/















































































































































































































































































































































Автор: Жинкин В.Б.
Теги: техника средств транспорта водный транспорт транспорт кораблестроение издательство судостроение устройство корабля
ISBN: 5-7355-0556-4
Год: 2000




Текст
В.Б.Жинкин
ТЮРИЯи
УСТРОЙСТВО
КОРАБЛЯ
В.Б. Жинкин
Теория
и устройство
корабля
2-е издание,
исправленное и дополненное
Допущено Министерством образования Россий-
ской Федерации в качестве учебника для студентов
высших учебных заведений, обучающихся по направ-
лению подготовки дипломированных специалистов
«Кораблестроение и океанотехника»
С.-Петербург
«Судостроение»
2000
ББК 39.42
Ж72
УДК 629.12.011
Федеральная программа книгоиздания России.
Одобрено кафедрами «Теории корабля» и «Судовых энергетических установок,
систем и оборудования» С.-Петербургского государственного морского
технического университета.
Рекомендовано к переизданию Советом кораблестроительного факультета
Военно-морского инженерного института и доцентом Государственной морской
академии нм. адм. С.О. Макарова Б. П. Коваленко
Жинкин В. Б.
Ж72 Теория и устройство корабля: Учебник.— 2-е изд., не-
правд. и доп.—СПб.: Судостроение, 2000.— 336 с., ил.
ISBN-5-7355-0556-4
Содержит основы знаний о мореходных качествах судна, его кон-
струкции и прочности, краткие сведения о судовых устройствах и си-
стемах. Особое внимание уделено физическим представлениям об этих
качествах, теоретическим способам нх определения, путям дальней-
шего совершенствования. Приведены многочисленные примеры, в том
числе расчетов ходкости, на основании которых определяется мощ-
ность судовой энергетической установки.
Предназначен для студентов кораблестроительных вузов, обучаю-
щихся по специальности «Судовые энергетические установки» (14.02),
а также по другим кораблестроительным специальностям в качестве
учебного пособия.
ББК 39.42
ISBN 5-7355-0556-4
© В. Б. Жинкин, 2000
ОТ АВТОРА
Учебник написан в соответствии с программой
курса «Теория и устройство корабля» и предна-
значен для студентов кораблестроительных вузов,
обучающихся по специальности «Судовые энерге-
тические установки» (14.02). Он знакомит с осно-
вами знаний о мореходных качествах судна, кон-
струкции и прочности его корпуса, содержит крат-
кие сведения о судовых устройствах и системах.
Особое внимание уделено водоизмещающим су-
дам, однако не забыты и суда с динамическим
поддержанием.
Для ознакомления студентов с количествен-
ными характеристиками отдельных мореходных и
прочностных качеств судна в учебнике приведены
многочисленные примеры расчетов.
Излагаемый материал базируется на положе-
ниях курсов высшей математики, теоретической
механики, сопротивления материалов, гидромеха-
ники и введения в специальность.
Автор с благодарностью рассмотрит все поже-
лания и замечания, которые просит направлять по
адресу: 191186, С.-Петербург, ул. М. Морская, 8.
Издательство «Судостроение».
ВВЕДЕНИЕ
Каждое судно должно обладать комплексом эксплуатаци-
онных и мореходных качеств.
К эксплуатационным качествам принято относить грузо-
подъемность и грузовместимость; маневренность, скорость, даль-
ность плавания и автономность; обитаемость судна. Одним из
важнейших эксплуатационных качеств является прочность, ко-
торая, наряду с мореходными качествами, обеспечивает без-
опасность плавания судна.
В середине прошлого столетия танкеры имели водоизме-
щение около 500 т, перед второй мировой войной основное
ядро наливного флота составляли суда водоизмещением
10—15 тыс. т. Впервые наименование «супертанкер» было при-
своено построенному в 1953 г. танкеру «Тина Онасис» водоиз-
мещением 59 тыс. т. Однако размеры судов этого типа про-
должали стремительно возрастать, абсолютный рекорд был за-
регистрирован в 1980 г., когда японские судостроители, удлинив
танкер «Оппама», довели его водоизмещение до 640 тыс. т.
«Чемпион» получил новое имя «Сиуайз Джаэнт», а суда подоб-
ного класса стали называть сверхкрупнотоннажными танкера-
ми. В связи со столь бурным ростом размеров судов прошлось
по-новому решать проблему их прочности.
Немало проблем возникает и прн внедрении новых материа-
лов и технологий. Пример тому — знаменитые цельносварные
суда типа «Либерти», строившиеся во время второй мировой
войны в США. Эта серия судов вошла в историю судостроения
как самая крупная в мире — всего было построено 2580 ед. На
изготовление первого судна потребовалось 250 дней; на изго-
товление одного из последующих — рекордно малое время —
7 суток 14 часов и 23 минуты; средняя продолжительность
строительства одного судна составила 35 дней. Однако просла-
вились суда типа «Либерти» тем, что в ходе эксплуатации не-
которые из них переломились пополам и погибли. Подобная кар-
тина имела место и у некоторых танкеров типа Т-2. И «Либер-
ти», и эти танкеры были судами массовой постройки, на них
впервые практически полностью отказались от клепаных соеди-
нений; нарушение прочности корпуса этих судов произошло
из-за недостатка опыта применения сварки. В дальнейшем по-
добные аварии были практически сведены на нет.
4
Мореходные качества судна — плавучесть, остойчивость, не-
потопляемость, ходкость, плавность качки и управляемость —
входят в компетенцию специальной науки — теории корабля.
Плавучестью называется способность судна ' плавать
в заданном положении относительно поверхности воды.
Остойчив ос ть — это способность судна, выведенного из
равновесия, возвращаться в исходное положение после прекра-
щения действия внешних сил.
Непотопляемость — способность судна оставаться на
плаву и в ограниченной степени сохранять другие мореходные
качества после затопления одного отсека или их группы. Непо-
топляемость определяется плавучестью и остойчивостью повре-
жденного судна.
Ходкостью называется способность судна двигаться с за-
данной скоростью при наименьшей возможной мощности главной
механической установки.
Плавность и малые амплитуды качки — каче-
ства, необходимые для обеспечения мореходности судна в усло-
виях морского волнения.
Управляемость — это способность судна выдерживать
заданное направление движения.
Неполное удовлетворение требований, предъявляемых к суд-
ну каждым из перечисленных выше качеств, в лучшем случае
существенно затруднит его эксплуатацию, а в худшем может
послужить причиной его гибели. Интуитивно это было ясно су-
достроителям н мореходам всех времен и народов. Почти две
тысячи лет назад известный римский мудрец Сенека сформули-
ровал требования к кораблю, который «хорошим именуется,
когда он устойчив и непоколебим, послушен рулю, ходок и вет-
ру уступчив».
До недавнего времени эти задачи судостроители решали
опытным путем, эмпирически, методом проб и ошибок, за кото-
рые мореплаватели платили своими жизнями. Искусство кораб-
лестроения совершенствовалось и передавалось от поколения
к поколению. История сохранила нам сведения о наиболее удач-
ных конструкциях своего времени. Абсолютным рекордсменом
среди них, пожалуй, следует признать древнегреческую триеру
(римская трирема), которая в течение почти тысячелетия явля-
лась главным боевым кораблем военных флотов этих стран.
Основоположником теории корабля по праву считается один из
величайших ученых древности Архимед. Открытый им в III в. до н. э.
закон лежит в основе плавучести судна. Занимался Архимед и
некоторыми вопросами остойчивости.
В практике судостроения закон Архимеда впервые приме-
нил английский инженер Энтони Дин — в 1666 г. он рассчитал
осадку корабля «Руперт» и прорубил, к величайшему удивле-
5
нию современников, пушечные порты в его бортах на стапеле,
еще до спуска на воду.
Рождение теории корабля как науки о мореходных каче-
ствах судна обычно датируют серединой XVIII в., когда почти
одновременно вышли труды члена Петербургской Академии
наук Л. Эйлера и французского академика П. Бугера. В этих
фундаментальных сочинениях излагалось учение о плавучести
и остойчивости, развивались положения Ньютона о законах со-
противления среды движению тел, затрагивались некоторые во-
просы мореходности судов. К середине следующего, XIX века,
главные проблемы плавучести и остойчивости были решены,
требования, предъявляемые к судам для обеспечения этих ка-
честв, в основном сформулированы.
Недостаточная остойчивость грозит кораблю гибелью. Су-
достроителям это было известно испокон веков. Однако для не-
которых закон был не писан.
В 1628 г. на испытаниях, произведя салют из всех пушек,
опрокинулся и в течение минуты затонул только что построен-
ный флагман шведского флота «Ваза», спроектированный в со-
ответствии с указаниями короля Густава II Адольфа. Стремясь
усилить вооружение корабля, сделать его более мощным, чем
у противника, на нем установили 64 орудия, расположенные
в три яруса на палубах каждого борта. Королевские инженеры
пытались доказать, что при таком количестве пушек центр тя-
жести корабля поднимется слишком высоко и это губительно
скажется на остойчивости, однако их доводы не были услыша-
ны монархом.
Некомпетентность венценосца начала XVII в. объяснима. Го-
раздо труднее понять, как почти четверть тысячелетия спустя
подобное могло произойти в просвещенной Англии. В 1870 г. по
проекту Кольза был построен броненосец «Кептен». На первый
взгляд, он обладал рядом неоспоримых достоинств: сильной ар-
тиллерией во вращающихся башнях, толстой бортовой броней,
низким надводным бортом, обеспечивающим малую площадь
цели и полным парусным вооружением в дополнение к паровой
машине. Главный кораблестроитель Великобритании Е. Рид от-
казался утвердить проект, но идея Кольза была поддержана
лордами адмиралтейства, мнение которых перевесило доводы
специалиста. Во время первого же пробного плавания в соста-
ве эскадры «Кептен» под действием шквала опрокинулся и
почти мгновенно затонул, унеся жизни 530 человек команды,
в том числе и автора злополучного проекта Кольза. Остальные
суда эскадры перенесли шквал безболезненно.
По приговору английского суда в соборе Св. Павла в Лон-
доне на бронзовой доске выгравирован текст, повествующий
о гибели «Кептена» и выражающий, по меткому замечанию ака-
демика А. Н. Крылова, «порицание невежественному упрямству
6
тогдашних лордов адмиралтейства». Случай с «Кептеном» стал
хрестоматийным примером, вошел во все руководства по
кораблестроению. Но стремление к увеличению вооружения лю-
бой ценой уже в XX в. привело к очередной трагедии. В 1934г.
вскоре после спуска на воду во время шторма опрокинулся
японский миноносец «Томодуру». Несколько дней спустя его об-
наружили плавающим в перевернутом состоянии, из 113 чело-
век команды погибло около 100. В то время Япония стреми-
лась проектировать свои надводные корабли так, чтобы при
минимальном водоизмещении разместить максимальное количе-
ство вооружения. Это привело к занижению остойчивости многих
военных кораблей различных классов. Гибель «Томодуру»
послужила толчком к ревизии проектов как построенных, так
и строящихся кораблей флота и их переделке.
Было бы ошибкой полагать, что потеря остойчивости грозит
только военным кораблям и что аварии подобного рода остались
в прошлом. И сегодня ежегодные потери мирового флота, причем
только среди достаточно крупных судов, составляют около 0,6%
их общего количества. При этом приблизительно 20% случаев —
наиболее тяжелые аварии от потери остойчивости. Так, например,
в 1987 г. крупный современный английский автомобильно-
пассажирский паром «Геральд оф фри Энтерпрайз», едва отойдя
от пирса, опрокинулся в бельгийском порту Зеебрюгге — погибло
более 190 человек. Причина аварии — неплотно закрытые
водонепроницаемые ворота, через которые вода хлынула на
грузовую палубу. Положение усугубили погруженные на паром,
но не закрепленные автомашины, в том числе тяжелые
грузовики — сместившись в сторону накрененного борта, они
способствовали опрокидыванию судна.
Еще более страшная трагедия произошла на Балтике
28 сентября 1994 г. с другим автомобильно-пассажирским
паромом «Эстония». Судно водоизмещением около 11000 т сначала
внезапно легло на борт, получив крен около 35°, а затем быстро
опрокинулось и затонуло. Хотя это случилось всего в сотне
километров от финского порта Турку и в спасательной операции
принимало участие несколько судов самолетов и вертолетов,
авария сопровождалась очень крупными жертвами — погибло
более 800 человек. Причина гибели судна так и осталась до конца
не выясненной.
Приоритет в создании науки о непотопляемости корабля
принадлежит отечественным ученым. «Истинным основателем
учения о непотопляемости судов» называл академик А. Н. Кры-
лов адмирала С. О. Макарова, впервые сформулировавшего
главные требования к обеспечению непотопляемости. Блестящее
развитие идеи С. О. Макарова нашли в трудах А. Н. Крылова
и И. Г. Бубнова — создателя современной строительной меха-
ники корабля.
7
Гибель в Порт-Артуре броненосца «Петропавловск» с адми-
ралом С. О. Макаровым на борту, трагедия Цусимы заставили
командование русского военно-морского флота прислушаться к
голосу ученых—с 1905 г. на всех кораблях были введены таблицы
непотопляемости, разработанные А. Н. Крыловым. В иностранных
флотах подобные таблицы нашли применение значительно позже.
Трагедия, произошедшая в 1912 г., когда в первом же транс-
атлантическом рейсе «непотопляемый», как его рекламировали
владельцы, пассажирский лайнер «Титаник», затонул, став
могилой для полутора тысяч человек, окончательно убедила
кораблестроителей в том, что для обеспечения непотопляемости
судна недостаточно одной интуиции, а требуются строгие и
обоснованные расчеты.
Вопросами ходкости конструкторы вплотную занялись только в
конце XIX столетия. В эпоху парусного флота скорость судна, а
следовательно, и продолжительность рейса, в основном определились
силой и направлением ветра, а также опытом судоводителя; форма
корпуса играла второстепенную роль. Появление паровой машины,
а затем и других механических двигателей в корне изменило
отношение к ходкости. Хотя в отличие от остойчивости и непото-
пляемости низкие ходовые качества не приводили к немедленной
гибели судна, неприятностей они тоже доставляли немало. Всего
150 лет назад парусник «Даймонд» из Европы в Америку шел сто
дней. За время столь продолжительного рейса 17 пассажиров умерло
от истощения.
Приблизительно в то же время первый пароход пересек Ат-
лантику без помощи ветра—это был «Сириус», водоизмещением
около 700 т. Выходя в рейс, он имел на борту 98 пассажиров и
450 т угля, отчего борта судна едва выступали из воды. В конце
пути запасы угля иссякли, поэтому на подходе к Нью-Йорку
были срублены мачты, за ними в топку пришлось отправить
всю деревянную утварь. Трансатлантический переход удалось
завершить за 18,2 суток, среднерейсовая скорость составила
8,5 уз — неплохой, по тем временам, результат. Рекордным
оказался и расход топлива—около 5 т на одного пассажира.
«Сириус» не был исключением: первые коммерческие пароходы
40-х гг. прошлого столетия имели удельную массу установки
порядка 800 кг/л. с. и расход топлива около 6 кг/(л. с.хч). У
судна водоизмещением 1500 т с паровой машиной мощностью
450 л. с. масса главной механической установки и топлива
составляла приблизительно 750 т. И это при скорости около 10 уз
и запасах угля всего на 6 сут.
Стало очевидным, что дальнейший прогресс судоходства не-
возможен без совершенствования формы корпуса судов и дви-
жителей, без создания достоверных методов расчета ходовых
качеств. Большой вклад в развитие учения о ходкости внес из-
вестный английский исследователь В. Фруд, разработавший
8
первые научно обоснованные методы прогнозирования сопро-
тивления воды движению судна. Широкое применение нашла
предложенная в 1892 г. русским инженером В. И. Афанасьевым
эмпирическая формула для определения мощности, необходимой
для достижения судном заданной скорости. В 90-х гг. XIX в. в
Петербурге был построен первый в России опытовый бассейн,
предназначенный для исследования мореходных качеств судов
на их моделях. Инициатива его создания принадлежала гени-
альному русскому ученому Д. И. Менделееву. Основоположником
вихревой теории гребного винта, основного движителя
сегодняшнего дня, является другой выдающийся ученый, «отец
русской авиации» Н. Е. Жуковский.
Самыми «молодыми» дисциплинами теории корабля, пожа-
луй, следует признать качку и управляемость. Создателем
классической общей теории качки корабля на волнении по праву
считается академик А. Н. Крылов. Английское общество ко-
рабельных инженеров за этот труд присудило ему, первому из
иностранцев, золотую медаль, что явилось признанием приори-
тета русской науки и принесло А. Н. Крылову мировую извест-
ность. Качка судна существенно затрудняет его эксплуатацию, а
иногда может стать и причиной его гибели. В декабре 1944г. третий
флот США попал в район, расположенный близ центра тайфуна.
Корабли испытывали сильную качку, у некоторых из них
амплитуды достигали 70 градусов и более. Три эсминца оп-
рокинулись и затонули. Еще около 30 единиц, от сторожевых
кораблей до линкоров и авианосцев, получили значительные
повреждения. Оценивая последствия тайфуна, командующий
Тихоокеанским флотом США адмирал Нимиц отмечал, что по-
тери оказались большими, чем этого можно было ожидать от
любого сражения.
Невысокие маневренные качества судна, недостаточное
знакомство судоводителей с законами управляемости могут по-
влечь за собой серьезные повреждения и даже гибель судов.
Примеров тому несть числа, остановимся на тех, которые чре-
ваты самыми тяжелыми последствиями,—на столкновениях су-
дов. В мае 1914 г. канадский пассажирский лайнер «Эмпресс оф
Айрленд» водоизмещением около 20 000 т в заливе Св. Лаврентия
был протаранен норвежским пароходом «Сторстад». Удар
пришелся в правый борт лайнера под углом 35 градусов, прямой
форштевень парохода вошел в его корпус на 5 м, произведя
большие разрушения. Всего через 17 минут после удара «Эмпресс
оф Айрленд» скрылся под водой, эта ошибка судовождения стоила
жизни более чем 1000 человек.
Осенью 1942 г. огромный английский пассажирский лайнер
«Куин Мэри» шел из США в Англию, имея на борту почти 11
тысяч американских солдат. Его сопровождал крейсер «Кюрасао».
Корабли двигались почти параллельными курсами с высокой ско-
9
ростью—25 уз. Когда они сблизились, за две минуты до столкно-
вения были предприняты попытки отвернуть, однако предотвра-
тить катастрофу уже не удалось. «Куин Мэри» врезался в ле-
вый борт крейсера и, подобно топору, разрубил его пополам.
«Кюрасао» затонул, вместе с ним погибло более 300 членов
экипажа. Позднее было высказано мнение, что столкновению
способствовала сила взаимного присасывания, впервые обнару-
женная еще в 1911 г. при столкновении лайнера «Олимпик» с
крейсером «Хок». Эта авария была хорошо изучена, на основании
ее сделаны выводы и соответствующие рекомендации. Однако,
как показал пример с «Кюрасао», тридцати лет оказалось не-
достаточно для воплощения этих рекомендаций в жизнь. В 1970 г.
в Ла-Манше в ясную погоду, при хорошей видимости столкнулись
два крупнотоннажных либерийских танкера, шедших встречными
курсами. За минуту до аварии, когда расстояние между судами
уменьшилось до одного кабельтова, на обоих танкерах были
переложены рули, но избежать столкновения не удалось—
кормовые части судов ударились по касательной. В результате—
пожар, загрязнение нефтью моря, гибель 14 человек.
Еще свежа в памяти трагедия, произошедшая в 1987 г. вбли-
зи Новороссийска, когда балкер «Петр Васев» врезался в борт
пассажирского лайнера «Адмирал Нахимов». Протараненное
судно затонуло в течение считанных минут, унеся жизни несколь-
ких сот пассажиров и членов экипажа.
С развитием судостроительных наук аварий, подобных опи-
санным выше, к счастью, становится все меньше. Приведены же
эти примеры в назидание будущим инженерам в целях иллю-
страции важности вопросов, о которых будет идти речь ниже.
Глава 1
ФОРМА КОРПУСА И ПЛАВУЧЕСТЬ СУДНА
1.1. Основные сведения о судах
Современное судно — сложнейшее плавучее сооружение,
предназначенное для выполнения транспортных, производствен-
ных или военных функций. Общая особенность всех судов — си-
ла их тяжести уравновешивается возникающими в воде силами
гидростатической или гидродинамической природы.
Классифицировать суда можно по ряду независимых при-
знаков: по характеру передвижения, району плавания, поло-
жению относительно поверхности воды, материалу корпуса, ти-
пу механической установки и т. д.
Кратко остановимся на главном классификационном при-
знаке— назначении судов. В этом плане их принято делить на
военные, их по традиции называют кораблями, и гражданские
суда. Последние, в свою очередь, подразделяют на транспорт-
ные, промысловые, служебные, суда технического флота.
Основой морского флота являются транспортные суда, ко-
торые можно разделить на пассажирские и грузовые. Послед-
ние как по водоизмещению, так и по количеству составляют
подавляющее большинство среди транспортных судов. Их при-
нято подразделять по роду перевозимого груза на две категории:
сухогрузные и наливные. Внутри каждой из этих категорий так-
же существует градация. Так, среди наливных судов различают
танкеры, предназначенные для транспортировки нефтепродук-
тов, газовозы, химовозы, виновозы (о специфике последних су-
дов говорит само их название).
Танкеры — самые крупные из современных судов, водоизме-
щение некоторых из них превышает 600 тыс. т, а длина — 400 м.
Еще более разнообразны типы сухогрузных судов. Здесь
прежде всего выделяют суда для перевозки массовых (навалоч-
ных, насыпных) и генеральных (в упаковке, отдельными места-
ми) грузов. Первые иногда называют балкерами, они перево-
зят руду, уголь, бокситы, цемент, зерно, сахар и т. д. Среди су-
ществующих судов по водоизмещению крупнейшие «навалоч-
ники» уступают только танкерам.
Суда для генеральных грузов делятся на универсальные и
специализированные. Первые составляют наиболее многочислен-
11
ную группу; в соответствии с названием они перевозят разно-
образные генеральные грузы.
К специализированным судам относят контейнеровозы, лих-
теровозы, автомобилевозы, лесовозы, суда с горизонтальным
способом обработки, суда для перевозки тяжеловесных грузов,
и т. д.
Самые крупные из судов данной категории — контейнерово-
зы— по водоизмещению (£>^80 тыс. т) уступают не только
танкерам, но и навалочникам, однако значительно превосходят
их по скорости, которая может достигать 20 уз и более.
Существуют и комбинированные суда, предназначенные для
перевозки как массовых, так и жидких грузов. Это позволяет
в значительной степени сократить количество балластных пере-
ходов, благодаря перевозке разнородных грузов на встречных
направлениях. По своим характеристикам комбинированные су-
да близки к судам для навалочных грузов и относятся, как и
танкеры, к сравнительно тихоходным судам — их скорость обыч-
но не превышает 16—17 уз.
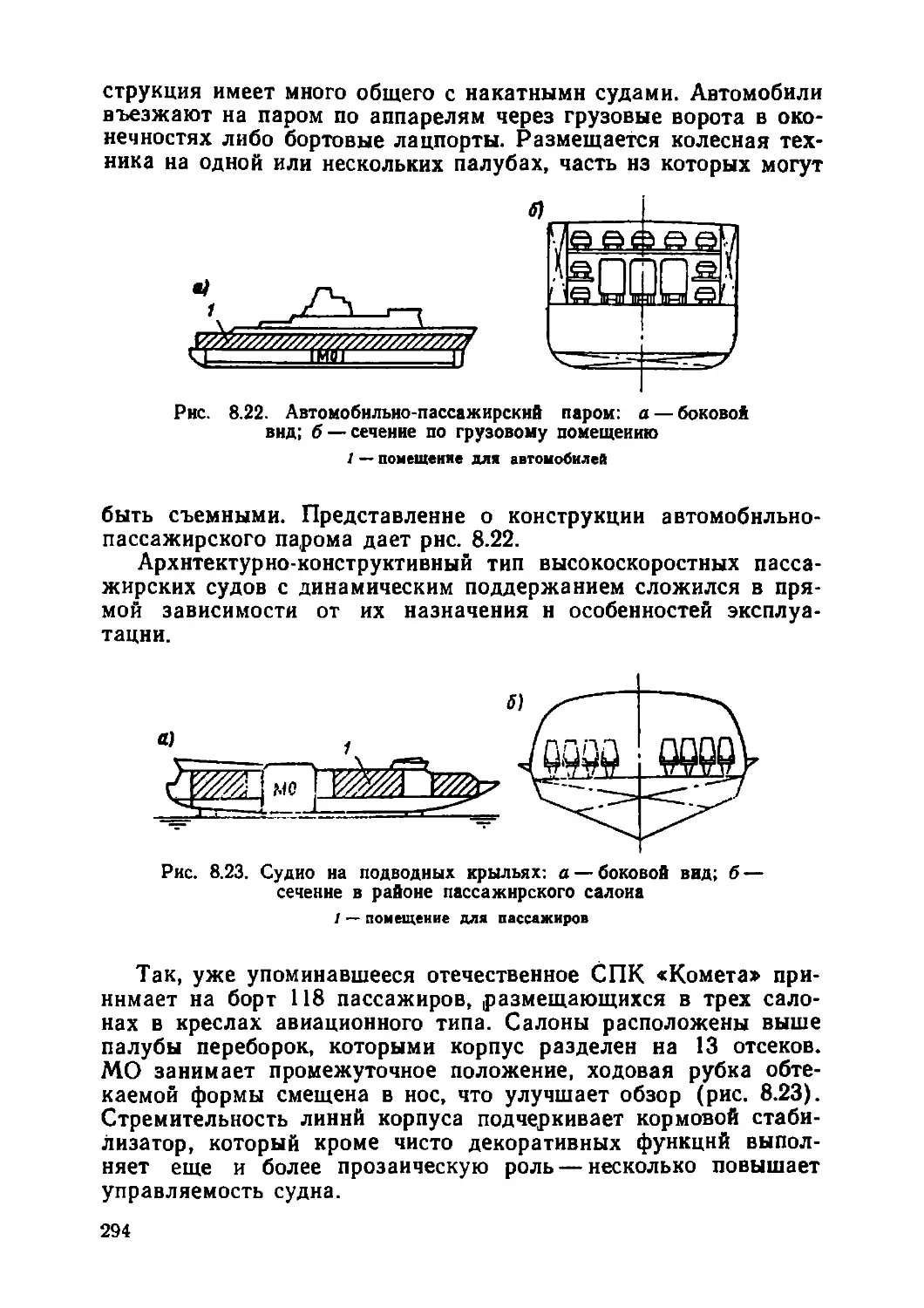
Самыми скоростными из транспортных судов являются пас-
сажирские лайнеры, предназначенные для обслуживания регу-
лярных линий. При весьма солидном водоизмещении, достига-
ющем 50—70 тыс. т, эти суда развивают скорость до 30—35 уз.
Более скромными размерами и скоростными качествами от-
личается другая категория пассажирских судов — круизные,
предназначенные для путешествий, отдыха, морского туризма.
Промысловые суда используются для добычи, переработки
и транспортировки морепродуктов. В эту категорию входят как
малые рыболовные суда водоизмещением в несколько десятков
тонн, так и крупные плавучие базы, водоизмещение которых до-
стигает 50 тыс. т.
Среди служебных в первую очередь следует назвать ледоко-
лы, буксиры, спасатели, научно-исследовательские, учебные и
другие суда. Основное их назначение — обеспечение эксплуата-
ции транспортного и промыслового флота.
К судам технического флота принято относить дноуглуби-
тельные снаряды, грунтоотводные шаланды, плавучие краны,
доки, мастерские и т. д. Сюда же причисляют и технические
средства освоения мирового океана: буровые суда, плавучие бу-
ровые установки, суда для добычи со дна твердых полезных ис-
копаемых и т. д.
По характеру сил поддержания, уравновешивающих силу
тяжести судна в расчетном режиме движения, различают суда
водоизмещающие и с динамическим поддержанием (СДП).
У первых превалируют гидростатические (архимедовы) силы
поддержания, у вторых — динамические, возникающие на днище
либо на несущих элементах.
12
Подавляющее большинство судов всех назначений относит-
ся к водоизмещающим. Высокоскоростные суда с динамическим
поддержанием (глиссеры, суда на подводных крыльях, суда
на воздушной подушке, суда-экранопланы) имеют небольшое
водоизмещение (D 500 т), их удельный вес в мировом флоте
весьма незначителен.
В дальнейшем речь в основном будет идти о водоизмеща-
ющих транспортных судах.
Классификационные общества. Технический надзор за по-
стройкой и эксплуатацией всех судов осуществляется класси-
фикационными обществами различных стран. Среди них самое
старое (основанное в 1834 г.) общество — Английский Ллойд,
Германский Ллойд, Французское и Норвежское бюро Вернтас
и др.
В России государственным органом технического надзора
является Регистр, который определяет условия, гарантирующие
безопасность плавания судов. Кроме выполнения функций над-
зора, Регистр разрабатывает обязательные для судостроителей
правила и технические нормы постройки судов, а также при-
сваивает судну класс в соответствии с его назначением и рай-
оном плавания. Классификационное свидетельство, выдаваемое
Регистром, означает, что судно полностью отвечает всем требо-
ваниям Регистра, в том числе в.отношении прочности и море-
ходности, т. е. тех качеств, которые в основном рассматривают-
ся в учебнике.
1.2. Форма судового корпуса
Основные габаритные размеры корпуса принято называть
главными размерениями. Это L — длина судна; В — ширина;
Н — высота борта; Т — осадка. Первые три неизменны и отно-
сятся к геометрическим характеристикам корпуса в целом, по-
следняя— осадка — может изменяться в широких пределах и
определяет погруженный (подводный объем) судна. Обычно,
когда говорят о главных размерениях судна, то принимают
осадку по расчетную, или конструктивную, ватерлинию, соот-
ветствующую проектной загрузке судна.
Длина тоже должна быть конкретизирована. Различают
длину между перпендикулярами Lxx, по КВЛ £Квл, макси-
мальную Lmax. Первые две близки между собой, последняя яв-
ляется габаритной. При изучении мореходных качеств судна,
строго говоря, следует оперировать с длиной по ватерлинии, од-
нако часто вместо нее принимают однозначно определенную
величину — Lxx-
Наиболее крупные современные суда достигают весьма вну-
шительных размеров: их длина может превышать 400 м, шири-
на 60, а осадка в грузу составлять около 30 м.
13
Координатные оси и посадки судна. В теории корабля в за-
висимости от характера решаемых задач принимают различ-
ные системы координат. В статике будем использовать левую
систему с началом в точке пересечения трех взаимно перпенди-
кулярных плоскостей: основной, диаметральной и плоскости
мидель-шпангоута (рис. 1.1). Напомним, что диаметральная
плоскость (ДП)—это продольная вертикальная плоскость,
проходящая через середину ширины судна; плоскость мидель-
шпангоута (пл. мш) — поперечная вертикальная плоскость,
проходящая через середину длины судна. В отличие от двух
предыдущих, основная плоскость (ОП) не является секущей.
Рис. 1.1. Система коордииат
Она горизонтальна (парал-
лельна поверхности воды) и
проходит через нижнюю точ-
ку корпуса судна. В каче-
стве координатной ОП при-
нята в связи с тем, что ее по-
ложение строго фиксирова-
но, чего нельзя сказать о
плоскостях ВЛ.
Линия пересечения ОП и
ДП — ось ох—направлена
в нос судна; линия пересе-
чения ОП и пл. мш — ось
оу — на правый борт; ось oz направлена вверх и представляет
собой линию пересечения ДП и пл. мш.
Посадкой судна называется его положение относительно по-
верхности воды. Посадка полностью определяется тремя неза-
висимыми величинами: средней осадкой — Тор, углом крена 0
и углом дифферента ф. Средняя осадка определяется погруже-
нием судна по оси oz; угол крена — угол поворота корпуса отно-
сительно оси ох, угол дифферента — относительно оси оу.
В судостроении зачастую используется специфическая тер-
минология. Так, если угол крена 0 = 0, то говорят, что «судно
сйдцт (а не плавает) прямо»; если ф=0— «судно сидит на
ровный киль». Как правило, нормальной в эксплуатации, а сле-
довательно, н расчетной является посадка, при которой 0 = 0
и <р = 0, т. е. когда судно «сидит прямо и на ровный киль». Ис-
ключение составляют некоторые специальные суда, имеющие
конструктивный дифферент на корму.
Положение судна, сидящего прямо, может быть задано и
осадками носом и кормой ТИ и Тк, при этом очевидно справед-
лива зависимость:
tg<₽ = (7,H — TK)/L «ф.
(1.1)
1 4
Реальные значения углов дифферента транспортных судов
малы, поэтому в (1.1) тангенс угла можно заменить его аргу-
ментом.
Теоретический чертеж. Исчерпывающее представление
о форме корпуса судна дает его теоретический чертеж (рис. 1.2).
Он состоит из трех проекций, на каждой из которых изобража-
ются сечения корпуса плоскостями, параллельными рассмот-
ренным выше, — ДП, пл. мш и ОП.
На теоретическом чертеже представляется теоретическая по-
верхность корпуса без учета наружной обшивки и выступающих
частей.
Рис. 1.2. Теоретический чертеж судна
Совокупность сечений плоскостями, параллельными ДП, при-
нято называть боком, а сами эти сечения — батоксами.
Обычно на этой проекции нос судна изображается справа,
а корма — слева. Сечения плоскостями, параллельными
пл. мш, наносятся на вторую проекцию, так называемый кор-
пус. В силу симметрии судна относительно ДП на корпусе
представляют только половину соответствующего сечения: спра-
ва от вертикальной линии — следа ДП — располагают носовые
шпангоуты, слева — кормовые, сечение по мидель-шпангоуту
помещают полностью, на обеих половинах корпуса.
Третья проекция — полушнрота — совокупность сечений
корпуса плоскостями, параллельными ОП. Здесь также пред-
ставляются только половины симметричных относительно ДП
ватерлиний. Обычно на теоретическом чертеже изображают
равноотстоящие батоксы (2—3 на один борт), ватерлинии
(10—15) н шпангоуты — 21. Нумеруются батоксы от ДП, ва-
терлинии— от ОП. Вертикальные линии, проведенные через
точки пересечения КВЛ с линиями штевней, называются но-
совым и кормовым перпендикулярами. Для од-
новинтовых судов кормовой перпендикуляр совпадает с осью
баллера руля.
Шпангоуту, в плоскости которого лежит носовой перпенди-
куляр, присваивается номер 0, мидель-шпангоуту — номер 10,
последний, 20-й, номер имеет шпангоут, совпадающий с кормо-
вым перпендикуляром.
15
В отличие от конструктивных шпангоуты на теоретиче-
ском чертеже называют теоретическими, а расстояние
между ними Д£ = £±1/20 — теоретической шпацией. В райо-
нах оконечностей, где форма корпуса изменяется наиболее ин-
тенсивно, проводят дополнительные шпангоуты под номерами
V4, ’/2, 3А И 18*/2, 19'/2.
Все проекции теоретического чертежа должны быть согла-
сованы— они описывают форму одного и того же корпуса.
Сечение судна ДП дает представление о палубной и киле-
вой линиях, а также о форме фор- н ахтерштевней. Для мор-
ских транспортных судов характерна седловатость (подъем
в носу и корме) палубы — это снижает залнваемость оконечно-
стей, особенно при движении на волнении. О форме поперечного
сечения палубы и днища, а также соединения их с бортами
можно получить представление по сечению пл. мш. Палуба
морских транспортных судов понижается к бортам, т. е. имеет
погибь бимсов, что ускоряет стекание с нее воды. Для большин-
ства судов и кораблей характерны круглоскулые обводы — пе-
реход бортовой ветви шпангоута в днищевую осуществляется
плавно. Исключение — высокоскоростные суда, которые могут
быть остроскулыми.
Обобщенные характеристики формы. Наряду с теоретиче-
ским чертежом представление о форме корпуса судна дают
обобщенные безразмерные характеристики — соотношения глав-
ных размерений и коэффициенты полноты. От этих характери-
стик во многом зависят как мореходные, так и другие качества
судна.
Основные соотношения главных размерений следующие:
L В И L
В ; Т '' Т ' Н '
Отношение L/В, нлн, как его иногда называют, относи-
тельная длина, в значительной степени определяет ходо-
вые качества: чем оно больше, тем относительно быстроходнее
судно. У современных водоизмещающих судов эта величина ко-
леблется в диапазоне LIB = 3 4-10. Ннжиий предел характерен
для некоторых буксирных судов, верхний присущ высокоскоро-
стным военным кораблям. Естественно, имеют место и исклю-
чения, так, например, некоторые спортивные лодки для акаде-
мической гребли имеют L/B > 25.
Отношение В/Т в основном влияет на остойчивость и качку.
Чем оно больше, тем лучше с точки зрения остойчивости, хотя
качка при этом делается более порывистой. Для современных
морских судов В/Т = 2 4-5.
Отношение LIT влияет на управляемость: его увеличение по-
вышает устойчивость на курсе и ухудшает поворотливость.
16
Отношение Н/Т определяет остойчивость на больших углах
наклонения и непотопляемость судна. Рост Н/Т благоприятно
влияет на оба эти качества.
Отношение LfH влияет на прочность корпуса, чем выше это
отношение, тем сложнее обеспечить общую прочность судна.
Основных независимых коэффициентов полноты три. Это
коэффициент полноты площади ватерлинии
a = SjLB, (1.2)
где S — площадь КВ Л;
коэффициент полноты мидель-шпангоута
р = омш/ВТ, (1.3)
где (Омш — площадь сечения мидель-шпангоута ниже ВЛ;
коэффициеитобщей полноты
б = К/£ВТ, (1.4)
где V — объем подводной части корпуса или объемное водоиз-
мещение.
Как следует из (1.2) — (1.4), все коэффициенты полноты —
суть отношения площадей (объема) соответствующих элементов
к площадям (объему) описанных прямоугольников (параллеле-
пипедов). Все эти коэффициенты меньше единицы, их числен-
ные значения для морских судов лежат в пределах: а = 0,7 4-
4- 0,85; р = 0,754-0,98; б = 0,354-0,85. Меньшие величины ха-
рактерны для более быстроходных судов; верхние границы от-
вечают тихоходным судам с очень полными обводами (образо-
ваниями).
В некоторых расчетах теории корабля удобнее пользоваться
производными от основных, дополнительными коэффициентами
продольной ф = б/р и вертикальной % = б/а полноты, физиче-
ская интерпретация которых ясна.
Пример 1.1. Некоторые из рассматриваемых теоретических положений
и выводов будем иллюстрировать примерами. Большую их часть отнесем
к одному судну, которому дадим имя «Инженер». Выбор названия не слу-
чаен: во-первых, первоначальный смысл слова инженер — изобретатель, сози-
датель, во-вторых, инженер — это основная движущая. сила научно-техинче-
ского прогресса, плоды которого еще 'не столь весомы, как хотелось;
в-третьих, цель настоящей книги — внести посильную лепту в превращение
студента в квалифицированного инженера.
Итак, задано многоцелевое сухогрузное судно «Инженер», боковой вид
которого приведен на рис. 1.3, а основные характеристики таковы:
^.тах — 181 М;
= 173 м;
В = 28,2 м;
Т = 9,5 м;
И = 15,1 м;
V = 28 700 м’;
D = 29 400 т;
G — 288 000 кН;
S = 3700 м2;
Шиш = 261 м2.
Судно имеет носовой бульб, машинное отделение сдвинуто в корму
(промежуточное положение машинного отделения МО). Система набора ком-
2141 5
17
бинированная — верхняя палуба и двойное дно набраны по продольной си-
стеме, борта по поперечной.
Найдем соотношения главных размерений н коэффициенты полноты
судна:
L
В
173 fi И
Ж2 6* 3'
= 2,97;
• J
Коэффициент общей полноты по (1.4)
. V 28.700
LBT " 173 • 28,2 • 9,5 “ 0,6 9’
Коэффициент полноты площади ВЛ по (1.2)
S
LB
3700
173 • 28,2
0,759.
Коэффициент полноты мидель-шпангоута по (1.3)
о____________________<°мш______261 _п
₽—ST = 28,2-9,5 “°’975’
Величины коэффициента общей полноты и отношение L/B дают осно-
вание полагать, что «Инженер» имеет достаточно острые обводы и отно-
сится к среднескоростным транспортным судам.
1.3. Элементы теоретического чертежа
В расчеты по теории корабля закладываются различные ха-
рактеристики формы корпуса. К основным элементам теорети-
ческого чертежа относят:
— объемное водоизмещение V;
— координаты центра величины хс, zc;
— площадь ватерлинии S;
— абсцисса центра тяжести площади ВЛ xF;
— центральные моменты инерции площади ВЛ 1Х и If',
— коэффициенты полноты а, 0, б.
Центром величины называют центр тяжести (центр масс)
подводного объема корпуса (объемного водоизмещения).
Все элементы теоретического чертежа принято изображать
на едином графике в функции от осадки. Сюда же часто до-
18
полннтельно наносят и зависимости малого г и большого У? ме-
тацентрических радиусов, а также возвышений поперечного тд
и продольного т,, метацентров. Эти величины используют при
анализе начальной остойчивости, судна.
Объемное водоизмещение судна можно найти суммируя эле-
ментарные объемы, заключенные между соседними ватерли-
ниями,
г
V = jsdz (1.5)
oJ
либо между соседними теоретическими шпангоутами
L/2
V= ( todx, (1.6)
-L/2
где S, со — площади ватерлиний и шпангоутов.
Координаты центра величины находятся с использованием
известных нз курса теоретической механики формул:
Муг мхг Мху
Хс — у—; ус------у~; гс — у~ • (1-7)
где MyZ, МХу, Мхг — статические моменты подводного объема
относительно соответствующих координатных плоскостей.
Поскольку корпус судна симметричен относительно ДП
(пл. xoz), то Мхг — 0 и ус = 0. Остальные элементы опреде-
ляются в виде
L/2 Т
МУг= coxdx; Mxy—^Szdz. (1.8)
-L/2 o’
Статический момент объема относительности плоскости мш
(пл. yoz) можно записать и в ином виде:
т
Myz=^SxFdz. (1.9)
oJ
В свою очередь, площадь ВЛ находится по формуле
L/2
S = 2 J ydx, (1.10)
—L/2
где у — половина ширины ВЛ в рассматриваемом месте, или
ордината, замеренная от ДП до борта.
Абсцисса центра тяжести (ЦТ) площади ВЛ
Xf — My/S, (1.11)
2*
19
где
L/2
Му = 2 xydx
-L/2
(1.12)
— статический момент площади ВЛ относительно оси.
Поскольку ватерлиния не симметрична относительно пл. мш,
то в общем случае xF 0.
Центральные моменты инерции определяются относительно
главных, т. е. проходящих через ц. т. площади ВЛ, осей. Одна
из них — ось ох, вторая — параллельна оси оу и проходит че-
рез точку F. Соответствующие моменты инерции:
(2y)3dx
12
L/2
т s y3dx>
-L/2
(1.13)
fF = ly — Sx2F (1.14)
где
L/2
Iу — 2 yx2 dx.
-L/2
(1.15)
Метацентрические радиусы не являются независимыми вели-
чинами, они находятся по формулам
r = /x/V; (1.16)
R = h/V (1.17)
Как правило, обводы корпуса, в частности контур ватерли-
нии y = f(x), не описываются в аналитическом виде, поэтому
все перечисленные выше интегралы (1.5) — (1.15) могут быть
определены только одним из известных приближенных методов
(способ трапеций, Симпсона и т. д.).
Построенные на основании указанных расчетов кривые эле-
ментов теоретического чертежа, или гидростатические кривые,
позволяют оперативно, без каких-либо вычислений, находить
необходимые элементы в зависимости от осадки судна. Некоторые
из этих кривых имеют собственные наименования, поскольку имеют
самостоятельное значение.
Строевая по ватерлиниям — это зависимость пло-
щади ватерлинии от осадки, в силу (1.5) она характеризует:
н распределение объема в функции от осадки. Большинство
современных транспортных судов имеет плоское днище, в этом
случае зависимость S{T) не исходит нз начала координат
(рис. 1.4). Очевидно, что площадь, ограниченная строевой по
ВЛ н осью ординат, — суть объемное водоизмещение при задан-
20
ной осадке Т. Строевая по ВЛ широко используется при реше-
нии задач о приеме и расходовании малого груза.
Грузовой размер представляет собой зависимость,
водоизмещения от осадки. На этот график, кроме объемного во-
доизмещения V, определенного по теоретическому чертежу, на-
носят еще и водоизмещение с учетом обшивки и выступающих
частей Vi, а также и массовое водоизмещение D (рис. 1.5). Гру-
зовой размер, в частности, используется при решении задач при-
ема и снятия большого груза.
Рис. 1.4. Строевая по
ватерлиниям
Рис. 1.5. Грузовой
размер
Масштаб Бонжана представляет совокупность зависи-
мостей площадей всех теоретических шпангоутов от их погру-
жения со (г). Величины указанных площадей определяются,
в виде
2
(o = 2^ydz. (1-18)
о
Строится масштаб Бонжана на трансформированном конту-
ре сечения корпуса диаметральной плоскостью. Трансформация
заключается в том, что для удобства использования, линей-
ные масштабы вдоль осей ох и оу выбираются различными
(рис. 1.6). От вертикальных линий, следов соответствующих
теоретических шпангоутов откладывают доведенные до высоты
верхней палубы значения площадей шпангоутов и(х).
С помощью масштаба Бонжана можно по (1.6) определить
водоизмещение по любую, в том числе и наклонную (для суд-
на, сидящего с дифферентом), ватерлинию. Масштаб Бонжана
используется при расчетах непотопляемости, продольного спус-
ка судна, а также для других целей.
Строевая по шпангоутам характеризует распреде-
ление объемов по длине судна и представляет собой зависи-
мость площади шпангоута от его расположения вдоль оси ох
при заданной осадке (рис. 1.7).
21
Строевая по шпангоутам может быть построена с помощью
масштаба Бонжана для любой ватерлинии. Очевидно, что пло-
щадь, заключенная между строевой и осью ох, суть объемное
водоизмещение. Строевая по шпангоутам, в частности, исполь-
зуется при расчете моментов, изгибающих судно.
1.4. Плавучесть судна
Плавучестью называется способность судна плавать в за-
данном положении относительно поверхности воды. Имеется
в виду, что судно может плавать по поверхности, либо в пол-
ностью погруженном положении, при этом считается, что оно
не имеет хода, либо его скорость настолько мала, что силами
гидродинамической природы можно пренебречь. Здесь и в даль-
нейшем, в остальных разделах теории корабля, будем полагать
судно бесконечно жестким, недеформируемым телом. Это оче-
редное допущение, однако, как показывает практика, учет де-
формаций корпуса при изучении мореходных качеств судна, су-
щественно усложняя расчеты, не повышает их точности, а тем
более не вносит качественных изменений в их результаты.
На плавающее в покое судно действуют две вертикальные,
равные между собой и противоположно направленные силы: си-
ла тяжести G и сила плавучести уУ:
G = yV, (1.19)
где у = pg— удельный вес; р — плотность (р = 1 т/м3 для прес-
ной и р = 1,025 т/м3 для морской) воды; g— ускорение свобод-
ного падения.
Равенство (1.19) представляет собой выражение известного
со школьной скамьи закона Архимеда, в связи с чем силу пла-
вучести часто называют архимедовой.
Сила тяжести судна G приложена в центре его тяжести,
а сила плавучести — в центре величины. Только равенства этих
сил недостаточно для обеспечения равновесия судна, необходи-
22
мо еще и равенство нулю суммы моментов этих сил относитель-
но координатных осей:
Gxg — yVxc = 0; (1.20)
Gyg-yVyc = 0, (1.21)
где xg, yg — координаты центра тяжести судна; хс, ус — коорди-
наты центра величины.
В силу симметрии корпуса относительно ДП ус = 0, соответ-
ственно для того, чтобы судно плавало прямо (0 = 0), необхо-
димо распределить нагрузку, составляющую силу его тяжести,
таким образом, чтобы и
Уг = 0. (1.22)
Из (1.19) и (1.20) вытекает второе требование к положению
центра тяжести судна, плавающего прямо и на ровный киль:
xg = xc. (1.23)
Координаты центра величины определяются только формой
подводной части судна и для каждой заданной осадки (задан-
ного водоизмещения) легко находятся, в частности, с помощью
кривых элементов теоретического чертежа.
Сила тяжести судна рассчитывается путем суммирования
отдельных статей нагрузки, включающих корпус, главные и
вспомогательные механизмы, оборудование, устройства, систе-
мы, запасы воды, топлива, экипаж судна и пассажиров, пере-
возимый груз и т. д.
G=LPb (1-24)
где pi — сила тяжести отдельной статьи нагрузки.
Координаты центра тяжести судна находят с использованием
известных из курса теоретической механики зависимостей:
52 Pixi. piyi ~ S P‘Zi п
хе q ; Vg q ; zg q • u-
Отдельные грузы на судне должны размещаться таким об-
разом, чтобы обеспечить выполнение условий (1.22) и (1.23).
Положение центра тяжести по высоте (величина zg) также не
может быть произвольным, его выбирают таким, чтобы оно от-
вечало требованиям обеспечения остойчивости.
Грузовой размер (рис. 1.5) представляет собой однозначную
зависимость водоизмещения от осадки для судна, сидящего на
ровный киль (<р = 0). В процессе эксплуатации, особенно
в балластных пробегах, зачастую имеет место значительный
дифферент. Для определения водоизмещения судна в этом слу-
чае служит диаграмма Г. А. Фирсова (рис. 1.8). На ней по ко-
23
ординатным осям отложены осадки носом и кормой, определя-
ющие дифферент судна. Нанеся на диаграмму точку, отвеча-
ющую заданным (известным) значениям Ти и Тк, легко найти
объемное водоизмещение V судна и соответствующую ему абс-
циссу центра величины хс. Диагональ диаграммы (пунктирная
линия) относится к судну, сидящему на ровный киль (ф = 0),
т. е. соответствует грузовому размеру.
Осадку судна определяют по маркам углублений (мар-
кам осадки), которые наносят на оба борта в носу и корме
судна, а также и в районе миделя.
Осадки на этих марках отмечают
через дециметр, отсчитываются они
от нижней кромки горизонтального
киля.
Изменение осадки судна при грузо-
вых операциях. Любое изменение на-
грузки приводит к изменению левой
части уравнения (1.19), что автомати-
чески отражается как на величине объ-
емного водоизмещения, так и на осад-
ке судна.
Рис. 1.8. Диаграмма Фир- Очевидно, что прием груза влечет
сова за собой вхождение в воду дополни-
тельного объема ДУ, удовлетворяю-
щего условию, аналогичному (1.19):
р — у ДУ.
(1.26)
В свою очередь, если груз не очень велик, то изменение
осадки ДТ будет также небольшим, в пределах которого пло-
щадь ватерлинии 3 практически останется постоянной. Тогда до-
полнительно вошедший в воду объем
ДУ = 5 ДТ,
(1-27)
и с учетом (1.26) получим элементарную зависимость измене-
ния осадки при приеме (снятии) груза р:
ЛТ — p/yS. (1.28)
Выражения (1.27) и (1.28), строго говоря, справедливы
лишь для прямобортного (когда судна, однако прак-
тика показывает, что их использование не приводит к сущест-
венным ошибкам, если сила тяжести груза не превышает р =
= (10-г- 12) % G.
Из (1.28), положив ДТ = 1 см = 0,01 м, легко получить
выражение для так называемого числа тонн на сантиметр
осадки:
<7 = y5/100g-,
(1.29)
24
где q — масса груза, прием (снятие) которого приводит к из-
менению осадки на 1 см.
Тогда, вместо (1.28) для практических расчетов удобно ис-
пользовать формулу
bT = mfq, (1.30)
где АТ — изменение осадки, см; т— масса, принимаемого
(снимаемого) груза, т.
Из (1.28) и (1.29) следует, что для решения задач, связан-
ных с грузовыми операциями, необходима строевая по ватер-
линиям (см. рис. 1.7).
Зависимости (1.28) и (1.30) используются для контроля
осадки в процессе эксплуатации судна, учета влияния на осад-
ку расходования топлива, воды и т. д.
Коэффициент полноты площади ватерлинии изменяется
в достаточно узких пределах (см. § 1.2), поэтому, приняв его
среднее значение а = 0,78, с учетом (1.2) и (1.29) вместо
(1.30) запишем
ДТ=1,25-^-м (1.31)
где т — масса груза, т; L, В — длина и ширина судна по рас-
сматриваемую ВЛ, м.
Формулу (1.31) можно использовать для экспресс-оценки
изменения осадки при грузовых операциях.
Строго говоря, грузовая операция кроме изменения осадки
в общем случае должна приводить и к появлению углов крена
и дифферента, т. е. к изменению посадки в целом. Для опреде-
ления этих углов мы пока не обладаем достаточной информа-
цией, поэтому сформулируем задачу несколько иначе: какие ус-
ловия должны быть выполнены, чтобы прием малого груза не
сопровождался ни креном, ни дифферентом?
Очевидно, что крен не появится, если ордината центра тя-
жести груза ур = 0, т. е. находится в ДП. Чтобы не возник
дифферент, моменты силы тяжести груза и дополнительной
силы плавучести должны быть равны, или, другими словами,
сила тяжести и сила плавучести должны лежать на одной вер-
тикали. Поскольку дополнительный, входящий в воду объем,
представляет собой призму, основанием которой является ва-
терлиния, то абсцисса центра тяжести этого объема равна абс-
циссе центра тяжести площади ВЛ. Таким образом, для отсут-
ствия дифферента необходимо выполнение условия
хр = хр. (1.32)
Сказанное выше справедливо для относительно небольшого
груза. Когда груз велик, задачу можно решать в несколько
этапов, разделив его на части, к которым применимы зависи-
25
шкалы (рис. 1.10). Она
Рис. 1.9. Определение измене-
ния осадки при приеме груза
мости (1.28) и (1.30). Однако при этом не исключена ощути-
мая ошибка: формулы (1.28) и (1.30) приближенные, погреш-
.ность может накапливаться. Проще и надежнее использовать
грузовой размер (рис. 1.5), отложив на котором требуемое при-
ращение подводного объема ДУ = р/у, сразу найдем изменение
осадки ДТ (рис. 1.9).
Эти же задачи, связанные с грузовыми операциями, могут
эффективно решаться с помощью так называемой грузовой
редставляет собой номограмму, на
вертикальных шкалах которой от-
кладывают водоизмещение в соле-
ной и пресной воде, дедвейт, осадку,
и высоту надводного борта судна.
Здесь же наносят и число тонн на
сантиметр осадки, а также некото-
рые элементы поперечной и про-
дольной остойчивости — возвыше-
ние малого метацентра, момент,
дифферентирующий на 1 см. По од-
ной из известных величин (£), Т, Dw
и др.) находят все остальные, при-
чем для этого ие требуется произво-
дить никаких выкладок. В связи
с этим грузовую шкалу широко ис-
пользуют в процессе эксплуатации, она входит в число штатных
судовых документов.
Основанием для построения грузовой шкалы служат элемен-
ты теоретического чертежа, в частности, строевая по ватерли-
ниям, грузовой размер, кривые апликат центра величины и ме-
тацентрических радиусов.
Изменение осадки судна при изменении плотности воды.
Морским судам приходится плавать в разных морях, заходить
в устья рек; осадка при этом, естественно, не остается посто-
янной.
При переходе судна из воды с удельным весом у (плот-
ностью р) в воду с yi(pi), в силу неизменности водоизмещения
судна D = const имеем
YV = v.V, н ду = у1_ y = v(-i-_ = _ 1).
Поскольку нет оснований ожидать большого изменения осад-
ки, для его определения воспользуемся выражением (1.27)
= - 1V
S ' Pi )
(1.33)
26
Рис. 1.10. Грузовая шкала
С учетом (1.2) и (1.4), принимая за исходные объемное во-
доизмещение V и осадку Т, преобразуем (1.33) к виду
"“(-К-1)-£-т_(:57-|)х-л <l34>
где % — коэффициент вертикальной полноты.
Положив в (1.34) среднее значение % « 0,9, для случая пе-
рехода из соленой воды р = 1,025 т/м3 в пресную pi = 1,0 т/м3
получим формулу, пригодную для оценок изменения осадки:
дт» 0,022т. (1.35)
Как следует из (1.35), для крупных судов увеличение осад-
ки при переходе в пресную воду может быть значительным
(при Т — 20 м ДТ « 0,5 м).
Пример 1.2. Для судна «Инженер» (см. пример 1.1) найдем число тони
на 1 см осадки, а также изменение осадки при следующих условиях: а) вы-
грузке 88 стандартных крупнотоннажных контейнеров общей массой 2680 т;
б) переходе в пресную воду.
По (1.29) определяем число тонн на 1 см осадки:
YS 10 - 3700 Q,, ,
q~ 100g — 100 - 9,81 — 37,7 T/CM’
a no (1.30) —уменьшение осадки при снятии 2680 т груза:
m 2680
ДГ =— = —— = 71,1 см = 0,711 м.
д
По (1.34) рассчитываем увеличение осадки при переходе судна из со-
леной (р = 1,025 т/м3) в пресную (pi = 1,0 т/м3) воду:
/ р Л б _ / 1,025 0,619 ....
ДГ = — 1-------Т = —=-----1 • • 9,5 = 0,195 м.
\Pi /а X 1,0 / 0,759
Оценка по (1.35) дает
ДГ' « 0.022Г = 0,022 - 9,5 = 0,209 м,
т. е. для рассматриваемого судна погрешность составляет
б = - 100 = 7,2%
Нормирование плавучести морских судов. Морская прак-
тика показала, что безопасная эксплуатация судна возможна
только в том случае, когда оно обладает достаточным запасом
плавучести. В качестве последнего принимается весь водоне-
проницаемый объем судна, расположенный выше его действу-
ющей ватерлинии. Фактически запас плавучести определяет то
дополнительное количество груза, которое может принять суд-
но до того, как оно утратит способность держаться на воде.
Запас плавучести выражают в процентах полного водоиз-
мещения. Его величина зависит от типа и назначения судна,
района плавания и т. д. Так, на сухогрузных судах он состав-
ляет (25—50) %, на нефтеналивных (16—25) %, на пассажир-
ских до (80—100) % объемного водоизмещения.
28
Необходимый запас плавучести назначается «Правилами
о грузовой марке морских судов» Регистра, аналогичные доку-
менты имеют классификационные общества и других стран —
все они составлены в соответствии с Международной конвен-
цией о грузовой марке. При этом фактически задается мини-
мально допустимая высота надводного борта. С этой целью
в районе миделя на оба борта судна наносят так называемую
грузовую марку, регламентирующую максимальную осадку суд-
на (минимальный надводный борт) в различных условиях пла-
вания. Грузовая марка включает палубную линию, так назы-
ваемый диск Плимсоля и
гребенку с направленными в
разные стороны зубьями
(рис. 1.11).
Палубная линия наносится
на уровне верхней кромки во-
донепроницаемой палубы. Диск
Плимсоля, названный так в
честь английского инженера,
предложившего его, представ-
ПалуВная линия
Т(Т)
ji(s)
3W
ЗСА(ША)
Ряс. 1.11. Грузовая марка
ватерлинией. В иос от
ляет собой окружность, пересе-
ченную горизонтальной чертой,
верхняя кромка которой со-
впадает с допускаемой летней
центра круга наносится вертикальная черта с отходящими
от нее грузовыми марками — горизонтальными линиями. Каж-
дая из этих линий относится к определенным условиям пла-
вания и в соответствии с этим обозначается. Так, буквой Л
(на иностранных судах S) маркируется грузовая марка, нахо-
дящаяся на одном уровне с горизонтальной линией в диске
Плимсоля, т. е. соответствующая летней ватерлинии. Буква 3
(W) обозначает зимнюю ватерлинию — минимальная высота
надводного борта увеличена. Этим учитываются более тяжелые
условия плавания. Еще ниже расположена грузовая марка, от-
носящаяся к плаванию зимой в Северной Атлантике, — ЗСА
(WNA), т. е. особо тяжелых условиях. Для крупных (L>100m)
судов грузовые марки 3 и ЗСА совпадают. Буква Т (Т) при-
сваивается грузовой марке, соответствующей плаванию в тро-
пических морях. Грузовые марки, отвечающие плаванию в прес-
ной воде, отмечаются горизонтальными линиями, отходящими
от вертикальной черты в сторону диска Плимсоля.
Например, грузовая марка П (F) отстоит от летней ВЛ на
расстояние, определяемое по (1.34), где принимается для соленой
воды р= 1,025 т/м3, а для пресной — р = 1,0 т/м3.
Буквы ТП (TF) определяют высоту надводного борта при
плавании судна в пресных тропических водах.
29
По особым правилам наносят грузовые марки на борт спе-
циальных судов (например, лесовозов), однако их идея —ли-
митирование минимального надводного борта, а следовательно
и запаса плавучести — остается неизменной.
В процессе всего периода эксплуатации осадка не может
превышать максимальную, допускаемую грузовой маркой для
конкретных условий плавания (сезон, район, соленость воды).
Контрольные вопросы
1. Какие основные типы транспортных судов вы знаете?
2. Что собой представляет теоретический чертеж судна?
3. Какие величины соотношении главных размерений и коэффициентов
полноты характерны для транспортных судов?
4. Какие условия должны быть выполнены, чтобы судно плавало прямо
и на ровный киль?
5. На какой вертикали должен располагаться ЦТ груза, чтобы его
прием не сопровождался ни креном, ни дифферентом?
6. Что собой представляет грузовая марка судна и что она регламен-
тирует?
Глава 2
ОСТОЙЧИВОСТЬ И НЕПОТОПЛЯЕМОСТЬ
2.1. Начальная остойчивость
Остойчивостью называют способность судна, выведенного из
положения равновесия, возвращаться в него после прекращения
действия внешних сил.
Как видно из определения, между понятиями остойчивость
судна и устойчивость, а также устойчивое равновесие тела в ме-
ханике просматривается аналогия. Однако имеются и отличия:
в остойчивости рассматриваются не только бесконечно малые,
но и конечные отклонения от положения равновесия; устойчи-
вость — чисто качественное состояние, а остойчивость имеет
меру, наконец, судно может либо обладать остойчивостью (ус-
тойчивое равновесие), либо быть неостойчивым (иметь неустой-
чивое и безразличное равновесие).
Плавающее судно как твердое тело обладает шестью степе-
нями свободы, следовательно можно говорить об отклонениях
от положения равновесия по всем этим степеням. Что касается
поступательных перемещений вдоль осей ох и оу, а также вра-
щательного относительно оси oz, то им ничто не препятствует,
поэтому не возникает восстанавливающих сил и момента. Та-
ким образом, по отношению к этим отклонениям судно не об-
ладает остойчивостью, а положение равновесия здесь безраз-
30
личное. Это обстоятельство не грозит судну гибелью, не препят-
ствует его использованию по назначению.
Отклонение вдоль вертикальной оси ог приводит к появле-
нию (для судна, имеющего запас плавучести) восстанавлива-
ющих сил, т. е. такое судно всегда обладает вертикальной ос-
тойчивостью. Кроме того, судно должно сопротивляться, проти-
востоять, наклонениям относительно осей ох и оу, в противном
случае оно опрокинется, перевернется. Устойчивое равновесие
при указанных наклонениях не обеспечивается автоматически,
как это было с вертикальной остойчивостью, а требует опреде-
ленных конструктивных реше-
ний. В общем случае характер
равновесия зависит от формы
корпуса, распределения нагруз-
ки, величины отклонения и т. д.
Изучением всех этих вопросов
и занимается «статическая
остойчивость» (или просто
«остойчивость»). В зависимо-
сти от того, в какой плоскости
Рис. 2.1. Равнообъемное наклонение
происходит наклонение, разли-
чают поперечную остойчи-
вость — поворот судна отно-
сительно оси ох, сопровождаемый появлением угла крена,
и продольную остойчивость — вокруг оси оу, угол диффе-
рента.
Кроме того, выделяют начальную остойчивость, когда углы
наклонения малы, и остойчивость на больших углах крена.
В первом разделе удается получить достаточно простые ана-
литические зависимости, определяющие остойчивость судна,
второй раздел имеет более общий характер и включает в себя
начальную остойчивость как частный случай.
Статическая остойчивость предполагает, что силы или мо-
менты прилагаются к судну в течение достаточно длительного
промежутка времени. Если эти условия не соблюдаются и си-
лами инерции пренебрегать нельзя, то вступают в действие за-
коны динамической остойчивости.
Будем рассматривать равнообъемные наклонения, когда уг-
ловые перемещения происходят в условиях вертикального рав-
новесия, т. е. при соблюдении закона Архимеда. Такое возмож-
но, если к судну приложен чистый момент, например, когда
груз перемещен с одного борта на другой. Любой более слож-
ный вариант, вызывающий наклонение судна, может рассмат-
риваться как сумма простых, включающих в том числе и чистый
момент.
Проанализируем равнообъемное наклонение судна в попе-
речной плоскости на бесконечно малый угол 60 (рис. 2.1). По-
31
скольку нас интересует положение корпуса относительно по-
верхности воды, можно его поворот вокруг оси ох заменить эк-
вивалентным поворотом действующей ватерлинии, как это сде-
лано на рис. 2.1. Этот же прием будем использовать и в даль-
нейшем при изучении поперечной остойчивости.
Так как наклонение равнообъемное, то объемы вошедшего
в воду и вышедшего из нее клиньев одинаковы:
vt = v2.
В свою очередь, можно записать (см. рис. 2.1):
w, = dvt = ytffidSi =60 i/i dSn
S, Si Si
v2 — dv2 = 60 уг dS2,
s, s,
где
dv( = dSt • 1//60
— объем элементарной призмы с основанием dSi
у&в; 60 — угол наклонения; dSt и yi — элементарная площадка
и ее отстояние от оси наклонения соответственно.
Сопоставляя (2.1) и (2.2), находим
yldSl = ^y2dS2 (2.4)
S> s2
Интегралы в (2.3) суть статические моменты площадей Si
и S2 относительно оси поворота, т. е.
MSl = MS1 (2.5)
(2-1)
(2-2)
(2.3)
высотой
откуда следует, что эта ось центральная, т. е. проходит через
центр тяжести площади ватерлинии.
Этот вывод можно сформулировать несколько иначе: две
равнообъемные ватерлинии пересекаются по линии, проходя-
щей через их общий центр тяжести. Доказанное для равнообъ-
емных наклонений положение называется теоремой Эйлера и
справедливо для малых наклонений относительно любой оси,
т. е. и для дифферента судна.
Метацентр, метацентрический радиус, метацентрическая вы-
сота. При наклонении корпуса изменяется форма его подвод-
ного объема, соответственно перемещается и центр величины.
Рассмотрим равиообъемное накренение судна на малый угол
60 (рис. 2.2). В исходном положении судно сидело прямо, ЦВ
Со находился в ДП, в накрененном положении он сместился
в точку Се. Центр кривизны дуги С0Се— точку те будем назы-
вать поперечным метацентром, а ее радиус г—поперечным или
малым метацентрическим радиусом.
32
Статический момент подводного объема V накрененного суд-
на относительно ДП можно записать (см. рис. 2.2)
MXZ=V • CtN = Vr№ (2.6)
либо в виде суммы статических моментов элементарных объе-
мов (2.4)
где 1х — момент инерции площади ВЛ относительно осн на-
креиения — оси ох.
Приравнивая (2.6) и (2.7), находим выражения для опре-
деления метацентрического радиуса:
r = Ix!V. (2.8)
Аналогичным образом можно получить и формулу для про-
дольного (большого) метацентрического радиуса:
R = h!V, (2.9)
где If — момент инерции площади ВЛ относительно поперечной
оси, проходящей через ее центр тяжести.
Длина судна всегда значительно больше его ширины, соот-
ветственно существенно различаются и моменты инерции 1Х и
If и метацентрические радиусы, поэтому один из них попереч-
ный именуют малым, а второй продольный — большим. Соотно-
шение этих радиусов имеет порядок (L/В)2, что в точности спра-
ведливо для прямоугольного в плайе понтона.
Сила плавучести всегда нормальна к плоскости ВЛ, поэто-
му метацентр еще можно определить н как точку пересечения
линий действия сил поддержания при малом наклонении судна.
Для того чтобы судно обладало остойчивостью, его иакрене-
ние должно сопровождаться появлением восстанавливающего
33
момента. В качестве сил, создающих этот момент, выступают
равные по величине силы тяжести и плавучести судна.
При фиксированном водоизмещении аппликата центра вели-
чины определяется только формой подводного объема. Возвы-
шение центра тяжести судна за счет расположения грузов (см.
(1.25)) может, вообще говоря, меняться в широких пределах.
Рассмотрим четыре в принципе возможных варианта взаимно-
го расположения ЦТ и ЦВ. В первом (рис. 2.3, а) центр тяже-
сти лежит ниже центра величины, момент, возникающий из-за
несовпадения линий действия сил тяжести и плавучести, стре-
мится вернуть судно в положение равновесия (0 = 0), т. е.
является восстанавливающим. Аналогичная картина имеет ме-
сто и когда ЦТ лежит выше ЦВ, но ниже метацентра
(рис. 2.3,6). В том случае, если ЦТ судна и метацентр совпадут
(рис. 2.3, в), восстанавливающий момент обращается в нуль,
а при дальнейшем повышении ЦТ (рис. 2.3, г) момент из вос-
станавливающего становится опрокидывающим — он стремится
увеличить отклонение судна от положения равновесия. Говорят,
что в первых двух случаях судно имеет положительную началь-
ную остойчивость, в третьем — нейтральную, а в четвертом —
отрицательную. В двух последних вариантах судно не об-
ладает остойчивостью (см. определение этого мореходного
качества).
Для надводных транспортных судов и кораблей типичным
является второй вариант взаимного расположения ЦТ и ЦВ
(рис. 2.3,6). Исключение составляют только подводные лодки
в погруженном положении и некоторые спортивные парусные
суда.
Теперь можно объяснить понятие метацентра — в переводе
с греческого слово означает предельный центр, т. е. предельное
по высоте положение центра тяжести остойчивого судна.
Мерой остойчивости судна является метацентрическая высо-
та— расстояние между метацентром и ЦТ судна. Для малой
или поперечной метацентрической высоты можно записать
Л = zme zg\ (2.10)
h = r + zc — zg\ (2.11)
h = r — a, (2.12)
где zmQ, zg, zc— аппликаты поперечного метацентра, ЦТ и ЦВ
соответственно; г—метацентрический радиус;
a = zg — zc (2.13)
— возвышение ЦТ над ЦВ.
34
Очевидно, что аналогичные формулы можно получить и для
большой (продольной) метацентрической высоты:
— гт^ zg‘,
H = R + zc-Zg’, (2.14)
Я = /? — а,
где zm<f— аппликата продольного метацентра.
Различие между большой и малой метацентрическими высо-
тами еще значительнее, чем между соответствующими радиуса-
ми. Так, обычно продольная метацентриче-
ская высота существенно больше длины
судна, а поперечная составляет где-то от 3
до 7 % ширины (см. пример 2.1).
Метацентическне формулы остойчиво-
сти. Составляющие восстанавливающего
момента. Для определения восстанавли-
вающего момента рассмотрим накрененное
на малый угол 0 судно (рис. 2.4). Плечо
Рис. 2.4. Восстанав-
этого момента — расстояние между ли- лнвающий момент
ниями действия сил тяжести и сил поддер-
жания
l = KN = hsin8.
(2.15)
а сам восстанавливающий момент при наклонениях в попереч-
ной плоскости
Мвв = Gh sin 0, (2-16)
где G — сила тяжести судна; h — малая (поперечная) метацен-
трическая высота.
С учетом того, что углы наклонения, рассматриваемые в на-
чальной остойчивости, малы, запишем метацентрическую фор-
мулу остойчивости в таком виде:
Мв9 = G/i0. (2.17)
Предельные значения углов крена, до которых еще справед-
лива метацентрическая формула (2.17), зависят от формы суд-
на. Практика показывает, что для* судов традиционной формы
зависимостью (2.17) можно пользоваться вплоть до 0 = (10 4-
4- 12)°.
Аналогичным путем получаем выражение для восстанавли-
вающего момента в продольной плоскости:
МВф = ОН<р. (2.18)
Метацентрическая формула продольной остойчивости (2.18)
применима для всех возможных в эксплуатации углов диффе-
рента, поскольку последние обычно не превышают 3—4°.
3*
35
Структура метацентрических формул остойчивости (2.17) и
(2.18) показывает, что чем больше метацентрические высоты h
и Я, тем больше восстанавливающие моменты, т. е. тем силь-
нее судно сопротивляется наклонению. Другими словами, как
уже отмечалось, метацентрические высоты суть меры началь-
ной поперечной и продольной остойчивости. В качестве тако-
вых еще используют произведения Gh и GH, называя их соот-
ветствующими коэффициентами остойчивости.
Записав метацентрическую высоту в форме (2.12), для вос-
станавливающего момента получим выражение
MB0 = G(r — а)9 = агв-Са9 = Мф + Мв. (2.19)
Величина метацентрического радиуса зависит только от фор-
мы судна [см. (2.8)], в связи с чем первая составляющая
в (2.19) называется моментом остойчивости формы, вторая но-
сит название момента остойчивости веса, поскольку оиа в зна-
чительной мере определяется положением ЦТ по высоте [см.
(2.13)]. Соответствующие названия даны и составляющим пле-
ча статической остойчивости
1 = гв — а9 = 1Ф + 1в. (2.20)
При обычном для водоизмещающих судов взаимном распо-
ложении ЦТ и ЦВ zg > zc — момент остойчивости веса, а так-
же соответствующее плечо отрицательны.
Для подводной лодки в погруженном состоянии действую-
щая ватерлиния отсутствует S = 0, I* = = 0, равны нулю н
метацентрические радиусы [см. (2.8) и (2.9)]. Единственная
возможность создать положительную остойчивость в этом слу-
чае— понизить ЦТ настолько, чтобы обеспечить ze < zc, а сле-
довательно и положительную величину момента остойчивости
веса.
Этим же обстоятельством объясняется и одинаковая про-
дольная и поперечная остойчивость подводной лодки: восста-
навливающими являются только моменты веса, которые одина-
ковы при наклонениях в обеих плоскостях.
Метацентрические формулы остойчивости (2.17) и (2.18) на-
ходят широкое применение .для определения соответствующих
углов наклонения судна под действием заданного (известного)
кренящего Мк или диффереитирующего Л4Я моментов. Действи-
тельно, статическое равновесие судна наступает при условии
равенства нулю всех приложенных к нему моментов, т. е. долж-
но иметь место
MK = Mrt; Мд = МВф. (2.21)
Тогда из (2.17) н (2.21) легко находим угол крена
0 — MKjGh,
(2.22)
36
а из (2.18) и (2.21) угол дифферента
<р — Мл/ОН. (2.23)
На практике удобно определять угол крена, пользуясь поня-
тием момента, Л& кренящего на Г. Его легко найти по (2.17)
при условии, что 0 = Г = 1/57,3:
М° =Gft/57,3. (2.24)
Дифферент судна можно задать как углом <р, так и разни-
цей осадок на носовом и кормовом перпендикулярах АТ (см.
§ 1.2). Последний способ чаще применяется в судовых усло-
виях, поскольку эксплуатационников, как правило, интересует
не сам угол наклонения, а его последствия: изменение осадок
носом (всхожесть на волну, слемминг и т. д.) и кормой — за-
глубление гребного винта. Поэтому в судовой документации,
в частности на грузовой шкале (см. рис. 1.10), имеется инфор-
мация о моменте Мд, дифференцирующем судно на один
сантиметр. Соответствующая формула может быть получена из
(2.18) с использованием (1.1) при условии AT = 1 см =
= 0,01 м:
Mi = GH/100L. (2.25)
При наличии зависимости (2.24) угол крена судна находят
по формуле
0° = Мк/М°. (2.26)
Разница осадок носом и кормой (в см) может быть опреде-
лена в виде
АТ = Мл/М'л, (2.27)
а соответствующий угол дифферента в градусах
На практике часто используется относительный дифферент
в виде
d — MlL. (2.29)
фактический представляющий угол дифферента, измеренный
в радианах.
Определить метацентрические высоты h и Н несложно, ес-
ли известно положение ЦТ по высоте Zg и имеются кривые
элементов теоретического чертежа, а конкретно зависимости г,
₽ и zc в функции от осадки (водоизмещения) судна [см. (2.11)].
На предварительных стадиях проектирования, когда теоре-
тический чертеж еще окончательно не разработан, для оценки
37
искомых величин можно пользоваться эмпирическими зависимо-
стями, оперирующими главными размерениями и ограниченным*
количеством характеристик формы корпуса.
Так, для приближенного расчета аппликаты ЦВ предложе-
на формула
_ Т 36 + 0,5
Zc— 6 * 6 + 0,1
для малого метацентрического радиуса
_ а2В2
г 11,66-Г’
а для продольного
(2.30}
(2-31)
(2.32}
Положение ЦТ по высоте в значительной степени зависит от
типа и назначения рудна, характера перевозимого груза, состоя-
ния загрузки и т. д.
Пример 2.1. Найдем для судна «Инженер» возвышение ЦВ, метацен-
трические радиусы н высоты. Дополнительно известно zt — 10,8 м.
Аппликату ЦВ определяем по (2.29):
Т 36 + 0,5 9,5 3 - 0,619 + 0,5
г~Т б + оЛ~^—• б;б19 + 0,1 =5’21
малый метацентрический радиус — по (2.30):
а2В2_________0,7592 • 28,22
Г~ 11,66 • Т ~ 11,6 0,619 - 9,5
большой метацентрический радиус — по (2.31):
а2
146
R
I2 0.7592 - 1732
Т ~ 14 - 0,619 - 9,5 —
Метацентрические высоты находим с использованием (2.11) и (2.14):
ft = r + zc — гг = 6,69 + 5,21 — 10,8 = 1,10 м;
H = R + zc — гг = 210 + 5,21 — 10,8 = 204 м.
Очевидно, учитывая приближенный характер зависимости (2.31), в рас-
четах продольной остойчивости можно принимать Н ~ R.
Пример 2.2. Найдем моменты — кренящий на Г и днфферентующий на
1 см.
По (2.24) имеем
1д0 Gh 288000 - 1,10 „
<=57j-----------57Д-------5540 кНм.
По (2.25)
„1 GH 288000 - 204 . „
М*~ 100L — 100 - 173 — 3400 кНм-
Начальная остойчивость быстроходных судов. Все высоко-
скоростные суда с динамическим поддержанием имеют режим
38
плавания. Продольная и поперечная остойчивость их в этом
случае принципиально ничем не отличается от рассмотренной
выше: восстанавливающие моменты создаются силами плаву-
чести и тяжести.
В расчетом режиме движения корпус этих судов выходит из
воды, силы поддержания имеют динамическую природу (см.
гл. 3). Этн же силы должны обеспечивать и начальную остой-
чивость. У глиссирующих судов при возникновении крена пере-
распределяются давления на скользящем по поверхности воды
днище. Равнодействующая сил давления смещается от ДП
в сторону накрененного борта и совместно с силой тяжести суд-
на создает восстанавливающий момент. Аналогичная картина
имеет место и у судов на неуправляемых подводных крыльях.
На СПК с автоматически управляемыми подводными крылья-
ми (АУПК) (см. гл. 3) восстанавливающий момент создается
путем управления углами атаки крыльев (или закрылков). Для
обеспечения поперечной остойчивости несущие крылья СПК де-
лают разрезными в ДП с раздельным управлением закрылка-
ми правого и левого бортов.
Остойчивость СВП достигается за счет секционирования
воздушной подушки в продольном и поперечном направлениях.
Так, например, при крене на правый борт давление в секциях,
расположенных справа от ДП, возрастает, появляется восста-
навливающий момент. Его увеличению будет способствовать и
более интенсивный расход воздуха из подушки со стороны при-
поднявшегося левого борта.
2.2. Изменение посадки н остойчивости при грузовых операциях
Грузовой операцией будем называть любое перемещение
груза, его прием, снятие или расходование. Вначале рассмот-
рим простейшую операцию — перенос груза, что в силу (1.19)
не вызывает изменения водоизмещения и средней осадки.
Общий случай перемещения груза из точки А(хр1, ypi, zPi)
в точку В(хР2, уР2, гР2) можно рассматривать как последова-
тельное чередование перемещений его ЦТ вдоль соответствую-
щих координатных осей.
Вертикальный перенос груза. Эта грузовая операция не вле-
чет за собой изменения посадки судна, поскольку не сопровож-
дается появлением моментов, поворачивающих судно относи-
тельно осей ох и оу. Однако при этом изменится начальная ос-
тойчивость, так как перемещение груза массой т вдоль оси oz
на расстояние zP2 — zpi — kzp приведет к изменению возвыше-
ния ЦТ судна (см. (1.25)) на величину
т • g • Дгр т Л
— q *= &zp, (2.33)
39
что, в свою очередь, приведет к соответствующему приращенику
н метацентрической высоты Л.
Действительно, в (2.10) элементы объемного водоизмеще-
ния— метацентрический радиус г и аппликата ЦВ гс — оста-
ются неизмененными, следовательно,
АЛ = — teg = — - J Azp. (2.34)
Аналогичные рассуждения применительно к продольной
остойчивости приведут к подобному же выводу:
АЯ= —Azg. (2.35)
Таким образом [см. (2.34) и (2.35)] вертикальный перенос
груза изменяет только начальную остойчивость, повышая ее
при перемещении ЦТ груза сверху вниз (zp2 < zPi и Azp < 0),
и наоборот.
Измененные значения метацентрической высоты запишутся
как
ht = h + Aft; "I
Я, = Я + АЯ. J
Как правило, для водоизмещающих судов грузовые опера-
ции подобного рода оказывают слабое влияние на продольную
остойчивость поскольку Я » АЯ, однако они должны обяза-
тельно учитываться при анализе остойчивости поперечной, если
величины ft и Aft имеют один порядок.
Пример 2.3. Найдем нэмененне остойчивости судна «Инженер» при пе-
реносе груза массой т = 2680 т вниз на расстояние Дар = —1,65 м. Ис-
ходные данные те же, что н в примере (2.1).
По (2.33) рассчитываем уменьшение возвышения ЦТ судна;
* т * 2680 , ак л 1 с
Дгг = _.Д2р = _^ж. 1,65 = -0,15 м
и по (2.36) с учетом (2.34) н (2.35) новые значения метацентрических
высот;
At =Л + ДЛ= 1,10 + 0,15 = 1,25 м;
Я1 =Я + ДН = 204-|-0,15 « 204 м.
Вывод: рассмотренная грузовая операция — вертикальный перенос
груза — привела к увеличению поперечной метацентрической высоты почти
на 15 %, а продольная метацентрическая высота осталась практически без
изменений.
Перенос груза в горизонтальной плоскости. При такой гру-
зовой операции положение ЦТ судна по высоте не изменяется,
сохраняются неизменными показатели продольной и поперечной
остойчивости — метацентрические высоты Л и Я. Иначе обстоит
дело с посадкой. При переносе груза массой т в поперечном
40
направлении на расстояние &уР = уР2— уР\ возникает кренящий
момент
MK = tngb.yp,
наклоняющий судно до тех пор, пока не наступит статическое
равновесие (2.21).
Угол крена при этом определится в виде
mgbyp т-&ур
я— Gh= Gh = Dh
Аналогичные рассуждения приведут к формуле для опреде-
ления угла дифферента при продольно-горизонтальном перено-
се груза на расстояние Дхр = хР2— хр]:
Мл т Ьхр
Ч=~ОН = DH '
(2.38)
Поскольку рассматриваются относительно малые равнообъ-
емиые наклонения, поперечная ось проходит через ЦТ площади
ВЛ, расположенный на расстоянии хр от плоскости мидель-
шпангоута. С учетом этого обстоятельства запишем выражения
для определения осадки судна носом и кормой:
г«=г + (т-^)<₽'-1
IL \ | <2’39)
Гк = Т-(4 + ^)ф.]
В (2.39) фигурирует Т — средняя осадка, измеряемая по
вертикали, проходящей через ЦТ площади действующей ВЛ.
Осадка на миделе, где наносится грузовая марка (см. § 1.4),
строго говоря, будет отличаться от средней на величину ДТ =
= хг-ф, которой можно пренебречь в силу того, что хр С Т
и ф< 1 (см. пример 2.4). Соответственно, для многих практи-
ческих расчетов, связанных с определением осадки в оконечно-
стях, формулу (2.39) можно упростить, приведя к виду
тн = г + 4ф;
Гк = 7'-^-<р.
(2.40)
Очевидно, что разница осадок носом н кормой
Д7'==£ • ф. (2.41)
Углы крена, дифферента и изменение осадок в оконечностях
можно также определить, используя зависимости (2.24) и
(2.25).
Пример 2.4. Для судна «Инженер» определим нзмененне посадки при
перемещения груза массой m = 2680 т на расстояния Дхр = —15,1 м вдоль
41
и Aj/d =1,6 м поперек судна. Исходные данные те же, что и в приме-
рах 2.1—2.3, дополнительно известно Хр = —0,97 м.
Найдем кренящий н дифферентующий моменты:
Мк = ng Ьур = 2680 «9,81 • 1,60 = 42.000 кНм;
Мл = mg ДХр = 2680 • 9,81 - (- 15,1) = - 398.000 кНм.
и по (2.37) н (2.38) соответствующие углы крена и дифферента
„ Мк 42 000 п.„„ __0
0 “ ~Gh ~ 288 000 - 1,10 “ °’ 33 рад ” 7,6 ’
Мл 398 000 ппп„
ф “ ~GH----- 288 000 - 204 - 0,0067 рад ~ “ 0,38 ‘
Разница между средней осадкой и осадкой на миделе
ДТ'мш = | хр • ср | = 0,97 - 0,0067 = 0,006 м.
Осадки носом и кормой
Тк = Т + А ф = 9,5 + (-0,0067) = 8,92 м;
ТК = Т — -уф =10,08 м
и их разница
ДТ = |ТН-ТК| = 1,16 м.
Относительный дифферент
d=-^ = -b^- 100% =0,67%.
Lt I/O
Легко убедиться, что те же са^ые значения получаем, используя фор-
мулы дли момента, кренящего на 1° (2.26) и дифферентующего на 1 сьс
(2.27).
Задача о произвольном переносе груза решается поэтапно,
причем первым этапом должен быть расчет для вертикального-
переноса, а на двух следующих при определении посадки судна-
необходимо учитывать изменение начальной остойчивости.
Прием (снятие) груза. В общем случае прием груза сопро-
вождается изменением и посадки, и остойчивости. Вначале рас-
смотрим вариант с малым грузом, когда для определения изме-
нения средней осадки можно пользоваться формулой (2.28),.
а углы крена и дифферента находить по метацентрическим фор-
мулам (2.17) и (2.19). Как и ранее, задачу разобъем на две бо-
лее простые: в первую очередь, условно примем груз в точку,,
лежащую на одной вертикали с ЦТ площади ВЛ, а затем пере-
несем его в точку с заданными координатами хр и ур.
В § 1.3 было показано, что прием груза влечет за собой рост
водоизмещения и средней осадки соответственно на величины
ДV = р/у и &T = p/yS [см. (1.26) и (1.28)]. Кроме того, из-
менится и начальная остойчивость, поскольку претерпят изме-
нение все величины, входящие в правые части формул (2.11) и
42
(2.14). Так, приращение малой метацентрической высоты, оче-
видно, будет
ДЛ = Дг + Дгс — Дгя. (2.40)
Статический момент погруженного объема относительно ос-
новной плоскости можно записать в виде
Мзд = (У + ДУ)(2с + Д2с); (2.41)
этот же момент можно представить как сумму:
Mxv = Vze + ДУ (Т + 4-), (2.42)
тде Т + ДТ/2 — отстояние от ОП, вошедшего в воду дополни-
тельного объема ДУ.
Приравняв (2.41) и (2.42), получим выражение для прира-
щения аппликаты ЦВ:
Дг‘=ттНг+^-Ч-тт^(7'+¥-4 (2-43>
где р, m — сила тяжести и масса груза соответственно.
Метацентрический радиус после приема груза запишется
"в виде
+ (2.44)
Полагая, как и ранее, что судно прямобортное, а следова-
тельно Ixi « Л, из (2.44) с учетом (2.8) получим приращение
метацентрического радиуса:
Лг = У + ДУ ““7 = ~ У + ДУ * г = — D + m ‘ Г‘ <2’45)
По аналогии с приращением аппликаты ЦВ определяем и
(изменение возвышения ЦТ:
= G + р ^Zp Ze>> = D + m (Zp Zg^’ (2.46)
где zp — аппликата ЦТ принимаемого груза.
Суммируя (2.43), (2.45) и (2.46), с учетом (2.11) находим
изменение поперечной метацентрической высоты:
= D + m (Г ~2 Zc ~ r + zs ~ 2₽) =
-т^(7'+4-'>-4 <2-47)
Аналогичным образом получаем и приращение продольной
метацентрической высоты:
<2-48>
43
которое с учетом соотношения величин, стоящих в скобках,
можно записать в виде
Ая‘-----5Т5Г'Я- (2'49>
Таким образом, на первом этапе мы определили новые зна-
чения водоизмещения, осадки и метацентрических высот судна:
У,=У + ДУ: Tt = T + AT- h,=h + ^h; Я, = Я + ДЯ. (2.50)
Вторая половина задачи — уже известный горизонтальный
перенос груза на расстояние Дур = ув вдоль оси оу и ДхР =
= хр — xF вдоль оси ох. Углы крена и дифферента определяем
по (2.37) и (2.38) с учетом (2.50) и (2.49):
т • &ур _ тур
(D + m) (Л + АЛ) :
т^хр т(хр — хр)
ф = (D + m) (Я 4-ДЯ) ~
Все полученные зависимости, очевидно, будут справедливы
и для расходования (снятия) груза, если изменить знак р
(или т) на минус.
Анализируя выражение (2.47), можно отметить, что метацен-
трическая высота при приеме груза не изменится (ДЛ = 0),
если
2р=т’+4--л- <2-53>
Выражение (2.53) суть уравнение нейтральной плоскости.
Если ЦТ принятого груза лежит выше этой плоскости — мета-
центрическая высота уменьшается, ниже — увеличивается.
Рассуждая аналогичным образом, получим нейтральную
плоскость и для продольной остойчивости. С учетом того, что
Н 3> Т + (ДТ/2) можно сделать вывод: прием груза всегда
уменьшает продольную метацентрическую высоту, поскольку
соответствующая нейтральная плоскость лежит много ниже ки-
ля судна.
Следует отметить еще один момент: нейтральные плоскости
при приеме (ДГ > 0) и расходовании (ДГ < 0) груза не сов-
падают. Кроме того, положение нейтральной плоскости по вы-
соте зависит и от массы принимаемого груза, так как ДТ =
= f(m).
Пример 2.5. Найдем положение нейтральных плоскостей для нашего
судна «Инженер». Исходные данные те же, что в примерах 1.2 и 2.1.
При приеме груза по (2.53) имеем
2Р = Т + ^-- Л =9,5 1,10 = 8,76 м;
44
прн снятии
2р = 9,51,10 = 8,04 м.
Таким образом, обе нейтральные плоскости находятся несколько ниже
действующей ватерлинии.
Если масса принимаемого груза превышает (10—12) % В
допущение о прямобортности судна может привести к суще-
ственным ошибкам при определении параметров посадки и на-
чальной остойчивости судна. В этом случае используют кривые
элементов теоретического чертежа, а
V(T) и зависимости от осадки аппли-
кат поперечного и продольного мета-
центров 2тв(Т) И Zmq>(T).
Рассчитав новое значение возвыше-
ния ЦТ над основной
__ Gzg + pzp Dzg + mzp
Zg 1 G + p D 4- m ’
(2.54)
именно: грузовой размер
Рис. 2.5. Определение воз-
вышения поперечного и про-
дольного метацентров
новые значения метацентрических вы-
сот находят по (2.10) и (2.14). Вели-
чины ?тв1 и 2тф1 снимают С кривых
элементов, как это показано на
рис. 2.5.
Если нужно контролировать остойчивость в процессе погруз-
ки, то следует располагать кроме кривых элементов и данными
об изменении возвышения ЦТ судна в функции от осадки, т.е.
иметь зависимость ze(7'). Последняя может быть получена с по-
мощью (2.46) для конкретного порядка приема большого гру-
за: заполнения танков, загрузки трюмов и т. д.
2.3. Влияние на начальную остойчивость
перемещающихся грузов и условий эксплуатации
До сих пор мы имели дело с грузами, положение ЦТ кото-
рых было строго фиксировано и не зависело от наклонений.
Однако на судне могут быть н подвижные, свободно перемеща-
ющиеся грузы. Несмотря на разнообразие таких грузов, у них
есть общая черта: их центр тяжести смещается в сторону на-
клонения. Таким образом возникает дополнительный момент,
увеличивающий угол крена или дифферента, т. е. снижающий
начальную остойчивость. Последнее обстоятельство делает под-
вижные грузы потенциально опасными. Все эти грузы можно
отнести к следующим категориям: подвешенные, перекатываю-
щиеся, жидкие, сыпучие.
45
Подвешенные грузы. Чаще всего с этой категорией грузов
приходится сталкиваться при проведении погрузоразгрузочных
операций с помощью судовых средств.
При накренении судна на угол 0 отклоняется от вертикали
и подвешенный груз (рис. 2.6), создавая при этом дополнитель-
ный кренящий момент
Мк = plT sin 0 ~ р/т0, (2.55)
где р — сила тяжести груза; /т— длина троса.
Рнс. 2.6. Влияние под-
вешенного грузе на
остойчивость
Рис. 2.7. Влияние пе-
рекатывающегося гру-
зе иа остойчивость
Соответственно на ту же величину по сравнению со значе-
нием, которое он имел до подъема груза, уменьшается и вос-
станавливающий момент:
МВ1 = Ма — Мк = GhQ — plTB. (2.56)
Представив этот момент в виде
МВ1 =ОЛ, =0 (Л + ДЛ), (2.57)
влияние подвешенного груза сведем к соответствующему сни-
жению начальной метацентрической высоты:
дА = _^ = _^_./т. (2.58)
Сопоставляя (2.58) с (2.34), приходим к выводу, что учет
влияния подвешенного груза сводится к его вертикальному пе-
реносу в точку подвеса. Очевидно, что аналогичным образом
получим и поправку к продольной метацентрической высоте
ДЯ = - -g- • /т. (2.59)
Пример 2.6. Найдем изменение начальной остойчивости судна «Инже-
нер» прн подъеме нз трюма тяжеловесной стрелой груза массой 70 т. Рас-
стояние от нока стрелы до ЦТ груза, лежащего на втором дне, /т = 39 м.
По (2.58) определяем
Д*--------------ето -39«-0.093 И.
46
По сравнению с первоиачалиьым значением (см. пример 2.1) h = 1,1 м
изменение метацентрической высоты не велико н не представляет опасности
с точки зрения значительного снижения поперечной остойчивости. В еще
меньшей степени сказывается подвешенный на стреле груз на продольной
остойчивости.
Выводы, полученные в примере 2.6, типичны для грузовых
судов с начальной остойчивостью, отвечающей нормам; иными
словами, погрузоразгрузочные работы, проводимые судовыми
средствами, как правило, не представляют опасности для ос-
тойчивости судна.
Перекатывающиеся грузы. К этой категории грузов в пер-
вую очередь относится колесный траспорт, а также грузы
в круглой таре (бочки, рулоны и т. д.).
Рассмотрим перемещение перекатывающегося груза массой
т по криволинейной траектории (рнс. 2.7). Считая угол иакре-
нения 0 малым, а траекторию ЦТ груза дугой окружности
с радиусом Яг, получаем выражение для дополнительного кре-
пящего момента, вызванного перемещением груза:
Мк = sin 0 « р7?г0. (2.60)
Рассуждая так же, как и в случае подвешенного груза, при-
дем к совершенно аналогичным выводам относительно уменьше-
ния метацентрических высот:
Дй = ДЯ = --g- • 7?г. ' (2.61)
Таким образом, поправка к метацентрической высоте опре-
деляется так, как будто перекатывающийся груз перенесен
в центр кривизны траектории движения. Формально при пере-
катывании груза по плоской поверхности (палуба, настил двой-
ного дна) судно должно полностью утратить остойчивость и оп-
рокинуться, так как /?г->оо и Дй -»—оо. Этого реально не
происходит: угол крена будет нарастать до тех пор, пока катя-
щийся груз не свалится за борт или не остановится, упершись,
например, в борт. В последнем случае судно будет плавать
с начальным углом крена, величина которого легко находится
по (2.37).
Перекатывающийся груз представляет для судна серьезную
опасность: его смещение приводит к снижению начальной ос-
тойчивости и появлению статического угла крена, знак которо-
го, особенно при качке, может меняться. Известны случаи гибе-
ли судов, вызванные перекатыванием плохо закрепленной колес-
ной техники и других подобных грузов.
Жидкие грузы. Жидкие грузы на судне размещаются в спе-
циальных емкостях — цистернах и танках. Возможны два состоя-
ния груза: емкость загружена частично либо полностью. В по-
следнем случае жидкий груз принципиально ничем не отлича-
47
•ется от закрепленного твердого — центр его тяжести строго фик-
сирован и не перемещается при наклонениях судна.
Совершенно другим образом ведет себя жидкий груз, когда
он заполняет цистерну не доверху. При наклонениях судна этот
груз переливается так, что свободная поверхность жидкости
всегда занимает горизонтальное положение, соответственно пе-
ремещается и центр тяжести груза, создавая дополнительный
крепящий момент. Рассмотрим два идентичных частично за-
полненных бортовых танка (рис. 2.8). При накреиении судна
иа малый угол 0 свободные поверхности в танках примут новое
горизонтальное положение, составляющее тот же угол 0 с пер-
воначальным. Перемещение ЦТ груза в танке происходит по
дуге окружности радиуса гж
(рис. 2.8) с центром в точке тж.
Дополнительный кренящий мо-
мент, вызванный указанным пере-
мещением,
Мк = ргж0^Уж "
(2.62)
где р = mg — сила тяжести, т =
= ря<п — масса; v — объем; рж —
плотность; у» — удельный вес
жидкого груза в танке.
с (2.55), приходим к выводу, что влня-
свободной поверхностью такое же, как
Проблема — в определении радиуса г».
Сопоставляя (2.62)
ние жидкого груза со
и груза подвешенного.
С этой целью дополнительный кренящий момент запишем в ви-
де суммы моментов от переместившегося слева направо клина
жидкости (рис. 2.8):
Л4К = УУж dSyQ = уж0 уг dS = уж • 0 • ix,
S S
(2.63)
где S — площадь свободной поверхности жидкого груза в тан-
ке, ix — момент инерции этой площади относительно ее цен-
тральной оси, параллельно оси ох.
Сравнивая (2.62) и (2.63), получаем зависимость для опре-
деления радиуса окружности, по которой перемещается ЦТ
жидкого груза:
Уж^х _ 1Х
Уж •» v
(2.64)
Формула (2.64) по структуре полностью соответствует полу-
ченной ранее формуле (2.8), в связи с чем гж называют иногда
метацентрическим радиусом, а точку тж — метацентром цистер-
ны (танка).
48
Рассуждая так же, как и при рассмотрении влияния подве-
шенного груза, найдем уменьшение начальной метацентриче-
ской высоты за счет наличия свободной поверхности жидкого
груза:
A L Мк Y>K0ix Тж ix Рж ix (Л сс\
^=-00-----------7Й0-------F'V---------Г'Т' ( }
где V — объемное водоизмещение судна.
Аналогичным образом можно иайти и поправку к продоль-
ной метацентрической высоте:
ДН-----V ' V’ (2’66)
где iv — момент инерции площади свободной поверхности отно-
сительно ее центральной оси, параллельной оси оу.
Из (2.65) и (2.66) следует очень важный вывод: влияние
жидкого груза на начальную остойчивость не зависит от его
массы, а определяется только площадью свободной поверхности.
Очевидно, что при наличии свободной поверхности в не-
скольких танках (цистернах), их отрицательное влияние на
остойчивость должно суммироваться. На любом судне большое
количество жидких грузов: топливо, питьевая и техническая во-
да, жидкий балласт и др. На наливных судах к этому перечню
добавляется груз в танках. Соответственно может быть суще-
ственным и влияние свободной поверхности в многочисленных
цистернах и танках на остойчивость. Известны случаи опроки-
дывания судов из-за потери остойчивости, вызванной жидкими
грузами. Поэтому в процессе эксплуатации ведется постоянный
контроль за свободными поверхностями жидких грузов и учет
их влияния на остойчивость. Кардинальным способом устране-
ния этого, в общем случае отрицательного, влияния является
заполнение емкостей доверху, так называемая запрессовка.
Когда это невозможно либо нерационально делать необхо-
димый эффект может быть достигнут путем деления свободной
поверхности продольными и поперечными переборками. Разде-
лив прямоугольную в плане цистерну т продольными переборка-
ми на (т + 1) одинаковых участков, мы уменьшим поправку
ДЛ к метацентрической высоте в (т + I)2 раз. Действительно,
из курса механики известно, что момент инерции
где b, h соответственно ширина и высота прямоугольника.
При установке переборок высота уменьшается в (т+1) раз,
а суммарный момент инерции (т+1) прямоугольника составит
(2.68,
43415
49
Необходимо отметить, что изложенное выше справедливо для
высокобортных цистерн, заполненных до половины, другими
словами, для тех случаев, когда форма свободной поверхности
при наклонениях резко не изменяется. Если жидкость в цистер-
ну залита почти доверху либо, наоборот, ее слишком мало, то
уже при малых углах крена площадь свободной поверхности
многократно уменьшается, соответственно снижается и ее влия-
ние на остойчивость. Поэтому, в частности, обычные остатки
жидких грузов в пустых танках и цистернах могут не прини-
маться в расчет при контроле остойчивости.
Было бы неверным на основании изложенного сделать вы-
вод, что обеспечение остойчивости наливных судов наталкива-
ется на серьезные трудности. Низкое расположение ЦТ судна
в грузу наряду с рациональным разделением корпуса продоль-
ными и поперечными переборками на изолированные, не сооб-
щающиеся между собой танки, приводят к тому, что необхо-
димые показатели продольной и поперечной начальной остой-
чивости достигаются у этих судов без особого труда.
В то же время наличие обширных свободных поверхностей
у сухогрузных судов может заметно сказываться на их началь-
ной поперечной остойчивости (см. пример 2.7).
Пример 2.7. Определим для судна «Инженер» влиинне свободной по-
верхности на остойчивость в двух расположенных в междудонном про-
странстве балластных цистернах, когда они не запрессованы. Размеры
цистерны: ширина (от бортв до вертикального киля) b = 13,8 м, длина
(между водонепроницаемыми флорами) I = 25 м. Балласт — забортная
вода.
По (2.67) рассчитываем моменты инерции свободной поверхности
ib3 25-13,8’ елпл . . Ы3 13.8-25’ ,оп„п .
«х — 12 12 — 5420 м ; iy— 12 — [2 — 18 000 м .
По (2.65) и (2.66) найдем приращения метацентрических высот
ла Р* 9 ** 2 - 5420 ....
ДЛ------.^=-2-^-------------------0,358 м,
1и 2 • 18 000
дя = -2-^ = = — 1.25 м
Р V 28700
Исправленные значения метацентрических высот
Л, = Л-J-ДЛ = 1,10 — 0,358 = 0,742 м;
Я1 = Я4-ДЯ = 204 — 1,25 «203 м.
Таким образом, в рассматриваемом случае незапрессованный балласт
снижает поперечную метацентрическую высоту более чем на 30 % и прак-
тически не сказывается на продольной остойчивости. Однако в силу не-
большой высоты междудонного пространства, столь значительное уменьше-
ние поперечной остойчивости будет иметь место лишь при 0=0, при появ-
лении даже небольшого угла крена площадь свободной поверхности в цис-
тернах существенно сократится, снизится и ее влияние на остойчивость.
50
Сыпучие грузы. К этой категории относится большая группа
грузов, таких, как руда, песок, уголь, цемент, зерно, соль, са-
хар и т. д. Эти грузы, подобно жидким, также обладают спо-
собностью к перемещению при наклонениях. Однако есть и от-
личие принципиального свойства: подвижка сыпучего груза начи-
нается только при углах крена, превышающих некоторый крити-
ческий. В качестве последнего выступает так называемый угол
естественного откоса 0е (рис. 2.9), измеряемый при свободном
насыпании груза (без разравнивания, уплотнения и т. д.). В тех
•случаях, когда угол крена 0 > 0е, свободная поверхность сы-
пучего груза смещается на угол Д0 =
= 0—0е. После возвращения в исходное /
положение груз так и остается смещен- X
ным, а следовательно, судно получает на-
чальный угол крена. Прн качке имеет '
место тенденция к нарастанию смещения рис. 2.9. Насыпной груз
сыпучего груза в одну сторону и соот-
ветствующему увеличению угла статиче-
ского крена, что не только затрудняет эксплуатацию судна, но
и может привести к его опрокидыванию.
Положение усугубляется тем, что угол естественного откоса
зависит не только от рода груза и его состояния в момент по-
грузки (сухой, влажный, мокрый и др.), но и от условий плава-
ния. Так, на величину этого угла оказывают влияние динамиче-
ские нагрузки (качка, вибрация), температура и влажность воз-
духа. Некоторые навалочные грузы обладают способностью
к разжижению (т. е. могут вести себя, как жидкие), когда
влажность превышает определенный предел.
Для уменьшения опасного влияния на остойчивость насып-
ные грузы разравнивают в трюмах, где, кроме того, устанавли-
вают дополнительные съемные продольные переборки — шиф-
тингбордсы. В ходе рейса на современных судах осуществляет-
ся вентиляция трюмов, контролируется влажность груза.
В заключение следует отметить, что подвижка грузов может
существенно снизить остойчивость и привести к катастрофиче-
ским последствиям. Известны случаи гибели довольно крупных
судов (L >• 150 м, D > 20 000 т) вследствие смещения сыпу-
чих или плохо закрепленных грузов.
Однако все рассмотренные выше потенциально подвижные
трузы перестают представлять опасность для остойчивости, ког-
да они (подвешенные, перекатывающиеся) надлежащим обра-
зом закреплены, а цистерны с жидким грузом запрессованы.
Влияние условий эксплуатации на начальную остойчивость.
В процессе эксплуатации судна его остойчивость меняется. Ряд
факторов, влияющих на нее, мы уже затрагивали: расходование
судовых запасов, в том числе топлива и воды, связанные с этим
изменения свободных поверхностей в цистернах и танках и
4
51
т. д. Все эти изменения происходят в течение длительного вре-
мени, а постоянно ведущийся на судне контроль за остойчи-
востью позволяет предотвратить ее уменьшение ниже допусти-
мого. Встречаются, однако, случаи, когда остойчивость может
существенно измениться за короткий промежуток времени.
В этом плане особую опасность представляет движение судна
на попутном волнении, особенно если длина волны близка дли-
не судна, а скорость ее распространения — скорости движения
судна. В этом случае имеет место как бы статическая постанов-
ка судна на волну. При неизменной величине погруженного
объема существенно трансформируется его форма, в том числе
и площадь действующей ватерлинии (ВЛ). При положении суд-
на на подошве волны его остойчивость увеличивается — вслед-
ствие развала бортов в оконечностях и их прямостенности
в средней части значительно возрастает площадь ВЛ и ее мо-
мент инерции.
Противоположная картина имеет место при положении суд-
на на вершине волны — этот вариант и является наиболее не-
благоприятным для поперечной остойчивости. На встречном вол-
нении подобная ситуация также может иметь место, но сниже-
ние остойчивости наблюдается довольно короткое время, за
которое судно не успевает на него среагировать. На попутном
волнении указанных выше параметров уменьшение остойчивос-
ти длится долго и возможно появление значительных накрене-
ннй, а иногда и опрокидывания судна. Расчет остойчивости на
попутном волнении достаточно громоздок и выходит за рамки
настоящей книги. Отметим лишь, что наибольшей опасности
в данной ситуации подвержены относительно небольшие суда.
При длине судна L > 100 м подобная опасность практически
исключена либо ее легко избежать, изменив курс или уменьшив
скорость.
Большие проблемы для безопасности плавания представляет
обледенение судна. В основном это относится к небольшим су-
дам с невысоким надводным бортом. Интенсивность обледене-
ния возрастает при низких температурах и во время шторма.
Обледенение приводит к снижению остойчивости (за счет повы-
шения центра тяжести судна) при одновременном уменьшении
запаса плавучести. Из-за того, что на ходу носовая оконечность
судна забрызгивается значительно сильнее, чем кормовая, при
обледенении может возникнуть настолько большой дифферент
на нос, что судно полностью лишится хода и управляемости.
При обледенении запас остойчивости обычно утрачивается
раньше, чем запас плавучести, и судно опрокидывается. Для
малых судов иногда это может произойти при массе льда, рав-
ной всего 2 % водоизмещения. Усугубляет положение и то, что,
затягивая шпигаты и штормовые портики, лед препятствует
стоку воды при заливании палубы.
52
Существуют способы учета влияния обледенения, хотя в по-
добной ситуации только за счет контроля остойчивости судна
обеспечить его безопасность не всегда удается. На малых судах
уменьшение остойчивости может происходить весьма быстро и
на большую величину. На низкобортных судах водоизмещением
D « 500 т количество льда, намерзающего в штормовых усло-
виях в течение часа иногда достигает 25 т.
Борьба с обледенением сводится, как правило, к ручной
сколке льда, иногда в сочетании с применением горячей воды.
Хороший эффект дает уход нз района обледенения, в меньшей
степени — изменение курса и скорости движения.
Известны случаи гибели одневременно нескольких судов, по-
павших в экстремальные условия. Так, в 1965 г. в Берйнговом
море при сильном шторме (ветер до 30 м/с, волны до Лв =
= 7—10 м) и температуре воздуха t = —22 °C погибло от обле-
денения шесть японских и четыре отечественных рыболовных
судна.
2.4. Остойчивость на больших углах крена
Полученные выше зависимости и выводы справедливы при
малых углах наклонения. Для морских судов традиционной
формы с достаточно большим отношением L/B Z> 5 дифферент
в процессе эксплуатации не превышает обычно 3—4°, следова-
тельно, начальная остойчивость охватывает все реально возмож-
ные углы наклонения в продольной плоскости.
Иначе обстоит дело с поперечной остойчивостью: даже в ус-
ловиях не очень суровой бортовой качки углы крена могут до-
стигать 20°, известны случаи, когда они доходили до 50° и
более. Поэтому возникает необходимость изучения наряду с на-
чальной остойчивостью поведения судна при больших углах на-
клонения в поперечной плоскости, В этом случае заметно меня-
ется площадь действующей ВЛ, соответственно претерпевают
изменения момент инерции этой площади и метацентрический
радиус [см. (2.8)]. Траектория центра величины перестает быть
дугой окружности, метацентр меняет свое положение в процес-
се наклонения (рис. 2.10).
Линии действия сил тяжести судна G и поддержания уУ пе-
рестают совпадать, возникает восстанавливающий момент. Что-
бы найти плечо этого момента — плечо статической остойчивос-
ти— рассмотрим рис. 2.11, выполненный в более крупном мас-
штабе. Очевидно, что искомое плечо
I — KL = EN = С0М — С0Е = С0М cos 0 + С9М sin 0 — КС0 sin 0 =
= r/e cos 0 + (гв — zc) sin 0 — (zg — zc) cos 0, (2.69)
53
где ус, 2С — координаты ЦВ — точки Со в первоначальном по-
ложении 6 = 0; уд, г® — координаты ЦВ — точки Се при накло-
нении судна на угол 0.
Восстанавливающий момент — произведение силы на плечо
Мм = Gl = G [у# cos 6 + (z# — zc) sin 0 — (zg — zc) sin 0]. (2.70)
Рис. 2.10. Накренение на
большой угол
Рис. 2.11. К определению
плеча статической остойчи-
вости
В (2.69) и (2.70) фигурируют пока неопределенные коорди-
наты ЦВ в наклоненном положении. Для их нахождения прида-
дим судну, накрененному на угол 0, дополнительное бесконеч-
но малое наклонение dQ (рис. 2.12). Приращения координат
ЦВ при этом запишутся:
dy# = С0С01 cos 0;")
dz# = C9C#1 sin0. J
Учитывая, что при d0->-O, хорду можно заменить соответст-
вующей дугой, т. е. C0Cei = rdQ, окончательно получим
dye = r# cos 0d0; d (z# — zc) = rg sin 0 d0. (2.72)
54
Проинтегрировав перемещения ЦВ за все время наклонения^,
найдем его координаты при угле крена 6:
0
ув = rB cos 6 dO;
о
0
(zB — zc) = rt sin 6 dO.
о
(2.73)
Тогда с учетом (2.69) для определения плеча статической
остойчивости при больших углах наклонения будем иметь вы-
ражение
е е
I = cos 6 r8 cos 0 d0 + sin 6 J rB sin 0 dO — a sin 0. (2.74)
о о
По аналогии с (2.20) запишем (2.74) в виде двух состав-
ляющих
/ = /Ф + /0, (2.75).
где
е е
/ф = cos 0 re cos 0 dO + sin 0^ rB sin 0 d0 (2.76)
о о
— плечо остойчивости формы и
lG = — (zg — zc) sin 0 = — a sinO (2.77)
— плечо остойчивости веса, определяемое при заданном водо-
измещении только положением ЦТ по высоте и углом крена.
Диаграмма статической остойчивости. Зависимость плеча1
статической остойчивости от угла крена /(0) называют диаграм-
мой статической остойчивости (ДСО). Иногда для этого упо-
требляется и второе наименование — диаграмма Рида (по име-
ни английского инженера-судостроителя, о котором шла речь
ро введении). Очевидно, что в силу линейной зависимости (2.70)
ДСО может одновременно представлять восстанавливающий мо-
мент при поперечных наклонениях Л1В0(0)—для этого доста-
точно на ось ординат нанести дополнительную шкалу (рис. 2.13).
Обычно ДСО ие имеет простого аналитического описания — ис-
комая зависимость /(0) определяется с помощью выражения
(2.74), в котором интегралы рассчитываются одним из прибли-
женных способов.
Судно одинаково остойчиво при наклонениях на правый и
левый борт, поэтому диаграмма статической остойчивости имеет
две ветви (см. рис. 2.13). При этом принято следующее прави-
ло знаков: угол крена на правый борт и соответствующее ему
55-
плечо статической остойчивости (восстанавливающий момент
Мвд) положительны, при крене на левый борт эти величины
меняют направление и вместе с ним знак. Естественно, что при
наклонении на любой борт восстанавливающий момент стре-
мится вернуть судно в положение равновесия — начало коорди-
нат, где 6=0. Следующая характерная для ДСО точка А со-
ответствует углу 6 = Отах, прн котором плечо (восстанавлива-
ющий момент) приобретает свое максимальное значение. В точ-
ке В это плечо (момент) обращается в ноль, ДСО пересекает
Рис. 2.13. Диаграмма статической остойчивости
ось абсцисс, угол крена при этом 6 = 0заЕ называется углом
заката диаграммы статической остойчивости. При больших уг-
лах наклонения восстанавливающий момент изменяет знак, т. е.
становится моментом опрокидывающим. В силу продольной
симметрии корпуса обе ветви ДСО абсолютно идентичны;
в дальнейшем будем рассматривать только одну из них — пра-
вую. ДСО характеризует остойчивость судна при любых, в том
числе и малых углах наклонения, т. е. она должна включать и
начальную остойчивость. Действительно, производная от плеча
статической остойчивости / по углу крена в начале координат
записывается [см. (2.69)]:
/ dl \ dy* d (za — z.X
U)^ = -^cos0-^Une+-49-^^0 +
+ (г9 — zc) cos 6 — a cos 0. (2.78)
В свою очередь, в соответствии с (2.72) имеем
dy. d 1г„ — гл
-^-=recos0; 1 8d—^ = resin0. (2.79)
При 0 —►о
r9 = r, sin 0 = 0, cos 0=1, ye = 0, zs — zc = 0. (2.80)
Тогда (2.78) с учетом (2.79) и (2.80) преобразуется к виду
<281>
t>6
т. е. искомая производная в начале координат равна метацен-
трической высоте.
Отсюда следует чисто практический прием определения ме-
тацентрической высоты при наличии ДСО: достаточно провести,
к последней касательную в начале координат и, отложив угол
6 = 1 рад = 57,3°, восстановить перпендикуляр, отрезок кото-
рого до пересечения с касательной и будет равен h (см.
рис. 2.14). Найденная (2.81) связь между метацентрической вы-
сотой и плечом статической остойчивости позволяет контроли-
ровать независимые расчеты I и Л, и, кроме того, для каждого
конкретного случая определять углы крена, до которых можно
использовать метацентрическую формулу остойчивости (2.17).
В последней плечо статической остойчивости равно
Z = /l0,
(2.82)
что представляет собой уравнение касательной к ДСО в нача-
ле координат.
Таким образом, до тех пор, пока касательная заметно не от-
ходит от самой зависимости /(6)—угол 6 = 01 на рис. 2.14,
формула (2.17) с достаточной для практических целей точно-
стью будет определять величину восстанавливающего момента.
При 6 Z> 61 эта формула дает ошибку в опасную сторону, при-
чем ее значение возрастает с ростом угла крена.
Диаграмма статической остойчивости в общем случае позво-
ляет решать ту же задачу, что и метацентрическая формула
(2.17), — находить угол крена под действием известного креня-
щего момента.
Предположим, что на судно действует внешний кренящий
момент, зависимость которого от угла крена задана Л4К(6). На-
нося его на ДСО, мы в общем случае получаем две точки пере-
сечения, в которых имеет место равенство кренящего и восста-
навливающего моментов (рис. 2.15). В точке А равновесие бу-
дет устойчивым: отклонение от него в любую сторону на малый
угол 60 ведет к возникновению мо-
мента 6Л4 = |Л4К — Мъ |, стремя-
щегося вернуть судно в исходное
равновесное положение.
Рис. 2.14. Связь метацентрической
высоты с ДСО
м|(
О ®п.а< 8
Рис. 2.15. Определение уг-
лов крена с помощью ДСО
57
Иная картина наблюдается в точке В — малейшее отклоне-
ние от нее на угол 66 > О немедленно приводит к опрокиды-
ванию судна, поскольку в области 6 > 62 кренящий момент
становится больше восстанавливающего; при отклонении на
угол 66 < 0, наоборот, Мв > Мк и опять под действием разни-
цы моментов судно будет уходить из точки В в сторону умень-
-шения угла крена до тех пор, пока в точке А вновь не восста-
новится равновесие, но теперь уже устойчивое. В соответствии
с определением накрененное судно обладает остойчивостью
только в точке А при угле крена 6ь
Представляющие практический интерес зависимости Л4К(6)
часто имеют ниспадающий характер, как это изображено на
рис. 2.15. Такой вид, например, будет у момента от дующего
с постоянной силой бокового ветра: по мере накренения судна
уменьшается площадь его парусности и отстояние ее центра тя-
жести от поверхности воды. Аналогичная картина наблюдается
и при поперечном переносе большого груза массой т иа рас-
стояние Аг/0, когда с учетом конечности угла крена кренящий
момент записывается в виде
MK = tng \ур cos 6.
Принимая с запасом в безопасную сторону кренящий момент
не зависящим от угла крена, на основании предыдущих рас-
суждений придем к выводу, если пересечение зависимости Мк =
= const с ДСО наблюдается при 6 < 6Шах, то равновесие бу-
дет устойчивым, если при 6 > 0тах — неустойчивым. При ста-
тическом действии постоянного по величине кренящего момен-
та трудно ожидать, чтобы в случае, когда Мк < (Л4в)тах,
судно попало в положение неустойчивого равновесия, соответ-
ствующее точке В (рис. 2.15). Максимальную величину восста-
навливающего момента называют иногда еще и запасом остой-
чивости, поскольку она определяет тот предельный статический
кренящий момент, который выдерживает судно, не опрокиды-
ваясь.
Форма ДСО зависит от обводов корпуса и положения центра
тяжести судна. Наряду с диаграммами наиболее распространен-
ного вида, подобными представленным на рис. 2.13—2.15, встре-
чаются S-образные ДСО, а также ДСО с отрицательной началь-
ной остойчивостью. В первом случае (рис. 2.16, а) диаграмма
имеет небольшую начальную метацентрическую высоту, соответ-
ственно появляется еше одна (кроме начала координат) точка
перегиба. Такая ДСО характерна для высокобортных (в том
числе и пассажирских) судов; обеспечивая достаточную остой-
чивость, она способствует умерению — повышению периода бор-
товой качки. Диаграмма, приведенная на рис. 2.16,6, еще не
свидетельствует о недостаточной остойчивости, хотя начальная
метацентрическая высота здесь и отрицательная. Просто судно,
58
имеющее такую ДСО, будет плавать с начальным углом крена'
6о на левый или правый борт: устойчивое равновесие имеет ме-
сто только в точках А и В и отсутствует в точке О — начале ко-
ординат, когда 0 = 0. Такую диаграмму могут иметь повре-
жденные либо неправильно загруженные суда.
Интерполяционные кривые плеч остойчивости формы. В про-
цессе эксплуатации судна его водоизмещение изменяется в ши-
роких пределах; прн неизменном водоизмещении ЦТ может за-
нимать различное по высоте положение; каждой паре заданных
величин V и zg отвечает собственная диаграмма статической
остойчивости. Чтобы не производить громоздких вычислений
для каждого варианта загрузки судна, используют интерполя-
ционные кривые плеч остойчивости формы — зависимости /ф =
= f(V, 0), полученные расчетом по (2.76) для ряда фиксиро-
ванных значений V и 0. Диапазон V выбирают таким, чтобы
он перекрывал все возможные в эксплуатации варианты — от со-
стояния порожнем до водоизмещения в полном грузу, углы кре-
на обычно принимают с интервалом 0= 10° (рис. 2.17). Имея
указанные интерполяционные кривые и зная положение ЦТ, не
составляет труда построить диаграмму статической остойчивос-
ти для любого водоизмещения судна. Плечо остойчивости веса
при этом рассчитывается по формуле (2.77), входящая в нее
величина zc(V) снимается с кривых элементов теоретического
чертежа.
С использованием интерполяционных кривых можно по-
строить и универсальные диаграммы статической остойчивости
(существует несколько разновидностей). Все они позволяют
без каких-либо расчетов найти ДСО для любого заданного со-
стояния загрузки судна.
Рис. 2.17. Интерполяционные кри-
вые плеч остойчивости формы
59
2.5. Динамическая остойчивость
Динамической остойчивостью будем называть способность
судна, не опрокидываясь, воспринимать внезапно приложенные
внешние динамические кренящие моменты.
В практике мореплавания приходится сталкиваться не толь-
ко со статически приложенными, но и с динамическими нагруз-
ками, которые нарастают до полной силы за очень короткий
промежуток времени, почти мгновенно. Пример тому — налетев-
ший на судно шквал, кото-
Рис. 2.18. Действие на судно дина-
мического кренящего момента
рый представляет наибольшую
опасность для остойчивости
всех судов, в особенности ма-
лых. Считая для простоты, что
динамически приложенный мо-
мент от шквала не зависит от
угла наклонения, рассмотрим
его действие на судно, диа-
грамма статической остойчиво-
сти которого задана (рис.2.18).
На участке ОА диаграммы
кренящий момент больше восстанавливающего Л4Д > Л1В, следо-
вательно угловое ускорение 9>0 и судно будет крениться с на-
растающей угловой скоростью 6. В точке Л моменты сравнялись
Мл = Л4В, соответственно 6 = 0, однако угловая скорость до-
стигла максимума б = Отах, и судно, «проскочив» положение
равновесия — угол 6С, по инерции будет наклоняться и далее. На
участке АВ момент М3 > Л4Д, следовательно 6<0 и угловая ско-
рость падает, достигая нуля в точке В, отвечающей динамиче-
скому углу крена 0Д > 6С. Поскольку в этой точке угловое ус-
корение достигло своей максимальной отрицательной величины,
судно, остановившись, затем начнет двигаться в противополож-
ную сторону, к точке А. Совершив вокруг этой точки несколько
колебаний с затухающей за счет сопротивления воды качке
амплитудой, судно остановится н будет плавать со статическим
углом крена 6С.
Приведенные рассуждения поясняют качественную сторону
поведеная судна под действием динамического момента, т. е.
тот факт, что Од > 6С. 4
Динамический угол крена можно определить из условия ра-
венства работ моментов, кренящего и восстанавливающего. Пер-
вая представляет собой произведение постоянного момента Мп
на угол крена 6Д, вторая — сумму элементарных работ восста-
навливающего момента в пределах 0 6 6Д:
60
«д
Мдед=$ AfBd0. (2.83)
oJ
Мерой статической остойчивости является восстанавлива-
ющий момент, а мерой динамической остойчивости служит ра-
бота этого момента. Из (2.83) ясно, что искомая работа суть
площадь диаграммы статической остойчивости в указанных
выше пределах. Отсюда практический метод определения ди-
Рис. 2.19. Определение динамического угла крена (а), и предельного дина-
мического момента (б)
намического угла крена — приравнивание площадей, соответст-
вующих работам кренящего и восстанавливающего моментов
(рис. 2.19,а). Первая из них — площадь прямоугольника OECD,
вторая — площадь фигуры OABD. В связи с тем, что эти пло-
щади имеют общий участок OACD достаточно равенства пло-
щадей треугольников с криволинейными гипотенузами ОЕА
(вертикальная штриховка) и АВС (горизонтальная штриховка).
На рис. 2.19,6 указанным графическим способом определен
предельный динамический момент Мп. пр, который выдержи-
вает судно, не опрокидываясь. Очевидно, что при Мд>Л1д. щ,
работы восстанавливающего момента не хватит для компенса-
ции работы момента кренящего и судно опрокинется.
С учетом того, что Мп, пр < Мв шах, можно сделать и еще
один вывод — динамический момент всегда более опасен, чем
статический.
Работа восстанавливающего момента может быть записана
в виде
в е
Т= J M,dQ = gD \ldG = gD • d, (2.84)
oJ о
где
е
d=\ldb (2.85)
61
— плечо динамической остойчивости; gD = G — сила тяжести
судна.
Графическое изображение функции Т(0) (или, что то же
самое в другом масштабе, d(0))—называется диаграммой ди-
намической остойчивости (ДДО). Из (2.84) и (2.85) следует,
что ДДО суть интегральная кривая по отношению к диаграм-
ме статической остойчивости; в начале координат ось абсцисс
является касательной к ДДО, при 0 = 0шах ДДО имеет точку
перегиба, а при 0 = 0аак — максимум (рис. 2.20). ДДО четная
функция, она симметрична относительно оси оу.
Рис. 2.20. Диаграмма динамической
остойчивости
Рис. 2.21. Определение динамических
углов крена и предельного динами-
ческого момента
Все задачи, связанные с действием на судне динамического
кренящего момента решаются с помощью ДДО проще, чем
с помощью ДСО. Так, на рис. 2.21 показано решение двух рас-
смотренных выше задач. Первая из них заключается в опреде-
лении динамического угла крена, возникающего под действием
на судно заданного момента Мя. Ранее мы выяснили, что ис-
комый угол 0Д находится из условия равенства работ креня-
щего и восстанавливающего моментов. Графическое изображе-
ние работы последнего — ДДО, работы постоянного кренящего
момента — луч, исходящий из начала координат (см. левую
часть выражения (2.83)]. Для его построения достаточно от на-
чала координат отложить единичный угол (0= 1 рад = 57,3°),
на восстановленном из этой точки перпендикуляре отложить
заданный момент Мя и провести прямую через эти две точки.
Там, где эта прямая пересечет ДДО, и выполняется усло-
вие (2.83), т. е. эта точка соответствует искомому углу 0Д. Пре-
дельный динамический момент можно найти, проведя из нача-
ла координат касательную к ДДО — точка касания будет иметь
место при 0д. пр, а сам искомый момент определяется при 0 =
= 1 рад (рис. 2.21).
Большой практический интерес представляет задача о воз-
действии динамического момента (шквала) на качающееся суд-
но. При этом можно рассматривать два крайних случая: в пер-
вом— шквал налетает на судно со стороны вошедшего в воду
борта в момент, когда угол наклонения при качке достигает
62
своего максимального (амплитудного) значения 0о, во втором
случае — со стороны борта, вышедшего из воды. Решение за-
дачи проиллюстрировано на рис. 2.22. Из точки А, соответст-
Рис. 2.22. Действие динамического момента на качающееся
судно
вующей углу крена 0о, проводят два луча, графически пред-
ставляющие работу заданного кренящего момента AfK. Там,
где эти лучи пересекут правую и левую ветви ДДО, будем
иметь динамические углы крена.
Как следует из рис. 2.22, один и тот же момент гораздо
опаснее, если он действует
Этот вывод только на пер-
вый взгляд кажется не-
ожиданным. Суть в том,
что, когда со стороны во-
шедшего в воду борта на-
летает шквал, на судно,
отклоненное от положе-
ния равновесия в ту же
сторону, действует восста-
навливающий момент,
со стороны борта, вошедшего в воду.
Рис. 2.23. Определение опрокидывающего
момента при качке
складывающийся с мо-
ментом кренящим. Ускорение достигает максимального значе-
ния, соответственно велика и угловая скорость, а вместе с ней и
инерция судна. Все это приводит к тому, что при указа- чом со-
четании угла крена прн качке и направления шквала динамиче-
ский угол крена будет иметь наибольшее значение. Гораздо ме-
нее опасен вариант, когда динамический момент действует со
стороны борта, вышедшего из воды.
Впрочем, подобную задачу все мы безошибочно решали
в детстве: раскачивая качели, мы подталкивали их именно в мо-
мент максимального отклонения от равновесия и именно в ту
63
сторону, куда они и без нашего вмешательства собирались дви-
гаться.
С помощью ДДО по аналогии с тем, как это делалось
раньше (см. рис. 2.21), легко определить и предельный дина-
мический (опрокидывающий) момент при качке с амплитудой:
0о (рис. 2.23).
2.6. Нормирование остойчивости судна
Правила Регистра регламентируют остойчивость судна.
В качестве основного критерия принята динамическая остойчи-
вость, поскольку наибольшая опасность опрокидывания возни-
кает при действии на качающееся судно внезапно приложенно-
го момента. Совместное воздействие волн и ветра на судно
учитывается с помощью критерия погоды, представляющего от-
ношение опрокидывающего Мо и динамического кренящего
Мя моментов:
^ = Мо/Мд> 1.0. (2.86)
Как правило, для морских судов достаточно выполнения
требования (2.86), если же суда эксплуатируются в тяжелых
штормовых условиях, критерий погоды специально согласовы-
вается с Регистром, рекомендующим в таких случаях прини-
мать k 1,5.
Кренящий момент от давления ветра находят по формуле
Мд. = р, • Ап • zn, (2.87)
где рв— давление ветра, Па; Лп — площадь парусности судна,
м2; zn—отстояние центра парусности от действующей ватерли-
нии, м.
Расчетное давление ветра регламентируется Нормами ос-
тойчивости Регистра в зависимости от типа судна и его катего-
рии по району плавания (от неограниченного морского и океан-
ского до прибрежного и рейдового) и изменяется в пределах
рв = (1774- 1216) Па.
Опрокидывающий момент для качающегося судна, когда
ветер действует со стороны вошедшего в воду борта, опреде-
ляют по схеме, описанной выше (см. рис. 2.23). Расчетная ам-
плитуда качки 0о определяется в соответствии с рекомендация-
ми Норм остойчивости в зависимости от размеров и формы
судна.
Указывают и основные варианты загрузки судна, для ко-
торых нужно проверять динамическую остойчивость.
Запас остойчивости судна определяется площадью диаграм-
мы статической остойчивости, в связи с чем нормируются и не-
которые элементы ДСО.
64
Максимальное плечо статической остойчивости должно со-
ставлять /тах 0,25 м для судов длиной L < 80 и и /щах
^0,20 м длиной L > 105 м, для промежуточных значений дли-
ны судна применима линейная интерполяция. Регламентиру-
ются и углы максимума ДСО и ее заката, которые соответст-
венно ДОЛЖНЫ отвечать условиям Отах 30°, Озак 60°.
Те же величины для ДСО, построенной с учетом обледене-
ния судна, ДОЛЖНЫ составлять Отах 25°, Озак 55°, для судов
ограниченного района плавания /тах 0,2 м.
Для всех судов начальная метацентрическая высота должна
быть положительной, для некоторых из них Нормы остойчи-
вости специально оговаривают минимально допустимое значе-
ние h. Так, для промысловых судов начальная метацентриче-
ская высота h должна быть не менее 0,05 м или 0,003 ширины:
судна, смотря потому, что больше. Для лесовозов с полным
грузом и полными запасами h 0,1 м, для контейнеровозов —
А 0,2 м (без учета обледенения). Суда длиной L<20 м дол-
жны иметь Л 0,5 м для транспортных и Л 0,35 м для про-
мысловых. Дополнительные требования предъявляются к ос-
тойчивости пассажирских судов: при скоплении всех пассажи-
ров судна на одном борту угол крена не должен превышать по-
ловины угла заливания (когда погружаются иллюминаторы)1
или угла, при котором палуба надводного борта входит в воду
или скула из нее выходит; в любом случае креи не должен пре-
вышать 10°.
С учетом того, что в (2.86) величина опрокидывающего мо-
мента определяется площадью ДСО, фактически получается,,
что Правила Регистра регламентируют именно эту диаграмму.
Таким образом, для суждения об остойчивости судна при за-
данном варианте загрузки необходимо иметь его ДСО, которая
может быть получена только расчетным путем. Однако каждой
ДСО отвечает вполне определенная метацентрическая высота,,
использующаяся для оперативного контроля остойчивости.
Практические методы нахождения метацентрической высоты.
Все эти методы можно разделить на две группы: расчетные и
экспериментальные. Последние в свою очередь могут быть пря-
мыми, служащими для непосредственного определения А (так
называемое кренование судна) и косвенными, когда метацен-
трическую высоту находят на основании известной ее связи
с другими параметрами, которые и измеряют в процессе опыта.
Расчетные методы базируются на использовании зависимо-
стей (2.10) — (2.12). Необходимые параметры подводного объ-
ема zc, zm, г определяют с помощью кривых элементов теорети-
ческого чертежа (см. § 1.3), положение ЦТ судна и его водоиз-
мещение находят путем скрупулезного контроля за приемом и
расходованием груза. Достоинство этих методов — возможность
прогнозирования остойчивости для любого состояния загрузки;
65
недостатки — необходимость постоянного тщательного учета из-
менений нагрузки судна.
Определение метацентрической высоты прямым методом —
кренованием судна — основано на использовании метацентриче-
ской формулы остойчивости (2.17). Замеряется крен судна под
действием известного статического кренящего момента Мк,
а затем рассчитывается искомая метацентрическая высота:
Л = MJGQ. (2.88)
Чаще всего кренящий момент задается перемещением изве-
стного груза на известное расстояние. Кренование — наиболее
надежный метод, однако его использование для текущего кон-
троля остойчивости возможно только для сравнительно неболь-
ших судов.
В основе косвенного метода определения метацентрической
высоты заложена связь между нею и периодом бортовой качки
судна на тихой воде Те (см. гл. 5). При этом используется так
называемая капитанская формула
I\ = cBl-y/h, (2.89)
где В — ширина судна, м; с — эмпирический коэффициент, за-
висящий от формы судна, наличия и размеров скуловых килей
и других выступающих частей.
Значение коэффициента с применительно к морским судам
изменяется в достаточно узких пределах с = 0,70 0,80; для
предварительных оценок можно принимать его значение по про-
тотипу.
Существует ряд эмпирических зависимостей для приближен-
ного определения коэффициента с в функции от основных ха-
рактеристик формы и размеров судна. Одна из них записыва-
ется в виде
с = a V[1 +(Я/В)а](6 + б), (2.90)
где В, Н — ширина и высота борта; 6 — коэффициент общей
полноты; а и Ь — коэффициенты: а = 0,412, 6 = 2,0 — для суд-
на без скуловых килей; а = 0,459, b = 1,6 — с килями.
Наиболее точные результаты с помощью (2.89) получают
при измерении периода бортовой качки без хода на тихой воде.
На практике это применимо только для малых судов. Крупно-
тоннажное судно можно раскачать на ходу повторенной не-
сколько раз перекладкой руля с борта на борт. Самым реаль-
ным способом для всех судов является замер периода бортовой
качки, вызванной волнением моря. Для повышения точности по-
добных измерений применяют специальную методику, хорошие
результаты дает использование технических средств регистра-
ции бортовых колебаний. Очевидно, что капитанская формула
66
(2.79) может использоваться и для нахождения периода качки
при известной метацентрической высоте (см. пример 2.8).
Пример 2.8. Для судна «Инженер» найдем период бортовой качки. Бор*
товые кили отсутствуют, метацентрическая высота Л =1,10 м (см. при-
мер 2.1).
По (2.90) рассчитываем
с = 0,412 7(1 + (Я/В)а] (2.0-|-б) =
= 0,412 д/[ 1 + (4Н-)2) <2’0 + °-619) = °’760
и по (2.89) определяем искомый период
Тй=^=.?’™:18'2 =20,4 с.
• 7л 71,10
Выше шел разговор о нормировании нижнего предела остой-
чивости, в том числе и метацентрической высоты. Однако, как
следует из (2.89), чрезмерная остойчивость также не жела-
тельна •—при больших значениях h снижается период бортовой
качки, возрастают соответствующие угловые ускорения (см,
гл. 5). Последнее обстоятельство не только ухудшает обитае-
мость судна, но иногда может приводить и к разрушению креп-
лений груза и его смещению, что в свою очередь чревато самыми
неблагоприятными, вплоть до катастрофических, последствиями.
Таким образом, рационально ограничивать величину метацен-
трической высоты и сверху. Косвенно это отражается в требова-
нии Норм Регистра проверять остойчивость некоторых судов по
критерию ускорения
fe = 0,3g/a> 1,0, (2.91)
где g— ускорение свободного падения; а — расчетное значение
ускорения при бортовой качке, определяемое по рекомендациям
норм.
Если требование (2.91) не удовлетворяется, эксплуатация
судна может допускаться с ограничением по погоде или при
условии принятия дополнительных мер предосторожности по со-
гласованию с Регистром.
2.7. Непотопляемость
Непотопляемость — способность поврежденного судна сохра-
нять плавучесть и остойчивость, а в ограниченной степени и
другие мореходные качества при затоплении одного или не-
скольких отсеков.
Утрата судном плавучести либо остойчивости означает его
гибель; снижение ходовых качеств, маневренности и ухудшение
5*
67
параметров качки не приводят немедленно к катастрофическим
последствиям. Этим объясняется предпочтение, отдаваемое при
определении непотопляемости, первым двум мореходным каче-
ствам. Строго говоря, непотопляемость не является самостоя-
тельным мореходным качеством — фактически это плавучесть и
остойчивость поврежденного судна с затопленными отсеками.
Естественно, что абсолютно непотопляемого судна построить
невозможно: каждое будет обречено на гибель при достаточно
больших повреждениях. Непотопляемость должна обеспечивать-
ся лишь при некоторых условиях, определяемых назначением
судна, его размерами, районом плавания и т. д. Так, в наиболь-
шей степени обеспечивается непотопляемость военных кораблей.
Среди гражданских судов в этом плане самые жесткие требо-
вания предъявляются к пассажирским судам, от безопасности
которых зависит жизнь большого количества людей.
Непотопляемость обеспечивается конструктивными и орга-
низационно-техническими мероприятиями, а в случае аварии —
борьбой команды за живучесть судна.
Основным конструктивным мероприятием, разрабатываемым
еще на стадии проектирования судна, является создание доста-
точного запаса плавучести и правильного его использования
при повреждении корпуса. Запас плавучести определяется вы-
сотой надводного борта; рациональное подразделение судна на
водонепроницаемые отсеки продольными и поперечными пере-
борками способствует минимальному расходованию этого запа-
са при повреждении корпуса и затоплении одного или группы
помещений.
Гибель судна от потери плавучести происходит в течение
длительного (несколько часов, а иногда и суток) периода, что
позволяет провести работы по спасению экипажа и пассажиров.
При потере остойчивости судно опрокидывается за считанные
минуты, что влечет большое число жертв. Поэтому требуется,
чтобы обреченное судно тонуло, не опрокидываясь, т. е. запас
плавучести должен расходоваться раньше, чем запас остойчи-
вости. Это обстоятельство также учитывается при выборе раз-
меров и расположения водонепроницаемых отсеков.
Среди основных предупредительных организационно-техни-
ческих мероприятий по обеспечению непотопляемости судна
в первую очередь следует назвать систематическую учебу лич-
ного состава; содержание в исправном состоянии всех водоне-
проницаемых закрытий; периодическую проверку на герметич-
ность всех водонепроницаемых отсеков; строгое соблюдение ин-
струкций по приему и расходованию жидких грузов; поддержа-
ние всех технических средств борьбы за живучесть судна
в состоянии, гарантирующем их немедленное использование.
В борьбу за непотопляемость экипаж судна обычно всту-
пает после аварии, при этом он должен определить место и ха-
68
рактер повреждения, предотвратить, по возможности, распро-
странение воды, заделать пробоину, в максимальной степени
восстановить остойчивость поврежденного судна и спрямить его.
Остойчивость восстанавливается путем откачки фильтраци-
онной воды из помещений, смежных с затопленным отсеком,
спуска воды в нижележащие помещения (цистерны), балласти-
ровки судна забортной водой. Спрямление судна подразумевает
уменьшение (в идеале устранение) крена и дифферента. Меро-
приятия по спрямлению судна: осушение затопленных отсеков
после заделки пробоины, перекачка жидких грузов, контрзатоп-
ление неповрежденных отсеков.
Общий принцип, которого придерживаются при борьбе за не-
потопляемость судна, формулируется следующим образом: вос-
становление остойчивости и спрямление судна должны прово-
диться таким образом, чтобы при этом запас плавучести рас-
ходовался в наименьшей степени.
Варианты возможных затоплений прорабатываются еще на
стадии проектирования судна. На их основе составляется спе-
циальная документация в виде, например, «Информации по не-
потопляемости для капитана», где содержатся рекомендации по
наиболее эффективной борьбе за живучесть судна после
аварии.
Расчеты непотопляемости. Основной целью расчетов непо-
топляемости является определение посадки и параметров остой-
чивости судна при затоплении одного отсека или их группы.
Последние можно разделить на две основные категории: сооб-
щающиеся и несообщающиеся с забортной водой. Кроме того,
отсек любой категории может быть заполнен доверху либо
иметь свободную поверхность воды. Наиболее благоприятным,
если в подобной ситуации уместно это слово, является полное
затопление отсека, несообщающегося с забортной водой. Самый
опасный вариант — частично заполненный отсек, сообщающийся
с забортной водой, — в этом случае при изменении посадки мо-
жет изменяться количество влившейся воды.
Расчеты непотопляемости можно проводить двумя теорети-
чески равноценными способами. При использовании первого из
них, влившаяся вода считается принятым жидким грузом. Из-
вестными (см. § 2.2) методами определяются посадка и изме-
нение остойчивости судна (с учетом свободной поверхности, ес-
ли она есть). Соответственно указанный расчет называют спо-
собом приема груза.
При втором способе затопленный отсек рассматривается как
не принадлежащий судну, масса (сила тяжести) которого при
этом остается неизменной, соответственно не меняется и поло-
жение центра тяжести. Определение параметров посадки и ос-
тойчивости аварийного судна сводится к нахождению элемен-
тов (S, /х, /„) нового, с учетом исключенных затопленных отсе-
69
ков, подводного объема корпуса. Этот способ называется спо-
собом постоянного водоизмещения или способом исключения..
Конечные результаты расчетов (посадка и остойчивость суд-
на), полученные обоими способами, одинаковы, выбор того
либо иного диктуется, как правило, категорией отсека. Для
всех типов отсеков, кроме открытого сверху и сообщающегося
с забортной водой, предпочтение следует отдать способу приема
груза.
В расчетах непотопляемости необходимо учитывать, что тео-
ретические объемы затопленных отсеков и площади свободной
поверхности в них будут отличаться от реальных. Дело в том„
что в этих отсеках располагается оборудование, грузы и т. д.,
уменьшающие количество влившейся воды. Для учета указан-
ного обстоятельства вводятся коэффициенты проницаемости объ-
ема и поверхности p.s:
p,„ = v0/v и p,s = s0/s, (2.92)
где Vo, So — реальные значения объема влившейся воды и пло-
щади ее свободной поверхности; v, s — то же, найденное по тео-
ретическому чертежу.
Коэффициенты проницаемости р/ 1,0 зависят от типа от-
сека (МО, грузовой трюм, жилое помещение и т. д.) и опреде-
ляются с использованием рекомендаций Правил Регистра.
Нормирование непотопляемости. Плавучесть поврежденного
судна в значительной степени определяется разделением кор-
пуса на водонепроницаемые отсеки. В связи с этим Правилами
Регистра регламентируются допустимые длины отсеков, кото-
рые представляют произведение предельных длин отсеков на
специальный коэффициент, называемый фактором деления. Пре-
дельная длина находится из условия, чтобы при затоплении дан-
ного отсека, аварийная ватерлиния касалась предельной линии
погружения. Последняя, в свою очередь, располагается на уровне
палубы водонепроницаемых переборок.
Фактор деления практически задает число отсеков, при за-
топлении которых судно остается на плаву. Если этот фактор
лежит в пределах 0,5 < F 1,0, то судно выдерживает затоп-
ление одного, при 0,33 < F 0,5 — двух и при F <Z 0,33 — трех
смежных отсеков. Численное значение фактора деления зада-
ется Правилами Регистра в зависимости от размеров судна,
его типа и назначения. Величина F определяет не только коли-
чество затапливаемых отсеков, но и в неявном виде размеры
аварийного надводного борта. Так, например, при F = 0,70 суд-
но будет выдерживать затопление лишь одного отсека, но ава-
рийная ватерлиния при этом будет располагаться несколько
ниже предельной линии погружения.
Правила Регистра регламентируют также аварийную остой-
чивость поврежденного судна. Правилами, в частности, зада-
70
ются размеры повреждений и коэффициенты проницаемости за-
тапливаемых помещений, которые должны закладываться
в расчет аварийной остойчивости. Основные требования к по-
следней сводятся к следующему: в конечной стадии затопления
поперечная метацентрическая высота не должна быть меиее
0,05 м или 0,03В; диаграмма статической остойчивости до за-
ката должна иметь достаточную протяженность, а ее макси-
мальное плечо должно быть не меньше 0,1 м. До принятия мер
по спрямлению поврежденного судна углы крена не должны
превышать 15° для пассажирских судов и 20—25° для непасса-
жирских, в зависимости от их типа.
При несимметричном затоплении углы крена после спрямле-
ния судна должны быть не более 7° у пассажирских судов при
затоплении одного любого отсека; 12° — для пассажирских су-
дов при затоплении двух и более отсеков и для непассажирских
судов; 17° — для наливных судов и газовозов.
В общем случае посадка и характеристики остойчивости
поврежденного судна, а также вероятность того, что оно не по-
гибнет, зависят от ряда случайных величин. Среди них можно
назвать: размеры пробоины и ее расположение по длине; про-
ницаемость затопленных помещений, нагрузку судна, его по-
садку и остойчивость непосредственно перед аварией; состояние
моря и др. В связи с этим при нормировании непотопляемости,
наряду с перечисленными выше, используют вероятностные под-
ходы, когда события, сопутствующие повреждению судна, счи-
таются не детерминированными, а случайными, подчиняющи-
мися вероятностным законам. Соответственно в качестве слу-
чайных событий рассматриваются и вероятность затопления
какого-либо отсека (или группы отсеков) и вероятность сохра-
нения плавучести и остойчивости аварийного судна.
При подобном подходе к нормированию непотопляемости
рассчитывается так называемый вероятностный индекс деления
на отсеки А. Его значение зависит от числа и протяженности
водонепроницаемых отсеков, их положения по длине судна, ко-
эффициента проницаемости, показателей аварийной остойчи-
вости, а также от ряда других величин. Найденный вероятност-
ный индекс А сравнивается с требуемым для данного судна
Правилами Регистра индексом R, при этом деление на отсеки
считается удовлетворительным, если А R.
Контрольные вопросы
I. Какие силы создают восстанавливающий момент при накренении
судна?
2. Что такое метацентр и почему он так называется?
3. Что является мерой начальной остойчивости судна?
71
Глава 3
СОПРОТИВЛЕНИЕ ДВИЖЕНИЮ СУДНА
3.1. Общие положения
Ходкостью называют способность судна двигаться с задан-
ной скоростью при эффективном использовании мощности энер-
гетической установки. Это мореходное качество в значительной
степени определяет энергетические затраты, сопутствующие
эксплуатации судна, а следовательно и экономические показа-
тели последнего.
На любое тело, движущееся в жидкости, действует сила со-
противления. Чтобы ее преодолеть, к телу необходимо прило-
жить полезную тягу — усилие, равное по величине и противопо-
ложное по направлению. При этом будет обеспечено установив-
шееся движение, т. е. прямолинейное с постоянной скоростью.
Именно такое движение является предметом изучения в курсе
«ходкость».
Устройство, предназначенное для создания полезной тяги,
называется движителем. Таким образом, ходкость включает два
раздела: сопротивление среды движению судна и движители.
Остановимся на первом из них, который изучает закономерно-
сти формирования силы сопротивления, определяющие ее фак-
торы, влияние условий эксплуатации судна.
Сила сопротивления, действующая на движущееся судно,,
зависит от скорости его перемещения, характеристик судна (его
размеров и формы) и характеристик среды (физических свойств
жидкости: ее плотности и вязкости). Большинство существую-
щих судов надводные; они испытывают сопротивление со сто-
роны воды и со стороны воздуха.
Вода — практически несжимаемая жидкость, ее плотность,
можно считать не зависящей от давления и температуры и, как
уже говорилось выше, принимать равной р = 1 т/м3 для прес-
ной и р = 1,025 т/м3 для морской воды. В отличие от плотности
кинематическая вязкость для пресной и соленой воды практи-
чески одинакова, однако она зависит от температуры:
t, °C.......................... 4 8 12 16 20
104 м2/с....................... 1,57 1,39 1,24 1,11 1,01
В нашей стране при расчетах сопротивления/судов темпера-
тура воды считается равной / = 4°С, кинематическая вязкость
при этом составляет v = 1,57 X Ю-6 м2/с.
И плотность и кинематическая вязкость воздуха зависят от
температуры и давления. При атмосферном давлении и темпе-
ратуре f=15°C эти величины принимают значения р =
72
Рис. 3.1. Силы, действующие иа
судно
= 1,23 кг/м3, v= 1,44X10“® м2/с, которые н используются
в расчетах сопротивления.
В несовпадении температур воды и воздуха нет противоре-
чия— практически всегда они не одинаковы. В то же время,
конкретные значения температур, закладываемые в расчеты
ходкости, имеют принципиальное значение — они позволяют
сопоставлять результаты, полученные в различных научных ла-
бораториях, конструкторских бюро и т. д.
По давней традиции в морском флоте для измерения скоро-
сти принята специальная единица — узел, который равен одной
морской миле в час. В свою очередь морская миля составляет
1852 м, что равно 1' земной
дуги по меридиану т. о. 1 уз =
= 1852/3600 = 0,514 м/с. Для
судов внутреннего плавания
скорость обычно измеряется
в километрах в час (км/ч).
Режимы движения судов.
Все силы, действующие на дви-
жущееся судно, могут быть
приведены к главному вектору
и главному моменту, которые располагаются в диаметральной
плоскости (ДП). Последнее объясняется тем, что корпус сим-
метричен относительно ДП, а движение установившееся.
Схема сил, действующих на судно, приведена на рис. 3.1.
Вертикальная составляющая главного вектора — сила поддер-
жания Яг уравновешивает силу тяжести судна G, горизонталь-
ная— сила сопротивления Rx— в свою очередь уравновешива-
ется создаваемой движителем полезной тягой Те- Главный
момент М уравновешивает дифферентующие моменты, возни-
кающие вследствие того, что вертикальные (Rz и G) и горизон-
тальные (Rx и ТЕ) силы противоположного направления
в общем случае действуют вдоль разных линий.
При невысоких скоростях движения сила поддержания прак-
тически полностью определяется гидростатикой, посадка судна
остается такой же, как и без хода.
По мере увеличения скорости все большую роль начинают
играть гидродинамические силы. За счет их вклада в силу под-
держания водоизмещающий объем и осадка уменьшаются, суд-
но подвсплывает, приобретает ходовой дифферент. Дальнейший
рост скорости движения приводит к тому, что корпус практи-
чески полностью выходит из воды и судно начинает скользить
по ее поверхности. При этом гидростатические силы постепенно
уменьшаются до нуля, а сила тяжести судна уравновешивается
гидродинамической силой поддержания.
В соответствии с природой действующих на судно снл под-
держания н характером изменения ходовой посадки различают
73
трн режима движения: плавание, переходный и глиссирование.
Как указывалось выше, режим движения определяется ско-
ростью. Однако в размерном виде скорость может характери-
зовать режим движения лишь конкретного судна. Поэтому в ка-
честве безразмерного критерия используется относительная
скорость — число Фруда по водоизмещению, записываемое сле-
дующим образом:
Frfl = v/Vg ^D/p, (3.1)
где v — скорость движения м/с; £ = 9,81 м/с2 — ускорение сво-
бодного падения; D — водоизмещение (масса) судна, т; р —
плотность воды, т/м3. ____
В (3.1) величина ^D/p= -y/V выступает в роли некоторо-
го обобщенного линейного размера, который в силу неизменно-
сти массы судна (D = const) также остается неизменным при
всех режимах движения. Число Фруда в традиционной записи
Yr = v/^/gl (3.2)
здесь использовано быть не может — рост скорости приводит
к уменьшению погруженного V объема корпуса, соответственно
снижаются и его смоченная поверхность Q и длина L действую-
щей ватерлинии, которая фигурирует в качестве характерного
размера в (3.2).
Режим плавания наблюдается при невысоких относительных
скоростях движения; условия, определяющие его, можно запи-
сать в виде
G = yV; Ffd < 1, 0, (3.3)
где у = pg — удельный вес воды, кН/м3; V—объемное водоиз-
мещение судна без хода (о = 0), м3.
В переходном режиме увеличивается относительная скорость
движения, соответственно изменяется условие равновесия вер-
тикальных сил:
О = уУ, + Ягд; 1, 0<Frfl<3, 0, (3.4)
где Vi < V — погруженный объем корпуса; 7?Гд— гидродинами-
ческая сила поддержания.
Режим глиссирования — скольжения по поверхности воды —
наступает при высоких относительных скоростях и характери-
зуется условиями
О = ЯГД, Fro > 3, 0. (3.5)
Выходу на режим глиссирования в значительной степени спо-
собствует дифферент на корму, возникающий еще в переходном
режиме. Дальнейший рост скорости сопровождается уменьше-
нием угла дифферента и снижением смоченной поверхности
корпуса.
74
При больших относительных скоростях Fro » 3 начинается
рикошетирование, когда скольжение по воде чередуется с под-
летами (как плоский камень, брошенный параллельно поверх-
ности воды). Подобный режим может наступить у высокоско-
ростных спортивных судов. Для того чтобы не допустить отры-
ва их корпуса от воды, принимаются специальные меры.
Границы между режимами достаточно условны; качествен-
ного изменения характера движения при достижении соответ-
ствующих относительных скоростей (FrD = 1,0 и FrD = 3,0) не
происходит.
Основная часть современных кораблей и судов морского
флота движется в режиме плавания, их называют водоизме-
щающими. В эту категорию, наряду с прогулочной весельной
лодкой водоизмещением D = 0,5 т и речным буксиром D = 20 т,
входят самые крупные военные корабли — ударные авианосцы
ОША (например, сЭнтерпрайз», D = 91000 т), и самые круп-
ные суда (например, сверхкрупнотоннажный танкер сБатиллус»,
D =630 000 т).
Переходный режим характерен для не очень больших, отно-
сительно быстроходных судов и кораблей. Так, например, зна-
менитые русские миноносцы типа <Новик» двигались в этом ре-
жиме; соответствующее максимальной скорости число Фруда
FrD = 1,8. Близки к ним в этом плане н современные фрегаты
(табл. 3.1). В режиме глиссирования движутся высокоскорост-
Таблнца 3.1. Характеристики некоторых судов
Судно Водой»-, мещеине D, т Скорость уз Мощность ЭУ, ps- кВт . Относи- тельная скорость % Энерговоору- женность = кВт/т
Навалочное 230000 12,6 13 900 0,270 0,061
Контейнеровоз 77 100 24 42 000 0,605 0,545
Ударный авианосец 80000 35 220 000 0,88 2,70
Пассажирский лайнер 41 500 36 177 000 1,00 4,25
Многоцелевой фрегат 3 320 29 32 000 1,23 9,64
Миноносец «Новик» 1300 37 22 000 1,80 17,0
Глиссирующий катер 70 45 4 600 3,60 66
Судно на подводных 330 62 25 000 3,86 76
нрыльих Судно иа воздушной по- 220 69 11 200 4,61 51
душие
ные катера, относящиеся к судам с динамическим поддержа-
нием (СДП). К тому же классу относятся и другие быстроход-
ные транспортные средства, у которых в расчетном режиме дви-
жения сила тяжести судна уравновешивается динамической
силой поддержания. Это — суда на подводных крыльях (СПК),
75
суда на воздушной подушке (СВП) и суда — экранопланы
(СЭП). Все СДП— сравнительно небольшие суда, водоизмеще-
ние которых на сегодня не превышает 500 т. * Это объясняется
тем, что за скорость приходится очень дорого платить — энерго-
затраты стремительно возрастают с увеличением числа Фруда.
Так, в табл. 3.1 для некоторых судов и кораблей приведены
относительные скорости — Fr^ и соответствующие им значения
энерговооруженности, или удельной мощности, т. е. мощности,
приходящейся на тонну водоизмещения v$ = Ps/D (Ps — мощ-
ность главной энергетической установки, ЭУ; D — водоизмеще-
ние).
На основании анализа данных табл. 3.1 можно прийти к вы-
воду, что создание высокоскоростных крупнотоннажных СДП —
задача на сегодняшний день совершенно нереальная. Подтверж-
дением тому служит и пример 3.1.
Пример 3.1. Оценим мощность механической установки и ее массу, не-
обходимые для того, чтобы навалочное судно водоизмещением D — 230 000 т
(см. табл. 3.1) двигался в режиме глиссирования.
Определим запасы топлива, обеспечивающие дальность плавания S =
= 16 000 миль. Примем Fro = 3,5, vs = 65 кВт/т, найдем требуемую мощ-
ность энергетической установки (ЭУ)
Ps = D X vs = 230 000 X 65 s 15 000 000 нВт.
Принимая для оценки удельную массу ум 40 кг/кВт, что соответ-
ствует современным паротурбинным и дизельным установкам большой мощ-
ности, определим массу ЭУ:
Ми = ум . ps = 40 X 10’’ X 15 000 000 = 600 000 т.
Приняв удельный расход топлива qT яз 0,2 кг/кВт-ч и рассчитав скорость
движения судна
v = FrD • = 3,5л/э,8Х -^230 000/1,05^=85 м/с = 165 уз =* 310 км/ч
определим запас топлина, необходимый для преодоления заданной дально-
сти плавания:
Мт = q^Ps . t = qT. Ps. (З/о) =0,2 X Ю'1 X 15 000 000 X 16 000/165 ss
290 000 т.
Таким образом, суммарная масса ЭУ и запасов топлива почти в 4 раза
должна превысить полное водоизмещение рассматриваемого судна.
3.2. Основные составляющие сопротивления
Из курса гидромеханики известно, что при установившемся
движении в безграничной идеальной жидкости тело не испыты-
вает сопротивления — парадокс Эйлера—д’Аламбера. Силы
* Совсем недавно отечественный флот пополнился самым крупным в мире
СВП водоизмещением 1000 т.
76
вязкости при этом отсутствуют, давление в носовой и кормовой
оконечностях одинаковы — рис. 3.2, а. Если тело приблизить
к свободной поверхности, на последней возникнут волны, рас-
пределение давления вдоль тела изменится (рис. 3.2,6), поя-
вится сила, направленная в сторону, противоположную скоро-
сти,— волновое сопротивление Rw- При движении в вязкой
жидкости на теле создается пограничный слой, линии тока от-
тесняются от поверхности, соответственно в кормовой оконеч-
ности снижается давление (рис. 3.2, в) — тело испытывает вяз-
костное сопротивление Ry.
В свою очередь это сопротивление можно представить со-
стоящим из двух частей — сопротивления трения Rf, и формы
RVP — за счет трансформации эпюры давлений.
На основании' изложенного сопротивление судна, которое
движется, пересекая свободную поверхность воды, можно запи-
сать в виде
Rx = R = Rv + Rw — Rf + Rvp + Rw (3.6)
(в дальнейшем индекс «х» в обозначении сопротивления будем
опускать).
Используя известную из гидромеханики форму представле-
ния сил динамической природы, запишем общую формулу со-
противления:
j? = C-^.Q, (3.7)
где С—коэффициент полного сопротивления судна; Q — пло-
щадь его смоченной поверхности.
Очевидно, что по аналогии с (3.6) и коэффициент полного
сопротивления можно представить в виде суммы составляющих:
С = Су Ч- Сф '== Ср Сур Сф, (3.8)
где Ср, Сур, Cw, Су соответственно коэффициенты сопротивле-
ния, трения, формы, волнового и вязкостного.
Силы вязкостной природы определяются числом Рейнольдса
Re = oL/v (3.9)
— критерием динамического подобия, характеризующим соот-
ношение вязкостных и инерционных сил.
Волнообразование, а следовательно и волновое сопротивле-
ние, зависят от отношения инерционных и гравитационных сил,
т. е. от критерия динамического подобия — числа Фруда
[см. (3.2) J. Тогда коэффициенты сопротивления можно пред-
ставить в виде
C = f(ReFr); Cv = f(Re); CF = f(Re); CVP = f (Re); Cw = f (Fr).
(3.10)
77
Выражение (3.10) записано в предположении справедли-
вости гипотезы о независимости отдельных составляют#*..
В соответствии с этой гипотезой вязкость жидкости не оказы-
вает влияния на процессы волнообразования, а последние,
в свою очередь, не влияют на вязкостное сопротивление. Строго
говоря, данная гипотеза не отвечает действительности — вза-
имное влияние имеет место. Однако для большинства судов оно
настолько мало, что имеет порядок погрешности соответствую-
щих экспериментов и расчетов. Допускаемая гипотезой нестро-
гость с лихвой окупается существенным упрощением экспери-
ментальных и теоретических методов изучения сопротивления.
Доля составляющих сопротивления различной природы за-
висит как от формы судна, так и, в значительно большей сте-
пени, от скорости его движения. При невысоких числах Фруда
(Fr < 0,20) преобладает вязкостное сопротивление, с ростом
относительной скорости волнообразование становится все более
интенсивным, соответственно возрастают волновые сопротивле-
ние и его роль в общем балансе (рис. 3.3). Коэффициент вяз-
костного сопротивления от скорости зависит слабо, незначи-
тельно уменьшаясь с ее ростом. Вследствие различия в числах
Рейнольдса (см. § 3.3) соотношение между коэффициентами
Рис. 3.2. Сопротивление движению
тела: а — в безграничной идеальной
жидкости; б — вблизи поверхности
в идеальной жидкости, в — в безгра-
ничной вязкой жидкости
вязкостного и волнового сопро-
тивления у модели и натурного
судна не одинаково.
Большинство морских тран-
спортных судов проектируется
Рис. 3.3. Составляющие сопротив-
ления
1 — судно; 2 — модель
78
таким образом, чтобы относительная скорость их движения не
превышала Fr = 0,25-j-0,30, когда величина волнового сопро-
тивления не является чрезмерной. Ограничение скорости водо-
измещающих судов и кораблей, вызванное указанными выше
причинами, часто называют волновым барьером.
Увеличение размеров судна при неизменной скорости дви-
жения приводит к снижению числа Фруда и, соответственно,
волнового сопротивления. В этом плане крупные суда имеют
определенные преимущества перед более мелкими.
Вязкостное сопротивление. Тело, движущееся в безграничной
жидкости, испытывает только вязкостное сопротивление.
В наибольшей степени к этому приближаются высоко летящий
самолет, подводная лодка на большой глубине. Тогда вместо
(3.7) и (3.8) можно записать
Я = = Rf 4- Rvp‘, |
C = CV=CF 4-Cyp.J
Прн этом практически все потери энергии происходят в по-
граничном слое — в примыкающей к поверхности тела очень
ограниченной области, где скорости изменяются от нуля до ско-
рости набегающего потока.
При невысоких скоростях, когда число Рейнольдса не пре-
вышает некоторого критического значения (Re<ReKp), режим
течения в пограничном слое ламинарный. Коэффициент сопро-
тивления трения пластины при этом
СРо = 1,328/VR^. (3.12)
Для судов и их моделей характерны двовольно высокие числа
Рейнольдса (Re = 108—1010 — суда; Re=106— 107 — модели),
существенно превышающие критическое значение, которое для
пластины
ReK? = 2,5 • 10®. (3.13>
Таким образом, для ходкости основной интерес представляет
закритический режим течения, турбулентный. При этом толщи-
на пограничного слоя для плоской пластины может быть най-
дена с помощью зависимости
6/L = 0,217 Re_|/7, (3.14>
а коэффициент сопротивления трения определен по одной из
следующих формул:
Прандтля — Шлихтинга
(ЗЛ5>
79
или мадридской
(3J6>
При интересующих нас значениях чисел Рейнольдса
(Re > 106) расчеты с использованием обеих зависимостей (3.15)
и (3.16) дают фактически одинаковые результаты. В отечест-
венной практике применяется формула Прандтля — Шлихтинга.
В носовой части каждого тела имеется участок с ламинар-
ным пограничным слоем. Его протяженность х определяется
равенством местного числа Рейнольдса его критическому зна-
чению:
Re = ox/v = ReKp. (3.17)
Влияние этого участка на коэффициент вязкостного сопро-
тивления не одинаково у судна и его модели (см. пример 3.2).
В связи с этим при моделировании принимаются специальные
меры, способствующие более раннему переходу ламинарного
течения в пограничном слое в турбулентное (см. § 3.3).
Пример 3.2. Оценим длину ламинарного участка в носовой оконечности
судна «Инженер» н его моделей, выполнвениых в масштабе mi = =
— 1 : 100 н т2 = 1 : 25. Скорости движения соответственно равны v =
= 10 м/с; Omi = I м/с; = 2,0 м/с; кинематическая вязкость во всех
случаях v= 1,1-Ю-’ м2/с.
Принимая ReKP = 2,5 X 10s, найдем длину ламинарного участка в об-
щем виде:
*j = v- (ReKp/o) ==2,75 X Ю-1/».
Тогда для судна
хл = 2,75 • 10"2 м; хл/£ = 1,59 - 10"2%.
Для моделей
mi = 1: 100; £Mi = 1,73 м;
хл = 2,75 • 10"’ м; хл/£=15,9%;
тг=1:25; /,м2 = 6,92 м;
хл=1,38- 10"‘ м; хл/£ = 2,0%.
Таким образом, у натурного судна относительная длина ламинарного
участка составляет сотые доли процента и режим его обтекания можно
считать полностью турбулентным, а у малой модели (mi = I : 100) погра-
ничный слой смешанный: в носовой оконечности на 16 % длины он лами-
нарный, а на остальной протяженности — турбулентный.
Точное определение отдельных составляющих вязкостного
сопротивления тела произвольной формы — задача, на сего-
дняшний день не нашедшая окончательного разрешения. Для
практических целей используется допущение о том, что сопро-
тивление трения корпуса судна равно таковому у эквивалент-
ной пластины. В качестве последней принимается условная пла-
S0
стина, длина и площадь которой соответственно равны длине и
площади смоченной поверхности судна и которая движется
с той же скоростью, что и судно. Выполнение указанных усло-
вий обеспечивает равенство чисел Рейнольдса у эквивалентной
пластины и судна (или модели), а следовательно и коэффици-
ентов сопротивления трения, которые могут вычисляться по
формулам (3.12), (3.15) или (3.16). В соответствии с зависи-
мостью (3.7) будут равны и величины сопротивления трения
в целом. Предполагается также, что и судовая поверхность н
эквивалентная пластина являются гидромеханически, или тех-
нически, гладкими, т. е. их шероховатость незначительна и не
оказывает влияния на характеристики пограничного слоя, кото-
рые и определяют сопротивление трения пластины.
Введенное допущение о равенстве коэффициентов сопротив-
ления трения судна и эквивалентной пластины, строго говоря,
не отвечает действительности. Трехмерность корпуса, присущие
ему продольная и поперечная кривизна приводят к увеличению
этого сопротивления на (3—6) %. На практике указанную до-
бавку относят к сопротивлению формы. Расчеты при этом су-
щественно упрощаются, а их погрешность остается в приемле-
мых пределах.
В связи с тем, что числа Рейнольдса у судна и его модели
не одинаковы (см. § 3.3), различаются у них и параметры по-
граничного слоя (см. пример 3.3).
Пример 3.3. Найдем коэффициент сопротивления трения и толщину по-
граничного слоя в кормовой оконечности судна «Инженер» и его моделей.
Исходные данные — те же, что н в примере 3.2. Режим течения во всех
случаях будем считать полностью турбулентным.
Для судна по (3.9) определяем расчетное число Рейнольдса
Re = oL/v=10- 173/1,1 • 10-»= 1,57- 10»,
а по (3.14) и (3.15) находим толщину пограничного слоя
5/£ = 0,217 Re~,/7 = 0,0105; 6=1,82 м
и коэффициент сопротивления трения эквивалентной пластины
CF0= 0,455/ (lg Re)2,58 = 1,49 • IO"3.
Соответствующие величины для моделей составят:
при/ш== 1:100 Re=l • 1,73/1,1 • 10-«= 1,57 • 106;
5/L = 0,0283; 5 = 0,0489 м; Cf0 = 4,12 - 10'3;
прн /п2=1:25 Re=2,0 • 6,92/1,1 10-’ = l,26 • 107;
5/L = 0,021; 5 = 0,145 м; Cfo = 2,90 • IO’3.
Сопоставляя рассчитанные величины можно прийти к сле-
дующим выводам:
1. Как коэффициент сопротивления треиия, так и относи-
тельная толщина пограничного слоя у судна всегда меньше,
чем у модели.
6)115
81
2. В месте расположения движителя поперечный размер
гидродинамического следа судна (т. е. удвоенная толщина по-
граничного слоя в корме) имеет один порядок с диаметром
гребного винта, большая часть площади диска которого нахо-
дится в этом следе. Так, для рассматриваемого судна «Инже-
нер» при диаметре винта D = 6,42 м (см. гл. 4) приблизительно'
70 % площади его диска погружены в спутную струю судна.
Своим возникновением сопротивление формы обязано пере-
распределению давлений в кормовой оконечности судна, про-
исходящим из-за наличия пограничного слоя. Различают тела
хорошо- и плохообтекаемые. У первых основная доля в вязкост-
ном сопротивлении приходится на сопротивление трения, у вто-
рых— на сопротивление формы.
Как правило, корпус судна относится к первой категории
тел, сопротивление формы у него не превышает 15—35 % вяз-
костного. Характер изменения сопротивления формы в функции
от числа Рейнольдса такой же, как и у сопротивления трення.
Последнее обстоятельство позволяет представить коэффициент
вязкостного сопротивления в виде
Су = С,0(1+ *), (3.18)
где k = Сур/Сро—коэффициент формы.
Точное определение коэффициента формы возможно только
средствами достаточно тонкого эксперимента. Приближенно
этот коэффициент находят с помощью эмпирических зависи-
мостей Грэнвилла (В/Т < 3)
6 = 18,7 • b3/(L/B)a (3.19)
или Ватанабе (для судов с полными обводами)
k = 0,017 4- 206/[(L/5)2 • т/B/L]. (3.20)
Коэффициент формы, как это и следует из его наименова-
ния, в значительной степени определяется обводами судна
(S, L/B, В/Т), о количественной его величине дает представле-
ние пример 3.4.
Пример 3.4. Рассчитаем коэффициенты формы для судна «Инженер»
н навалочного (табл. 3.1). Для последнего дополнительно известно: L =
= 291 м, В = 50 м, Г = 18,3 м, б = 0,85.
Для «Инженера» по (3.19) имели
k = 18,7-б2/(L/B)2 = 18,7-0,6192/6,13* =- 0,190,
для навалочного судна по (3.20)
Л = 0,0174-206/[(L/B)2 • V57T] = 0,017 4-20 • 0,85/[(291/50)а • V50/18.3] =
= 0,324.
Сопротивление формы плохообтекаемых тел может дости-
гать всех 100 % —пример тому пластина, поставленная поперек
82
потока, у которой при Re = 10s коэффициент сопротивления
составляет Су = СуР = 2,0. Та же пластина, расположенная по
потоку,— идеальное хорошообтекаемое тело; при том же числе
Рейнольдса ее вязкостное сопротивление на три порядка ниже:
Cv = Cfo = 2-10-3, а Сур == 0.
Таким образом, кроме формы тела на сопротивление сущест-
венное влияние оказывает и его ориентация относительно векто-
ра скорости набегающего потока.
Плохообтекаемые тела могут иметь фиксированную линию
отрыва потока и перемещающуюся. К первой категории отно-
сятся все тела с острыми кромками: пластина поперек потока,
конус и цилиндр, оси которых совпадают с направлением ско-
рости. Однако цилиндр, повернутый на 90°,— пример тела
с перемещающейся линией отрыва.
Судовые корпуса, как правило, имеют достаточно большое
удлинение (L/В 5,5) и относятся к хорошообтекаемым телам,
сопротивление формы у которых невелико (см. пример 3.4).
В случае меньшего удлинения и полных обводов иногда ие уда-
ется избежать отрыва потока, что отрицательно сказывается на
сопротивлении.
Надводная часть корпуса и особенно надстройки водоизме-
щающих судов относятся к телам плохообтекаемым, у них пре-
валирует сопротивление формы.
Волновое сопротивление. Перемещаясь по свободной поверх-
ности воды, судно генерирует волны. На их создание и поддер-
жание затрачивается энергия, которая отбирается у движуще-
гося судна. Эквивалентом этой энергии и является волновое
сопротивление. Его величина зависнит от формы корпуса, осо-
бенно в оконечностях. Для конкретного судна волновое сопро-
тивление интенсивно возрастает с ростом скорости. Необходи-
мое условие волнообразования—наличие свободной поверх-
ности, соответственно тело испытывает волновое сопротивление
только при движении вблизи этой поверхности. При высоких
скоростях движения свободная поверхность не успевает дефор-
мироваться, в этом случае (Fr->oo) волновое сопротивление
отсутствует.
Эпюра распределения давлений вдоль корпуса имеет два
пика в оконечностях и впадину в средней части (см. рис. 3.2).
Близость свободной поверхности трансформирует эту картину,
хотя и не меняет ее качественно. Перепады давления приводят
к вертикальному перемещению воды, по мере прохождения суд-
на жидкость начинает колебаться — образуются судовые волны.
По длине корпуса наблюдается два пика давления — в носу
и корме, оба служат волнообразующими центрами, соответ-
ственно создаются и две группы корабельных волн — носовая
и кормовая. Давления в кормовой оконечности всегда значи-
тельно меньше, чем в носовой (см. рис. 3.2,6, в) — это откла-
83
дывает отпечаток на кормовую группу волн, которая мейее вы-
ражена, чем носовая. При движении в условиях неограничен-
ного по глубине и ширине фарватера каждая группа волн
в свою очередь состоит из двух систем: расходящихся и попе-
речных (рис. 3.4).
Расходящиеся волны имеют относительно короткие гребни,
располагающиеся симметрично по левому и правому бортам
и составляющие с ДП угол, который не зависит от скорости
движения и для всех судов
изменяется в очень узких
пределах: 2р = 36 4- 40°.
Если через середины гребней
этих воли провести линию,
то она составит с ДП угол
3=18 4-20°. Внутри этого
угла располагаются попе-
речные волны, гребни кото-
рых перпендикулярны к ДП
судна. Наблюдатель, нахо-
дящийся на палубе, видит
застывшую картину волн,
Рис. 3.4. Схема волнообразования при
движении судна на глубокое воде
поскольку они распростра-
няются со скоростью движения судна о. Носовая поперечная
волна возникает несколько позади форштевня и начинается вер-
шиной, кормовая начинается впадиной перед ахтерштевнем.
Протяженность поперечных волн возрастает по мере удале-
ния от места зарождения, а их высота соответственно уменьша-
ется, поскольку остается неизменной энергия, затраченная на
волнообразование. Характер последнего определяется относи-
тельной скоростью. При невысоких числах Фруда отмечаются
преимущественно расходящиеся волны. С ростом скорости все
более заметными становятся поперечные волны, интенсивно
возрастает и волновое сопротивление. Пути расходящихся воли
носовой и кормовой групп не пересекаются, соответственно не
наблюдается и их взаимодействия. Иначе обстоит дело с вол-
нами поперечными. Известная из курса гидромеханики зави-
симость между скоростью с и длиной X справедлива и для кора-
бельных волн
X = 2лс2/& = 2nt»7g.
(3.20)
т. е. длина поперечных волн определяется скоростью движения
судна. Поскольку расстояние между волнообразующими цент-
рами практически неизменно, то в зависимости от скорости дви-
жения носовая поперечная волна может прийти к месту зарож-
дения кормовой вершиной либо подошвой. В первом случае
высота волн результирующей системы уменьшится, будет иметь
место благоприятное взаимодействие (интерференция). Когда
84
вершины поперечных волн носовой и кормовой групп наложатся
друг на друга, высота генерируемой корпусом системы кора-
бельных волн возрастет, увеличится и волновое сопротивле-
ние— в этом случае наблюдается неблагоприятная интерфе-
ренция.
В связи с изложенным, зависимость коэффициента волнового
сопротивления от числа Фруда ие является монотонной; там, где
интерференция неблагоприятная, появляются местные горбы,
а где благоприятная — впадины. Подобная картина в наиболь-
шей степени проявляется у судов полных образований. Положе-
ние впадин и горбов практически не зависит от формы корпуса
и определяется только выражением (3.20). Так, для водоизме-
щающих судов неблагоприятные скорости имеют место при
числах Фруда Fr = 0,22; 0,25; 0,30 и Fr = 0,50, когда коэффи-
циент волнового сопротивления достигает абсолютного максиму-
ма; дальнейший рост скорости приводит к его убыванию.
Коэффициент волнового сопротивления зависит от формы
корпуса, особенно в оконечностях. У относительно быстроход-
ных водоизмещающих судов с острыми образованиями волно-
вое сопротивление практически отсутствует вплоть до Fr = 0,20,.
у среднескоростиых — до Fr == 0,15, у тихоходных судов полных
обводов — до Fr = 0,10.
При движении судна под свободной поверхностью характер
волнообразования качественно остается таким же. Теорети-
чески волновое сопротивление исчезает только в безграничной
жидкости, т. е. на бесконечно большой глубине. Однако интен-
сивность волнообразования существенно снижается с ростом
погружения Л, что позволяет с достаточной для практических
целей точностью принимать Cw = 0 при выполнении условия
Л/£>(1,1 Fr —0,15), (3.21)
которое справедливо при 0,15 < Fr < 0,70 т. е. в диапазоне,
перекрывающем скорости движения водоизмещающих судов.
Волнообразование возникает не только на свободной поверх-
ности воды. Аналогичное явление происходит и при движении
тела вблизи границы раздела двух неперемешивающихся
жидкостей различной плотности, например морской воды раз-
ной солености или температуры. Такое движение сопровожда-
ется появлением внутренних волн и, как следствие, увеличе-
нием сопротивления за счет волновой его составляющей.
3.3. Дополнительные составляющие сопротивления
Буксировочная мощность судна
Выше шел разговор о вязкостном и волновом сопротивле-
нии, которые относят к основным составляющим, поскольку они
превалируют в общем балансе сопротивления судна. Однако,
85
•кроме перечисленных, имеют место и другие составляющие со-
противления, называемые дополнительными. К ним относят со-
противление шероховатости, выступающих частей и воздушное.
Зависимости (3.15) и (3.16) справедливы для определения
коэффициента сопротивления трения технически гладкой пла-
стины. Поверхность корпуса судна требованиям такой глад-
кости не отвечает — она обладает шероховатостью. Последнюю
принято разделять иа две категории. К общей, или распреде-
ленной, шероховатости относят неровности, характерные прак-
тически для всей поверхности, вызываемые как особенностями
материала корпуса (сталь, дерево, железобетон, пластмасса),
так и технологией его обработки и окраски. К местной шерохо-
ватости относят сварные швы, заклепочные головки, глухне вы-
резы и ниши. Шероховатости обоих типов несколько изменяют
характер течения жидкости в пограничном слое, а следовательно
и вязкостное сопротивление, увеличивая его. Основная доля
в этом процессе (до 70 % и более) принадлежит общей шеро-
ховатости.
Для количественной оценки распределенной шероховатости
вводят среднеквадратичную высоту бугорков ko- Если эти бу-
горки лежат глубоко в ламинарном подслое пограничного слоя,
т. е. выполняется условие ka <С бл, то шероховатость практи-
чески не оказывает влияния на вязкостное сопротивление, по-
верхность считается гидродинамически гладкой.
Параметры пограничного слоя определяются числом Рей-
нольдса, что позволяет в условии гидродинамической гладкости по-
верхности толщину ламинарного подслоя бл заменить на этот
критерий динамического подобия. Многочисленные исследова-
ния показали, что если имеет место соотношение
(k6/L) - Re < 100, (3.22)
то шероховатость ие изменяет сопротивления, т. е. поверхность
является гидродинамически гладкой.
Имея статистические данные по среднеквадратичной высоте
бугорков, характерных для поверхностей различных судов и их
моделей, можно делать выводы о влиянии общей шероховатости
иа вязкостное сопротивление. Так, например, для поверхности
стальных свежеокрашенных судов среднеквадратичная высота
бугорков может приниматься равной ko~40• 10-3 мм, а для мо-
делей, изготовленных из дерева, парафина или пластика
ko~ (4 -т- 8) • 10-3 мм. При этом поверхность модели является
гидродинамически гладкой, а судна — шероховатой (пример 3.5).
Пример 3.5. Определим состояние поверхности судна «Инженер» и его
модели в масштабе «1=1:25, если для яях соответственно известно
(А«/Ь)с * 2,3-10-7, (Ae/L) « 9-10-7, vc = 10 м/с, vM = 2 м/с, а числа Рей-
нольдса — см. пример 3.3.
«6
Для судна
(k6/L) • Re = 2,3 • IO’7 • 1,57 • 10» = 3,6 • 10» > 100.
Для модели
(Лб/L) • Re = 9 • КГ7 • 1,26 • 107 = ll < 100.
Таким образом, поверхность модели гидродинамически гладкая, судна — нет.
Роль элементов местной шероховатости проявляется дво-
яким образом: с одной стороны, они обладают собственным со-
противлением, а с другой — в прилегающем районе изменяют
характер течения в пограничном слое.
Точное определение сопротивления шероховатости судна
сопряжено со значительными трудностями. Как правило, в прак-
тических расчетах по аналогии с общей формулой сопротивле-
ния используют выражение
/гл = Сл(ро72)Й, (3.23}
где СА — коэффициент сопротивления шероховатости, опреде-
ляемый по статистическим данным.
В общем балансе сопротивление шероховатости современных
морских стальных судов обычно не превышает (10—15) %, по-
этому небольшая погрешность в определении величины Са не
приводит к сколь заметному искажению окончательных резуль-
татов. Однако следует отметить, что это относится к сопротив-
лению свежеокрашенного корпуса, т. е. к условиям сдаточных
испытаний. В процессе эксплуатации лакокрасочное покрытие
частично разрушается, обшивка судна подвергается коррозии,
обрастает морскими организмами. Интенсивность обрастания
зависит от солености и температуры воды, скорости движения
судна и времени его стоянок в портах. Шероховатость поверх-
ности значительно возрастает, соответствующая составляющая
сопротивления может стать сопоставимой с основными. Для
снижения вредных последствий коррозии и обрастания все суда
регулярно проходят докование, в процессе которого их поверх-
ность очищается и окрашивается. Периодичность докования
(одни-два года) устанавливается Правилами Регистра в зави-
симости от типа судна, его размеров, района плавания.
К выступающим частям относят все элементы, выходящие
за обводы корпуса и имеющие размеры, сопоставимые с тол-
щиной пограничного слоя. Это — гребные валы, кронштейны и
выкружки, скуловые кили, рули. Сопротивление этих конструк-
ций имеет в основном вязкостную природу и определяется
сложным взаимодействием пограничного слоя корпуса и высту-
пающих частей. Для определения этого сопротивления чаще
всего прибегают к экспериментальным методам: проводят испы-
тания как отдельных элементов, так и моделей судов с высту-
пающими частями и без них. Оба способа не лишены иедостат-
87
ков: в первом не учитывается взаимное влияние, во втором
в силу различия в числах Рейнольдса не моделируется соотно-
шение размеров выступающих частей и толщины пограничного
слоя (см. § 3.3). Поскольку для морских транспортных судов
сопротивление выступающих частей не превышает (2—10) %,
его обычно рассчитывают по формуле
Ялр = Слр(рр72)-О, (3.24)
где САр — коэффициент сопротивления выступающих частей,
принимаемый по эмпирическим данным в зависимости от раз-
меров судна и количества гребных винтов (см. § 3.3).
Для высокоскоростных СДП сопротивление выступающих
частей может существенно превышать указанные выше преде-
лы. Так, например, для СПК в расчетном режиме движения
всё сопротивление, за исключением воздушного, суть сопротив-
ление выступающих частей (см. § 3.5).
Надводная часть корпуса со стороны воздуха также испы-
тывает сопротивление. Его природа вязкостная, а поскольку
надстройки, как правило, относятся к телам плохообтекаемым,
преобладает сопротивление формы. Наиболее достоверный путь
определения сопротивления воздуха — продувка модели над-
водной части корпуса в аэродинамической трубе. В практи-
ческих расчетах его можно учитывать введением добавки
/?лл = Слл(ро2/2)-0. (3.25)
где САа—коэффициент сопротивления воздуха, определяемый
по статистическим данным.
Для морских транспортных судов сопротивление воздуха
составляет не более (0,5—1,5) % полного, что имеет один поря-
док с погрешностью расчетного либо экспериментального опре-
деления последнего. В связи с этим указанная составляющая
в ряде случаев вообще ие учитывается. Однако н здесь не обхо-
дится без исключений: сопротивление воздуха резко возра-
стает в условиях штормового ветра, а для СВП может быть
преобладающим и в обычных условиях.
Буксировочное сопротивление и буксировочная мощность
судна. Суммируя все рассмотренные выше составляющие, полу-
чаем буксировочное сопротивление в целом
R = Rf + Rvp + Rw + Ra + Rap + Raa- (3.26)
Строго говоря, в (3.26) фигурируют не все составляющие
сопротивления. Так, например, у судов весьма полных обводов
(6 0,8) может наблюдаться сопротивление от разрушения
носовой подпорной волны Rwb, а также индуктивное сопротив-
ление Ri, объясняющееся созданием двух интенсивных вихрей
в носовой оконечности. У многих быстроходных судов нельзя
пренебречь брызговым сопротивлением; СВП свойственна спе-
88
цифнческая составляющая — импульсное сопротивление. Вооб-
ще все эти составляющие имеют место для любого судна, одна-
ко обычно их можно не учитывать без ущерба для точности рас-
четов.
Буксировочным сопротивление называется потому, что если
бы судно буксировалось, то к тросу необходимо было бы
приложить именно такое усилие.
Для обеспечения судну заданной скорости движения нужно
затратить определенную полезную мощность Ре, которую ПО'
аналогии с сопротивлением тоже называют буксировочной
Pe = R-v. (3.27).
С учетом общей формулы сопротивления (3.7) можно запи-
сать в виде
РЕ = С^- • Q • o = C-£--Q-i)s, (3.28).
откуда следует, что буксировочная мощность возрастает про-
порционально как минимум третьей степени скорости. Как ми-
нимум — потому, что коэффициент полного сопротивления С
в свою очередь растет с увеличением скорости (точнее, числа
Фруда).
Мощность главной ЭУ судна Рв всегда больше буксировоч-
ной
Пропульсивный коэффициент т)о характеризует эффектив-
ность работы движителя, учитывает потери энергии как в самом
движителе, так и возникающие за счет его взаимодействия
с корпусом.
Значение пропульсивного коэффициента у современных су-
дов изменяется в достаточно широких пределах t]D = 0,4 -г- 0,8
и в основном определяется коэффициентом полезного действия
движителя (см. гл. 4). Коэффициент полезного действия пере-
дачи мощности зависит от ее типа.
Потери энергии в судовых передачах относительно невели-
ки— для наиболее распространенной прямой передачи от дви-
гателя к движителю они составляют не более (1 4-3) %. Таким
образом, мощность судовой силовой установки Ps практически
полностью определяется гидродинамическими факторами: со-
противлением корпуса, эффективностью движителя и скоростью
движения судна.
89'
3.4. Определение сопротивления экспериментальным путем
Достоверные аналитические методы расчета сопротивления
•судна произвольной формы пока что отсутствуют. Поэтому, как
и раньше, большое внимание уделяется экспериментам, в ходе
которых исследуется сопротивление судна либо его модели.
В первом случае, когда объектом испытаний служит само суд-
но, эксперимент называют натурным, во втором — модельным.
Прямое определение сопротивления современного, особенно
крупного, судна в ходе натурного эксперимента — задача чрез-
<Рис. 3.5. Схема натурного экспери-
мента В. Фруда
вычайной сложности. В прин-
ципе для этой цели могут ис-
пользоваться два метода.
Первый из них, в частности,
был реализован в конце прош-
лого века известным англий-
ским ученым Вильямом Фру-
дом, который проводил букси-
/ —«Актив»; 2 —стрела; 3 — буксировоч- рОВОЧНЫв ИСПЫТаНИЯ КОрВвТа
иый трос: 4- «Грейхаунд». «Грейхауид» (£ = 52 м, D =
= 1000 т) с помощью парового
судна «Актив» (рис. 3.5). Однако такая схема определения со-
противления имеет ряд существенных недостатков: гидродинами-
ческое влияние судна-буксировщика, невозможность устранения
провисания буксирного троса, его рывков и, как следствие, обеспе-
чения установившегося движения. Ну и, наконец, трудно пред-
ставить, с помощью какого судна можно было бы буксировать
контейнеровоз водоизмещением £> = 77 тыс. т (см. табл. 3.1)
с расчетной скоростью vs = 24 уз.
Опыт по прямому определению сопротивления вторым спо-
собом проводился в начале 50-х гг. нашего столетия по совер-
шенно другой, оригинальной методике. На судне «Люси Астон»
были установлены авиационные турбореактивные двигатели-
движители. Их тяга, равная по величине сопротивлению корпу-
са, замерялась с помощью динамометров, через которые дви-
гатели крепились к палубе. Очевидная сложность описанного
эксперимента объясняет его уникальность — подобных опытов
больше никто не проводил. В связи с этим основное значение
в теории корабля приобретает модельный эксперимент. Он поз-
воляет ие только предсказать сопротивление натурного судна,
но и исследовать влияние формы обводов, выбрать их опти-
мальными для конкретного судна и конкретиыххуеловий плава-
ния. Все вновь строящиеся суда в процессе проектирования
проходят стадию модельных испытаний.
Экспериментальные установки для изучения сопротивления.
Существует два принципа моделирования — в прямом и обра-
щенном движении. В первом случае модель, подобно натурному
90
Рис. 3.6. Схема опыто-
вого багссйня
судну, перемещается относительно неподвижной среды, во вто-
ром— модель неподвижна, перемещается рабочая среда.
При моделировании сопротивления чаще всего используется
первый принцип — прямое движение. Моделирование может
проводиться как в опытовых (буксировочных) бассейнах, так и
в условиях открытого водоема.
Основное значение в теории корабля имеют опытовые бас-
сейны— бетонированные каналы, заполненные водой. По спо-
собу буксировки модели бассейны разделяют на две группы:
типа Фруда и гравитационные. Послед-
ние относятся к категории малых — их
длина, как правило, не превышает 50 м.
Соответственно ограничены и длина моде-
лей £и = (34-4) м и скорость буксировки
t>M = (3-j-5) м/с. Перемещается модель
с помощью бесконечного троса, натяну-
того между двумя барабанами. Один
из них, ведущий, через систему блоков
приводится в движение свободно падаю-
щим грузом. Буксировочное усилие,
равное сопротивлению модели, задается
массой груза, скорость движения заме-
ряется. В силу указанных выше ограничений длины и ско-
рости моделей в бассейнах гравитационного типа далеко не
всегда удается получить достоверные данные по сопротив-
лению.
Размеры бассейнов типа Фруда могут быть весьма внуши-
тельными: их длина иногда превышает 1000 м, ширина и глу-
бина достигают соответственно 18 и 8 м. Буксировка модели
длиной до 12 м и водоизмещением до 10 т осуществляется с по-
мощью специальной тележки. Последняя, вопреки своему умень-
шительному названию, имеет большую массу: помимо экспери-
ментального оборудования и вычислительной техники на ней
располагается и группа экспериментаторов. Тележка движется
по рельсовым путям, проложенным вдоль бассейна, чаще всего
по его бортам (рис. 3.6). Скорость тележки может составлять
10—15 м/с и более. Модель крепится к тележке через динамо-
метр, с помощью которого замеряется сопротивление при за-
данной скорости.
Многие опытовые бассейны специализированы, т. е. приспо-
соблены для проведения испытаний определенных типов. Так,
глубоководные бассейны служат для исследования движения
модели в условиях неограниченного водоема. В отличие от них
мелководные предназначены для буксировочных испытаний мо-
делей при ограниченной глубине. Мореходные бассейны исполь-
зуются для исследования параметров движения судна в усло-
виях волнения. Существуют специальные бассейны для испыта-
91
ний моделей быстроходных судов — СДП. Скорости буксировки
в некоторых из иих достигают 50 м/с.
В последнее время начали создавать и кавитационные бас-
сейны; в иих давление над свободной поверхностью воды регу-
лируется— снижается за счет откачки воздуха из герметичного
помещения. Здесь исследуется влияние кавитацнн на характе-
ристики несущих элементов (крыльев), стоек, движителей бы-
строходных судов.
Особое место занимают ледовые бассейны, предназначенные
для испытаний моделей ледоколов и судов активного ледового
плавания в условиях сплошного ледового покрова.
Крупные бассейны типа Фруда—очень дорогостоящие соо-
ружения. Во всех странах мира их насчитывается немногим
более ста. В связи с этим каждый опытовый бассейн, когда это
возможно, стремятся приспособить для проведения испытаний
нескольких из перечисленных выше типов.
Общий недостаток всех опЫтовых бассейнов — ограниченная
длина рабочего участка, на котором модель движется в устано-
вившемся режиме. Как правило, более 2/3 длины бассейна
используется для разгона модели до необходимой скорости и
для ее торможения. Соответственно ограничено и время, в тече-
ние которого можно производить замеры и наблюдения за дви-
жением модели.
В этом плане выгодно отличаются испытания моделей с по-
мощью судна-буксировщика на открытом водоеме. Для исклю-
чения влияния гидродинамического поля судна модель обычно
буксируется впереди него. Время рабочего режима может при
этом выдерживаться достаточно большим. Тем не менее такие
испытания не имеют широкого распространения — они характе-
ризуются существенно меньшей, чем в лабораторных условиях,
точностью замеров; зависят от сезона, погоды и т. д.
Для исследования сопротивления в обращенном движении
служат гидродинамические лоткн, кавитационные н аэродина-
мические трубы. В первых двух установках рабочей средой
является вода, в последней — воздух. В судостроении аэроди-
намические трубы находят ограниченное применение: в них про-
дуваются модели надводной части судна некоторых выступаю-
щих частей и т. д.
Гидродинамические лотки и кавитационные трубы представ-
ляют собой замкнутый контур, в котором циркулирует вода.
Принципиальное отличие — в лотках рабочий участок, где рас-
полагается модель, имеет свободную поверхность. Здесь могут
исследоваться процессы волнообразования, испытываться моде-
ли надводных судов.
Кавитационные трубы не имеют свободной поверхности,
однако давление в рабочем участке может регулироваться, что
позволяет моделировать процессы, связанные с кавитацией.
92
Наибольшее распространение в теории корабля кавитационные
трубы находят при моделировании работы движителей и в пер-
вую очередь гребных винтов.
Требования, предъявляемые к модельному эксперименту.
Полное динамическое подобие при моделировании сопротивле-
ния в установившемся движении при наличии геометрического
подобия модели и натурного судна обеспечивается равенством
определяющих критериев динамического подобия — чисел Фру-
да и Рейнольдса:
FrM = FrH; |
ReM = ReH- J
(3.30)
Определяющими эти критерии являются потому, что сила
сопротивления в данном случае зависит от сил весомости и вяз-
кости (см. § 3.2).
Динамическое подобие, условие которого задается равен-
ствами (3.30), означает, что у модели и натуры должно выпол-
няться и равенство безразмерных коэффициентов сопротивле-
ния:
Си = Сн. (3.31)
В теории корабля моделирование осуществляется в воде,
следовательно vM = vH. При этом одновременное выполнение
условий (3.30) возможно лишь в единственном случае, когда
т = 1 и моделирование сводится к испытанию натурного суд-
на. Таким образом, на практике требования полного динами-
ческого подобия выполнены быть не могут, приходится прибе-
гать к частичному подобию, когда обеспечивается равенство
не всех критериев, а лишь части их. В нашем случае это озна-
чает либо
FrM — Fra', 1
R^m ReH. J
либо
ReM = ReH; )
FrM FrH. J
(3.32)
(3.33)
В соответствии с (3.32) при моделировании по числу Фруда
скорость модели должна быть меньше скорости натуры:
(3.34)
При выполнении (3.33) имеем
= vjm, (3.35)
т. е. модель должна двигаться со скоростью, во много раз пре-
вышающей скорость судна. Это требование с технической точки
93
зрения практически не выполнимо. Однако еще более важно
соображение принципиального свойства: реализация условия
(3.35) означала бы изменение режима движения (см. при-
мер 3.6).
Пример 3.6. Для модели судна «Инженер», выполненной в масштабе
т = 1 :25, найдем скорость, отвечающую (3.34) и (3.35). Расчетная ско-
рость движения судна vs = 21 уэ; v = 10,8 м/с.
При моделировании по числу Фруда имеем
1>м = 1>в Vm = 10,8 V1/25 = 2,16 м/с,
по числу Рейнольдса
= Vnlm = Ю,8 • 25 = 270 м/с.
Объемное водоизмещение модели
7м= Ия • т3 = 28,700/25’= 1,84 м’,
а число Фруда по водоизмещению (при Re„ = Re»)
FrD„ = vj^g -\/V~v = 270/9,81 • 1,84 = 77,5.
Относительная скорость модели при этом многократно превысит гра-
ницу, определяющую начало режима глиссирования —Frp = 3 (см. § 3.1).
Абсолютный рекорд скорости на воде был установлен
австралийцем Кеном Ворби в 1978 г. На гоночном катере «Спи-
рит ов Австралия» он достиг фантастической скорости v —
= 511 км/ч = 142 м/с. При этом относительная скорость соста-
вила Ftd = 43.
Изложенное выше убеждает в невозможности обеспечения
равенства чисел Рейнольдса, поэтому моделирование осуществ-
ляется по числу Фруда. Тогда, основываясь на гипотезе неза-
висимости составляющих сопротивления, можно записать
== CflS’H, Суи^Сун. (3.36)
Как следствие, не будет выполняться и равенство коэффици-
ентов полного сопротивления модели и натуры:
См С„. (3.37}
Таким образом, результаты модельного эксперимента нельзя
без изменений переносить на натуру; их следует пересчитывать
на основании тех или иных допущений. В соответствии с (3.36)
коэффициент волнового сопротивления не нуждается в коррек-
тировке; последняя, чтобы учесть различия в числах Рей-
нольдса, необходима для коэффициента вязкостного сопротив-
ления.
Пересчет вязкостного сопротивления может осуществляться
двумя способами. Идея пер вого из них принадлежит В. Фру-
ду и заключается в разделении коэффициента вязкостного со-
противления на две части, для каждой из которых используется
свой принцип расчета. Первая, основная, часть — сопротивле-
ние трения эквивалентной пластины Cfo', вторая, гораздо менее
94
значимая, сопротивление формы Сур и добавка на влияние кри-
визны ДСр:
Су = Срв + Сур + ДС/?. (3.38)
Величина CF0 однозначно определяется числом Рейнольдса
и находится по (3.15) или (3.16). Относительно второй части
вязкостного сопротивления (Сур + ДСр) делается допущение,
что она не зависит от числа Re и одинакова для модели и на-
туры. Объединив эту часть с коэффициентом волнового сопро-
тивления Cw, вводят так называемый коэффициент остаточного
сопротивления
CR = Cw + (Cyp + &CF), (3.39)
который предполагается зависящим только от числа Фруда.
Очевидная теоретическая иестрогость данного метода — до-
пущение о том, что часть вязкостного сопротивления не зависит
от числа Рейнольдса. Однако для хорошо обтекаемых тел,
к которым относятся и судовые корпуса, указанная часть —
(Сур + ДСу) — относительно невелика, небольшая погрешность
в ее определении практически не сказывается на окончательных
результатах. В связи с этим широко используемый, так назы-
ваемый видоизмененный метод Фруда обеспечивает вполне при-
емлемую точность при расчетах сопротивления по данным мо-
дельного эксперимента. Исключение составляют только некото-
рые суда с очень полными обводами (б > 0,8), для которых по-
грешность может оказаться ощутимой.
Подводя итог изложенному, рассмотрим методику опреде-
ления сопротивления по данным модельного эксперимента, нли,
как часто ее называют, методику пересчета сопротивления с мо-
дели на натуру. По замеренным в процессе эксперимента дан-
ным— скорости модели и ее сопротивлению по (3.7)—находим
коэффициент полного сопротивления модели См. Затем по (3.9)
рассчитываем число ReM и по (3.15) определяем коэффициент
сопротивления трения эквивалентной пластины Сроы- Далее
рассчитывают одинаковый для модели и натуры коэффициент
остаточного сопротивления
Сры — Си — СрОм — Срн. (3.40)
Скорость судна
= (3.41)
находят число ReH по (3.9) и соответствующий ему (3.15) коэф-
фициент сопротивления трения эквивалентной пластины Суон-
Коэффициент полного сопротивления судна определяют с уче-
том дополнительных составляющих — шероховатости, выступаю-
щих частей и воздушного:
Си = Ср0„ + СЯн + (Сд Сар 4- Сда)‘ (3.42)
95
Расчет завершается определением буксировочного сопротив-
ления (3.7) и буксировочной мощности (3.27).
Пример 3.7. Рассчитаем сопротивление и буксировочную мощность-
судна «Инженер» по данным эксперимента, иыполнениого на модели в мас-
штабе т = 1 :25. Площадь смоченной поверхности модели QH = 9,39 м2.
Результаты эксперимента: рм = 2,04 м/с, Ям = 75,4 Н, температура воды
в бассейне t= 16 °C.
С использованием (3.7) находим коэффициент полного сопротивления
модели (рн = 1000 кг/м8):
см = 2VPm^ • = 75,4 • 2/(1000 • 2,042 • 9,39) = 3,85 • 10“3;
с учетом того, что при /= 16 °C, v = 1.11-10-• м!/с рассчитываем по (3.9)
число Рейнольдса модели
ReM = Пм^м/Ум = 2,04.6,92/1,11 - 10"« = 1,27 • 107
н по (3.15) определяем коэффициент сопротивления трении эквивалентной
пластины.
CF0M = 0,455/(lg Re)2,58 = 2,89 . 10’8,
а затем по (3.40) — коэффициент остаточного сопротивления
Сли = Сян = С„ - CFm = (3,85 - 2,89) .10-’ = 0,96 • Ю’8.
Для натурного судна имеем по (3.41) он = = 2,04 V25 = 10,2 м/с,
по (3.9), принимая v„ = 1,57-10_» м2/с (см. § 3.1)
Реи = он£ц/Ун= Ю,2 • 173/1,57 10-*= 1,12 . 10»;
по (3.15) Сгон = 1,55 10-8 н по (3.42), принимая Сд = 0,2-10-8; СЛр =
= 0,Ы0-8 и Слл = 0 (см. § 3.5)
Сн = cfoh + CR„ + СА + САР = (1,55 + 0,96 + 0,2 + 0,1) • Ю"8 = 2,81 • IO'8.
Сопротивление судна «Инженер» на этой скорости (рн = 1,025 т/м8 —
см. § 3.1; й„ = Q»/m2 = 9,39-25» = 5870 м2)
Ян=Сн(Рн^/2)Пн = 2-81 • 1,025 • 10,22/(2 5870) = 880 кН
н буксировочная мощность
= RH • он = 880 - 10,2 = 8980 кВт.
Второй способ пересчета с модели на натуру заключа-
ется в том, что разделение сопротивления на составляющие
осуществляется в соответствии с их физической природой (3.8)
и вязкостное сопротивление пересчитывается целиком с исполь-
зованием выражения (3.18). Неоспоримое достоинство этого
метода — его теоретическая обоснованность. Однако он не на-
ходит широкого применения на практике из-за технической
сложности нахождения с необходимой точностью коэффициента
формы k, а следовательно и коэффициента вязкостного сопро-
тивления в целом.
Выше говорилось о необходимости выполнения геометри-
ческого подобия модели и судна. Оно достигается введением
жестких допусков на все размеры модели. Кроме того, поверх-
ность модели обрабатывается таким образом, чтобы она стала
96
технически гладкой (см. § 3.3). Для обеспечения наиболее пол-
ного соответствия режимов обтекания модели н судна в носо-
вой оконечности модели устанавливается специальный турбу-
лизатор, чаще всего тонкая проволока, укрепленная по пери-
метру первого теоретического шпангоута. Турбулизатор способ-
ствует более раннему переходу к турбулентному течению
в пограничном слое, т. е. ликвидирует вызванное различием
в числах Рейнольдса различие в относительной длине ламинар-
ного участка пограничного слоя (см. пример 3.2).
Для обеспечения наибольшей достоверности расчета сопро-
тивления по данным испытаний модели размеры последней
должны быть максимально возможными. Однако длина модели
ограничена как размерами бассейна, так, иногда, и достижимой
скоростью тележки. Поэтому при планировании модельного
эксперимента приходится идти на определенный компромисс:
увеличивать число ReM и при этом не выходить за пределы
возможностей экспериментальной установки. Этим обстоятель-
ством, в частности, объясняется тот факт, что при изготовлении
моделей не всегда придерживаются стандартных масштабов —
иногда они принимают достаточно экзотические значения т =
= 1: 39, т = 1: 52 и т. д.
3.5. Приближенные способы расчета сопротивления
Изготовление модели возможно лишь тогда, когда теорети-
ческий чертеж судна полностью разработан. Модельные испы-
тания, кроме того, требуют значительных материальных затрат.
Поэтому подобные эксперименты проводят обычно на завершаю-
щем этапе проектирования. На начальных же его стадиях со-
противление рассчитывают, используя приближенные методы.
Последние создаются на базе ранее проведенных эксперимен-
тальных исследований, как натурных, так и модельных. Более
того, все современные методы основаны на результатах испы-
таний систематических серий моделей судов, таких серий, в ко-
торых характеристики формы корпуса изменяются от модели
к модели по определенной системе. Это, кстати, позволяет
использовать материалы испытаний таких серий н сами прибли-
женные методы для оценки влияния на сопротивление соотно-
шения главных размерений, других параметров формы.
Точность расчетов приближенными методами повышается
и за счет их спецнализацнн — предназначения для судов опре-
деленного типа: морских транспортных, промысловых, ледо-
кольных, буксирных и т. д.
Современные методы можно разделить иа три группы.
В первой группе непосредственно рассчитывается полное сопро-
тивление либо буксировочная мощность. Во второй группе
73415
97
приближенно определяется только остаточное сопротивление.
Третья группа включает пересчет сопротивления с прототипа.
Методы первой группы самые простые, для их использова-
ния необходим минимум информации. К ним относится, напри-
мер, способ Адмиралтейских коэффициентов, в основе которого
лежит выражение (3.28). В соответствии с этим способом бук-
сировочная мощность судна определяется по формуле
РЕ = D213 v3s/CE, (3.43)
где D — водоизмещение судна, т; t?s— скорость, уз.; СЕ—Адми-
ралтейский коэффициент.
Величину СЕ обычно принимают по статистическим данным
в функции от размеров судна и его назначения, относительной
скорости движения.
Существуют и другие методы, входящие в первую группу.
Все они имеют не очень высокую точность, поскольку прибли-
женно определяются обе основные составляющие — сопротивле-
ние трения и остаточное. Кроме того, в этих методах, как пра-
вило, в явном виде не фигурируют характеристики формы кор-
пуса [см. (3.43)].
В связи с изложенным методы первой группы сегодня
используют лишь для самых грубых предварительных оценок.
Для более точного определения сопротивления с успехом
применяют методы второй группы. В их основе лежит опреде-
ление коэффициента остаточного сопротивления в виде
СЕ = СЕй • • kt ... knt (3.44)
где Сro = f (б, Fr) — коэффициент остаточного сопротивления ба-
зового судна; k,— коэффициенты влияния, учитывающие разли-
чие в некоторых основных параметрах формы (L/В, В/Т и др.)
у рассчитываемого и базового судов.
Коэффициент сопротивления трения эквивалентной пласти-
ны СЕа = f(Re) определяют по (3.15) нлн (3.16); как н при
пересчете с модели, так же находят и дополнительные состав-
ляющие сопротивления.
Приближенность методов второй группы — в невозможности
учета не только всех особенностей формы проектируемого суд-
на, но и влияния второстепенных с точки зрения сопротивления
величин, таких, как коэффициенты полноты ватерлннин а, ми-
дель-шпангоута 0 и т. д.
Математическая обработка результатов испытаний система-
тических серий моделей и представление их в виде аналити-
ческих зависимостей позволяет использовать приближенные
способы при создании систем автоматизнроваиного проектиро-
вания (САПР) судов.
98
Пересчет сопротивления с прототипа возможен, когда име-
ется судно, по своим параметрам близкое к проектируемому.
При этом пересчитывают либо полное сопротивление, либо
только остаточное. Идеи пересчета соответственно заимствуют
из рассмотренных выше приближенных методов первой или
второй группы.
Для расчета сопротивления необходимо знать площадь смо-
ченной поверхности судна. При отсутствии теоретического чер-
тежа эта площадь может быть приближенно определена по
одной из формул:
□ = £•7(1,36 + 1.136В/Г) (3.45)
□ = L • Т [2 + 1,37 (б — 0,247) В/Т], (3.46)
где L, В, Т — главные размерения судна; 6 — коэффициент
общей полноты.
Формулу С. П. Мурагина (3.45) применяют для относитель-
но быстроходных судов 6 0,65, а формулу В. А. Семекн
(3.46) — для судов с полными обводами 6 > 0,65.
Зависимости (3.45) и (3.46) обеспечивают вполне достаточ-
ную для практических целей точность, их погрешность обычно
не превышает (2—4) %.
Пример 3.8. Найдем приближенное значение площади смоченной поверх-
ности судна <Инженер» и сраиним его с точным.
По формуле (3.45) Мурагина (б < 0,65) рассчитываем £1 = £-Г(1,36 +
+ i,13d-5/T)= 173-9,5(1,36+1,13-0,619-28,2/9,5)= 5650 м2.
Точное значение Qo = 5870 м2 (см. пример 3.7), погрешность составляет
5Q = |(Q0 — £2)/Й | = (5870 — 5650)/5870 = 3,74%.
Коэффициенты дополнительных составляющих сопротивле-
ния СА и САр определяют в соответствии с рекомендациями
отраслевого стандарта (см. ниже).
Надбавка на шероховатость Сл
Длина судна L, и Коэффициент С^-Ю»
50—100 0,4—0,3
150—210 0,2
210—250 0,1
250—300 0
300—350 —0,1
350—400 —0,2
Отрицательные значения СА не имеют физического смысла,
при L > 300 м проявляется корреляционная функция коэффи-
циента СА, приводящего в соответствие данные модельных и
натурных испытаний.
7*
99
Коэффициент сопротивления выступающих частей
Двухвинтовые суда
Коэффициент общей
полноты б
0,55—0,60
0,60—0,70
Количество рулей
1
2
1
2
Одновинтовые суда
Коэффициент Сдр-10*
0,45
0,60
0,40
0,55
Длина судна L. м
50—130
130—200
200—400
Коэффициент C^-IO*
0,15
0,10
0,05
Эти рекомендации основываются на статистическом мате-
риале. Коэффициент воздушного сопротивления при этом при-
нимается Сал = 0.
Приводимые ниже два способа приближенного расчета со-
противления пригодны для большинства водоизмещающих су-
дов морского транспортного флота.
Серия быстроходных и среднескоростных судов. Приближен-
ный метод под таким названием предназначен для определения
сопротивления контейнеровозов, универсальных сухогрузных
и трейлерных судов, в том числе и с горизонтальным способом
грузообработки, а также лихтеровозов. Основные геометри-
ческие характеристики рассчитываемых судов не должны вы-
ходить за пределы:
6 = 0,50 ч- 0,65; L/B = 4,8 -ь 7,0;
L/K1/3 = 4,35 4-7,10; В/Т = 2,0 ч-5,0;
<р = 6/р = 0,565 4- 0,675.
Метод может использоваться для одно- и двухвинтовых су-
дов с V-образнымн либо бульбовымн обводами носовой око-
нечности.
Коэффициент остаточного сопротивления
Cr — С до • &l/b • кв/т, (3-47)
где Сл0(6, Fr) снимается с графиков на рис. 3.7 или 3.8 в зави-
симости от формы носовой оконечности.
Коэффициент влияния находится в виде
<3-48)
где СВо определяется по рис. 3.9 и 3.10 в функции от относи-
тельной длины L/В рассчитываемого судна и стандартного
<в данной серин, для которого L/B = 5,64; коэффициент влия-
100
вечность
ния кв/т — по рис. 3.11 независимо от формы носовой оконеч-
ности.
Серия универсальных среднескоростных судов. Этот прибли-
женный метод может использоваться для расчета сопротивле-
ния большинства морских транспортных судов: среднетоннаж-
101
Рис. 3.9. Зависимость СК(ЦВ, Fr)—V-образная носовая оконеч-
ность
Рис. 3.10. Зависимость Cn(L/B, Fr)— бульбообразная носовая
оконечность
102
них танкеров и навалочников, универсальных сухогрузных су-
дов промыслового флота, некоторых типов судов каботажного
плавания. Модели серии имели U-образиую, промежуточную и
Рис. 3.11. Зависииость Кв/т {BIT, Fr)
V-образную форму носовых шпангоутов. Пределы применимости
метода:
6 = 0,6 0,8; ф = L/V’/з = 5 о ч- 7,5;
L/B = 6,0 ч- 8,5; В/Т = 2,0 4- 5,0;
Ф = 0,612 ч- 0,815.
Коэффициент остаточного сопротивления в данном методе
находится в виде
Сц = Сяо • keir • Ов/т, (3.49)
где СНо(б, Fr) снимается с рис. 3.12.
Коэффициент влияния относительной длины
— ^ф/^фо» (3.50)
где и аф0 снимаются с рис. 3.13 в зависимости от расчетного
значения ф и стандартного фо (б), определяемого по рис. 3.12;
103
104
Рис. 3.14. Зависимости Кв/т (В/Т,Ft) и аЯ/т(В/Т)
коэффициенты kB/r и ав/т, учитывающие влияние отношения
В/Т, находят по рис. 3.14.
3.6. Влияние условий эксплуатации на сопротивление
До сих пор рассматривалось сопротивление при движении
необросшего судна на тихой воде неограниченной глубины и ши-
рины. В наибольшей степени такие идеальные условия отвечают
сдаточным ходовым испытаниям построенного судна на мерной
миле. В повседневной практике условия плавания могут сущест-
венно отличаться от идеальных, в подавляющем числе случаев
сопротивление судна при этом возрастает, порой многократно.
Подобное может происходить при движении судна на морском
волнении, во льдах, в условиях ограниченной глубины.
Сопротивление судна при плавании в штормовых условиях.
Движение судна на взволнованном море сопровождается па-
дением его скорости, иногда весьма значительным. Основные при-
чины, вызывающие это явление, следующие: возрастание сопро-
тивления за счет воздействия на корпус судна волн, а на его
надводную часть ветра, снижение эффективности работы про-
пульсивной установки (двигатель-движитель), рыскание судна
на курсе, наличие поверхностного ветрового течения.
Рис. 3.15 иллюстрирует уменьшение скорости довольно круп-
ного судна в штормовых условиях. По оси абсцисс на рисунке
отложена сила ветра по шкале Бофорта, по оси ординат —
уменьшение скорости. Каждая из кривых соответствует кон-
105
кретному направлению ветра относительно курса судна. Вопре-
ки известным пушкинским строкам
Ветер по морю гуляет
И кораблик подгоняет
попутный ветер несколько увеличивает скорость, только если
его сила не превышает 4—5 баллов. При более сильном ветре
ход судна снижается за счет качки, вызываемой волнением. Ве-
тер всех остальных направлений, кроме попутного, приводит
к падению скорости. Основную роль при этом играет возраста-
ние сопротивления, которое в свою очередь можно представить
в виде суммы дополнительного сопротивления гидродинами-
ческой Raw и аэродинамической Raa
Рис. 3.15. Падение скорости
при движении судна в штор-
мовых условиях
природы.
Увеличение сопротивления кор-
пуса при движении на волнении
главным образом возникает за счет
продольной качки и взаимодействия
ее компонент — килевой и вер-
тикальной качки — между собой.
Меньшее влияние оказывает ди-
фракция воли — отражение их от
корпуса и интерференция волновой
системы, генерируемой качающимся
судном с дифракционным волнением.
Теоретический расчет дополни-
тельного сопротивления судна при
движении на волнении Raw достаточно громоздок н зача-
стую не обеспечивает необходимой точности. Широкое примене-
ние находят полуэмпирические методы, основанные на теорети-
ческих предпосылках и опытных данных. Экспериментальные
исследования проводятся в мореходных бассейнах, моделирова-
ние осуществляется по числу Фруда. С помощью специальных
устройств — волнопродукторов — в бассейне создается волнение
с наперед заданными характеристиками, модель судна букси-
руется по взволнованной поверхности, замеряются ее скорость
и сопротивление.
Испытания чаще всего проводят на встречном регулярном
волнении, когда сопротивление, как правило, достигает макси-
мальной величины. Известный из курса гидромеханики факт,
что энергия волн пропорциональна квадрату их высоты Лв, под-
тверждается и здесь — дополнительное сопротивление иа волне-
нии также пропорционально Лв. Зависит оио и от второго пара-
метра регулярного волнения — длины волны X, однозначно
связанного с круговой частотой волнения а:
о =
(3.53)
106
Дополнительное сопротивление определяют как разность меж-
ду найденным средним значением сопротивления на заданном
волнении /?в и известным сопротивлением на тихой воде
при v = const:
Raw == R* — Л™- (3.54)
Данные испытаний обезразмериваются и представляются
в виде коэффициента дополнительного сопротивления
ГАТ== pg^^/L)' (3,55)
полнительного сопротивления
где Л»— высота волны; L и В — длина и ширина модели.
При фиксированной скорости (Fr = const) величина rAw
зависит только от частоты волнения, достигая максимального
значения в районе резонанса по вертикальной и килевой качке,
периоды собственных колебаний которых для транспортных су-
дов близки. Зависимость rAw(<j) часто называют передаточной
функцией дополнительного сопротивления.
В ряде случаев удобнее вместо частоты оперировать равно-
ценной ей величиной
Vr-»/V^
(3.56)
которая одинакова для судна и его модели.
С ростом скорости движения возрастает и максимум функ-
ции Taw (о), а соответствующая ему частота уменьшается.
Однако при всех интересных с практической точки зрения
числах Фруда максимум rAW располагается в районе VL/X «
~ 1,0, т. е. когда длина волны близка к длине судна (рис. 3.16).
107
Влиянием вязкости иа качку судна и сопровождающие ее
процессы волнообразования можно пренебречь. Поэтому вели-
чина rAw моделируется по числу Фруда и для заданного значе-
ния относительной длины волны Х/L без изменений переносится
с модели на судно.
Реальное морское волнение существенно отличается от ре-
гулярного. Его характеристики рассматриваются как случайные
величины и изучаются с применением вероятностных методов.
Развитое нерегулярное ветровое волнение можно представить
в виде суперпозиции бесконечного множества регулярных волн.
Для описания нерегулярного волнения используется понятие
об энергетическом спектре Sj(a), характеризующем распреде-
ление удельной энергии (квадрата высоты — Л2) волн по часто-
те. Среднее дополнительное сопротивление при движении с по-
стоянной скоростью на нерегулярном волнении находится как
сумма сопротивлений на каждой из бесконечного множества
регулярных волн, составляющих энергетический спектр:
ОФ
Rav = 8pg (B’/L) J Г/v (о) • Sc (a) da, (3.57)
о
где taw(o) —передаточная функция дополнительного сопротив-
ления находится расчетным или экспериментальным путем
и является характеристикой судна; Sj(<t)—энергетический
спектр — характеристика морского волнения заданной баль-
ности.
Обе функции, входящие под интеграл в выражении (3.57),
имеют явно выраженные максимумы, поэтому дополнительное
сопротивление Raw в значительной степени определяется взаим-
ным положением этих максимумов, т. е. отношением частот, им
соответствующих.
Для приближенного расчета дополнительного сопротивления
на волнении существует ряд методов, отечественных и зару-
бежных.
В соответствии с одним из них, предложенным автором со-
вместно с В. Фердинандом, выражение (3.57) может быть пред-
ставлено в виде
Rav = 8,9(1 +4,46)-^-. Л2Д. Fr1’36 • ехр(—3,5Fr) •/(a) • 1 О’, кН,
(3.58)
где 6 — коэффициент общей полноты судна; L, В — его длина
н ширина, м; /(а)—безразмерный интеграл, значение кото-
го находят по рис. 3.17 в зависимости от параметра
a = 0,252 Fr0,143 • VZ/W (3.59)
108
представляющего собой отношение частот соответствующих мак-
симумам энергетического спектра Sj(a) и передаточной функ-
ции taw (о).
Высота волнЗ%-иой обеспеченности А»з% характеризует
силу волнения и определяется в соответствии со шкалой баль-
ности морского волнения, от которой зависит и расчетная ско-
рость ветра:
Степень волнения, баллы ... Ill IV V VI VII VIII
Высота волн Лв3^, М . . . . 1,25 2,0 3,5 6,0 8,5 11,0
Расчетная скорость ветра, м/с 8,0 11 14 19 24 29
Выражение (3.58) можно использовать для определения до-
полнительного сопротивления не очень полных судов (б =
— 0,55 4- 0,75), движущихся на встречном нерегулярном вол-
нении.
Сопутствующий этому волнению встречный ветер вызывает
дополнительное воздушное сопротивление, которое может быть
найдено по формуле
КАА = Слл(рл&/2)-8л, (3.60)
где Саа — коэффициент воздушного сопротивления, рА — плот-
ность воздуха, vA = v -f- vw — скорость воздушного потока,
обтекающего надводную часть судна, равная сумме скоростей
судна v и ветра vw; Sa — площадь проекции надводной части
судна на плоскость мидель-шпангоута.
Если отсутствуют более точные данные (продувки в аэроди-
намической трубе, чертежи судна), то для современных транс-
портных судов можно принимать САл = 0,7, и
Sa = 2,5L, м2 (3.61)
где L — длина судна, м.
Приведенные зависимости (3.58) и (3.60) можно использо-
вать для определения дополнительного сопротивления и оценки
нижней границы потери скорости при плавании судна в усло-
виях шторма заданной бальиости.
Сопротивление судна при движении во льдах. Большинство
судов отечественного флота предназначено для эксплуатации
в ледовых условиях. Они строятся на классы Л и УЛ Регистра,
а суда активного ледового плавания (ледокольно-транспорт-
ные) имеют класс УЛА — усиленный ледовый (арктический).
В зависимости от ледовой обстановки различают два основ-
ных режима движения судна — в сплошном и битом льду. Пер-
вый является расчетным для ледоколов и в меньшей степени
ледокольно-транспортных судов. В битых льдах приходится
плавать всем судам ледового класса, в том числе имеющим
обычные формы корпуса и соотношения главных размерений.
109
Наиболее распространенным при этом является движение в за-
полненном льдом канале, проложенном ледоколом. Сплочен-
ность битого льда определяется отношением площади, занятой
льдинами, к общей площади и измеряется по десятибальной
шкале: сплоченность 8 баллов означает, что 80 % поверхности
воды, покрыты льдом.
При движении во льдах, сопротивление судна во многом
определяется такими характеристиками, как прочность льда, его
толщина, торосистость, заснеженность, коэффициентами трения
льда о корпус и льда о лед и др. Большинство этих харак-
теристик в реальных условиях изменяется в очень широких пре-
Рис. 3.18. Сопротивление при
движении судна в сплош-
ном льду
делах в зависимости от времени года,
района плавания, солености воды и т. д.
Все это затрудняет достоверное про-
гнозирование сопротивления при дви-
жении во льдах, существующие мето-
дики его определения во многом носят
оценочный характер.
В сплошном льду ледокол может
перемещаться непрерывным ходом или
набегами. Последний режим практи-
куется в тяжелых льдах, когда движе-
ние с постоянной, пусть и малой, ско-
ростью без остановок невозможно.
В этом случае движение имеет явно
выраженный циклический характер. Основную роль играют
вспомогательные операции (реверсирование, отход назад, раз-
гон) , непосредственное продвижение во льду едва занимает 10%
времени одного цикла. Этот режим весьма сложен и не под-
дается детальному анализу, на нем мы останавливаться не будем.
При непрерывном движении (os 1 уз) ледокол носом про-
резает лед, разламывает его бортами на отдельные сектора,
притаплнвает, раздвигает и частично разрушает их. Основная
масса обломков льда облегает подводный корпус, часть из них
загоняется под кромки образовавшегося во льду канала. Шири-
на последнего несколько превышает максимальную ширину ле-
докола и обычно составляет Вк ta 1,2В. Канал за ледоколом
практически полностью заполнен битым льдом от ледяного кро-
шева по оси до крупных льдин у сравнительно ровных кромок.
В соответствии с описанными выше процессами можно вы-
делить следующие основные составляющие сопротивления: раз-
рушения льда форштевнем и бортами; притапливаиия, повора-
чивания и раздвигания льдин; трения льда об обшивку корпуса
и льда о лед; гидродинамическое.
Типичная зависимость сопротивления движению в сплошном
льду приведена на рис. 3.18. Экстраполяция этой кривой
в область о = 0 позволяет выделить так называемое прямое, не
110
зависящее от скорости сопротивление Япр и скоростное Яск-
В прямое в основном входит сопротивление разрушения льда
и сопротивление, связанное с силами весового характера (при-
тапливаиие, поворачивание льдин). Скоростное сопротивление
включает сопротивление раздвигания разрушенного льда и со-
противление воды движению судна. Последняя составляющая —
гидродинамическая, как правило, мала по сравнению с ледовым
сопротивлением. С небольшой погрешностью, вызванной разли-
чием в процессах волнообразования, гидродинамическая состав-
ляющая может приниматься такой же, как и иа чистой воде.
Максимальная толщина льда, которую ледокол еще может
преодолевать непрерывным ходом со скоростью va = 1 4- 2 уз,
называется предельной. Она тем больше, чем больше водоизме-
щение ледокола, его энерговооружённость.
При движении в предельных и близких по толщине льдах,
гидродинамическая составляющая сопротивления пренебрежи-
мо мала и ее обычно не принимают в расчет. В этом случае
определению подлежит так называемое чистое ледовое сопро-
тивление Ял.ч. Для его расчета применительно к ледоколам
можно использовать полуэмпирическую зависимость
Ял. , = ВйлН (о,004ор + 3,6уА + 2,5В0’65 -М, кН, (3.62)
где В — ширина судна, м; Лл— толщина льда, м; ар — предел
прочности льда на изгиб, кПа; ул— удельный вес льда, кН/м3;
v — скорость движения, м/с; ц, т]г — коэффициенты, характери-
зующие форму корпуса ледокола.
При отсутствии более точных данных можно принимать
ор = 600 кПа, ул = 8,5 кН/м3, ц = 1,47, т]г = 2,83.
Для судов активного ледового плавания, способных непре-
рывным ходом преодолевать сплошные льды, чистое ледовое
сопротивление может быть приближенно найдено по формуле
Ял. ч = -^-(0,2аркл + 16,8»), кН, (3.63)
где т)1 — коэффициент ледокольности, изменяющийся для раз-
личных судов в пределах тр = 1,1 4- 2,1; остальные величины —
те же что и в (3.62).
Пример 3.9. Найдем чистое ледовое сопротивление отечественного атом-
ного ледокола «Арктика» (L = 136 м, В = 28 м, Т = 11 м) при движении
в сплошных льдах толщиной Лл= 2 м со скоростью v, = 2,5 уз = 1,29 м/с.
По (3.62) рассчитываем
/?л ч=28.2 . 1,47 [0,004 - 600 4- 3,6 - 8,5 - 2 4- 2,5 - 280’65 • 1,29/(1,47 - 2,83)]=
= 5790 кН.
Пример 3.10. Определим чистое ледовое сопротивление ледокольио-
транспортиого судна типа «Норильск» (L = 165 м, В = 24 м, Т = 10,5 м)
111
при движении в сплошных льдах толщиной Лл — 1,2 м со скоростью о» =
= 2 уа = 1,02 м/с. Принимая тц = 1,6, по (3.63) рассчитываем
Ял. ч =-^5-(0,25ОрЛл+ 16,8с) —(24 . 1,2/1,6) • (0,25 • 600-1,2 +
+ 16,8 - 1,02) =2900 кН.
Сопротивление судна, движущегося в битом льду, также
принято разделять на ледовую и гидродинамические части, при-
чем последняя принимается такой же, как и на чистой воде при
данной скорости. Ледовое сопротивление определяется в этом
случае потерей кинетической энергии при соударении корпуса
со льдинами, раздвиганием обломков льда, их деформациями
и трением их друг о друга. Оно может быть приближенно най-
дено по формуле
/?л. Ч = Ул • (В/2)2 • fe, (1 + 2faH (L/B)) +
+ ^гУлГЙлВ (f + aH tg ae) Fr + k^nrhnL tg2 ae • Fr2, кН, (3.64)
где г — средний размер льдин в плане, м; йл— толщина льда, м;
L, В — длина и ширина судна, м; ан — коэффициент полноты
носовой ветви конструктивной ВЛ, ао — угол входа носовой ВЛ,
град; ki, k2, — безразмерные коэффициенты; f — коэффициент
трения обшивки о лед.
Для практики наиболее интересен случай движения транс-
портного судна в канале за ледоколом. Сплоченность битого льда
при этом может считаться равной 8 баллам, безразмерные ко-
эффициенты в (3.64) принимают значения k\ — 0,15; k2 = 5,7;
йз = 4,3. При отсутствии более точных сведений можно ориен-
тироваться на статистические данные о форме ледоколов и су-
дов ледового плавания, согласно которым для первых a«aH =
= 0,69ч-0,76, для вторых a « аи = 0,84-0,81, угол входа носо-
вой ватерлинии для обоих типов судов ао = 20 4- 30°. Коэффи-
циент трения льда о корпус можно принимать f = 0,1, а средний
размер льдин в канале определять в функции от толщины
сплошного льда:
Л, м..................... 0,5 1,0 1,5 2,0
г, м..................... 0,7 1,1 1,3 1,4
Зависимость 3.62 4-3.64 включают ряд параметров (ор, Лл,
г, f и др.), точность определения которых недостаточно высока,
поэтому они могут служить лишь для приближенной оценки
сопротивления судна при движении во льдах.
При моделировании движения судов в ледовых условиях
возникают дополнительные проблемы. Увеличивается коли-
чество определяющих критериев динамического подобия: на-
112
ряду с числом Фруда, требуется удовлетворить и равенство
у модели и натуры чисел Коши
Ch=pu2/E, (3.65)
моделирующих соотношение сил инерции и сил упругости раз-
рушаемого льда, модуль упругости которого Е. Кроме того, не-
обходимо соблюдать геометрическое подобие в толщине льда
и размерах его обломков (прн движении в битом льду), обес-
печить равенство коэффициентов трения f и соотношения плот-
ности льда и воды.
Одновременное выполнение всех этих требований практи-
чески невозможно, соответственно усложняется методика про-
ведения модельного эксперимента и пересчета его результатов
на натуру. Сегодня этот вопрос еще не нашел общепринятого
разрешения; порой эти методики различны в разных исследова-
тельских центрах.
Сопутствуют модельному эксперименту и сложности чисто
технического свойства: перед каждым пробегом модели иа по-
верхности воды нужно наморозить лед заданных параметров.
Исследования ледовой ходкости проводят в специальных ле-
довых опытовых бассейнах, количество которых в мире в по-
следнее время увеличивается пропорционально росту практи-
ческого интереса к проблеме.
Современные самые мощные ледоколы способны преодоле-
вать непрерывным ходом ледяные поля толщиной до 3 м. Плата
за высокую ледопроходимость — существенное увеличение
энерговооруженности по сравнению с обычными судами. Так,
например, атомный ледокол «Арктика> (D = 23 400 т, Ps =
= 55 200 кВт) при умеренной скорости на чистой воде —
os = 21 уз (FrD = 0,645) обладает энерговооруженностью vs =
= 2,4 кВт/т. Иными словами, этот ледокол по энерговооружен-
ности более чем в 4 раза превосходит контейнеровоз (см.
табл. 3.1), хотя их относительные скорости близки.
Сопротивление движению в условиях ограниченного водоема.
Проблема определения этого сопротивления актуальна в основ-
ном для судов внутреннего и смешанного плавания, которые
большую часть времени эксплуатируются в реках, каналах,
мелководных водоемах — озерах, водохранилищах. Примени-
тельно к морским судам влияние мелководья может проявляться
во время ходовых испытаний, проводимых обычно на специаль-
ном полигоне — мерной миле.
Для количественной оценки влияния мелководья в рассмот-
рение вводятся дополнительные параметры: отношение глубины
водоема к осадке судна Н/Т и относительная скорость на мел-
кой воде
FrH = »/VgH- (3.66)
83415
ИЗ
Ограничение водоема по глубине оказывает влияние на все
основные составляющие сопротивления. Стеснение потока
между днищем судна и дном водоема приводит к росту местных
скоростей и соответствующему увеличению обеих составляющих
вязкостного сопротивления. Последнее может повыситься на
20—40 % в зависимости от величины Н/Т.
Однако основную роль в увеличении сопротивления судна
в целом играет волновая составляющая, которая может воз-
расти многократно. Это объясняется тем, что скорость волн на
мелкой воде не может превышать величины
с = л/gH- (3.67>
Скорость распространения судовых волн равна скорости
движения судна, следовательно в области критической скорости
uKp = *JgH (FrH = 1,0) процесс волнообразования должен пре-
терпевать качественные изменения.
Действительно, при невысоких относительных скоростях
FrH < 0,3 характер движения, а вместе с ним и сопротивление
иа мелкой и глубокой воде практически одинаковы; с ростом
скорости картина существенно изменяется. Длина поперечных
волн, образуемых судном, а также угол раствора расходящихся
волн увеличиваются, судовые волны охватывают все большую
поверхность, соответственно возрастают и потери энергии на
волнообразование. При критической скорости (Fra = 1,0) рас-
ходящиеся волны исчезают совсем, образуются две поперечные
волны большой интенсивности, называемые спутными. Особен-
но в этом плане выделяется носовая волна — ее высота при ма-
лых значениях Н/Т может быть настолько велика, что у судна
появится заметный дифферент на корму. Последнее обстоятель-
ство может привести, наряду с сопутствующим ему увеличе-
нием средней осадки, к касанию корпусом дна водоема и даже
его присасыванию к грунту.
Волновое сопротивление при этом (Ргн=1,0) достигает
максимума, возрастая в несколько раз по сравнению с таковым
на глубокой воде. На кривой сопротивления появляется харак-
терный горб.
При закритических скоростях (FrH>l,0) поперечные вол-
ны исчезают в силу ограничения, накладываемого требованием
(3.67). Фронт расходящихся волн искривляется, обращаясь вы-
гнутой стороной к судну, волновое, а вместе с ним и сопротив-
ление судна в целом падают. При дальнейшем росте скорости
(FrH > 1,1 4- 1,2) сопротивление на мелководье становится
меньшим, чем на глубокой воде (рис. 3.19).
Движение судна в мелководных каналах сопровождается
такими же процессами, однако они более ярко выражены. На
увеличение сопротивления существенное влияние оказывает
стесненность потока не только по глубине, но и по ширине. На-
114
ряду с Н/Т, в качестве параметра, характеризующего такую
стесненность, выступает отношение ширины канала к ширине
судна либо отношение площади мидель-шпангоута к площади
поперечного сечения канала. Определенное влияние оказывает
н форма поперечного сечения канала, с точки зрения сопротив-
ления прямоугольная форма имеет преимущества перед трапе-
циевидной, хотя последняя технологичнее.
Прн движении в узком мелководном канале со скоростями,
близкими к критической, создается спутная волна большой
интенсивности и возникает обратный
поток. Обе эти причины ведут к рез-
кому увеличению сопротивления, а так- я
же способствуют размыванию ложа
канала (реки). При закритическихско-
ростях сопротивление интенсивно сни-
жается (рис. 3.19).
Для предохранения берегов и ложа
внутренних водных путей от размыва-
ния ограничивают скорость движения
по ним
«max < 0,55 л/gH-
(3.68) рис 319 Сопротивление
Глубина большей части внутренних
водоемов редко превышает Н = 10 м,
чему соответствует допустимая ско-
рость Отах ~ 20 км/ч. На этой вели-
движению судна
1 — на глубокой воде; 3 — на
мелководье; 3 — в мелководном
канале
чине практически остановился рост скорости водоизмещающих
речных судов еще в начале нашего века. Качественный скачок
произошел с началом использования СПК и СВП, скорости ко-
торых составляют 60—80 км/ч. В расчетном режиме движение
этих судов практически не сопровождается волнообразованием,
поэтому их скорость не ограничивают.
Морским судам иногда также приходится двигаться в кана-
лах и реках, где скорость жестко ограничивается. Эти режимы,
как правило, занимают очень непродолжительное время и не
принимаются в расчет при назначении эксплуатационной ско-
рости.
Однако при проведении ходовых испытаний недопустимо
искажение результатов за счет недостаточной глубины поли-
гона. Поэтому эта глубина не должна быть меньше чем най-
денная по каждой из двух формул:
Hi > 3^/ВТ;
(3.69)
На > 2,75 • (u^/g). (3.70)
Легко убедиться, что выражение (3.70) означает ограниче-
ние относительной скорости величиной Ргн<0,31, когда еще
8*
115
характер волнообразования на мелководье практически не пре-
терпевает изменений.
Пример 3.11. Найдем минимально допустимую глубину на мерной миле
для проведения ходовых испытаний судов «Инженер» н навалочного (см.
табл. 3.1 и пример 3.4).
Дли судна «Инженер» по (3.69) и (3.70) имеем
( Я, = 3.7^ = 3-V28.2.9,5 = 49 м;
Нг = 2,75 • (vj/g) = 2,75 • 212/9,81 = 125 м,
т. е. Нт\п = = 125 м и определяющей при этом является скорость дви-
жения.
Для навалочного судна
/Л=3. л/50- 18,3 = 91 м;
Я2 = 2,75 • 12,62/9.81 =45 м,
т. е. Нтщ = /71=91 м — глубина полигона определяется габаритами судна.
Рекомендации, подобные (3.69) н (3.70), используют и при
выборе размеров модели в ходе проведения буксировочных
испытаний в опытовых бассейнах. Кроме того, по специальным
методикам учитывают н необходимость исключения влияния
боковых стенок бассейна.
Дополнительные требования к модельному эксперименту,
связанному с изучением влияния ограничения фарватера на со-
противление, заключаются в обеспечении геометрического подо-
бия границ потока (Н/Т, Ь/В и т. д.) и не представляют прин-
ципиальных трудностей.
3.7. Сопротивление движению быстроходных судов
с динамическим поддержанием
Сопротивление глиссирующих судов. Более раннему выходу
на расчетный режим н снижению сопротивления при глиссиро-
вании в значительной степени способствует специальная форма
корпуса. С этих позиций оптимальным было бы плоское либо
имеющее небольшую продольную погнбь днище. Однако такие
обводы противопоказаны с точки зрения мореходности — даже
при незначительном волнении корпус испытывал бы большие
ударные нагрузки. Поэтому у глиссирующих судов получила
распространение плоскокилеватая форма днища в сочетании
с транцевой кормой (рис. 3.20). Угол килеватости Р, максималь-
ный у носовых шпангоутов убывает по мере продвижения в кор-
му, а в районе транца достигает своего минимума: р = 0 4- 10°.
Бортовая ветвь шпангоута соединяется с днищевой не плавно,
как у водоизмещающих судов, а с изломом. Отсюда и название
подобных обводов — остроскулые. В некоторых случаях на дни-
116
ще располагают один или несколько поперечных уступов, так
называемых реданов. Некоторые глиссирующие суда имеют и
продольные реданы. Все эти неплавности — острые скулы, тран-
цевая корма, поперечные и продольные реданы — предназначе-
ны для фиксирования отрыва потока в расчетном режиме дви-
жения, предотвращения замыва бортов, транца и элементов
днища, не участвующих в создании гидродинамической силы
поддержания, а следовательно снижения сопротивления кор-
пуса.
Естественно, что все эти острые кромки «генераторы отры-
ва» резко увеличивают сопротивление глиссирующего судна
в режиме плавания и в большей ча-
сти переходного режима (см. § 3.1).
В этих режимах сопротивление
имеет те же составляющие, что и у
водоизмёщающих судов. В расчет-
ном режиме движения при глиссиро-
вании сопротивление корпуса мож-
но представить в виде
= + (3.71)
Рис. 3.20. Обводы глиссирую-
щего катера
где Rf н Rp— соответственно сопро-
тивление трения с учетом шерохова-
тости и давления.
В свою очередь, Rp — это проекция равнодействующей сил
гидродинамического давления на направление движения, т. е.
Rp = G • <р,
(3.72)
где G=yV — сила тяжести судна; <р — угол глиссирования
(дифферента).
Повышенное давление на днище глиссера приводит к волно-
н брызгообразованию, так что может рассматриваться как
сумма брызгового и волнового сопротивлений. С ростом скоро-
сти снижается угол глиссирования, соответственно уменьшается
и сопротивление давления, в основном за счет своей волновой
составляющей. При развитом глиссировании Rp < Rp, т. е.
основную роль в сопротивлении корпуса играет сопротивление
трения. Нелишне вспомнить, что подобная картина имеет место
и для тихоходных и среднескоростных водоизмещающих судов.
Дополнительные составляющие сопротивления — воздушное
RAA и выступающих частей RAP— у глиссирующих судов
в общем балансе играют существенную роль. Особенно это
относится к величине RAp, которая зависит от количества греб-
ных валов и для двух- и трех винтовых котеров может состав-
лять до (20—25) % сопротивления корпуса.
Удельное, отнесенное к силе тяжести судна, сопротивление
глиссирующих судов в режиме плавания и в значительной ча-
117
сти переходного существенно выше, чем у водоизмещающих
судов, — сказывается отрыв потока на всех угловатостях обво-
дов. Однако в расчетном режиме глиссирования эти же обводы
имеют явные преимущества перед хорошообтекаемыми кругло-
скулыми (рис. 3.21).
Сопротивление движению судов иа подводных крыльях.
В расчетном режиме движения условия равновесия СПК
(рис. 3.22) записываются в виде
у„+Гк = 6; )
у 1 -G I I (3-73)
* н • *кр — Ст * *ЦТ> )
где Ун, Ук — подъемные силы носового н кормового крыльев,
/кр — расстояние между крыльями; /цт —отстояние ЦТ судна
от передней кромки кормового крыла, относительно которой
записывается уравнение моментов — второе равенство в (3.73).
Здесь и далее по установившейся традиции, подъемную силу
крыльев будем обозначать буквой У.
Поскольку сила тяжести судна G = const, для выполнения
требований, накладываемых (3.73), при всех скоростях в рас-
четном, крыльевом, режиме движение необходимо обеспечить
условия
Ун = const; Ун = const. (3.74)
Из гидромеханики известно, что подъемная сила крыла
У = Су((юг/2) • S, (3.75)
где Су — коэффициент подъемной силы; S — площадь крыла
в плане.
Начало расчетного режима совпадает с отрывом корпуса от
воды, который происходит при скорости i*o, существенно мень-
шей максимальной расчетной ор.
Для СПК различных типов отноше-
ние этих скоростей может составлять
Рис. 3.21. Удельное со-
противление в функции
от относительной ско-
рости
1 — круглоскулые обеоды;
2 — остроскулые обводы, 3 —
СПК; 4 -СВП
&
Уф____lw >1
Рис. 3.22. Схема сил, действующих
иа СПК в расчетном режиме дви-
жения
118
Vp/vo = 1,3 4-2,5, откуда следует, что величина скоростного на-
пора в (3.75) будет изменяться в 1,7—6,3 раза. Так, например,
для канадского опытного противолодочного корабля на подвод-
ных крыльях «Бра Д’Ор» скорость отрыва vo = 25 уз, а макси-
мальная расчетная vp = 62 уз, т. е. t>P/t>o ~ 2,5.
Обеспечение условия (3.74) при изменении скорости возмож-
но за счет соответствующего в (3.75) изменения величин Су
или S либо их обеих. Из курса гидромеханики известно, что
Су = f (а, Л), (3.76)
где а — угол атаки; H = h/b—относительное погружение; h —
отстояние от входящей кромки до поверхности воды; b — хорда
крыла.
По способу регулировки подъемной силы, т. е. выполнения
требований (3.74), крыльевые системы СПК условно можно раз-
делить на три типа: малопогруженные крылья (МПК), реали-
зующие зависимость Су (Я); пересекающие свободную поверх-
ность крылья (ПСПК), площадь которых зависит от погруже-
ния 5(Я); автоматически управляемые подводные крылья
(АУПК), у которых регулировка подъемной силы осуществля-
ется за счет изменения угла атаки всего крыла Cy = f(a) либо
поворота закрылка. Последний вариант — крыло с закрылком —
находит более широкое применение. Чаще всего АУПК погру-
жены достаточно глубоко, так что влиянием свободной поверх-
ности можно пренебречь.
У судов с неуправляемыми крыльями — МПК и ПСПК — ре-
гулирование подъемной силы возможно только за счет измене-
ния погружения крыльев, соответственно в расчетном режиме
движения посадка СПК изменяется в достаточно широких пре-
делах.
На СПК с АУПК регулировка Су осуществляется за счет
управления глубокопогруженными крыльями (или их закрыл-
ками), посадка судна остается практически неизменной. Прису-
щий этим СПК значительный клиренс — отстояние корпуса от
поверхности воды — облегчает обеспечение заданной мореход-
ности.
Как н у глиссирующих судов, расчетному режиму движения
СПК предшествуют два других — режимы плавания и пере-
ходный.
Сопротивление СПК на первых двух режимах можно запи-
сать в виде
Я == + Rvg + Rap + Raa, (3-77)
где Rh — сопротивление корпуса; RWG — сопротивление крыльев,
Rap и Raa — сопротивление выступающих частей и воздушное
соответственно.
119
В расчетном режиме корпус судна выходит из воды, следо-
вательно
= Rva + Rap + Raa- (3.78)
При расчетах сопротивления СПК крылья выделяют в отдель-
ную статью, а к выступающим частям относят стойки крыльев,
гребные валы и их кронштейны, рули.
Типичная зависимость сопротивления СПК от скорости дви-
жения приведена на рис. 3.23. Характерный горб сопротивле-
ния объясняется тем, что начиная с соответствующей ему ско-
рости корпус начинает выходить
из воды и его сопротивление ин-
тенсивно убывает, превращаясь
в ноль при скорости отрыва и0—
скорости выхода на крылья.
Для облегчения выхода СПК
на расчетный режим его корпус
обычно имеет остроскулые ре-
данные обводы. За счет наличия
развитых выступающих частей
(крыльев, стоек и т. д.) по удель-
ному сопротивлению СПК на
невысоких относительных скоро-
стях существенно проигрывает водоизмещающим и глиссирую-
щим судам, однако в расчетном режиме движения имеет по
сравнению с ними явные преимущества (рис. 3.21).
Вообще говоря, в соответствии с (3.75) за счет выбора необ-
ходимой площади S на крылья можно поставить любое судно,
однако прн малых относительных скоростях это не рационально
(пример 3.12).
Пример 3.12. Оцевим габариты крыльев и сопротивлевие судна «Инже-
нер», если его превратить в СПК, т. е. поставить на крылья.
Для расчета примем верхние границы характерных для современных
СПК значений коэффициента подъемной силы крыльев Су = 0,25 и их каче-
ства К = Су/Сх = 20.
Тогда, рассматривая для простоты одно крыло, т. е. Y = G с помощью
(3.75) найдем его необходимую площадь при расчетной скорости vs =
= 21 уз:
о 26 2 - 288 000 _ „ 2
Суро2 0,25 • 1,025 (0,514 • 21 )2 м *
Считая, что хорда не должна превышать дливу судна, т. е. b = L =
= 173 м, определим размах требуемого крыла
l = S/b= 14 000/173 = 114м,
что почти в четыре раза превышает ширину корпуса.
Ориентировочное значение сопротивления крыла
р ________________р е__________К__________14 400 кН
Kwa — cX 2 20“ 20 ‘
120
что более чем в 14 раз превышает сопротивление водоизмещающего ва-
рианта судна «Инженер», которое на этой скорости составляет R = 1020 кН
(си. § 3.8).
Рассмотренный пример наглядно иллюстрирует тот факт, что
использование подводных крыльев для создания силы поддер-
жания при относительных скоростях, соответствующих режиму
плавания, совершенно неприемлемо, так как требует установки
гигантских по размерам крыльев, а, кроме того, многократно
увеличивает нх сопротивление.
Сопротивление среды движению судов на воздушной подушке.
В отличие от всех остальных судов у СВП отсутствует режим
плавания. Сила поддержания у них создается за счет повышен-
ного давления в воздушной подушке (ВП)—пространстве
между днищем и поверхностью воды. Это давление однозначно
определяется площадью $п ВП и силой тяжести судна:
Pn = G/Sn. (3.79)
Для создания необходимого давления в подушке в нее непре-
рывно нагнетается воздух. Мощность предназначенного для
этой цели вентилятора
Рв = рв •<?/!]-. (3.80)
где Рв = Лрп—напор вентилятора; А>1 — коэффициент, учи-
тывающий потери напора в системе подачи воздуха; Q — расход
воздуха; т]в— КПД вентилятора.
Отсюда очевидна еще одна особенность СВП — даже без
хода, в так называемом режиме парения, затрачивается энер-
гия на поддержание ВП. Для современных СВП можно считать
Рп ¥=/(&), а следовательно и мощность вентилятора остается
практически неизменной на всех режимах движения.
Все мореходные качества СВП, а в первую очередь ходкость,
определяются типом судна. СВП с полным отрывом от поверх-
ности или амфибийные (СВПА) не имеют контакта с водой как
в режиме парения, так и на ходу. Воздух истекает нз ВП по
всему ее периметру, расход его относительно велнк, велика и
мощность вентилятора. Скеговые СВП (СВПС) имеют постоян-
но погруженные в воду узкие боковые корпуса — скеги, пре-
пятствующие истечению воздуха из подушки по бортам судна.
Соответственно снижаются по сравнению с СВПА затраты мощ-
ности на поддержание ВП. Приведенная на рнс. 3.24 схема ил-
люстрирует указанные особенности СВП различных типов.
Для обеспечения при умеренных расходах воздуха требуе-
мой мореходности по контуру ВП устанавливается гибкое
ограждение (ГО), способное подгибаться при прохождении суд-
на над волной. В полном соответствии со своим названием
СВПА могут выходить на берег и передвигаться по суше, нали-
чие ГО позволяет нм преодолевать препятствия.
121
В связи с отсутствием режима плавания у СВП выделяют
только два режима — переходный и расчетный. Это деление
тоже в достаточной степени условное — по аналогии с СПК счи-
тают, что расчетный режим начинается за горбом сопротивле-
ния.
Для обоих типов СВП сопротивление можно записать в виде
R = + Rr + Ri + (3.81)
где Rw, Rr, Ri, Raa — соответственно волновое, остаточное,
импульсное и воздушное сопротивление.
Рнс. 3.24. Схемы СВПА (а) и СВПС (б)
/ — гибкое ограждение; 2 — скег
Точному определению в (3.81) поддается только импульсное
сопротивление
Ri = PxQw, (3.82)
где рд — плотность воздуха.
Физическая суть этой составляющей: затраты энергии на
ежесекундный отбор из окружающей среды необходимого
объема воздуха Q н придание ему скорости v, равной скорости
движения СВП.
Волновое сопротивление объясняется наличием под днищем
СВП области повышенного давления, которая, перемещаясь
вместе с судном, деформирует поверхность и вызывает верти-
кальные колебания воды. Максимум волнового сопротивления
имеет место в переходном режиме, с ростом скорости оно убы-
вает и в расчетном режиме движения СВП практически отсут-
ствует. Характерный горб на кривой сопротивления своим появ-
лением обязан именно волновому сопротивлению.
Остаточное сопротивление включает ряд составляющих раз-
личной природы. Это сопротивление от замыва гибкого ограж-
дения, брызговое, сопротивление взаимодействия внешнего по-
тока с ВП. Для СВПС в их число часто включают н гидроди-
намическое сопротивление скегов.
В зависимости от типа СВП изменяется н роль отдельных
составляющих в общем балансе сопротивления. Различно и
122
соотношение энергетических затрат на создание воздушной по-
душки Р„ и на движение Ре, так у СВПА величина (Рв/Рв) зна-
чительно больше, чем у СВПС.
Удельное сопротивление СВП меньше, чем у других СДП
(см. рис. 3.21), однако суммарные энергетические затраты на
движение имеют одни порядок. Это объясняется необходи-
мостью поддержания ВП.
Сопротивление движению судов-экранопланов (СЭП). При
движении крыла вблизи опорной поверхности — экрана (воды,
земли)— его аэродинамическая подъ-
емная сила возрастает в тем большей
степени, чем меньше расстояние до
экрана. Одновременно за счет индук-
тивного несколько снижается и сопро-
тивление крыла. В результате увели-
чиваются качество, а следовательно и
экономические показатели транспорт-
ного средства, летящего вблизи опор-
ной поверхности. Водная поверхность
в этом отношении имеет явные преиму-
щества перед сушей — на ней отсут-
Рнс. 3.25. Сопротивление
движению судва-экраио-
плана
ствуют горы, леса, другие значи- 1 — стартовый режим; 2 — полет
тельные неровности. Эти обстоятель- н,д водой
ства и привели к идее создания
СЭП. В зависимости от компоновки их принято разделять
на СЭП типа летающее крыло и СЭП самолетного типа. Пер-
вое фактически представляет собой крыло малого удлинения,
второе почти не отличается по форме от обычного само-
лета.
Если СЭП в расчетном режиме околоэкрэнного полета не
имеет контакта с водной поверхностью, оно относится к амфи-
бийному типу, в противном случае может двигаться только над
водой.
Выходу на расчетный режим движения предшествуют стар-
товый, в общем случае включающий, режим плавания н пере-
ходный. В расчетном режиме движения амфибийного СЭП сила
тяжести судна уравновешивается аэродинамической подъемной
силой воздушного крыла, в переходном к ней добавляются си-
лы, действующие на так называемые стартовые устройства,
в качестве которых могут использоваться глиссирующие поверх-
ности, подводные крылья, воздушная подушка либо различные
сочетания этих элементов. Соответственно в зависимости от ре-
жима движения изменяются н составляющие сопротивления
(рис. 3.25). Горбы на кривой /?(и) в переходном режиме своим
появлением обязаны сопротивлению различных элементов стар-
товых устройств, которые с ростом скорости одно за другим вы-
ходят из воды.
123
Максимальное сопротивление СЭП в стартовом режиме
может в два раза и более превышать таковое на расчетной ско-
рости околоэкраниого полета.
Сегодня еще не существует транспортных СЭП большого
водоизмещения, но работы в этом направлении ведутся во мно-
гих странах. Так, в нашей стране рассматривается возможность
создания на базе отечественных боевых экранопланов «Орленок»
(масса около 120 т, скорость 190 уз) и «Лунь» (масса 400 т, скорость
250 уз) конверсионных вариантов транспортных средств гражданского
назначения.
За исключением глиссирующих, суда с динамическим под-
держанием начали строить сравнительно недавно — во второй
половине нашего века. Опыт нх проектирования и эксплуата-
ции пока не нашел обобщения в достоверных приближенных
методах расчета сопротивления, подобных таковым для водонз-
мещающих судов. Поэтому особое значение приобретают экспе-
риментальные исследования, в первую очередь модельные. При
проведении последних в опытовых бассейнах возникает ряд спе-
цифических проблем, связанных с необходимостью обеспечения
изменения в широких пределах посадки СДП н ее регистрации,
за критического обтекания и заданного числа кавитации крыльев
СПК, устранения немоделнруемого воздушного сопротивления
и т. д. Испытания моделей СВП н СЭП должны проводиться не
только в бассейне, но н в аэродинамической трубе, а результаты
таких исследований следует согласовать между собой.
Контрольные вопросы
1. От чего зависит сопротивление судиа при его движении?
2. Какие существуют режимы движения судна?
3. Перечислите основные и дополнительные составляющие сопротивле-
ния судна.
4. Что такое буксировочная мощность судна и как она связана с мощ-
ностью главной энергетической установки?
5. Возможно ли обеспечение полного динамического подобии в модель-
ном эксперименте?
6. Что лежит в основе приближенных методов для определения сопро-
тивления движению судиа?
7. В каких случаях сопротивление судна возрастает по сравнению с дви-
жением иа тихой воде?
8. Почему корпус глиссирующего судиа имеет обводы с острыми об-
разованиями?
9. В каком режиме движения и почему у СПК имеет место горб сопро-
тивления?
10. Какие суда в расчетном режиме движения не имеют контакта с вод-
ной поверхностью?
Глава 4
ДВИЖИТЕЛИ
4.1. Классификация движителей
Движителем называется преобразователь энергии, предна-
значенный для создания полезной тяги ТЕ. Последняя уравно-
вешивает сопротивление R и обеспечивает судну установив-
шееся движение. При этом в общем случае должно выпол-
няться условие
z
LTei^R, (4.1)
где Z — количество движителей; Тщ— полезная тяга i-ro дви-
жителя.
Если все движители одинаковы, то (4.1) преобразуется
к виду ZTE = R', для одновинтового судна это условие записы-
вается Te = R.
К собственному сопротивлению судов специального типа
(буксиров, траулеров) необходимо добавить сопротивление бук-
сируемого судна или устройства: ZTEi = ZRi.
По принципу действия судовые движители принято разде-
лять на два типа: активные н гидрореактивные. Первые для
создания полезной тяги используют энергию движущихся масс
воздуха, вторые — преобразуют энергию механической установ-
ки в энергию поступательного движения судна. Для создания
полезной тяги эти движители используют реакцию отброшенных
масс жидкости. Работа гидрореактивных движителей, как и лю-
бых преобразователей энергии, сопровождается непроизводи-
тельными потерями, в силу чего нх коэффициент полезного дей-
ствия (КПД) всегда меньше единицы.
Активные движители. Особенность всех движителей данного
типа заключается в том, что они либо вообще не потребляют
энергии от судовых источников, либо затрачивают ее значи-
тельно меньше, чем создают для движения судна. Здесь не на-
рушаются фундаментальные законы физики — недостающая
энергия отбирается от ветра. Самым древним активным движи-
телем является парус, сыгравший огромную роль в становле-
нии и развитии цивилизации. В конце прошлого века парус был
вытеснен гндроактнвнымн движителями, приводимыми в дви-
жение механической установкой. Это существенно расширило
возможности флота, раббта которого теперь не зависела от ме-
теорологических условий.
В последнее время наблюдается возрождение интереса
к активным движителям — диалектическая спираль вышла на
125
новый виток. Основных причин тому две: все большее внимание
уделяется энергосберегающим технологиям и проблемам охра-
ны окружающей среды: с точки зрения экологической чистоты
активные движители вне конкуренции. Сегодня в мире насчи-
тывается уже несколько десятков морских транспортных судов,
оборудованных парусами, используемыми чаще всего в качестве
вспомогательных движителей. Среди этих судов — современные
рудовозы японской постройки дедвейтом более 30 тыс. т. Кроме
различных типов парусов (мягких, жестких, объемных и т. д.)
изучаются возможности роторных и турбинных активных дви-
жителей. Первый представляет собой принудительно вращаемый
вертикальный цилиндр, создающий в потоке воздуха подъемную
силу (эффект Магнуса), проекция которой на направление
движения и создает полезную тягу.
Роторный движитель — один из немногих судовых актив-
ных, на работу которого затрачивается энергия, однако она су-
щественно меньше, чем этот движитель отдает на движение
судна.
Ветротурбина вращается под действием потока воздуха
и может служить источником энергии для судового движителя
(например, гребного винта).
Гидрореактивные движители. Гребное весло — самый
древний из них, использующий для создания полезной тяги
мускульную энергию человека. Сегодня он находит применение
лишь на малых прогулочных н спортивных судах.
Гребное колесо — вопреки расхожему мнению имеет
также весьма внушительную историю. Суда, оборудованные
этим движителем, были известны в Древнем Египте и Древней
Греции. В качестве источника энергии на них использовались
люди или животные, обычно ходящие по кругу быки. Не выдер-
жав конкуренции с веслами, гребные колеса в античные време-
на сошли со сцены, чтобы вновь возродиться в XVIII в. в ка-
честве движителя паровых судов. Сегодня гребные колеса нахо-
дят очень ограниченное применение — в основном иа буксирах,
эксплуатируемых в мелководных внутренних водоемах. Основ-
ные недостатки гребных колес: громоздкость, высокая удель-
ная масса (15—30 кг/кВт), рыскание судна при качке.
Гребной винт (рис. 4.1)—движитель, нашедший наи-
большее распространение на современных судах всех типов, что
объясняется рядом достоинств, присущих ему:
1) высоким КПД, достигающим rj0 = 0,7 ч- 0,75;
2) простотой конструкции и небольшой удельной массой
(0,5—2 кг/кВт);
3) слабым реагированием на качку судна;
4) возможностью использования в качестве привода двига-
телей внутреннего сгорания с прямой (т. е. без редуктора) пере-
дачей мощности;
126
5) отсутствием необходимости изменять форму корпуса при
установке движителя.
Обычно гребные винты размещаются в кормовой оконеч-
ности судна, т. е. относятся к категории толкающих. Однако на
судах некоторых типов (отдельных ледоколах, СДП) могут
использоваться и тянущие винты.
Большинство морских транспортных судов имеют одни греб-
ной винт, но на некоторых крупных и относительно быстроход-
ных судах и кораблях число движителей может доходить до
Рис. 4.1. Гребиой
виит
Рис. 4.2. Крыльчатый дви-
житель
четырех. История знает пример, когда на судне «Турбнння»
было установлено девять гребных винтов —по три на каждом
из трех гребных валов.
Наряду с гребными винтами фиксированного шага (ВФШ),
лопасти которых закреплены, широкое применение в последнее
время находят винты регулируемого шага (ВРШ), имеющие
поворотные лопасти. ВФШ иногда выполняются со съемными
лопастями (на ледоколах, судах активного ледового плавания).
Крыльчатый движитель занимает особое место в ря-
ду гидрореактивных движителей — он одновременно может слу-
жить и органом управления. Этот движитель представляет со-
бой барабан, установленный заподлицо с днищем (рнс. 4.2). По
окружности барабана располагаются лопасти — крылообразные
тела, число которых изменяется от четырех до восьми. Барабан
вращается вокруг вертикальной оси, лопасти совершают колеба-
тельные движения относительно барабана. Таким образом ло-
пасть одновременно участвует в трех движениях — поступа-
тельном, вместе с судном, вращательном, вместе с барабаном,
и колебательном относительно него. В зависимости от закона
управления лопастями крыльчатый движитель может создавать
упор в любом направлении в плоскости своего диска, т. е. слу-
жить и органом управления. Судно, оборудованное двумя крыль-
127
чатыми движителями, может перемещаться лагом, разворачи-
ваться на месте. Кроме того, этот движитель позволяет произ-
водить реверс судна (см. § 4.11) без реверса механической
установки. Повышенные маневренные качества — основное до-
стоинство судов с крыльчатым движителем. Вместе с тем, на
всех режимах движения этот движитель может быть приведен
в соответствие с двигателем (см. § 4.10). Тем не менее, крыль-
чатый движитель не находит широкого применения, так как
обладает рядом существенных не-
Рис. 4.3. Водометный движи-
тель быстроходного судна
достатков:
1) сложностью конструкции н
большой (5—20 кг/кВт) удельной
массой;
2) ограничением передаваемой
на один движитель мощности;
3) сравнительно невысоким
КПД;
4) ограничением скорости из-за
опасности кавитации.
Водометный движитель
имеет водопроточный канал и насос,
засасывающий воду через приемное
отверстие, ускоряющий ее и выбра-
сывающий через сопло. Рабочим органом водометного движи-
теля чаще всего является осевой насос — вннт в трубе.
Специальное реверсивно-рулевое устройство изменяет направ-
ление струи, истекающей нз сопла, что обеспечивает
судну необходимую маневренность. Водометный движитель
может иметь подводный, полуподводный либо атмосферный
выброс струи. Первые два типа находят применение на водо-
измещающнх судах, эксплуатирующихся на мелководных или
засоренных (лесосплав) водоемах. Суда эти, как правило, ха-
рактеризуются умеренными скоростями движения, при которых
КПД водометных движителей существенно ниже, чем КПД
гребных винтов.
Водометы с атмосферным выбросом (рис. 4.3) в последнее
время используются на быстроходных СДП — глиссирующих
судах, СПК, СВП. Дело в том, что с ростом скорости КПД водо-
метного движителя увеличивается. Этим свойством обладают
все гндрореактивные движители (см. § 4.2), но до определен-
ного предела, пока отсутствует кавитация. Водометный движи-
тель единственный, у которого кавитация может быть отдалена
до скоростей vs = 100 уз и более. Это достигается за счет уста-
новки друг за другом нескольких ступеней (насосов), нагрузка
между которыми распределяется так, чтобы кавитация отсут-
ствовала. Поэтому водометный движитель, уступающий по
эффективности гребному винту при умеренных скоростях, с их
128
ростом до vb = 55 -г- 60 уз имеет КПД, превышающий таковой
у всех других движителей.
Перечисленные выше гидрореактивные движители относятся
к категории лопастных — в качестве рабочих элементов все они
имеют крыловидные тела — лопасти.
Газоводометный движитель в этом плане является
исключением. Рабочим телом в нем служит газ (сжатый воздух
либо пар высоких параметров). Поступая в профилированный
водопроточный канал, газ расширяется и с повышенной ско*
ростью выбрасывает из сопла воду, создавая полезную тягу.
Неоспоримые преимущества газоводометного движителя:
1) простота подвода энергии (исключаются двигатель, ре-
дуктор, валопровод);
2) отсутствие вращающихся деталей и соответственно опас-
ности нх кавитации;
3) весьма низкие массогабарнтные характеристики.
Однако газоводометный движитель в связи с низкой эффек-
тивностью пока не находит применения — его КПД не превы-
шает 30—40 % н имеет тенденцию к падению с ростом скоро-
сти. Иногда, в силу перечисленных достоинств, оправдано ис-
пользование газоводометного движителя в качестве второй
ступени обычного водомета.
Выше перечислены только основные типы движителей. Одна-
ко существует большое количество конструкций, не находящих
широкого применения в силу несовершенства, сложности, недо-
статочной разработанности. Среди них можно назвать гусеничный
и шнековый движители, «машущее крыло», «рыбнй хвост», а также
проекты «экзотических» движителей типа воздушных змеев и аэро-
статов, запускаемых в верхние слои атмосферы, и т. д.
4.2. Краткие сведения из теории движителей
Теория идеального движителя. Все гидрореактивные движи-
тели действуют по одному принципу, поэтому рассмотрим наи-
более общие закономерности, характеризующие их работу. Этой
цели служит теория идеального движителя, в которой приняты
следующие допущения:
1) жидкость идеальная, безграничная, несжимаемая;
2) движитель — тонкий проницаемый диск;
3) скорость равномерно распределена в поперечном сеченни
струи и в диске движителя;
4) упор создается за счет подвода к движителю внешней
энергии, обеспечивающей скачок давления в его диске; скорость
в струе, под действием этого скачка, изменяется непрерывно.
Потери мощности происходят только из-за увеличения кине-
тической энергии жидкости, протекающей в трубке тока, охва-
93415
129
тывающей движитель, т. е. на создание так называемых вызван-
ных осевых скоростей. В силу первого допущения отсутствуют
вязкостные потерн, в силу второго не учитывают конструктив-
ные особенности реального движителя н потерн энергии, свя-
занные с ними.
На бесконечности перед движителем (рис. 4.4, сечение I—I)
скорость и давление в струе такие, как и в окружающей жид-
кости.
На бесконечности за движителем (сеченне IV—IV) скорость
достигла своего наибольшего значения, а давление выравнялось
Рнс. 4.4. Схема идеального движителя
щадь гидравлического сечения
с давлением в окружающей
жидкости. На границе струн
имеет место разрыв скоро-
сти.
Создаваемый идеальным
движителем упор
Т = Ар • Ло = (р, — р,)Л0,
(4-2)
где pi, р2 — давления в
струе перед и за движи-
телем; Ло = nD2/4 — пло-
де нжнтел я; D — его диа-
метр.
Перепад давлений Ар определим, записав уравнение Бер-
нулли для линии тока от сечения I—I до сечення II—II, распо-
ложенного непосредственно перед диском, движителя, а также
от сечения III—III, сразу за диском, до сечення IV—IV далеко
на бесконечности за ним (см. рис. 4.4)
2 2
„ . PUA „ , P°s
Ро Ч 2--------Р' Ч 2~
. . Р^л+^Хоо'
Р2 Ч* ~2~ = Ро Ч--------2----
(4-3)
(4-4)
где va и vs — скорости в струе на бесконечности перед движи-
телем и в его диске соответственно, wxao — вызванная осевая
скорость на бесконечности за движителем.
Сопоставляя (4.3) и (4.4), находим скачок давлений в диске
движителя
Ар = р2 — р, =р 4-j а»Хоо, (4.5)
а затем и его упор
Г = ДрЛо = р(^лЧ--5г2-)“’х«»А- (4.6)
130
В соответствии с законом количества движения этот же упор
можно представить в виде
Т — mwxa> — pojWxooA)» (4.7)
где m = pug^o—масса жидкости, протекающая через диск
движителя в единицу времени.
Приравняв (4.6) и (4.7), получим
о, = г>а +-^=«а + г»хо, (4.8)
где
Wxoo/2. (4.9)
вызванная осевая скорость в диске движителя.
Вывод (4.9), справедливый для любого гидрореактивного
движителя в идеальной жидкости, в дальнейшем будет широко
использоваться.
Полезная мощность идеального движителя
P£/ = W, (4.10)
затраченная включает и приращение кинетической энергии жид-
кости в струе:
= (4.11>
Тогда КПД
РЕ! 1 (4.12)
П/ pD/ 1 + ГС*00 2da
и эффективность идеального движителя снижается с ростом
вызванной скорости.
Возможности анализа (4.12) ограничены, поэтому введем
в рассмотрение коэффициент нагрузки 'движителя по
упору
r 2Т
^та=—FT"
Р°аА)
(4-13)
Приравняв упор, определяемый из (4.6) и (4.13), получим
(-^)2 + 2 - Ста - 0 (4.14)
Решая квадратное уравнение (4.14) с учетом а/Яоо 0 нахо-
дим безразмерную осевую вызванную скорость
-^=V1+Cta-1 (4.15)
иА
131
Подставляя (4.15) в (4.12), определяем КПД идеального дви-
жителя
2
V* +с™ + 1
(4-16)
Таким образом, эффективность идеального движителя уве-
личивается с уменьшением коэффициента его нагрузки. Послед-
нее возможно за счет снижения упора, увеличения скорости дви-
жения, плотности жидкости и площади гидравлического сече-
ния движителя [см. (4.13)]. Для наиболее важного с практи-
ческой точки зрения случая, когда величины Т и vA заданы,
КПД движителя однозначно определяется его диаметром и воз-
растает с его ростом. Вследствие различий в плотности среды
КПД движителя, работающего в воде больше, чем в воздухе.
Используя (4.15) и (4.9), можно найти максимальное суже-
ние струи
/£» V = + = t + Vr+C^
\ D I VA + юхоо = 2 ^/1 + Сгд ’ ' ‘ ’
2
которое в пределе (при СТа-*-°°) составит(D«>/D) =0,5.
Работа реального движителя сопровождается дополнитель-
ными потерями энергии, идущими на преодоление сил вязкости,
закручивание потока и т. д. Поэтому и КПД т]о реального дви-
жителя всегда ниже, чем у идеального:
r]0 = fc0.T]/, (4.18)
где ko < 1 коэффициент качества.
На рис. 4.5 представлены КПД идеального и реального дви-
жителя в функции от коэффициента нагрузки. Заштрихованная
область характеризует дополнительные потери энергии. Можно
выделить две зоны — в первой (0 < Ста < Стао) характер из-
менения КПД движителей качественно различен, во второй
(Ста > Стао) он одинаков, при Ста = Стао = 0,3 4- 0,35 КПД
реального движителя имеет максимум. Резкое падение т]0 при
СТа->-0 объясняется не учитываемыми в теории идеального
движителя вязкостными потерями. Дело в том, что при задан-
ных Т и vA условие СТа-»-0 практически означает D-»-oo, а сле-
довательно и безграничный рост сил трения. Судовые движи-
тели обычно работают с коэффициентами нагрузки, существенно
большими, чем Стао « 0,35, а следовательно на иих могут быть
распространены выводы теории идеального движителя относи-
тельно характера зависимости КПД от Ста-
Выражение (4.18) позволяет сопоставлять эффективность
различных типов движителей. Для гребных винтов Лотах = 0,80
и имеет место при СТа « СТао-
132
Пример 4.1. Найдем коэффициент качества гребного винта судна «Ин-
женер». Дополнительно известно (см. § 4.12) D = 6,42 и; Т = 1410 кН;
vA = 8,5 м/с; Т)о = 0,630.
По (4.13) определяем коэфнцнент нагрузки:
Г - 8Г 8 • 1410 _ . ле
ГЛ— рц^яЛ2 1,025 • 8,52 • 3,14 • 6,422
и по (4.16), рассчитываем КПД идеального движителя
V1+CM+| “ V1 +1.<»+1
Тогда коэффициент качества (4.18)
0,630
~ 0,822
= 0,765.
Пример 4.2. Определим КПД идеального движителя, работающего в воз-
духе. Исходные данные те же, что и в прамере 4.1.
Принимая рл — 1,23-10-а т/м3, находим
СТА = 1,23 • 10-3 • 8,52 • 3,14 • 6,422 “874;
и, = 2 ------= 0,066.
4 V1 +874+ 1:
Пример 4.3. Рассчитаем диаметр воздушного идеального движителя,
эквивалентного по КПД, движителю, работающему в воде.
Имеем (см. пример 4.1) тр = 0,322, Ста = 1,05, тогда
D / W* х / 8 • 1410
= V Ра«аяСга “ * *’23 • ,0'3 * 8'52 • 3114 • *’05
Примеры 4.2 и 4.3 наглядно объясняют, почему иа кораблях
и судах не устанавливают воздушные винты: при приемлемых
габаритах их КПД будет на порядок ниже, чем КПД гребных
винтов, а для обеспечения эквивалентного КПД диаметр воз-
душного винта должен быть одного порядка с длиной судна,
что неприемлемо.
Исключение составляют СВПА и СЭП, вследствие амфибий-
ности которых установка гидравлических движителей невозмож-
на. Однако и КПД воздушных винтов у этих судов достаточно
высок. Причина — относительно большие габариты винтов и су-
щественно большие скорости движения.
Для справки: лучшие воздушные винты самолетов имеют
КПД т]о = 0,8 4-0,84, что больше, чем у гребных винтов; в этом
случае нет необходимости принимать меры для устранения ка-
витации.
Основы теории крыла. Рабочими элементами большинства
судовых движителей служат лопасти, действующие по принци-
133
пу несущего крыла. При движении крыла в жидкости на нем
возникают подъемная сила Y и сила профильного сопротивле-
ния X. Первая из этих сил нормальна к скорости, вторая на-
правлена вдоль нее. В безграничной жидкости профильное со-
противление имеет чисто вязкостную природу.
Гидродинамические характеристики (ГДХ) крыла пред-
ставляют в виде безразмерных коэффициентов подъемной силы
Cy и сопротивления Сх
= = (4.19}
где 5 — площадь крыла в плане; v — скорость движения.
Основные геометрические характеристики крыла (рис. 4.6):
хорда Ь, максимальная толщина профиля е, стрелка прогиба ес-
Последние величины чаще используются в безразмерном виде:
Рис. 4.5. КПД идеального Ряс. 4.6. Профиль крыла Рис. 4.7. Гидродииа-
н реального движителей мические характери-
стики крыла
б = е/b и бс — ес/Ь и соответственно называются относительной
толщиной и относительной кривизной (стрелкой прогиба). Кры-
ло может иметь авиационный либо сегментный профиль сече-
ния, в первом случае максимальная толщина располагается на
расстоянии I ж 6/3 от входящей кромки, во втором / — 0,56.
Для профиля заданной формы ГДХ зависят только от угла
атаки а (рис. 4.7). В общем случае бс > 0, соответственно и
угол нулевой подъемной силы ао > 0. Коэффициент подъем-
ной силы увеличивается вплоть до критического угла
атаки а = акр, при котором происходит отрыв потока, наблюда-
ется резкое падение CY и рост коэффициента сопротивления Сх.
Эффективность крыла определяется его качеством К = CyICx>
которое имеет максимум при небольших положительных углах
атаки. В теории движителей часто используется обратное ка-
чество профиля е = = В идеальной жидкости е = 0.
134
4.3. Конструкция и геометрия гребного винта
Наибольшее распространение на кораблях и судах всех ти-
пов получил гребной винт, поэтому в дальнейшем только его и
будем рассматривать.
Винт состоит из ступицы н лопастей, являющихся его рабо-
чими элементами. За счет разницы давлений на засасывающей,
обращенной в сторону движения, и нагнетающей, воспринимаю-
щей реакцию отброшенных масс воды, поверхностях лопастей
создается упор гребного винта.
Лопасть—крылообразное тело, со-
здаваемое двумя винтовыми поверхно-
стями, линия пересечения которых назы-
вается контуром.
Как и у крыла, у лопасти различают
две кромки — входящую, направленную
навстречу потоку, и выходящую — про-
тивоположную первой. Граница между
ними — край лопасти — самая удаленная
от оси точка гребного винта. Участок,
примыкающий к ступице, называется кор-
нем лопасти.
Кратко остановимся на винтовых по-
верхностях, от которых самый распро-
страненный движитель — гребной винт —
получил свое название.
Рис. 4.8. Образование
винтовой поверхности
Заставим отрезок АВ двигаться таким
образом, чтобы один его конец — точка А-—скользил по оси ци-
линдра, а другой — точка В — по его поверхности, одновременно
вращаясь вокруг оси. Образованная таким образом поверхность
носит название винтовой (рис. 4.8). Если скорости, поступатель-
ная и окружная, будут при этом постоянными, то образуется
правильная винтовая поверхность. Точка В на боковой поверх-
ности цилиндра опишет винтовую линию, шагом которой назы-
вается расстояние Р, проходимое этой точкой в осевом направ-
лении за один оборот.
Рассекая винтовую поверхность соосными цилиндрами, на
каждом из них получим винтовую линию — след движения со-
ответствующей точки отрезка АВ. Следовательно, винтовую
поверхность можно определить как совокупность бесконечного
множества винтовых линий, описанных точками отрезка АВ.
Сам этот отрезок называется образующей винтовой поверх-
ности. Он в общем случае может быть наклонен к оси цилиндра,
иметь криволинейную форму.
Разворачивая боковую поверхность цилиндра на плоскость,
получим прямоугольник, в котором винтовая линия является
диагональю. Нижняя половина этого прямоугольника называ-
135
ется шаговым треугольником: его катеты равны длине окруж-
ности и шагу винтовой линии. Если гипотенуза такого треуголь-
ника прямолинейная (рис. 4.9.а), то винтовая линия называется
винтовой линией постоянного шага, при этом шаговый угол
Ф = arctg(-j^j-) = const. Криволинейная гипотенуза — признак
винтовой линии переменного шага ф = /(у), где у — угол пово-
рота образующей относительно оси цилиндра.
Рис. 4.9. Шаговый треугольник: а — винтовая линия по-
стоянного шага; б — винтовая линия переменного шага
Правильная винтовая поверхность на всех радиусах в сече-
нии имеет винтовые линии постоянного шага, кроме того соблю-
дается и условие Р = const. Если же поверхность образована
винтовыми линиями постоянного шага, но P = f(r), то это вин-
товая поверхность радиально-переменного шага. Различают еще
винтовую поверхность аксиально-переменного шага — шаговые
треугольники имеют криволинейные гипотенузы (ф=# const),
ио один и тот же средний шаг Р = const. Если ф const и
P = f(r), то такая поверхность называется винтовой поверх-
ностью аксиально-радиально-переменного шага.
Лопасти гребных винтов образуются винтовыми поверхно-
стями всех перечисленных типов. Так, если нагнетающая по-
верхность лопасти может быть правильной, то засасывающая
всегда имеет в сечении винтовую линию переменного шага.
Рассекая лопасть гребного винта соосным с ним цилиндром
и разворачивая его на плоскость, получаем профиль сечения ло-
пасти, шаг и шаговый угол на данном радиусе (рис. 4.10).
Винтовая поверхность без искажений ие разворачивается на
плоскость. Наиболее точное представление о форме и площади
лопасти дает так называемый спрямленный контур, построение
которого осуществляется известными методами графики.
Основные геометрические характеристики гребного винта —
число лопастей, диаметр, шаг, диаметр ступицы, форма профиля
лопасти, площадь ее спрямленной поверхности. Современные
гребные винты имеют диаметр до £>=12 м, масса такого дви-
136
жителя может достигать 150 т. Число лопастей винтов изменя-
ется в пределах ZP = 2 4- 8.
Наряду с диаметром гребной винт характеризуют его безраз-
мерные геометрические характеристики. К ним относят:
— дисковое отношение ЛЕ/Ло, где ДЕ — площадь спрямлен-
ной поверхности всех лопастей; Ло — площадь диска (гидравли-
ческого сечения) гребного виита; Ле/Ло = 0,2 4-1,3 (большие
значения относятся к винтам быстроходных судов);
— шаговое отношение Р/D, где Р — шаг; D — диаметр вин-
та, P/D = 0,6 4-2,0 (большие значения — винты быстроходных
судов);
Рис. 4.10. Сечение лопасти гребного винта соосным цилиндром
— относительный диаметр ступицы dH = dH = 0,16 4- 0,35
(большие значения характерны для ВРШ и винтов со съемны-
ми лопастями).
Если относительно наблюдателя, смотрящего в корму уда-
ляющегося судна, гребной винт вращается по часовой стрелке,
то его называют винтом правого вращения, в противном слу-
чае— винтом левого вращения.
4.4. Гидродинамические характеристики
гребного винта
Кинематика гребного виита. В процессе работы гребной винт
с частотой п вращается вокруг своей оси и с поступательной
скоростью Уд перемещается вдоль нее. Путь, проходимый вин-
том в осевом направлении за один оборот, называется поступью
Ал = од/п. (4.20)
Поступь в общем случае не равна геометрическому шагу
винта, и на рабочих режимах движения обычно hA < Р. При-
чина— податливость рабочей среды — жидкости. В твердом те-
ле за один оборот винт проходил бы расстояние в точности рав-
ное шагу, как это и имеет место у болта, вворачиваемого
в гайку.
137
Разница между шагом гребного винта и его поступью
s = P-hA (4.21)
называется скольжением.
Для конкретного гребного винта (Р = const) поступь одно-
значно определяет скольжение, обе эти величины изменяются
в широких пределах, что позволяет винту выполнять функции
движителя при всех скоростях движения судна.
Перейдя к безразмерной величине, запишем относительную
поступь в виде
<422>
Относительная поступь J — важнейшая кинематическая ха-
рактеристика гребного винта, определяющая режим его работы,
а следовательно и силы на нем возникающие.
Кривые действия гребного винта. Работая в качестве движи-
теля, гребной винт создает вызванные осевые скорости (см.
§ 4.2). Вращаясь вокруг своей оси, он вовлекает в это движе-
ние окружающую жидкость, закручивает поток, т. е. создает
еще и вызванные окружные скорости. На это затрачивается до-
полнительная мощность, что является одной из причин, почему
КПД винта меньше, чем у идеального движителя. Кроме того,
вызванные окружные скорости изменяют и характер обтекания
лопасти.
Если рассечь гребной винт двумя соосными цилиндрами,
радиусы которых г и г + dr, то заключенный между ними уча-
сток лопасти можно рассматривать как элемент несущего
крыла. Результирующая скорость vR обтекания этого элемен-
та— геометрическая сумма четырех скоростей: осевой vAr
окружной Qr и двух вызванных, тех же наименований wx0 и '^ео-
В теории идеального движителя было доказано, что вызванная
осевая скорость в диске движителя равна половине таковой на
бесконечности [см. (4.9)]. То же соотношение справедливо
и для вызванных окружных скоростей, т. е. даео = и>0Оо/2.
Винт закручивает поток в сторону своего вращения, поэтому
относительная окружная скорость элемента лопасти составляет
(Qr— weo), а для результирующей скорости будет справедли-
вым выражение
= V(vA + 0Ух0)2 4- (Qr — wi0)2, (4.23)
где
£2 = 2лп (4.24)
— угловая скорость вращения винта.
Рассмотрим обтекание элемента лопасти, протяженностью dr
в обращенном движении, т. е. мысленно остановим винт, а всем
скоростям придадим противоположное направление (рис. 4.11).
138
Элемент лопасти, обтекается потоком со скоростью ол под
углом атаки
а = <р —Рь (4.25)
где <р — шаговый угол, Pi— угол индуктивной поступи, опреде-
ляемый выражением
Рис. 4.11. Схема обтекания элемента лопасти гребного винта
Элемент лопасти — элемент несущего крыла, на нем возни-
кают подъемная Сила dY и сопротивление dX:
dY = CY^b dr, dX = Cx~~.b dr, (4.27)
где bdr — площадь элемента в плане; b(r) — хорда крыла.
Назначение гребного винта как движителя создавать упор
Т — силу, направленную вдоль оси в сторону движения. Для
преодоления момента сопротивления вращению Q к винту не-
обходимо подвести мощность
Pd = Q-Q. (4.28)
Проектируя элементарные подъемную силу и силу профиль-
ного сопротивления на интересующие нас направления
(рис. 4.11), получаем элементарный упор
dT = dY cos ₽, — dX sin P, = dY cos p, (1 — e tg p.j; (4.29)
139
и элементарную силу сопротивления вращению
dx = dY sin р,- 4- dX cos Pi = dY sin P, (1 -f- e ctg P/), (4.30)
где e. = Cx/CY— обратное качество профиля.
Сопоставляя (4.29) и (4.30), убеждаемся, что наличие вяз-
кости жидкости (е > 0) приводит к уменьшению полезной си-
лы— упора — и к увеличению момента сопротивления вращению
dQ = rdx, т. е. к снижению эффективности гребного винта
(его КПД).
Интегрируя (4.29) и (4.30) вдоль всей лопасти, с учетом
(4.27) найдем создаваемый гребным винтом упор Т и момент Q,
необходимый для его вращения:
я 2
T = ZP \ Cy^-cosp/O-etgPObdr;
J &
rH
R 2
Q = Zp J CY sin P, (1 + e ctg p/)frrdr,
rH
(4.31)
где Zp — число лопастей; гн, R— радиусы ступицы и винта
соответственно.
Приведем подынтегральные выражения к безразмерному
виду
Т = pn2D* J Ь- CY (^)* cos р, (1 - е tg Р.) б dr,
гН
Q = px2D5 J Cy &)3 sin М1 + г ctg р() бг dr,
fH
(4.32)
где r = r!R — относительный радиус; 6 = b/D — безразмерная
ширина лопасти.
Анализ выражений (4.32) позволяет сделать вывод, что си-
лы, возникающие на гребном винте, являются сложными функ-
циями его размеров и формы контура лопастей [D, Б (г) ] формы
профиля (CY) сечения лопасти, его угла атаки (Р», <р — см.
(4.25)], относительной поступи (щ/nD) и вызванных скоро-
стей—(4.23), (4.26).
Назвав безразмерные интегралы в (4.32) коэффициентами
упора Кт и момента Кд соответственно, запишем
Т = Кт-рпгО*-,
Q = Kq- pn2Ds.
(4.33)
140
Эффективность работы гребного винта, как любого преобра-
зователя энергии, определяется его КПД — отношением полез-
ной TvA н затраченной QQ мощностей:
’Ь— QQ 2n«Q 7^ 2л • I4"54/
и зависит не только от сил, действующих на винте (Кт, Ко), но
и режима его работы J.
Для анализа потерь энергии, сопровождающих работу греб-
ного винта, запишем КПД элемента лопасти
dT • vA vA 1 — i tg p<
,|r — dQ,‘ Q ”~Qr 1 4-ectgP/ * ctgP*~~
°a rQ~tt,»0 _Lz±£₽£_ — « „ «
+ ’ 1+ectg^ —TVx*4r4’TVc’
где т]гх — осевой; rpe — окружной и т]гс — конструктивный КПД
элемента.
Как следует из (4.35), каждый из коэффициентов т)н учиты-
вает определенный вид потерь: т)гх — на создание вызванных
осевых, т)гв — вызванных окружных скоростей, т)ге — вязкостные
потери.
Произведение первых двух коэффициентов характеризует
потери энергии на создание вызванных (индуцированных) ско-
ростей и называется индуктивным КПД элемента:
П/г = Ч-х • т)^. (4.36)
Для гребного винта в целом имеют место дополнительные
потери, не фигурирующие в (4.35). Это, во-первых, концевые по-
тери, возникающие за счет перетекания жидкости у края ло-
пасти— аналог индуктивных потерь у крыла конечного удлине-
ния, во-вторых, КПД винта снижает ступица, которая ие создает
упора, но потребляет мощность на преодоление сопротивления
вращению. Тем не менее выражение (4.36) может быть рас-
пространено на винт в целом. При этом потери энергии на сту-
пицу относят к конструктивным, а на концевые вихри — к ин-
дуктивным.
Силы, создаваемые гребным винтом, определяются режимом
работы, т. е. его поступью. Зависимости упора и момента от по-
ступи (рис. 4.12) принято называть кривыми действия гребного
винта. Углы атаки элементов лопасти имеют максимальные
значения при отсутствии осевой скорости (см. рис. 4.11), т. е.
в так называемом швартовном режиме, когда Лд=0. При этом
достигают максимума и значения упора и момента. С ростом
скорости vA увеличивается hA и уменьшается угол атаки; соот-
ветственно снижаются н действующие на лопасть силы.
141
Поступь Pi, при которой упор обращается в нуль, называ-
ется гидродинамическим шагом гребного винта или поступью
(шагом) нулевого упора. В случае, когда Q = 0, имеет место
поступь (шаг) нулевого момента Р2. Разница между ними т =
я= Р2 — Pi — параль в определенной степени — характеризует
эффективность движителя; чем меньше параль, тем совершен-
нее гребной винт. В идеальной жидкости теоретически т — 0.
Как правило, имеет место соотношение Р < Р|, т. е. при равен-
Рис. 4.12. Кривые действия
гребного виита
стве поступи геометрическому шагу винта hA — Р упор Т > 0.
Это объясняется тем, что за счет конечной стрелки пробига ас,
угол нулевой подъемной силы а0 > 0 (см. рис. 4.7).
В диапазоне поступей 0 Лд < Pi винт создает упор
(7’>0) и для своего вращения требует затраты мощности
(Q >0, Pd = QQ > 0), т. е. выполняет функции движителя.
При ЛА > Р2 и упор и момент отрицательны — гребной вннт,
вращаемый набегающим потоком, создает сопротивление дви-
жению, однако с него, как с турбины, можно снимать энергию.
Соответственно, этот режим работы винта называют турбинным.
В случае, когда Р\ < hA < Р2 говорят, что винт парализо-
ван: для его вращения надо подвести энергию, а упор он
создает при этом отрицательный. Расчетный режим работы
гребного винта — в диапазоне поступей 0 Ла < Pi- В процессе
эксплуатации могут, однако, иметь место и режимы, когда
Ла Pi — при реверсе судна, при его буксировке, при движе-
нии под парусами с неработающим двигателем, для многоваль-
ной установки, когда работает только часть гребных винтов.
Кривые действия (рис. 4.12) характеризуют работу конкрет-
ного гребного винта (D, Р, Zp и др.) при конкретной (n = const)
частоте вращения. Изменение последней приведет к изменению
Т и Q при ЛА = const. Такая неоднозначность, а кроме того, и
зависимость динамических характеристик гребного винта от
142
размеров существенно затрудняют использование кривых дей-
ствия в приведенном выше виде.
Представив упор и момент в безразмерном виде с помощью
зависимостей (4.33) и в функции от относительной поступи
(4.22), получим гидродинамические характеристики (ГДХ)
гребного винта (рис. 4.13). Сюда же обычно наносят и зависи-
мость т]о(/). КПД обращается в нуль при /=0и J = PilD
[см. (4.34)]: в первом случае отсутствует скорость (па=0),
во втором упор (Т = 0). В соответствии с известной из высшей
математики теоремой Ролля между этими двумя точками имеет
место экстремум — максимальное значение КПД. Проектируя
гребной винт, стремятся, чтобы он работал именно в этой обла-
сти. Представленные в безразмерном виде ГДХ одинаковы для
всех геометрически подобных гребных винтов. Режим работы —
относительная поступь — однозначно определяет коэффициенты
упора и момента, а вместе с ними и КПД. Незавнснмыми на
рис. 4.13 являются только Кт и Kq, т)о определяется с по-
мощью (4.34).
4.5. Экспериментальные исследования работы
гребных винтов
Методы теории крыла и базирующейся на ней вихревой тео-
рии гребного винта позволяют рассчитать его ГДХ. Однако эти
методы опираются на экспериментальные данные и, кроме того,
иногда не обеспечивают необходимой точности.
Известный диалектический принцип — практика — критерий
истины—справедлив и применительно к движителям. Экспе-
риментальные исследования работы гребиых винтов не утрати-
ли актуальности и сегодня.
Габариты винтов современных транспортных судов и кораб-
лей, а также силы, возникающие на них в процессе работы, та-
ковы, что практически исключают возможность их непосред-
ственных испытаний в лабораторных условиях. В еще меньшей
степени представляется возможным исследовать на натурных
винтах влияние различных геометрических параметров. Поэтому
экспериментальное изучение всех аспектов работы гребных
винтов обычно проводят на моделях. Для их испытаний исполь-
зуют опытовые бассейны, гидролотки и прежде всего кавита-
ционные трубы.
Требования, предъявляемые к моделированию работы греб-
ных винтов. В соответствии с теорией моделирования для обеспе-
чения полного динамического подобия процессов, сопровождаю-
щих движение тела в жидкости, необходимо выполнение требо-
ваний геометрического и кинематического подобия, и, кроме
143
того, идентичность определяющих критериев динамического
подобия.
Геометрическое подобие — равенство отношений сходствен-
ных размеров — обычно обеспечивается без труда.
Кинематическое подобие означает одинаковое направление
в сходственных точках потоков скоростей и постоянство их отно-
шений. Эти же требования можно сформулировать и несколько
иначе: должно обеспечиваться равенство отношений характер-
ных скоростей. Для гребного винта в качестве таковых высту-
пают осевая vA и окружная Q/? = 2nnR скорости. Тогда, исполь-
зуя, как и ранее, индекс «м> для модели и «н» для натуры,
запишем
рАм рАн
ИЛИ /и —/н
(4.37)
Таким образом, применительно к моделированию работы
гребного винта кинематическое подобие будет иметь место при
равенстве у модели и натуры относительных поступей.
Определяющими для потоков вязкой несжимаемой жидкости
являются следующие критерии динамического подобия: числа
Эйлера, Фруда, Струхаля и Рейнольдса.
Первый из этих критериев — число Эйлера—выполня-
ется автоматически, если только не происходит разрыва оплош-
ности жидкости. Проектируя гребные винты, стремятся обеспе-
чить их работу без кавитации с тем, чтобы избежать ее нега-
тивных последствий (см. § 4.7). Для этих, некавитирующих,
винтов критерий Эйлера не является определяющим. Однако
в тех случаях, когда кавитацию устранить не удается, а также
для винтов, предназначенных для работы в режиме развитой
кавитации (см. § 4.9) критерий Эйлера становится определяю-
щим. При этом он записывается в виде так называемого осе-
вого числа кавитации
2 (Ро — Pv)
(4.38)
где ро — давление в потоке перед винтом; р0 — давление насы-
щенных паров воды.
Критерий подобия Фруда также можно исключить
из числа определяющих — гребные винты водоизмещающих су-
дов и кораблей обычно заглубляются настолько, что их работа
не сопровождается волнообразованием. Исключение должно
быть сделано при моделировании работы винтов, расположен-
ных вблизи или пересекающих свободную поверхность—напри-
мер, частично погруженных (см. § 4.9). Моделирование по числу
Фруда выполняется также при проведении самоходных испы-
таний (см. § 4.6).
144
Работа гребного винта — сугубо периодический процесс,
а следовательно, определяющим критерием подобия является
также и число Струхаля
St = o//L, (4.39)
где t — период; L — характерный размер.
Принимая для гребного винта t—\ln\ L = D найдем, что
равенство чисел Струхаля у модели и натуры сводится
к требованию (4.37), т. е. выполняется при наличии кинемати-
ческого подобия.
Гребной винт работает в вязкой жидкости, поэтому число
Рейнольдса также является определяющим критерием по-
добия.
Применительно к элементу лопасти имеем
_ vb 2лпгЬ
Re= —, (4.40)
где b — хорда; rQ = 2nnr — окружная скорость элемента.
В (4.40) в качестве характерной принята окружная скорость,
ибо именно она определяет работу гребного винта как движи-
теля. Число Рейнольдса для винта изменяется в зависимости
от радиуса (4.40), поэтому принимают его осредненное зна-
чение
nnD bCD 5 ЛР nD3
Re =-------— -----• (4.41)
v Zp Ло v ' '
Так как моделирование осуществляется в воде (vM = vH)
для удовлетворения требования ReM = ReH необходимо, чтобы
частота вращения модели винта
пи = n„ (D„/DH)3. (4.42)
При наличии полного динамического подобия должны быть
равны и безразмерные силовые коэффициенты, т. е. Ктм — Ктв
и — Aqh- Тогда с учетом (4.42) получим
TM==ArMpMraJIDi = 7’H, (4.43)
т. е. упор, создаваемый моделью, должен быть таким же, как и
у натурного винта.
Условия (4.42) и (4.43) выполнены быть не могут, что иллю-
стрирует пример 4.4.
Пример 4.4. Рассмотрим возможность моделирования по числу Re греб-
ного вннта судна сИнженер». Исходные данные те же, что и в при-
мере 4.1, дополнительно нзвестно п = 2,1 об/с. Моделирование приводится
в кавитационной трубе, габариты рабочего участка которой позволяют ис-
пытывать винты диаметром D 0,2 м.
Принимая Дм = 0,2 м, находим масштаб модели
m = Dn/Dn = 0,2/6,42 = 1: 32,1
103415
145
н необходимую частоту ее вращения (4.42):
Лм = ин (DH/DM)2 =2,1 •32,1г=2160 об/с« 130 000 об/мнн.
Требуемая нз условии (4.37) осевая скорость модели
ц,„ • я„ • D„
' "ннОн = рЛя/>» = 8>5 • 32-1 = 272 “/'•
а окружная скорость края лопастн
/?£2 = 0,1 . 2пли = 0,628 • 2160 « 1360 м/с,
что близко к скорости звука в воде v3 ~ 1500 м/с.
Привнмая погружение оси модели Л.ы = 1,0 м, атмосферное давление
ра = 101 кПа, а давление насыщенных паров рв = 2,3 кПа, по (4.38) най-
дем осевое число кавнтацни модели
2 (Ра + yh- и — ри) 2 (101 + Ю — 2,3) _____________
Оом =-------------5---------- = -----1 ЛОС . 0-702--- ~ 0>0°3>
1,025 • 272’
т. е. модель винта будет работать в режиме глубокой кавитации, в то-
время как у натурного винта кавнтацня будет отсутствовать.
Принимая диаметр гребного вала модели = 0,Юм = 0,02 м, рас-
считаем возникающие в нем иаприжения от сжатия под действием =
= Гн = 1410 кН (4.43):
4Г 4 • 1410 , с „
а=77—3,14.0,02» ^4’5-10*кПа’
вы
что на порядок превышает предел прочности современных сталей
а»р = (4-^7)-10s кПа.
Можно показать, хотя н не столь элементарными средствами, что на-
пряжения в лопастях гребного винта будут того же порядка, что и найден-
ные для вала.
Вывод: моделнрованне по чнслу Рейнольдса невозможно. Причина прин-
ципиального характера: режим работы модели (глубокая кавитация, близ-
кая к звуковой скорости) будет качественно отличаться от натуры. При-
чины, хоть н не принципиального свойства, но сегодня практически непре-
одолимые: необходимость обеспечения чрезвычайно высокой частоты вра-
щения н использования сверхпрочного материала для модели винта и ее
гребного вала.
Вывод о невозможности моделирования по числу Рейнольдса
не является неожиданным; аналогичную картину мы имели, рас-
сматривая сопротивление (см. гл. 3). Более того, в теории ко-
рабля и в судовой аэродинамике практически во всех экспери-
ментах моделирование по числу Рейнольдса выполнено быть
не может.
Тем не менее при исследовании работы гребных винтов сред-
ствами модельного эксперимента иет необходимости в специ-
альной методике пересчета результатов на натуру, как это было
при моделировании сопротивления (см. гл. 3). Дело в том, что-
при небольших углах атаки, характерных для элементов лопа-
стей, коэффициент подъемной силы не зависит от числа Re,
если последнее превышает некоторое критическое значение.
Вклад силы профильного сопротивления в ГДХ винта невелик,
мало изменяется и коэффициент сопротивления профиля при
146
закритических числах Рейнольдса. Таким образом, следует ожи-
дать, что начиная с какого-то момента наступит автомодаль-
ность по числу Рейнольдса, т. е. ГДХ гребного винта перестанут
от него зависеть. Анализ экспериментальных данных показал,
что для гребных винтов вычисленное по (4.41) критическое
число Рейнольдса составляет ReKp = (3 5) • 105.
Тогда при наличии геометрического подобия требования
к модельному эксперименту приобретают внд
J и — До 1
R^m ReKp- j
(4.44)
Выполнение требований (4.44) достаточно для того, чтобы
получить тождественность ГДХ модели и натуры: Ктм — Ктя,
K.QM = Kqh, Т)0м == 'Пон-
Условия (4.44) удовлетворяются без труда (см. пример 4.5).
Пример 4.5. Сформулируем требования к модельному эксперименту, вы-
текающие нэ (4.44). Дополнительно к исходным данным (см. пример 4.4)
известно число лопастей Zp = 4; дисковое отношение АеМо = 0,85, кинема-
тическая вязкость воды v= 1,1-10-’ м’/с.
Принимая Reitp = 5-10s, с использованием (4.41) найдем минимально
допустимую частоту вращении модели:
ReKp • v • Zp 5 - 10s - 1,1 - 10-' • 4
" 5(А£/Л0)-О2м-------5.0,85-0,2* 12’9 об/с“775 об/мни
и соответствующую из условия = 1а осевую скорость
12,9 0,2
------ - «-кг-ст—
vAit ° Ан п о
ни
Упор модели (при Кт* = Кгя):
у Гн
* к 9 ’д’ * Рм
Рнлн°н
2
• л2 • D4 = Гн • т4
>н
-1,10-«и
Возможность выполнения всех опредеелнных выше требований, предъяв-
ляемых к модельному эксперименту, не вызывает никаких сомнений.
Модельные испытания гребных винтов в свободной воде. Для
исследования ГДХ гребных винтов широко практикуют испы-
тания в свободной воде. Под этим подразумевают, что мо-
дель работает в безграничной жидкости, когда имеет место
равномерное распределение скоростей в диске вннта. Для про-
ведения подобных испытаний используют опытовые бассейны
и кавитационные трубы.
Экспериментальная установка опытового бассейна включает
хорошо обтекаемую гондолу, в которой размещен электродви-
гатель— привод модели винта, динамометр — прибор для за-
ю*
147
мера упора и момента, а также счетчик числа оборотов. С по-
мощью обтекаемой стойки гондола жестко соединена с букси-
ровочной тележкой. Погружение винта и его отстояние от гон-
долы выбирают такими, чтобы обеспечить равномерное поле
скоростей и исключить влияние на ГДХ модели свободной по-
верхности (рис. 4.14). В процессе экспериментов наряду с упо-
ром Т, моментом Q и частотой вращения п замеряют и скорость
перемещения vA, что позволяет получить кривые действия греб-
ного винта. Необходимая вариация поступи (hA, J) осуществля-
ется либо за счет изменения скорости va при n=const, либо на-
Рис. 4.14. Схема установки для
испытание моделей гребных
винтов
оборот: п = var при va — const.
Обычно первому варианту от-
дают предпочтение, так как он
позволяет исследовать работу
винта в швартовном режиме
(йл = 0), кроме того, в процессе
испытаний число Рейнольдса ос-
тается неизменным.
В кавитационной трубе мо-
дель винта испытывают в обра-
щенном движении — на нее нате-
кает поток воды со скоростью Од, которая регулируется в задан-
ных пределах с помощью осевого насоса, так называемого им-
пеллера. Электродвигатель располагается вне трубы, динамо-
метры могут быть и наружные, и внутренние (современные ма-
логабаритные конструкции). ч
Рабочий участок кавитационной трубы снабжен окнами, что
позволяет проводить визуальное наблюдение за испытаниями
гребного винта, обеспечивать фото- и киносьемку. Последнее
особенно важно при изучении работы винта на режимах, когда
имеет место кавитация. Визуализация достигается с помощью
специального прибора — импульсного источника света, называе-
мого стробоскопом. В том случае, когда частота вспышек
совпадает с частотой вращения модели, наблюдателе видит за-
стывшую картину — остановившийся гребной винт. Кавитацион-
ные трубы оборудованы специальными вакуумными системами,
позволяющими в широких пределах изменять давление в рабо-
чем участке, а следовательно, и проводить моделирование по
числу кавитации. Последнее обстоятельство наряду с описанной
ранее видуализацией делает кавитационные трубы основными
экспериментальными установками для исследования работы
гребных винтов.
Результаты модельных испытаний как в опытовых бассей-
нах, так и в кавитационных трубах представляют в виде без-
размерных коэффициентов — ГДХ (см. рис. 4.13).
Влияние геометрии гребных винтов. Исследование влияния
геометрических параметров винтов на их динамические харак-
148
теристики проводится путем испытания серий моделей, в кото-
рых варьируется изучаемый параметр. В наибольшей степени
на ГДХ винта влияние оказывает шаговое отношение, однознач-
но определяющее шаговый угол <р, а вместе с ним и угол ата-
ки а элемента лопасти [см. (4.25) и рис. 4.11]. Рост шагового
отношения приводит к росту (при заданной относительной по-
ступи) упора и момента, а также и соответствующих коэффи-
циентов (рис. 4.15).
Возрастает и абсолютный максимум КПД, однако при малых
относительных поступях предпочтительнее гребные винты с не-
высокими Р/D. Этим, в частности,
объясняются небольшие шаговые от-
ношения гребных винтов ледоколов
Р/D = 0,7 -j- 0,8, расчетным для ко-
торых является режим движения
с малой скоростью в тяжелых льдах.
Влияние дискового отношения
в основном сказывается на эффек-
тивности гребных винтов. Увеличе-
ние АЕ/А0 приводит к увеличению
площади лопастей и, соответственно,
их профильного сопротивления. По-
Рис. 4.15. Влияние шагового'
отношения иа Кт н т|0
следнее влечет снижение КПД. При проектировании гребных
винтов принимают минимально допустимое для обеспечения
прочности и отсутствия вредных последствий кавитации диско-
вое отношение.
Количество лопастей мало влияет на ГДХ гребных винтов.
Обычно его выбирают таким, чтобы избежать нежелательных
резонансных явлений и вызываемой ими вибрации корпуса либо
отдельных его конструкций.
Форма контура и относительная толщина лопасти также не
оказывают заметного влияния на ГДХ гребного винта, хотя от
последней зависят кавитационные и прочностные характери-
стики лопасти, предъявляющие к ее толщине противоречивые
требования.
Форма профиля сечения лопасти влияет как на кавитацион-
ную стойкость винта, так и на его эффективность. Авиационные
и близкие к ннм по форме профили обладают высоким качест-
вом, а следовательно, предпочтительны с точки зрения КПД
винта. Однако плата за качество — более ранее возникновение
кавитации. В связи с этим гребные винты быстроходных судов,,
рабочие режимы которых, как правило, находятся на грани ка-
витации, имеют сегментный профиль сечения лопасти.
Гребные винты транспортных судов зачастую имеют авиа-
ционный профиль на большей протяженности лопасти и только
на радиусах г > 0,7/? этот профиль переходит в сегментный.
149
При этом достигается достаточно высокая эффективность греб-
ного винта и отсутствует кавитация периферийных сечений ло-
пасти, где число кавитации элементов минимальное (см. § 4.7).
В последнее время при проектировании лопастей винтов ши-
роко используют специальные кавитационно устойчивые про-
фили.
Диаграммы для проектирования гребных винтов. Результаты
испытаний систематических серий моделей с различным шаго-
вым отношением используют для создания диаграмм, с помощью
которых решают все задачи проектирования судовых гребных
Рис. 4.16. Схема построения корпусной диаграммы
винтов. Чаще всего основная проблема заключается в опреде-
лении характеристик оптимального гребного винта.
Оптимальным будем называть винт, который отаечает усло-
виям задания н при этом имеет наивысший КПД.
В нашей стране широкое распространение получили диа-
граммы для расчета гребных винтов, построенные по методу
известного советского ученого Э. Э. Папмеля. Рассмотрим ме-
тод построения этих диаграмм и способы пользования ими.
Первоосновой служат ГДХ отдельных винтов серии, полученные
при закрнтических числах Рейнольдса. Все они сводятся на две
диаграммы: корпусную, построенную в координатах J — Кт и
машинную в координатах I — Kq.
Каждая из этих диаграмм несет в себе полную информацию
обо всех винтах серии, однако в зависимости от типа задания
на проектирование удобнее пользоваться какой-либо одной из
них. В последнее время наблюдается тенденция обходиться
только корпусной, метод построения которой и рассмотрим под-
робнее.
Пользуясь тем, что ГДХ винта полностью определяются лю-
быми двумя из трех кривых (рис. 4.13), отавим на графике
только зависимости Кт(1) и т]о(/)- Пойдем еще дальше — убе-
150
рем и зависимость цо(У), перенеся фиксированные значения
КПД на кривую Кт(/) (рнс. 4.16,а). Проделав подобные опе-
рации для всех винтов серин (для всех Р/D) и соединив плав-
ними кривыми точки с одинаковыми значениями КПД, сведем
результаты испытаний на единую корпусную диаграмму. Каж-
дая точка этой диаграммы (рис. 4.16,6) соответствует конкрет-
ному винту, работающему в определенном режиме. Так, напрн-
отношением (P/D)A,
мер, точка А отвечает винту с шаговым
режим работы которого определяется
поступью JA. При этом коэффициент
упора винта равен Ктл, а его КПД —
Лм (рнс. 4.16,6). Очевидно, ис-
пользуя (4.34), можно элементарно оп-
ределить и коэффициент момента
KQ = (Кт/11о)/(//2л).
Диаграмма позволяет на основании
испытаний ограниченного количества
винтов с фиксированными значениями
шагового отношения определять ГДХ
винтов подобного типа с любым, в том
числе и промежуточным, шаговым от-
ношением.
Рис. 4.17. Определение точ-
ки (Кот) opt
Для решения задачи о выборе опти-
мального гребного винта, следуя Э. Э. Папмелю, введем в рас
смотрение коэффициенты задания
(4.44)
Kdt = t>A' D ' 's/pjT — // V Кг’>
Замечательное свойство этих коэффициентов в том, что они,
в соответствии с названием, представляют единственно возмож-
ную безразмерную комбинацию элементов задания, с одной сто-
роны, и устанавливают однозначную связь между координата-
ми диаграммы, с другой.
Так, задание иа проектирование винта диаметром D, обеспе-
чивающего упор Т при скорости vA означает и задание коэффи-
циента Kdti = Ci и соответствующей этому коэффициенту квад-
ратичной параболы Kr = J2/Ci. Последняя является геометри-
ческим местом точек, отвечающих всем винтам серии, которые
выполняют условия задания. Среди них надо отыскать един-
ственную, принадлежащую гребному винту с наивысшим КПД.
Очевидно, что это точка 0 (рис. 4.17) касания рассматриваемой
параболы с линией постоянного значения КПД.
Подобным же образом решается задача и при другом типе
задания (уА, п, Т). В этом случае используется второй коэффи-
циент задания Knt, а все отличие сводится к тому, что зависи-
151
мость, соответствующая выражению Ккт = С будет параболой
четвертой степени: Кт =
Рис. 4.18. Диаграмма для расчета гребиых винтов (ZP = 4; Дя/До — 0,55)
На рнс. 4.18—4.20 приведены такие диаграммы, отвечающие
четырехлопастным винтам серии В, имеющим различные зна-
чения дискового отношения. Подобные винты широко нсполь-
.зуются на морских транспортных судах.
Определение характеристик оптимального винта с помощью
диаграмм осуществляется следующим образом: на линии Kdt opt
или Knt opt находится точка, отвечающая данному конкретному
заданию. Затем, как это делается на рнс. 4.16,6, определяют
геометрические (Р/D) и гидродинамические (J, Кт, т|о) харак-
теристики искомого гребного винта.
152
Машинная диаграмма строится идентичным образом, с той
лишь разницей, что на кривых действия оставляют зависимости
Kq(J) и т|о(/), а в качестве коэффициентов задания используют
KDQ = = (4.46)
где PD — мощность, подводимая к гребному винту.
Все задания на проектирование гребных винтов могут быть
сведены к двум типам, когда требуется обеспечить заданную
скорость, а искомой является мощность главной механической
153
•установки либо когда известна мощность двигателя, а опреде-
ляется скорость судна. Оптимальный винт в первом случае
означает, что потребная мощность будет минимальной, а во вто-
ром— достижимая скорость будет максимальной.
И корпусная и машинная диаграммы могут служить для ре-
шения задач любого типа. Кроме того, с помощью диаграмм
можно выбирать характеристики винта, который не является
оптимальным. Так, например, если заданы мощность Pd и ча-
стота вращения п двигателя, а также и диаметр гребного вин-
та, то практически определены и его ГДХ (Kq, J), т. е. какие-
либо вариации с целью оптимизации исключаются.
Следует, однако, иметь в виду, что задание на проектирова-
ние гребного винта должно быть корректным: нельзя требовать
обеспечения данному судну данной скорости при заданной мощ-
ности двигателя или заданного упора при фиксированных зна-
чениях частоты вращения и диаметра гребного винта.
154
Диаграммы могут служить как для решения прямой, так
и обратной задачи проектировочного расчета гребного винта.
Последняя заключается в определении геометрических харак-
теристик винта, ГДХ которого заданы. Практически эта проце-
дура— проектирование винта, что было рассмотрено ранее.
Прямая задача заключается в определении ГДХ виита, гео-
метрия н режим работы которого заданы. Для ее решения до-
статочно найти на диаграмме точку, соответствующую гребному
винту с заданным шаговым отношением, работающему с задан-
ной поступью. Подобная процедура, в частности, используется
для определения характеристик винта на режимах, отличных от
расчетного, например при построении ходовых характеристик
судна (см. § 4.10).
4.6. Взаимодействие гребного винта и корпуса судна
Винт посредством гребного вала жестко соединен с судном,
что обусловливает их механическую связь. Таким образом, мощ-
ность, потребляемая гребным винтом, н его частота вращения
равны аналогичным величинам главной механической установ-
ки. Одинаковы также скорости движения винта н корпуса,
а упор, создаваемый движителем, полностью воспринимается
упорным подшипником.
Помимо механической связи гребного винта н корпуса имеет
место н их гидродинамическое взаимодействие. Последнее про-
является в наложении гидродинамических полей корпуса и дви-
жителя, в результате чего сопротивление судна изменяется под
влиянием работы гребного винта, а ГДХ последнего отлича-
ются от таковых в свободной воде. Строгое теоретическое иссле-
дование указанного взаимодействия сопряжено со значитель-
ными трудностями. Поэтому обычно задачу упрощают: считают,
что корпус работает в поле скоростей, измененных движителем,
а гребной винт — в поле скоростей корпуса. Другими словами,
раздельно рассматривают влияние винта на корпус и корпуса
на движитель.
Попутный поток. Корпус судна вовлекает в движение приле-
гающие слои жидкости, создавая так называемый попутный по-
ток. В общем случае вектор скорости попутного потока произ-
вольно ориентирован в пространстве. Следовательно, в каждой
точке диска движителя можно выделить три составляющие ско-
рости попутного потока: осевую, окружную (тангенциальная) и
радиальную. Обычно осредненное по окружности значение
окружной скорости равно нулю. Радиальная составляющая не-
велика н практически не оказывает влияния на работу гребного
винта. Поэтому в дальнейшем будем рассматривать только осе-
вую скорость, которая отлична от нуля и считается положитель-
155
ной, если направлена в сторону движения судна. Средняя ско-
рость осевого попутного потока и — суть разница между ско-
ростью судна и и средней скоростью жидкости в диске винта vA
u = v — vA. (4.48)
Вводя в рассмотрение коэффициент попутного потока
ц ° ~ °л
о о
W
(4.49)
получаем выражение для скорости в диске винта
va = v(1— W). (4.50)
Учитывая физическую природу, ко-
эффициент попутного потока можно
представить в виде суммы трех состав-
ляющих
W = Wf + WP + Wv, (4.51)
где WF, Wp и IFy—коэффициенты по-
Рис. 4.21. Схема образова- путного потока трения, потенцналь-
иия попутного потока тре- ного и волнового соответственно.
иня Первый из них — WF-— объясняется
вязкостью жидкости. Представление
об образовании попутного потока трения дает рис. 4.21, на
котором схематически изображены условия работы гребного
винта, установленного за пластиной в идеальной (а) и вязкой
(б) жидкости.
Потенциальный попутный поток создается за счет телесности
корпуса, движение которого сопровождается появлением в окру-
жающей жидкости вызванных скоростей.
Волновой попутный поток единственный, скорость которого
может быть как положительной, так и отрицательной. Причина
его появления — волнообразование при движении судна; знак
определяется положением вершины или подошвы генерируемой
судном поперечной волны относительно движителя. В целом ве-
личина Ww мала по сравнению с остальными двумя составляю-
щими н при небольших относительных скоростях может не учи-
тываться.
Вязкость жидкости — основная причина создания попутного
потока, соответственно в (4.51) превалирует WF. Толщина по-
граничного слоя в кормовой оконечности судна такова, что рас-
положенный в ДП гребной винт почти полностью погружен
в спутную струю корпуса (см. пример 3.3). В меньшей степени
влияет пограничный слой на работу бортовых винтов при мно-
говальиой установке, соответственно в этом случае снижается
и коэффициент попутного потока в целом.
Сказанное выше в полной мере относится к так называе-
мому номинальному попутному потоку, исчерпывающие данные
156
о котором можно получить, замерив поле скоростей за корпу-
сом в месте расположения движителя. Работающий гребной
винт оказывает влияние на характер обтекания корпуса, а сле-
довательно и на создаваемый им попутный поток. Это влияние
учитывается эффективным попутным потоком, который отлича-
ется от номинального.
Надежное определение коэффициента эффективного попут-
ного потока сопряжено со значительными трудностями. На прак-
тике обычно используется понятие расчет-
ного попутного потока, скорость ко-
торого в (4.50) находят из условия эквива-
лентности работы гребного винта за корпу-
сом и в свободной воде, что выражается
в равенстве упоров в обоих случаях. Коэф-
фициент расчетного попутного потока опре-
деляют в процессе самоходных испытаний,
когда модель судна движется с помощью
модели гребного винта. Моделирование
при этом осуществляется по числу
Фруда, различие в числах Рейнольдса
учитывается введением специальных по-
правок.
Приближенно значение расчетного коэф-
фициента попутного потока может быть най-
дено по эмпирической формуле Э. Э. Пап-
меля, обобщающей результаты модельных
н натурных испытаний
130°
Рис. 4.22. Попутный
поток в диске греб-
ного виита, располо-
женного в ДП судна
WT = 0,1656XV^K/D - AW7,
(4-52)
где б — коэффициент общей полноты; х— показатель степени:
х= 1 для винта в ДП, х = 2 для бортового винта; V — объем-
ное водоизмещение судна; D — диаметр винта.
Коэффициент волнового попутного потока
AIF = 0,16 (Fr — 0,2) (4.53)
учитывается только при достаточно высоких относительных ско-
ростях Fr > 0,2, при меньших числах Фруда Д№ = 0.
Влияние неравномерности потока иа работу гребного винта.
Ранее мы рассматривали осредненные по диску гребного винта
скорость н коэффициент попутного потока. Однако течение
в гидродинамическом следе за корпусом характеризуется вы-
сокой степенью неравномерности: его скорость является функ-
цией как радиуса, так и угла поворота — vA=f(f, у). Сказан-
ное иллюстрирует рнс. 4.22, на котором показано распределение
коэффициента попутного потока по диску гребного винта, рас-
положенного в ДП судна, когда неравномерность поля скоростей
проявляется в наибольшей степени. Верхняя половина диска
157
находится в непосредственной близости к достаточно полным на
этом уровне ватерлиниям, внизу расстояние между винтом и.
корпусом возрастает, а полнота ватерлиний убывает (см. гл. К
теоретический чертеж). Снижается коэффициент попутного по-
тока и по направлению от ДП к борту судна.
Благодаря неравномерности поля скоростей, обтекание эле-
мента лопасти изменяется по мере поворота гребного винта.
При этом за счет непостоянства осевой скорости Од(у) изменя-
ется результирующая скорость обтекания Vr и, что значительно-
важнее, угол атаки элемента а (см. рис. 4.11). Вместе с ними
изменяются и элементарные силы dT н с/т, а следовательно упор
и сопротивление вращению лопасти в целом. Кроме того, осред-
ненные за один оборот значения Т и Q могут отличаться от та-
ковых в свободной воде, что учитывается коэффициентами влия-
ния неравномерности на упор с‘т, момент i’q, определяемыми вы-
ражениями
i’r = Ктв/Кг, Iq = KqbIKq, (4.54}
где Ктв, Kqb — коэффициенты упора и момента при работе за
корпусом; Кт, Kq — то же в свободной воде.
Указанные коэффициенты (4.54) находят в процессе само-
ходных испытаний, причем обычно принимают с'т = 1,0. Значе-
ние, iQ для судов традиционных обводов также мало отлича-
ется от единицы, в предварительных проектировочных расчетах
берут iQ = 1,0.
Не оказывая существенного влияния на осредиенные во вре-
мени значения упора и момента гребного винта, неравномер-
ность поля скоростей приводит к негативным последствиям дру-
гого свойства: точка приложения упора сдвигается относительно
оси винта, а сопротивление вращению отдельных лопастей,
кроме момента, создает еще и поперечную силу.
В наибольшей степени это проявляется у гребного винта,
расположенного в ДП судна, когда неравномерность макси-
мальная. Коэффициент попутного потока в верхней половине
диска существенно больше, чем в нижней U7b>№h (см. рис. 4.22),
а осевая скорость соответственно меньше Элементы
лопасти винта, расположенные вверху, имеют значительно боль-
шие углы атаки (см. рнс. 4.11), чем у лопасти нижней. Таким
образом, верхняя лопасть создает больший упор и имеет боль-
шее сопротивление вращению, чем нижняя. В результате точка
приложения упора сдвигается вверх от оси винта. Величина
указанного эксцентриситета на судах с полными обводами
может достигать е = 0,1Л. Различие в силах сопротивления вра-
щению верхней н нижней лопастей приводит к тому, что кроме
момента появляется боковая сила, уводящая судно с прямого
курса. Этот факт хорошо известен нз морской практики: судно
с винтом правого вращения, расположенным в ДП, при руле
158
в нейтральном положении (угол перекладки а = 0) уваливает
(отклоняется от курса) вправо, и наоборот.
Аналогичная картина имеет место и у бортовых винтов, од-
нако в силу гораздо меньшей неравномерности поля скоростей
ее влияние на ГДХ сказывается в значительно меньшей сте-
пени.
При работе за корпусом упор и момент гребного винта из-
меняются во времени с частотой пл = nZp, которая называется
лопастной. Амплитуды колебания Т и Q увеличиваются с умень-
шением числа лопастей и увеличением неравномерности поля
скоростей. По этой причине, в частности, у одновальных транс-
портнх судов гребные винты обычно имеют не менее четырех
лопастей.
Неравномерность поля скоростей не оказывает заметного
влияния на ходовые качества судна. Однако эксцентриситет упо-
ра н боковая сила на винте приводят к появлению моментов
изгибающих гребной вал в двух взаимно перпендикулярных
плоскостях. Наряду с циклическими изменениями сил на лопа-
стях эти моменты могут приводить к усталостным разруше-
ниям как самого винта, так и валопровода. Периодические из-
менения углов атаки элемента лопасти усугубляют отрицатель-
ные последствия кавитации, способствуя увеличению эрозии и
повышению шума гребного винта.
Засасывание. Вода в струе перед гребным винтом приобре-
тает дополнительную скорость, а давление в ней падает (см.
§ 4.2). Соответственно возрастает сопротивление формы рас-
положенного в этой струе корпуса, несколько увеличивается и
сопротивление трения за счет увеличения скорости обтекания
кормовой оконечности. Это явление носит название засасыва-
ния, а возникающая на корпусе дополнительная сила сопротив-
ления— силы засасывания. В результате упор гребного винта
Т должен быть больше буксировочного сопротивления R на си-
лу засасывания ДТ:
Т = ^4-Д7'. (4.55)
Выше мы оперировали с понятием полезной тяги Те, пред-
ставляющей часть упора, которая расходуется на преодоление
сопротивления. В общем случае
Te = RIZ, (4.56)
где Z — число гребных винтов.
По аналогии с коэффициентом упора, коэффициент полезной
тяги записывается в виде
Ke = T£/p.i2D4. (4.57)
159
Отношение силы засасывания к упору называется коэффи-
циентом засасывания:
ДГ Т — Тр
= ~Т--------—=
ТЕ
т
(4.58)
И попутный поток, и засасывание имеют одну и ту же физи-
ческую природу, поэтому по аналогии с (4.51) можно записать
коэффициент засасывания в виде трех составляющих — трения,
потенциальной и волновой:
t = t? + ip + tw, (4.59)
Основная роль в (4.59) принадлежит потенциальной состав-
ляющей, следовательно, определение коэффициента засасыва-
ния средствами модельного эксперимента в меньшей степени
подвержено масштабному эффекту, чем это и имеет место у ко-
эффициента попутного потока.
Используя (4.56) и (4.58), легко найти необходимый упор по
известной полезной тяге (сопротивлению):
Тр R
Т = = (4-60)
Самый достоверный способ определения всех коэффициентов
взаимодействия (1FT, t, i<?)—проведение самоходных испыта-
ний. В тех случаях, когда это невозможно, пользуются эмпири-
ческими зависимостями. Коэффициент засасывания для гребно-
го винта в ДП находят в виде
/ = 0,7№г, (4.61)
а для бортового винта с выкружками гребных валов и крон-
штейнами соответственно
/ = 0,25IFr + 0,14; (4.62)
t = 0,71Fr + 0,06. (4.63)
Приведенные формулы (4.61) — (4.63) справедливы для рас-
четного режима работы гребного винта, характеризуемого отно-
сительной поступью. Для определения коэффициента засасыва-
ния на других режимах можно пользоваться предложенной
Э. Э. Папмелем эмпирической формулой
*= ”1 -JKPilD) \ -Ji\piD) ' (4,64>
где t0 — коэффициент засасывания на швартовых (од = 0),
(Pi/D) и (P/D}—гидродинамическое и геометрическое шаго-
вые отношения соответственно.
Засасыванием не исчерпывается влияние гребного винта на
корпус. Конечное число лопастей вызывает пульсацию давлений
160
на элементах конструкций, вблизи которых они проходят. Это
может служить причиной местной вибрации корпуса.
Пропульсивный коэффициент. Эффективность работы греб-
ного винта характеризуется пропульсивным коэффициентом
40 Z2nnQ ’ (4.65)
где Ре = Ли — буксировочная (полезная) мощность; PD— мощ-
ность, подводимая к гребному винту.
С учетом (4.34), (4.50), (4.54), (4.60) и принимая iT = 1,0,
перепишем (4.65) в виде
ТЕи т' ° л 1 —f
1,0 = 2xnQB = 2nnQ ' iQ (1 — IFr) = " Ч"’ (4.66)
где
(4 67>
называется коэффициентом влияния корпуса.
Таким образом, пропульсивный коэффициент, с одной сторо-
ны, определяется коэффициентом полезного действия гребного
винта в свободной воде, а с другой — коэффициентом влияния
корпуса. Величина последнего зависит как от обводов корпуса,
так и, в значительно большей степени, от расположения греб-
ного винта.
Для заданного корпуса при фиксированном диаметре винта
возможность направленного влияния на Wi и t практически
исключена. Единственный путь в этом направлении — отдале-
ние винта от корпуса. При этом коэффициент попутного потока
практически не меняется, а коэффициент засасывания интенсив-
но убывает. Однако такое конструктивное решение вряд ли мо-
жет быть признано приемлемым. Для винта в ДП судна, как
правило, Wt > t, а следовательно т]н> 1. Это обстоятельство
не противоречит фундаментальным законам физики — гребным
винтом утилизируется часть энергии, затраченной на создание
корпусом попутного потока. Для бортовых винтов обычно
Пн<1.
Таким образом, с точки зрения эффективности одновальные
установки предпочтительны по сравнению с многовальными.
4.7. Кавитация гребиых винтов
Кавитация — гидродинамический процесс разрыва сплошнос-
ти жидкости, сопровождаемый появлением отдельных пузырьков
н полостей, заполненных смесью пара и выделившихся из воды,
ранее растворенных в ней газов. Кавитация наступает, когда
1 13415
161
давление в жидкости достигает критического значения — давле-
ния насыщенных паров. Для воды при комнатной температуре
это давление pv = 2,3 кПа, что составляет чуть более двух про-
центов от атмосферного.
В соответствии с законом Бернулли давление на поверхнос-
ти тела, движущегося в жидкости, падает с ростом скорости.
Чем выше скорость, тем быстрее давление снижается до крити-
ческого значения и на большей площади возникает кавитация.
С особыми проблемами сталкиваются при проектировании вы-
сокоскоростных судов, предотвратить кавитацию отдельных эле-
ментов которых (крыльев, стоек, кронштейнов и т. д.) стоит
большого труда. То же можно сказать и о гребных винтах, ло-
пасти которых движутся со значительными скоростями.
Кавитация лопастей винта. Практически лопасть представ-
ляет собой несущее крыло сложной формы. Соответственно про-
цессы возникновения и развития кавитации на лопасти имеют
много общего с таковыми у крыла.
Различают три вида кавитации крыла: вихревую, пузырьча-
тую и пленочную. Первая имеет место в ядрах, сбегающих
с концов крыла вихрей, где давление достигает критического
значения. Эти ядра заполняются паром и газом, становятся
видимыми. Дальнейший рост скорости приводит к снижению до
величины pv давления на небольших участках поверхности кры-
ла— образуются отдельные пузыри, ограниченные по размерам
полости. Когда давление становится равным критическому иа
большей части крыла, образуется каверна, охватывающая зна-
чительную поверхность, — п л е н о ч н а я кавитация. По ме-
ре увеличения скорости растут и размеры каверны, которая мо-
жет замыкаться далеко за пределами крыла.
Рассмотрим условия возникновения и развития кавитации на
засасывающей поверхности крыла. Запишем уравнение Бернул-
ли для линии тока, проходящей через некоторую точку этой по-
верхности:
. I PW1 СОК
Ро Ч 2~ = Р1Ч—(4.68)
где ро, vo — давление и скорость в потоке на бесконечности;
рь V\ — то же в точке А.
Из курса гидромеханики известно, что коэффициент разре-
жения (коэффициент давления с обратным знаком) в точке А
= 2(Ро-р.) (4.69)
pt'o
не зависит от скорости движения и определяется только фор-
мой крыла и его углом атаки. Условия для возникновения ка-
витации в точке А создадутся, когда давление в ней снизится
162
до давления насыщенных паров воды pi = pv, а коэффициент
разрежения станет равен числу кавитации а:
рл = 2<Ро~Р») , 2(Ро-РД) =0 (4.70)
Р»0 Ри0
Коэффициент разрежения не зависит от скорости, число ка-
витации падает с ее ростом. Таким образом, при фиксирован-
ном значении рА всегда найдется такая скорость, при которой
будет иметь место равенство (4.70), т. е. иа крыле возникнет
кавитация. Прежде всего это произойдет в той точке профиля»
где разрежение максимально: р = рт&х-
В начальной стадии кавитация (вихревая, пузырчатая) не
оказывает заметного влияния на ГДХ крыла. При развитой,
или, как ее еще иногда называют, суперкавитации, каверна
охватывает практически всю поверхность крыла, коэффициенты
подъемной силы и сопротивления уменьшаются.
Окружная скорость элементов лопасти зависит от радиуса»
на котором они расположены. Соответственно изменяется вдоль
радиуса и число кавитации элемента, которое, пренебрегая
в (4.23) вызванными скоростями, можно записать
. 2 (До — Др) ~ 2 (До — Ро)____1____________Сто М7П
Р«Я ~ Р^л 1+(2лга-/иЛ)2 1 +(я2г2//2) ’
где ао — осевое число кавитации (см. (4.38)); r = r/R— отно-
сительный радиус элемента.
Из (4.71) следует, что кавитации подвержены прежде всего
периферийные сечения (г® 1) и что при прочих равных усло-
виях она ранее наступит прн малых значениях поступи. Кроме
того, число кавитации элемента всегда меньше осевого. Для
рабочих радиусов винта (г > 0,5) и рабочих поступей (У < 1)
отношение сто/о$ может достигать 10 и более (см. пример 4.6).
Пример 4.6. Найдем число кавитации элемента лопасти, расположен-
ного на радвусе г = 0,75. Исходные данные те же, что и в примерах 4.4
и 4.5; дополнительно взвестио погружение оси винта = 5,9 м; относи-
тельная поступь J = 0,630, атмосферное давление ра = 101 кПа. По (4.28)
находим осевое число кавитации
_ 2(р0-ро) 2(101 + 59-2,3) _
0— ри^ 1,025 • 8,52 — ’ °’
а по (4.17) число кавитации элемента
„ сто________________4,26 4>26_П9й4
s— । ~ i ’ °’752 is ' ’
1 + /2 + 0,632
т. е. различие в числах кавитации достигает 15 раз.
11*
163
Отсюда следует, что кавитация винта начнется значительно
раньше, чем у эквивалентного крыла. Известно, что несущие
крылья СПК обтекаются безотрывно до скоростей Vs = 60 -j-
-5- 80 уз, в то время как избежать кавитации винтов этих судов
практически невозможно уже при vs > 40^3.
Как и для крыльев, для винтов принято различать две ста-
дии кавитации. В первой ГДХ гребного винта практически не
изменяются, во второй наблюдается заметное падение коэффи-
циентов упора и момента и менее выраженное снижение КПД.
В расчетном режиме работы гребного винта элементы ло-
пасти, как правило, имеют нулевые либо малые положитель-
ные углы атаки. При этом возникает рассмотренная выше кави-
тация засасывающей поверхности лопасти. При отрицательных
углах атаки может наблюдаться кавитация нагнетающей по-
верхности, а для выпукло-вогнутого профиля большой кривиз-
ны при а~0 кавитация может захватить и обе поверхности.
При работе за корпусом в существенно неравномерном поле
скоростей гребной винт может за один оборот подвергаться всем
перечисленным видам кавитации — углы атакй элементов лопас-
ти в отдельные промежутки времени будут принимать сущест-
венно различные значения.
Негативные последствия кавитации и способы ее устранения.
В первой стадии кавитационные полости имеют небольшую дли-
ну и замыкаются в пределах лопасти. В районе замыкания ка-
верна разрушается, пузырьки, заполненные паром, сносятся
в область повышенного давления и почти мгновенно схлапыва-
ются, когда пар конденсируется. Происходит гидравлический
удар, в области которого давление и температура достигают
настолько больших величин, что в материале лопасти возникают
напряжения, существенно превосходящие предел прочности.
Периодически повторяясь, этот процесс ведет к выкрашиванию
из материала микроскопических частиц и, как следствие, к раз-
рушению лопасти. Описанное явление носит название кавита-
ционной эрозии и доставляет массу хлопот при проектировании
и эксплуатации гребиых винтов. Известны случаи, когда греб-
ные винты быстроходных судов разрушались за считанные часы
работы.
При меньшей интенсивности кавитационная эрозия приводит
к существенному увеличению шероховатости лопастей и замет-
но снижает КПД гребного винта.
Неравномерность поля скоростей за корпусом способствует
усилению пульсации каверны, что в свою очередь делает более
интенсивным процесс кавитационной эрозии. Вначале она пора-
жав! корневые сечения лопасти, где относительная толщина
максимальна, затем периферийные, где максимума достигают
скорости обтекания элементов. Первый случай чреват опас-
ностью обламывания лопастей, второй — снижением КПД.
164
Кавитационной эрозии невозможно противостоять, однако из-
бежать ее можно благодаря следующим мероприятиям: сверле-
нию отверстий в корневых сечениях лопасти, уменьшению не-
равномерности поля скоростей, подводу к гребному винту возду-
ха или газа. Однако кардинальным способом борьбы с эрозией
является устранение причины ее порождающей — первой ста-
дии кавитации. Основной путь — отдаление кавитации засасы-
вающей поверхности лопасти за счет уменьшения максимально-
го коэффициента разрежения. При неизменном значении задан-
ного упора гребного винта этого можно достичь уменьшением
угла атаки и одновременным увеличением площади лопастей,
т. е. повышая дисковое отношение. Если последнее близко
к пределу, то некоторый эффект получают, используя профили
с более равномерным распределением коэффициента разреже-
ния, например сегментные, NACA-66 и др. Желаемый результат
может быть достигнут за счет увеличения диаметра гребного
винта и одновременного снижения частоты его вращения и уг-
лов атаки элементов лопастей. Уменьшение числа лопастей
также приводит к положительному эффекту — снижается отно-
сительная толщина лопасти, а вместе с нею и величина ртах-
Отдаляет начало кавитации и увеличение погружения оси греб-
ного винта.
Легко заметить, что все перечисленные выше способы сни-
жения опасности кавитации в реальных условиях имеют весьма
жесткие ограничения: дисковое отношение не может превышать
предельного значения, максимальный диаметр винта и погруже-
ние его оси диктуются осадкой судна, возможность уменьшения
числа лопастей также не беспредельна, а кроме того, это меро-
приятие существенно увеличивает виброактивностэ гребного
винта. В тех случаях, когда все пути исчерпаны, а вывести греб-
ной винт из первой стадии не удается, остается использовать
другие движители либо специальные снльнокавитирующие вин-
ты (см. § 4.9).
На основании обобщения опыта эксплуатации судов и экс-
периментальных исследований работы гребных винтов разраба-
тываются рекомендации по выбору дискового отношения, ми-
нимально допустимого с точки зрения отсутствия вредных по-
следствий кавитации. В отечественной практике широкое рас-
пространение получила формула
/ЛР\ 1,5 4-0,35Z„ 0,2
М- (4-72)
\ Ло /min (Ро — Pv) D2 Z ' '
тде Zp — число лопастей; Z — число гребных валов; D — диа-
метр гребного винта.
4.8. Проектирование гребных винтов
Выбор геометрических характеристик, числа винтов и направле-
ния их вращения. Для морских транспортных судов обычно КПД
винта увеличивается с ростом его диаметра. Это объясняется
снижением коэффициента нагрузки (см. § 4.2) при фиксирован-
ных значениях упора и скорости движения. Поэтому диаметр
винта выбирают максимально возможным из условия его раз-
мещения в кормовой оконечности судна. В первом приближении
для винта в ДП судна можно принимать D = (0,68 4- 0,75) Т,
для бортового, при двухвальной установке, D = (0,62 4-0,70)7’,
где Т—осадка судна.
При выборе числа лопастей гребного винта руководствуют-
ся соображениями, чтобы лопастная и удвоенная лопастная ча-
стоты не совпадали с собственными частотами первых трех то-
нов колебаний корпуса и основных его конструкций. В этом
случае удается избежать интенсивной вибрации корпуса, вызы-
ваемой работой гребного винта. Если информация об указан-
ных частотах отсутствует, для винтов в ДП принимают Zp 4,
а для бортовых в зависимости от нагрузки: при Клт>2 (или
К#т>1), что соответствует слабонагружениым винтам, берут
Zp = 3, для меньших значений этих коэффициентов Zp = 4.
Необоснованное увеличение Zp нерационально по двум причи-
нам: возрастает трудоемкость изготовления винта и несколько
снижается его КПД. Последнее обстоятельство имеет место
в связи с тем, что для обеспечения равного запаса на кавита-
цию увеличение числа лопастей влечет за собой и увеличение
дискового отношения.
Относительная толщина лопасти в самом широком месте
(г = 0,6—0,7) не должна превышать предельного значения
бтах, до которого КПД еще имеет приемлемое значение. При
соблюдении этого условия минимальное дисковое отношение,
обеспечивающее прочность винта
/ <\/ Z„ \2/3 з/ Ют Г
-£ =0,2411,08--= к—• А/-Т-Т-- (473)
\ /min \ D / \ бгаах^ / V . [о] 7
где D — диаметр ступицы и винта соответственно, м; бтах=
= 0.084-0,09; m — коэффициент, учитывающий условия работы
винта (т = 1,15 для транспортных судов; т—1,5 для буксиров,
т = 1,75 для судов ледового плавания, т = 2,0 для ледоко-
лов) ; Т — упор винта, кН; [о] — допускаемые напряжения, для
винтов транспортных судов можно принимать [о] = 6-104 кПа.
Увеличение дискового отношения приводит к падению
КПД. Поэтому его выбирают так, чтобы выполнить требования
обеспечения прочности (4.73) н отсутствия вредных последст-
вий кавитации (4.72). Как правило, у гребных винтов транспорт-
ных судов определяющим является последнее.
166
Пропульсивный коэффициент винта в ДП обычно больше,
чем при бортовом расположении (см. § 4.6). В связи с этим од-
новальной установке следует отдать предпочтение перед много-
вальной. В пользу последней, однако, говорит повышенные жи-
вучесть и маневренность, возможность осуществления парциаль-
ных режимов (см. § 4.11).
При выборе количества винтов определяющими могут стать
и следующие обстоятельства: наличие подходящих двигателей,
возможность их рационального размещения в корпусе, перво-
начальная стоимость установки и ее эксплуатации.
Что касатся морских транспортных судов, то тут прева-
лируют соображения экономического характера, поэтому боль-
шинство из них — одновальные. Исключение составляют круп-
ные быстроходные суда: пассажирские и грузовые лайнеры и др.
Необходимая мощность может оказаться слишком велика, что-
бы ее можно было получить в одном агрегате либо эффектив-
но переработать одним винтом.
Направление вращения гребного винта не сказывается на
его эффективности. Для одновинтовых судов оно определяется
устанавливаемым двигателем. Бортовые винты должны вра-
щаться в противоположные стороны во избежание уваливания
судна с прямого курса (см. § 4.6). При этом считается, что во
избежание попадания плавающих предметов между корпусом
и винтами вращение последних должно быть наружным,
т. е. лопасти в верхнем положении должны двигаться от
корпуса.
Подбор гребных винтов по диаграммам. Проектирование
гребных винтов транспортных судов, как правило, сводится
к выбору оптимального (см. § 4.5) винта. При этом он должен
обладать необходимой прочностью и удовлетворять условию от-
сутствия негативных последствий кавитации. В случае, когда
требуется обеспечить судну заданную скорость, оптимальность
винта означает минимальную мощность механической установ-
ки. Если заданы характеристики двигателя, оптимальный винт
позволяет судну двигаться с наибольшей скоростью.
Все задачи, связанные с проектированием гребного винта,
в том числе и оптимального, эффективно могут решаться с по-
мощью диаграмм для расчета гребных винтов (см. § 4.5). Ис-
ходной информацией при этом являются известные геометриче-
ские элементы гребного винта: Е)щах, Zp, AE/AQ и характери-
стики взаимодействия Wt, t, iq- Практически все многообразие
заданий на проектирование гребных винтов можно свести к че-
тырем основным типам, для каждого из которых используется
своя расчетная схема.
Схема I. Заданы: скорость судна v; расчетное сопротив-
ление R, диаметр винта D. Оптимальный гребной винт находит-
167
ся с помощью коэффициента задания Kdt (см. (4.44)), вычис-
ляемого с учетом того, что винт работает за корпусом судна:
- о (1 - F) D (4.74)
На диаграмме, соответствующей элементам задания Ав/А0,
Zp на линии Кйт opt находят точку, отвечающую рассчитанному
значению (4.74) этого коэффициента, затем, как это описано
в § 4.5, снимают величины P/D, I, Кт, т)о- Искомые значения
оптимальной частоты вращения двигателя и его мощности Ps
находятся по очевидным формулам:
nopi = v(l-W)/JD-, (4.75)
Ps = /?.o/Zt|5t]D, (4.76)
где t]d = ЛнЛо — пропульсивный коэффициент; t|s — КПД пере-
дачи мощности.
Потери энергии в валопроводе зависят от его длины (МО
в середине, в корме, промежуточное положение) и составляют
(1—3) %. Соответственно при прямой передаче мощности:
двигатель—вал—движитель t]s = 0,99 0,97. Наличие дополни-
тельного звена — механического редуктора либо гидромуфты —
увеличивает потери мощности, при этом iqs = 0,94 +•• 0,96. Еще-
меньшие значения КПД имеют место при электрической (ди-
зель-генератор—электродвигатель—вал—винт) передаче мощ-
ности: T]s = 0,88 -к 0,90.
Использование коэффициента Kdt фактически означает за-
дание коэффициента нагрузки Ста = 8/л Kdt, а вместе с ним
и предела коэффициента полезного действия г)0 (см. § 4.2), что
ограничивает возможности оптимизации винта. Поэтому часто
ту же задачу решают с помощью коэффициента задания Кит-
Схема 2. Исходные величины те же, что и в схеме 1. Зада-
вая ряд значений частоты вращения винта п, для каждой из
них с учетом взаимодействия винта и корпуса определяют
0(1 — W т\ 4 / Р
= V R/Z (1 — t) (4,77J
находят на линии Кит opt. диаграммы соответствующую точку,,
снимают относительную поступь J, а затем ее корректируют:
J' = a J.
Указанная корректировка необходима для учета влияния
корпуса: в связи с тем, что t(J) максимумы функций т]о(/) и
Ля(J) не совпадают, т. е. диаметр оптимального винта в свобод-
ной воде и за корпусом не одинаковы. Корректировка поступи
фактически означает корректировку оптимального диаметра.
168
Для гребных винтов в ДП а=1,05, для бортовых винтов, где
влияние корпуса слабее, а=1,03.
Последовательность дальнейших расчетов: J'DOpt-*~ Кт-*-
—► Р/D -*т]о—*- Ps’, их удобнее выполнять в табличной форме.
По результатам расчетов строят графические зависимости
Ps(n) и £)Opt(n), а затем выбирают гребной винт, обеспечива-
ющий Ps min- Очевидно, что практический интерес представ-
ляют только те варианты, при которых Dopt^Dmax- Для винтов
транспортных судов обычно искомый вариант /\min соответст-
вует максимальной величине диаметра.
Пример реализации указанной схемы расчета оптимального
гребного винта — см. в табл. 4.4 § 4.12.
Схема 3. Заданы /?, о, D и п. Находят значения Кт и I
{с учетом взаимодействия), которые однозначно определяют
координаты точки, сответствующей искомому винту. С диаграм-
мы снимаются величины Р/D, т]о; затем рассчитывают мощность
механической установки Р*.
Рассматриваемая схема исключает любые вариации, полу-
ченный гребной винт не является оптимальным.
В приведенных выше схемах заданы характеристики корпу-
са— скорость и сопротивление, а искомой является мощность
двигателя. Для решения таких задач и предназначены корпус-
ные диаграммы.
В том случае, когда задаются характеристики двигателя,
логичнее было бы использовать машинные диаграммы (см.
§ 4.5). Однако и эти задачи могут столь же эффективно ре-
шаться с помощью корпусных диаграмм.
Схема 4. Исходные данные: зависимость сопротивления
судна от скорости R(v) и характеристики главной механиче-
ской установки Ps, п.
В районе предполагаемой скорости задаются несколькими
ее значениями и для каждого из них рассчитывают коэффи-
циент задания Кит. Дальнейший расчет идентичен таковому
в схеме 2. Построив по его данным зависимости Ps(v), D(v)
и Р/D = f(v), находят искомые характеристики винта в точке,
где мощность равна заданной Ps(v) =Pssan- В этом варианте
предполагается, что диаметр винта не ограничен. В наиболее
интересном с практической точки зрения случае диаметр вин-
та всегда имеет верхний предел Dmax- Тогда для скоростей, при
которых DOpt -Отах, расчет ведется по схеме 2, а при
£>opt > Лпах— по схеме 3. В последнем случае принимают
D = Dta&i и выбранный винт, строго говоря, уже не будет опти-
мальным.
Пример такого расчета — см. в табл. 4.5, § 4.12, в первых
четырех столбцах которой £)Opt < Dmax и принимается D=Dopu
а в пятом DOpt > Dmax, в связи с чем принято D = Dmix.
В последнем случае КПД винта мало отличается от т|о max, ПО-
169
поскольку невелики и различия в Dopt и Z)max. Однако, если
ограничение диаметра винта при заданных характеристиках
двигателя (Ps, п) приводит к существенному снижению про-
пульсивного коэффициента, то решается вопрос о редукции ча-
стоты вращения. Такая ситуация возможна, когда по каким-
либо причинам не удается подобрать подходящий двигатель.
В этом случае расчет винта можно вести по схеме I для не-
скольких скоростей движения.
Обычно проектирование гребного винта выполняется в не-
сколько этапов. На первом определяются основные геометри-
ческие параметры (£), AE/AQ, Zp) и коэффициенты взаимодей-
ствия винта и корпуса (№т, t, t<?). Далее рассчитывают гребной
винт, обеспечивающий заданному судну заданную скорость
(схемы 1 или 2) и находят необходимые для этого характери-
стики (Ps, п) главной механической установки. Затем выбирают
двигатель, мощность и частота вращения которого в наиболь-
шей степени отвечают требуемым. На заключительном этапе
рассчитывают гребной винт, обеспечивающий проектируемому
судну с выбранным двигателем максимальную достижимую
скорость. Пример подобного расчета приведен в § 4.12.
Для подбора двигателя можно пользоваться каталогами
отечественных и зарубежных фирм, а также табл. 4.1, где при-
ведены основные характеристики некоторых судовых малообо-
ротных дизелей, выпускаемых консорциумом «МАН—Бурмей-
стер и Вайи». ДВС этой фирмы широко применяют на отечест-
венных судах.
Расчет гребного винта с использованием вихревой теории.
Проектирование гребных винтов с помощью диаграмм имеет и
недостатки: выбирается оптимальный винт в пределах рассмат-
риваемой серии, не учитывается неравномерность поля скоро-
стей за корпусом судна. В связи с первым обстоятельством не
гарантировано получение максимально возможного КПД, вто-
рое может привести к повышенной виброактивности гребного
винта и его неудовлетворительным кавитационным качествам.
Последнее особенно важно для винтов быстроходных судов.
Указанных недостатков можно избежать, используя вихревую
теорию гребного винта. В ее основе — вихревая теория крыла,
в которой воздействие крыла на окружающую жидкость заме-
няется воздействием эквивалентного вихря. Из курса гидроме-
ханики известно, что крыло бесконечного размаха с неизмен-
ной хордой может быть заменено присоединенным вихрем, име-
ющим такую же циркуляцию. Крыло конечного размаха заме-
няется П-образным вихрем постоянной циркуляции, состоящим,
из присоединенного (в пределах крыла) вихря и двух свобод-
ных, распространяющихся в бесконечность по направлению ско-
рости набегающего потока. Если хорда не постоянна по разма-
ху крыла, оно заменяется присоединенным вихрем переменной
170
Таблица 4.1. Характеристики некоторых судовых малооборотиых дизелей
(МОД)
Марка дизеля Частота враще- Агрегатная мощность Р^, тмс. кВт, при числе цилиндров
иия я, об/мии 4 5 б 7 8 9 10 11 12
ДКРН 45/90 227 3,24 3,88 4,53 5,18 5,82 6,47 7,12 7,76
ДКРН 52/105 183 3,54 4,43 5,31 6,20 7,08 7,97 — — —
ДКРН 45/120 170 2,59 3,24 3,88 4,53 5,18 5,82 6,47 7,12 7,76
ДКРН 55/138 150 3,94 4,93 5,91 6,90 7,88 8,87 9,85 10,8 П,8
ДКРН 67/140 145 — 6,88 8,25 9,63 н.о 12,4 13,8 15,1 16,5
ДКРН 80/160 126 — 9,7 11,6 13,6 15,5 17,5 19,4 21,3 23,3
ДКРН 90/160 122 — — 16,2 18,9 21,6 24,3 27,0 — 32,4
ДКРН 67/170 119 5,5 6,88 8,25 9,63 н.о 12,4 13,8 >5,1 16,5
ДКРН 90/180 114 — 12,6 15,1 17,6 20,1 22,6 25,1 27,6 30,1
ДКРН 80/195 103 7,76 9,70 И.6 13,6 15,5 17.5 19,4 21,3 23,3
ДКРН 98/200 , 103 — — 18,0 21,0 24,0 27,0 30,0 33,0 36,0
ДКРН 90/230 100 12,6 15,8 19,0 22,1 25,3 28,4 31,6 34,8 37,9
ДКРН 90/218 94 10,1 12,6 15,1 17,6 20,1 22,6 25,1 27,6 30,1
ДКРН 50/191 92 3,92 4,90 5,88 6,86 7,84 — — — —
ДКРН 90/255 90 12,6 15,8 19,0 22,1 25,3 28,4 31,6 32,2 35, 1
ДКРН 60/194 87 5,16 6,45 7,74 9,03 10,3 — — — —
ДКРН 90/292 78 15,6 19,6 23,5 27,4 31,3 35,2 39,1 43,0 46,9
ДКРН 60/229 76 4,48 5,6 6,72 7,84 8,96 — — —-
ДКРН 80/259 66 9,28 Н,6 13,9 16,2 18,6 20,9 23,2 25,5 27,8
ДКРН 90/292 58 11,6 14,6 17,5 20,4 23,3 26,2 29,1 32,0 34,9
Примечания: 1. Двигатели типа ДКРН — двухтактные крейцкопфные, с гаэо-
турбонаддувом, цифры за буквенным обозначением означает диаметр цилиндра и ход
поршня, см.
2. В таблице приведены номинальные значения мощности Ргв и частоты враще-
ния па.
3. Пример записи характеристик 12-цилиндрового двигателя: 12 ДКРН 90/292, Р411—
“34 900 кВт, пв*-58 об/мин.
циркуляции, а сбегающие с каждой его точки свободные вих-
ри образуют вихревую пелену. И, наконец, крыло можно за-
менить системой присоединенных вихрей переменной цирку-
ляции. Последняя схема в наибольшей степени подходит для
широких крыльв сложной формы.
Указанные операции преследуют одну цель — с помощью
теоремы Био-Савара определить вызванные свободными вих-
рями скорости в любой точке потока. Эти скорости направле-
ны по нормали к скорости набегающего потока. Они приводят
к уменьшению угла атаки — скосу потока, что влечет за собой
снижение подъемной силы крыла н увеличение его сопротив-
ления. Таким образом, задача определения сил, действующих
на крыло конечного размаха, практически сводится к нахожде-
нию вызванных свободными вихрями скоростей.
Лопасти те же крылья малого удлинения, следовательно, вих-
ревая теория может с успехом применяться и для расчета греб-
171
ного винта. Впервые эта идея была высказана в начале нашего
века Н. Е. Жуковским, который считается родоначальником
вихревой теории гребного винта. С ее помощью решаются обе
задачи: прямая — поверочный и обратная — проектировочный
расчет гребного винта. В обоих случаях учитываются индиви-
дуальные особенности поля скоростей за корпусом судиа.
Условие оптимальности винта при его проектировочном рас-
чете— достижение наивысшего пропульсивного коэффициента
при выполнении требований задания и отсутствии вредных по-
следствий кавитации. Другими словами, проектируется гребной
винт, приспособленный к заданному попутному потоку. В ре-
зультате такого расчета получают геометрические характери-
стики гребного винта — распределение относительной кривизны
профиля лопасти и шагового отношния по радиусу: бс(г) и
P/D = f(f).
Результатом поверочного расчета является распределение на-
грузки по радиусу винта заданной геометрии в функции от его
режима работы, относительной поступи:
= и^. = Н/).
В свою очередь эти зависимости позволяют найти силы,
действующие на отдельные лопасти:
Tz = Pi2£4 J dr, Qz = ртЧУ* J dr.
и на винт в целом:
Z Z
Т=£тг, Q=£qz. (4-78)
i=i 1=1
Выражение (4.78) учитывает, что в общем случае при ра-
боте в неравномерном поле скоростей упоры и моменты, созда-
ваемые отдельными лопастями, не одинаковы.
Рассчитав упор и момент для различных фиксированных
значений относительной поступи виита, можно получить его
ГДХ в свободной воде.
Поверочный расчет гребного винта широко используется при
анализе его прочности, проверке на кавитацию, при изучении
периодических усилий, возникающих на лопастях в неравномер-
ном поле скоростей.
Ледовые гребиые винты и их особенности. К гребиым винтам
ледоколов и судов активного ледового плавания предъявляют-
ся следующие специфические требования: высокая прочность,
обеспечивающая работу в ледовых условиях, достаточная эф-
фективность при движении передним и задним ходом с малыми
172
скоростями, т. е. на режимах, близких к швартовному. Жела-
тельно, чтобы винты имели съемные лопасти, замена которых
в случае поломки могла осуществляться судовыми средствами.
В отечественной практике широкое применение находят ледо-
вые гребные винты, разработанные М. А. Игнатьевым. Эти вин-
ты имеют четыре лопасти — поломка одной из них представ-
ляет не слишком большую опасность, а в межлопастное про-
странство не могут попасть крупные льдины. Контур спрямлен-
ной поверхности имеет симметричную форму, профиль сечения
лопасти двояковыпуклый, обеспечивающий прочность и доста-
точную эффективность на заднем ходу. Увеличенный диаметр
ступицы ан = 0,28 позволяет устанавливать съемные лопасти.
На основании испытания серии моделей М. А. Игнатьевым
были созданы расчетные диаграммы для проектирования греб-
ных винтов ледоколов (Zp = 4; Ая/Ао=О,5; Р/D = 0,4-?-1,2),
которые можно найти в специальной литературе.
При проектировании гребных винтов ледоколов их элементы
выбирают таким образом, чтобы в расчетном режиме можно
было обеспечить максимальный упор на единицу мощности глав-
ной механической установки. В качестве расчетного обычно при-
нимают режим движения в тяжелых либо предельных льдах
с малой скоростью.
При заданных мощности двигателя и диаметре гребного
винта максимальный удельный упор достигается при условии
Т г Кт
Тогда выбор ледового винта сводится к построению по дан-
ным диаграммы зависимости q—f(P/D) при расчетном зна-
чении относительной поступи. Максимум этой функции будет
соответствовать оптимальному с указанных позиций шаговому
отношению. Для ледовых винтов расчетная поступь лежит
в пределах J = 0-М),2, оптимальное шаговое отношение при
этом составляет PfD = 0,70ч-0,80.
Диаметр винта ледокола выбирают максимально возмож-
ным, при этом максимален должен быть и удельный упор. Од-
нако практика позволила выработать рекомендации: чтобы
уменьшить вероятность взаимодействия гребного винта с пла-
вающими на поверхности воды крупными льдинами, его ось
должна быть достаточно заглублена, что возможно при условии,
когда диаметр не превышает (55—60) % осадки.
Большая подводимая к ледовому винту мощность, повышен-
ная толщина лопасти, малые значения относительной поступи
на рабочих режимах — все это способствует возникновению ка-
витации. Основной способ ее отделения — увеличение дисково-
го отношения.
(4.79>
173
При работе во льдах существенно изменяются ГДХ гребно-
го винта: упор падает, момент возрастает, заметно снижается
КПД. Достоверная оценка этих изменений —одна из проблем,
возникающих при расчете ледовых гребных винтов. Проектиро-
вание осложняет и то обстоятельство, что практически не суще-
ствует систематических данных о взаимодействии гребного вин-
та и корпуса в водно-ледяном потоке.
Гребные винты для судов активного ледового плавания за-
нимают промежуточное положение между винтами транспорт-
ных судов и ледоколов.
Сегодня на ледоколах в основном используются винты фик-
сированного шага (ВФШ). Лучшим приводом в этом случае
является гребной электродвигатель, обеспечивающий значитель-
ное повышение момента на валу при взаимодействии винта со
льдом и тем самым снижающий вероятность заклинки виита.
Кроме того, электродвигатель уменьшает время реверса, повы-
шает маневренность судна. Поэтому, даже несмотря на доволь-
но высокие потери мощности в передаче, электродвижеиие на-
ходит широкое распространение на ледоколах и судах активно-
го ледового плавания.
В последнее время наблюдается тенденция использования
на этих судах ВРШ, в том числе и в насадках. Применение та-
ких винтов в сочетании с двигателем внутреннего сгорания или
турбиной снизит потери энергии в передаче. Насадка обеспе-
чивает повышение упора на швартовах, управление лопастя-
ми— достаточную маневренность. Однако подобная пропульсив-
ная установка имеет и ряд существенных недостатков: обломки
льда, попадая в насадку, приводят к резкому усилению вибра-
ции кормовой оконечности; начальная стоимость, эксплуатация
и ремонт в случае поломки ВРШ существенно выше, чем
у ВФШ.
Прочность гребных винтов. Лопасть представляет собой
винтообразной формы оболочку, имеющую переменную вдоль
радиуса ширину, толщину и кривизну. Ее можно рассматри-
вать как консольную балку, жестко заделанную в корневом се-
чении. Под действием внешних нагрузок: упора, сопротивления
вращению, центробежных сил — лопасть подвергается круче-
нию, изгибу, растяжению, т. е. испытывает сложное напряжен-
ное состояние.
Расчет прочности лопасти, как обычно, включает три зада-
чи: определение внешних сил и внутренних напряжений, назна-
чение обоснованного запаса прочности.
Внешние силы обычно разделяют на две категории: стацио-
нарные и периодические, возникающие в основном вследствие
неравномерности поля скоростей.
На сегодняшний день проблему определения внешних сил
можно считать практически решенной. Для гребного винта за-
174
данной геометрии, работающего в заданном поле скоростей, по-
верочный расчет позволяет определить как средние, так и ам-
плитудные значениях всех перечисленных выше видов нагрузок,
действующих на лопасть.
Несколько сложнее обстоит дело с определением сил вну-
тренних, однако для винтов с не слишком большим дисковым
отношением существуют достаточно надежные способы расче-
та этих напряжений.
Расчеты, выполненные для гребных винтов транспортных су-
дов, показывают, что определяющими являются напряжения
в корневом сечении лопасти. Поэтому обычно проверку проч-
ности проводят только для сечения на радиусе г = 0,2.
Считается, что прочность винта по статическим нагрузкам
обеспечена, если коэффициент запаса по временному сопротив-
лению материала находится в пределах п-вр = (Гир/отах =
= 8 4- 10, а по пределу текучести ns = о,/атах = 3 4-4.
Для расчета циклической прочности определяют максималь-
ные и минимальные значения нагрузок за один оборот. Это
можно сделать с помощью (4.77) при наличии полной информа-
ции о распределении скоростей в попутном потоке.
Для обеспечения циклической прочности должно выполнять-
ся условие
О-1/Лоо Vo, + Од • о. (4.80)
где а_| — предел усталости материала; оа—амплитудное изме-
нение напряжения; а — среднее значение напряжения; пт «
— (3,5 4-4)—коэффициент запаса циклической прочности.
Расчеты прочности широколопастных гребных винтов быст-
роходных судов, приведенные по более сложной методике, по-
казали, что максимальные напряжения у этих винтов наблю-
даются в районе входящей кромки лопасти на радиусах г =
= 0,7 4-' 0,8. Определяющим здесь оказалось стесненное круче-
ние лопасти, которое не учитывается для винтов транспортных
судов.
В заключение отметим, что точное определение напряжений
в лопастях в различных условиях эксплуатации (реверс, дви-
жение на волнении и др.) пока еще не всегда возможно. Это
компенсируется значительными запасами прочности, вводимы-
ми при назначении допускаемых напряжений.
На предварительных стадиях расчета винта для оценки его
прочности можно использовать выражение (4.73).
4.9. Движители быстроходных судов
Некавитирующие широколопастные гребиые винты. Основная
проблема, которую приходится решать, проектируя винты высо-
коскоростных судов, — максимальное отдаление кавитации. Это
175
достигается, во-первых, использованием на всех радиусах сег-
ментного сечения профиля, а, во-вторых, высоким дисковым от-
ношением. Последнему обстоятельству эти винты и обязаны
своим наименованием — широколопастные.
В отечественной практике распространение получили широ-
колопастные гребные винты Г. А. Звездкииой, которая построи-
ла соответствующие расчетные диаграммы. В их основе — ис-
пытания серии трех лопастных винтов с дисковым отношением
Ае/Ао = 0,5; 0,8; 1,1 и шаговым отношением Р/D = 0,6 4- 1,6.
Диаграммы построены по методу Э. Э. Папмеля, с их помощью
можно решать все задачи, связанные с проектированием греб-
ных винтов.
Обработка экспериментальных данных Г. А. Звездкиной,
проведенная под руководством автора, позволили представить
ГДХ широколопастных винтов в аналитическом виде:
Кг==1 - у1’03 (лв/ло)о>294
Кт max = (о, 15^7
(4.81)
р Ч0.415 (Лр/ло)+0,656
(4.82)
max
Кт
( 1,29 + 0,233
'-0.09-/-
Ле /
»Q(Kq-*•»>)
0,15
(4.83)
(4.84)
(4.85)
Кт —
K«0 = l6VZr)4-3’9]- 1°-3’
где Кт и Kq— коэффициенты упора и момента;
= Кт/Кт max — нормализованный коэффициент упора:
= ///max— нормализованная относительная поступь; Кт max —
коэффициент упора в швартовном режиме (/ = 0), /max, Kqo —
относительная поступь нулевого упора и соответствующий ей
коэффициент момента.
Были аппроксимированы также необходимые для проекти-
рования гребных винтов линии оптимальных значений всех ко-
эффициентов задания. Для удобства пользования они представ-
лены так, чтобы по известному значению соответствующего ко-
искомые характеристики
эффициента задания находить
(P/D, J) оптимального винта:
P/D = 0,690^ 4- 0,290,
P/D = 0,679KWq4-0,380,
P/D = 0,450KDr4-0,480,
/ = 0,670К\г;
J = 0,735/Gq;
/ = 0,490Kdt;
Р/D = 0,494KDQ + 0,580, J = 0,575Kdq 4-0,120.
(4.86)
(4-87)
(4.88)
(4.89)
176
Выражения (4.81) — (4.85) полностью описывают ГДХ всех
винтов серии, а (4.86)—(4.89) позволяют решать проблему вы-
бора оптимального винта при любых типах задания. Кроме то-
го, они могут использоваться и для винтов с промежуточными
значениями дискового отношения (в диапазоне Лв/Ло =
= 0,5 -ь 1,1).
Минимально допустимое с точки зрения прочности дисковое
отношение определяется по формуле, полученной с использова-
нием методики В. М. Лаврентьева:
/Л₽\ 0.148Г
-А (4-90)
\ Ле /mln [а] ’ ' ’
где Т — упор; D — диаметр винта; [о]—допускаемые напря-
жения.
Проверка винта на кавитацию осуществляется на заключи-
тельной стадии расчета, когда геометрические характеристики
(Дс/Ло, Р/D) и режим работы винта (/) уже известны. Отсут-
ствие второй стадии кавитации обеспечивается условием
а. величина последнего определяется выражением
/кР = (а — ’ (-р)’ (4-91)
где о0 — осевое число кавитации, а коэффициенты а и b опре-
деляются в зависимости от шагового отношения:
РЮ 0,6 0,8 1,0 1,2 I,4 1,6
а 1,43 1,17 1,00 0,91 0,89 0,89
ь 0,43 0,33 0,23 0,19 0,19 0,19
Выражение (4.91) справедливо в диапазоне 0,7
(МАс/Ао) 1,0, вполне достаточном для проверки винтов,
работа которых может сопровождаться кавитацией.
Винты, установленные на наклонных гребных валах (СПК
с МПК, глиссирующие суда), работают в равномерно скошен-
ном поле скоростей, когда угол атаки а элемента за один обо-
рот изменяется в достаточно широких пределах. В результате
в одном положении (а>0) на лопасти кавитация может на-
блюдаться на засасывающей, в другом а<0—на нагнетающей
поверхности, а в третьем, промежуточном, а = 0 — вообще от-
сутствовать. Наибольшую опасность с точки зрения возникно-
вения эрозии представляет кавитация нагнетающей поверхности.
Для устранения последней методами вихревой теории про-
водят корректировку геометрических элементов =
бс = f(г)) гребного винта.
Взаимодействие гребного винта с корпусом быстроходного
судна в значительной степени определяется типом судна и ком-
пановкой двнжительного комплекса. Так, например, на глисси-
рующих судах и СПК с малопогружными крыльями (МПК)
123415
177
обычно устанавливают наклонные гребные валы, у мореходных
СПК с АУПК винты располагают за гондолами. Систематиче-
ские данные по коэффициентам взаимодействия некавитирую-
щих гребных винтов с корпусом быстроходных судов отсутст-
вуют, чаще всего при расчетах используют известные резуль-
таты судов-прототипов.
Пример 4.7. Рассчитаем некавитнрующий гребной винт для быстроход-
ного судна водоизмещением D = 32 т. Известно: V, — 21,5 уз (о= 11,1 м/с);
R = 40 кН; число винтов — 2; коэффициенты взаимодействия W{ = t = 0;
диаметр винта D = 0,75 м.
Задавая [о] = 600-10® кПа, по (4.90) находим дисковое отиошеине (Т =
= R/2 = 20 кН):
(АР\ 0.148 - 20 . 10*
( АГ /mln = 0,75» .6.10* = °'880-
Принимаем Ае/Аь = 0,9.
По (4.44) определяем коэффициент задания
KDT = vaD -y/pjT =11,1- 0,75 V 1,025/20 = 1,88,
а по (4.88) рассчитываем шаговое отношение
Р/О = 0,45 - 1,88 + 0,48=1,33
и относительную поступь
7 = 0,49 • 1,88 = 0,921.
Используя (4.82) и (4.83) находим:
тах = (0,15 « 0,9 + 0,345) • 1,33^5 ' °'9+°-656> = 0,644;
7П1вх=(1,17 + 0,°9.0,9) • 1,33= 1,45.
0,921
Зная J— । ^ = 0,635, по (4.81) рассчитаем
Кт = 0,644 (1 — О.6351’03 ‘ °-90’294) = 0,235;
по (4.85) и (4.84) находим
KQO=10-3 (6 • 0,9+ 3,9) =0,0119;
Kq = [(1,29 + 0,233 • 0,9) 1,33—0,15] . 0,235- 10"'+ 0,0119 = 0,0552.
КПД гребного винта
Кт J 0,235 0,921
По = ' 2л“ °° 0,0552 6^8“= °’624’
Мощность энергетической установки (т]» = 0,98)
R-V. 20-11,1
Ps = 2t)si1o = °-98 • 0.624 = 367 кВт:
частота вращения
V. H.I
п —-ду-— 0,75-0,921 — 18,1 об/с —964 об/мин.
178
-Определим осевое число кавитации (й. = 2,1 м)
2 (рв + уйв - р„) _ 2(1014-21-2,3)
00----------5--------- 1,025 - 11,1» = 1 уи-
PVA
кавитации отсутствует при
00 ' А,
Рис. 4.23. ГДХ сильнокавитирующего гребного ииита
Сильнокавитирующие гребные винты. Предотвратить кавита-
цию гребного винта при высоких скоростях движения (os >
> 35 4- 40 уз) практически невозможно, остается приспособить
его для работы в этих условиях. Первая стадия кавитации со-
провождается интенсивной эрозией и ведет к разрушению греб-
ного винта. Поэтому в качестве расчетного режима принима-
ется вторая стадия — развитая кавитация, а соответст-
вующие гребные винты называют сильнокавитирующими. Ха-
рактерной особенностью этих винтов является зависимость их
ГДХ от числа кавитации оо. Кривые действия гребного винта
перестают быть однозначными: при фиксированной поступи ко-
эффициенты упора, момента и КПД принимают различные зна-
чения в функции от Сто- Так, на рис. 4.23 приведены характери-
стики трехлопастного сильнокавитирующего гребного виита
(СКГВ) с сегментным профилем сечения лопасти, имеющего
Ае/А0 = 1,1, P/D= 1,2.
12*
179
Построение диаграмм СКГВ существенно затрудняется: для’
каждого фиксированного значения числа кавитации ао надо-
строить свои диаграммы (корпусную и машинную). Сложно и
пользование ими: интерполяция для промежуточных значений
оо сопряжена с потерей необходимой точности расчетов. По-
этому чаще всего при проектировании СКГВ пользуются непос-
редственно кривыми действия отдельных винтов. Процедура
при этом выглядит следующим образом: определяют осевое чис-
ло кавитаций <т0 в зависимости от типа задания, рассчитывают
соответствующий коэффициент Kdt или Knt- На ГДХ СКГВ
наносят параболу, отвечающую расчетному значению коэффи-
циента задания. Точка пересечения этой параболы с зависи-
мостью Кт(/) при известном значении а0 соответствует режиму
работы рассматриваемого СКГВ, при котором он выполняет
условия задания (см. пример 4.8).
Проделав подобную операцию с кривыми действия всех вин-
тов серии, строят зависимость т]0 = flPfD), максимуму которой
отвечает шаговое отношение оптимального (выполняющего
условия задания и имеющего при этом наивысший КПД) винта.
Пример 4.8. Найдем характеристики СКГВ, обеспечивающего СПК
с АУПК типа «Тайфун», скорость vt = 45 уз = 23,1 м/с. Известно: число
винтов Zp = 2; сопротивление R = 66 кН; 1Гг = t = 0,05; диаметр винта;
D = 0,65 м; его погружение Л, = 1,2 м.
Определяем осевое число кавитации
2(101 + 12-2,3)
0 1,025 [23,1 (1 — 0,05)]»
Находим коэффициент задания
KDT = 23,1 • 0,95 • 0,65 д/ 2 ' 1,(>е|' °’95 = 2.45
и рассчитываем координаты параболы Kr(J), соответствующей данному ко-
эффициенту:
I....................0,8 0,9 1,0 1,1
KT = (JfKDT)2 . .0,107 0,135 0,167 0,202
В точке А пересечения параболы Ki(J) отвечающий нашему заданию
с зависимостью Ki(J) при числе кавитации <Го = 0,4 находим Кт = 0,15;
/ = 0,95; т)о = 0,625.
Требуемую мощность двигателя определяем (т]з = 0,95 — угловой ре-
дуктор) :
р _ R • v _ 66 • 23,1
s 2ч»т)о 2 • 0,95 • 0,625
1280 кВт;
необходимаи частота вращения иинта
V. 23,1 • 0,95
л= дТ= 0^65~Гб,95' =35’5 об/с = 213° об/мин
Частично-погруженные гребные винты. В последнее время
пристальное внимание проектантов высокоскоростных судов при-
180
ковано к пересекающим свободную поверхность частично погру-
женным гребным винтам (ЧПГВ). Их ступнца обычно распола-
гается над водой, касаясь ее поверхности; гребной вал наклон-
ный, лопасти могут иметь сегментный или клиновидный про-
филь сечения. При фиксированном погружении ГДХ ЧПГВ на-
поминают таковые для СКГВ, работающего в режиме развитой
кавитации при ст0 = const. В этом сходстве нет ничего удиви-
тельного: на лопастях ЧПГВ развиваются атмосферные кавер-
ны, заполненные воздухом.
Основные достоинства ЧПГВ:
1) устранение сопротивления выступающих частей валопро-
вода (гребного вала, его кронштейнов), которое на глиссиру-
ющих судах может составлять (25—30) % полного, а на спор-
тивных доходит до 50 % и более;
2) уменьшение наклона вала, что влечет за собой снижение
неравномерности (скоса) потока в диске винта, а также умень-
шение осадки;
3) большая защищенность гребного винта, располагающего-
ся за корпусом, а не под его днищем (на глиссирующих судах
и скеговых СВП) или под крылом (на СПК с МПК);
4) полное устранение опасности кавитации н связанной с ней
эрозии;
5) высокий КПД.
Однако ЧПГВ пока ие находят широкого применения.
Асимметрия обтекания приводит к появлению боковой силы,
величина которой соизмерима с упором, а также к повышен-
ной виброактивности ЧПГВ. Кроме того, создаваемый ими упор
на низких поступях слишком мал, чтобы обеспечить выход суд-
на на расчетный режим.
Первый недостаток устраняется путем установки двух вин-
тов противоположного вращения. Для повышения упора в пе-
реходном режиме следует увеличивать погружение винта. Ча-
стично это достигается автоматически, за счет изменения по-
садки судна, в случае необходимости можно использовать спе-
циальные профилированные насадки, устанавливаемые перед
винтом. Основной путь снижения виброактивностн ЧПГВ — уве-
личение числа их лопастей.
Тормозит использование ЧПГВ и то. что процессы, сопро-
вождающие их работу, недостаточно изучены. Теоретическое ис-
следование проблемы затрудняет существенная нестационар-
ность характера обтекания лопасти, которая попеременно дви-
жется в воздухе, пересекая свободную поверхность в воде. Оп-
ределенные трудности возникают и при моделировании работы
ЧПГВ: кроме подобия по числу Фруда необходимо обеспечить и
подобие по числам кавитации и Вебера. Последнее условие, мо-
делирующее силы поверхностного натяжения, невыполнимо
181
в принципе; требуемое число кавитации можно получить толь-
ко в специальном кавитационном бассейне (см. § 4.5).
Ограниченное применение на быстроходных судах находят и
воздушные движители. Они устанавливаются только в тех слу-
чаях, когда не имеется контакта с водной поверхностью в рас-
четном режиме движения (амфибийные СВП, экраноплаиы).
Чаще всего в качестве движителей подобных судов используют
воздушные винты изменяемого шага, имеющие узкие лопасти
с довольно большой относительной толщиной.
Применение воздушных винтов на судах других типов не
оправданно в силу того, что при характерных для судостроения
скоростях (у$ 60 уз) эффективность движителей, работаю-
щих в воздухе, значительно ниже, чем у гидравлических (см.
пример 4.1).
4.10. Работа пропульсивного комплекса судна
Главная механическая установка и движитель — единый про-
пульсивный комплекс, кинематические и динамические харак-
теристики отдельных элементов
которого должны быть жестко
увязаны. Действительно, частота
вращения гребного винта рав-
няется (или кратна в случае нали-
чия редуктора) частоте вращения
движителя, мощность, развиваемая
последним, за вычетом потерь в
передаче, равна мощности, потреб-
ляемой движителем.
Однако каждый из элементов
комплекса характеризуется собст-
венной зависимостью мощности от
частоты вращения. Для гребного
винта она определяется кривыми
действия, для двигателя — режи-
мом работы н подачей топлива.
Сегодня на транспортных судах
Рис. 4.24. Работа пропульсив-
ного комплекса двигатель —
движитель
наибольшее распространение имеет двигатель внутреннего сго-
рания (ДВС) — дизель.
Расчетный, или номинальный, режим работы этого двигате-
ля соответствует точке А на графике рис. 4.2, в которой часто-
та вращения и мощность имеют номинальные значения лн н
Psk. В этом режиме ДВС может работать неограниченное вре-
мя, соответственно значения пн и Рвя являются максимально
допустимыми при длительной работе. После устойчивой рабо-
ты ДВС заключено между четырьмя линиями: верхней 1 и ниж-
J82
ней 3 ограничительными характеристиками, которые отвечают
максимальной и минимальной мощности, развиваемой двигате-
лем в зависимости от частоты вращения. Замыкают это поле
(горизонтальная штриховка на рис. 4.24) линия минимально
устойчивых оборотов 2 и регуляторная ограничительная харак-
теристика 4. Последняя обеспечивается работой регулятора
частоты вращения, не допускающего разноса двигателя при вне-
запном снижении нагрузки.
Двигатель вырабатывает ровно стольке мощности, сколько
потребляет гребной винт. С учетом потерь в передаче эта ве-
личина составляет:
. (4.92)
4S 4s 4s
Для водоизмещающих судов и кораблей скорость движения
v практически пропорциональна частоте вращения гребного
винта л, т. е. J = const. В связи с этим в (4.92) для оценок
можно принять и Kq = const. Тогда мощность ДВС при рабо-
те на гребной винт
Ps = С • л\ (4.93)
где С—постоянный для конкретных условий плавания коэффи-
циент.
Говоря об условиях плавания, имеем в виду водоизмещение
судиа, его посадку, состояние поверхности корпуса, волнение мо-
ря и т. д. Другими словами величина С фактически опреде-
ляется конкретной зависимостью R(v). Весь диапазон измене-
ния коэффициента С заключен между граничными значения-
ми, отвечающими самому тяжелому режиму — швартовному
(Р->оо) и самому легкому — движению свежеокрашенного-
судна в балласте на тихой воде (P = /?min).
Зависимости (4.93) называются винтовыми характеристика-
ми двигателя. Та цз них, которая проходит через точку А (кри-
вая / на рис. 4.24) является номинальной (расчетной). Гранич-
ные винтовые характеристики — швартовного режима (кривая//)
и движения в балласте (кривая ///) — существенно сужают поле
возможной работы ДВС (вертикальная штриховка на рис. 4.24).
В точке А гребной винт при номинальной частоте вращения
использует номинальную мощность двигателя — говорят, что
в этом случае движитель соответствует механической установ-
ке. Эта точка расположена на расчетной винтовой характери-
стике, н она единственная, где соответствие двигателя и гребно-
го винта имеет место. В болеетяжелых, чем расчетные, условиях
плавания (левее расчетной винтовой характеристики на
рис. 4.24), двигателю не хватает мощности, чтобы вращать виит
с номинальной частотой вращения. При этом говорят, что винт
гидродинамически тяжелый. Когда сопротивление уменьшается,
винтовая характеристика идет ниже расчетной для вращения
183
винта с номинальной частотой требуется мощность, меньшая,
чем номинальная; винт в этом случае гидродинамически легкий
(на практике обычно говорят просто тяжелый и легкий винт).
И тяжелый и легкий винты не соответствуют механической
установке. Общее для них — недоиспользование мощности
Рвп, г<Рвн, однако если первый работает по верхней ограничи-
тельной характеристике с частотой лт < пн, то второй распо-
лагается на регуляторной характеристике и у него пп > пя.
Для того чтобы привести тяжелый гребной винт в соответ-
ствие с двигателем, надо уменьшить либо его шаговое отноше-
ние, либо диаметр. Последний способ наиболее эффективен (см.
(4.92)], иногда он используется на практике: винт «облегчают»,
обрубая его лопасти.
Сложнее обстоит дело в другом случае — ни увеличить P/D,
ни диаметр готового винта, оказавшегося легким, практически
невозможно. Единственный выход из положения — замена дви-
жителя.
Соответствие гребного винта и двигателя имеет место лишь
в одном режиме — расчетном. Таким образом, выбор последне-
го при проектировании движителя приобретает весьма важное
значение.
В процессе эксплуатации среднее сопротивление всегда вы-
ше, чем у свежеокрашенного корпуса на тихой воде. Причины
тому — обрастание обшивкн и ее коррозия, волнение моря, лед,
ветер и т. д. Эти обстоятельства, а также ухудшение поверх-
ности лопастей приводят к утяжелению гребного винта, спроек-
тированного на условия сдаточных испытаний.
Поэтому на практике обычно гребной винт предварительно
облегчают. Для этого в качестве расчетного задается режим
движения, когда сопротивление несколько выше, чем на тихой
воде. Таким образом обеспечивается некоторый запас мощнос-
ти, учитывающий условия эксплуатации, отличные от идеаль-
ных. Аналогичного облегчения гребного винта можно достичь,
повышая на (3—5) % расчетную частоту вращения по сравне-
нию с номинальной.
Выбор расчетного режима зависит и от типа двигателя. Если
в качестве такого на судне служит турбина или электродвига-
тель, то предварительно облегчать гребной винт не требуется:
обе эти установки позволяют поддерживать номинальную мощ-
ность и при оборотах, меньших номинальных.
Ходовые характеристики судна. Гребной винт проектируется
на одни расчетный режим движения. Чтобы иметь представ-
ление о ходовых качествах судна, условиях работы гребного
винта и двигателя на любых, возможных в эксплуатации режи-
мах строят так называемые ходовые характеристики.
Последние часто называют также и паспортной диаг-
раммой судна.
184
Судно — единый энергетический комплекс, отдельные элемен-
ты которого — двигатель, корпус и движитель — являются со-
ответственно источником, потребителем и преобразователем
энергии. Работа всех этих элементов, естественно, должна быть
согласована.
Потребитель энергии — корпус судна — характеризуется за-
висимостью сопротивления от скорости R(v), источник энер-
гии— двигатель — полем устойчивой работы, расположенным
ниже верхней ограничительной и регуляторной характеристик,,
которые представляют зависимости максимальной мощности от
частоты вращения Рв(п). Таким образом, характеристики этих
двух элементов комплекса — источника и потребителя энер-
гии— не имеют точек соприкосновения. Для их согласования
служит движитель, преобразующий энергию двигателя в полез-
ную тягу, преодолевающую сопротивление корпуса. Потребляе-
мая гребным винтом мощность и создаваемый ими упор опре-
деляются режимом его работы, т. е. отношением скорости и ча-
стоты вращения.
Таким образом, характеристики гребного винта Pd(v, п) и
Те (у, п) являются связующим звеном между характеристика-
ми корпуса /?(у) и двигателя Рв(п).
Ходовыми характеристиками (паспортной диаграммой) суд-
на будем называть совокупность согласованных между собой
характеристик корпуса, двигателя и движителя, построенных
в функции от скорости движения. Паспортная диаграмма со-
стоит из двух частей. На одной из них, которую обычно распо-
лагают вверху рисунка, сопоставляют сопротивление корпуса и
полезную тягу движителя, на второй, ннжней, — мощности дви-
гателя и движителя. Ось абсцисс у обоих графиков общая,
вдоль нее откладывают скорость судна. Поскольку диаграмма
относится к единому комплексу, обе части ее должны быть со-
гласованы.
На рис. 4.25 приведена паспортная диаграмма водоизмеща-
ющего судна. В расчетном режиме движения (точка Л) мощ-
ность и частота двигателя имеют номинальное значение. Кри-
вая 1 — расчетная зависимость /?(у), которую на диаграмме
еще называют кривой потребной тяги. Соответству-
ющая ей зависимость 1', перестроенная на нижнюю часть ди-
аграммы, суть потребная мощность. Совокупность кривых 2 и
2' — зависимости полезной тяги и потребляемой винтом мощнос-
ти от скорости движения прн фиксированных значениях часто-
ты вращения.
Кривые 3 и 4 представляют собой верхнюю ограничитель-
ную и регуляторную характеристики двигателя, т. е. максималь-
ную располагаемую мощность последнего. Перестроив эти кри-
вые на вторую половину паспортной диаграммы, получим пре-
185
дельную располагаемую тягу, которую в зависимости от скорости
могут обеспечить заданные двигатель и движитель. Совершенно
очевидно, что режимы, соответствующие участкам диаграммы,
расположенным выше кривых 3 и 4 (<?' и 4'), нельзя реали-
зовать.
Расстояние между кривыми располагаемой 3' и потребной /
тяги суть запас тяги на данной скорости. Для буксирных судов
он определяет максимальное усилие на гаке, т. е. сопротивле-
ние буксируемого судна. Для судов всех типов, чем больше за-
пас тяги на промежуточных режимах (у<Урасч), тем быстрее
осуществляется выход на расчетный режим движения.
Ходовые характеристики судна служат для решения задач,
связанных с определением параметров движения на всех режи-
мах, отличных от расчетного. Так, если зависимость сопротив-
ления от скорости /?(у) отличается от заложенной в расчет
(кривая /), то достаточно нанести ее на верхнюю половину ди-
аграммы, чтобы в точке пересечения с кривой располагаемой
тяги (3' или 4') найти максимальную достижимую судном при
этом режиме скорость и соответствующую частоту вращения
винта. Спроектировав указанную точку на нижнюю часть диаг-
раммы, получим используемую мощность двигателя. Если точка
пересечения находится на кривой 3 — винт тяжелый, на кри-
вой 4 — винт легкий.
Для построения паспортной диаграммы необходимо иметь
данные по взаимодействию корпуса и движителя. Пример рас-
чета и построения паспорт-
А pact Vptct
Рис. 4.25. Паспортная диаграмма судна
Рис. 4.26. Паспортная диаграмма
СДП
186
наличие горба сопротивления в переходном режиме. В результате
может оказаться, что хотя пропульсивный комплекс и обеспечиг
судну заданную скорость в расчетном режиме, реализовать его
невозможно, поскольку без посторонней помощи горб сопротив-
ления не преодолевается (кривая располагаемой тяги 1 на
рис. 4.26). Поэтому при проектировании движительного ком-
плекса СДП требуется обеспечить ие только расчетную ско-
рость, ко и требуемый запас тяги на горбе сопротивления (кри-
вая 2, рис. 4.26).
При построении паспортной диаграммы судна с сильнокави-
тнрующим гребным винтом необходимо учитывать зависимость
числа кавитации от скорости. Если гребной винт частично погру-
женный, то следует учитывать возможное изменение его погру-
жения с изменением посадки при различных режимах дви-
жения.
Гребные винты регулируемого шага. Для приведения греб-
ного винта (тяжелого или легкого) в соответствии с механиче-
ской установкой надо изменить его шаговое отношение. Таким
образом, универсальным способом обеспечения соответствия
двигателя и движителя на всех режимах движения является ис-
пользование гребных винтов регулируемого шага (ВРШ), ло-
пасти которых могут поворачиваться от положения переднего
до положения заднего хода. Каждому углу поворота лопастей
(т. е. каждому значению шагового отношения) ВРШ отвечают
свои, вполне определенные кривые действия, соответственно
гидродинамические характеристики единственного ВРШ отве-
чают ГДХ серии ВФШ. Возможность обеспечения постоянного
значения коэффициента момента Kq = const в широком диа-
пазоне изменения относительной поступи позволяет приводить
ВРШ в соответствие с двигателем на всех режимах движния,
вплоть до швартовного. Однако соответствие — не самоцель, ис-
пользование номинальной мощности во всех условиях плавания
позволяет повысить, а порой и значительно, тяговые характе-
ристики пропульсивного комплекса. Это свойство особенно важ-
но для судов, имеющих несколько равноценных режимов дви-
жения. Так, например, если гребной винт траулера рассчитать
на свободный ход, он будет тяжелым в режиме движения с тра-
лом. Если расчетным сделать последний, снизится скорость
свободного хода (легкий винт), увеличится время перехода из
базы в район лова. «Компромиссный» вариант винта не позво-
лит использовать номинальную мощность ни в одном из указан-
ных режимов. Установка ВРШ в этом случае — эффективное
решение проблемы.
Определенные преимущества сулит и применение ВРШ на
СДП, таким образом можно повысить запас тяги на горбе со-
противления без ущерба для расчетного режима движения.
187
Основное преимущество ВРШ — возможность использования
полной мощности двигателя на всех режимах. Кроме того, ему
свойственны еще и следующие достоинства:
1) реверс судна осуществляется без реверса механической
установки, что повышает маневренность судна, снижая время
реверса, а также позволяет использовать более легкие и деше-
вые, имеющие больший моторесурс нереверсивные двигатели;
2) при скорости движения меньшей, чем расчетная, может
быть выбрано такое сочетание шага и частоты вращения ВРШ,
при котором расход топлива будет минимальным;
3) иа всех режимах движения (вплоть до стопа) можно под-
держивать номинальную частоту вращения, что обеспечит ста-
бильность характеристик вспомогательных механизмов, работа-
ющих непосредственно от двигателя;
4) проще осуществляется автоматизация управления про-
пульсивным комплексом;
5) парциальные режимы (см. § 4.11) движения судна осу-
ществляются с меньшими потерями мощности за счет поворо-
та лопастей ВРШ во флюгерное положение.
Если бы ВРШ обладали только достоинствами, то они бы
вытеснили все остальные движители. Этого не произошло, по-
скольку ВРШ имеют по сравнению с ВФШ и ряд серьезных не-
достатков:
1) сложность конструкции, относительно высокую удельную
массу и стоимость;
2) необходимость увеличения диаметра ступицы для разме-
щения механизма поворота лопастей, что приводит к снижению
КПД на (1—3) %;
3) дополнительное снижение КПД из-за искажения формы
профиля сечения лопасти при ее повороте из положения, соот-
ветствующего расчетному режиму;
4) более раннее возникновения кавитации вследствие уве-
личения относительной толщины корневого сечения лопасти,
хорда которого ограничена размерами фланца;
5) во избежание задевания лопастей друг за друга при по-
вороте дисковое отношение ВРШ не должно превышать
Ае/Ао = 0,75.
Последние два недостатка делают весьма проблематичным
использование ВРШ на высокоскоростных СДП. Здесь, однако,
можно говорить о применении снльнокавитирующих и частич-
но погруженных ВРШ.
На водоизмещающих транспортных судах ВРШ находят
в последнее время все более широкое распространение, благо-
даря их эксплуатационным достоинствам, прежде всего эконо-
мичности и улучшенным маневренным качествам.
Паспортная диаграмма судна с ВРШ отличается тем, что
при построении кривой располагаемой тяги исходят из условия
188
-Ps = Рзв = const, что означает и Kq = const (при n = nH).
При этом, в частности, можно определить закон управления пе-
рекладкой лопастей во время разгона судна до расчетной ско-
рости.
Ходовые испытания судов. Каждое новое или капитально
отремонтированное судно проходит сдаточные испытания, основ-
ным элементом которых являются испытания ходовые (или
пропульсивные). Последние предназначены для определения хо-
довых качеств судна, проверки достоверности заложенных
в проект расчетов. В процессе этих испытаний изучают харак-
теристики работы пропульсивного комплекса судна, делают вы-
вод о соответствии (либо его отсутствии) движителя главной
механической установке. Анализ результатов испытаний дает
богатый материал для совершенствования существующих мето-
дик расчетов ходкости.
Ходовые (пропульсивные или скоростные) испытания основ-
ной целью имеют определение скорости движения судна при
различных режимах работы пропульсивной установки. Для
обеспечения высокой точности результатов еще на стадии под-
готовки к испытаниям следует выполнить ряд условий: водо-
измещение судна должно соответствовать проектным данным
и его необходимо замерить с высокой точностью; состояние по-
верхности корпуса должно отвечать свежеокрашенному, зало-
женному в расчеты, поэтому между спуском (докованием) суд-
на и его ходовыми испытаниями время не должно превышать
установленные пределы (для южных морей и Дальнего Восто-
ка 10—15 суток, для северных морей и Балтики — 30). Регла-
ментируются и гидрометеорологические условия: волнение мо-
ря не должно превышать 2—3 баллов, сила ветра — 3—4 бал-
лов, причем нижний предел относится к сравнительно неболь-
шим судам (D1000 т), а верхний к достаточно крупным
(£>^20 000 т). Перед испытаниями проверяют соответствие гео-
метрии гребного винта проектным данным, поверхности лопа-
стей очищают, их кромки сглаживают.
Глубина водоема должна быть не меньше, чем вычислен-
ная по каждой из двух формул (3.69) и (3.70), что позволяет
практически исключить влияние мелководья.
Ходовым испытаниям предшествуют швартовные, в ходе ко-
торых опробывают все механизмы, выполняют необходимые
регулировочные работы с целью обеспечения требуемых режи-
мов главной механической установки.
В процессе ходовых испытаний скорость судна определяют
как путь, пройденный за фиксированное время. Таким образом
непосредственно замеряют расстояние между двумя конкретны-
ми точками. Сегодня радионавигационные средства дают воз-
можность определить местоположение судна с высокой точ-
189
иостью, что позволяет проводить пропульсивные испытания в от-
крытом море.
Однако чаще эти испытания проводят на специально обору-
дованном полигоне — мерной миле (или мерной линии). Как
правило, это защищенный от господствующих ветров прибреж-
ный участок моря, который имеет достаточную глубину при от-
сутствии заметных течений.
Скорость определяют относительно берега, где установлены
ведущие и секущие створы. Первые задают направление движе-
ния, пересечение которого с линиями, проходящими через две
лары секущих створов, определяет две фиксированные точки
положения судна. Расстояние между ними («мерная миля»), де-
ленное на время прохождения, суть скорость движения.
В процессе ходовых испытаний, кроме скорости, регистри-
руют следующие величины: частоту вращения и мощность дви-
гателя, а также, гораздо реже, упор гребного винта. Режимы
работы двигателя, при которых требуется проводить стандарт-
ные скоростные испытания, регламентируются. Так, например,
для головных в серии транспортных судов, оборудованных
ДВС, обязательными являются режимы: п = лн, 1,03пн, 0,91пн,
0,80лн, 0,63пн.
Для исключения влияния гидрометеорологических факторов
(ветер, течение, волнение моря) скорость определяют по резуль-
татам трех пробегов: два в одном направлении — один в про-
тивоположном:
УСР = (»i + 2о2 + у3)/4. (4.94)
Установленные на судне штатные тахометры не обеспечи-
вают необходимой точности замера частоты вращения, поэтому
используют различные суммирующие счетчики, определяющие
среднее за некоторый промежуток времени значение частоты
вращения гребного вала.
Наибольшую точность в измерении мощности получают
с помощью специальных приборов: торсиометров, предназначен-
ных для определения крутящего момента на гребном валу. Ес-
ли торсиометр отсутствует, мощность находят по косвенным по-
казателям: в зависимости от расхода топлива и частоты вра-
щения с использованием данных стендовых испытаний двига-
теля.
Выше (см. гл. 3) уже говорилось, что прямое изменение со-
противления R натурного судна практически исключено. Косвен-
ный путь определения R — основного параметра, закладывае-
мого в расчеты ходкости, тоже не всегда возможен. Даже если
судно оборудовано упоромером, что само по себе бывает до-
статочно редко, то выделение сопротивления из упора с исполь-
зованием (4.60) тоже проблематично, поскольку необходимый
для этого коэффициент засасывания, определяемый в ходе са-
190
исходных испытаний, не свободен от масштабного эффекта.
В еще большей степени (см. § 4.6) этому эффекту подвержен
коэффициент попутного потока.
Существуют специальные методы анализа результатов ско-
ростных испытаний, позволяющие проверить соответствие зало-
женного в расчет сопротивления реальным данным. Кроме того,
эти испытания дают возможность оценить согласованность ра-
боты пропульсивного комплекса. Так, если обнаруживается не-
соответствие гребного винта двигателю, то решается вопрос
о корректировке геометрических элементов движителя.
Если судно оборудовано ВРШ, объем ходовых испытаний
значительно возрастает. Определению подлежат оптимальные
для ряда скоростей сочетания частоты вращения и шагового
отношения, при которых удельный расход топлива минимален.
Во время скоростных испытаний быстроходных судов иног-
да возникает необходимость наблюдать за процессами развития
кавитации на гребном винте. В этом случае в днище судна де-
лают специальные иллюминаторы.
Наряду со скоростными большую информацию о ходовых ка-
чествах судна дают и эксплуатационные испытания, совмещае-
мые с рабочими рейсами судна. При этом изучают и движение
судна в условиях волнения — его поведение, скоростные каче-
ства. Следует отметить, что точность замеров в ходе эксплуата-
ционных испытаний существенно ниже, чем на мерной миле, од-
нако их количество зачастую может компенсировать недостаточ-
но высокое качество.
И пропульсивные и эксплуатационные испытания дают бога-
тый материал для совершенствования методик расчета ходовых
качеств судна.
4.11. Дополнительные вопросы работы гребных винтов
Реверсирование гребных винтов. Реверсом называется ма-
невр, в ходе которого направление движения судна изменяется
на противоположное. Это возможно только за счет реверсиро-
вания гребного винта — соответствующего изменения направле-
ния его упора. Суда, оборудованные ВФШ, осуществляют ре-
верс путем изменения на противоположное вращения гребного
вала, т. е. за счет реверса механической установки.
Процесс реверса судна с переднего на задний ход можно
подразделить на четыре периода. Первый из них начинается
с подачи команды на реверс до отключения двигателя, вто-
рой— до остановки вращения гребного винта, третий — до оста-
новки судна, а четвертый — до развития судном заданной ско-
рости заднего хода. Реверс судна — сложный, нестационарный
процесс, во время которого все кинематические п динамические
191
характеристики гребного винта претерпевают существенные из-
менения. В связи с тем, что скорость указанных изменении от-
носительно невелика, при изучении работы гребного винта мож-
но использовать гипотезу квазистационарности. Суть последней
в том, что мгновенные силы, действующие на элемент лопасти
в данный момент времени, принимаются равными таковым
в стационарном поле скоростей, характерном для данного про-
межутка времени. Другими словами, используется принцип фо-
тографирования вспышкой: на снимке остается мгновенное изо-
бражение, присущее данному моменту.
Собственно реверс начинается во втором периоде, когда пос-
ле отключения двигателя частота вращения гребного винта
уменьшается до скорости свободного вращения под действием
набегающего потока, соответственно упор винта уменьшается,
а затем и изменяет знак—с этого момент винт начинает тор-
мозить судно. Затем под действием двигателя, включенного на
задний ход, винт продолжает сбрасывать обороты вплоть до то-
го, когда частота вращения станет равной нулю. Продолжитель-
ность второго периода относительно невелика, скорость судна
в силу его инерции меняется незначительно. Третий этап зани-
мает время, большее двух предыдущих: по мере того как дви-
гатель развивает полные обороты заднего хода, увеличивается
и упор винта, отрицательный по величине. Его максимум имеет
место в конце этапа при швартовном режиме заднего хода, ког-
да скорость движения тормозится до нуля. Последний, четвер-
тый, период реверса характеризуется увеличением скорости
заднего хода и падением отрицательного упора винта. Заканчи-
вается он, когда полезная тяга винта на заднем ходу становит-
ся равной сопротивлению судна, движущегося кормой вперед.
Основные характеристики маневренных качеств судна при
реверсе: время и путь выбега — расстояние, проходимое судном
до полной остановки (тормозной путь судна при работе про-
пульсивного комплекса на задний ход); время развития оборо-
тов гребного винта в противоположном направлении, время раз-
вития полной скорости заднего хода.
В процессе реверса непрерывно меняется характер обтека-
ния лопастей гребного винта, соответственные изменения проис-
ходят и с силами, на них возникающими. Действительно, про-
следим работу элемента лопасти, расположенного на радиусе г
(рис. 4.27).
В начале реверса обтекание элемента определяется скоро-
стями поступательного движения ^, угловой й и суммарной,
вызванной в диске винта wo = w»o + weo’> в конце его имеем
v', й' и Шо — соответствующие скорости заднего хода.
Таким образом, во время этого маневра непрерывно изменя-
ется (по величине и направлению) и результирующая скорость
vr, а также и угол атаки элемента а. В итоге и элементарные
192
силы упора и сопротивление вращению изменяются от значе-
ний dT и dx на переднем ходу до dT' и dx'— на заднем (см.
Рве. 4.27. Обтекание элемента лопасти ВФШ при реверсе
рис. 4.27). При этом меняются
и функции поверхностей (за-
сасывающая становится нагне-
тающей, н наоборот); и кро-
мок лопасти, входящей и выхо-
дящей. Для винтов с несим-
метричным профилем сечения
лопасти это приводит к замет-
ному снижению КПД. В этом
плане выгодно отличаются ле-
докольные винты, имеющие
двояковыпуклый профиль.
ГДХ ВФШ в режиме ре-
верса находят средствами мо-
Рис. 4.28. Последовательность изме-
нения коэффициента упора ВФШ
в процессе реверса
дельного эксперимента, в ходе
которого независимо изменяют-
ся направление и величина
поступательной и угловой ско-
ростей вращения винта. При
этом поступь перестает однозначно определять ГДХ винта:
одна и та же величина может быть
получена и на перед-
нем (с'А>0, Q > 0) и заднем (о'А<0, й'< 0) ходах, в то
время как коэффициенты упора и момента будут раз-
личаться не только по значению, но и по знаку. На рис. 4.28
приведена характерная для ВФШ зависимость KT(J) при ре-
1 33415
193
верее. Каждому из четырех квадрантов соответствует опреде-
ленное сочетание скорости Од и частоты п, которые принимают
положительными на переднем ходу. Точка А на рис. 4.28 отве-
чает установившемуся режиму движения судна в начале ре-
верса. В точке В при поступи нулевого момента винт свобод-
но вращается (Кд = 0, Кт < 0) — он отключен от двигателя
(конец первого периода). В точке С, конец второго периода,
в нуль обращается частота вращения я. Эта точка находится
за пределами графика, поскольку при этом формально J -+ оо,
Кт оо. Однако и упор и потребляемая винтом мощность
в этой точке имеют конечные значения, которые могут быть
определены при ином, чем было принято раньше, способе пред-
ставления ГДХ винтов [см. далее (4.95)]. На третьем этапе дви-
гатель работает на задний ход, частота приобретает конечное
отрицательное значение (п < 0), а судно все еще движется по
инерции вперед (од>0), относительная поступь меняет знак,
мы вновь попадаем на график в третий квадрант. Точка D со-
ответствует концу третьего периода — остановке судна (од = 0,
J =0), а точка Е — установившемуся заднему ходу, когда
va <. 0, п < 0, а поступь вновь положительна J > 0.
Как мы убедились выше, представление ГДХ ВФШ в тра-
диционном виде Кт(1) и Kg(J) приводит к тому, что при ре-
версе выпадают режимы в окрестности n = 0 (J-»-oo). Для
устранения этого недостатка вместо поступи можно использо-
вать величину, ей обратную: JP = 1/J, а коэффициенты упора
и момента представить в виде
КР = Т/ридД2; (4.95)
Km = Q/pv2AD3. (4.96)
Тогда совокупность зависимостей Kt(J), Kg(J) и KP(JP),
Km(JP) позволяет исследовать все режимы реверса без исклю-
чения.
Реверс судна, оборудованного ВРШ, осуществляется за счет
изменения шага винта (перекладки лопастей) без реверса ме-
ханической установки, частота вращения которой в процессе ма-
невра остается практически неизменной. Соответственно отсут-
ствуют режимы п->-0, отпадает необходимость и представле-
ния ГДХ ВРШ в виде (4.95), (4.96).
Различают три периода реверса судна с ВРШ: перекладка
лопастей из положения переднего (P/D)n в положение заднего
хода (P/D)3; торможение судна; развитие скорости установи-
вшегося заднего хода. Точка А на кривых действия ВРШ
(рис. 4.29) —начало первого периода, точка В — его конец. По
мере перекладки лопастей, занимающей время порядка (8—
30) с, коэффициент упора изменяется практически по верти-
кали: скорость судна и частота вращения винта остаются при
194
этом практически постоянными, т е. и J = const. Второй пе-
риод— торможение судна под действием отрицательного упо-
ра— завершается в точке С, когда ид = О, J = 0. Далее судно
начинает с нарастающей скоростью двигаться задним ходом и
последний, третий, период заканчивается в точке D, где движе-
ние принимает установившийся характер (иА — const). В ходе
реверса функции поверхностей лопасти ВРШ меняются, как
и у ВФШ; в отличие от ВФШ кромки, входящая и выходящая,
Рнс. 4.29. Изменение коэффициента упо-
ра ВРШ при реверсе
Рнс. 4.30. Обтекание элемента ло-
пасти ВФШ при реверсе
своего назначения не изменяют. Углы атаки элемента лопасти
ВРШ (рис. 4.30) изменяются в широких пределах, проходя и
режимы, соответствующие отрывному обтеканию профиля.
Судно, оборудованное ВРШ, имеет повышенные маневрен-
ные качества: сокращается время и путь выбега, соответственно
увеличивается безопасность плавания. Время реверсирования
судна очень важно для ледоколов и судов активного ледового
плавания — это одна из причин, стимулирующих работы по
использованию ВРШ на этих судах.
Нагрузки, возникающие на лопастях и ВФШ и ВРШ, в про-
цессе реверса могут существенно превышать расчетные при ус-
тановившемся движении. Это необходимо учитывать при ана-
лизе прочности винтов.
Парциальные режимы движения судна. Эти режимы свой-
ственны многовальным судам, когда работает только часть дви-
жителей. Недействующий гребной винт может быть при этом
застопоренным либо отсоединенным от двигателя и свободно
вращающимся набегающим потоком или подкручиваемым до
поступи нулевого упора. Все три варианта сопряжены с затра-
тами энергии: в первых двух случаях неработающий винт соз-
13*
195
дает сопротивление — отрицательный упор, в последнем исполь-
зуется мощность двигателя для его вращения.
Очевидно, что те же проблемы возникают и у парусного суд-
на, имеющего вспомогательный движитель, и у самоходного суд-
на, движущегося на буксире.
Для винта, ГДХ которого на режимах реверса известны, оп-
ределение сопротивления в нерабочем положении не представ-
ляет труда. Так, для застопоренного винта, пользуясь зависи-
мостью Kp(Jp), находим коэффициент упора КР при п=0
(7р = 0), а затем по (4.95) рассчитываем и создаваемое им со-
противление на данной скорости. Легко определить и тормоз-
ной момент, необходимый для удержания винта в застопорен-
ном положении — здесь используют зависимость Km(Jp).
Пренебрегая потерями на трение в подшипниках, сопротив-
ление свободно вращающегося винта можно найти с помощью
его ГДХ, представленных в любом виде, определив Кт (или КР)
при поступи нулевого момента.
Мощность, необходимая для подкручивания гребного винта,
до поступи нулевого упора элементарно рассчитать по известно-
му значению коэффициента момента Kq0 (см. пример 4.9).
В первом приближении искомые величины могут определять-
ся по формулам А. И. Калмакова
/?3 = 0,5ро2лД2(А£/Ао);
/?с = (0,1 -ь 0,15)p^D2(A£/A,);
Q, = 5- 10->2лО3(А£/Д,),
(4.97)
(4.98)
(4.99)
где /?з, /?с — сопротивление застопоренного и свободно враща-
ющегося винта соответственно; Qs — момент торможения.
Застопоренный гребной винт имеет сопротивление такого же
порядка, что и сопротивление корпуса: свободное вращение
уменьшает его в три-пять раз. Создаваемая неработающим греб-
ным винтом сила иногда приносит пользу. Так, устойчивость
движения буксируемого судна возрастает, если за его кормой
приложено тормозящее усилие. В связи с этим при буксировке
с помощью троса рекомендуется стопорить гребные винты бук-
сируемого судна, хотя это и приводит к резкому возрастанию
сопротивления (см. пример 4.9).
Пример 4.9. Найдем для судна «Инженер» сопротивление застопорен-
ного винта н необходимую для его подкручивания мощность. Дополнительно
известно: скорость буксировки v, = 4,5 уз, сопротивление корпуса при этой
скорости 4 = 37 кН, диаметр винта D = 6,42 м; дисковое отношение
Ае/А0 = 0,85; коэфицнент попутного потока Wr = 0,216; при поступи ну-
левого упора Ji — 0,99 коэффициент момента Kqo = 0,009.
По (4.97) рассчитываем
Яэ = 0,5 • 1,025 • [0,514 • 4,5 • (1-0,216)]’ - 6,42’ - 0,85 = 59 кН,
196
т. е. сопротивление застопоренного гребного винта на этой скорости боль-
ше, чем сопротивление самого судна.
Полезная мощность, необходимая для преодоления сопротивления за-
стопоренного винта,
РЕ = J? . v = 59 • 0,514 • 4,5 = 136 кВт.
При заданной скорости в диске винта = и(1 — Н7Г) = 1,82 м/с и из-
вестной поступи находим частоту вращения (подкручивания) гребного нинта:
о, 1,82
Л = 7^Г= 0,99 • 6Л2 =°’286 °б/С ~ 17 Об/МИН'
Мощность, необходимая для подкручивания, Pd = QOQ = Kgopw’D® X
X 2лл = 0,009-1,025-0,2863-6,425-2л « 13 кВт.
Сопоставляя результаты расчетов, делаем вывод, что энер-
гетические потери на подкручивание на порядок меньше, чем
на преодоление сопротивления застопоренного винта.
Периодические усилия на гребном винте в равномерном поле
скоростей. Ранее было показано, что создаваемые гребным вин-
том при работе в неравномерном поле скоростей упор и момент
изменяются во времени. Однако неравномерность не единствен-
ная причина, вызывающая периодические изменения усилий на
винте. Подобная картина может наблюдаться и в равномерном
поле скоростей. Дело в том, что при изготовлении гребного вин-
та неизбежны технологические отступления от чертежа. В ре-
зультате появляется так называемая неуравновешенность дви-
жителя, которая в общем случае может быть механической и
гидродинамической. В свою очередь, различают два типа ме-
ханической неуравновешенности: статическую и динамиче-
скую. Первая возникает, когда центр тяжести гребного винта
не лежит на его оси, что приводит к появлению центробежной
силы, изгибающей гребной вал. Соответствующий момент, по-
стоянный по величине, изменяет свое направление с частотой
вращения гребного винта. Статическая неуравновешенность
может вызываться разной массой лопастей, различными угла-
ми между ними.
Динамическая неуравновешенность может наблюдаться и
при отсутствии статической. Она характеризуется тем, что
главная ось инерции гребного винта не совпадает с осью его
вращения. Причинами этого могут быть смещение отдельных
лопастей вдоль ступицы, различные углы наклона образующих
разных лопастей к оси винта. В этом случае центробежные си-
лы всех лопастей не лежат в одной плоскости (плоскости дис-
ка вннта), они также создают постоянный момент, изгибающий
гребной вал и изменяющий свое направление с частотой враще-
ния винта.
Завершающий этап изготовления гребного винта — его ста-
тическая и динамическая балансировка, в процессе которых ме-
197
ханическая неуравновешенность сводится к минимуму, регла-
ментируемому соответствующим стандартом.
Гидродинамическая неуравновешенность появляется из-за то-
го, что размеры, форма и шаговые углы отдельных лопастей
неодинаковы. Соответственно будут различаться и действующие
на них усилия, что, в свою очередь, приведет к периодически из-
меняющемуся по направлению изгибающему моменту. Допус-
каемые техническими требованиями отклонения от чертежа та-
ковы, что гидродинамическая неуравновешенность не оказывает
заметного влияния на работу гребного винта. Однако дисба-
ланс всех рассмотренных видов может возникнуть и в процессе
эксплуатации вследствие повреждения гребного винта, неравно-
мерного обрастания и коррозионного износа отдельных лопа-
стей.
Периодические силы, создаваемые гребным винтом иа кор-
пусе судна. Усилия, действующие на движитель, передаются
корпусу с помощью механической связи — валопровода. Однако
имеет место и гидродинамическое воздействие винта на корпус.
Оно заключается в том, что лопасть, проходя в непосредствен-
ной близости от какого-либо элемента корпуса, создает на нем
повышенную силу засасывания. При прохождении межлопаст-
ного пространства эта сила падает до минимума. В результа-
те давления на близлежащих корпусных конструкциях (ахтер-
штевень, кронштейны, рули и др.) пульсируют. Действуя с ло-
пастной частотой, эти давления вызывают общую и местную
вибрацию корпуса судна. Амплитудные значения давлений опре-
деляются рядом факторов, основные из которых: нагрузка вин-
та, частота его вращения, неравномерность поля скоростей, сте-
пень развития кавитации, расположение винта относительно
корпуса.
Все это учитывают при проектировании кормовой оконеч-
ности. судна и выборе элементов гребного винта. Особое
внимание обычно уделяют обеспечению необходимого зазора
между лопастями винта и элементами корпусных кон-
струкций.
Шум, сопровождающий работу гребного винта. Движитель,
потребляющий большую часть мощности энергетической уста-
новки, является и одним из основных источников судовой шум-
ности, в которой обычно различают четыре составляющие. Пер-
вая из них—кавитационный шум, сопровождающий образова-
ние, пульсацию и схлапывание кавитационных пузырьков и ка-
верн. Вторая составляющая — звук вращения гребного винта —
обусловлен периодическими процессами, вызываемыми неодно-
родностью потока, конечным числом лопастей и др. Вызванные
работой гребного винта колебания корпусных конструкций так-
же генерируют звук — это третья составляющая шумности. По-
следняя— «пение» — интенсивное тональное излучение в звуко-
198
вом диапазоне частот. Причина его появления — автоколебания
лопасти под воздействием вихревой дорожки Кармана, срыва*
ющейся с выходящей кромки лопасти. Изучение данного явле-
ния показало, что для исключения «пения» достаточно заост-
рить выходящую кромку. Благодаря этому, сегодня вопрос
о «пении» гребных винтов практически снят с повестки дня.
Шум винта оказывает негативное влияние на обитаемость
судна и работу гидроакустической аппаратуры. Ухудшает он
и экологическую обстановку вблизи корпуса.
В числе мероприятий, снижающих шум, можно назвать все
способы отдаления кавитации и уменьшения неравномерности
поля скоростей в диске гребного винта, увеличение его диамет-
ра и снижение частоты вращения. Положительное влияние ока-
зывает и рациональное размещение гребного винта, подразу-
мевающее обеспечение необходимых зазоров между винтом и
корпусными конструкциями, а также профилировку и выбор
расположения выступающих частей.
4.12. Расчет ходкости судна
Выбору механической установки предшествует расчет ход-
кости судна, состоящий из двух частей. Первая заключается
в определении зависимости сопротивления от скорости движе-
ния, а вторая — в расчете движителя. Последний расчет, в свою
очередь, выполняют поэтапно: в первом приближении опреде-
ляют все, кроме шагового отношения, геометрические характе-
ристики гребного винта и коэффициенты его взаимодействия
с корпусом; затем рассчитывают оптимальный гребной винт,
обеспечивающий заданную скорость движения и определяют
необходимые для этого мощность и частоту вращения главной
механической установки. Далее выбирают подходящий двига-
тель, а поскольку его характеристики (Ран и пн) в общем слу-
чае всегда отличаются от полученных на предыдущем этапе, то
приходится заново рассчитывать винт, который находился бы
в соответствии с двигателем и обеспечивал оудну наибольшую
достижимую скорость.
Завершающий этап — расчет ходовых характеристик суд-
на— с одной стороны, дает необходимую информацию о всех
возможных в эксплуатации режимах движения, а с другой —
выполняет и контрольные функции по отношению к предыду-
щим расчетам.
Сказанное выше подкрепим конкретным примером — расче-
том ходкости судна «Инженер». Его основные характеристики
приведены в § 1.3, все, что понадобится дополнительно, будем
вводить по ходу расчетов.
199
Расчеты сопротивления. Расчет сопротивления на
тихой воде. Определяем число Фруда, соответствующее
расчетной скорости Us = 21 уз = 10,8 м/с:
Fr = _ *0,8 = 0,262.
V9 81 . 173
Данные модельных испытаний отсутствуют; рассчитывать
сопротивление будем приближенным методом, используя для
этого «Серию быстроходных и среднескоростных судов» (см.
§ 3.5). Выбор данного метода диктуется назначением судна, ос-
новными характеристиками формы его корпуса (б, LIB, BIT,
носовой бульб), а также расчетной относительной скоростью.
Площадь смоченной поверхности принимаем Q = 5650 м2
(см. пример 3.8). Для построения кривой сопротивления расчет
будем производить для чисел Фруда в диапазоне Fr =
= 0,18 4-0,30 с интервалом AFr = 0,02. В соответствии
с рекомендациями § 3.5 коэффициенты дополнитель-
ных составляющих сопротивления принимаем: Сх = 0,2-10-3;
САР = 0,1 • 10-3; Саа = 0. Все дальнейшие расчеты сведем
в табл. 4.2.
Таблица 4.2. Расчет сопротивления движению судиа <Ииженер»
т Величина Раз- мер- ность Численные значения
1 Fr — 0,18 0,20 0,22 0,24 0,26 0,28 0,30
2 CRo.10’ (рис. 3.8) — 0,50 0,57 0,72 0,97 1,22 1,60 2,40
3 СЛ-10а (L/B = 6,13) (рис. 3.10) — 0,48 0,52 0,67 0,82 0,93 1,15 1,49
4 СЛ.1О’ (L/B = 5,64) (рис. 3.10) — 0,56 0,59 0,70 0,88 1,00 1,15 1,72
5 ^/В = (3):(4) — 0,856 0,881 0,957 0,932 0,930 0,898 0,866
6 feB/T, (рис. 3.11) — 1,03 1,03 1,03 1,02 1,01 1,06 1,08
7 вя-10’ = = (2)-(5)-(6) — 0,441 0,517 0,710 0,922 1,15 1,52 2,25
8 t> = Fr м/с 7,42 8,24 9,06 9,89 10,7 Н.5 12,4
9 10-а Re, (по (3.9)) — 8,18 9,08 9,98 10,9 11,8 12,7 13,7
10 CFo-10a(no (3.15)) — 1,61 1,59 1.57 1,55 1,54 1,52 1,51
11 с.юа=сЛ+сВ0 + + С а + САР — 2,35 2,41 2,58 2,78 2,98 3,35 4,06
12 * (по (3.7)) pH 375 487 614 786 991 1290 1790
13 Р£ = /?-о кВт 2780 3900 5560 7770 10600 14900 22 200
14 os = о/0,514 Уз 14,4 16,0 17,6 19,2 20,8 22,4 24,0
200
Результаты расчета представ-
ляем графически (рис. 4.31);
они соответствуют условиям сда-
точных испытаний — движению
свежеокрашенного корпуса на ти-
хой воде.
Расчет сопротивления
при движении в штор-
мовых условиях. Диа-
пазон скоростей принимаем
тот же, что и ранее; расчеты
будем проводить для двух
состояний моря, соответствующих
6 и 7 баллам (при волнении боль-
шей интенсивности вопрос о воз-
растании сопротивления не актуа-
лен: скорость движения будем
выбирать такой, чтобы качка судна
ной в данных условиях [см. гл. 5].
Рис. 4.31. Сопротивление суд-
на «Инженер» при движении
на тихой воде (/), в штормо-
вых условиях при 6 и 7 бал-
лах (2 и 3); во льдах (4)
была минимально возмож-
Необходимые для расчета параметры волнения и ветра при-
нимаем:
Волнение мори, баллы.............. 6 7
Высота воли 3 %-й обеспеченности
Лвз%. м....................... • • 6.° 8.5
Расчетная скорость ветра и г, м/с 19 24
Дополнительное сопротивление на волнении, кН, рассчиты-
ваем по формуле (3.58), которая для нашего судна (6 = 0,619,
L = 173 м, В = 28,2 м) примет вид
Raw = 8,9 (1 + 4,46) • (B2/L*-5) A^Fr1,36 exp (- 3,5 Fr) • 1 (a). 102 =
= 1160ЛвЗ% Fr1’36 exp (- 3,5 Fr) -1 (a), кН. (4.100)
Дополнительное воздушное сопротивление определяем по
выражению (3.60), которое с учетом (3.61), а также при
САд = 0,7, рл = 1,23 -10-3 т/м3, запишем, как
2 “3
ЯАА = САА-^ • 5а = 0,7 • 1,23 210 • 2,5 • 173о2 = 0,186ол, кН.
(4.101)
Дальнейшие расчеты производим в табл. 4.3.
Результаты расчетов в виде полного сопротивления в штор-
мовых условиях приведены на рнс. 4.31, здесь же нанесено и
сопротивление на тихой воде, найденное по данным табл. 4.2.
Расчет сопротивления в канале за ледо-
колом. Принимаем, что судно движется в канале за ледоко-
201
Таблица 4.3. Расчет сопротивления судна при движении иа волнении
№ Величава Раз- мер- ность Численные значения
Fr — 0,18 0,22 0,26 0,30
о (табл. 4.2) м/с 7,42 9,06 10,7 12,4
va (табл. 4.2) Уз 14,4 17,6 20,8 24,0
Rn (табл. 4.2) кН 375 614 991 1790
Волнение моря бал- лы 6 7 6 7 6 7 6 7
а по (3.59) — 1,06 0,893 1,09 0,918 1,П 0,941 1.14 0,960
/ (а) по рнс. 3.24 — 0,0750 0,0700 0,0735 0,0730 0,0720 0,0740 0,0670 0,0750
дф по (4.100) КН 397 884 444 1050 475 1170 466 1250
aA = °v + ° м/с 26,4 31,4 28,1 33,1 29,7 34,7 31,4 36,4
^АА по (4-Ю1) кН 129 183 145 204 164 224 183 246
%AW + %АА кН 526 1070 589 1250 639 1390 649 1500
Rtb~^~^aw^^aa кН 901 1440 1200 1860 1630 2380 2440 3290
лом, проложенном во льду толщиной Лп = 1,5 м, средний раз-
мер льдин г =1,3 м. Следуя рекомендациям § 3.6 и задавая
а0 = 25°, рассчитываем сопротивление по формуле (3.64), кото-
рая для нашего судна принимает вид
/?л.Ч = Ул д/гЛл (-fj2 -6.(1 + 2fa„-g-j + МлгЛлВ X
X (f + «и tg a0) Fr + k^rh.'L • tg2 a0 • Fr2 =
= 8,5V1.3- 1,5 0,15(1 +2.0,1 .0,759- 6,13) +
+ 5,7 • 8,5 • 1,5 • 1,3 • 28,2 (0,1 + 0,759 • 0,465) Fr + 4,3 • 8,5 - 1,3 X
X 173 • 0,4652 Fr2 = 682 + 1210 Fr + 2660 Fr2. (4.102)
Из (4.102) следует, что для судна «Инженер», движущегося
со скоростями Fr < 0,3, основную роль в чистом ледовом со-
противлении играет прямое сопротивление (см. § 3.6).
Задавая ряд чисел Фруда, определяем полное сопротивление
Ял = Ята 4* Ял. ч-
Fr...............................0,18
Ds, уз.........................14,4
/?„, (табл. 4.2), кН..............375
Ял.ч, по (4.102), кН .... 986
кН..........................1360
0,20 0,22 0,24 0,26
16,0 17,6 19,2 20,8
473 614 786 991
1030 1080 1120 1180
1500 1690 1900 2180
Результаты расчета также наносим на рис. 4.31.
202
Расчет гребного винта. Выбор геометрических
характеристик и определение коэффициен-
тов взаимодействия. Судно одновинтовое, поэтому вы-
бираем число лопастей Zp — 4. Максимальный диаметр винта
принимаем Dmax — 6,6 м.
В качестве расчетного берем сопротнвэение, на 15 % превы-
шающее таковое на тихой воде. При заданной скорости v* —
=21 уз по рис. 4.31 определяем Лтв=Ю30 кН и находим
^?расч == 1,15 /?тв == 1180 кН.
Коэффициент попутного потока рассчитываем по (4.52):
1ГГ = 0,165dV^7/D - 0,1 (Fr - 0,2) =
= 0,165- 0,619 V^287UO/6,6 — 0,1 (0,262 — 0,2) = 0,216.
Коэффициент засасывания находим по (4.61):
t = 0,7Wт = 0,7 • 0,216 = 0,151.
Коэффициенты влияния неравномерности принимаем 1т —
= lQ — 1,0.
Определяем минимально допустимое дисковое отношение:
— из условия обеспечения прочности по (4.73) ([о] =
= 6-10* кПа, m = 1,15; 5Н = 0,167; бтах = 0,08; Т =
= Тв/(1 — Г) = 1180/(1 —0,151) = 1390 кН):
АЕ / Z„ \2/3
ЛГ = 0‘24(1,08-^)(^)
з/ 10/пТ
v “FT
л1С7ч/ 4 \2'3 Ч 10.1,15.1390
= 0,24(1,08-0,167) (-008.-6j) -----бТТо*---
0,543;
— из условия отсутствия вредных последствий кавитации
по (4.72) (ha = Т — 0,550 = 9,5 — 0,55‘6,6 = 5,9 м; ра =
= 101 кПа; р,, = 2,3 кПа):
АР Т 0,2
— = (1,5 + 0,35Z₽) (ро _ ро) D3 +
= (1,5 + 0,35.4)^^^-^.^ +0,2 = 0,786.
Таким образом, более жесткие требования к дисковому от-
ношению предъявляет условие отсутствия кавитации. Это, кста-
ти говоря, типично для гребных винтов транспортных судов.
Принимаем ближайшее большее значение дискового отношения
Ае/А.о = 0,85.
Расчет гребного винта, обеспечивающего судну заданную ско-
рость. Выбор двигателя. Расчет оптимального гребного винта
будем производить с использованием коэффициента задания
Кит (§ 4.8, схема 2). Расчетную диаграмму — см. на рис. 4.20:
Z₽ = 4; Ля/Ло = 0,85.
203
Данные, закладываемые в расчет: иА = и(1— Wr) =
= 10,8(1,0 — 0,216) =8,46 м/с; Т= 1380 кН; =
= iZq*216 = Ь08; r]s = 0.98— МО в корме.
Задавая частоту вращения гребного винта в диапазоне
п=(80ч-140) об/мин, дальнейшие расчеты ведем в табличной
форме (табл. 4.4).
Таблица 4.4. Расчет гребного виита, обеспечивающего заданную скорость
№ Величина Размер" иость Численные аиачеиия
1 Л об/мни 80 100 120 140
2 Л об/с 1,33 1,67 2,00 2,33
3 К„т- ° А */— 1,21 1,08 0,986 0,913
л/п ' Т —
4 J = {(Knt) по (Рис- 4.20) — 0,745 0,675 0,615 0,565
5 Г = /.1,05 — 0,782 0,709 0,646 0,593
6 DOpt = °A/nI' м 8,11 7,16 6,55 6,11
7 KT=T/pn2D*pi — 0,176 0,185 0,184 0,178
8 4> = f <п0 Рис- 4.20) 0,678 0,655 0,630 0,610
9 On = Пи'По — 0,732 0,707 0,680 0,659
10 кВт 17 000 18 300 19 000 19 700
По результатам расчета строим график — зависимости Ps(«)
и Dopt(n) (рис. 4.32), с которого при условии Dopt = Dmax =
= 6,6 м снимаем Ps — 18 900 кВт, п — 118 об/мин.
Из табл. 4.1 выбираем десятицнлиндровый двигатель
10 ДКРН 80/160, номинальные характеристики которого Psh =
= 19 400 кВт; пн = 126 об/мин.
Расчет гребного винта, обеспечивающего судну максимально
достижимую скорость. Хотя выбранный двигатель и имеет не-
сколько большую, чем требуемая, мощность, но в силу разли-
чия в частоте вращения скорость судна в принципе может и
уменьшиться. Исходя из этих соображений, зададим диапазон
скоростей vs = (20 -4- 22) уз, а дальнейшие расчеты при п =
— пи= 126 об/мин будем вести в табл. 4.5.
По результатам расчетов строим зависимости Dopt(os).
Ps(us) (рис. 4.33), по которому при Рзи = 19400 кВт опреде-
ляем Us max = 21,1 уз, D — Dopt = 6,42 м.
Для указанной скорости по рис. 4.31 находим: R — 1040 кН;
7^= 1,15-Я = 1120 кН; Т = ТЕ/( 1 — 0 = 1410 кН; vA =
204
Таблица 4.5. Расчет винта, обеспечивающего максимальную скорость
№ Величина Раз- мер- ность Численные значения
1 VS Уз 20,0 20,5 21,0 21,5 22,0
2 и м/с 10,3 10,5 10,8 н,о 11,3
3 vA=t>(l-47r) м/с 8,06 8,22 8,46 8,62 8,85
4 R (о) (по рнс. 4.31) кН 870 940 1030 1090 1190
5 ТЕ= 1,15R кН 1000 1080 1180 1250 1370
6 T = TE/(\-t) кН 1180 1270 1390 1470 1610
К VA .IfT 0,955 0,960 0,961 0,970 0,971
7 Nr V т
8 1 — <пО РИС- 4-20) — 0,595 0,598 0,600 0,603 0,605
9 I' = 1,05/ — 0,625 0,628 0,630 0,633 0,635
10 °ор1 = °л/л/' м 6,14 6,27 6,40 6,52 6,65
11 D м
Oopt ^maxi /^opt > Лпах 6,14 6,27 6,40 6,52 6,60
D == ^opt> D == ^max
12 J — J'; I — vA/nDnux — 0,625 0,628 0,630 0,633 0,640
13 KT = T/pn3D* — 0,182 0,183 0,184 0,181 0,188
14 ^a = f(KT. J) (по рнс. (4.20) — 0,625 0,628 0,630 0,623 0,620
15 TlD=T>o-nB — 0,675 0,678 0,680 0,672 0,670
16 ?S e ^£°/TU>TlS кВт 15500 17 100 19100 21000 (23400
Примечавне. В первых четырех столбцах таблицы О0р|<Ота1, поэтому при-
нимается £>-Оор) , и последнем — О0р1>О|в1ж в привито D-Dm„.
==0,514us(l — WT) =8,5 м/с; J = vjJnD = 0,630; Кт =
= T /pn2D* = 0,184.
На диаграмме (рис. 4.20) по координатам I и Кт опреде-
ляем КПД винта в свободной воде: т]о = 0,630 и его шаговое
отношение Р/D = 0,95.
Подведем итоги. Геометрические характеристики выбранно-
го гребного винта: D — 6,42 м; Р/D — 0,95; АЕ/АО — 0,85;
Zp =4. Его ГДХ в расчетном режиме: / = 0,630; Кт — 0,184;
т]о = 0,630.
Максимальная достижимая судном в расчетном режиме ско-
рость Vs max =21,1 уз.
Расчет паспортной диаграммы судна. Зададим ряд фиксиро-
ванных значений частоты вращения, включая номинальную:
га = 95; 105; 115; 126; 130 об/мин.
205
Для нескольких относительных поступей с диаграммы
(рнс. 4.20) снимаем значения Кт и т]о, соответствующие рассчи-
танному гребному винту (Р/D = 0,95):
I................ 0,40 0,50 0,60 0,70
Кт............... 0,297 0,248 0,198 0,149
По .............. 0,424 0,520 0,608 0,672
Верхнюю ограничительную характеристику выбранного дви-
гателя принимаем линейной — Ps(n) — (Psh/Пц) -п, регулятор-
Рис. 4.32. К расчету гребного вин-
та, обеспечивающего заданную ско-
рость
Рис. 4.33. К расчету гребного
винта, обеспечивающего макси-
мальную скорость
ную — вертикальной прямой, отвечающей условию п=пи. Рас-
чет будем вести в табл. 4.6, учитывая при определении полез-
ной тяги зависимость коэффициента засасывания от режима
движения (4.64).
По данным таблицы строим паспортную диаграмму — ходо-
вые характеристики судна (рис. 4.34). Расчетному режиму
движения отвечает точка А, в которой сходятся: расчетная за-
висимость сопротивления /?=1,15/?тв (кривая 1 — потребная
тяга); верхняя ограничительная характеристика двигателя
(кривая 6 — располагаемая мощность); зависимости TE(v5) и
Ps(vs), соответствующие номинальной частоте вращения.
При этом расчетная скорость движения судна составляет
vs =21,1 уз, а мощность на валу двигателя равна номиналь-
ной Ps = Psb = 19 400 кВт.
На ходовых испытаниях (свежеокрашенный корпус, тихая
вода — кривая сопротивления 2) наше судно покажет макси-
мальную скорость Os = 21,6 уз, гребной винт при этом будет
гидродинамически легким.
На волнении силой 6 и 7 баллов (кривые 3 и 4 соответст-
венно) достижимая скорость резко снизится до use =18 уз и
Vs7=13,3 уз, на этих режимах винт гидродинамически тяже-
лый. Аналогичная картина имеет место и при движении в би-
206
I I______________I________1________I________I_____
12 74 16 18 20 22 vs,y3
Рис. 4.34. Ходовые характеристики судна «Инженер»
207
Таблица 4.6. Расчет ходовых характеристик судиа «Инженер»
Велячина Размер- ность Чнсленкые зкачевяя
п об/мии 95 105 115 126 130
п об/с 1,58 1.75 1,92 2,10 2,17
При 7=0,40 vs = MD/[0,514(1 -lFr)] TE = KTpnW* (I-/) уз кН 10,1 1180 11,1 1440 12,2 1730 13,4 2080 13,8 2210
₽s = 0,514 • TE 6 sl^D^S кВт 12 700 17 100 22 500 29600 32 500
При J = 0,50 VS Уз 12,6 13,9 15,3 16,7 17,3
кН 966 1180 1420 1700 1810
PS кВт 10800 14 600 19 200 25 200 27 700
При 7 = 0,60 VS Уз 15,1 16,7 18,3 20,1 20,7
T'e кН 745 910 1090 1310 1400
Ps кВт 8850 11900 15 700 20600 27 200
При 7 = 0,70 VS Уз 17,7 19,5 21,4 23,4 24,2
TE кН 525 641 769 923 983
Ps кВт 7030 9490 12500 16 400 18 000
тых льдах (кривая 5), максимальная скорость составит в этом
случае иВл = 13,9 уз.
Следует, однако, отметить, что найденные при помощи пас-
портной диаграммы достижимые скорости движения в штормо-
вых условиях и во льдах, далеко не всегда будут реализовы-
ваться в эксплуатации. Снижение скорости по сравнению с пре-
дельной достижимой может диктоваться требованиями прочнос-
ти, желанием избежать резкой качки, слеминга, заливаемости.
Сегодня ведущие фирмы-изготовители малооборотиых судовых дизелей
(МОД) по индивидуальному заказу могут поставлять двигатели с заданными
характеристиками -значениями мощности и частоты вращения. В этом случае
достаточно ограничиться расчетом гребного виита, обеспечивающего судну
заданную скорость. При этом отпадает необходимость выполнения расчета
виита во втором приближении — на достижение максимальной скорости.
Однако для других типов судовых энергетических установок (некоторых
средне-и высокооборотиых ДВС, паровых и газовых турбин) этот заключительный
этап расчета винта остается актуальным. Поэтому, хотя в приведенном в § 4.12
примере расчета ходкости судиа используется МОД, в расчетной схеме все же
сохранено второе приближение. Это позволяет сделать указанную схему
208
проектировочного расчета гребного винта более универсальной, т.е.
пригодной и в случае применения других типов двигателей.
Контрольные вопросы
1. Какой из судовых движителей имеет наибольшее распространение?
2. Что собой представляет идеальный движитель?
3. Что собой представляет лопасть гребного винта и по какому принципу она
работает?
4. Какими потерями энергии сопровождается работа гребного винта?
5. Какие требования предъявляются к модельным испытаниям гребиых винтов?
6. Что собой представляют диаграммы для расчета гребных винтов? Как с нх
помощью проектируется оптимальный гребной виит?
7. В чем проявляется взаимодействие гребного винта и корпуса судна? Что
такое пропульсивный коэффициент?
8. Чем опасны первая и вторая стадии кавитации? Какие существуют способы
ее отдаления?
9. Почему большинство современных морских транспортных судов одновинтовые?
10. Что собой представляют ходовые характеристики судна?
11. Что такое виит регулируемого шага?
Глава 5
КАЧКА СУДНА
5.1. Общие сведения о качке
Качкой называются колебательные движения, совершаемые
судном на поверхности воды или вблизи нее. Основная причи-
на качки — морское волнение.
В теории корабля судно считается абсолютно твердым те-
лом, имеющим шесть степеней свободы. При плавании на тихой
воде судно находится в положении равновесия: внешними сила-
ми (ветер, волнение и т. д.) оно может быть выведено из это-
го положения. Сложные перемещения судна в общем случае
можно представить в виде суммы шести простейших движе-
ний— трех линейных и трех угловых. Соответственно различают
и шесть видов качки (рис. 5.1):
— вертикальную — поступательные колебания вдоль верти-
кальной осн;
— бортовую — вращательные колебания вокруг продольной
оси;
— килевую — вращательные колебания вокруг поперечной
осн;
— продольно-горизонтальную — поступательные колебания
вдоль продольной оси;
— поперечно-горизонтальную — поступательные колебания
вдоль поперечной оси;
— рыскание — вращательные колебания вокруг вертикаль-
ной оси.
143415
209
Первые три вида качки называют основными, поскольку ко-
лебания происходят относительно положения устойчивого рав-
новесия, отклонения от которого сопровождается появлением
восстанавливающих сил (или моментов).
При вертикальной качке изменяется осадка судна, а следо-
вательно нарушается равенство сил тяжести и поддержания.
Разность между ними и является той востаиавливающей силой,
которая стремится вернуть судно в положение устойчивого рав-
новесия.
Рис. 5.1. Виды качки (основные: а — вертикальная; б —борто-
вая; в — килевая; дополнительные: г— продольно-горизонталь-
ная: д — поперечно-горизонтальная; е— рыскание)
При бортовой качке происходит изменение угла крена, что
немедленно влечет за собой возникновение восстанавливающего
момента в поперечной плоскости (гл. 2).
Килевая качка сопровождается появлением угла дифферен-
та, при этом восстанавливающий момент в продольной плоскос-
ти также будет возвращать судно в исходное положение устой-
чивого равновесия.
Остальные виды качки — продольно-горизонтальная, попереч-
но-горизонтальная и рыскание — происходят относительно по-
ложения безразличного равновесия судна, отклонение от кото-
рого не ведет к возникновению восстанавливающих сил и мо-
ментов. Эти виды качки имеют место только при воздействии
на судно внешних возмущений, изменяющихся во времени.
Отдельные виды качки в чистом виде встречаются крайне
редко; чаще наблюдаются различные их сочетания. Совмест-
ные бортовые, вертикальные и поперечно-горизонтальные коле-
бания называют поперечной качкой; килевые, вертикаль-
ные и продольно-горизонтальные—продольной качкой.
Как любое колебательное движение, качка характеризуется
амплитудой, т. е. наибольшим отклонением от положения рав-
новесия, и периодом—временем совершения одного полного ко-
лебания. Чем меньше амплитуда и чем больше период, тем уме-
реннее качка.
Качка судна — отрицательное явление, поэтому, вообще го-
воря, мореходным качеством следует называть не саму качку,
а ее умеренность, т. е. малые амплитуды и большой период.
210
Экстремальная качка может привести к гибели судна — при
чрезмерных амплитудах бортовой качки судну грозит опроки-
дывание; известны случаи переламывания корпуса судна вслед-
ствие общего изгиба при продольной качке.
Плохо влияет качка на обитаемость судна, обеспечение его
нормальной эксплуатации. Среди отрицательных последствий
качки в этом плане надо отметить следующие:
— заливание палубы и палубных механизмов, что затруд-
няет их обслуживание;
— возникновение местных разрушений корпуса под дейст-
вием ударных нагрузок, в частности при слеминге;
— большие наклонения и ускорения, нарушающие нормаль-
ную работу механизмов;
— перемещение плохо закрепленных и сыпучих грузов, что
снижает безопасность плавания;
— увеличение сопротивления, снижение ходовых и манев-
ренных качеств судна;
— ухудшение состояния экипажа и пассажиров вследствие
морской болезни;
— ухудшение условий функционального использования су-
дов;
— резкое снижение боевой эффективности оружия на воен-
ных кораблях.
Теория корабля устанавливает связь между характеристи-
ками морского волнения и параметрами качки судна, геометри-
ческие элементы и нагрузка которого известны. Это позволяет
искать способы воздействия на качку в целях ее умерения, пу-
ти снижения вредных последствий качки.
Полностью устранить качку судов, даже самых крупных из
существующих сегодня и тех, что будут построены в обозримом
будущем, практически невозможно. Однако качка может быть
уменьшена за счет выбора рациональной формы судна и соот-
ветствующего распределения нагрузки. Бортовая качка эффек-
тивно умеряется с помощью специальных устройств — успокои-
телей качки. Характеристики всех видов качки в значительной
степени определяются скоростью судна и направлением его дви-
жения по отношению к волнению. Последнее обстоятельство
широко используется в морской практике для умерения качки
путем выбора соответствующего курса и скорости судна.
Уравнения движения при качке. Введем в рассмотрение две
системы координат: неподвижную и связанную с судном
Кхуг. Начало связанной системы поместим в ЦТ судна, а оси
направим так, чтобы они совпадали с главными осями инерции.
Примем допущение, что ЦТ располагается в точке пересече-
ния трех плоскостей — диаметральной, мидель-шпангоута и дей-
ствующей ватерлинии (рис. 5.2).
14*
211
Когда судно находится в покое, неподвижная система коор-
динат совпадает со связанной.
Предположив отдельные виды колебаний не зависящими
друг от друга, запишем уравнения всех шести видов качки:
D%-Ft-. (5.1)
I^-М,; 1г^-=Мг, (5.2)
где F\, F-ц и Fj—проекции главного вектора всех сил, дейст-
вующих на судно на соответствующие оси; Мх, Му, Мг — проек-
Рис. 5.2. Системы координат
ции главного момента на свя-
занные оси; D — масса судна;
/х, 1У, 1г — моменты инерции
массы судна относительно
главных центральных осей.
Третье уравнение (5.1) и
первые два уравнения (5.2)
описывают основные виды кач-
ки — вертикальную, бортовую
и килевую соответственно, ими
и ограничимся при дальней-
шем рассмотрении.
На качающееся судно действуют силы тяжести, плавучести,
инерции, а также силы гидромеханической природы.
В линейной теории качки предполагается, что отклонения
судна от положения равновесия малы. Это позволяет разде-
лить гидромеханические реакции на отдельные, практически не
зависящие друг от друга, составляющие: инерционные, демпфи-
рующие, восстанавливающие и возмущающие.
Инерционные силы и моменты пропорциональны ускорениям
судна, а также массам и моментам инерции массы жидкости,
вовлекаемой корпусом в отдельные движения при качке (так
называемые присоединенные массы и присоединенные моменты
инерции).
Демпфирующие силы и моменты определяются сопротивле-
нием воды перемещения судна при качке, в линейной теории
их считают пропорциональными скорости таких перемещений.
Восстанавливающие силы и моменты имеют гидростатиче-
скую природу, они возникают вследствие изменения величины
(вертикальная качка) или формы погруженного объема (борто-
вая и килевая качка). При этом в соответствии с метацентри-
ческими формулами остойчивости (2.17) и (2.18) восстанавли-
вающие моменты пропорциональны угловым перемещениям,
а восстанавливающая сила — линейному перемещению вдоль
оси [см. (1.26) и (1.27)].
212
Возмущающие силы и моменты выводят судно из положения
равновесия, вызывают его вынужденные колебания — качку.
В общем случае они являются функциями времени.
На основании изложенного выше уравнения основных видов:
вертикальной, бортовой и килевой качки судна иа волнении
можно записать следующим образом:
(D + Л33) - + Y^g = Fz (t)- (5.3)
(/x + X44) e + ^0 + Ghe = Mx (ty (5.4)
(ly + w Ф + ^-ф + ОЯ<р- My (0, (5.5)
где Хзз—присоединенная масса при вертикальной качке;
Z.44 и Х55 — присоединенные моменты инерции при бортовой и
килевой качке соответственно; N^, Ng и Nv — коэффициенты
сопротивления; — восстанавливающаяся сила при верти-
кальной качке; S — площадь действующей ватерлинии;
ОЛ0 и GHq>— восстанавливающие моменты при бортовой и ки-
левой качке; G— сила тяжести судна; Л, //—поперечная и про-
дольная метацентрические высоты; Fc(/)> Mx[t), Mv(t)—воз-
мущающие сила и моменты при соответствующих видах качки.
В (5.3) — (5.5) использованы общепринятые обозначения
дифференцирования по времени — точками над линейными нлн
угловыми перемещениями.
5.2. Качка судна на тихой воде
Основные виды качки, в отличие от дополнительных, имеют
место и на тихой воде. Судно, выведенное внешними силами из
положения равновесия (внезапно налетевший шквал, обрыв
подвешенного груза, рывок буксировочного троса и т. д.), а за-
тем предоставленное самому себе, будет совершать колебания
и на спокойной, не взволнованной воде. Как известно, из тео-
ретической механики, такие колебания, совершаемые под дей-
ствием восстанавливающих сил, называются свободными.
Для начала рассмотрим бортовую качку судна, происходя-
щую на тихой воде без сопротивления. При этом в выражении
(5.4) следует положить Af*(f) = 0 и No = 0, а разделив остав-
шиеся члены на коэффициент при высшей (второй) производ-
ной, запишем это уравнение в виде
6-|-ng0 = O, (5.6)
где по = *JGh/(lK + Х44)—круговая частота свободных (собст-
венных) колебаний при бортовой качке без сопротивления.
213
Из курса математики известно, что общее решение данного
однородного дифференциального уравнения второго порядка
с постоянными коэффициентами имеет вид
0 = Ct cosn8f -|- Сг sin n»t, (5.8)
где Ci и С2— постоянные, определяемые из начальных условий.
Задавшись, что при t = 0, судно отклонилось от положения
равновесия на максимальный угол 0 = 0о> его угловая скорость
соответственно 0=0, найдем Ci = 0о, С2 = 0, тогда (5.8) при-
мет вид
0 = 0О cos ntt. (5.9)
Таким образом, бортовая качка судна на тихой воде без со-
противления представляет гармонические колебания, происходя-
щие с периодом
г'=|-2”л/т- <5ло>
и имеющие амплитуду 0о.
Из (5.7) и (5.10) следует, что и круговая частота и период
свободных (собственных) колебаний не зависят от начальных
условий, а определяются только характеристиками судна — его
размерами, формой, массой — и распределением нагрузки.
Величина
r, = V(/x + M/D (5.11)
называется поперечным радиусом инерции мас-
сы, она пропорциональна ширине судиа rx = xB. С учетом
этого период качки (5.10) можно представить в виде той самой
капитанской формулы, которую мы использовали в § 2.6:
l\ = cB/-yjh, (5.12)
где постоянный для заданного судна коэффициент с = 2nx/V^-
Из (5.12) следует, что период собственных колебаний при
бортовой качке тем меньше, чем больше метацентрическая вы-
сота Л.
Плавность качки в значительной степени определяется угло-
вым ускорением, максимальная величина которого
I 9 Imax = = 0о = CJi, (5.13)
где Со = 0о^) •
С точки зрения обеспечения максимально возможной плав-
ности качки надо увеличивать период, т. е. снижать Л, что, од-
нако, немедленно приводит к ухудшению поперечной остойчи-
вости (см. гл. 2). Таким образом мы пришли к одному из часто
214
встречающихся в теории корабля противоречий, когда меро-
приятия, связанные с улучшением одного мореходного качества
отрицательно сказываются на другом. В таком случае необхо-
дим компромисс. Так, например, поперечная метацентрическая
высота назначается достаточной для того, чтобы обеспечива-
лось необходимая остойчивость, но не слишком большой, чтобы
ускорения при качке были умеренными.
Учет сопротивления при бортовой качке на тихой воде при-
водит к следующему уравнению движения:
9 + 2щё + ле0 = 0, (5.14)
N.
где H»= g (/Ж + Х44) ~ относительный коэффициент сопротивле-
ния бортовой качке.
В характерном для бортовой качки случае ра<Сле, решение
уравнения (5.14) при тех же, что и ранее начальных условиях,
записывается
0 = 0те-ив* cos (<o,f — Р),
где 0m = = 0О V1 + (НаМ)2 — максимальная
Р = arc tg(pe/coe) —фаза колебаний, а
<oe = Vrae — Не = ле 1 — •
(5.15)
амплитуда,
(5.16)
— частота собственных колебаний при бортовой качке с сопро-
тивлением.
Из (5.15) следует, что амплитуда качки убывает с течением
времени, т. е. колебания становятся затухающими. Частота соб-
ственных колебаний при наличии сопротивления уменьшается
сое<ле. однако с учетом рвСле можно заключить, что эти ча-
стоты различаются крайне мало. Действительно, значение так
называемого безразмерного коэффициента демпфирования
бортовой качки ve = ре/лв У водоизмещающих судов колеблет-
ся в пределах ve = 0,03-г-0,05, увеличиваясь до ve«0,l при на-
личии скуловых килей. Если принять ve = 0,05, то периоды сво-
бодных колебаний без сопротивления и с сопротивлением раз-
личаются не более чем на 0,125 % [см. (5.16)]. Таким образом,
полученная выше капитанская формула (5.12) применима и
для реальных судов, качка которых происходит с сопротивле-
нием.
Найдем абсолютную величину отношения двух последующих
амплитуд качки с сопротивлением (А/ = Ге/2 = л/сов):
101 I 0я>с_____________ яие/ue nve
02 |= й -н0(«+я/«0) =« =е
(5-17)
215
а затем и логарифмический декремент
In 10( | — In 1021 = nv9,
характеризующий интенсивность затухания колебаний при кач-
ке. Последнее выражение используется при обработке экспери-
ментальных данных для определения коэффициента демпфи-
рования бортовой качки.
Следует отметить, что, несмотря на небольшое сопротивле-
ние, затухание колебаний при бортовой качке происходит весь-
ма интенсивно. Так, при том же значении безразмерного коэф-
фициента демпфирования ve = 0,05, после десяти полных коле-
баний А/ = 10Те=20л/(ое амплитуда уменьшится в е"«23 раза,
т. е. можно считать, что качка практически полностью затухнет.
Аналогичным образом получаем и периоды собственных ко-
лебаний при вертикальной и килевой качке:
<5Л8>
(5.19)
Для количественной оценки этих величин используем эмпи-
рическую зависимость
1и = 0,07aDL2, (5.20)
а также известные данные о присоединенной массе Х33»£) и
присоединенном моменте инерции Xss«Zv.
С учетом выражения (2.31) для продольного метацентриче-
ского радиуса, принимая H~R, найдем период килевой качки:
Тф = 2,81 V(6/a) • Г- (5.21)
Период вертикальной качки составит
7\ = 2,84 V(6/a) • Т, (5.22)
где a — коэффициент полноты ВЛ; б — коэффициент общей пол-
ноты; Т — осадка судна, м.
Принимая для морских судов среднее значение б/а»0,75,
получаем
Т9 « Гс « 2,5 д/f • (5.23)
Из (5.23) следует хорошо подтверждающийся морской прак-
тикой факт, что периоды продольной и килевой качки близки
между собой (см. пример 5.1).
Пример 5.1. Определим приближенные значения периодов килевой и вер-
тикальной качки для судна «Инженер».
216
По (5.21) находим:
r.-Ml 7Л1 о.
а по (5.22)
Гс=2,84 V(6/a) -fr —7,91 с.
Более грубая зависимость (5.23) дает
^«^«2,5 V? = 2,5 д/9Л = 7.71 с.
Ранее (см. пример 2.8) имели Гв = 20,4 с. т. е. период бор-
товой качки более чем вдвое превышает близкие между собой
периоды вертикальной и килевой качки. Такое положение ха-
рактерно и для других водоизмещающих судов.
5.3. Качка судна на волнении
Морское волнение. Под действием ветра свободная поверх-
ность воды деформируется, массы жидкости приходят в дви-
жение, начинают за счет силы тяжести колебаться относитель-
но положения равновесия, возникает так называемое ветровое,
или морское, волнение. Говорят, что это волнение нерегуляр-
ное, так как колебания в общем случае носят хаотический ха-
рактер, параметры отдельных волн могут быть существенно раз-
личными.
Когда ветер утихает, короткие волны малой амплитуды бы-
стро гасятся, волнение становится близким к установившему-
ся регулярному, характеристики которого неизменны. Такое же
волнение, называемое еще зыбью, может наблюдаться и в гра-
ничащих со штормовыми районах, где ветер либо слаб, либо
вообще отсутствует.
В наибольшей степени регулярному соответствует волнение,
создаваемое с помощью волнопродуктора в опытовом бассейне.
Основными элементами такого регулярного волнения являются
(рис. 5.3):
1) Лв — высота волны — расстояние по вертикали между по-
дошвой и вершиной (амплитуда волны гв=Лв/2);
2) X — длина волны — расстояние между двумя соседними
вершинами (гребнями);
3) а — угол волнового склона;
4) с — скорость распространения гребня волны;
5) т — период волны —время прохождения двух соседних
гребней через фиксированную точку;
6) а —круговая частота волнения — число полных колеба-
ний уровня в фиксированной точке, происходивших в течение
2л секунд;
217
7) k = 2я/Х— частота формы профиля (волновое число) —
количество длин волн, укладывающихся в 2л метров.
Частицы жидкости, участвующие в волновом движении, пере-
мещаются по круговым орбитам, совершая полный оборот за
один период; радиусы орбит уменьшаются с глубиной. Таким
образом, со скоростью с распространяется только профиль вол-
ны, отдельные же частицы совершают круговые колебания во-
круг положения равновесия.
Для регулярного волнения все указанные выше характери-
стики неизменны во времени и взаимоувязаны. Из теории про-
Рис. 5.3. Элементы регулярного волнения
грессивных волн малой амплитуды (Лв/Х<^1) известны следу-
ющие соотношения:
2л.
(5-24)
д
с
V2xX . а2
--; Я =—.
g g
Волны предполагаются плоскими, двумерными, их профиль
имеет косинусоидальную форму. Если волна распространяется
вдоль оси т] (см. рис. 5.3), то в неподвижной системе коорди-
нат ордината волны запишется в виде
?в = rBcos (йт]и — at), (5.25)
а угол волнового склона
a~tga = -^- = — aosin(feTiB — at), (5.26)
где
a0 = kr„ - 2л = я 4 (5.27)
Л Л
— максимальный угол (амплитуда) волнового склона.
218
Положив т|в = 0, найдем в фиксированной точке—начале
координат — колебания уровня поверхности воды:
Св = г, cos о/ (5.28)
и угла волнового склона
a = a0sino/. (5.29)
Из гидромеханики известно, что полная (потенциальная и
кинетическая) энергия волны, приходящаяся на единицу пло-
щади взволнованной поверхности (единичную длину гребня и
единичную длину волны) составляет
dE=±yr2B. (5.30)
где у = pg — удельный вес жидкости; гв— амплитуда волны.
Теория волн малой амплитуды не устанавливает связи меж-
ду высотой и длиной волны. В расчетах крутизну волн ЛВД
задают, основываясь на статистических данных. В частности,
находит применение эмпирическая формула Циммермана
Лв = 0.17Л0’75, (5.31)
в соответствии с которой для морских волн разной длины вы
сота и крутизна волн составляют:
X, м 50 100 150 200 250
hi, м . . . . 3,20 5,38 7,29 9,04 10,7
Л./Х 1/16 1/19 1/21 1/22 1/23
Отсюда следует, что крутизна убывает с ростом длины
волны.
Как отмечалось выше, реальное морское волнение является
нерегулярным. Профиль такого волнения представляет собой
наложение бесконечного множества гармонических волн, име-
ющих различные высоты и частоты, а также сдвинутых друг от-
носительно друга по фазе. Все перечисленные параметры при
этом — случайные величины, соответственно случайной величи-
ной будет и ордината профиля волнения в фиксированной точке.
Рассматривая нерегулярное волнение как стационарный (сне
изменяющимися во времени статистическими характеристиками)
случайный процесс, можно ввести понятие об энергетическом
спектре Sj(a), характеризующем распределение энергии dE
гармонических составляющих волнения по частоте, которая из-
меняется в пределах О^сг^со.
Интенсивность волнения обычно оценивается высотой волн,
проще всего поддающейся измерениям. Поскольку волнение
имеет существенно различные параметры во времени, вводится
понятие обеспеченности высоты, по которой понимают процент
волн, высота которых равна или больше заданной.
219
Поскольку высота волны п %-й обеспеченности определяет
энергию волнения, то в общем случае она равна
hn % = k (5.32)
где k— коэффициент, зависящий от п %, а
Dt = J St (о) do (5.33)
о
— так называемая дисперсия изменения волновых ординат, ха-
рактеризующая полную энергию рассматриваемого нерегуляр-
ного волнения, задаваемого спектром.
Интенсивность волнения в РФ принято оценивать по 9-балль-
ной шкале с учетом высоты волн 3 %-й обеспеченности
(табл. 5.1). Здесь же приводится и сила ветра, соответствую-
щая данному волнению.
Таблица 5.1. Расчетные параметры ветра и иерегуляриого морского волнения
Характеристика волнения Значения характеристики при волнении
значительном СИЛЬНОМ очень сильном
Степень иолиеиия, баллы Высота волн 3 %-А обеспе- ченности, м Скорость ветра, м/с Сила ветра (по шкале Бофор- та), баллы 3 4 1,25 2,0 8 11 5 6 5 6 3,5 6,0 14 19 7 8—9 7 8 8,5 11,0 24 29 10 11
Бортовая качка судна иа регулярном волнении. Примем, что
судно, поперечные размеры которого (ширина В и осадка Г)
бесконечно малы по сравнению с длиной волны не имеет хо-
да и расположено лагом к волне. Очевидно, чтопри данных
допущениях оно будет вести себя как частица жидкости, уча-
ствующая в орбитальном движении. В соответствии с вывода-
ми гидромеханики, равнодействующая сил давления (сил пла-
вучести) будет направлена по так называемой динамической
вертикали — нормальной к свободной поверхности воды в дан-
ном месте. За счет влияния центробежных сил по этой же вер-
тикале будет действовать и сила тяжести судна. Тогда, как
следует из рис. 5.4, восстанавливающий момент запишется
Ма = Gh (0 — a)— GhQ — Gha, (5.34)
где а — угол волнового склона в данный момент времени в мес-
те расположения качающегося судна.
220
Выражение (5.34) состоит из двух частей. Первая из них
GhQ— суть восстанавливающий момент иа тихой воде, вторая
Gha — возмущающий момент, изменяющийся во времени по гар-
моническому закону с частотой, равной частоте рассматривае-
мого регулярного волнения (см. (5.29)). Если учесть конечность
размеров судна с помощью специального поправочного (редук-
ционного) коэффициента хе 1, то уравнение (5.4) бортовой
качки на регулярном волнении
запишется в виде
9 + 2реё + лев = neaoxe sin о/,
(5.35)
где аЭф = аохе sin at — угол эф-
фективного водного склона,
а «эфо = асхе — его амплитудное
значение.
Общий интеграл неоднородно-
го уравнения (5.35) можно
представить в виде суммы обще-
го решения дифференциального
уравнения без правой части и ча-
стного решения
О = 9с + 9в = 9me",,в, cos (ц,< - ₽)
+ 0« sin (at — 6). (5.36)
Рис. 5.4. Восстанавливающий мо-
мент при бортовой качке на вол-
нении
Первый член правой части выражения (5.36) суть уравне-
ние затухающих колебаний [см. (5.15)] которые, как было по-
казано выше, за счет демпфирования достаточно быстро ис-
чезнут.
Таким образом, через некоторое время останутся только вы-
нужденные колебания
0 = 0Bsin(ai — 6),
(5.37)
которые будут происходить с частотой а волнения и с отста-
ванием по фазе по отношению к возмущающему моменту (вол-
новому профилю).
Амплитуда вынужденных колебаний при этом составит
_ ао*е”е
V(^-<r2) +4p|-а2 ’
а сдвиг по фазе
6 = arctg
2цва
„2 „2
пв — а
(5.38)
(5.39)
221
Из (5.38) и (5.39) следует, что и амплитуда бортовой качки
и сдвиг по фазе являются функциями частоты волнения.
Отношение амплитуд качки и углов волнового склона носит
название коэффициента динамичности и записыва-
ется в виде
J =?• (5-40)
а,ф о V(1 — <^)2+4v??
где а = а/пе—относительная частота качки — соотношение ча-
стот собственных и вынужденных колебаний.
Выражение (5.40) называют и амплитудно-частотной ха-
рактеристикой (АЧХ) бортовой качки, поскольку оно опреде-
ляет амплитуды вынужденной качки в функции от частоты воз-
мущающего момента (регулярного волнения).
Проследим за характером изменения АЧХ. Когда о->0,
судно качается в согласии с волной £д= 1, 0В = Оэфо его ко-
лебания не отстают от волнения — сдвиг по фазе 6 = 0 [см.
(5.39)]. Такое положение возможно либо при о->0, либо при
пе->оо. Первый случай соответствует очень длинным волнам,
второй — судну с бесконечной начальной остойчивостью
/г->оо—см. (5.7), прообразом которого является плот.
Если о-> оо, то коэффициент динамичности £д->0,
0П -> 0, следовательно, качка будет отсутствовать. Это произой-
дет либо когда ст->оо и очень короткие волны малой амплиту-
ды не обладают достаточной энергией, чтобы раскачать судно,
либо при пе-»-О, т. е. когда начальная метацентрическая вы-
сота /г->0 и восстанавливающий момент отсутствует. Очевид-
но, что последний вариант не приемлем с точки зрения остой-
чивости.
Взяв производную от (5.40) по 5, определим положение мак-
симума АЧХ, которое соответствует относительной частоте вол-
нения, равной
а = 71 — 2ve- (5.41)
Таким образом, максимум АЧХ несколько сдвинут влево от
резонанса (пе = о, а = 1), а его величина составляет
*д max= ( 'j =----------,— • (5.42)
\аэфО/тах 2v9V1-v9
Сдвиг по фазе в этом случае (о = пд) достигает [см.
(5.39)] величины 6 = л/2, т. е. колебания судна отстают от воз-
мущающего момента на 90°.
Если сопротивление качке отсутствует, то из (5.41) и (5.42)
имеем
а=1, =оо,
\ С&эф о /max
222
т. е. приходим к известному из теоретической механики выводу
о неограниченном возрастании амплитуд колебаний идеального
математического маятника в условиях резонанса.
На рис. 5.5 представлены АЧХ судов, имеющих различные
коэффициенты демпфирования бортовой качки. Даже весьма
умеренное сопротивление (ve=0,05) приводит к резкому сниже-
нию резонансных амплитуд. Тем не менее у судов эти амплиту-
ды могут достигать весьма ощутимых величин в зоне резонанса.
В силу однотипности уравнений основных видов качки
(5.3) — (5.5) все качественные
выводы, полученные выше от-
носительно бортовой качки на
регулярном волнении, могут
быть распространены и на ки-
левую и вертикальную качку.
Отличия непринципиального
свойства будут иметь место
в значениях редукционных ко-
эффициентов и безразмерных
коэффициентов демпфирова-
ния.
При отсутствии хода для
каждого вида качки в прин-
Рис. 5.5. Амплитудно-частотные ха-
рактеристики
ципе существует резонанс-
ное волнение, вызывающее максимальные амплитуды соответ-
ствующих колебаний. Зная периоды собственных колебаний, без
труда можно найти параметры резонансного волнения, положив
7, = т [см. пример 5.2].
Пример 5.2. Для судиа «Инженер» найдем характеристики резонансных
волн для бортовой и килевой качки. Ранее (см. примеры 2.8 и 5.1) имели
Те = 20,4 с; Тф — 7,81 с. Полагая = т, с использованием (5.24) нахо-
дим для бортовой качкн
• g 20,4* . 9,81 ССЛ .
= ---------6^8—~ 650 М =
для килевой качки
= 7,81* • 9,81 __
Ко~~2И---------6Д8------95 м-
Зыбь (регулярное волнение) с длиной волн X = 650 м маловероятна,
поэтому резонансная бортовая качка судну без хода, по-внднмому, не угро-
жает. Килевая качка при X = 95 м тоже не представляет большой опасно-
сти — при таком соотношении длины волны и судна (X/L = (95/173)« 0,55)
редукционный коэффициент хф будет близок к нулю.
Этн выводы справедливы н для других достаточно крупных морских
судов (L > 100 м).
Качка судна на нерегулярном волнении. В этом случае судно
рассматривают как линейную динамическую систему, находя-
223
щуюся под воздействием стационарного случайного процес-
са — нерегулярного волнения с заданным энергетическим спект-
ром Вероятностные характеристики выходного процесса
(качка судна) определяют по известным характеристикам про-
цесса входного (волнения моря) с использованием соотноше-
ния
5.ых(0)=|Ф|’-5вх(о),
где Sbx(o), Sbux(o)—спектральные плотности входного и вы-
ходного случайных процессов; |Ф|—модуль передаточной
функции рассматриваемой динамической системы.
Тогда применительно к бортовой качке на нерегулярном
волнении (5.43) можно записать в виде
«е (о) = | Фе |2- se (о),
где Se(a)-—спектральная плотность углов бортовой качки;
Sa(o) = fe2Sc (о)
— спектральная плотность углов волнового склона волнения,
найденная с использованием соотношения (5.27); |Фе|—мо-
дуль передаточной функции, представляющий собой АЧХ ли-
нейной динамической системы (судна).
В рассматриваемом случае бортовой качки он определяется
выражением (5.40). Рассчитав дисперсию углов бортовой качки
00
De = j Se (о) do,
о
можно затем по аналогии с (5.32) найти амплитуды качки за-
данной обеспеченности.
В частности, средняя амплитуда бортовых наклонений
с обеспеченностью 45,6 % составит 0Ср = 1,25‘VOe, амплитуда
3%-й обеспеченности 03% = 2,64= 2,11 9Ср, а максималь-
ная с обеспеченностью 0,1 % 0o.i % = 3,7 = 2,96 0ср.
Максимальные амплитуды бортовой качки на нерегулярном
волнении оказываются несколько меньшими, чем резонансные
на регулярном. Это объясняется тем, что характеристики нере-
гулярного волнения меняются во времени и резонанс не успе-
вает развиться. И наоборот, на режимах, удаленных от резо-
нанса, амплитуды возрастают за счет наложения собственных
колебаний, которые уже не затухают столь интенсивно, как на
тихой воде.
Обычно средний период бортовой качки на нерегулярном
волнении близок к периоду собственных колебаний судна.
Использовав соотношение (5.13), получим дисперсию угло-
вых ускорений при бортовой качке:
Об 5» леО0. (5.43)
224
Выражение (5.43) позволяет найти угловые ускорения за-
данной обеспеченности, а по ним и ускорения линейные (мак-
симальные значения на борту судна):
а = О.5В0.
(5.44)
Для транспортного судна могут быть заданы предельно до-
пустимые параметры качки — угол крена и ускорение. Опреде-
лив описанным выше способом при заданной обеспеченности
эти величины, сравнивают их с
летворення требуемых условий
об умерении качки за счет пе-
рераспределения нагрузки суд-
на, в первую очередь, измене-
ния метацентрической высоты
h, а следовательно [см.
(5.10)}, и периода собственных
колебаний. На стадии проекти-
рования можно рассматривать
вопрос изменения формы суд-
на и установки на нем успо-
коителей качки.
Выше шел разговор о ли-
нейной теории качки, когда от-
клонения считаются малыми
(восстанавливающий момент
предельными. В случае неудов-
мореходностн решается вопрос
рактеристнка при учете нелинейности
определяется метацентриче-
ской формулой остойчивости), а сопротивление принимается
пропорциональным первой степени угловой скорости.
При достаточно больших амплитудах бортовой качки эти
условия не соблюдаются — восстанавливающий момент стано-
вится нелинейной функцией (диаграмма статической остойчи-
вости— см. гл. 2) угла крена, демпфирующие силы также ха-
рактеризуются нелинейной зависимостью от скорости.
Учет указанных обстоятельств приводит к существенному
усложнению уравнения бортовой качки, анализ которых выхо-
дит за рамки настоящего курса. Отметим лишь некоторые осо-
бенности нелинейной качки.
Амплитудно-частотная характеристика 6гг. = f(o) перестает
быть однозначной функцией: при а = const в некотором диапа-
зоне частот качка может происходить с двумя различными ам-
плитудами. При этом процесс будет зависеть от предыстории
движения (рис. 5.6), т. е. оттого, происходит ли увеличение
относительной частоты а (участок АЕВС) либо ее уменьшение
(участок CDEA). Частота свободных колебаний становится
функцией амплитуды, уменьшаясь с ее ростом. В пределе при
0m->03 эта частота пе->0. При отсутствии сопротивления
I .5^4 f S
225
максимальная амплитуда резонансной качки будет стремиться
к 93, а не к бесконечности, как это было в линейной теории.
5.4. Влияние курса и скорости движения судна на качку
При движении судна произвольным курсом по отношению
к направлению распространения волн частота возмущающей си-
лы становится функцией не только длины волны, но и скорости
Рис. 5.7. Движение судна на волнении
судна v и курсового угла
ф (рис. 5.7).
Действительно, ско-
рость распространения
волн ск относительно на-
блюдателя, находящегося
на судне, составит
ск = с — о созф =
= соэф),
(5.45)
где с — истинная скорость
волны в неподвижной
системе координат, ф — курсовой угол судна относительно на-
правления бега волн.
Соответственно вводятся понятия и о кажущемся периоде
волны
__ X ________________т____
К С — V COS® ,0
1 — — cos ф
и кажущейся частоте
2л
Ок = — = <7
тк
(5.46)
(5.47)
где т, о — истинные значения периода и частоты волнения.
Очевидно, что, анализируя качку движущегося судна, в рас-
чет надо закладывать кажущиеся параметры волнения, опреде-
ляемые выражениями (5.45) — (5.47).
При движении на попутном волнении (ф = 0, созф=1)
частота возмущающих сил уменьшается
= (5.48)
на встречном (ф = 180°, cos ф = —1) она возрастает
ОК = О(1+^).
(5.49)
226
Из (5.48) следует, что при ходе на попутном волнении резо-
нансными по килевой и вертикальной качке становятся волны
еще более короткие, чем на стопе, т. е. они не представляют
опасности для судна [см. пример 5.2]. Качественно иная карти-
на наблюдается при движении на встречном волнении (вразрез
волне) — в резонансные превращаются длинные волны (см.
(5.49)), обладающие достаточной энергией, чтобы раскачивать
судно с большими амплитудами [см. пример 5.3]. При этом
продольная качка может стать такой, что будет сопровождать-
ся интенсивным заливанием носовой оконечности, оголением
гребного винта, слемннгом.
Пример 5.3. Для судна «Инженер» найдем резонансные, по килевой
качке, длины воли при ходе на встречном волнении со скоростями о, =
= 8, 12, 16, 20 уз (о = 4,11; 6,17; 8,22; 10,3 м/с).
В соответствии с (5.49) условие резонанса (ти = Тф) запишется
_________________________Ок 2я 1
1 + (о/с) = Т9 ' 1 4- (о/с)
Зная 7'ф= 7,81 (см. пример 5.1) и используя связь (5.24) частоты волн
с их длиной, получаем квадратное уравнение
Х-Г Г • о = Х —9,76 VX-7,81о= О,
” V 2л ф
решая которое, находим параметры резонансных воли при различных скоро-
стях движения:
v,, уз............................ 8 12 16 20
Fr................................ 0,10 0,15 0,20 0,25
X, м.............................. 153 179 203 228
X/L............................... 0,883 1,03 1,17 1,32
Во всем рассмотренном диапазоне относительных скоростей (Fr =
= 0,1 Н- 0,25) резонансные по килевой качке встречные волны имеют длину,
близкую к длине судна.
Этот вывод справедлив и для других морских транспортных судов.
Влияние скорости и направления движения не исчерпывает-
ся только изменением частоты возмущающей силы. Скорость
хода приводит к увеличению безразмерного коэффициента демп-
фирования качки, а курсовой угол — к уменьшению амплитуды
угла волнового склона.
Применительно к бортовой качке эти изменения можно оп-
ределить с помощью приближенных зависимостей
veo = ve(l + 3,3Fr); (5.50)
аОф = а0 sin ф,
(5.51)
где ve, vei> — коэффициент демпфирования без хода и при нали-
чии скорости соответственно; а0, аоф — максимальный угол вол-
15*
227
нового склона при положении лагом к волнению (ф = 90°) и
на косых курсах (ф>^=90°) соответственно.
Выражение (5.51) учитывает не только кажущееся увеличе-
ние при неизменной высоте, длины волны Хк = X/cos хр, но и то
обстоятельство, что углы волнового склона в различных попе-
речных сечениях будут различаться не только по величине, но
иногда и по знаку.
Выражения (5.50) и (5.51) совместно с (5.42) могут исполь-
зоваться для анализа резонансной бортовой качки при ходе на
косом волнении [см. пример 5.4].
Пример 5.4. Найдем курс судна «Инженер», при ходе иа котором со
скоростью и, = 16 уз будет иметь место резонанс по бортовой качке.
Длина волны зыби X = 203 м соответствует резонансу по килевой качке
на этой же скорости [см. пример 5.3], ее период и скорость (5.24) равны
Т= 11,4 с; с = 17,8 м/с.
Используя (5.46), при условии Тк = Т0=2О,4 с [см. пример 2.8], на-
ходим
, h т \ с (, 11,4 \ 17,8
созф = р - —j . -= (1 - —) . — = 0,955,
откуда ф = 17,3°, что соответствует движению на волнении, близком к по-
путному.
Оценим амплитуды резонансной бортовой качки и максимальные уско-
рения. Дополнительно известно ve = 0,04, Xg « 1,0.
По (5.31) рассчитываем высоту волны
ЙВ=О,17Х0’78 =0,17 • 2O30,7® =9,14 м,
а по (5.27) максимальный угол волиоаого склона
a0 = nJ^-= 3,14 .^1 = 0,141 рад = 8,1°.
Коэффициент демпфирования с учетом скорости (Fr = 0,2) находим
по (5.50):
Veo = v# (1 + 3,3 Fr) = 0,04 • 1,66 = 0,0664,
а амплитуду угла волнового склона с учетом косого курса (ф = 17,3°) по
(5.51):
аОф = а# sin ф = 8,1° • 0,297 = 2,4® = 0,042 рад.
Резонансные амплитуды борт ной качки определяем с использованием
(5.42):
----------- . ----------= 18,1° = 0,315 рад,
2 • 0,0664 V1 — 0,0664»
а максимальные ускорения по (5.44) с учетом (5.13)
‘max = 4 4 0в = (l^)’ • • 0,315 = 0,421 м/с’.
Относительные ускорения а = a/g = 0,043 значительно меньше допустимых
а = 0,1.
228
Используя зависимость (5.46), можно выбрать такое соче-
тание скорости и курса, при котором отсутствовала бы разви-
тая бортовая или килевая качка. Для быстрого решения этой
задачи служат различные диаграммы штормового плавания.
Достаточно широкое распространение получила универсальная
диаграмма Ю. В. Ремеза, которая позволяет установить небла-
гоприятные с точки зрения бортовой качки сочетания скорости
н курсового угла. При этом предполагается, что плавание долж-
но происходить вне зоны 0,77 Тк/Те 1,43. Диаграмма по-
строена так, что входить в нее можно с любой из известных ве-
личин: высотой волн, их длиной, балльностью волиеиия.
Следует, однако, отметить, что использование указанной ди-
аграммы несколько затрудняется тем обстоятельством, что на
судах, как правило, отсутствуют средства для инструменталь-
ного определения параметров (йв, X) волн. Данные же, осно-
ванные на визуальных наблюдениях, не свободны от ошибок,
особенно в случае нерегулярного волнения.
Контрольные вопросы
1. Какие виды качки относятся к основным, а какие к дополнительным?
Почему?
2. Какие параметры характеризуют качку судна?
3. Какие силы и моменты действуют на судно при качке?
4. Как различаются частоты собственных колебаний при качке с сопро-
тивлением и без иего?
5. Как соотносятся периоды собственных колебаний при бортовой, ки-
левой и вертикальной качке?
6. Какое волнение называют регулярным? Каковы его основные харак-
теристики?
7. Что собой представляет нерегулярное волнение и чем оио характе-
ризуется?
8. Что такое амплитудно-частотная характеристика качки? Где распо-
лагается ее максимум?
9. Как влияют скорость судна и его курс на характеристики качки
и почему?
Глава 6
УПРАВЛЯЕМОСТЬ
6.1. Основные понятия
Управляемостью называется способность судна двигаться
заданным курсом. Траектория движения судна может быть пря-
молинейной, а может иметь криволинейную форму. Способность
судна сохранять прямолинейное направление движения име-
229
нуют устойчивостью на курсе, а способность необходимым обра-
зом изменять направление движения — поворотливостью. Толь-
ко при наличии обоих этих качеств судно обладает управляе-
мостью. Эти качества по сути своей противоречивы — улучше-
ние устойчивости на курсе ухудшает поворотливость судна, и
наоборот. Для обеспечения требуемой управляемости приходит-
ся идти на компромисс, выбирая оптимальное для заданного
судна сочетание показателей устойчивости на курсе и поворот-
ливости. При этом существенную роль играет тип и назначение
судна: для быстроходного пассажирского лайнера указанный
компромисс будет в пользу устойчивости на курсе, а для пор-
тового буксира в большей степени важна поворотливость.
При всей противоречивости качеств, определяющих управ-
ляемость, есть и то, что их роднит, — и устойчивость судна на
курсе, и его поворотливость обеспечиваются с помощью руле-
вого устройства.
Предоставленное самому себе судно с рулем в нейтраль-
ном положении не будет двигаться прямолинейным курсом. Под
влиянием внешних воздействий (волны, ветер) оно будет изме-
нять направление движения, поскольку отсутствуют какие-либо
восстанавливающие силы, стремящиеся вернуть судно на пер-
воначальную траекторию. Таким образом, ни одно судно не об-
ладает автоматической устойчивостью на курсе.
Для удержания судна на заданном направлении приходится
все время использовать руль. При этом говорят об эксплуата-
ционной устойчивости на курсе. Считается, что последняя удов-
летворительна, если для обеспечения движения заданным кур-
сов в условиях двух-, трехбалльного волнения руль перекла-
дывается с борта на борт не более 3—5 раз в минуту на угол
не более 3—4°.
Все современные суда оснащены автоматическими система-
ми удержания на курсе (авторулевыми), которые не только ос-
вобождают экипаж от утомительных вахт за штурвалом, но и
делают эту работу лучше человека, обеспечивая в общем слу-
чае меньшие, чем при ручном управлении, отклонения от за-
данного курса.
Наряду с теоретическими методами прн исследовании управ-
ляемости, как и других мореходных качеств, широкое примене-
ние находит модельный эксперимент. С этой целью исполь-
зуются экспериментальные установки — уже знакомые нам опы-
товые бассейны, гидро- и аэродинамические трубы. Надежные
результаты получают прн испытаниях автономных самоходных
моделей в открытом водоеме. Размеры таких моделей (L =
= 3—8 м) позволяют разместить на них не только оператора,
управляющего движением, но и всю необходимую регистриру-
ющую аппаратуру. Траектория движения при этом обычно,
фиксируется береговыми средствами.
230
6.2. Средства обеспечения управляемости
Управляемость всех судов обеспечивается с помощью средств
управления — специальных устройств, создающих нормальные
к диаметральной плоскости силы. Указанные средства управле-
ния принято подразделять на главные (ГСУ) и вспомогатель-
ные (ВСУ).
Эффективность ГСУ во многом определяется скоростью, воз-
растая с ростом последней. Поэтому их часто называют пас-
сивными. К ГСУ относятся рули различных типов, поворотные
винтовые насадки, направляющие аппараты судов с водомет-
ными движителями. Все они предназначены для обеспечения
управляемости в основном режиме движения судна.
ВСУ называют также средствами активного управления
(САУ), для своей работы они требуют подвода энергии. С их
помощью может осуществляться маневрирование судна при пре-
дельно малых скоростях или даже при отсутствии хода. Наи-
большее распространение получили такие САУ, как подрулива-
ющие устройства и поворотные винтовые колонки. О них речь
пойдет в гл. 7.
Самым распространенным ГСУ является рулевое устройство,
включающее рабочий орган — перо руля (или просто руль) —
и баллер, с помощью которого руль поворачивается. Перо руля
представляет собой крыло малого удлинения с симметричным
профилем сечения. Угол его поворота относительно ДП судна
называют углом перекладки руля. Руль работает по принципу
несущего крыла (см. § 4.2), возникающие на нем подъемная
сила и сила сопротивления определяются величиной соответст-
вующих коэффициентов и скоростью движения (см. (4.19)].
Безотрывное обтекание руля, сопровождающееся ростом коэф-
фициента подъемной силы, наблюдается до углов атаки а =
= 30—35°, этими же значениями и ограничивается угол пере-
кладки руля.
Классификацию рулей можно провести по двум призна-
кам— по способу соединения с корпусом и по расположению
оси баллера относительно пера руля.
Простой руль (рис. 6.1, а) опирается на корпус в двух или
более точках, а подвесной (рис. 6.1, в) висит на баллере. Про-
межуточный вариант (рис. 6.1,6) называют полуподвесным
рулем.
С целью уменьшения необходимого для поворота руля мо-
мента на баллере его ось смещают относительно передней кром-
ки пера — такие рули называются балансирными (рис. 6.1,в).
Пример небалансирного руля показан на рис. 6.1, а; руль,
представленный на рис. 6.1,6, часто именуют полубалансирным.
231
Площадь руля в значительной степени определяет его
эффективность. Обычно ее принято выражать в долях произве-
дения длины судна L на его осадку Т:
SK — T-Llk, (6.1)
где коэффициент k для различных судов лежит в пределах:
Тип судна
к
Быстроходные пассажирские........................... 85
Морские грузовые...................................40—70
Рыбопромысловые....................................20—40
Морские буксиры....................................30—40
Рис. 6.1. Основные типы судовых рулей:
а — простой небаланснрный; б — полупод-
весной (полубалансирный); в — подвесной
балансирный
Рве. 6.2. Поворотная
винтовая насадка со
стабилизатором
Поворотная направляющая насадка (рис. 6.2), охватываю-
щая гребной винт, закрепляется иа баллере, ось которого рас-
полагается в районе середины ее длины. При перекладке на-
садки на ней возникает боковая сила; кроме того, дополнитель-
ное поперечное усилие создается за счет отклонения струи вин-
та. В результате направляющая насадка обеспечивает на 40—
50 % большую боковую силу, чем обычный руль, имеющий та-
кую же площадь проекции на ДП.
Рули повышенной эффективности (РПЭ). В ряде случаев
требуемые показатели управляемости не могут быть обеспече-
ны при помощи обычных рулей или поворотных насадок. Воз-
никает задача — при малом отличии в габаритах и приводе су-
щественно увеличить создаваемую рулевым устройством боко-
вую силу.
В современных РПЭ используются в основном два извест-
ных принципа повышения коэффициента подъемной силы кры-
ла Cv. Первый из них заключается в установке поворотного
закрылка, площадь которого составляет 20—30 % общей пло-
щади крыла. При неизменном угле атаки, отклонение закрыл-
ка приводит к возрастанию Су, причем максимальное значение
этого коэффициента может увеличиться на 50 % по сравнению
с немеханизированным крылом.
232
Во втором случае используется уже известнымй нам (см.
§4.1) эффект Магнуса, возникающий при обтекании вращаю-
щегося цилиндра — ротора — поперечным потоком.
Рис. 6.3. Роторный руль с закрылком
Подъемная сила крыла, передняя кромка которого совмеще-
на с вращающимся цилиндром, существенно возрастает, уве-
личивается и критический угол атаки, до которого крыло обте-
кается безотрывно.
Оба эти принципа повышения боковой силы используются
при создании механизированных РПЭ — это рули с закрылка-
ми и роторные рули. Совмещение обоих принципов привело
к созданию роторного руля с за-
крылком (рис. 6.3).
В передней кромке пера руля ус-
тановлен вертикальный цилиндр,
в задней — поворотный закрылок.
Все элементы устройства образуют
общий крыльевой профиль и при
неподвижном цилиндре и неоткло-
ненном закрылке РПЭ работает
как обычный руль. Когда включены
все средства механизации рассмат-
риваемого РПЭ, создаваемая им
боковая сила резко возра-
Рис. 6.4. Коэффициент подъем-
ной силы
1 — обычный руль; 2 — роторный;
3 — роторный с закрылком
стает, существенно увеличивается
и критический угол атаки (рис. 6.4).
Как правило, включается ротор
и отклоняется закрылок только
при значительных углах переклад-
ки руля, поэтому все приведенные на рис. 6.4 зависимости Су(а)
исходят из начала координат, соответствующего неработающему
ротору и неотклоненному закрылку. Эффективность механизации
руля иллюстрируется следующими данными: по сравнению
с обычным руль с закрылком уменьшает диаметр циркуляции
вдвое; роторный — в 2,5 раза; роторный руль с закрылком — бо-
лее чем в 3 раза. Еще большей эффективности можно ожидать от
предложенного в С.-Петербургском государственном морском
техническом университете руля, оборудованного двумя роторами,
на входящей и выходящей кромках.
233
Следует, однако, отметить, что из-за сложности всех описан-
ных выше РПЭ они не находят широкого применения на судах.
6.3. Циркуляция судна
Если на судне, движущемся в установившемся режиме (пря-
молинейно с постоянной скоростью), переложить руль, то оно
начнет двигаться по криволи-
нейной траектории, называе-
мой циркуляцией. Если при
этом не изменять угол пере-
кладки руля, то весь процесс
движения, также называемый
циркуляцией, можно разделить
на три периода: маневренный,
эволюционный и установив-
шийся. Первый из них опреде-
ляется началом и концом пере-
кладки руля и по времени весь-
ма непродолжителен. Оконча-
ние второго периода совпадает
с моментом, когда все элемен-
ты криволинейного движения
приобретают постоянное значе-
ние, т. е. когда наступает уста-
новившееся движение.
До перекладки руля судно
движется прямолинейно, на
него действуют две лежащие
в ДП и взаимно уравновешивающиеся силы: сопротивление
движению и полезная тяга движителей. Как только руль
выводится из нейтрального положения в ДП, на нем воз-
никает гидродинамическая поперечная сила, под действием
которой судно начинает дрейфовать в сторону, противо-
положную перекладке руля, и поворачиваться относительно вер-
тикальной оси. Обтекание корпуса перестает быть симметрич-
ным, на нем, как на крыле предельно малого удлинения, так-
же возникает поперечная сила, способствующая повороту суд-
на в нужном направлении. Рост угловой скорости судна сопро-
вождается ростом момента сопротивления вращению, в резуль-
тате наступает установившееся движение, когда ЦТ судна дви-
жется по окружности постоянного диаметра Dc, называемого
диаметром установившейся циркуляции. Последняя, наряду
с Dc, характеризуется следующими элементами (рис. 6.5):
— тактическим диаметром циркуляции: кратчайшим рас-
стоянием между положениями ДП судна на прямом и обрат-
ном курсах Dt = (0,9 4- 1,2) Dc;
234
— выдвигом—расстоянием, проходимым ЦТ судна в на-
правлении прямого курса от момента начала перекладки руля
до момента поворота на 90°:
/,=(0,6 1,2) Dc-
— прямым смещением — расстоянием, на которое перемеща-
ется ЦТ судна в направлении, нормальном к первоначальному
прямолинейному курсу, при повороте ДП судна на 90°:
12 = (0,25 4- 0,50) Dc\
— обратным смещением — наибольшим расстоянием, на ко-
торое удаляется ЦТ судна в сторону, противоположную пово-
роту:
/, = (0 4-0,1) Dc.
Элементы циркуляции зависят от угла перекладки руля а.
Приведенные выше пределы их изменения характерны для мор-
ских транспортных судов при максимальных углах а = 30—35°.
Все перечисленные характеристики имеют практическое зна-
чение: величину выдвига необходимо знать при отворачивании
от берега или другого препятствия, прямое смещение нужно
учитывать при расхождении судов, а тактически диаметр цир-
куляции — при маневрировании в узкостях.
Основным показателем поворотливости судна является диа-
метр установившейся циркуляции. Для судов с обычными ру-
лями при а = 30—35° этот диаметр изменяется в пределах
Ос = (3 4- 6)L.
Важной характеристикой циркуляции является и ее пе-
риод— время, необходимое судну для полного поворота на 360°.
Этот период зависит от скорости движения и от значения Dc
и для транспортных судов составляет 3—5 мин.
Падение скорости и крен судна на циркуляции. Сопротивле-
ние движению судна на криволинейной траектории возрастает,
а скорость при неизменной мощности механической установки
падает. Теоретические и экспериментальные исследования по-
казали, что уменьшение скорости в основном определяется от-
ношением диаметра установившейся циркуляции к длине судна.
С достаточной степенью точности найти скорость иа циркуля-
ции можно, используя формулу Г. В. Соболева:
*Л , 40 (6.2)
N + (Ос/£)’
где vo — скорость судна на прямом курсе.
Движение на установившейся циркуляции сопровождается
креном судна. Действительно, на него при этом действуют сле-
235
дующие силы (рис. 6.6): приложенная в ЦТ и направленная
вдоль радиуса Яс наружу циркуляции центробежная сила инер-
ции:
Ри = О(0г/Яс),
(6.3)
а также гидродинамические реакции на корпусе Уп и на руле
YK. Последняя невелика, и ею можно пренебречь. Центр тя-
жести расположен выше точки приложения силы Уп, поэтому
водоизмещающие суда обычно кренятся наружу циркуляции.
Наличие крена немедленно вызывает появление восстанавли-
вающего момента, величина которого может быть найдена по
Рис. 6.6. Крен на циркуляции
метацентрической формуле ос-
тойчивости Л1в = GhQ. Приводя
моменты к точке приложения в
общем случае неизвестной си-
лы Уи, запишем
Ри (zg — zH) = gDhQ, (6.4)
где zg, zH — аппликаты ЦТ судна
и точки приложения Ун; h — ме-
тацентрическая высота.
Сопоставляя (6.3) и (6.4) и
принимая zH=T/2, запишем вы-
ражение для определения угла
крена
0 = gfc (г« “ т)- (6-5)
Практическое использование формулы (6.5) затруднено тем,
что в нее входит скорость v на установившейся циркуляции, ко-
торая также подлежит определению. С учетом зависимости
(6.2), а также того факта, что относительное падение скорости
для судов различных типов отличается мало, получена следу-
ющая, удобная для оценки угла крена в градусах, формула
(6.6)
где Do — скорость судна перед выходом на циркуляцию, м/с;
L — его длина.
Вообще говоря, в процессе циркуляции угол крена изменя-
ется, причем не только по величине, но и по знаку. Так, в ма-
невренном периоде, когда руль уже отклонен, а сила на кор-
пусе практически отсутствует, возникает небольшой крен на тот
же борт, куда переложен руль. Затем крен меняет свой знак
и достигает максимального значения в эволюционном периоде,
когда скорость еще мало отличается от Оо> а радиус циркуля-
236
ции уже мало отличается от /?с [см. (6.5)]. На основании на-
турных экспериментов найдено, что 0тах«2,20.
Обычно крен не велик, он редко превышает 1,5—2°. Одиако
для быстроходных водоизмещающих судов, обладающих к то-
му же пониженной начальной остойчивостью, этот крен может
представлять опасность. Известны случаи опрокидывания судов
от чрезмерного крена на циркуляции.
Пример 6.1. Для судна «Инженер» определим падение скорости и крен
на циркуляции. Дополнительно известно Vo = 20 уз, DJL = 4,3.
По (6.2) находим
«о 20 _
v = = —.. --= 13,5 уз,
-tfl 4-40/(Dc/L)» -У1 -Ь 40/4,3»
т. е. скорость на циркуляции составляет о = О,68о0.
Зная дополнительно (см. пример 2.1) zt = 10,8 м, Л »= 1,10 к, (по 6.5)
рассчитаем угол крена
(0,514. 13,5)»(10,8--^)
0 = ~ghR^ (2« “ т) = 9,81 • 1,1 • 2,15 • 173 0,0726 рад — 4,2°-
Оценка той же величины по (6.6) дает
1,4о? / П 1,4 (0,514.20)» (10,8--^)
д___1___2,1 ,_____________________\ х / _ 4 то
L-h \ « 2/ 173. 1,1
Очевидно, что установившийся крен на циркуляции не представляет
для «Инженера» сколь-нибудь серьезной опасности с точки зрения сниже-
ния остойчивости.
6.4. Особенности управляемости судов
с динамическим поддержанием (СДП)
Говоря об особенностях управляемости быстроходных судов
с динамическим поддержанием, представляется правомерным
разделить их на две группы. В первую из них войдут глиссиру-
ющие суда, СПК и скеговые СВП, т. е. все суда, которые имеют
постоянный контакт с водой. Во вторую группу войдут амфи-
бийные суда (СВПА) и экранопланы.
Как правило, суда первой группы, не отрывающиеся от по-
верхности воды, оборудуются гидродинамическими средствами
управления, чаще всего обычными рулями. При движении в ре-
жиме плавания управляемость этих СДП в принципе ничем
не отличается от таковой водоизмещающих судов. Другое де-
ло— расчетный режим движения, когда сила тяжести судна
уравновешивается гидродинамическими силами поддержания.
Движение глиссирующего судна на установившейся циркуля-
ции тоже сопровождается креном, однако его знак может быть
различным. При этом поперечная остойчивость определяется
237
действием гидродинамических сил, результирующая которых за
счет дрейфа (подскальзывания) судна смещается от ДП на уча-
сток корпуса, расположенный с внешней стороны циркуляции.
Если эта результирующая проходит выше ЦТ, то глиссер кре-
нится внутрь циркуляции, и наоборот. Крен во внутреннюю сто-
рону характеризует хорошую поперечную остойчивость, а крен
наружу — плохую, поскольку при этом увеличивается сила дрей-
фа. Последняя вместе с центробежной создает пару сил, ко-
торая может привести к опрокидыванию судна.
При движении СПК на циркуляции угол его крена опреде-
ляется близкой по структуре к (6.5) зависимостью:
e = k-(v4gRc). (6.7)
Знак коэффициента k в (6.7) определяется конструктивны-
ми особенностями крыльевого комплекса. Так, для СПК со
стреловидными крыльями &<0 (крен внутрь циркуляции), для
других типов крыльев А>0. Значение этого коэффициента обыч-
но определяется экспериментальным путем на самоходной мо-
дели.
В наибольшей степени проявляются связанные с управляе-
мостью особенности у амфибийных судов. Кратко остановимся
на таковых применительно к СВПА. Прежде всего следует от-
метить, что их рулевое устройство работает в воздухе, т. е.
должно обеспечивать требуемую поворачивающую силу в сре-
де с очень малой плотностью.
Для решения этой задачи используют воздушные винты,
движители, тяга которых изменяется как по направлению, так
и по величине. Первый вариант возможен, если воздушные вин-
ты установлены на поворотных пилонах, последний применим
в том случае, если движители расположены побортно, симмет-
рично относительно ДП.
Относительный диаметр циркуляции СВПА составляет 40—
60 длин, что на порядок выше, чем у водоизмещающих судов.
Поворачивающая сила на высоко расположенном воздушном
руле совместно с центробежной создает иа циркуляции наруж-
ный крен, который для СВП может привести (и неоднократно
приводил) к опрокидыванию. Поэтому СВПА часто оборудуют
специальными средствами управления по крену, широко ис-
пользуемыми при маневрировании. Кроме того, как правило,
при поворотах на 90° и более снижается скорость движения.
Как следует из изложенного, движение на циркуляции прак-
тически всех СДП сопряжено с определенным риском, т. е. при
выполнении указанного маневра должны быть соблюдены все
требования обеспечения безопасности плавания.
238
Контрольные вопросы
1. Что называется управляемостью судна? Какие два качества ее опре-
деляют?
2. Что собой представляет судовой руль? Почему углы его перекладка
ограничены?
3. Что такое циркуляция и какой ее элемент является основным пока-
зателем поворотливости судна?
4. В какую сторону кренится иа циркуляции водоизмещающее судно?
Глиссирующий катер? СПК? СВП?
Глава 7
ПУТИ СОВЕРШЕНСТВОВАНИЯ
МОРЕХОДНЫХ КАЧЕСТВ СУДНА
7.1. Общие положения
История судостроения — это одновременно и история по-
стоянного повышения мореходных качеств судов. Сначала кон-
структоры при решении этих задач шли чисто эмпирическим пу-
тем, затем развитие теории корабля дало новые идеи, а вместе
с ними и новый импульс в этом направлении.
Основные цели, преследуемые при совершенствовании мо-
реходных качеств:
— повышение безопасности мореплавания,
— улучшение обитаемости судна,
— повышение экономических показателей эксплуатации
судна,
— снижение отрицательного влияния на окружающую сре-
ду, т. е. повышение экологичности.
Приоритеты целей в различные времена менялись, сегодня
на первое место выходят вопросы экономики и экологии, кото-
рые тесно переплетены между собой.
Следует отметить, что мероприятия, направленные на улуч-
шение какого-либо мореходного качества, как правило, оказы-
вают положительное влияние и на некоторые другие. Так, на-
пример, успокоители качки (см. § 7.4) снижают ее амплитуды
и тем самым улучшают обитаемость судна. Вместе с тем снижа-
ется опасность перемещения грузов и, следовательно, частично
решаются проблемы остойчивости. Кроме того, несколько повы-
шаются ходовые качества судна за счет снижения его сопротив-
ления и более стабильной работы пропульсивного комплекса.
Установка парусного вооружения, основного или вспомога-
тельного, улучшает экономические показатели судна, его оби-
таемость (уменьшаются шум, вибрации), снижает амплитуды
239
качки (известный «успокоительный» эффект парусов), способ-
ствует поддержанию экологической чистоты.
Многокорпусные суда обладают не только пониженным вол-
новым сопротивлением (см. 7.2), но и высокой поперечной
остойчивостью. Плавучесть, остойчивость и непотопляемость
судов нормируются Правилами Регистра (см. гл. 1.2), и этими
нормами руководствуются при проектировании. На некоторых
специализированных судах, перевозящих грузы на палубе (ле-
совозы, контейнеровозы), выше ватерлинии иногда делают раз-
вал бортов, что способствует повышению их остойчивости.
Пример подобного конструктив-
Рис. 7.1. Схема бортового
буля
ного решения приведен в гл. 8
(см. рис. 8.19).
Проблемы могут также возник-
нуть при модернизации или ремонте.
Так, один из распространенных ва-
риантов модернизации — удлинение
судна — может приводить к тому,
что остойчивость станет недоста-
точной. Прием большого количе-
ства твердого балласта ведет
к снижению грузоподъемности судна и вряд ли может считаться
прогрессивным решением.
В подобной ситуации иногда прибегают к установке борто-
вых булей (рис. 7.1), которые простираются на часть длины
судна. Таким образом в ФРГ в 1980 г. были модернизированы
три грузовых судна. До переоборудования их длина составляла
216 м, а ширина 32,3 м. Суда были удлинены на 14,8 м, и для
повышения их остойчивости установили бортовые були, увели-
чившие ширину на 4 м. Общая длина этих булей составила
96 м. Их форма была выбрана после буксировочных испытаний
различных вариантов моделей в опытовом бассейне. В резуль-
тате скорость переоборудованного судна снизилась всего на
3,5 %, в то время как грузоподъемность возросла на 29 %.
Достаточно широко бортовые були используют на маломер-
ных спортивных и прогулочных судах. В этом случае они позво-
ляют ие только увеличить остойчивость на стоянке и ходу, но
также повышают запас плавучести и способствует обеспечению
непотопляемости.
Основное внимание, однако, уделяется совершенствованию
ходовых качеств судна, умерению его качки, повышению управ-
ляемости.
7.2. Способы снижения сопротивления воды движению судна
Основные составляющие сопротивления — вязкостное и вол-
новое— преобладают в общем балансе у водоизмещающих су-
дов, поэтому наиболее перспективным является изыскание воз-
можности уменьшения именно этих составляющих. Знание за-
кономерностей формирования сопротивления позволяет наме-
тить и пути его целенаправленного изменения.
Методы снижения вязкостного сопротивления. Вязкостное
сопротивление — основная составляющая сопротивления воды
для большинства транспортных судов. Соответственно наиболь-
шие выгоды сулит уменьшение именно этой составляющей.
Современные суда относятся к категории хорошо обтекаемых
тел — их сопротивление формы невелико и близко к своему
нижнему пределу (при заданных значениях коэффициента
общей полноты б). Следовательно, единственный путь сущест-
венного снижения вязкостного сопротивления может быть реа-
лизован только за счет его основной составляющей — сопротив-
ления трения. Последняя определяется течением жидкости
в пристеночной области (см. гл. 3), изменение характеристик
которого н может привести к благоприятному эффекту. Здесь
можно выделить два направления: а) ламинаризацию течения
в пограничном слое; б) подачу в пристеночную область газа или
жидкости с физическими свойствами, отличными от таковых
у воды.
При ламинарном режиме обтекания коэффициент сопротив-
ления трения (3.12) существенно ниже, чем при турбулентном
[см. (3.15)]. Это различие при числах Рейнольдса, характерных
для морских транспортных судов, теоретически может дости-
гать одного-двух порядков. Следовательно, ламинаризация по-
граничного слоя может привести к существенному снижению
сопротивления трения. Реальное использование этой идеи при-
менительно к судам может быть осуществлено либо за счет
создания демпфирующих покрытий, либо путем отсоса погра-
ничного слоя.
Нанесенные на поверхность тела податливые покрытия в не-
которых случаях снижают сопротивление трения в 1,5—2,0 раза
вплоть до чисел Рейнольдса Re = 2-107. Однако сложность
изготовления подобных покрытий, нестабильность их упругих
характеристик и в определенной степени случайность достиже-
ния требуемого положительного эффекта не позволяют сегодня
использовать этот метод снижения сопротивления.
Отсос пограничного слоя может быть распределенным (по
всей поверхности тела) либо сосредоточенным через специаль-
ные щели, заданным образом расположенные по длине тела.
В принципе, отсос позволяет обеспечить ламинарный режим
течения в пограничном слое при любых числа Рейнольдса. При
1 63415
241
этом может быть получен ощутимый эффект даже с учетом
энергетических потерь на отсос жидкости. Теоретические
оценки показывают, что при характерных для судов числах
Re = 108 -г-109, оптимальный распределенный отсос может сни-
зить сопротивление трения в шесть-семь раз. Сегодня, однако,
эта идея не находит практической реализации; она наталки-
вается на непреодолимые пока препятствия конструктивного
(сложность создания эффективной системы отсоса) и техноло-
гического свойства (слишком жесткие требования к состоянию
поверхности, которая должна быть очень гладкой).
Идея использования «воздушной смазки» — создания тонкой
газовой прослойки между поверхностью тела и окружающей
жидкостью — достаточно стара.
Экспериментальные исследования показали, что реализация
этой идеи на практике . возможна лишь на плоских участках
днища. Сегодня воздушная смазка находит ограниченное при-
менение только на судах внутреннего плавания. Так, на барже
водоизмещением D = 3270 т в рабочем диапазоне скоростей
движения (и = 12-т-18 км/ч) был получен выигрыш в сопро-
тивлении около 25%.
На морских транспортных судах воздушная смазка приме-
нения пока не находит. Это объясняется, во-первых, гораздо
меньшей, чем у судов внутреннего плавания, долей смоченной
поверхности, приходящейся на плоский участок днища, а во-
вторых,— дестабилизирующим влиянием качки.
В последнее время искусственная газовая кавитация используется на
малых быстроходных судах. Тонкая газовая или воздушная прослойка
создается на плоских горизонтальных либо близких к таковым участках
днища. При этом сопротивление движению глиссирующего катера
снижается на 30—35%.
Изменения физических свойств жидкости в пристеночной
области можно достичь и другим путем — за счет введения
высокомолекулярных соединений — полимеров. Незначительная
их добавка в воду приводит к существенному, в два-три раза,
снижению поверхностного трения. Концентрация полимеров на-
столько мала (Ю-4—10-6), что объяснить получаемый эффект
изменением плотности или вязкости невозможно. Дело в том,
что полимеры придают воде новые качества, переводят ее
в разряд аномальных (неньютоновских) жидкостей. При этом
резко уменьшается поперечная составляющая пульсационной
скорости и, как следствие, турбулеитнего обмена в пограничном
слое, снижаются энергетические потери и их эквивалент — со-
противление трения. Соответственно эффект от добавки поли-
меров имеет место только при турбулентном режиме обтека-
ния тела.
Практическая реализация этого способа возможна лишь
путем введения полимеров в пристеночную область через щели
242
либо перфорированную поверхность, а также за счет покрытия
тела растворимыми обмазками. В обоих случаях эффективность
снижается — уменьшение сопротивления составляет не более
(15—50)%. Это обстоятельство, высокая стоимость полимеров
и недостаточно изученные экологические последствия их ис-
пользования объясняют тот факт,что данный способ снижения
вязкостного сопротивления пока не находит применения.
Методы снижения волнового сопротивления. Волновое со-
противление начинает играть заметную роль у среднескорост-
ных и быстроходных водоизмещающих судов при числах Фруда
Fr 0,25, в этом диапазоне относительных скоростей и рацио-
нально уменьшать волнообразование, сопровождающее движение
судна. Существует два основных пути снижения волнового
сопротивления (см. гл. 3): использование благоприятной ин-
терференции и погружение корпуса под свободную поверхность.
Первая идея находит воплощение в носовых бульбах. Вол-
новая система, Создаваемая бульбом, взаимодействуя с волно-
вой системой корпуса, уменьшает интенсивность последней,
а следовательно, приводит к снижению волнового сопротив-
ления.
Другой вариант использования интерферирующих элемен-
тов— создание многокорпусных судов, среди которых наиболь-
шее распространение получили двухкорпусные — катамараны.
Рациональный выбор формы корпусов и поперечного кли-
ренса — расстояния между ними — позволяет существенно
уменьшать волновое сопротивление в расчетном режиме дви-
жения. Значительный эффект достигается и у тримарана — трех-
корпусного судна: в достаточно широком диапазоне относи-
тельных скоростей волновое сопротивление может быть сни-
жено в пять раз и более.
При одинаковом водоизмещении площадь смоченной поверх-
ности у катамарана, тримарана и так далее всегда больше, чем
у однокорпусного судна, т. е. соответственно больше и вязкост-
ное сопротивление. Поэтому многокорпусные суда становятся
эффективными с точки зрения энергозатрат на движение только
при достаточно высоких относительных скоростях, когда вол-
новое сопротивление преобладает.
Переход к подводному плаванию даже при относительной
близости к свободной поверхности (см. 3.21) приводит к су-
щественному снижению волнового сопротивления. Кроме того,
подводное судно практически не реагирует на морское волне-
ние— не испытывает качки, также не увеличивается и со-
противление в штормовых условиях. По некоторым оценкам,
при одинаковых водоизмещении и мощности энергетической
установки скорость подводного танкера при его заглублении
всего на треть длины будет на 20—30 % больше, чем у надвод-
ного. Однако многочисленные проекты подводных транспортных
16*
243
судов до сих пор не реализованы. Одни из главных тому при-
чин— значительное ухудшение условий обитаемости судна,
чисто психологические аспекты подводного плавания.
Объединение двух способов снижения волнового сопротив-
ления нашло свое воплощение в идее полупогруженных судов
или, как их еще называют, судов с малой площадью ватерли-
нии (СМПВ). Примером может служить трисек (рис. 7.2), два
подводных водоизмещающих сигарообразных корпуса которого
вертикальными хорошо обтекаемыми стойками соединены
с корпусом, расположенным выше поверхности воды.
Рис. 7.2. Схема трисека
Благоприятная интерференция волновых систем отдельных
корпусов и их заглубление приводят к тому, что на расчетной
скорости движения волнообразование, а следовательно, и вол-
новое сопротивление практически отсутствуют. При числах
Фруда в диапазоне 0,5 < Fr < 1,0 за счет этого снижается и
полное сопротивление, несмотря на некоторое увеличение пло-
щади смоченной поверхности. Если размеры стоек превышают
высоту воли, СМПВ практически не подвержен продольной
качке, соответственно отсутствует и дополнительное сопротив-
ление при движении в штормовых условиях.
Однако СМПВ не лишены и недостатков: это сравнительно
большая осадка, уменьшенная поперечная и особенно продоль-
ная остойчивость за счет малой площади ВЛ. При движении
на корпусах возникают вертикальные усилия, которые необхо-
димо компенсировать за счет установки несущих элементов.
В мировом флоте уже имеется некоторое количество СМПВ
различного назначения, опыт их эксплуатации определит даль-
нейшую судьбу судов этого типа.
7.3. Методы повышения эффективности гребиых винтов
Работа гребного винта сопровождается потерями мощности,
во-первых, в самом преобразователе энергии — движителе, во-
вторых,— при его взаимодействии с корпусом судна.
Выше (см. гл. 4) было показано, что КПД гребного винта
отличается от единицы вследствие потерь на создание вызван-
244
ных осевых и окружных скоростей, концевых и профильных по-
терь. За исключением последних, все остальные потери—ин-
дуктивные и зависят от коэффициента нагрузки по упору, уве-
личиваясь с его ростом.
Идеальный движитель имеет единственные потери энер-
гии — на создание вызванных осевых скоростей. Снижение этих
потерь до нуля невозможно в принципе — это противоречило бы
идее создания упора гребным винтом как гидрореактивным
движителем. Остальные индуктивные потери на создание вы-
званных окружных скоростей и концевые теоретически могут
быть сведены к нулю, хотя достичь этого на практике ие
удается.
Профильные или конструктивные потери имеют вязкостную
природу. На сегодняшний день конструкция и технология изго-
товления гребных винтов таковы, что достичь заметного эф-
фекта за счет дальнейшего совершенствования формы профиля
сечения, уменьшения толщины лопасти и диаметра ступицы,
улучшения качества поверхности лопастей практически не
удается — все эти возможности уже исчерпаны. Таким образом,
профильные потери у современных гребных винтов близки
к своему нижнему пределу.
Мероприятия, предотвращающие кавитацию, в явном виде
не влияют на эффективность работы гребного винта. Самым ра-
дикальным способом достижения той же цели — отдаления ка-
витации— является увеличение дискового отношения, что, од-
нако, влечет за собой снижение КПД винта. Таким образом,
устранение кавитации можно рассматривать в качестве одного
из способов повышения, пусть не прямого, а косвенного, КПД.
гребного винта.
Определенные резервы скрыты и в улучшении взаимодей-
ствия винта с корпусом судна. Во-первых, речь может идти
о более полной утилизации энергии попутного потока и соответ-
ствующего повышения пропульсивного коэффициента. Во-вто-
рых, уменьшение неравномерности поля скоростей благоприятно
сказывается на прочностных и кавитационных характеристиках
гребного винта, снижает периодические составляющие упора и
момента.
За последние 20 лет достигнуто снижение расхода топлива
более чем на 20%, в основном благодаря успехам судовой
гидромеханики. В первую очередь это объясняется широким
использованием бульбовой носовой оконечности, затем следует
назвать способы повышения эффективности комплекса гребной
винт — корпус судна. Все эти способы можно условно разде-
лить на две группы: снижающие потери энергии гребного винта
и улучшающие характеристики его взаимодействия с корпусом.
Наиболее перспективными средствами первой группы являются:
направляющие насадки,соосные винты, малооборотные винты
245
повышенного диаметра, гребные винты с нагруженными концевыми
сечениями лопасти (ГВ с НКСЛ) и с осевой турбинкой на обтекателе
ступицы (ГВ с ОТНОС). Взаимодействие улучшается за счет ис-
пользования гребных винтов с большой откидкой лопастей,
предвинтовых направляющих насадок, специальной профилировки
кормовой оконечности, а также путем активного воздействия на
поле скоростей в диске гребного винта.
Снижение потерь на создание вызванных осевых скоростей.
Одним из эффективных способов снижения этих потерь следует
назвать установку направляющих насадок (НН). Они представ-
Рис. 7.3. Направляющая
насадка
ров его элементов:
ляют собой кольцевые тела, обра-
зованные крыльевым профилем,
с минимальным зазором охваты-
вающие лопасти гребного винта.
Наибольшее распространение полу-
чили осесимметричные НН, соосные
с гребным винтом.
Площадь входного сечения та-
кой насадки (рис. 7.3) больше пло-
щади выходного, поэтому эти на-
садки еще называют ускоряющими.
На элементе насадки, как на крыле,
обтекаемом потоком с углом атаки
а, возникают подъемная сила ДУ и
сила профильного сопротивления
АХ. Результирующая этих сил от-
клонения в сторону движения суд-
на и создает элементарную силу
упора ДТн. Проинтегрировав эти
-силы по всей окружности, получим упор насадки Тн, который
увеличивается с ростом коэффициента нагрузки по упору Ста.
Упор Тк комплекса гребной винт — НН складывается из упо-
гк = тв + тн.
(7-1)
Более высокая, по сравнению с изолированным винтом,
эффективность комплекса объясняется как увеличением скоро-
сти протекания жидкости через диск гребного винта, так и со-
зданием упора направляющей насадкой. Оба эти фактора сни-
жают велиичну Ста винта в НН и увеличивают его КПД. До-
полнительный эффект достигается за счет резкого снижения
концевых потерь — зазоры между телом НН и лопастями винта
настолько малы, что практически устраняют перетекание жид-
кости с нагнетающей поверхности на засасывающую.
НН дает положительный эффект только при достаточно вы-
соких значениях Ста > 1,0. Особенно показано ее применение
246
для тяжелонагруженных винтов, когда на ходовых режимах
упор повышается на (20—30)%, а на швартовных до (40—50)%.
В последнее время на крупнотоннажных судах используют
и неосесимметричные насадки — их профиль в каждом мери-
диональном сечении различен. Наряду с описанным выше эф-
фектом, эти иасадки способствуют направленному выравнива-
нию поля скоростей в диске винта, что снижает нагрузки, вы-
зывающие изгибные колебания валопровода. По некоторым
оценкам, применение неосесимметричиых насадок на крупных.
танкерах в грузу повышает КПД на 6—9%, хотя в балласте-
может давать и отрицательный эффект (малые Ста)-
Второй путь снижения потерь на вызванные осевые скоро-
сти— использование гребных винтов большого диаметра. Уве-
личение последнего приводит к росту КПД вследствие сниже-
ния коэффициента нагрузки Ста (см. гл. 4). При этом не-
сколько уменьшается коэффициент попутного потока, а вместе-
с ним и коэффициент влияния корпуса, однако общий эффект
всегда положительный—пропульсивный коэффициент в целом
возрастает. Оценки для судна водоизмещением D = 50 тыс. т
показали, что увеличение диаметра гребного винта с 6,3 до-
8,6 м приводит к росту КПД винта на 26%, снижению коэф-
фициента влияния корпуса на 11 % и увеличению пропульсив-
ного коэффициента на 12%.
Существенное повышение диаметра винта чаще всего-
должно сопровождаться соответствующим изменением формы
кормовой оконечности: приданием ей полутуннельных образо-
ваний, препятствующих прорыву воздуха к гребному винту.
Увеличение диаметра оптимального гребного винта ведет к сни-
жению частоты вращения; так, в рассматриваемом примере
она уменьшилась со 122 до 65 об/мин. В свою очередь это при-
водит к росту крутящего момента и соответствующему увели-
чению размеров и массы гребного вала.
Дополнительные проблемы: возможное повышение виброак-
тнвности гребного винта, сложность обеспечения его погруже-
ния при ходе в балласте.
Снижение потерь на создание вызванных окружных скоро-
стей. Все способы повышения окружного КПД гребного винта
сводятся к утилизации энергии закрученного потока. В этом
плане достаточно давно известны и используются контрвинты
(контрпропеллеры)—неподвижные конструкции, располагае-
мые перед винтом либо за ним. В первом случае контрвинт
выполняет функции направляющего аппарата, во втором —
спрямляющего. В обоих случаях — это несколько (две-четыре)
профилированных, обтекаемых потоком с углом атаки непо-
движных лопастей, на которых создается дополнительный упор.
Контрвинт может увеличивать КПД тяжелоиагруженного греб-
ного винта на 10—15 %, ио только в расчетном режиме. На
247
других режимах эффективность конструкции снижается и мо-
жет стать отрицательной. Это обстоятельство, а также некото-
рое ухудшение маневренности и уменьшение КПД гребного
винта на заднем ходу существенно ограничивает применение
контрпропеллеров.
В середине 60-х гг. западногерманский ученый Грим пред-
ложил использовать вращающийся контрпропеллер, установ-
ленный за гребным винтом. Эта конструкция, известная под
названием направляющего лопастного колеса (НЛК) или про-
сто колеса Грима, получила достаточно широкое распростране-
ние. Лопасти свободно вращающегося НЛК спрофилированы
таким образом, что колесо работает как гидротурбина на вну-
тренних радиусах (т. е. в закрученной струе гребного винта) и
как обычный винт на наружных. НЛК не ухудшает маневрен-
ности, улучшает кавитационные и вибрационные характери-
стики гребного винта и в широком диапазоне скоростей увели-
чивает его КПД на (7—10)%.
В наибольшей степени утилизация энергии закрученного
потока достигается в установке, содержащей два соосных греб-
ных винта противоположного вращения. Дополнительные пре-
имущества: возможность обеспечения большого дискового от-
ношения 2(Ае/А0) при умеренной ширине лопасти, более пол-
ная утилизация энергии попутного потока (более высокий ко-
эффициент влияния корпуса) и меньший, чем у эквивалентного
одиночного винта, оптимальный диаметр.
Пропульсивный коэффициент соосного комплекса превышает
таковой у одиночного винта на (15—20)%, причем большие
значения относятся к слабонагружениым винтам. При Ста >
> 3,0 направляющая насадка более эффективна, чем соосные
винты. Соосные винты из-за сложности конструкции применялись толь-
ко на торпедах. Первыми стали использовать такие движители на
транспортных судах японские судостроители. Еще в конце 80-х годов
соосными гребными винтами они оборудовали два судна — дедвейтом
37 тыс. т. и 6 тыс. т. В 1993 г, фирма «Мицубиси» построила танкер дедвей-
том 258 тыс. т., на котором установлен 5-лопастной передний винт
диаметром 9,9 м с частотой вращения 50,4 об/мин и 3-лопастной задний
диаметром 8,8 м (84 об/мин). Расход топлива сократился на 15-20%.
Для обеспечения высоких (vs 25 уз) скоростей движения
крупнотоннажных транспортных судов необходима большая
мощность механической установки. В ряде случаев она не мо-
жет быть эффективно переработана одним гребным винтом,
установка двух винтов по традиционной схеме сопровождается
снижением эффективности.
В связи с этим возникла идея создания двухвальных уста-
новок, диски винтов которых перекрывают друг друга. При
этом возможны две модификации: когда вииты расположены
в одной плоскости н когда они сдвинуты в осевом направлении.
248
В обоих вариантах расстояние между осями винтов меньше их
диаметра, они приближены к ДП, что способствует повышению-
коэффициента влияния корпуса. Кроме того, в той части, где-
диски винтов перекрывают друг друга, снижаются потери на
закручивание потока. Если винты располагаются в одной пло-
скости, необходима синхронизация их вращения, установка
теряет преимущества двухвальной с точки зрения живучести и
маневренности.
Второй вариант лишен этих недостатков (рис. 7.4), его не-
обходимо рассматривать как единый комплекс гребные вин-
ты— кормовая оконечность. При
рациональном выборе формы по-
следней и оптимальном взаим-
ном расположении винтов про-
пульсивный коэффициент ком-
плекса может на (5—8) % пре-
вышать таковой у эквивалентно-
го по упору одиночного винта и
быть иа (20—25) % больше, чем
у традиционной двухвальной
установки. Недостаточная изу-
ченность всех аспектов (вибро-
активность, кавитационная стой-
кость перекрывающихся гребных
Рис. 7.4. Перекрывающиеся
гребные винты
винтов — причина, по которой сегодня они не находят примеиеиия.
Способы предотвращения кавитации гребного винта. Прежде
всего следует назвать винты тандем — расположенные друг за
другом на одном гребном валу. Как правило, это два винта,;
но известна конструкция и с тремя винтами. КПД винтов тан-
дем всегда ниже, чем КПД эквивалентного одиночного винта.
однако возможность существенного увеличения дискового отно-
шения (в два раза н более) оправдывает применение этих вин-
тов в отдельных случаях, когда все средства отдаления кави-
тации уже исчерпаны.
Предотвращению кавитации может теоретически способство-
вать и установка замедляющей направляющей иасадки. В этом
случае скорость протекания жидкости через диск гребного
винта снижается, уменьшается и КПД комплекса по сравнению
с КПД одиночного виита, однако с этим приходится мириться,
чтобы избежать вредных последствий кавитации.
Снижение концевых потерь. Все типы направляющих наса-
док предотвращают перетекание жидкости у края лопасти —
это их дополнительный положительный эффект. Однако суще-
ствуют конструкции, где эта цель — уменьшение концевых по-
терь— является основной. К ним относятся гребные винты с
нагруженными концевыми сечениями лопасти (гребные винты без
249
Рис. 7.5. Гребной винт
с БОЛ
Рис. 7.6. Предвинтовая
направляющая насадка
концевых вихрей). Края лопастей таких винтов снабжены концевыми
шайбами специальной профилировки либо просто отогнуты на 90°.
Устранение концевых потерь и одновременное уширение рабочих
периферийных сечений лопасти приводит к повышению КПД винта.
Улучшаются и кавитационные характеристики такого винта,
снижается его виброактивность.
В последнее время находит применение еще один способ
повышения эффективности гребного винта. В центре осевого вихря,
генерируемого работающим гребным винтом, на обтекателе
ступицы устанавливаются специально спрофилированные лопасти,
играющие роль турбины, предназначенной для утилизации энергии
этого вихря. Данная конструкция — осевая турбинка на
обтекателе ступицы (ОТНОС) повышает КПД гребного винта на
2—4 %.
Улучшение характеристик взаимодействия гребного винта и
корпуса. Здесь можно наметить два основных пути: приспособление
гребного винта к заданному полю скоростей и направленное изменение
характеристик потока в диске гребного вннта.
Первый путь реализуется при проектировании гребного винта,
приспособленного к попутному потоку. Недостатки — учитывается
только осевая неравномерность поля скоростей, да и то осредненная
по окружности заданного радиуса.
Хорошие результаты получают при использовании гребных винтов
с большой откидной лопастью (ГВ с БОЛ) (рис. 7.5). Такая форма
контура практически не изменяет ГДХ гребного винта, однако при
работе в неравномерном поле скоростей существенно снижает
амплитуды гидродинамических давлений и уровень вибрации
кормовой оконечности.
Направленное изменение поля скоростей в диске гребного винта
может осуществляться пассивными (без подвода энергии) и активными
средствами.
Один из вариантов—асимметричная кормовая оконечность (АКО),
закручивающая поток в сторону, противоположную вращению гребного
винта. В результате повышается пропульсивный коэффициент, снижается
250
боковая сила, уводящая судно с курса. Опыт эксплуатации
судов с АКО подтверждает их высокие экономические по-
казатели.
В последние годы на судах транспортного флота все шире-
применяются предвинтовые направляющие насадки (ПВНН).
Они располагаются в кормовой оконечности судна, составляя
с ним единое целое (рис. 7.6).
Конструкции ПВНН весьма разнообразны: их диаметр мо-
жет быть и большим и меньшим, чем у гребного винта; они
могут быть соосными с винтом и сдвинутыми вверх относи-
тельно его оси. Иногда в насадках устанавливается спрямляю-
щий аппарат типа контрвинта. ПВНН увеличивают пропуль-
сивный коэффициент, снижают кавитацию и виброактивность
гребного винта, и все это без ухудшения маневренности судна;
и его реверсивных характеристик.
Ограниченное применение находят направляющие конструк-
ции крыльевого типа, располагаемые иа корпусе или кронштей-
нах гребного винта.
Активное выравнивание поля скоростей может осуществ-
ляться с помощью вспомогательных водометных движителей
либо винтов малого диаметра, располагаемых перед основным*
гребным винтом. На сегодняшний день эти способы еще не на-
ходят применения в силу относительной конструктивной слож-
ности и недостаточной изученности.
7.4. Способы умерения качки
Умереиие качки означает снижение ее амплитуды и увели-
чение периода собственных колебаний. На стадии проектиро-
вания судна можно в определенной степени воздействовать на-
обе эти характеристики. Так, за счет рационального выбора
формы и соотношения главных размерений можно влиять на
величину метацентрического радиуса, а через него и на мета-
центрическую высоту; эти же факторы воздействуют и на коэф-
фициент демпфирования качки, т. е. на ее амплитуду (см. гл. 5)..
В процессе эксплуатации судна можно изменять период соб-
ственных колебаний путем распределения нагрузки по высоте;
изменение положения центра тяжести судна влечет за собой
изменение метацентрической высоты, а следовательно и пе-
риода качки. Сказывается, хотя в значительно меньшей сте-
пени, и распределение нагрузки по длине и ширине судна за
счет изменения моментов инерции массы относительно продоль-
ной и поперечной осей.
Эффективным способом умерения качки является выбор
такого сочетания скорости и курса судна, когда кажущийся
25 Г
период встречи с волной лежит вне зоны, опасной с точки
зрения возникновения резонанса (гл. 5).
Для умерения качки служат и специальные устройства —
успокоители качки. Последние по принципу действия подраз-
деляются на гравитационные, гидродинамические и гироскопи-
ческие. Гравитационные успокоители создают стабилизирую-
щий момент за счет силы тяжести перемещающего груза (как
правило, воды). В гидродинамических успокоителях момент
обеспечивается за счет реакции забортной воды на рабочих эле-
ментах успокоителя. И те и другие успокоители могут быть
активными, снабженными системами автоматического регулиро-
Рис. 7.7. Скуловые
кили
Рис. 7.8. Создание стабили-
зирующего момента на бор-
товых рулих
Рис. 7.9. Пассивная ус-
покоительная цистерна
вания и силовыми приводами, и пассивными — функционирую-
щими без указанных систем и не требующие для своей работы
затрат энергии.
В настоящее время используются только успокоители борто-
вой качки. Создание подобных устройств для умерения килевой
и вертикальной качки наталкивается на непреодолимые сего-
дня прболемы, однако работы в этом направлении не прекра-
щаются.
Основным критерием эффективности успокоителей качки
является кратность умерения качки судна: отношение ампли-
туд качки без успокоителя и с ним.
Скуловые кили. Наибольшее распространение получили пас-
сивные успокоители качки, называемые скуловыми (борто-
выми) килями (рис. 7.7). Они представляют собой пластины
предельно малого удлинения, устанавливаемые с обоих бортов
в районе скулы по нормали к обшивке судна. Их длина может
составлять (30—50) % длины, высота (3—5) % ширины судна,
а площадь — (3—6) % площади ватерлинии. Кили создают до-
полнительное демпфирование бортовой качки, поэтому (см.
гл. 5) их влияние особенно проявляется в зоне резонанса, где
кратность умерения качки может достигать двух. На нерегу-
252
лярном волнении эффективность скуловых килей несколько
снижается.
Установка килей приводит к увеличению сопротивления дви-
жению и, соответственно, уменьшению скорости на тихой воде
на (2—3)%.
Бортовые управляемые рули — активные успокоители качки,
эффективность которых весьма велика: они обеспечивают трех-
кратное умерение качки. Эти рули также устанавливают
в районе скулы и представляют собой управляемые крылья ма-
лого удлинения. Стабилизирующий момент создается за счет
подъемных сил разного знака (рис. 7.8), которые обеспечи-
ваются синхронной перекладкой рулей на один и тот же угол,
но в противоположные стороны по правому и левому бортам.
Обычно при ходе на спокойной воде бортовые рули уби-
раются в специальные ниши; они не оказывают отрицательного
влияния на сопротивление. Основной недостаток в том, что эти
рули становятся эффективными только по достижении судном
определенной скорости Vs > 12—15 уз, так как гидродинамиче-
ская подъемная сила, возникающая иа крыльях, пропорцио-
нальна квадрату скорости.
Успокоительные цистерны. Они относятся к успокоителям
качки гравитационного типа и могут быть как пассивными, так
и активными. И те и другие представляют собой не доверху за-
полненные симметричные относительно ДП бортовые цистерны,
соединенные между собой каналами, воздушным и водяным
(рис. 7.9). Отличие в том, что у активных успокоителей в од-
ном из каналов устанавливается нагнетатель, принудительно
регулирующий уровень воды в цистернах. В пассивных цистер-
нах вода перетекает только под действием силы тяжести при
наклонениях судна. Такая цистерна представляет собой колеба-
тельную систему (гидравлический маятник), обладающую соб-
ственным периодом свободных колебаний. Обеспечивая равен-
ство этого периода периоду собственных колебаний судна, со-
здают резонансный режим, при котором колебания воды
в цистернах сдвинуты по фазе на 90° относительно бортовой
качки. Последняя, в свою очередь, на такой же угол отстает от
колебаний свободной поверхности воды (см. гл. 5), в резуль-
тате стабилизирующий момент, создаваемый цистернами, на-
ходится в противофазе с моментом возмущающим (суммарный
сдвиг фаз— 180°), что способствует существенному снижению
резонансных амплитуд.
Однако эффективность пассивных цистерн уменьшается по
мере удаления от области резонанса. При некоторых значе-
ниях частот вынужденных колебаний судна благоприятное со-
отношение фаз нарушается и амплитуды качки могут даже
возрасти. Активные успокоительные цистерны снабжают спе-
циальными устройствами (воздуходувкой — в воздушном ка-
253
нале), позволяющими регулировать уровень воды по разным
бортам, всегда обеспечивая приложение стабилизирующего мо-
мента в противофазе к возмущающему.
Общие недостатки пассивных и активных успокоительных
цистерн — значительный объем и масса, что снижает соответ-
ствующие показатели судна — грузовместимость и грузоподъ-
емность.
Гироскопические успокоители качки в настоящее время ис-
пользуют преимущественно для местной стабилизации — от-
дельных постов, рубок, приборов.
7.5. Вспомогательные средства управления судном
Эффективность судовых рулей, обеспечивающих достаточ-
ную поворотливость судну в расчетном режиме движения, ка-
тастрофически ухудшается при уменьшении скорости, квадрату
которой пропорциональна создаваемая ими поперечная сила.
В результате на малых скоростях судно может оказаться прак-
тически неуправляемым. Поэтому дополнительно к главным на
многих судах устанавливают вспомогательные средства управ-
ления (ВСУ), оборудованные собственными двигателями и по-
тому называемые еще и средствами активного управления
(САУ). Как правило, ВСУ предназначены для обеспечения
управляемости судна на предельно малых ходах и без хода.
ВСУ принято подразделять на подруливающие устройства (ПУ)
и вспомогательные движительно-рулевые устройства (ВДРУ).
Отличительной особенностью первых является то, что ПУ
представляет собой проходящий от борта к борту канал, в ко-
тором устанавливается движитель, чаще всего ВФШ или ВРШ
(рис. 7.10). Засасывая забортную воду и выбрасывая ее в по-
перечном направлении, подруливающее устройство создает нор-
мальную к ДП судна силу. Два ПУ, установленные в оконеч-
ностях судна, обеспечивают ему движение лагом, поворот на
месте.
Вспомогательные движительно-рулевые устройства могут со-
стоять из поворотных винтовых колонок, активных рулей,
крыльчатых движителей. О последних шел разговор в гл. 4;
в качестве ВДРУ они могут использоваться благодаря возмож-
ности изменения направления создаваемой ими силы упора.
Поворотные винтовые колонки (ПВК) также позволяют
разворачивать упор на 360°. Используемые в качестве ВСУ
ПВК выполняются обычно откидывающимися или выдвиж-
ными, что позволяет убирать их внутрь корпуса, когда надоб-
ность в них отпадает (рис. 7.11). Их применяют на судах, ко-
торые должны иметь хорошую управляемость на предельно
малых ходах: рыбоперерабатывающих базах, океанографиче-
254
ских и научно-исследовательских судах, плавучих буровых
установках и др.
Разновидностью ПВК является активный руль (рис. 7.12),
в перо которого встроена грушевидная гондола с приводом
вспомогательного гребного винта. Последний часто помещается
в направляющую насадку для увеличения упора на малых
скоростях. Мощность электропривода вспомогательного винта
Рис. 7.10. Схема подру-
ливающего устройства
Рис. 7.11. Схе- Рис. 7.12. Актив-
на поворотной иый руль
винтовой ко-
лонки
обычно не превышает 10 % мощности главного двигателя,
а диаметр этого винта составляет 20—25 % диаметра основного.
Активный руль обеспечивает судну малый ход без работы
главных двигателей, а возможность его перекладки на углы до
а = 90° придает судну высокие маневренные качества. В по-
следнее время активный руль не находит широкого применения.
На некоторых судах и плавучих сооружениях, которые не-
обходимо с высокой точностью удерживать на заданном месте
(например, плавучая буровая установка), может одновременно
использоваться несколько ВСУ, в том числе и различных типов.
Для обычных транспортных судов управляемость ьа малых
скоростях также имеет большое значение при движении в узко-
стях, гаванях, районах с большим скоплением судов. В связи
с этим средства активного управления в последнее время рас-
пространяются все шире—большинство вновь строящихся су-
дов водоизмещением D = 4000—5000 т и выше снабжаются
ВСУ.
Контрольные вопросы
1. Какие основные цели преследуются при повышении мореходных ка-
честв судов?
2. Какие существуют способы снижения вязкостного сопротивления?
Волнового?
3. Что собой представляют направляющие насадки и каково их на-
значение?
255
4. Какие известны способы снижения потерь энергии на закрутку потока
за винтом?
5. Какие способы повышения пропульсивных качеств находят применение
на современных судах?
6. Какие типы успокоителей бортовой качки используютси иа морских
судах?
7. Что собой представляют вспомогательные средства управления судном
и для чего они предназначены?
Глава 8
ПРОЧНОСТЬ КОРПУСА СУДНА
И ЕГО КОНСТРУКЦИЯ
8.1. Общие положения
Ранее корпус судна мы считали абсолютно жестким, неде-
формируемым телом. В теории корабля нас интересовала
только внешняя форма обводов корпуса, соответственно изуча-
лось влияние этой формы на отдельные мореходные качества.
В строительной механике корпус плавающего судна рас-
сматривается как тонкостенная балка переменного по длине ко-
робчатого сечения. Под действием совокупности внешних и
внутренних сил различной природы эта балка деформируется,
в ее элементах возникают нормальные и касательные напря-
жения, следовательно, она должна обладать достаточной
прочностью.
Прочность можно определить как способность корпуса вос-
принимать, не разрушаясь, нагрузки, возникающие в процессе
эксплуатации судна.
Корпус должен обладать и достаточной жесткостью, т. е. его
деформации должны быть относительно невелики и не оказы-
вать влияния на мореходные качества судна. Обеспечение
прочности и жесткости корпуса при наименьшей затрате мате-
риала— одна из основных задач, решаемых при строительстве
судна.
Строительная механика корабля — наука о прочности суд-
на— занимается изучением следующих трех проблем:
1) определение внешних сил, действующих на корпус в це-
лом и на отдельные его конструкции в наиболее неблагоприят-
ных условиях эксплуатации;
2) определение внутренних сил — напряжений и деформа-
ций, возникающих в связях корпуса под действием заданной
системы внешних нагрузок;
3) сопоставление действующих напряжений с допускаемыми
и назначение обоснованного запаса прочности.
256
Внешние силы, действующие на корпус, можно подразде-
лить на две категории: возникающие при плавании иа тихой
воде и дополнительные, вызванные волнением моря и кач-
кой судна.
Определение усилий на тихой воде не представляет принци-
пиальных трудностей и может быть выполнено с приемлемой
точностью. Иначе обстоит дело с усилиями, возникающими при
движении судна на волнении, — эта весьма сложная задача до
сегодняшнего дня не нашла еще своего полного разрешения.
По физической природе внешние нагрузки можно классифи-
цировать следующим образом: силы тяжести; гидростатические
силы; гидродинамические силы; силы инерции. Под действием
этих сил корпус испытывает сложное деформационное состоя-
ние. Его изучение существенно облегчается, если ввести под-
разделение на более простые деформации: от общего изгиба
в продольной и поперечной плоскостях; под действием локаль-
ных, местных, нагрузок. Соответственно в строительной меха-
нике корабля принято рассматривать общую и местную проч-
ность.
Длина судна, как правило, существенно превышает его ши-
рину. Поэтому для большинства современных судов обеспече-
ние продольной общей прочности обычно означает и автомати-
ческое обеспечение прочности поперечной. Исключение состав-
ляют некоторые специальные суда, у которых длина и ширина
корпуса имеют один порядок: многокорпусные суда (катама-
раны, суда с малой площадью ватерлинии и др.), а также суда
на воздушной подушке, особенно амфибийные.
8.2. Общая прочность корпуса
В силу изложенного далее в основном будем рассматри-
вать общую продольную прочность судна. При этом в расчет
станем принимать только вертикальные силы, сопротивлением
судна и упором движителей будем пренебрегать, поскольку их
вклад в напряженное состояние корпуса весьма мал. Послед-
нее обстоятельство убедительно иллюстрирует пример 8.1.
Пример 8.1. Для судна «Инженер» оценим роль горизонтальных сил
в общем изгибе на тихой воде. Ранее имели при us = 21,1 уз Г = 1410 кН.
Примем, что плечо сил упора Т и сопротивлении R составляет 20 %
осадки I = 0,2-9,5 = 1,9 м.
Тогда момент от этих сил Мг = 1410-1,9 = 2,68-10* кНм. Момент от
вертикальных сил тяжести и поддержания можно оценить по (8.4) с ис-
пользованием рис. 8.3, откуда для о = 0,619 снимаем = 0,0174:
Л1тв = /СТв • gDL=> 0,0174.9,81 • 29,400 • 173 = 868 • 10’ кНм.
Следовательно, MtIM„ = 3,1 10-3, т. е. моментом от горизонтальных
сил (Г и £) можно пренебречь без всякого ущерба для точности расчетов.
173415
257
Аналогичная картина имеет место и для других водоизме-
щающих судов.
Для удобства изучения все силы, действующие иа корпус
судна, поделим на две категории: возникающие при плавании
судна на тихой воде и волновые. К последним отнесем как
гидростатические силы, своим появлением обязанные измене-
нию формы свободной поверхности воды, так и гидродинамиче-
ские, обусловленные орбитальным движением частиц окружаю-
щей жидкости. Сюда же причислим и инерционные силы, вы-
зываемые продольной качкой судна.
Рис. 8.1. Условное судно с перемещающимися по вертикали отсеками
Корпус судна — свободно плавающая балка. Под действием
вертикальных сил всех типов в его поперечных сечениях будут
возникать изгибающие моменты и перерезывающие силы, зна-
ние которых необходимо для определения действующих от об-
щего изгиба нормальных и касательных напряжений.
Силы, вызывающие общий изгиб корпуса на тихой воде. Как
следует из курса статики, равнодействующие сил тяжести судна
и гидростатических сил поддержания равны между собой и рас-
полагаются по одной вертикали. При заданной посадке судна
распределение архимедовых сил неизменно, в то время как
точки приложения сил тяжести могут изменяться в довольно
широких пределах. В результате на отдельных участках кор-
пуса судна силы тяжести и силы поддержания в общем случае
не равны друг другу. Поставим мысленный эксперимент: пред-
положим, что судно разделено на ряд отсеков, способных пе-
ремещаться друг относительно друга по вертикали. В силу
того, что одни из них нагружены больше, а другие меньше,
каждый отсек будет иметь собственную осадку (рис. 8.1).
Возвращаясь к реальному монолитному судну, констати-
руем, что неуравновешенная разность между локальными си-
лами тяжести и силами поддержания создает нагрузку, дей-
ствующую на корпус и вызывающую его общий изгиб в про-
дольной плоскости.
Для определения перерезывающих сил и изгибающего мо-
мента на тихой воде поступают следующим образом. Строят
кривые сил тяжести и сил поддержания и определяют интен-
сивность нагрузки — разность между первыми двумя кривыми.
258
Проще всего найти кривую сил поддержания, умножив
ординаты строевой по шлангоутам ш(х) на удельный вес
воды у. Если дифферент судна отличен от нуля, то для
построения строевой по шпангоутам необходимо использовать
масштаб Бонжана.
Для расчета кривой сил тяжести длину судна разбивают иа
большое число равных участков ‘(обычно на 20, соответствую-
щих теоретическим шпациям). На каждом участке суммируют
все составляющие нагрузки (корпус, оборудование, груз и т. д.),
а затем делят иа длину участка, получая погонную силу тя-
жести. Считая, что в пределах каждого участка нагрузка рас-
пределена равномерно, получают ступенчатую кривую сил тя-
жести. Очевидно, что для судна, находящегося в равновесии,
площади кривых сил тяжести и сил поддержания должны быть
равны, а центры тяжести этих площадей должны лежать на
одной вертикали.
Разность между ординатами кривых сил тяжести р(х) и
сил поддержания уа(х) определяет интенсивность нагрузки
<7(х) = р(х)-у<в(х). (8.1)
Перерезывающая сила N(x) и изгибающий момент М(х)
в произвольном сечении находят по очевидным зависимостям
X
N (х) = <7 (х) dx; (8.2>
о
X XX
м (х) = $ (х) dx = J J q (х) dx. (8.3)
о о о
Построение описанных выше кривых иллюстрирует рис. 8.2.
Судно в зависимости от соотношения сил тяжести и поддержа-
ния по его длине может изгибаться выпуклостью вниз или
вверх. В первом случае имеет место прогиб корпуса, во вто-
ром — перегиб. Как указывалось выше, для одного и того же
судна характер изгиба будет зависеть от состояния его на-
грузки. Так, для грузовых судов с расположением МО в сред-
ней части при плавании в балласте будет иметь место прогиб
корпуса. Это объясняется тем, что в районе МКО наблюдается
избыток сил тяжести, а в районах пустых трюмов — сил под-
держания. Для тех же судов при плавании в полном грузу
(при максимальной осадке) картина меняется на противопо-
ложную — при неизменной в районе МКО силе тяжести силы
поддержания существенно возрастают, создается значительный
их избыток, корпус изгибается выпуклостью вверх.
У танкеров с кормовым расположением МКО на тихой воде
обычно наблюдается прогиб — сказывается избыток веса от
полностью заполненных грузовых танков, расположенных
17*
259
в средней части судна. При плавании в балласте корпус, как
правило, имеет перегиб, несмотря на то, что основной балласт,
вес которого может составлять около половины грузоподъемно-
сти, располагается в средней части судна.
Таким образом, и величина и знак (прогиб или перегиб)
изгибающего момента в значительной степени определяются
Рис. 8.2. Силы, действующие на корпус судна на тихой
воде
состоянием нагрузки судна. Поэтому расчеты должны прово-
диться для всех встречающихся в эксплуатации вариантов за-
грузки судна с тем, чтобы найти максимальные значения уси-
лий от общего изгиба на тихой воде.
Практика показывает, что для большинства морских транс-
портных судов традиционных обводов максимальные значения
изгибающего момента имеют место в районе миделя незави-
симо от состояния нагрузки. Принято изгибающий момент пред-
ставлять в виде
Mn = KngDL, (8.4)
где D и L — водоизмещение, т, и длина, м, судна соответ-
ственно. Ктв — коэффициент, определяемый нагрузкой судна.
Для сухогрузного суда с МО в средней части при движении
в полном грузу максимальный изгибающий момент соответ-
260
•ствует состоянию судна с частично израсходованными за-
пасами.
Аналогичная картина наблюдается и для танкеров с МО
в кормовой оконечности. Для оценки изгибающего момента на
тихой воде можно использовать зависимость (8.4) и данные
рис. 8.3.
Стрелка прогиба корпуса в миделевом сечении может быть
приближенно найдена по формуле
f = МЬг/\\,4Е1, (8.5)
где Ми/ — максимальный изгибающий момент н момент инер-
ции корпуса в миделевом сечении соответственно; Е — модуль
упругости материала корпуса.
Оценки, проведенные с помощью (8.5), подтверждают вы-
сказанный ранее тезис о том, что деформация корпуса под дей-
ствием внешних сил относительно невелика и может не учиты-
ваться при изучении мореходных качеств судна (пример 8.2).
Пример 8.2. Для судна «Инженер» оценим прогиб на тихой воде.
Момент инерции поперечного сечення эквивалентного бруса находим
по формуле
/ = Wo (Н — е) = 10,4 (15,1 —6,70) =87,1 м4,
где момент сопротивления (8.14):
Wo = hop • BL2 (5 + 0,7) - 10-« = 10,4 м3;
высота условной расчетной волны (8.8)
Лвр = 10,75- = 9.32 м;
расстояние до нейтральной оси (8.15)
е = (0,34 + 0.06L • 10-2) Н = 6,70 м.
(Здесь Н = 15,1 м — высота надводного борта.)
261
По (S.5) находим прогиб (£ = 2,0-10е кПа):
Л4Т,Р 868.10s • 173»
П,4£/ ” 11,4.2-10»-87,1 — ’ М-
При длине судиа L = 173 м прогибом, максимальное значение которого
не превышает f = 13 см (f/L < 1 • 10“’), можно пренебречь.
Для оценки величины максимальной перерезывающей силы
на тихой воде (при равномерном распределении грузов) можно
пользоваться зависимостью
N„ — 'I •
где л = 4,9 для сухогрузных судов и и = 6,0 для танкеров.
Волновой изгибающий момент. Волнение моря приводит
к тому, что свободная поверхность воды перестает быть гори-
зонтальной, соответственно изменяется форма действующей
ватерлинии судиа, происходит перераспределение сил поддер-
Рис. 8.4. Корпус судна на вершине (а) и подошве (б) волны
жания по сравнению с таковым на тихой воде. Действующий
при этом на корпус изгибающий момент обычно представляют
в виде суммы моментов на тихой воде Мтв и дополнительного
волнового Л4В
м = мта + мв-
Для определения гидростатической составляющей волнового
момента используется искусственный прием — так называемая
статическая постановка судна на волну (еще одна разновид-
ность мысленного эксперимента). Предполагается, что переме-
щения профиля волны отсутствуют. Волнение считается регуляр-
ным, профиль волны трахоидальным. Анализ расчетных дан-
ных показывает, что максимальный изгибающий момент в ми-
делевом сечении возникает, если середина судна располагается
на вершине либо на подошве волны, длина которой близка
к длине судна X ~ L. В первом случае будет иметь место пере-
гиб, а во втором — прогиб судна (рис. 8.4).
262
В реальных условиях подобное положение будет иметь место
при движении на попутном волнении, когда скорость судна
равна скорости распространения волн. Этот режим (при к =
— L) неблагоприятен как с точки зрения прочности (макси-
мальные изгибающие момента), так и с точки зрения остойчи-
вости и управляемости, о чем шла речь в предыдущих разде-
лах книги.
При постановке судна на вершину волны можно отметить
подвсплывание корпуса за счет того, что обводы в средней, во-
шедшей в воду, части полнее, чем в оконечностях, которые из
воды вышли. При постановке на подошву волны наблюдается
противоположная картина.
Таким образом, вертикальные перемещения судна иа вол-
нении в значительной степени определяются полнотой его обво-
дов и в первую очередь коэффициентом полноты ватерлинии а.
Максимальное значение волнового изгибающего момента
при статической постановке на волну наблюдается в миделевом
сечении корпуса, для его оценки можно использовать зависи-
мость
Мв = 0,72 - Ktyh. BL\ (8.6)
где йв — высота волны, принимаемая йв = Х/20 = L/20; у —
удельный вес воды; В, L — ширина и длина судна; — —
коэффициент, принимающий различные значения на вершине
и иа подошве волны:
б.................... 0,6 0,7 0,8
К„.10«................ 1,28 1,54 1,80
К...10»............... 1,46 1,73 2,02
Пример 8.3. Для судва «Инженер» найдем изгибающие моменты иа вер-
шине н подошве расчетной волны (л = L = 173; й. = Х/20 = 8,65 м). Для
б = 0,619 определяем
яив = 1,33 • ю-»; /с,,, = i.5i • io-2;
соответствующие моменты (у= 10 кН/м3)
Ми, = 0,72 • 1,33 • 10-' • 8,65 • В£» = 699 • 103 кНм;
Мпз =0,72 . 1,51 • 10-' • 8,65 • В/,2 = 790 • 10s кНм.
Таким образом, дополнительный изгибающий момент при статической
постановке иа волну имеет один порядок с моментом на тнхой воде (см.
пример 8.1).
Частицы воды в составе волн равномерно движутся по кру-
говым орбитам, соответственно гидродинамическое давление
в волне определяется как силами тяжести, так и центробежными.
В результате кривые сил поддержания на подошве и вершине
волны несколько сглаживаются, волновые изгибающие моменты
уменьшаются на величину, называемую поправкой Смита.
263
Указанное уменьшение нагрузок можно учитывать введе-
нием в (8.6) поправочного коэфициента х С 1,0. Величина этого
коэффициента зависит от положения судна (на подошве или
вершине) относительно волны, полноты обводов 6 и относитель-
ной осадки Т/L. В первом приближении можно принимать
х = 0,72.
Наибольшее значение дополнительной перерезывающей силы
от волновых нагрузок приближенно определяется зависи-
мостью
Nt — 3,bMJL.
Движение судна на волнении сопровождается качкой, а сле-
довательно и появлением сил инерции. С точки зрения общего
продольного изгиба корпуса интерес в этом плане представляет
вертикальная и килевая качка.
Исследования показали, что силы инерции, возникающие от
килевой качки, достигают максимального значения при таком
положении профиля волны относительно копуса, когда гидро-
статическая составляющая волнового момента далека от своего
наибольшего значения. Поэтому вести трудоемкий учет влия-
ния этих сил не имеет смысла.
Несколько иначе обстоит дело с инерционными силами, вы-
зываемыми вертикальной качкой. При положении судна на по-
дошве волны учет этих сил приводит к увеличению суммарного
изгибающего момента, на вершине — к его снижению. По оцен-
кам, максимальные величины поправок в обоих случаях не
превышают (20—25)%. В практических расчетах обычно эти
поправки не учитывают.
Заметное влияние на волновой изгибающий момент оказы-
вает форма судна, особенно в носовой оконечности. По данным
экспериментов, этот момент при V-образных носовых шпангоу-
тах больше, чем при U-образных, на 25—30%. Последнее об-
стоятельство еще раз подтверждает противоречивость требова-
ний, предъявляемых к форме корпуса судна с позиций
обеспечения различных качеств, с чем зачастую приходится
сталкиваться при проектировании. Действительно, как было
отмечено ранее, с точки зрения дополнительного сопротивления
на волнении, а также амплитуд килевой и вертикальной качки,
предпочтение следует отдавать V-образной форме шпангоутов.
Реальное морское волнение отличается нерегулярностью,
соответственно действующие на корпус нагрузки меняются во
времени. Изменения эти, как и сам процесс волнения, иосят
случайный, вероятностный характер. Одной из основных проб-
лем при этом является оценка экстремальных значений волно-
вых нагрузок.
С позиций вероятностного метода, под экстремальным (наи-
большим) волновым изгибающим моментом следует понимать
264
такой, который за весь срок службы судна может быть превы-
шен с очень малой вероятностью. Задавая значение последней,
мы тем самым определяем обеспеченность указанного экстре-
мального момента. В отечественной и зарубежной практике
обычно принимают обеспеченность равной Q = 10-*. Это имеет
обоснование: считая, что время службы судна составляет 20 лет
и задав средний период изменения волновых моментов равным
6 секундам, получим количество циклов этих моментов N — 10е.
Тогда, исходя из позиций теории вероятностей, волновой мо-
мент с заданной обеспеченностью Q = 10-8 может быть пре-
взойден лишь один раз за все время эксплуатации судна.
Полученную на основании данного подхода величину вол-
нового момента представляют в виде, аналогичном таковому
при статической постановке судиа на волну:
М'Л = К' yh'pBL2, (8.7)
где К' — коэффициент, зависящий от формы обводов судна,
изгибающего момента на тихой воде, скорости движения судна,
продольного радиуса инерции масс, а также положения судна
относительно волны (на подошве или на вершине); h3V — вы-
сота условной расчетной волны, принимаемая зависящей от
заданной обеспеченности волнового момента и длины волны.
Для обеспеченности Q = 10-8 и длины волны, равной длине
судна (X = L), ее условная расчетная высота определяется
в виде
Ь„=10,7&-(^к)и. (8.8)
В первом приближении для оценок изгибающего волнового
момента на нерегулярном волнении можно принимать
/(' = 7. 10-’(6+ 0,7), (8.9)
где б — коэффициент общей полноты судна.
При движении по взволнованному морю в условиях развитой
вертикальной и килевой качки временами носовая оконечность
судна выходит из воды, а затем с ударом вновь погружается.
Это явление называется слемингом и чаще всего встречается
при движении судна в балласте, когда осадка носом невелика.
Ударные нагрузки, возникающие при слеминге, приводят к зна-
чительному возрастанию продольного изгибающего момента.
Учет этого явления при расчетах общей прочности натал-
кивается на значительные трудности. В ходе эксплуатационных
испытаний транспортных судов (сухогрузы «Оушн В алкен»,
L = 128 м, D = 14000 т; «Куйбышев ГЭС», L — 118 м, D —
= 9500 т) были получены наибольшие напряжения в районе
миделя от ударных нагрузок при слеминге, которые составили
15—30 % допускаемых в палубных связях при общем изгибе.
265
Для снижения вероятности слеминга и сглаживания его по-
следствий следует увеличивать осадку носом, применять V-об-
разные обводы, снижать скорость.
Представление о величине расчетного момента иа нерегу-
лярном волнении в сопоставлении с изгибающими моментами
на тихой воде и при статической постановке на волну можно
получить из примера 8.4.
Пример 8.4. Для судна «Инженер» определим расчетный -момент с обес-
печенностью Q = 10-8 иа нерегулярном волнении.
По (8.7) находим М* = K’yhipBL* = 727-10s кНм,
где К' = 7-10”3(д + 0,7) = 9,24 - IO-3; htp = 9,32 м (см. пример 8.2).
На основании сопоставления результатов расчетов в приме-
рах 8.1, 8.3, 8.4 можно заключить, что для рассматриваемого
судна все изгибающие моменты — на тихой воде, при статиче-
ской постановке на регулярную волну и на расчетном нерегу-
лярном волнении имеют один порядок и составляют:
Afz = (0,014 ч- 0,017)- gDL.
Качественно подобная картина имеет место и для других
водоизмещающих судов, хотя абсолютные значения К, лежат
в более широком диапазоне.
Напряжения от общего изгиба. При их определении исхо-
дим из справедливости гипотезы плоских сечений, в соответ-
ствии с которой нормальные напряжения в поперечных сече-
ниях изгибаемой балки по высоте изменяются по линейному за-
кону, а по ширине остаются неизменными.
Тогда для определения нормальных о и касательных т на-
пряжений можно использовать известные из курса «Сопротив-
ление материалов» зависимости
o = Mz//; (8.10)
t — NS/Ы, (8.11)
где М, N—изгибающий момент и перерезывающая сила в рас-
сматриваемом сечении; / — момент инерции площади продоль-
ных связей относительно горизонтальной нейтральной оси; z—
отстояние рассматриваемой связи от нейтральной оси; S — ста-
тический момент площади отсеченной части сечения, располо-
женного выше или ниже рассматриваемого уровня, относи-
тельно нейтральной оси; б — суммарная толщина продольных
связей корпуса иа рассматриваемом уровне.
Максимальные нормальные напряжения от изгиба дей-
ствуют в крайних связях корпуса, в районе палубы и днища.
Их знак определяется знаком момента; растягивающие напря-
жения считаются положительными. На нейтральной оси нор-
мальные напряжения обращаются в нуль, а касательные, на-
оборот, достигают своего наибольшего значения.
266
Максимальный изгибающий момент при общем изгибе дей-
ствует в районе миделевого сечения судна, максимальная пере-
резывающая сила — обычно на расстоянии четверти длины от
оконечностей.
Методы определения внешних сил — изгибающего момента М
н перерезывающей силы N — были рассмотрены выше. Для
определения внутренних сил — напряжений — необходимо знать
характеристики поперечного сечения корпуса. С этой целью
вводят понятие об эквивалентном брусе. В качестве последнего
принимается условная балка,
эквивалентная по способности
сопротивления общему продоль-
ному изгибу рассматриваемому
корпусу судна. Естественно, что
эквивалентный брус, как и сам
корпус, имеет по длине пере-
менное поперечное сечеиие.
В него включаются все непре-
рывные продольные связи дни-
ща, бортов, палуб и продольных
переборок.
Для расчета элементов экви-
валентного бруса необходимо
иметь схему рассматриваемого
поперечного сечения судна.
В силу симметрии корпуса отно-
Рнс. 8.5. Эквивалентный брус
судна
сительно ДП обычно вычерчивают только половину сечения
(рис. 8.5).
При сжатии ие вся обшивка (пластины палубы, днища, пе-
реборок) воспринимают одинаковые напряжения. Участки пла-
стин между продольными балками могут потерять устойчивость
при нагрузках, существенно меньших, чем опасные с точки
зрения разрушения материала от нормальных напряжений.
За счет прогибов от местных напряжений и при растяжении
не все участки пластин участвуют в общем изгибе. В связи
с этим при расчете элементов эквивалентного бруса пластины
обшивки учитываются не по всей ширине, а только в виде при-
соединенных к балкам продольного направления поясков.
8.3. Местная прочность
Элементы корпуса судна испытывают напряжение ие только
от общего изгиба, но и от локальных, местных, нагрузок. Так,
например, на днищевое перекрытие действует гидростатическое
давление воды, силы тяжести грузов, механизмов и т. д.
267
Для оценки прочности связей судового корпуса необходима
определять суммарные напряжения. Задача осложняется тем,
что одни и те же элементы корпуса могут воспринимать на-
грузки, участвуя в общем изгибе, изгибе перекрытия, в состаи
которого они входят, изгибе отдельной балки этого перекрытия
и, наконец, изгибе пластины, опирающейся на балки перекры-
тия. В этом случае, характерном для днищевой обшивки, сум-
марные нормальные напряжения будут складываться из четы-
рех составляющих.
Корпус судна — совокупность связанных между собой пере-
крытий (днищевых, бортовых, палубных). Для обеспечения не-
обходимой жесткости и сохранности формы сечения корпус
подкрепляется поперечными переборками.
Для упрощения расчетов местной прочности отдельные пе-
рекрытия рассматриваются изолированно друг от друга. Их
взаимодействие учитывают, задавая заделки перекрытий по
контуру. Так, днищевое перекрытие обычно считается прости-
рающимся от борта до борта между поперечными переборками,
т. е. рассматривается в пределах одного отсека. Бортовое пере-
крытие принимается опирающимся на днище, палубы и попе-
речные переборки. Палубные перекрытия, в свою очередь, опи-
раются на продольные и поперечные переборки и на борта
судна.
Заложенная в расчеты местной прочности определенная
идеализация реальной конструкции является вынужденной. Она
позволяет определить напряжения известными методами строи-
тельной механики корабля. Для решения этой задачи необхо-
димо знать все нагрузки, воспринимаемые перекрытием, причем
в самых неблагоприятных условиях эксплуатации. Кроме того,
нужно выбрать рациональную расчетную схему, которая до-
статочно правильно отражала бы принцип работы конструкции
и давала верное представление о напряженном состоянии свя-
зей, входящих в состав перекрытия. Правила Регистра содер-
жат рекомендации по выбору расчетных нагрузок для различ-
ных перекрытий. Эти нагрузки зависят от типа и назначения
судна, его размеров, условий эксплуатации.
Расчетные схемы постоянно совершенствуются. В этом плане
весьма продуктивен метод конечных элементов, позволяющий
рассчитывать не только сложные плоскостные перекрытия, но и
некоторые пространственные конструкции судовых корпусов.
Устойчивость продольных связей. Продольные связи должны
не только обеспечивать прочность от общего и местного изгиба,
но и не терять устойчивость под действием сжимающих усилий.
Размеры некоторых элементов судового корпуса определяют
в основном из условий обеспечения их устойчивости.
В соответствии с изложенным Правила Регистра требуют
выполнять проверку устойчивости элементов конструкций, ис-
268
пытывающих сжатие при общем изгибе корпуса. В первую оче-
редь это относится к листовым элементам настила верхней па-
лубы, днищевой и бортовой обшивке, а также к продольным
балкам, подкрепляющим эти листовые конструкции.
Исходя из необходимости обеспечения прочности, идеальной
следует признать конструкцию, которая разрушалась бы без
потери устойчивости ее элементов, т. е. с полным использова-
нием площади всех связей. Применительно к тонкостенной кон-
струкции корпуса судна этот принцип, к сожалению, на прак-
тике пока реализован быть не может.
8.4. Судостроительные материалы
Для изготовления корпуса судна используют сталь, легкие
сплавы, цветные металлы, дерево, пластмассы, железобетон
и т. д. Наибольшее распространение сегодня в судостроении
находит сталь, обладающая высокими прочностными свой-
ствами, достаточной вязкостью, которая хорошо обрабаты-
вается. Другие материалы применяют при постройке корпусов
некоторых специальных судов: с динамическим поддержанием,
спортивных и прогулочных и др. Все они, как правило, имеют
относительно небольшие размеры. В последнее время легкие
сплавы также широко используют для изготовления надстроек
н рубок крупных морских транспортных судов.
Некоторые плавучие сооружения, в основном стояночного
типа (доки, дебаркадеры, понтоны и др.), иногда делают из
железобетона. Этот материал хорошо воспринимает статиче-
ские нагрузки, его стоимость существенно ниже, чем стали.
Однако опыт использования железобетонных самоходных судов
показал, что их корпуса не способны в должной мере противо-
стоять знакопеременным нагрузкам и вибрации, вызываемой
работой двигателя и движителя.
Основным материалом для постройки корпусов современных
морских транспортных судов является корпусная сталь для
судостроения, характеристики которой определяются ГОСТ
5521—86. В соответствии с ним могут использоваться углеро-
дистые стали обыкновенного качества (обычные углеродистые
стали, ОУС) и легированные стали или стали повышенной
прочности (СПП). В отечественном судостроении наибольшее
распространение получили стали марок ВСтЗ (ОУС), а также
09Г2, 10ХСНД (СПП), минимальный предел текучести которых
соответственно составляет от = 2,35-10®, 2,95-105 и 3,9-105 кПа.
В Правилах Регистра качество стали характеризуется ка-
тегорией, определяемой совокупностью требований к механи-
ческим свойствам и химическому составу. Существуют ОУС
категорий А, В, Д и Е, а СПП категорий А32, Д32, Е32, А36,
269
ДЗб, ЕЗб, А40, Д40, Е40. Минимальный предел текучести ОУС
всех категорий от = 2,35-105 кПа, для СПП цифры в обозначе-
нии категории характеризуют предел текучести: ДЗб —отт|П =
= 3,6-105 кПа. Удельный вес всех видов сталей составляет
у = 78 кН/м3, модуль упругости Е = 2 -10® кПа.
СПП целесообразно применять в тех случаях, когда это при-
водит не только к снижению массы, но и стоимости кон-
струкции.
На практике СПП используют для изготовления связей, ис-
пытывающих наибольшие напряжения при общем продольном и
местном изгибе.. Для судов
длиной L < 100 м целесооб-
разно применять ОУС, при
100^ £<160 м возможно
использование и ОУС и
СПП с пределом текучести
от = 2,95-10s кПа (преиму-
щественно для основных
связей, обеспечивающих об-
щую продольную проч-
ность), в диапазоне 160
< £ < 240 м рационально
применение СПП с 2,95 X
X Ю5 < От < 3,9- 10s кПа, и
только при £ ^ 240 м можно ожидать полного использования
прочностных свойств стали с от = 3,9-105 кПа.
Корпусная сталь поставляется в виде листового, полосового
и профильного проката. Сортамент листового проката включает
листы, толщина которых изменяется в пределах б = 4 4- 50 мм,
ширина 6 = 1,44-3,2 м, длина 1 = 64-16 м. Стальные катан-
ные профили, находящие широкое применение в судостроении,
представлены на рис. 8.6. Их размеры ограничены существую-
щим сортаментом и иногда могут оказаться недостаточными
для использования профиля в качестве некоторых сильно на-
груженных связей корпуса. В этом случае балки с требуемым
моментом сопротивления сваривают (чаще всего в виде тавра)
из полосового материала.
Широкое применение при строительстве СДП находят лег-
кие сплавы на алюминиевой основе, которые прн сравнительно
малом удельном весе у = 27 кН/м3 обладают высокой проч-
ностью. Так, алюминиево-магниевые сплавы АМг5, АМгб1,
АМг61Н, АМг62Т1 соответственно имеют пределы текучести
<jT. 105 = 1,6; 1,8; 2,5; 3,5 кПа. Модуль упругости этих сплавов
Е = 0,71-108 кПа, а их стоимость сопоставима со стоимостью
нержавеющей стали. Кроме того, эти сплавы обладают высокой
коррозионной стойкостью, часть из них хорошо сваривается.
270
Алюминиевые сплавы, используемые в судостроении, постав-
ляются в виде листов, прессованных профильных балок и пане-
лей. Размеры листового материала лежат в пределах: толщина
6= 14-60 мм, ширина Ь =1,2 4- 1,5 м, длина 2 = 24-6 м.
Форма профилей из легких сплавов практически такая же, как
и стальных (см. рис. 8.6). Специально для судостроения про-
изводится несколько разновидностей прессованных панелей,
одна из которых с балками полособульбового профиля пред-
ставлена на рис. 8.7.
Применение прессованных панелей приводит к увеличению
надежности конструкции всего корпуса СДП, способствует по-
вышению технологичности,
снижению объема сварочных
работ.
Используются и трехслой-
ные клеенные панели, наруж-
ные, несущие слон которых
выполняют из легких сплавов,
а наполнителем служат неме-
таллические легкие материалы
(рис. 8.7).
Ограниченное применение
в судокорпусостроении нахо-
дят титановые сплавы. На-
L.JL-LJL
Рис. 8.7. Панели, используемые в кон-
струкции корпуса СДП: а — прессо-
ванные, б — трехслойные
1 — несущий слой (АМг); 3 — заполнитель
(пенопласт)
ряду с относительно малым удельным весом (у
ж 45 кН/м3) и хорошими антикоррозионными свойствами
эти сплавы обладают высокой прочностью (модуль упру-
гости £ « 1,1 • 108 кПа, временное сопротивление ов ~
а? 106 кПа), однако их значительная стоимость (приблизи-
тельно на порядок выше, чем у стали и алюминиевых сплавов),
а также необходимость соблюдений специальных режимов
в сложных технологических процессах, связанных с механиче-
ской обработкой и особенно сваркой, не позволяют с достаточ-
ной эффективностью применять их даже при постройке высоко-
скоростных СДП.
Перспективным направлением в изготовлении корпусных
конструкций является применение пластмасс—композитных ма-
териалов. Их свойства в значительной степени определяются
физико-механическими характеристиками составляющих ком-
понент— армирующего материала и связующего. В качестве
первого наибольшее распространение получило стекловолокно.
В отдельных пластмассах для достижения повышенной прочно-
сти и жесткости армирующими служат волокна бора, графита,
угольные волокна. В качестве связующего материала приме-
няются полимерные синтетические смолы: эпоксидные, поли-
эфирные, фенольные. Смолы соединяют элементы армирующего
материала в единое целое, защищают их от действия влаги.
271
Механические свойства пластмасс зависят от многих фак-
торов, среди которых основную роль играют тип и весовое со-
отношение отдельных компонент, а также технология произ-
водства материала.
Наибольшее распространение в судостроении получил стек-
лопластик, который, благодаря своим механическим свойствам,
успешно конкурирует с другими материалами. Так, стеклопла-
стик, намотанный однонаправленный, имея малый удельный вес
(у = 18 кН/м3), обладает весьма высокой прочностью (ав =
= 1,76-Ю5 кПа). Недостаточно широкое распространение
пластмасс в качестве материала корпуса объясняется как тех-
нологическими факторами (высоким уровнем ручного труда,
особенно на формовке узлов соединений, токсичностью компо-
нент), так и влиянием технологии изготовления материала на
его прочностные свойства. Последние также изменяются со вре-
менем по мере старения пластмассы.
Наиболее распространенным материалом для изготовления
крыльевых устройств СПК является нержавеющая сталь, обла-
дающая высокой коррозионной стойкостью. Предел текучести
различных марок нержавеющей стали изменяется в очень ши-
роких пределах: от = (2,4 4-7,5) • 105 кПа, с увеличением проч-
ности, как правило, ухудшается свариваемость материала.
Способы соединения металлических судовых конструкций.
Корпус судна состоит из огромного количества отдельных эле-
ментов, соединенных между собой. К соединениям предъяв-
ляются жесткие требования — они должны обеспечивать не
только целостность, с точки зрения прочности, конструкции, но
и водонепроницаемость корпуса и его отсеков, а в некоторых
случаях и газонепроницаемость отдельных помещений.
В наибольшей степени этим требованиям отвечает сварка —
способ соединения деталей путем плавления металла. Необхо-
димая для этого температура создается за счет электрической
дуги (электросварка) либо сгорания ацетилена в кислороде
(газовая сварка).
Применение сварки в судостроении привело к значитель-
ному (около 20%) облегчению корпусов стальных судов за
счет устранения необходимых для клепаных соединений допол-
нительных элементов (угольников, накладок н т. д.). Техноло-
гия стала более совершенной, снизился объем ручных работ,
сократились сроки постройки судов. Положительный эффект
оказала сварка и на сопротивление движению — существенно
уменьшилась шероховатость наружной обшивки корпуса.
Основными типами сварных соединений в судостроении яв-
ляются: стыковые, тавровые (впритык), угловые и нахлесточ-
ные. В первом и последнем случае соединяемые детали нахо-
дятся в одной плоскости, во втором и третьем — в плоскостях,
272
подходящих друг к другу под углом, чаще всего близком
к прямому (рис. 8.8).
Кромки свариваемых деталей зачастую подвергаются пред-
варительной обработке — им придается скос, который может
быть односторонним либо двусторонним.
Сварка может быть ручной, полуавтоматической и автома-
тической. Во всех случаях для повышения качества соединения
al
SI
GSSSSSSS b.\S\\\S
г) ктеге
в}
Ряс. 8.8. Типы сварных соединений: а — стыковое, б —
впритык, в — внахлест, г — угловые
1 — без скоса кромок; 2 — с односторонним скосом; 3 — с дву
сторонним скосом
Рис. 8.9. Форма заклепоч-
ных головок: а — кониче-
ская; б — полукруглая, в —
полупотайная: г — потайная
и его коррозионной стойкости расплавленный металл шва изо-
лируется от окружающего воздуха с помощью флюса либо за-
щитных газов (углекислого для стали, аргона для алюминиево-
магниевых сплавов). Сварные швы могут выполняться сплош-
ными, прерывистыми, точечными.
Побочные явления, сопровождающие сварку: неоднородность
металла в шве, остаточные деформации и напряжения. И то
и другое может отрицательно сказаться на прочности конструк-
ции. Эти обстоятельства предъявляют высокие требования
к технологии сборочных и сварочных работ.
Соединение деталей судового корпуса с помощью клепки
(рис. 8.9) осуществляется достаточно редко, когда конструкции
изготавливаются из тонких листов плохо свариваемых алюми-
ниево-магниевых сплавов или когда соединяются разнородные
металлы, сварка которых невозможна (надстройка из легких
сплавов и стальной корпус). В некоторых случаях заклепочные
соединения (рис. 8.10) применяют н на крупных стальных су-
дах для выполнения так называемых барьерных швов, призван-
ных препятствовать появлению и распространению на соседине
конструкции поперечных трещин. Примером такого барьера мо-
жет служить соединение ширстрека с палубным стрингером.
183415
273
Основные недостатки заклепочных соединений — большая
трудоемкость, сложность обеспечения водонепроницаемости^
утяжеление конструкций.
Другие типы соединений — резьбовые, паяные и клееные —
в судостроении практически не используются и здесь не рас-
сматриваются.
У А Ж
а)
L\4\\\\\\\V
cross
Рис. 8.10. Типы заклепочных соединений: а — соединение палуб-
ного стрингера с шнрстреком; б — соединение двух листов; в —
то же с помощью накладной планки; г — соединение двух листов
с помощью балки (СДП)
8.5. Проектирование корпусных конструкций
Выше (см. § 8.2, 8.3) рассматривалась прямая задача проч-
ности— определение напряжений в судовом корпусе, элементы
которого известны, под действием также известных (либо за-
данных) внешних нагрузок. В процессе проектирования судна
должна решаться и обратная задача — создание такой кон-
струкции корпуса, которая обеспечивала бы ему заадиную проч-
ность, а также необходимые экономические показатели при по-
стройке и эксплуатации судна.
Основной нормативный технический документ, используемый
при проектировании корпусных конструкций морских транс-
портных судов, — Правила классификации и постройки морских
судов Регистра. Аналогичные правила классификационных об-
ществ действуют и в других странах (Английский и Герман-
ский Ллойды, Французский и Норвежский Веритасы и др.).
В этих правилах содержатся требования к качеству материала,
размерам элементов конструкций, указания по конструктивному
оформлению основных узлов, принципиальные положения по
изготовлению корпуса, техническому надзору за постройкой и
эксплуатацией судов. В правилах обобщен опыт постройки
и эксплуатации транспортных морских судов традиционных
архитектурно-конструктивных типов. Считается, что надежность,
конструкций обеспечена, если они спроектированы в соответ-
ствии с требованиями этих правил.
274
Поверочные расчеты прочности проводят с использованием
норм прочности, разработанных на основе Правил Регистра.
Цель проектирования корпусных конструкций — выбор их
элементов таким образом, чтобы напряжения и (или) дефор-
мации не превосходили некоторых допустимых величин, уста-
навливаемых иа основе опыта проектирования, постройки и
эксплуатации судов.
В отечественной практике широко применяется следующая
схема проектирования корпусных конструкции.
В соответствии с рекомендациями Правил разрабатывают
конструктивные схемы отдельных перекрытий и определяют
расчетные нагрузки, действующие на них; Из условия обеспече-
ния местной прочности определяют толщины листовых элемен-
тов и размеры балок набора перекрытий. При этом проверяют
устойчивость балок и пластин, выполнение требования к усиле-
нию конструкций в отдельных районах (МО, ледовый пояс
и др.). Полученные размеры сопоставляют с минимально до-
пустимыми. Находят требуемые, исходя из условий обеспече-
ния прочности н жесткости при общем изгибе корпуса, значе-
ния момента сопротивления, площади стеики и момента инер-
ции поперечного сечения эквивалентного бруса.
Если это необходимо по соображениям общей прочности,
корректируют элементы продольных связей корпуса, выбран-
ных нз условия обеспечения местной прочности.
Требования к размерам элементов корпусных конструкций
устанавливаются Правилами на основе нормирования их проч-
ности к середине срока службы, т. е. учитывается неизбежный
коррозионный износ. Так, например, толщину пластин находят
в виде
б = б' + Дд,
где б'—расчетная толщина из условия местной прочности нли
устойчивости; Дб — добавка на износ.
Аналогичные зависимости используют и для определения
площадей поперечного сечения, моментов сопротивления и
инерции балок набора. Добавки на коррозионное изнашивание
назначаются в соответствии, с рекомендациями Правил.
Величины допускаемых напряжений, входящие в условия
прочности, в соответствии с Правилами назначают в долях от
нормативных пределов текучести материала:
[ст] = ka • он; Ч
[т] = йт-ти; I (8.12)
Ыпр = Vo2 + Зтг = йпр . ои, J
где [о], [т], [о] пр — допускаемые нормальные, касательные и
приведенные напряжения; ka, kt, k„p— соответствующие коэф-
18*
275
фициенты допускаемых напряжений; о и т — расчетные напря-
жяния в рассматриваемых связях; он = 2,35- 105/т| и тн —
= 0,57 ст и — нормативные пределы текучести по нормальным и
касательным напряжениям соответственено, кПа.
Условие прочности по приведенным напряжениям должно вы-
полняться для связей, в которых одновременно действуют вы-
сокие нормальные и касательные напряжения.
Коэффициент т] зависит от предела текучести стали:
ст,-105, кПа....... 2,35 2,95 315 355 390
т]................. 1,0 0,83 0,79 0,72 0,66
Для элементов конструкций, которые подвержены действию
больших сжимающих напряжений или испытывают значитель-
ные сдвиговые деформации, Правила устанавливают критиче-
ские напряжения, зависящие как от эйлеровых напряжений,
так и от предела текучести материала.
Необходимая величина момента сопротивления эквивалент-
ного бруса в средней части судна устанавливается из условия
обеспечения общей продольной прочности:
М -4- м'
W = W' + \W= "д *4-ДУ, (8.13>
где Л4ТВ, Л1В — расчетные изгибающие моменты на тихой воде
и волновой на нерегулярном волнении; [<т] — допускаемые нор-
мальные напряжения от общего изгиба для состояния корпуса
к середине срока службы; ДУ — запас на износ.
Изгибающие моменты определяют по рекомендациям, изло-
женным в § 8.2. Подсчитанный по (8.4) момент Л4ТВ сравни-
вается с Л4тво. который устанавливается Правилами в зависи-
мости от формы и размеров судна, условий его эксплуатации.
Для нахождения требуемого момента сопротивления в (8.13)
подставляется большая из двух величин Л4ТВ или AfTBo-
Правилами устанавливается также и минимальная величина
момента сопротивления поперечного сечения эквивалентного
бруса в миделевом сечении корпуса
У о = htpBL2 (6 + 0,7) • 10-*, (8.14)
где В, L, б — ширина, длина и коэффициент общей полноты
судна; Лвр — расчетная высота волны, определяемая по (8.8).
Нормирование Правилами минимальной величины момента
сопротивления проводится из условия обеспечения достаточной
жесткости корпуса при общем изгибе. При этом фактически
нормируется максимально допустимый прогиб [см. (8.5)], по-
скольку, зная Уо и положение нейтральной оси, легко найти и
момент инерции /о поперечного сечения эквивалентного бруса.
276
Для оценки отстояние е нейтральной оси от основной плоскости
можно использовать зависимости
е = (0,34 + 0.06L • 10-’).// (8.15)
для сухогрузных судов длиной 100 L 200 м;
е = (0,44 +0.03L • 10-’) • Я (8.16)
для танкеров той же длины без двойного дна.
Для танкеров большей длины L > 200 м рекомендуется
принимать е = 0,5 Н, где Н — высота борта судна.
Проверка прочности судовых конструкций осуществляется
путем сравнения действующих в них напряжений с допускае-
мыми. Коэффициенты допускаемых напряжений ki [см. (8.12)]
назначаются в зависимости от характера воспринимаемой рас-
сматриваемым элементом конструкции нагрузки (общий изгиб,,
местный изгиб, их сумма), от места расположения сечения
(пролет или опора), от вида учтеной внешней нагрузки. Так,
например, коэффициент нормальных допускаемых напряжений
изменяется для основных элементов судового корпуса в преде-
лах ka = 0,35 -j- 0,70.
Второй метод проверки прочности по предельным нагрузкам
заключается в сопоставлении действующих напряжений с раз-
рушающими, в качестве которых принимается предел текучести
(Тт. Так, условие обеспечения предельной прочности при общем
изгибе записывается в виде
(М„р/М) > п,
где Л4пр = Wt; Wt — минимальный момент сопротивления эк-
вивалентного бруса, вычисленный в предположении, что в верх-
ней палубе действуют напряжения, равные пределу текучести
(включаются только связи, ие теряющие устойчивости вплоть
до напряжений, равных от); М — расчетный момент в рассмат-
риваемом сечении; п — коэффициент запаса по предельным на-
грузкам.
В зависимости от типа и размеров судна, характера расчет-
ной нагрузки коэффициент запаса изменяется в пределах п =
= 1,35 4-1,50. Трудоемкость корпусных работ составляет
35—45 %, в связи с этим при проектировании конструкций не-
обходимо особое внимание уделять технологичности корпуса.
В основе понятия «технологичность» главным образом лежат
требования минимальной трудоемкости и стоимости. В частно-
сти, решают следующие задачи: выбор схемы разбивки корпуса
на блоки и секции с учетом особенностей завода-изготовителя;
выбор наиболее совершенных и простых конструкций деталей и
узлов; выбор максимально возможного количества унифициро-
ванных конструкций корпуса; учет серийности при выборе кон-
структивных решений и т. д.
277
8.6. Дополнительные вопросы прочности
Особенности расчетов прочности судов с динамическим под-
держанием. Как было установлено выше, расчет прочности
судна заключается в нахождении внешних сил и внутренних
напряжений. Первые в значительной степени определяются
условиями эксплуатации, вторые — формой корпуса и его раз-
мерами. Быстроходные СДП существенно отличаются от водо-
измещающих судов по обоим указанным выше факторам, соот-
ветственно имеются отлнчня н в подходах к расчетам прочно-
сти этих судов.
Расчеты общей прочности СПК выполняют для трех сле-
дующих режимов движения: 1) в водоизмещающем положении
на волнении повышенной бальностн; 2) в переходном режиме,
при выходе на крылья в условиях расчетного волнения; 3) при
ходе на крыльях с максимальной скоростью на расчетном
волнении.
При движении СПК в водоизмещающем режиме к изгибаю-
щему моменту Мтв на тнхой воде и волновому моменту Мв
добавляется н момент от удара волн в носовую оконечность
Aly. Определение Мтв принципиально не отличается от того,
что было рассмотрено выше применительно к водоизмещающим
судам. Особенность заключается лишь в необходимости учета
влияния деформации корпуса на указанный момент. В силу
низкого модуля упругости материала (обычно легкие сплавы
на алюминиевой основе) корпус СПК обладает большой гиб-
костью, что приводит к перераспределению гидростатических
сил поддержания и снижению изгибающего момента на тнхой
воде. Это снижение учитывается коэффициентом гибкости
X = МТВГ/А1ТВ,
где АГтвг и А41В — моменты с учетом и без учета гибкости кор-
пуса.
Значение этого коэффициента зависит от формы и размеров
корпуса, модуля упругости материала, момента инерции экви-
валентного бруса и изменяется в пределах x = 0>5-j-1.0.
При вычислении волнового изгибающего момента нельзя
пренебрегать силами инерции, как это делалось для водонзме-
щающих судов (см. § 8.2). Эти силы учитывают и при других
расчетных режимах — переходном н крыльевом.
При выходе на крылья общую прочность проверяют для
двух случаев: удара носовой оконечности о волну (прогиб кор-
пуса) и удара о волну средней части корпуса (перегиб). В этих
случаях имеет место максимальный изгиб корпуса. Ударные
нагрузки условно принимают распределенными на протяжении
некоторого участка днища (обычно составляющего 20 % Ь).
278
В расчетном крыльевом
режиме движения силы под-
держания становятся сосре-
доточенными— они прило-
жены в фиксированных точ-
ках на крыльях.
Соответственнее изменя-
ется схема действующих на
судно нагрузок (рнс. 8.11),
а общие выражения для
определения перерезываю-
щей силы и изгибающего
момента принимают вид
Рнс. 8.11. Силы, действующие иа СПК
W--------J [р (х) + Г (X)] dX + |XJX + I*/-;
о
X X
М = — [р (х) + г (X)] dx + |*КУК (х — хк) + |*к YB (х — х„),
о о
(8.17)
где р(х) = gm(x) — силы тяжести, распределенные по длине
судна в соответствии с законом распределения масс т(х);
г(х)—силы инерции, распределенные пропорционально рас-
пределению масс и вертикальных ускорений по длине судна;
Ун, Ук — силы, действующие на крылья; хн, хк— абсциссы-
этих сил.
Точное определение перечисленных выше изгибающих мо-
ментов сопряжено со значительными трудностями. Для ориен-
тировочной оценки величин расчетных изгибающих моментов
на волнении можно воспользоваться рекомендациями Правил
Регистра.
Так, расчетный изгибающий момент в водоизмещающем и
переходном режимах для случая удара корпуса о волну опре-
деляется по формуле
Мпл = (gDL/12) ппл, (8.18)
где D, L — водоизмещение и длина судна; п„я — коэффициент
перегрузки в центре тяжести судна прн ударе.
Значение коэффициента ппл зависит от расчетной высоты
волны 3%-й обеспеченности, относительной скорости отрыва
носовой части корпуса от воды FrOr = fr/^/gVo/p, (цг— ско-
рость горба сопротивления) н принимает различные значения
для удара носом (прогиб) и средней частью (перегиб). Во
всех случаях изгибающий момент прн прогибе превышает та-
ковой при перегибе. В интересном для практики диапазоне ско-
ростей отрыва Fror = 1,0 4-1,5 при волнении моря, не превы-
279
шающем 4 баллов (Лвз% =2,0 м) коэффициент перегрузки
практически не отличается от единицы: лПл « 1,0.
В расчетном крыльевом режиме движения момент от общего
изгиба СПК определяют по формуле
AfKp = А4ТВ • (8.19)
где
А4ТВ == gDlnp/kra (8.20)
— момент на тихой воде при ходе на крыльях;
/лЛВр\/, /0,8оиг л (Лн + Лк)]
Пк?=1+ -—)(1+ -77= 1------7----- (8
' -кр ' '’V*kp^' *- J
— Лвр— расчетная высота волны 3 %-й обеспеченности; /кр—
расстояние между крыльями; v — скорость на тихой воде, м/с;
Лн, Лк — погружения носового и кормового крыльев.
Коэффициент Лтв в формуле (8.20) зависит от отношения
/кр = /кр/L и для распространенного диапазона /КР = 0,6 4- 0,65
лежит в пределах Лтв = 20 4- 22.
Для СПК с малопогруженными крыльями, к которым отно-
сится большинство отечественных судов, отношение (Лн +
+ Лк)//кр составляет 1—3%, поэтому, учитывая приближен-
ность выражения (8.12), член, стоящий в квадратных скобках,
можно принимать равным единице.
В компетенцию местной прочности СПК дополнительно вхо-
дят расчеты крыльевого устройства.
Представление о величинах изгибающих моментов, дей-
ствующих на СПК, дает пример 8.5.
Пример 8.5. Найдем расчетный момент от общего изгиба для морского
СПК «Комета». Известно: Lmax = 35,2 м; /кр = 23 м; D — 59,5 т; ог =
— 14 уз = 7,2 м/с; tiBII — 35 уз = 18 м/с; мореходность — 4 балла (Л,з% -•
= 2 м).
При Frcr — 1,17 принимаем ппл — 1,0, тогда по (8.18) Мпя = gDLf\2 —
9,81-59,5-35,2/12 — 1710 кНм. В крыльевом режиме иа тихой воде (Л„ =
= 21) по (8.20) Мт> == gDAcp/Лт. = 9,81-59,5-23/21 = 639 кНм. СПК «Ко-
мета» имеет малопогружеииые крылья, поэтому в (8.21) выражение в квад-
ратных скобках принямаем равным 1,0, тогда
лЛ.-р / 08 \ 3,14 • 2 / 0,818 \
лкр = , + “?г ,+ VF = 1 +-23- ’ + — = 2’09-
•кр ' Л<4кр ' '
Расчетный изгибающий момент при ходе иа крыльях на волнении по
(8.19)
Л4кр = Л4тз • Икр " 1340 кНм.
Таким образом, определяющим в расчетах прочности при общем нзгнбе
для рассматриваемого СПК является момент в водонзмещающем режиме.
Сопоставляя полученные результаты с данными примеров 8.1—8.4, за-
ключаем, что для СПК относительная величина изгибающих моментов суще-
ственно выше, чем для водоизмещающих. Действительно, для СПК имеем
kt = Mi/gDL — 0,05 0,08,
280
в то время как для судна «Инженер»
ki =0,014 -е- 0,017.
Наиболее тяжелыми с точки зрения общего изгиба режи-
мами движения СВП принято считать следующие: 1) движе-
ние судна в расчетном режиме — на воздушной подушке с мак-
симальной скоростью на волнении заданной (отвечающей про-
ектным требованиям) интенсивности; 2) движение без воз-
душной подушки иа большем, чем в первом случае, волнении
с максимально возможной в этом режиме скоростью; 3) дина-
мическая посадка амфибийного СВП на неровный грунт, поста-
новка иа скеги — для скегового СВП (например, в процессе
докования).
В качестве расчетных в перечисленных выше режимах при-
нимают: 1) при движении иа ВП — удар носовой оконечности
корпуса о волну; 2) в водоизмещающем положении — удар но-
совой, кормовой или средней оконечностью о волну; 3) при
постановке судна иа опоры — положение корпуса на одной ио-
совой и одной кормовой опорах противоположных бортов (об-
щий изгиб и скручивание).
Во всех расчетных схемах доминирующими считают дина-
мические нагрузки. Для их определения используют прежде
всего данные экспериментов.
Вибрация корпуса. Судно, как любое упругое тело, имеет
несколько возможных форм собственных колебаний, каждая из-
которых характеризуется своей частотой. Соответственно упру-
гие колебания могут быть как свободными (под действием
однократно приложенной внешней нагрузки, например, удара
волны), так и вынужденными под действием периодических
внешних сил. Свободные колебания быстро затухают, основное
значение имеют колебания вынужденные.
Вибрация, как любой периодический процесс, характери-
зуется амплитудой и частотой колебаний.
Основные источники вибрации — главные и вспомогатель-
ные двигатели, гребной вал и виит, воздействие волн на корпус
судна. Причем гребной винт возбуждает вибрацию как с часто-
той вращения п, так н лопастной частотой пл = Zpn (см. гл. 4).
Возмущающие силы отклоняют корпус (или его отдельные
конструкции) от равновесного положения, упругие силы, воз-
никающие вследствие этого отклонения, стремятся возвратить
тело в первоначальное положение. Если частоты вынужденных
и собственных колебаний совпадают, имеет место резонанс, и
относительно небольшие по величине внешние нагрузки могут
привести к значительным колебаниям конструкции.
Вибрация может быть общей, всего корпуса, и местной, от-
дельных его перекрытий и связей.
281
Наиболее опасна местная вибрация. Она часто вызывает
усталостные повреждения в конструкциях с высокой концен-
трацией напряжений, в связях с резко меняющимся сечением,
в жестких точках и по углам надстроек и рубок.
Побочное действие вибрации — ухудшение условий работы
механизмов и устройств, а также обитаемости судна. Последнее
обстоятельство особенно важно для пассажирских судов, и его
устранению придается большое значение.
Расчеты вибрации преследуют цель определения частоты
собственных колебаний корпуса и его конструкций. Сопостав-
ляя их с частотой возмущающих сил, стремятся избежать ре-
зонанса. Уйти от него можно двумя путями: изменив конструк-
цию, т. е. частоту собственных колебаний, либо частоту возму-
щающих сил. Последний путь наиболее действенный.
Гребной винт — одни из основных источников вибрации кор-
пуса. Среди наиболее эффективных мер снижения его отрица-
тельного влияния можно назвать: изменение диаметра винта,
частоты его вращения, числа лопастей и их формы (придание
им саблевидности), выравнивания потока в дисках винтов, от-
даление их от корпуса.
8.7. Архитектурно-конструктивные типы судов
Архитектурно-конструктивный тип судиа характеризуется
его внешним обликом, положением МО по длине, типом и ко-
личеством грузовых помещений, люков, переборок, числом
палуб.
Внешний вид судна в основном определяется надводной
частью корпуса. При этом особую роль играют надстройки, их
количество, расположение и протяженность. С этих позиций
различают гладкопалубные, одно-, двух- и трехостровные суда.
Наибольшее распространение имеют два последних типа. Двух-
островиое судно, как правило, имеет одноярусную носовую над-
стройку — бак — и многоярусную кормовую — ют. Трехостров-
ное— одноярусные бак и ют и многоярусную среднюю над-
стройку. Отдельные надстройки могут сливаться, при этом
говорят, что судно имеет удлиненный бак и ют. Если над-
стройка распространяется на всю длину судна, его называют
шельтердечным. У таких судов главной является не верхняя
палуба надстроек, а вторая до которой доходят водонепрони-
цаемые переборки.
На транспортных судах МО, как правило, располагается
либо посередине, либо в кормовой оконечности, либо занимает
промежуточное положение, когда между ним н ахтерпиком на-
ходится еще один грузовой трюм (рис. 8.12).
282
Рис. 8.12. Расположение МО по дли-
не судна: а — в средней части; б —
в кормовой оконечности; в — проме-
жуточное
В средней части МО располагается только иа некоторых,
сухогрузных судах. В этом случае облегчается удифферентовка
судна, улучшается обзор с ходового мостика. Удаление жилых
помещений, от гребного винта в среднюю надстройку снижает
уровень вибрации, улучшает обитаемость. Тому же способ-
ствуют и меньшие, чем в оконечностях, вертикальные ускоре-
ния, возникающие за счет килевой качки. Однако такому рас-
положению МО присущи и существенные недостатки: заняты
самые удобные для перевоз-
ки груза помещения, значи-
тельно возрастает длина ва-
лопровода.
У современных грузовых
судов преобладает кормовое
расположение МО. Все танке-
ры имеют только такую ком-
поновку, с целью повышения
безопасности плавания грузо-
вые помещения (танки) отде-
ляются от МО специальным
коротким отсеком — коффер-
дамом, который должен быть
пустым или заполненным во-
дой. Преимущества располо-
жения МО в кормовой оконеч-
ности: увеличение грузовме-
стимости судна за счет умень-
шения объема МО, ликвидации туннелей гребиых валов, прохо-
дящих через грузовые трюмы; сокращение длины валопроводов
и соответственное снижение их массы; улучшение условий про-
ведения грузовых операций — укладки грузов в трюмах, меха-
низации погрузочно-разгрузочных работ. К недостаткам кормо-
вого расположения МО следует отнести трудности с удиффе-
рентовкой судна, особенно при плавании в балласте и при рав-
номерном размещении груза по трюмам. Кроме того, ухуд-
шаются условия управления судном (возрастает зона невиди-
мости) и обитаемости, осложняется обеспечение непотопляемо-
сти при затоплении МО.
Компромиссным является промежуточное положение МО, ко-
торому присущи как достоинства, так и недостатки двух пре-
дыдущих вариантов, но в меньшей степени. Тем не менее та-
кое расположение МО встречается относительно редко.
Архитектурно-конструктивный тип судна в основном опреде-
ляется его назначением, родом перевозимого груза и способом
выполнения грузовых работ. Все многообразие транспортируе-
мых морским путем грузов может быть сведено к четырем
категориям: наливным, генеральным, насыпным (или навалоч-
283
ным) и рефрежираторным. К наливным грузам относятся нефть
и нефтепродукты, сжиженные газы, масла, вино, химические
грузы и др. Генеральные (штучные) грузы различаются габа-
ритами, видом упаковки и т. д. Навалочные грузы могут иметь
разную плотность (руда, зерно), отличаться степенью подвиж-
ности при качке.
Идея максимального повышения рентабельности перевозки
грузов морем привела к развитию двух, на первый взгляд про-
тиворечивых, направлений — специализации и универсализации
судов. Реализация первого из них — создание крупных судов,
в максимальной степени приспособленных для наиболее эконо-
мичной перевозки определенных грузов на большие расстояния.
Эффект специализации в значительной степени снижается при
отсутствии устойчивых потоков грузов данной категории
в обоих направлениях. В этом случае целесообразно приспосо-
бить судно для перевозки н других грузов, т. е. использовать
универсальные суда. Более того, право иа жизнь обретают и
комбинированные суда, в одном направлении перевозящие жид-
кие грузы, а в другом — насыпные (например, нефтерудовозы).
Наливные суда. На сегодняшний день более половины миро-
вого тоннажа коммерческих судов приходится иа долю танке-
ров. Эти же суда характеризуются наибольшими размерами —
самый крупный из них имеет дедвейт DW = 554 тыс. т и водо-
измещение около 630 тыс. т.
Однако в последнее время особо крупнотоннажные тан-
керы не строят в первую очередь из-за того, что эти суда
имеют очень большую осадку. Так, у упоминавшегося «Батил-
луса> в полном грузу она составляет Т = 28,6 м. Для приема
таких танкеров нужны специальные порты; для них закрыты
каналы, некоторые проливы и даже моря. Определенную роль
играют и экономические факторы — необходимость использова-
ния дорогостоящих сталей повышенного сопротивления для
обеспечения достаточной прочности корпуса, а также масштабы
возможных экологических последствий катастроф в случае
аварий.
В связи с изложенным в последние годы преобладают за-
казы на постройку танкеров водоизмещением до 100 тыс. т, ко-
торые в грузу могут проходить через Суэцкий канал и заходить
в сравнительно мелководные порты (осадка этих судов не пре-
вышает 12—14 м).
Все танкеры имеют кормовое расположение МО, которое
должно быть надежно изолировано от грузовых танков. На-
ряду с коффердамами этой цели могут служить насосные отде-
ления и балластные цистерны. Продольные и поперечные пере-
борки образуют отделенные друг от друга грузовые помеще-
ния— танки. Для обеспечения возможности одновременного
провоза разнородного жидкого груза эти переборки должны
284
быть нефтегазонепроиицаемыми. Минимальное количество и
расположение продольных и поперечных переборок регламен-
тируется правилами различных классификационных обществ.
Последние в своих требованиях учитывают рекомендации Меж-
дународной конвенции по предотвращению загрязнения с су-
дов МАРПОЛ (от английского Marine Pollution — MARPOL).
Все положения этой конвенции и соответствующих Правил Ре-
гистра, относящиеся к нефтеналивным судам, направлены на
защиту вод Мирового океана от загрязнений нефтью и нефте-
продуктами. В частности, они требуют установки на танкерах
двойного диа и двойных бортов, что сводит к минимуму воз-
можность вылива груза при авариях. Выполненние требований
конвенции МАРПОЛ приводит, кроме того, к увеличению ко-
личества танков на судах дедвейтом более 150 тыс. т, а следо-
вательно, и к увеличению массы корпуса, усложнению грузо-
вых систем н удорожанию постройки судна на 5—8%. В то
же время большое количество продольных и поперечных пере-
борок снижают отрицательное влияние свободной поверхности
жидкого груза на остойчивость (см. гл. 2), повышают безопас-
ность плавания.
Перечисленные выше особенности формируют архитектур-
ный тип современных танкеров. На рис. 8.13 представлена
схема бокового вида н поперечного сечення отечественного
среднетониажного танкера типа «Победа» (£Х ВХ Н "КТ =
= 228 X 32,2 X 18,0 X 13,6 м; 0 = 84 500 т). В районе грузовых
танков судно имеет двойное дно и двойные борта, продольную
гофрированную переборку в ДП. Кроме выполнения своей
основной функции — уменьшения вероятности вылива нефти
при повреждениях, двойные борта и дно значительно улучшают
условия мойкн грузовых танков (набор установлен со стороны
балластных цистерн), а также способствуют снижению расхода
топлива на подогрев перевозимого груза, так как танки отде-
лены воздушной прослойкой от забортной воды.
Газовозы. В последнее время в мировом потреблении топ-
лива существенно возросла доля природного и попутного газов.
Мировое судостроение на эту тенденцию откликнулось созда-
нием специальных судов — газовозов. По своей конструкции
газовозы являются сложными судами, что, в частности, объяс-
285
няется необходимостью перевозить токсичные газы в сжижен-
ном состоянии (в условиях повышенного давления либо пони-
женной температуры) и требованиями обеспечения пожаро- и
взрывобезопасности, экологической чистоты.
Особенность газовозов — использование для перевозки груза
специальных цистерн, встраиваемых в основной корпус. Эти
цистерны могут иметь цилиндрическую, сферическую*
(рис. 8.14), призматическую форму.
Для предотвращения утечки газа в случае повреждения гру-
зовых емкостей при авариях газовозы должны иметь двойное
Рнс. 8.14. Газовоз со сферическими цистернами: а —боковой вид;
б — сечение по трюму
дно н двойные борта. Емкости для газа, располагающиеся
внутри судна, изолируют от обшивки и набора основного кор-
пуса. Создается так называемый вторичный барьер — проме-
жуточные временные емкости, куда в первую очередь попадает
сжиженный газ в случае утечки из основной емкости.
Значительные объемы в подпалубном пространстве газово-
зов занимают изоляция и другие специальные системы и кон-
струкции, предназначенные, в частности,’ для поддержания
в цистернах низких температур. Это обстоятельство наряду
с невысокой плотностью груза (р = 0,47 Ч- 0,70 т/м3) приводит
к необходимости увеличения надводного борта. Так, для газо-
возов отношение высоты борта к осадке может составлять
Н/Т = 1,3 -т- 1,5 н более. Особенности конструкции судов этого
типа, необходимость использования для их постройки дорогих
материалов (нержавеющая н другие качественные стали) при-
водит к тому, что стоимость газовозов почти в три раза пре-
вышает стоимость танкеров таких же размеров.
Суда для массовых грузов. Под термином массовые грузы
принято понимать насыпные н навалочные грузы, перевозимые
на судах без тары. К ним относятся: железная руда, каменный
уголь, химические удобрения, бокситы, зерно. В последнее
время все чаще без тары перевозят сахар и цемент. Иногда
суда данного типа называют навалочными, или навалочниками.
К узкоспециализированным судам для перевозки массовых
грузов относятся рудовозы, бокситовозы, углевозы, цемен-
товозы.
286
Своеобразное конструктивное оформление рудовозов
{рис. 8.15) объясняется особенностями грузов и грузообра-
ботки, также требованиями общей и местной прочности. Руда
и рудные концентраты обладают большой плотностью, а неко-
торые концентраты способны переходить в разжиженное со-
стояние. Погрузка и выгрузка должны осуществляться грейфе-
рами, без применения внутритрюмных машин. Часто суда за-
гружены лишь в прямом рейсе, а возвращаться вынуждены по-
рожнем. Перечисленное выше, а также необходимость обеспе-
Рнс. 8.15. Рудовоз водоизмещением D = 75 тыс. т: а — боковой вид;
б — сеченке по трюму
чения удовлетворительных мореходных качеств сформировали
современный архитектурно-конструктивный рудовозный тип.
Это — однопалубные суда с кормовым расположением МО,
двойными бортами, образованными двумя продольными пере-
борками, и двойным дном, значительно поднятым по сравнению
с другими сухогрузными судами. Длинные трюмы, широкие
большой протяженности люки вместе со специальными скосами
в ннжней части трюмов вдоль продольных и поперечных пере-
борок способствуют облегчению и ускорению разгрузочных ра-
бот. Ту же цель преследует и размещение набора в междуборт-
ном пространстве. Для уменьшения опасности перемещения
груза н возникновения больших кренящих моментов в верхней
части трюма также делают специальные скосы, способствующие
разравниванию руды в процессе погрузки и транспортировки.
Междубортное пространство и отсеки двойного дна на ру-
довозах используют для размещения балласта и судовых запа-
сов. Низкое расположение центра тяжести приводит к избыточ-
ной остойчивости и резкой качке (см. гл. 5). В верхней части
междубортного пространства иногда располагают относительно
небольшие подпалубные балластные цистерны, заполнение ко-
торых благоприятно сказывается на качке, особенно при ходе
в балласте.
Архитектурно-конструктивный тип других узкоспециализиро-
ванных судов, бокситовозов и углевозов, принципиально мало
чем отличается от описанного выше. Особенностью является
меньшая, чем у руды, плотность груза, а следовательно боль-
шие объемы грузовых помещений и меньшие размеры между-
бортных и междудонных балластных цистерн.
287
С тем, чтобы в наибольшей степени расширить транспортные
возможности, были созданы универсальные суда для массовых
грузов — УСМГ. С одной стороны, они являются специализиро-
ванными, так как предназначены для транспортировки только
массовых грузов, а с другой — это универсальные суда, способ-
ные перевозить любые массовые грузы с почти одинаковой
эффективностью.
Из этих предпосылок вытекают и требования к УСМГ:
объем грузовых помещений должен быть достаточным для пе-
ревозки различных массовых грузов, от тяжелой руды до лег-
кого зерна; колебания остойчивости при этом должны быть
Рнс. 8.16. Универсальное судно для массовых грузов с трюмами различ-
ной длины: а — боковой вид; б — сечение по трюму
минимальными, а значения изгибающих моментов не выходить
за пределы, гарантирующие умеренную массу корпуса.
Характерными особенностями таких судов является нали-
чие минимального двойного дна, скуловых и подпалубных бал-
ластных цистерн (рис. 8.16).
Для улучшения остойчивости УСМГ часто используется че-
редующаяся, через один, загрузка трюмов тяжелым грузом.
При этом трюмы заполняются значительно выше, чем при рав-
номерной нагрузке, центр тяжести повышается, метацентриче-
ская высота снижается (гл. 2), а период качки увеличивается
(гл. 5). Кроме того, такая загрузка упрощает удифферентовку
судна без приема балласта. В еще большей степени эти преиму-
щества могут быть реализованы путем применения трюмов раз-
ной длины: предназначенные для руды делают более коротки-
ми, чем смежные (см.рис.8.16). Однако чередующаяся загрузка
приводит к существенному росту изгибающего момента и пере-
резывающих сил. С увеличением количества трюмов этот отри-
цательный эффект несколько сглаживается. Соответственно
УСМГ имеют большое количество грузовых помещений, число
которых зависит от размеров судна и составляет п = 5(Оо>^
20 тыс. т), n = 7(Da>^40 тыс. т) и п = 9 4- 11 (Dw >
> 40 тыс. т).
Комбинированные суда предназначаются для перевозки на-
ливных, в основном нефти и нефтепродуктов, и массовых гру-
зов. Эти суда проектируют так, чтобы при транспортировке
288
разнородных грузов полностью использовать их грузоподъем-
ность. Архитектурно-конструктивный тип этих судов мало от-
личается от такового навалочных, а масса корпуса несколько
выше вследствие установки дополнительных систем и устройств.
Универсальные сухогрузные суда (УСС). К этой категории
принадлежит самая многочисленная группа сухогрузных судов
мирового флота. Степень универсальности этих судов зависит
от их прочностных характеристик и оборудования грузовых по-
мещений. Обычно универсальные суда строят для определен-
ных категорий грузов. Так, линейные суда (лайнеры) в основ-
ном предназначены для перевозки различных генеральных гру-
Рис. 8.17. Многоцелевое судно: а — варианты модификации фор
мы трюма: б — генеральный груз; в — насыпной груз
зов на определенных линиях, на многих из иих имеются рефри-
жераторные камеры, а трюмы и палуба приспособлены для
установки контейнеров. Трамповые суда (трампы) чаще всего
перевозят массовые и лесные грузы на переменных направле-
ниях. По размерам УСС уступают и навалочным судам и, тем
более, танкерам — их водоизмещение, как правило, не превы-
шает D = 20 -т- 25 тыс. т.
Дальнейшим развитием УСС являются появившиеся в по-
следнее время многоцелевые сухогрузные суда, в которых соче-
таются характерные черты н конструктивные особенности и спе-
циализированных судов, и универсальных. Их приспосабливают
для перевозки стандартных контейнеров, часть из них обору-
дуют для транспортировки колесной техники, тяжеловесных и
крупногабаритных грузов, а также массовых грузов. На
рнс. 8.17 приведены примеры вариантов загрузки многоцеле-
вого судна. Закрытия грузовых люков на нижней палубе вы-
полнены так, что в открытом положении они формируют трюм,
приспособленный для массового груза (рис. 8.17,а,б).
Улучшению условий погрузочно-разгрузочных работ в значи-
тельной степени способствует максимальное раскрытие палубы,
т. е. увелнчеинне грузовых люков до таких размеров, чтобы
можно было производить грузовые операции непосредственно
краном, не прибегая к подтягиванию, переноске либо подгреба-
нию груза. Суда, на которых реализуется этот принцип, полу-
193415
289
чили название открытых. У таких судов люки занимают боль-
шую часть площади палубы.
Из конструктивных соображений ширина люка обычно огра-
ничивается величиной b т 12 м, превышение которой приводит
к резкому увеличению массы люковых крышек. Соответственно
на крупных судах для необходимого раскрытия палубы устраи-
вают парные люки. В этом случае упрощается решение задачи
общей прочности судна, в обеспечении которой участвует также
средний участок палубы, расположенный между рядами люков.
Рис. 8.18. Варианты расположения люков на открытых судах: а — одно-
рядные; б — трехрядные; в — парные; г — двухрядные поперечные
На очень широких судах возможно и трехрядное расположение
люков либо поперечное двухрядное (рнс. 8.18).
Особенности открытых судов сказываются как иа конструк-
ции их корпуса, так и на внешних обводах. Бортовые цистерны
и продольные переборки на судах с парными и тройными лю-
ками улучшают грузовые помещения, приближая их форму
к прямобортной. Это обстоятельство, а также расположение на-
бора в междубортном пространстве существенно облегчают
проведение грузовых операций. Продольные переборки, кроме
того, способствуют обеспечению необходимой прочности, как
общей (за счет участия в общем изгибе), так и местной (за
счет создания промежуточных опор палубным и днищевым пе-
рекрытиям).
Изменение внешних обводов открытых судов выражается
в том, что борта в надводной части иногда делают наклонными.
Этот так называемый развал борта способствует при неизмен-
ных размерениях судна по ватерлинии увеличению ширины
палубы и объема бортовых и подпалубных балластных цистерн,
используемых при ходе порожнем для снижения избыточной
остойчивости. В полном грузу, наоборот, повышается остойчи-
вость на больших углах крена. На рис. 8.19 приведена схема
поперечного сечения открытого судна, иллюстрирующая опи-
санные выше особенности.
Суда для перевозки укрупненных унифицированных грузов.
Стремление максимально снизить простои судов в портах за
счет наиболее полной механизации грузовых операций привело
290
к идее строгой унификации грузовых мест. При этом форма и
размеры всех перевозимых на судне мест одинаковы и неиз-
менны, независимо от характера перевозимого груза. В наи-
более полной мере этот принцип воплотился в судах-контейне-
ровозах, предназначенных для транспортировки стандартных
контейнеров.
Последние представляют собой многократно используемую
тару, выполненную в виде прочного, как правило металличе-
ского, ящика с одной или несколькими дверями. Существуют
ными люками
Рис. 8.20. Размеще-
ние контейнеров в
трюме и на палубе
контейнеровоза
и каркасные контейнеры без обшивки, внутри которых разме-
щаются (с соответствующим креплением) легковые автомо-
били, цистерны с жидким грузом и т. д.
Начиная е 1964 г. в соответствии с рекомендацией Между-
народной организации по стандартизации размеры контейнеров
строго унифицированы, что позволяет проводить их обмен при
международных перевозках. Так, контейнеры 1-й группы имеют
одинаковое поперечное сечение (8-8 фут = 2,44-2,44 м) и
длину от 10 фут (3,05 м) до 40 фут (12,2 м). Наибольшая
масса контейнера с грузом не превышает 30 т.
Конструктивные особенности контейнеровозов определяются
условиями перевозки грузов и требованием всемерного ускоре-
ния грузовых операций. Они имеют полное раскрытие палубы,
минимальные подпалубные карманы, а также специальные на-
правляющие каркасы в трюмах. Последние создают ячеистую
структуру грузовых помещений, рассчитанную на вертикальную
погрузку и выгрузку контейнеров, при которых исключаются их
горизонтальные перемещения. Как правило, контейнеровозы
однопалубные, порой с двойными бортами суда; ширина люков
у них достигает 80—85 % ширины судна, а сами люкн могут
быть одиночными, парными или строенными. Для облегчения
перевозки контейнеров на палубе она не должна иметь погиби
бимсов и седловатости. Высокий полубак защищает палубный
19* 291
груз от заливаемости. В трюмах контейнеры устанавливают
в пять-шесть ярусов, на палубе — в два-четыре (рис.8.20).Чаще
всего контейнеровозы имеют кормовое либо промежуточное рас-
положение МО. Для увеличения грузоподъемности кон-
тейнеровозов целесообразно в междудонном и междубортном
пространстве перевозить и наливные грузы.
В качестве унифицированных грузовых мест могут служить
и лихтеры, т. е. несамоходные баржи различных размеров. Са-
мые крупные имеют массу до 1000 т, их главные размерения
L X ВХ Т — 20,7 X Ю,7 X 5,3 м. Благодаря простейшей форме
понтона, зачастую прямоугольной и прямостенной, уменьшается
Рис. 8.21. Лихтеровоз с вертикальной погрузкой лихтеров: а —
боковой вид; б — сечение по трюму
1 — лихтер; 2 — козловой кран
стоимость изготовления лихтеров, облегчается размещение
в них груза, а также и самих лихтеров на специальных судах —
лнхтеровозах. Груженые лихтеры принимают на борт с воды и
выгружают тоже на воду. Грузовые операции осуществляются
судовыми средствами — специальными стрелами, кранами либо
лифтами. Если масса лихтеров превышает 250—300 т, то их
погрузка проводится с кормы. Обородуование лихтеровоза коз-
ловыми кранами, выходящими на консоли в корме и переме-
щающимися по проложенным вдоль бортов рельсам, позволяет
вести вертикальную погрузку лихтеров в трюмы, а также на
закрытия люков. Конструкция лихтеров предусматривает уста-
новку их друг на друга в несколько ярусов (рнс. 8.21). Лихте-
ровозы описанного типа получили название ЛЭШ (от англий-
ского Lighter Aboard Ship (LASH) — лихтер на судне). Это
однопалубные суда с двойными бортами и полностью открытой
палубой. Поперечные переборки выделяют трюмы, в которые
устанавливают лихтеры таким образом, что длинная их сто-
рона перпендикулярна ДП судна. Лихтеровозы — одни из не-
многих судов, у которых МО может располагаться в носовой
оконечности судна (рис. 8.21). Там же в таком случае нахо-
дятся жилые и навигационные помещения.
292
Существуют лихтеровозы и другого типа — с горизонталь-
ным способом погрузки лихтеров. Их поднимают с воды кормо-
вым лифтом, перемещают на тележки, а затем с помощью ле-
бедок затягивают к местам установок. Соответственно изме-
няется и конструкция таких судов — они имеют две-трн
палубы, на которых в один ярус располагаются лихтеры; попе-
речные переборки прн этом отсутствуют.
Для транспортировки грузов крупными местами исполь-
зуются и суда с горизонтальной грузообработкой (накатные
суда или суда ро — ро), предназначенные для перевозки ко-
лесной техники, которая загружается своим ходом, либо гру-
зов, доставляемых на судно с помощью специальных самоход-
ных погрузочных машин.
В зависимости от рода перевозимого груза эти суда значи-
тельно отличаются друг от друга по архитектурно-конструктив-
ному типу. Общие черты: большое количество палуб, в том
числе иногда и подвесных, отсутствие в грузовых помещениях
поперечных переборок. Грузовые операции на этих судах осу-
ществляются через расположенные в носу, борту или корме
вырезы по специальным сходням, называемым аппарелями.
Кроме того, для распределения груза между палубами судна
используются лифты, подъемники и внутрисудовые аппарели.
В связи с ростом потребности в транспортировке водными
путями особотяжелых и крупногабаритных грузов в последнее
время создаются специальные суда. Их архитектурно-конструк-
тивный тип определяется характеристиками отдельных недели-
мых грузов, масса которых изменяется от 100 до 3000 т.
В частности, некоторые из подобных судов могут перевозить на
палубе самоподъемные плавучие буровые установки.
Пассажирские суда. При строительстве этих судов основное
внимание уделяется двум вопросам: созданию пассажирам наи-
лучших условий обитания и обеспечению безопасности их пла-
вания.
Первая цель достигается за счет всемерного увеличения
площади жилых и общественно-бытовых помещений для пас-
сажиров, вторая — за счет подразделения судна на отсеки,
снабжения его средствами противопожарной защиты, совре-
менным спасательным оборудованием.
Все эти требования формируют артнтектурно-конструктив-
ный тип пассажирских судов. Это многопалубные суда, с удли-
ненным, простирающимся почти до кормы баком, многоярус-
ными большой протяженности надстройками и рубками, сред-
ним расположением МО.
Широкое распространение находят автомобильно-пассажир-
ские паромы, предназначенные также для перевозки колесной
техники, в основном легковых и грузовых автомобилей. Внешне
эти суда практически не отличаются от пассажирских; их кон-
293
струкция имеет много общего с накатными судами. Автомобили
въезжают на паром по аппарелям через грузовые ворота в око-
нечностях либо бортовые лацпорты. Размещается колесная тех-
ника на одной или нескольких палубах, часть из которых могут
1M8I Ц
Рис. 8.22. Автомобильно-пассажирский паром: а — боковой
вид; б —сечение по грузовому помещению
1 — помещение для автомобилей
быть съемными. Представление о конструкции автомобильно-
пассажирского парома дает рнс. 8.22.
Архитектурно-конструктивный тип высокоскоростных пасса-
жирских судов с динамическим поддержанием сложился в пря-
мой зависимости от их назначения и особенностей эксплуа-
тации.
Рис. 8.23. Судно на подводных крыльях: а — боковой вид; б —
сеченне в районе пассажирского салона
1 — помещение для пассажиров
Так, уже упоминавшееся отечественное СПК «Комета» при-
нимает на борт 118 пассажиров, размещающихся в трех сало-
нах в креслах авиационного типа. Салоны расположены выше
палубы переборок, которыми корпус разделен на 13 отсеков.
МО занимает промежуточное положение, ходовая рубка обте-
каемой формы смещена в нос, что улучшает обзор (рис. 8.23).
Стремительность линий корпуса подчеркивает кормовой стаби-
лизатор, который кроме чисто декоративных функций выпол-
няет еще и более прозаическую роль — несколько повышает
управляемость судна.
294
При проектировании судов на воздушной подушке в основ-
ном придерживаются тех же принципов: обеспечение хорошего
обзора, максимальное снижение шума и вибрации в помеще-
ниях для пассажиров н экипажа. Все это, наряду с выполне-
нием требований прочности, зачастую приводит к расположе-
нию МО в корме, пассажирского салона — в средней части,
а ходовой рубки в носовой оконечности судна. Пример такого
расположения иллюстрирует рис. 8.24, на котором представлена
Рис. 8.24. Скеговое судно иа воздушной подушке: а —боковой
внд; б — сеченне по пассажирскому салону (?)
схема бокового вида н поперечного сечения отечественного мор-
ского СВПС типа «Чайка».
8.8. Системы набора и конструктивные элементы корпуса
Корпус судна — тонкостенная коробчатая балка, образован-
ная обшивкой и подкрепляющим ее набором. Отдельные эле-
менты корпуса — перекрытия — представляют собой близкие
к плоскостным конструкции, составленные листами обшивки
и балками набора. Участки обшивки, опирающиеся на балки,
имеют прямоугольную форму. Если эти прямоугольники ориен-
тированы длинной стороной вдоль судна, то такая система на-
бора называется продольной, если поперек него, то поперечной
(рис. 8.25). В том случае, если форма пластин близка к ква-
дратной, говорят, что система смешанная.
Балки, входящие в состав перекрытия, принято подразделять
на балки главного направления и нормальные к ним перекрест-
ные связи. При поперечной системе набора балки главного на-
правления расположены в плоскости шпангоута; расстояние
между ними называется поперечной шпацией. При продольной
системе набора соответственно балками главного направления
являются продольные связи, расстояние между ними — про-
дольная шпация. В каждой системе набора перекрестные
связи, расстояние между которыми всегда больше шпации, слу-
жат промежуточными опорами для балок главного направле-
ния. Выбор системы набора определяется тем, какие нагрузки
у конструкции превалируют — от общего или местного изгиба.
295
В том случае, когда перекрытие вносит большой вклад в обес-
печение общей прочности, а работа его сопряжена с возмож-
ностью потери устойчивости, предпочтение отдается продольной
системе набора. Поперечная система целесообразна для пере-
крытий, противостоящих преимущественно местным нагрузкам.
Большое распространение получила комбинированная си-
стема набора, предложенная академиком Ю. А. Шиманским.
Эта система сочетает в себе достоинства обеих предыдущих:
Рнс. 8.25. Схема перекрытий с поперечной (а) н продольной (б)
системой набора
1 — перекрестные связи; 2 — балки главного направления
палубные и днищевые перекрытия набираются по продольной
системе, а бортовые—по поперечной. Первые два образуют
пояски эквивалентного бруса (см. § 8.2) и воспринимают основ-
ную нагрузку от общего изгиба, последнее, бортовое, подвер-
жено воздействию льда, давлению забортной воды. Практиче-
ски у всех судов оконечности набираются по поперечной си-
стеме. Что касается средней части корпуса, то у относительно
небольших сухогрузных судов (L < 100 м) для всех перекры-
тий часто используется поперечная система набора. Крупные
сухогрузные и наливные суда длиной L 180 м обычно имеют
комбинированную систему набора. Все перекрытия у танкеров
большой длины,- как правило, набираются по продольной си-
стеме.
У малых судов толщина листов обшивки во многом опреде-
ляется технологическими факторами, а также предполагаемым
износом. При этом обеспечивается устойчивость пластин, сжи-
маемых вдоль короткой кромки, т. е. поперечная система на-
бора палубного и днищевого перекрытия удовлетворяет требо-
ваниям общей прочности. Использование стали повышенной
прочности, а также снижение удельной роли добавки на износ
приводят к тому, что у крупных судов относительная толщина
обшивки уменьшается и необходимую устойчивость перекрытий,
296
работающих на сжатие при общем изгибе, удается обеспечить,
только применяя продольную систему набора.
Представление о конструкции перекрытий, форме и взаим-
ном расположении отдельных связей, типах соединения их
между собой дает поперечное сечение корпуса судна (рис. 8.26).
Рве. 8.26. Поперечное сечение корпуса судна (пояснения
в тексте)
Совокупность листов внешней оболочки, образующих нижнюю
и боковую поверхности корпуса, принято называть обшивкой
(соответственно днищевой и бортовой). Что касается горизон-
тально расположенных листов, то их называют настилами: па-
лубный настил, настил двойного дна.
Отдельные листы обшивки днища 17 (рнс. 8.26), борта 21,
настила верхней палубы 6 усилены, т. е. имеют большую, по
сравнению с соседними, толщину. Это проявляется, в частности,
в том, что им присвоены собственные названия: горизонтальный
297
киль 14, скуловой пояс 18, ширстрек 23, палубный стрингер 3,
крайний междудонный лист 19. Двойное дно сверху ограничено
настилом 12, который совместно с обшивкой днища, балками
главного направления — вертикальным (усиленным) килем 13
н днищевыми стрингерами 16, а также перекрестными свя-
зями— флорами 15 — образует днищевое перекрытие. Для облег-
чения конструкции некоторые флоры и днищевые стрингеры
имеют большие вырезы. Это практически не снижает несущей
способности перекрытия, поскольку отверстия располагаются
в районе нейтральных осей продольных и поперечных связей.
Балки бортового набора 20 носят название шпангоутов, по-
перечные балки, подкрепляющие настнлы палуб — бимсов
(главной, верхней 5, нижней И). Находящиеся в одной плоско-
сти шпангоуты, бимсы и флоры составляют шпангоутную раму.
Продольные подпалубные балки 4 — балки главного направ-
ления палубного перекрытия, перекрестными связями для них
служат бимсы 5. Коммингсы 7 и 9 ограждают люки верхней
и нижней 8 палубы соответственно. Кницы 22 и бракеты 10
служат для соединения элементов набора корпуса. Стрингер-
ный угольник 24 усиливает соединение ширстрека 23 с палуб-
ным стрингером 3. В плоскости бортов на палубе устанавли-
вается специальная ограждающая конструкция — фальшборт,
состоящий из обшивки 25, верхней обделочной полосы — план-
шира 1 и подкрепляющих вертикальных стоек 2.
В рассматриваемом примере (рис. 8.26) верхняя палуба
и днищевое перекрытие набраны по продольной системе на-
бора, борта и нижняя палуба — по поперечной. Таким образом,
для судна в целом использована комбинированная система на-
бора. Такие конструкции характерны, в частности, для универ-
сальных сухогрузных судов.
8.9. Конструкция перекрытий и других элементов корпуса
Днищеное перекрытие. Оно воспринимает растягивающие и
сжимающие напряжения от общего продольного изгиба, а так-
же напряжения, вызываемые местными нагрузками. На отно-
сительно небольших сухогрузных судах (L < 80 м) и на мно-
гих танкерах днищевое перекрытие не имеет второго дна. На
всех сухогрузных судах большей длины, на газовозах и на
крупных танкерах днищевое перекрытие сверху закрывается
настилом второго дна. На современных транспортных судах на-
ружная обшивка днища в средней части делается горизонталь-
ной, килеватость появляется только в оконечностях. Настил
второго дна на всей длине от форпика до ахтерпика также го-
ризонтален— это создает удобства при укладке груза и обслу-
живании трюмов. Налииче двойного дна повышает и безопас-
298
ность плавания судна, препятствуя распространению воды
в случае пробоины в днище. При выборе высоты двойного дна,
расстояний между остальными элементами перекрытия учиты-
вается и необходимость доступа ко всем конструкциям для
осмотра, ремонта и окраски.
Конструкция днищевого перекрытия с двойным дном, выпол-
ненного по поперечной системе набора, представлено на
рис. 8.27. Балки главного направления — флоры, могут быть
Рис. 8.27. Днищевое перекрытие, по-
перечная система набора: а — сплош-
ной непроницаемый флор; б —сплош-
ной проницаемый флор; в — откры-
тый бракетный флор
/ — вертикальный киль; 2 —стрингер; 3 —
междудонный лист; 4 — ребро жесткости;
S — бракета
Рис. 8.28. Днищевое перекрытие, про-
дольная система набора
о о о
ООО
сплошными и открытыми, первые, в свою очередь, бывают про-
ницаемыми и непроницаемыми, выгораживающими междудон-
ные отсеки. Типы флоров, расстояния между ними регламенти-
руются Правилами Регистра в зависимости от размеров судна,
его назначения, расположения днищевого перекрытия (в око-
нечностях, в средней части, в районе МО) и т. д. Междудонный
лист устанавливается либо по нормали к обшивке в районе
скулы (рис. 8.27), либо горизонтально (см. рис. 8.26).
При продольной системе набора (рис. 8.28), днищевое пере-
крытие наряду с описанными выше элементами содержит про-
дольные ребра жесткости, установленные в одной вертикальной
плоскости по наружной обшивке и настилу второго дна. Сплош-
ные флоры, выполняющие роль перекрестных связей, распола-
гаются на каждом третьем шпангоуте, в них делаются вырезы
для прохода продольных ребер жесткости. Когда эти ребра
проходят через водонепроницаемый флор, то вырезы в послед-
нем заделываются путем приварки специальных планок. Допу-
скается разрезать продольные ребра жесткости, в этом случае
к непроницаемым флорам и переборкам они крепятся с по-
мощью книц или бракет.
Иногда на сухогрузных судах применяется стрингерная
система набора. При этом каждая пара продольных ребер
жесткости, расположенных в одной вертикальной плоскости,
299
заменяется сплошным днищевым стрингером. Пример такого
перекрытия представлен на рис. 8.26.
Палубные перекрытия. Как и днищевые, палубные перекры-
тия вносят основной вклад в обеспечение общей продольной
прочности. Кроме того, они воспринимают и местные нагрузки:
силу тяжести палубного груза, давление воды при заливании
судна во время шторма, льда— в случае его обмерзания.
При поперечной системе набора, применяемой только на
сравнительно небольших судах, балками главного направления
палубного перекрытия являются бимсы, перекрестными свя-
зями— карлингсы, усиленные продольные балки, простираю-
щиеся на всю длину отсека и привариваемые к поперечным
переборкам. Как правило, карлингсы продолжают коммингсы
люков, образуя вместе с ними непрерывные продольные связи.
При большой длине грузового трюма в углах люков могут
устанавливаться пиллерсы — вертикальные стойки трубчатого
сечения. Однако пиллерсы существенно затрудняют грузовые
операции в трюмах, поэтому в последнее время они практиче-
ски не используются.
При продольной системе набора балками главного направ-
ления служат продольные подпалубные ребра жесткости, ко-
торые располагаются в одной вертикальной плоскости с дни-
щевыми продольными балками и вертикальными стойками по-
перечных переборок. В результате создаются замкнутые про-
дольные рамы, которые во всех четырех углах подкрепляются
кницами.
Промежуточными опорами, перекрестными связями для про-
дольных подпалубных балок служат рамные бнмсы, которые
устанавливают не на каждом шпангоуте. Конструкция палуб-
ного перекрытия, набранного по продольной системе, представ-
лена на рис. 8.26. Настил верхней палубы усиливают в месте
стыковки с бортом (палубный стрингер), а также в районе
углов вырезов — грузовых люков. Палубный стрингер с шир-
стреком соединяют либо сваркой впритык, либо с помощью
стрингерного угольника, на заклепках. В этом случае закле-
почное соединение служит барьерным швом, препятствующим
появлению н распространению трещин. Ннжние палубы, кото-
рые располагаются в районе нейтральной оси и практически
не принимают участия в общем изгибе, обычно набирают по по-
перечной системе (см. рис. 8.26).
В отличие от палуб, распространяющихся по всей длине
судна, горизонтальные перекрытия, устанавливаемые в преде-
лах одного отсека (илн его части) называют платформами.
Они воспринимают только местную нагрузку, поэтому наби-
раются обычно по поперечной системе. Эта система хороша,
в частности, тем, что все балки главного направления, бимсы,
имеют одинаковую высоту, что улучшает условия размещения
300
генерального груза и проведения грузовых операций в трюме
и твиндеке.
Бортовые перекрытия. Они связывают между собой палуб-
ные н днищевые перекрытия, обеспечивая их совместную ра-
боту при общем продольном изгибе. Хотя бортовые перекрытия
и воспринимают перерезывающие силы от общего изгиба, в ка-
честве расчетной для них обычно принимают местную попереч-
ную нагрузку. Бортовые перекрытия сухогрузных судов при
относительно небольшой высоте имеют
значительную протяженность в продоль-
ном направлении. В этом случае попе-
речная система нвбора с вертикальными
балками главного направления наибо-
лее целесообразна для обеспечения ме-
стной прочности. Эти балки, шпангоуты,
устанавливаются на каждой шпации и
по концам опираются на днищевое и
палубное перекрытия. Такие шпангоуты
зачастую обеспечивают достаточную
жесткость всего борта, даже без пере-
крестных связей. Подобная конструкция
бортового перекрытия (см. рис. 8.26)
удобна с точки зрения размещения гру-
зов и проведения грузовых операций
в трюмах сухогрузных судов. При боль-
шой глубине трюмов может возникнуть
необходимость в промежуточных опо-
рах, тогда вдоль борта прокладывают
продольные балки — бортовые стрин-
геры, выполняющие роль перекрестных
связей. При этом в трюмах сухогруз-
5
Рис. Рис. 8.29. Попереч-
ное сечение корпуса тан-
кера по бортовому от-
секу
1 — ранный шпангоут; 1 —
рамный бимс; 3 — рамная
стойка продольной перебор-
ки; 4 — продольная перебор-
ка; 5 —флор; 6 — настил
двойного дна
ных судов стремятся применять так
называемую монотонную систему набора, когда шпангоуты и
стрингеры имеют одинаковую высоту, что удобно при проведе-
нии грузовых операций.
Пример бортового перекрытия, набранного по продольной
системе набора, — рис. 8.29, на котором приведено поперечное
сечение корпуса крупного танкера, имеющего двойное дно. Об-
шивка борта подкреплена горизонтальными продольными реб-
рами, непрерывно идущими по всей длине судна, исключая
оконечности. Продольную переборку проектируют совместно
с бортом — продольные ребра жесткости устанавливают в од-
ной плоскости с бортовыми. В этой же плоскости на попереч-
ных переборках, ограничивающих отсек, размещают горизон-
тальные ребра жесткости. Подкрепленные в местах соединения
кницами, все эти ребра образуют горизонтальную рамку, обес-
печивающую конструкции необходимую прочность. Продольный
301
и поперечный набор на переборке установлен со стороны бор-
тового танка, соседний трюм свободен от набора, что облегчает
проведение в нем грузовых операций, его зачистку. Перекрест-
ные связи — рамные шпангоут, бимс, стойка продольной пе-
реборки н флор, соединенные кницами, — создают шпангоут-
ную рамку, являющуюся промежуточной опорой для продоль-
ных балок главного направления.
Конструкция переборок. Подразделение судна иа водонепро-
Рис. 8.30. Форма гоф-
ров переборок: а —
трапециевидная; б —
волнистая
ницаемые отсеки проводится с помощью главных продольных
и поперечных переборок. Они также уча-
ствуют в обеспечении общей и местной
прочности судна. Количество переборок
определяется Правилами Регистра и за-
висит от размеров н назначения судна.
Водонепроницаемые продольные пере-
борки, устанавливаемые по всей длине,
применяют, как правило, только на танке-
рах. Одно нз назначений таких перебо-
рок— снижение отрицательного влияния
на поперечную остойчивость свободной по-
верхности жидкого груза (см. гл. 2).
Полотнище переборки набирают из го-
ризонтально ориентированных листов, тол-
щина которых убывает с высотой. Рас-
четным для переборки является давление
воды в заполненном отсеке. Выбор набора
определяется как соотношением разме-
ров переборки, так и системой набора корпуса судна в целом,
о чем говорилось выше.
Продольные и поперечные переборки, устанавливаемые на
настил двойного дна, в вертикальной плоскости должны про-
должать соответственно водонепроницаемый стрингер нли
флор.
Водонепроницаемая переборка может быть гофрированной.
У продольной переборки гофры должны располагаться гори-
зонтально, поперечные переборки могут иметь горизонтальные
либо вертикальные гофры. Последние могут иметь трапецие-
видную или волнистую форму (рнс. 8.30). Стенки гофров
в определенной степени заменяют ребра жесткости соответ-
ствующего направления, поэтому гофрированные переборки
легче плоских иа 20—25 %. Считается, что и трудоемкость их
изготовления также ниже на 10—15%. Широкое применение
гофрированные (штампованные) конструкции находят в на-
ружных и внутренних элементах надстроек и рубок.
Особенности конструкции корпуса в районе МО. Высокая
энерговооруженность современных судов накладывает отпеча-
ток на их конструкцию, особенно в районе машинного отделе-
302
ния (МО), где располагаются главные двигатели и большая
часть вспомогательных механизмов. Кроме сил тяжести, на
днищевое перекрытие в МО действуют большие инерционные
нагрузки, вызываемые качкой судна, оголением гребного винта
и «разносом» двигателя и другими причинами. Для обеспече-
ния нормальных условий работы главных и вспомогательных
механизмов деформация днищевого перекрытия должна быть
сведена к минимуму. Достаточная прочность и жесткость этого
перекрытия достигается благодаря усилению его набора и на-
дежного соединения с борто-
выми конструкциями.
Усилия от двигателя переда-
ются на перекрытия через фун-
дамент, который совместно
с элементами двойного дна
должен составлять единую
конструкцию. Протяженность
фундамента должна способст-
Рис. 8.31. Фундамент под главный
двигатель
вовать распределению нагруз-
ки от двигателя на возможно
большее число жестких связей.
При поперечной системе набора сплошные флоры в МО
устанавливают на каждом шпангоуте, при продольной — через
один, под фундаментом тоже на каждом.
Конструкции фундаментов весьма многообразны. Они зави-
сят от типа и мощности главного двигателя, его расположения,
соответствующих особенностей вспомогательных механизмов.
Общим у всех фундаментов является наличие трех типов эле-
ментов: продольных балок, служащих опорами двигателю; по-
перечных бракет, перевязывающих продольные балки, и под-
крепляющих эти конструкции вертикальных ребер или книц
(рис. 8.31).
В районе МО усиливают и бортовой набор рамными шпан-
гоутами и бортовыми стрингерами.
В палубах над МО делают вырезы, предназначенные для
удобства монтажа главного двигателя и его выгрузки при ре-
монте. По всей высоте межпалубного пространства эти вырезы
ограждают продольными и поперечными выгородками, обра-
зующими так называемую шахту—колодец, идущий через не-
сколько палуб в корпусе и в надстройке.
Конструкция окоиечиостей судна. Форма носовой оконечно-
сти судна в значительной степени определяет его мореходные
качества, в первую очередь ходкость на тихой воде и осо-
бенно на волнении. В ие меньшей мере она оказывает влияние
и на прочностные характеристики судна: от нее зависят вели-
чина ударных нагрузок при слеминге, силы, действующие на
корпус при движении во льдах.
303
Кормовая оконечность формирует поток в диске гребного
винта, существенно влияет на его эффективность, воспринимает
пульсирующие давления, вызванные работой движителя.
В районе кормовой оконечности гребной вал выходит из кор-
пуса судна.
Обе оконечности насыщены судовыми устройствами: в но-
совой размещается якорное, а в кормовой рулевое (см. гл. 9),
в обеих могут располагаться подруливающие устройства.
Размеры конструктивных элементов в оконечностях опре-
деляются требованиями местной прочности.
Носовая оконечность заканчивается мощной балкой слож-
ной формы — форштевнем, к которому присоединены обшивка
и вертикальный киль. С противоположной стороны носовая око-
нечность, форпик, ограничивается водонепроницаемой попереч-
ной переборкой, называемой таранной. Система набора прини-
мается поперечной, шпангоуты располагаются на расстоянии не
более 600 мм. Параллельно палубам в форпике устанавливают
несколько платформ. Последние заканчиваются у форштевня
и вместе с палубами служат для него опорами. Подавляющее
число современных судов имеет носовой бульб. Прн большой
высоте последнего он также подкрепляется горизонтальными
платформами. Конструкция форштевня определяется разме-
рами и назначением судна. Особенно мощные форштевни уста-
навливают на ледоколах. Подкрепление носовой оконечности
не ограничивается только особой конструкцией в форпике. На
протяжении не менее чем 0.15L от носового перпендикуляра
предусматривается усиление набора корпуса.
Кормовая оконечность судна, ахтерпик, заключена между
ахтерпиковой переборкой и ахтерштевнем — балкой или рамой
сложной конструкции. На ахтерштевне заканчивается вер-
тикальный киль, здесь же замыкаются бортовая обшивка и на-
бор корпуса.
Форма кормовой оконечности определяется в первую оче-
редь количеством гребных валов. Как и форпик, ахтерпик имеет
поперечную систему набора, его конструкция дополнительно
усиливается на судах ледового плавания.
Конструкция надстроек и рубок. Надстройки простираются
по всей ширине судна от борта до борта. Их лобовые пере-
борки воспринимают удары волн, соответственно их проекти-
руют более прочными, чем концевые переборки. Если длина
средней надстройки превышает 0.15L, то она участвует в общем
изгибе. Район соединения надстройки с корпусом подкреп-
ляется для уменьшения концентрации напряжений.
Основные элементы надстроек — плоскостные конструкции,
подкрепленные набором.
304
В отличие от надстроек рубки имеют ширину, меньшую, чем
корпус судна. Их конструкция мало отличается от таковой
у надстроек.
В последнее время в качестве материала для надстроек и
рубок используются легкие сплавы на алюминиевой основе.
Вместе с гофрированными конструкциями это приводит к умень-
шению массы судна и понижению его центра тяжести. Послед-
нее обстоятельство облегчает обеспечение требуемой попереч-
ной остойчивости (см. гл. 2).
Особенности конструкции судов ледового плавания. Прак-
тика показала, что при плавании в битых льдах, в том числе
Рис. 8.32. Схема ледового пояса
и при проводке в кильватере за ледоколом, корпус судна испы-
тывает большие ледовые нагрузки, существенно превышающие
те, которые действуют даже в условиях сильного шторма. По-
этому для обеспечения прочности обшивки в районе контакта
со льдом необходимы специальные конструктивные решения.
В основном они сводятся к созданию так называемого ледового
пояса, охватывающего значительную поверхность корпуса. По
высоте ледовый пояс должен перекрывать весь участок борта,
который может подвергаться воздействию льда. С учетом того,
что битый лед, развигаемый корпусом, притапливается и судно
зачастую плавает в балласте (малая осадка, дифферент на
корму), ледовый пояс начинается обычно выше конструктив-
ной ватерлинии, а заканчивается значительно ниже ее, часто
доходя до настила двойного дна (рис. 8.32).
В носовой оконечности верхняя граница ледового пояса при-
поднята (учитывается нагромождение кусков разрушаемого
льда друг на друга, его торошения), а нижняя опускается до
килевой линии — в этом районе происходит наиболее интенсив-
ное притапливанне льдин.
Ледовый пояс представляет собой участок бортового пере-
крытия более прочной и жесткой по сравнению с соседними
конструкции. Ледовые усиления корпуса в этом районе заклю-
чаются как в увеличении толщины обшивки борта, так и умень-
шении расстояния между балками набора. Практически это
сводится к тому, что кроме основных шпангоутов устанавли-
вают промежуточные, которые делят шпацию пополам и идут
не по всей высоте борта.
203415 305
Ледовой нагрузке лучще .противостоит поперечная система
набора. При этом промежуточные шпангоуты устанавливают
так, чтобы они перекрывали -высоту ледового пояса. Оканчи-
ваются эти шпангоуты Вверху на промежуточных палубах,
а внизу—на настиле двойного- дна, в пролете они подкреп-
ляются бортовыми стрингерами: В тех случаях, когда высота
ледового пояса относительно невелика, промежуточные шпан-
гоуты могут оканчиваться на бортовых стрингерах. Размеры
ледового пояса, толщина бортовой обшивки, характеристики
основных и дополнительных шпангоутов регламентируются
Правилами Регистра.
На крупных танкерах с продольной системой набора борто-
вых перекрытий усиления в районе ледового пояса выполняют
по той же продольной системе.
Ледовый пояс — основная, но не единственная особенность
конструкции подобных судов. Для наибольшего соответствия
условиям эксплуатации суда ледового плавания имеют спе-
циальную форму носовой и кормовой оконечности, могут иметь
развал бортов и т. д. В наибольшей степени эти особенности
проявляются у ледоколов и судов активного ледового плава-
ния (категория- УЛА). Примером может служить современное
многоцелевое сухогрузное ледокольно-транспортное судно
«Норильск» дедвейтом около Dw — 20 000 т. Оно предназна-
чено для плавания во льдах как за ледоколом, так и самостоя-
тельно. Его ледопроходимость характеризуется предельной тол-
щиной льда йл = 1,4 м. Непрерывным ходом со скоростью
около 2 уз судно может преодолевать ледяные поля метровой
толщины. Носовые обводы имеют ледокольную форму — фор-
штевень в районе ватерлинии наклонен на 30° к горизонту,
ахтерштевень снабжен «ледовым зубом» — специальным вы-
ступом, расположенным за рулем и предохраняющим послед-
ний прн движении задним ходом.
Борта судна ниже ватерлинии имеют развал. Конструкции
верхней части форштевня бака усилены для обеспечения дви-
жения судна вплотную за ледоколом. Ют имеет также усилен-
ный кормовой буксирный вырез, предназначенный для крепле-
ния носа судна,' следующего во льдах вплотную за «Нориль-
ском». В трех средних грузовых трюмах и в МО корпус судна
имеет двойные борта, суммарная протяженность которых со-
ставляет около 65 % длины судна. На баке расположен носо-
вой наблюдательный пост.
Материал корпуса, судовые устройства и оборудование рас-
считаны на нормальную работу прн температуре наружного
воздуха до —50 °C.
Канадский танкер-продуктовоз «Луни», предназначенный
для эксплуатации в районах Арктики, имеет еще одну кон-
структивную особенность. Так как движение во льдах сопро-
306
вождается толчками, вибрацией, сильным шумом, для созда-
ния нормальных условий обитания экипажа пятиярусная над-
стройка массой около 500 т вибро- и звукоизолировано от
корпуса судна.
Это достигнуто с помощью большого количества металлоре-
зиновых элементов, расположенных между двумя продольными
балками, на которые опирается надстройка, и двумя такими же
балками, укрепленными на верхней палубе. Специальные огра-
ничители не дают надстройке оторваться от корпуса при экс-
тремальных углах крена и дифферента.
Форма судов низших ледовых категорий (Л 1, Л2, ЛЗ) мало
отличается от традиционной для соответствующих транспорт-
ных судов.
8.10. Конструкция корпуса судов
с динамическим поддержанием
Масса корпуса современных высокоскоростных СДП состав-
ляет значительно большую часть водоизмещения, чем1-у судов,
движущихся в режиме плавания. Поэтому снижение веса —
основная задача, которую решают при проектировании корпус-
ных конструкций СДП. Эта цель достигается благодаря приме-
нению легких алюминиевых сплавов как основного корпусного
материала, а также выбору специальных конструктивных эле-
ментов корпуса.
Конструкция корпуса СПК. Принципы проектирования
основных частей СПК (наружной обшивки, переборок, корпус-
ных перекрытий и т. д.) не отличаются от общепринятых в су-
достроении. Однако специфика используемых исходных мате-
риалов— листового н профильного проката из легких сплавов,
прессованных и штампованных панелей — делают конструкцию
корпуса СПК в определенной степени необычной. Существует
два типа конструктивного оформления соединений пересекаю-
щихся связей набора. В первом продольные - балки крепятся
к обшивке, а поперечные к ним. Этот способ получил название
навесного, а шпангоуты именуют навесными нлн накладными.
Традиционный для стального судостроения тнп соединений,
когда и продольные и поперечные связи набора крепятся
непосредственно к обшивке, применительно к СПК иногда
называют нарезным. Его используют в наиболее ответ-
ственных участках перекрытия, там, где действуют значи-
тельные сосредоточенные нагрузки: в районе присоединения
крыльевых устройств (КУ), расположения фундаментов глав-
ного двигателя и т. д. Кроме того, в местах крепления стоек
КУ и кронштейнов гребных валов на 20 % и более утолщают
листы обшивки, а под каждой стойкой и кронштейном устанав-
20*
307
ливают дополнительные продольные и поперечные связи. В кон-
струкциях продольных и поперечных переборок основного кор-
пуса широко используют прессованные панели. Применение
тонколистового материала и малоразмерного балочного набора
с соединительными полками
чечной сваркой используется
приводит к тому, что наряду с то-
и клепка. Уменьшению массы кон-
струкций СПК способствует и
все более широкое применение
трехслойных панелей.
В качестве примера на
рис. 8.33 приведен конструктив-
ный мидель-шпангоут уже упо-
мннвшегося отечественного
морского СПК «Комета». Кор-
пус и надстройка этого судна
изготовлены цельносварными
из алюминиевых сплавов. По-
перечный набор корпуса со-
стоит из рамных шпангоутов
таврового и двутаврового про-
филей, к продольному набору
обшивки он крепится навесным
способом. За габариты корпу-
са выступает характерная для
всех СПК деталь — крино-
Рнс. 8.33. Поперечное сеченне кор- ЛИН, предохраняющий крылья
пуса СПК «Комета» от ударов при швартовке.
Еще один, присущий только
СПК, элемент — крыльевое устройство, включающее собственно
крылья, поддерживающие их стойки, стабилизирующие эле-
менты. Конструкция КУ в значительной степени определяется
их типом (МПК, АУПК, пересекающие свободную поверх-
ность— см. гл. 3), материалом для него служит обычно нержа-
веющая сталь, обладающая необходимыми прочностными и
антикоррозионными качествами.
Конструкция судов на воздушной подушке. По своей форме,
соотношению главных размерений, характеру сил поддержания
СВП в наибольшей степени отличается от всех других судов,
включая и СДП. Так, например, амфибийные СВП имеют ши-
рокие плоские корпуса, плохо приспособленные к плаванию
в водоизмещающем режиме (без ВП), особенно иа волнении.
Снеговые СВП по форме несколько напоминают катамараны
и в этом плане более близки к обычным судам.
Условно СВП можно представить состоящим нз трех основ-
ных элементов: собственно корпуса, надстройки и ограждения
воздушной подушки. Последнее на большинстве современных
судов гибкое, представляющее деформируемую конструкцию,
308
способную подгибаться прн встрече с препятствием. Как и
у СПК, корпус СВП часто составляет единое целое с над-
стройкой, особенно это характерно для относительно небольших
судов. В конструкции надстроек проявляется стремление
в наибольшей степени снизить их массу. Использование с этой
целью тонколистового материала приводит к необходимости
применять клепаные соединения. В конструкциях надстроек
широко используют панели,
прессованные, гофрирован-
ные, трехслойные. В пере-
крытиях надстроек преобла-
дает продольная система
набора, как в конструкции
корпуса СПК, находит при-
менение навесной способ
соединения продольных и
поперечных связей.
На рис. 8.34 приведено
поперечное сечение корпу-
са скегового СВП «Чай-
ка», которое, как упомина-
лось выше, предназначено
для морских пассажирских
перевозок. Обшивка крыши
и частично бортов над-
стройки выполнены из гоф-
рированных панелей; бо-
лее мощные используются
н для обшивки днища.
Балки продольного набо-
ра имеют полособульбовый
или Z-й (зетовый) про-
филь, шпангоуты надстрой-
ки выполнены из тавра.
Наряду со сваркой широ1
нения.
При постройке и эксплуатации СВП был зарегистрирован
ряд пожаров. Огнестойкость конструкций из легких сплавов
чрезвычайно низка — снижение прочности в два раза имеет
место уже при нагревании до 230 °C. Такая температура при
возгорании моторного топлива достигается в течение всего не-
скольких секунд, что может привести к разрушению конструк-
ции, находящейся вблизи. Для снижения подобной опасности
необходимо защищать конструкции из алюминиевых сплавов
пассивными легкими покрытиями.
Наиболее специфичным конструктивным элементом СВП
является гибкое ограждение (ГО), которое изготовляют из не-
используются клепаные соеди-
309
традиционных для судостроения синтетических тканей типа
найлона, терилена и др. Может быть, это одна из причин, по-
чему гибкие ограждения в разговорной речи часто именуют
«юбками».
Требования, предъявляемые к ГО, противоречивы (они
должны быть легкими, прочными, долговечными, иметь устой-
чивую форму), что приводит к появлению большого разнообра-
зия конструкций.
Иногда ограждения ВП изготавливают из жестких элемен-
тов, например, шарнирно закрепленных створок, возвращаемых
в исходное положение амортизатором. Такого рода конструкции
встречаются только на скеговых СВП.
Контрольные вопросы
1. Под действием каких сил возникает общий продольный изгиб кор-
пуса?
2. Что такое эквивалентный брус?
3. Почему сталь является основным судостроительным материалом?
4. Какие способы соединения металлических элементов корпуса исполь-
зуются в судостроении?
5. В каком месте по длине судна может располагаться машинное от-
дел еине?
6. Чем вызвана специализация и универсализации транспортных судов?
7. У каких судов устанавливаются двойные борТа? С какой целью?
8. Какие нагрузки воспринимают основные перекрытия судна?
9. Какие существуют системы набора судового корпуса?
10. В чем заключаются особенности конструкции корпуса в районе МО?
11. В чем заключаются основные особенности конструкции судов актив-
ного ледового плавания?
12. Какие типы соединений балок продольного и поперечного набора
используют на СДП?
Глава 9
СУДОВЫЕ УСТРОЙСТВА И СИСТЕМЫ
9.1. Общие сведения
Судовые устройства служат для обеспечения нормального
функционирования судна в соответствии с его назначением.
Практически на каждом судне, независимо от его типа,
имеются рулевое, грузовое, спасательное, якорное, швартовное
н буксирное устройства, которые поэтому и называются
общесудовыми.
Некоторые суда снабжаются еще и специальными
устройствами, предназначенными для выполнения специ-
фических функций. К этой категории относятся промысловые
устройства, устройства для крепления леса на палубе, для пе-
редачи грузов в море на ходу, крыльевые СПК и т. д.
310
Большинство механизмов, входящих в состав судовых
устройств и обеспечивающих их работу, располагается на верх-
ней палубе, соответственно они называются палубными. При-
вод этих механизмов может быть электрическим, гидравличе-
ским, электрогидравлическим, паровым или дизельным. Выбор
привода определяется как типом и назначением. устройства,
так и во многом типом главной судовой энергетической уста-
новки.
Судовые устройства, устанавливаемые на судах'различных
назначений, имеют много общего, зачастую они включают стан-
дартные элементы, обеспечивающие высокое качество при отно-
сительно небольшой стоимости серийной продукции.
На судах в зависимости от их типа преобладают те или
иные устройства; какие-то устройства могут быть широко пред-
ставлены, какие-то могут вообще отсутствовать. Так, например,
буксирные устройства в наибольшей степени характерны для
буксирных судов, а на многих других судах его роль выполняет
швартовное устройство.
Мы будем рассматривать преимущественно общесудовые
устройства.
9.2. Рулевое устройство
Назначение рулевого устройства — обеспечение управляемо-
сти судна. Из всех судовых устройств оио наиболее важное, так
как даже кратковременный выход его из строя может привести
к катастрофическим последствиям.
Рулевое устройство состоит из рабочего органа: руля, бал-
лера— вала для его поворота, рулевого привода, рулевой ма-
шины, поста управления.
Принцип работы и конструкция судового руля рассматрива-
лись раньше в гл. 6.
Основной пост управления находится в рулевой рубке у пу-
тевого компаса. Штурвал или пульт управления рулем обычно
монтируют на одной колонке с авторулевым (см. гл. 6). Ука-
затель угла перекладки руля помещается на колонке управле-
ния, его показания дублируются прибором, установленным на
лобовой переборке рубки, таким образом капитан и вахтенный
помощник имеют возможность постоянно контролировать поло-
жение руля.
Связь поста управления с пусковым механизмом исполни-
тельного органа рулевой машины осуществляется посредством
рулевой передачи, которая иа современных судах обычно вы-
полняется электрической или гидравлической.
В настоящее время рулевые машины, электрические или
электрогидравлические, устанавливают непосредственно у рум-
пеля без промежуточных приводов.
311
Передача усилия от рулевой машины к баллеру осуществ-
ляется с помощью рулевого привода.
На некоторых небольших судах применяется секторно-рум-
пельный привод (рис. 9.1), в котором румпель жестко скреплен
с баллером руля. Сектор свободно насажен на баллер н связан
с румпелем с помощью пружинного амортизатора. Перекладка
руля выполняется рулевой машиной через зубчатую передачу»,
поворачивающую сектор. Последний увлекает за собой рум-
Рис. 9.1. Схема секторно-рум-
пельного привода
1 — сектор; 2 — румпель; 3 — бал-
лер рула
Рис. 9.2. Схема электрогидравлн-
ческой рулевой машины
1 — электродвигатель; 2 — насос; 3 —
трубопроводы; 4 — перепускной кла-
пан; 6 — цилиндр; 6 — плунжер; 7 —
ползун; 8 — румпель; 9 — баллер
пель, при этом динамические нагрузки (например, от ударов
волн) гасятся амортизаторами.
На современных судах, как правило, рулевые машины сов-
мещают с рулевым приводом, что позволяет уменьшить габа-
риты комплекса и повысить его КПД. Наибольшее распростра-
нение при этом получили электрогидравлические машины плун-
жерного типа. В этих машинах давление рабочей жидкости
преобразуется в поступательное перемещение плунжера, кото-
рый через механическую передачу поворачивает баллер руля.
Машины могут иметь двух- и четырехцилиндровое исполнение;
в качестве рабочей жидкости в них используется минеральное
масло.
Работу рулевого устройства подобного типа можно просле-
дить на рис. 9.2, где представлена схема двухцилиндровой ма-
шины. Электродвигатель, включаемый посредством рулевой пе-
редачи с пульта управления, приводит в действие насос, кото-
рый перекачивает масло из одного рабочего цилиндра в другой,
приводя плунжеры в поступательное движение. Вместе с ними
начинает перемешаться и ползун, поворачивающий баллер че-
312
рез жестко связанный с ним румпель. Перепускной клапан,
включенный в гидравлическую систему, является амортизато-
ром. При ударах волн в перо руля в одном из цилиндров дав-
ление резко возрастает, клапан приоткрывается н масло из
него перемещается в другой цилиндр.
На крупнотоннажных судах для обеспечения большего вра-
щающего момента обычно устанавливают четырехцилиндровые
рулевые машины, принцип действия которых не отличается от
рассмотренного выше. Особенность таких машин состоит в том,
что в действие могут вводиться одна пара цилиндров с соб-
ственным насосом или обе. В открытом море работает только
один насос, а в стесненных водах, узкостях, портах включают
обе пары цилиндров.
Кроме описанных выше, существует еще ряд приводов: рум-
пельно-штуртросовый, секторный с валиковой проводкой, вин-
товой. На современных морских судах в качестве основных
они, как правило, не используются.
Рулевую машину обычно размещают в специальном поме-
щении — румпельном отделении, которое находится в непосред-
ственной близости от руля.
Регистр требует, чтобы каждое морское судно имело три
привода: основной, запасной и аварийный.
Основной привод должен обеспечивать перекладку руля
с борта на борт при максимальной скорости движения. Время
перекладки из крайнего положения 35° одного борта до 30°
другого не должно быть больше 28 с.
Требования к запасному приводу: перекладка руля с 20°
одного борта иа 20° другого при скорости, равной половине
максимальной (но не менее 7 уз), за время, не превышающее
60 с. При этом переход с основного привода на запасной также
лимитируется двумя минутами. Если основной привод состоит
из двух агрегатов, способных действовать независимо друг от
друга, то запасной привод не требуется.
Аварийный рулевой привод должен обеспечивать перекладку
руля при скорости переднего хода не менее 4 уз. Этот привод
не должен располагаться ниже водонепроницаемой палубы.
Установка его не требуется, если основной н запасной приводы
находятся в помещении, расположенном выше грузовой ватер-
линии.
Рулевое устройство должно иметь ограничители, не допу-
скающие перекладку руля более чем на 35° на каждый борт.
Особенность подводных судов — необходимость обеспечения
управляемости не только в горизонтальной плоскости, но и
в вертикальной. Соответственно эти суда снабжаются и гори-
зонтальными рулями, которые обычно располагаются не только
в кормовой части судна, но и в носовой, что повышает управ-
ляемость на малых скоростях. Горизонтальные рули всегда
313
парные, на оба борта; парными могут быть и вертикальные
рули.
9.3. Грузовое устройство
Грузовые устройства — это комплекс конструкций и меха-
низмов, предназначенных для выполнения погрузочно-разгрузоч-
ных работ силами экипажа судна.
Количество грузовых устройств и их тип определяются мно-
гими факторами: назначением судна, его размерениями, райо-
ном плавания, характером перевозимого груза.
Суда, предназначенные для грузовых операций иа необору-
дованных рейдах, либо посещающие порты, не имеющие кра-
нового оборудования, должны обладать развитым грузовым
устройством.
На сухогрузных судах в состав грузовых устройств входят
грузовые стрелы, краны, люковые закрытия и средства трюм-
ной механизации. Суда с горизонтальным способом грузообра-
ботки оборудуются аппарелями (внешними и внутренними),
межпалубными лифтами и подъемниками; на лихтеровозах
устанавливают катучие краны. Саморазгружающиеся суда для
перевозки сыпучих грузов снабжаются ленточными транспор-
терами, элеваторами и другими специальными устройствами.
Основными грузовыми устройствами наливных судов служат
насосы и трубопроводы.
Грузовые устройства современных морских сухогрузных су-
дов могут быть периодического и непрерывного действия.
К первой категории относятся грузовые стрелы и краны, ко
второй — транспортеры и элеваторы.
Грузовые стрелы устанавливаются на мачтах или гру-
зовых колоннах. Их принято разделять на легкие, грузоподъем-
ностью до Ют, и тяжеловесные, более 10 т. Грузоподъемность
последних может достигать 200—300 т, однако наибольшее рас-
пространение получили «тяжеловесы» на 40—60 т.
Устройство с легкой стрелой включает собственно стрелу,
мачту и грузовую лебедку (рис. 9.3). Нижний конец стрелы —
шпор — шарнирно связан с установленным на мачте башма-
ком. Система бегучего такелажа (тросов) позволяет стреле со-
вершать поворот в вертикальной и горизонтальной плоскостях.
Подъем груза осуществляется лебедкой посредством троса,
проходящего через систему блоков вдоль стрелы.
Основные схемы работы легких стрел одиночная и спарен-
ная. Одиночная работа стрел в последнее время практикуется
редко, как правило, только в качестве вспомогательной, для
погрузки снабжения, продовольствия и других подобных грузов.
314
При спаренной работе обе стрелы, разгружающие один
трюм, с помощью оттяжек неподвижно закрепляются: одна —
в положении за бортом, другая — над люком. Грузовые тросы
•обеих стрел соединяются вместе треугольным звеном, к кото-
рому крепится гак. Вначале с большей скоростью работает
лебедка стрелы, расположенной над люком, — груз почти вер-
тикально поднимается из трюма, затем более интенсивно рабо-
Рис. 9.4. Схема тяжеловесной перекид-
ной стрелы
1 — грузовая колонна; 2 — легкая стрела; 3 —
тяжеловес; 4 — лебедка
тает лебедка второй стрелы — груз выносится за борт, затем
обе лебедки переходят на режим спуска.
В последнее время широкое применение находят высокопро-
изводительные механизированные стрелы различных типов,
предназначенные для одиночной работы. Обслуживание таких
стрел производится без использования ручного труда, однако
при этом необходимо иметь три лебедки: одну грузовую н две
для оттяжек, обеспечивающих поворот стрелы в двух пло-
скостях.
Тяжеловесные стрелы обычно располагаются на отдельном
фундаменте в диаметральной плоскости судна. Часто их де-
лают перекидными, что позволяет обслуживать два соседних
трюма. В состав такого устройства кроме стрелы входят две
грузовые колонны и несколько (три, четыре) лебедок (рис. 9.4).
315
Обычно иа сухогрузных судах тяжеловесные стрелы обслу-
живают только один-два трюма. Исключение — суда, постоянно
занятые перевозкой тяжеловесных грузов в районы с мало-
освоенным побережьем. На них предусматривается спаренная
работа двух «тяжеловесов».
Грузовые краны имеют более высокую, чем стрелы,
производительность, однако они сложнее по конструкции и зна-
чительно дороже. Кроме того, их работа ограничивается погод-
ными условиями и углом крена, который не должен превы-
шать 5—8°.
Наиболее распространены стационарные поворотные одиноч-
ные краны грузоподъемностью до 25 т. По роду привода краны
делятся на электрические, электрогидравлические и гидравли-
ческие. Необходимость увеличения грузоподъемности привела
к созданию сдвоенных кранов, установленных на общей плат-
форме. Они могут использоваться как для раздельной работы —
на два люка, на два борта, так и для спаренной — для подъема
двойного номинального груза. Совместная работа двух спарен-
ных кранов позволяет почти вдвое повысить грузоподъемность
устройства.
Кроме стационарных на судах используются и перемещаю-
щиеся вдоль судна краны. К ним, в частности, относятся
специальные контейнерные краны, устанавливаемые на контей-
неровозах. Максимальной грузоподъемностью до 500 т характе-
ризуются катучие краны лихтеровозов (см. рис. 8.21). Переме-
щаясь с грузом (общая масса до 1100 т) вдоль судна на рас-
стояние 100 м и более, такой кран может заметно изменить
посадку лихтеровоза, поэтому на них устанавливается сложная
система контроля углов крена и дифферента.
На судах с горизонтальной грузообработкой (автомобильно-
пассажирские паромы, азтомобилевозы и др.) используют спе-
циальные устройства — забортные аппарели, обеспечивающие
проезд самоходной колесной техники с берега на судно. Длина
аппарелей, этих своеобразных подъемных мостов, может дости-
гать 50 м, ширина 10 м. Аппарели могут устанавливаться
в носу, корме или с борта. В последнем случае они выполняют
и функции лацпорта, закрывающего вырез в борту в походном
положении. В последнее время все большее распространение
находят поворотные аппарели, позволяющие выполнять грузо-
вые операции дри швартовке к берегу любым бортом или око-
нечностью (рис. 9.5).
Люковые закрытия могут быть съемными, откидными,
откатываемыми и наматываемыми. Современные морские
транспортные суда оборудуются механизированными люковыми
закрытиями, при операциях с которыми ручной труд сведен
к минимуму.
316
Грузовые устройства непрерывного действия
используются в основном на судах, предназначенных для пере-
возки насыпного груза. В эту категорию устройств входят лен-
Рис. 9.5. Схема поворотной аппарели
точные транспортеры и элеваторы. Первые перемещают груз
в направлении, близком к горизонтальному: максимальный угол
наклона не превышает 15—20° и зависит от типа перевозимого
груза. Для перемещения сыпучего груза в направлении, близ-
Рнс. 9.7. Грузовое устройство саморазгружающего судна
1— днищевой транспортер; 2 —элеватор; 3 — выносной транспортер
ком к вертикали, служат элеваторы—устройства, основными
элементами которых являются ковши, навешанные на замкну-
тую цепь (рис. 9.6). Указанные грузовые устройства находят
применение на саморазгружающихся судах (рис. 9.7), через все
грузовые помещения которого проходит ленточный транспор-
тер. С его наклонного участка груз попадает в накопительный
бункер. Здесь в действие вступает элеватор, поднимающий груз
на верхнюю палубу, откуда за борт он перемещается вынос-
ным транспортером.
317
В грузовых трюмах настил второго дна выполняется со зна-
чительным уклоном от борта к диаметральной плоскости, что
способствует ссыпанию груза на ленту транспортера.
9.4. Спасательные средства
. Спасательные средства предназначаются как для спасения
экипажа и пассажиров с гибнущего судна, так и для оказания
помощи людям с других судов, терпящих бедствия.
. Причины гибели судов могут быть самыми различными: по-
жар, посадка на мель, утрата плавучести, потеря остойчивости
и др. Спасательные средства должны, обеспечивать не только
эвакуацию людей с гибнущего судна, но и в наибольшей сте-
пени ограждать их от неблагоприятных воздействий внешней
среды (высокая температура горящей на поверхности воды
нефти; низкая — в арктических водах), создавать условия для
нормальной жизнедеятельности в течение некоторого времени.
Все морские суда снабжаются спасательными средствами
в соответствии с Международной конвенцией по охране чело-
веческой жизни на море (СОЛАС-74/83) и разработанными на
ее основе соответствующими Правилами Регистра.
Все спасательные средства можно разделить на две кате-
гории— индивидуального и коллективного пользования.
Индивидуальные спасательные средства предназначены для
кратковременного поддержания человека на плаву. Кратковре-
менного потому, что даже в достаточно теплой воде (t = 20°С)
человек от переохлаждения теряет сознание через 2—2,5 ч,
а его гибель наступает через 8—10 ч. При t = 10 °C это время
соответственно составляет 0,5 ч и 1—1,5 ч. Считается, что до-
пустимое время пребывания человека в воде без специальной
одежды при t= 10°С равно 3—5 мин, а при /=20°С — не
более 40 мин. К индивидуальным спасательным средствам от-
носятся спасательные круги, жилеты, нагрудники, а также
костюмы-комбинезоны, некоторое время предохраняющие от
переохлаждения.
Основным спасательным средством на морских судах слу-
жит шлюпочное устройство, включающее шлюпки и катера,
а также механизмы для их спуска и подъема. Количество спа-
сательных средств и их номенклатура определяются Регистром
в зависимости от типа судна и района его плавания. Так, об-
щее число мест в спасательных шлюпках, размещенных иа
каждом борту судна, должно быть равным: на пассажирских,
экспедиционных и промысловых судах — половине общего ко-
личества людей; на прочих судах — общему количеству мест на
судне. В дополнение к шлюпкам, а иногда взамен них могут
устанавливаться спасательные плоты.
318
Рис. 9.8. Обеспечение
внутреннего запаса пла-
вучести
На морских судах всех назначений предусматривается на-
личие как минимум одной моторной (дежурной шлюпки), имею-
щей скорость не менее 4—6 уз. Эта шлюпка должна быть
готова для немедленного использования в случае падения че-
ловека за борт.
Спасательные шлюпки могут быть открытого и за-
крытого типа. Максимальная вместимость спасательной шлюпки
не должна превышать 150 человек, а ее полная масса с людьми
и снабжением 20,3 т. Шлюпки вмести-
мостью 60—100 человек должны быть
либо моторными, либо с механическим
приводом на гребной винт, вместимостью
более 100 человек — только моторными.
В связи с тем, что возможно зали-
вание открытых шлюпок, они должны
обладать внутренним запасом плаву-
чести, достаточным для того, чтобы
полностью залитая шлюпка оставалась
на плаву со всеми находящимися в ней
людьми, механизмами и снабжением.
Указанный запас плавучести обеспечи-
вается либо воздушными ящиками,
обычно совмещаемыми с бортовыми си-
дениями, либо за счет утолщения бор-
тов (рис. 9.8). Последнее характерно
для пластмассовых шлюпок, в простран-
стве между наружной и внутренней обшивкой которых нахо-
дится легкий заполнитель.
Для защиты людей от непогоды шлюпки данного типа снаб-
жают специальными закрытиями ярко-оранжевого цвета,.хо-
рошо заметного на морской поверхности.
Основные недостатки открытых шлюпок — возможность их
заливания и плохая защита спасающихся от экстремальных
температур и атмосферных осадков. Определенные преимуще-
ства в этом плане имеют закрытые самовосстаиавливающиеся
шлюпки, которые в последнее время находят все большее при-
менение. В конструкции этих шлюпок используются два спо-
соба самовосстановления — пассивный и активный. В первом
случае восстановление происходит за счет формы надводной
части шлюпки и положения ее ЦТ (рис. 9.9), во втором — за
счет перетекания жидкого балласта из днишевого-отсека в не-
симметричный бортовой (рис. 9.10). В самрвосстанавливаЮ-
щихся шлюпках люди пристегиваются к сидениям ‘ремнями,
чтобы в случае ее опрокидывания при спуске они не получили
травм и чтобы не изменялось положение ЦТ шлюпки.
Аварии танкеров в ряде случаев сопрвождаются разливом
нефтепродуктов и их возгоранием. В подобной ситуации обыч-
319
ные спасательные шлюпки практически бесполезны, поскольку
не могут предохранить людей от высокой температуры, дости-
гающей 1000 °C и более, и задымленности. Поэтому наливные
суда снабжаются специальными танкерными спасательными
шлюпками. Для защиты людей от огня используются два прин-
ципа: непрерывное орошение поверхности шлюпки водой и тер-
моизоляция корпуса. В любом случае танкерные шлюпки
Рнс. 9.9. Пассивное самовосстановление шлюпки
должны выдерживать воздействие пламени с температурой не
менее 1200 °C в течение как минимум 10 мин. Шлюпки должны
быть самовосстанавливающимися. В негерметичном корпусе
создается избыточное давление воздуха, что защищает обита-
телей шлюпки от дыма. Необходимый
для этого, а также для нормальной
\ работы двигателя запас сжатого возду-
-==-/ * \-=- ха хранится в специальных баллонах.
Т ' у ’ Спасательные шлюпки располага-
ются на открытой палубе таким об-
Рнс. 9.10. Активный способ разом, чтобы можно было обеспечить
восстановления безопасную посадку в них людей,
а затем и спуск на воду при крене
судна на любой борт до 20° и дифференте до 10°.
Спускают шлюпки с помощью специальных устройств —
шлюпбалок. Последние могут быть поворотными (радиаль-
ными), заваливающимися и гравитационными (рис. 9.11). Пер-
вые два типа шлюпбалок работают только за счет внешних
источников энергии, в настоящее время они используются
редко. Гравитационные шлюпбалки вываливают шлюпки за
борт и вертикально спускают их на воду только под действием
сил тяжести, на всю операцию при этом уходит не более 2 мин,
для этого достаточно только отдать стопоры, крепящие шлюп-
балку по-походному.
Каждую пару шлюпбалок обслуживает одна лебедка с руч-
ным или механическим приводом. Оии предназначены для кон-
троля спуска спасательной шлюпки на воду и для ее подъема
на борт судна.
320
В последнее время появился принципиально новый тип спу-
скового устройства — продольный кормовой наклонный слнп,
с которого закрытая спасательная шлюпка соскальзывает
Рис. 9.11. Принципы работы шлюпбалок: а — радиальной; б — заваливаю-
щейся; в—гравитационной
Рис. 9.12. Схема спускового устрой-
ства со слипом
в воду (рнс. 9.12). Корпус шлюпки герметичен и допускает
кратковременное погружение в воду при сбрасывании с судна.
Посадка людей осуществляется в кормовой части шлюпки,
когда она еще находится на судне. Специальные кресла, обо-
рудованные привязными ремнями, позволяют обитателям
шлюпки воспринимать дина-
мические нагрузки при наибо-
лее удобном положении тела.
Спасательные плоты,
наряду со шлюпками, нахо-
дят применение на морских
судах. Они бывают жесткими
и надувными. Материалом для
жестких плотов служат легкие
сплавы или пластмассы.
Плоты снабжаются каме-
рами плавучести, их грузоподъемность — 4—12 человек. Ши-
рокого распространения жесткие плоты не получили из-за
своей громоздкости.
Надувные плоты пассажировместимостью 6—25 человек в по-
ходном положении хранят в контейнерах, занимающих срав-
нительно мало места. Конструкция устройства для крепления
контейнеров с плотами выполнена таким образом, что позво-
ляет приводить нх в готовность двумя способами. В первом
случае экипаж освобождает от крепления контейнеры н сбрасы-
вает их в воду, во втором освобождение контейнера происходит
автоматически за счет срабатывания гидростата, когда тонущее
судно погружается в воду. Обладающий положительной плаву-
честью контейнер всплывает, его створки раскрываются, пуско-
вой линь, закрепленный одним концом на палубе судна, вклю-
чает систему газонаполнения, которая приводит плот в рабо-
213415 321
чее (надутое) состояние за 1—3 мин, в зависимости от темпе-
ратуры окружающего воздуха. В обоих случаях посадка
осуществляется либо с воды (люди прыгают за борт и вплавь
добираются до плота), либо, реже, с помощью специальных
трапов. Компактность хранения надувных плотов описанной
конструкции обусловила их широкое применение на судах ма-
лых и средних размеров, причем в некоторых случаях это
единственные спасательные средства (например, на СПК,
СВП).
Основные недостатки этих плотов — необходимость прыгать
в воду, иногда с большой высоты; на плот люди попадают
в мокрой одежде, что при низкой температуре воздуха может
привести к переохлаждению и гибели.
В последнее время созданы плоты новых конструкций: они
надуваются на палубе судна, здесь же проводится посадка лю-
дей, затем с помощью кран-балки их спускают за борт.
Всем плотам присущ один общий недостаток — невозмож-
ность активного перемещения, поскольку они не оборудованы
двигателями. Однако следует отметить, что сегодня потерпев-
шим кораблекрушение нет необходимости самостоятельно до-
бираться до берега. Более того, они должны держаться как
можно ближе к месту гибели судна. Дело в том, что в рамках
Международной космической системы определения местополо-
жения самолетов и судов КОСПАС — CAPCAT на все совре-
менные морские суда устанавливаются аварийные радиобуи —
автоматически действующие устройства, посылающие радиосиг-
налы, которые служат для радиопеленгования и наведения спа-
сателей на место аварии.
Аварийный радиобуй либо сбрасывается экипажем с терпя-
щего бедствие судна, либо всплывает после его гибели. В воде
он автоматически включается и передает сигнал бедствия, со-
держащий сведения о судне (его тип, название, государствен-
ная принадлежность), характере бедствия и времени, прошед-
шем с начала аварии.
9.5. Якорное устройство
Основное назначение якорного устройства — обеспечение на-
дежной стоянки судна в заданном районе моря. Кроме того, оно
может использоваться для снятия судна с мели, способствовать
управлению судном в стесненных условиях плавания.
Главные элементы якорного устройства: якоря, якорные
цепи (канаты), якорные механизмы, клюзы,стопоры (рис. 9.13).
По назначению различают якоря: становые и вспомогатель-
ные (стоп-анкеры). Первые играют главенствующую роль — они
удерживают судно в заданном месте. Стоп-анкеры исполь-
322
зуются в дополнение к основным для удержания судна с отдан-
ным становым якорем в определенном положении, а также
для снятия его с мелн. При этом становые якори заводятся на
катерах или шлюпках. Количество якорей и их масса зависят
от размеров и типа судна н определяется Правилами Регистра.
Рис. 9.13. Схема якорного устройства
1 — брашпиль; 2 — стопор; 3 — якорь; 4 —
цепной ящик
Рнс. 9.14. Якоря: а — адмиралтей-
ский; б — Холла
Для выполнения своих функций становой якорь должен об-
ладать большой держащей силой, которая определяется коэф-
фициентом Ад, представляющим отношение этой силы к силе
тяжести якоря. Для одного и того же якоря указанный коэф-
фициент зависит от типа грунта.
Многообразие конструкций основных судовых якорей можно
разделить на два типа: якоря со штоками, зарывающиеся
в грунт одной лапой, и якоря, входящие в грунт двумя лапами.
К первому типу относится адмиралтейский якорь (рис. 9.14,а),
отличающийся простотой конструкции и хорошими держащими
21* 323
свойствами (/гд = 9-е-12). Недостаток такого якоря — трудо-
емкость и сложность его подъема и закрепления на судне по-
походному. Тем не менее адмиралтейские якоря находят при-
менение на современных судах, особенно в качестве стоп-анке-
ров. Мировой рекорд по глубоководной стоянке в 1959 г. был
установлен научно-исследовательским судном «Витязь», когда
он удерживался на глубине 11022 м с помощью двух адмирал-
тейский якорей.
Бесштоковый якорь Холла входит в грунт двумя лапами,
составляющими единое
целое
/ —турачка; 2 — звездочка; 3 —редуктор;
4 — электродвигатель
с коробкой (рнс. 9.14,6). Не
очень высокий коэффициент
держащей силы (£д = 3 4- 4)
компенсируется относительной
простотой конструкции и удоб-
ством в эксплуатации. Тяже-
лые якоря Холла используют
на крупных судах.
В последнее время появи-
лись якоря повышенной дер-
жащей силы. Они, подобно яко-
рю Холла, входят в грунт дву-
мя подвижными лапами, кото-
рые благодаря конструкции
одновременно выполняют и
функцию штока, препятствую-
щего опрокидыванию якоря.
Якорь удерживает судно на
месте посредством якорной
цепи, один конец которой со-
единен с якорем, а другой за-
креплен на судне. Якорная цепь состоит нз звеньев, которые,
в свою очередь, собираются в смычки длиной 25—27 м. Между
собой смычки соединяются специальными разъемными звеньями.
Смычки образуют якорную цепь, длина которой составляет
50—300 м. Чтобы предотвратить скручивание цепи, в нее вклю-
чают специальные поворотные звенья-вертлюги. Цепь крепится
к судну специальным быстроразъемным глаголь-гаком, уста-
навливаемым в цепном ящике. Глаголь-гак должен иметь ди-
станционный привод управления, расположенный в доступном
месте и позволяющий в случае необходимости быстро отдать
якорную цепь.
Калибр якорной цепи определяется диаметром прутка звена.
У крупных судов калибр составляет 100—130 мм.
Якорь поднимается специальными якорными машинами-ле-
бедками с горизонтальной осью (см. рис. 9.13)—брашпилями,
которые располагаются в ДП судна и обслуживают якорные
цепи обоих бортов или с вертикальной осью — шпилями. В со-
324
став шпиля входит электродвигатель, редуктор, специальная
звездочка и турачка (рис. 9.15). Звездочка — литая цилиндри-
ческая деталь с желобом, соответствующим форме звеньев.
Входя в зацепление с цепью, звездочка выбирает ее нли тра-
вит, поднимает либо опускает якорь.
Турачки — специальные барабаны — служат для намотки
швартовных тросов при швартовке судна.
В состав якорного устройства входят также якорные сто-
поры, предназначенные для удержания якоря в походном по-
ложении и для предотвращения передачи усилий с отданной
якорной цепи на якорные механизмы.
Для крепления якоря по-походному и обеспечения беспре-
пятственного прохода якорной цепи служат якорные клюзы —
специальным образом оформленные отверстия в корпусных
конструкциях.
Обычные якорные устройства рассчитаны на стоянку при
глубине моря до 200 м, на больших глубинах якорные цепи не
применяют, так как они рвутся под действием силы тяжести.
В этом случае используют особый выделки тросы, стальные
либо синтетические.
Глубоководные якорные устройства устанавливают на спе-
циальных судах — буровых, океанографических, научно-исследо-
вательских.
9.6. Швартовное и буксирное устройства
Основное назначение швартовного устройства—крепление
судна к причалу, к борту другого судиа, к рейдовой бочке
и т. д. Наиболее распространенные способы швартовки к при-
чалу— бортом и кормой (рис.9.16).Несмотря на относительную
сложность второго способа (необходимо дополнительно исполь-
зовать якорное устройство), ему иногда отдают предпочтение,
так как плата за стоянку судна в порту зависит от длины за-
нимаемого им причала.
В состав швартовного устройства транспортного судна вхо-
дят швартовные механизмы, тросы, клюзы, киповые планки,
кнехты, вьюшки и банкеты для хранения тросов, стопоры,
кранцы и др. В качестве швартовных используются стальные,
синтетические или растительные тросы.
В носовой части судна швартовным механизмом служит
брашпиль, на турачки которого накладываются швартовные
тросы при подтягивании судна к причалу во время швартовки.
На корме швартовные механизмы — шпиль или лебедки.
В последнее время получили распространение автоматиче-
ские швартовные лебедки, контролирующие натяжение канатов.
Когда изменяется положение судна относительно причала (во
325
время грузовых операций, сопровождающихся изменением
осадки по причине приливных колебаний уровня моря и др.)
швартовная лебедка автоматически выбирает или потравливает
трос, обеспечивая заданное его натяжение.
Через швартовные клюзы (рис. 9.17, а) пропускаются тросы,
идущие на берег. При леерном ограждении для этой цели слу-
Рис. 9.16. Способы швартовки судна:
а — бортом; б — кормой
Рнс. 9.17. Элементы швартовного
устройства: а — клюз; б—киповая
простая и с роульсами; в — кнехт
жат кнповые планки. Основное их назначение, так же, как и
клюзов, — предохранять швартовные тросы от излома и пере-
тирания в месте их прохода через борт судна. В этом плане
удобны кнповые планки с вращающимися вертикальными и
горизонтальными роульсами (рис. 9.17,6).
Кнехты — литые или сварные тумбы — предназначаются для
крепления на них швартовных тросов. Обычно на транспорт-
ных судах устанавливают парные кнехты (рис. 9.17,а), сим-
метрично относительно ДП по правому и левому борту судна.
Для временного задержания троса при переносе его с бара-
бана лебедкн на кнехты используют переносные и стационар-
ные стопоры различных типов.
В походном положении стальные тросы хранятся на так
называемых вьюшках — специальных барабанах. Для хранения
326
синтетических и растительных тросов применяют банкеты —
приподнятые над. палубой деревянные решетки, не препят-
ствующие стеканию воды и обеспечивающие просушку троса.
Для предохранения корпуса от повреждений во время
швартовки и стоянки судна у причала (или борта другого
судна) применяют временные краицы. Мягкий кранец пред-
ставляет собой парусиновый мешок, заполненный каким-либо
упругим материалом (например, пробковой крошкой) и опле-
тенный снаружи растительным тросом. Простейшими кранцами
являются автомобильная
шина (мягкий) и дере-
вянная чурка (жесткий
кранец)* В последнее вре-
мя распространение по-
лучили гидравлические
кранцы — резиновые бал-
лоны со стальным карка-
сом. Все типы временных
кранцев вывешиваются
за борт швартующегося
судна н остаются там во
время стоянки.
На некоторых специ-
альных судах (например,
буксирах) устанавли-
вают и постоянные кран-
цы, к которым относят-
ся привальные брусья,
кормовые и носовые буксирные кранцы.
Буксирное устройство предназначено для буксировки судна
(или другого плавучего сооружения), а также для обеспечения
возможности самому быть буксируемым. В морской практике
используются три основных способа буксировки: в кильватер,
лагом, толканием (рис. 9.18).
В первом случае буксируемое судно на тросе следует в киль-
ватер за буксирующим. Буксировка может проводиться на
длинном (в открытом море) и коротком (в стесненных усло-
виях) канате. При проводке караванов во льдах используют и
буксировку в кильватер вплотную. С этой целью в корме ледо-
кола делают специальный вырез для форштевня буксируемого
судна.
Буксировку лагом применяют только в сложной обстановке —
в портах, для перестановки судов. Для крепления судов бортом
друг к другу используют элементы швартовного устройства.
Буксировка толканием осуществляется только у специаль-
ных морских составных судов, включающих несамоходную гру-
зовую секцию и буксир-толкач.
327
Буксирное устройство транспортных судов предполагает бук-
сировку в кильватер. В носу и в корме для этого располагаются
усиленные кнехты. Для прохода буксирного троса в носу де-
лают специальный буксирный клюз; в корме для этой цели
чаще всего используют клюзы швартовного устройства.
В состав буксирных устройств специальных буксирных су-
дов дополнительно входят буксирные лебедки, гаки, буксирные
дуги и арки, оградители буксирного троса, лннеметательные
аппараты и другие элементы.
9.7. Судовые системы
Комплекс трубопроводов с арматурой, обслуживающих их
механизмов, емкостей, аппаратов, приборов, устройств, средств
управления и контроля представляют собой судовые системы.
Их назначение — обеспечение нормальной эксплуатации судна,
в первую очередь, такие его важнейшие качества, как плаву-
честь, остойчивость, непотопляемость, обитаемость, взрыво- и
пожаробезопасность.
Все имеющиеся на судне системы можно разделить на две
группы: общесудовые и системы, обслуживающие энергетиче-
скую установку. На некоторых судах, кроме того, имеются и
специальные системы, обеспечивающие их специфические
нужды.
Общесудовые системы по выполняемым функциям объеди-
нены в следующие группы: трюмные, балластные, противопо-
жарные, микроклимата, санитарные, сжатого воздуха и газов.
Трюмные системы предназначены для удаления за борт
воды, скопившейся в корпусе судна в процессе эксплуатации
либо попавшей в него в результате аварии. В их состав вхо-
дят: осушительная, водоотливаная, перепускная, а также си-
стема нефтесодержащих трюмных вод.
Балластные системы, включающие креповые и дифферент-
ные, служат для приема, удаления и перекачки водяного бал-
ласта с целью направленного изменения посадки (осадки, уг-
лов крена и дифферента) и остойчивости судна.
Трюмные и балластные системы взаимосвязаны, они могут
иметь общие участки трубопроводов, общие и взаимозаменяе-
мые механизмы; это приводит как к снижению протяженности
и массы систем, так и к повышению их надежности.
Системы пожаротушения включают системы водяного пожа-
ротушения, паротушения, пенотушения, углекислотного туше-
ния, систему инертных газов и другие, а также системы пожар-
ной сигнализации.
328
На каждом судне имеется несколько систем пожаротушения*,
в наибольшей степени отвечающих назначению судна н харак-
теру перевозимого на нем груза.
Системы искусственного микроклимата предназначены для
создания и поддержания в судовых помещениях необходимых
параметров воздушной среды. С этой целью используют си-
стемы вентиляции, отопления, охлаждения помещений, осуше-
ния и кондиционирования воздуха.
Системы бытового водоснабжения включают системы питье-
вой, пресной мытьевой и бытовой забортной воды. Назначения
всех перечисленных систем определяются их названиями.
К санитарным системам относится также сточная система,,
служащая для сбора и удаления с судна сточных и хозяйствен-
но-бытовых вод.
Системы сжатого воздуха предназначены для получения,
хранения и транспортировки к потребителю воздуха требуемых
параметров. Различают системы низкого, среднего и высокого
давления.
Наиболее развиты специальные системы танкеров. В их со-
став входят грузовые и обеспечивающие системы. Первые пред-
назначены для приема, перекачки в пределах судна и выгрузки
жидких грузов. Обеспечивающие включают следующие системы:
газоотводную, подогрева жидкого груза, мойки танков, их оро-
шения.
Газоотводная система служит для сообщения танков с атмо-
сферой, поддерживает в них безопасное давление при грузовых
операциях.
Система подогрева повышает температуру нефтепродуктов,
снижает их вязкость и тем самым облегчает их всасывание на-
сосами н транспортировку прн разгрузке.
Система мойки предназначена для очистки танков и трубо-
проводов при перемене сортов перевозимого груза, приемке
балласта, подготовке к ремонту и т. д.
Специальная система служит для орошения забортной во-
дой нагретых палубы и надводной части танкера с целью сни-
жения температуры груза — это способствует уменьшению его
потерь от испарения.
К специальным относятся также системы погружения,
всплытия и регенерирования воздуха подводных лодок; системы
подъема СВП; системы грунтоотсоса и грунторазмыва спаса-
тельных судов и т. д.
Основные требования, предъявляемые ко всем системам:
высокая надежность, живучесть, коррозионная стойкость, ком-
пактность и малая масса, высокая степень автоматизации и
механизации, приемлемые экономические показатели.
329
Контрольные вопросы
1. В чем назначение рулевого устройства и каков его состав?
2. Какие элементы входят в грузовое устройство сухогрузного судна?
Наливного?
3. Какие типы судовых спасательных средств существуют?
4. Что входит в состав якорного устройства?
5. Для чего служат швартовное и буксирное устройства и из каких
элементов они состоят?
6. Какие системы называются общесудовыми и почему?
предметный указатель
Адмиралтейский коэффициент 98
Амплитуда качки 210, 221
Аппарель 294, 316
Ахтерпик 304
Ахтерштевень 16, 304
Бак 282
Баллер 15, 311
Бассейн опытовый 8, 91
Бимс 298, 300
Борт надводный 70
Брашпиль 323
Брус эквивалентный 268
Бульб носовой 243, 304
Валопровод 168, 283
Ватерлиния 13
Вибрация 281
Винт гребной 126, 137, 166
Винтовая линия 135
— поверхность 135
Водоизмещение 4, И, 17, 98, 285
Волнение 105, 217, 223
Высота борта 13, 70
Высота метацентрическая
— поперечная 34, 57, 65
— продольная 35
Главные размерения 13, 16
Грузовая
— марка 29
— шкала 27
Грузовой трюм 287
Движитель
— водомётный 128
— газоводомётиый 129
— идеальный 129
— крыльчатый 127
Двойное дно 285, 297
Диаграмма
330
— для проектирования гребвых
вннтов 150
— динамической остойчивости 62
— статической остойчивости 55
— паспортная 184
Закрытие люковое 289
Запас плавучести 28, 68
Засасывание 159
Изгиб судна
— на тихой воде 258, 278
— иа волнении 262, 279
Кавитация 144, 161
Капитанская формула 66
Качка
— на волнении 220
— на тихой воде 213
Киль
— вертикальный 299
— горизонтальный 298
Клюз 322, 326
Кнехт 326
Кница 298, 301
Колесо гребное 126
Колонка поворотная 255
Коммингс 298
Контейнеровоз 12, 291
Коэффициент
— засасывания 160
— общей полноты 17
— попутного потока 156
— пропульсивный 161
Кривые
— действия гребного винта 142
— интерполяционные 55
— элементов теоретического чер-
тежа 20
Критерии динамического подобия 77,
93, 144
Ланпорт 316
Ледовый пояс 305
Лесовоз 12
Лихтеровоз 292
Лопасть гребного винта 127, 135
Люк грузовой 290
Марка грузовая 29
Масштаб Бонжана 21
Метацентр 32, 34
Мидель-шпангоут 14
Миля морская 73
Момент
— изгибающий 258
— опрокидывающий 64
— сопротивления вращению греб-
ного винта 139
Мощность буксировочная 89
Надстройка 304
Насадка
— направляющая 246
— предвинтовая 250
Непотопляемость 67
Неравномерность поля скоростей 157
Опрокидывание 6, 64, 68
Опыт кренования 66
Переборка 302
Перекрытие
— бортовое 301
— днищевое 298
— палубное 300
Период качки 66, 210, 216
Перо руля 231
Поверхность смоченная 77, 99
Погнбь бимсов 16
Посадка судиа 14
Поступь относительная 138
Поток попутный 156
Радиус метацентрический 20, 33
Развал бортов 290, 306
Размер гоузовой 21
Реверс 191
Рубка 304
Руль 231
Рыскание 209
Седловатость палубы 16
Сила
— плавучести 22
— подъёмная 118, 183
— сопротивления 73, 77
Слеминг 208, 265
Сопротивление буксировочное 88
Стрела грузовая 314
Стрингер 298
Строевая по шпангоутам 22
Танкер 4, II, 284
Теоретический чертёж 15
Трюм 287
Туннель гребного вала 283
Тяга полезная 125, 159
Угол
— атаки 134, 231
— дифферента 14, 35
— крена 14, 35, 53
Узел 73
Упор 130, 140, 159
Успокоитель качки 252
Устойчивость иа курсе 230
Фальшборт 298
Флор 299
Форпик 304
Форштевень 16, 304
Фундамент 303
Характеристики
— амплитудно-частотные 222
— гидродинамические гребного
винта 149
— ходовые 184, 207
Ходкость 5, 72, 199
Центр:
величины 18, 23, 34
тяжести 23, 34
Циркуляция 234
Частота
— вращения гребного винта 137,
142
— волнения 217, 221
Число
— Вебера 181
— кавитации 144, 163, 181
— Коши 113
— Рейнольдса 93, 145
— Струхаля 145
— Фруда 93, 144
— Эйлера 144
Шаг гребного виита 137, 149
Шкала Бофорта 105, 220
Шлюпбалка 320
Шлюпка 318
Шпангоут
— рамиый 297
— теоретический 15
Шпация 15, 295
Экраиоплан 123
Эксперимент модельный 90, 143
Якорь 322
Ящик цепной 323
331
СПИСОК ЛИТЕРАТУРЫ
Аксютин Л. Р. Борьба с авариями морских судов от потерн остойчиво-
сти. Л.: Судостроение, 1986. 169 с.
Аксютин Л. Р., Благовещенский С. Н. Аварии судов от потерн остойчи-
вости. Л.: Судостроение, 1975. 200 с.
Александров М. Н. Безопасность человека на море. Л.: Судостроение,
1983. 208 с.
Анфимов В. Н., Сиротина Г. Н., Чнжов А. М. Устройство и гидромеха-
ника судна. Л.: Судостроение, 1974. 368 с.
Ардтюшков Л. С., Ачкинадзе А. Ш„ Русецкий А. А. Судовые движи-
тели. Л., Судостроение, 1988. 296 с.
Барабанои Н. В. Конструкция корпуса морских судов. Л.: Судострое-
ние, 1981. 552 с.
Басин А. М. Качка судов. М.: Транспорт, 1969. 272 с.
Он же. Ходкость и управляемость судов. М.: Транспорт, 1977. 455 с.
Борисов Р. В., Жинкин В. Б. Теория корабля; Учеб, пособие. Л.: ЛКИ,
1981. 121 с.
Они же. Теория корабля (Движители): Учеб, пособие. Л.: ЛКИ, 1982.
106 с.
Бронников А. В. Морские транспортные суда. Л.: Судостроение, 1984.
352 с.
Он же. Суда ледового плавания: Особенности проектирования: Учеб,
пособ. Л.: ЛКИ, 1984. 38 с.
Ваганов А. М. Проектирование скоростных судов. Л.: Судостроение,
1978. 280 с.
Войткунскин Я. И. Сопротивление движению судов. Л.: Судостроение,
1988. 287 с.
Гарин Э. Н. Конструкция корпуса судов на воздушной подушке: Учеб,
пособ. Л.: ЛКИ, 1979. 96 с.
Он же. Конструкция корпуса судов иа подводных крыльях: Учеб, по-
собие. Л.: ЛКИ, 1982. 93 с.
Гофман А. Д. Двнжнтельно-рулевой комплекс и маневрирование судна:
Справочник. Л.: Судостроение, 1988. 360 с.
Гундобин А. А., Чашков М. Г. Судовые бортовые були. Л.: Судострое-
ние, 1986. 88 с.
Дорогостайский Д. В., Жученко М. М., Мальцеи Н. Я. Теория и устрой-
ство судна. Л.: Судостроение, 1975. 413 с.
Егоров И. Т., Буньков М. М., Садовников Ю. М. Ходкость и мореход-
ность глиссирующих судов. Л.: Судостроение, 1978. 335 с.
Жинкин В. Б. Ходкость быстроходных судов: Учеб, пособ. Л.: ЛКИ,
1980. 91 с.
Зильман Г. И. Управляемость судов на воздушной подушке: Учеб, по-
соб. Л.: ЛКИ, 1982. 91 с.
332
Зильман Г. И., Красиицкий А. Д. Управляемость судна: Учеб, пособ.
Л.: ЛКИ, 1986. 88 с.
Кацман Ф. М., Дорогостайский Д. В. Теория судна и движители. Л.:
Судостроение, 1979. 279 с.
Каштелян В. И., Позняк И. И., Рывлин А. Я. Сопротивление льда дви-
жению судна. Л.: Судостроение, 1968. 238 с.
Колызаев Б. А., Косорукой А. И., Литвиненко В. А. Справочник по
проектированию судов с динамическими принципами поддержания Л.: Су-
достроение, 1980. 472 с.
Короткий Я. И., Ростовцев Д. М., Сиверс Н. Л. Прочность корабля.
Л.: Судостроение, 1974. 432 с.
Крылов А. Н. Мои воспоминания. М.: Изд-во АН СССР, 1945. 552 с.
Кузовенков Б. П. Прочность судов на подводных крыльях и воздушной
подушке: Учеб, пособ., Л.: ЛКИ, 1981. 99 с.
Лаврентьев В. М. Расчет судовых гребных винтов: Учеб, пособ. Л.:
ЛКИ, 1975. 118 с.
Липис В. Б. Гидродинамика гребного ниита при качке судна. Л.: Судо-
строение, 1975. 263 с.
Лукашевич А. А., Перник А. Д., Фирсов Г. А. Теория корабля. Л.: Су-
достроение, 1950. 448 с.
Магула В. Э., Друзь Б. И., Кулагин В. Д. Теория и устройство судов.
М.: Морской транспорт, 1963. 495 с.
Мирохии Б. В., Жинкин В. Б., Зильман Г. И. Теория корабля. Л.: Судо-
строение, 1989. 352 с.
Нечаев Ю. И., Царев Б. А., Челпаиов И. В. Профессия — судостроитель.
Л.: Судостроение, 1987. 144 с.
Праиила классификации и постройки морских судов/Регистр СССР. Л.:
Транспорт, 1985. 928 с.
Путов Н. Е. Проектирование конструкций корпуса морских судов. Л.:
Судостроение, 1976. 374 с.
Ремез Ю. В. Качка корабля. Л.: Судостроение, 1983. 328 с.
Рябов Л. И., Курдюмои В. А. Конструкция бортовых перекрытий мор-
ских судов: Учеб, пособ. Л.: ЛКИ, 1980. 61 с.
Семенов-Тян-Шанский В. В. Статика и дянамнка корабля. Л.: Судострое-
ние, 1973. 608 с.
Симоненко А. С. Грузовые устройства сухогрузных судов. Л.: Судо-
строение, 1988. 224 с.
Ои же. Судовые устройства. Л.: Судостроение, 1986. 176 с.
Снтченко Н. К., Ситченко Л. С. Общее устройство судов. Л.: Судострое-
ние, 1987. 328 с.
Соболев Г. В. Управляемость корабля и автоматизация судовождения.
Л.: Судостроение, 1976. 478 с.
Справочник по теории корабля. В 3-х т./Под ред. Я. И. Войткунского.
Л.: Судостроение, 1985. Т. 1—3.
Статика корабля/В. В. Рождественский, В. В. Луговскнй, Р. В. Борисов,
Б. В. Мирохии. Л.: Судостроение, 1986. 240 с.
Сутуло С. В. Гидродинамические характеристики средств управления
судном: Учеб, пособ. Л.: ЛКИ, 1988. 108 с.
Судовая энергетика — введение в специальность/Н. В. Алешни, Н. В. Го-
лубев, В. И. Козлов, Б. В. Ракицкий/Л.: Судостроение, 1984. 140 с.
Тряскнн В. Н. Проектирование конструктивного мидель-шпангоута мор-
ских транспортных судов: Учеб, пособ. Л.: ЛКИ, 1986. 102 с.
Тряский В. Н., Лазарев В. Н., Смирнов Ю. А., Курдюмов В. А. Проек-
тирование корпусных конструкций морских судов: Учеб, пособ. Л.: ЛКИ,
1987. 85 с.
Управление судном н его техническая эксплуатация/Под ред А. И. Ще-
тининой. М.: Транспорт, 1983. 655 с.
Фрид Е. Г. Устройство судна. Л.: Судостроение, 1990. 344 с.
Хановнч И. Г. Почему плавают корабли. М.: Военнздат, 1947. 127 с.
333
ОГЛАВЛЕНИЕ
От автора.......................................................
Введение .......................................................
Глава 1. Форма корпуса и плавучесть судиа.......................
1.1. Основные сведения о судах..........................
1.2. Форма судового корпуса...............................
1.3. Элементы теоретического чертежа ...................
1.4. Плавучесть судиа...................................
Глава 2. Остойчивость и непотопляемость.........................
2.1. Начальная остойчивость.............................
2.2. Изменение посадки и остойчивости при грузовых опе-
рациях .................................................
2.3. Влияние на начальную остойчивость перемещающихся
грузов и условий эксплуатации ..........................
2.4. Остойчивость на больших углах крена................
2.5. Динамическая остойчивость..........................
2.6. Нормирование остойчивости судна....................
2.7. Непотопляемость....................................
Глава 3. Сопротивление движению судна...........................
3.1. Общие положения....................................
3.2. Основные составляющие сопротивления................
3.3. Дополнительные составляющие сопротивлении. Буксиро-
вочная мощность судиа...................................
3.4. Определение сопротивления экспериментальным путем
3.5. Приближенные способы расчета сопротивления.........
3.6. Влияние условий эксплуатации на сопротивление . . . .
3.7. Сопротивление движению быстроходных судов с дина-
мическим поддержанием...................................
Глава 4. Движители..............................................
4.1. Классификация движителей..........................
4.2. Краткие сведения из теории движителей.............
4.3. Конструкция и геометрия гребного винта............
4.4. Гидродинамические характеристики гребного внита . .
4.5. Экспериментальные исследования работы гребных винтов
4.6. Взаимодействие гребного винта и корпуса судиа . . .
4.7. Кавитация гребных иинтов..........................
4.8. Проектирование гребных винтов.....................
4.9. Движители быстроходных судов......................
4.10. Работа пропульсивного комплекса судна.............
4.11. Дополнительные вопросы работы гребных винтов . . .
4.12. Расчет ходкости судна.............................
Глава 5. Качка судиа............................................
5.1. Общие сведения о качке.............................
5.2. Качка судна на тнхой воде..........................
3
4
11
11
13
18
22
30
30
39
45
53
60
64
67
72
72
76
85
90
97
105
116
125
125
129
135
137
143
155
161
166
191
199
209
209
213
334
5.3. Качка судна на волнении.............................. 217
5.4. Влияние курса н скорости движения судна на качку . . 226
Глава 6. Управляемость............................................ 229
6.1. Основные понятия.................................... 229
6.2. Средства обеспечения управляемости.................. 231
6.3. Циркуляция судна.......................;............ 234
6.4. Особенности управляемости судов с динамическим под-
держанием (СДП) ......................................... 237
Глава 7. Пути совершенствовании мореходных качеств судна......... 239
7.1. Общие положения................................. 239
7.2. Способы снижения сопротивления воды движению судна 241
7.3. Методы повышения эффективности гребных винтов . . . 244
7.4. Способы умерения качки.......................... 251
7.5. Вспомогательные средства управления судном........... 254
Глава 8. Прочность корпуса судна и его конструкция................ 256
8.1. Общие положения............................... 256
8.2. Общая прочность корпуса....................... 257
8.3. Местная прочность............................ 268
8.4. Судостроительные материалы................... 269
8.5. Проектиронанне корпусных конструкций......... 274
8.6. Дополнительные вопросы прочности.............. 278
8.7. Архнтектурно-конструктннные типы судов....... 282
8.8. Системы набора и конструктивные элементы корпуса 295
8.9. Конструкция перекрытий и других элементов корпуса 298
8.10. Конструкция корпуса судов с динамическим поддер-
жанвем.................................................. 307
Глава 9. Судовые устройства и системы............................ 310
9.1. Общие сведения....................................... 310
9.2. Рулевое устройство................................... 311
9.3. Грузовое устройство.................................. 314
9.4. Спасательные средства................................ 318
9.5. Якорное устройство................................... 322
9.6. Швартовное н буксирное устройства.................... 325
9.7. Судовые системы...................................... 328
Предметный указатель.............................................. 330
Список литературы................................................ 332
Учебное издание
Жинкин Валентин Борисович
ТЕОРИЯ
И УСТРОЙСТВО корабля
Учебник для вузов
2-е издание, исправленное и дополненное
Редакторы Т. Н. Альбова, Т. И. Ильичева
Художественные редактор Н. В. Зимаков
Корректор С. Э. Зайцева
ИБ Ns 1793
ЛР Ns 010282 от 25.01.1998 г.
Подписано в печать 27.10.2000
Формат бОХЭО’/и Гарнитура литературная. Печать высокая.
Усл. печ. л. 21,0. Усл. кр.-отт. 21,0. Уч.-иэд. л. 22,5.
Тираж 1000 эка. Заказ №3415.
Изд. № 4674-2000.
Издательство «Судостроение», 191186, С.-Петербург, М. Морская, 8.
Отпечатано с готовых диапозитивов в ГП Типография им. П.Ф.Алохина
185005 г. Петрозаводск, ул. "Правды". 4