/










































































































































Текст
Ш,Резников
ЭЛЕКТРО-
ПРИВОДЫ .
ЖЕЛЕЗНОДОРОЖНОЕ
I
АВТОМАТИКИ
И ТЕЛЕМЕХАНИКИ
Издательство «Т[
'нспорт »
УДК 656.25-83
Резников Ю. М. Электроприводы железнодорожной автомати-
ки и телемеханики. — М.: Транспорт, 1985. 288 с.
Рассматриваются основы построения и конструкции электро-
приводов стрелочных переводов, автошлагбаума, автостопа метро,
широко применяемых в железнодорожной автоматике и телемеха-
нике. Приведены расчетные соотношения для определения основ-
ных параметров электроприводов. Изложены основные эксплуата-
ционно-технические характеристики электроприводов и их электро-
двигателей. Рассмотрены вопросы автоматизированного управле-
ния электроприводами, порядок технического обслуживания, контро-
ля рабочих режимов, разборки, сборки и смазки. Приведен пере-
чень возможных неисправностей электроприводов и способы их
устранения.
Предназначена для инженерно-технических работников, свя-
занных с разработкой, проектированием, строительством и эксплуа-
тацией устройств автоматики и телемеханики.
Ил. 99, табл. 24, библиогр. 27 назв.
Рецензент А. И. Семьянских
Заведующий редакцией В. П. Репнева
Редактор Г. Г. Баюшкина
Р
3602040000-015
049(01)-85
© Издательство «Транспорт», 1985
ПРЕДИСЛОВИЕ
Электроприводы получили широкое распростра-
нение в железнодорожной автоматике и телемеханике в
качестве надежного технического средства для механи-
зации многих производственных процессов. В книге зат-
ронуты лишь те из них, которые совершаются в зоне
повышенной опасности: перемещение остряков и сердеч-
ников крестовин стрелочных переводов, подъем и опу-
скание бруса шлагбаума, поворот ударного рычага ав-
тостопа метро.
В железнодорожной практике нашли применение
электро-, пневмо- и гидроприводы, реализующие перечис-
ленные производственные процессы. Первый стрелочный
привод (Италия, 1873 г.) был гидравлическим, а при-
вод шлагбаума (США, 1925 г.) — пневматическим.
В отечественной практике известен электропневматиче-
ский стрелочный привод.
Однако «пальма первенства» всегда оставалась за
электроприводами. Примечательным является тот факт,
что до настоящего времени в мировой технике сигнализа--
ции, централизации и блокировки (СЦБ) нет «эталон-
ного» электропривода ни для стрелочных переводов, ни
для автошлагбаумов, ни для автостопов метро. В разных
странах или группах стран основные компоненты элект-
ропривода — электродвигатель, передаточный и конт-
рольный механизмы, схема управления — конструктив-
но и схемно решены по-разному. Такое многообразие
объясняется особенностями исполнительных устройств
(стрелок, шлагбаумов и т. д.), различием систем СЦБ
и эксплуатационно-технических требований к электро-
приводам, видом элементной базы и уровнем технологии
производства.
Чаще других разрабатывались и внедрялись в экс-
плуатацию стрелочные электроприводы, что подтвержда-
ет и отечественный опыт. На первом этапе строительства
централизаций применяли взрезной электропривод с
внешним запиранием типа 3900, а с 1935 г. использова-
лись семь типов взрезных электроприводов с внутренним
запиранием серии СПВ.
Увеличение массы и скоростей движения поездов,
появление новых конструкций стрелочных переводов из
рельсов тяжелых типов с гибкими остряками, жестко
связанными между собой тягами, исключили возмож-
ность повсеместного применения электроприводов серии
СПВ, требующих обязательно раздельного хода остря-
ков. В 1957 г. для электрической централизации был
разработан невзрезной электропривод с внутренним за-
пиранием типа СП-1.
Для механизируемых сортировочных горок в 1963 г.
создан электромеханический привод типа СПГ, заме-
нивший электропневматический привод типа СЭП-55
при новом строительстве.
В 1964 г. на базе электропривода типа СПГ созданы
первые приводы унифицированной конструкции гороч-
ной (СПГ-2) и электрической (СП-2) централизаций,
что позволило применить прогрессивную технологию из-
готовления и резко увеличить их выпуск. Дальнейшее
совершенствование оказалось успешным после решения
ряда вопросов теории и расчета оптимальных параметров
стрелочных электроприводов.
В 1973 г. были внедрены в производство унифици-
рованные электроприводы типов СПГ-3 с повышенным
быстродействием и СП-3 с тяговым усилием, достаточ-
ным для перевода стрелок и подвижных сердечников
крестовин скоростных стрелочных переводов.
Автоматизация управления расформированием сос-
тавов на сортировочных горках с применением мини-ЭВМ
и микропроцессоров, увеличение темпа роспуска вагонов
и интенсивности работы стрелок привели к созданию
и внедрению в производство в 1981 г. впервые в мире
бесконтактного электропривода типа СПГБ-4, который
по быстродействию, безопасности, долговечности, к.п.д.,
габаритным размерам и массе превосходит зарубежные
образцы.
В 1982 г. начат выпуск электропривода типа СП-6
для электрической централизации с улучшенными эк-
сплуатационными характеристиками.
4
Схемы дистанционного управления стрелочными элек-
троприводами совершенствовались в направлениях:
уменьшения до минимума числа линейных проводов;
повышения степени защищенности от ложного контроля
положения стрелки; увеличения коммутационной способ-
ности пусковых приборов; улучшения конструктивного
оформления аппаратуры; уменьшения времени пуска и
торможения электропривода (на горках).
В отечественной практике нашли применение девя-
ти-, четырех- и двухпроводная схемы управления элект-
роприводами постоянного тока, причем двухпроводная
схема, внедряемая с 1955 г., получила преимуществен-
ное распространение. Ее элементы конструктивно объе-
динены в блок типа ПС-62, выпускавшийся с 1965 г.,
в зависимости от напряжения питания контрольной цепи
под названием ПС-110А или ПС-220А. С 1978 г. нача-
то производство блока типа ПС-220М с повышенной
коммутационной способностью.
Для управления быстродействующими электроприво-
дами типов СПГ-2 и СПГ-3 с 1966 г. применяют блок
типа СГ-66 с ускоренным получением контроля положе-
ния стрелки. В процессе создания бесконтактного элект-
ропривода типа СПГБ-4 была проведена комплексная
разработка его составных частей, включая тиристорную
схему управления, конструктивно оформленную в виде
блока типа СГ-76М. Главное преимущество этого бло-
ка — бездуговая коммутация цепей, встроенная диагнос-
тика, возможность дистанционного измерения тока при
работе электропривода на фрикцию — послужило основа-
нием для создания унифицированного блока управлений
типа СГ-76У бесконтактным и контактным горочными
электроприводами. В 1982 г. начато производство блоков
типа СГ-76У. Стрелочный электропривод переменного
тока используют в основном на метрополитене, но в
настоящее время он получает распространение и на
наземном транспорте. В метро для управления асинх-
ронным стрелочным электроприводом применяют се-
мипроводную схему с резервированием аппаратуры, а на
наземных железных дорогах, начиная с 1978 г., пятипро-
водную схему.
Электропривод автостопа метро типов ПАМ-2 и
ПАМ-3 с момента своего появления существенных из-
менений не претерпел. Конструктивно изменилась лишь
5
гарнитура автостопа из-за возникшей необходимости
установки его в прямоугольных тоннелях, на наземных
участках и в круглых тоннелях уменьшенного диаметра.
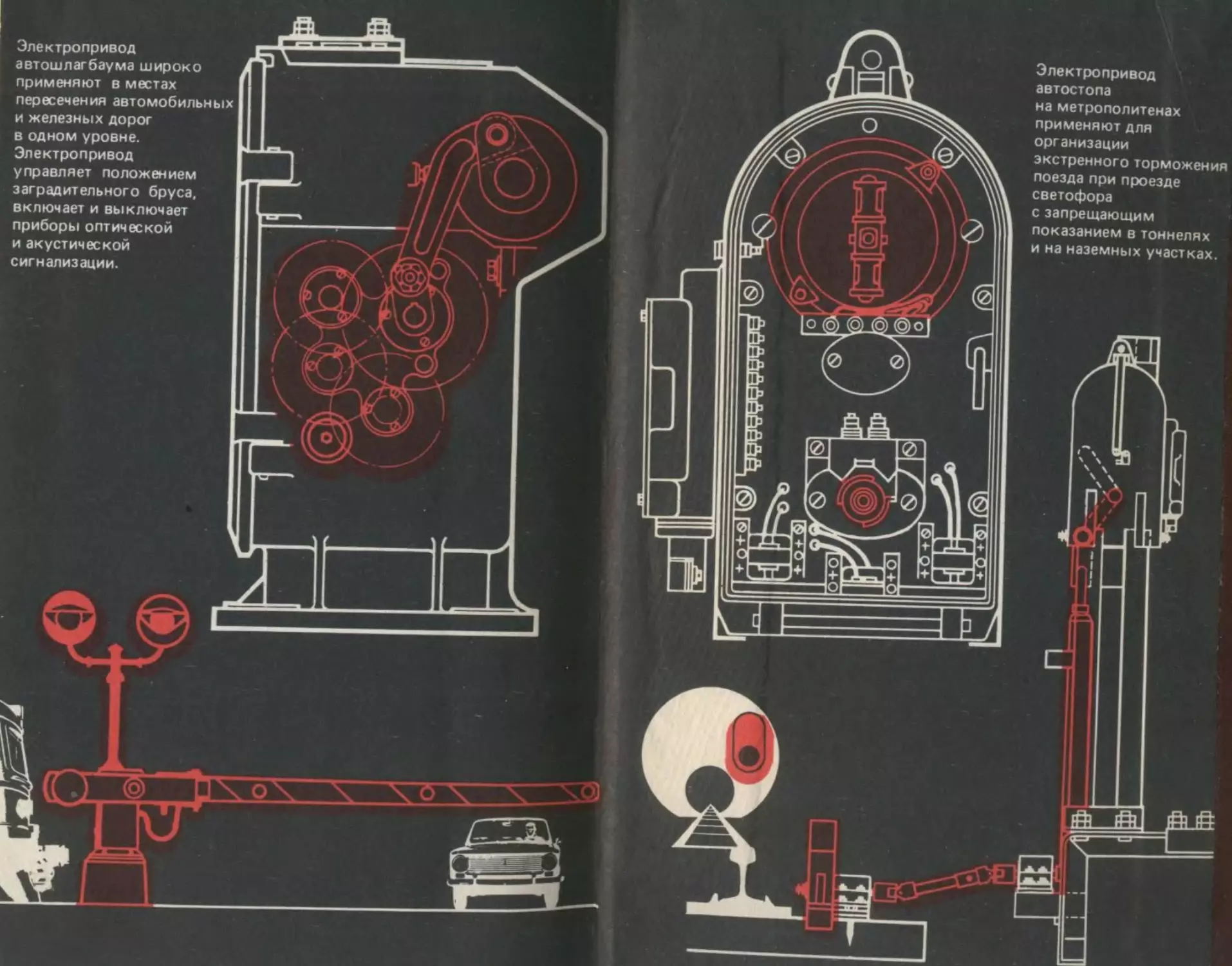
Первый электропривод автошлагбаума поднимал
длинный заградительный брус, перекрывающий всю
проезжую часть дороги. Опускался он под действием
собственного веса. С 1963 г. применяют короткий брус,
перекрывающий примерно половину ширины мостовой,
для чего был разработан маломощный электропривод,
поднимающий и опускающий брус.
В настоящей книге изложены основные вопросы
теории и подробно рассмотрены конструкции, схемы уп-
равления и техническое обслуживание важнейших элек-
троприводов, нашедших массовое применение в устрой-
ствах железнодорожной автоматики и телемеханики.
ОБЩИЕ СВЕДЕНИЯ
ОБ ЭЛЕКТРОПРИВОДАХ
1.1. ОСОБЕННОСТИ ОБЪЕКТОВ УПРАВЛЕНИЯ
И ФУНКЦИИ ЭЛЕКТРОПРИВОДОВ
Стрелочные переводы подразделяются на про-
стые (одиночные) и сложные (тройниковые и пере-
крестные). Простые стрелочные переводы, составляю-
щие около 98% общесетевого числа переводов и пересе-
чений путей, имеют стрелку, соединительные пути и кре-
стовину, уложенные на переводных брусьях. Стрелка со-
стоит из пар рамных рельсов, остряков, корневых уст-
ройств, опорных и крепежных деталей.
Рамные рельсы прикрепляют к переводным брусь-
ям через подкладки, башмаки и мостики. Чтобы обес-
печить постоянную ширину колеи, рамные рельсы соеди-
няют четырьмя—шестью связными полосами с разреза-
ми, которые изолируют рельсы друг от друга.
Остряки перемещаются по стрелочным подушкам.
Со стороны острия они связаны с электроприводом, а со
стороны корня каждый из них присоединен к соедини-
тельному рельсу вкладышно-накладочным или накла-
дочным устройством. При переводе стрелки остряк с
вкладышно-накладочным корневым креплением совер-
шает поворот при сравнительно небольшом тяговом уси-
лии электропривода, а остряк с накладочным корневым
креплением не поворачивается, а изгибается, для чего
требуется развить большое тяговое усилие. Жесткость
остряка в вертикальной плоскости и переводное усилие
снижают за счет вырезов вблизи корня длиной 0,9 м в
подошве с обеих сторон от полки. Такой остряк получил
название гибкого. Его преимуществами являются: от-
сутствие корневого зазора, простота в изготовлении и
надежность в эксплуатации, а недостатком — то, что
середина остряка мало отходит от рамного рельса при
приложении тягового усилия в традиционной точке у
острия остряка. Для устранения этого недостатка и обес-
печения требуемого желоба между остряком и рамным
7
рельсом при переводе стрелки гибкие остряки соединя-
ют между собой связными тягами. Чем остряки длин-
нее, тем тяг ставят больше. Кроме того, тяговое усилие
транслируют через отдельную рычажную передачу ко
второй точке остряка, а при очень длинном остряке на
стрелке устанавливают второй электропривод, который
соединяют с остряком в третьей точке, расположенной
примерно у его середины.
Стремление исключить вредные зазоры вслед за соз-
данием стрелки с гибкими остряками привело к появле-
нию крестовины с подвижным сердечником. В такой
крестовине подвижной сердечник прилегает к усовику,
что обеспечивает непрерывность поверхности катания
колеса. Чтобы подвижной сердечник перемещался, ус-
танавливают отдельный электропривод. Ход подвижного
сердечника меньше хода стрелки, равного 152 мм. По-
этому между электроприводом и рабочей тягой к сер-
дечнику предусматривают двуплечий рычаг с соотноше-
нием плеч, обеспечивающим требуемый ход сердечника.
Стрелочный перевод характеризуют маркой крес-
товины и типом рельсов. Марку крестовины определяют
отношением ширины сердечника к его длине и обозна-
чают простой дробью. К крутым относят стрелочные
переводы с крестовиной марок 1/5, 1/6, 1/7, 1/9, 1/11, а
к пологим — 1/18, 1/22. К основным относятся рельсы
типов Р50 и Р65, но в настоящее время начинается про-
изводство стрелочных переводов из рельсов типа Р75.
Стрелочный электропривод должен переводить стрел-
ку и подвижной сердечник крестовины из одного в дру-
гое крайнее положение, реверсировать стрелку и под-
вижной сердечник крестовины из любого промежуточ-
ного положения в первоначальное; запирать прижатый
остряк стрелки и сердечник в крайнем положении, конт-
ролировать положения стрелки и сердечника, допу-
скать перевод стрелки и сердечника вручную.
Шлагбаум состоит из заградительного бруса и мач-
ты со светофорными головками и предупредительными
надписями. Брус может иметь ручной привод или элек-
тропривод.
Заградительный брус изготовляют полым из сухой
древесины хвойной породы (сосны, лиственницы, пихты),
а также из фанеры повышенной водостойкости. В гори-
зонтальном положении брус находится над покрытием
8
дороги на расстоянии 1 — 1,25 м. Длину бруса выбирают
такой, чтобы он перекрывал не менее половины проез-
жей части автомобильной дороги с правой стороны по
ходу движения. Оставшаяся неперекрытой проезжая
часть должна быть не менее 3 м для свободного удале-
ния с переезда задержавшегося транспорта. Стандарт-
ная длина бруса 4 или 6 м. Если один брус не перекры-
вает всей полосы движения автотранспорта в одном на-
правлении, используют дополнительные шлагбаумы,
обеспечивающие полное перекрытие требуемой проезжей
части дороги.
Шлагбаум устанавливают на расстоянии 6 м от го-
ловки ближайшего рельса. Кроме сигнала положения,
предусматривают оптическую и акустическую сигнали-
зацию. В горизонтальном положении брус сигнализирует
в сторону автодороги тремя красными огнями, а в сто-
рону железнодорожного полотна — двумя мигающими
и одним белым огнем. На светофорных головках мачты
горят два красных огня. Акустический сигнал подает-
ся звонком громкого боя. Когда переезд открыт, брус
занимает вертикальное положение, и все сигналы вык-
лючены.
При случайном наезде автотранспорта на горизон-
тально расположенный брус во избежание поломки пре-
дусмотрена возможность его поворота на угол 45° в го-
ризонтальной плоскости.
Электропривод автошлагбаума поворачивает брус
из вертикального в горизонтальное положение и обрат-
но, запирает брус в вертикальном положении, контроли-
рует крайние положения бруса, управляет приборами
сигнализации.
Автостоп метро имеет основную деталь — путевую
скобу или ударный рычаг, взаимодействующую с поез-
дом. Автостоп устанавливают с правой стороны пути
перед изолирующим стыком светофора. Расстояние от
центра путевой скобы в заграждающем (вертикальном)
положении до внутренней головки ближайшего рельса
308±20 мм, а возвышение над ним 85—90 мм.
Путевая скоба выполнена в виде двух диаметрально
расположенных секторов, один из которых пустотелый.
Эксцентричное расположение массы необходимо для
установки путевой скобы в заграждающее положение
при ее разъединении с гарнитурой электропривода.
9
Электропривод автостопа должен поворачивать пу-
тевую скобу из вертикального (заграждающего) в го-
ризонтальное (разрешающее) положение и контролиро-
вать положение путевой скобы.
1.2. ЭКСПЛУАТАЦИОННО-ТЕХНИЧЕСКИЕ ТРЕБОВАНИЯ
К ЭЛЕКТРОПРИВОДАМ
В функциях, выполняемых электроприводами для
стрелочных переводов, автошлагбаума, автостопа метро,
много общего, но эксплуатационно-технические требо-
вания (ЭТТ) к каждому из них имеют отличия.
ЭТТ к стрелочным электроприводам. Согласно п. 6.28
Правил технической эксплуатации железных дорог Сою-
за ССР (ПТЭ) стрелочные электроприводы всех видов
должны обеспечивать при крайних положениях стрелки
плотное прилегание прижатого остряка к рамному рель-
су, не допускать замыкания стрелки при зазоре между
прижатым остряком и рамным рельсом 4 мм и более,
отводить другой остряк от рамного рельса на расстояние
не менее 125 мм.
Перечисленные положения являются исходными для
определения технических требований к стрелочным при-
водам.
Ход S переводной тяги, называемой обычно шибером
или штоком привода, должен быть
S>SC + SO+S3, (1)
где Sc = 125* мм — минимальны» ход остряков, обеспечивающий
необходимый желоб между отжатым остря-
ком и рамным рельсом для прохода колес
состава без удара в остряк;
So и S3 — дополнительный ход шибера, необходимый
для отпирания и запирания стрелки и зави-
сящий от конструкции запирающего меха-
низма.
Формула (1) может быть упрощена в двух частных
случаях.
1-й с л у ч а й S0 = S3, тогда S>SC4-2SO. Это имеет
место при равенстве ходов шибера для отпирания и за-
пирания стрелки.
* Для простых стрелочных переводов.
10
2-й случай So=53 = 0 и S>SC, т. е. шибер совер-
шает только рабочий ход (например, приводы с фиксато-
ром).
При внутренних запирающих механизмах расчет
удобно выполнять через угловой поворот органа, приво-
дящего шибер в движение (например, главный вал с
шиберной шестерней). Тогда по аналогии с формулой
(1) угловой поворот ф главного вала для рабочего хода
фс, отпирания ф0 и запирания ф3
’Р>’?с +?о+ ?э. (2)
Обеспечение прилегания прижатого остряка в край-
них положениях стрелки при ее исправном состоянии
и нормальной ширине колеи прежде всего зависит от
точности отработки приводом рабочего хода стрелки.
Поэтому привод должен обеспечивать требуемую точ-
ность рабочего хода стрелки, чтобы зазор между при-
жатым остряком и рамным рельсом был меньше 4 мм.
Это значение зазора исключает удар в острие остряка,
а также противошерстный взрез стрелки.
При следовании подвижного состава по стрелке на
ее остряки воздействуют вертикальные и горизонтальные
силы и, кроме того, возникает тряска, вибрация ит. д.;
в этих условиях может происходить отход прижатого
остряка от рамного рельса и, как следствие, попадание
гребней колес вагонов в пространство между прижатым
остряком и рамным рельсом, что ведет к аварии. Поэто-
му надежное запирание остряков и в особенности при-
жатого является важным требованием к стрелочным
приводам.
Условно различают три положения стрелки: плюсо-
вое крайнее, среднее и минусовое крайнее. Крайним на-
зывают такое положение стрелки, при котором прижа-
тый остряк заперт и прилегает к рамному рельсу с зазо-
ром менее 4 мм, а отжатый остряк отстоит от рамного
рельса на расстоянии не менее 125 мм. Отжатый остряк
в крайнем положении может запираться или не запи-
раться, что определяется конструкцией привода.
Средним называется такое положение стрелки, при
котором прижатый остряк отстоит от рамного рельса на
4 мм и более.
Важнейшим условием дистанционного управления
стрелками является наличие контроля их положения на
II
посту управления. Поэтому стрелочные приводы имеют
датчик контроля (называемый обычно автопереключа-
телем), обеспечивающий контроль положения стрелки и
преобразующий информацию об этом в электрическую
величину для дистанционной передачи ее в орган управ-
ления. Датчик должен выдавать соответствующую ин-
формацию как при перемещении остряков электропри-
водом, так и гребнями колес состава, т. е. при взрезе
стрелки.
В процессе эксплуатации стрелок возможно попада-
ние посторонних предметов между остряком и рамным
рельсом, препятствующее нормальному переводу. Если
при этом автоматическое реверсирование привода не
предусмотрено, привод следует оснастить защитой от
перегрузок.
Стрелочные приводы, кроме силового, должны допу-
скать перевод стрелки вручную. При этом, а также при
вскрытии привода питание должно отключаться автома-
тически. Взрезные стрелочные приводы должны предот-
вращать механические повреждения стрелки, гарнитуры
и привода, по крайней мере, при невысоких скоростях
взрезов. Крепление приводов на стрелках должно быть
надежным во избежание их смещений в процессе работы.
Кроме общих требований к стрелочным приводам
электрической (СП) и горочной (СПГ) централизаций,
последние должны удовлетворять ряду специальных
требований, вытекающих из специфики устройства и ра-
боты сортировочных горок. Отличительной особенностью
сортировочных горок является наличие спускной части
и свободное скатывание отцепов под действием силы
тяжести. В пределах стрелочной зоны после выхода с
замедлителя отцепы практически являются неуправляе-
мыми объектами и не могут быть остановлены незави-
симо от ситуации на очередной стрелке. В связи с этим
вероятность того, что к моменту вступления первых колес
отцепа на остряки стрелка будет находиться в крайнем
положении, должна быть равна или максимально близка
к единице. Для обеспечения максимальной вероятности
СПГ должны обладать высоким быстродействием, мак-
симальной надежностью и конструктивно обеспечивать
безопасность роспуска составов с горки.
Так как число срабатываний электроприводов СП в
сутки исчисляют сотнями (100—200), а СПГ — тысяча-
12
ми (до 3 тыс.), последние рассчитывают на большую
частоту срабатываний.
В процессе срабатывания движущиеся части СПГ
запасают значительную кинетическую энергию. Если
учесть, что скорость перевода стрелки приводом СПГ в
5__]0 раз выше, чем приводом СП, то запасенная им ки-
нетическая энергия в 25—100 раз превысит кинетиче-
скую энергию СП, так как величина кинетической энер-
гии пропорциональна квадрату скорости.
Если вся энергия в конце каждого перевода будет
передаваться стрелке, то это приведет к ее быстрому
расстройству, закрытию для движения и к значительным
экономическим потерям, особенно в условиях автомати-
зированной сортировочной горки. Поэтому в СПГ пре-
дусматривают защиту от динамических воздействий на
стрелку в конце перевода.
Конструкции СП и СПГ должны обеспечивать воз-
можность быстрой замены неисправных частей, требо-
вать минимума ухода, иметь минимальные габаритные
размеры, массу и стоимость. Кроме того, при создании
стрелочных приводов следует иметь в виду желатель-
ность унификации СП и СПГ как с точки зрения их
производства, так и эксплуатации.
ЭТТ к электроприводу автошлагбаума. Согласно
п. 6.36 ПТЭ автошлагбаум должен оставаться в закры-
том положении, и сигнализация должна продолжать
действовать до полного освобождения переезда поездом.
Закрытое (горизонтальное) положение бруса обычно
обеспечивается силами трения в механизме электропри-
вода. Вес бруса может быть уравновешен противовесом,
что снижает требуемый вращающий момент на выход-
ном валу электропривода. При отсутствии электропита-
ния необходимо предусматривать открытие шлагбаума
вручную. В открытом положении брус шлагбаума запи-
рается во избежание самопроизвольного закрытия от
случайного воздействия.
Угол поворота бруса в вертикальной плоскости дол-
жен быть минимальным, но достаточным для беспрепят-
ственного проезда транспорта любой высоты. Из этого
требования следует, что оптимальное значение угла
поворота 90°.
При эксплуатации электропривода может возникать
ситуация, когда под опускающимся брусом может ока-
13
заться автомобиль, и дальнейшее опускание бруса ока-
жется невозможным. Предотвращение заторможенного
состояния электродвигателя требует устройства в при-
воде соответствующей защиты.
Угловой поворот бруса шлагбаума необходимо конт-
ролировать для своевременного выключения электродви-
гателя в конце хода привода, контроля положения бру-
са, включения и выключения оптической и акустической
сигнализации. Поэтому электропривод должен иметь
автопереключатель (контактный или бесконтактный),
осуществляющий эти операции.
Учитывая, что массы бруса, противовеса и других
вращающихся частей обладают значительной инерцион-
ностью, электропривод должен быть снабжен амортиза-
торами, поглощающими ударные нагрузки.
Во избежание поломки бруса автошлагбаума из-за
случайного наезда на него автомобиля связь между бру-
сом и электроприводом (или другими частями автошлаг-
баума) должна быть нежесткой, иначе говоря, авто-
шлагбаум должен быть взрезным. (Здесь термин «взрез-
ной» применен благодаря некоторой аналогии между
наездом автомобиля на закрытый шлагбаум и наездом
локомотива на непереведенную стрелку.)
Электропривод должен закрепляться на отдельном
прочном фундаменте, заделанном в грунте. Он должен
требовать минимума ухода и иметь минимальную стои-
мость при сроке службы не менее 10 лет.
ЭТТ к электроприводу автостопа. Согласно §80 Пра-
вил технической эксплуатации метрополитенов автостоп
автоматически обеспечивает экстренное торможение мо-
торвагонного подвижного состава при проезде им све-
тофора с запрещающим показанием. Поэтому для меха-
нического воздействия на тормозную магистраль состава
допускается вводить путевую скобу в пределы габарита.
Угловой поворот выходного вала электропривода
должен быть выбран так, чтобы путевая скоба при ходе
из заграждающего в разрешающее положение выходила
за пределы габарита. Для обеспечения требуемой точ-
ности должны предусматриваться ограничители хода.
Конструкция электропривода и гарнитуры должна
предусматривать установку путевой скобы в заграждаю-
щее положение при отключении электропитания, разъе-
динении в кинематических связях и других нарушениях.
14
Переход в заграждающее положение допускается обес-
печивать механическим или электрическим способом.
При использовании механического способа предусматри-
вают груз, достаточный для преодоления сопротивле-
ния повороту скобы в заграждающее положение. В этом
положении, когда груз должен удерживаться, следует
стремиться снижать потребление электроэнергии. Учиты-
вая, что опускание груза может приводить к значитель-
ным ускорениям, необходимо предусматривать снижение
скорости электропривода или установку амортизато-
ров.
При повороте путевой скобы в разрешающее поло-
жение в случае попадания под нее посторонних пред-
метов электродвигатель привода будет испытывать пе-
регрузки. Поэтому электропривод должен быть оснащен
защитой, ограничивающей перегрузки.
Важным требованием к электроприводу автостопа
является контроль положений выходного вала, связан-
ного через гарнитуру с путевой скобой. Поэтому элек-
тропривод должен иметь автопереключатель, формирую-
щий информацию о положении выходного вала.
Электропривод устанавливают в круглых и прямо-
угольных тоннелях и на наземных участках. Крепление
должно быть надежным с учетом воздействий воздуш-
ных потоков, возникающих при проходе поезда.
Конструкция электропривода и гарнитуры автостопа
должна обеспечивать возможность быстрой замены де-
талей, требовать минимума ухода, иметь минимальные
габаритные размеры, массу и стоимость.
1,3, КЛАССИФИКАЦИЯ ЭЛЕКТРОПРИВОДОВ
Стрелочные приводы (рис. 1) классифицируют по
виду потребляемой энергии; времени перевода стрелки;
виду запирания стрелки; способу восприятия взреза
стрелки; виду коммутации рабочих и контрольных цепей,
выполняемой непосредственно в механизме привода.'
По виду потребляемой энергии стрелоч-
ные приводы различают электрические, электропневма-
тические и электрогидравлические. Электрические при-
воды в свою очередь можно разделить на электромеха-
нические и электромагнитные.
15
-Рис. 1. Классификация стрелочных приводов
Электромеханические стрелочные приводы основаны
на принципе преобразования электрической энергии в
механическую электродвигателями постоянного или пе-
ременного тока. Для всех типов электромеханических
приводов характерно использование электрической энер-
гии как для перевода, так и контроля положения стрелок.
Электромагнитные приводы, в которых электрическая
энергия преобразуется в механическую, например с по-
мощью соленоидов, из-за неэкономичности и громоздко-
сти распространения на железнодорожном транспорте
не получили (на городском транспорте их применяют
для перевода трамвайных стрелок).
Электропневматические и электрогидравлические
стрелочные приводы основаны на применении пневмати-
ческих и гидравлических двигателей. Энергия сжатого
воздуха или жидкости преобразуется в механическую
работу у них в рабочем цилиндре, имеющем поршень со
штоком. Последний через стрелочную тягу связан с ост-
ряками стрелки. Перемещение поршня в цилиндре под
действием сжатого воздуха или жидкости приводит к
переводу стрелки. Источником питания пневматического
и гидравлического двигателей является компрессор или
насос. Особенность этих приводов — использование
16 1
энергии сжатого воздуха или жидкости для перевода
стрелок и электрической энергии для управления и конт-
роля их положения, а также компрессии воздуха и обес-
печения давления жидкости.
По времени перевода стрелочные приводы
можно разделить на быстродействующие, с нормальным
временем перевода (нормальнодействующие) и мед-
леннодействующие.
К быстродействующим относятся приводы со време-
нем перевода стрелки до 1 с, нормальнодействующнм—
2—7 с, к медленнодействующим — 10 с и более. Быст-
родействующие приводы применяют на сортировочных
горках и маневровых районах станций, остальные на
станциях, включаемых в электрическую или диспетчер-
скую централизацию.
По виду запирания различают стрелочные
приводы с внутренним и внешним запиранием. При
внутреннем запирании его механизм находится внутри
привода, при внешнем — на стрелке.
По виду восприятия взреза стрелки, т. е.
ее принудительного перевода ребордами колес поезда
при пошерстном движении, стрелочные приводы разли-
чают взрезные и невзрезные.
Взрезные стрелочные приводы имеют устройство,
обеспечивающее заранее заданное сопротивление пере-
мещению шибера, производимому извне привода. Благо-
даря этому предотвращается разрушение механизма при-
вода при взрезе стрелки. Взрезные приводы могут быть
фиксаторного типа или с гибкой связью. В первом слу-
чае привод стопорится в крайних положениях фиксато-
рами; во втором — между каким-либо ведущим и ведо-
мым элементами привода устраивают нежесткое соеди-
нение. »
Невзрезные стрелочные приводы не имеют взрезного
устройства, что значительно повышает их надежность и
упрощает конструкцию и эксплуатацию.
Невзрезные стрелочные электроприводы защищают
от повреждений при взрезах электрическим мето-
дом [1].
По виду коммутации рабочих и конт-
рольных цепей, осуществляемой непосредственно
в механизме привода, различают контактные и бескон-
тактные стрелочные приводы.
17
В контактных приводах используют электрическую
коммутацию открытого типа или в масляной ванне. Так
как коммутация происходит автоматически в течение
цикла работы привода, переключающее устройство но-
сит название автопереключателя. Недостатками контакт-
ных приводов являются механический износ, подгорание
и отказы при низких температурах вследствие обледе-
нения или индевения контактов автопереключателей.
Перечисленные недостатки отсутствуют в бесконтактных
приводах.
К бесконтактным относятся стрелочные приводы, в
которых вместо электрических контактов используют
бесконтактные переключающие элементы.
Электроприводы автошлагбаума и автостопа метро
имеют меньше разновидностей, чем стрелочные приводы.
Поэтому их классифицируют, используя лишь отдельные
из рассмотренных признаков.
2 ТЕОРЕТИЧЕСКИЕ ОСНОВЫ
ПОСТРОЕНИЯ ЭЛЕКТРОПРИВОДОВ
2.1. СТРУКТУРНЫЙ СИНТЕЗ ЭЛЕКТРОПРИВОДА
Построение электропривода можно разделить на
два этапа: выбор элементов и построение структурной
схемы, или структурный синтез, и определение парамет-
ров этих элементов, или параметрический синтез. Да-
лее рассматриваются лишь некоторые из результатов,
имеющих практическое значение.
Структурный синтез привода выполняют на основе
предъявляемых к нему технических требований, класси-
фикационных признаков, анализа отечественного и зару-
бежного опыта и поиска новых конструктивных решений.
В качестве примера рассмотрим ход структурного
синтеза быстродействующего горочного стрелочного
привода (СПГБ).
Предположим, анализ мирового опыта показал, что
существуют три основных дискуссионных вопроса, тре-
бующих проведения исследований: вид двигателя приво-
да, вид запирания стрелки, взрезаемость.
При выборе вида двигателя анализируются пневма-
тичские, гидравлические и электрические двигатели. *
Рабочим агентом пневматического двигателя являет-
ся сжатый воздух, всегда содержащий в некотором ко-
личестве влагу. Наличие влаги при повышенных темпе-
ратурах вызывает коррозию, а при низких — обледене-
ние дроссельных отверстий и трубопроводов. Последнее,
а также утечка воздуха вследствие износа мест уплот-
нений приводят к изменению характеристик или полной
потере работоспособности привода. Гидравлический
двигатель требует применения в качестве рабочего аген-
та незамерзающих жидкостей со стабильными свойства-
ми, что представляется для напольных условий эксплу-
атации СПГБ трудноразрешимой задачей, имея в виду
высокие требования к его безопасности и надежности.
Кроме того, использование пневматических и гидравли-
19
ческих двигателей требует установки компрессоров или
насосов, прокладки кабельной линии, необходимой для
управления, и пневматической или гидравлической ли-
нии к приводу. Свойства электрического тока рабочего
агента электродвигателей практически стабильны, а для
электропитания достаточно только кабельной линии.
Коэффициент полезного действия электрических дви-
гателей выше, чем пневматических и гидравлических.
Это особенно ценно в связи с дистанционным управлени-
ем СПГБ. Интенсивность отказов электрических двига-
телей меньше, чем пневматических и гидравлических.
Таким образом, по одному из важнейших требований
к СПГБ — надежности — электродвигатели имеют пре-
имущества.
Особое место занимает вопрос о выборе вида двига-
теля СПГБ, удовлетворяющего по быстродействию. На-
ивысшим быстродействием обычно обладают гидравли-
ческие двигатели, за ними следуют пневматические и,
наконец, электрические. Поскольку функции стрелочно-
го привода не ограничиваются только позиционным пе-
ремещением стрелки, как показали исследования, требу-
емое быстродействие может быть достигнуто при любом
из перечисленных видов двигателей. Сравнение массы и
габаритных размеров приводов с электрическим, пнев-
матическим и гидравлическим двигателями по данным,
приведенным в [2], свидетельствует о преимуществах
электроприводов.
Характер производственного процесса сортировочной
горки (непрерывное скатывание отцепов) не допускает
даже кратковременной остановки стрелки в среднем по-
ложении. Этим объясняется требование гарантирования
бесперебойности электропитания. Для приводов посто-
янного тока применяют буферную систему с аккумуля-
торной или конденсаторной батареей, где наиболее про-
сто обеспечивается гарантированное электропитание.
Определяя вид запирания СПГБ, проанализируем
внешние и внутренние запирающие механизмы. Достоин-
ством внешних замыкателей, в частности крюкового и
клинового, является непосредственная связь запираемо-
го остряка и рамного рельса. Однако опыт эксплуата-
ции внешних замыкателей за рубежом и у нас в стране
(с приводами типов СЭП-55 и 3900) показывает, что
внешние замыкатели обладают рядом серьезных недо-
20
статков. Вследствие расположения привода в колее уход
за ними сложен и небезопасен для обслуживающего
персонала; наружная установка приводит к быстрому
засорению и, как следствие, частым заклиниваниям за-
мыкателей; тяговые и опорные элементы быстро изна-
шиваются и требуют частых замен при большом средне-
суточном числе переводов стрелок.
Внутренние запирающие механизмы лишены этих
недостатков благодаря расположению вне колеи и про-
стоте их герметизации. При этом надежность запирания
стрелки через рабочую тягу механизмом, находящимся
в самом приводе, вполне достаточна. Внутренние запи-
рающие механизмы по сравнению с внешними имеют
ряд важных преимуществ, к которым следует отнести
долговечность, простоту смазочных устройств, безопас-
ность и простоту обслуживания. Если учесть указанные
преимущества, а также то обстоятельство, что при пер-
спективном росте перерабатывающей способности оте-
чественных горок горочный технологический интервал
будет составлять всего 1—2 мин, применение внутрен-
него запирания становится единственно приемлемым для
СПГБ.
Специфической особенностью стрелочных приводов
является способ восприятия взреза стрелки, или взреза-
емость. Применяют стрелочные приводы взрезные и
невзрезные. Известно, что взрезные приводы могут на-
дежно предохранять от повреждений стрелку, гарниту-
ру и элементы самого привода лишь при низких скоро-
стях взрезов. Это объясняется тем, что при высоких
скоростях взрезов в большей степени проявляется инер-
ция подвижных частей стрелки, гарнитуры и привода.
Невзрезные приводы по безопасности, надежности и
экономичности имеют преимущества перед взрезными.
Поэтому целесообразно применять невзрезной привод с
автоматической защитой всех стрелочных устройств, ко-
торая исключала бы повреждения при взрезах вплоть
до максимально допустимых скоростей движения по
горке (40 км/ч).
Вид коммутации рабочей и контрольной цепей, вы-
полняемой непосредственно в приводе, существенно вли-
яет на его показатели.
Слабым звеном в контактных приводах, в особенно-
сти быстродействующих, является автопереключатель.
21
В практике отечественных сортировочных горок и ма-
невровых районов известны случаи, когда отказы авто-
переключателя делали невозможным перевод стрелок и
даже приводили к авариям. Наиболее характерными
причинами отказов являются подгорание, механический
износ или излом контактов, их обледенение или индеве-
ние, поломка контактных колодок или пружин кручения
автопереключателя. Уход за автопереключателе.м сло-
жен, так как необходимо поддержание заданного кон-
тактного нажатия, устранение частых разрегулировок,
удаление металлической пыли, образующейся вследствие
износа контактных пружин, и др.
Некоторые из перечисленных причин отказов трудно
устранимы, так как свойственны любым контактным си-
стемам автопереключателей, например, значительный из-
нос из-за большого среднесуточного числа переводов
стрелок, обледенение ввиду напольных условий работы
электроприводов и т. д. Наметившаяся в связи с этим
за рубежом тенденция к уменьшению числа контактов
автопереключателя до минимума и передача их функций
реле схемы управления стрелкой приводит к увеличе-
нию числа проводов между постом централизации и
стрелочным электроприводом и в целом не повышает
надежности устройств.
Повышение надежности работы контактов автопере-
ключателя горочного электропривода магнитным дугога-
шением, герметизацией, обогревом и тщательным ухо-
дом уже не дает желаемого результата из-за значитель-
ного роста коммутируемых мощностей, увеличения сред-
несуточного числа срабатываний и необходимости повы-
шения быстродействия.
Бесконтактный привод не имеет недостатков, свойст-
венных контактному приводу, но его применение, как
правило, связано с выключением рабочей цепи на посту
централизации, а не в приводе. Использование для этой
цели пускового реле означало бы простой перенос кон-
тактного коммутатора со стрелки на пост и не повышало
бы общей надежности аппаратуры. Как показали иссле-
дования [3], противоречие можно исключить, применив
тиристорные коммутаторы.
Таким образом, целесообразно выполнить СПГБ бес-
контактным, а блок управления электроприводом — с
бездуговой коммутацией.
22
Рис. 2. Структурная схема электропривода:
а — бесконтактный электропривод; б — обобщенная схема электропривода
В соответствии с изложенным построена структурная
схема горочного электропривода (рис. 2,а), содержащая
источник гарантированного электропитания ИГП; блок
управления электроприводом БУ; электродвигатель ЭД—
источник механической энергии; редуктор Р — усили-
тель вращающего момента электродвигателя; фрикци-
он — тормоз Ф, обеспечивающий защиту электродвига-
теля от перегрузок; запирающий механизм ЗМ, исклю-
чающий отход прижатого остряка при движении ваго-
нов по стрелке; бесконтактный автопереключатель Б АП,
сигнализирующий о положении стрелки С; датчик по-
шерстного следования подвижных единиц Д; дешифра-
тор сигналов датчика о взрезе стрелки ДШ; пульт уп-
равления ПУ; управляющий (вычислительный) комп-
лекс УВК. Тонкими линиями обозначены электрические
связи, жирными — механические.
Структурный синтез электроприводов автошлагбаума
и автостопа метро проводится аналогично. На обобщен-
ной структурной схеме (рис. 2,6) обозначены: АП —
контактный автопереключатель; ФУ — устройство,
фиксирующее исполнительный механизм в крайнем по-
ложении; ИМ — исполнительный механизм (брус шлаг-
баума, ударный рычаг или скоба автостопа). Контакт-
23
яый автопереключатель применяют для удешевления
электропривода при небольшом среднесуточном числе
•срабатываний и сравнительно невысокой коммутируемой
мощности. Электропривод электрической централизации
имеет такую же структурную схему, только вместо
звеньев ФУ и ИМ имеются звенья ЗМ и С.
2.2. ОПТИМАЛЬНОЕ УПРАВЛЕНИЕ ЭЛЕКТРОПРИВОДОМ
Синтез электропривода выполняют по заранее огово-
ренному критерию оптимальности. В качестве меры эф-
фективности при определении критерия оптимальности
могут выставляться, например, требования минимально-
го времени перевода стрелки на сортировочной горке,
минимальных потерь энергии при подъеме бруса авто-
шлагбаума и др.
Оптимальные задачи решают методами теории опти-
мального управления. Одним из методов, наиболее часто
применяющихся на практике, является принцип макси-
мума Л. С. Понтрягина [6].
Рассмотрим использование этого принципа для реше-
ния задачи обеспечения максимального быстродействия
СПГБ. Следует иметь в виду, что время перевода стрел-
ки зависит как от параметров органа управления и са-
мого привода (см. рис. 2), так и от закона управления
СПГБ. Сначала определим вид закона управления при-
водом.
Поведение объекта (СПГБ) описывается системой
уравнений
dxi , ,
Tt =^(х».....°i........М- /=1- ••• • п
или в векторной форме
dX
— =f(X.U). (3)
В фазовом пространстве X переменных xlt ..., хп зада-
но начальное х0 и конечное Xi положения объекта.
В пространстве управлений иь ..., иг задано некоторое
множество U, ограничивающее область определения до-
пустимых управлений, под которыми подразумевают уп-
24
равления в виде кусочно-непрерывных функций w = u(/).
Пусть под действием управлений u(t), начиная
с ' момента t0, объект из положения x0 = x(t0)
переходит в положение xi=x(ti), так что Сле-
довательно, время перехода составляет T=ti—10. Зада-
ча заключается в том, чтобы найти такую вектор-функ-
цию u(t), которая обеспечивает перевод объекта из од-
ного положения в другое за Тмин, т. е. минимизирует
/>
7= [Л. (4>
t.
Для нахождения u(t), которое может обеспечить ми-
нимум (4) вводится такая промежуточная функция Н,
зависящая от переменных х, и и некоторых вспомога-
тельных переменных ф, чтобы
Н (ф, х, и) = ф/ (х, и) = 2 фк /к <х> и> (5>
dH(W), >-(/), О(0) п
dt дх
Процесс (x(t), u(t)) будет оптимальным, если су-
ществует такая ненулевая вектор-функция ф(0, чтобы
для произвольного момента времени выпол-
нялось условие максимума
Н (0, х (0, и (Г)) = max Н (ф (0, х (t), V) (7)
и в конечный момент времени ti имело место ,
Я(ф(Л), х(6), «(6))>0. (8)
Следует отметить, что в оптимальном процессе функ-
ция Н будет постоянной т. е.
Н (<|> (0, х (0, и (О) = const. (9)
Применительно к стрелочным электроприводам в ка-
честве фазовых координат можно рассматривать углы
поворота ф и скорости <о вращения валов электродвига-
телей, а в качестве компонент управлений — их токи
i- Уравнение движения электропривода имеет вид
. dw
Л1 - Мс = I — (10)
25
или в относительных единицах
£1
dt
(Н)
Где цс — относительный момент сопротивления стрелки.
Обозначив Xi=[ dt, x2=<p,*3=v,n = f, получим систе-
му дифференциальных уравнений СПГБ
dx\
di~~X'
dx2
dT =Хз:
dx3
dF-u-^c.
(12)
Согласно формуле (5) в рассматриваемом случае
Л/^^Ч-^^з + ФзИ-'кз^с. (13)
Сопряженная система уравнений в соответствии с
выражением (6) имеет вид:
dl> d^
— = 0; — = 0; — = - Ф,
dt dt dt f2-
Проинтегрировав, получим
^ = Ci; Ф2-С2; ^3 = C3-C2t, I
где Ci, C2, Ca — постоянные интегрирования.
Условие максимума (7) показывает, учитывая най-
денное значение функции Н и ограничение по управле-
нию (—1<ис1),что
и (/) =d/Y(-(О'^(О’ ° (О) = sign e sign ц (14)
Из выражения (14) следует, что оптимальное управ-
ление u(t) представляет собой кусочно-постоянную функ-
цию, принимающую значения u = -J-l или и= — 1, и мо-
жет сменить знак только один раз (рис. 3, а).
При оптимальном управлении процесс срабатывания
привода состоит из участков разгона (0а) и торможения
(a/i), т. е. при отсутствии ограничений целиком проте-
кает в неустановившемся режиме. Скорость привода
26
привода
(х3) возрастает и убывает по линейному закону. Опти-
мальное управление приводом (практически управляют
напряжением, а не током) должно поддерживаться на
максимальном уровне, т. е. равным положительному зна-
чению (п = -}-1) до момента переключения (t2) и затем
отрицательному (и = — 1)—до конца срабатывания (Л).
Рассмотрим вопрос о технической реализации опти-
мального управления. Сложность технической реализа-
ции оптимального управления объясняется необходи-
мостью применения вычислительных систем для точного
расчета момента, когда следует переключить привод с
разгона на торможение в процессе каждого перевода
стрелки. Следовательно, управление по оптимальному
закону на участке разгона осуществляется просто (до-
статочно обеспечить |м| = 1); вычислительные системы
же необходимы для определения момента перевода при-
вода на участок торможения и обеспечения нулевой ко-
нечной скорости его электродвигателя.
Такая вычислительная система может быть построе-
на, в частности, на микропроцессорах со схемной защи-
той электропривода от опасных отказов.
Практический интерес представляет и другой путь
реализации оптимального управления, связанный с кон-
структивной фиксацией момента начала торможения
электропривода (МНТ).
В самом деле, если фиксировать МНТ (рис. 3, б) в
точке а(|и| = 1, ц=1), то при значениях и и ц, меньших
27
или больших 1, привод либо не дойдет до крайнего по-
ложения, что недопустимо, либо будет стремиться про-
скочить его. Практически в последнем случае прижатый
остряк стрелки будет совершать «отжим» рамного рель-
са. Однако недоход привода может быть полностью ис-
ключен, если фиксировать МНТ в точке А, соответству-
ющей полному ходу стрелки. Явление «отжима» приво-
дом, вызывающее быстрое расстройство стрелочного
перевода, может быть устранено введением отсечки дви-
жения в передаточном механизме СПГБ. Отсечка дви-
жения может быть достигнута стопорением одного из
элементов передаточного механизма привода при одно-
временном выключении управления (и = 0). Однако во
избежание появления недопустимых динамических пере-
грузок в элементах привода при его стопорении запа-
сенная при разгоне кинетическая энергия должна быть
поглощена каким-либо тормозом. Функции механиче-
ского тормоза может выполнять фрикционное сцепление,
которое предусматривается в стрелочных приводах для
исключения перегрузки электродвигателя при попадании
посторонних предметов между остряками и рамными
рельсами. При этом мощность фрикции должна быть
достаточной, чтобы продолжительность механического
торможения не превышала длительности паузы между
переводами стрелки при роспуске состава. Полная оста-
новка движущихся частей привода во время паузы ме-
жду переводами, а не одновременно с окончанием пере-
мещения стрелки вполне допустима, если последняя бу-
дет уже заперта. Следовательно, стопорение (отсечку
движения в передаточном механизме) целесообразно
предусмотреть после срабатывания запирающего меха-
низма.
Взаимоположение стопорящего органа и фрикции
тормоза также небезразлично в кинематической схеме
привода. Динамические воздействия на элементы приво-
да могут быть сведены к минимуму в том случае, если
стопорящий орган и фрикция будут находиться в одном
пли в соседних звеньях передаточного механизма. Если
стопорящий орган и фрикция будут разделены несколь-
кими звеньями, например каскадами зубчатых шесте-
рен, то кинетическая энергия последних, запасенная при
разгоне привода и не погашенная при торможении фрик-
цией, будет дополнительно воздействовать на стопо-
28
рящий орган и может вызвать в нем и в упомянутых
звеньях недопустимые перегрузки. Применение аморти-
заторов в последнем случае значительно усложнило бы
конструкцию стопорящего органа.
Таким образом, рассмотренный вариант управления
стрелочным электроприводом имеет три характерных
этапа: управление ы = -Н на участке разгона, отсечка
движения стрелки, механическое (электромеханическое)
торможение движущихся частей привода.
Реализация такого управления СПГБ позволяет за
счет некоторого усложнения его механики на 20—30%
повысить быстродействие, так как t (0,7—0,8)6
(см. рис. 3, б) при одном и том же ограничении по на-
пряжению (обычно 200 В).
2.3. ПЕРЕДАТОЧНОЕ ЧИСЛО РЕДУКТОРА
В электроприводах железнодорожной автоматики и
телемеханики, как правило, используют понижающие ре-
дукторы, работающие как усилители вращающего мо-
мента электродвигателя и характеризуемые передаточ-
ным числом
5 = Ш1 /о>2.
(15)
где ан — угловая скорость вращения ведущего вала (электродви-
гателя);
«г — угловая скорость вращения ведомого вала (главного
вала привода).
<
Исследования показали, что для быстродействующе-
го электропривода целесообразно применять редуктор
[4]. Оптимальное по быстродействию передаточное число
редуктора можно вычислить так:
6 - .Ис/три + [(Afc/T1A<)2 4- /с/&/9]2 ,
(16)
где М — вращающий момент электродвигателя;
Мс — момент сопротивления исполнительного механизма;
П — к. п. д. редуктора;
/» — момент инерции электродвигателя;
/с — момент инерции исполнительного механизма, приведен-
ный к главному валу привода;
6 — коэффициент, учитывающий инерцию вращающихся масс
редуктора.
art 29
Момент инерции стрелки относительно корня
ZCK=QZ?/3f,
где Q — общий вес перемещаемых частей стрелки;
L — длина остряка;
g — ускорение силы тяжести.
Приведение момента инерции /ск к главному валу
электропривода выполняется на основе равенства кине-
тической энергии заменяемой системы (стрелки) и при-
веденной. Поэтому
'z - (“с/«2)2 - (17)
где со с — угловая скорость стрелки.
Момент инерции шлагбаума, состоящего из масс бру-
са т6, кронштейна-рамы /пКр и противовеса тп,
Рб + «б ) + wicp ( Ркр + °кр ) + «п ( Ра + °п ), (18)
где рб ркр> рп — радиусы инерции относительно оси, проходящей че-
рез центр тяжести масс, и параллельной оси вы-
ходного вала электропривода автошлагбаума;
аб, «кр, «„ — расстояние между осями.
Момент инерции ударного рычага (скобы) автостопа
определяют аналогичным образом.
Из уравнения (16) следует, что оптимальное переда-
точное число для одного и того же исполнительного ме-
ханизма различных стрелок будет неодинаковым. По-
скольку с эксплуатационной точки зрения £ удобно иметь
однозначным, представляет интерес исследовать влияние
отклонения передаточного числа g от оптимального go
на основные параметры электропривода.
Результаты исследования для СПГБ (рис. 4) пока-
зывают, что при одинаковое быстродействие Г°
может быть получено как при £<£о, так и при
причем средний квадратичный момент ги° и потребле-
ние энергии 1Г° в обоих случаях будут равными. Однако
скорость электродвигателя (о® во втором случае больше,
чем в первом. Параметры СПГБ при g<£o зависят
больше от £0 = £/£(ъ чем при £>Во. В частности, быстро-
действие СПГБ снижается на 10% при уменьшении пе-
редаточного числа от оптимального на 25%, а увеличе-
ние g при том же условии возможно до 60%. В преде-
30
Рис. 4. Зависимость характеристик электропривода от относительно-
го передаточного числа редуктора
лах 0,75<д°<1,6 потребление энергии возрастает на
10%, а средний квадратичный момент — на 5%. Изме-
нения усилий перевода и моментов инерции различных
горочных стрелок влияют на параметры электропривода
при g>so значительно меньше, чем при £<£0. Таким
образом, предпочтительным является отклонение пере-
даточного числа от оптимального в сторону увеличения.
Реализация найденного ранее закона управления
(см. рис. 3,6) в сочетании с оптимальным (или близким
к нему) передаточным числом редуктора позволяет
обеспечить максимальное быстродействие стрелочного
электропривода.
Передаточное число редуктора электропривода для
ЭЦ, ДЦ,; автошлагбаума и других, работающих преиму-
щественно в установившемся режиме, определяют исхо-
дя из заданного времени перевода, максимально веро-
ятного тягового усилия и используют заранее известный
электродвигатель постоянного или переменного тока.
Вращающий момент электродвигателя и его полезная
мощность
М = Мс/^ = Гг2/^- (19)
Р2 = <01 М, (20)
где г2 — плечо тягового усилия;
’] — к. п. д. редуктора;
F — тяговое усилие электропривода.
31
Если в электроприводе применен электродвигатель с
«жесткой» механической характеристикой, например с
параллельным возбуждением (или асинхронный), поль-
зуются формулами (15) и (19).
Определить передаточное число по тем же формулам
при электродвигателе с последовательным возбуждени-
ем, имеющем «мягкую» характеристику, сложно, так как
неизвестно уравнение его механической характери-
стики.
При малых моментах, когда его магнитная система
не насыщена, механическая характеристика имеет ги-
перболический характер, а при больших, когда магнит-
ный поток становится практически постоянным, — ли-
нейный. Поэтому необходимо предварительно построить
кривую намагничивания электродвигателя и по ней
выбрать значение магнитного потока Ф. Выбор облег-
чается тем, что уже в номинальном режиме стрелочные
электродвигатели имеют значительное насыщение маг-
нитной системы.
Выражение, удобное для определения передаточного
числа с учетом сопротивления кабельной линии к элек-
троприводу, можно получить исходя из уравнения рав-
новесия э. д. с.
U6 = Е + / (Яя + /?ов + Яд + ДЯ) = Е + / 2 R. (21)
где Uf> — напряжение источника электропитания;
Е — з. д. с. электродвигателя;
/ — рабочий ток;
/?я, Яов, — сопротивления якоря, обмотки возбуждения двигателя,
/?л. Д/? кабельной линии и переходных контактов.
Подставляя в (21) значения
Е = Кеи>1Ф и / = Л1//<МФ,
(22)
получим
+ М^1КмФ.
(23)
Заменив в (23) М и ои их выражениями из (19) и
(15) и произведя соответствующие действия, получим
т)Ке Ки фЦ £2 - тДм Ф£/б £ + Л4С2 * = °- (24)
32
Если для удобства практических расчетов выражать
момент в килограммометрах, а частоту вращения в
оборотах в минуту, то, решая (24), получим
6 = (Уь + ИU*6-4A2M\n2VR)/2Kt фл2> (25)
Где jUj —Л1с/ч'—момент сопротивления стрелки с учетом к. п. д.
редуктора, механических и вентиляционных потерь и потерь
в стали якоря двигателя;
д'е =. pN/60 а = 1,03Км — постоянная двигателя;
W — число активных проводников обмотки якоря;
р — число пар полюсов двигателя;
а — число параллельных ветвей обмотки якоря;
п2 = ’Рс/^'с — частота вращения главного вала привода, об/мин,
?с — Углов°й поворот главного вала электропривода при переводе,
град;
/с = t — tn — время перемещения исполнительного механизма, с;
г — заданное время перевода, с;
tn — время холостого хода и отпирания привода, с.
После определения передаточного числа по уравне-
нию (25) необходимо выполнить -проверочный расчет.
Если сопротивление кабельной линии в расчете не учи-
тывается, то вместо Uq в уравнении (25) используют U
(номинальное напряжение электродвигателя). Наряду
с описанным имеются и другие методы определения пе-
редаточного числа редуктора [5].
2.4. ТЯГОВОЕ УСИЛИЕ СТРЕЛОЧНОГО ЭЛЕКТРОПРИВОДА
При переводе стрелки (рис. 5) перемещаются ее ост-
ряки 7 и 2, связная 3, рабочая 4 и контрольные тяги 5,
6 стрелочной гарнитуры и детали крепления. Если ис-
пользуют внешнее запирание, а также при гибких ост-
ряках, когда связных тяг несколько, масса перемещае-
мых частей соответственно увеличивается за счет замы-
кателя или связных тяг.
Усилие перевода стрелки затрачивается на прео-
доление трения перемещаемых частей о подушки 1,
упругих сил (если стрелка имеет гибкие остряки) и со-
противления в шарнирах. Усилие, необходимое для пре-
одоления трения перемещаемых частей стрелки, опре-
деляется силой трения, возникающей при их движении.
Ье можно найти таким образом.
2-П22
Рис. 5. Расчетная схема определения усилия перевода стрелки
Разделим стрелку на п равных элементов длиной I
каждый и обозначим через q\, q2, .... q* вес каждого
элемента. Веса элементов будут различны как за счет
изменения веса частей остряков 7 и 2, так и за счет
наличия или отсутствия связных тяг стрелочной гарни-
туры и других перемещаемых частей в пределах эле-
ментов.
Полагая, что остряк лежит не на отдельных подуш-
ках, а на сплошном основании и коэффициент трения
между остряками и основанием одинаков по всей длине
остряка и равен f, найдем элементарные силы трения
Fi=fq2, ...»
Моменты элементарных сил трения относительно кор-
ня остряков
= M2-=3l/2(fqJ... Мк = [(2* - 1) l]/2fq„ 1
а суммарный момент силы трения
МТ - S = П2// 2 <h + 3^2 + ... + (2Л—I) qK,
Следовательно, усилие преодоления трения переме-
щаемых частей, приложенное на расстоянии (L—а) от
корня,
34
F - M./L-a = 1/2/ [l/fL-a]] £ + 3g2 + ... + (2Л-1) 7K.
! = !
Если для приближенных вычислений силы F поло-
жить, что <71=<72 = ... = <7к=<7, то q можно вынести за знак
суммы
F - 1/2/7 [l/(L - Л)] 2 1+ 3 + ...+ (2Л—1) = 1/2/7Я’ (//(£-«)].
л-1
Так как In ° L и qn = Q, то F — 1/2/Q [L/(L-a)]t (26)
где L — длина остряка;
Q — общий вес перемещаемых частей стрелки.
Усилие преодоления упругих сил, действующих при
переводе стрелки с гибкими остряками, определяется
деформацией изгиба. Максимальная деформация чис-
ленно равна ходу остряков. Расчетное усилие, необходи-
мое для изгиба остряка как балки, защемленной одним
концом, с достаточной для практики точностью можно
определить по формуле
Р-ЗЕ/ср5/£», (27)
где Е — модуль упругости материала остряка;
/Ср — средний момент инерции остряка относительно вертикаль-
ной оси;
S — деформация остряка.
Усилие преодоления сопротивления в шарнирах опре-
деляют экспериментально. Коэффициент, учитывающий
влияние сил трения в шарнирах, обычно принимается
равным 1,1.
Таким образом можно вычислить расчетное усилие
перевода стрелки с шкворневым или вкладышно-накла-
дочным креплением
F = 1,1-1/2/Q [£/(£-а)] = 0,55/Q [L/(L-a)] (28>
и стрелки с гибкими остряками
Fr - 1,1 {1/2/Q R£-a)J + ЗЕ/ср $/£«}-
- 0,55/Q [L/(L—a)] + 3,3E/cp S/£>. (29)
Из формул (28) и (29) видно, что усилие перевода
стрелки зависит от веса перемещаемых частей стрелки,
Таблица 1
Измеренные усилия перевода стрелок
Тип стрелочного перевода Вид корневого крепления Усилие перевода стрелки, Н Состояние стрелки
минималь- 1 « g максималь- О = средне- арифмети- ческое макси- мально- вероятное
Р43 1/9 1/П Шкворневое 660 860 1280 1540 970 1190 1210 1470 Смазана Не смазана
Р43 1/9 750 1520 1140 1520 Смазана
1/И Вкладышно-нак- 1040 1850 1360 1850 Не смазана
Р50 1/9 ладочное 800 1680 1190 1550 Смазана
1/П 1100 2400 1520 2130 Не смазана
пдс 1/9 1060 2180 1650 2150 Смазана
rot) 1/Н 1720 2620 2120 2490 Не смазана
Р65 1/11* 2950 — — Смазана
Р50 1/18 1880 3020 2330 3080 Смазана
Р65 1/18 Накладочное .3500 — — Смазана
Р65 1/22 (остряк гибкий) 4750 — — Смазана
• Усилие перевода подвижного сердечника крестовины 3000 H.
типа рельсов, конструкции корневого стыка, длины
остряков, места закрепления переводных тяг и коэффи-
циента трения остряков о подушки. Все указанные ве-
личины, за исключением последней, являются вполне
определенными. Коэффициент трения в среднем может
колебаться от 0,2 до 0,3 и зависит от состояния стрелки,
качества смазки стрелочных подушек, чистоты обработ-
ки их поверхностей, а также подошв остряков и других
факторов.
В табл. 1 приведены результаты измерений усилий
перевода стрелок различных марок, проведенных бю-
ро пути ЛИИЖТа. Измерения выполнялись тензометри-
ческим и динамометрическим методами. Как следует из
табл. 1, переводное усилие стрелок одной и той же мар-
ки колеблется в больших пределах. Однако нормой яв-
ляются значения усилий, заключенные в промежутке от
минимально измеренных до среднеарифметических.
В то же время максимальное тяговое усилие стрелочно-
го электропривода должно определяться исходя из мак-
36
слмально вероятных значений переводных усилий. Ни-
же приведены расчетные усилия перевода горочных и
перекрестных стрелок:
Тип стрелочного перевода Расчетное усилие перевода стрелки, Н
Одиночный Р43 1 /6 600-800
> Р50 1 /6 600-800
Перекрестный Р43 1/9 1500
» Р50 1/9 2200
> Р65 1/9 3000
Расчет усилия перевода стрелки в каждом конкрет-
ном случае необходим для регулировки стрелочного
электропривода.
Тяговое усилие стрелочного электропривода опреде-
ляют с учетом динамического характера его работы
dv Q dv
<30)
где v — скорость перемещаемых масс стрелки и гарнитуры.
Динамическая составляющая в уравнении (30) имеет
существенное значение для быстродействующих электро-
приводов. В частности, для стрелки марки ‘/6 Р50 она
равна 470 Н.
2.5. ВРЕМЯ СРАБАТЫВАНИЯ ЭЛЕКТРОПРИВОДА
В ряде случаев к быстродействию электропривода
предъявляются жесткие требования. Особую актуаль-
ность имеет вопрос определения времени срабатывания
стрелочного электропривода на горках.
Перерабатывающая способность механизированных
и автоматизированных сортировочных горок и безопас-
ность роспуска составов с применением устройств го-
рочной автоматики в большой степени зависят от быст-
родействия и надежности стрелочных приводов, кото-
рые при самых неблагоприятных условиях (снижение
питающего напряжения, загрязнение стрелки, колеба-
ния окружающей температуры и др.) должны обеспе-
чить перевод и запирание стрелки к моменту вступле-
ния очередного отцепа па ее остряки. Недопустимость
сбоев при сортировке составов предъявляет к надеж-
37
Рис. 6. Расчетная схема определения времени срабатывания быст-
родействующего электропривода
ности стрелочных приводов, особенно автоматизирован-
ных горок, высокие требования. Между тем требования
увеличения быстродействия и повышения надежности
стрелочных приводов в значительной мере являются
противоречивыми вследствие динамического характера
их работы. Поэтому прежде всего необходимо опреде-
лить максимально допустимое по эксплуатационно-
техническим соображениям время перевода стрелки.
При этом будем исходить из следующих условий:
1. Датчиком присутствия отцепа на стрелке явля-
ется рельсовая цепь cdef (рис. 6), которую для повы-
шения надежности действия дополняют педалями или
иного рода устройствами.
2. Длина рельсовой цепи стрелки не должна быть
меньше базы b расчетного вагона.
3. В рельсовой цепи предусмотрен защитный участок
1з = с-\-й для завершения перевода стрелки до подхода
к острякам первой колесной пары вагона. При этом
имеется в виду, что перевод стрелки начался до или
одновременно с вступлением отцепа на рельсовую цепь,
так как после ее шунтирования перевод стрелки невоз-
можен.
4. Максимальная скорость отцепа на защитном уча-
стке не превышает 7 м/с [7].
38
Исходя из указанных условий время срабатывания
привода не должно превышать
-[*-(* + /)]/V - ('сг + *рц) -
= [11,2 - (4,34+1,086)]/7—0,25 = 0,575 с,
где b — база расчетного четырехосного вагона [7];
е — длина остряка расчетной стрелки марки 1/6 Р50;
f — расстояние от корня остряка до оси изолирующего стыка;
/сг — время срабатывания стрелочно-пускового блока; для блока
типа СГ-76У /Сг = 0,15 с;
/рц — время фиксации вступления отцепа в пределы рельсо-
вой цепи, равное 0,1 с.
Если считать длину защитного участка заданной и
равной 6м [8], то допускаемое время срабатывания
привода
t = (С + rf)/v- (fcr + 'рц) = 6/7-0,25 - 0,607 с.
Таким образом, время срабатывания стрелочного
привода на сортировочной горке должно быть не более
0,6 с при максимальной скорости движения по стрелке
25 км/ч.
При меньшей скорости движения допускаемое вре-
мя срабатывания привода можно увеличить, пересчи-
тав его по приведенным формулам.
2.6. ОПТИМАЛЬНЫЙ РАДИУС
УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ
ПО СДУБЛИРОВАННЫМ ЖИЛАМ КАБЕЛЯ
Электроприводы стрелок и крестовин стрелочных
переводов, как правило, находятся на расстоянии от
20 до 1500 м от источников электропитания. Но у боль-
шинства электроприводов этот диапазон значительно
уже. Поэтому весьма актуальным является вопрос об
определении оптимального радиуса управления элект-
роприводом /?о по недублированным жилам кабеля.
Рассмотрим эту задачу на примере электропривода
электрической централизации. Очевидно, за /?0 было бы
Целесообразно принять максимальный радиус управле-
ния, равный или несколько превышающий расстояние
до наиболее удаленной стрелки некоторой станции С,
0=1, ..., п). В этом «идеальном» случае необходимость
39
р
o.i
Рис. 7. Распределение стрелок
по зонам удаления на станци-
ях с числом стрелок:
1 — от 8 до 12; 2 — от 16 до 24;
в дублировании кабельных
жил отпала бы, но резко
подскочили бы первона-
чальные затраты на элек-
тропривод и источник пи-
тания. Поэтому целесооб-
разно на основе анализа
распределения стрелок по
зонам удаления на различ-
ных станциях принять за
/?о радиус, охватывающий,
по крайней мере, 80% об-
щего числа стрелок на «ти-
пичных» станциях.
Распределение стрелок
по зонам удаления можно
определить по методике,
изложенной в [10]. Еесущ-
ность заключается в том,
что, во-первых, реальные
станции группируют по чис-
лу стрелок (например, 1-я
3 - от 32 до 48; 4 - от 48 до 72; Группа С ЧИСЛОМ СТреЛОК ОТ
5 — свыше 100 8 ДО 12, 2-Я — ОТ 12 ДО 16 И
т. д.); во-вторых, определя-
ют действительное расположение стрелок по зонам
их удаления (с интервалом 100 м) в каждой группе
станций и определяют число стрелок в каж-
дой зоне; в-третьих, строят зависимость P=f(l), где
P = n/N — вероятность попадания стрелки в заданную
зону; п — число стрелок в данной зоне удаления; —
общее число стрелок на i-й станции; I — расстояние от
поста ЭЦ, м.
Из графика Р = f (/) (рис. 7) видно, что 80% стрелок
на станциях с общим числом от 8 до 48 стрелок распо-
ложены от поста ЭЦ на расстоянии, не превышающем
800 м; на станциях с 48—72 стрелками в том же радиу-
се находятся 75,4%, а на станциях со 100 и более стрел-
ками — 58,3%. Учитывая, что на сети дорог станций с
числом стрелок до 48 более 90%, можно принять /?о =
= 800 м. Таким образом, следует обеспечить радиус
управления стрелками без дублирования жил кабеля
нс менее 800 м. В настоящее время радиус управления
40
R по сдублированным жилам кабеля не превышает
480 м для «массовых» стрелок марки */п Р65 при при-
менении электродвигателей типа МСП-0,25.
В связи с этим рассмотрим вопрос о возможности
увеличения R до Ro. Для этого проанализируем уравне-
ние
/=Д6ГклпПо/Г1/ф(Лп+Ло)’ (3D
где MJk=Up-----допустимое падение напряжения в кабельной ли-
— f/эд—/фГс нии, В;
/ф — ток фрикции привода при расчетной нагрузке на
шибере, А;
п = 0,0234 Ом — сопротивление 1 м медной жилы кабеля диаметром
1 мм;
лп, п0 — число жил кабеля в прямом и обратном проводах;
6/р = 220 В — напряжение источника центрального питания;
Uэн — номинальное напряжение электродвигателя приво-
да, В;
г с = 2,6 Ом — сопротивление соединительных проводов, контак-
тов и обмотки блокировки перевода пусковым реле.
Учитывая условие пп = и0=1 преобразуем выражение
(31):
(32)
Анализируя уравнение (32), видим, что увеличение I
может быть достигнуто повышением напряжения источ-
ника питания, уменьшением напряжения электродвига-
теля и снижением тока, потребляемого приводом.
Уменьшение номинального напряжения двигателя
приводит к почти пропорциональному возрастанию тока,
т. е. существенного эффекта не дает. Увеличение напря-
жения источника питания по сравнению с существую-
щим 220 В требует модернизации щитовой установки
поста ЭЦ и может быть выполнено в перспективе.
Уменьшение потребляемого тока достигается снижени-
ем мощности электродвигателя за счет увеличения вре-
мени перевода стрелки, повышения к. п.д. электропри-
вода, правильного согласования сопротивлений линии
и внутреннего сопротивления двигателя.
В [10] исследована возможность обеспечения
>800 м за счет увеличения времени перевода стрелки и
обосновано применение электродвигателя типа МСП-
0,15, имеющего унифицированную конструкцию с
электродвигателем типа МСП-0,25.
41
2.7. СИНТЕЗ ЗАПИРАЮЩЕГО МЕХАНИЗМА
Запирающий механизм относят к специфическим уз-
лам электропривода. Из известных конструкций вну.
тренних запирающих механизмов (кулачковых, рычаж-
ных, клиновых, с тормозом на валу электродвигателя
и др.) наиболее простыми являются кулачковые
(рис. 8, а). Шибер 1 заперт (движение влево невозмо-
жно) введением в зацепление зубьев-кулачков 5 и 6.
В другом крайнем положении шибер будет заперт (дви-
жение вправо невозможно) введением в зацепление
зубьев-кулачков 3 и 2 (рис. 8, б). Остальные зубья ше-
стерни 4 имеют корригированный эвольвентный профиль
и перемещают шибер при рабочем ходе. Запирающие
механизмы описанной конструкции могут быть располо-
жены на одном или двух шиберах, имеют минимальное
число деталей, просты по технологии изготовления и по-
этому получили широкое распространение у нас в стра-
не и за рубежом. Однако, как показал опыт эксплуата-
ции кулачковых запирающих механизмов в стрелочных
приводах СПВ (разных типов) и СП-1, имели место за-
клинивания шибера; быстрый износ кулачков из-за вы-
сокого вращающего момента, требовавшегося при отпи-
рании; фиттинг запирающих поверхностей и др. Дли-
тельное время эти явления объясняли отсутствием
смазки либо неточностью изготовления элементов запи-
рающего механизма. Основная причина заключается
Рис. 8. Кулачковый запирающий механизм
42
в том, что параметры известных механизмов, подобран-
ные эмпирическим путем, далеки от оптимальных.
Основными задачами синтеза запирающих механиз-
мов являются определение условий заклинивания и угла
запирания а (рис. 8, в). Возможность заклинивания
обусловлена контактированием запирающих поверхно-
стей шестерни и шибера под действием силы Fo. Если
между ними имеется зазор, то заклинивание невозмож-
но. Сила Го зависит от усилия перевода стрелки, жест-
кости остряков и гарнитуры.
Уравнение кулачкового запирающего механизма по-
лучено в следующем виде [11]:
Л*о = Л Г (Го - Р/2)/[( 1 + /2) sin а - (/, - Л) COS а], (33)
где Мо — отпирающий момент;
Fo. Р — усилие на шибере и его вес;
R — радиус запирающего кулачка;
а — угол запирания;
f\ — коэффициент трения между запирающими поверхностями;
/2 — коэффициент трения между шибером и опорной плоскостью.
При заклинивании запирающего механизма Л1о=оо.
Следовательно, (l+fiMsina— (ft—f2)cosa = 0, а угол
заклинивания
Л-Л
“з = arctg 7 • (34)
1 • 71 /2
Из формулы (34) вытекает необходимое условие
синтеза запирающего механизма, заключающееся в том,
что угол запирания должен превышать угол заклинива.-
ния (a>a3), т. е.
a > arctg
(35)
Однако при a-*a3 /И0->оо. Поэтому достаточным ус-
ловием (35) признать нельзя, так как при углах запи-
рания а, близких к а3, например a3<«<ai, отпираю-
щие моменты велики (рис. 9).
Достаточное условие синтеза запирающего механиз-
ма заключается в том, чтобы отпирающий момент был
минимальным. В математической форме это условие
можно записать как ^->0 . Таким образом, угол
43
Рис. 9. Внешняя характерис-
тика кулачкового запирающего
запирания должен выби-
раться на пологой, а не на
круто падающей части ха-
рактеристики M0=f(a). Ес-
ли на практике этого достиг-
нуть не удается, следует
конструктивно обеспечить
соотношение что так-
же снизит отпирающий
момент (Моз < МО2 < AfO|).
Меньший коэффициент тре-
ния между запирающими
механизма поверхностями по сравне-
• нию с коэффициентом тре-
ния между шибером и опорной плоскостью (А</г) мо-
жет быть обеспечен тщательным подбором материалов
для трущихся пар, обеспечением требуемой чистоты их
поверхностей, соответствующей конструкцией смазочных
устройств или заменой трения скольжения между запи-
рающими поверхностями трением качения.
Анализ показывает, что при жидкостной смазке за-
пирающего механизма приводов, не имеющих масляной
ванны на шибере (СПВ-5, СП-1, СП-la), и стекании, в
конечном счете, смазки вниз, под шибер, создаются ус-
ловия, способствующие заклиниванию Поэтому
для перечисленных приводов можно рекомендовать
лишь консистентную смазку.
При синтезе горочного привода в целях повышения
быстродействия минимизируют угол поворота главного
вала <р (см. формулу (2)), а следовательно, и угол запи-
рания. Очевидно, минимальным следует считать угол
запирания, при котором отпирающий момент Мо не бу-
дет превышать момента сопротивления стрелки Л1с, под-
считанного по формуле (19).
Найдем минимальный угол запирания, полагая в вы-
ражении (33) Af0=Mc.
Решая (33) относительно amin, получим
Л я
(1 + /д /2) Sin amIn - (Д - /2) cos amln = - PfJ. (36)
Тригонометрическое уравнение (36) можно привести
к квадратному, выражая sina и cosa через tg 4- с по-
44
мощью известных формул. После преобразований
чаем:
. °inin 2а emin b с
tp2 ---- ----- tg -- — ---- = 0.
g 2 b-c к 2 Ь —с
где а = 1 4* /] f<£ ~ f \ fт с — А ^0 ^А) /^с.
Из формулы (37) находим
«mln = 2arc‘g
/ (1 +/!) (1 +4) mi - (А-рд)2 /2 р2 -
_________- (1 + А А)_________
А“ А)~А/?(/:о“/>А)
полу-
(37)
(38)
В расчетах по формуле (38) следует использовать
наиболее неблагоприятные сочетания fx, f2, Fo.
Кулачковые запирающие механизмы применяют в ря-
де стран, причем вопросы исключения заклинивания
в них решены по-разному. В советских, американских,
японских и приводах ряда других стран выдержано со-
отношение fi<A, причем в отечественных приводах —
устройством локальной масляной ванны на шибере, а
в зарубежных — заменой трения скольжения запираю-
щих поверхностей трением качения. Для этой цели одна
из запирающих поверхностей выполнена в виде ролика,
вращающегося вокруг оси и катящегося по другой за-
пирающей поверхности.
В западногерманских приводах запирающий механизм
имеет значительный угол запирания, достигнутый за
счет увеличения радиуса запирающего кулачка, выпол-
ненного в виде сегмента отдельно от шиберной шестер-
ни. Это потребовало применения электродвигателя боль-
шей мощности, чем необходимо для перевода самой
стрелки и, кроме того, по сравнению с отечественными
приводами усложнило конструкцию и технологию изго-
товления всего запирающего механизма и, в частности,
шиберов.
При необходимости одностороннего запирания двух-
позиционного исполнительного объекта применяют кри-
вошипно-коромысловый механизм с размещением коро-
мысла в «мертвой» зоне в крайнем положении. Такая
конструкция предусмотрена в электроприводе автошлаг-
баума для запирания заградительного бруса в верти-
кальном положении.
45
Вместо механического используют и так называемое
«электрическое запирание». Сущность его состоит в том,
что в конце срабатывания привода электродвигатель
не выключают, оставляя его в заторможенном состоя-
нии, что обеспечивает определенный запирающий мо-
мент на выходном валу передаточного механизма. Пе-
регрев заторможенного электродвигателя предотвраща-
ют ограничители тока. Такой способ реализован в элек-
троприводе автостопа метро для запирания путевой
скобы, находящейся в разрешающем положении.
2.8. ПОСТРОЕНИЕ И РАСЧЕТ БЕСКОНТАКТНОГО
АВТОПЕРЕКЛЮЧАТЕДЯ
Автопереключатель (контроллер, контактор) имеет-
ся во всех электроприводах железнодорожной автома-
тики и телемеханики. Одной из его важнейших функций
является контроль положений исполнительного меха-
низма. Учитывая ответственность этой функции, к бес-
контактному автопереключателю предъявляют особые
требования.
В крайнем положении исполнительного механизма
выходной сигнал должен быть непрерывным, а в сред-
нем — уровень выходного сигнала необходим такой,
чтобы надежно исключалось притяжение якоря конт-
рольного реле или срабатывание другого прибора конт-
роля.
Повреждения электрической и механической схемы
бесконтактного автопереключателя (обрыв или замыка-
ние в ее элементах: полупроводниковых приборах,
конденсаторах, резисторах, проводах и т. п.) не должны
приводить к появлению ложного контроля крайнего
положения исполнительного механизма. Число проводов,
соединяющих бесконтактный автопереключатель с конт-
рольными реле (или заменяющими их приборами) и ис-
точником питания, требуется по возможности минималь-
ное. Характеристики срабатывания и выключения бес-
контактного автопереключателя должны быть стабиль-
ными, а потребление мощности — минимальным. Пита-
ние предусматривают от источника постоянного или пе-
ременного тока со стандартным напряжением, имею-
щимся на посту централизации.
46
Схемное решение бесконтактного автопереключателя
должно быть выполнено на простых и надежных эле-
ментах, способных обеспечить его безотказную и долго-
вечную работу с назначенным, ресурсом не менее 1 млн.
срабатываний при изменениях окружающей температу-
ры в пределах от —40 до -f-55° С, напряжения питания
от —15 до +10% и его частоты ±1 %.
Стабильность работы бесконтактного автопереключа-
теля не должна зависеть от допустимого внутригруп-
пового разброса параметров схемных элементов. Конст-
рукция и схема автопереключателя должны исключать
необходимость проведения в процессе эксплуатации под-
регулировки, юстировки (установки на нуль) и т.п.
Бесконтактный автопереключатель обязан обладать вы-
сокой ударопрочностью и виброустойчивостью.
На работу автопереключателя не должны оказывать
влияния внешние электрические и магнитные поля, не-
посредственная близость ферромагнитных масс, а так-
же число, расположение и длина токоподводящих про-
водов.
Анализ многочисленных видов, схемных решений и
конструктивных исполнений применяемых в промышлен-
ности бесконтактных переключателей показал, что они
не удовлетворяют всей совокупности перечисленных
требований.
Исследования показали, что для создания специаль-
ного бесконтактного автопереключателя необходимо ис-
пользовать индукционный (трансформаторный) прин-
цип.
Действие индукционного переключателя основано на
изменении коэффициента взаимоиндукции между пер-
вичной и вторичной катушками трансформатора за счет
пассивного шунта. Это смещение может быть поступа-
тельным, вращательным и т. п. Если шунт находится
против полюсов, на которых расположены катушки, с
незначительным воздушным зазором между шунтом и
полюсами, то во вторичной катушке индуцируется
э. д. с. значительной величины. С увеличением воздуш-
ного зазора э. д. с. на выходе резко снижается, причем
коэффициент такого преобразования может быть выше
коэффициента возврата, например, исполнительного
реле.
47
Таким образом, переход из выключенного во вклю-
ченное состояние реле сопровождается активным воз-
действием шунта, что весьма существенно. При обрыве
и коротком замыкании в любой из катушек реле выклю-
чается. Прямое сообщение линейных проводов от обеих
катушек не будет приводить к срабатыванию реле, если
трансформатор выполнить повышающим и выбрать
соответствующий тип реле. К преимуществам трансфор-
маторного переключателя следует отнести отсутствие
гальванической связи между входной и выходной
цепями.
Относительно просто бесконтактный автопереключа-
тель для двухпозиционного электропривода может быть
реализован на двух трансформаторных датчиках с
П-, Ш-образным или магнитопроводом другой формы.
Однако в этом случае они будут потреблять значитель-
ную мощность, иметь нестабильные характеристики и
недостаточную надежность [12].
Если в датчике имеется постоянный воздушный за-
зор между подвижной и неподвижной частями, то повы-
шается надежность, упрощаются изготовление и обслу-
живание, отпадает необходимость в сложной регулиров-
ке. Для реализации этого магнитная система датчика
должна быть выполнена подобно электрической машине
с явнополюсным статором и магнитным шунтом — рото-
ром. Если датчик автопереключателя выполнить с двух-
полюсным статором, то будут устранены лишь техноло-
гические недостатки упомянутых вариантов магнитных
цепей. Если предусмотреть трехполюсный статор с по-
парной коммутацией полюсов ротором соответствующей
формы, появляется возможность сохранить магнитную
цепь замкнутой в каждом из трех состояний автопере-
ключателя, соответствующих контролю начального по-
ложения объекта, среднего и переведенного.
Каждый из датчиков бесконтактного автопереклю-
чателя (рис. 10, а) имеет статор 2 и 3, ротор-секторы 1
и 4, катушки питающую (внизу) и сигнальную (вверху).
Ротор-секторы взаимодействуют с остряками стрелки и
механизмом электропривода с помощью внешних свя-
зей (показаны пунктиром).
Предположим, верхний датчик контролирует плюсо-
вое положение стрелки. Ротор-сектор 1 обеспечивает
магнитное перекрытие полюсов, на которых расположены
48
Рис. 10. Принципиальная схема (а) и схема замещения (б) бес-
контактного автопереключателя
питающая и сигнальная катушки, что приводит к появ-
лению э. д. с. Етах. В то же время в магнитопроводе 3
ротор-сектор 4 замыкает два других полюса, отчего
э. д. с. на зажимах его сигнальной катушки незначитель-
на и равна Zimin.
Когда стрелка находится в среднем положении, ро-
тор-секторы датчиков замыкают полюсы, расположен-
ные снизу. Э. д. с. на зажимах сигнальной катушки вер-
хнего датчика при этом резко снижается до значения
Zimin-
В переведенном положении стрелки ротор-сектор 4
замкнет магнитную цепь питающей и сигнальной кату-
шек нижнего датчика, вторичная э. д. с. возрастет до
^тах. Э. д. с. на зажимах сигнальной катушки верхнего
датчика при этом будет незначительной. Ток, потребля-
емый датчиком, зависит от полного сопротивления пер-
вичной цепи. Для снижения его значения в среднем и
переведенном положениях на третьем полюсе достаточ-
но поместить катушку, включив ее последовательно-
встречно с питающей катушкой.
Точный расчет магнитной цепи датчика затруднен
из-за сложности распределения магнитного поля рассе-
яния вдоль статора и поля выпучивания у полюсов вбли-
зи воздушных зазоров, нелинейности кривой намагничи-
49
вания, влияния вихревых токов и гистерезиса. Но пара-
метры датчика могут быть рассчитаны приближенно и
затем уточнены в процессе испытания.
Исходными данными для расчета датчика бескон-
тактного автопереключателя являются питающее напря-
жение U\, частота питания Д напряжение сигнальной
катушки U2, крутизна характеристики (релейность) и
габаритные размеры.
Ложное срабатывание контрольного реле при сооб-
щениях контрольных линейных проводов может быть
исключено, если коэффициент трансформации будет
удовлетворять условию t72/^7i> 1- Частота возбуждения
датчика должна отличаться от частоты тока в рабочей
цепи электропривода. Это условие необходимо для по-
вышения защищенности контрольных цепей от ложных
срабатываний при сообщениях с рабочими цепями.
Крутизна характеристики датчика должна быть доста-
точной для надежного выключения контрольного реле
при среднем положении стрелки.
Габаритные размеры датчиков ограничены в связи
с необходимостью обеспечить их установку в электро-
приводе взамен контактной системы. Поэтому по кон-
структивным соображениям выбирают следующие раз-
меры:
г — радиус ротор-сектора;
b — ширина полюса статора;
/ — длина полюса;
д — воздушный зазор между ротор-сектором и по-
люсом.
Вначале рассчитывают магнитную проводимость
магнитной цепи датчика. Учитывая, что магнитная про-
ницаемость материала магнитопровода статора и ротор-
сектора в 100 и более раз больше магнитной проницае-
мости воздуха, ограничиваются расчетом магнитной про-
водимости только воздушных зазоров.
Так как ротор может занимать три фиксированных
положения (контрольное, среднее и переведенное), зна-
чения воздушных зазоров будут различны, исключая
воздушный зазор между ротором и полюсом, на кото-
ром расположена питающая катушка.
В положении контроля магнитные проводимости
воздушных зазоров между 1-м, 2-м и 3-м полюсами со-
ответственно:
50
G} = ixQlb/Z- G2-nolbl* +iL0lgx‘,
G3 = |x0/ln(l +b/rl)/'f,
где Цо — магнитная проницаемость воздуха;
gx — удельная магнитная проводимость, определяемая по
кривой Ротерса [13];
Ф — угол между плоскостями ротор-сектора и третьего по-
люса.
Для дальнейшего расчета составлена схема замеще-
ния датчика (рис. 10, б), на которой арабскими цифра-
ми указаны суммарные магнитные потоки на участках
магнитной цепи, а римскими — их доли.
Предварительно определим суммарные проводимо-
сти воздушных зазоров в комбинациях 1—2, 1—3 и
2-3.
Пренебрегая проводимостями утечки, получаем
°п - °1 + а,У °13 “ + <<з):
@23 = ^2 ^3^^2 + ^3^’
Задаваясь индукцией Вт в 1-м полюсе, находим ам-
плитудное значение магнитного потока в нем
ф. = Вт Ы.
1 т
Учитывая, что
/О12в*'Г/°13 И *!-«»} + Ф11,
определим потоки Ф{ и Ф’1. Аналогично находят Ф? и
Ф" Ф' и Ф”
* о о
Далее находим э.д. с. Е\, Е2 и Е3, используя соотно-
шения
~ А *!•» ^3 = ^1» ^2 = ^2 + ^2 г2а»
где Л— коэффициент компенсации.
Число витков каждой катушки
о> = Ё/(4,44
51
Для определения диаметров проводов катушек пред-
варительно рассчитывают токи, протекающие по ним.
Из схемы замещения (см. рис. 10, б) имеем:
Z1 “ Gl + G3 + !2 = ^2^Ju>W2 G2 + Z2,)-
Диаметр провода катушки
d = У47^ = 1,13 y'TTiq,
где q — плотность тока.
Потребляемая от сети и полезная мощности датчика
и к. п. д.
Р1 = U\ Z1 C0S P2 = U2/2’ 4 =
Расчетные параметры датчиков уточняют в процессе
испытаний.
3 ЭЛЕКТРОПРИВОДЫ СТРЕЛОК И КРЕСТОВИН
СТРЕЛОЧНЫХ ПЕРЕВОДОВ
3.1. ОБЩАЯ ХАРАКТЕРИСТИКА
Аппаратура управления подвижными элемента-
ми стрелочных переводов, включаемых в электрическую'
(ЭЦ), диспетчерскую (ДЦ) и горочную (ГАЦ) центра-
лизацию, содержит ряд устройств, из которых конструк-
тивно наиболее сложными являются стрелочные приво-
ды. Условия работы приводов перечисленных централи-
заций и требования, предъявляемые к ним, различны и
часто противоречивы. Если для приводов ГАЦ характер-
ны высокое быстродействие (время перевода стрелки
около 0,5 с), небольшие нагрузки (до 1000—1500 Н),
благодаря исключительному применению на горках лег-
ких стрелок, как правило, небольшое удаление от источ-
ников питания (до 200 м), то для приводов ЭЦиДЦ—
значительно меньшее быстродействие (время перевода
стрелки 2—7 с), большие нагрузки (в среднем до
3500 Н) и значительно большее удаление от источников-
питания в ЭЦ (при центральном питании до 2 км) и
меньшее (при местном питании) — в ДЦ.
Условия обслуживания приводов различных центра-
лизаций в процессе эксплуатации также весьма раз:
личны.
Несмотря на различия, каждый стрелочный электро-
привод имеет: электродвигатель — источник механичес-
кой энергии; редуктор — усилитель вращающего момен-
та электродвигателя и преобразователь его вращатель-
ного движения в поступательное движение переводных
тяг; фрикционное сцепление (фрикцион — тормоз), обес-
печивающее защиту электродвигателя от перегрузок и
торможение вращающихся частей привода в конце пере-
вода стрелки; автопереключатель, контролирующий по-
ложение стрелки и используемый, если это не возложе-
но на приборы схемы управления, для автоматического
выключения электродвигателя в конце перевода, подго-
5£
товки цепи реверсирования привода и включения приво-
да спаренной стрелки.
Блочное исполнение узлов позволило выпускать
электроприводы в разных исполнениях для ЭЦ и ГАЦ.
Работа электропривода протекает в такой последова-
тельности: после срабатывания прибора, включающего
электродвигатель, вал последнего начинает свободное
вращение, или холостой ход. Во время холостого хода
автопереключатель выключает контрольное реле, сигна-
лизируя о начавшемся переводе стрелки, и подготовляет-
ся цепь реверсирования. Следующий этап — отпирание
стрелки. В приводе с внутренним запиранием оно проис-
ходит в его механизме, а при внешнем запирании — не-
посредственно на ’стрелке. За отпиранием следует рабо-
чий ход электропривода.
В конце рабочего хода стрелка занимает новое край-
нее положение. Заключительный этап — запирание
стрелки, получение сигнала контроля ее крайнего поло-
жения и выключение двигателя. После выключения
электродвигателя кинетическая энергия якоря и других
вращающихся масс электропривода гасится фрикцио-
ном-тормозом. Если электродвигатель в конце перевода
не выключился, то привод начинает работать на фрик-
цию. Это длится до тех пор, пока он не будет выключен
или возвращен в исходное положение поворотом руко-
ятки на центральном посту, или автоматическим уст-
ройством, срабатывающим по истечении 8—10 с при ЭЦ
и ДЦ и 1,2 с при ГАЦ, или пока не перегорит предо-
хранитель в рабочей цепи.
Таким образом, нормально работа стрелочного элект-
ропривода состоит из следующих этапов: пускового, от-
пирания, рабочего хода, запирания и контроля.
В настоящее время для ЭЦ и ДЦ применяют элект-
роприводы с внутренним запиранием: невзрезные пос-
тоянного и переменного тока — типов СП-3, СП-6 и пе-
ременного тока — типа СП-8; взрезные постоянного и
переменного тока — типа СПВ-6.
На сортировочных горках и в маневровых районах
станций, где требуется ускоренный перевод стрелок, ис-
пользуют невзрезные электроприводы постоянного то-
ка: с контактным автопереключателем — типов СПГ-3 и
СПГ-ЗМ; с бесконтактным автопереключателем — ти-
пов СПГБ-4 и СПГБ-4М.
54
3.2. СТРЕЛОЧНЫЕ ЭЛЕКТРОПРИВОДЫ
ТИПОВ СП-3 И СП-8
Электропривод типа СП-3 является третьей моделью
отечественных невзрезных стрелочных приводов с внут-
ренним запиранием. Его выпускают с электродвигателя-
ми постоянного тока типов МСП-0,25 и МСП-0,15 и пе-
ременного тока типа МСТ-0,25.
Электропривод типа СП-8 отличается от СП-3 много-
контактным блокировочным устройством и применением
трехфазных двигателей типов МСТ-0.3 и МСТ-0,6.
Основные характеристики электропривода типа СП-3:
максимальное тяговое усилие 6000 Н, максимальное вре-
мя перевода 7 с, электропитание постоянным током при
номинальных напряжениях 30, 100, 110 и 160 В и пере-
менным током 50 Гц напряжением 127 и 220 В, габарит-
ные размеры 780X955X255 мм, масса 165 кг, установ-
ка с правой или левой стороны стрелки.
Электропривод типа СП-8 имеет те же основные ха-
рактеристики, что и СП-3, но электропитание его трех-
фазного двигателя рассчитано на напряжение ПО и
190 В.
Учитывая почти полное конструктивное сходство-
электроприводов типов СП-3 и СП-8, при их описании
для кратности даются ссылки лишь на СП-3 (рис. 11).
Конструкция электропривода. Электропривод состоит
из трех блоков: электродвигателя 2; редуктора 4 с фрик-
ционом 3; автопереключателя 10-, устройства обогрева и
освещения 12, расположенных в корпусе 1. Рациональ-
ное сопряжение элементов привода в блоки позволило-
число последних свести только к трем, что весьма важно’,
в частности, с точки зрения напольных условий эксплуа-
тации стрелочных электроприводов. Электродвигатель
соединен с редуктором уравнительной муфтой 13, а ре-
дуктор с автопереключателем и автопереключатель с ши-
бером 8 — через зубчатые зацепления. Кроме шибера, в
корпусе 1 находятся контрольные линейки 6 и 7 и ряд
других устройств.
Корпус выполнен прямоугольным, с дном и стенками,
над которыми возвышаются обрабатываемые приливы,
или набы, для установки и крепления элементов меха-
низма привода. Обработка наб предусмотрена в одной
плоскости, что уменьшает опасность перекосов деталей
5о
Рис. II. Стрелочный электропривод типа СП-3 (вид сверху)
при сборке и упрощает обработку корпуса, позволяя осу-
ществлять ее с одной установки.
Внутри корпуса на набах размещены вышеперечис-
ленные узлы. На боковых стенках корпуса расположены
блокировочное устройство 15, замок привода 14, направ-
ляющая плита 9, кожух 5 и боковая крышка 11. Корпус
закрывают съемной сварной крышкой.
Блокировочным устройством (рис. 12) выключают
привод из централизации при его осмотре или переходе
на ручное обслуживание. Оно состоит из блокировочной
заслонки 2, контактного ножа 5, контактной колодки 6,
собачки с пружиной 4.
Блокировочная заслонка представляет собой сталь-
ную штампованную пластину, к которой приварена чека 9.
Пластина и чека могут поворачиваться на некоторый
угол вокруг оси 8. Так как чека находится в пазу, имею-
щемся в оси 7, исключается ее перемещение независимо
от этой оси. Такое крепление пластины к оси 7 обеспечи-
вает полное врубание контактного ножа в контактную
колодку. Для улучшения прижатия резиновых шайб / к
56
Рис. 12. Блокировочное устройство
корпусу привода блокировочная заслонка дополнена не-
выпадющим винтом 3, который закреплен в чашке 10.
Наружный конец винта имеет квадратную головку для
завинчивания специальным ключом.
Контактный нож 5 жестко насажен на ось 7 и может
проворачиваться только вместе с ней. Один конец ножа
имеет пятку, в которую под действием пружины упирает-
ся собачка 4, а к другому заклепками прикреплена
текстолитовая изолирующая планка, имеющая две
электрически не связанные контактные пластинки,
замыкающие две пары контактов на контактной колод-
ке 6.
Контактная колодка 6 содержит две пары подрессо-
ренных контактов. Подрессоривание контактов обеспечи-
вает постоянное контактное нажатие в течение срока
службы привода.
Блокировочное устройство работает таким образом.
Если привод нужно вскрыть, то оттягивают на себя и по-
ворачивают вниз блокировочную заслонку 2. Нож 5 раз-
мыкает контакты на колодке 6. а собачка 4 под дейст-
57
вием пружины упирается в пятку ножа, препятствуя его
•самопроизвольному падению на контакты.
При закрытии привода сначала отжимается в сторо-
ну собачка 4, затем проворачивается вверх до упора бло-
кировочная заслонка 2 (упором является выступ, имею-
щийся на контактной колодке 6). После этого заслонка
прижимается к корпусу привода винтом 3.
Замком привода (рис. 13) запирают крышку и кор-
пус. Замок состоит из пластины /; двух защелок 4, вра-
щающихся на осях 2 и стягиваемых пружиной 7; двух
штифтов 3, ограничивающих поворот защелок. Замок
крепят винтами 6 к корпусу привода. При захлопывании
крышки чека 8, приваренная к ней, раздвигает защелки,
а затем последние заскакивают в вырезы чеки. Для от-
пирания замка вставляют ключ 5 и поворачивают его.
Защелки освобождают чеку и крышка привода может
быть поднята. Ключом открывают привод (горизонталь-
ная часть) и завинчивают винт 3 (см. рис. 12), обеспечи-
вающий герметизацию курбельной заслонки (вертикаль-
ная часть).
Крышка привода (рис. 14) стальная сварная и сос-
тоит из листа 6 и двух боковых стенок 3. К одной из
боковых стенок приваривают два ушка 8, имеющих про-
рези для снятия крышки. По внутреннему периметру
крышки приварен желоб 7, в который закладывают уп-
лотнение 4 (пеньковое, из трубчатой или фасонной рези-
Рис. 13. Замок привода
58
Рис. 14. Крышка привода
ны). Для исключения выпадания уплотнения из желоба
его стенки имеют уклон.
Вентиляция привода выполнена через отверстия в бо-
ковых стенках крышки. Во избежание попадания через
вентиляционные отверстия посторонних предметов в при-
вод они закрыты густой сеткой 1 и жалюзи 2. К боковой
стенке крышки приварена чека 5.
Для ввода проводов в привод в стенках корпуса име-
ются две вертикальные прорези для левого и правого
вводов, позволяющие избежать отсоединение монтажа от
путевой коробки при замене привода. Прорези защище-
ны заглушками.
В месте расположения шибера и контрольных линеек
(см. рис. 11) к корпусу привода прикреплена направля-
ющая плита 9, к которой накладкой прижаты проварен-
ные в минеральном масле войлочные сальники. Это обе-
спечивает постоянную смазку поверхностей шибера и
линеек, что способствует уменьшению трения в направ-
ляющих и предохраняет от коррозии.
Чтобы исключить прямое попадание дождя, снега и
посторонних предметов, шибер и линейки прикрывают
защитным кожухом 5. При необходимости шибер и конт-
рольные линейки могут быть переставлены для выхода
в противоположную сторону через отверстие, закрывае-
мое боковой крышкой 11. В этом случае направляющая
плита 9, защитный кожух 5 и боковая крышка 11 также
Должны быть переставлены.
59
Рис. 15. Устройство для обогрева и освещения
Рис. 16. Передаточный механизм привода
Устройство для обогрева и освещения (рис. 15, а)
предотвращает обледенение контактной системы автопе-
реключателя вследствие резких колебаний температуры
и влажности внутри привода, а также служит для вклю-
чения осветительной лампы. Оно состоит из кронштейна
2 на гильзах 6 которого смонтированы резисторы 3, 4,
5 w электрическая розетка 1. Резисторы 4 и 5 предназна-
чены для обогрева и каждый имеет мощность 25 Вт и
сопротивление 56 Ом. В качестве обогревателей приме-
няют проволочные эмалированные влагостойкие резисто-
ры типа ПЭВ.
Резистором 3 регулируют напряжение на осветитель-
ной лампе типа ЖС-12-15 (12 В, 15 Вт). Он имеет мощ-
ность 25 Вт и максимальное сопротивление 27 Ом. В ка-
честве балластного применен регулируемый резистор
типа ПЭВР.
Обогреватели питаются от понижающего трансфор-
матора типа ПОБС-5А (рис. 15, б), устанавливаемого в
трансформаторном ящике на группу стрелок (не более
5) рядом с разветвительной муфтой. Трансформаторы
типа ПОБС-5А питаются током промышленной частоты
напряжением 220 В от трансформатора ТС или от спе-
циального изолирующего трансформатора [14]. Для уве-
личения срока службы обогревателей мощность рассеи-
вания допускают не 25 Вт, а 12,5 Вт.
В электроприводе обогреватели выключаются кон-
тактом блокировочного устройства (см. рис. 12). Сезон-
ные включение и выключение обогревателей выполняют-
ся специальными предохранителями, устанавливаемым^
в релейных шкафах или путевых ящиках.
Передаточный механизм (рис. 16) электроприводов
типов СП-3 и СП-8 четырехкаскадный. Вращательное
движение вала электродвигателя преобразуется в посту-
пательное перемещение шибера посредством четырех
зубчатых пар: четырех вал-шестерен 4, 7, 27 (вал-шес-
терня второго каскада на рисунке не показан), трех ко-
лес 12, 29, 30 и зубчатой рейки-шибера 2. Параметры
зубчатых пар приведены в табл. 2.
Отличительной особенностью механической передачи
привода является единая конструкция редуктора с фрик-
ционом, причем фрикцион расположен на выходном ва-
лу редуктора, соседнем с главным валом. В корпусе 11
редуктора имеются перечисленные выше вал-шестерни
61
Таблица 2
Зубчатые пары электроприводов типов СП-3 и СП-8
Параметры Номер каскада
1 И Ш IV
Число зубьев: шестерни 14 14 15 7
колеса 68 60 51
шибера — — — 6
Модуль 1.5 2 3 7
Передаточное число каскада 4,86 4,28 3,4 1
Общее передаточное число 7С .5
и колеса (за исключением 4 и 27), шарикоподшипники,
закрытые крышками 8 и 28, подшипник скольжения 14.
Вне корпуса на вал-шестерне 7 расположен фрикцион,
корпус 15 которого жестко (шпонками) соединен с ко-
лесом 12, вращающимся в подшипнике 14. В корпусе 15
фрикциона имеется жестко связанная с вал-шестерней 7
втулка 16, на которой расположен набор дисков 17 и 19,
служащих в качестве трущихся пар.
Набор дисков сжимается тремя тарельчатыми пру-
жинами 20, усилие нажатия которых регулируется гай-
кой 22 через предохранительную шайбу 25. Самоотвин-
чивание гайки исключается стопорным винтом 23. Кор-
пус 11 закрывают крышкой (на рис. 16 не показана). Вы-
текание смазки из корпуса редуктора и фрикциона иск-
лючают войлочные сальники, резиновые и картонные
прокладки.
Корпус И редуктора отливают из серого чугуна с
минимальной толщиной стенки, равной 10 мм. Крепеж-
ные лапы имеют толщину 35 мм и, кроме того, для них
предусмотрены ребра жесткости.
Вал-шсстерня промежуточного каскада аналогична
вал-шестерне 27 и отличается от нее лишь размерами.
Выходной вал-шестерня 7 имеет консольно расположен-
ную шестерню и пять ступеней: сальниковую для посад-
ки шарикоподшипника (№ 207) с распорным кольцом
9, шайбы 10 и корпуса фрикциона 15, стальной втулки
16 и резьбовую под регулировочную гайку 22.
62
Зубчатое колесо 30 изготовляют из качественной ста-
ти и жестко закрепляют двумя шпонками на вал-шестер-
не промежуточного каскада. Колесо 12, выполненное
также из качественной стали, имеет кроме зубчатой, вы-
ступающую часть, вращающуюся в подшипнике 14.
В центре колеса предусматривается отверстие с шпоноч-
ными пазами для жесткого крепления шпонками 13 к
корпусу фрикциона 15.
Вал-шестерни 7, 27 и промежуточного каскада изго-
товляют из легированной хромистой стали марки 40Х и
термообрабатывают, что повышает износостойкость и
улучшает структуру материала.
Подшипник скольжения 14 выполняют из бронзы и
запрессовывают в корпус редуктора 11. На внутренней
поверхности подшипника предусмотрены смазочные и
сальниковая канавки.
Корпус фрикциона 15, изготовляемый из чугуна, име-
ет внутреннюю полость, в которой расположен механизм
фрикции, и цилиндрическую часть для посадки на вал-
шестерню 7 и колесо 12. На внутренней поверхности по-
лости и наружной поверхности цилиндрической части
расположено по три паза для шпонок 18 и 13. На внут-
ренней поверхности цилиндрической части предусмотре-
на канавка, в которую закладывают сальник. Последний
исключает проникновение порошка, образующегося в
процессе трения дисков друг о друга, внутрь редуктора.
Кроме сальниковой, предусмотрены смазочные канавки
и отверстия в шайбе 10, через которые смазка поступает
в них из корпуса редуктора при разбрызгивании во вре-
мя вращения шестерен.
Внутри корпуса фрикциона расположена стальная
втулка 16, которая с помощью шпонок 24 жестко закреп-
лена на вал-шестерне 7. Фланцевая часть втулки утол-
щена по сравнению с фрикционными дисками, так как
воспринимает усилие сжатия пружин. Круглая часть
втулки имеет лыски, благодаря которым обеспечивается
жесткая связь со стальными дисками 19.
Стальные диски 19 неподвижны при работе привода
на фрикцию. Они имеют толщину 3 мм. На поверхно-
сти дисков с каждой стороны предусмотрены по 4
смазочных канавки. Внутреннее отверстие в дисках по
конфигурации соответствует посадочной части втул-
63
Подвижные диски 17 изготовляют из стали также тол-
щиной 3 мм. На торцовой поверхности подвижных дис-
ков выполнены 3 шпоночных паза, расположенных сим-
метрично пазам в корпусе фрикциона. Набор из четырех
дисков 17 крепят к корпусу фрикциона 15 шпонками 18.
Для повышения износостойкости и предотвращения яв-
ления схватывания диски закаливают.
Тарельчатые пружины 25 отличаются простотой изго-
товления. Их штампуют из листовой пружинной стали.
Внешний диаметр пружины в свободном состоянии 80 мм,
внутренний — 40 мм, высота — 4 мм. Три пружины
обеспечивают плавность регулирования фрикциона. Для
стабилизации пружинящих свойств и увеличения уста-
лостной прочности каждая из пружин подвергается тер-
мообработке. При сжатии на 1,5±0,2 мм каждая пружи-
на создает усилие 3000 Н. На заводе фрикционное сцеп-
ление регулируют на 2500 Н.
Регулировочной гайкой 22 изменяют усилие сжатия
фрикционных дисков. На ее поверхности имеются шесть
прорезей для стопорного винта 23, завинчиваемого непо-
средственно в отверстие на вал-шестерне 7.
Распорное кольцо 9 исключает смещение шарикопод-
шипника в процессе работы привода, а шайба 10 — вы-
падание шпонок 13. Механизм фрикциона закрыт крыш-
кой, к которой точечной сваркой прикреплена шайба 21,
удерживающая сальник. Заедания вал-шестерни 7 о
крышку 8 при осевом перемещении вала в процессе ра-
боты исключает стальная шайба, установленная между
ними.
Для уменьшения вредных сопротивлений, оказывае-
мых трущимися частями в редукторе, предусмотрена их
смазка, метод смазки — разбрызгивание, в связи с чем
рекомендуется применение жидких смазочных масел.
При вращении шестерен и колес редуктора масло, зали-
тое в его корпус, увлекается зубьями и разбрызгивается,
смазывая все трущиеся поверхности. Масло заливают
после снятия крышки редуктора. Уровень заливаемого
масла устанавливают по маслоуказателю. Для замены
отработанного масла свежим снизу корпуса редуктора
имеется маслосливное отверстие, закрываемое пробкой.
Во избежание вытекания масла из редуктора между
крышками 8 и 28 и корпусом 11 применяют прокладки
из прокладочного картона, а в местах выхода вал-шесте-
64
рсн 7 и 27 используют шарикоподшипники с маслоотра-
жательными шайбами и войлочные сальники.
Редуктор передает вращение III каскаду механиче-
ской передачи через вал-шестерню 7, находящуюся в
зацеплении с зубчатым колесом 29.
Зубчатое колесо 29 свободно насажено на главный
вал 4. Кроме зубчатого венца, на ступице колеса имеют-
ся трапецеидальный выступ 32 и выступающая цилинд-
рическая часть с радиальным вырезом 6 и выступом 33.
Трапецеидальный выступ ограничивает поворот колеса.
Радиальный вырез выталкивает ролик переключающего
рычага на цилиндрическую поверхность при вращении
колеса. Выступ 33, угол между образующими гранями
которого 64°, входит в вырез 31 главного вала, равный
110°. После поворота колеса на угол 110°—64°=46°
между ним и главным валом создается жесткое зацеп-
ление. Таким образом, холостой ход привода равен 46°.
Для уменьшения трения при холостом ходе колеса о
шейку главного вала в дне радиального выреза 6 пре-
дусмотрено смазочное отверстие. Колесо изготовляют из
стальной поковки, проходящей нормализацию перед ме-
ханической обработкой.
Главный вал 4 выполнен как одно целое с шиберной
шестерней, ограничителем поворота 1 и шайбой с угло-
выми вырезами 5 и 31. Шиберная шестерня имеет пять
рабочих и два запирающих зуба. Рабочие зубья имеют
эвольвентный профиль с применением коррекции, запи-
рающие зубья — специальную форму. Последние, кроме
того, утолщены по сравнению с рабочими зубьями.
Угловые вырезы колеса 29 выполняют следующие
функции. Вырез 31 обеспечивает холостой ход привода,
а 5 — мгновенность западания переключающего рычага
и дополнительное запирание им главного вала. Главный
вал изготовляют из качественной стали марки сталь 45.
Для повышения износоустойчивости запирающие зубья
подвергают закалке. Этот вал вращается в шарикопод-
шипниках (№ 307). Один из подшипников находится в
корпусе редуктора, а другой — в основании автопере-
ключателя.
Электродвигатель привода связан с входным валом
редуктора уравнительной муфтой 13 (см. рис. 11). Муф-
та состоит из кулачковой втулки, закрепленной шпонкой
на выходном конце вала электродвигателя; кулачковой
3—1122 65
шайбы, надеваемой на квадратный конец вал-шестерни
27 (см. рис. 16), и вкладыша с крестообразно располо-
женными пазами. Кулачки втулки и шайбы входят в па-
зы вкладыша. Уравнительная муфта допускает неболь-
шое радиальное смещение вала электродвигателя отно.
сительно входного вала редуктора при сохранении парал-
лельности их осей.
Передаточный механизм работает таким образом (см.
рис. 16). Вращение вала электродвигателя передается
через уравнительную муфту входному валу редуктора и
затем через две зубчатые пары корпусу фрикциона 15,
жестко связанному с колесом 12. С корпусом фрикцио-
на жестко связаны подвижные диски 17, прижимаемые
пружинами 26 к"неподвижным, жестко связанным с вал-
шестерней 7. Вращение колеса 12 передается вал-шестер-
не 7 через фрикционное сцепление. Вал-шестерня 7 пово-
рачивает колесо 29, которое, совершив холостой ход, на-
чинает вращать главный вал-шестерню 4, отпирает запи-
рающий механизм и перемещает шибер 2.
При застопоривании остряков стрелки главный вал и
связанный с ним через зубчатую пару вал-шестерня 7
перестают вращаться. Если вал-шестерня остановился, то
срабатывает фрикционное сцепление. Диски 19, связан-
ные с валом, также становятся неподвижными, а диски
17 совместно с корпусом фрикциона 15 продолжают вра-
щаться электродвигателем. За счет трения между плос-
костями соприкосновения подвижных и неподвижных
дисков создается нагрузка на электродвигатель.
Для нормальной работы привода необходимо, чтобы
крутящий момент AfH на фрикционном валу, создаваемый
нагрузкой на шибере, был меньше момента Мф, переда-
ваемого фрикционным сцеплением,
MK<M*-Prc9fn, (39)
где Р — усилие сжатия фрикционных дисков;
Гср — средний радиус поверхности дисков;
f — коэффициент трения трущихся пар в масляной ванне;
п — число трущихся плоскостей.
Важнейшими характеристиками являются точность
регулировки и стабильность работы фрикционного сцеп-
ления. Точность регулировки определяют по прираще-
нию тягового усилия электропривода при повороте регу-
лировочной гайки фрикциона на одну ступень.
66
Для того чтобы определить точность регулировки,
найдем момент нагрузки, приведенный к валу фрик-
циона,
Мн = Fr2^3 Ч “ ^-3,6/3,4 0,9 = 1,17F, (40)
где р — тяговое усилие;
г2 — радиус окружности зацепления шиберной шестерни;
— передаточное число III каскада передачи (см. табл. 2);
__ к. п. д. каскада с учетом потерь в двух зубчатых парах
и подшипниках.
Пользуясь формулой (39), получаем
.Иф = Р-3,15-0,06-8 = 1,51Р. (41)
Приравнивая выражения (40) и (41), найдем
F - 1,29Р. (42)
В рабочей зоне характеристика набора тарельчатых
пружин фрикциона является линейной, причем сжатие
на 1 мм соответствует Р«2000 Н. Таким образом, при
шаге резьбы регулировочной гайки 1 мм и 12 ступенях
регулирования точность регулировки с учетом формулы
(42) составляет 1,29x2000:12=215 Н. В первых выпу-
сках приводов серии СП точность регулировки равня-
лась 430 Н. Такая невысокая точность усложняла регу-
лировку фрикции, если привод был установлен на лег-
кой стрелке. Чтобы исключить это, число ступеней ре-
гулирования было увеличено с 6 до 12 за счет введения
на вал-шестерне 7 двух взаимно перпендикулярных
резьбовых отверстий под стопорный винт 23 вместо од-
ного (см. рис. 16). Число прорезей гайки (шесть) оста-
лось без изменений.
Стабильность работы фрикционного сцепления харак-
теризуется постоянством произведенной регулировки. Это
означает, что если фрикционное сцепление отрегулирова-
но по усилию или потребляемому току, оно не должно
самопроизвольно терять регулировку. Основной мерой
для повышения стабильности работы фрикционного сцеп-
ления привода СП-3 является смазка трущихся поверх-
ностей, уменьшающая их износ и нагрев фрикциона.
Кулачковый запирающий механизм запирает электро-
привод (см. рис. 8, а). Отпирание, перевод и запирание
привода происходят в такой последовательности.
Главный вал после включения электродвигателя на-
чинает вращать шиберную шестерню. После поворота на
3* 67
20° кулачок 5 в виде зуба специальной формы шестерни
боковой гранью начнет перемещать шибер и, повернув-
шись на 32°, выйдет из зацепления. Затем шибер переме-
щается зубьями нормального (эвольвентного) профиля
шестерни, которая поворачивается на 194°. Зуб 3 специ-
альной формы шестерни входит в зацепление с шибером
(см. рис. 8, б) и доводит его до крайнего положения, по-
вернувшись на 18°. Когда шибер 1 остановится, зуб 3
повернется еще на 16° и торцовой радиальной поверх-
ностью войдет в зацепление с радиальной поверхностью
зуба 2 шибера, тем самым запирая его. Угловой рабочий
поворот главного вала с шиберной шестерней на отпира-
ние, перевод и запирание стрелки 280°, а полный ход
шибера — 154±2 мм.
Как следует из кинематики запирания, запирающие
зубья-кулачки шиберной шестерни и шибера работают
как при запирании, так и при отпирании. Поэтому шибер
и главный вал изготовляют из качественной стали, а
зубья-кулачки подвергают закалке токами высокой час-
тоты.
Для исключения заклинивания запирающего механиз-
ма коэффициент трения между зубьями-кулачками шибе-
ра и шиберной шестерни понижен по сравнению с коэф-
фициентом трения между шибером и опорной плоскостью
(корпусом привода) за счет применения масляной ван-
ны на шибере. Масляная ванна образована двумя стен-
ками 3 (на рис. 16 передняя стенка не показана), прик-
репленными винтами с потайными головками к шибе-
ру 2. Стенки ванны имеют выборки во избежание тре-
ния о торцовую поверхность зубьев шиберной шестерни
и для сообщения впадин между зубьями шибера, запол-
няемых смазкой. Наличие смазки в масляной ванне
предотвращает заклинивание запирающего механизма и
уменьшает износ рабочих и запирающих зубьев шибе-
ра и шиберной шестерни.
Основной функцией ограничительного устройства яв-
ляется снижение до минимума динамических воздействий
стрелочного привода на стрелку.
Ограничительное устройство привода типа СП-3 (см.
рис. 16) состоит из ограничителя 32 поворота колеса
29 и ограничителя поворота 1 главного вала 4.
Ограничитель поворота колеса 29 состоит из упорно-
го выступа 32 и упора 34, запрессованного в корпусе
68
привода. Вращение колеса ограничивается наклонными
гранями упора 34, угол между которыми 64°. Наличие
ограничителя поворота зубчатого колеса позволяет раз-
грузить ограничитель поворота главного вала.
Вращение главного вала 4 при переводе стрелки про-
должается до тех пор, пока рабочая грань ограничителя
поворота 1 не упрется в плоскость шибера 2. Ограничи-
тель поворота главного вала фиксирует положение запи-
рания привода. При отсутствии ограничителя поворота
в конце перевода главный вал по инерции выходил бы
из положения запирания.
Блок автопереключателя коммутирует электрические
цепи управления электропривода.
Блок автопереключателя (рис. 17, а) содержит рабо-
чие 1 и 15, контрольные 4 и 11 контактные колодки и ко-
лодки с ножами 3 и 14. Автопереключатель собран на ос-
новании 18, в котором на осях 23 и 24 могут поворачи-
ваться переключающие рычаги 13 и 6 и на осях 19 и 28—
ножевые рычаги 17 и 25. В основании 18 имеются па-
зы для прохода шибера и двух контрольных линеек 26
и 27.
Основание 18 представляет собой отливку из серого
чугуна. Нижняя сторона обработана для установки в
корпусе привода, а верхняя — для крепления контактной
системы. На боковой стороне в бобышке имеется клас-
сное отверстие для запрессовки опорного шарикоподшип-
ника главного вала. Для осей вращения ножевого и пе-
реключающего рычагов в основании предусмотрены ка-
либрованные отверстия. В собранном виде блок автопе-
реключателя крепят к корпусу привода шестью болтами
Ml6, а для исключения смещений в процессе работы
штифтуют.
Ножевой рычаг 25 представляет собой стальную об-
работанную отливку, вращающуюся на оси 28. На его
верхней плоскости выфрезерован паз, в котором болтами
закреплена колодка с ножами 3. Нижняя, изогнутая
часть рычага заканчивается широким зубом, который
при повороте к контрольной колодке входит в вырезы
обеих контрольных линеек.
В тело рычага запрессована ось с роликом 2, нахо-
дящимся в вилкообразной части переключающего рыча-
га 6. Ножевой рычаг 17 по конструкции аналогичен ры-
69
Рис. 17. Автопереключатель
Переключающий рычаг 6 является, как и ножевой,
стальной отливкой. Его боковые грани обработаны для
свободного вращения на оси 24 в пазу, выполненном в
основании 18. Головка рычага, в которую запрессован
палец с роликом 7, имеет Г-образную форму в месте за-
падания в вырез шайбы главного вала 9. Острие головки
и ролики 7 и 10 подвергают поверхностной закалке тока-
ми высокой частоты, что повышает износостойкость. Пе-
реключающий рычаг, поворачиваясь, вилкообразной
частью воздействует на ролик 2, переключая ножевой
рычаг.
70
Пружины 8 размещены над переключающими рыча-
гами 6 и 13 и по концам закреплены на них. Каждая
пружина содержит 43 витка из проволоки диаметром
2 мм. По концам в каждую пружину ввинчены проуши-
ны 5. В каждой проушине предусматривается отверстие
для надевания на фигурную стойку, отлитую в теле пе-
реключающего рычага 6 или 13. Конфигурация стойки
выполнена так, чтобы проушины не соскакивали с нее в
эксплуатации.
Контрольные линейки 26 и 27 изготовляют из сталь-
ных пластин сечением 12X32 мм2 и имеют на одном из
концов приваренные ушки 20 и пальцы 21 для крепле-
ния к стрелочным контрольным тягам. Пальцы от выпа-
дания предохраняются шплинтами 22.
На каждой контрольной линейке расположены по два
контрольных выреза, используемых при правой и левой
установках привода. При крайнем положении стрелки
зуб соответствующего ножевого рычага находится в сов-
мещенных вырезах обеих линеек. При взрезе стрелки
скошенная грань выталкивает зуб ножевого рычага на
поверхность линейки. Угол контрольного скоса выбран
так, что для выталкивания зуба рычага достаточно уси-
лия 2500—3000 Н, в то время как усилие взреза гораздо
выше.
Для контроля положения каждого остряка исполь-
зуют две контрольные линейки. Между собой они отли-
чаются только направлением сторон угла контрольного
скоса.
Прежде чем познакомиться с взаимодействием час-
тей автопереключателя, рассмотрим его некоторые осо-
бенности.
Контрольную систему автопереключателя используют
для выключения электродвигателя в конце перевода (на
оба направления 2 пары контактов); контроля положе-
ния остряков при обычно принятом двухполюсном раз-
мыкании контрольных цепей (четыре пары); включения
привода спаренной стрелки (две пары); управления с
маневровой колонки или путевой коробки (две пары);
включения пневмообдувки (две пары).
Контактные пары имеют неодинаковый воздушный
зазор, что определяется их назначением. На каждой кон-
тактной колодке расположена контактная пара с уве-
личенным воздушным зазором (12 мм вместо 6 мм), ком-
71
мутирующая цепи электродвигателя. Зазор выбирают из
расчета исключения дугообразования при использовании
в приводе низковольтного электродвигателя. Контактные
пары с воздушным зазором 6 мм используют в релейных
цепях. Однако практика показывает, что они удовлетво-
рительно работают и в цепи двигателя переменного тока.
В процессе эксплуатации приводов наблюдается па-
дение капель конденсата с внутренней поверхности
крышки привода на контакты автопереключатсля. Для
исключения этого явления в приводе типа СП-3 кон-
тактная система автопереключателя закрыта двумя за-
щитными кожухами 12, выполненными из прозрачного
сополимера марки МСН. Каждый кожух закреплен не-
выпадающим зажимом 30 в виде барашковой гайки.
Защитные кожуха предотвращают случайные замыка-
ния контактов автопереключателя.
Переключающие рычаги 6 и 13 управляют ножевыми
рычагами в зависимости от положения главного вала 4
и колеса 29 (см. рис. 16). Связь переключающих рыча-
гов с главным валом осуществляется через их Г-образ-
ные головки, западающие в определенных положениях в
вырез 5, а с колесом — через ролики 7 и 10 (см. рис.
17, а), взаимодействующими с цилиндрической частью
колеса и радиальным вырезом 6 на ней (см. рис. 16).
Ножевые рычаги 17 и 25 (см. рис. 17, а) коммутиру-
ют контактные колодки автопереключателя в зависимо-
сти от положения переключающих рычагов и контроль-
ных линеек. Связь ножевых рычагов с переключающими
осуществляется через ролики 2 и 16, а с контрольными
линейками — специальным зубом соответствующего ры-
чага, западающим в вырезы, сделанные в контрольных
линейках. Пружины 8 стремятся повернуть ножевые ры-
чаги в сторону контрольных контактных колодок 4 и 11,
тем самым через ролики 2 и 16, прижимая переключа-
ющие рычаги к цилиндрической части колеса 29
(см. рис. 16).
В крайнем положении стрелки, соответствующем по-
ложению автопереключателя, показанному на рис. 17, б,
ролик 7 и головка переключающего рычага 6 будут соот-
ветственно находиться в радиальном вырезе 6 (см. рис.
16) и угловом вырезе 5. Колодка с ножами 3 (см. рис.
17, а), установленная на ножевом рычаге 25, замыкает
контакты контрольной контактной колодки 4, а угол по-
72
ворота рычага 25 ограничен упором 29 в основании 18.
В начале перевода стрелки ролик 7 выжимается враще-
нием колеса из радиального выреза на цилиндрическую
часть, приподнимая переключающий рычаг и выводя его
головку из углового выреза. Ножевой рычаг 25 размыка-
ет контакты контрольной контактной колодки 4 и замы-
кает контакты рабочей колодки 1. В конце перевода
стрелки в радиальном и угловом вырезах окажутся со-
ответственно ролик 10 и головка переключающего рыча-
га 13, а ножевой рычаг 17, если зуб западает в вырезы
на контрольных линейках 26 и 27, замкнет контакты
контрольной колодки 11, включая контрольную цепь но-
вого положения или привод спаренной стрелки. Угол
поворота рычага 17 ограничен упором.
Рассмотрим действие автопереключателя в некоторых
ситуациях.
При взрезе стрелки в положении, изображенном на
рис. 17, а, левый ножевой рычаг 25 под действием конт-
рольных линеек, перемещаемых остряками стрелки, бу-
дет выведен в среднее положение. Правый ножевой ры-
чаг останется в прежнем положении, так как колесо 29
и главный вал 4 (см. рис. 16) при взрезе неподвижны.
Контроль прежнего положения стрелки будет выключен,
а нового — не включен.
При обрыве рабочей тяги контрольные линейки пере-
мещаться не будут, так как остряки стрелки неподвиж-
ны. В этом случае в конце срабатывания привода зуб од-
ного из ножевых рычагов упрется в поверхность конт-
рольных линеек, благодаря чему этот рычаг займет сред-
нее положение.
Обрыв контрольной тяги приводит к тому, что остря-
ки будут перемещать только одну контрольную линейку.
Следовательно, вырезы в линейках будут смещены друг
относительно друга. В этом случае зуб одного из ноже-
вых рычагов также упрется в поверхность контрольной
линейки, а рычаг и колодка с ножами займут среднее
положение, не замыкая контактов контрольной колодки.
Для исключения ложного контроля при возврате стрел-
ки в исходное положение между серьговыми болтами
связной и контрольных тяг устанавливают проволочные
звенья. Благодаря этому оторвавшаяся контрольная тя-
га сможет совершать лишь неполный ход и, таким обра-
зом, вырезы в обеих линейках будут по-прежнему сме-
73
щены друг относительно друга. К аналогичной ситуации
приведет и разъединение связной тяги с остряком
вследствие повреждения серьги.
Рассмотрение устройства автопереключателя пока-
зывает, что в приводе обеспечивается отсутствие контро-
ля при среднем положении стрелки, взрезе, обрывах тяг
и других явлениях.
Особый контроль взреза (как в приводе типа СПВ-6)
отсутствует и из централизации, даже при взрезе, при-
вод типа СП-3 не выключается. Это объясняется тем,
что в последнем случае всегда будут иметь место по-
вреждения элементов стрелки или привода, что является
лучшим подтверждением факта взреза.
Электродвигатель привода после выключения в кон-
це перевода и стопорения при зажатой фрикции может
резко изменять направление вращения. Это приводит к
нежелательному обратному проворачиванию шестерен и,
в частности, зубчатого колеса, которое воздействует че-
рез ролик на переключающий и связанный с ним ноже-
вой рычаги. На зубчатом колесе привода типа СП-3 ус-
тановлено фиксирующее устройство, исключающее это
явление.
Фиксирующее устройство (рис. 18) состоит из фикса-
тора 2, пружины 4 и гайки 3. Стальной фиксатор окан-
чивается шарообразной головкой, которая в положении
фиксации находится в лунке, имеющейся на поверхности
корпуса редуктора 1. Внутри фиксатора имеется отвер-
стие, в котором расположена пружина 4. Фиксатор с
пружиной удерживаются в отверстии зубчатого колеса
стальной шлицевой гайкой 3.
Фиксирующее устройство работает таким образом.
В начале перевода за счет шарообразной формы головки
Рис. 18. Блок автопереключа-
теля с фиксатором
фиксатор выходит из лун-
ки на поверхность бобышки
редуктора 1, а затем в про-
цессе перевода скользит по
ее поверхности. В конце
перевода фиксатор под дей-
ствием пружины западает в
другую лунку, смещенную
по отношению к первой. К
моменту западания фикса-
тора в новом положении
74
электродвигатель оказывается выключенным, а фикса-
тор препятствует обратному вращению зубчатого ко-
леса. Нежелательное размыкание контрольных контак-
тов в этом случае отсутствует.
Работа и электромеханические характеристики элект-
роприводов. Элементы приводов взаимодействуют таким
образом. После включения вал электродвигателя начи-
нает вращаться. Это вращение через муфту сцепления
сообщается вал-шестерне 27 (см. рис. 16), затем колесу
30, жестко закрепленному на вал-шестерне второго кас-
када. Последняя вращает колесо 12, которое через фрик-
цион передает вращение вал-шестерне 7 и колесу 29.
В начале вращения колеса 29 из радиального выреза 6 вы-
талкивается ролик переключающего рычага, а из угло-
вого выреза 5 его головка, тем самым отпирая вал-шес-
терню 4. Затем выступ 33 колеса 29 заканчивает холос-
той поворот вместе с колесом, доходит до стенки выреза
31 и начинает вращать вал-шестерню 4. К этому момен-
ту соответствующий переключающий рычаг полностью
перебрасывает ножевой рычаг из контрольного положе-
ния в рабочее. В начале вращения вал-шестерни 4 сна-
чала отпирается шибер 2, затем делает рабочий ход и
запирается в переведенном положении. К моменту запи-
рания головка второго переключающего рычага запада-
ет в угловой вырез 5, а его ролик — в радиальный вы-
рез 6. Второй ножевой рычаг замыкает контрольные кон-
такты переведенного положения стрелки, если его зуб
вошел в вырезы на контрольных линейках.
Контрольные линейки привода обеспечивают конт-
роль положения стрелки, перемещаясь вместе с остряка-
ми. При взрезе стрелки ножевой рычаг под действием
контрольной линейки на его зуб будет выведен в сред-
нее положение. Контрольные контакты автопереключате-
ля размыкаются. Привод, подвергшийся взрезу, подле-
жит тщательной проверке для решения вопроса о воз-
можности его дальнейшей эксплуатации.
Электромеханические характеристики электроприво-
дов типов СП-3 и СП-8 приведены в табл. 3—7.
Испытания выполнялись на грузовом стенде [15],
позволяющем создавать фиксированную нагрузку на
привод. В процессе испытаний измеряют напряжение на
зажимах электродвигателя, потребляемый ток, время пе-
ревода нагрузки и активную мощность (у электропривода
75
Таблица 3
Электромеханические характеристики
электропривода типа СП-3 с электродвигателем
на напряжение 30 В
Параметры Тип электро- двигателя Значение характеристик в зависимости от нагрузки на шибере, Н
0 1000 2000 3000 4000 5000 6000
Потреб- МСП-0,15 3,4 6,0 8,4 —
ляемый ток, МСП-0,1 3,8 6.6 9,0 11,4 13,4 — —
А МСП-0,25 5,0 7,5 10,8 13,6 16,4 19,6 22,6
Время пе- МСП-0,15 2,2 3,31 4,54 —— — — ——
ревода, с МСП-ОЛ 2,32 3,14 4,0 5,1 6,35 — —
МСП-0,25 1,66 2,15 2,63 3,15 3,66 4,19 4,86
Полезная МСП-0,15 — 45,6 66,5 — — — —
мощность, МСП-0,1 — 48 76 88,5 95 — —*
Вт МСП-0,25 — 70 115 144 165 180 186
Потреб- МСП-0,15 102 180 252 — — —- —
ляемая мощ- МСП-0,1 114 198 270 342 402 — —
ность, Вт МСП-0,25 150 ?25 324 408 492 588 678
К. п. д. МСП-0,15 — 0,253 0,263 — — —
МСП-0,1 — 0,241 0,28 0,258 0,235 — —
МСП-0,25 — 0,31 0,356 0,353 0,335 0,306 0.275
Удельная МСП-0,15 0,595 0,572 — — — —
энергия, МСП-0,1 — 0,625 0,54 0,582 0,64 — —
Вт-с/Н МСП-0,25 — 0,485 0,425 0,43 0,45 0,49 0,55
где
переменного тока). Остальные параметры, указанные
в таблицах, рассчитывают.
Потребляемая электроприводом мощность
= UI.
U — напряжение на зажимах электродвигателя, В;
/ — потребляемый ток, А.
Полезная мощность
где
Fl
Р2 - t '
F — нагрузка на шибере, Н;
I — длина пути шибера (0,154 м);
t — время перевода, с.
76
Таблица 4
Электромеханические характеристики электропривода типа СП-3
с электродвигателями типов МСП-0,1 и МСП-0,25 на напряжение
100 В и МСП-0,15 на напряжение 110 В
Параметры Тип электро- двигателя Значение характеристик в зависимости от нагрузки на шибере, Н
0 1000 2000 3000 4000 5000 6000
Потреб- МСП-0,15 0,9 1.7 2,3 3,0 3,6 4,2 4,7
ляемый ток, МСП-0,1 1,38 2,38 3,3 4,15 4,95 — —
А МСП-0,25 1,3 2,32 3,36 4,25 5,2 6,1 7,0
Время пе- МСП-0,15 2,12 2,9 3,78 4,33 4,95 5,78 6,6
ревода, с МСП-0,1 1,7 2,26 2,83 3,44 4,29 — —
МСП-0,25 1,48 1,87 2,2 2,48 2,73 2,96 3,23
Полезная МСП-0,15 52 78,8 103 120 129 135
мощность, МСП-0,1 66,7 107 131 141 — —
Вт МСП-0,25 — 80,6 138 183 222 256 280
Потреб- МСП-0,15 99 187 253 330 396 462 517
ляемая мощ- МСП-0,1 138 238 330 415 495 — —
ность, Вт МСП-0,25 130 232 336 425 520 610 700
К. п. д. МСП-0,15 —. 0,278 0,311 0,312 0,303 0,279 0,261
МСП-0,1 —- 0,28 0,325 0,315 0,285 —
МСП-0,25 — 0,346 0,407 0,432 0,427 0,42 0,4
Удельная МСП-0,15 — 0,54 0 478 0,476 0,49 0,534 0,568
энергия, МСП-0,1 — 0,54 0,47 0,475 0,525 —
Вт-с/Н МСП-0,25 — 0,435 0,37 0,35 0,356 0,362 0,455
Коэффициент полезного действия электропривода
*1 = Р2/Р1-
где Pi и Р2 — соответственно полезная и потребляемая (активная)
электроприводом мощности
cos ? = РХ/У31Л.
Удельная энергия
W = Pxt if.
Как следует из табл. 3—7, ток, потребляемый элект-
роприводом постоянного тока, зависит от нагрузки и почти
77
Таблица 5
Электромеханические характеристики электропривода типа СП-3
с электродвигателем на напряжение 160 В
Параметры Тип электро- двигателя Значение характеристик в зависимости от нагрузки на шибере, Н
0 1000 2000 3000 4000 5000 6000
Потреб- МСП-0,15 0,6 1.1 1.6 2,1 2,5 2,9 3,3
ляемый ток, МСП-0,1 0,8 1,42 2,04 2,6 3,15 — —«
А МСП-0,25 1,2 1,69 2,31 2,9 3,51 4,05 4,6
Время пе- МСП-0,15 1,93 2.8 3,6 4,2 4,8 5,5 6,35
ревода, с МСП-0,1 1,9 2,56 3,21 3,83 4,81 — —
МСП-0,25 1,35 1,69 1,98 2,26 2,5 2,68 2,87
Полезная МСП-О.Ьб — 53,2 82.8 106 124 135 141
мощность, МСП-0,1 — 59 95 118 125 — —
Вт МСП-0,25 — 89,2 154 200 242 282 316
Потреб- МСП-0,15 96 176 256 336 400 464 528
ляемая мощ- МСП-0,1 128 238 326 416 505 — • —
ность, Вт МСП-0,25 192 271 370 464 563 650 735
К. п. д. МСП-0,15 0.302 0,323 0,315 0,31 0,291 0,267
МСП-0,1 — 0,247 0,291 0,283 0,247 — —
МСП-0,25 — 0,329 0,416 0,432 0,431 0,43 0,43
Удельная МСП-0,15 — 0,492 0,46 0,47 0,48 0,51 0,55
энергия, МСП-0,1 —. 0,61 0,525 0,531 0,61 ж —
Вт-с/Н МСП-0,25 — 0,46 0,366 0,35 0,351 0,351 0,351
Таблица 6
Электромеханические характеристики электропривода типа СП-3
с электродвигателями типа МСТ-0,25
Параметры Напряже- ние на двигателе, В Значение характеристик в зависимости от нагрузки на шибере, Н
0 1000 1600 2000 2500 3000 4000
Потребляемый ток, А 127 1,55 1,87 2,05 2,3 2,6 2,95 3.5
220 0,9 1,05 1,15 1,3 1,45 1,65 2.1
Время перевода, с 127 2,57 2,75 2,81 2,95 3,1 3,25 3,94
220 2,58 2,75 2,83 2,93 3,05 3,23 3.81
Активная мощность, 127 150 225 276 339 405 480 600
Вт 220 135 202 264 330 395 465 645
Полезная мощность, 127 — 55 81 102 122 140 153
Вт 220 — 55 80 103 124 140 159
К. п. д. 127 — 0,244 0,292 0,297 0,301 0,292 0,255
220 — 0,271 0,302 0,311 0,314 0,301 0.247
Удельная энергия, 127 — 0,62 0,515 0,502 0.501 0,52 0,592
Вт-с/Н 220 — 0,56 0,50 0,485 0,482 0,502 0,61
COS <р 127 0,44 0,545 0,61 0,67 0,71 0,74 0,78
220 0,397 0,506 0,605 0,67 0,71 0,74 0.8
78
га
=
s
е;
ГО
га
Электромеханические характеристики электропривода типа СП-8
г 6000 3,95 2,35 см го о? го о ср го га- 1,67 1,63 608 640 о т- го го 184,4 188,5 553,3 566,8
па шибере. 000S 3.6 2,1 7,7 4,5 4,72 4,6 1,58 1,56 г-- го СЛСМ — го 1388 1410 163,1 167,3 487,3 493,6
X X п > о м я X С 4000 3.2 1,85 6,5 3,75 го ГО т|- -г -«• СМ — гого 395 426 ИЗО 1150 136,9 138,4 405,2 407,9
X »- о о S 6 X я 3000 2,85 1,65 5,1 3,0 4,3 4,33 S- ю т* тг * СР is CM Tf 'Г ю оооо 107,4 106,7 314,4 318,6
а 1 с Б £ S 5 0> X tt 000’ 2,7 1,5 3,75 2,25 гого я—и я—* Tt тг 1,42 1,41 см см 82 гого 74,2 74,2 216,9 218,4
1000 го СМ —’ 2,7 1,6 4,0 4,0 1,38 1,38 см го ГОСТ! Я—* я—я 38,5 38,5 <ого. г—* Г-* г—* г—и
X со о 2,45 1,35 1,9 1,04 3,84 3,83 1.-33 1,32 100 115 220 230 1 1 | |
« о £ К а X я Г ние на двигателе, В 061 ОН 110 190 ПО 190 061 ОН ПО 190 061 ОН ОН 190 ПО 190
Тип электро- двигателя МСТ-0,3 МСТ-0,6 МСТ-0,3 МСТ-0,6 МСТ-0,3 МСТ-0,6 МСТ-0,3 МСТ-0,6
Параметры Потребляемый ток, А Время перевода, с Активная мощность, Вт • J о О ! S а г ? <и а С Вт
79
X 1)009 0,303 0,295 0,331 0,338 0,507 0,522 0,465 0,454 О 04 оо оо с" о* 0,953 0,943
о.
о X 3 000! оо оо 04 — СОСО ЙЙ ОСО <2® “ тг 55 ,947 ,94
о о оо оо оо оо о о
X
X п > о. i ,346 ,325 СО ЙЙ ’Г со м- ь- 99 ,648 ,7 ,913 ,92
о оо оо оо о о о о оо
о о j о 1 ,<353 ,314 со оо ь- со •Осб Йо чГ тГ — еч чГ яф хг 0 04 Л(О Г— <ф ЙЙ
X CQ 03 Г5 о о О о оо оо о о о о
а ♦
* X S 1 LQ ТГ сосч ЙЙ 00 со тг Ю 04 СО ЧГ <ф о хг ио оо оо
Си ф оо оо ОО оо о о ОО
ie xapai 0001 СО о СЧ^ч ,275 ,262 ,648 ,78 9Й юю ,34 ,423 ,78 ,796
X *У оо оо о о о о оо о о
03
X СО о *28 04 04 оо со
О О о о
Напряже- ние на двигателе, В ПО 190 ПО 190 ПО 190 061 он ПО 190 ПО 190
1 ип электро- двигателя МСТ-0,3 МСТ-0,6 МСТ-0,3 МСТ-0,6 МСТ-0,3 МСТ-0,6
ИЯ,
Параметры К. п. д. О- о В (В к eg В Л о ZL о н э- о и
а
80
зависит от приложенного напряжения, которое оп-
ределяет лишь время перевода стрелки. Это наглядно
видно из осциллограмм (рис. 19), снятых при нагрузке
на шибере 2000 Н и различных напряжениях на элект-
родвигателе типа МСП-0,25 160 В. Указанные особенно-
сти стрелочного электропривода объясняются свойства-
ми электродвигателя. Номинальное тяговое усилие элек-
тропривода типа СП-3 с электродвигателями типов
МСП-0,15 и МСП-0,25 составляет 3500 Н. Сравнивая
это значение с усилиями перевода наиболее часто при-
меняемых стрелок (см. табл. 1), можно сделать вывод
о том, что в эксплуатации приводы типа СП-3 работают
преимущественно в облегченном или номинальном ре-
жиме. Это способствует повышению их эксплуатацион-
ной надежности и долговечности.
Энергетическая диаграмма электропривода типа СП-3
(рис. 20) характеризует соотношение потерь в различ-
ных его частях и полезной мощности при номинальной
нагрузке на шибере.
Модификации стрелочных электроприводов серии СП.
Первый электропривод типа СП-1 имел фрикцию на ва-
лу электродвигателя. Ограничительное устройство в ви-
де семигранного упора было расположено на главном
валу рядом с шиберной шестерней. Поворот главного ва-
ла ограничивался чугунной плоскостью в основании ав-
топереключателя. Запирающий механизм привода был
выполнен без масляной ванны. Контрольные линейки 6
(см. рис. 18) перемещались в общем пазу 5, зазора 10 мм
между ними не было. Угол поворота ножевых рычагов
автопереключателя особо не ограничивался. Провода
вводились в корпус привода со стороны автопереключа-
теля.
Как показал опыт эксплуатации, привод типа СП-1
работал неустойчиво. При быстром переводе стрелки
(менее, чем за 1,5—2 с) кинетическая энергия, запасен-
ная шестернями и валами редуктора, оказывалась значи-
тельной и вызывала повреждения в корпусе редуктора
и в опорной плоскости основания автопереключателя
после срабатывания ограничительного устройства. Фрик-
ция погашала лишь «живую силу», запасенную электро-
двигателем и, кроме того, местонахождение ее на быст-
роходном валу приводило к быстрому нагреву и неста-
бильной работе. В запирающем механизме имели место
81
Рис. 19. Осциллограммы токов Рис. 20. Энергетическая днаграм-
и напряжений электропривода ма электропривода типа СП-3
типа СП-3
заклинивания. В -автопереключателе наблюдался отход
ножей с выключением контрольных контактов в конце
перевода, повреждения контактных колодок от удара но-
жей, заклинивание контрольных линеек. Привод имел
также и другие недостатки.
В электроприводе типа СП-1а ограничительное уст-
ройство было выполнено из двух частей 1 и 32 (см. рис.
16), стабильность работы фрикции несколько повышена
за счет применения металлических трущихся пар (вмес-
то тормозной ленты), контрольные линейки раздвинуты,
предусмотрены фиксирующее устройство (см. рис. 18) и
возможность ввода проводов в корпус привода в двух
местах, корпус привода был увеличен на 20 мм по шири-
не и на 10 мм по длине для удобства укладки монтаж-
ного жгута. Рассмотренные усовершенствования позволи-
ли исключить в приводе типа СП-1а часть недостатков,
свойственных его предшественнику. Однако основные
вопросы динамики электропривода были разрешены при
разработке электропривода типа СП-2, в котором редук-
тор был впервые совмещен с фрикционом, причем пос-
ледний размещен на выходном валу редуктора, сосед-
нем с главным валом. В этом случае фрикция погашает
кинетическую энергию, запасаемую всеми быстровраща-
ющимися каскадами механической передачи. Конструк-
тивное решение оказалось настолько удачным, что по-
зволило унифицировать электроприводы ЭЦ и ГАЦ.
Привод типа СП-2 отличался от СПГ-2, заменившего
электропневматический привод типа СЭП-55, только
передаточным числом редуктора.
82
В электроприводе типа СП-2 в отличие от СП-1а был
предусмотрен ограничитель поворота ножевых рычагов
автопереключателя.
В 1969 г. было введено раздельное крепление к ост-
рякам рабочих и контрольных тяг, и повышена износоус-
тойчивость связи последних с шибером и контрольными
тинейками привода. В электроприводе типа СП-2Р для
этого увеличен диаметр присоединительного отверстия
в шибере с 20 до 26 мм, а также усилены и раздвинуты
с 12 до 16 мм ушки контрольных линеек.
В электроприводе типа СП-3 в отличие от СП-2Р уве-
личено передаточное число редуктора с 55 до 70, преду-
смотрено устройство обогрева контактов, пружины кру-
чения автопереключателя заменены пружинами растя-
жения, контактная система закрыта кожухами.
В настоящее время начато серийное производство
электроприводов типа СП-6.
3.3. СТРЕЛОЧНЫЙ ЭЛЕКТРОПРИВОД ТИПА СП-6
Дальнейшее увеличение скоростей движения поездов,
внедрение стрелочных переводов из рельсов тяжелых ти-
пов Р65 и Р75, в том числе с крестовинами, имеющими
подвижной сердечник, переход к индустриальному мето-
ду технического обслуживания устройств ЭЦ потребова-
ли создания более надежного электропривода, чем су-
ществующие.
Новой моделью невзрезного стрелочного электропри-
вода с внутренним запиранием является привод типа
СП-6. Его основные характеристики: максимальное тя-
говое усилие 6000 Н, максимальное время перевода 7,0 с,
назначенный ресурс1 — 1,2 млн. срабатываний при уси-
лии до 3500 Н, электропитание постоянным током при
номинальных напряжениях 30, 100, ПО и 160 В и пере-
менным током частотой 50 Гц напряжением ПО, 127,
190 и 220 В, габаритные размеры 780X955X255 мм, мас-
са — не более 175 кг, установка с правой или левой
стороны стрелки. Электропривод типа СП-6 выпускают
1 Назначенный ресурс — суммарная наработка объекта, при
Достижении которой эксплуатация должна быть прекращена неза-
висимо от его состояния (ГОСТ 27.002—83).
83
с двигателями тех же типов, что и электроприводы СП-3
и СП-8.
Корпус электропривода липа СП-6 по форме, габа-
ритным размерам и расположению внутренних наб поч-
ти аналогичен корпусу привода типа СП-3. Отличие со-
стоит лишь в увеличенных размерах набы, предназна-
ченной для установки многоконтактного блокировочного
устройства 1 (рис. 21).
Кроме блокировочного устройства, в корпусе 2 раз-
мещены электродвигатель 14, уравнительная муфта 3,
редуктор 4, автопереключатель 10, шибер 8, главный
вал 9, контрольные линейки 5, панель освещения 13.
Узлы и детали, расположенные на боковых стенках кор-
пуса электропривода типа СП-6, имеют ряд изменений.
Улучшена герметизация отверстий для установки кур-
бельной рукоятки и ключа для открывания привода за
счет усиления прижатия закрывающих их резиновых
шайб к корпусу. Для этого пластина 2 блокировочной
заслонки удлинена и невыпадающий винт 1 (рис. 22)
помещен слева от резиновой шайбы 3. С заслонкой
связан держатель 4, несущий оба ножа, каждый из ко-
торых коммутирует по две пары контактов на колодках
5 и 6.
Боковая крышка 11 (см. рис. 21) имеет увеличенную
на 15 мм по высоте бобышку, что потребовалось в свя-
зи с удлинением одной из контрольных линеек 5.
На панели освещения 13, предназначенной для под-
ключения переносной лампы типа ЖС 12-15, расположе-
ны штепсельная розетка и регулируемый проволочный
резистор типа ПЭВР-25 сопротивлением 27 Ом. Обогре-
ватели 12 контактов автопереключателя, штепсельная
розетка и резистор ПЭВР включают по схеме (см. рис.
15, б). Резистор снижает избыточное напряжение при
подключении лампы. Остальные элементы корпуса элек-
троприводов типов СП-6 и СП-3 аналогичны.
Механическая передача электропривода типа СП-6
так же, как и СП-3, четырехкаскадная: две цилиндриче-
ские зубчатые пары в закрытом редукторе и две вне его.
Общее передаточное число осталось тем же — 70,5. Кон-
струкция внешних зубчатых пар сохранена в электропри-
воде типа СП-6 без изменений, а редуктор существенно
реконструирован: фрикцион встроен внутрь корпуса, все
валы вращаются в шарикоподшипниках, улучшена гер-
84
Рис. 21. Стрелочный электропривод типа СП-6 (вид сверху)
Рис. 22. Четырехконтактное блокировочное устройство
85-
метизация, предотвращающая вытекание масла из ре-
дуктора.
В корпусе 1 -редуктора (рис. 23) расположены вал-
шестерни: первого каскада 15, второго 4, третьего 2/-
колесо 7, жестко (шпонками 6) закрепленное на валу-/'
механизм фрикциона, встроенный в зубчатое колесо 24
и шарикоподшипники 5, 10, закрытые крышками 9, 3 и
20. Вал-шестерни и колесо 7 по конструкции аналогичны
соответствующим деталям редуктора электропривода ти-
па СП-3, но в отличие от последнего обе опоры вал-шес-
терни 21 — шарикоподшипники 28 легкой серии №60207
с маслозащитными шайбами (подшипник скольжения уп-
разднен), и квадратная часть вал-шестерни 15 выполне-
на сечением 12X12 мм (вместо 10ХЮ мм). В связи с
этим кулачковая шайба 11 имеет увеличенное квадрат-
ное отверстие и невзаимозаменяема с аналогичной де-
талью электропривода типа СП-3. Две другие детали
уравнительной муфты — вкладыш 12 и кулачковая
Рис. 23. Редуктор с встроенным фрикционом
86
тупка 13, надеваемая на вал электродвигателя, не из-
менились. Применение шарикоподшипника 28 с маслоза-
щитной шайбой взамен подшипника скольжения позво-
лило повысить долговечность опоры и предотвратить в
эТом месте вытекание масла из редуктора. Сечение
квадратной части вал-шестерни 15 увеличено из-за при-
менения более мощных электродвигателей, в частности,
•типов МСТ-0,3 и МСТ-0,6.
Вал-шестерня 4 находится в зубчатом зацеплении с
вениовой частью колеса 24, в ступице которого смонти-
рован механизм фрикциона, так что вал-шестерни 4 и 21
между собой имеют фрикционную связь. Механизм фрик-
циона состоит из втулки 22, жестко (шпонками 23) сое-
диненной с вал-шестерней 21, четырех подвижных 25 и
такого же числа неподвижных дисков 26, прижатых друг
к другу тарельчатыми пружинами 29. Одна из них нахо-
дится внутри корпуса редуктора на втулке 22, а две дру-
гие — на втулке 30 вне корпуса. Усилие от наружных
пружин к внутренней передается промежуточной втул-
кой 27, а регулируется корончатой гайкой 31. Самоот-
винчивание гайки исключает стопорный винт 32.
Колесо (рис. 24, а) выполнено из качественной стали,
имеет зубчатый венец 1; выступающую часть, в которую
запрессована втулка 2, и полость 4 в ступице. Втулку 2
изготовляют из бронзы. Она выполняет функцию под-
шипника скольжения, когда вал-шестерня 21 (см. рис.
23) заторможен, а колесо 24 вращается, т. е. при работе
привода на фрикцию. Смазочная канавка 3 (см. рис.
24, а) обеспечивает доступ масла к трущимся поверх-
ностям вала и колеса. В полость ступицы помещают'
стальную втулку (рис. 24, б), фланцевая часть которой
играет роль одной из поверхностей трения, а на цилинд-
рической располагают фрикционные диски.
Подвижной (рис. 24, в) и неподвижный (рис. 24, г)
диски толщиной по 2 мм изготовляют из стали. Подвиж-
ной диск имеет на периферии три выступа, входящих при
сборке в пазы ступицы колеса. Неподвижный диск вы-
полняют с внутренним отверстием, соответствующим по
форме посадочной части втулки (см. рис. 24, б). Подвиж-
ные и неподвижные диски подвергают закалке, повышаю-
щей износостойкость и предотвращающей явление схва-
тывания. Для обеспечения смазки трущихся поверхнос-
тей на фланцевой части втулки и неподвижных дисках
87
Рис. 24. Элементы встроенного фрикциона:
а — зубчатое колесо с внутренней полостью; б — втулка; в — подвижной
диск; г — неподвижный диск
предусмотрены смазочные канавки (см. рис. 24, б и г),
в которые масло поступает через вырезы в ступице
колеса.
Максимальный момент, передаваемый фрикционным
сцеплением электропривода типа СП-6 согласно форму-
ле (39), остался тем же, что и у электропривода типа
СП-3, так как усилие сжатия пружин, средний радиус по-
верхности дисков, коэффициент трения и число трущих-
ся поверхностей не изменились. Показатель точности ре-
гулировки фрикции у обоих электроприводов также оди-
наков, а стабильность работы выше у электропривода
типа СП-6 за счет принудительной смазки поверхностей
трения маслом при вращении шестерен.
В процессе эксплуатации электропривода типа СП-3
наблюдалось вытекание масла из редуктора. Для предот-
вращения этого в электроприводе типа СП-6 улучшена
герметизация редуктора. В месте выхода вала 21 преду-
смотрен шарикоподшипник 28 с маслозащитной шайбой
(см. рис. 23). Кроме того, как и в электроприводе типа
88
гП-3 в крышках 9 и 20 установлены войлочные сальни-
С 16 и 19, а между крышками 2, 3, 9, 20 и корпусом ре-
актора — картонные прокладки.
ду спуск масла и промывка редуктора осуществляются
еоез пробку 8. Уровень заливаемого масла контролиру-
Чт’я маслоуказателем 14 через отверстие, закрываемое
заглушкой. Маслоуказатель не рекомендуется оставлять
в редукторе постоянно, так как уже при небольшом из-
гибе его стержень начинает задевать за вращающиеся
детали внутри редуктора.
Редуктор электропривода типа СП-6 передает враще-
ние электродвигателя главному валу привода таким об-
разом. Вал электродвигателя через муфту сцепления
(детали 11, 12, 13) вращает вал-шестерню 15 и колесо
7 первого каскада зубчатой передачи. Последнее сооб-
щает движение вал-шестерне 4 и колесу 24 второго кас-
када, с которым жестко связаны подвижные диски 25,
которые за счет трения вращают прижатые к ним та-
рельчатыми пружинами 29 неподвижные диски 26, за-
крепленные жестко на выходном вал-шестерне 21,
В свою очередь вал-шестерня 21 вращает зубчатое ко-
лесо третьего каскада, которое, совершив холостой ход,
приводит в движение главный вал.
Если стрелка остановилась в среднем положении из-
за попадания постороннего предмета между остряком и
рамным рельсом, главный вал и связанный с ним через
колесо вал-шестерня 21 перестают вращаться. При этом
неподвижные диски 26 останавливаются (чем и объясня-
ется их название), а подвижные 25, связанные с зубчаг
тым колесом 24, продолжают вращаться электродвига-
телем.
Усилие, которое в этом положении развивает
электропривод на шибере, ограничивается соответству-
ющей регулировкой фрикциона.
При работе электропривода типа СП-6 на фрикцию
в отличие от СП-3 нет внешних вращающихся частей на
вал-шестерне 21, так как тарельчатые пружины 29 и ре-
гулировочная гайка 31 неподвижны, что повышает безо-
пасность проведения регулировки. Еще одно преимуще-
ство редуктора со встроенным фрикционом заключается
в том, что в связи с отсутствием корпуса 15 (см. рис.
16) исключается знакопеременное воздействие его на ре-
89
гулировочную гайку и, следовательно, самоотвинчивание
или срез стопорного винта 23, ведущие к разрегулиров-
ке фрикции.
Блок автопереключателя электропривода типа СП-6
имеет ряд отличий от аналогичного блока электроприво-
да типа СП-3, хотя принцип его работы в целом не изме-
нился.
Опыт эксплуатации электроприводов типа СП-3 пока-
зал, что, несмотря на наличие устройства обогрева 12
(см. рис. И), имели место случаи обледенения контак-
тов автопереключателя, в особенности на удаленных кон-
тактных колодках. Для предупреждения обледенения
обычно повышали, напряжение на обогревателях, что уве-
личивало расход электроэнергии и сокращало срок их
службы.
Чтобы повысить тепловое воздействие при минималь-
ном расходе электроэнергии, в электроприводе типа
СП-6 обогреватели 5 (рис. 25) размещены непосредствен-
но над контактами.
Между парами рабочих 15 и контрольных 16 контак-
тов расположено по одному обогревателю (на рис. 25
справа обогреватель не показан). В качестве обогрева-
телей использованы проволочные эмалированные резис-
торы типа ПЭВ-25-56± 10%. Обогреватель 5 прикрепля-
ют шпилькой 6 к угольникам 4 и 9 и изолируют от них
гильзой 7 и шайбами 8. Угольники закрепляют на осно-
вании автопереключателя теми же винтами, что и кон-
тактные колодки. Изоляционные трубки 1 исключают ка-
сание контактов 15 или 16 угольниками. Возможность
соскакивания обогревателя 5 со шпильки 6 в случае са-
моотвинчивания гаек исключается шплинтами 3. Прово-
да от обогревателя можно подключать либо на свобод-
ных шпильках автопереключателя, либо непосредственно
увязывать с монтажным жгутом. В угольнике 4 предус-
мотрено отверстие для скобы, предотвращающей прови-
сание проводов.
Чтобы повысить устойчивость пластмассовых контакт-
ных и ножевых колодок против появления усталостных
трещин, в автопереключателе электропривода типа СП-6
предусмотрены амортизаторы. Они представляют собой
плоские прокладки толщиной 1 мм, подкладываемые
под рабочую 2 и контрольную 11 контактные колодки
и колодку 14 с ножами.
90
Положение рычага
2 1 ft 13 12 11
Рис. 25. Контактный автопереключатель
91
В процессе эксплуатации электропривода типа СП-3
наблюдался ряд случаев, когда волочившиеся части под.
вижного состава частично или полностью удаляли (точ-
нее, вырывали!) контрольные линейки из привода, де-
формировали тяги гарнитуры. Кроме того, вследствие
тряски, вибрации контрольных тяг выходили из строя
сварные ушки контрольных линеек. Эти причины сни-
жали точность контроля положения стрелки, что потре-
бовало модернизации контрольных линеек.
Контрольные линейки электропривода типа СП-6
(рис. 26, а) по назначению различны. Одна контролиру-
ет положение ближнего, а другая — дальнего остряка.
Контрольная линейка ближнего остряка состоит из
пластины 8, съем-ного ушка 6, связывающего его с конт-
рольной тягой, и упора 9, остающегося в приводе при
удалении линейки внешней силой и препятствующего
замыканию контрольных контактов.
Рис. 26. Контрольные линейки:
а — сборка для правой установки привода; б — сборка для левой уста-
новки привода
92
Упор 9 привинчен к пластине 8 двумя винтами 1,
- )Торые законтрены гайками. Возможность соскакивания
к в случае самоотвинчивания исключают закрутки.
Ушко б, изготовляемое методом точного литья, снабже-
но штифтом 7 диаметром 15 мм, который запрессовы-
вают в пластину 8. Кроме того, ушко прикрепляют к
пластине болтом 5 с резьбой М12. В вилкообразную
часть ушка линейки входит ушко контрольной тяги
и закрепляется пальцем 2. Шплинт 3 (или закрутка)
предохраняет палец 2 от выпадания.
Контрольная линейка дальнего остряка состоит из
пластины 10 и ушка //, прикрепляемого к ней, как бы-
ло описано. Суммарная толщина ушек обеих линеек
в вилкообразной части увеличена с 12 до 16 мм для
уменьшения износа отверстий для пальца 2.
Каждая линейка имеет по одному контрольному вы-
резу, а не по два, как в электроприводе типа СП-3, пред-
назначенному для западания рычагов 25 и 17 (см. рис.
17, а). Взаимодействие контрольных линеек с ножевыми
рычагами автопереключателя при нормальном переводе
и взрезе стрелки, обрывах рабочей и контрольных тяг
у электропривода типа СП-6 не отличается от СП-3.
Дополнительно обеспечивается потеря контроля при
частичном или полном удалении линейки ближнего
остряка из корпуса электропривода. При этом упор 8
(рис. 27) при чрезмерном ходе контрольной линейки 4
ближнего остряка, скользящей по направляющим 5 и 6,
упирается в набу 9 корпуса электропривода, винты 7
срезаются (усилием около 5000 Н), после чего упор
остается в направляющих, а линейка 4 продолжает дви-’
жение. По окончании вращения главного вала переклю-
чающий 3 и ножевой 2 рычаги совершат поворот, отчего
зуб ножевого рычага упрется в поверхность упора 8 и
исключит замыкание контрольных контактов автопере-
ключателя. При нормальной работе электропривода
упор 1 совершает ход 154 мм, не доходя до набы 9.
Для установки новой линейки необходимо снять бо-
ковую крышку 10, отжать ножевой рычаг, вынуть упор,
вставить линейку и закрепить на иен упор винтами.
Для левосторонней установки электропривода на
контрольных линейках (см. рис. 26, б) в отличие от пра-
восторонней установки (см. рис. 26, а) ушки 6 и И пе-
реставляют на другую сторону пластин 8 и 10.
93
Рис. 27. Схема разъединения хвостового упора с линейкой при
ее удалении из привода
В ходе эксплуатационных испытаний электроприво-
дов СП-6 проверялся также вариант линеек с умень-
шенными контрольными вырезами в форме «ласточкина
хвоста». Проверка показала, что в этом случае появля-
ются значительные динамические воздействия на ноже-
вой рычаг при взрезе стрелки. Поэтому в серийных
электроприводах СП-6 вырезы в контрольных линейках
имеют параллельные грани, как и в электроприводах
СП-3. Уместно отметить, что в эксплуатируемых элект-
роприводах СП-3 целесообразно применять контрольные
линейки с упором 9 (см. рис. 26).
Исследования показали, что наряду с усовершенст-
вованием автопереключателя необходима реконструк-
ция стрелочной гарнитуры. В частности, на электропри-
вод при взрезе стрелки на «втягивание» шибера и, сле-
довательно, сжатие рабочей тяги действует усилие око-
ло 20 000 Н. При взрезе в противоположном направле-
нии, т. е. при растяжении рабочей тяги возникает уси-
лие в несколько раз больше (>90 000 Н), что может
приводить к разрушению электропривода. Усовершенст-
вование гарнитур должно снизить усилие, развивающе-
еся в последнем случае, до 20 000 Н, что предотвратит
разрушение электропривода и незапертое состояние
стрелки.
94
Работа и электромеханические характеристики элек-
i пивода типа СП-6 аналогичны рассмотренным для
электропривода типа СП-3.
3 4 СТРЕЛОЧНЫЙ ЭЛЕКТРОПРИВОД ТИПА СПВ-6
В маневровых районах станций магистрального же-
лезнодорожного транспорта, на промышленном транс-
порте и метрополитене применяют взрезные стрелочные
электроприводы типа СПВ-6.
Конструкция электропривода. К основным показа-
телям электропривода СПВ-6 относятся: максимальное
тяговое усилие 3000 Н, максимальное время перевода
5 с, электропитание постоянным током прн номиналь-
ных напряжениях 30, 100, 160 В и переменным током
50 Гц напряжением 127 и 220 В, установка с левой и
правой сторон стрелки. Габаритные размеры электро-
привода типа СПВ-6: 870x955x255 мм; масса не более
195 кг.
Корпус 2 закрывают съемной крышкой. Внутри него
(рис. 28) размещают электродвигатель 1, редуктор
с фрикционом 19, взрезное устройство 9, шиберы 13 и 14,
контрольные линейки 15 и 16, автопереключатель,
устройство обогрева и освещения 3, пружины растя-
жения 7 и 11, контактный блок 10. На боковых стенках
корпуса расположены блокировочное устройство 20, за-
мок привода 21, плита с накладкой для прижатия саль-
ников 12, боковая крышка 6, кожух 17.
Элементы, расположенные на боковых стенках кор-
пуса, а также устройство обогрева и освещения имеют
конструкцию, аналогичную элементам корпуса привода
типа СП-3, рассмотренным выше.
Вращательное движение вала электродвигателя
в поступательное движение шиберов преобразуется в
приводе с помощью пяти зубчатых пар (рис. 29). Две
зубчатые пары 4, 5 и 7, 8 помещены в закрытый
редуктор и соединены с третьей парой 3, 9 фрикцио-
ном б; четвертая 2, 11 и пятая 1, 12 пары представля-
ют собой шестерни с прямозубыми рейками. Редуктор
с Фрикционом привода типа СПВ-6 по конструкции почти
аналогичен редуктору с фрикционом привода типа СП-3.
Отличие заключается в том, что редуктор привода ти-
95
Ш I 4/5
Рис. 28. Стрелочный электропривод типа СПВ-6 (вид сверху)
00 h
0S£
Рис. 29. Механическая передача электропривода типа СПВ-6
па СПВ-6 имеет меньшее передаточное число для уско-
рения перевода стрелки в маневровом районе. Парамет-
ры зубчатых пар приведены в табл. 8.
Кулачковый запирающий механизм привода раз-
мещен на двух шиберах. Каждый шибер запирает толь-
ко один остряк, причем остряки имеют раздельный ход.
Запирающее усилие незапертого шибера, связанного
с отжатым остряком, равно взрезному, а запертого, свя-
занного с прижатым остряком, зависит от прочности
элементов привода и стрелки.
Запирающий механизм привода типа СПВ-6 сос-
тоит из четырех зубьев-кулачков 1 и 2 специальной
формы — по одному на каждой шиберной шестерне и
Зубчатые пары электропривода типа СПВ-6
Таблица 8.
Параметры Номера каскадов
I II Ш IV
Число зубьев: шестерни колеса шибера Модуль Передаточное число каскадов '-'бшее передаточное число 15 67 1.5 4.46 16 58 2 3,62 5 15 51 3 3,4 4,9 7 6 7 1
4—1122
97
каждом шибере и двух пальцев 3 — по одному
на каждом шибере (рис. 30). Запирание осущест-
вляется введением в зацепление зубьев специаль-
ной формы 1 и 2. Главный вал, начиная движение после
включения электродвигателя, приводит во вращение обе
жестко связанные с ним шиберные шестерни. Последние
в этот момент по-разному связаны с шиберами: у одной
в зацеплении находятся зубья нормального эвольвент-
ного профиля, а у другой — специального. В связи с
этим начавшееся вращение шестерен приведет к пере-
мещению только одного шибера — левого незапертого.
Индивидуальное перемещение продолжается до тех пор,
пока палец 3 левого шибера не упрется в палец право-
го шибера, и рЪвно 13 мм. После этого под действием
левого шибера правый шибер переместится на 11 мм
и его шестерня войдет в зацепление с зубьями нормаль-
ного профиля. Отпирание привода на этом заканчивает-
ся. Дальнейшее перемещение шиберов — рабочий ход —
осуществляется шестернями совместно.
В конце рабочего хода зуб 2 специальной формы уже
левой шиберной шестерни войдет в зацепление с левым
шибером, доведет его до крайнего положения и замк-
нет.
Строго определенный ход шибера 154±2 мм и конст-
рукция запирающего механизма привода требуют ог-
раничения угла поворота главного вала. Для этого ис-
пользуют простое ограничительное устройство, состоящее
Рис. 30. Запирающий механизм электропривода типа СПВ-6
98
Рис. 31. Взрезное устройство
из подвижного упора 15 (рис. 31), расположенного на
крышке взрезного барабана, и неподвижного упора,
отлитого и обработанного в дне корпуса привода. Исполь-
зование ограничительного устройства такой конструк-
ции возможно благодаря тому, что главный вал делает
при переводе 0,76 оборота, т. е. меньше полного оборо-
та вокруг своей оси. Угловой поворот на отпирание,
рабочий ход и запирание стрелки 273°, в связи с чем
угол, образованный гранями упора, 87°.
Взрезное устройство расположено на главном валу
привода. Оно защищает привод от механических пов-
реждений при взрезе стрелки за счет наличия гибкой
связи между валом 3 и колесом 7. В корпусе взрезного
барабана 7, закрытом крышкой 2, находится жестко
связанная с главным валом крестовина 9, в направля-
ющих пазах которой могут перемещаться ползуны 10 и
14, раздвинутые двумя пружинами 11 так, что ролики 8
ползунов находятся в овальных вырезах взрезного ба-
рабана.
Взрезной барабан 1 представляет собой пустотелый
Цилиндр с дном. Его изготовляют из стальной поковки.
На цилиндрической поверхности барабана выфрезеро-
ваны; паз 26° для западания запирающего барабан ры-
чага автопереключателя, два паза для выхода хвостови-
ков ползунов 10 и 14 и два овальных паза, в которые
западают стальные закаленные ролики 8 ползунов. В
дне барабана имеются отверстия для его центровки на
главном валу, доступа к регулирующим гайкам и паз
90°, в который входит упор 60° колеса. Во взрезном
барабане собран весь механизм взрезного устрой-
ства.
Крышка 2 взрезного барабана представляет собой
чугунный литой диск, над поверхностью которого высту-
пает упор 15 ограничительного устройства и бобышка,
к которой крепится скоба фиксатора 5. В крышке так
же, как и в барабане, имеются отверстия для доступа к
регулирующим гайкам. Крышку крепят к корпусу взрез-
ного барабана /.винтами и во избежание смещения при
работе ограничительного устройства штифтуют. Сталь-
ная крестовина 9 в отличие от барабана 1 жестко (шпон-
кой 13) связана с главным валом. В плоскости, пер-
пендикулярной ее оси, имеются направляющие пазы для
ползунов, а на ее поверхности выступ, в который нор-
мально упирается фиксатор 4 под действием пружины.
С обеих сторон к выступу примыкает круговая канавка,
в которую соскакивает фиксатор при взрезе стрелки.
Крестовина передает рабочий момент, создаваемый
взрезным усилием, ползунам 10 и 14.
Ползуны 10 и 14 различаются тем, что один из них
имеет подвижные опоры для пружин 11 в виде гаек.
Ползун 14 состоит из литого стального основания
с хвостовиком, двух резьбовых шпилек, навинченных
на них корончатых гаек 12 и ролика 8. Резьбовые шпиль-
ки гладкой частью запрессованы в основание, после
чего заштифтованы. Корончатые гайки 12 имеют коль-
цевые проточки, которые являются непосредственной
опорой пружин взрезного сцепления. Вращение гаек
изменяет сжатие пружин. Максимальный ход гаек по
шпилькам 3,5 мм, что позволяет регулировать взрезное
усилие от 10 000 до 15 000 Н. Для исключения самопро-
извольного проворачивания в процессе эксплуатации
электропривода и разрегулировки взрезного устройства
корончатые гайки шплинтуют.
Пружины 11 изготовляют из стальной пружинной
проволоки. Каждая пружина имеет по 8,5 витка из
проволоки диаметром 4,5 мм при шаге навивки 9,5 мм.
На заводе взрезное устройство регулируют на усилие
10 000—13 000 Н. Это обеспечивается предварительным
100
жатием пружин на 5,2—6,2 мм, что соответствует соз-
ываемым каждой из пружин усилиям от 150 до 330 Н.
Да Взрезное устройство срабатывает следующим об-
Ра3р1о’езд, идущий в пошерстном направлении, гребня-
колес’ начинает перемещение отжатого остряка, что
обусловлено конструкцией стрелки. Отжатый остряк
через рабочую тягу начнет воздействовать на незапер-
тый шибер. Последний через связанную с ним шиберную
шестерню приводит во вращение главный вал 3, после
чего вторая шестерня отпирает шибер, связанный с при-
жатым остряком. Главный вал вращает жестко связан-
ную с ним крестовину 9, которая передает это усилие
ползунам 10 и 14 и через ролики 8 ползунов взрезному
барабану. Но барабан заперт рычагом автопереключа-
теля, упирающимся в боковую грань паза 26°, и может
быть отперт только в том случае, если вращение осу-
ществляется электродвигателем, а не главным валом.
Так как барабан 1 остается неподвижным, ролики 8
начинают выкатываться из его овальных вырезов на
внутреннюю цилиндрическую поверхность. Ползуны бу-
дут сближаться, скользя по направляющим в крестови-
не 9 и преодолевая действие пружин 11. Движение пол-
зунов 10 и 14 в радиальном направлении продолжается
до тех пор, пока их ролики 8 целиком не выходят на
внутреннюю цилиндрическую поверхность барабана.
Хвостовики ползунов прячутся в барабан, после чего
фиксатор 4 соскакивает с выступа в круговую канавку
крестовины 9, фиксируя срабатывание взрезного уст- -
ройства.
При нормальной работе привода взрезное устройст-
во не срабатывает. В этом случае электродвигатель че-
рез шестеренчатую передачу сначала вращает колесо
с упором.
Колесо 7 с упором представляет собой обработанную
стальную поковку. К ее боковой поверхности приклепан
Упор 6. Колесо свободно насажено на главный вал
вплотную к взрезному барабану так, что упор 6 входит
в его вырез 90°. Колесо вращает барабан внешними
гранями упора, угол между которыми 60°, после свобод-
ного поворота на угол 30°. Внутри упора имеется вырез,
который западает ролик 16 рычага, запирающего
101
взрезной барабан (рис. 32). Конфигурация выреза та-
кова, что наклонной гранью ролик в момент свободного
поворота колеса на 30° выталкивается вверх и подни-
мает рычаг автопереключателя, запирающий взрезной
барабан. При совместном вращении колеса и взрезного
барабана ролик катится по его внешней цилиндрической
поверхности, исключая трение рычага. После того как
взрезной барабан отпирается и начинает вращаться
стенками овальных вырезов он воздействует на ролики
ползунов и крестовину, сообщая движение главному
валу. Взрезное устройство не срабатывает, так как уси-
лие перевода стрелки меньше взрезного.
Взрезное усилие должно превышать фактическое
усилие перевода стрелки для ее нормальной работы.
Практика показывает, что необходимость в электродви-
гателе с возможно большими пусковым моментом и пе-
регрузочной способностью приводит к появлению «са-
мовзреза», или ложного взреза. Явление «самовзреза»
заключается в том, что взрезной барабан сразу в нача-
ле перевода выжимает ролики ползунов, преодолевая
действие взрезных пружин, вращается до упора, но не
приводит в движение главный вал. Это объясняется тем,
что момент, определяемый инерцией масс покоя — стрел-
ки и узла главного вала, превышает рабочий момент
взрезного устройства. Во избежание «самовзреза» при-
Рнс. 32. Автопереключатель
102
ится увеличивать взрезное усилие в 10—15 раз по
Х видению к усилию перевода стрелки. Усилие перево-
ОТ1'большинства легких стрелок 1000—1500 Н. Казалось
J3, достаточно взрезное усилие установить 5000—
7000 Н Однако во избежание «самовзрезов» при рабо-
‘ Привода требуется взрезное устройство, рассчитанное
т J3 000—15 000 Н. Завышенное взрезное усилие приво-
дит к интенсивному износу остряков стрелки и механиз-
ма привода при взрезе. В связи с этим во взрезном уст-
ройстве предусмотрена возможность индивидуальной
регулировки взрезного усилия.1
Автопереключатель состоит из левого и правого кон-
тактных блоков, расположенных на основании 8, ноже-
вых рычагов 4 и 9, переключающих рычагов 11 и 17,
контрольных линеек 1 и 2, взрезной шайбы 6, пальцев
5 и 7. Каждый контактный блок имеет по одной рабо-
чей и одной контрольной контактной колодке и колод-
ке с ножами, как в приводах серии СП.
В чугунном основании 8 предусмотрены плоскости
для крепления контактных колодок, отверстия для осей
ножевых рычагов 4 и 9 и пальцев 5 и 7.
Ножевые рычаги 4 и 9 представляют собой фигурные
стальные отливки. Одна из сторон каждого рычага
имеет паз, в который плотно входит колодка с ножами,
и ее крепят двумя болтами. Рычаг имеет выступ, окан-
чивающийся зубом, который при повороте в сторону
контрольной контактной колодки входит в вырез, имею-
щийся на контрольных линейках 1 и 2.
Переключающие рычаги 11 и 17 представляют собой .
Т-образные стальные отливки, свободно насаженные
одним концом на оси 5 или 18 (см. рис. 28). На проти-
воположном конце в тело каждого рычага впрессована
ось с роликами 12 или 16 (см. рис. 32). Этим концом ры-
чаг запирает взрезной барабан. Третий конец переклю-
чающего рычага имеет палец, которым он при повороте
воздействует через поводок 3 или 10 на ножевой рычаг.
Контрольные линейки в приводе типа СПВ-6 по кон-
струкции такие же, как в СП-3.
Взрезную шайбу 6, изготовляемую из стали, жестко
(шпонкой) крепят на главном валу. Шайба имеет два
выреза, смещенные друг относительно друга на 93°, в
которые попеременно западают пальцы 5 и 7 в конце
Работы привода. Ножевые рычаги переключаются из
юз
рабочего положения в контрольное в конце перевода
пружинами растяжения 13, 14 и 15.
Положение ножевых рычагов автопереключателя
поставлено в механическую зависимость от взрезного
барабана и контрольных линеек. Ножевые рычаги под
действием пружин 13 и 14 через поводки 10 и 3 прижа-
ты к переключающим рычагам, а последние под дейст-
вием пружины 15 прижаты к взрезному барабану. При
вращении вокруг оси переключающий рычаг 17 через
поводок 3 воздействует на ножевой рычаг 4, обеспечи-
вая поворот последнего. Угол поворота ножевых рыча-
гов из одного в другое положение 21°. Ножи переклю-
чаются в контрольное положение мгновенно, что обес-
печивается западанием переключающего рычага в
вырез 26° на взрезном барабане.
Связь каждого ножевого рычага с контрольными
линейками осуществляется зубом, которым оканчивает-
ся выступ упомянутого рычага. Если контрольные ли-
нейки, перемещаемые остряками стрелки, займут край-
нее положение в конце перевода, то зуб одного из но-
жевых рычагов войдет в совмещенные вырезы на линей-
ках. Если зазор между прижатым остряком и рамным
рельсом будет 4—5 мм, то зуб упрется в поверхность
линейки, контролирующей плотность прилегания прижа-
того остряка. Колодка с ножами займет среднее поло-
жение, а контакты контрольной колодки останутся
разомкнутыми. Если зазор более 5 мм, то результат
будет таким же, так как переключающий рычаг 17 не
западет в вырез 26°.
Рассмотрим работу автопереключателя в целом при
нормальном переводе, взрезе стрелки и обрывах тяг
применительно к первоначальному положению, изобра-
женному на рис. 32.
При нормальном переводе стрелки переключающий
рычаг 17 роликом 16 выталкивается на поверхность
взрезного барабана. При повороте оси он воздействует
на левый ножевой рычаг 4, переключая его из контроль-
ного в рабочее положение. Таким образом, уже в нача-
ле работы привода теряется контроль и подготовляется
рабочая цепь реверсирования. Последнее необходимо
для возвращения привода из среднего положения, если
перевод стрелки по каким-нибудь причинам невозможен.
Если стрелка заняла крайнее положение в конце пере-
104
ода, то переключающий рычаг И под действием пру-
жины автопереключателя западает в вырез 26° взрез-
ного барабана, а зуб правого ножевого рычага — в
вырезы на контрольных линейках. Одновременно ножи
правой колодки врубаются в контрольные контакты
правого контактного блока автопереключателя, выклю-
чая электродвигатель и замыкая контрольную цепь но-
вого положения стрелки. При последовательном пере-
воде спаренных стрелок в конце работы первого привода
замыкание его контрольных контактов приводит к вклю-
чению второго привода. После перевода и замыка-
ния контрольных контактов последнего включает-
ся цепь контроля нового положения спаренных стре-
лок.
Взрез стрелки приводит ножи автопереключателя в
среднее положение. Левый ножевой рычаг занимает
такое положение под действием пальца 5, выталкивае-
мого из овального выреза вращающейся взрезной шай-
бой 6. После поворота главного вала с взрезной шайбой
хвостовик ползуна, на который опирался правый пере-
ключающий рычаг 11, окажется внутри взрезного бара-
бана. Потеряв опору, этот рычаг провернется против ча-
совой стрелки, а правый ножевой рычаг под действием
пружины займет среднее положение.
В случае обрыва любой из контрольных тяг вырезы
в контрольных линейках сместятся друг относительно
друга, так как перемещаться будет только одна линей-
ка. Следовательно, зуб ножевого рычага не западет,
даже если вырез одной из линеек окажется под зубом.
Зуб упрется в поверхность другой контрольной линейки,
а ножи этого рычага займут среднее положение. Ножи
второго рычага будут замыкать контакты рабочей ко-
лодки. Контроль крайнего положения стрелки в этом
случае будет отсутствовать.
Работа электропривода. После подключения к источ-
нику питания электродвигатель вращает через механи-
ческую передачу зубчатое колесо с упором, который
выжимает ролик переключающего рычага и выводит
рычаг из выреза корпуса взрезного сцепления. Пере-
ключающий рычаг через поводок поворачивает рычаг с
3Убом, на котором установлены контактные ножи, со
стороны колодки контрольных контактов в сторону ко-
лодки рабочих контактов. После поворота зубчатого ко-
105
леса с упором на 30° оно вращает взрезной барабан, я
с ним и главный вал.
В начале вращения главного вала сидящая на нем
шиберная шестерня, имеющая нормальное зацепление
с шибером отжатого остряка, заставляет двигаться этот
шибер, а другая в то же время отпирает шибер прижа-
того остряка. Палец шибера отжатого остряка упирает-
ся в палец шибера прижатого остряка и заставляет его
перемещаться в том же направлении. К концу перевода
первый шибер останавливается, а второй продолжает
двигаться до полного перевода стрелки, в конце которо-
го второй переключающий рычаг западает в вырез взрез-
ного барабана, а ножевой рычаг под действием пружи-
ны переключается и замыкает контрольные контакты,
размыкая при этом рабочие. В это время первый шибер*
полностью запирается специальным зубом шиберной
шестерни.
Контрольные линейки в конце каждого хода остря-
ков обеспечивают контроль положения только прижато-
го остряка. При взрезе стрелки главный вал вместе с
взрезной шайбой поворачивается и ножевые рычаги
становятся в среднее положение; все контрольные и ра-
бочие контакты размыкаются. Для возврата их в исход-
ное положение необходимо отжать фиксатор, имеющий-
ся на крышке взрезного сцепления, и поворотом курбель-
ной рукоятки, надетой на ось электродвигателя, повер-
нуть взрезной барабан до момента выхода хвостовика
ползунов из его пазов. Полный цикл перевода стрелки
с отпиранием и запиранием остряков соответствует по-
вороту главного вала на 273°, что обеспечивает переме-
щение шиберов на 154±2 мм.
Электромеханические характеристики электропри-
вода типа СПВ-6. Методика испытаний электроприво-
дов аналогична рассмотренной ранее для привода типа
СП-3. Результаты испытаний приведены в табл. 9—12,
Сравнивая электропривод типа СПВ-6 с СП-3, сле-
дует отметить, что он имеет меньший к. п. д. при одина-
ковых нагрузках и потребляет больший ток при мень-
шем времени перевода стрелки.
Модификации стрелочных электроприводов серии
СПВ. Серийный выпуск электроприводов типа СПВ был
начат в 1935 г. До настоящего времени известно семь
получивших признание модификаций, образующих серию:
106
Таблица 9
«тоомеханические характеристики электропривода ипа СПВ-6 с электродвигателями на напряжение 30 В
Параметры Тип электро- двигателя • Значение характеристик в зависимости от нагрузки на шибере, Н
0 1000 2000 2500
Потребляемый ток, А МСП-0,25 МСП-0,1 7,0 11,0 10 14.5 16,0 14,0
Время перевода, с МСП-0,25 МСП-0,1 1.7 2,1 2,1 3,1 3,5 4,5
Потребляемая мощ- МСП-0,25 210 330 435 480
ность, Вт МСП-0,1 300 — 420
Полезная мощность, МСП-0,25 — 72 99 110
Вт МСП-0,1 — 72 — 93,5
К. п. д. МСП-0,25 —* 0,218 0,228 0,229
МСП-0,1 — 0,223 — 0,222
Удельная энергия, МСП-0,25 — 0,69 0,67 0,672
Вт-с/Н МСП-0,1 — 0,63 — 0,68
Таблица 10
Электромеханические характеристики электроприводов
типа СПВ-6 с электродвигателями на напряжение 100 В
Параметры Тип электро- двигателя Значение характеристик в зависимо- сти от нагрузки на шибере, Н
0 1000 2000 2500 3000
Потребляемый ток, А МСП-0,25 2.1 3,2 4.2 4,6 5,0
МСП-0,1 — 2.8 — 5,0 —
Время перевода, с МСП-0,25 1,65 2,2 2,5 2,7 2,9
МСП-0,1 — 2,0 — 3,5 —
Потребляемая мощ- МСП-0,25 210 320 420 460 500
ность, Вт МСП-0,1 — 280 500
Полезная мощность, МСП-0,25 — 70 123 142 159
Вт МСП-0,1 — 76 — 108 —
К. п. д. МСП-0,25 — 0,218 0.293 0,309 0,308
МСП-0,1 — 0,27 — 0,216 МВ
пУ?®л.|>ная энергия, МСП-0,25 — 0,704 0,525 0,496 0,48
от-с/н МСП-0,1 — 0,56 0,58 —
107
Таблица if
Электромеханические характеристики электроприводов
типа СПВ-6 с электродвигателями на напряжение 160 В
Параметры Тип электро- двигателя Значение характеристик в зависимости от нагрузки на шибере, И
0 1000 2000 2500 зооо
Потребляемый ток, А МСП-0,25 1,5 2,2 3,0 3,4 3,8
МСП-0,1 — 2,0 — 3,2 —
Время перевода, с МСП-0,25 1.6 2,0 2,3 2,5 2.7
МСП-0,1 — 2,0 — 4,0 —
Потребляемая мощ- МСП-0,25 240 352 480 544 608
ность, Вт МСП-0,1 — 320 — 512 —
Полезная мощность, МСП-0,25 — 77 134 154 171
Вт МСП-0,1 — 75,5 — 94 —
К. п. д. МСП-0,25 <— 0,218 0,279 0,283 0.281
МСП-0,1 — 0,235 — 0,184 —
Удельная энергия, МСП-0,25 — 0,704 0,552 0,544 0.547
Втс/Н МСП-0,1 — 0,64 — 0.815 —
Таблица 12
Электромеханические характеристики электроприводов
типа СПВ-6 с электродвигателем типа МСТ-0,25
Параметры Напряже- ние на двигателе, В Значение характеристик в зависимости от нагрузки на шибере, Н
0 1000 2000 2500
Потребляемый 127 1,7 2,0 2,6 3,0
ток, А 220 1,0 1,2 1,5 1,75
Время перевода, 127 2,05 2,2 2,6 2,9
с 220 2,0 2,1 2,5 2,8
Активная мощ- 127 157 252 414 528
ность, Вт 220 160 256 420 537
Полезная мощ- 127 70 118 132,7
ность, Вт 220 — 73,3 123,2 137,5
К. п. д. 127 —- 0,277 0,285 0,251
220 — 0,286 0,293 0.256
Удельная энер- 127 — 0,554 0,538 0,612
гия, Вт-с/Н 220 — 0,537 0,525 0,601
COS ® 127 0,42 0,572 0,723 0,8
220 0,42 0,56 0,735 0,8
108
СПВ СПВ-2, СПВ-3, СПВ-За, СПВ-4, СПВ-5 и
СПВ-6. Их основные элементы: механическая передача,
запирающее устройство, фрикционное сцепление, элек-
тродвигатель — в первых шести выпусках не претерпе-
вали существенных изменений. Под пристальным вни-
манием преимущественно находилось взрезное устрой-
ство.
Не останавливаясь на незначительных различиях
между приводами, отметим их основные особенности
(см. рис. 31).
Первый электропривод типа СПВ имел взрезной
барабан, который связывался с главным валом пальцем,
входящим в овальный вырез, имеющийся на внутренней
окружности барабана. Палец удерживался в вырезе
пружинами, укрепленными на станине, насаженной на
главный вал. При взрезе стрелки с усилием 6000—
8000 Н палец выталкивался из выреза на внутреннюю
поверхность барабана. Как показал опыт, взрезное уст-
ройство с пальцем работало неустойчиво ввиду быст-
рого износа пальца и по этой причине падения взрезно-
го усилия- В электроприводе типа СПВ-2 вместо взрез-
ного использовалось срезное устройство. Внутри бара-
бана помещался жестко насаженный на главный вал
срезной диск. Барабан и срезной диск были связаны
штифтом, который срезался при взрезе стрелки. Штифт
имел сечение, рассчитанное на срез при усилии на ши-
берах 8000—10 000 Н. Срезное устройство не имело ус-
пеха ввиду частых ложных взрезов из-за усталости
штифта и фактической неопределенности значения срез-
ного усилия, но подкупало простотой обслуживания. .
В электроприводе типа СПВ-3 было вновь примене-
но взрезное устройство. Оно состояло из взрезного ба-
рабана, внутри которого находилось жестко насаженное
на главный вал основание, в которое упирался, преодо-
левая действие взрезных пружин, ползун с роликом.
При взрезе стрелки и усилии на шиберах 7000—8000 Н
ползун сжимал пружины и проворачивался внутри ба-
рабана. При этом только одна колодка с ножами ста-
новилась в среднее положение, разрывая контрольную
Цепь, а другая оставалась в рабочей контактной колод-
ке, не разрывая рабочей цепи электродвигателя. Тем
самым создавалась возможность восстановления взрез-
ного сцепления включением электродвигателя без
109
фиксации взреза, что явилось крупным недостатком
привода типа СПВ-3.
Взрезное устройство электропривода типа СПВ-За
имело уже два ползуна 10 и 14 во взрезном барабане /]
а также крестовину 9 и пружины 11. Его взрезное уси-'
лие регулировалось в пределах 7000—9000 Н. Для вос-
становления сцепления после взреза между колесом с
упором 7 и взрезным барабаном 1 помещался отпираю-
щий диск. Последний имел два овальных выреза, обес-
печивающих выталкивание переключающего рычага из
барабана.
Для упрощения конструкции взрезного устройства в
электроприводе типа СПВ-4 вместо отпирающего диска
были применены две скобы, прикрепляемые к корпусу
взрезного барабана. Скобы, расположенные в месте за-
падания при взрезе стрелки переключающих рычагов,
обеспечивали их выталкивание при восстановлении
взрезного сцепления. Кроме того, за счет увеличения
диаметра проволоки взрезных пружин усилие взреза
было повышено до 15 000 Н.
Основное отличие электропривода типа СП В-5 от
СПВ-4 — возможность перекладки шиберов и контроль-
ных линеек с выходом в противоположную сторону. Это
обеспечивало возможность правой и левой установки
привода на стрелке. В приводе типа СПВ-5 исключены
отпирающие скобы. Для выталкивания отпирающих
рычагов осуществлена специальная наклонная фрезе-
ровка на поверхности взрезного барабана. Кроме того,
была повышена прочность некоторых деталей.
В приводе типа СПВ-6 в отличие от СПВ-5 применен
редуктор с фрикционом от электропривода типа СП-3,
изменена кинематика взаимодействия переключающих
и ножевых рычагов автопереключателя и заменены пру-
жины кручения пружинами растяжения, что повысило
их долговечность и ремонтопригодность.
3.5. БЫСТРОДЕЙСТВУЮЩИЕ ЭЛЕКТРОПРИВОДЫ
ТИПОВ СПГ-3, СПГБ-4, СПГ-ЗМ и СПГБ-4М
На сортировочных горках и в маневровых районах
станций магистрального и промышленного железнодо-
рожного транспорта применяют быстродействующие
НО
стрелочные электроприводы типа СПГ-3 с электродви-
жками типа МСП-0,25 на напряжение 100 В на гор-
ках и МСП-0,25 160 В в маневровых районах. Вновь
разработанные электроприводы типа СПГБ-4 имеют то
же назначение и их используют взамен электроприводов
типа СПГ-3.
Электроприводы типов СПГ-3 и СПГБ-4 относятся
к приводам: электромеханическим, с внутренним запи-
ранием, быстродействующим, невзрезным, бесконтакт-
ным (СПГБ-4), контактным (СПГ-3).
Их основные характеристики: максимальное тяговое
усилие 2000 Н, время перевода стрелки 0,5—0,6 с (на
горках), 1 — 1,2 с (в маневровых районах), ход шибера
154±2 мм, назначенный ресурс 10б срабатываний
(СПГБ-4) и 0,75-106 (СПГ-3), электропитание двига-
теля постоянным током при напряжениях 200—220 В,
габаритные размеры 790X955X255 мм, масса не более
180 кг, установка с левой и правой сторон стрелки.
Высокое быстродействие электроприводов типов
СПГ-3 и СПГБ-4 на горках достигается сочетанием мак-
симального управляющего воздействия по -напряжению
с передаточным числом редуктора, близким к оптималь-
ному. Время перевода стрелки в маневровом районе
регулируют изменением напряжения на зажимах элек-
тродвигателя.
Конструкция электропривода типа СПГ-3 унифици-
рована с ранее рассмотренной конструкцией электро-
привода типа СП-3- Электропривод типа СПГБ-4 отли-
чается от СПГ-3 конструкцией автопереключателя, в
котором вместо контактной системы предусмотрены
бесконтактные датчики 1 и 2 (рис. 33). По сравнению
с СП-3 электроприводы типов СПГ-3 и СПГБ-4 имеют
меньшее передаточное число, достигнутое изменением
числа зубьев шестерен в I каскаде редуктора (табл. 13).
Процесс срабатывания электропривода типа СПГБ-4
(СПГ-3) при применении его в устройствах ГАЦ имеет
три характерных этапа: максимальное управление от
момента включения электродвигателя до момента запи-
рания стрелки; отсечка движения стрелки; механичес-
кое торможение вращающихся масс электропривода.
Максимальное управление электроприводом осуще-
ствляется по максимальному напряжению (200—220 В),
подаваемому на электродвигатель.
111
Таблица 13
Зубчатые пары электроприводов типов СПГ-3 и СПГБ-4
Параметры Номера каскадов
I II in IV
Число зубьев: шестерни 21 16 15 7
колеса 61 58 51
шибера —. — — 6
Модуль 1,5 2 3 7
Передаточное число каскада 2,9 3,62 3,4
Общее передаточное число 35,7
Функция отсечки движения в конце срабатывания
СПГ выполняется ограничителем поворота 32 (см. рис.
16), выполненным как одна деталь с колесом 29 и упо-
ром 34, запрессованным в дно корпуса электропривода и
закрепленным в нем. Таким образом, кинетическая энер-
гия, запасенная быстровращающимися массами в процес-
се срабатывания, не передается главному валу 4. Пос-
ледний имеет ограничитель поворота 1, ограничивающий
поворот главного вала 4 и тем самым передачу запасен-
ной кинетической энергии шиберу 2 и далее стрелке. Сле-
довательно, в конце срабатывания электропривода эле-
менты стрелочного перевода будут подвергаться воздей-
ствию кинетической энергии Wz, запасенной самой стрел-
кой, ее гарнитурой и шибером. Эта энергия составляет
незначительную часть кинетической энергии №э, запасае-
мой движущимися частями электропривода и стрелки.
Так, для горочных стрелок Wc= (0,0384-0,133) W3, что
очень важно для обеспечения долговечности элементов
стрелочного перевода.
Вращающиеся массы электропривода тормозятся
фрикционом — тормозом 15, мощность которого доста-
точна, чтобы продолжительность механического тормо-
жения не превышала длительность паузы между пере-
водами стрелки при роспуске состава. При срабатывании
части электропривода СПГ-3 взаимодействуют точно так
же, как у электропривода СП-3. Электропривод типа
СПГБ-4 отличается действием автопереключателя.
112
Рис. 33. Бесконтактный стрелочный электропривод типа
СПГБ-4 (вид сверху)
Рис. 34. Бесконтактный автопереключатель
113
Бесконтактный автопереключатель (рис. 34) состоиЛ
из чугунного основания 12, на котором установлены ле?
вый 4 и правый 7 датчики, контрольные 2, 10 и переклю-
чающие 19, 15 рычаги, стягиваемые пружинами 6. Осно-
вание, переключающие рычаги и пружины унифициро-
ваны с соответствующими деталями автопереклю-
чателя электропривода типа СП-3, рассмотренного
выше.
Контрольный рычаг 2 представляет собой обработан-
ную отливку из стали, имеющую Т-образную форму и
вращающуюся на оси 20. Нижняя часть рычага выполне-
на в форме зуба, западающего в вырезы на контрольных
линейках 17 и 18, а верхняя заканчивается роликом 5,
(9), находящимся в пазу поводка 3 (8). Кроме того, на
контрольном рычаге имеется ролик 1(11), находящийся
в вилкообразной части переключающего рычага 19 (15),
Под действием пружин 6, стягивающих переключаю-
щие рычаги 19 и 15, поводок 3 левого датчика занимает
контрольное положение К, а поводок 8 правого датчи-
ка — начальное П. После перевода электропривода по-
водок 3 займет начальное положение П, а поводок 8 —
контрольное К. При взрезе электропривода под действи-
ем контрольных линеек 18 и 17 контрольный рычаг 2
(или 10) и поводок 3 (или 8) займут среднее (вертикаль-
ное) положение В.
Положение стрелки контролируется зубьями конт-
рольных рычагов 2 и 10, входящими в вырезы контроль-
ных линеек 18 и 17 после запирания шибера, что прове-
ряется западанием головок переключающих рычагов 19
и 15 в вырез шайбы главного вала 16. Для снижения
ударных нагрузок при переключениях механизма на оси
13 (или 20) предусмотрены амортизирующие пружины
кручения 14, противодействующие повороту контрольных
рычагов 2 и 10 в сторону главного вала.
Датчик (рис. 35, а) положений стрелки состоит из
корпуса 6, в котором расположены статор 7 с катушка-
ми И, 12 и 13, поводок 1 с ротор-сектором 14. Корпус
закрыт передней 3 и задней 9 крышками.
Корпус 6 датчика отливают из серого чугуна. В ниж-
ней части корпуса имеются лапки для крепления его на
основании автопереключателя. На торцовых сторонах^
корпуса расположено по 4 резьбовых отверстия для
крепления передней и задней крышек. Внутренняя по-
114
Рис. 35. Датчик автопереключателя
W? = 6250(поз12)
В скобках показана
нунерация ВыВодов
для праВого датчика,
без скобок-для левого
верхность корпуса представляет собой цилиндр, в кото-
ром предусмотрены 2 кольцевые проточки, в которые
устанавливаются пружинные кольца 4, предотвращаю-
щие осевое перемещение статора 7. Радиальное переме-
щение статора исключается стопорным винтом 5. Трех-
полюсный статор 7 собран из 50 листов электротехниче-
ской стали толщиной 0,5 мм, скрепленных заклепками. На
наружной поверхности статора против каждого полюса
имеется паз для прохода скобы 8, удерживающей катуш-
ку. Ротор-сектор 14, вращаясь, осуществляет магнитную
коммутацию полюсов статора, что накладывает жесткие
требования на воздушный зазор между ним и полюсами.
Роторная конструкция позволила обеспечить серийное
производство датчиков с минимальным и примерно оди-
наковым воздушным зазором, что гарантирует стабиль-
ность их характеристик. Ротор-сектор изготовляют из
стали Армко. Ротор-сектор поворачивает поводок 1, с
осью которого он жестко соединен (шпонкой) и закреп-
лен от осевого смещения плоским стопорным кольцом 10.
сь поводка 1 вращается в подшипниках скольжения: 2—
115
из бронзы, запрессованном в переднюю крышку 3, 1
из чугуна в задней крышке 9. В бронзовом подшипник»
имеется сальник, пропитанный минеральным маслом.
На полюсах статора размещены питающая 13 и вспо-
могательная 11 катушки, на которые подается напряже-
ние питания; сигнальная катушка 12, с которой снима-
ется выходное напряжение. Намоточные данные катущек
приведены в табл. 14.
Электрическая схема соединений датчика (рис. 35, б)
предусматривает последовательно-встречное включение
питающей и вспомогательной катушек. Датчик соединя-
ют с цепями штепсельным разъемом 15.
Датчики бесконтактного автопереключателя имеют
заводскую маркировку: ДБП — датчик бесконтактный
правый; ДБЛ — датчик бесконтактный левый. Если
смотреть со стороны пружин 6 (см. рис. 34), датчик ДБП
будет расположен на основании 12 справа, а ДБЛ —
слева. Конструктивно правый и левый датчики различа-
ются расположением питающей и вспомогательной кату,
шек на полюсах, ротор-сектора на оси поводка и штеп-
сельного разъема на задней крышке датчика. В левом
датчике указанные детали размещены так, как показано
на рис. 35; в правом датчике питающая 13 и вспомога-
тельная 11 катушки меняются местами, ротор-сектор 14
развернут на оси поводка 1 на 180°. Датчики в собран-
ном виде различают по надписи ДБП и ДБЛ на фирмен-
ной табличке или по расположению колодки штепсель-
ного разъема. Если смотреть со стороны поводка, то у
правого датчика колодка штепсельного разъема должна
находиться справа от оси, у левого — слева.
Бесконтактный автопереключатель действует при пе-
реводе стрелки таким образом.
Таблица 14
Намоточные данные катушек датчиков
Наименование Параметры катушек
сигнальной питающей вспомогатель- ной
Марка провода ПЭВ-2 ПЭВ-2 ПЭВ-2
Диаметр провода, мм 0,1 0,4 0,4
Число витков 6250 460 330
116
Электродвигатель привода через редуктор с фрикцио-
м вращает зубчатое колесо, свободно насаженное на
Равный вал 16 (см. рис. 34). После поворота колеса на
46° между его выступом (на рис. 34 заштрихован) и
чавным валом создается жесткое зацепление. В процес-
се этого поворота через ролик колесо воздействует на пе-
реключающий рычаг 19 и выводит его головку из выре-
за шайбы 16 главного вала. Переключающий рычаг ро-
ликом 1 поворачивает контрольный рычаг 2 и одновре-
менно поводок 3 ротор-сектора левого датчика. Ротор-
сектор из положения контроля К переходит в начальное
положение П, выходное напряжение датчика при этом
уменьшается и контрольное реле на посту централиза-
ции выключается.
Затем колесо и главный вал вращаются совместно^
обеспечивая отпирание, перевод и запирание стрелки. В
конце перевода пружины 6 автопереключателя воздей-
ствуют через переключающий 15 и контрольный 10 ры-
чаги на поводок 8 ротор-сектора правого датчика, кото-
рый переходит из начального положения П в положение
контроля К. За счет этого выходное напряжение возрас-
тает, контрольное реле переведенного положения стрел-
ки срабатывает, воздействуя на коммутатор схемы уп-
равления, выключающий электродвигатель привода. Про-
цесс срабатывания электропривода на этом заканчива-
ется.
При взрезе стрелки контрольные линейки 18 и 17, пе-
ремещаемые остряками, поворачивают контрольный ры-
чаг 2 и поводок 3 датчика в среднее положение. В ре-
зультате этого выходное напряжение уменьшается, что
приводит к выключению контрольного реле на посту и
включению звонка взреза.
Для оценки исправности датчика на его передней
крышке расположена табличка, на которой имеется шка-
ла с отметками каждого из положений поводка. Острие
указателя поводка должно быть расположено в преде-
лах отметки, соответствующей каждому из этих положе-
ний.
Отклонения указателя за пределы отметки свиде-
тельствуют о появлении неисправности.
Взаимное положение ротор-секторов обоих датчиков
при переключениях рассмотрим на кинематической схе-
ме (рис. 36).
117
Рис. 36. Кинематическая схема бесконтактного автопе-
реключателя
118
В крайнем плюсовом положении стрелки (рис. 36, а)
„тор-сектор левого датчика расположен у полюсов, на
юторых находятся питающая 1 и сигнальная 3 катушки,
ротор-сектор правого датчика будет занимать место у
отюсов с питающей / и вспомогательной 2 катушками.
Таким образом, напряжение питания U\ трансформиру-
ется в левом датчике в непрерывное выходное напряже-
ние Uz высокого уровня, а в правом датчике — низкого
уровня. Вспомогательная катушка 2 служит для увеличе-
ния полного сопротивления первичной цепи и снижения
тока, потребляемого датчиком в этом положении ротор-
сектора.
Когда стрелка перейдет в среднее положение (рис.
36, б), ротор-сектор левого датчика займет положение у
полюсов с питающей и вспомогательной катушками, а у
правого датчика положение ротор-сектора не изменится.
Поэтому выходное напряжение U2 у обоих датчиков бу-
дет низкого уровня.
В переведенном положении стрелки — минусовом
(рис. 36, в) ротор-сектор левого датчика останется у по-
люсов с питающей и вспомогательной катушками, а ро-
тор-сектор правого датчика займет положение у полю-
сов с питающей и сигнальной катушками. Выходное на-
пряжение у правого датчика возрастет до высокого
уровня, а у левого останется низкого уровня.
При взрезе стрелки, находившейся в плюсовом поло-
жении (рис. 36, г), ротор-сектор левого датчика, зани-
мавший место у полюсов с питающей и сигнальной ка-
тушками (см. рис. 36, а), под действием контрольного
рычага совершит поворот и расположится у полюсов с
питающей и вспомогательной катушками. Выходное на-
пряжение датчика снизится до низкого уровня.
Бесконтактный автопереключатель питается номиналь-
ным напряжением 24 В переменного тока частотой 50 Гц.
В качестве нагрузки датчика применяют реле первого
класса типа НМ 1-7000, включенное через выпрямитель-
ный мост. Технические характеристики датчиков при на-
пряжениях питания 20, 24 и 28 В приведены в табл. 15.
Рассмотрим действие бесконтактного автопереключа-
теля при некоторых повреждениях.
В случае обрыва рабочей тяги контрольные линейки
перемещаться не будут, так как остряки стрелки непод-
вижны. В конце срабатывания электропривода конт-
11»
Таблица
Технические характеристики датчиков
Параметры
Значение характеристик в зависимости от угла поворот»
ротор-сектора
0’ 6СР 120»
Контроль началь- Контроль средне- Контроль пере- веденного поло- жения
наго положения го положения
Напряжение
переменного то-
ка частотой
50 Гц на вход-
ных катушках, В
Напряжение
переменного то-
ка на сигналь-
ной катушке, В
Потребляемый
переменный ток,
А, не более
20 24 28
Не более
3,0 3,5 4,0
0,25 0,3 0,4
рольный рычаг упрется в поверхность контрольных лине-
ек и займет среднее положение, показанное слева на рис.
36, г.
При обрыве связной пли контрольной тяги один или
оба остряка будут перемещать только одну контрольную
линейку. Следовательно, контрольные вырезы в линейках
будут смещены друг относительно друга. Поэтому в кон-
це срабатывания электропривода контрольный рычаг уп-
рется в поверхность одной из линеек и аналогично пре-
дыдущему займет среднее положение.
Повреждение связи контрольного 10 и переключаю-
щего 15 рычагов (см. рис. 34) приведет к тому, что пос-
ледний под действием пружины кручения 14 повернется
против часовой стрелки. Поводок 8 займет положение
П, при котором контроль будет выключен. В электропри-
воде типа СПГ-3 в аналогичной ситуации контрольные
контакты будут замкнуты.
При обрыве связи контрольного рычага 10 с поводком
8 ротор-сектор датчика благодаря эксцентрично распо-
ложенной массе повернется в сторону нижних полюсов
статора, что также приведет к выключению контроля.
120
Рис. 37. Осциллограмма про-
цесса срабатывания горочного
электропривода типа СПГ-3 и
стрелочно-пускового блока ти-
па СГ-66
Наличие в бесконтакт-
м автопереключателе
двух датчиков позволяет в
случае повреждения одного
из них иметь контроль по-
ложения стрелки при рос-
пуске состава или маневро-
вой работе.
Электромеханические ха-
рактеристики электроприво-
дов. Вследствие кратковре-
менности срабатываний го-
рочных электроприводов их
характеристики удобно оп-
ределять осциллографом. В
качестве примера на рис. 37
приведена осциллограмма
процесса срабатывания
электропривода типа СПГ-3
на наиболее тяжелой горочной стрелке марки 1/9 Р50
при включении его стрелочно-пусковым блоком типа
СГ-66. В основном же на горках применяют стрелки
марки 1/6 Р50, имеющие меньшие усилия перевода и мо-
мент инерции, чем стрелки марки 1/9 Р50 [16].
На осциллограмме отмечены этапы срабатывания
электропривода и обозначены: /у и tcr — ток управляю-
щей цепи и время срабатывания пусковых реле; /р и
/ср — рабочий ток и время срабатывания электроприво-
да; /к — ток контрольной цепи; /и — ток индикаторных
ламп. ••
Электромеханические характерстики электроприводов
типов СПГ-3 и СПГБ-4 с электродвигателями типов
МСП-0,25 100/200 В и МСП-0,1 100 В при напряжении
200 В, полученные в результате обработки множества ос-
циллограмм, приведены в табл. 16. С увеличением нап-
ряжения до 220 В время срабатывания электроприводов
уменьшается на 0,03—0,05 с.
В электроприводах типов СПГ-3 и СПГБ-4 предус-
мотрено применение электродвигателей типа МСП-0,25
100/200 В. Характеристики приводов с двигателем типа
МСП-0,1 100 В приведены для справки, так как на
Ряде сортировочных горок их используют наряду с
121
Таблица ig
Электромеханические характеристики стрелочных электро пои во™ л-
типов СПГ-3 и СПГБ-4 АОв
Параметры Значения характеристик в зависимости от типа стрелки
1/6 Р50 (Р43) 1/9 Р50 (Р43)
и типа электродвигателя
МСП-0,25 МСП-0,1 МСП-0,25 МСП-0,1
Время срабатывания, с Рабочий ток, А (среднее квадратичное значение) Потребляемая мощность, Вт Полезная мощность, Вт К. п. д. Удельная энергия, Вт-с/Н 0,55 3,7 740 450 0,607 0,74 0,66 3,5 700 306 0,437 0,84 0,58 3,9 780 484 0,619 0,532 0,69 3,7 740 361 0.488 0,60
Ранее на сортировочных горках применяли быстродей-
ствующие приводы типов СЭП-55 и СП Г-2.
Привод типа СЭП-55 электропневматический, взрез-
ной, с внешним шарнирно-упорным замыкателем обеспе-
чивал перевод горочных стрелок за 0,5—0,6 с с усилием
до 1000 Н при давлении воздуха в рабочем цилиндре
0,49—0,59 МПа.
Опыт эксплуатации показал, что при большом числе
переводов стрелок герметизирующие уплотнения привода
быстро изнашиваются, а утечка воздуха препятствует
нормальной работе. Серьезными недостатками явля-
лись внешнее запирание, из-за чего часто заклинивался
замыкатель, чрезмерное динамическое воздействие на
стрелку и др. Поэтому привод типа СЭП-55 был заменен
электромеханическим приводом типа СПГ-2, имевшим
внутреннее запирание.
Электропривод типа СПГ-3 отличается от СПГ-2
только меньшим передаточным числом (35 вместо
43), за счет чего увеличилось его быстродействие.
В дальнейшем намечается серийный выпуск электро-
приводов типов СПГ-ЗМ и СПГБ-4М, в которых для уни-
фикации конструкций будут использовать: редуктор *с
встроенным фрикционом (см. рис. 23), но с параметра-
ми зубчатых пар, приведенными в табл. 13; контроль-
122
линейки со съемными ушками; четырехконтактное
баокировочное устройство (см. рис. 22).
и Кроме того, в электроприводе СПГ-ЗМ в отличие от
гНГ-3 обогреватели размещены непосредственно над
контактами автопереключателя (см. рис. 25).
Перечисленные узлы и детали подробно рассмотрены
< 3 з Электромеханические характеристики электро-
приводов типов СПГ-3, СПГ-ЗМ, СПГБ-4 и СПГБ-4М
совпадают.
3.6 СТРЕЛОЧНЫЕ ГАРНИТУРЫ
Стрелочные электроприводы устанавливают на стрел-
ках железных дорог МПС, метрополитенов, промышлен-
ных предприятий. Установка приводов на стрелках же-
лезных дорог и подъездных путях (от станции примыка-
ния до территории промышленных предприятий) произ-
водится в соответствии с требованиями габарита прибли-
жения строений С. Приводы на стрелках, находящихся
на территории депо, мастерских, грузовых дворов, скла-
дов, речных и морских портов, заводов, фабрик и других
промышленных предприятий, а также между территория-
ми промышленных предприятий, можно устанавливать
также в соответствии с требованиями габарита прибли-
жения строений Сп.
Централизуемые стрелочные переводы должны иметь
крестовины следующих марок: на главных и приемо-.от-
правочиых пассажирских путях — не круче 1/11, а для
перекрестных переводов — 1/9; стрелочные переводы,
по которым пассажирские поезда проходят только по
прямому пути перевода, могут иметь крестовины марки
1/9; на приемо-отправочных путях грузового движения—
не круче 1/9, а симметричные — не круче 1/6; на прочих
путях — не круче 1/8, а симметричные — не круче 1/4,5.
На линиях с высокоскоростным движением поездов
требуется повышение допускаемых скоростей движения
по боковому пути. В этом случае используют стрелочные
переводы с крестовинами пологих марок: при скоростях
оО км/ч — не круче 1/18; при скоростях 100—120 км/ч—
не круче 1/22.
При высокоскоростном движении поездов лишь в
прямом направлении обычно используют стрелочные пе-
123
реводы марки 1/11 с гибкими остряками из рельсов тя-
желого типа Р65 (Р75) и подвижным сердечником крес*
товины.
Для обеспечения максимальной безопасности обслу-
живающего персонала конструкция стрелочных гарнитуп
позволяет устанавливать приводы вне рельсовой колеи
Для уменьшения влияния угонов и прогибов элемен-
тов стрелки при движении поездов на нормальную рабо-
ту стрелочного привода последний устанавливают на
двух фундаментных угольниках, подвешенных и закреп-
ленных непосредственно на рамных рельсах.
Применение рельсовых цепей требует тщательной
электрической изоляции рельсовых нитей друг от друга.
Для обеспечений этого требования стрелочные гарниту-
ры и установленные на них приводы изолируют от рам-
ных рельсов и остряков.
Тип стрелочной гарнитуры выбирают в соответствии
с типами: устанавливаемого привода (СП-3, СПВ-6,
СПГ-3 и др.), стрелки (одиночная, перекрестная, с под-
уклонкой и др.), рельсов (Р50, Р65 и др.) и вариантом
установки (левая или правая). Кроме того, для перево-
да подвижных сердечников крестовин применяют специ-
альную гарнитуру. Независимо от типа стрелочная гар-
нитура состоит из двух фундаментных угольников, слу-
жащих для установки привода; продольной и попереч-
ных связных полос, предохраняющих рамные рельсы и
фундаментные угольники от взаимных перемещений; ра-
бочих и контрольных тяг, связывающих привод с серьга-
ми остряков; элементов соединений и изоляции стрелки.
Отличительной особенностью стрелочной гарнитуры
является способ крепления рабочей и контрольной тяг к
остряку: нераздельный и раздельный.
При нераздельном креплении рабочую и контрольную
тяги соединяют с ушком серьги остряка одной общей
осью. В раздельном креплении к ушку той же серьги
крепится осью только рабочая тяга, а контрольную при-
соединяют также осью (расстояние между осями 130 мм)
к другой серьге, расположенной на остряке рядом с
первой. В последнем случае отрыв от остряка серьги,
подверженной силовому воздействию привода через ра-
бочую тягу, не приводит к одновременному перемещению
контрольной тяги, что надежно исключает возможность
появления ложного контроля. В нераздельном креплении
124
оабочей и контрольной тяг к остряку такая возможность
не исключалась. Поэтому в настоящее время применяют
раздельное крепление независимо от типа стрелочных
приводов.
В последние годы все большее распространение полу-
чают стрелочные переводы с крестовинами, имеющими
подвижные сердечники. Перемещение, запирание и конт-
роль положения подвижного сердечника осуществляют-
ся электроприводом того же типа, что и стрелки. Гарни-
тура для установки электропривода крестовины имеет
тот же состав деталей, что и стрелки, но рабочая тяга
крепится в ней к одному плечу коромысла (меньшему),
другое плечо которого (большее) связано с шибером.’
Необходимость в коромысле вызвана меньшим ходом
подвижного сердечника по сравнению с ходом стрелки.
Контрольные тяги могут быть соединены с контрольны-
ми линейками электропривода крестовины также через
коромысла или непосредственно, как у стрелочного элек-
тропривода. Но в этом случае в контрольных линейках
предусматривают по второму вырезу с таким расчетом,
чтобы контрольный рычаг автопереключателя западал
в них по окончании заданного хода подвижного сер-
дечника.
Кроме способа крепления рабочих и контрольных тяг
к острякам и подвижному сердечнику, существенные от-
личия в конструкцию стрелочной гарнитуры вносит в
основном тип привода. В связи с этим рассмотрим от-
дельно устройство гарнитур для установки электропри-
водов разных типов.
Гарнитуры для установки электроприводов типов
СП-3, СП-6 и СП-8. Установочные размеры электропри-
водов типов СП-3, СП-6 и СП-8 совершенно одинаковы,
что позволяет использовать ту же гарнитуру. В связи с
этим в дальнейшем будем указывать лишь электропри-
вод типа СП-3.
Стрелочные гарнитуры электроприводов типа СП-3
выпускают следующих типов для колеи 1520* мм:
№ 13635-00-00 — для стрелок из рельсов типа Р50 с
крестовинами марок 1/9 и 1/11 по черт. ПТКБ ЦП
№ 1329-01-000, № 13637-00-00 — для стрелок из рель-
Сов типов Р65 и Р75 с крестовиной марки 1/11 по черт.
Перечень гарнитур для колеи 1524 мм приведен в [1].
125
ПТКБ ЦП № 1327-01-000; № 16348-00-00 — для полой!
стрелок из рельсов типа Р65 с крестовиной марки 1/18
подвижным сердечником по черт. ПТКБ Нп
№ 1676-02-000; № 16188-00-00 — для перекрестных стр/
лок из рельсов типа Р50 с крестовиной марки 1/9 „
черт. ПТКБ ЦП № 1623-01-000; № 16187-00-00 - д"?
симметричных стрелок из рельсов типа Р50 с крестови.
ной марки 1/6 по черт. ПТКБ ЦП № 1644-01-000.
Нумерация чертежей указана для правой установки
привода на гарнитуре, без перекладки шибера и конт-
рольных линеек после получения с завода. При левой
установке привода используют чертежи, имеющие ту же
нумерацию, но с отличительными буквами УЧ. Например,
для правой установки привода на перекрестных стрел’
ках из рельсов типа Р50 нужно пользоваться чертежом
гарнитуры 16188-00-00, а для левой установки — черте-
жом 16188-00-00УЧ. Кроме того, нумерация установоч-
ных чертежей сохраняется, но дополняется указанием
номера варианта I или II. Варианту I при правой уста-
новке соответствует положение привода с правой сторо-
ны стрелки без перекладки шибера после получения с
завода, а для левой установки — положение с левой
стороны стрелки с перекладкой шибера, т. е. симметрич-
ное первому. Варианту II при правой установке соответ-
ствует положение привода с правой стороны стрелки с
перекладкой шибера, а для левой установки — положе-
ние с левой стороны стрелки без перекладки шибера.
Правый 12 и левый 19 фундаментные угольники гар-
нитуры (рис. 38) изготовляются из уголковой равнобо-
ковой стали 9X75X75 мм и имеют длину 3185 мм. Угло-
вая форма сечения исключает изгиб и уменьшает вибра-
цию под тяжестью привода, расположенного консольно
на угольниках. Для той же цели к вертикальным сторо-
нам фундаментных угольников приклепаны дополнитель-
ные угольники 1.
Фундаментные угольники подвешивают к рамным
рельсам в соседних шпальных ящиках с помощью четы-
рех угольников 17, Такое крепление создает дополни-
тельное усилие на рамные рельсы, которое компенсирУ'
ется поперечной связной полосой 18. Смещение фунда-
ментных угольников друг относительно друга предотвра-
щается продольной связной полосой 10. Полосу изготов-
ляют из листовой стали и крепят шурупами 9 к каждой
126
Рис. 38. Гарнитура с электроприводом типа СП-3 на простой стрелке
127
шпале и двумя болтами 6 с гайками к каждому уголыЯ
ку. Самоотвинчиваиие гаек исключается стопорной плаЗ
кой 7, углы которой подогнуты. Связная полоса 10 умею*
шает также вибрацию привода при проходе подвижно/
состава по стрелке. Каркас гарнитуры, таким образов?
состоит из двух фундаментных угольников 12 и 19 и про’
дольной связной полосы 10. Жесткость каркаса обеспе.
чивается корпусом самого привода, закрепляемого тЯ
тырьмя болтами 4 на угольниках.
Ближний и дальний остряки стрелки соединены меж-
ду собой связной тягой 14, на которой имеется насадное
ушко для крепления рабочей тяги 8. Конфигурация этой
тяги хорошо видна на профильной проекции стрелки (см
рис. 38 вверху). Ее изготовляют из круглой углеродис-
той стали диаметром 40 мм; на концах тяги расположе-
ны проушины: на одном — двойная в виде вилки, на
другом — одинарная. Тяга проходит под рамным рель-
сом и остряком в шпальном ящике. Концом в виде вил-
ки ее прикрепляют к ушку связной тяги, а другим — r
шарниру Гука.
Рабочую тягу соединяют с шибером привода шарни-
ром Гука, что исключает влияние перекосов, возникаю-
щих при установке привода, на работу стрелки. Шарнир
5 размером 122X60X60 мм имеет два взаимно перпенди-
кулярных паза для проушин рабочей тяги и шибера, а
также отверстия для пальцев 2 и 3 и их шплинтовки.
Шарниры изготовляют из углеродистой стали.
Короткая 11 и длинная 13 контрольные тяги связыва-
ют левую и правую контрольные линейки привода с ост-
ряками стрелки. Контрольные тяги изготовляют из тако-
го же материала, что и рабочие, но с меньшим диамет-
ром, равным 25 мм. По обеим сторонам тяг расположе-
ны проушины для крепления с помощью пальцев непос-
редственно к линейкам и серьгам остряков.
Связную тягу соединяют с остряками стрелки двумя
серьгами. Серьгу 6 (рис. 39, а) можно крепить к остря-
ку через промежуточную подушку 3 или непосредствен-
но, но в обоих случаях двумя болтами 5 с гайками. В
месте крепления серьгу изолируют от остряка проклад-
кой 4, втулкой 1 и шайбами 2, изготовляемыми
фибры.
Фигурный угольник 4 (рис. 39, б), прикрепленный бол-
товым соединением 1 к шейке рамного рельса, опирает-
128
рпез промежуточную стальную прокладку 5 на стре-
сЯ ' vю 6 и фибровую 7 прокладки. Изоляция болтов 2
Лк печивается фибровой втулкой 8 и шайбой 9 под го-
o6eC-v Самоотвинчивание гаек исключается стопорной
Лланкой 3 с подогнутыми концами.
пл реляция поперечной связной полосы (рис. 39, в), ко-
пая выполнена разрезной, обеспечивается установкой
Дибровой прокладки 2 между ее половинами. Приварен-
ные к краям полосы в месте разреза угольники стяги-
вают через прокладку 2 болтами. В отверстиях болты
изолируют втулками 1, а в месте прилегания — шайба-
ми 3 из фибры.
Болтовые соединения являются одним из самых от-
ветственных элементов стрелочной гарнитуры. Для обес-
печения их надежности используют контргайки, шплин-
12»
товку (закрутками) или стопорные планки с подогнуты]
ми концами. 4
Стрелочные гарнитуры для электропривода типа СП-jJ
оборудуют проволочным звеном 20 (см. рис. 38). Благлг
даря этому в случае отрыва серьги от остряка послед2
ний будет перемещаться звеном 20 и стрелка не будет’
давать контроля после возвращения ее в исходное поло-
жение. При отсутствии звена 20 оторвавшийся остря»-
мог бы остаться прижатым к рамному рельсу, и возвра^
щение стрелки в исходное состояние могло бы привести
к получению ложного контроля. В электроприводе типа
СП-6 первого выпуска наряду со звеном была преду-
смотрена планка 7 (см. рис. 21).
При переводе длинных стрелок с гибкими остряками
обычным способом остряк изгибается не только в ослаб-
ленной корневой части, но и по всей длине. Поэтому же-
лоб между отжатым остряком и рамным рельсом оказы-
вается недостаточным для проследования колесных пар
без удара в остряк. Чтобы увеличить желоб, переводное
усилие прикладывают к стрелкам марок 1/11 и 1/18 в
двух точках (у острия и в конце острожки остряков), а
к стрелкам марки 1/22 — в трех точках (третья точка
находится между острием и острожкой остряка). Ход
остряков делают нераздельным, для чего их соединяют
тягами в вышеуказанном количестве. Переводное усилие
передается от первой к второй точке через рычажно-
шарнирную передачу (на стрелках марок 1/11 и 1/18).
На стрелках марки 1/22 во второй точке (примерно у
конца острожки) располагают второй электропривод и
транслируют переводное усилие к третьей точке также
через шарнирно-рычажную передачу.
Стрелочные гарнитуры для установки приводов на по-
логих стрелках принципиальных отличий от ранее рас-
смотренной не имеют. Второй электропривод размещают
на стрелке марки 1/22 также на фундаментных угольни-
ках. Между шибером привода и рабочей тягой преду-
сматривают коромысло с соотношением плеч, уменьшаю-
щим почти вдвое ход рабочей тяги по сравнению с хо-
дом шибера. Контрольные линейки не устанавливают.
Дополнительные переводные устройства обслуживают
работники службы пути [17].
Стрелочная гарнитура на перекрестной стрелке не-
сколько сложнее рассмотренной. Это объясняется тем.
130
пои переводе перекрестной стрелки перемещаются
чт0 вз а четыре остряка, связанных жестко попарно.
не Стрелочная гарнитура для правой и левой установки
ектропривода на перекрестной стрелке (рис. 40) рас-
9Л тана на его размещение без перекладки шибера. Фун-
СЧ рентные угольники 3 и 4 крепят ко всем четырем рам-
Дым рельсам. Связные тяги 7 и 11 соединяют попарно од-
ноименные остряки стрелки.
На обеих связных тягах имеются насадные ушки 2
10, позволяющие присоединить рабочую тягу 6 и 9 к
шиберу привода и ко второй паре остряков. Длинную
контрольную тягу 8 присоединяют к Г-образной серьге 1
дальнего остряка, а короткую 5 — ближнего остряка.
Остальные детали гарнитуры те же, что и для простой
стрелки.
Перекрестные стрелочные переводы выпускают с не-
подвижными и подвижными сердечниками крестовин.
В последнем случае сердечник крестовины переводит
электропривод, устанавливаемый на специальной гар-
нитуре (рис. 41). Гарнитура содержит длинный 1 и ко-
роткий 5 фундаментные угольники, рабочую тягу 4,
контрольные тяги 2 и 3, детали для крепления и изоля-
ции.
Рабочая тяга 4 связывает шибер привода с коромыс-
лом, преобразующим ход шибера 154 мм с учетом воз-
можных зазоров в соединениях в ход попарно соединен-
ных сердечников 84 мм.
Контрольные тяги 2 и 3 связывают контрольные ли-
нейки привода с двумя коромыслами, расположенными
одно над другим и вращающимися на одной оси. Оба ко- *
ромысла соединены тягами с серьгами ближайших к
приводу сердечников крестовин. Положение дальних сер-
дечников контролируется через связные тяги. Техничес-
кое обслуживание переводного механизма подвижных
сердечников, за исключением электропривода и упоми-
навшихся деталей гарнитуры, обеспечивают работники
службы пути.
Электропривод крестовины включают по схеме спа-
ренных стрелок с одним из двух электроприводов пере-
крестного стрелочного перевода.
В рассмотренном двойном (перекрестном) стрелочном
ереводе угол между образующими крестовины тупой,
°этому ее иногда называют тупой крестовиной с под-
131
06h
Рис. 40. Гарнитура с электроприводом типа СП-3 на перекрестной стрелке
Рис. 41. Гарнитура с электроприводом типа СП-3 для перевода подвижных сердечников крестовин
вижными сердечниками. Кроме двойного стрелочного пе
ревода с тупой крестовиной, в последнее время разрабс
тан скоростной перевод из рельсов Р65 марки 1/11 J
гибкими остряками и крестовиной с непрерывной поверх,
ностью катания, образуемой за счет подвижного сердеч.
ника. Его гарнитура почти аналогична гарнитуре, пока-
занной на рис. 41. Отличие заключается в том, что каж-
дая контрольная тяга соединена с контрольной линей-
кой, а коромысло между ними, уравнивающее ход
шибера и линейки, упразднено. Это стало возможно за
счет того, что на каждой контрольной линейке выполне-
но по второму контрольному вырезу. Расстояние между
контрольными вырезами па линейке равно ходу под-
вижного сердечника.
Гарнитура для установки электроприводов типа
СПВ-6. Ранее выпускавшаяся гарнитура предусматрива-
ла нераздельное крепление рабочих и контрольных тяг к
острякам по чертежам:
№ У-11189-00-00 — для стрелок из рельсов типа Р43;
№ У-11192-00-00 — для стрелок из рельсов типа Р50;
№ 13207-00-00 — для стрелок из рельсов типа Р65;
№ У-11539-00-00 — для перекрестных стрелок из рель-
сов типа Р43;
№ 13687-00-00 — для перекрестных стрелок из рель-
сов типа Р50.
В связи с переходом к раздельному креплению рабо-
чих и контрольных тяг к острякам гарнитуры переобору-
довались на месте по чертежу № 14836-00-00. На остря-
ках устанавливали дополнительные (Г-образные) серьги
и контрольные тяги перегибались в приспособлениях по
чертежам № У-7790-05 РП и У-7790-06-Р1П.
Стрелочные гарнитуры для установки электроприво-
дов типа СПВ-6 отличаются от ранее рассмотренных гар-
нитур (см. рис. 38—40) наличием второй рабочей тяги
(вместо связной) и формой фундаментных угольни-
ков. Эта рабочая тяга присоединяет второй шибер к даль-
нему остряку (первый шибер соединен с ближним остря-
ком), что необходимо для раздельного хода остряков при
взрезе стрелки. Фундаментные угольники изогнуты в
месте установки привода так, что новый уровень отли-
чается в этой части на ПО мм от остальной. Понижение
сделано для того, чтобы ось шиберов и рабочих тяг на-
ходилась на одной прямой, что практически исключает
134
прогиб при переводе стрелки и вследствие этого отжим
остряков. Недостатком такой конструкции является низ* •
Кое положение привода, что приводит к заливанию его
водой, особенно на станциях, расположенных в выемках
Гарнитура для установки горочных электроприводов
типов СПГ-3, СПГ-ЗМ, СПI Б-4 и СПГБ-4М. Электропри-
воды на горочных стрелках из рельсов типа Р50 с крес-
товиной марки 1/6 колеи 1520 мм устанавливают на
гарнитуре по чертежу № 16186-00-00, а для колеи
1524 мм — по чертежу № 15967-00-00.
Стрелочные гарнитуры для установки электроприво-
дов серий СПГБ (СПГ) и ранее рассмотренные для
электроприводов серии СП максимально унифицированы
Это в первую очередь относится к деталям крепления и
изоляции фундаментных угольников к рамным рельсам
и изоляции серег и связных полос.
I
ЭЛЕКТРОПРИВОДЫ АВТОШЛАГБАУМА
И АВТОСТОПА МЕТРО
4.1. ЭЛЕКТРОПРИВОД АВТОШЛАГБАУМА
Автошлагбаум (рис. 42) состоит из электропрц.
вода 2, закрепленного на фундаменте 1; заградительного
бруса 3 длиной 4 или 6 м; кронштейна-рамы 5; противо-
весов 6; сигнального механизма 4.
Брус закрепляют в кронштейн-раме фиксатором, до.
пускающим поворот бруса на 45° для предотвращения
поломки при случайном наезде автотранспорта. Крон-
штейн-раму прикрепляют болтами к втулкам, жестко
связанным с концами выходного вала электропривода.
Относительно оси выходного вала брус уравновешива-
ют противовесами.
Основные характеристики электропривода: макси-
мальный вращающий момент на выходном валу 165 Н м,
максимальное время подъема (опускания) бруса 9 с,
электропитание постоянным током при номинальном на-
пряжении 24 В, габаритные размеры 800X465X300 мм.
масса 253 кг.
Конструкция. Электропривод автошлагбаума (рис.
43) состоит из электродвигателя 10, редуктора 7 с фрик-
ционом 8; кривошипно-коромыслового механизма, враща-
ющего выходной вал 4; амортизаторов 12, автопереклю-
чателя (контактора) 14, размещенных в корпусе 9, за-
крываемом крышкой 1.
Корпус 9 представляет собой литую конструкцию из
чугуна, нижняя наружная поверхность которой обрабо-
тана для установки и закрепления на типовом светофор-
ном (или специальном) фундаменте. На верхней части
корпуса 2 крепят сигнальный механизм 4 (см. рис. 42).
представляющий собой стойку с кронштейнами, на кото-
рых имеются две однозначные светофорные головки и
звонок громкого боя. В нижней и верхней частях корпу-
са расположены отверстия для ввода кабеля и проводов
и отверстие 11 для ввода проводов, идущих от фонарей
136
Рис. 43.
Электропривод автошлагбаума
бруса шлагбаума. Крышку /, закрывающую корпус п»м
жимают к нему накидными гайками.
Редуктор 7 выполнен четырехкаскадным (на рис 4Я
каждый каскад пронумерован римскими цифрами) q
понижает частоту вращения электродвигателя четырмЗ
парами шестерен и колес прямозубой цилиндрической
передачи. Параметры зубчатых пар электропривода дв
тошлагбаума приведены в табл. 17.
Шестерня I каскада связана с входным валом редуд
тора через фрикцион 8; во II, III и IV каскадах примене-
ны вал-шестерни, вращающиеся в шарикоподшип
никах.
На выходной вал редуктора жестко насажен крнвь-
шип 6, который'тягой 5 связан с коромыслом 3. Послед,
нее находится на выходном валу 4 электропривода, квад-
ратные концы которого расположены вне корпуса 9 и
служат для закрепления кронштейн-рамы и бруса. Со-
стояние кривошипно-коромыслового механизма, показан-
ное на рис. 43, соответствует горизонтальному положе-
нию бруса. В горизонтальном положении брус не заперт
и при отключении электропитания может быть переве-
ден в вертикальное положение от руки.
Когда брус находится в вертикальном положении, ко-
ромысло 3 повернуто на 90° против часовой стрелки отно-
сительно первоначального положения и расположено в
«мертвой» зоне, благодаря чему брус в вертикальном по-
ложении оказывается запертым. Запирание бруса в этом
положении необходимо для предотвращения неконтроли-
руемого опускания шлагбаума.
Таблица 17
Зубчатые пары электропривода автошлагбаума
Параметры Номера каскадов
I Н Ш IV
Число зубьев: шестерни колеса Модуль Передаточное число каскада Общее передаточное число 16 75 2 4,68 16 75 2 4,68 6 16 75 2 4.68 5 16 96 2 6
138
Движущиеся части электропривода и шлагбаума об-
атают значительной инерционной массой и запасают
рачительную кинетическую энергию. Для ее гашения в
«онне опускания или подъема бруса предусмотрены дву-
* ий рычаг 13, жестко насаженный на выходной вал 4,
и подпружиненные пальцы-амортизаторы 12. Если элект-
ропривод в конце поворота шлагбаума не выключился,
электродвигатель 10 начинает работать на фрикцию 8,
расположенную на входном валу редуктора.
Автопереключатель (контактор) электрических цепей
(рис. 44) содержит контактную систему нажимного типа,
переключаемую толкателями 6 под действием кулачков
4, закрепленных на выходном валу электропривода 3.
Контактная система состоит из трех групп контактов.
В каждой группе имеется по одной замкнутой и разомк-
нутой паре контактов. Нумерация контактов указана над
ними. Контакты коммутируются в зависимости от угла
поворота выходного вала следующим образом:
Номера контактов .... 1-Г 2-2* 3-3' 4-4' 5-5' 6-6'
Угол замыкания контактов
при “ вращении выходного
вала по часовой стрелке,
град................. 86-90 10-90 0- 86 0-10 10-90 0-10
Автопереключатель имеет пластмассовое основание
10, на стойках 11 которого закреплены верхние 12 (2-2',
3-3', 5-5') и нижние 15 (/“/', 4-4', 6-6') неподвижные
контакты. Подвижные контакты 13 и 14 расположены на
колодке 18 из пластмассы и перемещаются в направляю- •
тих 16. Контактное нажатие обеспечивается пружиной
17. Толкатель 6, несущий на одном конце колодку 18, а
на другом конце бугель 5, перемещается во втулке 7.
Под действием пружины 9, упирающейся в кольцо 8.
жестко (штифтом) закрепленный на толкателе, бугель 5
постоянно прижимается к поверхности кулачка 4.
Кулачок каждого толкателя выставлен относительно
оси выходного вала 3 под определенным углом и закреп-
лен на нем обоймой 1. Кулачок имеет прорезь, в которой
находится подпружиненный язычок 2, обеспечивающий
мгновенность переключения контактов. В конце поворо-
та вала 3 бугель 5 мгновенно западает за край язычка 2,
имеющий прямоугольную форму. В начале поворота ва-
ла 3 в обратном направлении бугель нажимает на язы-
139
15 1617 18
Рис. 44. Контактор
последний утопает в прорези кулачка, по образую-
чоК’ которого бугель выходит на его поверхность, пере-
^оч 1 я контакты через толкатель 6. В свободном состоя-
воздушный зазор между контактами не менее 5 мм.
НН1 Работа и электромеханические характеристики. При
овороте шлагбаума из горизонтального (закрытого для
Лвижения автотранспорта) в вертикальное (открытое)
Достояние (см. рис. 43) включается электродвигатель 10
и через муфту сцепления вращает входной вал редукто-
ра который через фрикцион 8 передает вращение осталь-
ным каскадам. Выходной вал редуктора сообщает дви-
жение кривошипу 6, связанному с ним тягой 5 коромыс-
лу 3 и валу 4, поворачивающему брус. В начале поворо-
та вал 4 через кулачки переключает соответствующие
контакты автопереключателя, вращается до упора в
амортизатор 12 и запирает шлагбаум в вертикальном по-
ложении благодаря нахождению коромысла в «мертвой»
зоне. Если выходной вал 4 электропривода занял надле-
жащее положение, контакты автопереключателя вновь
переключатся, выключая электродвигатель.
Электропривод при закрытии шлагбаума работает
аналогично.
В электроприводе автошлагбаума применен электро-
двигатель постоянного тока с параллельным возбужде-
нием типа СЛ-571к. Его основные характеристики: по-
лезная мощность 95 Вт, частота вращения 2200 об/мин,
напряжение 24 В, номинальный ток 7 А, к. п. д. 0,56.
Электропривод с двигателем указанного типа обеспечи-
вает подъем и опускание бруса длиной 4 или 6 м за 4—
9 с при рабочем токе не более 3 А. Когда электропривод
работает на фрикцию, ток регулируется от 4,5 до 5 А.
Максимальное значение тока фрикции не должно превы-
шать номинального тока электродвигателя более чем на
15—20%, т. е. 8,4 А.
4-2- ЭЛЕКТРОПРИВОДЫ АВТОСТОПА ТИПОВ ПАМ-2
и Пам-3 для метро
Автостоп применяют в устройствах автоматической
блокировки метрополитена для экстренного торможения
поезда при проезде красного сигнала. Механическое воз-
действие автостопа на систему торможения осуществля-
141
Рис. 45. Автостопы типов ПАМ-2 и ПАМ-3
ударным рычагом (скобой). Перед появлением раз-
дающего огня на светофоре ударный рычаг, поворачи-
Р еМЬ!й электроприводом, выводится из зоны взаимодей-
ствия с электропоездом.
Основные характеристики приводов типов ПАМ-2 и
ПАМ-3: время поворота ударного рычага 3 с, потребляе-
мый ток 0,8 А, электропитание трехфазным переменным
тлком частотой 50 Гц напряжением НО В, габаритные
пазмеры 9ЮХ770Х1700 мм (ПАМ-2) и 1145Х1585Х
Х1850 мм (ПАМ-3), масса 195 кг (ПАМ-2) и 220 кг
(ПАМ-3), установка с правой стороны колеи: ПАМ-2 —
в тоннелях диаметром 6 м (рис. 45, а), прямоугольных
тоннелях (рис. 45, б) и на наземных открытых участках
(рис. 45, в); ПАМ-3 — в тоннелях диаметром 5,1 м (рис.
45, г).
Автостоп состоит из электропривода 1, основания 2 и
гарнитуры 3.
Механизм электропривода (рис. 46) собран в перед-
ней 15 и задней 14 коробках.
В передней коробке расположены: электродвигатель
13 с регулятором скорости 17, автокоммутатор 21, дрос-
сели 4. На боковой поверхности передней коробки разме-
щены кабельный ввод 2, розетка 1 для подключения ос-
ветительной лампы, запирающая планка 18 с защелкой
19. Переднюю коробку закрывают крышкой 16 и запира-
ют замком 20. В задней коробке 14 имеется механичес-
кая передача электропривода. Вращательное движение
электродвигателя преобразуется двухкаскадной зубча-
той передачей, состоящей из шестерни 10, насаженной
на вал электродвигателя 13 и зацепляющейся с колесом,
находящимся на вал-шестерне 7, и зубчатого сектора,
расположенного на выходном валу 3 и связанного с
вал-шестерней 7. Параметры зубчатых пар электропри-
вода автостопа приведены в табл. 18.
Шестерня 10 закреплена на валу электродвигателя
от радиального смещения шпонкой, а от осевого штиф-
том.
На вал-шестерне 9 (рис. 47), кроме зубчатого коле-
са, расположен механизм фрикции, обеспечивающий воз-
можность регулирования вращающего момента, переда-
ваемого от колеса 3 вал-шестерне 9.
Фрикция образована боковыми гранями колеса 3, к
оторым прижаты правый 4 и левый 5 диски под дейст-
143
Рис. 46. Электропривод
а-а
автостопа метро
1 Зубчатые пары электропривода автостопа
Параметры Номера I каскада II
Число зубьев: шестерни колеса Модуль Передаточное число каскада Общее передаточное число 16 212 1 13,25 134 11 112 2 n 1O‘W ,9
вием пружинящей обоймы 13, нажатие которой на диски
можно регулировать гайкой 14. После регулировки по-
ложение регулировочной гайки закрепляется фиксатором
2, западающим под действием подпружиненной плавки
1 в одно из 12 полуовальных углублений в торце гайки.
Вал-шестерня 9, вращающаяся в шарикоподшипниках
8 № 6015, кроме зубчатой, имеет три ступени для сбор-
А —I
Рис. 47. Вал-шестерня с фрикцией
146
Лоикции: первую резьбовую, на которую навинчива-
КИ Опорную гайку И; шпоночную для посадки правого
ГТ евого 5 дисков фрикции и втулки 7, вторую резьбовую
Л регулировочную гайку 14. Вал-шестерню изготовля-
п0Диз легированной хромистой стали марки 40Х и под-
*°Т гают термообработке, повышающей износостойкость,
^фрикционное колесо 3 выполнено из качественной
али и, кроме зубчатой венцовой части и боковых гра-
ней служащих поверхностями трения, имеет ступицу, в
которой предусмотрено классное отверстие для шарико-
подшипника 6 № 206. Внутреннее кольцо шарикоподшип-
ника расположено на стальной втулке 7, жестко (шпон-
кой Ю) связанной с вал-шестерней 9. Таким образом,
при незажатой фрикции колесо 3 вращателя свободно от-
носительно вал-шестерни 9 на шарикоподшипнике 6.
Левый диск фрикции 5 с одной стороны четырьмя вин-
тами скреплен с упорной гайкой 11, а с другой находит-
ся в контакте с колесом 3. Поверхность контакта обра-
зуют двадцать трапецеидальных выступов, выполненных
на диске.
Правый диск 4 подобно левому контактирует с коле-
сом 3 двадцатью выступами. На противоположной сто-
роне диска имеется небольшая ступица, на которой рас-
положена обойма 13 с пружинами в виде рессор, причем
последние упираются в торец ступицы под действием ре-
гулировочной гайки 14.
Обойма с пружинами (рис. 48) состоит из шайб 4 и 5,
между которыми расположены четыре одинаковых набо-
ра 1 из пластинчатых рес-
сор. Каждый набор содер-
жит 5 рессор, отличающих-
ся по длине на 3 мм. Шай-
бы и рессоры скреплены ме-
жду собой заклепками 2.
Обойма предохранена от ра-
диального смещения паль-
цем, проходящим через от-
верстие 3. Палец 12 (см.
Рис. 47) завинчивают в пра-
®Ь1и Диск 4 и затем раскле-
пывают.
Скм^Р^вы” и левый 5 ди-
ки Фрикции изготовляют Р»с. 48. Обойма с пружинами
147
из чугуна, а колесо 3 — из стали. Трущиеся пары вы.
полнены из разнородных металлов, что предупреждавI
явления схватывания. Фрикция должна обеспечивать
гулировку усилий перевода ударного рычага автостопа
от 80 до 200 Н. Так как в регулировочной гайке 14 пре.
дусмотрено двенадцать углублений для фиксатора 2, чи^
ело ступеней регулирования равно двенадцати, а точ-
ность регулировки 10 Н. На заводе фрикцию регулиру.
ют от 150 до 170 Н. ‘
Вал-шестерня 7 (см. рис. 46) через зубчатое зацепле-
ние вращает выходной вал 3, на котором, кроме зубча-
того сектора, расположены автокоммутатор 21 и рычаг
5, связывающий электропривод с гарнитурой автостопа.
Выходной вал вращается в роликоподшипниках 6№7205.
Рычаг 5 закрепляют на квадратном хвостовике вала 3
пальцем, предохраняемым от выпадания шплинтом.
Угол поворота вала 3 ограничивается литыми упорами
на дне задней коробки, в которые упираются боковые
грани зубчатого сектора.
Автокоммутатор 21 состоит из круглого валика с ла-
мелями 24, или собственно коммутатора, и колодки с
восемью парами контактных пружин 22. Валик закрепля-
ют на выходном валу 3 гайкой 23 и стойкой, ввинченной
в вал 3 перпендикулярно его оси.
Ламели 24 валика электропривода, вращающегося
совместно с выходным валом 3, коммутируют контактные
пружины 22. Угловые размеры ламелей различны. В за-
висимости от набора ламелей различают четыре типа
коммутаторов: односекундный, трехсекундный, односе-
кундный ускоренный, трехсекундный ускоренный. Тип
коммутатора характеризует время открытия разрешаю-
щего сигнала; размеры и расположение ламелей, комму-
тирующих моторные цепи, во всех коммутаторах одина-
ковы. Тип коммутатора выбирают в соответствии с ре-
зультатами расчета пропускной способности участка и
указывают при заказе автостопа. В табл. 19 приведены
угловые координаты расположения ламелей в четырех
сечениях коммутатора (по числу пар контактных пру-
жин с обеих сторон валика).
На рис. 49 в качестве примера показано расположе
ние ламелей в сечениях коммутатора автостопа с трех-
секундным ускоренным открытием разрешающего сиг- ,
нала.
148
Таблица
овые координаты расположения ламелей
Tim коммутатора Угловые координаты начала н конца ламелей в сечении (см. рис. 49)
АА ВБ гг
Односекундный 20’30' - 124’30' 20’30' - 159’30' 184’30' - 20’30' - 159’30'
245’5' - 185’30' - 233’5' 185’30' -
349’5' 234’5' - 234’5'
Трехсекундный 20’30' - 20’30' - 20’30' -
124’30' 159’30' 185’30' - 159’30'
300’30' - 185’30' - 234’5' 245’5' -
349’5' 234’5' 349’5'
Односекундный ускоренный 20°30' - 124’30' 20’30' - 159’30' 185’30'- 20’30' - 159’30'
245’5' - 185’30' - 234’5' 245’5' -
349’5' 234’5' 349’5'
Трехсекундный ускоренный 20’30' - 124’30' 20’30' - 159’30' 185’30' - 20’30' - 159’30'
300’30' - 185’30' - 234’5' 300’30' —
349’5' 234’5' 349’5'
Ламели во всех типах коммутаторов выполнены из
листовой латуни толщиной 3 мм и закреплены на поверх-
ности валика винтами. Во избежание самоотвинчивания
винты раскернивают в шлиц. Контактные пружины изго-
товляют из листовой бронзы толщиной 1 мм. Контакт-
ное нажатие пружины на ламель должно находиться в .
пределах от 1,5 до 2,5 Н. Такое нажатие обеспечивается
отжимом пружин примерно на 2,5 мм. При вращении
коммутатора зазор между каждой из пружин и валиком
должен быть 0,1—0,3 мм, что предотвращает износ пру-
жин от трения о поверхность валика.
В крайнем положении электропривода автостопа за-
пирание ударного рычага (путевой скобы) специальным
механизмом, как, например, шибера в стрелочном при-
воде, не предусмотрено. Но при открытом состоянии ав-
тостопа механизм удерживается в крайнем положении
электродвигателем, который защищается от перегрузки
пижением напряжения за счет включения контактами
автокоммутатора в каждую фазу дополнительного ин-
дуктивного сопротивления — дросселя 4 (см. рис. 46).
149
270’
it
300’30
185° 30
Рис. 49. Коммутатор
начало
ламели
ламели
в-в
Дроссель состоит из сердечника 26, катушки 25, яко-
ря 28, скоб 29.
Сердечник 26 собран из тридцати Ш-образных плас-
тин электротехнической стали марки Э-41 толщиной
0,5 мм. С одной стороны пластины покрывают электро-
изоляционным лаком марки МЛ-92.
Катушка 25 намотана на каркас проводом марки
ПЭВ-2 диаметром 0,47 мм. Число витков 525, активное
сопротивление 6 Ом. Катушка изолирована от каркаса
двумя слоями лакоткани, а снаружи покрыта хлопча-
тобумажной пряжей и окрашена лаком. Ее выходы вы-
полнены проводом марки МГВ сечением 1 мм2.
Якорь 28 дросселя собран из 24 прямоугольных плас-
тин электротехнической стали марки Э-41 толщиной
0,5 мм. Для обеспечения прочности крепления использу-
ют крайние пластины толщиной 1,5 мм.
Скобами 29 скрепляют сердечник и якорь между со-
бой и закрепляют дроссель в передней коробке электро-
Воздушный зазор между сердечником и якорем
регулируют картонными прокладками, после чего якорь
прижимают к сердечнику двумя латунными болтами
150
Пои переходе автостопа в закрытое состояние дрос-
1 в каждой фазе шунтируются соответствующими
контактами автокоммутатора.
К Электродвигатель привода выполнен с регулятором
стоты вращения 17 (см. рис. 46), снижающим число
Чбооотов его вала в конце хода в открытое и закрытое
состояние автостопа
регулятор (рис. 50) состоит из обоймы 5, двух пла-
вающий втулок 2 с тормозными вкладышами 1, пальцев
3 и пружин 4-
Стальная обойма 5 служит для сборки регулятора и
жесткого закрепления его на валу электродвигателя
шпонкой и штифтом.
Плавающую втулку 2 изготовляют из стали. Она име-
ет круглую форму и перемещается в обойме по скользя-
щей посадке. Внутри втулки расположены два отверстия:
меньшего диаметра, в которое устанавливают палец 3 с
пружиной 4, и большего диаметра — для запрессовки
тормозного вкладыша 1 из фибры.
Установку деталей в указанном порядке выполняют
так: сначала палец 3 соединяют с обоймой 5 и осью 6,
затем втулку 2 несколько выдвигают из обоймы и допол-
нительно скрепляют с вкладышем 1 заклепкой 9. Воз-
можность проворачивания втулки 2 внутри обоймы 5
исключена шариком 8, а выпадание оси 6 — кольцом 7-
Рассмотренный регуля-
тор частоты вращения элект-
родвигателя относят к цент-
робежным регуляторам. Ког-
да электродвигатель выклю-
чен, плавающие втулки при-
жаты пружинами 4 к обой-
ме усилием 4—5 Н. После
включения электродвигате-
ля на плавающие втулки
начинают действовать цент-
робежные силы, под дейст-
вием которых они сжимают
пружины и тем самым при-
жимают тормозные вклады-
и к внутренней поверхнос-
и диаметром 100 мм чугун-
°и крышки электродвига-
Рнс. 50. Центробежный регу-
лятор частоты вращения элект-
родвигателя
151?
теля 13 (см. рис. 46). За счет трения возникает допол!
нительная нагрузка на вал, и частота вращения снижая
ется. В конце хода электропривода как на открытии"
так и закрытие автостопа регулятор должен обеспечить
снижение частоты вращения электродвигателя в пред₽
лах от 400 до 600 об/мин.
Переднюю коробку электропривода закрывают сталь-
ной сварной крышкой 16 (см. рис. 46), откидывающейся
на петлях 30. По внутреннему периметру крышки прива-
рен желоб, в который закладывают уплотнение из пень-
ки. Крышка прижимается к коробке запирающей план-
кой 18, к которой прикреплена защелка 19, взаимодей-
ствующая с ригелем замка 20. Замок прикреплен g
крышке заклепками.
Замок (рис. 51) состоит из пластины 6, к которой
прикреплена винтами коробка 5; ригеля 1, перемещаю-
щегося в отверстиях коробки; рычага 8, пружины 9 и
ключа 4. Ригель 1 жестко связан с рычагом 8 штифтом
2. Рычаг 8 под действием пружины 9 прижат к пальцу 7,
и ригель выдвинут из замка. При воздействии защелки на
скос ригеля последний через рычаг сжимает пружину и
перемещается, за счет чего защелка западает за прямо-
угольную часть ригеля. Для освобождения защелки не-
обходимо надеть ключ 4 на направляющий штифт 3 и
поворачивать так, чтобы бородка ключа перемещала ры-
чаг 8, а с ним и ригель 1 до отпирания. Замочная сква-
жина закрыта язычком, упирающимся в пломбировочное
ушко.
Уменьшение потерь на трение в механизме электро-
привода автостопа достигается смазкой трущихся по-
верхностей. Шестерни и подшипники смазывают консис-
тентной смазкой, а детали регулятора частоты вращения,
тормозную поверхность крышки электродвигателя и
вкладыш — индустриальным маслом. Доступ к регуля-
тору открывается после снятия крышки 16 (см. рис. 46)
электропривода, а к механической передаче — после сня-
тия заслонки 9 вытягиванием стержня 8 до упора.
Работа и электромеханические характеристики элект-
ропривода автостопа. Электродвигатель 13 (см. рис. 46)
после включения вращает через шестерню 10 фрикцион-
ное колесо. Последнее через фрикционную связь с левым
и правым дисками приводит в движение вал-шестерню 7
и связанный с ней зубчатый сектор, сидящий на выход-
152
ном валу 3. Выходной вал через рычаг 5 воздействует на
гарнитуру автостопа, что и приводит путевую скобу в
положение, заграждающее или разрешающее движение
поезда. Одновременно выходной вал вращает коммута-
тор, ламели 24 которого замыкают в зависимости от уг-
ла поворота разные группы контактов 22, включенных в
моторную и контрольную цепи.
В конце хода на отпирание и запирание электродви-
гатель подтормаживается центробежным регулятором
частоты вращения, что уменьшает ударные нагрузки в
звеньях электродвигателя и гарнитуры. Частота враще-
ния снижается на 40—60%. Выбег фрикционного колеса
должен быть от 10 до 15 зубьев после окончания хода
на отпирание и от 20 до 25 зубьев после окончания хода
на запирание.
По окончании хода на запирание контакты автоком-’
мутатора отключают электродвигатель привода и шун-
тируют фазные дроссели. После хода на отпирание
электродвигатель остается включенным, тем самым за-
пирая крайнее положение автостопа. Контакты автоком-
мутатора снимают шунт с дросселей, и напряжение на
электродвигателе снижается до 30—45 В при напряже-
нии сети НО В, что обеспечивает усилие удержания ры-
чага выходного вала 150 — 200 Н.
Рабочий ток нормального хода электропривода 0,55—
и,65 А. Максимальный потребляемый ток вновь собран-
ного автостопа не должен превышать 0,8 А при напря-
жении питания НО В. Ток удержания рычага выходного
ала в разрешающем положении находится в пределах
153
ют 0,5 до 0,65 А. Температура нагрева обмоток электро]
двигателя превышает температуру окружающей сред
не более чем на 35° С. Время хода электропривода дд»
перевода путевой скобы из запрещающего в разреши,
ющее положение или обратно нс превышает 3 с. д’*
Гарнитуры автостопов. Из-за стесненных условий и
конфигурации тоннеля метрополитена электропривод /
автостопа располагают в стороне и на значительной
высоте относительно головки крайнего рельса (см
рис. 45). Электропривод устанавливают на основании У
сваренном из стальных полос и угольников, и закрепля-
ют двумя болтами Ml6 и стяжным болтом того же диа-
метра. Связь между рычагом выходного вала электро-
привода и путевой скобой осуществляется с помощью
гарнитуры. Чем меньше диаметр тоннеля, тем выше при-
ходится располагать электропривод и тем больше эле-
ментов содержит гарнитура.
В состав гарнитуры автостопа типа ПАМ-3 (рис. 52)
входят нижнее 8 и промежуточное 12 основания, подуш-
ка 4, на которых закрепляют элементы рычажной пе-
редачи от электропривода к путевой скобе 2. Рычажную
передачу образуют противовес 9 с серьгами 7 и 13 на
концах, рычаги 6, 10, 15, фигурная муфта 19, кардан 21
с шарнирами 20 на концах и валы 11, 18 и 25.
Нижнее основание 8 сваривают из уголковой стали.
Промежуточное основание 12, отлитое из чугуна, крепят
к основанию 8 болтами. Подушку 4 изготовляют из
стальной полосы и прикрепляют костылями к шпалам.
К полосе приварены упоры, ограничивающие повороты
скобы 2: упор 5 — в заграждающее, а упор 1 — в раз-
решающее положение. Для регулирования положения
скобы 2 относительно уровня головки рельса (УГР) пре-
дусмотрены стальные подкладки 3 толщиной 2, 3 и 5 мм.
Противовес 9 представляет собой чугунную отливку
массой 14,4 кг. Серьга 13 соединяет его с рычагом 5
выходного вала электропривода (см. рис. 46), а серьга
7 — с рычагом 6 (см. рис. 52).
Противовес используют не только как элемент связи
в рычажной передаче, но и как груз, приводящий путе*
вую скобу в заграждающее положение в случае неис-
правности электродвигателя привода.
Стальные рычаги 6 и 10 соединены между собой ва-
лом И через сквозное отверстие в промежуточном ос-
154
Рис. 52. Гарнитура автостопа типа ПАМ-3
новании 12. Концы вала 11 выполнены квадратной фоп«
мы для надежного крепления к рычагам.
Рычаг 10 связан вильчатым рычагом 15 с фигурной
муфтой 19, отливаемой из стали. Муфта закреплена на
валу 18. Валы 11 и 18 вращаются в подшипниках сколь-
жения 16, изготовленных из антифрикционного сплава и
запрессованных в основании 12. Смазка в подшипник
поступает через масленку 17. Муфта 19 передает враще-
ние через карданную передачу валу 25, на котором на-
ходится путевая скоба.
Кардан состоит из стального вала требуемой длины
литых стальных муфт на его концах и стальных шарни-
ров 20 с крестообразно расположенными отверстиями
Размер А кардана (см. рис. 45) и длина его вала I, вы-
пускаемых заводом, приведены ниже:
Л, мм.............. 200 242 250 280 300 325 350 355 400 500 550
I, мм.............. 137 179 187 217 237 262 287 292 337 437 487
Муфта с шарниром 20 имеет свободный ход, равный
8—9 мм, относительно карданного вала 21. Для этого
на валу сделана сквозная прорезь, через которую про-
ходит палец, соединяющий его с муфтой. Муфта, нахо-
дящаяся на противоположном конце вала, связана с
ним жестко за счет прессовой посадки и штифтовки. Эта
муфта соединена шарниром с аналогичной по конструк-
ции и методу крепления муфтой, расположенной на ва-
лу 25 путевой скобы.
Вал 25 вращается в радиально-сферических шарико-
подшипниках 24 № 1207, установленных в разъемном
литом чугунном корпусе 23, закрытом сбоку крышкой 22.
В местах выхода вала предусмотрены сальники, предот-
вращающие вытекание смазки. На корпусе расположе-
на масленка, через которую подшипники могут попол-
няться свежей смазкой. На выходной конец вала 25 на-
прессована путевая скоба 2.
Скоба 2 представляет собой стальную отливку мас-
сой 10 кг и состоит из пустотелой ударной части, взаи-
модействующей с ударным рычагом электропоезда, и
эксцентрично расположенной массы, под действием ко-
торой скоба поворачивается в вертикальное заграждаю-
щее положение в случае разъединения карданного вала
21 с валом 25. Скоба закреплена на валу 25 шпонкой от
156
радиального и гайкой от осевого смешения г »
щниена от самоотвинчивания шплинтом Гаика За‘
Гарнитура к электроприводу автпг-rL
отличается от гарнитуры к электооппи^ ТИПа ПАМ-2
тем, что в связи с большим диа.метпом ° У ™Па ПАМ'3
ние 8 устанавливают ниже, причем Р ннеля основа-
располагают на одной прямой Поэтпмм Валов 11 и ™
лов предусмотрен один общий" ва т ВМесто Двух ва-
рого использованы корпус 24 г „ ’ д кРепления кото-
подшипники 24. Корпус устанавливают*™ " шаРик°’
реннои к нижнему основанию 3 Гем nL а=?0ЛКе- "Рива-
Варианты гарнитуры автостоп? Р 45)'
круглых и прямоугольных тоннелей JT ПАМ‘2 лля
ков (см. рис. 45, а, б, в) пазп.н/? наземных участ-
рацией нижнего основания ‘ ются только конфигу-
5 СПЕЦИАЛЬНЫЕ И ПРОМЫШЛЕННЫЕ
ЭЛЕКТРОДВИГАТЕЛИ К ЭЛЕКТРОПРИВОДАМ
5.1. ТЕХНИЧЕСКИЕ ТРЕБОВАНИЯ,
ПРЕДЪЯВЛЯЕМЫЕ К ЭЛЕКТРОДВИГАТЕЛЯМ
Электродвигатель является источником механи-
ческой энергии электропривода. В связи с этим от пра-
вильного выбора типа электродвигателя зависит чет-
кость и бесперебойность работы привода в целом.
Работу электроприводов железнодорожной автома-
тики и телемеханики характеризует ряд особенностей:
повторно-кратковременный режим работы, реверсивный
характер нагрузки, напольные условия эксплуатации,
дистанционное управление приводом. Диапазон нагру-
зок у электроприводов неодинаков. Так, нагрузка стре-
лочных электроприводов изменяется в широких преде-
лах, у остальных — сравнительно мало.
Перечисленные особенности определяют технические
требования, предъявляемые к электродвигателям.
В частности, условиям работы в автошлагбауме отвеча-
ют промышленные электродвигатели, выбираемые по
роду тока в зависимости от принятого источника элект-
ропитания устройств на переезде и станции.
В стрелочных электроприводах применяют специаль-
ные электродвигатели, что диктуется более жесткими
эксплуатационно-техническими требованиями.
Так, для обеспечения перевода стрелки с учетом
инерции ее масс и привода в любых атмосферных усло-
виях электродвигатель должен обладать большим пус-
ковым моментом.
Знакопеременный характер работы привода требует
от двигателя реверсивности, т. е. обеспечения вращения
вала в обе стороны. Электродвигатель должен быть рас-
считан для работы в повторно-кратковременном режиме
с перегрузками. Дистанционное управление стрелочным
приводом — прямое или кодовое при местном, централь-
ном или магистральном питании — делает предпочти-
тельным двигатель, который не требует пусковых реоста-
158
и ДРУГИЕ специальных приборов. Электродвига-
тов 111Жен быть экономичным, обеспечивая минималь-
тель Vi сход кабеля на стрелку, герметичным и макси-
ньп‘ но простым в обслуживании.
N,a П ходя из необходимости обеспечения бесперебойно-
паботы централизованных стрелок и экономичности
сТИ ^управления применяют электродвигатели постоян-
схеМ тока. Непрерывность питания в этом случае легко
я^Г2п^иить от аккумуляторных и конденсаторных бата-
прй и других источников питания.
Из электродвигателей постоянного тока наилучшим
боазом отвечает рассмотренным требованиям электро-
двигатель с последовательным возбуждением, облада-
ющий большим пусковым моментом и большой перегру-
зочной способностью. При малых моментах на валу бла-
годаря «мягкой» характеристике он развивает высокую
скорость, а при больших — автоматически снижает ее.
Это свойство позволяет, применяя один и тот же дви-
гатель, обеспечивать ускоренный перевод легких стрелок
в маневровых районах и более медленный перевод тя-
желых стрелок на главных путях станций. Небольшая
мощность стрелочного электродвигателя допускает его
использование без пусковых устройств.
Электродвигатель с последовательным возбуждением
не боится больших снижений напряжений, что немало-
скорость, а при больших —
важно для дистанционного управления приводом и уни-
фикации двигателей к стрелочным электроприводам ЭЦ,
ДЦ и ГАЦ. Надежность двигателей последовательного
возбуждения выше, чем других двигателей постоянного
тока, за счет того, что обмотки полюсов наматывают
проводом большого сечения (исключение составляют
двигатели, у которых полюсы выполнены в виде посто-
янных магнитов).
Реверсивность электродвигателя может быть обеспе-
чена двумя обмотками возбуждения, навитыми в проти-
воположных направлениях, или изменением направления
тока в обмотке возбуждения относительно направления
тока в обмотке якоря.
Из электродвигателей переменного тока характери-
™и. близкие к требуемым, имеет трехфазный асин-
Ронныи электродвигатель с короткозамкнутым ротором.
рТ™ увеличения пускового момента используют элект-
Р двигатель с повышенным скольжением, достигаемым
159
за счет увеличения активного сопротивления рото 1
Реверсивность асинхронного электродвигателя мп°Ра’
быть обеспечена переключением фаз в любой паре ***
водов. Возможность переключения схемы соединения ог*
моток статора с треугольника на звезду и наобоп°'
позволяет осуществлять питание от источников с разнш
ми напряжениями. Большим преимуществом асинхров
ного двигателя являются также отсутствие коллектоод
и простота обслуживания. : !
К недостаткам асинхронного двигателя относятся
квадратичная зависимость момента на валу от напря.
жения, вследствие чего при снижении напряжения зна-
чительно уменьшаются пусковой момент и перегрузоц.
пая способносхь; необходимость в небольшом воздущ.
ном зазоре между статором и ротором по сравнению с
двигателем постоянного тока, что усложняет производст-
во и снижает надежность двигателя; потребность как
минимум в трех линейных проводах, в то время как для
включения электродвигателя постоянного тока достаточ-
но двух.
Однофазный коллекторный электродвигатель исполь-
зуют с последовательным возбуждением по тем же при-
чинам, что и двигатель постоянного тока. Однако от по-
следнего он отличается более тяжелыми условиями ком-
мутации, что приводит к быстрому износу и порче кол-
лектора и щеток. Преимуществом однофазного коллек-
торного двигателя по сравнению с двухфазным является
меньший потребляемый ток.
В отличие от коллекторного двухфазный двигатель
требует незначительного ухода, но развивает недоста-
точный пусковой момент, что приводит к усложнению
механической связи с приводом.
Остальные типы электродвигателей постоянного и
переменного тока не удовлетворяют требованиям к стре-
лочным двигателям по пусковым и рабочим характери-
стикам из-за сложности включения и реверсирования,
ввиду больших габаритных размеров, массы и высокой
стоимости.
В настоящее время в отечественных стрелочных при-
водах используют специальные электродвигатели посто-
янного тока типов МСП-0,1, МСП-0,15 и МСП-0,25 и
асинхронные трехфазного тока с короткозамкнутым Р0'
тором типов МСТ-0,25, МСТ-0,3 и МСТ-0,6; в электро-
160
автостопа метро — асинхронный трехфазного
привод ко ОТКОзамкнутым ротором и центробежным ре-
т°ка oDOM частоты вращения типа МАС-0,1; в электро-
гУлЯТ автошлагбаума — промышленный электродви-
пр“ев°'Постоянного тока типа СЛ-571К.
СТРЕЛОЧНЫЕ ЭЛЕКТРОДВИГАТЕЛИ
ПОСТОЯННОГО ТОКА ТИПОВ МСП-0,1, МСП-0,15 И МСП-0,25
Стрелочные электродвигатели имеют последователь-
ное возбуждение, т. е. обмотка возбуждения включена
последовательно с обмоткой якоря. Их можно оценивать,
и двигатели любых типов, по пусковым, рабочим и
регулировочным характеристикам.
И Пусковые характеристики определяются в основном
пусковым током, пусковым моментом, временем пуска.
Рабочие характеристики представляют собой зависимо-
сти скорости вращения, момента на валу, полезной
мощности и к. п.д. от тока якоря. К рабочим относится
также и механическая характеристика: зависимость
скорости вращения от момента на валу. Регулировочные
характеристики определяются пределами регулирования
скорости, устанавливаемыми по отношению наибольшей
скорости вращения к наименьшей.
Номинальными параметрами стрелочных электро-
двигателей являются: напряжение, мощность, момент,
ток и скорость вращения. Номинальным называется
напряжение, на которое рассчитан двигатель. Его ука-
зывают на заводском щитке. Номинальной является мак-
симальная мощность, которую двигатель может продол-
жительно развивать в заданном повторно-кратковремен-
ном режиме при номинальном моменте на валу. Номи-
нальным называется ток, потребляемый электродвига-
телем при номинальном напряжении и номинальной
мощности на валу. Номинальной называется частота
ращения, измеряемая числом оборотов якоря при но-
ннальном напряжении и номинальной мощности.
дв ^лектР„одвигатели типа МСП-0,1. Такой тип электро-
г™ ПОЛУЧИЛ широкое распространение на маги-
ный ЛЬН°М И пРомышленном транспорте и, хотя серий-
ря 0 ®ЫпУск прекращен, их еще эксплуатируют благода-
Рганизации ремонта непосредственно на дистанциях.
161
160
150
1.8
Номинальные параметры стрелочных электродвигат
типа МСП-0,1 приведены ниже:
Напряжение, В...........30 100
Мощность, Вт..........130 150
Потребляемый ток, А . . . 8 2,5 ____
Частота вращения, об/мин . 1300 1500 1500
Момент, Н-м........... 0,98 0,98 0,98
Примечание. Паспортная номинальная мощность 100 Вт.
Коэффициент полезного действия (к. п.д.) при номи-
нальной мощности 55%.
Электродвигатели имеют напряжения 30, 100 к
160 В и применяются при местном, центральном и ма-
гистральном питании устройств электрической центра-
лизации.
Габаритные размеры электродвигателей 320Х250У
Х190 мм, масса 20 кг.
Электродвигатели типа МСП-0,1 независимо от но-
минального напряжения имеют совершенно одинаковые
узлы и детали и отличаются только намоточными дан-
ными.
Корпус электродвигателя 5 (рис. 53) представляет
собой полую цилиндрическую отливку с лапками из се-
рого чугуна. Внутри корпуса размещают: полюсы с ка-
тушками 6, якорь 8, коллектор 12, щеточное устройство
10. Корпус закрыт передней 9 и задней 4 крышками, в
которых находятся опоры вала якоря — шарикопод-
шипники 2. Для предохранения от выбивания смазки из
Рис. 53. Электродвигатель типа МСП-0,1
162
Рис. 54. Полюс с обмоткой
„„шинников, а также по-
поД“,я пыли используют
пад; ' я,нитные шайбы 3 и
£₽о ые «льники 13. Про-
&й люфт вала якоря
А vnuDViOT компенсацион-
ными /. Для об-
учения условий транспор-
тировки предусмотрен рым
7 а для осмотра и ухода —
отверстие в передней крыш-
ке, закрываемое смотровой
заслонкой//.
Полюс с обмоткой (рис. 54) является электромагни-
том возбуждения. Его сердечник собран из стальных
пластин 6 толщиной 1 мм. Длина сердечника 78 мм. Па-
кет полюса стянут четырьмя стальными заклепками 2.
Полюс крепят к корпусу двигателя двумя винтами 3,
для чего в сердечнике предусмотрены резьбовые отвер-
стия. Полюс заканчивается полюсным наконечником, ох-
ватывающим по дуге якорь. Назначение полюсного на-
конечника — облегчить прохождение магнитного потока
через воздушный зазор за счет постоянства его магнит-
ного сопротивления по всей дуге. В двигателе имеются
два полюса.
На каждом полюсе размещена обмотка возбуждения
5, каждая из которых создает магнитные потоки проти-
воположных направлений. Для вращения якоря в опре-
деленном направлении включают только одну обмотку,
а вторую не используют. Обмотки возбуждения изоли-
руют от полюса и корпуса двигателя картонными про-
кладками 1, 4 и 7. Обмотки полюсов наматывают мед-
ным проводом марки ПЭВ-2. После намотки обмотку
обертывают лакотканью, миткалевой лентой, подверга-
ют вакуумной пропитке лаком МЛ-92 и покрывают
возбуждения
Ют вакуумной пропитке лаком МЛ-92
эмалью ГФ-92-ХС. Параметры обмоток
Двигателей приведены ниже:
Напряжение, В . . . .
Число витков ........
Диаметр голого провода,
^•противление, Ом . .
Масса, кг .
30
160
1,56
0,47
0,93
мм .
100
430
0,86
4,16
0,78
160
628
0,64
10,5
0,9
водные концы катушек выполнены проводом ПГВ
6*
163
И н
штац.
сечением 1,5 мм2. Воздушный зазор между полюсам
якорем 0,5—0,75 мм.
Якорь электродвигателя (рис. 55) набран из т—.
пованных листов электротехнической стали марки
толщиной 0,5 мм. Лист стали имеет 24 паза прямоугпиЯ
ной формы для укладки секций якоря. С одной сторопЯ
лист покрыт лаком № 317. Сердечник 3 якоря запрессл!
вывают на вал 1 и закрепляют шайбами 2. Крайни»
пластины якоря утолщены для придания ему надлежа-
щей жесткости. Сердечник связан с валом шпонкой 5
Длина сердечника превышает длину полюса на 2 мм. Это
сделано для того, чтобы уменьшить изменение проводи,
мости магнитной цепи двигателя, возникающее за счет
осевого люфтй якоря. Сердечник в собранном виде по-
крывают лаком № 317.
Обмотка якоря состоит из 24 секций. В каждом пазу
сердечника размещены по две стороны секций 14, тща-
тельно изолируемых от сердечника. Пазовая изоляция
состоит из чередующихся слоев электрокартона 16 и ла-
320
Лист якоря
Эскиз укладки
концов секции якоря
В коллекторные пластины
Рис. 55. Якорь с коллек-
тором электродвигатеч»
типа МСП-0,1
164
пазам у — 1 ч-12. Дан-
ин 17. Секции в пазу изолируют друг от друга про-
£ОТКа1 у -
кЛ8пбмотки в пазах закрепляют фибровыми клиньями 13.
исключения выбрасывания секций во время враще-
ДлЯ ’ердечник бандажируют проволочными скобами 4,
НИЯ бовые части обмотки якоря — льняным шнуром 6
а Л?пх изоляции лобовых концов 7 и 12. Обмотка яко-
п°_ простая петлевая с шагом по
ные секции якоря приведены ниже:
Напряжение, В..........30
Число витков...........2ХП
Диаметр голого провода, мм 0,64
Сопротивление, Ом .... 0,11
Масса, кг .............0,024
100
33
0,49
1,1
0,022
160
53
0,38
2,9
0,029
Секции наматывают медным проводом марки ПЭВ-2,
а секции якоря для двигателя 30 В — в два провода
параллельно по 11 витков в отличие от двигателей 100
и 160 В, наматываемых в один провод. Якорь после на-
мотки подвергают вакуумной пропитке лаком МЛ-92
или компаундом КП-34, после чего покрывают эмалью
ГФ-92-ГС. Выводы секций якоря присоединяют к кол-
лектору.
Коллектор представляет собой цилиндр 9, в поверх-
ность которого запрессованы 24 коллекторные пластины
8, изолированные друг от друга прокладками 11. Кол-
лектор 9 прессуют из пресс-материала марки АГ-4-В и
насаживают на вал якоря на шпонке 10. Коллекторную
пластину 8 изготовляют из меди и крепят выступом, вы-
полненным в виде «ласточкина хвоста». В пластине
имеется прорезь, в которую укладывают выводы секций •
якоря и запаивают. Изоляционную прокладку 11 изго-
товляют из миканита. По форме она соответствует кол-
лекторной пластине. Коллекторное деление двигателя
6 мм. Шаг по коллектору 1—2, начальный 1—7.
Щеточное устройство соединяет якорь двигателя с
внешней цепью (рис. 56). Оно состоит из пластмассово-
го основания 12, щеткодержателей 2, щеток 10, левой 9
и правой 8 пружин, левой 11 и правой 7 направляющих
стоек, соединительной пластины 6, трех выводов 4.
Пор а основании 12 щеткодержателя, изготовляемом из
ва с1с поРошка» собирают весь узел щеточного устройст-
g » чем изолируют токопровод от корпуса двигателя.
ем имеются три отверстия для выводов 4 и два от-
165
верстия для осей 13 щеткодержателей. Проворачивание
стержней 3 при затягивании гаек выводов 4 исключают
в основании выступы в месте расположения квадратных
головок стержней.
Щеткодержатель изготовляют из латуни, так как он
является токоведущим. Он представляет собой полоску
шириной Ими толщиной 1 мм, на одном конце изогну-
тую в кольцо, а на другом имеет форму стакана для
размещения щетки. Кольцо щеткодержателя насажено
на латунную втулку, обеспечивающую легкость враще-
ния на оси 13 и надежный электрический контакт.
Щетку 10 изготовляют из графита марки Г1 (ГЗ).
Ее сечение в месте прилегания к коллектору 0,8X1,2 см2.
Конец щетки, опирающийся на коллектор, должен иметь
радиальную вогнутую поверхность, соответствующую
кривизне коллектора. Для этого щетки притираются к
коллектору. Щетки, устанавливаемые на геометрической
нейтрали двигателя, постоянно прижимаются к коллек-
тору под действием пружин 8 и 9.
Пружины 8 и 9 аналогичны и отличаются лишь лево-
и правоходовой навивкой. Каждая пружина имеет по
два кольца. Одно из них служит для крепления на оси
13, а другое — большего диаметра — для регулировки
усилия нажатия щетки на коллектор. Через большое
кольцо проходит выступ направляющей стойки 7, слу-
жащий точкой опоры пружины. Начальное усилие, со-
здаваемое пружиной 4—6 Н. При износе щетки на 50 !'о
усилие должно быть не менее 2 Н.
166
Вывод состоит из латунного стержня 3, изолирующей
I яки 5, самостопорящейся гайки 14 и шайб 1. Средний
вТ- * д соединен с якорем двигателя пластиной 6, а два
ВЬ1Вйних — непосредственно с концами обмоток возбу-
к?,а,11НЯ. Вторые концы обмоток якоря и возбуждения
Еднняют между собой на оси щеткодержателя 13.
Унифицированные электродвигатели типов МСП-0,15
МСП-0,25. Они осуществляют перевод остряков из
вельсов тяжелых типов, а также подвижных сердечников
крестовин стрелочных переводов и в отличие от МСП-0,1
способны развивать большие моменты на валу. Электро-
двигатель типа МСП-0,15 отличается от МСП-0,25 ча-
стотой вращения. Первый можно отнести к тихоходным,
а второй — к быстроходным. Применение электродвига-
телей типа МСП-0,15 позволяет существенно сократить
расход стрелочного кабеля в тех случаях, когда не тре-
буется ускоренного перевода стрелок (см. § 2.6).
Электродвигатели типа МСП-0,25, как и МСП-0,1,
выпускают для приводов электрической централизации
на напряжение 30, 100 и 160 В. Кроме того, электродви-
гатель типа МСП-0,25 100 В используется при напряже-
нии 200 В для приводов горочной централизации и обо-
значен условно МСП-0,25 100/200 В, а электродвигатели
типа МСП-0,15 выпускают на напряжение 30, НО и
160 В (табл. 20).
Номинальные параметры электродвигателей
Таблица 20
Характеристика Тип двигателя Значение характеристик
Напряжение, В МСП-0,15 30 ПО 160
МСП-0,25 30 100/200 160
Мощность, Вт МСП-0,15 150 150 150
МСП-0,25 250 250/550 250
Потребляемый ток, А МСП-0,15 7,7 2,2 1.5
МСП-0,25 12,5 3,3/3.6 2.5
об/ХТТа вРа1«ения. МСП-0,15 850 850 850
w/МИН МСП-0,25 1460 1700/3600 1700
Момент, Н м МСП-0,15 1,67 1,67 1,67
МСП-0,25 1.47 1,47/1,47 1.47
к. П. д. МСП-0,15 0,58 0,55 0,56
— МСП-0,25 0,6 0,7/0,8 0,7
167
Габаритные размеры электродвигателей 320\250у
Х193 мм, масса 15,6 кг.
Конструкции электродвигателей типов МСП-0,15 й
МСП-0,25 совершенно одинаковы, а намоточные данниД
различны.
Корпус 8 электродвигателей типов МСП-0,15 н
МСП-0,25 (рис. 57) изготовляют из стальной трубы дИа.
метром’ 160 мм с приварными лапками. Стальная стани-
на перед чугунной имеет значительное преимущество за
счет более высокой индукции насыщения стали. К кор.
Рис. 57. Электродвигатель типа МСП-0,25 (МСП-0,15)
168
Лист якоря
Размеры паза
якоря
Эскиз укладки
обмотки 0 паз
Рис. 58. Элементы якоря электродвигателя типа МСП-0,25
пусу 8 изнутри прикреплены два полюса 9 с обмотками
10 и снаружи — пластмассовая колодка с тремя вывода-
ми 11. Внутри корпуса расположен якорь 4 с коллекто-
ром 5. Корпус электродвигателя закрыт передней 6 и
задней 2 крышками.
В переднем щите размещено щеточное устройство.
Якорь вращается в шарикоподшипниках 7 серии № 60202,
имеющих одну маслозащитную шайбу (со стороны па-
кета якоря). Люфт якоря регулируют компенсационны-
ми шайбами 1. Рым 3 служит для транспортировки
электродвигателя.
Конструкция полюсов и изоляция обмоток возбужде-
ния двигателей типов МСП-0,15 и МСП-0,25 выполнены
аналогично двигателю типа МСП-0,1. Обмотки возбуж-
дения, параметры которых приведены в табл. 21, нама- •
тывают из провода марки ПЭВ-2 или ПЭТВ, а вывод-
ные концы выполняют из провода марки ПГВ сечением
1,5 мм2.
Воздушный зазор между полюсом и якорем должен
находиться в пределах от 0,5 до 0,7 мм.
Якорь имеет зубцы, образующие полузакрытые пазы
грушевидной формы (рис. 58). Обмотка якоря содержит
24 секции. В каждом пазу расположены по две стороны
секций 2, намотанных одна поверх другой проводом мар-
и ПЭВ-2 и изолированных лакотканью и электрокар-
тоном 3 от стенок паза. Обмотки в пазах закреплены
‘Чиньями /. Полузакрытый паз исключил необходи-
мость в скобах 4 (см. рис. 55).
169
тзблИЦа 2i
Параметры обмоток возбуждения электродвигателей
Характеристика Тип электро- двигателя Значение характеристики
Напряжение, В МСП-0,15 30 110 1КЛ
МСП-0,25 30 100 160
Число витков МСП-0,15 135 510 79R
МСП-0,25 90 290 468
Диаметр голого прово- МСП-0,15 1.4 1.0 0 Я
да, мм МСП-0,25 1.7 1.32 1.0
Сопротивление при 20°С, МСП-0,15 0,605 4,52 11,0
Ом МСП-0,25 0,22 1.51 3^85
Масса обмотки, кг МСП-0,15 0,73 1,38 1.4
МСП-0,25 0,73 1,43 1.33
Т аблица 22
Параметры секций якоря электродвигателей
Характеристики Тип электро- двигателя Значения характеристик
Напряжение, В МСП-0,15 30 ПО 160
« МСП-0,25 30 100 160
Число витков МСП-0,15 10 35 50
МСП-0,25 6 21 31
Диаметр голого прово- МСП-0,15 0,9 0,5 0,4
да, мм МСП-0,25 0,8 и 0,63 0,5
0,75*
Сопротивление при 20°С, МСП-0,15 0,1 1,2 2,433
Ом МСП-0,25 0,045 0,45 1,116
Масса, кг МСП-0,15 0,031 0,032 0,019
МСП-0,25 0,02 0,024 0,017
• Секцию наматывают параллельно в два провода.
170
и паметры секций приведены в табл. 22, а схема
эпических соединений якоря — на рис. 59. При ее
эЛеК .зовании руководствуются следующими данными:
исП° пазов z = 24, шаг по пазам (/=14-12, число кол-
чИСЛорных пластин k = 24, начальный шаг по коллектору
^14-7, шаг по коллектору (/к=1-т-2.
После намотки якорь пропитывают под давлением
омпаундом КП-34 или лаком МЛ-92, а лобовые части
К пакет дополнительно покрывают эмалью марки
ГФ-92-ГС.
Выводы секции якоря припаивают к коллекторным
пластинам припоем ПОС-40. Коллектор в двигателях
типов МСП-0,15 и МСП-0,25 используют такой же, как
в двигателе типа МСП-0,1.
Щеточное устройство имеет щеткодержатели
(рис. 60,а), расположенные диаметрально противопо-
ложно относительно коллектора 1, закрепленные на
стенках квадратной части переднего щита И двигателя.
Каждый щеткодержатель имеет латунный корпус 5, в
котором находятся щетка 6 с пружиной и регулировоч-
ный винт 7, доступ к которому закрыт колпачком 8.
Корпус 5 изолирован от щита 11 втулкой 10 и шайбой 4
из пластмассы и закреплен разрезной гайкой 9, в кото-
рую упирается при завинчивании через резиновые коль-
тппа ЧСГН) 253 электРических соединений якоря электродвигателя
171
ца — амортизаторы колпачок 8. Токопровод к щетко-
держателю осуществляется проводом 3. Коллектор может
быть осмотрен через окно, закрытое крышкой 2. Давле-
ние щетки на коллектор регулируют винтом 7.
Опыт эксплуатации электродвигателей
МСП-0,25 показал, что описанное щеточное устройство
неудобно. Измерить давление щетки на коллектор при
регулировании его винтом 7 в напольных условиях ока-
залось весьма сложно, поэтому винт 7 закручивали поч-
ти до отказа. Это приводило к завышенному давлению,
износу щетки и накоплению графитной пыли, что спо-
собствовало понижению изоляции электродвигателя
ит.д. -
В настоящее время электродвигатели типов МСП-0.1^
и МСП-0,25 выпускают с курковыми щеткодержателям”
172
r go 6), закрепленными на изоляторах 2 ко дну
3 (РиС‘ .0 щита /• Доступ к щеткам обозначен через бо-
^ые’отверстия в щите, закрываемые крышками 4.
кО0к'Соковый щеткодержатель (рис. 60, в) имеет корпус
. шетку Л курок 5 и пружину 6.
°* К опус з щеткодержателя отливают из антифрикци-
। го сплава на цинковой основе. В нем предусмотрены
оИ,,О<оугольное профилированное отверстие для щетки,
nPn-aii для размещения курка и пружины, два отверстия
КЗР крепления его винтами к изолятору 7 и отверстие
2ля крепления токопровода.
д Шетку 1 марки ГЗ изготовляют из графита, ее разме-
оы 8X10X25 мм. В щетку на глубину около 12 мм мето-
дом пайки заделана литца 2. Усилие вырывания литцы
из тела щетки не менее 70 Н. Переходное падение на-
пряжения на пару щеток при рекомендуемой плотности
тока 10—11 А/см2 1,9 В. Перед установкой в эксплуата-
цию двигателя щетки обязательно должны быть притер-
ты к коллектору, а коллектор продорожен. Максималь-
ный износ щетки не должен превышать 50% ее первона-
чальной длины.
Курок 5 штампуют из листовой стали. Нормально
под действием пружины 6 он обеспечивает давление
щетки на коллектор. Для замены щетки курок повора-
чивают за язычок 4 до упора, причем удерживания его
рукой в этом положении не
требуется.
Курковый щеткодержатель
в отличие от трубчатого не
требует подрегулировки. Уси-
лие нажатия щетки на коллек-
тор поддерживается в преде-
лах от 1,96 до 2,94 Н (200—
300 гс) за счет характеристики
пружины и изменения плеча
развиваемой ею силы при по-
вороте курка вследствие по-
степенного износа щетки. Пер-
воначальная регулировка тре-
Уемого нажатия щетки обыч-
о осуществляется изменением
ага пружины, т. е. сближе-
ем или удалением витков.
Рис. 61. Принципиальная
схема электродвигателя по-
стоянного тока
173
Характеристики электродвигателей. После поди J
чения электродвигателя к источнику питания начи11
вращаться якорь (рис. 61) ив его обмотке наводит^
электродвижущая сила. Наводимая э. д. с. направлен
всегда встречно току в якоре и, следовательно, напрял.-13
нию на зажимах электродвигателя и называется реакщ.
ей якоря. Напряжение U, подводимое к двигателю, урЗ
новешивается реакцией якоря, падением напряжения на
сопротивлениях обмоток якоря, возбуждения щеточного
контакта и э. д. с. самоиндукции якоря J
dl ~ dl
U = E+l (R* + R0B + Ящ) + •= Е + IR + L~ . (43)
Развиваемый двигателем вращающий момент М урав.
новешивается суммой тормозных моментов на валу,
складывающейся из момента холостого хода М1( полез-
ного момента на валу Afn и динамического момента Мд,
возникающего при любых изменениях частоты вращения
двигателя за счет инерции вращающихся масс,
М = Мх + Мп + Мд (44)
Уравнение (44) аналогично уравнению (10). Уравне-
ния (43) и (44) называются соответственно уравнения-
ми э. д. с. и моментов двигателя и являются основопола-
гающими для понимания характеристик стрелочного
двигателя. Для установившегося режима уравнения (43)
и (44) упрощаются:
U = E + fR; (15)
М = Мх + Мп (46)
Подставляя в уравнение (45) значение реакции яко-
ря Е=КепФ, преобразуем его относительно частоты вра-
щения п
n = (U -//?)/КеФ. (47)
Из уравнения (47) следует, что при уменьшении на-
грузки на электродвигатель, т. е. вращающего момента
М, когда ток и поток Ф уменьшаются, частота вращения
п увеличивается. Когда нагрузка незначительна (напри-
мер, при холостом ходе), п может превысить допустимые
пределы, т. е. двигатель с последовательным возбужде-
нием нельзя пускать вхолостую. Эта особенность стре-
174
двигателя принимается во внимание при расче-
лоЧН°рГмени холостого хода привода.
г увеличением нагрузки, т.е. вращающего момента
; G тота вращения двигателя, наоборот, уменьшается:
ЛЬ час ___ д0 насыщения магнитной системы — резко,
снача. насыщения —плавно. Как отмечалось, отличитель-
П°- С <)бенностью двигателя с последовательным возбуж-
н0И -м является большой пусковой момент. По формуле
де"щаЮщего момента М = Км1Ф видно, что до насыще-
В? стали, когда магнитный поток Ф растет по кривой
намагничивания пропорционально току /, момент зави-
сит от квадрата тока
М - КР.
После насыщения стали магнитный поток становит-
ся постоянным. Теперь вращающий момент зависит от
тока в первой степени
М =К'Г.
Таким образом, во время холостого хода привода, т. е.
до насыщения стали, двигатель будет развивать момент,
пропорциональный квадрату тока. В момент включения
двигателя п = 0 и, следовательно, Е = 0. Поэтому пуско-
вой ток двигателя оказывается большим. Если прене-
бречь индуктивностью в выражении (43), получаем
In = U!R. (48)
Однако наибольшим является ток в момент реверси-
рования двигателя. В этот момент якорь по инерции про-
должает вращаться в первоначальном направлении, а ,
включение обмотки возбуждения ОВ2 (см. рис. 61) из-
меняет направление магнитного потока па противопо-
ложное. В результате этого э. д. с. якоря изменит направ-
ление, и двигатель некоторое время будет работать как
генератор, причем его э. д. с. сложится с напряжением U.
Поэтому ток в момент реверсирования будет
zp - W + E)IR. (49)
тп„Пусковая аппаратура должна быть рассчитана с уче-
том уравнения (49).
Mcii пбеИН0СТЬЮ стРелочных электродвигателей серии
буж является однополюсное расположение обмоток воз-
ня, что приводит к повышению магнитного рас-
175
Рис. 62. Рабочие характеристики электродвигателей:
а — МСП-0,1 (30 В); б — МСП-0,1 (100 В);
0,25 (100/200); з - МСП-0,25 (160 В)
в - МСП-0,1
(160 В);
176
МсП-0,15 (ЗОВ); д — МСП-0,15 (160 В);
е — МСП-0,25 (30 В); ж — МСП-
177
сеяния. Коэффициент рассеяния магнитного потока до-1
ходит под нагрузкой до 1,25. I
Изменение схемы реверсирования переменой н^
правления тока в обмотке возбуждения относительно
тока в якоре позволяет увеличить полезный магнитный
поток в электродвигателе типа МСП-0,1 на 6—10% при
параллельном включении обеих обмоток возбуждения
или на 20—26% при последовательном. В первом случае
поток увеличивается за счет уменьшения магнитного рас-
сеяния, а во втором — за счет увеличения вдвое ампер-
витков возбуждения.
Наличие лишь одной обмотки возбуждения приводи-
ло бы при ее повреждении (например, обрыве) к ос-
тановке стрелки в среднем положении. Применение
второй обмотки возбуждения позволяет вернуть стрел-
ку в исходное состояние и задать вариантный марш-
рут. Кроме эксплуатационного преимущества, есть и
техническое: упрощается схема управления электропри-
водом.
Рабочие характеристики .электродвигателей типов
МСП-0,1, МСП-0,15 и МСП-0,25 приведены на рис. 62.
Скоростные характеристики n = f (/) двигателей име-
ют круто падающий, «мягкий» характер, типичный для
двигателей с последовательным возбуждением. Характе-
ристика при малых токах (/<7Н) представляет
собой параболу, а при больших (/>/н) становится пря-
молинейной, причем при возрастании момента на валу
двигателя втрое (М«ЗЛ1и) потребляемый ток возраста-
ет лишь в 2 раза (/~2/„), а полезная мощность —
в 1,7 раза (Р^\,7Рп). Таким образом, при изменении
момента нагрузки в широких пределах полезная мощ-
ность изменяется в меньших пределах, что свидетель-
ствует о высокой перегрузочной способности стрелоч-
ных двигателей. Потребляемая мощность Р\ находится
в линейной зависимости от тока /. Кривая к. п.д. двига-
телей т]=/(7) сначала быстро растет с увеличением на-
грузки, затем к. п. д. при нагрузке, близкой к номиналь-
ной, достигает максимума и при больших нагрузках на-
чинает уменьшаться. Последнее объясняется тем, что по-
тери в якоре и обмотке возбуждения /2(/?я+^ов) растут
быстрее, чем полезная мощность.
Скорость вращения двигателя типа МСП-0,25 100/200 В
регулируют изменением напряжения. Такой спо-
178
соб регулирования широко применяют в технике на-
ряду со способами, заключающимися в ослаблении маг-
нитного потока двигателя (например, шунтированием
обмотки возбуждения сопротивлением). Скоростные ха-
рактеристики двигателя при напряжениях 100 и 200 В
почти параллельны, причем при равных нагрузках ча-
стота вращения при напряжении 100 В уменьшается
почти вдвое.
Сравнение электродвигателей типов МСП-0,1 и
МСП-0,25 показывает, что при меньших размерах кор-
пуса и массе (на 4 кг) двигатели типа МСП-0,25 имеют
более высокую мощность и к. п. д. Однако при исполь-
зовании в электроприводе они при одинаковых нагруз-
ках потребляют по сравнению с МСП-0,1 несколько
большие токи за счет значительно меньшего времени
перевода стрелки.
Наиболее экономичными по потребляемому току яв-
ляются электродвигатели типа МСП-0,15. Уменьшение
потребляемого тока достигается снижением частоты вра-
щения. По сравнению с
МСП-0,25 электродвигатели
типа МСП-0,15 имеют не-
сколько меньший к. п. д.
при одинаковых нагрузках,
но больший, чем электро-
двигатели типа МСП-0,1.
На графике (рис. 63)
показана зависимость тем-
пературы обмоток возбуж-
дения Тов и якоря Тя от вре-
мени при фиксированных
значениях потребляемых дви-
гателем токов в пределах от
номинального до двойного
номинального. Из графиков
следует, что при номиналь-
ном токе электродвигатель
может работать в длитель-
ном режиме не менее 1 ч,
при полуторном номиналь-
ном токе — не более 0,5 ч,
а при двойном — не более
ч. При длительности ра-
Рис. 63. Кривые нагрева элек-
тродвигателя МСП-0,15 (160 В)
179
боты двигателя сверх указанной наступит перегрев об-1
мотки. Для предупреждения перегрева двигателя ш
фрикции электропривода применяют автоматический
отключающие устройства.
5.3. СТРЕЛОЧНЫЕ ЭЛЕКТРОДВИГАТЕЛИ
ПЕРЕМЕННОГО ТОКА ТИПОВ МСТ-0,25,
МСТ-0,3 И МСТ-0,6
Электродвигатель переменного тока так же, как и
постоянного, имеет неподвижную часть — статор и вра-1
щающуюся, называемую ротором (в отличие от якоря).
Применение трехфазного переменного тока позволяет
перейти к бесколлекторному двигателю.
Если в двигателе постоянного тока электромагниты
возбуждения создают постоянный магнитный поток, то I
в двигателе переменного тока возникает уже изменяю-
щийся по амплитуде поток. В трехфазном двигателе на
статоре расположены не одна, а три обмотки возбужде-
ния, создающие три самостоятельных потока, сдвинутых
относительно друг друга на 120°. Результирующее маг-
нитное поле, создаваемое трехфазным статором, явля-
ется вращающимся с числом оборотов в минуту
n=60f/p, (50)
где f — частота тока статора;
р — число пар его полюсов.
В короткозамкнутой обмотке ротора, находящегося
во вращающемся поле возбуждения, наводится э. д. с.,
как в трансформаторе. Активная составляющая тока
ротора от наведенной э. д. с. создает магнитное поле
ротора. Взаимодействие магнитных полей статора и ро-
тора приводит к появлению силы, под действием которой
начинается вращение ротора. Определение направления
вращения ротора по правилу левой руки показывает,
что оно происходит в сторону вращения поля статора.
Если скорость вращающегося поля статора Пъ а ротора
п, то в двигателе всегда П1>л. Это объясняется тем, что
при достижении ротором скорости вращающегося поля
статора прекратится наведение э. д. с. в его обмотке, так
как поле статора становится неподвижным относительно
180
ротора- Характеристикой запаздывания ротора являет-
ся скольжение двигателя, определяемое отношением
5 = [("i — п)/п1] 100%. (51 >
Стрелочные электродвигатели серии МСТ выполнены
с повышенным скольжением, достигающим при номи-
нальной нагрузке 18%. Повышение скольжения против
обычного для двигателей равной мощности произведено
для увеличения пускового момента.
Асинхронные двигатели так же, как двигатели по-
стоянного тока, оценивают по совокупности трех групп
характеристик: пусковых, рабочих и регулировочных. Из
пусковых наибольший интерес представляют кратности
пускового тока и пускового момента, определяемые от-
ношением пускового тока и пускового момента к номи-
нальным. К рабочим характеристикам относят зависи-
мости частоты вращения, момента, коэффициента мощ-
ности cos <р и к. п. д. от полезной мощности на валу, а
также механическую характеристику — зависимость
частоты вращения от момента на ралу. Регулировочные
характеристики определяются возможностями регулиро-
вания частоты вращения двигателя.
К номинальным параметрам (табл. 23) асинхронного
двигателя в отличие от двигателя постоянного тока до-
, Таблица 23
Номинальные параметры стрелочных электродвигателей
Характеристика Значение характеристик в зависимости от типа электродвигателя ♦
МСТ-0,25 МСТ-0,3 МСТ-0,6
Напряжение пи- тания, В Потребляемый ток, А, не более Мощность, Вт Вращающий мо- мент, Нм Частота враще- ния, об/мин К- п- Д . %, не менее COS ср Частота, Гц — — (220/127)±}g* 1,4/2,4 200 1,57 1250±10% 59 0,78 50 (190/110)+ 2,1/3,6 300 3,43 850 ±5 % 66 0,72 50 (190/110)+s°w’4 2,8/4,85 600 2,37 2850±10% 69 0,84 50
18!
бавляется номинальный коэффициент мощности cos
Электродвигатели рассчитаны на питание током npd.
мышленной частоты 50 Гц напряжением 127 или 110 В
при соединении обмоток статора треугольником и 220
или 190 В — звездой. Включение обмоток треугольником
при напряжении 220 В в начале кабельной линии поз-
воляет резко увеличить дальность управления электро-
приводом переменного тока.
Электродвигатель типа МСТ-0,25. До 1981 г. он вы-
пускался в литом корпусе (рис. 64). Корпус 15 представ-
ляет собой пустотелую чугунную отливку цилиндричес-
кой формы с лапами. Внутри корпуса расположены ста-
тор с обмоткой 16 и ротор 17. Корпус закрыт с обеих
сторон крышками 4. В крышках имеются классные от-
верстия для шарикоподшипников 2. Для предохранения
от попадания пыли и вытекания смазки используют фет-
ровые уплотнения 1 и маслозащитные шайбы 3. Габарит-
ные размеры электродвигателя 320x250X178 мм.
Сердечник статора 16 собран из пластин электротех-
нической стали марки 1311 толщиной 0,5 мм. Сердечник
запрессовывают непосредственно в корпус 15 и закреп-
ляют стопорным кольцом 5, приваренным в трех местах
для исключения проворачивания во время работы дви-
гателя. В сердечнике имеются 24 паза полузакрытой
грушевидной формы.
Обмотка статора размещена в пазах в два слоя (я
изолирована от сердечника картонными прокладками
10, 11 и 12. Между секциями обмотки расположена меж-
слойная изоляция 9. Обмотку в пазу закрепляют дере-
вянным клином 13. Параметры секций 8 обмотки стато-
6 7В /^\,3
10
и
12
13
Рис. 64. Электродвигатель переменного тока типа МСТ-0,25
182
0С5 0С1 0С6 0С2 0C3 0<*
Рис. 65. Схема электрических соединений статора электродвигателя
типа МСТ-0,25
ток 66’ ^хема соединений обмоток электродвигателя переменного
183
ра: число витков 53, марка провода ПЭВ-2, диаметр голого!
провода 0,55 мм, сопротивление при 20° С 11,3 Ом, мас-1
са 0,046 кг. При использовании схемы электрических со-1
единений статора (рис. 65) руководствуются следующи-1
ми данными: число полюсов 2р = 4, пазов z=24, фаз
т = 3; шаг по пазам г/=1-г6; число пазов на полюс и
фазу q = 2\ параллельных ветвей 1, катушечных групп 12.1
Фазные выводы обмотки статора выполнены прово-1
дом марки ПВГ на панель 6, которую крепят через изо-
лирующую подкладку 7 к корпусу двигателя (см.
рис. 64). На панели расположены шесть зажимов — по
паре на фазную обмотку статора. Обмотки сое-
диняют звездой или треугольником перемычками 14
(рис. 66).
Воздушный зазор между статором и ротором должен
быть возможно меньшим в отличие от двигателя посто-Л
янного тока. Это объясняется тем, что в бесколлектор-
ном двигателе статор и ротор связаны между собой лишь
через магнитный поток, создаваемый статором и прони-
зывающий ротор. Чем меньше воздушный зазор, тем
меньше его магнитное сопротивление и, следовательно,
лучше электромагнитная связь между статором и рото-
ром.
Ротор (рис. 67) состоит из сердечника 4, насажен-
ного на вал 3, и обмотки 1 типа «беличья клетка».
Сердечник 4 собран из листов электротехнической
стали марки 1311 толщиной 0,5 мм. Для изоляции ли-
сты с одной стороны покрывают лаком № 317, что спо-
собствует уменьшению потерь на вихревые токи. Сер-
дечник закрепляют от проворачивания относительно ва-
30
Рис. 67. Ротор
184
Рис. 68. Общий вид электродвигателя переменного тока в корпусе
из стальной трубы
ла шпонкой 5. Он имеет 18 круглых пазов диаметром
4,2 мм. Длина ротора 90 мм.
Короткозамкнутая обмотка ротора состоит из 18 мед-
ных стержней диаметром 3,8 мм, уложенных в пазах
сердечника, и двух замыкающих колец 2 сечением
60 мм2. Стержни в торце приваривают к кольцам.
С 1982 г. электродвигатель типа МСТ-0,25 выпуска-
ют в корпусе из трубы с приварными лапами. В настоя-
щее время электродвигатели серий МСП и МСТ всех
типов выпускают в унифицированном корпусе.
В связи с тем что внутренний диаметр литого корпу-
са электродвигателя типа МСТ-0,25 был меньше, чем
унифицированного 3 (рис. 68), увеличили наружный’
диаметр статора.
Высота электродвигателя возросла до 198 мм, а мас-
са — до 19,3 кг. Листы статора перед сборкой в пакет
покрывают изоляционным лаком марки БТ-982. Статор
после запрессовки в корпус от проворачивания предохра-
няют двумя стопорными винтами 8. Параметры секций
обмотки статора и схема электрических соединений не
изменились, но диаметр намоточного провода, приведен-
ный в соответствии с ГОСТ 7262—78, стал 0,56 мм.
Передняя и задняя крышки 2 электродвигателя оди-
наковы и выполнены ребристыми снаружи. Это придает
им жесткость и одновременно увеличивает поверхность
охлаждения электродвигателя. Крышки отлиты из алю-
185
минисвого сплава совместно со стальными втулками /
внутри которых расположены шарикоподшипники
№ 60203 с маслозащитными шайбами. Продольный люфт
ротора регулируют в пределах 0,24—1,36 мм компенса-
ционными шайбами 7.
Панель с выводами конструктивно не изменилась, ио
каждый болт дополнительно снабжен гайкой 4, опрес-
сованной пластмассой. Это предотвращает замыкание
болтов у электродвигателя за счет прогиба крышки
привода.
Электродвигатель типа МСТ-0,3. Внедрение стрелоч-
ных переводов из рельсовых тяжелых типов потребова-
ло разработки асинхронного электродвигателя, способ-
ного развивать ^значительно большие моменты, чем элек-
тродвигатель типа МСТ-0,25. Кроме возросшего номи-
нального момента, электродвигатель типа МСТ-0,3 спо-
собен развивать большую мощность при номинальном
напряжении на зажимах ПО или 190 В, что позволило
увеличить допустимую потерю напряжения в линии при
электропитании от источника 220 В. Частота вращения
электродвигателя меньше, чем у МСТ-0,25, так как он
выполнен шестиполюсным [см. формулу (50)].
Габаритные размеры электродвигателя МСТ-0,3
(см. рис. 68) 320x250X198 мм, масса 19,3 кг. Детали и
Рис. 69. Статор электродвигателя типа МСТ-0,3 (МСТ-0,6)
186
технология изготовления электродвигателя МСТ-0,3-
сходны с описанным выше электродвигателем МСТ-0,25,
поэтому рассмотрим лишь конструктивные отличия.
Сердечник статора (рис. 69) электродвигателя типа
дСТ-0,3 собран из листов 1 электротехнической стали
марки 1311 толщиной 0,5 мм. Число пазов в сердечнике
36. В каждом пазу расположено по одной стороне двух
секций 7 и 10 статора, изолированных друг от друга про-
кладкой 6 из электрокартона. Секции изолированы от
сердечника прокладками 8 и 9 из лакоткани и электро-
картона. Между секцией 10 и клином 5 из пластмассы
(или дерева) также помещена прокладка 11 из электро-
картона. Лобовые части обмотки статора изолируют
лакотканью 4, киперной лентой 2 и закрепляют техниче-
ским шнуром 3. Обмотку подвергают пропитке электро-
изоляционным лаком МЛ-92. На выводы 12 обмотки на-
деты наконечники С1—С6.
Секции обмотки статора имеют такие параметры: чи-
сло витков 29, марка провода ПЭВ-2, диаметр провода
0,69 мм, сопротивление при 20° С 0,5 Ом, масса 0,036 кг.
При использовании схемы электрических соединений
обмотки статора (рис. 70) руководствуются такими дан-
ными: число полюсов 2р = 6, пазов z=36, фаз т=3, па-
зов на полюс и фазу q = 2, параллельных ветвей 1, ка-
тушечных групп 18, шаг по пазам </=1-ь6. Сопротивле-
ние каждой фазной обмотки 6 Ом.
Ротор электродвигателя типа МСТ-0,3 собран из ли-
стов стали той же марки и толщины, что и статор. Он
имеет 26 пазов полузакрытой формы (у электродвига-
теля типа МСТ-0,25 круглый паз закрытой формы). По-
лузакрытая форма паза по сравнению с закрытой поз-
воляет несколько увеличить пусковой момент и перегру-
зочную способность двигателя. Обмотка ротора 6
(см. рис. 68) типа «беличья клетка» состоит из 26 стер-
жней 5 грушевидной формы и двух короткозамыкающих
колец сечением по 36 мм2 каждое, образуемых методом
горячей заливки алюминием. Воздушный зазор между
статором и ротором должен быть от 0,25 до 0,39 мм.
Электродвигатель типа МСТ-0,6. Данный тип элек-
тродвигателей применяют для ускоренного перевода
СтРелок в маневровых районах станций, в связи с чем
он выполнен двухполюсным для обеспечения максималь-
ной частоты вращения при электропитании от источника
187
0С50С10С60С2 0C3
Рис. 70. Схема электрических соединении обмотки статора элект-
родвигателя типа МСТ-0,3
0С5 0С/ 0С6 0С2 0М &CJ
Рис. 71. Схема электрических соединений обмотки статора элект-
родвигателя типа МСТ-0,6
188
пиленной частоты тока 50 Гц [см. формулу (50)].
проМь1и^леКТрОДВИГатель типа МСТ-0,3, он рассчи-
Как включение звездой при напряжении 190 В и тре-
таН Н31<ком при напряжении НО В. Габаритные разме-
уГ°.1ьн двигателей типов МСТ-0,6 и МСТ-0,3 одина-
РЫ • масса электродвигателя типа МСТ-0,6 19 кг.
^Конструктивно электродвигатель типа МСТ-0,6 отли-
I 14 оТ'рассмотренного выше электродвигателя типа
хлСТ-0 3 статором и ротором; корпус, боковые крышки,
ал ротора с подшипниками и выводная панель унифи-
^Сердечник статора электродвигателя типа МСТ-0,6
т 24 паза грушевидной формы, в которых располо-
жены секции. Пазовая изоляция секций аналогична рас-
смотренной.
Секции обмотки статора имеют такие параметры:
число витков 21, марка провода ПЭВ-2, диаметр прово-
да 0,93 мм, сопротивление при 20°С 0,32 Ом.
При использовании схемы электрических соединений
обмотки статора (рис. 71) руководствуются следующими
данными: число полюсов 2р=2, пазов 2=24, фаз zn = 3,
пазов на полюс и фазу р=4, катушечных групп 6, па-
раллельных ветвей 1, шаг по пазам у=1-ь11. Сопротив-
ление каждой фазной обмотки не превышает 2,2 Ом.
Ротор имеет 31 круглый паз диаметром 3,5 мм полу-
закрытой формы. Стержни «беличьей клетки», изготов-
ляют из медного прутка диаметром 3,28 мм. Стержни в
торцах приваривают к медным кольцам сечением 55 мм2.
Характеристики электродвигателей типов МСТ-0,25,
МСТ-0,3 и МСТ-0,6. Пусковые характеристики двигате-'
лей,, отличающиеся невысокой кратностью пускового то-
— пускового момента
Ка /п//п и удовлетворительной
МП/Л41Ь приведены ниже:
МСТ-0,25
^п//н ............ 2,7
Afn/AfH............ 2,2
Удовлетворительный пусковой момент
ышением скольжения путем увеличения
вного сопротивления клетки ротора к
сец1Гат^ля- Практически это осуществлено увеличением
СечеНИ- сеРдечников статора и ротора и уменьшением
ений стержней клетки. Благодаря таким пусковым
МСТ-0,3
2,3
2,5
МСТ-0,6
3,6
3,6
достигнут по-
отношения ак-
индуктивному
189
характеристикам возможно прямое включение двигате-
ля в сеть при номинальном напряжении.
Рабочие характеристики двигателей при включении
звездой приведены на рис. 72—74. Скоростная характе-
ристика n = f(P2) каждого из них представляет собой
кривую, слабо наклоненную к оси абсцисс. Такая харак-
теристика называется жесткой в отличие от мягкой, ко-
торую имеет двигатель постоянного тока с последователь-
ным возбуждением. Моментная характеристика M = f(P2)
представляет собой кривую, кривизна которой определя-
ется скоростной характеристикой. Коэффициент мощно-
сти cos (p=f(P2) быстро растет при увеличении нагрузки
и при значениях Р2, несколько больших номинальной
мощности, достигает максимума. Так как асинхронный
двигатель потребляет значительный намагничивающий
ток, его cos ф всегда меньше единицы. Кривая к. п. д.
f] = f(P2) имеет обычный характер. Она быстро растет
с увеличением нагрузки примерно до половины шоми-
нальной, мало изменяется затем при ее увеличении до
номинальной и начинает убывать при дальнейшем уве-
личении нагрузки.
Сравним характеристики / = /(Р2) электродвигателей
типов МСТ-0,25 и МСТ-0,3, применяемых в электричес-
кой централизации. Электродвигатель типа МСТ-0,3
потребляет ток холостого хода в 1,8 раза больший, чем
МСТ-0,25. Поэтому ток, потребляемый электроприводом,
в котором использован электродвигатель типа МСТ-0,3,
при переводе «массовых» стрелок оказывается выше, чем
при электродвигателе типа МСТ-0,25 (см. табл. 6, 7).
Однако с удалением стрелок от поста ЭЦ на расстояние
свыше 600 м эта особенность проявляться не будет из-
за значительной потери напряжения в кабельной линии
к электроприводу.
На рис. 75 приведен график зависимости тока, пот-
ребляемого электроприводом типа СП-6 с электродвига-
телем типа МСТ-0,3 при различных нагрузках на шибере
и сопротивлениях рабочих проводов кабельной линии.
Из графика следует, что электродвигатель типа МСТ-0,3
обеспечивает надежную работу электропривода при на-
грузке до 4500 Н без дублирования жил на расстоянии
до 850 м.
Двигатели испытаны на механическом стенде с вклю-
чением обмоток статора звездой и треугольником. Со-
190
Рис. 73. Рабочие характеристи-
ки электродвигателя типа
МСТ-0,3
Рис. 72. Рабочие характерис-
тики электродвигателя типа
МСТ-0,25
противление кабельной линии имитировалось проволоч-
ными резисторами. Напряжение на зажимах двигателя
[/л, потребляемый ток /л, активную мощность Pi и ча-
стоту вращения измеряют соответственно вольтмет-
ром, амперметром, ваттметром и тахометром. Вращаю-
щий момент М, полезная мощность' Р2 и к. п. д. вычисле-
W 1200 Рг,Вт п 1000 2000 3000 1)000 5000 F.H
Рис. 74. Рабочие характерис-
^СТ 0 дЛектРодвнгателя тнпа
Рис. 75. Нагрузочные кривые
электропривода типа СП-6
191
ны по вышеприведенным формулам. Скольжение 5 оп-
ределено по формуле (51).
По нагреву двигатели рассчитаны на работу в пов-
торно-кратковременном режиме с продолжительностью
включений ПВ = 15%. Назначенный ресурс — 500 000 пе-
реводов стрелок при условии соблюдения правил эксплу-
атации.
Частоту вращения двигателей регулируют не только
изменением числа пар полюсов, но и частоты тока [со-
гласно формуле (50)]. Этот метод может быть приме-
нен в случае использования асинхронных двигателей
для стрелочных приводов на механизированных сорти-
ровочных горках.
5.4. ЭЛЕКТРОДВИГАТЕЛЬ ТИПА МАС-0,1
Электродвигатель разработан специально для приво-
да автостопа метрополитена. Он относится к трехфаз-
ным асинхронным электродвигателям с короткозамкну-
тым ротором, закрытого исполнения и имеет фланцевое
крепление (без лап). Его номинальные параметры: на-
пряжение питания 110 В ±10%; потребляемый ток не
более 0,8 А; мощность 45 Вт, вращающий момент
0,49 Н-м; частота вращения 1000±20 об/мин; к. п.д. не
менее 57%; cosqp=0,52; частота 50 Гц.
Электродвигатель предназначен для эксплуатации в
горизонтальной плоскости, в повторно-кратковременном
режиме с ПВ = 25% и числом включений в час 30. Обмот-
ки четырехполюсного статора электродвигателя соеди-
нены звездой. Электродвигатель имеет габаритные раз-
меры 248X166X171 мм и массу 11,6 кг. Корпус 8 элек-
тродвигателя (рис. 76) отливают совместно с фланцевой
частью 11, имеющей язычки 3 для закрепления электро-
двигателя в приводе автостопа. На корпусе имеется на-
ба 1, на которой установлена колодка, к которой под-
ключают выводные концы 2 С1—С6 обмоток статора.
Внутри корпуса расположены статор 10 с обмотками и
ротор 9. Корпус закрыт крышкой 13. В крышке и кор-
пусе имеются отверстия для шарикоподшипников 14, в
которых вращается ротор 9. Двухрядные сферические
шарикоподшипники № 1203 допускают небольшие пере-
косы вала при несоосности отверстий в съемной крыш-
192
ке 13 и корпусе 8. Шарикоподшипники закрыты крыш-
ками 5, каждую из которых крепят тремя винтами 6.
Для регулировки осевого люфта ротора, который дол-
жен находиться в пределах от 0,2 до 0,5 мм, под крыш-
ку 5 устанавливают компенсационные шайбы 7. В крыш-
ках 5 предусмотрены каналы 15 для смазки.
Сердечник статора 9 собран из листов электротехни-
ческой стали марки 1311 толщиной 0,5 мм и после за-
прессовки в корпус 8 закреплен от проворачивания тре-
мя стопорными винтами 12. Сердечник имеет 24 паза
полузакрытой грушевидной формы. Число пазов на по-
люс и фазу 2.
Обмотка статора расположена в пазах в два слоя и
изолирована от сердечника прокладками из лакоткани
и электрокартона. Секции в пазу изолированы друг от
друга прокладкой из электрокартона. Обмотку в пазу
закрепляют деревянным клином.
Секции обмотки статора имеют параметры: число-
витков 50, марка провода ПЭВ-2, диаметр провода
0.5 мм, сопротивление при 20° С 12 Ом, масса 0,079 кг.
Обмотку статора укладывают с шагом 1—6 по пазам.
Схема электрических соединений обмотки аналогична
приведенной на рис. 65. Сопротивление каждой фазной
обмотки 100 Ом. Обмотку пропитывают электроизоляци-
онным лаком марки МЛ-92. Воздушный зазор между
статором и ротором 0,2—0,3 мм.
Ротор электродвигателя типа МАС-0,1 собран из ли-
стов электротехнической стали той же марки и толщины,
7"П22 ]9з
что и статор. Листы ротора перед сборкой в пакет изо-
лируют с одной стороны покровным изоляционным ла-
ком марки БТ-982. Сердечник ротора имеет 30 пазов.
Обмотка ротора типа «беличья клетка» состоит из
30 стержней и двух замыкающих их колец и изготовля-
ется методом горячей заливки алюминием.
Рабочие характеристики асинхронного электродвига-
теля типа МАС-0,1 подчинены тем же закономерностям,
что и ранее рассмотренные характеристики электродви-
гателей серии МСТ. Поэтому здесь приведены лишь не-
обходимые для практики данные зависимости потреб-
ляемого электродвигателем тока при различных враща-
ющих моментах на валу:
Вращающий момент, Нм.... 0 0,22 0,49 0,69 0,83
(холостой
ход)
Потребляемый ток, А....... 0,5 0,65 0,8 1,0 1,32
Электродвигатель должен быть отрегулирован так,
чтобы при токе торможения, равном 0,65 А, его ротор
не зуммировал. Надежность электродвигателя типа
МАС-0,1 характеризуется вероятностью безотказной ра-
боты не ниже 0,97 за 8000 ч работы с ПВ = 25% и 30
включениями в час при номинальной нагрузке.
5.5. ПРОМЫШЛЕННЫЕ ЭЛЕКТРОДВИГАТЕЛИ
При конструировании электропривода всегда жела-
тельно применять промышленный электродвигатель мас-
сового выпуска. В ряде случаев (стрелочные приводы,
привод автостопа) осуществить это не удается в силу
«жесткости» предъявляемых эксплуатационно-техничес-
ких требований (см. § 5.1). В других случаях (электро-
приводы автошлагбаума и высоковольтного разъедини-
теля [18]) благодаря почти постоянной по значению и
характеру нагрузке, частоте вращения, напряжению, от-
сутствию жестких ограничений по габаритным размерам
и массе, сравнительно небольшому среднесуточному чи-
слу включений обоснованно использованы промышлен-
ные электродвигатели серии СИ и др.
Электродвигатель типа СЛ-571К, применяемый в при-
воде автошлагбаума, относится к двигателям постоян-
ного тока с параллельным возбуждением, защищенного
194
исполнения н имеет фланцевое крепление. Его номи-
нальные параметры: напряжение питания 24 В, потреб-
ляемый ток 7 А, мощность 95 Вт, вращающий момент
0,41 Н-м, частота вращения 2200 об/мин, к. п. д. не ме-
нее 56%. •
Габаритные размеры 112X173 мм, масса 4,4 кг.
Электродвигатель содержит индуктор 6, якорь 1,
щеткодержатель 7, закрытые передней 8 и задней 4
крышками (рис. 77). Крышки стянуты между собой
шпильками 5. На передней крышке расположена колод-
ка 2 с выводами и окно для доступа к коллектору, за-
крытое накладкой 10. В бобышке передней крышки име-
ется классное отверстие для шарикоподшипника 9
№ 60029, а в задней крышке — для шарикоподшипника
3 № 60201.
Индуктор (рис. 78) состоит из корпуса 5, магнито-
провода 4 и обмоток возбуждения 3. Магнитопровод
собран из листов электротехнической стали, отштампо-
ванных в виде полюсов совместно со спинкой станины.
В такой конструкции полюсы несъемные, что исключает
зазор между полюсом и станиной. Корпус 5 получают
путем обливки магнитопровода алюминиевым сплавом
методом литья под давлением при одновременной оп-
рессовке пакета магнитопровода. Обмотки возбуждения
3 закрепляют на полюсах держателями 2. Каждую об-
мотку наматывают проводом марки ПЭТВ диаметром
0,51 мм. Число витков 550, общее сопротивление 14,5 Ом.
Обмотки соединяют последовательно в изоляционной
трубке 1. Выводные концы 6 выполняют проводом мар-
ки МГШДО сечением 0,5 мм2. Обмотки возбуждения
подвергают пропитке лаком БТ-988, после чего их по-
крывают лаком БТ-99.
Якорь (рис. 79) состоит из сердечника 5, насаженно-
го на вал 1; обмотки 2; коллектора 6 и деталей изоля-
ции. Сердечник имеет 15 пазов, изолируемых от прово-
да 7 пазовой изоляцией 9, прокладками 8. Секции на-
матывают проводом марки ПЭТВ диаметром 0,64 мм
параллельно в два провода и закрепляют в пазах
клиньями 10. Число витков в секции 5,5, сопротивление
0,29 Ом. Электрические соединения в обмотке якоря вы-
полняют по схеме, приведенной на рис. 80. Крепление в
пазах и изоляция секций выполнены так же, как в стре-
лочных электродвигателях серии МСП. Число коллек-
Рис. 77. Электродвигатель
постоянного тока типа СЛ-571к
Рис. 78. Индуктор
Сечение
2 3 4 5 б паза
Рис. 79. Якорь электродвигателя типа СЛ-571К
196
торных пластин удвоено по сравнению с числом пазов
якоря. Благодаря ступенчатой намотке секций умень-
шается реактивная э. д. с., влияющая на искрение ще-
ток, что особенно важно для электродвигателя, рассчи-
танного на длительный режшм работы.
Ламели коллектора расположены прямо против па-
зов якоря, поэтому выводы секций получаются прямыми,
без перекрещиваний. Для этого ось каждого паза 4 ,
(см. рис. 79) расположена под углом к оси якоря. Якорь
после намотки подвергают пропитке лаками той же мар-
ки, что и обмотку возбуждения. Коллектор 6 содержит
30 ламелей, опрессованных пластмассой. Ширина ламе-
ли в месте контакта со щеткой 3 мм.
Щеткодержатели 7 (см. рис. 77) трубчатого типа,
по конструкции аналогичны ранее использовавшимся в
электродвигателях типа МСП-0,25 (см. рис. 60, а). Щет-
ки медно-графитные марки Ml. Усилие нажатия щетки
на коллектор, обеспечиваемое пружиной, 2 Н. Пружины
покрыты лаком марки ЛБС-2.
-Рабочие характеристики электродвигателя типа
^1-571 к типичны для двигателя параллельного возбуж-
197
6 АВТОМАТИЗИРОВАННОЕ УПРАВЛЕНИЕ
ЭЛЕКТРОПРИВОДАМИ
6.1. ТИПОВЫЕ СХЕМЫ УПРАВЛЕНИЯ
Типовые схемы управления электроприводами
для стрелочных переводов, автошлагбаума, автостопа
метро реализуют общий алгоритм работы: при получе-
нии команды об изменении положения объекта включа-
ют электродвигатель привода; после достижения конеч-
ного положения объектом электродвигатель выключает-
ся контактами автопереключателя; по окончании пере-
вода контактами автопереключателя включаются конт-
рольные или другие исполнительные реле и приборы
сигнализации.
Несмотря на общий алгоритм работы, схемы имеют
существенные аппаратурные отличия.
Схема управления электроприводом автостопа. Ли-
нейное реле ЗЛ (рис. 81) включает электропривод для
установки путевой скобы в разрешающее или заграж-
дающее положение в зависимости от состояния двух
Рис. 81. Схема управления электроприводом автостопа метро
198
впереди лежащих перед светофором 3 рельсовых цепей.
При вступлении поезда в пределы рельсовой цепи Зп
путевое реле ЗП-1 выключается, зажигает красный огонь
на светофоре 3 и выключает линейное реле ЗЛ. Послед-
нее, замыкая контакты 21-23 и 31-33, включает электро-
двигатель автостопа, который поворачивает путевую ско-
бу в заграждающее положение. В конце хода электро-
привода разомкнутся контакты 10-11 и 13-14 автопере-
ключателя, выключая электродвигатель, и замкнутся
контакты 9-10, 12-13, 15-16, шунтирующие дроссели
1Др—ЗДр. Контакты 3-4 контролируют окончание хода
электропривода в заграждающее положение. После ос-
вобождения рельсовых цепей In и Зп, возбуждения их
путевых реле и линейного реле 1Л возбудится реле ЗЛ
и контактами 21-22 и 31-32 включит электропривод.
По окончании хода электропривода разомкнутся кон-
такты 9-10, 12-13 и 15-16 автопереключателя, но электро-
двигатель будет оставаться включенным через дроссели
1Др—ЗДр, ограничивающие ток удержания путевой ско-
бы в разрешающем положении. Контакты 7~8 контроли-
руют окончание хода электропривода в разрешающее по-
ложение и включают зеленый огонь светофора. Опыт
эксплуатации показал, что рассмотренная схема работа-
ет надежно, но имеет место частое подгорание контактов
автопереключателя в цепях включения ламп и в особен-
ности электродвигателя.
Схема управления спаренными автошлагбаумами.
Команда на включение электропривода (рис. 82) пода-
ется занятием рельсовой цепи участка приближения к
переезду поездом или вручную со щитка управления. В
обоих случаях выключается реле ПВ, обрывает цепь пи-
тания реле включения механизма электропривода ВМ,
открытия шлагбаума ОШ, указательного реле открытия
ОУ и включает звонки громкого боя. Реле ОУ отпускает
якорь и включает мигающие сигналы 1Л и 2Л в свето-
форных головках на мачте шлагбаума и 1ЛШ, 2ЛШ —
на самом брусе. Третья лампа ЗЛШ на брусе горит не-
прерывным огнем. Исправность нитей ламп контролиру-
ют огневые реле 10, 20, АО, БО.
По истечении времени замедления 8—10 с, предусмот-
ренного для освобождения автотранспортом переезда,
Реле ВМ отпускает якорь и включает реле закрытия
шлагбаума ЗШ. Последнее включает электродвигатель,
199
Рис. 82. Схема управления спаренными автошлагбаумамн
200
который опустит брус в закрытое положение. Предусмот-
рен реостатный пуск электродвигателя через два после-
довательно включенных резистора 2,2 Ом. После сраба-
тывания шунтирующих резисторы контактов реле АШ и
Е>Ш электродвигатель включается на полное напряжение
буферного источника питания до конца хода электропри-
вода. Затем разомкнутся контакты 2-2' автопереключа-
теля и выключат электродвигатель, а контакты 5-5' вык-
лючат звонки громкого боя. Горизонтальное положение
бруса контролирует указательное реле закрытия ЗУ,
включаемое контактами 6-6'.
После прохода поезда возбуждаются реле ПВ, ВМ,
ОШ и выключается ЗШ. Притянув якорь, реле открытия
шлагбаума ОШ включает электродвигатель, изменив при
этом направление тока в обмотке возбуждения. Брус нач-
нет подниматься и займет вертикальное положение. По
окончании хода контакты 3-3' автопереключателя вык-
лючат электродвигатель, а замкнувшиеся контакты 1-1'
включат указательное реле открытия ОУ. Возбудившись,
реле ОУ выключает все сигнальные лампы и приборы
мигания в схеме.
Команды электроприводу автошлагбаума могут по-
даваться в экстренных случаях со щитка местного управ-
ления (рис. 83). На щитке расположены кнопки 3 —
закрытия шлагбаумов и включения сигналов; О — от-
201
крытия шлагбаумов и выключения сигналов; ЗС — вклю-
чения заградительной сигнализации при аварийной си-
туации на переезде; Б — блокировки закрытия, что поз-
воляет дежурному по переезду задержать начавшееся
опускание бруса до освобождения переезда задержав-
шимся транспортом.
На щитке предусмотрены лампочки, контролирующие
приближение поездов, закрытое и открытое положение
шлагбаумов, состояние заградительных светофоров, пе-
регорание светофорных ламп, исправность приборов ми-
гания. Перечисленная информация через устройства дис-
петчерского контроля поступает на ближайшую станцию.
Схема управления автошлагбаумами имеет ряд не-
достатков: требуется значительное число реле; несмотря
на применение реостатного пуска электропривода, кон-
такты автопереключателя часто подгорают; обледенение
контактного валика приводит к потере контакта и иска-
жению сигнализации.
Схемы управления стрелочными электроприводами
составляют многочисленную группу. Это объясняется
различной областью применения (ЭЦ станций, сортиро-
вочные горки, метрополитен и др.) и родом тока (посто-
янный, переменный).
В ЭЦ основной является двухпроводная схема управ-
ления стрелочным электроприводом постоянного тока
(рис. 84). В управляющей цепи схемы предусмотрены:
нейтральное пусковое реле НПС для контроля требова-
ний безопасности (отсутствия поезда на стрелочной сек-
ции — контактом путевого реле СП, незанятости стрел-
ки в другом маршруте — контактом замыкающего реле
3, исключения местного управления стрелкой — контак-
том исключающего реле МИ) и блокировки перевода
(по катушке 1-3) на время протекания тока в рабочей
цепи; поляризованное пусковое реле ППС, выбирающее
направление перевода и управляющее реверсирующим
реле Р также поляризованного типа.
Реле НПС имеет собственное замедление на отпус-
кание якоря за счет намотки его катушек на медных
гильзах и внешнее — за счет конденсатора С1. Замед-
ление необходимо для удержания якоря реле НПС на
время переключения реле ППС, Р и контактов автопере-
ключателя электропривода из контрольного в рабочее по-
ложение. Диод Д1 исключает разряд конденсатора СЯ
202
Ёлок ПС-ZIOM
203
через катушки реле ППС. Управляющая цепь питается
от низковольтного источника.
В рабочую цепь схемы входят реле Р, электродвига.
тель привода, контакты реле НПС, ППС, Р и автопере*
ключателя. Контакты реле НПС в рабочей цепи предус-
мотрены для двухполюсного отключения высоковольтно-
го источника питания привода и подключения контроль-
ной цепи к линейным проводам Л1 и Л2. Резистор
16 000 Ом, включенный последовательно с реле Р, за-
щищает его от перегрузки при пуске электропривода.
Контрольную цепь образуют контрольный трансфор-
матор СКТр, общее контрольное нейтрально-поляризо-
ванное реле ОК, вентильный столбик ВС, контакты реле
НПС, Р и автойереключателя. Кроме того, в контрольной
цепи имеются защитный резистор 1000 Ом, включенный
последовательно с ВС и защищающий его от пробоя, а
также ограничивающий ток в катушке 1-3 реле НПС до
значения, меньшего тока отпадания; конденсатор С2 пре-
дотвращает замыкание постоянной составляющей конт-
рольного тока через трансформатор СКТр.
Приборы управляющей, рабочей и контрольной цепей
взаимодействуют таким образом. Поворот рукоятки стре-
лочного коммутатора или замыкание контакта стрелоч-
ного управляющего минусового МУ (или плюсового ПУ)
реле приводит к возбуждению реле НПС с контролем
требований безопасности, перечисленных выше. Притя-
гивая якорь, реле НПС отключает контрольное реле ОК
от линейных проводов Л1 и Л2 и включает обмотку ре-
ле ППС, создающую магнитный поток обратного направ-
ления. Реле ППС, перебрасывая поляризованный якорь,
контактами меняет полярность в линейных проводах,
отключает цепь питания реле НПС, подготовляя цепь его
возбуждения для обратного перевода стрелки.
Изменение полярности в линейной цепи приводит к
срабатыванию реверсирующего реле Р. Это реле переб-
расывает поляризованный якорь и замыкает рабочую
цепь электродвигателя стрелочного привода. Реле НПС
во время всех переключений удерживает якорь притяну-
тым за счет замедления на отпускание. В процессе пере-
вода стрелки удержание якоря реле НПС обеспечивает-
ся включением его низкоомной обмотки в рабочую цепь
электродвигателя. После окончания перевода контакта-
ми автопереключателя электропривода выключается цепь
204
рабочего тока и в линейной цепи остается включенным
только реле Р. При этом ток в обмотке реле НПС ста-
новится незначительным, вследствие чего оно отпускает
якорь, выключает рабочую цепь и подключает к линей-
ным проводам контрольную цепь. Реле ОК возбуждает-
ся за счет постоянной составляющей тока, выпрямлен-
ного ВС. Полярность тока зависит от того, через какие
контакты автопереключателя включен ВС: плюсового
21-22 и 23-24 или минусового 31~32 и 33-34 положения
стрелки.
Контрольная цепь питается от индивидуального транс-
форматора СКТр, который изолирует контрольную цепь
данной стрелки от цепей других стрелок и обеспечивает
напряжение (170 В переменного тока), необходимое для
устойчивой работы реле ОК.
В схеме предусмотрена защита от ложного контроля
проверкой соответствия положения поляризованных яко-
рей реле ОК и ППС, через которые включены реле ПК
и МК. Однако в контрольной цепи двухпроводной схемы,
построенной на полярном признаке, могут создаваться
условия, способствующие ложному контролю при прояв-
лении выпрямительного эффекта. Суть его заключается
в том, что если со стороны поста к линии подключается
реле ОК, а со стороны поля — электродвигатель приво-
да, например, вследствие перегорания предохранителя
при работе на фрикцию, то при наличии определенных
межконтактных зазоров контрольный ток в реле ОК
может приобрести форму разнополярных импульсов раз-
личной амплитуды и, следовательно, содержать постоян-
ную составляющую. Паразитный межконтактный зазор
может образоваться между щеткой и коллектором элект-
родвигателя, в контактах автопереключателя, выводах
путевых ящиков, штепсельных разъемах стативов и т. д.
Для защиты от ложного контроля в этом случае в блоке
предусмотрен резистор /?2, благодаря которому постоян-
ная составляющая должна оказаться недостаточной для
срабатывания реле ОК типа КМ-3000. В последнее вре-
мя для той же цели параллельно электродвигателю ус-
танавливают конденсаторы емкостью по 4 мкФ, представ-
ляющие меньшее сопротивление переменному току, чем
паразитный зазор между щеткой и коллектором.
Другой недостаток схемы заключается в том, что
ложный контроль может возникнуть из-за перепутыва-
205
ния линейных проводов Л1 и Л2 местами или неправиль-
ного подключения ВС при ремонтах. Этот недостаток
преодолевают конструктивным и технологическим мето-
дами: в местах промежуточных соединений проводов Л1
и Л2 используют наконечники разного диаметра, окра-
шивают их в разные цвета, на нулевки надевают гре-
бенки.
К достоинствам схемы следует отнести минимум
линейных проводов и простоту.
Четырехпроводную схему управления стрелочным
электроприводом постоянного тока применяют на малых
станциях, оборудуемых устройствами ЭЦ с местным пи-
танием [19]. В схеме (рис. 85) предусмотрены пуско-
вое нейтрально-тГоляризованное реле СУП, контрольные
нейтрально-поляризованные реле СК и СК1, их повто-
рители ПК и МК, реле сброса фрикции СФ и вспомога-
тельные реле: включающее СВ и аварийного перевода
при неисправной рельсовой цепи СА. Пусковое реле СУП
обеспечивает притяжение нейтрального и переброс поля-
ризованного якорей при появлении напряжения на ка-
тушке 1-2, блокировку перевода по токовой катушке, т. е.
обеспечивается окончание перевода стрелки, если после
включения электропривода на стрелку вступает подвиж-
ной состав.
Приборы, взаимодействуя между собой, образуют
последовательно управляющую, рабочую и контрольную
цепи.
Управляющая цепь проходит через контакты плюсо-
вой и минусовой стрелочных кнопок, повторителя ЧП ОЗ
замыкающего и стрелочно-путевого реле, провода ка-
бельной линии 3 и 4, тыловые контакты реле МД (при
центральном управлении) к выводам 1-2 реле СУП.
Нажатие соответствующей стрелочной кнопки при ус-
ловии отсутствия замыкания данной стрелки в другом
маршруте (фронтовой контакт реле НОЗ и ЧПЗ) и ее
свободности (фронтовой контакт реле СП) вызывает сра-
батывание реле ЧП ОЗ и затем СУП.
Одновременно срабатывает включающее реле СВ и
запускает реле времени СФ с помощью предварительно
заряженного конденсатора емкостью 3000 мкФ. За счет
конденсаторов, включенных собственным контактом
реле СФ, обеспечивается его замедление с соответству-
ющим запасом для перевода одиночной или спаренных
206
Электропривод Путевая Релейный шкаф Помещение ДСП
стрелки хоров к а выходных светофоров _____ __________
Рис. 85. Четырехпроводная схема управления стрело>ным электроприводом постоянного тока с местным пи-
танием
207
стрелок. Возбудившись, реле СФ включает дополнитель-
ное замыкающее реле СЗ, которое усиленным контактом
должно коммутировать рабочую цепь. Его устанавлива-
ют в релейном шкафу. Кроме того, реле СЗ является пов-
торителем замыкающих реле и при заданном маршруте
находится без тока. Поэтому повреждение проводов в
цепи этих реле не может привести к отпиранию стрелок.
Чтобы дежурный мог переводить стрелку при повреж-
денной рельсовой цепи, на пульте управления установле-
на запломбированная кнопка СА. При ее нажатии воз-
буждается реле СА и шунтирует контакты реле СП в
пусковых цепях. Кнопка и реле СА, а также реле СВ,
СФ и СЗ могут быть общими на группу стрелок.
Рабочая цеп£ проходит через токовую катушку реле
СУП, обмотки электродвигателя, контакты автопереклю-
чателя привода и замыкается контактами нейтрального
и поляризованного якорей реле СУП и реле СЗ.
Нейтральные контакты реле СУП подключают элект-
родвигатель привода к местной батарее, а поляризован-
ные выбирают обмотку возбуждения, соответствующую
направлению перевода. В конце перевода электродвига-
тель выключается рабочим контактом автопереклю-
чателя.
Для повышения защищенности привода от самопро-
извольного перевода нейтральные контакты реле СУП
включают в прямые и обратные провода электродвига-
теля. Защита от токов короткого замыкания предусмот-
рена рабочими предохранителями на 10 А. Предохрани-
тели устанавливают в два прямых провода, что позво-
ляет при перегорании одного из предохранителей вернуть
стрелку в исходное состояние.
Если в процессе перевода привод по какой-либо при-
чине начал работать на фрикцию, то по истечении замед-
ления реле СФ отпускает якорь и выключает реле СЗ, а
последнее — электродвигатель привода. Отключение ра-
бочей цепи предотвращает разряд батареи при затянув-
шемся переводе стрелки и исключает перевод стрелки
под составом при маневровых передвижениях без вклю-
чения сигналов в следующей ситуации. Если в рабочей
цепи имеется недостаточно плотный контакт, отчего
стрелка не будет переводиться, дежурный может дли-
тельное время удерживать нажатой кнопку управления,
предварительно разрешив машинисту движение пострел-
208
ке От сотрясений, вызванных прохождением состава по
стрелочному участку, контакт может восстановиться и
начаться перевод стрелки.
Спаренные стрелки переводят последовательно, при-
чем рабочая цепь второго электропривода замыкается
контрольными контактами первого после завершения его
перевода.
Контрольная цепь схемы проходит через катушки ре-
ле СК и СК1, контрольные контакты автопереключателя
и поляризованный контакт реле СУП. Последовательно
включенные реле СК и СК1 получают питание от рабо-
чей батареи 48 В. Напряжение нормальной работы одно-
го реле 24 В. Применение двух контрольных реле позво-
ляет осуществить в цепи их повторителей ПК и МК
схемную защиту от’ложного контроля при несрабатыва-
нии поляризованного якоря одного из них. Кроме того,
реле ПК и МК имеют необходимое число контактов для
построения схем централизации.
В начале перевода стрелки контрольные реле СК и
СК1 выключаются поляризованным контактом реле СУП
и включаются током обратной полярности лишь в конце
нормального перевода контрольными контактами авто-
переключателя: 33-34 и 35-36 — в плюсовом положении
и 23-24 и 25-26 — в минусовом.
При взрезе стрелки контрольные контакты автопе-
реключателя размыкаются, выключая реле СК и СК1 и
их повторители ПК и МК.
Защита контрольной цепи от ложных срабатываний
при сообщении с другими цепями постоянного и перемен-
ного тока обеспечивается двухполюсным отключением
контрольных реле СК и СК1 от батареи контактами ав-
топереключателя привода и высоким индуктивным соп-
ротивлением последних (для их срабатывания требуется
напряжение переменного тока около 800 В).
Недостатком схемы является подгорание контактов
пускового реле, коммутирующего значительно большие
токи, чем в двухпроводной схеме, так как при мест-
ном питании применяют низковольтные электродвига-
Пятипроводная схема управления асинхронным
ЛсктРоприводом [9] имеет управляющую и контроль*
Ую цепи (рис. 86), заимствованные из двухпроводной
хемы- Однако описанные ситуации, приводящие к лож-
209
Рис. 86. Пятипроводная схема управления стрелочным электрон
водом переменного тока
ному контролю, в этой схеме не возникают благодаря
применению бесколлекторного электродвигателя и боль-
шего числа линейных проводов.
В рабочую цепь входят трансформаторы Тр1, Тр2 и
ТрЗ, электродвигатель привода и контакты реле НПС,
ППС и автопереключателя. Электропривод включают
контакты реле ППС. При реверсировании теми же кон-
тактами изменяется порядок следования фаз, что и обес-
печивает вращение электродвигателя в противополож-
ную сторону. Реле НПС на время перевода блокируется
не непосредственно рабочим током, как в двухпроводной
схеме, а напряжением, снимаемым с трансформаторов
Тр1, Тр2 и ТрЗ, осуществляющих контроль наличия фаз
питания. Первичные обмотки трансформаторов включе-
ны в каждую из фаз последовательно с нагрузкой, а вто-
ричные соединены согласно-последовательно; их нагруз-
кой является блокирующая обмотка реле, включенная
через выпрямительный мост. Трансформаторы работают
в режиме ферромагнитного утроителя частоты [20]. В
этом случае магнитный поток в каждом из трансформа-
торов не может быть синусоидальной функцией време-
ни. Кривые потоков и индуцируемые ими э. д. с. могут
содержать лишь гармоники, кратные трем. Напряже-
ние на выводах вторичной цепи равно сумме э. д. <МИН*
дуцируемых во вторичных обмотках. Первые гармони*
210
и их, равные по величине и сдвинутые на одну треть
*ериода друг относительно друга, в сумме дадут нуль.
Основной будет третья гармоника э. д. с., а 9, 15 и дру-
гНе по отношению к третьей гармонике играют роль 3-й,
5-й и других нечетных гармоник. При отсутствии тока в
первичной обмотке любого из трансформаторов суммар-
ное напряжение на вторичных обмотках будет равно
нулю, что и обеспечит выключение реле и, таким обра-
зом, контроль пропадания фазы.
На метрополитене применяют семипроводную схему
управления асинхронным стрелочным электроприводом,
в которой исправность фаз контролируется тремя реле
НПС [21]. Если отсутствует фаза, соответствующее ре-
ле НПС не блокируется, что предупреждает перевод
стрелки.
Анализ рассмотренных схем показывает, что их об-
щим недостатком является контактная коммутация то-
ка в рабочей цепи, следствием которой является интен-
сивное разрушение контактов луковых реле, в особеннос-
ти при реверсировании, а для выключения электроприво-
да, что следует иметь в виду, пусковые реле вообще не
рассчитаны. Из практики известны случаи сваривания
фронтовых и тыловых с общими контактами у реле НПС
типа НМПШ 0,2/220 (см. рис. 84). Известны также слу-
чаи перекрытия дугой нормальных и переведенных кон-
тактов у реле ППС типа ПМПШ 150/150 при реверсиро-
вании электропривода, отчего перегорал рабочий предох-
ранитель и стрелка останавливалась в среднем положе-
нии. Ликвидация указанных недостатков связана с реше-
нием проблемы бездуговой коммутации цепей. Одно из
направлений в ее решении — применение бесконтактных
коммутаторов.
62. эксплуатационно-технические требования к схемам,
СОДЕРЖАЩИМ БЕСКОНТАКТНЫЕ КОММУТАТОРЫ
Применение в технике СЦБ бесконтактных элементов
(полупроводниковых, магнитных и т. д.) позволяет рас-
ширить функциональные возможности, повысить быст-
родействие и надежность, снизить расходы на проектиро-
вание, строительство и эксплуатацию, унифицировать и
Г андартизировать узлы устройств. Однако использова-
• 211
ние преимуществ бесконтактных элементов не должно
заслонять «оборотной стороны медали»: отказ бескон-
тактного элемента не должен приводить к нарушению
безопасности движения. Это в первую очередь относит-
ся к схемам управления стрелочными электроприводами
и поэтому служит своего рода психологическим барье-
ром на пути применения бесконтактных коммута-
торов.
Основываясь на известных требованиях к схемам уп-
равления стрелочными электроприводами постоянного и
переменного тока, ниже сформулированы ЭТТ, которым
должны удовлетворять схемы, содержащие бесконтакт-
ные коммутаторы.
Основные положения ЭТТ справедливы для схем уп-
равления бесконтактными и контактными электропри-
водами.
Функциональные требования. Аппаратура схемы
должна осуществлять пуск электропривода и слежение
за переводом стрелки для фиксации окончания перевода
стрелки, возврата в исходное положение, выключения
электропривода в среднем положении при невозможнос-
ти перевода (кроме горочных электроприводов).
Выключение электропривода необходимо выполнять
на посту приборами с бездуговой коммутацией, в про-
тивном случае — автопереключателем. Приборы схемы
должны непрерывно контролировать плюсовое, минусо-
вое и среднее положения стрелки. На табло аппарата уп-
равления необходимо предусматривать контроль взреза
стрелки.
Возможность получения ложного контроля по-
ложения взрезанной стрелки должна исключаться кон-
струкцией электропривода.
Эксплуатационные требования. Перевод замкнутой в
маршруте стрелки должен исключаться до разделки все-
го маршрута или секции, в которую входит данная
стрелка; исключается перевод стрелки при занятии стре-
лочного участка подвижным составом, а также в случае
выключения питания контрольной цепи.
В отдельных случаях, предусмотренных инструкция-
ми: при местном управлении стрелкой, вспомогательной
переводе, когда проверка свободности стрелочного участ-
ка перед началом перевода возлагается на агентов слуЯЗ
бы движения, в схеме предусматривают возможность
212
перевода стрелки при поврежденной рельсовой цепи уча-
стка.
Схема должна обеспечивать довод стрелки в крайнее
положение с получением контроля и исключать ее воз-
врат в первоначальное положение, если после начавше-
гося перевода разомкнется цепь первоначального воз-
буждения пусковых приборов вследствие занятия под-
вижным составом стрелочного участка.
Управление стрелочным приводом осуществляют
маршрутное и индивидуальное с исключением индивиду-
ального управления при использовании маршрутного и
исключением маршрутного управления при использова-
нии индивидуального.
Схема должна предусматривать возможность перехо-
да с центрального на местное управление стрелкой и на-
оборот, включение приборов автоматической очистки и
автоматической защиты стрелки, гарнитуры и привода от
повреждений при взрезах.
Управление одиночной или спаренными стрелками мо-
жет быть с параллельным или последовательным пере-
водом.
Необходимо предусматривать выключение стрелки из
зависимости заменой управляющей аппаратуры макетом
с обеспечением соответствующей индикации на табло ап-
парата управления и возможность проводить регулярные
измерения технологических параметров (тока фрикции
электропривода) на посту управления без выхода об-
служивающего персонала на стрелку.
Технические требования к построению схемы. Схема
состоит, как правило, из трех взаимосвязанных цепей:
управляющей, рабочей и контрольной. Общим требова-
нием к построению цепей является защищенность их от
опасных отказов, т. е. свойство исключать появление не-
допустимых для безопасности движения поездов положе-
ний стрелки при повреждениях в схеме, а также под воз-
действием помех; высокая надежность.
Нарушение работы схем не должно приводить к
опасным последствиям при следующих ситуациях:
неправильных действиях на пульте управления, на-
пример, «игре» стрелочной рукояткой;
перегорании или изъятии предохранителей;
выходе из строя источника электропитания, его пере-
сечениях и колебаниях питающего напряжения сети;
213-
коротком замыкании и обрыве в конденсаторах, ре.
зисторах, полупроводниковых приборах, датчиках, про.
водах;
неразмыкании контакта реле или автопереключателя;
неразмыкании контакта реле, конструкция которого
не исключает его сваривание или иное ложное соедине-
ние;
несрабатывании якоря поляризованного реле;
неправильном подключении линейных проводов, ког-
да один провод ошибочно подключен вместо другого; |
однополюсном соединении линейных проводов с лю-
бым источником электропитания;
заземлении одного из линейных проводов или его
сообщении с корпусом электропривода;
соединении линейных проводов схемы через емкость
кабеля с другими цепями;
наведении в линейных проводах посторонних э. д. с.,
которые определяются действующими нормами;
образовании дуги на контактах реле, коллекторе
электродвигателя или наличии коммутационных процес-
сов в любых частях схемы;
изменениях временных характеристик реле и пере-
ходных сопротивлений контактов;
изломе контактов стрелочного коммутатора, кно-
пок или контактов реле не первого класса надежности;
проведении контрольных измерений параметров эле-
ментов без их выключения из схем;
изъятии из схемы отдельных узлов и элементов для
их профилактики, ремонта или замены.
Повреждение контрольной цепи должно обнаружи-
ваться немедленно, а управляющей и рабочей — при
очередном срабатывании схемы.
Если какая-либо цепь схемы не имеет соединений с
линейными проводами (воздушными или кабельными),
допускается однополюсное выключение постовых прибо-
ров. При наличии таких соединений предусматривают
двухполюсное выключение постовых приборов.
Построение управляющей цепи имеет свои особеннос-
ти. Управляющую цепь образуют пусковые приборы, фор-
мирующие рабочую цепь с проверкой требований, обес-
печивающих безопасность движения поездов, и незави-
симо от положения стрелки (состояния контрольных
реле).
214
Если команда на перевод стрелки не привела к вклю-
чению электропривода (например, из-за нарушения кон-
такта в рабочей цепи, перегорания предохранителя, от-
сутствия одной из фаз), предпочтителен сброс команды
(пускового прибора управляющей цепи) во избежание
самопроизвольного пуска при восстановлении контакта.
Перед включением рабочей цепи пусковым прибором
(бесконтактным коммутатором) обязательной является
проверка срабатывания всех реле, участвующих в пуске
и реверсировании электропривода, за исключением тех
из них, отказ которых не может привести к остановке
стрелки в среднем положении.
При построении цепи нужно иметь в виду следующее.
Рабочая цепь, предназначенная для включения, выклю-
чения и реверсирования электропривода, должна обеспе-
чивать перевод «массовых» стрелок без дублирования
жил линейных проводов кабеля (при стрелочных перево-
дах марок 1/9 и 1/11 Р50 радиус управления должен
быть 800 м, см. § 2.6).
Рабочую цепь самоблокируют рабочим током или на-
пряжением после выключения управляющей цепи. Рабо-
чая и управляющая цепи должны быть гальванически
разделены.
В рабочей цепи допускается применять специальное
реле у электропривода для реверсирования и последую-
щего отключения его двигателя от линейных проводов.
Если рабочая цепь имеет общие линейные провода с
контрольной цепью, обеспечивают невозможность разво-
рота стрелочного электродвигателя от источника конт-
рольного тока, а также под действием индуцированных
в линейных проводах э. д. с. посторонних источни-
ков.
Для включения и выключения рабочего тока применя-
ют бесконтактные коммутаторы на тиристорах, симисто-
Рах и т. д. При повреждении, например, пробое тиристо-
ра. выключение и реверсирование электропривода могут
выполняться контактами реле. В случае кратковремен-
ного нарушения контакта и его восстановления в про-
цессе срабатывания электропривода бесконтактный ком-
мутатор должен включаться вновь автоматически для за-
еРшения перевода стрелки. Потеря контроля в край-
ом положении стрелки не должна приводить к замыка-
ию цепи рабочего тока.
215-
Рабочая цепь может иметь центральное, магистраль-
ное и местное питание электропривода.
В рабочей цепи, содержащей бесконтактные коммутй.
торы, обеспечивают двухполюсное отключение от источ-
ника питания с наличием физического промежутка, т. е.
контактами реле, а при работах на стрелке — блок-коц-
тактом. При затянувшемся переводе должно предусмат-
риваться автоматическое выключение электропривода, а
на горках — автоматический возврат его в исходное по-
ложение.
Ряд требований предъявляется к построению конт-
рольных цепей схемы.
Контрольная цепь, обеспечивающая непрерывный
контроль положения стрелки, должна быть гальваничес-
ки разделена с рабочей цепью. Контрольные реле в сред-
нем положении стрелки отключают от всех полюсов ис-
точника питания во избежание появления ложного конт-
роля при сообщениях в линейных проводах.
В контрольной цепи проверяется отпускание якоря
реле первого класса надежности, если размыкание цепи
его обмотки осуществляется контактом, конструкция ко-
торого не исключает его ложное замыкание (в частнос-
ти, контрольный контакт автопереключателя из-за по-
ломки пластмассовой контактной колодки может остать-
ся замкнутым). Надо учитывать .необходимость провер-
ки размыкания не менее двух тыловых контактов одного
и того же реле, соединенных с якорем разными тягами.
Контрольные реле отключают от линейных проводов,
если последние являются общими для рабочей и конт-
рольной цепей, ранее момента включения рабочей цепи.
Желательно, чтобы устойчивая работа контрольной цепи
обеспечивалась при удалениях стрелки от поста ДО
4,5 км. Контроль положения стрелки сохраняют при вы-
ключении блок-контакта электропривода для технологи-
ческих целей. После перевода курбелем обеспечивают
контроль переведенного положения стрелки. Ложный
контроль положения стрелки, не соответствующий е®
фактическому положению, не должен возникать в сле-
дующих случаях при: ошибочном изменении полярности
подключения элементов контрольной цепи (например,
выпрямительного столбика); переходе в режим генера-
тора стрелочного электродвигателя при его расцеплении
с редуктором; ситуациях, перечисленных выше.
216
Конструктивно-технические требования. Реле,бескон-
тактные приборы и другие элементы, применяемые в схе-
ме, выбирают из числа серийно выпускаемых, а число их
типов принимают минимальным. Компоновку приборов
схемы в блоки можно выполнять размещением бескон-
тактных и релейных элементов в различных субблоках,
либо в одном блоке со штепсельным включением. В обос-
нованных случаях допускается неблочное исполнение
схемы.
Электропитание приборов схемы должно предусмат-
риваться с отклонением от номинала в пределах от 4-10
до —15% от напряжения источника, имеющегося на по-
сту централизации.
Стабильность работы схемы не должна зависеть от
допустимого внутригруппового разброса параметров эле-
ментов, а нагрев приборов, входящих в ее состав, сверх
установленных норм для эксплуатации исключается.
Схема должна быть экономичной по числу линейных
проводов, соединяющих постовые приборы с напольны-
ми, в связи с чем допускается уплотнение линии, т. е.
использование одних и тех же линейных проводов для
совмещения управляющей, рабочей и контрольной цепей.
При необходимости разработки схемы с высоким
быстродействием (для стрелок сортировочных районов)
контрольная и рабочая цепи могут иметь раздельные ли-
нейные провода.
Появление неисправности в схеме (блоке, субблоке)
сопровождается соответствующей индикацией и, по воз-
можности, выключением схемы из действия. Схема долж-
на быть выполнена на простых и надежных элементах,-
способных обеспечить ее безотказную и долговечную ра-
боту с назначенным ресурсом не менее 1 млн. срабаты-
ваний.
Рассмотренным эксплуатационно-техническим требо-
ваниям должны удовлетворять схемы и аппаратура, в
которых недопустим отказ, непосредственно ведущий к
снижению уровня безопасности движения поездов. Стои-
мость аппаратуры для реализации схем, построенных по
первому классу надежности, т. е. не допускающих опас-
ного отказа, часто оказывается значительной.
Поэтому при построении конкретных схем следует
Учитывать частные факторы, способствующие «смягче-
нию» предъявляемых к ним требований и тем самым
217
снижению стоимости управляющей аппаратуры. К таким
частным факторам при разработке схем управления ав-
тошлагбаумами можно отнести наличие дежурного на
переезде, который при отказе аппаратуры примет меры
к его закрытию. Требования к схемам управления элект-
роприводом автостопа метро могут быть смягчены на
том основании, что автостоп является не функциональ-
ным, а контрольным устройством, дублирующим сигнал
остановки. При этом подразумевается, что совпадение во
времени отказов в схемах управления светофором и
электроприводом автостопа является маловероятным со-
бытием.
Несмотря на более жесткие требования к схемам уп-
равления стрелочными электроприводами, именно в них
впервые были применены серийно бесконтактные комму-
таторы. Несомненно, в ближайшие годы этот опыт полу-
чит дальнейшее распространение.
6.3. БЛОКИ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ
С ПРИМЕНЕНИЕМ ТИРИСТОРНЫХ КОММУТАТОРОВ
Внедрение стрелочных переводов из рельсов тяжелых
типов, повышение нагрузок на электропривод, увеличе-
ние быстродействия стрелочных приводов для сортиро-
вочных горок и потребление значительных мощностей
приводят к резкому возрастанию токов при пуске, ревер-
сировании и переводе стрелки. В этих условиях комму-
тирующая способность типовой пусковой аппаратуры ока-
зывается «на пределе» и технический ресурс ее резко
уменьшается. Применение ступенчатого реостатного пус-
ка несколько улучшает положение вещей, но при этом
ухудшается быстродействие аппаратуры за счет увели-
чения времени переключений и разгона электропривода.
Другой путь повышения надежности и долговечности —
использование бездуговой коммутации тока.
Рассмотренные технические требования к схемам и
аппаратуре, содержащей бесконтактные коммутаторы,
являются достаточно жесткими. Поэтому на данном эта-
пе схемы управления стрелочными электроприводами вы-
полняют комбинированными: используют реле первого
класса надежности для повышения уровня безопасности,
а бесконтактные приборы, в основном тиристоры — Д-1Я
218
улучшения рабочих характеристик £хем, бездуговой ком-
мутации пусковых цепей, быстродействующей защиты
различных узлов аппаратуры. Эффективность комбини-
рованных решений очевидна. Так, гарантированное чис-
ло срабатываний пусковых реле типа НМПШЗ, опреде-
ляемое их механическим ресурсом, составляет при бесто-
ковой коммутации не менее 1 млн., при включениях элект-
рической цепи постоянного тока 5 А 220В — 100 000, а
при выключениях тока 6 А 240 В — 10 срабатываний.
Таким образом, применение бесконтактных коммутато-
ров для включения и выключения цепей позволяет зна-
чительно увеличить срок службы реле, периодичность
замены стрелочных блоков и получить ряд других преи-
муществ.
Особенно остро недостатки пусковых реле ощущались
в блоках управления быстродействующими стрелочными
электроприводами. В связи с этим первыми были разра-
ботаны блоки для горок и маневровых районов, получив-
шие наименование: тип СГ-76М, применяемый для управ-
ления бесконтактным электроприводом типа СПГБ-4 и
СГ-76У (унифицированный), предназначенный для уп-
равления бесконтактными электроприводами типов
СПГБ-4, СПГБ-4М и контактными типов СПГ-3, СПГ-ЗМ.
Компоновка контактных и бесконтактных приборов в
одном корпусе позволяет использовать указанные блоки
в действующих централизациях.
Функции блока управления типа СГ-76М расширены
по сравнению с известными стрелочно-пусковыми блока-
ми (СГ-66, СГ-74, ПС-220 и др.). Кроме функций конт-
роля требований безопасности движения, включения
электропривода для перевода стрелки и реверсирования,
блоки типа СГ-76 могут выключать электропривод в кон-
це перевода стрелки, при повреждении коммутирующих
приборов (тиристоров, конденсаторов и др.) автомати-
чески выключаться из действия, обеспечивая при этом
индикацию о неисправности, и позволяют дистанционно
(без выхода работника на стрелку) измерять ток фрик-
пин электропривода.
Управляющая цепь блока питается постоянным током
от контрольной батареи напряжением 24 В, рабочая
Цепь — постоянным током напряжением 220 В и конт-
рольная цепь — переменным током напряжением 24 В.
“ состав блока (рис. 87) входят два тиристорных
219
Рис. 87. Схема управления бесконтактным быстродействующим стрелочным электроприводом
220
коммутатора ТК1 и ТК.2, два управляющих реле: нейт-
ральное НУС и поляризованное ПУС, реле автовозврата
два контрольных реле ПК и МК, быстродействую-
щее нейтральное вспомогательное реле НВС и медленно-
действующее на срабатывание поляризованное реле (тех-
нической диагностики) ТД.
Тиристорные коммутаторы, собранные по одинаковой
схеме для плюсового (ТК+) и минусового (ТК—) на-
правлений перевода, предназначены для бездугового
включения электропривода при поступлении команды на
перевод стрелки и выключении его после получения конт-
роля (контактами 81-82 ПК, МК) или реверсировании
из среднего положения (контактами 111-112 или 131-132
НВС). Каждый тиристорный коммутатор состоит из пус-
кового Т и запирающего ЗТ тиристоров, резисторов,
диодов и конденсатора.
Тиристоры при подключении к аноду А положитель-
ного РП, а к катоду К отрицательного РМ напряжения и
отсутствии на управляющем электроде У отпирающего
напряжения, не пропускают рабочего тока.
Пуск тиристора Т осуществляется подачей отпираю-
щего напряжения с анода на управляющий электрод че-
рез ограничивающий резистор R5, а при включении ЗТ—
с конденсатора через ограничивающий резистор R6.
Конденсатор С1 или С2 начинает заряжаться сразу же
после отпирания тиристора Т; его обкладка 1 оказывает-
ся подключенной к полюсу РП, а обкладка 2 через парал-
лельно включенные зарядные резисторы R1 и R2 — к
полюсу РМ. Резисторы R3 и R4 предотвращают отпира-
ние тиристоров Т и ЗТ в случае быстрого нарастания
анодного напряжения и отсутствия потенциала на управ-
ляющем электроде У, а диоды Д1 и Д2 исключают появ-
ление отрицательного потенциала на электроде У в мо-
мент запирания тиристоров.
При переводе стрелки в плюсовое положение работой
тиристорного коммутатора ТК-{- управляют контакты
81-82-83 ПК и 111-112-113 НВС, а коммутатора ТК—,
используемого для перевода стрелки в минусовое поло-
жение, — контакты 81-82-83 МК и 131-132-133 НВС. В
качестве примера рассмотрим действие тиристорного
коммутатора ТК—, включенного в цепи минусовой об-
мотки возбуждения ОВМ электродвигателя (ТК+ ана-
логично включен в цепь плюсовой обмотки ОВП).
221
При подаче напряжения РП (Н-220 В) в точку ЕЗ-lj
и РМ (—220 В) в точку E3-13 в начальный момент замк-
нуты контакты 131-132 НВС. Управляющего напряже-
ния на электроде У нет и, следовательно, рабочий ток от
точки ЕЗ-11, через тиристор Т, к точке ЕЗ-1 и далее к
обмотке ОВМ не протекает. После отпускания якоря ц
замыкания контактов 131-133 НВС на электроде У появ-
ляется положительное (относительно катода К) напря-
жение, что приводит к мгновенному отпиранию тиристо-
ра Т и включению цепи рабочего тока. В точке ЕЗ-1 по-
является напряжение относительно точки E3-13, пример-
но равное 220 В. Одновременно появляется рабочее на-
пряжение на зажимах электродвигателя и заряжается
конденсатор С2, причем на его обкладку 2 от точки E3-13
через резисторы R1 и R2 поступает отрицательный по-
тенциал. Тиристор Т выключается после замыкания кон-
тактов 81-82 МК (в конце перевода стрелки) или 131-132
НВС (при реверсировании стрелки). С управляющего
электрода (точка ЕЗ-З) пускового тиристора Т снима-
ется напряжение и подается на управляющий электрод
У запирающего тиристора ЗТ. Последний отпирает и
подключает конденсатор С2 к тиристору Т обратной
полярностью. Ток разряда конденсатора протекает в на-
правлении, противоположном прямому току через тири-
стор Т, и запирает его. Затем запирается тиристор
ЗТ, так как через него протекает ток, ограничиваемым
резисторами R1 и R2 и меньший тока удержания его в
открытом состоянии. Другие приборы схемы управления
имеют следующее назначение.
Нейтральное управляющее реле НУС типа НМПЗ
0,2/220 контролирует свободность стрелочного изолиро-
ванного участка, наличие переменного тока и другие
требования безопасности и обеспечивает двухполюсное
размыкание рабочей цепи.
Поляризованное управляющее реле ПУС типа ПМПУ
150/150 выбирает тиристорный коммутатор, соответст-
вующий направлению перевода, а в случае его повреж-
дения во время перевода используется для реверсирова-
ния привода и исключения среднего положения стрелки.
Нейтральное вспомогательное реле НВС типа РЭМ>
обеспечивает включение и бездуговое реверсирование за
счет предварительного выключения одного тиристорного
коммутатора и последующего включения другого. Резне-
222
T0p M ускоряет срабатывание реле НВС, а диод ДИ
замедление, перекрывающее время перелета яко-
ря реле ПУС.
Контрольные реле ПК и МК типа НМ1-7000 контро-
лируют плюсовое и минусовое положения стрелки и фор-
мируют команду на выключение тиристорных коммута-
торов.
Реле автоматического возврата АВ типа АНМ2-380
реверсирует стрелку при затянувшемся переводе (свыше
1,2 с) в автоматическом режиме работы централизации.
Реле технической диагностики ТД типа ПМПУ 150/150
через 20—25 с автоматически выключает рабочую цепь
при наличии контроля положения стрелки и появлении
неисправности и включает мигающую индикацию на
пульте управления. Время замедления на срабатывание
реле ТД обеспечивается термоэлементом.
Схема управления допускает два режима работы:
ручной — стрелочным коммутатором или кнопками и
автоматический — при помощи маршрутного набора,
устройств горочной автоматической централизации или
управляющего вычислительного комплекса.
В ручном режиме команды на перевод стрелки фор-
мируются контактами стрелочного коммутатора через
входы блока 215, 216.
В автоматическом режиме команды на перевод стрел-
ки реализуются контактами сортировочных реле 1С—
7С (или управляющих реле ПУ и МУ) через входы 213,
214 или контакты реле АВ, которые в необходимом слу-
чае обеспечивают автовозврат стрелки.
В исходном состоянии блока, показанном на рис. 87,
реле ПК, АВ под током; реле МК, НУС, НВС без тока,
якоря реле ПУС и ТД переброшены током прямой по-
лярности (контакты 111-112 и т. д. замкнуты); тиристо-
ры выключены; конденсаторы С1 и С2 разряжены. При
переводе стрелки в минусовое положение приборы взаи-
модействуют таким образом.
Команда на перевод в автоматическом режиме фор-
мируется замыканием контактов реле 1С, ЗС или обоих
реле одновременно. В результате этого на входы 212 и
214 подается напряжение 24 В постоянного тока, отчего
возбуждаются реле НУС и НВС через контакты 51-52 АВ
11 121-122 ПУС. После замыкания контакта 41-42 НУС
срабатывает ПУС и перебрасывает поляризованный
223
якорь. Реле НУС и НВС выключаются контактом 121-
122 ПУС, но удерживают якоря за счет замедления. За-
тем реле НВС контактом 131-133 включает тиристор т
и рабочий ток начинает протекать через электродвига-
тель. Если цепь рабочего тока не образовалась из-за от-
сутствия предохранителя 1ПР, реле НУС, выдержав за.
медление, размыкает рабочую цепь, что предотвращает
возможность пуска при установке предохранителя во вре-
мя движения вагона по стрелке.
Если рабочая цепь кратковременно разомкнулась в
процессе срабатывания электропривода из-за нарушения
контакта в линейной цепи, тиристор Т практически мгно-
венно запирается, но после восстановления контакта от-
пирается вновь, обеспечивая завершение перевода, так
как на его управляющем электроде автоматически появ-
ляется напряжение. Нарушение контакта в управляющей
цепи отпертого тиристора к его запиранию не приводит.
После окончания перевода стрелки на выходе датчи-
ка ДБП электропривода появляется контрольное напря-
жение, включающее реле МК в блоке через выпрямитель-
ный мост. Последнее контактом 81-82 МК дает команду
на выключение тиристорного коммутатора ТК— выше-
описанным образом. После этого реле НУС, выдержав
замедление около 0,4 с, обеспечивает двухполюсное от-
ключение питания блока.
При затянувшемся свыше 1,2 с переводе стрелки про-
исходит автовозврат ее в исходное положение. Для авто-
возврата стрелки из среднего положения в автоматичес-
ком режиме в схему управления включено реле автовоз-
врата АВ, имеющее замедление на отпускание якоря.
Нормально реле АВ находится под током через контак-
ты реле ПК и МК. В случае выключения реле ПК и МК
цепь питания реле АВ обрывается и начинается отсчет
времени автовозврата, настраиваемого резисторами R2,
R3 на 1,2 с. После отпускания якоря замыкаются кон-
такты 51-53 АВ и включают реле НВС (реле НУС удер-
живает якорь притянутым за счет рабочего тока в об-
мотке 1-3). Быстродействующее реле НВС притягивает
якорь и контактом 131-132 дает команду на выключение
тиристорного коммутатора ТК— до начала перелета яко-
ря реле ПУС. Таким образом, контакты реле ПУС пере-
ключаются в обесточенной цепи. Затем реле НВС будет
выключено контактами 121-123 ПУС, замкнет свои кон-
224
такты 111-113 и включит тиристорный коммутатор ТК-}-.
После возвращения стрелки в исходное положение на вы*
ходе датчика ДБП появляется контрольное напряжение,
включающее реле ПК, которое контактами 81-82 дает
команду на выключение тиристорного коммутатора ТК.-}-.
Проверка исправности тиристорных коммутаторов
построена на контроле их способности выключать рабо-
чий ток. Пробой тиристоров Т и ЗТ, обрыв ЗТ, короткое
замыкание или обрыв конденсатора, резисторов Rl, R2 и
др. приводят к потере этой способности. Поэтому после
перевода стрелки реле НУС будет удерживать якорь за
счет протекания рабочего тока. При этом через контак-
ты 61-62 НУС и 21-22 МК (или ПК) будет подключено
напряжение к термоэлементу Т, который через 20—25 с
нагрева замкнет контактами 51-52 цепь срабатывания
реле ТД. Последнее контактами 111-112 и 141-142 отклю-
чит рабочую цепь до прихода обслуживающего персона-
ла. Индикация о появлении неисправности осуществляет-
ся миганием лампочек ПЛ или МЛ на пульте управле-
ния, что обеспечивается их подключением контактами
131-133 ТД к шине ГСХМ.
Убедиться в наличии неисправности можно нажатием
кнопки В и пуском стрелки сначала в одно, а затем в
другое крайнее положение. Кнопка В является группо-
вой.
Блок типа СГ-76М, кроме функциональных преиму-
ществ, имеет больший технический ресурс (1 млн. сраба-
тываний вместо 100 тыс.) по сравнению с блоком типа
СГ-66 и в совокупности с бесконтактными стрелочными
электроприводами типов СПГБ-4 и СПГБ-4М позволяет
получить существенный эффект.
Блок типа СГ-76У пригоден также для управления
контактными стрелочными электроприводами типов
СПГ-3 и СПГБ-ЗМ [27]. В блоке типа СГ-76У в отличие
от СГ-76М предусмотрены балластные резисторы в конт-
рольной цепи для питания ее напряжением 220 В и уве-
личено быстродействие блока.
Тиристорные коммутаторы для управления контакт-
ным стрелочным электроприводом нашли применение и
На зарубежных железных дорогах.
В Чехословакии разработан блок, рассчитанный на
включение и реверсирование электропривода тиристор-
НЫми коммутаторами, а выключение рабочей цепи осу-
^422 225
Рнс. 88. Схема управления горочным электроприводом, применяемая в Чехословакии
226
ществляется контактами автопереключателя [22]. На
схеме (рис. 88) приведены управляющая, рабочая и конт-
рольная цепи, схема инвертора для запуска тиристоров
и питания контрольной цепи и схема реле автовозврата.
Схема управляющей цепи содержит по два быстро-
действующих плюсовых и минусовых управляющих реле,
которые могут возбуждаться при повороте стрелочной
рукоятки, замыкании контакта сортировочного реле С1С
или С2С и реле автовозврата АВ. Выключение управля-
ющего реле выполняет в конце перевода стрелки
контакт возбудившегося контрольного реле ПК
или МК.
Рабочая цепь имеет три тиристора Tl, Т2, ТЗ, разде-
лительные диоды Д7 и Д8, коммутирующий конденсатор
С4, зарядные резисторы R7 и R8. Рабочий ток включают
двумя тиристорами в прямом и обратном проводах. Ти-
ристоры включаются контактами реле 2МУ при перево-
де стрелки в минусовое и 2ПУ — в плюсовое положение.
Коммутирующий конденсатор служит для реверсирова-
ния электропривода. Если во время перевода стрелки
поступит команда для ее возвращения в исходное поло-
жение, то коммутирующий конденсатор С4 отключит ра-
ботающий тиристор. Через резисторы R7 и R8 заряжа-
ется конденсатор С4 после открытия одного из тиристо-
ров. Эти резисторы выбирают такими, чтобы ток через
них был меньше удерживающего тока тиристора. Этим
обеспечивается выключение цепи рабочего тока после
реверса в соответствующей ветви и возврат стрелки в
исходное положение. Включение тиристоров фиксируется
лампами тлеющего разряда HOI, НО2 и НОЗ. Перена-
пряжения, возникающие при выключении электродвига-
теля контактами автопереключателя, ограничивают дио-
ды Д12 и Д13, включенные параллельно обмоткам. Ис-
точником питания управляющей цепи тиристоров явля-
ются два выхода инвертора.
Контрольная цепь содержит плюсовое ПК и минусо-
вое МК контрольные реле и контрольный выпрямитель
Источником питания контрольной цепи является ин-
вертор, собранный на транзисторах Т1—Т4, получающий
питание от стабилизатора напряжения. Частота тока
инвертора 1 кГц. В схеме исключен ложный контроль
пРи коротком замыкании проводов кабельной линии и
ошибочном выборе положения стрелки.
Схему реле автовозврата АВ настраивают на замед.
ление 1,1 с, причем для постоянства времени замедления
питание подается от стабилизатора напряжения. После
автовозврата возбуждение реле АВ осуществляют нажа-
тием кнопки В.
Управляющая, рабочая и контрольная цепи взаимо-
действуют таким образом. Поворот рукоятки в минусо-
вое положение приводит к возбуждению реле 1МУ н
2МУ по цепи, проходящей через предохранитель, контак-
ты реле, контролирующие наличие напряжения, ПКПТ
и свободность стрелочного участка СП, минусовый кон-
такт стрелочной рукоятки, контакт контрольного реле
МК. Сработав, минусовые управляющие реле самоблоки-
руются независимо от занятия стрелочного участка. Кон-
тактом реле 2МУ замыкается цепь включения тиристо-
ров Т2 и ТЗ, причем напряжение управления подается от
разных обмоток инвертора (А—В и С—Д). Тиристоры
открываются, и через обмотки возбуждения ОВ—и яко-
ря Я потечет ток. В конце перевода стрелки рабочая
цепь разомкнется контактом автопереключателя и тирис-
торы выключатся. Одновременно контрольные контакты
автопереключателя замкнут цепь питания контрольного
реле МК.
При реверсировании электропривода или автовозвра-
те в плюсовое положение возбуждаются плюсовые уп-
равляющие реле 1ПУ и 2ПУ, отключаются реле 1МУ и
2МУ, выключается напряжение управления с тиристора
Т2 и подается управляющий импульс на управляющий
электрод тиристора Т1. Тиристор Т1 отпирается и под-
ключает заряженный коммутирующий конденсатор С4
обратной полярностью к тиристору Т2 и запирает послед-
ний. Рабочий ток пройдет теперь через обмотку ОВА~ и
якорь Я, электродвигатель вернет стрелку в исходное
положение и выключится контактом автопереключателя.
Контрольные контакты замкнут цепь питания плюсового
контрольного реле ПК.
Рассмотренная схема имеет ряд интересных техни-
ческих решений. Использование инвертора для импульс-
ного пуска тиристоров и одновременно для питания
контрольной цепи делает его контролируемым; рассмот-
ренная вентильная контрольная цепь с нейтральными ре*
ле не дает ложного контроля при ошибочном подключе-
нии линейных проводов; имеется визуальный контроль
228
за работой тиристоров. Наряду с этим схема обладает
рядом свойств, противоречащих отечественным ЭТТ (см.
§ 6.2). Стрелка может остаться в среднем положении при
пробое тиристора Т1 или Т2 за счет одновременного
включения обеих обмоток возбуждения электродвигате-
ля при реверсировании и автовозврате; то же происхо-
дит при обрыве цепи коммутирующего конденсатора С4,
зарядного резистора R7 или R8. Управляющее реле ПУ
или МУ остается возбужденным, даже если рабочая цепь
не замкнулась из-за нарушения какого-либо контакта
или сгоревшего рабочего предохранителя. Это опасно,
так как при восстановлении контакта или установке
исправного предохранителя возможен самопроизвольный
перевод стрелки под вагоном. Тиристоры в схеме недо-
используются, так как рабочий ток выключается кон-
тактами автопереключателя.
В отечественной практике были попытки применить
схему рабочей цепи, подобную рассмотренной, но в силу
указанных недостатков успеха не имели. Полученный
опыт был использован при разработке блока типа СГ-76.
6.4. ОСОБЕННОСТИ РАБОТЫ
ТИРИСТОРНЫХ КОММУТАТОРОВ
Работа тиристорных коммутаторов совместно с ре-
лейным комплектом блока и индуктивной нагрузкой, соз-
даваемой электроприводом, имеет свои особенности.
На рис. 89 приведены осциллограммы срабатывания
блока типа СГ-76У при пуске и реверсировании элект-
ропривода типа СПГБ-4. Шлейфы 1 и 2 были включены
в цепи катушек контрольных реле ПК и МК (см. рис.
87); шлейф 3 — через их контакты; шлейф 4 — через
контакты реле ПУС; шлейф 5 — в цепи стрелочной руко-
ятки; шлейф 6 — в минусовой провод рабочей цепи. На
осциллограммах хорошо виден дребезг контактов реле
ПУС, записанный шлейфом 4. Это явление, характерное
в той или другой степени и для контактов остальных ре-
Ле> ухудшает условия работы тиристоров. Поэтому пере-
ключения контактов реле в анодных цепях включенных
тиристоров крайне нежелательны. Как видно из осцил-
лограмм, это учтено за счет срабатывания реле НВС по-
Следним в цепях управления тиристорами. Дребезг кон-
229
тактов самого реле НВС не проявляется, так как если
после первого замыкания контакта тиристор откроется,
то кратковременное размыкание того же контакта открц’
того состояния тиристора не изменяет.
На правильную и надежную работу тиристоров силь-
но влияют перегрузки по току и перенапряжения, по-
этому важно установить причины их появления и знать
способы снижения или подавления.
Помимо случайных причин появления перегрузок и
перенапряжений в питающей сети, они могут быть выз-
ваны различными коммутациями. Так при реверсе стре-
лочного электропривода возникает перегрузка по току
230
до 25,5 А, а при отключении электродвигателя — перена-
пряжение до 500 В и более.
На практике применяют ряд способов борьбы с пе-
регрузками и перенапряжениями: в тиристорном комму-
таторе используют элементы, не чувствительные к доба-
вочным импульсам напряжения или тока; на источник
перегрузок и перенапряжений воздействуют, чтобы пода-
вить или снизить их уровень; в схему вводят дополни-
тельные накопители или поглотители энергии.
Наиболее простым решением является выбор тирис-
торов с таким расчетом, чтобы они могли выдерживать в
течение продолжительного времени наибольшие токи и
перенапряжения. Такой путь отвечает требованиям СЦБ
в наибольшей степени. Однако при этом номинальные
параметры полупроводниковых приборов должны пре-
вышать нормальные рабочие со значительным запасом,
поэтому использование только этого способа не всегда
экономично. Обычно сочетают разумный запас с теми
или иными мерами по уменьшению перегрузок и пере-
напряжений.
Перегрузки по току тиристорного коммутатора возни-
кают при работе стрелочного электропривода на фрик-
цию, его пуске и реверсировании. Борьба с начальным
всплеском тока при пуске и особенно при реверсирова-
нии требует осуществления реостатного пуска, что непри-
емлемо, так как снижается быстродействие электропри-
вода. Поэтому тиристор выбирают по току исходя из зна-
чения тока реверсирования. Исследования показали, что
при предварительном выключении соответствующего ти-
ристорного коммутатора ток реверсирования снижается
с 40 до 25,5 А. Хотя импульс тока реверсирования коро-
че 0,1 с, тиристор выбирают не менее чем с двойным за-
пасом, т. е. максимальным прямым током 50 А. Однако
надо учесть, что при продолжительном включении это
значение уменьшается и зависит от типа тиристора. Для
тиристора типа Т10-50 максимально допустимый ток в от-
крытом состоянии при естественном охлаждении 16 А.
Это приемлемо, так как ток перевода стрелки около 4 А
(см. табл. 16), а ток при работе электропривода на
Фрикцию до 7 А (§ 76 Инструкции ЦШ/3793). Сравни-
тельно небольшие значения токов и времени работы
электропривода позволяют применить охладитель упро-
щенной конструкции.
231
Наибольшие перенапряжения возникают в момент
выключения тиристорного коммутатора и обусловлены
индуктивным характером нагрузки.
Исследования показали, что уровень перенапряжений
на пусковом тиристоре Т Un зависит от тока фрикции
/ф таким образом:
/ф, А......... 5,2 6 7 7.8 8,5 9 10
Ua, В......... 440 460 500 525 545 560 600
Перенапряжения на запирающем тиристоре ЗТ соот-
ветственно в 1,5 раза меньше, а длительность импульса
перенапряжения одинакова и не превышает 1 мс. Так
как значения постоянного напряжения в закрытом состо-
янии и постоянного обратного напряжения должны быть
не более 60% их импульсного значения, можно принять
тиристор 450 В. Но с учетом двойного запаса и значений
Un выбирают тиристор 1000 В, т. е. 10 класса. Сниже-
ние класса требует специальных мер, анализируемых
ниже.
Обратные диоды, подключенные параллельно элект-
родвигателю, почти полностью устраняют перенапряже-
ния. Однако с точки зрения требований СЦБ такое ре-
шение уязвимо: в случае пробоя диода, находящегося
под воздействием тех же перенапряжений, будет зашун-
тирован электродвигатель, что может привести к/ оста-
новке стрелки в среднем положении. При пробое тирис-
тора стрелка перевод закончит, и реле ТД выключит
электродвигатель, т. е. требования безопасности будут
удовлетворены.
Перенапряжения снижают конденсаторными фильт-
рами, подключаемыми параллельно тиристору. Этот спо-
соб требует много места и в типовом корпусе стрелочно-
го блока реализовать его сложно.
Уровень перенапряжений зависит от коммутирующей
емкости С1 и С2 (см. рис. 87). Если коммутирующую ем-
кость увеличить по сравнению с ее значением, требуе-
мым для запирания Т, перенапряжения на нем уменьша-
ются. Минимальная емкость, необходимая для запира-
ния тиристора,
С = /ж tJUo = 7-100/200 = 3,3 мкФ,
ф в р
где /ф — ток при работе электропривода на фрикцию. А;
Up — напряжение на конденсаторе, В;
/в — время выключения тиристора, мкс.
232
Перенапряжения на тиристоре Т в зависимости от С
при = 1 А указаны ниже:
С. мкФ................. 10 20 30 40
Ua, В................. 500 380 340 320
Таким образом, предпочтительной является емкость
С=304-40 мкФ. Однако следует иметь в виду, что при
этом увеличивается время /3 заряда конденсатора С, что
для быстродействующего привода нежелательно.
Если R1 = R2 = 30 кОм, то уже при С=20 мкФ
f3 = 3CR1R2KR1 + R2) = 0,9 с,
что значительно превышает время перевода стрелки, рав-
ное 0,6 с. При С— 10 мкФ /3=0,45 с, что приемлемо.
Сопротивление резисторов R1 и R2 ограничено значени-
ем удерживающего тока тиристора и мощностью рас-
сеяния на резисторе выбранного типа.
Работоспособность тиристорного коммутатора зависит
не только от значений напряжений на тиристорах и про-
текающих по ним токов, но и первых производных их по
du
времени, т. е. от скорости нарастания напряжения
и тока Превышение критических значении этих
параметров недопустимо:
Группы..........................
/du \
- В/мкс................
\ut /Крит
!di_ \
\dt /крит,
А/мкс ...............
1 2 3 4 5
20 50 100 200 500
20 40 70 100 200
Исследования показали, что в блоке типа СГ-76У
пусковой тиристор менее критичен к своей группе, чем
запирающий.
Условия работы ЗТ усложнены следующим обстоя-
тельством. При отпирании ЗТ основной тиристор Т запи-
рается, так как к нему оказывается приложенным отри-
цательное напряжение конденсатора С. Причем в на-
чальный момент тиристор Т полностью открыт, а ЗТ
только начинает открываться, и в этот момент ЗТ может
быть подвержен воздействию эффекта Сущность
233
его заключается в том, что управляющий импульс перво,
начально включает область, непосредственно прилегаю,
щую к управляющему электроду, и лишь затем вклю-
ченное состояние распространяется по всей площади
перехода тиристора. Локальный нагрев области перво-
начального включения при высоких скоростях нараста-
ния тока может привести к выходу прибора из строя
сразу же после включения либо к постепенной потере
своих свойств из-за избыточного разогрева. Предельное
di
значение зависит от размера первоначального вклю-
чения области и скорости распространения включенного
состояния. Скорость распространения заряда в области
включения зависит от градиента концентрации инжекти-
рованных носителей, поперечного поля, поперечного то-
ка и геометрии структуры тиристора. Для прибора с за-
данными параметрами скорость распространения есть
функция параметров схемы включения: амплитуды и за-
кона изменения анодного тока, характера анодной на-
грузки, температуры тиристора и параметров импульса
управления [23].
В тиристорных коммутаторах блока типа СГ-76У (см.
рис. 87) значение «57 А/мкс. Поэтому с учетом за-
паса тиристор должен быть выбран с критической скоро-
стью нарастания прямого тока не ниже 4 группы
(100 А/мкс). Применение тиристора более низкой груп-
. 'di
пы возможно при условии уменьшения аппаратурной
например, с помощью индуктивности L, включенной по-
следовательно с коммутирующим конденсатором С, при-
чем
l = 1 ,ззар tB/K2 /ф, Я
где К — отношение амплитуды тока, протекающего в LC-конту-
ре, к максимальному значению тока нагрузки.
На работу тиристорного коммутатора влияют пара-
метры источника управляющих сигналов. В блоке типа
СГ-76У управляющий сигнал формируется из анодного
напряжения тиристора. Необходимые значения напря-
жения и тока управления, скорости нарастания управля-
ющего сигнала и заряда в базовую область управляю-
щего электрода обеспечиваются при соответствующих
234
рходных характеристиках тиристора. Такая схема уп-
равления тиристором отличается минимумом элементов
(один резистор) и простотой, что особенно важно для
стрелочного блока, но предъявляет повышенные тре-
бования к качеству тиристоров. В иных случаях исполь-
зуют более сложный источник управляющих сигналов
(блокинг-генератор, мультивибратор, генератор на од-
нопереходном транзисторе и др.), менее критичный
к входным характеристикам тиристора, но и менее на-
дежный.
Рассмотренные особенности тиристорных коммутато-
ров свидетельствуют о необходимости тщательного вход-
ного контроля тиристоров перед установкой в блок. Па-
раметры тиристора указаны на его корпусе:
Т10-50-10-425-У2 или 10-425 Т10-50-У2 означает: Т10 —
вариант конструкции тиристора; 50 предельный ток, А;
10 — класс тиристора или 10X100=1000 В — предель-
ное повторяющееся напряжение; 4 — группа по критн-
ческой скорости нарастания прямого напряжения ( ^-) ;
2 —группа по времени выключения; 5 — группа по крити-
. di . ..
ческой скорости нарастания прямого тока ( ); У —
климатическое исполнение (для умеренного климата);
2 — категория размещения.
Установка в блок тиристоров только предусмотренно-
го или более высокого класса и группы — необходимое
условие для безотказной работы в течение назначенного
ресурса. Это же относится и к диодам, включенным в уп-
равляющие цепи тиристоров, так как пробой диода при-,
водит к выходу из строя тиристора из-за появления на
его управляющем электроде отрицательного потенциала
относительно катода. К потере способности тиристора за-
пирать прямой ток может привести наличие мостящего
контакта 112-113 (132-133) у реле НВС (типа КДР-1 или
РЭМ-1). Мостящий контакт должен быть устранен за
счет правильной регулировки контактов. Следует отме-
тить важность соблюдения норм контактного нажатия
У реле НУС (типа НМПЗ 0,2/220) и ПУС (типа ПМПУ
150/150) для предотвращения чрезмерного дребезга и по
Этой причине искрения контактов.
Скрытые технологические дефекты выявляют при тре-
нировке готовых блоков.
235
6.5. АВТОМАТИЧЕСКАЯ ЗАЩИТА СТРЕЛОК,
ГАРНИТУР И СТРЕЛОЧНЫХ ЭЛЕКТРОПРИВОДОВ
ОТ ПОВРЕЖДЕНИЙ ПРИ ВЗРЕЗАХ
В связи с возрастанием объема сортировочной рабо-
ты и развитием промышленного железнодорожного
транспорта появилась необходимость в комплексной
защите стрелочных устройств от повреждений при взре-
зах и исключении задержек поездов.
Механические способы защиты (взрезной привод ц
взрезная стрелка) стали малоэффективными из-за воз-
росших скоростей маневрирования составов и скоростей
взрезов.
Для защиты-от повреждений при взрезах не только
стрелочного электропривода с гарнитурой, но и стрел-
ки во всем диапазоне допускаемых скоростей маневриро-
вания (согласно п. 15.16 ПТЭ до 60 км/ч) предложен
электрический метод [24]. Его сущность заключается в
автоматической установке стрелки при взрезе в попут-
ное подвижной единице положение, чем исключается
силовое воздействие гребней колес состава на остряки,
гарнитуру и электропривод. Указанный метод получил
название автоматической защиты стрелок, гарнитур и
стрелочных электроприводов от повреждений при взре-
зах (АЗПВ).
Устройства АЗПВ (рис. 90) содержат по одной путе-
вой педали на каждое ответвление стрелочного перево-
да (1Д\ и /Д2 типа ПБМ-56 и др.), блок педальных реле
БМП-62, диодный блок БДШ-20, реле фиксации взреза.
Нормально устройства АЗПВ, как и другие устройст-
ва защиты, применяемые в технике СЦБ (автостопы,
ПОНАБ, автоматические выключатели т. д.), находятся
в режиме ожидания.
При взрезе стрелки в положении, показанном на рис.
90, движение первого колеса состава мимо магнитной пе-
дали 1Д2 при занятости рельсовой цепи 2П вызывает
срабатывание педального реле 2ПД, которое включит
повторитель 20ПСП. Возбудившись, реле 20ПСП под-
ключит полюс ТСПБ к стрелочно-пусковому блоку
ПС220М (выводы 1'6) (см. § 6.1). Срабатывание послед-
него обеспечит включение стрелочного электропривода и
перевод стрелки в попутное движущемуся составу поло-
жение.
236
Рис. 90. Схема включения устройств автоматической защиты от
повреждений при взрезах по сигналу от магнитной педали
Фиксация взреза может предусматриваться оптиче-
ская (миганием красной лампочки над стрелочной руко-
яткой), акустическая (звонком АВз) и механическая
(счетчиком, связанным с кнопкой взреза АВ). Оптическая
и акустическая индикации включаются таким образом.
Реле 20ПСП, воздействуя на стрелочный пусковой
блок, одновременно включает повторитель 2ПОПСП, ко-
торый самоблокируется и снимает опорное напряженнее
Диода Д. Реле АВ срабатывает и выключает обратный
повторитель 1АВ. Выдержав замедление («6,3 с), реле
1АВ контактом, включенным последовательно с кнопкой
АВ, переключит цепь самоблокировки реле 2ПОПСП, и
она пройдет через контакт реле 1СП, контролируя фак-
тическое вступление состава на стрелочную секцию.
237
После освобождения секции и возбуждения реле /С/7
самоблокировку реле 2ПОПСП обеспечит контакт вык-
лючившегося реле 2АВ. Вслед за реле 2АВ выключится
реле ЗАВ, которое, выдержав замедление, включит крас-
ную лампочку и звонок АВз. Нажатием кнопки АВз де-
журный по маневровому посту выключает звонок. Мига-
ние красной лампочки прекращается после нажатия
кнопки АВ, что приводит к выключению реле 2ПОПСП
и затем АВ и выключению повторителей 1АВ, 2АВ ц
ЗАВ. Одновременно срабатывает механический счетчик,
связанный с кнопкой АВ. После этого звонок звонит
вновь и выключается, когда кнопка АВз вытягиванием
возвращается в исходное положение.
Применение .нескольких медленнодействующих реле
повторителей вызвано тем, что направление движения
состава фиксируется по последовательности занятия
предстрелочной и стрелочной рельсовых цепей, так как
педали ПБМ-56 этого не делают.
На сортировочных горках Октябрьской дороги элект-
ропривод включается не по сигналу от педали, а кон-
тактами путевых реле двух рельсовых цепей, смежных
с рельсовой цепью стрелочного изолированного участка.
Схема (рис. 91) содержит пять реле типа НМШ1-1800:
1С и 2С, определяют направление движения под-
вижного состава по стрелке (противошерстное или по-
шерстное); ПЗ и М3 (плюсовое и минусовое замыкаю-
щие реле), переводят стрелки в положение, соответству-
ющее маршруту подвижной единицы; П1СП — множи-
тель контактов стрелочного путевого реле.
При противошерстном движении по стрелке первым
будет занят участок 1СПУ, и реле П1СП, срабатывая,
включает счетчик 2С, который, размыкая контакты 2Г23,
исключает возможность срабатывания реле 1С, и схема
защиты влияния на управление стрелкой в этом случае
не оказывает.
В случае пошерстного движения первым будет за-
нят участок 2СПУ и затем 1-2ПУ илиЗСПУ н 1-ЗПУ,чем
отключается цепь управления стрелкой от рукоятки на
аппарате ГАЦ. При этом реле ПЗ и М3 проверяют со-
ответствие положения стрелки занятым участкам. В слу-
чае рассогласования реле ПЗ или М3 возбуждают-
ся и переводят стрелку по направлению движе-
ния.
238
Рис. 91. Схема включения устройств автоматической защиты от повреждений при взрезах по сигналу рель-
совых цепей
239
Принудительный перевод стрелки сопровождается
взрезным звонком, сигнализирующим дежурному по
горке о необходимости перевода стрелочной рукоятки
в нужное положение, и фиксируется импульсным счет-
чиком. Показания счетчика взрезов фиксируются в опе-
ративном журнале ДСПГ.
Рассмотренный метод автоматической установки стре-
лок при пошерстном движении позволяет в дальнейшем
рационализировать маршрутизацию и осигнализова-
ние передвижений и повысить безопасность движения
поездов в маневровых районах при универсальном при-
менении невзрезных стрелочных электроприводов, а на
сортировочных горках — осуществить полную автомати-
зацию управления стрелками.
7 ТЕХНИЧЕСКОЕ ОБСЛУЖИВАНИЕ
ЭЛЕКТРОПРИВОДОВ
7.1. УСТАНОВКА ЭЛЕКТРОПРИВОДОВ
Стрелочный электропривод устанавливают на
гарнитуре, частично подготовленной заводом к сборке.
Окончательная подготовка осуществляется непосредст-
венно на стрелке после дополнительной сверловки фун-
даментных угольников. Разметку под сверловку обычно
выполняют по месту после предварительной подвески
угольников к рамным рельсам. После этого гарнитура
на стрелке собирается с обязательным применением за-
щитных средств от саморазвинчнвания резьбовых соеди-
нений. Основным руководством для подбора деталей
комплекта гарнитуры и ее сборки служат установочные
чертежи, нумерация которых приведена выше.
Установке электропривода предшествует его поузло-
вая разборка, которая является обязательной. Перед от-
правкой с завода электропривод смазывают внутри ан-
тикислотной и антищелочной универсальной низкоплав-
кой смазкой марки «УН». После разборки узлы и дета-
ли промывают в керосине, высушивают и подвергают
наружному осмотру. Внимательный наружный осмотр
необходим для выявления нарушений, которые могли’
произойти из-за небрежной транспортировки привода.
Особое внимание уделяется деталям из чугуна, которые
могут иметь трещины. Все обнаруженные недостатки не-
зависимо от значимости должны фиксировать в специ-
ально заведенной дефектной ведомости. Затем привод
собирают, следя за тем, чтобы детали, которые предо-
хранены от смещения штифтовкой, попали строго на свои
места. После сборки все зубчатые зацепления и трущие-
ся части смазывают, а масленки заполняют смазкой
Рекомендуемых марок для данного времени года. Соб-
ранный и смазанный привод проверяют вращением кур-
ильной рукоятки. При этом должны отсутствовать не-
равномерный ход шибера, заедания, стук или шум при
241
вращении зубчатых колес. Величина люфтов, рабочих
зазоров, хода шибера, врубания контактов и т. д. долж-
на быть в допустимых пределах.
Если в процессе сборки электропривода типа СП-3
(СПГ-3, СПГ-ЗМ, СПГБ-4, СПГБ-4М) должна быть про-
изведена перекладка шибера и контрольных линеек, не-
обходимо: повернуть шибер в направляющих пазах кор-
пуса на 180° в горизонтальной плоскости; повернуть
контрольные линейки в направляющих пазах корпуса
на 180° в вертикальной плоскости; поменять местами на-
правляющую плиту и накладки сальников с боковой
крышкой корпуса.
Особое внимание следует обратить на поворот конт-
рольных линеек именно в вертикальной плоскости. Де-
ло в том, что имеется возможность повернуть их в гори-
зонтальной плоскости и даже отрегулировать затем рабо-
ту привода, но при этом будет обеспечиваться контроль
положения уже не прижатого, а отжатого остряка, что
недопустимо.
Контрольные линейки в электроприводе типа СП-6
переставляют таким образом (см. рис. 21):
снимают боковую крышку 11;
расшплинтовывают ушки 6 линеек;
дальнюю от шибера линейку выдвигают из электро-
привода так, чтобы открылся доступ к упору, находя-
щемуся на конце линейки, ближней к шиберу;
расшплинтовывают и выкручивают винты, крепящие
упор, после чего последний снимают;
вытягиванием за ушки линейки удаляют из привода;
ушки снимают и переставляют на другую сторону ли-
неек;
снимают направляющую плиту с накладкой сальни-
ков и переставляют на другую сторону привода;
линейки разворачивают на 180° в горизонтальной
плоскости и устанавливают в привод; при этом линейка,
на которой крепят упор, должна попасть в свой направ-
ляющий паз, т. е. остаться ближней к шиберу;
упор устанавливают на прежнее место на линейках.
Если перестановку линеек выполняют у стрелки, то
упор следует устанавливать в последнюю очередь, т. е.
после окончания всех регулировочных работ. Если ли-
нейки с выходом в противоположную сторону перестав-
лять не требуется, то на время регулировочных работ во
242
избежание повреждений крепежных винтов упор целесо-
образно снимать. При установке упора на место нужно
следить за тем, чтобы его нижняя плоскость не высту-
пала за плоскость линейки, винты были затянуты, уста-
новлены контргайки и зашплинтованы.
Для перекладки шибера и контрольных линеек элек-
тропривода типа СПВ-6 необходимо: шиберные шестерни
поменять местами; пальцы шиберов выпрессовать и за-
прессовать их с противоположной стороны; шибер повер-
нуть в направляющих пазах корпуса привода на 180° в
горизонтальной плоскости; контрольные линейки повер-
нуть в направляющих пазах корпуса на 180° в вертикаль-
ной плоскости; направляющие и накладки сальников по-
менять местами с боковой крышкой.
После сборки выполняется внутренний электрический
монтаж привода в соответствии со схемой, предусмот-
ренной проектом. После монтажа проверяют наличие
контргаек на всех шпильках автопереключателя, колод-
ке блок-контакта, двигателя и усилие их затяжки. Под-
готовленный электропривод устанавливают и крепят на
гарнитуре.
Как правило, рабочие и контрольные тяги требуют
удлинения или укорочения, т. е. подгонки. Для регули-
ровки тяг на месте монтажа используют прокладки меж-
ду серьгой и остряком или горячую осадку или оттяжку.
Уменьшение диаметра рабочих тяг при оттяжке допуска-
ется не более 2 мм, а контрольных — 2,5 мм при условии
обеспечения плавных переходов в месте уменьшения диа-
метра. Первой подгоняют рабочую тягу, для чего ее обя-
зательно снимают. При подгонке связной тяги гарниту- ’
ры электроприводов серии СП следует соблюдать осто-
рожность: при нагреве тяги не должно прогреваться
место насадки ушка во избежание ослабления его закреп-
ления. Вслед за рабочими подгоняют контрольные тяги.
Их длину можно регулировать, изменяя стрелу прогиба
в горизонтальной плоскости. Сначала регулируют корот-
кую контрольную тягу, а затем длинную. Контрольные
тяги регулируют при соответствующем плотно прижатом
к рамному рельсу остряке, а затем длинную тягу укора-
чивают, а короткую удлиняют на 1,5—2 мм.
Стрелочные гарнитуры для установки электроприво-
дов серии СП имеют в комплекте рабочие и контрольные
тяги, изготовленные в соответствии с чертежами. Только
243
при правой установке электропривода по варианту II »
левой — по варианту I концы контрольных тяг должны
быть перегнуты в противоположную сторону.
Пальцы шарниров Гука, контрольных линеек и оси
серег после подгонки тяг должны свободно без заеданий
вставляться в отверстие сопряженных деталей, но не
иметь при этом люфтов.
Установка стрелочного электропривода на гарнитуре
считается произведенной правильно, если: ход остряков
из одного крайнего положения в другое, измеренный про-
тив серег, составляет 1521г мм; в крайних положени-
ях остряки плотно прижаты к рамным рельсам; зуб но-
жевого рычага автопереключателя заходит в вырезы
контрольных линеек; при закладке шаблона толщиной
4 мм между остряком и рамным рельсом зуб ножевого
рычага автопереключателя не заходит в вырезы конт-
рольных линеек, а контрольные контакты разомкнуты;
зазор между зубом ножевого рычага, когда он находится
в вырезах контрольных линеек, и скосом линейки, свя-
занной с прижатым остряком, не менее 1 мм и не более
3 мм. Зазор регулируют по указателю (рис. 92).
Для разделки кабеля у электропривода применяют ка-
бельные муфты или путевые ящики. Провода вводят в
электропривод в гибком шланге.
Технология установки электроприводов на простых,
пологих и перекрестных стрелочных переводах, а также
на стрелочных переводах, имеющих крестовину с под-
вижным сердечником, более подробно рассмотрена в [25].
Электропривод автошлаг-
баума устанавливают на ти-
повой бетонный фундамент
от светофора, который ори-
ентируют так, чтобы отвер-
стие для ввода кабеля на-
ходилось со стороны обочи-
ны автомагистрали. Ось
фундамента должна быть
удалена от ближнего рель-
са на расстояние не менее
8,5 м при полном перекры-
тии дороги заградительны-
ми брусьями или 6м —
при неполном. РасстоЯ-
Контрольные линейки
Рис. 92. Указатель для регули-
ровки зазора между прижа-
тым остряком и рамным рель-
сом
244
ние от оси бруса до покрытия дороги должно составлять
1 —1,25 м. После закрепления электропривода на фунда-
менте вводят кабель в кабельную муфту и разделывают
его, а затем устанавливают и закрепляют мачту и крон-
штейн-раму на концах выходного вала, выступающих из-
корпуса электропривода.
Заградительный брус вводят концом с металлически-
ми накладками в отверстие кронштейн-рамы и соединя-
ют с ней осью. Соединение должно быть сделано так,
чтобы брус при воздействии на него рукой в горизонталь-
ной плоскости поворачивался на угол 45° в обе стороны.
Затем протаскивают заводские жгуты проводов к свето-
форным головкам, звонку громкого боя, в корпус приво-
да, брус и подключают провода согласно схеме управле-
ния (см. рис. 82).
Брус балансируют противовесами. Он считается урав-
новешенным правильно, если при любом угле поворота
из горизонтального в вертикальное положение рукой са-
мопроизвольное падение бруса будет отсутствовать.
В сигнальные фонари заградительного бруса и свето-
форные головки устанавливают лампы и заменяют за-
глушки стеклами.
Щиток управления размещают на наружной стене
будки дежурного по переезду. Над щитком навешивают
козырек. Подводимый кабель разделывают на выводах,,
предусмотренных для этого внутри каркаса щитка.
Электропривод автостопа метро устанавливают на
гарнитуре, поставляемой заводом с учетом типа тоннеля
или места установки и требуемой длины карданного ва-
ла. Поэтому установка сводится к сборке и регулировке ’
узлов.
Полосу 4 (см. рис. 52) располагают на шпалы так,
чтобы путевая скоба оказалась над шпальным ящиком
на расстоянии от 288 до 328 мм до внутренней грани
головки ближнего рельса. Затем подкладками 3 добива-
ются возвышения скобы над уровнем головки рельса в
пределах от 85 до 90 мм, после чего пришивают полосу
4 костылями к шпалам. Место заделки нижнего основа-
ния 8 выбирают так, чтобы вертикальная ось скобы, ось
карданного вала и центр вращения вала 11 по возмож-
ности лежали в одной плоскости. После закрепления
нижнего основания устанавливают карданный вал 21, до-
биваясь легкости его вращения совместно с путевой ско-
245-
бой. Затем болтами закрепляют верхнее основание 2 на
нижнем 3 (см. рис. 45).
Электропривод устанавливают на верхнем основании,
выставляют его по вертикали и предварительно закреп-
ляют, не затягивая гаек. К Л осле этого подвешивают тягу,
противовес 9 с помощью с-ерьги 13 (сМ. рис. 52), которую
на противоположном кон lxе связывают серьгой 7 с рыча-
гом 6 и приступают к окончательной регулировке гарни-
туры. Обеспечивают зазор» между противовесом и путе-
вым бетоном или балла стом не менее 50 мм. Такой же
зазор оставляют и у путеной скобы. Расстояние от под-
кладки ходового рельса zxo гарнитуры автостопа не ме-
нее 15 мм. В заграждающем положении зазор между пу-
тевой скобой и упором 5 регулируют на 5 мм, но при
выборке люфтов скоба должна касаться упора. В разре-
шающем положении авто*стопа скоба не должна касать-
ся упора /; при этом зазор между рычагом электропри-
вода и вырезом серьги 13 должен быть не менее 3 мм,
что регулируют вращениеушка 14 по резьбе.
В отрегулированной г гарнитуре все резьбовые соеди-
нения затягивают, трущие ся части электропривода и гар-
нитуры смазывают и выполняют контрольную операцию.
После нажатия на рычаг электропривода сверху вниз до
перекрытия светофора на красный огонь автостоп дол-
жен возвратиться в открвлтое положение. Если этого не
происходит, регулируют ток удержания противовеса в
разрешающем положении автостопа с помощью дроссе-
лей в пределах от 0,5 до О, 65 А.
7.2. ТРЕБОВАНИЯ ПО ТЕХНИЧЕ СКОМУ ОБСЛУЖИВАНИЮ
ЭЛЕКТРОПРИВОДОВ
Стрелочный электропривод. При техническом обслу-
живании стрелочного электропривода необходимо соблю-
дать требования, основном перечень которых сгруппиро-
ван далее по узлам.
Корпус имеет крышку, которая должна легко снимать-
ся и надеваться, обеспечивая при защелкивании замка
уплотнение за счет прокл эдки из трубчатой или фасон-
ной резины. Уплотнение крышки должно надежно пре-
дохранять электропривод, ст попадания внутрь влаги и
пыли. Отверстия в корпуса для прохода курбельной ру-1
246
коятки и ключа при закрывании блокировочной заслон-
ки должны надежно уплотняться за счет резиновых
шайб, приклепанных к заслонке. Наличие зазора не до-
пускается. Уплотнение должно обеспечиваться также в
месте выхода шиберов и контрольных линеек за счет
войлочных сальников, которые одновременно должны
смазывать их поверхность.
При повороте блокировочной заслонки для доступа к
замочной скважине контактный нож должен полностью
разомкнуть все пары контактов на колодке блок-контак-
тов. Заглушка должна плотно закрывать отверстие для
ввода проводов. Снаружи корпус периодически окраши-
вают в черный, а изнутри в серый цвет нитроэмалью, а
крышку корпуса — изнутри и снаружи в черный цвет.
Для покраски в черный цвет применяют нитроэмаль мар-
ки НЦ-184, а в серый — НЦ-132.
Детали электропривода, имеющие поступательное или
вращательное движение, должны легко перемещаться без
заеданий; толчки и резкий стук — отсутствовать. При
вращении рукой входного вала передачи или корпуса
фрикциона в собранном электроприводе не должно быть
заеданий и шума при работе зубчатых колес и шестерен.
Рабочие зазоры должны иметь такие значения: гори-
зонтальный и вертикальный зазоры между шибером и
направляющими — до 0,5 мм, между контрольными ли-
нейками и направляющими — до 0,5 мм; боковой зазор
между гранями зубьев шибера и шиберной шестерни по
всей длине хода шибера — до 1 мм; осевое перемещение
валов между опорами — 0,3—0,6 мм. Все трущиеся ча-
сти электропривода должны быть смазаны.
Запирающие зубья — кулачки не должны иметь сле-
дов фитинга, задиров, сколов, трещин и неравномерного
износа. Сопряженные поверхности запирающих зубьев
должны быть притерты. Пальцы шиберов (СПВ-6) сле-
дует прочно закреплять в посадочных отверстиях. Запи-
рающие зубья шибера должны иметь плавные переходы
между запирающей и боковой гранями. Зубья шибера
должны постоянно быть смазаны, для чего должна обес-
печиваться герметичность масляной ванны в местах при-
легания ее стенок к шиберу.
Вращающиеся части ограничительных устройств и
особенно их опорные плоскости нужно внимательно про-
верять на отсутствие сколов, трещин и глубоких вмятин.
24Г
Особое внимание следует уделять проверке прочности
закрепления упора 34 (см. рис. 16) в электроприводах
серии СПГ (СПГБ).
Взрезное сцепление электропривода типа СПВ-6 дол-
жно четко и надежно срабатывать при взрезе. При уста-
новке на стрелках, близких к источникам электропита-
ния, напряжение на электродвигателях обычно значи-
тельно выше номинального. Во избежание самовзреза
взрезное устройство должно в этих случаях регулиро-
ваться на усилие 13—15 кН, в остальных — 10—12 кН.
Фиксатор взрезного устройства должен четко сраба-
тывать при взрезе. Упор холостого хода 6 (см. рис. 31)
должен быть прочно соединен с шестерней.
Фрикционное сцепление развивает усилие, которое
должно быть на стрелках ЭЦ на 25—30% и на стрелках
ГАЦ на 50% выше требуемого для перевода стрелки.
При регулировке фрикции по потребляемому току пред-
варительно необходимо измерить ток нормального пере-
вода. Ток работы электропривода серий СП и СПВ на
фрикцию должен превышать в 1,25—1,3 раза, а СПГБ
(СПГ) в 1,5 раза ток нормального перевода. Фрикцион-
ное сцепление регулируют на каждой стрелке индивиду-
ально. Значения токов работы на фрикцию при вращении
в разные стороны не должны превышать 10% средне-
арифметического значения обоих токов.
Фрикционные диски должны быть притерты так, что-
бы суммарная площадь контакта трущейся пары состав-
ляла не менее 75% площади поверхности диска, мень-
шего по диаметру. Корпус фрикциона, расположенный
вне редуктора, должен иметь осевой люфт в пределах от
0,5 до 1 мм, встроенный в редуктор — от 0,3 до 0,5 мм,
а фрикционные диски свободно перемещаться при несжа-
той пружине. Для сохранения постоянства регулировки
фрикционные диски электроприводов серий СПВ, СП
(за исключением СП-1), СПГ и СПГБ должны постоян-
но смазываться.
Контактные колодки, ножи и пружины должны быть
очищены от грязи и нагара. Контактные ножи должны
•быть расположены симметрично относительно контакт-
ных пружин и перпендикулярно к изолирующим основа-
ниям. Врубание ножей в контактные пружины должно
происходить практически мгновенно на глубину не ме-
нее 7 мм. Каждая пара контактных пружин должна от-
248
жиматься на одинаковое расстояние 0,7—1 мм относи-
тельно ножа с контактным нажатием 3,5—5 Н, не давая
остаточных деформаций. Расстояние между контактны-
ми пружинами автопереключателя определяют специаль-
но изготовленными шаблонами из пластмассы: 5,7 и
11,6 мм для измерения номинального расстояния между
контактными пружинами соответственно для контроль-
ных и рабочих контактов при отсутствии ножа и 6,4 и
12,5 мм при наличии ножа. При регулировке контакт-
ных пружин не допускается образование перегибов. Вру-
бание контактных ножей не должно заканчиваться уда-
ром в изолирующие колодки. Угол поворота контактных
ножей не должен превышать: СПВ-6—21°, СП и СПГ—
28°, но обеспечивать при любом крайнем положении
шибера замыкание трех пар рабочих и такого же числа
контрольных контактов. При взрезе стрелки и отсутствии
повреждений в механизме привода ножи должны разомк-
нуть рабочие (только в СПВ) и контрольные контакты
и занять среднее положение, обеспечив зазор не менее
2,5 мм до контактных пружин.
Рабочие зазоры между составными частями автопе-
реключателей должны быть следующими: между пяткой
переключающего и пальцем (СПВ) или роликом (СП,
СПГ, СПГБ) ножевого рычагов 0,3—0,8 мм; концом пе-
реключающего рычага и вырезом взрезного барабана
(СПВ) или шайбы главного вала (СП, СПГ, СПГБ)
1.5—3 мм; контактным ножом и изолирующей колодкой
1,5—3 мм (при крайних положениях ножа); контактны-
ми пружинами и ножом (при среднем положении но-
жа) — не менее 2,5 мм; зубом ножевого рычага и ско-.
сом выреза контрольной линейки, связанной с прижа-
тым остряком, — 1—3 мм.
Сопротивление изоляции между контактами автопе-
реключателя и корпусом электропривода при относи-
тельной влажности до 80% должно быть не менее
25 МОм. Изолирующие основания колодок автопереклю-
чателя и блок-контакта должны проверяться на электри-
ческую прочность от источника переменного тока часто-
той 50 Гц и мощностью 0,5 кВ-А при напряжении 1000 В
в течение 1 мин.
Ротор-секторы датчиков при вращении вручную не
Должны иметь заеданий. По окончании перевода пружи-
ны автопереключателя должны обеспечить четкий пере-
249
ход ротор-сектора соответствующего датчика в контроль-
ное положение.
Для оценки исправности датчика на его передней
крышке имеется шкала с предельными рисками для каж-
дого из положений поводка при начальном, среднем и
переведенном положениях стрелки. Острие указателя по-
водка должно быть расположено между рисками, соот-
ветствующими каждому из этих положений.
Допустимое превышение температуры обмоток датчи-
ка над температурой окружающего воздуха не более
65°С. Температуру воздуха принимают не выше 45°С,
напряжение питания 28 В и нагрузка — реле типа
НМШ1-7000, включенное через выпрямительный
мост.
В процессе эксплуатации характеристики датчиков
должны соответствовать данным, указанным в табл. 15.
Сопротивление изоляции между обмотками электро-
двигателя и корпусом при температуре окружающего воз-
духа 20°±5°С и относительной влажности до 90% долж-
ны быть менее 100 МОм, а после испытаний на влагоус-
тойчивость — не менее 10 МОм. Электрическую проч-
ность изоляции обмоток следует проверять от источника
переменного тока частотой 50 Гц и мощностью 0,5 кВ-А
при напряжении 1500 В в течение 1 мин.
Воздушный зазор между полюсным наконечником и
сердечником якоря не должен превышать 0,75 мм (серия
МСП), статором и ротором — 0,3—0,39 мм (серия МСТ).
Продольный люфт якоря должен быть от 0,2—0,7 мм, а
ротора МСТ — 0,4—1 мм. Щетки притирают не менее
чем на 40% и располагают строго на геометрической ней-
трали, т. е. диаметрально по коллектору на горизонталь-
ной оси, совпадающей с осью электромагнитов возбужде-
ния. Усилие нажатия щеток на коллектор должно быть
1,96—2,94 Н (200—300 гс), причем коллектор следует
продорожить и отполировать. Биение коллектора не
должно превышать 0,03 мм. Сердечники электромагнитов
возбуждения должны плотно прилегать к корпусу элект-
родвигателя и быть надежно закреплены. Разность чис-
ла оборотов при вращении в одну и другую сторону не
должна превышать 10%. Температура перегрева обмо-
ток электродвигателей после двухчасовой работы в пов-
торно-кратковременном режиме (ПВ=15%) должна
быть не более 60°С сверх температуры окружающей
250
среды. Искрение на коллекторе не должно превышать
степени 2 по шкале искрения (степень искрения 2 соот-
ветствует таким условиям, когда в процессе длительной
работы электродвигателя на коллекторе остаются следы
почернения, а на щетках следы нагара).
Электропривод автошлагбаума. Требования к техни-
ческому обслуживанию электропривода автошлагбаума
в основном совпадают с рассмотренными в части ухода
за корпусом, механической передачей и электродвигате-
лем. Ряд других требований вызван конструктивными
отличиями.
Крышка электропривода должна поворачиваться на
90° до упора и в этом положении свободно сниматься с
шарнира. При установке редуктора в корпус необходимо
обеспечить соответствие крайних положений выходных
валов редуктора и электропривода при помощи кривоши-
па 6, тяги 5 и коромысла 3 (см. рис. 43). Осевой люфт
выходного вала 4 электропривода не должен превышать
1 —1,5 мм. Брус из вертикального положения не должен
выходить при воздействии на него от руки, но после пред-
варительного поворота оси фрикции рукой для снятия
запирания должен приводиться в горизонтальное поло-
жение небольшим усилием.
Фрикция должна обеспечивать нормальную работу
автошлагбаума при подъеме и опускании бруса. Попада-
ние смазки на поверхность фрикционной шайбы не до-
пускается. Регулировочная гайка должна быть надежно
зафиксирована. Ток при работе электропривода на фрик-
цию при застопоривании бруса должен быть в пределах
от 4,5 до 5 А. Значения токов работы на фрикцию при'
подъеме и опускании бруса не должно отличаться более
чем на 10%.
Необходима проверка надежности фиксации положе-
ния бруса в горизонтальной плоскости. Если затяжка
пружины слабая, то брус при подъеме и опускании мо-
жет самопроизвольно повернуться и повредить устройст-
ва сигнализации шлагбаума. Чрезмерная затяжка пру-
жины может создать излишне жесткую связь, при кото-
рой брус при наезде на него автомобиля не повернется
вокруг осн и сломается. Сместившийся от наезда брус
Должен усилием руки приходить в исходное положение,
когда фиксирующее устройство западает в лунки накла-
док бруса.
251
Брус должен быть полностью уравновешен противо-
весами. Удары бруса в конце работы электропривода
исключают регулировкой предварительного сжатия пру.
жин амортизаторов 12.
Контактор и кулачки следует отрегулировать так,
чтобы обеспечить правильную работу при замыкании и
размыкании контактов. В разомкнутом состоянии воз-
душный зазор между контактами должен быть не менее
5 мм. При замыкании подпружиненный контакт должен
утапливаться в обойму не менее чем на 3 мм. Толкатель
6 контактора (см. рис. 44) должен перемещаться в осно-
вании 10 без заеданий. Ход толкателя регулируют в пре-
делах 7,5—8,5 мм. Штифт, крепящий упорное кольцо 8
к толкателю, должен свободно перемещаться в прорези
втулки. Заметный люфт толкателя относительно основа-
ния и втулки недопустим. Кулачки 4 контактора должны
быть прочно прикреплены к валу 3 после окончания ре-
гулировки. Винт обоймы 1 закрепляют с помощью гайки
и контргайки. При нажатии язычок 2 должен без заеда-
ний входить в прорезь кулачка, а затем легко возвра-
щаться в исходное положение. На поверхности кулачка
4 не должно быть заметного износа от трения бу-
геля 5.
Сопротивление изоляции между всеми токоведущими
частями электропривода и его корпусом должно быть не
менее 25 МОм.
Электропривод автостопа метро. В соответствии с
рассмотренными ранее техническими требованиями,
предъявляемыми к аналогичным узлам стрелочного
электропривода, данный электропривод должен обслу-
живаться по ряду узлов (корпус, механическая переда-
ча, электродвигатель) таким же образом.
При правильном обслуживании электропривода уси-
лие перевода его механизма из верхнего в нижнее край-
нее положение, приложенное к рычагу выходного вала,
не должно превышать 50 Н. В собранном виде с гарни-
турой автостоп должен возвращаться в разрешающее
положение после нажатия рукой на тот же рычаг до пе-
рекрытия светофора на красный огонь. Фрикция должна
быть отрегулирована так, чтобы по окончании перевода
в разрешающее крайнее положение перебег зубчатого
колеса 3 (см. рис. 47) был в пределах от 10 до 15 зубь-
ев, а в заграждающее положение 20—25 зубьев.
252
Валик автокоммутатора не должен иметь люфта на
валу более 3°. Смещение контактных пружин колодки
автопереключателя 21 относительно ламелей 24 (см. рис.
46) не допускается более 0,3 мм. Несоосность скругле-
ний, имеющихся на концах контактных пружин, относи-
тельно оси коммутатора не должна превышать 1 мм:
усилие нажатия контактных пружин на ламели должно
находиться в пределах от 1,5 до 2,0 Н, износ ламелей
допускается до 1 мм, а контактных пружин до 0,5 мм.
Центробежный регулятор электродвигателя должен
обеспечивать снижение частоты вращения в конце пере-
вода в любое положение на 400—600 об/мин. Тормозной
вкладыш должен выступать из обоймы не менее чем на
0,5 мм, а зазор между ним и тормозной поверхностью
должен быть не менее 1 мм. Температура нагрева элект-
родвигателя не должна превышать 75°С.
В собранной карданной передаче гарнитуры угловой
люфт путевой скобы не должен быть более 3°, а путевая
скоба при расцеплении с карданной передачей должна
приходить в заграждающее положение.
7.3. КОНТРОЛЬ РАБОЧИХ РЕЖИМОВ
Стрелочный электропривод может находиться в двух
рабочих режимах: нормального перевода и работы на
фрикцию. Особое место занимает явление взреза стрел-
ки, оборудованной электроприводом.
Контроль режима нормального перевода заключается
в измерении напряжения на зажимах электродвигателя, •
потребляемого тока и времени перевода стрелки. Изме-
рения напряжений и тока проводят многопредельным
вольтамперметром, позволяющим делать измерения на
постоянном и переменном токе. Измерения выполняют
непосредственно у электропривода.
Перед проведением измерений переключатели посто-
янно-переменного тока и предел измерений прибора ус-
танавливают в соответствии с родом тока и номиналь-
ным напряжением электродвигателя.
Для измерения напряжения на электродвигателе по-
стоянного тока выводные концы прибора подключают
к среднему и одному из крайних зажимов электродвига-
теля при переводе стрелки в одну сторону и к среднему
253
и другому крайнему — при переводе в противополож-
ную. Подключая, надо иметь в виду, что под напряжени-
ем находятся оба крайних зажима по отношению к
среднему: один — благодаря приложенному напря-
жению, другой — индуцированному (при вращении
якоря).
Для измерения потребляемого тока выводные концы
прибора подключают к блок-контакту, причем последний
должен быть разомкнут.
Время перевода стрелки можно измерять электросе-
кундомером типа ПВ-53 или с невысокой точностью
обычным секундомером. При использовании электросе-
кундомера по запасным жилам кабеля на стрелку пода-
ется переменный ток 127 или 220 В. Если в приводе
электродвигатель переменного тока, то достаточно под-
ключиться к зажимам любой фазы.
Схемы включения вольтамперметра и электросекун-
домера для контроля рабочих режимов электропривода
показана на рис. 93, а и б.
Отсчет измеряемых величин имеет некоторые осо-
бенности, связанные с кратковременностью нормального
перевода стрелки, в связи с чем требует некоторого на-
выка. Движение стрелки вольтамперметра после вклю-
чения электропривода характеризуется резким броском,
затем медленным возвратом до определенного значения
кратковременной остановкой против нее и быстрым воз-
вратом в исходное положение. За отсчетное принимается
Рис. 93. Схема включения вольтамперметра и электросекундомера
для контроля рабочих режимов электропривода
254
значение, указанное стрелкой прибора в момент кратко-
временной остановки. В лабораторных условиях исполь-
зуют осциллограф, благодаря чему повышается точ-
ность измерений. Электросекундомер позволяет полу-
чить фиксированное показание. После отсчета его стрел-
ка возвращается в исходное состояние нажатием имею-
щейся на нем кнопки.
Электросекундомер измеряет время перевода стрел-
ки без учета времени срабатывания приборов схемы
управления и холостого хода привода, так как последнее
не зависит от нагрузки на стрелке и почти неизменно.
Па горках время срабатывания электропривода, и схемы
измеряют осциллографом (см. рис. 37 и 89).
Полученные результаты сравнивают с данными, при-
веденными ранее в таблицах электрических характери-
стик электроприводов, и анализируют. Если потребляе-
мый ток по результатам измерений выше табличного, это
указывает на плохое содержание стрелки, наличие зае-
даний, отсутствие смазки. Повышенное напряжение на
электродвигателе ускоряет перевод и способствует по-
явлению отжимов на стрелке. Особое внимание следует
уделить измерению напряжений в электроприводах ти-
пов СП-1 и СП-la, так как при перенапряжении в кор-
пусе редуктора часто появляются трещины и изломы.
Режим работы электропривода на фрикцию контро-
лируется при остановке остряков стрелки в среднем по-
ложении и заключается в измерении и регулировке по-
требляемого тока. Согласно техническим требованиям по
обслуживанию электроприводов ток работы на фрикцию
должен в 1,25—1,3 раза (СП) и 1,5 раза (СПГ и СПГБ)
превышать ток нормального перевода. Если при регу-
лировке тока фрикции при вращении в одну и другую
сторону оказывается, что он имеет разное значение, то
большее значение не должно превышать ток нормально-
го перевода больше, чем в 1,4 раза (СП) и 1,6 раза
(СПГ и СПГБ). Напряжения на зажимах электродви-
гателя при его работе на фрикцию меньше, чем при
нормальном переводе. В связи с этим при регулировке
тока фрикции требуется измерить напряжение. Мини-
мальное напряжение на электродвигателе привода типа
СПГБ-4 (СПГ-3) 190—200 В.
Усилие взреза электропривода типа СПВ-6 при регу-
лировке взрезного устройства контролируется динамо-
255
метром и рычажным устройством. Динамометр соеди-
няют с незапертым шибером привода. При воздействии
рычагом через динамометр на шибер происходит искус-
ственный взрез. Взрезное усилие регулируют через окна,
имеющиеся в. дне и крышке взрезного барабана и от-
крывающие доступ к корончатым гайкам. Для регули-
ровки гайки 12 (см. рис. 31) расшплинтовываются и
вращаются для поджатия или ослабления взрезных пру-
жин. После регулировки и контроля взрезного усилия
по динамометру шплинты устанавливают вновь. Враще-
нием гаек можно регулировать взрезное сцепление на
усилие 10—15 кН.
Контроль рабочего режима бесконтактного автопе-
реключателя состоит в периодической проверке напря-
жения питания датчиков и их выходных напряжений.
Напряжения измеряют в стрелочной муфте дважды в
год (весной и осенью). Напряжение питания датчиков
должно быть 20—28 В, а выходное напряжение не ниже
55 В. Все большее распространение получают методы
дистанционного контроля параметров рабочих режимов
и состояния узлов электроприводов.
Дистанционное измерение тока фрикции бесконтакт-
ного электропривода без выхода на стрелку осуществля-
ется двумя способами. В одном случае на посту выклю-
чают питание датчиков автопереключателя, например
изъятием контрольного предохранителя, в силу чего по
окончании перевода привод будет работать на фрикцию,
и по окончании измерения вновь включают питание дат-
чиков, возвращая предохранитель на место и тем самым
выключают рабочий ток. В другом случае провода Р1 и
Р2 (см. рис. 87) группы стрелок переключают, меняя
местами с помощью реле, и затем поочередно запускают
каждый электропривод, который, не переводя стрелки,
начнет работать на фрикцию. Электропривод выключит-
ся автоматически с помощью реле ТД через 20—25 с
нагрева термоэлемента. При этом фиксируются не одна,
как при первом способе, а две информации: ток фрикции
и время замедления реле ТД. По окончании измерений
нажатием кнопки В восстанавливают исходное состоя-
ние реле ТД и проводов Р1 и Р2.
На ряде дорог применяют дистанционный контроль
состояния электродвигателя стрелочного привода
(рис. 94). Сущность способа заключается в том, что
256
Рис. 94. Схема дистанционного обнаружения неисправностей элект-
родвигателей
электродвигатель, совершающий при отключении враще-
ние по инерции, подключают к входу осциллографа (за-
поминающего или с послесвечением) или к самописцу.
Характер кривой генерируемой э. д. с. позволяет устано-
вить некоторые неисправности электродвигателя.
Измерительное устройство (рис. 94, а) собрано в ви-
де переносного блока и содержит реле Э. При нажатии
кнопки К реле Э отключает пусковой блок ПС-220М и
подключает электродвигатель через делитель R1—R2 к
входу осциллографа. Луч осциллографа должен запу-
скаться автоматически записываемым сигналом. Типич-
ный характер осциллограмм и их оценка показаны на
9'-1122 257
рис. 94, б. Последовательность выполнения контрольны»
операций подробно описана в [26]. х
Рабочий режим электропривода автошлагбаума кои
ролируется измерением напряжения на электродвигате'
ле и поддерживается равным 24—28 В. Рабочий ток и
должен превышать 3 А, а ток фрикции должен
в пределах от 4,5 до 5 А. Кроме того, проверяется ис-
правность приборов сигнализации.
Рабочий режим электропривода автостопа метро
контролируется проверкой и при необходимости регули-
ровкой тока удержания путевой скобы в разрешающем
положении, который должен быть 0,5—0,65 А при на-
пряжении сети, НО В, и тока нормального перевода
равного 0,55—0,65 А.
Методики измерения времени срабатывания электро-
приводов автошлагбаума и автостопа метро и стрелоч-
ных электроприводов аналогичны.
Рабочий режим блоков управления электропривода-
ми и приборов схем при неблочном исполнении счита-
ется нормальным, если они выполняют свои функции.
Все профилактические работы с учетом сроков замены
или в связи с необходимостью ремонта проводятся на
ремонтно-технологическом участке дистанции.
7.4 СМАЗКА ЭЛЕКТРОПРИВОДОВ
Смазка является важным техническим требованием
по обслуживанию электроприводов, так как от ее ка-
чества и правильного применения зависят их надеж-
ность и долговечность. Особое значение этого вопроса
требует специального рассмотрения.
Известно, что смазанные поверхности скользят легче
друг относительно друга, чем несмазанные. Между не-
смазанными поверхностями возникает сухое трение из-
за наличия часто не видимых без микроскопа неровно-
стей, а также действия молекулярных сил. Трение приво-
дит к дополнительным потерям мощности на его пре-
одоление, к нагреву и износу трущихся поверхностей-
Сухое трение пропорционально нагрузке на трушиест
поверхности, а также зависит от чистоты их обработки,
марки материала, площади контакта и скорости взаим-
ного перемещения.
258
По кинематическому признаку различают трение
скольжения, если трущиеся поверхности движутся посту-
пательно и имеют постоянный контакт, и трение каче-
ния, если трущиеся поверхности имеют периодический
контакт.
Потери на трение качения меньше потерь на трение
скольжения примерно в 10—100 раз.
Между смазанными поверхностями могут возникать
жидкостное, полужидкостное или граничное трения.
Жидкостное трение появляется между трущимися по-
верхностями, когда они разделены слоем масла. Полу-
жидкостное трение образуется, когда слой масла в неко-
торых местах разрушен и трущиеся поверхности в этих
местах соприкасаются. Граничное трение возникает, ког-
да между трущимися поверхностями остается лишь тон-
чайшая пленка, свойства которой отличаются от
свойств масляного слоя. Принцип действия масляного
слоя и его законы обоснованы гидродинамической тео-
рией смазки.
Рассмотрим в качестве примера действие смазки в
подшипнике скольжения электропривода типа СПВ-6
(рис. 95). В состоянии покоя (и=0) вал касается под-
шипника только частью своей поверхности ввиду нали-
чия зазоров между ними. При вращении вала (ui>0)
слои масла, прилипшие к его поверхности, увлекают за
собой соседние слои. Для продвижения между валом
и подшипником эти слои создают определенный зазор,
вытесняя вал к центру подшипника. Форма масляного
слоя между валом и подшипником напоминает клин.
Когда скорость вращения вала увеличивается (v2>vi),
масляный клин приподнимает вал еще больше. Таким об-
разом, благодаря образованию масляного клина вал в
процессе вращения уже не касается подшипника, а слов-
но лежит на масляной подушке. Сухое трение уступает
место жидкостному. Следует иметь в виду, что при дви-
жении одной смазанной плоской поверхности по другой
может также возникнуть масляный клин, если между
плоскостями предусмотрен клиновидный зазор и доста-
точна скорость их относительного перемещения.
Вероятность появления масляного клина зависит от
скорости перемещения трущихся поверхностей, вязкос-
ти масла, нагрузки, их формы и состояния. Надежность
Жидкостной смазки повышается с ростом скорости пере-
9*
259
Рис. 95. Схема образования масляного клина при вращении вал»
в подшипнике “
мещения трущихся поверхностей и вязкости масла
уменьшением нагрузки и разности кривизны поверхнос-
тей. Вместе с тем увеличение вязкости масла, скорости
перемещения, а также площадки контакта между тру-
щимися поверхностями приводит к увеличению потерь на
трение. Это противоречие можно устранить, если для
быстроходных деталей использовать масла с наименьшей
вязкостью, а для тихоходных — с повышенной.
Зазор между трущимися поверхностями, в частности
между валом и подшипником, имеет большое значение.
Масло через большой зазор вытекает быстрее, что за-
трудняет возникновение масляного клина. В этом случае
можно применять масла с высокой вязкостью, что соот-
ветственно уменьшит утечку. Зазоры между валом и под-
шипником, показанные на рис. 95, увеличены для нагляд-
ности. В действительности, они исчисляются сотыми
долями миллиметра и зависят от класса точности изго-
товления. Например, подшипники скольжения электро-
привода типа СПВ-6 изготовляют по третьему классу
точности. Несмотря на небольшую толщину, масляный
слой обладает громадной грузоподъемностью. Масляная
пленка тоньше человеческого волоса и на площади в
1 см2 может выдержать нагрузку в несколько сотен ки-
лограммов. Однако вытекание масла часто приводит к
исчезновению масляного клина и возникновению полу-
жидкостного и граничного трений.
Если при жидкостном трении свойства масла зави-
сят только от его вязкости, то при полужидкостном и
граничном они определяются его химическим составом.
От химического состава масла зависят его противоизнос*
ные и антифрикционные свойства. Для придания маслу
определенных свойств используют присадки, т. е. масл
260
пегируют. Повышение противоизносных свойств дости-
гают применением химически активных присадок: серы,
хлора, фосфора, свинцовых мыл и др. Антифрикционные
свойства, т. е. уменьшение трения, повышаются полярно-
активными присадками: кислотами, смолами и др.
Кроме жидких масел, для смазывания трущихся по-
верхностей применяют консистентные смазки, которые
приготовляют на основе жидких масел смешиванием их
с загустителями: парафином, церезином, металлически-
ми мылами и др.
Свойства консистентных смазок независимо от соста-
ва зависят преимущественно от исходных минеральных
масел. Основными характеристиками консистентных сма-
зок являются показатель консистентности, или пенетра-
ция, и температура каплепадения.
Из сказанного следует, что выбор смазочного масла
или консистентной смазки не должен носить случайного
характера при эксплуатации стрелочных электроприво-
дов. Лучшие результаты дает применение не одного сор-
та масла или консистентной смазки для всех видов тру-
щихся поверхностей электропривода, а нескольких в со-
ответствии с условиями их работы.
Карты расположения точек смазки стрелочных элект-
роприводов разных типов показаны на рис. 96—99. В со-
ответствии с обозначениями на картах рекомендуются
следующие сорта консистентных смазок и жидких масел.
А — индустриальное И-12А (веретенное 2) и И-20А
(веретенное 3) ГОСТ 20799—75 — минеральное масло
селективной очистки из сернистых нефтей. Вязкость со- '
ответственно 12±2 сСт и 20±2 сСт (при 50°С). Темпе-
ратура застывания —30°С. Применяют для заливки ре-
дукторов в электроприводах серий СП, СПГ, СПГБ и
приводе типа СПВ-6. Заменителями могут быть следую-
щие масла: осевое 3 в (зимнее время) и С (в особо хо-
лодных условиях) ГОСТ 610—72;
Б — индустриальное И-50А (машинное СУ) ГОСТ
20799-75 — минеральное масло глубокой очистки из от-
борных нефтей. Вязкость 50±8 сСт (при 50°С). Темпе-
ратура застывания —20°С, высокостабильное. Применя-
Ют для смазки открытых зубчатых колес, трущихся по-
верхностей шиберов, контрольных линеек, рычагов, осей
и роликов автопереключателей в электроприводах всех
типов и, кроме того, ванны на шибере — в СП и СПВ-6.
261
Рис. 96. Карта смазки электроприводов типов СП-3 и СПГ-3
Рис. 97. Карта смазки электропривода типа СП-6
262
Рис. 98. Карта смазки электропривода типа СПВ-6
Нс- 99. Карта смазки электропривода типа СПГБ-4
263
Заполнение смазкой осуществляется из самотечной мае
ленки. Заменителями масла могут быть другие сорта ин*
дустриальных масел с вязкостью не ниже 30 сСт-
В — смазка СЭМ-1 (ТУ ИММС АН БССР 01-01-79)^
электропроводная металлизированная, представляю^
тая собой пластическую пасту темно-коричневого цвета*
в состав которой входят жировая смазка, мелкодисперс-
ная медь, графит и трилон. Основные характеристики
смазки: диапазон рабочих температур от 4-60 до
—60°С; электрическое сопротивление слоя толщиной
0,1 мм не менее 100 Ом, 5 мм — более 1 МОм, напряже-
ние пробоя 800 В. Применяют для предотвращения об-
леденения контактов автопереключателей (преимущест-
венно контрольных).
Смазку удобно наносить тонким слоем (0,1 мм) на
поверхность контактов тампоном или шпателем. Если
электропривод оборудован устройством обогрева контак-
тов, необходимость в смазке отпадает, так как основной
ее целью является все же не уменьшение износа, а пре-
дотвращение обледенения контактов.
Г — ЦИАТИМ-201, ГОСТ 6267—74 — однородная
мягкая мазь гладкой структуры желтого цвета, темпера-
тура каплепадения не ниже 170°С, не растворяется в
воде, обладает хорошими низкотемпературными свойст-
вами, работоспособна при температурах от 4-120 до
—60°С. Смазывают шарикоподшипники редуктора и
электродвигателя в приводах всех типов и заполняют
ванну на шибере и фрикцион в приводах серий СПГ и
СПГБ, а также фрикцион в приводах типов СП-3 и
СПВ-6. Заполнение смазкой удобно выполнять шпате-
лем.
Температура застывания большинства сортов приве-
денных смазок не ниже —20°С. В связи с этим в тех
районах страны, где по климатическим условиям темпе-
ратура зимой может упасть ниже —5-е—10°С, применя-
ют сезонную смазку: летнюю (примерно с 1 апреля до
1 ноября) и зимнюю (примерно с 1ноября до 1 апреля).
При переходе на зимнюю смазку электропривод должен
быть тщательно промыт керосином и очищен от летней
Электроприводы должны смазывать регулярно. Пе-
риодичность смазки зависит от частоты переводов стрел-
ки, климатических и местных условий и утечки масла.
264
Шарикоподшипники электродвигателей рекомендуется
заполнять свежей смазкой 1 раз в год при текущем ре-
монте электропривода, а масло из редукторов сливать
(через пробку) и заливать свежее — один раз в 6 меся-
цев. Уровень заливаемого масла определяют по риске
маслоуказателя 14 (см. рис. 23); норма заливки 200 мл.
Другие части интенсивно работающих приводов (шибе-
рЬ1) контрольные линейки, рычаги автопереключателя
и т. Д-) рекомендуется смазывать 2 раза в месяц.
Контакты автопереключателя смазывают с наступле-
нием минусовых температур. Перед нанесением смазки
контакты очищают от нагара и обезжиривают спиртом.
Затем смазку типа СЭМ-1 наносят на контакты и рабо-
чие поверхности ножей автопереключателя. Примерный
расход смазки на один электропривод 5 г. С наступлени-
ем плюсовых температур контакты очищают от смазки
и протирают спиртом.
Трущиеся части электропривода автошлагбаума сма-
зывают консистентной смазкой ЦИАТИМ-201. Ею наби-
вают все шарикоподшипники, в том числе электродви-
гателя, примерно на 2/з объема каждого, слегка смазы-
вают кистью зубья шестерен, пальцы кривошипа и коро-
мысла, бугели, толкатели и кулачки выходного вала
электропривода. Так как в электроприводе автошлагбау-
ма предусмотрена фрикция сухого трения, попадание
смазки на фрикционную шайбу должно быть исключено.
Контактную систему автопереключателя можно сма-
зывать пастой СЭМ-1 в опытном порядке для изучения
ее эффективности против обледенения и обындевения .
контактов.
В электроприводе и гарнитуре автостопа метро на
трущиеся части наносят машинное масло. Внутри корпу-
са электропривода смазывают зубья шестерен, шарико-
подшипники, поверхности трения фрикции. Все шарнир-
ные соединения гарнитуры следует смазывать особенно
тщательно. Подшипники карданного вала заполняют
смазкой через масленки шприцем для консистентной
смазки до момента появления свежей смазки из под-
шипника.
Ламели автокоммутатора электропривода, установ-
ленного не в тоннеле, а на открытом участке, можно
смазывать пастой СЭМ-1 в опытном порядке для изу-
чения ее эффективности против обледенения контактов.
265
7.5. РАЗБОРКА И СБОРКА ЭЛЕКТРОПРИВОДОВ
И БЛОКОВ УПРАВЛЕНИЯ
Стрелочный электропривод подвергают разборке ддя
текущего ремонта. Сначала выполняют поузловую раз.
борку, а затем подетальную. Последовательность каждой
разборки должна быть строго определенной.
Электроприводы типов СП-3 и СП-6. Поузловую раз-
борку привода проводят следующим образом: отпирают
и снимают с него крышку; с одного из переключающих
рычагов снимают проушины пружин автопереключателя
соответствующий ножевой рычаг поворачивают рукой’
после чего вытягивают обе контрольные линейки; затем
последовательно вынимают электродвигатель, редуктор с
фрикционом, автопереключатель. Электродвигатель перед
снятием должен быть несколько отодвинут в сторону
замка привода.
Электродвигатель типа МСП-0,15 или МСП-0,25 (см.
рис. 57) разбирают в таком порядке: снимают боковики
с передней крышки 6, отжимают курки щеткодержате-
лей и вынимают щетки; отвинчивают крепежные винты
и снимают заднюю крышку 2; якорь вытягивают за круг-
лый конец; снимают переднюю крышку 6; отпаивают
провода п снимают полюсы 9 с обмотками возбуждения;
с помощью струбцины снимают подшипники 7 якоря.
Электродвигатель типа МСП-0,1 разбирают в той же
последовательности, но щетки снимают после изъятия
крышки 9 (см. рис. 53).
При разборке электродвигателя типов МСТ-0,25.
А^СТ-0,3 или МСТ-0,6 (см. рис. 68) отвинчивают болты и
снимают крышки 2 и извлекают ротор 6. Для снятия сер-
дечника статора предварительно удаляют стопорные вин-
ты 8 и отключают провода.
Двигатели собирают в обратном порядке. Насаживая
подшипники, их следует нагреть до 80—90°С, затем на-
деть на вал и, пользуясь трубчатой оправкой из меди
или латуни, подвинуть до упора. После сборки проверя-
ют свободное вращение вала якоря и наличие осевого
люфта. Люфт регулируют шайбами 1 (см. рис. 57) и 7
(см. рис. 68).
Подетальную разборку редуктора с внешним фри*'
ционом (см. рис. 16) начинают со снятия верхней крыш-
ки и сливания масла, затем отвинчивают стопорный винт
266
23 н свинчивают регулировочную гайку 22. Фрикцион
снимают постукиванием рукояткой молотка о корпус ре-
актора, после чего вытягивают выходной вал-шестерню
7. Далее снимают крышки подшипников 8, 28 и крышку
подшипника промежуточного вала, колесо 12, входной и
промежуточный вал-шестерни. Для этого входной вал-
шестерню 27 зажимают за квадратный конец в слесар-
ных тисках и вытягивают постукиванием молотка о кор-
пус редуктора. Для вытягивания промежуточного вал-
шестерни в имеющееся в его торце отверстие с резьбой
Л18 ввинчивают болт, головку которого зажимают в сле-
сарных тисках. Последними из редуктора извлекают рас-
порное кольцо 9, шайбу 10 и колесо 30. Подшипник
скольжения 14 выпрессовывают только в случае замены.
При разборке рекомендуется помечать местоположение
каждой шпонки относительно корпуса фрикциона 15 и
колеса 12. Детали фрикциона извлекают после снятия
крышки 26 с корпуса 15, обязательно промывают в керо-
сине и смазывают перед установкой на место после ос-
мотра. Все сальники перед сборкой заменяют новыми,
изготовленными из полугрубошерстного войлока и про-
питанным в машинном масле.
Редуктор с фрикционом собирают в такой последова-
тельности: устанавливают вал-шестерню 27, затем про-
межуточный вал-шестерню с колесом 30 и крышки 8,28
и промежуточного вал-шестерни, колесо 12 вставляют в
подшипник скольжения; корпус фрикциона 15 вставля-
ют на шпонках 13 в отверстие колеса 12; на вал-шестер-
ню 7 надевают кольцо, после чего его начинают продви-
гать через крышку 8 и подшипники в глубь редуктора, •
вставляя при этом распорное кольцо 9 и шайбу 10 (в
центрирующую выточку на колесо 12); затем на шпонки
24 насаживают втулку 16, а в корпус фрикциона 15
шпонки 18 и набирают пакет фрикционных дисков, пред-
варительно смоченных в машинном масле и смазанных
смазкой ЦИАТИМ-201; надевают тарельчатые пружины
~0, предохранительное кольцо 21 и навинчивают регули-
ровочную гайку 22. Фрикцион закрывают через про-
кладку крышкой 26, затем масло заливают внутрь кор-
пУса (по метке маслоуказателя), после чего редуктор
закрывают крышкой.
Подетальную разборку редуктора с встроенным
Фрикционом (см. рис. 23) начинают со снятия муфты
267
сцепления (детали) 11, 12, 13, крышки 2 и сливания мае
ла. Затем свинчивают стопорный винт 32 и удаляют пе
гулировочную гайку 31, две тарельчатые пружины 29 и
втулку 30. Вал-шестерню 21 извлекают из' редуктор»
легким постукиванием рукояткой молотка, после чего
снимают крышки 3, 9, 20 подшипников. Втулку 27 ото-
двигают в сторону подшипника 28, затем вынимают зуб-
чатое колесо 24, снимают третью тарельчатую пружину и
из ступицы колеса извлекают фрикционные диски ।
втулку 22. Далее входной вал-шестерню 15, промежуточ-
ный вал-шестерню 4 и колесо 7 удаляют описанным об-
разом.
Шарикоподшипники 28 выпрессовывают только в
случае замены. Если выпрессовку не делают, то их про-
мывают вместе с корпусом 1.
Сборку выполняют после промывки всех деталей и
выбраковки изношенных. Подшипники набивают свежен
смазкой на 2/з объема. Вначале устанавливают вал-шес-
терню 15, затем 4 с колесом 7 и крышки 3, 9, 20 с кар-
тонными прокладками.
В ступицу колеса 24 вставляют втулку 22, набирают
пакет дисков, начиная с подвижного диска (с выступа-
ми) и заканчивая неподвижным диском 26, и надевают
на втулку тарельчатую шайбу. Затем на вал-шестерню
21 надевают кольцо 18 и продвигают через крышку 20
внутрь редуктора, фиксируя при этом на шпонках 23
колесо 24 с содержащимися внутри него деталями. По-
сле этого последовательно на вал устанавливают втул-
ку 30, две тарельчатые пружины 29, навинчивают регу-
лировочную гайку 31 и ввинчивают стопорный винт32.
В редуктор заливают 200 мл масла и закрывают крыш-
кой 2. Муфту сцепления собирают при установке элект-
родвигателя в следующем порядке: кулачковую втулку
13 насаживают на шпонке па вал электродвигателя, а
кулачковую шайбу 11 и вкладыш — на квадратный ко-
нец вал-шестерни 15 и придвигают электродвигатель к
редуктору.
При разборке контактного автопереключателя (см.
рис. 17) прежде всего снимают пружины 8 переключаю-
щих рычагов и крышки 12, затем снимают обогреватели
(только в СП-6), контактные колодки, расшплинтовыва-
ют оси 23 и 24 и выталкивают внутрь, после чего снима-
ют переключающие рычаги 6 и 13 и удаляют главный
268
вал 9. В резьбовые отверстия, имеющиеся в осях 28,
ввинчивают винты или болты, после чего за головки пос-
ледних оси вытягивают, позволяя снять ножевые рычаги
/7 и 25. Автопереключатель собирают в обратном по-
рядке.
г Электроприводы типов СПГ-3 и СПГБ-4. Поузловую и
подетальную разборку и сборку выполняют аналогично
разборке и сборке привода типа СП-3, за исключением
бесконтактного автопереключателя.
Бесконтактный автопереключатель (см. рис. 34) раз-
бирают в том же порядке, что и контактный, с той лишь
разницей, что сначала с основания 12 снимают датчики
4 и 7.
Датчики (см. рис. 35) начинают разбирать со свинчи-
вания винтов и снятия передней крышки 3. При этом сле-
дует соблюдать осторожность: вращая поводок 1, надо
найти положение, при котором он легко выйдет из кор-
пуса вместе с крышкой, не повредив катушек. Затем
снимают заднюю крышку 9 и отпаивают провода от ко-
лодки штепсельного разъема. Статор 7 извлекают из
корпуса после вывинчивания стопорного винта 5 и изъя-
тия стопорного кольца 4. Кольцо 4 извлекают после его
предварительного сжатия круглогубцами за усы. Катуш-
ки снимают со статора в случае необходимости их заме-
ны после разгибания удерживающих скоб 8. Для отде-
ления ротор-сектора 14 от поводка 1 сначала удаляют
стопорное кольцо 10 после его предварительного разжа-
тия круглогубцами, вводимыми в отверстия усов кольца.
Затем с поводка снимают крышку 3 для замены сальни-
ка. Подшипник скольжения 2 выпрессовывают из крыш-
ки только при необходимости его замены.
Датчик собирают в обратном порядке. Катушки не-
обходимо обогнуть скобами 8, причем так, чтобы скобы
не перекрывали диаметр расточки статора, выводные
концы катушек уложить после подпайки к штырям штеп-
сельной колодки в пространство между радиальными по-
верхностями корпуса и катушек.
Электропривод типа СПВ-6. Поузловую разборку
привода выполняют в такой последовательности. Привод
отпирают и снимают с него крышку; нож автопереключа-
теля отжимают и вытягивают контрольные линейки, за-
тем снимают электродвигатель и редуктор с фрикционом;
Удаляют стопоры с осей переключающих рычагов 5 и
269
18 (см. рис. 28) и связывающую их пружину, вытягива
ют оси и снимают переключающие рычаги; отвинчивают
болты и снимают автопереключатель с главным валом и
затем колесо 4 и взрезное устройство 9. Порядок раз-
борки редуктора с фрикционом и автопереключателя та-
кой, как описано ранее.
Разбирая главный вал, сначала снимают колесо с упо.
ром и выпрессовывают взрезное устройство, затем_щи.
верные шестерни и взрсзную шайбу. Взрезное устройство
(см. рис. 31) разбирают в такой последовательности: от.
винчивают винты и снимают крышку 2 взрезного бара-
бана, оттягивают в любую сторону и вынимают пружины
И, сближают ползуны 10 и 14 к центру крестовины 9 и
вынимают вместе’с ней из корпуса 1. Электропривод со-
бирают в обратном порядке.
Электроприводы типов СПГ-ЗМ и СПГБ-4М. Поузло-
вую разборку и последующую сборку этих электропри-
водов выполняют так же, как и электроприводов типов
СП-6 и СПГБ-4.
Электропривод автошлагбаума. Поузловую разборку
электропривода выполняют в таком порядке: отпирают
и откидывают крышку 1 (см. рис. 43), отключают мон-
таж, снимают электродвигатель 10 и автопереключатель
14, удаляют тягу 5, после чего извлекают редуктор. Ес-
ли необходимо заменить выходной вал 4, предваритель-
но снимают брус, противовесы и кронштейн-раму. Изно-
шенный кулачок 4 (см. рис. 44) заменяют без снятия
выходного вала, для чего обойму 1 выполняют разъем-
ной.
Подетальную разборку электродвигателя автошлаг-
баума начинают со снятия шпилек 5 (см. рис. 77), стя-
гивающих крышки. Первой после этого снимают заднюю
крышку 4, затем от корпуса отделяют переднюю крыш-
ку 8, отсоединяют провода от колодки и крышку сни-
мают.
Якорь 1 вытягивают из корпуса за выступающий ко-
нец вала, после чего струбциной снимают подшипники.
Для снятия щеток предварительно из щеткодержателей
свинчивают винты; после изъятия щеток из передней
крышки удаляют винты, стопорящие щеткодержатели, и
последние вытягивают.
Обмотки возбуждения снимают только в случае за-
мены после отгибания держателей.
270
Редуктор разбирают так: снимают кривошип, фрик-
цию и крышки подшипников с обеих сторон корпуса ре-
дуктора, затем извлекают валы в сторону шестерен по-
стукиванием в противоположный конец вала, последними
извлекают колеса.
При разборке автопереключателя первым снимают
стойки 11 (см. рис. 44) и колодки 18 с подвижными кон-
тактами 13 п 14. Затем вывинчивают винты, снимают
втулки 7, выбивают штифты из колец 8, после чего из
каждой втулки извлекают пружину 9, кольцо 8 и толка-
тель 6. Бугель 5 снимают с толкателя только для замены.
Узлы электропривода собирают в обратном порядке.
Электропривод автостопа метро. Сначала его разъ-
единяют с гарнитурой и снимают с верхнего основания,
а затем разбирают в такой последовательности (см. рис.
46): отпирают замок 20, откидывают крышку 16, свинчи-
вают винты 12 и снимают электродвигатель 13, снимают
контактную колодку, отвинчивают гайку 23 и вытягива-
ют валик автокоммутатора 21, удаляют дроссели 4,
снимают рычаг 5, вытягивают стержень 8, после чего
снимают заслонку 9, свинчивают винты и разделяют
переднюю 15 и заднюю 14 коробки, извлекают выход-
ной вал 3 и вал с фрикцией 7.
При разборке электродвигателя автостопа снимают
центробежный регулятор и крышку 13 (см. рис. 76), из-
влекают ротор 9, вывинчивают стопорные винты 12 и уда-
ляют статор 10. Центробежный регулятор начинают раз-
бирать снятием компенсационных шайб 7 винтов 6, за-
тем удаляют плавающие втулки, шарики, после чего сни-
мают заклепки, тормозные вкладыши и извлекают языч-
ки 3 и пружины 4 (см. рис. 50).
Разборку фрикции начинают с выпрессовкн подшип-
ников 8 (см. рис. 47), затем свинчивают винты и упор-
ную гайку И, последовательно снимают левый диск
фрикции 5, колесо 3, правый диск 4, обойму с пружина-
ми 13 и свинчивают регулировочную гайку 14.
Узлы электропривода автостопа собирают в обрат-
ном порядке.
В ходе подетальной сборки узлов нужно следить, что-
бы детали становились на свои места легко и без пере-
косов. При поузловой сборке электроприводов следует
Руководствоваться техническими требованиями, приве-
денными в начале главы.
271
7.6. ВОЗМОЖНЫЕ НЕИСПРАВНОСТИ
ЭЛЕКТРОПРИВОДОВ И СПОСОБЫ ИХ УСТРАНЕНИЯ
В процессе эксплуатации электроприводов иногда воз-
никают нарушения в их работе. Рассмотрим некоторые
неисправности и методы их устранения.
Заклинивание запирающего механизма. Как прави-
ло, заклинивание возникает, если коэффициент трения
между запирающими зубьями больше коэффициента тре-
ния между шибером и корпусом привода. Такое положе-
ние возникает при использовании жидкой смазки в при-
водах без масляной ванны на шибере из-за стекания
под него масла. Поэтому в приводах типов СПВ-5, СП-1
и СП-1а запираюТций механизм смазывают только кон-
систентной смазкой.
В приводах типов СП-2, СП-2Р, СП-3, СП-6 и СПВ-6
предпочтительным является применять жидкую смазку
для заполнения масляной ванны на шибере. В быстро-
действующих приводах типов СПГ-2, СПГ-3, СПГ-ЗМ;
СПГБ-4 и СПГБ-4М используют консистентную смазку,
чтобы уменьшить ее выбивание из масляной ванны.
Для предотвращения заклинивания, в частности при
попадании мелких предметов между остряком и рамным
рельсом, напрессовке снега, закладке шаблона 4 мм и
т. п., необходимо, чтобы ток фрикции был отрегулиро-
ван по упомянутым выше нормам для ЭЦ и ГАЦ. Следу-
ет иметь в виду, что в соответствии с Инструкцией
ЦШ/3793 на горках плотность прилегания остряка про-
веряют отжимом его от рамного рельса, специальной от-
верткой и попыткой вставить шаблон толщиной 4 мм
без включения привода.
Электропривод потребляет повышенный ток при нор-
мальном переводе. Причинами повышенного потребле-
ния тока стрелочным электроприводом могут быть пло-
хое содержание стрелки и крестовины стрелочного пере-
вода, перекос шибера рабочей тягой, заедания в меха-
низме электропривода, отсутствие смазки на трущихся
поверхностях, неисправность электродвигателя.
Для устранения неисправности стрелка должна быть
вычищена и хорошо смазана, рабочая тяга отрегулиро-
вана, механизм электропривода приведен в соответствие
с техническими требованиями по обслуживанию электро-
приводов и смазан рекомендуемыми сортами смазок.
272
Электропривод автошлагбаума может потреблять по-
вышенный ток по аналогичным причинам, а также из-за
неуравновешенности бруса противовесами, заеданий в
сочленениях кулисы и кривошипа с тягой. Увеличение
тока, потребляемого электроприводом автостопа, чаще
всего имеет место из-за заеданий в гарнитуре и плохой
регулировки центробежного регулятора двигателя.
Чтобы снизить потребляемый ток до нормы, необхо-
димо уравновесить брус, смазать все сочленения меха-
низма электропривода и гарнитуры свежей смазкой,
обеспечить начальный зазор между тормозными башма-
ками центробежного регулятора и поверхностью трения
не менее 1 мм.
Фрикция работает нестабильно. Нестабильная рабо-
та фрикций в электроприводах всех типов, кроме СП-1,
СП-1а и автошлагбаума, может быть вызвана отсутст-
вием смазки на поверхностях фрикционных дисков, при-
менением нерекомендованных сортов смазок, износом
фрикционных дисков до зеркального блеска их поверх-
ностей или попадания между дисками (иногда из-за за-
грязненности смазки) мелких частиц.
Для приведения фрикции в норму все детали надо
тщательно промыть керосином, снять зеркальный блеск
с поверхности трения мелкозернистой наждачной бума-
гой («нулевкой»), смазать втулку и каждый диск реко-
мендованной смазкой.
Обеспечить работу фрикции в электроприводах типов
СП-1, СП-la и автошлагбаума значительно сложнее, что
объясняется рядом ее недостатков. Небольшие габарит-
ные размеры фрикции не обеспечивают быстрой теплоот-
дачи. При работе электропривода на фрикцию в течение
5 мин температура обоймы фрикции достигает
130—140°С (во избежание ожогов в момент регулировки
фрикции следует учитывать это обстоятельство). Боль-
шое значение для нормальной работы фрикции имеет
материал фрикционных колец. Наилучшие результаты
показывают фрикционные кольца из асботканобакелита.
Нестабильная работа фрикции может иметь место и
вследствие перекоса трущихся поверхностей друг отно-
сительно друга. Перекос может возникнуть при завин-
чивании стопорного винта, предотвращающего самоот-
винчивание регулировочной гайки фрикции, если конец
273
винта упрется в радиальную поверхность гайки (СП-1)
Для исключения этого явления нужно использовать винт
с головкой, а чтобы избежать его самоотвинчивание, под
головку необходимо ставить пружинную шайбу. Длину
винта выбирают такой, чтобы при полном завинчивании
конец его не доходил до радиальной поверхности гайки
на 1 —1,5 мм. Конструкция фрикции не допускает несо-
осности валов электродвигателя и редуктора. Несоос-
ность можно устранить изменением положения электро-
двигателя, смещая его в болтах.
Для повышения долговечности фрикции, выполня-
ющей в быстродействующих приводах также роль ме-
ханического тормоза, можно применить электрическое
торможение, шунтируя двигатель регулируемым сопро-
тивлением (до 15 Ом) через контрольные контакты ав-
топереключателя в конце перевода стрелки.
Конденсация влаги. Плохое качество уплотнений в
местах прилегания крышки электропривода, блокиро-
вочной заслонки, заглушек в местах ввода проводов,
выхода шиберов, контрольных линеек и валов, а также
резкие перепады окружающей температуры могут при-
вести к появлению влаги в корпусе электропривода.
В стрелочных приводах слив предусмотрен ло уклону
для стекания через пробку в дне корпуса.
Для предотвращения попадания влаги нужно про-
верить качество уплотнений в указанных местах. На
период дождей жалюзи заклеивают бумагой. Поверх
крышки электропривода, но с воздушной прослойкой
рекомендуется накладывать покрывной кожух, образуя
таким образом двойную крышку. Внутри электропри-
вода можно помещать пакет с силикагелем, который
поглощает влагу. Его недостатком является необходи-
мость в периодическом восстановлении. Для этого си-
ликагель помещают в сушильный шкаф, в котором
его сушат при температуре 180—200°С в тече-
ние 6 ч. |
Обледенение контактов автопереключателя. Ради-
кальным средством, предотвращающим этот недоста-
ток, является обогрев автопереключателя, как это пре-
дусмотрено в приводе типа СП-6. Обогрев осуществля-
ют с помощью остеклованных проволочных сопротив-
лений мощностью 25 Вт или спиралями, пропуская по
ним ток 1 А. Электропитание для обогревательных
274
элементов обычно подается на группу электропри-
водов.
Имеется опыт предотвращения обледенения контак-
тов их смазкой пастой типа СЭМ-1. Существуют также
механические методы предотвращения отказов при об-
леденении: устройство наклепок на ножах автопереклю-
чателя, образование остроугольных насечек и др. Од-
нако использование этих методов приводит к уменьше-
нию площади электрического контакта, что нежела-
тельно.
Дугообразование при коммутации автопереключа-
теля. Причиной его в стрелочных электроприводах яв-
ляется медленный переброс ножей в конце перевода
или усталость пружины кручения или растяжения ав-
топереключателя. Параметры пружин подобраны та-
ким образом, чтобы обеспечивалось размыкание трех
пар рабочих и замыкание такого же числа контрольных
контактов при силе контактного нажатия пружин 3,5—
5 Н. Если контактное нажатие выше нормы, то созда-
ются условия, при которых ножи могут не размыкать
рабочих контактов совсем или размыкать медленно
вследствие недостаточности усилия, развиваемого пру-
жиной. При этом и возникает опасность дугообразова-
ния и подгорания контактов. Если контактное нажатие
меньше нормы, то ножи врубаются с чрезмерной силой.
В электроприводах типов СПВ-5 и СП-1 в этом случае
могут возникать поломки карболитовых контактных
колодок вследствие ударов ножей. Это требует изго-
товления колодок из прочных пластмасс, например, •
волокнита или стеклопластиков. В электроприводах
других типов в отличие от СПВ-5 и СП-1 предусмот-
рены упоры, ограничивающие угол переброса ножей
автопереключателя.
Контактное нажатие регулируют подгибанием рес-
сорных пружин 31 (см. рис. 17). Значение контактного
нажатия находится в пределах нормы, если при вруба-
нии ножей каждая рессорная пружина отжимается на
0,7—1 мм. Значение контактного нажатия можно из-
мерить динамометром. Крючок динамометра закреп-
ляют на контактную пружину 32. Нажатие можно оп-
ределить, если между контактной пружиной и поверх-
ностью ножа проложить полоску бумаги и постепенно
натягивать пружину динамометра. Показание динамо-
275
метра, при котором полоску бумаги легко вытянуть
будет соответствовать нажатию одной контактной npyl
жины на нож. Контактное нажатие следует проверять
не реже одного раза в 3 месяца и при необходимости
регулировать указанным способом.
Если контактное нажатие находится в пределах
нормы, но ножи перебрасываются медленно, то пружи-
на кручения или растяжения подлежит немедленной
замене из-за усталостных деформаций.
Дугообразование может возникнуть из-за несиммет-
ричного врубания ножей автопереключателя между
контактными пружинами. Для устранения этого недо-
статка винты, крепящие контактные колодки к осно-
ванию автопереключателя, ослабляют, контактные ко-
лодки, подлежащие регулировке, устанавливают сим-
метрично относительно врубленных в них ножей, после
чего винты затягивают.
В автопереключателе скользящего типа (электро-
привод автостопа метро) частой причиной сильного
искрения является слабое нажатие контактных пру-
жин 22 на ламели 24 (см. рис. 46). Это возникает при
износе контактных пружин свыше 0,5 мм или ламе-
лей — свыше 1 мм. Такие детали необходимо заменять.
При замене нажатие контактных пружин на ламели
регулируют от 1,5 до 2 Н. Если на поверхности валика
имеются следы обугливания, то это свидетельствует об
отсутствии начального зазора между пружинами и ва-
ликом. Необходимо обеспечить этот зазор в пределах
от 0.1 до 0,3 мм, что проверяется щупом.
Из редуктора электропривода вытекает масло. При-
чиной является износ уплотнений в редукторе или на-
личие подшипников без маслозащитных шайб. Для
предотвращения интенсивного вытекания масла реко-
мендуется сменить уплотнения и установить в редук-
тор шарикоподшипники с маслозащитными шайбами:
с одной стороны подшипника (серия № 60000) или с
обеих сторон (серия № 80000).
Замедленный перевод стрелки электроприводами
типов СПГ-3, СПГБ-4, СПГ-ЗМ и СПГБ-4М. Основной
причиной замедленного перевода стрелки является
пониженное напряжение на двигателе. Для устранения
этого необходимо обеспечить напряжение на двигателе
не менее 200 В при работе привода на фрикцию. Мед-
276
пенный перевод стрелки может быть вызван причина-
ми, которые приводят к увеличению потребляемого
тока при нормальном переводе (см. выше).
В электроприводе типа СПВ-6 наблюдается «само-
взрез». Причинами «самовзреза» при исправном состо-
янии взрезного устройства являются его неправильная
регулировка или чрезмерное напряжение на электро-
двигателе.
Для устранения указанного явления нужно отрегу-
лировать взрезное устройство в соответствии с реко-
мендациями, сделанными в § 7.2. Напряжение на
электродвигателе не должно превышать номинального
более чем на 40—50%.
После перевода наблюдается отбой рамных рель-
сов, бруса шлагбаума, путевой скобы автостопа.
Причиной является неправильная регулировка фрик-
ции. Для устранения этой неисправности в стрелочном
приводе фрикцию нужно отрегулировать так, чтобы по-
требляемый ею ток превышал ток нормального перево-
да не более чем в 1,25—1,3 раза, а напряжение на
электродвигателе равнялось номинальному с допуском
от —5 до 4-Ю%.
В электроприводе автошлагбаума ток, потребляе-
мый при работе на фрикцию, должен быть отрегули-
рован в пределах от 4,5 до 5 А. Кроме того, причиной
отбоя или колебаний бруса может явиться слабая пру-
жина амортизаторов 12 (см. рис. 43). Для устранения
этого недостатка пружину следует сжать регулировоч-
ной гайкой или заменить новой, удлинив ее на,
1,5—2 см.
Фрикцию в электроприводе автостопа регулируют
при выключенном двигателе грузами, подвешиваемыми
к рычагу выходного вала. Масса груза от 150 до 170 Н.
Причиной сильных ударов скобы в упоры является
слабое подтормаживание двигателя центробежным ре-
гулятором из-за износа тормозных башмаков или пру-
жины 4 (см. рис. 50). Если длина выступающей части
башмака из обоймы 5 меньше 0,5 мм, то башмак дол-
жен быть заменен. При проверке пружины следует
иметь в виду, что ее длина в свободном состоянии со-
ставляет 19 мм, а при сжатии на 6 мм усилие, созда-
ваемое пружиной, должно составлять 5 Н.
277’
7.7. ВОЗМОЖНЫЕ НЕИСПРАВНОСТИ
ЭЛЕКТРОДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА
И СПОСОБЫ ИХ УСТРАНЕНИЯ
Искрение щеток. Искрение может быть вызвано их
плохим состоянием, неправильной установкой щетко-
держателей, слабым или слишком сильным прижатием
к коллектору, возвышением одних пластин коллектора
над другими, коротким замыканием в якоре, биением
коллектора.
Щетки должны быть тщательно притерты к коллек-
тору стеклянной шкуркой. При слабом нажатии пру-
жины 8 (см. рис. 56) или 6 (см. рис. 60, в) следует
поджать, а при сильном ослабить так, чтобы нажатие
щеток на коллектор было 2—3 Н. Регулировочный
винт 7 (см. рис. 60, а) должен быть закручен заподли-
цо с корпусом 5 щеткодержателя (ни в коем случае не
до отказа).
При возвышении одних пластин над другими или
биении коллектор необходимо проточить, а затем про-
дорожить на глубину 1 мм. Короткое замыкание, кото-
рое может произойти из-за сообщения проводов и ос-
татков олова между петушками коллектора после пай-
ки или заусенцев после обточки, надо устранить.
Загрязнение коллектора устраняют протиркой чи-
стой тряпкой, слегка смоченной бензином. Грязь, на-
копившуюся в зазоре между ламелями коллектора,
удаляют заостренной пластинкой из твердого дерева
или пластмассы.
При вращении якоря в одну сторону щетки искрят
сильнее, чем при вращении в другую. Причиной являет-
ся сдвиг щеток с нейтрали. Для устранения неисправ-
ности нужно установить щетки на нейтрали.
Электродвигатель плохо идет в ход и перегревается.
Следует иметь в виду, что электродвигатели серии МСП
предназначены для повторно-кратковременного режи-
ма работы, поэтому при излишне длительном включе-
нии, например при работе на фрикцию, они могут пе-
регреваться. Перегрев обмоток не должен превышать
60° С сверх температуры окружающей среды.
Плохой ход может иметь место вследствие корот-
кого замыкания или обрыва в одной или нескольких
•секциях якоря или замыкания между пластинами кол-
278
лектора, а также из-за отсутствия смазки в подшипни-
ках. В случае короткого замыкания или обрыва в сек-
циях якорь нужно перемотать. Замыкание на коллек-
торе часто происходит из-за соединения заусенцев, об-
разовавшихся после обточки. Они удаляются шабером.
Необходимо проверять пайку выводных концов секций
к коллекторным пластинам. В результате неаккурат-
ной пайки олово может замыкать соседние пластины.
Подшипники двигателя должны быть смазаны.
Электродвигатель после включения не вращается.
Причиной может быть перегорание предохранителей,
отсутствие щеточного контакта, обрыв в обмотке воз-
буждения или якоря. Для устранения указанных неис-
правностей надо проверить целость предохранителей,
наличие щеточного контакта и обрыва. Место обрыва
можно установить контрольной лампой или мегаом-
метром.
Частота вращения электродвигателя при номиналь-
ном напряжении и номинальной нагрузке меньше или
больше номинальной или неодинаковая при вращении
в разные стороны. При вращении в разные стороны
электродвигатель потребляет неодинаковый ток. Щет-
ки сдвинуты с нейтрали в первом случае по направле-
нию вращения, во втором — против направления вра-
щения электродвигателя. Для устранения неисправности
щетки нужно поставить на нейтраль.
Потеря изоляции. Сопротивление изоляции обмоток
по отношению к корпусу, измеренное мегаомметром на-
пряжением не ниже 500 В, должно быть не менее
5 МОм. При несколько меньшем сопротивлении изоля-
ции иногда оказывается достаточным продуть двига-
тель сжатым воздухом от угольной пыли. Если эта ме-
ра не приводит к повышению сопротивления изоляции,
двигатель необходимо подвергнуть сушке и пропитке.
Подшипники перегреваются. Причиной может быть
загрязнение пылью; отсутствие смазки; повышенное
трение между сальником 13 (см. рис. 53) и валом; от-
сутствие осевого люфта, необходимого для компенса-
ции температурного удлинения вала; износ или разру-
шение подшипника.
Для устранения неисправностей нужно промыть
подшипник и заложить свежую смазку в объеме, рав-
ном 2/3 свободного пространства между его кольцами,
279
проверить состояние сальников, снять при отсутствии
осевого люфта компенсационную шайбу 1. В случае из-
носа подшипники нужно заменить.
Обрыв выводных концов секций якоря от ламелей
коллектора. Это явление возникает в тех случаях, ког-
да пакет якоря имеет люфт относительно коллектора
Указанный недостаток может быть устранен в завод-
ских условиях.
7.8. ВОЗМОЖНЫЕ НЕИСПРАВНОСТИ
ЭЛЕКТРОДВИГАТЕЛЕЙ ПЕРЕМЕННОГО ТОКА
И СПОСОБЫ ИХ УСТРАНЕНИЯ
•
Сердечник статора равномерно перегревается. При-
чиной является повышенное напряжение сети. Для уст-
ранения перегрева нужно снизить напряжение до но-
минального.
Сердечник статора перегревается местами. При об-
точке статора заусенцы могут замыкать листы сердеч-
ника, а ротор, вращаясь, может задевать за статор. За-
усенцы должны быть удалены шабером, а ротор отцент-
рован. Место зачистки нужно покрыть лаком.
Обмотка статора перегревается. Причинами могут
быть перегрузка электродвигателя, заниженное напря-
жение сети, сообщение витков в обмотке статора, не-
правильное соединение выводных концов обмоток, ко-
роткое замыкание между фазами. Устраняя неисправ-
ность, нужно проверить нагрузку и напряжение пита-
ния, устранить межвитковое сообщение; если оно об-
наружено, правильно включить электродвигатель
(см. рис. 66).
Электродвигатель плохо идет в ход, а ротор пере-
гревается. Причиной является плохой контакт между
стержнями обмотки 1 (см. рис. 67) и короткозамыка-
ющими кольцами 2 вследствие разрыва стержня или
отрыва от кольца. Для устранения неисправности надо
найти место повреждения, приварить (припаять) стер-
жень к кольцу, а при его разрыве заменить новым.
Электродвигатель не идет в ход. Обрыв в одной
фазе статора при включении звездой, который можно
установить вольтметром по отсутствию напряжения в
этой фазе. Устранить обрыв.
280
Частота вращения электродвигателя при номиналь-
ной нагрузке меньше номинальной. Причиной может
быть пониженное напряжение сети, недостаточный кон-
такт в цепи ротора или включение обмотки звездой на
напряжение 127 В. Для устранения следует повысить
напряжение, отремонтировать ротор, включить обмотку
статора при напряжении сети 127 В треугольником.
Электродвигатель работает неустойчиво. Это имеет
место при обрыве в фазе, если ротор вращается с по-
ловинной скоростью. Если сила тока в фазах различ-
на — обрыв в фазе статора. Сильное гудение указыва-
ет на то, что одна фаза обмотки статора «перевернута».
Для устранения неисправности определяют места об-
рывов и ремонтируют. Обмотки включают в соответст-
вии с рис. 66.
7.9. ЭКСПЛУАТАЦИЯ БЛОКОВ УПРАВЛЕНИЯ
С ТИРИСТОРНЫМИ КОММУТАТОРАМИ
Перед вводом в эксплуатацию тиристорный блок
подвергают проверке на унифицированном стенде для
испытаний блоков ЭЦ и ГАЦ по специальной програм-
ме. В ходе проверки контролируется правильность
электрических соединений в блоке и характеристики
приборов (реле, тиристоров и др.). Если блок прошел
проверку на стенде, его подвергают тренировке, обна-
руживающей скрытые технологические дефекты полу-
проводниковой аппаратуры. Интенсивность отказов ти-
ристоров и диодов в блоках типов СГ-76М и СГ-76У ‘
имеет место в начале их эксплуатации. Тренировку
проводят на отработавшем срок службы электропри-
воде, отрегулировав фрикцию по току на 7—8 А с ча-
стотой включения 240 раз в час в течение 24 ч. Если
блок выдержал испытания, его устанавливают на ста-
тив при изъятых рабочих и контрольных предохрани-
телях. Перед установкой проверяют состояние стрелоч-
ного перевода, электропривода, сопротивление изоля-
ции жил кабеля, монтажа и питающей установки на
соответствие нормам технического обслуживания уст-
ройств СЦБ.
Убедившись в отсутствии подвижной единицы на
стрелке, устанавливают рабочие и контрольные предо-
281
хранители, включают реле диагностики ТД (нажатием
кнопки В) и проверяют правильность выполнения бло-
ком всех зависимостей, а также время срабатыва-
ния реле ТД по методике, изложенной в техниче-
ском описании и инструкции по эксплуатации блока
№ 24567.ОО.ОО.ТО.
Время срабатывания реле ТД должно быть в пре-
делах от 20 до 25 с. Следует обратить внимание, чтобы в
РТУ термоэлемент регулировался при том же значении
напряжения, при котором он будет эксплуатироваться
на статнее.
Рассмотрим возможные неисправности блоков ти-
пов СГ-76М и СГ-76У и способы их устранения.
Одно из контрольных реле не включается. В этом
случае необходимо убедиться в отсутствии напряжения
55—80 В переменного тока на выводах статива, связан-
ных с данным контрольным реле, после чего измерить
напряжение на соответствующих выводах стрелочной
муфты и, если оно также отсутствует, проверить, нет
ли потери контакта в штепсельном разъеме датчика.
Если нет, то датчик нужно заменить с учетом марки-
ровки: ДБЛ — левый, ДБП — правый.
Для измерений используют универсальный прибор
с высокоомным входом типа Ц-434 или Ц-4315. Если
контрольное реле по-прежнему не будет включаться,
нужно заменить блок.
Оба контрольных реле не включаются. Необходимо
проверить исправность контрольных предохранителей и
возбужденное состояние реле КПТК (см. рис. 87).
Реле технической диагностики ТД перебросило по-
ляризованный якорь и замигала лампочка плюсового
или минусового положения стрелки на пульте управ-
ления. Реле ТД срабатывает при повреждении элемен-
тов внутри блока. Чтобы убедиться в повреждении,
электромеханик нажимает кнопку В для возвращения
реле ТД в первоначальное положение и затем с пульта
управления переводит стрелку сначала в исходное, а
затем в переведенное положение. Если лампа контро-
ля положения стрелки замигает вновь, блок должен
быть заменен и отправлен на ремонтно-технологичес-
кий участок (РТУ), где с помощью программы провер-
ки будет определен отказавший элемент.
282
Таблица 24
Характерней ни полупроводниковых приборов блоков типов СГ-76М и СГ-76У
Параметры Тип приборов
Т10-50-10-425У2 Т10-63-П-324У2 Т10-80-12-324У2 КД205Ж, А, Б КЦ402И, Ж КЦ402А, Б
—
Максимальное обратное напря- жение, В 1000, 1100, 1200 600, 500, 400 500, 600 600, 500
Максимально допустимый средний прямой ток, А 50, 63, 80 0,5 0,6 1,0
Постоянное напряжение на диоде при мак- симальном пря- мом токе, В Постоянный обратный ток при максималь- ном обратном напряжении, мА: du 1,75 1.0
6 4 гр - 200 0,2
В/мкс Л 3 гр — 100 5 гр-200
А/мкс 4 гр — 100 — — —
Время выклю- чения, мкс Отпирающий ток управления, А, не более 150 — — —
0,15 — — —
Отпирающее напряжение уп- равления, В, не более 4
Диапазон ра- бочих темпера- тур, °C -50?+125 -40-!-+85 —40-Г-+85 - 40-i-+85
Полупроводниковые приборы, которые могут быть
использованы взамен отказавших, приведены в табл. 24.
Для замены тиристора блок разбирают в такой по-
следовательности: снимают крышку монтажной каме-
ры, отпаивают 14 выводов тиристорного блока, снима-
283
ют кожух релейной камеры, свинчивают винты, крепя-
щие к шасси тиристорный блок, и последний снимают
Затем с тиристорного блока снимают экран с платы
ТК+ или ТК—, на которой находится неисправный
тиристор, свинчивают четыре винта, крепящие плату,
после чего плату осторожно приподнимают, заменяемый
тиристор выпаивают, ключом свинчивают и снимают.
Операции по установке нового тиристора, сборке
тиристорного блока и возвращении на место соверша-
ются в обратном порядке. При этом следует иметь в
виду, что после завинчивания нового тиристора в ради-
атор от руки его надо слегка затянуть ключом для соз-
дания надежного хеплового контакта. К катоду ти-
ристора допускается прилагать усилие не более 9,8 Н,
а к управляющему электроду — не более 0,98 Н. Пай-
ку управляющего электрода можно выполнять в тече-
ние 2—3 с паяльником мощностью не свыше 60 Вт при-
поем, температура которого не превышает 220°С.
Техническое обслуживание блока должны выпол-
нять электромеханики, имеющие определенные знания
по бесконтактным устройствам и специфике работы по-
добных систем. Профилактические, ремонтные и прове-
рочные работы должны выполнять на ремонтно-техно-
логическом производственном участке дистанции.
Первая проверка после ввода блока в эксплуатацию
должна проводиться через 2 года, что соответствует
примерно 1 млн. срабатываний на головной стрелке.
Техническое состояние блока проверяют по программе
№ 24567.00.00.ПМ на унифицированном стенде для ап-
паратуры ЭЦ и ГАЦ. Контролируют электрические,
временные и механические параметры реле и термоэле-
мента, параметры полупроводниковых приборов, кон-
денсаторов, резисторов и сопротивление изоляции мон-
тажа. При условии замены контактной системы реле
ПУС типа ПМПУ 150/150 и исправности остальных
приборов блок эксплуатируют еще в течение 1 млн.
срабатываний. При замене неисправного тиристора мо-
жет оказаться, что на корпусе исправного указаны не
все обозначения, например Т10-50У2 и класс (над обо-
значением типа), а остальные цифры отсутствуют
(см. табл. 24). Блок, в который будет установлен такой
тиристор, тренируют особенно тщательно (не менее
48 ч).
284
СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ
1. Резников Ю. М. Стрелочные электроприводы электриче-
ской и горочной централизации. 2-е изд., перераб. и доп. М.:
Транспорт, 1975. 152 с.
2. Резников Ю. М., Сагайтис В. С. Современные отече-
ственные и зарубежные стрелочные приводы и анализ их техни-
ческих характеристик. — Автоматика и связь/ЦНИИТЭИ, 1972,
вып. 7 (73), 50 с.
3. Резников Ю. М. Структурный синтез бесконтактного
стрелочного электропривода для систем централизаций с учетом
требований технической диагностики. — Тр. ВЗИИТ, 1978, вып. 93,
с. 32—40.
4. Р е з н и к о в Ю. М. Синтез передаточных механизмов быст-
родействующих стрелочных электроприводов. — Сб. научных тру-
дов, вып. 64. М.: ВЗИИТ, 1973, с. 67—77. ’
5. Мелкозеров П. С. Приводы в системах автоматического
управления. М.: Энергия, 1966. 384 с.
6. Математическая теория оптимальных процессов/Л. С. Понт-
рягин, В. Г. Болтянский, Р. В. Гамкрелидзе, Е. Ф. Мищенко. 2-е
изд., перераб. и доп. М.: ГИФМЛ, 1969. 384 с.
7. Фонарев Н. М. Автоматизация процесса расформирова-
ния составов на сортировочных горках. М.: Транспорт, 1971,
271с.
8. Сагайтис В. С., Соколов В. Н. Устройства механи-,
зированных и автоматизированных сортировочных горок. Справоч-
ник. М.: Транспорт, 1979. 175 с.
9. Телеуправление стрелками и сигналами/А. С. Переборов,
А. М. Брылеев, В. Ю. Ефимов и др. 3-е изд., перераб. и доп. М.:
Транспорт, 1981. 390 с.
10. Резников Ю. М. Усовершенствованные устройства уп-
равления централизованными стрелками. М.: ВЗИИТ, 1979. 26 с.
11. Резников Ю. М. Синтез запирающих механизмов стре-
лочных электроприводов. — Сб. научных трудов, вып. 40. М.:
ВЗИИТ, 1969. с. 50—61.
12. Резников Ю. М. Оптимизация магнитной цепи датчика
автоконтроля положений стрелки. — Сб. научных трудов, вып. 98.
М.: ВЗИИТ, 1978. 10—20 с.
13. Буль Б. К. Основы теории и расчета магнитных цепей.
М.: Энергия, 1964. 463 с.
14. Ошурков И. С., Баркаган Р. Р. Проектирование
электрической централизации. М.: Транспорт, 1980. 295 с.
285
15. Д м и т j> е н к о И. Е., У с т и н с к и й А. А., Цыганков
В. И. Измерения в устройствах автоматики, телемеханики н
связи на железнодорожном транспорте. 3-е изд., перераб. и доп
М.: Транспорт, 1982. 312 с.
16. Резников ГО. М. Исследование быстродействия стре-
лочных электроприводов для сортировочных горок. — Вестник
ВНИИЖТ, 1969, № 1. с. 36—39.
17. Симон А. А., Путря Н. Н., Елсаков Н. Н. Совре-
менные стрелочные переводы. М.: Транспорт, 1977. 190 с.
18. Резников Ю. М. Аппаратура дистанционного управле-
ния разъединителями высоковольтных линий автоблокировки. _______
Автоматика, телемеханика и связь, 1963, № 7, с. 14—18.
19. Велтистов П. К. Схемы релейной централизации ма-
лых станций. М.: Транспорт, 1974. 216 с.
20. Н е й м а н Л. Р., К а л а н т а р о в П. Л. Теоретические ос-
новы электротехники. Ч. II. 5-е изд., перераб. и доп. М.: ГЭИ
1959. 444 с.
21. Прокопьев В. С. Пусковой стрелочный блок типа
ПС-127М. — Автоматика, телемеханика и связь, 1982, № 6,
с. 40—41.
22. SaTorie М. Re!6ova sada pro ovlAdani rychlob6zn£ho prestav-
niku vymen sp£dovist£. «zeleznicni tecnika>, 1979, № 2, c 92 — 97,
чешек.
23. Тиристоры. Технический справочник. Перевод с англ.,
под ред. В. А. Лабунцова. М.: Энергия, 1971. 560 с.
24. А. с. 219616 (СССР). Устройство для автоматического уп-
равления стрелками/Авт. нзобрет. Ю. М. Резников. — Заявл.
7.01.67 № 1124107/26—24; Опубл. в Б. И., 1968, № 19; Кл. 20i,
17. — УДК 625.151.32(088.8).
25. Асе Э. А., Г о н ч а р о в А. Я., П а п и ч е в В. В. Монтаж
устройств железнодорожной автоматики и телемеханики. М.:
Транспорт, 1979. 415 с.
26. С е м ь я н с к и х А. И., Яничек Н. И. Способ дистанци-
онного обнаружения неисправностей в электродвигателях постоян-
ного тока. — Автоматика, телемеханика и связь, 1981, № 2,
с. 37-38.
27. Резников Ю. М., Щербаков Е. В., Нейшильд
И. В. — Управление быстродействующими стрелочными электро-
приводами. — Автоматика, телемеханика и связь, 1980, № 11,
с. 15—18.
ОГЛАВЛЕНИЕ
Предисловие .................................. 3
1. Общие сведения об электроприводах
1.1. Особенности объектов - управления и функции электро-
приводов ..........................7
1.2. Эксплуатационно-технические требования к электропри-
водам ..............................Ю
1.3. Классификация электроприводов ... 15
2. Теоретические основы построения электроприводов
2.1. Структурный синтез электропривода . . . . 19
2.2. Оптимальное управление электроприводом ... 24
2.3. Передаточное число редуктора........................29
2.4. Тяговое усилие стрелочного электропривода ... 33
2.5. Время срабатывания электропривода ..................37
2.6. Оптимальный радиус управления электроприводом по
недублированным жилам кабеля...........................39
2.7. Синтез запирающего механизма........................42
2.8. Построение и расчет бесконтактного автопереключате-
ля ..................................46
3. Электроприводы стрелок и крестовин
стрелочных переводов
3.1. Общая характеристика .................53
3.2. Стрелочные электроприводы типов СП-3 и СП-8 . 55
3.3. Стрелочный электропривод типа СП-6 .... 83
3.4. Стрелочный электропривод типа СПВ-6 ... 95
3.5. Быстродействующие электроприводы типов СПГ-3,
СПГБ-4, СПГ-ЗМ и СПГБ-4М . . .110
3.6. Стрелочные гарнитуры.................................123
4. Электроприводы автошлагбаума и автостопа метро
4.1. Электропривод автошлагбаума .........................136
4.2. Электроприводы автостопа типов ПАМ-2 и ПАМ-3 для
метро ..............................141
5. Специальные и промышленные электродвигатели
к электроприводам
5.1. Технические требования, предъявляемые к электродви-
гателям ...............................158
5.2. Стрелочные электродвигатели постоянного тока типов
МСП-0,1, МСП-0,15 и МСП-0,25 .... 161
287
5.3. Стрелочные электродвигатели переменного тока типов
МСТ-0,25, МСТ-0,3 и МСТ-0,6................................180
5.4. Электродвигатель типа МАС-0,1 .... 192
5.5. Промышленные электродвигатели.........................194
6. Автоматизированное управление электроприводами
6.1. Типовые схемы управления ... . 198
6.2. Эксплуатационно-технические требования к схемам, со-
держащим бесконтактные коммутаторы . . . .211
6.3. Блоки управления электроприводами с применением тн- ’
ристорных коммутаторов 218
6.4. Особенности работы тиристорных коммутаторов 229
6.5. Автоматическая защита стрелок, гарнитур и стрелоч-
ных электроприводов от повреждений при взрезах . . 236
7. Техническое обслуживание электроприводов
7.1. Установка электроприводов .... 241
7.2. Требования по техническому обслуживанию электро-
приводов 246
7.3. Контроль рабочих режимов 253
7.4. Смазка электроприводов 258
7.5. Разборка и сборка электроприводов и блоков управ-
ления 266
7.6. Возможные неисправности электроприводов и способы
их устранения ..........................272
7.7. Возможные неисправности электродвигателей постоян-
ного тока и способы их устранения .... 278
7.8. Возможные неисправности электродвигателей перемен-
ного тока и способы их устранения .... 280
7.9. Эксплуатация блоков управления с тиристорными ком-
мутаторами ...............................281
Список использованной литературы ... . 285
Юрий Маркович Резников
ЭЛЕКТРОПРИВОДЫ железнодорожной АВТОМАТИКИ
И ТЕЛЕМЕХАНИКИ
Переплет художника Е. Н. Волкова
Технический редактор Н. Д. Муравьева
Корректор-вычитчик Е. А. Котляр
Корректор М. В. Деянова
И Б № 2468
Сдано в набор 20.02.84. Подписано в печать 26.11.84. Т-20799.
Формат 84X108732. Бум. тип. № 1. Гарнитура литературная.
Высокая печать. Усл. печ. л. 15.12. Усл. кр.-отт. 15.54.
Уч.-изд. л. 15,36. Тираж 10000 экз. Заказ 1122. Цена 1 р. 30 к.
Изд. № 1-3-1/6 № 1569.
Ордена «Знак Почета» издательство «ТРАНСПОРТ*, 103064,
Москва, Басманный туп.. 6а
Ордена Трудового Красного Знамени тип. изд-ва Куйбышев-
ского обкома КПСС.
443086 ГСП. г. Куйбышев, проспект Карла Маркса, 201.
Электроприводы стрелок
и подвижных сердечников
крестовин стрелочных переводов
являются средствами,
позволяющими ликвидировать
ручной труд, сократить время
приготовления маршрутов
и повысить безопасность
поездной и маневровой работы.
Аппаратура автоматизированного
управления электроприводами
разрабатывается на
современной элементной базе.
Внедрение бесконтактных
электроприводов с бездуговой
коммутацией цепей
и автоконтролем исправности
повышает производительность
устройств и снижает
затраты на их содержание.
Электропривод
автошлагбаума широко
применяют в местах
пересечения автомобильных
и железных дорог
в одном уровне.
Электропривод
управляет положением
заградительного бруса,
включает и выключает
приборы оптической
и акустической
сигнализации.
Электропривод
автостопа
на метрополитенах
применяют для
организации
экстренного торможения
поезда при проезде
светофора
с запрещающим
показанием в тоннелях
и на наземных участках.