/









































































































































































































































































































































































































































































































Текст
ВОЕННО-ВОЗДУШНАЯ АКАДЕМИЯ
Для служебного
пользования
Экз. №
ПРАКТИЧЕСКАЯ АЭРОДИНАМИКА
И
БОЕВОЕ МАНЕВРИРОВАНИЕ
САМОЛЕТОВ
У тверждено
главнокомандующим Военно-воздушными силами
в качестве учебника для слушателей
Военно-воздушной академии имени Ю. А. Гагарина
МОНИНО—1984
1
Учебник содержит два раздела, что определило двойное его
наименование.
Первый раздел учебника «Практическая аэродинамика» из-
лагается не в традиционной форме, а в виде методики ее изу-
чения авиационными командирами с летным составом строевых
частей ВВС, что обеспечивает повышение методической подго-
товки руководящего летного состава и одновременно является
теоретической базой для изучения второго раздела.
Во втором разделе «Боевое маневрирование самолетов»
рассматриваются вопросы оценки и учета летно-тактических
и пилотажных свойств самолетов в процессе организации и
осуществления боевой подготовки. Раздел предназначен для
повышения подготовки руководящего летного состава как
командиров-организаторов боевых действий и является базой
для решения тактических задач, задач боевой подготовки и
безопасности полетов.
Учебник предназначен для слушателей всех факультетов
академии и академических курсов, а также может быть реко-
мендован командному составу строевых частей и всему лет-
ному составу.
В написании учебника принимали участие: кандидат тех-
нических наук, доцент полковник-инженер А. М. КРЫЛОВ
(главы 4 (кроме § 4.3), 5, 9, 10 и § 2.6 и 2.7), кандидат тех-
нических наук, доцент полковник-инженер в отставке
Н. Н. СТЕПАНОВ (глава 1), кандидат военных наук, доцент
полковник-инженер С. А. БЫТКО (главы 2 (кроме § 2.6 и
2.7) и 8), кандидат военных наук, доцент полковник-инженер
В. С. ПОДБЕРЕЖСКИЙ (глава 7), кандидат технических
наук подполковник-инженер В. П. АЛЕЩЕНКО (главы 3, 6 и
§4.3).
Под общей редакцией кандидата технических наук, доцента
полковника-инженера А. М. КРЫЛОВА и кандидата техниче-
ских наук, ' доцента полковника-инженера в отставке
Н. Ну СТЕПАНОВА.
Авторы выражают благодарность рецензентам и другим
товарищам, оказавшим большую помощь в доработке рукописи
учебника.
2
ВВЕДЕНИЕ
Дисциплины «Практическая аэродинамика» и «Боевое
маневрирование самолетов» являются теоретической основой,
на которой базируются оперативно-тактическая выучка и
профессиональная подготовка авиационного командира, не-
обходимые для успешного выполнения обязанностей на
командных должностях в строевых частях ВВС.
Эти дисциплины способствуют овладению современными
методами принятия решений для организации и ведения бое-
вых действий с высокой эффективностью, а также обеспечи-
вают знания и навыки, совершенствующие методическую
подготовку авиационных командиров, направленную на по-
вышение качества и эффективности обучения подчиненного
летного состава в интересах реализации им максимальных
боевых возможностей самолетов с учетом требований по
безопасности полетов. Именно такие требования предъявляет
к советским воинам Министр обороны СССР, так как особое
значение в обеспечении боевой готовности Вооруженных Сил
имеет овладение личным составом военной техникой, напря-
женный характер современных боевых действий на земле, на
воде и в воздухе требуют от советских воинов отличного зна-
ния и умения с высокой эффективностью применять оружие
в любой сложной обстановке. Поэтому изучение оружия и
боевой техники является одной из важнейших задач боевой
подготовки.
Эти задачи ставит перед руководящим составом строевых
частей главнокомандующий Военно-воздушными силами,
который в своих приказах и директивах указывает, что
современный бой должен быть выигран на земле, что нельзя
надеяться на некое озарение в критической ситуации, а нужна
кропотливая работа по обучению летного состава науке
побеждать и выполнению задачи государственной важности —•
летать без катастроф и аварий, как этого требуют ЦК КПСС
и Советское правительство.
3
Прошедший XXVI съезд КПСС наметил новые рубежи по
укреплению обороноспособности страны, повышению боевой
мощи наших Вооруженных Сил, составной частью которых
являются ВВС. Им отводится важнейшая роль при ведении
вооруженной борьбы, поэтому военная авиация технически
совершенствуется для усиления боеготовности и повышения
безопасности полетов.
Эффективное боевое применение современной авиационной
техники определяется не только высокой морально-полити-
ческой и психологической подготовкой, но и пилотажным
мастерством, глубокими знаниями техники, аэродинамики,
тактики. При разработке учебника авторы руководствовались
требованием главнокомандующего ВВС о повышении уровня
знания аэродинамики всеми категориями летного состава.
В первом разделе учебника, содержание которого отражено
в названии «Практическая аэродинамика», фактически рас-
сматривается методика ее изучения авиационными команди-
рами различных категорий с летным составом строевых ча-
стей в целях повышения эффективности летной подготовки и
безопасности полетов.
Во втором разделе изложены вопросы применения методов
динамики полета для решения тактических задач и задач
боевой подготовки, объединенные общим названием «Боевое
маневрирование самолетов».
Таким образом, вначале учебный материал направлен на
подготовку командира — методиста боевой подготовки, а за-
тем командира — организатора боевых действий.
При изучении учебника предполагается, что читатели
имеют необходимые знания по аэродинамике, динамике поле-
та и теории пилотирования в объеме дисциплин, изучаемых
в высших военных авиационных училищах летчиков.
4
РАЗДЕЛ I
ПРАКТИЧЕСКАЯ АЭРОДИНАМИКА
МЕТОДИКА ИЗЛОЖЕНИЯ И ОБЪЯСНЕНИЯ
ЛЕТНО-ТАКТИЧЕСКИХ И ПИЛОТАЖНЫХ СВОЙСТВ
САМОЛЕТОВ В ПРОЦЕССЕ БОЕВОЙ ПОДГОТОВКИ
СТРОЕВЫХ ЧАСТЕЙ ВВС
5
Авиационный командир должен не только сам глубоко
знать аэродинамические и динамические свойства своего са-
молета, но и обучать подчиненный ему ленный состав, умело
объяснять ему причины летных и пилотажных особенностей
самолета, правильно спланировать тематику занятий, увязав
ее с задачами части, выполняемыми в данный период.
Настоящий раздел содержит материал по частной мето-
дике изучения с летным составом летно-тактических и пило-
тажных свойств серийного самолета.
Методологической основой изучения практической аэро-
динамики, как и других дисциплин, является материалисти-
ческая диалектика, марксистско-ленинская теория познания.
В соответствии с ними при изложении и объяснении высотно-
скоростных, взлетно-посадочных, маневренных и пилотажных
свойств самолетов, а также характеристик дальности и про-
должительности полета следует избегать одностороннего, уп-
рощенного подхода к объяснению реальных явлений, помнить
о взаимной обусловленности и взаимосвязи их различных
сторон.
В некоторых случаях различные факторы оказывают на
ту или иную характеристику противоположное влияние, и
учет только одного фактора может создать ложное представ-
ление о расхождении теории с практикой. Так, например, при
освоении новой техники может оказаться, что у самолета,
на который идет переучивание, длина разбега больше, чем у
старого, несмотря на повышенную тяговооруженность и боль-
шее ускорение. Однако стоит сравнить скорости отрыва са-
молетов, ^сак сомнение исчезает, так как новый самолет об-
ладает повышенной скоростью отрыва. Но повышенная ско-
рость отрыва нового самолета тоже требует объяснения. Если
нагрузки на крыло у обоих самолетов одинаковы, то все дело
в пониженном значении коэффициента подъемной силы при
отрыве, причиной которого может быть, например, значитель-
но меньшее удлинение крыла.
6
Вместе с тем нельзя забывать и другое: чтобы познать
явление, невозможно рассматривать сразу все его стороны в
их сложной взаимосвязи, ничем не пренебрегая, ничего не
упуская из виду. Без схематизации ни одно явление изучить
не удастся, но при этом нужно отбрасывать лишь второсте-
пенные стороны, учитывая главное, существенное. Так, напри-
мер, при рассмотрении сил, действующих на самолет в полете,
в большинстве случаев можно пренебрегать углом между век-
торами тяги и скорости, при изучении горизонтального поле-
та— учитывать кривизну земной поверхности только при око-
локосмических скоростях и т. д. Пользуясь формулами, схе-
мами сил, уравнениями, следует всегда помнить, что они
справедливы лишь в конкретных условиях, для определенных
видов маневров, областей скоростей и высот полета, при не-
которых допущениях и т. д.
Как гласит ^важнейшее положение марксистско-ленинской '
теории познания, истина всегда конкретна. Так, например,
известная формула, позволяющая определять радиус кри-
визны траектории в горизонтальном боевом маневре, справед-
лива только при следующих условиях: поверхность земли
считается плоской, траектория горизонтальна, равнодейст-
вующая всех поверхностных сил лежит в плоскости симмет-
рии самолета (отсутствует скольжение).
Конкретность истины заключается также в ее историче-
ской обусловленности. Развитие авиационной техники приво-
дит к тому, что некоторые положения, справедливые ранее,
устаревают, требуют замены новыми в соответствии с изме-
нившимися условиями. Так, например, положение о необхо-
димости уменьшать высоту полета для повышения его даль-
ности и продолжительности было правильным для самолетов
с поршневыми двигателями, но стало неверным для реактив-
ной авиации. Есть положения, которые устаревают сравни-
тельно медленно. Например, известное уравнение горизон-
тального полета: подъемная сила равна силе тяжести, дейст-
вующей на самолет, осталось достаточно точным от первых
шагов до наших дней, но станет неверным, если самолеты
будут летать с околокосмическими скоростями.
Только на основе марксистско-ленинского понимания при-
чинно-следственных связей между явлениями авиационный
командир должен оценивать боевую выучку летного состава,
технику пилотирования, ошибки в пилотировании, способы их
устранения и предотвращения. При этом в большинстве слу-
чаев причинно-следственная цепочка выглядит так: причина—
ошибка летчика — отклонение самолета.
Отклонения самолета при пилотировании относятся к ка-
тегории случайных явлений, а в соответствии с марксистско-
7
ленинской философией случайные явления подчиняются своим
закономерностям, т. е. случайность не равнозначна беспричин-
ности, все случайности имеют свои причины и поэтому должны
исследоваться математическими методами (например, мето-
дами теории вероятностей). Если, например, на взлете в кон-
це разбега самолета произойдет полный отказ двигателя и при
этом откажут еще и тормоза, то самолет неизбежно выкатит-
ся за пределы ВПП на грунт (в соответствии с закономерно-
стями -динамики полета). Но при данных условиях попытка
взлета может закончиться или без последствий, или поломкой,
или аварией, или катастрофой (в соответствии с закономер-
ностями теории вероятностей).
Используя методические приемы изложения и объяснения
летному составу вопросов практической аэродинамики, при-
веденные в данном разделе учебника, следует избегать двух
крайностей. Первая состоит в том, что обучающий ограничи-
вается изложением фактических сведений по данному само-
лету, перечислением и описанием его особенностей. Вторая
крайность: на занятиях излагаются общие положения по
аэродинамике и динамике полета самолетов, приводятся схе-
мы сил, уравнения движения, дается определение терминов
безотносительно к изучаемому типу самолета. Правильный
подход заключается в теоретическом обосновании и объяс-
нении тех конкретных особенностей, которыми обладает дан-
ный самолет. Не следует, в частности, писать формулы, изо-
бражать схемы сил, давать определение понятиям, которые
не будут использованы при изучении свойств именно данного
самолета. Главное при этом, чтобы приводимые формула,
график тесно увязывались бы с полетом, чтобы летный со-
став видел, что это не просто теория, а обоснование полета,
способствующее грамотной эксплуатации и пилотированию,
и в конечном счете повышающее безопасность полетов.
8
Глава I
МЕТОДИКА ИЗЛОЖЕНИЯ И ОБЪЯСНЕНИЯ
ВЫСОТНО-СКОРОСТНЫХ СВОЙСТВ САМОЛЕТА
§ 1.1. СОДЕРЖАНИЕ
И ПОСЛЕДОВАТЕЛЬНОСТЬ ИЗУЧЕНИЯ
ВЫСОТНО-СКОРОСТНЫХ СВОЙСТВ САМОЛЕТА
Содержание и последовательность изучения высотно-ско-
ростных свойств самолета определяются целью, которая по-
ставлена перед авиационным командиром при обучении лет-
ного состава. Целью обучения является достижение такой
выучки, которая позволяла бы осуществлять максимальную
реализацию боевых возможностей самолета, определяемых
его высотно-скоростными свойствами, с одновременным со-
блюдением необходимого уровня безопасности полетов. Чем
полнее реализуются боевые возможности самолетов, тем выше
эффективность боевых действий авиационных подразделений
и частей, тем экономичней и успешней может быть выполне-
на любая боевая задача. Обеспечение же высокой эффектив-
ности выполнения боевых задач — важнейшее требование к
деятельности командиров и штабов авиационных подразде-
лений и частей, вытекающее из решений XXVI съезда КПСС.
Высотно-скоростные свойства самолета характеризуются
его диапазоном скоростей и высот полета (DVH). Диапазон
скоростей и высот полета — важнейшая составная часть лет-
но-тактических свойств самолета, отражающая совокупность
возможных и допустимых режимов полета. Наличие инфор-
мации о диапазонах скоростей и высот полета своего само-
лета и самолетов противника дает возможность сравнить их
высотно-скоростные свойства и косвенно-маневренные свойст-
ва в целях выработки рекомендаций по рациональному манев-
рированию при выполнении различных боевых задач.
Можно рекомендовать следующую последовательность
изучения высотно-скоростных свойств конкретного типа са-
молета:
1. Рассмотреть границы диапазона скоростей и высот по-
лета, определяемые предельными условиями равновесия дей-
ствующих на самолет сил, используя при этом схему сил и
уравнения движения самолета. Объяснить летчикам причины,
определяющие наличие границ, условия их построения, атак-
9
же явления (особенности в поведении самолета), с которыми
они могут встретиться при выходе на границы и за них.
2. Рассмотреть границы, определяемые ограничениями,
связанными с безопасностью полетов, наличием внешних под-
весок, особенностями применения оружия, надежностью ра-
боты силовой установки, допустимыми величинами углов
скольжения, перегрузок и т. д. Раскрыть при этом физическую
сущность и причины ограничений скорости и высоты полета,
особенности в поведении самолета на границах, возможные
последствия выхода за границы. Попутно с анализом ограни-
чений целесообразно напомнить летчикам понятия истинной
(воздушной), индикаторной, приборной скоростей и числа
М полета, показать взаимную связь между этими понятиями,
а также их связь со скоростью перемещения самолета относи-
тельно воздуха и с величиной угла атаки.
3. Напомнить летчикам сущность кривых Жуковского и
показать, что с их помощью удобно анализировать не только
границы DVH и промежуточные режимы, в частности, первые
и вторые режимы полета, но также и вопросы пилотирования
самолета, например, возможности выхода на опасные режимы
из-за ошибок летчиков. Раскрытию физической сущности вто-
рых режимов и разъяснению особенностей пилотирования на
вторых режимах уделить повышенное внимание, имея в виду,
что очень часто летчики имеют нечеткое представление о вто-
рых режимах, уделяют им чрезмерное внимание, приписывая
не вытекающие из их сущности опасности, не знают, что ча-
ще всего летчик сам выводит самолет на второй режим в ре-
зультате неграмотного пилотирования.
4. Провести анализ графиков диапазонов скоростей и вы-
сот полета, представленных в Методическом пособии по тех-
нике пилотирования, Техническом описании, Практической
аэродинамике данного типа самолета. Рассказать о различ-
ных формах представления в этих источниках, а также в Ин-
струкции летчику информации о высотно-скоростных свойст-
вах самолета.
5. Провести анализ влияния условий боевого применения
на границы DVH.
6. Дать летчикам рекомендации по учету ограничений ско-
рости и высоты в целях повышения безопасности полетов.
Изучая тему, нужно добиться знания летным составом не
только самих высотно-скоростных данных самолета, но и за-
висимости этих данных от условий его боевого применения,
твердого усвоения связи между действующими на самолет
силами, подвластными летчику, уравнениями движения, уста-
новленными ограничениями и высотно-скоростными свойст-
вами самолета.
10
Весьма полезно сопровождать изложение материала реше-
нием небольших примеров или задач, показывая обучаемым
методику количественной оценки влияния различных факто-
ров на высотно-скоростные свойства самолета и увязывая их
с предстоящим полетом, его анализом.
§ 1.2. ГРАНИЦЫ ДИАПАЗОНА СКОРОСТЕЙ
И ВЫСОТ ПОЛЕТА, ОПРЕДЕЛЯЕМЫЕ ПРЕДЕЛЬНЫМИ
ВОЗМОЖНОСТЯМИ САМОЛЕТА ПО ТЯГЕ
Методика раскрытия данного вопроса может быть сле-
дующей.
1. Напомнить летчикам о том, что движение самолета в
воздухе и, следовательно, реализация того или иного режима
полета определяется соотношением действующих на самолет
сил. Связь между действующими силами и параметрами дви-
жения самолета выражается уравнениями движения.
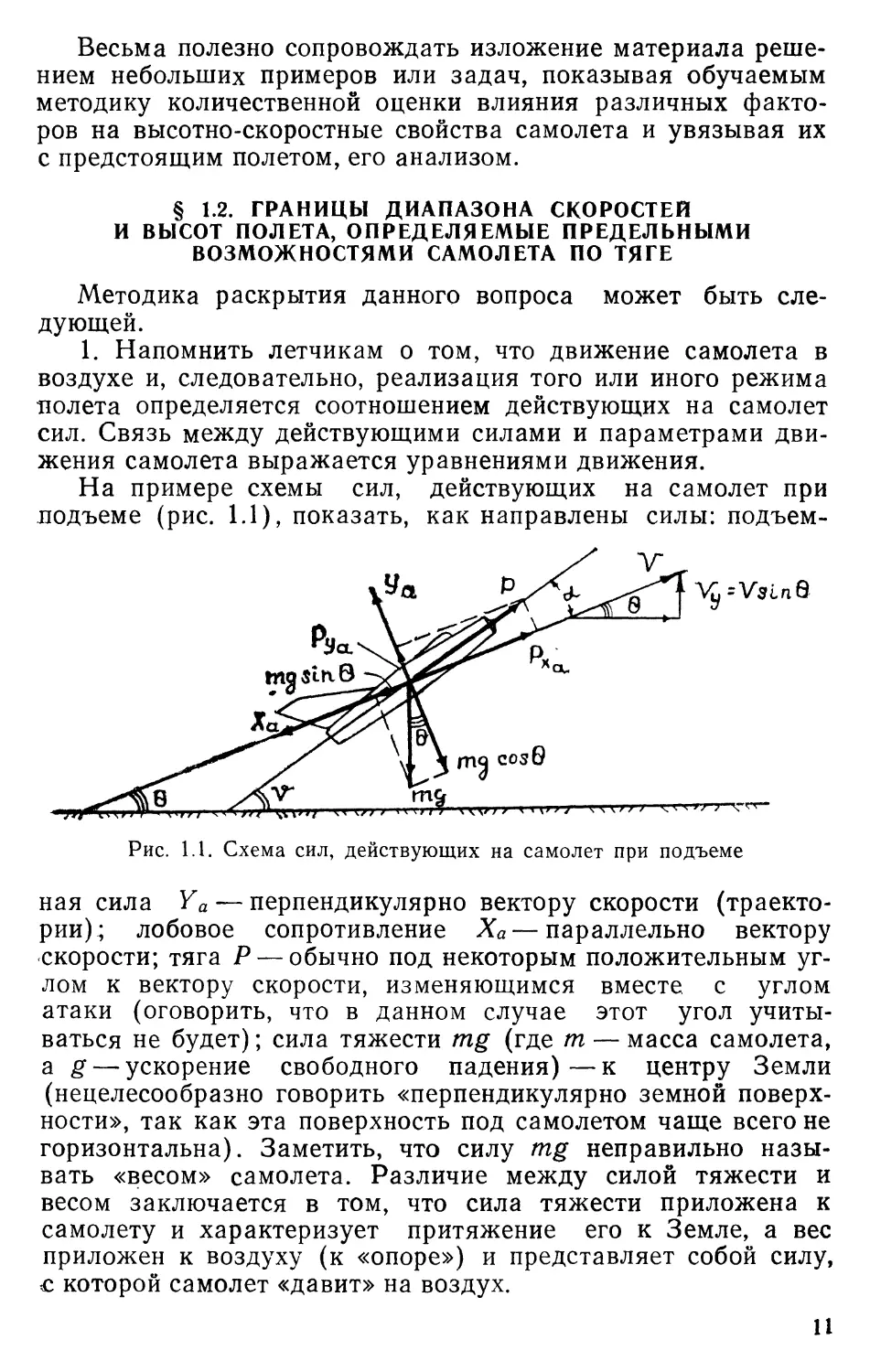
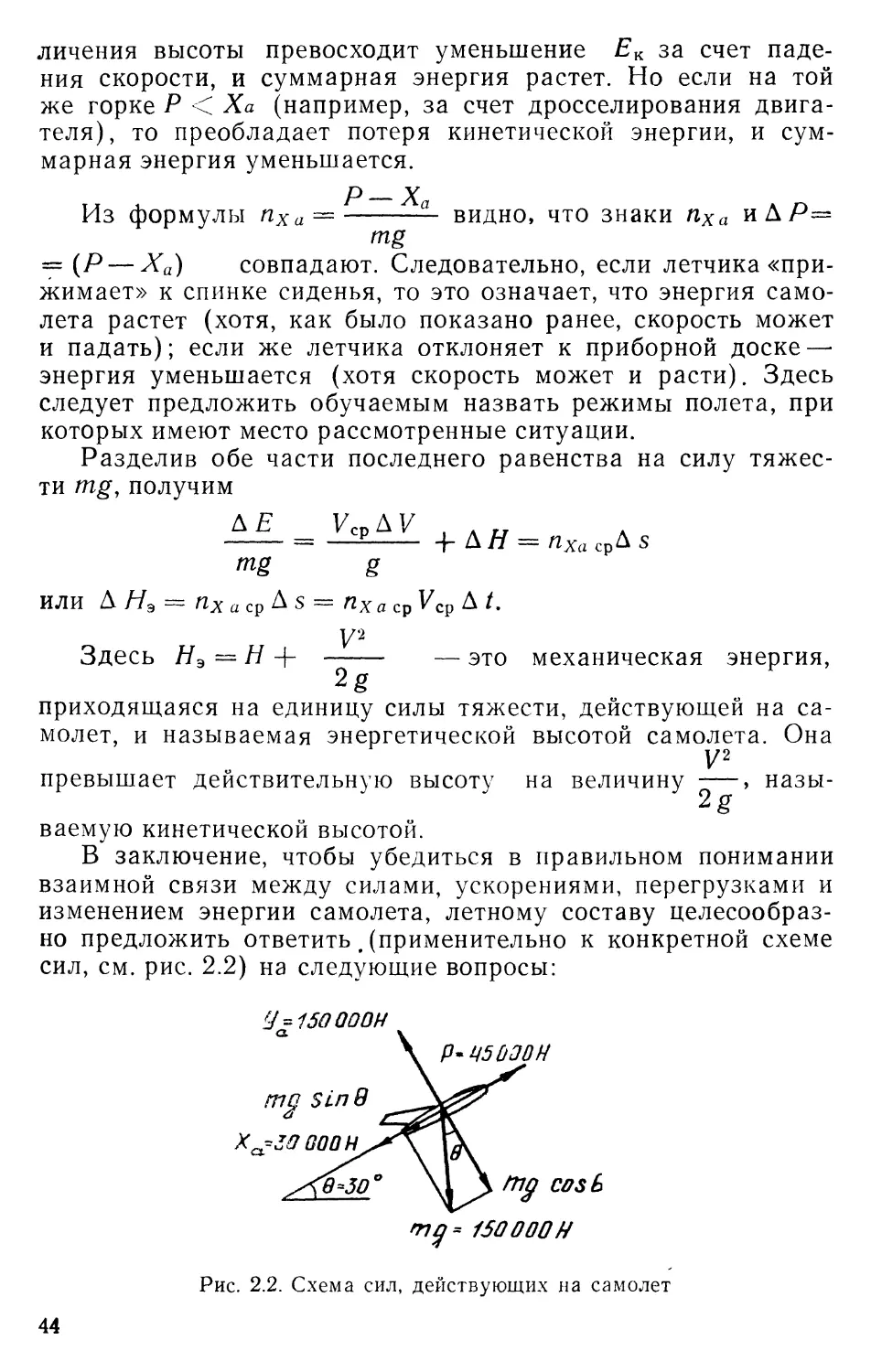
На примере схемы сил, действующих на самолет при
подъеме (рис. 1.1), показать, как направлены силы: подъем-
Рис. 1.1. Схема сил, действующих на самолет при подъеме
ная сила Ya — перпендикулярно вектору скорости (траекто-
рии); лобовое сопротивление Ха — параллельно вектору
скорости; тяга Р — обычно под некоторым положительным уг-
лом к вектору скорости, изменяющимся вместе с углом
атаки (оговорить, что в данном случае этот угол учиты-
ваться не будет); сила тяжести mg (где т — масса самолета,
a g— ускорение свободного падения)—к центру Земли
(нецелесообразно говорить «перпендикулярно земной поверх-
ности», так как эта поверхность под самолетом чаще всего не
горизонтальна). Заметить, что силу mg неправильно назы-
вать «весом» самолета. Различие между силой тяжести и
весом заключается в том, что сила тяжести приложена к
самолету и характеризует притяжение его к Земле, а вес
приложен к воздуху (к «опоре») и представляет собой силу,
£ которой самолет «давит» на воздух.
11
Далее напомнить, что для того чтобы определенно судить
о характере движения самолета, целесообразно рассматри-
вать отдельно тангенциальные (продольные) и нормальные
(поперечные) силы. В соответствии с этим силу тяжести сле-
дует разложить на составляющие, направленные вдоль век-
тора скорости и перпендикулярно к нему.
Здесь же подчеркнуть важность умения правильно изо-
бражать схемы действующих на самолет сил, поскольку от
этой правильности зависит справедливость выводов, получае-
мых при анализе движения самолета. Показать, что делается
это легко, просто, если твердо знать, как направлены силы
и на какие направления их следует проектировать.
Далее заметить: для того чтобы полет (горизонтальный
или наклонный) был установившимся и прямолинейным, не-
обходимо в соответствии с первым законом Ньютона равно-
весие сил. Летчик добивается этого равновесия, управляя тя-
гой (с помощью РУД) и подъемной силой (с помощью ручки
управления) в соответствии с заданным режимом полета
(скоростью, высотой, углом наклона траектории), полетной
массой самолета и параметрами атмосферы.
Из сказанного сделать вывод, что при объяснении режи-
мов установившегося полета нужно опираться на уравнения
равновесия сил (являющиеся уравнениями прямолинейного и
равномерного движения), получаемые путем применения пер-
вого закона Ньютона к схеме действующих на самолет сил.
2. Опираясь на схему сил, написать уравнения их равно-
весия вдоль вектора скорости и по нормали к нему, оговорив
прц этом, что в методических целях для обеспечения боль-
шей простоты изложения материала в этих уравнениях не
учтены сферичность Земли, ее вращение, а также угол откло-
нения тяги от вектора скорости:
Р == Ха + mg sin 0; Ya = mg cos 0.
Заметить, что в случае горизонтального полета, когда
0 = 0, sin0 = 0 и cos0=1, эти уравнения имеют вид:
Р = Ха; (1.1)
Ya = mg. (1.2)
Связать уравнения движения самолета с действиями лет-
чика и показать их физический смысл. Если, например, необ-
ходимо выполнять установившийся прямолинейный горизон-
тальный полет, то летчик должен, управляя подъемной силой,
уравнять ее с силой тяжести (уравнение 1.2), чем будет
обеспечено условие прямолинейности (постоянства угла на-
клона траектории), а затем, управляя тягой, уравнять ее с
12
лобовым сопротивлением (уравнение 1.1), обеспечив тем са-
мым условие равномерности движения.
3. Обратить внимание летчиков на то, что уравнения
равновесия сил являются исходными для целого ряда фор-
мул, позволяющих рассчитывать те или иные характеристики
и анализировать их зависимость от различных факторов.
Так, например, формула скорости установившегося горизон-
тального полета получается из уравнения (1.1), если раскрыть
в нем лобовое сопротивление
&
откуда
V = 1/" 2Р л-.
|/ Cxa?S
Из формулы видно, что величина скорости на заданной
высоте зависит от положения РУД (тяги силовой установки
самолета) и ручки управления (угла атаки и, следовательно,
коэффициента сопротивления). При необходимости можно
напомнить, что величина Сха в горизонтальном полете в свою
очередь зависит от числа М полета, конфигурации самолета
и его полетной массы.
Аналогичным образом руководитель занятия может пока-
зать, как из уравнений равновесия сил получаются формулы
потребных скоростей горизонтального полета, подъема и сни-
жения, высоты полета в различных условиях, угла и верти-
кальной скорости подъема и т. д.
4. Опираясь на сказанное, объяснить летчикам, какие гра-
ницы DVH полета изучаемого самолета обусловлены равно-
весием сил. Показать эти границы, используя прием, пока-
занный на рис. 1.2, в следующей, например, последователь-
ности.
А. Границы, обусловленные равновесием лобового сопро-
тивления в горизонтальном полете Ха г и располагаемой
тяги Рр:
— максимальная скорость горизонтального полета Умакс,
т. е. наибольшая скорость, при которой тяга силовой уста-
новки самолета достаточна для установившегося прямоли-
нейного горизонтального полета на данной высоте (точка а на
рис. 1.2). При этой скорости Рр = Хаг , откуда
<L3>
13
предупредить, что эта формула удобна для анализа зависи-
мости l/макс от различных факторов, но неудобна для рас-
чета, так как величины Рр и Сха в свою очередь зависят от
скорости и поэтому приходится прибегать к последователь-
ным приближениям;
Рис. 1.2. Определение границ диапазона скоростей и высот го-
ризонтального полета
— минимальная по тяге скорость Умин.р , т. е. наименьшая
скорость установившегося горизонтального полета на данной
высоте (точка б);
— предельная высота установившегося горизонтального
полета Нпр («потолок режима»), т. е. наибольшая высота
установившегося горизонтального полета при данной скоро-
сти (точка в). Обратить внимание летчиков на то, что кривая
предельных высот (в—б—а на рис. 1.2)—это фактически
верхние части кривых VMaKc и 7МИн.р . Следовательно, точка
в может характеризовать как предельную высоту установив-
шегося горизонтального полета при скорости Vit так и мини-
мальную по тяге скорость на высоте, обозначенной на рис. 1.2
как Япр при Vi.
Полет на предельных высотах характерен отсутствием из-
бытка тяги, следовательно, возможности парировать слу-
14
чайное уменьшение скорости. Вывести самолет на предельные
высоты можно лишь выполнив динамическую горку, посколь-
ку в установившемся наборе по мере приближения к пре-
дельной высоте избыток тяги и вертикальная скорость стре-
мятся к нулю, а продолжительность подъема — к бесконеч-
ности. В силу указанных особенностей верхней границей
установившегося горизонтального полета при эксплуатации
самолета принято считать линию практических потолков.
Исходя из того, что на Нпр Рр = Хаг и имея в виду*,
что Ха г=Уar/K=fng/K (где К—аэродинамическое качество
самолета на предельной высоте), а в стратосфере (на тех вы-
сотах, где температура воздуха неизменна) тяга ТРД про-
порциональна атмосферному давлению, т. е.
можно записать равенство
mg
из которого получается формула давления воздуха на пре-
дельной высоте
Вычислив это давление, определяют (по таблице MCA)
высоту Япр.
Здесь уместно напомнить летчикам, что располагаемой
тягой называют тягу, развиваемую силовой установкой само-
лета при наибольшем допустимом режиме работы двигателя
(или двигателей).
Б. Границы, обусловленные равновесием силы тяжести mg
и подъемной силы самолета Y а при наибольшем безопасном
(допустимом) угле атаки:
— минимально допустимая скорость горизонтального по-
лета на данной высоте доп (точка г). При этой скорости
т гт _ V _ г Р 1^2мин ДОП о
/71g — 1 а — а доп ~
4U
откуда
2 mg
Су а доп Р
— располагаемая высота горизонтального полета Яр, т. е.
наибольшая высота, на которой можно безопасно создать
потребную для горизонтального полета подъемную силу при
данной скорости (данном числе М) полета (точка д на рис. 1.2).
Обратить внимание на то, что физическая основа понятий Нр
И Умин доп одна и та же, а именно — равновесие сил Ya и mg.
Поэтому точки, лежащие на кривой г—д (рис. 1.2), характе-
ризуют одновременно как минимально допустимые скорости
на заданных Н, так и располагаемые высоты при заданных V.
На высоте Нр mg ~ Ya = 0,7 Су адоп рнр М2 S, откуда вы-
текает формула для давления воздуха на располагаемой
высоте
рн =—.
р 0,7CYaaonM^S
Определив по ней давление, с помощью таблицы MCA на-
ходят высоту Яр при заданном М = const.
§ 1.3. ГРАНИЦЫ ДИАПАЗОНА СКОРОСТЕЙ
И ВЫСОТ ПОЛЕТА, ОПРЕДЕЛЯЕМЫЕ УСЛОВИЯМИ
БЕЗОПАСНОСТИ ПОЛЕТА
(ОГРАНИЧЕНИЯМИ СКОРОСТИ И ВЫСОТЫ)
Начиная рассмотрение вопроса, полезно разъяснить лет-
чикам его актуальность, особенно с точки зрения безопасно-
сти полетов. Для этого напомнить, что предельно допусти-
мыми являются такие режимы полета, которые определяются
летными ограничениями, связанными со значительным услож-
нением условий полета, в частности, ухудшением устойчиво-
сти и управляемости,- условий работы конструкции, силовой
установки, оборудования самолета и рядом других причин.
Понимание физических основ ограничений дает возмож-
ность летному составу разумно выполнять требования Инст-
рукции по пилотированию самолета и тем существенно повы-
шать безопасность полетов. Обычно за пределами ограниче-
ний имеется некоторый диапазон неэксплуатационных режи-
мов, полет на которых возможен, но в условиях массовой
эксплуатации недопустим, так как связан с вероятностью
попадания на опасные критические режимы, выход на кото-
рые может привести к сваливанию и попаданию в штопор,
разрушению конструкции самолета, отказу двигателя и т. д.
В то же время непроизвольные (а в боевых условиях и
преднамеренные) выходы за ограничения возможны. Поэтому
летчики должны знать особенности поведения самолета, вы-
веденного на ограничение, возможные последствия несоблю-
16
дения ограничений, порядок действий в случае выхода за
ограничение.
После этого вступления рассмотреть ограничения изучае-
мого самолета, обратив внимание на следующее.
1. В практике полетов малые скорости часто ограничивают
эволютивной скоростью УЭв. Если скорость полета не менее
эволютивной, то обеспечивается выполнение как прямолиней-
ного полета, так и плавных криволинейных маневров без
опасности возникновения интенсивного срыва потока при со-
хранении достаточной управляемости. Для каждого вида
маневра существует своя эволютивная скорость. Однако для
удобства запоминания обычно назначается наименьшая из
них, обеспечивающая выполнение разворотов в горизонталь-
ной плоскости с перегрузкой nY а — 1,5 (креном у— 50°) при
а = аДоп(СуаДоп). ° Если самолет имеет крыло изменяемой в
полете стреловидности, то эволютивная скорость назначается
для минимальной, средней и максимальной стреловидностей.
Эволютивная скорость связана с минимально допустимой
скоростью__горизонтального полета соотношением Еэв =
Гмин доп У из которого видно, что минимальная эволю-
тивная скорость, установленная по Пуа = 1,5, больше Еминдоп
горизонтального полета. Это означает, что при эволютивной
скорости в горизонтальном полете а<адоп и имеется запас
угла атаки как для искривления траектории, так и для ком-
пенсации возможных ошибок летчика.
2. Причиной ограничения максимальной скорости являют-
ся возникающие на больших скоростях полета нежелатель-
ные, а иногда и опасные явления, связанные с большой вели-
чиной скоростного напора или числа М.
С ростом скоростного напора увеличиваются аэродинами-
ческие силы, а следовательно, и нагрузки, действующие на
конструкцию. В результате, если скоростной напор превышает
допустимую для данного самолета величину (напомнить лет-
чикам, какую именно, и соответствующую ей приборную ско-
рость), то возможны: разрушение или недопустимые остаточ-
ные деформации обшивки самолета и его частей, а также
двигателя и воздухозаборника, наружных подвесок и их креп-
лений, закрылков, шасси и т. д.; нарушенйя устойчивости и
управляемости, связанные с упругими деформациями частей
самолета (уменьшение эффективности и реверс элеронов, «ва-
лежка» самолета и др.) или с чрезмерными нагрузками на
рули, превышающими возможности бустерных устройств; воз-
никновение самовозбуждающихся колебаний (флаттера);
создание недопустимо больших перегрузок при полете в не-
спокойном воздухе на малых высотах и др.
С увеличением числа М полета изменяется характер об-
2—5007сп
17
текания самолета, распределение давления по его поверх-
ности, возрастает температура торможения воздушного по-
тока. При достаточно больших числах М возможны: наруше-
ния устойчивости и управляемости (потеря путевой устойчи-
вости, затягивание в пикирование, «волновая валежка»); не-
устойчивая работа двигателя и воздухозаборника («зуд»,
«бубнение»); нарушение прочности первой ступени компрес-
сора двигателя; недопустимый нагрев поверхности самолета
и деталей силовой установки, снижающий их прочность.
В Инструкции летчику не всегда указаны причины ограни-
чения максимальной скорости (числа А1) данного самолета,
поэтому руководителю занятия необходимо предварительно
выяснить их, обратившись к таким источникам информации,
как Техническое описание самолета, Методическое пособие по
технике пилотирования, пособие по практической аэродина-
мике изучаемого серийного самолета.
Ограничения максимальной скорости контролируются лет-
чиком по М-метру и указателю приборной скорости (широ-
кой стрелке КУС).
Рис. 1.3. Зависимость минимально допустимой высоты
горизонтального полета от скорости
3. Для современных скоростных самолетов существует ог-
раничение минимальной высоты полета. Оно обусловлено
следующими особенностями полета вблизи земли. Чем мень-
ше высота, тем меньше и безопасно допустимые при пилоти-
ровании пределы ее отклонения. В то же время опыт полетов
показывает, что с уменьшением высоты и увеличением ско-
рости точность выдерживания высоты летчиком уменьшается.
Так, например, на //=100 м и V = 600 км/ч Д/7=±5 м, а на
18
V = 850 км/ч уже ±14 м. Это объясняется высоким уровнем
психофизиологического напряжения, быстрой утомляемостью
летчика, снижением его работоспособности в условиях, когда
необходимы непрерывный контроль за высотой, ее регулиро-
вание, быстрая реакция на приближающиеся препятствия,
когда затруднена ориентировка, ограничено применение
средств ближней и дальней навигации и контроль пути при-
ходится вести визуально. Если к тому же выключена САУ, то
приходится учитывать характерные для полета на больших
дозвуковых приборных скоростях малые величины P“y , т. е.
помнить о необходимости осторожного пилотирования. По-
ложение усугубляется воздействием болтанки, которая на вы-
соте, например, 100 м при частоте колебаний перегрузки
2—3 Гц вызывает боль в пояснице, животе, сердце и укачи-
вание, а при частоте 10 Гц — ухудшение зрения. В итоге ниже
некоторой минимальной высоты полет становится невозмож-
ным. На рис. 1.3 показана примерная зависимость #МИндоп
(V) при полете без использования автоматики.
§ 1.4. ИСПОЛЬЗОВАНИЕ КРИВЫХ ЖУКОВСКОГО
ДЛЯ АНАЛИЗА
РЕЖИМОВ УСТАНОВИВШЕГОСЯ ПОЛЕТА
Прежде всего следует напомнить летчикам, что кривые,
изображающие зависимость тяги и сопротивления от скоро-
сти полета на данной высоте, впервые предложены «отцом
русской авиации» Н. Е. Жуковским в 1916 г. для расчета лет-
ных данных самолета. Метод расчета, основанный на сопо-
ставлении этих кривых, широко используется и в наше время
как в Советском Союзе, так и за рубежом. Но кривые Жу-
ковского (рис. 1.4) весьма удобны также и для анализа ха-
рактеристик самолета в установившемся полете. С их по-
мощью легко определяются максимальная и минимальная по
тяге скорости (если с сопротивлением сопоставляется распо-
лагаемая тяга), наивыгоднейшая скорость горизонтального
полета, а также избыточные тяги Ризб <= Рр— Хаг, которые
летчик в случае необходимости может использовать при ма-
неврировании.
Далее следует отметить, что так как тяга и лобовое сопро-
тивление зависят не только от скорости полета, но также и
от высоты, температуры воздуха и других факторов, то, срав-
нивая кривые Жуковского, построенные с учетом этих кон-
кретных условий, можно проанализировать влияние условий
боевого применения на высотно-скоростные свойства само-
лета.
Если на указанном графике изображать не располагаемую
2*
19
тягу, а тягу силовой установки самолета при различных по-
ложениях РУД, то можно анализировать не только крайние
(граничные), но и промежуточные режимы полета. В качестве
иллюстрации этого положения рассмотреть вопрос о первых
и вторых режимах полета.
Рис. 1.4. Кривые Н. Е. Жуковского
Прежде всего отметить, что понятие «режимы полета» от-
носится к установившимся движениям самолета, при которых
силы, действующие на самолет по касательной к траектории,
взаимно уравновешены. Режимы полета, при которых равно-
весие тангенциальных сил устойчиво, называют первыми
режимами, а режимы полета, при которых равновесие
тангенциальных сил неустойчиво,— вторыми режимами.
Обратить внимание на то, что если равновесия тангенциаль-
ных сил нет (например, при выполнении петли Нестерова,
боевого разворота, разгона, торможения и т. п.), то говорить
о первых или вторых режимах и объяснять летное происше-
ствие попаданием на второй режим бессмысленно, так как
понятия первого и второго режимов в этих случаях исчезают,
поскольку нет установившегося движения.
Далее, пользуясь иллюстрацией, аналогичной рис. 1.5, по-
казать, что установившийся полет на данной высоте при од-
ном и том же положении РУД возможен на двух различных
скоростях—Vi и V2. Но стремление самолета сохранить эти
режимы неодинаково. Если летчик выдерживает постоянным
угол наклона траектории и не трогает РУД, то на первом
режиме Vi случайные нарушения скорости устраняются са-
ми возникающей неуравновешенностью тяги и лобового со*
20
противления. Например, уменьшение скорости приводит к соз-
данию избытка тяги, заставляющего самолет разгоняться до
скорости Уь Таким образом, для сохранения первого режима
полета летчику достаточно управлять самолетом только руч-
кой (штурвалом), выдерживая прямолинейность движения.
Рис. 1.5. Первые и вторые режимы горизон-
тального полета на дозвуковых скоростях
На втором режиме V2 возникающая неуравновешенность
тангенциальных сил вызывает все большее отклонение само-
лета от заданной скорости. Поэтому для сохранения второго
режима летчику приходится работать и ручкой и РУД. На-
пример, при случайном увеличении скорости надо уменьшить
тягу, восстановить исходную скорость, затем тягу увеличить
до первоначальной, выдерживая ручкой прямолинейность
траектории (постоянство угла '&). Таким образом, вторые
режимы требуют повышенного внимания летчика.
Угрозу безопасности полета может создать попадание во
второй режим на дозвуковых скоростях, причем эта угроза
возникает не потому, что режим полета — «второй», а потому,
что из-за больших углов атаки и малого скоростного напора
возможны опасные нарушения устойчивости и управляемости
самолета (главным образом сваливание).
Границей между I и II дозвуковыми режимами горизон-
тального полета на данной высоте является скорость устано-
вившегося полета при максимальной степени дросселирова-
ния двигателя. Эта скорость у самолетов с ТРД обычно близ-
ка к наивыгоднейшей скорости горизонтального полета (не-
много больше ее).
Реальная возможность непреднамеренного выхода на
II режим имеется при полете вблизи дозвукового потолка, так
как такой полет производится на скорости, близкой к наи-
выгоднейшей, в целях достижения максимальной дальности
или продолжительности. При полете с наивыгоднейшей ско-"
21
ростью случайное ее уменьшение приводит к некоторому не-
достатку тяги (из-за возросшего сопротивления) и к дальней-
шему уменьшению скорости. Вместе со скоростью умень-
шается подъемная сила, и самолет начинает снижаться. Если
летчик будет действовать неправильно, пытаясь выбором
ручки удержать самолет от снижения, это приведет к про-
грессирующему падению скорости и увеличению угла атаки
вплоть до сваливания.
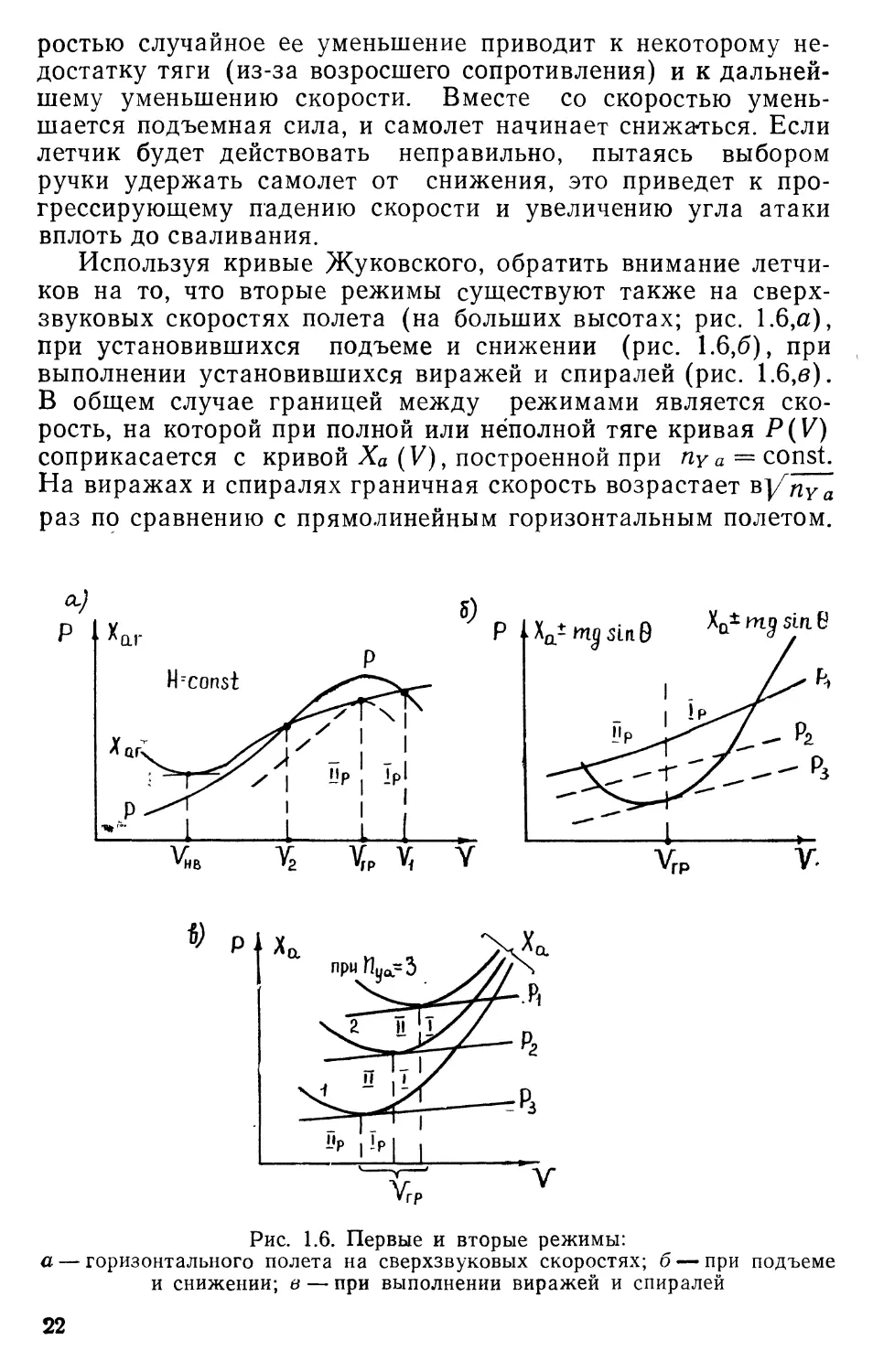
Используя кривые Жуковского, обратить внимание летчи-
ков на то, что вторые режимы существуют также на сверх-
звуковых скоростях полета (на больших высотах; рис. 1.6,а),
при установившихся подъеме и снижении (рис. 1.6,6), при
выполнении установившихся виражей и спиралей (рис. 1.6,в).
В общем случае границей между режимами является ско-
рость, на которой при полной или неполной тяге кривая P(V)
соприкасается с кривой Ха (V), построенной при пу а = const.
На виражах и спиралях граничная скорость возрастает ^У пу а
раз по сравнению с прямолинейным горизонтальным полетом.
Рис. 1.6. Первые и вторые режимы:
а — горизонтального полета на сверхзвуковых скоростях; б — при подъеме
и снижении; в — при выполнении виражей и спиралей
22
Сверхзвуковые вторые режимы опасности не представ-
ляют, однако могут привести к вынужденной потере высоты
и ухудшению условий выполнения боевой задачи, например,
при перехвате. Если допустить существенное уменьшение ско-
рости V2, то для ее восстановления может не хватить распо-
лагаемой тяги и придется терять высоту.
Методически неудачным является утверждение, что на
втором режиме имеет место обратное реагирование самолета
на отклонения ручки и РУД, тогда как на первом режиме это
реагирование — прямое. Это неверно. На втором режиме, как
и на первом, перемещение РУД вперед вызывает разгон, а
назад — торможение; перемещение вперед ручки управления
вызывает уменьшение угла атаки и первоначальное искривле-
ние траектории вниз; взятие ручки «на себя» (на докритиче-
ских углах атаки) искривляет вначале траекторию кверху.
Однако дальнейшее поведение самолета на втором режиме
будет иным, но это будет реагирование не на отклонения руч-
ки и РУД, а на изменение скорости.
Так, например, небольшое перемещение РУД вперед
(рис. 1.7) на первом режиме приведет лишь к небольшому
увеличению скорости от Vi до Е/, так как с ростом скорости
быстро исчезает избыток тяги. А на втором режиме, если лет-
чик выдерживает прямолинейность траектории, увеличение
скорости будет сначала усиливаться и прекратится только
после достижения скорости первого режима V/. «Обратного»
реагирования здесь нет.
Рис. 1.7. Изменение избыточной тяги
при перемещении РУД вперед
Другой пример. Взятие ручки «на себя» во втором режиме
приведет, как и обычно, к увеличению a, Ya и Ха . За счет
возрастания Ya траектория начнет искривляться вверх (обыч-
ное «прямое» реагирование), а скорость начнет уменьшаться
как за счет увеличения угла 0 и, следовательно, силы
mg sin 0, так и за счет возрастания Ха . При уменьшении
скорости упадет подъемная сила Ya, и траектория начнет
23
искривляться вниз. После нескольких колебаний установится
равновесие при угле 0, меньшем первоначального, на мень-
шей скорости, но с возросшим углом атаки.
Следовательно, при взятии ручки «на себя» угол наклона
траектории в конце концов уменьшается, но это является
следствием снижения скорости, а не отклонения ручки. Отме-
ченная особенность в поведении самолета может ётать при-
чиной летного' происшествия, если летчик ее не понимает и
пытается прекратить снижение самолета дальнейшим взяти-
ем ручки «на себя». Подобные действия приведут к превы-
шению допустимого угла атаки и сваливанию самолета или к
приземлению с полной тягой до ВПП.
В заключение обратить внимание летчиков, что при пило-
тировании на а = const вторых режимов не бывает. Случайные
отклонения скорости от заданной в любую сторону устраня-
ются сами, так как взаимное расположение кривых тяги и
сопротивления при а = const (рис. 1.8) имеет один и тот же вид
Рис. 1.8. Отсутствие вторых режимов при
полете с постоянным углом атаки
во всем диапазоне возможных на данной высоте скоростей
полета (как больших, так и меньших наивыгоднейшей ско-
рости). Но при таком законе пилотирования колебания V
сопровождаются соответствующими колебаниями угла 0 и
высоты полета, что следует учитывать, особенно при полете
на малых высотах.
§ 1.5. АНАЛИЗ ГРАФИКОВ ДИАПАЗОНОВ СКОРОСТЕЙ
И ВЫСОТ ГОРИЗОНТАЛЬНОГО ПОЛЕТА
Достаточно полное представление о высотно-скоростных
свойствах можно составить с помощью приводимых в описа-
нии самолета, Инструкции летчику, Практической аэродина-
24
мике графиков диапазона скоростей и высот полета, изобра-
жаемых в координатах Н (V) или Я(Л4), а иногда также и
Я( 1/пР ). Перед занятиями на этот график целесообразно на-
нести не только границы по возможным и допустимым ско-
ростям и высотам полета, но также и собранную из различ-
ных источников информацию об особенностях (ограничениях
по высоте и скорости) применения вооружения, управления'
двигателем и других и изменениях границ, обусловленных
различными условиями боевого применения.
Начиная занятие, напомнить летчикам, что эксплуатацион-
ным (практически реализуемым) диапазоном скоростей и вы-
сот полета является область, ограниченная слева линией
эволютивной скорости, сверху — линией практических потол-
ков режимов и справа — линией максимальной или макси-
мально допустимой скорости. Внутри этого диапазона возмо-
жен и допустим полет с постоянной скоростью, с разгоном и
с торможением. Эксплуатационный диапазон V—Н является
лишь частью полного диапазона V—Н, так как за его преде-
лами имеются области скоростей и высот, полет на которых
возможен (с точки зрения достаточности сил Р и Ya), но
запрещен по условиям безопасности (рис. 1.9). Подчеркнуть,
что диапазон V—Н является одной из важнейших летно-так-
тических характеристик самолета. Чем он шире, тем боль-
шими боевыми возможностями обладает самолет.
При изучении графиков нужно обратить внимание на два
момента.
1. Усвоение летно-тактических возможностей самолета по
скорости и высоте полета. При этом полезно сравнить их с
данными самолетов вероятного противника или ранее экс-
плуатировавшегося в данной части самолета. Сравнение
лучше всего производить наложением выполненных в одина-
ковых масштабах графиков сравниваемых самолетов, что
позволяет наглядно показать области скоростей и высот, где
имеет преимущество тот или иной самолет.
2. Раскрытие характера и причин изменения диапазона
скоростей по высоте и возможностей полета за пределами гра-
ниц диапазона. Для этого проанализировать содержание под-
готовленного заранее графика, аналогичного изображенному
на рис. 1.9.
Линия с—т является границей по эволютивной скорости.
Левее проходит линия а—б—в—г—д, называемая в учебни-
ках границей горизонтального полета. Нижнюю часть этой
линии (а—б—в) называют границей по минимально допусти-
мой скорости Уминдоп, а верхнюю (в—г—д)—границей по
располагаемой высоте Нр. Левее и выше этой границы гори-
зонтальный полет недопустим, так как из-за малого скоро-
2&
стного напора для создания подъемной силы Ya = mg необхо-
дим угол атаки а>адоп. Как только по мере уменьшения ско-
рости угол атаки превысит угол атаки сваливания, горизон-
тальный полет становится невозможным.
Рис. 1.9. Диапазон скоростей и высот полета самолета
Формулы Уэв, Уминдоп» а также Унв имеют одинако-
вую структуру, легко получаемую из условия обеспечения
прямолинейной горизонтальной траектории Ya=rng:
Су а
РУ2
2
S = mg У =
2 mg
Су ар S
/26
поэтому, если обозначить индексами 1 и 2 скорости и плот-
ности на разных высотах, то
Следовательно, минимально допустимая, эволютивная и
наивыгоднейшая (линия у — е) скорости увеличиваются с вы-
сотой. Основная причина заключается в том, что для созда-
ния одной и той же Ya на большей высоте при неизменном
Су а (Су адоп или Су dHB) и уменьшенной плотности воз-
духа необходима повышенная скорость. Темп вызванного
уменьшением р роста скорости может быть либо усилен, ли-
бо ослаблен изменениями Су Ддоп и Су Онв , вызванными од-
новременным ростом числа М полета с высотой.
Линия ф — х является границей между I и II дозвуковыми
режимами полета.
Линия в — и — к — л — м — н является границей устано-
вившегося горизонтального полета. Верхний ее отрезок (в —
и—к—называют предельной, по тяге высотой горизонталь-
ного полета 77Пр , а также линией потолков режимов; правый
отрезок (я — л — м — н)—максимальной скоростью VMaKC;
левый отрезок (в — и — к) —минимальной по тяге скоростью.
Правее и выше этой границы из-за нехватки тяги горизон-
тальный полет (в пределах допустимых скоростей) возможен
только с торможением, а полет на постоянной скорости —
только со снижением. Наибольшую высоту установившегося
горизонтального полета называют статическим потолком
(точка к). Иногда отдельно различают сверхзвуковой (точ-
ка /с) и дозвуковой (точка и) статические потолки.
В описаниях и инструкциях многих самолетов кроме или
вместо статического потолка указывается практический по-
толок. Это — высота, на которой максимально возможная вер-
тикальная скорость установившегося подъема равна не ну-
лю, как на статическом потолке, а некоторой условной вели-
чине (3—5 м/с — для разных типов маневренных и 0,5 м/с —
для неманевренных самолетов).
Надо правильно разъяснить летчикам понятие «практичес-
кий потолок», смысл которого заключается не в том, что нель-
зя набрать большую высоту, а в том, что это наибольшая вы-
сота, на которой летчик имеет возможность длительно (в пре-
делах располагаемого запаса топлива) выполнять установив-
шийся горизонтальный полет, надежно парируя возможные
нарушения режима имеющейся в запасе избыточной тягой.
Изменение потолков режимов по скорости можно объяс-
27
нить следующим образом. Из формулы (1.4) следует, что
давление на высоте Нпр , а значит, и сама эта высота обус-
ловлены величиной силы тяжести, располагаемой тягой, аэро-
динамическим качеством самолета, соответствующим углу
на котором обеспечивается равновесие сил Хаг=Рр, и дав-
лением на той стратосферной высоте, начиная с которой Р?
пропорциональна атмосферному давлению р. Изменение ско-
рости (числа Л4) полета сопровождается изменением указан-
ных тяги и качества, что приводит к изменению //Пр • Так, на-
пример, значительное уменьшение качества некоторых само-
летов на трансзвуковых скоростях обусловливает «провал»
в линии потолков на этих режимах.
Объяснение изменений Имакс с высотой можно построить
следующим образом. Если сравнивать V макс на двух высо-
тах, то в соответствии с формулой (1.3) получится:
У большинства современных самолетов с ТРД отношение
Pp/р увеличивается с высотой до 11—13 км за счет того, что
тяга уменьшается медленнее, чем плотность воздуха. В ре-
зультате Умакс увеличивается. Угол атаки, а с ним и коэф-
фициент Сха изменяются на этих высотах мало, так как
уменьшение а за счет повышения скорости в значительной
мере компенсируется его увеличением за счет роста высоты.
Выше И —13 км тяга примерно пропорциональна плотнос-
ти воздуха, следовательно, Рр/р = const, а угол атаки и СХа
увеличиваются. В результате 1/макс уменьшается.
Линия б — е — ж является границей установившегося го-
ризонтального полета при использовании максимального
(бесфорсажного) режима работы двигателя. Эта граница
определяется из условия Рр = Ха г.
Линия л — п является ограничением максимальной скорос-
ти по максимально допустимому числу М полета. Из рисунка
видно, что тяга силовой установки позволяет развивать более
высокие скорости (вплоть до скоростей, соответствующих ли-
нии л — м — н), однако делать это запрещается по условиям
безопасности полета. Постоянство допустимой скорости (вер-
тикальность линии л — п) объясняется постоянством скорости
звука в стратосфере, благодаря чему установленное число
^4доп = const получается при одной и той же истинной ско-
рости.
Линия п — р является ограничением максимальной скорос-
ти по максимально допустимому скоростному напору («по
прибору»). Поскольку плотность воздуха с высотой умень-
28
шается, то для получения одной и той же приборной скорости
истинную скорость необходимо увеличивать, что и показыва-
ет эта кривая: имакс доп? = I/ •
г
Рассматривая вопрос о допустимых скоростях полета, осо-
бенно следует подчеркнуть, что каждый летчик должен твер-
до знать, какой причиной вызвано ограничение максимальной
скорости по числу М и q на его самолете, чтобы в самом край-
нем случае принять обоснованное решение о возможности или
невозможности временного выхода за ограничение. Например,
ограничение по прочности в критической ситуации можно не-
много превысить. Ограничение же по флаттеру нельзя пре-
вышать ни при каких обстоятельствах, так как флаттер раз-
рушает самолет почти мгновенно. В связи с повышенной
опасностью флаттера устанавливаются такие ограничения
максимальной скорости полета по прибору, при которых до
границы возможного его появления имеется существенный за-
пас скорости.
Линия л — д является границей по максимальной энерге-
тической высоте. За эту границу самолет не может попасть
из-за недостатка энергии.
Областью — г — д — л — к — и — т является областью ди-
намических высот. Горизонтальный полет в этой области воз-
можен только с торможением (так как Рр < Ха г )• На дина-
мических высотах ограничение максимальной скорости не
имеет смысла, так как самолет выходит на эти высоты при
скоростях, существенно меньших, чем скорость, максималь-
но допустимая по числу М.
Наибольшая из динамических высот (точка д) называется
динамическим потолком.
Закончив рассмотрение диапазона V — Н, следует обра-
тить внимание летчиков на другие формы представления
информации о высотно-скоростных свойствах самолета,
встречающиеся в инструкциях летчику (экипажу), пособиях,
практических аэродинамиках и прочей литературе по са-
молету.
В некоторых случаях диапазон скоростей и высот полета
изображается в координатах Н — Vnp (рис. 1.10). Такая фор-
ма представления информации удобна с точки зрения пилоти-
рования самолета, поскольку пилотирование осуществляется
главным образом по приборным скоростям.
В литературе, регламентирующей летную работу, основные
высотно-скоростные данные самолета — эволютивная прибор-
ная скорость, максимально допустимые приборные скорости
и числа Л4, наибольшие высоты практического потолка — со-
29
держатся также и в цифровой форме. Кроме того, в цифровой
же форме указываются ограничения скоростей и высот поле-
та, обусловленные надежностью работы двигателя и входного
устройства, безопасностью полета с включенной САУ, проч-
ностью шасси, закрылков, предкрылков и тормозных щитков.
Эти цифровые данные безусловно необходимы летчику, одна-
ко только по ним одним трудно, а подчас и невозможно оце-
нить всю совокупность возможных высот и истинных скорос-
тей полета самолета. Их нужно использовать совместно с
графиками диапазонов V — Н полета.
Рис. 1.10. Диапазон приборных скоростей и высот полета самолета
§ 16 УЧЕТ ОГРАНИЧЕНИЙ
ВЫСОТНО-СКОРОСТНЫХ СВОЙСТВ САМОЛЕТОВ
ДЛЯ ПОВЫШЕНИЯ БЕЗОПАСНОСТИ ПОЛЕТОВ
Изучая с летчиками ограничения скоростей полета самоле-
та, уместно предупредить их о типичных ситуациях, в кото-
рых могут быть допущены непроизвольные нарушения ограни-
чений, и напомнить им предписанные Инструкцией действия
по ликвидации этих нарушений.
Так, например, максимально допустимая приборная ско-
рость может быть легко превышена на средних и малых высо-
тах, особенно при полете со снижением, из-за малого сопро-
тивления самолета в полетной конфигурации и большой тяги
силовой установки. Во всех случаях превышения ограничений
по скорости необходимо уменьшить ее до допустимой вели-
чины, снизив тягу двигателя и выпустив тормозные щитки.
30
У самолетов с нижней децентрацией тяги при уменьшении тя-
ги появляется пикирующий момент, который необходимо свое-
временно парировать.
В некоторых случаях можно ускорить торможение перево-
дом самолета в набор высоты или уменьшением угла сниже-
ния. Однако для этого потребуется увеличение угла атаки, что
в некоторых случаях может усугубить положение. В частнос-
ти, если нарушено ограничение числа М по путевой устойчи-
вости, то увеличение угла атаки приведет к дальнейшему
уменьшению путевой устойчивости, возрастанию амплитуды
колебаний самолета, боковых перегрузок, возможности появ-
ления остаточных деформаций вертикального оперения и фю-
зеляжа.
В случае нарушения ограничения по минимально допусти-
мой скорости его ликвидация возможна двумя способами:
— опусканием носа самолета (например, в верхней точке
траектории петли Нестерова), уменьшением угла атаки и раз-
гоном по нисходящей траектории. Поскольку этот способ свя-
зан с потерей высоты, пользоваться им следует осторожно;
— увеличением тяги двигателя. Однако тяга, потребная
для разгона в данной ситуации, велика (из-за большого лобо-
вого сопротивления при малых скоростях), поэтому ее надо
увеличивать сразу полностью.
Ошибки летчиков при полете на малых скоростях, а так-
же несвоевременное вмешательство их в управление при
сильных вертикальных порывах могут явиться причиной сва-
ливания самолетов. В случае сваливания летчик должен
немедленно дать ручку «от себя» за нейтральное положение
для уменьшения a<^aflOn и увеличения скорости. Элероны
должны быть в нейтральном положении до выхода самолета
На ОС 0СдОП.
При малых скоростях и в условиях сильной болтанки сле-
дует избегать маневров, связанных со значительным увели-
чением углов атаки (разворотов с набором высоты, энергич-
ных переходов в набор высоты, разворотов с большими кре-
нами и т. п.).
§ 1.7. АНАЛИЗ ВЛИЯНИЯ УСЛОВИЙ
БОЕВОГО ПРИМЕНЕНИЯ НА ГРАНИЦЫ ДИАПАЗОНА
СКОРОСТЕЙ И ВЫСОТ ПОЛЕТА
Прежде всего, надо напомнить летчикам, что понимается
под условиями боевого применения (которые иногда назы-
вают эксплуатационными факторами). Это — конкретные,
определяемые боевой (или учебной) задачей и фактическими
условиями ее выполнения боевая нагрузка самолета, вариант
31:
вооружения (внешних подвесок), конфигурация крыла, режим
полета и параметры атмосферы.
Затем надо объяснить, для чего необходим анализ влияния
условий боевого применения. Дело в том, что приводимые в
указанных источниках высотно-скоростные данные соответст-
вуют, как правило, так называемым расчетным условиям, т. е.
некоторой средней полетной массе самолета, определенному
варианту внешних подвесок (а чаще' всего — самолету без
внешних подвесок), а также стандартным значениям пара-
метров атмосферы. В реальных условиях выполнения задачи
все эти факторы обычно отличаются (иногда очень значи-
тельно) от расчетных. А так как действующие на самолет си-
лы существенно зависят от указанных факторов, то, естествен-
но, и высотно-скоростные свойства самолета, определяемые
соотношением этих сил, меняются вместе с реальными усло-
виями полета. Эти изменения оказывают непосредственное
влияние на боевые возможности самолетов и безопасность по-
летов. Знание авиационными командирами и всем летным со-
ставом, как и почему влияют те или иные факторы, и учет
этого влияния будут способствовать достижению максималь-
ного использования боевых возможностей самолетов при со-
хранении уровня безопасности полетов.
Далее следует напомнить, что влияние режима полета уже
рассмотрено при анализе диапазона скоростей и высот поле-
та, после чего приступить к анализу влияния остальных фак-
торов.
1.7.1. Влияние варианта вооружения и боевой нагрузки
Влияние варианта вооружения и боевой нагрузки осуще-
ствляется через изменение полетной массы самолета, допол-
нительное сопротивление внешних подвесок А Хао (увеличе-
ние ПЛС) и усиление ограничений скорости.
Влияние полетной массы на эволютивную и минимально
допустимую скорости легко показать с помощью выражения
вытекающего из формул, определяющих указанные скорости.
Из формулы видно, что с увеличением полетной массы эти
скорости возрастают, поскольку для уравновешивания боль-
шей силы тяжести необходима большая подъемная сила, а
увеличить ее при неизменном угле атаки адоп можно лишь за>
счет повышения скоростного напора. Указанное влияние мо-
жет быть несколько усилено уменьшением СГадоп по мере
роста числа М.
32
На максимальную и минимальную по тяге скорости (т. е.
-на границы установившегося горизонтального полета на не-
изменной высоте) изменения полетной массы оказывают сле-
дующее влияние (рис. 1.11): увеличение т сопровождается
ростом лобового сопротивления самолета за счет индуктивной
его составляющей и, как результат, уменьшением максималь-
ной и увеличением минимальной по тяге скорости. С ростом
высоты или с уменьшением скорости на /7 = const влияние мас-
сы усиливается, так как увеличивается доля индуктивной
части в общем сопротивлении самолета.
Рис. 1.11. Влияние полетной массы самолета на
максимальную и минимальную по тяге скорости
полета
Изменения массы самолета не влияют на ограничения ско-
рости маневренных самолетов по допустимым числу М и ско-
ростному напору.
В каждой точке границы горизонтального полета (распо-
лагаемой высоты /7Р) Ya=mg или 0,7 СГйдоп рн? M'-S=mg,
следовательно, при М = const рНр> пропорционально mg и для
сохранения равенства сил Ya и mg увеличению силы тяжести
на 1% (за счет большей массы самолета) должно соответст-
вовать увеличение на 1 % давления или снижение границы го-
ризонтального полета на 64 м.
В каждой точке границы установившегося горизонтально*
го полета (предельной высоты 7/пр) Хаг^Р? . Необходимо
обратить внимание обучаемых на то, что при этом условии
аэродинамическое качество не зависит от полетной массы
3—5007сп
33
самолета. Действительно, из равенства Ха г = Рр получается;
что
р
Сха =---------- = const (пот).
0,7 pM2S
Физически это означает, что равновесие сил Ха г и Рр до-
стигается при данном числе М на одном и том же угле атаки
независимо от величины полетной массы. Это означает, что и
на аэродинамическое качество самолета полетная масса (при
условии Ха г = Рр) не влияет.
Поскольку Xar^rng/K^o увеличение силы тяжести на 1%
сопровождается ростом Ха г также на 1 % и для соответству-
ющего увеличения на 1 % располагаемой тяги Рр необходимо^
повышение (в стратосфере, где Рр[р = const) давления на 1%,
т. е. снижение границы установившегося горизонтального по-
лета примерно на 64 м.
Влияние внешних подвесок на границы диапазона скорое
тей и высот полета модсно иллюстрировать следующей схемой.
fm— влияние было рассмот-
рено ранее;
Подвески
--практически не влия-
ет на и V МИц доп;
еплс)*
— усиливает
на Кмакс:
влияние т
влияние т
как на урав-
— усиливает
на Нпр, так
новешивание &Хаи тре-
буется дополнитель-
ная тяга;
— по условиям устойчи-
вости, управляемости,
аэродинамического на-
грева;
1 7дпп — по’ условиям прочнос-
ти замков, самих под-
весок, из-за вибраций..
* ПЛС — показатель лобового сопротивления (подробно — в 4.2.2).
34
В целом видно, что увеличение т и применение внешних
подвесок сопровождаются сужением области скоростей и вы-
сот полета, которые могут быть использованы при выполне-
нии боевых задач. Кроме того, более строгими становятся ог-
раничения как минимальных, так и максимальных скоростей,
что требует от летчиков повышенного внимания в целях со-
хранения безопасности полета.
1.7.2. Влияние изменений стреловидности крыла в полете
Перед рассмотрением этого вопроса полезно напомнить
обучаемым, что от величины угла стреловидности крыла зави-
сят (при прочих равных условиях) характер распределения и
величина избыточного давления, а также начало возникнове-
ния и интенсивность волнового кризиса и. в итоге все аэроди-
намические характеристики самолета. Затем можно показать
причинно-следственную связь в виде: изменение % — измене-
ние аэродинамических характеристик — изменение высотно-
скоростных свойств самолета.
Так, например, перевод крыла на меньший угол стрело-
видности на дозвуковых скоростях полета приводит, во-пер-
вых, к увеличению СудД0п и, следовательно, к снижению ми-
нимально допустимой скорости, во-вторых, к повышению
аэродинамического качества в горизонтальном полете и та-
ким образом к уменьшению Ха г и росту #np (рис. 1.12)«
Рис. 1.12. Влияние стреловидности КИС на границы диапазона
скоростей и высот полета
3*
35
Исключением здесь является полет на больших дозвуковых
скоростях и малых высотах, при которых сопротивление Хаг,
соответствующее большой %, оказывается меньше, чем при
малой Это объясняется наличием волнового кризиса и
обусловленного им волнового сопротивления, которое сущест-
венно снижается с увеличением %. Применение больших % на
малых и предельно малых высотах необходимо для преодоле-
ния ПВО, при этом воздействие турбулентности атмосферы
меньше влияет на самолет и летчика.
На сверхзвуковых скоростях качество в горизонтальном
полете ухудшается с уменьшением %, что приводит к сниже-
нию #пр и Умакс . Кроме того, уменьшение % сопровождается,
как правило, снижением максимально допустимых скоростей
полета (по Л4ДОп и 7ДОП)-
В результате минимальную стреловидность целесообразно
использовать при взлете, посадке и полете на малых скоро-
стях (из-за повышенных Су «), а также при выполнении задач,
связанных с большими дальностью и продолжительностью по-
лета (из-за более высокого К).
1.7.3. Влияние температуры и давления воздуха
Повышение температуры и понижение давления воздуха
сопровождаются уменьшением его массовой плотности р =
р
= . Для того чтобы в этих условиях сохранить величи-
ну подъемной силы при неизменном угле атаки аА0П , необхо-
димо обеспечить неизменность скоростного напора воздуха
^ = О,5рУ2, т. е. компенсировать уменьшенную плотность повы-
шением скорости. Именно по этой причине с повышением тем-
пературы и понижением давления увеличиваются минимально
допустимая и эволютивная скорости полета (здесь при необ-
ходимости руководитель занятия может напомнить формулы
этих скоростей).
При уменьшении р допустимая величина скоростного напо-
ра соответствует большей скорости. Это объясняет причину
увеличения с ростом f и уменьшением р максимально допу-
стимой по скоростному напору скорости.
С ростом температуры увеличивается скорость звука, бла-
годаря чему сохраняются неизменными минимально допусти-
мое, эволютивное и максимально допустимое по q числа М по-
лета, а максимально допустимая по числу М скорость возра-
стает.
Повышение Г и понижение р воздуха вызывают уменьше-
ние тяги силовой установки самолета, благодаря чему умень-
36
шаются VMaKC и Ммакс, а также скорость и число М на лю-
бом установившемся режиме при задросселированной тяге
(рис. 1.13).
Рис. 1.13. Влияние температуры воздуха на
максимальную скорость полета самолета
Уменьшение тяги вызывает также и понижение высоты Нпр>
определяемой по давлению /?япр (формула 1.4). Входящее в
это выражение аэродинамическое качество К может изме-
ниться (при увеличении Г), как в сторону увеличения (и тем
самым ослабить влияние повышенной температуры Г), так и
в сторону уменьшения (и тем усилить это влияние). Дело в
том, что снижение тяги сопровождается уменьшением а, на
котором обеспечивается равенство Ха г — Рр . Уменьшение же
угла атаки, как известно, может сопровождаться как сниже-
нием, так и повышением К. У современных самолетов качество
на дозвуковом потолке обычно повышается, а на сверхзвуко-
вом понижается при увеличении Р.
На располагаемую высоту горизонтального полета измене-
ния температуры не влияют.
37
Глава 2
МЕТОДИКА ИЗЛОЖЕНИЯ И ОБЪЯСНЕНИЯ
МАНЕВРЕННЫХ СВОЙСТВ САМОЛЕТА
§ 2.1. СОДЕРЖАНИЕ И ПОСЛЕДОВАТЕЛЬНОСТЬ
ИЗУЧЕНИЯ МАНЕВРЕННЫХ СВОЙСТВ
Изучение данного вопроса с летным составом следует на-
чинать с определения места и роли маневренных свойств бое-
вых самолетов в общем комплексе свойств, определяющих их
боевые возможности. При этом необходимо отметить, что ма-
невренные свойства относятся к важнейшим характеристи-
кам боевого самолета любого рода авиации. Маневренность
служит залогом успеха в воздушном бою, при преодолении
ПВО противника на маршруте полета, нанесении ударов по
наземным целям и выполнении других боевых задач. Далее
следует подчеркнуть, что вместе с такими свойствами, как
высотно-скоростные, дальность и продолжительность полета,
пилотажные свойства, они определяют боевые возможности
авиационных боевых комплексов.
Прежде чем приступить к изучению маневренных свойств,
следует дать определение маневренности.
Под маневренностью понимают способность самолета ме-
нять свое положение в пространстве путем изменения скорос-
ти по величине и направлению. Способность самолета менять
скорость по величине характеризуется тангенциальным уско-
рением jxa и может быть названа «приемистостью», а по на-
правлению— нормальным ускорением jn а и может быть на-
звана «поворотливостью» самолета. Каждое из этих ускоре-
ний зависит как от составляющей силы тяжести, так и
соответственно от тангенциальной пХа или нормальной ско-
ростной пу а перегрузки. Суммарное же ускорение пропор-
ционально величине полной перегрузки п. Поэтому перегруз-
ки могут быть использованы в качестве общих показателей
маневренности. Отсюда следует подчеркнуть, что при равных
начальных условиях самолет, обладающий большими пере-
грузками, может более интенсивно искривлять траекторию и
менять величину скорости, т. е. имеет лучшие маневренные
характеристики.
Далее следует напомнить в общем-то известное летчикам
из училищного курса «Ародинамика и динамика полета са-
38
молета» положение о том, что при изучении вопросов манев-
ренности боковая перегрузка nza, как правило, не учитыва-
ется, поскольку полагают, что маневры выполняются коорди-
нированно и боковая сила Za =0. Таким образом, маневрен-
ность самолета можно охарактеризовать двумя перегрузками
пха и nYа. которые и являются общими показателями ма-
невренности.
Следует также показать, что с этими перегрузками с по-
мощью известных формул связаны все частные показатели
маневренности: радиусы кривизны траекторий, угловые ско-
рости, время разворота на заданные углы, разгона и тормо-
жения, скороподъемность самолета и т. п.
Маневренные свойства можно излагать в следующей по-
следовательности:
— показатели маневренности, их ограничения; формы
представления информации о показателях маневренности;
— области выполнимости основных боевых маневров и
фигур пилотажа;
— зависимость показателей маневренности от условий
боевого применения;
— методы расчета и моделирования боевых маневров;
— рациональные боевые маневры; выбор рациональных
боевых маневров для ведения боевых действий самолетами
родов авиации;
— оценка полноты использования маневренных свойств
самолетов в процессе боевой подготовки;
— методика анализа ошибок летчиков в технике пилоти-
рования.
Изучение маневренных свойств серийного самолета целе-
сообразно начинать с общих характеристик его маневреннос-
ти— наибольших возможных перегрузок: пУа — нормальной
скоростной и пХа — тангенциальной. От них в конечном итоге
зависят и параметры тех или иных маневров.
Перед изучением материалов по перегрузкам конкретного
самолета следует убедиться в том., что обучаемые знают фи-
зические основы вопроса о перегрузках и, если требуется,
внести необходимую ясность.
Здесь нужно обратить внимание на следующие моменты:
— определение понятия «перегрузка»;
— связь между силами, действующими на самолет, и пе-
регрузками;
— связь между перегрузками и ускорениями;
— тангенциальная перегрузка как энергетическая харак-
теристика.
Определение понятия «перегрузка» можно дать по-разно-
му. Летчик связывает перегрузку с изменениями своего веса
39
в полете. В свою очередь, изменения веса в полете обусловле-
ны тем, что при маневрировании самолета искривляющая тра-
екторию движения сила создается за счет избытка подъемной
силы над подъемной силой горизонтального полета, равной
силе тяжести, действующей на самолет. Поэтому и самолет и
все находящиеся в нем тела, в том числе и летчик, подверже-
ны действию этой «избыточной силы» или «перегрузки», с ко-
торой и удобно связывать изменения веса летчика в полете.
Здесь же следует отметить, что перегрузка возникает под
действием результирующей силы, складывающейся из тяги
силовой установки самолета и аэродинамической силы. При
определении перегрузки в условиях разбега или пробега при
взлете и посадке дополнительно учитываются силы реакции
Земли. По своей природе все эти силы возникают в резуль-
тате взаимодействия поверхностей самолета (крыла, фюзеля-
жа, двигателя) с потоком воздуха или пневматиков колес с
поверхностью ВПП и объединены общим названием «поверх-
ностные силы».
Из этого видно, что сюда не вошла сила тяжести, выеден-
ная в отдельную группу — массовых или гравитационных
(объемных) сил.
Массовая сила (сила тяжести) —это сила, с которой тело
притягивается к Земле. Распределена она по всему объему (в
том числе и внутреннему) тела, а ее равнодействующая при-
ложена в центре масс.
Силу тяжести и летчик и любая часть самолета восприни-
мают непосредственно от гравитационного поля и поэтому
взаимодействия тел друг с другом (в нашем случае летчика
с креслом) под действием только массовой силы не происхо-
дит.
Следовательно, массовая сила на изменение веса летчика
(самолета) в полете влияния не оказывает. Для оценки этого
изменения следует рассмотреть, что представляет собой вес,
обратив внимание обучаемых на то, что вопреки укоренивше-
муся в обиходе представлению вес тела — это не сила, с кото-
рой оно притягивается к Земле, а сила, с которой тело под
действием силы тяжести действует на удерживающую его
опору (в нашем случае на чашку сидения).
Таким образом, вес тела и сила тяжести — не одно и то
же. Они приложены к разным телам: сила тяжести — к телу
(к летчику), вес к опоре — к креслу. Вес (весомость) опреде-
ляется как векторная величина:
G =
где т — масса рассматриваемого тела (летчика, самолета,
и т. п.);
40
g — вектор ускорения свободного падения;
j — вектор ускорения, которым обладает тело.
Если опора, удерживающая тело, неподвижна относитель-
но Земли или движется прямолинейно и равномерно (ускоре-
ние / = 0), вес G равен силе тяжести mg.
Здесь уместно показать летчикам, каким образом при дей-
ствии только силы тяжести mg может^наступить невесомость.
Так, при свободном падении тел j = g и вес G = 0, т. е. если
лишить летчика опоры, его вес (весомость) будет равен нулю
и, несмотря на наличие силы тяжести, наступает невесомость.
Для того чтобы самолет двигался лишь под действием силы
тяжести, летчик должен уравновесить тягой лобовое сопро-
тивление (Р = Ха) и создать Ya = 0 и Za = 0. В то же время
при подъеме тел с ускорением их вес превышает силу тяжес-
ти, а при снижении с ускорением вес тел меньше силы тяжести.
Итак, перегрузка определяется как отношение результи-
рующей (суммарной поверхностной) силы к произведению
массы самолета (летчика) на ускорение свободного падения:
R
п =------
mg
В зависимости от того, по осям какой системы координат
раскладывается результирующая сила R, рассматривают со-
ответствующие составляющие перегрузки. Так, при использо-
вании скоростной системы координат получают указанные
тангенциальную пХа , нормальную скоростную nY а и боковую
nZa перегрузки.
Связь между действующими на самолет силами и пере-
грузками. Здесь уместно обратить внимание летчиков на рас-
крытие физического смысла известных формул:
Ya Р - Ха ' Za
Пу а = -- \ ПХа~ ------- » nZ а = -- •
mg mg mg
В частности, когда одновременно Уа = 0; Р—Ха—0\ Za =
= 0, т. е. все три перегрузки равны нулю, наступает невесо-
мость. Как уже отмечалось, летчик ощущает вес (весо-
мость), когда он давит на свою опору — сиденье (сиденье да-
вит на летчика). Но сиденье может передавать на летчика
только поверхностные силы. Силу же тяжести и летчик и крес-
ло получают непосредственно от гравитационного поля, в ко-
тором они находятся, а не от сиденья. Поэтому летчик на си-
денье не давит, если никакие поверхностные силы на самолет
не действуют. Из этого следует, что перегрузки характеризу-
41
ют величину поверхностных сил, выраженных в долях дейст-
вующей на самолет силы тяжести.
Связь между перегрузками и ускорениями. Показывая эту
связь, целесообразно сослаться на второй закон Ньютона: ус-
корение равно отношению силы к массе. Так, например, чем
больше отношение подъемной силы к силе тяжести, тем выше
центростремительное ускорение, создаваемое подъемной си-
лой, тем энергичнее искривляется траектория. Но это отно-
шение есть перегрузка Пуа. Следовательно, величина этой
перегрузки характеризует способность самолета к искривле-
нию траектории.
Чем больше отношение избыточной тяги (Р— Ха) к силе
тяжести, тем выше тангенциальное ускорение, создаваемое
избыточной тягой. Значит, большая тангенциальная перегруз-
ка характеризует лучшие способности самолета к разгону.
Однако и это следует подчеркнуть особо, перегрузки не
учитывают тех ускорений, которые создаются силой тяжести
или ее составляющими. В создании ускорения самолета уча-
ствуют все действующие на него силы, а в создании перегру-
зок не участвует сила тяжести. Следовательно, оценка уско-
рения самолета по величине перегрузки является прибли-
женной.
Важно также отметить, что летчик в полете не может до-
стоверно судить по перегрузкам о характере движения само-
лета в данный момент. Если, например, летчик прижат к спин-
ке сиденья, то нельзя сказать с уверенностью, что самолет на-
бирает скорость. При больших углах набора высоты танген-
циальная составляющая силы тяжести mg sin 8 может ока-
заться больше избыточной тяги, и самолет будет терять ско-
рость. Действительно, согласно второму закону Ньютона тан-
генциальное ускорение
Rxa (Р — Xa~mgsin0) , .
/Х а — —= g --------2----------- =g(nXa- Sin 0).
т mg
При sin 8 > nXa оно будет отрицательным.
Надежно судить о характере движения самолета летчик
может не по ощущаемым перегрузкам, а по показаниям пи-
лотажных приборов.
Тангенциальная перегрузка как энергетическая характе-
ристика. При раскрытии этого вопроса следует показать обу-
чаемым, что если тангенциальная перегрузка положительна,
то это еще не значит, что самолет будет разгоняться.
Положительное значение пХа говорит лишь о том, что
механическая энергия самолета, т. е. сумма его потенциаль-
ной и кинетической энергий, возрастает.
42
В курсе физики доказывается, что прирост кинетической
энергии тела равен работе внешних сил:
dEK=d -^2- = dA=FXads.
у 2 У
Тогда прирост кинетической энергии самолета будет
равен
dV = F XadS = (P-Ха-mg sin®) ds,
\ 2 /
где (P — Xa — mg sin 0)—тангенциальная сила FXa, дейст-
вующая на самолет. Произведение этой силы на путь ds —
работа. Из рис. 2.1 видно, что sin & ds = dH. Следовательно,
tnVdV + mgdH = (Р-Ха) ds,
или, перейдя от бесконечно малых приращений к конечным,
получим
<РД V + mgkH = (Р-Ха) As.
Но
т Уср Д V = А Ек и mg кН = к Еп.
Рис. 2.1. Элементы траектории полета са-
молета
Следовательно, работа избыточной тяги (Р — Ха) рав-
на сумме приростов кинетической и потенциальной энергии,
т. е. приросту полной механической энергии самолета Д£.
Если Р> Ха , то прирост энергии положителен; если Р<Ха
то он отрицателен, т. «е. энергия убывает; если Р = Ха, то
прирост энергии равен нулю, энергия остается неизменной.
При изложении этого вопроса обязательно следует отме-
тить, что при положительном избытке тяги суммарная энер-
гия возрастает. Одна из ее составляющих (кинетическая или
потенциальная) может оставаться постоянной или даже
убывать, но зато другая возрастает на большую величи-
ну. Например, на горке, выполняемой с потерей скорости,
Р>Ха означает, что количественно прирост Еп за счет уве-
43
личения высоты превосходит уменьшение Ек за счет паде-
ния скорости, и суммарная энергия растет. Но если на той
же горке Р < Ха (например, за счет дросселирования двига-
теля), то преобладает потеря кинетической энергии, и сум-
марная энергия уменьшается.
р__ха
Из формулы ПХа =--------— видно, что знаки пХа иДР =
mg
— (Р— Ха) совпадают. Следовательно, если летчика «при-
жимает» к спинке сиденья, то это означает, что энергия само-
лета растет (хотя, как было показано ранее, скорость может
и падать); если же летчика отклоняет к приборной доске—•
энергия уменьшается (хотя скорость может и расти). Здесь
следует предложить обучаемым назвать режимы полета, при
которых имеют место рассмотренные ситуации.
Разделив обе части последнего равенства на силу тяжес-
ти mg, получим
ДЕ Vcp Д V , Л и
---- — -------- -р Д Н = Пха срД s
mg g
ИЛИ Д Нэ = пх а ср Д S = Пха ср Vcp Д Л
— это механическая энергия,
V'2
Здесь Нэ = Н 4- ------
2g
приходящаяся на единицу силы тяжести, действующей на са-
молет, и называемая энергетической высотой самолета. Она
V2
превышает действительную высоту на величину -------, назы-
2g
ваемую кинетической высотой.
В заключение, чтобы убедиться в правильном понимании
взаимной связи между силами, ускорениями, перегрузками и
изменением энергии самолета, летному составу целесообраз-
но предложить ответить, (применительно к конкретной схеме
сил, см. рис. 2.2) на следующие вопросы:
У = 150 QQ ОН
Р-05ОЗОН
гид Sin 9
X^50 BOOH
тд созЬ
150 000 И
Рис. 2.2. Схема сил, действующих на самолет
44
а) Чему равна тангенциальная перегрузка nXa?
б) Чему равна нормальная скоростная перегрузка пуа?
в) Как движется в данный момент самолет — ускоренно,
замедленно, равномерно?
г) Прямолинейна или искривлена траектория в данный
момент?
д) Меняется ли, а если меняется, то как: потенциальная
энергия; кинетическая энергия; полная механическая энер-
гия?
е) Куда прижимает летчика — к спинке сиденья или к
приборной доске?
Правильные ответы таковы:
ч Р — Ха 45000- 30000
а) пХа =--------=--------------- =0,1.
mg 150 000
Типичной ошибкой здесь является попытка включить в
числитель составляющую /ngsin©. Поэтому при разборе сле-
дует подчеркнуть, что перегрузки создаются только резуль-
тирующей поверхностных сил, в которую не входят сила тя-
жести и ее
составляющие.
Ya 150 000
=------ =--------= 1.
б) Пу а
mg 150 000
в) Самолет движется замедленно: вперед его движет си-
ла Р = 45 000 Н, а препятствуют движению две силы — Ха и
mg sin©, равные в сумме 105 000 Н. Здесь опять-таки надо
подчеркнуть, что поскольку в создании ускорения участвуют
все силы без исключения, то и складываются Ха и mg sin©.
г) Траектория искривлена таким образом, что угол ©
увеличивается. Это происходит потому, что сила Ya больше
составляющей силы тяжести mg cos©.
Обычно последнее утверждение о том, что припуа = 1
траектория искривляется, вызывает у летчиков недоумение.
Здесь приходится объяснять, что при Пуа = 1 траектория
прямолинейна лишь в горизонтальном полете. При © ^=0 тра-
ектория прямолинейна лишь при Пу й = cos 0, т. е. при
nya<Z 1. Поэтому равенство пуа = 1 в наклонном полете так
же, как и неравенство ¥а > mg cos©, свидетельствует об уве-
личении угла 0, т. е. об искривлении траектории. Если же
¥a<Z mg cos 0, то происходит уменьшение угла ©.
д) Потенциальная энергия (mgH) растет, так как само-
( т V2 \
лет набирает высоту. Кинетическая энергия I—-— I падает,
поскольку скорость уменьшается. Полная же энергия растет,
поскольку
Р> Ха (Пха > 0).
45
На последний момент также следует обратить внимание*
аудитории, подчеркнув, что об изменении полной механичес-
кой энергии самолета можно судить по знаку пХа независи-
мо от того, как меняются ее составляющие (кинетическая и
потенциальная энергии).
е) Летчика прижимает к спинке, так как пХа> ®(Р>
~>Ха), несмотря на то, что скорость уменьшается, посколь-
ку mg sin @ больше (Р — Ха). Но эта большая по величине
(чем Р — Ха) составляющая силы тяжести перегрузку не
создает и летчиком не воспринимается, хотя и оказывает ре-
шающее влияние на изменение скорости полета.
В заключение, используя ответы на вопросы «г» и «е»,
следует еще раз напомнить и показать летчикам, что досто-
верно судить о характере движения самолета можно лишь по
показаниям приборов, а не по своим ощущениям.
После рассмотрения физических основ вопроса о пере-
грузках следует перейти к изучению собственно маневренных
свойств конкретного самолета в изложенной в начале пара-
графа последовательности.
§ 2.2. ПОКАЗАТЕЛИ МАНЕВРЕННОСТИ
И ИХ ОГРАНИЧЕНИЯ, ОПРЕДЕЛЯЕМЫЕ УСЛОВИЯМИ
БЕЗОПАСНОСТИ ПОЛЕТА И ВОЗМОЖНОСТЯМИ
СИЛОВОЙ УСТАНОВКИ САМОЛЕТА
Прежде всего следует напомнить, что общими показате-
лями маневренности являются наибольшие перегрузки, зная
которые, всегда можно перейти к частным показателям, ха-
рактеризующим кинематику движения (/?, <о, t и т. д.) само-
лета по любым, в том числе и пространственным траекто-
риям.
Наибольшие перегрузки целесообразно классифицировать
следующим образом (рис. 2.3):
Рис. 2.3. Классификация наибольших перегрузок
46
Нор-
маль-
ные
скоро-
стные
максимально возможная (при Су амакс; акр);
располагаемая пуар(по адоп или <рмакс);
предельная по тяге пуа пр;
максимально допустимая по прочности самолета^
п* или физиологическим возможностям лет*
Yа макс
чика Пуаф\
Тангенциальная — располагаемая перегрузка пХа^
Далее следует рассмотреть этот вопрос более подробно,,
начав с анализа формул
Ya Рр - Ха
Пуа = --- И Пха^~ --Е----
mg mg
Наибольшее значение перегрузки nYa в данных условиях
полета получается при таком отклонении ручки управления
на себя, которое обеспечивает максимально возможную ве-
личину подъемной силы, а наибольшее значение перегрузки
пха р — при создании наибольшей силы тяги Рр.
Величина перегрузки м%аР на современных самолетах не*
ограничивается. В то же время создание максимально воз-
можной перегрузки пу а иногда может угрожать безопасное*
ти полета, в связи с чем устанавливают ее ограничения. Они
могут быть аэродинамическими, прочностными, физиологи*
ческими и энергетическими (рис. 2.3).
2.2.1. Ограничения перегрузок
Аэродинамические ограничения перегрузки nY а объясни*
ются тем, что еще на докритических углах атаки возникают
аэродинамические явления (срыв потока, смещение центра
давления и т. п.), ухудшающие устойчивость и управляе*
мость самолета. В связи с этим устанавливаются наибольшие
безопасно допустимые значения угла атаки адоп или коэффи-
циента подъемной силы Суадоп , которым соответствует рас-
полагаемая перегрузка Пу а р (или пуадоп ).
Здесь необходимо пояснить летчикам, по каким именно
признакам на изучаемом самолете устанавливаются макси-
мально допустимые в полете углы атаки адоп или Су а доп по
тряске, покачиванию с крыла на крыло, срабатыванию спе-
циальной сигнализации и т. п. Обязательно следует указать
летному составу на опасность их превышения и разъяснить, к.
чему это может привести (к потере управляемости, «подхва-
ту» и т. п.).
На сверхзвуковых скоростях полета вследствие недоста-
47
точной эффективности продольного управления самолет не
выходит на а адоп даже при полном отклонении ручки уп-
равления «на себя» (при максимальном отклонении стабили-
затора Фмакс). В этом случае наибольшая перегрузка пу а
(при фМакс) также является располагаемой перегрузкой Пуа$ •
Прочностные ограничения указываются в инструкциях и
описаниях самолетов в виде величин наибольших эксплуата-
ционных перегрузок ^yaMaKC, которые зависят от варианта
боевой загрузки и массы самолета.
Их превышение в полете связано с опасностью возникно-
вения остаточных деформаций самолета, а большое их пре-
вышение может привести к разрушению самолета в воздухе.
Однако следует пояснить летчикам, что выход за пределы
а макс возможен при достаточно больших скоростях по
прибору, когда пУар > Пу а макс .
Физиологические ограничения перегрузки связаны с огра-
ниченными возможностями человеческого организма по вы-
держиванию перегрузок, особенно в направлении «голова —
таз». В документации по серийным самолетам они не указы-
ваются. Их необходимо учитывать при маневрировании с
пуа, близкими к Пу а р или ^уймакс, особенно при длитель-
ном выдерживании этих перегрузок.
Энергетические ограничения перегрузки nYa связаны с
тем, что при большой перегрузке лобовое сопротивление мо-
жет превысить располагаемую- тягу. Возможность этого мож-
но показать, используя следующий прием. Напомнить обу-
чаемым, что индуктивная составляющая сопротивления
Xa^^AC2YaqS = A(C^a rfqS
в сильной степени зависит от угла атаки или от перегрузки
Пу а
q2 S2 q 8
Поэтому-то и легко при маневрировании, создавая большие
(до 7—8 ед.) перегрузки, получить лобовое сопротивление^
превышающее располагаемую тягу двигателями самолет бу-
дет терять скорость.
Здесь же следует показать летчикам, что предельную по
тяге перегрузку можно найти из условия
Рр == Ха = Ха о Ха инд Я?Y а пр»
откуда
_____ Г Рр Ха о
а пр— I/ y •
у Л.а инд.г
48
В заключение следует подчеркнуть, что по своей сути пре-
дельная по тяге перегрузка является ограничением по энер-
гетическим возможностям самолета на данном режиме поле-
та. Это вытекает из того, что при nYa =пуаПр ^хйр=0и изме-
нения энергии не происходит. Если пу а > пуапр, то энергия
будет убывать; если nY а < nY а пр, то энергия будет возрас-
тать.
В заключение следует отметить, что перегрузки широко
используются при определении траектории движения самоле-
та. Большинство уравнений, описывающих траекторию дви-
жения его центра масс, содержат ту или иную перегрузку, с
помощью которой и определяются количественные изменения
параметров движения (ДЕ, Д0, Д<р...), а в итоге и частные по-
казатели маневренности.
2.2.2. Формы представления информации
о показателях маневренности
Ранее было показано, что для суждения о маневренных
свойствах необходимо иметь информацию прежде всего о
наибольших перегрузках. Такая информация содержится в
Инструкции летчику и в технической документации по само-
лету в виде цифр как отдельных, так и сведенных в таблицы,
и в виде графиков.
На рис. 2.4 приведен пример графической зависимости
располагаемой нормальной скоростной перегрузки nYap от
скорости (числа Л1) и высоты полета.
Рис. 2.4. Зависимость располагаемых нормальных скоростных перегрузок от
числа М и высоты полета
4—5007сп
49
Для объяснения причин такого характера зависимостей
следует напомнить обучаемым, что с возрастанием скорости и
уменьшением высоты полета увеличивается скоростной напора
а следовательно, и располагаемая подъемная сила
Y
Уар — Суа? qS и перегрузка пуар = ——- .
mg
Однако при числах М 1, несмотря на то, что с увеличе-
нием М (V) скоростной напор продолжает расти, темп роста
Уар и перегрузки Пуар замедляется. Это объясняется тем,,
что одновременно сильно уменьшается располагаемая вели-
чина Су а р = Су а фмакс (рис. 2.5). Поэтому на указанных ре-
жимах (Л4 1 и больших высотах) даже максимальные от-
клонения летчиком ручки управления на себя не приведут к
созданию ^уамакс-
Рис. 2.5. Зависимость Су а макс, Су а доп , Су а тр от числа М
полета
Точно так же нельзя создать п^а макс и на малых высотах
при небольших скоростях полета (на рис. 2.4 эта область ог-
раничена числом М 1). Однако причина здесь другая —
малый скоростной напор, при котором даже вывод самолета
на Су ар = Су а доп не обеспечивает выхода на Пу а макс. Далее'
следует показать летчикам, что в тех случаях, когда необхо-
димо иметь информацию о располагаемых (допустимых) пе-
регрузках для диапазона высот и скоростей полета самолета,,
информацию, приведенную на рис. 2.4, целесообразно пред-
50
ставить в несколько ином виде. На рис. 2.6 показан для при-
мера такой график изменения величины пУор в координатах
высота — скорость. Причем каждой линии, приведенной на
графике, соответствуют постоянные значения пУар= 1, 2, 3.
Рис. 2.6. Характер изменения линий постоянных значений распола-
гаемых нормальных скоростных перегрузок от числа М и высоты
полета
Графики зависимостей предельной по тяге пу а пр и распо-
лагаемой тангенциальной «хар перегрузок от числа М и вы-
соты Н приведены на рис. 2.7 и 2.8.
При необходимости линии постоянных значений пх а Р и
пу а пР также могут быть построены в координатах Н — V-
На практике все рассмотренные перегрузки пУар, «Уапр и
«хаР часто изображают на одном графике в виде зависимос-
ти тангенциальных перегрузок «хар от скорости, полета (чис-
ла М) и от нормальных скоростных перегрузок пуадля опре-
деленных высоты полета, удельной нагрузки на крыло и его
стреловидности, режима работы двигателя (рис. 2.9). Такие
зависимости получили название обобщенных характеристик
маневренных свойств самолета, поскольку на графике мож-
но найти любую перегрузку: пу а Р (для заданной скорости на
левой границе по СУа1Рмакс или СУад0П), п*а макс, пУап9
(точки на горизонтальной оси при ПхаР=0 для заданной ско-
рости полета), а также и величину пхаР при любой скорости
и перегрузке пуа для данной высоты полета.
Обобщенные характеристики удобны для различного рода
4*
51
Рис. 2.7. Зависимость предельных по тяге перегрузок от числа М и
высоты полета
Рис. 2.8. Зависимость располагаемых тангенциальных перегрузок от М и Н
52
расчетов, поскольку позволяют непосредственно с графика
снять величину любой перегрузки.
При необходимости иметь информацию не только о пере-*
грузках, но и о кинематических параметрах разворотов в гори*
зонтальной плоскости следует пользоваться графиком, пред-
ставленным на рис. 2.10. С его помощью можно определить
величину угловой скорости разворота при различных значе-
ниях скорости полета и нормальной скоростной перегруз*
ки Пу а . На графике могут быть нанесены границы по
«Гамаке. «у а пр, а ТЭКЖ6 Умакс ДЛЯ КОНКреТНОГО СЭМО-
лета с заданными mg/S, CYa№n, %, режимом работы двигате-
ля на заданной высоте полета.
Рис. 2.9. Зависимость располагаемых тангенциальных перегрузок от числа
М и от нормальных перегрузок маневрирования
Величина радиуса разворота самолета в горизонтальной
плоскости может быть определена с помощью графика и с при-
менением формулы
V
Л==15,9-2_,
О)г
57 3
где 15,9-=—L—коэффициент, позволяющий подставлять в
3,6
формулу скорость в км/ч, а угловую ско-
рость в град/с;
V — скорость, км/ч;
о)г — угловая скорость, град/с.
53
Говоря о графике, следует обратить внимание летчиков
на то, что построенные границы определяют области выпол-
йимости маневров, в данном случае в горизонтальной плос-
кости и, как будет более подробно показано в дальнейшем,
характеризуют по существу предельные маневренные воз-
можности самолета, подобно тому, как границы диапазона
высот и скоростей полета характеризуют высотно-скоростные
свойства самолета.
Рис. 2.10. Границы областей маневрирования самолета в горизон-
тальной плоскости
График, представленный на рис. 2.10, является основой
для построения номограммы, с помощью которой можно по-
лучить дополнительно к перечисленной информацию о вели-
чине радиуса и времени разворота, о приборной скорости по-
лета самолета данного типа, а также и о величине Су а (уг-
ла атаки) и степени его приближения к допустимому зна-
чению в процессе маневрирования (см. рис. 8.3 § 8.1).
Для суждения о разгонных свойствах самолетов целесо-
образно воспользоваться графиком, представленным на
рис. 2.11 и характеризующим зависимость приращения ско-
рости AV при различных значениях пха от углов набора
(снижения) за различные промежутки времени Д/=1, 2, 3... с.
График позволяет проводить анализ влияния на характерис-
тики набора высоты тангенциальной перегрузки пха и уг-
ла 0. Так, точки пересечения кривых, соответствующих по-
стоянным значениям пХа , с осью‘ординат позволяют опреде-
лять углы установившегося набора (снижения) с V=const.
Например, при/гха = ± 0,4 0ycт = ±23o35, ( — 24°, точка А на
рис. 2.11).
54
Рис. 2.11. График для определения величины изменения скорости для раз-
личных 0 и пХа
55
Влияние на величину AV только угла 0 можно оценить с
помощью кривой, соответствующей пХа =0. Здесь следует
обратить внимание на то, что до углов 0 приблизительно 50°
зависимость AV (0) практически линейна и каждые 10° уг-
ла 0 обусловливают увеличение или снижение V на AV=
= 6,5 км/ч за 1 с. При углах 0, превышающих 60°, влияние
угла 0 на AV существенно возрастает, достигая максимума
при 0 = 90°.
Влияние на А У только перегрузки пХа можно оценить^
проведя прямую, параллельную оси абсцисс, из точки, соот-
ветствующей выбранному углу 0. Здесь следует подчеркнуть,
что независимо от угла 0 изменение пХа на ±0,1 обусловли-
вает прирост (уменьшение) V на 3,5 км/ч за 1 с. В случае
необходимости с помощью номограммы может быть оценено
совместное влияние на AV обеих этих факторов, т. е. пХа и
угла 0. Например, при 0 = 30° и пХа =0,2 потеря скорости
AV составляет ~11 км/ч за 1 с и 33 км/ч за 3 с (точки 1 —
2 —3 — 4 —5).
Для оценки параметров маневрирования самолета по про-
странственным спиральным траекториям может быть исполь-
зована номограмма, приведенная на рис. 2.12. В верхнем
правом ее квадранте приведена зависимость изменения вели-
0
чины tgу, входящей в выражение для сосп = tg усп, от уг-
лов 0 и усп для различных значений перегрузок пУа- При
этом определение угла крена у производится с помощью от-
дельной правой кривой (пунктир). Остальные кривые
(сплошные линии) служат для определения углов 0. Так,
например, спираль с углом набора (снижения) 30° и с пере-
грузкой пУа = 2 должна выполняться с углом крена 65° (ли-
ния АБВГ).
Из этого видно, что спираль с одним и тем же углом 0
можно выполнить с различными углами крена, зависящими от
перегрузки. Например, для 0 = 30°—с у = 30° при пУа = 1,с
у = 50° при пуа =1,37 и с у = 60° при пу а =1,8 и т. д.
Приведенный пример показывает, что спирали с креном,
не превышающим у = 60°, могут выполняться с перегрузкой
пУа<2. При этом перегрузке пУа=2 при у = 60° соответст-
вует угол 0 = 0 (т. е. разворот в горизонтальной плоскости).
При углах 0, отличных от нуля, перегрузка nY а на спирали с
о)Сп= const будет меньше 2 и составит пуа=1 при у = 60° и
0=60°. Изложенную особенность следует учитывать при вы-
боре маневров в процессе подготовки к воздушному бою, по-
56
Рис. 2.12. Номограмма для определения параметров и границ выполнимости спиралей
скольку угловые скорости юсп при этом (см. средний верх-
ний квадрант) малы и не превышают 8 град/с. Необходи-
мость увеличить угловую скорость <осп обусловливает рост
nYa , а следовательно, и у>60°.
В верхнем левом квадранте приведены зависимости време-
ни разворота на 90° и 180° от угловой скорости со и скорости
V полета (пунктир).
Не требует пояснения порядок пользования нижними пра-
вым и средним квадрантами, с помощью которых определя-
ются величины 1/др , текущего Суа (угла атаки а) и его за-
паса до CYa доп для самолета конкретного типа. С помощью
кривых, приведенных в нижнем левом квадранте, определя-
ются величины радиусов спиралей, значения которых откла-
дываются для косинуса выбранного угла 0СП по оси орди-
нат (точки 3— 4 — 5 — 6), а также величины набора высоты
за половину или четверть витка спирали считыванием Л// на
оси абсцисс с помощью линий, соответствующих значению
синуса угла © и угла <р поворота траектории (точки 3 — 4 —
7 — 8).
В заключение следует показать, что в зависимости от ре-
шаемых задач боевой подготовки, уровня подготовленности
аудитории и конкретных задач обучения в каждом отдель-
ном случае может быть использован тот или иной вид (фор-
ма) информации, обеспечивающий лучшие результаты обуче-
ния. При этом следует обращать внимание на необходимость
дать обучаемым возможно более полные знания в интересах
реализации предельных маневренных свойств самолета для
наиболее эффективного решения боевых задач, а с другой
стороны — в интересах соблюдения условий безопасности
полетов.
§ 2.3. АНАЛИЗ ВЛИЯНИЯ УСЛОВИЙ БОЕВОГО
ПРИМЕНЕНИЯ НА ПОКАЗАТЕЛИ МАНЕВРЕННОСТИ
При изложении вопросов влияния условий боевого при-
менения (скорости, высоты полета, массы самолета, атмос-
ферных условий, варианта вооружения и т. п.) на общие по-
казатели маневренности необходимо использовать известные
формулы ДЛЯ ПУ а пр • Ранее было ПОКаЗЗНО, ЧТО
инд г
Если раскрыть выражения для
р С aS X С aS X — (mS)
'р — °р Ч ла(1 — '-'х а0 Ч °, инд г — ” »
О
а пр
58
то получится
„ ';р - с>-
Уап₽ mg У А ‘
Здесь же уместно привести и другую формулу:
^У а пр — -- •
mg
Она получена также из условия Рр = Ха, где Ха =
. mg
К К Гапр’
2.3.1. Влияние скорости и высоты полета
На рис. 2.4, 2.7, 2.8 приведены типичные для современных
самолетов зависимости наибольших перегрузок от числа М
(скорости) и высоты полета.
Из рис. 2.4 видно, что располагаемая нормальная
скоростная перегрузка растет с увеличением ско-
рости (числа М) и уменьшением высоты полета. Объяснить
1 Су ар QS
это можно с помошью формулы: пУар =-------—5 которая
mg
pV2
показывает, что чем выше скоростной напор q =-- или 9 =
2
= 0,7 рМ2, тем больше располагаемая подъемная сила и со-
ответственно перегрузка. При этом необходимо учитывать
изменение коэффициента СУар с изменением числа М (см.
рис. 2.5), которое сказывается на темпе роста пУйр, как пра-
вило, ослабляя его в меньшей или большей (как при М> 1,1
на рис. 2.4) мере.
На малых высотах и больших дозвуковых скоростях поле-
та величина nYap значительно превышает п^а макс (см.
рис. 2.4). Неучет этого обстоятельства связан с возмож-
ностью выхода на недопустимо большие перегрузки. Увели-
чение высоты при постоянном числе М полета приводит к
уменьшению скоростного напора, располагаемых подъемной
силы и нормальной скоростной перегрузки nYap . Из форму-
Су ар 0,7 pM2S .
ЛЫ Пу а р =--□--------следует, ЧТО при ПОСТОЯННЫХ а(Су а р),
mg
М и mg!S с увеличением высоты полета
ДУар2
ПУ а р I
Р'2
Р1
59
Далее следует перейти к анализу изменения предель-
ной по тяге пе р егр у з к и (см. рис. 2.7).
р
Из формулы Пу а пр = —-К, где К—аэродинамическое ка-
mg
чество самолета, соответствующее условию Рр=Х, следует,
что с увеличением высоты при постоянном числе М полета
предельная по тяге перегрузка уменьшается из-за падения
располагаемой тяги.
Так как при пуа = пуащ) выполняется равенство Ха = ’
=Рр, то коэффициент лобового сопротивления СХа =
= —— =ср.
0,7р/И25
С увеличением высоты в пределах тропосферы распола-
гаемая тяга вследствие понижения температуры воздуха
уменьшается медленнее, чем давление. В результате увели-
чивается угол атаки, соответствующий равенству Рр = Ха, а
с ним меняется аэродинамическое качество, которое может
или повышаться или понижаться в зависимости от того, уда-
ляется или приближается к наивыгоднейшему значению угол
атаки. Изменения аэродинамического качества самолета ока-
зывают влияние на темп уменьшения Пуйпр с высотой. При
постоянном числе М полета в пределах высот, на которых
тяга пропорциональна давлению (/7>11 —13 км), коэффици-
ент СХа не меняется с увеличением высоты. Следовательно,
Q
остаются постоянными угол атаки, Су а и К —--- . В этих
СХа
условиях = Р2
^У а пр 1 Р\
Следует подчеркнуть, что наличие двух максимумов кри-
вых л/апр (Н; V) на больших высотах так же, как и для
кривых пХар (Н; V), объясняется наличием соответственно
двух максимумов избытков тяги на кривых Жуковского.
Располагаемая тангенциальная перегрузка равна
_ Рр Ха ___ Рр Пу а _ Р р Пу а
Хар mg mg mg К mg К
Как и предельная по тяге нормальная скоростная пере-
грузка, располагаемая тангенциальная перегрузка зависит от
тяги силовой установки и аэродинамического качества (при
постоянных mg ипуа). Поэтому влияние на нее числа М и
высоты полета принципиально такое же. С возрастанием чис-
60
ла М полета характер изменения пХар определяется особен-
ностями аэродинамических и тяговых характеристик самоле-
та, а с увеличением высоты перегрузка пХар , как правило,
уменьшается (см. рис. 2.8).
2.3.2. Влияние варианта вооружения и боевой нагрузки
Вначале следует обратить внимание летчиков на то, что
влияние боевой нагрузки на общие показатели маневренности
сказывается через изменение лобового сопротивления за счет
наружных подвесок и полетной массы.
Влияние полетной массы самолета. Приведя
формулы наибольших перегрузок Пуар и пу а пр, следует пока-
зать, что последние меняются обратно пропорционально мас-
се самолета (при постоянных М и Н). Так же в обратно
пропорциональной зависимости меняется и максимально до-
пустимая в эксплуатации перегрузка Яуамакс, так как в слу*
чае, например, увеличения массы самолета максимально до-
пустимая подъемная сила при прочих равных условиях не ме-
няется, поскольку повысить ее нельзя по условиям прочности.
Можно показать, что
А Пу а пр Лиг
И у а пр
При заданной перегрузке nYa с увеличением массы само-
лета располагаемая тангенциальная перегрузка пха Р умень-
шается, но не по пропорциональной, а по более сложной за-
висимости, поскольку с возрастанием массы растет и лобовое
сопротивление за счет его индуктивной составляющей.
Влияние внешних подвесок сводится, во-первых,
к увеличению полетной массы, что, как было уже показано,
приводит к уменьшению наибольших перегрузок и, во-вто-
рых, к возрастанию лобового сопротивления, в частности, его
безындуктивной составляющей.
В силу последнего обстоятельства дополнительно снижа-
ются ПХ а р И Пу а Пр .
тя рр -
Из выражения для пХар——--------
mg
ЛО.
~~рр
mg
видно, что относительное влияние сопротивления подвесок
тем меньше, чем больше тяга и разность Рр—Ха.
На располагаемую нормальную перегрузку пуар сопро-
тивление подвесок при постоянной массе не влияет, посколь-
61
ку она зависит только от величины располагаемой подъемной
силы.
2.3.3. Влияние изменений стреловидности крыла в полете
Увеличение угла стреловидности крыла сопровождается:
уменьшением располагаемого коэффициента подъемной силы
и соответственно располагаемой нормальной перегрузки. Но
при этом увеличивается, как правило, ^уамакс.
При изменении угла стреловидности крыла предельная
по тяге нормальная скоростная и располагаемая тангенциаль-
ная перегрузки меняются за счет изменения аэродинамичес-
кого качества (коэффициентов Сха и СУа).
т-т Р гл Р а
Поскольку ПуаПр = ------ К и Пхар — ------------, ТО
mg mg К
меняются при этом обе перегрузки. На дозвуковых скоростях
полета К падает при увеличении стреловидности в основном:
за счет уменьшения удлинения крыла и вызванного этим ро-
ста индуктивного сопротивления. На сверхзвуковых скоростях
с увеличением стреловидности качество возрастает из-за за-
метного снижения Сха о и почти постоянного Сх а инд, обуслов-
ленного слабым изменением скоса потока. Таким образом,
увеличение стреловидности крыла на дозвуковых скоростях
полета приводит к уменьшению пуап? и пха р , а на сверхзву-
ковых скоростях полета — к возрастанию этих перегрузок.
2.3.4. Влияние температуры наружного воздуха
Влияние температуры наружного воздуха сказывается на
изменении перегрузок, прежде всего, через изменение тяги
силовой установки. Так, повышение температуры приводит к
снижению тяги, которое сопровождается уменьшением пХар и
Пу а пр •
Существенное их снижение может иметь место на сверх-
звуковых скоростях полета, где особенно малы избытки тяги.
В то же время при постоянных значениях 7И, р (высоты по
прибору) изменения температуры наружного воздуха не ока-
зывают влияния на располагаемую нормальную скоростную-
перегрузку nYap (если не учитывается влияние нормальной
составляющей тяги Ру а)-
§ 2.4. МЕТОДЫ РАСЧЕТА БОЕВЫХ МАНЕВРОВ
Начинать изложение данного параграфа следует с упоми-
нания о том, что для суждения о целесообразности примене-
ния того или иного маневра в конкретных условиях обстанов-
ки, т. е. для оценки степени его применимости при подготов-
ке к полетам, необходимо иметь параметры в различных точ-
62
ках маневра, а в ряде случаев и сами траектории движениям
Получить же все указанные данные можно, лишь рассчитав-
маневр.
2.4.1. Методы расчета боевых маневров
Прежде всего необходимо отметить, что существует ряд;
методов расчета маневров, но все они базируются на решении
системы дифференциальных уравнений, описывающих дви-
жение центра масс самолета в пространстве. Эта система из-
вестна летчикам из курса ВВАУ «Динамика, полета самоле-
та», и в данном случае ее целесообразно привести без вывода*
в окончательном виде:
. dV t
1. —— =g(nXa — sin0);
at
q а
2. --- = — (Пу a cos Y — cos 0);
dt V ’
3 dy _ g/гу Q sin у e
dt V cos 0
4. —- = Vsin 0;
dt
5. = у cos 0.
dt
(2.1)
При необходимости можно напомнить обучаемым, что вы-
вод уравнений движения основан на использовании второго*
закона Ньютона с учетом сил, действующих на самолет.
Далее следует обратить внимание слушателей на то, что*
данная система не замкнута (5 уравнений содержат 8 неиз-
вестных— V, Н, 0, ф, Y, Пу а, nxa* L) и для ее решения необ-
ходимы еще три уравнения. Этими недостающими уравне-
ниями в зависимости от решаемых задач являются:
а) при нахождении траектории движения самолета — за-
кон управления в виде зависимостей Пуа==Пуа(/);т==т(/);ПдВ —
= Пдв (О ИЛИ nxa==nxa(t);
б) при нахождении закона управления при пилотировании4
на маневре, траектория движения которого известна: уравне-
ния, определяющие форму траектории:
0 = 0(/); ф=ф(0; V=V(/);
в) при нахождении какого-либо условия оптимальности —
закон управления или закон изменения траектории движения,
обеспечивающие выполнение этого условия. Например, тре-
6&
буется найти траекторию, обеспечивающую движение само-
лета из одной точки в другую в минимальное время или с ми-
нимальным расходом топлива. Из множества возможных
траекторий математически выбирается единственная, обеспе-
чивающая выполнение заданного условия /мин или /птмин. По
найденной траектории находится и закон управления (пилоти-
рования).
Задачи подобного рода носят название вариационных и
решаются специальными методами. Недостающие уравнения
здесь получаются применением метода оптимизации в виде
специальных дифференциальных уравнений. Однако решение
задач такого рода требует специальной подготовки и здесь
не рассматривается. В условиях практической деятельности
авиационного командира успешно могут быть решены задачи
динамики полета в первой и второй постановках.
Необходимо напомнить летчикам, как с помощью приве-
денных уравнений движения от общих показателей маневрен-
ных свойств самолета, т. е. от перегрузок, можно перейти к
частным, т. е. к /?, <о, t выполнения маневра. Так, например,
при маневрировании в горизонтальной плоскости (Н = const,
€►=0) уравнения движения системы (2.1) имеют вид:
t dV
l.—— = gnxa-,
a t
2.---- = 0, т. е. Пу а cos "f—1=0;
di
dq _ gnygSin у _
’ dt V
(2.2)
= V.
dt
Из второго уравнения системы (2.2) получается nY а cos 7 =
= 1 или пуа — —-— , а из третьего уравнения с учетом no-
cos 7 .
d ф g sin г g ,
следнего выражения — юг =» —— = — ------= —- tg у или,
dt V cosт V
если произвести тригонометрические преобразования и ис-
gV^fllYa— 1 т-г тл
ключить т, 0>г = ---• Поскольку ©=—, ТО
64
радиус разворота в горизонтальной плоскости: Rr =
V2 д <р
----- ...... , а время разворота на угол Д <р Д t = —— =
gVn2Ya—l Шг
ДфУ
=----7 ' :т. При развороте на 360° время Д/ =
gVn2Ya —1
2tcV V V
=----= 0,64 —==- = 0,64 ——.
gVn\a— 1 V^Ya— 1 tgy
Аналогично для маневров в вертикальной плоскости вто-
рое уравнение системы (2.1) при условии у=0 имеет вид:
„ V de
Пуа~ COS 0 =-------,
g dt
откуда величина угловой скорости поворота траектории в вер-
тикальной плоскости равна
de g ,
----- = (Ов = -2- («у а — COS 0)
d t--V
и радиус траектории
=-------Y1-----.
«>в g(nYa — COS0)
d©
Таким образом, заменив в левой части производную --
dt
угловой скоростью сов, вместо дифференциальных уравнений
можно получить конечные аналитические связи, т. е. форму-
лы для расчета со и R.
Аналогичным образом получаются выражения для со, R
и t пространственных маневров в проекциях на вертикальную
и горизонтальную плоскости. Таким образом, зная общие по-
казатели маневренности, с помощью приведенных уравнений
можно получить частные показатели для любых точек траек-
тории рассматриваемых маневров.
Необходимо указать, что метод решения уравнений систе-
мы (2.1) как конечных алгебраических связей обладает су-
щественным недостатком — он не позволяет рассчитать тра-
екторию движения и найти все необходимые параметры ма-
невров.
Для ответа на последний вопрос следует решить систему
(2.1) нелинейных дифференциальных уравнений. Для ее ре-
шения прибегают к приближенным методам и, в частности,
к методу численного интегрирования, получившего широкое
распространение, особенно в связи с развитием вычислитель-
ной техники. При отсутствии ЭВМ применяется графоанали-
тический метод решения системы.
5—5007сп
65
Для примера на рис. 2.13 в графическом виде представле-
но первое уравнение системы (2.1):
Д V = g (rtxa — sin 0) Д t.
Вычисление приращений скорости с помощью этого гра-
фика не представляет сложности и не требует пояснения.
Например, для Vo = 9OO км/ч,пхасР = 0,2, 0ср = 30°, Д/=3 с
нужно вычислить пха ср — sin 0ср = (0,2—0,5) =—0,3, а затем,
воспользовавшись графиком, найти ДУ=32 км/ч (рис. 2.13,
ключ а — б — в).
Рис. 2.13. Графическая интерпретация первого уравнения сис-
темы, описывающей движение центра масс самолета
Недостатком рассмотренного графика является то, что
здесь необходимо выполнять действия по нахождению sin &
и вычитанию, что требует затрат времени. Избежать этого
недостатка можно, применив график, приведенный на
рис. 2.11.
Вопросы применения графоаналитического метода для мо-
делирования маневров будут рассмотрены в § 2.5.
2.4.2. Приближенные методы расчета боевых маневров
Вначале следует подчеркнуть, что в ряде случаев практи-
ческой деятельности авиационного командира может возник-
нуть необходимость в производстве расчета боевых маневров
66
в условиях дефицита времени, когда исключена возможность
использования рассмотренных методов в полном объеме.
В этих случаях особое значение приобретают приближенные
методы.
Энергетический метод
Следует напомнить, что летящий самолет, как и любое
движущееся тело, обладает определенной механической энер-
гией:
1 и I mV2
Е — Еп -f- Ек — m g Н j —
или удельной механической энергией (энергетической высо-
той)
По физическому смыслу энергетическая высота — это вы-
сота, на которую может подняться самолет за счет полного
превращения кинетической энергии в потенциальную
(рис. 2.14):
Нд~Н + Нк.
Рис. 2.14. К определению понятия энергети-
ческой высоты
При этом имеется в виду, что для осуществления полного
превращения кинетической энергии в потенциальную необхо-
димо, чтобы на маневре постоянно сохранялось равенство тя-
ги и лобового сопротивления (Р = Ха),т. е. изменение скорос-
ти происходило только под действием силы тяжести.
5* 67
Далее следует показать, какими факторами обусловлено
т. dV
изменение энергии самолета. Взяв уравнение ----------=
dt
g(nXa~sin©), умножить левую и правую его части на Vdt и
разделить на g:
V dV
-----= nXaVdt — VsinOdt
g
Поскольку V sin © = , to nXa V d t = dH.
dt g
Правая часть полученного выражения есть dH3, в чем
можно убедиться, продифференцировав равенство НЭ = Н +
V2 VdV
Н------. Следовательно, dH3=dH-]--------= пХа Vdt или
2g g
dH3 v
окончательно ----- —nXaV, т. e. изменение удельной ме-
dt
ханической энергии во времени тем существеннее, чем
больше скорость полета и тангенциальная перегрузка пХа.
Производную = У*у принято называть энергетиче-
ской скороподъемностью, поскольку она характеризует изме-
нение энергетической высоты в единицу времени.
Отметить, что с помощью полученных выражений воз-
можно определение конечных (начальных) значений скоро-
сти или высоты при маневрировании. Для этого, перейдя от
бесконечно малых приращений к конечным, нужно записать:
nXaZfV ЬЛ = Ъ. Н + .
g
Зная средние за маневр пХа, V и время t его выполнения,
можно найти ДУ или АН. Значительно упрощается решение
задачи в следующих частных случаях.
1. Маневр выполняется в горизонтальной плоскости, т. е.
ДУ ДУ
Д/7 = 0. Тогда nXacpAt =----- или----- = gnXa ср (первое
g At
уравнение системы (2.1) для движения самолета на постоян-
ной высоте). Из этого выражения следует, что величина уско-
рения определяется только тангенциальной перегрузкой.
2. Маневрирование выполняется без изменения энергии
самолета, т. е. таким образом, что средняя за маневр пере-
грузка пХа Ср = 0. Тогда АН = — ^ср —- и Д У = — g
g VCp
. 68
т. е. набор высоты Д/7 за счет уменьшения скорости на ДУ тем
больше, чем больше Уср . А набор скорости ДУ за счет по-
тери высоты АН тем больше, чем меньше скорость полета.
С помощью приведенных формул легко определить изме-
нение высоты или скорости в целом за маневр, но, как ука-
зывалось, при условии, что летчик пилотирует самолет, вы-
держивая пхаср = 0. В противном случае необходимо учиты-
вать пхаср и At за маневр.
3- Пространственный маневр (восходящая или нисходя-
щая спираль) выполняется с постоянной скоростью V (ДУ=
= 0). В этом случае А Нэ ~ А Н == V пХа^ A t. Поскольку в
установившемся наборе (снижении) пХа =sin 0, то, зная ве-
личины угла 0, V и Д/, можно найти прирост (уменьшение)
высоты на спирали.
Недостатком рассматриваемого метода является то, что
он не позволяет получить представление о форме траектории
на маневре, а также и о величинах параметров (J?, шит. д.)
в промежуточных точках.
Энергетическим методом можно определять изменение ДУ
или Д/7 и на полупетле и перевороте, но при этом надо быть
уверенным в том, что, например, на перевороте при пилоти-
ровании с выдерживанием пХаср = ® самолет развернется
на 180° точно в тот момент, когда будет потеряна заданная
высота Д//. А о таком совпадении на практике можно знать
далеко не всегда. Поэтому и применять рассматриваемый
метод целесообразно для определения изменения ДУ по АН
(или наоборот) в тех случаях, когда не цграют роли форма
траектории (горка, снижение) или величины углов разворо-
та. Для лучшего уяснения сущности рассматриваемого мето-
да целесообразно рассмотреть пример.
Пример. Самолет выполняет горку с потерей скорости от
У1 = 1800 км/ч (500 м/с) до Уг=1440 км/ч (400 м/с) при ус-
ловии, что в среднем пХа ср ~ 0 (Р = Ха).
Требуется найти приращение высоты АН. Из условия
У 2 V 2
пХа = О Н31 = Н3г, т. е. Нг + —— = Н2 + ——, найдем
2g 2g
Д Н = Н2 - Ht =
У12-У2*
2g
5QQ2 _ 4QQ2
2-9,81
— 4600 м.
Следовательно, уменьшение скорости на ДУ=360 км/ч
при большой средней скорости УСр =1620 км/ч (450 м/с)
позволяет набрать значительную высоту.
Аналогичная потеря скорости ДУ=360 км/ч, но в диапа-
зоне скоростей 1000 + 640 км/ч, т. е. при Уср =820 км/ч, обус-
69
ловливает набор высоты АН =--------------- =2320 м, т. е.
2-9,81
в два раза меньший.
Показать, что при решении аналогичных задач можно ис-
ключить расчеты, если построить в координатах Н—V ли-
нии постоянных значений Нэ = const (рис. 2.15). В этом слу-
чае ответ на задачу может быть дан по результатам измере-
ния AV и АН непосредственно на графике (точки а, а' на
рис. 2.15).
Рис. 2.15. Линия постоянных энергетических высот и минимально допус-
тимых скоростей маневрирования
Расчет маневров
с малыми углами поворота траектории
Вначале необходимо обратить внимание на то, что манев-
рирование в зоне огня зенитной артиллерии снижает точность
стрельбы и поэтому широко применялось для этой цели в
прошлом и будет использоваться в дальнейшем. Это объяс-
няется тем, что маневрирование самолета обусловливает воз-
никновение систематической ошибки стрельбы А, для нахож-
дения которой используется следующий приближенный метод.
Пусть на самолет, движущийся прямолинейно, в точке А
начала действовать неуравновешенная нормальная к траек-
70
тории сила Rna (рис. 2.16). В результате такого воздействия
возникает нормальное ускорение. Ограничиваясь небольшим
отрезком времени (временем полета снаряда), будем считать
Rna неизменной по величине и направлению от начала и до
конца маневра. При таком допущении движение самолета
Рис. 2.16. к расчету маневров с малыми уг-
лами поворота траектории
под действием силы Rna можно рассматривать как равно-
ускоренное, т. е. считать jna = const. К концу отрезка времени
At самолет будет иметь перпендикулярную к начальному на-
правлению полета составляющую скорости Vn= jnaAt —
= —— - At и отклонится от первоначального направления
т
на величину ошибки
Л _ ; (М2 _ Rna (At)2
. v,
а траектория повернется на угол е = arcsin —— .
Величина нормальной силы:
— при маневре в вертикальной плоскости
Rna в = Ya± mg cos® = mg(nYa ± cos 0);
— в горизонтальной плоскости
Rna г = Уа sin у = mg ny a sin 7 = mg tg 7 поскольку nYa =
- 1 Y
cos% /
— при маневрировании по пространственной траектории
Rna в = У a COS 7 ± mg cos 0 = mg (nY a cos 7 ± cos 0);
Rnav = Уa sin 7 = mg nY fl sin 7.
71
Пример. В горизонтальном прямолинейном полете летчик
увеличил перегрузку nY а до 2 и одновременно создал крен
у=45°. Определить, на сколько метров уклонится самолет от
первоначального направления полета через 5 с.
Отклонение самолета в проекции на вертикальную плос-
кость равно
Л Л и (tly a COS У — COS0) /Л.ч2
А„ в = Д Н = g (А О2-
Считая вследствие малости угла 0 cos 0 = 1:
. 9,81 (2 • 0,707-1) „
Дяв = —-—i----------- 52 = 51 м.
2
Отклонение самолета в проекции на горизонтальную плос-
кость составляет
Д„ = gnyasmy (Д = 9,81 • 2- 0,707 . =
2 2
Следовательно, за 5 с самолет отклонится на 51 м вверх
и на 173 м в сторону от первоначального направления.
В тех случаях, когда нормальная сила начинает действо-
вать не сразу, а по истечении времени смещение и скорость
самолета определяются по формулам
Л _ ; (^-0.5 ^ + 0,83/г .
А„ - In - ,
=/„0-0,5^.
В заключение следует обратить внимание летчиков на
важность умения решать систему дифференциальных уравне-
ний, являющегося ключевым в разрешении проблемы моде-
лирования маневров.
§ 2 5. ГРАФОАНАЛИТИЧЕСКИЙ МЕТОД
МОДЕЛИРОВАНИЯ МАНЕВРОВ
Прежде всего обратить внимание обучаемых на то, что
моделирование предстоящих полетных заданий является не-
обходимостью, обусловленной требованиями повышения ка-
чества и эффективности боевой подготовки, боевых действий
и безопасности полетов.
Процесс моделирования в общем случае включает два
этапа:
— расчет маневров, заключающийся в решении системы
72
дифференциальных уравнений (2.1), описывающей движение
центра масс самолета;
— графическое построение траектории движения по ре-
зультатам выполненных расчетов.
Как уже отмечалось, в условиях летной практики наибо-
лее просто решение системы уравнений, т. е. расчет маневров,,
производить графоаналитически.
2.5.1. Моделирование маневров в горизонтальной
плоскости
Уравнения движения центра масс самолета в этом случае
имеют наиболее простой вид (2.2). Используя приведенные
d ф
уравнения и учитывая, что —- = сог , можно построить
d t
номограмму (рис. 2.17), в каждом из квадрантов которой от-
ражены соответствующие аналитические зависимости (урав-
нения системы 2.2). Считывание численных значений опреде-
ляемых величин на осях квадрантов позволяет произвести
графическое решение рассматриваемых уравнений, т. е. по-
лучить численные значения /?Ср, 0)ср, ср, а также приращений:
ДУ, Д ф, Д Lx, Д Lz .
В квадрантах номограммы (рис. 2.17) приведены:
— в верхнем среднем квадранте — зависимости угловой
скорости разворота самолета в горизонтальной плоскости <о г
от скорости полета и перегрузки nYa == п —
третье уравнение системы (2.2). Естественно, что справедлива
эта зависимость для любого самолета и любой высоты полета;
— в верхнем левом квадранте — зависимости радиуса
У2
разворота R? = —7===- от угловой скорости <ог и ско-
gVn\a—\
рости полета У;
— в верхнем правом квадранте — зависимости времени
разворота At от угловой скорости <ог для различных углов
разворота Дф= 15°, 30°, 45° и т. д.;
— в нижнем правом квадранте — зависимости прираще-
ния скорости AV=gnXa At в км/ч от времени At для различ-
ных значений перегрузки пХа (первое уравнение системы).
Причем значения пха могут быть со знаком «плюс», и тогда
имеет место рост скорости, или со знаком «минус», и тогда
самолет тормозится;
— в нижнем среднем квадранте — вспомогательные ли-
нии, соответствующие различным значениям временных ин-
73
Рис. 2.17. Номограмма для моделирования маневров в горизонтальной плоскости
тервалов Д/ = 2, 3, 4 с. С помощью оцифровки на оси ординат
этого квадранта определяется путь самолета вдоль траекто-
рии его движения за промежуток времени Д/;
— в нижнем левом квадранте — зависимости продольного
Д£х~УсозфД/ и бокового A Lz = V sin ср Д t смещений са-
молета при развороте на угол Дер от скорости полета V для
различных средних значений синуса и косинуса этого угла
(пятое уравнение системы 2.2).
Порядок пользования номограммой можно показать на
следующем примере: определить параметры форсированного
разворота самолета в горизонтальной плоскости с торможе-
нием от скорости 1000 км/ч до скорости 800 км/ч с Пу сг= 5.
Скорости 1000 км/ч и nY а =5 соответствует угловая скорость
<ог=10 град/с (точки 1—2—3 на номограмме). Для шага
Д/ = Зс в правых верхнем и нижнем квадрантах провести вер-
тикальную прямую 4—З1 до пересечения ее с горизонтальной
линией 2—3—З1, проходящей через найденную о)г = 10 град/с.
В результате получится точка З1, соответствующая углу раз-
ворота Дф = 30°. Продолжить вертикальную линию вниз до
пересечения с перегрузкой пХа, соответствующей выбранной
высоте и скорости полета (точка 5). Величину пХа опреде-
лить по сеткам обобщенных характеристик пХа$ (У,пуа}, при-
водимым в Техническом описании самолета. Пусть в данном
случае пх а =—0,2. Тогда потеря скорости составит
=—21 км/ч.
Далее, из точки 2 провести горизонтальную линию 2—10—
11 и получить в точке 11 пересечения ее с кривой, соответст-
вующей V=1000 км/ч, величину радиуса 7?=1590 м (точ-
ка 11х).
И, наконец, из точки 1 опустить вертикальную прямую до
пересечения с линией, соответствующей шагу Д/ = Зс (точ-
ка 7). Из точки 7 провести горизонтальную линию влево до
пересечения с линиями, соответствующими средним значе-
л 30°
ниям синуса и косинуса угла поворота Д фср = --------~
2
= 15°(точки 8 и 9) и определить Д Lx = 810 м (точка 9') и
ALz =215 м (точка З1).
Отложив в соответствующем масштабе Д и &LZ на
бумаге, найти положение центра масс самолета после пово-
рота на угол Дф=30° или через Д£ = 3с.
Особенностью проведенного расчета является то, что так
как неизвестна скорость 17ср в середине выбранного участка
Дф = 30°, для расчетов была взята начальная скорость
Vo=lOOO км/ч и считалось, что в течение Зс она не меняется.
На самом же деле она изменилась от Vo=lOOO км/ч до VK =
75
= 979 км/ч и при этом угловая скорость увеличилась
до ог =10,12 град/с. Соответственно изменились и вели-
чины найденных /?г, и kLz. Поэтому для большей
точности следует повторить расчет для средней скорости
VCp =990 км/ч и получить окончательные значения Д <р, /?Ср »
Д Lx и Д Lz.
В изложенной последовательности произвести расчет па-
раметров маневра на каждом из последующих шагов интегри-
рования до выхода в конечную (заданную) точку, соответст-
вующую VK=800 км/ч. При этом величину шага интегриро-
вания выбирать в зависимости от того, на сколько сильно ме-
няется по скорости пХа и, следовательно, от того, можно ли
без существенных ошибок ее осреднить, считая постоянной.
2.5.2. Моделирование маневров в вертикальной плоскости
В соответствии с уравнениями движения, входящими в си-
стему (2.3), номограмма для моделирования маневров в вер-
тикальной плоскости (петли Нестерова, полупетли, перево-
рота, горки, набора высоты, снижения) имеет вид, представ-
ленный на рис. 2.18. Она аналогична рассмотренной номо-
грамме для моделирования маневров в горизонтальной плос-
кости. Их различие определяется различием сил, обусловли-
вающих угловые скорости поворота траектории в горизон-
тальной и вертикальнойплоскостяхи, в частности, тем, что при
d&
определении а>в = -- необходимо учитывать составляющую
dt
силы тяжести, величина которой зависит от угла 0. Поэтому
, g ..
(ов раскладывается на две составляющие: сов = -^-лу а и сов =
“ cos 0, благодаря чему становится возможным рассмат-
ривать движение самолета отдельно под действием поверхно-
стных (<oBz) и массовых (wB") сил (второе уравнение системы
2.3).
На рис. 2.18 значения со/ в зависимости от скорости и
nY а отложены в верхнем среднем квадранте. Там же внизу
отложены значения о)в" для различных углов 0.
Для большего удобства эти же зависимости но в бо-
лее крупном масштабе отложены на отдельном графике в
левом нижнем квадранте. Для нахождения суммарной вели-
чины о)в необходимо из угловой скорости сов' , определяемой
по V и пуа, вычесть «)в", найденную по V и углу 0. Напри-
мер, скорости 1000 км/ч ипу а=6 соответствует а>в' = 12,0 град/с,
а углу 0 = 30° на этой скорости соответствует (ов" = 1,8 град/с.
76
Рис. 2.18. Номограмма для моделирования маневров в вертикальной плоскости
Величина wB =12,0—1,8=10,2 град/с. Значения wB, опреде-
ленные с помощью номограммы, справедливы для любой вы-
соты полета.
В квадрантах номограммы (рис. 2.18) приведены:
— в верхнем левом квадранте — зависимости радиуса кри-
визны траектории в вертикальной плоскости RB =--------=
(DB
V2
= -------------- от угловой скорости wB и скорости полета;
g(nYa — COS0)
— в верхнем правом квадранте — время At поворота
траектории на углы А© =15°, 30°, 45° при различных шв;
— в нижнем правом квадранте — зависимости прираще-
ния скорости ±АV от времени для различных постоянных зна-
чений ( пХа — sin© ), входящих в первое уравнение системы
(2.3);
— в нижнем среднем квадранте — вспомогательные ли-
нии, соответствующие значениям At = 2, 3, 4, 5 с. Оцифровка
на оси ординат этого квадранта позволяет определить вели-
чину пути, проходимого самолетом за соответствующий про-
межуток времени At (длину участка траектории);
— в нижнем левом квадранте — зависимости горизонталь-
ной проекции пути AL=Vcos©AZ и приращения высоты
A/7=Vsin0A/ от скорости для различных значений угла ©
(четвертое и пятое уравнения системы 2.3).
Порядок пользования номограммой можно показать на
следующем примере: определить траекторию движения и па-
раметры на начальном участке полупетли, выполняемой с на-
чальными Vo =1000 км/ч, //о = 1ООО м, пуа =5, ©о=0.
В качестве аргумента выбрать угол 0, задаться его при-
ращением (шагом), равным, например, А0 = ЗО°.
Вначале определить о/в = Ю град/с (точка 2), затем для
30
угла А ©ср = = 15° найти сов" = 1,9 град/с и в итоге
(ов = 10—1,9= 8,1 град/с (точка 3). Для полученного значения
о)в и А© = 30° найти Д/ = 3,75 с (точки 1—3—4—5).
Определив из графиков обобщенных характеристик соот-
ветствующую заданным высоте, скорости и перегрузке пуа
величину яхаР=—0,14, вычесть из нее sin 15° = 0,259. В ито-
ге пха—sin© =—0,14—0,259 = —0,4 (точка 6), a AV=
= —53 км/ч (точка б1).
Далее, из точки 1 для найденного А£ = 3,75 с (точка 9) и
угла 0Ср =15° найти АН — Vsin© Л/ = 270 м (точки 10—10х)
и AL= V cos © At= 1000 м (точки 11—/Л). Радиус /?Ср =
= 1950 м (точки 3—5—З1).
78
Найденные значения AV,. ЛЯ, ДА уточнить для сред-
ней на выбранном интервале Д0 скорости VCn = 1000 —
54
—-у- = 973 км/ч: АЛ = 910 м, ДЯ = 250 м, ДV =49км/ч».
юв = 10,3 — 1,9 = 8,4 град/с, Д t = 3,5 с.
Отложив в соответствующем масштабе величины ДА и ДАЛ
на бумаге, найти графически положение центра масс самоле-
та в вертикальной плоскости после поворота на угол ДО = 30%
В аналогичной последовательности произвести расчет по-
следующих точек траектории, однако при этом следить (об-
ратив на это внимание обучаемых), чтобы не выйти за огра-
ничения по адоп (граница VMHH по адоп с увеличением высо-
ты смещается вправо). После выхода на эту границу, чта
может быть определено с помощью номограммы (см. рис.
2.10), следует уменьшать перегрузку на каждом шаге А©
так, чтобы двигаться по границе. При этом может оказаться
более целесообразным перейти к другой независимой пере-
менной, например, к скорости, с тем. чтобы контролировать
а при подходе к верхней точке маневра.
Кроме того, следует учесть, что после прохода 0 = 90°
СГ
величину составляющей cos© в выражении для^в
необходимо не вычитать, а прибавлять, поскольку при этом
составляющая силы тяжести mg1 cos© не препятствует, а по-
могает подъемной силе искривлять траекторию, т. е. увели-
чивает «)в.
Отложив величины ДА и АН для всех рассчитанных интер-
валов на бумаге, в выбранном масштабе получить траекто-
рию движения самолета, т. е. провести графоаналитическое
моделирование.
2.5.3. Моделирование пространственных маневров
Уравнения пространственного движения центра масс са-
молета для общего случая приведены в уравнении (2.1). От-
личие этих уравнений от соответствующих уравнений движе-
ния в вертикальной и горизонтальной плоскостях состоит в
том, что в уравнение для юв входит cosy, а горизонтальная
составляющая скорости Vr = V cos©.
Для моделирования пространственных маневров исполь-
зуются рассмотренные номограммы для вертикальной и гори-
зонтальной плоскостей с учетом отмеченных особенностей,
обусловливающих необходимость предварительного определе-
ния горизонтальной и вертикальной проекций угловых ско-
ростей пространственного маневра. Определение о>г и о)В
79
производится по номограмме, изображенной на рис. 2.19, в
-квадрантах которой приведены:
— в правом квадранте — зависимости составляющих ®'в
и <ов" угловой скорости о)в от скорости полета, перегрузки
Пу а и угла 0;
sin т
— в левом квадранте — зависимости сомножителя ----в
cos 0
формуле для о)г, учитывающего различие величин углов у
при пространственном маневрировании и при маневрировании
в горизонтальной плоскости, от углов 0 и у;
— в среднем квадранте, предназначенном для перемноже-
/ sin? „
ния сомножителей о)в -----ио)в cosy,— линии постоянных
cos 0
значении cosy (пунктир) и ---- (сплошные линии).
cos 0
Порядок пользования номограммой можно показать на
примере определения параметров участка боевого разворота,
выполняемого с начальной скоростью Го=ЮОО км/ч, nYa =5,
углом крена у = 45° и углом наклона траектории 0 = 30°.
Горизонтальная составляющая угловой скорости =
g sin у
= -2— nY а---- определяется перемножением сомножителей
V cos 0
сов' и — - (точки 1—2—3—4—41). Она равна <ог = 10 • 0,8 =
COS0
= 8 град/с. Предварительно с помощью левого квадранта дол-
. sin у
жна быть определена величина---равная в данном случае
cos 0
0,8 (точки а — б — в). Вертикальную составляющую угловой
скорости определить, перемножив вначале о)в' на cos 45°
(точки 1 — 2— 3 — 5 — 51), что составляет 7 град/с. После
этого вычесть составляющую <ов" = 1,7 град/с (точка 6) и по-
лучить о)в =7—1,7 = 5,3 град/с.
По полученным значениям проекций о>г и сов с помощью
номограмм для горизонтальной и вертикальной плоскостей
определить проекции траектории движения самолета и необ-
ходимые параметры в соответствующих плоскостях.
2.5.4. Методы построения траекторий движения самолета
Прием, предложенный профессором В. П. Вет-
ч инкиным, позволяющий графически воспро-
изводить траектории плоских криволинейных
/80
5007сп
Рис. 2.19. Номограмма для моделирования пространственных маневров
маневров. Взять для примера случай движения самолета
в горизонтальной плоскости. Уравнения при этом имеют вид:
dV d ср g . g ,, -т-----------;
---- = g nx a ; — — tg 7 = V n2y a — 1 ;
dt * dt V V У
p V2 - V2
gtgT gVn2Ya— 1
Полагая, что закон пилотирования (изменения угла кре-
на, перегрузки и тяги двигателя или пХа) известен, опреде-
лить изменение скорости численным интегрированием перво-
го уравнения или графоаналитически с помощью номограмм.
Для построения траектории нанести точку 1 начального
положения центра масс самолета и из нее провести вектор
скорости (рис. 2.20). По нормали к траектории в точке 1
(перпендикулярно к вектору скорости) отложить величину ра-
диуса рассчитанную по соответствующей формуле для на-
чальных условий Vo, Пу аз То-
Рис. 2.20. Графический прием построения траекторий по
методу Ветчинкина
Далее, из центра Ох радиусом У?! провести дугу 1 — 2, стя-
гивающую угол A= -^- tg у Л / = Г1_ д /. Направление
У
искривления траектории (влево, вверх и т. п.) определяется'
из условий задачи.
82
Интервал времени может быть принят равным 2—10 с в
зависимости от темпа искривления траектории и изменения
пха • Интегрируя численно или графоаналитически уравнение
для AV, найти скорость в точке 2, по формуле для 7? опреде-
лить значение радиуса R2 и отложить его на направлении
01—2. Из центра О2 провести радиусом R2 дугу 2—3, стяги-
вающую угол Дф2 и т. д. Полученные таким образом участки
дуг 1—2; 2—3; 3—4 и т. д. образуют траекторию движения.
Для пространственных траекторий строят ее горизонталь-
ную и вертикальную развертки.
Следует обратить внимание обучаемых на то, что решение
уравнений удобнее производить графически с помощью номо-
грамм для соответствующих (горизонтальной и вертикаль-
ной) плоскостей.
Второй прием построения траектории дви-
жения самолета при моделировании маневров
сводится к следующему. Из точки 7, характеризующей
начальное положение центра масс самолета, по направлению
его движения (вдоль вектора скорости) откладывается вели-
чина продольного смещения АЛ%1На первом шаге (рис. 2.21).
Рис. 2.21. Графический прием по-
строения траекторий движения
В конце отрезка 1—71 перпендикулярно начальному направ-
лению откладывается величина поперечного смещения A Lz i.
Полученная таким образом точка 2 характеризует положение
центра масс самолета в конце первого шага. Через точку 2
под углом Дф1 к начальному направлению полета проводится
прямая линия, на которой откладывается величина продоль-
ного смещения А 2 и из конца отрезка (точка 21) в перпен-
6*
83
дикулярном направлении — величина бокового смещения
ДА/2. В итоге получается точка 3, характеризующая положе-
ние центра масс самолета в конце второго шага интегрирова-
ния. Затем на прямой линии, проведенной из точки 3 под уг-
лом Дф2 к направлению движения в конце первого участка
или под углом А = Д Ф1+Д ф2, равным сумме приращений
угла Дф на предыдущих шагах, к начальному направлению
движения откладывается величина смещения ДАхз и по
перпендикуляру к немуДAzз. В итоге получается также ряд
точек, определяющих траекторию движения самолета с за-
данными промежутками времени.
Здесь также следует подчеркнуть, что величины Д Lx и
AAZ получаются по результатам численного или графоана-
литического интегрирования. Отметить, что, как показывает
практика моделирования, вторым приемом для построения
траекторий целесообразно пользоваться тогда, когда величи-
ны радиусов в несколько раз превосходят длину пути, прохо-
димого за выбранный промежуток времени. Обычно это име-
ет место при больших скоростях и малых перегрузках манев-
рирования, например, на участках ввода и вывода из фигуры.
В этих случаях первые и последние участки траектории сле-
дует строить вторым методом, а средние —любым (первым
или вторым).
Рассмотрена методика моделирования, включающая эта-
пы расчета маневров и графического воспроизводства траек-
торий движения, необходимые для обоснования принимаемых
решений на боевые действия. В заключение следует пока-
зать возможности рассмотренного графоаналитического ме-
тода моделирования маневров на примере решения задач,
представляющих практический интерес, в частности, на при-
мере определения параметров участка вывода из восходящих
маневров и ввода в пикирование, применяющихся часто при
боевом маневрировании. Необходимый для выполнения моде-
лирования закон управления nYa (О Л (О следует выбрать, со-
образуясь с изложенной в Инструкции летчику техникой вы-
полнения маневра, а также методикой, приведенной в § 2.7
и 8.2.
2.5.5. Пример графоаналитического моделирования
Приступая к изложению этого вопроса, следует напомнить,
что искривление траектории самолета в вертикальной плос-
кости (рис. 2.22,а) происходит под действием центростреми-
тельной силы, равной
А'ц с = У a COS Ч — mg cos 0.
84
Если при этом Ya cos у mg cos 0, то самолет искривляет
траекторию так, что угол 0 увеличивается, а при i\cosy<
< mg cos 0 угол 0 уменьшается. При равенстве Ya cos
= mg cos© угол 0 не меняется, и самолет выполняет спираль.
При заданном угле набора (снижения) летчик может ме-
нять соотношение сил, меняя величину угла атаки (перегруз-
ку) и угол крена у. При заданных © и nY а увеличение угла
крена больше потребного для спирали (усп) приведет к тому,
что mg cos 0 будет больше racosy , и самолет будет умень-
шать угол 0. При уменьшении угла крена у<;Сп, наоборот,
угол 0 будет возрастать.
Рис. 2.22. Силы, действующие на самолет при выполнении пространствен-
ного маневра:
а — при вводе в горку; б — при выводе из горки
Следовательно, выполнение участков вывода из горки и
ввода в пикирование связано, прежде всего, с созданием не-
равенства Ya cosy<mgcos0 и для повышения интенсивности
искривления траектории следует уменьшать составляющую
Ya cosy, т. е. уменьшать Ya и увеличивать крен.
Однако отмеченная особенность справедлива при созда-
нии углов крена не более 90°. При вводе в пикирование или
выводе из горки с созданием крена более 90° составляющая
подъемной силы Ya cosy помогает составляющей силы тя-
жести искривлять траекторию, и центростремительная сила
ЕцС равна уже их сумме:
Fuc = Ya cos 7 + mg cos 0 .
При этом искривление траектории будет тем более энер-
гичным, чем больше пу а и больше угол крена у (рис-2,22,6)«
Для получения параметров рассматриваемых участков
горки и пикирования обратимся к номограммам для модели-
85
рования маневров в вертикальной плоскости и в пространстве
(см. рис. 2.18 и 2.19).
Для удобства пользования на рис. 2.23 приведены средний
и правый квадранты номограммы рис. 2.19, выполненные в бо-
лее крупном масштабе, с нанесенными границами VMHH по
«доп Для высот Н = 2000 и 5000 м.
Пусть, например, требуется найти параметры участка вы-
вода из горки, выполняемого с начальными Т/о = 5ООО м, Vo =
= 600 км/ч, ©о = ЗО°, с перегрузкой Яуа = 1,5 и углами кре-
на 60° — при выводе разворотом и 120° — при выводе полу-
переворотом.
Решение начинаем для 0Ср = 15° с определения величи-
о
ны сов" = cos 9, которую находим в точке в (а — б — в
на рис. 2.23), равной 3,3 град/с. В точке д найдем wBz =
= nY а = 5.1 град/с и продолжим далее линию г—д па-
раллельно оси абсцисс.
Найденное значение u)B/z откладываем на оси абсцисс ле<
вого квадранта (точка в1) и из этой точки проводим верти-
кальную линию до пересечения с продолжением линии г —
д — д' (точка е'). Эта точка и определяет величину угла кре-
на, потребного для выполнения спирали с 0Ср =15° и пу а =
= 1,5.
При создании же заданного угла крена у = 60° проекция
вертикальной угловой скорости (при nYa= 1,5) сов' =
= 2,6 град/с, т. е. <ов = 3,3—2,6 = 0,7 град/с. Следовательно,
время выполнения участка вывода из горки в этом случае со-
30
ставит (при у = 60° и Пуд = 1,5) М = =43 с, т. е. оно
недопустимо велико.
Сократить его можно либо уменьшив nY а, либо увели-
чив у. Из рис. 2.23 видно, что при том же у = 60° и уменьше-
нии пу а до 0,5 <ов' снижается до 0,8 (а — ж — з — и) и тог-
30
да (ов =3,3—0,8 = 2,5 град/с и AZ= --- =12 с. При созда-
2,5
30
НИИ Пу а = 0 < = 0 и Д t = ------- = 9,1 с.
3,3
Такой же эффект, как в последнем случае, дает и увели-
чение крена до 90° при пуа= 1,5. Следует обратить внимание
на то, что время выполнения боевых маневров связано преж-
де всего со временем пребывания в зоне поражения средств
ПВО противника (ЗА, ИА и т. п.), с интенсивностью манев-
рирования и поэтому должно быть возможно меньшим.
86
800
600
GOg
00
Рис. 2.23. К объяснению примера графоаналитического моделирования пространственных маневров
Уменьшение времени целесообразно также и потому, что по-
теря скорости на участке вывода будет при прочих равных
условиях тем меньше, чем меньше время, так как AV=
= g(nxa — sin©) At
И, наконец, если прияуа = 1,5 увеличить у до 120°, то
30
(ов'=х—2,6 град/с, юв = 3,34-2,6 = 5,9 град/с и А/=---~ 5 с.
5,9
Естественно, что это время может быть уменьшено при даль-
нейшем увеличении угла крена и перегрузки.
Таким образом, за счет выбора способа пилотирования
летчик имеет возможность существенно менять время, а так-
же и другие параметры маневра.
При необходимости по номограммам рис. 2.18 и 2.19 опре-
деляются величины 7?г и /?в, A Lx, А И и строятся проекции
траектории движения самолета в вертикальной и горизон-
тальной плоскостях, т. е. графически воспроизводится траек-
тория движения.
Для определения параметров участка ввода в пикирова-
ние с отрицательными перегрузками можно пользоваться те-
ми же номограммами (см. рис. 2.18 и 2.19), но при определе-
нии wB необходимо складывать <ов' и а)в". Так, при nYa=
= —1,0 и у = 0 (при Vo = 6OO км/ч, 0 = 30°) сов = 3,34-3,4 =
= 6,7 град/с. Создание угла крена в этом случае приведет
а
лишь к уменьшению со/ на величину nY а (1 — cos 7) и к
увеличению времени.
Наличие границ по адоп позволяет судить о величине запа-
са по пуа или V при выполнении горки, вводе в пикирование
и других маневров, т. е. учитывать при подготовке к полетам
требования безопасности.
§ 2.6. МЕТОДИКА АНАЛИЗА ОШИБОК ЛЕТЧИКА
Современный высокоманевренный, быстротечный характер
боевых действий требует полного использования боевых воз-
можностей самолетов, определяемых летными свойствами.
Высокая эффективность боевого применения самолетов
может быть достигнута только при наличии высокой идеоло-
гической закалки, глубоких знаний и понимания законов ди-
намики полета, прочных навыков в технике пилотирования,
владения способами боевого маневрирования, применения
оружия и тактическими приемами ведения боевых действий.
Это повышает требования к процессу обучения летного соста-
ва. Для совершенствования методики летного обучения необ-
ходимо уметь грамотно анализировать каждый полет, выяв-
88
лять успехи и недостатки в выполнении полетного задания,,
учить подчиненный летный состав самостоятельно анализи-
ровать свои полеты, критически оценивать свою деятель-
ность.
Недостатки в технике пилотирования как командир, про-
веряющий выучку летного состава, так и сам летчик могут
определять в зависимости от уровня подготовки, по субъек-
тивным ощущениям в полете (зрительным, кинетостатичес-
ким, акселерационным, звуковым и вестибулярным) и с по-
мощью средств объективного контроля, что повышает досто-
верность оценки боевой выучки летного состава.
Анализ полета позволяет установить причины ошибок в
технике пилотирования, их закономерность или случайность,
величину отклонений самолета (больших, являющихся пред-
посылками к летным происшествиям, и малых, зачастую не
учитываемых статистикой), наметить комплекс мероприятий
по устранению обнаруженных недостатков за счет улучшения
методов и приемов летного обучения, учесть индивидуальные
особенности летчика и условия выполнения полетного за-
дания.
Глубокое знание летным составом теории анализа полета
и методов объективного контроля техники пилотирования
позволяет успешнее решать задачи летной подготовки. Далее
рассмотрим методику анализа ошибок летчика как главную
часть анализа полета.
2.6.1. Отклонения самолета и ошибки летчика
В процессе анализа полета целесообразно придерживать-
ся следующей известной, но не всегда используемой последо-
вательности действий авиационного командира или летчика.
1. Определить отклонение самолета, т. е. что именно про-
изошло в поведении самолета, каково отличие фактических
параметров на рассматриваемом участке полета от заданных.
Отклонения самолета могут быть вызваны различными
причинами: ошибками летчика; внешними возмущениями,
воздействующими на поведение самолета (порывами ветра,
состоянием ВПП и т. д.); несовершенством аэродинамической
компоновки, систем управления, что на определенных режи-
мах полета может способствовать возникновению и развитию
неблагоприятных отклонений самолета; несовершенством че-
ловеческого организма, не приспособленного природой к поле-
ту (например, некоторые ощущения в полете не отражают ре-
альной картины полета; человек ограничен в чувствительнос-
ти к величинам перемещений ручки управления и т. д.), т. е.
тем, что называют психофизиологическими особенностями и
изучают в авиационной эргономике.
8а
Наиболее существенны отклонения по причине ошибок лет-
чика в технике пилотирования. Именно они приводят к наи-
большему числу летных происшествий (очень больших откло-
нений самолета) и предпосылок к ним (больших отклонений)
по вине летного состава, поэтому ошибкам летчика и особен-
но причинам ошибок должно быть уделено главное внимание
при анализе полета. Но анализировать следует не только
очень большие отклонения самолета, но и малые, на которые
не всегда обращают внимание, в то время как именно они,
накапливаясь, приводят к развитию больших отклонений.
В учебнике «Динамика полета и пилотирование самолетов»
(Монино, ВВА, 1976) излагаются математические методы
учета и анализа отклонений самолета как категорий случай-
ных явлений. Анализируя полет, командир должен обратить
внимание летчиков на то, чтобы не путать понятия отклоне-
ний самолета и ошибок летчика.
Примерами отклонений самолета являются: скольжение
на развороте; высокое выравнивание на посадке; вместо пет-
ли Нестерова получается косая петля и т. д.
2. Выявить ошибку летчика, т. е. установить, какие оши-
бочные действия летчика привели к отклонению самолета.
Здесь следует обратить внимание обучаемых, что ошибки
летчика в первую очередь связаны с нарушением строго до-
зированных, точных действий органами управления самоле-
том и его оборудованием и выражаются в неправильных, не-
соразмерных, некоординированных или несвоевременных пе-
ремещениях рычагов управления самолетом или в бездейст-
вии летчика.
Неправильные перемещения рычагов управления, не со-
ответствующие фактическому отклонению самолета, приво-
дят к развитию отклонений от малых до больших (к пред-
посылкам или летным происшествиям).
Несоразмерные и некоординированные (несогласованные)
перемещения хотя и могут по своему характеру соответство-
вать развивающемуся отклонению самолета, также приводят
к неблагоприятным последствиям (например, к «раскачке»
самолета). Несвоевременность же перемещений рычагов уп-
равления может вызвать отклонения, которых могло бы и не
быть, или, наоборот (при запаздывании), к невозможности
ликвидировать в определенных условиях полета опасное от-
клонение самолета.
Следует подчеркнуть то важное обстоятельство, что суще-
ствует множество ошибок летчиков в технике пилотирования
при выполнении различных элементов полета от взлета до
посадки, однако многие из них имеют общую теоретическую
основу, а потому их можно свести к нескольким типичным
90
сшибкам, дающим наибольший процент летных происшест-
вий. Например, и на взлете, и на посадке, и при выполнении
пилотажа в зоне самолет может быть непреднамеренно выве-
ден на большие углы атаки, что в дальнейшем может привес-
ти к тяжелому летному происшествию. Итак, основа одна —
большие углы атаки, а ошибки —свои, присущие данному
элементу полета.
Можно, например, назвать такие основные ошибки:
а) Перетягивание ручки управления, слабый контроль за
показаниями указателя углов атаки приводят к следующим
опасным отклонениям самолета:
— выходу на углы атаки, превышающие углы атаки сва-
ливания. При дальнейших несвоевременных и ошибочных
действиях может появиться еще более опасное отклонение —
сваливание, штопор и т. д.;
— выходу на углы атаки, большие установленных для от-
рыва на взлете («подрыв») и приземления на посадке;
— более раннему сваливанию на самолетах с боковыми
воздухозаборниками.
б) Вывод из нисходящих маневров (пикирования, пере-
ворота и др.) с вращением самолета вокруг продольной оси.
В этом случае отклонение самолета—опасная дополнитель-
ная потеря высоты на выводе из маневра.
в) Раздельное создание крена и перегрузки на вводе в ви-
раж или пренебрежение к необходимости парирования уве-
личения крена или излишнее нажатие на внутреннюю педаль
и создание внешнего скольжения и др. Эти ошибки вызывают
очень опасное особенно на предельно малых высотах откло-
нение самолета — зарывание на вводе или в процессе
виража. Положение усугубляется, если при этом летчик до-
пускает следующую еще более опасную ошибку — пытается
устранить зарывание взятием ручки на себя, нажатием на
внешнюю педаль без уменьшения крена, чем создает предпо-
сылку для сваливания самолета.
г) Летчик считает законченным вывод из нисходящего
маневра при создании угла тангажа Ф = 0, а не при Vy =0.
Отклонение самолета — движение к земле с Vy=Vsina —
продолжается потеря высоты («просадка»), приводящая к на-
рушениям требований безопасности полета.
д) Летчик не контролирует темп увеличения скорости при
пикировании с большими углами (увлекаясь слежением за
целью), что приводит к выходу на опасные трансзвуковые
скорости полета. Происходит перебалансировка самолета из-
за смещения назад центра давления. Самолет стремится еще
более увеличить угол пикирования (проявление неустойчи-
вости по скорости), и летчику необходимо своевременно и со-
91
размерно подбирать ручку на себя. Поэтому главное — конт-
роль за определением точки начала вывода, не допускать за-
паздывания даже при неудачном прицеливании.
3. Определить причину ошибки летчика, т. е. найти явле-
ние или обстоятельство, предшествовавшее этой ошибке и не-
посредственно вызвавшее ее возникновение. Это — главная
задача командира или рядового летчика, так как устранение
выявленных причин ошибок повышает уровень безопасности
полетов.
У ошибки летчика имеются различные причины: непра-
вильное переключение внимания (в том числе отключение
внимания), слабая обученность (летчик не знает, почему
следует именно так пилотировать, как требует Инструкция;
почему, в каких случаях и какие могут быть допущены ошиб-
ки в технике пилотирования, как их избежать и грамотно ис-
править), недостаточные теоретические знания (особенно
дающие о себе знать при выходе на предельные режимы по-
лета), отрицательные психофизиологические качества инди-
видуальности (напряженность, недисциплинированность), не-
достатки в методике летного обучения и т. д.
Это самый сложный и ответственный этап в анализе, так
как он предопределяет дальнейшую целесообразность дейст-
вий командира по обучению летного состава.
Кроме рассмотренных этапов анализ ошибок летчика дол-
жен обязательно содержать рекомендации по рациональным
способам исправления отклонений самолета (что должен был
сделать летчик в полете в процессе парирования отклонения
самолета). И как результат анализа — необходимо наметить
меры по предупреждению ошибок в предстоящих полетах.
Таким образом, целесообразна следующая причинно-
следственная методическая последовательность рассуж-
дений:
ОТКЛОНЕНИЕ САМОЛЕТА — ОШИБКА ЛЕТЧИКА —
ПРИЧИНА ОШИБКИ —РЕКОМЕНДАЦИИ ПО ИСПРАВ-
ЛЕНИЮ ОШИБКИ В ВОЗДУХЕ —МЕРОПРИЯТИЯ ПО
ПОВЫШЕНИЮ БЕЗОПАСНОСТИ ПОЛЕТОВ.
§ 2.7. МЕТОДИКА ИЗЛОЖЕНИЯ И ОБЪЯСНЕНИЯ
БОЕВЫХ МАНЕВРОВ И ФИГУР ПИЛОТАЖА
Для качественной и эффективной подготовки летного со-
става к решению задач, предусмотренных Боевым уставом
рода авиации, авиационному командиру при планировании и
проведении командирской и летной подготовки необходимо
уделять особое внимание изучению и отработке элементов
боевых маневров, т. е. различных фигур пилотажа. Это обус-
92
ловлено тем, что успех боевых действий во многом зависит
от способности летчика в кратчайшее время занимать наивы-
годнейшее положение относительно воздушных и наземных це-
лей или выходить из-под удара с последующим возможно
быстрым переходом к атаке, что определяется прежде всего
умением прогнозировать свои действия, т. е. выбирать опти-
мальный маневр, и четко знать и применять закон пилотиро-
вания, потребный для достижения поставленной цели. Здесь
уместно привести слова известного советского аса А. И. По-
крышкина о том, что каждая фигура — даже самая простая—
это маневр в воздушном бою.
Для освоения этого маневра летный состав при высоких
политических, моральных и психологических качествах дол-
жен обладать хорошей теоретической подготовкой, позволяю-
щей овладеть полными боевыми возможностями самолета.
Для сокращения сроков и повышения качества командир-
ской подготовки летного состава целесообразно использовать
такую последовательность в изучении элементов боевого ма-
неврирования, которая обеспечила бы твердое знание летным
составом теории маневрирования и на ее основе — практичес-
кие навыки по обоснованному выбору законов пилотирования
в интересах эффективного и безопасного выполнения любых
маневров в различных условиях боевого применения.
Целесообразна следующая последовательность:
— краткая теория фигуры пилотажа (маневра). Прибли-
женные методы расчета ее параметров. Возможное исполь-
зование при боевом маневрировании;
— границы выполнимости (области допустимых и без-
опасных высот и скоростей ввода);
— обоснование техники пилотирования, обеспечивающей
эффективное и безопасное выполнение фигуры пилотажа.
Законы пилотирования. Переключение внимания;
— возможные варианты выполнения. Особенности выпол-
нения на больших и малых высотах, в учебных целях и в бою;
— особенности пилотажных свойств (устойчивости и уп-
равляемости) самолета при выполнении фигуры в различных
условиях боевого применения;
— меры безопасности. Основные отклонения самолета и
ошибки летчика, приводящие к развитию аварийных ситуа-
ций (к наибольшему числу предпосылок и летных происшест-
вий) ;
— оценка качества пилотирования с помощью средств
объективного контроля.
При необходимости можно рассмотреть также вопрос:
«Особенности выполнения маневра в групповом полете».
В качестве примера, иллюстрирующего методику изучения
93
боевых маневров (фигур пилотажа), рассмотрим изучение
боевых маневров самолета в горизонтальной плоскости (уста-
новившегося и форсированного разворотов, змейки, горизон-
тальной восьмерки и др.).
1. В соответствии с изложенным изучение следует начать
с краткого изложения теории выполнения боевого маневра.
Здесь следует напомнить, что для разворота в горизонталь-
ной плоскости летчику необходимо создать искривляющую
силу, которой может служить подъемная или боковая сила.
Начиная с времен выдающегося русского летчика П. Н. Нес-
терова, для разворота используется составляющая подъемной
силы yasin у, которую летчик создает, накреняя самолет, а
вместе с ним и подъемную силу (рис. 2.24).
Рис. 2.24. Схема сил на правом развороте с внут-
ренним скольжением
Если использовать боковую силу, создавая ее отклонени-
ем внутренней педали, то увеличить угловую скорость и
уменьшить радиус разворота практически невозможно, так
как на современных самолетах подъемная сила во много раз
превосходит боковую силу, и положительный эффект от
скольжения получается ничтожным, а опасность сваливания
значительно возрастает.
Вторая составляющая подъемной силы Уд cos у должна
иметь такую величину, чтобы уравновесить силу тяжести са-
молета и обеспечить полет на постоянной высоте.
94
Таким образом, накреняя самолет и создавая TaSin^ и
Уд cosy, летчик добивается выполнения условий:
— разворота (поворота вектора скорости)
sin 7 = tnjz а\
— сохранения постоянной высоты (разворота в горизон-
тальной плоскости)
Ya cos y = mg.
Эти уравнения называются уравнениями движения центра
масс самолета.
Известно, что разворот в горизонтальной плоскости мож-
но выполнять либо с постоянной скоростью либо с перемен-
ной. Следовательно, необходимо рассмотреть еще уравнение,,
описывающее изменение скорости полета. Его легко соста-
вить, используя схему сил и второй закон механики:
Р - Ха = mjXa-
Уравнение соответствует: развороту с постоянной ско-
ростью, когда тангенциальная сила Р—Ха= 0(Р—Ха), разво-
роту с разгоном — при Р > Ха (что возможно на малых вы-
сотах при большой тяговооруженности даже при использова-
нии максимально допустимых перегрузок), развороту с тор-
можением— при Р < Ха (что обычно и бывает при выпол-
нении форсированных разворотов).
При теоретическом обосновании формул для расчета раз-
ворота в горизонтальной плоскости следует опираться на из-
вестные соотношения:
17 dtp Т7 V2 п 2
lz а = v —X- = V ti) = — = Rr СО2;
d t Рг
где jza И jxa — боковое и тангенциальное ускорения;
со — угловая скорость разворота;
Rr— радиус разворота.
Тогда, используя условие
Ya sin Y = mjZa,
получим
Уа sin y = tn V co,
95'
откуда угловая скорость, радиус и время разворота равны
_ KaSiny _ gVn2Ya— 1
“ ~ tn V ~ V '
V V2
~~ -----Г ’
® g у n-Ya— 1
л , _ д Ф Лф17
® gVn*Ya— 1
Приведенные формулы устанавливают связь между ско-
ростью полета, перегрузкой (креном), создаваемой летчиком,
и частными показателями виража о)г, t.
Следует обратить внимание летного состава на возмож-
ный неправильный анализ этих формул. В самом деле, хоро-
шо известен факт уменьшения радиуса или увеличения угло-
вой скорости разворота при снижении скорости полета и со-
хранении перегрузки. Однако иногда встречается мнение, что
для получения виража с минимальным радиусом и макси-
мальной угловой скоростью необходимо выполнять его на
минимальной скорости. При этом забывают, что при выходе
на минимальные скорости уменьшается и величина перегруз-
ки, а это оказывает на и со противоположное ожидаемому
влияние.
Если необходимо вычислить эти параметры для правиль-
ного установившегося (без скольжения) разворота, то в фор-
мулы подставляют значения предельной по тяге перегрузки
а пр* Если же речь идет о форсированном развороте, когда
одновременно изменяются скорость, радиус кривизны траек-
тории и угол крена, то необходимо подставлять значение рас-
полагаемой нормальной скоростной перегрузки nY а р, чтобы
вычислить текущие значения радиуса и угловой скорости
(время в этом случае вычисляется суммированием Л/ по
участкам разворота).
тл 1
Известное выражение nYа=---- получается с помощью
cos 7
условия Yacos^=mg. Особых пояснений этот вопрос не тре-
бует. Следует лишь обратить внимание обучаемых на то, что,
если летчик на вираже меняет перегрузку при изменении кре-
на в соответствии с этим выражением, то обеспечивается вы-
держивание постоянной высоты полета; если летчик создает
nYа<------, то самолет будет терять высоту, а если nYa>
cos у
> -----, то набирать ее.
cosy
96
Статистика показывает: при боевом маневрировании ви-
ражи и развороты, применяются достаточно часто как для
-срыва атаки противника (разворотом на него), так и наобо-
рот для атаки воздушных целей. Правильные (установив-
шиеся) виражи могут использоваться в затяжном воздуш-
ном бою, когда летчик желает сохранить уровень энергии,
которой обладал самолет к моменту завязки боя, а форсиро-
ванные развороты — для выхода из-под огня противника или
для последнего доворота при открытии огня. При этом лет-
чик должен помнить, что самолет теряет скорость, вместе с
ней уменьшается уровень энергии, а следовательно, и воз-
можности маневра по высоте и скорости.
2. Далее следует рассмотреть границы (области) выпол-
нимости форсированных и правильных виражей; выявить ха-
рактерные режимы полета, соответствующие требованиям
различной тактической обстановки (боя), и показать ограни-
чения, связанные с безопасностью выполнения разворотов и
виражей. Эти границы обычно строят и показывают в коор-
динатах радиус — скорость, т. е. R?(V) для определенных
высот полета, боевой нагрузки, режимов работы двигателя.
Но для летного состава целесообразнее строить их в коорди-
натах угловая скорость — скорость полета, т. е. со (V, Н, $руд,
mglS).
Границы выполнимости виражей строятся на основании
расчетов в соответствии с выражением w =
На рис. 2.25 показаны границы для разных высот. Их рас-
смотрение целесообразно начать со средних высот
(рис. 2.25,в):
7—8 — граница по допустимому углу атаки (аДопУУА);
8—5—4 — ПО прочности (по ЯэУамакс) или по возможнос-
тям летчика (попуаф);
4—9 — по максимально допустимой скорости полета;
6—5—Ю — по максимальному отклонению ручки на себя;
1—2—3 — по равенству Рр = Ха (граница установивших-
ся виражей; nYa = пуапР; яхар = 0).
/ — область установившихся виражей и разворотов. При
рассмотрении этой области следует пояснить, что при полной
тяге установившийся разворот можно осуществить только по
границе 1—2—3, когда Рр = Ха, а чтобы выполнить его ни-
же этой границы, необходимо уменьшать тягу двигателя, так
как в противном случае будет происходить разворот с раз-
гоном.
II — область, где выполнять разворот опасно, так как
здесь потребные углы атаки больше допустимых. При разво-
7—5007сп
97
a)
Mcp = const
Форса*
Рис. 2.25. Области выполнимости виражей в различных условиях
роте по границе 7—6 используются перегрузки, соответствую-
щие допустимому углу атаки. Разворот на этой границе про-
исходит с уменьшением скорости от точки 6 до точки /, где
= Ха и возможен развороте Vi = const.
Ill — область форсированных виражей и разворотов, ко-
торые выполняются с потерей скорости, так как при пу а >
пр располагаемая тяга меньше лобового сопротивле-
ния. Затем целесообразно выделить характерные режимы и
показать их тактическую значимость.
Точка 1 — установившийся разворот при полной тяге с ми-
нимальным радиусом. Этот режим может использоваться для
входа внутрь траектории противника, но так как он обычно
соответствует области малых скоростей и выход в эту точку
сопровождается большим снижением уровня энергии, то он
имеет ограниченное тактическое значение.
Точка 2— установившийся разворот на полной тяге с мак-
симальной угловой скоростью, а следовательно, с минималь-
ным временем разворота. Этот режим имеет наибольшее так-
тическое значение.
Точка 3 — установившийся разворот на полной тяге с мак-
симальным креном (Туст. макс) на максимально допустимой
скорости. Этот режим может иметь значение при маневриро-
вании в зоне ПВО противника.
Точка 4 — форсированный разворот с максимальной
эксплуатационной перегрузкой на максимально допустимой
скорости.
Точка 5 — соответствует полному отклонению ручки уп-
равления на себя (хв Макс <Г0) при выполнении форсированного
разворота (например, от точки 4).
Точка 6 — выход на допустимый угол атаки при выполне-
нии форсированного разворота. В дальнейшем (при пилоти-
ровании по адоп без снижения) самолет выйдет на устано-
вившийся разворот (точка /).
3. Установив границы выполнимости виража, следует пе-
рейти к обоснованию техники пилотирования. Прежде всего
следует отметить, что еще при теоретическом изучении вира-
жа (до начала полетов), используя аппарат механики и ма-
тематики, можно обосновать потребные величины, направле-
ния и темп отклонения рулей для получения установившего-
ся виража.
Раскрытие вопроса полезно начать с рисунка, на котором
изобразить вектор угловой скорости вращения самолета на
вираже, разложить его по осям связанной системы коорди-
нат (так как летчик вращает самолет вокруг этих осей) и
вывести элементарные соотношения, которые позволят про-
анализировать необходимые действия летчика.
7*
99
На рис. 2.26 показано, что при выполнении виража нос
самолета находится выше линии горизонта, а это обстоятель-
ство с учетом того, что вектор угловой скорости направлен
перпендикулярно плоскости вращения самолета на вираже,
свидетельствует о том, что имеется составляющая
сох = ш sin = .sin *&.
В чем ее смысл? Судя по рисунку, на левом вираже >0
(вектор направлен вперед вдоль оси X, т. е. в положи-
тельную сторону), а на правом—сох < 0 (назад). В соответ-
ствии с правилом знаков это означает, что при выполнении
левого виража самолет должен вращаться в правую сторо-
ну, а правого — в левую.
Рис. 2.26. Вращение самолета на вираже
Другими словами, в процессе выполнения установившего-
ся виража (y = const, V = const) летчик должен отклонять
ручку управления к внешнему борту для парирования посте-
пенного увеличения угла крена по кинематическим причинам
(простым примером кинематического увеличения угла крена
является петля Нестерова: на вводе у = 0, в верхней точке у =
= 180°), что обычно он и делает дискретными движениями по
мере накопления ошибки в крене и попадания ее в зону чув-
ствительности летчика.
Из этого же выражения следует, что чем более глубок ви-
раж и чем с большим углом тангажа он выполняется, тем
100
большую величину сох должен создавать летчик, т. е. его
движения должны быть более энергичными.
Из рис. 2.26 видно, что на левом вираже («у >0, а на пра-
вом о)у < 0, т. е. самолет надо вращать педалями в сторону
желаемого виража (в отличие от а>х ). Величина же
gtg у g
(«У = си cos 7 = cos 7 = sin у.
Чем больше угол крена на вираже, тем большую величи-
ну wy надо создавать отклонением педали, но уже независи-
мо от угла тангажа.
Из рис. 2.26 также видно, что независимо от направления
виража (oz>0 (вектор направлен всегда в сторону правого
крыла, т. е. в сторону положительного направления оси Z), а
это означает, что ручку управления всегда надо брать на се-
бя и тем энергичнее, чем глубже вираж (при увеличении у),
так как
0 tg г
G)Z =(DSiny~ sin у.
При объяснении этого вопроса следует подчеркнуть, что
рассматривался сам вираж, но не участки ввода и вывода.
Величина отклонения элеронов зависит от темпа ввода и
вывода, рекомендуемых Инструкцией летчику, а руля на-
правления— только от необходимости удерживать «шарик» в
центре. Здесь следует напомнить летному составу о том, что
положение шарика указателя скольжения не позволяет од-
нозначно судить ни о величине угла скольжения, ни о боко-
вой перегрузке. Оно говорит лишь о том, каково отношение
боковой перегрузки к нормальной или отношение угла сколь-
жения к углу атаки. При необходимости это можно объяс-
нить следующим образом.
Кажущаяся сила тяжести, действующая на шарик указа-
теля скольжения, направлена в сторону, противоположную
поверхностной силе F (рис. 2.27), которая геометрически
складывается из подъемной силы Ya и боковой силы Za.
Угол фш, характеризующий величину отклонения шарика от
нейтрального положения, может быть определен по формуле
Za
^Z а Cza$
Пу а ^Уаа
Из формулы видно, что при наличии скольжения (Za^0,
nzt^O) чем больше Ya (nYa), тем меньше шарик отклоняет-
ся от нейтрального положения. Например, на глубоком вира-
101
же, когда потребная величина nY а большая, указатель сколь-
жения значительно слабее реагирует на некоординированное
отклонение рулей. Следовательно, при маневрировании на
больших углах атаки, где полет наиболее опасен, «шарик»
отклоняется меньше при той же даче педали и дезинформи-
рует летчика, который считает, что выполняет координирован-
ный маневр. (Кстати, это является причиной выполнения по-
лубочки при подходе к верхней точке на петле Нестерова).
Рис. 2.27. к показанию указателя скольжения («шарика»)
Даже в прямолинейном горизонтальном полете припуа =
V2
= 1, когда tg срш = nZa S ——, „шарик* при одном и
16
том же скольжении (Р) отклоняется больше от нейтраль-
ного положения с увеличением приборной скорости.
При маневрировании с «уа<1 чувствительность «шари-
ка», наоборот, увеличивается, а при отрицательных перегруз-
ках он теряет устойчивость и скатывается к краю указателя
скольжения. Поэтому летчику надо помнить, что с увеличе-
нием пуа для парирования того же скольжения педаль следу-
ет отклонять больше, чем при малых перегрузках (углах
атаки).
Следует обратить внимание обучаемых и на другой чисто
пилотажный вопрос, связанный с возможным неправильным
пониманием контроля угловой скорости поворота с помощью
указателя поворота. Обычно считают, что если стрелку ука-
зателя поворота удерживать на одной риске, то угловая ско-
рость и время разворота будут одинаковы независимо от ско-
рости полета. Данная ошибка связана с неправильным пред-
102
ставлением, что указатель показывает угловую скорость по-
ст а _________
ворота на вираже <ur = tg 7 =у n2y e—1 , тогда как
на самом деле он показывает
оу = о)г cos 7 —
g
— tg 7 COS 7 =
= ~-sin7, т. e. угловую скорость поворота относительно оси
Y (см.рис. 2.26).
Следовательно, если летчик будет удерживать стрелку при
любых скоростях на одной и той же отметке, то будет одина-
кова не«г, а <оу.
При обосновании техники пилотирования на вираже сле-
дует проанализировать хорошо известные зависимости с точ-
ки зрения получения дополнительной информации по пилоти-
рованию. Так, например, в соответствии с пуд==------- стро-
cos у
ят и приводят график потребных перегрузок на вираже в зави-
симости от заданного угла крена (рис. 2.28).
Рис. 2.28. Зависимость потребной перегрузки от за-
данного угла крена на вираже
На первый взгляд можно сделать только вывод, что сна-
чала по мере увеличения крена до углов 30—45° потребная
перегрузка возрастает незначительно (у = 30°, nYаПотр = 1,15;
7=45°, пу а потр= 1,4), а при углах крена более 60° потребная
перегрузка при увеличении крена резко возрастает (у=60°,
Луапотр =2; у = 80°, ^гапотр— 6). Но при внимательном ана-
лизе можно утверждать, что при вводе в вираж темп взятия
103
ручки управления на себя по мере возрастания крена должен
быть разный: сначала плавный, а при у = 45° его надо замет-
но увеличивать, чтобы на вводе не потерять высоту ^сохра-
нить =. Это следует из того, что на глубоких
cosy /
виражах небольшим изменениям крена соответствует значи-
тельное изменение потребной перегрузки. Из этого же следует,
что точнее можно выполнить вираж, если при малых углах
крена его контролировать по авиагоризонту, а при больших —
по акселерометру.
При углах крена менее 30° ввиду незначительного отличия
потребной перегрузки от пу Д=1 самолет «прощает» летчику
ошибки, связанные с тем, что на вводе сначала создается
крен, а потом перегрузка, соответствующая этому крену. На
глубоких виражах такая ошибка приведет к зарыванию на
вводе. Итак, надо обратить внимание летного состава на уме-
ние анализировать имеющиеся материалы в интересах улуч-
шения качества пилотирования и безопасности полета.
На рис. 2.29 приведена зависимость nY а (Vnp ), анализ
которой показывает, что в процессе выполнения, например,
форсированного разворота целесообразно выдерживать за-
данный режим на Kip >770 км/ч по акселерометру, а на
VnP <.770 км/ч — по указателю углов атаки. Здесь же можно
нанести некоторые ограничения в целях повышения безопас-
900 500 600 ?ОО 800 900 1000 VnptKM/4
Рис. 2.29. Зависимость нормальной скоростной перегрузки
от скорости по прибору
104
ности полетов при освоении пилотажа, приняв за рабочие
луа=5—5,5 и а=18—20° по указателю углов атаки, хотя ми-
нимальное время форсированного виража будет при реали-
зации л*амакс и адоп = 22—24° по УУА.
При теоретическом обосновании пилотирования целесооб-
разно показать возможные законы пилотирования, предва-
рительно подчеркнув, что под законом пилотирования будем
понимать изменение по времени (или по какому-либо друго-
му параметру) nYa(t) или а(/), y(t), ^₽уд(0- Тогда на устано-
вившемся вираже riya=const, y = const, ВРуд = const, на фор-
сированном вираже изменяются nY а (рис. 2.30) и у — в соот-
ветствии с nY а~-----, аоРуд=соп5Т Например, в соответ-
cosy
ствии с рекомендациями Инструкции летчику для выполнения
форсированного разворота необходимо за 3—4 с создать мак-
симально допустимую эксплуатационную перегрузку, затем по*
мере уменьшения скорости, увеличивая угол атаки, сохранять
П Ус макс И Тмакс ПОСТОЯННЫМИ (уЧНСТОК Б—В). ПрИ ДОСТИ-
жении в точке В величины адоп соразмерно со снижением пе-
регрузки уменьшать крен (участок В — Г), а выйдя в точке Г
на перегрузку nY а пр установившегося виража, можно выдер-
живать nYanp и соответствующий угол у постоянными, со-
храняя на участке Г — Д V=const. Здесь же надо напомнить
летному составу основные правила и особенности переклю-
чения внимания на вводе, вираже и выводе из него.
4. Переходя к рассмотрению возможных вариантов выпол-
нения виражей, следует разъяснить летному составу особен-
ности выполнения форсированных и правильных виражей на.
больших и малых высотах, что связано как с трансформаци-
10Ь
ей областей выполнимости по высотам, так и с различной
степенью проявления неблагоприятных явлений устойчивости
и управляемости.
Так, на рис. 2.25,а, б, в, г показано, как изменяются грани-
цы выполнимости виражей. С помощью таких графиков
удобно рассмотреть особенности в выполнении, например,
форсированных виражей на различных высотах. Известно,
что для разворота в минимальное время применяют форсиро-
ванный разворот, в процессе которого происходит интенсив-
ное уменьшение скорости полета, так как перегрузку нужно
выдерживать максимально возможной по прочности самоле-
та (Пу а макс)’ полному отклонению ручки управления на себя
*{*вмакс), условиям максимально допустимого угла атаки
‘(ядопууа). При этом индуктивное сопротивление резко уве-
.личивается (пропорционально квадрату перегрузки), что и
ведет к уменьшению скорости и уровня энергии в бою.
Какие же законы пилотирования (пуд, т, оруд) в этом
случае обеспечат разворот в минимальное время на задан-
ный угол? Для выполнения форсированного разворота на
малой высоте, когда вследствие высокой тяговооруженности
предельная по тяге перегрузка пуаПр в некотором диапазоне
скоростей может превысить максимальную эксплуатацион-
ную перегрузку (рис. 2.25,а), на участке 4—1 необходимо
применять закон пилотирования:
nY а макс (0 = C0I1St’ Тмакс (0 = COHSt; Вруд (/) =COnst.
Здесь эффективность рулей высокая и для создания
Пу а макс не требуется полного отклонения ручки управления
на себя. Поэтому по мере уменьшения скорости имеется воз-
можность поддерживать пэу а макс подбором ручки на себя и,
не уменьшая крена, выйти на режим установившегося разво-
рота (точка /). Выйти в точку 2 или точку 8 (на адоп) МОЖНО
только изменив режим работы двигателя ^руд (/)—var.
Заметим, что если начинать разворот на V < V макс доп, ТО За-
КОН пилотирования до точки 1 справа будет тот же.
При маневрировании в пределах скоростей (1—2), на ко-
торых Пу а пр 2> пу а макс летчиК ДОЛЖСН ПОМНИТЬ, ЧТО ДЗЖе СЗ-
мый энергичный разворот будет происходить с увеличением
скорости и создаются условия для нарушения требований по
безопасности полета: можно легко выйти за ограничения
максимально допустимой скорости.
Но не всегда и не у всех самолетов имеется пуаПр>
>«уамакс- Обычно «уамакс>«Уапр, поэтому на рис. 2,25,6
показан закон пилотирования на той же высоте, но для са-
молета с меньшей тяговооруженностью.
106
На участке 4 — 8 /4 вмакс (0 = const; тмакс(0 = const;
8руд(0 = const (полный форсаж), т. е. до точки 8 пилотиро-
вание осуществляется, как и в первом случае, хотя и с более
интенсивной потерей скорости (так как больше величина от-
рицательного избытка тяги Р — Ха).
На участке 8—1 nya(t) = var, адоп(/) = const; 7 (/) = var;
Зруд (0=const, т. е. в точке 8 самолет выходит на ограничение
по адоп, и дальнейший разворот необходимо выполнять, умень-
/ 1 \
шая крен в соответствии с падением перегрузки { пуа =---
\ cos у /
при адоп = const. В точке 1 самолет при адоп выходит на ре-
жим установившегося разворота. Обычно разворот на 180° за-
канчивается еще до выхода в точку 1, да и невыгодно туда
выходить, так как запас энергии самолета в этом случае резко
уменьшается.
Следует подчеркнуть, что при пилотировании на предель-
но малых высотах более интенсивно проявляются неблаго-
приятные особенности в пилотажных свойствах («подхват»,
обратная реакция по крену на отклонение педали, реверс эле-
ронов и др.), поэтому при переходе со сверхзвуковых на
трансзвуковые скорости пилотировать самолет необходимо
плавными отклонениями рычагов управления, не применяя
энергичного маневрирования, не допуская непроизвольного
увеличения крена.
С увеличением высоты выполнения разворота появляются
дополнительные особенности (см. рис. 2.25,в), которые летный
состав должен отчетливо понимать. В самом деле, если, как
и в первых двух случаях, разворот необходимо начинать с
Умаксдоп (точка 4), то на участке 4—5 «у а макс (О = const;
7 (0 = const; 8Руд (t) = const.
Такое пилотирование уже рассмотрено, но в точке 5 ока-
жется, что еще до выхода на адоп ручка управления будет
полностью выбрана на себя (хвмакс) в процессе поддержания
постоянной величины «у а макс при потере скорости. Теперь
уже не удастся удержать «у а макс = const и на участке 5—6
nYa(t) = var; хв макс — const; nYa < «уамакс; 7(0 = var; 8Руд(0=
= const, т. е. по мере торможения от точки 5 до выхода на
Ядоп (точка 6) необходимо при полностью выбранной на
себя ручке по мере снижения перегрузки уменьшать крен
( 1 \
Пу а = ---- , чтобы сохранить высоту.
\ cos у /
На участке 6—1 пуа[1) — чы\ 7(0 = var; ВРуд (0 = const.
107
Угол атаки адоп(/)= const; nYa^nYамакс, т. е. если это*
необходимо (выход на малые скорости), то, удерживая са-
молет на адоп, выйти в точку /, где возможен установив-
шийся разворот с соответствующими перегрузкой и кре-
ном.
И, наконец, рис. 2.25, г иллюстрирует разворот на боль-
ших высотах. Границы ПО ^уамакс(^— 5), Хвмакс (5— б), ПУащ>
(2—3) не пересекаются, а поэтому в точку 4, соответствую-
щую n3Ya макс на Умаксдоп, выйти уже невозможно, так как
эффективности рулей не хватает (при полностью взятой
ручке управления хВМакс).
На участке 5—6: nYa(t) = var; хвMaKc==const; иуа«пэУамакс;
7 (t) = var; ВРУД (/) = const, т. е. на Умакс доп необходимо пол-
ностью взять ручку управления на себя и по мере торможе-
ния уменьшать крен в соответствии с падением перегрузки
/ 1 \
Лу .
\ COS 7/
В точке 6 самолет выйдет на адоп, продолжая терять ско-
рость, и, если летчик допустит ее падение до значения, соот-
ветствующего точке 7, может произойти сваливание, т. е. уже
не гарантируется безопасность полета.
Что касается разницы в пилотировании на разворотах
(виражах), выполняемых в учебных целях и в бою, то следу-
ет отметить:
— при выполнении разворота в учебных целях ввод необ-
ходимо производить с темпом не более пуа = 1,5 с контролем
и регулированием параметров полета;
— при выполнении разворота в боевых условиях ввод
должен быть более быстрым и нерегулируемым, т. е. пара-
метры полета могут быть проконтролированы по приборной
информации и подправлены (если это требуется) только пос-
ле окончания ввода, в момент которого летчик наблюдает
цель и фиксирует необходимый крен по горизонту.
5. Летный состав должен знать и учитывать особенности
изменения пилотажных свойств самолета при выполнении
маневров. Важность этого вытекает из того, что может про-
изойти уменьшение уровня безопасности полетов или замет-
ное усложнение пилотирования, тоже оказывающее влияние
на безопасность полета. Так, например, при выполнении фор-
сированного разворота со сверхзвуковых скоростей при вхо-
де в область трансзвуковых скоростей полета возможно такое
неблагоприятное явление, как самопроизвольное увеличение
перегрузки при фиксированной ручке управления (подхват).
Если перед полетом в зону на пилотаж напомнить летному
108
составу об этом явлении, присущем любому сверхзвуковому
самолету, то его легко парировать своевременным и сораз-
мерным отклонением ручки управления от себя. Однако сле-
дует помнить, что имеются самолеты с очень энергичным за-
бросом, особенно при торможении со значительным темпом
и с большими перегрузками. В этих случаях даже мгновен-
ное вмешательство летчика приводит к большому забросу
перегрузки.
Возможно также проявление обратной реакции по крену
на отклонение педали, трудно устранимых моментов рыска-
ния и крена и т. д.
Кроме того, следует обратить внимание обучаемых на то,
что неблагоприятные явления устойчивости и управляемос-
ти, присущие данному типу самолета, проявляются сильнее
с уменьшением высоты полета и поэтому при маневрирова-
нии на предельно малых высотах надо быть готовым к не-
медленному парированию начавшегося отклонения самолета
от заданной траектории, а само маневрирование не должно
быть энергичным в области трансзвуковых скоростей. Лет-
ному составу, эксплуатирующему самолеты с крылом изме-
няемой стреловидности, напомнить, что при перестановке
крыла в процессе маневрирования изменяются также харак-
теристики продольной и боковой устойчивости и управляемос-
ти и неучет их изменения может быть пагубным. Следова-
тельно, изучение этих явлений представляется необходимым
в процессе командирской подготовки. Лучше всего это делать
по определенной схеме, например, такой:
— напомнить физическую сущность явления (особен-
ности) ;
— показать признаки, по которым можно выявить эту
особенность в полете; ,
— перечислить режимы полета, на которых она проявля-
ется в опасной степени;
— дать рекомендации по предотвращению развития опас-
ных ситуаций (подробнее см. главу 5).
Например, если напомнить: в Инструкции летчику сказа-
но, что самолет обладает повышенной поперечной устойчи-
востью при средней и большой стреловидности крыла (осо-
бенно с подвесками), пониженной путевой устойчивостью при
числах М полета, близких к максимально допустимым, и по-
вышенным взаимодействием движений крена и рыскания, то
это означает, что самолет с крылом большой стреловидности
обладает способностью создавать мощные моменты по крену
при наличии скольжения Мх ст $4$^ которые приводят
к энергичному кренению за малое время. Это естественное
свойство самолета, называемое повышенной поперечной
109
устойчивостью, летчик может воспринимать как неустойчи-
вость по крену и в дальнейшем действовать неправильно. По-
этому надо показать, что эту особенность можно выявить в
процессе учебы на земле, оценив величину и знак т?х (коэф-
фициента поперечной устойчивости). Если т?х < 0, то самолет
поперечно устойчив, если т?х 0, то чрезмерно устойчив, ес-
ли ^х>0, то самолет поперечно неустойчив (обратная реак-
ция). В воздухе же признаком большой поперечной устойчи-
вости будет резкая реакция по крену на незначительное от-
клонение педали (или на внешние возмущения), поэтому на
вводе в вираж возникнут сложности в координированном пи-
лотировании. Заметим, что если самолет поперечно неустой-
чив, то он будет крениться в сторону, противоположную от-
клоненной педали.
Теперь можно указать летчикам режимы полета и
эксплуатационные факторы, усиливающие опасность этого
движения: минимально допустимые скорости, большие углы
атаки, большие стреловидности крыла, внешние подвески.
Напомнить, что поэтому в Инструкции может быть пункт, гла-
сящий: полет при большой стреловидности крыла с подфюзе-
ляжным баком запрещен. Все изложенное при необходимос-
ти можно пояснить с помощью графиков (рис. 2.31) и сделать
вывод, что ввиду указанных особенностей боковой устойчи-
вости виражи необходимо выполнять с включенной САУ в ре-
жимах «Демпфирование» или «Стабилизация».
6. Затем надо перейти к анализу возможных отклонений
самолета и ошибок летчика в процессе выполнения виража,
показать меры безопасности, под которыми здесь следует по-
нимать рекомендации по технике пилотирования, направлен-
ные на предотвращение развития опасных ситуаций. Реко-
мендации должны касаться основных ошибок, приводящих к.
Рис. 2.31. Зависимость статического коэффициента
поперечной устойчивости от числа М и угла атаки
110
наибольшему числу отклонений самолета, предпосылок или;
летных происшествий, носить обоснованный и краткий харак-
тер и раскрывать те главные моменты, которые следует учи-
тывать для предотвращения развития аварийных ситуаций.
Из этого следует, что вначале целесообразно раскрыть,
теорию полета, связанную с возможными серьезными откло-
нениями самолета при маневре, действиями летчика, приво-
дящими к ним, а затем дать рекомендации по предотвраще-
нию или парированию развивающегося неблагоприятного от-
клонения самолета от заданных параметров.
Например, одним из опасных отклонений самолета при
выполнении установившихся глубоких разворотов (особенно
на малых высотах), приводящим к серьезным летным проис-
шествиям, является потеря высоты (зарывание) на разворо-
те, вызванная тем, что летчик не выдерживает потребного
соотношения крена и угла атаки (перегрузки) и оказывается
/1 V
nYa<.----> Т. е. г a cos 7 < mg, что вызывает потерю высо-
cos у
ты. При этом чем более глубокий вираж выполняется, тем
сложнее выдерживать это соответствие, так как потребная
перегрузка резко возрастает даже при увеличении крена всего
на 3—5° (см. рис. 2.28).
Выполнение разворота в этом случае происходит на углах
атаки, значительно превышающих наивыгоднейшие, т. е. в об-
ласти вторых режимов полета, поэтому дальнейшие негра-
мотные действия летчика могут привести к выходу на углы
атаки сваливания. В то же время опытный летчик, находясь
на тех же углах атаки и пилотируя самолет рациональными
отклонениями рычагов управления, будет совершать разво-
рот на первом режиме полета.
Следует разъяснить летному составу это кажущееся про-
тиворечие: самолет находится на углах атаки, значительно
превышающих найвыгоднейшие углы атаки, и одновременно
в зависимости от действий летчика может находиться на пер-
вом или втором режиме полета. Чтобы выяснить этот вопрос,
уместно кратко рассмотреть теорию полета на первом и вто-
ром режимах.
Прежде всего нужно напомнить летчикам понятия первого-
и второго режимов полета (см.. § 1.4).
Далее следует подчеркнуть, что важным обстоятельством,
способствовавшим неправильному пониманию границ первых
и вторых режимов, было утверждение, что величина угла ата-
ки является определяющим признаком режима.
В реальном полете при углах атаки больше наивыгодней-
ших режим полета может быть и первым и вторым. Это зави-
111
сит от техники пилотирования летчика. Например, если вы-
полняется прямолинейный горизонтальный полет на а>анв,
а летчик отклонением ручки управления выдерживает задан-
ную высоту, пользуясь высотомером и вариометром, то это
второй режим, причем он может происходить с потерей ско-
рости до сваливания, если летчик при начавшемся уменьше-
нии скорости для сохранения высоты будет увеличивать угол
атаки. Но если изменить технику пилотирования и при умень-
шении скорости вместо высоты выдерживать постоянный угол
атаки (по указателю углов атаки или сохраняя неизменным
положение ручки управления), то режим полета будет первым,
при падении скорости лобовое сопротивление уменьшится и
появится избыток тяги, под действием которого скорость бу-
дет восстанавливаться. Однако следует помнить, что при та-
ком пилотировании имеется существенный недостаток, свя-
занный с колебаниями высоты, что снижает безопасность по-
лета на малых высотах.
Затем вернуться к установившемуся развороту, на котором
границей режимов (рис. 2.32) в зависимости от перегрузки
является скорость Vrp = VHB V Пу а, где VHB —наивыгод-
нейшая скорость в прямолинейном горизонтальном полете.
Если летчик при зарывании самолета на установившемся раз-
вороте будет выдерживать высоту, не изменяя угла атаки, а
уменьшая угол крена, то полет происходит на первом режиме
.и будет безопасным, хотя а>анв. При этом устойчиво сохра-
*СЛР
Рис. 2.32. Границы первого и второго режимов на вираже
П12
яяется скорость полета. Если же она окажется меньше за-
данной, следует уменьшить угол атаки, если больше задан-
ной — увеличить его.
Разворот на больших углах атаки будет происходить на
втором режиме только при ошибочном пилотировании, когда
летчик выдерживает высоту не изменением угла крена, а уг-
лом атаки, т. е. не поперечными, а продольными отклонения-
ми ручки управления, например, повышая лобовое сопротив-
ление увеличением угла атаки при потере скорости. Такая
ошибка очень опасна на малых высотах.
Для определения границ между областями первых и вто-
рых режимов можно использовать график скоростей и высот
установившегося горизонтального полета при различных по-
ложениях РУД, получаемый на основании летных испытаний.
Примерный вид такого графика показан на рис. 2.33, где об-
ласти первых режимов определяются тем, что при переходе
к большей скорости установившегося режима требуется бо-
лее переднее положение РУД. На вторых же режимах боль-
шим скоростям соответствуют более задние положения РУД.
Линии границ режимов проходят через максимумы кривых,
соответствующих фиксированным положениям РУД.
< частичный форсаж
\ \ полный форсаж
) ] минимальный
форсаж
н режим
Рис. 2.33. Границы первого и второго режимов на диапа-
зоне скоростей и высот полета
Из этого теоретического обоснования вытекают и реко-
мендации по правильному исправлению зарывания на разво-
роте (меры безопасности): исправлять зарывание на глубо-
ком развороте следует только уменьшением крена. Попытка
исправить зарывание на глубоком вираже увеличением угла
атаки (перегрузки) создает предпосылку для сваливания са-
молета. Если к тому же полет происходит на предельно ма-
лых высотах, то следует подчеркнуть, что в этом случае иног-
да ошибочно считают: исправить зарывание можно отклоне-
8—5007сп 113
нием внешней педали, т. е. созданием внутреннего скольже-
ния (см. рис. 2.24), а это является грубейшей ошибкой в тех-
нике пилотирования.
В самом деле, при отклонении внешней педали за счет соз-
дания рулевого момента нос самолета поднимается вверх й
летчику кажется, что потеря высоты прекратилась. Однака
потеря высоты связана с тем, что Ya£osy <mg, и чтобы она
прекратилась за счет отклонения внешней педали (создания
боковой СИЛЫ Za), НЗДО ВЫПОЛНИТЬ условие УдСОЗу +
+ Za sin у > mg, где Za sin у — вертикальная составляющая
боковой силы. Такое условие практически создать невозмож-
но, так как на современных самолетах Za sin у <^Ya cosy, если
даже летчик отклонит педаль полностью. Но поскольку при
скольжении реально возникает опасность сваливания, летчик
должен, отклоняя педаль, уменьшать угол атаки, т. е. сни-
жать Уаи Уд cos 7 , а следовательно, вместо ожидаемого уве-
личения суммарной вертикальной силы произойдет ее умень-
шение, и темп потери высоты увеличится. Итак, рекомендация
по повышению безопасности полета — исправление зарывания
отклонением внешней педали без уменьшения крена является
грубейшей ошибкой. Далее указать, что основная причина
этих ошибок — слабые теоретические знания, отсутствие навы-
ка в сохранении параметров разворота, неправильное пере-
ключение внимания и т. д. Пути их исправления в воздухе и
проведение работы по их предупреждению' изложены ранее.
Поэтому нетрудно самим составить логическую цепочку: от-
клонение самолета — ошибка летчика — причина ошибки —
исправление в воздухе — предупреждение на земле.
7. Оценка качества пилотирования с помощью средств
объективного контроля должна быть проиллюстрирована пу-
тем рассмотрения и анализа ленты САРПП или «Тестер» вы-
полненного полета. При этом желательно иметь такие полет-
ные записи, где были допущены отклонения самолета и ошиб-
ки летчика. Прежде всего следует установить (и показать
летному составу, как это делается), соблюдались ли в поле-
те условия безопасности, и если нет, то не был ли допущен
выход за эксплуатационные ограничения по Яудмакс, ^допууа,
минимальной безопасной высоты выполнения виража, ско-
рости менее эволютивной, несоответствия перегрузки и крена
и т. д. Затем проанализировать темп создания перегрузки на
вводе, умение вводить в вираж с получением согласованных
режима двигателя, перегрузки и крена, выдерживания режима
правильных виражей без больших колебаний параметров по-
лета. Здесь важно правильно применить установленные норма-
тивы оценки выполнения фигуры, особенно учитывая погреш-
ности показателей бортовой регистрирующей аппаратуры.
114
Глава 3
МЕТОДИКА ИЗЛОЖЕНИЯ И ОБЪЯСНЕНИЯ
ВЗЛЕТНО-ПОСАДОЧНЫХ ХАРАКТЕРИСТИК
§ 3.1. СОДЕРЖАНИЕ
И ПОСЛЕДОВАТЕЛЬНОСТЬ ИЗУЧЕНИЯ
ВЗЛЕТНО-ПОСАДОЧНЫХ ХАРАКТЕРИСТИК
Излагая взлетно-посадочные характеристики (ВПХ) са-
молетов, важно разъяснить, что они имеют большое такти-
ческое значение и оказывают влияние на боевую эффектив-
ность авиационных соединений, частей и подразделений. По-
казать, что хорошие ВПХ в некоторых случаях как бы экви-
валентны увеличению скорости или дальности полета, а так-
же массы боевой нагрузки. Например, самолет «А» имеет та-
кие ВПХ, что может базироваться только на аэродроме
I класса, удаленном от линии фронта на 300 км, а самолет
«Б» с лучшими ВПХ базируется на грунтовом аэродроме,
удаленном от линии фронта на 50 км. Это эквивалентно уве-
личению его тактического радиуса на .250 км. Кроме того, са-
молет «Б», имея скорость полета, одинаковую с самоле-
том «А», по вызову может гораздо быстрее прибыть в район
боевых действий, что эквивалентно увеличению скорости его
полета.
Если оба самолета базируются на ВПП ограниченных раз-
меров, то для обеспечения взлета самолета «А», имеющего
большую длину разбега, необходимо уменьшить его взлетную
массу за счет снижения запаса топлива или массы боевой на-
грузки. А это ведет к снижению его боевой эффективности и
увеличению потребного наряда сил для выполнения боевой
задачи.
Для грамотной летной эксплуатации самолетов, с которой
в первую очередь связана безопасность полетов, в том числе
и на взлетно-ггосадочных режимах, летчикам и авиационным
командирам нужно уметь учитывать изменения ВПХ при из-
менении условий боевого применения, хорошо знать условия,
обеспечивающие безопасность взлета и посадки самолетов.
Излагаемый материал целесообразно рассматривать па-
раллельно для взлета и посадки, с тем чтобы летчики могли
уяснить причины различного влияния условий боевого при-
менения на взлетные и посадочные характеристики.
Схемы сил, действующих на самолет на взлете и посадке,
8* 115
нужно использовать для объяснения характера движения са-
молета и вывода уравнений его движения, которые позволя-
ют провести не только расчеты различных этапов взлета, по-
садки, но и, что особенно важно для летчика, качественный
анализ влияния условий боевого применения на характер
движения самолета на взлетно-посадочных режимах и по-
лучить приближенные расчетные формулы взлетно-посадоч-
ных характеристик.
Инструкцией летчику (командиру экипажа) серийного са-
молета установлен ряд ограничений взлетно-посадочных ха-
рактеристик, которые диктуются требованиями безопасности
полетов. Изучение этих ограничений не следует сводить толь-
ко к запоминанию цифровых данных. Необходимо теоретичес-
ки обосновать положения Инструкции с тем, чтобы летчик по-
нимал причины и физическую сущность этих ограничений,
знал те опасные последствия, которые возможны в случае их
нарушения, ситуации непреднамеренного выхода за эти огра-
ничения и способы их предупреждения.
Для быстрого определения ВПХ в Инструкции летчику
имеются номограммы. Летному составу нужно знать принци-
пы, на которых они построены, и как ими пользоваться. Это
особенно важно при перелетах на другие аэродромы.
При изложении условий, обеспечивающих безопасность
взлета и посадки самолетов, необходимо сосредоточить вни-
мание на обосновании действий летчика при безотказной ра-
боте авиационной техники и ее отказах.
На занятиях следует приводить заранее подготовленные
примеры из жизни своей части (подразделения). Это делает
занятие, с одной стороны, более интересным, наглядным, а с
другой’—придает ему практическую направленность.
§ 3.2. СВЯЗЬ МЕЖДУ ХАРАКТЕРОМ ДВИЖЕНИЯ
САМОЛЕТА ПРИ ВЗЛЕТЕ И ПОСАДКЕ
И ДЕЙСТВУЮЩИМИ НА НЕГО СИЛАМИ
Прежде всего следует отметить, что взлет и посадка яв-
ляются неустановившимися движениями, так как силы, дейст-
вующие на самолет на этих этапах полета, не уравновешены и
изменяются по мере изменения его скорости. Схема сил, дей-
ствующих на самолет на разбеге, представлена на рис. 3.1.
Дополнительно к силам, действующим на самолет в поле-
те, при движении самолета по ВПП на него действуют еще си-
ла нормальной реакции N = mg— (Уа + Ру а) и сила трения
Коэффициент трения /тр зависит от состояния
поверхности ВПП и вида ее покрытия (табл. 3.1).
116
Таблица 3.1
Покрытие ВПП /тр
Бетонное покрытие в хорошем состоянии с задел- кой швов между стыками плит 0,02
То же с незаделанными швами и местными неров- ностями 0,03—0,035
Твердый грунт (огр > 12 кгс/см2 или 120 Н/см2) 0,045—0,05
Мягкий грунт (агр < 10 кгс/см2 или 100 Н/см2) 0,07—0,1
Вязкий грунт (агр < 7 кгс/см2 или 70 Н/см2) 0,15—0,2
Хорошо укатанный снег 0,045—0,05
Сыпучий, плохо укатанный снег 0,06—0,07
Талый снег толщиной 10—12 мм на твердом осно- вании 0,05-0,06
Рис. 3.1. Схема сил, действующих на самолет при разбеге:
Рх а— Р cosa^P — проекция тяги на скоростную ось ОХа,
Ру а = Р sin а — проекция тяги на ось подъемной силы
Указанная схема сил справедлива также и для пробега са-
молета. Отличие будет состоять в том, что на пробеге прак-
тически отсутствует тяга двигателя. Кроме того, сила лобово-
го сопротивления Ха берется с учетом дополнительного со-
противления тормозного парашюта, а сила трения FTp —с
учетом работы тормозов колес. В этом случае средний коэф-
фициент трения достигает 0,15—0,3. Используя схему сил, на
117
основании второго закона Ньютона можно записать уравне-
ния движения самолета в скоростной системе координат:
На разбеге
^взл /р = Рха (Ха Ар )} 1 (Ч 1 \
mB3njY = Ya + Pya + N--mg=Q\
На пробеге
^пос/пр — (Ха 4“ Ар); 1 (3 2)
/Ппос /У = Al 4~ # — mg - О J
Из уравнений видно, что ускорение самолета на разбеге
jp создается разностью проекции тяги на скоростную ось Рха
и сопротивлений Ха и АР , а замедление на пробеге /пр—
суммой сопротивлений Ха + АР . Отрыв и приземление са-
молета происходят при условии А = 0, т. е. на взлете при
твзл g=Ya + Руа> а на посадке — при тпос g = У а-
Анализируя схему сил, действующих на самолет при раз-
беге (пробеге), следует отметить, что это, так сказать, «мо-
ментальная фотография»: в процессе движения самолета по
ВПП эти силы изменяются (рис. 3.2 и 3.3).
Пользуясь этими рисунками, можно объяснить причины
такого изменения сил. Величина тяги в общем случае зави-
сит от скорости, однако в процессе разбега она изменяется
незначительно, поэтому ее можно считать постоянной. Сила
р {/2
лобового сопротивления Ха == Сха —S возрастает про-
порционально квадрату скорости от нуля в начале разбега до
Y ^ВЗЛ g tj-
Ха == ---- в момент отрыва, где /\отР — аэродинамическое
Аотр
качество самолета во взлетной конфигурации в момент отры-
ва. На пробеге же сила лобового сопротивления уменьшается
по мере снижения скорости.
Подъемная сила Уа на разбеге и пробеге также изменяет-
ся пропорционально квадрату скорости. Скачкообразное из-
менение сил в процессе разбега (пробега) является следстви-
ем действий летчика (подъема носового колеса на разбеге,
выпуска тормозного парашюта на пробеге и т. д.).
Из рис. 3.2 видно, что избыточная тяга Рха — (Ха + АР),
действующая на самолет с большой тяговооруженностью,
на разбеге остается примерно постоянной. Это позволяет рас-
сматривать разбег как равноускоренное движение. Тормозя-
щая же сила Ха + АР ) на пробеге изменяется по сложному
закону, однако для анализа влияния условий боевого приме-
118
Силы
Рис. 3.2. Зависимость от скорости сил, действующих на самолет на разбеге:
1 — процесс подъема передней стойки шасси; Упс — скорость начала подъ-
ема передней стойки
Рис. 3.3. Зависимость от скорости сил, действующих на самолет на пробеге:
1 — начало опускания передней стойки шасси; 2 — конец опускания перед-
ней стойки шасси; 3 — включение тормозов колес; 4 — выпуск тормозного
парашюта
119
нения на посадочные характеристики пробег в первом при-
ближении можно считать равнозамедленным движением.
Тогда из первых уравнений систем (3.1) и (3.2) можно опре-
делить средние значения на разбеге и пробеге:
/рср - Рха~(Ха+Лр)сР- ; (3.3>
7И»эл
_ (Ха “1“ FTp )ср
/пр ср---------------.
/Ппос
Это позволяет, пользуясь известными из курса физики со-
отношениями для равномерно переменного движения, запи-
сать расчетные формулы взлетно-посадочных характеристик
при движении самолета по горизонтальной ВПП и отсутствий!
ветра:
Длина разбега
V*
Lp = / -отр . (3.4>
2 /р ср
Длина пробега
Дц> = (3.5>
/пр ср
Время разбега
tp = . (3.6>
/р ср
Время пробега
/пр = ^. (3.7>
/пр ср
В формулы (3.5) и (3.7) подставляется абсолютное значе-
ние ускорения на пробеге. Скорость отрыва и посадочную ско-
рость можно определить из вторых уравнений систем (3.1) и.
(3.2), помня, что в момент отрыва (приземления) сила нор-
мальной реакции отсутствует.
Тогда указанные уравнения приобретают вид:
На разбеге
¥ а + Р Y а ~ ТИвзл 8
ИЛИ
Су а отр S + Ру а = ^вэл 8’
120
На пробеге
Yа — /Иное й»
Су а пос
рУ2пос
2
S — /пП0С g,
откуда
Ztn^g
Су а отр Р 5
Ру а у
^взл S /
Vnoc =
2mnOcg
Су а пос Р <S
(3.8>
(3.9>
Поскольку сила тяжести на посадке меньше, чем на взле-
те, а коэффициент подъемной силы в посадочной конфигура-
ции больше, чем во взлетной (рис. 3.4), то посадочная ско-
рость меньше скорос-
ти отрыва. Из форму-
лы (3.8) также следу-
ет,, что для самолетов
с большой тяговоору-
женностью неучет вер-
тикальной составляю-
щей силы тяги приво-
дит к ошибкам в рас-
четах взлетных харак-
теристик.
Важными этапами
с точки зрения без-
опасности полетов яв-
ляются воздушные
участки взлета и по-
садки. Поэтому важно
уметь оценить протя-
женность этих участ-
ков и знать особенно-
Рис. 3.4. Зависимость коэффициента подъ-
емной силы от угла атаки на взлетно-по-
садочных режимах с учетом влияния
земли:
сти поведения самоле-
та на них и основные
ошибки в технике пи-
лотирования, приводя-
7 «*•* взлет, Ь3 —25°; 2 —посадка с выклю-
ченной системой сдува пограничного слоя
(СПС), Ь3 =35°; 3— посадка с вклю-
ченной системой СПС, $з =35°
щие к летным происшествиям на взлете и посадке.
Воздушный участок взлета начинается с момента отрыва»
самолета от ВПП и заканчивается в момент набора безопас-
ной высоты //без с одновременным разгоном до безопасной»
скорости взлета Уг, которая для одно- и двухдвигательных^
121
•самолетов на 20% больше скорости сваливания самолета во
взлетной конфигурации (V2=l,2VeB ). Часто в Инструкции
.летчику и другой литературе в качестве безопасной указыва-
ют высоту 25 м, однако в некоторых документах эту высоту
считают равной 10,7 м, что связано с сертификацией самоле-
тов по международным нормам летной годности.
Длина воздушного участка Ав.у равна его проекции на
плоскость летной полосы. В зависимости от типа самолета и
методики взлета вид траектории воздушного участка может
’быть самым различным, однако ввиду малой его протяжен-
ности (по времени он занимает 1—3 с) точный расчет траек-
тории набора //без необязателен. С достаточной для практи-
ки точностью длину воздушного участка можно подсчитать,
используя энергетический метод, который заключается в
сравнении приращения механической энергии самолета с ра-
ботой внешних сил на воздушном участке. Механическая
энергия самолета в момент отрыва равна
р __ ^ВЗЛ У2отр
а в конце воздушного участка
Р __ ^взл ^22 | гг
— -----------|~ Швзл g Н без-
Если принять, что на воздушном участке избыток тяги
&Р — РХа — Ха не меняется и длина траектории воздушного
участка примерно равна Рв.у вследствие малости угла накло-
на траектории, то работа внешних сил в направлении движе-
ния самолета определится как
Д = ДРРВ.У,
откуда
ву ДР
Приравняв изменение энергии самолета Е2 — Е\ произве-
денной работе, легко получить
Le у = ( У?^у2°тр 4- нбез"). (3.10)
ДР \ 2g }
Вполне очевидно, что взлетная дистанция равна сумме
длин разбега и воздушного участка
Рвзл = Рр Рв.у •
Следует заострить внимание летного состава на том, что на
^воздушном участке скорость полета мала и близка к скорос-
122
ти сваливанйя. Поэтому на этом участке не рекомендуются
резкая работа рычагами управления и их большие переме-
щения. К концу воздушного участка исчезает эффект близос-
ти земли (экранный эффект) и у самолетов в зависимости
от аэродинамической компоновки и центровки может по-
явиться тенденция к опусканию носа или взмыванию. В это
время от летчика требуется повысить внимание к выдержи-
ванию угла тангажа и не отвлекаться на выполнение других
операций. Именно поэтому Инструкцией летчику рекоменду-
ется ставить кран шасси на уборку на высоте 10—15 м.
Воздушный участок посадки состоит из участков плани-
рования, выравнивания и выдерживания. Началом посадоч-
ной дистанции считается точка, расположенная на глиссаде
на высоте 15 м (высота начала планирования).
Под длиной воздушного участка посадки Ав.у понимается
длина горизонтальной проекции траектории движения само-
лета на этом участке. В зависимости от способа пилотирова-
ния длины отдельных составляющих воздушного участка мо-
гут меняться, в то время как его суммарная длина остается
примерно постоянной. К тому же на, современных самолетах
эти этапы посадки выполняются слитно как единый маневр.
Поэтому расчет длины воздушного участка посадки, как и
взлета, целесообразно вести энергетическим методом. При-
равняв изменение механической энергии самолета к работе
внешних сил, легко получить выражение, аналогичное фор-
муле (3.10):
г ^ПОС g ( ^2ПЛ 1^2ПОС . ГУ \ /О 11\
£в-У = Т---п --------й-------^Ипл •
Ха — Рха \ % g /
Из этого выражения видно, что длина воздушного участка
получается тем меньшей, чем меньше тяга двигателя. Но имен-
но здесь следует заострить внимание летного состава на том,
что преждевременное уменьшение тяги приведет к возраста-
нию угла и вертикальной скорости снижения, сильно усложнит
процесс выравнивания, увеличит потерю скорости на вырав-
нивании, может привести к значительным ошибкам в расчете
на посадку и создаст предпосылку к грубому приземлению
или приземлению до ВПП.
§ 3.3. АНАЛИЗ ВЛИЯНИЯ УСЛОВИЙ БОЕВОГО
ПРИМЕНЕНИЯ НА ВЗЛЕТНО-ПОСАДОЧНЫЕ
ХАРАКТЕРИСТИКИ. ФИЗИЧЕСКАЯ СУЩНОСТЬ
ОГРАНИЧЕНИЙ ВЗЛЕТНО-ПОСАДОЧНЫХ
ХАРАКТЕРИСТИК
Условия боевого применения оказывают значительное
влияние на взлетно-посадочные характеристики, что необхо-
димо учитывать в процессе боевой подготовки строевых частей
123
в целях повышения эффективности боевых действий и обеспе-*
чения безопасности полетов.
Расчетные формулы (3.3—3.9) позволяют производить как
качественный, так и количественный анализ этого влияния и
получать формулы пересчета ВПХ на изменившиеся условия
боевого применения.
3.3.1. Влияние варианта вооружения (боевой нагрузки)
При изменении варианта вооружения изменяются масса
самолета и его лобовое сопротивление за счет изменения
безындуктивного сопротивления подвесок.
Из^ формулы (3.8) следует, что
а из формулы (3.3):
tiling
Кроме того, за спет подвесок
Причина возрастания скорости отрыва с увеличением мас-
сы самолета физически объясняется тем, что при прочих рав-
ных условиях равенство Ya + Py а = ^взл g в момент отрыва
может быть достигнуто только за счет увеличения скорости,
если летчик при отрыве выдерживает угол атаки постоянным,
указанным в Инструкции (этот угол не зависит от массы са-
молета).
Теперь, используя формулу (3.4), легко провести качест-
венный анализ влияния массы самолета на длину разбега:
> а /-----* I 0 ; Г--т
I > j •
X-----i/p.cp-----
124
Из схемы видно, что при увеличении взлетной массы само-
лета длина разбега возрастает как из-за повышения скорости
отрыва, так и из-за уменьшения ускорения при разбеге.
Для приближенной количественной оценки влияния массы
на взлетные характеристики пренебрежем вертикальной со-
ставляющей тяги силовой установки, поскольку она в несколь-
ко раз меньше силы тяжести самолета. Тогда формулу (3.8)’
можно записать в виде:
V0Tp~l/ (ЗЛ2)
у а отр Р
Если взлетная масса самолета меняется от твзл i до тззл29
то
Е2отр 2 И1ВЗЛ 2 S
V2OTp 1 взл 1 g
откуда
Готр 2= Уотр t 1/- (3.13)
У '^ВЗЛ 1
Из формулы (3.13) видно, что увеличение взлетной массы
на 1% приводит к возрастанию скорости отрыва на 0,5% (ес-
ли не учитывать вертикальной составляющей тяги).
Пренебрегая зависимостью избыточной тяги Р — (Ха 4~
+ /\р)ср от силы тяжести (это допустимо для самолетов с
большой тяговооруженностью, так как Рср >(ХС + /Чр^р)
и взяв отношение ускорений на разбеге при различных взлет-
ных массах самолета, из формулы (3.3) найдем
__ . ^взл 2
Jp ср 2 — /р cpl
^взл 1
(3.14)
Тогда из формул (3.4), (3.13) и (3.14) следует
^Рг — ^Р1
(3.15)
т. е. увеличение взлетной массы на 1% приводит к возраста-
нию длины разбега на 2%.
Зависимость (3.15) отражает влияние только массы само-
лета на длину разбега, но не учитывает безындуктивного со-
противления подвесок, которое хотя и на порядок меньше, чем
безындуктивное сопротивление самолета, но все же оказыва-
ет влияние на длину разбега. Поэтому формулу (3.15) можно
использовать лишь для приближенного расчета.
Поскольку на пробеге практически отсутствует вертикаль-
ная составляющая тяги, то из формулы (3.9) следует, что из-
125
менение посадочной массы влияет на посадочную скорость в
меньшей степени, чем изменение взлетной массы на скорость
отрыва:
t ^пос~* t mnocg-> t Vпос .
И здесь следует обратить внимание летного состава на то,,
что недопустимо компенсировать увеличение посадочной мас-
сы за счет повышения Су а пос (увеличения посадочного угла
атаки), так как это может привести к удару самолета хвосто-
вой частью о ВПП.
Что касается ускорения на пробеге, то его можно считать
независящим от массы, так как с увеличением массы самоле-
та растет и замедляющая сила (Ха + FTp)cp:
Поэтому посадочная масса влияет на длину пробега толь-
ко через посадочную скорость.
1 ^пос —ГПпос S Т ^ПОС t Lnp .
Этот анализ позволяет, как и для взлета, записать прибли-
женные формулы пересчета посадочных характеристик на
изменившуюся посадочную массу:
Упос 2
/^пос 2 ,
^пос 1
—’ Vпос 1
j т ^пос 2
^пр 2 — ^пр 1
^пос 1
(3.16)
Следует обратить внимание летного состава на то, что мас-
са самолета оказывает более сильное влияние на длину раз-
бега, чем на длину пробега. Это легко показать, сравнив вы-
ражения (3.15) и (3.16). Причина заключается в том, что
ускорение на пробеге практически не зависит от массы само-
лета, в то время как на разбеге оно обратно пропорциональ-
но ей.
3.3.2. Влияние давления и температуры воздуха
Из выражений (3.8) и (3.9) видно, что скорость отрыва и
посадочная скорость зависят от плотности воздуха р, связь
которой с давлением и температурой выражается уравнением
состояния газа
126
(317>
где Т — 273 + tn° — абсолютная температура воздуха.
Это уравнение позволяет провести качественный анализ
влияния давления и температуры воздуха на взлетно-поса-
дочные характеристики, подобно тому, как это было сделано
при анализе влияния варианта вооружения.
Для количественной оценки влияния атмосферных условии
на ВПХ следует показать их взаимосвязь математически»
Пусть при плотности воздуха pi скорость отрыва равна V0Tp 1
и посадочная скорость—Vnoci > а при р2 соответственно VOTp2
и УПос2. Из формул (3.12) и (3.9) следует, что при прочих
равных условиях
V2OTP 2 Pl „ V2 пос 2 Pl
------- = --- pj -------------,
V2OTp 1 p2 ^2пос 1 p2
Подставив в эти выражения формулу (3.17), легко пока-
зать, что
Готр 2 - VoTp 11/"— (3.18>
' Рг Л
И
Vnoc 2 = Vnoc ! 1 / —
Г р2 Л
Причина идентичности этих формул заключается в том,
что независимо от давления и температуры воздуха отрыв
(приземление) самолета при прочих равных условиях про-
исходит на постоянной приборной скорости, т. е. при постоян-
ном скоростном напоре. При этом с повышением температуры
воздуха или уменьшением его давления постоянство скорост-
ного напора может сохраниться только за счет увеличения
истинной скорости.
Следует отметить, что зависимость (3.18) не учитывает
влияния атмосферных условий на тягу, вертикальная состав-
ляющая которой оказывает влияние на скорость отрыва, осо-
бенно у самолетов с большой тяговооруженностью.
Ускорение на разбеге
/р ср — ё Iх Р _Рха_ ^ВЗЛ Q /72-ВЗЛ 9 ( к + М ) ’ \ А отр / — тяговооруженность самолета.
127
У современных маневренных самолетов величина
денного коэффициента трения
приве-
значи-
/пр-----— I- Ар
£ \ Лотр
тельно меньше тяговооруженности, поэтому можно принять,
что
jp ср — g
(3.19)
При неизменной взлетной массе и изменившихся атмос-
ферных условиях, используя формулу (3.19), можно запи-
сать:
/р Ср 2 _ ^ВЗЛ g __ Р) (2 20)
/р ср 1 ^взл g Pl Pl
Из теории двигателей известно, что изменение тяги дви-
гателя связано с давлением и температурой воздуха зависи-
мостью:
Р2 Р2 / Р1 \п
Pl Р1 \ ^2 /
причем показатель степени п зависит от программы регулиро-
вания двигателя и его конструктивных особенностей.
Подставив последнее выражение в формулу (3.20), полу-
чим
/р Ср 2 __ Рч /
/р Ср 1 Pi \ ?2 /
(3.21)
Теперь с помощью (3.4), (3.18) и (3.21) легко получить
формулу для приближенного пересчета длины разбега на из-
менившиеся давление и температуру воздуха:
Рр 2 У2отр 2 /р ср 1 / Pl V / Р2 \”+1
Рр 1 У2отр 1 /р ср 2 \ Р2 / \ Р1 /
(3.22)
Следует заметить, что при изменении температуры возду-
ха меняется и вертикальная составляющая тяги двигателя,
от которой зависит скорость отрыва. С учетом этого выраже-
ние (3.22) следует записать в виде:
Рр 2 / Р1 \2 / Т2 у
Рр 1 ' Р2 / \ Р1 /
(3.23)
где 8<n+1 и изменяется в пределах 1,9—3 в зависимости от
типа самолета, его взлетной массы и разности температур
Тх и Т2.
Из выражения (3.23) видно, что давление и температура
воздуха оказывают на длину разбега противоположное влия-
128
ние, причем степень этого влияния различна. Так, если уве-
личение давления на 1 % приводит к уменьшению длины раз-
бега на 2%, то возрастание температуры воздуха на 1% при-
водит к ее увеличению на 8%. На это необходимо обращать
особое внимание при базировании на высокогорных аэродро-
мах с жарким климатом.
Ускорение при пробеге не зависит от давления и темпера-
туры воздуха, так как на этом этапе посадки практически от-
сутствует тяга двигателя, а сила лобового сопротивления и
сила трения тоже не зависят от этих параметров (если в про-
цессе торможения не перегреть тормоза). Здесь следует разъ-
яснить неправильность мнения, что с изменением плотности
воздуха изменяется среднее значение лобового сопротивления
на пробеге. На самом деле, независимо от давления и тем-
пературы приземление происходит на посадочном угле атаки,
предписанном Инструкцией летчику (Су а пос =const), и при
одном и том же скоростном напоре. Поэтому сопротивление
Ха в начале пробега (и в среднем за пробег)' одно и то же
при любой плотности воздуха за счет соответствующего из-
менения истинной посадочной скорости.
Взяв отношение длин пробега (3.5) при различных давле-
ниях и температурах наружного воздуха, легко показать, что
^пр 2 Pi Т2 (% 24)
^пр 1 Ръ
Из сравнения выражений (3.23) и (3.24) видно, что дав-
ление и температура воздуха оказывают качественно анало-
гичное влияние на длины разбега и пробега (например, при
уменьшении давления и та и другая увеличиваются), но их
влияние более сильно сказывается на длине разбега, что объ-
• ясняется независимостью ускорения на пробеге от указанных
параметров атмосферы.
3.3.3. Влияние скорости и направления ветра
Рассматривая этот вопрос, необходимо обратить внимание
летного состава на то, что независимо от скорости и направ-
ления ветра отрыв (приземление) самолета при прочих рав-
ных условиях происходит на постоянной истинной скорости
Votp (Vnoc). Однако путевая скорость самолета (относи-
тельно ВПП) зависит от скорости и направления ветра. Дей-
ствительно, вектор скорости ветра W, направленного под уг-
лом р к оси ВПП, можно разложить на боковую W? и про-
дольную U составляющие (рис. 3.5) .
9—5007сп
129
Наличие продольной составляющей ветра приводит к то-
му, что даже тогда, когда самолет неподвижен, его воздуш-
ная скорость уже равна U, Поэтому
Vп отр = Vотр i U
И
Vп ПОС — VПОС ± U •
Здесь знак плюс соответствует взлету (посадке) с попут-
ным ветром, а минус — со встречным.
Рис. 3.5. Разложение вектора ветра 1F на продольную U и бо-
ковую W z составляющие
Поскольку длины разбега и пробега рассматриваются от-
носительно ВПП, то при наличии ветра в формулах (3.4) и
(3.5) необходимо учитывать его продольную составляющую:
Лр = <V°TP ±67)2; (3.25)'
2 /р Ср
L = (Vnoc ± U)2 .
2/прср
Строго говоря, на длину разбега влияет и боковая состав-
ляющая ветра, что вызвано уменьшением ускорения на раз-
беге из-за использования тормозов или руля направления
для выдерживания направления движения. Однако, учитывая
ограничения по допустимой скорости ветра, этим влиянием
можно пренебречь и, используя формулы (3.25) и (3.26), за-
писать соотношения
и
Ар / Уотр ± <7 \2
Apo \ V отр /
Апр / Упос ±U\*
Апро \ Vnoc )
130
откуда следует
(3.27)
(3.28)
где ЛРв и Лпро — соответственно длины разбега и пробега в
штиль.
Из формул (3.27) и (3.28) следует, что на длины разбе-
га и пробега ветер оказывает одинаковое влияние, причем это
влияние тем сильнее, чем меньше скорость отрыва (посадоч-
ная) и больше скорость ветра. Увеличение длины разбега
(пробега) при взлете (посадке) с попутным ветром может
привести к тому, что длина ВПП окажется недостаточной для
взлета (посадки) самолета. Поэтому взлет (посадка) про-
тив ветра всегда предпочтительнее.
3.3.4. Влияние уклона ВПП
При изучении этого вопроса следует обратить внимание
на то„ что в Инструкции летчику маневренных самолетов от-
сутствует информация о влиянии уклонов ВПП на взлетно-по-
садочные характеристики. Однако знание этого влияния не-
обходимо как для оценки возможности выполнения взлета
(посадки) с тяжелым вариантом вооружения или с коротких
ВПП, так и для учета особенностей визуального определения
угла атаки при взлете (посадке) с ВПП, имеющей уклон.
Уклоном ВПП называется отношение разности высот двух
точек АЛ, расположенных на ее поверхности, к расстоянию
между ними (базе) в (рис. 3.6,а):
Д/1
t _-----.
в
Иногда уклон ВПП выражается в процентах:
i 100%.
в
Из рис. 3.6,а видно, что i = sin©Bnn. В соответствии с тре-
бованиями, предъявляемыми к аэродромам, продольный
уклон на базе более 40 м не должен превышать 0,03, что соот-
ветствует ©вппмакс — 2°. Ввиду малости углов ©впп вполне
допустимо считать ©впп = * (где ©впп — в радианах).
9*
131
Анализируя схему сил, действующих на самолет при взле-
те с ВПП, имеющей продольный уклон, или при посадке на
нее, следует показать, что к ускорению на разбеге (пробеге)
по горизонтальной ВПП добавляется ускорение, создавае-
мое продольной составляющей силы тяжести /ng sin ©впп
{рис. 3.6,6), равное
. . mg sin ©впп . гч л
А / = ------------- g sin ©впп — g ©впп.
т
Рис. 3.6. Взлет (посадка) с (на) ВПП с уклоном
Строго говоря, при разбеге и пробеге как на уклон, так и
под уклон снижается сила трения за счет уменьшения силы
реакции земли cos ©Впп - что ведет к измене-
нию среднего ускорения на разбеге (пробеге). Но поскольку
cos ©впп макс = 0,9995, то этим влиянием вполне можно пре-
небречь. Это же замечание относится и к скорости отрыва,
при расчете которой по формуле (3.8) необходимо учитывать
не силу тяжести самолета, а ее нормальную составляющую
mg cos ©впп •
С учетом сказанного длины разбега и пробега при нали-
чии уклона ВПП можно подсчитать по формулам
У2отр
(3.29)
2 (/р Ср ± g ©впп)
У2ПОС
(3.30)
^пр 0 -
2 (/пр ± £©впп)
При взлете знак плюс соответствует разбегу под уклон, а
минус — на уклон, при посадке — наоборот: плюс — пробег на
132
уклон, минус — под уклон. При этом в формуле (3.30) ис-
пользуется абсолютная величина /Пр.сР. Из формул (3.29) и
(3.30) видно, что для сокращения потребной длины ВПП
взлет предпочтительно выполнять под уклон, а посадку — на
уклон.
Уклоны ВПП оказывают более сильное влияние на длину
разбега самолета с малой тяговооруженностью, что объясня-
ется меньшей величиной их ускорения на разбеге по горизон-
тальной ВПП и более длительным действием дополнительной
силы mg sin ©впп-
3.3.5. Влияние уровня подготовки летного сбстава
Для каждого типа самолета существует оптимальный за-
кон изменения угла атаки при разбеге, которому соответст-
вует, например, минимальная длина разбега. Однако предпи-
сываемый Инструкцией взлетный угол может быть не самым
выгодным, но зато являться наилучшим в отношении просто-
ты пилотирования и безопасности взлета. В процессе разбега
летчик выдерживает этот угол не по указателю угла атаки,
а по положению передней части фонаря кабины относитель-
но горизонта. Точность выдерживания угла атаки на взлете
зависит от степени натренированности летчика, регулировки
высоты его сиденья, уклона ВПП, погодных условий (види-
мости горизонта). Все это приводит к тому, что ошибка лет-
чика в выдерживании угла атаки на взлете может дости-
гать ±2°, а это влечет за собой изменение Суа отр (см.
рис. 3.4), скорости отрыва и длины разбега.
Именно поэтому необходимы тренировки летного состава
в выдерживании взлетного угла атаки.
Посадочные характеристики зависят также от посадочного
угла атаки, и эта зависимость проявляется тоже через коэф-
фициент подъемной силы самолета в посадочной конфигура-
ции (см. рис. 3.4).
Если превышение рекомендованного Инструкцией угла
атаки создает опасность касания хвостовой частью самолета
о ВПП, то использование малых углов атаки приводит к
увеличению посадочной скорости, а следовательно, и к воз-
растанию длины пробега.
Недостаточная величина посадочного угла атаки может
быть следствием ряда причин: слабой натренированности лет-
чика в определении и придании самолету правильного поло-
жения по тангажу, недостаточного темпа увеличения угла
тангажа или резкой уборки РУД на выравнивании и выдер-
живании, стремления летчика исправить ошибку в расчете
на посадку за счет посадочного угла атаки.
133
Следует обратить внимание летного состава на то, что
стремление к уменьшению длины пробега за счет увеличения
угла атаки на посадке может привести к сваливанию само-
лета при потере эффективности поперечного управления.
Влияние уровня подготовки летного состава на взлетно-по-
садочные характеристики можно количественно оценить по со-
отношениям
^°тР 2 _ -| Су а отр 1 • ^пос 2 _, - /~ Су а пос 1
У отр 1 у Су а отр 2 ^пос! у Су а пос 2
Ср 2 Су ц отр 1 , Спр 2 Су д ПОС 1
Ср 1 Су а отр 2 СПр 1 Су а пос 2
Эти зависимости легко получить из формул (3.8), (3.9),
(3.4), (3.5), если принять допущение, что небольшое измене-
ние угла атаки не влияет на средние ускорения разбега и про-
бега.
Неблагоприятное сочетание условий боевого применения
может привести к значительному увеличению скорости отры-
ва (посадочной скорости), так что она может превысить до-
пустимую скорость по прочности пневматиков из-за их нагру-
жения большими центробежными силами.
Ограничения по посадочной скорости, как правило, более
жесткие. Это объясняется тем, что при посадке кроме цент-
робежных сил на колеса действуют и ударные нагрузки.
Ограничиваются также максимальная скорость выпуска тор-
мозного парашюта (по условиям прочности его крепления) и
скорость начала торможения (по энергоемкости колес). И хо-
тя все эти ограничения наложены из условий прочности эле-
ментов конструкции самолета, возможность их превышения
связана с зависимостью ВПХ от условий боевого применения
и действий летчика.
Накладываются также и прочностные ограничения по мак-
симальной взлетной и посадочной массам самолета. Об этих
ограничениях уместно напомнить при объяснении и изложе-
нии летному составу взлетно-посадочных характеристик са-
молета.
3.3.6. Представление информации о взлетных
и посадочных характеристиках в Инструкции летчику
В условиях мирного времени, когда авиационные части
(подразделения) базируются на стационарных аэродромах с
ВПП достаточно большой длины, гарантирующей возмож-
134
ъость взлета и посадки самолетов в любых метеоусловиях,
«летный состав обращает мало внимания на определение
взлетно-посадочных характеристик самолетов.
Однако при перелетах на другие аэродромы, особенно ес-
ли метеорологические условия на них значительно отличают-
ся от условий на аэродромах предыдущего базирования, а
также в условиях военного времени, когда возникает необхо-
димость в выполнении боевой задачи в нерасчетных условиях
или с поврежденных аэродромов, расчет взлетно-посадоч-
ных характеристик для оценки возможности выполнения
взлетов и посадок на этих аэродромах приобретает большое
значение.
Для ускорения расчетов ВПХ и потребной длины ВПП в
конкретных метеоусловиях в Инструкции летчику имеются
специальные номограммы. Их рассчитывают интегрировани-
ем уравнений движения самолета на разбеге (пробеге), а ре-
зультаты расчетов проверяют и уточняют в летных испыта-
ниях. Для маневренных самолетов обычно используются но-
мограммы, представляющие собой графики с четырьмя за-
полненными квадрантами, в которых для различной взлетной
(посадочной) массы самолета учитываются поправки на из-
менение давления и температуры воздуха, скорость и направ-
ление ветра, точность выдерживания угла атаки на взлетно-
посадочных режимах (рис. 3.7). Недостатком таких номо-
грамм является то, что они не учитывают уклонов ВПП.
В большинстве случаев номограммы составляются для су-
хой бетонной ВПП. Если же на самолете можно выполнять
'боевые задачи с грунтовых аэродромов, то для определения
ВПХ в этом случае помещают дополнительные графики пе-
ресчета длин разбега и пробега с учетом прочности грунта.
Что касается скоростей подъема передней стойки, отрыва и
посадочной, то они не зависят от вида покрытия ВПП.
Работа с номограммами «по ключам» не представляет
сложности. Однако не следует умалять значения приведенных
расчетных формул, так как они позволяют сделать поправки
на те условия, которые не учитываются в номограммах. Кро-
ме того, во временных инструкциях экипажу, когда самолеты
еще не прошли войсковых испытаний в полном объеме, эти
номограммы вообще не приводятся, а в некоторых инструк-
циях серийных самолетов приводятся для ограниченного диа-
пазона изменения метеоусловий.
Умение авиационного командира и летного состава поль-
зоваться различными способами определения взлетно-поса-
дочных характеристик самолета в конкретных условиях бое-
вого применения позволяет не только принимать обоснован-
135
Рис. 3.7. Номограммы для определения взлетно-посадочных характе-
ристик самолета-истребителя
136
ные решения на боевые действия, но и способствует повыше-
нию безопасности полетов.
Что касается номограмм конкретного типа самолета, то
при их изучении с летным составом необходимо рассмотреть,,
какие функциональные связи они отражают, влияние каких,
параметров на ВПХ не отражено в номограммах, показать,
ключи их использования, а также какие дополнительные рас-
четы и в каких условиях следует выполнить.
137
Глава 4
МЕТОДИКА ИЗЛОЖЕНИЯ И ОБЪЯСНЕНИЯ
ХАРАКТЕРИСТИК ДАЛЬНОСТИ
И ПРОДОЛЖИТЕЛЬНОСТИ ПОЛЕТА САМОЛЕТОВ
Дальность и продолжительность полета относятся к числу
важнейших летно-тактических характеристик самолета, изме-
няющихся в зависимости от условий боевого применения и
^содержания выполняемых боевых задач. Грамотному выбору
летным составом режима полета, обеспечивающего эконом-
ное расходование топлива, всегда уделялось большое вни-
мание.
Возрастание энерговооруженности современных авиаци-
онных комплексов обусловливает все более жесткие требо-
вания к выбору режимов полета и работы силовой установки
по расходам топлива. Расчеты по расходам и остаткам топли-
ва входят важной составной частью в методику выбора так-
тических приемов, разработки вариантов выполнения боевых
задач.
Опыт локальных войн показал, что часть небоевых потерь
экипажей египетских ВВС была обусловлена тактикой изра-
ильтян завязывать бой с самолетами, имеющими относи-
тельно небольшой остаток топлива после дежурства в возду-
хе или дежурства на аэродроме с работающими двигателями,
возвращения с погони за демонстративными группами. Более
быстрой выработке топлива способствовало также неправиль-
ное использование повышенных режимов работы двигателя
при дежурстве на аэродроме и маневрировании в воздушных
зонах дежурства.
Умелое расходование топлива — это один из показателей
эффективного владения боевой техникой, качества боевой под-
готовки летчика. Поэтому при подготовке и проведении заня-
тий с летным составом по данной теме командиры особое
внимание должны обратить на привитие навыков и умения
количественно оценивать влияние различных факторов на рас-
ходы топлива. Необходимо, чтобы летчики твердо усвоили,
что топливо — это тоже оружие и неумелое его использование
ведет к невыполнению боевой задачи, к поражению.
138
§ 4.1. ПОСЛЕДОВАТЕЛЬНОСТЬ И МЕТОДИКА
ИЗУЧЕНИЯ ХАРАКТЕРИСТИК
ДАЛЬНОСТИ И ПРОДОЛЖИТЕЛЬНОСТИ ПОЛЕТА
В Военно-воздушных силах для каждого типа самолетов
имеются инструкции по расчету дальности и продолжитель-
ности полета, которые составлены на основе летных испыта-
ний. С их помощью можно решить любую задачу по расчету
тактического радиуса, располагаемого времени дежурства в
воздухе, дальности сопровождения по любому заданному
профилю, при любых режимах полета и вариантах боевого
применения. Можно решать и обратную задачу — определить
потребное количество топлива для выполнения поставленной
боевой задачи. Часто на командных пунктах имеются графи-
ки для определения тактического радиуса, с помощью кото-
рых можно ответить на вопрос летчика: до какого аэродрома
хватит топлива? Эти инструкции отражают влияние на часо-
вые и километровые расходы топлива, а следовательно, на
дальность и продолжительность полета, целого ряда факто-
ров. Например, изменение конфигурации самолета (с подвес-
ками и без них) учитывается с помощью таблицы индексов
(ПЛС)', которые объединяют различные варианты подвесок,
что значительно сокращает объем инструкций и упрощает их
использование.
Кроме того, учитывается влияние на часовые и километро-
вые расходы скорости и высоты полета (главных факторов),
поэтому расходы топлива даются в виде непрерывной функ-
ции от скорости и дискретно от высоты (1000 м, 5000 м), т.е.
по высотам при расчетах приходится делать интерполяцию.
Но не всегда представляемая информация удобна для рас-
четов, а главное, не позволяет, как правило, вести оператив-
ную оценку досягаемости целей в условиях дефицита време-
ни. Поэтому информацию необходимо перестраивать и пред-
ставлять в виде, удобном для использования при принятии
решения на боевые действия.
Из изложенного следует, что для обеспечения грамотного
расхода топлива в полете, исключающего небоевые потери,
для принятия обоснованного решения на боевые действия в
условиях дефицита времени необходимо изложить и объяс-
нить летному составу: теоретическое обоснование влияний ус-
ловий боевого применения на расходы топлива; формы пред-
ставления информации по дальности и продолжительности
полета серийного самолета с привитием практических навы-
ков и умений определять выгодные по расходу топлива режи-
мы полета.
Для того чтобы решить эти задачи, перед изучением кон-
139
кретных материалов по расходам топлива серийного самоле-
та, следует убедиться в том, что обучаемые знают физические
основы вопроса, и, если потребуется, внести необходимую яс-
ность.
Здесь нужно обратить внимание на следующие моменты:
— принятые терминологию и обозначения, которые в лите-
ратуре иногда имеют отличия;
— определение понятий «показатели» дальности и про-
должительности полета;
— анализ влияния условий боевого применения на харак-
теристики дальности и продолжительности полета;
— рациональные по расходу топлива режимы полета;
— анализ форм представления информации о дальности
и продолжительности полета.
Что касается вопросов использования различных форм ин-
формации о дальности и продолжительности полета в усло-
виях дефицита времени, то они изложены во втором разделе
учебника (см.главу 7).
Методика изложения фактически приводится далее по хо-
ду изучения указанных вопросов, однако подчеркнем, что1
главное — практическая направленность, т. е. за любым тео-
ретическим положением, приведенными кривыми и формула-
ми должен быть виден полет, действия летчика в воздухе и
при подготовке к полетам на земле. Все должно иллюстриро-
ваться конкретными цифровыми данными по серийному само-
лету, примерами анализа и расчетов. Поскольку в литерату-
ре используются различные обозначения расходов топлива, то
следует выбрать те из них, которые используются в Инструк-
ции по расчету дальности и продолжительности полета экс-
плуатируемого самолета.
§ 4.2. ОСНОВНЫЕ ПОКАЗАТЕЛИ ДАЛЬНОСТИ
И ПРОДОЛЖИТЕЛЬНОСТИ ПОЛЕТА
4.2.1. Общие и частные показатели дальности
и продолжительности полета и их взаимная связь
Можно рекомендовать следующую последовательность
рассуждений:
— сначала перечислить общие показатели, напомнить их
обозначения, физический смысл и взаимосвязь;
— затем перечислить частные показатели;
— установить связь между общими и частными показате-
лями;
— проанализировать эту связь, выявить те факторы, ко-
торые определяются характером полетного задания и дейст-
140
виями летчика, и установить их влияние на показатели даль-
ности и продолжительности полета;
— раскрыть физический смысл понятий ПЛС, определите-
ля километрового расхода топлива (ОКРТ), д, Яуарасч,
используемых в инструкциях по расчету дальности и продол-
жительности полета.
Общими показателями дальности и продолжительности
полета являются расходы и запас топлива на самолете.
Напоминая это летчикам, следует подчеркнуть, что даль-
ность и продолжительность полета с работающими двигателя-
ми определяются их экономичностью, которая характеризует-
ся удельным расходом топлива. С удельным расходом топли-
ва тесно связаны часовой и километровый расходы. В свою
очередь часовой расход определяет секундный и минутный
расходы топлива, понятия которых используются при анализе
расходов топлива (выработки из баков) как при установив-
шемся, так и неустановившемся боевом маневрировании.
В литературе эти общие показатели имеют различное обо-
значение. Так, удельный расход топлива обозначается Ср и
Суд ; часовой расход— СЧас, Ch и Q4; километровый рас-
ход— Ск и q. Целесообразно использовать обозначения Суд,
Q4 и q, представленные в инструкциях по расчету дальности
и продолжительности полета.
Прежде чем напомнить их физический смысл, следует ука-
зать на трудности, которые могут встретиться в связи с пере-
ходом на новую систему единиц «СИ». В самом деле, в чем
измерять расходы топлива? Использовать понятие веса или
массы топлива? Если брать понятие веса топлива, то, напри-
ГИ I
мер, часовой расход будет измеряться в — , если брать
ч
массу—то в
кг
ч
Первый случай удобен тем, что все формулы останутся не-
изменными, но все цифры надо умножать на 9,81 м/с2, вто-
рой— тем, что все цифры из инструкций останутся прежними,
но все формулы надо поделить на g = 9,81 м/с2. Учитывая это,
целесообразно пользоваться не весовыми, а массовыми рас-
ходами топлива.
Понятие удельного расхода топлива просто продемонстри-
ровать следующим примером: если двигатель с тягой 1 кгс
(9,8 Н) проработает в течение 1 ч, то израсходованное топли-
во и будет удельным расходом. Итак, удельный расход в ста-
« кгс (топлива)
рои системе имеет размерность -----------------—, а в но-
кгс (тяги) • ч
141
вой----- . Он зависит от типа двигателя, режима его работы
Н-ч
и условий боевого применения: скорости, высоты полета, тем-
пературы воздуха (рис. 4.1). Режим работы определяется час-
тотой вращения ротора двигателя («оборотами») и работой
форсажной камеры.
Рис. 4.1. Зависимость удельного расхода топлива от режима работы дви-
гателя, числа М и высоты полета
Поскольку удельный расход топлива характеризует эко-
номичность двигателя с единичной тягой за 1 ч работы, а
двигатели развивают тягу величиной Р, то часовой расход
топлива в.Р раз больше и, следовательно, выражается фор-
мулой Рч=СУдР . Этой формулой для расчетов воспользо-
ваться не так просто, так как надо знать, какую тягу разви-
вает двигатель и каков удельный расход на данном режиме.
В частности, в установившемся горизонтальном полете по-
требная тяга Р = Хаг = —, и тогда часовой расход топ-
лива Q4 = Суд Р = Суд .
К
Из анализа этой формулы следует, что для расчета Q4
необходимо знать основные аэродинамические характеристики
самолета (Суа и С^а), определяющие величину качества К =
р
=----Такие расчеты производят при проектировании новых
Сха
самолетов и сравнивают полученные величины с заданными
заказчиком. В летных испытаниях их проверяют, уточняют и
издают Инструкцию по расчету дальности и продолжительно-
сти полета.
142
Километровый расход топлива также окончательно уста-
навливается в летных испытаниях. Он связан с часовым рас-
ходом простым соотношением q Так как Q4 =
mg mg
=СуД—— , получается q = Суд —— .
К К V
Кроме расходов топлива Суд, Qr и q к общим показате-
лям относится и запас топлива на полет, поэтому целесооб-
разно напомнить обучаемым его слагаемые, так как знание-
их величин, назначения и контроль за их использованием в.
полете являются гарантией как от опасного перерасхода топ-
лива, так и от недоиспользования боевых возможностей само-
летов по глубине и продолжительности боевого полета.
Расчетный запас топлива тТрасч определяют по выра-
жению
Ш? расч == ПЦ 0,07 tTl'i I 1Т1т расх Шт гар,
где тт == 7 (feT Wr осн + №тптб) — располагаемый запас топли-
ва;
Т — плотность топлива, кг/л;
WT осн*» ^тптб — эксплуатационные выраба-
тываемые вместимости ос-
новных (внутренних) и под-
весных топливных баков, л;
kT — коэффициент полноты за-
правки внутренних топлив-
ных баков (при ограничении
по размерам ВПП или усло-
виям взлета может быть
&т<1; подвесные топливные
баки всегда заправляются
полностью);
0,07 тт — гарантийный технический за-
пас топлива, учитывающий;
возможные отклонения рас-
ходов топлива от расчетных,
(приводимых в Инструкции)
за счет допусков на регули-
ровку двигателей, изготовле-
ние самолета и неточности в
определении количества топ-
лива и характеристик расхо-
дов при испытаниях;
S^Tpacx — расход топлива на запуск И’
опробование двигателей, ру-
143
ление до начала взлета,
взлет, посадку и повторный
заход, заруливание, а также
на сбор и роспуск боевого
порядка, если он осуществ-
ляется не на маршруте;
2 гар = 0,05 znT + такт + пгт 3аП — учитываемый в соответ-
ствии с Наставлением по
штурманской службе авиации
Вооруженных Сил СССР
5%-ный навигационный запас
топлива (0,05 тт), тактиче-
ский запас топлива тттакт на
возможное изменение такти-
ческой обстановки (опреде-
ляется командиром), запас
топлива для ухода на запас-
ный аэродром и перенацели-
вание /Пт зап-
Частными показателями дальности и продолжительности
полета являются тактический радиус действия /?т, практичес-
кая дальность полета ЛПр > продолжительность т на различ-
ных участках боевого полета (время дежурства в воздухе,
время нахождения в районе блокируемой цели, время ведения
•воздушного боя и т. д.). В зависимости от условий боевого
применения величины /?т, Lnp» " непрерывно изменяются, но
во всех случаях они могут быть определены с помощью общих
показателей дальности и продолжительности полета Суд, Q4>
q и тт.
Связь между общими и частными показателями дальности
и продолжительности полета легко установить, используя
общеизвестные понятия средних часового и километрового
расходов топлива (как отношения массового расхода топлива
на участке полета к времени или пройденному расстоянию).
Следовательно, по известным средним расходам топлива
можно с достаточной точностью определять дальность и про-
должительность на небольших участках полета (для манев-
ренных и относительно легких самолетов):
ъ = -----; т =---------.
<7ср ср
Инструкции для маневренных самолетов и содержат сред-
ние величины <7сР и Q4Cp в виде таблиц и графиков.
Можно пояснить, что в формулах взяты средние расходы,
-обусловленные только изменением массы самолета на участ-
ие
ке полета, а все остальные параметры, влияющие на измене-
ние q и Q4, приняты постоянными. Для определения средних
расходов в инструкциях по расчету дальности и продолжи-
тельности приводятся поправочные коэффициенты р,, учиты-
вающие влияние на q изменения полетной массы самолета
(рис. 4.2).
Рис. 4.2. График для определения по-
правочного коэффициента ц, учиты-
вающего изменение километрового
расхода топлива при отклонении фак-
тической массы самолета от рас-
четной
Анализ связи общих и частных показателей дальности и
продолжительности полета удобно провести, если записать:
j /72 Т’С V
7ср ^ср g Суд
/итг ттг К
т = ----- =------------,
Qq Ср ^СР ^Суд
где ттг —расход топлива на участок горизонтального по-
лета;
тср—средняя масса самолета на этом участке полета;
К — аэродинамическое качество в данных условиях по-
лета;
V — истинная скорость полета.
По этим формулам можно не только подсчитать дальность
(тактический радиус) и продолжительность полета, но и про-
анализировать факторы, влияющие на них.
10—5007сп
145
Из формул видно, что L и т зависят помимо запаса топли-
ва от аэродинамического совершенства самолета Л, режима
полета (через К. Суд) и экономичности двигателя Суд, т. е.
от конструктивных и эксплуатационных факторов.
Из формулы
tTlrr К V
^ср S £*уд
видно, что дальность зависит от пяти факторов, но для пол-
ного анализа надо найти еще и внутренние связи между ними.
Показать, как это сделать, считая известными /ятг, ^ср и q,
можно так:
*
— записать и преобразовать произведение -----:
Суд
КУ = КЗ,6Ма _ 3,6КМ20]/Т _ 72 КМ .
Суд Суд Суд Суд /у Т
— проанализировать входящие в последнее выражение
параметры. Для этого выяснить, от чего зависит К в устано-
вившемся горизонтальном полете:
где
.............................._ но -2- _!_.
qS 0,7pM2S р M2S
Из этой формулы видно, что Су а г есть функция от чис-
ла М полета и m/р. В инструкциях по расчету дальности и
m ,
продолжительности полета используют отношение-- (массы
Р
к давлению воздуха), которое называют приведенной мас-
сой (тпр).
Итак, Су а г С уд г । Л1, , НО ТОГДа Сх а г^^Сх а г (Су др ,
\ р )
М) = Схаг ( М, ], а следовательно, и Кг = Кг (Муп/р).
\ Р /
Отсюда следует вывод: если в полете на разных высотах
сохранять одинаковые число М и — , то К будет о<;та-
Р
ваться -Постоянным. Теперь следует рассмотреть параметр
Суд/ УТ. Здесь можно сослаться на теорию подебия ТРД,
146
из которой известно, что Суд/]/Т = f(M; Р/р). Что такое
Р/р (отношение тяти двигателя к давлению воздуха)? В уста-
новившемся горизонтальном полете >
Р = _Х± == =
р р Кр Кр К р
а поэтому, как и К, Plp = f(M9 пг/р), т. е. Сул/УТ тожеза-
висит только от числа М полета и — .
Р
Таким образом доказано, что при заданных конфигурации
самолета, ттг, mcp , Н величина L будет определяться только
двумя параметрами — числом М полета и приведенной мас-
m /и
сои /ипр = ро —, которая отличается от — в р0 раз. Но ро
Р Р
есть величина постоянная и поэтому утверждение, что
L=f(M\ /иПр), является верным.
Понятие тпр используется в инструкциях по расчету даль-
ности и продолжительности полета для уплотнения содержа-
щейся в ней информации. С этой же целью применяют поня-
- q
тие относительного километрового расхода топлива q = — =
m
УД KV’
который показывает расход топлива на 1 км пути
для каждого килограмма массы самолета и зависит уже (как
было доказано выше для Суд/ КУ) только от числа М и тпр.
Можно подумать, что q не зависит от высоты полета, но
такой вывод будет неверным, так как качество зависит от
высоты полета (о чем уже говорило.сь), а поэтому и q зави-
сит от высоты полета.
Функциональная^ связь q и /ппр приводится в инструкциях
в виде номограмм q (М, znnp) для определения q, L, х горизон-
тального полета при заданной конфигурации самолета.
В инструкциях информация о влиянии на L и т конфигу-
рации самолета учитывается стреловидностью крыла, влия-
ние которой рассмотрено далее, а также индексами ПЛС и
ОКРТ.
4.2.2. ПОКАЗАТЕЛЬ ЛОБОВОГО СОПРОТИВЛЕНИЯ (ПЛС)
И ОПРЕДЕЛИТЕЛЬ КИЛОМЕТРОВОГО РАСХОДА
ТОПЛИВА (ОКРТ)
Прежде че^ расшифровать индекс ПЛС, надо напомнить
обучаемым, что километровый расход топлива, а следова-
тельно, /?т и L зависят от конфигурации и массы внешних
10*
14Г
подвесок, которые может нести самолет. В каждом случае
боевого применения для эффективного достижения цели дей-
ствий устанавливается определенный вид потребного воору-
жения, варианты которого носят множественный характер.
Чтобы их учесть, а это необходимо, так как при изменении
конфигурации и массы подвесок изменяется лобовое сопротив-
ление самолета (за счет безындуктивного сопротивления,
связанного с изменением внешней формы подвесок, и индук-
тивного, связанного с изменением потребного угла атаки при
изменении полетной массы самолета), пришлось бы иметь
инструкции очень большого, объема. ПЛС (показатель лобо-
вого сопротивления) и призван помочь уплотнить информа-
цию и учесть влияние различных подвесок на L и т.
С этой целью различным вариантам внешних подвесок во-
оружения, подвесных топливных баков и их держателям,
имеющим одинаковое безындуктивное сопротивление, при-
сваивается одно и то же числовое значение ПЛС. Естествен-
но, это сразу сокращает потребное число номограмм, так как
количество вариантов подвесок как бы сокращается, и объем
Инструкции по расчету дальности и продолжительности
уменьшается, а действия, с ней упрощаются. Если же подвес-
ки имеют сопротивление, отличное от других, и не подлежат
объединению в ,группы, то им присваивается свое значение
ПЛС, отличное от ПЛС других подвесок.
Нужно подчеркнуть, что подвески, имеющие один и тот же
ПЛС, необязательно имеют и одинаковую массу, наоборот,
она скорее бывает различной. Поэтому изменение индуктив-
ного сопротивления, связанного с наличием внешних подве-
сок, нецелесообразно учитывать с помощью ПЛС. Это дела-
ют, учитывая общее влияние изменения полетной массы са-
молета по специальному графику т (ц) или с помощью дру-
гого показателя (ОКРТ), о котором речь пойдет далее.
Каков же физический смысл ПЛС? Его легко установить,
если учесть дополнительное безындуктивное лобовое сопро-
тивление от подвесок:
Д Ха0 подв — Д Сх а0 подв
откуда
л г> С __ Д XaQ подв
а0 подв — • >
Я
т. е. это произведение определяет дополнительное безындук-
тивное сопротивление от подвесок, выраженное в долях ско-
ростного напора. Поскольку числовое значение ДС X а0 подв S
оказывается меньше единицы, то оперировать им при расче-
148
тах неудобно, поэтому это произведение умножают на про-
извольно выбранный коэффициент С, который приводит к по-
лучению целых чисел.
Таким образом, показателем лобового сопротивления дан-
ной группы или отдельной подвески называют выражение
ПЛС = С Д Сх а0 подв 3»
Коэффициент С может быть равен 10, 100 или любому дру-
гому удобному для округления числу, т. е. не имеет физи-
ческого смысла. Например, пусть С=100, тогда ПЛС=100
АСха0поДв£. ДСха0подв берется обычно для чисел М < Л4кр.
Тогда при Д СхаГ} подв =0,002 и 3 = 40 м2 получим для этих
подвесок ПЛ С = 100 • 0,002 -40 = 8.
Самолету без внешних подвесок присваивается свой ПЛС,
а суммарный с подвесками ПЛС вычисляется как
ПЛС = ПЛСь + 2 ПЛС1.
Например, если у самолета СХао =0,02, то 77ЛС0= 100 • 0,02 •
• 40 = 80, а с подвесками ПЛ С = 80 +'8 = 88.
При расчете L и т по Инструкции не требуется произво-
дить такие вычисления, так как в ней приведены уже готовые
величины ПЛС, соответствующие различным вариантам под-
весок, и даны примеры ‘вычисления суммарных ПЛС и их ис-
пользования при расчетах Лит. Иногда ошибочно считают,
что по величине ПЛС самолета можно оценить, какой само-
лет лучше с точки зрения дальности и продолжительности по-
лета: выигрывает тот тип самолета, у которого меньше зна-
чение ПЛС. Это, конечно, неверно, так как С — произвольное
число.
При обучении летного состава умению использовать Ин-
струкцию по расчету L и т необходимо разъяснить, что от-
дельные инструкции не позволяют по значению ПЛС опреде-
лить q, L и т полета при любых, установленных для выпол-
нения боевого полета числах М и Н.
Например, можно это сделать для режимов максимальной
дальности, но нельзя для других чисел Л4, которые могут быть
необходимы по тактическим условиям. В э'гом случае в ин-
струкциях вводится показатель ОКРТ — определитель кило-
метровых расходов топлива, который позволяет определить L
и т для любых условий боевого применения и представляет
информацию в компактном виде. ОКРТ, как и ПЛС, — услов-
ная величина, являющаяся обобщенным показателем кило-
метрового расхода топлива, количественно характеризующая
149
полное лобовое сопротивление самолета (а не только безын-
дуктивное, как ПЛС) в установившемся прямолинейном гори-
зонтальном полете. Отсюда следует, что ОКРТ характеризует
и потребную тягу силовой установки.
ОКРТ = С CXaS = C-^_ S = C — .
qS q
Таким образом, ОКРТ — это приведенный к удобным для
использования числовым значениям коэффициент Сха-
Например, если С=1000, 5 = 25 м2, аСха=0,02, то ОКРТ=
= 1000-25-0,02 = 500.
Можно показать связь часового и километрового расходов
топлива с ОКРТ в установившемся горизонтальном прямоли-
нейном полете:
Q4 = СуД Р = Суд Ха = Суд Сха q S — Суд Сха 0,7 р М2 S.
ОКРТ
Если подставить СХа —----- , то
CS
0 7
Qr ~ ОКРТ СУд ,
С
а
q = == ОКРТ СУд М .
Ma а С
Из формулы видно, что faa заданных Н и М полета q зави-
сит от Суд и пропорционален ОКРТ. Учитывая полетную мас-
су, подвески (с помощью ПЛС) и стреловидность крыла в по-
лете, по номограмме легко определить величину ОКРТ, а по
ней /у, Си т. При этом для определения q, L и т по ОКРТ тре-
буется одна номограмма для всех режимов полета, т. е. про-
исходит существенное уплотнение информации (уменьшение
объема Инструкции).
§ 43 АНАЛИЗ ВЛИЯНИЯ УСЛОВИЙ
БОЕВОГО ПРИМЕНЕНИЯ НА ХАРАКТЕРИСТИКИ ДАЛЬНОСТИ
И ПРОДОЛЖИТЕЛЬНОСТИ УСТАНОВИВШЕГОСЯ
ПРЯМОЛИНЕЙНОГО ГОРИЗОНТАЛЬНОГО ПОЛЕТА
Приступая к анализу этого влияния, необходимо показать,
что дальность и продолжительность установившегося горизон-
тального полета зависят от относительного запаса
150
топлива на борту самолета, а также от километрового и ча-
сового расходов топлива.
г _ г _ тт г __ KV —
С C^g m*T'
Уд KV
mT г tnT г К -
Тр — —- — ' tTlf г
Q, c,.s
К
Удельный расход топлива и аэродинамическое качество
зависят от условий боевого применения. Поэтому общие по-
казатели дальности и продолжительности полета (километ-
ровый и часовой расходы топлива) также зависят от условий
боевого применения. При анализе этой зависимости удобно ис-
пользовать метод «замораживания коэффициентов», т. е., рас-
сматривая влияние одного фактора, считать другие неизмен-
ными. Анализ необходимо начать с главных факторов, опре-
деляющих дальность и продолжительность, к которым отно-
сятся скорость и высота полета.
4.3.1. Влияние скорости полета
При анализе этого влияния следует напомнить расчетные
формулы часового и километрового расходов топлива в уста-
новившемся прямолинейном горизонтальном полете:
О -с х -с mg • п-^-с mg
Чч — Ьуд — иУд—— , q — — Ьуд
Л V Л V
и показать, что при изменении скорости полета меняются Суд,
Ха и К, а это ведет к изменению Q4 и q. Анализируя эти
формулы, можно допустить ошибку, так как на первый взгляд
Q4 не зависит от V. Поэтому надо подчеркнуть, что это не-
верно. На самом деле изменение скорости влияет на Q4 даже
сильнее, чем на q. Это влияние проявляется через изменение
К. Показ влияния V удобно делать с помощью четырех гра-
фиков, совмещенных на одном рисунке (рис. 4.3),.
Из первого графика следует, что увеличение скорости по-
лета при постоянной частоте вращения ротора двигателя п ве-
дёт к возрастанию удельного расхода топлива. , Напомнить,
что летчик для повышения скорости полета увеличивает час-
тоту вращения (обороты), что у ТРД ведет к уменьшению
Суд , eqiH скорость меньше крейсерской, и к росту Суд, если
V> VKp (см. дроссельную характеристику, рис. 4.3). Поэтому
151
V
Рис. 4.3. Зависимости удельного рас-
хода топлива, лобового сопротивле-
ния, аэродинамического качества,
часового и километрового расходов
топлива от скорости установившегося
горизонтального полета
4.3. Зависимости удельного рас-
152
удельный расход топлива при увеличении скорости полета,
пока частота вращения меньше крейсерской, остается пример-
но постоянным и возрастает при частоте вращения больше
крейсерской. Это удобно показать схематически:
/-----► |СУЛ при п = const------------------Ч
' Суд const х*
t v нужно f лI —> | Суд (n < Пкр)-s* j Суд.
t ^УД > Икр)
Зависимость лобового сопротивления и аэродинамическо-
го качества в установившемся горизонтальном полете от ско-
рости следует показать на втором графике и пояснить, что
если бы удельный расход топлива не зависел от скорости, то
зависимость Q4 = f (V) в точности повторила бы зависимость
Xa=f(V). Но так как Суд зависит от скорости полета, то
характер изменения часового расхода топлива по скорости
отличается от характера изменения лобового сопротивления
(третий график рис. 4.3). Поэтому минимальный часовой рас-
ход топлива достигается, строго говоря, на скорости, несколь-
ко большей наивыгоднейшей (V тмакс > VHb), но отличие это
небольшое и практически считается, что скорость максималь-
ной продолжительности равна наивыгоднейшей скорости ус-
тановившегося горизонтального полета (Утмакс = VHB).
Следует обратить внимание летного состава на то, Что вы-
полнять установившийся прямолинейный горизонтальный по-
лет на скорости меньшей, чем скорость максимальной продол-
жительности, нецелесообразно, так как это будет полет на
втором режиме, что снижает безопасность.
Имея зависимость часового расхода топлива.от скорости,
легко проанализировать зависимость от нее километрового
расхода топлива. Эту зависимость .можно интерпретировать
геометрически как тангенс угла наклона линии, проведенной
из начала координат в точку Q4— /(V), соответствующую вы-
бранной скорости полета. Наименьший угол наклона имеет
касательная, проведенная из начала координат к кривой
Q4 = f (V) . Точке касания соответствует скорость максималь-
ной дальности установившегося горизонтального полета
Vi/макс, при которой достигается минимальный километро-
вый расход топлива б/мин . Эта скорость, как правило, больше
скорости максимальной продолжительности:
VL макс Vт макс •
В инструкциях по расчету дальности и продолжительно-
сти полета маневренных самолетов обычно приводятся зави-
симости километровых расходов топлива от приборной ско-
153
роста. Поэтому для выполнения инженерно-штурманских рас-
четов и определения часовых расходов топлива от приборной
скорости полета необходимо перейти к истинной, для чего в
этих же инструкциях имеются специальные номограммы.
4.3.2. Влияние высоты полета
Анализ этого влияния следует начать с того, что расходы
топлива обратно пропорциональны аэродинамическому каче-
ству. Поэтому нужно показать, как оно меняется в горизон-
тальном полете с изменением высоты при постоянном числе М
(рис. 4.4) и пояснить, ^то на малых высотах и скоростях,
больших VHB , горизонтальный полет выполняется на углах
атаки, меньших наивыгоднейшего, а с ростом высоты они
увеличиваются до анв, что приводит к возрастанию аэродина-
мического качества до максимальной его величины, а на боль-
ших высотах, когда углы атаки становятся больше наивыгод-
нейшего, аэродинамическое качество уменьшается.
Рис. 4.4. Зависимость аэродинамического
качества в установившемся горизонтальном
полете от высоты
Кроме того, с подъемом на высоту при постоянном числе
АГ удельный расход топлива уменьшается (из-за увеличения
{до крейсерской) частоты вращения ротора двигателя, по-
требной для горизонтального полета, и повышается при воз-
растании частоты вращения от крейсерской до максимальной
(у земли можно лететь при частоте вращения 60—70%, а на
предельной высоте необходима частота вращения 100%). Не-
которое влияние на удельный расход топлива оказывает и па-
дение температуры воздуха до высоты 11 км (см. рис.-4.1,в)-
Поэтому часовой расход топлива на дозвуковых скоростях с
154
увеличением высоты полета сначала уменьшается, а затем
растет.
Это пояснение можно показать схематически:
М --const
Километровый расход топлива с увеличением высоты по-
лета при постоянном числе М снижается из-за уменьшения
часового расхода и роста воздушной скорости, но на высотах,
близких к дозвуковому статическому потолку, он увеличи-
вается.
Поскольку максимальные боевые возможности самолета
по глубине и времени ведения боевых действий зависят от
минимальных километрового и часового расходов топлива, то
имеет смысл рассмотреть зависимость именно этих расходов
топлива от высоты.
Для этого формулу часового расхода следует записать в
виде
<2ч ыин = — rng
Лмакс
и подчеркнуть, что минимальный часовой расход топлива по-
лучается при полете на наивыгоднейшей скорости, когда аэ-
родинамическое качество максимально. Изменение минималь-
ного часового расхода топлива по высоте можно показать
схематически:
| КМ> I Суд У Л < Лкр », ! Су.---—I 3* «И*
Х-00-”^15___> Кмакс == const — нужно t V Тмакс-> t Л > Лкр j > t Q4- мин
Наименьший часовой расход топлива получается при по-
лете на наивыгоднейшей скорости на высоте, несколько мень-
шей бесфорсажного дозвукового статического потолка. Он в
1,5—1,8 раза меньше, чем минимальный часовой расход топ-
лива у земли (рис. 4.5).
155
Минимальный километровый расход топлива получается
при максимальном значении произведения (ЛТ):
Рис. 4.5. Зависимость минимальных расхо-
дов топлива от высоты полета
Причины изменения минимального километрового расхода
топлива по высоте также удобно показать схематически:
f Н < 11 кмч
ЦКУ)
нужно л
—----1 п
(Я>11 кмх
CVT - const
t Ямнн
ЦК Омаке
Наименьшей километровый расход топлива достигается
также на высотах, меньших бесфорсажного дозвукового ста-
тического потолка, но больших, чем оптимальные высоты по
продолжительности полета. Причем этот расход в 2—2,5 раза
меньше минимального километрового расхода топлива у зем-
ли (рис. 4.5).
Скорость, соответствующая режиму наибольшей даль-
ности, больше скорости режима наибольшей продолжитель-
156
ности, которую легко запомнить, так как это постоянное зна-
чение приборной скорости для всех высот полета. Дело в том,
что при Vt макс полет происходит ца аНв , т. е. при постоянном
Су а нв • Следовательно, чтобы сохранить горизонтальный пря-
молинейный полет ( Ya—mg), летчик должен выдерживать
постоянный скоростной напор, а при этом широкая стрелка
показывает одну и ту же скорость (при полете на Л4<СЛ4кр).
Скорость режима наибольшей дальности Vl макс приб Нв
является постоянной, а уменьшается с увеличением высоты.
4.3.3. Влияние варианта вооружения
При изменении варианта вооружения изменяются масса
самолета и сопротивление внешних подвесок. При неизмен-
ной скорости установившегося горизонтального йолета с воз-
растанием массы самолета увеличиваются часовой и километ-
ровый расходы топлива. Это связано с тем, что при возраста-
ний полетной массы нужно увеличить подъемную силу, что
вызовет рост индуктивного сопротивления, а следовательно, и
потребной тяги двигателя.
Влияние полетной массы на расходы топлива удобно по-
казать схематически:
V = const;
Я = const; t f Yf Xa и-> f Xa г^|Р^|(?ч==СудР->|(7.
X = const;
Пересчет километрового расхода топлива на другую по-
летную массу производится по формуле
<74 = <71Г 1 + 0.1Я (-^-1) .
L \ / _
Эта зависимость в Инструкции по расчету дальности и
продолжительности полета учитывается поправочным коэф-
фициентом р- = —,который для различных высот приводится
Qi
в виде графиков (см. рис. 4.2).
Внешние подвески вооружения не создают подъемной силы,
но изменяют безындуктивное лобовое сопротивление. Поэтому
157
Влияние изменений полетной массы на расходы топлива
усиливается по мере уменьшения скорости и увеличения вы-
соты, т. е. по мере роста доли индуктивного сопротивления.
Изменение же сопротивления подвесок сильнее сказывается
на закритических и особенно сверхзвуковых скоростях.
Поэтому расходы топлива на режимах максимальной даль-
ности и продолжительности полета сильнее зависят от мас-
сы самолета, чем от дополнительного сопротивления под-
весок.
Для удобства выполнения инженерно-штурманских рас-
четов в инструкциях по расчету дальности и продолжитель-
ности полета учет изменения километрового расхода топлива
с изменением варианта внешних подвесок производится с по-
мощью показателя лобового сопротивления (ПЛС). Пример
зависимости километровых расходов топлива от ПЛС пока-
зан на рис. 4.6.
Рис. 4 6. Зависимость километрового расхода топлива от
приборной скорости полета, варианта вооружения и
массы самолета
4.3.4. Влияние угла стреловидности крыла
Из формул видно, что часовой и километровый расходы
топлива обратно пропорциональны аэродинамическому ка-
честву самолета, на которое существенное влияние оказывает
лобовое сопротивление, в свою очередь зависящее от угла
стреловидности крыла. Изменение лобового сопротивления
158
связано с тем, что при постоянной скорости с увеличением
угла стреловидности уменьшается безындуктивное сопротив-
ление и возрастает индуктивное, а суммарное сопротивление
в зависимости от аэродинамической компоновки самолета мо-
жет быть минимальным при различных углах стреловидности
крыла на различных высотах. Поэтому и расходы топлива мо-
гут быть минимальными при различных углах стреловидности
крыла. В инструкциях по расчету дальности и продолжитель-
ности полета обычно приводятся таблицы для выбора опти-
мального угла стреловидности при полете на режиме макси-
мальной дальности в зависимости от ПЛС и высоты полета.
При полетах со скоростями большими, чем режим макси-
мальной дальности, необходимо по номограммам из Инструк?
ции определить километровые расходы для различных углов
стреловидности крыла и по меньшему из них выбрать опти-
мальный угол стреловидности.
4.3.5. Влияние температуры воздуха
Анализируя это влияние, следует рассмотреть два случая:
полет с постоянной приборной скоростью (числом М полета),
когда летчик меняет частоту вращения ротора двигателя (по-
лет на дроссельных режимах), и полет на фиксированном ре-
жиме работы двигателя.
Для полета с постоянной приборной скоростью на задан-
ной высоте необходимо выдержать равенство тяги лобовому
сопротивлению, которое при постоянной приборной скорости
не зависит от температуры наружного воздуха. Тяга же дви-
гателя при неизменном положении РУД уменьшается с уве-
личением температуры воздуха. Поэтому для полета с посто-
янной приборной скоростью при повышении температуры
нужно увеличить, частоту вращения ротора двигателя, что
приведет к возрастанию воздушной скорости и удельного рас-
хода топлива пропорционально квадратному корню из абсо-
лютной температуры воздуха.
Это пояснение можно показать схематически:
.—а “ 20 VT — | М — — для М = const—f j V ~ j/'T-*M «const ха « const
э а нужно S
сохранения^. X
Р*=»Ха нужно •
Теперь легко показать влияние температуры воздуха на
часовой и километровый расходы топлива.
159
Vnp — const
t tH—t Суд- V T —4 Q,=судха~ V T
---~Xa = const -S
t t« v = const •
^tv—yT—V
Итак, при полете с постоянной приборной скоростью (чис-
лом Л4) воздушная скорость и часовой расход топлива изме-
няются пропорционально квадратному корню из абсолютной
температуры воздуха, а километровый расход не зависит от
температуры.
В инструкциях по расчету дальности и продолжительности
полета маневренн&х самолетов не приводятся зависимости
часового расхода топлива от температуры, но, пользуясь гра-
фиками зависимости километрового расхода топлива от при-
борной скорости и номограммой пересчета приборной скорос-
ти в воздушную, можно определить расход топлива, исполь-
зуя его связь с километровым расходом.
Если полет происходит на фиксированном режиме работы
двигателя (максимал, форса^), то влияние температуры на
часовой расход топлива обратно описанному ранее, что связа-
но с работой автоматики двигателя, регулирующей подачу
топлива по числам М полета.
V автоматика г— г_
Следует обратить внимание летного состава на то, что хо-
тя изменение температуры воздуха не влияет на километро-
вый расход топлива при постоянной приборной скорости, тем
не менее дальность полета зависит от температуры воздуха.
Это связано с тем, что изменение температуры приводит к из-
менению характеристик .набора заданной высоты *(ттнаб,
^наб, ^наб) за счет изменения вертикальной скорости и часо-
вого расхода топлива при фиксированных режимах работы
двигателя, на которых производится набор высоты.
4.3.6. Влияние ветра
Рассмотрение этого вопроса важно для оценки боевых воз-
можностей самолетов по глубине боевых действий. На про-
должительность полета скорость и направление ветра влияния
160
не оказывают, так как часовой расход топлива не зависит от
ветра.
Дальность горизонтального участка полета увеличиваемся
при попутном ветре и уменьшается при встречном. Расчет
дальности полета при наличии ветра ведется теми же метода-
ми, что и в штиль, только при расчетах следует исходить не
из воздушной скорости V, а из путевой скорости относитель-
но земли Vn == V ± U.
Оптимальную воздушную скорость, при которой имеет
место минимальный километровый расход топлива, можно
найти проведением касательной к кривой Q4 = f (V) из точки,
отстоящей от начала координат на ±U\ влево — при попут-
ном ветре, вправо — при встречном (рис. 4.7).
Рис. 4.7. Графическое определение скорости минимального ки-
лометрового расхода топлива при наличии ветра
Однако в инструкциях по расчету дальности и продолжи-
тельности полета маневренных самолетов имеются графики
зависимости часового (секундного) расхода топлива от числа
М полета только для фиксированных режимов работы двига-
теля (максимал, минимальный и полный форсаж), на которых
установившийся горизонтальный полет на режиме максималь-
ной дальности невозможен. Этот режим полета обеспечивает-
ся на дроссельных режимах работы двигателя. Поэтому для
построения зависимости часового расхода топлива от воздуш-
11-5007сп
161
ной скорости необходимо воспользоваться зависимостью q =
— f(H, Vnp, ПЛС. m), а расчет вести по следующему алго-
ритму:
4-----*• q----
Следует заметить, что минимальный километровый расход
топлива у современных маневренных самолетов практически
не зависит от ветра, если его скорость менее 100—120 км/ч.
Только при очень сильном попутном ветре можно лететь на
воздушной скорости несколько меньшей, чем скорость наи-
большей дальности полета (чтобы увеличить время полезно-
го действия попутного ветра), а при очень сильном встречном
ветре — на несколько большей воздушной скорости (чтобы
уменьшить время вредного действия ветра).
§ 4.4. ОПТИМАЛЬНЫЕ ПО РАСХОДУ ТОПЛИВА
РЕЖИМЫ ПОЛЕТА
4.4.1. Режим полета «по потолкам»
Большое практическое значение имеет правильный выбор
режима полета, обеспечивающего наибольшую дальность. Эти
режимы необходимы При перебазировании на другой ТВД,
при отдельных перегонах самолетов, а иногда и для выпол-
нения боевого задания.
Перед изучением правил использования номограмм, пред-
назначенных в инструкциях по расчету L и т для определения
режимов полета «по потолкам», следует напомнить основные
теоретические сведения и дать практические рекомендации по
технике пилотирования (контролю выдерживания) на этих
режимах.
В чем же заключается оптимальность по расходу топлива
режима полета «по потолкам»?
Ранее было показано, что наибольшая дальность полета
на постоянной высоте получается при определенной скорости
(числе М). При этом километровый расход топлива минима-
лен, а скорость полета является оптимальной по расходу топ-
лива. Однако с увеличением высоты полета минимальный ки-
лометровый расход не остается постоянным, а уменьшается,
если сохранять постоянным угол атаки (неизменное качество)1
при увеличении истинной скорости полета.
Кроме того, он уменьшается и за счет падения удельного
расхода (до высоты 11 км) из-за понижения температуры воЗ-
162
духа. Лишь после наступления волнового кризиса (на высо-
тах, близких к дозвуковому статическому потолку) дмин не-
сколько возрастает за счет уменьшения качества. Наимень-
шее значение gw получается на высоте, несколько меньшей
дозвукового потолка (на бесфорсажном режиме). Полет на
этой высоте при скорости максимальной дальности и будет
оптимальным по расходу топлива.
Оптимальная высота горизонтального полета не остается
постоянной в течение всего полета. Действительно, если лет-
чик по мере выработки топлива и облегчения самолета будет
сохранять высоту, уменьшая угол атаки или истинную ско-
рость, то километровый расход топлива будет увеличиваться,
и самолет уйдет с оптимального режима. В самом деле, так
g tYl Суд --
как q = , то при уменьшении а падает величина д,
при этом уменьшается (KV) и растет q (то же будет и при
уменьшении V).
Как же сохранить режим полета оптимальным? Здесь надо
пояснить, что это целиком зависит от летчика, его умения гра-
мотно пилотировать самолет. Если по мере облегчения само-
лета постепенно увеличивать высоту полета и сохранять не-
изменной истинную скорость (число М), то удастся сохра-
нить постоянный угол атаки и произведение КУ, достигшее
на оптимальном режиме наибольшего значения, тоже будет
оставаться постоянным.
Из условия прямолинейного горизонтального полета Ya =
— mg, CYaOJ pM2S=mg, видно, что при сохранении летчиком
Су а и М неизменными необходимо, чтобы давление наруж-
* „ ms
ного воздуха убывало пропорционально массе Р = ------- ,
Су a 0,7M2S
Т^аким образом, полет на оптимальном режиме должен
происходить при неизменном (оптимальном) числе М с по-
степенным увеличением высоты по мере облегчения самоле-
та. Такой полет называют обычно полетом «по потолкам»,
хотя он на самом деле происходит несколько ниже статичес-
кого потолка. Выходит, что летчик должен выдерживать вер-
тикальную скорость набора в точном соответствии с этим ус-
ловием. А как же это сделать, если известно, что набор вы-
соты в таком полете происходит настолько медленно, что по
вариометру его обнаружить нельзя?
Для того чтобы ответить на этот вопрос, надо пояснить, что
по мере облегчения самолета и при сохранении постоянными
,, mg
а и числа М лобовое сопротивление Ха г=—и, казалось бы,.
К
16&
летчику необходимо уменьшать частоту вращения ротора дви-
гателя («обороты»), так как в противном случае начался бы
рост числа М полета.. Если бы полет происходил на неизмен-
ной высоте, то так бы и пришлось сделать, но при полете «по
потолкам» этого делать не нужно: в стратосфере тяга авто-
матически уменьшается пропорционально давлению воздуха
(а значит, и массе) при неизменной частоте вращения ротора
двигателя. Это делает весьма простой технику полета «по по-
толкам»: летчик устанавливает неизменную частоту вращения
ротора двигателя («обороты») и сохраняет постоянным чис-
ло Ml макс • Высота при этом увеличивается автоматически по
мере уменьшения массы.
Однако здесь надо подчеркнуть, что по тактическим усло-
виям возникает потребность выполнять полет «по потолкам»
не в стратосфере, а сразу после взлета и набора высоты или
после выполнения части задания. В этом случае тяга с высо-
той уменьшается медленнее, чем давление, и поэтому летчи-
ку придется убирать избыток тяги (сохранять Р=Ха г), т. е.
уменьшать режим работы двигателя, сохраняя постоянным
число Ml макс- Здесь уместнее говорить, что полет «по потол-
кам» происходит уже не на оптимальной высоте по топливу,
а на наивыгоднейшей (где gw > ?минмин для Нопт).
Учитывая, что на современных самолетах летчик может
вести контроль угла атаки по прибору, методика выполнения
полета «по потолкам» состоит в следующем:,
— набирается высота начала полета «по потолкам» и под-
бором режима работы двигателя устанавливается число
Ml макс}
— по указателю угла атаки определяется и запоминается
угол а, соответствующий началу полета «по потолкам»;
— подбором режима работы двигателей сохраняются по-
стоянными число Ml макс и а (при этом самолет по мере вы-
работки топлива будет набирать высоту);
— изменяется режим работы двигателя при полете в ус-
ловиях переменной температуры воздуха.
Последнее очень важно, так как полет «по потолкам» вы-
полняется при частоте вращения роторов двигателей, близ-
ких к максимальным. При повышении температуры воздуха
для поддержания заданного режима полета потребуется уве-
личить частоту вращения роторов двигателей (пропорцио-
нально ]Л7\т. е. практически на 1% нажцждые 4° температу-
ры). При этом может оказаться, что даже при полете с мак-
симальной частотой вращения роторов двигателей заданный
режим выдержать невозможно. В этих условиях выполнение
164
полета возможно только на меньшей высоте, что сократит
дальность полета.
Необходимо обратить внимание обучаемых, что баромет-
рическая высота полета «по потолкам» с увеличением угла
стреловидности крыла уменьшается, что легко объяснить, ис-
пользуя ранее изложенный материал.
У некоторых летчиков может возникнуть сомнение: не по-
явится ли при полете «по потолкам» на стратосферных высо-
тах угроза безопасности полета, если сохранять постоянной
истинную скорость. Ведь с увеличением высоты в этом случае
приборная скорость (по широкой стрелке) будет постепенно
уменьшаться и может стать* менее приборной эволютивной
скорости. На это следует ответить, что опасность уменьшения
приборной скорости в горизонтальном полете связана не с са-
мой скоростью, а с углом атаки: его чрезмерное возрастание
может привести к сваливанию самолета.
Однако поскольку при полете «по потолкам» угол атаки
сохраняется неизменным (его увеличение, которое требова-
лось бы в связи с постепенным снижением приборной скорос-
ти, компенсируется уменьшением потребного угла атаки из-за
облегчения самолета), то никакой угрозц безопасности поле-
ту не возникает. Вот если бы летчик сохранял постоянной не
истинную, а приборную скорость, то ему) пришлось бы по ме-
ре выработки топлива уменьшать угол атаки, отходя от его
оптимальной величины. В; результате дальность полета умень-
шилась бы из-за возрастания километрового расхода топлива
по сравнению с выдерживанием постоянной истинной скорос-
ти полета.
Действительная угроза безопасности полета «по потол-
кам» может возникнуть, если стреловидность крыла в полете
подбирается так, что самолет на данных Н и М выходит на
режим тряски, на которой длительный полет вызывает повы-
шенную утомляемость экипажа. Во избежание попадания са-
молета на режим тряски при выполнении длительных марш-
рутных полетов необходимо при подготовке к полету выявить
эти режимы с помощью Инструкции по расчету L и т и при-
нять решение о возможности выполнения полета на заданном
режиме (даже если он совпадает с числом Ml макс) в зависи-
мости от возможности полета на нем, подготовленности эки-
пажа и т. д.
Весьма поучительно сразу после изложения этого материа-
ла проследить определение режима полета «по потолкам» и
его зависимости от различных факторов, используя номограм-
мы, имеющиеся в Инструкции по расчету L и т изучаемого
самолета.
165
4.4.2. Режимы установившегося маневрирования
Прежде всего следует напомнить, что в инструкциях по
расчету дальности и продолжительности полета кроме Q4 и q
используется понятие секундных расходов топлива и имеют-
ся номограммы для их определения на различных режимах
работы двигателей: Qc = -^-.С секундным расходом топли-
3600
ва тесно связан расход топлива на любом участке маневра:
май — Qc Т-ман
3600
^ман •
Отсюда следует, что расход топлива при маневрировании
зависит от выбранного летчиком режима работы двигателя
(через Суд и Р) и от времени маневра. Время Маневра, в свою
очередь, зависит от высоты и скорости полета и от перегрузки
на маневре. В зависимости от них маневрирование может
быть установившимся (без изменения энергетической высо-
ты) и неустановившимся (с изменением энергетической вы-
соты) .
После этого рассмотреть возможность экономии топлива
на установившихся маневрах, например, при выполнении
установившихся разворотов и виражей. Так, целесообразно
выяснить, влияет ли угол крена при установившемся разворо-
те на расход топлива и если влияет, то как найти оптималь-
ный крен по топливу? Чтобы выяснить это, надо предвари-
тельно вывести формулу, определяющую расход топлива на
установившемся развороте.
При развороте на угол <р
ср __ (р V
^разв ~ — - _/—-----г ,
gVri Ya— 1
а
Р = X = — т£ПУа
а К к
Тогда
п _ СулР _r mg Пу а
3600 уд 3600 К ’
откуда
т -П -Г mnYa
— ц/с Тразв — С» уД -
К
g______фУ
3600 gyrn2Ya— 1 *
166
Для того чтобы была однозначность при анализе, необхо-
димо преобразовать выражение
Пу а _ 1_____
/п2Уа-1 “ V 1-\/П2уа ’
тогда
т _ gmV<?____________Суд
тразв 3600 К/1 — l/n2Ya'
или, считая tn, V, <р постоянными величинами,
Q
mt разв = Const —— . (4.1)
KV 1 — 1/п г<2
Анализ целесообразно начать с выяснения, какой разво*
рот по топливу выгоднее — с малым креном или с большим.
Для разворота с малым креном потребная перегрузка
близка к единице ( при т = 10° nY а =—— =—— = 1,016,
\ cosT 0,984
а при т = 5° nY а =1,004 j , следовательно, близка к единице
и величина 1/п2уа. По мере дальнейшего уменьшения ма-
лых кренов величйна У 1 —1/п2у а стремится к нулю, а сле-
довательно, расход топлива увеличивается. Вывод: малые
углы крена на установившемся развороте невыгодны с точ-
ки зрения экономии топлива (располагаемое время боя
уменьшается).
Однако из приведенных рассуждений не ясен физический
смысл причины увеличения расхода топлива с уменьшением
малых кренов. Чтобы раскрыть его, целесообразно выяснить,
как при уменьшении малых кренов будут изменяться время
разворота и секундный расход топлива, после чего уже можно
судить об изменении расхода топлива из баков: тг — Фс^разв-
Удобно проделать это с помощью числового примера: пусть на
одной и той же скорости выполняется разворот на один и тот
же угол (Дер), но при у1 = 10° и у2 = 5°.
Как в этом случае будет отличаться время разворотя?
_ Д ф __ Д ф V т _ Д ф . Д ф V
0)1 gV П*у al— 1 ’ 0)2 gV.n2ya2—l
откуда
- 1/ П2у а 1 1 = f 1’032 “ 1
Т1 “ |/ П2уа2— 1 |/ 1,008—1
167
Это означает, что время разворота на заданный угол с кре-
ном 5° будет в два раза больше, чем с креном 10?. Секундные
же расходы топлива будут практически одинаковыми и при-
мерно такими же, как в прямолинейном горизонтальном поле-
те, так как потребные перегрузки практически не отличаются
от единицы. Следовательно, при уменьшении крена от 10 до 5°
расход топлива из баков увеличивается в два раза за счет
большого времени, потребного на разворот. Это же можно по-
яснить с помощью символической формы записи:
летчик ^4
летчик _______J Ха---------р Ос ~ constX
При 1 малых т---------— |тмина
(У == COnst) (й И ПрИ Д f = CODS! — f Сразв
Читается это так: при уменьшении крена летчик для со-
1
хранения высоты снижает перегрузку по закону nY а~--------
cos 7
В результате уменьшается лобовое сопротивление, и чтобы
сохранить скорость, летчик снижает частоту вращения ротора
двигателя («обороты»). При этом увеличивается Суд и тяга
уменьшается так, что Qc или несколько снижается или оста-
ется постоянным. Одновременно с понижением nY а уменьша-
ется со — .п 7~.......I. ( при постоянной скорости) и увел-
Д ср
личивается время разворота т = —. В итоге увеличивается
со
и уменьшается располагаемое время на боевое маневрирова-
ние. Таким образом, ясно, что малый угол крена явно невыго-
ден. Но, может быть, невыгоден очень большой крен?
Анализ влияния больших кренов на расходы топлива
удобно вести, выяснив сначала, как при изменении углов
/ 1 \
крена ( потребной перегрузки nYa= ) изменяются
Суд, К, 1/ 1------— , К 1---------— , и установив после
г а у П2у а
этого характер изменения расходов топлива при разворо-
те. Характер изменения всех этих параметров и тт показан
на рис. 4.8.
Из формулы (4.1) следует, что расход топлива за время раз-
ворота тем меньше, чем больше произведение Д' 1 / 1----—-у
168
и меньше удельный расход топлива. При росте перегрузки
второй сомножитель этого произведения увеличивается. Если
угол атаки перед разворотом меньше наивыгоднейшего, то од^
новременно возрастает и качество так как при увеличении
перегрузки угол атаки приближается к наивыгоднейшему, при
котором качество максимальное. Поскольку при увеличении
перегрузки (угла крена) растет лобовое сопротивление, лет-
чику необходимо увеличивать режим работы двигателя, что
приводит к уменьшению Суд .
Рис. 4.8. Зависимость расхода топлива и определяющих его параметров
от перегрузки на установившихся разворотах
Следовательно, в этом случае увеличение перегрузки, а
значит и угла крена, и уменьшение Суд, сокращают расход
топлива. Но и тогда, когда перед разворотом угол атаки ра-
вен наивыгоднейшему (что соответствует примерно режиму
максимальной продолжительности горизонтального полета),
произведение К 1/ 1----7— при увеличении пУатоже сна-
г П2у а
чала растет за счет второго сомножителя (до точки с на
рис. 4.8) и лишь потом начинает уменьшаться, когда качество
по мере дальнейшего роста угла атаки (ОМ понижается
более сильно (правее точки с на рис. 4.8).
Если бы Суд не изменялся или влияние его изменения
было бы незначительным, то ттмин соответствовал бы ве-
169
личине
. Однако уменьшение Суд (пра-
\ г ГГу а / макс
вее точки с' на рис. 4.8) по мере увеличения частоты вра-
щения ротора двигателя („оборотов*) вызывает дальнейшее
сокращение расхода топлива (правее точки d' на рис. 4.8),
но даже и при Судмин (точка d) еще не получается гиТМИн
(в точке сГ /пТМИн), так как минимальное значение ве-
Q
личины------- УД ~"=^ соответствует большей перегрузке
KV ‘--г-
К п\ а
(точка е).
Отсюда следует, что на установившемся развороте при за-
данных скорости, высоте, полета и варианте боевой зарядки
(ПЛС) .минимальный расход топлива достигается при наивы-
годнейших перегрузках (углах крена), близких к предельным
по тяге.
Следовательно, увеличение углов крена до наивыгодней-
ших (Тнв) позволяет экономить топливо в полете. Нетрудно
рассчитать и построить зависимости тт = }(пуа, 7 ) при раз-
личных V=const (рис. 4.9). Из рисунка видно, что каждой
Рис. 4.9. Зависимость расхода топлива от перегрузки (угла кре-
на) на различных скоростях установившегося разворота
170
скорости установившегося разворота соответствуют свои наи-
выгоднейшие по расходу топлива перегрузки и углы крена.
Если такие зависимости построить для различных постоян-
ных высот, то, используя их, легко получить зависимости
/л»мин от 7нв (рис. 4.10), из которых следует, что на какой-
то скорости разворота существует самый минимальный рас-
ход топлива (назовем его оптимальным) при каком-то зна-
чении Тнв , которое обозначим как -[опт.
Рис. 4.10. Зависимость минимальных расходов топ-
лива от наивыгоднейших углов крена при устано-
вившихся разворотах на различных высотах (каж-
дой точке кривой соответствует своя постоянная
скорость разворота)
Следует обратить внимание, что на рис. 4.10 каждой точ-
ке кривых соответствуют свои отличные друг от друга, но по-
стоянные скорости разворота. Зная величины истинных ско-
ростей, соответствующих т? Опт и уОпт, не представляет труда
пересчитать их в приборные скорости и дать рекомендации
летному составу по выдерживанию режимов тт опт при выпол-
нении установившихся разворотов. Например, для одного из
серийных самолетов на малых и средних высотах эти значе-
ния соответствуют:
На Н = 1000 м Уопт = 600 км/ч, Упр. опт == 560 км/ч,
Топт == 65°.
На Н = 5000 м Уопт = 700 км/ч, Упр. опт = 540 км/ч,
Топт — 55°.
Такие данные по изложенной методике нетрудно получить
для любого серийного самолета и использовать при обучении
летного состава экономному расходованию топлива в ходе
171
боевой подготовки. Эти режимы будут полезны также при
определении скоростей и высот в зонах дежурства в воздухе
(экономится топливо — растет время дежурства), преодоле-
нии ПВО противника маневром «Змейка» и в других случаях.
Приведенные величины оптимального угла крена на боль-
ших высотах (или при большйх температурах воздуха) могут
оказаться нереальными из-за нехватки тяги для обеспечения
установившегося разворота. Тогда придется ограничиться
тем креном, который соответствует максимальному режиму
работы двигателя, т. е. выполнять разворот с креном меньше
оптимального по расходу топлива.
Отсюда следует практический вывод, что экономия топли-
ва при развороте на больших высотах достигается на макси-
мале, т. е. на предельном по тяге для этой высоты угле .крена
(например, на угле, близком к 30°, на высоте на 1000 м ниже
бесфорсажного потолка). На этих высотах иногда может
быть выгоден даже форсажный режим, так как он обеспечи-
вает возможность увеличения перегрузки и крена, что сокра-
щает время разворота. Если выигрыш от этого превысит про-
игрыш от увеличения Qc, то расход топлива из баков умень-
шится.
Однако на меньших высотах применять форсаж уже не-
целесообразно, так как относительное сокращение времени на
разворот окажется меньшим, чем повышение секундного рас-
хода топлива. А на малых высотах выдержать оптимальный
крен можно на бесфорсажном режиме при частоте вращения
ротора двигателя ниже максимальной.
4.4.3. Режим набора высоты
Известно, что расход топлива при наборе высоты состав-
ляет существенную часть от общего расхода топлива. Поэто-
му возникает проблема: как сэкономить топливо? Один из пу-
тей решения проблемы — использование рациональных ре-
жимов работы двигателя. Чтобы показать это, можно, напри-
мер, проанализировать расходы топлива при подъеме само-
лета с заданной скоростью на бесфорсажных и форсажных
режимах работы двигателя, предварительно выведя аналити-
ческое соотношение расходов топлива тт на указанных ре-
жимах:
x-v Qq _ Суд Р
тт наб = Ус -наб = — -наб - — -наб •
Но
А Н ЬН bHmg
VyycT V(P-Xa)
172
Тогда
т, наб —
^УД
3600 V
А И mg
Р
Р-Ха'
В этом выражении V, т и Ха от режима работы двигате-
ля не зависят, поэтому отношение расходов топлива при, на-
боре высоты АН на форсажном и бесфорсажном режимах
равно
Шуф б/уд ф Рф Рбф Ха
^тб ф Судбф Рбф Рф Ха
___ Судф Рф 1 Хд/Рбф
Суд бф Рбф Рф1 Рбф — Xaj Рбф
Из трех сомножителей в правой части первые два превы-
шают единицу, но третий меньше единицы, так как в знаме-
нателе ---->1,а вычитаемое в числителе и знаменателе —
РбФ
(X \
—— . Причем третий сомножитель сильно
Р бф /
уменьшается с приближением величины сопротивления Ха к
бесфорсажной тяге Рбф. В целом в зависимости от конкрет-
ных условий боевого применения отношение расходов топли-
^тф
ва ---— может оказаться как больше, так и меньше единицы,
тТ бф
т. е. в одном случае расход топлива будет меньшим на бес-
форсажных режимах, а в другом — на форсажных.
Для примера можно привестй такие данные: включение
форсажа приводит к увеличению тяги в 1,5 раза и удельного
расхода топлива в 1,8 раза, т. е. ——— = 1,8 и —— = 1,5.
С уд бф Рбф
Далее сравнить расходы топлива на малой высоте, где
Ха/Рбф =0,35 и на большой, где Ха/Р6ф =0,8 (можно на-
помнить обучаемым, что на бесфорсажном потолке Ха = Рбф>
Т. е. Х.а/Рбф = 1)-
На малой высоте
= 1,8 . 1,5 • -1 ~ 0,35 = 1,52.
тт бф 1,5 — 0,35
На большой высоте
-т,ф .. = 1,8-1,5— -= о,77.
штбф 1,5 — 0,8
173
Из примеров видно, что включение форсажа на малой вы-
соте увеличило затрату топлива на 52%, а на большой вы-
соте привело к экономии топлива на 23%.
Таким образом, на малых высотах экономии топлива не
достигается^ так как резкий рост Суд, а с ним и Qc при
включении форсажа превалирует над выигрышем во време-
ни набора высоты. На больших высотах сокращение времени
набора высоты превалирует над ростом Qc и включение фор-
сажа выгодно, тем более что начиная с некоторых страто-
сферных высот, полет без форсажа вообще невозможен.
Далее следует показать, как определить высоту включе-
ния форсажа, чтобы обеспечить оптимальный расход топлива.
Для этого используют графоаналитический прием, основан-
ный на определении наивыгоднейшего режима набора, обес-
печивающего минимальный расход топлива, в функции энер-
гетической высоты при различных режимах работы двига-
телей.
наб — Qc ^наб ~ Qc CD | Д //э,
(и Пх д)ср ^Ха/ср
где
Д Н9 = //экон ’ //э нам, кон — //кон "4“
I ^2кон TJ ______и | V2Ha4
"I--Z-- И П э нам — 12 нач I >
2 g 2 g
т. е. //экон и //Энач определяются конечными и начальными
значениями высоты и скорости полета. Определив расходы
топлива по этой формуле, строят график (рис. 4.1*1) зависи-
Рис. 4.11. К определению момента включения фор-
сажа при наборе высоты
174
мости mT (/7Э) для максимального бесфОрсажного И форсаж-
ного режимов работы двигателя.
Из рисунка видно, что на малых высотах экономичнее
производить набор высоты на бесфорсажных режимах (кри-
вая, соответствующая бесфорсажному режиму, идет положе,
т. е., например, на набор Д Н3 = 1000 м топлива тратится
меньше, чем на форсажном режиме). На больших высотах
на каждые ДЯэ=1000 м топлива тратится меньше уже
на форсажном режиме (кривая бф идет уже круче, чем
кривая ттф, и пересекает ее).
Включение форсажа соответствует той Н9 (и соответст-
вующему ей сочетанию V и //), где расход топлива на Д Н3 =
= 1000 м одинаков. Эта точка А определяется смещением
кривойтТф (Нэ) до касания кривой ттбф{Нэ). В летных ис-
пытаниях проверяют полученные результаты, а в Инструкции
экипажу режимы набора высоты с минимальной затратой
топлива указывают в виде программы изменения скорости по
выботе.
В заключение отметить, что внимательное изучение изло-
женных вопросов обеспечивает теоретическое обоснование гра-
мотного использования различных форм информации по рас-
ходам топлива, дальности и продолжительности полета как
изложенных в инструкциях по расчету дальности и продол-
жительности полета, так и новых, предлагаемых в главе 7
учебника.
1ТБ
Глава 5
МЕТОДИКА ИЗЛОЖЕНИЯ И ОБЪЯСНЕНИЯ
ПИЛОТАЖНЫХ СВОЙСТВ САМОЛЕТОВ
Потенциальные боевые возможности подразделений и час-
тей ВВС в значительной степени определяются летно-такти-
ческими, а степень их реализации — пилотажными свойства-
ми самолетов.
Под пилотажными свойствами обычно понимают целый
комплекс качеств самолета, включающий характеристики ус-
тойчивости и управляемости, свойства пилотажно-навигацй-
онного оборудования, удобство обзора, работы с оборудова-
нием кабины, представление информации о полете и т. д.
Рассмотрим главное, что определяет пилотажные свойст-
ва— устойчивость и управляемость самолетов. Пилотажные
свойства конкретной боевой авиационной техники с присущи-
ми ей достоинствами и недостатками устойчивости и управля-
емости оказывают существенное влияние на уровень реализа-
ции боевых возможностей самолетов и безопасность полетов
на различных этапах боевого применения.
Авиационный командир, решая поставленную боевую за-
дачу, должен учитывать, что при боевом маневрировании са-
молет может попасть в область высот и скоростей полета,
где изменение пилотажных свойств сопровождается неблаго-
приятными особенностями устойчивости и управляемости. Это
не только ограничивает возможности выдерживания режимов
точного пилотирования (например, при прицеливании), помо-
жет привести и к срыву атаки из-за необеспечения безопасно-
сти полета (сваливания и входа в штопор, непроизвольного
выхода на большие углы атаки и перегрузки, «выворачивания»
и т. д.).
Если командир хорошо знает пилотажные свойства само-
лета и владеет методикой их изложения и объяснения летчи-
кам, то подготовит их к управлению самолетом в сложных
условиях воздушной обстановки, научит использовать особен-
ности своей машины для ее эффективного применения, т. е.
повысит вероятность боевого успеха и безопасность полетов.
176
§ 5.1. СОДЕРЖАНИЕ И ПОСЛЕДОВАТЕЛЬНОСТЬ
ИЗУЧЕНИЯ ПИЛОТАЖНЫХ СВОЙСТВ САМОЛЕТА
Содержание и последовательность изучения пилотажных
свойств самолета с летным составом должны определяться
целью, которую ставит авиационный командир в процессе ко-
мандирской подготовки по практической аэродинамике, а ба-
зироваться главным образом на научно-практической поста-
новке: действия летчика — реакция самолета.
Этой целью в первую очередь является максимальная ре-
ализация боевых возможностей самолета, которая зависит от
многих факторов, и в том числе от пилотажных свойств са-
молета. Другими словами, необходимо добиться знаний и
умений летного состава, обеспечивающих максимальный ре-
зультат при выполнении боевой задачи на эксплуатируемом
самолете с учетом присущих ему достоинств и недостатков в
пилотажных свойствах.
Каковы же пути решения этой проблемы? Такими путйми
являются:
— воспитывать у летчиков чувство личной ответственнос-
ти за качество каждого полета как основного показателя вы-
полнения ими воинского долга по защите своей Родины;
— побудить их к активной работе по самостоятельному
добыванию знаний;
— определить оптимальный уровень знаний и практичес-
ких навыков летного состава, необходимый для успешного ос-
воения боевых возможностей самолетов, определяемых их пи--
лотажными свойствами, и повышения безопасности полетов;
— повышать уровень теоретической подготовки летного
состава. Научить самостоятельно работать с руководящими
документами и литературой, регламентирующей технику пи-
лотирования и боевое применение, умению выявлять по ней
условия, необходимые для повышения эффективности приме-
нения авиационной техники с соблюдением мер по безопас-
ности полетов;
— совершенствовать учебно-материальную базу по прак-
тической аэродинамике в направлении, обеспечивающем ка-
чественное проведение всех видов занятий и творческую са-
мостоятельную работу летчиков.
Воспитание летного состава в духе беззаветной преданно-
сти социалистической Родине, готовности к ее защите в про-
цессе изучения пилотажных свойств должно базироваться на
показе высоких боевых возможностей самолетов, привитии
веры в свою авиационную технику, ^привитии умений и навы-
ков по ее полному использованию в различных условиях бое-
вого применения.
12—5007с п
177
Объем же знаний и умений определяется программами,,
изложенными в курсах командирской подготовки, поэтому в
учебнике рассматривается рациональная методика изложения
и объяснения пилотажных свойств самолетов летному сос-
таву.
Прежде всего следует иметь в виду, что изучение этой те-
матики вызывает, как правило, большие трудности, которые
объясняются не только сложностью вопросов устойчивости и
управляемости, но и неумением обучаемых увязывать их с
летной практикой, с полетом. Иногда даже те особенности
устойчивости и управляемости, которые кратко изложены в
Инструкции летчику, остаются непонятными, а поэтому и не
всегда учитываются при пилотировании, что может привести
к предпосылкам или к летным происшествиям. Поэтому не-
обходимо сориентировать летный состав в принятых терми-
нологии, символике, определениях, правиле знаков, связан-
ных с устойчивостью и управляемостью самолетов, так как в
документах, регламентирующих летную работу, свойства са-
молета выражены техническим языком в виде графиков и
символов, за которыми скрыты физический смысл поведения
самолета в воздухе на различных режимах полета и необхо-
димые действия летчика по его управлению.
Освоение этого языка, умение «читать» графики и симво-
лы дает возможность анализировать качественные и количе-
ственные характеристики устойчивости и управляемости и по
ним оценивать пилотажные свойства самолетов, режимы по-
летов, где проявляются различные неблагоприятные особен-
ности в их поведении, учет которых повышает эффективность
боевого применения и безопасность полетов.
Затем целесообразно рассмотреть критерии оценки летчи-
ками пилотажных свойств: количественные характеристики
устойчивости и управляемости, с помощью которых летчик
при подготовке к полетам (или даже еще до выполнения по-
летов на новом самолете) может установить:
— неблагоприятные особенности в пилотажных свойствах
самолета, которые могут привести к летным происшествиям,
т. е. где, когда, почему следует ожидать опасных режимов
полета и как их предотвратить;
— на каких режимах полета, при какой конфигурации са-
молета существенно изменяется управляемость, какие ошиб-
ки в пилотировании могут быть связаны с этими измене-
ниями;
— почему следует именно так пилотировать, как указано
в Инструкции летчику, и какие могут быть допущены ошиб-
ки в технике пилотирования, как их избежать или грамотно
исправить;
178
— особенности в пилотажных свойствах, проявляющиеся
в полете, но не отмеченные в Инструкции летчику, Методи-
ческом пособии по технике пилотирования и боевому приме-
нению;
— приемы пилотирования, обеспечивающие движение са-
молета по заданной траектории;
— особые случаи в полете, их опознавание, действия по
предупреждению развития опасных ситуаций;
— меры безопасности при пилотировании и т. д.
Разобрав физическую сущность количественных характе*
ристик, надо обязательно проиллюстрировать их, т. е. пока*
зать форму представления информации о пилотажных свой-
ствах в типовой документации конкретного серийного эксплуа-
тируемого самолета. С помощью этой информации можно
приступить к изложению и объяснению влияния условий бое-
вогр применения на изменение пилотажных свойств, а следо-
вательно, на реализацию потенциальных боевых возможное*
тей самолетов.
Изменения характера движения и управляемости при ма-
неврировании самолета могут быть настолько существенны-
ми, так загружать внимание летчика, что будут отвлекать его
от выполнения основной боевой задачи. Чтобы улучшить пи-
лотажные свойства, современные самолеты оборудованы раз-
личными автоматичёскими устройствами в системе управле-
ния,- грамотное использование которых повышает эффектив-
ность боевого применения и безопасность полетов. Поэтому и
эти вопросы должны изучаться. Завершить изучение пило-
тажных свойств с летным составом можно изложением и объ-
яснением неблагоприятных особенностей устойчивости и уп-
равляемости самолета на различных режимах полета. Для
этого обучаемые будут уже подготовлены.
§ 5.2. СИСТЕМАТИЗАЦИЯ ОСНОВНЫХ ПОНЯТИЙ
И ОПРЕДЕЛЕНИЙ
5.2.1. Понятия устойчивости и управляемости самолета
Понятие устойчивости обычно связывают со способностью
самолета без вмешательства летчика возвращаться к исход-
ному состоянию равновесия (установившемуся режиму поле-
та) после прекращения действия кратковременного и ограни-
ченного по величине внешнего возмущения, которое наруши-
ло равновесие сил и моментов. Внешними возмущениями
могут быть порывы Ветра, восходящие или нисходящие пото-
ки воздуха и т. п.
Приведенная формулировка устойчивости, принятая во
12*
179
многих учебниках и учебных пособиях, является неточной, так
как не учитывает характера изменения параметров полета в
процессе возмущенного движения и времени его протекания.
Из летной практики, экспериментальных и теоретических
исследований известно, что в процессе возмущенного движе-
ния устойчивый самолет с течением времени возвращается не
ко всем величинам параметров движения, описывающих ис-
ходный установившийся режим полета. Например, самолет
может восстановить исходный угол атаки, но не вернуться
при этом к исходному углу тангажа, может возвратиться к
исходному углу скольжения, но не вернуться к исходному уг-
лу крена. Поэтому следует обратить внимание на то, что
устойчивый самолет после окончания действия конечного воз-
мущения возвращается к исходным углам атаки и скольже-
ния, определяющим положение самолета по отношению к воз-
душному потоку, но пространственные углы тангажа, крена
и рыскания при этом могут изменяться. Для сохранения их
исходных значений необходимо*либо вмешательство летчика
{что на устойчивом самолете сделать гораздо проще, чем на
неустойчивом), либо использование автопилота.
Учитывая сказанное, целесообразно так сформулировать
понятие устойчивости самолета: устойчивость — это способ-
ность самолета самостоятельно, без вмешательства летчика
или автопилота возвращаться за конечный промежуток време-
ни к параметрам движения, определяющим его положение по
отношению к потоку, т. е. к углам атаки и скольжения исход-
ного установившегося режима полета. При такой формули-
ровке летчику понятно, что самолет самостоятельно не вер-
нется к исходному курсу, крену и тангажу, и поэтому он дол-
жен своевременно вмешиваться и ^корректировать движение
самолета.
Если же рассматривать возмущения, связанные с дейст-
виями летчика (отклонением рулей, выпуском закрылков, тор-
мозных щитков, сбросом подвесок и т. д.), то целесообразно
говорить не только об устойчивости, но и об управляемости
самолета.
При управляющем возмущении (например, при ступенча-
том отклонении ручки) устойчивый самолет вернется к со-
стоянию равновесия, но при новых значениях параметров
движения (углов атаки и скольжения), соответствующих но-
вому положению рулей. В этом случае нужно говорить о со-
вместном проявлении устойчивости и управляемости самолета.
Другими словами, существует тесная взаимосвязь между ус-
тойчивостью самолета и его управляемостью.
Непосредственно под управляемостью обычно понимается
комплекс свойств самолета, характеризующих связь между
180
воздействиями летчика на рычаги управления и реагирова-
нием самолета на эти воздействия. К этому комплексу свойств
относятся: «плотность хода», «хождение за ручкой», «легкость
управления», «строгость управления» и т. д.
При выполнении боевых маневров летчик в процессе пи-
лотирования вынужден прикладывать различные величины
усилий, отклонять рычаги управления на разную величину и
с неодинаковой скоростью. В зависимости от характера из-
менения этих количественных критериев управляемости лет-
чик качественно оценивает управляемость, учитывая степень
реализации летно-тактических свойств* самолета, возмож-
ность выполнения маневров, требующих точного пилотирова-
ния (например, при прицеливании и ведении огня), простоту,
точность и гармоничность отклонений рычагов управления и
величину усилий на нйх при маневре.
В заключение отметим, что при изучении пилотажных
свойств конкретных эксплуатируемых самолетов целесооб-
разно не применять терминов «статическая» и «динамичес-
кая» устойчивость и управляемость, а использовать приведен-
ные понятия устойчивости и управляемости. Для количествен-
ной же оценки удобно использовать понятия статических и
динамических характеристик устойчивости и управляемости
(не путать с понятиями статической и динамической устойчи-
вости и управляемости). Такой подход упрощает методику
изучения пилотажных свойств самолетов, а следовательно,
сокращает сроки подготовкой летного состава и повышает ее
качество.
5.2.2. Использование систем координат
и правила знаков
При изучении пилотажных свойств самолета следует на-
помнить обучаемым, что для правильного понимания, умения
читать и анализировать графические зависимости, аналити-
ческие выражения, определяющие количественные критерии
устойчивости и управляемости, целесообразно использовать
связанную с самолетом систему координат с началом в его
центре масс и правило знаков, принятое при летных исследо-
ваниях и в специальной авиационной литературе по устойчи-
вости и управляемости.
В этой системе (рис. 5.1) продольная ось ОХ направлена
параллельно хорде крыла (положительное направление впе-
ред к носу самолета), нормальная ось ОУ-LOX и лежит в
плоскости симметрии самолета (положительное направление
вверх от плоскости крыльев). Поперечная ось OZ перпенди-
кулярна плоскости симметрии самолета (положительное на-
правление в сторону правого крыла).
181
Положение связанной системы относительно нормальной
системы определяется тремя углами: углом тангажа Ф, углом
крена у и углом рыскания гр.
Прежде чем перейти к изучению правила знаков, необхо-
димо вспомнить принятые обозначения (табл. 5.1 и 5.2).
Рис. 5.1. Связанная система координат и правило знаков
Таблица 5,1
Момент Формула момента Угловая скорость Угол
Тангажа (продольный) Afz — mzq S ba “z &
Крена (поперечный) TVIjy’ —— uiyrCj 5 I °>x 7
Рыскания (путевой) My —- triy q S I (Dy
Но ручку управления можно отклонять на себя и от себя,
влево и вправо, педали — правую и левую. В соответствии с
этим возникают кабрирование и пикирование (Mz> кренение
влево и вправо (Л4х), движение влево и вправо по курсу (Му)
и т. д. Как же их обозначить, чтобы по символам и их знакам
определить действия летчика и реакцию самолета?
Принято следующее простое правило знаков: если отсчет
вести, представив себя мысленно в кабине самолета смотря-
щим вдоль положительного направления осей связанной сис-
182
темы координат, то вращения самолета, по часовой стрелке
соответствуют положительным значениям моментов, угловых
скоростей и углов, а необходимые для их создания перемеще-
ния ручки и педалей, усилия на них, отклонения рулей счи-
таются отрицательными.
Таблица 5.2
Рычаги управления Усилие Линейное перемещение Углы отклоне- ния рулей
Ручка рв (продольное) 8ь; ?
Рэ (боковое) 8Э
Педали рв 8Н
Таблица 5.3
Движение по тангажу Движение по крену Движение по рысканию
Действия летчика Реакция самолета Действия летчика Реакция самолета Действия летчика Реакция самолета
Хв<0 Mz>0 хэ < 0 Мх>0 хн <С 0 My> 0
(РУ на себя) Рв<0 > 0 (РУ вправо) Рэ<0 шх> 0 (левая пе- даль) Рн<0 <Оу 0
(тянущее усилие на РУ) ^в<0; ? < о Д &> 0 &э<0 Д 7 > 0 < 0 Д ф > 0
(носок вниз) (на кабри- (левый (вправо) (влево) (носовая
хв 0 рование) Mz<0 элерон вниз) х3 > 0 Мх < о хн > 0 часть фюзе- ляжа влево) MY <0
(РУ от себя) “z < 0 (РУ влево) ШХ<° (правая педаль) Щу < 0
Рв>0 Д 9<0 Рэ >0 Д т <0 Рн>0 Д ф < 0
(давящее усилие на РУ) > 0; <р>0 (на пики- рование) &э>0 . (правый элерон вниз) (влево) &н>0 (вправо) (носовая часть фю- зеляжа вправо)
183
И наоборот: отрицательным моментам, угловым скорос-
тям и углам соответствуют положительные величины откло-
нений органов управления и усилий на них. Например, если
отклонение ручки на себя и тянущее усилие отрицательны
(хв <0, Рв < 0), то момент, угловая скорость и прирост угла
тангажа при этом положительны (на кабрирование—Mz>0,
o)Z > 0, Дй>0).
В табл. 5.3 и на рис. 5.1 показаны принятые знаки и их фи-
зический смысл.
Таким образом, вместо слов «Летчик отклонил ручку вле-
во, дал левую ногу и самолет стал разворачиваться и кре-
ниться влево» можно записать:
хэ > о | х
хп < 0 Iх-
> 0, toy> Д ф > 0 (влево);
* < 0, (йх < 0#. Д 7 < 0 (влево).
Запись вида o)Z>0, Д'&>0 „расшиф-
хв <С 0 J
ровывается" так: летчик приложил тянущее усилие (Рв< О),
отклонил ручку управления на себя (хв<0) и перевел са-
молет на кабрирование (Mz > 0, coz>0, Д-&>0).
Если при хн<С0 С 0, Ду>0, то это обрат-
ная реакция по крену на отклонение педали, так как лет-
чик отклонил левую педаль (хн< 0), а момент крена, угло-
вая скорость и прирост угла крена положительны, что со-
ответствует кренению самолета вправо.
§ 5.3. МЕТОДИКА ИЗЛОЖЕНИЯ И ОБЪЯСНЕНИЯ
ХАРАКТЕРИСТИК УСТОЙЧИВОСТИ И УПРАВЛЯЕМОСТИ.
ИСПОЛЬЗОВАНИЕ ХАРАКТЕРИСТИК УСТОЙЧИВОСТИ
И УПРАВЛЯЕМОСТИ ДЛЯ ВЫРАБОТКИ РЕКОМЕНДАЦИЙ
ПО ПОВЫШЕНИЮ БЕЗОПАСНОСТИ ПОЛЕТОВ
Приступая к изучению пилотажных свойств самолета, лет-
чик обнаружит ряд их особенностей, изложенных в Инструк-
ции летчику, Методическом пособии по пилотированию и бое-
вому применению, в учебном пособии по практической аэро-
динамике и в другой литературе регламентирующего или опи-
сательного характера. Иногда сведения по пилотажным свой-
ствам изложены очень кратко, схематично, в лучшем случае
показано, как проявляется то или иное свойство в полете.
Летчику же нужно знать не только как, но и почему эта
свойство самолета проявляется, на каких режимах полета,
как управлять самолетом, чтобы реализовать его потенциаль-
184
ные летно-тактические свойства, несмотря на проявление не-
благоприятных Пилотажных свойств. Поэтому при изучении*
пилотажных свойств целесообразно воспользоваться заранее
отработанной методикой изложения и объяснения.
5.3.1. Методика изложения
1. Рассмотреть виды возмущенного движения самолета.
2. Изложить и объяснить физическую сущность динами-
ческих характеристик устойчивости и управляемости.
3. Проанализировать связь динамических характеристик
устойчивости и управляемости с качественными определения-
ми пилотажных свойств, используемыми летным составом для
оценки поведения самолета («плотностью хода», «хождением
за ручкой», «строгостью управления» и др.).
4. Напомнить общую структуру суммарных продольного и.
бокового аэродинамических моментов.
5. Изложить и объяснить физическую сущность статичес-
ких характеристик устойчивости и характеристик демпфиро-
вания движения самолета, используя аэродинамические мо-
менты.
6. Установить связь статических характеристик и харак-
теристик демпфирования с продольной и боковой устойчи-
востью самолета.
7. Показать связь коэффициентов рулевых моментов с
характеристиками системы управления самолета.
8. Изложить и объяснить статические характеристики уп-
равляемости самолета.
9. Показать, что характеристики устойчивости и управ-
ляемости являются критериями оценки пилотажных свойств
самолета.
10. Использовать анализ характеристик устойчивости и
управляемости для выработки рекомендаций по пилотирова-
нию самолета и повышению безопасности полетов.
5.3.2. Виды возмущенного движения самолета
В полете проявляются пилотажные свойства,, присущие
данному конкретному типу самолета. Они определяют харак-
тер его движения при отклонении летчиком рычагов управле-
ния (рулей), изменении режима работы двигателя или полет-
ной конфигурации самолета (стреловидности крыла, положе-
ния воздушных тормозов, закрылков и т. д.), стрельбе из бор-
тового оружия, сбросе наружных подвесок, а также при воз-
действии на самолет атмосферной турбулентности или других
возмущений (взрывов и т. д.).
Здесь следует напомнить обучаемым, что движение само-
185
лета, обусловленное изменением сил и моментов при откло-
нении рычагов управления, называется вынужденным или уп-
равляемым движением, а движение, развивающееся послед
внешнего возмущения при зажатых рычагах управления, на-
зывается свободным или собственным движением самолета.
И то и другое движение называют возмущенным, так как
оно получается от сложения исходного невозмущенного дви-
жения (например, установившегося прямолинейного горизон-
тального полета) и дополнительного движения самолета
(вращательного и поступательного).
Возмущенное движение отличается от невозмущенного и
после того, как действие возмущения прекратилось, причем
его характер может быть как колебательным, так и неколеба-
тельным (апериодическим).
Рассматривая характер возмущенного движения самоле-
та, необходимо использовать понятие переходного процесса,
который показывает, каким образом (колебательно или апе-
риодически), за какое время самолет переходит на новые зна-
чения или возвращается к исходным значениям параметров,
характеризующих режим полета. Другими словами, переход-
ный процесс — это процесс изменения параметров, характе-
ризующих режим полета.
Из опыта полетов летному составу известно, что парамет-
ры полета при возмущенном движении самолета изменяются
по времени неодинаково. Быстро изменяются углы атаки, тан-
гажа, скольжения, крена, перегрузка (нормальная и боко-
вая), но медленно изменяются скорость и высота полета, угол
наклона траектории к горизонту- и т. д.
Это и понятно: повороты самолета вокруг центра масс со-
вершаются в течение немногих секунд и даже долей секунды,
в то время как для значительного изменения скорости или
направления полета требуются десятки'и даже сотни секунд.
Напоминая летчикам эти положения, следует подчеркнуть,
что поэтому продольное и боковое возмущенные движения
самолета в свою очередь делятся на два этапа общего дви-
жения:
— короткопериодическое (период — доли-секунды или не-
сколько секунд) или малое, связанное с вращением вокруг
центра масс и несущественными поступательными перемеще-
ниями самолета по высоте и горизонту (вверх, вниз, влево,
вправо), вызванное главным образом нарушением равнове-
сия моментов;
— длиннопериодическое (период — несколько десятков се-
кунд) или фугоидное, связанное с перемещениями в простран-
стве центра масс самолета, сопровождающимися изменения-
ми величины и направления скорости полета, высоты, углов
186
наклона траектории и вызванное главным образом нарушени-
ем равновесия сил.
При раскрытии этого вопроса (рис. 5.2, 5.3) полезно на-
помнить, что летчик только в испытательных полетах предо-
ставляет самолету двигаться самостоятельно в течение не-
скольких десятков секунд, а обычно он сразу вмешивается и
корректирует движение самолета. Поскольку длиннопериоди-
ческое движение развивается медленно, летчик парирует его
машинально, легко и иногда даже не замечает этой неопас-
ной разновидности возмущенного движения.
Другое дело короткопериодическое движение, которое раз-
вивается быстро, летчик его ощущает, наблюдает и именно
оно влияет на оценку пилотажных свойств самолета на раз-
личных режимах полета. Следовательно, по критериям корот-
копериодического движения можно предвидеть, установить,
прогнозировать поведение самолета и вырабатывать рекомен-
дации по пилотированию при подготовке к полетам на земле,
при моделировании предстоящего полета. Например, если
графические зависимости количественных характеристик ус-
тойчивости и управляемости показывают большое число ко-
лебаний малого периода с большим временем затухания, то
можно сделать вывод, что пилотирование самолета на этом
режиме полета без применения автоматических устройств
будет сильно затруднено, парирование колебаний опасно (из-
за возможной раскачки). Отсюда командир может сделать
соответствующие выводы и дать рекомендации по пилотиро-
ванию (например, зажать ручку управления до прекращения
колебаний, а не пытаться их парировать).
Полезно с помощью рис. 5.2 и 5.3 показать вынужденное
и свободное продольное возмущенное движение самолета. От-
метить, что длинйопериодическое движение (II этап) начина-
ет заметно проявляться лишь после того, как за счет демпфи-
рующих свойств самолета затухнет короткопериодическое
движение. Напоминая летчикам эти основы, следует показать
физику возникновения колебаний.
Короткопериодическое продольное движение устойчивого
самолета обычно представляет собой затухающие быстрые ко-
лебания углов атаки, тангажа, перегрузки. Эти колебания
вызваны нарушением продольного равновесия моментов, их
непрерывным изменением по величине и знаку, приводящим
к вращению самолета вокруг центра масс, к появлению при-
ращений подъемной силы, а следовательно, и к искривле-
ниям траектории.
Если первоначальным возмущением явилось, например,
увеличение углов атаки и тангажа, то положительный при-
кроет подъемной силы будет искривлять траекторию движения
187
00
дУ
О
I3TQR
Короткопериодическое
~дд имение (мал ое-несколько*
. п секунд)
ht^<0; мЧ>О дУ~О
0^05дя1|кт
"-исх
(Н-Хисх)
КсХ
3*£«СД
A<t
АСС
Ь ~5 6
дх^=const
-------tiai__________
Переходный, процесс
Два згапа возмущенного движения ---------
самолета Лзтап
__________Длиннопериодическое движение
(большое-десятки секунд)
Ар л Х1< О
1д0^О^.
дУ<О
Д17- А оС >О дУ^О*
дУ<сг
д6<о
17*0
дУ<0
и д0>о
Ь^чст^исх Д<Л.д<«т>О
<*• =С^ЦСХ+ A0^«jCT
Я-в^Висх^Яб
~K"'tc
Рис. 5 2. Вынужденное продольное
дУц-0
досуст srCOrtSt
АХв =const
*Уа>0
д1Т=Л<^>0
дУ<о
лв-о
возмущенное движение самолета
дУц’О
^^>0
*V<o
д6>0
Iэтап (V= const)
--------Коротко периода.---
чеекое движение (малое~нкком>р
Д?Г См а.
т$<о
Л 5а зтоша. возмущенного движения самолета --------
U этап (ny=corist)
------------Д л и нноп ери о ди иеское ------------
движение (большое, тру гоидное-десятки секунд)
мех Дс(_=О^ дМу = О
ДОС
(дпу)
Рис. 5.3. Собственное продольное возмущенное движение самолета
самолета вверх, а момент этого прироста относительно центра
масс — уменьшать угол атаки, ликвидируя возмущение. Ког-
да угол атаки станет меньше исходного, момент изменит знак,
что приведет к увеличению угла атаки, но оно будет меньшим,
чем первоначальное. Через 1—3 с процесс восстановления
угла атаки заканчивается, и самолет оказывается в наборе
высоты.
Здесь снова необходимо обратить внимание летчиков, что
после окончания короткопериодических колебаний исходный
режим полета восстановился неполностью: угол атаки стал
прежним, но угол тангажа и угол наклона траектории не вер-
нулись к исходному значению. Это и будет причиной длинно-
периодического движения (если летчик и дальше не будет
вмешиваться в управление): пологий подъем приведет к по-
степенному уменьшению скорости, а с ней и подъемной силы.
Траектория начнет искривляться (Ka<mg), и постепенно
самолет перейдет на снижение, набирая скорость и увеличи-
вая подъемную силу.
Когда наступит неравенство Ya >tng, траектория начнет
искривляться вверх, самолет постепенно перейдет к набор вы-
соты и т. д. Таким образом, процесс колебаний будет повто-
ряться в течение десятков секунд.
Следует предупредить, летный состав, что характер длин-
нопериодического движения только в том случае не опасен,
если самолет устойчив по скорости. В противном случае в на-
чале длиннопериодического движения неустойчивый по ско-
рости самолет может попасть в неблагоприятный режим за-
тягивания в пикирование.
Исходя из изложенного, можно сделать следующие вы-
воды:
1. С точки зрения пилотирования самолета длинноперио-
дическое движение не имеет особого значения (кроме режи-
мов полета, где проявляется неустойчивость по скорости), так
как летчик на длительные промежутки времени не предостав-
ляет самолет самому себе.
2. Для летчика основной интерес представляют характе-
ристики короткопериодического движения, т. е. начальной ста-
дии возмущенного движения, оказывающей существенное
влияние на пилотирование и, следовательно, на эффектив-
ность выполнения боевой задачи.
3. Для того чтобы безопасно и эффективно управлять со-
временными боевыми самолетами, нужно хорошо понимать
сущность переходных процессов, развивающихся при наруше-
нии равновесия, знать количественные характеристики устой-
чивости и управляемости и уметь их анализировать.
4. Без знания общепринятых понятий и терминологии лет-
190
чик не сможет даже прочитать материалы, характеризующие
устойчивость и управляемость конкретного типа самолета, и
тем более не сможет провести их анализ для учета поведения
самолета и выработки рекомендаций пр технике пилотирова-
ния в различных условиях боевого применения.
Летчик, выполняя боевой полет, отклоняет рычаги управ-
ления в соответствии с задачей управления (воздушный бойг
атака наземной цели, десантирование воздушным способом
и т. д.), а самолет в различных условиях боевого применения
неодинаково реагирует на одни и те же величины отклонения
рулей, что ощущается летчиком по различному изменению уг-
ловых ускорений (в первом приближении — темпа изменения
углов крена, тангажа и т. д.) управляемых параметров.
Другими словами, летчик реагирует на характер изменения
переходных процессов, описываемых количественными крите-
риями устойчивости и управляемости, называемыми динами-
ческими.
5.3.3. Динамические характеристики устойчивости
и управляемости, их физическая сущность и связь
с качественными определениями пилотажных свойств
самолетов
Переходный процесс возмущенного Движения самолета но-
сит, как правило, колебательный характер и количественно
оценивается множеством динамических характеристик устой-
чивости и управляемости.
Наиболее важными из них (см. рис. 5.2, 5.3), которым сле-
дует в первую очередь уделить внимание, являются:
/ср — время срабатывания;
Д хзабр — величина относительного заброса параметра (угла
атаки, скольжения, перегрузки и т. д.);
/зат — время затухания колебаний самолета;
Т — период колебаний самолета;
тзат— показатель затухания колебаний самолета;
Язат—число колебанйй до практически полного их зату-
хания.
Здесь необходимо подчеркнуть, что эти характеристики
приводятся в Техническом описании самолета, которое хотя
и называется техническим, содержит информацию, необходи-
мую летчику для анализа поведения самолета в предстоящих
полетах.
Главное при изучении этого вопроса — обратить внимание
обучаемых на физический смысл динамических характерис-
тик. При этом целесообразно привести те цифровые данные,
характеризующие величины динамических характеристик, ко-
191
торые, как установлено из опыта полетов, обеспечивают при-
емлемые пилотажные свойства самолета. Привязывая эту ин-
формацию к конкретному самолету, следует вести сравнение с
ними величин динамических характеристик изучаемого само-
лета, что поможет сделать качественные выводы о возможном
поведении самолета на различных режима^ полета.
1. /Ср — время от начала возмущенного движения, за кото-
рое приращение рассматриваемого параметра движения (угла
атаки, крена, перегрузки, угловой скорости и т. д.) впервые
становится равным А х = 0,95 А хуст, где А хуст — последую-
щее установившееся приращение параметра, соответствующее
новому балансировочному положению руля в установившемся
полете. Например, если летчик из горйзонтального прямоли-
нейного полета вводит самолет в вираж с креном ,60°, то по-
требная перегрузка пх а = 2 и тогда Аиу а уст—Пу a ^Уаг.п ет
= 2—1 = 1, а время срабатывания будет соответствовать вре-
мени первого достижения величины Аиуд = 0,95 Аиудуст =
=0,95-1 = 0,95. Время /ср характеризует быстродействие уп-
равления, т. е. показывает, как (вяло, энергично) самолет
«ходит за ручкой управления».
Время срабатывания будет тем меньше, чем больше угло-
вое ускорение после отклонения рычага управления:
М
СО =* - .
I
где М— суммарный момент (тангажа, рыскания, крена);
I — соответствующий момент инерции самолета.
Но так как суммарный момент зависит от степени устой-
чивости самолета, величины отклонения руля и его эффектив-
ности, характеристик демпфирования, то от них будет зави-
сеть и время срабатывания.
Летная практика показывает, что если /ср не превышает
1,5—3 с, то быстродействие (реакция самолета на отклонение
рычагов управления) обеспечивает необходимое качество пи-
лотирования.
2 А „ __ А Хзабр А Хмакс А Хуст
• Х-забр — --------- — ,
A XyQT Al Хуст
где Ахмакс — максимальная величина, которую регулируе-
мый параметр движения достигает впервые от начала воз-
мущенного движения.
Например, если за параметр движения взять перегруз-
ку и принять, что А Пу а макс = 7,5 (здесь Апуд берем от
Л 92
Пуа—1» т- е- п\ а макс “ ^,5), 3 Д Пу а уст ~ 6,0, ТО А П\ а забр =
— 1 5
х= 7,5 — 6,0 = 1,5. Тогда А яуа3абр — —2— = 0,25.
6,0
Величина Ахзабр влияет на точность пилотирования (по-
казывает, как точно ходит самолет за рычагами управле-
ния). Чем больше величина Ахзабр, тем труднее обеспечить
точное пилотирование. Например, если относительный заброс
по углу атаки и перегрузке превышает величину 0,2, то пило-
тирование самолета существенно затрудняется, так как при
энергичном маневрировании за счет заброса возможен выход
на а>адоп или Луа>4амакс.
У современных маневренных самолетов А /гзабр может до-
стигать величин 0,3—1,0. Из этого следует вывод, что на ре-
жимах полета, где достигаются такие величины, может суще-
ственно снизиться безопасность полетов. Обратив на это
внимание летного состава, надо предупредить, что для пред-
отвращения выхода на неэксплуатационные углы атаки и пе-
регрузки необходимы плавные и своевременные действия ру-
лями и усиленный контроль за положением самолета.
3. Время затухания /зат—время от начала переходного
процесса, за которое начальная амплитуда возмущения умень-
шается в 20 раз, т. е. до 5% начального значения. Процесс
затухания практически бесконечен, поэтому, чтобы ограничить
его, и считают, что в данном случае колебательное движение
практически прекращается.
С увеличением высоты ^уменьшением числа М полета вре-
мя затухания возрастает.
Время затухания оказывает существенное влияние на тех-
нику пилотирования, безопасность полета и боевое примене-
ние. Так, увеличение времени затухания колебаний затрудня-
ет пилотирование и прицеливание, а также вынуждает летчи-
ка отвлекать внимание на непрерывное парирование случай-
ных возмущений режима полета.
4. Период колебаний также оказывает влияние на технику
пилотирования, безопасность полета и боевое применение.
Уменьшение периода колебаний при большом времени зату-
хания резко ухудшает условия прицеливания и ведения при-
цельного огня.
Если период колебаний будет менее 1,0—1,5 с, то полет
становится опасным, так как летчик, пытаясь парировать руч-
кой эти высокочастотные колебания, опаздывает с реакцией
и раскачивает самолет до опасных углов атаки и перегрузок.
Следует показать, что используемое соотношение Т = —зат
пзат
193
справедливо только для случая свободных колебаний само-
лета.
о. тзат -----------относительное уменьшение амплитуды
А+т
колебаний за один период. Этот показатель характеризует ин-
тенсивность затухания колебаний самолета, т. е. способность
самолета демпфировать (гасить) колебания. Например, если
при анализе характеристик самолета выявлено, что глзат =10,.
то на данном режиме полета (высоте, скорости) в течение од-
ного колебания амплитуда уменьшается в 10 раз, а практи-
чески полное затухание колебаний (в 20 раз) произойдет за
два колебания. Такая величина тзат обеспечивает в продоль-
ном движении приемлемое поведение самолета на ответствен-
ных режимах полета. Если же тзат =2, то, например, до
уменьшения амплитуды колебаний угла крена в 20 раз про-
изойдет 10 колебаний.
Малые величины тзат являются признаком плохой устой-
чивости самолета.
6. Показатель /гзат характеризует, как „плотно сидит**
20 ,
самолет в воздухе. пзат =----- (справедливо только для
случая свободных колебаний самолета, т. е. без вмеша-
тельства летчика).
При тзат = 1 (незатухающий процесс) формула непри-
годна. При тзат = 2 пзат = 10; при тзат = Ю язат = 2, следо-
вательно, при увеличении тзат и уменьшении /гзат улучша-
ются условия прицеливания.
Летная практика показывает, что если пзат> 3—4, то за-
трудняется точное пилотирование, так как любое возмущение
вызывает слабозатухающие колебания самолета, что затруд-
няет прицеливание и приводит к большому рассеиванию сна-
рядов при стрельбе из пушек.
В описании самолета кроме указанных динамических ха-
рактеристик обычно приводится еще величина х (рис. 5.4), ко-
торая оказывает существенное влияние на поведение самоле-
та в боковом движении (совместном движении по рысканию
и крену). Поэтому полезно показать, как величина х характе-
ризует взаимосвязь этих движений:
WX макс тх /у
X =-------~------------.
WY макс mY lx
Отсюда видно, что х характеризует отношение максималь-
ных угловых скоростей крена и рыскания и зависит главным
194
образом от поперечной (т^), путевой (/и^) устойчивости и от
соотношения моментов инерции (Л7Лх).
По величине х можно судить, какой вид движения — кре-
нение или рыскание — преобладает в процессе боковых коле-
баний самолета. Например, если х=15, то это значит, что са-
молет кренится в 15 раз быстрее, чем изменяет угол рыска-
ния. При малых значениях х (х 3) реакция самолета на от-
клонение педали (на скольжение) не сопровождается резким:
Рис. 5.4. Зависимость величины х:
а — от числа Л1 и высоты полета; б — от приборной скорости полета
кренением, т. е. самолет не будет строгим в отношении неточ-
ной дозировки в даче ноги. Такой самолет легче пилотировать
при полете в неспокойной атмосфере (например, при заходе^
на посадку с боковым ветром).
При значительном преобладании движения крена над рыс-
канием (большие х) пилотирование затрудняется, так как са-
13*
195
молет при боковых колебаниях излишне быстро кренится и
при небольших периодах колебаний это может привести к бо-
ковой раскачке самолета.
Заметим, что при большой интенсивности затухания боко-
вых колебаний (большая величина zn3aT и малое значение
/зат ), когда они практически затухают за 1 —1,5 периода (та-
кое затухание наблюдается только на самолетах с включен-
ными демпферами рыскания и крена), летчик воспринимает
их не как колебания, а как апериодическое (неколебательное)
движение. В этих условиях даже большие величины х ( — 5—
8) могут не замечаться летчиком и не мешать пилотированию.
При х = 0 самолет не реагирует креном на скольжение.
Необходимо обратить внимание летчиков на то, что у них
может появиться мнение, что собственные свойства самолета
не имеют значения, так как летчик не будет ждать развития
возмущенного движения самолета, а своевременно вмешает-
ся в управление и в зависимости от конкретных условий поле-
та будет это делать с различным темпом, имея, например,
целью уменьшить /зат, А *забР и /?зат- Но достичь этой цели
можно быстрее и проще, с меньшими затратами энергии, при
меньших навыках в пилотировании, а значит и безопаснее, на
самолете, который сам без вмешательства летчика стремится
вернуться к основным исходным параметрам движения, т. е.
имеет хорошие характеристики устойчивости. Летчик же свое-
временным вмешательством в процесс развития возмущенно-
го движения может изменить характер переходного процесса в
требуемую ему сторону, подавив собственные динамические
свойства самолета.
Кроме того, от собственных свойств самолета зависят ве-
роятность и величина ошибок в технике пилотирования (нару-
шений потребных дозировки, соразмерности отклонения рыча-
гов управления и т. д.), а значит и безопасность полетов.
Дело в том, что собственные свойства самолета при раз-
личной степени устойчивости (нормальной, повышенной и ма-
лой), а то и неустойчивости также различны и требуют раз-
личных навыков в технике пилотирования.
И, наконец, хорошая устойчивость исключает самопроиз-
вольный выход самолета на опасные режимы полета (по углу
атаки, перегрузке, скорости и т. д.).
Если в процессе собственного возмущенного движения са-
молета /Зат велико (например, при полете на больших высо-
тах), то потребуется много времени для восстановления рав-
новесия, а если еще при этом мал период колебаний, то такой
тип колебательного затухающего возмущенного движения с
точки зрения пилотирования самолета является неблагопри-
ятным.
196
Если же процесс затухания колебаний непродолжителен
или является апериодическим, то при таком типе возмущен-
ного движения техника пилотирования упрощается, .а число
возможных ошибок уменьшается (рис. 5.5).
Рис. 5.5. Изменение угла атаки в процессе малого продольного возмущен-
ного движения:
а — колебательное с быстрым затуханием; б—апериодическое с быстрым
затуханием; в — апериодическое с медленным затуханием
Естественно, если с течением времени колебательный про-
цесс усиливается или происходит апериодическое нарастаю-
щее отклонение от исходного режима равновесия, то такие ви-
ды возмущенного движения усложняют процесс пилотирова-
ния и утомляют летчика.
Любой из этих видов движения описывается теми коли-
чественными критериями, которые рассмотрены. Следователь-
но, анализируя их для конкретного самолета, авиационный ко-
мандир при подготовке к полетам не только может прогнози-
ровать поведение самолета на различных этапах боевого поле-
та, но и учить свой летный состав эффективно использовать
боевые возможности самолета и повышать уровень безопас-
ности полетов.
Исходя из изложенного, можно сделать следующие вы-
воды.
1. Динамические характеристики устойчивости и управляе-
мости определяют поведение самолета (характер переходных
процессов) при отклонении летчиком органов управления, из-
менении режима работы двигателя или полетной конфигура-
ции самолета, открытии огня из бортового оружия, сбросе
подвесок, а также при воздействии на самолет атмосферной
турбулентности или других возмущений.
2. Для полного использования боевых возможностей само-
лета и соблюдения необходимого уровня безопасности полетов
летчик должен хорошо понимать сущность переходных про-
197
цессов, определяющих поведение самолета при нарушении
равновесия, знать и уметь анализировать динамические ха-
рактеристики, чтобы прогнозировать поведение самолета на
различных этапах боевого полета и выбирать рациональные
способы пилотирования.
3. Динамические характеристики тесно связаны со стати-
ческими характеристиками устойчивости и управляемости. По-
этому следующим этапом в изложении и объяснении летному
составу пилотажных свойств должно быть рассмотрение фи-
зической сущности статических характеристик устойчивости
и управляемости. Это рассмотрение можно проводить на
основе анализа суммарного аэродинамического момента.
5.3.4. Связь суммарных аэродинамических
моментов тангажа, крена и рыскания со статическими
характеристиками устойчивости и управляемости
Прежде всего следует напомнить общую структуру аэроди-
намических моментов, для чего удобно воспользоваться за-
писью в виде табл. 5.4.
Из таблицы видно, что основными аэродинамическими мо-
ментами, определяющими характер переходных процессов (ди-
намических характеристик), являются статические, рулевые и
демпфирующие моменты.
На примере продольного возмущенного движения было
показано, что угол атаки и перегрузка изменяются с течением
времени после появления начального возмущения по опреде-
ленному закону (например, колебательному). А чем же опре-
деляется поведение самолета в самый первый момент после
изменения угла атаки или угла скольжения?
При раскрытии вопроса надо показать, что эти углы опре-
деляют положение самолета относительно набегающего пото-
ка, а следовательно, определяют величину подъемной силы,
лобового сопротивления и боковой силы на данных скорости и
высоте полета. Значит, изменение углов атаки и скольжения
вызывает появление добавочных аэродинамических сил и их
моментов, которые могут быть стабилизирующими (направ-
ленными на возвращение к исходному режиму равновесия)
или дестабилизирующими (направленными на дальнейшее от-
клонение параметра от исходного режима равновесия). Эти
моменты определяют начальный характер движения и назы-
ваются статическими.
Например, возникший вследствие увеличения угла атаки
добавочный пикирующий момент (A4z<0) является статичес-
198
Таблица 5.4
Обозна- чения суммар- ного мо- мента Составляющие момента Примечание
^Статические Демпфирую- щие Рулевые
Mz = -(танга- жа) Mz ст + Mz демп + M Z рул Суммарные аэро- динамические мо- менты представ- лены в упрощен- ном виде, т. е. без учета момен- тов от несиммет- рии самолета, мо- ментов от запаз- дывания скоса по- тока, дополни- тельных моментов крена и рыскания (спиральных и др.) Это позволяет вести изложение и объяснение лет- ному составу толь- ко главного, опре- деляющего пове- дение самолета, без ущерба для понимания физи- ческой сущности явлений
Мх = = (кре- на) Мх ст + Мх демп + Мх рул
Л4у = = (ры- скания) My ст 4“ My демп + M Y рул
Составляющие момента в структурной форме
Mz мс^ су + СО У Mz Z»‘Z + M'f Ф z T
Мх = М“х<ох Ь М^э+^Ч
Му = M/H °h +
Коэффи- циент суммар- Составляющие коэффициента момента ного момента
™z = {"'Y (О О' mvz?
тх = CD V" mx шх + тхэ 5э 4 mx" SH
mY ==- CDV mYn 69
ким стабилизирующим, а добавочный кабрирующий момент
(Mz > 0) —статическим дестабилизирующим.
Другой пример статического стабилизирующего момента —
момент рыскания (Л4У) , возникающий при скольжении и стре-
199
мящийся завернуть самолет в сторону скользящего крыла, т. е.
направленный на уменьшение скольжения (самолет стремится
сам устранить скольжение).
В литературе эту начальную тенденцию в движении само-
лета, определяемую статическим стабилизирующим (дестаби-
лизирующим) моментом, часто называют статической устой-
чивостью (статической неустойчивостью).
Однако, как уже указывалось, рациональнее использовать
понятие не статической устойчивости, а просто устойчивости,
которая определяется динамическими и статическими харак-
теристиками. Коэффициенты статических стабилизирующих и
дестабилизирующих моментов будем называть статическими
характеристиками устойчивости.
Кроме статических моментов на самолет действуют момен-
ты, вызванные действиями летчика: рулевые, возникающие
при отклонении органов управления, моменты от отклонения
закрылков, выпуска шасси, воздушных тормозов, сброса под-
весок, стрельбы и т. д.
Отклонения рулей (ср, 8Н, ), рычагов управления (хв,
хэ, хн), усилия на них (Рв, Рэ, Рн), потребные для балан-
сировки самолета, их производные по параметрам движения
(например, по перегрузке, угловой скорости вращения и т. д.),
коэффициенты рулевых моментов и их производные по углам
отклонения рулей называют статическими характеристиками
управляемости.
Как только самолет начинает вращаться под действием
статических или рулевых моментов (или и тех и других), то
сразу появляются демпфирующие моменты, которые иногда
называют динамическими моментами (не путать с динамичес-
кими характеристиками). Эти моменты наряду со статически-
ми оказывают определяющее влияние на переходные процес-
сы, т. е. на устойчивость и управляемость самолета. При
слабом демпфировании колебания самолета будут затухать
медленно (например, при полете на больших высотах) и по-
требуется большое время для затухания колебательного про-
цесса. Но и при очень сильном демпфировании время установ-
ления равновесия также затянется, хотя колебаний может и
не быть (апериодический процесс).
Демпфирующие моменты направлены против вращения,
т. е. они стремятся погасить вращение. Заметим, что иногда
моменты, возникающие при вращении самолета, стремятся
еще больше ускорить вызвавшее их вращение. Такие моменты
называют моментами авторотации (самовращения).
Устойчивость и управляемость самолета разделяют на про-
дольную и боковую. Основанием для этого является симмет-
ричная форма самолета относительно его вертикальной плос-
200
кости (плоскости симметрии). В тех случаях, когда возмуще-
ния, действующие в плоскости симметрии, сильно влияют на
боковое движение самолета, продольное и боковое движения
рассматривают вместе и говорят об их взаимодействии (при
штопоре, инерционном вращении и др.). В связи с этим ста-
тические, динамические характеристики и характеристики
демпфирования целесообразно также делить на продольные и
боковые.
5.3.5. Физическая сущность статических характеристик
устойчивости, характеристик демпфирования
и их связь с устойчивостью самолета
Летный состав, как правило, знает формулы, определяю-
щие физическую сущность создания аэродинамических мо-
ментов, например, аэродинамического момента тангажа
Mz ст ~ (*м -^ф)* (5- О
Это означает, что статические моменты создаются прира-
щением нормальной (поперечной) силы, приложенным в фо-
кусе (боковом фокусе), относительно центра масс самолета.
Приращение вызывается изменением а (^), т. е. положения са-
молета относительно воздушного потока.
Затруднения обычно вызывают другие формы представле-
ния статических моментов:
— тангажа
Mz ст = лф Су = т? Су q S ba,
или
MZcT = М“а = m^aq S ba',
— рыскания
Муст = М₽р = m? p<?SZ;
— крена
/Их ст = М3. р = q SI,
(5.2)
а ведь именно их коэффициенты и используются в анализе ус-
тойчивости самолета
I cY kmz
; та7
z ЬСу z Да
Y др x др
201
На рис. 5.6 и 5.7 показана физическая сущность появления
статических моментов, не требующая особых пояснений. По-
казать переход от вида формул (5.1) к (5.2) нетрудно. На-
пример, из рис. 5.7 статический момент рыскания
Afy ст = Д 2 (*^М ),
Ртадилазирующии момент
(фокус позади центра масс)
Дестадилизарунщии момент
(фокус впереди центра масс)
Рис. 5.7. Стабилизирующие
Рис. 5.6. Статические моменты тангажа:
а — стабилизирующий; б — дестабилизирующий
моменты рыскания и крена
где хм — положение центра масс;
Хф3 — положение фокуса по углу скольжения, в котором
прикладывается приращение поперечной силы AZ
при изменении угла скольжения;
Д Z =«= С^Д р Др — приращение угла скольжения; С| —
приращение коэффициента поперечной силы при Др = 1°.
202
Тогда
Му ст — A $q S (хм Хф р) —
= С|Д^дх(—---------) I = С|Д₽ (хм - 7ф/) <7S I,
где I — размах крыла.
Отсюда видно, что для перехода к формулам вида (5.2)
необходимо обозначить
Z ( %м -^ф [В) — Y •>
тогда получим
Л4у ст = гпх Ар q SI,
или
MY ст = m’y Р q SI,
где , т. е. изменение коэффициента статическо-
го момента рыскания при изменении угла скольжения на 1°.
Следовательно, чем больше С|, и расстояние между цент-
ром масс и фокусом по углу скольжения, тем больше ,
а следовательно, больше и статический момент рыскания
при одинаковых скольжении, высоте, скорости полета и
размахе крыла.
Статические моменты (рис. 5.6) могут быть стабилизирую-
щими (стремящимися ликвидировать приращение Да или Др)
и дестабилизирующими (стремящимися еще больше увели-
чить Да или Др). Это зависит от взаимного положения фоку-
са и центра масс:
— если фокус лежит позади ЦМ, то моменты—стаби-
лизирующие, а величины = (хм—хф) , mY = Cy ( хм —
— Хф?),тх = Сг (ум — Уфз) —меньше нуля (отрицательны);
— если фокус окажется впереди ЦМ (что в полете впол-
не вероятно), то моменты будут дестабилизирующими, а
величины (или и т?к — больше нуля (положи-
тельны).
Необходимо отметить, что знаки коэффициентов статичес-
ких моментов определяют знаки самих моментов, т. е. направ-
ление их действия, и сделать практический вывод: с помощью
анализа коэффициентов статических моментов или в
продольном, и Шх в боковом движении) можно при изу-
203
чении нового самолета (или при подготовке к полетам на но-
вых режимах по Н, V, % и т. д.) установить, стремится ли само-
лет сам сразу после нарушения балансировки по а или р вер-
нуться к их исходным значениям или нет. Другими словами,
помогает самолет летчику устранить непроизвольные возмуще-
ния по а и р или препятствует этому, а следовательно, растет
безопасность полета или она уменьшается.
Кроме того, надо остановиться на следующих вопросах.
1. Почему о поперечной устойчивости судят по критерию
а не по т^х >0(т. е. по приращению коэффициента
момента крена при изменении угла крена на 1°)?
Дело в том, что хотя летчик ощущает поперечную устойчи-
вость в виде кренения самолета, сам самолет непосредственно
на крен не реагирует (т. е. при изменении крена не появляет-
ся дополнительных моментов), а реагирует на скольжение,
которое развивается при появлении крена.
Исключением является лишь случай полета в непосредст-
венной близости от земли (например, при выдерживании на
посадке), когда у опущенного крыла возрастает подъемная
сила из-за усиления эффекта «воздушной подушки», а у под-
нятого уменьшается из-за ослабления того же эффекта. При
полете вдали от земной поверхности стабилизирующий мо-
мент крена возникает только вследствие скольжения в сторо-
ну опущенного крыла, которое появляется по двум причинам:
— при полете с положительным углом атаки поворот са-
молета относительно связанной продольной оси (накренение)
сопровождается выдвижением опущенного крыла вперед;
— под действием составляющей силы тяжести, направлен-
ной вдоль размаха, после накренения развивается движение в
сторону опущенного крыла. При этом следует отметить, что
первая причина проявляется при накренении немедленно, а
вторая — не сразу, так как поперечное движение развивается
постепенно.
Для того чтобы момент крена, вызываемый таким сколь-
жением, стремился устранить крен, он должен быть направ-
лен в сторону, обратную скольжению, т. е. необходимым усло-
вием поперечной устойчивости в соответствии с принятым
правилом знаков действительно является неравенство: 0.
Итак, в качестве меры поперечной устойчивости использу-
ют абсолютную величину отрицательной безразмерной произ-
водной т?х . Однако она не вполне правильно характеризует
величину стабилизирующего момента крена, действующего на
самолет в первые мгновения после накренения на определен-
ный угол.
Последнее можно объяснить так: чем больше угол атаки,
204
тем больше и угол скольжения, созданный накренением в со-
ответствии с первой причиной. Значит, и коэффициент стаби-
лизирующего момента/Пхст = при одном и том же зна-
чении т?х будет больше при большем угле атаки. А на отри-
цательных углах атаки скольжение в первый момент появит-
ся на поднятое крыло, т. е. прит^.<^0 самолет будет стре-
миться не устранить, а увеличить крен. В связи с этим можно
было бы более обоснованно судить о первоначальной реакции
самолета на накренение по знаку и величине нет^ а произ-
ведения тх а.
Из этого следует практический вывод, который каждый лет-
чик должен учитывать: с ростом углов атаки реакция по кре-
ну на скольжение может увеличиваться. Следует обратить
внимание летного состава и на то, что самолет, у которого
< 0 («поперечно устойчивый» по принятой терминологии),
подвергается действию момента крена в сторону, обратную
скольжению, не только в тех случаях, когда скольжение
вызвано накренением, но и во всех других случаях скольже-
ния (при действии бокового порыва ветра, несимметричном
отказе двигателей, несимметричном сбросе подвесок и пр.),
что приводит к нежелательным накренениям самолета. По
этой причине, а также по соображениям динамической устой-
чивости стремятся ограничить величину т?х, особенно на со-
временных самолетах, обладающих небольшими моментами
инерции относительно продольной оси.
Вместе с тем нежелательна и поперечная неустойчивость,
хотя особой опасности она не представляет. У некоторых са-
молетов со стреловидными крыльями она возникает в транс-
звуковой области и проявляется при управлении самолетом в
виде обратной реакции по крену на отклонение педалей. Эту
особенность можно обнаружить при изучении характеристик
поперечной устойчивости самолета по значению положителш
ной величины т?х > 0.
2. В качестве меры путевой устойчивости используют аб-
солютную величину отрицательной безразмерной производной
< 0, так как в этом случае в полете момент рыскания, вы-
зываемый скольжением, направлен в сторону скольжения, т. е.
стремится его убрать.
3. Надо пояснить, что величину можно измерить, так
как численно она равна расстоянию между центром масси фо-
205
кусом самолета, выраженному в процентах от средней аэро-
динамической хорды:
mcY=_5!-------= хм-7ф.
Ьа Ьа
Ее называют запасом центровки, так как она определяет
положение фокуса относительно центра масс самолета.
Если, например, говорят, что запас центровки равен 3%
=—0,03), то это значит, что указанное расстояние равно
3% длины САХ.
Чем больше величины , т^на одних и тех же вы-
соте и скорости полета, тем более мощные статические аэро-
динамические моменты возникают при изменении аир. По-
этому производную т(^ можно назвать статической характе-
ристикой продольной устойчивости самолета в прямолинейном
V 3 ₽
полете с постоянной скоростью, а и Шх — статическими
характеристиками путевой и поперечной устойчивости.
Судить о появлении стабилизирующего или дестабилизи-
рующего момента можно с помощью производных m^Y или
mazi так как они имеют одинаковый знак для углов атаки,
меньших критических:
т“==/^ус;;при а<акр->С“>0 и знаки maz и mczY сов-
падают.
Итак, /п“ = (Тт - хф)С“у .
Здесь следует подчеркнуть, что приток<-
< 0 и т^< 0, хотя и возникают статические стабилизирующие
моменты, говорить о том, что самолет устойчив, нельзя, так
как наличие стабилизирующего момента еще не гарантирует
удовлетворительных характеристик процесса возвращения са-
молета к исходным параметрам движения после воздействия
внешнего возмущения или перехода к новому установившему-
ся режиму, потребному при боевом маневрировании. Отсюда
следует сделать вывод, что наличие стабилизирующего ста-
тического аэродинамического момента является обязатель-
ным, но не достаточным условием собственной (т. е. без уче-
та автоматики) устойчивости самолета.
По виду моментных диаграмм mz(Су, а), /Лу(3) и тх($)
можно определить начальную реакцию самолета на изменение
а и р и ее интенсивность (рис. 5.8 и 5.9). При раскрытии этого
вопроса полезно пояснить, что в полете наличие путевой и по-
перечной устойчивости летчик может определить по следую-
щим признакам: если при уводе «шарика» начальная тенден-
206
Рис. 5.8. Моментная диаграмма самолета со стреловидным
крылом (пример)
Рис. 5.9. Моментные диаграммы самолета
207
ция в движении самолета такова, что он стремится развер-
нуться против потока (уменьшить скольжение) и кренится в
сторону, противоположную уводу «шарика», то он обладает
путевой и поперечной устойчивостью. Качество же устойчивос-
ти движения самолета определяется динамическими характе-
ристиками.
Можно порекомендовать летному составу при переучива-
нии на новый тип самолета сравнить кривые тг (Су), гп\ (₽) и
/Пх(в) нового и старого самолетов. Если у нового они идут
круче, то следует ожидать более энергичной реакции самоле-
та по тангажу, рысканию и крену при одинаковых режимах
полета.
В самом деле, чем круче, например, кривая ^х(3), тем
больше отрицательная величина т-х (больше поперечная ус-
тойчивость) и тем больший момент крена возникает даже при
незначительном скольжении.
Следует обратить внимание на довольно распространенное
ошибочное представление, что самолет с такими свойствами
является «недостаточно устойчивым». Летный состав в данном
случае под устойчивостью понимает способность самолета
практически не реагировать изменениями крена на возмуще-
ния по углу скольжения (например, на отклонение педали) и
сохранять полет без крена при невмешательстве летчика.
О таком самолете летчики говорят, что он «плотно сидит в
воздухе», так как не требует постоянного вмешательства в уп-
равление при полете в «болтанку».
На самом деле самолет, энергичнее реагирующий на
скольжение, более устойчив в поперечном отношении с точки
зрения аэродинамики. Однако по качественной оценке летчи-
ков ведет себя в полете хуже, чем менее устойчивый, так как
при возникновении скольжения либо быстро реагирует на него
большой угловой скоростью крена, который летчик не всегда
сумеет парировать, либо выполняет резкие раскачивания с
крыла на крыло. Особенно опасен такой самолет в случае от-
каза расположенного на крыле двигателя, так как он может
даже перевернуться, резко реагируя на скольжение из-за от-
каза двигателя.
Здесь необходимо рассмотреть чисто «пилотажный» вопрос
о том, что при зарывании самолета на вираже его свойство
уменьшать крен при скольжении на опускающееся крыло (по-
перечная устойчивость) подсказывает летчику наиболее ра-
циональный способ ухода с опасного режима полета: умень-
шай крен, а не тяни ручку управления на себя. Если летчик
при зарывании не будет препятствовать (отклонением элеро-
нов) самолету убирать крен, то в силу его поперечной устой-
208
чивости он самостоятельно будет стремиться устранить
зарывание.
При анализе путевой устойчивости надо пояснить, что ее
увеличение (увеличение #4 < 0) в отличие от поперечной ус-
тойчивости полезно, так как возникают меньшие колебания
по курсу при том же внешнем возмущении, следовательно, са-
молет стабильнее сохраняет свое положение в воздухе.
Изучая с летным составом эти вопросы, надо обратить их
внимание на умение увязывать для конкретного самолета ха-
рактер изменения величин т?х непосредственно с по^
ведением самолета в воздухе, его боевым применением.
Если, например, осваиваемый самолет обладает большей
путевой устойчивостью при одинаковой со старым самолетом
поперечной устойчивости, то можно объяснить летному соста-
ву, что выполнить правильный (координированный) разворот
на нем будет легче и проще.
Дело в том, что в этом случае даже при появлении неболь-
шого внутреннего скольжения, которое можно и не заметить
с помощью «шарика», будет возникать мощный стабилизирую-
щий момент рыскания Л4Уст = q SI, быстро разворачиваю-
щий самолет в сторону заданного вращения, т. е. устраняю-
щий скольжение и способствующий выполнению координиро-
ванного разворота.
Если же путевая устойчивость у нового самолета будет
мала, то при вводе в разворот возникнут колебания, на борь-
бу с которыми потребуется дополнительное время, что приве-
дет к запаздыванию с выходом на установившуюся угловую
скорость разворота (например, на противника), т. е. снизит
уровень реализации боевых возможностей самолета.
Следует обратить также внимание обучаемых на влияние
изменения центровки на величины тс^, т?., т?х . Сначала на-
помнить, что такое центровка, каковы пределы ее изменения
на эксплуатируемом самолете, а затем указать, что запас цент-
ровки, а следовательно, и характеристики устойчивости уве-
личиваются по мере смещения вперед центра масс (при выра-
ботке топлива, сбросе грузов, дозаправке в воздухе и др.),
поэтому при передних центровках создается более мощный
стабилизирующий момент, чем при задних, при одном и том
же изменении аир.
Особых пояснений это не требует. Следует лишь обратить
внимание обучаемых, на пилотажную сторону вопроса. По-
казать, например, что по мере роста отрицательного значения
увеличиваются потребные отклонения ручки управления
(стабилизатора) для выполнения одних и тех же боевых ма-
невров. Так как стабилизатор имеет ограниченный диапазон
14-5007сп
209
углов отклонения, то при слишком передней центровке (т. е.
слишком большой величине zn^Y 0) может проявиться не-
хватка рулей для выполнения того или иного режима полета.
Например, невозможно сбалансировать самолет на нужном
значении угла .атаки при взлете или посадке. Поэтому цент-
ровка самолета не должна смещаться вперед дальше опреде-
ленного предела, называемого предельно передней цент-
ровкой.
При слишком малом отрицательном значении тс^ (напри-
мер, при значительном смещении ЦМ назад) управление са-
молетом затрудняется, так как даже на очень небольшие от-
клонения ручки управления самолет отвечает слишком боль-
шими изменениями угла дтаки и перегрузки, вследствие чего
возможна «раскачка». Следовательно, существует какое-то
предельно заднее положение ЦМ самолета, при котором про-
дольная устойчивость (величина еще обеспечивает до-
пустимые характеристики управляемости. Такую центровку
называют предельно задней.
Изучая статические характеристики устойчивости серийно-
го самолета, необходимо объяснить •летному составу, что по-
мимо величины mczY для оценки продольной устойчивости ис-
пользуют другую характеристику, обозначаемую в литерату-
ре как .
В приведенных рассуждениях угловые скорости считались
равными нулю, но на самом деле при изменении а и р проис-
ходит вращение самолета. В этом случае вместе с восстанав-
ливающими (стабилизирующими) моментами развиваются
демпфирующие моменты, которые повышают начальную
устойчивость самолета в криволинейном полете по сравнению
с прямолинейным полетом.
Характеристики демпфирования
Прежде всего, записать структуру демпфирующих мо-
ментов:
Mz демп =' Mzz = m^z (DZ qS ba;
M Y демп = MyY coY = zzi^y u)Y q S
Mx демп = (DX = zn£x (DX q S Z,
A mz my Д tnx
где m^z «------- , , ntvvx—:------характеристики
Д <0z Д g)y Д <dx
демпфирования.
210
Из рис. 5.10 ясна физическая сущность возникновения
демпфирующего момента тангажа. Из рисунка видно, > что
Д MZ демп = А Wo ^-т.о — СYr.о А ^г.о Q S ^-т.о— fTl^Z tf)Z Q S Ьа •
л Угр
(a32<o
Рис. 5.10. Демпфирующие Моменты:
а — при wz> 0; б —при <oz <0
AMjgaPMn"&
А ^£бемп " A j/f0 Lf V ° tnr<P
А^Го=СуГо А<^-Го^ 5
Фокус co.
^LrD
Следовательно, rn^z пропорциональна CaYr0 (несущей спо-
собности горизонтального оперения), Даг.0~-^- , где U =
(ркружная скорость перемещения стабилизатора/
установить,
вертикаль-
= Ь]
при вращейии самолета с uz). Аналогично легко
что tn^i ~ С^ в 0 ^боковой несущей способности
ного оперения С? п °-У а /п£х~С“
* 4В.0 др 1” л Укр,
довательно, чем больше С“„„, С*. С₽ зависящие от
7 I Кр* 1 Г • О В • о
Ско- Сле-
конструктивной и аэродинамической компоновок, тем луч-г
ше демпфирующие свойства самолета.
В литературе встречаются чаще всего характеристики
демпфирования вида m™z, т*х, т^’ а не т^х, туг. Не-
обходимо пояснить, что это не просто разная символика, а
переход от размерных величин к безразмерным, исключа-
ющим зависимость характеристик демпфирования от вели-
чины скорости полета.
В самом деле, в отличие от коэффициентов CY,. Сх, Cz и
других, которые непосредственно от ^скорости полета не
зависят, коэффициенты m%z, myt, тух обратно пропорцио-
нальны скорости. Например, для myz это можно пояснить
с помощью рис. 5.10: чем больше скорость полета у0, тем
меньший прирост угла атаки стабилизатора вызывает одна
и та же угловая скорость coz. При U = £г.о = const и при
14*
211
сложении большей величины Vo и той же U получаете®
меньшая величина А аг.о, а следовательно, и меньший демп-
фирующий момент. Чтобы исключить непосредственное
влияние скорости на характеристики демпфирования, вво-
, — ®zba
дят безразмерную угловую скорость a>z =------- и тогда
------------------------ — Ьа
mz демп = m^z <oz = m“z <i)Z = <^z — az ,
V
откуда m^z = m^z--------t
ba
где m^z зависит от аэродинамических свойств и геометри-
ческих параметров самолета (С^г 0, аг.о, Ьа) и числа Л4полетаг
но уже не зависит непосредственно от скорости полета.
Аналогично можно показать, что
I - I
(Оу = СО у , (О х — СО / - .
2V 2V
2V ш 2V
----, /tzSx = щ х---..
I х х I
_У самолета, обладающего демпфирующими свойствами,.
/n“z<0; W”y < 0; m“x<0.
Следовательно, отсюда можно сделать вывод, что с по-
мощью величины и знака характеристик демпфирования на
различных режимах полета можно установить наличие демп-
фирования и его интенсивность.
Здесь же целесообразно отметить, что моменты демпфиро-
вания оказывают существенное влияние на характер переход-
ных процессов: при недостаточном демпфировании сильно воз-
растает начальный заброс и колебательность движения само-
лета в переходном процессе, что затрудняет пилотирование
при выполнении боевых маневров (атаки воздушной или на-
земной цели, противозенитного маневра и т. д.).
5.3.6. Связь характеристик демпфирования
со статическими характеристиками устойчивости самолета
Эту связь можно показать на примере продольной устой-
чивости самолета. Летчик при маневрировании в основном из-
меняет а(Пу) и при этом стремится пилотировать самолет ко-
ординированно, т. е. с р~0. Влияние m^z на продольную*
212
устойчивость оценивается с помощью критерия А %ф == ~~
где Д %ф — величина, эквивалентная сдвигу фокуса при кри-
волинейном движении самолета за счет демп-
фирования;
Iх =---------относительная массовая плотность самолета.
рн S Ьа
Может возникнуть вопрос: откуда такое название?
„ . 2 т т Sba
Преобразуем =----------— =------, тогда уусл ==--------
PhSZ?^ ЪЬа 2
Рн 2
„ , т
условный объем самолета, а отношение-------= pcaM — услов-
£>усл
ная массовая плотность самолета. Следовательно, отноше-
ние условной массовой плотности самолета к плотности
воздуха (безразмерная характеристика) рь= Рса“ и есть
Рн
относительная массовая плотность самолета.
Как показывают исследования, на малых высотах у са-
_ m^z
молетов-истребителей величина Дхф =-------- — (0,01 —
Iх
—0,015), т. е. запас устойчивости может повыситься в кри^
волинёйном полете за счет демпфирующих свойств са-
молета примерно на 1 — 1,5%. Для тяжелых самолетов эта
величина может быть значительной (от 5 до 10% САХ).
m^z .
На больших высотах величина —-— становится пренеб-
режимо малой (из-за малой плотности воздуха) и можно не
учитывать ее влияния на продольную устойчивость самолета.
Однако ее можно искусственно повышать за счет средств ав-
томатики, например, за счет постановки демпферов тангажа
(демпферов продольных колебаний). Так, на тяжелых само-
летах на_ взлетно-посадочных режимах можно увеличить зна-
чение Д Хф на 0,1—0,15, т. е. на 10—15% САХ.
Изложив этот вопрос, следует подчеркнуть, что демпфиро-
вание является весьма полезным свойством самолета не толь-
ко потому, что увеличивает устойчивость, но и потому, что
демпфирование — это способность создавать аэродинамичес-
кий момент сопротивления воздуха при вращении самолета,
213
тормозящий его вращение. Образно говоря, самолет без демп-
фирования—это «дикий конь», а самолет с демпфировани-
ем — это «обученная, объезженная лошадь».
5.3.7. Связь статических характеристик
с устойчивостью самолета по перегрузке
Прежде всего следует отметить, что если в качестве исход-
ного параметра, к которому должен самостоятельно возвра-
титься самолет после воздействия внешнего возмущения, вы-
бра'ць перегрузку пУа, то в этом случае появляется понятие
устойчивости самолета по перегрузке
Уа CyaqS C«azqs
а ~ ---- — """ -- ==------ *
mg mg mg
Из формулы видно, что при постоянном скоростном напо-
ре q изменение CYa (а) сопровождается изменением пере-
грузки, поэтому при возмущении по углу атаки самолет полу-
чает возмущение и по перегрузке.
Совместное влияние стабилизирующего момента и момен-
та демпфирования на устойчивость по перегрузке обычно вы-
ражают через величину <зп, называемую степенью устойчи-
вости по перегрузке:
m^z - к
Од — т^Х == (хм Хф] ~Н Хф*
Iх
Этот коэффициент так же, как выражается в долях
или процентах САХ.
Из формулы видно, что чем больше запас центровки
(/ngY = xM —Хф) и Дхф, тем больше ап, и тем энергичнее саг
молет препятствует изменению перегрузки на заданных вы-
соте и скорости полета.
На больших высотах, естественно, демпфирование незна-
чительное:
<( Д хф ~ О) и <Тд mzx == хм — Хф .
Следовательно, можно утверждать, что практически устой-
чивость по перегрузке в этом случае оценивается только по*
взаимному расположению фокуса и центра масс.
При совпадении центра масс и фокуса самолет называют
нейтральным по перегрузке, а соответствующую центровку—
нейтральной.
214
Однако для малых и средних высот, где демпфирование
оказывает существенное влияние на устойчивость по пере-
грузке, такое определение нейтральной центровки является
неверным.
Нейтральная
цгнтробка
Эксплуатационный. ^7
Ниапаьон цёнтробок
~~JA В *
Рис. 5.11. Взаимное положение центра масс, фокуса и точки нейтральности
у устойчивого по перегрузке самолета
В этом случае нейтральная центровка по перегрузке хн
(рис. 5.11) определяется из условия ап = 0 (а не из усло-
вия mcz't — 0):
m*z _ __
= А хм Хф 4_ * — 0,
z и р
или
- mjz _
Хм — хн — Хф (а не хн — Хм — Хф ).
Для малых значений <зп можно записать:
Хн — Хм — Хф
г
Из формулы видно, что нейтральная центровка соответ-
ствует положению фокуса, скорректированному за счет
215
вращения самолета с <oz. Здесь же нужно пояснить, что
расстояние, определяемое соотношением аЛ « хм — хп, долж-
но обеспечивать такой запас устойчивости по перегрузке,
который определяет удовлетворительные характеристики
управляемости. Но хм изменяется от предельно передней
(^мп.п) до предельно задней (хм п.з) центровки, и, следова-
тельно, именно при предельно задней центровке должна
быть приемлемая величина аЛ. Другими словами, должно
бы1ъ обеспечено соотношение аямин = хм п,3 — хн, откуда
п.з = мин 4“ -^н •
Величину ап мин определяют из практики летной эксплуа-
тации. При анализе этой величины для серийного самолета
надо сравнить ее с нормируемой величиной ап, которая долж-
на быть для маневренных самолетов не менее 3—4% САХ
(т. е. нейтральная центровка должна быть на расстоянии 3—
4% САХ за предельно задней центровкой), а для неманеврен-
ных самолетов — не менее 10% САХ.
Кроме того, при изложении этого вопроса ну^сно объяс-
нить, почему у самолетов с крылом изменяемой стреловиднос-
ти опмин выбирается, исходя из положения фокуса при мини-
мальной стреловидности крыла. Дело в том, что при увели-
чении стреловидности крыла в полете фокус сдвигается
назад, и запас устойчивости увеличивается.
Из наших рассуждений следует:
—если /п^у<^0 (фокус позади центра масс), то всегда
ап < 0, и самолет устойчив по перегрузке;
—если _ о (фокус совпадает с центром масс), то на
больших высотах, где демпфирование слабое (zn^z^O), ма-
невренные самолеты имеют малый запас устойчивости (2—
3%).
На малых и средних высотах зп хотя и невелик, но оста-
ется отрицательной величиной за счет демпфирования (само-
лет малоустойчив по перегрузке, если не применять средств
автоматики);
—если (фокус впереди центра масс), то на боль-
ших высотах, где Дхф^0; <зп > 0 (самолет неустойчив по
перегрузке без применения средств автоматики), а на малых
и средних высотах может оказаться малое отрицательное
значение <зп (самолет малоустойчив по перегрузке) или
>0 (неустойчив по перегрузке).
216
5.3.8. Связь статических характеристик
с устойчивостью самолета по скорости
Прежде всего следует подчеркнуть, что рассмотренное
свойство самолета реагировать на возмущение, изменяющее
перегрузку при постоянной скорости полета, проявляется в
малом (короткопериодическом) движении и определяет устой-
чивость самолета.
Однако на самолет могут подействовать возмущения, из-
меняющие скорость полета (порыв встречного или попутно-
го ветра или выполнение летчиком разгона и торможения)
при неизменной перегрузке а, соответствующей ее значе-
нию в исходном установившемся полете, например, в гори-
зонтальном полете (пу а — 1)-
Свойство, самолета восстанавливать исходное значение
воздушной скорости называют устойчивостью по скорости.
Это свойство самолета проявляется в большом (длинноперио-
дическом) движении, после того как самолет вернется к ис-
ходной перегрузке.
При изложении и объяснении этого вопроса уместно на-
помнить летному составу три различных, но взаимосвязанных
условия устойчивости по скорости и выбрать для анализа
наиболее удобное.
д Y
1. Это условие устойчивости по скоро-
сти (наиболее часто встречающееся в литературе) означает,
что если при увеличении скорости (Д7>0) самолет нач-
нет набирать высоту (ДУа>0), то он устойчив по скорое
сти, так как в процессе искривления траектории вверх при-
ращение тангенциальной составляющей силы тяжести
/ng sin Д0 приводит к уменьшению скорости (к стремлению
вернуться к исходной скорости полета).
Однако это условие является условием устойчивости ре-
жима полета, т. е. одновременного наличия устойчивости по
перегрузке и скорости, а не только устойчивости по скорости.
Поэтому оно не вполне удобно для оценки устойчивости по
скорости и целесообразнее использовать другое условие.
2. Для того чтобы было единообразие условий устойчи-
вости по перегрузке (7n^v<0, о„<^0) и скорости, следу-
ет представить условие устойчивости по скорости в виде
mvz > 0. Тогда признаком устойчивости по скорости является
наличир момента тангажа при изменении скорости полета
и неподвижной ручке управления (хв = const): кабрирующе-
го (Д Mz > 0) при увеличении (ДУ>0) и пикирующего (Д7Иг<0)
при уменьшении скорости полета (ДУ<0).
217
Для того чтобы определить идентичность первого и второ-
го условий устойчивости по скорости, установим их взаимо-
связь.
Если момент тангажа изменяется при изменении подъем-
ной силы, скорости и отклонении ручки управления, а само-
лет в полете непрерывно балансируется, то приращение мо-
мента будет равно
dMz = M}.dYa + MvzdV + M*BdxB = 0.
При неподвижной ручке управления d хв =0 и тогда
M^dYa + MVdV =0,
откуда
dYa Mvz
~dV
Из этой формулы видно:
— если самолет устойчив по перегрузке (Л^<0), то ой:
/ dY \
будет устойчив и по скорости I а > 0 1 при Л4^>0.
Следовательно, условие устойчивости по скорости Mvz > 0
идентично условию >0, если самолет устойчив попе-
регрузке или < 0).
3. Возникает вопрос, можно ли говорить об устойчивости
по скорости (Mvz > 0), если самолет неустойчив по пере-
грузке (AfJ>0)?
Чтобы выяснить это, вспомним, что летчик при пилоти-
ровании балансирует самолет путем отклонения ручки уп-
равления (dxB^=0), поэтому при маневре с неизменной ве-
личиной подъемной силы {dYa = Q-, nYa = const)
MvzdV + M*BdxB = b,
откуда
dx9 = Mvz
dV ~ M*B •
Из э“гой формулы видно, что у устойчивого по скоро-
сти самолета (Л4£>0) расход ручки на единицу скорости
б/ Xq
dV в* ТаК КЗК ПРИ нормальной управляемости М** <0-
218
Это означает, что при отклонении ручки на себя (хв<0>
возникает кабрирующий момент, от себя (хв > 0) — пикирую-
mHft(Mz<0). Следовательно, знак х% определяется зна-
ком М\.
Отсюда и вытекает третье, наиболее удобное для лет-
чика условие устойчивости по скорости: х^ = ~~~ > 0-
В соответствии с этим условием независимо от устойчиво-
сти по перегрузке (тп|у < 0 или /п^у>0), если при разгоне
требуется отклонять ручку управления от себя (или при
торможении—на себя), то самолет устойчив по скорости.
Если же х* < 0, то это означает, что при увеличении ско-
рости ручку придется отклонять на себя, при торможении—•
от себя, т. е. самолет неустойчив по скорости.
Здесь можно напомнить, что полученное выражение
аналогично x"y<0 (или х^ <0), используемому для оцен-
ки устойчивости по перегрузке.
В качестве выводов целесообразно показать:
— на самолете, устойчивом по скорости, летчику проще
выдерживать скорость полета и число М. Такой самолет не
проявляет стремления к самопроизвольному отклонению от
заданного летчиком режима балансировки по скорости и чис-
лу М. Однако для безопасности полета более существенна
устойчивость по ^перегрузке, чем по скорости;
— практически все современные самолеты неустойчивы
по скорости на трансзвуковых скоростях полета (х^<0, что
соответствует отрицательному наклону балансировочной кри-
вой хв по V), но у одних самолетов это проявляется слабо
в виде стремления к снижению при разгоне или к набору вы-
соты при торможении, а у других сильно, так что даже огра-
ничивают допустимое число М полета (у самолетов с прямым
крылом возможно затягивание в пикирование);
— следует отметить, что у самолетов со стреловидными
крыльями после начала волнового кризиса и прохождения
области неустойчивости с дальнейшим увеличением скорости
кабрирующий момецт нарастает, т. е. самолет становится из-
лишне устойчивым по скорости с точки зрения управляемости.
Необходимо обратить внимание обучаемых и на другой
чисто пилотажный аспект этого вопроса: если полет происхо7
дит в трансзвуковой области в зоне неустойчивости по ско-
рости, то для балансировки с увеличением скорости надо
брать ручку на себя и уменьшать давящие усилия. Не обла-
дает ли в данном случае самолет обратной управляемостью?
219
Следует показать, что не обладает, так как приемы пилотиро-
вания в зоне неустойчивости по скорости в основном такие же,
как и на устойчивом самолете. Так, для увеличения скорости
надо первоначально отдать ручку от себя, но чтобы сбаланси-
ровать самолет на заданной скорости, в последующем при-
дется взять ручку на себя в более заднее положение, чем в
исходном режиме полета.
Таким образом, первоначальная реакция самолета оди-
накова у устойчивого и неустойчивого самолетов, а отличие
в пилотировании возникает только ' через некоторый проме-
жуток времени.
Из изложенного следует, что возникновение стабилизиру-
ющих (восстанавливающих) моментов тангажа при измене-
нии перегрузки и скорости является обязательным условием
продольной устойчивости самолета по перегрузке и скорости
полета.
5.3.9. Связь коэффициентов рулевых моментов
с характеристиками системы управления
Здесь целесообразно сначала напомнить структуру руле-
вых моментов:
Mz рул = М^ = m'l ф q S ba;
Му руЛ = Л4уН Вн q S
Мх рул = М*э оэ — т Вэ q SI
и показать, что иногда путают смысл обозначений Ml и
ту и mfr , и т^>, называя ту mfr , т%> эффек-
тивностью рулей, в то время как эффективность рулей —
это моменты, приходящиеся на 1° угла отклонения руля
(Му , Л4^э), а ту mfc , — их коэффициенты, т. е.
коэффициенты эффективности рулей.
В соответствии с принятым правилом знаков эти коэф-
фициенты при нормальной управляемости имеют отрица-
тельные значения: ml < 0, т\* <0, <0 и вместе с их
абсолютной величиной определяют знак (направления дей-
ствия) и величину рулевых моментов на данном режиме
полета. В самом деле, если, например, при отклонении
ручки к правому борту (хэ<0, Вэ< 0—левый элерон вниз)
имеем при
< о -> Мхрул = Шх3 8э q s I > 0
220
(самолет кренится вправо), то при
т^э > 0 -> Мрул = Вэ q S I < О
—самолет кренится влево при ручке, данной вправа
(обратная реакция по крену на отклонение элеронов).
Для дальнейшего изложения необходимо установить связь
рулевых моментов с некоторыми характеристиками системы
управления.
При пилотировании самолета летчик судит о смене режи-
ма полета по изменению усилий, прикладываемых к ручке и
педалям Рв, Рз> Рн и их перемещениям (хв, *э, хн). При-
чем одним и тем же величинам перемещения ручки (Дхв)
могут соответствовать различные значения усилий (АРВ).
Чтобы связать их, используют производные
Рхв ~ ; рхн ~ t
в Дхв Э Дхэ Н Дхн
которые называют расходами усилий на рычагах управления
для их перемещения. Например, Р** читается так: величина
усилия, прикладываемого к ручке для ее перемещения на 1 см.
При анализе этих величин для серийного самолета главное —
обратить внимание на то, как они изменяются. Если более
чем в 2—3 раза, то пилотировать самолет будет сложнее, так
как труднее будет соизмерять усилие на ручке с потребным
ее перемещением при резком изменении Р** от минимальных
до максимальных значений. Чтобы связать рулевые моменты
с этими характеристиками, необходимо использовать следую-
щий простой прием.
1. Записать формулу рулевого момента, появляющегося
при отклонении, например, стабилизатора на величину Дф:
Д АйрУл = ж^Дфд5Ьа.
2. Заменить угол отклонения стабилизатора Дф, который
непосредственно летчик не видит, на перемещение ручки
Дхв, которое летчик использует как обратную связь в системе
управления.
Для этого представить:
А . Дхв Дф A ya
Д ф = Д ф------------ Д хъ = срхв Д хв,
Д хв Д хв
где ф*в — передаточное число от ручки к стабилизатору,
показывающее, на какой угол (Д ср) отклонится стабилиза-
тор при перемещении ручки на величину Дхв= 1 см. Тог-
221
да 7И£РУл = Д Хвф^в ^S6a, т. е. рулевой момент зависит
от величины коэффициента эффективности руля т®, пере-
мещения ручки летчиком. Дхв, передаточного отношения от
ручки к рулю, высоты и скорости полета (через q), стре-
ловидности крыла (через S, Ьа)-
Поскольку у летчика формируются ощущения управляемо-
сти самолета не только по перемещениям, а главным образом
по усилиям, нужно заменить Д хв на Д Ръ .
Для этого представить:
Л л . А Д ХВ \ Г) Р л о Д в
Д Хв — Д Хв — —— — —- —- Д Рв — X в Д Р в — — .
л Рв &РВ в Рхв°
ф*в
Тогда Mz руЛ = т* Д Рв q S ba, т. е. рулевой момент
вВ
зависит от тех же факторов, что и ранее, а также от ДРВ
(вместо Дхв) и от Р^в (расхода усилий на перемещение руч-
ки на' 1 см, величина которого формируется системой за-
грузки). Аналогичные рассуждения помогут получить необ-
ходимые выражения для Л4урул и Л4хрул. Рассмотренные
характеристики Р£в, <р*в и другие необходимо использовать
при изл'ожении и объяснении статических характеристик
управляемости.
Кроме того, можно добавить, что Р*в характеризует
центрируемость ручки, т. е. чем она больше, тем большее уси-
лие надо приложить к ручке, чтобы переместить ее от ней-
трального по усилиям положения. Но при больших Рр лет-
чик быстро устанет при маневрировании и чтобы облегчить
ему управление, применяют загрузку управления с ломаными
или нелинейными характеристиками.
5.3.10. Статические характеристики управляемости
Для количественной оценки управляемости самолета ис-
пользуются характеристики, которые делятся на статические
и динамические. К важнейшим динамическим критериям уп-
равляемости относят характеристики короткопериодического
возмущенного движения самолета: время срабатывания и от-
носительный заброс управляемого параметра, которые описы-
вают быстроту ответной реакции самолета на управляющие
воздействия летчика и характер (колебательность) процесса
перехода самолета на заданное значение параметра (угол
атаки, перегрузку и т. д.). Эти критерии уже рассматривались,
поэтому здесь целесообразно раскрыть физический смысл ста-
222
тических количественных характеристик управляемости. Ста-
тические характеристики управляемости устанавливают связь
между управляющими действиями летчика и ответным изме-
нением регулируемого параметра, т. е. реакцией самолета.
Управляющие действия летчика количественно измеряют-
ся отклонениями рулей, ручки и «. педалей и потребными для
этого усилиями: Дер, Дхв, ДРСтветная реакция самолета
оценивается величиной изменения регулируемых параметров
Да, Дпу, ДУ (Д 7И), т. е. приращениями угла атаки, пере-
грузки, скорости, числа М полета.
Если характеристики действий летчика отнести к измене-
ниям соответствующих регулируемых летчиком параметров, то
получим количественные статические характеристики управ-
ляемости. Учитывая, что с точки1 зрения пилотирования более
существенными являются усилия, которые летчик приклады-
вает к рычагам управления и на которые он ориентируется,
создавая желаемую перегрузку, для него наибольший инте-
рес представляют следующие характеристики продольной
управляемости:
Д Рв •
— градиент усилия на ручке по перегрузке— Р*ч ~
Д Пу
При маневрировании эта величина показывает, на сколько
летчик должен изменить усилие на ручке, чтобы получить
приращение перегрузки на единицу.
На занятиях по практической аэродинамике серийного са-
молета необходимо научить летчиков пользоваться этой вели-
чиной. Например, показать, что, используя величину PJy,
можно определить потребное изменение усилий на ручке я
установить, по силам ли это летчику для данного режима по-
лета (высоты и скорости):
Д Рв ~ Р&¥ Д ~ P^Y (^Y П0ТР исх) •
Например, если в воздушном бою пуср»4, то при
пп г- кгс [ лл \ до
рлу _ _ 5------------- 49------------ получим: Д Рв =
ед. перегр. \ ед. перегр. /
= — 5 (4 — 1 ) = — 15 кгс (147 Н), т. е. в течение боя (3—5 мин)
летчику придется как бы держать пудовую гирю, и рука
будет очень уставать,
Однако такой расчет для больших перегрузок может ока-
заться неточным из-за нелинейности характеристик загрузоч-
ных механизмов (Рв по хв);
.— градиент усилия на ручке по скорбсти полета— Р^ =
223
Д Рв *
=—е- Расх°Д усилия на ручке для балансировки само-
лета на новой заданной скорости при маневрировании в пря-
молинейном горизонтальном полете.
Хотя отклонений ручки и педалей в процессе маневриро-
вания и не играют такой роли, как усилия, в приобретении
«чувства» изменения режима полета, но дополняют его, по-
этому летному составу целесообразно уметь использовать для
оценки продольной управляемости величины:
— градиент (расход) перемещения ручки по перегрузке
„ Д Хв
xnY ;
В Д«у
— градиент (расход) перемещения ручки по скорости
xv ж -А Хв
в ДУ
Их физический смысл легко установить по аналогии с
P”Y И Рв-
Таким образом, к статическим характеристикам управляе-
мости относятся не только отклонения органов управления
(ручки, педалей, рулей) и усилия, прикладываемые к ним
летчиком при балансировке самолета в различных установив-
шихся режимах полета, но и производные этих отклонений и
усилий по регулируемым параметрам.
В целом рассмотренные характеристики управляемости,
оказывая влияние на характер управляемости самолета, во
многом определяют пилотажные свойства, включающие кроме
характеристик устойчивости и управляемости удобство пило-
тирования с точки зрения рационального распределения вни-
мания (например, возможности вести маневренный воздуш-
ный бой, почти не уделяя внимания приборам), повышения
безопасности полетов и возможности максимально использо-
вать боевые свойства самолета.
Для того чтобы проанализировать влияние того или иного
фактора на показатели управляемости, можно использовать
аналитические выражения характеристик управляемости,
прежде всего, формулы, которые определяют действия летчи-
ка — потребное отклонение ручки управления (хв) и усилия
на ней (PQ):
— 1,43
mz ф*в
РнМ2'
рпу ~ _ 1 43
В ’
mg/S
рнМ- ’
224
В этих формулах /п| < 0 (при нормальной управляемо-
сти), ср^в^О и Р*в >0 (по правилу знаков). Следователь-
но, знаки x£y и P"y определяются знаком ал, что позволя-
ет использовать эти характеристики управляемости при под-
готовке к полетам для оценки устойчивости самолета по
перегрузке:
—если x£Y <0, P"Y < 0, что соответствует ап < 0, то са-
молет устойчив по перегрузке;
—если x"y == 0, что соответствует ал=0, то самолет ней-
трален по перегрузке.
—если x"y > 0, что соответствует оп > 0, то самолет не-
устойчив по перегрузке.
В полете о наличии устойчивости по перегрузке летчик
может судить по следующему признаку: при полете с увели-
ченной перегрузкой необходимы большие величины ф, хв, Рв,
т. е. дополнительные отклонения стабилизатора, ручки управ-
ления и усилия на ней в направлении «на себя».
Полезно заметить, что если система управления самолета
имеет постоянное передаточное число (фхв = const) на всех
режимах полета, то практически невозможно обеспечить удов-
летворительную управляемость сверхзвуковых самолетов во
всем диапазоне высот и скоростей полета.
В самом деле, если минимальная приемлемая величина
x"y (например, установленная из летного опыта x"y =10 —
15 мм на единицу перегрузки) обеспечивает управляемость
на околокритических скоростях полета у земли, то на малых
приборных скоростях полета (небольших величинах q) и на
больших высотах (малых значениях рп ) величина x"y мо-
жет стать настолько большой, что для создания п у =2—3
потребуется ход ручки управления больше размеров кабины
летчика.
Если же взять максимальную приемлемую величину %" y ,
то на докритических скоростях полета у земли (больших q}
она может оказаться такой малой, что возможные ошибки
летчика будут соизмеримы с потребными ходами ручки уп-
равления, и, следовательно, вмешательство летчика для пари-
рования внешних возмущений может привести к раскачке с
большими забросами перегрузки и даже к сваливанию само-
лета. Естественно, что если при этом летчик производил ата-
ку цели, то она будет сорвана. Поэтому в систему управления
включают устройства (например, АРУ), которые корректиру-
ют ф* в зависимости от режима полета.
Исходя из этого, величина х"у должна быть такой, что~-
15-5007сп
225
бы обеспечивать эффективное выполнение боевой задачи
(воздушный бой, атаку наземной цели, полет строем, барра-
жирование и т. д.) при малой нагрузке на летчика. Например,
для маневренных самолетов она должна быть не менее
10 мм/ед. перегр., иначе самолет будет строгим в управлении.
Причем хорошо, если при уменьшении) скорости полета отри-
цательные значения x^y увеличиваются.
Анализ этой производной с помощью Технического описа-
ния и поможет сделать выводы о степени сложности пилоти-
рования на тех или иных режимах полета.
Летный состав должен знать зависимость характеристик
управляемости от эксплуатационных факторов. Важность
этих факторов вытекает из того, что они определяются харак-
тером полетного задания и действиямл летчика.
Из формул для Рв, , *в, хпч видно, что эти важней-
шие показатели управляемости зависят от режима полета
(высоты и скорости) через скоростной напор q и от бое-
вой зарядки самолета через mg/S, от степени устойчивости
по перегрузке через’ центровку, положение фокуса само-
лета и других условий, от эффективности стабилизатора
т?, а Рв и хв-—и от перегрузки, создаваемой летчиком при
маневрировании (nY).
При анализе зависимости P"y от различных факторов
следует помнить, что приемлемые характеристики управляе-
мости самолета по усилиям будут только в том- случае, если
эта величина находится в определенных пределах. Например,
для истребителей нормой является Р" y = — 1—3 кгс/ед.
перегр. (9,8—29,4 ///ед. перегр.). Если же P“y <—1 кгс/ед.
(Н \
— 9,8-----------), то легко превысить установлен-
ед. перегр. /
ные ограничения по ^умакс , возможен «подхват», так как
теряется чувство управления. А если PJJy >—3 кгс/ед. перегр.,
то в процессе выполнения боевой задачи (например, воздуш-
ного боя в течение 3—5 мин) летчик будет сильно уставать,
так как управление будет тяжелым и в ходе маневрирования
при изменении перегрузки придется часто прибегать к трим-
мированию, что скажется на эффективности выполнения бое-
вой задачи.
Используя формулы для хв и Рв, учитывая, что q =
pV2
= —---, и, взяв производную ПО V при пу = const, получим
226
4on nY (mgjS) .
mz Ф'в PhV3 ’
4 °* рвв »y (mg/S)
mz ФХв PHV3
При раскрытии вопроса надо подчеркнуть, что эти фор-
мулы запоминать не нужно, но с их помощью удобно вести
анализ влияния различных факторов на указанные производ-
ные, а следовательно, и на пилотажные свойства самолета.
При анализе следует помнить, что должно бытьх^>0,
> 0, а это обеспечивается наличием устойчивости по ско-
рости.
Если <>0 и Р^>0, но очень малы, то летчик плохо-
„чувЬтв^ет" изменение скорости по перемещению ручки й
усилию "на ней, а если х^ < 0 и PVQ < 0 (неустойчивость по
скорости), то „чувство управления" становится превратным.
Чересчур большая величина Р*>0 заставляет летчика в
процессе разгона и торможения часто прибегать к тримми-
рованию.
Полезно напомнить, что еще до выполнения полетов (на-
пример, при теоретическом переучивании на новый самолет)
летчик может установить, устойчив или неустойчив самолет
по скорости, степень неустойчивости, а следовательно, и ее
проявление в полете с помощью балансировочных кривых
(рис. 5.12). Они показывают потребные для продольной ба-
О
р.>о|
а
£
°, е
Область ^обратных
усилий на РУ
НЧОкм
Рьм>о
Устойчиб
по скорости
6)
(Э
в мм
/Неустойчив £
по скорости ъ
И-Юкм
Иццо
М
Ре°
Устойчив по
скорости
I Р?<<о
Зато гиб ание 6
пикирование для
самолета с прямым
крылом
Уз хода ручки.
%
*/з
Область, pipo тных ‘
отклонений. РУ
м
Устойчиб
по скорости
РУогее&г
Неустойчив
по скорости
1м-*РУ на себя
-у^Устойчи
по скорости
ноо
Х«<0--450
а
Рис. 5.12. Балансировочные кривые:
а — по усилиям; б—по отклонениям
15*
22Г
лансировки величины отклонений ручки и усилий, приклады-
ваемых летчиком при различных скоростях полета, и строят-
ся для различных высот полета, центровок, полетной конфи-
гурации. Как же это установить?
Если, например, видно, что кривые имеют отрицательный
наклон (А1 = 0,85—1,2), то можно утверждать, что по мере
увеличения числа М полета летчик будет ощущать неестест-
венное уменьшение давящего усилия и вынужден отклонять
ручку на себя, т. е. обратно привычному движению ручки с
ростом скорости. Это свидетельствует о продольной неустой-
чивости по скорости. При этом х^<0 и Р^<0.Из рисунка
также видно, что на числах М> 1,2 кривые круто идут вверх.
Это означает, что самолет становится чрезмерно устойчивым
по скорости > 0; Р™ > 0).
Основной интерес при оценке пилотажных свойств в дви-
жении по крену и рысканию представляют статические пока-
затели управляемости, характеризующие отклонеция рулей
и усилия летчика, потребные для балансировки самолета. При
раскрытии этого вопроса полезно напомнить, что если само-
лет летит прямолинейно без скольжения, а сам самолет сим-
метричен, то боковая балансировка осуществляется при' ней-
тральных положениях руля направления и элеронов (это не
вполне верно для самолетов с воздушными винтами, вращаю-
щимися в одну сторону).
Наличие любой асимметрии (несимметричные подвески,
отклонения закрылков, отказ бокового двигателя, преднаме-
ренный полет со скольжением) заставляет отклонять руль на-
правления и элероны для боковой балансировки. Затем сле-
дует отметить, что обычно в описаниях самолетов приводятся
следующие количественные характеристики боковой управ-
ляемости в прямолинейном полете;
— расходы руля направления, усилий на педалях и их
«хода» (перемещения) на единицу угла крена при установив-
шемся скольжении:
н“ Дт ’ н Ду н Ду
— расходы элеронов, бокового усилия на ручке и пере-
мещения ручки на единицу угла крена при установившемся
скольжении:
37-_^<0; а5~-^-<0.
9 Ду 9 Ду э Ду
228
Нормально эти показатели должны быть отрицательными,
что при принятом правиле знаков обеспечивает естествен-
ность управляющих движений летчика. Чем больше их абсо-
лютные значения, тем меньше максимально достижимые углы
крена при установившемся скольжении (например, на посад-
ке при боковом ветре), тем труднее выполнять полет со сколь-
жением.
Напоминая это, следует подчеркнуть, что крен при таком
полете нужен для сохранения прямолинейности полета (рав-
новесия сил), отклонения руля направления — для уравнове-
шивания стабилизирующего момента рыскания, а элеронов —
стабилизирующего момента крена. При анализе характерис-
тик боковой управляемости для оценки их влияния на пилЬ-
тажные свойства следует пользоваться количественными зна-
чениями характеристик управляемости PJ и которые нор-
мируются, исходя из условия удобства пилотирования, и со-
ставляют
рт = — (1—4)или — (э,8 - 39,6
град \ град
Рт = — (0,05-1) или — (0,49 — 9,8) ——
э> град град
Полезно отметить, что при маневрировании по криволи-
нейным траекториям основной задачей бокового управления
самолетом является его накренение для придания соответ-
ствующего направления подъемной силе, которая является
главным источником искривления траектории* Поэтому важ-
нейшими показателями боковой управляемости являются рас-
ходы отклонения элеронов, бокового усилия на ручке и ее
перемещения на единицу угловой скорости (например, на
= 1 рад/с) установившегося поперечного вращения:
Д оэ „ Д Рэ Д х9
%°х~------ ; Р^х~ -—-; х("х ~ .
э Д о)Х Ао)х 3 “
Здесь следует пояснить, что угловая скорость ик^еет
место» не только при изменениях угла крена, но и при выпол-
нении нисходящих спиралей с постоянным углом крена и даже
виража (правда, здесь она очень мала).
Эти производные можно получить из условия равновесия
229
рулевого и демпфирующего моментов при установившемся вра-
щении:
В(1)х
э
тХХ I
тхэ ~2V
Ршх = —» Ргэ о'°х.
э Д (Ох д 8Э э э
Формулу В^х можно использовать для анализа и уста-
вить, что расход элеронов на создание единицы угловой ско-
рости крена обратно пропорционален скорости полета. При
этом неважно: управление элеронов прямое или с помощью
бустеров. На величину Р3Х существенное влияние оказывает
система управления: прямая или с помощью бустеров (через
— расход усилий на отклонение элеронов на 1°).
При прямом управлении усилие на ручке определяется ве-
личиной шарнирного момента, который зависит от подъемной
силы, создаваемой отклоненным элероном:
РЭ == Мш
откуда
Рэ = ~
21
хэ
или
Р&э = - мш —— , но Мш = Уэгш, а V2.
хэ
Следовательно, и Рьээ прямо пропорционален V2.
Теперь ясно, что расход усилий на создание единицы
угловой скорости крена (Р^х) в отличие от 8"х прямо про-
порционален скорости полета. Иначе говоря, при прямом
управлении трудно накренить самолет быстро при большой
скорости полета.
С изменением высоты при данной скорости 8^х остается
неизменным, а Ршзх уменьшается пропорционально плотно-
V2
^эр —
помнить, что с изменением скорости и высоты полета из-
меняется и число М, от которого зависят эффективность
элеронов т^э и демпфирование /яхх , поэтому все сказан-
230
S3 I . Здесь же необходимо на-
сти воздуха Уэ = С
ное справедливо без учета влияния числа М полета и де-
формаций крыла.
Деформации крыла, выход на критические числа Л! и на
сверхзвуковой полёт вызывают дополнительное уменьшение
эффективности элеронов и поэтому W может не только не
уменьшаться с ростом скорости (обратно пропорционально
ей), но даже увеличиваться, а при этом Р*х растет быстрее,
чем , и прямое поперечное управление становится очень
тяжелым. При бустерном управлении изменяется пропор-
ционально расходу элеронов, т.. е. при изменении скорости
полета расход усилий по угловой скорости крена совершенно
не соответствует их естественному изменению при прямом
управлении. Появляется избыточная легкость при больших
скоростях полета на малых высотах, возможна непроизволь-
ная поперечная раскачка самолета.
Заметим, что в отличие от т^э<^0, mfr < 0 коэффициент
mfr должен быть положительным, т. е. mfr >0.
В самом деле, если mfr =----- >0, то это значит, что
х Д2„
при отклонении правой педали (А Вн > 0) появится крен впра-
во (Атх>0), при отклонении левой педали (ДВН<СО) — ле-
вый крен (Лтх<0), что и требуется при нормальном пи-
лотировании.
Если же при анализе^ эффективности рулей окажется,
что коэффициент mfr< 0, то это не что иное, как обратная
реакция по крену на отклонение педали (на дачу ноги).
Необходимо добиться отчетливого понимания, что в усло-
виях обратной реакции любая попытка летчика выполнить
доворот по курсу (например, в процессе прицеливания) откло-
нением педалей при нейтральном положении элеронов приво-
дит к образованию внешнего (по отношению к желаемому
развороту) крена. При обратной реакции все развороты дол-
жны выполняться без скольжения.
Далее надо разъяснить, что путевую и поперечную устой-
чивость самолета можно определить не только с помощью за-
висимостей mY(₽) и тх(р), но и по характеру изменения ба-
лансировочных углов отклонения элеронов и руля направле-
ния, боковых отклонений ручки управления и изменения по-
ложения педалей, а также по изменению усилий на ручке
управления и педалях при скольжении, т. е. по виду баланси-
ровочных кривых (рис. 5.13).
Если самолет поперечно и флюгерно устойчив, то его ба-
лансировочные кривые имеют отрицательный наклон. Это
231
S3
ю
а)
*э <
«э
Б)
Поперечно неусгойчиВ
*§
_Кден^лево^
(1Р) ^положени^
ВлеВв^
g
'Крен Вправо уг
вкольженш? (fi)
вправо
Поперечно устойчив
-$Э
-*э
<Г/<О? $з 40
XHj
§
Скольжений
влево .
/ Флюгерно неустайчи.!}
' В*>с>, &ц>о
/Скольжение ja
Вправо
Флюгерно устойчив
^<о, xf<o
-®н^'
Ч
а и
Поперечно
/ неустойчиВ
?5о
Флюгерно
/ неустойчив
-г^Рен Влево^<^
&Г
Скольжениё^
(-fP Влево
X
у <и
3
d
кн
Рис. 5.13. Балансировочные кривые:
в — по отклонениямj б и а по усилиям
Поперечно
устойчив
pf<o,
скольжение
Вправо (f*)
Флюгерно
устойчив
Рн^<О? РНГ<О
означает, что если летчик желает, например, выполнить пря-
молинейный полет со скольжением, то ему придется при
скольжении вправо отклонить ручку вправо (положительно-
му скольжению А ₽ > 0 соответствует отрицательное отклоне-
ние ручки Ахэ<0 —ручка вправо), чтобы компенсировать
восстанавливающий момент крена, направленный влево, и,
накренив самолет, уравновесить боковую силу Za за счет
mg sin у, а также дать левую педаль (для сохранения угла
скольжения путем уравновешивания стабилизирующего мо-
мента рыскания, направленного вправо).
Следовательно, если при анализе балансировочных кри-
Л хэ . „ А хн / п
вых установлено:-----<2 0 или-----< U, то самолет попе-
Ар Ар
речно и флюгерно устойчив. То же можно установить и с
помощью Р\ < 0;’ ~ 0; xi — << 0;
9 АТ н АР АТ
Х1 ~ < 0 и т- д-
" А у
5.3.11. Взаимосвязь характеристик устойчивости
и управляемости
Можно рекомендовать следующую последовательность рас-
суждений.
1. Сначала напомнить, что устойчивость'—это способность
самолета сохранять режим полета (восстанавливать, невоз-
мущенное движение), а управляемость — изменять его (прово-
цировать возмущенное движение).
2. Затем показать, что исходя из этого правильного по-
ложения иногда делают неправильный вывод, что чем больше
устойчивость, тем хуже управляемость и, наоборот, чем мень-
ше устойчивость, тем лучше управляемость. Поэтому важное
практическое значение в методике обучения летного состава
практической аэродинамике имеет правильное разъяснение
взаимосвязи устойчивости и управляемости.
3. После этого кратко изложить вопрос о взаимосвязи ха-
рактеристик устойчивости и управляемости, которую можно
установить по. балансировочным кривым, показателям Р”р,
xJy и другим характеристикам, а также по характеру корот-
копериодического возмущенного движения при переходе с
одного режима полета на другой.
Если рассматривать второй вопрос, то, на первый взгляд,
действительно следует, что при увеличении степени устойчи-
вости по перегрузке (ол) и прочих равных условиях растет по-
233
казатель управляемости Р“ч,т. е. с повышением устойчивости
затяжеляется управление самолетом, летчик быстрее утомля-
ется. Но такой подход к анализу формулы для современных
боевых самолетов является формальным, односторонним.
Из ранее приведенных формул видно, что на величину ста-
тических показателей управляемости на данном режиме
полета с заданной перегрузкой и боевой зарядкой оказывает
влияние не только степень устойчивости по перегрузке (ол),
но и характеристики системы управления, о которых уже го-
ворилось ранее (Р*в , <рхв).
Следовательно, при больших запасах устойчивости само-
лета, изменяя характеристики системы управления, можно из-
менять показатели управляемости в сторону их улучшения,
обеспечивая приемлемые пилотажные свойства.
Полезно также отметить, что с увеличением запаса устой-
чивости маневренность самолета действительно ухудшается
и здесь не поможет изменение характеристик системы управ-
ления (усилий и перемещений ручки), так как показатель
nv °п
<р Y ~ — ———— -------- не зависит от конструкции системы
управления (будь она с бустерами или без них).
Действительно, видно, что чем больше степень устойчи-
вости по перегрузке, тем меньшее значение перегрузки можно
получить йри полном отклонении стабилизатора. К тому же,
если полет происходит на малых и средних высотах при боль-
ших скоростях (например, на сверхзвуковых скоростях), то
маневренность самолета еще более ухудшается.
Необходимо также добиться отчетливого понимания, что ве-
личина еще не определяет качество устойчивости по пере-
грузке (хорошая устойчивость или нет), а только показывает
величину и направление статического аэродинамического мо-
мента, возникающего при нарушении равновесия по углу ата-
ки и препятствующего (или способствующего при неустойчи-
вости) его изменению.
Главное же состоит в том, что при одном и том же значе-
нии <зп (например, даже лучшем для маневренных самолетов
<зп =—0,03) поведение самолета в возмущенном движении при
переходе с одного режима полета на другой, т. е. его динами-
ческие характеристики устойчивости (период колебаний, вре-
мя затухания, количество колебаний до затухания и т. д.), мо-
гут существенно отличаться в зависимости от режима полета,
конфигурации самолета, его боевой зарядки и других фак-
торов.
Итак, вопреки мнению: больше устойчивость — хуже уп-
равляемость можно утверждать: меньше устойчивость — хуже
234
управляемость, имея в виду, что меньше и больше рассмат-
риваются по отношению к нормируемой величине устойчивос-
ти по перегрузке (например,мин =3—4% САХ).
В самом деле, если снижать степень устойчивости, то при
остальных неизменных параметрах потребные величины ,
х"ч уменьшаются. Представим, что они стали близки*к нулю.
Что это значит? Это значит, что реакция самолета на малей-
шее отклонение ручки и изменение усилий на ней станет
очень резкой, а с учетом зоны нечувствительности летчика это
усложнит пилотирование (потребуются неоднократные движе-
ния ручкой для балансировки самолета на новом установив-
шемся значении параметра), т. е. управляемость самолета
станет такой, которую летчики называют строгой, так как
трудно дозировать величину отклонения ручки. В этом случае
повышение устойчивости (например, при более передней цент-
ровке) улучшает управляемость, так как усилия на ручке уве-
личиваются и попадают в зону чувствительности летчика по
усилиям.
Взаимосвязь устойчивости и управляемости можно про-
демонстрировать, разбирая влияние высоты полета на эти ха-
рактеристики. Чем больше высота полета, тем меньше ско-
ростной напор при том же числе М полета (^ = 0,7 рн М2),- что
уменьшает стабилизирующие аэродинамические моменты, пре-
пятствующие изменению угла атаки (перегрузки): 7I4zct =
=впСч qSba . При этом стабилизирующий момент с увеличени-
ем высоты полета уменьшается быстрее, чем скоростной напор
(так как уменьшается добавочный стабилизирующий момент
от демпфирования), а это приводит к уменьшению показате-
лей управляемости , *"y 9 если их не регулировать специ-
альными устройствами. Одновременно уменьшается рулевой
момент Mz рул = tn^ q S ba- В результате пилотирование серь-
езно затрудняется по сравнению с малыми и средними высо-
тами: происходит ухудшение затухания колебаний, увеличи-
вается их количество, растет заброс угла атаки (перегрузки).
Даже у опытного летчика возможны раскачка самолета и вы-
ход на большие углы атаки, хотя это и не так опасно, как на
малых высотах. Итак, с увеличением высоты ухудшается ус-
тойчивость, а вместе с ней и управляемость.
Летному составу известно, что при уменьшении устойчи-
вости для создания той же перегрузки нужно меньше откло-
нять ручку (уменьшается потребный рулевой момент). Но при
мецьшем рулевом моменте самолет медленнее переходит на
заданную перегрузку
* __ Afz рул MZ ст MZ демп
~ т
iz
235
Отсюда следует важный практический вывод: чем меньше ус-
тойчивость самолета, тем хуже «хождение за ручкой» (боль-
ше запаздывание в создании перегрузки в ответ на отклоне-
ние ручки). Выходит, что малая устойчивость не улучшает, а
ухудшает управляемость.
Таким образом, упрощенное представление о противопо-
ложности таких качеств самолета, как устойчивость и управ-
ляемость, является неверным.
Связь устойчивости и управляемости можно выразить так:
управляемость самолета тем лучше, чем лучше устойчивость
(т. е. чем ближе количественные показатели устойчивости ле-
жат к области нормируемых пределов) при приемлемых для
летчиков величинах усилий на ручке и (педалях (достаточной
легкости управления), отсутствии запаздывания на отклоне-
ние рычагов управления (хорошем «хождении за ручкой») и
забросов регулируемого параметра. При этом обеспечивает-
ся большая точность пилотирования, повышается эффектив-
ное выполнение боевой задачи и безопасность полета.
Летный состав должен отчетливо понимать, что управляе-
мость и устойчивость значительно улучшаются при примене-
нии автоматических устройств (демпферов танг.ажа, крена,
рыскания, автоматов устойчивости): самолет «плотнее сидит
в воздухе» в турбулентной атмосфере, повышается точность
управления за счет уменьшения забросов и быстрого гашения
колебаний, полет становится более безопасным, особенно при
малых запасах устойчивости.
5.3.12. Характеристики устойчивости и управляемости
как критерии оценки пилотажных свойств самолета
Эту связь удобно показать с помощью схемы, приведенной
в табл. 5.5, в которой характеристики устойчивости и управ-
ляемости увязаны с действиями, наблюдениями и ощущения-
ми летчика в полете, а также с рекомендациями по подготов-
ке к полетам. Особых пояснений таблица не требует.
5.3.13. Использование статических характеристик
устойчивости и управляемости для выработки рекомендаций
по пилотированию и повышению безопасности полетов
В практике полетов степень устойчивости по перегрузке в
зависимости от вариантов боевой зарядки, полетной конфигу-
рации и других факторов может изменяться в широких пре-
делах, благодаря чему самолет может быть либо чрезмерно
устойчивым, либо малоустойчивым и даже неустойчивым.
В этом случае авиационный командир должен уметь дать ре-
236
комендации летному составу по пилотированию при различ-
ной степени устойчивости самолета и тем самым повысить без-
опасность полетов и летную выучку, направленную на умелое
использование боевых возможностей самолета. Как же опре-
делить степень устойчивости самолета и выработать необхо-
димые рекомендации по пилотированию?
В литературе по аэродинамике обычно приводятся балан-
сировочные кривые (зависимости углов отклонения стабили-
затора, усилий на ручке, ее перемещений от угла атаки, пере-
грузки), по виду которых и можно проделать такой анализ
(рис. 5.14).
Рис. 5.14. Балансировочная кривая
Из анализа балансировочной кривой, среднюю часть кото-
рой образно называют «ложкой», и поясняющих на ней рисун-
ков можно выяснить, что переход самолета с одного угла
атаки на другой происходит с тем меньшим статическим аэро-
динамическим моментом Mzct = Sba, противоборству-
ющим рулевому моменту Л4гРуЛ = m^(fqS ba, чем меньше ус-
тойчивость по перегрузке (<зп).
Величина ап зависит от центровки, режима полета (высо-
ты, скорости — через положение фокуса)’ и демпфирующих
свойств самолета. Однако следует объяснить летному составу,
что по мере уменьшения степени устойчивости по перегрузке
для создания одного и того же угла атаки (перегрузки)' тре-
буется меньшее отклонение стабилизатора (меньший руле-
237
Таблица 5.5
Летчик в полете наблюдает, ощущает и контролирует Критерии оценки пилотажных свойств (упрощенная модель) По ним летчик при подготовке к полетам в ожидаемых условиях боевого применения оценивает
Переходные процессы возмущен- ного движения самолета, которые описываются динамическими харак- теристиками устойчивости и управ- ляемости ^ср» ^забр » Т, 4зат> ^зат? ^2-зат, * Устойчивость Управляемость Вид и качество переход- ных процессов, т. е. поведение самолета на неустановивших- ся режимах полета
Переме- щение рычагов управ- ления и усилия на них При небольших отклоне- ниях самолета, связанных с переходом из одного режи- ма установившегося полета в другой I.PnY, X"Y, Р“’Х, Х'“Х XL PL X~t, в ’ в 1 э ’ э ’ э’ э1 *н’ н’ Р“х И т. д. §шх Вт ' эн Ожидаемое изменение харак- тера перемещений рычагов управления и усилий на них, т. е. затраты энергии и вре- мени летчика на управление самолетом
При выводе самолета на максимально допустимые величины параметров Н» Рв п Y макс t Рв а доп > Рв М макс, макс’ у макс
При поддержании скоро- сти полета ,с выполнением операций III. ^вРмакс. Рвт. щ, Рв мех, Рвхмакс, Рв сбр. гр
Центровку и работу автоматов устойчивости Опреде- ляющих коэффи- циенты аэроди- намиче- ских мо- ментов Статиче- ских Только тенденцию к возвра- щению или переходу к ново- му режиму установившегося полета
Работу демпферов Враща- тельных пг(ах тых Z Y X Демпфирующие свойства самолета
Работу АРУ, АРЗ и т. д. Рулевых mz, тХ3 ’ т\" > т'^ Эффективность рулей при пилотировании
вой момент), а при увеличении — большее (рис. 5.15). Это
приводит к ряду особенностей в пилотировании самолета е
разными <зп.
Рис. 5.15. Влияние запаса центровки на переходный процесс после
отклонения ручки на себя (отклонения руля высоты разные, обеспе-
чивающие одинаковый прирост угла атаки)
При большом запасе устойчивости (см. рис. 5.14, положе-
ние 1 — крутой отрицательный наклон кривой, x"Y < 0,
>4%), хотя и растут потребное отклонение ручки управления
и усилия на ней (затяжеление) для получения заданной пере-
грузки, но самолет охотно идет за ручкой управления и ее ос-
тановка сразу обеспечивает балансировку на заданном угле
атаки (перегрузке).
При нормальном запасе устойчивости (положение 2 — от*
рицательный наклон кривой меньше, X"Y<C 0, ап=3 — 4 %) са-
молет уже менее энергично следует за ручкой управления и
летчику для увеличения быстродействия требуется отклонять
ручку несколько больше, чем необходимо для балансировки
на заданной перегрузке.
Следовательно, потребное отклонение ручки для баланси-
ровки на заданном угле атаки уменьшается, но при этом тре-
буется ее незначительное обратное движение. Заметим, что
если бы летчик отклонил ручку на такую же величину, как
в первом случае, то самолет под действием большей разности
рулевого и стабилизирующего моментов двигался бы за руч-
кой более охотно, чем в первом случае, но и вышел бы на
перегрузку более заданной.
239
Самолет с малым запасом устойчивости (положение 3 —
кривая выполаживается, ал < 1%), практически не имея про-
тиводействия стабилизирующего момента, становится строгим
в управлении (необходимо точно дозировать небольшие по-
требные отклонения ручки, что сделать безошибочно затруд-
нительно). При этом возможны раскачка самолета и заброс
угла атаки (перегрузки) до значений, превышающих огра-
ничения (т. ^е. опасность полета увеличивается), поэтому
необходима уже значительная отдача ручки от себя для ба-
лансировки на заданном угле атаки (перегрузке) после взя-
тия ее на себя для перехода на этот заданный угол.
Участок балансировочной кривой, на котором x"Y =='0
(ап“0, положение 4), соответствует режиму полета с нейт-
ральной центровкой, при которой самолет становится очень
строгим в управлении, а создание и сохранение заданного
угла атаки требуют неоднократного отклонения ручки управ-
ления сначала в желаемую сторону, а потом в нейтральное
положение. При этом следует помнить, что даже небольшое
отклонение ручки приводит к значительному уходу от рав-
новесного режима, если несвоевременно его парировать.
Если самолет неустойчив по перегрузке (зп >0, положе-
ние 5—балансировочная'кривая имеет положительный на-
клон, т. е. х^ >0, а точка нейтральности лежит впереди
центра масс), то при отклонении ручки управления возникает
дестабилизирующий статический момент, совпадающий по
знаку с рулевым. Потребуется двойное движение ручкой для
управления выходом на заданную перегрузку, а чтобы сба-
лансировать самолет, ручку управления придется в конце
концов отклонить в противоположную сторону за исходное
балансировочное положение.
При изучении этого вопроса нужно объяснить некоторые
особенности. Во-первых, что, несмотря на усложнение пилоти-
рования, неустойчивый по перегрузке самолет имеет сущест-
венное преимущество: уменьшаются потери на балансировку,
так как в этом случае на горизонтальном оперений требуется
создавать подъемную силу, направленную в ту же сторону,
что и подъемная сила крыла. Это дает выигрыш в маневрен-
ности самолета, поэтому ведутся работы по созданию таких
самолетов.
Во-вторых, надо отметить, что при маневрировании по
криволинейным траекториям продольная неустойчивость по
перегрузке приводит к неблагоприятному явлению, называе-
мому «подхватом». Если летчик на средних и малых высотах
маневрирует по слабоизогнутым траекториям с небольшими
углами атаки, то самолет устойчив и никакого «подхвата»
J240
нет, но при энергичном маневрировании с использованием
больших углов атаки самолет может стать неустойчивым
(или малоустойчивым), и тогда резкое отклонение ручки
приводит к самопроизвольному ' увеличению угла атаки и
перегрузки, т. е. к «подхвату». Например, это возможно при
запаздывании с выходом из пикирования после атаки назем-
ной цели, когда летчик вынужден создавать большую пере-
грузку.
Рис. 5.16. К анализу балансировочной кривой, имеющей «выпола-
живание». Безопасность посадки:
а — не обеспечивается; б — обеспечиваемся
В-третьих, показать, что если балансировочная кривая
имеет выполаживание на посадочных углах атаки (рис.5.16),
то следует быть особенно внимательным при ее анализе.
В самом деле, если летчик систематически выполнял пред-
посадочное планирование на угле атаки си, то он привык к
динамическому стереотипу: отклонение ручки (±ДхВ1 ) при-
водит к изменению угла атаки в соответствии с прямой 1. При
16—5007сп
241
посадке на выравнивании он отклонял ручку на А Хв, (точ-
ка Л), и самолет выходил на необходимый аг.
Если летчик на основе имеющегося динамического стерео-
типа проделает те же движения ручкой на самолете, имею-
щем балансировочную кривую 2 (рис. 5.16,а), то вместо ожи-
даемого аг самолет выйдет на аз (точка Б), При этом может
оказаться, что аз соответствует потере поперечной управляе-
мости и тогда существенно уменьшается безопасность полета.
Например, при посадке с боковым ветром, когда перед
приземлением летчик дает ногу, чтобы сориентировать само-
лет вдоль полосы, появляется скольжение, при котором на
угле атаки аз сильнее проявляется поперечная устойчивость
(самолет кренится резче, чем на аг) и ухудшается попереч-
ная управляемость (уменьшается ), в результате чего
может не хватить элеронов для компенсации кренения.
Итак, незнание летчиком характера протекания балансиро-
вочной кривой может привести к тяжелому летному проис-
шествию.
Если же летчик это знает и на выравнивании действует
плавно, мелкими двойными движениями (кривая 1—2 на
рис. 5.16,6), то безопасность посадки обеспечивается.
Однако необходимо помнить, что в усложненной нестан-
дартной обстановке несоразмерное движение ручкой (кри-
вая 1—3—4) может также привести к выходу на аз. Дейст-
вительно, если летчик привык к ветке нейтральности, то,
сделав несоразмерное движение, он по стереотипу оставит
ручку в точке 3, ожидая, что ветка нейтральности продол-
жается. Но самолет на этих а уже вновь устойчив и поэтому
задержка ручки в положении 3 приведет к дефициту Ахвпри
балансировке, которая наступит только в точке 4. Дефицит
в А хв приведет к нехватке рулевого момента MZpyJI =
— пт?. ср*в Д xBq S ba, и выравнивание окажется пологим (низ-
ким), т. е. вновь возникнет предпосылка к летному проис-
шествию.
Этот пример не только указывает на необходимость изу-
чения пилотажных свойств эксплуатируемого самолета на
всех режимах полета, но и демонстрирует подход к анализу
балансировочных кривых в интересах пилотирования и повы-
шения безопасности полетов.
§ 5.4. ФОРМЫ ПРЕДСТАВЛЕНИЯ ИНФОРМАЦИИ
О ПИЛОТАЖНЫХ СВОЙСТВАХ
5.4.1. Формы представления динамических характеристик
Прежде всего следует ознакомить летный состав с видом
информации по динамическим характеристикам.
242
Дело в том, что летчик в полете наблюдает и ощущает
возникновение возмущенного движения самолета, например,
колебательного (частоту или период, время затухания коле-
баний, количество колебаний до затухания, заброс регули-
руемого параметра, время срабатывания и т. д.).
Обычно динамические характеристики представляют в
виде зависимостей Т, /Зат, /ср, ^зат, А ^забр от скорости полета
(числа М) для различных высот, стреловидностей крыла и.
центровок самолета (рис. 5.17,а, б, в, г).
Рис. 5.17. Зависимость от числа М и высоты полета:
а и- периода свободных колебаний самолета; б — времени затухания
малого продольного движения; в — времени срабатывания при ступен-
чатом отклонении ручки управления; г —заброса перегрузки при сту-
пенчатом отклонении ручки управления
При подготовке к полетам по этим зависимостям можно
оценить поведение самолета (вид и качество переходных про-
цессов) в ожидаемых условиях боевого применения.
Однако этот вид информации недостаточно удобен для
анализа авиационному командиру при подготовке к занятиям
и летному составу при изучении пилотажных свойств нового
16*
243
самолета. Во-первых, эта информация малообозрима — много
графиков, еще больше кривых для различных условий. Во-
вторых, для анализй движения при возмущающем или управ-
ляющем воздействии на самолет необходимо комбинировать
(объединять) эти различные кривые. Например, взаимоувя-
зывать Т И /Зат, /сраб И Д /2Эабр, * И /Зат И Т. Д.; B-ТретЬИХ, ЧВСТЬ
информации оказывается иногда излишней, т. е. выходит за
диапазон высот и скоростей полета серийного самолета (ле-
жит вне его). Поэтому при изложении и объяснении пилотаж-
ных свойств удобнее использовать другой вид информации
Рис. 5.18. Линии постоянных Т и /зат на диапазоне скоростей
и высот полета
о динамических характеристиках (рис. 5.18, 5.1 Я, 5.20), ко-
торый руководитель занятия может заблаговременно полу-
чить простым и быстрым перестроением графиков, изобра-
женных на рис. 5.17, путем их сечения для выбранных по-
стоянных значений рассматриваемых параметров (T=const,
= const, /срав = const, const и т. д.) и построения не-
обходимых для анализа сочетаний характеристик прямо в
диапазоне скоростей и высот полета серийного самолета.
244
Рис. 5.19. Линии постоянных величин /сраб и пзабР на диапазоне скорос-
тей и высот полета
345
Этот вид представления динамических характеристик ог-
раничен (исключает лишнюю информацию), легко обозрим,
тесно увязан с возможными режимами полета, а потому удо-
бен для анализа.
Рис. 5.20. Линии постоянных величин х и /зат боковых колебаний на диа-
пазоне скоростей и высот полета
5.4.2. Анализ пилотажных свойств
по новой форме представления информации
о динамических характеристиках
Напомнив, что для полного использования боевых воз-
можностей самолета и соблюдения необходимого уровня
безопасности полетов каждый летчик доджей уметь анали-
зировать йнформацию по динамическим характеристикам,
чтобы' прогнозировать поведение самолета на различных этаг
пах боевого полета и выбирать рациональные способы пило-
тирования, следует обратить внимание обучаемых на следую-
щие характерные моменты (рис. 5.18—5.20).
1. С увеличением скорости полета (числа М) на постоян-
ной высоте период и время затухания колебаний уменьша-
ются. На сверхзвуковых скоростях /Зат практически не из-
меняется.
246
Вследствие этого число колебаний до затухания при уве-
личении числа М > 1,0 растет, а при увеличении числа до
М 1,0 уменьшается, так как время затухания колебаний
падает быстрее, чем период колебаний. С увеличением высо-
ты полета при Af = const период колебаний возрастает. В ре-
зультате наименьший период и наибольшее число колебаний
могут наблюдаться при трансзвуковых и сверхзвуковых ско-
ростях полета на малых и средних высотах (так-как здесь
велики запас устойчивости по перегрузке и скоростной напор),
что при энергичном боевом маневрировании затрудняет точ-
ное пилотирование, например, при прицеливании и ведении
огня и тем самым снижает боевые возможности самолета. '
2. Линия а—б (см. рис. 5.18) соответствует сравнительно
большому периоду колебаний Т =1,5 с,-поэтому на высотах
и числах М полета, лежащих левее этой границы, летчик рас-
полагает достаточным временем, чтобы своевременным вме-
шательством в управление устранить колебания самолета
без опасности его раскачки.
С ростом высоты полета время затухания колебаний уве-
личивается быстрее, чем период колебаний, что приводит к по-
вышению колебательности движения самолета.
Так, на одних и тех же сверхзвуковых скоростях поле-
та число колебаний до затухания возрастает при увеличе-
нии высоты полета от области 1 \ п— --зат — = 2 |
\ Т 1 /
/6 12 \
к области 4 п=-----------?- ---- = 5 — 10 колебаний .
\ 1,2 1,2 J
Следовательно, правее границы а—б, особенно на трансзву-
ковых и сверхзвуковых скоростях, с увеличением высоты по-
лета (по мере уменьшения демпфирования) возможности по
точному слежению, точному управлению траекторией поле-
та, а потому и по ведению прицельного огня уменьшаются
еще больше (увеличивается рассеивание).
Одновременно снижается безопасность полета, так как,
опаздывая с реакцией (запаздывание 0,2—0,3 с) при париро-
вании высокочастотных колебаний, можно раскачать самолет
до опасных перегрузок и углов атаки. Непрерывное париро-
вание случайных возмущений требует плавных и небольших
отклонений ручки, применения двойных движений, что отвле-
кает летчика от выполнения основной боевой задачи.
3. Время срабатывания с увеличением чисел М полета на
постоянной высоте снижается, что вызвано уменьшением пе-
риода колебаний. В 'этом случае уменьшается «хождение»
самолета за ручкой управления. Одновременно <гри уменьше-
нии Лр несколько увеличивается заброс перегрузки Д п3абр >
247
поэтому на большей скорости (числе М) необходимо пилоти-
ровать самолет более плавными отклонениями ручки управ-
ления, что повысит безопасность полета (уменьшится опас-
ность выхода за ограничения по углу атаки или перегрузке)
и точность отслеживания цели при боевом маневрировании.
С увеличением высоты полета возрастают время срабатыва-
ния и заброс перегрузки при маневрировании. С точки зре-
ния эффективного выполнения задач данного этапа полета
(при малой нагрузке на летчика) наименьшие затруднения в.
пилотировании летчик будет_ иметь в области 1—2—3—4Г
ограниченной величинами Д/г3абр= 0,2—0,3, что обеспечивает
на малых, средних и больших высотах эффективное выполне-
ние боевых задач при небольших психических и физиологи-
ческих нагрузках. Большие значения соответствуют неманев-
ренным самолетам. Пилотируя самолет плавными движения-
ми, летчик может существенно уменьшить забросы перегруз-
ки, а применяя двойные движения при переходе на новый ре-
жим,— сократить время срабатывания и затухания коле-
баний.
4. Линия г—д (см. рис. 5.19) соответствует /ср = 1,5 с, по-
этому на высотах и числах М полета, лежащих левее этой
границы, с уменьшением скорости полета у маневренных са-
молетов «хождение» за ручкой существенно ухудшается, так
как растет время срабатывания. При этом усложняется пи-
лотирование, связанное с энергичным, маневрированием и
точным управлением траекторией полета (в воздушном боюг
при атаке наземных целей, полете на предельно малых вы-
сотах с огибанием рельефа местности, полете в сомкнутом
строю, дозаправке топливом в полете и т. д.).
Заметим, что такой границей для неманевренных самоле-
тов может служить величина /Ср > 3,0 с.
5. Коэффициент х для фиксированной стреловидности кры-
ла при дозвуковых скоростях падает с увеличением числа М
на постоянной высоте полета, причем на малых числах М
падение происходит достаточно интенсивно, что ослабляет
колебательность движения самолета при выполнении боевого
маневрирования. Это объясняется снижением поперечной
(т^) и возрастанием путевой устойчивости (т^} при умень-
шении а с увеличением числа М в горизонтальном прямоли-
нейном полете. При увеличении «у > 1,0 (рис. 5.20 соответст-
вует Пу = КО) фиксированные значения величины х сдвига-
ются в область больших скоростей [в соответствии с
VnY>i = Vn Y=i , поэтому интенсивность боковых ко-
лебаний самолета при энергичном маневрировании увеличи-
вается.
248
Увеличение х с ростом сверхзвуковых скоростей, связанное
со снижением поперечной и еще более быстрым уменьшением
/ 7y \
путевой устойчивости х ~ —g у— , свидетельствует о
возможном нарастании боковых колебаний (по крену и рыс-
канию) с существенным преобладанием движений крена над
рысканием. Это является одной из главных причин ограниче-
ния числа М полета.
6. Линия к^-н (см. рис. 5.20) соответствует времени зату-
хания боковых колебаний/Зат б = Ю с. Опыт полетов пока-
зывает, что при количестве боковых колебаний порядка 6—7
(т3ат — 3) это обеспечивает достаточно устойчивое боковое
колебательное движение на высотах и скоростях, лежащих
левее этой границы, при необходимости точного пилотирова-
ния (прицеливания и ведения эффективного огня, заправки
топливом и т. д.). Если же не требуется энергичное маневри-
рование, точное слежение, но может потребоваться точное
управление траекторией полета (например, крейсерский по-
лет), то граница к—н сдвигается в область больших значе-
ний /Зат. б, где допускается и большее количество колебаний
до затухания.
7. Область 1 (см. рис. 5.20) является наиболее благоприят-
ной с точки,зрения приемлемых значений х, при которых са-
молет отвечает незначительным (легко парируемым) крене-
нием на возникающее рыскание. В этой области (/зат^Юс),
а х<3,0, и процесс затухания боковых колебаний обеспечи-
вает высокие пилотажные свойства самолета.
В области 2 величины х больше, чем в области /, но они
допустимы с точки зрения приемлемого качества пилотирова-
ния самолета, так как в этой области затухание боковых коле-
баний ПРОИСХОДИТ ДОСТаТОЧНО быСТрО ( /Зат <5 с).
8. Современные маневренные самолеты с крылом изменяе-
мой стреловидности обычно выполняют боевое маневрирование
при достаточно больших углах стреловидности крыла и атаки,
что приводит к значительному увеличению их поперечной и
уменьшению путевой устойчивости, а следовательно, к росту
величины х, т. е. к усилению взаимосвязи движений крена и
рыскания. В этом случае, например, создание угла скольже-
ния для атаки противника из неподвижных пушек может при-
вести к раскачке по крену, что снижает уровень безопасности
полета. Летчик вынужден отвлекать внимание в этой ситуа-
ции от выполнения основной боевой задачи.
9. Внешние подвески оказывают дестабилизирующее влия-
ние: уменьшают путевую и увеличивают поперечную устойчи-
вость (рост х), что приводит к повышенной реакции по крену
24»
на дачу ноги при меньших числах М полета и стреловидностях
крыла (это причина более жестких ограничений числа М по-
лета при внешних подвесках). Даже поперечно устойчивый
самолет может стать неустойчивым при больших внешних
подвесках, поэтому энергичное маневрирование с переходом
скорости звука на таких самолетах нежелательно.
Статические характеристики .устойчивости и управля-
емости, эффективность рулей и характеристики демпфиро-
вания представляют в виде кривых, изображающих зависи-
мость коэффициентов соответствующих моментов (/п^у,ал,
т$х, , Ршэх, т^., mfr , mfr , mfr , mfr ) от
скорости полета, стреловидности крыла, внешних подвесок
для определенной высоты (последнее для тех, которые от нее
зависят). Эти кривые являются не только средством для рас-
чета, но удобны и для анализа пилотажных характеристик на
различных режимах полета. Частично эти формы .представле-
ния информации уже рассматривались (использование балан-
сировочных кривых для оценки устойчивости самолета).
В дальнейшем удобно объединить изложение вопроса о
форме представления перечисленных характеристик с анали-
зом влияния условий боевого применения на пилотажные
свойства самолетов.
5.4.3. Методика анализа статических характеристик
устойчивости и управляемости серийного самолета
Летный состав зачастую, изучая практическую аэродина-
мику серийного самолета и «наткнувшись» на ряд различных
кривых, характеризующих устойчивость и управляемость, оси
которых обозначены, как им кажется, какими-то «кабалистиче-
скими» символами типаал, <о^х, и им подобными, немед-
ленно отказываются от попытки понять их, считая, что они
никак не связаны с полетом и, конечно же, нужны только
«придумавшим» их ученым и инженерам. При этом они совер-
шают в отношении этой информации три ошибки:
— во-первых, она получена в летных испытаниях и не но-
сит чисто академического характера, а прямо отражает реаль-
ные свойства самолета в полете;
— во-вторых, она необходима не авиационному инженеру,
готовящему авиационную технику, а именно летчикам, гото-
вящимся к полетам в заранее известных областях скоростей
и высот полета и диапазонах^ (^у) . При этом боевые условия
могут потребовать выхода на предельные режимы полета,
диктуемые сложившейся тактической ситуацией, что снижает
уровень безопасности полета из-за существенного изменения
характеристик устойчивости и управляемости;
250
— в-третьих, читается эта информация легко, если усвоить
простое правило знаков и четко «переводить» символику в
реальный полет (см. 5.2.2).
Другими словами, понимание физики изменения сил и мо-
ментов, действующих на самолет, позволяет проводить не
только качественную (характер ожидаемого поведения само-
лета), но даже и количественную оценку (с какой интенсив-
ностью) изменения поведения самолета в воздухе на различ-
ных этапах его боевого применения (при прицелицании и ве-
дении огня в ближнем воздушном бою, атаке наземных це-
лей, полетах на предельно малых высотах и т. д.).
На занятиях целесообразно обучать летный состав такому
анализу, предварительно разбив рассматриваемые аэродина-
мические коэффициенты на группы. Например:
— коэффициенты устойчивости: m^Y , rr$x, mfy
— коэффициенты демпфирования: rrtp,
— коэффициенты эффективности рулей:
и др.
Кроме того, отдельно показать анализ усилий и переме-
щений ручки управления, необходимых для балансировки
самолета (Рв, хв, Р3 и т. д.), а также их производных (P"Y,
и др.). Причем обязательно показать отличие в пове-
дении самолета, когда эти характеристики изменяют свои зна-
ки и становятся то отрицательными, то нулевыми, то поло-
жительными.
Перед проведением анализа полезно напомнить, что само-
леты, начиная от первого поколения и до последних типов бое-
вых самолетов, претерпели существенное изменение аэродина-
мической ц массовой компоновки: появилась изменяемая в
полете стреловидность крыла, что повлекло за собой даже в
одном и том же полете применение различных формы крыла
в плане, его относительной толщины, удлинения, стреловид-
ности передней кромки, встречающей набегающий поток.
Основная масса самолета и боевой нагрузки сосредоточена
в сильно вытянутом фюзеляже (последнее оказывает влияние
на инерционные характеристики самолета /х, /у, Iz ), а на-
личие многочисленных внешних подвесок, расположенных
вдоль крыла, влияет на 1х и /у .
Отсюда вытекают два момента, которые необходимо ус-
воить для последующего анализа:
— практически все характеристики устойчивости и управ-
ляемости носят ярко выраженный нелинейный характер *по
числам М, углам атаки и скольжения;
— в одном и том же полете взаимосвязь между продольным
251
и боковым движениями проявляется от слабой до существенно’
влияющей на безопасность полетов степени.
Проверив, что обучаемые усвоили общий подход к анализу,,
ознакомить их с возможной его методикой.
1. Определить структуру аэродинамического момента, из-
менение коэффициента которого подвергается анализу.
2. Уяснить, от каких параметров зависят изучаемые мо-
менты: от величины и знака самого коэффициента момента,
от числа М полета, углов атаки и скольжения, высоты, стре-
ловидности крыла, упругих деформаций и др. Зафиксировать
те параметры, влияние которых на анализируемый коэффи-
циент не рассматривается.
3. Уточнить физический смысл влияния изменения момента
на поведение самолета (например, через изменение динамиче-
ских характеристик устойчивости и управляемости) в зависи-
мости от характера изменения рассматриваемого параметра
(М, а, р, Н,...).
4. Нанести на анализируемые зависимости ограничения,
указанные в Инструкции летчику. Например, Мдоп> адоп, аотр,
апос/ Vмакс, доп» Уэв И Др.
5. Выявить диапазоны параметров, в которых анализируе-
мые аэродинамические коэффициенты или характеристики
управляемости изменяются интенсивно и даже изменяют знак.
6. Учесть влияние внешних подвесок, а при необходимости
и конфигурацию самолета в полете (шасси, закрылки, тормоз-
ные щитки, аэродинамический гребень и т. д.)/При этом пом-
нить, что изменяются не только абсолютные значения харак-
теристик, но становятся более жесткими и ограничения.
7. При анализе помнить о возможном взаимном влиянии
рассматриваемых характеристик.
8. По ходу анализа делать практические выводы о воз-
можном поведении самолета и действиях летчика на различ-
ных режимах полета, увязывая их с условиями выполнения
упражнений в соответствии с КБП рода авиации.
После этого в качестве примера провести цо предлагаемой7
методике анализ какой-либо зависимости, проверить, все ли
понятно летному составу и предложить самостоятельно про-
вести анализ других зависимостей.
5.4.4. Пример анализа статических характеристик
устойчивости серийного самолета
Анализируется зависимость (а), т. е. изменение коэф-
фициента поперечной устойчивости (/п^) от величины угла
атаки (рис. 5.21).
252
1- Мхст — tn?x$qSl — 0,7 m?x$pM2Sl — момент крена при
наличии скольжения (р), о котором- летчик судит по поло-
жению „шарика1*.
Л?/
©
Граница по энергичному
кренению при склонении порам/
Обратная реакция по крону
на дачу педали
©
Рис. 5.21. Зависимость коэффициента
поперечной устойчивости от угла ата-
ки и стреловидности крыла
Здесь следует напомнить, что отклонение «шарика» будет
различным при одной и той же величине р в зависимости от
создаваемого летчиком угла атаки (перегрузки): чем больше
угол атаки (перегрузка), тем меньше увод «шарика» при
одном и том же скольжении. Следовательно, при больших
а (му) «шарик» при скольжении может практически не изме-
нить своего положения, и летчик сделает неправильный вывод
об отсутствии скольжения.
2. Из формулы видно, что Л4Х ст зависит от величины и
знака т?х и р, величин Н, М, S и I. Поскольку намечен
анализ т?х (а), то надо принять остальные параметры за
постоянные величины, в том числе и стреловидность крыла.
3. От изменения величиныа вместе с ней и AfXcT в
основном зависят заброс по углу крена и угловой скорости
крена. Причем чем меньше отрицательная величина т?х , тем
больше заброс Д Тзабр, что необходимо учитывать при боевом^
маневрировании, связанном с изменением крена. Так, на пре-
дельно малых высотах при вводе в маневр на малых Vnp это
существенно влияет на безопасность полета, а при атаке мо-
жет произойти уход противника из прицела.
4. На рассматриваемую зависимость нанести величину
адоп и а отрыва и посадки, взяв их из Инструкции летчику»
но при этом учесть, что в Инструкции л указаны в соот-
ветствии с УУАП, а нанести надо истинные а. Их связь обычно
253
имеется в Техническом описании. Например, аист = —-------
5. Изучая /и^(а), выявить а, при которых /п£=0
ит^>0 (разумеется, если все это имеет место).
Поведение самолета, т. е. в данном случае движение
/ • Мх \ *
крена I =-------1, будет определяться величиной и знаком
V 1х /
т? и р на соответствующих углах атаки:
р<0->Л4хст>0^шх=^>0
(„шарик* слева)
(кренение вправо)
9 0 —> Мх ст <. О —> юх = —— О
(„шарик** справа)
(кренение влево)
«г р С 0 —> Мх с г 0 —> сох О
/ („шарик** слева) (кренение влево)
> 0 —> Мхсл > 0 —> их > О
(„шарик** справа) (кренение вправо)
Естественная
реакция по кре-
ну на отклоне-
ние педали
Обратная реак-
ция по крену
на отклонение
педали
В первом случае поведение самолета является естест-
венным для летчика, так как отклонение левой педали
хн< О, 8Н < 0, р > 0 будет приводить к левому крену Мх<^'
и наоборот.
Во втором случае при анализе обнаружена обратная реак-
ция по крену на дачу педали. Это означает, например, что при
необходимости доворота на цель влево для открытия огня из
бортового оружия (или стыковки при дозаправке в воздухе,
т. е. при маневрах с малыми а, где возможно условие j>0)
при привычной даче левой ноги летчик вдруг окажется в си-
туации, противоположной той, которую он ожидал. Самолет-
начнет крениться вправо, что увеличивает скольжение на пра-
вое крыло, еще больше растет у вправо, а в силу путевой
устойчивости носовая часть фюзеляжа пойдет вправо, и траек-
тория самолета изменится. Он может быть «выброшен» впра-
во относительно намеченной траектории. Это не только снизит
эффективность боевого применения, но и опасно (например, в
сомкнутом строю, при парировании летчиком случайных воз-
мущений, посадке с боковым ветром и т. д.).
При а, на которых /п^=0, самолет при любом скольжении
(влево, вправо) не реагирует креном на скольжение.
Напомнить, что этот анализ соответствует исходному по-
254
лету с у = 0 и не учитывает момента крена от появления по-
перечной силы на киле за счет отклонения руля направления,
который действует, как правило, в сторону, противоположную
отклоненной педали
Если на анализируемой кривой при аотр(апос) т$х по абсо-
лютной величине окажется высокой (или просто больше,
чем т?х ранее эксплуатировавшегося самолета), то следует
ожидать усиления * интенсивности кренения при меньшем
отклонении педали.
Следовательно, непроизвольное энергичное отклонение пе-
дали для парирования внезапного порыва бокового ветра при
заходе на посадку может привести даже к полубочке, что'
крайне опасно, учитывая пониженную эффективность элеро-
нов на этих а (при Vnp. отр, Vnp. пос? рис. 5.22, 5.23). Это вы-
по ^иаогкл педали
пониж меронсб
Рис. 5.22. Зависимость коэффициентов эффектив-
ности элеронов и руля направления (по крену) от
угла атаки
Неблагоприятное ^сочетание
прсиз&одныхf я
3/70 350 1/Пр
енная реакция на отклонение
педали и нузкая - на отклонение
ручки по элеронам
Рис. 5.23. К анализу реакции самолета креном на отклонения
ручки управления и педали на взлетно-посадочных режимах
255
зывает необходимость ограничивать верхний предел отрица-
тельного значения т?х (см. рис. 5.21).
В процессе изложения вопроса обратить внимание летного
состава на то, что анализ поведения самолета по крену можйо
провести по зависимости (а, Л4), т. е. по знаку и вели-
чине угловой скорости крена Д ©х» возникающей при отклоне-
/ А (1>Х \
нии педали на Д хн = 1 см w* н ж---|.
\ х bxj
Величины Лих и ДХн в летных испытаниях записываются
бортовой аппаратурой (рис. 5.24), по ним строится зависи-
Рис. 5.24. Пример записи обратной реакции
самолета по крену на отклонение педали
мость со*и (а), анализируя которую (рис. 5.25), летчик легко
найдет описанные естественную и обратную (если она име-
ется) реакции по крену на дачу педали. Следует только об-
ратить внимание, что производная й*н (в отличие от т^) при
скорости крена от отклонения
педали
<256
естественной реакции должна быть положительной (напри-
мер, дал правую ногу — Дхн^>0 — кренение вправо, т. е.
Д<ох>0), а при обратной о)*н<^0. Это, соответствует приня-
тому правилу знаков.
Для анализа производной <о^н можно использовать выра-
жение
Дшх т?х 1_____1__2V
Дхн т%х 83 х^н I
Все входящие в него величины уже известны, кроме 83
(потребного отклонения руля направления для изменения
скольжения на Г) и (величины отклонения 8Н при откло-
нении педали на 1 см).
V—const
Я ~ const
X const
, положительных «Й1 возможна <^к<0,>т. е. об-
значений у, ратная реакция по крену
/ на дачу педали»
Следует пояснить, что физика явления состоит в уменьше-
нии запаса поперечной устойчивости (/п^<0) при малых а и
больших скоростях полета у современных самолетов со стре-
ловидными крыльями. На трансзвуковых и сверхзвуковых
скоростях сильно проявляется сжижаемость воздуха (речь уже
идет о влиянии числа М полета), в результате чего на сколь-
зящем крыле ранее развивается волновой кризис, уменьшает-
ся его несущая способность (С“) по сравнению с отстающим
крылом (рис. 5.26) и появляется стремление к самопроизволь-
ному увеличению крена в сторону скольжения.
В конце анализа подчеркнуть, что вместе с изменением
изменяются и ряд других характеристик, которые вместе
и будут определять боковое движение самолета.
Такой упрощенный анализ (по отдельным коэффициентам
и т. д.) соответствует требованиям марксистско-ленинской
теории познания о необходимости схематизации изучаемых яв-
17—5007сп
257
лений, важно помнить только о взаимообусловленности и
взаимосвязи их различных сторон.
Рис. 5.26. Изменение несущих свойств
полукрыльев при скольжении самолета
§ 5.5. ВЛИЯНИЕ УСЛОВИЙ БОЕВОГО ПРИМЕНЕНИЯ
НА ПИЛОТАЖНЫЕ СВОЙСТВА САМОЛЕТОВ
Изучая с летным составом этот вопрос, сначала следует
установить теоретическую связь динамических характеристик
со статическими и другими аэродинамическими характеристи-
ками устойчивости и управляемости, а также с условиями бое-
вого применения. Затем провести анализ влияния’ этих усло-
вий на характер движения и управляемость при боевом ма-
неврировании.
5.5.1. Зависимость динамических характеристик
от статических и условий боевого применения
(эксплуатационных факторов)
При теоретическом обосновании пилотажных свойств и
объяснении особенностей их характеристик следует опираться
на общие закономерности, определяющие зависимость дина-
мических характеристик от статических характеристик и от
ряда аэродинамических и эксплуатационных факторов (усло-
вий боевого применения).
Наиболее важными факторами, которым следует в пер-
вую очередь уделить внимание, являются: боевая нагрузка, в
том числе и внешние подвески, стреловидность, несущая спо-
258
собность крыла, режим ттолета (высота и скорость), степень
устойчивости, демпфирование и т. д. Связи между динамиче-
скими характеристиками устойчивости и управляемости и ука-
занными факторами многообразны и сложны. При изучении
конкретного самолета и сопоставлении его с ранее изучав-
шимся (состоявшим на вооружении части) самолетом целе-
сообразно обратить внимание на наиболее существенные ив
этих связей.
1. Увеличение <зп приводит к уменьшению периода колеба-
ний углов атаки и перегрузки в малом движении:
где lz — момент инерции, Л1“ — приращение продольного-
момента при изменении угла атаки на 1°.
Iz = т rz2,
где rz — радиус инерции,
Л4“ = m” q S ba = rrfy C^qS ba,
так как
С“.
Если вместо nty учесть
то
Т -9гг 1 fmg/S
V g^n^qba
где
V2
q = p-L- = 0,7 рМ2.
При докритических скоростях полета это влияние довольно
слабое, но при сверхкритических и особенно сверхзвуковых
скоростях — весьма сильное в связи с тем» что на докритиче-
ских числах М положение фокуса слабо зависит от числа М
полета (т. е. запас устойчивости в основном определяется цент-
ровкой самолета). По мере же дальнейшего увеличения ско-
рости полета и развития волнового кризиса происходит пере-
распределение аэродинамической нагрузки и фокус смещается
17*
259
назад (растет сл). Здесь следует подчеркнуть то обстоятель-
ство, что после выхода на сверхзвуковые скорости фокус за
счет недостаточной жесткости стреловидного крыла может
снова смещаться вперед, что уменьшает и несколько увели-
чивает период колебаний.
Эти рассуждения позволяют сделать практический вывод
для пилотирования: наименьший период колебаний будет про-
являться на сверхзвуковых скоростях полета на малых и сред-
них высотах, где велики степень устойчивости и скоростной на^
пор, что при большом времени затухания колебаний требует
высокой летной выучки для реализации режимов точного пи-
лотирования. ’
По аналогии в боковом движении, считая, что периоды
колебаний крена и рыскания одинаковы для случая незадемп-
фированных колебаний, можно записать:
Тб=2^|/ Д- = 2«rY|/-
Из формулы следует вывод, что увеличение путевой устой-
чивости также приводит к уменьшению периода колебаний
углов скольжения и крена.
Из формул видно, как период колебаний зависит от высо-
ты и скорости полета через q (практические выводы сделаны
в предыдущем параграфе), а также от боевой нагрузки
(tnglS), стреловидности крыла (через Су, ba, I), расположе-
ния внешних црдвесок по отношению к центру масс самолета
(через rz и rY).
Касаясь влияния запаса устойчивости на время сраба-
тывания, надо напомнить, что /ср связано с периодом коле-
баний и примерно может оцениваться при хорошем демп-
фировании как /Ср~—— Укп, а при плохом — как /Ср~
2
-i- Ткп. Отсюда нетрудно сделать вывод о зависимости
4
/Ср и от различных аэродинамических' и эксплуатационных
факторов (например, от скорости и высоты полета; см.
рис. 5.17, в).
В заключение обратить внимание обучаемых, что рас-
смотренные связи ол и Ткп, и Тб являются связями стати-
ческих и динамических характеристик устойчивости.
2. Уменьшение коэффициентов и характеризую-
260
щих демпфирующие свойства самолета, сопровождается уве-
личением времени затухания колебаний перегрузки, углов
атаки, скольжения и крена. Однако эта связь не так проста,
как кажется на первый взгляд, и нужно добиться ясного её
понимания.
Известно, что /зат определяется в основном демпфирую-
щими и инерционными свойствами самолета, что в упрощен-
ном виде можно представить так:
4 mg/S r2z
*зат Му ~ = — —- •
g V Р Ьр
_ mg/S г\
зат Р’1 g V р Р
Коэффициент пропорционален величине С“г 0 (несу-
щей способности горизонтального оперения), а —вели-
чине С₽в , характеризующей изменение поперечной силы
на вертикальном оперении при изменении угла скольжения
на 1°.
Таким образом, физическая сущность изменения m^z и
заключается в изменении о и во по числу М по-
лета (рис. 5.27). Следовательно, влияние и на /Зат
следует рассматривать совместно с непосредственным влия-
нием скорости полета, т. е. через произведения m^z V и
/п“у V.
При дозвуковых скоростях полета с ростом числа М эти
произведения увеличиваются, и поэтому t33T колебаний уг-
лов атаки, скольжения, крена и перегрузки уменьшается. На
сверхзвуковых скоростях с увеличением чисел М эти произве-
дения остаются примерно постоянными. В результате /зат на
этих скоростях практически не изменяется, что видно из
рис. 5.18.
С ПОМОЩЬЮ формул /зат а, пу И /зат ₽'т ЛвГКО ПОКаЗЭТЬ ВЛИЯ-
ние на /зат высоты полета (через р), стреловидности крыла
(через Ьа, /), варианта боевой нагрузки (mg/S), места рас-
положения внешних подвесок и распределения груза вдоль
фюзеляжа (через rz, rY).
Необходимо отметить только, что m^z и от высоты
не зависят, и физическая сущность увеличения /зат с ростом
261
высоты при неизменном числе М полета заключается в ос-
лаблении демпфирующих моментов (Mz деМп = &zq S ba
и Мудемп = m^^.qSl) из-за снижения <7=0,7 рМ2, в свою
очередь уменьшающегося из-за падения давления воздуха.
Вместе с тем следует отметить, что /зат б зависит и от со-
отношения поперечной (т^) и путевой (т^) устойчивости,
т. е. от статических характеристик устойчивости. Физическая
сущность здесь заключается в том, что если самолет имеет
чрезмерную поперечную устойчивость (повышенную реакцию
креном на отклонение педали) при нормальной путевой устой-
чивости (а это соответствует большим величинам х), то при
возмущении появляется большая раскачка по крену, благо-
даря чему колебания становятся слабозатухающими.
Рис. 5.27. Зависимость несущих свойств опе-
рения от числа М полета
Необходимо остановиться и на практических следствиях
увеличения /зат: любое случайное возмущение или резкое
движение ручкой, педалями приводит к длительным слабоза-
тухающим колебаниям, что, например, усложняет слежение за
целью в воздушном бою, при атаке наземной цели, дозаправ-
ке в воздухе и т. д.
3. Количество колебаний до затухания и заброс регулируе-
мого летчиком параметра (угла атаки, перегрузки и т. д.) из-
меняются по скорости и высоте в зависимости от сочетания
демпфирующих свойств (оказывающих влияние на /Зат ) и
степени устойчивости (оказывающей влияние на Т), что упро-
щенно можно записать в виде:
„ _ ^зат
”зат ~ ~ •
Оценку влияний на них различных факторов можно провести,
используя это выражение и предыдущий анализ /зат и 7\
262
4. Величина приращения угла атаки Дауст и перегрузки
Д Пу уст при ступенчатом отклонении ручки управления
(Ахв = const) тем больше, чем меньше степень устойчивости
по перегрузке ап, несущая способность крыла' С“ и больше
коэффициент эффективности стабилизатора
В самом деле, из условия
А Хв — G fi С у A GtycT
следует:
®уст —
т*в Ах, mt Ахв
£ ______ ___
°пСу 0 пСу
, к mZ ,,
где т*в~------г— изменение коэффициента момента тан-
Ахв
гажа, приходящегося на единицу пере-
мещения ручки управления;
А®
<рхв ~-----передаточное число от стабилизатора к
А хв
ручке управления.
Установившееся значение прироста перегрузки в этом
случде равно
С’ A ауст q а mt^xB г
А ~ __ у 3 ______.
уст mg!S rng/S <зп
т. е. от несущей способности крыла не зависит. Здесь можно
пояснить, что произведение <рхв Дхв = Дф, т. е. соответству-
ет величине отклонения стабилизатора.
5.5.2. Анализ влияния условий боевого применения
на характер движения и управляемость самолетов
при боевом маневрировании
В качестве основных условий боевого применения самоле-
та здесь целесообразно рассматривать боевую нагрузку, ско-
рость и высоту полета, а также сопутствующие им изменения
эксплуатационных факторов (например, стреловидности кры-
ла и т. д.). Важность этих условий, определяемых характером
полетного задания и действиями летчика, вытекает из того,
что они существенно влияют на поведение самолета в полете.
Зависимости динамических, статических и других аэроди-
намических характеристик устойчивости и управляемости (на-
263
пример, характеристик демпфирования) от высоты и скорости
(числа М) полета приводятся в описаниях самолетов в виде
графиков. В той или иной форме помещаются также материа-
лы по влиянию и других факторов (центровки, углов атаки,
стреловидности крыла, перегрузок и др.).
На занятиях по практической аэродинамике серийного са-
молёта необходимо научить летчиков пользоваться всеми эти-
ми материалами. Одновременно с этим следует раскрыть фи-
зический смысл, причины рассматриваемых зависимостей,
пояснить, имеется ли (и почему) какая-либо разница в этих
зависимостях у изучаемого самолета и других самолетов, из-
вестных обучаемым.
Методика анализа
При изложении этих вопросов показать прежде всего ме-
тодику анализа. Например, дать такие рекомендации:
— при анализе воспользоваться заранее выписанными
формулами, определяющими прямую или косвенную, взаимо-
связь условий боевого применения с параметрами, Влияющими
на характер движения и управляемость при боевом маневри-
ровании (Г, /зат, /ср, А пзабр, /гзат, х, P"y , Р™х и др.);
— подготовить графики динамических, статических
и других аэродинамических характеристик (mzY » тх*
Рв, Хв и др. от V, Н. а, х и др.);
— анализ вести раздельно для полета на дозвуковых и
сверхзвуковых скоростях;
— воспользоваться символической формой записи: стрел-
кой f обозначить увеличение, а стрелкой 1 —уменьшение
рассматриваемого параметра;
— анализ проводить в виде оценки изменения динамиче-
ских характеристик устойчивости и управляемости и характе-
ристик управляемости при маневрировании (P"Y, Р^х и др.)
от изменения полетной массы (боевой нагрузки), скорости и
высоты полета;
— при анализе влияния того или иного фактора на эти
характеристики целесообразно сначала выяснить, как от это-
го фактора (например, от скорости) зависят статические ха-
рактеристики и другие, привлекаемые для анализа, аэроди-
намические характеристики устойчивости и управляемости,
после чего уже можно судить об изменении динамических ха-
рактеристик, т. е. оценивать изменение характера движения и
управляемости самолета; при этом следует иметь в виду, что,
рассмотрев влияние увеличения фактора, нет необходимости'
анализировать влияние его уменьшения, так как оно будет
противоположным;
264
— в описаниях серийных самолетов при изображении гра-
фиков часто по оси ординат вверх от оси абсцисс отклады-
вают отрицательные значения параметра, поэтому перед ана-
лизом необходимо выяснить эти знаки, так как они опреде-
ляют направления действия рассматриваемых величин;
—, в конце анализа дать практические рекомендации.
Влияние изменения боевой нагрузки
В зависимости от поставленной боевой задачи изменяется
вариант боевой нагрузки самолета, что приводит к_изменению
^агрузки на крыло (mglS) и центровки самолета (хм). В поле-
те хм может изменяться постепенно (при выработке топлива)
или резко (при сбросе груза). В описаниях серийных самоле-
тов приводятся графики, по которым можно установить, в ка-
кую сторону (уменьшения или увеличения) изменится цент-
ровка самолета в зависимости от остатка топлива.
Изменение центровки оказывает влияние на степень устой-
чивости по перегрузке аЛ, что в свою очередь изменяет пе-
риод колебаний Ткп, время срабатывания /ср и заброс пере-
грузки Дпузабр. Чём более задняя центровка (больше вели-
чина хм), тем меньше ее запас = хм — Хф, меньше и сте-
tn*z
пень устойчивости пег перегрузке ~tncz\ Ч-------, а следо-
вательно, уменьшается стабилизирующий момент A4Zct =
= anCNqSba^ противодействующий рулевому моменту, соз-
даваемому летчиком.
В результате для случая, когда центр масс сдвигается
назад, что обычно бывает при внешних подвесках, а летчик
отклоняет ручку управления на одну и ту же величину при
неизменных высоте и числе М полета, на основе анализа по
приведенной методике получим
ДЛ'В = const
Л1 ~ const
В = const
Т Л. --------
(1ДМ назад)
img'S
-> | Д tty yd
/ср
j 1 Д п \ зиб»
I m6.„
Im
Это означает, что при снижении боевой нагрузки и одно-
временном увеличении центровки понижается степень устой-
чивости по перегрузке и уменьшается нагрузка на крыло
265
mglS. Это приводит к изменению характера движения само-
лета и его управляемости.
Уменьшение а„ при постоянном рулевом моменте Мгрул=
= трхв<Р’в qSba приводит к возрастанию приращения уста-
новившегося значения перегрузки Дпууст и Ткп, но одновре-
менно из-за снижения нагрузки на крыло уменьшается вре-
мя затухания колебаний /зат. В свою очередь, это вызывает
увеличение време.ни срабатывания tcp, относительного забро-
са перегрузки ДпУзабр и количества колебаний до затухания
Лзат*
Из второй цепочки следует, что в этих условиях уменьшит-
ся расход ручки и усилий на ней для изменения перегрузки
(х"у, P"y).
Теперь можно сделать вывод, что в этом случае ухудшает-
ся хождение самолета за ручкой (| /ср), правда, самолет
выходит на большее значение перегрузки (угла атаки) при
постоянном отклонении ручки (хв = const), улучшается плот-
ность хода ( |п3ат), процесс затухания колебаний перегрузки
становится более коротким по времени (| /зат) и колебания
имеют меньшую частоту (f Ткп) , что облегчает вмешатель-
ство в управление самолетом для корректировки его движе-
ния. Управление самолетом облегчается (|^by)’ но тРе"
буются более соразмерные движения ручкой
Однако летный состав знает, что независимо от запаса
центровки для выполнения заданного боевого маневра необ-
ходимо получить одно и то же приращение перегрузки
(Д /2у уСт = const), поэтому, найример, при уменьшении запаса
центровки надо меньше отклонять ручку на себя (а не
Дхв= const), т. е. создавать меньший рулевой моменр При
этом характер изменения параметров при изменении центров-
ки сохранится, но легко установить, что абсолютная величина
заброса перегрузки (угла атаки) уменьшится, так как летчик
создает Д Пу yCT = const, а относительный заброс Д nY забрумень-
шается. Это можно пояснить с помощью формулы:
Д ^У забр = Д ^У макс Д ^У уст = Д ^У забр Д ^У уст,
А ~~ Д Пу забо
что следует из Д п у забР =---------- .
Д Пу уСТ
На рис. 5.28 показано влияние центровки на характер дви-
жения самолета. Из анализа вытекают и практические реко-
мендации.
1. Летчику необходимо строго контролировать центровку,
так как в полете с более задними центровками управление
266
самолетом становится легким («строгий» самолет резко реа-
гирует углом атаки и перегрузкой на отклонение ручки), а
движение опасным: возможен непроизвольный выход на углы
атаки сваливания или за ограничения по перегрузке (в зави-
симости от высоты и скорости полета).
Рис. 5.28. Влияние положения центра масс самолета на изменение пе’ре-
грузки:
а — при одном и том же отклонении ручки управления; б — при отклоне-
нии ручки управления, обеспечивающем одинаковый прирост перегрузки
267
2. В этом случае эффективность выполнения боевой задачи
уменьшается, так как затрудняется пилотирование самолета
в процессе быстрого маневрирования с обеспечением точного
слежения за целью, точного управления траекторией полета
(атака воздушной или наземной цели, полет на предельно
малых высотах с огибанием рельефа местности, полет сомкну-
тым строем, заправка топливом в полете).
3. Летчик! Помни, что к изменению центровки в полете мо-
гут привести неправильные заправка топливом, его выработ-
ка, размещение грузов и внешних подвесок, порядок их сбро-
са, поэтому необходимо тщательно проверять готовность са-
молета к полету и грамотно эксплуатировать его в воздухе.
Отметить, что можно проанализировать также влияние
изменения боевой нагрузки на поведение самолета по рыска-
нию и крену. Надо обратить внимание летного состава на не-
обходимость особого учета’влияния внешних подвесок, кото-
рые не только увеличивают нагрузку, а следовательно, и не-
обходимые углы атаки, но и непосредственно влияют на
путевую и поперечную устойчивость. Всем летчикам известен
факт более жесткого ограничения чисел МДОп при внешних
подвесках.
Влияние числа М полета
Современные боевые самолеты используются в широком
диапазоне дозвуковых, трансзвуковых и сверхзвуковых ско-
ростей полета, поэтому устойчивость их движения и управ-
ляемость изменяются за счет влияния сжимаемости воздуха и
упругости конструкции. Это влияние проявляется через изме-
нение статических и других аэродинамических коэффициен-
тов сил и моментов, причем количественные изменения зави-
сят от аэродинамической компоновки самолета, но общая
тенденция качественно сохраняется примерно одинаковой не-
зависимо от их компоновки.
Основное влияние на характер поведения самолета в про-
дольном движении оказывают величины m^Y, ол, пг^гигпг,
которые могут существенно изменяться на различных режи-
мах полета по скорости. При изучении этого нужно объяс-
нить следующее.
а) Что является причиной увеличения отрицательных зна-
чений m^Y и ал, т. е. запаса центровки и степени устойчиво-
сти, при возрастании скорости полета на числах М ^>Мкр?
Напомнив обучаемым
\ - г
ал = (-^м — Хф ) 4" Д Хф = niz^~\-»
268
Рис. 5.29. Зависимость коэффициента демпфирования
от числа М полета
269
следует подчеркнуть, что при неизменной центровке (хм =
=const) с увеличением числа М полета основной причиной,
влияющей на степень устойчивости по перегрузке ал и запас
центровки , является изменение положения фокуса_Хф.
Вторая причина — изменение демпфирующих свойств (rn^z 9
рис: 5.29). Здесь следует отметить: на/И<Мкр (рис. 5.30)
положение фокуса слабо зависит от числа М полета, т. е. ве-
личина в основном определяется изменением в полете
центровки хм .
Хф
22 Эксплуатационный диапазон
__Хмпп центроИок
Рис. 5.30. Зависимость положения фокуса самолета от числа М
полета и стреловидности крыла
При М > Л1кР по мере развития волнового кризиса проис-
ходит перераспределение аэродинамической нагрузки таким
образом, что фокус смещается назад и растет разность
хм —Хф = тгу. Это приводит к увеличению нейтральной
m^z
центровки хн == Хф-------. Естественно, при Этом увеличи-
вается и = хм — хн.
б) Почему у некоторых самолетов на больших числах М
полета с увеличением скорости фокус возвращается вперед?
У самолетов с жестким крылом (например, треугольным кры-
лом малого удлинения) положение фокуса после выхода на
сверхзвуковые скорости практически не зависит от величины
числа М полета, а у самолетов, имеющих стреловидное крыло,
даже на больших высотах крыло деформируется при боль-
ших скоростных напорах, нагрузка перераспределяется и фо-
кус смещается вперед, т. е. степень устойчивости по перегруз-
ке ал уменьшается (рис. 5.30—5.32).
27В
Сц
5)
Стабилизирующие моменты
г77777777777777П7777Ъ777777777777777777777^77Т7-
_ 1.0 2,0 М
Дестабилизирующие моменты
eo'Lcax
77777777777777')7М *м^- Эксплуатационный
77777/7777777777( с диапазон цент рода.
e;=xM-xH
-мпл диапазон центровок
1,0 2,0 М
Рис. 5.31. Зависимость нейтральной центровки и запаса продольной
устойчивости по перегрузке от числа М полета
с л / 1 Влияние перераспределения
большие ошео в | давлений при М>МКР (сдВиг
7у I фокуса, назад)
Влияние упругости
крыли (едВиг фокуса
Вперед)
Устоичид по перегрузке
чгтгп1птпт111птпп111ТГ1гпПп1ПННП1ППТГт1ПТГП'ПГ1ППП'П1'
©Неустойчив по перегрузке
Рис. 5.32. Характер влияния на <зп упругих деформаций крыла при росте
скоростного напора и перераспределении давления по поверхности крыла
при превышении критического числа М йолета
271
в) Почему внешние подвески влияют на положение фо-
куса, а следовательно, и на mczY, ап?
Внешние подвески обычно смещают фокус вперед
(рис. 5.33), величина смещения изменяется в зависимости от
их вида и числа М полета. Причина: создаваемый ими при
увеличении угла атаки прирост подъемной силы приложен в
фокусе подвесов, который лежит впереди их центра масс,
Рис. 5.34. Взаимное расположение
фокусов самолета и подвески
поэтому, если даже центр масс подвесок размещен точно под
центром масс самолета (рис. 5.34), фокус самолета с подвес-
ками смещается вперед, уменьшаются запас центровки и сте-
пень устойчивости по перегрузке. Это смещение может до-
стигать 4—5% и оказывать существенное влияние на пове-
дение самолета и его управляемость.
г) Почему изменяются демпфирующие свойства самолета,
характеризуемые величиной mzz?
Напомнив обучаемым, что демпфирующий момент суще-
272
ствует только при наличии угловой скорости вращения
(<*>Z 7^ 0)
Mz демп = (dzqS ba,
следует пояснить, что с увеличением М > 1 демпфирующие
свойства крыла и оперения ухудшаются вследствие падения
их несущей способности, поэтому уменьшается величина
m^z (см. рис. 5.29).
Значит ли это, что уменьшается и сам демпфирующий мо-
мент? При уяснении этого надо учесть, что с ростом числа
М повышается q=0t7 рМ\ что способствует увеличению
-Мгдемп- Однако, поскольку влияние демпфирования на о*
tnjz
оценивается величиной-^ , которая эквивалентна сдвигу
фокуса назад, это падение m^z вызывает уменьшение Д %ф=
m%z
= —— , а следовательно, и снижение степени устойчиво-
сти по перегрузке
д) От каких факторов зависят характеристики управляе-
мости при криволинейном маневриррвании?
Для ответа на этот вопрос надо привлечь формулы:
------------------------
mJ , '
1 „ Рхв
хп\ = <pnY :; Рп1 — tpnY в ,
фхв
где флу —------потребное отклонение стабилизатора для
Д
изменения перегрузки на единицу.
Из этой формулы видно, что управляемость зависит от сте-
пени устойчивости по перегрузке коэффициента эффектив-
ности стабилизатора т^9 , боевой нагрузки mglS и режима
полета (скорости и высоты — через q). Следовательно, от чис-
ла М эти характеристики зависят через и q.
Здесь можно напомнить известный факт уменьшения эф-
фективности стабилизатора (равно как и других рулей) на
сверхзвуковых скоростях полета, что не требует особых пояс-
18-5007сп
273
нений и характеризуется зависимостью от М на Н = const
(рис. 5.35).
На Н = const -> ф М t Я = 0,7 рМ2-> ф <рлу , т. е. уве-
личивается чувствительность самолета к отклонению стаби-
лизатора, ц наоборот, при уменьшении числа М. растет <рЛу»
т. е. чувствительность уменьшается (увеличивается потреб-
ное отклонение стабилизатора для изменения перегруз-
ки на единицу).
Рис. 5.35. Изменение по числу М коэффициентов
эффективности управляемого стабилизатора, руля
направления, элеронов, руля высоты
Особое внимание необходимо обратить на то, что величи-
ны хлу и для обеспечения удобства пилотирования долж-
ны изменяться по числу М и высоте полета в ограниченном
диапазоне их значений. Подробнее этот вопрос будет изложен
в дальнейшем.
Используя изложенное (в том числе формулы, устанавли-
вающие взаимосвязь динамических характеристик с другими
характеристиками и параметрами движения), можно проана-
лизировать влияние числа М при полете на постоянной высоте
и фиксированной стреловидности крыла на характер движе-
ния и управляемость самолета отдельно для чисел Л1<1 и
Л4>1. В целях упрощения анализа целесообразно не учиты-
вать возможное изменение характеристик системы управле-
ния, т. е. считать <рхв и Р*в постоянными величинами. Тогда,
например, для чисел Л4>1 и при /7 = const, хм = const, х = const
и хв = const:
274
| Д Пу уст
| Д Пу уст
I Д Пу уст
>
t Л4
/зат const.
t ^зат
| ^зат
| Пзат» Д И у забр
Это означает, что при увеличении сверхзвуковых скоростей
на постоянной высоте с неизменными стреловидностью крыла
и центровкой:
а) уменьшается эффективность стабилизатора, что при
некотором увеличении степени устойчивости по перегрузке
приводит к достижению меньшей величины установившейся
перегрузки ДпууСт, несмотря на рост скоростного напора, ко-
торый несколько компенсирует это уменьшение;
б) уменьшается период колебаний из-за увеличения ад и q,
что несколько компенсируется снижением несущей способно-
сти крыла С“. В результате уменьшается /ср, т. е. улучшает-
ся хождение самолета за ручкой;
в) время затухания крлебаний практически не изменяется,
так как уменьшается эффективность демпфирования при
росте скорости полета. В условиях, когда уменьшается пери-
од колебаний, последнее является неблагоприятным фак-
тором;
г) возрастание частоты колебаний (уменьшение Ткп ) и
неизменное /зат приводят к увеличению количества колебаний
До затухания t n3aT и относительного заброса перегрузки
Т А Пу забр. Первое, уменьшая скорость затухания, оказывает
противодействие летчику при точном пилотировании, а второе
Удобнее связать с абсолютной величиной заброса перегрузки
275
(A И у забрв^ Пу макс — Дпууст)- Для этого надо напомнить, что
в интересах обеспечения боевого маневра с заданной пере-
грузкой летчик для получения той же перегрузки ДпуУст =
•= const, что и на меньших числах М полета будет больше от-
клонять ручку управления и поэтому абсолютный заброс пере-
грузки (угла атаки), увеличится (Апузабр = Д пуза'бР Д пу уст»
где Д пу уст =const), а безопасность полета уменьшится и надо
быть предельно внимательным (ведь частота колебаний боль-
шая, растут забросы и можно легко выйти за ограничения по
углу атаки или перегрузке).
Для того чтобы убедиться в пониманий взаимной связи
между расходами ручки и усилий на ней, потребными для из-
менения перегрузки на единицу при боевом маневрировании,
и изменением режима полета, можно предложить летному со-
ставу ответить на вопрос: как регулируются в полете *by и
и чем отличаются друг от друга процессы регулирования
на различных самолетах, которые ими эксплуатировались?
Если кто-либо ответит, что это делается одинаково на всех,
самолетах, то следует напомнить, что x"y и Р^ч регулируются
в полете за счет <рхв и Р*в , Р^ различными способами
(АРУ, АРЗ, нелинейный механизм и др.). У некоторых само-
летов на трансзвуковых скоростях полета и Р^ возра-
стают (требуются более размашистые отклонения ручки и она
затяжеляется), а при дальнейшем увеличении скорости сни-
жаются (самолет более строго реагирует на отклонение ручки
и она облегчается), у других они уменьшаются во всем диа-
пазоне чисел М полета.
Таким образом, для каждого серийного самолета следует
уточнить их изменение, используя соответствующую литера-
туру. Однако для выбранных здесь условий: Н = const, % =
= const, = const, %в = const и линейных загрузочных пру-
жин = const можно записать:
276
Если характеристики управляемости изменяются у изучае-
мого серийного самолета именно так, как в рассматриваемом
случае, то можно сделать вывод, что АРУ и АРЗ неполностью
выполняют свои функции по подбору оптимального изменения
характеристик управления.
Следует напомнить, что летный состав за оптимальное из-
менение характеристик Р^ , х% принимает такое
сочетание законов изменения градиентов усилий и перемеще-
ний ручки, которое позволяет на основе кинетостатических
ощущений иметь представление об изменении скорости, пере-
грузки, угла атаки, запасе до срыва, моменте выхода на опас-
ный угол атаки. А это обеспечивается в том случае, если, на-
пример, практически не зависит от скорости, когда для
изменения перегрузки на одну и ту же величину требуется
одна и та же величина расхода усилий на ручке вне зависи-
мости от того, на какой скорости производится боевое манев-
рирование. При этом должна уменьшаться пропорцио-
нально увеличению скорости, и тогда летчик по величине
отклонения ручки чувствует изменение скорости. На рис. 5.36
показано такое оптимальное сочетание в зависимости от при-
борной скорости полета.
а)
277
Итак, если установлено, что на данных высотах и скоро-
стях полета у серийного самолета , Ру и ху изме-
няются неудачно, то можно ожидать, что в процессе боевого
маневрирования летчик будет вынужден часто контролировать
режим полета по приборной информации, а это уменьшает
безопасность полетов и эффективность боевого применения,
так как ухудшается осмотрительность в полете и увеличивает-
ся вероятность выхода за ограничения по углу атаки или
перегрузке. Другие практические рекомендации соответствуют
сделанным ранее при рассмотрении форм представления ин-
формации.
Влияние числа М полета на характер бокового движения
и управляемость анализируется так же, как и влияние на
продольное движение, но при раскрытии этого вопроса необ-
ходимо напомнить, что характер бокового движения зависит
не только от абсолютных величин т?х и гЦ, но и от соотно-
шения между ними, определяемого величиной коэффициен-
тх h
та х: , который характеризует соотношение
my lx
движений крена и рыскания [ * = <05макс ) .
\ ®Y макс /
Сделав вывод, что статические характеристики и характе-
ристики демпфирования, влияющие на динамические характе-
ристики в боковом движении, сами зависят от числа М полета,
целесообразно кратко пояснить, используя символическую
формулу записи:
Дозвуковые Vconst->/яу^ const (или незначитель
/ ное увеличение)
j М — Трансзвуковые
‘ хб.ф (назад)""*
Н ~ const
X = const X „
> Сверхзвуке-ч _
вые скоро- 'I Хб.ф(вперед)^
сти
т\- (причина
ограничения
Мдоп)-
Это означает следующее (рис. 5.37, 5.38):
— на дозвуковых скоростях полета с увеличением чис-
ла М несущая способность киля и фюзеляжа, определяемая
величиной Cz (аналогично С“), остается примерно постоян-
278
«ой и степень путевой устойчивости (т§) у самолета не из-*
меняется, так как хм= const и хв.ф = const. Кстати, из этого
следует, что стабилизирующий момент рыскания (Му ст41
— изменяется пропорционально V2;
Ftty
-QOO3
-qooa
- 0,004
о
*0.004
♦ 0,002.
Рис. 5.37. Зависимость статического коэффициента путевой устойчив
вости от числа М полета и перегрузки (угла атаки)
X=ronst
5 2,0 м
-qoo2
-0,001
о
♦ O.OQ4
Относительно тонкое крыло
с большой стреловидностью
Относительно
толстое крыло
0/5 4.0
&#ратная реакция по креня
на. дача ноги.
одра гной реакции.
Рис. 5.38. Зависимость статического коэффициента поперечной
устойчивости от числа Л1 полета и угла атаки
Тонкое крыло
/поперечная устойчи.6ость
только уменьшается
279
— на трансзвуковых скоростях полета С| увеличивается
(теперь Му ст t быстрее, чем в первом случае) и боковой фо-
кус (точка приложения приращения поперечной силы AZ,
определяемая распределением поперечной силы по килю и
фюзеляжу) смещается назад, что приводит к росту путевой
устойчивости и является положительным фактором с точки
зрения удобства пилотирования самолета;
— на сверхзвуковых скоростях уменьшается (скачки
становятся более косыми), а боковой фокус сдвигается впе-
ред, так как на этих^скоростях поперечная сила на киле умень-
шается сильнее, чем на фюзеляже (теле вращения), поэтому
роль фюзеляжа в создании этой силы возрастает, а сама она
перемещается вперед (если бы не было киля, то фюзеляж был
бы неустойчив, т. е. его фокус лежал бы впереди центра масс).
В результате путевая устойчивость самолета уменьшается, что^
часто является причиной ограничения числа Л4ДОП.
Поскольку природа стабилизирующего момента крена
Мхст = т?х р q SI определяется главным образом/несущей спо-
собностью крыла С* , то при
Дозвуковые_______Су const------«= const
IЛ4 / Трансзвуковые f.Су
\\ Сверхзвуковые ~ |Су.
скорости
На рис. 5.38 показано, что на сверхзвуковых скоростях trix
может стать положительной величиной (значения trrfx, лежа-
щие ниже оси абсцисс), что означает поперечную неустойчи-
вость, а практически в полете выражается в обратной реак-
ции по крену на дачу педали. Здесь следует напомнить, что
в этом случае попытка летчика выполнить доворот по курсу
отклонением педали при нейтральных элеронах приведет к
неожиданному образованию крена во внешнюю сторону, и
желаемый маневр будет сорван. При обратной реакции все
развороты должны выполняться без скольжения.
Изменение тшхх и по числу М полета соответствует
характеру зависимостей С“ (Л1) и С|во (Л4). Они тем больше^
чем больше несущие свойства крыла и вертикального опере-
ния:
280
__Дозвуковые______туУ и —^(незначительно I
/ х _ или примерно
।_____Трансзвуковые | ШуУ и 1 т** постоян ны)
\ Сверхзвуковые | т^у и 1
скорости
На рис. 5.39 и 5.40 показаны эти зависимости. Прежде чем
окончательно проанализировать влияние числа М на боковое
движение, целесообразно рассмотреть ряд вопросов, связан-
ных с величиной х. Прежде всего необходимо напомнить, что
х зависит от высоты и скорости полета, наличия внешних
подвесок, угла стреловидности крыла, что оказывает сущест-
венное влияние на развитие бокового движения самолета.
Рис. 5.39. Зависимость коэффициента демпфирования
Крена от числа М полета и стреловидности крыла
Так, при х<3 (для маневренных) и х<1,5 (для неманев-
ренных) самолетов боковое движение развивается наиболее
благоприятно. Чем больше х, тем самолет сильнее реагирует
креном на скольжение. Так, при х=10—15 угол крена увели-
чивается в 10—15 раз быстрее, чем угол скольжения, что сни-
жает безопасность полета (особенно при посадке с сильным
боковым ветром, когда самолет может даже перевернуться)
и максимальную реализацию боевых возможностей (при не-
большом нажатии на педаль — резкое кренение, увеличивает-
ся вероятность раскачки). Можно подчеркнуть, что при быст-
ром затухании боковых колебаний (/изаТб^>3) могут оказать-
ся безопасными для полета повышенные значения х (напри-
мер, х = 6—8).
281
Рис. 5.40. Зависимость коэффициента демпфирования рыскания
от числа М полета и центровки самолета
Зависимость х от условий боевого применения удобно по
казать в следующем виде:
От угла атаки (перегрузки)
|а
М «const
Н = cdnst
У 1
= const
*х
Эта запись пояснений не требует
От стреловидности крыла
М = const
Н — const
а = const
Наличие внешних подвесок—> f
Л! == const
Н — const
а = const
"282
Зависимость х (М, Н) показана на рис. 5.41.
Рис. 5.41. Соотношение угловых скоростей крена и рыскания
С учетом изложенного можно записать, например, для слу-
чая увеличения больших чисел М полета:
l.mf.___Л ________
f Al ~ const ~ Const
(.И > 1,0) <7 ------- !
Читается эта символическая запись влияния больших чи-
сел М полета на характер бокового движения так же, как и
запись их влияния на продольное движение.
Влияние высоты полета
Вследствие изменения плотности воздуха с изменением вы-
соты полета меняется характер движения и управляемость.
Физическая суть состоит в том, что с уменьшением высоты
28Я
при постоянном числе М полета увеличиваются скоростной
напор и аэродинамическое демпфирование ^^демп =
== m^z q S ba9 МУдемп =m^">YqSl ) усиливается влияние
аэроупругости (нежесткости конструкции). Последнее объяс-
няется закручиванием концов крыла на уменьшение угла ата-
ки, снижением их несущей способности, и в результате нагруз-
ка вдоль хорды крыла перераспределяется так, что фокус
сдвигается вперед, т. е. уменьшается запас центровки
trizx = Хм—%ф.Кроме того, уменьшается относительная мас-
2 т
совая плотность самолета , а следовательно, растет
?Sba
_ m'z
Дхф=—— (усиливается влияние демпфирования на сте-
Н
пень устойчивости), что сдерживает падение степени устой-
сп = rncz\ _j-£_ , вызываемое уменьшением запаса
И /
центровки (см. рис. 5.32).
Если с уменьшением высоты полета при неизменных стрело-
видности крыла и числе М полета летчик будет создавать
одно и то же установившееся приращение угла атаки (Дауст),
то, учитывая изложенное, можно записать:
Юри
/ == const
— const
Л1 = const
f I Ъаг .
Это означает, что с уменьшением высоты и при принятых
условиях (М = const, Д ауст = const, х = const)
— из-за увеличения скоростного напора (q):
а) уменьшается 7\п;
б) увеличивается установившееся значение перегрузки
Д nY уст, что приводит из-за влияния упругих деформаций к
перемещению фокуса вперед, а следовательно, к уменьшению
<^п и увеличению 7\п;
— из-за увеличения плотности воздуха;
в) уменьшается относительная массовая плотность само-
лета ц, т. е. возрастает роль влияния демпфирования на устой-
чивость самолета по перегрузке ( t оЛ), а поэтому уменьшает-
284
ся Ткп. Суммарное влияние понижения высоты приводит к
уменьшению ТКп (увеличению частоты колебаний) и време-
ни срабатывания /ср, т. е. к улучшению хождения за ручкой
управления;
г) уменьшается время затухания колебаний. Причем
надо пояснить, что /зат уменьшается обратно пропорциональ-
но увеличению р, а главная часть изменения Ткп (путь па“)
обратно пропорциональна Vph, т. е. время затухания снижа-
ется быстрее и поэтому сокращается число колебаний пзат и
заброс перегрузки (Дпзабр).
Влияние высоты полета на управляемость по перегрузке
и скорости удобнее показать в виде двух цепочек для усло-
вий: yW=cofist, срхв = const, AayCT = const, / = const:
где а — скорость звука.
С точки зрения реализации боевых возможностей со сни-
жением высоты_полета часть характеристик изменяется благо-
приятно (/Ср, Д^забр, /зат, ^зат), но уменьшение Ткп до ма-
лых значений (менее 1,0—1,5 с) при существенном времени
затухания оказывает неблагоприятное влияние на пилотиро-
вание самолета (например, может привести к продольной «рас-
качке» самолета с выходом на недопустимые углы атаки или
перегрузки). Потребные перемещения ручки для изменения
перегрузки и скорости уменьшаются, т. е. самолет становится
более строгим в управлении по углу атаки и перегрузке, и
летчик хуже «чувствует» изменение скорости по перемещению
ручки и изменению усилий на ней.
Здесь следует обратить внимание летного состава на то,
что необходимость выполнения боевого полета на предельно
малых высотах требует особенно точного пилотирования, а
это невозможно без понимания характера изменения устойчи-
285
вости движения и управляемости самолета. Дело в 70м, что в
этом случае полет обычно происходит в условиях повышенной
турбулентности воздуха, постоянно меняющегося рельефа
местности и более резкой реакции самолета на малые откло-
нения ручки при больших приборных скоростях.
Кроме того, вследствие уменьшения периода колебаний
(например, до 1 с) все более возрастает отрицательное воз-
действие запаздывания в действиях летчика при управлении
самолетом (парировании внешних возмущений), что умень-
шает безопасность полета (вероятность раскачки, крайне
опасной на этих высотах, возрастает). В подобных условиях
полет требует от летчика большого психического и физиче-
ского напряжения и вместе с тем четких действий при управ-
лении самолетом.
Оценка влияния высоты полета на боковое движение про-
водится аналогично, но с учетом изменения аэродинамических
характеристик, что было изложено при рассмотрении влияния
числа М.
§ 5.6. ВЛИЯНИЕ АВТОМАТИЧЕСКИХ УСТРОЙСТВ
В СИСТЕМЕ УПРАВЛЕНИЯ НА ПИЛОТАЖНЫЕ СВОЙСТВА
И БЕЗОПАСНОСТЬ ПОЛЕТОВ
При изучении автоматических устройств в системе управ-
ления серийного самолета нужно добиться знания летным
составом не только конструктивного их оформления, но глав-
ным образом принципа работы, понимания, на каких режимах
полета выгодно их цсп^льзовать, а на’ каких нет (при этом,
безусловно, руководствоваться указаниями Инструкции лет-
чику).
Летчику нужно знать не только как, но и почему изменя-
ются те или иные характеристики устойчивости и управляе-
мости при включении автоматических устройств самолета
(причем упор делать не на запоминание, а на понимание).
5.6.1. Методика изложения
Изложение и объяснение этого вопроса можно вести в сле-
дующей последовательности.
1. Изложить общий подход к проблеме (обосновать необ-
ходимость постановки автоматики).
2. Перечислить автоматические устройства в системе уп-
равления, применяемые на изучаемом серийном самолете.
3. Последовательно рассмотреть их влияние на поведенйе
самолета (возможность реализации его маневренных свойств,..
286
повышение безопасности полетов), для чего изложить и объяс-
нить:
— общий принцип работы;
— какие характеристики и как улучшаются (динамиче-
ские, статические и т. д.);
— физическую сущность влияния автоматики на пилотаж-
ные свойства и безопасность полетов;
— недостатки и характерные отказы автоматов.
Если говорить о проблеме в целом, то отметить, что летчик
ввиду его ограниченных психофизиологических возможностей^
конструктивного несовершенства системы управления и невоз-
можности только средствами аэродинамической компоновки
обеспечить необходимые характеристики устойчивости и уп-
равляемости самолетов, летающих на скоростях от малых
дозвуковых до сверхзвуковых и на высотах от предельно ма-
лых до стратосферных, не всегда способен осуществить задан-
ный боевой маневр с требуемой точностью для эффективного»
применения оружия по воздушным и наземным целям. По-
этому в целях более полной реализации маневренных свойств,
самолетов, а также для повышения безопасности полетов он
должен (в соответствии с Инструкцией экипажу) уметь поль-
зоваться различными автоматическими устройствами в систе-
ме управления, которые несколько изменяют имеющиеся на-
выки в пилотировании самолета. Подчеркнуть, что ручная си-
стема управления и автоматика используют одни и те же рули:
— для изменения угла атаки — стабилизатор или руль
высоты;
— для изменения угла скольжения — руль направления;
— для изменения угла крена — элероны, интерцепторы
и т. д.
Разница в том, что при включенной автоматике рули откло-
няются, как правило, независимо от летчика (при неизменном
положении ручки и педалей в данный момент), реагируя на
внешние возмущения.
Главная цель автоматики — воздействовать на пилотаж-
ные свойства самолета, чтобы они лучше соответствовали
возможностям летчика, его пилотирующего.
Здесь необходимо отметить следующие факторы:
— важно уменьшать /зат колебаний (автоматы демпфи-
рования тангажа, крена и рыскания);
— статические характеристики устойчивости ту
в ряде случаев оказываются недостаточными, иногда — излиш-
не высокими. Существуют различные автоматические устрой-
ства (автоматы продольной, поперечной и путевой устойчи-
вости, автоматы центровки и др.), исправляющие собственные
статические характеристики устойчивости самолета;
287
— одйого улучшения демпфирования и статических харак-
теристик устойчивости мало для обеспечения хороших пило-
тажных свойств самолета. В системы управления самолетов
приходится включать автоматические устройства, обеспечи-
вающие надлежащие величины перемещений ручки управле-
ния и педалей и усилий на них (^by > и т. д.). Эти авто-
маты называют АРУ;
— полеты без катастроф и аварий по вине летного соста-
ва— задача государственной важности, поэтому возникает
необходимость предупредить летчика об опасных режимах
полета или вмешаться в ручное управление независимо от лет-
чика при выходе самолета на ограничения. Это делают авто-
маты безопасности полета.
Наряду с упомянутыми устройствами, улучшающими устой-
чивость и управляемость самолета при пилотировании его лет-
чиком, на современных самолетах широко применяются систе-
мы автоматического управления (САУ) полетом, осуществ-
ляющие 'без вмешательства летчика выдерживание заданного
режима полета (автопилоты) или изменение параметров псг-
лета по заданной или оптимальной программе (с использова-
нием бортовых ЭВМ и наземных средств).
Применяются автоматические устройства, берущие на себя
только часть функций летчика по пилотированию и контролю
(автоматы балансировки, ограничители перегрузки, директор-
ные приборы).
5.6.2. Автоматы демпфирования
При боевом применении на режимах, требующих точного
пилотирования, необходимо подавить колебания малого перио-
да (большой частоты) в кратчайшее время. Однако часто из-
за ухудшения естественных демпфирующих свойств самолета
и запаздывания реакции летчика на угловые скорость и уско-
рение сделать это не удается. Для искусственного повышения
демпфирующих свойств летчик должен использовать в полете
демпферы тангажа, крена и рыскания, которые значительно
быстрее реагируют на возмущения (имеют меньшее запазды-
вание).
Чувствительным элементом (датчиком) автомата демпфи-
рования является скоростной гироскоп, подающий сигнал,
пропорциональный угловой скорости вращения вокруг соот-
ветствующей оси, через усилитель на исполнительное устрой-
ство (обычно — раздвижную тягу в системе управления соот-
ветствующим рулем). В итоге элероны (руль направления,
-стабилизатор) отклоняются на строго дозированный угол
{Д 8Э = k(1)x <ох; ASH = fco)Y Шу5 А = fe(oz o)Z), пропорциональный
288
угловой скорости, создавая при этом момент, направленный
против вращения (демпфирующий момент), что существенно
улучшает качество переходных процессов и упрощает пилоти-
рование самолета, снижает утомляемость летчика, если он
вынужден гасить колебания самолета продолжительное время.
Передаточные коэффициенты (они положительны) за-
висят от параметров системы и ее настройки и численно равны
отклонению руля в градусах при изменении угловой скорости
на 1 град/с:
Д&а , Д'8Н
----
Д (0% Д U)y
, Д го
6<В7 — ------— = ф“2 .
Z A<»Z
Чем выше передаточный коэффициент, тем больше откло-
няется руль при той же угловой скорости и сильнее демпфи-
рование, создаваемое автоматом, т. е. быстрее гасятся колеба-
ния, уменьшается заброс перегрузки и увеличивается период
колебаний (рис. 5.42).
Рис. 5.42. Влияние демпфера тангажа на характеристики устойчивости и
управляемости самолета:
а — на характер переходного процесса; б — на величину x”Y и P”Y; в*—ца
характер изменения перегрузки
При данный величинах передаточных коэффициентов
демпфирующие Моменты Л4хдемп = Mfc Д8Э;. Л4удемп =
= ЛЦ,нД8н; Мгдемп = М? Дф определяются эффективностью
рулей (М^, MY4 М%), которая помимо геометрических
19-5007сп
289
параметров зависит от скоростного напора и числа М. В си-
стеме автомата демпфирования может быть предусмотрено
автоматическое изменение передаточных коэффициентов в
зависимости от скорости и высоты полета.
Основное назначение автоматов демпфирования — уско-
рить гашение короткопериодических колебаний, улучшить тем
самым динамические характеристики устойчивости и управ-
ляемости. Но демпферы реагируют на угловую скорость, воз-
никающую не только при вращательных колебаниях, но и
вращениях в одну сторону, создаваемых летчиком при манев-
рировании, т. е. «пытаются» ухудшить маневренность само-
лета. Например, при выводе из пикирования, выполнении пет-'
ли Нестерова на датчик демпфера тангажа действует поло-
жительная угловая скорость , и демпфер отклоняет стаби-
лизатор на пикирование, ввиду чего летчику приходится до-
полнительно отклонять ручку на себя, чтобы обеспечить соз-
дание необходимого управляющего момента (желаемую энер-
гичность выполнения маневра).
Таким образом, следует подчеркнуть: включенный демп-
фер тангажа повышает расходы ручки (и усилий на ней) на
единицу перегрузки (x"y ? ; рис. 5.42,6), но не влияет на
величину <рл y .
Кстати, можно отметить, что по этой причине часть летчи-
ков, считающих, что включение демпфера тангажа, (или САУ
в режим «Стабилизация») затяжеляет управление, выключа-
ют егб при боевом маневрировании, а потом удивляются, по-
чему цель в прицеле колеблется. Это, конечно, неправильное
решение, еще и потому, что зависимости xJy (М)
изменяются плавнее с включенным демпфером (дело в том,
что с увеличением скорости влияние демпфера на эти гра-
диенты уменьшается), что облегчает боевое манёврирование
с торможением в области трансзвуковых скоростей.
Необходимо предупредить летный состав о том, что допол-
нительное отклонение ручки для компенсации работы демпфе-
ра далеко не всегда желательно. В самом деле, на сверхзву-
ковых скоростях полета (когда эффективность стабилизатора
резко уменьшена, а продольная устойчивость увеличена) при
полном отклонении .ручки стабилизатор может отклониться
неполностью, т. е. произойдет ограничение маневренности са-
молета. В то же время при маневре с торможением со сверх-
звуковых скоростей на дозвуковые и постоянном отклонении
ручки Дхв = const произойдет меньший прирост перегрузки, что
увеличивает безопасность полета (меньше эффект скоростно-
го подхвата).
290
Далее показать, что включение автомата демпфирования
повышает и устойчивость по перегрузке на величину
Л «а Psv 1 V
&<зп = т* kW7 --= пц k,--------<
z z 2m ba
< 0 (так как < 0, k,„? > 0).
Пример.
m* = — 1,0, fx = 180, Уэв = 140 м/с (~500 км/ч), ba — 4 m;
= 0,2, Д<т„= - 1 • 0,2 • ——0,039.
z 180 4
Это эквивалентно смещению фокуса назад на 3,9%, т. е.
увеличению степени продольной устойчивости, что является
для современных боевых самолетов благоприятным на дозву-
ковых скоростях полета. Такое же влияние оказывает.демпфер
рыскания на больших сверхзвуковых скоростях полета, где
путевая устойчивость недостаточна.
На устойчивость по скорости демпфер тангажа не влияет,
однако позволяет уменьшить самопроизвольный прирост пере-
грузки при переходе со сверхзвуковых скоростей на дозвуко-
вые с фиксированным положением ручки управления.
Аналогично влияет включение демпферов крена и рыска-
ния на расходы ручки и усилий на единицу угловой скоро-
сти крена (х^х, Р^х), не влияя на W, и расходы педалей и
усилий на них на единицу a>Y (x„y , P^y).
Н = const.
X =? const
Включение /
при л'в -- const
М = const
| Степень продольной и путевой ус-
тойчивости
/ I Пз3 г
I Т
1 ^ср
1 А /?забр(А Тзабр» & Чгшбр)
I, Д /7//ит (при Х$ = const)
; Р"«, х^ (приф^ - const);J Р^, х,*
(при С - const); JP^> (при
№ = const).
Если на самолете установлен автопилот, то демпферы вхо-
дят в него как составная часть. Каналы демпфирования- авто-
19*
291
пилота могут оставаться включенными при отключении авто-
пилота в случае перехода на ручное управление (это отклю-
чение на многих самолетах происходит автоматически при
вмешательств^ летчика в процесс управления самолетом).
Ранее уже рассматривали, как расшифровывается такая
цепочка и какие можно сделать выводы в интересах боевого
маневрирования.
При выключении или отказе демпфера картина будет об-
ратная. На рис: 5.43 показана реакция устойчивого в путевом
(/и^<^0)и поперечном (т^<^0) отношении самолета на сту-
пенчатый порыв ветра при полете с включенными и выклю-
ченными демпферами рыскания и крена. Из рисунка видно,
что при выключенном демпфере характеристики переходного
процесса ухудшаются. Так, например, при полете в болтанку
на /7=18 км, М = 1,8 отказ демпфера тангажа (крена) увели-
чивает время затухайия в 15—20 (5—7) раз, число колебаний
до полного затухания — в 20—25 (10—12) раз и уменьшает
Рис. 5 43. Реакция самолета на ступенчатый порыв ветра с
включенным автоматом демпфирования:
а (пунктир) — при выключенном демпфере рыскания; б (пунк-
тир) — при выключенном демпфере крена
292
период колебаний в 1,5—2 (2—2,5) раза, т. е. самолет в этом
случае плохо «сидит в воздухе».
Теперь нетрудно сделать вывод о недостатках автоматов
демпфирования:
— ограничивается маневренность, так как при полном от-
клонении ручки стабилизатор отклонится неполностью — часть
располагаемого его отклонения уйдет на компенсацию недо-
статочного демпфирования;
— летчик быстрее устает из-за дополнительных усилий,
которые он прикладывает, работая «против» демпфера, а ча-
стое триммирование в процессе выполнения фигур пилотажа
не рекомендуется.
В конце изложения подчеркнуть, что если автомат демп-
фирования дополнительно реагирует на угловое ускорение
(например, на ®z), т. е. закон его работы: A <p = ^z(oz+^z<oz ,
то второе слагаемое обеспечивает улучшение маневренных
свойств по сравнению с демпфером, не реагирующим Hao>z-
Это устройство называют фильтром высокой частоты.
В этом случае при выполнении установившихся маневров
(например, виража) с малой частотой изменения угловой ско-
рости демпфер не работает и не оказывает влияния на манев-
ренность самолета, а при энергичных маневрах с большой
частотой (nz (косая полупетля и т. п.) отклоняет стабилизатор
на их парирование, но при достижении желаемой летчиком
угловой скорости разворота стабилизатор возвращается к уг-
лам отклонения, соответствующим положению ручки. Поэтому
дать рекомендацию: когда берешь ручку на себя для увеличе-
ния а (ну) при энергичном маневрировании, не забывать, что
при несоразмерном ее отклонении возможен заброс по а(пу)
вплоть до выхода за ограничения после возвращения стабили-
затора в балансировочное положение, соответствующее вели-
чине Д%в. Вместо увеличения безопасности полета в этом слу-
чае растет его опасность.
Отказы демпфера, равно как и других автоматов, относятся
к особым случаям полета и здесь не рассматриваются.
Целесообразно напомнить летному составу, что включение
режима «Стабилизация» САУ также способствует повышению
демпфирующих свойств самолета путем стабилизации задан-
ных углов крена у, тангажа Ф и рыскания ф. При этом летчик
работает ручкой и педалями как обычно и выдерживаемые
САУ у, Ф и ф будут изменяться только при вмешательстве лет-
чика, который, прикладывая усилия к ручке по у и $, превы-
шающие установленные Инструкцией, может отключать ста-
билизацию и изменять у и 'О’, но не может отключать демпфи-
293
рование колебаний. Однако, естественно, в этом случае уве-
личивается расход ручки и усилий на ней (затяжеляется уп-
равление), поэтому летчик в процессе боевого маневрирования
может отключать каналы САУ по у и
5.6.3. Автоматы устойчивости
Назначение автоматов устойчивости — создавать дополни-
тельные стабилизирующие моменты при помощи соответст-
вующего отклонения рулевых поверхностей. Это требуется
делать на некоторых режимах полета, когда самолет может
оказаться нейтральным или неустойчивым (например, по пере-
грузке на дозвуковых скоростях полета, в путевом отношении
на сверхзвуковых скоростях полета).
Простейшим автоматом устойчивости является контрба-
лансир (рис. 5.44) в системе продольного управления самолё-
том, применявшийся еще на винтомоторных самолетах. Сила
тяжести контрбалансира стремится отклонить руль высоты
книзу, но в исходном равновесном режиме полета это его дей-
ствие уравновешивается моментом аэродинамической силы
7?р, действующей на руль с триммером. При случайном уве-
личении перегрузки пу кажущаяся масса контрбалансира воз-
растает пропорционально и руль отклоняется вниз, созда-
вая тем самым пикирующий момент.
Рис 5 44 Простейший автомат устойчивости (контрбалансир)
Таким образом, контрбалансир повышает устойчивость са-
молета по перегрузке (если, разумеется, ручка не зафикси-
рована). Устойчивость по скорости тоже повышается: напри-
мер, при увеличении скорости сила /?р возрастает и руль от-
клоняется кверху, создавая кабрирующий момент. При этом
балансировочная кривая - Pb(^y) изменяется (рис. 5.45).
Именно так повышали устойчивость на самолетах в период
294
Великой Отечественной войны, когда система управления
была безбустерной (обратимой) с аэродинамическим трим-
мером.
Рис. 5.45. Влияние контрбалансира на вид балан-
сировочной кривой
На современных самолетах в качестве автомата устойчи-
вости может быть использована раздвижная тяга, входящая
в систему автомата демпфирования. В этом случае рулевые
поверхности отклоняются на угол, пропорциональный измене-
нию угловой скорости (канал демпфирования) и перегрузок,
углов атаки и скольжения (канал стабилизации). Например,
для обеспечения путевой устойчивости руль направления от-
клоняется по закону:
Д Вн = &(oY o>y 4“ А Р,
или
А &н = Y (oY 4- nz Д rtz,
где fea>Y, з» nz — соответственно передаточные числа ав-
б/ В
томата путевой устойчивости. Например, kH п z = -—5—* по-
d nz
требное отклонение руля направления для изменения боко-
вой перегрузки на единицу. Так же читаются и остальные вы-
ражения.
При включении автомата увеличивается путевая устой-
чивость:
Д Шу рул
Д?
Д (т^н SH)
а₽~
= т= /Пу» ka р = тfeH
Д nz
др
Д
Таким образом, если летчик не включит автомат устойчи-
вости, а самолет окажется, например, неустойчивым в путевом
отношении, то при изменении угла скольжения он будет вы-
295
нужден для обеспечения устойчивости вмешиваться в управ-
ление, чтобы за счет изменения рулевого момента Д/ИурУл =
= Д он 7 S/компенсировать недостаток стабилизирующего
путевого момента Д Му СТ=^|Д ₽ q SI. Но, во-первых, это не
всегда возможно по усилиям, во-вторых, ответная реакция
летчика может запаздывать и поэтому целесообразно откло-
нять рули не летчику, а автомату. Принцип работы автомата
устойчивости показан на рис. 5.46. Заметим, что если исклю-
Ц~ порыб Ветра спрай а.
(пояВился ^р>о-на прайсе крыло)
бокойои фокус
2L
й 8.0
^^8.0.
—дЗн>о
' лм* ВлеВорЬ/
путеВая неустойчивость
^уАу^Ур^вд^^у^Snpah)4&/
Рис. 5.46. Принцип работы автомата устойчивости
чить канал демпфирования, то автомат устойчивости, повы-
шая устойчивость, а следовательно, уменьшая период колеба-
ний, не влияет на демпфирование, что приводит к росту
числа колебаний до затухания и затрудняет точное пилоти-
рование.
Включение АУ
(без канала демп-
фирования)
Включение АУ
(с каналом демп-
фирования)
|<т„ (т?у, т\)—
,Хт№г[тшУ,
Z У -X
296
На рис. 5.47 показана реакция самолету при выключении
автомата устойчивости по перегрузке.
А Пу
----Без канала устойчивости
t (работает только канал
РаботаютоБа кан~
Рис. 5 47. Реакция самолета на ступенчатый порыв ветра с выклю-
ченным и включенным каналом устойчивости по перегрузке
В автопилотах в качестве датчиков системы стабилизации
самолета используются позиционные гироскопы, реагирующие
на отклонения от заданных значений углов тангажа, крена и
курса, а также датчик давления наружного воздуха, сигналы
которого используются для стабилизации высоты полета.
Применяются и датчики скорости для автоматического изме-
нения тяги двигателей в целях сохранения скорости полета.
Средствами автоматизации можно не только повышать
устойчивость самолета, но, и снижать ее в тех случаях, когда
она оказывается излишней, что может привести к ухудшению
управляемости (нехватке рулей). Наиболее характерный слу-
чай такой неблагоприятной ситуации — повышение устойчиво-
сти по перегрузке вследствие смещения назад фокуса самолета
при переходе с дозвуковых скоростей на сверхзвуковые.
Однако для снижения устойчивости в данном случае нель-
зя воспользоваться автоматическими отклонениями стабили-
затора по сигналам датчика перегрузки, так как нехватку
стабилизатора таким путем устранить нельзя. Излишнюю
устойчивость можно устранить автоматом центровки, обеспе-
чивающим надлежащее смещение назад центра масс самолета
путем перекачки топлива в задние баки (рис. 5.48,а), или же
Рис. 5.48. Улучшение характеристик продольной устойчивости
и управляемости самолета средствами автоматики
297
автоматическим выдвижением из фюзеляжа носового горизон-
тального оперения — дестабилизатора (или же фиксацией та-
кого оперения, которое на дозвуковых скоростях является
«свободно плавающим»).
Улучшать управляемость самолета можно автоматом ба-
лансировки, который исправляет «ложки» на балансировочных
кривых путем введения рассогласования между положениями
рычага и органа продольного управления (рис. 5.48,6). Бла-
годаря этому при разгоне в околозвуковом диапазоне скоро-
стей летчик получает возможность по-прежнему отдавать
штурвал (ручку управления) от себя (т. е. по ощущениям
летчика самолет на всех числах М остается устойчивым по
скорости — пунктирная кривая), в то время как- балансиро-
вочные отклонения стабилизатора (руля высоты) для пари-
рования затягивания в пикирование будут осуществляться
автоматом. При торможении со сверхзвуковой скорости авто-
мат балансировки предупредит самопроизвольное увеличение
перегрузки, позволяя летчику постепенно подбирать ручку на
себя.
Таким образом, эти автоматы не только улучшают харак-
теристики управляемости, но и повышают безопасность поле:
тов. Уместно предупредить летчиков, что и здесь растут
x"y, pgX и т. д. (управление затяжеляется, что может
ограничить маневренность самолета). Повышение безопасно-
сти полета происходит за счет ограничения возможности са-
молёта самопроизвольно увеличивать перегрузки, а, р, но
надо помнить, что автомат устойчивости не гарантирует пред-
отвращения выхода за пэУмакс, «доп. Для этой цели используют
автоматы безопасности. Подчеркнуть, что при выключении ка-
нала устойчивости регулируемый параметр не вернется к ис-
ходному (см. рис. 5.47) . Кроме того, расход рулей при работе
АУ может быть более ±3°, поэтому необходимо изучить осо-
бенности работы АУ и быть готовым к парированию опасных
явлении при его отказах.
5.6.4. Автоматы управляемости
Рассмотренные автоматы демпфирования и устойчивости
оказывают благоприятное влияние на динамические характе-
ристики устойчивости и тем самым на динамические характе-
ристики управляемости. Правильный выбор статических ха-
рактеристик устойчивости благоприятно сказывается на ста-
тических характеристиках управляемости.
Однако перемещения ручки (педалей) и усилия, приклады-
ваемые летчиком, зависят не только от устойчивости самоле-
та, но и от характеристик системы управления. Для современ-
298
ных самолетов характерны большие величины шарнирных мо-
ментов рулей, что делает необходимым применение бустеров
(а отклонение управляемого стабилизатора без бустера про-
сто неосуществимо). В настоящее время применяются, как
правило, необратимые бустеры, полностью освобождающие
летчика от восприятия шарнирного момента. Но управлять са-
молетом, -не ощущая усилий, а только по перемещению ручки
очень трудно (особенно на больших скоростях полета, когда
малы потребные отклонения ручки). Поэтому при необрати-
мом управлении усилия на ручке (педалях), необходимые для
«чувства управления», формируются загрузочным устройством.
На первых самолетах с необратимыми бустерами это были
простые пружины, создававшие усилия, пропорциональные
отклонениям ручки (педалей).
Однако такой загрузочный механизм.имеет существенный
недостаток: на режимах цолета, где мала эффективность ру-
лей (малый скоростной напор) или велики статические харак-
теристики устойчивости, требуются большие отклонения орга-
нов управления, а значит и большие усилия. Для устранения
этого недостатка были введены автоматы регулирования за-
грузки (АРЗ), изменяющие в зависимости от приборной ско-
рости и высоты полета (а следовательно, от скоростного на-
пора и числа А4) передаточные отношения между перемеще-
ниями ручки и сжатием загрузочных пружин и др.).
Основным недостатком АРЗ является изменение переда-
точного числа в зависимости от положения ручки управ-
ления хв, а не от режима полета (Л4, Я), поэтому хорошая
управляемость обеспечивается только в определенном диапа-
зоне высот полета. Например, если это хорошо для больших
высот, то на малых могут быть очень низкие величины
P"y . Чтобы учесть это, на некоторых самолетах одновременно
изменяется и передаточное отношение • между отклонениями
ручки и руля (стабилизатора <рХв), что способствует лучшей
дозировке перемещений ручки и усилий на'ней на режимах,
где невелики (или велики) расходы руля (стабилизатора), й
тем самым повышению точности управления, уменьшению ве-
роятности «раскачки» самолёта летчиком (система АРУ).
Пояснить, что с помощью формул Р“ч , x"y легко уста-
новить режимы полета, где требуется корректировка Р“Y>
x"y:
— при малых скоростных напорах xJy будут велики, сле-
довательно, такими режимами являются: полет на больших
стратосферных высотах или на скоростях, близких к эволю-
тивным на малых и средних высотах;
299
— при больших скоростных напорах х^у и будут, на-
оборот, малы, следовательно, такими режимами являются:
большие приборные дозвуковые скорости полета на малых и
средних высотах.
На рис. 5.49 показан закон регулирования системы управ-
ления по сигналам от бортового ПВД. Особых пояснений он не
требует. Следует только отметить:
Рис. 5.49. Закон регулирования системы управления
— автоматы такого типа обеспечивают улучшение условий
пилотирования на всех режима* полета;
— при регулировке срхв изменяется диапазон углов откло-
нения стабилизатора, так, например, если q/»H на VnP2 мень-
ше ф*авкс на УПР1 в два раза, то при полном взятии ручки на
себя стабилизатор на Vnpt Vnp2 тоже отклонится в 2 граза
меньше, т. е. происходит ограничение маневренных возмож-
ностей самолета.
.—* Большие РпУ
/ ’ в в
АРУ----Малые V’ 1 х;7/, РпУ
(на устойчивость по пере-
грузке не влияет)
| или | устойчивость по
скорости.
300
В настоящее время на самолетах, оборудованных бортовы-
ми ЭВМ, имеется возможность формирования любого желае-
мого закона изменения усилий и отклонений органов управ-
ления, что позволяет наилучшим образом удовлетворить тре-
бования легкости и точности управления и наличия «чувства
управления» во всем эксплуатационном диапазоне скоростей,
высот полета и перегрузок. Ранее рассматривалось, от ка,-
ких факторов зависят и как изменяются характеристики
управляемости, поэтому здесь при изложении вопроса це-
лесообразно дать летному составу практические рекомен-
дации:
— если при анализе выяснится, что Рр < —1 кг/ед. перегр.»
a XgY С 10 мм/ед. перегр., то на больших приборных скоро-
стях на малых и средних высотах, где самолет „строг1* в
управлении при выполнении энергичных маневров, ручку
следует отклонять плавно, так, чтобы перегрузка увеличи-
валась со скоростью ну < 1,5 (т. е. nY = 5 — 6 достигалась
бы за 3—4 с). Это обеспечивает возможность контроля уве-
личения перегрузки, внекабинного пространства, а также
меньшую потерю энергетической высоты Д Яэ;
—возможную раскачку (при отказах САУ с q/®KC == const
или ее выключении) предотвращать не парированием, а фик-
сацией ручки и переводом самолета в набор для уменьшения
скорости полета. При этом плавно дросселировать двигатель
и по возможности не пользоваться тормозными щитками, что-
бы предотвратить появление дополнительных моментов, кото-
рые могут оказаться неблагоприятными;
— помнить, что при выполнении маневров с торможением
от сверхзвуковой скорости на дозвуковую рост и x”y мо-
жет вызвать «подхват» самолета, если его несвоевременно па-
рировать отдачей ручки от себя с темпом, зависящим от ин-
тенсивности «подхвата» и торможения;
—если отказ АРУ будет соответствовать (рис. 5.49);
то заход на посадку строить по пологой глиссаде, выравнива-
ние производить плавно, начиная его на Н>8—10 м. Это вы-
звано уменьшением угла отклонения стабилизатора при при-
вычном для летчика отклонении ручки. Учесть также, что безо-
пасность посадки может уменьшиться, так как увеличится
длина пробега.
5.6.5. Автоматы безопасности полета (АБ)
Вначале следует напомнить, что воздушный бой, атака
наземной цели требуют полного использования боевых воз-
можностей самолетов, а это связано с выходом на предель-
301
ные режимы полета. В целях увеличения безопасности поле-
тов ставят пассивные АБ (световое табло, постукивание по
ручке), предупреждающие летчика только о приближении
самолета к предельному (критическому) режиму полета
«доп» Рдоп, Яумакс’ ^пр доп , Or доп), и активные, контролирующие
режим полета, предупреждающие о выходе на опасные режи-
мы и воздействующие помимо воли летчика на рули, механи-
зацию, двигатели против выхода самолета на эти режимы
полета. На самолетах эти автоматы устанавливаются как са-
мостоятельные блоки или встраиваются в САУ. Сигналы на
исполнительные устройства подаются пропорционально огра-
ничиваемым в полете параметрам (а, р, у, Ф, nYf Дф, Л4).
Если при этом не учитывать упреждение в нарастании па-
раметра, то такой автомат безопасности не оставлял бы лет-
чику времени на вмешательство в управление или в момент
автоматического срабатывания руля против опасности само-
лет оказывался бы уже на критическом режиме полета (на-
пример, в штопоре). Поэтому АБ реагируют также и на ско-
рость изменения параметра а, й, nY и т. д.). В этом случае
при срабатывании автомата остается запас по параметру, ко-
торый имеет ограничения, до появления опасного явления
(Д а = асв — асра6; Д nY = п\ макс — nY сраб и т. д.), позволяющий
существенно повысить безопасность полета.
Однако следует подчеркнуть: «На автомат надейся, а сам
не плошай!», так как на работу АБ могут оказывать влияние
ошибки летчика, связанные с одновременным регулировани-
ем других параметров, отрицательно влияющих на контроли-
руемые параметры (например, развивается р и влияет на
аСрабл^)« Далее рассмотрим АБ:’ СОУА и БПС и их влияние
на движение самолета и управляемость.
СОУА (сигнализатор опасных углов атаки) относится к ак-
тивным АБ: при энергичном боевом маневрировании с выхо-
дом самолета на углы атаки срабатывания &Сраб системы
гидроцилцндр отталкивает ручку от себя на уменьшенное а
с одной и той же силой до 20 кгс. Это приводит к уходу от
опасного режима помимо воли летчика, если он не «перетя-
нет» ручку с большей силой, хотя сделать это, даже ожидая
срабатывания, не так просто. Закон отталкивания ручки:
&сраб ^срабо~Н
, А а
где ------------ (отношение изменения угла атаки к скоро-
Д а
сти его изменения).
Из рис. 5.50 видно, что чем больше скорость приращения
угла атаки а, тем меньше аСраб, т. е. тем больше запас, на-
302
пример, до сваливания самолета. После уменьшения а систе-
мой СОУА его снова можно неоднократно увеличивать вплоть
до повторного срабатывания и таким образом полностью реа-
лизовать маневренные возможности самолета. При маневри-
ровании по слабоизогнутым траекториям отталкивания мо^
Рис. 5.50. Зависимость угла атаки срабатывания
СОУА от скорости изменения угла атаки
жет не произойти из-за малости а, и летчик просто почувст-
вует упор, препятствующий дальнейшему взятию ручки на
себя. С учетом скорости- перемещения ручки реализуется
закон:
асраб ~ асраб0 “Ь Я + kxB Хв.
В конце, как обычно, дать практические рекомендации:
— для осуществления боевых действий на предельных ре-
жимах— изучай особенности устойчивости и управляемости
своего самолета на больших углах атаки;
— будь готов при энергичном маневрировании с исполь-
зованием адоп к парированию Опасных явлений, так как
СОУА не всегда предотвращает сваливание (при -пересили-
вании летчиком усилия, создаваемого СОУА; при создании
значительного скольжения или отклонения руля направления
больше определенной величины, например ДВн>5°;при от-
казе СОУА или блока перекрестных связей (БПС);
— если АБ серийного самолета не учитывает сигнала,
пропорционального скорости отклонения ручки хв, то при ее
резком отклонении из-за относительно большого времени сра-
батывания АБ (/Сраб аб ~ о, 1 с) стабилизатор отклоняется
больше, чем это предусмотрено законом управления, и само-
лет излишне «сбросит» угол атаки, перегрузку и можно ока-
заться в тактически невыгодной ситуации; следовательно, не
дергай ручку;
303
— СОУА не устраняет недостатки продольной и боковой
устойчивости, поэтому ожидай встречи с теми же неблагопри-
ятными явлениями, что и без СОУА;
— помни, что при пилотировании по границе срабатыва-
ния СОУА (на ос — осдоп ) на самолетах, у которых резко ра-
стет лобовое сопротивление при увеличении а, может сущест-
венно уменьшить уровень энергии, а следовательно, произой-
ти потеря позиционного преимущества и даже стать невоз-
можным выполнение очередного энергичного маневра;
— резкое отклонение ручки (на самолетах без СОУА)
уменьшает резерв времени для парирования опасного движе-
ния самолета, так как летчик получит сигнал о выходе на адоп
за время до 1,5 с до сваливания, т. е. пассивные средства сиг-
нализации в этом случае малоэффективны.
Если упражнения КБП серийного самолета предусматри-
вают выход,на адоп, то летный состав будет готов использо-
вать этот предельный режим для успешной атаки цели, выхо-
да из-под удара противника, предотвращения столкновения с
препятствиями при пилотировании на предельно малых вы-
сотах.
Блок перекрестных связей (БПС). При теоретическом обо-
сновании постановки на самолет БПС в САУ или в виде от-
дельного автомата перекрестных связей следует напомнить
обучаемым, что понимается под перекрестными связями.
Если говорить только о моментах, то можно показать:
Прямая связь
Изменение а ------------------► изменяет Л1г.
Изменение ft..ЗА изменяет Л1Л-,
Прямая связь
Это означает:
—при прямой связи: изменение а вызывает изменение мо-
мента тангажа (например, MZcT = m^vC^aq Sba)^ а изменение
₽ — моментов крена и рыскания;
— при перекрестной сцязи изменение а вызывает измене-
ние Мх и Му (например, момент крена Мх, обусловленный
созданным скольжением, будет увеличиваться при взятии
ручки на себя), так как т?х, /п|, зависят от угла атаки»
304
Из рис. 5.21, 5.22 I—коэффициент эф-
и .51 видно, что с j фективности эле-
ронов
X. коэффициент попе-
X. речной устойчиво-
X сти
— коэффициент путе-
вой устойчивости
Взаимодействие продольного и бокового движений про-
исходит на больших углах атаки, где эффективность элеро-
нов мала (самолет плохо идет за ручкой по крену), велика
поперечная устойчивость (создается мощный момент против
крена при скольжении Мд ст ? 7 3 Л причем чем больше
скольжение р, тем больше МХСт, а проконтролировать р на
больших а сложно, так как «шарик» менее чувствителен к
скольжению) и одновременно падает путёвая устойчивость
(момент рыскания не справляется с развивающимся сколь-
жением) .
Рис. 5.51. Зависимость коэффициента путе-
вой устойчивости от угла атаки:
/ — путевая устойчивость; 2—-самолет об-
ладает малой устойчивостью, не обеспечи-
вающей плотность хода в боковом движе-
нии; 3—путевая неустойчивость
В результате при маневрировании вращением вокруг про-
дольной оси ©дна предельных режимах а> «доп, где дозиро-
вать отклонение педали против р сложно (к тому же «ша-
рик» практически находится в центре), самолет в самый не-
обходимый момент становится вялым по крену при отклоне-
нии элеронов, что может привести к срыву атаки, свалива-
нию и т. д.
20-5007сп
305
Действительно, при полном отклонении ручки к борту ма-
невренный самолет должен вращаться с угловой скоростью
<«х>90 град/с, а неманевренный — с <ох > 30 град/с, если же
истребитель вращается даже с сох =10 град/с, то это медлен-
но, вяло.
Подсказать, что изложенное — не что иное, как объясне-
ние проявления аэродинамического взаимодействия продоль-
ного и бокового движений, но, кроме того, еще имеется кине-
матическое взаимодействие (циклический переход а в р и об-
ратно при быстром вращении самолета относительно его про-
дольной оси. Кстати, здесь уместно задать вопрос о величине
1Охлоп серийного самолета, которая указана в Инструкции
летчику). Кинематическое взаимодействие, хотя и приводит
к уменьшению а, но существенно увеличивается р, что спо-
собствует опасному развитию событий, вызванному аэроди-
намическим взаимодействием. А так как самолет вращается
вокруг оси, не совпадающей с его продольной осью, то воз-
никает еще и инерционное взаимодействие. Инерционные мо-
менты (не путать с моментами инерции /х, /у» Iz ) при вра-
щении с ®х > ©х доп могут превысить аэродинамические стаби-
лизирующие моменты (Mz ст илиМу ст), т. е. привести к потере
продольной или путевой устойчивости. Эти высказанные по-
путно замечания следует завершить напоминанием: «Летчик!
Не допуская нарушения Инструкции по пилотированию се-
рийного самолета, не попадешь в режим «инерционного вра-
щения» и штопор».
Для того чтобы помочь летчику координированно (₽ = 0)
пилотировать самолет, и поставлен БПС. Сущность его рабо-
ты заключается в том, что он отклоняет руль направления А8Н
в сторону крена соразмерно перемещению летчиком ручки по
крену хэ, т. е. искусственно повышает путевую устойчивость
до такой степени, что момент рыскания полностью устраняет
скольжение, создаваемое при управлении креном:
Му искус — Му ст + А Му рул = Р 4“ ГП> А йн) q SI.
Можно предупредить, что если летчик начинает маневр с
использованием крена при р = 0, то в самый первый момент
БПС, отклоняя руль направления (А 8Н >3—5°), способствует,
а не препятствует развитию скольжения на внешнее крыло,
усиливает крен в желаемую сторону, но затем действует по
своему прямому назначению, устраняя скольжение:
Мхнач = Мхэ + Мх ст = {тхэ + тх?иач)^/,
где рНач создается моментом
A MY рул = /т2уН A 8Н q S I.
306
Здесь же отметить, что при пилотировании на предельных
углах атаки использовать дачу внутренней педали по крену
для увеличения угловой скорости вращения опасно, так как в
первый момент еще более увеличится р, что снижает асв (дру-
гое дело, если использовать внешнюю педаль для устранения
крена, если не хватает эффективности элеронов).
В целом включение БПС позволяет улучшить поперечную
управляемость (рис. 5.52), устранить заброс угла скольжения
в условиях уменьшения путевой устойчивости, поэтому само-
лет «плотнее сидит» в воздухе на а > адоп, так как в САУ БПС
Рис. 5.52. Влияние блока перекрестных связей на харак-
теристики поперечной управляемости:
а — на ; б—-на (п£э
Л макс %
работает совместно с автоматом устойчивости и демпфером
крена (при этом увеличивается и асв на 3—4°). Причем асв
увеличивается не за счет БПС, а за счет повышения устойчи-
вости (А Вн = k“znz). Закон отклонения руля направления при
изменении крена имеет вид
А &н = k"z nz + хъ
20*
307
т. е. при включении БПС автоматическое отклонение руля на-
правления будет пропорционально боковому отклонению руч-
ки хэ и возникающей боковой перегрузке nz (или р).
Д Вн
В этой формуле передаточные числа
~------в Подчеркнуть, что БПС выключается автоматиче-
Д хэ
ски при уменьшении угла атаки до значения авыкл, например,
до а = 20°, т. е. на меньших а БПС не работает, и поэтому
из-за того, что на малых а самолет энергично вращается по
крену от ручки, наоборот, надо следить, чтобы не выйти за
ограничения по со^доп (например, не допускать вращения с
а)Х = ЮО град/с, если шХдоп = 90 град/с).
При автоматическом включении на а=авкл возможно не-
значительное рыскание, причина которого изложена ранее.
Для его устранения используют закон:
Д &н = nZ + (OY + kxR3 x3.
Если после включения БПС летчик будет маневрировать на
а> Явкл + (1^-2°), например, выполнять вираж на малых ско-
ростях, то самолет еще обладает хорошей реакцией по крену
на отклонения ручки хэ и могут появиться незатухающие бо-
ковые колебания с частотой 0,3—0,5 Гц (типа «голландский
шаг»). Чтобы избежать дальнейшей раскачки, следует зажать
ручку и уменьшить скорость или продолжать маневр с мень-
шим 'креном. Естественно, что в целях безопасности полета
маневрировать на предельных по а режимах надо только с
включенным БПС.
§ 5.7. МЕТОДИКА ИЗЛОЖЕНИЯ И ОБЪЯСНЕНИЯ
НЕБЛАГОПРИЯТНЫХ ОСОБЕННОСТЕЙ УСТОЙЧИВОСТИ
И УПРАВЛЯЕМОСТИ
5.7.1. Неблагоприятные особенности
в пилотажных свойствах
Приступая к изучению пилотажных свойств серийного са-
молета, летчик обнаруживает ряд неблагоприятных особен-
ностей, которые в полете проявляются не все вместе, а в раз-
личных пределах дозвуковых, трансзвуковых скоростей, на
предельно малых и больших высотах, в зависимости от стре-
ловидности крыла, внешних подвесок и т. д.
Эти неблагоприятные особенности не случайны, они свя-
заны с тем, что конструктор может обеспечить оптимальные
308
пилотажные свойства для каких-то конкретных условий бое-
вого применения (высоты, стреловидности крыла и т. д.), но
при изменении этих условий устойчивость и управляемость са-
молета могут существенно изменяться, приобретая иногда
опасный характер. Уже с зарождения авиации появились не-
благоприятные особенности — сваливание, штопор и др. По
мере совершенствования конструктивной и аэродинамической
компоновки одни особенности устранялись в КБ или находили
методы борьбы с ними при летных испытаниях, другие оста-
вались долгое время неразгаданными, но с расширением диа-
пазона высот и скоростей полета возникали новые, не менее
опасные явления. Так, еще в 1942 г. на самолете БИ-1 летчик
Г. Бахчиванджи попал в режим затягивания в пикирование,
разгадано же оно было только через много лет. Из-за увели-
чения числа особенностей росло и количество ограничений,
указанных в Инструкции летчику, превышение которых в од-
них случаях угрожает безопасности полета, а в других, хотя и
ухудшает поведение самолета, но непосредственной опасности
может не представлять. Летчики должны хорошо знать не-
благоприятные особенности серийного самолета, физические
причины их появления, влияние на ограничения, накладывае-
мые на движения самолета и учитывать в ходе полетов для
повышения их безопасности.
Например, надо знать, что неблагоприятное реагирование
сверхзвуковых самолетов на выполнение энергичных маневров
с вращением вокруг продольной оси заставляет ограничивать
допустимые угловые скорости накренения (g>x<^90 град/с) и
это объясняется продольной удлиненностью их формы, обес-
печивающей малое сопротивление при сверхзвуковых скоро-
стях и саму возможность достижения этих скоростей в полете.
Обоснование неблагоприятных особенностей пилотажных
свойств в описаниях и инструкциях серийных самолетов, как
правило, или отсутствует или бывает очень кратким, поэтому
необходимы комментарии, основанные на общих теоретиче-
ских положениях. Но главное — дать летному составу мето-
дику для самостоятельного изучения неблагоприятных особен-
ностей. В этих целях изложение и объяснение пилотажных
свойств необходимо вести по определенной схеме '(методике),
которая и послужит инструментом для самостоятельного по-
полнения знаний. Эта методика может иметь различную струк-
туру в зависимости от летной выучки, но в целом в нее должны
быть включены следующие вопросы:
— общетеоретические сведения об изменениях режимов
полета современного боевого самолета, летно-тактических и
пилотажных свойств, приводящих к неблагоприятным особен-
ностям в его поведении;
30®
— сбор информаций о неблагоприятных особенностях се-
рийного самолета (их количестве и ранжировании по степени
опасности) из различных источников (Инструкции летчику,
Методического пособия по технике пилотирования и боевому
применению, описаний, отчетов по летным испытаниям, дан-
ным КБ и т. д.);
— увязка режимов, на которых проявляется та или иная
особенность, с режимами полета, определяемыми упражнения-
ми КБП рода авиации (о чем подробнее сказано в главе
10 учебника). В этом параграфе, считая, что приведенные
вопросы уже разобраны, укажем встречающиеся неблагопри-
ятные особенности на различных режимах полета, рассмот-
рим методику изложения и объяснения любой конкретной не-
благоприятной особенности и прокомментируем ее на при-
мере непроизвольного кабрирования (увеличения a, ft) при
неизменном положении ручки (хв == const) и числа М = const,
именуемого среди летного состава как «срывной подхват».
Изучая с летным составом неблагоприятные особенности
устойчивости и управляемости самолета, следует отметить, что
у современных самолетов в совокупности их достаточно мно-
го, но у конкретного самолета их количество имеет ограни-
ченный характер.
5.7.2. Методика изложения и объяснения
неблагоприятных особенностей в пилотажных свойствах
Для изложения и объяснения летному составу конкретных
неблагоприятных особенностей, которые присущи серийному
самолету, можно воспользоваться следующей методикой.
1. Зачитать указания Инструкции летчику, посвященные
изучаемой особенности. Кратко изложить ее сущность, что
именно и в какой форме происходит в полете, связано это с
действиями летчика или только с внешними факторами.
2. Указать, на каких режимах полета (//, V) она прояв-
ляется, чтобы увязать изучение с влиянием данной особенно-
сти на выполнение упражнений КБП рода авиации (см. гла-
ву 10), или боевой задачи (прицеливание, эффективный огонь
и т. д.).
3. Изложить и объяснить физические основы (причины)
появления и характер протекания данной особенности.
4. Показать, с помощью каких критериев летчик при под-
готовке к полетам может оценить вероятность возникновения
особенности и ее интенсивность.
5. Перечислить признаки естественные и искусственные, по
которым летчик может судить о приближении к неблагоприят-
ной особенности в полете, а следовательно, предусматривать
310
меры по предотвращению выхоДа на эти режимы, если они
опасны.
6. Оценить влияние на безопасность полета, разобрать
возможные ошибки летчика в пилотировании, способствую-
щие выходу на опасные режимы и на самих режимах. Дать
необходимые рекомендации.
7. Рассмотреть влияние условий боевого применения са-
молета (стреловидности, внешних подвесок, и т. д.) на прояв-
ление неблагоприятной особенности устойчивости и управ-
ляемости.
8. Показать признаки, по которым можно определить эту
особенность на данных, полученных с помощью средств
объективного контроля.
5.7.3. Пример изложения и объяснения
неблагоприятной особенности серийного самолета
После уяснения сути методики необходимо показать ее в
действии, т. е. провести по ней изложение и объяснение какой-
либо неблагоприятной особенности, например, непроизволь-
ного кабрирования в дозвуковом полете.
1. Пусть в Инструкции летчику сказано: при средней
стреловидности и любых подвесках в процессе выполнения
маневрирования на числах Л1 = 0,7—0,8 и а=12—16° суще-
ственно уменьшается запас устойчивости по перегрузке, вплоть
до нейтральности, что требует постоянного контроля за вели-
чинами пу и а, выдерживаний которых затруднено.
Из приведенной формулировки следует, что в целях обес-
печения безопасности полетов необходимо проанализировать
поведение самолета при малой степени устойчивости, нейт-
ральности и даже неустойчивости по перегрузке. Сразу от-
метить, что в этом случае в полете, когда при маневрировании
летчик в какой-то момент после отклонения ручки на себя
зафиксирует ее (xB=const), самолет не сбалансируется на
новом значении а (пу), соответствующем этому хв = const, а
неожиданно резко и самопроизвольно начнет кабрировать,
увеличивая углы атаки (перегрузку) и тангажа при М = const
(число М практически не успевает измениться). При непра-
вильных действиях летчика возможна «раскачка» самолета
с выходом на а, где проявляется продольная неустойчивость
по перегрузке > 0, а следовательно, создаются предпосылки
для срывного подхвата с выходом за ограничения по адоп или
пэ
"Ч макс*
2. Это неблагоприятное движение самолета обычно про-
является на дозвуковых скоростях полета (М<1,0) с боль-
шими углами атаки. Приче^ чем меньше высота полета при
311
одном и том же числе 2И, тем «подхват» интенсивнее и опас-
нее. На больших высотах «подхват» может возникнуть при
меньших nY, но при больших а, что опасно, так как может
произойти сваливание самолета (то же относится и к манев-
рированию на малых V). На средних и малых высотах и
больших приборных скоростях опасность «подхвата» состоит
не столько в сваливании, так как в этом случае имеется до-
статочный запас по углу атаки до сваливания, сколько в
возможности превышения ограничений по прочности самоле-
та, когда летчик в процессе энергичного пилотажа создает
fl мэ
~ ™Умакс •
3. Причиной непроизвольного кабрирования на М< 1,0 яв-
ляется малая степень устойчивости (ап <С 1 %~~2 %), нейтраль-
ность (о« = 0) или неустойчивость ( зЛ>0) самолета по пере-
грузке (подробнее см. 5.3.4). Поводом для появления этой
причины могут быть факторы, связанные с аэродинамической
компоновкой, упругими деформациями или с неправильными
действиями летчика в воздухе при пилотировании самолета.
На первые летчик практически влияния оказать не может
или, если может, то только косвенно. Например, используя
строго установленные стреловидности крыла по режимам по-
лета, он может косвенно воздействовать на развитие этого
явления, так как при изменении стреловидности крыла ме-
няется его относительная толщина с, а известно, что чем боль-
ше с, тем сильнее проявляется непроизвольное кабрирование,
особенно если при этом еще и большая стреловидность крыла.
Дело в том, что уменьшение степени устойчивости по
перегрузке связано с изменением положения центра масс и
фокуса самолета: либо ЦМ движется назад (задние цент-
ровки), либо фокус вперед. Смещение ЦМ назад прямо зави-
сит от грамотности действий летчика при подготовке к поле-
там и в полете и может быть вызвано неправильными разме-
щением подвесок и заправкой топливом, выработкой топлива
и сбросом подвесок. Смещение фокуса вперед также зависит
от неправильного размещения подвесок, но является главным
образом следствием тактической необходимости, например,
потребностью выполнить энергичное торможение со сверх-
звуковых скоростей на дозвуковые при боевом маневриро-
вании (при этом фокус движется вперед, растет эффектив-
ность рулей) или выйти на предельные режимы по углам
атаки (при этом появляется концевой срыв, попадание гори-
зонтального оперения в след потока от крыла) или исполь-
зовать на малых и средних высотах большие приборные ско-
рости, обеспечивающие наиболее энергичный разворот на
противника (возникают упругие деформации крыла и фюзе-
312
ляжа) и др. Иногда летчики удивляются: на одном и том же
самолете, на тех же режимах полета подхват то проявляется,
то нет. Ничего удивительного в этом нет, просто в первом
полете по стечению обстоятельств все факторы действуют в
сторону уменьшения совместно, и самолет попадает на ре-
жим подхвата, а в другой раз этого не наблюдается. Можно
также отметить влияние на подхват отказов автоматики —
демпфера тангажа, АРУ и т. д.
Для объяснения удобно использовать рис. 5.53, из которого
видно, что главная причина уменьшения степени устойчивости
и появления неустойчивости — срыв потока с концов стрело-
видного крыла при увеличении углов атаки. Обратить внима-
ние летного состава, чтосесли новый серийный самолет по
сравнению с прежним имеет более вынесенный относительно
крыла фюзеляж, то это дополнительно смещает фокус вперед.
И
6^>0(неу сто и ч и В по Пч)
»м,>е л
АУ^(АУ^АУЛ -----------------
\ Спутный слёЗ
<0 (устоичиВ попч )
-ЛУГ[] (потери из-за
попадания 6 спутный СЛеЗ)
(нейтрален по И Л
След движения Хнпрц1^
относительна X^const
" \^“гРаАрнаа центроВка (Хи)
Рис. 5.53. К объяснению срывного подхвата
Итак, в соответствии с изложенным и рис. 5.53 (см.
стр. 314).
При этом положение усугубляется при задних центровках.
4. При подготовке летчиков к полетам (или при изложе-
нии и объяснении'командиром) для анализа лучше всего ис-
пользовать балансировочные кривыё, т. е. зависимости по-
313
И АГ J
фюзеляжа
требных для балансировки самолета отклонений ручки
усилий на ней Рв или отклонений стабилизатора ср. по углу
атаки или перегрузке. Для этого командиру при изложении
и объяснении балансировочных кривых, помещенных в описа-
нии самолета, надо показать, что можно использовать балан-
сировочные кривые трех типов: для фиксированного (зажа-
того) управления хв(«, пч) и ср (а, п^) и для освобожденного
(брошенного) управления Рв (a, пу) (рис. 5.54). Напомнить,
что устойчивость с зажатым управлением — это устойчивость
по перемещениям ручки, а с брошенным — по усилиям.
В нашем примере речь шла о существенном уменьшении
степени устойчивости, близком к нейтральности на а=12—16°,
что на балансировочных кривых выглядит в виде участка Ш,
где одному и тому же отклонению (<р = const) руля, ручки
(х3 =? const) и усилию (Рв =« const) на ней соответствуют раз-
ные балансировочные значения угла атаки (перегрузки).
'/ЛЛ
(яг cob)
X„=C6n$t; %ep=COn$t
mg/s=const; const
t Область неустойчиВости
* в» в
!ча сеЗя)
Рис. 5.54. Использование балансировочных кривых
при объяснении срывного подхвата
314
Каждый летчик понимает, насколько это опасно, например,
при посадке на выравнивании, когда на ничтожное отклоне-
ние ручки самолет может ответить резким увеличением углов
атаки и тангажа.
Лучше всего суждение об устойчивости (нейтральности,
неустойчивости) строить на основе анализа балансировочных
кривых типа хв(а, nY), т. е. при зажатом управлении, опре-
деленных полетным заданием при постоянных значениях хм,
X, М, Н, mg/S.
Самолет устойчив по перегрузке, если балансировочная
кривая имеет отрицательный наклон (рис. 5.54), а расход
ручки на единицу перегрузки х“х 0. Кстати отметить, что
при <0 расход стабилизатора на-единицу перегрузки мо-
жет быть либо флу<0 (участки /, /Д V), либофлт ^0 (уча-
сток ///), либо > 0 (участок II). Это объясняется тем, что
на входящую в формулу q/’Y , не влияют автоматы устой-
чивости, а в формулах для x”y и Р" y величина учитывает
и работу автомата устойчивости, т. е. АУ >албез АУ.
Следовательно, при албезАУ = 0 <pnY == 0, но при этом
<зп ау < 0 и хлу < 0, P”y<^ 0. При этом может быть и Рлу >0
(т. е. устойчивость с освобожденным управлением не опре-
деляется устойчивостью с зажатым летчиком управлением).
Например, самолеты Ил-62, Ан-12, Ил-86 в некотором
диапазоне углов атаки неустойчивы по усилиям Рлу >0 (уча-
сток IV на рис. 5.54) npnx"Y<^0. Это связано с перекомпен-
сацией руля высоты на этих самолетах, ' когда суммарная
аэродинамическая сила Приложена в точке, лежащей впереди
оси вращения руля, и поэтому при отклонении штурвала на
себя тянущие усилия на ней не растут, а уменьшаются. Та-
ким образом, если <p"v == 0, но x*y < 0, то можно сделать вы-
вод, что самолет устойчив по перегрузке.
Самолет с брошенным управлением устойчив только тогда,
когда P"y<^0 (участки Д II, V). Однако следует подчеркнуть:
если самолет не оборудован САУ или отдельными автомата-
ми и имеет прямую безбустерную систему управления, то об
его устойчивости следует судить только по q/1* <0. Если
срлу = 0, то самолет будет нейтрален, а прифЛу>0 неустойчив
по перегрузке.
Почему же выполаживание хв (пу) и Рв(пу) происходит
раньше, чем ф (nY)? Если загрузка ручки выполнена так,
что имеется резкий излом характеристики Рв (хв), то усилие,
необходимое для перемещения ручки на единицу [ Ръ
315
ЬРВ \
----- при каком-то малом значении хв увеличивается:
A хв у
*в >Р** (точка А на рис. 5.55). Это приводит к резкому
Рис. 5.55. Зависимость усилия на ручке управле-
ния от ее отклонения (закон загрузки ручки)
выполаживанию балансировочных кривых хв (a, riY) и Рв (а,
Пу), хотя <pnY своего характера не изменяет. При малой сте-
пени устойчивости, близкой к нейтральности, когда потреб-
ные расходы ручки по отклонениям и усилиям резко умень-
шаются, переход на более жесткую загрузку ручки (f Р*в )
не дает возможности летчику дозировать ее соразмерно ре-
mglS
жиму полета: <pnY ---------------т. е. от Рпу не зависит,
mz q
но — (pnY ——-—, т. е. с t при q)nY = const.
в рхВ (рРв I В V в 1 •
Если же изменяется и степень устойчивости по перегрузке,
как это может быть при увеличении больших а, то
До п —теряется чувство
t л пх управления, само-
(большихр^^Н Р вв—лет самопроизволь-
но стремится fa, И,
В заключение указать, что интенсивность непроизвольного
кабрирования, раскачки или выхода на срывной подхват
можно прогнозировать с помощью степени выполаживания,
316
т. е. по глубине «ложки» на балансировочных кривых (по
темпу уменьшениях^, Р1^, <рлу , соответствующих устойчи-
вому самолету,— см. рис. 5.56).
Рис. 5.56. Использование балансировочных кривых для про-
гнозирования интенсивности непроизвольного кабрирования,
раскачки самолета, выхода на срывной подхват
5. Признаком приближения к режимам полета с малой
устойчивостью, нейтральностью и неустойчивостью по пере-
грузке является тенденция самолета к самопроизвольному
кабрированию (изменению a, fytiy ) на пилотаже при обыч-
ной, привычной для летчика величине, отклонения ручки и ее
фиксации. Чем меньше устойчивость по перегрузке, тем она
проявляется сильнее. Это сразу должно настораживать лет-
чика, ему необходимо быть готовым к парированию самопро-
извольного движения, но без раскачки самолета или выхода
на срывной подхват.
Другим признаком является «ослабление» ручки, т. е.
уменьшение потребных отклонений ручки х“х и усилий на
ней P“y при увеличении перегрузки на каждую единицу в
процессе боевого маневрирования (об этом уже подробно
говорилось). Летчик это обычно замечает приоп<Д— 2%.
Кроме того, косвенно о выходе на большие а летчику подска-
жет появление боковых колебаний по крену и рысканию
(из-за уменьшения путевой и увеличения поперечной устой-
чивости), которые трудно компенсировать из-за ухудшения
управляемости.
Внимательный летчик может проконтролировать выход на
режимы с малыми по приборной информации (ауУА, свето-
317
вому табло, срабатыванию тактильной сигнализации, СОУА).
Включенная автоматика в этом случае,существенно повышает
безопасность полетов.
6. Ранее уже говорилось, что опасность полета будет оп-
ределяться возможной раскачкой, «срывным подхватом» с
выходом за ограничения по адоп или Пумакс- При этом соз-
даются предпосылки к потере скорости полета. Следует рас-
смотреть ошибки, которые могут привести к летным проис-
шествиям.
Одна из грубейших ошибок летчика, приводящая к суще-
ственному снижению безопасности полета (без использования
автоматики),— пилотирование самолета при боевом манев-
рировании без учета выхода на режимы полета с малой сте-
пенью устойчивости. Она заключается в том, что в бою лет-
чик, стремясь выполнить одни и те же маневры с одинаковым
искривлением траектории (/2ув), привычно отклоняет ручку
по величине отклонения хв, и темпу ее перемещения хв и
ожидает привычного, необходимого ему движения самолета.
Однако поведение самолета будет другим. Для изложения
этого вопроса целесообразно изобразить переходные процес-
сы для нормальной степени устойчивости, например, аЛ1 ==3°/о
(кривая /), и малой ртепени =0,5% (кривая 2, рис. 5.57)
и затем провести анализ.
(у а сеЗя)
Рис. 5.57. Переходные процессы при нормальном (/) и малом (2)
запасах устойчивости по перегрузке
318
При малой степени устойчивости по перегрузке, близкой к
нейтральной, самолет, как это уже показано, весьма строг в
управлении и требует от летчика точной дозировки не только
усилий на ручке Рв, но и ее перемещений хв. Однако вот
здесь-то и может быть заложена причина ошибки летчика,
приводящая, например, к раскачке самолета при малых .
Так, если на малоустойчивом самолете летчик, желая улуч-
шить хождение самолета за ручкой, начнет перемещать ее
более энергично (хВз = хВз > хВ1) и на большую величину
(%в2 *В1) , то рулевой момент увеличивается из-за передачи
ручки, а стабилизирующий — мал, хотя и остается постоян-
ным. В итоге получается
Д Mz 2 — Mz рул 2 — Mz ст Д Mz 1 — Mz рул 1 Mz ст 5
следовательно, и
• ДТИ^г Л • Д Mz 1
Д 2 -----------Д 1 =----------—
Iz *z
т. е. самолет будет кабрировать более энергично (а2^> аь
Иу2>пу1) при меньшей степени устойчивости по перегрузке
и выйдет на большую перегрузку (угол атаки), чем рассчи-
тывал летчик:
mg хв фХв
Д Пу уст 2 —
^>ДПуУст1,
так как а„ 2 < t (при остальных постоянных значениях).
Кстати следует отметить, что при этом можно превысить
nY, установленную Инструкцией летчику (например, Пу <—
= 1,5, что означает f Пу до 5—6 за 3—4 с). Период колеба-
ний Т2 > 7\, /ср 2 > 4р 1, но главное — Д nY забР 2> ДnY аабр i или
Д «забр 2> Д Tsa6p 1. Абсолютный заброс угла атаки равен
Д ®забр 2 — Д ®забр 2 Д ауст 2,
НО
Д ®забр 2 Д ®забр 1, Д Яуст 2 > Д ®уст 1 ,
поэтому Дазабр 2 >,Д®забр1, самолет за счет забррса может
попасть из точки 1 в точку 2 (см. рис. 5.56), т. е. на „ветку*
неустойчивости на балансировочной кривой, отсюда и „под-
хват*.
319
Если даже летчик в момент времени t\ (рис. 5.58) отдаст
ручку от себя (хвз=%в1), чтобы, ускорив переход на потреб-
ное значение угла атаки (перегрузки), получить желаемый
прирост Дауст1 (ДпуУст1), то заброс все же будет больше,чем
при хв 1<^Хвз=хв 2 и, в конце концов, за счет неоднократных
отклонений ручки в зоне нечувствительности летчика к ее ма-
лым перемещениям может начаться раскачка самолета с вы-
ходом на большие a (nY). Если при этом летчик будет про-^
должать энергично отклонять ручку (хв з ^>хв i) , то увеличит-
ся нарастание угла атаки (перегрузки), и вероятность выхода
на режим «подхвата» еще более возрастет (кривая 3).
Рис. 5.58. К объяснению возможности возникновения раскачки самолета
В самом деле известно, что летчикам в полете трудно
точно дозировать отклонение ручки и усилий на ней при их
малых потребных для выполнения маневра значениях, что
имеет место при небольшой степени устойчивости по пере-
грузке, поэтому наименьшие ошибки в технике пилотирова-
ния они допускают во вполне определенных пределах
(рис. 5.59). С этими пределами, установленными документа-
ми, регламентирующими допуск самолетов к летной эксплуа-
тации, и следует сравнивать фактические значения xby ’ ?by >
Рв и т. д. Если они не укладываются в нормативы, а летчик
не учитывает выхода на режимы с малым ол> то ошибки в
пилотировании неизбежны.
320
Изложенное позволяет сделать вывод: при малой степени
устойчивости выход на режим «подхвата» зависит от техники
пилотирования.- При энергичном взятии ручки на себя легко
оказаться на а ^><Хдоп или пу >л* маКс • Такую ошибку, вероят-
нее всего, можно совершить при выводе из нисходящих ма-
невров (пикировании, перевороте и др.). Следовательно, пи-
лотировать надо плавными, соразмерными движениями ручки.
Вторая ошибка практически связана с первой, когда при
парировании «подхвата» летчик энергично «передаст» ручку
от себя, что может привести к сильному уменьшению яу (при-
чины те же) и, следовательно, к затягиванию восходящих ма-
невров и к большой потере скорости.
Рис. 5.59. Влияние величины перемещения ручки управт
ления и усилия на ней на относительную ошибку:
I — область, где точная дозировка ручки при пилоти-
ровании невозможна из-за малых при малой сте-
пени устойчивости; II — область, где управление облег-
чается, а ошибки в пилотировании увеличиваются; III —
область, где обеспечивается приемлемая точность пило-
тирования при любых допустимых нагрузках на ручке;
/V —область, где управление затяжеляется, а ошибки
в пилотировании увеличиваются; V — область, где точ-
ная дозировка ручки при пилотировании невозможна
из-за больших XgY, при большой степени ус-
тойчивости
21—5007сп
321
Следует объяснить еще одну ошибку, которая рвязана с
взаимодействием продольного и бокового движений. Напри-
мер, на выводе из ликирования с одновременным разворотом
летчик энергично отклоняет ручку по диагонали и создает
большие угловые скорости вращения вокруг продольной оси
сох с одновременным движенйем по курсу wY . При таком дви-
жении дополнительно появляется инерционный момент тан-
гажа Mzm = (/у — 1х) со2х а, причем он всегда является деста-
. билизирующим, т. е. направлен на увеличение возмущения.
Например, на рис. 5.60 показано действие Mz ин>0, т. е.
направленного на увеличение a(nY) при вращении по крену
(<ох>0)и рысканию вправо (о)у<СО). Для компенсации AIzh®
летчику придется дополнительно отдавать ручку от себя на
величину А хв, при которой
а _ (/Y — /х)2 (*>х ос
т mi
где Ml — эффективность стабилизатора (MJ qSba ). При-
чем даже если он будет делать это плавно и соразмерно,
балансировочная кривая выполаживается на величину Дф
(которая увеличивается с ростом а — см. формулу) и угол
атаки, при котором может начаться «подхват», существенно
уменьшается (аД0П2 , кривая 2 на рис. 5.61). Таким образом,
«подхват» может начаться на тех а, на которых летчик не
ожидает проявления этой неблагоприятной особенности. Не
все летчики достаточно хорошо это- понимают, поэтому
командир должен обратить их внимание на эту особенность
(тем более, что ей не всегда уделяется внимание в Инструк-
ции летчику) и предупредить, что энергичное отклонение руч-
ки по диагонали, например, после атаки наземной цели с
пикирования может вызвать полную потерю устойчивости по
перегрузке.
7. Рассмотреть, например, влияние изменения стреловид-
ности крыла в полете (рис. 5.62) и показать, что при Хер = 45°
в макс, а при Хмин = 15 (Jn = On мин, следовательно, при
торможении и переходе с хср на хмнн уменьшаются PJy. На-
пример, с величин P"y = — 16 ------—------- ( — 156,8 X
ед. перегр. \
к/ \ 1 КГС / по # \
X-------------) на P"y « — 1----------- —9,8------------ .
ед. перегр. / ед. перегр. \ ед. перегр. /
Это означает, что у летчика меняются кинетостатические*
ощущенйя: от тяжелых при /Ср до необычно легких при хМИн-
Это, конечно, утомляет его и приводит к ошибкам в пилоти-
322
№
♦
У
Рис. 5.60. Возникновение инерционного момента при энергичном маневрировании
ровании. Здесь же следует пояснить и влияние тех внешних
подвесок, которые уменьшают аЛ.
8. Запись самопроизвольного увеличения перегрузки при
«подхвате» показана на рис. 5.63. Если аппаратура объектив-
ного контроля ведет запись только перегрузки и фс», то по
ним можно установить проявление этой неблагоприятной
особенности, но, правда, при этом неизвестно положение ру-
лей поперечного и путевого управления. Если же производит-
ся запись' отклонений не только рулей, но и боковых откло-
нений ручки управления (хэ), педалей (хн), то признаки
подхвата таковы: на участке, где резко увеличивается пере-
грузка, положение зажатой ручки хв не соответствует росту
перегрузки, ахэ^0 и хн = 0.
Рис. 5.61. Уменьшение допустимого угла атаки при энергичном ма-
неврировании
\ ^нейтральная центроВка]
II НИН
/5 30 45 60 75
п МАКС
Рис. 5.62. к объяснению особенностей пилотирования самолета, свя-
занных с изменением в полете стреловидности крыла
Эксплуатац ионньш
диапазон
центробок
324
Кстати объяснить, что при пилотировании малоустойчиво-
го самолета, когда малы отрицательные величины P"Y или
PJy >0, летчику трудно точно выдержать заданную пере-
грузку на установившемся вираже (рис. 5.64), и оценка за
полет будет невысокой. Учитывая изложенное, подчеркнуть:
пользуйся автоматикой: движение самолета в воздухе станет
менее опасным и более точным, а управляемость улучшится.
Рис. 5.63. Запись самопроизвольного увеличения
перегрузки при подхвате
1 ^Усок при Рв -5 р^п^рРГр J
^УсокЛри. Р"9>О
Рис. 5.64. Запись изменений перегрузки при выполнении
установившегося виража:
а —на самолете с нормальным запасом устойчивости;
б —на малоустойчивом самолете
325
Рассмотрев материал первого раздела, можно сделать
следующее заключение.
Глубокое усвоение авиационным^ командирами предло-
женной в учебнике методики изучения практической аэроди-
намики самолетов позволит повысить эффективность и каче-
ство обучения подчиненного летного состава и будет способ-
ствовать усилению боеготовности Военно-воздушных сил и
повышению безопасности полетов.
326
РАЗДЕЛ II
БОЕВОЕ МАНЕВРИРОВАНИЕ САМОЛЕТОВ
ОЦЕНКА И УЧЕТ ЛЕТНО-ТАКТИЧЕСКИХ
И ПИЛОТАЖНЫХ СВОЙСТВ САМОЛЕТОВ
ПРИ ОРГАНИЗАЦИИ, ПОДГОТОВКЕ И ВЕДЕНИИ
БОЕВЫХ ДЕЙСТВИИ
327
Боевая эффективность самолетов зависит от целого ряда
факторов, среди которых важное место занимают их летные
свойства. Боевая эффективность тем выше, чем больше потен-
циальные боевые возможности, которыми обладают самолеты,
и выше степень их реализации при боевом применении. Потен-
циальные боевые возможности во многомюпределяются летно-
тактическими свойствами самолетов, а степень их реализа-
ции — пилотажными. Настоящий раздел учебника имеет
целью научить руководящий летный состав при принятии ре-
шения на боевые действия и в ходе их всесторонне оценивать
и учитывать:
— соответствие взлетно-посадочных свойств самодеТов
условиям базирования в интересах выполнения боевых задач
с максимальной эффективностью;
— возможности самолетов по глубине и продолжитель-
ности воздействия на противника в условиях дефицита вре-
мени на подготовку к выполнению боевых задач;
— маневренные свойства самолетов обоснованным выбо-
ром, расчетом и моделированием боевых маневров, обеспе-
чивающих выполнение различных боевых задач;
— сильные и слабые стороны своих самолетов и против-
ника сравнением их летных свойств.
Пилотажные свойства самолетов влияют на боевую эф-
фективность и безопасность полетов весьма существенно: от
них зависит возможность реализации в полете высотно-ско-
ростных и маневренных свойств самолетов; оказывают влия-
ние на точность выполнения летчиком заданного боевого ма-
невра; на самолете, обладающем хорошей устойчивостью и
управляемостью, летчик имеет возможность уделять меньше
внимания пилотированию самолета и больше — наблюдению
за обстановкой на земле и в воздухе, ее оценке, выполнению
функций, связанных сбоевым применением.
Знание всех этих вопросов поможет командиру-летчику
правильно оценивать высотно-скоростные и маневренные свой-
ства самолетов, успешно преодолевать ПВО противника, ве-
сти воздушный бой, эффективно атаковать наземные цели.
Наличие теоретических знаний улучшает качество практиче-
ского обучения летного состава^ снижает сроки обучения, по-
вышает безопасность полетов, позволяет разрабатывать новые
тактические приемы ведения боевых действий, развивает само-
стоятельность мышления и инициативу авиационного коман-
дира.
328
Глава 6
ОЦЕНКА СООТВЕТСТВИЯ
ВЗЛЕТНО-ПОСАДОЧНЫХ ХАРАКТЕРИСТИК
УСЛОВИЯМ АЭРОДРОМНОГО БАЗИРОВАНИЯ
САМОЛЕТОВ
Условия аэродромного базирования оцениваются рядом
количественных и качественных показателей: географиче-
ским положением аэродрома, его удалением от линии фронта
и объекта действий; характеристиками ВПП; наличием и ха-
рактером препятствий в полосе воздушных подходов; метео-
рологическими условиями в районе аэродрома; высотой аэро-
дрома над уровнем моря; оснащенностью аэродрома спе-
циальными сооружениями и оборудованием; запасами топли-
ва и боеприпасов; наличием и качеством подъездных путей.
Не касаясь вопросов обеспечения, рассмотрим оценку
взаимного соответствия взлетно-посадочных характеристик
(ВПХ) самолетов и условий базирования. При этом будем
использовать один из основных принципов диалектико-мате-
риалистического подхода — принципа всестороннего исследо-
вания. Этот принцип вытекает из положения диалектики о
всеобщей связи и взаимообусловленности предметов и яв-
лений. «Чтобы действительно знать предмет, надо охватить,
изучить все его стороны, все связи... требование всесторонно-
сти предостережет нас от ошибок...»*.
§ 6.1. ОЦЕНКА ПРИГОДНОСТИ АЭРОДРОМА
ДЛЯ БАЗИРОВАНИЯ АВИАЦИОННОЙ ЧАСТИ
(ПОДРАЗДЕЛЕНИЯ)
Определяя пригодность аэродрома для базирования авиа-
ционной части (подразделения), командир должен оценить
взаимное соответствие условий базирования и взлетно-поса-
дочных характеристик самолета по следующему алгоритму.
По размерам ВПП:
— возможен ли взлет самолета с максимальной взлетной
массой при всех нормально работающих двигателях;
* Ленин В. И. Поли. собр. соч., т. 42, с. 290.
32»
— возможен ли взлет самолета с максимальной взлетной
массной при одном отказавшем двигателе;
— возможна ли посадка самолета с максимальной поса-
дочной массой при исправно работающей посадочной меха-
низации;
— возможна ли посадка самолета с максимальной поса-
дочной массой при отказе основных тормозов;
— возможна ли посадка самолета с максимальной поса-
дочной массой при отказе тормозного парашюта.
По взлетной дистанции:
— пригоден ли аэродром по взлетной дистанции при всех
работающих двигателях для самолета с максимальной взлет-
ной массой;
— пригоден ли аэродром по взлетной дистанции при од-
ном отказавшем двигателе на самолете с максимальной взлет-
ной массой.
По посадочной дистанции:
— пригоден ли аэродром по посадочной дистанции для са-
молета с максимальной посадочной массой при отказе поса-
дочной механизации;
— пригоден ли аэродром по посадочной дистанции при
прекращении взлета на разных его этапах и при различной
степени исправности посадочной механизации.
По полосе воздушных подходов (ПВЦ):
— позволяет ли ПВП осуществить взлет самолета с мак-
симальной взлетной массой на всех работающих двигателях;
— позволяет ли ПВП осуществить взлет самолета с мак-
симальной взлетной массой при одном отказавшем двигателе;
— позволяет ли ПВП уйти на второй круг самолету с
максимальной посадочной массой при всех работающих дви-
гателях;
— позволяет ли ПВП уйти на второй круг самолету с
максимальной посадочной массой при одном отказавшем
двигателе.
По состоянию поверхности ВПП:
— в какой степени интенсивность осадков на ВПП (тол-
щина слоя снега, воды, наличие льда) влияет на возможность
взлета и посадки с различными взлетными и посадочными
массами;
— соответствует ли аэродромно-строительным нормам
макро- и микрорельеф;
— достаточна ли прочность искусственного покрытия ВПП.
330
Заметим, что вопросы оценки пригодности аэродрома в
случае отказа двигателя на однодвигательном самолете не
имеют смысла.
Из рис. 6.1 следует, что потребная для нормального взле-
та * длина ВПП. определяется соотношением
ЬвпПп В9Л == ^вир + £р.ф + А ^р.ф = ^вир + (1 + Лр) £р.ф »
~ ^выр 4" ^р.расч» (6*1)
Рис. 6. 1. Траектория взлета самолета:
1 — первый участок полосы воздушных подходов (ПВП); 2 — второй учас-
ток ПВП; 3 —третцй участок ПВП; 4 — полоса воздушных подходов; 5—
траектория набора высоты; 6 —линия ограничения препятствий
где £Выр — запас ВПП на выруливание (буксировку)
и установку самолета на старт перед взле-
том. Для маневренных самолетов этот за-
пас принимается равным 50 м. Если плани-
руется взлет группой, 1 то величину £»Ыр
устанавливает командир с учетом состава
группы и дистанции между самолетами;
£р.ф — фактическая длина разбега самолета в кон-
кретных условиях базирования. Она опре-
деляется по номограммам, помещенным в
инструкции экипажу, или расчетным путем;
Д£р.ф =&рЬр.ф —запас ВПП, учитывающий увеличение дли-
ны разбега вследствие возможных ошибок
летчика в технике пилотирования и отличия
тяговых характеристик двигателей от рас-
четных значений;
* Под нормальным понимается взлет со всеми работающими двига-
телями и при исправной работе взлетной механизации.
331
kp—коэффициент увеличения длины разбега
(в силу указанных причин). Его значение
нормируется величиной 0,15;
£р.расч. — расчетная длина разбега в конкретных
условиях базирования с учетом возможных
отклонений.
Из выражения (6.1) видно, что потребная для взлета дли-
на ВПП регламентируется фактической длиной разбега само-
лета £р.ф , которая зависит от условий базирования и опреде-
ляемых боевой задачей взлетной массы и конфигурации самот
лета. При изменении этих условий изменяется и потребная
длина ВПП.
Потребная для посадки длина ВПП определяется из соот-
ношения (рис. 6.2) .
АвпПп пос — Ан.т.п + Ат<п 4“ ^пр.ф 4“ Апр.ф 4“ АСр — Ан.т.п 4~
Рис. 6.2. Траектория посадки самолета:
1— планирование; 2 — выравнивание; 5 —выдерживание
где Ан.т.п — расстояние от торца ВПП до начала полосы
точного приземления (конец «зебры»). Это рас-
стояние составляет 50 м;
Ат.п — длина полосы точного приземления, зависящая
от посадочной скорости (табл. 6.1). Однако
большинство аэродромов маркировано так, что
Ат.п == 300 м;
Таблица 6.1
Индикаторная посадочная скорость, км/ч <100 <150 <200 <250 <300 >300
£т.п, М 75 100 200 300 400 500
332
Апр.ф — фактическая длина пробега в конкретных усло-
виях базирования (без использования аварий-
ных средств торможения);
#пр — коэффициент увеличения длины пробега; учиты-
вает возможные неточности в технике пилотиро-
вания на посадке, запаздывание летчика с вы-
пуском тормозного парашюта, включением ре-
верса тяги, уборкой посадочной механизации, а
также разброс технических характеристик тор-
мозов. Величина fenp =0,3 определяет запас поло-
сы, гарантирующий окончание пробега в преде-
лах ВПП при посадке с перелетом на повышен-
ной скорости;
Аср — запас ВПП на сруливание после окончания про-
бега. Его величина для маневренных самолетов
составляет 25 м.
Для осуществления как взлета, так и посадки самоле-
тов необходимо, чтобы выполнялось условие Двпп >
>£вппп.взл (1впп>£вппп.пос) И обеспечивался безопасный
пролет самолета на воздушном участке взлета (посадки).
Оценивая взлетную дистанцию, авиационный командир
должен помнить, что даже при самом неблагоприятном соче-
тании условий базирования и боевого применения она не
должна превышать суммарной длины ВПП и концевой по-
лосы безопасности (КПБ), уменьшенной на длину участка
выруливания:
£взл^5 ^ВПП + ^КПБ Ьвыр.
Посадочная дистанция не должна превышать суммарной
длины ВПП и КПБ, уменьшенной на длину участка срулива-
ния (см. рис. 6.2):.
^п.д ^впп + Акпб — LCp :
При отказе посадочной механизации или средств тормо-
жения увеличивается фактическая длина пробега, что ведет
к возрастанию посадочной дистанции. Может случиться так,
что длина ВПП окажется недостаточной для посадки. Поэто-
му в конце ВПП устанавливают аэродромные тормозные
устройства (АТУ).
Проверка пригодности аэродрома по полосе воздушных
подходов производится в том случае, если аэродром распо-
ложен в гористой местности или на взлетно-посадочном кур-
се имеются препятствия.
Здесь важно, чтобы препятствия не выходили за норми-
руемую линию их ограничения (см. рис. 6.1, линия 6). Обыч-
но это условие учитывается при строительстве аэродромов.
333
В инструкциях летчику и технических описаниях манев-
ренных самолетов почти не раскрывается физической сущно-
сти влияния состояния поверхности ВПП на длину разбега
самолета, а количественная оценка этого влияния недоста-
точно полная.
От состояния поверхности ВПП зависит прежде всего
коэффициент трения (табл. 3.1), который влияет на ускоре-
ние разбега, а следовательно, и его длину.
При оценке пригодности аэродрома для базирования авиа-
ционной части авиационному командиру следует обратить,
внимание на рельеф и прочность ВПП. Наличие больших
уклонов может привести к отрыву или приземлению на по-
вышенной скорости при взлете и посадке на уклон, а также
к набору высоты без выдерживания после отрыва или к при-
землению с высокого выдерживания при посадке под уклон
(рис. 6.3).
Рис. 6.3. Взлет и посадка на ВПП с уклоном:
а — взлет на уклон — увеличивается продолжительность выдерживания;
б — посадка на уклон — сопровождается большой вертикальной скоростью
приземления; в — взлет под уклон — сопровождается преждевременным от-
ходом от земли; г — посадка под уклон — приземление с высокого вырав-
нивания
В первом случае для выдерживания постоянной высоты
над поверхностью самолет должен -набирать высоту, а во
втором — терять ее. Летчик же не всегда успевает отреаги-
ровать на изменение общего уклона ВПП.
Местными называются уклоны на базе 5—50 м. В основ-
ном они влияют на перегрузку при первом ударе во время
приземления. Так, если самолет приземляется с вертикальной
334
скоростью Vy = 0,5 м/с, что соответствует «мягкой» посадке, то
при приземлении на участок ВПП с местным уклоном
©м =0,03 (1°40'), которого летчик не замечает, увеличение
вертикальной скорости приземления («на уклон») при поса-
дочной скорости 280 км/ч составит:
Д Vy = Vnoc ©м - 0,03 = 2,35 м/с.
3,6
Посадка же с вертикальной скоростью VY =0,5 + 2,35 =
= 2,85 м/с является очень грубой.
Прочность искусственных покрытий оценивается норма-
тивной одноколесной нагрузкой, под которой понимается до-
пустимая нагрузка на покрытие от одной основной одноко-
лесной опоры самолета с давлением в пневматиках не выше
10 кгс/см2 (~100 Я/см2) для аэродромов I и II класса и
8 кгс/см2 (^80 Я/см2) для аэродромов III класса (табл.6.2).
Таблица 6,2
Показатель прочности ВПП Класс аэродрома
I П ill Посадочные площадки
Нормативная одноколесная нагрузка, тс 17 12 5 —
Допустимая нагрузка зависит от толщины бетонных плит
или прочности подстилающего грунта (для металлических
плит). Превышение нормативной одноколесной нагрузки мо-
жет привести к деформации, разрушению или выворачиванию
плит, особенно вблизи края (рис. 6.4).
Рис. 6.4. Возможные последствия превышения допустимой од-
ноколесной нагрузки:
а — выворачивание плит; б — деформация металлического по-
крытия; .в — разрушение плит
335
§ 6.2. ОЦЕНКА
ПРИГОДНОСТИ ГРУНТОВОГО АЭРОДРОМА
В дополнение к тем показателям, по которым производит-
ся оценка пригодности аэродрома с БВПП для базирования
авиационной части, решение о пригодности грунтового аэро-
дрома принимается еще по результатам оценки возможности
страгивания самолета с места под действием тяги собствен-
ных двигателей и по глубине колеи, оставляемой самолетом
при разбеге.
Прочность грунта, обеспечивающая страгивание самолета
с места, определяется по формуле
(Тстр = 1,4 grK , (6.2)
Н'ВЗЛ
Рк
где £г.к=--- —удельная нагруженность колес главных одор
В D
самолета, кгс/см2 (///см2);
Рк—нагрузка на одно колесо главных опор,
кгс (//);
D и В — наружные диаметр и ширина главных колес,
см;
Н'взл — тяговооруженность самолета на взлете;
т — коэффициент, учитывающий деформацию
шин при качении (табл. 6.3).
Максимально допустимая глубина колеи Лдоп = 0,065 D
образуется после первого прохода самолета по грунту проч-
ностью
О/г 4 §г.к
(6.3)
ГДе &танд коэффициент тандемности,, учитывающий по-
вторный проход по одной колее колес четырехколесной опоры
самолета (табл. 6.3). Для одиночных и спаренных колес на
ОДНОЙ ОСИ ГЛавНЫХ ОПОр &танд = 1.
Таблица 6.3
Прочность грунта кгс/см2 3 5 7 9 П
т 1,0 1,1 1,2 1,4 1,7
&ганд 1,65 1,65 1,54 1,54 1,54
336
Сопоставление прочности грунта, полученной расчетом по
формулам (6.2) и (6.3)', с фактической, определенной испы-
таниями на лётном поле специалистами авиацйонного тыла,
позволяет решить вопрос о пригодности грунтового аэродро-
ма для взлета и посадки самолетов. При этом должны вы-
полняться два условия:
(Г стр ^гр И (J/i Opp .
Проверку пригодности ГВПП для базирования самолетов
данного типа следует проводить до перебазирования авиа-
ционной части на аэродром (при рекогносцировке). Однако
авиационному командиру следует помнить, что наиболее до-
стоверный способ оценки проходимости по грунту заклю-
чается в практической проверке способности самолета стра-
гиваться с места, используя тягу . собственных двигателей,
рулить и совершать пробежки по ВПП. Особое внимание не-
обходимо уделить участкам ВПП с меньшей прочностью
грунта, так как на них возникает опасность застрять на ру-
лении или разбеге. При этом возникают значительные удар-
ные и вибрационные, нагрузки, которые могут привести к тя-
желым последствиям.
В случае недостаточной прочности грунта из условия
страгивания или максимально . допустимой, глубины колеи
авиационный командир может принять решение на боевые
действия, уменьшив взлетную массу самолета. Это приведет
к снижению удельной нагружен’ности колес главных опор са-
молета qY.к, уменьшению (Гетр и (Г/г. Кроме того, пстр будет
уменьшаться и за счет увеличения тяговооруженности само-
лета на взлете, а использование стартовых ускорителей по-
зволяет не только сократить потребную длину ВПП из усло-
вий взлета, но и еще в большей степени уменьшить Оя-
При интенсивной эксплуатации грунтовые ВПП подвер-
гаются разрушению, особенно при применении стартовых по-
роховых ракетных двигателей (СПРД). Для сохранения ра-
ботоспособности грунтовых аэродромов и поддержания ин-
тенсивности боевой работы необходимо, чтобы при рулении,
разбеге и пробеге колеса не оставляли колеи глубиной более
максимально допустимой.
Количество взлетов и посадок N, которое может быть про-
изведено с грунтовой ВПП из условия достижения допусти-
мой глубины колеи, определяется по формуле'
(6.4)
Р(х)
где Nnp — количество проходов, при котором образуется
колея предельно допустимой глубины.
22—5007сп
337
Величину Nap можно найти по формуле
Йдоп- hl
Nnp = Ю ₽ , (6.5>
в которой Л1 и йдоп — соответственно глубины колеи от пер-
вого прохода самолета по грунту и
предельно допустимая;
р — коэффициент, учитывающий увеличе-
ние глубины колеи при их совпадении.
Он зависит от прочности грунта и типа
самолета. Значения р для маневрен-
ных самолетов приведены в табл. 6.4;
йд—коэффициент, учитывающий качество,
дернового покрова. Меняется от 1
(удовлетворительное качество) до 2
(отличное);
Р(х) —вероятность совпадения проходов.
Определяется методами теории веро-
ятностей в предположении нормаль-
ного закона распределения отклонений
самолета при разбеге и пробеге от оси
ВПП.
Таблица 6.4
Прочность грунта arpf кгс/см2 6 1 8 1 10' | 12 1 14
Н/см 58,8 78.5 98,1 1 1 117.7 1 | 137,3
23,4 10,8 7,2 1,6 1,6
Значения Р(х) для ВПП различной ширины приведены в
табл. 6.5.
Таблица 6.5
Ширина ВПП, м 20 25 30 35 40 45 50
Р (X) 0,0215 0,017 0,0138 0,012 0,0108 0,0096 0,0086
Такие расчеты целесообразно провести заранее для аэро-
дромов с различной прочностью ВПП применительно к кон-
кретному типу самолета. Это ускорит расчеты, необходимые
командиру для принятия решения на использование аэро-
дромного маневра с учетом интенсивности боевых действий.
338
§ 6.3. ПРОБЛЕМЫ, ВОЗНИКАЮЩИЕ
ПРИ НЕСООТВЕТСТВИИ ВЗЛЕТНО-ПОСАДОЧНЫХ
ХАРАКТЕРИСТИК САМОЛЕТОВ И УСЛОВИЙ БАЗИРОВАНИЯ
При оценке пригодности аэродрома для выполнения бое-
вых задач могут возникнуть проблемные ситуации, когда по-
требные условия базирования (£впп, ^пвп, £в,у, /0гр и др.)
превышают располагаемые.
Ситуация 1. В соответствии с боевой задачей выбран ва-
риант вооружения самолета и определена потребная заправка
топливом (т. е. взлетная масса самолета известна). Распо-
лагаемая длина ВПП больше потребной для взлета в конМ
кретных метеоусловиях, но путевая скорость отрыва превы-
шает максимально допустимую по прочности колес. Возникает
проблема: как уменьшить путевую скорость отрыва, чтобы
обеспечить безопасность взлета самолета?
Ситуация 2. В соответствии с боевой задачей выбран ва-
риант вооружения.самолета и определена потребная заправ-
ка топливом; скорость отрыва не превышает максимально
допустимую, но располагаемая длина ВПП меньше потребной.
Возникает проблема: каким способом уменьшить потребную
для взлета длину ВПП?
Существуют четыре пути решенйя этих проблем:
— изменение направления старта (если по тактическим
соображениям вначале рассматривался вздет с попутным
ветром);
— . уменьшение взлетной массы самолета;
— увеличение угла атаки на отрыве;
— применение стартовых ускорителей.
Оценку возможности реализации первых двух путей мож-
но провести с помощью номограмм из Инструкции летчику
(см. рис. 3.7). Например, при взлете самолета массой 16 т с
нормальным углом атаки на отрыве, при давлении 720 мм
рт. ст., температуре + 20°С и попутном ветре t/ = 2 м/с ско-
рость отрыва составляет 320 км/ч, что на 10 км/ч превышает
ограничение по основным колесам на взлете.
При перемене старта на обратный (ветер встречный
U = 2 м/с) путевая скорость отрыва составляет 305 км/ч, что
на 5 км/ч меньше установленного ограничения.
Увеличение же угла атаки на отрыве на 2° по Сравнению с
нормальным при взлете с попутным ветром позволяет умень-
шить путевую скорость отрыва до 314 км/ч, что не решает
возникшую проблему и. снижает безопасность взлета, так как
углы атаки на разбеге ограничиваются не только по конструк-
тивным соображениям, но и тем, что чрезмерное их увеличе-
ние может привести к «подрыву» самолета с последующим
сваливанием.
22*
339
Уменьшить взлетную массу самолета можно как за счет
применения боЛее легкого варианта вооружения, так и сни-
жения запаса топлива. В этом случае командир должен оце-
нить, что для него более приемлемо в сложившейся обстанов-
ке: увеличение наряда сил для выполнения боевой задачи или
уменьшение глубины боевых действий.
В процессе проверки возможности реализации этого пути
возникает вопрос: на сколько нужно уменьшить взлетную
массу самолета, чтобы не превысить ограничение путевой ско-
рости отрыва по основным колесам? Решить его можно с по-
мощью той же номограммы «обратным ходом».
^.. = 320
С7 2* М/С •*---*-*******^
« 290 = 14,1 т.
В данном случае взлетную массу самолета нужно умень-
шить на 1,9 т. Из этого видно, что из трех путей решения ука-
занной проблемы самым рациональным является изменение
старта на обратный.
Может оказаться, что информации, содержащейся в номо-
граммах, недостаточно для решения этого вопроса. Тогда
возникает новая проблема: как определить допустимую взлет-
ную массу в условиях недостатка информации, содержащейся
в номограммах. Можно указать два пути решения проблемы:
— расчетный — с использованием формул пересчета ВПХ
на изменившиеся условия боевого применения;
— дополнение номограмм недостающей информацией.
Пусть в номограмме (см. рис. 3.7) недостаточно информа-
ции по давлению р2- Тогда по номограмме определим VOTpi
для mi, pi и, задавшись скоростью V0Tp8 из формулы (3.8),
пренебрегая составляющей тяги, найдем
т. = тх (.
\ Уотр. ) Pi
Для того чтобы каждый раз не делать подобных расче-
тов, можно, используя расчетный путь, дополнить номограм-
мы. недостающей информацией. Например, на номограмме,
изображенной на рис. 3.7, приведена зависимость скорости
отрыва и длины разбега от давления воздуха в диапазоне
800—680 мм рт. ст., а необходимо определить взлетные ха-
рактеристики при давлении 635 мм рт. ст., что соответствует
высоте расположения аэродрома 1500 м над уровнем моря.
340
С этой целью по номограмме (см. рис. 3.7,а). определим
скорость отрыва для произвольно выбранных взлетной массы
и давления (например, mi = 15 т, pi = 680 мм рт. ст.) при ус-
ловии, что летчик выдерживает на взлете-нормальный угол
атаки:
Уотр (15,680) = 316 км/ч.
Используя формулу (3.11), вычислим скорость отрыва для
той же взлетной массы, но при давлении 635 мм рт. ст.:
Уотр (15;635) = 316 р/ 63g- = 327 км/ч.
Этот расчет позволяет во втором квадранте (см. рис. 3.7,а)
ПОЛуЧИТЬ ТОЧКУ А С КООрДИНатаМИ (VOTp(15,760h V0Tp (15, 635) ).
Аналогично найдем скорость отрыва для тех же давлений,
но при другой взлетной массе (например, т2=13 т):
V0Tp (13, 685)
=29з1/ 4^
у ОсО
= 303 км/ч
и нанесем на рис. 3.7, а точку Б с координатами (V0Tp (iveo);
VOTp(13;635)) •
По этим двум расчетным точкам дополним номограмму
(см. рис. 3.7,а) линией АБ, соответствующей давлению
635 мм рт. ст. Таким способом можно дополнять информа-
цией номограммы для определения взлетно-посадочных ха-
рактеристик по любому параметру.
Номограммы для определения длины разбега (см.
рис. 3.7,6) позволяют определить и показатель степени 8, ха-
рактеризующий влияние температуры на длину разбега. С этой
целью по рис. 3.7,6 найдем LPl для взлетной массы ть дав-
ления pi при температуре воздуха t° и Ар2 при температу-
ре /2° и прочих тех же условиях. Поскольку оценивается зави-
симость длины разбега только от температуры, то формула
(3.14) запишется в виде:
^Р2 _ ( ^2 У
£Р1 I Л г
Прологарифмировав это выражение
341
получим
18-^
——Bl
i А
lg--~
Л
(6.6)
Заменим, что показатель 8 зависит от тяговооруженности
самолета на взлете, так как от нее зависят ускорение и длина
разбега, а также от того, на сколько температура воздуха от-
личается от стандартной, что связано с изменением тяги дви-
гателя.
В качестве примера в табл. 6.6 приведены результаты
расчета показателя степени 8 с использованием номограммы
(см. рис. 3.7,6) при Л = 15°С (Т1 = 288 К).
Таблица 6.6
tt° с 20 .25 30 35 40
^взл, Т 13 2,67 2,66 2,57 2,55 2,5
15 2,64 2,49 2,36 2,30 2,24
Весьма эффективным средством уменьшения скорости от-
рыва и длины разбега, а следовательно, и потребной длины
ВПП являются стартовые ускорители.
§ 6.4. ВЛИЯНИЕ ВЗЛЕТНО-ПОСАДОЧНЫХ
ХАРАКТЕРИСТИК И УСЛОВИЙ БАЗИРОВАНИЯ
НА БОЕВЫЕ ВОЗМОЖНОСТИ САМОЛЕТА
Как было показано ранее, условия базирования влияют на
взлетно-посадочные характеристики, которые зависят от
взлетной массы самолета. Так как взлетная масса изменяется
в зависимости от варианта вооружения и заправки топливом,
то, следовательно, условия базирования и взлетно-посадочные
характеристики влияют на боевые возможности самолетов,
подразделений и частей. Это влияние можно показать на
графике зависимости тактического радиуса /?т при простей-
шем профиле полета от запаса топлива на самолете сов-
мещенном с графиком зависимости потребной для взлета
длины ВПП от взлетной массы самолета (рис. 6.5).
342
343
^•влл ^гвпп ^бьпп Аввпцг 1>бвпп ^дф^т2 ^тммс ^тмлке^гмдке
ПОТР ПОТР МАКС МАКС Г ВПП БЫМ БВПП
| МАКС МАКС с СПРД ССПРД « МРД
Рис. 6.5. Влияние располагаемой длины ВПП на тактический радиус действия при. заданных атмосферных
условиях, варианте вооружения, режиме и профиле полета
Допустим, что авиационная часть (подразделение) бази-
руется на аэродроме с БВПП, длина которой Абвпп потр. макс
в данных метеоусловиях позволяет осуществлять взлет само-
лета с максимальной взлетной массой тВЗЛмакс. При выбран-
ных (заданных) варианте вооружения, профиле и режиме
полета самолет с полной заправкой топливом ттмак® имеет
тактический радиус RT макс бвпп . Но может оказаться, что
располагаемая длина ВПП Лбвпщ меньше потребной для
осуществления взлета самолета массой ^взлмакс . Тогда для
обеспечения возможности взлета с этой ВПП необходимо
уменьшить взлетную массу самолета до например, за счет
неполной заправки топливом тт t, что приведет к снижению
тактического радиуса до R?t .
Итак, с уменьшением располагаемой длины ВПП для со-
хранения выбранного варианта вооружения приходится умень-
шать заправку самолета топливом, что ведет к соответствую-
щему снижению тактического радиуса (линия ВДБА на
рис'6.5).
С уменьшением заправки самолета топливом, вызванным
недостаточной длиной ВПП, может наступить такой момент»
что при удалении аэродрома на расстояние £л.ф от линии
фронта самолет вообще не сможет проникнуть на территорию
противника (точка А на рис. 6.5).
В этом случае тактический радиус действия можно уве-
личить за счет применения стартовых ускорителей (СПРД).
Так, при располагаемой длине БВПП Лбвпп2 (без примене-
ния СПРД) величина тактического радиуса будет равна Rt2.
Если же их применить, то даже при располагаемой длине
БВПП £бвпп макс спрд < Ьбвпп2 можно увеличить заправку
самолета топливом до тт спрд» и тактический радиус достигнет
величины RT макс бвпп спрд. Увеличение тактического радиуса
за счет применения СПРД составит величину
Д RT = Rr макс БВПП СПРД Rt2 •
Таким образом, применение стартовых ускорителей суще-
ственно расширяет боевые возможности самолета при бази-
ровании на аэродромах с ограниченной длиной ВПП. Так,
при базировании на аэродроме с БВПП длиной Абвпп макс спрд
без применения стартовых ускорителей вообще нельзя было
бы взлететь, а их применение позволяет достичь такого ра-
диуса действия, который для маневренных самолетов отли-
чается от максимального без СПРД лишь на 15—20%.
У некоторых типов маневренных самолетов ограничена
взлетная масса при эксплуатации их с грунтовых ВПП.
Уменьшение взлетной массы самолета до /пмакс гвпп за
344
счет сокращения количества заправляемого топлива позво-
ляет осуществить взлет с ГВПП. Тактический радиус при этом
СОСТавИТ веЛИЧИНу /?т макс гвпп •
Если командир примет решение применить аэродромный
маневр, перебазировав подразделение (часть) на полевой
аэродром, расположенный на удалении £п,а от основного
аэродрома базирования, то при одном и том же тактическом
радиусе действия /?т макс гвпп глубина боевых действий воз-
растет на величину Д Лг.б.д-
На рис. 6.5 можно выделить несколько характерных обла-
стей боевых возможностей самолета:
АВС — область глубины боевых действий при удалении
аэродрома базирования на расстояние Ьл.ф от линии фронта;
КБВС— область глубины боевых действий только с
БВПП;
АДЕ — область глубины боевых действий с использовани-
ем СПРД;
ЕДВС — область глубины боевых действий с БВПП без
использования СПРД;
АБК — область глубины боевого воздействия при исполь-
зовании грунтовых аэродромов; удаленных на расстояние
от линии фронта;
АХБ\К — область глубины боевых действий с полевого
грунтового аэродрома, расположенного на удалении £п.а от
основного аэродрома;
АА\БХБ — область увеличения глубины боевых действий
за счет использования полевого аэродрома.
На указанные области оказывают влияние атмосферные
условия в районе аэродрома. Так, при ограниченной длине
ВПП и низкой температуре воздуха можно повысить /?т за
счет увеличения заправки топливом, если при высокой тем-
пературе нельзя было взлететь с полной заправкой. Можно
учесть также влияние прочности грунта на тактический ра-
диус (сдвинется граница БХК), уклонов ВПП и наличия вет-
ра (сместится линия АВ) и других условий базирования.
Аналогичным образом меняются практическая дальность
полета и время дежурства в воздухе.
Кроме того, уменьшение заправки топливом позволяет
ускорить подготовку самолетов к повторному вылету, но это
потребует увеличения частоты боевых вылетов для осуществ-
ления непрерывности воздействия по противнику.
В ходе боевых действий может сложиться ситуация, в ко-
торой объект удара будет находиться на таком удалении, что
уменьшение заправки самолета топливом не позволит донести
до него боевой груз, а располагаемая длина ВПП не даст
возможности осуществить взлет с максимальной взлетной
345
массой. В этом случае взлетную массу самолета придется
уменьшить за счет снижения массы боевой нагрузки. Это бу-
дет способствовать не только уменьшению потребной длины
ВПП, но и увеличению тактического радиуса действия само-
лета за счет снижения его массы и лобового сопротивления.
Но уменьшение боевой нагрузки отрицательно сказывается
на наряде сил, потребном для выполнения поставленной бое-
вой задачи.
Взлетные характеристики самолета и условия базирования
влияют и на такой показатель боевых возможностей, как ми-
нимальное время взлета авиационной части (подразде-
ления).
Необходимость такого взлета может возникнуть в случае
.нанесения удара по вызову или угрозы нанесения противни-
ком удара по аэродрому.базирования.
В общем случае при взлете самолетов по одному время
взлета авиационной части (подразделения) можно вычислить
по формуле
Т = ^взЬ 4“ ^инт (№ 1 )>
где /взл—время взлета одиночного самолета — время от на-
чала разбега до набора безопасной высоты;
^инт— интервал взлета — время от начала разбега пре-
дыдущего самолета до начала разбега следую-
щего;
N — количество взлетающих самолетов.
Поскольку взлет состоит из этапов разбега и набора
безопасной высоты, то
^взл = + ^наб •
Считая разбег равноускоренным движением и используя
формулы (3.4) и (3.6), время разбега можно рассчитать по
формуле
(6.7)
Построенный по этой формуле график для определения
времени разбега в зависимости от длины разбега и скорости
отрыва (рис. 6.6) справедлив для всех типов самолетов, взле-
тающих классическим способом (с разбегом).
Поскольку на длину разбега и скорость отрыва влияют
условия базирования и боевого применения, то от этих усло-
вий зависит и время разбега. Чтобы рассчитать его по фор-
346
Р V0Tp
муле (6.7) или определить по рис. 6.6, необходимо найти Уотр
и £р по номограммам из инструкции экипажу.
Расчеты и летная практика показывают, что время на-
бора безопасной высоты у современных маневренных само-
летов находится в пределах 1—3 с. Это позволяет при произ-
водстве приближенных расчетов вычислять время взлета са-
молета по формуле
^взл = ip 4“ (I 3), с.
Рис. 6.6. Зависимость времени разбега самолета от длины раз-
бега и скорости отрыва
Интервал времени между взлетающими самолетами лими-
тируется временем существования спутного следа опасной
интенсивности. Как известно, при попадании самолета в
спутный след происходит значительное изменение местных
углов атаки, что приводит к возникновению неуравновешен-
ных сил и моментов. При парировании воздействия спутного
следа летчиком потеря высоты может составить 150—200 м.
Поэтому обеспечение безопасности полетов при взлете (по-
садке) требует таких интервалов времени между взлетаю-
щими (садящимися) самолетами, которые исключили бы
возможность их попадания в спутный след опасной интенсив-
ности.
Экспериментальные и теоретические исследования пока-
зали, что через время после взлета самолета спутный след
разрывается на изолированные кольца, которые затем раз-
рушаются. Воздействие такого разорванного следа на само-
лет напоминает полет в турбулентной атмосфере и не создает
угрозы безопасности полетов. Поэтому за время существова-
347
ния спутного следа можно принять время t*. Это время в
стандартных атмосферных условиях вне зоны влияния земли
для самолетов различного назначения приведено в табл. 6.7.
Таблица 6.7
Время Самолет
Истреби- тель Истребитель- бомбардиров- щик Бомбарди- ровщик Дальний бомбарди- ровщик Военно- транспортный
/*, с 30 40 30 65 140
/взл, С 19 25 26 38 32
Из таблицы видно, что для всех типов самолетов время
существования спутного следа опасной интенсивности больше
времени взлета самолета. Поэтому за безопасный интервал
взлета следует принимать время /*. Действительно, как видно
из рис. 6.7,
^инт = ^р + ^наб + (^* — — Лтб ) —
Рис. 6.7. Схема расчета интервала времени между взлетающими самолетами
Сократить время взлета авиационной части (подразделе-
ния) можно за счет взлета самолетов парами, но если интер-
вал между взлетающими в паре самолетами меньше двух-трех
размахов крыла, то время существования следа может уве-
личиться. Поэтому можно использовать следующий поряДок
взлета: пара—одиночный по оси ВПП —пара — одиночный
и т. д.
Ветер независимо от его направления сокращает время
существования следа. Особенно сильно его сокращает боко-
вой ветер (рис. 6.8). При боковом ветре более 5 м/с снос
следа позволяет уменьшить интервалы времени между взле-
тающими самолетами до /ВЗл, т. е. не учитывать времени
существования спутного следа.
348
Для сокращения времени взлета авиационной части (под-
разделения) в условиях рассредоточенного базирования
командир может принять решение на одновременный встреч-
ный (если позволяет ширина ВПП) или (если такой воз-
можности нет) на последовательный встречный взлет.
Кроме того, следует учитывать возможность взлета с запасной
ВПП, рулежных дорожек и с применением стартовых уско-
рителей.
Рис. 6.8. Снос спутного следа боковым ветром
§ 6.5. ОЦЕНКА ВОЗМОЖНОСТИ ВЫПОЛНЕНИЯ
БОЕВЫХ ЗАДАЧ С ПОВРЕЖДЕННЫХ АЭРОДРОМОВ
Опыт Великой Отечественной войны и современных ло-
кальных войн показал, что в ходе ведения боевых действий
аэродромы постоянно подвергаются ударам противника. Уда-
рам подвергаются, как правило, ВПП, рулежные дорожки,
места стоянки самолетов, склады и технические постройки.
Однако не каждый удар противника по аэродрому сопровож-
дается выводом его из строя на длительное время.
Опыт локальных войн показал, что примерно 40% сбро-
шенных бомб производят разрушения, требующие ремонтно-
восстановительных работ. Обстановка может сложиться так,
что не будет времени или материалов для полного восстанов-
ления аэродрома. Тогда перед командиром встает проблема:
как обеспечить выполнение боевой задачи с поврежденного
аэродрома?
Можно указать несколько путей решения этой проблемы:
— использовать для взлета неповрежденные участки
ВПП, КПБ, рулежные дорожки, прилегающие участки авто-
трасс;
— применять стартовые ускорители (если на самолете
предусмотрено их применение);
— уменьшить взлетную массу самолета до величины,
обеспечивающей взлет с неповрежденного участка ВПП;
— во второй фазе разбега (на основных колесах) увели-
349
чить угол атаки до максимально допустимого. Но не следует
забывать, что в этом случае возникает опасность подрыва са-
молета, т. е. снижается безопасность взлета;
— при наличии времени и строительных материалов про-
извести ремонт участка бетонного покрытия, длина которого
позволит осуществлять взлет самолетов с заданным вариан-
том вооружения (боевой нагрузки);
— при дефиците времени и отсутствии строительных ма-
териалов отремонтировать участок ВПП путем засыпки во-
ронок грунтом с последующим его упрочением до величины,
обеспечивающей взлет самолета с заданным вариантом
вооружения.
Во всех перечисленных случаях посадку производить на
аэродромы взлета, если это возможно, или на запасные аэро-
дромы.
Рассмотрим подробнее последний путь решения проблемы.
Возможность такого взлета обеспечивается тем, что в про-
цессе разбега самолета по мере роста скорости возрастает
подъемная сила Ya, а сила реакции земли W уменьшается до
нуля в момент отрыва (см. рис. 3.2). Следовательно, в про-
взлетной массы самолета и длины неповрежденного участка
ВПП. Атмосферные условия стандартные
350
цессе разбега самолета по мере роста скорости уменьшается
одноколесная нагрузка на ВПП и потребная прочность по-
крытия (грунта) ВПП.
Задавая различные значения длины неповрежденного
участка БВПП и используя номограммы из Инструкции лет-
чику по определению взлетных характеристик в зависимости
от взлетной массы самолета, можно рассчитать и построить
графики зависимости потребной длины отремонтированного
участка ВПП («грунта») от взлетной массы самолета для
различных прочностей «грунта» (рис. 6.9).
Набор таких графиков позволяет определить потребную
длину отремонтированного участка ВПП для взлета в стан-
дартных условиях. Однако на практике они всегда отличают-
ся от стандартных, что необходимо учитывать при определе-
нии потребной длины отремонтированного участка ВПП.
Зная длину неповрежденного участка ВПП Lост и взлет-
ную массу самолета, по рис. 6.9 можно определить потреб-
ную длину отремонтированного участка ВПП определенной
прочности оГр в стандартных атмосферных условиях £р гр. ст.
Из формулы (3.23) следует
т _ т / 760 \2
^Р Гр, Р - Lp гр. СТ I I 9
X Р /
что позволяет рассчитать потребную длину отремонтиро-
ванного участка ВПП с учетом изменения атмосферного дав-
ления Lprp.p. По результатам таких расчетов заполняется
квадрант в номограмме рис. 6.10.
Из формулы {3.23) определим потребную длину отремон-
тированного участка ВПП Lprp, t с учетом температуры
воздуха:
/ Т \е
£р гр, t = Lp гр. ст I ^gg ) •
Показатель степени влияния температуры на длину раз-
бега рассчитывается по данным номограммы из Инструкции
летчику (см. рис. 3.7) по формуле (6.6).
По результатам таких расчетов номограмма (рис. 6.10)
дополняется информацией о влиянии температуры воздуха на
длину отремонтированного участка ВПП.
Задаваясь различными значениями L0Ct и /пвзл, по
рис. 6.9 определяется £РгР.ст , а по формуле
(V0Tp аи 2±t/)2-(Vrp±f/)8
Т __ J ______н~2_________________
^р гр и — гр. ст т/2 I/ 2 *
V ОТР аН—2 ~~ У Гр
361
где аотРн_2 —угол атаки при отрыве, на 2° меньший нор-
мального (что учитывает возможные ошибки летчика), и
Утр —скорость в момент выхода на «грунт», рассчитывается
потребная длина отремонтированного участка ВПП с учетом
скорости и направления ветра Lpj-pu. По результатам расче-
тов номограмма рис. 6.10 дополняется соответствующей ин-
формацией.
Рис. 6 10. Номограмма для определения потребной длины отремонтирован-
ного участка ВПП с прочностью грунта 6 кгс/см2 (60 ///см2)
Для того чтобы воспользоваться этой номограммой, необ-
ходимо знать потребную прочность грунта, так как номо-
граммы строятся для постоянных значений огр.
Полагая, что для страгивания самолета с места имеется
хотя бы небольшой йеповрежденный участок БВПП, рас-
352
смотрение условия для определения потребной прочности
грунта для страгивания самолета можно опустить и оцени-
вать только условие несоздания колеи глубиной больше
максимально допустимой.
Из выражений (6.4), (6.5) и глубины колеи после перво-
то прохода hr = --- можно определить потребную
т сгГр2
прочность грунта
Огр == COnst §г.к»
В этой формуле постоянный множитель зависит от конст-
руктивных особенностей шасси самолета и количества взле-
тающих самолетов, а удельная нагруженность главных колес
^г.к — от воздушной скорости в момент выхода самолета на
«грунт» и от того, где происходит подъем передней стойки —
на неповрежденном или отремонтированном участке ВПП.
Поэтому зависимость потребной прочности «грунта» от длины
неповрежденного участка БВПП ( Lост ) и взлетной массы
самолета изменяется скачком (рис. 6.11).
Поскольку воздушная скорость самолета в момент его вы-
хода на «грунт» зависит от метеоусловий, то потребная проч-
ность грунта отремонтированного участка ВПП в фактиче-
ских условиях базирования агр>ф такжё зависит от них. Эта
зависимость учитывается в номограмме (рис. 6.11) соответ-
ствующими поправками на давление, температуру, скорость
и направление ветра. Такие номограммы позволяют быстро
определить потребную прочность грунта в фактических усло-
виях боевого применения, но недостаток состоит в том, что
их нужно рассчитывать для конкретной ширины ВПП и опре-
деленного количества вылетов.
Методику определения потребной длины отремонтирован-
ного участка ВПП и постановку задачи на его ремонт рас-
смотрим на следующем*примере.
По аэродрому базирования истребительного авиаполка, на
вооружении которого находится 30 самолетов, нанесен удар,
в результате которого остался неповрежденным участок
БВПП длиной 450 м. Запасные железобетонные плиты на
аэродроме отсутствуют. Метеоусловия на аэродроме: р =
= 720 мм рт. ст., 10°С, ветер попутный 2 м/с.
Для постановки задачи командиру отдельного батальона
аэродромно-технического обеспечения на ремонт аэродрома
необходимо определить потребную прочность грунта и длину
отремонтированного участка ВПП для взлета самолетов с за-
данным вариантом вооружения.
Для решения этой задачи по Инструкции летчику опреде-
23—5007с п
353
Мем взлетную массу самолета (например, гивзл =9000 кг), а
по номограмме (рис. 6.11) — минимальную потребную проч-
ность грунта:
Огр.ф = 6 кгс/см2 (или ^60 17/см2).
При этом видно, что самЬлет выходит на «грунт» на трех
точках.
Рис. 6.11. Номограмма для определения потребной прочности грунта отре-
монтированного участка ВПП
Из набора номограмм, подобных той, что представлена на
рис. 6.10, берем номограмму для згр =6 кгс/см2 (60 ///.см2) и
по ней определяем потребную длину отремонтированного уча-
стка ВПП £Гр.ф =920 м.
Таким образом, в течение 2—3 мин авиационный командир
может поставить задачу командиру отдельного батальона
354
аэродромно-технического обеспечения: «Отремонтировать
920 м ВПП путем засыпки воронок грунтом и его упрочнения
до 6 кгс/см2 (60 Н/см2)».
В случае недостатка времени на ремонт ВПП указанной
длины авиационный командир с помощью этих номограмм
может определить минимальную потребную длину отремон-
тированного участка ВПП и его прочность из условий взлета
самолета минимальной массы для быстрого перебазирования
на запасный аэродром. Эти же номограммы позволяют быстро
определить потребную длину и прочность грунта при необхо-
димости удлинения ВПП за концевую полосу безопасности
(если сильно разрушена БВПП), выборе полевых аэродромов
и определении минимальных сроков подготовки грунтовых,
аэродромов.
23*
355
Глава 7
ОЦЕНКА ВОЗМОЖНОСТЕЙ САМОЛЕТОВ
ПО ГЛУБИНЕ И ВРЕМЕНИ ВЕДЕНИЯ
БОЕВЫХ ДЕЙСТВИЙ
§ 7.1. УЧЕТ ВОЗМОЖНОСТЕЙ САМОЛЕТОВ
ПО ГЛУБИНЕ И ПРОДОЛЖИТЕЛЬНОСТИ ВЫПОЛНЕНИЯ
БОЕВЫХ ЗАДАЧ ПРИ ПРИНЯТИИ РЕШЕНИЯ
Боевые возможности по глубине (продолжительности)'
полета самолета конкретного типа определяются профилем и
режимом полета, вариантом боевой нагрузки и условиями
аэродромного базирования. В содержание условий аэродром-
ного базирования входят: удаление аэродромов взлета и по-
садки от линии фронта, характеристики их ВПП и метеоусло-
вия в районе аэродромов. Оценка условий аэродромного бази-
рования определяет, в первую очередь, возможность выполне-
ния взлетов и посадок.
Расстояние между аэродромом взлета и объектами воз-
действия определяет потребный радиус действий, а потребные
степень нанесения ущерба и степень противодействия про-
тивника обусловливают выбор применяемого вооружения,
состав своих сил,, боевую нагрузку самолетов и количество
атак (время воздействия на цели).
При оценке состояния противника определяются следую-
щие основные факторы, влияющие на общую протяженность
и продолжительность полета: состав сил ПВО противника по
маршруту полета и в районе цели, их расположение и воз-
можности по противодействию; ожидаемые метеоусловия на
прямом и обратном маршрутах; рельеф местности и характер-
ные ориентиры.
Основные результаты оценки состояния противника позво-
ляют командиру выбрать рациональный маршрут, профиль и
режим полета к цели и обратно, определить боевой порядок,
место, содержание и характер боевых маневров при преодоле-
нии ПВО и атаках целей.
Совокупная оценка влияния перечисленных элементов бое-
вых условий и возможности выполнения боевой задачи по
дальности могут быть проведены с использованием Инструк-
ции летчику по эксплуатации (ИЛ), Инструкции по расчету
дальности и продолжительности полета (ИРДП) и специаль-
ных графических форм представления информации. Спе-
356
циальные формы представления информации весьма удобны
для использования командиром при необходимости быстрой
оценки возможностей по дальности при изменении профиля по-
лета, вариантов заправки топливом и вооружения. В условиях
достаточности времени на выполнение расчетов и принятие
решения основным видом информации остается ИРДП, позво-
ляющая получить более точную оценку.
7.1.1. Пути обеспечения выполнения боевой задачи
по дальности полета в проблемных ситуациях
Результаты уяснения целей и содержания поставленной
боевой задачи, оценки условий аэродромного базирования и
состояния противника являются необходимой исходной ин-
формацией для выбора командиром рационального варианта
решения поставленной боевой задачи.
Может быть два варианта соотношения между потребным
тактическим радиусом и реальными возможностями авиацион-
ной техники: потребный тактический радиус больше или
меньше располагаемого радиуса действия. В первом (про-
блемном) случае возможны следующие совокупные или раз-
дельные пути обеспечения выполнения боевой задачи (реше-
ния проблемы): аэродромный маневр; обеспечение условий
взлета с заданного аэродрома с вариантом максимальной за-
правки топливом; использование режимов максимальной
дальности (по скорости, высоте, стреловидности крыла) над
своей территорией.
При оценке целесообразности аэродромного маневра нуж-
но учитывать, что в интересах увеличения дальности более
выгоден взлет с аэродрома маневра, а не* посадка на него.
Другим важным моментом является необходимость сравнения
условий взлета с различных аэродромов. Может оказаться,
что выигрыш по дальности за счет расстояния аэродромов от
линии фронта может быть перекрыт сокращением дальности
за счет худших аэродромных условий и необходимости сниже-
ния запаса топлива.
При взлете с заданного аэродрома необходима предвари-
тельная проверка достаточности длины ВПП с учетом влия-
ния метеоусловий и состояния поверхности. Такая проверка
легко проводится с использованием номограмм, помещаемых
в ИЛ. С их помощью можно решать также обратную задачу:
с какой максимальной массой обеспечивается безопасный
взлет с заданной ВПП. Определив максймальную взлет-
ную массу, можно просмотреть варианты увеличения запа-
са топлива за счет снижения массы боевой нагрузки и на-
оборот.
357
В зависимости от степени обеспечения прикрытия от вне-
запных атак истребителей противника и подавления его на-
земных средств ПВО командир на этапе предварительной
оценки определяет участки, где возможно использование оп-
тимальных режимов по дальности полета. При выборе на та-
ких участках высоты горизонтального полета необходимо
сравнение суммарных расходов топлива (на набор высоты,
горизонтальный полет и последующее снижение) для несколь-
ких высот в целях определения оптимальной высоты, где сум-
марный расход топлива будет наименьшим. Такой расчет рас-
ходов топлива можно вести или с использованием ИРДП
или специальных номограмм, содержание которых будет по-
казано далее.
§ 7.2. ФОРМЫ ПРЕДСТАВЛЕНИЯ ИНФОРМАЦИИ
О ДАЛЬНОСТИ И ПРОДОЛЖИТЕЛЬНОСТИ ПОЛЕТА
ДЛЯ ОЦЕНКИ ДОСЯГАЕМОСТИ ЦЕЛЕЙ В УСЛОВИЯХ
ДЕФИЦИТА ВРЕМЕНИ
Существующие в ИРДП формы информации требуют
относительно больших затрат времени командиром на оценку
возможности выполнения боевой задачи по дальности. В бое-
вых условиях затраты времени на производство расчетов
должны быть минимально возможными. Для практических
целей результаты расчетов можно считать надежными при
относительных ошибках до 5%. Опыт й специальные иссле-
дования показывают, что требованиям надежности результа-
тов при небольших сроках расчетов (до 2—3 мин) удовлетво-
ряют заранее рассчитанные и представленные в удобной фор-
ме специальные номограммы.
Основными формами специальных номограмм являются
расположенные в координатах «высота — истинная ско-
рость»:
— изолинии километровых расходов топлива для выбран-
ных значений ПЛС и стреловидности крыла (рис. 7.1);
— изолинии секундных расходов топлива на различных
режимах работы двигателя (рис. 7.2);
— изолинии максимальных практических дальностей и
продолжительностей полета (рис. 7.3).
Удобной формой представления информации по дальности
являются так называемые «шалаши» (рис. 7.4), показываю-
щие зависимость между пройденным расстоянием и полетной
массой самолета при полете по простому профилю (набор
высоты — горизонтальный полет — снижение).
358
1000
Рис. 7.1. Изолинии километровых расходов топлива
Постоя ИНЬ! ПЛС, к
1000
иоо
Ц км/ч
ас =о,з кг/с
г
Рис. 7.2. Изолинии секундных расходов топлива в горизонтальном полете
Рис. 7.3. Изолинии максимальных практических дальностей и про-
должительностей полета
360
Рис. 7.4. Зависимость радиуса действий от массы самолета (номограмма
«шалаш»)
* 36Р
7.2.1. Обобщенная информация о предельных
возможностях по дальности и продолжительности
боевого полета по простому профилю.
Способ построения линий равных дальностей
Для быстрой оценки практической дальности (продолжи-
тельности) полета на выбранных (заданных) высоте и скоро-
сти удобна форма, показанная на рис. 7.3. Чтобы построить
такой график, необходимо рассчитать с использованием
ИРДП практические дальности (продолжительности) полета
с различными скоростями на разных высотах.
По результатам расчета сначала строят график практи-
ческих дальностей для какой-либо одной высоты (при выг
бранных запасе топлива, ПЛС и стреловидности крыла), но
для ряда скоростей. Затем строят графики для других высот
(рис. 7.5).
Рис. 7.5. Зависимость практической дальности от высоты и скорости
полета
Имея совокупность графиков Lnp (V) для ряда высот,
выполняют сечения = const, определяют им соответст-
вующие Н и V, а затем строят линии равных дальностей в
координатах Н (V).
Предложенная форма наглядно показывает возможности
самолета по дальности и продолжительности полета на раз-
личных высотах и скоростях, а также скорости и высоты, на
которых обеспечивается режим наибольшей дальности (про-
должительности). Она очень удобна, так как для определения
практической дальности на заданных Н и V требуется всего
362
несколько секунд времени. Но такие графики необходимо
иметь для многих вариантов вооружения (ПЛС), % и различ-
ных вариантов заправки топливом.
7.2.2. Обобщенная информация о предельных
возможностях по дальности и продолжительности
горизонтального полета.
Способы построения изолиний километровых и секундных
расходов топлива
Удобной для расчетов дальности и Продолжительности го-
ризонтального полета является форма представления инфор-
мации, показанная на рис. 7.1 и 7.2 в виде изолиний постоян-
ных километровых (секундных) расходов топлива в горизон-
тальном полете.
Для построения изолиний постоянных километровых рас-
ходов в координатах Н—V необходимо:
— выбрать боевую нагрузку, определить ПЛС самолета и
стреловидность крыла;
— на помещенных в ИРДП графиках километровых рас-
ходов провести ряд сечений #i=const, по точкам пересечений
снять для выбранных ПЛС и стреловидности крыла совокуп-
ность парных значений высот и скоростей для каждого
qi = const, а затем построить изолинии в координатах Н—V,
Для построения изолиний постоянных секундных расходов
топлива в горизонтальном полете необходимо:
— выбрать боевую нагрузку, определить ПЛС самолета
и стреловидность крыла;
— задаться рядом высот и на каждой из них рядом одина-
ковых значений приборной скорости;
— пересчитать для каждой высоты выбранные приборные
скорости в истинные;
— по данным ИРДП для выбранных высот, приборных
скоростей, ПЛС и стреловидности определить километровые
расходы и, используя выражение Qc=?W3600, рассчитать
секундные расходы;
— для каждой из выбранных высот построить зависимо-
сти секундного расхода топлива в горизонтальном полете от
истинной скорости;
— провести на полученных зависимостях ряд сечений
Qc = const и по точкам пересечений снять для каждого сече-
ния совокупность парных значений высот и скоростей;
— построить изолинии Qeir=const в координатах Н—V.
Изолинии километровых и секундных расходов топлива в
горизонтальном полете в компактном виде показывают воз-
363
можности самолета по дальности и продолжительности на
различных высотах и скоростях. Их использование позволяет
командиру быстро решать, например, следующие вопросы:
— оценивать дальность (продолжительность) горизон-
тального полета на любых заданных высоте и скорости по
известному располагаемому запасу топлива /птг на горизон-
тальный полет:
Аг = lq, тг = т^тг/Qc»
— выбирать для заданных ПЛС и х высоты и скорости
наименьших расходов топлива;
— оценивать расход топлива по расстоянию (времени) на
рассматриваемых высотах и скоростях горизонтального по-
лета
тгг = Д Lr q\ tnrr = Д тг Qc.
7.2.3. Обобщенная информация о предельных
возможностях по продолжительности полета
на неустановившихся режимах.
Способ построения изолиний секундных расходов топлива
для фиксированных режимов работы двигателя
В практике подготовки к выполнению боевого задания
всегда имеется необходимость расчета расхода топлива на
неустановившихся режимах (например, при ведении воздуш-
ного боя или при выполнении атак наземных целей). При-
ближенную, но достаточно надежную оценку расходов топлива
при маневрировании с изменением высоты и скорости можно
провести при использовании построенных в координатах Н—V
(рис. 7.6) изолиний секундных расходов топлива для ряда
фиксированных режимов работы двигателя.
Построение таких изолиний выполняется следующим об-
разом:
— задаться рядом высот и на каждой из них рядом чи-
сел М, определить на каждой высоте величину стандартной
температуры воздуха;
— выбрать режим работы двигателя и, используя из
ИРДП зависимости секундных расходов топлива от числа Л4,
высоты и температуры воздуха, определить на выбранных
высотах и числах М величины секундных расходов топлива;
— пересчитать числа М в истинную скорость и затем по-
строить зависимости секундных расходов топлива от скорости,
для каждой из выбранных высот;
364
СП
— на полученных графиках провести ряд сечений Qc с =
= const и для каждого из них по точкам пересечений снять
совокупность парных значений высот и скоростей;
“ построить изолинии Qcj =const в координатах Н—V.
Использование изолиний секундных расходов топлива при
фиксированных режимах работы двигателя позволяет коман-
диру быстро оценивать, например, расходы топлива на не-
установившихся режимах по известной продолжительности
маневрирования или, наоборот,— продолжительность манев-
рирования при заданном расходе топлива. Методика исполь-
зования показана в следующем параграфе.
Совместное использование изолиний секундных и кило-
метровых расходов топлива в горизонтальном полете и се-
кундных расходов для фиксированных режимов работы дви-
гателя позволяет командиру быстро решать широкий круг
задач по оценке возможностей самолета по дальности и про-
должительности полета.
В связи с тем что такие графики необходимо иметь для
различных вариантов вооружения и стреловидностей крыла,
возникает необходимость в уплотнении информации. Такое
уплотнение частично может быть достигнуто, как уже гово-
рилось, за счет отбора основных вариантов боевого примене-
ния самолетов в соответствии с задачами рода авиации.
Рис. 7.7. Типовой профиль боевого полета
Кроме того, в боевых условиях наиболее вероятным типо-
вым профилем полета будет следующий сложный профиль
(рис. 7.7): набор высоты Ни. полет к цели над своей террито-,
рией на заданной высоте ALU и скорости, соответствующей
минимальному километровому расходу топлива, снижение до
предельно малой высоты А Лсн.ц в целях успешного преодоле-
ния ПВО противника, сброс подвесных топливных баков,
установка крыла в боевое положение, полет к цели А /?оц на
366
предельно малой высоте Н2, боевое маневрирование в районе-
цели (в зависимости от поставленной боевой задачи здесь
могут быть переменными высота, скорость, режим работы
двигателя и т. д.), а затем возвращение до линии фронта на
предельно малой высоте Д /?од , набор высоты Н3 и установ-
ление скоростей, обеспечивающих возвращение на свой аэ-
родром в зависимости от остатка топлива на борту, сни-
жение ДАсн.д, полет по кругу (или посадка с прямой), по-
садка.
Исходя из такого типового профиля, комплект графиков
(изолиний километровых и секундных расходов в координа-
тах Н—V) для различных ПЛС, положения КИС можно
уменьшить, принимая, например, условие оптимальной по
дальности стреловидности крыла над своей территорией и
оптимальной для боевого маневрирования стреловидности
крыла над территорией противника. Отметим, что высоты Hi
и Н2 могут быть выбраны не только по тактическим условиям'
Их можно подбирать с помощью указанных графиков из
условия обеспечения потребного времени пребывания в за-
данном районе при различном удалении от аэродрома
взлета.
7.2.4. Обобщенная информация по зависимости радиуса
действия от массы самолета при полете
по простому профилю. Способ построения номограммы
(«шалаша»)
Номограмма строится для заранее определенных условий
полета, когда известны:
— взлетная и посадочная массы, запас топлива на полет;
— режимы набора высоты, горизонтального полета и сни-
жения.
В координатах «радиус действия — масса самолета» (см.
рис. 7.4) строят линии набора высоты (/—2), снижения
(5—4) и горизонтального полета на выбранной высоте
(2—3'—4). При расчете используют помещенные в ИРДП
графики LHB (^т), £сн(/ит) и Qr(^n, х, ПЛС, V).
Расчет дальности горизонтального полета с учетом изме-
нения х и ПЛС ведут раздельно по участкам с использованием
формулы
т _ тт
/^г. —----,
Qr i
где расходы топлива на участках тт выбирают от начала го-
ризонтального полета до начала снижения.
367
Алгоритм построения «шалаша» при полете по простому
профилю и с Постоянным ПЛС прост:
— выбирают режим полета (//; V), величину % и опреде-
ляют величины ПЛС самолета при полете на выполнение за-
дания и при возвращении;'
— используя ИРДП, определяют пройденное расстояние,
расход топлива на взлет и набор заданной высоты и остаточ-
ную массу самолета (точка 2 на рис. 7.4);
— с учетом необходимого остатка топлива определяют
посадочную массу самолета, расход топлива при снижении на
посадку, пройденное при снижении расстояние и массу само-
лета в начале снижения (точка 4 на рис. 7.4);
— определив по данным ИРДП средний километровый
расход для ПЛС самолета с боевой нагрузкой и массой, соот-
ветствующей 0,8 запаса топлива, задаются некоторым произ-
вольным расходом топлива А тт и находят пройденное в гори-
зонтальном полете расстояние ALr;
— от точки 2 откладывают вправо величину Атт и затем
от конца этого отрезка откладывают вверх величину A Lr;
— через точку 2 и верхнюю точку отрезка A Lr проводят
линию 2—4';
— определив по данным ИРДП средний километровый
расход для ПЛС самолета без боевой нагрузки при массе,
соответствующей 0,4 запаса топлива, задаются некоторым
произвольным расходом топлива Дтти находят соответствую-
щее ему расстояние ALr при возвращении с задания;
— от точки 4 откладывают влево величину Атт, а затем
от конца этого отрезка вверх — величину A Lr;
— через точку 4 и верхнюю точку отрезка A Lr проводят
линию до пересечения с линией 2—4'. Точке 3' на оси R соот-
ветствует величина предельного радиуса при полете по> про-
стому профилю.
7.2.5. Комбинированный график («шалаш»)
для анализа глубины боевых действий при планировании
боевого полета по сложным профилям с различными ПЛС
В боевых условиях типовым полетом является полет по
сложному профилю. Поэтому для упрощения процедуры
оценки радиуса действия при полете по сложному профилю
и сокращения времени оценки целесообразно построить ком-
бинированный график для типовых сложных профилей
полета.
Достаточно просто выполняется построение таких графи-
ков, если зафиксировать взлетную и посадочную массы само-
лета и высоты горизонтального полета по крайней мере на
368
трех этапах: —до снижения на малую высоту полета,
Н2— на малой высоте и Н3— после повторного набора высо-
ты. Естественно, должны быть зафиксированы также скоро-
сти полета на этих участках.
Таким образом, для решения поставленной задачи потре-
буется построить набор простых «шалашей» для различных
фиксированных (на каждом этапе) высоты и скорости
полета.
Поскольку необходимо знать предельные возможности са-
молета по дальности (тактическому радиусу), то за основу
нужно взять вариант максимальной заправки топливом при
выполнении типовых боевых задач (максимальную взлетную
массу) и крейсерские скорости на выбираемых высотах по-
лета. Преодоление ПВО противника обычно осуществляется
на предельно малых высотах, поэтому скорости полета на них
можно выбрать отличными от крейсерской.
Способ построения комбинированного графика. Построе-
ние комбинированного графика (рис. 7.8) для оценки даль-
ности (тактического радиуса) самолета при полете по слож-
ному профилю с различным соотношением протяженности
участков горизонтального полета на высоте Нх полета к цели,
предельно малой высоте Н2 и высоте полета от цели Н3 мож-
но выполнить следующим образом.
1. На листе миллиметровой бумаги в масштабе по описан-
ному порядку строятся графики дальности горизонтального
полета на предельно малой высоте Н2:
— линия о — b — с при полете к цели с ПЛСб.н самолета
с выбранной боевой нагрузкой;
— линия е — b — f при полете с ПЛС о после выполнения
задания.
Проекция /?в точки пересечения указанных линий на ось
R показывает величину тактического радиуса Rh= о при полете
по простому профилю на предельно малой высоте с различ-
ными ПЛС.
2. По данным из ИРДП строится график дальности на-
бора высоты Я1 после взлета (линия 00') и при выполнении
горизонтального полета к цели с ПЛСб.н (линия о'4).
Выбирается высота полета от цели Н3, определяется поса-
дочная масса самолета с учетом необходимого запаса топ-
лива и по данным ИРДП — расход топлива и пройденное рас-
стояние при снижении с Н3 на посадку (линия ее'). Путем
добавления к массе самолета перед снижением расходов топ-
лива в горизонтальном полете от цели и определения из
ИРДП пройденных расстояний строится график дальности на
высоте Н3 с ПЛСо самолета без боевой нагрузки (линия е'4).
24-5007сп
369
370
Проекция /?4 точки 4 пересечения линий дальностей на ось
R показывает тактический радиус, если высота полета к цели
Wi одинакова с высотой возвращения с задания 7/3.
3. Снижение с высоты Нх при полете к цели при одном и
том же расходе топлива увеличивает дальность по сравнению
с полетом на /Л = const. Для учета этого при построении ком-
бинированного графика необходимо:
— задаться рядой значений массы самолета при полете к
цели (ть т4) и на линии дальности о'4 отметить соответ-
ствующие им точки (Л . . . , 4);
— по данным ИРДП (принимая тх,...,т4 за средние
массы самолета и учитывая его ПЛС с боевой нагрузкой)
определить расходы топлива Д/пТсн при снижении с высоты
Нх до Н2 и соответствующие им расстояния А £сн;
— отложить от точек 1,...,4 вправо соответствующие ве-
личины Д/Птсн и затем вертикально вверх расстояния А£сн,
соединить полученные точки 4' линией, которая будет
определять дальность при полете к цели на высоте Нх с по-
следующим снижением до высоты /72.
4. Дальность при возвращении от цели на постоянной
высоте //з больше дальности при использовании переменного
профиля «Уход от цели на f/2<H3— набор Я3— горизон-
тальный полет на //3». Для учета уменьшения дальности при
использовании сложного профиля по сравнению с простым
комбинированный график необходимо достроить следующим
образом:
— задаться рядом значений массы самолета при возвра-
щении (т5, т7), на линии дальности е'4 отметить соот-
ветствующие точки (5,..7);
— используя данные ИРДП, определить расходы топлива
Аттн.ви пройденные расстояния А £н.в при наборе высоты с
Н2 до //3, принимая массы самолета т5,..., т7 за средние и
учитывая ПЛС самолета после израсходования боевой на-
грузки;
— от точек 5,..7 отложить влево соответствующие ве-
личины А /тгт н.в и затем вертикально вверх ААН.В, соединить
полученные точки линией 5'—6'—7' начала набора высоты
от Н2 до //3.
5. На полученном комбинированном графике предельным
возможностям по тактическому радиусу соответствуют:
/?в — при полете по простому профилю на высоте Н2\
Т?4 — при полете по простому профилю на Hx=H3i
Rs — при полете по сложному профилю со снижением
перед целью с Нх до Н2 и немедленным набором, высоты с Н2
rq Нг при уходе от цели (линия о—о'—3—3'—5—е'—е);
24*
371
7?s' — при полете по сложному профилю: набор Нх (оо') —
горизонтальный полет на Нх (p'S)—снижение перед целью
с Н\ до Н2 (SS') — возвращение от цели или на постоянной
высоте H2(S'e) или по профилю S'7'— горизонтальный полет
на Н2, 7'7— набор высоты //3, 7'е— горизонтальный полет
на Я3, е'е — снижение. При полете по профилям 7'е или
7'7ее' расстояния и расходы топлива одинаковы.
Для оценки предельных радиусов при других вариантах
протяженностей участков на высотах Н2, Н3 необходимо
внутри угла о" 3'7' провести следующим образом сетку линий
дальностей при полете на Н2 к цели и от нее.
Принимая за начальные точки на линии о"3', провести ряд
линий, эквидистантных ос, до пересечения с 3'7', Точки пере-
сечения на 3'7' покажут величину предельного радиуса при
полете по сложному профилю, когда варьируется протяжен-
ность участков на Н} и Н2 при полете к цели, но всегда
остается условие немедленного набора высоты при уходе от
цели.
Принимая за начальные точки на линии 3'7', провести ряд
линий, эквидистантных ef, до пересечения с о"3'. Точки пере-
сечения на о"3' покажут величины предельных радиусов при
полете по сложному профилю, когда варьируется протяжен-
ность участков на Н2 и Я3, при полете от цели, но всегда
остается условие снижения перед целью и первоначального
полета от цели на высоте Н2.
Линии внутри угла о"3'с', эквидистантные ос, при смеще-
нии их вверх показывают графически, что при увеличении
протяженности участка полета к цели на одновременно
возрастает предельный радиус RT (от с' до 3') и уменьшается
протяженность полета к цели на Н2.
Линии внутри угла S'3'7', эквидистантные fe, при смеще-
нии их вверх показывают графически, что при увеличении
протяженности участка полета к цели на Н\ также растет
предельный радиус (от S' до 3'), но одновременно умень-
шается протяженность участка полета от цели на Н2 и возра-
стает протяженность участка полета от цели на Я3.
Совокупность всех предельных радиусов при полете по
сложному профилю лежит на границах и внутри фигуры
S'3'c'b'S'. Наибольшему предельному радиусу Л3' соответст-
вует снижение перед целью с Н\ rq Н2 с последующим немед-
ленным набором высоты с Н2 до Я3 при уходе от цели. Наи-
меньшему предельному радиусу RB' соответствует режим
«Набор высоты Н\ после взлета (оо') с немедленным после-
дующим снижением до Н2(о'о")—горизонтальный полет к
цели и от нее на высоте Н2 до посадки (о”Ь'Ь7'е)».
372
§ 7.3. МЕТОДЫ ЭКСПРЕСС-ОЦЕНКИ
ДОСЯГАЕМОСТИ ЦЕЛЕЙ И ПРОДОЛЖИТЕЛЬНОСТИ
ПРЕБЫВАНИЯ В РАЙОНЕ БОЕВЫХ ДЕЙСТВИЙ
Методы экспресс-оценки досягаемости целей и продолжи-
тельности пребывания в районе боевых действий основаны на
использовании рассмотренных в § 7.2 различных форм пред-
ставления информации о дальности и продолжительности
полета.
7.3.1. Метод экспресс-оценки глубины
и продолжительности полета по изолиниям
километровых и секундных расходов топлива
В целях сокращения времени на экспресс-оценку при ис-
пользовании графиков (см. рис. 7.1, 7.2, 7.6) для определения
возможностей самолета по радиусу действия при полете по
сложному профилю не будем производить расчетов времени,
расхода топлива- и пути при взлете, наборе высоты и сниже-
нии в соответствии с Инструкцией по расчету дальности, а
поступим следующим образом: будем считать, что имеющееся
на борту топливо можно разделить на три части: для манев-
рирования в районе цели или воздушного боя, для полета
по маршруту и гарантийный запас (включающий прочие
части).
Приближенно можно считать, что повышенный расход
топлива при наборе (без включения форсажа) и малый рас-
ход при снижении примерно компенсируют друг друга и топ-
ливо, израсходованное при наборе и снижении, можно считать
как бы израсходованным в горизонтальном полете. Заметим,
что при этом происходит некоторое завышение дальности
полета.
Кроме того, если взлет и набор высоты происходят на
форсажном режиме, то погрешности в расчетах выходят за
допустимые пределы (позволяющие примерно оценить время
ведения боевых действий при различном удалении от аэро-
дрома базирования) и оперативные (по времени) расчеты
следует выполнять, учитывая расходы на форсажных режи-
мах на взлете и при наборе высоты.
Пусть на боевое маневрирование (например, воздушный
бой) расходуется количество топлива, равное штман, на по-
лет по маршруту— /итг.п (в него же в соответствии с нашим
допущением входит топливо, израсходованное при наборе и
снижении), гарантийный запас—mT.rap .
Рассмотрим варианты приближенной оценки возможно-
стей самолетов по глубине и времени боевых действий.
373
Оценка режимов полета (Н, V, х, ПЛС),
обеспечивающих выход в заданный район боевых действий
Боевой задачей определены: удаление аэродрома базиро-
вания от линии фронта ДАф; удаление района ведения бое-
вых действий от линии фронта (от госграницы) Д£ц; объект
боевых действий (самолеты противника в воздушном бою,
ВПП, капониры при блокировании аэродромов противника и
т. д.) и степень ущерба.
В результате уяснения задачи и оценки
обстановки определены:
— ПЛС, соответствующий виду боевой нагрузки, необхо-
димой для обеспечения заданной степени ущерба, и количе-
ству топлива на борту самолета (^тр);
— состав группы самолетов;
— количество топлива на боевое маневрирование ттман,
tn^Y И П2т.гар.
Необходимо оценить режимы полета Н, V, обеспечиваю-
щие выход в заданный район боевых действий.
Решение:
— количество топлива для полета по маршруту к цели и
обратно:
/ПТг — ПТ,^ ПТх ман гар »
— тактический радиус Кц = Д + Д £ц;
— средний километровый расход топлива, обеспечиваю-
щий полет к цели и возвращение на свой аэродром одиноч-
ного самолета:
— средний q с учетом состава группы. Например, для
звена
^?ЗВ --- 1,03 <7од ,
— для заданного ПЛС, соответствующего полету к цели,
по графикам (см. рис. 7.1) определяем совокупность значе-
ний высот и скоростей полета, обеспечивающих gSB =» const:
лета, где i~ 1, 2, 3;
— аналогично для ПЛС01О соответствующего полету от
цели:
ПЛ Соц —> (?зв = const
374
— в соответствии с замыслом на боевые действия и так-
тической ситуацией выбираем необходимые значения Нс
и Vc,
Примечание. В этих расчетах не учитывается измене-
ние q при отклонении фактической массы самолета от рас-
четной. Однако за счет некоторой взаимной компенсации
*(гПф > /Ир—при полете к цели итф <тр—при полете от цели)
и при использовании высот до 2000 м эта ошибка не влияет
существенно на результаты расчетов.
Оценка досягаемости района боевых действий
Боевой задачей определены те же условия,
что и в предыдущем варианте.
В результате уяснения задачи и оценки обстановки опре-
делены: ПЛС; режимы полета—V и Н; предполагаемое вре-
мя боевого маневрирования (например, воздушного боя—тв.б);
состав группы самолетов.
Необходимо оценить досягаемость района боевых дей-
ствий.
Решение:
— определить вероятные границы высоты и скорости бое-
вого маневрирования и оценить их средние значения;
— оценить предполагаемый режим работы двигателя или
соотношение режимов по времени (например, 50% времени
маневрирования используется полный форсаж и 50% време-
ни — максимал);
— для средних высот и скоростей маневрирования и вы-
бранных режимов работы двигателя определить с использо-
ванием изолиний Qci = const (см. рис. 7.6) величины секунд-
ных расходов топлива и, зная располагаемое время маневри-
рования, оценить расход топлива (учитывая увеличение его
на 10% при полете звеном):
ШТ ман = 1,1 Qc пф тпф + 1,1 Qc макс тмакс ,
где тПф, тмакс — время использования соответственно режи-
мов полного форсажа и максимала;
— оценить километровый расход при полете к цели ?ф.ц>
.который определяется (по рис. 7.1) с помощью ключа:
375
Аналогично определяются qou, при полете от цели (с уче-
том своих ПЛС и р-) и километровые расходы топлива с уче-
том состава группы <7Гр = ЕОЗдф*,
— количество топлива, потребное для полета к цели
т-г. ц == ?Гр.ц йщ количество топлива, потребное для полета от
цели т,ч оц = ^гр.оц ^оц ; количество топлива, потребное для
достижения района боевых действий,
потр ^тц + оц ^?т ман “Ь ^тг •
Если количество топлива на борту самолета ^Тр > потр».
то необходимая глубина боевых действий обеспечивается.
Если же /ПтР </ит потр, то создается проблемная ситуация,
вызванная несоответствием желаемых и фактических воз-
можностей в данной обстановке. В этом случае необходимо
определить пути решения проблемы обеспечения досягаемо-
сти заданных районов боевых действий (варьирование режи-
мов полета к цели и от цели, возможное изменение ПЛС за
счет боевой нагрузки, использование гарантийного запаса
топлива и т. д.) и оценить их эффективность.
Оценка располагаемого времени ведения боевого
маневрирования (времени присутствия в заданном районе
боевых действий)
Боевой задачей определены те же условия,,
что и в первом варианте.
В результате уяснения задачи и оценки обстановки опре-
делены: ПЛС; режимы полета — V(A1) и /7; состав группы
самолетов.
Необходимо оценить располагаемое время ведения боево-
го маневрирования (время присутствия в заданном районе-
боевых действий).
Решение:
— по графикам (см. рис. 7.1) определить километровые
расходы топлива 7плс i в соответствии с заданным режимом
полета;
— оценить количество топлива, необходимое на полет к
району боевых действий и обратно:
^тг t = ?плс i 2 /?ц;
— определить количество топлива на боевое маневриро-
вание в заданном районе:
ман == ^тр 2 ^тг г ’
i=l
где i=l,2 ... — варианты ПЛС в одном полете;
376
— по графику (см. рис. 7.6) определить секундные расхо-
ды топлива для средних высоты и скорости маневрирования
и предполагаемых режимов работы двигателя. Затем опреде-
лить относительное время использования каждого режима
(например, если предполагается использовать 60% времени
на режиме полного форсажа и оставшиеся 40% на режиме
«Максимал», то относительное время будет соответственно
раВНО ^пф = 0,6, ^макс — 0,4)*,
—'далее рассчитать средний секундный расход топлива
Qc ср — 2i Qc i ч’ режима
(для нашего примера Qc ср = Фспф 0,6 + Самаке 0,4) и затем,
располагаемое время на маневрирование
_____ ман
Тман ~ ~д ‘
Чс ср
Если это время окажется меньше потребного, то создается
проблемная ситуация, вызванная несоответствием желаемых
и фактических возможностей.
В целях увеличения точности расчетов в приведенных за-
дачах за счет уточнений, связанных с расходами топлива на
взлет на форсажных режимах и посадку, целесообразно
предварительно составить таблицу, в которой указать коли-
чество топлива, израсходованного до выхода в прямолиней-
ный горизонтальный полет. За исключением топлива, потреб-
ного на взлет и набор высоты, остальные части представляют
практически постоянные величины и на время расчетов не*
влияют.
Так, если расход топлива на запуск, пробу и руление со-
ставляет 20 кг/мин, то при времени 5—7 мин от начала за-
пуска и до взлета расход топлива тт зем =20(5—7) = 100—
140 кг; навигационный и тактический запасы можно также
представить единой величиной, например,ттгар = 35.0 кг. Из-
вестен и расход топлива на полет по кругу перед посадкой,
например, 45 кг/мин, что за время 10 мин дает общий расход
гит=45-10 = 450 кг. Естественно, что по решению командира
или в зависимости от ситуации этот расход может быть,
включен на боевые участки полета.
Учет расхода топлива на взлет и набор высоты и при сни-
жении самолета с различных высот до высоты полета по кругу
требует дополнительного расхода времени. Для расчета ука-
занных величин можно воспользоваться графиками тг (тззл>
ПЛС), тВМл ( /Ивзл, ПЛС), L{ твзл , ПЛС), имеющимися в
ИРДП, но сведенными в единый график (рис. 7.9), или таб-
лицами расходов топлива для типовых профилей полета (на-
377
пример, для набора высот 200, 1000, 2000 м и т. д., наиболее
'часто используемых при выполнении боевых задач). Однако
в любом случае время расчетов увеличивается незначительно,
но их точность повышается.
Рассмотрим пример оперативных (по времени) расчетов,
связанных с оценкой располагаемого времени присутствия в
заданном районе боевых действий.
Рис. 7.9. Комбинированный график для определения
времени набора высоты и пройденного пути
Боевой задачей определены: удаление аэродро-
ма базирования от линии фронта 210 км; удаление аэродрома
противника, который необходимо блокировать, от линии фрон-
та 190 км.
В результате уяснения задачи и оценки обстановки опре-
делены:
— боевая зарядка,/ивзл, ттр , ПЛС;
— режимы полета к цели и от цели над своей террито-
рией— высота 2000 м, скорость 600 км/ч, Хопт;
.378
— полет к цели и от цели над территорией противника на
высоте 200 м, скорости 900 км/ч, /Ср , сброс баков на высоте
.200 м; при блокировании аэродрома противника считать сред-
нюю высоту 2000 м и число М = 0,8, а секундный расход топ-
лива—как среднее секундных расходов на полном форсаже
(50% времени) и на максимале. Состав группы — звено са-
молетов.
Требуется оценить располагаемое время блокирования
аэродрома противника.
Решение.
1. Выбрать необходимый комплект графиков (рис. 7.1, 7.2,
7.6), исходя из того, что заданным условиям соответствуют:
при полете к цели над своей территорией — ПЛС1, /опт; над
территорией противника — ПЛС2, хср;
— при полете от цели над территорией противника —
ПЛСз, /ср; над своей территорией — ПЛСз,/опт.
2. Определить по заранее составленным графикам (рис. 7.9)
(из ИРДП) расход топлива, время и путь при взлете на фор-
саже и наборе высоты 2000 м на максимальном режиме для
^взл , ПЛС1 и Xопт •
3. Определить по графикам (рис. 7.1) километровый и за-
тем общий расход топлива по маршруту над своей террито-
рией ДЛЯ ПЛС1 И /опт-
4. Определить расход топлива ттг по маршруту над тер-
риторией противника (после сброса баков) для ПЛС2 и /ср-
Это же количество топлива будет израсходовано при полете
от цели, если ракеты окажутся неизрасходованными (по рас-
ходам топлива это более тяжелый вариант, снижающий ^Рман
или идущий в запас). Тогда для полета на предельно малой
высоте к цели и от цели потребуется тт — 2 ттг.
5. Определить количество топлива для полета над своей
территорией от цели для ПЛС2, /опт . При этом принять, что
расходы топлива при наборе высоты 2000 м и снижении до
высоты круга будут такими же, как на маршруте:тТГ == Lr q.
6. Определить количество топлива на блокирование аэро-
дрома противника:
Шт бл — ^тр —• (2 ^тг ~F НВ “Т взл 4“ наб “Т пос )•
7. По графикам рис. 7.6 определить секундный расход топ-
лива при блокировании
Qc ср. бл = 0,5 (Ссф + Qcm)«
8. Располагаемое время блокирования аэродрома против-
ника равно
_ бл
Тр бл “ 7Г *
Чс ср бл
379
Если ударный эшелон подходит к аэродрому после начала
блокирования только через т > ^рбл, то это время не удовлет-
воряет поставленной задаче, и командир имеет проблемную
ситуацию, которую должен решить, варьируя режимы полета,
ПЛС и заправку топливом.
7.3.2. Метод экспресс-оценки радиуса действия
при полете по сложному профилю
с использованием комбинированного графика
Для практического использования комбинированного
графика (см. рис. 7.8) при подготовке к выполнению боевой
задачи по сложным профилям необходимо:
— оценить с учетом изломов маршрута расстояние до
цели Лц и сравнить его величину с максимальным и мини-
мальным значениями предельных радиусов. Если расстояние
до цели находится в интервале предельных радиусов (боль-
ше /?BZ , но меньше R3f), то возможности самолета обеспечи-
вают выполнение задания по дальности;
— отложить расстояние до цели £ц на оси R и провести
горизонтальную линию Лц через область предельных ра-
диусов;
— с учетом тактической обстановки определить необходи-
мое расстояние ДАН2ц полета к цели на высоте Н2 (оно не
должно быть больше, чем расстояние от точки Г до горизон-
тальной линии Лц); отложить ДЛн2ц от горизонтальной ли-
нии вниз (левее области предельных радиусов) так, что-
бы нижний конец лежал на линии о"3' (для определения точ-
ки конца снижения с Нх до Н2);
— провести через полученную на о"3' точку линию, экви-
дистантную о" с', до пересечения с горизонтальной линией Lu
внутри области предельных радиусов и затем через их точку
пересечения провести линию, эквидистантную Sz7', до пере-
сечения с 3'7' (линией начала набора высоты Я3 после ухода
от цели на Н2};
— из точки пересечения, лежащей на 3'7' (точки начала
набора высоты /73), провести вертикаль до горизонтальной
линии Ац и определить максимально возможное расстояние
ухода от цели на Н2 — Д L^2 оц;
— если расстояние ухода от цели на Н2 определено с уче-
том тактической обстановки и оно меньше максимально воз-
можного Д Lh2 , то можно уменьшить расход топлива при
возвращении от цели за счет более раннего перехода в набор
высоты 773.
380
§ 7.4. ПРИБЛИЖЕННЫЕ МЕТОДЫ ОЦЕНКИ
ИЗМЕНЕНИЯ ВОЗМОЖНОСТЕЙ САМОЛЕТОВ
ПО ГЛУБИНЕ БОЕВЫХ ДЕЙСТВИЙ
7.4.1. Оценка увеличения тактического радиуса
за счет уменьшения расстояния,
пройденного на предельно малой высоте
Оценка увеличения тактического радиуса за счет умень-
шения расстояния, пройденного на предельно малой высоте,
была рассмотрена при использовании комбинированного
графика.
Оценка дополнительного увеличения дальности Д^н за счет
уменьшения расстояния, пройденного на предельно малой
высоте Д Lh0 при полете по сложному профилю, может быть
осуществлена также по рис. 7.1 и формуле
Д LH/^LH0^qHJqH—1, (7.1)
где qtf0 — километровый расход топлива при полете у земли
со средней полетной массой;
—километровый расход топлива при полете на основ-
ной высоте маршрута.
Формула (7.1) получена из следующих соображений:
Д^тНо= Яно^ЬНо — экономия топлива за счет сок-
ращения пути на предельно малой высоте;
A L'H = Д тт н0/Ян — расстояние, пройденное на сэконом-
ленном топливе на высоте Н\
bLH = bL'H-&LHa = =
Ян
= - Й
Ян \ Ян /
и
Д _ дн& ______।
Д lh0 Ян
7.4.2. Учет влияния боевой нагрузки
и высоты полета по простому профилю
на тактический радиус ( ПЛ С = const)
На рис. 7.10 показаны зависимости R (тб,и)Н1, построен-
ные по номограммам R(m). Эти зависимости хорошо аппрок-
симируются прямыми вида у=Уъ—ах. Чтобы оценить AR (Я),
достаточно по графикам (рис. 7.10,а) определить значения из-
381
менения тактического радиуса при изменении ооевои нагруз-
Д R
ки-------- для ряда высот от 0 до 10 км и построить гра-
А^б.н
. Д / "7 1 Л
фик зависимости-------- от высоты полета (рис. 7.10,о), после
А /пб.н
чего аппроксимировать эту зависимость прямой. Далее по-
строить (рис. 7.10,в) зависимость R (//)™бн==0, которую также
аппроксимировать прямой.
по простому профилю от
д я
------от высоты полета;
Д/Пб.н
без боевой нагрузки от
(Н 9 ^б.Н=о) ft ।
Рис. 7.10. Линейная аппроксимация зависимостей:
а — тактического радиуса при полете
массы боевой нагрузки; б — величины
в — тактического радиуса при полете
высоты.
Для рассмотренного нами примера радиус действия при
полете по простому профилю оценивается приближенными
формулами вида
m6 н = Rff=0; ;пб.н=0 + д уу
Д/?(Н = 0, ГИб.н)
-------------------- /Пб.н>
Д/пб.н
что позволяет с использованием графиков (рис. 7.4, 7.10,а,
б, в) просто и быстро проводить оценку его изменения при
варьировании боевой нагрузки (без изменения ПЛС) и высо-
ты полета.
382
7.4.3. Учет влияния изменения взлетной массы
и гарантийного запаса топлива на тактический радиус
при полете по простому профилю
В тех случаях, когда УАБ не позволяют осуществить взлет
с максимальной взлетной массой, возникает необходимость в
оценке влияния уменьшения взлетной массы (или увеличения
ее при применении-ускорителей взлета) на тактический ра-
диус. Для этого достаточно воспользоваться графиками
/?( т )H==const (см. рис. 7.4), аппроксимируя зависимость,
прямой
I A R \
R (^)//=const “ R (^o)<H=const “h I ~ j (^ ^o),
\ А ^Ивзл /H=Const
A R 7 1 л Л
где величину---------определить по рис. 7.10,б.
А швзл
Учет влияния гарантийных запасов топлива на радиус
действия при полете по сложному профилю осуществляется
по графикам рис. 7.8 через посадочную массу (путем ее уве-
личения на величину гарантийного запаса).
7.4.4. Учет влияния изменения скорости полета
и ПЛС на тактический радиус
Учет влияния изменения скорости полета на тактический
радиус при полете по простому профилю (приближенно рав-
ный половине практической дальности) может * быть эффек-
тивно произведен по графику рис. 7.3, если скорость изме-
няется на всем участке полета по простому профилю. В тех
случаях, когда возникает необходимость оценить влияние из-
менения скорости на участке полета у земли, можно восполь-
зоваться формулой
A Lh0, у2 = А Ано. vKp (Яукр1Яу2)н9»
где <?Vkp и qy2 определить по графикам рис. 7.1, а
ALh0,vkp —по рис. 7.3.
Учет влияния ПЛС на досягаемость целей может быть
легко произведен по комплекту номограмм с различными ПЛС
(см. рис. 7.4) при полете по простому профилю. При полетах
по сложному профилю необходимо иметь комплект комбини-
рованных графиков рис. 7.8, построенных для ПЛС основных
вариантов вооружения.
383
7.4.5. Методика экспресс-оценки дальности
(тактического радиуса) полета по сложному профилю
с использованием графиков R (т) полета
по простому профилю
Графики R(m) при полете по простому профилю (см.
рис. 7.4) можно использовать для оперативного расчета даль-
ности (тактического радиуса) при полете по сложному про-
филю.
Порядок расчета:
— определить высоты HQ и скорости полета к це;1и
по сложному профилю, варианты заправки топливом, боевой
нагрузки (ПЛС) и стреловидность крыла;
— выбрать из комплекта два графика R(m) полета по
простому профилю на высотах /Д и Но, соответствующих вы-
бранным ПЛС и заправке топливом;
— исходя из тактических соображений, определить про-
тяженность участков полета к цели и обратно на высотах
Но (включая снижение при полете к цели и набор высоты
при возвращении) и общую дальность полета по сложному
профилю;
— используя ИРДП или комплексные графики (рис. 7.9
или 7.11), определить'расходы топлива на участок снижения
при полете к цели и набора высоты при возвращении;
Z
HaSop высоты
Рис. 7.11. Графики для определения расходов топлива и пройденного
пути при наборе высоты и снижении
— по графику R(m) определить (рис. 7.12) расход топ-
лива при полете к цели и обратно на высоте HQ для участка
сложного профиля, для чего: разделить протяженность уча-
стка полета к цели и от нее на высоте HQ пополам, отложить
ее величину вертикально вниз от вершины «шалаша» (отре-
.384
зок аб) и провести через точку б горизонталь. Отрезок вг
покажет величину потребного расхода топлива;
— просуммировать расходы топлива на снижении к цели,
полете на HQ и наборе высоты Ht при полете по сложному
профилю {т1Ны сн нв);
— на графике R(m) для высоты Ht раствором циркуля
отложить у вершины величину сн.нв (рис. 7.12, отрезок
д—е) и опустить из вершины Hi перпендикуляр и—к;
Рис-. 7.12. К определению предельного тактического радиуса действия
при полете по сложному профилю
— от точки к отложить вверх половину величины суммар-
ного расстояния при снижении, полете на Но и наборе вы-
соты Hi (отрезок к—л); проекция точки л на ось R покажет
величину предельного тактического радиуса при полете по
сложному профилю, а его удвоенная величина — предельную
дальность;
— сравнить величину предельной дальности полета по
выбранному сложному профилю с фактической дальностью
полета при выполнении задания.
’Порядок определения^предельной дальности (тактического
радиуса) полета по сложному профилю на высотах Я/, HQ
с использованием графиков R(m) для простых профилей
можно значительно упростить, если высота Hi не выше сред-
ней. Тогда средние суммарные километровые расходы топ-
лива при снижении и наборе можно принять равными кило-
метровым расходам на Но, Покажем методику таких расчетов
на примерах решения типовых задач.
25- 5007сп 385
Задача 1
Определено:
— фактический радиус действия 7?ф при полете по слож-
ному профилю на высотах /Л, /7о‘,
— расходуемая боевая нагрузка и располагаемый расход
топлива при маневрировании в районе цели Wh •»
Необходимо определить максимально возможное расстоя-
ние полета на малой высоте HQ.
Решение:
— отложить на оси R (рис. 7.13) величину 7?ф и провести
горизонталь;
— из вершины Hi опустить на проведенную горизонталь
перпендикуляр;
— отложить на горизонтали величину тб.н (отрезок а—б)
так, чтобы перпендикуляр делил этот отрезок пополам;
— из точки а провести эквидистантно ов линию а—г, а из
точки б — эквидистантно ее линию бд\
— отрезки г'г и д'д покажут соответственно максимально
возможные расстояния полета на Но к цели и от нее.
Задача 2
Определено:
— фактический радиус действия 7?ф при полете по слож-
ному профилю на высотах Hi, Но;
— протяженность участков полета на малой высоте Но к
цели и от нее.
Необходимо определить максимально возможные для /?ф
запас топлива и боевую нагрузку, расходуемые при маневри-
ровании в районе цели.
Решение:
— на оси R отложить величину Л?ф и провести горизон-
таль (рис. 7.14);
— между горизонталью /?ф и левой стороной «шалаша»
Hi разместить вертикально отрезок а—а', численно равный
протяженности полета на HQ к цели;
— между горизонталью /?ф и правой стороной «шалаша»
Н^ разместить вертикально отрезок бб', численно равный про-
тяженности полета на HQ от цели;
— через точки а', бг провести эквидистантно сторонам
«шалаша» HQ линии а'а", б'б" и по отрезку а"—б" опреде-
лить максимально возможные запас топлива и боевую
нагрузку, расходуемые при маневрировании в районе
цели.
3?6
R
Рис. 7.13. К определению максимально возможного расстояния поле-
та на малой высоте
Рис. 7.14. К определению максимально возможных запаса топлива и
боевой нагрузки при маневрировании в районе цели
387
3 ад а ч a 3
Определено:
— массы расходуемых топлива и боевой нагрузки при ма-
неврировании в районе цели тб, н;
— протяженность участков полета на малой высоте к
цели и от нее.
Необходимо определить предельный радиус при полете
по сложному профилю.
Решение:
— у вершины графика Яо (рис. 7.15) отложить горизон-
тально величину Шб.н (отрезок а—б);
— по вертикали вниз отложить протяженности участков
полета на HQ при полете к цели (а—а') и от цели (б—б'),
величины им соответствующих расходов топлива (а'—а" и
б'—б");
— у вершины графика отложить горизонтально сум-
марный расход топлива при полете на! высоте Яо, расход
топлива и боевой нагрузки при маневрировании в районе вы-
полнения боевой задачи (в'г' = вг);
— из любой точки на отрезке вг—г' отложить вертикально
вверх отрезок, равный полусумме протяженностей полета на
Яо (в'-<?);
Рис. 7.15. К определению максимально возможного радиуса действия
при полете по сложному профилю
— проекция точки д на ось R покажет величину максИ|-
мально возможного радиуса действия /?макс при принятых
условиях полета по сложному профилю.
388
Глава 8
МЕТОДИКА ВЫБОРА И РАСЧЕТА
РАЦИОНАЛЬНЫХ БОЕВЫХ МАНЕВРОВ
Маневренные свойства реализуются при боевом маневри-
ровании, под которым понимают маневрирование одиночных
самолетов или их групп в интересах выполнения боевой зада-
чи. Основные цели боевого маневрирования состоят в выводе
самолета летчиком в исходное положение, обеспечивающее
наиболее эффективное применение оружия в воздушном бою,
при ударе по наземным (морским) целям или в уклонении от
поражения от огня противника. Для этого в воздушном бою
летчик стремится упредить противника в выходе в область
возможных атак (область стрельб), при маневрировании в
зонах поражения средств ПВО — за пределы режимов функ-
ционирования этих средств, чем обусловливается высокая
эффективность преодоления их зон поражения. Чем выше ма-
невренные свойства самолета, тем выше вероятность преодо-
ления противодействия ЗА и ЗУР различной дальности. Об
этом свидетельствует опыт Великой Отечественной войны и
последующих военных конфликтов.
Так, опыт боев на Ближнем Востоке показал, что за счет
маневрирования возможен уход от выпущенной ракеты, если
своевременно начать разворот на нее со снижением с пере-
грузками, близкими к максимальным. Значительно умень-
шается вероятность попадания снарядов ЗА в самолет в зоне
поражения этих средств при маневрировании с перегрузками,
превышающими 3—4 единицы.
При раскрытии вопросов тактической значимости манев-
ренных свойств следует отметить, что в ряде случаев, когда
последние/не могут быть использованы в полной мере для
успешного преодоления ПВО противника по условиям выпол-
няемое™ задачи (например, загруженные истребители-бом-
бардировщики, следующие к цели), командованием органи-
зуются мероприятия по подавлению средств ПВО специально
выделенными силами, что увеличивает потребные наряды
самолетов.
Иначе говоря, снижение маневренных свойств самолетов
389
в данном случае необходимо компенсировать увеличением
потребного наряда сил. Только при этом условии может быть
нанесена заданная степень ущерба противнику. То же спра-
ведливо и при ведении воздушного боя. Недостаток манев-
ренных свойств истребителей в интересах успеха необходимо
компенсировать выделением дополнительных сил для осу-
ществления тактических приемов по наращиванию усилий
в бою.
Приведенные примеры свидетельствуют о взаимной связи
и обусловленности боевых возможностей самолета его манев-
ренными свойствами, т. е. о существенной тактической значи-
мости маневренных свойств, являющихся составной частью
летных характеристик, определяющих вместе с вооружением
и оборудованием самолетов их боевые возможности.
§ 8.1. ОБЛАСТИ ВЫПОЛНИМОСТИ
ОСНОВНЫХ БОЕВЫХ МАНЕВРОВ И ФОРМЫ ПРЕДСТАВЛЕНИЯ
ИНФОРМАЦИИ О НИХ
Под боевыми маневрами будем понимать маневры, реали-
зуемые при боевом маневрировании, т. е. в интересах эффек-
тивного выполнения боевых задач. По своей сути боевые
маневры — это отдельные законченные или незаконченные
фигуры пилотажа, которые в процессе маневрирования не-
прерывно следуют друг за другом.
Ранее отмечалось, что основные цели боевого маневриро-
вания состоят в упреждении противника в занятии выгодного
положения для атаки при ведении воздушного боя или в сни-
жении эффективности огня зенитных средств при преодоле-
нии противодействия средств ПВО при атаке наземных це-
лей, в связи с чем маневрирование должно выполняться, как
правило, возможно более энергично, со скоростями и пере-
грузками, достигающими предельных значений, определяемых
границами областей выполнимости маневров. В свою очередь,
положение границ обусловлено выходом самолета в каждой
их точке на одно из ограничений (аэродинамическое, прочно-
стное, энергетическое) самолета, и превышение любого из них
связано с нарушениями условий безопасности полета и долж-
но быть исключено.
В дальнейшем под предельными маневрами или предель-
ными маневренными возможностями (свойствами) будем
понимать маневры и маневренные возможности, определяемые
перегрузками (углами атаки) и скоростями, соответствующи-
ми границам областей выполнимости маневров на самолете
данного типа. В силу сказанного представляется целесооб-
разным характеризовать предельные маневры и предельные
390
маневренные возможности самолета границами областей
выполнимости маневров, подобно тому как высотно-скорост-
ные свойства самолета определяются границами диапазона
высот и скоростей полета.
8.1.1. Области выполнимости разворотов
в горизонтальной плоскости
Для определения областей и границ выполнимости разво-
ротов в горизонтальной плоскости, а также для оценки пара-
метров этих маневров следует обратиться к известным ана-
литическим выражениям, и прежде всего к уравнению, опре-
деляющему зависимость угловой скорости от скорости полета
и перегрузки, записанному для разворота в горизонтальной
плоскости в виде
Построим график (рис. 8.1) указанной зависимости в
координатах о>г — V для различных значений перегрузок,
вплоть до максимально допустимой в эксплуатации а макс.
При необходимости вместо перегрузок nY а (или вместе с
Рис. 8.1. График зависимости угловой скорости разворота в горизонтальной
плоскости от скорости полета и перегрузки nYa
391
ними) могут быть проставлены величины углов крена, потреб-
ные для выполнения разворотов в горизонтальной плоскости у
и определенные с помощью формулы
1
у = arccos----.
Пу а
Здесь следует подчеркнуть, что обе эти зависимости спра-
ведливы для любого самолета и любой высоты полета.
Для суждения о предельных энергетических, аэродинами-
ческих и прочностных возможностях самолета конкретного
типа на график наносят его ограничения по Умакс, пуамаке,
V мин доп по адоп (рис. 8.2), соответствующие определенной
высоте Н = const. Этим самым и определяются области вы-
полнимости разворотов в горизонтальной плоскости на дан-
ной высоте, границы которых определяют предельные режи-
мы маневрирования. Наносится также граница предельных
установившихся разворотов, которая весь диапазон выполни-
мости разворотов делит на две области: область установив-
шихся разворотов (ниже границы) и область форсированных
разворотов (выше границы).
На графике могут быть нанесены точки, представляющие
наибольший интерес в боевых условиях и соответствующие
установившимся и неустановившимся разворотам с /?мИН и
^макс (точки а, б и к на рис. 8.2). График позволяет найти
предельные маневренные возможности самолета, практиче-
ская реализация которых будет определяться в первую оче-
редь летной выучкой, мастерством воздушного бойца.
Рис. 8.2. Границы областей маневрирования в горизонтальной плоскости
892
Эти предельные возможности реализуются при условии,
что летчик, создавая максимально допустимую перегрузку
Галакс ’ выполняет форсированный разворот до выхода на
минимальную скорость, соответствующую адоп (точка к на
рис. 8.2). При этом имеет место максимальная угловая ско-
рость неустановившегося (форсированного) разворота.
Однако выход на адоп не означает еще, что разворот на
этом должен быть закончен. Он может быть продолжен, но
все внимание летчика теперь должно быть уделено выдержи-
ванию допустимого угла атаки по УУА. При этом самолет
будет тормозиться до выхода в точку б (отрезок к—б). Для
того чтобы самолет оставался в горизонтальной плоскости, по
мере падения скорости, необходимо уменьшать крен. После
выхода в точку б летчик может выполнять предельный уста-
новившийся разворот, который будет являться разворотом с
минимальным (или близким к нему) радиусом.
Таким образом, точка б является характерной тем, что в
ней совпадают предельная по тяге и располагаемая (по адоп)
нормальные скоростные перегрузки, и при этом разворот мо-
жет выполняться длительно, в отличие от других режимов на
линии к—б, на которых маневрирование с адоп является
кратковременным.
Для суждения о величине радиуса разворота в каждой
точке области, а также о степени приближения к границе по
«доп рассмотрим номограмму, изображенную на рис. 8.3, в
квадрантах которой представлены:
— в верхнем правом — зависимости o)r(V, «уй), а также
границы выполнимости разворотов в горизонтальной плоско-
сти интересующего нас самолета на заданной высоте полета
Н = const;
— в левом верхнем — зависимости-радиуса разворота от
угловой скорости для различных скоростей по траектории.
Там же пунктиром проведена кривая для определения вре-
мени установившегося разворота на 180°;
— в нижнем правом — линии, позволяющие перейти для
конкретного самолета от истинной скорости полета к при-
борной;
— в нижнем левом — зависимости величины Су а от УПр
для различных перегрузок. Для примера там же нанесены
линии, соответствующие границам секторов, обозначенных на
указателе углов атаки.
Таким образом, рассмотренная номограмма позволяет оп-
ределить не только границы выполнимости горизонтальных
маневров с учетом требований безопасности полета, т. е. пре-
дельные маневренные возможности самолета, но и все необ-
ходимые параметры разворотов. Становится возможным перед
393
394
Рис. 8.3. Номограмма для определения параметров и границ выполнимости маневров в горизонталь-
ной плоскости
полетом определять также величины достигаемых при пило-
тировании углов атаки (ауУА) и оценивать их запасы до вы-
хода на адоп, что способствует повышению безопасности.
8.1.2. Области выполнимости спиралей
(восходящих и нисходящих)
Уравнения движения самолета по спиральной траектории
можно получить из системы уравнений, описывающей движе-
ние центра масс самолета в пространстве, и из геометричес-
ких соотношений, если учесть ограничения, обусловленные
необходимостью выдерживать постоянным угол набора (сни-
Ч ГА х ^0 _
жения), т. е. 0 = const или-- = 0. Это условие окажет
dt
влияние лишь на уравнение
d 0 g . _.
-----= (пу a cos 7 — cos 0), определяющее изменение уг-
dt V
d0
ла наклона траектории, которое при ------= 0 будет иметь
dt
вид
Пу а COS 7 = COS0,
откуда получим
cos©
Пу а = -------------------------— •
cos 7
Выдерживая 0, 7, nYa такими, чтобы постоянно сохраня-
лась эта зависимость, летчик сможет выполнять спираль с
постоянным заданным углом набора (снижения).
Формулы для определения радиуса, шага и времени вы-
полнения одного витка спирали имеют вид:
~ V2COS0 , Г» ГА X ГА
Ren — —2 » “ 2 тс сп tg 0 ;
gtgT
__ 2 тс /?сп
►СП - •
V cos 0
Для определения границ областей выполнимости и пара-
метров маневров по типу спирали целесообразно использо-
вать номограмму, рассмотренную в § 2.2 на рис. 2.12. Там же
изложен порядок пользования номограммой и возможности
по определению с ее помощью интересующих нас парамет-
ров. На данной номограмме могут быть нанесены границы
областей выполнимости спиралей. При этом в зависимости от
типа самолета в первую очередь могут представлять интерес
395
ограничения не столько по перегрузке пу а, сколько по углам
0Сп или у.
Так, на рис. 2.12 в качестве примера в верхних среднем и
правом квадрантах приведено ограничение по углам крена
у = 60°. Ограничения по углам © наносятся в верхнем правом
и нижнем левом квадрантах, а ограничения по аД0П(Су а доп) —
в нижнем правом квадранте. Ограничения по величине пере-
грузки пу а, соответствующей адоп , целесообразно наносить
для спиралей, при выполнении которых заданному значению
tgу соответствует наибольшее значение nYa(o-) , что имеет
место при угле 0 = 0 (верхние правый и средний квадранты
номограммы).
В качестве примера в верхнем среднем квадранте приве-
дены границы минимальных скоростей полета самолета,
имеющего mglS^A: кН1м2\ Су адоп = 0,7 для Я = 0 и 5 км и
ограничение по углу крена у = 60°.
8.1.3. Области выполнимости разворотов
в наклонной плоскости
Для движения в плоскости маневра (рис. 8.4) необходи-
мо, чтобы были взаимно уравновешены силы, действующие в
направлении, перпендикулярном плоскости маневра (рис. 8.5),
т. е.
Ya cos 8 = mg cos ф,
где 6 — угол крена относительно плоскости маневра.
Рис. 8.4. Схема и характерные точки разворота в наклонной
плоскости
396
Выдерживание последнего равенства возможно при усло-
вии, что летчик меняет крен в зависимости от изменения ско-
рости полета при заданном угле ф. Следует отметить, что со-
ставляющие силы тяжести mg cos ф и zngsini|) постоянны в
любой точке фигуры и меняются лишь с изменением полетной
массы самолета и угла ф.
Изменение же второй части рассматриваемого равенства
Ya cos 6 происходит из-за изменения угла наклона траекто-
рии, а следовательно, скорости и высоты полета. Для того что-
бы в процессе выполнения всей фигуры произведение УЛсозй
так^ке оставалось неизменным и равным постоянной величи-
не zngcosip, по мере падения скорости (следовательно, и
подъемной силы) необходимо уменьшать угол д (увеличи-
вать cos д).
Рассмотренное равенство служит основой для вывода
формулы, определяющей величину угла крена, необходимого
для удержания самолета в наклонной плоскости:
созф
Т » arccos (sin ф cos ф) — arcsin ——,
Пу а
где ф — угол разворота самолета в горизонтальной пло-
скости.
397
Угол наклона траектории определяется формулой 0 =
= arctg(tgx|? sin ф). Пользование приведенными довольно
сложными формулами затруднительно. Поэтому на практике
может оказаться полезной более простая, но приближенная
формула
у — о = ф cos
которая дает точные результаты в точках /, 2, 3, 4 (см.
рис. 8.4). Во всех остальных точках формула дает прибли-
женные значения углов крена.
При разворотах, выполняемых с углами наклона плоско-
стей маневра к горизонту 30° < ф < 60° и с начальными пере-
грузками пуа = 5—7, величина угла б меняется в пределах
80—85°, т. е. с достаточной для практики точностью может
быть принята равной 82 ±3°. Тогда величину угла крена в
точках /, 2, 3, 4 для разворотов, выполняемых с указанными
углами ф = 30—60° ипуЛ = 5—7, можно найти по формуле
у = 82°—ф cos ф.
Учет изменения перегрузки (только при ее уменьшении
ниже 5 единиц) производится из расчета снижения крена
по 4° на каждую единицу уменьшения перегрузки ниже 5.
Тогда формула будет иметь вид:
у = [82 — 4 (5 — пу а)] — ф cos ф .
Невыдерживание рекомендуемых углов крена, в частно-
сти, за счет стремления оставить его постоянным и равным
начальному, приводит к тому, что траектория маневра
сместится из наклонной плоскости вниз, в результате чего бу-
дет набрана меньшая высота и утрачено достоинство манев-
ра— минимальное время разворота в наборе высоты (боево-
го разворота). При этом, как показывают расчеты, «недобор»
высоты может достигать 50%.
Отметим важную для летчика особенность выполнения
разворота в наклонной плоскости: в точках 2 и 4, т. е. при
развороте на ф = 90 и 270°, угол 0 должен быть численно ра-
вен углу наклона плоскости маневра: в точке 2 угол 0=ф,
в точке 4 — 0=ф. В тех случаях, когда необходимо знать
точно величины углов крена в любой точке маневра, следует
воспользоваться номограммой, приведенной на рис. 8.6.
С ее помощью углы разворота в наклонной плоскости при-
водятся к углам 0 и ф соответственно в вертикальной и гори-
зонтальной плоскостях. Например, для разворота, выполняе-
мого в плоскости, наклоненной к горизонту под углом ф = 30°с
пуа=4, при развороте в плоскости маневра на угол ц= 110°
398
угол О равен 28° (точки 1—2—3), угол разворота самолета в
горизонтальной плоскости <р составляет 116° (точка 4).
Как видно из формул, приведенных на номограмме, угол
крена определяется двумя составляющими: у', учитывающей
действие силы тяжести, и у", учитывающей действие поверх-
ностных сил. Вначале найдем величину у'=103° (точки
4'—5—6), из которой затем вычтем составляющую у" = 13°,
найденную по отдельному графику, помещенному в левом
нижнем квадранте номограммы. В итоге угол крена
у= 103—13 = 90° (точка 7).
Рис. 8.6. Номограмма для определения угловых параметров (углов крена,
0, <р) при выполнении разворотов в наклонной плоскости
Границы областей выполнимости разворотов в наклонных
плоскостях имеют вид, представленный на рис. 8.7.
Границы справедливы для конкретного самолета опреде-
ленной конфигурации (стреловидности крыла, положения
механизации, варианта вооружения и т. п.), заданного режи-
ма работы двигателя и определенного закона пилотирова-
ния. Каждая точка границы соответствует для заданной вы-
соты минимальной скорости начала маневра, обеспечивающей
выход в верхнюю точку на минимально допустимой (эволю-
тивной) скорости. Йз рисунка видно, что с увеличением
угла ф область, из которой возможно безопасное выполнение
390
маневра, уменьшается, и минимальной она будет для разво-
рота, выполняемого в плоскости, наклоненной к горизонту
под углом i|> = 90°, т. е. для полупетли.
И *м/¥
Рис. 8.7. Границы областей выполнимости разворо-
тов в наклонных плоскостях
8.1.4. Области выполнимости переворотов
Уравнения движения самолета при выполнении переворо-
та получают из уравнений движения самолета в пространстве
после введения ограничений, обусловливающих его движение
в вертикальной плоскости (см. § 2.4). Мгновенный радиус
траектории переворота равен
я = -Х---------К!----.
«>в —COS0)
Для расчета границ областей выполнимости переворота
воспользуемся приближенными формулами при средних зна-
чениях скорости, перегрузки и угла наклона траектории на
маневре:
» •
А ср---- »
g Пу а ср
ДЯ=.— 2Яср =------
g Пу а ср
__гс /?сР гс Уср
Vcp g ср
400
Границы областей выполнимости переворота определяют-
ся соответствующими определенным скоростям полета высо-
тами безопасного ввода самолета в переворот. Безопасная
высота ввода слагается из минимальной потери высоты на
перевороте Д/Л и запаса цысоты, обеспечивающего безопас-
ность вывода Д Н2.
Определим минимальную потерю высоты за переворот на
малых скоростях. Поскольку
то
Pep V ср Q
nY а ср Ь Y а ср ~ э
2 mg
1.^-----4т«
&Cy а ср Pep S
т. е. потеря высоты на перевороте, а следовательно, и безо-
пасная высота ввода зависят в данном случае не от скорости
полета, а от удельной нагрузки на крыло и коэффициента
подъемной силы данного самолета.
По мере увеличения скорости летчик имеет возможность
увеличивать Суаср, а следовательно, и перегрузку пуа ср та-
ким образом, что потеря высоты остается постоянной (уча-
сток а—б на рис. 8.8). Так получается до тех пор, пока на
Рис. 8.8. Границы областей выполнимости переворотов
26-5007сп
401
скорости Vi перегрузка не достигнет предела по прочности
самолета ^yaMaKC- При дальнейшем увеличении скорости
пу а макс ~ const, и потеря высоты будет возрастать примерно
пропорционально V2cp (участок б—в).
При Л4>1 (за точкой в) максимальная эксплуатационная
перегрузка уже не достигается даже при полном взятии руч-
ки на себя.
Безопасная высота ввода в переворот начинает быстро
возрастать (участок в—г), и граница ввода приближается к
вертикали. Практически это означает, что, начиная с некото-
рой скорости (за точкой г), вводить самолет в переворот
нельзя ни на какой высоте. Дело в том, что после достижения
скорости, на которой возможно создание ^уамакс., потеря вы-
соты в решающей степени зависит от средней, а следователь-
но, и от конечной скорости на выводе из переворота.
Изменение же скорости на маневре определяется соотно-
шением между разгоняющей (P+/ngsin0) и тормозящей Ха
силами, причем Ха = Хао +Хаинл.г п2уа, т. е. пропорциональ-
на п2у а. Возможности по созданию тормозящей силы с увели-
чением высоты существенно сокращаются как из-за уменьше-
ния величины Хао, так и из-за снижения располагаемой
перегрузки nYdp (см. рис. 2.4 главы 2).
В связи с этим на больших высотах, превышающих высоту
в точке г, даже при небольшом увеличении скорости и полном
взятии ручки на себя невозможно создать тормозящую силу,
большую разгоняющей, и самолет лавинообразно набирает
скорость, что обусловливает увеличение #Ввода, а это приво-
дит к снижению пу а Р, что дополнительно требует увеличе-
Рис. 8.9. Гранищя областей выполнимости
переворотов самолетов А и Б
402
ния Нввода и т. д. На рис. 8.9 для сравнения приведены гра-
ницы областей безопасного ввода в переворот для двух само-
летов А и Б, имеющих различные др(иу ар a ар б).
§ 8.2. РАЦИОНАЛЬНЫЕ БОЕВЫЕ МАНЕВРЫ
ВЫБОР РАЦИОНАЛЬНЫХ БОЕВЫХ МАНЕВРОВ
ДЛЯ ВЕДЕНИЯ БОЕВЫХ ДЕЙСТВИЙ
Ранее было показано, что маневренные свойства современ-
ных боевых самолетов в значительной мере определяют их
боевые возможности и являются важным фактором, который
необходимо учитывать при выработке и принятии авиацион-
ным командиром решения на боевые действия. В то же время
при выполнении конкретной боевой задачи должны приме-
няться определенные, обеспечивающие максимальную эффек-
тивность боевых действий маневры, называемые рациональ-
ными боевыми маневрами.
Под рациональным маневром будем понимать маневр,
обеспечивающий наибольшую степень достижения желаемого
результата.
8.2.1. Выбор рациональных боевых маневров
для выполнения противоракетного маневрирования
на маршруте полета к цели и обратно
Выполнение боевого полета связано, прежде всего, с пре-
одолением противодействия средств ПВО противника на всех
его этапах: при полете по маршруту к цели и обратно, атаке
наземной цели и т. п. В настоящем разделе рассмотрим воз-
можности выполнения маневрирования, обеспечивающего
преодоление противодействия средств ПВО на маршруте по-
лета к цели и обратно.
Не останавливаясь на способах и тактических приемах,
применяемых при таком маневрировании, отметим лишь, что
современная ПВО, включающая зенитную артиллерию, зенит-
ные управляемые ракеты малой, средней и большой дально-
сти, обусловливает необходимость применения в качестве
противозенитных маневров: полета на малых и предельно
малых высотах, выполняемого обычно в сочетании с увеличе-
нием скорости полета до максимально допустимой и по воз-
можности под нижней границей зоны поражения ЗУР средней
и большой дальности; противоракетного маневрирования на
средних и больших высотах, рассчитанного на противодейст-
вие ЗУР средней и большой дальности вне зон поражения ЗА
и ЗУР малой дальности.
26*
403
В зависимости от условий полета и типа ЗУР, в зонах
поражения которых производится маневрирование, на сред-
них и больших высотах широко применяют змейки, выполняе-
мые с постоянной скоростью на заданной высоте, либо с из-
менением высоты.
Рассмотрим методику оценки возможностей выполнения
распространенного в практике фронтовой авиации маневра
типа «симметричная змейка» с углами отворота от линии пути
на 90° на постоянной высоте. Траектория такого маневра
приведена на рис. 8.10. .
Рис. 8.10. Расчетная схема ПРМ типа «сим-
метричная змейка»
Отметим, что в зависимости от типа самолета и характера
противодействующих ЗУР углы крена могут быть различны-
ми и достигать 60°.
В общем виде решение задачи сводится к определению
условий выполнимости установившегося разворота на задан-
ной высоте для самолета с определенными полетной массой
и конфигурацией (боевой зарядкой, стреловидностью крыла
и т. п.).
При выполнении полета к цели, когда боевая зарядка
ударных самолетов, как правило, близка к максимальной,
наибольший интерес представляет оценка предельной высоты,
на которой возможно маневрирование с заданным углом кре-
на (перегрузкой) в горизонтальной плоскости с постоянной
скоростью, т. е. выполнение установившегося разворота.
Как уже отмечалось, основная задача такой оценки —
определить, возможно ли маневрирование самолета с загруз-
кой, близкой к максимальной, на высотах, выходящих за
верхнюю границу зоны эффективного поражения ЗА и ЗУР
малой дальности, поскольку маневр «змейка» на противодей-
ствие этим средствам не рассчитан.
404
При полете же от цели после того, как выработана боль-
шая часть топлива и израсходован . основной боекомплект,
выход за верхнюю границу зоны поражения ЗУР малой даль-
ности и ЗА не является проблемой и, очевидно, наибольший
интерес будет представлять определение режима маневриро-
вания, обеспечивающего минимальный расход топлива на за-
данной высоте.
Задача нахождения максимальной высоты выполнимости
установившегося разворота с заданным углом крена (пере-
грузкой) сводится к нахождению -граничных условий сущест-
вования равенства располагаемой (на максимальном режиме
работы двигателя) тяги лобовому сопротивлению.
В общем случае эта задача решается следующим образом.
Последовательно для ряда чисел М производится сравнение
располагаемой тяги и лобового сопротивления самолета при
заданной перегрузке (например, nYа =2) для различных вы-
сот и в результате выбирается та, при которой имеет место
указанное равенство.
Отметим, что на практике порядок определения условий
выполнимости предельных разворотов для различных высот
существенно упрощается тем, что в инструкциях по расчету
дальности и продолжительности полета приводятся графики,
общий вид которых аналогичен приведенному на рис. 8.11,
позволяющие определять: максимальную высоту выполнимо-
сти установившегося разворота в горизонтальной плоскости
с заданной перегрузкой для заданных % и ПЛС и режим по-
лета (частоту вращения ротора двигателя, число Л1), обеспе-
чивающий выполнение маневрирования с заданными т Д X»
ПЛС, V на заданной высоте.
Подробно вопрос о том, как пользоваться графиками для
нахождения необходимых параметров установившихся разво-
ротов, изложен в соответствующей документации по самолету
и здесь не рассматривается.
Отметим лишь, что при пользовании графиками необходи-
мо учитывать следующее обстоятельство.
В целях сокращения объема информации, помещаемой в
Инструкции, зависимость частоты вращения ротора двига-
теля, потребной для выполнения установившихся разворотов,
от числа М маневрирования и температуры наружного возду-
ха приводится для расчетной перегрузки пУа^ч , представ-
ляющей собой перегрузку, приведенную к расчетным высоте
полета и массе самолета. За расчетные принимают опреде-
ленные, постоянные для каждого самолета массу и высоту,
например, Н = 0 и т= 150000/7 (150 кН). Поэтому если не-
обходимо выполнить разворот на высоте, например, /7 = 3000 м
405
с у = б0° (nYa = 2) на самолете с = 170 000 Я, то расчетную
перегрузку получают из выражения
Пу а расч — ^У а ф
/7расч
РФ
гпф _2 101 325 170000
траСч ~ 70 125 150 000
Для этой перегрузки находят частоту вращения (обороты)
при установившихся разворотах с помощью графиков, поме-
щенных в Инструкции (рис. 8.11).
Рис. 8.11. Номограмма для определения режима работы двигателя
при выполнении установившихся разворотов в горизонтальной плос-
кости
Таким образом, введением Пуа расч учитывается влияние
высоты и полетной массы самолета на перегрузку установив-
шихся горизонтальных разворотов и становится возможным
избежать построения большого количества графиков для раз-
личных высот и полетных масс самолета.
В свою очередь, для исключения расчетов по определе-
нию пу а расч в Инструкции приводится график, аналогичный
представленному на рис. 8.12. Порядок пользования им ясен
406
Рис. 8.12. Номограмма для определения расчетной перегрузки маневрирования
из рисунка. Отметим лишь, что с помощью графика может
быть решена и обратная задача — по известной расчетной
перегрузке для заданных высоты и массы самолета определить
фактическую (потребную) перегрузку для выполнения разво-
рота в горизонтальной плоскости.
Весьма важным вопросом, возникающим при оценке па-
раметров противоракетного маневра на средних и больших
высотах, является вопрос выбора скорости полета, обеспечи-
вающей минимальные расходы топлива.
Для решения вопроса обратимся к рис. 8.10 и 8.13. Из
рис. 8.10 ясно, что число «полуволн» т, укладывающихся на
участке маршрута заданной длины Л, равно .Радиус
разворота в горизонтальной плоскости:
R - Л2
gV П2уа— 1
Рис. 8.13. Зависимость расхода топлива от скорости полета при выполнении
ПРМ типа «симметричная змейка»
При условии выполнения маневра с постоянной перегрузкой
Пуа величина радиуса, а следовательно, и число полуволн за-
висят от скорости полета. Чем больше скорость, тем мень-
ше т и наоборот.
408
В то же время путь S, проходимый самолетам при манев-
рировании, в 1,57 раза больше расстояния по прямой при за-
данном L и не зависит от скорости полета, а следовательно,
и от количества полуволн. В этом случае время маневрирова-
ния Д t = — уменьшается с повышением скорости полета,
секундный же расход топлива при этом возрастает (рис. 8.13).
Как видно из рис. 8.13, существует оптимум скорости,
обеспечивающий минимум расхода топлива при выполнении
ПРМ на заданном участке маршрута. Этот оптимум прояв-
ляется тем более отчетливо, чем выше частота вращения ро-
тора двигателя, необходимая для маневрирования, т. е. чем
больше высота полета, масса самолета и ПЛС.
В условиях полета к цели на больших высотах и с полной
боевой зарядкой при выборе скорости полета решающим мо-
жет стать фактор, определяемый не расходом топлива, а ус-
ловиями' безопасности полета, в частности, должна быть ис-
ключена возможность выхода на углы атаки, превышающие
допустимые.
На рис. 8.14 в качестве примера приведены границы обла-
стей выполнимости разворотов в горизонтальной плоскости
для одного из серийных самолетов, имеющего Су адоп =0,7
при % = 45°, с различными удельными нагрузками на крыло
(mg/S = 4000 Н/м2 и 5500 Н/м2) для высот //=1000 и 5000 м.
Из рисунка видно, что при mg/S = 5500 Н/м2 и /7 = 5000 м для
маневра, выполняемого с пу а = 2, Кмин. доп — 730 км/ч.
Для сравнения отметим, что при тех же mg]S = 5500 Н/м2
И Пу # = 2? НО На Н = 1000 М, Кмин доп — 600 км/ч.
Если же учесть предусмотренные официальными нормати-
вами погрешности в выдерживании перегрузки на оценку
«отлично» Д пу а = ±0,5, то Кмин доп возрастает до 825 км/ч,
при Д Пу а = ± 1,0 (пилотирование на оценку «хорошо^)
К МИН доп = 900 км/ч, а на оценку «удовлетворительно»
КМин доп =980 км/ч.
Естественно, что несмотря на наличие оптимума скорости
по расходу топлива, необходимо назначать ее из последнего
условий — условия безопасности полета.
Здесь же обратим внимание лишь на то, что чем хуже
пилотирует самолет хотя бы один летчик группы, тем дальше
от оптимальной будет скорость, которую следует назначать
всей группе для маневрирования, тем выше расход топлива
(см. рис. 8.13). Как показывают расчеты, разница в расходе
топлива при выполнении ПРМ на участке маршрута длиной
100 км из-за необходимости назначать разные скорости манев-
409
Рис. 8.14. Зависимость1 изменения положения границы Умин по адоп от высоты полета, удельной
нагрузки на крыло и индивидуальной подготовки летчика
рирования для летчиков разной подготовки может достигать
200 кг и более.
В то же время при маневрировании с небольшими удель-
ными нагрузками на крыло и на малых высотах (при полете
от цели) минимальные по адоп скорости полета невелики и в
нашем примере для mg/S = 4000 Н/м2 и //=1000 м составля-
ют 500 км/ч и будут ниже оптимальной по расходу топлива
скорости полета, которая в этом случае и должна быть назна-
чена для маневрирования.
Из изложенного видно, что выбор скорости маневрирова-
ния должен производиться отдельно для каждого этапа бое-
вого полета в зависимости от конкретных данных (%, mg/S,
ПЛС, Н). В целом же поставленная нами задача успешного
преодоления противодействия средств ПВО на маршруте по-
лета вырастает в проблему, при решении которой следует
учитывать характер, состав и расположение средств ПВО,
боевую загрузку самолета по этапам полета, а также требо-
вания условий безопасности маневрирования.
8.2.2. Выбор рациональных маневров
при ведении воздушного боя
Сравнительная оценка маневренных свойств самолетов
основана на сопоставлении общих показателей маневренно-
сти (перегрузок) самолетов — своего и противника (см.
главу 9).
В соответствии с методикой сравнения строятся области
сравнительного превосходства (проигрыша) своего самолета
над самолетом противника и намечаются общие рекоменда-
ции летному составу по ведению маневрирования в интере-
сах достижения успеха в воздушном бою.
Однако на практике ведение воздушного боя в областях,
в которых свой самолет имеет превосходство в показателях
маневренности, не всегда представляется возможным, по-
скольку в ряде случаев летчики, участвующие в воздушном
бою, будут ограничены в выборе диапазона высот и скоростей
его ведения условиями боевой задачи, например, в выборе
высоты при прикрытии истребителей-бомбардировщиков, ата-
кующих наземные цели, и т. п. В этих условиях необходимо
прогнозировать возможные ситуации и уметь вести бой в лю-
бой из областей, в том числе и в тех, в которых у своих са-
молетов хуже показатели маневренности. Для этого необхо-
димо прежде всего твердо знать предельные маневренные
свойства самолета, уметь полностью реализовать их в своих
интересах в любой из областей.
При определении высот и скоростей ведения маневренного
411
воздушного боя возникает необходимость знать положение
границ области, в которой возможно маневрирование самоле-
тов в воздушном бою.
Рассмотрим методику построения таких границ, исходя из
того, что при маневрировании оба летчика должны иметь
возможность сохранять визуальный контакт с самолетом про-
тивника, а для этого расстояние между ними не должно пре-
вышать дальности визуальной видимости, которая для усло-
вий воздушного боя может быть принята равной в среднем
4 км. При этом условии радиусы фигур не должны превышать
половины дальности, т. е. 2 км.
Для построения воспользуемся номограммой для опреде-
ления параметров и границ выполнимости разворотов в гори-
зонтальной плоскости (рис. 8.15).
Рис. 8.15. Номограмма для определения границ областей ведения воз-
душного боя
Задавшись максимальной величиной радиуса для конкрет-
ных условий боя, например, /? = 2000 м, отложим ее на оси
абсцисс левого верхнего квадранта номограммы (рис. 8.15)
и проведем вертикальную прямую линию а—б. Для каждой
точки пересечения этой прямой с кривыми, соответствующими
различным скоростям, проводим горизонтальные прямые
(б—в) до пересечения с вертикальными линиями, проведен-
ными через соответствующие скорости правого квадранта
412
(в—г—д), В точке в пересечения этих прямых в правом верх-
нем квадранте определяем величину перегрузки пу<г=6, с ко-
торой возможен разворот с выбранным радиусом 1?=2000 м
при рассматриваемой скорости полета, в нашем случае —
1200 км/ч.
Далее из точки е пересечения кривой, соответствующей
найденной перегрузке nY а — б с Су а, соответствующим допу-
стимому углу атаки адоп , в левом нижнем квадранте прово-
дим горизонтальную прямую е—д до пересечения ее в правом
нижнем квадранте с вертикалью в—д, проведенной через за-
данную скорость. В точке пересечения прямых д находим пре-
дельную высоту Япр> на которой может быть выполнено
маневрирование с заданным радиусом при рассматриваемой
скорости с найденной перегрузкой Пу а < пэу амакс и адоп.
Рис. 8.16. Области ведения воздушного боя самолетов (своего
и противника)
Проделав аналогичные графические построения для других
скоростей, получим искомые границы области ведения манев-
ренного воздушного боя, внутри которой самолеты не уда-
ляются на расстояние, превышающее дальность визуальной
видимости (рис. 8.16). Следует отметить, что поскольку вели-
чины адоп и п9у а иакс второго самолета отличаются от анало-
гичных характеристик первого, то и границы искомой области
413
для него (при том же радиусе /?) будут отличными от уже
найденных границ (пунктир).
При рассмотрении вопросов маневрирования в воздушном
бою современных самолетов необходимо обратить особое вни-
мание на возможности, которые имеет летчик по использова-
нию запасов кинетической энергии (скорости) самолета для
дополнительного набора высоты.
Для количественной оценки таких возможностей обратим-
ся к энергетическому методу, сущность которого рассмотрена
ранее. Было показано, что при маневрировании с сохранением
постоянной энергии самолета, т. е. при dH3 = О ДЯ = —
VcpAV ъ а л н
---------. Это означает, что набор высоты А Н за счет
g
уменьшения скорости на определенную величину А V будет
тем больше, чем выше средняя скорость за маневр, или что то
же самое, чем больше запас кинетической энергии самолета.
В то же время AV —-------АН, т. е. набор скорости за
V ср
счет потери высоты тем больше, чем меньше запас кинетиче-
ской энергии (скорость).
При сравнительно небольших скоростях Иср маневриро-
вания, имевших место в годы второй мировой войны, запас
высоты давал существенный прирост скорости. Отсюда и из-
вестная формула воздушного боя А. Покрышкина: высота —
скорость — маневр — огонь. Возрастание средних скоростей
маневрирования в воздушном бою приводит к уменьшению
прироста скорости AV за счет потери высоты АН, но в то же
время и к увеличению набираемой- высоты А Н за счет потери
скорости A V.
Таким образом, определяющим здесь становится уже пре-
восходство над противником в скорости, избыток которой мо-
жет быть использован для существенного дополнительного на-
бора высоты или увеличения угловой скорости разворота.
Указанные особенности должны учитываться при выборе
рациональных боевых маневров.
Воздушный бой в горизонтальной плоскости
Как показал опыт Великой Отечественной войны и после-
дующих военных конфликтов, основным содержанием началь-
ного этапа воздушного боя, обеспечивающим его успех с
первой атаки, является внезапность, в свою очередь основы-
вающаяся на стремительности сближения, дерзости летчи-
ка. Достижение же стремительности предполагает, прежде
всего, наличие у атакующего избытка скорости, который ис-
414
пользуется для сокращения времени сближения, набора до-
полнительной высоты.
Для условий ведения воздушного боя в горизонтальной
плоскости рассмотрим, что дает атакующему летчику пре-
восходство в скорости над атакуемым, или, другими словами,
определим тактическую значимость избытка скорости.
Из графиков (рис. 8.15) следует, что сам по себе избыток
скорости в развороте без увеличения перегрузки маневриро-
вания никакого преимущества ни в угловой скорости, ни в
угле разворота не дает. Наоборот, при этом имеет место про-
игрыш в угловой скорости разворота. Например, при nYa = 6
и V = 850 км/ч, со=13 град/с, а при V = 1150 км/ч со = 9 град/с.
Для того чтобы иметь выигрыш в угловой скорости, как это
видно, например, из рис. 8.15 (правый верхний квадрант),
необходимо создавать перегрузку, превышающую перегрузку
самолета противника на 0,6—0,8 единиц на каждые 100 км/ч
превышения скорости.
Для определения величины углового сближения самолетов,
имеющих разные скорости, целесообразно воспользоваться
номограммой, представленной на рис. 8.17. Верхние правый и
средний ее квадранты аналогичны рассмотренным на рис. 8.15.
Левые верхний и нижний квадранты служат для определения
. , Уп2у а — 1
величины времени Аг и сомножителя------------, входящего
ПХа
в выражение для угла разворота
А
Уп2Уа—1 ДУ
Пха V
При этом зависимость At =At (пХа) рассматривается для раз-
личных избытков скоростей А V, а зависимость сомножителя
V п2уа—1
—-------- от Их а приводится для различных перегрузок Луа.
В нижнем правом квадранте приведены зависимости второго
А V А А v
сомножителя -р- в выражении А(р для различных А к от ско-
рости полета V, Нижний средний квадрант служит для пере-
множения рассмотренных сомножителей в выражении для А(р.
Номограмма позволяет определять угол и время разворота
при уменьшении (увеличении) скорости на определенную вели-
чину за счет форсирования разворота или решить обратную
задачу: определить параметры (крен, перегрузку, потерю
скорости и время) разворота самолета на заданный угол. Так,
в случае разворота с потерей скорости с 1000 до 900 км/ч,
415
Рис. 8.17. Номограмма для оценки влияния величины избытка скорости на параметры разворотов в гори-
зонтальной плоскости
т. ё. при Уср = 950 км/ч с пх а =—0,3 и пуа=4 угол фазворота
составит 80°, Д /=’10 с (сплошные линии).
Оценим влияние выпуска тормозных щитков и уменьше-
ния пх а до —0,5 в рассмотренном примере. При этом же угле
разворота Дф = 80° падение скорости составит теперь уже
180 км/ч (пунктир), а время разворота практически будет тем
же. Следовательно, выпуск щитков явно нецелесообразен.
В той же последовательности находятся параметры разво-
рота второго самолета, которые затем сравниваются с пара-
метрами разворота первого.
Изложены общие положения, знание которых необходимо
летчику при подготовке к ведению воздушного боя.
Перейдем теперь к рассмотрению методики выработки ре-
комендаций летному составу по выбору рациональных манев-
ров в горизонтальной плоскости, обеспечивающих успешное
выполнение задач боя.
Методика основывается на сопоставлении совмещенных на
одном графике границ выполнимости разворотов в горизон-
тальной плоскости.
При сравнении целесообразно придерживаться определен-
ной последовательности.
1. Сравнить границы по адоп» пуам&к& ^макс, пУапр<
2. Сравнить параметры маневров nYa, R,t в характерных
точках, соответствующих ^макс и, 7?Мин , а также в точках с
совмещенными пу а Р и пуапрдля установившихся и форсиро-
ванных разворотов.
3. Определить величины максимального выигрыша (про-
игрыша) в угле разворота Дф за определенное время, напри-
мер, за время разворота на 360°.
Поскольку основной задачей лётчика в маневренном
воздушном бою является упреждение противника в угле раз-
ворота в целях опережения его в выходе в область применения
оружия, то за основу сравнения берется выигрыш в угловой
скорости и в радиусе разворота, определяемый с помощью
номограмм.
По результатам сравнения выявляются перегрузки, угло-
вые скорости, а также скорости и высоты, на которых целе-
сообразно вести бой с противником.
В качестве примера рассмотрим совмещенные границы
двух условных самолетов с характеристиками, близкими к
соответствующим характеристикам серийных самолетов вто-
рого поколения (рис. 8.18).
Не останавливаясь на рассмотрении первого и второго
пунктов рекомендованной методики сравнения, отметим, что
летчику самолета А выгодным для ведения воздушного боя
является диапазон скоростей от УМин до 1000 км/ч, в котором
27—5007сп
417
Рис. 8.18. Совмещенные границы областей маневрирования в горизонтальной плоскости самолетов А и Б
он имеет превосходство, и в Умин (по адоп J и в перегрузке
предельного установившегося виража.
Превосходство в адоп позволяет летчику самолета А вы-
полнять длительный установившийся разворот с со=10,5 град/с
(точка а), а летчику самолета Б — с <о = 8,5 град/с (точка б),
причем и с большим радиусом.
Таким образом, обеспечивается превосходство в угловой
скорости А<о = 2 град/с. И если разворот на 360° летчик само-
го а . 360
лета Ь выполнит за A t— ---- = 42 с, то за это же время
самолет Л развернется на угол <р= 10,5-42 = 441 , т. е. выигрыш
(Лф) составляет 81° за один оборот.. Практически этот же
выигрыш в Асо = 2 град/с сохраняется до скоростей^800—
850 км/ч, что обусловлено превосходством в предельной по
тяге перегрузке на Апу«=0,5. В отличие от летчика самоле-
та А летчику самолета 5, наоборот, выгодны скорости, пре-
вышающие 1000 км/ч, при которых превосходство самолета Б
в угловой скорости предельного установившегося разворота
достигает 1,5 град/с на V= 1300 км/ч.
Однако для летчика этого самолета возникает вопрос, ка-
ким должно быть маневрирование, чтобы он мог длительное
время находиться в выгодном для него диапазоне скоростей,
превышающих 1000 км/ч.
Как следует из рис. 8.18, для этого ему не следует выпол-
нять форсированные развороты, а целесообразно маневриро-
вать с перегрузками, не превышающими предельных по тяге
перегрузок (точки с, d, е).
В заключение отметим, что с помощью рассмотренных но-
мограмм в последовательности, изложенной ранее, можно
воспроизводить графически пр отдельным этапам траектории
движения обоих самолетов, определять их взаимное положе-
ние, т. е. выполнять моделирование маневрирования в воздуш-
ном бою (в данном случае — в горизонтальной плоскости);
Выбор закона управления истребителем в воздушном бою
в горизонтальной плоскости
Рассмотрим возможности полного использования манев-
ренных свойств самолетов за' счет знания и умения летчика
пилотировать самолет (изменять режим работы двигателя,
перегрузку и крен, применять тормозные щитки). Ранее уже
отмечалось, что одним из важнейших параметров, определяю-
щих тактику боя на горизонталях и успех в бою, является
угловая скорость разворота, т. е. способность самолета к
«поворотливости».
27* 419
Опыт Великой Отечественной войны, локальных войн
указывает на часто возникающую проблему: как быстрее раз-
вернуться на противника при завязке боя в горизонтальной
плоскости, если в начале разворота скорость полета имеет
различную величину; какой закон пилотирования обеспечит
рациональный маневр и приведет к успешному применению
оружия?
Прежде всего заметим, что выбор рационального закона
управления (режима работы двигателя, перегрузки ['и крена,
положения тормозных щитков) на развороте в горизонталь-
ной плоскости может диктоваться не только соображениями
увеличения угловой скорости разворота. Например, в воздуш-
ном бою важно сохранить или увеличить энергетическое пре-
( V2 \
имущество над противником [ Н9 = Н -|-----), т. е. свободу
\ 2£/
маневра высотой и скоростью полета по отношению к маневру
самолета противника. Для этого тяга должна быть возможно
большей, а сопротивление — меньшим Д Нэ =* пха ср Уср /Ман==
(Р - ХЭСР и J \
=----------ИсрГман ,т. е. летчику в этом случае невыгодно
mg )
уменьшать тягу Р и выпускать тормозные щитки (увеличи-
вать сопротивление Ха).
Однако когда говорится о сокращении времени разворота
(д ® \
t =— , независимо от того, каков будет
U) /
уровень энергии к концу маневра, вполне можно ставить во-
прос о целесообразности преднамеренного торможения са-
молета.
Ответ на этот вопрос неоднозначен и зависит от того, на
каких скоростях и высотах полета происходит завязка боя на
горизонталях.
В самом деле, из выражения для угловой скорости разво-
ё VП2У а— 1
рота (Of = ®--у----- следует, что для сокращения времени
разворота его надо выполнять при максимально возможной
перегрузке^у а. Как быть тогда со скоростью? Возникает про-
блемная ситуация: вроде бы средняя скорость на развороте
должна быть как можно меньшей и поэтому летчику следует
убрать тягу и выпустить тормозные щитки. Но приведет ли это
к успеху?
Ведь применение такого закона управления приводит к
снижению скорости, а вместе с ней и к уменьшению пере-
480
/ CyapV2S\
грузки —2 mg—J И может оказаться»что угловая ско-
рость разворота не только не увеличится, а наоборот, умень-
шится, и учитывая это, летчику надо разворачиваться на пол-
ной тяге с убранными тормозными щитками. Как же решить
эту проблему? Рассмотрим возможные варианты.
I вариант. Завязка боя происходит на сравнительно не-
больших скоростях полета или больших высотах. В этом слу-
чае наибольшая перегрузка пу а определяется величиной допу-
стимого угла атаки адоп :
_ С у а ад°п Р V2
Пуа ~ 2mg/S ’
где mglS — заданная нагрузка на крыло, соответствующая
выбранной боевой зарядке самолета.
Тогда
1//Суд «ДОП Р V___1_
V \ 2mgjS ) V2
Такой вид аналитического выражения для угловой скоро-
сти разворота в горизонтальной плоскости удобен для ана-
лиза. В самом деле, из формулы видно, что при уменьшении
скорости полета в процессе разворота на малых скоростях
или больших высотах снижается и угловая скорость разворо-
та. Следовательно, в этом случае выгодно использовать сле-
дующий закон управления: полный форсаж, создание пере-
грузки и крена в соответствии с допустимым углом атаки ц
уборку тормозных щитков.
II вариант. Завязка боя происходит на больших скоростях
полета или на малых и средних высотах. В этом случае разво-
рот ведется при больших скоростных напорах, и наибольшая
перегрузка определяется ограничениями по прочности само-
лета, *г. е. величиной пуа макс. При этом разворот выполняется
на-углах атаки меньше допустимых.
Если считать, что эксплуатационная перегрузка не зависит
от скорости полета, то при развороте с уменьшением скорости
полета (форсированном развороте) летчик увеличивает угол
атаки и сохраняет постоянное значение эксплуатационной
перегрузки и соответствующего ей крена до тех пор, пока не
421
наступят ограничения по полностью выбранной на себя ручке
управления.
Если nt „ = const, то из выражения
л и МаКС 9 х
<or=^/(^eMaKC)2-l
следует, что при уменьшении средней скорости! полета увели-
чивается угловая скорость, сокращается время разворота на
заданный или потребный угол для эффективного применения
оружия. Следовательно, в этом случае целесообразным зако-.
ном управления будет: выключение форсажа (уменьшение
тяги), выдерживание постоянных значений пУа макс и макси-
/ 1 \
мального крена Нмакс — arccos —----- и выпуск тормозных
\ а макс /
щитков.
III вариант. Этот вариант содержит в себе элементы первых
двух вариантов, т. е. при завязке боя на горизонталях в начале
разворота углы атаки меньше допустимых, но в процессе раз-
ворота по мере уменьшения скорости летчик выводит самолет
на допустимые углы атаки адоп. При этом искусственное
торможение (уборка РУД,.выпуск тормозных щитков) выгод-
но только на том участке, где летчику удастся увеличением
угла атаки поддерживать постоянные перегрузку и крен, а
затем еще до выхода на допустимый угол атаки ему следует
убрать тормозные щитки и включить полный форсаж, чтобы
не допустить сильного уменьшения скорости при пилотирова-
нии пр границе адоп и связанного с этим существенного сни-
жений перегрузки и угловой скорости разворота.
Рассмотрим выбор рациональных законов управления и
условия получения максимальной угловой скорости разворота
при ведении воздушного боя в горизонтальной плоскости с
помощью зависимости Юг (К nYa) для заданного варианта бое-
вой зарядки (полетной массы).
На рис. 8.19 применены следующие обозначения:
• ^уст мин . —-скорость установившегося разворота с мини-
мальным радиусом;
Умакс форс — скорость полета, при которой происходит
форсированный разворот с максимальной угловой скоростью;
Ко макс уст —скорость установившегося разворота с макси-
мальной угловой скоростью;
—скорость, при достижении которой в процессе фор-
сированного разворота выгодно изменять перегрузку (или
«сигнал» летчику для изменения перегрузки);
V-p — скорость, при достижении которой в процессе фор-
422
сированного разворота выгодно изменять 'тягу и сопротивле-
ние (уборка тормозных щитков). Ее величина является сиг-
налом для управления тягой и тормозными щитками;
Умаксдоп — максимально допустимая скорость полета.
Через точку 2 проведена касательная, соответствующая
величине максимальной угловой скорости, а через точку 1—
касательная, соответствующая минимальному радиусу уста-
новившегося разворота.
Рис. 8Л9. Номограмма для выбора рационального маневрирования
при ведении воздушного боя в горизонтальной плоскости -
Анализируя представленную на рис. 8.19 зависимость,
можно утверждать, что диапазон скоростей Vp < V < Умакс доп
является невыгодным для разворота в воздушном бою/ так
как в этом диапазоне угловая! скорость форсированного раз-
ворота меньше угловой скорости установившегося разворота
(все значения ©форс лежат ниже линии, соответствующей
^уст макс e const). Поэтому если разворот начат в этом диа-
пазоне скоростей, то в целях быстрого выхода в,диапазон
скоростей Vn у а < V < Vp, где Юфорс > “уст макс, целес’ообраз-
но использовать следующий закон управления: уменьшить
тягу (выключить форсаж), создать перегрузку пуа = луамакс
и выпустить тормозные щитки. По мере торможения поддер-
живать Пувмакс = const (Тмакс e const) увеличением угла атаки.
, Диапазон скоростей у о V , наоборот,1 выгоден для
энергичного разворота (<»форс> «устмакс ), хотя здесь при
торможении происходит дальнейшая потеря уровня энергии
423
самолета. Поэтому при достижении скорости V р необходимо
изменить закон управления: включит!^ форсаж, убрать тор-
мозные щитки и продолжать разворот (^перегрузкой большей,
чем предельная по тяге, т. е. находиться выше границы уста-
новившихся разворотов (например, продолжать разворот с
перегрузкой п?у а макс = const , если это возможно). Включение
форсажа снижает темп потери уровня энергии (скорости)
самолета.
Если форсированный разворот продолжать выполнять при
скоростях V<Vnya, то для сохранения горизонтальности
разворота летчик выведет самолет на допустимые углы атаки,
достигнет ^форсмакс, где удержаться невозможно, и выйдет в
точку 1, соответствующую минимальному радиусу устано-
вившегося разворота, где со < о)уСтмакс •
Другими словами, при потере скорости меньше Vnya даже
полный форсаж уже не обеспечивает разгона до Упуа при
любых пу а > Пу а пр . Здесь, конечно, невыгодно уменьшать
тягу и применять тормозные щитки. В этом диапазоне быстрое
прекращение торможения и переход к разгону возможны
только за счет уменьшения перегрузки ниже предельной по
тяге (например, переход из точки 1 по закону 1—7—2).
Следовательно, при выходе на, скорость УПуа (при тормо-
жении, точка 6) следует, не изменяя режима работы двига-
теля, уменьшить перегрузку с максимальной эксплуатацион-
ной до предельной по тяге с таким расчетом, чтобы попасть
в точку 2, где и продолжать разворот на противника с мак-
симальной угловой скоростью, но уже установившегося раз-
ворота. Умение в зависимости от тактической ситуации свое-
временно уменьшать перегрузку позволяет избежать большой
потери скорости, а следовательно, и уровня энергии.
Однако заметим, что преждевременный сброс перегрузки
при торможении до скорости УпУа приводит к недостаточно
полному использованию боевых возможностей по углу разво-
рота, а задержка со сбросом перегрузки при подходе кУПуа
ведет к существенной потере скорости полета и снижению
уровня энергии, что также приводит и к проигрышу в угле
раЗВОрОТа (ф = <ОГ ^разв) , Так КаК ХОТЯ ЗДеСЬ <«форс > «уст макс,
но значительно убыстряется темп потери скорости до выхода
на угол адоп, а следовательно, резко уменьшается время раз-
ворота до выхода на адоп.
Заметим также, что при V >Vnya снижение скорости бу-
дет сопровождаться увеличением радиуса разворота, а при
V<Vnya —его уменьшением.
424
Иногда скорость полета, соответствующую максимальной
угловой скорости установившегося разворота (14> угг макс ),
называют потребной скоростью воздушного боя на горизонта-
лях. Умение летчика, управляя перегрузкой, выходить на эту
скорость обесйечивает рациональное маневрирование в
воздушном бою.
Учитывая, что разворачиваться выгодно на скорости Улуа,
а предельные возможности соответствуют диапазону скоро-
стей УПуа-— ^минует ’ в Диапазоне высот и скоростей полета
конкретного самолета можно построить область высот и ско-
ростей рационального маневрирования на горизонталях.
Принципиальный вид такого графика показан на рис. 8.20.
Такую же область можно построить и. для самолета против-
ника и использовать эти области (своего самолета и против-
ника) для сравнительного анализа при моделировании
воздушного боя в горизонтальной плоскости. Кривая 1—2 яв-
ляется границей по минимальной скорости установившегося
разворота. Она определяется из условия равенства шфорсадоп
и <оуст (точка 1 на рис. 8.20), что может соответствовать ми-
нимальному радиусу установившегося разворота.
Рис. 8.20. Область высот и скоростей рационального
маневрирования на горизонталях
Кривая 2—3 является границей максимальной высоты по-
лета, где еще можно вести воздушный бой из условия сохра-
нения визуального контакта между противоборствующими са-
молетами.
425
Эта граница строится из условия 7? = const. Тогда
V2
О — ____________
/V4
^2 g2 + 1 —Церегрузка, которая обеспечива-
ет на данных Н и V полета сохранение R = const (напри-
мер, R = 2000 м).
Учитывая, что 2 = — (при М = const), получим ргр =
ПУа 1 Pi
~Рх9пУа, т. е. при данном числе М полета давление на гра-
нице 2—3 определяется давлением на располагаемой высо-
те при этом числе М и значением пУа, рассчитанным по
приведенной формуле. Рассчитав ргр(Л1), легко построить
границу 2—3.
Линия 3—4 — граница по скорости, на которой достигается
максимальная угловая скорость установившегося разворота
(Ко уст макс )• Влево и вправо от этой границы при выполне-
нии установившихся разворотов уменьшается угловая ско-
рость, но вправо это сопровождается увеличением радиуса
разворота. Граница 1—4 определяется из условия обеспечения
безопасной высоты полета по нестолкновению с землей при
необходимости выполнения нисходящих маневров с режимов
горизонтальных разворотов.
Воздушный бой по пространственным траекториям
Обоснование и выбор пространственных маневров, приме-
няемых в воздушном бою, будем производить с-помощью но-
мограмм, сущность и порядок использования которых изложен
в первом разделе учебника.
При этом целесообразно придерживаться следующей ме-
тодики.
1. С помощью сеток обобщенных характеристик опреде-
лить рациональные для ведения воздушного боя перегрузки
(углы атаки), скорости и высоты.
2. С помощью графика, определяющего зависимость
A V=AV (©, пха ), найти допустимые пределы изменения уг-
лов © и скоростей полета, обеспечивающие летчику возмож-
ность маневрирования в выгодной (по соотношению перегру-
зок Пу а пр и Пха) О/)ЛаСТИ.
3. Определить целесообразные фигуры пилотажа, а также
параметры их выполнения и произвести оценку величины
выигрыша (проигрыша) в AV, Д<р, Д©. Для выполнения такой
оценки воспользуемся приведенными на рис. 8.21 сетками
426
427
Н^ЗОООм
Рис. 8.21. Сетки обобщенных характеристик маневренности самолетов А и Б
обобщенных характеристик рассматриваемых самолетов А и
Б для // = 3000 м.
Из графика следует, что в диапазоне скоростей от VMHH
до V = 925—975 км/ч превосходство в^харИ в предельной по
тяге перегрузке Пуапр независимо от нормальной перегруз-
ки Пуа, с которой производится маневрирование, имеет само-
лет Л (линии пхмр для всех перегрузок л у а проходят для этого
самолета выше, чем для самолета Б).
На скоростях же полета выше указанных, наоборот, пре-
имуществом обладает самолет Б, и летчику этого самолета не-
выгодно для сохранения энергетического преимущества умень-
шать скорости ниже оговоренных.
Рассмотрим, как должен маневрировать летчик самоле-
та Б, чтобы оставаться в выгодной для него области. Снимем
с графика (рис. 8.21) величины пх ав точках пересечения кри-
вых равных перегрузок: при
Пуа—\ Пха^^^, Пуа = 3, Пх а = 0,28;
Пуа~5 Пха—09 Пуа=7, Их а = —0,38.
С помощью графика (см. рис. 2.11) для указанных Пха на-
ходим углы установившегося набора 0уСт =35°; 16°; 0°; —-22°.
Для облегчения запоминания найденной зависимости меж-
ду углами 0 и перегрузкой п,уа формализуем ее и выразим с
помощью формулы (только для рассматриваемой пары само-
летов) :
1 * j 35”0
Пу а — 1,5 Ч---.
Смысл ее для летчика самолета Б состоит в том, что
остаться в выгодном для него диапазоне скоростей он может,
если при выполнении маневрирования с различными углами©
не превысит найденной по формуле перегрузки. Так, при вы-
полнении, например, боевого разворота, при средней угле
gg_________________________________________________3Q
6ср =30° перегрузка не должна превышать пуа =———Ь
+ 1,5=2, а на снижении со средним углом 0 = —20° пуа долж-
на быть не менее 7.
Величину максимального угла 0, соответствующего созда-
ваемой перегрузке пуа,при необходимости получим с помощью
формулы
0 = 50 — 10 Пу.а •
Следовательно, при создании перегрузки, например, 4 еди-
ницы, угол на маневре не должен превышать 0 = 50—4-10=10°
428
и т. д. Этих же рекомендаций летчик самолета Б должен
придерживаться для того, чтобы перейти из невыгодной для
него области скоростей, меньших 925—975 км/ч, в область
скоростей выгодных, т. е. превышающих указанные.
Летчику же самолета А выгодны скорости, меньшие ука-
занных, вплоть до минимальных, определяемых адоп. Поэтому
и перегрузки он должен стремиться выдерживать больше ого-
воренных, но не превышать допустимого угла атаки по ука-
зателю. Поскольку для летчиков обоих самолетов в рассматри-
ваемом случае каких-либо ограничений, кроме п* а макс й адоп
нет, то и выполнять они могут любые маневры, только для
летчика самолета Б их выгодно (для возможно более дли-
тельного сохранения энергетического преимущества) выпол-
нять с меньшими перегрузками, чем найденные с помощью
рассмотренной формулы, а для летчика самолета А, наоборот,
с большими перегрузками пуа .
Указанное обстоятельство совсем не означает, что летчику
самолета Б нельзя создавать большие перегрузки при манев-
рировании. Он может создавать их любыми, вплоть до макси-
мальных, однако должен помнить, что выйдя в нежелатель-
ную для него область (менее 950 км/ч), он теряет энергети-
ческое преимущество, и этот проигрыш будет накапливаться
с каждой секундой нахождения в данной области. Поэтому
при планировании боя частей, вооруженных самолетами 5,
предпочтительнее предусматривать маневрирование (речь
идет о длительном маневрировании) на больших скоростях
полета.
Определим теперь значимость максимального энергетиче-
ского проигрыша, т. е. проигрыша в пХар, например, для лет-
чика самолета Б.
Как видно из рис. 8.21, для рассматриваемой высоты
/7 = 3000 м максимальная величина проигрыша впхар имеет
место на скорости 650 км/ч приму а = 3 и достигаетД Лхд=0,15.
Йз графика (рис. 2.12) видно, что независимо от ско-
рости и высоты полета при одинаковых углах 0 разница в
Дмхд=0,15 обусловливает изменение разницы в скоростях
между самолетами на 5,2 км/ч за каждую секунду маневри-
рования. При этом за время, например, 10 с полета, эта раз-
ница возрастает до 52 км/ч. Разница же в углах установив-
шегося прямолинейного набора Д0 = 28—12 = 8°.
Определим теперь конечные параметры обоих самолетов
при выполнении боевого разворота. Наиболее просто такое
сравнение можно произвести для разворотов, выполняемых
по типу спирали, с помощью номограммы, приведенной на
рис. 8.22.
429
Рис. 8.22. Номограмма для определения параметров спирали
Для пользования ею предварительна) находим для интере-
сующих нас 7=650 км/ч, средней высоты Н^=3000 мйув = 3
(рис. 8.22) пха а — 0,35, пхав = 0,2. Из рис. 2.12 определяем
углы установившихся спиралей: 0уСТ а ~ 20° и 0устд = 12° со-
ответственно.
Далее с помощью графических зависимостей, помещенньрс
в верхнем правом квадранте номограммы (рис. 8.22), находим
для спиралей, выполняемых с углами 0уст — 20й и 12° и
пу а=3, потребные углы крена у, равные ,73 и 71° соответ-
ственно.
В последовательности, показанной на рис. 8.22 сплошны-
ми линиями, находим радиусы разворотов- Ra *= 1050 м и
Rs = 1120 м и изменения высоты кН а = 1220 м и А Нб =750 м.
Время разворота на угол <р = 180° составляет 19 и 21 с соответ-
ственно.
Как видим, разница в радиусе, времени и угле разворота
довольно мала и за время разворота на 180° ощутимого выиг-
рыша не дает. В то же время довольно ощутима разница в
набираемой высоте (А/7 = 470 м).
Особенностью выполняемой оценки, обусловливающей ее
приближенность, является то, что в рассматриваемом диапа-
зоне изменения высот полагаем постоянной 11 равной среднему
значению величину перегрузки пха. Поэтому не следует брать
диапазон изменения высот (угол разворота) слишком боль-
шим, чтобы ограничить величины погрешностей расчетов.
Обратим внимание также на то, что в принятой ситуации
скорость 7 = 650 км/ч припуа=3 для самолета Б является
минимально допустимой и ограничена выходом на адоп. Если
же летчик самолета Б будет также выдерживать угол 0 = 20°
(как и летчик самолета Л), то ежесекундно он будет терять
скорость на 5 км/ч и через 19 с затормозится до 555 км/ч. Од-
нако, как видно из рис. 8.22, делать этого он не должен, по-
скольку уже в начале маневра при 7 = 650 км/ч пуа =3 и
/7ср =|3000 м находится на границе по допустимому углу ата-
ки, дальнейшее увеличение которого из условий безопасности
полета для него недопустимо. Поэтому на 7=650 км/ч он
должен набирать высоту с углом 0 не более 12°.
При необходимости по известным величинам радиусов и
углов перемещения самолета за определенные промежутки
времени в соответствующем масштабе воспроизводятся гра-
фически траектории движения самолетов в горизонтальной и
вертикальной плоскостях и определяется относительное взаим-
ное их положение.
Полученные данные являются той основой, на которой
базируются тактические приемы, обеспечивающие успех
воздушного боя.
431
8.2.3. Выбор рациональных боевых маневров при атаке
наземных целей
Для самолетов фронтовой авиации маневренные свойства
относятся к основным свойствам, определяющим эффектив-
ность боевых действий не только при ведении воздушного боя,
но и при нанесении авиационных ударов. Это объясняется тем,
что для успешной атаки наземной цели, прикрытой мощной
современной системой ПВО, необходимо выполнять сложные
виды маневров. Последнее возможно при условии, что само-
лет обладает высокими маневренными свойствами, не усту-
пающими маневренным свойствам самолетов-истребителей.
Говоря о роли маневренных свойств при рассмотрении во-
просов нанесения ударов по наземным целям, следует также
отметить, что эффективность боевых действий экипажей са-
молетов, вышедших в район нанесения авиационного удара и
обнаруживших цели, может быть охарактеризована вероят-
ностью выполнения боевой задачи №б.з, определяемой вероят-
ностями наступления ряда событий, в том числе и зависящих
от маневренных свойств самолетов.
К ним относятся:
0ат—вероятность выхода в атаку цели;
Аюр— вероятность ее поражения;
^пво—вероятность преодоления противодействия средств
ПВО объекта.
Под вероятностью выхода в атаку цели принято понимать
вероятность наступления события, состоящего в том, что лет-
чик после обнаружения цели доворотом самолета сможет
устранить имеющееся боковое уклонение и занять положение,
обеспечивающее приемлемое и эффективное применение нахо-
дящихся на борту средств поражения.
Вероятность выхода в атаку зависит от способа атаки и
маневренных свойств самолета. Важным является последнее
обстоятельство, поскольку маневренность определяет возмож-
ности самолета по искривлению траектории, и в конечном ито-
ге— по занятию исходного положения для атаки, особенно с
пикирования, а также (что существенно при преодолении
ПВО) время пребывания атакующего в зоне огня ПВО. По-
вышению вероятности выхода в атаку способствует и автома-
тизация выполнения этого этапа атаки цели.
Вероятность поражения цели также существенно зависит
от маневренных свойств самолета.
Будем полагать, что в результате соответствующей подго-
товки к полету отобраны и подвешены на самолет оптималь-
ные (для заданной цели) средства поражения. Кроме того, из
всех способов атак будем рассматривать широко распростра-
432
ненный и обеспечивающий высокую точность поражения спо-
соб — атаку с пикирования.
Известно, что при атаке с пикирования точность стрельбы
из пушек, неуправляемыми реактивными снарядами и бомбо-
метания тем выше, чем меньше дальность стрельбы. На
рис. 8.23 показан характер изменения величины вероятного
отклонения Ех от дальности стрельбы пушечными и неуправ-
ляемыми реактивными снарядами и от дальности бомбоме-
тания.
Рис. 8.23. Зависимость величины вероятного откло-
нения от дальности стрельбы для различных средств
поражения
В свою очередь дальность стрельбы и связанная с ней вы-
сота начала выхода из пикирования определяются скоростью
самолета, углом пикирования, а также и условиями на выводе
из пикирования (перегрузкой, допустимым углом атаки,
безопасной высотой вывода из пикирования и т. п.).(Влияние
перегрузки и скорости полета на дальность стрельбы может
быть оценено по величине потери высоты на выводе из пики-
рования с помощью формулы
к и V2cp(l—COS0)
дя=—7----------------0Т-
g I Пу а ср COS I
Характер влияния на дальность стрельбы угла пикирования
приведен на рис. 8.24, из которого видно, что большие даль-
ности стрельбы имеют место и при больших и малых углах
пикирования. На больших углах пикирования возрастание
дальности стрельбы обусловлено значительной потерей высо-
ты (из-зй существенного возрастания скорости) на выводе из
28—5007сп
433
пикирования, что хорошо видно из приведенной формулы,.
Возрастание дальности стрельбы при малых углах пикирова-
ния объясняется увеличением наклонной дальности с умень-
шением угла пикирования (в пределе при 0 = 0, т. е. в гори-
зонтальном полете, наклонная дальность, если не учитывать
понижения траектории снаряда, равна бесконечности).
Рис. 8.24. Зависимость дальности стрельбы от угла
пикирования
Вследствие рассмотренных причин существует угол пики-
рования, обеспечивающий минимальную дальность стрельбы
(рис. 8.24) и составляющий, $ак показывают расчеты, при-
мерно 20—25°. Зависимость дальности стрельбы от скорости
полета на выводе из пикирования для различных перегрузок
показана на рис. 8.25.
Атр
Рис. 8.25. Зависимость дальности стрельбы от скорости и перегруз-
ки на выводе из пикирования
434
Из анализа кривых следует, что дальность стрельбы тем
меньше, чем меньше скорость и больше,перегрузка на выводе.
В то же время с уменьшением скорости для создания заданной
перегрузки возрастают потребные углы атаки (коэффициен-
ты СУа), что видно из выражения
Су а =
2 mg Пу а
pV2S
Так как из условий безопасности угол атаки (коэффи-
циентСуа) ограничен величиной адоп (Су а доп) , перегрузка,
которую можно (создать на выводе из пикирования, пропор-
циональна квадрату скорости и потеря высоты, а следовав
тельно, и дальность стрельбы будут меняться так, как пока-
зано на рис. 8.26.
Рис. 8.26. Зависимость дальности стрельбы от скорости на выво-
де из пикирования и от удельной нагрузки на крыло
Из суммарного графика (рис. 8.27), полученного наложе-
нием кривых рис. 8.25 и 8.26, видно, что введение ограничений
по адоп из условий безопасности обусловливает наличие оп-
тимальной скорости, обеспечивающей минимум дальности
стрельбы. Величина оптимальной скорости зависит от удель-
ной нагрузки на крылр mg]S, перегрузки пуа и величины
адоп (Су а
На рис. 8.28 приведена итоговая номограмма, позволяющая
оценивать дальность стрельбы с учетом всех рассмотренных
райее факторов (скорости, перегрузки, угла пикирования,
безопасной высоты и т. п.).
28*
435
Для удобства пользования на номограмме вместо дально-
сти стрельбы приведены связанные с ней безопасные высоты
начала вывода из пикирования. Эти высоты назначаются как
из условий исключения возможности столкновения с землей
(что зависит от рельефа местности в районе цели, подготовки
летчика и т. п.), так и из условия невхода в зону разлета ос-
колков боеприпасов различных типов и калибров.
Рис. 8.27. Оптимальные скорости, обеспечивающие минимум
дальности стрельбы
Таким образом, с помощью номограммы учитываются все
условия, влияющие на безопасность атаки.
Порядок пользования номограммой ясен из рисунка и изо-
браженных на нем ключей и пояснений не требует.
В дополнение к сказанному отметим, что номограмма по-
строена для серийного истребителя-бомбардировщика, имею-
щего Су а доп =0,8, средний угол пикирования выбран рав-
ным 20°, средняя высота на выводе из пикирования принята
равной 1000 м.
Вероятность преодоления ПВО объекта в значительной сте-
пени обусловлена характером маневрирования, требования к
которому зависят от того, в зонах поражения каких средств
оно производится. Так, например, при нанесении удара по це-
лям, прикрываемым ЗУР средней дальности, целесообразна
атака с пикирования с выполнением энергичного боевого раз-
ворота, обеспечивающего срыв режима автосопровождения
РЛС подсветки цели.
При атаке непосредственно огневых позиций ЗУР средней
дальности высокая эффективность преодоления противодей-
436
700 300 900 1000 У,км/ч
Определение оптимальной скорости
Вы 6 ада из Пикирования:
tny/S v°nT
И а. Оап
Определение Ннв по ИБ£3
800 Кср-.Щ&^ап) 300
*------
7"ИК ^выв^*^,,
1200 НВЕЗ Нн* 1200
Определение Ннв по 20СкпроизВодится
Так каН Ц П0 “нв”
оо
Рис. 8.28. Номограмма длВ определения оптимальных параметров при стрельбе по наземным целям
с пикирования
ствия средств ПВО достигается выполнением энергичного бое-
вого разворота в сторону цели. При маневрировании в зонах
поражения ЗА для увеличения промаха стрельбы целесооб-
разны маневры с большими (больше 3—4 единиц) перегруз-
ками и на возможно больших дальностях. В зонах поражения
ЗУР малой дальности целесообразны маневры, большая часть
которых выполняется на дистанциях, близких к максималь-
ным для этих средств (5—8 км), с входом атакующего в зону
поражения на минимальное время, которое по возможности
должно быть меньше времени полета ракеты до атакующего
их самолета. Целесообразны также выход за верхнюю грани-
цу зоны поражения, большие перегрузки и т. п.
Для отыскания рациональных маневров при атаке назем-
ных целей на практике может оказаться целесообразным при-
ближенный спбсоб решения поставленной задачи. При этом в
качестве основы маневрирования выбирается кдасс маневров,
в наибольшей степени удовлетворяющий сформулированному
комплексу требований (или принятому критерию оптималь-
ности — целевой функции).
На основе маневров выбранного класса рассматриваются
возможности ,(с оценкой эффективности) выполнения атак
наземных целей самолетами фронтовой авиации с учетом рас-
смотренных вероятностей: преодоления ПВО, выхода в атаку,
поражения целей. Рассматриваемой задаче и изложенному
комплексу требований в наибольшей степени удовлетворяет
боевой разворот, выполняемый .в минимальное время с боль-
шими угловыми скоростями перемещения атакующего относи-
тельно средств ПВО (форсированный боевой разворот), кото-
рый, следовательно, и может быть положен в основу маневри-
рования при атаке наземных целей.
Ранее было показано, что для уменьшения времени выпол-
нения пространственного маневра целесообразно его форси-
рование, заключающееся в том, что во второй половине бЪе-
вого разворота угол крена увеличивается более 90°. Увеличе-
ние угловой скорости разворота достигается в данном случае
за счет возрастания центростремительной силы, искривляющей
траекторию движения в вертикальной плоскости (KacosT±
± mg cos 0) по двум причинам:
— возможности при создании большого угла крена напра-
вить составляющую подъемной силы Уасозу в сторону со-
ставляющей силы тяжести и получить суммарную силу
(Yа cos т + mg cos 0);
— появления возможности увеличивать подъемную силу
(перегрузку nYa), а с ней и составляющую Yacos 7 до макси-
мальных значений, определяемых выходом самолета наадоп.
Набираемая высота при таком маневре, естественно, умень-
438
шается, но зато в максимальной степени используются несу-
щие свойства крыла и в итоге возрастает центростремительная
сила, искривляющая траекторию, угловая скорость и умень-
шается время маневра.
С помощью вариационных методов показывается, что наи-
большего сокращения времени маневрирования можно до-
стичь, выполняя его, так, чтобы траектория движения лежала
в наклонной плоскости (см. рис. 8.4).
Далее в качестве одного из возможных вариантов излага-
ется методика выбора рациональных боевых маневров для
атаки наземных целей с пикирования на основе форсирован-
ного боевого разворота, выполняемого в наклонной плоскости.
Рис. 8.29.- Схема атаки с применением разворота в наклонной плоскости
(РНП):
ОВС — разворот в наклонной плоскости с набором заданной высоты
и выходом в направлении на цель; CD — ввод в пикирование; DE —
атака цели
Для исследования вопроса о возможностях реализации
выбранного маневра — разворота в наклонной плоскости —
в качестве основы для маневрирования самолетов фронтовой
авиации при атаке наземных целей с пикирования примем
схему, изображенную на рис. 8.29 и 8.30.
439
Рис. 8.30. Расчетная схема маневра при атаке наземной цели с
пикирования на основе РНП
4
440
, Согласно рис. 8.29 атака с пикирования с заданным углом
возможна при выводе самолета на позицию начала пикиро-
вания, т. е. в одну из точек, расположенных на определенных
высоте и удалении от цели. Совокупность таких точек в про-
странстве образует окружность с радиусом /nHKcos0
(рис. 8.30), которую можно рассматривать как основание
конуса с вершиной на атакуемой цели, а образующие конуса
являются траекториями прямолинейных участков пикирования.
Высота, на которой расположено основание конуса, и его
радиус определяются заданными углом и скоростью начала
пикирования, а также временем, потребным на прицеливание,
и безопасной высотой вывода самолета из атаки.
В точке С самолет развернут на цель, но угол наклона
траектории в общем случае не равен заданному углу пикиро-
вания Эпик, поэтому следующим этапом должец быть этап
ввода самолета в снижение, в результате выполнения кото-
рого самолету придается заданный угол пикирования (уча-
сток DC на рис. 8.29).
Как видно из рис. 8.30, в зависимости от величины боко-
вого уклонения самолета в момент обнаружения цели меня-
ется угол наклона плоскости маневра к горизонту гр, а даль-
ность до объекта Do и угол визирования А° в этот момент
определяют угол доворота самолета <р для выхода на направ-
ление атаки (точки 1 и 2 на рис. 8.30).
Координаты точек 1 и 2, из которых должен начаться ма-
невр, могут быть определены по результатам предваритель-
ного моделирования серии разворотов в наклонных плоско-
стях для различных условий (/70» Vo» ^Уа0»Ф) и вариантов
вооружения самолета (ПЛС, mg) по специальной методике,
сущность которой здесь не рассматривается.
Отметим лишь, что поскольку в основу маневрирования
положен маневр определенного класса, то траектория движе-
ния самолета при выполнении этого маневра с различными,
законами пилотирования (законами изменения крена, пере-
грузки и т. п.) может быть заранее рассчитана. При этом мож-
но заранее определить также точки начала маневра при раз-
личных боковых уклонениях самолета в момент обнаружения
цели. Соединенные между собой, эти точки образуют границу
начала маневра (рис. 8.31).
Из условий построения этой границы следует, что каждая
ее точка — это точка, начав из которой выполнение разворота
в наклонной плоскости с определенным углом гр (с выбранными
HQ, Ко, пуа0, ПЛС, mg), в конце маневра выведем самолет
в одну из точек окружности с заданными радиусом, высотой
и одновременно развернутым на цель (по углам ср и 0), т. е.
на позицию начала пикирования (прицеливания). Условно
441
Рис. 8.31. Границы начала маневра при атаке наземных целей
часть границы, расположенную до траверза цели (участок
ОВ), назовем передней, а сзади траверза — задней (уча-
сток ВС).
В боевой обстановке для успешного преодоления объекто-
вой ПВО может потребоваться выполнение атаки разворотом
в сторону от цели. Придерживаясь той же методики, можно
построить еще одну — третью (среднюю) границу начала ма-
невра (рис. 8.31). Начиная маневр от этой границы, летчик
также выводит самолет на позицию прицеливания для атаки
с пикирования, но, как уже отмечалось, разворот при этом
выполняется в сторону от цели. Такой маневр обеспечивает,
например, высокую эффективность преодоления противодей-
ствия ЗУР средней дальности.
По' результатам моделирования кроме границ начала ма-
невра определяется зависимость угла наклона плоскости ма-
невра ф и угла доворота на цель ср от угла ее визирования 4°,
а при заданной границе это то же самое, что и от величины
бокового уклонения самолета (рис. 8.31).
Из рисунка видно, что по мере увеличения бокового укло-
нения самолета^ в момент обнаружения цели (увеличения
угла Л) возрастает угол доворота на цель <р и уменьшается
угол наклона плоскости маневра к горизонту ф (до углов А
порядка 120°), а затем ф немного растет.
Как показывают исследования, время выполнения манев-
ра для выхода в атаку с пикирования на основе разворота в
наклонной плоскости существенно меньше, чем при выполне-
нии обычного боевого разворота (55с), и для истребителей-
бомбардировщиков второго поколения не превышает 35с. При
этом время выполнения маневра тем меньше, чем меньше
начальное боковое уклонение (угол визирования). Макси-
мального сокращения времени выполнения маневра (до 20с)
можно добиться при выходе точно на цель, т. е. выполняя
практически переворот на горке.
,Наличие трех последовательно расположенных границ
начала маневра позволяет летчику выполнять маневрирова-
ние практически при любой дальности обнаружения цели
(в радиусе 5—8 км) и различном боковом уклонении атакую-
щего при выходе на нее. Характер изменения маневра в зави-
симости от того, у какой из границ он начат, приведен на
рис. 8.32.
Однако в интересах успешного преодоления противодей-
ствия средств ПВО полет до очередной границы необязателен,
а возможно начало маневрирования сразу же после обнару-
жения цели. Последнее обстоятельство объясняется тем, что
разворот атакующего на определенный угол влево или вправо
вызывает поворот на тот же угол осевой линии, а следова-
443
тельно, и самих границ начала маневра. Поворот же границ,
не меняя взаимной ориентации вектора скорости самолета и
осевой линии, меняет расстояние до этих границ.
Рис. 8.32. Характер изменения РНП при различных дальностях и боковых
уклонениях в момент обнаружения цели
На рис. 8.33 показано, что поворот атакующего, например,
из точки А на 90° вправо приводит к смещению границ таким
образом, что самолет выходит на заднюю границу начала ма-
невра уже в конце разворота; при разворотах из точек В и С
угол доворота должен быть равен 75 и 60° соответственно.
444
2
Рис. 8.33. Схема изменения положения границ начала маневра при отворо-
тах атакующего
445
В конце разворота летчик перекладывает самолет из правого
крена в левый и начинает майевр для атаки. Угол, на кото-
рый должен развернуться атакующий, чтобы из произвольной
(в радиусе 6—8 км относительно цели) точки пространства
выйти в конце разворота на заднюю границу начала манев-
ра, может быть найден по формуле
Т а + М^ок-1)2’
где k, а, в — постоянные коэффициенты, зависящие от
параметров разворотй;
/>прод и Лбок—начальные продольное и боковое уклонения
атакующего относительно цели.
Предварительный отворот от цели на угол <р позволяет
сократить общее время пребывания атакующего в зоне огня
средств ПВО, а также выполнять противозенитный маневр
(выход из зоны эффективного поражения МЗА, маневрирова-
ние с перегрузкой и т. п.). Например, время разворота на 90°
из точки А на скорости 900 км/ч и cnY а = 4 составит Юс, в то
время как следование до задней границы заняло бы 30с, а до
средней — 14 с.
В первом случае значителен выигрыш во времени, а также
исключается необходимость прохождения через зону наибо-
лее плотного огня вблизи цели, выполняется отворот от цели,
как противозенитный маневр. Выигрыш во времени во втором
случае небольшой, но при этом создаются условия атакую-
щему для, выполнения противозенитного маневра.
Таким образом, отворот атакующего в зоне поражения
средств ПВО способствует повышению боевых возможностей
самолетов фронтовой авиации, расширяет тактические приемы
и условия их выполнения.
Наличие границ начала маневра обеспечивает выполнение
атаки с ходу при любых (в радиусе 5—8 км) дальности и бо-
ковом уклонении атакующего при выходе на цель, что также
повышает эффективность боевых действий самолетов фрон-
товой авиации по наземным целям.
На рис. 8.34 в качестве примера представлен один из ва-
риантов применения маневра на основе разворота в наклонной
плоскости для атаки малоразмерной одиночной цели. Посколь-
ку в этом случае цель будет обнаружена, как правило, на ма-
лом удалении, атака производится либо от средней границы
отворотом от цели (в данном случае влево — первая пара),
либо от задней границы разворотом на цель (вправо — вторая
пара). В обоих случаях выполняется по два захода.
446
§ 8.3. ОЦЕНКА ПОЛНОТЫ ИСПОЛЬЗОВАНИЯ
МАНЕВРЕННЫХ СВОЙСТВ САМОЛЕТОВ В ПРОЦЕССЕ
БОЕВОЙ ПОДГОТОВКИ
Выполнение боевых задач самолетами фронтовой авиации
связано прежде всего с использованием их предельных манев-
ренных свойств и, следовательно, наиболее важным для лет-
чика является вопрос их выявления и полной реализации в
интересах успешного выполнения поставленных задач.
В свою очередь, предельные маневренные возможности с
максимальной полнотой и наглядностью могут быть представ-
лены с помощью ^границ областей выполнимости маневров, и в
частности границ выполнимости разворотов в горизонтальной
плоскости. Однако эти границы, отражая требования безопас-
ности полета (ограничения по 'аДОП, Умакс, «у а макс )> ПОСТрОб-
ны без учета уровня индивидуальной подготовки летного со-
става и не отражают возможностей практической реализации
предельных маневренных свойств самолетов летчиками раз-
личной квалификации.
Рис. 8.35. Изменение положения границы Умин по адоп в зави-
симости от подготовленности летчиков
Рассмотрим возможности такого учета с помощью номо-
граммы, изображенной на рис. 8.35, применительно к манев-
рам, выполняемым в горизонтальной плоскости. Вначале от-
метим, что в наибольшей степени роль индивидуальной под-
готовки летчика сказывается при маневрировании у левой
границы (по адоп) области выполнимости разворотов в гори-
зонтальной плоскости, поскольку в первую очередь превыше-
ние допустимого угла атаки связано с нарушением требования
448
безопасности полета и должно быть безусловно исклю-
чено.
В то же время превышение, например, предельной по тяге
перегрузки, оказывая влияние на изменение скорости полета,
на безопасность полета влияет отдаленно, лишь в случа'е вы-
хода из-за ошибок пилотирования на границу по адоп или
э
а макс’
При выполнении форсированных разворотов следует также
исключить возможность превышения летчиками разной квали-
фикации п3у а макс и Vмакс доп . Однако подход к решению этих
вопросов аналогичен тому, который используется при исклю-
чении возможностей превышения адоп. Поэтому и рассмот-
рение вопроса о влиянии на реализацию предельных манев-
ренных свойств самолета индивидуальной летной выучки бу-
дем производить лишь применительно к левой границе (по
Ядоп).
С этой целью обратимся вначале к нормативам оценок
техники пилотирования при выполнении виражей с креном,
превышающим 45°, приведенным в официальных документах,
регламентирующих летную работу. Эти нормативы для ма-
невренных самолетов фронтовой авиации могут быть следую-
щими (табл. 8.1):
Таблица 8.1
Отклонения параметров „Отлично" „Хорошо" „Удовлетворительно"
Д Я, м ±50 ± 75 ± 100
t Д V, км/ч ± 50 + 75 ± 100
ДиУа 0,5 1,0 1,5
Д 7°, град 5 7 10
Попутно отметим, что предусмотренные нормативами оце-
нок техники пилотирования отклонения параметров от задан-
ных характеризуют умение летчика выдерживать заданный
режим 'маневрирования или «чистоту» пилотирования.
Отложим на графике последовательно для ряда точек, в
которых пересекаются кривые постоянных перегрузок пу а
с границей адоп, величины допустимых отклонений в выдержи-
вании перегрузки на оценки «отлично», «хорошо» и «удовлет-
29-5007сп 449
ворительно» (рис. 8.35). Для нашего примера это точки а, б,
в, г, д, которым соответствуют скорости У = 625, 750, 850, 950
и 1025 км/ч. В результате получаем три дополнительные гра-
ницы, обусловливающие пределы индивидуального допуска
летного состава к выполнению маневров в горизонталь-
ной плоскости в зависимости от выучки каждого из лет-
чиков.
Полученные границы позволяют оценивать влияние каче-
ства пилотирования на время и радиус выполнения разворо-
тов, а следовательно, и на возможный исход боевых действий.
Например, на скорости 900 км/ч летчику, пилотирующему с
оценкой «отлично», т. е. с погрешностями в выдерживании
перегрузки, не превышающими Arzy а= ±0,5 ед., в качестве
максимально допустимой (для данной скорости) можно на-
значить перегрузку пуа = 5 (точка 7); с оценкой «хорошо»
(А пу а —± 1»0) пуа=4?5 (точка 2); «удовлетворительно»
(А пуа = ± 1,5) пу а=4,0.(точка 3). При этом первый летчик
будет выполнять разворот с угловой скоростью он = 10,7 град/с,
второй — с (02 = 9,6 град/с, третий — с соз = 8,3 град/с. Устано-
вившийся разворот на 360° летчики выполнят соответственно
за время: A/i = 33,5 с, А/2 = 37,5 с, Д/3 —43,5 с. Радиусы разво-
рота при этом равны: 7?i = 1320 м, Т?2= 1500 м, /?з = 1720 м.
Из этого видно, что разница и во времени и в радиусе разво-
рота весьма существенна. Разница в угле разворота для лет-
чиков, имеющих «отличную» и «удовлетворительную» подго-
товку, может достигать 100° за один оборот виража. Есте-
ственно, что при ведении воздушного боя эта разница может
оказать решающее влияние на его исход.
Таким образом, введение дополнительных границ выпол-
нимости разворотов в горизонтальной плоскости, учитываю-
щих индивидуальную подготовку летчиков, обеспечивает со-
блюдение условий безопасности при выполнении боевых ма-
невров на предельных режимах в зависимости от выучки
летчиков.
Рассмотренные границы позволяют оценить также и пол-
ноту использования маневренных свойств самолета.
Для этого на график следует нанести в виде точек режимы
(скорости, перегрузки и т. п.) маневрирования, предусмотрен-
ные программой обучения, и определить затем, в какой мере
эти режимы приближаются к предельным, т. е. к границам
области выполнимости маневров, как далеко они отстоят от
режимов разворотов с^макс или /?Мин, т. е. от оптимальных,
а также выяснить, на какие режимы (упражнения) необходи-
мо обратить внимание, чтобы степень приближения их к гра-
ницам и к оптимальным режимам с учетом индивидуальной
летной выучки была возможно большей. Как было показано,
450
индивидуальная выучка летного состава существенным обра-
зом влияет на степень (полйоту) практической реализации
маневренных свойств самолета, снижая ее тем сильнее, чем
большие погрешности в выдерживании режима маневрирова-
ния допускает летчик.
Рис. 8.36. Влияние высоты, удельной нагрузки на крыло и подготов-
ленности летчиков на положение границ Умян по адоп
Из рис. 8.36 видно, что влияние выучки летного состава на
полноту использования маневренных свойств самолета сопо-
ставимо с влиянием на них высоты полета при изменении ее
в пределах /7= 1000—4000 м или увеличением нагрузки на
крыло с mg/S = 4000 Н/м2 до 5500 Н/м2. В отличие от высоты и
полетной массы самолета влияние качества пилотирования
наиболее сильно сказывается при перегрузках, меньших 3 —
4 единиц.
В этом и состоит обусловленность боевых возможностей
самолетов; определяемых их’ маневренными характеристика-
ми, индивидуальной выучкой летного состава, а также влия-
ние последней на полноту использования маневренных
свойств.
Перейдем теперь к вопросу методического обоснования
последовательности в обучении летчиков.
Методически обоснованной считается последовательность,
обеспечивающая отработку в первую очередь тех .заданий,
которые содержат наиболее простые режимы пилотирования.
К последним, в частности, следует отнесли режимы, ошибки в
выдерживании которых приводят к минимальным отклоне-
ниям параметров (например, скорости полета) от заданных.
Для нахождения таких режимов маневрирования в гори-
29*
451
dV
зонтальнои плоскости воспользуемся показателем — , харак-
' dtp
ПХа — sin 0
У п2у а- I
теризующим величину изменения скорости на единицу угла
u dV
поворота траектории. Напомним, что -----
d ср
dV ja
или------= —----.
d ф а>г
Определив с помощью номограмм (рис. 8.17 и 2.11) вели-
Д V
чины/а и <1>г, построим зависимость -- от величины пере-
Д <р
грузки для различных высот полета от 0,2 до 7 км (рис. 8.37).
Рис. 8.37. Влияние высоты полета на величину ----
Д
При выполнении разворотов в горизонтальной плоскости
отклонения в выдерживании перегрузки установившегося раз-
ворота в сторону превышения приводят к падению скорости,
и наоборот, в сторону уменьшения — к увеличению скорости.
Однако для большей наглядности на рис. 8.37 по оси ординат
отложены абсолютные значения изменений скорости при по-
грешностях летчика в выдерживании перегрузки. При необ-
Д V
ходимости учесть знак---- следует иметь в виду, что левая
Д ф
ветвь каждой кривой соответствует положительному приросту
скорости, а правая — отрицательному. ,
Из рисунка видно, что с увеличением высоты полета само-
лет становится более «строгим» в пилотировании, поскольку
одни и те же ошибки в выдерживании перегрузки приводят
452
к большим (с ростом высоты) изменениям скорости полета на
каждый градус угла поворота. Так, на Н=200 м при
л , . п Д V „ км/ч
ДмУв=±1,0 — =0,15—— , а на высоте И=7000 м
Д <р град
ДУ -о)4км/4 .
Д<р- ’ град
Однако из условий безопасности полета целесообразно
осваивать вначале средние, а затем малые и большие высоты.
Как показывают исследования, изменение .скоростей в до-
звуковом диапазоне чисел М полета существенного влияния
ДУ
на --- не оказывает.
Д ср
На рис. 8.38 приведена для того же самолета зависимость
ДУ
величины --- от перегрузки nY а при прохождении самолетом
Д6
различных точек вертикальной фигуры — полупетли.
Из этого видно, что в первой трети маневра, т. е. до углов
@ = 45—60°, ошибка летчика в выдерживании заданного зако-
Рис. 3.38. Влияние угла наклона траектории при вертикальном манев-
Д V
ре на величину
Д О
453
на изменения перегрузки Пу а практически не влияет на вели-
чину изменения скорости, поскольку зависимости не имеют
явно выраженного оптимума.
Однако по мере увеличения угла О требования.к точности
выдерживания заданной перегрузки повышаются. Особенно
жесткими эти требования становятся вблизи верхней точки
полупетли (0> 150°), где при отклонениях пергрузки от за-
д V
данной на &пУа = ± 0,5 ед.-----увеличиваются в 1,5 раза
Д О
по сравнению с минимальным значением.
В то же время прохождение этих же точек траектории на
форсажном режиме работы двигателя с аналогичными по-
грешностями в пилотировании приводит к существенно мень-
шему влиянию ошибок летчика на величину возрастания (по-
тери) скорости, т. е. позволяет снизить требования к точности
(«чистоте») пилотирования.
Рассмотрим, как влияет строй группы самолетов на пол-
ноту использования их маневренных свойств. При этом будем
исходить из основных положений, состоящих в том, что со-
хранение боевого порядка, обеспечивающего совместное вы-
полнение боевой задачи группами различного тактического
назначения, основывается на размещении самолетов относи-
тельно друг друга на определенных дистанциях и интервалах
в группах, т. е. на выдерживании каждым из них своего места
в строю. В общем случае вместо интервала могут быть ого-
ворены дальность D между самолетами и угол визирования р
(рис. 8.39).
Рис. 8.39. Параметры строя группы са-
молетов
Летные характеристики группы отличаются от характери-
стик одиночного самолета, поскольку ведомым для сохранения
места в строю необходим резерв тяги, а также запас по углу
атаки.
454
Резерв тяги обеспечивает движение внешних самолетов в
Строю с большими радиусами и соответственно с большей ско-
ростью полета при одинаковой угловой скорости разворота
всей группы, за счет чего и достигается сохранение строя.
Кроме того, резерв тяги используется ведомыми для того, что-
бы компенсировать непрерывные колебания дистанций, интер-
валов и превышений самолетов группы.
Запас же угла атаки позволяет внутренним ведомым для
сохранения своего места в строю выдерживать меньшие ско-
рости, *т. е. разворачиваться с меньшими радиусами при той
же угловой скорости и также компенсировать колебания ин-
тервалов и дистанций самолетов группы.
-Под предельными режимами группы будем понимать пре-
дельные режимы полета ведущего, обеспечивающие возмож-
ность выдерживания ведомыми своего места в строю с выхо-
дом на режимы, определяемые границами маневрирования
одиночного самолета. При этом в случае разворота на ведо-
мых угол атаки внутреннего самолета не должен превышать
допустимого «. При развороте же в свою сторону (от ведо-
мых) ведущий должен быть уверен в том, что у внешнего ве-
домого хватит тяги двигателя для выдерживайия своего места
в строю.
Выбор параметров предельных разворотов будем произво-
дить для сомкнутого строя в предположении, что выполняют-
ся они способом «захождения», при котором самолеты дви-
жутся с одинаковой угловой скоростью, но с разными радиу-
сами и скоростями, так что строй группы остается неизмен-.
ным (рис. 8.40).
В зависимости от состава, боевого порядка, высоты полета
группы развороты выполняются либо с накренением плоскости
строя на величину угла крена ведущего самолета, либо в па,-
раллельных плоскостях. В обоих случаях в первую очередь
важны проекции параметров строя (интервалов) на горизон-
тальную плоскость L cos у, которые и определяют кинематику
(радиусы и угловые скорости) разворота самолетов в гори-
зонтальной плоскости.
Для определения предельных режимов маневрирования
группы необходимо знать ее состав' и взаимное расположение
(интервалы и дистанции) самолетов. В основу расчетов берем
номограмму с нанесенными границами областей выполнимо-
сти разворотов в горизонтальной плоскости одиночного само-
лета для рассматриваемой высоты.
Рассмотрим разворот в сторону строя звена самолетов на
/7=1000 м в левом пеленге при ширине строя 7=150 м.
Учет безопасности полета ведомых в этом случае (при
маневрировании вблизи границы по аДОп) заключается в том,
455
что ведущий должен пилотировать самолет с меньшим, чем
допустимый для одиночного самолета углом атаки, обеспе-
чивая этим самым безопасность ведомым. Для нахождения
величины угла атаки самолета ведущего воспользуемся из-
вестной границей по адоп для одиночного самолета (рис. 8.41),
считая ее границей маневрирования крайнего внутреннего
ведомого.
Рис. 8.40. Схема разворота группы самолетов:
а — разворот способом «захождения»; б — разворот
с накренением плоскости строя; в — разворот на одной
высоте в параллельных плоскостях
Для произвольной точки этой границы (например, точки Л)
находим величины угловой скорости со = 8 град/с (точка в) и
радиуса R = 1200 м (точка Л"). Для найденной угловой скоро-
сти в левом верхнем квадранте на горизонтальной пря-
мой АвА', соответствующей постоянной угловой скорости
группы, откладываем влево величину суммарного интервала
(ширины) .строя / группы самолетов и находим величину
скорости и радиуса предельного разворота ведущего =
= 1350 м, точка Б" и V=680 км/ч, точка Б').
При необходимости на этой же прямой внутри интервала/
456
Рис, 8.41. Номограмма для определения границ маневрирования группы самолетов
в строю
по величинам интервалов между отдельными самолетами оп-
ределяем значения скоростей и радиусов разворотов каждого
внутреннего ведомого самолета группы.
По найденной величине скорости полета и угловой скоро-
сти определяем в правом верхнем квадранте режим выполне-
ния (перегрузку, крен) предельного разворота строем (точ-
ка 5) с учетом условий безопасности для всех самолетов
группы.
В аналогичной последовательности находятся другие точ-
ки и как результат строятся границы предельных разворотов
самолета ведущего или всей группы самолетов.
С помощью нижних квадрантов номограммы находим ве-
личины Су а (углов атаки), которые должен выдерживать
каждый летчик группы, в том числе и ведущий.
Для оценки предельных возможностей разворота группы
в сторону ведущего (от ведомых) воспользуемся границей
предельных установившихся разворотов одиночного самолета,
изображенной в верхнем правом квадранте, принимая ее за
границу предельных установившихся разворотов внешнего
ведомого для заданных высоты полета, ПЛС, угла стреловид-
ности крыла самолетов и режима работы двигателя.
Как и в предыдущем случае, для произвольной точки гра-
ницы (например, точки М) с помощью кривых верхнего ле-
вого квадранта по известным со и V находим величину радиуса
разворота крайнего внешнего самолета группы (/? = 2480 м,
точка М"). Отложив от этой точки внутрь величину, равную
ширине строя группы (для <о = const), найдем скорость полета
ведущего самолета при условии, что крайний внешний ведо-
мый будет выполнять разворот, выдерживая свое место в
строю, на максимальном режиме работы двигателя (точка А/',
V= 1000 км/ч).
По этой скорости при условии постоянства угловой ско-
рости в верхнем правом квадранте находим точку N, опре-
деляющую режим (перегрузку, крен, скорость) предельного
разворота ведущего, а следовательно, и группы в целом.
Далее, по материалам и в последовательности, изложенным
в официальной литературе (например, в Инструкции по рас-
чету дальности и продолжительности полета), для найденного
режима полета (V, H,nYa) определяем режим работы двига-
теля самолета ведущего, потребный для выполнения устано-
вившегося разворота, и проставляем его на графике.
Проделав аналогичные операции для ряда точек границы
предельных установившихся разворотов крайнего ведомого
самолета (кривая М—М"), находим границу предельных
разворотов, а также и соответствующие ей режимы работы
458
двигателя самолета ведущего, а следовательно, й всей группы
в целом (кривая А—N").
При необходимости в изложенной последовательности на-
ходятся частоты вращения роторов двигателей самолетов
остальных ведомых, обеспечивающие им выполнение предель-
ного разворота с сохранением строя самолетов всей группы.
В качестве примера на рис. 8.41 представлены границы обла-
сти выполнимости предельных разворотов звена серийных ма-
невренных самолетов в боевом порядке «пеленг». Ширина
строя группы, как отмечалось, составляет 150 м. При .расчете
были приняты: стреловидность крыла % = 45°, ПЛС = 90,
mg/S = 4000 Н/м2, Су а доп =0,7, наибольший режим работы
двигателя — «Максимал», Н = 1000 м.
В итоге окончательные рекомендации командиру звена
могут быть даны для обоих рассмотренных предельных разво-
ротов следующим образом: при развороте «на ведомых» не
превышать Су а доп =0,55 (угол атаки по УУА ...), при раз-
вороте же в свою сторону («от ведомых») не увеличивать ча-
стоту вращения ротора двигателя более 93%.
Особенности приведенных рекомендаций состоят в том, что
обеспечивая летчикам возможность сохранения своего места
в строю, они не учитывают уровня индивидуальной летной
подготовки ведомых, тем самым из-за погрешностей пилоти-
рования возможны нарушенйя требований безопасности поле-
та, поскольку не исключены выходы за пределы допустимых
углов атаки и максимальной скорости, а также невыполнение
условий, обеспечивающих ведомым возможность сохранять
свое место в' строю по признаку достаточности тяги двига-
телей.
В общем случае такой учет может быть выполнен проведе-
нием дополнительных границ, отстоящих от рассмотренных
на величину нормируемых официальными документами до-
пусков на выдерживание перегрузки, аналогично тому, как
это было сделано при изложении маневрирования одиночного
самолета.
В заключение отметим' что о^а рассмотренных фактора —
индивидуальная выучка летного состава и полет строем —
существенным образом сказываются на полноте испбльзова-
ния маневренных свойств самолетов, а следовательно, и на
их боевых возможностях, определяемых с учетом требований
безопасности полета, и должны рассматриваться как непре-
менное условие высокой эффективности боевых действий и
безопасности полетов авиационных частей и соединений.
459
Глава 9
СРАВНИТЕЛЬНАЯ ОЦЕНКА
ЛЕТНЫХ СВОЙСТВ САМОЛЕТОВ
Опыт боевых действий авиации свидетельствует о том, что
успех сопутствует тем, у кого выше морально-политические и
психологические качества, а боевая выучка преобладает над
выучкой противника.
Опыт также показывает, что боевые возможности и эффек-
тивность боевых действий авиационных подразделений и ча-
стей во многом зависят от правильного учета и использования
боевых свойств самолетов, в первую очередь летных свойств
и свойств оружия.
Так, для успешного решения задачи по уничтожению са<-
молетов противника в воздушных боях очень важны хорошие
скоростные и маневренные свойства, большой запас топлива,
определяющий тактический радиус и время ведения боя, а
также взлетно-посадочные свойства, позволяющие использо-
вать самолеты с грунтовых аэродромов и различных площа-
док. Эти свойства необходимы и при уничтожении наземных
и морских целей. Чем лучше знает летный состав боевые
возможности авиационных подразделений и частей, чем пол-
нее использует их в конкретной тактической обстановке, тем
большего результата можно достичь при меньших затратах,
т. е. повысить эффективность выполнения боевых задач. А это
отвечает требованиям, вытекающим из решений XXVI съезда
КПСС, приказов и директив Министра обороны СССР и глав-
нокомандующего ВВС.
Одним из важнейших условий достижения высокой эффек-
тивности и качества выполнения боевых задач является зна-
ние боевых свойств самолетов противника, умение сравнивать
их со свойствами своих самолетов и, используя результаты
сравнения, правильно оценивать соотношение возможностей
противоборствующих самолетов. Путем сравнения можно
выявить области высот и скоростей полета, в которых один из
сравниваемых самолетов имеет преимущество в летных свой-
ствах по отношению к противнику, что позволяет определить
сильные и слабые стороны авиационной техники противника
460
и оценить свои силы, целенаправленно вести разработку
плана воздушного боя, строить логику управления боем, учи-
тывать преимущества и недостатки самолетов в ходе отработ-
ки различных вариантов боя и при выборе оптимального
варианта.
Итак, использование командиром и его штабом результа-
тов сравнения летных свойств самолетов своих и противника
на всех этапах планирования и ведения боевых действий яв-
ляется необходимым условием для принятия обоснованных
решений.
Сравнительная оценка боевых возможностей самолетов
включает методику сравнения летных свойств противоборст-
вующих самолетов и ее раскрытие в ходе сравнения высотно-
скоростных и маневренных свойств самолетов, а также анализ
результатов сравнения в интересах принятия решения и раз-
работки рекомендаций летному составу по ведению боевых
действий.
§ 9.1. СРАВНЕНИЕ ВЫСОТНО-СКОРОСТНЫХ
СВОЙСТВ САМОЛЕТОВ (ПРИ НЕПОЛНОЙ ИНФОРМАЦИИ
О САМОЛЕТЕ ПРОТИВНИКА)
Высотно-скоростные свойства обычно представляют в виде
графиков диапазонов высот и скоростей полета самолетов
(см. главу 1), границы которых определяются тремя группами
кривых, связанных с ограничениями по условиям безопасности
полетов, установившимися режимами полетов и энергетиче-
скими возможностями.
9.1.1. Критерии сравнения
высотно-скоростных свойств самолетов
Что же брать за критерии сравнения? Часто, изучая само-
лет противника, выбирают отдельные цифры, характеризую-
щие максимальные возможности самолета по скорости и вы-
соте полета, и сравнивают их с данными своих самолетов. На
основе такого сравнения делают выводы о преимуществе того
или иного самолета. Дает ли сравнение по таким критериям
реальную картину слабых и сильных сторон своих самолетов
и противника?
Пусть, например, известно, что свой самолет имеет макси-
мальную скорость 2100 км/ч и статический потолок 19 000 м,
а самолет противника — 2300 км/ч и 21 000 м (рис. 9.1.). Срав-
нивая эти цифры, можно сделать вывод, что самолет против-
ника имеет гораздо лучшие высотно-скоростные характеристи-
ки по сравнению с нашим самолетом. На самом же деле, если
461
сравнивать их диапазоны высот и скоростей полета (рис. 9.1),
вывод окажется противоположным.
Дело в том, что по взаимному положению границ диапазо-
нов высот и скоростей полета можно делать выводы не только
о соотношении высотно-скоростных свойств самолетов, но и
предварительные выводы о маневреннькх возможностях про-
тивоборствующих самолетов. Так, анализируя рис. 9.1, можно
установить, что граница горизонтального полета у нашего
самолета проходит выше (/7рс > Н?п) , а граница по мини-
мальной скорости левее, чем у самолета противника (Уминс <
< Умин п) . Граница установившегося горизонтального полета
(линия статических потолков) большей частью также прохо-
дит выше (до скорости 1900 км/ч), и только на большой вы-
соте и скоростях от 1900 до 2300 км/ч самолет противника
имеет некоторое преимущество.
Рис 9.1. Сравнение диапазонов высот и ско-
ростей полета
Итак, сравнение высотно-скоростных свойств самолетов
следует проводить не по отдельным цифрам летно-тактических
данных, а по всему диапазону высот и скоростей полета. За
критерии сравнения удобно выбрать границы диапазонов вы-
сот и скоростей сравниваемых самолетов.
9.1.2. Сравнение границ горизонтального полета
Сравнение проводится способом наложения границ гори-
зонтального полета противоборствующих самолетов (рис. 9.2).
Из рисунка видно, что при числах М<М2 граница горизон-
тального полета нашего самолета проходит левее и выше, а
при М>М%—правее и ниже, чем у самолета противника. Это
означает:
462
1. Наш самолет может свободнее маневрировать, выходить
на скорости, недоступные самолету противника по условиям
безопасности полета (точки 4, 5; область 1 на рис. 9.2), Он
имеет возможность создавать большую перегрузку при бое-
вом маневрировании на предельных режимах при одинаковых
с самолетом противника скоростях, например, соответствую-
Рис. 9 2. Сравнение границ горизон-
тального полета:
/ — область, недоступная самолету
противника по условиям безопасности
полета; // — область, недоступная для
своего самолета
щих Уминп • В этом случае у нашего самолета будет преиму-
щество в частных показателях маневренности, например, в
радиусе, угловой скорости и времени разворота в горизонталь-
ной плоскости и при других энергичных маневрах, при мень-
шей или одинаковой опасности сваливания (превышения адоп).
V2
В самом деле, Я=---====-, и если nY а с > Hy а п, то при
gV^Ya-l
Vc=Vn RC<R„, а <ос> <оп (так как а> = — ).
\ R /
2. На любых высотах и скоростях, больших минимальных,
наш самолет может также маневрировать с более высокими
перегрузками, а следовательно, с лучшими частными показа-
телями боевых маневров (R, <о, t).
Обоснование:
— при числе ЛЦ = const 7/рс > Нрп, поэтому при полете
на и М, (точка 7) наш самолет и самолет противника
могут создавать
перегрузки: Пуарс =
Pi
РНрс
и - Р'
nY а рп — “
463
но Рярс<РНрП, поэтому nY арс> пу а рп, а следовательно,
^рс > ^рп! Яс Яп? tc < ^ni
— при числе М3 — const Ярс < Нрп и nY а рс Я у а рп>
ПОЭТОМУ (Dpc ^рп» Rc Яп, •
Вывод. Самолет, у которого граница или часть границы
горизонтального полета проходит левее и выше, имеет:
— лучшие характеристики форсированных разворотов и
других энергичных маневров на всех высотах (при одном и
том же числе М полета), кроме высот, на которых самолет
достигает ограничений по прочности (поЯуамакс ). На этих вы-
сотах независимо от соотношения границ горизонтального по-
лета преимущество в выполнении энергичных маневров при-
надлежит тому из противоборствующих самолетов, у которого
выше значение яэу а макс*,
— меньшую минимальную скорость, а следовательно, воз-
можность более энергичного маневрирования при одинаковой
опасности сваливания или при одинаковых маневрах обладает
большим уровнем безопасности полета.
9.1.3. Сравнение границ
установившегося горизонтального полета
(линий потолков)
Сравнение проводится также наложением, но уже границ
установившегося горизонтального полета противоборствую-
щих самолетов (рис. 9.3). Из рисунка видно, что при числах
М2>М>М4 #прс>#прп, а при М4>М>М2, наоборот,
^Пр с < ^пр п •
Рис. 9.3. Сравнение границ установив-
шегося горизонтального полета (ли-
ний потолков)
464
Каково же в этом случае соотношение маневренных
свойств этих самолетов?
Вспомним, что для пересчета пуаПр можно воспользо-
ваться формулой пу а пр — , которая справедлива толь-
^пр
ко наЯ>11 км и при М =='const. Тогда в точке 1 при
А4Х = const
Pi Pi
Пу а пре— — , 72 Y а прп— ~ > НО Ряпрс < Рнпрп >
^Лтрс прп
поэтому Пу а пре > Пу а прп . ЭтО ОЗНЭЧаеТ, ЧТО ₽уст с < Ryn п,
О>уст С (Оуст п» ^уст с < (уст п •
По аналогии в точке 3 при М3 = const
Рз
Пу а пре — ~ j
Р^прс
„ - Рз
'lY а прп — ~~ ,
РЯпрп
НО
Рнпрс Рнпрп И ПУ а ПРС< ПУ а прп ,
т. е. при маневрировании с этими перегрузками Ryci с > /?уСтп»
(Пуст с 0JyCT п> tyct с > ^устп •
Вывод. Самолет, у которого граница установившегося
горизонтального полета проходит выше, имеет лучшие харак-
теристики установившихся разворотов и любых других манев-
ров, выполняемых с сохранением энергетической высоты
/ V2 \
[Н9 — Н-\-----= const), на всех стратосферных высотах.
\ 2g /
Если для сравниваемых самолетов известны коэффициенты
индуктивности (Л) и нагрузки на крыло (mglS) и если про-
изведение (Л mglS)c С ( Л mg/S)„ , то наш самолет, имеющий
преимущество в Пуапр, будет иметь преимущество и в распо-
лагаемой тангенциальной перегрузке грхар при маневрирова-
30-5007сп >465
нии c,nY а~ 1, что дает ему преимущество в разгоне jxa, скоро-
подъемности VY и росте уровня энергии Vy ,.так как
! Amg ( 2 Л
rLX а р = -— а пр — 1 ’
qS )
= д^ = УД4ар; дгу = 7Д4ар.
Общий вывод. В условиях неполной информации о са-
молете противника (когда известен только диапазон высот и
скоростей полета) командир может по соотношению распола-
гаемых и предельных высот полета сделать’ предварительные
выводы о соотношении маневренных свойств сравниваемых
самолетов.
Что касается сравнения границ максимально допустимой
скорости полета, то, во-первых, сравнивать надо истинные
скорости, которые определяют изменение взаимного положе-
ния противоборствующих самолетов, а, во-вторых, ничего опре-
деленного о возможностях по догону противника или отрыву
от него на любых скоростях по соотношению этих границ ска-
зать нельзя.
Дело в том, что отрыв или догон определяётся преимуще-
ством в«хаР, которое не зависит от соотношения максимально
допустимых скоростей. И только при маневрировании на этих
скоростях один из самолетов может уйти в область, недоступ-
ную для другого по условиям прочности или устойчивости и
управляемости. Однако такой вариант действий ограничен
ввиду недостаточных запасов топлива у современных самоле-
тов для ведения боевых действий на предельных по скорости
режимах.
§ 9.2. СРАВНЕНИЕ МАНЕВРЕННЫХ СВОЙСТВ
САМОЛЕТОВ ПО ОБЩИМ ПОКАЗАТЕЛЯМ МАНЕВРЕННОСТИ
9.2.1. Критерии сравнения маневренных свойств самолетов
Ранее было установлено, что маневренные свойства само-
лета полностью описываются перегрузками nY др, «у а пр и пХар-
В самом деле, располагаемая нормальная скоростная пере-
грузка характеризует максимальную «поворотливость» само-
лета или способность к быстроте выполнения любых энергич-
ных маневров.
Предельная по тяге нормальная скоростная перегрузка
«у а пр характеризует «поворотливость» самолета или способ-
ность к быстроте выполнения, но уже маневров без потери
энергии, что очень важно уметь делать в маневренном воздуш-
ном бою.
466
Располагаемая тангенциальная перегрузка пха Р характе-
ризует «приемистость» самолета, т. е. способность к быстроте
разго-на, набора высоты, набора энергетической высоты.
Следовательно, сравнив общие показатели маневренности
nY ар,Пу а пр и пхар своего самолета и самолета противника,
можно провести анализ преимуществ и недостатков в манев-
ренных свойствах самолетов.
Выводы: 1. Наибольшие перегрузки Пуар,/гуапР5пхар яв-
ляются общими количественными показателями маневренно-
сти. Чем они больше, тем больше боевые возможности само-
лета, определяемые его маневренными свойствами.
2. За критерии сравнения маневренных свойств целесооб-
разно принять общие показатели маневренности nYap, Пуапр,
а Р •
9.2.2. Способы сравнения самолетов
по общим показателям маневренности
В настоящее время используют два способа сравнения:
— относительный, при котором рассматриваются отноше-
ния перегрузок нашего самолета и самолета противника:
77 ^У а рс "7 ^Уа пре , ~ — Пх а Рс
Пуа р— ? ^У а пр — , ”Ха р •
^У а рп ^У а прп а рп
Если эти величины больше единицы, то преимущество при-
надлежит нашему самолету; если меньше,— то самолету про-
тивника;
— абсолютный, при котором рассматриваются разности
перегрузок противоборствующих самолетов:
А ^У а р —2 Ya рс ^У а рп»
А ^У а пр — ^У а пре ^У а прп »
А Пх а р ~ ПХ а рс Пх а рп •
Если эти величины больше нуля, т е. положительны, то
преимущество принадлежит нашему самолету;' если меньше
нуля, т. е. отрицательны,— то самолету противника.
Первый способ дает возможность оценить, во сколько раз
частные показатели маневренности своего самолета (7?, со, t,
ixa, Vy, Vy ) лучше или хуже, чем у самолета противника, а
второй — на сколько (А/?, А со, Д/, &jxa, AV*) эти
показатели больше или меньше, чем у сравниваемого самолета.
30* 467
В самом деле, при маневрировании с большими пере-
грузками (Пу ар > 1 ) МОЖНО ДОПуСТИТЬ, ЧТО tfy а р — 1~Пуар.
Тогда, например, радиус и угловая скорость форсированного
разворота в горизонтальной плоскости равны
s/«2yop- 1
V2
ё Пу а р
ё пУ а Р
V
При условии, что сравнение ведется для одинаковых ско-
ростей на маневре у противоборствующих самолетов, получим
/?фс = Vs . V2 = Пуд рп = 1 .
Кфп ёПуарс ёПуарп Пу а рс Пу а р
шфс ё Пу а рс ё Пу а рп Пу а рс, *“
---- =□= ------ , ------- — ------- — лу а р,
£0фп V V Пу а рп
/фс Дф . А <? <°п 1
/фп ®п wc Пу а р
Тогда
Яфс КфпЦ------- > ^фс = ^фп “= > ^фс = 03фп Пу а р .
Пу а р
Это означает, что радиус, время форсированного разворота
на заданный угол у нашего самолета будут меньше, а угловая
скорость больше, чем у самолета противника, во столько раз,
ВО СКОЛЬКО Пу а р > •
И наоборот, радиус, время разворота на заданный угол у
своего самолета будут больше, а угловая скорость меньше,
чем у самолета противника, во столько раз, во сколько
Пу а р 1«
Аналогичный вывод можно сделать и в отношении связи
частных показателей установившихся маневров с Пу.апр-
При сравнении перегрузок пХар следует иметь в виду то
обстоятельство, что из-за малости абсолютных значений пх а р?
особенно на больших высотах или при маневрировании с
большими перегрузками пу и знакоиеременности пХар (с уве-
личением Пу а перегрузка nXap мёняет знак с положительного
на отрицательный и наоборот) применение относительного ме-
тода приводит в ряде случаев к ошибочным, а иногда и неле-
пым результатам.
468
Например, пусть пхаРс = —0,2, а пХарп = — 0,1, тогда
— Пх а рс —0,2 _
пхар=------— =—— = 2, т. е. получается, что преиму-
а рп 0,1
щество по пХар (в два раза) принадлежит нашему самоле-
ту. На самом же деле наш самолет проигрывает самолету
противника в разгонных характеристиках (А/Ха А пхаР),
в скороподъемности^ AVy = V ив потере уров-
ня энергии^ AVy = V^nxap так как при создании оди-
наковой с самолетом противника перегрузки nY а
& ПХ а р 0 (A fix а р = ^Х а рс а рп~ 0,2 ( 0,1) — 0,1).
Поэтому при сравнении Их аР предпочтение следует отда-
вать второму (абсолютному) способу сравнения (поДпхар)
При условии, что сравнение ведется для одинаковых ско-
ростей на маневре у противоборствующих самолетов, получим
А ё Пу а рс ё ПУ а рп
А <1)ф - 0>фс (»)фП .-, —
в —— (fly а рс ^У а рп) — А Пу а р’,
Л п V V2 1 . Л , <? <рУ
А 7?ф — - — 1 , А /ф - “,
А (Оф g к Пу ар Ашф gA/lya,p
откуда
g
^фс = ®фп Н A Пу а р,
Это означает, что радиус и время форсированного разво-
рота у своего самолета будут меньше, а угловая скорость
больше, чем у самолета противника, если А nY а р>0 (и наобо-
рот, если А Пу а ₽<0).
Аналогичный вывод легко сделать при сравнении Anyапр.
По величине А«хар = ^Харс~ Пхарп можно определить
превосходство или проигрыш:
469
— в разгоне или торможении одного самолета по сравне-
нию с другим при маневрировании с одинаковыми углами 0:
Д jxa = jxa c — /xan=g(nxapc — sin@) —
— g (Пхарп — Sin @) = g(nxapc— Пхарп) = g^tlxap,
— в установившемся наборе высоты:
ДУУ = Vyc-yyn =V4apc-V4apn = VAn1Xap;
— в быстроте набора или потери уровня энергии:
АГу = Гус-Г¥п=УпХарс-УПхарп = ^АпХар,
откуда
jx а с ~ jx а п + g А пХ а р ,
Vyc«VYn +V^4ap ;
Пс =V*yn + VbnXap.
Это означает, что ускорение разгона, скороподъемность
и быстрота набора энергии будут больше у нашего само-
лета, чем у самолета противника, если А пХа Р>0 (А пхХа р >0)>
и меньше, еслиА/гХаР <0(Дп^ар < 0).
9.2.3. Тактическая значимость превосходства
в общих показателях маневренности
Итак, для сравнения маневренных свойств противоборст-
вующих самолетов целесообразно использовать оба способа,
в соответствии с которыми имеем
1 П у а р Ц 1 Y а пр А а р
Если nY а р > 1, пу а Пр > 1 и А пхх а р > 0, то преимущество
по этим перегрузкам принадлежит нашему самолету, если
Пу а р < 1, пу a пр < 1 и лХар<0, то самолету противника.
Если же пу йр= 1, пу а ~ 1 и р=0, то самолеты
обладают равными возможностями по маневрированию на
высотах и скоростях, где соблюдаются эти условия.
Преимущество А п{х а является предпосылкой к стреми-
тельности сближения с противником, обеспечению внезапно-
сти, занятию тактически выгодной позиции для эффективного
применения оружия, свободе маневра высотой и скоростью в
ходе боя за счет создания большего уровня энергии (энергети-
ческой высоты), который отражает способность самолета к на-
ступлению к моменту завязки боя. Умение летчика правильно
470
распорядиться этой энергией, экономно ее расходовать или на-
капливать в процессе боя является важнейшим условием ус-
пешного ведения воздушных боев.
Известно, что по знаку пхар нельзя судить о характере из-
менения скорости (кроме режима прямолинейного горизон-
тального полета, когда при л^ар> О происходит разгон, а при
пх а р < 0 —торможение самолета), но можно утверждать
(см. главу 2), чтопхар>0 всегда свидетельствует о происхо-
дящем нарастании уровня энергии, так как
AH3 = nXapVM и = nXapV.
Если nxap = 0(Pp = Xa),TO Vy =0, ЬНЭ = О и Нэ = Н +
V2
Н-------- const, т. е. при маневрировании в бою со сред-
2g
ними перегрузками, примерно равными предельным по тяге
(при иуапр яхар=0), летчик сохраняет уровень энергии,
обеспечивая себе свободу маневра высотой и скоростью, а
следовательно, сохраняя инициативу в бою.
Если ПХар > 0(Рр > Ха), то V*Y > 0, А//э> 0 и Н9 уве*
личивается, т. е. при пилотировании с иуа<пуапр возможно-
сти по энергетическому маневрированию даже возрастают, что
позволяет навязывать свою волю противнику в воздушном
бою.
Если пХа р<0(Рр < Ха), то VY < 0, Д Нэ < 0 и Нэ пони-
жается, т. е. при пилотировании с nY а>пу а пр возможно-
сти по маневру высотой и скоростью уменьшаются, а против-
ник далеко не всегда позволит восстановить утраченный уро-
вень энергии (запас высоты и скорости).
Покажем, как можно использовать величину р для ре-
шения задач тактики боя.
Ранее было установлено, что при маневрировании с
nY а ср ~ Пу а пр А Нэ = 0 и, следовательно,
А Нэ = Д Н + .У?р— = 0,
g
откуда
ДЯ =-----VcpАV- и ду = _-£-ДЯ,
S ^ср
где АН — прирост высоты за маневр за счет потери скорости
на AV;
Ду = Икон—Унач ; Иср = -------,
471
ДУ— прирост скорости за счет потери высоты на АН.
Из этих формул видно, что за счет одной и той же потери
скорости (Д V = Укон — Унач ) в процессе маневра наберет
больше высоты тот самолет, ‘который имеет большую
среднюю скорость на маневре, а при одной и той же потере
высоты (АН = НКОн — Нпач ) приобретает больший ДУ тот са-
молет, у которого меньше УСр.
Из этого следуют важнейшие практические выводы:
— при сравнительно малых средних скоростях полета
(200—600 км/ч), характерных для истребителей второй миро-
вой войны, за счет небольшой потери высоты можно получить
существенное увеличение скорости, т. е. при маневрировании
главным слагаемым уровня энергии (Нэ) является высота,
которую легко превратить в скорость (потенциальную энер-
гию— в скорость). Отсюда вытекает знаменитая формула
Покрышкина: «Высота — скорость — маневр — огонь!»;
— при больших скоростях, характерных для современных
самолетов, наоборот, сравнительно небольшая потеря скоро-
сти приводит к существенному приросту высоты при выпол-
нении восходящих маневров. Здесь главным слагаемым уров-
ня энергии является скорость, избыток которой легко превра-
тить в дополнительную высоту, поэтому в современных усло-
виях формула боя: скорость — высота — маневр — огонь!
Если имеется превосходство над самолетом противника в
^хаР,то наш летчик будет иметь преимущество в свободе ма-
невра высотой и скоростью при выполнении боевого маневри-
рования с перегрузками пу а, одинаковыми с теми, которые
создает противник.
В самом деле, если Д ихдр^О, то, следовательно, самолет
имеет преимущество в предельной по тяге перегрузке, а это
означает, что при маневрировании противника со средними
перегрузками, равными пу а Пр п, наш летчик, создавая такую
же перегрузку (nY а с = nYa прп, но nYа c<nY а прс), будет иметь
преимущество в наборе высоты за счет скорости или скорости
за счет потери высоты:
Д Ус ~ а Р ^ман >
где /Ман — время маневра;
А Уп ==------------приращение скорости у самолета про-
Vcp п
тивника за счет потери АН при использовании nY а =nYa при*
У нашего самолета будет это же приращение Д V за счет
Д Н и еще дополнительное увеличение скорости за счет
ДЯХар>0 на величину g-ДПхар/ман.
Д 7УС = Д Hn V А Пх а р ^ман»
472
где Дп„=------t------набор высоты за счет избытка ско-
g
роста (Д V) у самолета противника.
Преимущество в пХар также означает:
— превосходство по быстроте догона
2ДГ) Г 2ДР
Д/’ха К §Д«ХОр
где tsD — дистанция, которую необходимо ликвидировать для
обеспечения эффективного применения оружия;
— по быстроте ликвидации превышения
&Н = АН
“ A Vy ” VAn*
Л р
Превосходство в особенно необходимо на первом
этапе и в конце воздушного боя, когда требуется быстро на-
бирать высоту или скорость для сближения или отрыва от
противника. В тактике боя величину А «хар>0можно рассмат-
ривать как меру способности самолета к дальнейшему ускоре-
нию на любых участках траектории, включая вертикали.
В этом случае летчик может контролировать дистанцию до
противника, т. е. сокращать или увеличивать ее в соответст-
вии с обстановкой. В целом считается, что это преимущество
открывает возможность к наступлению в воздушном бою, так
как самолет быстрее наберет высоту и скорость, требуемые
для выполнения атаки.
Пример. Пусть А пхх а р = 0,3. Тогда скороподъемность и
быстрота набора энергии нашего самолету больше на, AVy=
=0,3 V м/с, AV^ = 0,3 V м/с, а ускорение горизонтального
разгона больше на A jxa — g& пхХа^ = 9,81 • 0,3 = 3 м/с2. В
этих условиях превышение самолета противника, например, на
500 м может быть ликвидировано нашим самолетом при ско-
рости 900 км/ч (250 м/с) за время
, А Я 500 _
t =---------=-----------~7 с.
V Ад1 250 • 0,3
X а р ’
Если же нашему летчику потребуется для выхода на ди-
станцию применения оружия ликвидировать отставание 2Q00m
на постоянной высоте, то на это потребуется время
t =
2АЕ>
g^nXa9
2 • 2000
9,81 • 0,3
^36,5 с.
473
Преимущество в пУор(«уапр> 1, АяудпР>0) является
в воздушном бою:
— предпосылкой к успешному сближению с противником
и преследованию его в развороте по горизонту, вертикали или
в наклонной плоскости в условиях длительного маневрирова-
ния (без потери уровня энергии); к уменьшению потребного
времени для ответных действий при атаке противнику
Л _
I *МИН -
\ Фуст. макс
— превосходством в скорости увеличения (при nYacp<Z
<Яуапр) ИЛИ расхода (при Пу а ср > Пу а пр) уровня энергии,
т. е. большей свободой маневра высотой и скоростью, если лет-
чики противоборствующих самолетов пилотируют с одинако-
выми средними перегрузками (пуаср).
При таком преимуществе целесообразно (если позволяет
тактическая ситуация), например, выполнять разворот в сто-
рону противника на постоянной скорости и высоте (сохраняя
уровень энергии), если он обнаружен на дальностях, не позво-
ляющих ему мгновенно применять оружие (например, пушки).
Если удастся навязать противнику бой на виражах, то первым
можно занять тактически выгодную позицию для эффектив-
ного применения оружия. __
Рассмотрим примеры использования пуаПр и ДггуДПр
для расчетов при подготовке к боевым действиям.
Пример 1. Определить угол разворота без потери энергии,
потребный для ликвидации углового отставания от самолета
противника, если яуапр =1,2, а Дф = 45°.
Решение. Известно, что
_ А Тс __ Дфп
Фуст С------? Фуст п -
откуда
(DyCT с Д фс
= — — Пу а пр.
Фуст п Д Фп
Но
Д фс = Д фп + 45°,
тогда
фп + 45 _ пр _ | 2 или Дфп = 225°, а Дф£==
Д фп
= Д фс + 45° = 225 + 45 = 270°,
474
т. е. ликвидация углового отставания будет осуществлена за
3/4 виража независимо от высоты полета, если скорости обоих
самолетов одинаковы.
Пример 2. Определить потребное для этого время, если
Пу а пр = 1,2, nY а Прс = 6, a Vc = Vп= 900 км/ч (250 м/с).
Решение. Известно, что
“ Пу а прс
Пу а прс — >
Пу а прп
откуда
_ Пу а ПрС _ 6 _ -
Пу а прп — -= — — О.
Пу а пр 1 >2
Следовательно,
Д Пу а пр — Пу а прс Пу а Прп = 6 5 =» 1 .
Тогда
A g^ Пу а пр 9,81 Q о ,
V 250
и
1^-^- -44- . 22.3 с,
Д ^yCT 2
т. е. угловое отставание в 45° будет ликвидировано за 22,5 с.
Преимущество в пуар (пуар>1, Дпудр > 0) является
предпосылкой к успешному сближению с противником и пре-
следованию его в развороте по горизонту, вертикали или в на-
клонной плоскости при маневрировании с потерей уровня энер-
гии. Потеря энергии происходит припуа р>ИуаПр, что соответ-
ствует пх а Р<С0- Так как снижение уровня энергии (т. е. высо-
ты или скорости или того и другого) можно допустить только
до определенного предела (например, скорости — до Vмин доп)
и происходит это быстро, то такой маневр может быть только
кратковременным.
В самом деле, стремление развернуться на противника как
можно быстрее приводит к использованию летчиком Пудр
вплоть до п^амакс, что действительно приводит к увеличению
угловой скорости разворота, но одновременно фактически яв-
ляется преднамеренным уменьшением уровня энергии, кото-
рый самолет имел к моменту завязки боя. Поэтому такие ма-
475
невры следует использовать только в критической ситуации
для кратковременного увеличения угловой Скорости разворота
на противника и выхода в минимальное время в область при-
менения оружия или для выхода из-под атаки противника,
когда он достиг рубежа открытия огня. При неудачной атаке
й снижении уровня энергии до величины, меньшей чем у са-
молета противника, не всегда удастся повторная атака, так
как у противника будет преимущество в свободе маневра вы-
сотой и скоростью полета.
Заметим, что при атаке с выходом на предельные рубежи
полета (малую скорость, большие углы атаки) необходимо
помнить, что решающую роль в успехе атаки начинают играть
характеристики устойчивости и управляемости (поведение са-
молета на этих режимах, его управляемость). Поэтому следует
мастерски владеть техникой пилотирования.
В качестве вывода можно отметить, что результаты срав-
нения по общим показателям маневренности во многом опре-
деляют тактику ближнего боя.
9.2.4. Сравнение пУар, пУапр и пХаР
Сравнение располагаемых нормальных скоростных перегрузок
Ранее было установлено, что
= (9.1) tngfS
ИЛИ пуар=-?£-’ (9.2) Рнр
где Phi — давление на лю.бой высоте при выбранном значе-
нии числа М = const;
Р/7р — давление на располагаемой высоте при этом
числе М.
Следовательно,, величину nYap = —можно полу-
чу а Рп
чить, подставив сюда выражения (9.1) или (9.2). В первом
случае
^У а рс (Су а р \ /
Пу ар — в I —; I Я • I
^У а рп \ / с '
_ /Судр \ ж /Судр \
\mglS /с ‘ \mglS)a
(9.3)
476
(скоростной напор сократился, так как считаем, что самолеты
ведут маневрирование примерно на одинаковых высотах и
скоростях). __
Из формулы (9.3) видно, что для расчета пу а р надо знать
зависимости Су а р (Л4) противоборствующих самолетов. Вы-
брав ряд чисел М, определить для них Суарси Суарпи для за-
данных вариантов _(rnglS)c и (mg/S)n рассчитать соответст-
вующие величины пу а которые затем построить прямо
на диапазоне высот и скоростей полета (рис. 9.4).
Во втором случае
Пу а рс РН[ . РН[ Рн$п
Пу а рп Рнрс РНрп Рнрс.
(9.4)
Рис. 9.4. Сравнение располагаемых
нормальных скоростных перегрузок
Следовательно, отношение располагаемых нормальных
скоростных перегрузок сравниваемых самолетов (на задан-
ных высоте и скорости) равно обратному отношению атмо-
сферных давлений на границах горизонтального полета (на
линиях Нр, где nYap = 1 ) этих самолетов.
Если имеется информация в виде линий Нр (границ гори-
зонтального полета) противоборствующих самолетов, то, ис-
пользуя формулу (9.4), легко определить пуа^
Пусть, например, требуется вычислить пуа$ для всех
высот на М = 0,9. Из рис. 9.4 видно, что для этого числа
М у нашего самолета Нрс =» 19 км | рНп = 654 Krf- или
\ р м2
ff \
6410------) , а у самолета противника Ярп = 20,4 км
м2 /
(Pffnn = 523 кгс или 5130
V ₽ м2 м2 )
Следовательно,
т. е. наш самолет уступает самолету противника впуар на
20%. Поэтому у него будет больше радиус, меньше угловая
скорость, больше время маневра, чем у противника, пример-
но на 20%.
Этот проигрыш соответствует любым высотам при Л1 = 0,9.
Если взять число М = 1,3, при котором границы горизонталь-
ного полета пересекаются, то //рс =» Ярп (точка А на рис. 9.4).
Это значит, что
РНрс=Рнрп и Пуар= 1.
Изолиния пуар = 1,0 (или Дпуар = 0) называется линией
равных возможностей противоборствующих самолетов. Она
разделяет диапазон высот и скоростей полета на области
превосходства нашего самолета (в них nY ар>1_и Дпуар>0)
и превосходства самолета противника (в_них nY а р < 1 и
Д^уар<0). В нашем примере справа от пуар = 1 преиму-
щество у нашего самолета, а слева — у противника. Заметим,
что линии Нр сравниваемых самолетов могут пересекаться
неоднократно, тогда будет такое же количество изолиний
пу а р= 1,0. При числе М= 1,8 (см. рис. 9.4) пу ар = 1,2, т. е.
превосходство уже на стороне нашего самолета, (и то же на
20%).
Если бы у самолетов не было ограничений по прочности
(по пу а макс), то все изолинии пу а р=const проходили бы вер-
тикально до Н = 0 (см. рис. 9.4), но с учетом ограничений
вертикальность линий нарушается (рис. 9.5).
Дело в том, что по мере уменьшения высоты полета
при М = const на каких-то высотах, соответствующих для
своего самолета величинам давления рп с = Рнрс п\ а максс
и самолета противника рп*п = Р/урп^уамаксп? наступает огра-
ничение по Яуамакс • Хотя фактически несущие способности
Крыла ПОЗВОЛЯЮТ получить ^YaP > ^Уамакс » Н0 ЭТ0 бЫЛО бы
нарушением требований по безопасности полетов. Следо-
вательно, начиная с этих высот, летчики противоборствую-
щих самолетов, несмотря на необходимость и возможность
получения больших перегрузок, вынуждены маневрировать
с Пуар ие более пэУамакс.
Например, для числа М = const, соответствующего точ-
ке А (рис. 9.5), на всех высотах Н > На оба самолета име-
478
ют равные возможности по созданию пуар, так как
пуаР = 1 (пересекаются /7рси Нрп). Однако на Н<^НА на-
ступает ограничение по п^амакс, причем в нашем примере
Пу а макс с > Гамаке п- ПОЭТОМУ Ограничение ДЛЯ НЭШвГО C3MO-
лета наступит на меньших высотах, чем для самолета про-
тивника.
Рис. 9.5. Сравнение располагаемых нормаль-
ных скоростных перегрузок (с учетом огра-
ничений по прочности)
м
В самом деле, при = const Нрс = Нрп, т. е. рнрс =
= Рнрп, а тогда РДС>РДП, т. е.ЯДс<ЯДп. Напомним,
что рД— это атмосферное давление на высоте, где насту-
пает ограничение по л®аиакс.
Следовательно, на Н<НА при МА = const nyep=^=l. Сна-
— а рс
чала Пхар = ——-—» т. е. уже наступило ограничение у
^Ya макс
самолета противника (Яуамаксп)> но еще не наступило у
нашего самолета (rcYapc). Это означает, что постепенно нач-
нет увеличиваться соотношение перегрузок и rtyap > 1.
А это значит, что изолиния пуар = 1 будет отклоняться от
вертикали. По мере дальнейшего уменьшения высоты на-
ступит ограничение и у нашего самолета, и тогда
— nt
„ Ya макс с
Пуор = -----------
Y а макс п
479
Пусть nYa р = —j— = 1,2, т. е. появится область высот и
скоростей, где везде nYap = 1,2 (преимущество нашего са-
молета), а линии «уар = 1,2 сохранят свою вертикальность
вплоть до встречи с границей этой области (точка Б на
рис. 9,5). Как же построить линии Пуар = const с учетом
ограничений по «уамакс, особенно в случае пересечения
границ ЯД и Яд п? Чтобы выяснить это, воспользуемся
рис. 9.6, на котором нанесены границы горизонтального по-
лета ЯрС и Ярп и линии высот ЯД и Яд , соответствую-
щих постоянным значениям ограничений и
п3
Y а макс.п •
_ Рис. 9.6. К построению изолиний
Пу = const в области ограничений по
прочности
При Мх = const Ярс > Ярп , поэтому перегрузки, которые
могут создать летчики противоборствующих самолетов в
точке 1 (рис. 9.6), равны: nYа рс = п\а макс с (так как точка 1
лежит ниже высоты, где наступило ограничение по
«Уамаксс) И «У» рп = 5
следовательно,
м п3
“ а рс \ а макс с
^Y а р — “ — I 9
а рп Р1/Рнрп
откуда
480
По этой формуле и ведется расчет (если задавать раз-
ные Пуар) и построение линий nYap — const, если выше
проходит граница по п’омакс нашего самолета. Если же
выше проходит граница по л’омакс самолета противника
(точка 2 на рис. 9.6), то
Рг
л Y а рс — ,
Р^рс
„ - Рз/РЯрС
^Тарп ^Y а макс, п 1 ® ^Y ар пЭ ’
ха макс п
откуда
Р2 аит п ^у а р Р^рс*
Сравнение предельных по тяге нормальных
скоростных перегрузок
При неполной информации о самолете противника (из-
вестны только ffnp) сравнение можно сделать только на стра-
тосферных высотах, а при наличии информации о тяговых и
аэродинамических характеристиках — во всем диапазоне вы-
сот и Скоростей полета расчетом Пу а пр противоборствующих
самолетов.
Отношение предельных по тяге перегрузок равно
Пу а прс
Пу а пр — •
Пу а прп
Учитывая, что на высотах 11(13) км и более при М =
. PHi
= const применимо соотношение nYanp =---------, можно запи-
РНпр
сать (аналогично выражению 9.4)
- _ Рн£ в Рн< _ Рнпрп
П'Х а пр — “ • ~ 1 — ~ •
Рнпрс Р^ПрП Р^ПрС
Поэтому при РнПрс = РЯпрп (в точках пересечения//„рс и Япрп)
пуапр=1, т. е. нолучается вертикальная изолиния до Н
не менее 11(13) км, делящая диапазон высот и скоростей
полета на области преимущества по п\а пр того или друго-
го самолета. Если Япрс> Япрп> то пуаПр>1; если НПрс<//прп,
ТО MYanp<l- Поскольку Л Ya np<«Y ар, ТО _Д0П0ЛНИТ6ЛЬНЫХ
ограничений по высоте нет, но вид линий «y а пр e const по-
лучается на Н <11(15) км самым разнообразным (рис. 9.7).
31—5в07сп
481
Сравнение «ха Ри построение изолиний кпхдр =const, про-
ще всего провести для т. е. пХар, соответствующих
/1уа = 1* Чтобы построить ИЗОЛИНИИ =4арС ~ПХарп’
необходимо иметь зависимости «Ya ПР (^> А (М). С ИХ по-
мощью по формуле п1Хар —
qs
(«2у а пр — 1) подсчитыва-
Рис. 9.7. Сравнение предельных по тяге ско-
ростных перегрузок
ются значения «^арс и* п1Харп для ряда высот и чисел М
полета, одинаковых для обоих самолетов. Полученные
Д п1ха р = const для разных высот и чисел М соединяется
плавными кривыми. Их вид может быть самым разнообраз-
ным. Наиболее простой показан на рис. 9.8, в точках А и
Б которого =0, так как на предельной высоте
Рис. 9.8. Сравнение располагаемых
тангенциальных перегрузок
482
9.2.5. Области с различным соотношением
показателей маневренности
Если на диапазон высот и скоростей полета нанести линии
равных возможностей Пу ар = 1, Иуапр^! иДПхар = 0, то в
результате пересечения этих линий образуются области Н—V
с различным соотношением показателей маневренности срав-
ниваемых самолетов (рис. 9.9). Размеры и вид этих областей
могут быть самыми разнообразными (рис. 9.10). Иногда эти
области настолько малы, что их практически можно не учи-
CSou самолет
Рис. 9.9. Области е различным соотношением показателей маневрен-
ности сравниваемых самолетов (пример 1)
Рис. 9.10. Области с различным соотношением показателей маневренности
(пример 2)
ЗР
483
тывать. В целях большей наглядности и простоты запомина-
ния областей с различным соотношением показателей манев-
ренности их иногда упрощают, ограничивая осредненными вер-
тикальными (M = const) и горизонтальными (77 = const) ли-
ниями.
* В этом случае поле диапазона высот и скоростей разби-
вается на квадраты и прямоугольники, имеющие разное соот-
ношение перегрузок. Для обеспечения анализа удобно по-
строить дополнительную таблицу, в которой указать преиму-
щество, проигрыш или равные возможности по перегрузкам
путем применения следующих знаков: «плюс».— если преиму-
щество принадлежит нашему самолету, «минус» — если про-
тивнику и «равно» — при равных возможностях по маневри-
рованию (см. рис. 9.9и 9.10). __
Хотя ИЗОЛИНИИ nYa р = 1, Пу а пр = 1 И Ди₽ = ® Д^ЛЯТ
диапазон высот и скоростей полета на области преимущества
по той или иной перегрузке, все же не каждый летчик сможет
реализовать имеющееся преимущество, если оно определяется
небольшими отлйчиями в величинах указанных перегрузок,
либо тактическая значимость превосходства практически рав-
на нулю.
Действительно, если в_ примерах, рассмотренных в 9.2.3,
вместо Пу а пр =1,2 ВЗЯТЬ Пу а пр = 1,05, то окажется, что для
ликвидации углового отставания в 45° нашему самолету нуж-
но развернуться на 900° (т. е. выполнить два с половиной ви-
ража), затратив на это более 60 с. Практически реализовать
это невозможно в скоротечном маневренном воздушном бою.
Если взять =0,05 вместо Дп^ар =0,3, то для умень-
шения дистанции на 2000 м нашему самолету потребуется не
36,5с, а 90с, а таким временем можно располагать только в
редких случаях.
Вывод. Если превосходство или проигрыш одного из са-
молетов невелики, то около линий равных возможностей
Пуа р =1, иуапр==1, Д=0 можно выделить области при-
мерно равных возможностей, размеры которых находятся в за-
висимости от выучки летного состава. Например, на диапазон
высот и скоростей нанести_области примерно равных возмож-
ностей с пУар =0,95—1,05,иУапр=0,95—1,05 и Д и^ар=—0,02—
0,02. Тогда области превосходства нашего самолета будут
определяться значениямиП\а р>1,05, nYanp> Дпхар >
>0,02, а самолета противника — nY а р < 0,95, nY а пр < 0,95,
Дп^ < — 0,02 (рис. 9.11).
Прежде чем провести сравнение по областям преимуще-
ства, рассмотрим сравнение маневренных свойств по обобщен-
ным характеристикам.
484
н
Область примерноравных
Возможностей по ц„„
3U.p
Область примерно равных
возможностей по лП^ар
flyg пр
м
Рис. 9.11. Области примерно равных возможностей
§ 9.3. СРАВНЕНИЕ МАНЕВРЕННЫХ СВОЙСТВ
ПО СЕТКАМ ОБОБЩЕННЫХ ХАРАКТЕРИСТИК
Общие показатели маневренности nyflp, Пуапр, пХар и
любые другие значения пуа, построенные в виде графической
зависимости лха р(пу а, Л4),называются сетками обобщенных
характеристик манёвренности (рис. 9.12). Они несут практи-
05
чески полную информацию о маневренных свойствах самоле-
тов. Их недостатками являются меньшая наглядность и много-
численность (для каждой высоты своя сетка). Однако они
позволяют выявить критерии, существенно упрощающие ин-
формацию, потребную для запоминания, чтобы в полете реа-
лизовать преимущества своего самолета или учесть его не-
достатки. К таким критериям относятся граничная тактиче-
ская перегрузка и граничное тактическое число Л4* полета.
По сеткам легко определить пудр (их значения находятся
по левой границе, обусловленной достижением допустимого
угла атаки и определяющей безопасность полета) Лу а пр (в точ-
ках пересечения кривых пх а Р (Л4) для данных п\а с осью аб-
сцисс, т. е. значения пХа при пхаР = 0)? любые пХа$ при лю-
бых пу а, доступных рассматриваемому самолету, в том числе
при ПудМаКС (по этим «ха р можно определить темп потери ско-
рости и энергии при маневрировании на предельных режимах
по перегрузке п3х а макс, вплоть до выхода на режимы с адоп ).
Из сеток видно, что при М = const увеличение п\а ср в воздуш-
ном бою приводит к уменьшению положительных и переходу к
отрицательным значениям пха, определяющим изменение
уровня энергии самолета. Сравнение маневренных свойств с
помощью сеток ведется методом их наложения друг на друга
для фиксированной высоты (рис. 9.13).
Хар
О
Рис. 9.13. Сравнение маневренных свойств по
сеткам обобщенных характеристик
Если на графике соединить точки пересечения кривых при
одинаковых Пу а;, в которых Их а рс =Их прп, ТО ПОЛуЧИМ ЛИНИЮ
(широкая линия на рис. 9.13), в каждой, точке которой nXflp
486
противоборствующих самолетов равны. Перегрузки nYfl, ле-
жащие на этой кривой, называются граничными тактическими
перегрузками и обозначаютсяп\а. Причем п*Ха=Л соответст-
вует число Л42, и* а = 5 — число Л4з, а и* а = и* а макс — число
М..
На графике можно выделить три характерные области:
I— область энергетического превосходства (при Л4<Л11),
в которой наш самолет имеет преимущество при маневрирова-
нии с любыми nY
I/ — область обусловленного превосходства (при
Mi<M<M2), где превосходство в энергетике обусловлено
величиной пу а, которую летчики создают в ходе маневриро-
вания;
III — область энергетического проигрыша (при Л4>Л12),
в которой наш самолет проигрывает противнику в энергетике
При любых Пу а •
9.3.1. Граничные тактические перегрузки
и число М* полета
Известно, что свобода действий в маневренном бою при-
надлежит тому летчику, который вступает в бой при более
/ V2 \
высоком уровне энергии \ Н3~ Н ------и умеет сохранять
\ 2g )
его или экономно расходовать в процессе боя. Изменение уров-
ня энергии определяется величиной и знаком тангенциальной
перегрузки (Д/7Э = пха Vcp Д 0, которые зависят от высоты и
скорости полета, а также от величины перегрузки nY а, кото-
рую создает летчик в ходе боя.
Если считать, что ближний бой завязывается примерно на
одинаковых высотах и скоростях, то изменение соотношения
уровней энергии, определяемое величиной Д Пх арпротивобор-
ствующих самолетов, будет зависеть только от создаваемой
летчиками перегрузки пу а. При энергичном маневрировании
(больших пуа) величина пх а р существенно уменьшается или
становится отрицательной величиной, а последнее означает,
что уровень энергии снижается. Причем тот из самолетов, у
которого величина пх а р меньше, будет быстрее терять уровень
энергии (скорость или высоту или и то и другое), а следова-
тельно, его инициатива в бою будет сковываться. Поскольку
при боевом маневрировании летчик может использовать раз-
личные траектории (от слабо до сильно изогнутых), то стано-
вится недостаточным вести сравнение изменения уровня энер-
гии противоборствующих самолетов только по пхх а р> т. е. при
Пуа = 1. Поэтому в целях получения информации о соотноше-
437
нии изменения энергетической маневренности сравниваемых
самолетов при любых Пу а удобно воспользоваться понятием
граничной тактической перегрузки боевого маневрирования
пУа. Чтобы выяснить физический смысл этой перегрузки, по-
строим зависимость «хдР (иуа) на фиксированных Н и М,
Эта зависимость имеет вид
A mg 9 9 .
ПХар = ---(4апр — nYa)
qS
и графически представляет собой параболу (рис. 9.14), из ко-
торого видно, что если летчик создает nY a==nY anp, то nxap=Ot
и маневрирование будет происходить без потери энергии.
Рис. 9.14. Зависимость располагаемой тангенциаль-
ной перегрузки от нормальной скоростной пере-
грузки
При «уд <п удпр появляется ихар>0, величина которой по ме-
ре уменьшения Пу д увеличивается, а это значит, что у самолета
возрастает уровень энергии, которым летчик может распоря-
диться по своему усмотрению, выполняя, например, или не-
установившиеся (разворот с разгоном, восходящая ёпираль с
торможением при больших углах набора, петля Нестерова
и др.), или установившиеся маневры (боевой разворот по типу
восходящей установившейся спирали и др.). ПриИуд>Пудпр,
пхдр<0, следовательно, чем больше nYa, тем быстрее будет
происходить уменьшение уровня энергии, а возможности по
маневрированию сужаются. Сравниваемые самолеты имеют,
как правило, разные величины произведений параметра ин-
/ . mg \
дуктивности на нагрузку на крыло А------- ) . Чем больше
эти величины, тем сильнее при энергичном маневрировании
488
растет индуктивное сопротивление и тем больше кривизна
параболы «каР(лу а), т. е. тем меньше пхар при той же пере-
грузке п Уа.
Если на одном графике построить кривые пхаР(пуа)
сравниваемых самолетов, то в зависимости от соотношения
[ д | и п1 Их взаимное положение различно.
I I л а р *
1. Если (Л mg/S)c>(4 m^/S)n, п1Харс >«харп’ т- е- св0*
самолет превосходит самолет противника впхдрпри Нуд = 1»
то кривые пересекаются (рис. 9.15,а). В точке пересечения
лхдрс = ^хд рп» а перегрузку «у д, при которой это происходит,
и называют граничной тактической перегрузкой п\а.
Граничной тактичёской перегрузкой называется такая нор-
мальная скоростная перегрузка пУд, при которой на опреде-
ленных И и V у двух сравниваемых самолетов равны распо-
лагаемые тангенциальные перегрузки.
Рис. 9.15.‘ Возможные варианты взаимного расположения зависимостей
пХдр (nY д) сравниваемых самолетов
489
На рис. 9.15,а Пуа<СпУаПрс и этой перегрузке соответствует
положительное значение п*Ха >0, что означает: при манев-
рировании в бою со средними перегрузками пу а а оба са-
молета будут накапливать энергию с одинаковой скоростью
у* = у* = _ (£э =у п*
V Y с v Y п v "хар'
В этом случае преимущества добьется более искусный летчик,
хорошо владеющий тактикой боя.
Если же навязывать противнику бой со средними перегруз-
ками яуаср<Яуа ’ т0 энергетическим превосходством будет об-
ладать наш самолет, так как в этом случае Д пХа Р = ^харс —
— ^харп>0, а следовательно, он будет быстрее увеличивать
уровень энергии, чем самолет противника:
ДЕ* =rYc — У*п=У«Харс ~VnXapn=V ЬпХар.
При этом увеличивается свобода маневра по высоте и ско-
рости, и инициатива в бою переходит к летчику нашего само-
лета. Например, пусть Пуаср=2 (т. е. меньше, чем п^а = 4)
и при этом пХа рс = 0,6, а пХа рп =0,5 . Тогда Д пх ар =0,6 —
—0,5= 0,1, ДУ* =У Д^хар =222-0,1 =22,2 м/с, т. е. темп уве-
личения уровня энергии у нашего самолета больше на 22,2 м/с.
Если, наоборот, противник будет навязывать бой с пу а»
а летчик нашего самолета примет бой на энергичных манев-
рах с большими перегрузками, то инициативой постепенно мо-
жет завладеть противник, так как при Пу а пре > а сР > n*Y а он
будет быстрее накапливать уровень энергии (^харп >^харс,
Д^ха Р<0), при nY а прп >nY а сР>Пу а прс будет увеличивать энер-
гию, а наш самолет—ее терять(пх а Рс< 0, пХа Рп >0) и, нако-
нец, при пуа с^>пу а прп оба самолета будут терять энергию, но
у нашего самолета это будет происходить быстрее (яхарс < 0,
ЯхаРп<0). Например, пусть при Пу а ср = 5 (пуа ср а =
= 4) /г Харе = —0,3, Их при =—0,15, тогда Д ПХа р= —0,3—( —
— 0,15) = —0,15, ДУ* =222 (—0,15)=—33,3 м/с, т. е. наш
самолет будет быстрее расходовать свой уровень энергии на
33,3 м/с.
Следовательно, действительно п*а является границей
при маневрировании: для нашего самолета п*уа =Пуамаксс, а
для противника n*Ya =Пуаминп. Конечно, все это справед-
ливо без учета реализации тактического замысла боя» ко-
торый может позволить решить исход боя в первой вне-
запной атаке.
490
по (л тё \~{ л mg \ 1 ,
2. Если А —— > А —— I , л* „„ > л* и
I е [ с X а рс X а рп
\ /с \ о /п
Пул пре = fty а Прп, то кривые примут вид, представленный на
рис. 9.15,6. В этом случае
пч а = П': а пре, = О. прп , Пх а рс = Пх а рп = О»
т. е. в ходе боевого маневрирования начальный уровень энер-
гии будет сохраняться, если оба летчика создают средние
перегрузки, примерно равные предельной по тяге перегрузке.
При создании пуаср<Пуа преимущество по энергетике пере-
ходит к нашему самолету (Алх а Р>0), при пуа ср > п*а—к про-
тивнику (А Пха р < 0).
3. Если (А -т& > f А j , л' л > л* пп и
I о 1 I q I ’ X а рс Y а рп
\ / С \ /п
^уапрс >^уапрп» то кривые пересекаются при больших зна-
чениях нормальной перегрузки, когда у обоих самолетов
а р< 0 (рис. 9.15>а). В этом случае n*a>nYanp обоих са-
молетов, т. е. при маневрировании с nY acp~^Y а °^а само“
лета имеют пХдр<;0, т. е. теряют энергию с одинаковой
скоростью.
Однако летчику нашего самолета достаточно вести боевое
маневрирование с п\а ср< п*уа (например, с nYanpc), как появ-
ляется превосходство по энергетике над самолетом против-
ника. Так как Пу а пРп<ЛуапРс> то попытка противника маневри-
ровать с пчаср — яуапрс приведет к потере энергии его само-
лета (он будет тормозиться), в то время как наш самолет
будет маневрировать без потери энергии.
4. Если (А <(а~^\ , а п\ = п\ р , то
I С*/ \ Of Аа рс Л и рп
\ О / С \ /П
при этом всегда лу а пРс > п\а прп, а кривые пересекаются
прилУа = 1 (рис. 9.15,г), которая и является граничной
тактической перегрузкой (л*уа = !)• При маневрировании с
любыми луаср>1 преимуществом будет обладать наш са-
молет и только на слабоизогнутых или прямолинейных тра-
екториях возможности самолетов будут равными.
5. Если И 4арс >ПХарп> ™
кривые не пересекаются (рис. 9.15,6), что указывает на от-
сутствие п*уа. В этом случае энергетическое преимущест-
во на любых маневрах принадлежит нашему самолету.
Выводы:
1. Командиру, планирующему воздушный бой, или каж-
дому летчику, готовящемуся к ведению боя, при выборе вида
491
й характера маневров необходимо знать величину (если
она существует) и целесообразные величины средних пере-
грузок, используемых при маневрировании, относительно п* а
(т. е. больших или меньших величины п*а)‘ для своего само-
лета в вероятном диапазоне высот и скоростей ведения боя.
2. Определить существование п* легко с помощью инфор-
мации, заложенной в сетки обобщенных характеристик манев-
ренности.
Для того чФобы удобнее было запомнить величинуп*\а*
которая зависит от высоты и скорости полета (рис. 9.16),
Рис. 9.16. Зависимость граничных тактических перегрузок
от высоты и скорости полета
целесообразно использовать искусственный йрием, заключаю-
щийся в том, что в координатах 77—Vnp строятся h*y а для
высот вероятного ведения боя (рис. 9.17), а затем они осред-
няются. В результате может получиться график ^*Ya(Vnp)
Рис. 9.17. К выводу приближенной
формулы для определения граничной
тактической перегрузки
492
(рис. 9.18) для выбранных высот (например Н = 0—8000 м)
и скоростей полета (например, от УЭв до 1200 км/ч). Этот
график затем аппроксимируется в виде приближенной фор-
мулы, удобной для летчика:
^ПР Q
100
а макс
Рис. 9.18. Зависимость граничной тактической пе-
регрузки от осредненной скорости полета по
прибору
где Vnp—приборная скорость в текущий момент боя. Вид
такой формулы знаком летному составу по эмпирическим
формулам, определяющим сочетание nYa на маневре и Vnp
из условий, обеспечивающих безопасность от сваливания
самолета.
Если летчик нашего самолета при маневрировании будет
создавать nYacp не более а макс, то он будет иметь превос-
ходство над противником по скорости набора энергии, разгону
и скороподъемности. Для каждой пары противоборствующих
самолетов надо выводить свою формулу п* а, но, как уже от-
мечалось, п* а имеется не всегда. Эта величина отсутствует в
том случае,когда кривые ^xep(nY а,7И) одного самолета лежат
выше кривых другого (не пересекаются), либо когда они пере-
секаются, но при всех пУана одном и том же числе М полета
(рис. 9.19). Итак, а отсутствует, но есть характерное чис-
ло /И* полета, которое делит сетки на две области I и II.
Область I — область чисел Л4<Л1*, в которой наш само-
лет обладает полным энергетическим превосходством над са-
молетом противника при маневрировании с использованием
493
любых фигур пилотажа (любых nY а ср ). Эта область назы-
вается областью полного энергетического превосходства.
Область II— область полного энергетического превосход-
ства самолета противника (Л4>Л4*).
Рис. 9.19. Определение граничного тактического
числа М* полета
Следовательно, в данном случае число является грани-
цей, определяющей преимущество одного из самолетов, поэтов
му оно называется граничным тактическим числом Л4* полета.
Если сетки построены по скорости, то выявляется граничная
тактическая скорость V*. Превосходство одного самолета над
другим по энергетике иногда показывают в виде линий равных
разностей
ду* =у;с-у*ун = удпха.Р,
построенных на диапазоне высот и скоростей полета для фик-
сированных значений а. Такие графики позволяют исследо-
вать тактику воздушного боя. Если Д V* >0, то преимущество
у нашего самолета, если Д7у=0, то возможности самолетов
одинаковы, если Д V* <0, то преимущество у противника, так
как ДУу указывает, насколько быстрее один из самолетов
увеличивает энергию, а значит, определяет свободу маневра по
высоте и скорости полетав Заметим, что при незначительном
отличии V*c и V*n, например, при ДУ* = ±15 м/с индиви-
дуальная техника пилотирования может свести к нулю это
преимущество, поэтому в зависимости от боевой выучки лет-
ного состава такие значения Д V* можно отнести к примерно
равным возможностям. Эти графики строятся для различных
Пуд = const (на рис. 9.20 они показаны для nYa=l).
494
Рис. 9.20. Линии равных разностей A
§ 9.4. АНАЛИЗ ОБЛАСТЕЙ С РАЗЛИЧНЫМ
СООТНОШЕНИЕМ ПОКАЗАТЕЛЕЙ МАНЕВРЕННОСТИ
Прежде чем вести анализ, целесообразно проделать сле-
дующее.
1. Распределить области по значимости, используя принцип
постепенного перехода от полного превосходства своего само-
лета к превосходству самолета противника.
2. Уяснить условия сравнения: высота, скорость, боевая
нагрузка, возможности бортового оружия, прицельно-навига-
ционных комплексов и др.
3. Для каждой области построить вид зависимостей
^хар(иуа) сравниваемых самолетов, которые определяют на-
личие или отсутствие граничной тактической перегрузки.
4. Наметить вид и характер рациональных боевых манев-
ров, которые целесообразно использовать в бою против само-
лета противника в рассматриваемой области высот и скоро-
стей полета.
Прежде всего отметим, что независимо от выявленных об-
ластей с различным соотношением показателей маневренно-
сти при планировании и ведении боевых действий необходимо
стремиться создать условия, обеспечивающие к моменту за-
вязки боя преимущество над противником в уровне энергии
(Д Нэ—Нэс—Нэп =Д Н + Это позволит занять так-
\ g /
тически выгодное положение для открытия огня за счет боль-
шей свободы маневра высотой и скоростью полета, реализо-
495
вать фактор внезапности и обеспечить стремительность пер-
вой атаки.
Если в процессе атаки цель не уничтожена, а превосходство
в энергии потеряно, то необходимо руководствоваться реко-
мендациями, вытекающими из анализа результатов сравнения
областей с различным соотношением показателей маневрен-
ности противоборствующих самолетов.
С учетом информации, представленной на рис. 9.9, летчику
нашего самолета рекомендуется вести маневренный воздуш-
ный бой в области 1. В этой области п* а отсутствует, так как
наш самолет имеет преимущество по всем трем сравниваемым
перегрузкам (рис. 9.15,д). Это позволяет нашему летчику на-
вязывать бой любого типа: длительный на установившихся
режимах (без потери энергии) или кратковременный на не-
установившихся режимах полета (с потерей энергии), не
опасаясь потерять преимущество в«хар. При попытке про-
тивника маневрировать с аналогичными перегрузками наш
самолет будет сохранять преимущество по радиусу, угловым
скоростям и времени на любых фигурах, по скороподъемно-
сти, набору скорости (разгону) и энергии.
В случае завязки боя в неблагоприятном для нас диапазоне
высот и скоростей следует постепенно затягивать противника
в область 1. Естественно, что противник будет стремиться
перевести бой в область 8, где преимущество по всем пере-
грузкам принадлежит его самолету, поэтому исход боя будет
зависеть от тактического и пилотажного искусства летчиков,
их морально-психологической и огневой подготовки.
В области 2 наш самолет имеет преимущество по пока-
зателям, связанным С ТЯГОВООруженНОСТЬЮ (^харс^^Харп и
nY а пре > ну а пРп), но проигрывает по располагаемой пере-
грузке (nY а рс <С а рп)- Вследствие различной величины
I а mg \
групп А —— у противоборствующих самолетов зависи-
мости пхар(Пуа) пересекаются при перегрузках, больших
предельных по тяге (рис. 9.15,/?), т. е. п* а > nYanpc. Здесь
с учетом того, что nYapc<C Пуарпч возможны варианты:
1) Пу а рс Пу а, Пу а рп П*, д .
В этом случае при маневрировании с nYanpc< пуа < п*а
наш самолет будет иметь преимущество при любых допу-
стимых перегрузках.
Если летчик самолета противника будет использовать
Пу арп>Пу а рС, то его самолет получит кратковременное пре-
восходство на энергичных маневрах по угловой скорости, ра-
диусу и времени, но одновременно будет быстро терять энер-
496
гию (например, из-за потери скорости), так как Апхдр > О
(например, лХарс = —0,1, пХа^= — 0,2, Д/гХар = —0,1—
(—0,2) =0,1). В результате его тактическое положение ухуд-
шается.
2) пуДрс >^уа> пх nY а • ® этом случае при манев-
рировании с любыми Лудср^>^уа наш самолет будет проиг-
рывать противнику по энергетике.
В области 2 рационально использовать в зависимости от
тактической ситуации виражи, петли Нестерова, косые цетли,
боевые развороты и другие аналогичные маневры, так как в
этом случае наш самолет имеет преимущество в радиусах,
угловых скоростях, времени выполнения маневра, а также
в разгоне, скороподъемности, скорости изменения энергии,
если летчик создает nYacp<n*a. Можно затягивать против-
ника на длительный, непрерывный воздушный бой, маневри-
руя без потери энергии с пча ср ~ пуапрс >^уа прп или с
накоплением энергии по отношению к противнику при исполь-
зовании более умеренных перегрузок ЯуасР<ЛУа прс. При этом
нашему летчику следует учитывать, что противник за счет луч-
ших показателей энергичных маневров (7?, со, t) при ftYapn>
> Пу а в последний момент может уходить из-под атаки, бо-
лее энергично доворачиваться на цель при ее атаке, энергич-
нее, с меньшей потерей высоты выходить из нисходящих .ма-
невров, быстрее входить в восходящие маневры.
В областях 5 и Гщаш самолет превосходит противника в
перегрузкея*хар, но проигрывает в яуапр.Граничная тактиче-
ская перегрузка и* a<nYаПр (рис. 9.15,а), поэтому нашему
летчику для сохранения превосходства в энергетике (в nxaPj
необходимо маневрировать с умеренными перегрузками, не
превышающими в среднем величину я*Y а, которая для нашего
Самолета является максимальной с точки зрения сохранения
преимущества над противником.
Следовательно, в этих областях невыгодно вести бой на
виражах и косых петлях с ftYacp >^Ya, особенно в области 7,
где самолет противника имеет лучшие показатели не только
предельных по тяге, но и форсированных виражей и развод
ротов. Поэтому рекомендация об использовании умеренных
п\а означает, что бой выгоднее вести на вертикальных манев-
рах типа горок и пикирований, восходящих и нисходящих спи-
ралей, догонах и отрывах от противника по прямой или сла-
боизогнутой траектории. Здесь целесообразно вести не затяж-
ной непрерывный воздушный бой, а бой, состоящий из отдель-
ных атак (атака—уход, используя преимущество впхвр, и
снова атака). Преимущество в^удр, имеющееся в области 3,
наш летчик может использовать только для энергичного от-
32—5007с п 497
ворота при открытии огня противником или для кратковре-
менного доворота на цель, обеспечивающего эффективный
огонь. Используя преимущество самолета в пХар (в скоро-
подъемности, разгоне и наборе энергии) и тактическое ис-
кусство, бой следует переводить в область /, не давая про-
тивнику увлечь себя в области 6 и 8.
В областях 4 и 5 наш самолет имеет превосходство в Яудпр*
но проигрывает в^хар. Граничная тактическая перегрузка
<^у дпр(как и в областях 3 и 7), но теперь уже она мак-
симальна для самолета противника, а нашему самолету целе-
сообразно использовать^у д ср>я*у д. Это означает, что пред-
почтительнее затягивать противника на длительный воздуш-
ный бой, маневрируя с Яу дсР==Яуд пре . Так какпудпрс >ЯудпРп,
то такое маневрирование приведет к успеху в занятии выгод-
ного тактического положения за счет большей свободы ма-
невра высотой и скоростью. Целесообразно использовать уста-
новившиеся виражи и развороты, косые петли, вертикальные
маневры с энергичным искривлением траектории.
Заметим, что в области 4пч а Рс^>яудрп, поэтому наш само-
лет будет иметь преимущество и на неустановив'щихся энер-
гичных маневрах (форсированных разворотах и др.).
В области 6 наш летчик должен предусматривать возмож-
ность создания условий для внезапной атаки, в процессе ко-
торой допустимы один-два энергичных кратковременных ма-
невра (например, доворота на цель). Если при этом решить
исход боя не удалось, то при дальнейшем маневрировании
преимущество в тактическом плане перейдет к противнику,
так как его самолет обладает превосходством по^хдр и Лудпр,
т. е. по перегрузкам, обеспечивающим ведение боя с преиму-
ществом в радиусах, угловых скоростях, времени маневра и
постепенное накапливание превосходства в энергии.
В области 8 исход должен решаться одной внезапной ата-
кой, так как противник имеет преимущество по всем трем
перегрузкам (п*у а отсутствует), и любое маневрирование в
ближнем бою для нашего самолета невыгодно.
Рассмотренные принципы маневрирования справедливы в
случае встречи противников и завязки боя на приблизительно
одинаковых высотах, скоростях и дальнейшего маневрирова-
ния по примерно аналогичным траекториям. Поэтому при
разработке тактических приемов воздушного боя необходимо
знать не только принципы маневрирования, вытекающие из
сравнения общих показателей маневренности (виды манев-
ров), но и параметры маневров в различных условиях бое-
вого применения, области их выполнимости.
498
§ 95. СРАВНЕНИЕ МАНЕВРЕННЫХ СВОЙСТВ
САМОЛЕТОВ ПО ОБЛАСТЯМ ВЫПОЛНИМОСТИ
ХАРАКТЕРНЫХ БОЕВЫХ МАНЕВРОВ
Сравнение производится сопоставлением на одном графике
границ областей выполнимости одинаковых боевых маневров
(виражей, петель Нестерова, переворотов) противоборствую-
щих самолетов. Эти границы рассчитываются заранее для
каждого самолета с учетом реально используемых законов
управления, соответствующих различному уровню подготовки
летного состава. Например, хорошо подготовленный летный
состав создает перегрузки при боевых маневрах, используя
углы атаки, близкие к допустимым (предельным) ш допусти-
мые (например, 0,8 адоп — адоп), летный состав со средней
подготовкой или хорошо подготовленный в составе группы —
0,7 Ядоп аДОП‘
9.5.1. Сравнение по областям выполнимости
горизонтальных маневров
Сравнение позволяет выявить скорости полета на заданной
высоте боевого применения, при которых наш самолет имеет
преимущество или проигрывает самолету противника по угло-
вой скорости и радиусу разворота, а также оценить величину
этого преимущества или проигрыша и влияние закона управ-
ления на соотношение характеристик горизонтальных манев-
ров противоборствующих самолетов.
Как видно из графика (рис. 9.21), на котором показан
--------сбой самолет
--------Самолет противника
Рис. 9 21. Сравнение самолетов по областям выполни-
мости горизонтальных маневров
32* 499
один из возможных вариантов соотношения границ горизон-
тальных боевых маневров, граница предельных разворотов
своего самолета Ц—2—3) проходит выше соответствующей
границы (Г—2'^-3') самолета противника. Это означает, что
наш самолет на данной высот# имеет лучшие показатели
форсированных горизонтальных боевых маневров. Например,
соз><оз', #з<Яз, следовательно, при развороте на одинаковый
угол /з<7з', хотя уровень энергии будет больше у самолета
противника (Уз'> Vs),. Однако если наш самолет станет вы-
полнять разворот на V=V3', он будет обладать равным с про-
тивником уровнем энергии и сохранять преимущество в со, R,
t. Поскольку в нашем примере п\ амаксс > п*а макс п> то фак-
тически хорошо подготовленный летчик сможет реализовать
преимущество на форсированных боевых маневрах во всем
диапазоне скоростей (области 1—3—5—3'—3'—/'), в то вре-
мя как противник при любом уровне подготовки не может
выполнить таких маневров.
Если же уровень подготовки таков, что летчик использует
только 0,7 аДоп, или полет совершается в группе^ (в нашем
примере эта граница совпадает с границей аД0Пп 1'—2'—3'),
то возможности по маневрированию в бою на предельных ре-
жимах уменьшаются, а преимущество исчезает (кроме об-
ласти 3'—4—5—5'—3', где сохраняется превосходство пуамдКС)-
В точке 4' пересекаются границы установившихся боевых
маневров противоборствующих самолетов в горизонтальной
плоскости (2—4—6 и 2'—4'—6'). Это означает, что при
V* <^уст с === ^уст п» RycT с == Ry&r п> ^уст с==:^уст п» Т. е. ВОЗМОЖНОСТИ
самолетов одинаковы.
Однако этой же точке 4' соответствует и пудмакс п » сле-
довательно, на V=V* противник не сможет при необходимо-
сти маневрировать более энергично (создавать пуа>п^а максп),
в то время как летчик нашего самолета может увеличивать
перегрузку и создавать кратковременное превосходство
(<o4,z > id/) без потери энергии. Длительное маневрирование в
этом случае хотя и приводит ко все большему превосходству
в со (вплоть до соз), но сопровождается потерей скорости (энер-
гии), что не всегда выгодно по тактическим соображениям
(например, в предвидении выполнения восходящего маневра).
Итак-,-на V<V* наш самолет имеет полное преимущество при
маневрировании без потери энергии («уаср=^¥дпр) , так как
линия 2—2"—4—4' лежит выше, чем линия 2'—4'. В области
2—2"—4'—2'—2 наш самолет при маневрировании на одина-
ковых с противником скоростях и перегрузках (кренах) бу-
дет накапливать энергию (разворот е разгоном), а противник—
терять ее (разворот с торможением). На V>V* вплоть до
600
Vдоп превосходство по маневрированию без потери энергии
переходит к противнику и в области 4'—&—6—4' он будет
разворачиваться с разгоном, а наш самолет — с торможением.
Однако и здесь, если наш летчик создаст «у а Ср ~ Яу а макс с»
то он будет обладать преимуществом на развороте, хотя с еще
более энергичным торможением, т. е. фактически реализовать
это преимущество можно только кратковременно (например,
при последнем решающем довороте на цель для открытия
огня).
Заметим, что в этой области при маневрировании по оди-
наковой траектории (/?с = Rn) превосходством как в угловой
скорости, так и в уровне энергии будет обладать самолет про-
тивника (например, при маневрировании без потери энергии
V71 > V7).
В области. 2—4Г—2Г картина будет обратной. При умень-
шении или увеличении высоты боевого маневрирования гра-
ницы Областей смещаются, что приводит к изменению диапа-
зонов скоростей, в которых имеются преимущество или про-
игрыш противоборствующих самолетов, и абсолютных вёлй-
чин Дсо, Д/?, Д/.
9.5.2. Сравнение по областям выполнимости восходящих
и нисходящих плоских наклонных боевых маневров
К таким маневрам относятся косые полупетли и полу-
перевороты. Сравнение производится способом наложения
границ областей безопасного ввода в маневр противоборст-
вующих самолетов, рассчитанных для одинаковых законов
пилотирования, т. е. для одинаковых изменений в процессе
выполнения маневра перегрузки, крена и режима работы дви-
гателя. Получаемый при этом график позволяет выявить об-
ласти высот и скоростей, в которых каждый из сравниваемых
самолетов имеет превосходство или проигрывает по распола-
гаемому углу наклона плоскости маневра к горизонту:
Д фр = фрс фрП .
Расчет Д фр можно проделать для любой заданной скоро-
сти и высоты боевого применения.
В чем же физический смысл и что дает превосходство в фр?
Известно, что в вертикальной плоскости изменение скоро-
сти по времени определяется выражением
dV < • ™
—— = g(nXa —sm 0),
at
где 0 —угол наклона вектора скорости.
501
При полете в наклонной плоскости под углом гр к горизон-
ту угол 0 связан с углом поворота траектории в плоскости
наклонного маневра ц соотношением
sin 0 = sin ф sin р,
которое легко получить из геометрических построений
движения самолета в наклонной плоскости. Тогда
'd V . • f • \ сч а.
---- = g(nXa—sinфsin р). Это означает, что' быстрота
dt
изменения скорости при выполнении наклонного боевого ма-
невра определяется величинами тангенциальной перегрузки
fix а и углов ф и ц. Если | пх a I <| sin ф sin |х|, то чем больше
угол ф, тем при одних и тех же конфигурациях самолета, за-
коне пилотирования по а и режиме работы двигателя, т. е.
при одной и той же величине пх а, темп потери скорости будет
больше.
Если ввод в наклонный маневр противоборствующих са-
молетов производится при одинаковых начальных условиях,
а сравнение производится исходя из предположения, что
то можно сделать вывод о том, что самолет, имеющий преиму-
щество по углу наклона плоскости маневра к горизонту (Аф),
фактически обладает преимуществом по тангенциальной пере-
грузке на А Пх а р = Пх а рс — Пх а рп-
В самом деле>
1 ( 1 dV f \
Sin ф = -----------— + Пха р .
sin jx \ g dt /
гт - х ldV \
При одинаковой быстроте изменения скорости — ) =
\ d t /с
[ dV
= ------ получим
\ dt /п
A sin ф = sin фс — sin фп == - — а р .
sin рь
Это означает, что если А ф>0 (фс > фп), то А пхар^>®, пхарс >
>^харп, а следовательно, наш самолет будет иметь преи-
мущество в энергетической скороподъемности (АЕ*У —
= V&nXap)- А это значит, что летчик нашего самолета мо-
жет свободнее маневрировать по углу ф на одинаковых с про-
тивником высоте и скорости или свободнее маневрировать вы-
502
сотой и скоростью при одинаковых с противником маневрах
по углу ф, в то время как противник будет стеснен в маневре
высотой и скоростью в тех же условиях (заметим, что если
Дф<0, то картина будет обратная).
За счет этого наш самолет имеет возможность догнать
противника в наступательном бою и создать условия для
эффективного применения оружия, если он будет выполнять
маневр с тем же углом ф, что и противник. При атаке со сто-
роны противника, если наш летчик будет использовать более
крутые маневры за счет своего преимущества по ф, то это
обеспечит ему возможность срыва атаки противника и захвата
инициативы в бою, если противник, атакуя, будет повторять
маневр нашего самолета (прифп = фс, пХа рп < пХа рс, V*Yn<C
<V*Yc).
Поскольку в процессе воздушного боя летчик использует
не отдельные фиксированные значения углов ф, а весь их
комплекс от ф = 0 (горизонтальный маневр) до ф = 90° (петля,
переворот), то при сравнении областей выполнимости манев-
ров с различными углами наклона ф удобно пользоваться по-
нятием граничной тактической скорости ввода в боевой ма-
невр (V*BB). V*bb—это такая скорость ввода в маневр, при
которой противоборствующие самолеты выполняют маневр с
одинаковым углом ф, т. е. имеют равные возможности
(Дф = 0),
Рис. 9.22. Сравнение самолетов по об1-
ластям выполнимости восходящих ма-
невров
На рис. 9.22 показаны области выполнимости восходящих
(наклонных и вертикальных) маневров противоборствующих
самолетов. Из рисунка видно, что при рводе в боевой маневр
5Q3
на Vbb>V *вв мин с наш самолет (сплошные линии) имеет
превосходство над самолетом противника (пунктирные линии)
по Дф на любых высотах, а при VBB< ^*Ввмаксп проигрывает
противнику также на всех высотах.
Следовательно, для нашего самолета граничная тактиче-
ская скорость ввода в маневр с ф = 90° в этом случае является
минимальной ( V*BBMHHc)» при которой обеспечивается пре-
имущество над противником, и, наоборот, для самолета про-
тивника— максимальной (У*ввмаксП) при вводе в маневр с
ф = 30°.
После нанесения граничных тактических скоростей ввода в
боевой маневр образуются три области:
I — область высот и скоростей безусловного превосходства
самолета противника по располагаемой величине фр, ограни-
ченная справа величиной Иввмаксп ;
II— область высот и скоростей безусловного превосходства
своего самолета по фр , ограниченная слева величиной
У*ВВ МИН С 5
III — область высот и скоростей обусловленного превос-
ходства, в которой наличие превосходства или проигрыша по
фР сравниваемых самолетов зависит от величины угла гр, соз-
даваемого в процессе боевого маневрирования. На рис. 9.22
при гр = 90° превосходство имеет самолет противника, а при
ф = 30° — наш самолет.
Заметим, что понятие V*BB существует только в том случае,
если пересекаются границы областей выполнимости маневров
с одинаковыми углами ф = const, построенные для одних и тех
же законов пилотирования.
Закон пилотирования по располагаемому коэффициенту
подъемной силы и максимально допустимой эксплуатационной
перегрузке позволяет реализовать предельные маневренные
возможности самолета, а следовательно, и минимальные га-
бариты фигур. Отступление от этого закона менее подготов-
ленным летчиком приводит к увеличению габаритов, т. е. к
неполной реализации потенциальных маневренных возможно-
стей самолета.
В воздушном бою или при нанесении ударов по наземным
объектам возникают тактические ситуации, требующие вариа-
ций параметров, в верхней точке восходящих маневров (ниж-
ней точке нисходящих маневров). Поэтому для полного срав-
нения возможностей двух самолетов при маневрах в наклон-
ной плоскости необходимо иметь области выполнимости этих
маневров для различных углов наклона плоскости к горизон-
ту и. для законов пилотирования, обеспечивающих в верхн.ей
точке при скорости не менее заданной: минимальное прира-
щение высоты; максимальное приращение высоты; макси-
504
мально возможную скорость; минимальное время разворота
на заданный угол; максимальное приращение энергии.
.Совмещенные области выполнимости маневров сравни-
ваемых самолетов являются удобной и наглядной формой
представления информации, которая может быть использо-
вана для разработки и реализации тактических приемов ве-
дения боевых действий, а также для графоаналитического
моделирования простейших тактических ситуаций при встрече,
завязке и ведении маневренного воздушного боя.
9.5.3. Сравнение маневренных свойств самолетов
для планирования
воздушного боя (комплексный график)
Комплексный график по сравнению маневренных свойств
представлен на рис. 9.23. Он состоит из пяти самостоятельных
графиков, выполненных в одном масштабе по высоте и ско-
рости полета, размещенных в виде, удобном для проведения
сравнительной оценки и выработки рекомендаций летному со-
ставу в ходе принятия решения командиром на боевые дей-
ствия:
— центральный график I — с диапазонами высот и скоро-
стей противоборствующих самолетов и нанесенными на них
областями с различным соотношением показателей маневрен-
ности и энергетического превосходства;
— слева и справа — графики II и III с диапазонами высот
и скоростей полета и нанесенными на них областями выпол-
нимости восходящих и нисходящих боевых маневров противо-
борствующих самолетов при различных = const и заданных
законах управления;
— сверху и снизу — графики IV и V областей выполнимо-
сти разворотов и виражей для различных высот их приме-
нения.
Особенностью комплексного графика является то, что он
строится и анализируется для конкретных условий боевого
применения, т. е. для предполагаемых диапазонов высот и ско-
ростей ведения боевых действий ( — Уб.д) и вариантов
боевой нагрузки (ПЛС). При этом графики с областями вы-
полнимости горизонтальных боевых маневров строятся: один—
для наименьшей высоты, а другой — для наибольшей высоты
боевого применения в соответствии с поставленной боевой за-
дачей. Заметим, что на рис. 9.23 эти графики представлены в
виде зависимостей радиусов разворота от скорости его вы-
полнения, но удобно использовать и ранее рассмотренные за-
висимости угловой скорости разворота от скорости его вы-
полнения. Так же конкретизируются области превосходства
505
§
I - области С различным состчощсн и
общих показателей маирбренгрг.^
П - области выполнимости бисхадящц <
_м и невро б
ИI - об л аста выполнимости н и сход я ш, и х
_ -Манеороб
[vv-области выполнимости горизон-
та ль нотх маневров
Рис. 9.23. Комплексный график сравнения маневренных свойств самолетов
самолетов по общим показателям маневренности и области
выполнимости боевых маневров.
Таким образом, комплексный график по сравнительной
оценке конкретных пар противоборствующих самолетов с раз-
личными массами, углами стреловидности крыла, вариантами
вооружения является исходной информацией, которая окажет
помощь командирам и штабам в принятии обоснованного ре-
шения и повышении эффективности боевых действий авиа-
ционных подразделений и частей.
Во-первых, эта информация позволяет наиболее полно
оценить боевые возможности, определяемые маневренными
свойствами самолетов. Она отвечает на вопросы: в какой об-
ласти диапазона высот и скоростей полета, по какому крите-
рию или группе критериев маневренности, при каких типовых
маневрах и законах пилотирования самолет противника может
быть сильнее или слабее нашего самолета.
Во-вторых, командиры и штабы, используя эту инфор-
мацию при планировании боевых действий, сократят время*
повысят качество и обоснованность принимаемых решений.
В-третьих, эта информация позволяет определить целе-
сообразные возможные варианты тактических приемов на
основе характера и параметров боевых маневров, которые
могут быть реализованы в данных условиях боевого приме-
нения.
Получив боевую задачу, командир в процессе выработки
и принятия решения на боевые действия должен использовать
заранее подготовленные комплексные графики сравнения лет-
ных свойств противоборствующих самолетов. Так, например,
определив в соответствии с условиями боевой задачи необхо-
димый вариант боевой зарядки и заправки топливом на мо-
мент завязки воздушного боя, командир выбирает для этих
условий комплексный график и наносит на него высоты и ско-
рости возможной встречи и завязки воздушного боя с против-
ником. Далее по соотношению критериев майевренности в вы-
бранном диапазоне высот и скоростей полета определяет
целесообразный вид маневра (горизонтальный, восходящий,
нисходящий) для своих самолетов и противника, а затем не-
обходимые конкретные параметры этих маневров, обеспечи-
вающие реализацию тактического замысла выполнения бое-
вой задачи. И, наконец, разрабатывает рекомендации летному
составу по реализации выбранных боевых маневров в инте-
ресах выполнения боевой задачи с учетом определенных
принципов.
Перечислим эти принципы.
1. Встречу, завязку и ведение маневренного воздушного
боя целесообразно планировать на больших дозвуковых ско-
507
ростях независимо от места и размеров областей Н—V пол-
ного маневренного превосходства нашего самолета. Это обес-
печит необходимый запас энергии для быстрого сближения с
противником и создания условий эффективного применения
оружия.
2. При выборе вида и характера маневров для всех этапов
боя необходимо учитывать области выполнимости этих манев-
ров по высоте, скорости, углу наклона плоскости к горизонту,
закону пилотирования по сравнению с возможностями само-
лета противника.
3. Всегда помнить, что можно не ограничивать себя выбо-
ром и характером маневра только тогда, когда он будет за-
канчиваться в достаточно широкой области нашего полного
превосходства, с высоким уровнем энергии при наступатель-
ном характере продолжения боя. Выбирать необходимо та-
кие маневры (по высоте и углу ф, закону пилотирования, вре-
мени выполнения, высоте и ‘скорости в верхней или нижней
точке), которые не ухудшат не только тактическое, но и энер-
гетическое наше превосходство, так как эти понятия тесно
взаимосвязаны.
4. При разработке характера боевого маневрирования не-
обходимо иметь в виду, что одному и тому же сочетанию
значений перегрузок я у а и пха могут соответствовать различ-
ные маневры в зависимости от создаваемых углов крена и на-
клона траектории маневра к горизонту. Общим для всех этих
маневров является то, что траектория искривляется в соответ-
ствии с величиной Пу а, а характер изменения энергетической
высоты определяется величиной пх а-
5. В диапазоне высот и скоростей, где наш самолет превос-
ходит противника по пх а р и иуапр, но уступает поПудр, он
имеет лучшие характеристики разгона, скороподъемности, воз-
можности. сохранения и накопления энергии, брльшие углы
наклона плоскости косых маневров к горизонту, меньшие ра-
диус, время, большую угловую скорость разворота в любой
плоскости, но проигрывает в габаритах и времени выполнения
форсированных энергичных маневров. х /
6. Планируя бой в области с превосходством только по ‘
^хар, необходимо помнить, что завязывать и вести бой следует
на маневрах с нормальными перегрузками не более тактиче-
ских и углами ф, которые обеспечивают выход самолета в об-
ласть полного или частичного превосходства с большим уров-
нем энергии при наступательном характере продолжения боя.
7. При необходимости планирования боя на высотах и ско-
ростях, где наш самолет имеет преимущество только по НуаПр»
следует учитывать, что маневрирование должно выполняться
с перегрузками, превышающими тактическую, что обеспечи-
508
вает сохранение или увеличение уровня энергии нашего само-
лета по отношению к противнику и даст возможность при не-
обходимости длительно удерживать инициативу боя или
перейти в другую область с более благоприятным соотноше-
нием характеристик маневренности. Превосходство в Пуапр
позволяет использовать свое преимущество в радиусе, угловой
скорости и времени выполнения маневров без потери энергии.
При этом следует помнить, что противник может использовать
свое преимущество по перегрузкам пхар и П\а Р,т. е. по разго-
ну, скороподъемности, темпу изменения энергии и т. д.
8. Превосходство только в п\а Р (т. е. лучшие характери- .
стики форсированных разворотов) следует использовать в на-
ступательном бою только для реализации фактора внезапно-
сти при наличии избытка скорости или в .оборонительном ма-
неврировании для ухода из-под удара ракет или пушечного
огня противника. При этом следует помнить, что в процессе
маневра произойдет потеря энергии нашего самолета. Дли-
тельное маневрирование в этой области опасно, так как про-
тивник имеет превосходство по характеристикам всех манев-
ров, кроме форсированных.
9. Если встреча с противником произошла (или плани-
руется) в области с неблагоприятным соотношением характе-
ристик маневренности то, сообразуясь с конкретной тактиче-
ской ситуацией или замыслом, следует выбрать такой маневр,
при котором сохранялась бы или накапливалась энергия, а
воздушный бой в процессе выполнения маневра перемещался
бы в область, где есть наше превосходство в Пуапр и nXap?
что позволит вести наступательный бой. Если же выход в об-
ласть нашего превосходства возможен только с потерей энер-
гии, то это может привести к потере тактического превосход-
ства и к необходимости ведения оборонительного боя.
10. Планируя или ведя воздушный бой, следует всегда пом-
нить, что если в начале боя у противников скорости и высоты
разные, то маневренное превосходство имеет тот из них, у
которого больше энергетическая высота. Но для достижения
успеха надо уметь воспользоваться избыточной энергией,
разумно маневрировать, не теряя, а сохраняя или увеличивая
энергию самолета, грамотно выбирая вид и характер маневров
с учетом перечисленных принципов.
В заключение отметим, что информация о показателях
потенциальных боевых возможностей, определяемых летными
свойствами своих самолетов и противника, и результаты срав-
нения летных свойств, полученные при различных^ вариантах
боевого применения, составляют одну из основ той информа-
ции, которая необходима командиру для моделирования, при-
нятия решений и планирования боевых действий.
509
Глава 10
ОЦЕНКА И УЧЕТ ПИЛОТАЖНЫХ СВОЙСТВ
САМОЛЕТОВ ПРИ ОРГАНИЗАЦИИ И ПРОВЕДЕНИИ
БОЕВОЙ ПОДГОТОВКИ ЧАСТЕЙ ВВС
Решение задач летной подготовки только в том случае мо-
жет обеспечить достижение поставленных целей по обучению
летного состава с выполнением требований по безопасности
полетов, если авиационный командир и его штаб при органи-
зации и проведении летной подготовки умеют учитывать и
учитывают неблагоприятные особенности в пилотажных свой-
ствах эксплуатируемых типов самолетов.
В самом деле, при боевом маневрировании летчик может
непроизвольно выводить самолет в области высот и скоростей
полета, где проявляются неблагоприятные особенности в пи-
лотажных свойствах, оказывающие влияние на эффективность
боевого применения и безопасность полетов. В данном случае
понимание летчиком особенностей пилотирования на этих ре-
жимах повышает вероятность боевого успеха и безопасность
полета. В то же время в период организации и проведения
боевой подготовки учет командиром и его штабом возможных
неблагоприятных явлений может оказать существенное влия-
ние на сроки и качество боевой выучки летного состава под-
разделения и части, общий уровень безопасности полетов, от-
работку тактического замысла ведения боевых действий.
Существенную помощь рядовым летчикам и руководящему
летному составу при этом окажет предлагаемый комплексный
график (рис. 10.1), позволяющий учитывать неблагоприятные
особенности в пилотажных свойствах самолетов при решении
задач и упражнений КБП.
§ 10.1. МЕТОДИКА УЧЕТА НЕБЛАГОПРИЯТНЫХ
ОСОБЕННОСТЕЙ ПРИ ОРГАНИЗАЦИИ БОЕВОЙ ПОДГОТОВКИ
ПОДРАЗДЕЛЕНИЙ И ЧАСТЕЙ
Летная подготовка, включающая отработку техники пило-
тирования, самолетовождения и боевого применения, ведется
поэтапно, т. е. вначале осваиваются полеты на средних и боль-
ших высотах, затем на стратосферных высотах и, наконец, на
510
малых и предельно малых высотах. При этом в каждом угу*
ражнении диапазон используемых скоростей полета делится,
как правило, на поддиапазоны. Например, сначала осваива-
ются скорости по прибору от 700 до 1100 км/ч, а затем от 500
до 300 км/ч. На больших высотах сначала осваивают полеты
на числах М< 1,0, затем в диапазоне М ~1,0—1,5 и, наконец,
ДО Мдоп.
Эти методические принципы летной подготовки и исполь-
зованы в предлагаемой методике учета неблагоприятных осо-
бенностей устойчивости в процессе организации боевой под-
готовки. Суть заключается в том, что строится график, объе-
диняющий информацию по выполнению упражнений, в соот-
ветствии с КБП рода авиации, и по неблагоприятным особен-
ностям устойчивости и управляемости, оказывающим непо-
средственное влияние на реализацию боевых возможностей
самолетов и безопасность полетов. Вид этого графика прост
и удобен для использования в условиях строевых частей.
Рассмотрим последовательность построения такого гра-
фика.
1. Построить диапазон высот и скоростей полета эксплуа-
тируемого типа самолета в координатах Н—М или Н—ипр
и выделить на нем области выполнения упражнений КБП, для
чего:
— сверху и справа от диапазона высот и скоростей полета
построить таблицу, в которой указать номер выполняемой
задачи в соответствии с КБП, этапы обучения и номера уп-
ражнений по диапазонам чисел М полета. Например, для са-
молета-истребителя с крылом изменяемой в полете стреловид-
ности нанести три диапазона чисел Л4, соответствующие ис-
пользуемой в полете стреловидности крыла, а для самолета
с крылом фиксированной стреловидности можно нанести диа-
пазоны чисел /И, используемые по группам упражнений:
Л1=Л1эв —0,9 и Л1>0,9. Затем нанести диапазон высот полета,
используемых по упражнениям. Все это проделать для летной
подготовки одиночно, парой, звеном, эскадрильей. В графиках
соответствующих упражнений по высотам номера упражне-
ний или групп упражнений удобно проставить так, чтобы они
ограничивали используемый диапазон высот снизу и сверху.
Для этого нужно написать их так, чтобы нижней границе вы-
сот соответствовал бы нижний, а верхней границе — верхний
обрез соответствующих номеров упражнений;
— на оси высот, а также справа от таблицы в соответст-
вии с НПП-78 нанести принятую градацию высот;
Я<200 м — предельно малые высоты;
200—1000 м — малые высоты;
1000—4000 м — средние высоты;
511
4000—12 000 м — большие высоты;
12 000—40 000 м — стратосферные высоты.
Это необходимо сделать в целях единого подхода к клас-
сификации высот. Дело в том, что при выявлении неблаго-
приятных особенностей устойчивости и управляемости по раз-
личным источникам может быть нестыковка, связанная с раз-
личным смыслом терминов «большие высоты» и т. д. Это осо-
бенно относится к открытой литературе. Если же взять из
этой литературы конкретные цифры (например, 6000 м) и
нанести в классификации НПП-78, то будет соблюдено един-
ство подхода к вопросу.
2. Нанести на диапазон высот и скоростей зоны по чис-
лам М (или приборным скоростям), соответствующие дозву-
ковым, трансзвуковым скоростям полета (на графике их
удобно выделить разной расцветкой). Нанести линию постоян-
ных значений числа М = 1. Дело в том, что удобно рассмат-
ривать неблагоприятные особенности в соответствии с этими
зонами.
3. С целью учета влияния больших углов атаки на реали-
зацию боевых возможностей самолетов, ниже оси чисел М
может оказаться удобным нанести зависимость С\а (М) так,
чтобы точка перегиба кривой соответствовала числу М поле-
та, при котором наступает ограничение достижимого коэффи-
циента подъемной силы по максимальному отклонению стаби-
лизатора. С помощью этого графика легко показать, что са-
молет слева от этого числа М может быть выведен летчиком
на большие углы атаки достаточно легко, а справа возмож-
ности выхода на большие углы атаки значительно уменьша-
ются (конечно, без учета скольжения).
4. Выделить на диапазоне высот и скоростей полета обла-
сти проявления неблагоприятных особенностей устойчивости и
управляемости, присущих данному конкретному типу само-
лета. Для этого:
а) выявить их с помощью имеющейся документации и лите-
ратуры: Инструкции летчику; Методического пособия по тех-
нике пилотирования и боевому применению; Технического
описания самолета (часть I); учебного пособия по практиче-
ской аэродинамике данного типа самолета; выпусков по ана-
лизу и расследованию летных происшествий и предпосылок
к ним; статей в открытой и закрытой печати;
б) присвоить каждой неблагоприятной особенности свой
номер (лучше по степени опасности ее проявления в полете).
Например, / — затягивание в пикирование; 2— обратная реак-
ция по крену на отклонение руля направления и т. д.;
в) определить области высот и чисел М полета, где не-
512
благоприятные особенности проявляются особенно сильно
(опасно), а где менее сильно.
Если неблагоприятные особенности проявляются в каком-
то узком диапазоне чисел М полета по веем высотам, то с
помощью различных обозначений можно указать, где силь-
нее, а где слабее по высоте они действуют. После этого нане-
сти выявленные неблагоприятные особенности устойчивости и
управляемости на диапазон высот и скоростей полета. Заме-
тим, что можно нанести и такие неблагоприятные особенности,
которые не были указаны в литературе, но отмечаются летчи-
ками в полете. Может оказаться, что на одном самолете они
проявляются, а на другом (такого же типа) отсутствуют
(обычно это связано с асимметрией самолета, например,
«валежка»). '
5. Справа от графика указать используемые обозначения
для выделения областей проявления или интенсивности про-
явления неблагоприятных особенностей, нанесенных на графи-
ки в виде номеров, а также их краткий физический смысл.
Кроме того, прямо на графике целесообразно изложить реко-
мендации летному составу по пилотированию при входе в об-
ласть проявления любой неблагогрриятной особенности в пило-
тажных свойствах эксплуатируемого самолета. Полученный
график полезно сделать в виде плаката и повесить в классе
подготовки к полетам. На этот график целесообразно нанести
область воздушных боев по опыту локальных войн.
6. Провести анализ полученного графика с целью учета
неблагоприятных особенностей устойчивости и управляемо-
сти: в процессе планирования и организации боевой подго-
товки (на земле); в динамике боевой подготовки (в полете).
Воспользоваться графиком просто: по “известным номерам
упражнений определяется область их выполнения по высоте и
скорости (числу М) и анализируется, имеются ли пересечения
этой области с областями проявления неблагоприятных осо-
бенностей. Если имеются, то оценивается, с какими именно,
степень их опасности и в процессе подготовки к полетам отра-
батываются рекомендации летному составу по соблюдению
мер безопасности^ а в период планирования учебы подбирает-
ся тематика занятий по практической аэродинамике.
График может быть использован не только авиационным
командиром, планирующим боевую подготовку (в том числе
и наземную), но и любым летчиком (от выпускника ВВАУЛ
до летчика-снайпера), готовящимся к полету по конкретному
заданию и моделирующим предстоящий учебный и боевой
полет.
В самом деле, если в часть прибывают выпускники ВВАУЛ,.
то с ними в первую очередь проводится наземная подготовка.
33- 5007сп 513
Сроки этой подготовки ограниченны, поэтому необходимо про-
извести четкий отбор материала для изучения. Вот здесь
командир и должен обязательно спланировать занятия по
изучению неблагоприятных особенностей, присущих тем вы-
сотам и скоростям полета, с которых начинается подготовка
этих летчиков. При этом в период отработки техники пилоти-
рования на тренажера-х целесообразно давать вводные по тем
особенностям, которые могут проявиться в планируемых пер-
вых полетах. Заметим, что в этот период максимально ис-
пользуются учебно-боевые самолеты, иногда имеющие спе-
цифические особенности, не присущие боевому самолету.
Следовательно, эти особенности должны быть или выде-
лены в диапазоне высот и скоростей боевого самолета или
для учебно-боевого самолета надо отдельно составить и на-
нести неблагоприятные особенности на диапазон высот и ско-
ростей полета.
Комплексный график может быть использован при состав-
лении плана летной подготовки и для каждого летчика, а не
только пары, звена, авиаэскадрильи, авиаполка. Он окажется
полезным и при планировании подготовки мастеров боевого
применения и снайперов, которые выполняют упражнения кур-
са по наиболее сложным видам боевого применения.
Кроме того, в период уточнения объема, порядка выполне-
ния и степени сложности полетного задания в зависимости от
уровня подготовки летчиков и поставленных учебных целей
на полет по данному упражнению командир руководствуется
инструкциями летчику и методическими пособиями по техни-
ке пилотирования и боевому применению Самолета. В них, к
< сожалению, . не всегда полностью приведены особенности
устойчивости и управляемости (неблагоприятные явления),
которые необходимо учитывать, а те, которые приведены,
ввиду ограниченного объема перечисленных документов не
содержат физики явлений, не указывают различной степени
их проявления' в полете. Поэтому решение и рекомендации
командира могут оказаться неполными, если у него под рукой
не будет графика, оформленного в соответствии с данной ме-
тодикой.
Такой график необходимо использовать и при разработке
схем выполнения упражнений или групп однородных упраж-
нений в целях обеспечения качественной подготовки к поле-
там. Цричем на графическом изображении схемы кроме не-
обходимых расчетов и текстуального изложения задания на
полет», условий и последовательности его выполнения, перечня
литературы, необходимой для подготовки к полету, должны
быть указаны возможные неблагоприятные особенности устой-
чивости и управляемости, присущие высотам и скоростям по-
614
Комплексный график
о, я
_____________________________
20. 2?-82,. 95 104, 115-150
Зад а ч а КБП______________
мера
Tr capmgem-
' с/пыи г ре
. ле
у„р
> ______________________
*______________105 - И4
С Led ’ збуя сСые
Пр диапазонам бысот полета
Одиночна
Пара
Збеко
аз
22-54
5_____
Средние
Высоты
©
Ф
©
10
Доз^срыс.
I'пороет и
большие
высоты
Спраул с
бы со та
15
11-21; 82-94
(рСНСзбухсбыР
* с доросли
I м=1,о
Мтап
&
1 этап
in этап
a)Mi 0.95
Ь)м--Ю-1,5
1)М>1.5
62-94-
53-60
11-21
1-1Q
' 46-52
145-150
115-121
72-81
61-70 101-105
105-114
151-142
72-31
101-105
калые
Высоты
Л 1 О 01 0.3 0,5 ’ 0> л
Предельно
малые Самолет k
высоты —jftKoSbixotiifm
на большие
углы .
оипагм
11-21
48-52
1-10 53-60
~i ~ ит«77 77. .
зтап - зов - J5 <5|---------35-10Q
61 70
95-100
52-34
105-114
121-150
115-121
~ 121-1’30
145-150
131-140
/ 75 М
,—-------------------(уст ppp упр ^оозм.оыхеоо самолета ха большие (дез ешьжехия)
И
Обозначения:
(l)— проявление неблагоприятного явления
Л) — сильное проявление
проявление в узком диапазоне чисел Л1
— проявление на всех М в узком диапазоне Н
ГЛ — усиливается с уменьшением Н
усиливается с увеличением числа М
5-7 у-диапазон высот, в котором
5~7 выполняется упражнение
На дозвуковых V
(D — ухудшение эффективности элеронов и обратная реакция по крену на отклонение элеронов
— самопроизвольное кабрирование (срывной подхват по перегрузке)
(з)— повышенная чувствительность к малым отклонениям РУ («строг» на больших </)
В(4)—тенденция к самопроизв. | ил i при выполнении маневров с nYfl>l (на малых х)
—обратная реакция по у на отклонение р. п. (на откл. педали)
(8у—аэроинерционное вращение — самопроизв. изменение аир при (,)\>а)х доп
— повышенная частота колебаний (1—15 Гц) и слабое затухание колебаний при
— значительное изменение реакции по у на Р (дачу ноги) на % > хср
На трансзвуковых V полета
— скор-остной__(в ол новой)« подхвдт»
— ухудшение поперечной управляемости из-за понижения эффективности элеронов (деформации или
волновой кризис)
- непроизвольное кренение («валежка») из-за асимметрии самолета
— повышенная реакция у на дачу ноги (А), особенно при А1 = 0,85—1,0 ипуа>2—2,5 наЯ>6—7 км
— неустойчивость по скорости («ложка» на балансир, кривой) на М = 0,85—0,9 -г- 1,05—1,1
— «волновое рыскание» самолета — самопроизвольное рыскание (влево, вправо от курса) с колебаниями
по у НРИ ~ 1
На сверхзвуковых V полета
—уменьшение путевой устойчивости (М>2,0)
В—то же с подвесками (7И > 1,6)
— стремление самолета к самопроизвольному скольжению при М 2^. Мдоп с быстрым t rtza
Q у — неуправляемое кренение («валежка») при значит, превышении q (не хватает элеронов)
У 7)—сверхзвуковой срыв самолета при значительном превышении Л4ДОП из-за потери путевой устойчивости
при быстром | /
На больших Н
—повышенная колебательность, плохое затухание колебаний и повышенные забросы перегрузок при рез-
ких отклонениях рулей на //>15—18 км (при отказе демпферов)
земли
СПС
Вблизи
(К^) —увеличение пикирующего момента с выключенной
— взлет и посадка с САУ, так как ал ~0
(51) —неустойчивость по скорости на Уир< 300 км/ч
Рис.
(МиГ-21)
10.1
Вкл. к зак. 5007сп
лета выполняемых, упражнений КБП, а также рекомендации
по мерам безопасности (законам пилотирования в этих усло-
виях) ..
В летно-методической подготовке в период методических
занятий с руководящим летным составом, практических заня-
тий с руководителями полетов и инструкторами, работы мето-
дического совета, анализа предпосылок к летным происшест-
виям и разработки мероприятий по их предупреждению также
целесообразно для повышения эффективности всей работы
учитывать неблагоприятные особенности устойчивости и уп-
равляемости, представленные в виде удобного для анализа
графика.
Таким образом, график дает наглядное представление о
взаимосвязи этапов обучения летного состава с неблагоприят-
ными особенностями устойчивости и управляемости самоле-
тов. Он позволяет целенаправленнее отрабатывать тактиче-
ский замысел боевых действий, строить обучение в соответ-
ствии с диалектическим принципом от простого к сложному
(от полетов в области высот и чисел М полета, где неблаго-
приятных явлений нет или они слабо проявляются, к
областям, где они есть); подбирать и планировать тёматику
занятий по практической аэродинамике по группам летного*
состава в соответствии с решаемыми ими задачами боевой
подготовки на день, месяц, квартал; следить за боевой выучкой
летного состава (например, охватывает ли она области высот и
скоростей полета, соответствующие воздушным боям по опыту
локальных войн), за соблюдением необходимого уровня безо-
пасности полетов; учитывать особенности при переучивании
на новую авиационную технику (какие неизвестные до этого
неблагоприятные явления могут встретиться в полете).
Каждый летчик независимо от степени его боевой выучки
при подготовке к полетам по конкретному заданию может
учесть с помощью этого графика неблагоприятные особенно-
сти устойчивости и управляемости, которые могут проявиться
в полете, тщательно изучить их и тем самым увеличить безо-
пасность полетов, так как их проявление не будет неожидан-
ным, а летчик будет готов к их парированию. Естественно, что
в этом случае в большей степени летчик сможет реализовать
потенциальные боевые возможности самолета.
В самом деле, если на каких-то высотах и скоростях поле-
та у самолета появляется повышенная колебательность, а
летчик этого не ожидает, но не только ухудшаются условия
прицеливания, но и увеличивается рассеивание огня из пушек,
что может привести к невыполнению боевого задания.
33*
515-
ЛИТЕРАТУРА
1. Медников В. Н. Динамика полета и пилотирование самолетов.
Монино, ВВА, 1976.
2. Б ы т к о С. А. и др. Боевое маневрирование самолетов. Монино,
ВВА, 1982.
3. Р ы ж о в П. И., К р ы л о в А. М. Организация и методика прове-
дения занятий по практической аэродинамике с летным составом строевых
частей. Монино, ВВА, 1976.
4. С т е п а н о в Н. Н. Методика изучения высотно-скоростных свойств
самолетов. Монино, ВВА, 1982.
5. Алещенко В. П. Методика изучения взлетных и посадочных
характеристик самолетов. Монино, ВВА, 1982.
6. Крылов А. М., Подбережский В. С. Методика изучения ха-
рактеристик дальности и продолжительности полета. Монино, ВВА, 1982.
7. Крылов А. М., Подбережский В. С. Оценка возможностей
самолетов по глубине и продолжительности ведения боевых действий. Мо-
нино, ВВА, 1982.
8. Ар о н и н Г. С. Методика изложения и объяснения летному составу
аэродинамических и летных свойств серийного самолета. Монино, ВВА,
1970.
9. Пашковский И. М. Устойчивость и управляемость самолета. М.,
Машиностроение, 1975.
10. Алтухов В. А., Брага В. Г., Бутенко Г. Ф. и др. Практи-
ческая аэродинамика маневренных самолетов. М., Воениздат, 1977.
516
ОГЛАВЛ ЕНИЕ
Введение................................................... 3
Раздел I
ПРАКТИЧЕСКАЯ АЭРОДИНАМИКА
МЕТОДИКА ИЗЛОЖЕНИЯ И ОБЪЯСНЕНИЯ ЛЕТНО-ТАК-
ТИЧЕСКИХ И ПИЛОТАЖНЫХ СВОЙСТВ САМОЛЕТОВ В ПРО-
ЦЕССЕ БОЕВОЙ ПОДГОТОВКИ СТРОЕВЫХ ЧАСТЕЙ ВВС . . 5
Глава 1. Методика изложения и объяснения высотно-скоростных
свойств самолета............................................... 9
§ 1.1. Содержание и последовательность изучения высотно-ско-
ростных свойств самолета................................... 9
§ 1.2. Границы диапазона скоростей й высот полета, определяе-
мые предельными возможностями самолета по тяге . . 11
§ 1.3. Границы диапазона скоростей и высот полета, определяе-
мые условиями безопасности полета (ограничениями ско-
рости и высоты)............................................16
§ 1.4. Использование кривых Жуковского для анализа режимов
установившегося полета.....................................19
§ 1.5. Анализ графиков диапазонов скоростей и высот горизон-
тального полета ...........................................24
§ 1.6. Учет ограничений высотно-скоростных свойств самолетов
для повышения безопасности полетов.........................30
§ 1.7. Анализ влияния условий боевого применения на границы
диапазона скоростей и высот полета.........................31
Глава 2. Методика изложения и объяснения маневренных свойств
самолета.......................................................38
§ 2.1. Содержание и последовательность изучения маневренных
свойств....................................................38
§ 2.2. Показатели маневренности и их ограничения, определяемые
условиями безопасности полета и возможностями силовой
установки самолета.........................................46
§ 2.3. Анализ влияния условий боевого применения на показа-
тели маневренности ....................................... 58
§ 2.4. Методы расчета боевых маневров......................52
§ 2.5. Графоаналитический метод моделирования маневров . - 72
§ 2.6. Методика анализа ошибок летчика.....................38
§ 2.7. Методика изложения и объяснения боевых маневров и
фигур пилотажа ............................................92
517
Стр.
Глава 3. Методика Изложения и объяснения взлетно-посадочных
характеристик .................................................. 115
§ 3.1. Содержание’и последовательность изучения взлетно-поса-
дочных характеристик ....................................... 115
§ 3.2 Связь между характером движения самолета при взлете
и посадке и действующими на него силами . . .116
§ 3.3. Анализ влияния условий боевого применения на взлетно-
посадочные характеристики. Физическая сущность ограни-
чений взлетно-посадочных характеристик ... . 123
Глава 4. Методика изложения и объяснения характеристик даль-
ности и продолжительности полета самолетов . . . 138
§ 4.1. Последовательность и методика изучения характеристик
дальности и продолжительности полета.........................139
§ 4.2. Основные показатели дальности и продолжительности
полета ......................................................140
§ 4.3. Анализ влияния условий боевого применения на характе-
ристики дальности и продолжительности установившегося
прямолинейного горизонтального полета ...................... 150
§ 4.4. Оптимальные по расходу топлива режимы полета . . 162.
Глава 5. Методика изложения и объяснения пилотажных свойств
самолетов.....................................................176
§ 5.1. Содержание и последовательность изучения пилотажных
свойств самолета .... ................177
§ 5.2. Систематизация основных понятий и определений . . 179
§ 5.3. Методика изложения и объяснения характеристик устой-
чивости и управляемости. Использование характеристик
устойчивости и управляемости для выработки рекоменда-
ций по повышению! безопасности полетов....................184
§ 5.4. Формы представления информации о пилотажных
свойствах . .....................................242
§ 5.5. Влияние условий боевого применения на пилотажные
свойства самолетов........................................258
§ 5.6. Влияние автоматических устройств в системе управления
на пилотажные свойства и безопасность полетов . . 286
§ 5.7. Методика изложения и объяснения неблагоприятных осо-
бенностей устойчивости и управляемости....................308
Раздел II
БОЕВОЕ МАНЕВРИРОВАНИЕ САМОЛЕТОВ
ОЦЕНКА И УЧЕТ ЛЕТНО-ТАКТИЧЕСКИХ И ПИЛОТАЖНЫХ
СВОЙСТВ САМОЛЕТОВ ПРИ ОРГАНИЗАЦИИ, ПОДГОТОВКЕ И
ВЕДЕНИИ БОЕВЫХ ДЕЙСТВИЙ......................................327
Глава 6. Оценка соответствия взлетно-посадочных характеристик
условиям аэродромного базирования самолетов . . . 329
§ 6.1. Оценка' пригодности аэродрома для базирования авиа-
ционной части (подразделения)............................329
§ 6.2. Оценка пригодности грунтового аэродрома .... 336
518
Стр.
§ 6.3. Проблемы, возникающие при несоответствии взлетно-по-
садочных характеристик самолетов и условий базирования 339
§ 6 4. Влияние взлетно-посадочных характеристик и условий ба-
зирования на боевые возможности самолета .... 342
§ 6.5. Оценка возможности выполнения боевых задач с повреж-
денных аэродромов...........................................349
Глава 7. Оценка возможностей самолетов по глубине и времени
ведения боевых действий.........................................356
§ 7.1. Учетр возможностей самолетов по глубине и продолжи-
тельности выполнения боевых задач при принятии решения 356
§ 7.2. Формы представления информации о дальности и продол-
жительности полета для оценки досягаемости целей в ус-
ловиях дефицита времени , в.................................358
§ 7.3. Методы экспресс-оценки досягаемости целей и продолжи-
тельности пребывания в районе боевых действий . . . 373
§ 7.4. Приближенные методы оценки изменения возможностей
самолетов по глубине боевых действий........................381
Глава 8. Методика выбора и расчета рациональных боевых ма-
невров ....................................................... 389
§ 8.1. Области выполнимости основных боевых маневров и фор-
мы представления информации о них...........................390
§ 8.2. Рациональные боевые маневры. Выбор рациональных бое-
с вых маневров для ведения боевых действий .... 403
§ 8.3. Оценка полноты использования маневренных свойств са-
молетов в процессе бревой Подготовки........................448
Глава 9. Сравнительная оценка летных свойств самолетов . . . 460
§ 9.1. Сравнение высотно-скоростных свойств самолетов . . 461
§ 9.2. Сравнение маневренных свойств самолетов по общим по-
казателям маневренности ................................... 46о
§ 9.3. Сравнение маневренных свойств по сеткам обобщенных
характеристик ............................................. 485
§ 9.4. Анализ областей с различным соотношением показателей
маневренности...........................................ч . 495
§ 9.5. Сравнение маневренных свойств самолетов по областям
выполнимости характерных боевых маневров .... 499
Глава 10. Оценка и учет пилотажных свойств самолетов при орга-
низации и проведении боевой подготовки частей ВВС 510
§ 10.1. Методика учета неблагоприятны^ особенностей при орга-
низации1 боевой подготовки подразделений и частей . . 510
Литература^...............................................516-
519
Между страницами
514 и 515 помещена 1 вкл. (рис. 10.1)
Уч.-изд. л. 24,0
Лит. редактор Г. В. СИБИРЦЕВА
Техн, редактор 3. Г. КРЮЧИХИНА
Корректоры С. В. КУЛИК, Т. А. СИТНИКОВА
Сдано в набор 24.2.84 г. Подп. к печати 5.11.84 г.
Формат бумаги 60 x 90Vie Печ. л. 32,625 (в т. ч. 1 вкл.)
Изд. № 57
Зак. 5007сп
Типография ВВА
520
ЗАМЕЧЕННЫЕ ОПЕЧАТКИ
Стра- ница Строка Напечатано Следует читать
48 5 св. Ри ?макс) (при ермакс)
56 10 сн. 1 С, = 1, С
75 11 сн. 30° _ 30°
~ 2 ” 2
107 6 сн. “%а(0 =
116 5 св. характер характер движения
215 3 сн. ХВ=
239 5 св. равные разные
271 3 сн. 8П °п.
276 4 сн. М> 1 М< 1
278 18 св. 5 Г5 <е-го н Ч"
305 7 св. t т? | т?
319 20 св. mlxB <р*в лв<р*в
468 12 св. ?фп <^фп
469 6 св. д н
V Д л' „ лер
469 7 св. Д Нэ V^nXap
1/ 4 пХар
471 18 св. nYa> nY а пр nY а < nY а пр
480 11 сн. nYap nY a p
481 4 сн. Нпре < НПрп Hnpc > //прп
490 18 св. ^A«Xa₽
504 18 св. V* * вв макс п V* r DB МИН C