/













































































































































































Автор: Слижевский Н.Б. Король Ю.М. Соколик М.Г.
Теги: принципы проектирования, характеристики, свойства и испытания средств транспорта водный транспорт судостроение
ISBN: 966-321-009-5
Год: 2004



Текст
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ УКРАИНЫ
Национальный университет кораблестроения
имени адмирала Макарова
РАСЧЕТ ХОДКОСТИ
НАДВОДНЫХ ВОДОИЗМЕЩАЮЩИХ
СУДОВ
Под общ. рсд. проф. Н.Б. Слижсвского
Рекомендовано Министерством образования
и науки Украины в качестве учебного пособия
для студентов высших учебных заведений
Николаев
НУК
2004
УДК 629.012.073(075)
ББК 39.425
Р24
Рекомендовано Министерством образования и науки Украины
в качестве учебного пособия для студентов высших учебных заведений,
писъмо№ 14/18.2-1483 от 17.09.2003
Рецензенты:
Л.М. Дыхта. доктор технических наук, профессор;
В.А. Некрасов, доктор технических наук, профессор;
В.П. Шостак, кандидат технических наук, профессор.
Р 24 Расчет ходкости надводных водоизмещающих судов: Учебное
пособие/ Н.Б. Слижевскии, Ю.М. Король, М.Г. Соколик, В.Ф. Ти-
мошенко’, Под общ. ред. проф. Н.Б. Слижевского.-Т\мколайв: НУ К,
2004.- 192 с.
ISBN 966-321-009-5
Изложены меюды расчета ходкости надводных водоизмещающих судов,
на которых в качестве движителей используюгея гребные винш различных
модификаций (ВФШ и ВРШ. свободные и вишы в насадках, одиночные и вин-
ты-тандем противоположного вращения). Методы базируются на использова-
нии экспериментальных диаграмм коэффициентов буксировочного сопротив-
ления корпуса судна, а также гидродинамических характеристик гребных вин-
тов, Пособие снабжено примерами расчета.
Предназначено в качестве учебного пособия по курсовому и дипломному
проектированию для специальностей "Корабли и океанотехника" и "Судовые
энергетические установки и оборудование". Может быть также полезено для ин-
женеров и научных работников в области судостроения и водного транспорта.
УДК 629.012.073(075)
ЫЖ 39.425
ISBN 966-321-009-5
© Слижевскии Н.Б., Король Ю.М,,
Соколик М.Г., Тимощенко В.Ф., 2004
© Видавництво НУК, 2004
ВВЕДЕНИЕ
Ходкостью называется способность судна перемещаться с заданной
скоростью при минимальной затрате мощности либо же развивать
максимальную скорость при заданной мощности главного двигателя.
Для ее оценки необходимы две основные составляющие: сопротивле-
ние движению судна и гидродинамические характеристики движителей.
Знание их позволяет связать гидродинамику пропульсивного комплек-
са корпус судна - движители с характеристиками его главных двигате-
лей в процессе проектирования и эксплуатации судна и, таким обра-
зом, дает возможность оценить ходовые качества судна.
Сопротивление движению судна представляет собой проекцию глав-
ного вектора сил давления и касательных напряжений трения, действу-
ющих на корпус судна и выступающие части со стороны воды и возду-
ха, на направление движения судна. Расчетным режимом при оценке хо-
дкости является продольное установившееся движение, которое совпа-
дает с направлением ДП судна. В свою очередь, величина силы со-
противления зависит от главных размерений судна, формы его обводов,
характеризуемых соотношением главных размерений и коэффициента-
ми полноты, от состояния поверхности наружной обшивки, скорости и
режима движения, от параметров посадки и условий эксплуатации. Для
надводных водоизмешающих судов расчетным является режим плава-
ния, когда действующая на судно сила тяжести практически полностью
уравновешивается архимедовой силой поддержания. Этот режим наблю-
г- 1
дается, когда число Фруда по водоизмещению ггг - .---- < 1.
3
Расчет ходкости надводных водоизмещающих судов
Вторым элементом пропульсивного комплекса является Ояилсшлель.
Наиболее распространен в настоящее время на морских водоизмещаю-
щих судах гребной винт (ГВ) различных модификаций: винт фиксиро-
ванного шага (ВФШ), винт регулируемого шага (ВРШ), свободные и
гребные винты в насадках, одиночные н гребные винты-тандем проти-
воположного вращения. Гидродинамические характеристики гребных
винтов (упор и реактивный момент) зависят от их геометрии, режима
работы, взаимного расположения ГВ и корпуса судна.
И. наконец, одним из элементов пропульсивного комплекса явля-
ется главный двигатель с устройствами, предназначенными для переда-
чи мощности от главного двигателя к ГВ. Характеристикой этого эле-
мента служит зависимость развиваемой мощности от частоты враще-
ния гребного вала.
Необходимо отметить, что судовой корпус, движители, главный
двигатель с устройствами для передачи мощности от главного двигате-
ля к ГВ работают совместно, составляя единый пропульсивный ком-
плекс. И если по каким-либо причинам изменится характеристика од-
ного нз элементов комплекса, то эт о вызове г соответс гвуюгцие измене-
ния характеристик других элементов и, таким образом, установится
новый режим работы комплекса. Этому комплексу присущи следую-
щие особенности работы:
создаваемый гребным винтом упор Тв всегда больше тяги ТЕ за
счет дополнительного сопротивления ДА (силы засасывания), возни-
кающего на корпусе судна вследствие подсасывающего действия рабо-
тающего ГВ;
скорость натекающе! о на ГВ потока меньше скорости движения
судна из-за иодтормаживающе! о действия на поток корпуса судна;
мощность PD, потребляемая движителями, больше полезной (бук-
сировочной) мощности РЕ за счет гидродинамических потерь в про-
„ РЕ
пульсивном комплексе. В этой связи отношение = определяющее
рв
величину гидродинамических потерь в пропульсивном комплексе и име-
нуемое пропульсивным коэффициентом, является гидродинамической ха-
рактеристикой эффективности работы этого комплекса. Величина это-
го коэффициента для морских водоизмещающих судов составляет
0,45...0.75.
Расчет ходкости судна осуществляется в приведенной последова-
тельности.
1, Рассчитываются буксировочные сопротивление и мощность для
приемосдаточных либо среднеэксплуатационных условий.
2. В соответствии с типом и назначением судна выбирается расчеь
ный режим для расчета ходкости судна.
4
Введение
3. Для расчетного режима определяются элементы и режим работы
ГВ, потребная мощность главного двигателя и частота вращения ГВ.
4. Для выбранного главного двигателя методом последовательных
приближений производится уточнение элементов и режима работы греб-
ного винта, а также скорости хода судна.
5. Выполняются расчет прочности лопастей и проверка винта на ка-
витацию.
6. Осуществляются расчет и построение теоретического чертежа
гребного винта.
7. Для оценки ходкости на нерасчетных режимах производятся рас-
чет и построение диаграммы ходкости.
Расчет ходкости надводных водои.змещающих судов
1. РАСЧЕТ БУКСИРОВОЧНОГО СОПРОТИВЛЕНИЯ
И МОЩНОСТИ
1.1. Сопротивление движению судна и его составляющие
Сопротивлением движению R называют проекцию главного векто-
ра гидроаэродинамических сил, действующих на подводную и надвод-
ную судовую поверхности, на направление продольного движения суд-
на. Это сопротивление состоит из сопротивлений давлений R и каса-
тельных напряжений R , возникающих в результате взаимодействия
подводной и надводной поверхностей судна с натекающими потоками
воды и воздуха.
Сопротивление движению судна, в свою очередь, сосз оит из сопро-
тивления так называемого ronoi о корпуса судна и дополнительных со-
противлений, обусловленных наличием выступающих частей и шеро-
ховатостей, а также воздушного сопротивления. Значительные измене-
ния структуры обтекания и сопротивления могут быть вызваны воз-
действием внешних условий, таких, как глубина и ширина фарватера,
ветер, волнение и течение, наличие льда, изменение дифферента и сред-
ней осадки, обрастание подводной части корпуса судна при соверше-
нии рейсов и стоянок, разгон и торможение и т. п.
При выполнении расчетов ходкости полагают, что судно со свеже-
окрашенным корпусом движется равномерно прямолинейно со скоро-
стью переднего хода "и, на неограниченном фарватере и при отсутствии
волн, ветра и течения. Учет влияния указанных выше эксплуатацион-
ных факторов на сопрошвлсние производится по специальным мето-
дикам [6] либо введением поправочного коэффициента кЕ в соответст-
вии с отраслевой нормалью [15].
Сопротивление корпуса надводного водоизмешатощего судна со-
стоит из двух составляющих-вязкостной Rv и волновой /?и,Всвою
очередь, вязкостное сопротивление Ry состоя г из сопротивления тре-
ния Rp, которое обусловлено наличием касательных напряжений вяз-
кости, возникающих за счет прилипания частиц жидкое ти к поверхно-
сти судна, и сопротивления давления (формы) Rvp, обусловленного
перераспределением давления вдоль корпуса судна в вязкой жидкос-
ти. Особенно существенно это изменение в кормовой оконечности, где
формируемый корпусом судна пограничный слой достигает наиболь-
шей толщины.
На распределение давления по поверхности корпуса оказывает зна-
чительное влияние волнообразование на свободной поверхности, вы-
зываемое движением судна, которое приводит к возникновению волно-
вого сопротивления Rw.
6
Расчет буксировочного сопротивления и мощности
Процессы формирования пограничного слоя и волнообразования
происходят в жидкости одновременно и оказывают влияние друг на
друга. Однако, как показывают исследования, степень взаимодейст-
вия в большинстве случаев невелика. Это дает возможность исполь-
зовать гипотезу о независимости составляющих сопротивления суд-
на, что позволяет определять его величину в виде суммы следующих
составляющих:
R = RF+RVF+Rw+Rtp+RA +RAA, (1.1)
где Rf - сопротивление трения; RVp~ сопротивление формы; Rw -
волновое сопротивление; RAP - сопротивление выступающих частей;
R (- сопротивление шероховатостей; RAA - воздушное сопротивление.
Для водоизмещающего судна роль отдельных составляющих сопро-
тивления движению зависит от скорости движения судна (рис. 1.1), а
также от формы корпуса судна (рис. 1.2). Анализ данных, приведенных
на рис. 1.1 и 1.2, позволяет сделать вывод, что для транспортных судов
основную роль в общем балансе играет вязкостное сопротивление. Со-
противление воздуха движению судна при отсутствии ветра невелико и
в зависимости от скорости и формы надводной части корпуса судна и
надстроек составляет' 1,5...3,0 % от полного сопротивления судна.
Рис. 1.1. Относительная роль основ-
ных составляющих сопротивления
транспортного судна:
I - зона вязкостного сопротивления:
11 - зона волнового сопротивления
Рис. 1.2. Влияние коэффициен-
та общей полноты 8 на роль
составляющих сопротивления
для скоростей полного хода:
1 - зона соиро1ивления 1рения;
11 -зона вязкостно! о сопротивле-
ния давления; JIJ-зона волново-
1 о сопротивления
Расчет ходкости надводных водоизмещающих судов
1.2. Общие формулы для буксировочных сопротивления и мощности
В соответствии с теорией гидродинамического подобия и модели-
рования сопротивление воды движению судна может быть вычислено
по формуле
К = <У~а, (1-2)
I де С - безразмерный коэффициент буксировочного сопротивления;
р - плотность воды, т/м3; о - скорость судна, м/с; - площадь смочен-
ной поверхности судна, м2.
Входящий в (1.2) коэффициент буксировочного сопротивления яв-
ляется функцией формы корпуса судна, чисел Рейнольдса и Фруда и в
соответствии с( 1.1) может быть представлен в виде следующей суммы:
С - +СУР +СИ/ + САР + СА + САА, (1.3)
где CF - коэффициент сопротивления трения; Сур - коэффициент со-
противления формы; СIF-коэффициент волнового сопротивления; САР -
коэффициент сопротивления выступающих частей; СА - коэффициент
сопротивления шероховатостей (надбавки на шероховатость); СА4~ ко-
эффициент воздушного сопротивления.
Коэффициент сопротивления трения обычно представляют в виде
суммы
G-=cA)+cv,
где С/,- -коэффициент сопротивления трения эквивалентной гладкой
пластины, a CF -добавка к CF обусловленная пространственным ха-
рактером обтекания телесного судна (как правило, CF(. <0,05 Сл ). Сум-
му коэффициен гов волнового сопротивления, формы и СР( называют
коэффициентом остаточного сопротивления:
c«=c(,, + c„.+cff.
Тогда выражение (1.3) перепишется в виде
C = Cfo+Cs+C^+Q+C„.
При расчете ходкое ги наряду с сопротивлением необходимо опре-
делить буксировочную мощность (в ваттах или киловаттах), которая
расходуется на буксировку судна с заданной скоростью,
РЕ = Ro.
8
Расчет буксировочного сопротивления и мощности
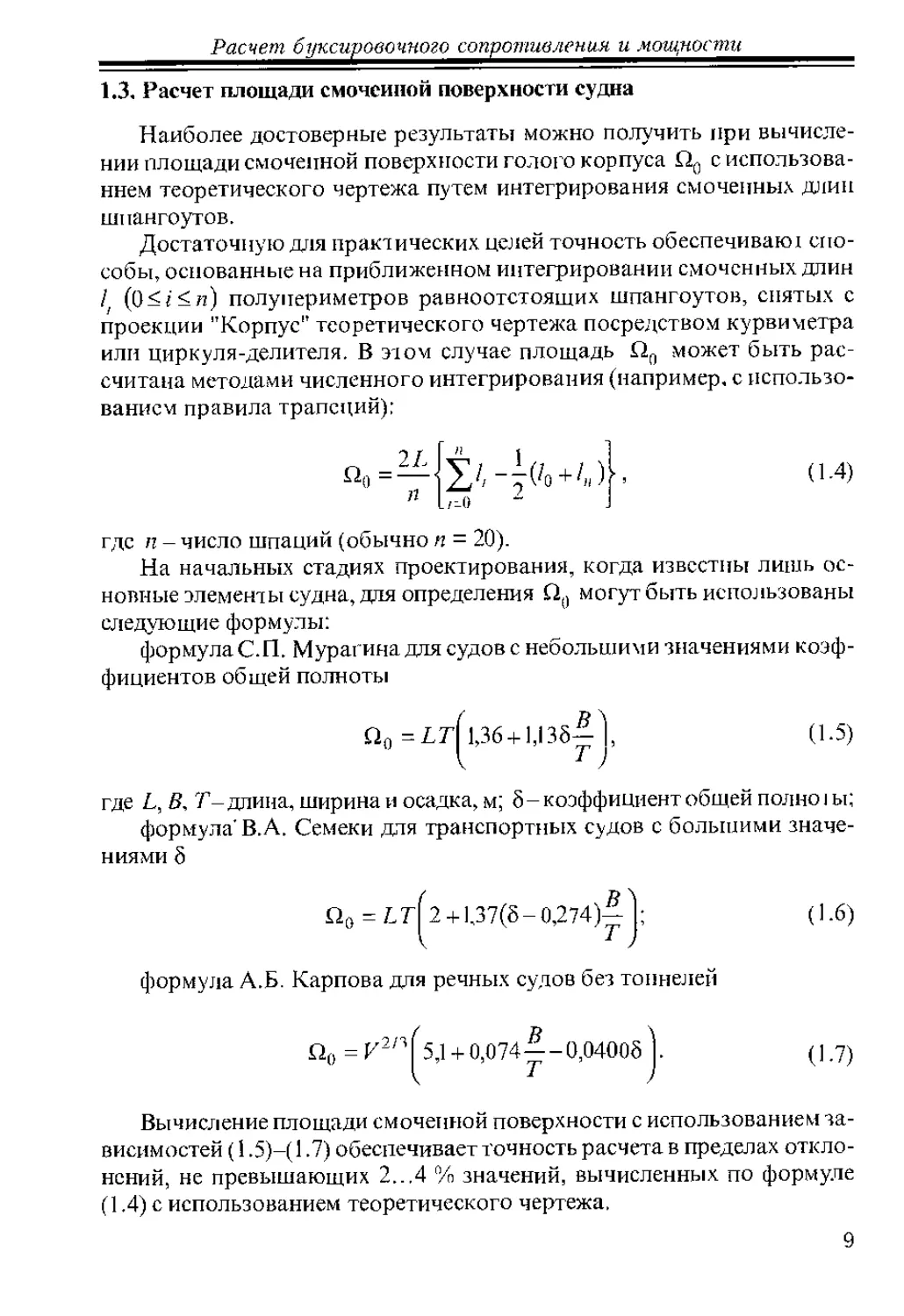
1.3. Расчет площади смоченной поверхности судна
Наиболее достоверные результаты можно получить при вычисле-
нии площади смоченной поверхности голого корпуса Ц, с использова-
нием теоретического чертежа путем интегрирования смоченных длин
шпангоутов.
Достаточную для практических целей точность обеспечиваю! спо-
собы, основанные на приближенном интегрировании смоченных длин
I (0<i<n) полунериметров равноотстоящих шпангоутов, снятых с
проекции "Корпус" теоретического чертежа посредством курвиметра
или циркуля-делителя. В этом случае площадь может быть рас-
считана методами численного интегрирования (например, с использо-
ванием правила трапеций):
Ц>= —(1-4)
я га 2 J
где п - число шпаций (обычно п = 20).
На начальных стадиях проектирования, когда известны лишь ос-
новные элементы судна, для определения £2() могут быть использованы
следующие формулы:
формула С. П. Мурагина для судов с небольшими значениями коэф-
фициентов общей полноты
Я»=Ь^1,36 + 1,138^| (1.5)
где L, В. Т- длина, ширинам осадка, м; 5-коэффициент общей полнот;
формула'В.А. Семеки для транспортных судов с большими значе-
ниями 5
Ц,= £7^2+1,37(8-0,274)® (1.6)
формула А.Б. Карпова для речных судов без тоннелей
Яо =(/2'^5,l + 0,074y-0,0400sj. (|.7)
Вычисление площади смоченной поверхности с использованием за-
висимостей (1.5)-(1.7) обеспечивает точность расчета в пределах откло-
нений, не превышающих 2...4 % значений, вычисленных по формуле
(1.4) с использованием теоретического чертежа.
9
Расчет ходкости надводных водоизмещающих судов
Площадь смоченной поверхности Q с учетом площади поверхно-
сти выступающих частей принимается:
для двухвинтовых судов с выкружками гребных валов
£2 = (l,01...1,04)£2ft;
для двухвинтовых судов с кронштейнами гребных валов
£2 = (1,ОО8...1,О25)£2о;
для судов со скуловыми килями
П = (1,О1...1,ОЗ)По.
Суммарная площадь поверхности всех выступающих частей у одно-
и двухвинтовых судов может составить 1,5...7,0% площади смоченной
поверхности голого корпуса Qo.
1.4. Общая характеристика и классификация способов приближенного
расчета буксировочных сопротивления и мощности
В настоящее время наиболее достоверные данные о величине сопро-
тивления движению судна можно получить пересчетом результатов
модельного эксперимента в опытовом бассейне. Проведение испыта-
ний, однако, не всегда оказывается возможным, особенно на ранних
стадиях проектирования. Поэтому на начальных стадиях важную роль
играют приближенные способы, которые позволяют при ограниченном
числе характеризующих форму корпуса судна параметров с достаточ-
ной степенью точности рассчжать буксировочные сопротивление и
мощность.
Поскольку главные размерения, их сооношення и коэффициенты
полноты не могут полностью охарактеризовать форму корпуса судна,
разработка универсального метода расчета буксировочного сопротив-
ления и мощности не представляется возможным. В настоящее время
наиболее распространены приближенные методы для отдельных типов
судов с характерными обводами, использование которых позволяет
получить результаты расчета, обладающие достаточно высокой точ-
ное! ью.
Современные методы приближенного расчета буксировочных со-
противления и мощности базируются обычно на обработке результа-
тов буксировочных испытаний достаточно большого числа моделей
судов данного типа. В этом случае точность расчета будет тем выше,
чем больше форма корпуса проектируемого судна приближается к фор-
10
Расчет буксировочного сопротивления и мощности
ме корпуса испытанной серии моделей. Наиболее достоверными сле-
дует считать методы, разработанные на основе систематических ис-
пытаний серий моделей судов с последовательно изменяющимися па-
раметрами формы корпуса судна (соотношения главных размерений
и коэффициенты полноты). Материалы таких испытаний позволяют
получить данные, пригодные не только для расчета буксировочных
сопротивления и мощности, но и для выбора наиболее выгодной фор-
мы обводов судна.
Существующие приближенные способы расчета могут был ь подраз-
делены на следующие группы:
методы расчета полного сопротивления или мощности;
методы расчета остаточного или волновот о сопротивления;
методы, основанные на пересчете остаточного сопротивления с про-
тотипа.
Методы первой группы, обладающие наименьшей точностью, при-
меняются для сугубо ориентировочной оценки величины буксировоч-
ной мощности. К ним относятся способы адмиралтейских коэффици-
ентов, методы Э.Э. Папмеля, Эйра, Дайсона и др. (см., например, [6]).
единственное преимущество которых - их простота. Однако в настоя-
щее время в связи с широким использованием компьютерных техноло-
гий это качество угратило решающее значение, поэтому методы пер-
вой группы, как правило, не применяют и в настоящем учебном посо-
бии они не приводятся.
Методы второй группы позволяют производить расчеты буксиро-
вочных сопротивления и мощности с более высокой точностью, по-
скольку возникающие в этом случае погрешности связаны только с оп-
ределением остаточного или волнового сопротивления при достаточ-
ной точности расчета сопротивления трения судна. Основой для разра-
ботки методов этой группы являются результаты анализа буксировоч-
ных испытаний систематических серий моделей конкретных типов су-
дов. К этим методам относятся:
серии Японской судостроительной ассоциации и отечественные се-
рии быстроходных и среднескоростных универсальных сухогрузных,
контейнерных и трейлерных судов;
серии с умеренной полнотой обводов, универсальные сухогрузы,
танкеры,рудовозы;
серии института судостроения Токио и отечественные серии судов с
полными обводами для крупнотоннажных танкеров и рудовозов;
серия "60'' по данным буксировочных испытаний в опытовом бас-
сейне Д. Тейлора (США) для универсальных сухогрузов и среднетон-
нажных танкеров без носового бульба;
И
Таблица 1.1. Параметры систематических серий отечественных и зарубежных судов
№ п/п Наименование Форма оконечности > L ~В S | Св L L Уй 6 Р 3 Ф- — Р Источ- ник
1 Серия быстроходных и срсднескоростных уни- версальных сухогрузных, контейнерных и трейлер- ных судов Нос - V, бульб 4,8... ...7,0 2,0... ...5,0 - 0,50... ...0.65 - - 1-2 [2, 6]
2 Серия пассажирских и грузопассажирских судов Hoc - V 6,5... ...7,3 2,5... ...3,5 -0,05... ...0,00 - 0,55... ...0,65 2 [2]
3 Серия судов с умеренной полнотой обводов, уни- версальные сухогрузы, танкеры, рудовозы Hoc-U, V - 2,0... ...5,0 -0,025... ...0,030 5,0... ...7,5 0,60... ...0,80 1 [2.6]
4 Серия судов полных об- водов - танкеры, рудово- зы Нос - V, бульб, цилиндр, та- ранно-кони- ческая корма - U, V, сигара 5,8... ...8,3 2,2... ...3,5 0,015... ...0,044 -0,800... ...0,875 - - 1 [2, 6]
5 Серия "60" для универсальных сухогру- зов и танкеров Пос- U 5,5... ...8,5 2.5... ...3,5 -0,025... ...0,035 4,5... ...7,5 0,60... ...0,80 - - 1 (61
6 Способ голландского бассейна для морских транспортных судов Нос - U - 2,0... ...3,0 -0,020... ...0,023 - - 0,60... ...0,80 1 [6]
7 Способ Тейлора для во- енных кораблей, пасса- жирских и быстроходных грузовых судов lloc-V, корма - V 2,25... ...3,75 5,2... ...10,0 - - 0,54... ...0,86 1 2 [6]
Расчет буксировочного сопротивления и мощности
Расчет ходкости надводных водонзмещающих судов
способ Д. Тейлора (США) для военных кораблей, пассажирских и
быстроходных грузовых судов;
способ В.А. Первова для скоростных транспортных судов;
метод Т.Н. Кабачинского для среднескоростных судов смешанного
плавания;
метод НИИВТ для грузовых и пассажирских судов внутреннего и
смешанного плаваний:
способ В. А. Ерошина для MPT, СРТ и БМРТ;
диаграммы удельного остаточного сопротивления буксиров, ледо-
колов и промысловых судов.
В табл. 1.1 приведены некоторые из распространенных отечествен-
ных и зарубежных систематических серий судов.
Методы третьей группы позволяют рассчитать буксировочные со-
противление и мощность с достаточно высокой степенью точности при
условии достаточно близких значений относительных геометрических
характеристик и общего характера обводов судна-прототипа и проек-
тируемого судна, К методам этой группы относятся:
метод И.В. Гирса для судов без цилиндрической вставки;
метод О.В. Дубровина для буксиров, ледоколов и рыбопромысло-
вых судов.
В принципе, для пересчетов коэффициента остаточного сопротив-
ления с прототипа можно воспользоваться материалами любой из при-
веденных серий.
1.5. Практические методы расчета остаточною сопротивления с
использованием экспериментальных диаграмм (методы второй 1 руппы)
1.5.1. Серия быстроходных и среднескоростных судов
Для расчета коэффициентов остаточного сопротивления CR судов
с малыми значениями 8 могут быть использованы результаты испыта-
ний моделей систематической серии Японской судостроительной иссле-
довательской ассоциации и отечественной серии быстроходных и сред-
нескоростных судов. Чаще всего эти результаты используются для рас-
чета сопротивления одно- и двухвинтовых контейнерных и трейлерных
судов, в том числе с горизонтальным способом грузообработки, а так-
же лихтеровозов со следующими характеристиками: — =4,80—7,00;
В В
у = 2.00-5,00; 8 = 0,500.-0,650; носовые шпангоуты V-образные н буль-
бообразные; Fr = 0,17...0,34.
Чертежи корпуса и штевней моделей этой серии применительно к
одновальному варианту расположения гребного винта приведены на
рис. 1.3.
12
Продолж. табл. 1.1
№ п/п Наименование Форма оконечности"1 L_ ~В
8 Способ Первова для ско- ростных гранспортных судов Hoc V, корма - V -
9 Серия Даусона для кабо- тажных С*ДОВ Hoc-U, корма - V 5,5... ...6,5
10 С пособ Дауэра-Г ирса для быстроходных судов Пос - V, корма - V
И Способ Кабачинского для среднескоростных судов 4,0... ...12,0
12 Способ НИИВТ для гру- зовых и пассажирских судов внутреннего и сме- шанного плавания Hoc-U 5,0... ...9,0
13 Серия Брошина для БМРТ Hoc-V 5,0... ...7,0
14 Серия Ерошила для СРТ Jloc-V 3,5... ...5,0
15 Серия Ерошина для МРТ Hoc-V 2,5... ...3,5
16 Диаграмма Неймана для буксиров - -
17 Диаграмма Неймана для ледоколов -
18 Диаграмма Неймана для промысловых судов - -
в_ Т L L Uv 8 ₽ 8 ,р=р Z, Источ- ник
2,0... ..5,0 -0,03... ...-0,02 5,0... ...7,5 0,55... ...0,65 - - 2 [7]
,05... .2,42 -0,02... ...0,02 - 0,65... ...0,75 - 1 [7]
- 5,0... ...11,0 - - 1-2 [1]
1,7... ..6,0 - - 0,65... ...0,82 1 [1]
4,0... ..8,0 - - 0,45... ...0,87 - - 1-2 [20]
2,3... ..3,2 -0,03... ...0,02 - - 0,833... ...0,980 0,60... ...0,76 1 [121
2,3... ..3.2 -0,03... ...0,01 - 0,65... ...0,92 0,55... ...0,70 1 [6]
2,6... ..4,0 -0,05... ...-0,01 - - 0,75... ...0,92 0,50... ...0,72 1 [6]
2,4... ..3,2 3,9... ...5,2 - - 0,58... ...0,68 и
2.7... ..3.2 - 4,2... ...5,0 - - 0,57... ...0,62 - [6]
2,0... ..2,4 - 4,7... ...5,1 - 0,56... ...0,66 - Гб]
Расчет ходкости надводных вое
20
Серия быстроходных
грузовых судов (Япония)
Пос - бульб
6,5... 2,1... -0,025... 5,37...
...8,0 ...2,7 ...-0,007 ...7,81
Серия крупнотоннажных
танкеров (Япония)
Серия транспортных су-
дов Британской судо-
строительной ассоциации
(BSRA)
Нос - бульб
Нос - бульб
**V. U- V-, U-образная.
5,5... 2.76... 0,016... 4,99...
...7,0 ...3,06 ...0,035 ...5,58
0,55...
...0,65
0,80...
...0,84
Рис. 1.3. Теоретический корпус и штевни исходной модели серии быстроходных
и среднсскоростных судов:
----------------V-образная;----бульбообразная носовая оконечность
Расчет ходкости надводных водоизмещающих судов
При расчете буксировочного сопротивления по материалам данной
серии с использованием традиционной схемы разделения сопротивле-
ния корпуса судна на сопротивление трения и остаточное сопротивле-
ние коэффициент CR рассчитывается по следующей формуле:
С R ~ С Г’
где численное значение коэффициента CR(8) определяется с помощью
экспериментальных диаграмм (рис. 1.4* и 1.5*)*’ в зависимости от фор-
мы корпуса судна с V-образной и бульбообразной формой носовых
шпангоутов стандартной серии с — = 5,64 и — = 3,50 для заданных зна-
В Т -у
чений коэффициента полноты 8 ичислаФруда Fr = -==.
L
Коэффициент kUB влияния несоответствия отношения — для про-
L В
ектируемого судна и — = 5,64 для стандартной серии определяется с
помощью экспериментальных диаграмм (рис. J .6* и 1.7*) в зависимости
от формы носовой оконечности.
В эт ом случае коэффициент влияния несоответствия отношения
определяется по диаграммам (см. рис. 1.6* и 1.7”) для заданных значе-
ний числа Fr как отношение коэффициентов CR для расчетного и стан-
дартного — - 5,64 , т. е.
Значение коэффициент влияния kB/r> учитывающею несоответ-
ствие расчетного ~ и стандартного у = 3,50 значений, снимается с
диаграмм (рис. 1.8-1.10*) для заданных значений числа Fr.
1.5.2. Серия пассажирских и грузопассажирских двухвинтовых
судов
Систематическая серия предназначена для расчета коэффициента
остаточного сопротивления двухвинтовых пассажирских и грузопасса-
жирских судов, имеющих следующие геометрические характеристики:
”> Отмеченные значком ”*"
рисунки приведены в конце главы.
Расчет буксировочного сопротивления и мощности
- = 6.5...7.3- — = 25..,3,5; л, =~ = -0,05...0,00; 8 = 0,55...0,65; Fr =
5 Д L
= 0,17...0,37. Теоретический чертеж модели серии показан на рис. 1.11.
Рис. 1.11. Теоретический корпус и штевни моделей
серии грузопассажирских и пассажирских судов
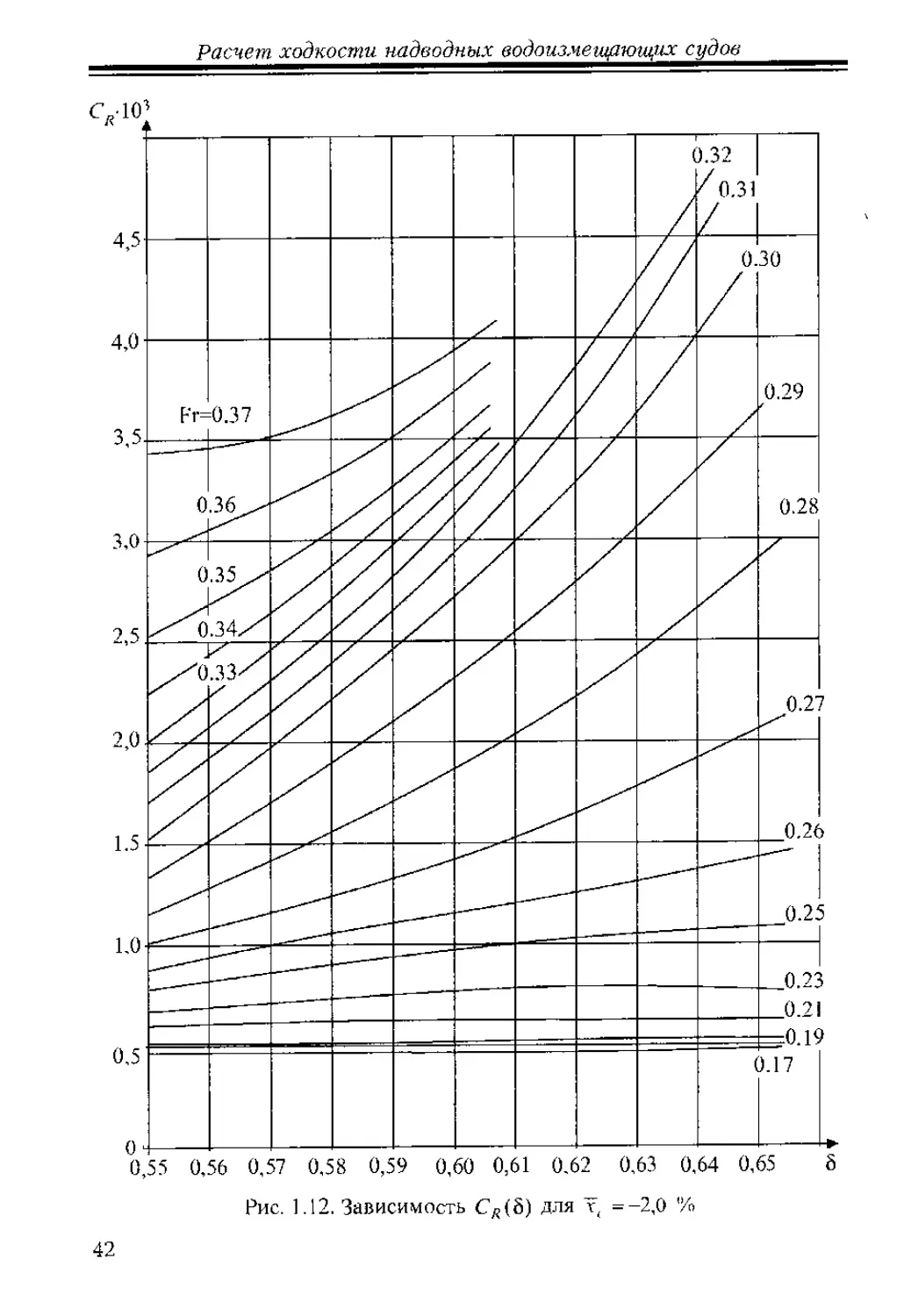
Если проект ные значения х( е [-3,0;—2,0] %, т о коэффициент оста-
точного сопротивления рассчитывается по формуле
где C/?(8,Tf) определяется по диаграммам рис. 1.12*—1.14*; коэффици-
енты влияния k!ID и кв/Г находятся по материалам предыдущей серии.
Если заданное значение х( выходит за указанные пределы, го коэффи-
циент остаточного сопротивления вычисляется как
Cr =Ck(8,.v(. =-3,0 %)kX!kL/skB/r,
2-390
17
Расчет ходкости надводных водоизмещающих судов
где к определяется по диаграммам рис. 1.15’-1.17" в зависимости от
коэффициента полноты водоизмещения 5.
].5.3. Серия судов с умеренной полнотой обводов
Область значений коэффициентов общей полноты 8 = 0,600...0,800
охватывает большую часть морских транспортных судов различных ти-
пов и назначения, включая универсальные сухогр) зные суда, среднетон-
нажные танкеры и рудовозы, суда для каботажных перевозок, а также
транспортные суда флота рыбной промышленности со следующими ха-
рактеристиками: -^ = 5,50...8,50; у = 2,50...3,50; у = -у= = 4,50...7,50;
<р = 0,614...0,805; носовые шпангоуты U-образные, промежуточные и
V-образные; Fr = 0,16. ..0,30.
Форма обводов моделей этой серии иллюстрируется рис. 1.18
(8 = 0,700).
Рис. 1.18. Теоретический корпус и ццевни модели серии универсальных
морских транспоргных судов:
а - U-образная носовая оконечность: б- V-образная носовая оконечность
18
Расчет буксировочного сопротивления и мощности
Коэффициент остаточного сопротивления в этом случае рассчиты-
вается по формуле
Cr =(“R&)kykBiTaBii ^кГ- (1-8)
Коэффициент СЛ(8) снимается с диаграммы рис. 1.19’ для задан-
ных значений коэффициента 8 и чисел Fr. С этой же диаграммы сни-
мается стандартное значение относительной длины у0(8) (шкала для
Yo расположена справа).
Коэффициент ку, учитывающий влияние относительной длины
1/-—=• на остаточное сопротивление, вычисляется по формуле
Чу
в которой значения коэффициентов и а^ снимаются с диаграммы
рис. 1.20* для заданного у и стандартного ^о(с,1ИмаемогосдиагРам’
мы рис. 1.19*) значений относительной длины и чисел Fr.
Коэффициенты kBlT и <7в/7-,произведениекоторыхвформуле(1.8)
5 В „ е
учитывает влияние различия расчетного — и стандартного — = 2,5,
определяются по графикам рис. 1.21 * для заданных значений чисел Fr.
Коэффициент к учитывающий влияние на остаточное сопротив-
ление CR несоответствия относительной абсциссы центра величины
—~ = xf (%) с его стандартным значением снимается с графиков
рис. 1.22*-1.24* для заданных значений коэффициентов общей полноты
8 и чисел Фруда.
Оценка влиянияносового бульба на коэффициент остаточного сопро-
тивления может быть выполнена по формуле
CR = ^6CR-
где к5 = 74,7Fr’-29,5Fr2 + l,33Fr + 1,055-коэффициент влияния буль-
ба; C’R - коэффициент остаточного сопротивления, рассчитанный но
формуле (1.8).
1.5.4. Серия субов полных образовании
В эту серию включены крупнотоннажные танкеры и рудовозы с ко-
эффициентами общей полноты 8 > 0,800. Помимо систематической се-
рии моделей, испытанных институтом судостроения в Токио, наиболее
19
Расчет ходкости надводных водоизмещающих судов
крупным исследованием является серия моделей судов, испытанных в
ЦНИИ им. акад. А.Н. Крылова.
Эта серия судов имеет следующие характеристики: 8 = 0.800...0,875;
ф = 5,8...8,3: у = 2,2...3,5; х( = (1,5...4,4)%^; Fr = 0,10.-0,23. Форма
носовой оконечности: V-образная, цилиндрическая, бульбообразная с
заострением ГВЛ, таранно-коническая; форма кормовой оконечности:
U-образная, V-образная, сигарообразная.
Теоретические чертежи корпусов и штевней этой серии приведены
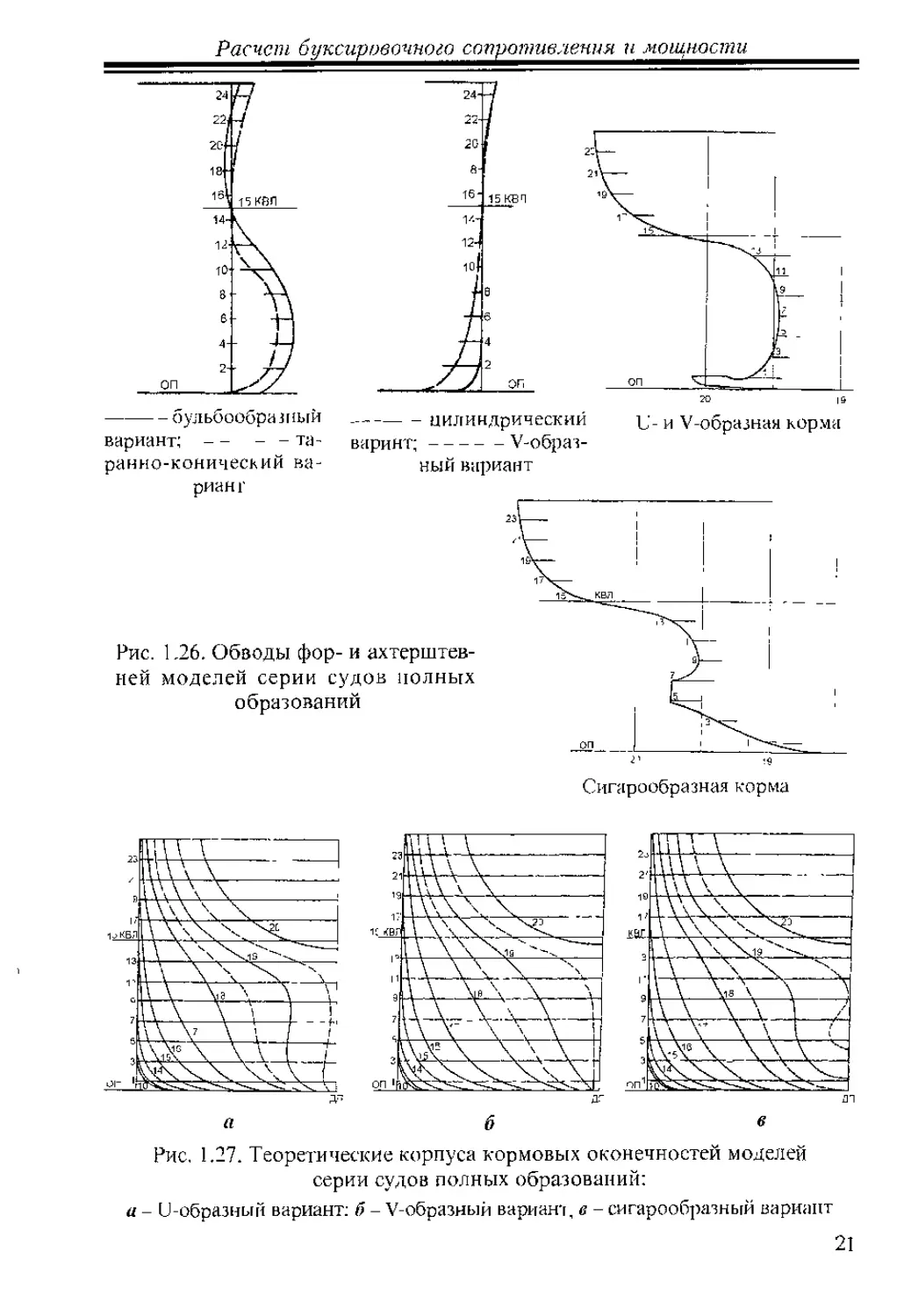
на рис. 1.25-1.27.
Рис. 1.25. Теоретические корпуса носовых окопечноией моделей
серии судов полных образований:
а • V-образный вариант; б - цилиндрический вариант; в - бу.чьбовый вариант;
г - таранно-конический вариант
20
Расчет буксировочного сопротивления и мощности
Рис. 1.27. Теоретические корпуса кормовых оконечностей моделей
серии судов полных образований:
а - U-образный вариант: б - V-образный вариант, в - сигарообразный вариант
21
Расчет ходкости надводных водоизмещающих судов
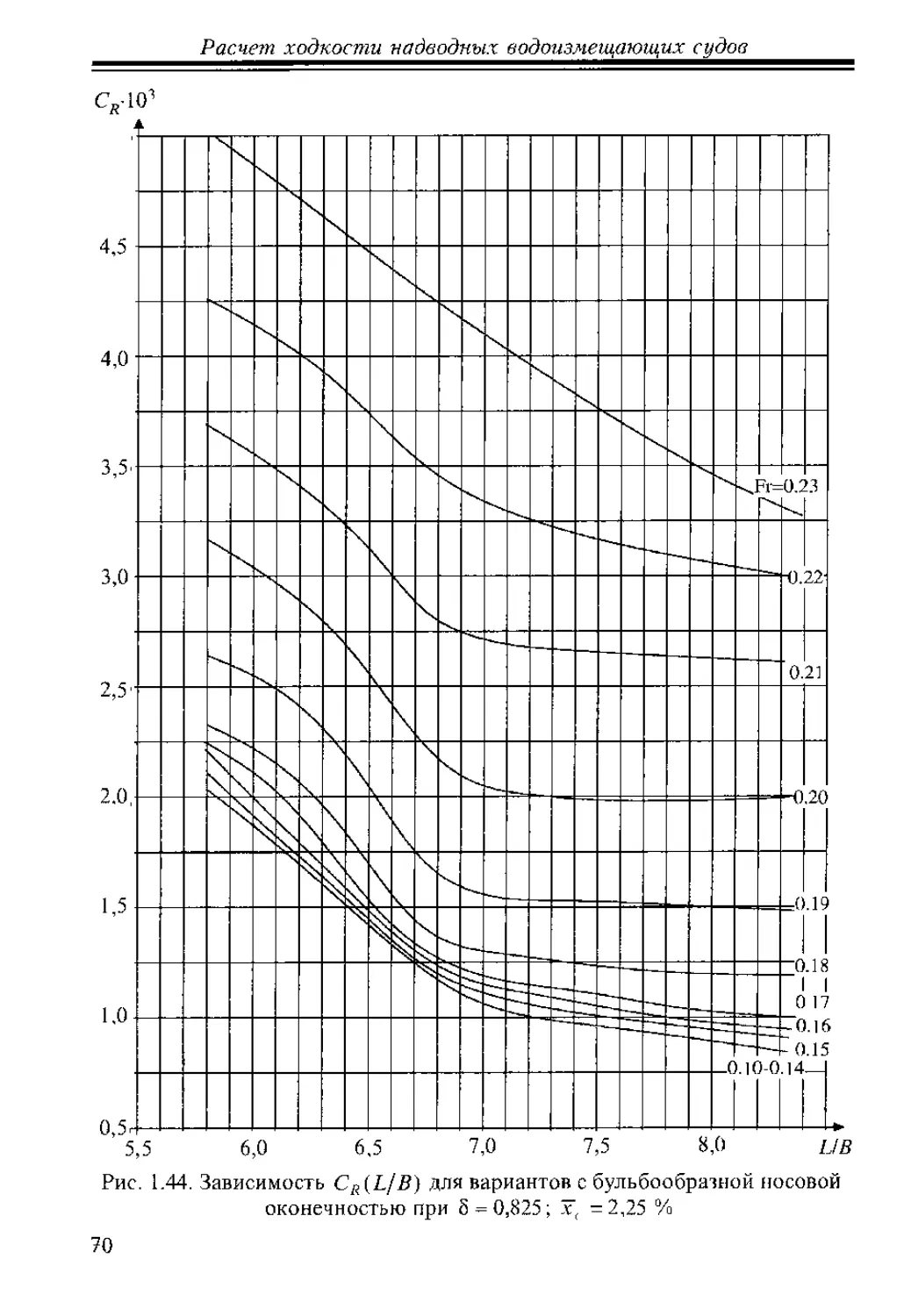
Коэффициент остаточного сопротивления для всех форм носовых
обводов, кроме V-образных, рассчитывается по формуле
Cr - Сд S;— ртЛв/т/<корМ(|,
где значение коэффициента С J 5;—J спимается с диадами рис. 1.28*-
-1.39* для заданных значений о и Ь'г с использованием линейной ин-
терполяции по отношению или с рис. 1.40*-1.48* с ишерполянией по
S для соответствующей формы носовой оконечности.
В случае V-образной формы носовой оконечности коэффициент
остаточного сопротивления определяется по формуле
Cr ~ С /?(^) L! В-Ь.^ L! Скорма’
где С/Д5) снимается с диаграммы рис. 1.33*, a kui} - с использовани-
ем рис. 1.50*-1.51* и линейной интерполяции по S.
Коэффициент kBiT, учитывающий несоответствие расчетного и
- В г
стандартного значении —, для всех вариантов носовых обводов опре-
деляется по । рафику рис. 1.52*.
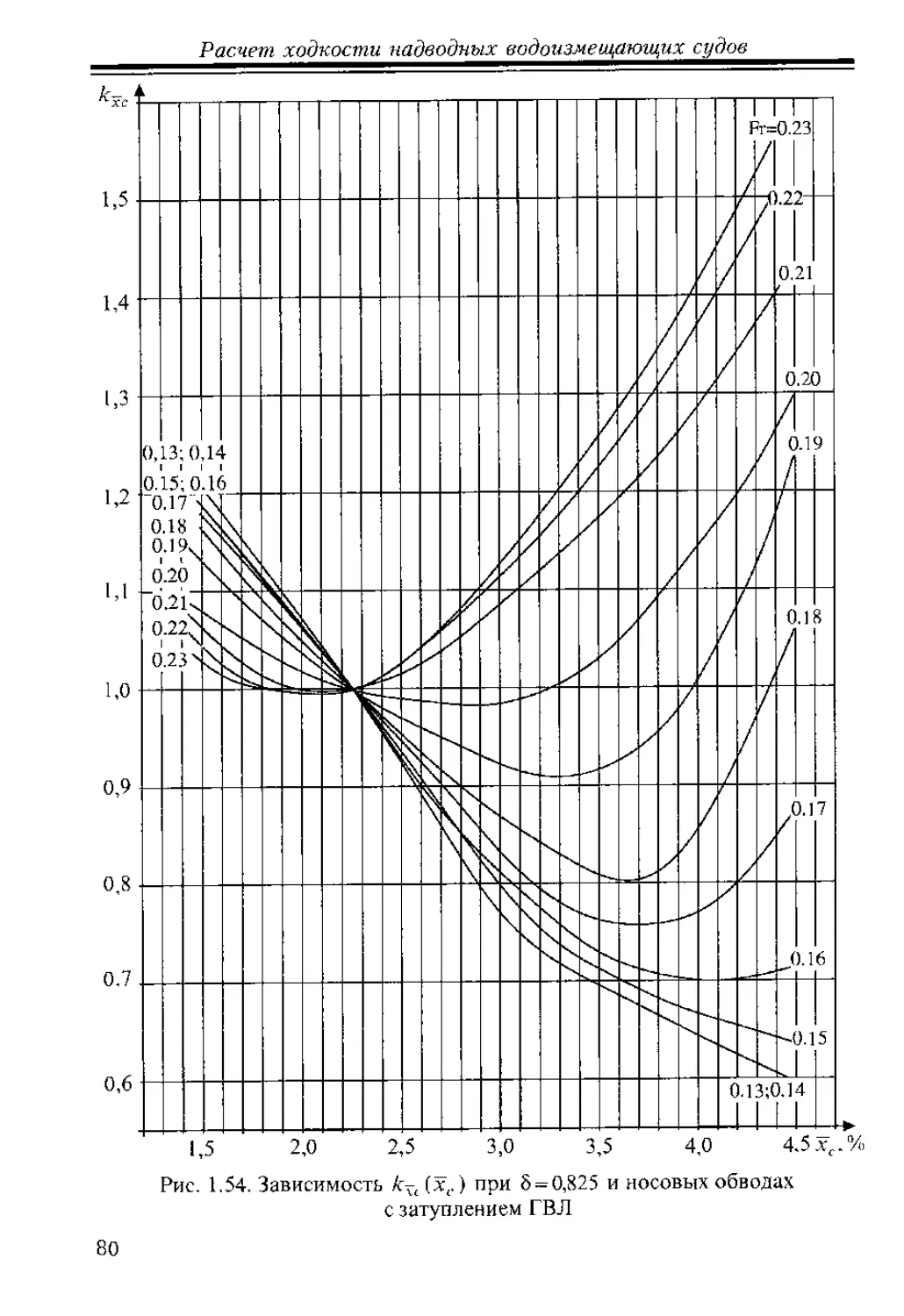
Коэффициент къ .учитывающий несоответствие расчетного и стан-
дартного значений othochiелыюй абсциссы центра величины ,
определяется для носовых обводов с заострением ГВЛ (бульбообраз-
ные) по диаграмме рис. 1.53*. а с затуплением ГВЛ (V-образные, цилин-
дрические, таранно-конические) - по рис. 1.54*.
Коэффициент к учитывает отличие контура кормовых шпан-
гоутов от U-образной формы, и его значение определяется по рис. 1.55*.
1.5.5. Серии рыбонро.итсловы v судов
Наиболее полные систематические исследования сопротивления и
характеристик ходкости промысловых судов различных типов были
выполнены В.А. Брошиным. Исходные модели серий среднетоннаж-
ных и малых промысловых судов при различных значениях — имели
одинаковую базовую форму обводов (теоретический корпус приведен
на рис. 1.56).
В обеих сериях варьировались ф^,, ——
Р, х( в следующих
22
Расчет буксировочного сопротивления и мощности
пределах:
для среднетопнажпых промысловых судов
^ = 0.550.-0 700; ^ = 3,5...5.0; - = 2,3...3,2; Р = 0,650...0,920;
В В Т
х, = — = -0,03.-0,01; Fr = 0,21 ...0,37;
‘ L
для малых промысловых судов
L В
<ррр =0,500.-0,720; -^ = 2.5...3,0; у = 2,6...4,0; р = 0.750.-0.920;
xt = -0,05...-0,01; Fr = 0,10...0,50.
Рис. 1.56. Теоре1ический корпус базовых моделей
серий среднетоннажных и малых промысловых судов
Результаты буксировочных испытаний .моделей серий в виде зави-
симости CR от каждого варьируемого параметра при фиксированных
базовых значениях остальных для среднеюннажных и малых судов при-
ведены на рис. 1.57*-! .66*. В этом случае коэффициент остаточного со-
противления рассчитывается по следующей формуле:
Ск = cR(v)cR^ j:s^]cR(p)cs(.vc)x
23
Расчет ходкости надводных водоизмещающих судов
где Ся((?„,)-по графику рис. 1.57*; _ Рис- 1-59*: CR
рис. 1.61*; Сл(0)-рис. 1.63*; CR (хс)-рис. 1.65*:С*
для среднетоннажных промысловых судов при -^ = 4,24 по графику
рис. 1.59*, для малых промысловых судов при -^- = 3,0 - по рис. 1.60";
CR(ip/)/3)-рис. 1.58*; Сд| |-рис. 1.60*; C\f—1-рис. 1.62*; СДр) -
I В ) U J
рис. 1.64*; ) - рис. 1.66*.
1 .6. Способы пересчета остаточного сопротивления с прототипа
(методы третьей группы)
В эюм случае точность расчета коэффициента остаточного сопро-
тивления проектируемого судна с использованием данных судна-про-
тотипа зависит от того, насколько близки у сопоставляемых судов их
относительные размерения и коэффициенты полноты, а также харак-
тер обводов. Так как различия в геометриии судна-прототипа и проек-
тируемого судна всегда есть, го задача состоит в учете влияния на ко-
эффициен! остаточного сопротивления отличий геометрических пара-
метров формы корпуса проек тируемого судна от судна-про готипа. Та-
кой подход позволяет учесть влияние на коэффициент сопротивления
нс более трех-четырех геометрических параметров с использованием
так называемых коэффициентов вляния.
1.6.1. Способ И.В. Гирса
Этот способ применяется для расчета остаточного сопротивления
морских скоростных судов без цилиндрической вставки, имеющих сле-
дующие геометрические характеристики; ср = 0,500...0.850; — =2,0...
...14,0; V = 5,0... 11,0; Fr = 0,25...0,65. 7
Коэффициент остаточного сопротивления в этом случае рассчиты-
вается по формуле
Здесь C'R (Fr) - коэффицие«п ос точного сопротивления судна-про-
ютипа; Ад =_^— коэффициент, учитывающий влияние отличия ко-
Хфн
24
Расчет буксировочного сопротивления и мощности
эффициентов продольной остроты ф проектируемого судна и q> суд-
на-прототипа, где значения коэффициентов х9 = хф(ф; Fr) и =
= Х<рп(Фи’ Fr) определяются по графикам рис. 1.67*; = ——коэф-
. ” - э,. Х'|'п
фициент, учитывающий влияние различия коэффициентов остроты у
проектируемого судна и % судна-прототипа: значения коэффициен-
тов X,, =X,,(v;Fr) и (v„;Fr) определяются по графикам
рис. 1.68*; кв1Т =—------коэффициент. учитывающий влияние раз-
fl Х<'")п (В\
личия — проектируемого судна и I — I судна-прототипа, где значения
коэффициентов Хл,г и =Х(в/г)п Trj on-
ределяются по графикам рис. 1.69*.
1.6.2. Способ О. В. Дубровина
Этот способ используется для расчета остаточного сопротивления
буксиров, ледоколов, промысловых судов, имеющих следующие геомет-
рические характеристики: 5 = 0,450...0,550; — =3,5...5.5; — =2,0...3,5;
Fr = 0,10...0.35. В Т
Коэффициент остаточного сопротивления рассчитывается по фор-
муле
Cr -Сяк]
Здесь C'r -коэффициент остаточною сопротивления судна-прого-
типа; kLIB =----------коэффициент, учитывающий влияние различия
£ Х(/./8)п
— проектируемого судна и— судна-прототипа, где значения коэф-
фициентов 1l!b = Xz/B^;FrJ и Х(г/в)п ;Frj 0ПРеле;[ЯЮТСЯ
У (В 3
ио графикам рис. 1.70*; кВ/Т =—, где Хв/Г = Хв/г| —• Fr и
Г/ДЗ 3 Х|В/7>„ V Д
Х(2„„ >„ = X(e/r)n аг :Fr определяются по графикам рис. 1.71 ;
/с5 =------ коэффициент, учитывающий влияние различия коэффици-
ентов общей полноты 5 проектируемого судна и 5П судна-прототипа.
25
Расчет ходкости надводных водоизмещающих судов
где значения коэффициентов %s = X5(8;Fr) и %§п = X8n(8n;Fr) опре-
деляются по графикам рис. 1.72*.
1. 7. Сопротивление судов внутреннего и смешанного плавания
Особенности судов внутреннего и смешанного (река-море) плава-
ния обусловлены экономическими требованиями и специфическими ус-
ловиями эксплуатации. Их размерения жестко ограничиваются глуби-
ной фарватера, габаритами шлюзов, извилистостью речного фарватера
и др. В этой связи современные большегрузные (водоизмещением более
2000 т) суда внутреннего и смешанного плавания имеют полные образо-
вания (0.780 < 8 < 0,870), большую относительную ширину> 3 зна-
чительную длину цилиндрической вставки. Как правило, эти суда двух-
вальные.
Основанием для определения остаточного сопротивления судов
внутреннего и смешанного плавания являются обобщенные результа-
ты серийных модельных испытаний с систематической вариацией со-
отношений главных размерений и коэффициентов полноты. Как и для
морских судов, способы расчета остаточного сопротивления основы-
ваются на использовании серийных диаграмм либо на пересчете оста-
точного сопротивления с судна-прототипа.
7.7.1. Метод НИИВТарасчета коэффициента остаточного
сопротивления
Для грузовых судов внутреннего и смешанного (река-море) плава-
ния на тихой и глубокой воде, имеющих следующие характеристики:
0.07 < Fr < 0 25 ; 4,0 < — < 8,5; 3.7 < - < 14,0; 0,800 < 8 < 0,930, - исполь-
В Т
зуется эмпирическая формула, полученная Е.М. Сироткиным по резуль-
татам систематических испытаний моделей судов в опыговом бассейне
Новосибирского института инженеров водного транспорта (НИИ ВТа):
сй =*Л,Д1,62-0,14зОо-’ +
LL В JJ
Г / / \ Г / \2 7 1
+ 1,64 J Г0’145 -1’28 kFr-0,°7)4 г
где /с5 - множитель, учитывающий влияние коэффициента общей пол-
нош, рассчитывается по формуле
Л5 = 1,00 + 0,80(108 - 8,5)+2,7(103 - 8,5)5;
26
Расчет буксировочного сопротивления и мощности
кв/Т ~ множитель, учитывающий влияние относительной ширины
численное значение которого определяется по формуле
В_
Г '
кВ!т = 1,00-0.084^® 1-б)+[4,38-402(Я-0,195)2]((у1-б] КГ3.
1.7.2. Memot) расчета коэффициента остаточного сопротивления
путем пересчета с прототипа
Этот метол базируется на результатах систематизации и обработ-
ки данных модельных и натурных судов, проведенных в ЛИВТс
(Ленинградский институт инженеров воднот о транспорта), НИИВТе
и ГИ И ВТе (Горьковский институт инженеров водного транспорт а) для
барж, грузовых судов, буксиров, пассажирских и грузопассажирских
судов.
Коэффициент остаточного сопротивления CR проектируемого суд-
на определяется путем пересчета коэффициента остаточного сонрояв-
ления C'R судна-прототипа по формуле
(1-9)
где V —водоизмещение, м\ Q-площадь смоченной поверхности, м2:
bv с,, ф - коэффициенты, учитывающие различие в соотношениях
l L
в' в
——. 5 проектируемого и судна-прототипа (здесь Ll( - длина
цилиндрической вставки).
Входящие в (1.9) значения коэффициента остаточного сопротивле-
ния с'ц =C'R (Fr) судна-прототипа определяются по графикам рис. 1.73-
-1.75” в зависимости от типа судна, характеристики которого приведе-
ны в табл. 1.2.
Коэффициенты а..Ь..с, и с/ рассчитываются по формулам: а1 = —;
1 11 1 аГ
h, = —; о, = — и с/, =——.где а ,/) с .г/ -коэффициентыдлярасчег-
bn У \
ного судна; </ , /?п. сп. «п -коэффициенты для судна-прототипа, опреде-
ляющиеся по следующим формулам:
г/,--6,17 10"4(— 'I +0,0276^—^1 -0.422-+2,831; Д= 2- +0.634;
t В) I s J в 8
27
Расчет ходкости надводных водоизмещающих судов
= 6.49^~J-5,74-j^-+2,25 -для самоходных грузовых судов; с, = I -
для буксирных, пассажирских и грузопассажирских судов; d\ = 31,7552-
-45,045 +16,43 - для самоходных грузовых судов; d} = 7.13352 -2,3288-
-0,164 - для буксирных, пассажирских и грузопассажирских судов.
Таблица 1.2. Характеристики типовых судов внутреннего и смешанного
плавания _____ ____________________________________________
Номер L в г в 5 L
1 Сайо 8,18 годные грузовые 0,212 суда 0,851 0,79
2 6.93 0,216 0,837 0,76
3 7.02 0.204 0,830 0,75
4 7,95 0.266 0,869 0,78
5 6,74 0,225 0,800 0,75
6 8,50 0,266 0,818 0,80
7 6.Н 0,184 0,788 0,76
1 Букс 4,99 риыс суда и то. 0,243 качи 0,545
2 4,73 0,253 0,557 -
3 5,02 0,243 0,636 —
4 4,60 0,400 0,522 -
5 5,13 0,275 0,525 —
6 4,70 0,244 0,61S -
7 4,04 0,135 0,528 -
1 Пассансирск 7,75 не и грузопассаэ 6,190 сирские суда 0,575
2 8.10 0,198 0,710 —
3 6,60 0,202 0,573 -
4 5,72 0,249 0,465 —
5 4.73 0,202 0.58] -
При расчете коэффициента ос га точного сопротивления CR для пас-
сажирских и грузопассажирских судов необходимо пользоваться зави-
симостью
Cr каФ\с\сЬ-
причем на графиках рис. 1.75* число Фруда определялось по формуле
г- и
Fr = ..
28
Расчет буксировочного сопротивления и мощности
1.8. Сопротивление трения судна
В соответствии с методом Фруда сопротивление корпуса судна раз-
деляется на остаточное сопротивление и сопротивление трения эквива-
лентной технически гладкой пластины. Эквивалентной называется пла-
стина, имеющая длину, площадь смоченной поверхности и скорость
движения, равные их значениям для судна.
Так как для натурных судов пограничный слой является турбулент-
ным практически по всей длине, то для определения коэффициента со-
противления трения можно воспользоваться одной из формул (Пранд-
тля-Шлихтинга, Шенхерра, Пустотного и Котловина и т. д). В прак-
тике отечественною судостроения чаще всего используется формула
Прандтля-Шлихтинга
0,455
(lg Re)2’
(1.Ю)
где Re =-----число Рейнольдса; и - скорость судна, м/с; L - длина
судна по ватерлинии, м; v - кинематический коэффициент вязкости,
значение которого для морской воды при t = 4 °C принимается равным
1.61 10-6 м2/с.
Численные значения CF0 (Re), рассчитанные по формуле (1.10), при-
ведены в табл. 1.3.
Таблица 1.3. Коэффициент трения по формуле Прандтля-Шлихтинга
Re-10 ! GH0’ Re-10 “ CW1OJ Re-10’4 Сд)-103
1,00 3,00 1,00 2,13 1,00 1.57
1,25 2,90 1,25 2,06 1,25 1.53
1,50 2 82 1,50 2,01 1.50 1.49
1,75 2.75 1.75 1.97 1.75 1,46
2,00 2,69 2,00 1,94 2,00 1,44
2,50 2,60 2,50 1,88 2,50 1,40
3,00 2,53 3,00 1,83 3,00 1,37
3,50 2,48 3,50 1.80 3,50 1.35
4,00 2,43 4,00 1,77 4,00 1.33
4,50 2,38 4,50 1,74 4.50 1,31
5.00 2.35 5,00 1.71 5,00 1,29
5,50 2,32 5,50 1,69 5,50 1,28
6,00 2,29 6,00 1,67 6,00 1,27
6,50 2,26 6,50 1,65 6,50 1,26
7,00 2,24 7,00 1,64 7,00 1,25
7,50 2,22 7,50 1,63 7,50 1,24
29
Расчет ходкости надводных водоизмещающих судов
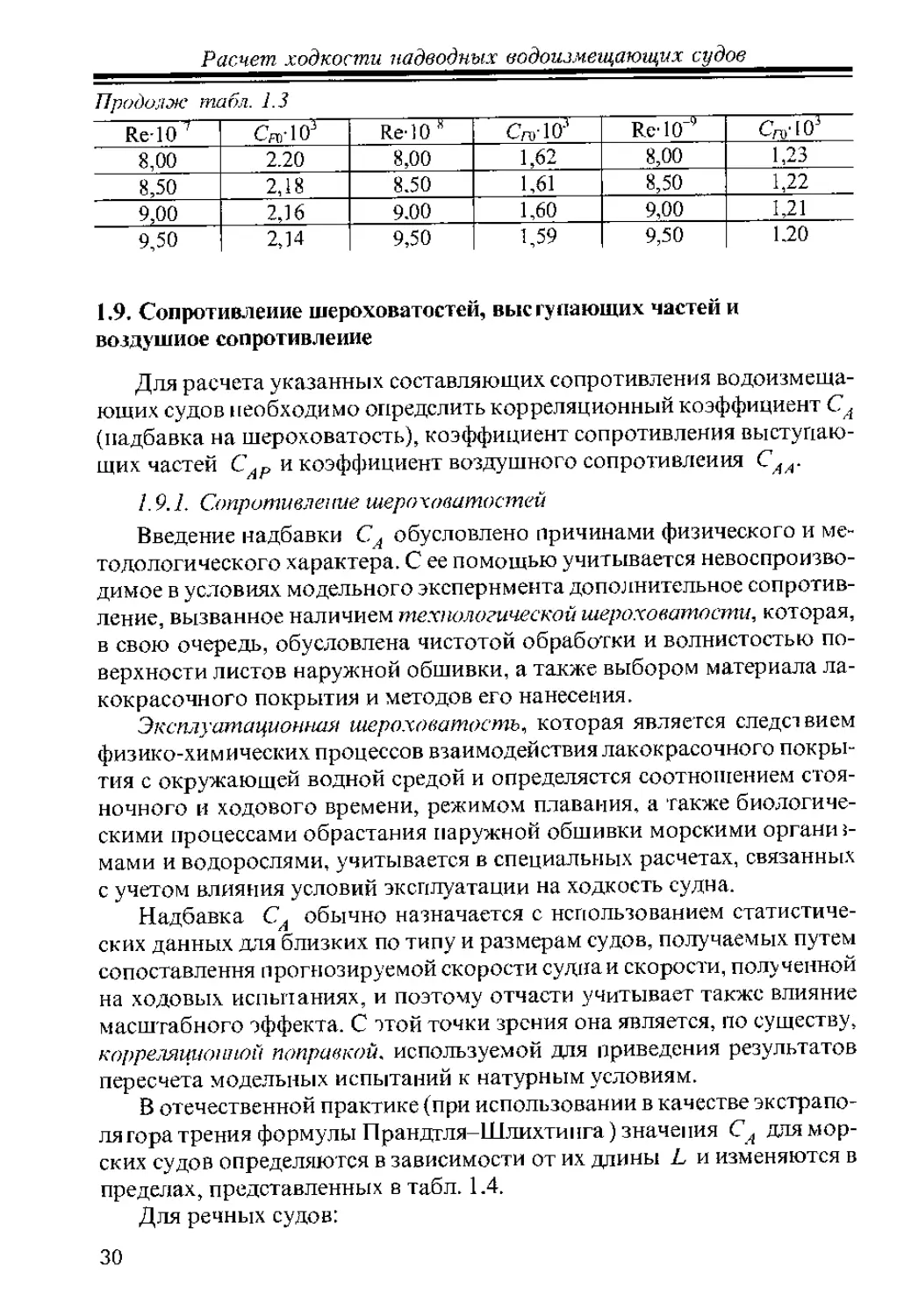
Продолж табл. 1.3
Re-10 ' Re lO “ Сги'Ю’1 RdO’9 Оги' । о5
8,00 2.20 8,00 1,62 8,00 1,23
8,50 2Д8 8.50 1,61 8,50 1,22
9,00 2,16 9.00 1,60 9,00 1,21
9,50 2,]4 9,50 1,59 9,50 1.20
1.9. Сопротивление шероховатостей, выступающих частей и
воздушное сопротивление
Для расчета указанных составляющих сопротивления водоизмеща-
юших судов необходимо определить корреляционный коэффициент СА
(надбавка на шероховатость), коэффициент сопротивления выступаю-
щих частей САР и коэффициент воздушного сопротивления САА.
1.9.1. Сопротивление шероховатостей
Введение надбавки СА обусловлено причинами физического и ме-
тодологического характера. С ее помощью учитывается невоспроизво-
димое в условиях модельного эксперимента дополнительное сопротив-
ление, вызванное наличием технологической шероховатости, которая,
в свою очередь, обусловлена чистотой обработки и волнистостью по-
верхности листов наружной обшивки, а также выбором материала ла-
кокрасочного покрытия и методов его нанесения.
Эксплуатационная шероховатость, которая является следствием
физико-химических процессов взаимодействия лакокрасочного покры-
тия с окружающей водной средой и определяется соотношением стоя-
ночного и ходового времени, режимом плавания, а также биологиче-
скими процессами обрастания наружной обшивки морскими организ-
мами и водорослями, учитывается в специальных расчетах, связанных
с учетом влияния условий эксплуатации на ходкость судна.
Надбавка СА обычно назначается с использованием статистиче-
ских данных для близких по типу и размерам судов, получаемых путем
сопоставления прогнозируемой скорости судна и скорости, полученной
на ходовых испытаниях, и поэтому отчасти учитывает также влияние
масштабного эффекта. С этой точки зрения она является, по существу,
корреляционной поправкой, используемой для приведения результатов
пересчета модельных испытаний к натурным условиям.
В отечественной практике (при использовании в качестве экстрапо-
лягоратрения формулы Прандтля-Шлихтинга) значения С4 длямор-
ских судов определяются в зависимости от их длины L и изменяются в
пределах, представленных в табл. 1.4.
Для речных судов:
30
Расчет буксировочного сопротивления и мощности
большегрузных внутреннего и Таблица 1.4. Значения надбавки на
смешанного плавания (8> 0,800 и шероховагосгь дли морских судов
Fr < 0,200) L, м С4-10'
50. .150 0,3...0.4
СА - (0,5...0,7)-10'\ 150. .210 0,2
210. .250 0,1
250. .300 0
барж (8 > 0,820 и Fr < 0,180) 300. .350 -0,1
СА = (0,7...1,0)-10-3. 350. 400 -0,2
1 9.2. Сопротивление выступающих частей
Выступающими частями называются детали подводной поверхно-
сти корпуса судна, выходящие за пределы пограничного слоя и резко
нарушающие плавный характер обтекания судна. К ним относятся круп-
ные детали корпуса: скуловые кили, рули, конструкции выходов из кор-
пуса гребных валов (дейдвудное утолщение у одновинтовых судов, вы-
кружки или кронштейны и гребные валы - у двухвинтовых).
Сложный характер формирования потока, обтекающего выступа-
ющие части, затрудняет расчетное определение их сопротивления. По-
этому, учитывая относительно небольшую (по сравнению с сопротив-
лением корпуса водоизмещающих судов) величину сопротивления вы-
ступающих частей надводных водоизмещающих судов, коэффициент
сопротивления выступающих частей САР принято рассчитывать в виде
суммарной добавки, определяемой с использованием статистических
данных, которые получены в результате модельных и натурных испы-
таний водоизмещающих судов (табл. 1.5).
Таблица 1.5. Значения коэффициента выступающих частей
Одновинтовые суда Двухвинтовые суда
Длина судна Л, м С.р-Ю3 Коэффициент общей полноты 3 Количесгво рулей GH05
50...130 0,15 0.550...0,600 1 0,45
130...200 0,10 т 0,60
200...400 0,05 0,600...0,700 2 0.40 0.55
1.9.3. Воздушное сопротивление
Воздушное сопротивление имеет вязкост ную природу и воздействует
на надводные конструкции корпуса судна (надводную часть корпуса,
надстройки и рубки, мачты, трубы). В расчетах ходкости оно определя-
ется аэродинамическим сопротивлением надводной части при отсут-
ствии ветра. Другими словами, величина этого сопротивления являет-
ся аэродинамической реакцией воздушного потока, натекающего на над-
31
Расчет ходкости надводных водоизмещающих судов
водную часть со скоростью движения судна. В этом случае относитель-
ная величина воздушного сопротивления для водоизмещающих судов
невелика (I...3 %) и ею принято пренебрегать.
Влияние ветра и волнения учитывается при расчете ходкости судна
в эксплуатационных условиях.
1.10. Учет влияния условий эксплуатации на буксировочное
сопротивление судна
В процессе эксплуатации судно попадает в условия, отличные от
условий приемосдаточных испытаний (свежеокрашенный корпус, от-
сутствие ветра и волнения, глубокая вода). Следствием этого является
увеличение буксировочных сопротивления и мощности, падение ско-
рости, изменение условий работы движителя и главного двигателя.
К основным факторам, влияющим на увеличение буксировочных
сопротивления и мощности в условиях эксплуатации, относятся:
обрастание и коррозия поверхности подводной части корпуса судна;
ветер, течение, волнение.
Интенсивность воздействия этих факторов на сопротивление зави-
сит от гидрометеорологических условий, состояния подводной части
наружной обшивки н др. Влияние этих факторов, учитывая перемен-
ный во времени характер их воздействия, можно оценить, опираясь на
статистический подход к анализу рассматриваемых явлений.
Эксплуатационные надбавки /с£ к буксировочным сопротивлению
и мощности рекомендуется
принимать в соответствии с
рекомендациями табл. 1.6.
Дедвейт судна может быть
определен по формуле
где коэффициент утилизации
водоизмещения Г|0(|/=0,60...
Таблица 1.6. Значения эксплуатационной
надбавки для морских судов
Тип судна DW^r
Сухогруз До 7000 1.20
Сухогруз Свыше 7000 1,15
Нефтеналивное До 10000 1,20
Свыше 10000 1,15
11ассажирское U5
...0,80 и зависит от типа, размеров, скорости и дальности плавания; Д-
водоизмещение судна, т.
Более строгий учет влияния везра и волнения, а также других фак-
торов (ледовой обстановки, мелководья и стесненности фарватера) мож-
но осуществить согласно рекомендациям [6].
1.11. Пример расчета буксировочных сопротивления и мощности
Рассмотрим пример расчета буксировочных сопротивления и мощ-
ности для сухогрузного судна "Архангельск", у которого длина L =
32
Расчет буксировочного сопротивления и мощности
= 130,30 м; ширина.5= 17,68 м; осадка Т= 7,83 м; водоизмещение V =
= 12428 м3; абсцисса центра величины х = -0,56 м; коэффициент пол-
ноты водоизмещения 3 = 0,689; форма носовой оконечности U-образ-
ная: количество гребных винтов zp = 1; эксплуатационная скорость хода
vs = 14,4 уз.
Для выбора метода расчета сопротивления необходимо определить
следующие безразмерные характеристики корпуса:
L 130.30
относительную длину у = у = = 5,625:
4v V12428
относительную абсциссу центра величины х( = — -100%,
Исходные и полученные данные свидетельствуют о том, что для
расчета коэффициента остаточного сопротивления можно применить
серию судов с умеренной полнотой обводов (см. п. 1.5.З.).
Площадь смоченной поверхности голого корпуса определим по
формуле В.А. Семеки
а0 = Д7’^2 +1.37(8-0,274)у
а0 = 130,30 7,83 |^2 +1,37 (0.689 - 0,274) —у) = 3350 м2.
Площадь смоченной поверхности с учетом скуловых килей вычис-
лим как
£2= l,O2£2o; £2 = 1,02-3350 = 3417 м2.
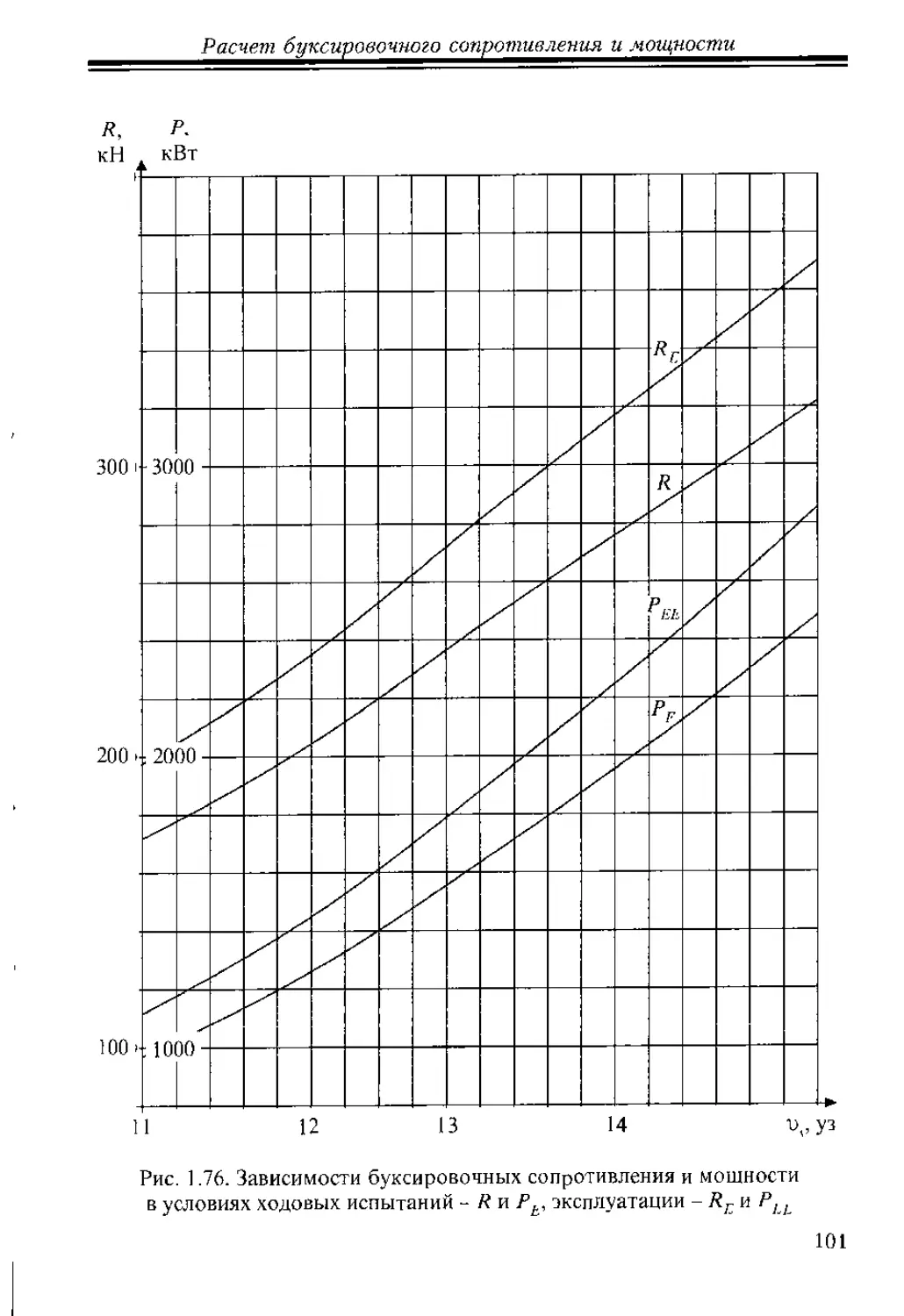
Расчеты буксировочных сопротивления и мощности выполнены в
табличной форме (см. табл. 1.7). Результаты расчета представлены в
виде графиков на рис. 1.76’.
33
1 390
Расчет ходкости надводных водоизмещающих судов
Таблица 1.7. Расчет буксировочного сопротивления
№ [1/П Расчетная величина Единица величи- ны Значения
1 V. V3 11,0 12,0 13,0 14,4 15.0
2 v =0,514о, м/с 5,65 6,17 6,68 7,40 7.71
3 и- М2/С" 31,97 38,04 44,65 54,78 59,44
4 Fr-\j/-fgL - 0,158 0,173 0,187 0,207 0,216
5 Сл-|0* - по рис. 1.19 0.667 0,731 0.814 0,868 0.923
6 кхс - по рис. 1.23 - 1.187 1,105 1,083 1.050 0.975
7 \ptl(5) - по рис. 1.19 - 5.76 5.76 5,76 5,76 5,76
8 а,и (Fr) - по рис. 1.20 - 1.17 1.17 1,17 1,14 1.14
0 awa(Fr)-no рис. 1.20 - 1,09 1,09 1,09 1,09 1,09
10 - 1,073 1,073 1,073 1.046 1,046
1 1 А«т<Рт)-по рис. 1.21 - 0,985 0,985 0,985 0.985 0.985
12 ав,г-по рис. 1.21 — 1,0 1.0 1,0 1.0 1,0
13 СЛ10’= П.5-И.6-П. Ю-п.11п.12 - 0,837 0,854 0,932 0,939 0,927
14 Re-10 8 = (dL/v)-10 * - 4,580 4,996 5,413 5,995 6,245
15 Сд)-10‘- по формуле (1.10) — 1,734 1.715 1,697 1,675 1,667
16 [О'- по табл. 1.4 0,35 0,35 0,35 0,35 0,35
17 Cjp-Ю’- по табл. 1.5 - 0,15 0.15 0.15 0,15 0,15
18 С-104 = п.13 + п.15 + и-16 + п. 17 — 3,071 3,069 3,129 3,114 3,094
10 R =(р/2)£Уп.18п.З кН 171,9 204,4 244.7 298,7 322,1
20 Рс = иЛ кВт 971 1261 1635 2210 2483
7 I Rr-kfR кН 197,7 235.1 281.4 343,5 370,4
22 Pcr-k,;PK кВт 1117 1450 1880 2541 2855
Расчет буксировочного сопротивления и мощности
Рис. 1.4. Зависимость Ся(8) для вариантов с V-образной носовой
оконечностью при LIB - 5.64 и В!Т= 3,50
35
Расчет ходкости надводных водоизмещающих судов
36
Расчет буксировочного сопротивления и мощности
с.-ю’
Рис 1.6. Зависимость Ск от отношения L/В для вариантов с V-образной
носовой оконечностью при 8 = 0,564 и В/Т = 3,50
37
Расчет ходкости надводных водоивмещающих судов
Рис 1.7. Зависимость CR от отношения LIB для вариантов с бульбообраз-
ной носовой оконечностью при 6 = 0,564 и В/'Г = 3,50
38
Расчет буксировочного сопротивления и мощности
при L/й - 4,92 и 8 = 0,55
39
Расчет ходкости надводных водоизмещающих судов
Рис. 1.9. Зависимость коэффициента влияния /сд/гот отношения BIT
при UB - 5,64 и S = 0,55
40
Расчет буксировочного сопротивления и мощности
41
Расчет ходкости надводных водоизмещающих судов
42
Расчет буксировочного сопротивления и мощности
43
Расчет ходкости надводных водоизмещающих судов
44
Расчет буксировочного сопротивления и мощности
45
Расчет ходкости надводных водоизмещающих судов
46
зления и мощности
47
Расчет ходкости надводных водоизмещающих судов
Рис. 1.19. Зависимость коэффициента остаточного сопротивления
от коэффициента общей полноты при LIB = 7,3
48
Расчет буксировочного сопротивления и мощности
4-190
49
Расчет ходкости надводных водоизмещающих судов
50
Расчет буксировочного сопротивления и мощности
51
Расчет ходкости надводных водоизмещающих судов
52
Расчет буксировочного сопротивления и мощности
53
Расчет ходкости надводных водоизяещающих судов
Рис. 1.28. Зависимость Сд(5) для вариантов с цилиндрической носовой
оконечностью при L/J? = 5.8
54
Расчет буксировочного сопротивления и мощности
Рис. 1.29. Зависимость Ся(6) для вариантов с бульбообразыой носовой
оконечностью при /./5 = 5,8
55
Расчет ходкости надводных водоизмещающих судов
Q О’
F 1-0.23
/
/ / / /
,0.20
/
/ 0.17
X ^0.1 . 6
U.1? /у.14
'о. 10 0.13
0,80 0,81 0.82 0,83 0,84 0,85 5
Рис. 1.30. Зависимость Сл(5) для вариантов с таранно-конической носовой
оконечностью при Л/5 = 5,8
56
Расчет буксировочного сопротивления и мощности
Рис. 1.31. Зависимость Сй(5) для вариантов с бульбообратной носовой
оконечностью при Ь!В = 62
57
Расчет ходкости надводных водоизмещающих судов
Рис. 1.32. Зависимос1ь <7Л(3) для вариантов с таранно-конической носовой
оконечностью при LjB-62
58
Расчет буксировочного сопротивления и мощности
Рис. 1.33. Зависимость Сл(5) для вариантов с V-обраэной носовой
оконечностью при LjB-=68
59
Расчет ходкости надводных водоизмещающих судов
Рис. 1.34. Зависимость Ся(8) для вариантов с цилиндрической носовой
оконечностью при LjB = (>^>
60
Рис. 1.35. Зависимость Сл(5) для вариантов с бульбообразной носовой
оконечностью при LjB = ()3
61
Расчет ходкости надводных водоизмещающих судов
Рис. 1.36. Зависимость С^(5) для вариантов с таранно-конической носовой
оконечностью при
62
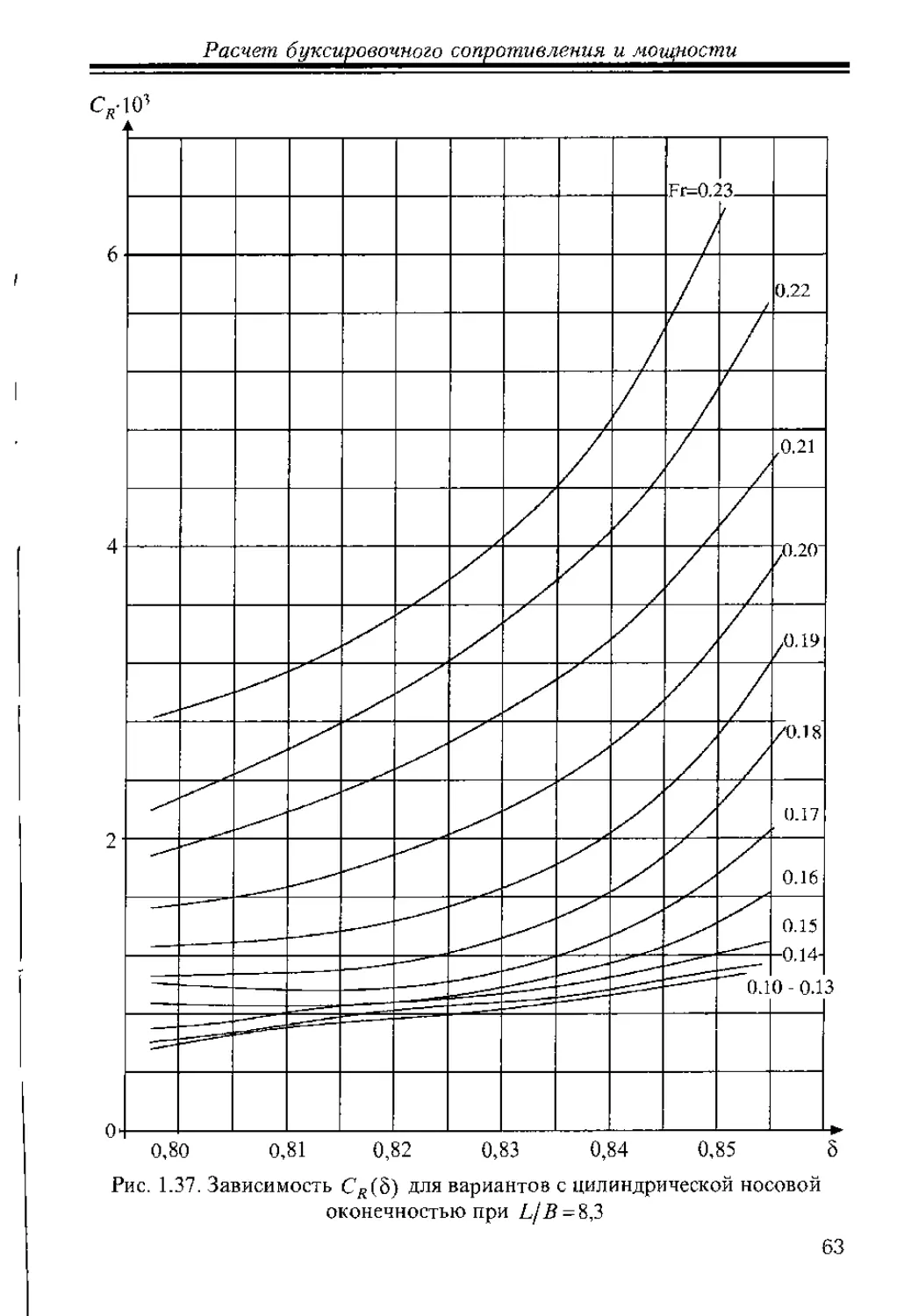
Расчет буксировочного сопротивления и мощности
Рис. 1.37. Зависимость Сд(5) для вариантов с цилиндрической носовой
оконечностью при Ь!В = Ъ,Ъ
63
Расчет ходкости надводных водой вмещающих судов
Рис. 1.38. Зависимость CR (5) для вариантов с бульбообразной носовой
оконечностью при LjB = %3
64
Расчет буксировочного сопротивления и мощности
с.-ю3
Рис. 1.39. Зависимость CR (б) для вариантов с таранно-конической носовой
оконечностью при Lj В = 8,3
5-Т90
65
Расчет ходкости надводных водоизмещающих судов
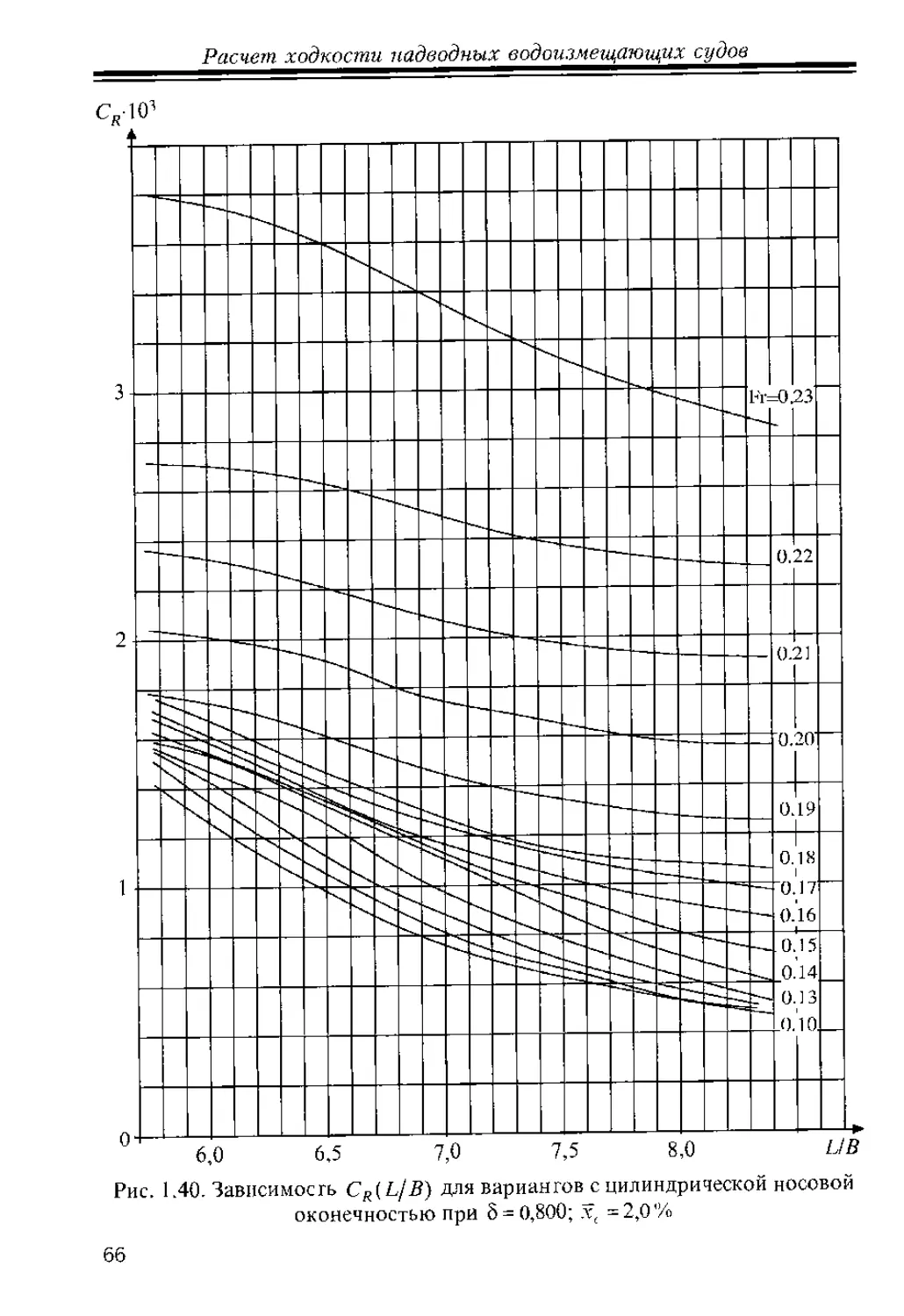
Рис. 1.40. Зависимость CR(LjB) для вариантов с цилиндрической носовой
оконечностью при 5 = 0,800; =2,0'/с
66
Расчет буксировочного сопротивления и мощности
Рис. 1.41. Зависимость CR(LjB) для вариантов с бульбообразной носовой
оконечностью при 5 = 0.800; л, =2,0%
67
Расчет ходкости надводных водоизмещающих судов
Рис. 1.42. Зависимость CR(LjB) для вариантов с таранно-конической
носовой оконечностью при 8 = 0,800; \ =2,0%
68
Расчет буксировочного сопротивления и мощности
Рис. 1.43. Зависимость CR{L/B) для вариантов с цилиндрической носовой
оконечностью при 8 = 0.825; хс = 2,25 %
69
Расчет ходкости надводных водоизмещающих судов
Рис. 1.44. Зависимость CR(L]B) для вариантов с бульбообразной носовой
оконечностью при 8 = 0,825; х( —2,25 %
70
Расчет буксировочного сопротивления и мощности
Рис. 1.45. Зависимость CR(L/B) для вариантов с таранно-конической
носовой оконечностью при 8 = 0,825; х\. = 2,25 %
71
Расчет ходкости надводных водоизмещающих судов
Рис. 1.46. Зависимость CR(L/B) для вариантов с цилиндрической носовой
оконечностью при 8 = 0,850; х, =2,50%
72
Расчет буксировочного сопротивления и мощности
Рис. 1.47. Зависимость CR(L]B) для вариантов с бульбовой носовой око-
нечностью при 8 = 0,850; х( =2,50%
73
Расчет ходкости надводных водоизмещающих судов
Рис. 1.48. Зависимость CR(L/В) для вариантов с таранно-конической
носовой оконечностью при 8 = 0,850; v, =2.50%
74
Расчет буксировочного сопротивления и мощности
Рис. 1.49. Зависимость kq^L/B) для вариантов с V-образной носовой
оконечностью при 8 = 0,800
75
Расчет ходкости надводных водоизмещающих судов
оконечностью при 8=0,825
76
Расчет буксировочного сопротивления и мощности
77
Расчет ходкости надводных водоизмещающих судов
78
ютивления и мощности
79
Расчет ходкости надводных водоизмещающих судов
Рис. 1.54. Зависимость к-с (хс) при 8 = 0,825 и носовых обводах
с затуплением ГВЛ
80
Расчет буксировочного сопротивления и мощности
Рис. 1.55. Поправочные коэффициенты на изменение формы кормовых
шпангоутов:
1 - V-образная; 2 -сигарообрашая при 5 = 0,800; 3 - V-образная,
4 - сигарообразная при 5 = 0,825: 5 - V-образная, 6 - сигарообразная при 5 = 0,850
81
6-390
Расчет ходкости надводных водоизмещающих судов
Рис. 1.57. Зависимость Сй(<рет,) для среднетоннажных промысловых судов
82
83
Расчет ходкости надводных водоизчещающих судов
Рис. 1.59. Зависимость Ск(ьрр / в) для среднетониажпых
промысловых судов
84
Расчет буксировочного сопротивления и мощности
Рис. 1.60. Зависимость Сл(ьи, / в) для малых промысловых судов
85
Расчет ходкости надводных водоизмещающих судов
86
Рис. 1.62. Зависимость CR(BIT) для малых промысловых судов
87
Расчет ходкости надводных водоизмещающих судов
88
89
Расчет ходкости надводных водоизмещающих судов
СЛ.1О’
1 Fr=0.37
0.36
6 к. 0.34
0.33 0.32
0.31 0.29
0.27 0.25
0.23
0.21
1- 1
-0,025 0,020 -0,015 -0,010 -0,005 0 0,005 0,010
Рис. 1.65. Зависимость CR (лс) для среднетоннажных промысловых судов
90
Расчет буксировочного сопротивления и мощности
91
Расчет ходкости надводных водоизмещающих судов
92
Расчет буксировочного сопротивления и мощности
93
Расчет ходкости надводных водоизмещающих судов
Рис. 1.69. Зависимость коэффициента влияния по И.В. Гирсу
94
Расчет буксировочного сопротивления и мощности
Рис. 1.70. Зависимость коэффициента влияния х£/в(Л/5) по О.В. Дубровину
95
Расчет ходкости надводных водоизмещающих судов
96
Расчет буксировочного сопротивления и мощности
7-490
Расчет ходкости надводных водоизмещающих судов
Рис. 1.73. Зависимость CR(Fr) для самоходных грузовых судов
внутреннего и смешанного плавания
98
Расчет буксировочного сопротивления и мощности
Рис. 1.74. Зависимость Сл(Рг) для буксирных судов
внутреннего и смешанного плавания
99
Расчет ходкости надводных водоизмещающих суды
Рис. 1.75. Зависимость Сл(Рг) для пассажирских и грузопассажирских
судов внутреннего и смешанного плавания
100
Расчет буксировочного сопротивления и мощности
R, Р.
Рис. 1.76. Зависимости буксировочных сопротивления и мощности
в условиях ходовых испытаний - R и Рь, эксплуатации - Rr и Pt t
101
Расчет ходкости надводных водоизмещающих судов
2. РАСЧЕТ ГРЕБНОГО ВИНТА ДЛЯ ВЫБОРА
ГЛАВНОГО ДВИГАТЕЛЯ
2.1. Предварительный выбор основных элементов гребного винта
Прежде чем перейти к определению оптимальных геометрических
параметров и режима работы гребного винта с использованием винто-
вых диаграмм, необходимо предварительно осуществить выбор тех его
элементов, которые удовлетворяют другим (помимо оптимальности)
проектным требованиям (тип движителя, число лопастей, диаметр и
частота вращения, диаметр ступицы, наклон лопастей, форма контура
и профиля сечения лопастей и др.).
2. /. /. Выбор типа движителя и расчетных винтовых диаграмм
При проектировании движительного комплекса судна прежде все-
го решается вопрос о выборе типа движителя исходя из опыта проекти-
рования и эксплуатации однотипных с проектируемым судов, условий
эксплуатации, экономичности и надежност и движителя. При этом мо-
гут производиться вариантные расчеты ходкости судна с различными
движителями и принимается тот вариант, который наиболее полно удов-
летворяет указанным требованиям.
Н аиболее распространенный тип движи т еля на морских судах - греб-
ной винт. Для водоизмещающих судов он являе гея наиболее простым и
экономичным движителем. В зависимост и от назначения и условий экс-
плуатации на морских транспортных судах могут применяться:
гребные винты фиксированного шага (ВФШ) цельнолитые либо со
съемными лопастями;
гребные винты регулируемого шага (ВРШ):
ВФШ либо ВРШ в стационарных или в поворотных насадках;
гребные винты кавитирующие и некавитирующие.
Высокая эффективность, простота конструкции и передачи мощно-
сти от двигателя, относи гельно низкая стоимость изготовления, надеж-
ность в эксплуатации делаю i ВФШ наиболее предпочт ительным типом
судового движителя. Более того, размещение гребного винта на судне
не требует каких-либо существенных отступлений от яаивыгоднейшпх
обводов. По существу, единственным недостатком ВФШ является за-
висимость их гидродинамических характеристик от режима работы, что
усложняет их совместную работу с главным двигателем. Для преодоле-
ния этого недостатка используются ВРШ. лопасти которых могут по-
ворачиваться относительно их осей.
Некавитирующие гребные винты серии Трооста с саблевидной фор-
мой контура и комбинированным профилем сечения лопасти по срав-
102
Расчет гребного винта для выбора главного двигателя
нению с ГВ других серий имеют более высокий КПД (в среднем на
5-6 %) и лучше приспособлены для работы в неоднородном потоке за
корпусом судна. Применяются для судов со скоростью хода <25...
...27 уз, возникновение кавитации для которых практически исключа-
ется. Проектирование ГВ этой серии ведется с использованием экспе-
риментальных диаграмм Трооста (рис. 2.Г-2.8*), построенных по ре-
зультатам систематических испытаний в Вагенингеиском опытовом бас-
сейне (Голландия) моделей гребных винтов, характеристики которых
приведены в табл. 2.1.
Таблица 2.1. Характеристики гребных винтов серии Трооста (серия В)
Число ло- пастей Z Дисковые от- ношения ^*2 А, Относи- (ельная толщина лопасти e0/D Относи- тельный диаметр ступицы dn/D Относи- тельное уменьше- ние ша1 а на ступице, % У гол от- клонения лопасти, град Шаговое отноше- ние P/D
2 0,30 0,055 0,180 0 15 0,5... 1,4
3 0,35; 0,50; 0,65 0,050 0,180 0 15 0,5...1,4
4 0,40; 0,55; 0,70 0,045 0,167 20 15 0,5...1,4
5 0,60 0,040 0,167 0 15 0,5...1,4
Проектирование некавитирующих гребных винтов может также осу-
ществляться по диаграммам И.А. Титова (ЦНИИ им. акад. А.Н. Кры-
лова), построенным с использованием результатов испытаний четырех-
лопастных ВФШ с различными относительной толщиной и дисковым
отношением. Кроме того, были получены результаты испытаний 6. 7 и
8-лопастных винтов, применяющихся на современных судах в связи с
ростом мощности, потребляемой i-ребными винтами, и, следовательно,
ростом гидродинамической пульсации в месте расположения движите-
лей. Расчетные диаграммы для этих винтов приведены на рис. 2.9‘-2.17*.
а геометрические характеристики серии - в табл. 2.2.
Таблица 2.2. Характеристики гребных винтов серии Титова (серия Т)
g N Дисковые от- Относительная Относитель- Угол О1 кло- Шаговое
ношения юлшина лопа- ный диаметр нения лопа- 01ноше-
* У с Сти eJD ступицы dyD с I и,град ние P/D
4 0,35:0.58; 0.75 0,040 0,200 0 0,6...1,5
4 0,35; 0,58; 0,75 0,060 0.200 0 0.6...1,5
6 0.68 0,045 0,180 7 0,5...1,3
7 0.70 0,041 0,180 7 0,5.. 1,3
8 0,72 0.039 0,180 7 0,5...1,3
Отмеченные значком рисунки приведены в койне главы.
103
Расчет ходкости надводных водоизмещающих судов
Ниже приведены материалы по геометрическим (табл. 2.3. и 2.4) и
гидродинамическим характеристикам (рис. 2.18*, 2.19* и 2.20*-2.22*) мо-
делей некавитирующих гребных винтов современной геометрии с саб-
левидной формой контура лопасгей, предложенных Н.Ю. Завадовским
и В.Г. Мищкевичем (ЦНИИ им. акад. А.Н. Крылова) и спроектирован-
ных с использованием вихревой теории несущей поверхности.
Таблица 2.3. Характерно шки гребных винтов серии Завадовского (серия Z)
Число ло- пастей Z Дисковые отно- шения Отлост сль- ная толщина лопасти etl/D Относитель- ный диаметр ступицы 4lt/D Угол откло- нения лопа- сти, град Illai овос отношение P/D
4 0 85 0,045 0,i8 15 0,9... 1.4
4 1,00 0.045 0,18 15 0,9...1,4
Таблица 2.4. Характеристики гребных винтов серии Мншкевича (серия М)
Дисковые отно- Относитель- Относитсль- Угол откло- Шаговое
§ тения ная толщина зый диаметр нения лона- отношение
о 5^ =: & А, лопасти eyD ступицы 44D ст, грал P/D
4 0.65 0,060 0,20 5 0.6...1,4
4 0,75 0,060 0,20 5 0,6...1.4
4 0,85 0,055 0,20 5 0,6...1,4
Гребные винты ледоколов и судов ледового плавания отличаются
от обычных повышенной прочностью лопастей и увеличенным диамет-
ром ступицы (в случае применения конструкции сьемных лопасгей).
Форма контура лопасти - симметричная. Для выбора относительных
элементов ГВ этой серии можно воспользоваться диаграммами
Г.А. Звездкиной (рис. 2,23* и 2.24*), полученными по результатам испы-
таний двух серий четырсхлопастных гребных винтов, геометрические
характеристики которых приведены в табл. 2.5.
Таблица 2.5. Характеристики гребных винтов серии Звездкиной (серия ZV)
Тип судна Число лопа- стей Z Дисковые от- ношения -d/L Шаговое от- ношение P/D Относительный диаметр ступицы
Сула ледового плавания 4 0.52 0,5... 1,2 0,28
Лелоколы 4 0.50 0,4...1,2 0,28
Для повышения эффективности гребных винтов, работающих при
больших и умеренных нагрузках (коэффициент нагрузки ГВ больше 1,0),
широкое применение находят неподвижные и поворотные направляю-
104
Расчет гребного винта для выбора главного двигателя
щие насадки. ГВ - направляющая насадка - это наиболее эффективный
тип движительного комплекса для буксиров, толкачей и некоторых гру-
зовых и грузопассажирских судов.
Применение насадки на буксирных судах приводит к повышению
гяги на гаке (на 50 % на швартовном режиме и на 20...30 % при букси-
ровке). Установка направляющих насадок на морских транспортных
судах^ в отдельных случаях повышает КПД движительного комплекса
па 5...7 %. Ее использование, помимо этого, позволяет достичь боль-
шой защищенности ГВ и его благоприятной работы в условиях волне-
ния и качки.
Для выбора элементов оп гимального гребного винта в насадке мо-
гут быть использованы экспериментальные диаграммы (рис.2.25*-2.3Г)
трех- и четырехлопастных зребных винтов с саблевидной и симметрич-
ной формой контура лопает и, геометрические харакзеристики которых
приведены в табл. 2.6.
Таблица 2.6. Характеристик» гребных винтов в насадках серий NT, NM, NF,
NK, NP
Число ло- I пастей Z Дисковые отношения АР 4 Относи- тельная толщина лопасти еи/О Относи- тельный диаметр ступицы dtl/D Форма контура лопасти Относи- тельная длина насадки Коэф- фици- ент рас- твора а Коэффи- циент расши- рения р
4 0,35; 0,58; 0,75 0,060 0,200 Сабле- образная 0,6 1,30 1.2
4 0,55 0,045 0,167 Сабле- образная 0,5 1,40 1.05
4 0,57 0,060 0,180 Сабле- образная 0,8 1,36 1,18
4 0.55 0,045 0,167 Каплана 0.6 1,20 1,12
3 1,07 0,045 0,165 Симмет- ричная 0,6 1,20 1,12
Конструктивная особенность гребных винтов регулируемо! о шага,
заключающаяся в возможности поворота его лопастей в широком диа-
па зоне угловых положений, обеспечивав! этим движителям существен-
ные эксплуа!ационные преимущества по сравнению с обычными вин-
тами. Основным достоинством ВРШ является возможность передать
на ГВ полную мощность главного двигателя независимо oi скорости
движения судна за счет соо гветствующего изменения шага лопастей, в
В последние годы на больших фанаюртых судах иногда исшыьзукмся осене-
симметричные насадки, которые по сравнению с обычными насадками лучше при-
способлены к работе в неоднородном потоке за корпусом судна.
105
Расчет ходкости надводных водоизмещающих судов
результате чего
существенно увеличиваются тяговые характеристики на промежу-
точных и малых скоростях, что особенно важно для рыболовных трау-
леров, буксиров, ледоколов и др.;
всегда можно достичь соответствия между потребляемой ГВ мощ-
ностью и мощностью главного двигателя в реальных условиях эксплу-
атации;
возможно получить любую скорость движения - от скорости пол-
ного переднего до скорости заднего хода-без изменения режима рабо-
ты главного двигателя и др.
Вместе с тем ВРШ свойственны следующие недостатки:
наличие дополнительных гидродинамических потерь, обусловлен-
ных увеличением диаметра ступицы (для ВРШ dv - 0,28...0,30) и отно-
сительной толщины у корня лопасти. Это вызывает уменьшение на
3...5 % КПД ВРШ по сравнению с ВФШ;
большая масса и стоимосл ь. Несмотря на это, считаю г. однако, что
использование ВРШ окупается за 1-2 года эксплуатации.
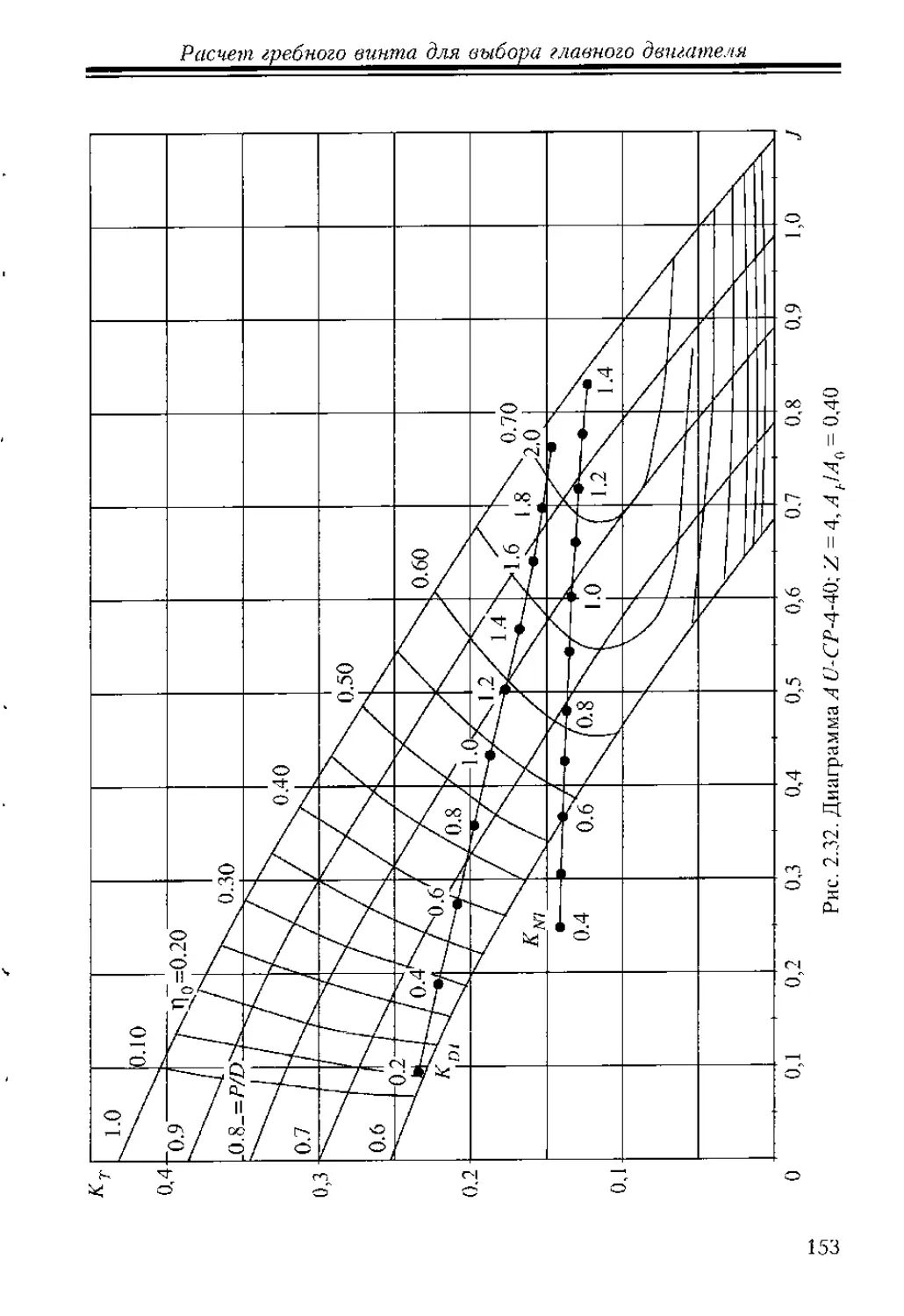
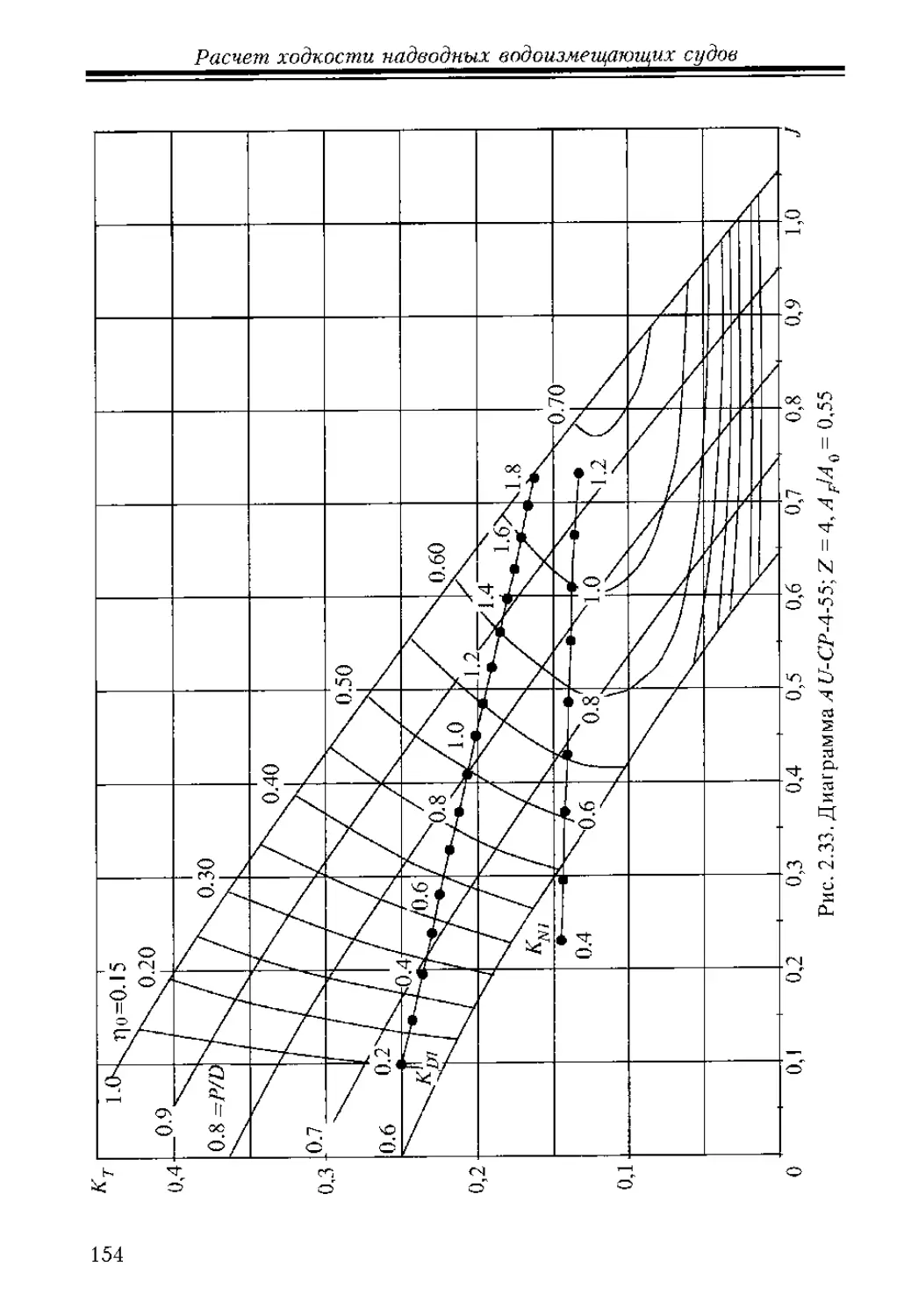
Выбор оптимальных элементов свободных ВРШ и в насадке может
быть произведен с применением экспериментальных диаграмм
(рис. 2.32*-2.36*). Кроме того, этот расчет можно выполнить с исполь-
зованием расчетных диаграмм для винтов фиксированного шага с вве-
дением поправки на КПД ЛВ1>Ш =(0,97...0,99)т]ВФи1,учитывающей вли-
яние утолщенной ступицы.
Таблица 2. 7. Характеристики ВРШ серий AU-СР, NR
Число лопа- стей Z | Дисковые отношения А) Относи- тельная толщина лопасти e0/D Относи- тельный диаметр ступииы (T/D Форма кон- тура лопа- сти Относи- тельная длина насадки Коэффи- циент раствора а Коэффи- циент расши- рения р
4 0,40 0,04 0,300 Сабле- образная - - -
4 0,55 0.04 0,300 Симмет- ричная - - -
4 0,70 0,04 0,300 Симмет- ричная - - -
4 0,57 0,06 0,317 Симмет- ричная 0,6 1,30 1,12
4 0.57 0,06 0,317 Симмет- ричная 0,8 1,36 1,18
106
Расчет гребного винта для выбора главного двигателя
2.1.2. Выбор диаметра гребного винта
Исходя из возможности размещения гребного вита в кормовом
подзоре, предельное значение диаметра гребною винта для морских
судов рекомендуется принимать в зависимости от осадки кормой Тк.
одновальные суда - (0,68...0.75) 7";
двухвальпые суда - (0,62...0.70) Т .
При этом мсныиие значения диаметра D следует принимать для не-
буксирных судов, а большие —для буксиров и толкачей, гребные винты
которых работают в режиме больших коэффициентов нагрузки С .
2.1.3. Выбор числа лопастей
У гребных винтов современных судов число лопастей Z изменяет-
ся в достаточно широком диапазоне (от трех до восьми).
При предварительном выборе Z необходимо руководствоваться
следующими соображениями:
для гребных винтов быстроходных судов, работающих в режиме,
близком к возникновению кавитации, целесообразно применять мень-
шее число лопастей (чаше всего Z = 3 и реже Z = 4);
для гребных винтов, работающих при больших коэффициен тах на-
грузки, следует предпочесть увеличение числа лопастей, так как в этом
случае увеличивается на 2-3 % КПД ГВ за счет уменьшения концевых
потерь на лопастях гребного винта.
Предварительно число лопастей Z может быть принято равным
числу лопастей ГВ судна-прототипа либо
Z = 3, если K.DT> 2,0 или Kvr > 1,0;
Z = 4, если KDT < 2,0 или KN1 < 1,0,
где KDl = Du . Ц-; KVT= ил =v(l-lVr) -расчетное зна-
V / « у/п\Тв
чение скорости в диске ГВ, м/с; Гй = —- -расчетное значение упо-
ра; п - частота вращения ГВ, с-1; D - диаметр ГВ, м; р - пло гность воды,
кг/м3; WГ - расчетное значение коэффициента попутного потока; I -
расчетное значение коэффициента засасывания; Z^ - число винтов.
При этом необходимо иметь в виду, что при pa6oie ГВ на корпусе
судна возникают нестационарные гидродинамические нагрузки, наи-
большая интенсивность которых соответствует частотам V] -nZ и
Vy =2nZ. Поэтому для окончательного определения Z необходимо
выполнить расчеты собственных колебаний корпуса, валопровода и
главного двигателя и выбрать число лопастей из условия отсутствия
107
Расчет ходкости надводных водоизмещающих судов
совпадения этих частот с частотами Vj и v2 гидродинамических пуль-
саций, индуцируемых ГВ в неоднородном потоке за корпусом судна.
2.1.4. Выбор дискового отношения и относительной толщины
лопастей
При выборе дискового отношения гребных винтов следует иметь в
виду, что его увеличение при неизменных шаговом отношении Р/D и
относительной поступи J приводит к уменьшению КПД винта за счет
роста профильного сопротивления лопастей. С этой точки зрения дис-
ковое отношение должно быть минимально возможным.
Минимально допустимую величину дискового отношения следует
назначать исходя из следующих требований:
из условия обеспечения достаточной прочности лопастей и ограни-
чения относительной толщины ётах <0,08 на условном относительном
радиусе Fo = — =0.6 по формуле
где D - диаметр гребного винта, м; Т -упоргребного винта, кН; Z-
число лопастей; коэффициент с' зависит от материала гребного вин-
да: с' - 0,065 - для углеродистой стали; с' = 0,060 - для латуни; с' =
= 0,055-для нержавеющей стали. Коэффициент т' учитывает возра-
с гание нагрузки на лопасть в зависимости от условий рабо гы винд ов
.для судов различных типов: 2,0 - для ледоколов; 1,75 - для судов, ра-
бо1ающих в битом льду; 1,50 - для буксиров и толкачей; 1,15 - ,1дя
прочих судов;
из условия отсутствия второй стадии кавитации. Для расчета мини-
(Ае 'I
мальпо допустимого дискового отношения —— может быть ис-
" I -4(1 1mm
пользован 1рафик —— = /(/^ ,/?6 )-рис. 2.37. полученный И.А. Ти-
А) /тип
товым по данным испытаний серии моделей гребных винтов серии Тро-
оста в кавитационной трубе.
На графике рис. 2.37 приняты следующие обозначения: рк =—у -
nD~
удельная нагрузка на ГВ, кН/м2, при которой наступает вторая стадия
кавитации; hs - глубина погружения оси гребного винта, м; Гв - упор
гребного винта, кН. Определенная по графику (рис. 2.37) величина дис-
108
Расчет гребного винта для выбора главного двигателя
кового отношения | ] должна быть увеличена иа 50...70 %, что-
I Лд 1mm
бы избежать не только второй, но и первой стадии кавитации. Расчетное
ГМ
4? JI 4
значение дискового отношения должно приниматься ~г~ - 4 , в
( Ае
[л
зависимости оттого, что больше, и равным ближайшему диаграммному
значению.
Рис. 2.37. Диаграмма
И.А. Титова для опре-
деления минимально
допустимого ДИСКОВО-
ГО отношения гребных
винтов
В дальнейшем после расчета элементов оптимального гребного вин-
та производится специальная проверка на кавитацию с целью уточне-
ния величины дискового значения.
При выборе дискового отношения гребного винта в насадке можно
воспользоваться приведенными выше рекомендациями для свободных
гребных винтов, увеличив определенное таким образом дисковое отно-
шение на 15...20 %.
2.1.5. Определение формы контура лопасти
При выборе формы контура лопастей гребного винта необходимо
руководствоваться следующими соображениями:
а) симметричный контур лопастей рекомендуется:
109
Расчет ходкости надводных водоизмещающих судов
для широколопастных некавитирующих (А^/А^ = 0,70. ..0,80) и ка-
витирующих гребных винтов;
для винтов ледоколов и буксиров, работающих в условиях частого
реверса;
для гребных винтов регулируемого шага;
б) несимметричный, чаще всего саблевидный контур винтов серии
Трооста рекомендуется применять для гребиых винтов с АЕ/А0 < 0,70
(что характерно для большинства морских транспортных судов).
Данные испытания моделей ГВ с различной саблевидностью в опы-
товом бассейне и кавитационных трубах в однородном потоке свиде-
тельствуют о слабом влиянии угла саблевидности па гидродинамичес-
кие характеристики ГВ.
В неоднородном потоке за корпусом судна интенсивность кавита-
ции и гидродинамической пульсации на лопастях ГВ оказывается су-
щественно зависящей от саблевидности лопастей, с увеличением кото-
рой, как показывают исследования, снижается величина периодичес-
кой нагрузки, действующей на валопровод и обшивку кормовой око-
нечности судна. Поэтому надлежащим выбором саблевидности лопас-
тей можно управлять амплитудами и фазами гармоник периодических
нагрузок, действующих на ГВ и наружную обшивку судна.
Следует однако иметь в виду, что лопасти с достаточно большой
саблевидностью оказываются менее прочными, особенно в режиме ре-
верса и заднего хода. В этой связи угол саблевидности не должен пре-
вышать половину межлопастного угла.
2.1.6. Определение наклона лопастей
Наклон лопастей ГВ в корму осуществляется с целью удаления ло-
пастей от наружной обшивки корпуса судна во избежание удлинения
гребного вала и выбирается в каждом конкретном случае с учетом раз-
меров кормового подзора. Наклон практически нс влияет на гидроди-
намические характеристики ГВ и вместе с тем несколько снижает проч-
ность его лопастей. В связи с этим угол наклона должен быть ограни-
ченным и находиться в пределах 5...10°.
2.1.7. Определение Диаметра ступицы
Относительный диаметр сгупицы dfjD ГВ назначается с учетом
его конструктивных особенностей (цельнолитой или со съемными ло-
пастями). Обычно для цельнолитых ГВ принимают 0,18^-=*-^ 0,22. для
, _ °
составных 0,265= —5=0,30. При выборе относительного диаметра сле-
дует иметь в виду, что с его увеличением уменьшается КПД ГВ. При
этом установка за гребным вин том профилированного руля несколько
снижает эти по гери.
110
Расчет гребном винта для выбора главного двигателя
2.2. Взаимодействие гребного винта с корпусом судна
Работа комплекса "гребной винт - корпус судна - главный двига-
тель" сопровождается механическим и гидродинамическим взаимодей-
ствием его элементов.
Механическое взаимодействие заключается в том, что осевая ско-
рость поступательного движения гребного винта равна скорости дви-
жения корпуса судна, а угловая скорость вращения гребного вала рав-
на угловой скорости вращения ГВ. При этом упор Тв, развиваемый
движителем, равен осевой силе, передаваемой на корпус судна посред-
ством гребного вала и упорного подшипника, а создаваемый главным
двигателем момент на выходном конце гребного вала-моменту гидро-
динамических сил сопротивления вращению гребного винта.
Гидродинамическое взаимодействие элементов рассматриваемого
комплекса имеет более сложный характер и состоит во взаимном влия-
нии полей скорости, индуцируемых движущимся судном и работающим
гребным винтом. Это взаимодействие, как известно, в практических
расчетах ходкости судна оценивается с помощью коэффициента рас-
четного попутного потока Wr коэффициента засасывания Л коэффи-
циента Iq влияния неоднородного попутного потока на гидродинами-
ческий момент Q иа гребном винте и коэффициента влияния корпуса
Пя = —
Наиболее достоверно коэффициенты гидродинамического взаимо-
действия Wr t, Iq и г|И могут быть определены по данным самоходных
испытаний модели проектируемого судна в опытовом бассейне. Менее
точным является использование данных испытаний модели близкого
судна-прототипа. При отсутствии указанных возможностей, а также на
ранних стадиях проектирования, когда геометрия корпуса судна опре-
делена ориентировочно, указанные коэффициенты могут быть рассчи-
таны с использованием систематических серий моделей или по форму-
лам, приближенно аппроксимирующим эти данные. Ниже приведены
приближенные формулы для расчета коэффициентов W-rn t судов раз-
личных типов. Коэффициент iQ при этом принимается равным единице.
Для одновальных транспортных судов с U-образными и умеренно
U-образными кормовыми шпангоутами (5>0,600)
1У7 - [о,25 +2,2(5-0,
I = 0,20 + 0,10(5-0,50)+0,055(^£ -1,8).
(2.1)
111
Расчет ходкости надводных водоизмещающих судов
Для одновальных быстроходных контейнерных судов с V-образны-
ми кормовыми шпангоутами (8 < 0,650 и — < 0,70)
IV, = J),20+8,0(8-0,55)2][о,97 + 7,of0,7-//) ;
L I J J (2 2)
t = 0,18 +0,35 (8-0,50)+0,055 (KDt -2,0).
Для двухвальных быстроходных контейнерных судов (8 < 0,650 ,
— = 0,60.. .0,65)
Т
IV,- =0,09+0,14(8-0,50);
I = 0,15 +0,53 - (8 - 0,50) + 0,055 (Кт- -2,0). (23)
Для судов с кронштейнами коэффициент попутного потока WT
уменьшается на 30 %, а коэффициент засасывания t - на 20 %.
Для одновальных рыбопромысловых судов с V-образными кормовы-
ми шпангоутами и 8> 0,550
/ = 0,19+1,6 -4--0.60 +0,1(К„ -2.0).
(2.4)
В формулах (2.1)-(2.4) приняты следующие обозначения: D - диа-
метр гребного винта, м; Т- осадка судна, м; 8 - коэффициент общей
полноты судна; р - коэффициент полноты мидель-шпангоута:
K[)E=X)D ——коэффициент диаметра тяги гребного винта; о -ско-
N ТЕ /?
рость судна, м/с; р - плотность воды, кг/м ’; ТЕ =-тяг а гребного
винта, Н; R - сопротивление движению судна. Н. р
Для гребных винтов в насадках коэффициенты И?' попутного по-
тока и Г засасывания принимаются:
W'r =0,7И7 и /' = 0,6/,
где WT и t - коэффициенты попутного потока и засасывания свобод-
ных ГВ.
112
Расчет гребного винта для выбора главного двигателя
Для судов всех типов коэффициент засасывания зависит от режима
работы ГВ. Поэтому при расчете ходовых характеристик судна (см.
разд. 4) следует учитывать зависимость коэффициента засасывания от
относительного скольжения
р
где — “ шаговое отношение нулевого упора, которое приближеино при-
Р т
нимается равным конструктивному шаговому отношению —; J -
относительная поступь ГВ. Эта зависимость устанавливается форму-
лой Э.Э. Папмеля
вкоторой t и S'j соответствуют расчетному, а I* и sf-произвольному
режиму работы ГВ.
2.3. Расчет элементов гребного винта для выбора главного двигателя
Этот расчет выполняется с целью получения исходных данных для
обоснованного, с точки зрения ходкости судна, выбора главного дви-
гателя и, если необходимо, - передаточного отношения редуктора. Ис-
ходной для этого расчета информацией являются кривые буксировоч-
ного сопротивления в условиях ходовых испытаний R - R(x)s) или экс-
плуатации R£-Re(x)s) (для буксирных судов R+Z-p =f(x>s) или
Re + Zt = /£(ц,),где ZT~ тяга на гаке) и значение расчетной скорости
судна свободного хода или в режиме буксировки.
Расчет в этом случае выполняется в такой последовательности.
2.3.I. Выбор расчетного режима
В зависимости от типа главного двигателя назначается расчетный
режим для определения элементов оптимального гребного винта и не-
обходимого для обеспечения заданной скорости судна главного двига-
теля.
Правильный выбор расчетного режима движения судна весьма ва-
жен, так как влияет на эксплуатационно-экономические характеристи-
ки проектируемого судна. Дело в том, что сопротивление воды движе-
нию судна в процессе эксплуатации меняется в зависимости от степени
загрузки (изменение осадки), глубины и ширины фарватера, гидроме-
теорологических условий (ветер, волнение, течение), а также состояния
8-390
113
Расчет ходкости надводных водоизмещающих судов
наружной обшивки (коррозия, обрастание). Следовательно, будет ме-
няться и режим работы системы гребной винт-главный двигатель и,
как следствие этого, происходить изменение скорости хода. Таким об-
разом, выбор расчетного режима тесно связан с задачей согласованной
работы главного двигателя и гребного винта, что, в свою очередь, обес-
печит проектную скорость судна в заданных условиях либо максималь-
ную тягу на гаке буксира.
При выборе расчетного режима необходимо руководствоваться сле-
дующими рекомендациями.
• Элементы гребных винтов морских транспор 1ных судов с дизель-
ными главными двигателями необходимо рассчитывать на среднеэкс-
пдуагационные условия. В этом случае при проектировании ГВ учиты-
вается обрастание наружной обшивки корпуса судна, влияние ветра и
волнения. Надбавки к буксировочному сопротивлению за счет влияния
вышеуказанных эксплуатационных факторов могут быть рассчитаны
на основании приведенных в подразд. 1.10 рекомендаций.
Выбор среднеэксплуатационного режима в качестве расчетного да
судов с дизельными главными двигателями обусловлен тем, что ДВС
имеют ограничивающую мощность характеристику по условиям теп-
ловой напряженности двигателя и максимально допустимому моменту
(ограничительная характеристика) и ограничивающую сверху диапа-
зон изменения частоты вращения (регуляторная характеристика). В
этом случае изменение режима движения по сравнению с расчетным в
ту или другую сторону приводит и недогрузке или перегрузке главного
двигателя по мощности.
Так при увеличении скорости, связанной, например, с уменьшени-
ем сопротивления движению судна, ГВ становится гидродинамически
легким. Поэтому для согласованной работы гребного винга и главного
двигателя необходимо частоту вращения двигателя увеличивать, что
невозможно из-за ограничения частоты вращения ДВС (регуляторная
характеристика), следовательно, двигатель не будет развивать номи-
нальной мощности при частоте вращения, близкой к номинальной. При
уменьшении скорости движения судна за счет увеличения сопротивле-
ния винт становится гидродинамически тяжелый, частота вращения и
мощность двигателя уменьшаются. Двигатель начинает работать по
внешней ограничительной по мощности характеристике, испытывая
тепловые и .механические перегрузки. Длительная работа двигателя в
этом режиме недопустима.
Чтобы избежать перегрузки двигателей внутреннего сгорания при
работе с гидродинамически тяжелыми гребными винтами, все ведущие
дизелестроительные фирмы оговаривают условия проектирования греб-
ных винтов. В условиях ходовых испытаний гребной вин г должен быть
114
Расчет гребного винта для выбора главного двигателя
гидродинамически легким, чтобы в процессе эксплуатации за счет об-
растания корпуса и влияния гидрометеорологических факторов двига-
тель догружался бы, но не испытывал перегрузок.
Так, например, фирма MAN B&W рекомендует' для малооборот-
ных двигателей назначать 15%-ю надбавку к сопротивлению на ходо-
вых испытаниях и на этот режим проектировать гребной винт, а мощ-
ность двигателя назначать на 10 % больше расчетной. Эта же фирма
для среднеоборотных двигателей рекомендует проектировать гребные
винты на мощность, соответствующую эксплуатационной мощности
двигателя, принимая частоту вращения равной 102,5 % эксплуатацион-
ной. Шаговое отношение такого винта будет соответствовать шагово-
му отношению винта, спроектированного применительно к сопротив-
лению на 20 % больше, чем в условиях ходовых испытаний.
Фирма New Sultzer Diesel рекомендует выбирать расчетную частоту
вращения равной номинальной, арасчетную мощность на 10... 15 % мень-
ше номинальной мощности двигателя. Гребной винт, спроектирован-
ный на эти условия, соответствует винту, спроектированному иа 35%-е
увеличение буксировочного сопротивления на ходовых испытаниях.
Фирма Fiat рекомендует вводить коррективы непосредственно в
шаговое отношение, "облегчая" гребиые винты для двигателей без над-
дува на 4 % и для двигателей с наддувом на 6 %. Эти рекомендации
близки к рекомендациям фирмы New Sultzer Diesel.
ЦНИИ морского флота России предлагает проектировать гребные
винты на условия ходовых испытаний при осадке судна по грузовую
марку, эксплуатационную мощность двигателя - 90 % номинальной и
частоту вращения, равную 99 % номинальной.
Для того чтобы в условиях ходовых испытаний двигатель с гидро-
динамически легким гребным винтом мог развить спецификационную
(номинальную) мощность, все фирмы разрешают на регламентируемый
для сдачи судна период увеличить частоту вращения гребного винта до
106... 109 % номинальной.
• Элементы гребных вингов морских транспортных судов с турбин-
ными главными двигателями необходимо проектировать применитель-
но к условиям приемосдаточных испытаний в полном грузу. В этом слу-
чае наружная обшивка подводной части судового корпуса считается
свежеокрашенной, глубина воды - более 10 осадок судна, волнение
моря - не более двух баллов, а сила ветра - не более 2-3 баллов.
• Гребные винты судов с электродвижением следует проектировать
применительно к среднеэксплуатационным условиям для электродви-
гателей переменного тока, а для установок постоянного тока - на ре-
жим приемосдаточных испытаний.
• Для буксиров и ледоколов в качестве расчетного принимается ре-
жим буксировки и режим форсирования льда соответственно.
115
Расчет ходкости надводных водоизмещающих судов
2.3.2. Выбор типа движителя
На базе рекомендаций, приведенных в подразд. 2.1, выбирается тип
движителя, а для гребного винта определяются его основные геометри-
ческие характеристики (дисковое отношение, число лопасгей, форма
контура и профиля, сечения лопастей и др,). Производится выбор соот-
ветствующих расчетных винтовых диаграмм.
2.3.3. Расчет коэффициентов взаимодействия
На основании рекомендаций, приведенных в подразд. 2.2, расчиты-
ваются коэффициенты взаимодействия гребного винта и корпуса суд-
на: коэффициенты засасывания г, попутного потока WT и влияния
1 0-0
корпуса пк =—------
iQ{\-WT)
2.3.4. Расчет элементов оптимального винта
Расчет элементов оптимального винта и необходимых для обеспе-
чения заданной скорости судна мощности Ps (при прямой передаче на
винт), Psp (при редукторной передаче) и частоты вращения п главного
двигателя. Расчег выполняется в табличной форме (табл. 2.8).
При расчете задаются 4—5 численных значений диаметра гребного
винга (1,00...0,85) £>пр, где предельная Z>np величина диаметра гребно-
Таблица 2.8. Расчет элементов гребного винта для выбора главно! о двигателя
№ п/п Расчетные величины Едини- ца ве- личины Численные значения
1 D (задаемся) м
2 -
3 J = J{KDr) - по диаграмме -
4 — = —(Кт ) -по диаграмме D D 1)7 -
5 Г)о = т]0(ЛГЛ)/ ) - но диаграмме —
6 (1-0
7 КВг
W
8 р КВт
9 п =1-4-60 JD мин 1
116
Расчет гребного винта для выбора главного двигателя
го винта определяется согласно
рекомендациям, приведенным в
подразд. 2.1.
Численное значение упора
Тв в выражении для KDT опре-
деляется по формуле Тв =—— ,
~ R т RC
где 1 р = — или 1 р = —-— по-
Zp Zp
лезная тяга гребного винта; R
или Re - буксировочное сопро-
тивление судна, соответствую-
Таблица 2.9. Средние значения КПД ва-
лопровода__________________________
Тип упорного подшипника Гн
Гребенчатый 0,95
Митчеля 0,97
Шариковый или роликовый 0,96...0,98
щее расчетному режиму движе-
ния с заданной скоростью; Zp -
число гребных винтов.
Численные значения КПД ва-
лопровода Т|в и редуктора т| мо-
гут быть определены согласно
рекомендациям, приведенным в
табл. 2.9-2.11.
Таблица 2.10. Средние значения КПД
редуктора
Тип передачи Лг
Зубчатый редуктор: одноступенчатый двухступенчатый 0,97...0,99 0,94...0,97
Г идромуфта 0,95...0,97
Магнитная муфта 0,96...0.98
Таблица 2.11. Средние значения КПД
электропередачи
Род тока I Постоянный I Переменный
| 0,86...0,90 | 0,83...0,93
2.3.5. Выбор главного двигателя
По результатам расчета табл. 2.8 производится выбор главного дви-
гателя. Сначала, если это не оговорено в техническом задании на про-
ектирование, выбирают тип и фирму-изготовитель главного двигате-
ля. На современных судах в качестве главных применяют мало- (МОД,
п < 300 об/мин), средне- (СОД, 300 < п < 1500 об/мин) и высокооборот-
пые (ВОД, п > 1500 об/мин) дизели, паровые и газовые турбины и греб-
ные электродвигатели.
Силовые установки с электродвижением устанавливаются в настоя-
щее время только на специализированиых судах - ледоколах, плавучих
буровых установках и самоходных подводных объектах, поэтому элек-
тродвигатели для этих судов серийно не выпускаются, а проектируются
и изготавливаются по заявкам судовых проектных организаций.
Силовые установки с паровыми (ПТУ) и газовыми (ГТУ) турбина-
ми применяют, как правило, на быстроходных судах и военных кораб-
лях. Газовые турбины иногда комбинируют с паровыми турбинами при
помощи теплоутилизирующего контура, что повышает КПД устано-
вок и делает их способными конкурировать с дизелями. Чаще всего ГТУ
имеют суда с динамическими принципами поддержания (суда на под-
водных крыльях, на воздушной подушке и экранопланы).
Подавляющее большинство судов мирового флота имеют дизель-
ные энергетические установки.
117
Расчет ходкости надводных водоизмещающих судов
Номинальной PSN называется максимальная мощность, кото-
рую дизель может развивать практически hcoi раниченное время при
номинальной частоте вращения. Номинальная мощность развивает-
ся при номинальном среднем эффективном давлении рток и указы-
вается заводом-изготовителем для стандартных условий: температу-
ры окружающего воздуха 27 °C, атмосферного давления 100 кПа, от-
носительной влажности воздуха 60 %, температуры охлаждающей
воды на входе в охладитель наддувочного воздуха 27 °C, теплоты сго-
рания топлива 42,7 МДж/кг. Эта мощность является паспортной или
построечной и приводится в каталогах или фирменных лицензион-
ных материалах.
При установке главного двигателя на конкретное судно вводится
спецификационная мощность Ps = (0,85...0,90)Psv,которая обеспечи-
вает судну заданную эксплуатационную скорость. Запас по мощности
до поминального значения Psv снижается постепенным ухудшением
технического и эксплуатационного состояния энергетической установ-
ки и корпуса судна.
Передача мощности от главного двигателя к гребному винту осу-
ществляется по следующим трем схемам:
прямая передача, реализуемая на судах среднего и большого водо-
измещения при помощи МОД;
редукторная передача, применяемая на судах среднего и малого
водоизмещения при помощи СОД и ВОД:
редукторная суммирующая передача, объединяющая в один агре-
гат два или несколько двигателей и реализуемая на судах большого,
среднего и малого водоизмещения при помощи МОД, СОД и ВОД.
Редукторы одномашинных агрегатов изгошвливают с планетарны-
ми и цилиндрическими ступенями с внешними зацеплениями. Плане-
тарные передачи имеют высокий КПД (до 98 %), небольшие габариты
и массу. Удельная масса редукюров составляет по мощности 3,5...
...11,0 кг/кВт, по моменту 0.15...0,71 кг/(Н м). Мощностная насыщен-
ное! ь по объему 110...280кВг/м3, по площади 275...680 кВт/м2, подлине
1400...4700 кВт/м, по ширине 1100...3700 кВт/м.
В каждом конкретном случае выбор того или иного двигателя и спо-
соба передачи мощное ги от двигателя к гребному винту решается с уче-
том экономических и массогабаритных показателей, а также целевой
функции на проектирование, формируемой заказчиком.
118
Расчет гребного винта для выбора главного двигателя
2.4. Пример расчета элементов гребного винта для выбора двигателя
В качестве движителя в соответствии с приведенными выше реко-
мендациями выбираем винт фиксированного шага. Предельное значе-
ние диаметра гребного винта
°пР = Лтр " 0,7'7,83 = 5,48 м.
Расчетный режим для гребного винта выбирается соответствующим
среднеэксплуатационным условиям. Для проектной скорости (в нашем
случае среднеэксплуатационной) = 14,4 уз численные значения бук-
сировочных сопротивления и мощности составляют:
= 343,5 кН; Р££ = 2541 кВт (по табл. 1.7).
Для одновальных транспортных судов с U-образпыми и умеренно
U-образными кормовыми шпангоутами (§>0,600) коэффициенты по-
путного потока и засасывания определяются следующим образом:
WT = [о,25 + 2.2 (8 - 0.50)2 ]10,94 +1,8 (3,8=у
WT = [о,25 +2,2 -(0,689-0,50)2 ]• |о,94 +1,8 - (0,8 - 5,48/7,83)2 ]= 0,31;
t = 0,20 + 0,10 • (8 - 0,50)+0,055 (КВЕ -1,8),
где коэффициент нагрузки гребного винта по тяге
КпЕ =vD^f>/TF ; КВЕ = 7,40 5.48/1025/343500 =2,21,
и, таким образом,
t = 0,20 + 0,10 (0,689 - 0,50)+0,055 (2,21 -1,8) = 0,24.
При выборе числа лопастей гребного винта рассчитаем коэффици-
ент нагрузки гребного винта по упору при постоянном диаметре:
KDT =x>AD^/p/TB; Х)а = о(1 - IV т); т>л = 7,40(1 - 0,31) = 5,11 м/с;
KDr = 5,11 • 5,48 • ^/1025/452000 = 1,33.
119
Расчет ходкости надводных водоизмещающих судов
Так как KDT = 1,33 < 2,0, то число лопастей принимаем Z = 4.
Дисковое отношение и относительную толщину лопастей будем
выбирать из условия обеспечения достаточной прочности лопастей, а
также из условия отсутствия второй стадии кавитации.
Для обеспечения достаточной прочности дисковое отношение дол-
жно быть
= 0,375
( °>06 4 f13зК15-452
1^5,48 0,08 J V 100
Найдем минимально допустимое дисковое отношение из условия
отсутствия второй стадии кавитации. Для этого воспользуемся графи-
ком (см. рис. 2.37) (Л£/Л()) = f(pk,hs). предварительно рассчитав
удельную нагрузку:
47^ 052000 =19174 н/м
ПО2 3,14'5,482
полагая hs = Т/2; hs = 7,83/2 = 3,91 м.
Дисковое отношение будет
(ЛЕ /4)" = 1,6 (ЛЕ /Ло )min; (ЛЕ /4,)" = 1,6 0,22 = 0.35.
Окончательно расист ное значение дискового отношения принима-
ем не меньше (АЕ/А(}) =0,43 и равным ближайшему большему таблич-
ному значению (см. табл. 2.1) АЕ /Ао =0,55.
Располагая значениями числа лопастей и дискового отношения,
выбираем винтовую диаграмму J-KT 21-4-55 (см. рис. 2.6*). Дальней-
шие расчеты проводим в табличной форме (табл. 2.12), принимая Г)в =
= 0,97 и т}р = 0,97. Результаты расчетов изображены на рис. 2.38*.
Выполнив анализ паспортных данных двигателей ведущих дизеле -
строительных фирм, нетрудно убедиться, что единственной возможно-
стью для рассматриваемого проекта будет дизель-редукторный агре-
гат на основе СОД с номинальной мощностью Ps^ = Psp/0,9. Паспорт-
ные данные двигателей расчетного диапазона приведены в табл. 2.13.
По соображениям экономичности остановим свой выбор на двига-
теле № 3 фирмы KRUPP МаК 6М552С. По рис. 2.38* определим часто-
120
Расчет гребного винта для выбора главного двигателя
ту вращения гребного винта и передаточное отношение редуктора / .
Частота вращения гребного винга с учетом округления принимается
равной 90 об/мин, а передаточное отношение редуктора z = 500/90 =
= 5,55. Масса редуктора ориеюировочно т? = 4,0-4500 = 18000 кг.
Таблица 2.12. Расчет элементов гребного винга для выбора главного двигателя
№ п/п Расчетные величины Единица ве- личины Численные значения
I D (задаемся) м 5,48 5.21 4,93 4,66
2 KDT ~ Dv^p/Tg - 1,33 1.27 1,20 1.13
3 J = J(Kni ) - по диаграмме рис. 2.6 - 0,634 0,608 0,581 0,552
4 д = -^-60 JD об/мин 88,2 96,8 107,0 119,2
5 Р Р — -—(А'пт) -по диаграмме D D рис. 2.6 - 1,036 1,020 1,004 0.984
6 По =П()(А'0Г) -по диаграмме рис. 2.6 - 0,607 0,593 0,577 0,561
7 (1-0 г'=’1"г|" = ,е(1-ио)Т|“ - 0,669 0.653 0,635 0,618
8 Ф1в кВт 3916 4012 4125 4239
9 Р - Г5Р - ППвП), кВт 4037 4136 4253 4370
10 Ры = — 0.9 кВт 4485 4595 4725 4855
Таблица 2.13. Паспортные данные СОД расчетного диапазона
№ п/л Марка PS.v, кВт п, об/мин i/кВт/ч L. мм Д, мм //. мм С.
1 12PA6V280B 4860 1050 196 5375 2400 3540 26,0
2 16PA6L280CL 4720 750 190 5515 1950 3025 32,0
3 6М552С 4500 500 184 5565 2340 4205 62.0
121
Расчет ходкости надводных водоизмещающих судов
Рис. 2.1. Диаграмма Д-2-30; Z = 2,АtJAQ = 0,30
122
Расчет гребного винта для выбора главного двигателя
Рис. 2.2. Диаграмма Р-3-35: Z = 3, = 0,35
123
Расчет ходкости надводных водоизмещающих судов
Рис. 2.3. Диаграмма Д-3-50; 7 = 3, = 0,50
124
Расчет гребного винта для выбора главного двигателя
Рис. 2.4, Диаграмма Д-3-65; Z = 3, А^А^ = 0.65
125
Расчет ходкости надводных водоизмещающих судов
Рис. 2.5. Диа1рамма В-4-40; Z= 4, А ^А(} = 0,40
126
Расчет гребного винта для выбора главного двигателя
Рис. 2.6. Диаграмма 5-4-55; Z = 4,АГ/А.
127
Расчет ходкости надводных водоизмегцающих судов
Рис. 2.7. Диаграмма 5-4-70; Z = 4, Л£Л40 = 0,70
128
Расчет гребного винта для выбора главного двигателя
9- 390
Рис. 2.8. Диаграмма В-5-60; Z- 5. AfjAn = 0,60
129
Расчет ходкости надводных водоизмещающих судов
Рис. 2.9. Диа1 рамма М-35-04; Z = 4, А = 0,35, г„/О = 0,04
130
Расчет гребного винта для выбора главного двигателя
Рис. 2.10. Диаграмма Г-4-35-06; Z = 4. AJA, = 0,35; tJD = 0,06
131
Расчет ходкости надводных водоизмещающих судов
Рис. 2.11. Диаграмма Г-4-58-04; Z = 4, AJA^ = 0,58, eJD = 0,04
132
Расчет гребного винта для выбора главного двигателя
Рис. 2.12. Диграмма 7Ч-58-06; 7 = 4,Л£/Л0 = 0,58, e(JD = 0,06
133
Расчет ходкости надводных водоизмещающих судов
Рис. 2.13. Диаграмма У-4-75-04; Z = 4, А^Ац = 0,75, e(JD = 0,04
134
Расчет гребного винта для выбора главного двигателя
Рис. 2.14. Диаграмма Г-4-75-06; 7. = A^A^Aq = 0,75, efJD - 0,06
135
Расчет ходкости надводных водоизмещающих судов
Рис. 2.15. Диа1рамма Т-6-68; 7. = 6, А^А^ = 0,68
136
Расчет гребного винта для выбора главного двигателя
Рис. 2.16. Диаграмма Т-7-70; 7. = 7, = 0,70
137
Расчет ходкости надводных водоизмещающих судов
Рис. 2.17. Диаграмма Т-8-72; 7. = 8, AjjA^ = 0,72
138
Расчет гребного винта для выбора главного двигателя
Расчет ходкости надводных водоизмещающих судов
Рис. 2.19. Диаграмма Z-4-100; Z = 4, А^А{} - 1.00
140
Расчет ходкости надводных водоизмещающих судов
Рис. 2.21. Диаграмма Л/-4-75; Z = 4, А^А^ = 0,75
142
Расчет гребного винта для выбора главного двигателя
Рис. 2.22. Диаграмма Л/-4-85; Z- 4, А^А{) = 0,85
143
Расчет ходкости надводных водоизмещающих судов
Рис. 2.23. Диаграмма ZJ/-4-50; Z- 4, АЕ1Ай = 0,50
144
Расчет гребного винта для выбора главного двигателя
Рис. 2.24. Диаграмма ZV-4-52; 7. = 4,Л£/Л0 - 0,52
10-390
145
Расчет ходкости надводных водоизмещающих судов
Рис. 2.25. Диаграмма ^7'-4-3560; Z= 4, А ^Аа = 0.35, IJD = 0,60
146
Расчет гребного винта для выбора главного двигателя
Рис. 2.26. Диаграмма ЯТ-4-58-60; Z = 4, = 0,58, IJD = 0,60
147
ю«
Расчет ходкости надводных водоизмещающих судов
Рис. 2.27. Диаграмма WT-4-75-60; Z = 4, А^Ай - 0,75, IJD ~ 0,60
Расчет гребного винта для выбора главного двигателя
Рис. 2,28. Диаграмма /VA4-4-55-50; Z= 4,А^Ао = 0,55, IJD - 0,50
149
Расчет ходкости надводных водоизмещающих судов
Рис. 2.29. Диграмма JVF-4-57-80; Z = 4, AЕ/Ао = 0,57, IJD = 0,80
150
Расчет гребного винта для выбора главного двигателя
Рис. 2.30. Дижрамма /VA-4-55-60; Z- А,А^А0 - 0,55, /п/£>- 0.60
151
Расчет ходкости надводных водоизмещающих судов
0.3 0,4 0,5 0,6 0.7 0.8 0.9 1,0 1,1 1.2 1,3 1.4 0,5 0.6
Рис. 2.31. Диаграмма /VP-3-107-60; Z = 3, Я£Ы0 = 1,07. IJD = 0.60
152
Расчет гребного винта для выбора главного двигателя
Рис. 2.32. Диаграмма А (7-СР-4-40; Z = 4, A h!A^ = 0,40
153
Расчет ходкости надводных водоизмещающих cydot
Рис. 2.33. Диаграмма A U-CP-4-55; Z = 4, А 0 = 0,55
154
Расчет гребного винта для выбора главного двигателя
Рис. 2.34. Диаграмма А kl-CP-4-КУ.
155
Расчет ходкости надводных водоизмещающих судов
Рис. 2.35. Диаграмма ММ-57-60; Z = 4, А = 0,57. IJD - 0,60
156
Расчет гребного винта для выбора главного двигателя
Расчет ходкости надводных водоизмещающих судов
Рис. 2.38. Диаграмма для выбора главного двигателя
и передачи мощности на гребной винт
158
Проектировочный расчет гребного винта и скорости судна...
3. ПРОЕКТИРОВОЧНЫЙ РАСЧЕТ ГРЕБНОГО ВИНТА
И СКОРОСТИ СУДНА ПРИ ИЗВЕСТНОЙ
МОЩНОСТИ ГЛАВНОГО ДВИГАТЕЛЯ
3.1. Общие положения
Этот заключительный расчет ходкости судна включает в себя опре-
деление с использованием винтовых диаграмм элементов оптимально-
го гребного винта, расчет прочности лопастей, проверку на кавитацию,
а также расчет и построение теоретического чертежа гребного винта.
При этом возможны следующие случаи.
• Мощность Ps главного двигателя и частота п вращения гребно-
го винта известны из предварительного расчета ходкости, мет одика ко-
торого изложена в разд. 2. Необходимо определить элементы оптималь-
ного гребного винта, обеспечивающего наибольшую скорость при пол-
ном использовании мощност и главного двигателя.
• Заданы мощность Ps и частота вращения главного двигателя п.
Необходимо рассчитать частоту вращения гребного винта, а также эле-
менты оптимального гребного винта, обеспечивающего наибольшую ско-
рость судна при полном использовании мощности главного двигателя.
3.2. Расчет элементов гребного винта прн заданной мощности главного
двигателя и частоте вращения гребного винта
В рассматриваемом случае наряду со спепификационной мощнос-
тью главного двигателя Р^р и частотой вращения гребного винта п
считаются известными на основании предварительного расчета ходко-
сти судна (см. разд. 2) следующие величины:
скорость хода Ds судна, которая в рассматриваемом расчете явля-
ется скоростью первого приближения:
кривые буксировочных сопротивления Я(г>5.) или R^v^ и мощно-
сти Р£(г>5) или Рее^); 4
дисковое отношение —форма контура и профилей сечения лопа-
стей и их число Z; п
число гребных винтов
коэффициенты гидродинамического взаимодействия гребных вин-
тов и корпуса судна и Iq,
КПД валопровода Т|в и редуктора т}
Геометрические характеристики оптимального гребного винта и
максимальная скорость хода рассчитываются методом последователь-
ных приближений с использованием винтовых диаграмм, выбранных в
предварительном расчете ходкости, в форме табл. 3.1.
159
Расчет ходкости надводных водоизмещающих судов
Таблица 3.1. Расчет характеристик оптимального гребного винта и скорости
хода судна
№ п/п Расчетные величины Едини- ца ве- личины Численные значения
1-го прибли- жения 2-го прибли- жения
1 УЗ US1
2 =o,5l4(l~wy)«s м/с
3 кН
4 кВ г
5 кН
6 -In \ TB -
7 J = j(KNT) -ho диаграмме -
8 J' = aj —
9 D-X<- J’n м
10 pn'D4 -
11 Ло =По(^Г’^') _ по диа’ грамме -
12 —(KT,J') - no диаграмме -
13 i (i-O П~Г|О (1 U7 \ Iq (l-JTr) -
14 p* SfJ Z^ripTI кВт
Каждое последующее приближение скорости хода vS(i + п назнача-
ется из условия, что буксировочная мощность РЕЕ и, следовательно,
мощность главного двигателя Ps водоизмещающих судов пропорцио-
нальны 1)5. Таким образом,
(3.1)
где и5(. - скорость г-го приближения, уз; о(; + 1)-скорость (7 + 1)-го при-
ближения, уз; Psp - спецификационная мощность главного двигателя,
160
Проектировочный расчет гребного винта и скорости судна...
кВт; PgPi - требуемая спецификационная мощность главного двигате-
ля в /-м приближении, кВт (см. табл. 3.1, п. 14).
Расчет производится до тех пор, пока расхождение между РЕР[ и
PSP не будет превышать 1,0... 1,5 %.
Коэффициент а (см. табл. 3.1. п. 8) учитывает различие в величине
диаметра оптимального гребного винта при работе в свободной воде и
за корпусом судна. Принимается а = 1,05 для ГВ, расположенных в
ДП, и а = 1,03 для бортовых ГВ.
3.3. Расчет элементов оптимального винт для заданной мощности
главного двигателя
В рассматриваемом случае наряду с заданной спецификационной
мощноегью и частотой вращения главного двигателя считаются изве-
стными кривые буксировочного сопротивления Л(о$.) илн РЕ(У>$) и
мощности Р^5) или PEE(vs). Схема расчета в этом случае выглядит
следующим образом:
3.3.1. Рассчитывается приближенное значение скорости ходаъу с ис-
пользованием кривой буксировочной мощности Pp^s) или Pee(\js). при
этом принимается РЕ = kPs или РЕЕ = kPs и коэффициент к = 0,5.. .0,7.
3.3.2. Для определенной таким образом скорости о5 с учетом при-
веденных в разд. 2 рекомендаций рассчитываются:
предельное значение диаметра D гребного винта;
дисковое отношение —С, формы контура и профилей сечений, а так-
же число лопастей Z;
коэффициенты гидродинамического взаимодействия ГВ и корпуса
судна t и
КПД валопровода Т|в и редуктора Т| .
Методом последовательных приближений рассчитывается скорость
хода судна по (3.1) при полном использовании мощности главного дви-
гателя. В качестве первого приближения принимается значение скоро-
сти которая определена по кривой буксировочной мощности РЕ{х>^)
или Р£С(иу).
При этом возможны два случая:
передача мощности от главного двигателя к гребному вингу пря-
мая. В этом случае методом последовательных приближений (см.
табл. 3.1) наряду с определением скорости хода при известной частоте
вращения гребного винта рассчитываются элементы оптимального греб-
р
ного винта (диаметр D и шаговое отношение —);
передача мощности от главного двигателя к 1ребному винту через
редуктор. В этом случае, задавшись расчетным значением диаметра
161
Н-390
Расчет ходкости надводных водоизмещающих судов
гребного винта £>=0,9Рпр, где £>пр - предельное значение диаметра
гребного винта, методом последовательных приближений (табл. 3.2) на-
ряду с определением скорости хода рассчитывают оптимальную часто-
р
ту вращения и элементы гребного винта (шаговое отношение —). По
результатам расчета определяется передаточное о i ношение редуктора.
Таблица 3.2. Расчет харакп еристик оптимального гребного вин га, частоты вра-
щения и скорости хода судна
№ п/п Расчетные величины Еди- ница вели- чины Численные значения
1-го прибли- жения 2-го прибли- жения
1 Os уз и?1
2 = 0,5] 4(1 м/с
3 кН
4 Pf-.E = кВ г
5 Т - в (I-0Z, кН
6 V 1 Б -
7 J = - по диаграмме -
8 /7 = Hi. (-,0 JD об/мин
9 кг=-^ pn2D4 -
10 т|о = x\0(KT,J) - по диа- грамме -
11 р -3) ~ по диаграмме -
12 1 О-') 11'11,1 ie О-»',) -
13 Z/?T|1(ripn кВт
3.4. Особенное ги расчета соосных гребных винтов
Движительный комплекс, состоящий из двух винтов, имеющих об-
щую ось вращения и расположенных на небольшом расстоянии друг от
друга, носит название соосных гребных винтов.
162
Проектировочный расчет лребного винта и скорости судна...
Использование соосных гребных винтов противоположного враще-
ния позволяет уменьшить потери на закручивание потока, что позволя-
ет повысить КПД движительного комплекса. Кроме того, использова-
ние этих винтов даст возможность устранить некомпенсированные ре-
активные и гироскопические моменты при криволинейном движении
надводных и подводных судов. Недостаз ком этих движительных комп-
лексов является сложность конструкции редуктора, обеспечивающего
противоположное вращение и уплотнения линии вала.
Соосные гребные винты одинакового направления вращения - вин-
ты-тандем - имеют более низкий КПД, чем винты противоположного
вращения и одиночные винт ы. Основанием для их применения является
возможность снижения диаметра, а также некоторого увеличения запа-
са на кавитацию за счет реализации большого дискового отношения.
Для приближенных оценок характеристик соосных гребных вин гов
могут быть использованы 1рафики (рис. 3.1,3.2), полученные Линдгре-
ном на основании анализа данных испытаний серии соосных гребных
винтов. Расчет следует вести по коэффициенту
0,5233-0.4 [(го7
где V/ = v(l - И7}-) м/с; - мощность, подводимая к соосным гребным
винтам, кВт.
163
Расчет ходкости надводных водоизмещающих судов
В зависимости от этого коэффициента по графику (см. рис. 3.1) опре-
деляют величины относительной поступи J = —КПД Ро н гидроди-
намическое шаговое отношение —1^- переднего гребного винта. Шаго-
р Л
вое отношение переднего и заднего ~ находят по [рафикам (см.
рис. 3.2) в зависимости от гидродинамического шагового отношения ——•.
Рис. 3.2. Зависимости PJD и PJD
от Р, !1)
При практическом проек-
тировании диаметр заднего
гребного винта D3 принимают
на 5...10 % меньше диаметра
£»п переднего, чтобы исклю-
чить опасность кавитационной
эрозии, обусловленной пересе-
чением лопастями заднего вин-
та вихревых шнуров, сходяших
с концов лопасгей переднего.
При этом относительное умень-
шение диаметра заднего греб-
ного винта возрастает по
мере роста нагрузки комплекса.
3.5. Проверка гребного винта на кавитацию
Эго! расчет выполняется па заключительном эише расчета ходкос-
ти с целью проверки правильности выбора и возможной дальнейшей
корректировки элементов и режима работы гребного винта из условия
отсутствия первой стадии кавитации (для нскавигируюших винтов), при
наличии которой возникает эрозия поверхности лопастей.
Для проверки гребнот о винта на кавитацию можно воспользовать-
ся приближенными эмпирическими методами Шенхсрра и Э.Э. Пап-
меля.
Метод Шенхерра позволяет paccnmaib минимально допустимую
АЬ
величину дисковот о от ношения —— из условия отсу i с i вия первой ста-
дии кавитации при известных значениях (полученных на основании рас-
чета ходкости) диаметра D, шага Р. числа лопастей Z, глубины hs
по1ружепия оси, частоты вращения п и относшельной поступи J греб-
ного винта;
164
Проектировочный расчет гребного винта и скорости судна..
41 А
где р{ = 101340 + pg/zs - статическое давление на глубине оси вращения
( р А
1ребного винта, Па; Кс =K(\Z.—,J -кавитационная характеристи-
ка, значение которой определяется по диаграмме (рис. 3.3); £ = 1.3... 1,6 -
Рис. 3.3. Кавитационная характеристика для гребных винюв:
---------------------2 = 3.-------Z = 4
Метод Э.Э. Напмеля позволяет рассчитать значение критической
частоты вращения п . при которой возможно возникновение первой
стаЛщи кавитации. При известных значениях £>, Z. —/и коэффнци-
Л
165
Расчет ходкости надводных водоизмещающих судов
енга упора гребного винта КТ
“р о V р '
где Ск - безразмерный коэффициент, определяющий начало первой
стадии кави1ации,
г0 = - относи тельный радиус эквивалентного сечения лопасти, при-
нимается /jj =0,7; - коэффициент относительного разрежения, зна-
чение кот орого вычисляс гея по формуле
^о.гсДис,.)-^,
Сх - коэффициент подъемной силы эквивалентного сечения допасти,
принимается
С,.=^Цхг(1 + Хг);
И
в - относительная голщипа лопасти на радиусе г = 0,7 R, которая при-
ближенно может быть принята из условия, что ё <ёхмх = 0.08...0,10.
Для того чюбы при работе гребного винта не возникала кавита-
ция, необходимо, чтобы частота вращения гребного винта п была на
10 % меньше критической, т.с.
п <, 0,9пкр.
3.6. Pac’ici общей прочности винта
Расчет прочности выполняется при следующих допущениях:
лопасть движителя заменяется консольным прямым стержнем, ко-
торый подвержен косом) изгиб) ог действия внешних сил;
одна и з центральных осей инерции профиля параллельна ei о хорде.
3.6.1. Расчет внешней нагрузки
Изгибающие моменты от действия осевых и касательных i идроди-
166
Проектировочный расчет гребного винта и скорости судна...
намических сил в произвольном сечении лопасти (rjj < гр < 1) гребных
винтов с относительным радиусом ступицы 0,2 < гн < 0,4 определяют-
ся по формулам:
МР
М, =
KQprr D5
17.
(ГН-Гр)’
где функции Gp н GT определяются
табл. 3.3; гр - относительный радиус
рассматриваемого сечения.
Кроме гидродинамических сил, не-
обходимо учитывать еще действие на
лопасш винха центробежных сил инер-
ции Р . Для расчета в районе корня ло-
пасти используется формула
(в районе корня лопасти) по
Таблица 3.3. Значения функций
Gp и Gp
Gp
GT
0,2 0,3 0,4
0,475 —Д4~ 0.325
1,38 1,1 0,84
= 4nVGru,
(3.2)
где G - масса лопасти; г (= 0,47Я - приближенное значение радиальной
координаты ЦТ лопасти. Масса лопасти определяется по формуле
(3.3)
где рм - плотность материала винта, кг/м\ Ь{) и <?0 - ширина и макси-
мальная толщина спрямленного контура на относительном радиусе
г = 0.6 (для усеченного контура лопасти eJD = 0,0375; b^/D = 0,170).
Изг ибающий момент от действия центробежных сил в районе кор-
ня лопасти находится но формуле
4,= 0.7/>,r,tgZ„.
где - угол откидки лопасти.
Проекции полного изгибающего мо-
мента сечения лопасти, развернутого на
плоскость (рис. 3.4), рассчитываются по
формулам:
- (Мр + cos ф + МТ$т ср;
= (Мр + Л/ц) sin ф - Л/j-cos ф,
(3.4)
Рис. 3.4. Расположение осей
координат и расчетных
точек
PID
где ф = arctg—с—•
167
Расчет ходкости надводных водоизмещающих судов
3.6.2. Расчет напряжений в лопастях
Наибольшее напряжение - растягивающее или сжимающее в точке
С (или D) у корпя лопасти oi действия гидродинамических сил будет
= М^1 ИС, где И< = fy2b - момент сопротивления сечения относитель-
но оси Для точек Л, 13 и D (см. рис. 3.4) авиационного профиля коэф-
фициент с, = 0,10, дня сегментного = 0,11; для точки С авиационного
профиля £ =0,085, сегментного £ = 0,075. Напряжение в точке С (или D)
от действия центробежных сил
где F-площадь сечения лопасти, развернутого па плоскость, находит-
ся по формуле F - g{eb, в которой gj = 0.70...0,72 для авиационного
профиля и g, = 0,71 ...0.73 для сегментного профиля; е - толщина рас-
четного сечения, м; h - хорда расчетного сечения, м; для относительно-
ю радиуса =0,2, Ь = 1,687) (Д£ /До)/Z.
Суммарное значение растягивающего и сжимающего напряжения
0 = ^ + ^.
(3.5)
Полученные ио формуле (3.5) значения напряжений сравниваются с
допустимыми напряжениями, приведенными в табл. 3.4.
Таблица 3.4. Значения допустимых напряжений для различных материалов,
Н/м2 (Па)
Материал Предел текучест и а-10 ' Предел прочное III Опр ‘ 1 0 Допустимые напряжения Ю''
Чугун 1000... 1500 1800...2600 250..300
Углеродистая сталь 2000 4000 500...600
Латунь марганцовистая 2000 4800 500...600
Бронза 2500 6400 600...700
Нержавеющая стать 5000 7000 1200...1400
Стеклопластик 2000 4500 500...600
3.7. Расчет и построение теоретического чертежа гребного винта
3.7. /. Расчет и построение спрямленной лопасти гребного винта
Для построения теоретического чертежа гребного винта необходи-
мо знать численные значения диаметра D, шага Л дискового отноше-
/1г „ _ . -
ния —, числа лопастей Z. диаметра ступицы а и относительной
До _
юлщины лопасти на оси гребного винта е0. а также форму кон i ура и
168
Проектировочный расчет гребного винта и скорости судна...
профиля сечений лопастей. Наиболее распространенные формы конту-
ров спрямленной поверхности лопасти винтов: саблевидная, усеченная
и эллиптическая (рис. 3.5). Для расчета саблевидного спрямленного кон-
тура необходимо определить максимальную ширину контура спрямлен-
ной лопасти
(3.6)
Рис. 3,5. Формы контуров спрямленной лопасти:
а - саблевидный: б-усеченный: в -эл панический
Значения ординат саблевидного контура в долях от 6|11ах для входя-
щей b и выходящей Л кромок контура, а также расстояние /? от
вертикальной оси контура до линии наибольших толщин в долях от
ширины лопасти b + 5КЫХ приведены в табл. 3.5. В этой же 1аблице
приведены ординаты Ь = 5ИХ + /\Ь1Х усеченного и эллиптического коп-
гуров в долях от величины b . коюрая для усеченного кошура рас-
считывается по формуле (3.6), а для эллиптическо! о - по формуле
= 2,14—1
169
Расчет ходкости надводных водоизмещающих судов
Таблица 3.5. Значения ординат спрямленных контуров
Ординаты контура r=r/R
0,20 0,30 0,50 0,70 0,80 0,95 1,00
Апи.х 0,469 Са 0,526 5левиднь 0,576 й контур 0,514 0.414 0,124
b№MJbmM 0,292 0,333 0,408 0,467 0,485 0,415 0,201
bcjb 0,266 0,262 0,240 0,082 -0,018 -0,284 -
Усеченный контур
b/2binax j 0,360 j 0,383 | 0,428 | 0,464 | 0,470 | 0,459 | 0.454
bjbm^ I °-100 [ 0.Ю9 | 0,125 | 0.110 | 0,083 | 0,045 | 0,030
Эллиптический контур
Ы2Ь^ I О'265 I О-343 I 0.456 | 0,500 | 0,489 | 0,356 | 0,144
bJb^M | 0,080 | 0.047 I 0,013 | о'оО2 | 0 | 0 | б~
3.7.2. Профилирование лопасти
При профилировании лопасти устанавливается закон изменения ее
1 олшины по радиусу и ширине. Закон изменения максимальной толщи-
ны лопасти по радиусу изображают на условном сечении по линии наи-
больших толщин, которые строят на боковой проекции лопасти
(рис. 3.6). Чтобы построить это сечение лопасти, на боковой проекции
под углом наклона %°R — 0...15° проводят образующую, затем по оси
гребного винта откладывают значение условной толщины е() = е0£>, а
на конце лопасти при г = R- кромочное значение толщины е , вычис-
ляемое но формуле
<? = а£>(50 - £>) мм,
где а = 0,08 для стальных винтов и а = 0,06 щы латунных винтов; D -
диаметр винта, м.
Полученные гочки соединяю] прямой линией. Максимальная тол-
щина профиля е на данном радиусе г на условном сечении измеряется
в направлении, параллельном оси винта.
По закону изменения толщины профиля вдоль хорды профили не-
кавитирующих винтов бывают авиационные и сегментные. Саблевид-
ные и усеченные винты имеют авиационный профиль у корня лопасти,
постепенно перехо,4ящей в сяментный. Ординаты саблевидных и эл-
липтических профилей указаны в табл. 3.6 и 3.7.
Линия наибольших толщин делит профиль на две части: входящую
шириной и выходящую шириной Ь-, (рис. 3.7). Ординаты нагнетаю-
щей уи и засасывающей у3 сторон профиля в процентах от максималь-
ной толщины е приведены для абсцисс, равных 0,9Ьг: 0,6Z>1: 0,46,;
170
Проектировочный расчет гребного винта и скорости судна...
Рис. 3.6. Чертеж гребною винт
171
Расчет ходкости надводных водоизчещающих судов
0,8b, и Л2 и измеряемых от линии наибольших толщин в сторону входя-
щей и выходящей кромок соответственно.
Таблица 3.6. Ординаты профилей саблевидных и усеченных гребных винтов
r=r!R Расстояние от места наибольшей толщины е, %
до входящей кромки 0 до выходящей кромки
100 90 60 40 80 100
Засасывающая поверхность
0,20 40.0 64,3 87,0 100,0 86,9 58,4 30,0
0,30 37,5 62,6 85,8 100,0 86,8 54,7 25,3
0,50 30.4 56.8 79,4 100,0 86,1 43 4 9,7
0,70 16,0 44,2 74,9 100,0 84,9 39,4 0,0
0,80 7.4 34,4 88,7 100,0 85,3 41,0 0,0
0,95 0.0 29.5 73,5 100,0 87,9 46,4 0,0
Нагнетающая поверхность
0,20 40,0 20,3 5,9 0,0 -5,5 18,2 30,0
0,30 37,5 16.5 4,6 0,0 и 12,2 25,3
0,50 30,4 8,5 0,0 0,0 0,0 1,8 9,7
0,70 16,0 0,0 0,0 0,0 о,о 0,0 0,0
0,80 7.4 0,0 0,0 0,0 о,о 00 0,0
0,95 0,0 0,0 0,0 0,0 0,0 0,0 о,о
Таблица 3. 7. Ординаты профилей для гребных винтов с эллиптическим кон-
туром
r=r/R Расстояние от места наибольшей толщины е, %
до входящей кромки 0 до выходящей к зомки
100 90 60 40 80 100
Засасывающая поверхность
0,20 40,0 62,0 86,5 100,0 81,2 36 0 5,0
0,30 39.1 62,8 87.2 100,0 82,5 37,8 8.0
0,50 29,5 56,4 83,1 100,0 85,2 41,2 13,1
0,70 17,4 44,2 72,8 100,0 83.1 42,6 16,8
0,80 13,5 35.2 67,8 100,0 83,0 42,6 17,6
0,95 9.5 31,6 69,1 100,0 85,5 43,5 19,4
1,00 9.0 31,2 71,0 100,0 86,5 39,3 12,5
Нагнетающая поверхность
0.20 40,0 20,0 6.2 0,0 0,0 0.0 0,0
0,30 39,1 16,6 2,3 0,0 0,0 0,2 3,3
0,50 29,5 9,4 0,0 0,0 0.0 0.7 6,0
0,70 17,4 0,5 0,0 0,0 0,0 2,5 7,1
0,80 13,5 0,0 0,0 0,0 0,0 2,7 8,8
0,95 9,5 0.0 о,о 0,0 о,о 0.0 0,0
1,00 9,0 0.0 0,0 0.0 0,0 0,0 о,о
172
Проектировочный расчет г.ребного винта и скорости судна...
Входящая кромка профиля очерчивается по окружности диаметра
т/вх с центром, поднятым на высоту увх, соответствующую абсциссе
.Vj = by. Для выходящей кромки характерно очер1ание по дуге окруж-
ности радиуса г с центром па нагнетающей поверхности лопасти.
Значения dKJe и гВ)1Х/е приведены в табл. 3.8.
Рис. 3.7. 11остроепие профиля лопасти
Таблица 3.8. Значения daJe и rKh<Je
7 = r!R. 0.20 0,30 0,50 0.70 0,80 0,95
d^Je 0,400 0,344 0,270 0,187 0,192 0,177
'"вы 'е 0,136 0,125 0,120 0.142 0.158 0,190
3.7.3. Построение нормальной и боковой проекций
Для построения нормальной и боковой проекций KOHiypa лопасти
из точки О (рис. 3.8) в направлении выходящей кромки отложим отре-
зок ОР. именуемый полюсным расстоянием и равный РТ2п. Из полюса
П проведем лучи через точки пересечения вершкальной оси с дугами
окружностей радиусов г.
К профилю проведем касательные параллельно и перпендикулярно
лучу ПА, в результате чего получим отрезки а, Ь, а'и Ь’. Затем на нор-
мальной проекции из цен i ра О1 проведем дугу радиуса р и отложим по
этой дуге отрезок и-вправо, а отрезок «'-влево. Получим точки Ви
В', лежащие на контуре нормальной проекции лопасти.
Для построения контура боковой проекции из точек В и В' парал-
лельно оси винта проведем торизонтали и на них опустим перпендику-
ляр из точки А,, лежащей на пересечении образующей лопасти с юри-
173
Расчет ходкости надводных водоизмещающих судов
зонталью, проведенной на радиусе г;. Откладывая от этого перпенди-
куляра, вдоль, горизонтальный отрезок b вправо, а отрезок Ь' влево,
получим точки С и С, принадлежащие контуру боковой проекции.
Рис. 3.8. Построение нормальной и боковой проекции
Выполнив построения для всех приня тых значений радиусов г , по-
лучим ряд точек, соединив которые плавными кривыми, построим ис-
комые контуры боковой и нормальной проекций.
Диаметр ступицы винтов фиксированного тага = (0,16...0,20)Р
не должен превышать dK < (1,8. ..2,0)t/B, где - диаметр вала.
Длину ступицы выбираем на 2-3 % больше максимальной ширины
контура боковой проекции лопасти с тем расчетом, чтобы при хране-
нии и транспортировке, находясь в горизонтальном положении, греб-
ной вин t лежал на торце ступицы, а не на кромках лопастей.
Внутреннему отверстию ступицы придают конусность с уклоном
1/15. Ступнцу винта закрепляют к валу при помощи шпонок, длина ко-
торых составляет 90...95 % длины конусной части гребного вала, или
бесшпоночным (прессовым) способом. При заднем ходе упор винта
воспринимается крепежной гайкой гребного вала, закрываемой обте-
кателем, длина которого /обт = (0,14...0,1 T)D. Обтекатель заканчивает-
ся сферой, радиус которой rog( = (0.05.. .0,10)Z).
На теоретическом чертеже гребного винта (см. рис. 3.6) приводятся
174
Проектировочный расчет гребного винта и скорости судна..
численные значения диаметра D, шага Р, диаметра ступицы d шаго-
Р
вого отношения —, дискового отношения —, относительного диамет-
, D
d„ - 7
ра ступицы —, числа лопастей Z и относительной толщины е0 на оси
I ребпого винта.
На теоретическом чертеже гребного винта также указываются раз-
меры формовочного угольника, необходимого для изготовления форм
под отливку винта. Для определения размеров формовочного угольни-
ка на нормальную проекцию лопасти наносят линию его установки
(рис. 3.9), радиус ко юрой назначим с учетом зазора на замок верхней и
нижней частей формы;
Яф = R + (50...100) мм.
На чертеже нормальной проекции из
точки 0 проведем лучи под углами (Xj и
а, таким образом, чтобы обеспечить в на-
туре минимальный зазор между контуром
лопасти и лучом не менее 50 мм. Тогда
длина £ф и высота йф формовочного
угольника будут соответственно равны:
Рис. 3.9. Формовочный
угольник
3.8. Пример расчета гребного винта для выбранного двигателя
3.8.1. Расчет гребного винта для выбранного двигателя
Рассчитаем характеристики оптимального гребного винта и ско-
рость хода судна при следующих значениях спецификационной мощ-
ности двигателя и частоте вращения гребного винта: Psp = 4060 кВт;
п = 90 об/мин; Zp = 1; Т|в = 0,97; Т| = 0.97.
Расхождение между спецификационной мощностью PSP н Р^р со’
ставляет 1.01 %, что приемлемо, поэтому можно ограничиться одним
приближением.
Результаты расчета сведены в табл. 3.9.
3.8.2. Проверка гребного винта на кавитацию
Проверку гребною винта на кавитацию выполним по схеме
Э.Э. Папмеля в следующей последовательности.
• Рассчитаем коэффициент подъемной силы эквивалентного сече-
175
Расчет ходкости надводных водоизмещающих судов
ния лопасти, определив предварительно значение коэффициента упора
КТ по диаграмме й-4-55 рис. 2.6 для 7= 0,618 и PID = 0,990; = 0,213:
Cv =-^-^Кт(\ + Кт); С =-^0,213(1+0,213) = 0,282.
ГзМ °-55
ы
Таблица 3.9. Расчет гребного винта и скорости хода судна для выбранного
двигателя
№ п/п Расчетные величины Едини- ца ве- личины Численные значения
1-го при- бли- жения 2-го при- бли- жения
1 Ое уз 14,4
2 =o.5l4(l-irr)uv м/с 5,11
3 кН 343,5
4 кВт 2541
5 т 'Д1-02, кН 452,0
6 Vn v Тв - 0,910
7 J = J(KVT) -по диа- грамме - 0,589
8 J' = aJ 0,618
9 D = — J'n м 5,51
10 K-, = ~T~7 pCd* - 0,213
11 По = т1о(*ы ,7') -по диа1 рамме - 0,610
12 р —(Kr,J') - по диаграмме - 0.990
13 1 (1-0 " "ч (1-14) - 0.672
14 р‘ РГ.Е SF z7-3„np3 кВт 4019
176
Проектировочный расчет гребного винта и скорости судна...
• Определим коэффициент относительного разрежения, приняв
ё - 0,06 в соответствии с рекомендациями подразд. 3.5:
i,K =0,5С,(| + С,)+2ё; =0,5 0,282(1 + 0,282J + 2 0,06 = 0,301.
• Вычислим коэффициен т, характеризующий начало кавитации:
• Рассчитаем критическую частоту вращения гребного винта, опре-
делив предварительно статическое давление на глубине оси вращения
hs = Т/2', hs =7,83/2 = 3,915 м:
= 101340 + pghs\ Р} =101340 + 1025-9,81 -3.915 = 140706 Па;
2Q [7Г 2'0,564 /140706 „ ,, г,
iKn =—-J—; пнп =—-----------J--------=2,40 об/с = 144 об/мин.
4 й V р 'р 5.51 V 1025
Очевидно, что п < 0,9и , следовательно, кавитация отсутствует.
3.8- 3. Пример расчета действующих напряжений для г = 0,3
Ар
Исходные данные; D = 5.51 м; Z = 4; е() =0.045; — - 0.55; Тв =
+
= 452,0 кН; п = 1.5 с-1; = 15°; ./ = 0.618; Г| = 0.672; Кт = 0,213; матери-
ал - бронза Бр.АЖН 9-4-4; ру = 7600 кг/м3; поток однородный. Резуль-
таты расчета сведены в табл. 3.10.
12-390
177
Расчет ходкости надводных водоизмещаюгцих судов
Таблица 3.10. Расчет действующих напряжений в корневом сечении лопасти
№ п/п Расчетные величина Единица величины Численные значения
1 b = 0,859Л|га>. м 1,393
2 e = 0,8Dfo м 0,198
3 Р/D (по табл. 3.9) - 0,990
4 . P/D (р arctg яг град 46,4-
5 Gp (т^, г ) - по табл. 3.3 - 0,4
6 С/ (7^1 ,/=") — по табл. 3.3 - и
7 Mlt=TBDGr/(2Z) Н-м 124300
8 к - КТ J К-ci - — ilo 2л - 0,0344
9 MI=KrJpn1D,G:l(2Z) Н-м 50400
10 G - по формуле (3.3) кг 450
11 Рц-по(3.2) 11 51800
12 .W-по (3.4) Н-м 12600
13 Мг = (Мр + MJ cos <р + sin (р Н-м 130900
14 F-gfeh м" 0,193
15 И7 = £eb (для точки (') м1 0,00464
16 ас(О-Ч/1К((’) Н/мм" 28,2
17 Н/м\г о,з
18 "(<WO+o. Н^мм2 28,5
19 O,.,IW) - 2,46
Вывод: прочность гребного винта обеспечена.
178
Расчет и построение диаграммы ходкости
4. РАСЧЕТ И ПОСТРОЕНИЕ ДИАГРАММЫ
ХОДКОСТИ
4.1. Общие положения
Диаграмма ходкости служит для опенки ходкости судна на режи-
мах, отличных от расчетного. Указанное отличие может быть обуслов-
лено:
изменением буксировочного сопротивления в результате обраста-
ния судового корпуса, влияния мелководья, волнения и ветра, измене-
ния водоизмещения;
частичным использованием мощности главно! о двигателя;
буксировкой другого судна и др.
Ходкость будет считаться определенной для заданного эксплуага-
ционного режима, если известны скорость хода судна vs., мощность
Ps, развиваемая главным двигателем, тяга Т н часто!а вращения п
гребного винта.
На диаграмме ходкости (рис. 4.1) изображаются:
характеристики гребного винта
«О
где TB(x>s,n) - тяга гребного винта; PD(x>s,n) -мощность, необходи-
мая для вращения гребного винта, валопровода и передачи;
характеристики судового корпуса
(4.2)
где - буксировочное сопротивление, соотвекгвующее расчет-
ному режиму движения, a PEF(x>s.n) -эффективная мощность, необхо-
димая для движения судна при совместной работе его корпуса, движи-
теля, валопровода и передачи;
характеристики главного двигателя
Дд'Ъул); Р5(о5,/!), (4.3)
где Ts(X)s,n) и /5(1)5,/?) -располагаемые тяга гребных винтов и соот-
ветствующая ей мощность главного двигателя.
Для буксирных судов, кроме зависимостей (4.1 )-(4.3), на диа! рамме
ходкости сз роит ся кривая тяги на гаке, равная Ts-Д, в зависимости от
скорости хода судна.
179
12*
Расчет ходкости надводных водоизмещающих с у dot.
Рассмотрим практическую схему расчета характеристики гребного
винта (4.1) и главного двигателя (4.3). Методика расчета характеристи-
ки судового корпуса (кривая буксировочной мощности и сопротивле-
ния) изложена в разд. 1.
Г. кН
8 <9 10 11 12 13 14; 15 16 17 18 19 уз
Р. кВт
Рис. 4.1. Диаграмма ходкости (паспортная диаграмма)
180
Расчет и построение диаграммы ходкости
4.2. Расчет характеристик гребного винта, работающего за корпусом
судна
С учетом попутного потока и засасывания гяга гребного винта
Тв=К-1в?пгС\
а мощность, необходимая для вращения винта, валопровода и редуктора,
2лХе8ря3£>’
Го ------------'
ЛвЛр
где Ктв и К^- коэффициенты тяги и момен!а гребного винта, рассчи-
тываемые с учетом взаимодействия гребного винта и корпуса судна в
функции от кажущейся поступи J гребного винта.
Схема расчета Ктви КуВ приведена в табл. 4.1,
Таблица 4.1. Расчет безразмерных характеристик гребного вниз а за корпусом
судна
№ п/п Расче (ные величины Численные значения
1 J
2 К-/О, Р/D) ~ по диаграмме
3 р0(Л Р/D) - по диаграмме
4 к =^tL Q
5 P/D
6 r = ^
7 KTB=(i-r)K,
8 К QB =1qKq = KO
9 U 1-^7-
В п. 1 табл. 4.1 записываются значения /, задаваемые с таким расче-
том, чтобы равномерно заполнить диапазон О...О,9(Р/Д).
181
Расчет ходкости надводных водоизмещающих судов
Коэффициенты упора и момента гребного винта в свободной воде
Кг и (пп. 2 и 3 соответственно) снимаются с диаграммы, по которой
проектировался гребной винт.
Коэффициент засасывания /0 на швартовном режиме может быть
определен но расчетным значениям относительного скольжения .$ и
коэффициента V.
/о =/.ур.
где I - значение коэффициента засасывания, определяемое на основа-
нии рекомендаций разд. 2 и используемое при выборе элемен гов опти-
мального гребного винта с учетом влияния судового корпуса; 5 - рас-
четное значение относительного скольжения.
4
P/D'
где J - расчетное значение поступи гребного винта, определяемое в
разд. 3 (см. табл. 3.1, п. 7).
Данные, полученные в табл. 4.1 (пп. 7-9). позволяют рассчитать
необходимые характеристики гребного винта за корпусом судна:
Тв (ц5, л), PfJ (vs,n). Расчет 11роизводи гея в форме табл. 4.2 для несколь-
ких (4-5) значений частоты вращения 1ребного винта п = (1,05.. ,0.80)и11ОМ
и обязательно содержит п - /г ,
Таблица 4.2, Расчет характеристик гребного винта за корпусом судна
№ п/и Расчешыс величины Единица величины Численные значения
) значения из табл. 4.1 -
2 о. = 1.9457, ,nD уз
3 Тц = кН
4 _2itKgilpn'D5 “п ЛвЧр кВ г
По данным расчета табл. 4.2 строятся характеристики гребного вин-
ia на диаграмме ходкое!и <см. рис. 4.1).
4.3. Расчет и построение характеристик главных двигателей и корпуса
судна
Внешняя ограничительная характеристика двшателя содержится
обычно в технической документации, прилагаемой заводом-изгогови-
гелсм, либо в справочной литературе. Для приближенных расчетов ха-
182
Проектировочный расчет гребного винта и скорости судна.. -
рактеристик главных двигателей можно воспользоваться следующими
приближенными зависимостями:
для малооборотных ДВС без га jo турбинного наддува
Ps= Р$р, (4.4)
П1ЮМ
для ДВС с газотурбинным наддувом
W; (4-5)
^,1ОМ J
для ГТЗА, а также ГТУ с песблокироваиным компрессором и сило-
вой турбиной
(4.6)
Я||ОМ \ ^ном J
для гребных электродвигателей постоянного тока Ps = Psp.
В формулах (4.4)-(4,6) /г - номинальная частота вращения греб-
ного вала; Psp- спецификационная мощность главных двигателей.
По данным расчета строится кривая располагаемой мощности
Ps(x>s,n) -см. рис. 4.1. Кривая располагаемой гяги rs(viS>-,n) сзроигся
переносом соответствующих точек машинной диаграммы на корпусную.
Характеристиками корпуса являются сопротивление /?(vs-) в усло-
виях ходовых испытаний и Я£(ъ5) -вусловияхэксплуашции. Кривые
эффективной мощности PEF(vs,n) и Pe^C^s^) строятся переносом
соответствующих точек корпусной диаграммы па машинную.
4.4. Пример расчета и построении диаграммы ходкоеги (паспортной
диаграммы)
4.4.1. Расчет кривых действия гребного винта за корпусом судна
Расчет кривых действия [ребного винта за корпусом судна приве-
ден в табл. 4.3 для следующих исходных данных:
—= 0,55; Z = 4; е„= 0,045; = 0,990; I = 0,24; Ц/г=0,31;
А)
.!„=!—=1--!^- = 0,376; = ts- („ = 0,24-0,376 = 0,090.
р P/D р 0.990 ° р °
183
Расчет ходкости надводных водоизмещающих судов
Таблица 4.3. Расчет кривых действия гребного винза за корпусом судна
№ п/п Расчетные величины Численные значения
1 J 0,400 0,500 0,600 0,700 0,800
2 КАТ Р/Т) - по рис. 2,6 0,302 0,262 0,2] 8 0,175 0,127
3 r)0(J, Р/Т) - по рис. 2.6 0,425 0.520 0,595 0,665 0,705
4 „ _KTJ ' 2"т|о 0,0453 0,0401 0.0350 0,0293 0,0229
5 Л' = 1 — P/D 0,596 0.495 0,394 0.293 0,192
6 t = — 0,151 0,182 0,228 0.307 0,469
7 KTli=(l-t)K7 0,256 0,214 0,168 0,121 0,067
8 Kqr = 'qKq = Kq 0,0453 0,0401 0,0350 0,0293 0,0229
9 0.580 0,725 0,870 1,014 1,159
4.4.2. Расчет характеристик гребного винта
Расчет выполняется в табличной форме для п = 1,6; 1,5; 1,4; 1,3 об/с.
Pesyj [ьтат ы расчета приведены в табл. 4,4.
Таблица 4.4. Расчет характеристик гребного винта
w -1,6 с 1 = 96 мин
p/?'Z)4 = 1,025-],62 -5.514 =2419 кН;
2Яр„'Р-^ 6.28-1.025-|.6^-5.5Р=|42:!|7кВт Л1!др 0.97-0,97
1 Л, — 0,580 0,725 0.870 1.014 1,159
2 и. = 1,945 TnD уз 9.94 12.43 14,92 17,39 19,87
3 Th - KihPu'D* кН 6)9,3 517,7 406,4 292,7 162,1
4 р 2KKQfipn'Di IJ ПпПр кВ г 6447 5707 4981 4170 3259
n =1,5 с 1 = 90 мин pn1Di = I.0251.52 -5.514 =2126 кН; Зяри’/)4 6,28-1.025 1,5Ч-5.5 Is D — = = 117266 кВт ПиЛр 0,97-0.97
1 Л, - 0,580 0,725 0,870 1,014 1.159
2 и, = 1,945 JiJiD УЗ 9,32 1 1,65 13,99 16,30 18,63
TR = KTllpH-D4 кН 544.3 455,0 357.2 257.2 142,4
184
Проектировочный расчет гребного винта и скорости судна... Продлж. табл. 4.4
4 ,. 2тгА'е„р/?3Д> 1 о ЛвПр кВт 5312 4702 4104 3436 2685
п = ] ,4 с 1 - 84 мил ря2/)4 = 1,025-1,4" • 5.514 = 1852 кН; 2,p„sOs=6.28 1,025-1,4s-55Г = 1)534| кВт ЛкЛр 0,97-0.97
1 Л - 0,580 0,725 0,870 1,014 1.159
2 и, = 1,945 TnD Y3 8,70 10,88 13.05 15,21 17,39
3 Тц = KrupirD* кН 474.1 396.3 311,1 224.1 124,1
4 Ч) ПвПр кВт 4319 3823 3337 2793 2183
и =1,3 с 1 = 78 мин p/i2Z>4 -1,025-I.32 5.514 =1597 rfl; 2ip»’D’ 6.28-1,025-1.3’-5.51s „ — = 76335 кВт Л.Пр 0,97-0,97
1 — 0,580 0,725 0,870 1.014 1,159
2 и, = 1,945 JvnD УЗ 8,08 10,10 12.12 14,13 16,15
3 Тв = K„pn’D“ к] 1 408,8 341,8 268,3 193,2 107,0
4 rD ЛвЛр кВт 3458 3061 2671 2237 1748
4.4.3. Расчет внешней ограничительной характеристики
Внешняя ограничи-
тельная характеристика
двигателя рассчитывает-
ся в табл. 4.5 по прибли-
женной зависимости (4.5).
Таблица 4.5. Расчет внешней ограничшельной
характерноики двигателя
Заключение по расчеп ходкости
В резулыа1е выполненного расчета ходкости получены следующие
результаты:
в качестве главного двигателя выбран дизель-редукторный aiperaT
на базе СОД KRUPP МаК 6М552С с номинальной мощностью
4500 кВт. частотой вращения 500 об/мин и передаточным отношением
редукюра 5,55:
185
Расчет ходкости надводных водоизмещающих судов
выбраны элементы оптимального гребного винта фиксированного
шага:
диамезр гребного винта -5,51 м;
шаг - 5,45 м;
диаметр ступицы - 0,92 м;
дисковое отношение - 0.55;
число лопастей - 4;
относительная толщина лопасти на оси
гребного винта - 0,045;
среднеэксплуаганионная скорость хода - 14,4 уз;
скорость хода на испытаниях - 14,9 уз.
Список литературы
СПИСОК ЛИТЕРАТУРЫ
1. Апухтин 11.А., Войткунский Я.И. Сопротивление воды движению су-
дов. - М.; Л.: Матгиз. 1953. - 356 с.
2. Атлас диаграмм для расчета буксировочной мощности морских транс-
портных судов (РД 5.0181-75). - М.: МСП, 1976. - 141 с.
3. Басин А.№.. Анфимов В.Н. Гидродинамика судна. - Л.: Речной транс-
порт, 1961. - 684 с.
4. Басин А.М., Миниович И.Я. Теория и расчет i ребных винтов. Л.: Суд-
промгиз. 1963. - 760 с.
5. Ваганов Г.И., Воронин В.Ф., Шанчурова В К. Тяга судов. - М.: Транс-
порт 1986.- 199 с.
6. Войткунский Я.И., Першиц Р Я.. Титов И.А. Справочник по теории
корабля. Л.: Судлромгиз. 1960.-688 с.; 1973.-511 с.; 1985.-Т. 1.-764 с.
7. Войткунский Я.И. Сопротивление движению судов. - Л.: Судощрос-
ние. 1988. -287 с.
8. Горбов В М , Шаповалов Ю.О.. Ратушняк I.O. Головн! двигуни сучас-
них гранспортних суден. - МиколаТв: УДМТУ. 1998. - 72 с.
9. Дубровин О.В. Расчет буксировочной мощности судна но прототипу:
Пособие по курсовому и дипломному проектированию. -Лг ЛКИ. I960.
10. Кацман Ф.М . Пустошный А. ф., Штумпф В.М. Пропульсивные каче-
ства морских судов. - Л.: Судостроение. 1972.- 510с.
11. Кацман Ф.М.. Дорогое тайский Д.В. Теория судна и движители. - Л.:
Судостроение, 1979. - 279 с.
12. Кулагин В.Д. Теория и устройство промысловых судов.-Л.: Судостро-
ение. 1986, 392 с.
13. Овсянников М.К., Петухов В.А. Дизели в пропульсивном комплексе
морских судов: Справочник. Л.: Судостроение. 1987. - 254 с.
14. ОСТ 5.4129-75. Комплекс движитсльный гребной вин i-направляющая
насадка. Методика расчета и правила проектирования. - М., 1975.
15. СНраслевая нормаль Oil 9-792-68. Ходовые качества транспортных
судов. - М.: МСП, 1968.
16. Павленко ГЕ. Сопротивление воды движению судов. - М.: Морской
транспорт, 1956. - 507 с.
17. Русецкий А.А., Жученко М.М.. Дубровин О.В. Судовые движители. -
Л.: Судостроение, 1971. - 287 с.
18. Слижевс кий Н Б. Король Ю №.. Проскученко Ю №. Расчет ходкост
судна. - Николаев: НКЦ. 1980. - 94с.
19. Судовые двшаюли внутреннего ci орания / Ю А. Фомин и др. - Л.:
Судостроение. 1989. 344 с.
20. Ходкость и управляемость судна / В Г Павленко и др. - М.: Транс-
порт. 1991. 397 с.
21. Design Charts 1'or the Propulsive Performances of High Speed Cargo Liners
/ К Yokoo el al // The 45lh Research Committee. The Shipbuilding Research
Association of Japan. 1964; 1966.
187
Расчет ходкости надводных водоизмещающих судов
22. Investigation into the Propulsive Performance of Super Tankers with
Bulbous Bow / K. Yokoo el. al. // Report of Ship Research Institute. - 1967. - Vol.
4,N5. - P. 1-31; 1969:-Vol. 6. N 2. - P. 1-34,
23. Lackenhy H.. Parker M. The BSRA Methodical Series, Variation of
Resistance with Breadth-draught Ratio and Length-displacement Ratio //TRINA. -
1966. - Vol. 108, N 4. - P. 363-388.
24. The BSRA Methodical Series. Geometry of Forms and Variations of
Resistance with Block Coefficient and Longitudinal Center of Buoyancy/ D. Moor
el al. // TRINA. - 1961. - Vol. 103, N 4. - P. 323419.
Содержание
СОДЕРЖАНИЕ
Введение................................................. 3
1. Расчет буксировочного сопротивления и мощности........ 6
1,1. Сопротивление движению судна и его составляющие. 6
1.2. Общие формулы для буксировочных сопротивления и мощ-
ности................................................. 8
1.3. Расчет площади смоченной поверхности судна...... 9
1.4. Общая характеристика и классификация способов прибли-
женного расчета буксировочных сопротивления и мощности... 10
1,5. Практические методы расчета остаточного сопротивления
с использованием экспериментальных диаграмм (меюды вто-
рой группы).......................................... 12
1.6. Способы пересчета остаточного сопротивления с прототи-
па (методы третьей группы)......................... 24
1.7. Сопротивление судов внутреннего и смешанного плавания 26
1.8. Сопротивление трения судна..................... 29
1.9. Сопротивление шероховатостей, выступающих частей и
воздушное сопротивление.............................. 30
1.10. Уче1 влияния условий эксплуатации на буксировочное со-
противление судна.................................. 32
1.11. Пример расчета буксировочных сопротивления и мощ-
ности................................................ 32
2. Расчет гребного винта для выбора главного двигателя.. 102
2.1. Предварительный выбор основных элементов гребного
винта............................................... 102
2.2. Взаимодействие гребною вита с корпусом судна.....111
2.3. Расчет элементов гребного винта для выбора главного дви-
гателя ..............................................113
2.4. Пример расчета элементов гребного вин га для выбора дви-
гателя ............................................. 119
3. Проектировочный расче! t ребного винта и скорости судна при
известной мощное ги главного двигателя................. 159
3.1. Общие положения................................ 159
3.2. Расчет элементов гребного винта при заданной мощности
главного двигателя и частоте вращения гребного винта..159
3.3, Расче! элеменюв огпимального винта для заданной мощ-
ности главного двщ ат еля........................... 161
3.4. Особенности расчета соосных гребных винтов......162
3.5. Проверка гребного винта на кавитацию ...........164
3.6. Расчет обшей прочности виша.................... 166
189
Расчет ходкости надводных водоизмещающих судов
3.7. Расчет и построение теоретического чертежа гребного винта 168
3.8. Пример расчета гребного винта для выбранного двигателя 175
4. Расчет и построение диаграммы ходкости...............179
4.1. Общие положения................................. 179
4.2. Расчет характерисгик гребного винта, работающего за кор-
пусом судна...........................................181
4.3. Расчет и построение характеристик главных двигателей и
корпуса судна.........................................182
4.4. Пример расчета и построения диаграммы ходкости (пас-
портной диаграммы)....................................183
Список литературы....................................... 187
УДК 629.012.073(075)
ББК 39.425
Р 24 Розрахунок ходовост! надводних водотоннажних суден: Навчаль-
ний поОбник / М.Б. С.'йжевський, Ю.М. Король, М.Г. Сопол1к,
В.Ф. Тимошенко; П1д ред. М.Б. Сл1жевсъкого. - МиколаГв: НУК,
2004.- 192 с.
Викладепо методирозрахунку ходовосл надводних водотоннажних суден,
на яких як рушп використовуються гребн) i bhhih р!зних модифжаиш (1 ФШ i
ГРШ. витый 11 виши в насадках, одиночш i i виныандем нренилежною обер-
ишня). Методи базукиься на використанн! експеримешальних дни рам коефь
1ДСППВ буксирувального опору корпусу судна, а також плродинахпчних харак-
теристик гребних гвинпв. Пос1бник мютить приклад розрахунку.
Иризначено як навчальний иосюник з курсового i дипломного нроекту-
ваниядляспещальностей "Кораб.п й океаиотсхжка'Ч "Судиов! енергетичн! уста-
новки й устаткування". Може бу in також корисним для шженертв i иауковшв у
галуз! суднобудування i водно! о транспорту.
СЛТЖЕВСЬКИЙ Микола Борисович
КОРОЛЬ K)pift Михайлович
СОКОЛ1К Михайло Гаврилович
ТИМОШЕНКО В1ктор Федорович
РОЗРАХУНОК ХОДОВОСТ1
НАДВОДНИХ ВОДОТОННАЖНИХ СУДЕН
Навчальний поабник
Видавництво НУК. 54002. м Мпколгив, вуп Скороходова. 5
Свиоитво про внесения суб’скта видавничо'1 справи до,Державного реестру видавщв.
ВИГО1ГВННК1В i розповсюджувач1В видавничо! продукт? ДККг (150 в,д 12 12.2002 р.
Редактор Н.О. 111айкша
Кочи'югсрна правка А.Й I рцц i Т.М. Черсдшченко
Комп'ютерпа верстка Т.М. Череджчснко
Корекюр Н.О. Шайк1на
Подписано до дружу (18.02.04. Формат 70x100/16. Патр офсетний.
Ум. друк. арк. 15,5. Обл.-вид. арк 11.9 Тираж 400 прим Вид.№34. Зам №390
J (1на догов!рна.