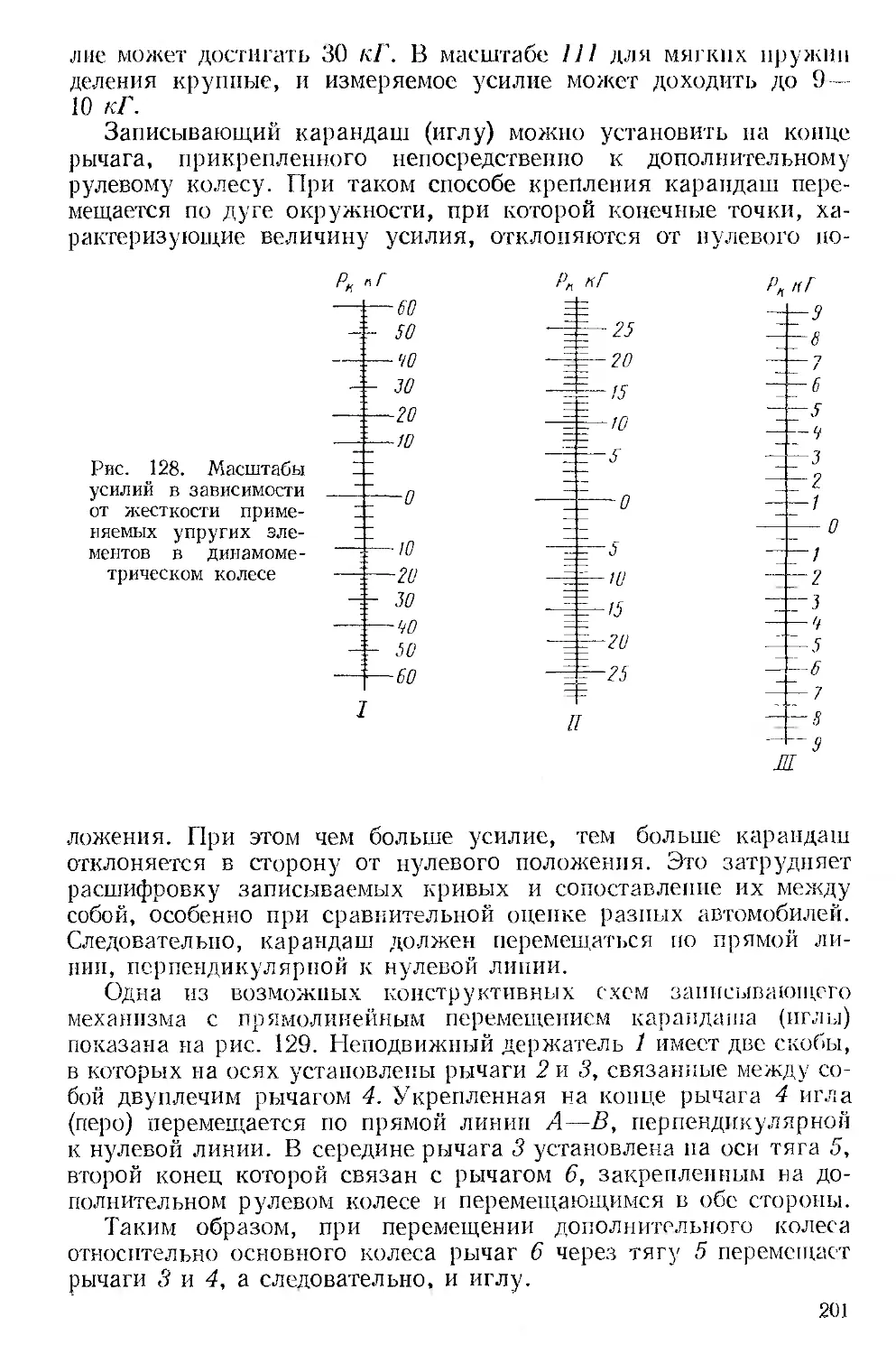
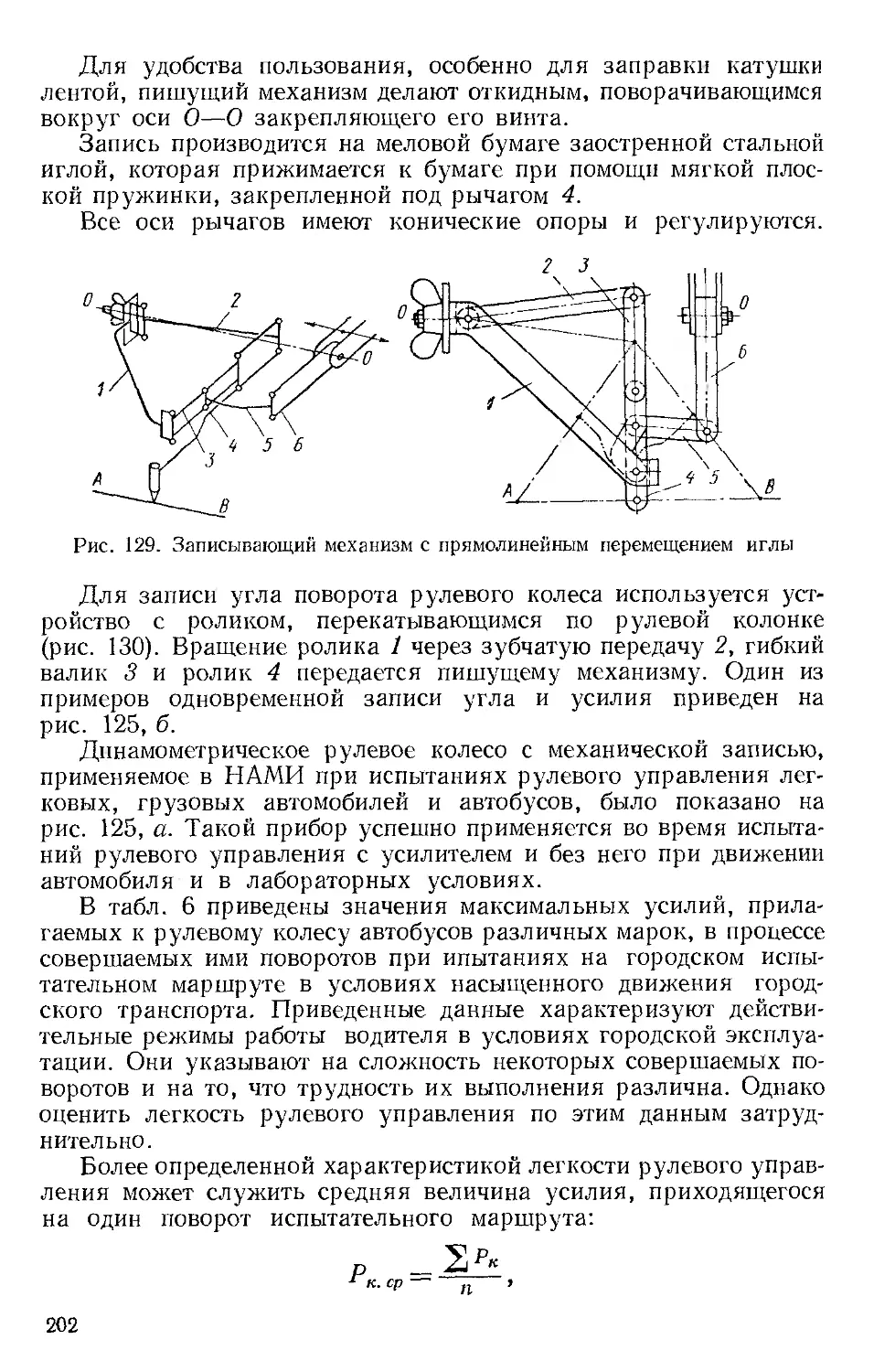
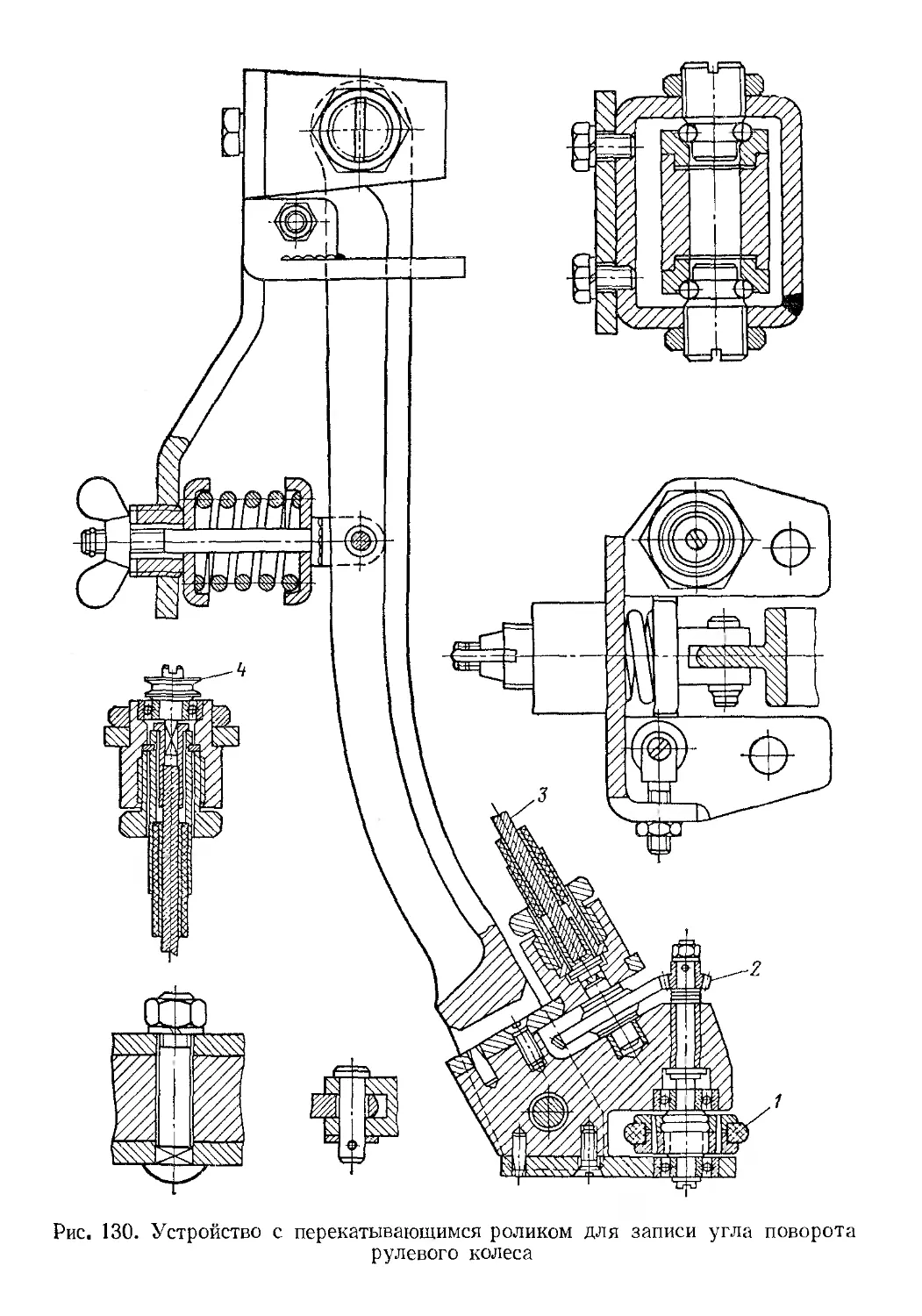
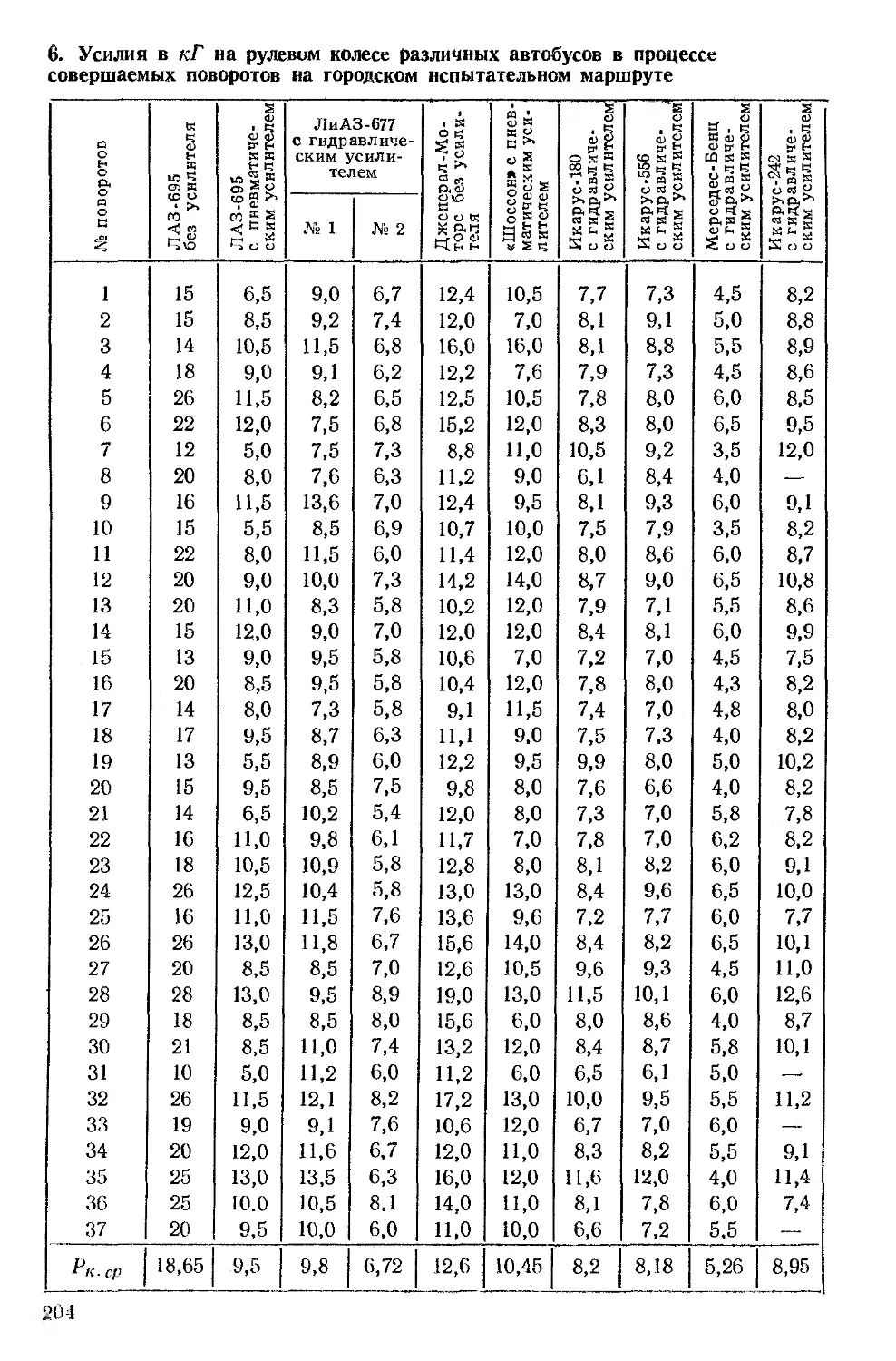
/








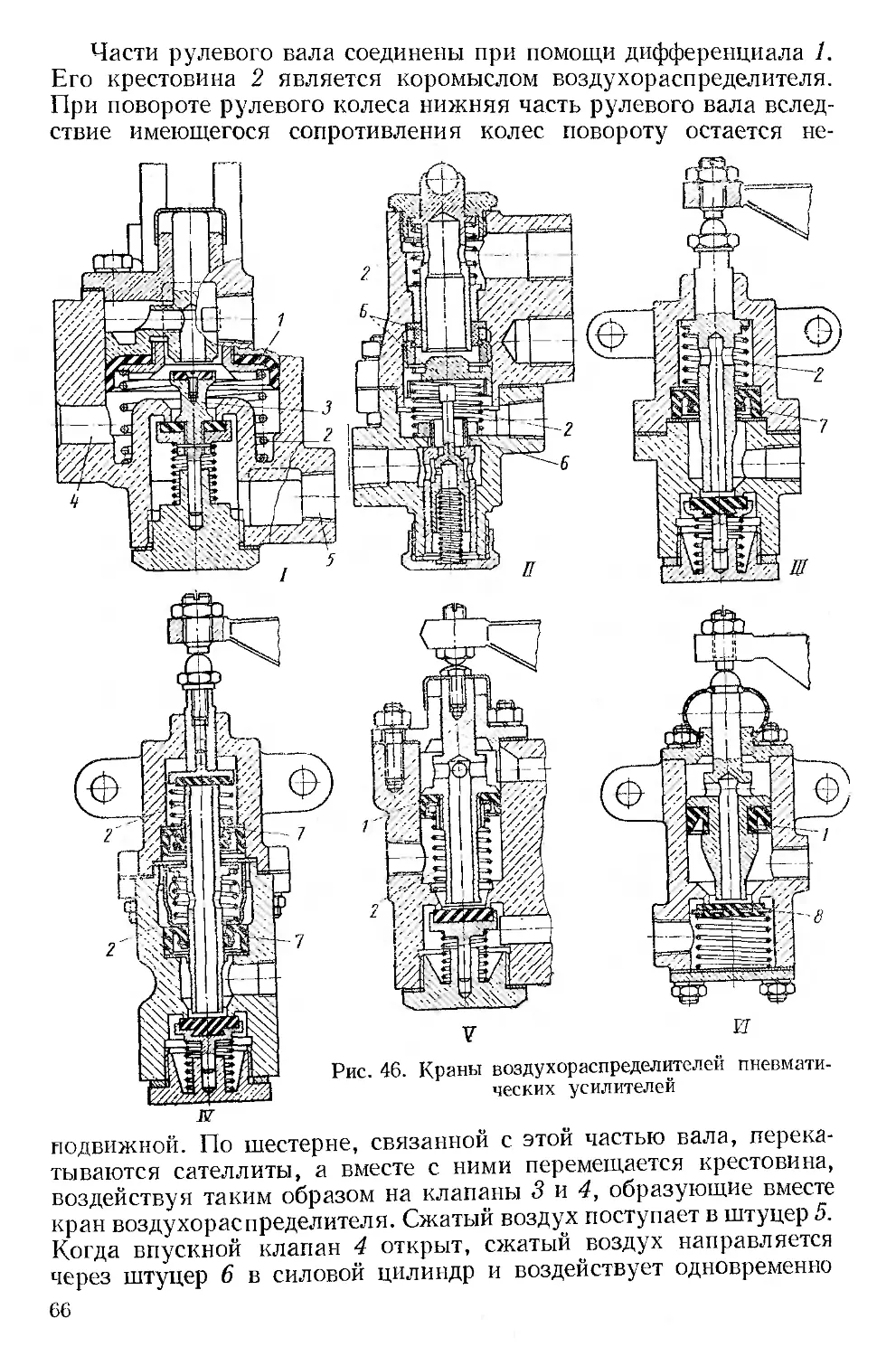

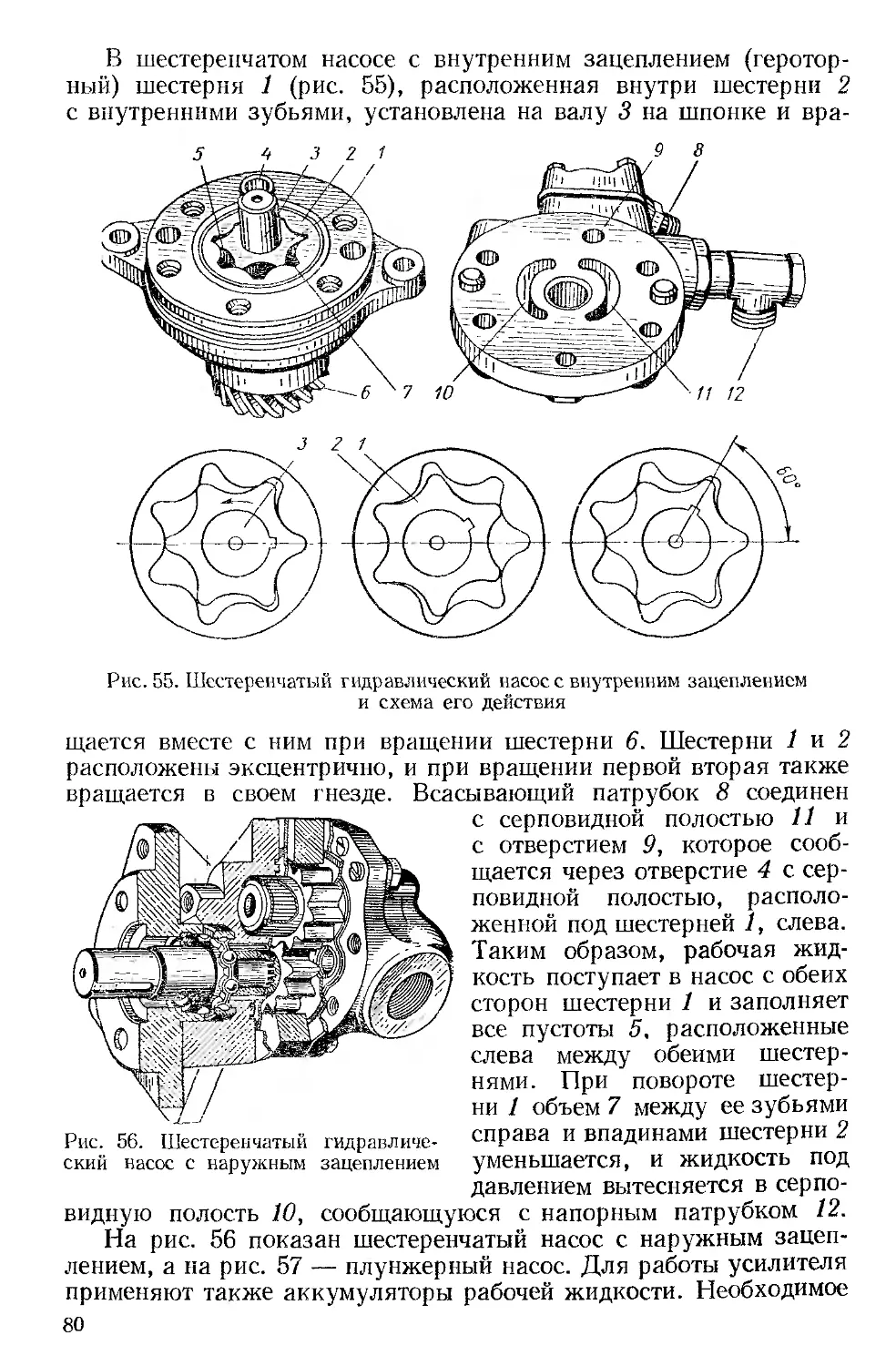





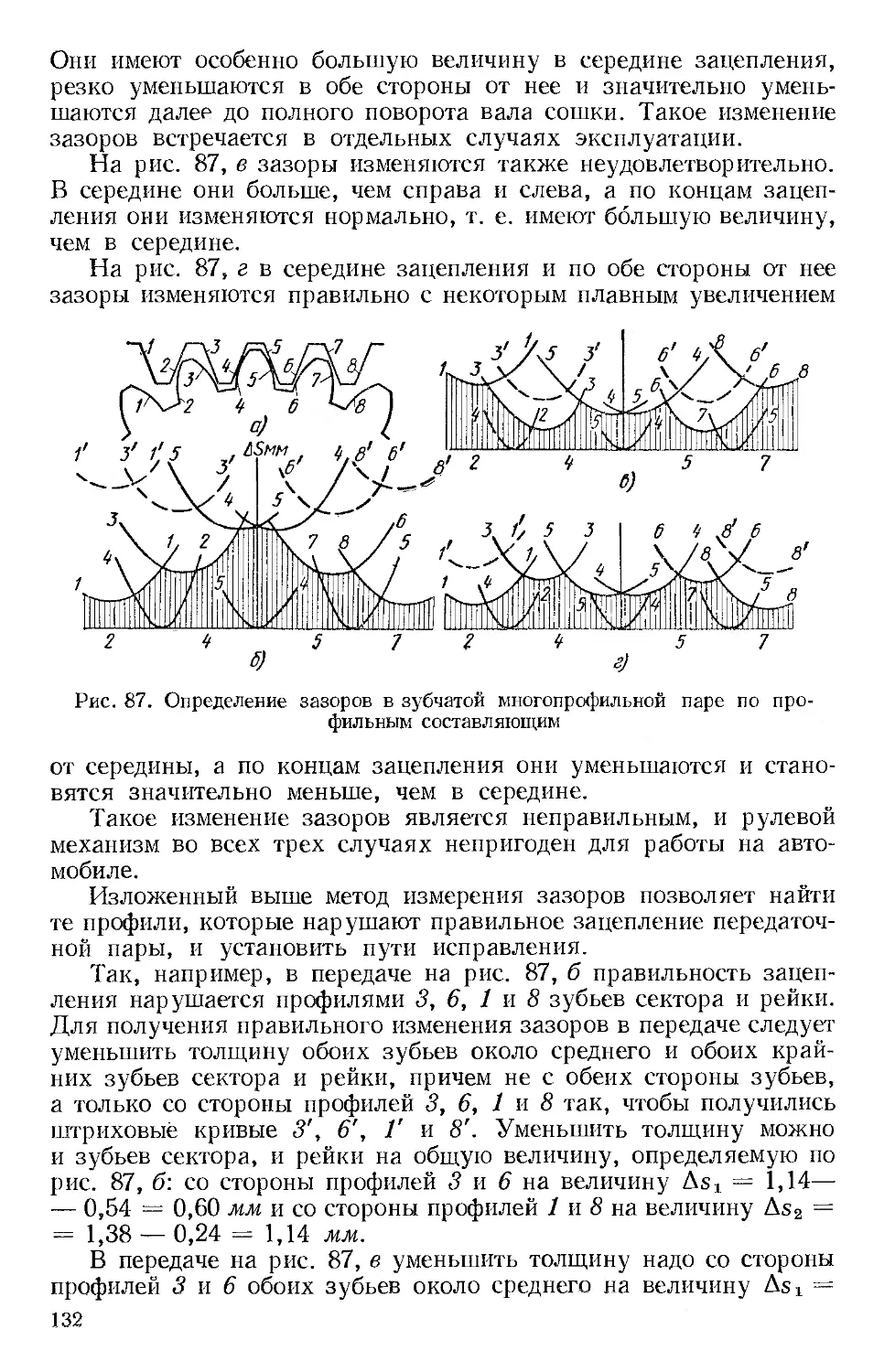


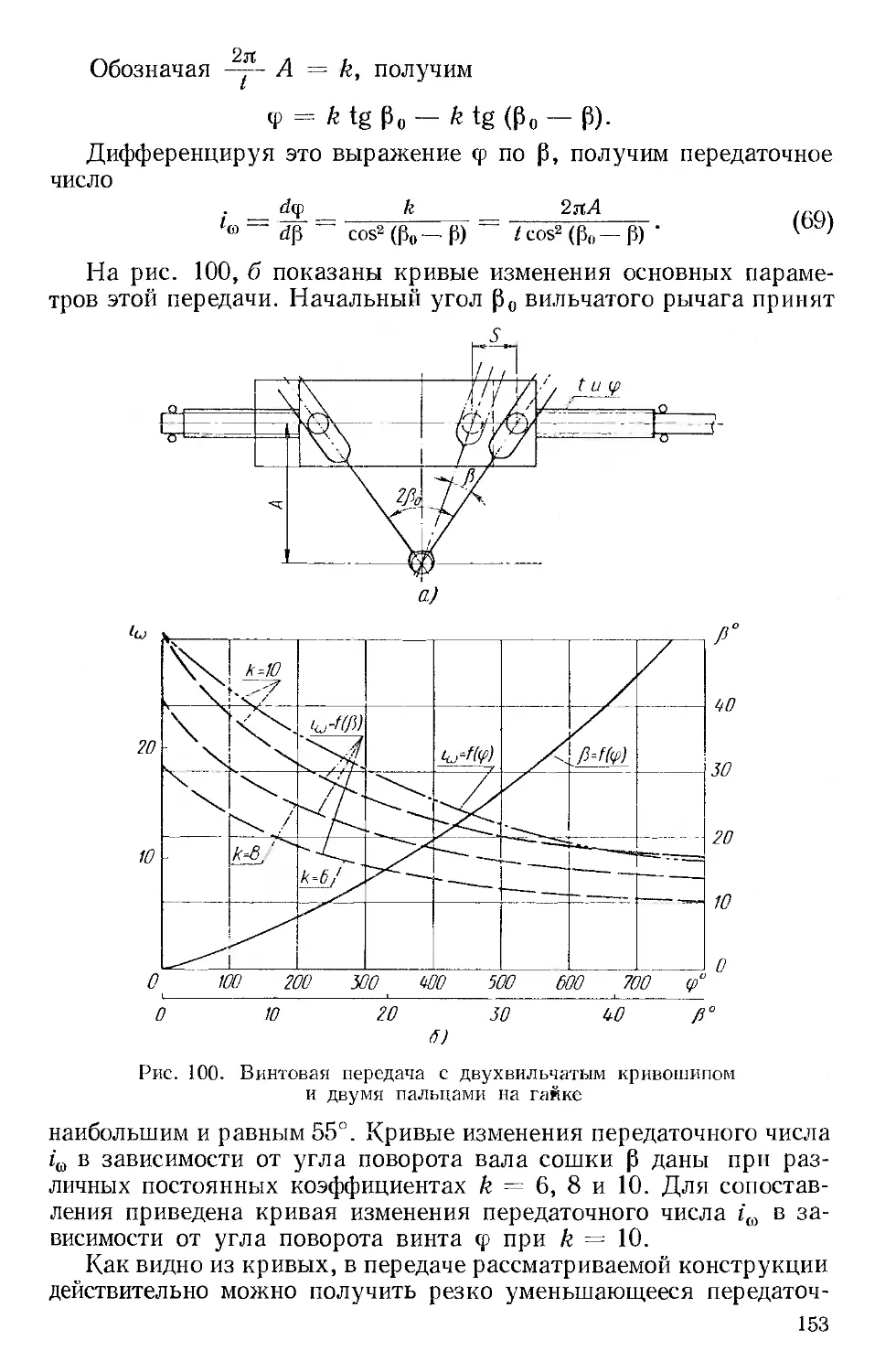
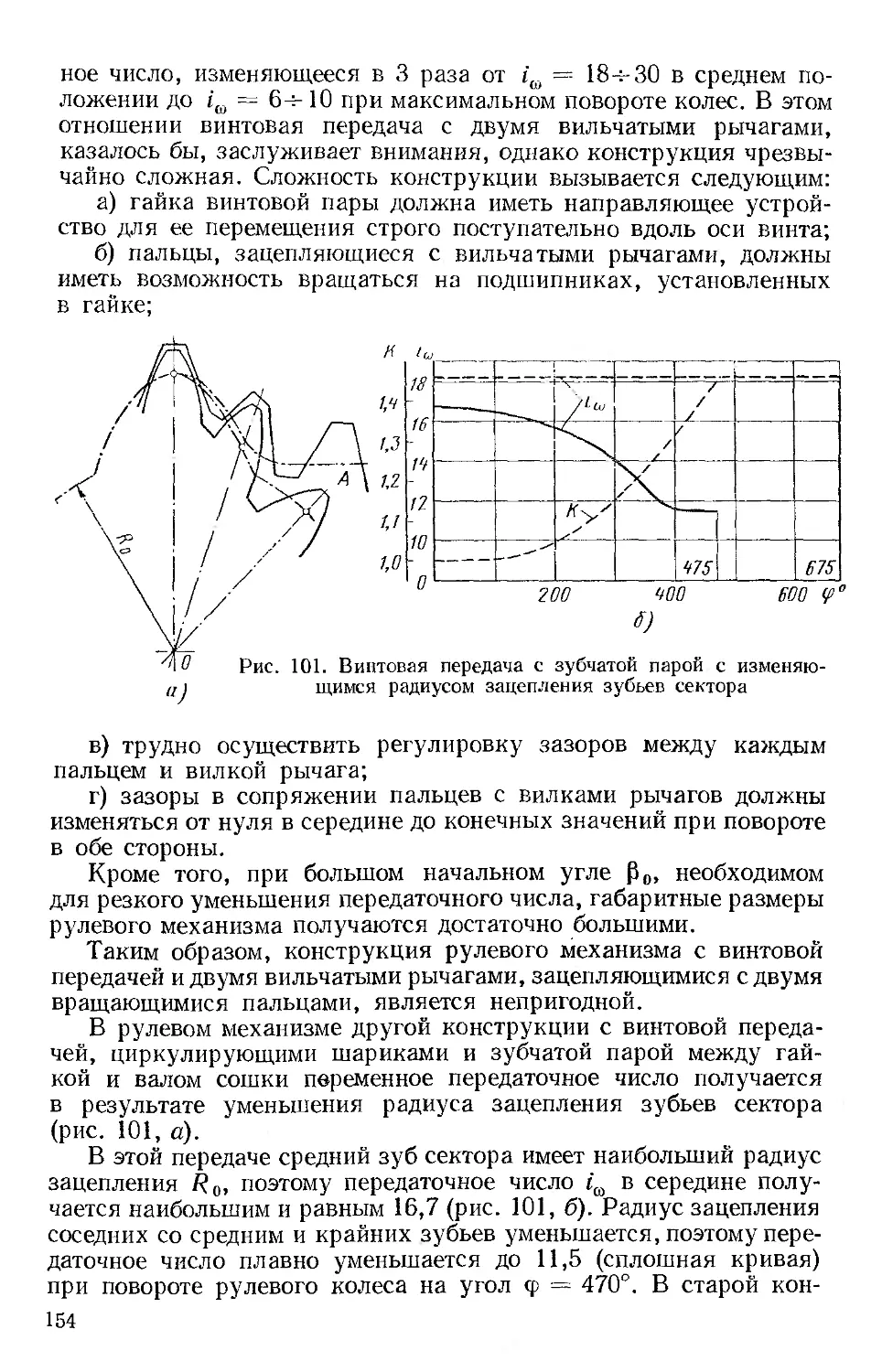
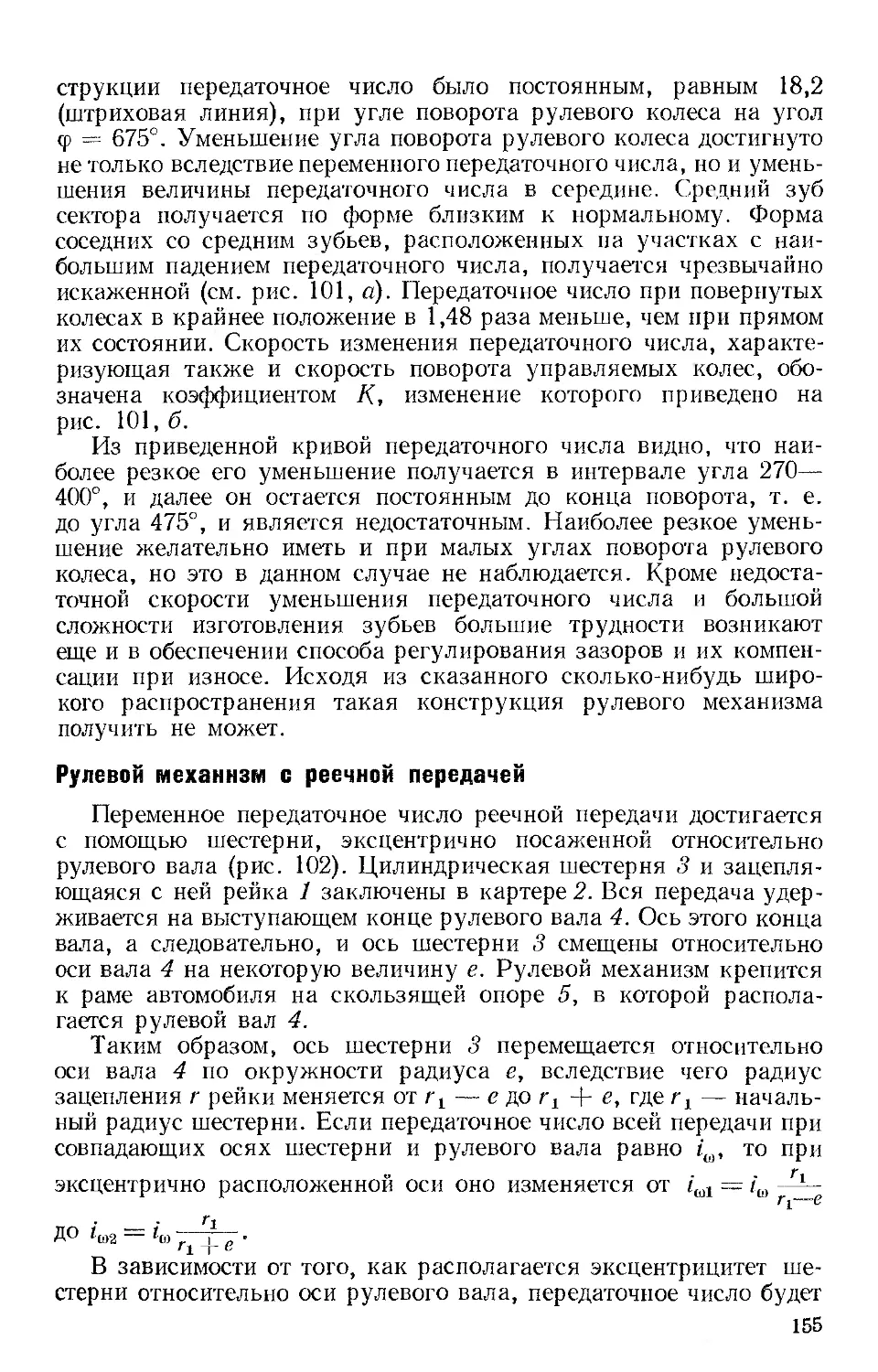




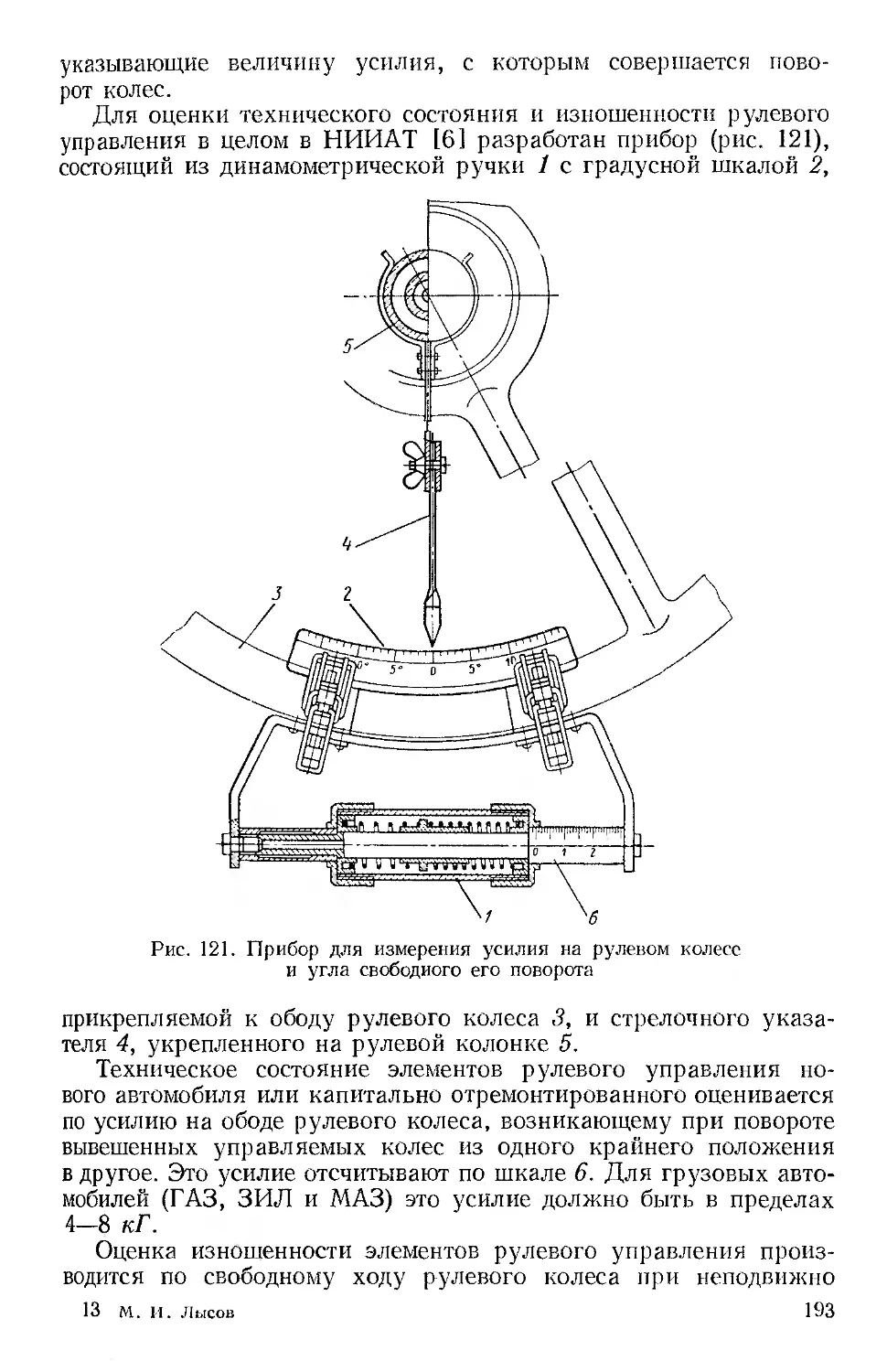
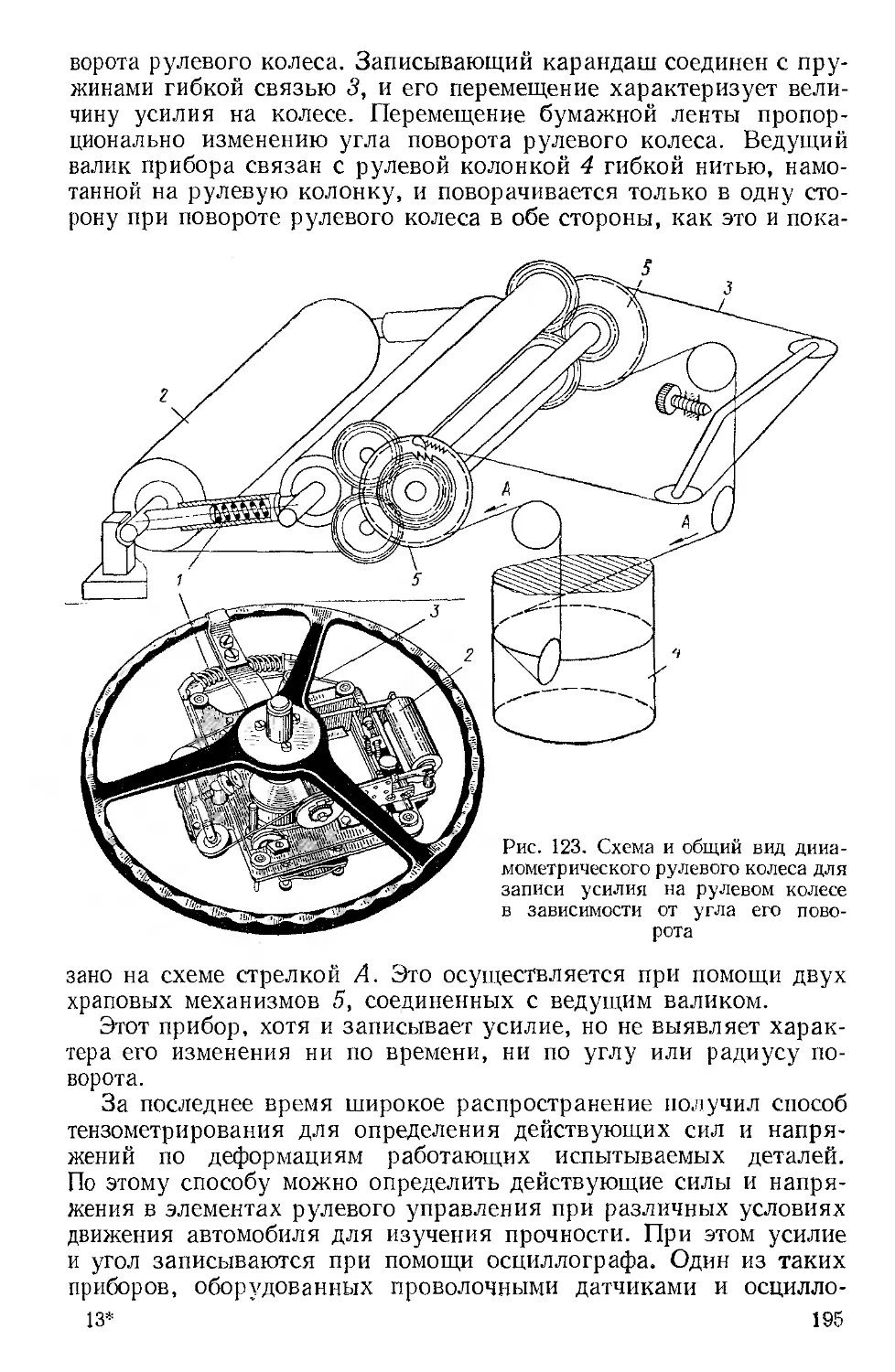
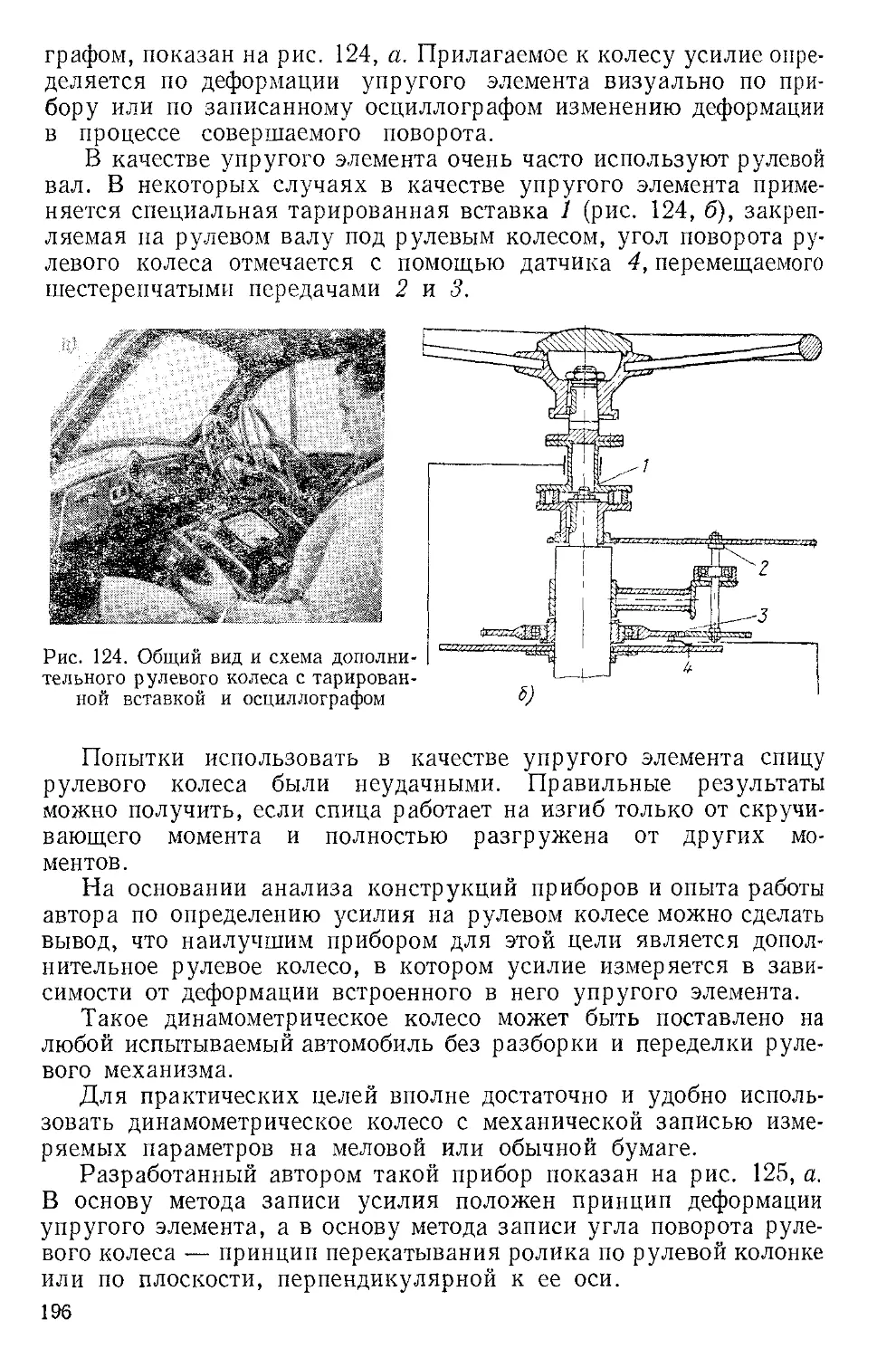
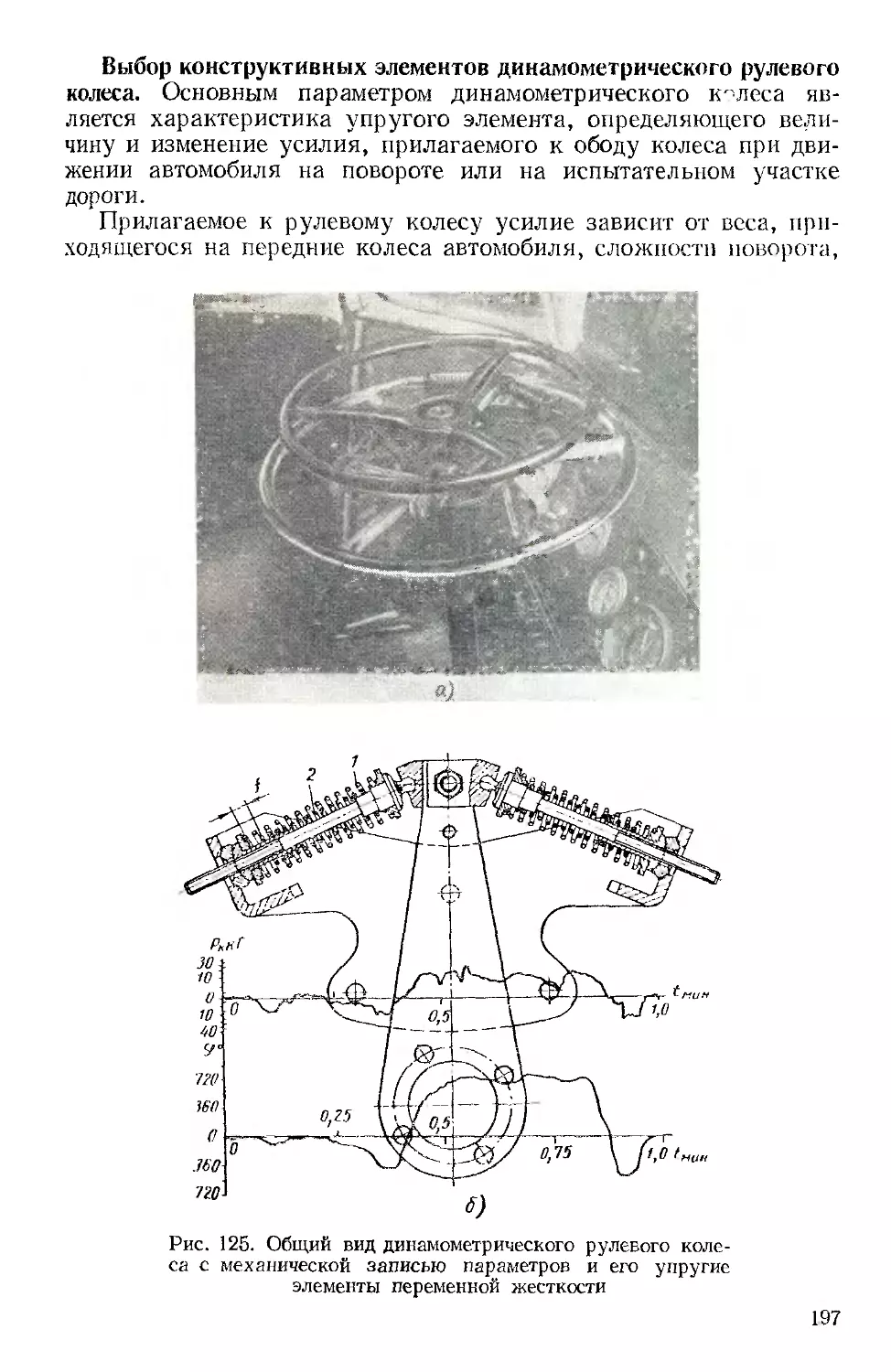
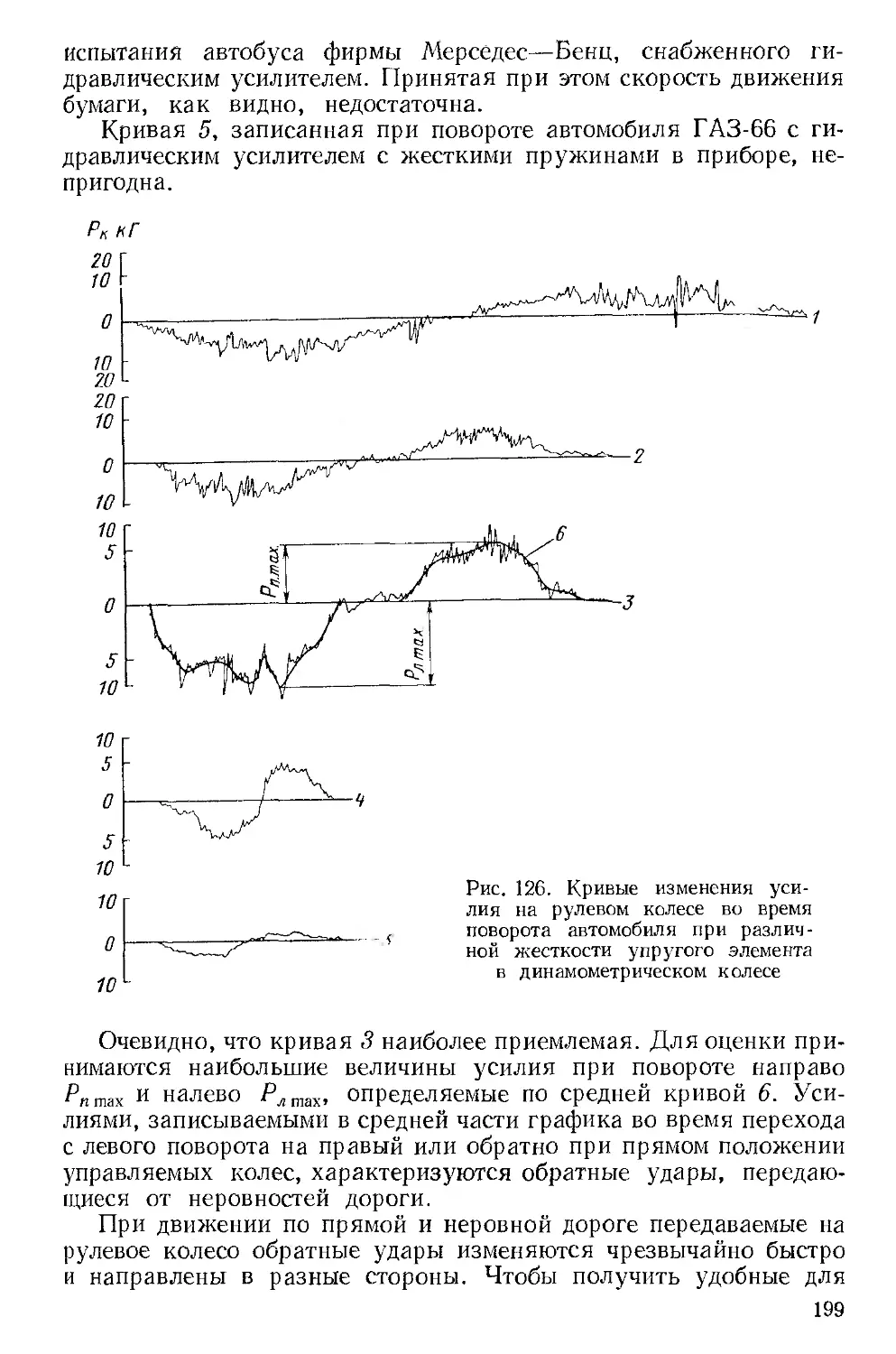


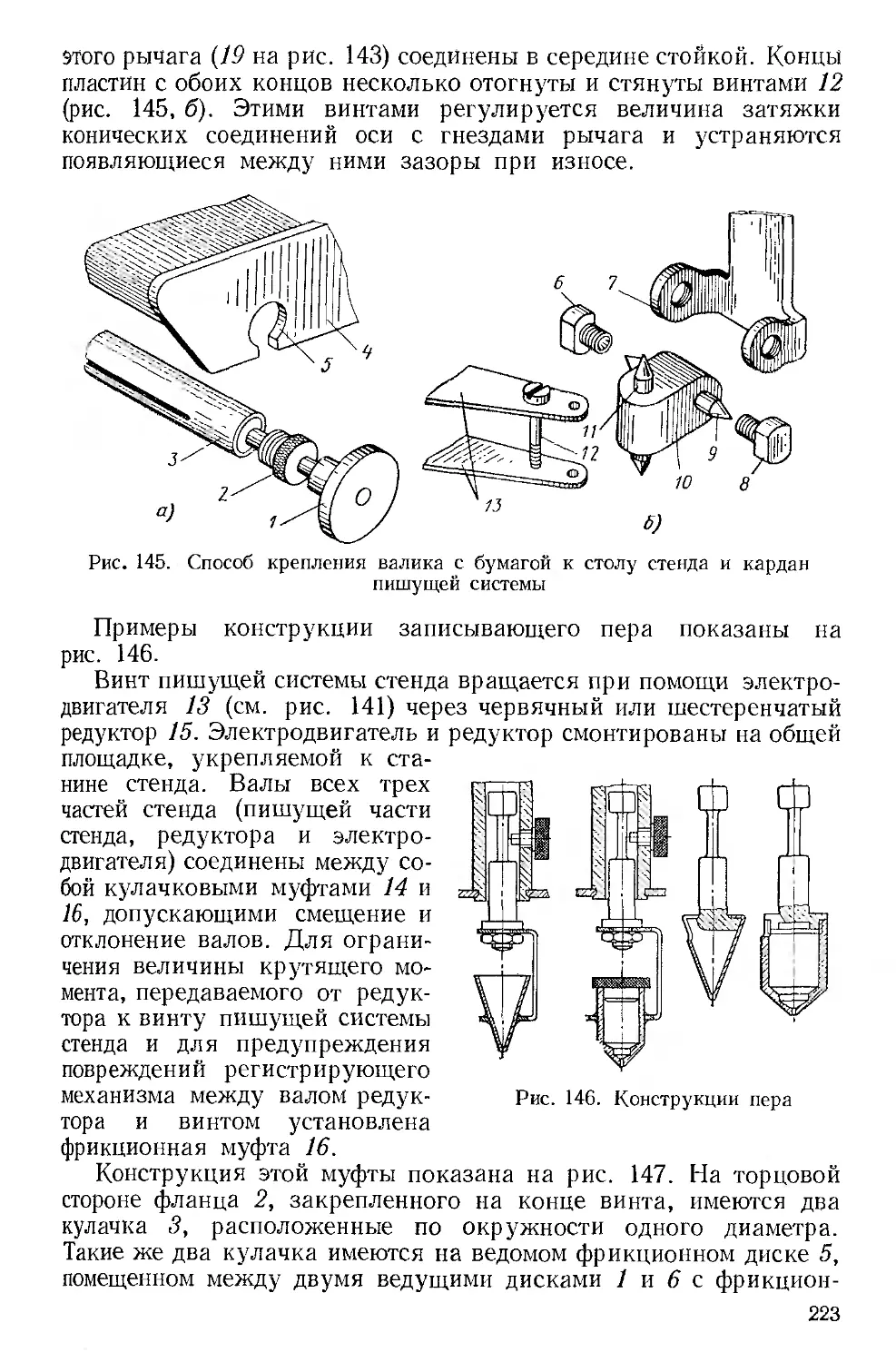





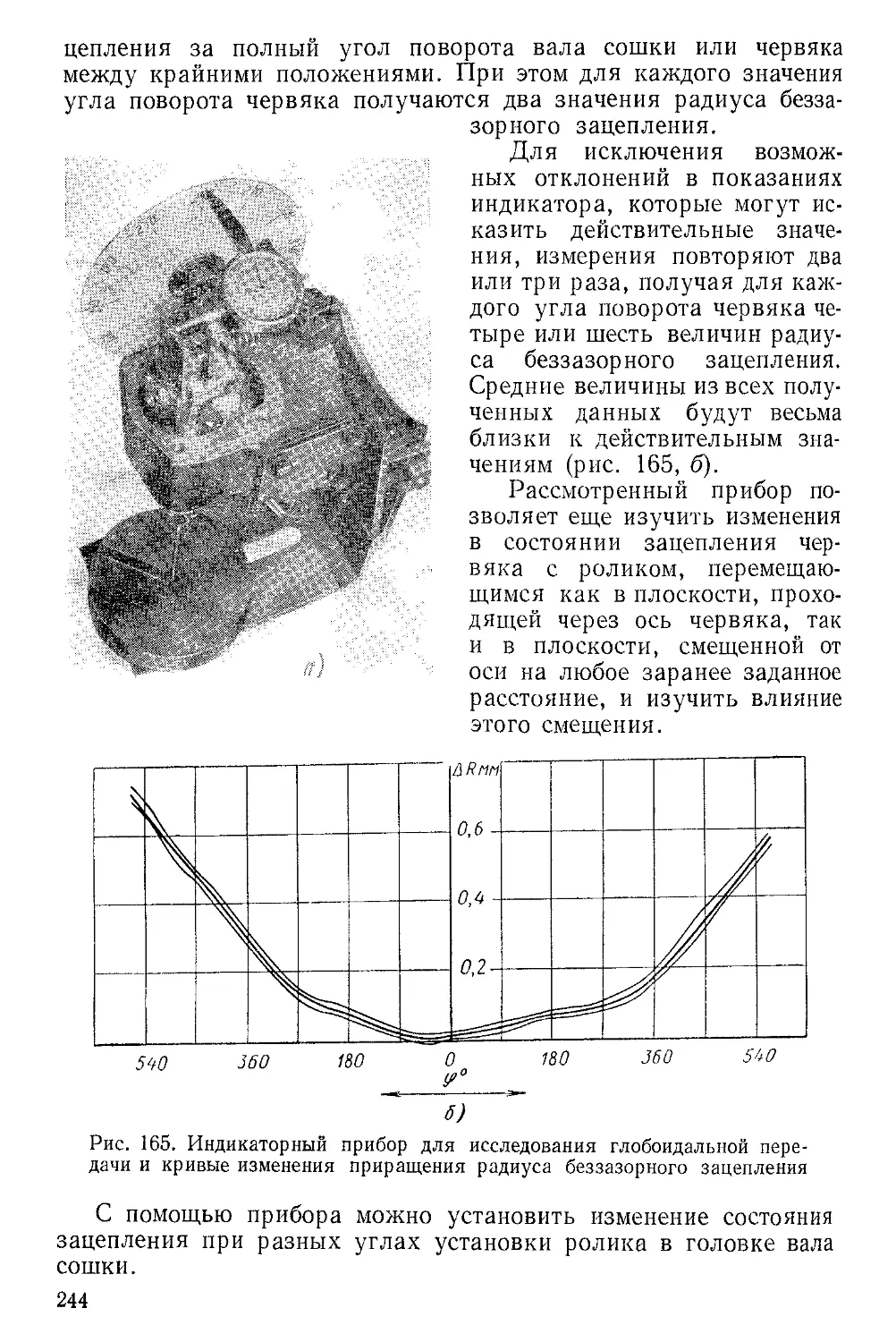
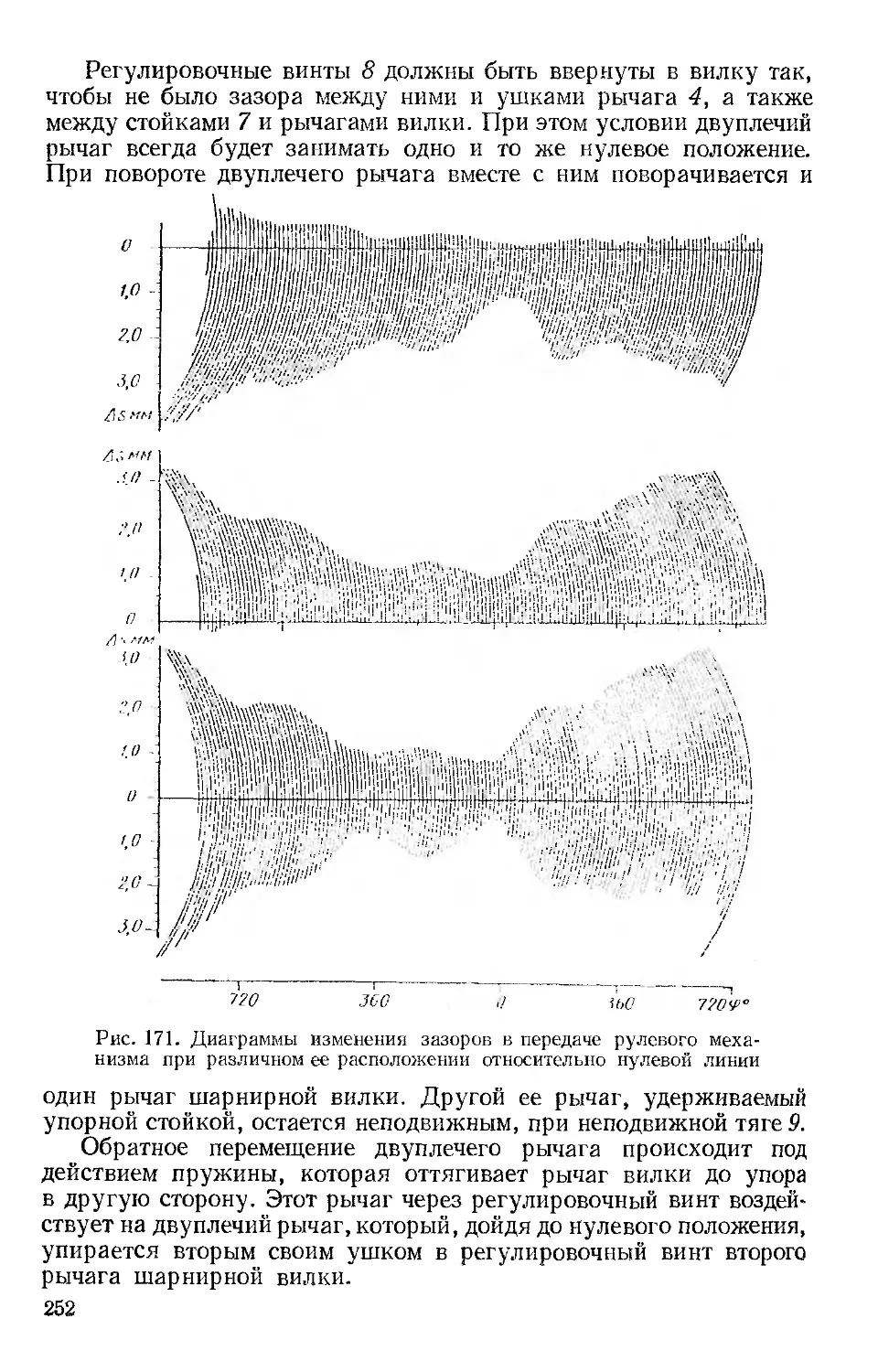



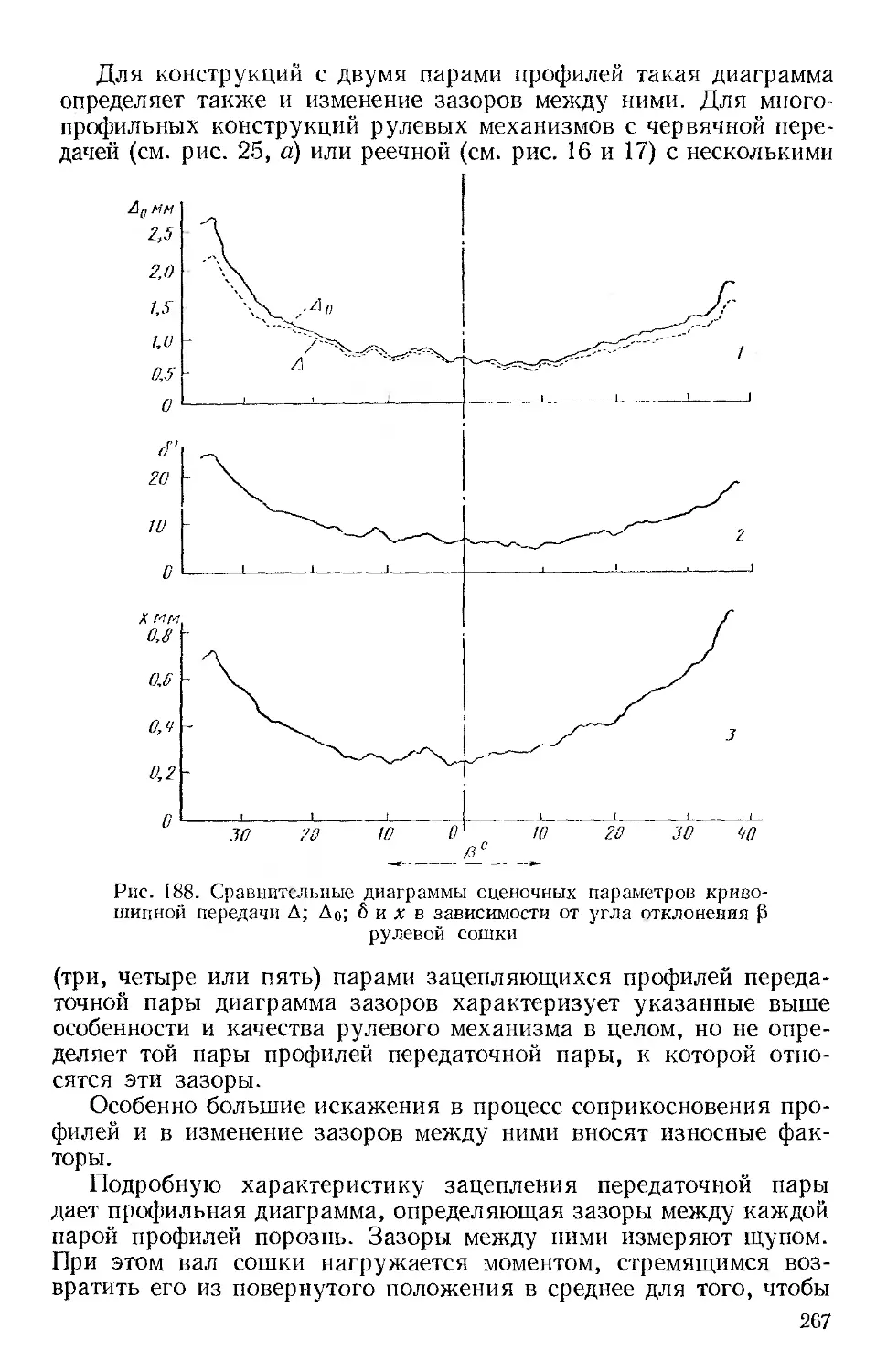
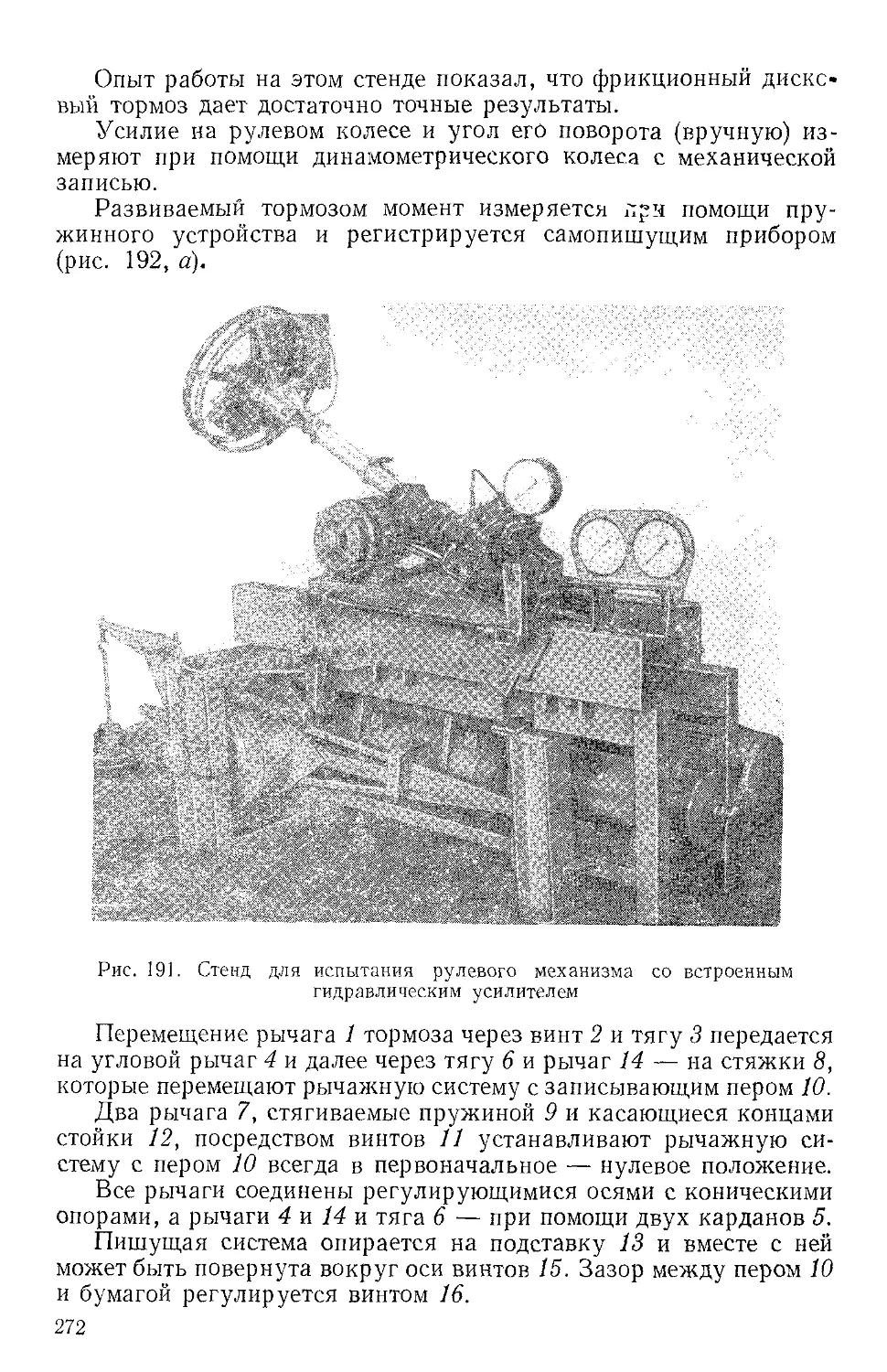
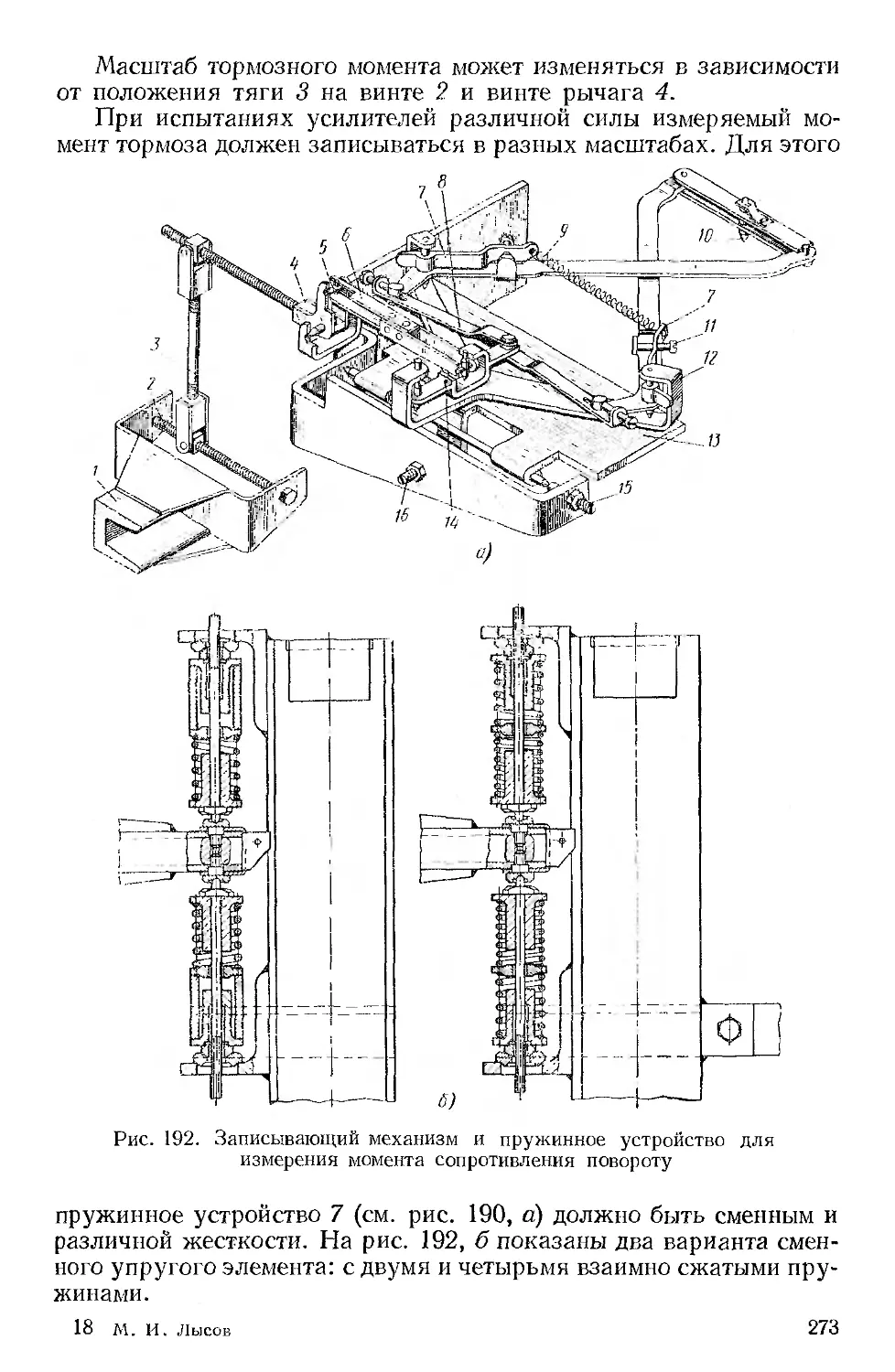



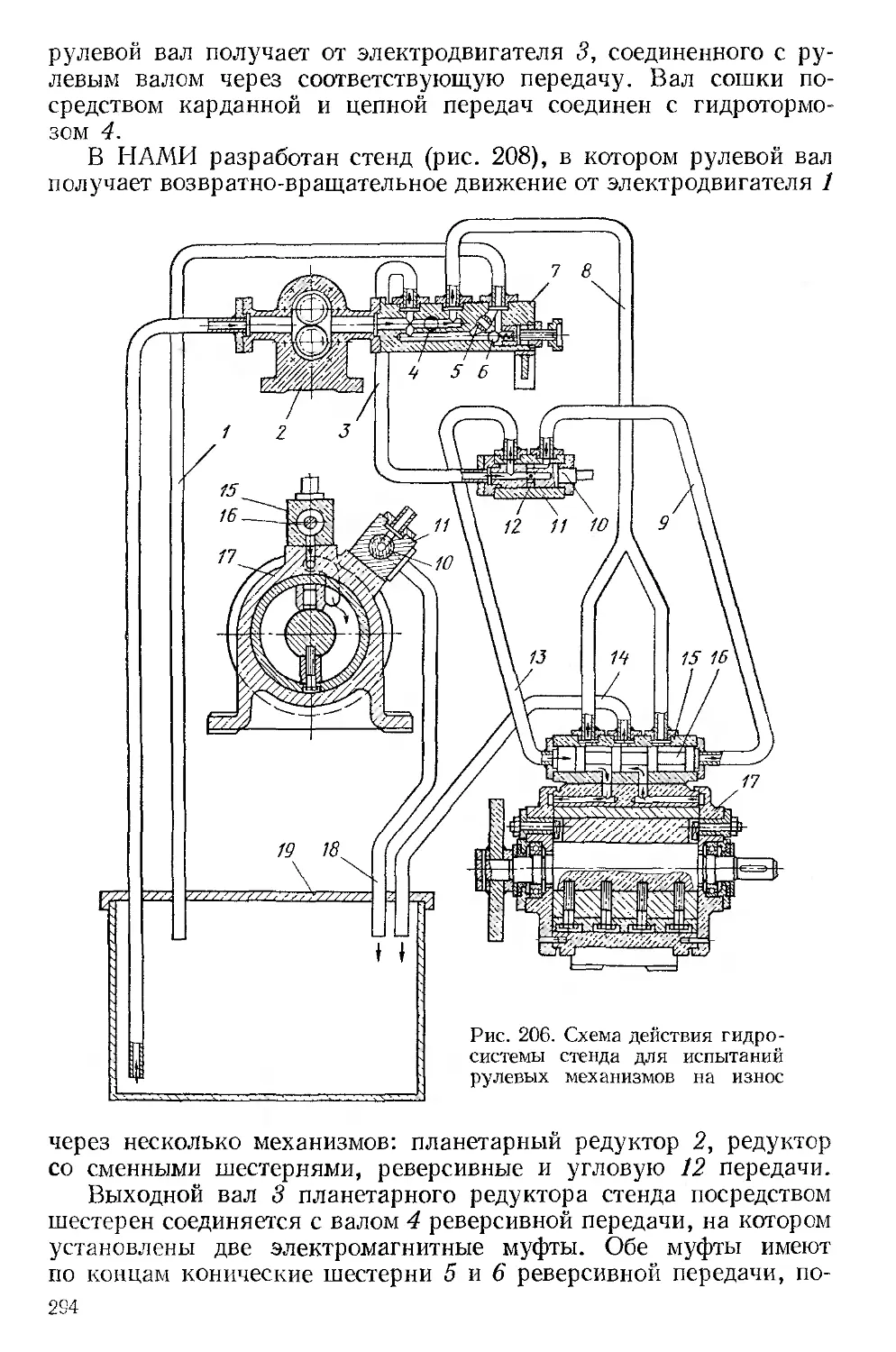
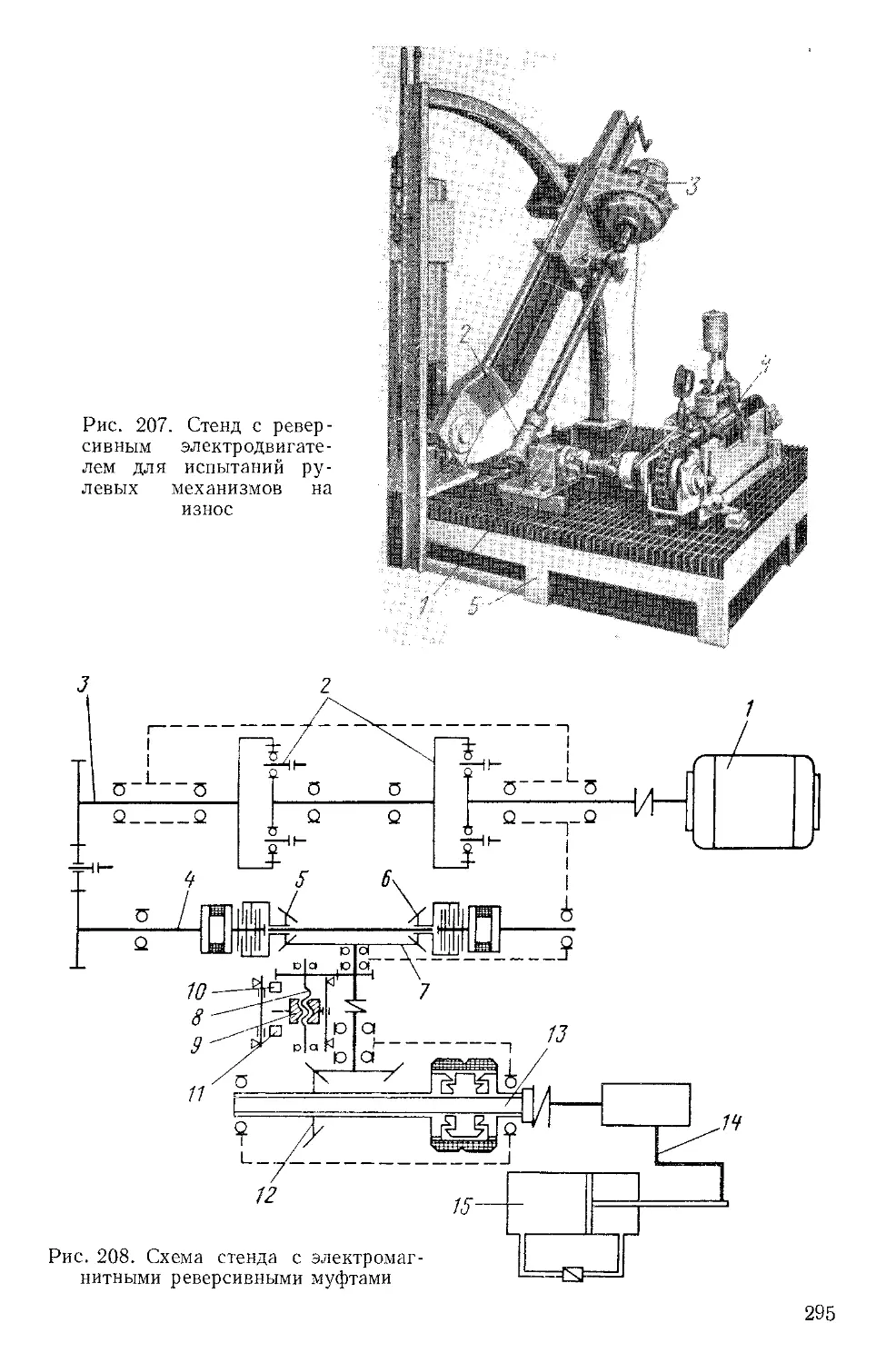


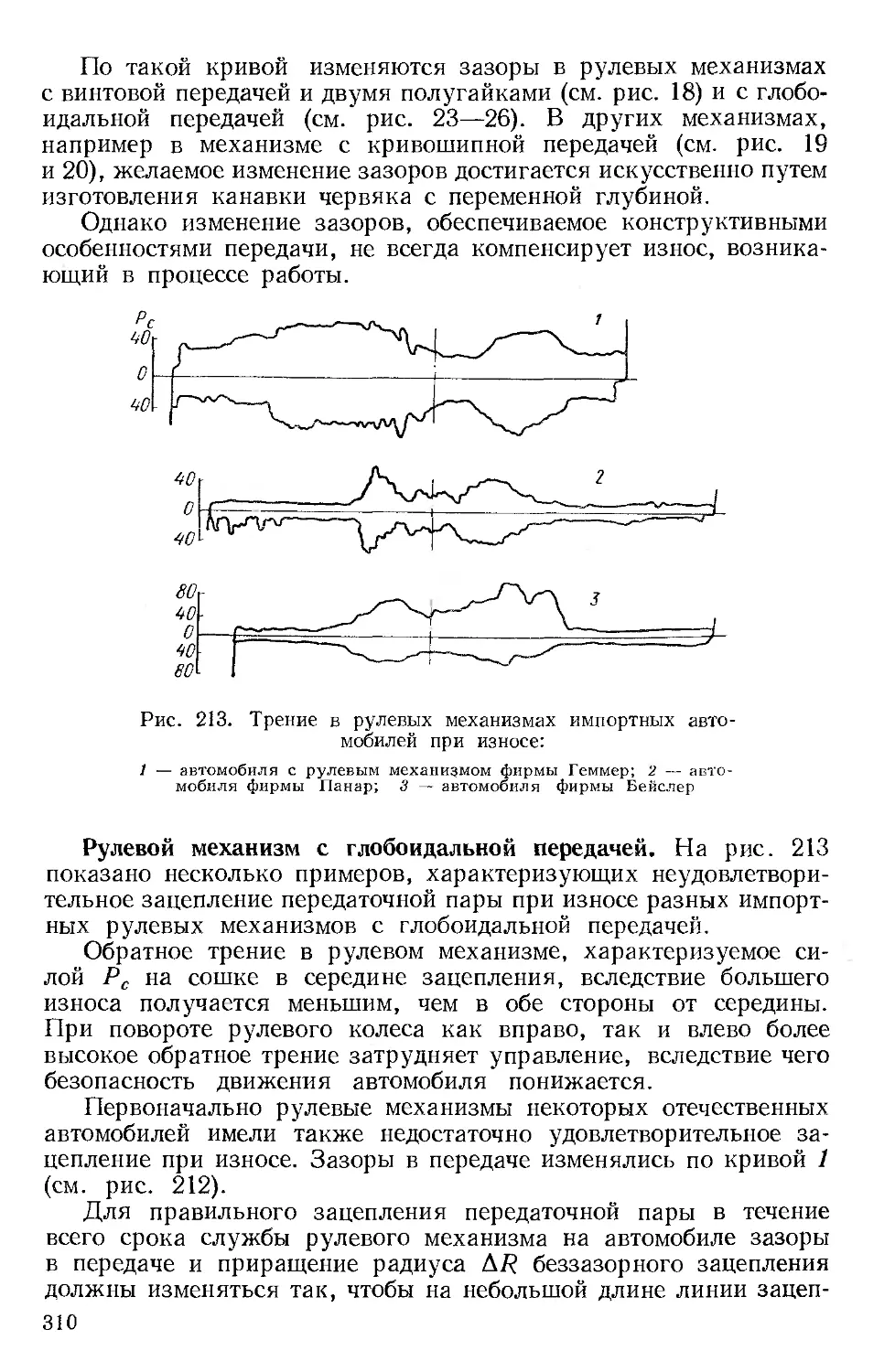
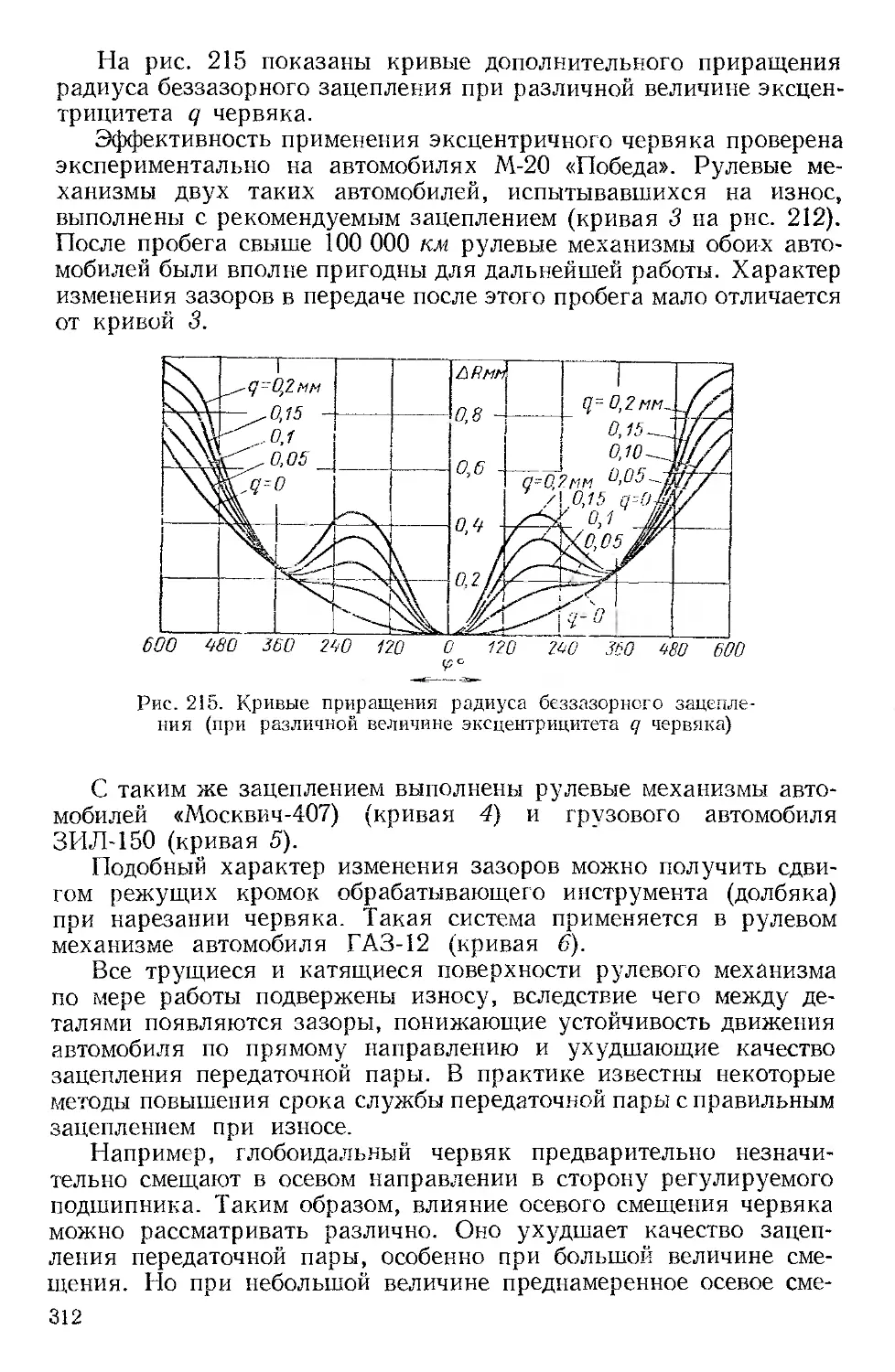







Текст
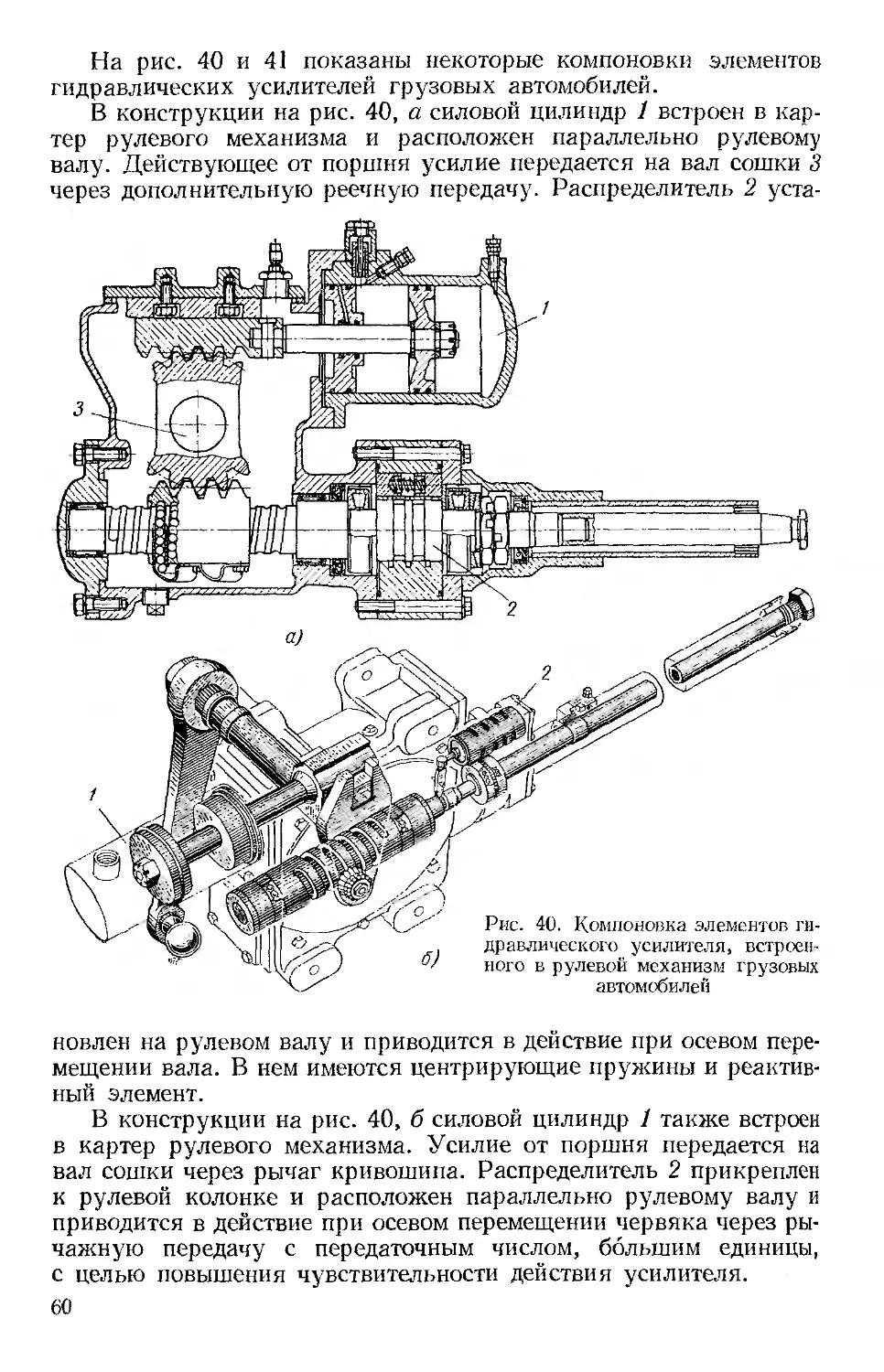
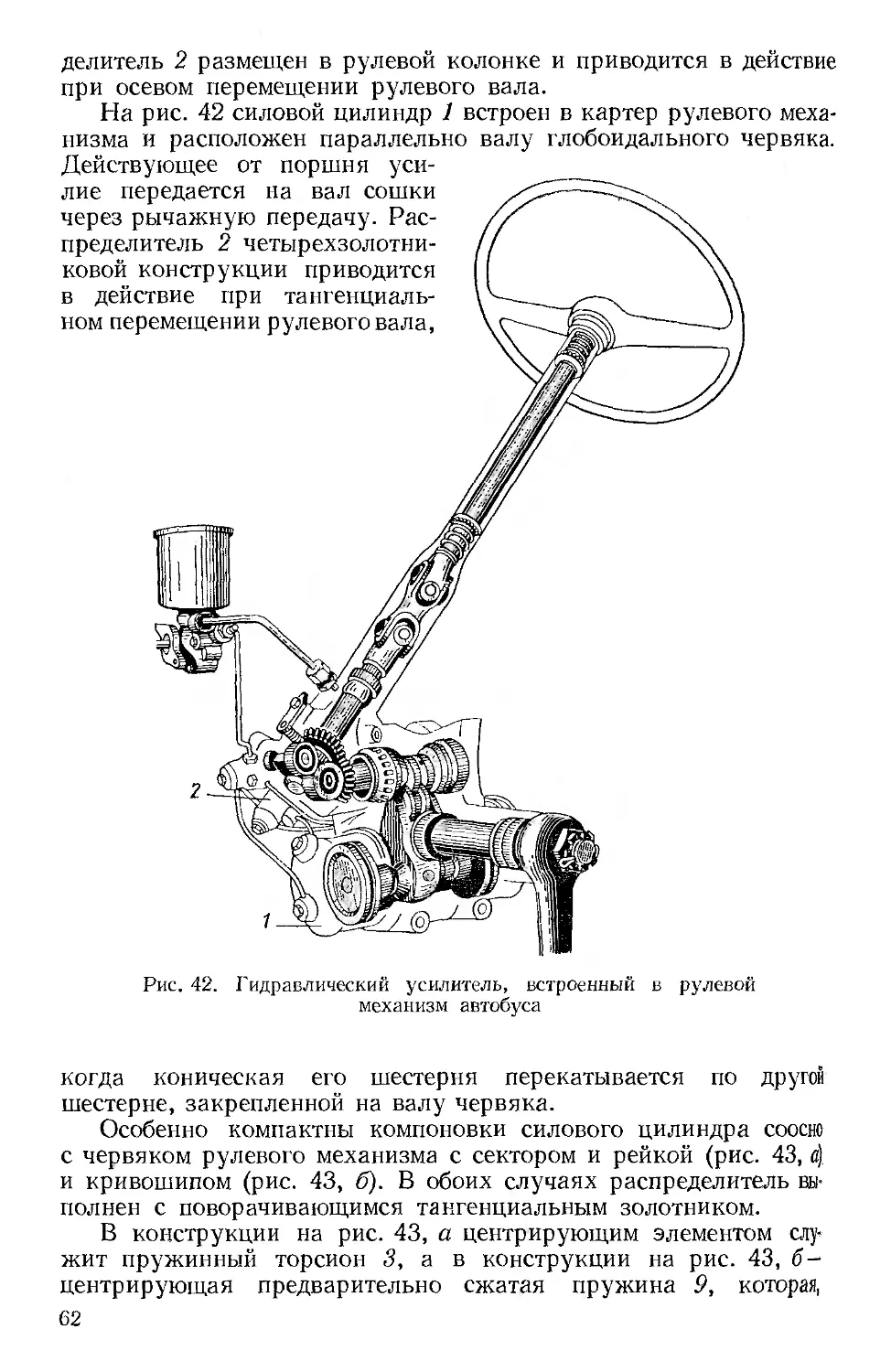
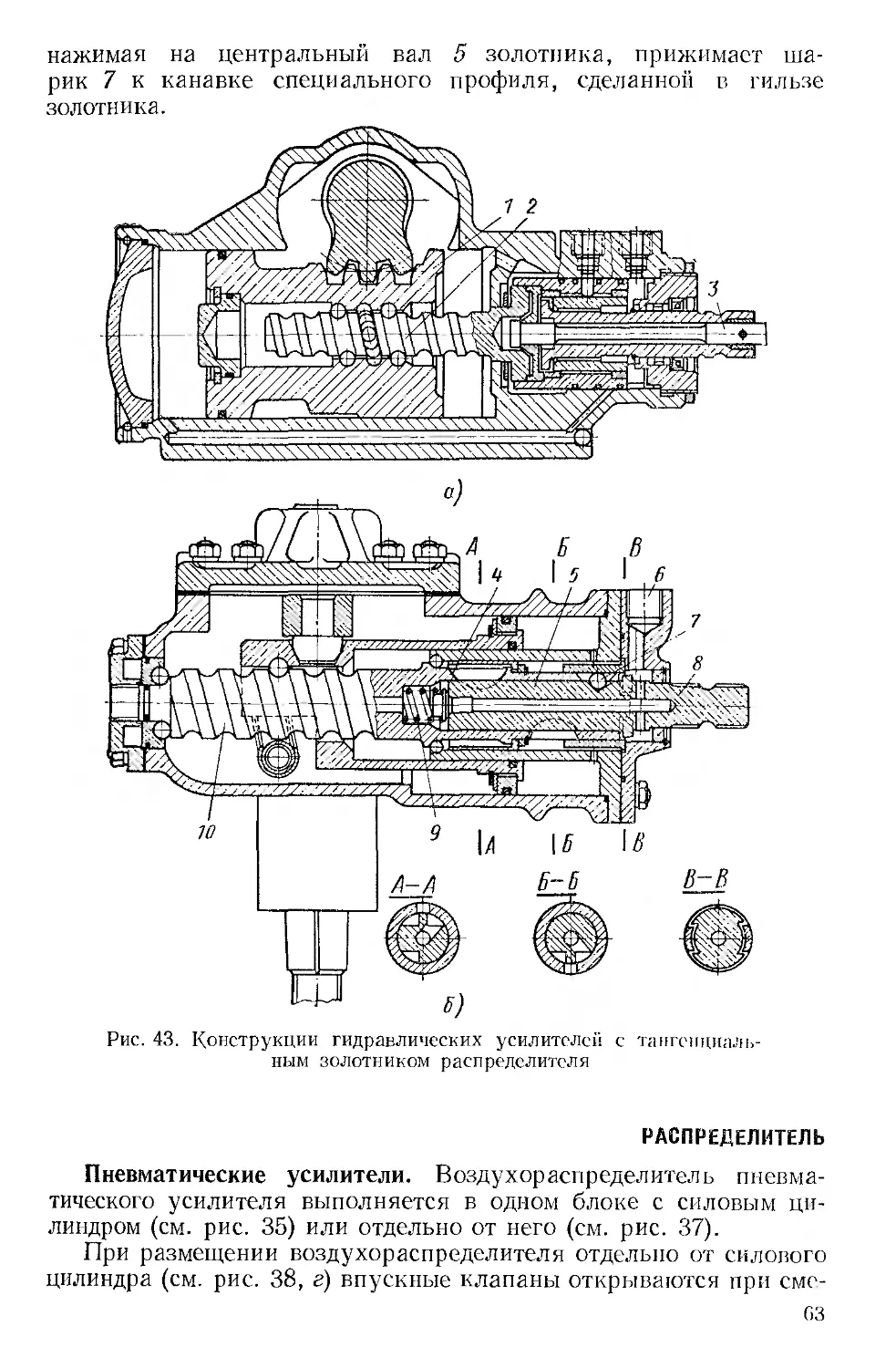
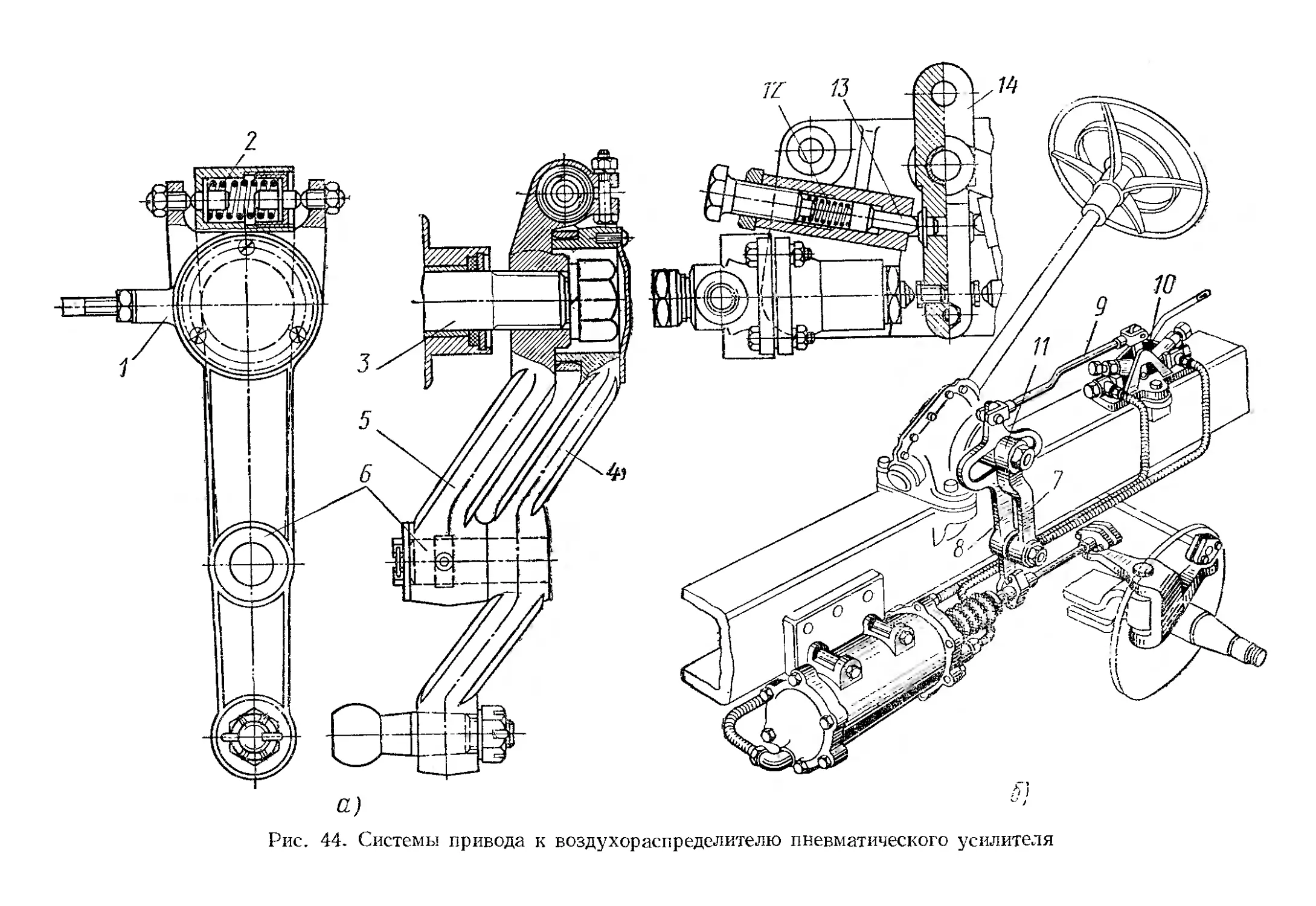
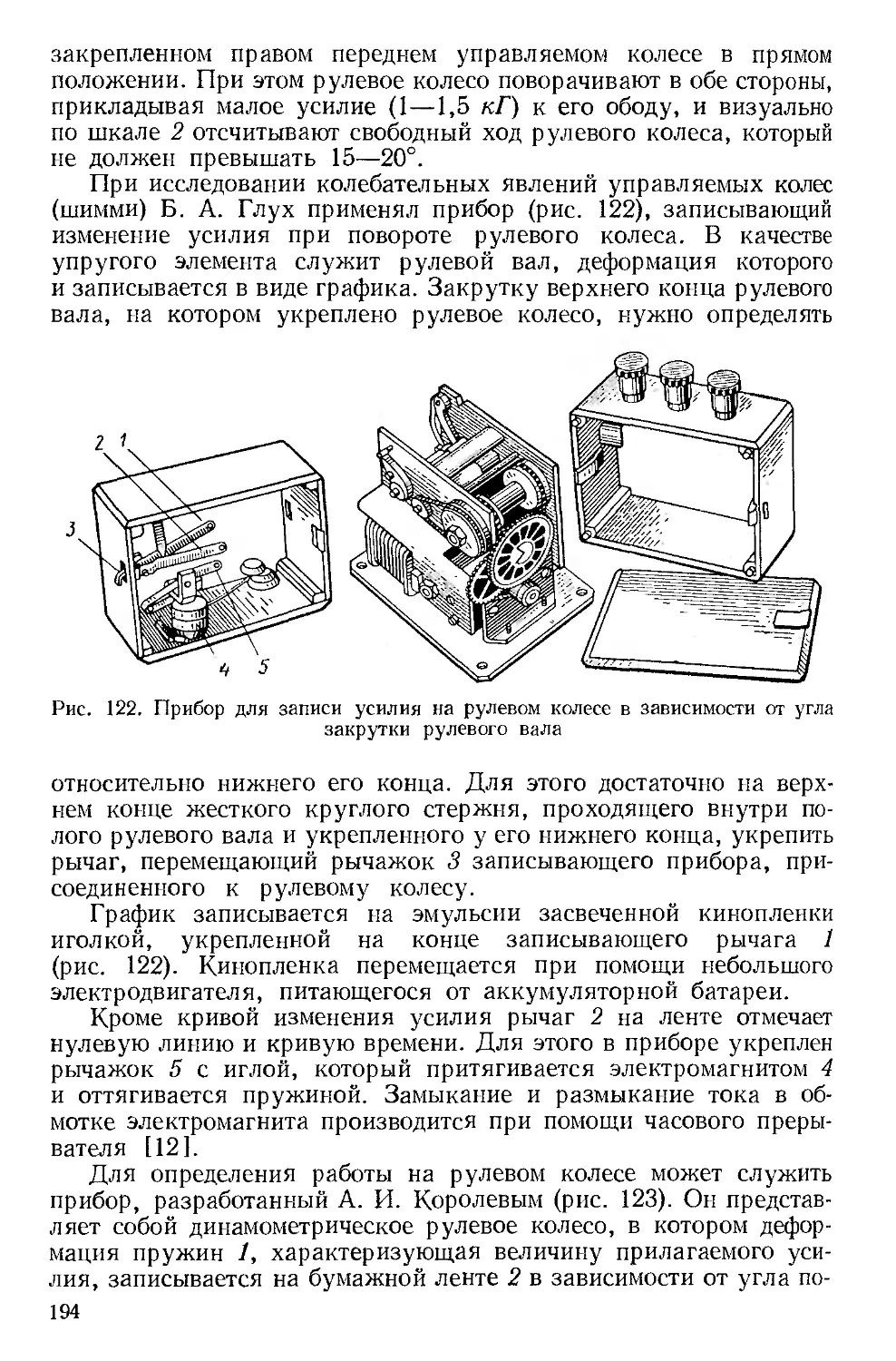
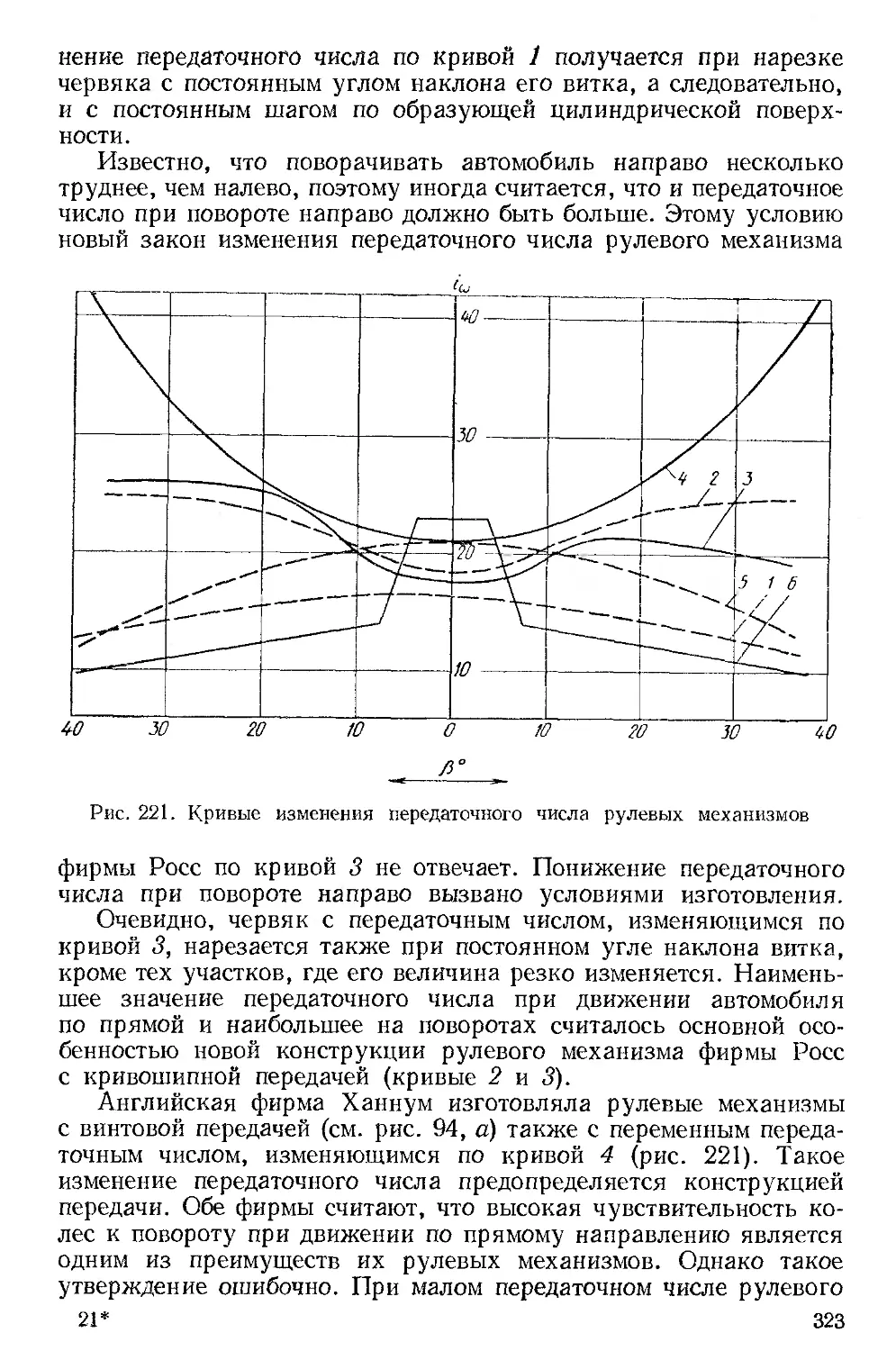
РУЛЕВЫЕ
УПРАВЛЕНИЯ
АВТОМОБИЛЕЙ
М.И.ЛЫСОВ
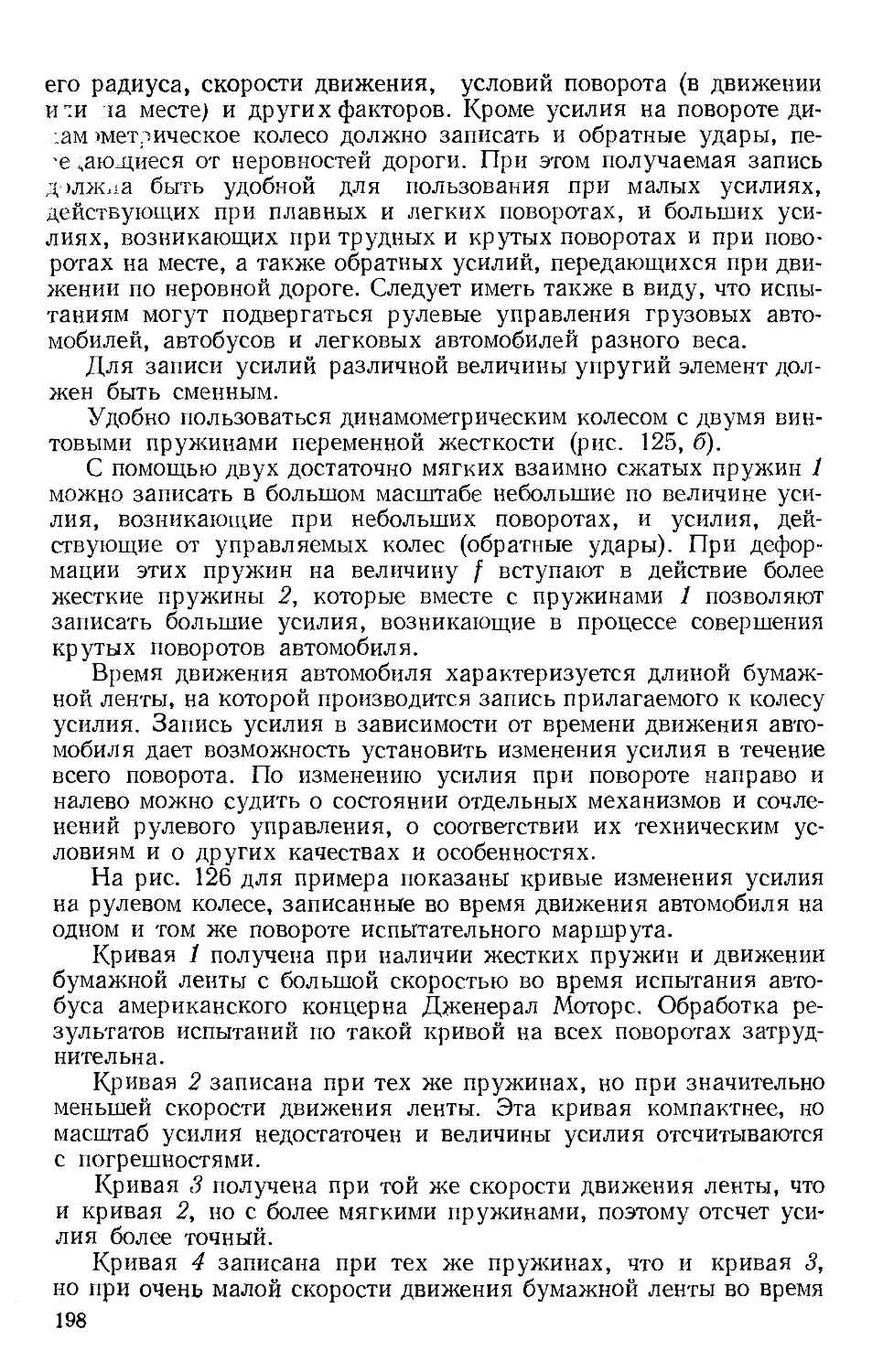
Л88
УДК 629.014
Лысов М. И. Рулевые управления автомобилей.
М., «Машиностроение» 1972, 000 с.
В книге дан краткий обзор основных конструкций
механизмов рулевого управления. Приведены све-
дения по теории и расчету рулевых механизмов и уси-
лителей, установлены параметры и критерии для их
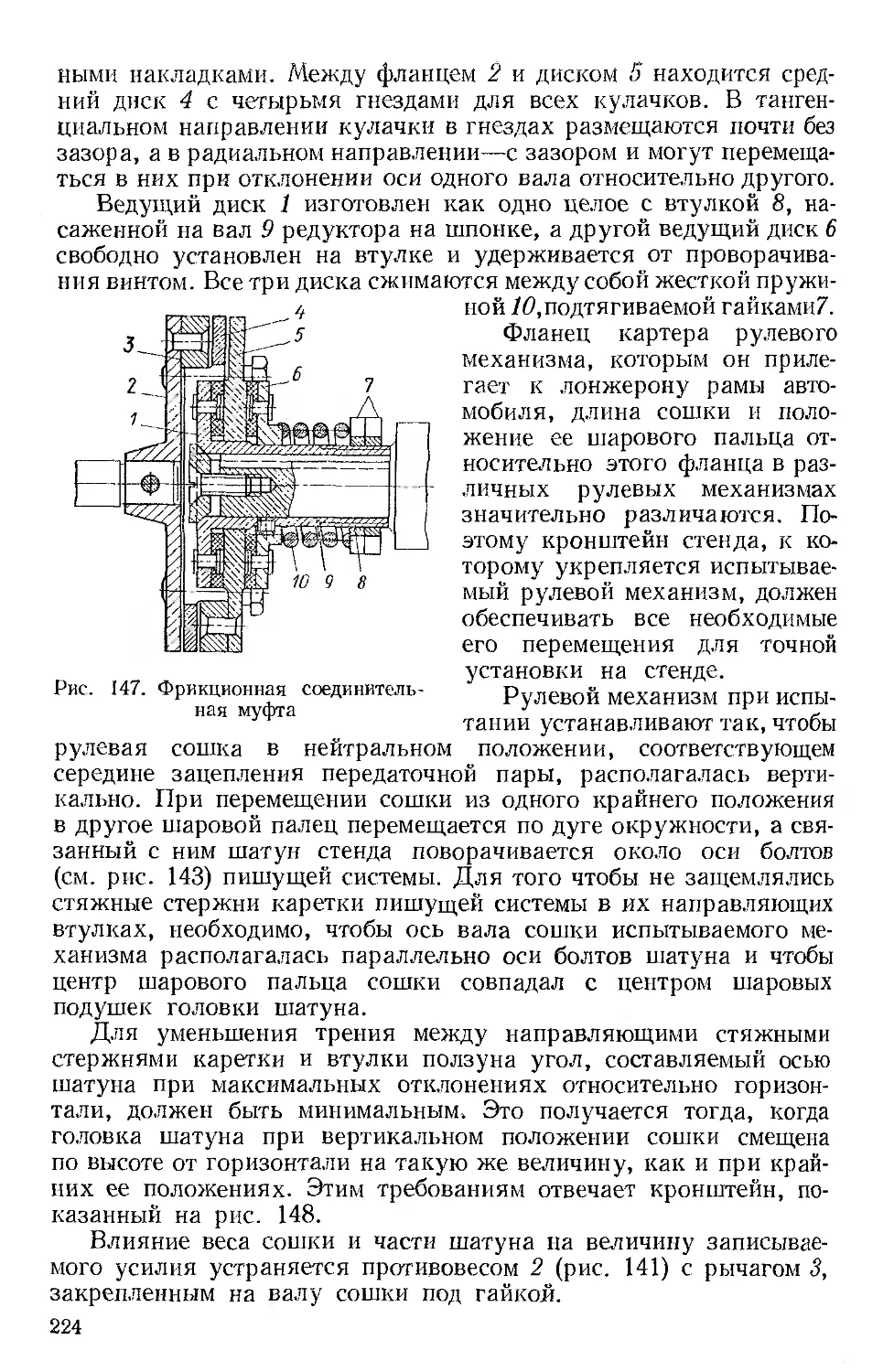
оценки. Дано описание экспериментально-исследова-
тельского оборудования и приведены результаты испы-
таний рулевого управления, рулевых механизмов и
усилителей и результаты теоретических исследований
конструкций.
На основе выполненных исследований даны реко-
мендации по выбору размеров важнейших деталей ме-
ханизмов рулевого управления.
Книга предназначена для инженерно-технических
работников автомобильной промышленности и транс-
порта. Табл. 10, илл. 233, библ. 18 назв.
Рецензент инж. Б. Н. Попов
Редактор д-р техн, наук В. В. Осепчугов
226—72
3-18-3
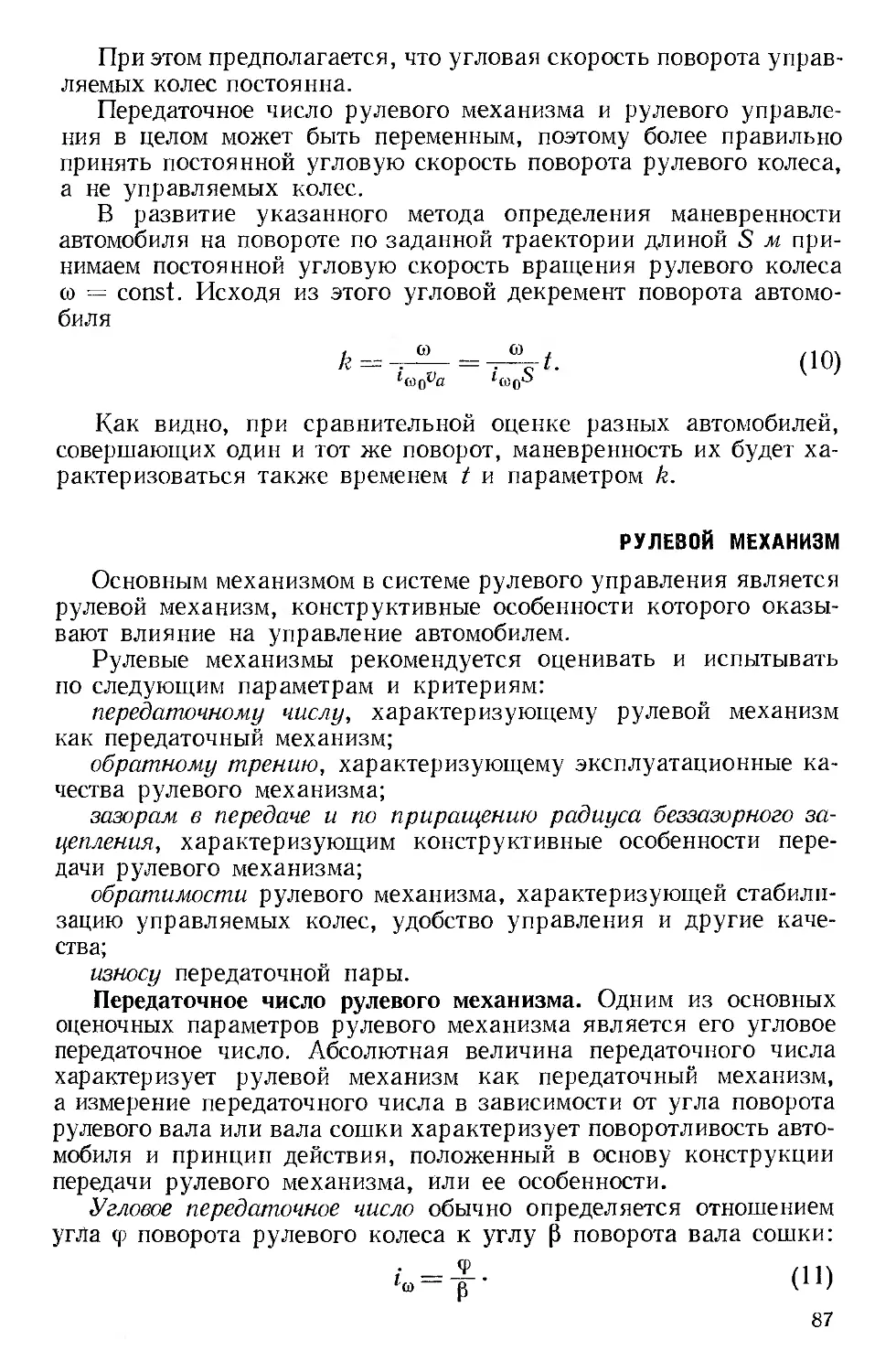
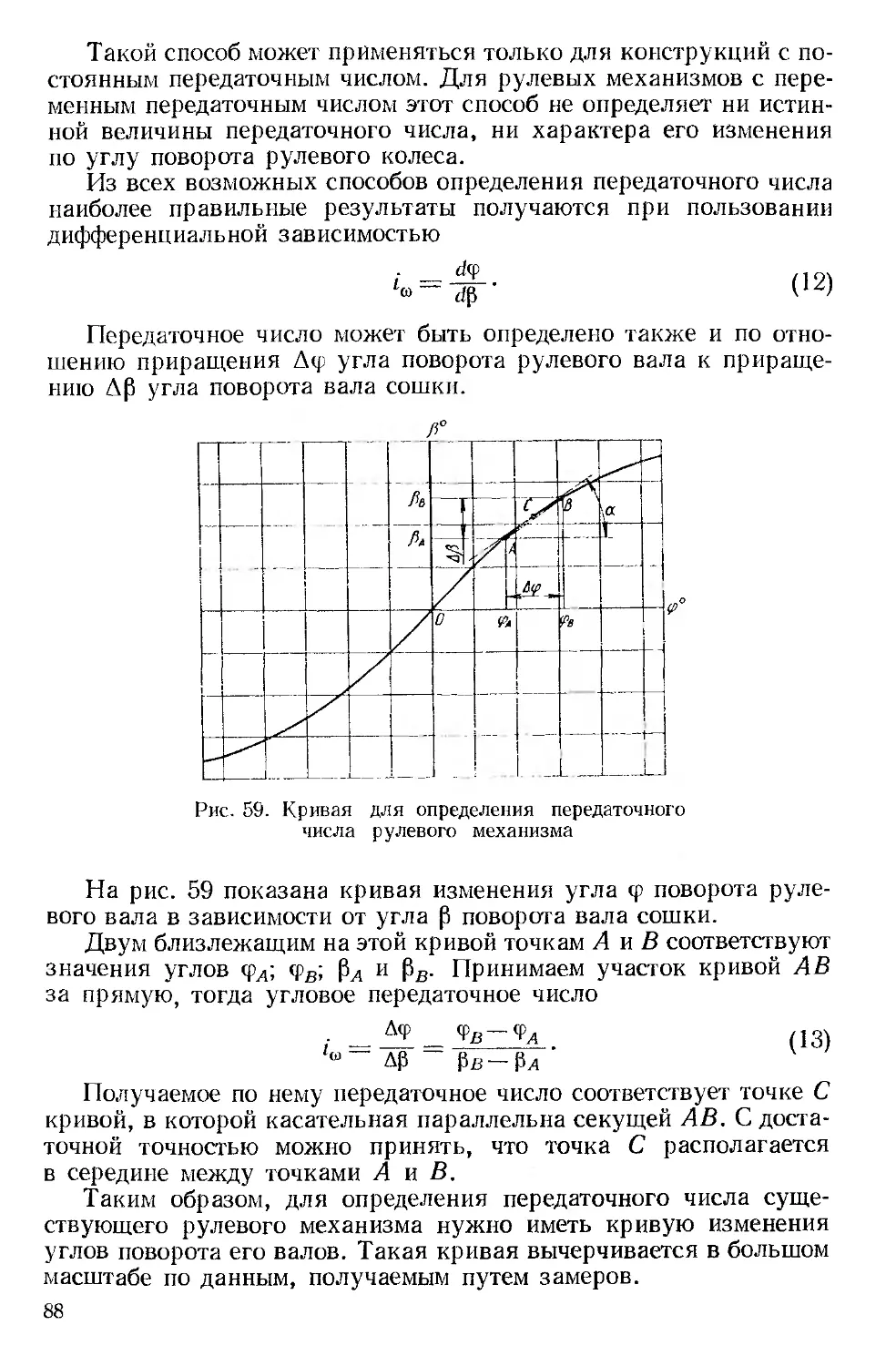
ПРЕДИСЛОВИЕ
Во время движения автомобиля водитель управляет сцепле-
нием, коробкой передач, системой тормозов и сигнализацией
(звуковой и световой) периодически, а рулевым колесом непре-
рывно. Водитель должен постоянно и внимательно наблюдать
за дорогой и приводить в действие рулевое управление, что свя-
зано с затратой физической силы. Таким образом, наиболее
сложным и утомительным видом управления является рулевое.
В отношении безопасности движения автомобиля рулевое управле-
ние — один из наиболее ответственных механизмов.
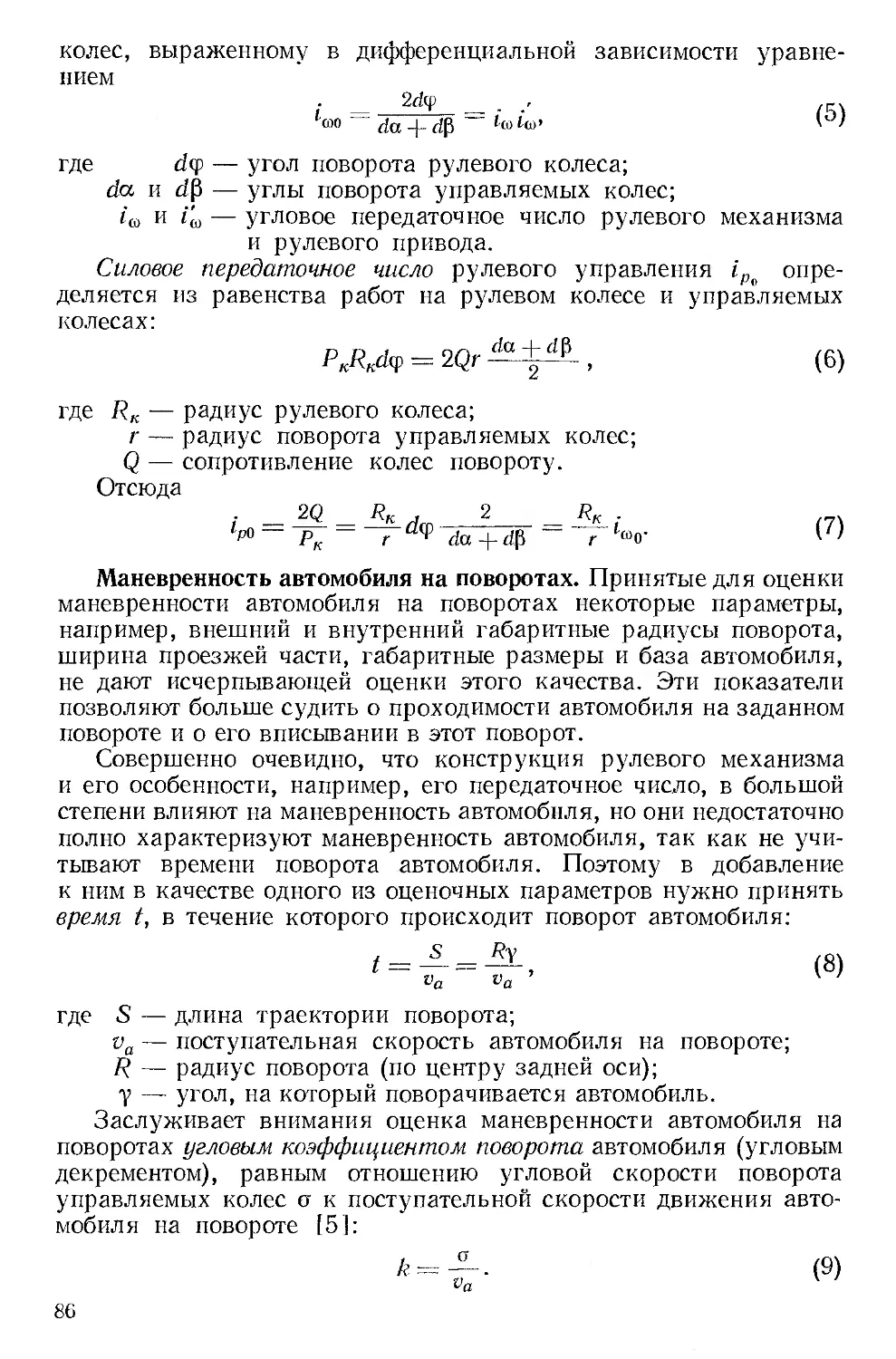
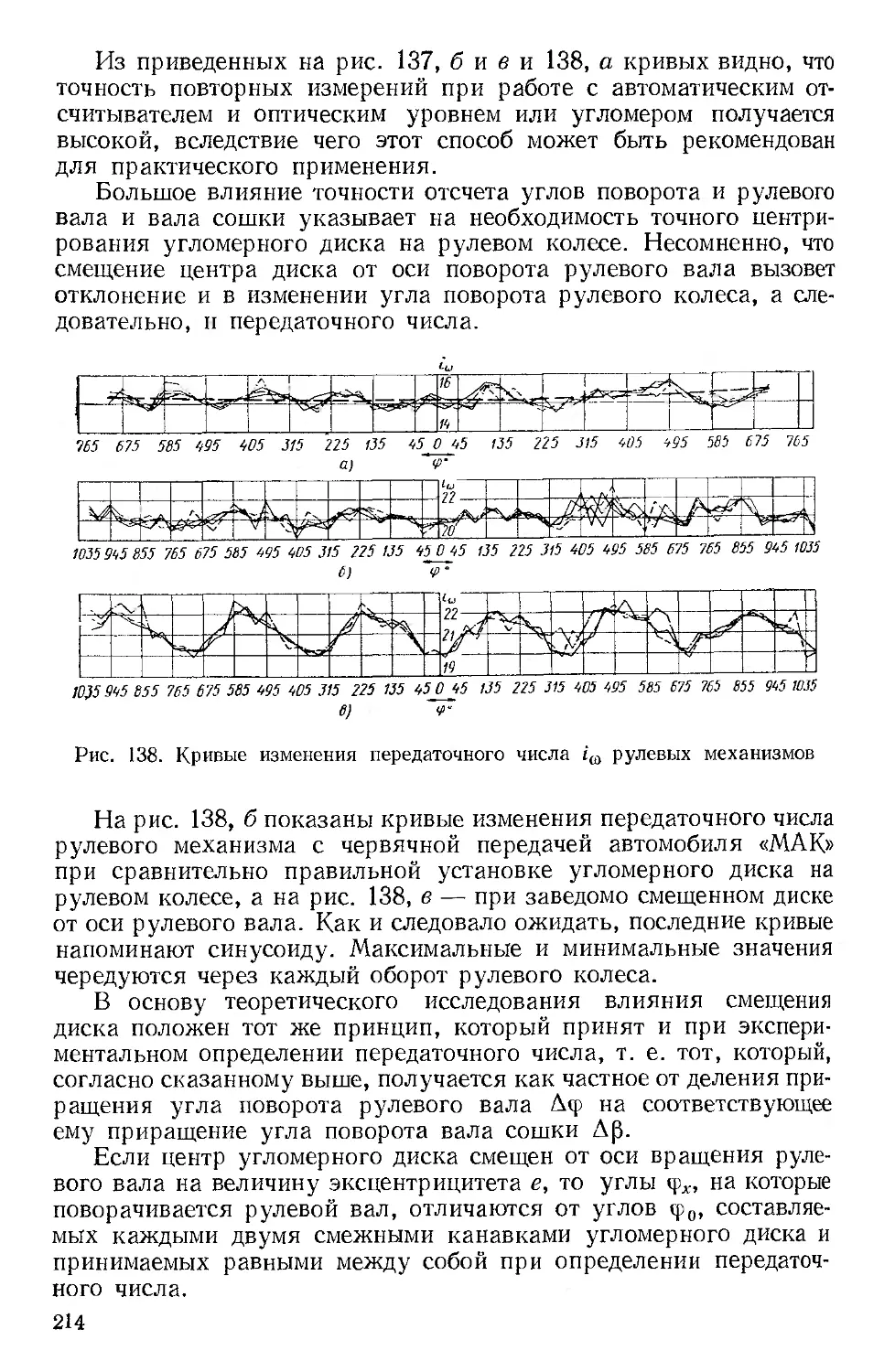
Легкость управления, правильность и точность поворота
колес, способность возвращаться в исходное положение и сохра-
нять заданное направление движения автомобиля, минимальная
передача обратных ударов на рулевое колесо, полная надежность
механизмов рулевого управления в работе, долговечность и без-
отказность действия в течение всего срока службы автомобиля,
удобство в эксплуатации — таковы основные требования, кото-
рым должно отвечать рулевое управление.
Одним из радикальных решений вопроса облегчения рулевого
управления грузовых автомобилей большой грузоподъемности,
многоместных автобусов и троллейбусов является применение
усилителей.
Это подтверждается значительным количеством конструкций
усилителей и сравнительно большим их распространением на
автомобилях различных типов.
Изучаемые вопросы по рулевому управлению рассматриваются
в данной книге в следующих направлениях.
1. Разработка методов расчета и установление связи между
основными конструктивными параметрами рулевых механизмов
и усилителей и эксплуатационными качествами автомобиля.
2. Теоретические иссследования происходящего рабочего про-
цесса в механизмах рулевого управления.
3. Экспериментальные исследования влияния конструктивных,
производственных и других факторов на определяемые пара-
метры и происходящие рабочие процессы в механизмах рулевого
управления.
Эти исследования носят специфический характер, так как
не основываются на уже разработанных положениях, не служат
контрольными испытаниями рулевых механизмов и их усилителей
на сколько-нибудь стандартном оборудовании, а являются но-
1* 3
вымн вопросами как по методике выполнения, так и по использу-
емому оборудованию.
В соответствии с постановкой исследовательских вопросов
необходимо было разработать оценочные параметры и критерии,
способы их определения, методику испытаний, а также скон-
струировать принципиально новое оборудование.
Разработка теории и расчета рулевых механизмов, а также
методов их оценки и испытаний имеет для промышленности боль-
шое значение. Хотя ио некоторым рассматриваемым в книге
вопросам нет еще исчерпывающих решений, тем не менее на осно-
вании проделанной работы автор предлагает новые оценочные
параметры и критерии для исследования рулевых механизмов
и усилителей пневматического и гидравлического типа. Разрабо-
танные методы экспериментального исследования позволили по-
лучить данные, подтверждающие справедливость теоретических
положений.
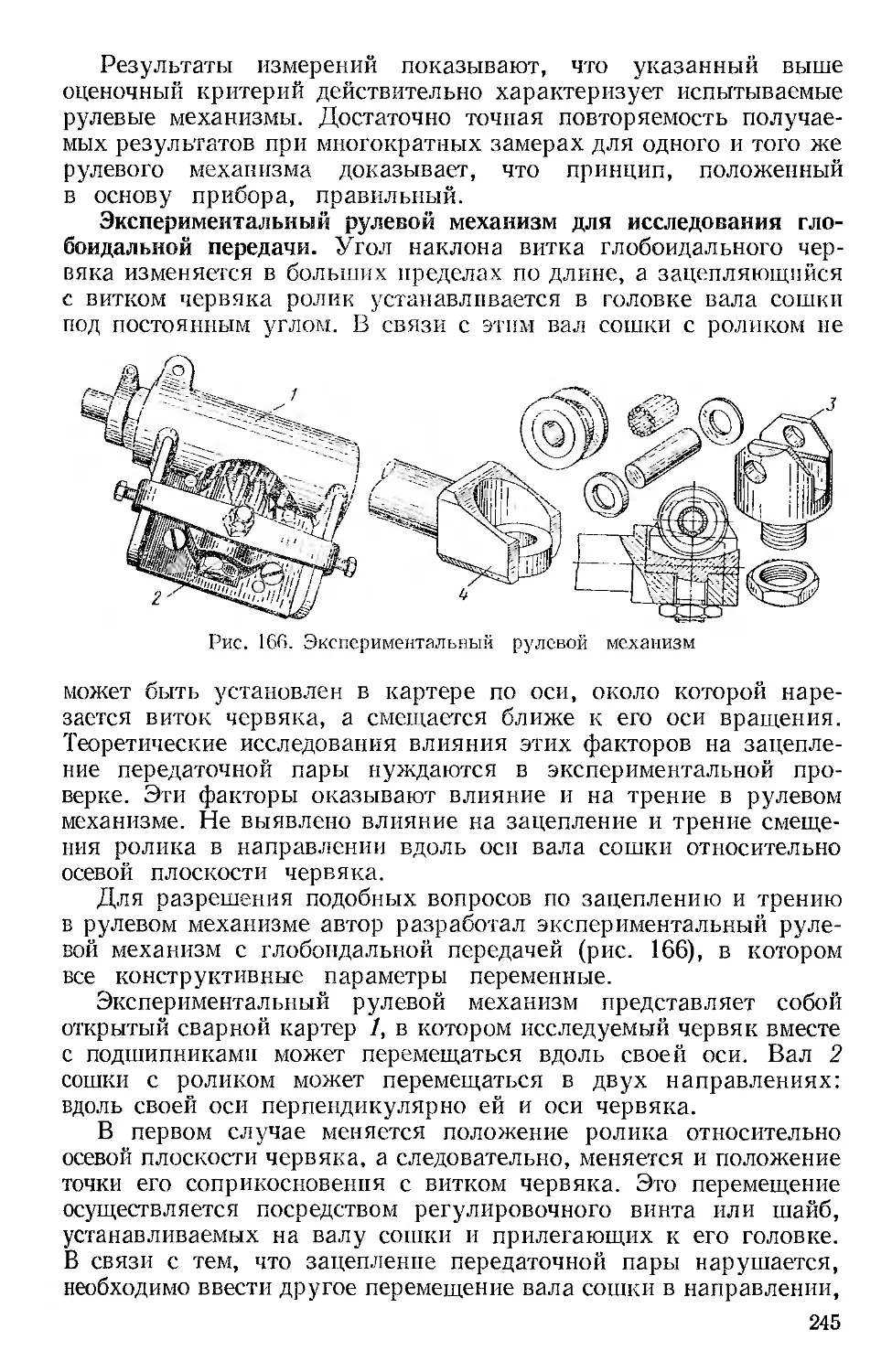
Глава I
НАЗНАЧЕНИЕ И КЛАССИФИКАЦИЯ
РУЛЕВОГО УПРАВЛЕНИЯ И ЕГО ЭЛЕМЕНТОВ
Рулевое управление автомобиля состоит из рулевого меха-
низма и рулевого привода.
Рулевым механизмом называют механизм, который позволяет
осуществить поворот колес с необходимым передаточным числом,
а рулевым приводом — систему тяг и рычагов, которые в сово-
купности с рулевым механизмом осуществляют поворот авто-
мобиля.
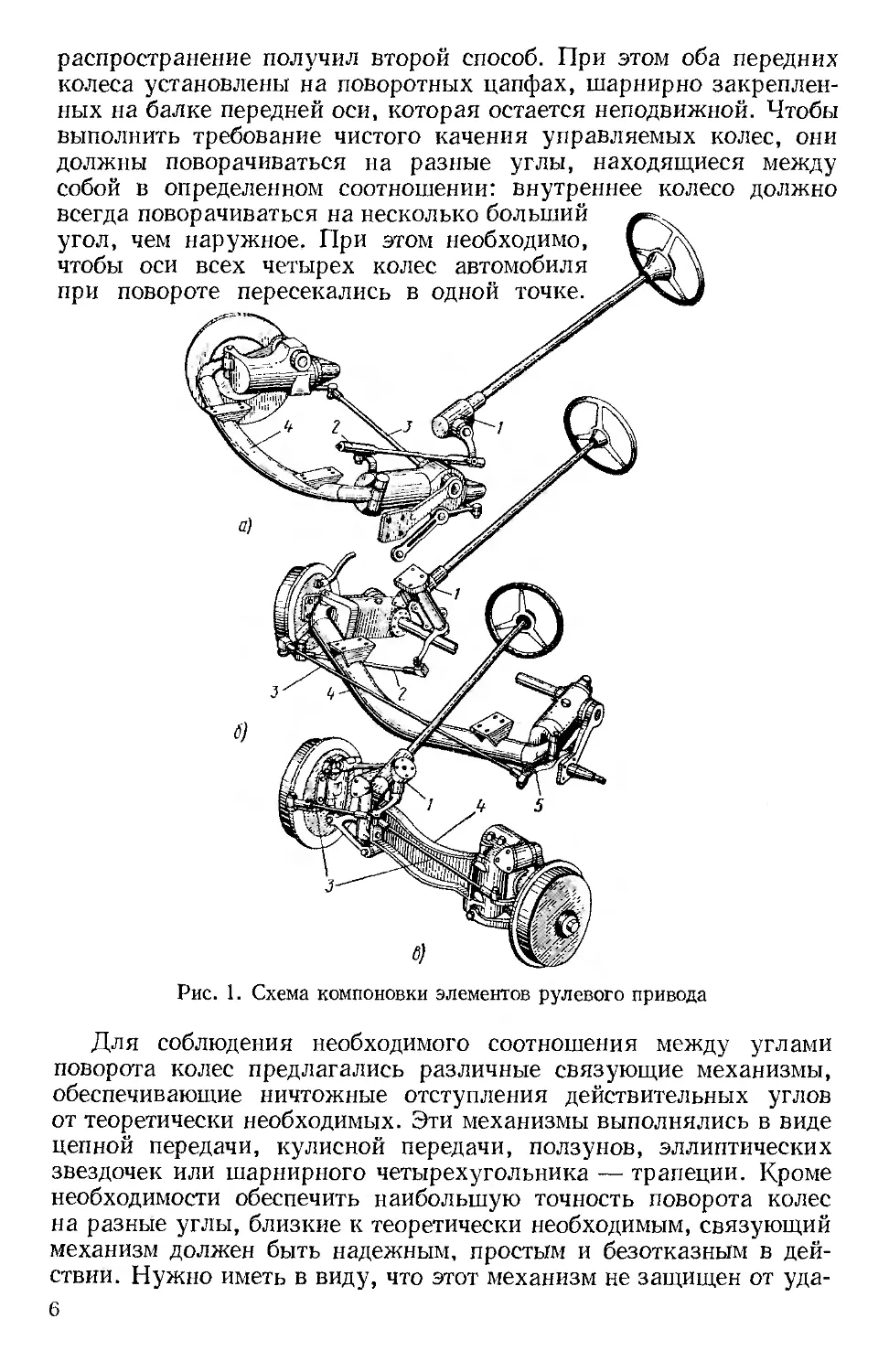
На рис. 1 показаны три схемы рулевого управления, в которых
рулевой механизм 1 посредством тяг 2 и 3 связан с колесами
автомобиля. Водитель изменяет направление движения автомо-
биля, повертывая колеса, которые принято называть управляе-
мыми. Управляемыми могут быть передние или задние колеса,
или те и другие вместе.
Основным недостатком автомобиля с задними управляемыми
колесами по сравнению с автомобилем, имеющим передние управ-
ляемые колеса, при всех прочих равных условиях поворота
является то, что отъехать от борта тротуара или стены он может
только задним ходом или при очень большом радиусе поворота;
кроме того, передняя часть автомобиля на повороте медленнее
отклоняется от первоначального направления, чем в случае
передних управляемых колес. Если все колеса управляемые, то
радиус поворота получается минимальным, что особенно важно
при ограниченных углах поворота колес. Однако автомобилю
со всеми управляемыми колесами свойственны недостатки автомо-
биля с задними управляемыми колесами, но в несколько меньшей
степени, поскольку управляемыми являются также и передние
колеса.
В современных двухосных автомобилях управляемыми делают
обычно передние колеса, поворот которых можно осуществить
двумя способами: поворотом всей оси вместе с сидящими на ней
колесами или поворотом одних только колес при неподвижной
передней оси.
Поворот по первому способу обеспечивает чистое качение
колес без бокового их скольжения по дороге, но из-за ряда недо-
статков, возникающих при цельной конструкции передней оси,
такой способ не применяется на автомобилях, и преимущественное
распространение получил второй способ. При этом оба передних
колеса установлены на поворотных цапфах, шарнирно закреплен-
ных на балке передней оси, которая остается неподвижной. Чтобы
выполнить требование чистого качения управляемых колес, они
должны поворачиваться на разные углы, находящиеся между
собой в определенном соотношении: внутреннее колесо должно
всегда поворачиваться на несколько больший
угол, чем наружное. При этом необходимо,
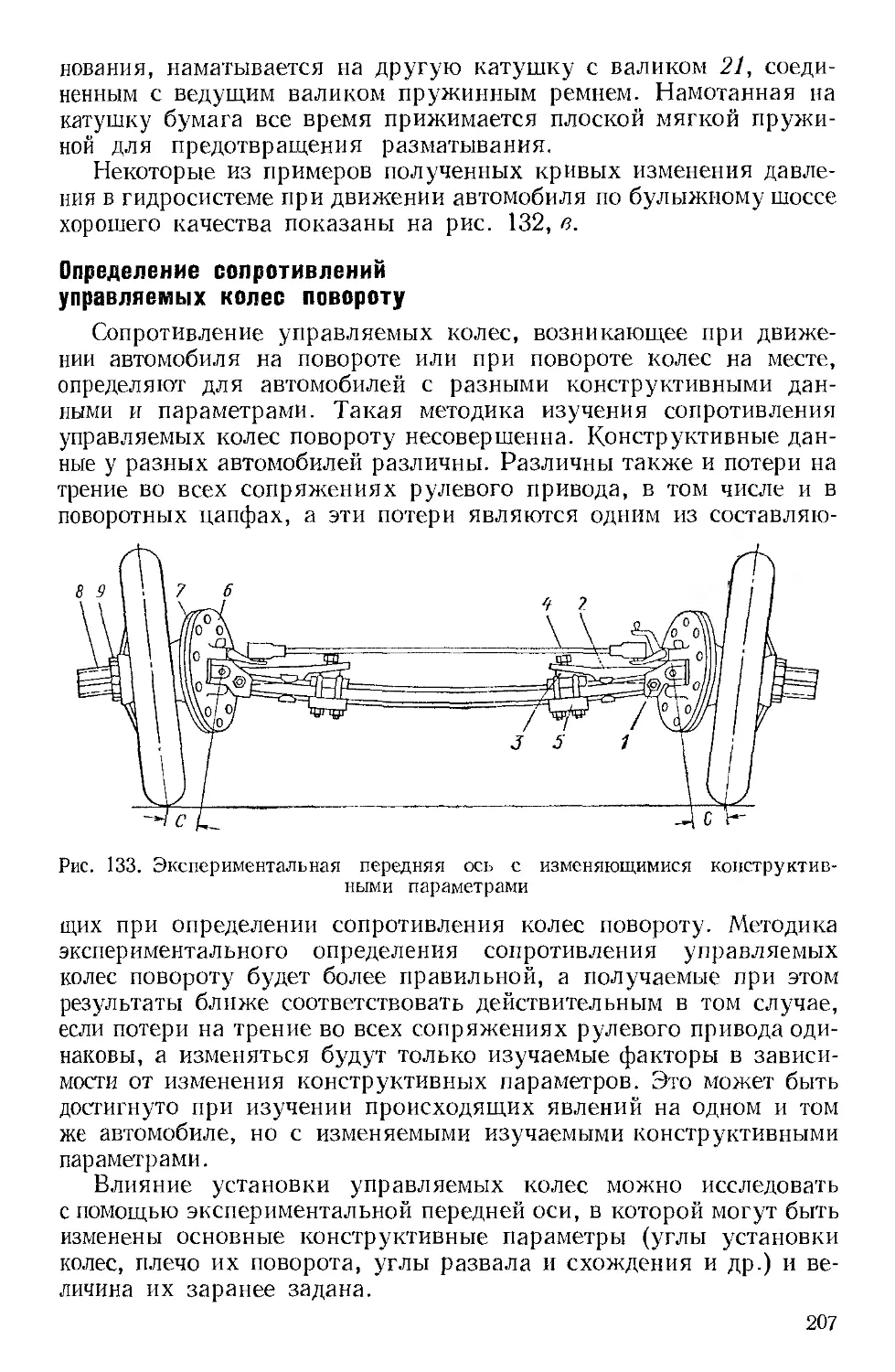
чтобы оси всех четырех колес автомобиля
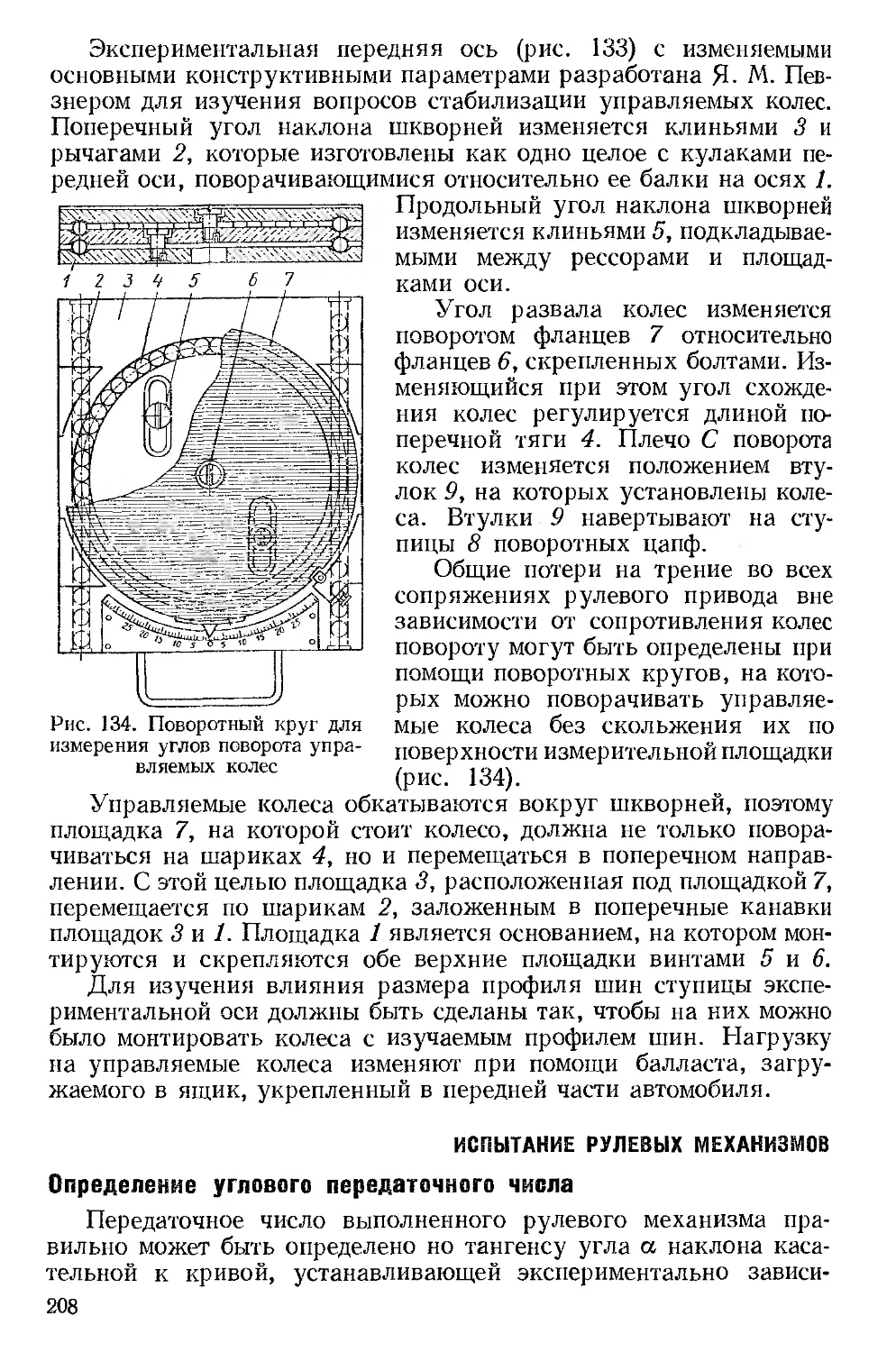
при повороте пересекались в одной точке.
Рис. 1. Схема компоновки элементов рулевого привода
Для соблюдения необходимого соотношения между углами
поворота колес предлагались различные связующие механизмы,
обеспечивающие ничтожные отступления действительных углов
от теоретически необходимых. Эти механизмы выполнялись в виде
цепной передачи, кулисной передачи, ползунов, эллиптических
звездочек или шарнирного четырехугольника — трапеции. Кроме
необходимости обеспечить наибольшую точность поворота колес
на разные углы, близкие к теоретически необходимым, связующий
механизм должен быть надежным, простым и безотказным в дей-
ствии. Нужно иметь в виду, что этот механизм не защищен от уда-
6
ров, от пыли и грязи и атмосферных осадков. Поэтому, несмотря
на теоретические преимущества некоторых схем кинематических
связей, исключительное распространение на автомобилях получил
шарнирный четырехугольник — правильная трапеция. Одним
основанием трапеции служит средняя часть 4 (см. рис. 1) передней
оси (балка), другим основанием — поперечная тяга ,3, а боковыми
сторонами — рычаги 5, укрепленные в поворотных цапфах колес.
При таком общепринятом способе установки управляемых
колес для изменения направления движения достаточно повер-
нуть одно из них, для чего в поворотной цапфе закрепляется
рычаг, который поворачивается при помощи рулевого механизма
и продольной тяги.
В современных автомобилях оси управляемых колес установ-
лены под некоторыми углами относительно геометрических осей
автомобиля. Ось вращения колеса наклонена к горизонтали (угол
развала) и к продольной оси автомобиля (угол схождения). Ось
поворота колеса (ось шкворня поворотной цапфы) также накло-
нена в двух направлениях: в продольном и поперечном. В связи
с тем, что ось вращения и ось поворота колеса расположены под
некоторыми углами, все элементы рулевого привода перемещаются
в плоскостях, наклоненных одна к другой. По этой причине
соединения всех звеньев рулевого привода делают шаровыми.
В отношении разнообразия конструктивных форм, а также
и ответственности работы наибольшего внимания заслуживают
рулевой механизм и рулевая трапеция с ее шарнирными соеди-
нениями.
Остальные детали рулевого управления (рычаги, тяги, руле-
вой вал, рулевое колесо и др.) достаточно простые по конструк-
ции, поэтому классифицировать их по конструктивным или дру-
гим признакам излишне.
По расположению рулевого механизма на автомобиле рулевое
управление разделяется на левое (см. рис. 1, а) и правое
(см. рис. 1, б).
Рулевое управление выполняется левым или правым по раз-
ным соображениям. В первые годы развития автомобиля, когда
скорости его движения были малы, рулевое управление при право-
стороннем движении выполнялось правым. Такое рулевое управ-
ление было наиболее целесообразным, так как водитель мог
точнее подъехать к месту посадки или высадки пассажиров,
а также обогнать медленно едущий впереди экипаж. С повышением
скоростей движения появилась опасность столкновения со встреч-
ными экипажами и особенно с быстро двигающимися автомоби-
лями. В этом случае левое рулевое управление при правосторон-
нем движении оказывается наиболее удобным.
По принципу действия рулевое управление разделяется на
механическое, гидравлическое и рулевое управление с усилите-
лем. Наибольшее распространение получили механическое руле-
вое управление и рулевое управление с усилителем. Гидравли-
7
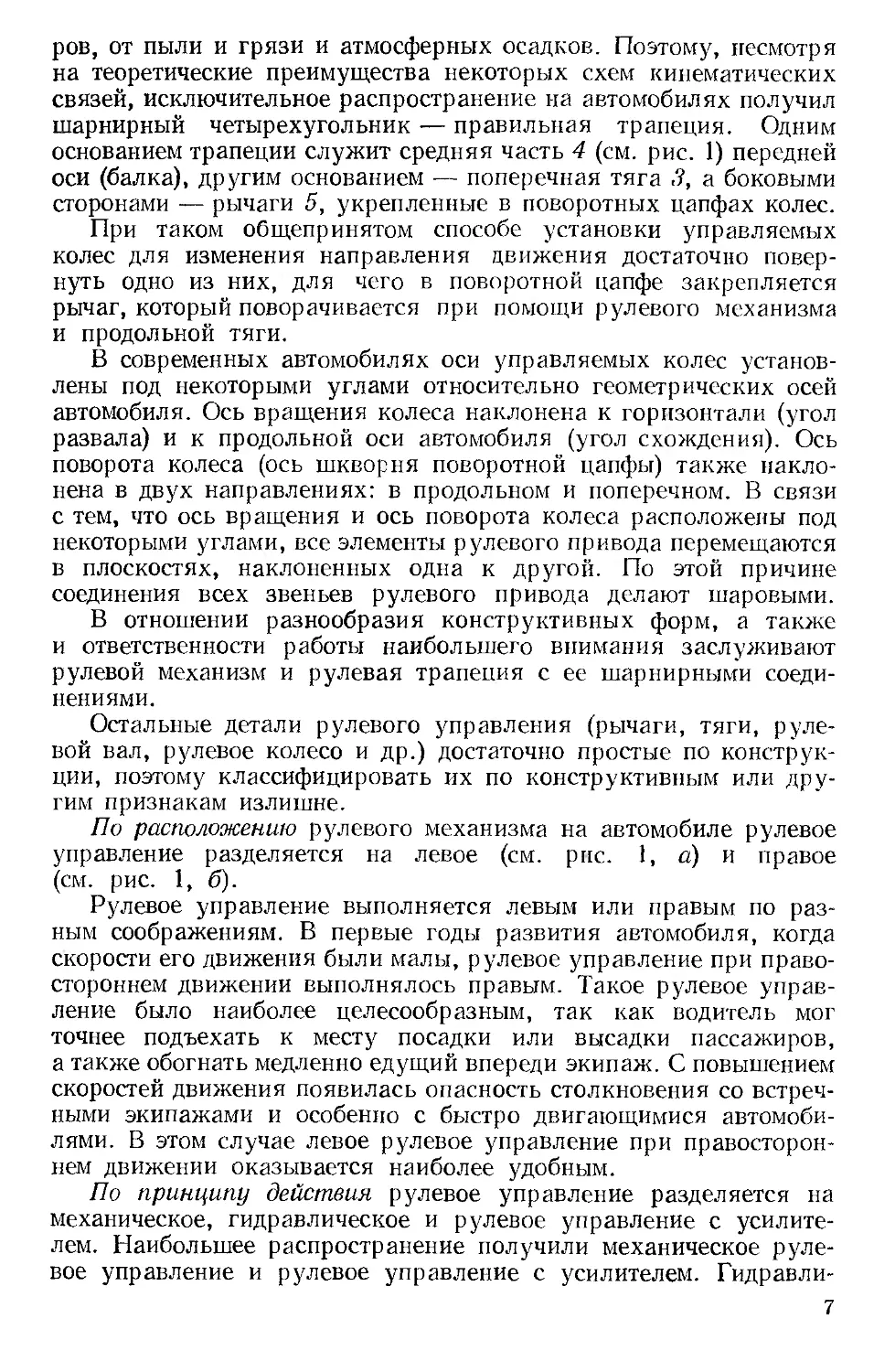
ческое рулевое управление сложнее механического и применяется
только в отдельных случаях, когда требуется дистанционное
управление. Общий вид гидравлического рулевого управления
показан на рис. 2.
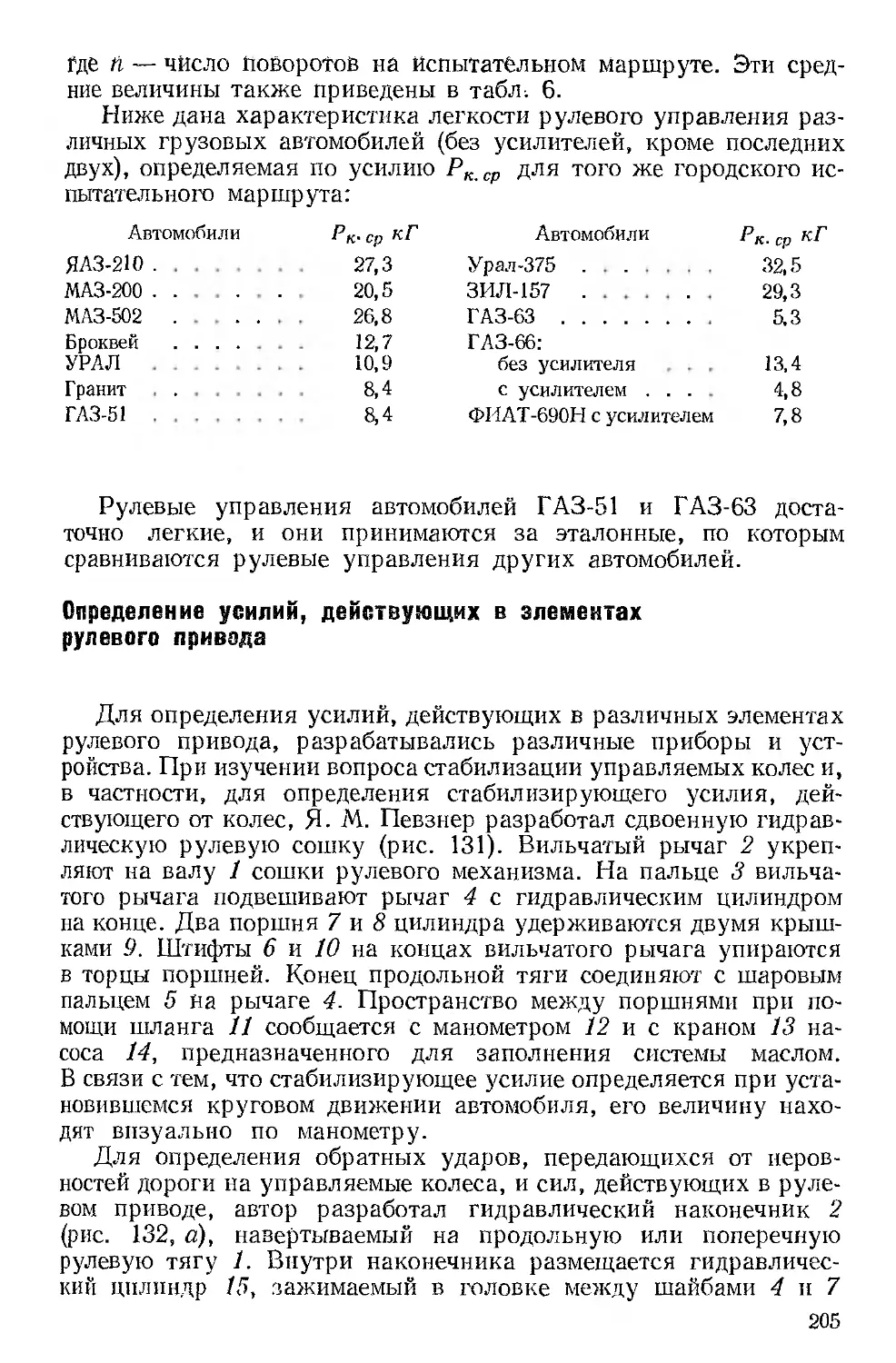
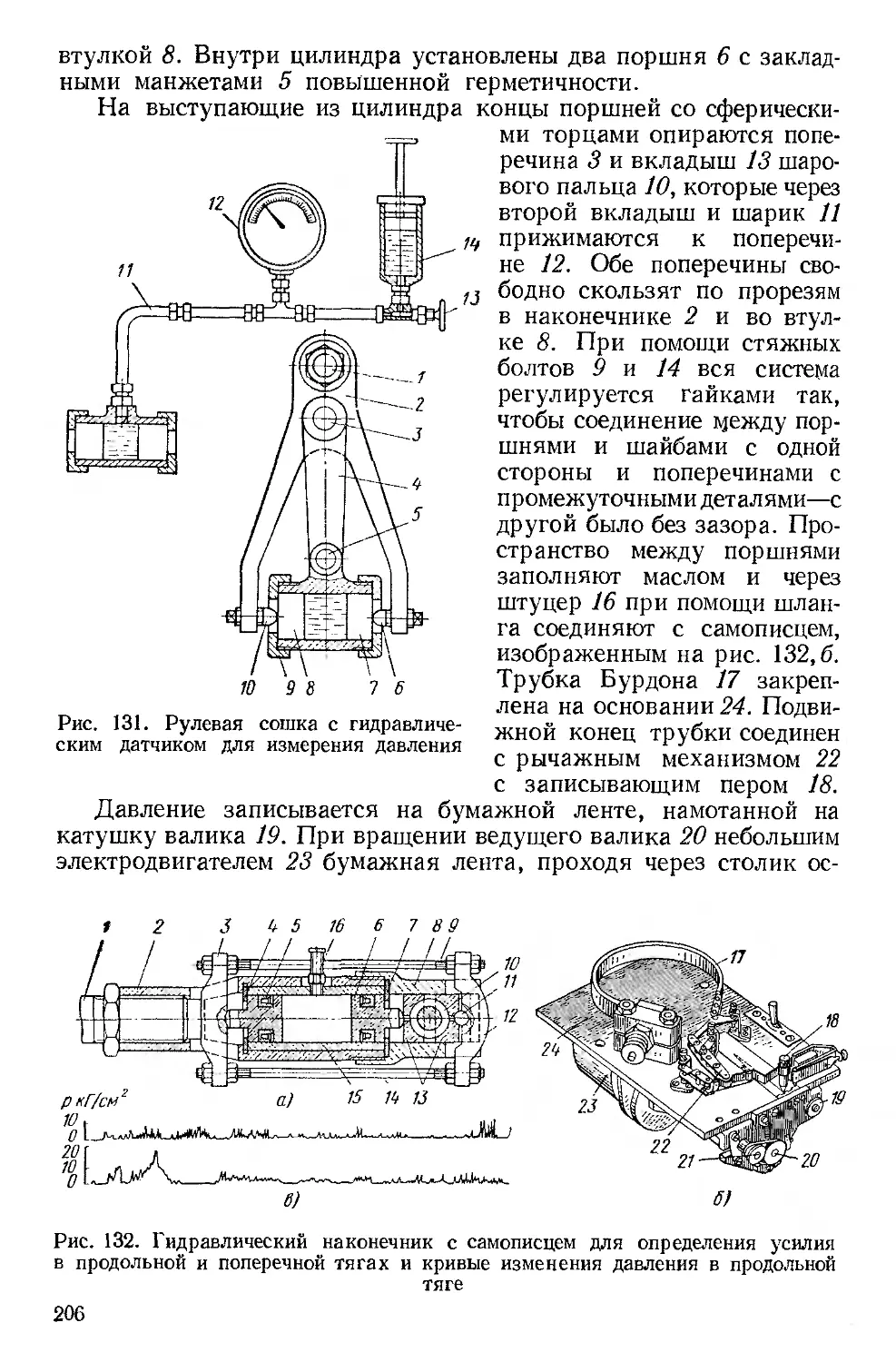
Рис. 2. Общий вид гидравлического рулевого упра-
вления, работающего под давлением
РУЛЕВЫЕ МЕХАНИЗМЫ
Рулевые механизмы изготовляют за рубежом отдельные спе-
циализированные фирмы, и лишь некоторые автомобильные за-
воды производят рулевые механизмы собственной конструкции.
В отличие от ранее принятой классификации по изготовителю
предлагается классифицировать все конструкции рулевых меха-
низмов по двум признакам: по передаточному числу и по прин-
ципу, заложенному в конструкцию передачи. При таком делении
рулевые механизмы могут иметь отдельные модификации и под-
разделяться еще и по другим отличительным особенностям. В соот-
ветствии с этим классификация рулевых механизмов может быть
представлена в следующем виде.
По передаточному числу рулевые механизмы разделяются на
две группы: с постоянным и переменным передаточными числами.
По конструктивным признакам рулевые механизмы разде-
ляются на пять основных групп.
1. С шестеренчатой передачей: цилиндрическими шестернями;
коническими шестернями; реечной парой.
2. С кулачной передачей: улитками; кулаком специальной
формы.
3. С винтовой передачей: вильчатым рычагом; кривошипом;
качающимся рулевым валом; шатунно-кривошипной парой; пово-
рачивающейся гайкой; зубчатой парой; двуплечим рычагом.
4. С кривошипной передачей: одним скользящим пальцем;
одним скользящим поворачивающимся пальцем; двумя скользя-
щими пальцами; одним вращающимся пальцем; двумя вращаю-
щимися пальцами.
5. С червячной передачей с винтовой нарезкой: па цилиндре
(зубья на торце сектора); на внутренней поверхности шара; на
глобоиде.
РУЛЕВОЙ ПРИВОД
Рулевая трапеция тяги. Рулевая трапеция может быть класси-
фицирована по конструктивным признакам и по расположению
относительно передней оси.
По конструктивным признакам рулевая трапеция разде-
ляется на два типа: цельную (см. рис. 1, а и б) и расчлененную
(см. рис. 1, в).
По расположению относительно передней оси рулевая трапе-
ция разделяется на переднюю (см. рис. 1, б и в) и заднюю
(см. рис. 1, а).
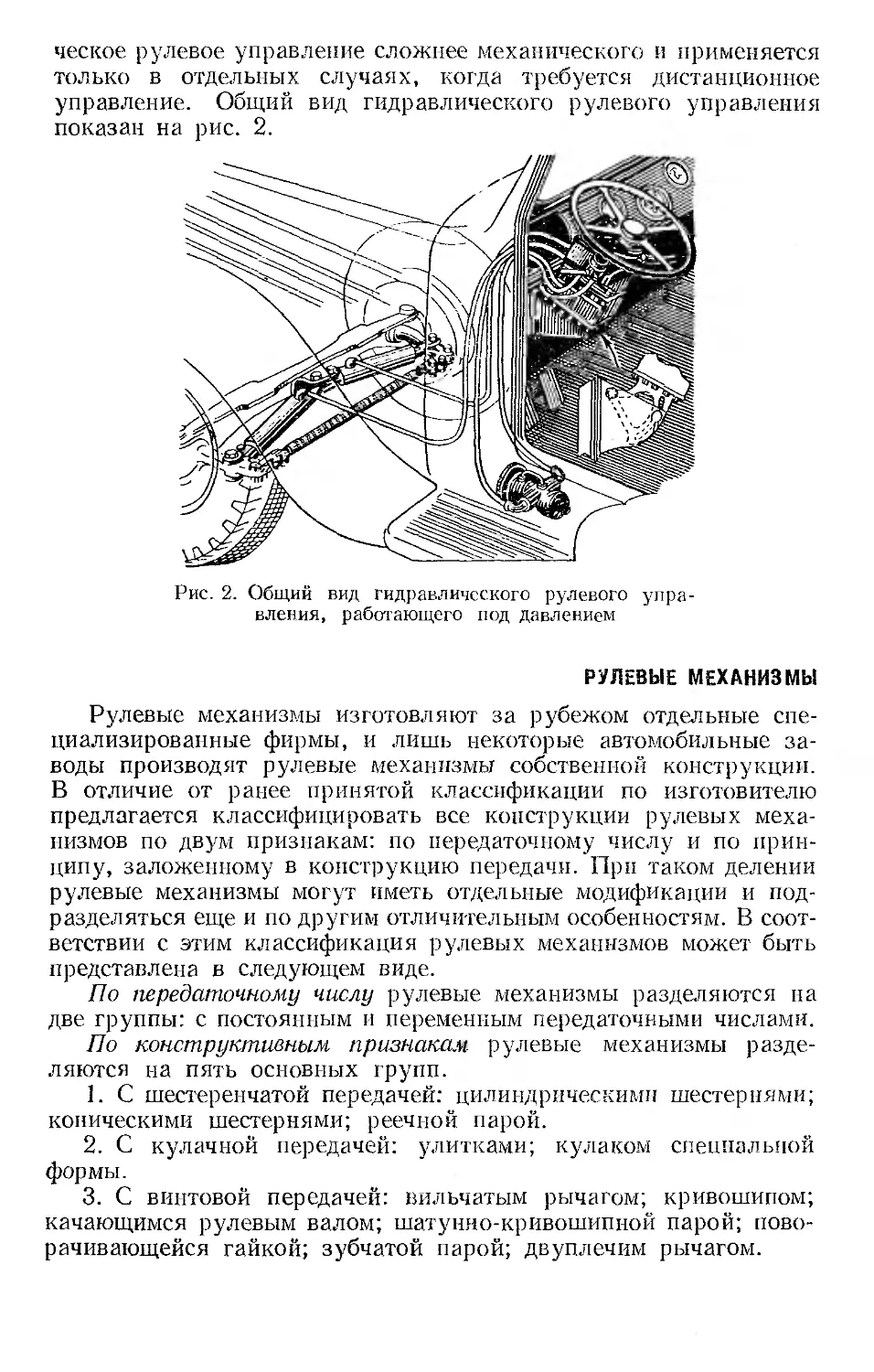
На рис. 3 показана передняя ось автомобиля МАЗ-500 с обыч-
ной рессорной подвеской и задней рулевой трапецией, а также
схема для определения расчетных размеров рулевой трапеции.
9
Если аир — углы поворота соответственно наружного и вну-
треннего управляемых колес, то качение их без скольжения по
дороге получается при условии
ctg а = ctg Р + ,
(1)
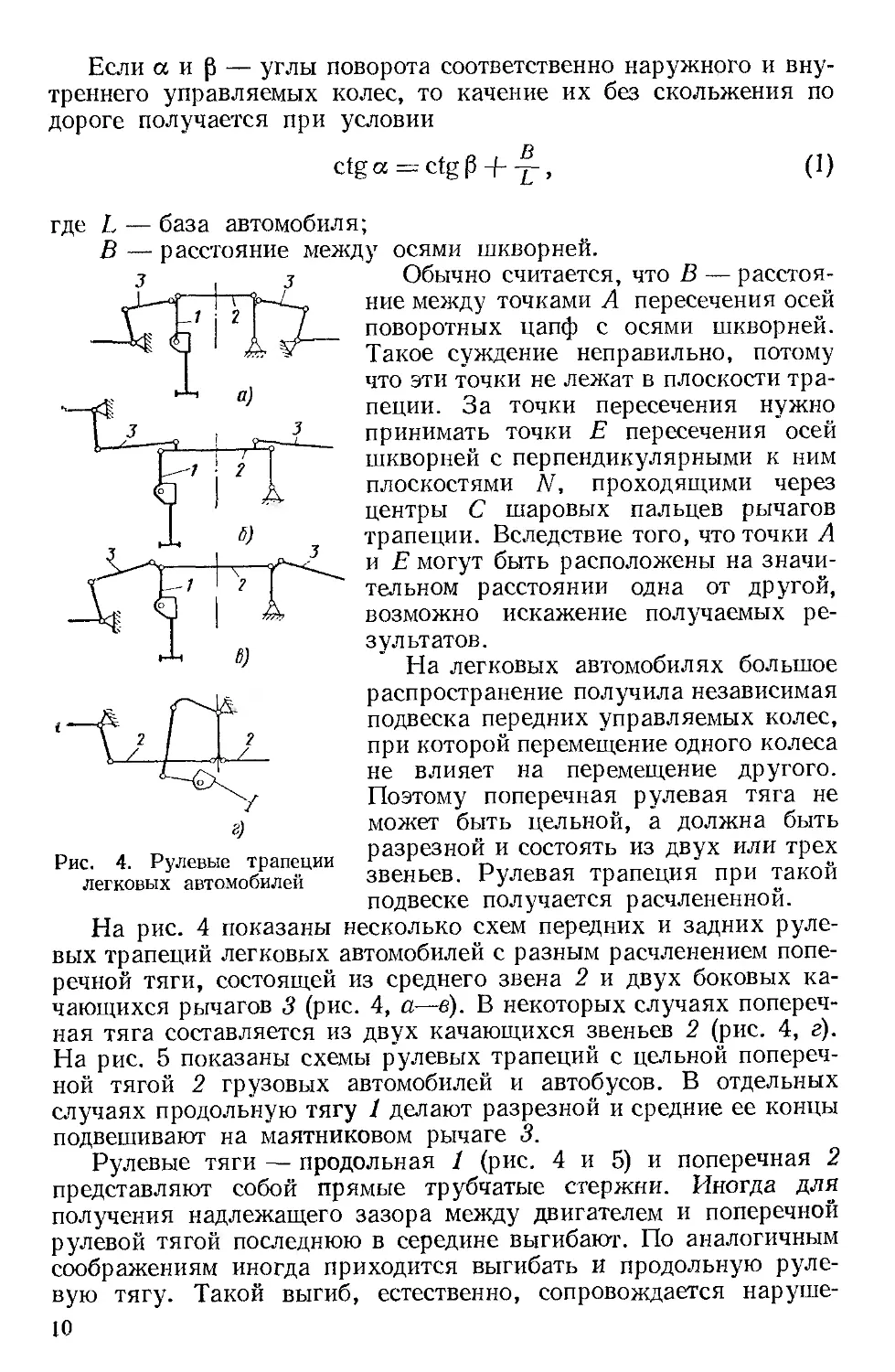
Рис. 4. Рулевые трапеции
легковых автомобилей
где L — база автомобиля;
В — расстояние между осями шкворней.
Обычно считается, что В — расстоя-
ние между точками А пересечения осей
поворотных цапф с осями шкворней.
Такое суждение неправильно, потому
что эти точки не лежат в плоскости тра-
пеции. За точки пересечения нужно
принимать точки Е пересечения осей
шкворней с перпендикулярными к ним
плоскостями N, проходящими через
центры С шаровых пальцев рычагов
трапеции. Вследствие того, что точки А
и Е могут быть расположены на значи-
тельном расстоянии одна от другой,
возможно искажение получаемых ре-
зультатов.
На легковых автомобилях большое
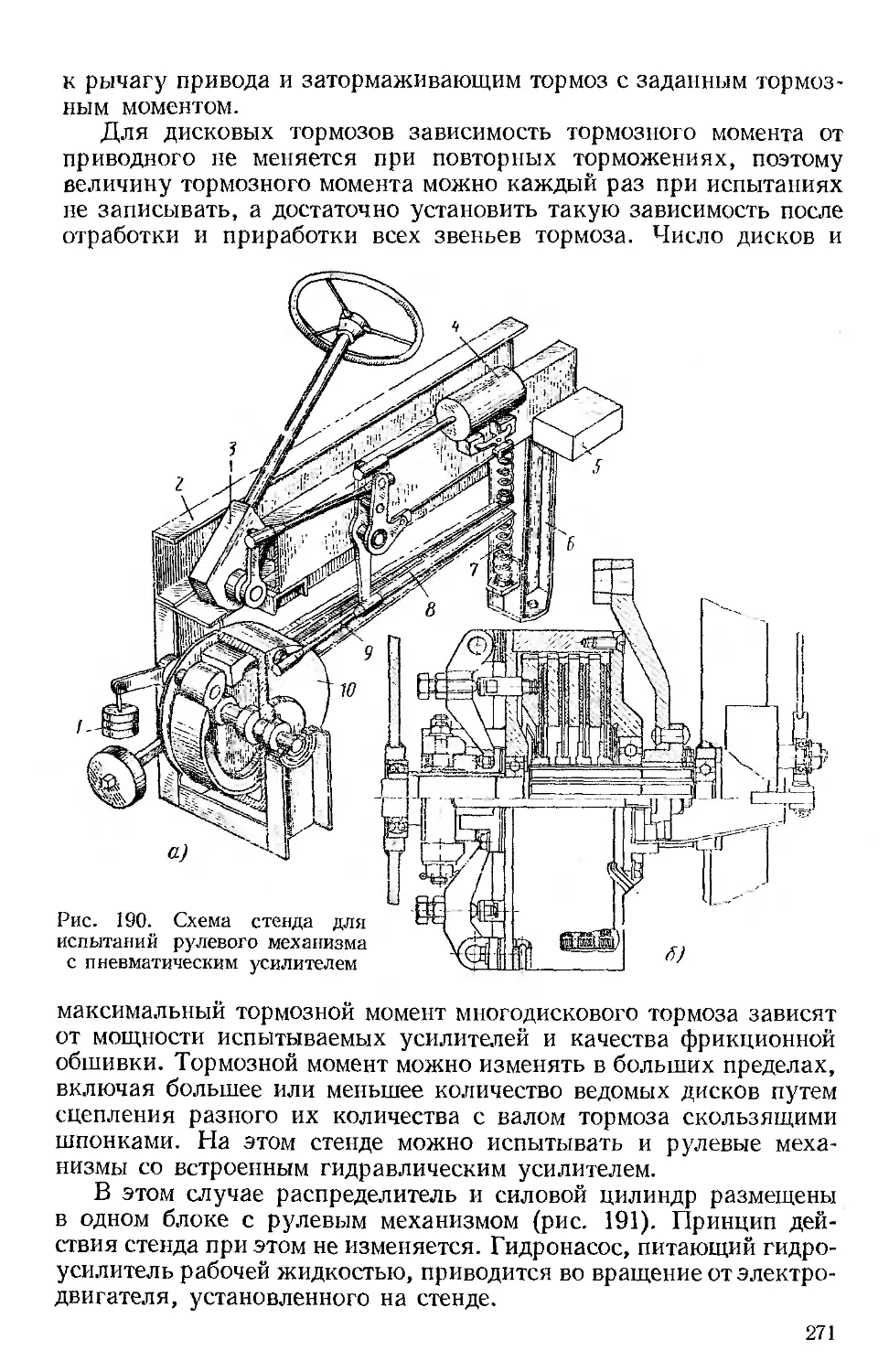
распространение получила независимая
подвеска передних управляемых колес,
при которой перемещение одного колеса
не влияет на перемещение другого.
Поэтому поперечная рулевая тяга не
может быть цельной, а должна быть
разрезной и состоять из двух или трех
звеньев. Рулевая трапеция при такой
подвеске получается расчлененной,
несколько схем передних и задних руле-
На рис. 4 показаны
вых трапеций легковых автомобилей с разным расчленением попе-
речной тяги, состоящей из среднего звена 2 и двух боковых ка-
чающихся рычагов 3 (рис. 4, а—в). В некоторых случаях попереч-
ная тяга составляется из двух качающихся звеньев 2 (рис. 4, г).
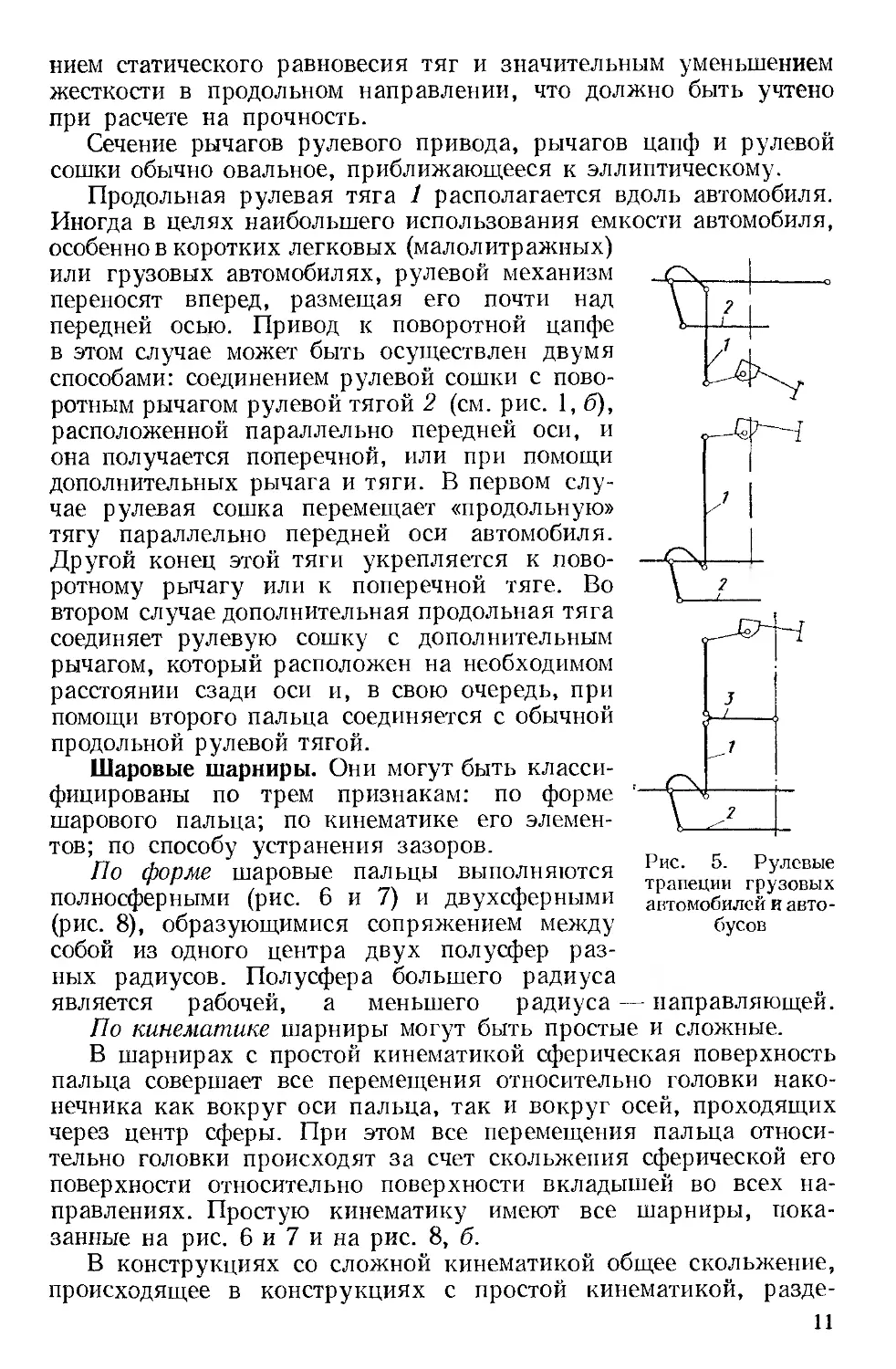
На рис. 5 показаны схемы рулевых трапеций с цельной попереч-
ной тягой 2 грузовых автомобилей и автобусов. В отдельных
случаях продольную тягу 1 делают разрезной и средние ее концы
подвешивают на маятниковом рычаге 3.
Рулевые тяги — продольная 1 (рис. 4 и 5) и поперечная 2
представляют собой прямые трубчатые стержни. Иногда для
получения надлежащего зазора между двигателем и поперечной
рулевой тягой последнюю в середине выгибают. По аналогичным
соображениям иногда приходится выгибать и продольную руле-
вую тягу. Такой выгиб, естественно, сопровождается наруше-
10
нием статического равновесия тяг и значительным уменьшением
жесткости в продольном направлении, что должно быть учтено
при расчете на прочность.
Сечение рычагов рулевого привода, рычагов цапф и рулевой
сошки обычно овальное, приближающееся к эллиптическому.
Продольная рулевая тяга 1 располагается вдоль автомобиля.
Иногда в целях наибольшего использования емкости автомобиля,
особенно в коротких легковых (малолитражных)
или грузовых автомобилях, рулевой механизм
переносят вперед, размещая его почти над
передней осью. Привод к поворотной цапфе
в этом случае может быть осуществлен двумя
способами: соединением рулевой сошки с пово-
ротным рычагом рулевой тягой 2 (см. рис. 1, б),
расположенной параллельно передней оси, и
она получается поперечной, или при помощи
дополнительных рычага и тяги. В первом слу-
чае рулевая сошка перемещает «продольную»
тягу параллельно передней оси автомобиля.
Другой конец этой тяги укрепляется к пово-
ротному рычагу или к поперечной тяге. Во
втором случае дополнительная продольная тяга
соединяет рулевую сошку с дополнительным
рычагом, который расположен на необходимом
расстоянии сзади оси и, в свою очередь, при
помощи второго пальца соединяется с обычной
продольной рулевой тягой.
Шаровые шарниры. Они могут быть класси-
фицированы по трем признакам: по форме
шарового пальца; по кинематике его элемен-
тов; по способу устранения зазоров.
По форме шаровые пальцы выполняются
полносферными (рис. 6 и 7) и двухсфернымп
(рис. 8), образующимися сопряжением между
собой из одного центра двух полусфер раз-
Рис. 5. Рулевые
трапеции грузовых
автомобилей и авто-
бусов
ных радиусов. Полусфера большего радиуса
является рабочей, а меньшего радиуса — направляющей.
По кинематике шарниры могут быть простые и сложные.
В шарнирах с простой кинематикой сферическая поверхность
пальца совершает все перемещения относительно головки нако-
нечника как вокруг оси пальца, так и вокруг осей, проходящих
через центр сферы. При этом все перемещения пальца относи-
тельно головки происходят за счет скольжения сферической его
поверхности относительно поверхности вкладышей во всех на-
правлениях. Простую кинематику имеют все шарниры, пока-
занные на рис. 6 и 7 и на рис. 8, б.
В конструкциях со сложной кинематикой общее скольжение,
происходящее в конструкциях с простой кинематикой, разде-
11
ляется на два: вокруг оси пальца и вокруг осей, проходящих
через центр шара и перпендикулярных к первой осп.
При перемещении вокруг осп пальца рабочая поверхность
пальца скользит во вкладышах. При перемещениях вокруг осей,
проходящих через центр шара, вкладыш скользит относительно
головки наконечника. Сложную кинематику пальца имеет шар-
Рис. 6. Шаровые шарниры рулевого привода с полно-
сферным пальцем
нпр, показанный па рис. 8, в. В этой конструкции при перемеще-
нии пальца вокруг осп коническая его поверхность скользит
по внутренней конической поверхности сферического кольца.
Проворачиванию кольца вокруг осп пальца препятствует штифт /,
заходящий в прорезь кольца.
Для смазки рабочих поверхностей кольца и пальца на внутрен-
ней конической поверхности кольца сделаны канавки.
При перемещении пальца около центра шара вокруг осей,
перпендикулярных к оси пальца, скольжение, происходит между
J2
сферической поверхностью кольца и внутренней поверхностью
головки наконечника.
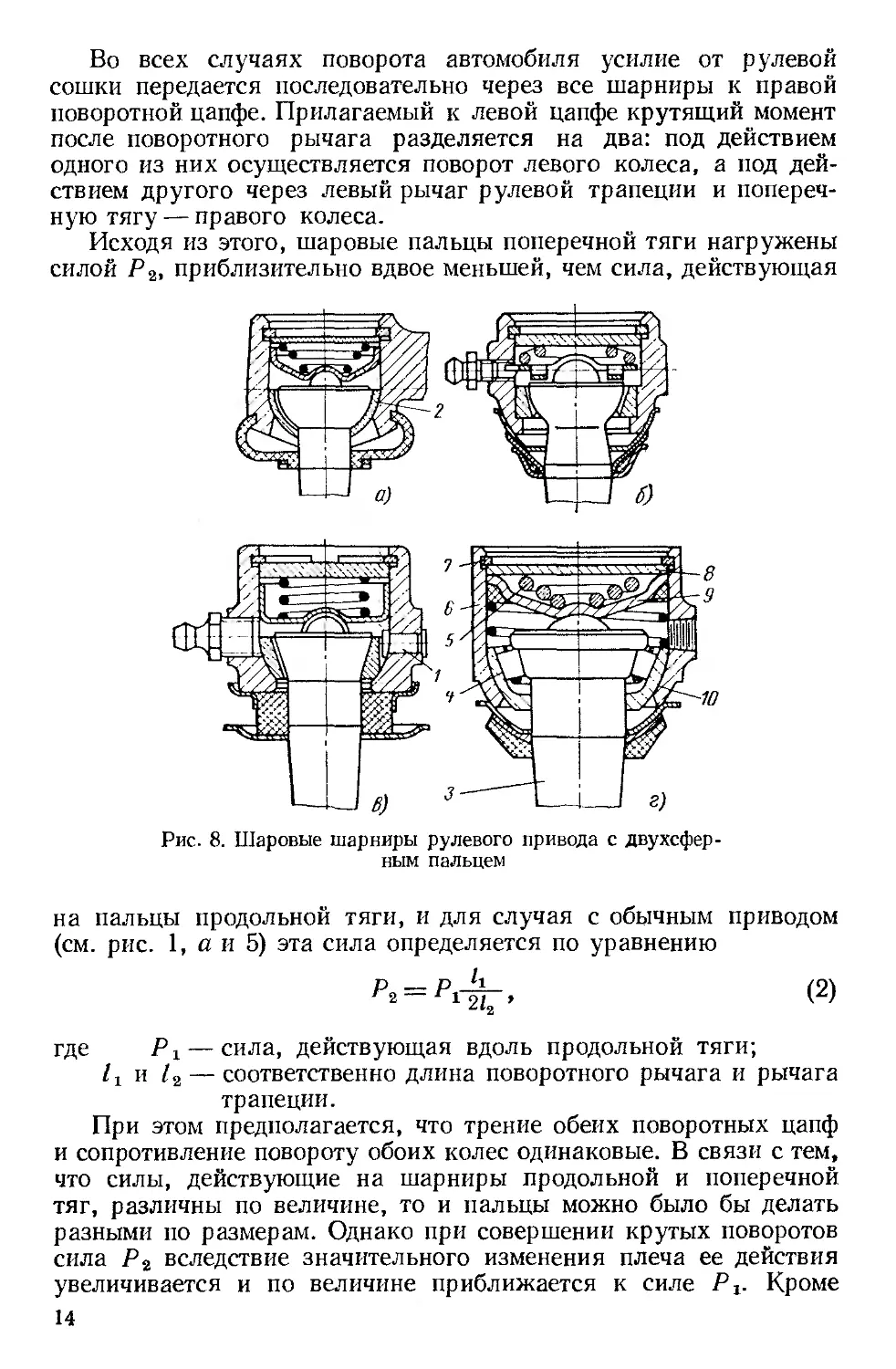
Шарнир, показанный иа рис. 8, а, также имеет сложную кине-
матику. Вкладыш 2 посажен на цилиндрическую часть хвосто-
вика пальца так, что он перемещается вокруг осей, проходящих
через центр шара, вместе с пальцем, вследствие чего скольжение
происходит между наружной
и сферической поверхностью
головки наконечника. Посад-
ка вкладыша на сферическую
поверхность пальца выпол-
нена плавающей, поэтому
предполагается, что при по-
вороте пальца вокруг своей
оси его шаровая поверхность
может скользить по внутрен-
ней поверхности вкладыша.
Для смазки рабочих поверх-
ностей на внутренней поверх-
ности вкладыша имеются две
канавки.
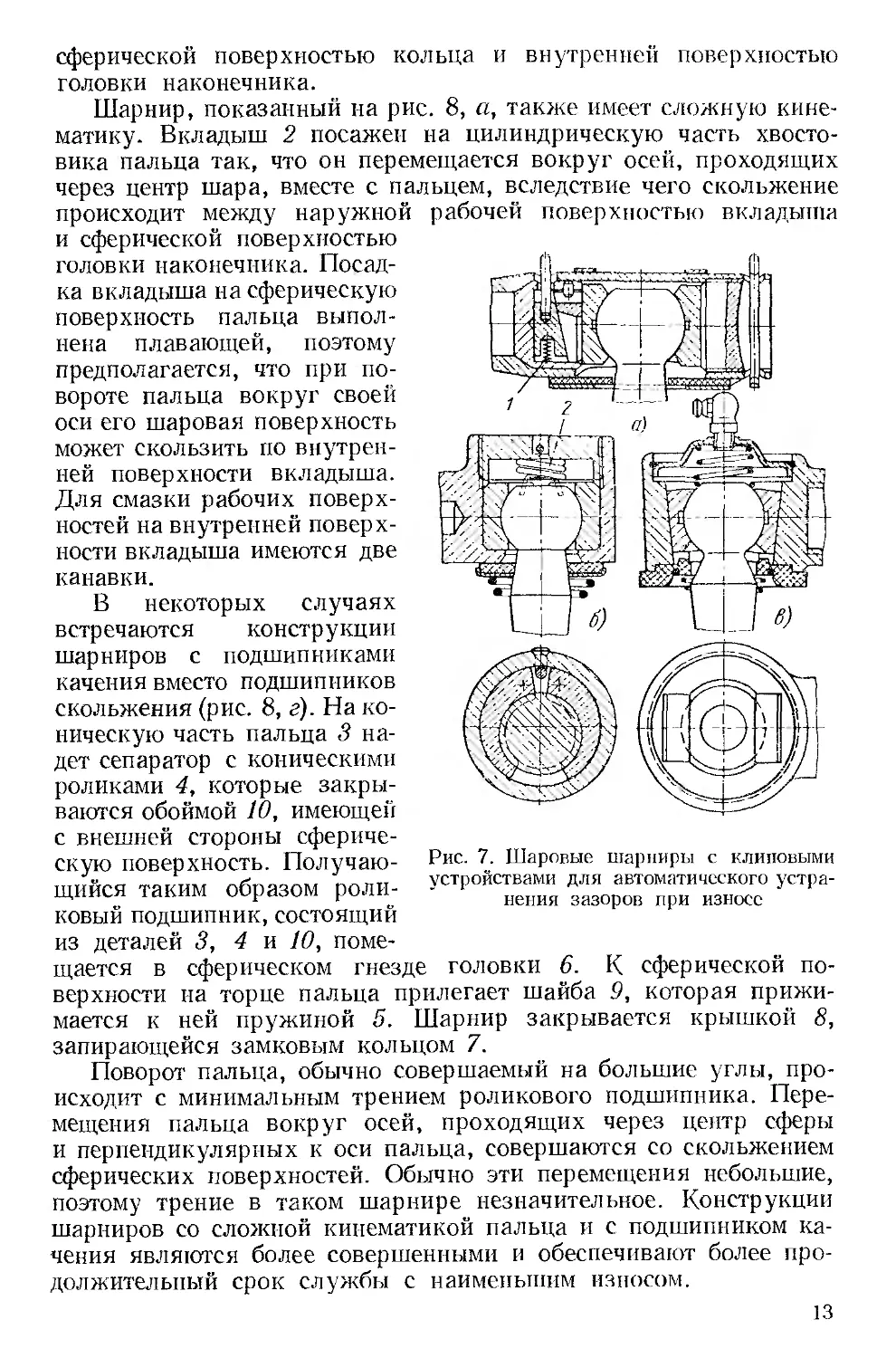
В некоторых случаях
встречаются конструкции
шарниров с подшипниками
качения вместо подшипников
скольжения (рис. 8, г). На ко-
ническую часть пальца 3 на-
дет сепаратор с коническими
роликами 4, которые закры-
ваются обоймой 10, имеющей
рабочей поверхностью вкладыша
с внешней стороны сфериче-
скую поверхность. Получаю-
щийся таким образом роли-
ковый подшипник, состоящий
из деталей 3, 4 и 10, поме-
Рис. 7. Шаровые шарниры с клиповыми
устройствами для автоматического устра-
нения зазоров при износе
щается в сферическом гнезде головки 6. К сферической по-
верхности на торце пальца прилегает шайба 9, которая прижи-
мается к ней пружиной 5. Шарнир закрывается крышкой 8,
запирающейся замковым кольцом 7.
Поворот пальца, обычно совершаемый на большие углы, про-
исходит с минимальным трением роликового подшипника. Пере-
мещения пальца вокруг осей, проходящих через центр сферы
и перпендикулярных к оси пальца, совершаются со скольжением
сферических поверхностей. Обычно эти перемещения небольшие,
поэтому трение в таком шарнире незначительное. Конструкции
шарниров со сложной кинематикой пальца и с подшипником ка-
чения являются более совершенными и обеспечивают более про-
должительный срок службы с наименьшим износом.
13
Во всех случаях поворота автомобиля усилие от рулевой
сошки передается последовательно через все шарниры к правой
поворотной цапфе. Прилагаемый к левой цапфе крутящий момент
после поворотного рычага разделяется на два: под действием
одного из них осуществляется поворот левого колеса, а под дей-
ствием другого через левый рычаг рулевой трапеции и попереч-
ную тягу — правого колеса.
Исходя из этого, шаровые пальцы поперечной тяги нагружены
силой Р2, приблизительно вдвое меньшей, чем сила, действующая
Рис. 8. Шаровые шарниры рулевого привода с двухсфер-
ным пальцем
на пальцы продольной тяги, и для случая с обычным приводом
(см. рис. 1, а и 5) эта сила определяется по уравнению
= (2)
где — сила, действующая вдоль продольной тяги;
/j и /2 — соответственно длина поворотного рычага и рычага
трапеции.
При этом предполагается, что трение обеих поворотных цапф
и сопротивление повороту обоих колес одинаковые. В связи с тем,
что силы, действующие на шарниры продольной и поперечной
тяг, различны по величине, то и пальцы можно было бы делать
разными по размерам. Однако при совершении крутых поворотов
сила Р2 вследствие значительного изменения плеча ее действия
увеличивается и по величине приближается к силе Рг. Кроме
14
того, при движении по неровной дороге или наезде на неровность
динамические силы, действующие при этом, могут превосходить
силы, действующие от рулевой сошки при повороте автомобиля.
Так, например, в случае удара одним правым колесом возникаю-
щая при этом сила передается последовательно через все шар-
ниры рулевого привода на рулевой механизм и далее на раму.
В связи с этим шаровые пальцы должны быть одних размеров,
и классификация по передаваемому усилию поэтому не дается.
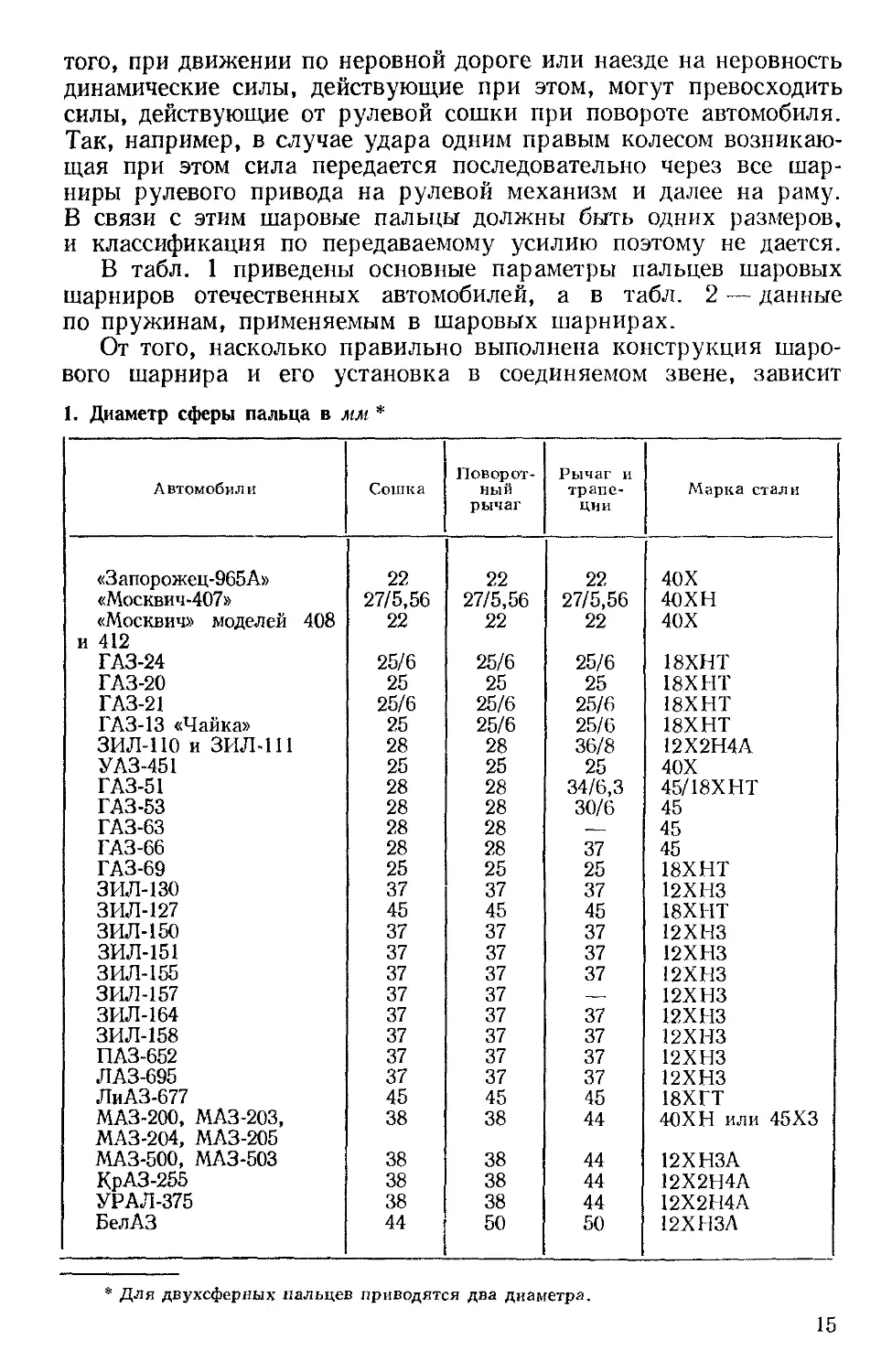
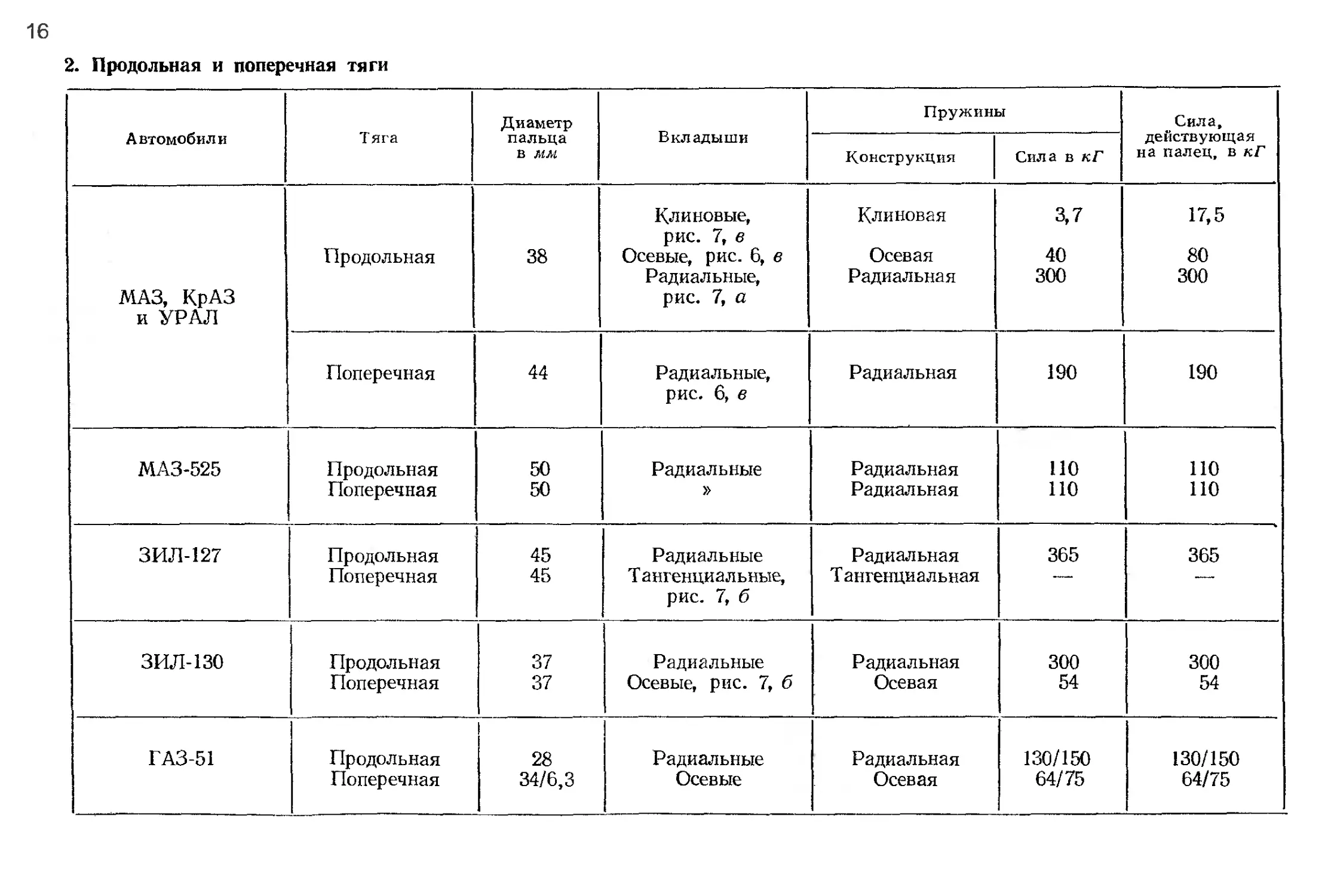
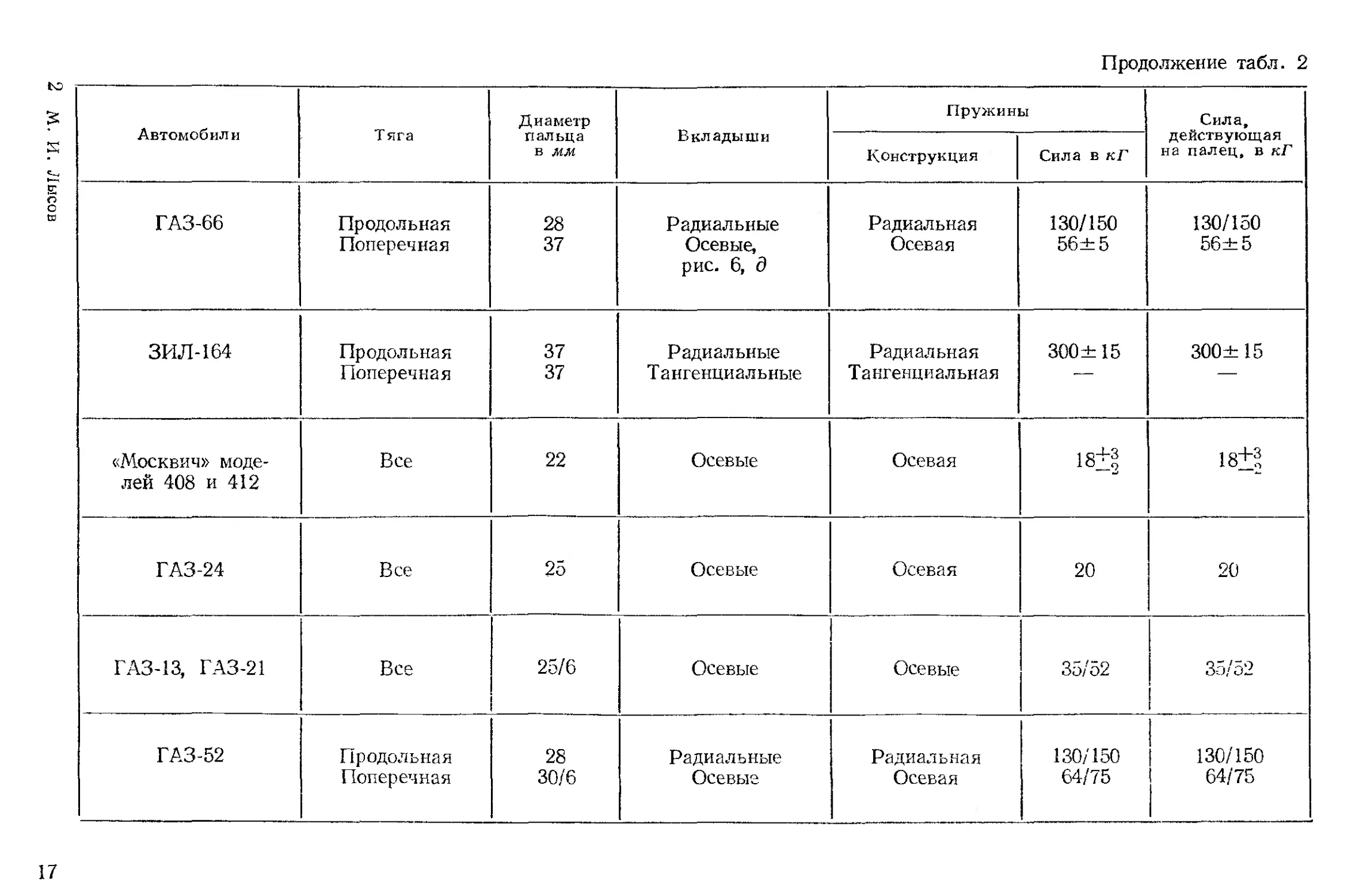
В табл. 1 приведены основные параметры пальцев шаровых
шарниров отечественных автомобилей, а в табл. 2 — данные
по пружинам, применяемым в шаровых шарнирах.
От того, насколько правильно выполнена конструкция шаро-
вого шарнира и его установка в соединяемом звене, зависит
1. Диаметр сферы пальца в мм
Автомобили Сошка Поворот- ный рычаг Рычаг и трапе- ции Марка стали
«Запорожец-965А» 22 22 22 40Х
«Москвич-407» 27/5,56 27/5,56 27/5,56 40ХН
«Москвич» моделей 408 22 22 22 40Х
и 412
ГАЗ-24 25/6 25/6 25/6 18ХНТ
ГАЗ-20 25 25 25 18ХНТ
ГАЗ-21 25/6 25/6 25/6 18ХНТ
ГАЗ-13 «Чайка» 25 25/6 25/6 18ХНТ
ЗИЛ-110 и ЗИЛ-111 28 28 36/8 12Х2Н4А
УАЗ-451 25 25 25 40Х
ГАЗ-51 28 28 34/6,3 45/18ХНТ
ГАЗ-53 28 28 30/6 45
ГАЗ-63 28 28 .— 45
ГАЗ-66 28 28 37 45
ГАЗ-69 25 25 25 18ХНТ
ЗИЛ-130 37 37 37 12ХНЗ
ЗИЛ-127 45 45 45 18ХНТ
ЗИЛ-150 37 37 37 12ХНЗ
ЗИЛ-151 37 37 37 12ХНЗ
ЗИЛ-155 37 37 37 12ХНЗ
ЗИЛ-157 37 37 —. 12ХНЗ
ЗИЛ-164 37 37 37 12ХНЗ
ЗИЛ-158 37 37 37 12ХНЗ
ПАЗ-652 37 37 37 12ХНЗ
ЛАЗ-695 37 37 37 12ХНЗ
ЛиАЗ-677 45 45 45 18ХГТ
МАЗ-200, МАЗ-203, 38 38 44 40ХН или 45X3
МАЗ-204, МАЗ-205
МАЗ-500, МАЗ-503 38 38 44 12ХНЗА
КрАЗ-255 38 38 44 12Х2Н4А
УРАЛ-375 38 38 44 12Х2Н4А
БелАЗ 44 50 50 12ХНЗА
Для двухсферных пальцев приводятся два диаметра.
15
16
2. Продольная и поперечная тяги
Автомобили Тяга Диаметр пальца в мм Вкладыши Пружины Сила, действующая на палец, в кГ
Конструкция Сила в кГ
МАЗ, КрАЗ и УРАЛ Продольная 38 Клиновые, рис. 7, в Осевые, рис. 6, в Радиальные, рис. 7, а Клиновая Осевая Радиальная 3,7 40 300 17,5 80 300
Поперечная 44 Радиальные, рис. 6, в Радиальная 190 190
МАЗ-525 Продольная Поперечная 50 50 Радиальные » Радиальная Радиальная НО ПО ПО ПО
ЗИЛ-127 Продольная Поперечная 45 45 Радиальные Т ангенциальные, рис. 7, б Радиальная Т ангенциальная 365 365
ЗИЛ-130 Продольная Поперечная 37 37 Радиальные Осевые, рис. 7, б Радиальная Осевая 300 54 300 54
ГАЗ-51 Продольная Поперечная 28 34/6,3 Радиальные Осевые Радиальная Осевая 130/150 64/75 130/150 64/75
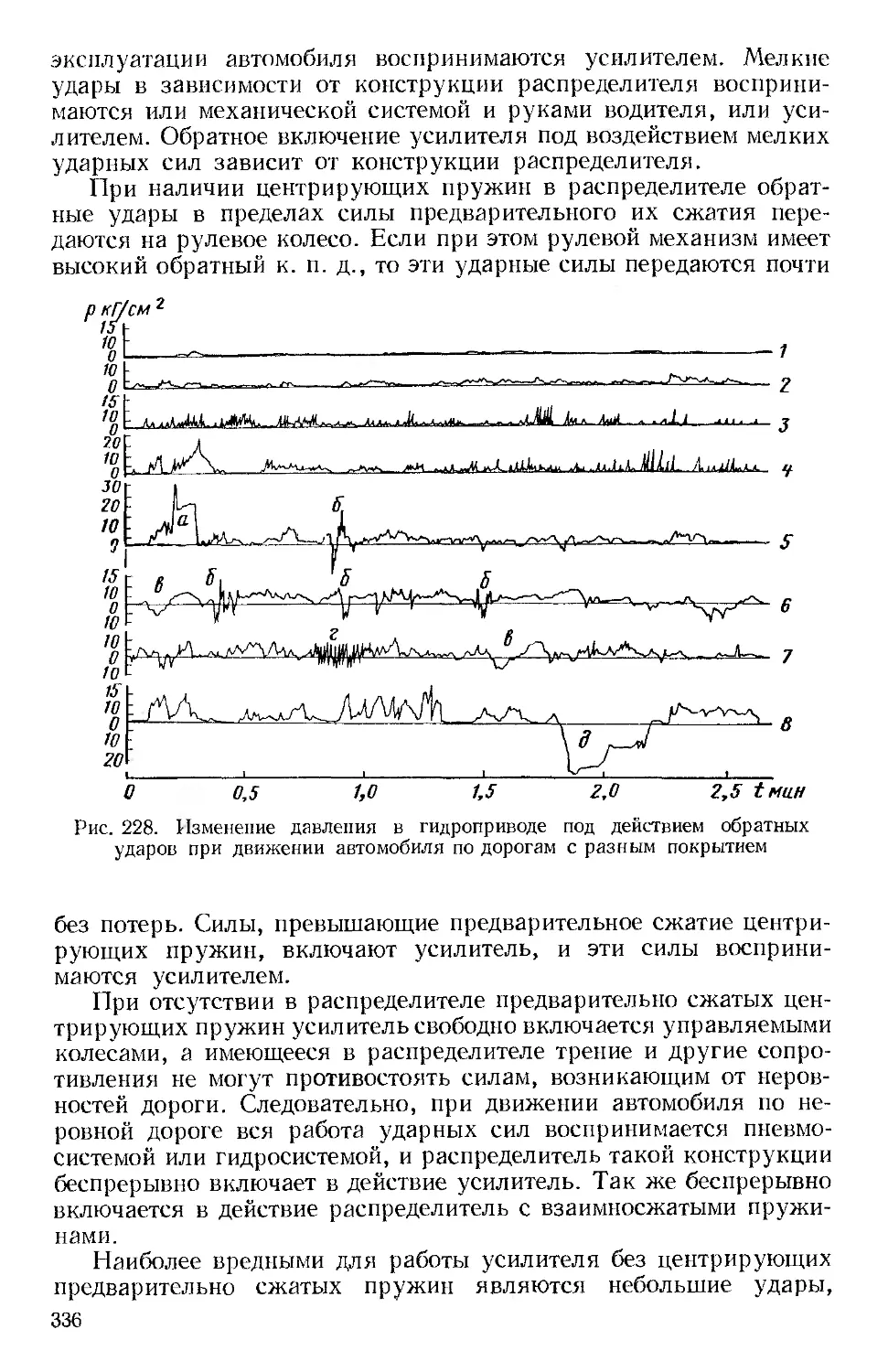
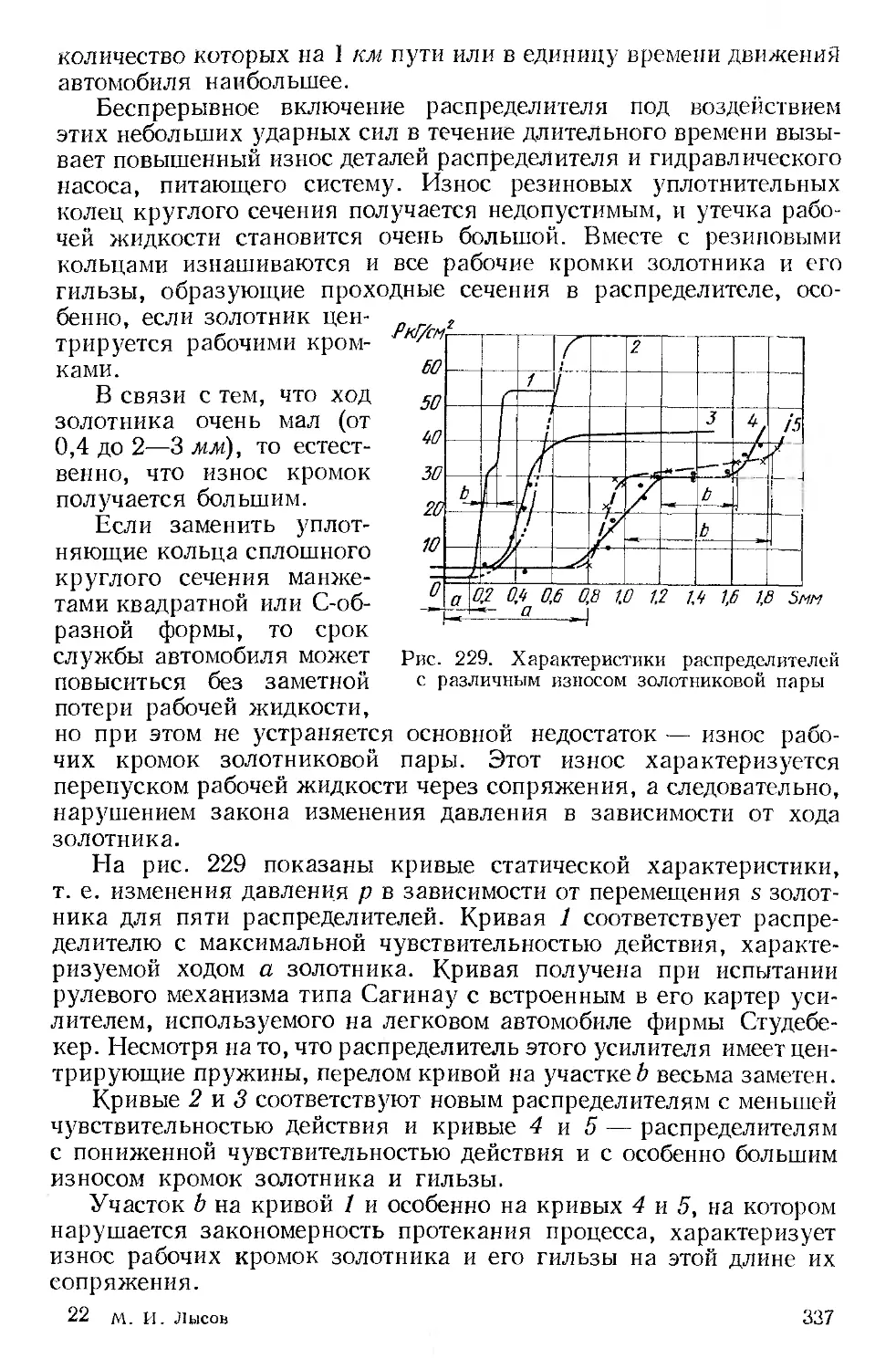
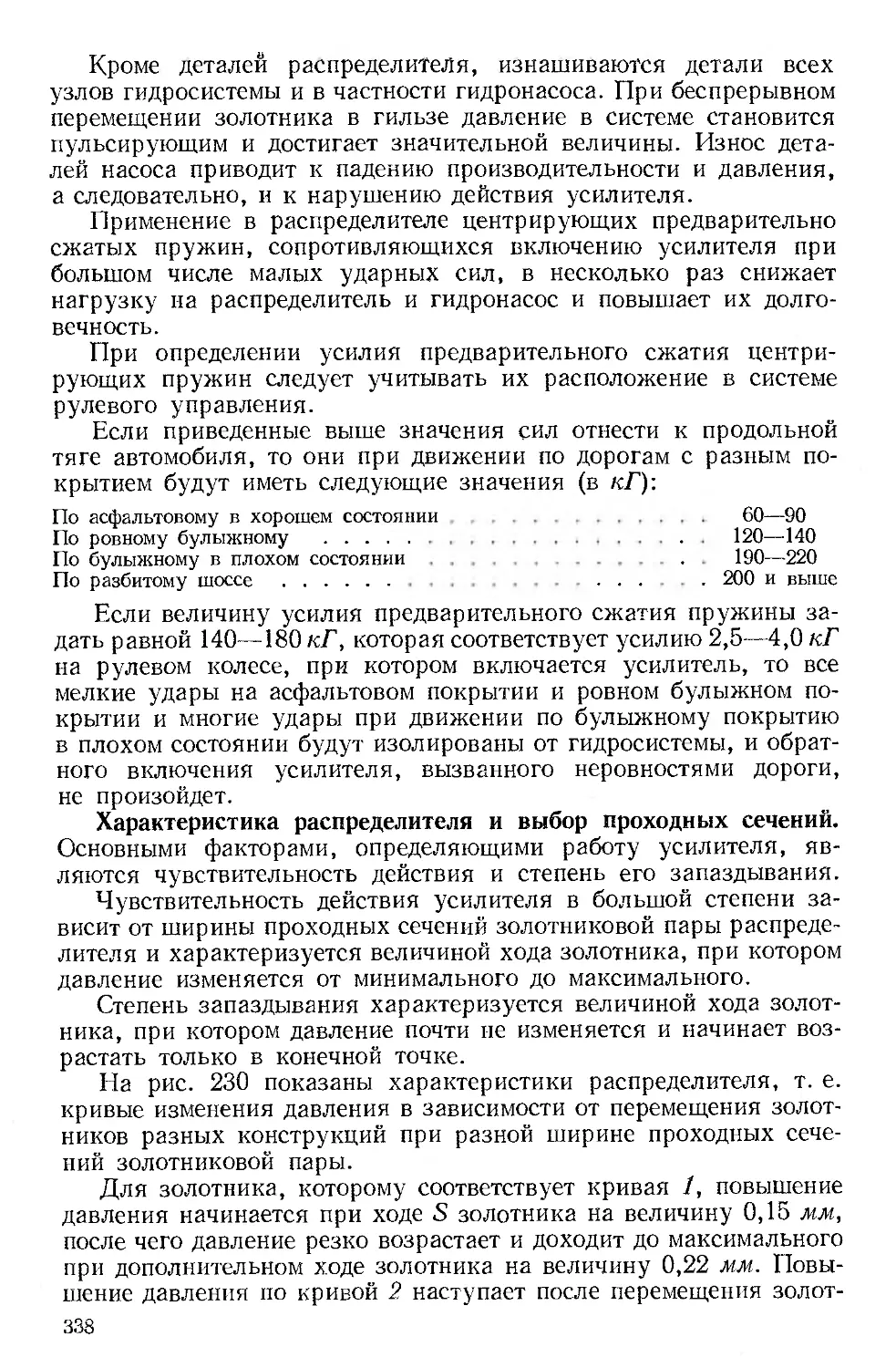
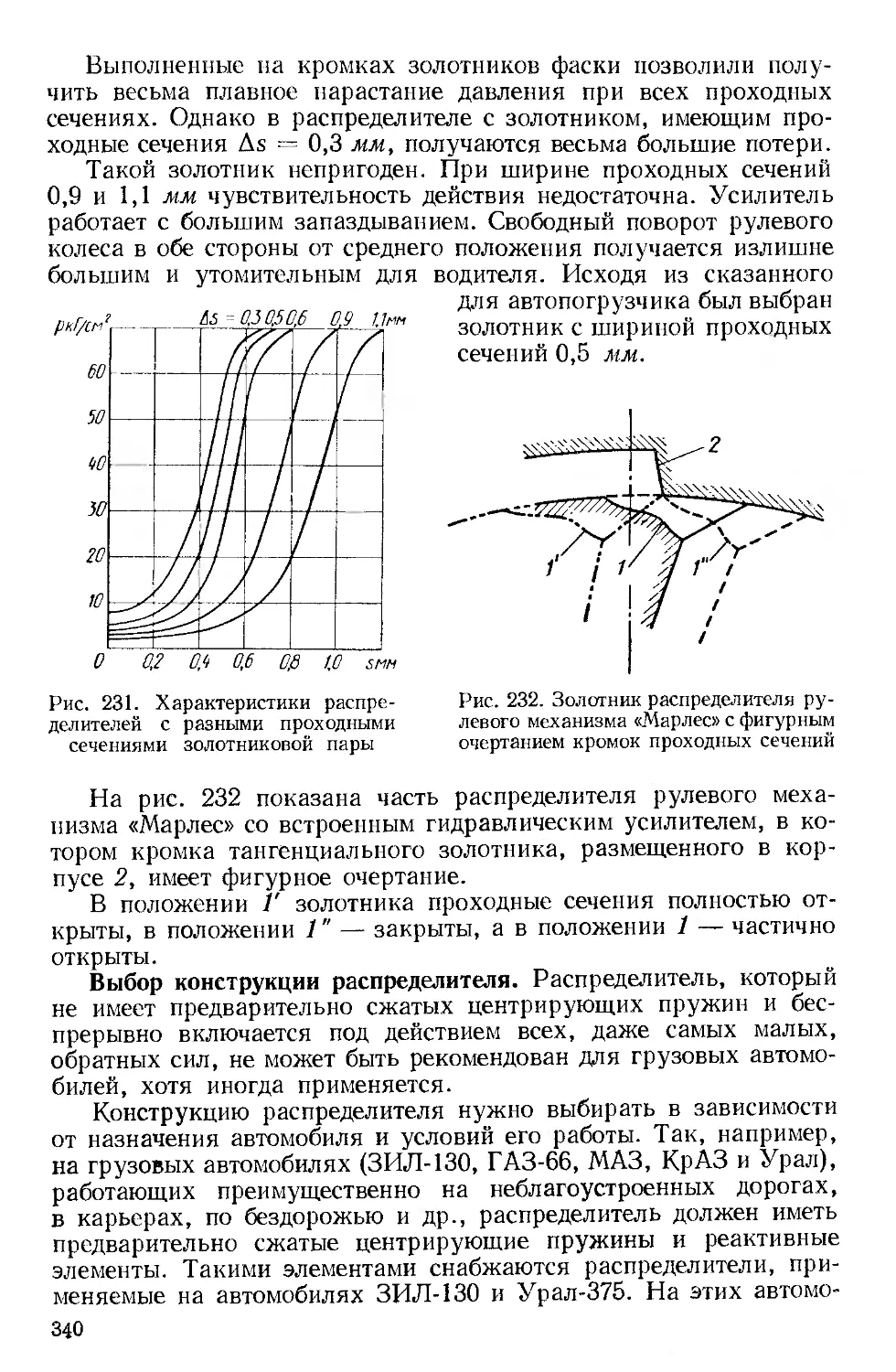
Лысов
Продолжение табл. 2
Автомобили Тяга Диаметр пальца в мм Вкладыши Пружины Сила, действующая на палец, в кГ
Конструкция Сила в кГ
ГАЗ-66 Продольная Поперечная 28 37 Радиальные Осевые, рис. 6, д Радиальная Осевая 130/150 56+5 130/150 56+5
ЗИЛ-164 Продольная Поперечная 37 37 Радиальные Тангенциальные Радиальная Тангенциальная 300+15 300+ 15
«Москвич» моде- лей 408 и 412 Все 22 Осевые Осевая 18±| 181?
ГАЗ-24 Все 25 Осевые Осевая 20 20
ГАЗ-13, ГАЗ-21 Все 25/6 Осевые Осевые 35/52 35/52
ГАЗ-52 Продольная Поперечная 28 30/6 Радиальные Осевые Радиальная Осевая 130/150 64/75 130/150 64/75
17
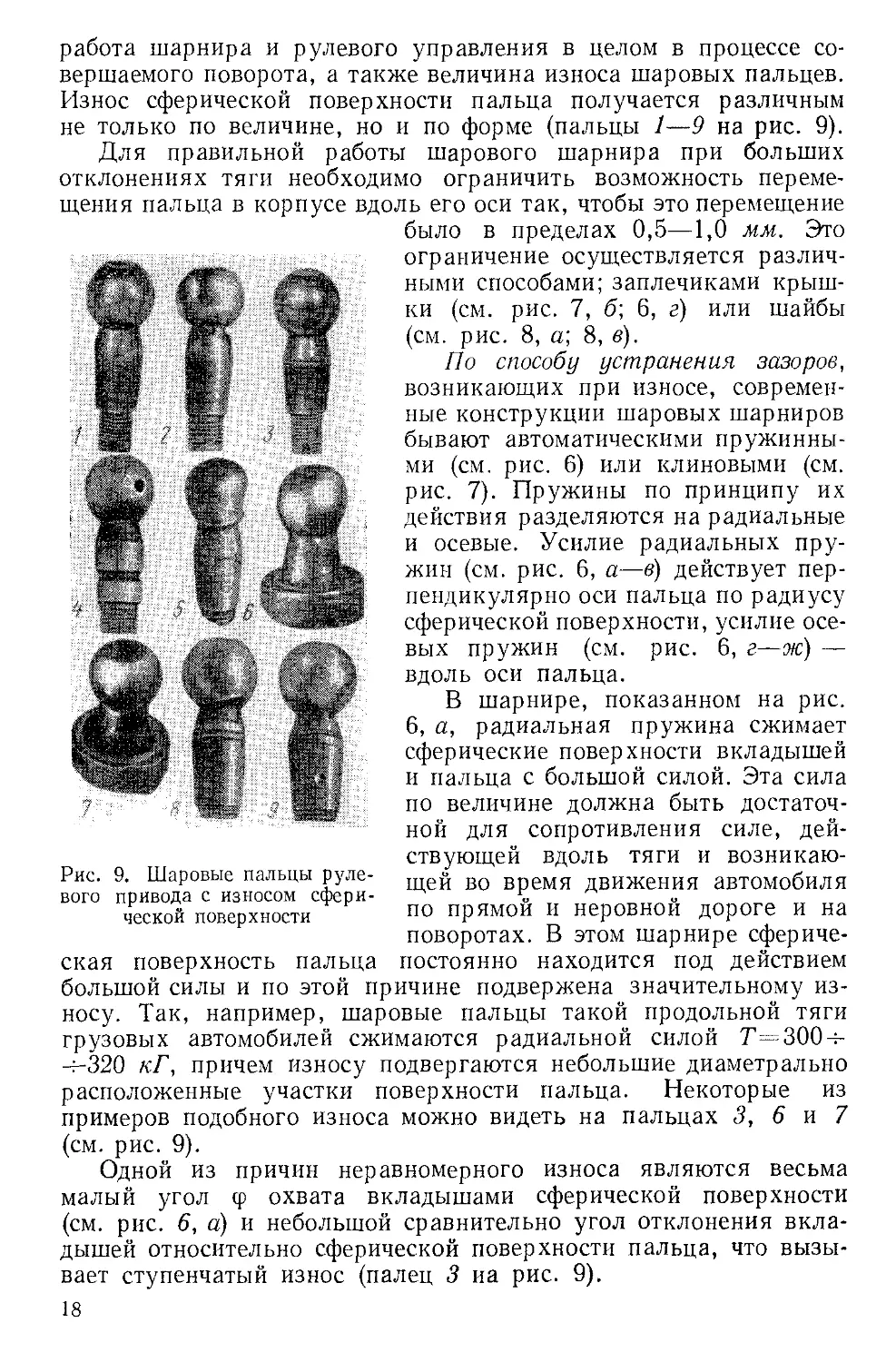
Рис. 9. Шаровые пальцы руле-
вого привода с износом сфери-
ческой поверхности
ская поверхность пальца
работа шарнира и рулевого управления в целом в процессе со-
вершаемого поворота, а также величина износа шаровых пальцев.
Износ сферической поверхности пальца получается различным
не только по величине, но и по форме (пальцы 1—9 на рис. 9).
Для правильной работы шарового шарнира при больших
отклонениях тяги необходимо ограничить возможность переме-
щения пальца в корпусе вдоль его оси так, чтобы это перемещение
было в пределах 0,5—1,0 мм. Это
ограничение осуществляется различ-
ными способами; заплечиками крыш-
ки (см. рис. 7, б; 6, г) или шайбы
(см. рис. 8, а; 8, в).
По способу устранения зазоров,
возникающих при износе, современ-
ные конструкции шаровых шарниров
бывают автоматическими пружинны-
ми (см. рис. 6) или клиновыми (см.
рис. 7). Пружины по принципу их
действия разделяются на радиальные
и осевые. Усилие радиальных пру-
жин (см. рис. 6, а—в) действует пер-
пендикулярно оси пальца по радиусу
сферической поверхности, усилие осе-
вых пружин (см. рис. 6, г—ж) —
вдоль оси пальца.
В шарнире, показанном на рис.
6, а, радиальная пружина сжимает
сферические поверхности вкладышей
и пальца с большой силой. Эта сила
по величине должна быть достаточ-
ной для сопротивления силе, дей-
ствующей вдоль тяги и возникаю-
щей во время движения автомобиля
по прямой и неровной дороге и на
поворотах. В этом шарнире сфериче-
постоянно находится под действием
большой силы и по этой причине подвержена значительному из-
носу. Так, например, шаровые пальцы такой продольной тяги
грузовых автомобилей сжимаются радиальной силой Т=3004-
-н320 кГ, причем износу подвергаются небольшие диаметрально
расположенные участки поверхности пальца. Некоторые из
примеров подобного износа можно видеть на пальцах 3, 6 и 7
(см. рис. 9).
Одной из причин неравномерного износа являются весьма
малый угол ф охвата вкладышами сферической поверхности
(см. рис. 6, а) и небольшой сравнительно угол отклонения вкла-
дышей относительно сферической поверхности пальца, что вызы-
вает ступенчатый износ (палец 3 на рис. 9).
18
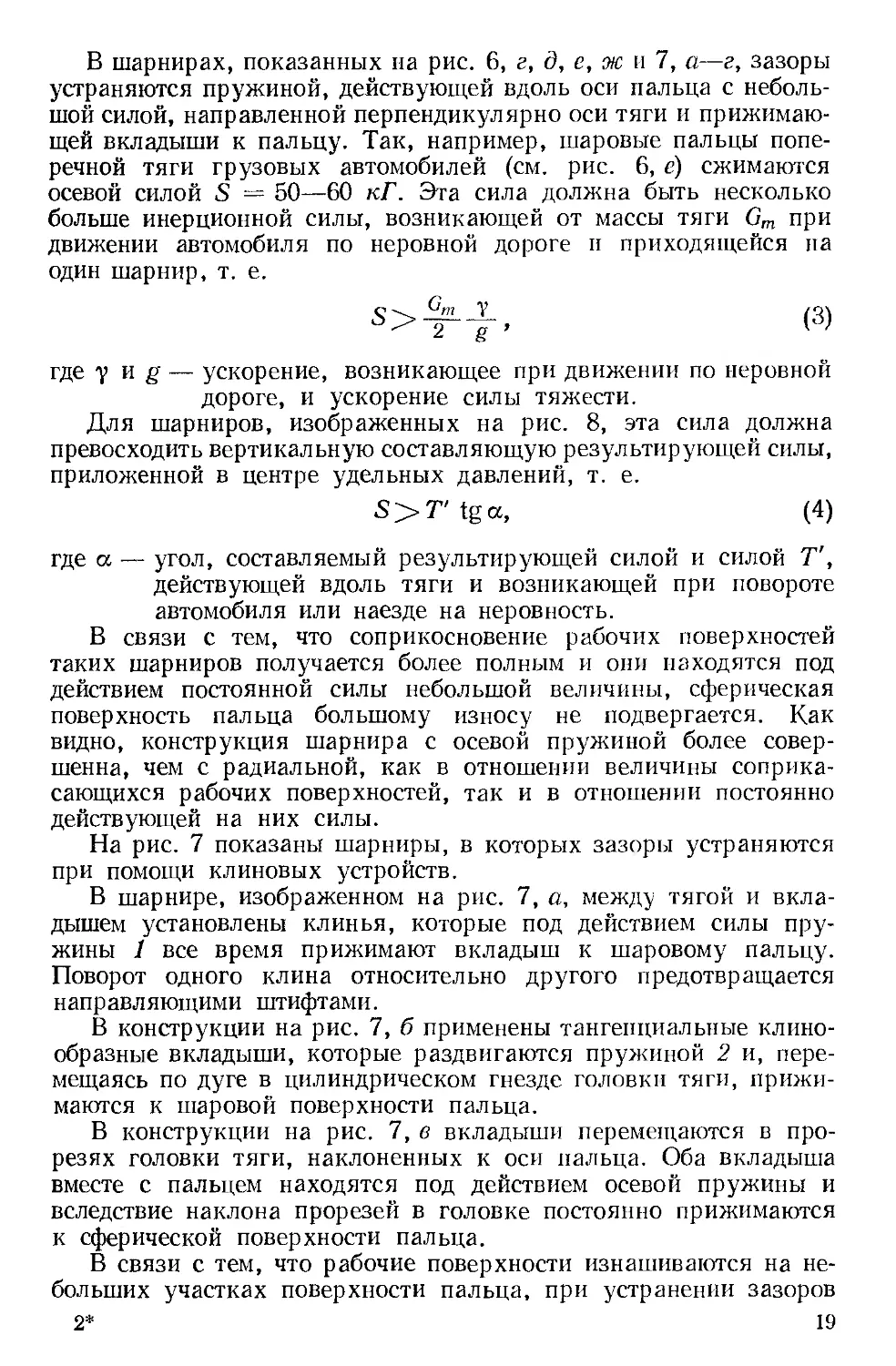
В шарнирах, показанных на рис. 6, г, д, е, ж и 7, а—г, зазоры
устраняются пружиной, действующей вдоль осп пальца с неболь-
шой силой, направленной перпендикулярно оси тяги и прижимаю-
щей вкладыши к пальцу. Так, например, шаровые пальцы попе-
речной тяги грузовых автомобилей (см. рис. 6, ё) сжимаются
осевой силой S = 50—60 кГ. Эта сила должна быть несколько
больше инерционной силы, возникающей от массы тяги Gm при
движении автомобиля по неровной дороге и приходящейся па
один шарнир, т. е.
(3)
где у и g — ускорение, возникающее при движении по неровной
дороге, и ускорение силы тяжести.
Для шарниров, изображенных на рис. 8, эта сила должна
превосходить вертикальную составляющую результирующей силы,
приложенной в центре удельных давлений, т. е.
S>rtga, (4)
где а — угол, составляемый результирующей силой и силой Т',
действующей вдоль тяги и возникающей при повороте
автомобиля или наезде на неровность.
В связи с тем, что соприкосновение рабочих поверхностей
таких шарниров получается более полным и они находятся под
действием постоянной силы небольшой величины, сферическая
поверхность пальца большому износу не подвергается. Как
видно, конструкция шарнира с осевой пружиной более совер-
шенна, чем с радиальной, как в отношении величины соприка-
сающихся рабочих поверхностей, так и в отношении постоянно
действующей на них силы.
На рис. 7 показаны шарниры, в которых зазоры устраняются
при помощи клиновых устройств.
В шарнире, изображенном на рис. 7, а, между тягой и вкла-
дышем установлены клинья, которые под действием силы пру-
жины 1 все время прижимают вкладыш к шаровому пальцу.
Поворот одного клина относительно другого предотвращается
направляющими штифтами.
В конструкции на рис. 7, б применены тангенциальные клино-
образные вкладыши, которые раздвигаются пружиной 2 и, пере-
мещаясь по дуге в цилиндрическом гнезде головки тяги, прижи-
маются к шаровой поверхности пальца.
В конструкции на рис. 7, в вкладыши перемещаются в про-
резях головки тяги, наклоненных к оси пальца. Оба вкладыша
вместе с пальцем находятся под действием осевой пружины и
вследствие наклона прорезей в головке постоянно прижимаются
к сферической поверхности пальца.
В связи с тем, что рабочие поверхности изнашиваются на не-
больших участках поверхности пальца, при устранении зазоров
2* 19
путем расклинивания вкладышей поворот на большие углы шара,
имеющего при износе эллиптическую форму, затруднителен.
В этом отношении конструкцию с клиновыми устройствами шар-
нира следует считать менее удачной, чем с осевой пружиной.
Рабочие поверхности шарниров нужно регулярно смазывать.
Однако это несколько усложняет эксплуатацию. Для упрощения
обслуживания получают распространение шарниры с «вечной»
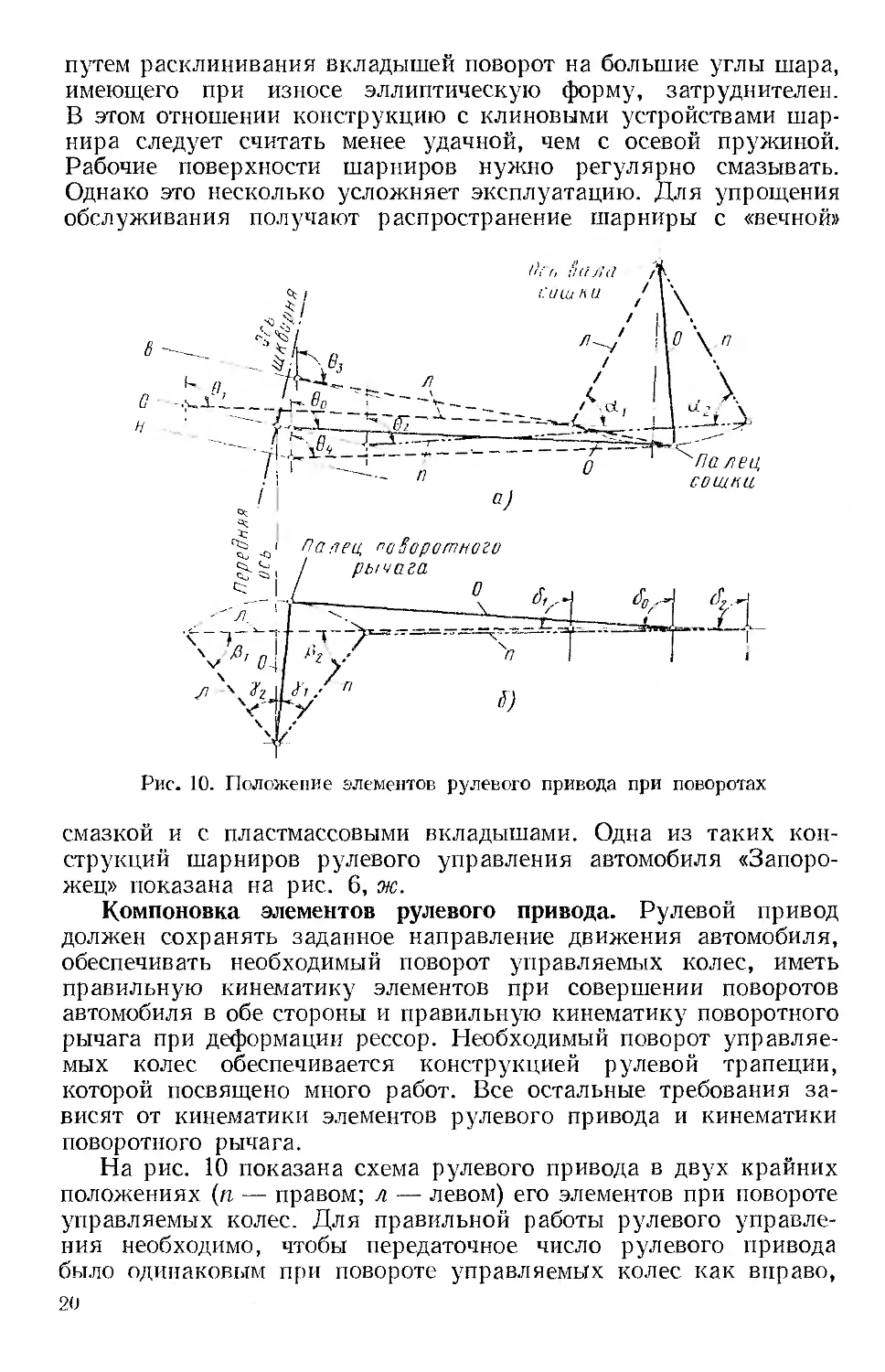
Рис. 10. Положение элементов рулевого привода при поворотах
смазкой и с пластмассовыми вкладышами. Одна из таких кон-
струкций шарниров рулевого управления автомобиля «Запоро-
жец» показана на рис. 6, ж.
Компоновка элементов рулевого привода. Рулевой привод
должен сохранять заданное направление движения автомобиля,
обеспечивать необходимый поворот управляемых колес, иметь
правильную кинематику элементов при совершении поворотов
автомобиля в обе стороны и правильную кинематику поворотного
рычага при деформации рессор. Необходимый поворот управляе-
мых колес обеспечивается конструкцией рулевой трапеции,
которой посвящено много работ. Все остальные требования за-
висят от кинематики элементов рулевого привода и кинематики
поворотного рычага.
На рис. 10 показана схема рулевого привода в двух крайних
положениях (п — правом; л — левом) его элементов при повороте
управляемых колес. Для правильной работы рулевого управле-
ния необходимо, чтобы передаточное число рулевого привода
было одинаковым при повороте управляемых колес как вправо,
20
так и влево. Так как рулевой привод состоит из системы тяг
и рычагов, то от взаимного их расположения зависит соотношение
передаточных чисел привода при правом и левом повороте упра-
вляемых колес. Взаимное расположение элементов рулевого при-
вода и их кинематика считаются правильными, если углы at
и а2> составляемые рулевой сошкой с продольной рулевой тягой,
и углы и 02 между поворотным рычагом и продольной тягой
в крайних их положениях при повороте в обе стороны получаются
приблизительно равными.
Большое значение для работы рулевого управления имеет
длина продольной тяги.
11ри обычной схеме рулевого привода (см. рис. 5, а) углы уг
и у2 (см. рис. 10) поворота левого управляемого колеса при
повороте направо и налево получаются различными, причем
?2> Т1-
Очевидно, в таком же соотношении находятся и углы поворота
поворотного рычага и рулевой сошки. Чтобы получить равные
углы, составляемые продольной тягой с поворотным рычагом
в крайних их положениях, нужно шаровой палец поворотного
рычага в среднем положении разместить сзади передней оси
так, как показано на рис. 10, б.
Таким же путем получаются равные углы, составляемые про-
дольной тягой с рулевой сошкой в крайних ее положениях. Для
этого шаровой палец сошки относительно вертикальной оси,
проходящей через ось ее вала (рис. 10, а), в среднем положении
управляемых колес должен размещаться позади оси.
Углы 9 и б в разных положениях колеса и сошки должны
быть близки к 90°.
Эти положения действительны для любой обычной схемы руле-
вого привода грузового и легкового автомобилей и автобусов.
Правильная кинематика поворотного рычага при деформации
рессор заключается в том, чтобы траектория перемещения его
шарового пальца относительно шарового пальца сошки как
центра по возможности совпадала с траекторией его перемещения
относительно другого центра, около которого перемещается рес-
сорная площадка при деформации подвески.
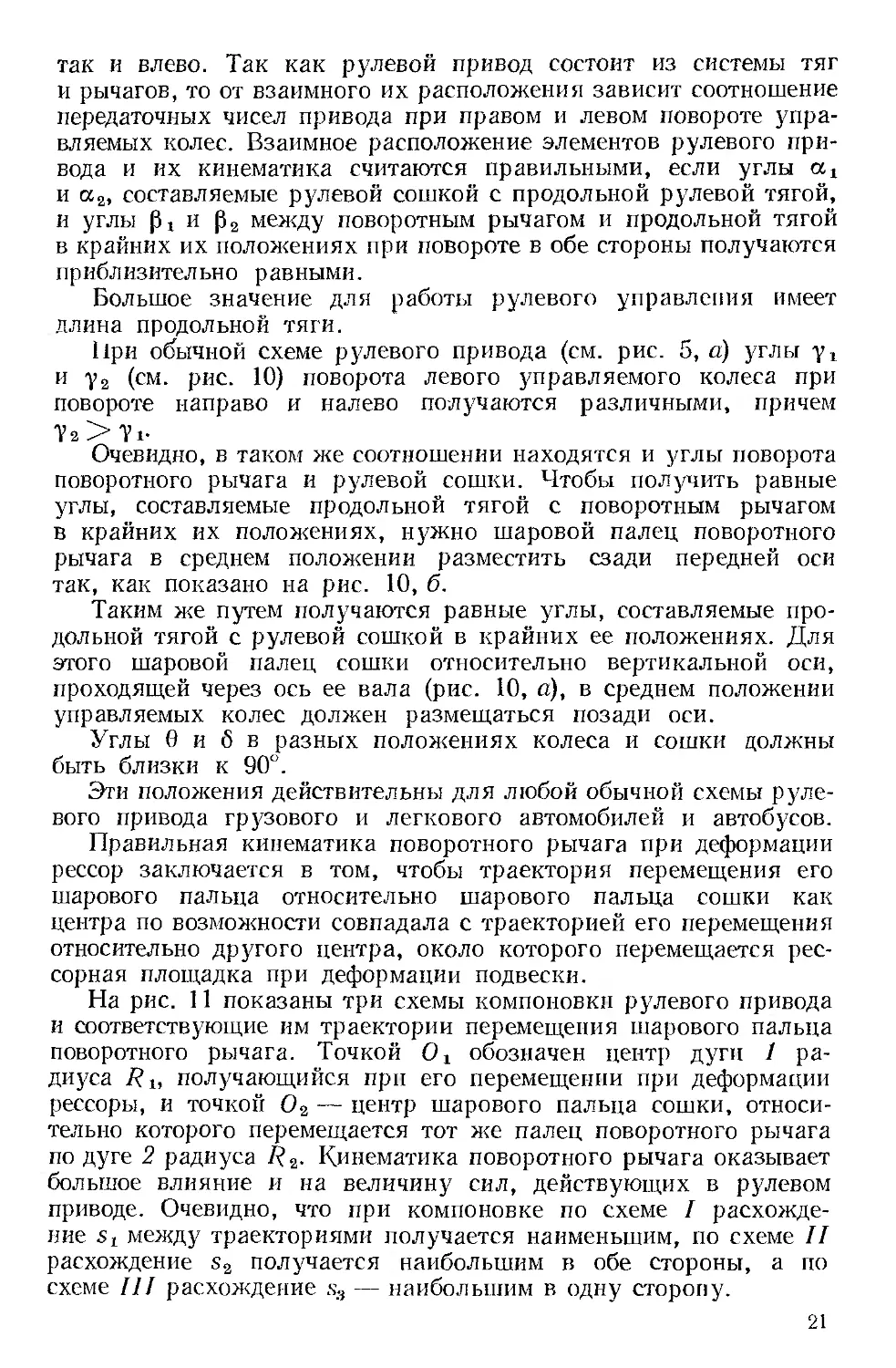
На рис. 11 показаны три схемы компоновки рулевого привода
и соответствующие им траектории перемещения шарового пальца
поворотного рычага. Точкой обозначен центр дуги 1 ра-
диуса получающийся при его перемещении при деформации
рессоры, и точкой О2 — центр шарового пальца сошки, относи-
тельно которого перемещается тот же палец поворотного рычага
по дуге 2 радиуса /?2- Кинематика поворотного рычага оказывает
большое влияние и на величину сил, действующих в рулевом
приводе. Очевидно, что при компоновке по схеме I расхожде-
ние St между траекториями получается наименьшим, по схеме II
расхождение s2 получается наибольшим в обе стороны, а по
схеме III расхождение s3 — наибольшим в одну сторону.
21
Кроме сил сопротивления колес повороту относительно до-
роги вращающиеся колеса обладают инерцией и гироскопическим
моментом, которые сопротивляются повороту колес от занимае-
мого ими положения. При движении автомобиля по неровной
дороге из-за неправильной кинематики в рулевом приводе возни-
кают силы, действующие в двух противоположных направлениях.
Такие силы приводят к усталостным разрушениям отдельных
деталей, как, например, вала сошки шариков или иголок ролика
,2 глобоидальной передачи и дру-
Рис. 11. Траектории шарового шар-
нира поворотного рычага при дефор-
мации рессор
гих деталей. При недостаточно
жестком креплении картера ру-
левого механизма к раме эти
силы, действуя на картер и
рулевую колонку, вызывают
усталостное разрушение ко-
лонки.
При неточной кинематике
продольной тяги относительно
рулевой сошки углы, составляе-
мые ими в крайних положениях,
могут резко различаться. В од-
ном крайнем положении угол,
составляемый сошкой и тягой,
будет близким к 180', а в дру-
гом крайнем положении—близ-
ким к 90°. Тогда при повороте
в первое крайнее положение
вполне возможно перенапряже-
ние продольной тяги или вала
сошки, предшествующее уста-
лостным разрушениям.
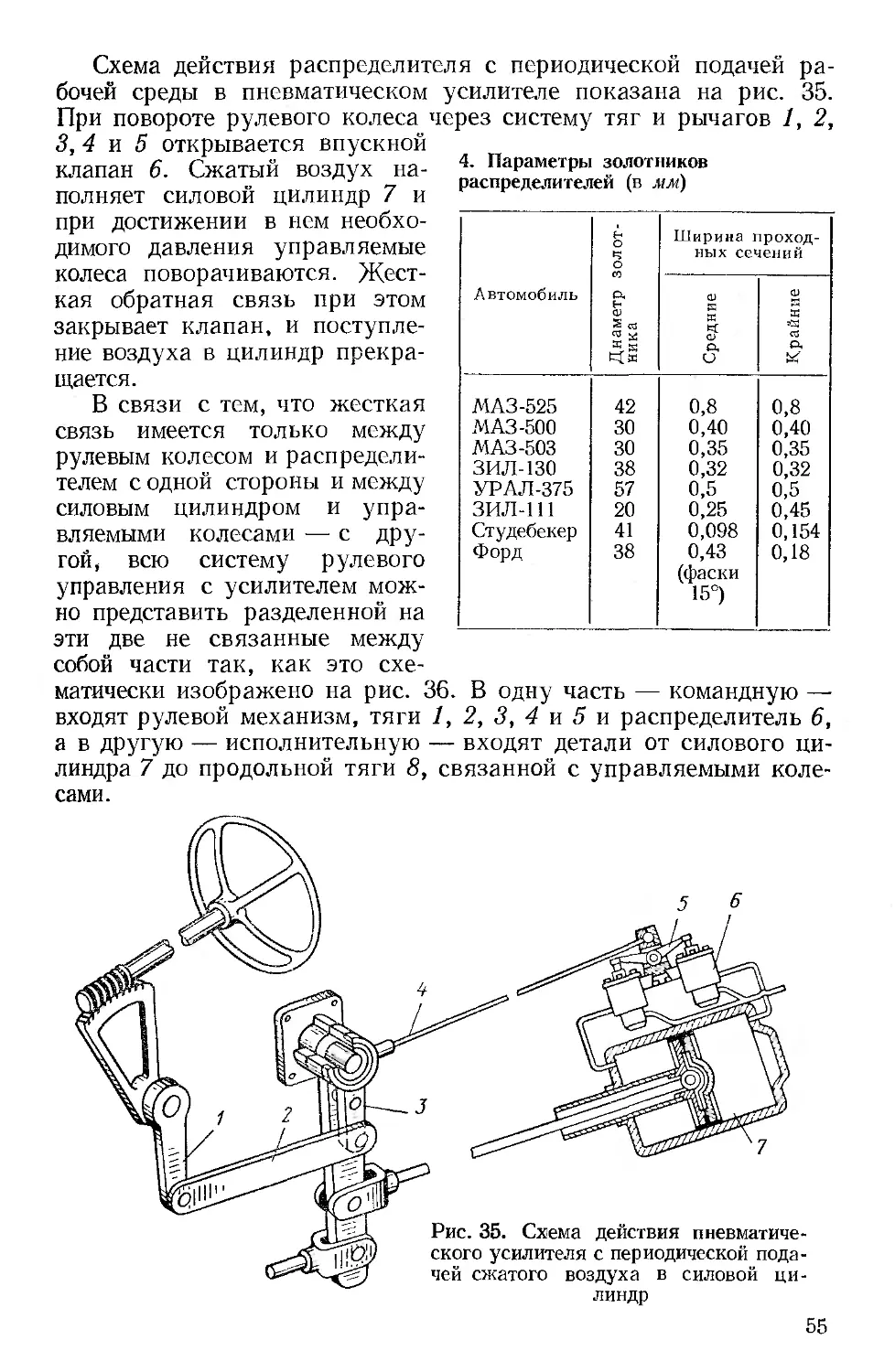
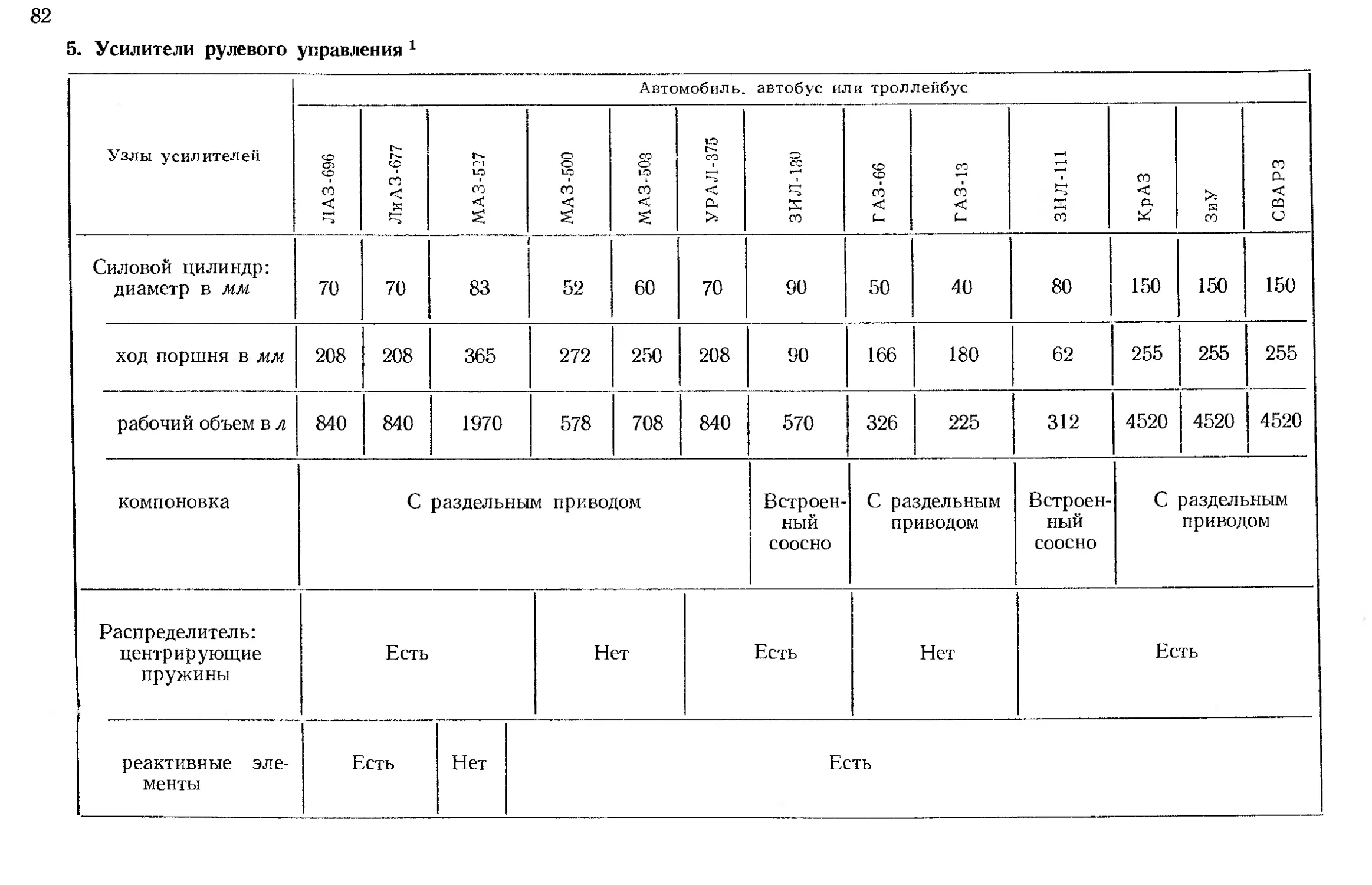
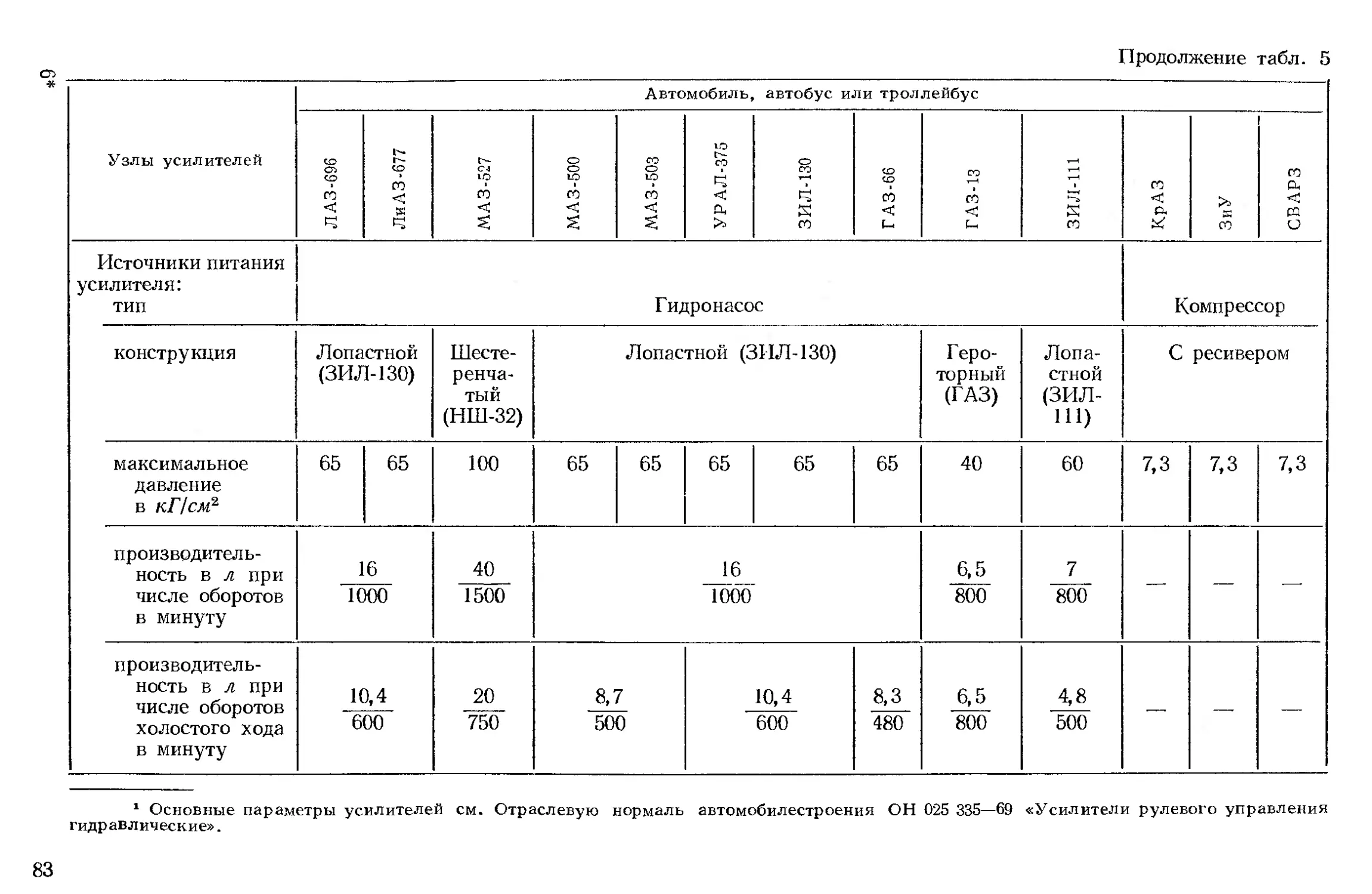
УСИЛИТЕЛИ РУЛЕВОГО УПРАВЛЕНИЯ
Усилитель ставится в систему рулевого управления с целью
облегчения труда водителя и обеспечения безопасности движения
и состоит из источника энергии; исполнительного органа (сило-
вого цилиндра); распределительного органа (распределителя);
центрирующего элемента и реактивного устройства.
Источником энергии обычно являются компрессор с ресивером,
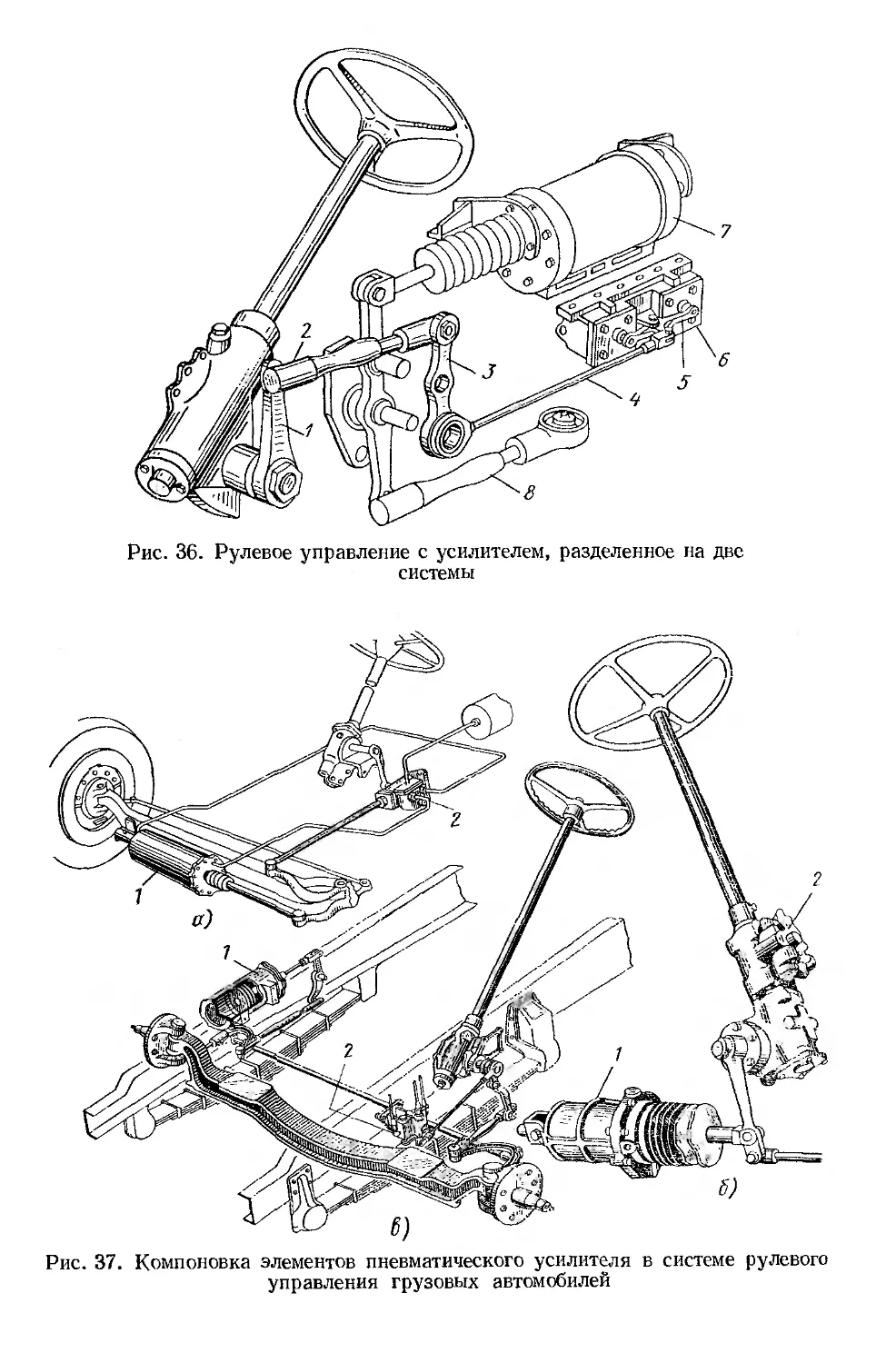
гидронасос или аккумулятор давления с гидронасосом. Рулевое
управление с встроенным в него усилителем представляет собой
следящую систему с жесткой обратной связью.
По роду рабочей среды или используемой энергии усилители
разделяются на механические; электрические; пневматические;
гидравлические.
Наибольшее распространение получили гидравлические и пнев-
матические усилители, причем за рубежом чаще применяют
22
гидравлические усилители. Это объясняется тем, что к моменту,
когда потребовалось быстро решить вопрос об облегчении управле-
ния сверхтяжелыми грузовыми автомобилями и тягачами, наибо-
лее отработанными были механизмы гидравлической системы,
широко применяемой в различных областях техники. Поэтому
в усилителях рулевого управления были использованы именно
эти механизмы.
Пневматические усилители, появившиеся значительно раньше
гидравлических, хотя во многих случаях экономически и более
выгодные, чем гидравлические, не имели вполне отработанных
механизмов и не получили поэтому достаточного распространения.
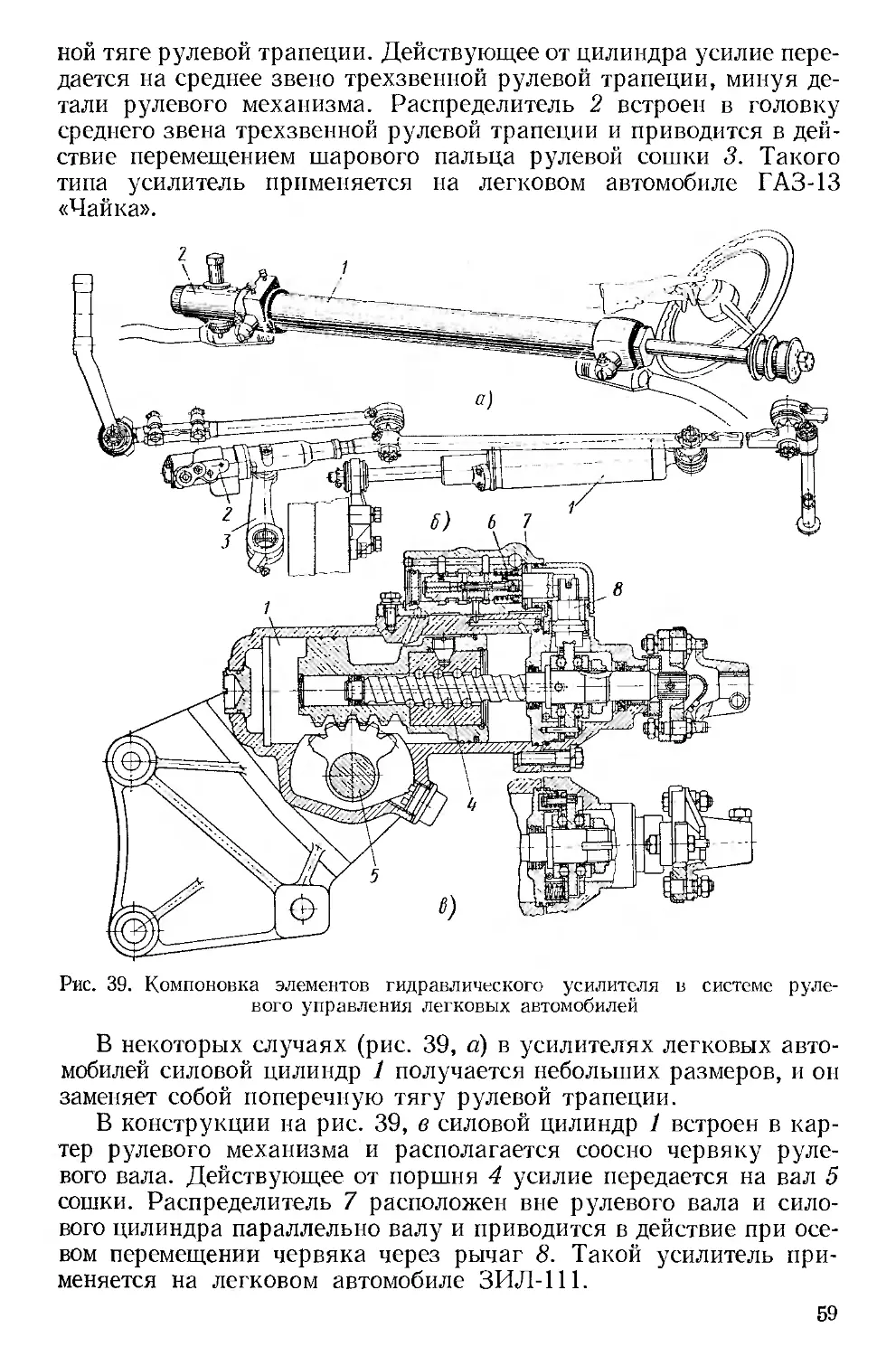
Гидравлический усилитель не только облегчает рулевое упра-
вление, но и воспринимает обратные удары и сохраняет направ-
ление движения автомобиля при наезде на неровность одним
колесом или проколе шины. Эти качества уменьшают утомляе-
мость водителя и повышают безопасность движения автомобиля.
В связи с этим гидравлические усилители за последнее время стали
широко применяться не только на грузовых автомобилях и авто-
бусах, но и на легковых автомобилях. Так как усилие, прилагае-
мое к рулевому колесу таких автомобилей, невелико, диаметр
силового цилиндра получается небольших размеров.
Гидравлические усилители применяются на всех новых гру-
зовых автомобилях ЗИЛ и грузовых автомобилях большой грузо-
подъемности МАЗ, КрАЗ и УРАЛ. Они установлены на автомо-
билях ГАЗ-66 и его модификациях, на автопогрузчиках, на новых
автобусах ЛАЗ-698, ЛиАЗ-677 и легковых автомобилях ЗИЛ-114
и ГАЗ-13 «Чайка».
Недостатки, выявившиеся в процессе эксплуатации автомо-
билей, снабженных пневматическим усилителем, постепенно устра-
нялись, и они к настоящему времени получили несравненно боль-
шее распространение, чем раньше и, в частности, на автобусах.
Пневматические усилители применяются преимущественно на
грузовых автомобилях, автобусах и троллейбусах, снабженных
пневматической системой, установленной для работы других
механизмов (тормозов, дверей и др.).
Пневматические усилители получили применение на отече-
ственных грузовых автомобилях КрАЗ, троллейбусах ЗиУ и
СВАРЗ и автобусах ЗиУ, управление которыми затруднено.
По принципу действия рабочей среды усилители бывают с рас-
пределителями, имеющими непрерывную циркуляцию и периоди-
ческую подачу рабочей среды. В первом случае рабочая среда
(обычно жидкость) постоянно циркулирует от насоса к распреде-
лителю усилителя и далее идет от него на слив в бак насоса.
При этом давление жидкости получается сравнительно неболь-
шим и необходимым только для преодоления сопротивления ее
перетеканию.
Во втором же случае рабочая среда, находящаяся под давле-
нием, периодически подается в силовой цилиндр усилителя после
23
открытия клапана, сообщающего его с аккумулятором или реси-
вером давления.
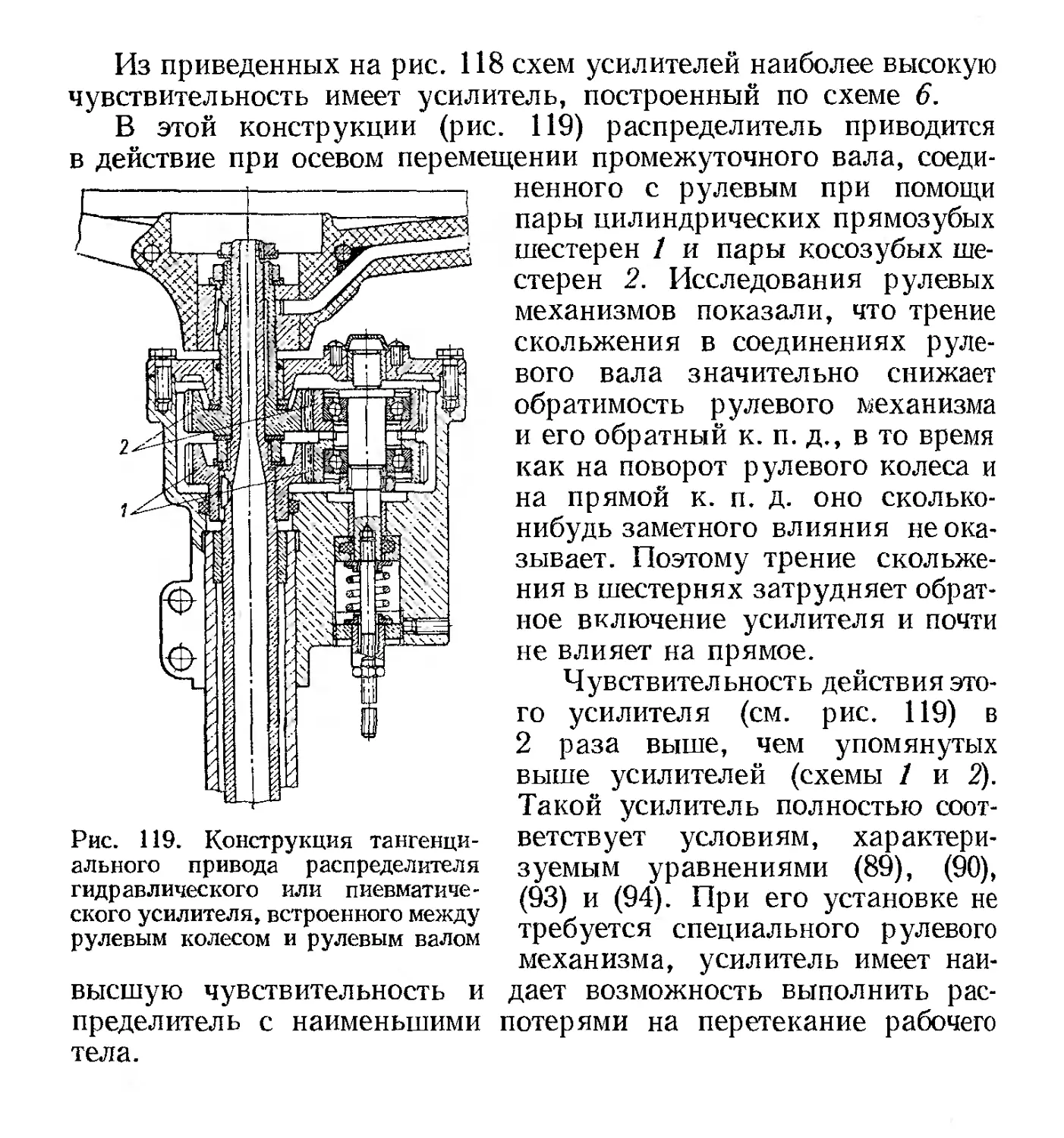
По компоновке основных элементов усилители бывают с силовым
цилиндром, выполненным в одном блоке с рулевым механизмом
или отдельно от него; с распределителем, расположенным после
рулевой передачи или до нее. Рулевые механизмы со встроенными
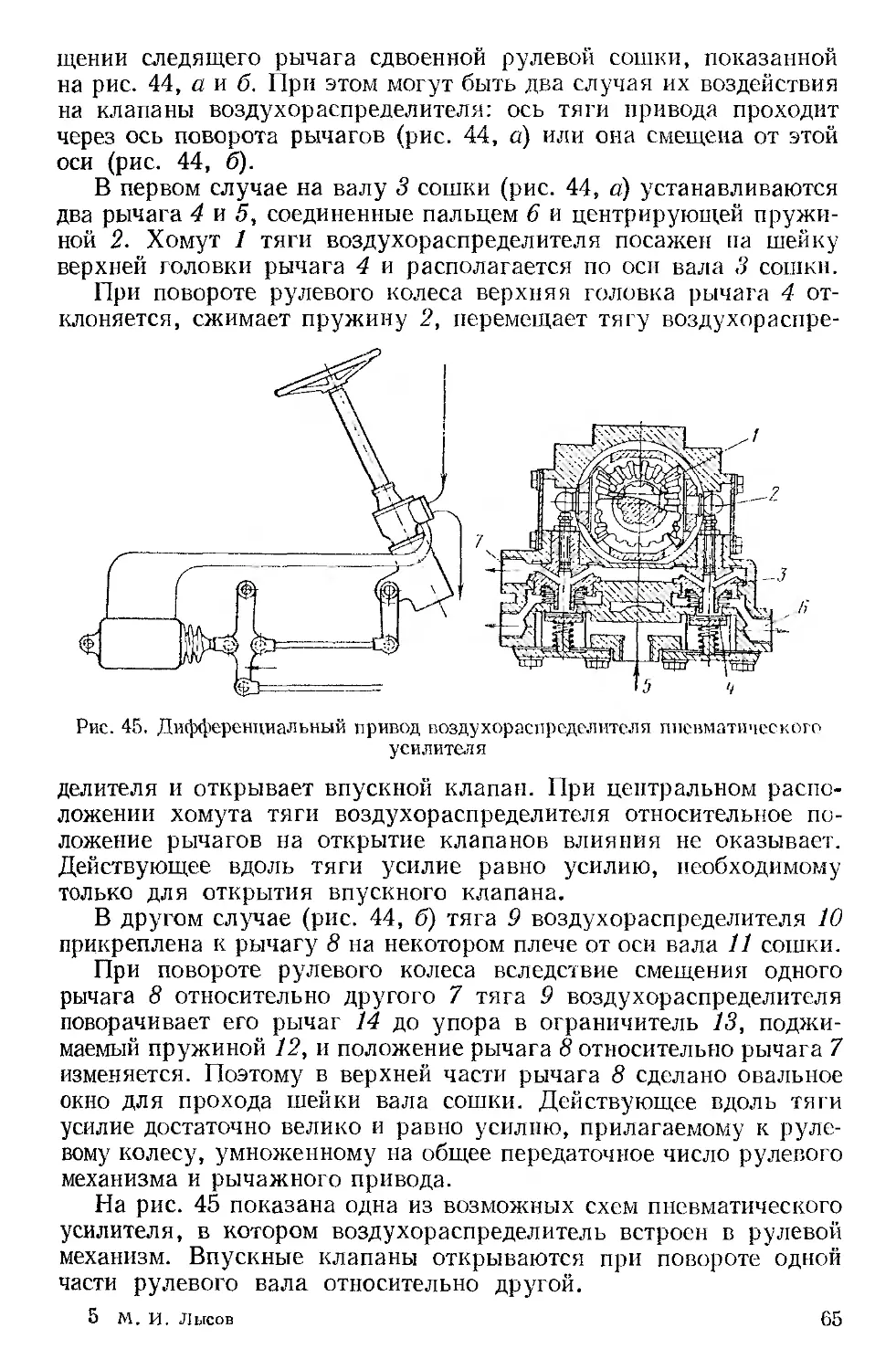
силовым цилиндром и распределителем выпускаются обычно
специализированными фирмами (Геммер, Росс, Сагинау и др.)
и немногими автомобильными фирмами (Крайслер, Линкольн
и др.). Если распределитель располагается после рулевой пере-
дачи, то его встраивают в рулевую колонку, в продольную тягу,
в следящий рычаг сдвоенной рулевой сошки и др., и он приво-
дится в действие при осевом перемещении рулевого вала, про-
дольной тяги или при взаимном перемещении рычагов сдвоенной
сошки. Распределитель, размещенный за рулевым колесом, до
рулевой передачи, встраивают в рулевой механизм. При этом
он приводится в действие не при осевом, а при тангенциальном
перемещении рулевого вала или рулевого колеса.
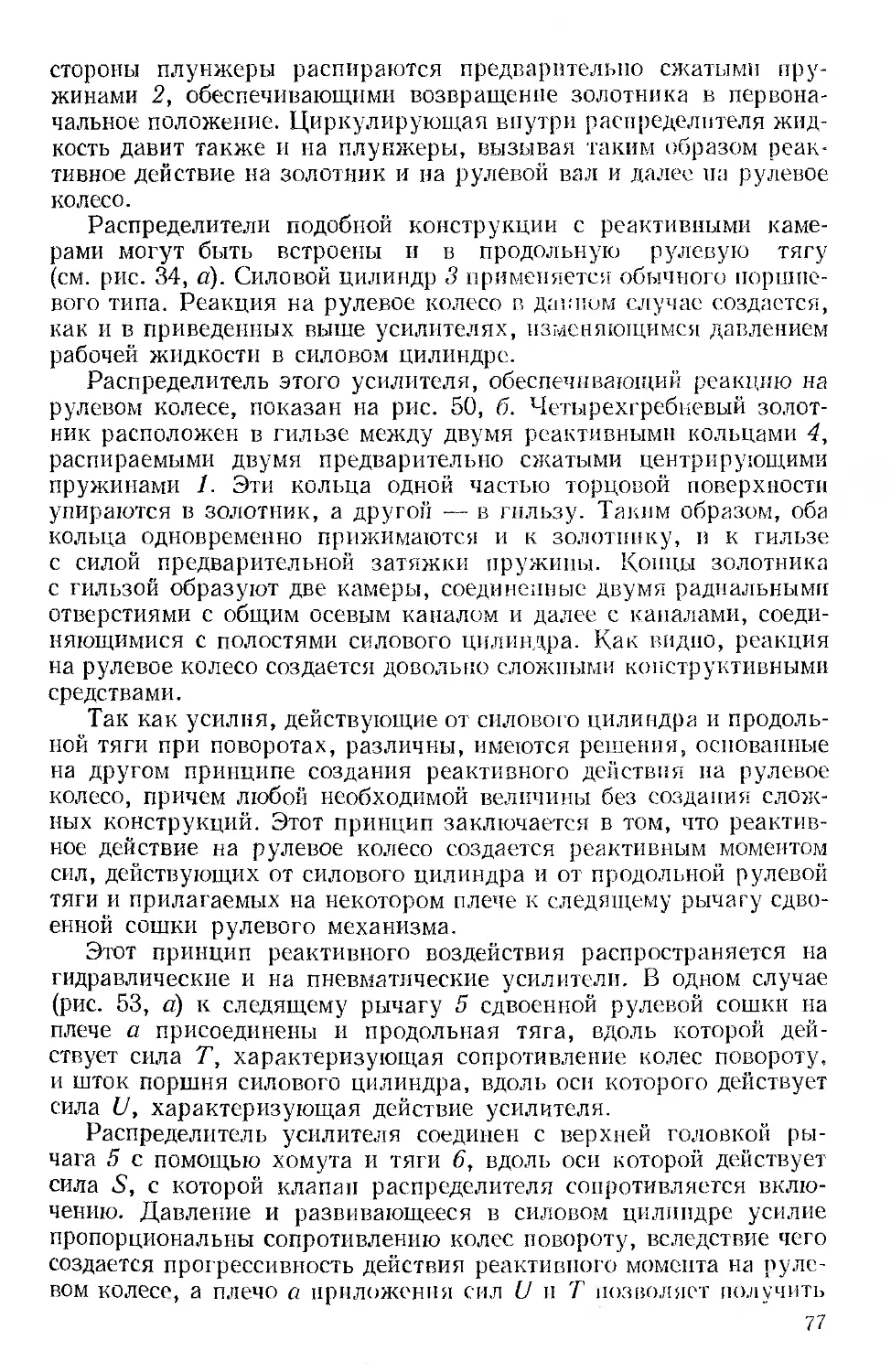
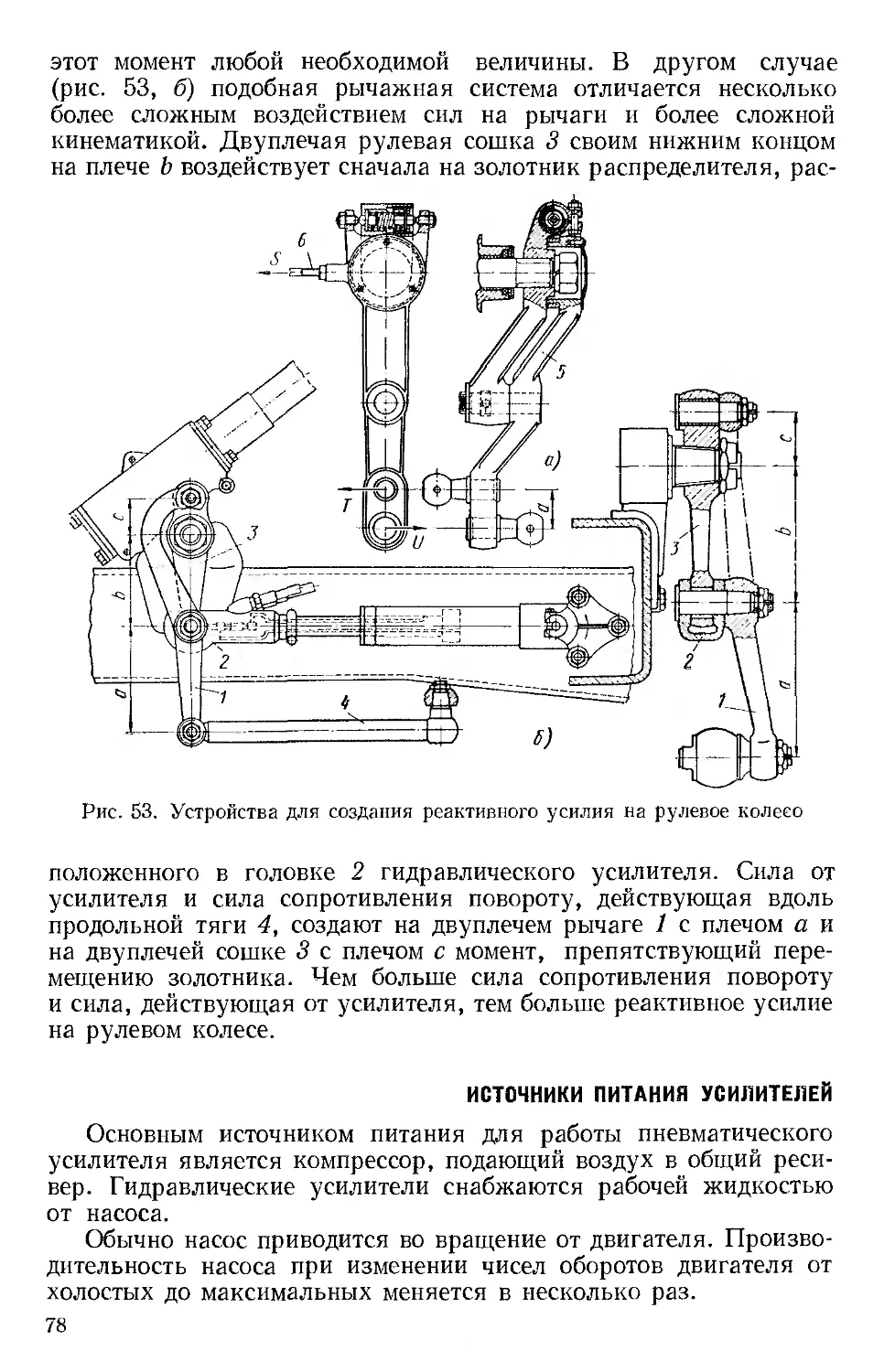
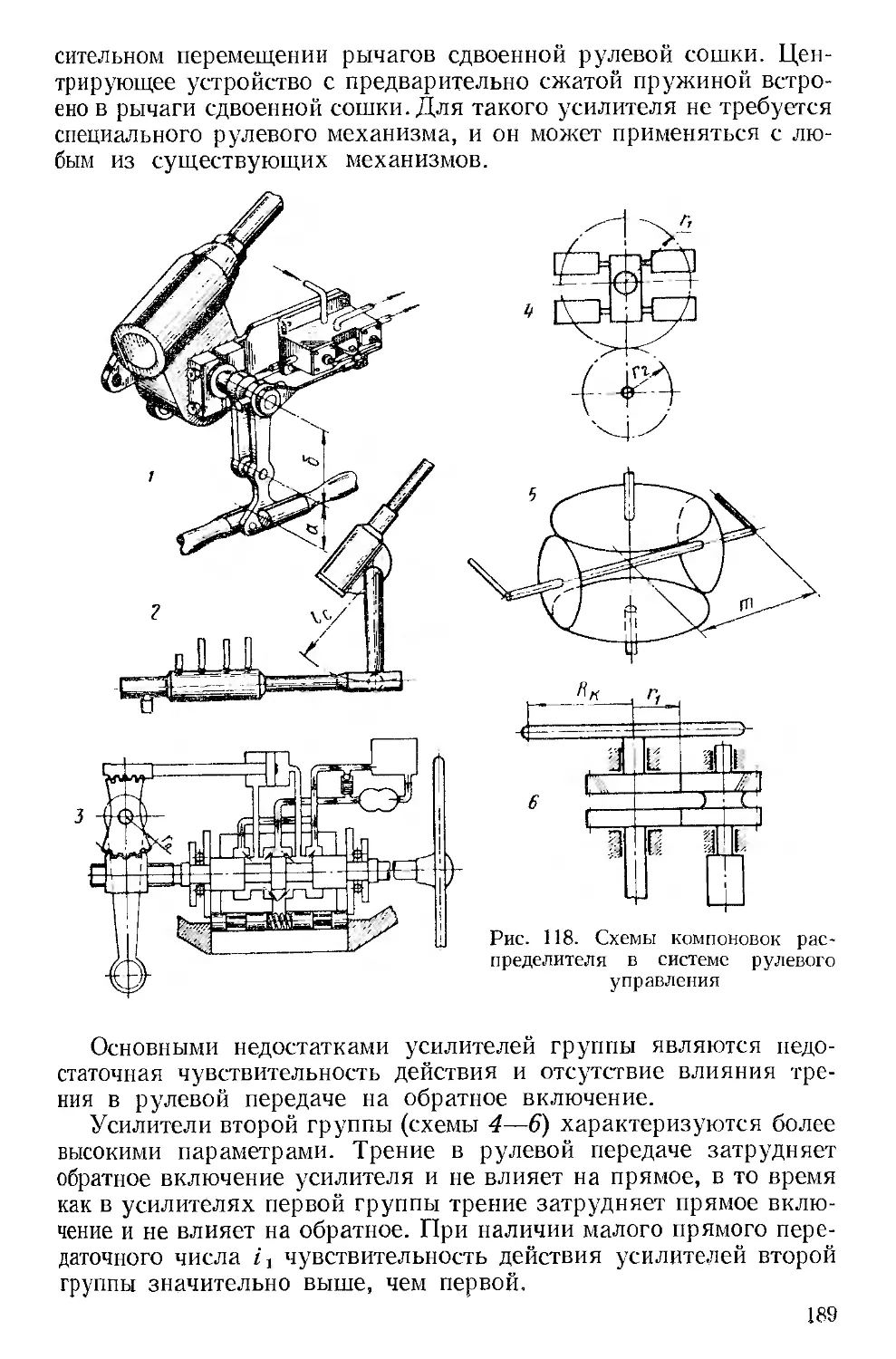
По действию усилителя на рулевое колесо усилители бывают
с реактивным действием или без него.
В усилителях без реактивного действия усилие, прилагаемое
к рулевому колесу, преодолевает только силу центрирующей пру-
жины и остается постоянным при повороте.
В усилителях с реактивным действием усилие, прилагаемое
к рулевому колесу, преодолевает силу центрирующей пружины
и усилие, возникающее от реактивного элемента, встроенного
в распределитель, и увеличивающееся с повышением сопротивле-
ния колес повороту.
По конструкции распределителя усилители бывают с осевым
золотником и тангенциальным (поворачивающимся) золотником.
По конструкции силового цилиндра усилители бывают прямого
и дифференциального действия.
В усилителях прямого действия рабочая среда направляется
только в одну полость силового цилиндра, и давление рабочей
жидкости действует только на одну площадь поршня. В усили-
телях дифференциального действия рабочие площади поршня
различны, и рабочая среда направляется или в одну штоковую
полость с меньшей рабочей площадью поршня или в обе полости
одновременно.
Глава И
ОСНОВНЫЕ КОНСТРУКЦИИ РУЛЕВЫХ МЕХАНИЗМОВ
РУЛЕВЫЕ МЕХАНИЗМЫ С ШЕСТЕРЕНЧАТОЙ ПЕРЕДАЧЕЙ
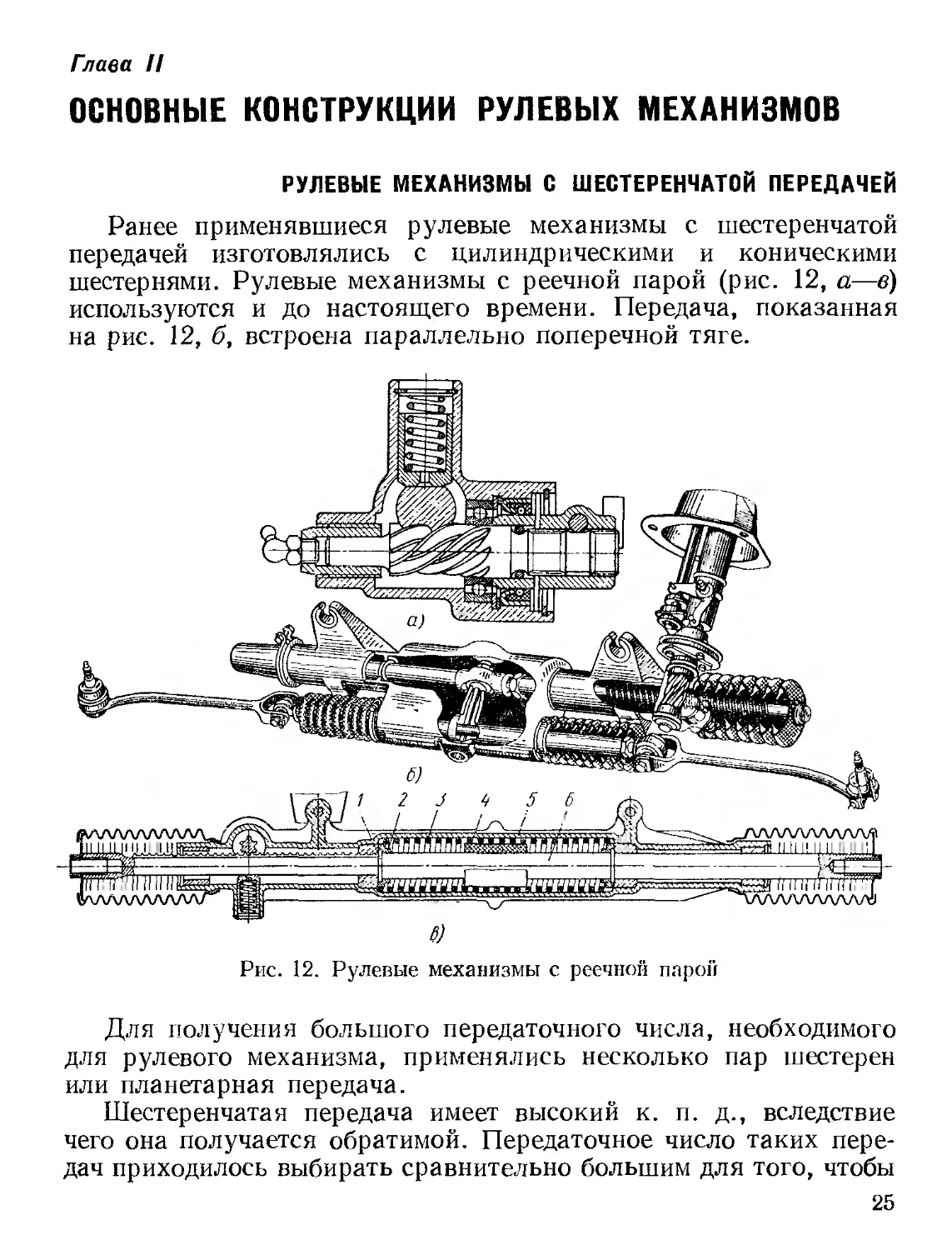
Ранее применявшиеся рулевые механизмы с шестеренчатой
передачей изготовлялись с цилиндрическими и коническими
шестернями. Рулевые механизмы с реечной парой (рис. 12, а—в)
используются и до настоящего времени. Передача, показанная
на рис. 12, б, встроена параллельно поперечной тяге.
&
Рис. 12. Рулевые механизмы с реечной парой
Для получения большого передаточного числа, необходимого
для рулевого механизма, применялись несколько пар шестерен
или планетарная передача.
Шестеренчатая передача имеет высокий к. п. д., вследствие
чего она получается обратимой. Передаточное число таких пере-
дач приходилось выбирать сравнительно большим для того, чтобы
25
в какой-то степени уменьшить передачу обратных ударов на ру-
левое колесо от неровностей дороги, или применять специальные
устройства.
В особо обратимых конструкциях, как, например, в рулевых
механизмах с реечной передачей, для поглощения мелких удар-
ных сил рейка удерживается предварительно сжатой пружиной 3
(рис. 12. в), установленной в корпусе 5 между внутренними шай-
бами 2. В проточках реечного штока 6 установлены наружные
шайбы 1 так, что они касаются внутренних шайб 2 без осевого
зазора. Все ударные силы, действующие от неровностей дороги,
которые меньше силы предварительного сжатия пружины, по-
глощаются корпусом рулевого механизма и далее рамой авто-
мобиля и не передаются на рулевое колесо.
Для перемещения рейки в ту или другую сторону к рулевому
колесу нужно приложить усилие, превосходящее силу предвари-
тельного сжатия пружины и сопротивление колес повороту.
Поворот рулевого колеса и перемещения реечного штока 6 и упра-
вляемых колес ограничиваются распорной втулкой 4, размещен-
ной внутри пружины.
РУЛЕВЫЕ МЕХАНИЗМЫ О КУЛАЧНОЙ ПЕРЕДАЧЕЙ
Для устранения недостатков, присущих обратимой шестерен-
чатой передаче, стали применять передачи необратимые или нахо-
дящиеся на пределе обратимости, в том числе червячные, винто-
вые и кулачные.
К кулачным передачам относятся и такие передачи, в которых
две улитки, выполненные по спирали, укреплены на рулевом
валу. В некоторых конструкциях кулак имеет специальную
форму. Однако в основном из-за сложности изготовления кулач-
ные передачи не получили распространения в рулевых меха-
низмах автомобилей.
РУЛЕВЫЕ МЕХАНИЗМЫ С ВИНТОВОЙ ПЕРЕДАЧЕЙ
Рулевые механизмы с винтовой передачей в связи с развитием
винтовых пар с циркулирующими шариками получили широкое
распространение. Они применяются и на легковых, и на грузовых
автомобилях, поэтому по конструкции и по принципу действия
они значительно различаются.
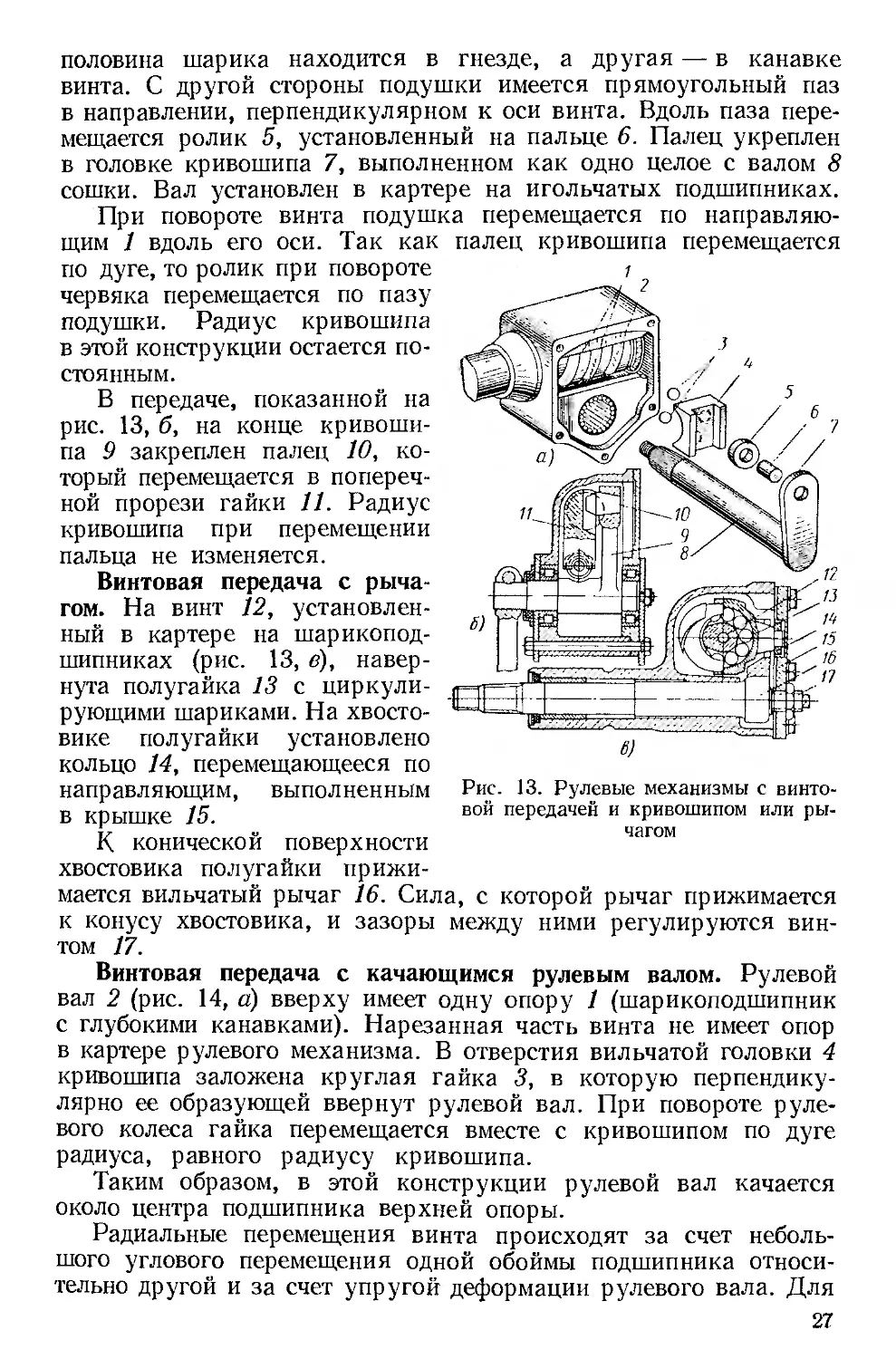
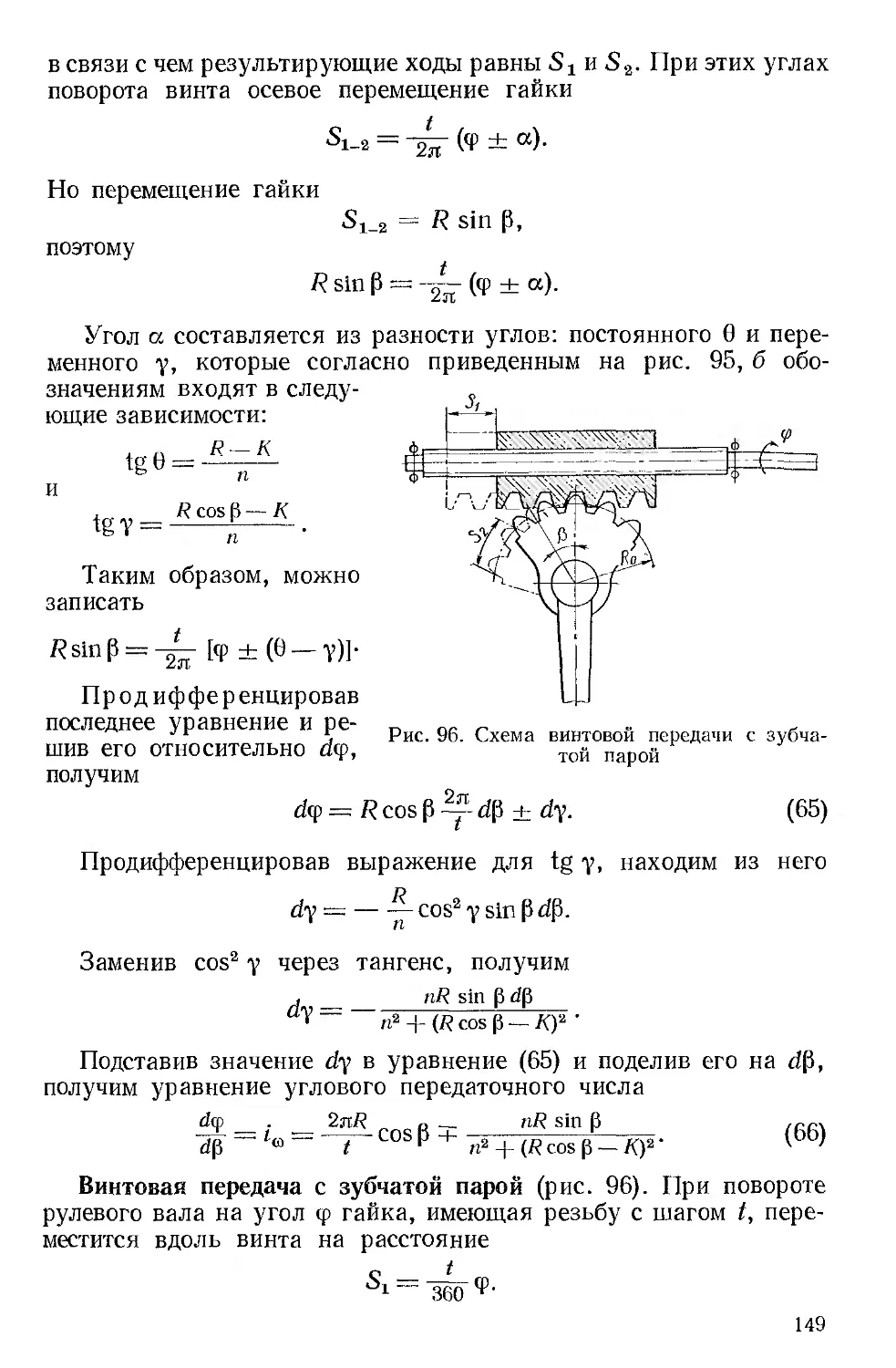
Винтовые передачи с кривошипом. В передаче, показанной
на рис. 13, а винт 2, имеющий канавку с полукруглым профилем,
установлен на двух радиально-упорных шарикоподшипниках
в картере рулевого механизма.
Вдоль винта по направляющим 1 картера перемещается по-
душка 4 с цилиндрической выемкой, сделанной по размеру на-
ружного диаметра винта. В качестве нарезки в подушке служат
два шарика 3, заложенные в гнезда подушки таким образом, что
26
половина шарика находится в гнезде, а другая — в канавке
винта. С другой стороны подушки имеется прямоугольный паз
в направлении, перпендикулярном к оси винта. Вдоль паза пере-
мещается ролик 5, установленный на пальце 6. Палец укреплен
в головке кривошипа 7, выполненном как одно целое с валом 8
сошки. Вал установлен в картере на игольчатых подшипниках.
При повороте винта подушка перемещается по направляю-
щим 1 вдоль его оси. Так как
по дуге, то ролик при повороте
червяка перемещается по пазу
подушки. Радиус кривошипа
в этой конструкции остается по-
стоянным.
В передаче, показанной на
рис. 13, б, на конце кривоши-
па 9 закреплен палец 10, ко-
торый перемещается в попереч-
ной прорези гайки 11. Радиус
кривошипа при перемещении
пальца не изменяется.
Винтовая передача с рыча-
гом. На винт 12, установлен-
ный в картере на шарикопод-
шипниках (рис. 13, в), навер-
нута полугайка 13 с циркули-
рующими шариками. На хвосто-
вике полугайки установлено
кольцо 14, перемещающееся по
направляющим, выполненным
в крышке 15.
К конической поверхности
палец кривошипа перемещается
Рис. 13. Рулевые механизмы с винто-
вой передачей и кривошипом или ры-
чагом
хвостовика полугайки прижи-
мается вильчатый рычаг 16. Сила, с которой рычаг прижимается
к конусу хвостовика, и зазоры между ними регулируются вин-
том 17.
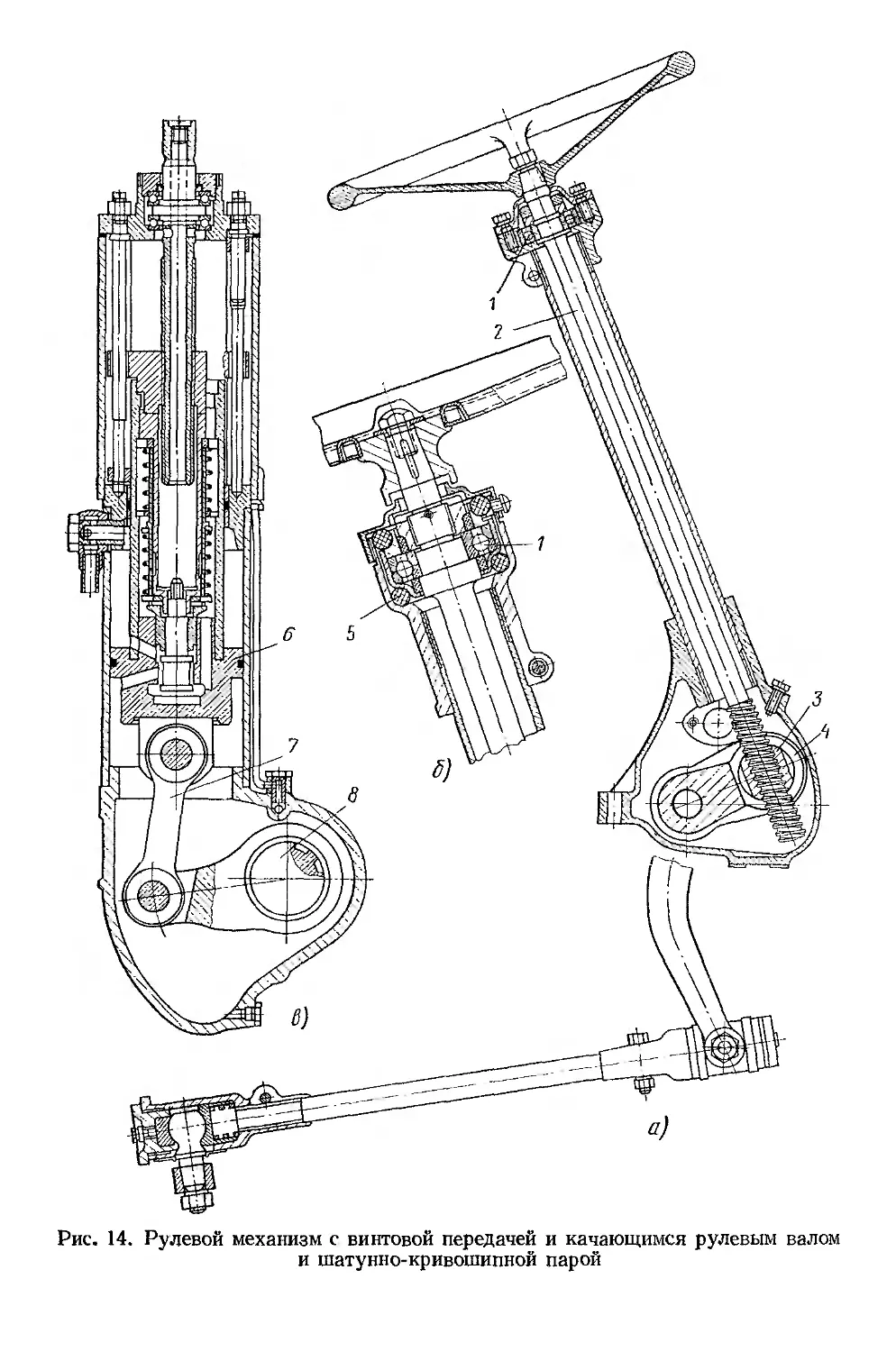
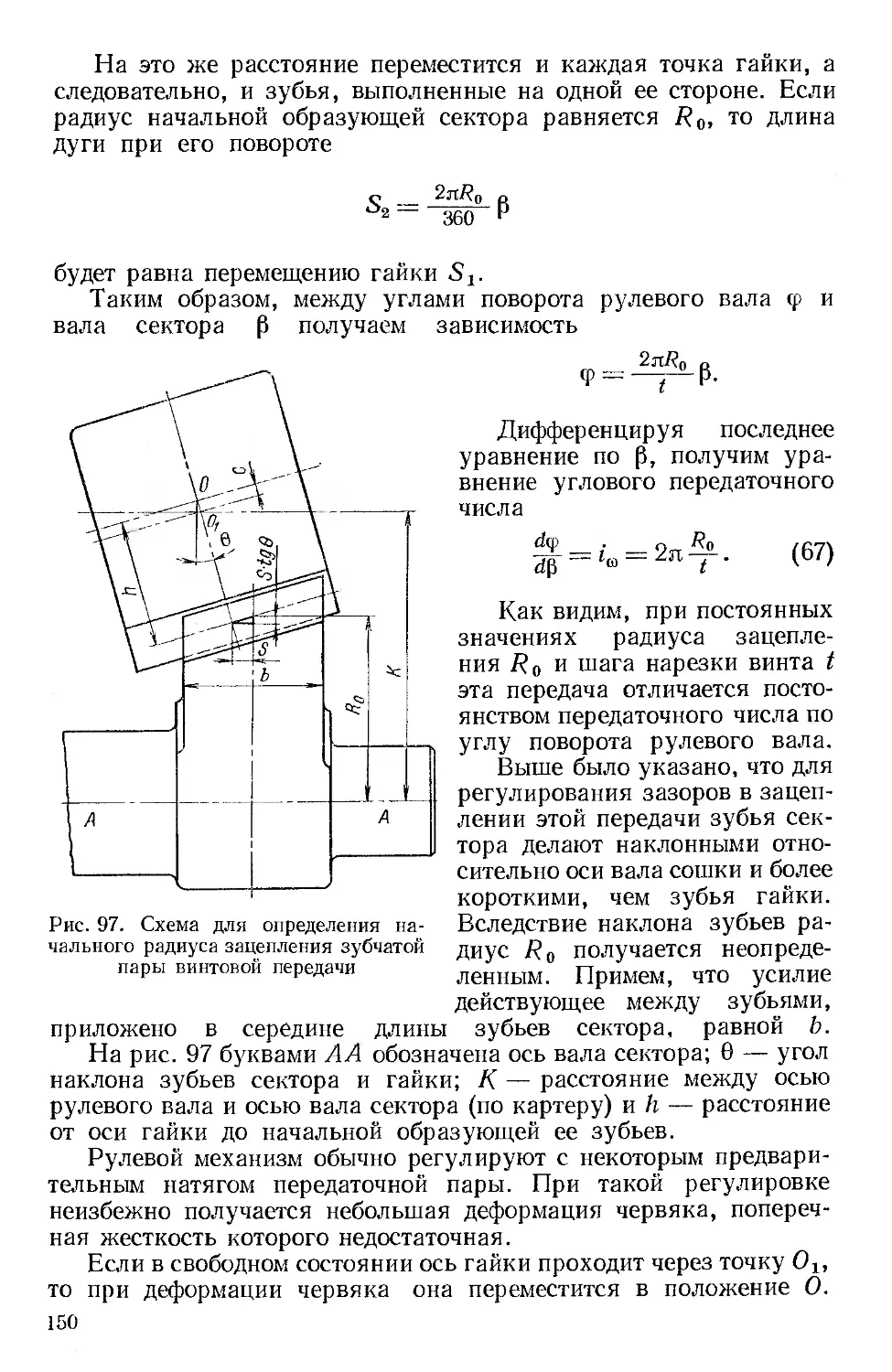
Винтовая передача с качающимся рулевым валом. Рулевой
вал 2 (рис. 14, а) вверху имеет одну опору 1 (шарикоподшипник
с глубокими канавками). Нарезанная часть винта не имеет опор
в картере рулевого механизма. В отверстия вильчатой головки 4
кривошипа заложена круглая гайка 3, в которую перпендику-
лярно ее образующей ввернут рулевой вал. При повороте руле-
вого колеса гайка перемещается вместе с кривошипом по дуге
радиуса, равного радиусу кривошипа.
Таким образом, в этой конструкции рулевой вал качается
около центра подшипника верхней опоры.
Радиальные перемещения винта происходят за счет неболь-
шого углового перемещения одной обоймы подшипника относи-
тельно другой и за счет упругой деформации рулевого вала. Для
27
Рис. 14. Рулевой механизм с винтовой передачей и качающимся рулевым валом
и шатунно-кривошипной парой
уменьшения перегибов (деформаций) рулевого вала центр криво-
шипа (и гайки) несколько смещен от оси верхней опоры с таким
расчетом, чтобы при перпендикулярном расположении криво-
шипа с винтом рулевой вал деформировался в одну сторону,
а при максимальном повороте вала кривошипа — в другую. Для
устранения деформации рулевого вала его верхнюю опору уста-
навливают между резиновыми кольцами 5 (рис. 14, б). Такая
конструкция применялась на троллейбусах.
Рис. 15. Рулевые механизмы с винтовой передачей и поворачивающейся гайкой
В шатунно-кривошипной паре (рис. 14, в) ползун 6 (в данном
случае поршень соосного гидравлического усилителя) посредством
шатуна 7 соединяется с кривошипом вала сошки 8. При этом вал
сошки располагается относительно осп рулевого вала так, чтобы
шатун отклонялся от нее на одинаковые углы в среднем и крайних
его положениях.
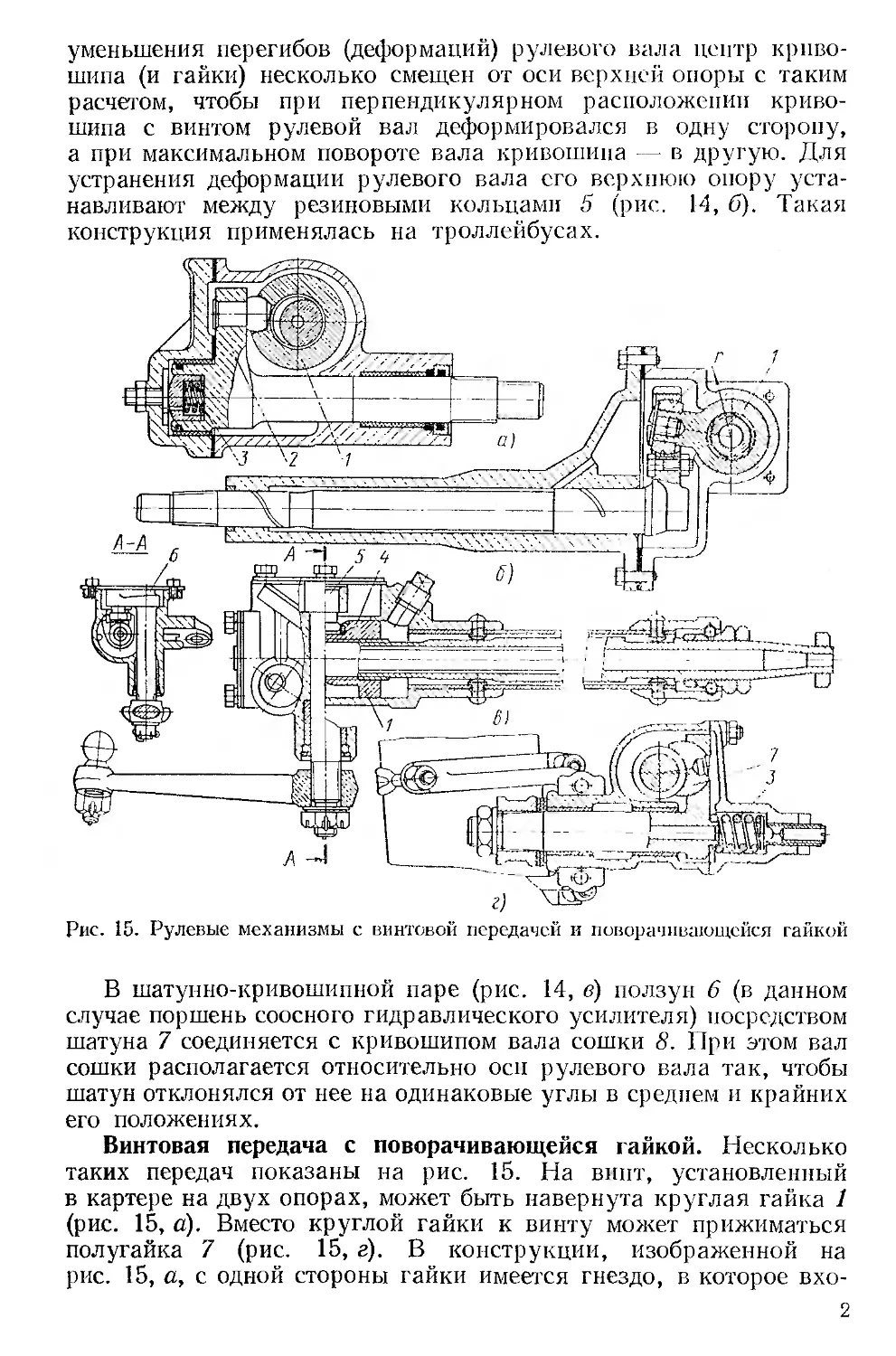
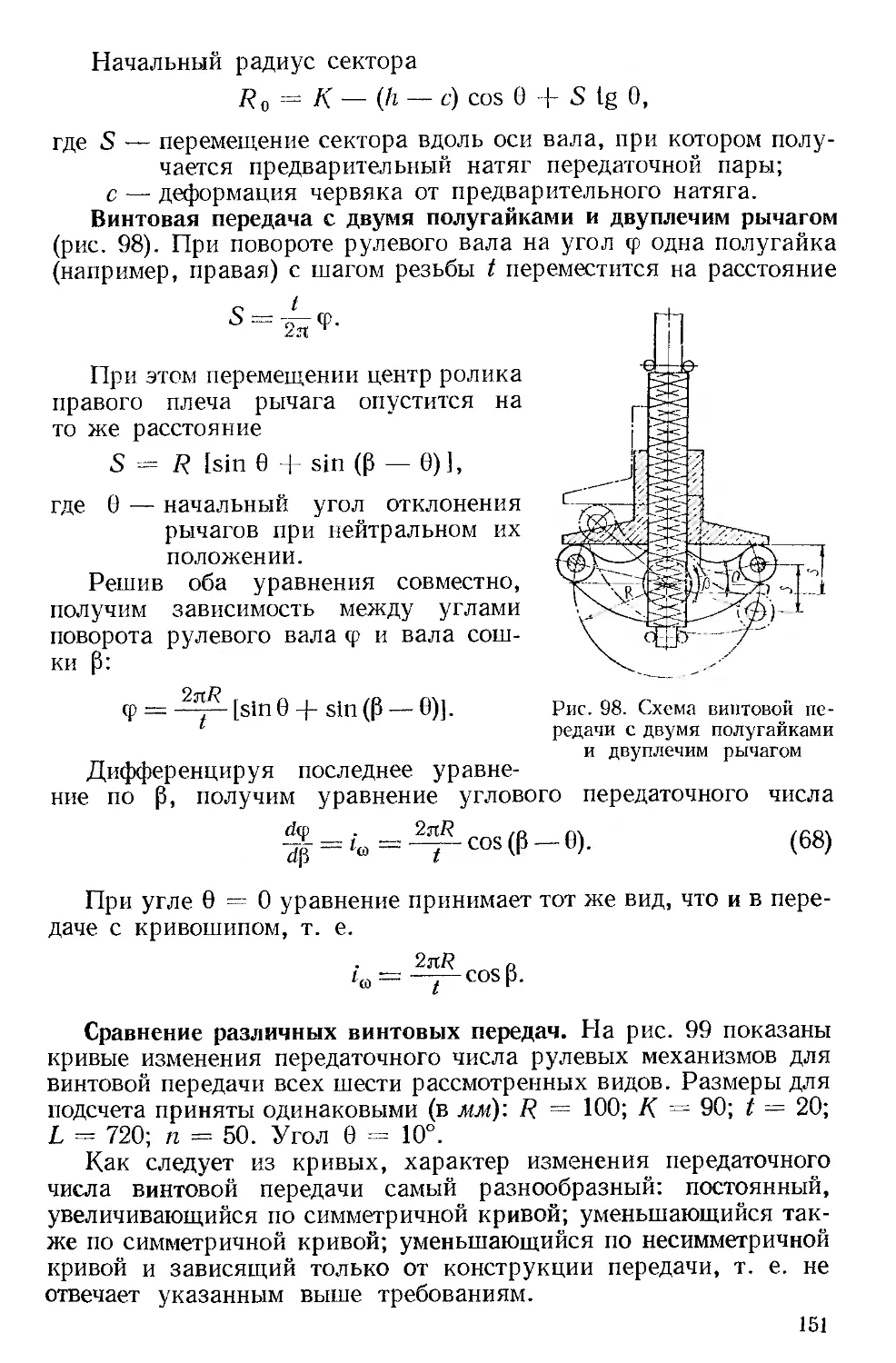
Винтовая передача с поворачивающейся гайкой. Несколько
таких передач показаны па рис. 15. На винт, установленный
в картере на двух опорах, может быть навернута круглая гайка 1
(рис. 15, а). Вместо круглой гайки к винту может прижиматься
полугайка 7 (рис. 15, а). В конструкции, изображенной на
рис. 15, а, с одной стороны гайки имеется гнездо, в которое вхо-
2
дит шаровой палец кривошипа 2, прижимаемый к гнезду пру-
жиной 3. В отдельных конструкциях такой передачи цилиндри-
ческая гайка 1 имеет скользящую посадку в картере, заменяющем
таким образом две опоры винта (рис. 15, б и в). Сбоку гайки сде-
лано гнездо (рис. 15, в), в которое запрессована стальная втулка 4.
В отверстие втулки вставлен шаровой палец 5, запрессованный
в головку кривошипа 6, изготовленного как одно целое с валом
сошки. Шаровой палец может быть закреплен и на гайке
(рис. 15, б). При повороте рулевого колеса гайка перемещается
вдоль винта, увлекая за собой палец кривошипа, и тем самым
поворачивает вал сошки.
Так как шаровой палец кривошипа перемещается по дуге
около оси вала сошки, то гайка, кроме поступательного пере-
мещения вдоль винта, совершает вращательное движение вокруг
его оси.
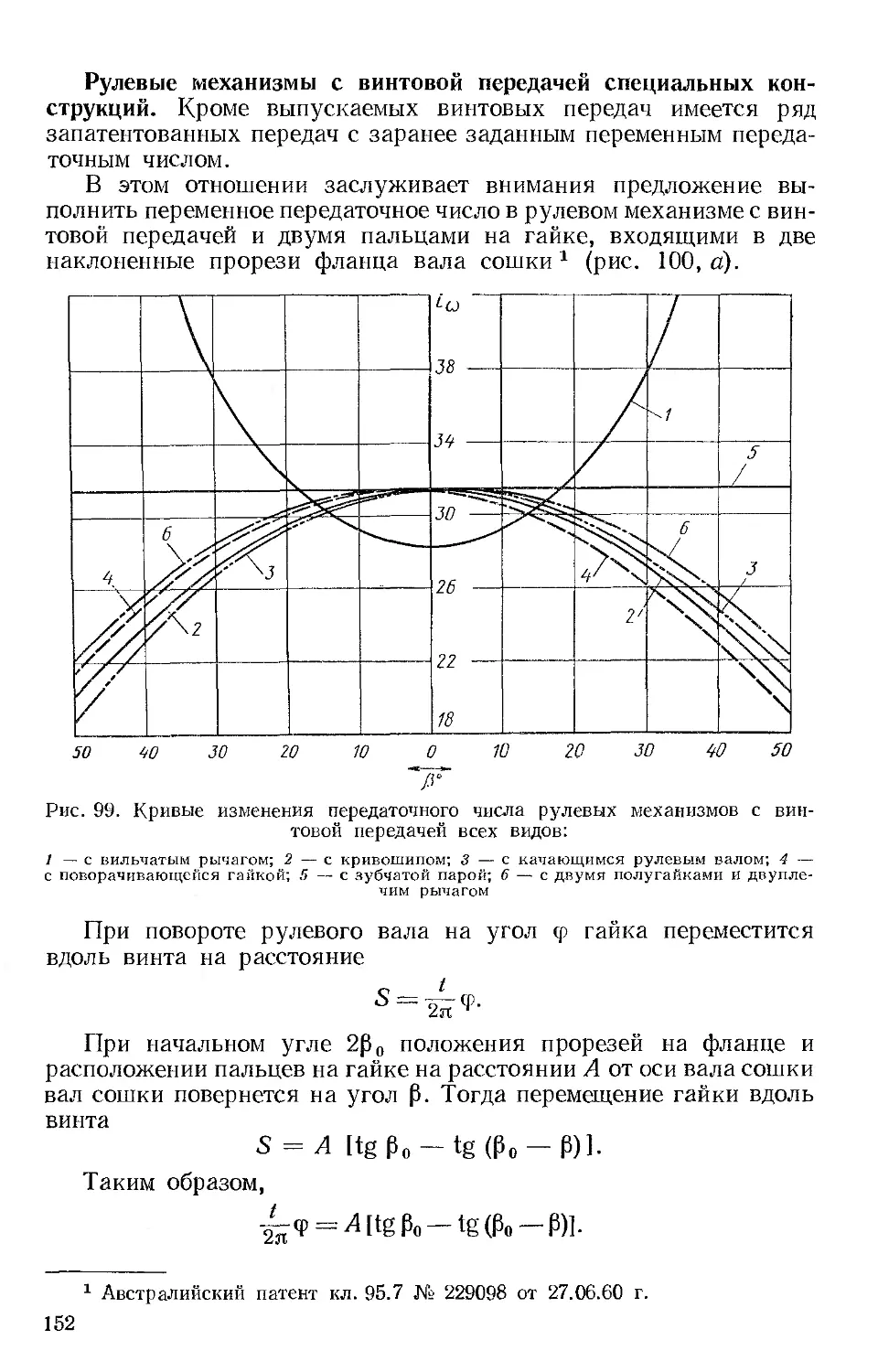
Винтовая передача с зубчатой парой. На винт, установленный
в картере на подшипниках, навертывают гайку. На одной стороне
гайки сделаны два ряда зубьев рейки, с которыми зацепляются
две цилиндрические шестерни, насаженные на вал сошки с обеих
ее сторон. Гайка — разрезная и стягивается двумя болтами для
устранения зазоров, появляющихся между гайкой и винтом
вследствие их износа.
Зазоры, образующиеся между зубьями рейки и шестерен,
не могут быть устранены, и вследствие быстрого износа эта пере-
дача большого распространения не получила. Более совершен-
ным в этом отношении является рулевой механизм автомобиля
МАЗ-500 (рис. 16, а и б). На винт рулевого вала 4, установлен-
ного на двух подшипниках в картере рулевого механизма, навер-
нута гайка 2. С одной ее стороны имеются зубья, с которыми за-
цепляются зубья сектора 3 вала рулевой сошки. Для регули-
ровки зазоров зубья сектора сделаны наклонными. В целях
повышения долговечности и получения полной обратимости руле-
вого механизма между нарезками винта и гайки заложены ша-
рики (рис. 16, в) в виде двух замкнутых ручьев. Входные и выход-
ные концы нарезки гайки замыкаются трубками, заполненными
такими же шариками, как и в нарезке винта с гайкой. При пово-
роте винта гайка перемещается вдоль его оси, а шарики, пере-
катываясь по нарезке, выходят в один конец трубок, перемеща-
ются по ним, выходят из другого их конца и поступают с другой
стороны гайки в нарезку. При перемещении гайка, зацепляясь
с зубьями сектора, увлекает их, поворачивая, таким образом,
вал рулевой сошки.
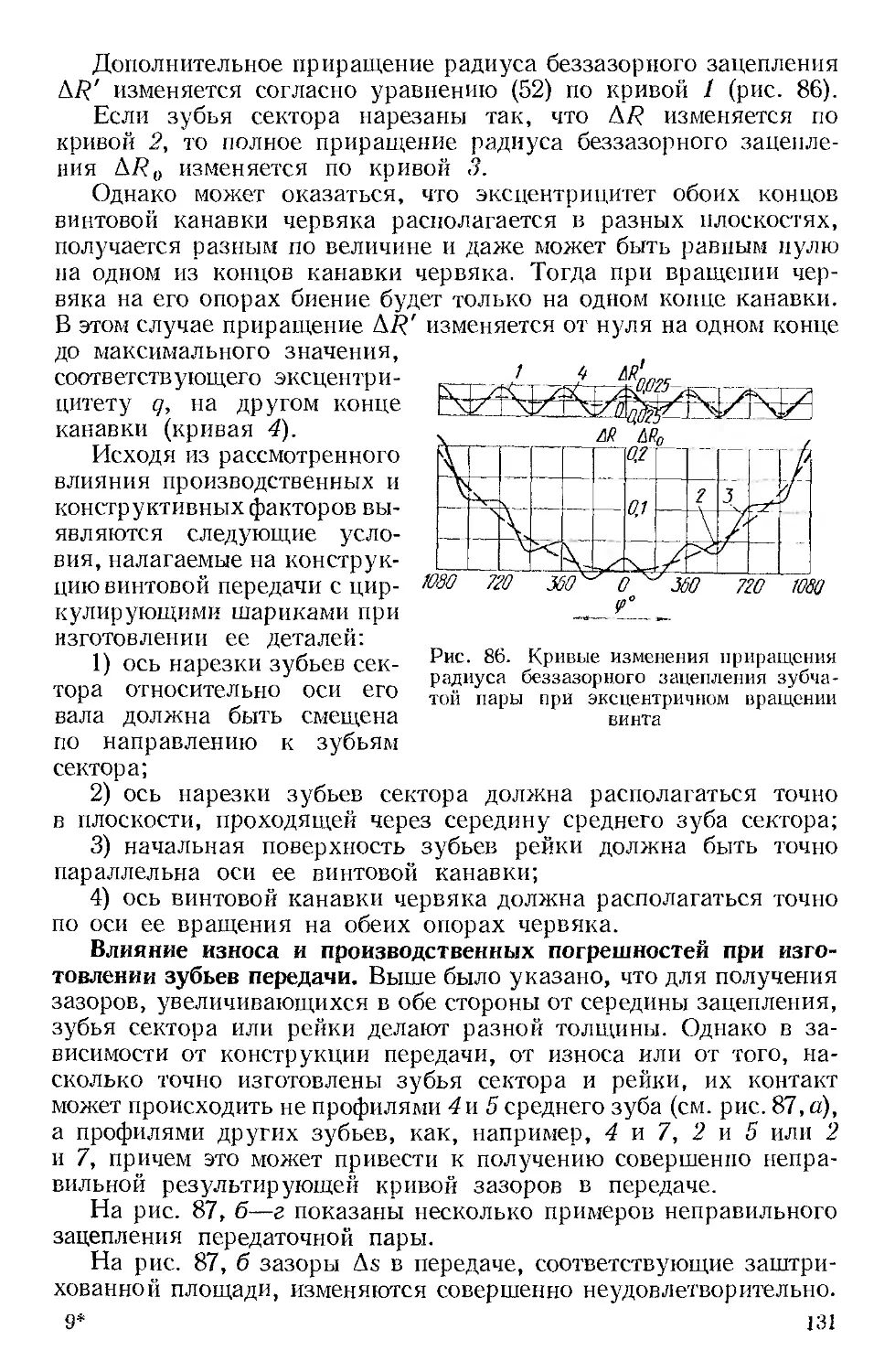
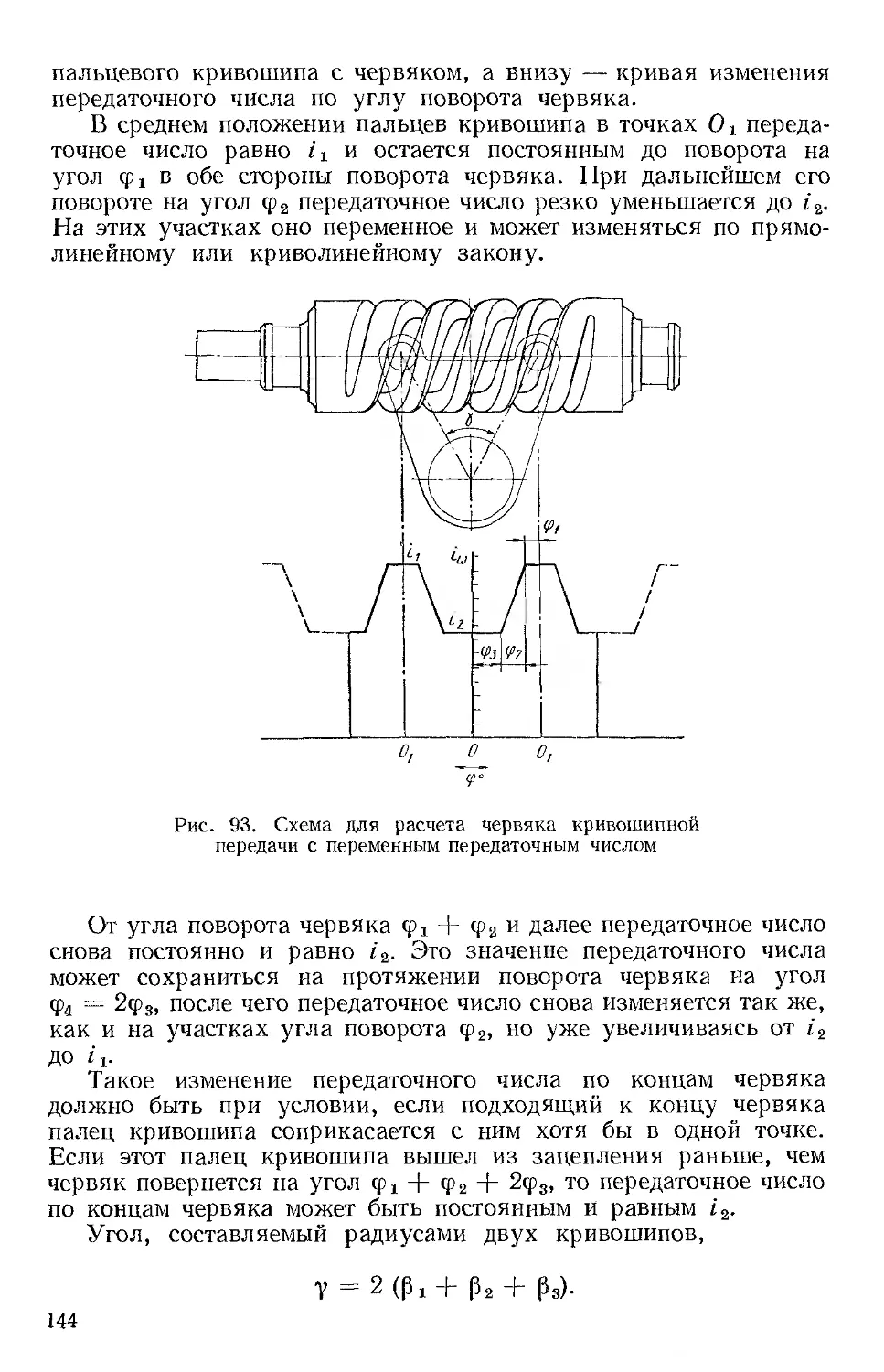
В рулевом механизме автомобиля МАЗ-500 винтовая канавка
червяка имеет переменную глубину: на среднем участке червяка
на длине / х — 40 мм она мельче и постепенно увеличивается
на 0,025 мм с обеих сторон червяка на участках Z2 == 55 мм.
Такое выполнение канавки червяка преследует две цели: во-
первых, получить повышенное трение на небольшом среднем
30
участке зацепления передаточной пары, соответствующем движе-
нию автомобиля по прямому направлению, с тем чтобы обратные
удары от неровностей дороги с меньшей силой передавались на
рулевое колесо, а следовательно, и на руки водителя; во-вторых,
Рис. 16. Рулевой механизм с винтовой передачей и зубчатой парой
более плотная посадка перекатывающихся деталей позволяет
уменьшить износ рабочих поверхностей винта, шариков и гайки
и применяется для того, чтобы повысить срок службы винтовой
пары при минимальных зазорах.
31
На рис. 17 показана конструкция рулевого механизма с винто-
вой передачей и зубчатой парой с встроенным гидравлическим
усилителем автомобиля ЗИЛ-130 [21. Силовой цилиндр 1 выпол-
нен как одно целое с картером и расположен соосно с рулевым
валом. Реечные зубья в средней части поршня 2 зацепляются
с зубьями сектора 3. В поршне закреплена гайка с циркулирую-
щими шариками и ввернутым в нее винтом 4.
Действующее от поршня усилие передается непосредственно
на вал сошки через реечную передачу. Распределитель 5 размещен
на конце винта соосно с силовым цилиндром и приводится в дей-
ствие при осевом перемещении винта вместе с золотником.
Зазор между зубьями регулируют при помощи винта 6 путем
перемещения сектора вдоль оси вала сошки.
Винтовая передача с двуплечим рычагом. В передаче, показан-
ной на рис. 18, а, винт 2 рулевого вала имеет два участка с пра-
вой и левой нарезкой. На них накладываются две полугайки 1
и 3 с резьбой, соответствующей резьбе винта. Обе полугайки
перемещаются вдоль винта и удерживаются с ним шпонкой.
Как одно целое с валом сошки изготовлен двуплечий рычаг 5
концы которого касаются торцов обеих пол.угаек 1 и 3. Для умень-
шения трения на рычагах установлены ролики 4.
32
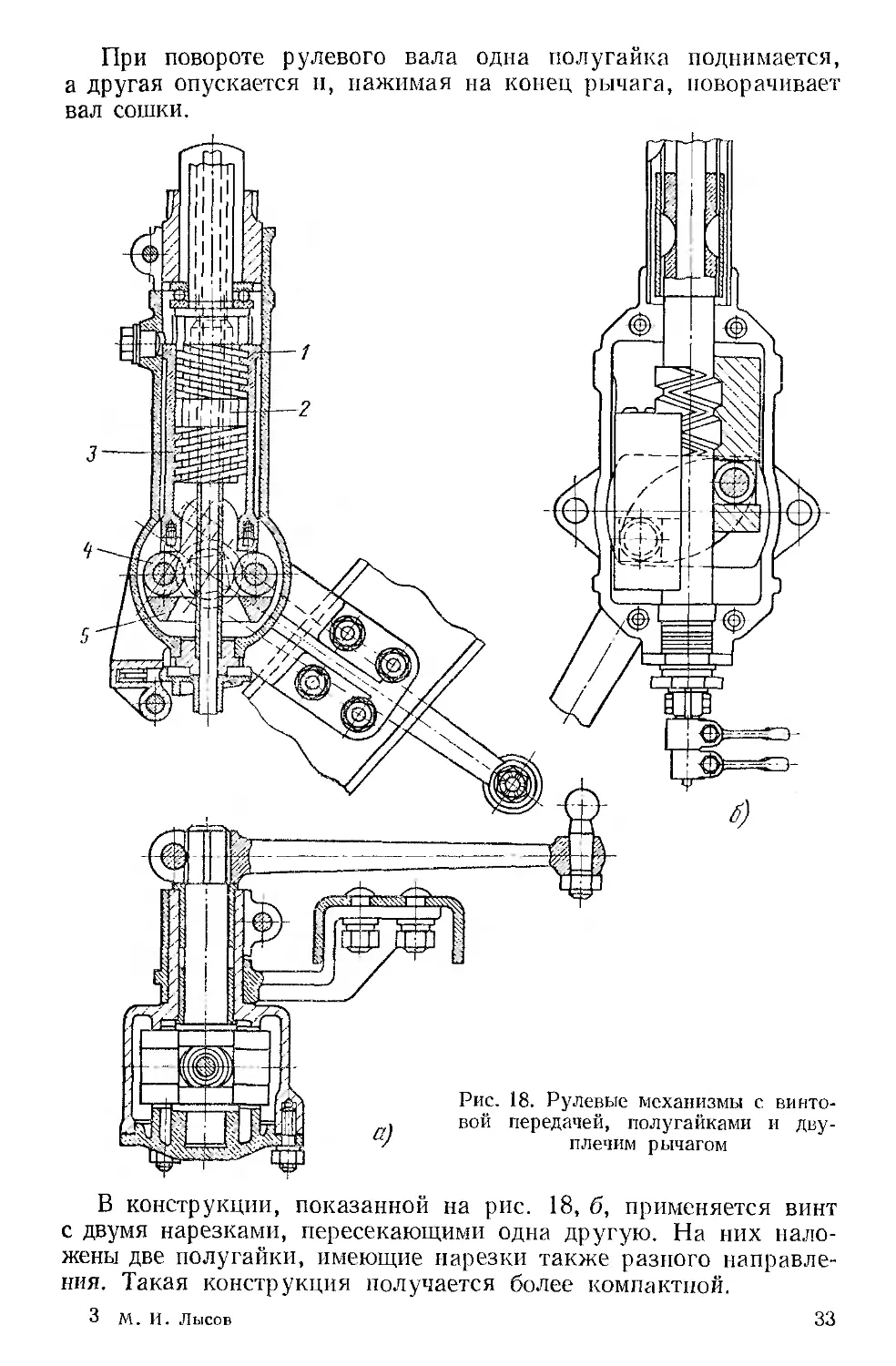
При повороте рулевого вала одна полугайка поднимается,
а другая опускается и, нажимая на конец рычага, поворачивает
вал сошки.
В конструкции, показанной на рис. 18, б, применяется винт
с двумя нарезками, пересекающими одна другую. На них нало-
жены две полугайкп, имеющие нарезки также разного направле-
ния. Такая конструкция получается более компактной.
3 М. И. Лысов 33
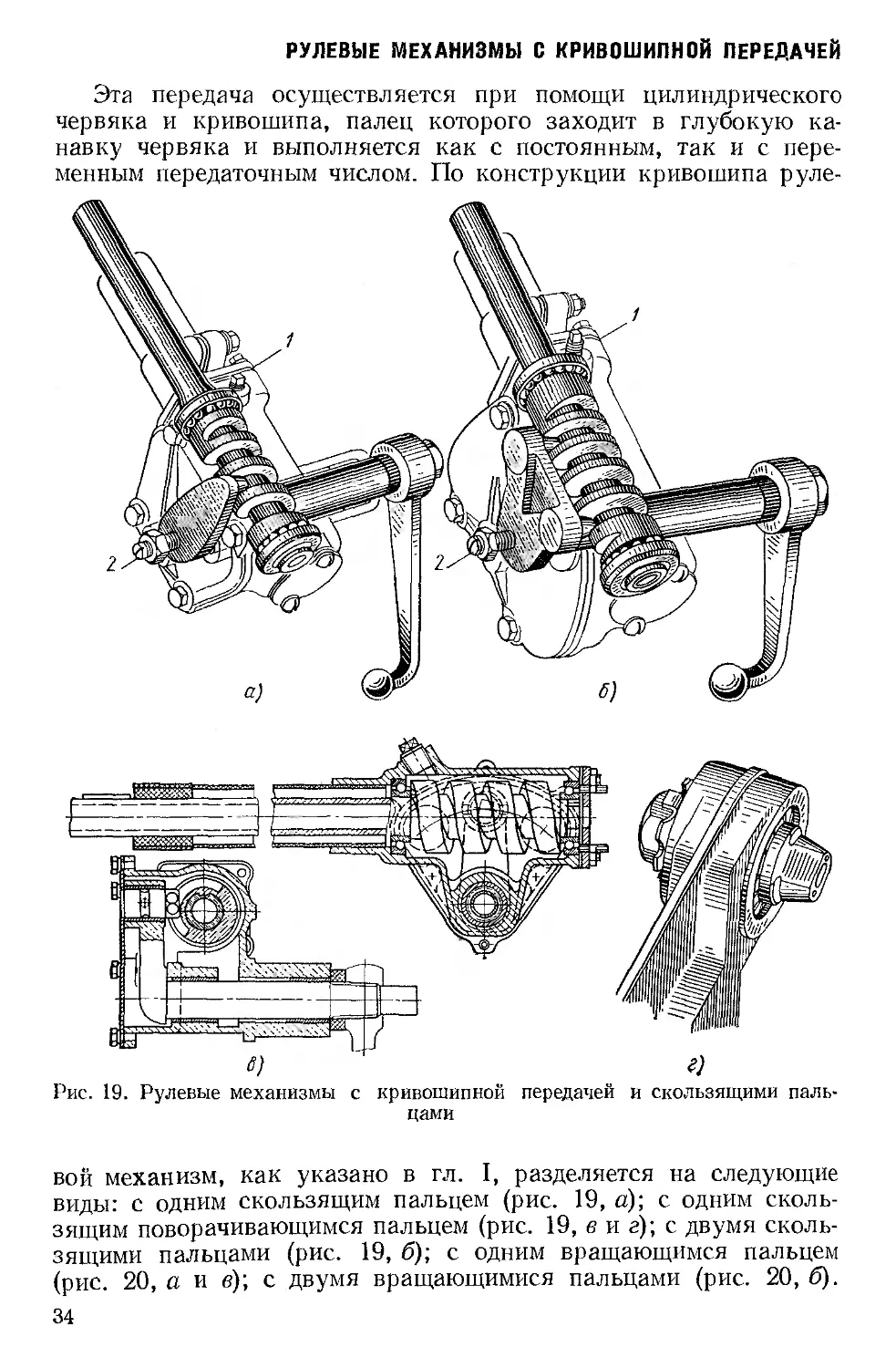
РУЛЕВЫЕ МЕХАНИЗМЫ С КРИВОШИПНОЙ ПЕРЕДАЧЕЙ
Эта передача осуществляется при помощи цилиндрического
червяка и кривошипа, палец которого заходит в глубокую ка-
навку червяка и выполняется как с постоянным, так и с пере-
менным передаточным числом. По конструкции кривошипа руле-
Рис. 19. Рулевые механизмы с кривошипной передачей и скользящими паль-
цами
вой механизм, как указано в гл. I, разделяется на следующие
виды: с одним скользящим пальцем (рис. 19, а); с одним сколь-
зящим поворачивающимся пальцем (рис. 19, в и а); с двумя сколь-
зящими пальцами (рис. 19, б); с одним вращающимся пальцем
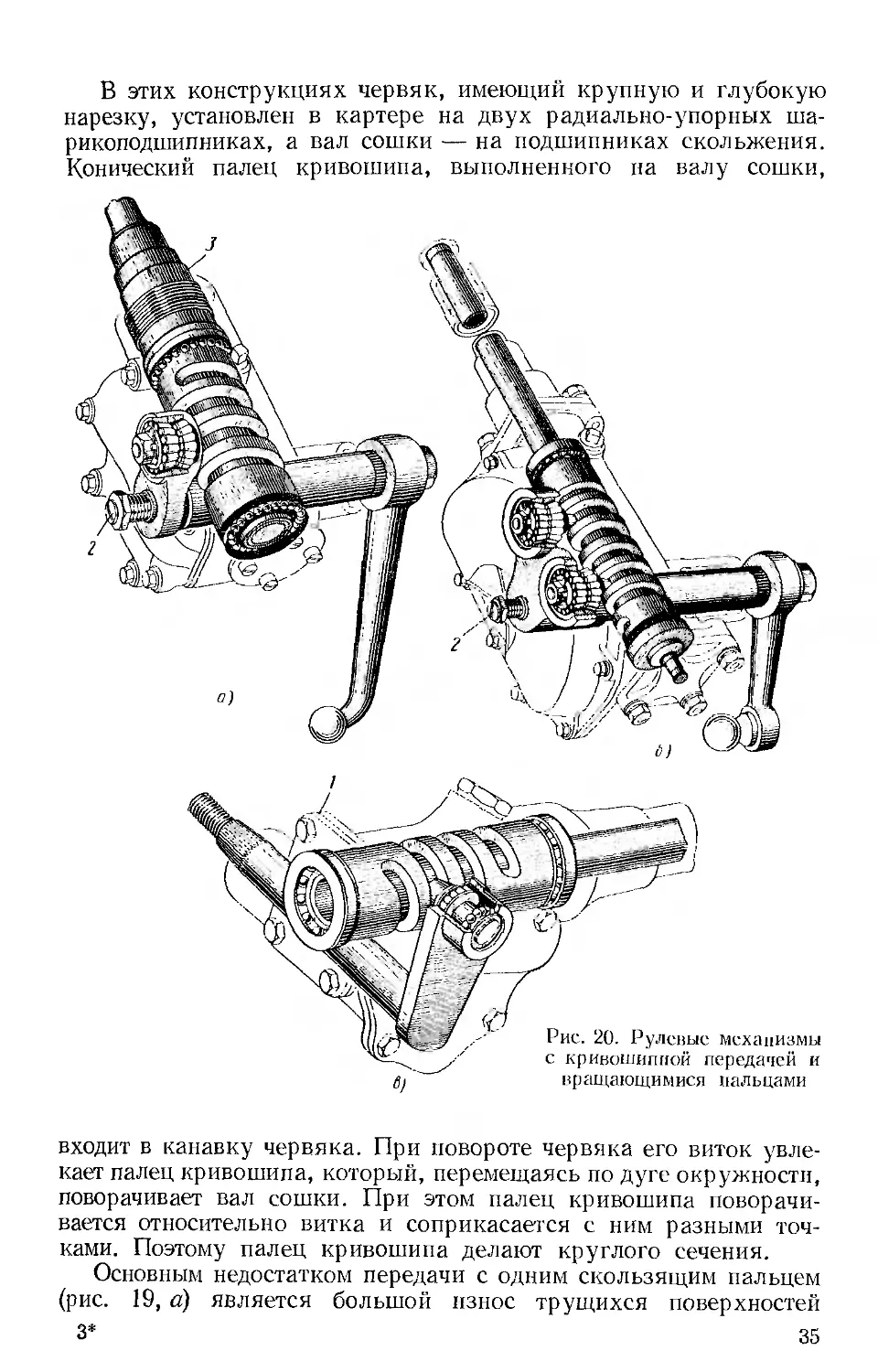
(рис. 20, а и в); с двумя вращающимися пальцами (рис. 20, б).
34
В этих конструкциях червяк, имеющий крупную и глубокую
нарезку, установлен в картере на двух радиально-упорных ша-
рикоподшипниках, а вал сошки — на подшипниках скольжения.
Конический палец кривошипа, выполненного на валу сошки,
входит в канавку червяка. При повороте червяка его виток увле-
кает палец кривошипа, который, перемещаясь по дуге окружности,
поворачивает вал сошки. При этом палец кривошипа поворачи-
вается относительно витка и соприкасается с ним разными точ-
ками. Поэтому палец кривошипа делают круглого сечения.
Основным недостатком передачи с одним скользящим пальцем
(рис. 19, а) является большой износ трущихся поверхностей
3* 35
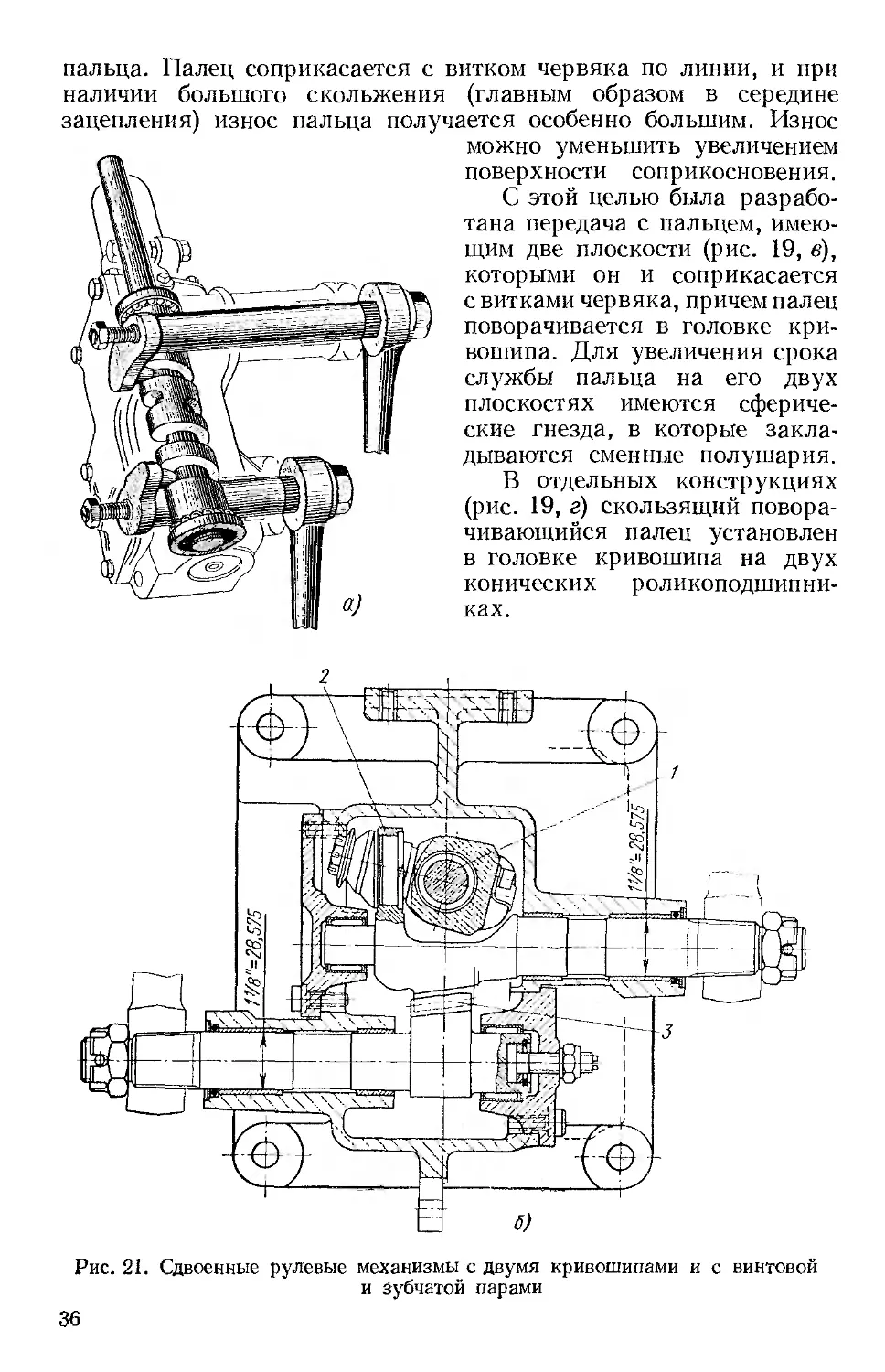
пальца. Палец соприкасается с витком червяка по линии, и при
наличии большого скольжения (главным образом в середине
зацепления) износ пальца получается особенно большим. Износ
можно уменьшить увеличением
поверхности соприкосновения.
С этой целью была разрабо-
тана передача с пальцем, имею-
щим две плоскости (рис. 19, в),
которыми он и соприкасается
с витками червяка, причем палец
поворачивается в головке кри-
вошипа. Для увеличения срока
службы пальца на его двух
плоскостях имеются сфериче-
ские гнезда, в которые закла-
дываются сменные полушария.
В отдельных конструкциях
(рис. 19, а) скользящий повора-
чивающийся палец установлен
в головке кривошипа на двух
конических роликоподшипни-
ках.
Рис. 21. Сдвоенные рулевые механизмы с двумя кривошипами и с винтовой
и зубчатой парами
36
В зарубежной печати высказывалось предположение, что дей-
ствующее в передаче с двумя пальцами усилие распределяется
равномерно на два скользящих пальца, вследствие чего их износ
должен быть значительно ниже. При тех же размерах пальцев,
что и в передачах с одним пальцем, прочность получается более
высокой. Уменьшение износа и повышение прочности пальцев
считалось основным преимуществом кривошипа с двумя паль-
цами. В действительности, при повороте червяка один палец
кривошипа выходит из зацепления и в соприкосновение с витком
входит другой палец, воспринимающий всю действующую силу,
которая в этом положении получается наибольшей. Этот палец
остается в зацеплении с червяком до максимально возможного
угла поворота кривошипа, вследствие чего максимально допусти-
мый угол поворота кривошипа значительно больше, чем в кон-
струкции с одним пальцем, что и является основным преимуще-
ством. Для получения минимального износа, легкости управле-
ния и обратимости трение в передаче должно быть минимальным.
В рулевом механизме с кривошипной передачей это достигается
путем применения вращающегося пальца (одного или двух).
Каждый палец (см. рис. 20) установлен в головке кривошипа
на двух подшипниках: конических роликовых или цилиндри-
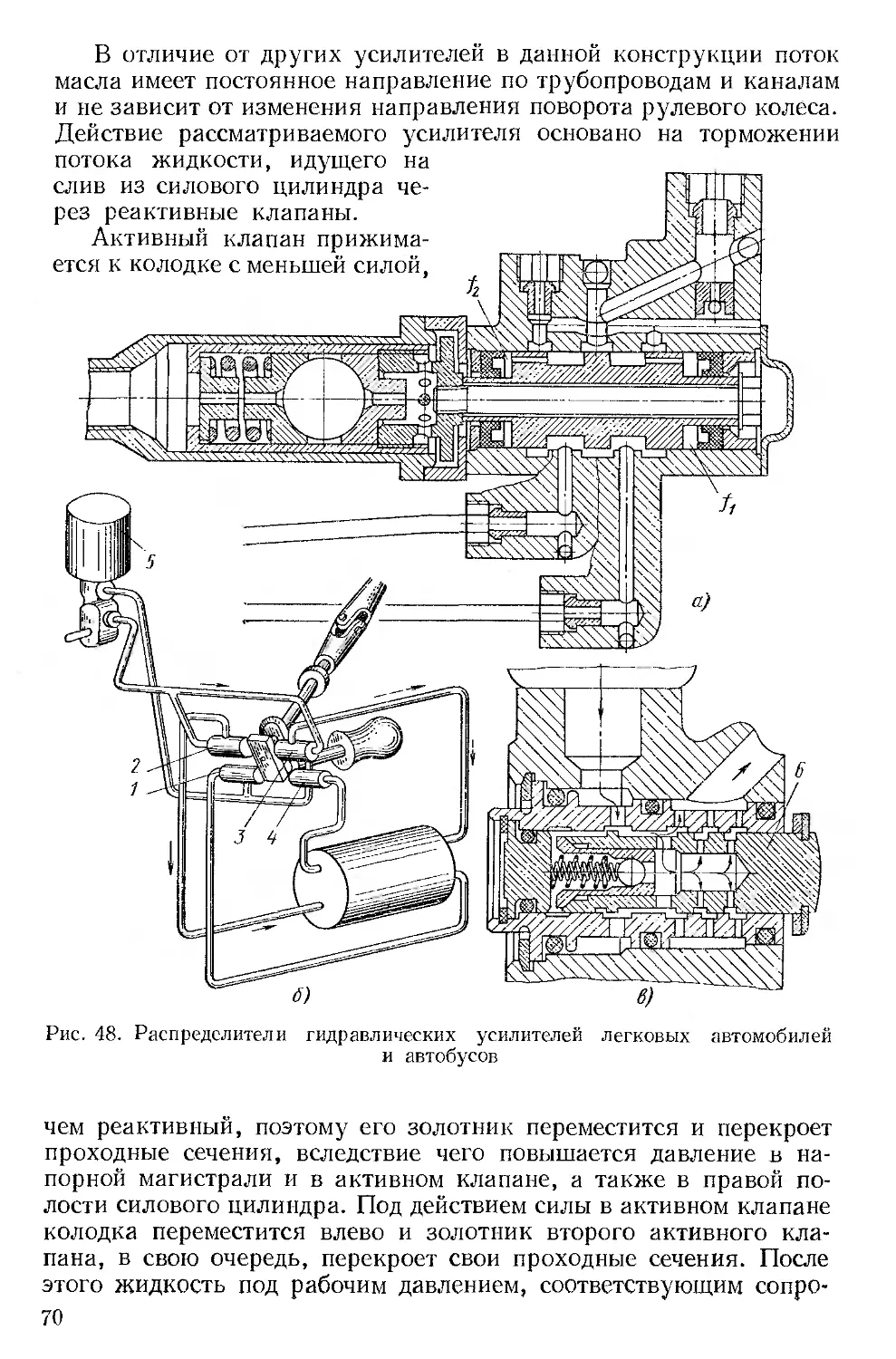
ческих и шариковых, воспринимающих осевые и радиальные
усилия.
Рулевой механизм с кривошипной передачей специальной
конструкции применяется также и на автомобиле с четырьмя
управляемыми колесами. Иногда применяется сдвоенный вал
с двумя сошками, выполненный как одно целое с кривошипом
в середине. В некоторых случаях механизм сдвоенный с двумя
валами и однопальцевыми кривошипами (рис. 21, а), пальцы
которых зацепляются удлиненным червяком с двумя нарезками
либо с винтовой передачей 1 и кривошипом 2 и двумя валами со-
шек, соединенными между собой зубчатой парой 3 (рис. 21, б).
Для регулирования зазоров зубья на обоих валах сделаны с на-
клоном.
РУЛЕВЫЕ МЕХАНИЗМЫ С ЧЕРВЯЧНОЙ ПЕРЕДАЧЕЙ
В процессе развития конструкций рулевых механизмов чер-
вячная передача претерпевала изменения и в зависимости от
формы червяка и зацепляющейся с ним детали (шестерни, сектора,
ролика и т. д.) имеет несколько разновидностей. В одних кон-
струкциях винтовая нарезка выполнена на цилиндре (цилиндри-
ческий червяк) и зацепляется с червячной шестерней или много-
зубым сектором, в других винтовая нарезка сделана на диске
или на внутренней поверхности шара и зацепляется с червячной
шестерней.
В подавляющем же большинстве конструкций винтовая на-
резка сделана на глобоиде. В отдельных конструкциях цилиндри-
37
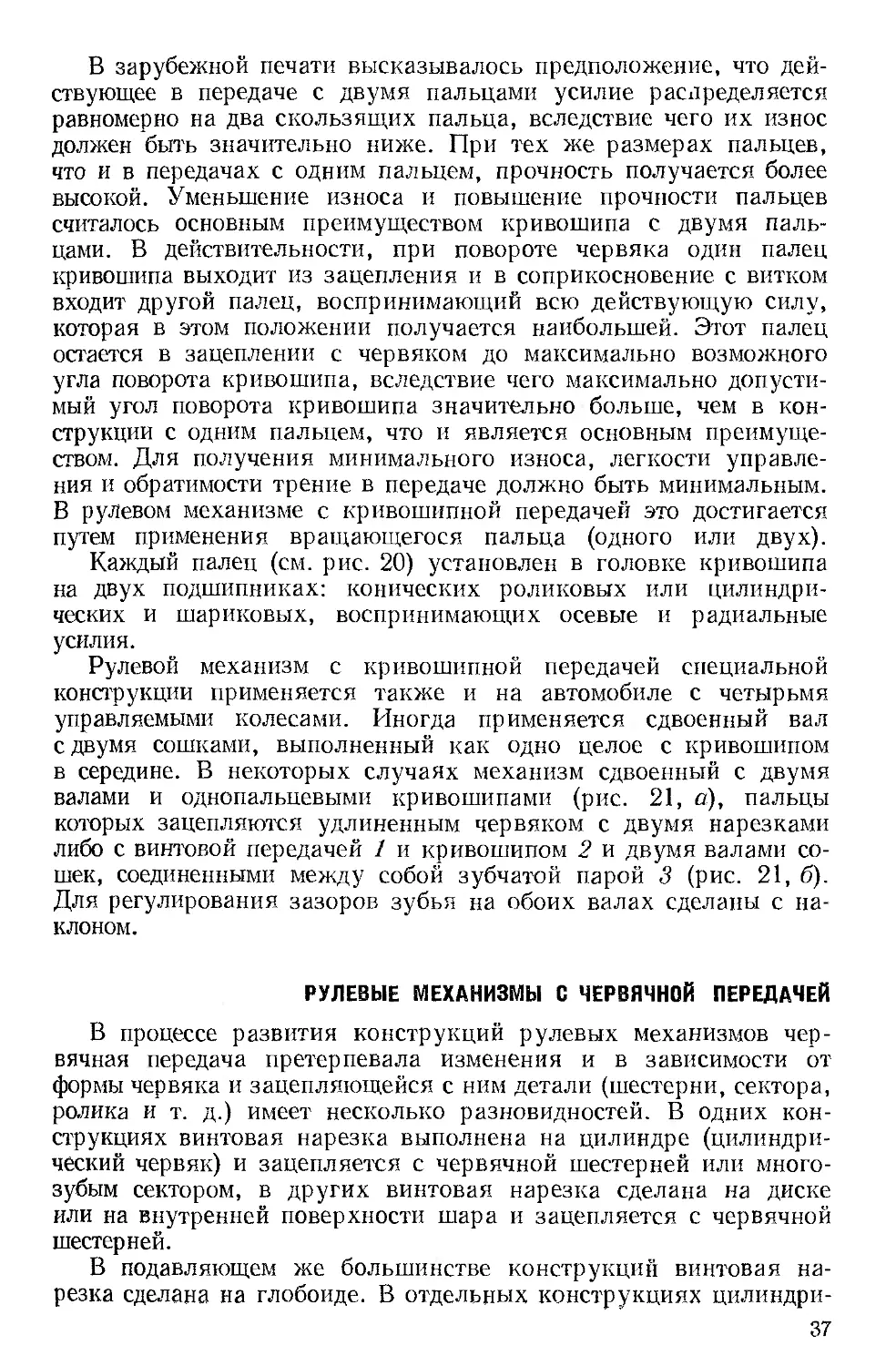
ческий червяк зацепляется с зубьями на торцовой стороне сектора.
В этой передаче зубья сектора спиральные и витки червяка со-
прикасаются с каждым из зацепляющихся с ними зубьев сектора
в одной точке по длине. При одной и той же трапециевидной форме
профилей витков червяка и зубьев сектора их контакт получается
по линии, которая при повороте червяка перемещается по длине
зуба сектора. Таким образом, в этой конструкции вся длина зубьев
сектора становится рабочей, вследствие чего их износ получается
меньше, чем у сектора с другим расположением зубьев.
Рулевой механизм с такой передачей, применяемый ранее
на грузовых автомобилях КрАЗ и МАЗ, изображен на рис. 22.
Чтобы получить равномерное распределение усилия, действую-
щего между витками червяка и зубьями сектора, необходимо,
чтобы расстояние между осями червяка и вала сектора в процессе
эксплуатации было постоянным. Для этого вал сектора опирается
на игольчатые подшипники вместо обычных бронзовых втулок.
Применение в этих опорах подшипников качения (более
износостойких) становится тем более необходимым, что действую-
щие на опоры силы при коротком расстоянии между ними имеют
более высокие значения, чем при большом расстоянии.
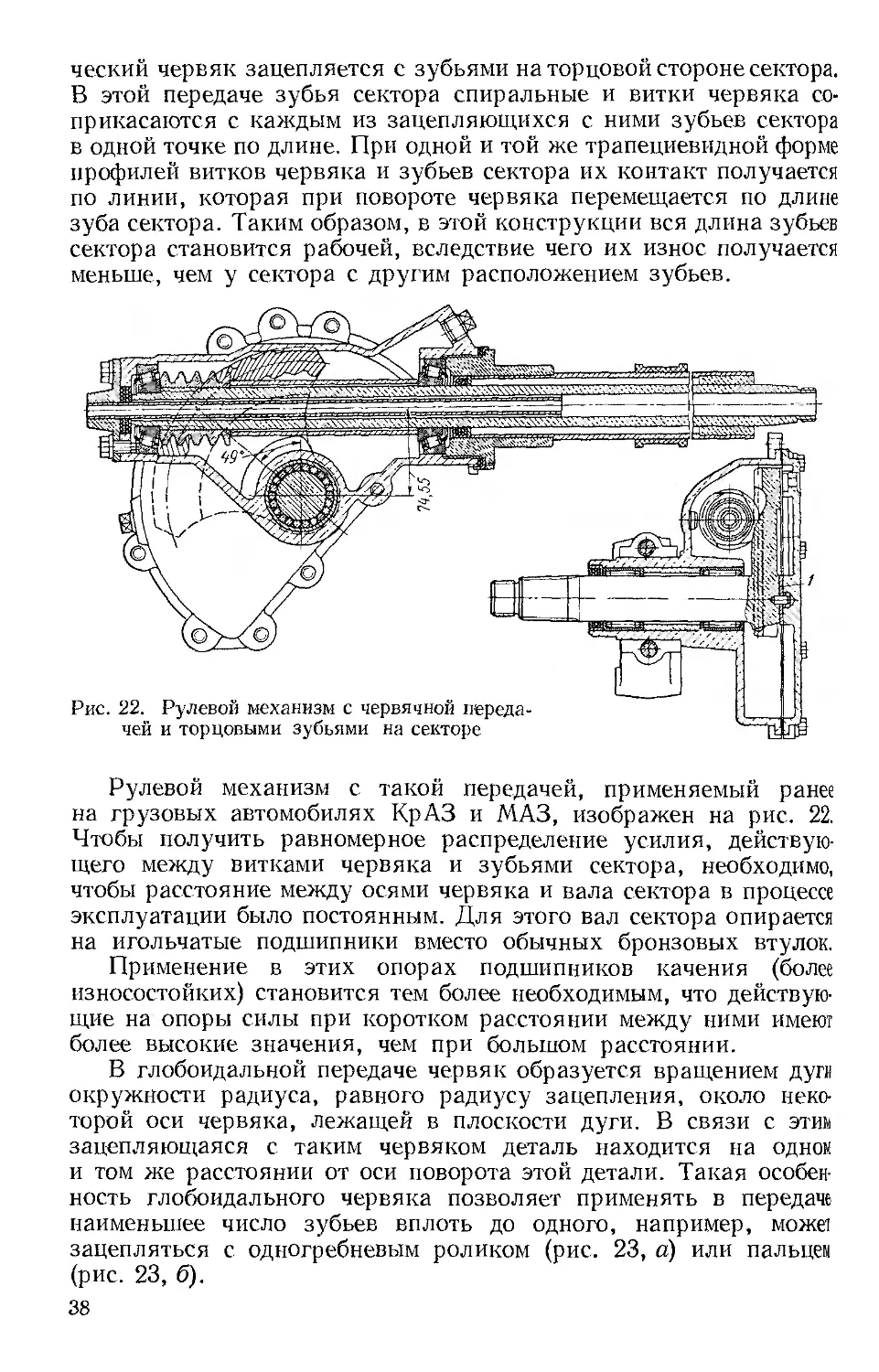
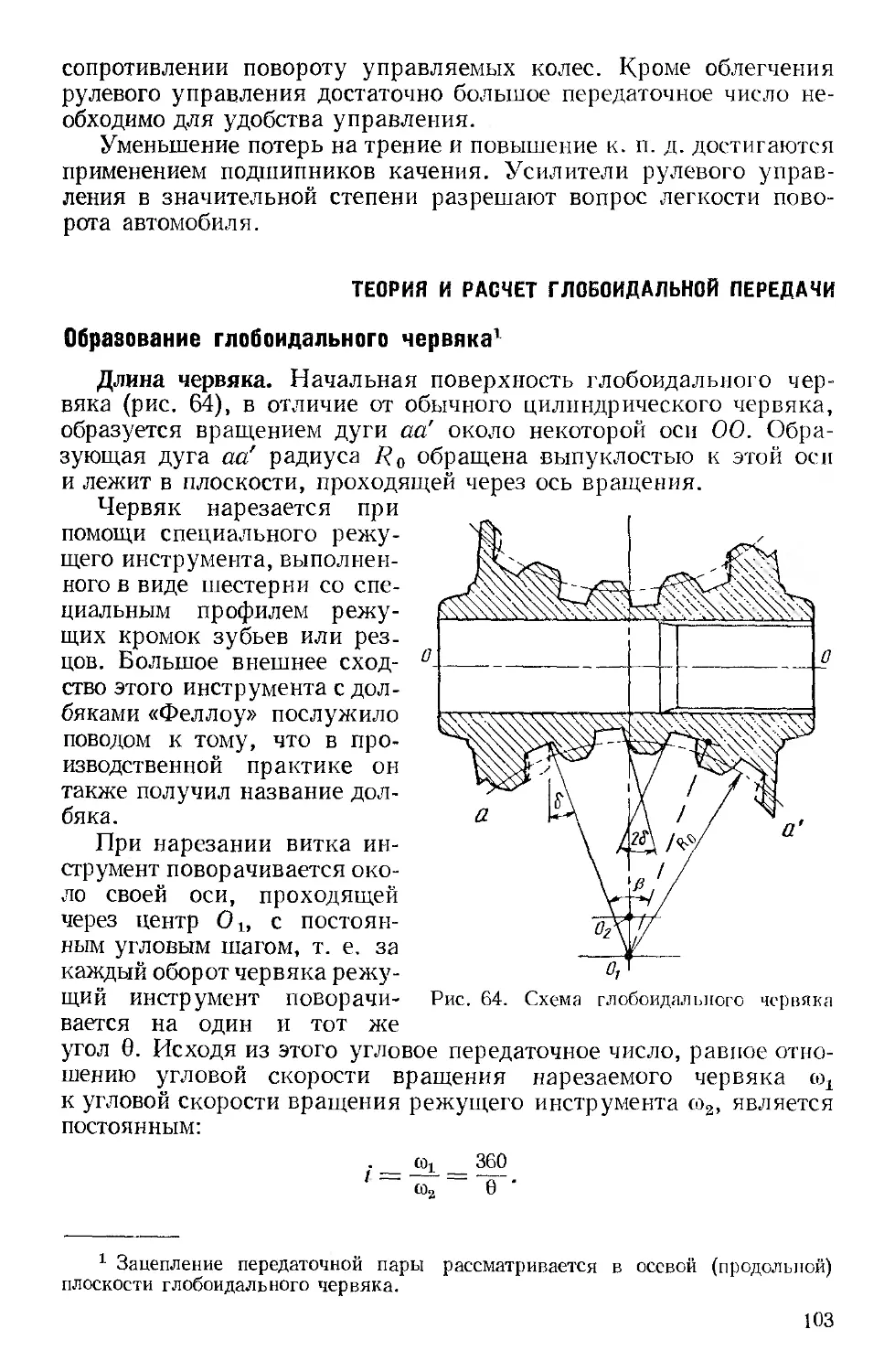
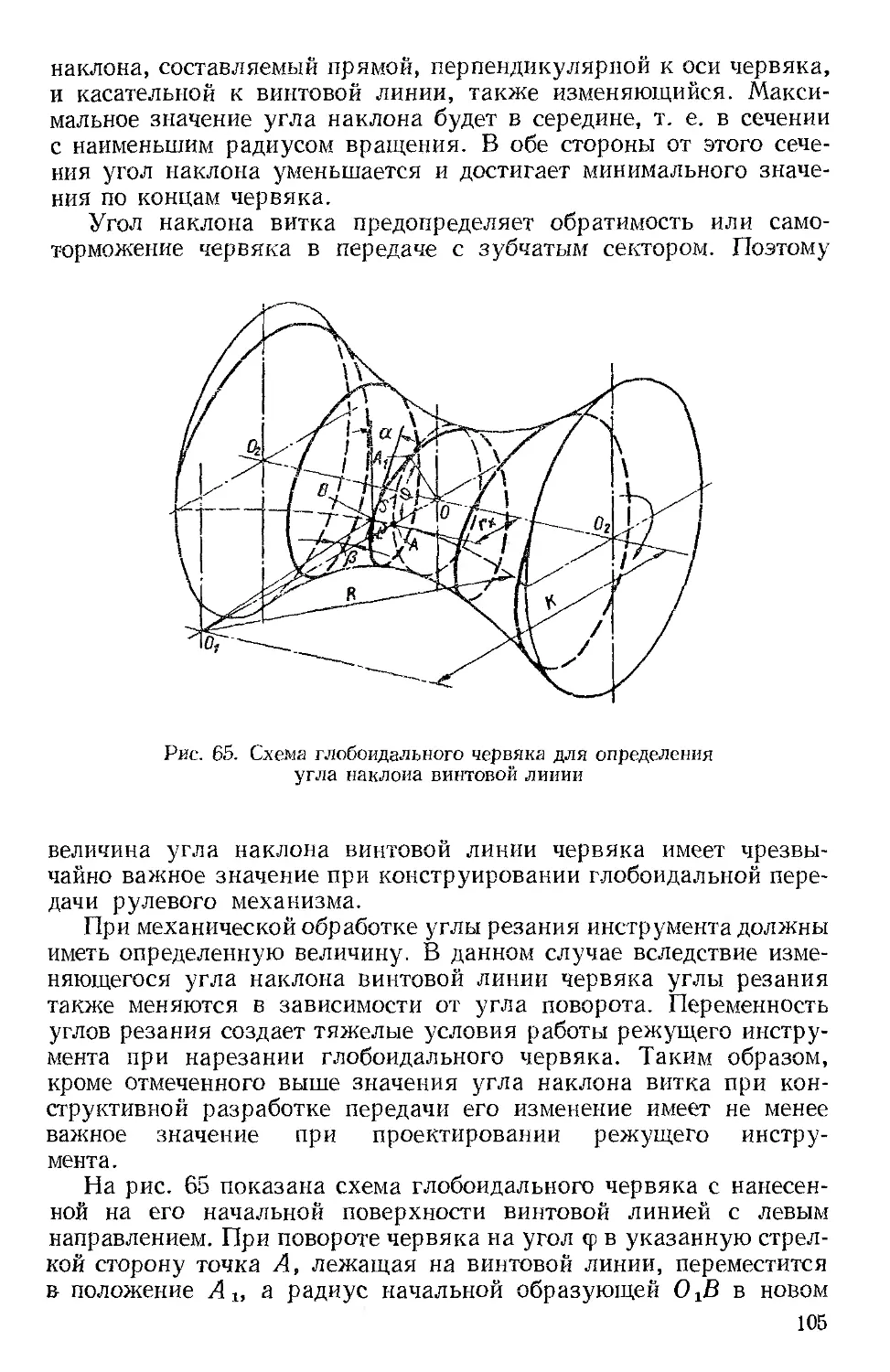
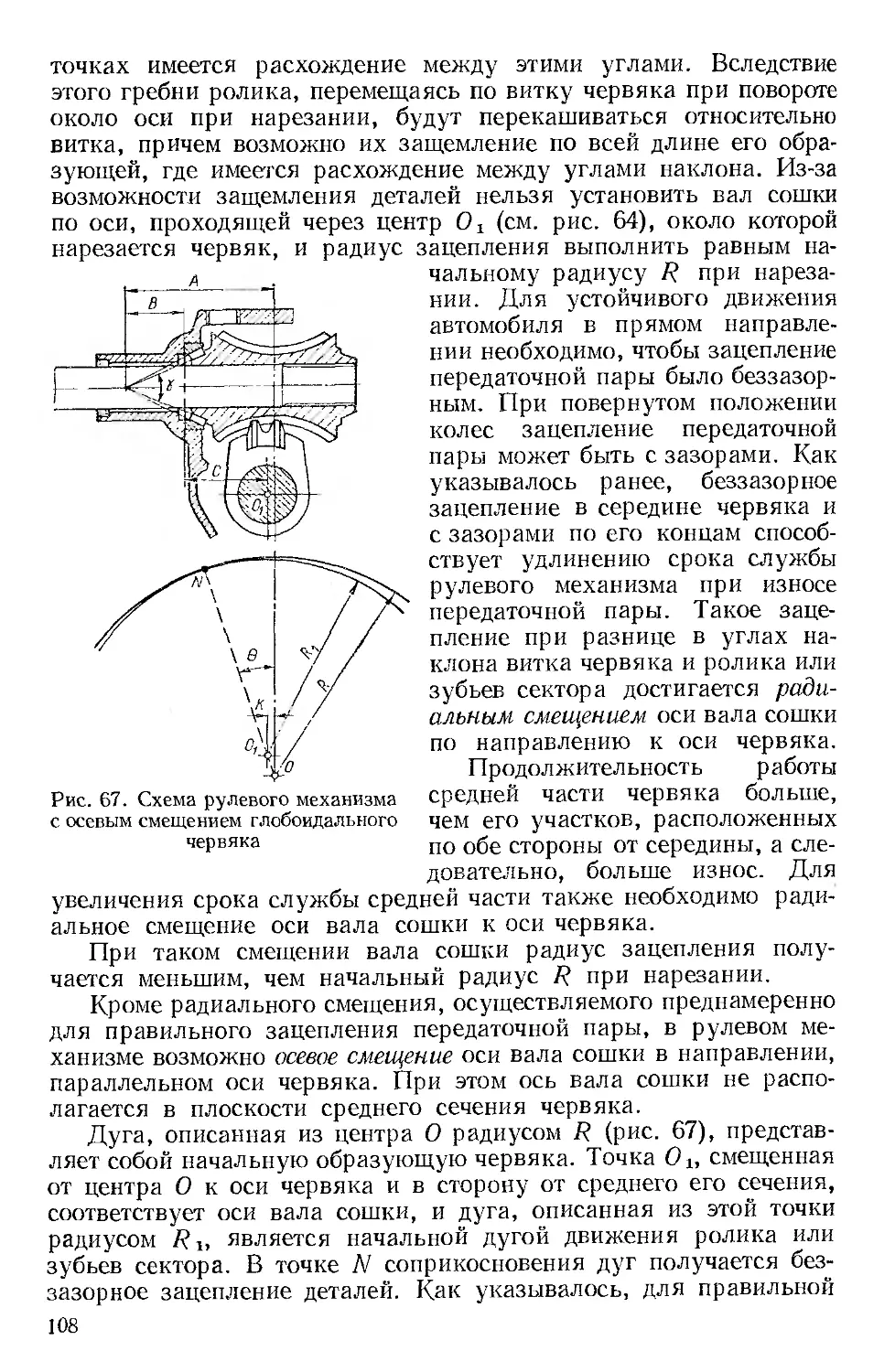
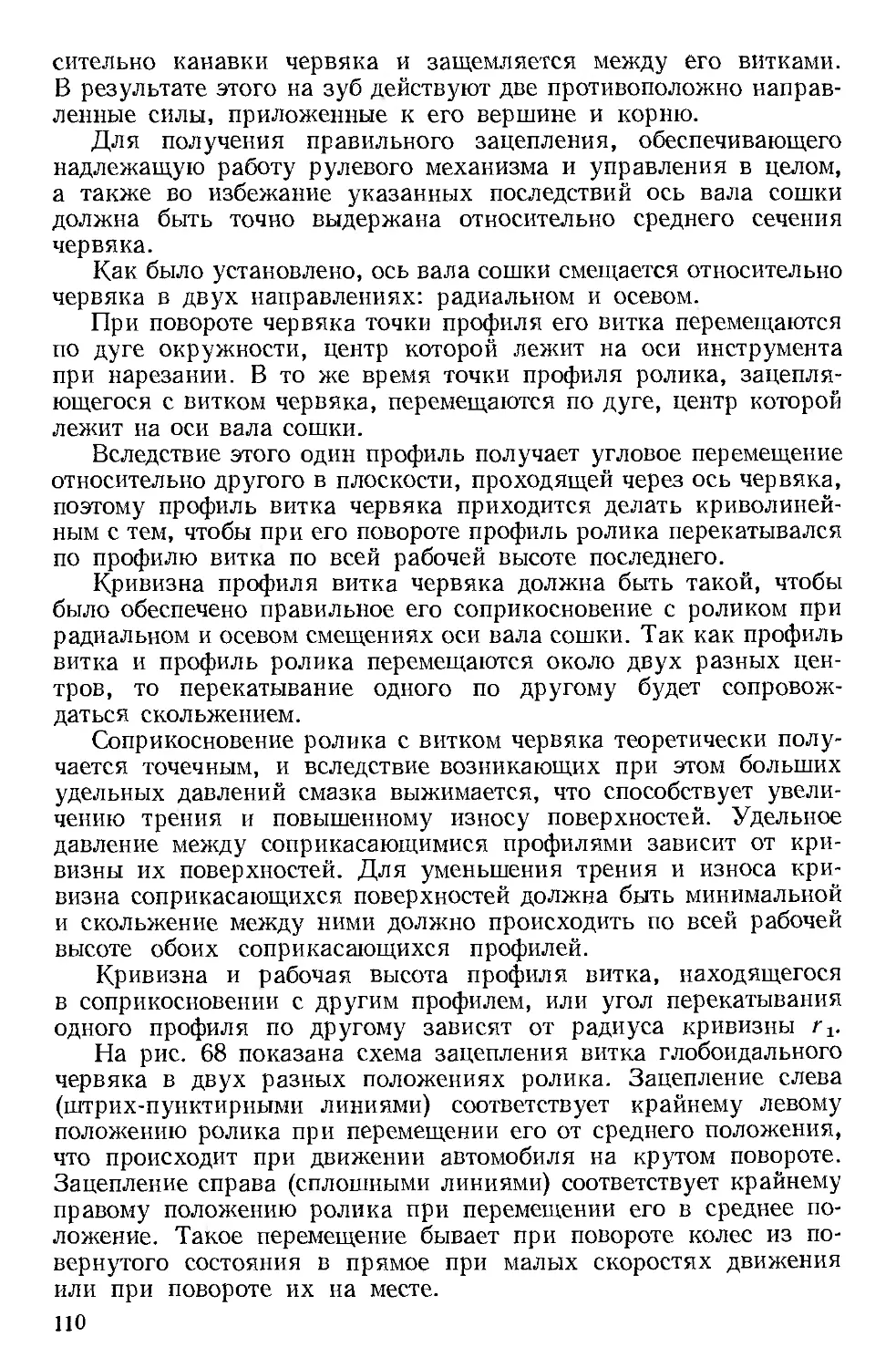
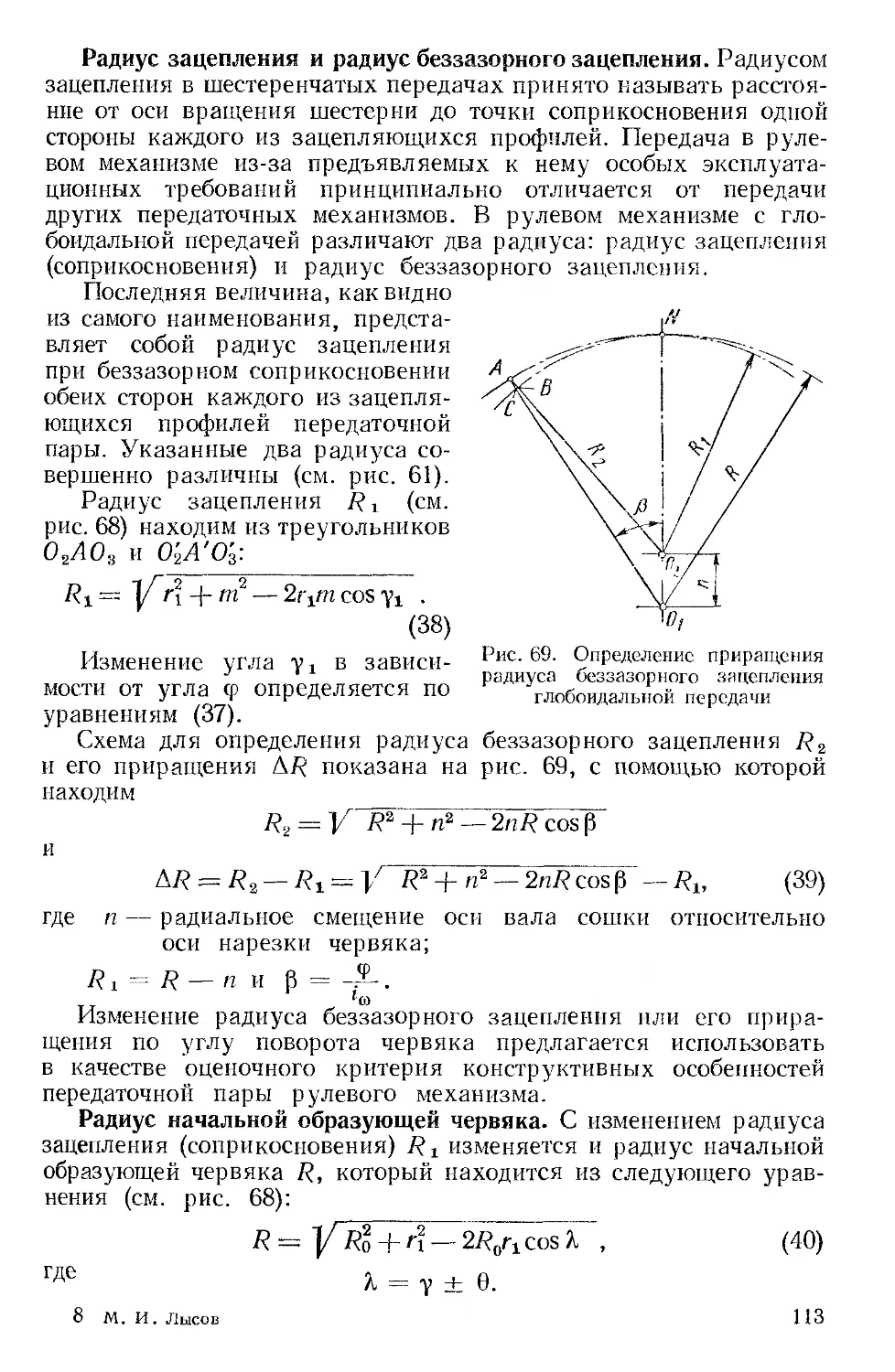
В глобоидальной передаче червяк образуется вращением дуги
окружности радиуса, равного радиусу зацепления, около неко-
торой оси червяка, лежащей в плоскости дуги. В связи с эти»
зацепляющаяся с таким червяком деталь находится на одном
и том же расстоянии от оси поворота этой детали. Такая особен-
ность глобоидального червяка позволяет применять в передаче
наименьшее число зубьев вплоть до одного, например, может
зацепляться с одногребневым роликом (рис. 23, а) или пальцем
(рис. 23, б).
38
Из всех существующих конструкций рулевой механизм с гло-
боидальной передачей относится к одному из наиболее распростра-
ненных рулевых механизмов, применяемых на автомобилях раз-
личных марок и типов.
Рис. 23. Рулевые механизмы с глобоидальным червяком
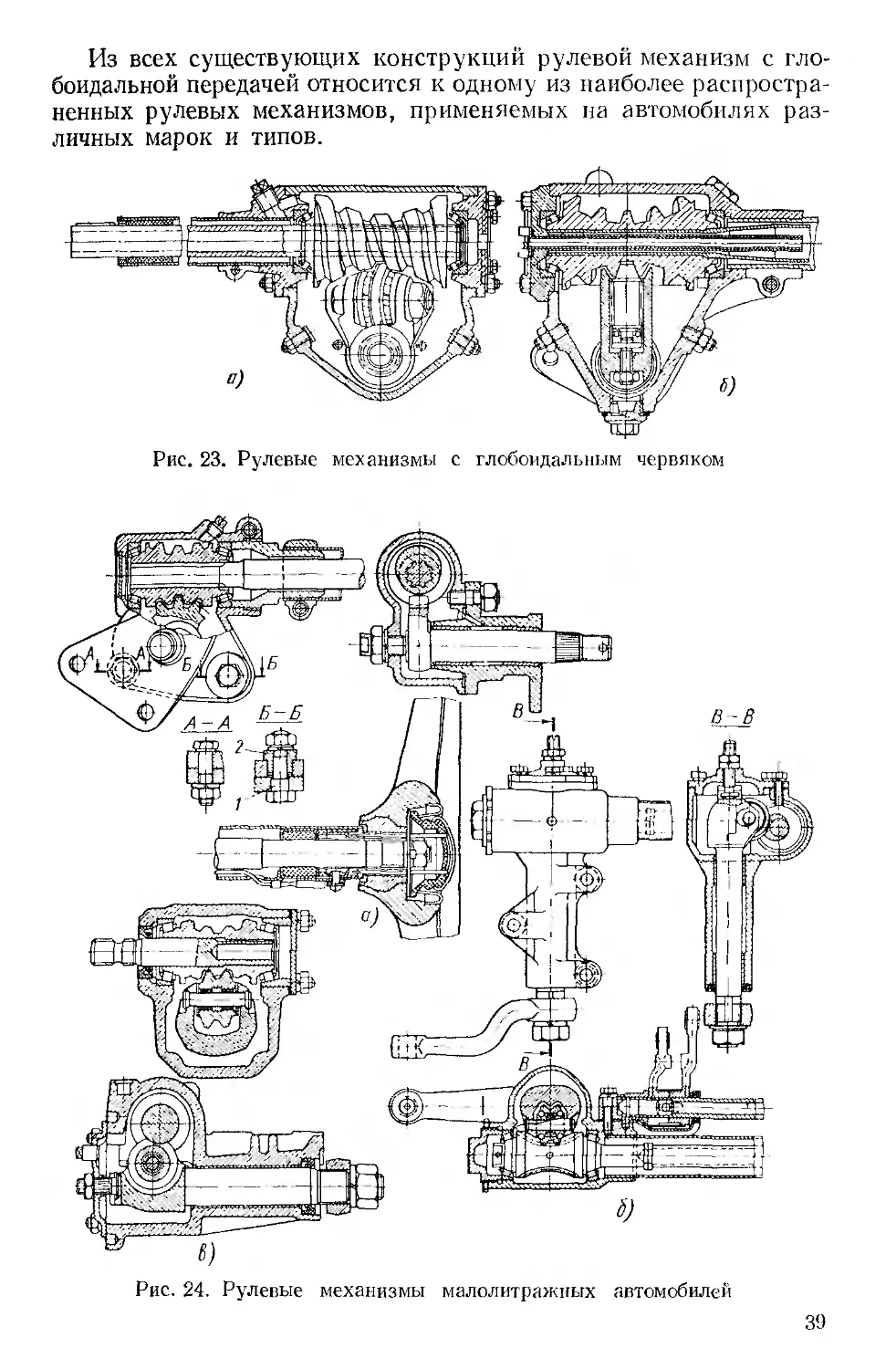
Рис. 24. Рулевые механизмы малолитражных автомобилей
39
В рулевых механизмах автомобилей ГАЗ-А и ГАЗ-АА при-
менялась глобоидальная передача с двухзубым сектором, а в ру-
левом механизме автомобиля «Москвич-401» — с трехзубым секто-
ром, показанным на рис. 24,а.
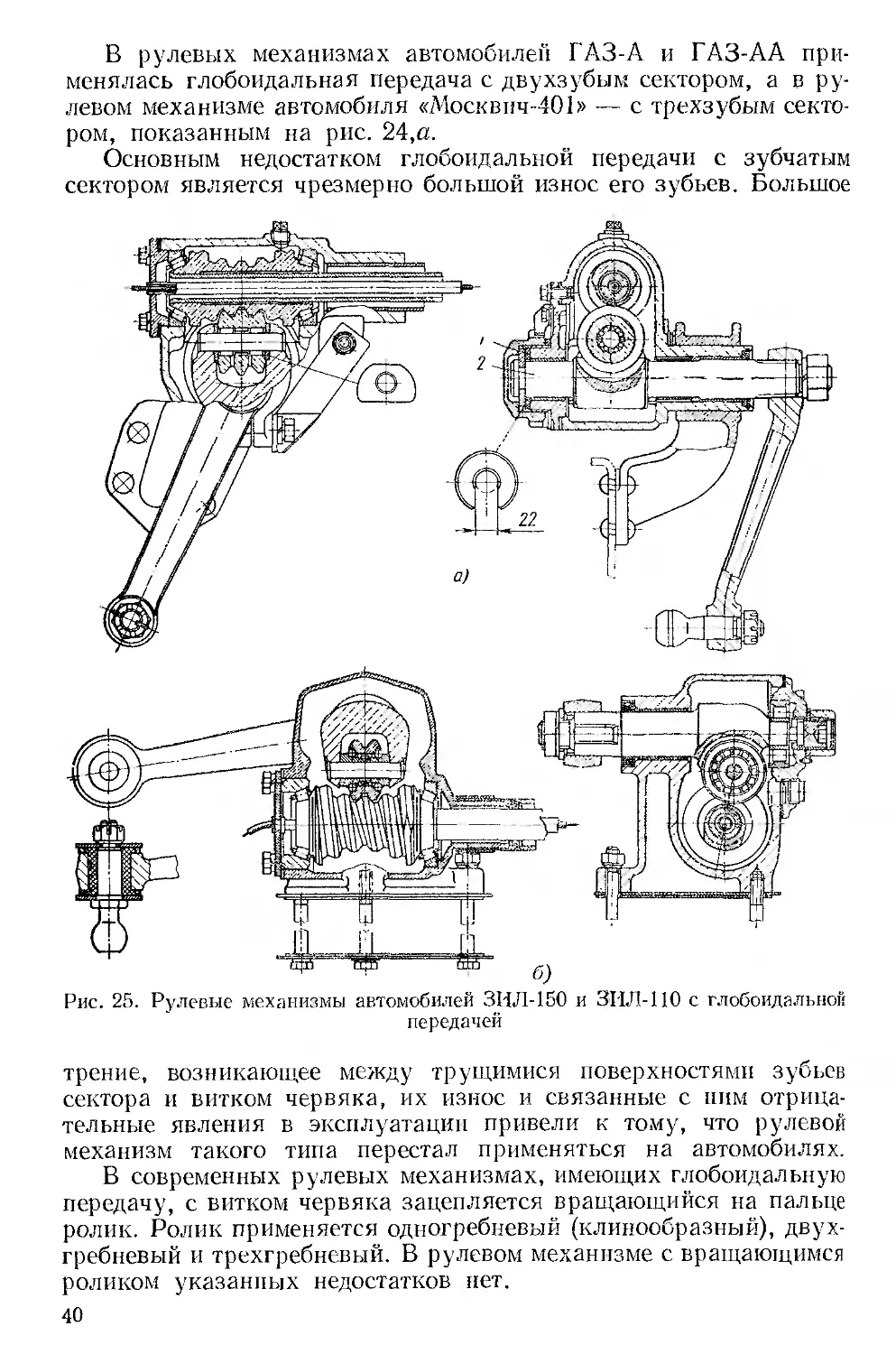
Основным недостатком глобоидальной передачи с зубчатым
сектором является чрезмерно большой износ его зубьев. Большое
Рис. 25. Рулевые механизмы автомобилей ЗИЛ-150 и ЗИЛ-110 с глобоидальной
передачей
трение, возникающее между трущимися поверхностями зубьев
сектора и витком червяка, их износ и связанные с ним отрица-
тельные явления в эксплуатации привели к тому, что рулевой
механизм такого типа перестал применяться на автомобилях.
В современных рулевых механизмах, имеющих глобоидальную
передачу, с витком червяка зацепляется вращающийся на пальце
ролик. Ролик применяется одногребневый (клинообразный), двух-
гребневый и трехгребневый. В рулевом механизме с вращающимся
роликом указанных недостатков пет.
40
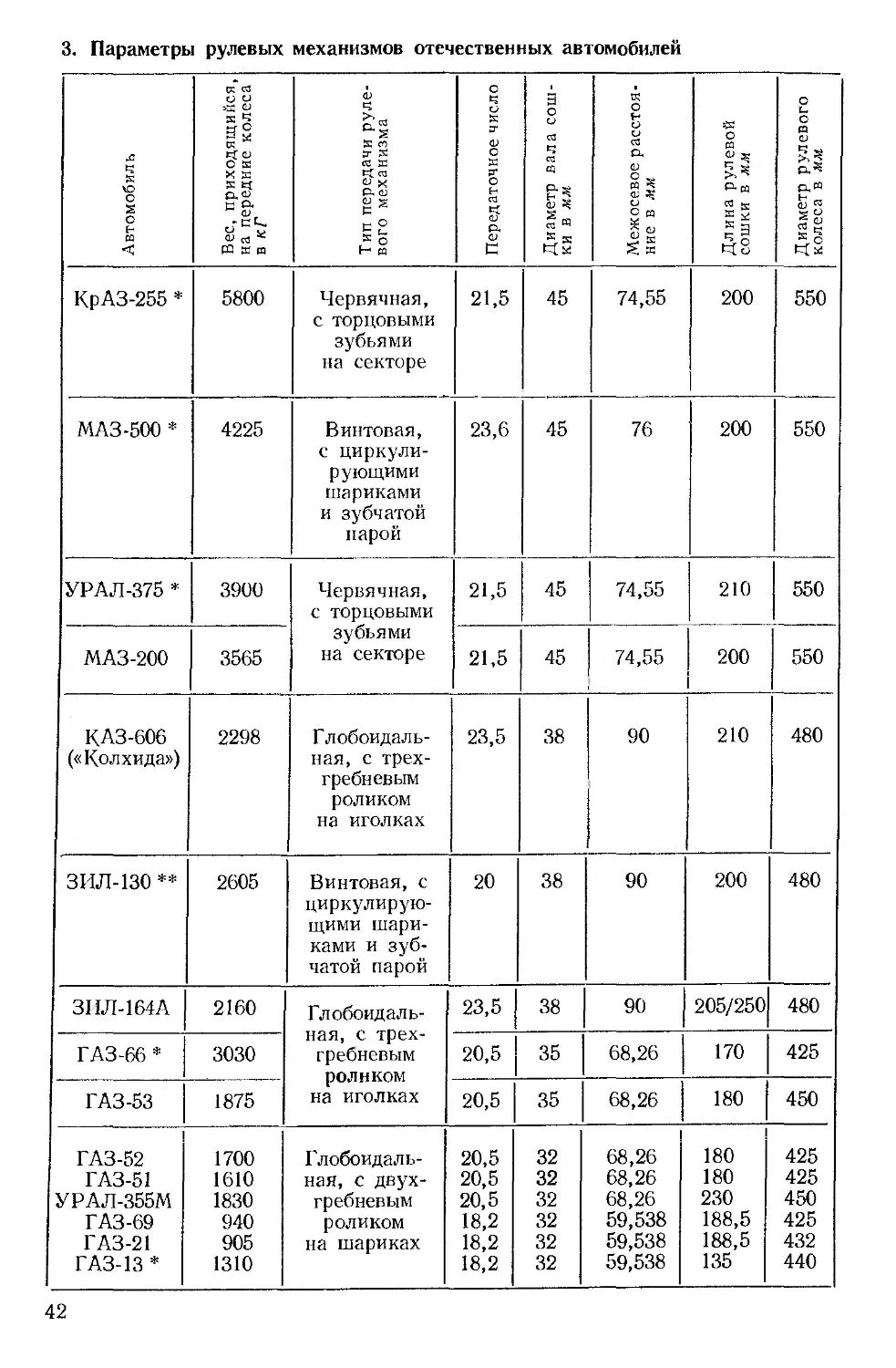
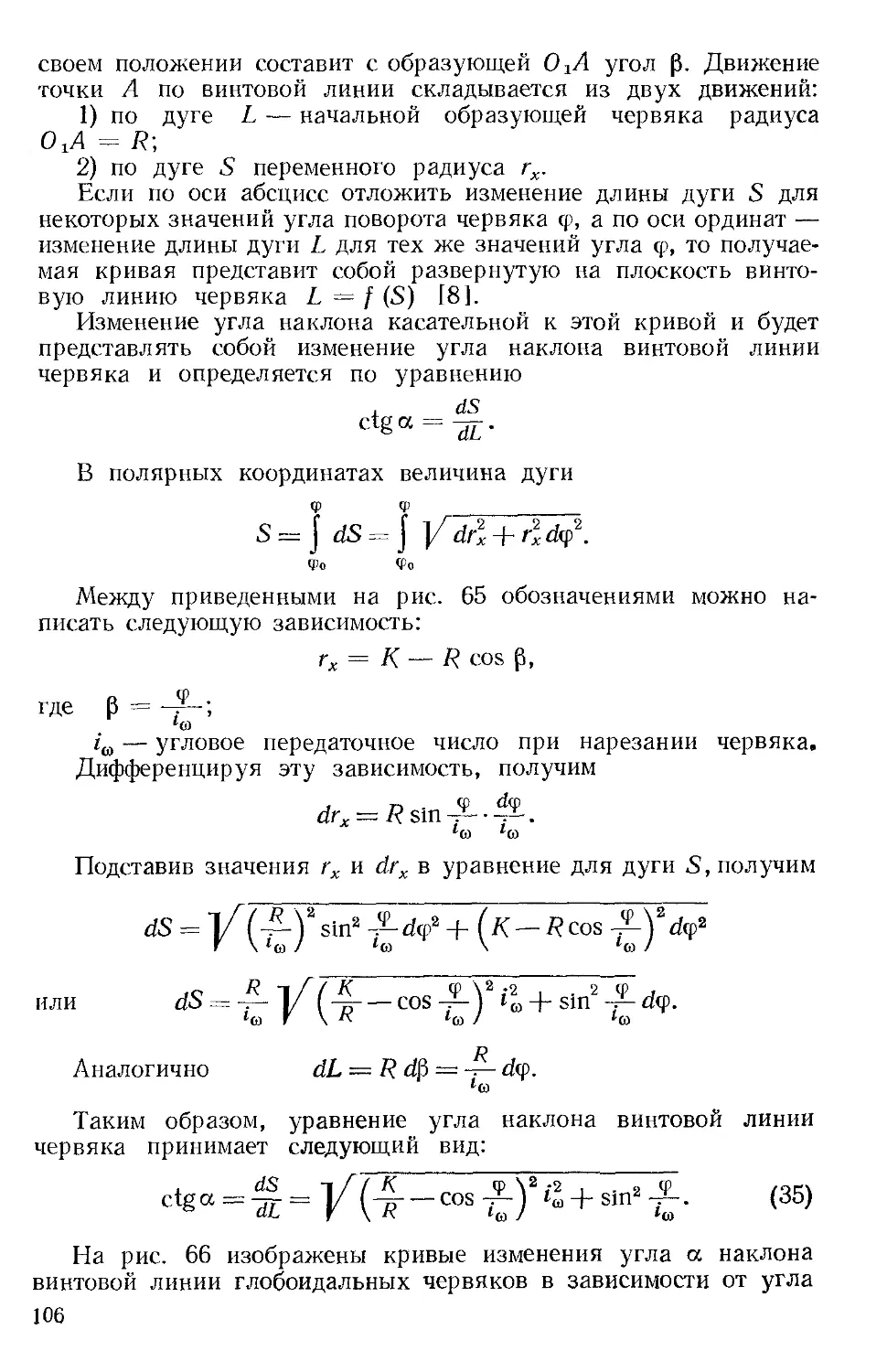
3. Параметры рулевых механизмов отечественных автомобилей
Автомобиль Вес, приходящийся, на передние колеса в кГ Тип передачи руле- вого механизма Передаточное число Диаметр вала сош- ки в мм Межосевое расстоя- ние в мм Длина рулевой сошки в мм Диаметр рулевого колеса в мм
КрАЗ-255 * 5800 Червячная, с торцовыми зубьями на секторе 21,5 45 74,55 200 550
МАЗ-500 * 4225 Винтовая, с циркули- рующими шариками и зубчатой парой 23,6 45 76 200 550
УРАЛ-375 * 3900 Червячная, с торцовыми зубьями на секторе 21,5 45 74,55 210 550
74,55
МАЗ-200 3565 21,5 45 200 550
КАЗ-606 («Колхида») 2298 Глобоидаль- ная, с трех- гребневым роликом на иголках 23,5 38 90 210 480
ЗИЛ-130 ** 2605 Винтовая, с циркулирую- щими шари- ками и зуб- чатой парой 20 38 90 200 480
ЗПЛ-164А 2160 Глобоидаль- ная, с трех- гребневым роликом на иголках 23,5 38 90 205/250 480
ГАЗ-66 * 3030 20,5 35 68,26 170 425
68,26
ГАЗ-53 1875 20,5 35 180 450
ГАЗ-52 ГАЗ-51 УРАЛ-355М ГАЗ-69 ГАЗ-21 ГАЗ-13 * 1700 1610 1830 940 905 1310 Глобоидаль- ная, с двух- гребневым роликом на шариках 20,5 20,5 20,5 18,2 18,2 18,2 32 32 32 32 32 32 68,26 68,26 68,26 59,538 59,538 59,538 180 180 230 188,5 188,5 135 425 425 450 425 432 440
42
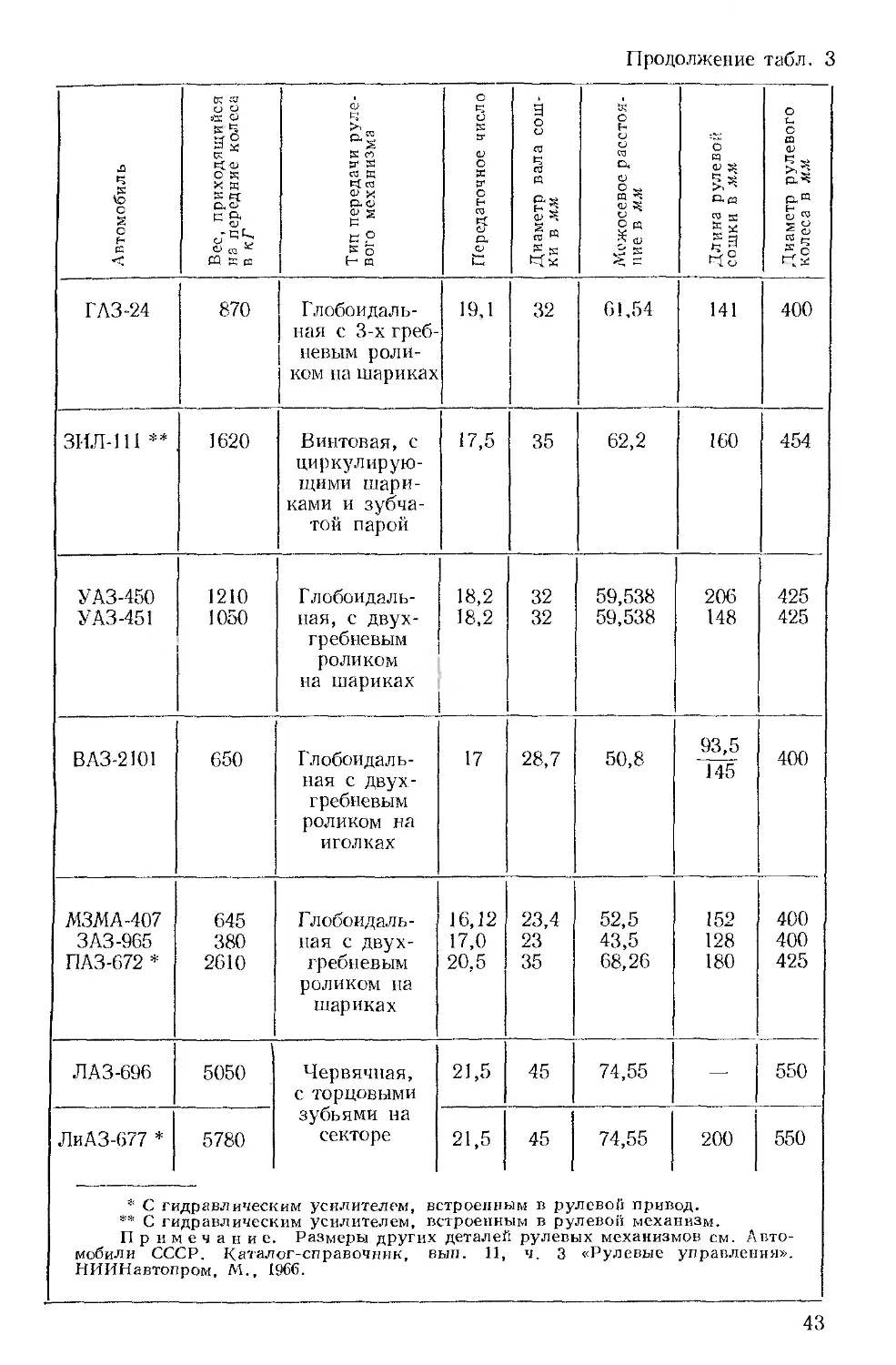
Продолжение табл. 3
Автомобиль Вес, приходящийся на передние колеса в кГ Тип передачи руле- вого механизма Передаточное число Диаметр вала сош- | КИ в мм Можосевое расстоя- ние в мм Длина рулевой' сошки в мм ' Диаметр рулевого i колеса в мм
ГАЗ-24 870 Глобоидаль- ная с 3-х греб- невым роли- ком на шариках 19,1 32 61,54 141 400
ЗИЛ-111 ** 1620 Винтовая, с циркулирую- щими шари- ками и зубча- той парой 17,5 35 62,2 160 454
УАЗ-450 УАЗ-451 1210 1050 Глобоидаль- ная, с двух- гребневым роликом на шариках 18,2 18,2 32 32 59,538 59,538 206 148 425 425
ВАЗ-2101 650 Глобоидаль- ная с двух- гребневым роликом на иголках 17 28,7 50,8 93,5 145 400
МЗМА-407 ЗАЗ-965 ПАЗ-672 * 645 380 2610 Глобоидаль- ная с двух- гребневым роликом на шариках 16,12 17,0 20,5 23,4 23 35 52,5 43,5 68,26 152 128 180 400 400 425
ЛАЗ-696 5050 Червячная, с торцовыми 21,5 45 74,55 — 550
ЛиАЗ-677 * 5780 зубьями на секторе 21,5 45 74,55 200 550
* С гидравлическим усилителем, встроенным в рулевой привод. * * С гидравлическим усилителем, встроенным в рулевой механизм. Примечание. Размеры других деталей рулевых механизмов см. Авто- мобили СССР. Каталог-справочник, вьш. 11, ч. 3 «Рулевые управления». НИИНавтопром, М., 1966.
43
В рулевых механизмах автомобилей «Москвич» моделей 402,
408 и 412 применяется двухгребневый ролик, зацепляющийся
с глобоидальным червяком (рис. 24, б). Такого же типа рулевой
механизм (рис. 24, в) установлен на малолитражном автомобиле
ВАЗ 2101. В рулевом механизме автомобиля ЗИЛ-150 (рис 25, а)
с глобоидальным червяком зацепляется трехгребневый ролик,
в механизме автомобиля ЗИЛ-110(рис. 25, б) применен двухгреб-
невый ролик.
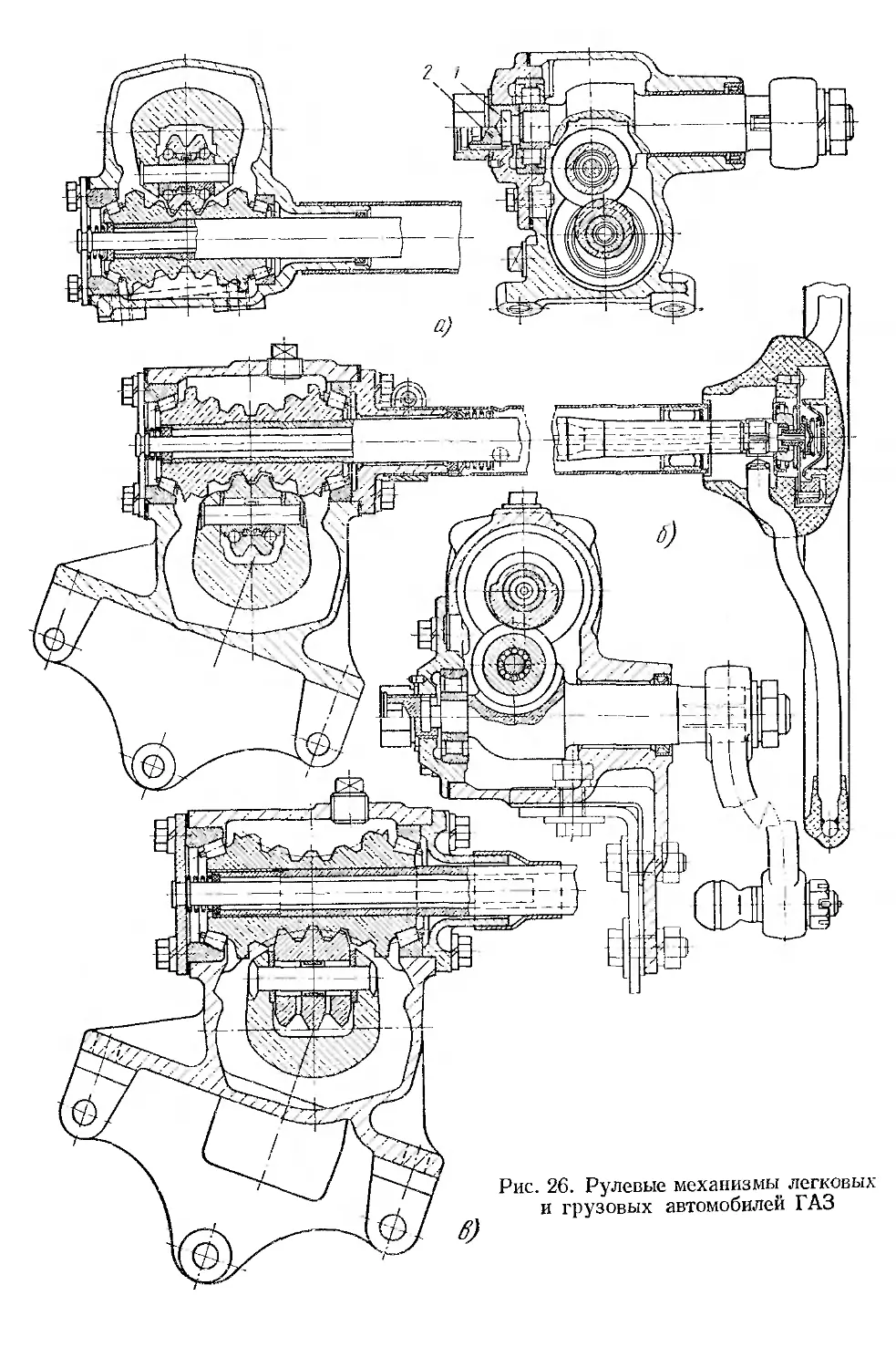
В рулевых механизмах легковых автомобилей ГАЗ моделей
М-20, М-21, М-13 (рис. 26, а) и грузовых автомобилей ГАЗ-51
(рис. 26, б) с глобоидальным червяком зацепляется двухгребневый
ролик, на грузовых автомобилях ГАЗ моделей 53 и 66 — трех-
гребневый ролик (рис. 26, в).
Основные параметры рулевых механизмов отечественных авто-
мобилей приведены в табл. 3.
КОНСТРУКТИВНЫЕ РЕШЕНИЯ ОСНОВНЫХ УЗЛОВ РУЛЕВОГО МЕХАНИЗМА
Опоры червяка и вала сошки. Червяк или винт с рулевым
валом устанавливается в картере рулевого механизма обычно
на двух шариковых радиально-упорных или роликовых кони-
ческих подшипниках, воспринимающих осевые и радиальные
усилия. В отдельных конструкциях применялись подшипники
скольжения.
Вал сошки с кривошипом, с сектором или роликом устанав-
ливается обычно на подшипниках скольжения во втулке, сде-
ланной как одно целое с картером или во втулке его съемной
боковой крышки. Если вал сошки короткий, то его опоры рас-
полагаются и во втулке картера, и в его боковой съемной
крышке.
Иногда в качестве опор вала сошки вместо втулок приме-
няются подшипники качения (роликовые цилиндрические или
игольчатые). Такие опоры применяются преимущественно в тех
механизмах, в которых износ втулок очень сильно влияет на за-
цепление передаточной пары, и в конструкциях с коротким валом
сошки (см. рис. 25, б и 26, а—в). Вал сошки автомобиля ЗИЛ-150
(см. рис. 25, а) установлен на трех подшипниках скольжения,
два из которых располагаются во втулке картера, а третий —-
в боковой его крышке. Вал сошки автомобиля ЗИЛ-НО (см.
рис. 25, б) установлен на втулке в картере и роликовом подшип-
нике в его боковой крышке.
В обеих конструкциях головка вала с роликом располагается
между опорами, в связи с чем создаются благоприятные условия
для работы подшипников этого вала и передачи в целом. В руле-
вых механизмах автомобилей Горьковского автозавода (см. рис. 26)
головка вала сошки с роликом располагается между опорами,
одна из которых в виде роликового подшипника расположена
в боковой крышке картера.
44
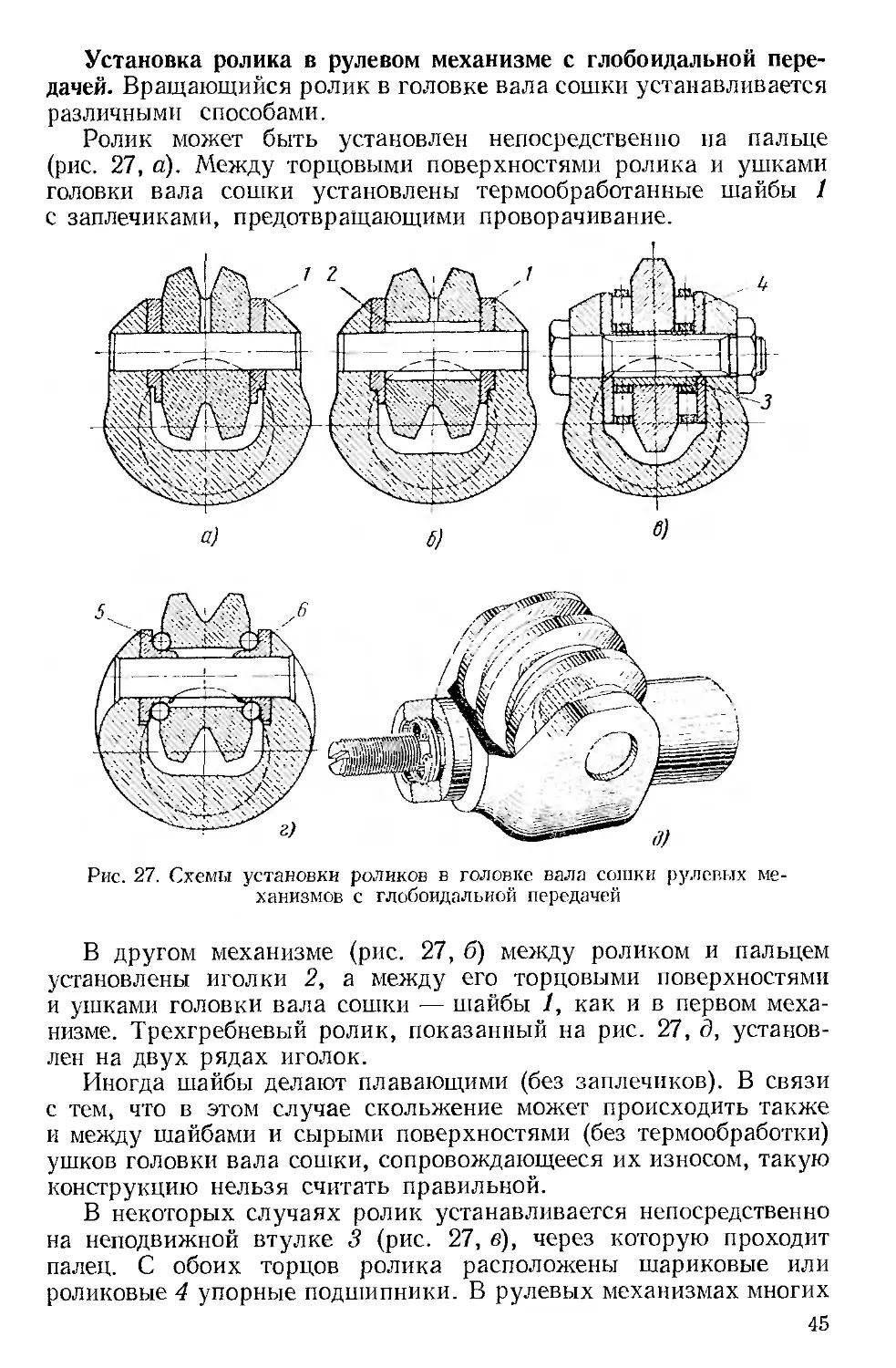
Установка ролика в рулевом механизме с глобоидальной пере-
дачей. Вращающийся ролик в головке вала сошки устанавливается
различными способами.
Ролик может быть установлен непосредственно па пальце
(рис. 27, а). Между торцовыми поверхностями ролика и ушками
головки вала сошки установлены термообработанные шайбы 1
с заплечиками, предотвращающими проворачивание.
Рис. 27. Схемы установки роликов в головке вала сыпки рулевых ме-
ханизмов с глобоидальной передачей
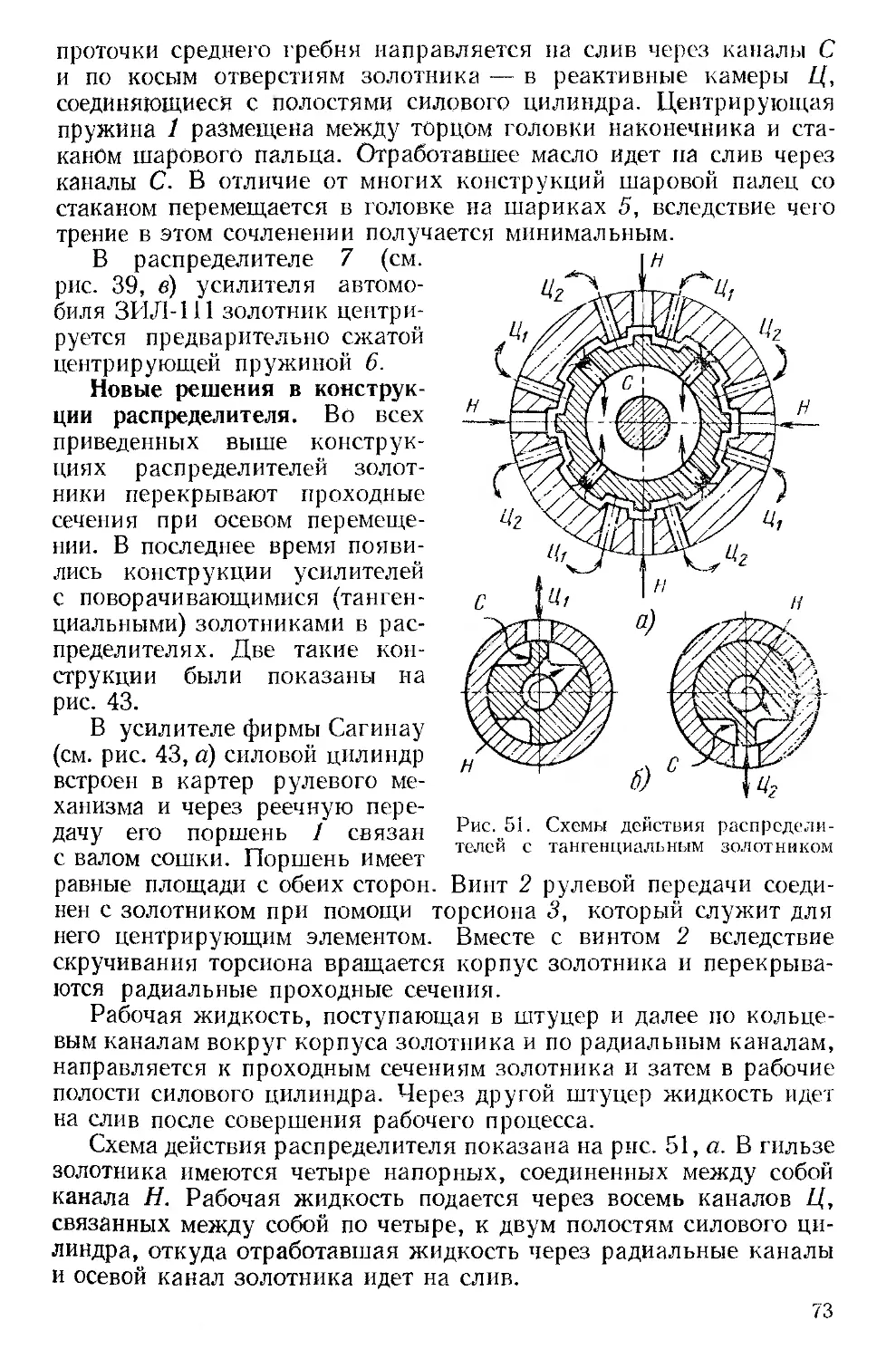
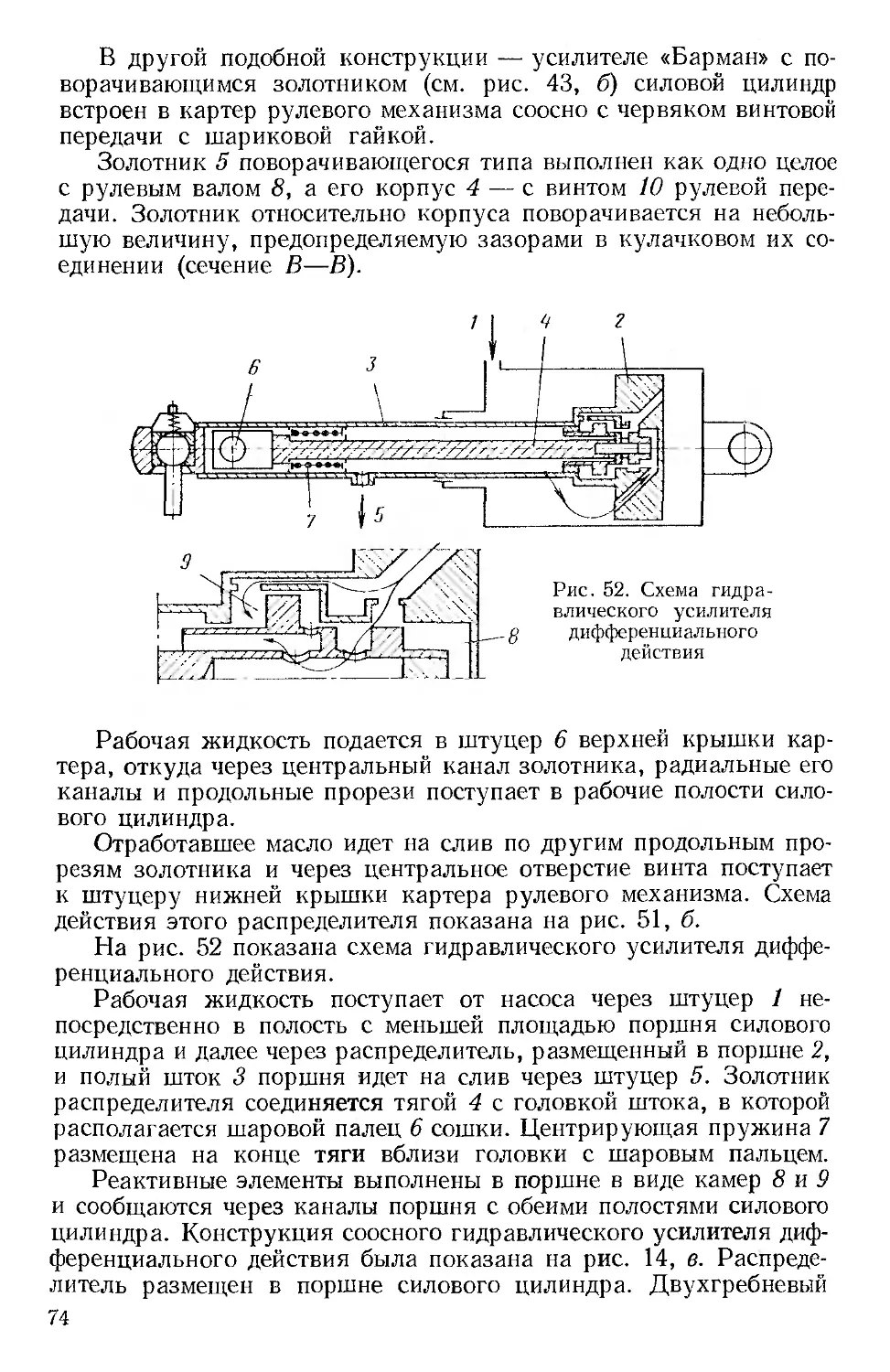
В другом механизме (рис. 27, б) между роликом и пальцем
установлены иголки 2, а между его торцовыми поверхностями
и ушками головки вала сошки — шайбы 1, как и в первом меха-
низме. Трехгребневый ролик, показанный на рис. 27, д, установ-
лен на двух рядах иголок.
Иногда шайбы делают плавающими (без заплечиков). В связи
с тем, что в этом случае скольжение может происходить также
и между шайбами и сырыми поверхностями (без термообработки)
ушков головки вала сошки, сопровождающееся их износом, такую
конструкцию нельзя считать правильной.
В некоторых случаях ролик устанавливается непосредственно
на неподвижной втулке 3 (рис. 27, в), через которую проходит
палец. С обоих торцов ролика расположены шариковые или
роликовые 4 упорные подшипники. В рулевых механизмах многих
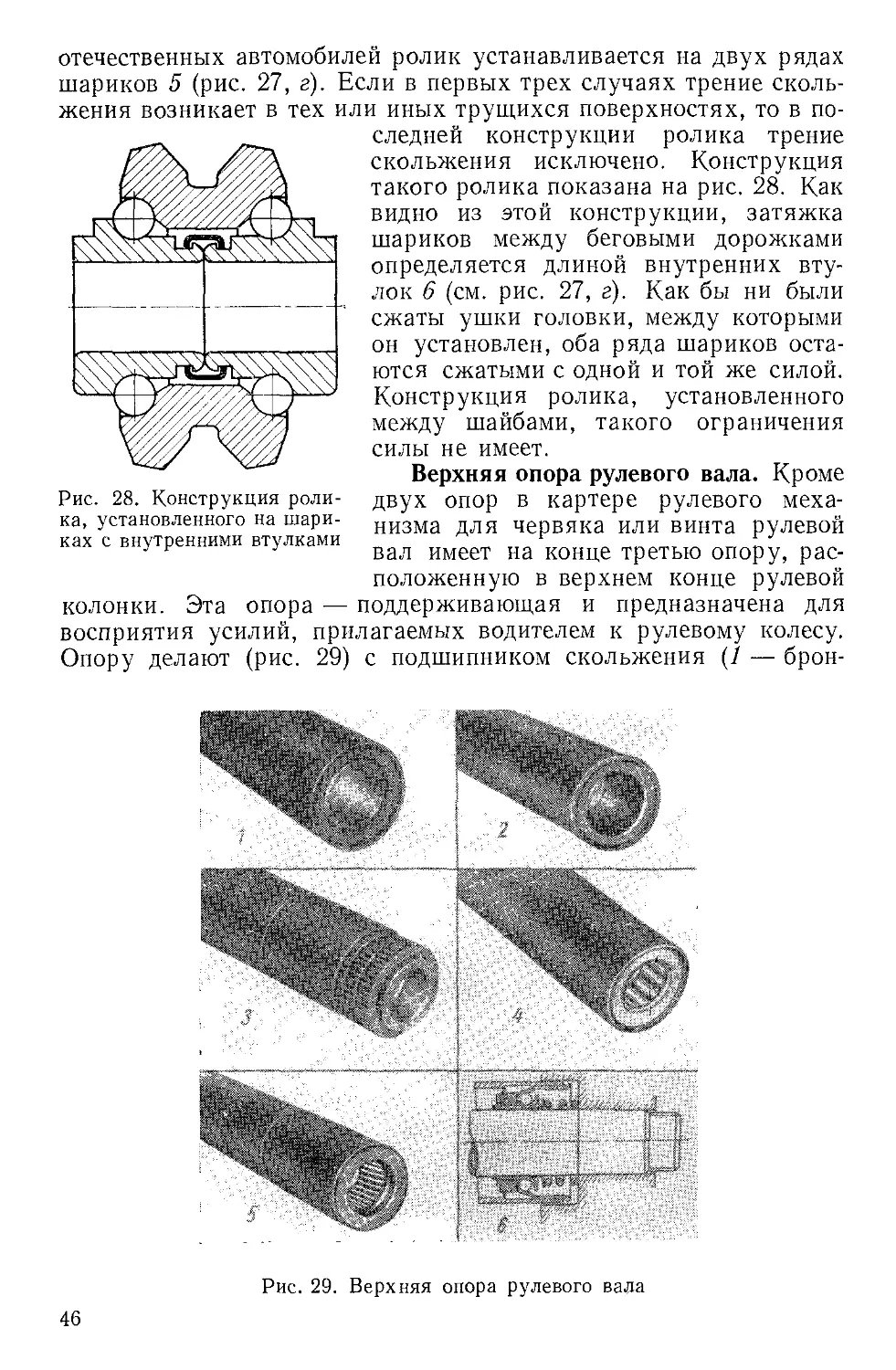
45
Рис. 28. Конструкция роли-
ка, установленного на шари-
ках с внутренними втулками
отечественных автомобилей ролик устанавливается на двух рядах
шариков 5 (рис. 27, г). Если в первых трех случаях трение сколь-
жения возникает в тех или иных трущихся поверхностях, то в по-
следней конструкции ролика трение
скольжения исключено. Конструкция
такого ролика показана на рис. 28. Как
видно из этой конструкции, затяжка
шариков между беговыми дорожками
определяется длиной внутренних вту-
лок 6 (см. рис. 27, г). Как бы ни были
сжаты ушки головки, между которыми
он установлен, оба ряда шариков оста-
ются сжатыми с одной и той же силой.
Конструкция ролика, установленного
между шайбами, такого ограничения
силы не имеет.
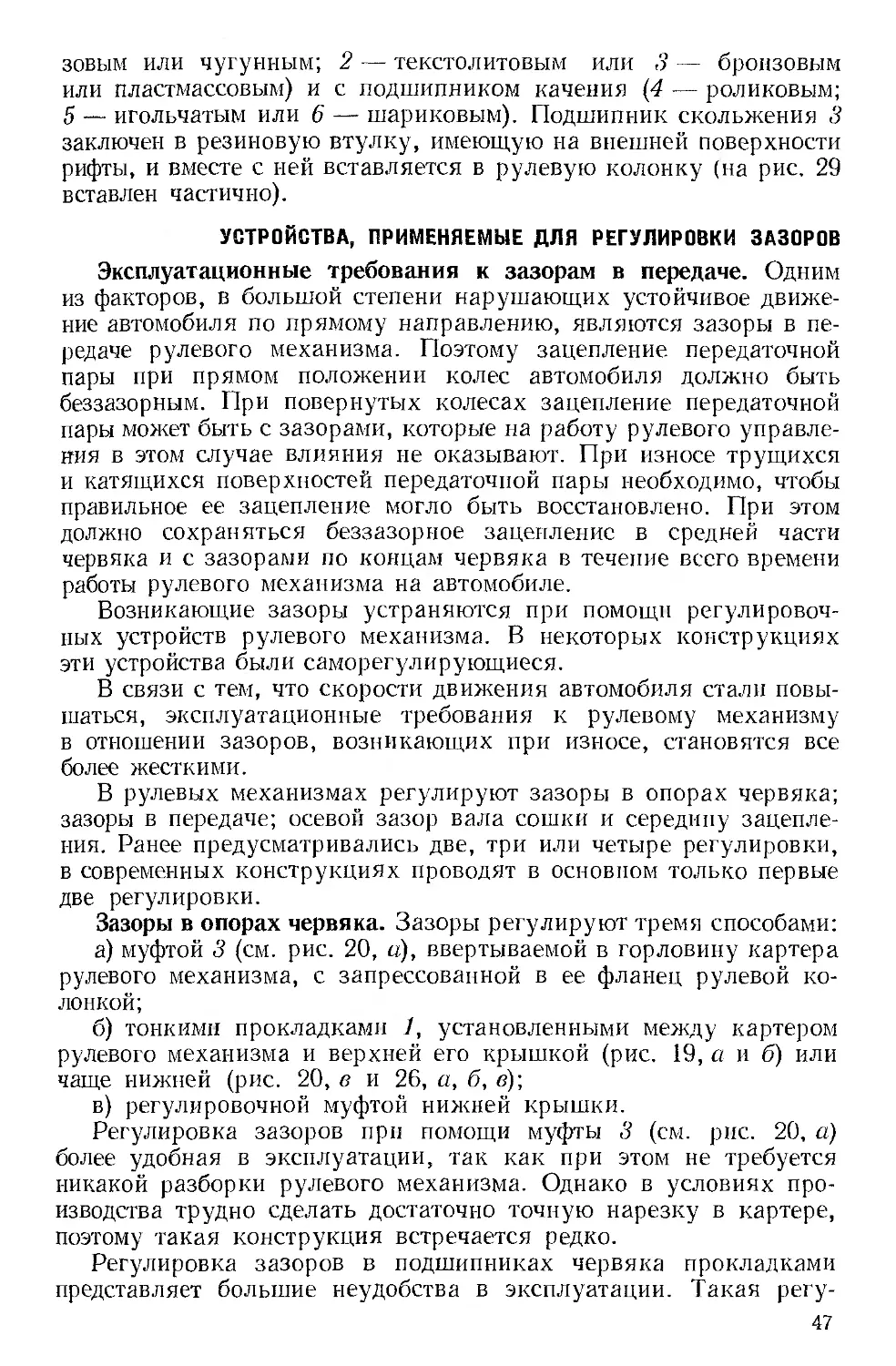
Верхняя опора рулевого вала. Кроме
двух опор в картере рулевого меха-
низма для червяка или винта рулевой
вал имеет на конце третью опору, рас-
положенную в верхнем конце рулевой
колонки. Эта опора — поддерживающая и предназначена для
восприятия усилий, прилагаемых водителем к рулевому колесу.
Опору делают (рис. 29) с подшипником скольжения (1 — брон-
Рис. 29. Верхняя опора рулевого вада
46
зовым или чугунным; 2 — текстолитовым или 3 — бронзовым
или пластмассовым) и с подшипником качения (4 — роликовым;
5 — игольчатым или 6 — шариковым). Подшипник скольжения 3
заключен в резиновую втулку, имеющую на внешней поверхности
рифты, и вместе с ней вставляется в рулевую колонку (на рис. 29
вставлен частично).
УСТРОЙСТВА, ПРИМЕНЯЕМЫЕ ДЛЯ РЕГУЛИРОВКИ ЗАЗОРОВ
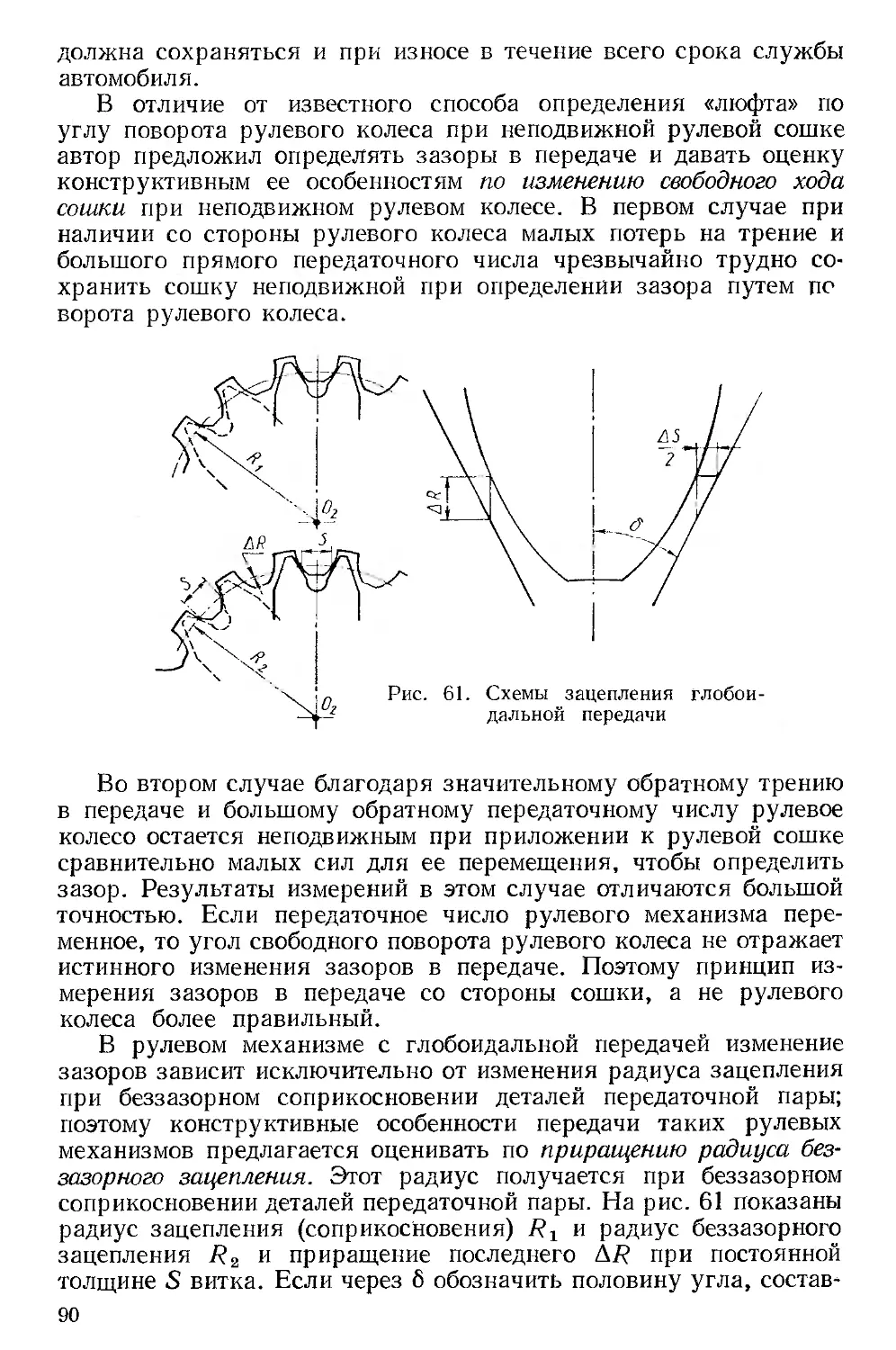
Эксплуатационные требования к зазорам в передаче. Одним
из факторов, в большой степени нарушающих устойчивое движе-
ние автомобиля по прямому направлению, являются зазоры в пе-
редаче рулевого механизма. Поэтому зацепление передаточной
пары при прямом положении колес автомобиля должно быть
беззазорным. При повернутых колесах зацепление передаточной
пары может быть с зазорами, которые на работу рулевого управле-
ния в этом случае влияния не оказывают. При износе трущихся
и катящихся поверхностей передаточной пары необходимо, чтобы
правильное ее зацепление могло быть восстановлено. При этом
должно сохраняться беззазорное зацепление в средней части
червяка и с зазорами по концам червяка в течение всего времени
работы рулевого механизма на автомобиле.
Возникающие зазоры устраняются при помощи регулировоч-
ных устройств рулевого механизма. В некоторых конструкциях
эти устройства были саморегулирующиеся.
В связи с тем, что скорости движения автомобиля стали повы-
шаться, эксплуатационные требования к рулевому механизму
в отношении зазоров, возникающих при износе, становятся все
более жесткими.
В рулевых механизмах регулируют зазоры в опорах червяка;
зазоры в передаче; осевой зазор вала сошки и середину зацепле-
ния. Ранее предусматривались две, три или четыре регулировки,
в современных конструкциях проводят в основном только первые
две регулировки.
Зазоры в опорах червяка. Зазоры регулируют тремя способами:
а) муфтой 3 (см. рис. 20, а), ввертываемой в горловину картера
рулевого механизма, с запрессованной в ее фланец рулевой ко-
лонкой;
б) тонкими прокладками 1, установленными между картером
рулевого механизма и верхней его крышкой (рис. 19, а и б) или
чаще нижней (рис. 20, в и 26, а, б, в);
в) регулировочной муфтой нижней крышки.
Регулировка зазоров при помощи муфты 3 (см. рис. 20, а)
более удобная в эксплуатации, так как при этом не требуется
никакой разборки рулевого механизма. Однако в условиях про-
изводства трудно сделать достаточно точную нарезку в картере,
поэтому такая конструкция встречается редко.
Регулировка зазоров в подшипниках червяка прокладками
представляет большие неудобства в эксплуатации. Такая регу-
47
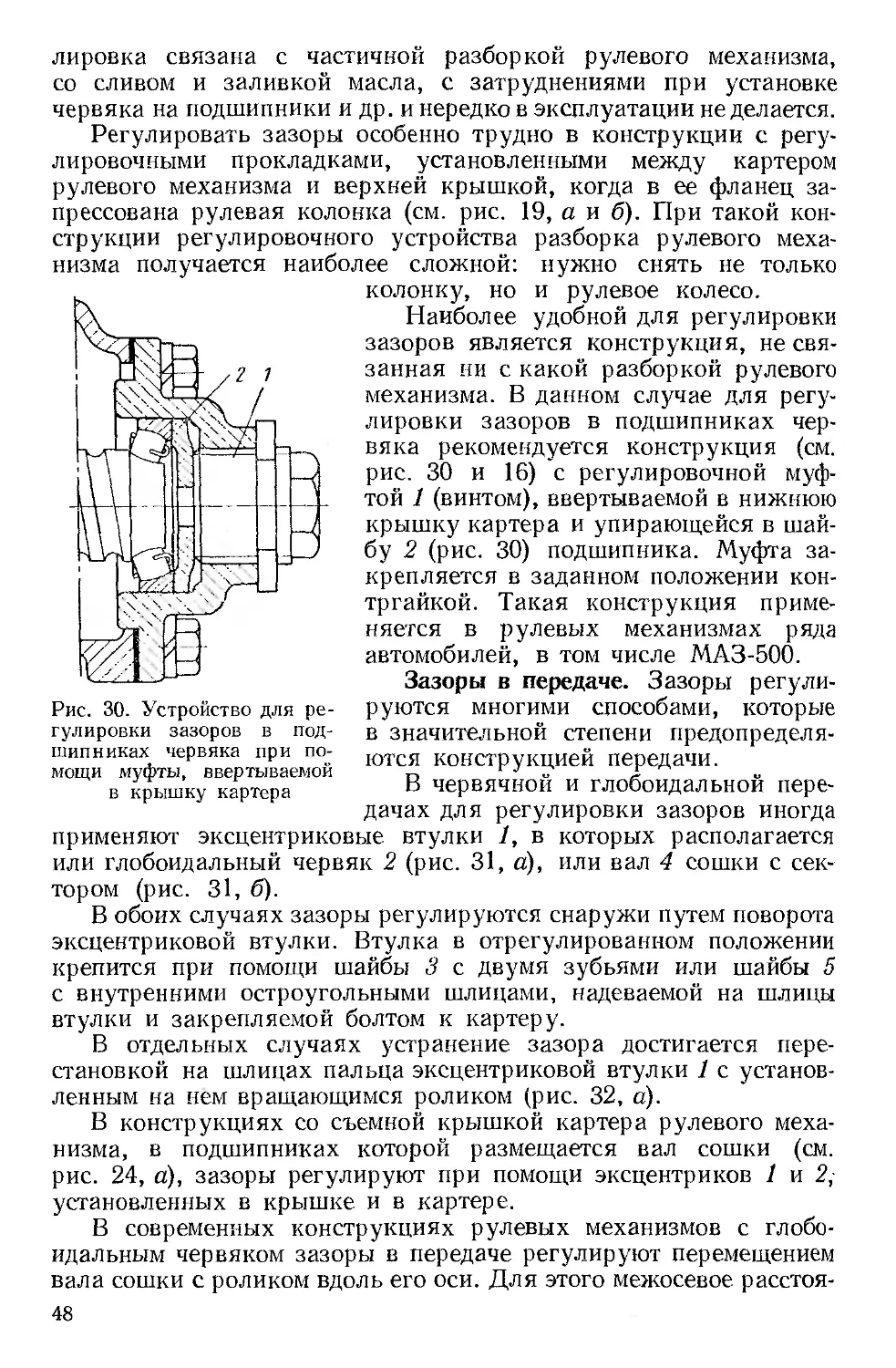
Рис. 30. Устройство для ре-
гулировки зазоров в под-
шипниках червяка при по-
мощи муфты, ввертываемой
в крышку картера
лировка связана с частичной разборкой рулевого механизма,
со сливом и заливкой масла, с затруднениями при установке
червяка на подшипники и др. и нередко в эксплуатации не делается.
Регулировать зазоры особенно трудно в конструкции с регу-
лировочными прокладками, установленными между картером
рулевого механизма и верхней крышкой, когда в ее фланец за-
прессована рулевая колонка (см. рис. 19, а и б). При такой кон-
струкции регулировочного устройства разборка рулевого меха-
низма получается наиболее сложной: нужно снять не только
колонку, но и рулевое колесо.
Наиболее удобной для регулировки
зазоров является конструкция, не свя-
занная ни с какой разборкой рулевого
механизма. В данном случае для регу-
лировки зазоров в подшипниках чер-
вяка рекомендуется конструкция (см.
рис. 30 и 16) с регулировочной муф-
той 1 (винтом), ввертываемой в нижнюю
крышку картера и упирающейся в шай-
бу 2 (рис. 30) подшипника. Муфта за-
крепляется в заданном положении кон-
тргайкой. Такая конструкция приме-
няется в рулевых механизмах ряда
автомобилей, в том числе МАЗ-500.
Зазоры в передаче. Зазоры регули-
руются многими способами, которые
в значительной степени предопределя-
ются конструкцией передачи.
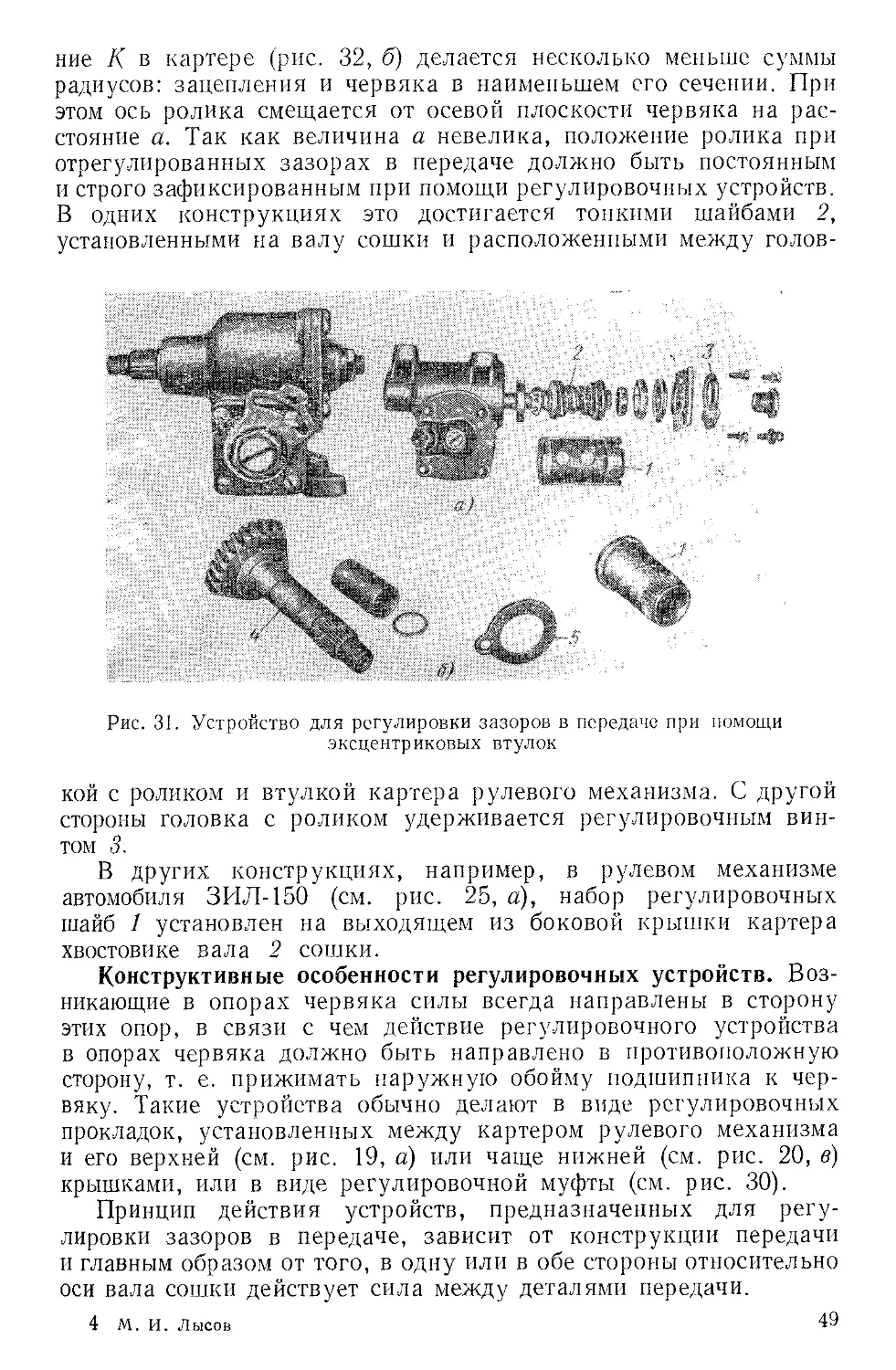
В червячной и глобоидальной пере-
дачах для регулировки зазоров иногда
применяют эксцентриковые втулки 1, в которых располагается
или глобоидальный червяк 2 (рис. 31, а), или вал 4 сошки с сек-
тором (рис. 31, б).
В обоих случаях зазоры регулируются снаружи путем поворота
эксцентриковой втулки. Втулка в отрегулированном положении
крепится при помощи шайбы 3 с двумя зубьями или шайбы 5
с внутренними остроугольными шлицами, надеваемой на шлицы
втулки и закрепляемой болтом к картеру.
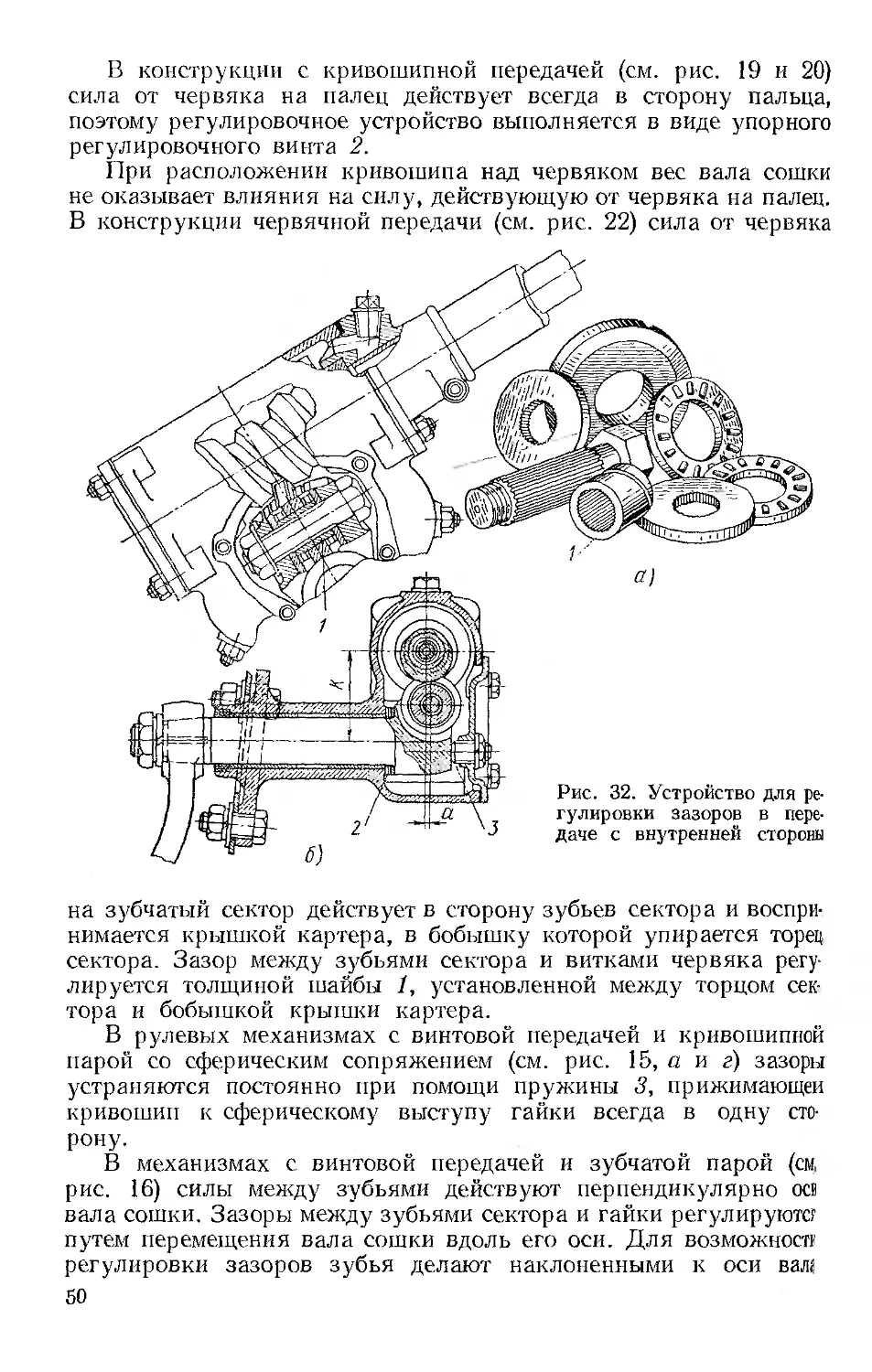
В отдельных случаях устранение зазора достигается пере-
становкой на шлицах пальца эксцентриковой втулки 1 с установ-
ленным на нем вращающимся роликом (рис. 32, а).
В конструкциях со съемной крышкой картера рулевого меха-
низма, в подшипниках которой размещается вал сошки (см.
рис. 24, а), зазоры регулируют при помощи эксцентриков 1 и 2,
установленных в крышке и в картере.
В современных конструкциях рулевых механизмов с глобо-
идальным червяком зазоры в передаче регулируют перемещением
вала сошки с роликом вдоль его оси. Для этого межосевое расстоя-
48
ние К в картере (рис. 32, б) делается несколько меньше суммы
радиусов: зацепления и червяка в наименьшем его сечении. При
этом ось ролика смещается от осевой плоскости червяка на рас-
стояние а. Так как величина а невелика, положение ролика при
отрегулированных зазорах в передаче должно быть постоянным
и строго зафиксированным при помощи регулировочных устройств.
В одних конструкциях это достигается тонкими шайбами 2,
установленными на валу сошки и расположенными между голов-
Рис. 31. Устройство для регулировки зазоров в передаче при помощи
эксцентриковых втулок
кой с роликом и втулкой картера рулевого механизма. С другой
стороны головка с роликом удерживается регулировочным вин-
том 3.
В других конструкциях, например, в рулевом механизме
автомобиля ЗИЛ-150 (см. рис. 25, а), набор регулировочных
шайб 1 установлен на выходящем из боковой крышки картера
хвостовике вала 2 сошки.
Конструктивные особенности регулировочных устройств. Воз-
никающие в опорах червяка силы всегда направлены в сторону
этих опор, в связи с чем действие регулировочного устройства
в опорах червяка должно быть направлено в противоположную
сторону, т. е. прижимать наружную обойму подшипника к чер-
вяку. Такие устройства обычно делают в виде регулировочных
прокладок, установленных между картером рулевого механизма
и его верхней (см. рис. 19, а) или чаще нижней (см. рис. 20, в)
крышками, или в виде регулировочной муфты (см. рис. 30).
Принцип действия устройств, предназначенных для регу-
лировки зазоров в передаче, зависит от конструкции передачи
и главным образом от того, в одну или в обе стороны относительно
оси вала сошки действует сила между деталями передачи.
4 М. И. Лысов 49
В конструкции с кривошипной передачей (см. рис. 19 и 20)
сила от червяка на палец действует всегда в сторону пальца,
поэтому регулировочное устройство выполняется в виде упорного
регулировочного винта 2.
При расположении кривошипа над червяком вес вала сошки
не оказывает влияния на силу, действующую от червяка на палец.
В конструкции червячной передачи (см. рис. 22) сила от червяка
на зубчатый сектор действует в сторону зубьев сектора и воспри-
нимается крышкой картера, в бобышку которой упирается торец
сектора. Зазор между зубьями сектора и витками червяка регу-
лируется толщиной шайбы 1, установленной между торцом сек-
тора и бобышкой крышки картера.
В рулевых механизмах с винтовой передачей и кривошипной
парой со сферическим сопряжением (см. рис. 15, и и г) зазоры
устраняются постоянно при помощи пружины 3, прижимающей
кривошип к сферическому выступу гайки всегда в одну сто-
рону.
В механизмах с винтовой передачей и зубчатой парой (см,
рис. 16) силы между зубьями действуют перпендикулярно ос»
вала сошки. Зазоры между зубьями сектора и гайки регулируютс?
путем перемещения вала сошки вдоль его оси. Для возможноств
регулировки зазоров зубья делают наклоненными к оси вале
50
сошки под небольшим углом (6°). В связи с этим при вертикальном
или наклонном положении вал сошки под действием собственного
веса может переместиться, и зубья его сектора могут закли-
ниться между зубьями гайки. В такой конструкции регулировоч-
ное устройство должно удерживать вал сошки в обоих направле-
ниях. Для этого регулировочный винт имеет головку 5 (см.
рис. 16, б), которая размещается в гнезде вала сошки между
днищем гнезда и ввернутой в него гайкой 6, приваренной к стен-
кам гнезда. При помощи такого
устройства вал сошки может
быть смещен в обе стороны
путем поворота винта, положе-
ние которого в боковой крышке
закрепляется контргайкой.
В рулевом механизме с гло-
боидальной передачей (см. рис.
24—26) окружное усилие от
червяка действует в обе сторо-
ны. Для компенсации износа
деталей передаточной пары ро-
лик размещается вне осевой
плоскости червяка, и при пере-
мещении вала сошки вдоль его
оси ролик может заклиниться
с витком червяка. В таких кон-
струкциях регулировочное уст-
ройство должно удерживать вал
сошки в обоих направлениях
относительно его осн.
В некоторых случаях поло-
жение вала сошки регулируется
при помощи прокладок, устано-
вленных на валу СОШКИ ИЛИ рис. зз Устройство для регулировки
С наружной его стороны (см. зазоров в передаче при помощи винта
рис. 25, а), или с внут-
ренней (см. рис. 32, б).
Регулировка, связанная с разборкой рулевого механизма при
съемке шайб с вала сошки или прокладок из-под крышки картера,
представляет большие неудобства в эксплуатации. Особенные
затруднения встречаются в том случае, когда для регулировки
необходимо снимать рулевое колесо, колонку или весь рулевой
механизм с автомобиля. В современных конструкциях рулевых
механизмов зазоры регулируют без какой-либо разборки. Все
регулировки осуществляются с наружной доступной стороны
механизма.
С целью упрощения процесса регулировки зазоров в передаче
в более поздних конструкциях регулировочное устройство пред-
ставляет собой винт с головкой, размещенный в гнезде вала
4* 51
сошки. Гнездо выполняется или цилиндрической формы с вверну-
той в него гайкой 6 (см. рис. 16), или Т-образной формы 1 (рис. 33),
куда вводится шайба 2 с головкой регулировочного винта 3.
Во всех случаях положение винта 3 относительно крышки 6 за-
крепляется контргайкой 4 и звездочкой 5. В некоторых конструк-
циях на конце вала сошки делают проточку 1 (см. рис. 26, с),
которую заводят в Т-образное гнездо, выполненное в регулиро-
вочной муфте 2, ввернутой в боковую крышку картера и закре-
пленной контргайкой.
Глава III
УСИЛИТЕЛИ РУЛЕВОГО УПРАВЛЕНИЯ
ПРИНЦИП ДЕЙСТВИЯ УСИЛИТЕЛЕЙ
Принцип действия усилителя (рис. 34, а) заключается в том,
что при повороте рулевого колеса сначала приводится в действие
распределительный орган (распределитель) 2, управляющий по-
током рабочей среды, направляемой в силовой цилиндр 3 из на-
соса 1. При достижении в цилиндре необходимого давления пор-
шень поворачивает связанные с ним управляемые колеса. При
этом обратная жесткая связь между колесами и распределительным
органом закрывает клапан, и движение потока рабочей среды
прекращается.
Схема действия распределителя гидравлического усилителя
с непрерывной циркуляцией жидкости показана на рис. 34, б.
Два гребня 4 золотника расположены в гильзе между четырьмя
щелями 5, из которых две напорные соединяют центральный на-
порный канал 6 с каналами 7, идущими в обе полости силового
цилиндра. Другие две щели сливные и соединяют полости ци-
линдра с каналами 8, отводящими жидкость на слив. Принцип
действия золотникового распределителя с непрерывной циркуля-
цией жидкости заключается в том, что возникающее в силовом
цилиндре усилие создается за счет разности давлений в обеих
его полостях, образующихся вследствие изменения сопротивления
проходных сечений, через которые идет поток жидкости. Это
достигается путем перемещения золотника вдоль его оси. При
этом одна из напорных щелей, относящаяся к одной полости сило-
вого цилиндра, расширяется, а другая щель, относящаяся ко вто-
рой его полости — сужается. В то же время сливная щель, относя-
щаяся к первой полости, сужается, а ко второй — расширяется.
Проходные сечения, образующиеся кромками золотника и
кромками напорных и сливных щелей, обычно делают одинако-
выми, чтобы сужение одной щели соответствовало расширению
Другой.
В табл. 4 приведены основные параметры золотников распре-
делителей гидравлических усилителей некоторых отечественных
и зарубежных автомобилей.
Распределитель усилителя с периодической подачей рабочей
среды применяется в гидравлических и пневматических усили-
53
телях. В распределителе гидравлического усилителя (рис. 34, в)
каналы 7, сообщающиеся с силовым цилиндром, перекрыты греб-
нями 4 золотника, а при его перемещении жидкость под давлением
из канала 6 направляется в один из каналов 7 и далее в одну из
полостей силового цилиндра. Из другой его полости жидкость
по другому каналу идет на слив.
Рис. 34. Общая схема рулевого управления с усилителем и принцип
действия распределителя
54
4. Параметры золотников
распределителей (в мм)
Автомобиль С ц: о СО о, ф s rt Я S Чд Ширина проход- ных сечений
Средние Крайние
МАЗ-525 МАЗ-500 МАЗ-503 ЗИЛ-130 УРАЛ-375 ЗИЛ-111 Студебекер Форд 42 30 30 38 57 20 41 38 0,8 0,40 0,35 0,32 0,5 0,25 0,098 0,43 (фаски 15°) 0,8 0,40 0,35 0,32 0,5 0,45 0,154 0,18
Схема действия распределителя с периодической подачей ра-
бочей среды в пневматическом усилителе показана на рис. 35.
При повороте рулевого колеса через систему тяг и рычагов 1, 2,
3,4 и 5 открывается впускной
клапан 6. Сжатый воздух на-
полняет силовой цилиндр 7 и
при достижении в нем необхо-
димого давления управляемые
колеса поворачиваются. Жест-
кая обратная связь при этом
закрывает клапан, и поступле-
ние воздуха в цилиндр прекра-
щается.
В связи с тем, что жесткая
связь имеется только между
рулевым колесом и распредели-
телем с одной стороны и между
силовым цилиндром и упра-
вляемыми колесами — с дру-
гой, всю систему рулевого
управления с усилителем мож-
но представить разделенной на
эти две не связанные между
собой части так, как это схе-
матически изображено на рис. 36. В одну часть — командную —
входят рулевой механизм, тяги 1, 2, 3, 4 и 5 и распределитель 6,
а в другую — исполнительную — входят детали от силового ци-
линдра 7 до продольной тяги 8, связанной с управляемыми коле-
сами.
Рис. 35. Схема действия пневматиче-
ского усилителя с периодической пода-
чей сжатого воздуха в силовой ци-
линдр
55
Рис. 36. Рулевое управление с усилителем, разделенное на две
системы
Рис. 37. Компоновка элементов пневматического усилителя в системе рулевого
управления грузовых автомобилей
КОМПОНОВКА ЭЛЕМЕНТОВ УСИЛИТЕЛЕЙ
Пневматические усилители. На рис. 37 приведены некоторые
примеры компоновки элементов пневматического усилителя гру-
зовых автомобилей, а на рис. 38 — автобусов. По компоновке,
показанной на рис. 37, а, силовой цилиндр 1 прикрепляется к балке
передней оси, а воздухораспределитель 2 — к головке продоль-
ной тяги. В другой компоновке (фирмы Беидикс-Вестингауз) си-
ловой цилиндр 1 (рис. 37, 6) соединяется непосредственно с руле-
вой сошкой. Воздухораспределитель 2 размещается па рулевой
колонке. В автомобиле КрАЗ силовой цилиндр 1 (рис. 37, в) уси-
лителя укреплен на правом лонжероне рамы и через двуплечий
рычаг и дополнительную продольную тягу соединен с поворот-
ным рычагом правой поворотной цапфы. Воздухораспределитель 2
расположен слева и приводится в действие от следящего рычага
сдвоенной рулевой сошки.
В автобусе «Шоссон» (рис. 38, а) силовой цилиндр 1 прикреп-
лен к раме, шток — к одному из рычагов сдвоенного промежуточ-
ного рычага 3, соединяющего концы продольной разрезной тяги 4,
а воздухораспределитель 2 — к раме.
В некоторых конструкциях силовой цилиндр 1 (рис. 38, б)
расположен параллельно продольной тяге и прикреплен к раме
и к переднему концу продольной тяги. Воздухораспределитель 2
размещен в штоке поршня и приводятся в действие при переме-
щении шарового пальца рулевой сошки.
Представляет интерес компоновка усилителя конструкции
ЛАЗ-НАМИ на автобусе «Львов» (рис. 38, в). Силовой цилиндр 1
подвешен на двух шипах 4, прикрепленных к нему вблизи перед-
ней крышки. Это увеличивает продольную устойчивость штока
поршня, конец которого прикреплен к пальцу рулевой сошки и
передает усилие непосредственно к продольной тяге. Воздухорас-
пределитель 2 размещен на специальном кронштейне, прикреп-
ленном непосредственно к картеру рулевого механизма.
В унифицированном троллейбусе-автобусе ЗиУ силовой ци-
линдр 1 (рис. 38, г) прикреплен к промежуточному рычагу 3, со-
единяющему концы продольной разрезной тяги. Воздухораспре-
делитель 2 установлен на специальном кронштейне, закреплен-
ном непосредственно к картеру рулевого механизма, и приводится
в действие от следящего рычага сдвоенной рулевой сошки. Эта
компоновка наиболее интересная и правильная. Крепление возду-
хораспределителя на специальном кронштейне обеспечивает на-
дежную работу усилителя. Возникающие в процессе движения
автомобиля деформации различных узлов, как, например, рамы,
кронштейна крепления картера рулевого механизма и других де-
талей и узлов никак не влияют на включение усилителя, и тем
самым обеспечивается вполне надежная его работа.
Крепление силового цилиндра к промежуточному рычагу 3
допускает более свободное его размещение в системе рулевого
57
управления и позволяет прилагать наибольшее усилие к поворот-
ному рычагу управляемых колес, минуя рулевой механизм, ко-
торый может применяться любой конструкции без изменений.
При этом продольная тяга разделена на две части, которые можно
сделать более прямыми, а следовательно, более устойчивыми
Рис. 38. Компоновка элементов пневматического усилителя в системе рулевого
управления автобусов
против продольного изгиба. Без промежуточного рычага цельная
продольная тяга имела бы большой изгиб в средней части с весьма
низкой продольной устойчивостью.
Гидравлические усилители. На рис. 39 показаны основные
примеры компоновки элементов гидравлического усилителя в си-
стеме рулевого управления легковых автомобилей.
В конструкции на рис. 39, б силовой цилиндр 1 выполнен от-
дельно от рулевого механизма и расположен параллельно попереч-
58
ной тяге рулевой трапеции. Действующее от цилиндра усилие пере-
дается на среднее звено трехзвенной рулевой трапеции, минуя де-
тали рулевого механизма. Распределитель 2 встроен в головку
среднего звена трехзвенной рулевой трапеции и приводится в дей-
ствие перемещением шарового пальца рулевой сошки 3. Такого
типа усилитель применяется на легковом автомобиле ГАЗ-13
«Чайка».
Рис. 39. Компоновка элементов гидравлического усилителя в системе руле-
вого управления легковых автомобилей
В некоторых случаях (рис. 39, а) в усилителях легковых авто-
мобилей силовой цилиндр 1 получается небольших размеров, и он
заменяет собой поперечную тягу рулевой трапеции.
В конструкции на рис. 39, в силовой цилиндр 1 встроен в кар-
тер рулевого механизма и располагается соосно червяку руле-
вого вала. Действующее от поршня 4 усилие передается на вал 5
сошки. Распределитель 7 расположен вне рулевого вала и сило-
вого цилиндра параллельно валу и приводится в действие при осе-
вом перемещении червяка через рычаг 8. Такой усилитель при-
меняется на легковом автомобиле ЗИЛ-111.
59
На рис. 40 и 41 показаны некоторые компоновки элементов
гидравлических усилителей грузовых автомобилей.
В конструкции на рис. 40, а силовой цилиндр 1 встроен в кар-
тер рулевого механизма и расположен параллельно рулевому
валу. Действующее от поршня усилие передается на вал сошки 3
через дополнительную реечную передачу. Распределитель 2 уста-
новлен на рулевом валу и приводится в действие при осевом пере-
мещении вала. В нем имеются центрирующие пружины и реактив-
ный элемент.
В конструкции на рис. 40, б силовой цилиндр 1 также встроен
в картер рулевого механизма. Усилие от поршня передается на
вал сошки через рычаг кривошипа. Распределитель 2 прикреплен
к рулевой колонке и расположен параллельно рулевому валу и
приводится в действие при осевом перемещении червяка через ры-
чажную передачу с передаточным числом, большим единицы,
с целью повышения чувствительности действия усилителя.
60
На рис. 41, а силовой цилиндр 1 расположен отдельно от руле-
вого механизма в одной плоскости с продольной рулевой тягой,
с которой соединен шарнирно. Распределитель 2 выполнен как
одно целое с головкой силового цилиндра и приводится в действие
при перемещении шарового пальца рулевой сошки. Он имеет цен-
трирующую пружину и реактивные элементы.
Рис. 41. Гидравлические усилители, выполненные отдельно от рулевого меха-
низма грузовых автомобилей
Весьма распространенной является компоновка (рис. 41, б),
в которой распределитель 2 встроен в головку продольной тяги 3
и приводится в действие при перемещении шарового пальца руле-
вой сошки. Силовой цилиндр 1 при такой компоновке размещается
в любом удобном месте, например, на балке передней оси, как
показано на рис. 41, б, и не связан непосредственно с рулевым
механизмом, который может быть любой конструкции.
В конструкции на рис. 41, в силовой цилиндр / расположен
также отдельно от рулевого механизма. Действующее от штока
усилие передается непосредственно на рулевую сошку. Распре-
61
валу глобоидального червяка.
делитель 2 размещен в рулевой колонке и приводится в действие
при осевом перемещении рулевого вала.
На рис. 42 силовой цилиндр 1 встроен в картер рулевого меха-
низма и расположен параллельно
Действующее от поршня уси-
лие передается на вал сошки
через рычажную передачу. Рас-
пределитель 2 четырехзолотни-
ковой конструкции приводится
в действие при тангенциаль-
ном перемещении рулевого вала,
Рис. 42. Гидравлический усилитель, встроенный в рулевой
механизм автобуса
когда коническая его шестерня перекатывается по другой
шестерне, закрепленной на валу червяка.
Особенно компактны компоновки силового цилиндра соосно
с червяком рулевого механизма с сектором и рейкой (рис. 43, с)
и кривошипом (рис. 43, б). В обоих случаях распределитель вы-
полнен с поворачивающимся тангенциальным золотником.
В конструкции на рис. 43, а центрирующим элементом слу-
жит пружинный торсион 3, а в конструкции на рис. 43, б-
центрирующая предварительно сжатая пружина 9, которая,
62
нажимая на центральный вал 5 золотника, прижимает ша-
рик 7 к канавке специального профиля, сделанной в гильзе
золотника.
Рис. 43. Конструкции гидравлических усилителей с тангенциаль-
ным золотником распределителя
РАСПРЕДЕЛИТЕЛЬ
Пневматические усилители. Воздухораспределитель пневма-
тического усилителя выполняется в одном блоке с силовым ци-
линдром (см. рис. 35) или отдельно от него (см. рис. 37).
При размещении воздухораспределителя отдельно от силового
цилиндра (см. рис. 38, г) впускные клапаны открываются при сме-
63
Рис. 44. Системы привода к воздухораспределителю пневматического усилителя
щении следящего рычага сдвоенной рулевой сошки, показанной
на рис. 44, а и б. При этом могут быть два случая их воздействия
на клапаны воздухораспределителя: ось тяги привода проходит
через ось поворота рычагов (рис. 44, а) или она смещена от этой
оси (рис. 44, б).
В первом случае на валу 3 сошки (рис. 44, а) устанавливаются
два рычага 4 и 5, соединенные пальцем 6 и центрирующей пружи-
ной 2. Хомут 1 тяги воздухораспределителя посажен па шейку
верхней головки рычага 4 и располагается по осп вала 3 сошки.
При повороте рулевого колеса верхняя головка рычага 4 от-
клоняется, сжимает пружину 2, перемещает тягу воздухораспре-
Рис. 45. Дифференциальный привод воздухораспределителя пневматического
усилителя
делителя и открывает впускной клапан. При центральном распо-
ложении хомута тяги воздухораспределителя относительное по-
ложение рычагов на открытие клапанов влияния не оказывает.
Действующее вдоль тяги усилие равно усилию, необходимому
только для открытия впускного клапана.
В другом случае (рис. 44, б) тяга 9 воздухораспределителя 10
прикреплена к рычагу 8 на некотором плече от оси вала И сошки.
При повороте рулевого колеса вследствие смещения одного
рычага 8 относительно другого 7 тяга 9 воздухораспределителя
поворачивает его рычаг 14 до упора в ограничитель 13, поджи-
маемый пружиной 12, и положение рычага 8 относительно рычага 7
изменяется. Поэтому в верхней части рычага 8 сделано овальное
окно для прохода шейки вала сошки. Действующее вдоль тяги
усилие достаточно велико и равно усилию, прилагаемому к руле-
вому колесу, умноженному на общее передаточное число рулевого
механизма и рычажного привода.
На рис. 45 показана одна из возможных схем пневматического
усилителя, в котором воздухораспределитель встроен в рулевой
механизм. Впускные клапаны открываются при повороте одной
части рулевого вала относительно другой.
5 М. И. Лысов 65
Части рулевого вала соединены при помощи дифференциала 1.
Его крестовина 2 является коромыслом воздухораспределителя.
При повороте рулевого колеса нижняя часть рулевого вала вслед-
ствие имеющегося сопротивления колес повороту остается не-
17
подвижной. По шестерне, связанной с этой частью вала, перека-
тываются сателлиты, а вместе с ними перемещается крестовина,
воздействуя таким образом на клапаны 3 и 4, образующие вместе
кран воздухораспределителя. Сжатый воздух поступает в штуцер 5.
Когда впускной клапан 4 открыт, сжатый воздух направляется
через штуцер 6 в силовой цилиндр и воздействует одновременно
66
на реактивный клапан 3, создавая реакцию па рулевом колесе.
Отработавший воздух выходит через штуцер 7.
На рис. 46 показаны несколько конструктивных решений кра-
нов воздухораспределителей разных пневматических усилителей.
Кран / имеет реактивный клапан 1, возвратную пружину 2
и сдвоенный впускной клапан 3. Кран II выполнен с металли-
ческими клапанами 6 без реактивного клапана и двумя возврат-
ными пружинами 2 (уплотнение производится при помощи саль-
ников); кран III — без реактивного клапана с уплотняющим саль-
ником 7 и возвратной пружиной 2; кран IV — также без реактив-
Рис. 47. Схема воздухораспределителя, встроенного в шток поршня
пневматического усилителя
кого клапана с двумя сальниками 7, двумя возвратными пружи-
нами 2 и с перепуском отработавшего воздуха в результате пере-
крытия клапанов. Кран V имеет реактивный клапан 1 и возврат-
ную пружину 2; кран VI — закладной реактивный клапан 1 без
возвратной пружины и пластинчатый впускной клапан 8.
На рис. 38, б был показан пример компоновки пневматического
усилителя со встроенным в шток его поршня распределителем.
Усилитель приводится в действие при перемещении шарового
пальца сошки.
В этом усилителе (рис. 47) воздух из ресивера поступает по
стрелке А в полый шток 9 поршня 3. Эта часть штока представ-
ляет собой клапанную коробку, в которой размещены два плоских
клапана 7 с центрирующей пружиной 6. Оба клапана установлены
на полой тяге 8, соединенной с одной стороны с головкой 5 шаро-
вого пальца сошки, а другим концом — с реактивной диафраг-
мой 4, укрепленной на торце поршня.
Реактивное действие создается рабочим давлением в силовом
цилиндре, действующим на резиновую диафрагму 4. Образуемые
диафрагмой две полости 1 и 2 сообщаются с полостями силового
цилиндра так, что действующая от нее сила возвращает клапан
воздухораспределителя в нейтральное закрытое положение.
5* (57
Так как площадь диафрагмы велика, реактивное усилие полу-
чается достаточно большим, и оно действительно ощущается на
рулевом колесе. В нейтральном положении шарового пальца оба
клапана 7 соприкасаются одновременно с двумя клапанными сед-
лами впускных каналов и двумя седлами обеих полостей силового
цилиндра. В связи с этим обе полости силового цилиндра перекры-
ваются, и они не сообщаются ни между собой, ни с окружающим
воздухом.
При перемещении шарового пальца сошки в ту или другую
сторону открывается правый или левый клапан, и воздух через
полость штока 9 или полую тягу 8 поступает в переднюю или зад-
нюю полости силового цилиндра. Отработавший воздух выпу-
скается через те же каналы, но в обратном направлении.
При перекрытых обеих полостях силового цилиндра во время
перемещения поршня возникают сопротивления, вызванные про-
тиводавлением в одной полости и разрежением — в другой. Это
можно было бы считать некоторым преимуществом этой конструк-
ции перед другими в отношении обратного включения усилителя.
Однако такое преимущество кажущееся. Когда перемещения
поршня, при которых наступает обратное включение усилителя,
малы, то возникающие противодавление и разрежение воздуха со-
противления обратному включению не оказывают вследствие
большой упругости воздуха. Вместе с тем основным и главным
недостатком конструкции пневматического усилителя с перекры-
тыми полостями цилиндра является весьма большое расхождение
во времени наполнения силового цилиндра сжатым воздухом и
выпуска отработавшего воздуха из другой полости. Клапаны от-
крывают и закрывают впускные и выпускные каналы одновре-
менно, поэтому время совершения процессов впуска и выпуска
получается одинаковым, хотя оно должно значительно разли-
чаться, в результате чего освобождение силового цилиндра от от-
работавшего воздуха будет неполным.
Гидравлические усилители. Конструкции распределителей и их
размещение в системе рулевого управления с гидравлическим уси-
лителем отличаются большим разнообразием.
В одних конструкциях распределитель размещается в продоль-
ной тяге (см. рис. 41, б) или в головке силового цилиндра усили-
теля (см. рис. 41, а).
В этих случаях золотник распределителя приводится в действие
при перемещении шарового пальца рулевой сошки относительно
тяги или головки.
В отдельных конструкциях (см. рис. 40, а) распределитель 2
выполняется в нижней или в верхней части (как в данном случае)
картера рулевого механизма. Золотник размещается соответ-
ственно снизу или сверху рулевого вала и перемещается при его
осевом перемещении.
Для получения больших проходных сечений и более полного
их открытия при минимальном осевом перемещении червяка кри-
68
вошипной передачи золотник распределителя располагается па
рулевой колонке параллельно рулевому валу (см. рис. 40, б) и
перемещается при помощи рычажной передачи с передаточным
числом, большим единицы [2-—3]. На рулевом валу делают ка-
навку, в которую заходит головка качающегося рычага. Второй
конец рычага соединяется с золотником распределителя, распо-
ложенного сбоку на рулевой колонке.
В глобоидальной передаче осевое смещение червяка совер-
шенно недопустимо. Поэтому в таких конструкциях применяется
другой способ включения распределителя, осуществляемый при
тангенциальном перемещении рулевого вала. С этой целью он
делается разрезным и нижняя его часть и вал червяка соединяются
посредством двух шестерен (см. рис. 42). При перекатывании одной
шестерни по другой конец вала смещается в тангенциальном на-
правлении, что и используется для приведения в действие распре-
делителя.
Большой ход впускного клапана или золотника распредели-
теля при минимальном угле поворота рулевого колеса может быть
получен в результате введения рычажной системы в передачу
к золотнику или впускному клапану. Например, вследствие боль-
шого соотношения плеч рычага 8 (см. рис. 39, в) тяга и золотник
распределителя перемещаются на большую величину, поэтому не
создается значительного сопротивления потоку рабочей жидкости
через клапаны.
На рис. 48 и 49 показаны основные примеры конструктивного
решения распределителя различных гидравлических усилителей.
Распределитель усилителя автомобиля ГАЗ-13 «Чайка»
(рис. 48, а) не имеет центрирующих пружин и находится в равно-
весии под действием давления рабочей жидкости в реактивных ка-
мерах с разными рабочими площадями /у и f2. Так как площади
поршня силового цилиндра различны из-за наличия штока и
равны Fr и F.,, то для равновесного состояния золотника площади
реактивных камер должны находиться в следующем соотношении:
A ’
В четырехклапанном распределителе (рис. 48, б), один из кла-
панов которого показан на рис. 48, в, два клапана 1 и 4 реактив-
ные, а два другие (2 и 3) — активные. Рабочая жидкость от на-
соса 5 направляется в силовой цилиндр через два активных кла-
пана, откуда по другим трубопроводам — к реактивным, а от них
на слив в бак насоса. Все клапаны находятся под небольшим дав-
лением, определяемым суммарными потерями на перетекание жид-
кости. При этом активные клапаны находятся под давлением,
большим, чем реактивные. Как видно из конструкции распреде-
лителя, клапаны прижимаются к колодке дополнительно силой
пружин.
69
В отличие от других усилителей в данной конструкции поток
масла имеет постоянное направление по трубопроводам и каналам
и не зависит от изменения направления поворота рулевого колеса.
Действие рассматриваемого усилителя основано на торможении
Рис. 48. Распределители гидравлических усилителей легковых автомобилей
и автобусов
чем реактивный, поэтому его золотник переместится и перекроет
проходные сечения, вследствие чего повышается давление в на-
порной магистрали и в активном клапане, а также в правой по-
лости силового цилиндра. Под действием силы в активном клапане
колодка переместится влево и золотник второго активного кла-
пана, в свою очередь, перекроет свои проходные сечения. После
этого жидкость под рабочим давлением, соответствующим сопро-
70
тивлению колес повороту, направляется только в одну полость
силового цилиндра, а из другой идет на слив.
В распределителях, показанных на рис. 49, о и б, реактивные
плунжеры 1 находятся под действием силы предварительного сжа-
тия центрирующих пружин 2 и сил от давления действующей на
них рабочей жидкости.
Рис. 49. Распределители гидравлических усилителей грузовых
автомобилей Урал-375 и ЗИЛ-130
Распределитель (рис. 50, о), встроенный в головку продольной
тяги, включается в действие при перемещении шарового пальца
сошки. Центрирующие пружины 1 размещены с двух сторон ста-
кана, в котором установлен шаровой палец. Четырехгребпевый
золотник связан стяжкой со стаканом шарового пальца.
Поток масла через штуцер Н* поступает в кольцевое простран-
ство корпуса и далее через соединительный канал 3 — в полость
* На рис. 50 и 51 буквой Ц обозначены элементы (трубопроводы, штуцеры
и т. д.), связанные с силовым цилиндром; буквой Н — с насосом; буквой С - -
со сливом.
71
между штуцерами Ц, соединяющимися с обеими полостями сило-
вого цилиндра. Через центральный канал золотника рабочая
жидкость подводится к той или другой реактивной камере 2. От-
работавшее масло проходит по тем же проточкам золотника и по
внутреннему каналу к сливному штуцеру С и на слив.
Рис. 50. Распределители гидравлических усилителей гру-
зовых автомобилей, встроенные в продольную тягу и
силовой цилиндр
Распределитель, показанный на рис. 50, б, встроен в разрез-
ную продольную тягу, па одной части которой закреплен четырех-
гребневый золотник, а на другой — корпус распределителя.
Распределитель центрируется двумя пружинами 1, размещен-
ными в реактивных камерах и упирающимися в кольца 4, Направ-
ление потока масла показано стрелками.
Распределитель может быть выполнен в головке силового
цилиндра (рис. 50, в). Поток масла из напорного канала Н через
72
Рис. 51. Схемы действия распредели-
телей с тангенциальным золотником
проточки среднего гребня направляется па слив через каналы С
и по косым отверстиям золотника — в реактивные камеры Ц,
соединяющиеся с полостями силового цилиндра. Центрирующая
пружина 1 размещена между торцом головки наконечника и ста-
каном шарового пальца. Отработавшее масло идет па слив через
каналы С. В отличие от многих конструкций шаровой палец со
стаканом перемещается в головке на шариках 5, вследствие чего
трение в этом сочленении получается минимальным.
В распределителе 7 (см.
рис. 39, в) усилителя автомо-
биля ЗИЛ-111 золотник центри-
руется предварительно сжатой
центрирующей пружиной 6.
Новые решения в конструк-
ции распределителя. Во всех
приведенных выше конструк-
циях распределителей золот-
ники перекрывают проходные
сечения при осевом перемеще-
нии. В последнее время появи-
лись конструкции усилителей
с поворачивающимися (танген-
циальными) золотниками в рас-
пределителях. Две такие кон-
струкции были показаны на
рис. 43.
В усилителе фирмы Сагинау
(см. рис. 43, а) силовой цилиндр
встроен в картер рулевого ме-
ханизма и через реечную пере-
дачу его поршень 1 связан
с валом сошки. Поршень имеет
равные площади с обеих сторон. Винт 2 рулевой передачи соеди-
нен с золотником при помощи торсиона 3, который служит для
него центрирующим элементом. Вместе с винтом 2 вследствие
скручивания торсиона вращается корпус золотника и перекрыва-
ются радиальные проходные сечения.
Рабочая жидкость, поступающая в штуцер и далее по кольце-
вым каналам вокруг корпуса золотника и по радиальным каналам,
направляется к проходным сечениям золотника и затем в рабочие
полости силового цилиндра. Через другой штуцер жидкость идет
на слив после совершения рабочего процесса.
Схема действия распределителя показана на рис. 51, а. В гильзе
золотника имеются четыре напорных, соединенных между собой
канала Н. Рабочая жидкость подается через восемь каналов Ц,
связанных между собой по четыре, к двум полостям силового ци-
линдра, откуда отработавшая жидкость через радиальные каналы
и осевой канал золотника идет на слив.
73
В другой подобной конструкции — усилителе «Барман» с по-
ворачивающимся золотником (см. рис. 43, б) силовой цилиндр
встроен в картер рулевого механизма соосно с червяком винтовой
передачи с шариковой гайкой.
Золотник 5 поворачивающегося типа выполнен как одно целое
с рулевым валом 8, а его корпус 4 — с винтом 10 рулевой пере-
дачи. Золотник относительно корпуса поворачивается на неболь-
шую величину, предопределяемую зазорами в кулачковом их со-
единении (сечение В—В).
Рис. 52. Схема гидра-
влического усилителя
дифференциального
действия
Рабочая жидкость подается в штуцер 6 верхней крышки кар-
тера, откуда через центральный канал золотника, радиальные его
каналы и продольные прорези поступает в рабочие полости сило-
вого цилиндра.
Отработавшее масло идет на слив по другим продольным про-
резям золотника и через центральное отверстие винта поступает
к штуцеру нижней крышки картера рулевого механизма. Схема
действия этого распределителя показана на рис. 51, б.
На рис. 52 показана схема гидравлического усилителя диффе-
ренциального действия.
Рабочая жидкость поступает от насоса через штуцер 1 не-
посредственно в полость с меньшей площадью поршня силового
цилиндра и далее через распределитель, размещенный в поршне 2,
и полый шток 3 поршня идет на слив через штуцер 5. Золотник
распределителя соединяется тягой 4 с головкой штока, в которой
располагается шаровой палец 6 сошки. Центрирующая пружина 7
размещена на конце тяги вблизи головки с шаровым пальцем.
Реактивные элементы выполнены в поршне в виде камер 8 и 9
и сообщаются через каналы поршня с обеими полостями силового
цилиндра. Конструкция соосного гидравлического усилителя диф-
ференциального действия была показана на рис. 14, в. Распреде-
литель размещен в поршне силового цилиндра. Двухгребневый
74
золотник закреплен в стакане гайки винтовой пары рулевого ме-
ханизма и удерживается в нейтральном положении центрирующей
пружиной. Рабочая жидкость через штуцер поступает в обе по-
лости силового цилиндра и идет на слив через внутреннюю по-
лость поршня-гайки. При перемещении золотника вниз проход-
ные сечения перекрываются и рабочая жидкость под давлением
поступает только в одну верхнюю полость цилиндра с меньшей
площадью поршня, и поршень движется вниз. При перемещении
золотника вверх рабочая жидкость входит в обе полости. Так как
нижняя полость силового цилиндра имеет большую площадь
поршня, чем верхняя, то поршень будет двигаться вверх. Реактив-
ного действия этот распределитель не создает.
ЦЕНТРИРУЮЩИЙ ЭЛЕМЕНТ
Впускной клапан воздухораспределителя пневматического уси-
лителя и золотник распределителя гидравлического усилителя
должны возвращаться из смещенного или открытого состояния
в первоначальное (нейтральное или закрытое) принудительно. Для
установки золотника, клапана, рычага или коромысла в нейтраль-
ное положение применяются клапанные пружины и центрирую-
щие пружины пли используется давление рабочей жидкости и
реактивные клапаны, которые, находясь под действием сжатого
воздуха, ускоряют возвращение в исходное положение впускных
клапанов.
Центрирующий элемент является важнейшим элементом рас-
пределителя усилителя, и в зависимости от особенностей его кон-
струкции, места расположения и связи с распределительным кла-
паном рулевое управление с усилителем в большей или меньшей
степени отвечает эксплуатационным требованиям. Так, например,
правильным подбором величины силы предварительного сжатия
центрирующих пружин сохраняется возможность самовозвраще-
ния управляемых колес в исходное положение.
На рис. 44 и 45 изображены приводы, а на рис. 46 — краны
воздухораспределителей, в которых применяются все упомянутые
выше элементы в виде центрирующих и возвратных пружин и
реактивных клапанов. Такие же центрирующие устройства при-
меняются и в распределителях гидравлических усилителей.
Центрирующий элемент может быть выполнен в виде одной
предварительно сжатой пружины 2 (см. рис. 44, а) или в виде двух
взаимно сжатых пружин 12 (см. рис. 44, б).
На рис. 50, б показан пример применения в качестве центри-
рующего элемента двух предварительно сжатых пружин 1. Однако
две пружины могут быть заменены одной (см. рис. 50, в). В этом
случае центрирующая пружина 1 распирает заплечики штока зо-
лотника и прижимает их к заплечикам гнезда в головке.
В распределителях, выполненных на рулевом валу (см. рис. 49,
а и б), центрирующим элементом служит ряд предварительно сжа-
75
тых пружин 2, расположенных вокруг золотника и распирающих
плунжеры 1.
В распределителе, применяемом в механизме с глобоидальной
передачей, все четыре клапана (рис. 48, в) находятся во взаимно
уравновешенном состоянии под действием внутренних пружин и
давления циркулирующей жидкости.
РЕАКТИВНОЕ УСТРОЙСТВО
Одним из важнейших качеств обычного рулевого управления
является способность создавать у водителя так называемое «чув-
ство дороги» или ощущение производимого им поворота. Оно за-
ключается в том, что с увеличением сопротивления повороту управ-
ляемых колес возрастает и усилие на рулевом колесе. Этим ка-
чеством реактивного прогрессивного воздействия на рулевое ко-
лесо должно обладать и рулевое управление с усилителем, встроен-
ным в его систему.
Реакция на рулевом колесе создается действием центрирую-
щих элементов. Однако эта реакция имеет почти постоянную ве-
личину и не создает у водителя «чувство дороги». Реакция создается
также давлением рабочей среды и реактивного плеча в системе
привода.
Реактивные элементы, находящиеся под давлением рабочей
среды, по конструкции отличаются большим разнообразием, но
могут быть сведены к двум формам: реактивному клапану и реак-
тивной камере.
Конструкции реактивного клапана 1, встроенного в воздухо-
распределитель пневматического усилителя, показаны на рис. 46
(кран /). При открытии впускного клапана 3 сжатый воздух при
поступлении его в силовой цилиндр по каналу 4 давит и на ре-
активный клапан 1. Возникающее при этом усилие через привод
и рулевой механизм передается на рулевое колесо и создает у во-
дителя ощущение производимого им поворота. Это усилие пропор-
ционально давлению в силовом цилиндре, а следовательно, и со-
противлению колес повороту.
Конструкция одного из реактивных клапанов гидравлического
усилителя показана на рис. 48, в.
Золотники 6 возвращаются в нейтральное положение под дей-
ствием размещенных внутри их корпуса пружин и давления ра-
бочей жидкости. С повышением нагрузки (сопротивления колес
повороту) давление в напорной магистрали увеличивается по-
этому и сопротивляемость золотников их перемещению (включе-
нию) также увеличивается. Это обстоятельство вызывает реакцию
на рулевом колесе и чувство производимого водителем поворота.
В распределителе, изображенном на рис. 49, а, вокруг золот-
ника расположены плунжеры 1, упирающиеся одной частью тор-
цов в шайбы золотника, а другой — в наружные шайбы корпуса
рулевого механизма и в крышки распределителя. С внутренней
76
стороны плунжеры распираются предварительно сжатыми пру-
жинами 2, обеспечивающими возвращение золотника в первона-
чальное положение. Циркулирующая внутри распределителя жид-
кость давит также и на плунжеры, вызывая таким образом реак-
тивное действие на золотник и на рулевой вал и далее па рулевое
колесо.
Распределители подобной конструкции с реактивными каме-
рами могут быть встроены и в продольную рулевую тягу
(см. рис. 34, а). Силовой цилиндр 3 применяется обычного поршне-
вого типа. Реакция на рулевое колесо в данном случае создается,
как и в приведенных выше усилителях, изменяющимся давлением
рабочей жидкости в силовом цилиндре.
Распределитель этого усилителя, обеспечивающий реакцию на
рулевом колесе, показан на рис. 50, б. Четырехгребневый золот-
ник расположен в гильзе между двумя реактивными кольцами 4,
распираемыми двумя предварительно сжатыми центрирующими
пружинами 1. Эти кольца одной частью торцовой поверхности
упираются в золотник, а другой — в гильзу. Таким образом, оба
кольца одновременно прижимаются и к золотнику, и к гильзе
с силой предварительной затяжки пружины. Концы золотника
с гильзой образуют две камеры, соединенные двумя радиальными
отверстиями с общим осевым каналом и далее с каналами, соеди-
няющимися с полостями силового цилиндра. Как видно, реакция
на рулевое колесо создается довольно сложными конструктивными
средствами.
Так как усилия, действующие от силового цилиндра и продоль-
ной тяги при поворотах, различны, имеются решения, основанные
на другом принципе создания реактивного действия на рулевое
колесо, причем любой необходимой величины без создания слож-
ных конструкций. Этот принцип заключается в том, что реактив-
ное действие на рулевое колесо создается реактивным моментом
сил, действующих от силового цилиндра и от продольной рулевой
тяги и прилагаемых на некотором плече к следящему рычагу сдво-
енной сошки рулевого механизма.
Этот принцип реактивного воздействия распространяется на
гидравлические и на пневматические усилители. В одном случае
(рис. 53, а) к следящему рычагу 5 сдвоенной рулевой сошки на
плече а присоединены и продольная тяга, вдоль которой дей-
ствует сила Т, характеризующая сопротивление колес повороту,
и шток поршня силового цилиндра, вдоль оси которого действует
сила U, характеризующая действие усилителя.
Распределитель усилителя соединен с верхней головкой ры-
чага 5 с помощью хомута и тяги 6, вдоль оси которой действует
сила S, с которой клапан распределителя сопротивляется вклю-
чению. Давление и развивающееся в силовом цилиндре усилие
пропорциональны сопротивлению колес повороту, вследствие чего
создается прогрессивность действия реактивного момента на руле-
вом колесе, а плечо а приложения сил U п Т позволяет получить
77
этот момент любой необходимой величины. В другом случае
(рис. 53, б) подобная рычажная система отличается несколько
более сложным воздействием сил на рычаги и более сложной
кинематикой. Двуплечая рулевая сошка 3 своим нижним концом
на плече b воздействует сначала на золотник распределителя, рас-
Рис. 53. Устройства для создания реактивного усилия на рулевое колеео
положенного в головке 2 гидравлического усилителя. Сила от
усилителя и сила сопротивления повороту, действующая вдоль
продольной тяги 4, создают на двуплечем рычаге 1 с плечом а и
на двуплечей сошке 3 с плечом с момент, препятствующий пере-
мещению золотника. Чем больше сила сопротивления повороту
и сила, действующая от усилителя, тем больше реактивное усилие
на рулевом колесе.
ИСТОЧНИКИ ПИТАНИЯ УСИЛИТЕЛЕЙ
Основным источником питания для работы пневматического
усилителя является компрессор, подающий воздух в общий реси-
вер. Гидравлические усилители снабжаются рабочей жидкостью
от насоса.
Обычно насос приводится во вращение от двигателя. Произво-
дительность насоса при изменении чисел оборотов двигателя от
холостых до максимальных меняется в несколько раз.
78
Чтобы избежать излишнего расхода жидкости при больших
числах оборотов двигателя, применяется специальный клапан-ре-
гулятор производительности (рис. 54, б). Масло из напорной ка-
меры 1 поступает внутрь клапана 6 и далее через калиброванное
отверстие клапана 5 и магистраль 3 направляется в силовой ци-
линдр усилителя.
При повышении числа оборотов увеличивается производитель-
ность насоса, а вместе с иен и давление. Так как проход масла через
Рис. 54. Лопастной гидравлический насос и клапан-регулятор производительности
калиброванное отверстие клапана 5 затруднено, то при повышен-
ном давлении клапан сместится влево, сожмет левую пружину и
приоткроет отверстие сливного канала 2. Таким образом, избыток
масла будет перетекать обратно по трубопроводу в приемное от-
верстие 4 масляного бака. При обратных ударах, возникающих
от неровностей дороги, масло из силового цилиндра поступает
в магистраль 3, воздействует на клапан 5, который в результате
деформации пружины приоткрывает сливное отверстие. Насосы
применяются лопастные, шестеренчатые, плунжерные и ролико-
вые. Шестеренчатые насосы бывают с внутренним и наружным за-
цеплением.
На рис. 54, а показан насос лопастного типа.
79
В шестеренчатом насосе с внутренним зацеплением (геротор-
ный) шестерня 1 (рис. 55), расположенная внутри шестерни 2
с внутренними зубьями, установлена на валу 3 на шпонке и вра-
Рис. 55. Шестеренчатый гидравлический насос с внутренним зацеплением
и схема его действия
щается вместе с ним при вращении шестерни 6. Шестерни 1 и 2
расположены эксцентрично, и при вращении первой вторая также
вращается в своем гнезде. Всасывающий патрубок 8 соединен
с серповидной полостью 1] и
Рис. 56. Шестеренчатый гидравличе-
ский насос с наружным зацеплением
с отверстием 9, которое сооб-
щается через отверстие 4 с сер-
повидной полостью, располо-
женной под шестерней 1, слева.
Таким образом, рабочая жид-
кость поступает в насос с обеих
сторон шестерни 1 и заполняет
все пустоты 5, расположенные
слева между обеими шестер-
нями. При повороте шестер-
ни 1 объем 7 между ее зубьями
справа п впадинами шестерни 2
уменьшается, и жидкость под
давлением вытесняется в серпо-
видную полость 10, сообщающуюся с напорным патрубком 12.
На рис. 56 показан шестеренчатый насос с наружным зацеп-
лением, а на рис. 57 — плунжерный насос. Для работы усилителя
применяют также аккумуляторы рабочей жидкости. Необходимое
80
Рис. 57. Плунжерный ги-
дравлический насос
v М. И . Лысов
82
5. Усилители рулевого управления 1
Узлы усилителей Автомобиль, автобус или троллейбус
ЛАЗ-696 ЛиАЗ-677 МАЗ-527 МА 3-500 МАЗ-503 УРАЛ-375 ЗИЛ-130 ГАЗ-66 ГАЗ-13 ЗИЛ-Ш КрАЗ ЗиУ СВАРЗ
Силовой цилиндр: диаметр в мм 70 70 83 52 60 70 90 50 40 80 150 150 150
ход поршня в мм 208 208 365 272 250 208 90 166 180 62 255 255 255
рабочий объем в л 840 840 1970 578 708 840 570 326 225 312 4520 4520 4520
компоновка С раздельным приводом Встроен- ный соосно С раздельным приводом Встроен- ный соосно С раздельным приводом
Распределитель: центрирующие пружины Есть Нет Есть Нет Есть
реактивные эле- менты Есть Нет Есть
Продолжение табл. 5
Узлы усилителей Автомобиль, автобус или троллейбус
ЛАЗ-696 ЛиАЗ-677 МАЗ-527 МАЗ-500 МАЗ-503 УРАЛ-375 ЗИЛ-130 ГАЗ-66 ГАЗ-13 ЗИЛ-111 КрАЗ ЗиУ СВАРЗ
Источники питания усилителя: тип Гидронасос Компрессор
конструкция Лопастной (ЗИЛ-130) Шесте- ренча- тый (НШ-32) Лопастной (ЗИЛ-130) Геро- торный (ГАЗ) Лопа- стной (ЗИЛ- 111) С ресивером
максимальное давление в кГ/см2, 65 65 100 65 65 65 65 65 40 60 7,3 7,3 7,3
производитель- ность в л при числе оборотов в минуту 16 40 _16 1000 6,5 800 7 800 — — —
1000 1500
производитель- ность В Л при числе оборотов холостого хода в минуту 10,4 600 20 750 8,7 500 10,4 600 8,3 480 6,5 800 4,8 500 — — —
1 Основные параметры усилителей см. Отраслевую нормаль автомобилестроения ОН 025 335—69 «Усилители рулевого управления
гидравлические».
83
давление в нем создается гидронасосом, а находящийся в аккуму-
ляторе воздух является упругой средой.
Одна из конструкций аккумулятора, в котором воздух от ра-
бочей жидкости разделяется резиновой камерой, показана на
рис. 58, а. Воздух находится под тем же давлением, что и жид-
кость, идущая от насоса. В другой конструкции аккумулятора
(рис. 58, б) жидкость отделяется от воздуха поршнем.
Основные параметры по усилителям рулевого управления оте-
чественных автомобилей приведены в табл. 5.
ГЛАВА IV
ОЦЕНОЧНЫЕ ПАРАМЕТРЫ И КРИТЕРИИ МЕХАНИЗМОВ
РУЛЕВОГО УПРАВЛЕНИЯ
РУЛЕВОЕ УПРАВЛЕНИЕ В ЦЕЛОМ
Рулевое управление в целом оценивают по многим признакам,
но основные из них, зависящие от рулевого механизма и рулевого
привода, следующие: передаточные числа (угловое и силовое),
легкость управления, поворотливость автомобиля и маневренность
на поворотах.
Легкость управления и поворотливость автомобиля. Эти об-
щие понятия характеризуются комплексом параметров, главней-
шие из которых:
усилие Рк, прилагаемое к рулевому колесу при повороте авто-
мобиля;
угол ф поворота рулевого колеса, при перемещении управ-
ляемых колес из одного крайнего положения в другое.
Легкость управления можно было бы оценивать по работе, ко-
торую необходимо совершить для поворота рулевого колеса. Од-
нако этот параметр может служить только для сравнительной
оценки рулевого управления различных автомобилей, так как при
одной и той же работе на рулевом колесе, но при различных зна-
чениях силы и угла поворота рулевого колеса утомляемость во-
дителя будет различной. Поэтому правильно оценить легкость ру-
левого управления можно только по указанным выше параметрам
порознь. Эти параметры дополняются временем t, в течение кото-
рого совершается поворот автомобиля. Этот показатель, рассматри-
ваемый отдельно, характеризует также маневренность автомобиля
на поворотах.
Усилие Рк, прилагаемое к рулевому колесу при вывешенных
колесах, и угол ф' свободного поворота рулевого колеса при опу-
щенных колесах характеризуют потери на трение и состояние изно-
шенности механизмов рулевого управления. Угол ф' определяется
при небольшом (2—4 кГ) усилии на рулевом колесе.
На легкость управления и поворотливость автомобиля влияют
угловое и силовое передаточные числа.
Угловое передаточное число рулевого управления определяется
по соотношению углов поворота рулевого колеса и управляемых
85
колес, выраженному в дифференциальной зависимости уравне-
нием
. _ 2d<p . . г,
“° da 4- ’
где dtp — угол поворота рулевого колеса;
da и dp — углы поворота управляемых колес;
г(0 и Гы — угловое передаточное число рулевого механизма
и рулевого привода.
Силовое передаточное число рулевого управления iPo опре-
деляется из равенства работ на рулевом колесе и управляемых
колесах:
PKRKdfp = 2Qr^-(6)
где RK — радиус рулевого колеса;
г — радиус поворота управляемых колес;
Q — сопротивление колес повороту.
Отсюда
1р0~ Рк~ г Ах-рФ ~ г W (7)
Маневренность автомобиля на поворотах. Принятые для оценки
маневренности автомобиля на поворотах некоторые параметры,
например, внешний и внутренний габаритные радиусы поворота,
ширина проезжей части, габаритные размеры и база автомобиля,
не дают исчерпывающей оценки этого качества. Эти показатели
позволяют больше судить о проходимости автомобиля на заданном
повороте и о его вписывании в этот поворот.
Совершенно очевидно, что конструкция рулевого механизма
и его особенности, например, его передаточное число, в большой
степени влияют на маневренность автомобиля, но они недостаточно
полно характеризуют маневренность автомобиля, так как не учи-
тывают времени поворота автомобиля. Поэтому в добавление
к ним в качестве одного из оценочных параметров нужно принять
время t, в течение которого происходит поворот автомобиля:
f = (8)
Va Va ’ '
где S — длина траектории поворота;
va — поступательная скорость автомобиля на повороте;
R — радиус поворота (по центру задней оси);
у — угол, на который поворачивается автомобиль.
Заслуживает внимания оценка маневренности автомобиля на
поворотах угловым коэффициентом поворота автомобиля (угловым
декрементом), равным отношению угловой скорости поворота
управляемых колес о к поступательной скорости движения авто-
мобиля на повороте [5]:
k = —
Va
(9)
86
При этом предполагается, что угловая скорость поворота управ-
ляемых колес постоянна.
Передаточное число рулевого механизма и рулевого управле-
ния в целом может быть переменным, поэтому более правильно
принять постоянной угловую скорость поворота рулевого колеса,
а не управляемых колес.
В развитие указанного метода определения маневренности
автомобиля на повороте по заданной траектории длиной S м при-
нимаем постоянной угловую скорость вращения рулевого колеса
со = const. Исходя из этого угловой декремент поворота автомо-
биля
Как видно, при сравнительной оценке разных автомобилей,
совершающих один и тот же поворот, маневренность их будет ха-
рактеризоваться также временем t и параметром k.
РУЛЕВОЙ МЕХАНИЗМ
Основным механизмом в системе рулевого управления является
рулевой механизм, конструктивные особенности которого оказы-
вают влияние на управление автомобилем.
Рулевые механизмы рекомендуется оценивать и испытывать
по следующим параметрам и критериям:
передаточному числу, характеризующему рулевой механизм
как передаточный механизм;
обратному трению, характеризующему эксплуатационные ка-
чества рулевого механизма;
зазорам в передаче и по приращению радиуса беззазорного за-
цепления, характеризующим конструктивные особенности пере-
дачи рулевого механизма;
обратимости рулевого механизма, характеризующей стабили-
зацию управляемых колес, удобство управления и другие каче-
ства;
износу передаточной пары.
Передаточное число рулевого механизма. Одним из основных
оценочных параметров рулевого механизма является его угловое
передаточное число. Абсолютная величина передаточного числа
характеризует рулевой механизм как передаточный механизм,
а измерение передаточного числа в зависимости от угла поворота
рулевого вала или вала сошки характеризует поворотливость авто-
мобиля и принцип действия, положенный в основу конструкции
передачи рулевого механизма, или ее особенности.
Угловое передаточное число обычно определяется отношением
угла ф поворота рулевого колеса к углу р поворота вала сошки:
87
Такой способ может применяться только для конструкций с по-
стоянным передаточным числом. Для рулевых механизмов с пере-
менным передаточным числом этот способ не определяет ни истин-
ной величины передаточного числа, ни характера его изменения
по углу поворота рулевого колеса.
Из всех возможных способов определения передаточного числа
наиболее правильные результаты получаются при пользовании
дифференциальной зависимостью
Передаточное число может быть определено также и по отно-
шению приращения Аф угла поворота рулевого вала к прираще-
нию Др угла поворота вала сошки.
Рис. 59. Кривая для определения передаточного
числа рулевого механизма
На рис. 59 показана кривая изменения угла (р поворота руле-
вого вала в зависимости от угла р поворота вала сошки.
Двум близлежащим на этой кривой точкам А и В соответствуют
значения углов <рА; <рв; РЛ и рв. Принимаем участок кривой АВ
за прямую, тогда угловое передаточное число
А(Р Фд—Фл (13)
ДР ~ Рв-Рл ’
Получаемое по нему передаточное число соответствует точке С
кривой, в которой касательная параллельна секущей АВ. С доста-
точной точностью можно принять, что точка С располагается
в середине между точками А и В.
Таким образом, для определения передаточного числа суще-
ствующего рулевого механизма нужно иметь кривую изменения
углов поворота его валов. Такая кривая вычерчивается в большом
масштабе по данным, получаемым путем замеров.
88
Обратное трение. От обратного трения зависят обратимость
рулевого механизма, его к. п. д., отдача обратных ударов на руле-
вое колесо и в определенной степени легкость управления.
Рулевой механизм в отношении внутренних потерь на трение
и качества регулировки и сборки в условиях производства при-
нято оценивать по усилию, прилагаемому к рулевому колесу, т. е.
по величине прямого трения, отнесенного к его ободу. Однако по
этому усилию нельзя судить об обратимости рулевого механизма,
т. е. о способности его передавать усилие и вращение в обратном
направлении и о способности
рулевого механизма передавать
обратные удары на рулевое ко-
лесо. Для механизмов с боль-
шим передаточным числом, и
в частности для рулевого меха-
низма, величина обратного
к. п. д. ниже, чем прямого, а
для отдельных конструкций за-
висимость между этими коэф-
фициентами несоизмерима. По-
этому судить об обратном к. п. д.
по усилию, прилагаемому к ру-
левому колесу, также невозмож-
но. Значения параметров обра-
тимости к. п. д. при передаче
усилия в обратном направлении,
а также и отдачи обратных уда-
ров на рулевое колесо зависят
исключительно от величины
обратного трения, приведенного
к валу сошки. В связи с г
ципиально иной метод оценки п
сошки.
Рис. 60. Приборы для оценки руле-
вого механизма
им автором предложен прин-
усилию, прилагаемому к пальцу
В этом случае обратимость рулевого механизма устанавли-
вается непосредственно. По величине этого усилия можно судить
об отдаче обратных ударов на рулевое колесо и в некоторой сте-
пени о прямом и обратном к. п. д.
На рис. 60, а показаны измерение усилия, прилагаемого к руле-
вому колесу, с помощью пружинного динамометра, а на рис. 60, б—
оценка рулевого механизма по усилию, прилагаемому к пальцу
сошки.
Зазоры в передаче и приращение радиуса беззазорного зацеп-
ления. Ряд качеств рулевого механизма зависит в основном
от особенностей конструкции передаточной пары.
В условиях эксплуатации зацепление передаточной пары
должно быть беззазорным в середине зацепления, т. е. при дви-
жении по прямой, и может быть с зазорами к концам, т. е. при
повороте автомобиля. Эта особенность конструкции передачи
89
должна сохраняться и при износе в течение всего срока службы
автомобиля.
В отличие от известного способа определения «люфта» по
углу поворота рулевого колеса при неподвижной рулевой сошке
автор предложил определять зазоры в передаче и давать оценку
конструктивным ее особенностям по изменению свободного хода
сошки при неподвижном рулевом колесе. В первом случае при
наличии со стороны рулевого колеса малых потерь на трение и
большого прямого передаточного числа чрезвычайно трудно со-
хранить сошку неподвижной при определении зазора путем по
ворота рулевого колеса.
Во втором случае благодаря значительному обратному трению
в передаче и большому обратному передаточному числу рулевое
колесо остается неподвижным при приложении к рулевой сошке
сравнительно малых сил для ее перемещения, чтобы определить
зазор. Результаты измерений в этом случае отличаются большой
точностью. Если передаточное число рулевого механизма пере-
менное, то угол свободного поворота рулевого колеса не отражает
истинного изменения зазоров в передаче. Поэтому принцип из-
мерения зазоров в передаче со стороны сошки, а не рулевого
колеса более правильный.
В рулевом механизме с глобоидальной передачей изменение
зазоров зависит исключительно от изменения радиуса зацепления
при беззазорном соприкосновении деталей передаточной пары;
поэтому конструктивные особенности передачи таких рулевых
механизмов предлагается оценивать по приращению радиуса без-
зазорного зацепления. Этот радиус получается при беззазорном
соприкосновении деталей передаточной пары. На рис. 61 показаны
радиус зацепления (соприкосновения) RA и радиус беззазорного
зацепления /?2 и приращение последнего Д7? при постоянной
толщине S витка. Если через б обозначить половину угла, состав-
90
ляемого внутренними сторонами лунки ролика, то зазор в пере-
даче
As = 2A/?tg6. (14)
Обратимость рулевого механизма. Под обратимостью подра-
зумевается способность механизма передавать усилие и вращение
в обратном направлении, т. е. от сошки к рулевому колесу.
При движении автомобиля на повороте на передние управляе-
мые колеса действует стабилизирующий момент, который стре-
мится повернуть их, а вместе с ними и рулевое колесо из поверну-
того положения в нейтральное (прямое) положение. Когда води-
тель освобождает рулевое колесо, автомобиль с криволинейного
движения при повороте постепенно переходит на прямолинейное
движение. Действию стабилизирующего момента противодействует
момент трения, возникающий в узлах рулевого управления, по-
этому действительный момент М равен разности этих моментов.
Так как момент трения не подчиняется каким-либо математическим
законам, а зависит от ряда качеств и особенностей, то рулевой
механизм по обратимости можно оценить по экспериментальным
данным.
Стабилизирующий момент изменяется в зависимости от угла
поворота колес, вследствие чего их обратное движение из повер-
нутого положения неравномерно.
Измерителями обратимости служат следующие параметры:
угловая скорость обратимости
(15)
угол возврата рулевого колеса
(16)
положение
время возвращения рулевого колеса в
/ = п/W
V м ’
степень возврата рулевого колеса
Ф
где J — момент инерции вращающихся
i — передаточное число рулевого ь
Ф — угол поворота рулевого колеса, с которого начинается
его возвращение в нейтральное положение;
Фх — угол, на который повернулось рулевое колесо при воз-
вращении в нейтральное положение.
Износ передаточной пары рулевого механизма. Срок службы
рулевого механизма на автомобиле предопределяется в основном
качеством зацепления передаточной пары, т. е. тем, насколько
91
(17)
(18)
изменение зазоров при износе отвечает эксплуатационным требо-
ваниям. Поэтому же признаку производится сравнительная оценка
передачи различных конструкций рулевых механизмов (по резуль-
татам испытаний на износ и на разрушение деталей передаточной
пары или их поверхностей).
Рулевые механизмы можно испытывать на автомобиле при
дорожных испытаниях его на износ или в лабораторных условиях.
При дорожно-износных испытаниях автомобиля в целом уста-
навливается качество зацепления в зависимости от пробега.
При лабораторных испытаниях имеющаяся в условиях экс-
плуатации нагрузка расчленяется на спокойно-износную нагрузку,
т. е. плавно прилагаемую, и на динамическую, т. е. ударную. Та-
кое расчленение позволяет установить причину разрушения, про-
исшедшего в условиях эксплуатации. В первом случае определяют
износ в зависимости от нагрузки, количества поворотов и угла
поворота рулевого вала. Во втором случае рулевой механизм ис-
пытывается на динамическую нагрузку, изменяющуюся по вели-
чине и по направлению. При этом возникают усталостные разру-
шения поверхностей и отдельных деталей передаточной пары
в зависимости от нагрузки и числа ее изменений в единицу вре-
мени.
УСИЛИТЕЛИ РУЛЕВОГО УПРАВЛЕНИЯ
Действие рулевого управления при наличии усилителя отли-
чается некоторыми особенностями, которые следует учитывать
при общей оценке рулевого управления.
Автор предлагает оценивать усилители следующими основными
показателями:
эффективности действия;
реактивного действия на рулевое колесо;
прямого и обратного включения усилителя и амортизирующего
действия при разрыве шины передней оси;
чувствительности действия;
маневренности автомобиля на поворотах;
расхода рабочей среды.
Кроме этих основных оценочных параметров, имеются другие,
дополняющие основные. Так, например, изменение давления в си-
ловом цилиндре или время срабатывания усилителя позволяют
оценить потери в трубопроводах и др.
Эффективность действия. Эффективностью действия усилителя
называется его способность уменьшить прилагаемое к рулевому
колесу усилие Рк, характеризующее сопротивление колес повороту
при работе без усилителя, до величины Р при включенном его
состоянии. Исходя из этого эффективность действия усилителя
принято оценивать показателем эффективности [9]:
3 = ^-- (19)
92
Прилагаемое к рулевому колесу усилие
P = PK-PV, (20)
где Pv — развиваемое усилителем усилие, приведенное к ободу
рулевого колеса.
Тогда показатель эффективности
о.. Рк 1
РК~Рд ~ х__Р_у_
Рк
(21)
При малых сопротивлениях колес повороту и свободном откры-
тии впускного клапана или перемещении золотника показатель Э
получается высоким, стремя-
щимся к бесконечно боль-
шой величине. С повышением
сопротивления колес пово-
роту он резко понижается и
изменяется по кривой BE
(рис. 62).
Если в распределителе
создаются сила трения, сила
возвратных и центрирующих
пружин и другие силы,
препятствующие свободному
включению усилителя в дей-
ствие, то давление р в сило-
вом цилиндре при малых со-
противлениях колес повороту
получается не максималь-
Рис. 62. Изменение давления и эффектив-
ности действия усилителя в зависимости
от сопротивления управляемых колес
повороту
ным, а пропорциональным
сопротивлению поворота
(кривая р).
При возникновении в рас-
пределителе сил, препятству-
ющих перемещению золотника, усилитель включается не сразу же
при повороте рулевого колеса, а только по достижении силы, пре-
вышающей силы сопротивления распределителя. Поэтому показа-
тель Э изменяется от единицы в момент включения усилителя по
выпуклой кривой АС (при пропорциональном увеличении давле-
ния в силовом цилиндре), достигает максимального значения
в точке С (при достижении максимального давления) и далее умень-
шается по кривой СЕ (при постоянном максимальном давлении
в силовом цилиндре).
Совершенно очевидно, что при малых сопротивлениях колес
повороту действие усилителя должно быть небольшим, а при боль-
ших сопротивлениях — значительным, причем чем выше сопро-
тивление колес повороту, тем больше должно быть действие уси-
лителя.
93
Из рис. 62 видно, что область Л4 эффективности действия не-
производительная и только область N является рабочей.
При постоянных конструктивных данных усилитель имеет
только одну характеристику АСЕ, и поэтому между размерами
силового цилиндра, давлением рабочей среды и показателем эф-
фективности действия имеется прямая зависимость.
Таким образом, оценочным параметром эффективности дей-
ствия усилителя являются максимальная величина ее показа-
теля Э, получающаяся в точке С при достижении максимального
давления в силовом цилиндре и соответствующем сопротивле-
нии Рк управляемых колес повороту.
Имеются предложения оценивать действие усилителя по не-
которым другим параметрам, например,
по удельному усилию, в кГ/кг развиваемому силовым цилиндром,
Э' =Jjl= . (22)
GK GK ’
no удельному объему в смСкг силового цилиндра
по коэффициенту мощности в кГ-см силового цилиндра
— Vpmax , (24)
где ршах — максимальное давление в системе;
V — рабочий объем силового цилиндра;
F и L — площадь и рабочий ход поршня силового цилиндра;
GK — вес (масса) автомобиля, приходящийся на передние
колеса.
При этом следует иметь в виду, что величина L зависит от пере-
даточного числа привода (рычажной системы) к силовому ци-
линдру от управляемых колес. Произведение Fpmax определяет
максимальную силу, действующую на шток поршня.
Исходя из этих предпосылок можно сделать следующий вывод.
1. Удельное усилие Э' не отражает компоновки силового ци-
линдра в системе рулевого управления и не характеризует по-
этому пригодности усилителя для конкретного автомобиля.
2. Удельный объем /<, также не характеризует пригодности
усилителя для конкретного автомобиля.
3. Коэффициент мощности к2 определяет и компоновку сило-
вого цилиндра, и действующую силу, но не характеризует сте-
пень облегчения управления при повороте колес автомобиля.
Таким образом, приведенный выше оценочный параметр — по-
казатель эффективности Э более полно и точно характеризует
основное качество усилителя — силовое действие.
Усилия Рк и Р можно определить расчетом и экспериментально
как на ходу автомобиля, так и в лабораторных условиях при по-
мощи динамометрического рулевого колеса, описанного ниже.
94
По усилиям на колесе можно судить и о других качествах усили-
теля, как, например, о величине включающего усилия, о реактив-
ном действии усилителя на рулевое колесо и других.
Реактивное действие. Достаточно заметное повышение усилия
на рулевом колесе характеризует одно из важных свойств руле-
вого управления — «чувство дороги», т. е. ощущение водителем
производимого им поворота, и оценивается показателем р реактив-
ного воздействия усилителя на рулевое колесо. Этот показатель
мог бы быть выражен процентным повышением усилия Р0, при
котором усилитель включается в действие, или, точнее, танген-
сом угла наклона касательной к кривой изменения усилия Р.
Однако эти величины не связаны с усилием на колесе Рк при ра-
боте без усилителя. Если относить их только к усилию Р, то мо-
жет получиться, что одно и то же изменение показателя р при раз-
ных изменениях сил Рк будет одинаково характеризовать два
совершенно разных усилителя. Поэтому более правильно отнести
величину приращения усилия Р к приращению усилия Рк на
колесе при работе без усилителя, т. е.
АЛ
Р = (z5)
Таким образом, оценка работы усилителя и определение оце-
ночных его параметров производится также по усилию, прилагае-
мому к рулевому колесу.
При исследовании влияния какого-либо фактора на параметры,
характеризующие работу усилителя, необходимо, чтобы все дру-
гие факторы были постоянны. Такие условия могут быть созданы
в лаборатории на специальном стенде для испытания усилителей
рулевого управления.
Прямое и обратное включение усилителя. Прямое включение
усилителя характеризуется прилагаемым к рулевому колесу уси-
лием Ро, при котором усилитель включается в действие. Обрат-
ное включение характеризуется действующим вдоль продольной
тяги усилием Т, при котором усилитель включается в действие со
стороны управляемых колес. Эти усилия определяются соответ-
ственно по следующим уравнениям:
p0 = rJ_-, Т = Р^— = Р^-,
Ч1!! 12*12 11Ч2
где R — Q |- S — сопротивление распределителя включению, со-
ставляющееся из усилия Q центрирующей пру-
жины и силы сопротивления S, равной сумме
сил трения и давления на впускной клапан или
золотник;
Н и — прямое передаточное число и прямой к. п. д.
передачи от рулевого колеса до золотника или
впускного клапана распределителя;
95
i — полное передаточное число рулевого управле-
ния от рулевого колеса до продольной тяги;
G » '•h — обратное передаточное число и обратный к. и. д.
передачи от продольной тяги до распредели-
теля.
Чувствительность действия усилителя. Чувствительность ха-
рактеризуется углом поворота рулевого колеса <р, при котором
усилитель включается в действие. Этот угол зависит от конструк-
тивных факторов распределителя и его расположения в системе
рулевого управления и определяется передаточным числом z’j.
Наибольшей чувствительностью действия усилители обладают
при минимальном значении 1\.
Маневренность. Маневренность автомобиля на поворотах при
наличии усилителя в системе рулевого управления определяется
показателем маневренности ДЛ4, равным отношению времени
поворота автомобиля при работе без усилителя к времени /, при
работе с усилителем.
Этот показатель достаточно точно может быть определен экс-
пер иментальным путем.
Расход рабочей среды. Теоретически расход жидкости (в л!мин)
гидравлическим усилителем и воздуха — пневматическим усили-
телем определяется соответственно по уравнениям
где F и I — площадь и ход поршня силового цилиндра;
п и ф — максимальное число оборотов и угол поворота руле-
вого колеса при перемещении поршня от одного край-
него положения до другого;
рх — давление воздуха в ресивере.
Глава V
ОСНОВЫ ТЕОРИИ И РАСЧЕТА РУЛЕВЫХ МЕХАНИЗМОВ
ОПРЕДЕЛЕНИЕ РАСЧЕТНЫХ СИЛ
Оценку легкости рулевого управления автомобиля и расчет
на прочность деталей всех его механизмов производят по силам,
действующим в узлах рулевого управления.
В основу определения расчетных сил должны быть положены
силы, действующие от рулевого колеса.
С повышением грузоподъемности автомобилей и, главным обра-
зом, с увеличением веса (массы) на переднюю ось управление
ими во время поворота становится все более трудным. Облегчение
рулевого управления особенно необходимо для большегрузных
автомобилей-самосвалов, машин высокой проходимости, транс-
портных машин (троллейбусов и многоместных автобусов), экс-
плуатируемых в тяжелых условиях.
Затруднения в управлении автомобилем в процессе совершае-
мого поворота преимущественно вызываются силами сопротивле-
ния колес повороту, стабилизирующими силами и внутренними
потерями на трение в узлах рулевого управления и, в частности,
в поворотных цапфах и в рулевом механизме.
В современных конструкциях узлов рулевого управления и
рулевых механизмов трение скольжения заменяется трением ка-
чения, и все внутренние потери на трение от рулевого колеса до
поворотных цапф становятся минимальными, поэтому можно
считать, что затруднения при повороте автомобиля вызываются
в основном силами сопротивления повороту колес по дороге и
стабилизирующими силами. Прилагаемое при этом к рулевому
колесу усилие рекомендуется определять расчетным путем для
двух условий:
а ) повороту колес на месте; в этом случае определяются макси-
мальное усилие, которое может быть приложено водителем с уче-
том усилителя, и силы, действующие в деталях рулевого управ-
ления, для проведения расчета на прочность;
б ) движению автомобиля на повороте; в этом случае усилие,
прилагаемое к рулевому колесу, определяется для оценки легкости
рулевого управления.
Определение расчетных сил при повороте колес на месте.
Существовавший ранее способ расчета на прочность рулевого
7 М. И. Лысов 97
управления на усилие Рк = 40 кГ, прилагаемое к рулевому ко-
лесу, был пригоден при ограниченном количестве типов автомо-
билей. При большом количестве такой прием не отражает ни гру-
зоподъемности автомобиля, нп веса, приходящегося на передние
колеса. Это приводит к тому, что расчетные данные для рулевых
управлений разных автомобилей (от малолитражных легковых до
тяжелых грузовых) получаются несопоставимыми и не соответ-
ствующими действительным.
При определении основного сопротивления повороту — мо-
мента трения колес с дорогой при повороте их на месте рекомен-
дуется применять достаточно простую полуэмпирпческую фор-
мулу [3 и 15]
и /~G?
м = Ц/ г1’ <26)
где Gl — вес (масса), приходящийся на передние колеса;
р, — коэффициент трения колес с дорогой;
рш — давление в шинах.
Однако при использовании этого уравнения результаты не
всегда совпадают с действительными величинами. Это объясняется
тем, что в приведенном уравнении вес Gv входит в степенной за-
висимости и, кроме того, не входят ни размеры шин и показатели
их качества, ни трение в механизмах рулевого управления.
В реальных условиях работы шины, поданным акад. Е. А. Чу-
дакова [13], момент, затрачиваемый на поворот колеса, склады-
вается в основном из двух сопротивлений: сопротивления каче-
нию по дороге и сопротивления поворачиванию 742, т. е. тре-
ния скольжения отпечатка шины колеса с дорогой при перемеще-
нии его вокруг вертикальной оси и упругой деформации шины.
Сопротивление
Мг = GJr,
где f — коэффициент качения;
/ — радиус поворота колеса, т. е. плеча поворота центра от-
печатка шины управляемого колеса относительно оси
шкворня.
При поворачивании колес вокруг шкворней поворотных цапф
на угол а на тот же угол повернется отпечаток шины относительно
первоначального положения. Трение скольжения между колесами
и поверхностью дороги определяется главным образом радиусом
поворота колеса г и опорной площадью отпечатка шины. При этом
наружные кромки шин, соприкасающиеся с дорогой, двигаются по
радиусу гтах, а внутренние кромки — по радиусу rmin. При
таком движении колеса внешние и внутренние его кромки
должны скользить по дороге, что вызывает определенную работу
трения.
Разность rmax — rrain получается тем больше, чем больше опор-
ная поверхность отпечатка шины; скольжение же между элемен-
98
тами шины и дорогой получается тем больше, чем больше эта раз-
ность и чем меньше средний радиус поворота г. Максимального
значения работа трения достигнет в том случае, когда радиус
г — 0. В этом случае работа трения между шинами и дорогой
Л=|(а + Р)р^г = ^О1-^-^ = М2-^, (27)
где Jр и F — полярный момент инерции и площадь отпечатка
шины;
р — удельное давление колеса на дорогу;
аир — углы поворота управляемых колес.
По мере увеличения опорной поверхности шины отношение
Г
быстро растет, и в соответствии с этим быстро увеличивается ра-
бота, затрачиваемая на поворот управляемых колес, причем эта
работа тем больше, чем мягче шины.
Подобные рекомендации, достаточно близкие к этому условию
расчета, даются Я- Табореком, который предлагает момент сопро-
тивления колес повороту определять по уравнению
М = [iGi/i, (28)
где h = е2 — плечо приложения силы трения относи-
тельно оси шкворня;
е — расстояние от центра отпечатка до пересечения оси
шкворня с дорогой.
В уравнениях (27) и (28) не учитываются потери на трение
в поворотных цапфах и шарнирах рулевой трапеции, которые мо-
гут быть достаточно велики, поэтому пренебрегать ими при рас-
чете не следует.
В уравнении (27) в развитие метода Е. А. Чудакова момент
трения поворачивания колеса М2 можно заменить моментом пары
сил с плечом х. Если учесть, кроме того, к. п. д.,то уравнение мо-
мента сопротивления повороту управляемых колес на месте при-
нимает следующий вид:
M = G1mxA- + G1/tA-, (29)
где г — плечо поворота центра отпечатка шины;
— к. п. д., учитывающий потери на трение в поворотных
цапфах и шарнирах рулевой трапеции;
х — расстояние от центра отпечатка шины до центра удель-
ных давлений каждой его половины по длине большой
оси.
Сопротивление качению колес незначительно, поэтому основ-
ное сопротивление колес повороту создает момент М2 трения
колес с дорогой.
1* 99
Если принять, что удельные давления по площади следа рас-
пределяются по эллипсоиду, то координата центра тяжести чет-
верти эллипсоида
X = А У^^Р? = 0,375
и момент сопротивления колес повороту
Mi = 0,375pGi J/R2 — Ri —, (30)
где R и Rl: — свободный и статический радиусы колеса.
В действительности распределение удельных давлений близко
к равномерному, и можно принять х = 0,424 Vr2 — R2-
Если в среднем считать, что Rc — 0,957?, то момент
М = >-(0,132И/? + /г). (31)
Приведенное уравнение момента сопротивления колес повороту
их на месте рекомендуется применять при расчете на прочность
деталей рулевых механизмов и привода к управляемым колесам.
При этом расчетное усилие на рулевом колесе
р_______________________1с . 7И
где 1С и 1р — длины рулевой сошки и поворотного рычага;
RK — радиус рулевого колеса;
— угловое передаточное число рулевого механизма;
ц2 — к. п. д. рулевого механизма.
В отличие от ранее применяемого расчета на усилие Рк =
= 40 кГ и расчета по уравнениям (27) и (28) предлагаемый способ
расчета по уравнению (32) учитывает не только вес, приходящийся
на передние колеса, но и размер шин, определяющий их отпечатки,
а также потери на трение в шарнирах и рулевых механизмах,
вследствие чего его можно применять для расчета рулевых управ-
лений разных автомобилей, и результаты получаются вполне со-
поставимыми.
Вычисленное по уравнению (32) усилие на рулевом колесе при
повороте управляемых колес на месте является максимальным для
данного автомобиля, и поэтому его можно принять за расчетное.
Однако для грузовых автомобилей большой грузоподъемности это
усилие может превосходить физические возможности водителя,
и в этом случае принимать его за расчетное для всей системы руле-
вого управления нельзя. В таких случаях для рулевого механизма
и деталей до усилителя за расчетное усилие следует принимать
максимальное усилие, которое кратковременно может приложить
водитель к ободу рулевого колеса. Это усилие на основе экспери-
ментальных данных может быть принято равным 70 кГ.
100
(32)
На рис. 63, а показана экспериментальная кривая 1 зависи-
мости усилия Рк, прилагаемого к рулевому колесу, от угла <р
его поворота при повороте на месте управляемых колес автобу-
са ЛАЗ-698. Можно заметить, что в первоначальный период при
повороте рулевого колеса до <р = 360° усилие изменяется незна-
чительно, после чего резко растет до конца поворота. Поворот
направо (кривая 2) совершается с несколько большим усилием,
чем налево (кривая 1), так как в этом случае рабочей является
меньшая площадь силового
цилиндра усилителя.
Такой характер изменения
усилия объясняется тем, что
в первый период управляе-
мые колеса поворачиваются
за счет деформации резины,
а в последующий период про-
исходит скольжение колес по
опорной площадке.
Определение расчетных
сил при движении автомо-
биля на повороте. Затруд-
нения в управлении авто-
мобилям создаются по раз-
ным причинам, главные из
которых следующие:
1) большая величина уси-
лия, прилагаемого к руле-
вому колесу во время пово-
рота автомобиля, возникаю-
щая вследствие большого
веса, приходящегося на пе-
редние колеса, значитель-
Рис. 63. Изменение усилия на рулевом
колесе при повороте на месте и на пово-
ротах
него трения во всех звеньях рулевого управления и др.;
2) большой угол поворота рулевого колеса;
3) обратные удары, передающиеся на рулевое колесо от не-
ровностей дороги, и удары, возникающие вследствие несовпадения
кинематики подвески и рулевого привода.
При решении вопросов легкости рулевого управления соот-
ношение сил Рк, прилагаемых к рулевому колесу, и сил Q сопро-
тивления управляемых колес повороту, возникающих в процессе
совершаемого поворота, устанавливается из равенства работ этих
сил:
р к> dv -р _ г)г (а + Р)
7 dt di ’
или
РкРк W ^0 Т(а + Р) =
где т]0 = t)1t]2 — общий к. п. д. рулевого управления.
101
Множитель
dtp dt_________dtp _ ia0
dt d (a + P) ~ d (a + P) 2 ’
t. e. представляет собой половину полного углового передаточного
числа. Поэтому уравнение работы принимает следующий вид:
Шм = . (33)
Замечая, что
Дсйао __ .*
2г ~ 1Р°’
где ip0 — полное силовое передаточное число, можно записать
В этом случае сила Q сопротивления колес повороту отличается
от силы при повороте на месте.
При движении автомобиля на повороте момент сопротивления
скольжению шин по дороге во много раз меньше, чем при повороте
их на месте, и в значительной степени зависит от скорости движе-
ния автомобиля. Это объясняется тем, что при движении автомо-
биля поворот колеса относительно дороги происходит не за счет
скольжения отпечатка шины по дороге, а за счет деформации ре-
зины.
На рис. 63, б изображена кривая изменения усилия Рк, при-
лагаемого к рулевому колесу автомобиля ЗИЛ-585 при совер-
шении крутых поворотов, быстро меняющихся по траектории,
напоминающей «восьмерку», в зависимости от скорости движе-
ния va по заданной траектории. При малых скоростях движения
прилагаемое к рулевому колесу усилие получается очень боль-
шим. Поворот управляемых колес в этом случае происходит почти
на месте с большой деформацией резины или со скольжением ко-
лес по дороге. С повышением скорости движения усилие на руле-
вом колесе значительно уменьшается.
В процессе усовершенствования грузовых автомобилей боль-
шой грузоподъемности и многоместных автобусов уменьшение
усилия, прилагаемого водителем к рулевому колесу, происходило
в четырех направлениях: увеличения углового передаточного числа
рулевого механизма; уменьшения вредных потерь на трение в нем
и повышения его к. п. д.; уменьшения плеча поворота управляе-
мых колес; применения усилителей.
Действительно, достаточно большое угловое передаточное
число рулевого механизма является фактором, позволяющим
в значительной степени снизить усилие, прилагаемое к рулевому
колесу во время поворота автомобиля. Величина передаточного
числа рулевого механизма назначается такой, чтобы водитель мог
без особого напряжения повернуть рулевое колесо при большом
102
сопротивлении повороту управляемых колес. Кроме облегчения
рулевого управления достаточно большое передаточное число не-
обходимо для удобства управления.
Уменьшение потерь на трение и повышение к. п. д. достигаются
применением подшипников качения. Усилители рулевого управ-
ления в значительной степени разрешают вопрос легкости пово-
рота автомобиля.
ТЕОРИЯ И РАСЧЕТ ГЛОБОИДАЛЬНОЙ ПЕРЕДАЧИ
Образование глобоидального червяка1
Длина червяка. Начальная поверхность глобоидального чер-
вяка (рис. 64), в отличие от обычного цилиндрического червяка,
образуется вращением дуги аа' около некоторой оси 00. Обра-
зующая дуга аа' радиуса Цо обращена выпуклостью к этой оси
и лежит в плоскости, проходящей через ось вращения.
Червяк нарезается при
помощи специального режу-
щего инструмента, выполнен-
ного в виде шестерни со спе-
циальным профилем режу-
щих кромок зубьев или рез-
цов. Большое внешнее сход-
ство этого инструмента с дол-
бяками «Феллоу» послужило
поводом к тому, что в про-
изводственной практике он
также получил название дол-
бяка.
При нарезании витка ин-
струмент поворачивается око-
ло своей оси, проходящей
через центр Оъ с постоян-
ным угловым шагом, т. е. за
каждый оборот червяка режу-
щий инструмент поворачи-
Рис. 64. Схема глобоидального червяка
вается на один и тот же
угол 9. Исходя из этого угловое передаточное число, равное отно-
шению угловой скорости вращения нарезаемого червяка (ох
к угловой скорости вращения режущего инструмента со2, является
постоянным:
.___ ы, ____360
1 ~ <о2 ~ 0
1 Зацепление передаточной пары рассматривается в осевой (продольной)
плоскости глобоидального червяка.
103
Профили витков червяка (их сечения) располагаются на
начальной дуге аа' и обращены к центру Ог. Поскольку сечения
витков располагаются на дуге окружности, то очевидно, что
зацепление с ними гребней ролика или зубьев сектора может
происходить на полной их высоте по всей длине образующей
червяка.
Вследствие этого число гребней ролика или зубьев сектора
в этой передаче может быть минимальным (один—три). Это дает
возможность при малых габаритных размерах передачи рулевого
механизма (при малом числе зубьев или гребней ролика) полу-
чить большой угол поворота вала сошки. В этом и заключается
основное преимущество глобоидальной передачи рулевого ме-
ханизма. Однако, несмотря на такую особенность глобоидального
червяка, угол поворота вала сошки ограничен.
Длина глобоидального червяка с полным профилем витка
определяется условиями его нарезания и не может быть особенно
большой. Режущие кромки инструмента располагаются в пло-
скости, проходящей через ось червяка. Инструмент подается
в радиальном направлении от наружной поверхности червяка
перпендикулярно его оси до полной высоты витка. Поэтому
внутренние стороны профиля витка по концам червяка полу-
чаются прямые и перпендикулярны оси червяка.
На рис. 64 внутренние плоские стороны профиля витка на
концах показаны сплошными линиями, а профиль, который дол-
жен получаться в этих местах по профилю инструмента, — штри-
ховыми. Это обстоятельство, т. е. подрез профиля витка, ограни-
чивает применение глобоидальной передачи в тех случаях, когда
от рулевого механизма требуется получить особенно большой угол
поворота вала сошки.
Максимально возможный центральный угол червяка р, кото-
рый получается при полном правильном профиле его витка, рав-
няется углу 26, составляемому касательными к профилям витка
у его корня. В тех случаях, когда нужно получить угол поворота
вала сошки больше, чем 26, в зацеплении с червяком применяется
трехзубый сектор или трехгребневый ролик. Такие конструкции
показаны на рис. 25—27.
Так как профили всех витков червяка располагаются на дуге
окружности, то зацепляющиеся с ними зубья сектора или гребни
ролика в идеальном случае должны перемещаться по той же дуге.
Это вызывает необходимость размещать центр О2 поворота зубьев
сектора или ролика строго в плоскости, проходящей через среднее
сечение червяка, т. е. в той плоскости, в которой располагается
ось инструмента при нарезании витка червяка.
Угол наклона винтовой линии червяка. Винтовая линия,
нанесенная на начальную поверхность указанного выше тела
вращения с постоянным угловым шагом 6, а следовательно, и
постоянным линейным шагом t по образующей, имеет изменяю-
щийся радиус от оси вращения червяка. Вследствие этого угол
104
наклона, составляемый прямой, перпендикулярной к оси червяка,
и касательной к винтовой линии, также изменяющийся. Макси-
мальное значение угла наклона будет в середине, т. е. в сечении
с наименьшим радиусом вращения. В обе стороны от этого сече-
ния угол наклона уменьшается и достигает минимального значе-
ния по концам червяка.
Угол наклона витка предопределяет обратимость или само-
торможение червяка в передаче с зубчатым сектором. Поэтому
Рис. 65. Схема глобоидального червяка для определения
угла наклона винтовой линии
величина угла наклона винтовой линии червяка имеет чрезвы-
чайно важное значение при конструировании глобоидальной пере-
дачи рулевого механизма.
При механической обработке углы резания инструмента должны
иметь определенную величину. В данном случае вследствие изме-
няющегося угла наклона винтовой линии червяка углы резания
также меняются в зависимости от угла поворота. Переменность
углов резания создает тяжелые условия работы режущего инстру-
мента при нарезании глобоидального червяка. Таким образом,
кроме отмеченного выше значения угла наклона витка при кон-
структивной разработке передачи его изменение имеет не менее
важное значение при проектировании режущего инстру-
мента.
На рис. 65 показана схема глобоидального червяка с нанесен-
ной на его начальной поверхности винтовой линией с левым
направлением. При повороте червяка на угол <р в указанную стрел-
кой сторону точка А, лежащая на винтовой линии, переместится
в положение а радиус начальной образующей ОгВ в новом
105
своем положении составит с образующей ОгА угол р. Движение
точки А по винтовой линии складывается из двух движений:
1) по дуге L — начальной образующей червяка радиуса
О И - R-,
2) по дуге S переменного радиуса гх.
Если по оси абсцисс отложить изменение длины дуги S для
некоторых значений угла поворота червяка ф, а по оси ординат —
изменение длины дуги L для тех же значений угла ф, то получае-
мая кривая представит собой развернутую на плоскость винто-
вую линию червяка L = f (S) [8].
Изменение угла наклона касательной к этой кривой и будет
представлять собой изменение угла наклона винтовой линии
червяка и определяется по уравнению
В полярных координатах величина дуги
S — J dS = J 1^drx +г* dq?.
<Po 4>0
Между приведенными на рис. 65 обозначениями можно на-
писать следующую зависимость:
гх = К — R cos р,
где р =
ia — угловое передаточное число при нарезании червяка.
Дифференцируя эту зависимость, получим
drx — R sin .
l(j) l(j)
Подставив значения гх и drx в уравнение для дуги S, получим
dS = 1Л(~Vsin2 Д-с?ф2+ (к — 7?cos у^У^ф2
,с R 1 Г / К. ф \2 ,2 . . 2 ф ,
или dS^.- I/ (-5-----------cos Д-) + sin Д-дф.
1И Г \
Аналогично dL = R dfi = — dtp.
Таким образом, уравнение угла наклона винтовой линии
червяка принимает следующий вид:
ctg а = - cos il + sin2 -J-. (35)
На рис. 66 изображены кривые изменения угла а наклона
винтовой линии глобоидальных червяков в зависимости от угла
106
их поворота <р, подсчитанные по приведенному уравнению для
рулевых механизмов, имеющих различные конструктивные дан-
ные /С; 7?; /ю. Кривые показывают, что эти данные влияют на
разность между максимальными и минимальными значениями
Рис. 66. Кривые изменения угла наклона винтовой линии глобоидальных чер-
вяков с разными конструктивными данными:
Кривые 1 2 3 4 5 6 7 8
. . 13 15 18 19 19 20 22 24
K/R 1,4914 1.4510 1,3628 1,4150 1,4312 1,3555 1,3452 1,3051
угла наклона винтовой линии червяка и на изменение угла на-
клона. При некоторых данных кривые эквидистантны, а при дру-
гих они пересекаются.
Определение параметров глобоидальной передачи
При расчете глобоидальной передачи кроме рассмотренного
выше угла наклона винтовой линии червяка при нарезании и дей-
ствительного при зацеплении в передаче определяют следующие
основные параметры:
кривизну профиля витка червяка;
радиус зацепления (соприкосновения) и радиус начальной
образующей червяка;
действительные углы поворота вала сошки и действительное
угловое передаточное число.
Кривизна профиля витка червяка. Величина угла установки
ролика в головке вала сошки относительно оси вала сошки по-
стоянна и принимается равной среднему значению углов наклона
винтовой линии червяка в рабочей его части. Поэтому углы на-
клона витка червяка и гребней ролика равны только в одной
точке в каждую сторону от середины червяка. Во всех остальных
107
нарезается червяк, и радиус
Рис. 67. Схема рулевого механизма
с осевым смещением глобоидального
червяка
точках имеется расхождение между этими углами. Вследствие
этого гребни ролика, перемещаясь по витку червяка при повороте
около оси при нарезании, будут перекашиваться относительно
витка, причем возможно их защемление по всей длине его обра-
зующей, где имеется расхождение между углами наклона. Из-за
возможности защемления деталей нельзя установить вал сошки
по оси, проходящей через центр СД (см. рис. 64), около которой
зацепления выполнить равным на-
чальному радиусу Д при нареза-
нии. Для устойчивого движения
автомобиля в прямом направле-
нии необходимо, чтобы зацепление
передаточной пары было беззазор-
ным. При повернутом положении
колес зацепление передаточной
пары может быть с зазорами. Как
указывалось ранее, беззазорное
зацепление в середине червяка и
с зазорами по его концам способ-
ствует удлинению срока службы
рулевого механизма при износе
передаточной пары. Такое заце-
пление при разнице в углах на-
клона витка червяка и ролика или
зубьев сектора достигается ради-
альным смещением оси вала сошки
по направлению к оси червяка.
Продолжительность работы
средней части червяка больше,
чем его участков, расположенных
по обе стороны от середины, а сле-
довательно, больше износ. Для
увеличения срока службы средней части также необходимо ради-
альное смещение оси вала сошки к оси червяка.
При таком смещении вала сошки радиус зацепления полу-
чается меньшим, чем начальный радиус Д при нарезании.
Кроме радиального смещения, осуществляемого преднамеренно
для правильного зацепления передаточной пары, в рулевом ме-
ханизме возможно осевое смещение оси вала сошки в направлении,
параллельном оси червяка. При этом ось вала сошки не распо-
лагается в плоскости среднего сечения червяка.
Дуга, описанная из центра О радиусом К (рис. 67), представ-
ляет собой начальную образующую червяка. Точка 0г, смещенная
от центра О к оси червяка и в сторону от среднего его сечения,
соответствует оси вала сошки, и дуга, описанная из этой точки
радиусом является начальной дугой движения ролика или
зубьев сектора. В точке N соприкосновения дуг получается без-
зазорное зацепление деталей. Как указывалось, для правильной
108
работы рулевого управления беззазорное зацепление деталей
в рулевом механизме должно быть в точке, соответствующей
нейтральному, т. е. прямому положению управляемых колес.
Эта точка расположена в среднем сечении червяка с наименьшим
радиусом.
Таким образом, в этом среднем сечении и должна распола-
гаться ось вала сошки. Если по тем или иным причинам ось вала
сошки не находится в этой плоскости, то смещается и точка без-
зазорного зацепления червяка с роликом или зубьями сектора.
Если осевое смещение червяка равно /г, то угол смещения точки
беззазорного зацепления можно найти из зависимости
. г, k k
sln 6 -' обГ ~ R — Ri ’
Так как разность R — RA мала, то даже при незначительном
осевом смещении k угол 0 получается большим.
Осевое смещение червяка может явиться результатом про-
изводственных погрешностей, вследствие чего не выдержаны
следующие размеры:
1) расстояние А (см. рис. 67) от середины червяка до вершины
конуса верхней опоры червяка при правильном угле у конуса
опоры;
2) угол у при правильном расстоянии А;
3) расстояние В от вершины конуса роликоподшипника верх-
ней опоры червяка до торца обоймы подшипника;
4) расстояние С от торца гнезда обоймы верхнего роликопод-
шипника червяка картера рулевого механизма до оси вала сошки;
5) диаметры роликов верхнего подшипника.
Правильное расположение оси вала сошки относительно сред-
него сечения червяка достигается при условии А — В = С.
Если по тем или иным причинам имеется осевое смещение
червяка, при котором А — В не равно С, то зацепление переда-
точной пары рулевого механизма получается неправильным, так
как точка беззазорного соприкосновения ролика с червяком сме-
щается от середины червяка в сторону, противоположную его
осевому смещению.
При значительном осевом смещении червяка вследствие боль-
шого угла смещения 0 детали защемляются в той точке линии
зацепления, где соприкасаются дуга начальной образующей
и дуга движения ролика. При этом неправильными будут и работа
рулевого управления, и зацепление между деталями. В одной
половине от середины с роликом будет соприкасаться верхняя
часть профиля витка, а в другой половине — нижняя часть дру-
гой стороны профиля.
В рулевом механизме с роликом неправильная регулировка
середины зацепления, вызывающая осевое смещение червяка,
приводит к износу его витка, в механизме же с зубчатым секто-
ром — к излому зуба. При этом зуб сектора перекашивается отно-
109
сительно канавки червяка и защемляется между его витками.
В результате этого на зуб действуют две противоположно направ-
ленные силы, приложенные к его вершине и корню.
Для получения правильного зацепления, обеспечивающего
надлежащую работу рулевого механизма и управления в целом,
а также во избежание указанных последствий ось вала сошки
должна быть точно выдержана относительно среднего сечения
червяка.
Как было установлено, ось вала сошки смещается относительно
червяка в двух направлениях: радиальном и осевом.
При повороте червяка точки профиля его витка перемещаются
по дуге окружности, центр которой лежит на оси инструмента
при нарезании. В то же время точки профиля ролика, зацепля-
ющегося с витком червяка, перемещаются по дуге, центр которой
лежит на оси вала сошки.
Вследствие этого один профиль получает угловое перемещение
относительно другого в плоскости, проходящей через ось червяка,
поэтому профиль витка червяка приходится делать криволиней-
ным с тем, чтобы при его повороте профиль ролика перекатывался
по профилю витка по всей рабочей высоте последнего.
Кривизна профиля витка червяка должна быть такой, чтобы
было обеспечено правильное его соприкосновение с роликом при
радиальном и осевом смещениях оси вала сошки. Так как профиль
витка и профиль ролика перемещаются около двух разных цен-
тров, то перекатывание одного по другому будет сопровож-
даться скольжением.
Соприкосновение ролика с витком червяка теоретически полу-
чается точечным, и вследствие возникающих при этом больших
удельных давлений смазка выжимается, что способствует увели-
чению трения и повышенному износу поверхностей. Удельное
давление между соприкасающимися профилями зависит от кри-
визны их поверхностей. Для уменьшения трения и износа кри-
визна соприкасающихся поверхностей должна быть минимальной
и скольжение между ними должно происходить по всей рабочей
высоте обоих соприкасающихся профилей.
Кривизна и рабочая высота профиля витка, находящегося
в соприкосновении с другим профилем, или угол перекатывания
одного профиля по другому зависят от радиуса кривизны гх.
На рис. 68 показана схема зацепления витка глобоидального
червяка в двух разных положениях ролика. Зацепление слева
(штрих-пунктирными линиями) соответствует крайнему левому
положению ролика при перемещении его от среднего положения,
что происходит при движении автомобиля на крутом повороте.
Зацепление справа (сплошными линиями) соответствует крайнему
правому положению ролика при перемещении его в среднее по-
ложение. Такое перемещение бывает при повороте колес из по-
вернутого состояния в прямое при малых скоростях движения
или при повороте их на месте.
110
Поэтому профиль ролика N соприкасается с левой стороной
профиля витка S червяка. С правой стороной профиля ролик
будет соприкасаться при подобных же условиях работы, но при
другом направлении поворота червяка.
На рис. 68 буквой 0| обозначена ось при нарезании червяка,
01 или Di — ось вала сошки, в головке которого установлен
ролик, и 03 — центр кривизны профиля витка червяка, который
выполнен по дуге круга радиуса Центр 03 перемещается по
Рис. 68. Определение кривизны профиля витка гло-
боидального червяка
дуге окружности радиуса /?0 около центра Olt т. е. около оси при
нарезании червяка. Прямая N представляет собой образующую
профиля ролика. Чтобы обеспечить правильное зацепление пере-
даточной пары, получающееся до износа неподвижного подшип-
ника червяка и после его износа, рассмотрим случай, когда ось
вала сошки кроме радиального смещения к оси червяка на ве-
личину п имеет еще двустороннее осевое смещение на величину k
от среднего сечения червяка.
Индексом ' отмечено положение точек, определяющих зацеп-
ление после износа неподвижного подшипника (рис. 68, справа).
Опустив из центра 02 перпендикуляр О2Ь на образующую АЬ
конуса ролика, найдем, что вершина образованного прямого
угла b перемещается около центра О2 по дуге окружности М
с радиусом г2.
При повороте червяка точка А касания его с роликом пере-
мещается по высоте профиля витка, а следовательно, будет изме-
няться и угол Л, составленный радиусами г t и Ro.
Ill
Разность углов А для левого и правого крайних положений
ролика представляет собой угол х обкатки профиля витка или
угол перекатывания одного профиля по другому.
Согласно приведенным обозначениям угол
% — А. 1 А 2 = у 1 Ч- 01 у 2 4_ 0 г-
Из треугольников OgA’a'; О^Ь'а’; О2ЬА и О3аА имеем
r1==aO3cosyi; r2 = а02 cos ур и = a O3cosy2. ]
, ? (36)
г 2 = аО2 cos у2; J
откуда
cos У! = 41ТД1Д . cos у — (37)
где
т — aOs 4- а02,
или __________________________________________
т = A2 п*cos(р0 + + ₽Л)
т' = ]/~№ 4- па 4- {k'T — 27? ]/ п2 у (A')2 cos (р\ ~ 4VF ф2).
Углы 0j и 02 находят из соотношений
(0х02)2 — т2 4- А?2 — 2m/? cos 0Х = п2 4- А2
и
(OiOtf = 4- (т )2 — 2m 7? cos 02 = ti 4- (k )2,
откуда
„ Rz ~р (m'Y — п2 — (/г')2
cos 0„ =----.
2 2Rm
Углы фх и ф2 определяют из треугольников еОгО2 и eOiO2:
, k . , k'
tgipi = —; tg42=—•
Углы px и Рд определяют по углу <р поворота червяка и по
передаточному числу i при его нарезании:
Так как точка А перемещается по высоте профиля витка, то
радиус зацепления 7?г изменяется в зависимости от угла <.р пово-
рота червяка, вследствие чего в какой-то степени будет изменяться
и действительное передаточное число.
112
Рис. 69. Определение приращения
радиуса беззазорного зацепления
глобоидальной передачи
Радиус зацепления и радиус беззазорного зацепления. Радиусом
зацепления в шестеренчатых передачах принято называть расстоя-
ние от оси вращения шестерни до точки соприкосновения одной
стороны каждого из зацепляющихся профилей. Передача в руле-
вом механизме из-за предъявляемых к нему особых эксплуата-
ционных требований принципиально отличается от передачи
других передаточных механизмов. В рулевом механизме с гло-
боидальной передачей различают два радиуса: радиус зацепления
(соприкосновения) и радиус беззазорного зацепления.
Последняя величина, как видно
из самого наименования, предста-
вляет собой радиус зацепления
при беззазорном соприкосновении
обеих сторон каждого из зацепля-
ющихся профилей передаточной
пары. Указанные два радиуса со-
вершенно различны (см. рис. 61).
Радиус зацепления , (см.
рис. 68) находим из треугольников
03:
R-l— ]/"г\ 4- т2 — 2r1m cos Yr .
(38)
Изменение угла yt в зависи-
мости от угла ср определяется по
уравнениям (37).
Схема для определения радиуса беззазорного зацепления
и его приращения Л/< показана на рис. 69, с помощью которой
находим
R2 = п* — 2nR cos Г
и
Л Я = R а — R х = /“R2 + n2 —2n7?cosp“ — Rlf (39)
где п — радиальное смещение осп вала сошки относительно
оси нарезки червяка;
Ri = R — п и ₽ = -i.
Изменение радиуса беззазорного зацепления пли его прира-
щения по углу поворота червяка предлагается использовать
в качестве оценочного критерия конструктивных особенностей
передаточной пары рулевого механизма.
Радиус начальной образующей червяка. С изменением радиуса
зацепления (соприкосновения) /?х изменяется и радиус начальной
образующей червяка R, который находится из следующего урав-
нения (см. рис. 68):
R = + — (40)
где X = у ± 0.
8 М. И. Лысов
113
Для червяка существующего рулевого механизма по приве-
денным уравнениям были определены значения радиусов зацеп-
ления АД и начальной образующей R, изменение которых по углу р
поворота вала сошки показано на рис. 70. Как видно, изменение
обоих радиусов вследствие радиального смещения осей червяка
и вала сошки небольшое.
С изменением радиусов зацепления и начальной образующей
действительный угол а' наклона винтовой линии червяка, опи-
Рис. 70. Изменение радиусов зацепления начальной обра-
зующей червяка и действительного передаточного числа
рулевого механизма в зависимости от угла поворота вала
сошки
сываемой точками соприкосновения деталей передаточной пары,
также будет отличаться от первоначального угла наклона по
образующей а0.
Действительное угловое передаточное число. Вследствие ради-
ального смещения оси вала сошки и изменения радиуса зацепле-
ния действительное угловое передаточное число отличается
от передаточного числа при нарезании червяка, равного i и по-
стоянного по углу его поворота.
Для определения действительного передаточного числа на
рис. 71 показана схема зацепления глобоидальной передачи.
Здесь R i — радиус зацепления и Д — радиус начальной обра-
зующей червяка.
При повороте червяка на угол <р радиус R начальной образу-
ющей переместится от первоначального его положения на угол р.
При этом радиус зацепления составит с первоначальным по-
ложением угол р'.
114
Из треугольников АВ02 и ЛВСЛ имеем
Rx sin Р' = R sin fJ;
«' В . к R . ф
Sin p = -75- sin p —- -75- sin —r
z\i I
ИЛИ
P' = arcsin
/В .„ <P
\ Ri S1 i
Дифференцируя это уравнение по ср, получим
откуда
. __ dtp
z°~"<
Отношение радиусов R± и R — ве-
личина, меньшая единицы, но близкая
к ней, вследствие чего числитель дроби
представляет собой величину, несколько
меньшую, чем cos-?-, и сама дробь
будет меньше единицы.
Радиус зацепления R t от середины
червяка в обе стороны по углу его
поворота немного изменяется, следова-
тельно, и действительное передаточное
число также незначительно изме-
Рис. 71. Определение дей-
ствительного передаточного
числа рулевого механизма
няется.
Уравнение (41) может быть представлено в виде
<р
COS —Г-
I
По этому уравнению при заданных значениях R R и / опре-
делена зависимость величины S, характеризующей изменение
действительного передаточного числа /м, от угла поворота вала
сошки р (см. рис. 70).
Небольшое изменение действительного передаточного числа,
получаемое из чисто конструктивных соображений, вследствие
особенностей глобоидального червяка какого-либо значения для
эксплуатации не имеет.
8* 115
Особенности конструкций рулевых механизмов с глобоидальной
передачей и вращающимся роликом
Разновидности зацепления. В глобоидальной передаче рулевого
механизма вращающийся ролик применяется трех видов: одно-
гребневый (клинообразный), двухгребневый, т. е. имеющий в се-
редине лунку для витка червяка, и трехгребневый (см. рис. 27).
Одногребневый ролик соприкасается своими боковыми кони-
ческими поверхностями с боковыми поверхностями канавки чер-
вяка (рис. 72, а).
Двухгребневый ролик может соприкасаться или внутренними
коническими поверхностями лунки с боковыми поверхностями
Рис. 72. Схемы зацепления
глобоидальной передачи
витка червяка (рис. 72, б), или наружными коническими поверх-
ностями с наружными поверхностями двух смежных канавок
червяка (рис. 72, в). Расположенный между этими канавками
виток в последнем случае не соприкасается с лункой ролика.
В конструкции с трехгребневым роликом зацепляется сначала
средний гребень в точке Аг (рис. 72, а), а затем при повороте
червяка в соприкосновение с его витком вступает один из край-
них гребней в точке А3 (рис. 72, в), который остается в зацеплении
до полного поворота вала сошки.
Углам Рс р2; р2 и р3, составляемым радиусами зацепления
со средней плоскостью червяка, соответствуют углы поворота
червяка фь ф2; ф2 и ф3.
Из приведенных схем видно, что начальный радиус зацепле-
ния одногребневого ролика располагается перед средней пло-
скостью червяка под углом +Рх (рис. 72, а), у двухгребневого
ролика с внутренним зацеплением — за средней плоскостью под
116
углом —р2 (рис. 72, б), у двухгребневого ролика с наружным
зацеплением — перед средней плоскостью под углом 4 р3
(рис. 72, б), а у трехгребневого ролика — под углом |3,. Вследствие
этого линия зацепления по образующей червяка располагается
по-разному относительно его середины, а следовательно, полу-
чается различной и рабочая длина червяка.
Если из условий нарезания витка червяк допускает угол по-
ворота вала сошки, равный (3, то в зависимости от конструкции
применяемого ролика максимальный угол поворота с одногреб-
невым роликом
с двухгребневым роликом с внутренним зацеплением
R =В_______
rmax Н 4 ,
с двухгребневым роликом с наружным зацеплением
₽гаах = ₽ + 4^
с трехгребневым роликом
К
₽тах = ₽ + -Н„
где [4 — угловой шаг червяка.
Из сопоставления первых трех разновидностей зацепления
(рис. 72, г) заключаем, что при зацеплении по третьей схеме
(рис. 72, б) длина червяка /2 наименьшая, а при зацеплении по
второй схеме (рис. 72, б) — наибольшая. Если учесть, что длина
червяка ограничена по производственным соображениям, то
очевидно, что зацепление его с роликом по схеме, показанной
на рис. 72, б, наивыгоднейшее.
Угловое смещение ролика или зубьев сектора относительно
витка червяка при различных видах зацепления. Разница в углах
наклона витка червяка и гребней ролика, сопровождающаяся
перекосом одного относительно других, вызывает перемещение
точки их соприкосновения по длине и по высоте витка. Это пере-
мещение тем больше, чем больше разница в углах наклона дета-
лей зацепляющейся пары. По этому угловому несовпадению, на-
зываемому угловым скольжением, оцениваются виды зацепления.
На рис. 73 показан график изменения угла наклона витка
глобоидального червяка в зависимости от угла его поворота.
При повороте на угол ср зацепление червяка с одногребневым
роликом начинается в точке А ь отстоящей от середины червяка
на угол 4~Ф1, я кончается в точке Въ отстоящей от того же сече-
ния на угол ф—фг. Разность в углах наклона витка червяка па
рассматриваемом участке равна Лещ.
117
Если зубья сектора или ролик располагаются относительно
оси вала сошки в лучшем случае под углом, равным некоторому
среднему значению между углами наклона витка червяка на рас-
сматриваемом участке, то угловое скольжение между зацепля-
ла,
ющимися деталями равно —
При внутреннем зацеплении витка червяка с двухгребневым
роликом и повороте его на тот же угол <р начало и конец зацепле-
ния соответствуют Л2иВ2. В этом случае начало и конец зацеп-
Рис. 73. Изменение угла наклона винтовой линии глобоидального чер-
вяка при различных видах зацепления
ления отстоят от середины червяка на уголы —<р2 и <р + ср2.
Угловое скольжение между витком червяка и роликом или зубьями
Ла» п
сектора при этом виде зацепления составит —При соприкос-
новении витка червяка с двухгребневым роликом наружного
зацепления и повороте червяка на тот же угол <р начало и конец
зацепления находятся в точках А3 и В3 и отстоят от середины
червяка на углы +<р3 и <р — <р3. Угловое скольжение между
витком червяка и роликом или сектором при этом виде зацепле-
Дач
ния равняется-^-.
Из рис. 73 видно, что минимальная разность углов наклона
витка червяка, а следовательно, и минимальное угловое сколь-
жение между ним и роликом или сектором получается при их
зацеплении, выполненном по третьей схеме (см. рис. 72, в), а ма-
ксимальная — по второй (см. рис. 72, б).
При этом
Аа3 Аа, <7 Аа2.
118
Таким образом, в отношении как длины червяка, так и угло-
вого скольжения зацепление его с роликом, выполненное по
третьей схеме (см. рис. 72, в), имеет все преимущества перед
первыми двумя видами.
Исследование влияния конструктивных параметров
глобоидальной передачи на зацепление
Изменение угла наклона витка червяка в зависимости от
конструктивных параметров. В осуществленных рулевых меха-
низмах с глобоидальной передачей, имеющих различные пере-
К
даточные числа ia и отношение углы наклона а винтовой
линии червяка также различные (см. рис. 66). При постоянном
передаточном числе ia = 20 угол наклона а при различных ~-
изменяется, как показано на рис. 74, а. При наибольшем значе-
нии разность в углах наклона винтовой линии червяка полу-
чается минимальной, но минимальным будет и угол наклона вин-
товой линии червяка.
При постоянном значении — = 1,35 изменение угла наклона
при переменном показано на рис. 74, б. Минимальная разность
в углах наклона винтовой линии червяка получается при наи-
большем значении ia, но и числовое значение угла при этом также
минимальное.
Все кривые построены для одной и той же длины червяка
в зависимости от угла р = .
Для получения минимального углового скольжения между
зацепляющимися деталями при заданном передаточном числе
отношение следует выбирать наибольшим преимущественно
за счет изменения величины R.
Оценка зацепления при радиальном и осевом смещениях чер-
вяка относительно вала сошки. Одной из важнейших конструк-
тивных особенностей передачи является изменение зазоров между
ее деталями. Зацепление должно быть без зазора в среднем сече-
нии червяка и с зазорами в обе стороны от него. Такое изменение
зазоров получается при смещении оси вала сошки к оси червяка.
При этом согласно рис. 69 и 61 радиальный зазор АД при-
ращения радиуса беззазорного зацепления и профильный зазор As
в зацеплении определяются из уравнений (39) и (14). Приведен-
ные уравнения позволяют получить характеристику и оценку за-
цепления при радиальном смещении червяка или оси вала сошки.
Однако кроме радиального смещения на величину п червяк
смещается относительно оси вала сошки в осевом направлении
на величину k.
119
При наличии обоих смещений зацепление глобоидальной пере-
дачи должно оцениваться по приращению радиуса беззазорного
зацепления, определяемого по уравнению
ЛК = +/г2 + Л2 — 27?и1/п2 + /г2со5р — Кх + V п2 + k2.
(42)
Зазоры в передаче, как и ранее, определяются по урав-
нению (14).
Таким образом, получаются необходимые зависимости между
конструктивными и определяемыми параметрами.
Как видно из рис. 75, радиальное смещение п вала сошки
весьма заметно влияет на приращение радиуса беззазорного за-
цепления Л/?, а следовательно, и на изменение зазоров в передаче,
главным образом, при больших углах поворота червяка <р и почти
не влияет при малых их значениях.
120
Для того же глобоидального червяка при радиальном сме-
щении оси вала сошки п = 4 мм даже незначительное осевое
смещение k червяка оказывает огромное влияние на зацепление
передаточной пары, т. е. приращение Л/? (рис. 76, а).
Рис. 75. Приращение радиуса беззазорного зацепления глобо-
идальной передачи при различном радиальном смещении
п (R = 47,44 мм)
Если осуществить зацепление беззазорным в среднем сечении
червяка, т. е. при <р = 0 сделать Л/? — 0, то слева от этого се-
чения (рис. 76, б) приращение радиуса беззазорного зацепления,
а следовательно, и зазоры в передаче имеют отрицательные зна-
Рис. 76. Кривые изменения приращения радиуса беззазорного зацепления гло-
боидальной передачи при различном осевом смещении k червяка
чения. Поэтому при повороте червяка налево передаточная пара
будет защемляться, а при большом осевом смещении червяка
поворот рулевого колеса на необходимый угол влево будет не-
возможен.
121
Зацепление глобоидального червяка и ролика
вне ооевой плоскости
Теоретические исследования глобоидальной передачи всегда
выполнялись в плоскости, проходящей через ось червяка, и
каких-либо указаний на возможность изменения или нарушения
зацепления передаточной пары при соприкосновении ее деталей
вне этой плоскости не встречалось.
При общепринятом способе регулирования зазоров в передаче
путем смещения вала сошки вдоль его оси положение ролика
(в связи с его наклоном) относительно витка червяка в за-
висимости от величины этого
смещения значительно изме-
няется, а следовательно, из-
меняется и положение точек
контакта их рабочих поверх-
ностей.
Зацепление передаточной
пары в этом случае изменя-
ется не только в зависимости
от величины осевого смеще-
ния вала сошки, но и от угла
его поворота р. В этом слу-
чае угловой перекос ролика
относительно витка червяка
Да = а—(«1 ± Р ), (43)
где а — угол наклона витка
червяка;
а[ — угол наклона ролика
в головке вала сошки,
отнесенный к точке
соприкосновения его
с витком червяка;
Р' — угол поворота вала
сошки, отнесенный
к точке соприкосно-
вения ролика с вит-
ком червяка («+» —
при повороте направо
и «—» — налево).
Рис 77. Схема зацепления ролика при
смещении его вдоль оси вала сошки от
центральной плоскости глобоидального
червяка, проходящего через его ось
На рис. 77 изображена схема зацепления витка червяка с ро-
ликом при смещении его положения от осевой плоскости червяка.
Согласно приведенным обозначениям угол наклона ролика в точке
его контакта с витком червяка определяется из уравнения
tgai = tgaxcosO.
(44)
122
Аналогично получаем и для углов а и 0:
tg а' = tg a cos 6, tg (У — tg0cos6. (45)
Угол 6 определяется из уравнения
tg 6 = , (46)
Л — (р + n) COS |> ' '
где е — слгещение ролика вдоль оси вала сошки;
К — расстояние между осями червяка и долбяка при нарезке
витка;
р — радиус от оси вала сошки до оси ролика;
п — радиальное смещение оси вала сошки к оси червяка;
а, — угол установки ролика относительно оси вала сошки;
Р — угол поворота радиуса образующей червяка.
Между углами аир действительна ранее установленная
зависимость (35).
Если в передаче применяется двух- или трехгребневый ролик,
то точка А контакта витка червяка переходит с одного гребня
ролика на другой. Так как расстояние от каждого гребня ролика
до витков червяка различно, то и положение точки их контакта
с червяком изменяется в значительных пределах.
Если в середине зацепления расстояние от осевой плоскости
червяка до центра ролика равно е, то при переходе точки контакта
с одного гребня ролика на другой это расстояние
е = е ± a sin alt (47)
где а — расстояние от центра ролика до точки контакта наружного
его профиля с витком.
Знаки «-]-» и «—» относятся соответственно к правому и ле-
вому вращению рулевого вала при левом направлении нарезки
червяка и меняются при правом. Очевидно, что наилучшие условия
зацепления получаются с одногребневым роликом и наихудшие —
с трехгребневым. Особенно неудовлетворительным получается
зацепление глобоидального червяка с двумя широко расставлен-
ными роликами.
РАСЧЕТ ЧЕРВЯЧНОЙ ПЕРЕДАЧИ
В рулевом механизме с червячной передачей и зубчатым сек-
тором типа примененного на автомобиле МАЗ-200 (см. рис. 22)
увеличение зазоров в обе стороны от середины достигается тех-
нологическими приемами путем уменьшения толщины соответ-
ствующих зубьев сектора. Для этого зубья сектора нарезаются
при наклоненном положении венца и вала сошки под углом у
(рис. 78, а).
На рис. 78, б показано, как образуются зазоры, увеличива-
ющиеся в обе стороны от середины сектора. Дуга I соответствует
прямому положению начальной образующей зубьев сектора,
относительно которой дуга отклоняется на угол у при нарезании,
123
дуга II соответствует той же начальной образующей, наклоненной
относительно первоначального положения. При таком наклонен-
ном положении сектора зубья нарезаются при его повороте вокруг
оси Olt составляющей с наклоненной осью вала сошки О2 угол у.
Дуга III соответствует начальной образующей нарезанных
зубьев сектора, плоскость которой расположена под прямым
углом к оси Ох.
Расстояние между дугами II и I, изменяющееся в обе стороны
от середины С, представляет собой искомые зазоры в передаче.
Рис. 78. Определение зазоров в червячной паре рулевого механизма и
кривые их изменения при различных углах наклона вала при нареза-
нии зубьев
Согласно рис. 78 осевые зазоры
АД = Д sin у (1 — cos Р), (48)
где Д — радиус начальной образующей зубьев сектора;
Р — угол поворота вала сошки.
На рис. 78, в показаны кривые 1—4 осевого зазора АД в за-
висимости от угла р поворота вала сошки при разных углах у
(соответственно 0° 40'; 1° О'; 1° 30' и 2° О'), определенные по
уравнению (48) для рулевого механизма автомобиля МАЗ-200
(Д = 113,74 мм).
Если зубья сектора нарезаны без наклона оси вала сошки,
т. е. при у = 0, то зазоры в передаче будут одинаковыми во время
полного поворота вала, и такая передача получается недолговеч-
ной. Как видно из кривых, указанным выше приемом могут быть
получены зазоры, увеличивающиеся в такой степени, чтобы ком-
пенсировать любой износ средних зубьев сектора, встречающийся
в эксплуатации.
Следует иметь в виду, что изменение зазоров в соответствии
с кривыми на рис. 78, в получается в том случае, если ось вала
124
сошки при нарезании зубьев будет наклонена на угол у в сто-
рону средних зубьев сектора. Если в результате производствен-
ных отступлений и погрешностей ось вала сошки при нарезании
зубьев окажется наклоненной в противоположную сторону, то
осевые зазоры АТ? будут не увеличиваться в обе стороны от се-
редины, а плавно уменьшатся (рис. 79). Кривые /—4 соответ-
ствуют тем же углам у = 0° 40'; Iе О'; 1° 30' и 2° О', что и на
рис. 78.
Как видно из кривых, даже самые незначительные производ-
ственные отступления или погрешности в углах отклонения от
50 40 30 20 10 0° 10 20 30 W 50
Рис. 79. Изменение зазоров в червячной паре рулевого меха-
низма при неправильной нарезке зубьев сектора
вала сошки при нарезании зубьев сектора приводят передаточную
пару в совершенно непригодное состояние.
Если ось нарезки зубьев сектора будет отклонена не точно
в противоположную сторону от зубьев, а будет еще повернута,
например, на три зуба вправо, то при отклонении оси на угол
у = 1е 0' изменение осевого зазора АТ? происходит по асимметрич-
ной кривой 5 (рис. 79).
Кроме указанных погрешностей зацепление передаточной
пары может нарушаться по следующим причинам:
1) нарезаемая фреза посажена эксцентрично на шпиндель
станка и вращается в процессе нарезания зубьев сектора с бие-
нием;
2) зубья сектора нарезаны правильно, но червяк посажен
на рулевой вал эксцентрично и вращается в опорах с биением.
В обоих случаях зазоры в передаче изменяются по синусо-
идальной кривой 6 (рис 79).
Встречающиеся в отдельных случаях рулевые механизмы
с уменьшающимися зазорами подтверждают, что погрешности
в условиях производства возможны. В связи с этим ошибка в угле
установки вала сошки при нарезании зубьев не должна пре-
вышать 6'—8', при номинальном его значении 35'.
125
РАСЧЕТ ВИНТОВОЙ ПЕРЕДАЧИ
В рулевых механизмах с винтовой передачей имеются два пере-
даточных узла: винтовая пара (винт и гайка с циркулирующими
шариками) и зубчатая пара (зубчатый сектор на валу сошки и
реечные зубья на гайке винта).
Винтовая пара с циркулирующими шариками достаточно изно-
состойка и при износе не искажает заданный закон изменения
зазоров в передаче. Износ, которому подвержены в основном
зубья сектора и гайки, существенно влияет на закон изменения
зазоров в передаче. Поэтому в конструкции самих зубьев преду-
S мм
5)
Рис. 80. Изменение зазоров и размеров зуб-
чатой пары рулевого механизма автомобиля
ЗИЛ-130
сматривается возможность
компенсации износа зубь-
ев, что является вполне
достаточным мероприя-
тием.
Рулевой механизм с
винтовой передачей с цир-
кулирующими шариками и
зубчатой парой со встроен-
ным гидроусилителем при-
меняется на автомобилях
ЗИЛ. Рулевой! механизм
с винтовой и зубчатой па-
рами разработан для авто-
мобилей МАЗ, КрАЗ,
Урал, автобусов ЛАЗ и
ЛиАЗ и др.
Основным показателем,
характеризующим долго-
вечность работы рулевого механизма с правильным зацеплением,
являются зазоры в передаче и их изменение за полный поворот
рулевого колеса.
Влияние эксцентрицитета нарезки зубьев сектора на изменение
зазоров в зубчатой паре. Для удлинения срока службы рулевого
механизма при износе зазоры в передаче должны увеличиваться
в обе стороны от середины зацепления. Так как винтовую пару
с циркулирующими шариками выполняют без зазора, то необ-
ходимые зазоры в передаче образуются в зубчатой паре, т. е.
в наиболее изнашивающейся паре. Требуемый закон изменения
зазоров в передаче достигается изготовлением зубьев сектора или
рейки разной толщины.
В рулевом механизме автомобиля ЗИЛ-130 крайние впадины
рейки делают одного размера и несколько шире средней впадины.
Зубья сектора имеют одинаковую толщину.
Размеры S зубьев сектора (сплошные линии) и ширины впа-
дин рейки (штриховые линии) показаны соответственно на
рис. 80, а.
126
Изменение зазоров As между зубьями показано на рис. 80, б.
В рулевом механизме автомобилей МАЗ-500 зубья сектора
делают разной толщины, причем так, что средний зуб самый тол-
стый, два ближних к среднему — несколько тоньше и два край-
них — самые тонкие. Это достигается тем, что их нарезают при
повороте около оси Olt смещенной от оси О вала сошки к зубьям
сектора на некоторое расстояние п (рис. 81).
При таком способе нареза-
ния зубьев зазоры в передаче
As = 2А7? tg -у = 2 tg -у х
X [/?с — п cos р ±
± ]/rn2cos2p + /?o —п2 ], (49)
где А/? — приращение радиуса
беззазорного зацепле-
ния;
у — угол зацепления;
— начальный радиус
зубьев сектора;
Р — угол поворота вала
сошки.
На рис. 82 показаны кривые
1, 2, 3, 4 и 5 изменения зазоров
в зубчатой паре при различной
величине эксцентрицитета. В ру-
левом механизме автомобилей
МАЗ принята величина п =
= 0,5 мм. Зазоры в передаче
изменяются по кривой 2. Из
рис. 82 видно, что при повороте
вала сошки на угол р = 24°,
т. е. на угловой шаг сектора,
Рис. 81. Схемы для определения при-
ращения радиуса Д7? беззазорного за-
цепления и зазоров As в зубчатой
паре со смещенной осью нарезки зубьев
сектора
толщина зубьев, расположенных рядом со средним зубом (точ-
ка А), уменьшается на величину As = 0,05 мм, а у край-
них зубьев (точка Б), т. е. при повороте вала на угол р = 48°,
уменьшается на величину As = 0,184 мм. Толщина зубьев рейки
рулевых механизмов автомобилей МАЗ-500 и МАЗ-504 одинакова
для всех четырех зубьев; s = 9,356-^-9,425 мм на высоте h =
= 5,0 мм. Таким образом, принцип изготовления зубьев сектора
разной толщины так, чтобы зазоры в передаче изменялись по
одной из кривых, показанных на рис. 82, правильный и направлен
на повышение долговечности работы рулевого механизма.
Показанный на рис. 82 характер изменения зазоров в пере-
даче зависит от величины эксцентрицитета п оси, расположенной
точно в плоскости, проходящей через середину среднего зуба
сектора. В общем случае, если ось нарезки смещена в этой пло-
127
скости на угол ро, то зазоры в передаче As и приращение радиуса
беззазорного зацепления АТ? определяются согласно рис. 83 по
уравнениям
As = 2A/?tgy; AZ? =/?0 —/?2;
Rl = R$ + и2 — 2nR2 cos (180 — р0 — р), (50)
где /?1 = 7?-
Рис. 82. Изменение зазоров As в зубчатой паре при различном
смещении п оси нарезки зубьев сектора
При этом могут быть следующие пять случаев изменения
величин АТ? и As:
1. п = 0; р0 = 0. В этом случае зазоры остаются одинаковыми
в течение всего поворота вала сошки (прямая 1 на рис. 84).
Начальная плоскость зибьеб рейки
Рис. 83. Схема для определения при-
ращения радиуса беззазорного заце-
пления зубчатой пары при произволь-
ном положении оси нарезки зубьев
сектора рулевого механизма
2. п >0; ро = 0. В этом
случае (кривая 2) зазоры имеют
минимальное значение в сере-
дине зацепления и увеличива-
ются симметрично в обе сторо-
ны от нее.
3. п>0; ро^О. При ро>0
зазоры в передаче (кривая 3)
увеличиваются в одну сторону
от середины зацепления, умень-
шаются в другую, доходят до
минимального значения, а затем
снова увеличиваются. При р0<СО
соответствующая кривая 3' яв-
ляется зеркальным изображе-
нием кривой 3.
4. п <0; Ро = 180°. При
этих данных ось, около которой
нарезаются зубья сектора, ле-
жит на оси среднего зуба и
располагается не ближе к зубь-
128
ям, а дальше от них; зазоры в передаче уменьшаются симмет-
рично в обе стороны поворота вала сошки (кривая 4).
5. и <0; Ро S 180°. В этом случае ось при нарезании зубьев
сектора находится не ближе к зубьям, а дальше от них и распо-
ложена не на оси среднего зуба, а с той или с другой ее стороны.
Если р0 > 180°, то зазоры в передаче (кривая 5) при повороте
вала сошки в одну сторону уменьшаются, а в другую сторону
увеличиваются, доходят до максимального значения и дальше
уменьшаются. При р(| < 180° кривая 5' является зеркальным
изображением кривой 5.
Рис. 84. Кривые изменения приращения радиуса беззазор-
ного зацепления зубчатой пары при произвольном поло-
жении оси нарезки зубьев сектора рулевого механизма
Из приведенных данных видно, что минимальные зазоры
в середине зацепления могут быть получены тогда, когда зазоры
в передаче изменяются по кривой 1 или 2.
При изменении зазоров по кривой 1 долговечность передачи
небольшая. Правильной конструкцией передачи следует считать
такую, в которой зазоры изменяются по кривой 2.
При изменении зазоров по кривым 3 или 3' затрудняется
поворот рулевого колеса в обе стороны на небольшом участке
зацепления передаточной пары, т. е. конструкция передачи не-
правильная. При изменении зазоров по кривым 4, 5 и 5' зазоры
уменьшаются за полный угол поворота вала сошки в обе стороны,
поэтому передаточная пара с таким изменением зазоров непри-
годна для работы на автомобиле.
Влияние угла наклона начальной плоскости зубьев гайки отно-
сительно оси винта. Непараллельность начальной плоскости
зубьев гайки относительно оси винта может характеризоваться
углом 6, составляемым осью винта с начальной плоскостью ее
зубьев. Если начальный радиус зубьев сектора равен /?0, as —
длина линии зацепления, то дополнительное приращение радиуса
беззазорного зацепления
A7?" = stge = j^7?0₽tge. (51)
9 М. И. Лысов
129
Это дополнительное приращение радиуса беззазорного зацеп-
ления изменяется по прямолинейному закону и зависит от ве-
личины непараллельное™ начальной плоскости зубьев и оси
винта, т. е. угла 6.
При постоянном начальном радиусе Т?о = const и при непа-
раллельной начальной плоскости зубьев гайки относительно оси
винта зазоры в передаче изменяются по кривой Г (см. рис. 84).
При всяком другом изменении радиуса 7? 0 дополнительное прира-
щение радиуса беззазорного зацепления А/?", получающееся
между кривыми 1 и Г, будет накладываться на соответствующие
кривые 2, 3, 3', 4, 5 и 5'.
----Влияние несоосности оси
Рис. 85. Схема для определения при-
ращения радиуса беззазорного заце-
пления зубчатой пары при эксцен-
тричном вращении винта
винтовой канавки винта отно-
сительно оси его вращения.
При выводе уравнения прира-
щения радиуса беззазорного
зацепления А/? предполагается,
что ось винтовой канавки чер-
вяка точно совпадает с осью ее
вращения на опорах. В действи-
тельности эти оси могут несколь-
ко не совпадать. В этом случае
начальный радиус вращения
винтовой канавки червяка, а
следовательно, и приращение
радиуса беззазорного зацепле-
ния А/? не остаются постоян-
ными, а изменяются за каждый оборот червяка.
Если А/? при заданном эксцентрицитете, например, при
п > 0 и ро = 0 изменяется по кривой 2 (см. рис. 84), то при
наличии биения червяка полное приращение радиуса беззазор-
ного зацепления
А/?о = А/? + АТ?',
где А/?' — дополнительное приращение радиуса беззазорного за-
цепления, получающиееся вследствие биения винто-
вой канавки червяка и равное приращению радиуса
ее вращения.
На основании рис. 85
А/?' =Т?А.-Т?0.
Изменяющийся радиус вращения винтовой канавки червяка
определяется из уравнения
/?А — 2qRx cos <р 4- q — Т?о = О,
где q — эксцентрицитет оси винтовой канавки червяка.
Тогда ______________
АТ?' = Т?х-7?0 = Т?0[-^со5ф± ]/1-(-£)%1п2ф -1] . (52)
130
Дополнительное приращение радиуса беззазорного зацепления
ДД' изменяется согласно уравнению (52) по кривой 1 (рис. 86).
Если зубья сектора нарезаны так, что ДА? изменяется по
кривой 2, то полное приращение радиуса беззазорного зацепле-
ния АА?0 изменяется по кривой 3.
Однако может оказаться, что эксцентрицитет обоих концов
винтовой канавки червяка располагается в разных плоскостях,
получается разным по величине и даже может быть равным нулю
на одном из концов канавки червяка. Тогда при вращении чер-
вяка на его опорах биение будет только на одном конце канавки.
В этом случае приращение ДД' изменяется от нуля на одном конце
до максимального значения,
соответствующего эксцентри-
цитету q, на другом конце
канавки (кривая 4).
Исходя из рассмотренного
влияния производственных и
конструктивных факторов вы-
являются следующие усло-
вия, налагаемые на конструк-
цию винтовой передачи с цир-
кулирующими шариками при
изготовлении ее деталей:
1) ось нарезки зубьев сек-
тора относительно оси его
вала должна быть смещена
по направлению к зубьям
Рис. 86. Кривые изменения приращения
радиуса беззазорного зацепления зубча-
той пары при эксцентричном вращении
винта
сектора;
2) ось нарезки зубьев сектора должна располагаться точно
в плоскости, проходящей через середину среднего зуба сектора;
3) начальная поверхность зубьев рейки должна быть точно
параллельна оси ее винтовой канавки;
4) ось винтовой канавки червяка должна располагаться точно
по оси ее вращения на обеих опорах червяка.
Влияние износа и производственных погрешностей при изго-
товлении зубьев передачи. Выше было указано, что для получения
зазоров, увеличивающихся в обе стороны от середины зацепления,
зубья сектора или рейки делают разной толщины. Однако в за-
висимости от конструкции передачи, от износа или от того, на-
сколько точно изготовлены зубья сектора и рейки, их контакт
может происходить не профилями 4и 5 среднего зуба (см. рис. 87, а),
а профилями других зубьев, как, например, 4 и 7, 2 и 5 или 2
и 7, причем это может привести к получению совершенно непра-
вильной результирующей кривой зазоров в передаче.
На рис. 87, б—г показаны несколько примеров неправильного
зацепления передаточной пары.
На рис. 87, б зазоры As в передаче, соответствующие заштри-
хованной площади, изменяются совершенно неудовлетворительно.
9*
131
Они имеют особенно большую величину в середине зацепления,
резко уменьшаются в обе стороны от нее и значительно умень-
шаются далее до полного поворота вала сошки. Такое изменение
зазоров встречается в отдельных случаях эксплуатации.
На рис. 87, в зазоры изменяются также неудовлетворительно.
В середине они больше, чем справа и слева, а по концам зацеп-
ления они изменяются нормально, т. е. имеют большую величину,
чем в середине.
На рис. 87, г в середине зацепления и по обе стороны от нее
зазоры изменяются правильно с некоторым плавным увеличением
Рис. 87. Определение зазоров в зубчатой многопрофильной паре по про-
фильным составляющим
от середины, а по концам зацепления они уменьшаются и стано-
вятся значительно меньше, чем в середине.
Такое изменение зазоров является неправильным, и рулевой
механизм во всех трех случаях непригоден для работы на авто-
мобиле.
Изложенный выше метод измерения зазоров позволяет найти
те профили, которые нарушают правильное зацепление передаточ-
ной пары, и установить пути исправления.
Так, например, в передаче на рис. 87, б правильность зацеп-
ления нарушается профилями 3, 6, 1 и 8 зубьев сектора и рейки.
Для получения правильного изменения зазоров в передаче следует
уменьшить толщину обоих зубьев около среднего и обоих край-
них зубьев сектора и рейки, причем не с обеих стороны зубьев,
а только со стороны профилей 3, 6, 1 и 8 так, чтобы получились
штриховые кривые 3', 6', Г и 8'. Уменьшить толщину можно
и зубьев сектора, и рейки на общую величину, определяемую по
рис. 87, б: со стороны профилей 3 и 6 на величину Asx = 1,14—
— 0,54 = 0,60 мм и со стороны профилей 1 и 8 на величину As2 =
= 1,38 — 0,24 = 1,14 мм.
В передаче на рис. 87, в уменьшить толщину надо со стороны
профилей 3 и 6 обоих зубьев около среднего на величину Asi =
132
= 0,5 — 0,2 = 0,3 мм, а в передаче на рис. 87, г — со стороны
профилей 1 и 8 обоих крайних зубьев на величину As2 = 0,60 —
— 0,23 = 0,37 мм.
Кроме приведенных примеров с симметричным нарушением
зацепления возможны случаи асимметричного нарушения.
ТЕОРИЯ И РАСЧЕТ КРИВОШИПНОЙ ПЕРЕДАЧИ
Образование червяка и угол поворота вала сошки
Кривошипная передача образуется из цилиндрического червяка
и кривошипа с одним или двумя пальцами. Пальцы распола-
гаются в винтовой канавке червяка и перемещаются по дуге
окружности.
Основным принципиальным отличием рулевого механизма
с кривошипной передачей перед другими является то, что он
может быть сделан с любым, заранее заданным передаточным
числом, получаемым при нарезании червяка.
Так как червяк имеет цилиндрическую форму, то палец кри-
вошипа вследствие криволинейного своего перемещения (поло-
жения 0, 1, 2), отклоняясь от оси червяка, будет находиться
в канавке на разной глубине (рис. 88, а). Это обстоятельство
ограничивает величину угла поворота вала сошки. Некоторое
увеличение этого угла может быть получено смещением оси вала
кривошипа ближе к оси червяка так, чтобы палец при перемеще-
нии располагался по обе стороны этой оси. Наибольший угол
при этом получается тогда, когда стрелка f дуги движения пальца
делится осью червяка пополам. Это мероприятие только несколько
увеличивает угол поворота вала сошки. Полное решение этого
вопроса достигается применением двухпальцевого кривошипа.
В конструкции с однопальцевым кривошипом угол поворота вала
сошки ограничивается выходом пальца из зацепления с червяком.
Канавка такого червяка обычно не имеет выхода по концам, и
наибольший угол поворота вала сошки равен р'.
Пальцы двухпальцевого кривошипа располагаются через одну
или несколько винтовых канавок червяка, образуя между радиу-
сами определенный угол у. В такой конструкции контакт обоих
пальцев с витками червяка одинаковый, и поэтому износ паль-
цев меньше и срок службы рулевого механизма больше. Это
ошибочно считают основным преимуществом конструкции с двух-
пальцевым кривошипом перед конструкцией с однопальцевым
кривошипом. В действительности, основное преимущество заклю-
чается в возможности получения большого угла поворота криво-
шипа. В среднем положении кривошипа оба пальца соприка-
саются одной стороной с витками червяка до определенного угла
его поворота. При дальнейшем повороте червяка один палец
выходит из зацепления, а другой остается в зацеплении до ма-
133
ксимально возможного угла поворота кривошипа (3". Таким обра-
зом, в рулевом механизме с двухпальцевым кривошипом макси-
мально возможный угол поворота вала сошки
(Г = ₽' + у.
Образование винтовой линии червяка и угол ее наклона
При движении точки по дуге окружности, а не по образующей
цилиндрической поверхности червяка описываемая точкой вин-
товая линия получается с переменным углом наклона. Особенно
сильно изменяется угол наклона при переменном передаточном
числе. Величина угла наклона и его изменение по углу поворота
червяка имеют основное значение при проектировании передачи
и предопределяют обратимость и самоторможение червяка для
всех рулевых механизмов с кривошипной передачей.
Между тем этот важный вопрос образования винтовой линии
червяка при криволинейном движении точки освещался недо-
статочно.
Ниже устанавливается аналитическая зависимость между
конструктивными параметрами и приводится расчет передаточной
пары рулевого механизма этого типа.
На рис. 88, б показана схема перемещения точки, описывающей
винтовую линию при указанных условиях ее движения для опре-
деления угла наклона а0 винтовой линии червяка. Окружность С
радиуса г0 представляет собой среднее сечение червяка. По дуге ЕЕ
радиуса /?0 вокруг центра О t перемещается точка А (центр пальца
кривошипа).
В основу определения угла наклона винтовой линии червяка
положен дифференциальный метод. При этом движение точки А
складываается из двух движений: по дуге EF радиуса /?0 (по-
ложения Bi и 52) и по окружности С радиуса г0 [11].
При повороте червяка вправо или влево на угол dtp центр А
пальца кривошипа описывает на червяке участки винтовой ли-
нии А А , в одну сторону и АА2 — в другую.
Из бесконечно малых криволинейных и остроугольных тре-
угольников со сторонами dS и dL имеем
d.S, .
sin а0 = -^[sin у.
Дифференциалы дуг 5 и L
dS = Rod$ = RU-^ и dL = rod(p.
l<0
Подставляя полученные значения в последнее уравнение,
получим
sin а0 = —sin у. (53)
ГО1ГО
134
При повороте червяка угол
у = 90 — (а0 + Р).
Знак «—» в скобках соответствует повороту направо, знак
«+» — налево при левом направлении винтовой линии. Так как
sin у — cos (сс0 + р) = cos а() cos р ± sin а(| sin р,
то уравнение (53) получит следующий вид:
п
sin а0 = —Д- (cos а0 cos р ± sin a,, sin Р),
го1<л
откуда
135
С учетом выражения <р = р/ш получим следующее уравнение
угла наклона винтовой линии движения центра пальца криво-
шипа в зависимости от угла поворота червяка:
= + <54)
*0 cos JL 1<о
1со
Это уравнение действительно для любых значений входящих
в него членов.
На рис. 89 изображены кривые изменения углов наклона а
в зависимости от угла <р. Передаточное число рулевого механизма
постоянное.
Рис. 89. Кривые изменения углов наклона а, витка червяка,
радиусов зацепления R и толщины витка 6 червяка кривошип-
ной передачи
Цифрой 0 обозначена середина зацепления, или середина
червяка. Как видно, кривые изменения абсолютных величин
углов а несимметричны относительно середины червяка. Эта
особенность характерна для червяка кривошипной передачи
рулевого механизма.
Влияние взаимного расположения
червяка и кривошипа на зацепление
При изменяющемся угле наклона винтовой линии червяка
шаг по образующей цилиндрической поверхности червяка полу-
чается также переменным. Несимметричность кривой изменения
угла наклона винтовой линии червяка относительно его середины
указывает, что другое, например, перевернутое расположение
червяка относительно кривошипа или кривошипа относительно
червяка, должно вызвать изменение в зацеплении передаточной
пары.
136
В осуществленной передаче при неизменяемых величинах 7?0
г0 и а0 перевернутое расположение червяка или кривошипа
может вызвать прежде всего изменение в передаточном числе.
Из уравнения (54) имеем
'’«о = Vе cos р (ctg а0 ± tgp).
т о
На рис. 90 показаны кривые изменения угла наклона винто
вой линии червяка рулевого механизма с постоянным передаточ-
ным числом соответственно при нормальном (сх0 и /ю) и перевер-
нутом («6 и /(„) его положениях в картере механизма. Такое не-
соответствие может быть, если
нарезался червяк, устано-
вленный в патроне станка
другим концом.
Как видно, при перевер-
нутом расположении червяка
относительно кривошипа пе-
редаточное число полу-
чается переменным вместо
постоянного, заданного при
нарезании червяка.
При двухпальцевой кон-
струкции кривошипа пере-
вернутое положение червяка
совершенно нарушает заце-
Рис. 90. Кривые изменения угла наклона
витка и передаточного числа рулевого
механизма с кривошипной передачей при
прямом и перевернутом положениях
червяка
пление пальцев с червяком.
При этом угловой шаг изменяется и, следовательно, должно
быть переменным и расстояние между пальцами по углу
поворота червяка, а этого в действительности нет. Таким обра-
зом, в процессах конструирования и производства рулевого ме-
ханизма с кривошипной передачей необходимо строго соблюдать
следующие условия:
1) пальцевая фреза при нарезании червяка должна пере-
мещаться по той же дуге, что и палец кривошипа по червяку в кар-
тере рулевого механизма;
2) ось поворота фрезы при нарезании червяка совпадала
с осью вала кривошипа в картере;
3) расположение червяка относительно пальцевой фрезы при
нарезании должно быть в точном соответствии с его расположе-
нием в картере относительно кривошипа.
В случае нарушения этих условий при однопальцевой кон-
струкции кривошипа нарушается правильный контакт пальца
с витком червяка и передаточное число изменяется не так, как
при нарезании червяка; при двухпальцевой конструкции криво-
шипа полностью нарушается зацепление его пальцев с витками
червяка.
137
Определение параметров кривошипной передачи
Радиус зацепления (соприкосновения). Выше было рассмотрено
движение точки по винтовой линии червяка. В действительности
с витками червяка соприкасается палец кривошипа.
В этом случае радиусы его точек контакта с витками червяка
от оси вала кривошипа не только отличаются по величине от ра-
Рис. 91. Схемы для
определения радиусов зацепления и толщины витка
червяка кривошипной передачи
диуса до центра пальца, но изменяются в зависимости от угла
поворота червяка, как и углы наклона описываемых ими винто-
вых линий.
На рис. 91, а показана схема зацепления пальца кривошипа
с витками червяка для определения радиусов зацепления. На
этой схеме О — ось вала кривошипа; Ог — ось пальца кривошипа
радиусом гп; А и В — точки контакта пальца с витками червяка;
138
/?0 — радиус до центра пальца; тх и т2— касательные к вин-
товым линиям, описываемым точками Л и В и составляющие
с вертикалью углы а, и аа.
Радиусы зацепления (соприкосновения) и В2 определяются
из треугольников 00 гА и 00 J3:
Bl -2 = Rx — fn Ro--nR0 COS %•
Угол
X = 90 — p ± ax,
где ax — угол наклона винтовой линии, описываемой точкой
контакта пальца с витком;
Р — угол поворота вала кривошипа.
Подставляя это значение, уравнение радиусов зацепления
пальца кривошипа с витками червяка получим в следующем
виде:
/?1__2 = Rx = rn + Во - 2г„В0 sin П + а,). (55)
В этом уравнении знак «—» соответствует правому вращению,
а знак «+» — левому вращению червяка при левом направлении
винтовой линии.
Действительные углы наклона витка червяка. Подставляя
значение радиуса контакта пальца с витком Вх из уравнения (55)
в уравнение (54), получим
ctg ах =---7========J^======------------+ tg X. (56)
1/rn + Ro — sin + а Л cos
Решение этого уравнения представляет некоторые затрудне-
ния, так как определяемый угол ах входит в обе его части и при-
том в разных тригонометрических функциях. Вполне удовлетво-
рительные результаты дает метод приближенного решения, если
написать последнее уравнение в следующем виде:
А =---- ------- + sin В — ctg ах cos 6И •
J d + sin (₽+«х)
При решении этого уравнения принимаем угол ах близким
к среднему значению а0. Сначала задаем величину, несколько
большую среднего значения, и получаем некоторую величину Av
Задаваясь другим значением ах, меньшим среднего, при том же
угле р получаем другую разность Д2.
Значения ах должны быть такими, чтобы разность А в одном
случае была положительной, в другом — отрицательной и обе
близкие к нулю. Прямая, соединяющая полученные значения А,
отложенные по оси ординат, отсчет на оси абсцисс значение
угла ах, при котором разность А — 0. Такой расчет получается
сложным и трудоемким. Достаточно близкие к действительным
139
получаются углы наклона, определяемые по приближенной
формуле
ctg «л = - Л 9 Г°1<а . _=г- + tg ₽•
]/ гп + ^0 — 2rnR0 Sin (₽+«0 )
В скобках подкоренного выражения вместо определяемого
угла ах подставляется значение а0 — угла наклона винтовой
линии, описываемой центром пальца кривошипа. Решение по-
следнего уравнения затруднений не представляет, а разница
в значениях угла наклона ах, определяемых по точной и прибли-
женной формулам, получается в пределах нескольких угловых
секунд.
При определении угла наклона по формуле (56) возможны
неточности в подсчетах, которые могут исказить получаемые ре-
зультаты.
На рис. 89 изображены кривые изменения углов наклона витка
червяка механизма с постоянным передаточным числом. Кри-
вая <xt соответствует изменению угла наклона винтовой линии,
описываемой точкой касания пальца с правой стороной профиля
витка, и кривая <х2 — то же для левой стороны профиля витка
червяка. Обе кривые получаются при перемещении точек сопри-
косновения пальца кривошипа по наружной цилиндрической по-
верхности червяка.
На том же рис. 89 показаны кривая изменения радиуса Rt
соприкосновения пальца кривошипа с левой стороной профиля
канавки и кривая R2—с правой стороной.
Толщина витка червяка. Из расчета винта известно, что при
постоянных его радиусах с изменением угла наклона изменяется
и шаг нарезки.
В рассматриваемом случае угол наклона, а следовательно, и
линейный шаг изменяются. Шаг может изменяться только за
счет изменения толщины витка червяка [11]. За каждый оборот
червяка, т. е. при повороте его на угол 2л, вал кривошипа по-
вернется на угол pz. Поэтому каждое последующее положение
пальца при повороте кривошипа на угол р отстоит от предыдущего
на угол pz.
Этими двумя положениями пальца и предопределяется тол-
щина витка. На рис. 91, б изображена схема положения пальцев,
справа и слева от середины червяка, для определения толщины
витка.
Винтовые линии <Xj и <х2 витка червяка описываются на наруж-
ной его поверхности точками контакта с пальцем и имеют углы
наклона <хг и <х2.
Точкой О обозначена ось вала кривошипа, а точками Oj и
02 — положения пальца кривошипа, отстоящие одно от другого
на угол при повороте червяка на угол 2л.
140
Разделив дугу OtO2 пополам и соединив точки О, и 02 с О3
прямыми OiOs и О2О3, равными t, получим треугольники OtOO0
и 00ООа с углами при вершине О, равными
Проектируя прямые OtOs и О2О8 на нормали к витку, получим
треугольники OiBO3 и О2АО3, из которых имеем
Xi = t cos у t — t cos 0X; x2 = t cos Л2;
у2 = t cos 02.
Из треугольников и O2OO3 находим, что
t — 2R0 sin •
*
Углы X,x, X,2, Oj и 02 составляются из следующих углов:
2-i_2 = [3 + а2 + и 01-2 = Р + 04 + • (57)
Верхние знаки относятся к повороту направо, а нижние —
к повороту налево при левом направлении нарезки.
Две схемы для определения этих углов показаны внизу справа
и слева на рис. 91, б. С достаточной точностью можно считать,
что толщина витка
6=(Х + у) COS -1 — (4 + г2)
или
6 = t [cos К + cos 0] cos Я1^~Я2— (/4 + r2). (58)
Минимальное значение толщины витка 6 получается при ма-
ксимальных углах Л и 0, для которых функции косинусов полу-
чаются минимальными.
Из уравнений (57) находим, что максимальные значения
углов X и 0 получаются при повороте червяка налево при левом
направлении нарезки:
^2 = ₽ + а2 —^2 = Р + ai + -у--
Исходя из этого, а также из приведенной на рис. 91, б схемы
находим, что минимальная толщина витка получается на том
конце червяка, на котором направление наклона витка не совпа-
дает с направлением радиуса кривошипа.
Подставляя все полученные значения в уравнение (58), полу-
чим
6 = 2R0 sin-^- cos Я1 + Яа £cos (Р + а2 ± +
+ cos (р + 04 + — fa + г2).
Изменение толщины витка показано на рис. 89 кривой 6.
141
Диаметр пальца из конструктивных соображений и из условий
прочности не может быть выполнен малым, что ограничивает
выполнение передачи с малым угловым шагом pz, а следовательно,
и с большим передаточным числом /ю.
Это обстоятельство является основным недостатком конструк-
ции рулевого механизма с кривошипной передачей. Для получе-
ния большого передаточного числа необходимо увеличивать га-
баритные размеры рулевого механизма.
Рис. 92. Схемы для определения глубины и ширины
канавки червяка и рабочей высоты пальца кривошип-
ной передачи
Глубина и ширина канавки червяка. Пальцевая фреза при наре-
зании червяка перемещается по дуге круга, поэтому глубина
и ширина канавки получаются переменными. Особенно изменяются
они у червяка, с витками которого зацепляется двухпальцевый
кривошип. В такой конструкции каждый из пальцев при боль-
ших углах поворота в ту или другую сторону выходит из канавки
и в зацеплении остается другой палец. У такого червяка глубина
и ширина канавки изменяются от нуля на одном его конце до
максимального значения в середине и до нуля на другом конце.
Схема для определения глубины канавки червяка в зависи-
мости от угла его поворота изображена на рис. 92. Глубина и
ширина канавки h и S определяются соответственно из уравнений
h — |Z 4 — (У — cos ₽)2 — е„ (59)
S = 2 (r3 + h tg ф) =
= 2 (r3 + tg ф [ |/4 - - Z cos - е] j, (60)
где г2 — радиус наружной поверхности червяка;
К. — межосевое расстояние;
А?(| — радиус до центра пальцевой фрезы;
142
е — расстояние от оси червяка до плоскости, в которой
перемещается торец пальцевой фрезы при нарезании;
в зависимости от конструктивных особенностей пере-
дачи делается переменным;
г3 — радиус торца пальцевой фрезы;
ф — половина угла конуса пальцевой фрезы.
РАСЧЕТ РУЛЕВЫХ МЕХАНИЗМОВ
С ПЕРЕМЕННЫМ ПЕРЕДАТОЧНЫМ ЧИСЛОМ
Передаточное число рулевого механизма обеспечивает основ-
ные эксплуатационные качества рулевого управления. При вы-
боре передаточного числа рулевого механизма считалось, что оно
должно быть переменным и назначаться исходя из силовых воз-
действий, т. е. быть минимальным в середине, при прямом поло-
жении управляемых колес, и наибольшим при повернутом поло-
жении. Опыт отечественного автомобилестроения показал, что
передаточное число нужно выбирать из условий маневренности
и поворотливости автомобилей. Оно должно быть максимальным
при прямом положении управляемых колес, резко уменьшаться
в обе стороны от середины и далее быть постоянным или лучше
немного уменьшающимся до конца поворота в обе стороны [71.
Основным преимуществом рулевого механизма с резко умень-
шающимся передаточным числом является уменьшение угла по-
ворота рулевого колеса, способствующее облегчению управления.
Переменным передаточное число получается в большинстве
рулевых механизмов с винтовой передачей и предопределяется
исключительно ее конструкцией. В отдельных конструкциях
рулевых механизмов передаточное число делают переменным
преднамеренно путем применения искусственных конструктивных
и технологических приемов. К таким конструкциям относятся
рулевые механизмы с шестеренчатой, реечной, глобоидальной
и кривошипной передачами [11].
Рулевые механизмы с кривошипной передачей
В кривошипной передаче передаточное число делают постоян-
ным и переменным и резко уменьшающимся в обе стороны от
середины. Основными параметрами, необходимыми для расчета
кривошипной передачи с резко уменьшающимся передаточным
числом, являются угол наклона витка червяка и зависимость
между углами q> и р поворота рулевого вала и вала сошки.
Для определения угла наклона действительно уравнение (54),
в которое для различных углов поворота червяка передаточное
число берут из кривой его изменения. При расчете рулевого ме-
ханизма с резко уменьшающимся передаточным числом, имеющим
в передаче двухпальцевый кривошип, встречаются некоторые
трудности. На рис. 93 вверху показана схема зацепления двух-
143
пальцевого кривошипа с червяком, а внизу — кривая изменения
передаточного числа по углу поворота червяка.
В среднем положении пальцев кривошипа в точках переда-
точное число равно z’i и остается постоянным до поворота на
угол в обе стороны поворота червяка. При дальнейшем его
повороте на угол ф2 передаточное число резко уменьшается до /2.
На этих участках оно переменное и может изменяться по прямо-
линейному или криволинейному закону.
Рис. 93. Схема для расчета червяка кривошипной
передачи с переменным передаточным числом
От угла поворота червяка Ф, + ф2 и далее передаточное число
снова постоянно и равно /2. Это значение передаточного числа
может сохраниться на протяжении поворота червяка на угол
ф4 = 2ф3, после чего передаточное число снова изменяется так же,
как и на участках угла поворота ф2, но уже увеличиваясь от /2
До щ.
Такое изменение передаточного числа по концам червяка
должно быть при условии, если подходящий к концу червяка
палец кривошипа соприкасается с ним хотя бы в одной точке.
Если этот палец кривошипа вышел из зацепления раньше, чем
червяк повернется на угол фх + ф2 + 2ф3, то передаточное число
по концам червяка может быть постоянным и равным Z2.
Угол, составляемый радиусами двух кривошипов,
Т = 2 (fh+ р2 + рз).
144
Углам |3 соответствуют углы поворота червяка ср, связанные
с ними передаточными числами:
R Ф1 . О фз .
Фз
(2
где ix — некоторое среднее значение передаточного числа па
участках червяка с углом поворота <р2; ix имеет перемен-
ное значение от щ до /2.
Подставив значения |3, получим
т = + + (61)
\ *1 LX 12 /
Следует учесть, что 2(срх + ср2 + ср3) = п -360, где п — целое
положительное число (2—3).
Угол р2 определяется следующим путем. При передаточном
числе, изменяющемся по прямолинейному закону, угол Z наклона
этой прямой к оси абсцисс находят по уравнению
= = (62)
& dtp <р2 V ’
Определив значение с/ср из уравнения передаточного числа
dtp
= d[i и п°Дставив его в последнее уравнение, получим
(i *з __ dia
Фа
откуда
ар = (63)
Интегрируя последнее уравнение в пределах от щ до /2 при
переменном передаточном числе и повороте рулевого вала на
угол ср2, получим значение искомого угла
1п/2). (64)
Расстояние между пальцами кривошипа
W = 2J?0sin^,
где /?() — радиус перемещения пальцев кривошипа.
Рулевые механизмы с винтовой передачей
Передаточные числа рулевых механизмов с винтовой переда-
чей получаются постоянными и переменными.
Величина передаточного числа зависит от конструктивных
размеров передачи, а характер его изменения зависит от прин-
ципа действия, положенного в основу передаточной пары.
Ю М. И. Лысов 145
Винтовая передача с вильчатым рычагом (рис. 94, а). Кон-
струкция рулевого механизма с такой передачей показана на
рис. 13, в.
При повороте червяка на угол <р гайка, имеющая резьбу с ша-
гом t, переместится на величину
С t
Если расстояние от оси червяка до вала рычага или, более
точно, до оси шипа или сухаря гайки равно К, то угол поворота
последнего р определяется из выражения
tg₽=|-
Из двух приведенных выражений найдем
Дифференцируя последнее уравнение по р, получим
dtp _ . __ 2л/( 1 .
dp t cos2 P
/2<р2
4л3№ ’
Учитывая, что
—Vr = 1 + Ш2 Р = 1 + -
COS2 Р °
получим угловое передаточное число
. ___________________ 2л/( . /ср2
~‘
Винтовая передача с кривошипом (рис. 94, б). Конструкция
рулевого механизма с такой передачей показана на рис. 13, а.
При повороте червяка гайка перемещается по направляющим
картера вдоль оси винта. В то же время ролик пальца кривошипа
146
перемещается по дуге окружности радиуса, равного радиусу кри-
вошипа. В результате ролик кривошипа перемещается вдоль паза
гайки. Если шаг винта равен t, то при повороте червяка на угол <р
гайка переместится вдоль его оси на расстояние
Этому же расстоянию будет равняться и проекция дуги пальца
кривошипа, вал которого повернулся при этом на угол |3:
S = 7? sin р.
Таким образом, между углами <р и р получается зависимость
Дифференцируя последнее уравнение по р, получаем уравнение
углового передаточного числа
Учитывая, что
cos р = |' 1 — sin2P = 1 — ,
окончательно получим
Я2л/? \2 2
~г) •
Винтовая передача с качающимся рулевым валом (рис. 95, а).
При повороте рулевого вала на угол ср гайка переместится по винту
имеющему шаг t, от начального своего положения на расстояние
Если расстояние между центром верхней опоры рулевого вала
и осью вала кривошипа равно L, то при радиусе кривошипа 7?
длина рулевого вала от верхней опоры до центра гайки
(N ± S)2 = R2 + L2 — 2/?L cos (у ± Р),
где N = ]' L2 — R2 — начальная длина рулевого вала при пер-
пендикулярном его положении относи-
тельно кривошипа.
Подставляя значения S и L, получим
cos (у ± Р) =
2Т?2 +2Т y-£2_R2_
л '
ж
2<РД
2л )
10*
147
Продифференцировав последнее уравнение и решив относи-
dtp
телыю получим
dq> _ . _________sin (у ± р)_____
— “ ~~ / уL^~ 7?2 Ф / t \ 2
2л RL ± RL \ 2л /
В этих уравнениях верхние знаки относятся к правому вра-
щению рулевого вала при повороте автомобиля направо, а нижние
знаки — к левому вращению при повороте автомобиля налево.
Винтовая передача с поворачивающейся гайкой (рис. 95, б).
В этой передаче на винт, установленный на двух опорах, навернута
гайка. С одной ее стороны сделано гнездо, в которое входит шаро-
вой палец кривошипа. При повороте винта с шагом t на угол ф
гайка переместилась бы по винту вдоль его оси на расстояние
S = ср. В рассматриваемой конструкции гайка связана шар-
нирно с шаровым пальцем кривошипа. Так как палец перемещается
по дуге окружности, то он увлекает за собой и гайку. Поэтому гайка
не только движется поступательно вдоль винта, но и поворачивается
около его оси на угол а в одну и ту же сторону от среднего поло-
жения, увеличивая и уменьшая ход S по винту па величину AS,
148
в связи с чем результирующие ходы равны и S2. При этих углах
поворота винта осевое перемещение гайки
Si_2 = (<р ± а).
Но перемещение гайки
S1-2 = R sin р,
поэтому
R sin Р = (<р ± а).
Угол а составляется из разности углов: постоянного 6 и пере-
менного у, которые согласно приведенным на рис. 95, б обо-
значениям входят в следу-
ющие зависимости:
tPV= flc°sP-.K
ь * п
Таким образом, можно
записать
Rsinp = -^ [<р ± (6 — у)]-
Продифференцировав
Рис. 96. Схема винтовой передачи с зубча-
той парой
последнее уравнение и ре-
шив его относительно dip,
получим
d([) = R cos Р dp ± dy.
(65)
Продифференцировав выражение для tg у, находим из него
dy — — cos2 у sin Р б/р.
Заменив cos2 у через тангенс, получим
,_______________________ nR sin р dp
аХ—~ z^ + tRcosp —Д)2 ’
Подставив значение dy в уравнение (65) и поделив его на dp,
получим уравнение углового передаточного числа
dtp . 2nR а _ nR sin Р
;,Х== == - COS Р + „ —5-------(ЬЬ)
dp “ t 1 zi2 (R cos р — Л)2 ' '
Винтовая передача с зубчатой парой (рис. 96). При повороте
рулевого вала на угол ср гайка, имеющая резьбу с шагом t, пере-
местится вдоль винта на расстояние
" 360 <р-
149
На это же расстояние переместится и каждая точка гайки, а
следовательно, и зубья, выполненные на одной ее стороне. Если
радиус начальной образующей сектора равняется До, то длина
дуги при его повороте
2л7?0
360
будет равна перемещению гайки Sj.
Таким образом, между углами поворота рулевого вала ср и
вала сектора р получаем зависимость
Рис. 97. Схема для определения на-
чального радиуса зацепления зубчатой
пары винтовой передачи
2 о
Дифференцируя последнее
уравнение по р, получим ура-
внение углового передаточного
числа
= = (67)
Как видим, при постоянных
значениях радиуса зацепле-
ния 7? о и шага нарезки винта t
эта передача отличается посто-
янством передаточного числа по
углу поворота рулевого вала.
Выше было указано, что для
регулирования зазоров в зацеп-
лении этой передачи зубья сек-
тора делают наклонными отно-
сительно оси вала сошки и более
короткими, чем зубья гайки.
Вследствие наклона зубьев ра-
диус До получается неопреде-
ленным. Примем, что усилие
действующее между зубьями,
приложено в середине длины зубьев сектора, равной Ь.
На рис. 97 буквами АА обозначена ось вала сектора; 0 — угол
наклона зубьев сектора и гайки; К — расстояние между осью
рулевого вала и осью вала сектора (по картеру) и h — расстояние
от оси гайки до начальной образующей ее зубьев.
Рулевой механизм обычно регулируют с некоторым предвари-
тельным натягом передаточной пары. При такой регулировке
неизбежно получается небольшая деформация червяка, попереч-
ная жесткость которого недостаточная.
Если в свободном состоянии ось гайки проходит через точку Ог,
то при деформации червяка она переместится в положение О.
150
Начальный радиус сектора
7?0 = К — (h — с) cos 0 + S tg О,
где S — перемещение сектора вдоль оси вала, при котором полу-
чается предварительный натяг передаточной пары;
с — деформация червяка от предварительного натяга.
Винтовая передача с двумя полугайками и двуплечим рычагом
(рис. 98). При повороте рулевого вала на угол ф одна полугайка
(например, правая) с шагом резьбы t переместится на расстояние
5 = ~
2 л
При этом перемещении центр ролика
правого плеча рычага опустится на
то же расстояние
S - [sin 0 + sin (Р — 0) ],
где 0 — начальный угол отклонения
рычагов при нейтральном их
положении.
Решив оба уравнения совместно,
получим зависимость между углами
поворота рулевого вала ф и вала сош-
ки 0:
Рис. 98. Схема винтовой пе-
редачи с двумя полугайками
и двуплечим рычагом
Ф = [sin 0 -J- sin (р — 0)].
Дифференцируя последнее уравне-
ние по р, получим уравнение углового передаточного числа
dtp - 2nR ,п пч
= —cos(₽-0).
(68)
При угле 0 = 0 уравнение принимает тот же вид, что и в пере-
даче с кривошипом, т. е.
/и= COS0.
Сравнение различных винтовых передач. На рис. 99 показаны
кривые изменения передаточного числа рулевых механизмов для
винтовой передачи всех шести рассмотренных видов. Размеры для
подсчета приняты одинаковыми (в мм): R = 100; К = 90; t = 20;
L = 720; п = 50. Угол 0 = 10°.
Как следует из кривых, характер изменения передаточного
числа винтовой передачи самый разнообразный; постоянный,
увеличивающийся по симметричной кривой; уменьшающийся так-
же по симметричной кривой; уменьшающийся по несимметричной
кривой и зависящий только от конструкции передачи, т. е. не
отвечает указанным выше требованиям.
151
Рулевые механизмы с винтовой передачей специальных кон-
струкций. Кроме выпускаемых винтовых передач имеется ряд
запатентованных передач с заранее заданным переменным переда-
точным числом.
В этом отношении заслуживает внимания предложение вы-
полнить переменное передаточное число в рулевом механизме с вин-
товой передачей и двумя пальцами на гайке, входящими в две
наклоненные прорези фланца вала сошки1 (рис. 100, а).
so w зо го ю о ю го зо w so
Рис. 99. Кривые изменения передаточного числа рулевых механизмов с вин-
товой передачей всех видов:
1 — с вильчатым рычагом; 2 — с кривошипом; 3 — с качающимся рулевым валом; 4 —
с поворачивающейся гайкой; 5 — с зубчатой парой; 6 — с двумя полу гайками и двупле-
чим рычагом
При повороте рулевого вала на угол ф гайка переместится
вдоль винта на расстояние
При начальном угле 2f}0 положения прорезей на фланце и
расположении пальцев на гайке на расстоянии А от оси вала сошки
вал сошки повернется на угол р. Тогда перемещение гайки вдоль
винта
S = A [tg ₽0 — tg (₽0 — ₽)].
Таким образом,
= A [tg₽0 — tg(₽0 — ₽)].
1 Австралийский патент кл. 95.7 № 229098 от 27.06.60 г.
152
Обозначая A = k, получим
Ф = k tg Po — k tg (00 — p).
Дифференцируя это выражение ср по ₽, получим передаточное
число
. ______ dtp _ k 2 л А
l(i> dp cos2 (p0 — P) t cos2 (p(, — P)
(69)
На рис. 100, б показаны кривые изменения основных параме-
тров этой передачи. Начальный угол ро вильчатого рычага принят
Рис. 100. Винтовая передача с двухвильчатым кривошипом
и двумя пальцами на гайке
наибольшим и равным 55°. Кривые изменения передаточного числа
Д в зависимости от угла поворота вала сошки р даны при раз-
личных постоянных коэффициентах k = 6, 8 и 10. Для сопостав-
ления приведена кривая изменения передаточного числа ia в за-
висимости от угла поворота винта ф при k = 10.
Как видно из кривых, в передаче рассматриваемой конструкции
действительно можно получить резко уменьшающееся передаточ-
153
ное число, изменяющееся в 3 раза от = 18-:-30 в среднем по-
ложении до ia = 6ч-10 при максимальном повороте колес. В этом
отношении винтовая передача с двумя вильчатыми рычагами,
казалось бы, заслуживает внимания, однако конструкция чрезвы-
чайно сложная. Сложность конструкции вызывается следующим:
а) гайка винтовой пары должна иметь направляющее устрой-
ство для ее перемещения строго поступательно вдоль оси винта;
б) пальцы, зацепляющиеся с вильчатыми рычагами, должны
иметь возможность вращаться на подшипниках, установленных
в гайке;
щимся радиусом зацепления зубьев сектора
в) трудно осуществить регулировку зазоров между каждым
пальцем и вилкой рычага;
г) зазоры в сопряжении пальцев с вилками рычагов должны
изменяться от нуля в середине до конечных значений при повороте
в обе стороны.
Кроме того, при большом начальном угле ро, необходимом
для резкого уменьшения передаточного числа, габаритные размеры
рулевого механизма получаются достаточно большими.
Таким образом, конструкция рулевого механизма с винтовой
передачей и двумя вильчатыми рычагами, зацепляющимися с двумя
вращающимися пальцами, является непригодной.
В рулевом механизме другой конструкции с винтовой переда-
чей, циркулирующими шариками и зубчатой парой между гай-
кой и валом сошки переменное передаточное число получается
в результате уменьшения радиуса зацепления зубьев сектора
(рис. 101, а).
В этой передаче средний зуб сектора имеет наибольший радиус
зацепления /?0, поэтому передаточное число ia в середине полу-
чается наибольшим и равным 16,7 (рис. 101, б). Радиус зацепления
соседних со средним и крайних зубьев уменьшается, поэтому пере-
даточное число плавно уменьшается до 11,5 (сплошная кривая)
при повороте рулевого колеса на угол <р = 470°. В старой кон-
154
струкции передаточное число было постоянным, равным 18,2
(штриховая линия), при угле поворота рулевого колеса на угол
<р = 675°. Уменьшение угла поворота рулевого колеса достигнуто
не только вследствие переменного передаточного числа, но и умень-
шения величины передаточного числа в середине. Средний зуб
сектора получается по форме близким к нормальному. Форма
соседних со средним зубьев, расположенных па участках с наи-
большим падением передаточного числа, получается чрезвычайно
искаженной (см. рис. 101, о). Передаточное число при повернутых
колесах в крайнее положение в 1,48 раза меньше, чем при прямом
их состоянии. Скорость изменения передаточного числа, характе-
ризующая также и скорость поворота управляемых колес, обо-
значена коэффициентом /С, изменение которого приведено на
рис. 101, б.
Из приведенной кривой передаточного числа видно, что наи-
более резкое его уменьшение получается в интервале угла 270—
400°, и далее он остается постоянным до конца поворота, т. е.
до угла 475°, и является недостаточным. Наиболее резкое умень-
шение желательно иметь и при малых углах поворота рулевого
колеса, но это в данном случае не наблюдается. Кроме недоста-
точной скорости уменьшения передаточного числа и большой
сложности изготовления зубьев большие трудности возникают
еще и в обеспечении способа регулирования зазоров и их компен-
сации при износе. Исходя из сказанного сколько-нибудь широ-
кого распространения такая конструкция рулевого механизма
получить не может.
Рулевой механизм с реечной передачей
Переменное передаточное число реечной передачи достигается
с помощью шестерни, эксцентрично посаженной относительно
рулевого вала (рис. 102). Цилиндрическая шестерня 3 и зацепля-
ющаяся с ней рейка 1 заключены в картере 2. Вся передача удер-
живается на выступающем конце рулевого вала 4. Ось этого конца
вала, а следовательно, и ось шестерни 3 смещены относительно
оси вала 4 на некоторую величину е. Рулевой механизм крепится
к раме автомобиля на скользящей опоре 5, в которой распола-
гается рулевой вал 4.
Таким образом, ось шестерни 3 перемещается относительно
оси вала 4 по окружности радиуса е, вследствие чего радиус
зацепления г рейки меняется от гг — е до rL + е, где rs — началь-
ный радиус шестерни. Если передаточное число всей передачи при
совпадающих осях шестерни и рулевого вала равно tw, то при
эксцентрично расположенной оси оно изменяется от /Ш1 — ia
Г1 е
Д° 4,2 — 4» ~ тдг •
Г1 г,:
В зависимости от того, как располагается эксцентрицитет ше-
стерни относительно оси рулевого вала, передаточное число будет
155
либо увеличиваться, либо уменьшаться. Принимая, что шестерня
и рейка на рис. 102 показаны в среднем положении, радиус за-
цепления г получается наибольшим, в связи с чем передаточное
число в этом среднем положении получается наименьшим.
Рис. 102. Схема реечной передачи рулевого механизма с переменным пере-
даточным числом
Рулевой механизм с глобоидальной передачей
В рулевом механизме с глобоидальным червяком зацепляется
ролик, имеющий один, два и три гребня. Выше было установлено,
что угол поворота вала сошки с одногребневым роликом ограни-
чен по технологическим условиям. Значительно больший угол
поворота вала сошки получается при зацеплении червяка с двух-
и трехгребневым роликом. Кроме того, одногребневый ролик имеет
только две рабочие поверхности, поэтому изнашивается больше,
чем двух- и трехгребневый ролики. Однако эти преимущества полу-
чаются в передаче с постоянным передаточным числом, но могут
быть сделаны попытки применить двух- и трехгребневый ролики
в передаче с глобоидальным червяком, имеющей резко уменьша-
ющееся передаточное число.
При зацеплении глобоидального червяка с двух- и трехгреб-
невым роликами предполагается, что витки червяка соприкасаются
с внутренними поверхностями лунки двухгребневого ролика,
а канавки червяка — со средним гребнем трехгребневого ролика.
В действительности в процессе поворота соприкосновение витка
глобоидального червяка с гребнями ролика меняется, и точка их
касания переходит с одного витка червяка на другой и с одного
гребня ролика на другой.
Такой порядок соприкосновения не имеет значения для пере-
дачи с постоянным передаточным числом.
Переменное передаточное число в глобоидальных передачах
можно получить только с помощью специальной нарезки червяка.
156
Для конструкции рулевого механизма с переменным передаточным
числом и особенно с рекомендуемым резко уменьшающимся за-
коном его изменения (кривая 1 на рис. 103) при переходе точек
соприкосновения с одной пары рабочих поверхностей на другую
резко меняется и фактическое изменение передаточного числа.
А В
Рис. 103. Кривые изме-
нения передаточного
числа с повой нарез-
кой глобоидального
червяка при зацепле-
нии с одногребневым,
двухгребневым и трех-
гребневым роликами
Соприкосновение глобоидального червяка с трехгребневым
роликом начинается в точке А. При повороте червяка на угол q1,
точка касания переходит в точку А±. В этом положении рабочие
поверхности выходят из соприкосновения, и в работу вступает
другая пара рабочих поверхностей, соприкасающихся в точке В.
При повороте червяка дополнительно еще на угол <р2 точка ка-
сания переходит в точку В1. Таким образом, при правильной кон-
структивной схеме передачи наружная рабочая поверхность трех-
гребневого ролика, отстоящая от отработавшей поверхности сред-
него гребня на величину шага t червяка, соприкасается с участком
червяка уже отработавшим с внутренней рабочей поверх-
ностью среднего гребня ролика на участке от точки А до точки А г.
157
Средний гребень ролика при повороте червяка на угол <рх работает
на участке витка с передаточным числом от iL до /2. Наружная
рабочая поверхность находится в соприкосновении с витком на
участке BAL при повороте червяка на угол ipa.
Передаточное число рулевого механизма меняется следующим
образом. От максимального в середине, т. е. в точке А, равного /х,
оно резко уменьшается, доходя в точке А до величины /2 при
повороте червяка на угол <рх (кривая 2). Далее соприкосновение
профилей в точке А± кончается, и в работу вступают другие про-
фили, касающиеся в точке В. Передаточное число в этой точке
равно 13 и несколько больше, чем в точке Alt и далее оно увели-
чивается до максимального, равного iL, и остается таким на всем
среднем участке червяка. С этим участком соприкасается наруж-
ный гребень ролика, и передаточное число уменьшается до зна-
чения г4 в точке Bt при повороте червяка на угол <рх + ср2 (кри-
вая 2). Такой характер изменения передаточного числа получается
при повороте червяка направо и налево.
Как видно, передаточное число рулевого механизма в передаче
с трехгребневым роликом искажается и не отвечает заранее задан-
ному, как это показано на кривой 2. Оно искажается и при зацеп-
лении с двухгребневым роликом.
Кроме передаточного числа в передаче рулевого механизма
с двух- и трехгребневыми роликами нарушается и процесс за-
цепления.
Линейный шаг t по образующей глобоидального червяка пе-
редачи с резко уменьшающимся передаточным числом (кривая /)
резко увеличивается от середины и изменяется обратно пропор-
ционально изменению передаточного числа по уравнению
dt = =
так, как это показано кривой 3.
Двух- и трехгребневый ролики имеют общую длину по обра-
зующей соответственно /2 — 1,5/ и t3 = 2,5/ во всех положениях
относительно червяка. Таким образом, шаг червяка / по обра-
зующей получается переменным, а у зацепляющегося с ним ро-
лика — постоянный и равный /2 и /3.
Вследствие сказанного их зацепление нарушается.
В одном из механизмов с глобоидальной передачей и пере-
менным передаточным числом конструкции Бишопа, показанной
на рис. 104, а, два широко расставленных ролика при прямом по-
ложении управляемых колес соприкасаются своими внутренними
поверхностями с концевыми витками червяка [14]. При повороте
червяка примерно на 180° один из роликов выходит из зацепления
и в соприкосновении с витком червяка остается другой ролик,
который при этом соприкасается наружной своей поверхностью.
Передаточное число рулевого механизма этой конструкции
изменяется так, что в нейтральном положении оно имеет наиболь-
158
шее значение, а наименьшие и равные между собой — в крайних
положениях управляемых колес (рис. 104, б).
Такая передача представляет интерес, если основные ее эле-
менты конструктивно выполнены правильно.
В данном случае ось роликов располагается под некоторым
углом относительно оси червяка, в связи с чем оба ролика, будучи
широко расставленными, находятся на большом расстоянии от
Рис. 104. Рулевой механизм с глобоидальной передачей
и двумя широко расставленными роликами
осевой плоскости червяка, и необходимого при этом одновремен-
ного их соприкосновения с витками червяка не происходит.
Исходя из сказанного рулевой механизм с двумя широко рас-
ставленными роликами, сидящими на одной оси, выполнить нельзя.
Правильное соприкосновение роликов получается тогда, когда
точки их соприкосновения располагаются в одной плоскости,
параллельной оси червяка. Такое зацепление можно осуществить
при условии, если оба ролика будут вращаться на двух разных
осях, расположенных под одним углом наклона к оси червяка
или вала сошки. Такие же условия правильного зацепления полу-
чаются и в более простой конструкции передачи с одногребневым
роликом (рис. 105) или с вращающимся пальцем, расположенным
159
по радиусу образующей червяка (см. рис. 23, б) [11]. Кроме кон-
структивного различия конструкции с двумя широко расставлен-
ными роликами или с одним в середине принципиально разли-
чаются по основному признаку — переменному передаточному
числу.
В первом случае максимальное передаточное число червяка
должно быть выполнено по его концам и минимальное — в се-
редине. В конструкции с одногребневым роликом или пальцем
максимальное передаточное число должно быть в середине чер-
вяка и минимальное — по концам.
Рис. 105. Рулевой механизм с глобоидальным червяком
и одногребневым роликом
Известно, что ролики в той и другой конструкциях устанав-
ливаются под постоянным углом, а угол наклона глобоидального
червяка изменяется. Значительно изменяется и угол наклона
витка червяка при переменном передаточном числе в зависимости
от того, в какой части червяка получаются максимальные и ми-
нимальные значения передаточного числа.
Очевидно, что соотношение между переменным углом наклона
витка червяка и постоянным углом наклона ролика может быть
критерием для оценки совершенства конструкции передачи. Угол
наклона винтовой линии глобоидального червяка определяется
по уравнению (35).
Для сопоставления и анализа конструкций с различным вы-
полнением глобоидальной передачи принимаем, что передаточное
число рулевого механизма изменяется по одной и той же кривой 1
(см. рис. 103). При этом передаточное число червяка при разном
выполнении передачи будет различным.
Наибольшее передаточное число червяк, зацепляющийся с дву-
мя широко расставленными роликами, имеет' по концам, а наи-
меньшее — в середине; в передаче с одногребневым роликом или
160
с вращающимся пальцем наибольшее передаточное число червяк
имеет в середине, а наименьшее — по концам.
Для сопоставления указанных конструкций передачи необ-
ходимо, кроме того, чтобы соприкосновение рабочих поверхностей
происходило в осевой плоскости червяка.
В связи с тем, что кон-
струкция рулевого механиз-
ма, показанная на рис.104, о,
неработоспособна, будем ана-
лизировать конструкцию с
широко расставленными ро-
ликами, установленными на
разных осях, и считать, что
оба ролика располагаются
в осевой плоскости червяка и
одновременно соприкасаются
с концевыми его витками.
Рис. 106. Передаточные числа глобоидаль-
ных передач
Правильная работа передаточной пары получается тогда,
когда перекос рабочих поверхностей, а следовательно, и разность
в углах наклона ролика и витка червяка получаются наимень-
шими, а взаимное их расположение должно быть таким, чтобы
было обеспечено наиболее правильное их соприкосновение. Эти
Рис. 107. Угол наклона винтовой линии
глобоидальных червяков различных
переда ч
условия достигаются в кон-
струкциях с одногребневым
роликом (см. рис. 105) или
с вращающимся пальцем, рас-
положенным по радиусу обра-
зующей червяка (см. рис. 23,6).
Учитывая, что зацепляю-
щийся с витком червяка ролик
устанавливается под постоян-
ным углом, сравнительную
оценку конструкций рулевых
механизмов с глобоидальной
передачей! можно произвести по
перекосу их поверхностей, т. е.
по изменению угла наклона вит-
ка червяка с различным вы-
полнением передаточного числа.
Исходя из этого условия на рис. 106 показаны кривые изме-
нения передаточного числа таких передач, а на рис. 107 — соот-
ветствующие им кривые изменения угла наклона витка глобои-
дального червяка с различным его выполнением: 1 — с постоянным
передаточным числом; 2 и 3 — с переменным передаточным числом.
В первом случае с червяком может зацепляться одногребневый
или двухгребневый ролик, во втором случае — сдвоенный ролик
(по типу передачи на рис. 104), соприкасающийся с концевыми
витками червяка. В третьем случае с витком червяка зацепляется
11 М. И. Лысов
161
одногребневый ролик или вращающийся палец (см. рис. 105 или
23, б).
В первом случае разность в углах наклона витка червяка
Дах = 4°, во втором случае Ди2 = 10° 50' и в третьем случае
Ди3 = 2° 44'. При одном и том же угле поворота вала сошки соот-
ветствующие углы поворота червяка = 720°; ф2 = 540° и
Ф3 - 550°.
Вместе с этим замечаем, что в середине зацепления, происхо-
дящего в середине червяка в конструкции с одногребневым ро-
ликом, угол наклона витка получается наименьшим. Это способ-
ствует большей сопротивляемости рулевого механизма передаче
обратных ударов на рулевое колесо.
В связи с тем, что при резко уменьшающемся передаточном
числе, изменяющемся по кривой is, разность в углах наклона
наименьшая, приведенный характер его изменения следует считать
наиболее правильным.
Как видно, резко уменьшающееся передаточное число с любым
его изменением по углу поворота рулевого колеса наиболее успешно
осуществляется в рулевом механизме с кривошипной передачей.
Изготовление ее вполне возможно, и конструктивно она остается
столь же простой, как и при других изменениях передаточного
числа.
Соприкосновение пальца с витком червяка происходит по
линии, и правильность их контакта не нарушается с изменением
передаточного числа и угла наклона витка.
Глава V!
РАСЧЕТ УСИЛИТЕЛЕЙ РУЛЕВОГО УПРАВЛЕНИЯ
Основным назначением усилителя является облегчение труда
водителя. Кроме того, усилитель может воспринимать обратные
удары, передающиеся от дороги, и сохранять направление дви-
жения автомобиля при наезде на неровность одним из колес пе-
редней оси или разрыве шины. Возникающее при этом амортизи-
Рис. 108. Расчетные элементы усилителя
рующее действие усилителя объясняется тем, что передающаяся
от колес сила включает усилитель и он противодействует этой
силе.
В данной главе излагаются основные вопросы расчета по вы-
бору конструктивных размеров элементов усилителя рассма-
триваются рабочие процессы, происходящие в них, устанавли-
ваются пути правильного конструирования и выбора схемы уси-
лителя.
Одна из расчетных схем усилителей рулевого управления по-
казана на рис. 108. Расчету подвергаются силовой цилиндр 1,
распределитель 2, центрирующий элемент 3 и реактивное устрой-
ство 4.
ОПРЕДЕЛЕНИЕ РАЗМЕРОВ СИЛОВОГО ЦИЛИНДРА
Основными параметрами, характеризующими действие уси-
лителя, являются приведенное к рулевому колесу усилие
Ри = pFi -=-~ (D2- d2) pi = tn (D2 — d2) = Plt - P (70)
11
163
и показатель эффективности действия усилителя
о _ Рх _ Рк _ 1
-Р Рк~Ри “ l~k ’
где Dud — диаметры силового цилиндра и штока поршня;
р — результирующее давление в силовом цилиндре,
Рис. 109. Кривые изменения усилия Ри
в зависимости от диаметра силового ци-
линдра D и коэффициента т
в напорной магистрали;
i — передаточное число
от рулевого колеса
до силового цилин-
дра;
Рк — усилие, прилагае-
мое к рулевому ко-
лесу при работе без
усилителя и харак-
теризующее сопро-
тивление колес по-
вороту;
Р — усилие, прилагае-
мое к рулевому ко-
лесу при работе с
усилителем;
т и k — коэффициенты;
сх . , Р и
т = -Трг, k =
На рис. 109 изображены
кривые усилия Ри, действую-
щего от усилителя в зависи-
мости от диаметра силового
цилиндра при различных ко-
эффициентах пг, построенные по уравнению (70).
Коэффициент т может быть известной величиной. Диаметр D
силового цилиндра выбирается в зависимости от необходимой
величины усилия Ри. При этом в зависимости от типа или назна-
чения автомобиля усилитель или полностью преодолевает сопро-
тивление колес повороту, или только часть этого сопротивления.
РАСЧЕТ ЦЕНТРИРУЮЩЕГО ЭЛЕМЕНТА
Одним из недостатков усилителя как гидравлического, так и
пневматического является его склонность легко включаться при
воздействии на него малых сил, возникающих во время движения
управляемых колес по неровной дороге. Обратное включение
гидравлического усилителя сопровождается колебаниями управ-
ляемых колес и «рысканием» автомобиля из стороны в сторону.
При установке пневматического усилителя происходит виляние
164
колес, передача обратных ударов на рулевое колесо и большой
непроизводительный расход воздуха.
Для того чтобы затруднить обратное включение усилителя,
в его систему вводят центрирующий элемент гидравлического
или пружинного типа. В последнем случае применяется одна или
несколько предварительно сжатых пружин. В отдельных кон-
струкциях в качестве центрирующей силы используется давление
рабочей жидкости, которое, воздействуя на реактивные элементы,
создает центрирующую силу.
В пределах тех сил, которым сопротивляются центрирующие
силы, усилитель не включается, и рулевое управление работает
как обычное, чем определяется одно из важнейших свойств ру-
левого управления — сохранение устойчивости движения авто-
мобиля по прямой дороге и особенно на повышенных скоростях.
Для сохранения самовозврата управляемых колес центрирующее
усилие по величине должно быть немного больше величины обрат-
ного трения рулевого механизма, приведенного к тяге распреде-
лителя.
На рис. НО, а изображена схема сил, действующих на рычаж-
ную систему одной из наиболее сложных для расчета конструкций
усилителей.
Из уравнения равновесия системы сил имеем
Та = Ua + Sb — Q (b + с), (71)
где сила Т = РКЦ
сила U = Fpx,
сила Q — сопротивление центрирующего устройства, при-
веденное к тяге распределительного органа;
сила S = (2 Рп + S Fi + 2 Pxf)-~- — сопротивление рас-
пределителя включению;
2 Рп — результирующая сила возвратных пружин и
клапанов;
2 — сумма сил трения;
S Pxf = Pofi + (/2 — Л) Рх ~ результирующая сила дав-
ления рабочей среды;
/1 и /2 — площади впускного и реактивного клапанов;
р0 и рх— давление в напорной магистрали и в силовом
цилиндре;
m и п — плечи коромысла;
F — площадь поршня.
Подставив в уравнение (71) значения указанных сил, находим
давление рх в силовом цилиндре.
На рис. ПО, а показаны кривые изменения давления рх и
показателя эффективности действия Э в зависимости от прилагае-
мого к рулевому колесу усилия Рк при различных силах Р =
= S Q (1 препятствующих включению распредели-
сь
теля. При этом на оси абсцисс выявляется усилие при котором
усилитель включается в действие.
График на рис. ПО, а позволяет выбрать наивыгоднейшие зна-
чения основных параметров для каждого рассматриваемого случая.
В процессе включения распределителя центрирующее уси-
лие Q изменяется и в зависимости от жесткости пружины и его
Рис. ПО. Расчет центрирую-
щего элемента пневматиче-
ского усилителя:
а — кривые изменения давле-
ния рх в силовом цилиндре и
показателя эффективности Э
в зависимости от сопротивления
колес повороту Рк при различ-
ных сопротивлениях R включе-
ния распределителя; б — харак-
теристика центрирующих пру-
жин
изменение AQ может быть достаточно большим, как это и видно
из рис. ПО, б. Для получения наибольшей плавности включения
распределителя необходимо, чтобы при открытии впускного кла-
пана или перемещении золотника приращение центрирующего
усилия было наименьшим.
Приращение усилия центрирующей пружины при открытии
впускного клапана определяется исходя из хода клапана или
золотника и деформации пружины:
где /гх — зазор между толкателем и впускным клапаном;
h2 — величина открытия впускного клапана.
По величине As и характеристике пружины определяется при-
ращение усилия AQ.
166
Так, например, заданному ходу штока As по характеристике
пружины 1 (см. рис. НО, б) соответствует приращение усилия
AQX. Как видно, это приращение получается очень большим, и
такая характеристика пружины неудовлетворительна. Для пру-
жины 2 с более пологой характеристикой тому же приращению
деформации As соответствует значительно меньшее приращение
усилия AQ2. При мень-
шем приращении усилия
центрирующей пружины
можно получить более
плавное включение усили-
теля.
Эти выводы относятся
к усилителям всех типов.
На рис. 111, а пока-
зана схема рулевого упра-
вления с гидравлическим
усилителем. Распредели-
тель с центрирующими
пружинами и реактивными
плунжерами встроен в кар-
тер рулевого механизма.
Силовой цилиндр закре-
плен на раме, а шток порш-
ня связан шаровым шар-
ниром с рулевой сошкой.
В этом случае прилагае-
мое к рулевому колесу
усилие Рк при повороте
управляемых колес опре-
деляется из уравнения
Рис. 111. Расчетная схем;) и кривые измене-
ния усилия Рк на рулевом колесе при уста-
новке гидравлического усилителя
1(Р« Рц Рр) Рк1р11 +
+ ЛЛЬъП31’а = Л1, (72)
где М — момент сопротивления управляемых колес пово-
роту;
Рц и Рр — центрирующее и реактивное усилия распредели-
теля, приведенные к рулевому колесу;
Рц ~ Ррх — усилие от силового цилиндра;
Рк — радиус рулевого колеса;
/] и i]j — передаточное число и к. и. д. рулевого ме-
ханизма;
Д ~ jy----передаточное число рулевого привода;
На и ц3 — к. п. д. шаровых шарниров и шкворневых со-
единений.
167
Для анализа влияния отдельных параметров на легкость управ-
ления принимаем за наибольшее сопротивление колес повороту
момент М = 300 кГ-м, получающийся при повороте их на месте,
и конструктивные данные /, = 147 мм; 12 = 187 мм; ls = 165 мм;
14 = 255 мм; /Б = 343 мм; Рк = 260 мм и = 21,5. Тогда усилие,
прилагаемое к рулевому колесу, по уравнению (72)
Рк = . 46’5 - + Р — ( °’°-2-6-4— 0,0158 f) рх,
ЧгЧг'Пз 4 \ 41 / г
где F — площадь поршня силового цилиндра;
р — реактивная площадь распределителя;
рх — давление в силовом цилиндре.
На рис. 111,6 показаны кривые изменения усилия Рк на
рулевом колесе в зависимости от давления в силовом цилиндре
усилителя при различных параметрах системы рулевого управле-
ния. При высоких к. п. д. всех элементов рулевого управления,
т. е. = ц2 = 1]3 = 1 и центрирующем усилии Рц = 3 кГ уси-
лие Рк изменяется по кривой 1. При увеличении центрирующего
усилия до 12 кГ усилие Рк растет на эту величину при всех дав-
лениях гидросистемы и изменяется по кривой 2.
Большое влияние на величину усилия Рк оказывают потери
на трение в элементах рулевого управления. Так, кривая 3 соот-
ветствует изменению усилия Рк при высоких значениях к. п. д.
элементов рулевого управления, но меньших единицы, т. е. при
г] , = 0,9; ц2 = 0,95 и ц3 = 0,9, а кривая 4 — при низком к. п. д.
рулевого механизма = 0,6 и высоких к. п. д. других элементов
ц2 = 0,95 и ц3 = 0,9. Если потери на трение большие и в шквор-
невых соединениях, т. е. ц3 = 0,7, то усилие Рк будет изменяться
по кривой 5. Кривая 6 получена при ц, = 0,9, ц2 = 0,9 и ц3 =
= 0,7.
Как видно из кривых 3, 4, 5 и 6, потери на трение в механизмах
рулевого управления оказывают большое влияние на легкость
рулевого управления. Потери на трение в рулевом механизме
существенны в основном при небольших давлениях гидросистемы
(кривые 3 и 4). Большие потери на трение в поворотных цапфах
резко увеличивают усилие на рулевом колесе при всех давлениях
гидросистемы примерно на одну и ту же величину (кривые 4 и 5).
При высоком к. п. д. рулевого механизма и больших потерях на
трение в поворотных цапфах наибольшее облегчение получается
при малых давлениях (кривые 5 и 6).
Определенное влияние оказывает величина реактивной пло-
щади f распределителя. При f = 0; = 0,9; ц2 = 0,9 и ц3 = 0,7
усилие Рк изменяется по кривой 7. Кривая 6 соответствует f =
= 5,72 см2, а кривая 8 — f = 12 см2 при тех же к. п. д. Из кри-
вых 6, 7 и 8 видно, что реактивная площадь повышает «чувство»
дороги. Усилие Рк растет при высоких давлениях и большой
реактивной площади f. Однако значительно снизить усилие на ру-
левом колесе можно при увеличении площади F силового ци-
168
линдра. Если увеличить диаметр поршня д о <7 8 см при тех же
параметрах т) х = 0,9; ч]2 = 0,9; ц3 = 0,7 и f — 12 см2, то усилие Рк
будет изменяться по кривой 9. При том же диаметре, но = 0,6;
1)2=0,9; ч]3=0,7 и f-5,72 см2 усилие Рк изменяется по кривой 10.
Из приведенных результатов видно, что небольшое усилие на
рулевом колесе можно получить в результате увеличения диаме-
тра поршня d силового цилиндра и высоких к. п. д. элементов
рулевого управления (кривые 10, 9 и 3). «Чувство» дороги дости-
гается благодаря реактивной площади f (кривые 7, 6 и 8). Анализ
происходящих процессов позволяет не только оценить влияние
отдельных параметров на легкость управления, но и выбрать наи-
выгоднейшие или оптимальные их значения.
РАСЧЕТ РАСПРЕДЕЛИТЕЛЯ
Гидравлические усилители. Давление рабочей жидкости в гидро-
системах, как известно, передается на рабочий орган почти мгно-
венно. Однако в процессе ее движения через распределитель и по
трубопроводам усилителя давление на поршень силового ци-
линдра изменяется и зависит от общего сопротивления всей гидро-
системы. Действие гидравлического усилителя начинается тогда,
когда давление в силовом цилиндре достигает величины, достаточ-
ной для преодоления сопротивления колес повороту.
В гидравлических усилителях с постоянной циркуляцией
рабочей жидкости через распределитель (см. рис. 34, б) пояски
золотника в нейтральном его положении не перекрывают каналов
корпуса, и они полностью открыты. Поэтому при среднем поло-
жении золотника потери на перетекание масла в распределителе
различны и составляют I—4 кПсм3.
При перемещении золотника зазоры между рабочими кромками
золотника и его корпуса изменяются, а следовательно, изменяются
и сопротивления потоку рабочей жидкости, в соответствии с чем
меняется и ее напор /?.
Давление рабочей жидкости при перемещении золотника [1]
*) 9 9 9
Р = у!г = у^ = у - 1 = уе > (73)
' 1 ' 2g 1 \ tt'i ) 2g 2g 1 \ л ds ) 2g ’ ' ’
где у — удельный вес рабочей жидкости;
h — напор;
и v2 — скорости движения рабочей жидкости в предыду-
щем и последующем сечениях;
и wz — площади предыдущего и последующего сечений;
е — коэффициент гидравлического сопротивления;
Q — расход жидкости;
d — диаметр золотника;
s — перемещение золотника.
На рис. 112 показана кривая изменения давления р жидкости
в силовом цилиндре в зависимости от перемещения s золотника,
169
подсчитанного по приведенным данным, для двухпояскового зо-
лотника с диаметром d = 30 мм\ начальные зазоры s = 0,5 мм
одинаковы во всех четырех проходных сечениях. При определении
силы U, действующей от силового цилиндра, следует принимать
результирующее давление р, равное разности давлений в напорной
магистрали pi и в сливной ра.
Рабочая жидкость проходит по отдельным участкам с различ-
ным сопротивлением перетеканию. Исходя из этого общий напор
жидкости составляется из суммы напоров по отдельным участкам
Рис. 112. Изменение давления р
рабочей жидкости в силовом ци-
линдре в зависимости от переме-
щения s золотника
гидравлической цепи, т. е.
н = У h = ех Д 4- е 2
* 2g 2g
v2
+ (74)
где ej е2, ..., коэффициенты ги-
дравлического со-
противления соот-
ветствующих уча-
стков гидравличе-
ской цепи;
t»i, v2, . . v„—средние скорости
потока рабочей
жидкости в соот-
ветствующих се-
чениях.
Для примера ниже приведены коэффициенты гидравлического
сопротивления £1для участков гидравлической цепи с расширением
сечения и е2 для участков с сужением сечений в зависимости от
отношения проходных сечении .
— 0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1,0
31 1,0 0,81 0,65 0,50 0,36 0,24 0,15 0,09 0,045 0,015 0
е2 0,50 0,47 0,43 0,38 0,34 0,30 0,25 0,20 0,15 0,09 0
Средние скорости течения рабочей жидкости Hi и v2 опреде-
ляются исходя из расхода жидкости, т. е. полезно необходимой
производительности насоса Q и проходных сечений. Производи-
тельность в см?!мин
Q = 60-^,
где vc — объем жидкости, вытесняемой из силового цилиндра
в процессе совершаемого поворота рулевого колеса из
одного крайнего положения в другое, с максимальной
рабочей скоростью;
t — минимальное время, за которое происходит процесс
вытеснения рабочей жидкости из силового цилиндра.
170
Следует иметь в виду, что при малых проходных сечениях по-
тери на перетекание рабочей жидкости резко возрастают и работа
гидравлической системы становится неудовлетворительной. Ис-
ходя из этих соображений целесообразно, чтобы проходные се-
чения были по возможности большими. При этом эксплуатацион-
ные показатели работы усилителя будут наиболее высокими.
Пневматические усилители. В пневматических усилителях
давление в силовом цилиндре нарастает постепенно при открытии
впускного клапана, а не мгновенно, как в гидравлических уси-
лителях. Поэтому усилитель начинает действовать с некоторым
запаздыванием относительно срабатывания воздухораспредели-
теля. В этом заключается основное принципиальное отличие
пневматического усилителя от гидравлического.
Скорость наполнения силового цилиндра пневматического
усилителя и изменение давления в нем зависят от сопротивления
потоку сжатого воздуха. Не менее важно и время освобождения
силового цилиндра от отработавшего воздуха, которое может
вызвать затруднения при быстром повороте рулевого колеса с од-
ного направления на другое.
Таким образом, время наполнения и время освобождения
должны быть минимальными.
Оценка и выбор конструкции распределителя. Конструкции
распределителя оценивают по усилию S, необходимому для пере-
мещения золотника или открытия впускного клапана и опреде-
ляемому по уравнению
Действующее вдоль тяги золотника или толкателя впускного
клапана усилие зависит от конструкции распределителя. Оно из-
меняется также в процессе открытия впускного клапана или пере-
мещения золотника. Так, например, для разных конструкций воз-
духораспределителей (см. рис. 46) оно изменяется 3 раза: при
перемещении толкателя до соприкосновения с впускным клапаном
это усилие
= + S F,
где 2 Рп — сумма сил всех пружин; 2 F — сумма сил трения.
При соприкосновении толкателя с впускным клапаном усилие
S2 - J ^2 А + р0Д,
где р0 — давление в ресивере; f t — площадь впускного клапана.
Эти два усилия для разных конструкций могут быть одинако-
выми. Усилие S3 при открытии клапана для разных конструкций
воздухораспределителей получается различным.
Для кранов III и IV с сальником усилие
Ss^SX + E^-Hpo-pJA-
171
Как только впускной клапан приоткроется, действующее на
толкатель усилие S2 резко уменьшается до величины усилия Ss.
При этом впускной клапан, не оказывая сопротивления толка-
телю, проваливается вместе с ним и открывает свободный проход
сжатому воздуху в силовой цилиндр, давление в котором ста-
новится равным рх.
Провал впускного клапана и резкое увеличение проходного
сечения для сжатого воздуха приводит к излишне большому рас-
ходу воздуха и неудовлетворительному его использованию.
Для кранов I, V, VI и VII с реактивным клапаном площадью
f2 усилие
$з — 2 Рп + 2 Р + Pofi + Рх (/а — fl)-
При открытии впускного клапана действующее вдоль толка-
теля усилие Sv резко увеличивается до величины S3, большей,
чем S3, на величину pxf2. Эта достаточно большая сила ускоряет
закрытие впускного клапана, и впуск сжатого воздуха прекра-
щается раньше, чем в первом случае. Таким образом, реактивный
клапан ограничивает впуск сжатого воздуха, вследствие чего его
расход получается значительно меньшим, чем в первом случае,
и воздух используется более производительно.
Гидравлические распределители выполняются с постоянной
циркуляцией рабочей жидкости и без циркуляции. К первым
рабочая жидкость поступает непосредственно от насоса, а ко вто-
рым — от аккумулятора. Распределители с постоянной цирку-
ляцией различаются местом подвода рабочей жидкости и в зави-
симости от конструкции реактивных элементов имеют уплотняющие
детали с различной надежностью.
Так, например, в конструкции с реактивной камерой (см.
рис. 50, б) рабочая жидкость подводится в камеры с торцов зо-
лотника, и сальники, заложенные на концах золотника, нахо-
дятся под большим давлением. В конструкции с реактивными плун-
жерами (см. рис. 49) рабочая жидкость подводится к плунжерам
с внутренней стороны, и сальники находятся под минимальным
давлением, близким к давлению в сливных каналах. В связи с этим
трение в сальниках и вследствие этого усилие, необходимое для
перемещения золотников указанных конструкций, получаются
различными.
РАСЧЕТ РЕАКТИВНЫХ УСТРОЙСТВ
Одним из важнейших качеств обычного рулевого управления
без усилителя является его способность создавать у водителя
так называемое «чувство дороги», т. е. ощущение проводимого им
поворота.
Это ощущение проявляется в том, что с увеличением сопро-
тивления повороту управляемых колес возрастает и усилие на
рулевом колесе. Такое свойство должно иметь и рулевое управле-
172
ние с усилителем. Для этого служат реактивные устройства, спо-
собствующие также более быстрому затуханию колебаний управ-
ляемых колес, возникающих при обратном включении усилителя.
Основным показателем для выбора величины реакции должно
быть только приращение усилия, прилагаемого к рулевому колесу,
при повышении сопротивления колес повороту.
Показатель реакции мог бы быть выражен повышением вклю-
чающего усилия Ро в % или тангенсом угла наклона касательной
к кривой изменения усилия Р на рулевом колесе. Однако это
повышение не связывается с сопротивлением колес повороту, т. е.
с усилием Рк на рулевом колесе при работе без усилителя. Если
рассматривать отношение повышения усилия к усилию Ро, то
может получиться, что одинаковое изменение силы Р при разных
изменениях усилия Рк будет одинаково характеризовать два со-
вершенно разных усилителя. Поэтому более правильным будет
принять в качестве показателя реакции приращения усилия Р
на 1 кГ усилия Рк на колесе при работе без усилителя, т. е.
ЬР
V- ЬРК'
Известны три способа создания реакции на рулевое колесо:
1) реактивным клапаном 1 воздухораспределителя (см. рис. 46);
2) реактивным плечом а следящего рычага 5 (см. рис. 53, о);
способ пригоден для любой конструкции усилителя, причем ре-
активное плечо может быть создано смещением точки подвеса
следящего рычага 1 на сошке (см. рис. 53, б);
3) реактивной площадью плунжеров 1 (см. рис. 49) или реак-
тивной камеры Ц распределителя гидравлического усилителя (см.
рис. 50, б).
При первом способе
п с/ т
Рм — Sb—
п
Р* =---------т’
Pa + th-fJb —
P = Pk-(FPx~F1)^t
Рк_______
PK-(Fpx~Fi)^-
'Wc.i
(75)
(76)
(77)
На рис. 113 показаны кривые изменения усилия Р и показа-
теля эффективности действия Э в зависимости от сопротивления
повороту Рк при различных диаметрах d реактивного клапана,
подсчитанные по уравнениям (76) и (77) при переменном давле-
нии рх.
Из приведенных данных видно, что с увеличением диаметра
реактивного клапана усилие на рулевом колесе увеличивается, а
эффективность действия понижается. Однако при особенно боль-
173
шом диаметре изменение указанных показателей может быть не-
удовлетворительным. Такой расчет дает возможность выбрать
наивыгоднейшую величину диаметра d реактивного клапана.
При втором способе
РК1 (^2 Ч) РЧ
Р(Ч~Ч + a) + (f2~M
Рис. 113. Изменение показателя эф-
фективности Э (сплошные кривые) и
усилия Р (штриховые кривые) на руле-
вом колесе в зависимости от сопроти-
вления повороту Рк при различных
диаметрах d реактивного клапана
n Uti Rl2
~~НЧ-Чр
g ____ fit (^2 G)1
a ~ Ua + P/2
(78)
(79)
(80)
где 2?=Q-|-S — сопротивление
включению воз-
духораспреде-
лителя;
12 — длина рулевой
сошки;
fi и f2 — площади впуск-
ного и реактив-
ного клапанов.
При этом способе усилие Р
на рулевом колесе при работе
с усилителем заметно повыша-
ется с увеличением реактивного
плеча а, а давление в силовом
цилиндре и показатель эффек-
тивности действия усилителя
при этом уменьшаются.
Для гидравлического усилителя следует учитывать место рас-
положения распределителя: соосно с рулевым валом, в продольной
тяге или в головке силового цилиндра.
Для соосного усилителя
772 = (t/ — Q — S) г0;
PKRKia = (F — f) pxr0 — Qr0,
откуда
РкРкЧ I Q
~ (F-f)r0 ^F~f’’
(81)
(82)
Я PKRK4
(Q г Pxf) го ’
где г о — средний радиус зубьев сектора;
F — площадь поршня силового цилиндра.
(83)
174
При расположении распределителя в продольной тяге усилие
T = U — Q — S-, ^^ + Q = Px(F~f),
откуда
n __ Рк^К^бУ | Q
Px~ l2(P-f) Г F —I ’
n _ (Q ~f~ Pxf ) ^2 Q _ Pk^K^U)
RKia ' (.Q + PxDk'
При этом способе усилие на рулевом колесе при работе с уси-
лителем заметно повышается с увеличением реактивной пло-
Рис. 114. Изменение показателя эффективности действия Э усилителя
(сплошные кривые) и усилия Р на рулевом колесе (штриховые кривые)
в зависимости от сопротивления повороту Рк при различных значениях
реактивной площади f и реактивного плеча а
щади f, а давление в силовом цилиндре и показатель эффектив-
ности действия усилителя уменьшаются.
На рис. 114 показан характер изменения величин Э и Р при
работе с усилителем в зависимости от сопротивления повороту Рк
при различных значениях реактивной площади f плунжеров и
реактивного плеча а следящего рычага.
Исходя из сказанного оптимальное приращение усилия Р,
а следовательно, и величину реактивной площади f или реактив-
ного плеча а следует выбирать из сопоставления приращения
усилия Р на колесе и показателя эффективности Э.
УСТОЙЧИВОСТЬ УСИЛИТЕЛЯ
Устойчивость усилителя следует разделять на статическую
и динамическую. Под статической устойчивостью подразумевается
способность усилителя оставаться в равновесии при любом за-
данном положении рулевого колеса.
При определении динамической устойчивости рассматривают
причины возникновения колебаний управляемых колес при на-
личии гидравлического усилителя; сопротивляемости усилителя
175
динамическим силам, действующим от управляемых колес; время
наполнения силового цилиндра в зависимости от сопротивления
повороту и давления в силовом цилиндре.
В определенных случаях из-за статически неустойчивого со-
стояния усилителя нарушается стабилизация управляемых колес
или колеса постепенно стремятся отклониться от положения,
соответствующего прямому направлению движения автомобиля.
Устойчивым является такой усилитель, который при прямом
положении управляемых колес или колесах, выведенных из этого
положения, будет находиться в состоянии равновесия.
Устойчивое состояние управляемых колес характеризуется
уравнением приведенных сил
2X + Lf + 2s + L^ = 0, (84)
где %Ри — сумма сил, действующих на шток поршня усилителя
(включая действие от распределителя);
SF — сумма сил трения в системе рулевого управления,
в том числе и в силовом цилиндре;
ZS — сумма сил, стабилизирующих положение управляе-
мых колес;
S7? — сумма сил сопротивления колес повороту.
Первая сумма сил зависит от результирующего давления ра-
бочей жидкости и площади поршня. С повышением скорости дви-
жения (числа оборотов двигателя) давление несколько повышается,
а следовательно, может меняться и сумма 2 Ри-
Сила сопротивления колес повороту 2 R уменьшается с повы-
шением скорости движения автомобиля, а следовательно, умень-
шается и сопротивляемость колес воздействию на них внешних
сил (см. рис. 63, б).
Сумма сил J) S, зависящая в основном от углов установки
шкворней поворотных цапф, стремится включить усилитель с об-
ратной стороны, чем способствует нарушению статической его
устойчивости.
Силы трения в различных узлах и соединениях рулевого управ-
ления, составляющие в сумме 2 F, по-разному влияют на стати-
ческую устойчивость усилителя. Так, например, трение в поворот-
ных цапфах, шарнирах рулевой трапеции и силовом цилиндре
препятствуют действию стабилизирующих сил и обратному вклю-
чению усилителя, т. е. способствует сохранению его статической
устойчивости. Однако эти потери снижают к. п. д. усилителя,
поэтому их следует уменьшать. Вместе с тем известно, что потери
на трение в этих подвижных соединениях зависят от коэффи-
циентов трения, величины действующих на них сил, в том числе и
от сил предварительного натяга. Эта сумма сил трения умень-
шается в процессе приработки поверхностей и не зависит от ско-
рости движения автомобиля.
Трение в рулевом механизме оказывает различное влияние на
статическую устойчивость усилителя в зависимости от размещения
176
распределителя и способа его включения. В случае включения
распределителя при взаимном перемещении рычагов сдвоенной
сошки, осевом перемещении рулевого вала или перемещении шаро-
вого пальца сошки трение в рулевом механизме не оказывает со-
противления обратному включению, т. е. способствует нарушению
устойчивости усилителя. Если распределитель включается при
тангенциальном перемещении рулевого вала, то трение в рулевом
механизме затрудняет обратное включение усилителя и способ-
ствует сохранению его статической устойчивости. При любом
размещении распределителя включение его с обратной стороны
должно происходить при усилии, большем, чем сила трения в ру-
левом механизме, приведенная к штоку золотника или распреде-
лителя. В противном случае устойчивость усилителя нарушается,
и он, будучи включенным с обратной стороны, противодействует
стабилизирующим силам, и стабилизация управляемых колес
полностью исключается. Исходя из этого сумма стабилизирующих
сил и сил сопротивления должна удовлетворять уравнению
+ (85)
Это является первым условием статической устойчивости уси-
лителя, и оно относится к усилителям всех типов.
Другим фактором, влияющим на статическую устойчивость
усилителя, является сумма сил 2 Ри, действующих в самом уси-
лителе. Поэтому вторым условием, характеризующим устойчивое
состояние усилителя, является 2 Рц = 0.
Второе условие устойчивости гидравлического усилителя на-
рушается в связи с тем, что площади поршня с обеих его сторон
различаются на величину площади штока. При равных давлениях
рабочей жидкости и нейтральном положении золотника в клапане
распределителя на шток поршня действует сила, стремящаяся
повернуть управляемые колеса от прямого их положения в сто-
рону действия этой силы. Из-за постоянного стремления усилителя
повернуть управляемые колеса нарушается его статическая устой-
чивость. Для равновесного состояния поршня и предотвращения
непроизвольного поворота управляемых колес необходимо, чтобы
силы, действующие на него в обеих полостях силового цилиндра,
были равны.
Это может быть достигнуто двумя способами: созданием разных
давлений рабочей жидкости в обеих полостях силового цилиндра
или равными рабочими площадями поршня.
В первом случае распределитель должен обеспечить получение
разных давлений рабочей жидкости при нейтральном положении
золотника в обеих полостях силового цилиндра.
Отношение этих давлений должно удовлетворять уравнению
= (86)
Р‘2 7 1
где р, и Fp, р2 и Е2 — давления и площади поршня в одной и
другой полостях силового цилиндра.
177
12 М. II. Лысов
Разные давления в цилиндре при нейтральном положении
золотника могут быть получены тогда, когда сопротивления потоку
жидкости, направляющейся в разные полости цилиндра, различны.
Следовательно, должны быть различны и проходные сечения между
рабочими кромками золотника и его корпуса.
Для усилителей с различными площадями поршня необходимое
соотношение давлений может быть достигнуто смещением золот-
ника в одну сторону.
Соотношение проходных сечений и расстояние смещения зо-
лотника от среднего положения могут быть найдены по кривой
изменения давления рабочей
жидкости в зависимости от
величины проходных сече-
ний, изменяющихся в про-
цессе перемещения золотника
вдоль оси корпуса.
Давление р рабочей жид-
кости определяется по урав-
нению (73).
При перемещении золот-
ника относительно корпуса
клапана зазоры между их ра-
бочими кромками изменяют-
ся, а следовательно, меняются
площади проходных сечений
и сопротивления потоку ра-
бочей жидкости, и в соответ-
ствии с этим меняются да-
вления в напорном и слив-
Рис. 115. Давление рабочей жидкости р
в полостях силового цилиндра при сме-
щенном положении золотника ном каналах.
Для двухгребневого золот-
ника, изображенного в сме-
щенном положении на рис. 115, а с диаметром d = 30 мм и
с зазорами 0,5 мм, одинаковыми для всех четырех проходных
сечений, на рис. 115, б построены кривые изменения давления рг
в напорном канале и р2 — в сливном.
По кривым, зная соотношение площадей поршня, определяют
давления pt и р2 и величину перемещения золотника 50, которой
соответствуют эти давления. Такое положение золотника, сме-
щенного на расстояние s0 от середины, и должно быть нейтральным.
В некоторых конструкциях гидравлических распределителей
разные проходные сечения автоматически устанавливаются в не-
обходимом соотношении. Это происходит в том случае, если зо-
лотник возвращается в нейтральное положение действующими
на него реактивными силами давления рабочей жидкости, а не
центрирующих пружин, как в большинстве других конструкций.
В таком распределителе рабочие площади реактивных камер
различны. Конструкция распределителя усилителя рулевого ме-
178
ханизма автомобиля ГАЗ-13 «Чайка» с разными реактивными
площадями f j и f2 золотника была показана на рис. 48, а.
Если давления в силовом цилиндре должны быть равны рх
п р2, то золотник распределителя должен находиться в равнове-
сии под действием на него сил р^х — p2f2. Отсюда находим,
что реактивные площади золотника должны быть в том же соот-
ношении, что п площади поршня:
fz _ Pi = 2k
Л Pz Л ‘
Кроме сохранения статической устойчивости усилителя зо-
лотник с разными реактивными площадями обеспечивает одинако-
вые реактивные усилия на рулевом колесе при повороте его в обе
стороны.
Во втором случае, т. е. при равных площадях поршня, равен-
ство сил на поршень достигается по-разному, в зависимости от
конструкции силового цилиндра.
Так, например, равные площади могут быть получены при
использовании сквозного штока поршня. Равные площади имеет
лопастная конструкция силового цилиндра со сдвоенными порш-
нями.
Совершенно очевидно, что в зависимости от компоновки сило-
вого цилиндра, имеющего разные площади поршня, происходящие
в нем рабочие процессы будут различны.
Опыт показал, что на автомобилях с обычной компоновкой
рулевого привода для поворота направо требуется большее усилие,
чем для поворота налево, в связи с тем, что передаточные числа
рулевой трапеции различны. Если в систему рулевого управления
встроен усилитель, то кинематика рулевого привода и его переда-
точные числа при повороте направо и налево должны быть раз-
личными. Такая необходимость объясняется тем, что площади
поршня различны, а следовательно, различны и силы, действу-
ющие в полостях силового цилиндра, соответствующих этим пло-
щадям. Если площади поршня при повороте автомобиля направо
и налево соответственно равны Fn и Ел, то передаточные числа
рулевого привода in и (л при этих поворотах должны находиться
в обратном соотношении, т. е.
При обычной схеме рулевого привода компоновку силового
цилиндра следует считать правильной, если поршень при повороте
автомобиля направо работает большей площадью, а при повороте
налево — меньшей.
Давления в силовом цилиндре при равных площадях поршня
получаются одинаковыми, а следовательно, равными получаются
реактивные усилия на рулевом колесе.
12* 179
Рис. 116. Кривые изменения
основных параметров v и t уси-
лителя, характеризующих ско-
рость его срабатывания
Фактором, характеризующим динамическую устойчивость уси-
лителя, является момент включения усилителя, оцениваемый
временем запаздывания действия силового цилиндра относительно
момента срабатывания распределителя.
Время запаздывания срабатывания гидравлического усили-
теля, заполненного рабочей жидкостью, мало (0,02—0,05 сек).
Для заполнения пневматического усилителя сжатым воздухом
до необходимого давления требуется некоторое время, н поэтому
время запаздывания срабатывания больше (0,2—0,3 сек).
При больших запаздываниях, возникающих вследствие зна-
чительных сопротивлений потоку сжатого воздуха, возможно повы-
шенное сопротивление повороту руле-
вого колеса в самый начальный мо-
мент его вращения и значительное
понижение при дальнейшем пово-
роте. Это нарушает плавность вклю-
чения усилителя, поэтому сумма всех
сопротивлений пневматической систе-
мы должна быть наименьшей.
Время t срабатывания силового
цилиндра зависит от необходимого
давления рх, сопротивления пово-
роту Рк и суммарного сопротивле-
ния S системы движению сжатого
воздуха.
Так, например, при постоянных
значениях сопротивления перетека-
нию сжатого воздуха и всех конструктивных данных пневмати-
ческого усилителя время t, необходимое для наполнения си-
лового цилиндра, в зависимости от рабочего давления в нем изме-
няется по восходящей кривой t = f (рх), как показано на рис. 116,
полученной расчетным путем.
С другой стороны, изменение усилия на рулевом колесе, не-
обходимое для совершения поворота, в зависимости от скорости
движения автомобиля va изменяется по ниспадающей кривой Рк =
= f (^о). показанной на рис. 63, б. Кривая изменения этого усилия
получена экспериментально.
Если усилитель снимает с рулевого колеса только часть на-
грузки, то кривая Рк = f (ой) может быть заменена кривой va =
= f (рх), показанной на рис. 116.
Из приведенных кривых находим, что при большой скорости
движения автомобиля на повороте, равной vlt давление pv в си-
ловом цилиндре должно быть небольшое, и время /, срабатывания
силового цилиндра также мало.
При малых скоростях движения иа, наоборот, давление ра в сило-
вом цилиндре и время /2 его наполнения получаются большими.
Трудные, или крутые, повороты совершаются при малых ско-
ростях движения автомобиля с приложением больших усилий на
180
рулевом колесе, поэтому время наполнения силового цилиндра
никакого значения не имеет.
Для поворотов, совершаемых на повышенных скоростях дви-
жения автомобиля, требуются малые усилия на рулевом колесе, а
следовательно, малое давление в силовом цилиндре и незначитель-
ное время для его наполнения, что имеет место в действительности.
УСИЛИТЕЛИ ДИФФЕРЕНЦИАЛЬНОГО ДЕЙСТВИЯ
В усилителях дифференциального действия, один из которых
показан на рис. 52, рабочая жидкость поступает непосредственно
в силовой цилиндр. При перекрытии канала полости без штока
рабочая жидкость давит на площадь поршня со стороны штока,
и действующее при этом усилие Рг = pF При перекрытии ка-
нала полости со стороны штока рабочая жидкость давит на обе
площади поршня, и усилие Р2 = Р (Д2— Р Таким образом,
силы Pt и Р2, действующие в обе стороны поворота управляемых
колес, получаются разными.
При сообщающихся полостях силового цилиндра в нейтраль-
ном положении золотника усилитель статически неустойчив.
В результате действия разных сил Рг и Р2 поршень все время стре-
мится переместиться в сторону действия большей силы. В связи
с этим необходимо, чтобы эти силы были равны, что возможно
в том случае, если /'2 = 2F
При этом условии диаметр штока поршня
d = = 0,7070,
1<2
где D —диаметр поршня.
Реактивные элементы работают по тому же дифференциальному
принципу, в связи с чем их размеры должны быть различны. При
перекрытии канала полости без штока (см. рис. 52) действующая
в реактивной камере 8 на золотник и его шток реактивная сила
fli^pfi-
При перекрытии канала полости со штоком действующая в ре-
активной камере 9 на шток золотника сила
R 2 = Р (12 fl)-
Для того чтобы эти реактивные силы были равны, необходимо,
чтобы
fa = 2f1(
где fj — реактивная площадь золотника;
f2 — реактивная площадь фланца.
При определении зависимости между размерами поршня и
штока, а также и реактивными площадями золотника и фланца
необходимо учитывать некоторые дополнительные особенности.
181
Выше предполагалось, что в нейтральном положении золот-
ника давление в обеих полостях силового цилиндра, а также и в
реактивных камерах одно и то же. В действительности, в связи
с неизбежными потерями при проходе рабочей жидкости через
первое проходное сечение золотника, давление в полости силового
цилиндра со штоком несколько больше, чем в полости без штока.
Такая же разница в давлениях имеется и в реактивных камерах.
Опыт показал, что потери на перетекание рабочей жидкости
через проходные сечения золотника А/? = 0,5 -<-5,0 кПсм*.
С учетом действительных потерь А/? размеры штока поршня и
реактивного фланца золотника должны быть несколько больше
найденных выше.
ЧУВСТВИТЕЛЬНОСТЬ ДЕЙСТВИЯ УСИЛИТЕЛЯ
В рулевом управлении с усилителем жесткая связь сущест-
вует только между рулевым колесом и золотником распределителя,
с одной стороны, и между управляемыми колесами и корпусом
золотника — с другой. Для перемещения золотника или впуск-
ного клапана на расстояние h до полного открытия рулевое колесо
нужно повернуть на угол ц>. Только после этого, т. е. при дости-
жении в силовом цилиндре определенного усилия, поршень на-
чинает перемещаться, а вместе с ним и управляемые колеса, что
вызывает запаздывание начала поворота колес и излишнее их
поворачивание в конце поворота.
Исходя из этого величину угла ф поворота рулевого колеса,
после которого начинает действовать усилитель, можно принять
в качестве оценочного параметра, характеризующего чувствитель-
ность действия усилителя.
Ход рулевого колеса по ободу
L • == hir,
откуда
h .
где h — ход золотника или впускного клапана;
RK — радиус рулевого колеса;
— передаточное число от рулевого колесо до золотника или
впускного клапана распределителя.
При одних и тех же значениях RK и h угол ц> поворота рулевого
колеса зависит исключительно от передаточного числа i lt которым
вполне можно характеризовать чувствительность действия уси-
лителя. Такая характеристика становится наиболее полной при
сравнительной оценке усилителен разных конструкций, прове-
денной ниже.
182
ВЛИЯНИЕ ДЕЙСТВУЮЩИХ СИЛ, КОНСТРУКЦИИ ПРИВОДА и к. п. д
НА РАБОТУ УСИЛИТЕЛЯ
В отдельных случаях неправильного выполнения усилителя
может быть мала устойчивость автомобиля при движении по пря-
мой и неровной дороге и недостаточна чувствительность действия
усилителя. Первый недостаток возникает из-за включения уси-
лителя с обратной стороны силами, передающимися от неровно-
стей дороги, и сопровождается вилянием управляемых колес.
Второй недостаток проявляется в запаздывании начала поворота
управляемых колес и излишнем их поворачивании в конце пово-
рота при остановленном рулевом колесе. Оба фактора затрудняют
управление и понижают безопасность движения автомобиля. Чтобы
найти правильные конструктивные решения для усилителя, необ-
ходимо изучить причины, вызывающие такие явления.
Обратному включению усилителя препятствуют центрирующие
силы, вызванные предварительным сжатием центрирующей пру-
жины. Эти силы придают системе рулевого управления жесткость.
В отдельных конструкциях вместо центрирующих сил исполь-
зуется сила давления рабочей среды.
Если силы, действующие от управляемых колес, будут пре-
восходить силу предварительного сжатия, то под их воздействием
центрирующая пружина деформируется, и система становится
упругой. При этом в системе рулевого управления могут возник-
нуть колебания управляемых колес (при гидравлическом уси-
лителе), виляние управляемых колес, передача обратных ударов
на рулевое колесо и большой непроизводительный расход воз-
духа (при пневматическом усилителе). Колебаниям управляемых
колес при рулевом управлении без усилителя, т. е. явлению
шимми, посвящено несколько работ, и этот вопрос можно считать
в какой-то степени изученным.
Из этих работ известно, что одним из факторов, способствую-
щих возникновению явления шимми, является упругость рулевой
системы. Безусловно, могут быть изучены колебания управляе-
мых колес и при наличии усилителя в системе рулевого управле-
ния. Однако во всех случаях эти колебания рассматриваются
как чрезвычайно вредные для рулевого управления и связаны
с понижением безопасности движения автомобиля и затруднениями
в управлении им. Поэтому задача заключается в том, чтобы найти
такие конструктивные решения основных механизмов усилите-
лей, чтобы прямое их включение было легким, а обратное вклю-
чение трудным или практически невозможным.
В основу правильной конструкции усилителя рулевого управ-
ления, обеспечивающего наибольшую устойчивость автомобиля и
легкость управления, должны быть положены следующие условия.
1. Небольшое усилие на рулевом колесе, при котором усили-
тель включается в действие в прямом направлении, и плавное из-
менение этого усилия при повороте автомобиля (Ро = min).
183
2. Наибольшая чувствительность действия усилителя (<р =
= min).
3. Максимальная сопротивляемость обратной включающей
силе Т, действующей от продольной тяги при движении по пря-
мой и неровной дороге (Т = шах).
4. Наличие реактивного действия р на рулевое колесо.
5. Достаточная эффективность действия.
Первое условие необходимо для обеспечения легкости руле-
вого управления.
Второе и третье условия являются главнейшими в отношении
сопротивления обратному включению и устойчивости движения
автомобиля и зависят исключительно от компоновочных соотно-
шений, т. е. от того, где и как встроены в систему рулевого управ-
ления распределительный и центрирующий элементы.
Четвертое условие зависит от конструкции распределителя и
может быть осуществлено с помощью реактивных плунжеров 1
(см. рис. 49), реактивных камер 3 (см. рис. 50), клапанов обрат-
ного действия 1 (см. рис. 46), реактивного плеча а (см. рис. 53)
и др. Величину реакции выбирают исходя только из необходи-
мости ощущать производимый поворот, т. е. исходя из прира-
щения усилия Р на рулевом колесе в зависимости от сопротив-
ления повороту.
Выполнение пятого условия зависит от размеров силового ци-
линдра усилителя и может быть осуществлено без каких-либо
серьезных затруднений.
Из указанных условий вытекают следующие соотношения,
определяющие правильную конструкцию усилителя:
прямое включающее усилие
₽. = ; (8?)
обратное включающее усилие
где Q — сила предварительного сжатия центрирующей пру-
жины (одной или нескольких);
S — сила, действующая вдоль тяги распределителя, т. е.
сила сопротивления включению;
щ и ц j — прямое передаточное число и прямой к. п. д. пере-
дачи от рулевого колеса до тяги распределителя;
и i]2 — обратное передаточное число и обратный к. п. д.
передачи от продольной рулевой тяги до тяги распре-
делителя.
Из всех условий наиболее трудно выполнимыми являются пер-
вое, второе и третье.
184
Наилучшие результаты получаются тогда, когда удовлетворены
следующие уравнения:
Q = max; (89)
(90)
Т = iPory (91)
i i — i, i 2 :=— 1, (92)
T 4i . Л) 42 ’ (93)
z'i = min, (94)
где i — полное передаточное число рулевого управления от руле-
вого колеса до продольной тяги.
Из приведенных уравнений видно, что показатели прямого и
обратного включения усилителя зависят от сил Q и S сопротив-
ления его включению, передаточных чисел i, iA и za и к. п. д.
И -42-
Влияние сил сопротивления включению. Так как характер
действия сил Q и S различный, несомненно, что они оказывают
совершенно разное влияние на систему рулевого управления и на
работу усилителя.
Сила Q изменяется от величины центрирующей силы, опреде-
ляемой предварительным сжатием центрирующей пружины, и
придает системе рулевого управления жесткость. Эта сила пре-
пятствует включению усилителя и возникновению колебаний
управляемых колес и должна быть наибольшей.
Сила сопротивления S изменяется почти от нуля. Будучи вза-
имно уравновешенной с другой такой же симметричной силой,
она придает упругость рулевой системе и способствует появле-
нию колебаний управляемых колес. Очевидно, что эта сила дол-
жна быть наименьшей.
Отсюда вытекает одно из важнейших условий правильного
конструирования усилителей рулевого управления: отношение
сил Q и S должно быть наибольшим.
Из уравнения S = (2Pn + JFi + 2 Pxf) — видно, что сила S
зависит исключительно от конструкции распределителя. Так, на-
пример, из приведенных выше конструкций кранов распредели-
телей пневматического усилителя (см. рис. 46) наименьшее зна-
чение силы S, близкой к нулю, имеет конструкция VI с бес-
пружинным возвратом обратного клапана.
Влияние передаточных чисел. Приравнивая член урав-
нения (93) к единице, находим, что сила Т, включающая усили-
тель со стороны тяги, может быть в i раз больше, чем усилие Ро,
185
включающее усилитель со стороны рулевого колеса. Это полу-
чается тогда, когда прямое передаточное число от рулевого
колеса до распределителя равно полному передаточному числу z,
а обратное передаточное число z2 от продольной тяги до распре-
делителя равно единице.
Этому условию удовлетворяет такая компоновка усилителя,
при которой распределитель с центрирующим элементом соеди-
няется с концом следящего рычага сдвоенной сошки или разме-
щается в продольной тяге пли на рулевом валу; при этом усили-
тель включается при осевом перемещении тяги или рулевого
вала (см. рис. 34, а и 40).
Влияние к. п. д. рулевого управления. Из уравнения (93)
видно, что соотношение сил Т и Ро зависит от двух множителей i
и .
Первый множитель задается и остается постоянным. Второй
множитель переменный и зависит от конструкции рулевого меха-
низма, приработки и износа деталей передаточной пары. Кроме
того, этот множитель весьма неопределенный, так как обратное
включение усилителя происходит не в процессе совершаемого
поворота, а при движении автомобиля по прямой и неровной до-
роге, т. е. тогда, когда рулевой механизм находится в ненагру-
женном состоянии, и к. п. д. при этом получается весьма условным.
В этом случае решающим фактором является обратимость руле-
вого механизма или потери на трение в нем. Поэтому при иссле-
довании рассматриваемого вопроса потери на трение в рулевом
управлении оцениваем значениями условных к. п. д.
На основании испытаний рулевых механизмов разных конструк-
ций известно, что общие потери на трение при прямом и обратном
направлениях поворота валов различны, вследствие чего анализ
этого влияния весьма важен. Этот вопрос приобретает особое зна-
чение также и потому, что распределитель может быть встроен
в любой части системы рулевого управления с самыми различными
прямыми и обратными передаточными числами, а следовательно,
и условными к. п. д.
Потери на трение в рулевом механизме в прямом направлении
всегда ниже, чем в обратном, поэтому очевидно, что для отноше-
ния включающих сил Т и Ро действительно уравнение (93).
На основе установленных выше уравнений (87) и (88) на
рис. 117, а показаны кривые изменения параметров, характеризую-
щих прямое и обратное включение усилителя, в зависимости от
изменения прямого передаточного числа zx. При этом принято
следующее: полное передаточное число i = 25; прямой к. п. д. тц
(линия 1) изменяется прямолинейно от 1 при t\= 1 до 0,8 при
zx = 25 и обратный к. п. д. т]2 (линия 2) изменяется также прямо-
линейно от 0,4 при zx = 1 до 1 при zx = 25. В соответствии с при-
нятыми условиями построены кривые изменения величин:
POI(Q + S) = l/zxT]i (кривая 5); T/(Q + S) = Z/Z xtj2 (кривая 4);
186
Т/Ро == z'ih/ih (кривая 5) и Q I S = Z’0/i1h при значенияхпря-
мого включающего усилия Ро = 4, 6, 8 и 10 кГ (кривые 6, 7,
8 и 9).
Из кривых видно, что если при низком качестве обратимости
рулевого механизма (т)2 = 0,4) разместить распределитель вблизи
рулевого колеса (t\ = 1), то можно получить высокую сопротив
ляемость обратным включа-
ющим силам. Однако с по-
вышением обратимости руле-
вого механизма в процессе
его работы на автомобиле со-
противляемость усилителя
обратному включению будет
уменьшаться. Сопротивляе-
мость наиболее низка для не-
которых современных кон-
струкций рулевых механиз-
мов, в которых потери на тре-
ние особенно малы. К таким
о 'll
Ъ-Ъ
in
0.8
Ofi
/ч
0,2
конструкциям относятся вин-
товая передача с шариковой -----
гайкой, глобоидальная чер- i'/"
вячная передача, имеющая '1"ги
ролик, установленный на ша- 1,2
риках, кривошипная передача 7>/7
свращающимся пальцем и др. ’pg
Если принять для таких кон-
струкций т]! = 1 —0,85 и
i]2 = 0,65 — 1,0 при z‘i= 0.‘>
= 1—25, (рис. 117, б), то о?
значения параметров, харак-
теризующих сопротивляе-
мость обратному включению,
получаются значительно ни-
же. Так, например,изменение
отношения Т!Р0 (кривая 5)
Рис. 117. Изменение основных параметров
усилителя в зависимости от к. п. д.
гп и г12 и передаточного числа
при малых и больших значениях it получается уже совсем малым.
Кроме того, прямое передаточное число щ по конструктивным
признакам не может быть равно единице, и наименьшее его зна-
чение будет находиться в пределах 3—5. Поэтому отношение Т/Ро
несколько уменьшается.
Из приведенных кривых видно, что при малых значениях г,
сумма сил Q и S (кривые 2, 7, 8 и 9) должна быть особенно малой.
Если при этол/ учесть, что Q/S = шах, то сила S должна быть
близкой к нулю, что необходимо учитывать при конструировании
распределителя.
Влияние конструкции привода на чувствительность усилителя.
Из всех многочисленных конструкций усилителей заслуживают
187
внимания лишь некоторые из них, наиболее полно отвечающие
условиям эксплуатации. Эти конструкции можно разделить на
следующие две принципиально разные группы.
1. Усилители, отвечающие условиям, характеризуемым урав-
нениями (89)—(92). К этой группе относятся усилители, в которых
распределитель и центрирующий элемент встроены в рулевой
механизм (см. рис. 40, а), в продольную тягу (см. рис. 34, а),
в следящий рычаг сдвоенной рулевой сошки (см. рис. 38, е) и при-
водятся в действие при осевом перемещении рулевого вала или
продольной тяги или при взаимном смещении рычагов сдвоенной
рулевой сошки.
2. Усилители, отвечающие условиям, характеризуемым урав-
нениями (89), (90), (93) и (94). К этой группе относятся усилители,
в которых распределитель и центрирующий элемент встроены
между рулевым колесом и рулевой передачей и приводятся в дей-
ствие при тангенциальном движении рулевого вала (см. рис. 42, 45).
Для сравнения конструкций усилителей в отношении чувст-
вительности действия на рис. 118 показаны схемы привода от руле-
вого колеса до золотника или впускного клапана распределителя.
Для этих схем, в соответствии с номером на рис. 118, уравнения
передаточного числа гх, характеризующего чувствительность дей-
ствия, имеет следующий окончательный вид:
= <95)
О j . . (96)
О Вк 3- if — —— 1^', '0 (97)
4. Г1 + А (98)
СМ 1^ ю (99)
6. Z, = itgK. (100)
Усилители первой группы (схема /) в отношении прямого и
обратного включения и чувствительности действия равноценны.
Однако следует учесть, что для некоторых требуется специальная
конструкция рулевого механизма (см. рис. 42), а в других имеются
свисающие гибкие упругие шланги (см. рис. 34, а), не защищенные
от повреждений. Разработанный с учетом уравнений (89)—(94)
пневматический усилитель конструкции ЛАЗ-НАМИ (см. рис. 38, в
и 44, а) может успешно применяться на грузовых автомобилях,
автобусах, троллейбусах и других машинах, снабженных пневма-
тической системой. Распределитель прикреплен к кронштейну
картера рулевого механизма и приводится в действие при отно-
188
сительном перемещении рычагов сдвоенной рулевой сошки. Цен-
трирующее устройство с предварительно сжатой пружиной встро-
ено в рычаги сдвоенной сошки. Для такого усилителя не требуется
специального рулевого механизма, и он может применяться с лю-
бым из существующих механизмов.
Рис. 118. Схемы компоновок рас-
пределителя в системе рулевого
управления
Основными недостатками усилителей группы являются недо-
статочная чувствительность действия и отсутствие влияния тре-
ния в рулевой передаче на обратное включение.
Усилители второй группы (схемы 4—6) характеризуются более
высокими параметрами. Трение в рулевой передаче затрудняет
обратное включение усилителя и не влияет на прямое, в то время
как в усилителях первой группы трение затрудняет прямое вклю-
чение и не влияет на обратное. При наличии малого прямого пере-
даточного числа /] чувствительность действия усилителей второй
группы значительно выше, чем первой.
189
Из приведенных на рис. 118 схем усилителей наиболее высокую
чувствительность имеет усилитель, построенный по схеме 6.
В этой конструкции (рис. 119) распределитель приводится
в действие при осевом перемещении промежуточного вала, соеди-
Рис. 119. Конструкция тангенци-
ального привода распределителя
гидравлического или пневматиче-
ского усилителя, встроенного между
рулевым колесом и рулевым валом
высшую чувствительность и
пределитель с наименьшими
тела.
ненного с рулевым при помощи
пары цилиндрических прямозубых
шестерен 1 и пары косозубых ше-
стерен 2. Исследования рулевых
механизмов показали, что трение
скольжения в соединениях руле-
вого вала значительно снижает
обратимость рулевого механизма
и его обратный к. п. д., в то время
как на поворот рулевого колеса и
на прямой к. п. д. оно сколько-
нибудь заметного влияния не ока-
зывает. Поэтому трение скольже-
ния в шестернях затрудняет обрат-
ное включение усилителя и почти
не влияет на прямое.
Чувствительность действия это-
го усилителя (см. рис. 119) в
2 раза выше, чем упомянутых
выше усилителей (схемы 1 и 2).
Такой усилитель полностью соот-
ветствует условиям, характери-
зуемым уравнениями (89), (90),
(93) и (94). При его установке не
требуется специального рулевого
механизма, усилитель имеет наи-
дает возможность выполнить рас-
потерями на перетекание рабочего
Глава VII
ИСПЫТАНИЯ МЕХАНИЗМОВ РУЛЕВОГО УПРАВЛЕНИЯ
Методы испытаний и параметры, комплексно оценивающие ка-
чество рулевого управления, разработаны недостаточно полно.
В связи с этим получили наибольшее распространение методы
оценки рулевого управления по отдельным его элементам. Неиз-
бежные в процессе работы механизмов рулевого управления износ,
конструктивные недостатки и производственные погрешности
предопределяют ряд оценочных параметров, а также методы испы-
таний механизмов рулевого управления. Испытания механизмов
рулевого управления разделяются на следующие:
1) контрольно-оценочные;
2) проверочные, проводимые для определения прочности, на-
дежности, износостойкости и других факторов работы механизмов;
3) научно-исследовательские, проводимые для решения отдель-
ных вопросов или комплекса вопросов, связанных с работой меха-
низмов.
ОЦЕНКА ЛЕГКОСТИ РУЛЕВОГО УПРАВЛЕНИЯ
Легкость рулевого управления нужно оценивать при испыта-
ниях грузовых автомобилей и, прежде всего, большой грузоподъ-
емности, управление которыми затруднено, и особенно при испы-
таниях автобусов, управлять которыми значительно сложнее и
труднее, чем грузовыми автомобилями.
Определение усилия на рулевом колесе
Основным параметром для оценки легкости рулевого управ-
ления является усилие, прилагаемое к рулевому колесу. Если
к тому же будут известны угол поворота рулевого колеса и время,
в течение которого действует это усилие или происходит процесс
поворота, то оценка легкости рулевого управления по этим дан-
ным будет более полной.
Предлагалось оценивать легкость управления по работе,
совершаемой на рулевом колесе. Однако при одной и той же ра-
боте утомление водителя будет различным. Поэтому более пра-
вильно оценивать легкость управления по составляющим работы:
усилию на рулевом колесе и углу его поворота. Работа нарулевом
колесе может служить только в качестве параметра для сравни-
191
тельной оценки легкости рулевого управления различных авто-
мобилей, по на одном и том же испытательном маршруте.
Если автомобили испытывают по одному маршруту с постоян-
ными радиусами поворота и приблизительно в одних и тех же
условиях (например, подчиненных общему потоку городского
транспорта), то для оценки легкости управления достаточно опре-
делить усилие, прилагаемое к рулевому колесу.
До сих пор недостаточно известна величина усилия на рулевом
колесе, на которую нужно рассчитывать все детали рулевого
Рис. 120. Динамометрическое колесо с ви-
зуальным отсчетом прилагаемого усилия
управления данного автомо-
биля. Имеющиеся предпосыл-
ки к определению этих сил
нуждаются в накоплении экс-
периментальных данных.
Таким образом, усилие на
рулевом колесе должно опре-
деляться при двух состоя-
ниях автомобиля:
1) при движении в про-
цессе совершаемого поворота
для оценки легкости рулевого
управления;
2) на месте, преодолевая
сопротивление управляемых
колес повороту, для получе-
ния расчетных данных, ха-
рактеризующих прочность
всех деталей рулевого упра-
вления, а также для расчета
усилителя.
Приборы и устройства. Для определения усилия па рулевом
колесе при движении автомобиля применялись различные спо-
собы.
Я. М. Певзнер изготовил колесо (рис. 120), предназначенное
для визуального определения максимального усилия, прилагае-
мого к рулевому колесу при установившихся условиях кругового
движения автомобиля.
К рулевому колесу (основному) испытываемого автомобиля
прикрепляется дополнительное рулевое колесо, которое может
отклоняться относительно основного на некоторый угол. Допол-
нительное рулевое колесо поворачивается па оси, укрепленной
к основанию 1, которое связано с колесом посредством двух пред-
варительно растянутых пружин 2. При повороте дополнитель-
ного колеса одна из пружин будет растягиваться, а другая сжи-
маться до тех пор, пока прилагаемое к колесу усилие не будет
равно усилию, необходимому для поворота управляемых колес.
Конец стрелки 4, укрепленной к основанию 1, перемещается
в прорези шкалы и при повороте передвигает ползуны 3,
192
указывающие величину усилия, с которым совершается пово-
рот колес.
Для оценки технического состояния и изношенности рулевого
управления в целом в НИИАТ [61 разработан прибор (рис. 121),
состоящий из динамометрической ручки 1 с градусной шкалой 2,
Рис. 121. Прибор для измерения усилия на рулевом колесе
и угла свободного его поворота
прикрепляемой к ободу рулевого колеса 5, и стрелочного указа-
теля 4, укрепленного на рулевой колонке 5.
Техническое состояние элементов рулевого управления но-
вого автомобиля или капитально отремонтированного оценивается
по усилию на ободе рулевого колеса, возникающему при повороте
вывешенных управляемых колес из одного крайнего положения
в другое. Это усилие отсчитывают по шкале 6. Для грузовых авто-
мобилей (ГАЗ, ЗИЛ и МАЗ) это усилие должно быть в пределах
4-8 кГ.
Оценка изношенности элементов рулевого управления произ-
водится по свободному ходу рулевого колеса при неподвижно
13 М. И. Лысов 193
закрепленном правом переднем управляемом колесе в прямом
положении. При этом рулевое колесо поворачивают в обе стороны,
прикладывая малое усилие (1—1,5 кГ) к его ободу, и визуально
по шкале 2 отсчитывают свободный ход рулевого колеса, который
не должен превышать 15—20°.
При исследовании колебательных явлений управляемых колес
(шимми) Б. А. Глух применял прибор (рис. 122), записывающий
изменение усилия при повороте рулевого колеса. В качестве
упругого элемента служит рулевой вал, деформация которого
и записывается в виде графика. Закрутку верхнего конца рулевого
вала, на котором укреплено рулевое колесо, нужно определять
Рис. 122. Прибор для записи усилия на рулевом колесе в зависимости от угла
закрутки рулевого вала
относительно нижнего его конца. Для этого достаточно на верх-
нем конце жесткого круглого стержня, проходящего внутри по-
лого рулевого вала и укрепленного у его нижнего конца, укрепить
рычаг, перемещающий рычажок 3 записывающего прибора, при-
соединенного к рулевому колесу.
График записывается на эмульсии засвеченной кинопленки
иголкой, укрепленной на конце записывающего рычага 1
(рис. 122). Кинопленка перемещается при помощи небольшого
электродвигателя, питающегося от аккумуляторной батареи.
Кроме кривой изменения усилия рычаг 2 на ленте отмечает
нулевую линию и кривую времени. Для этого в приборе укреплен
рычажок 5 с иглой, который притягивается электромагнитом 4
и оттягивается пружиной. Замыкание и размыкание тока в об-
мотке электромагнита производится при помощи часового преры-
вателя [12].
Для определения работы на рулевом колесе может служить
прибор, разработанный А. И. Королевым (рис. 123). Он представ-
ляет собой динамометрическое рулевое колесо, в котором дефор-
мация пружин 1, характеризующая величину прилагаемого уси-
лия, записывается на бумажной ленте 2 в зависимости от угла по-
194
ворота рулевого колеса. Записывающий карандаш соединен с пру-
жинами гибкой связью 3, и его перемещение характеризует вели-
чину усилия на колесе. Перемещение бумажной ленты пропор-
ционально изменению угла поворота рулевого колеса. Ведущий
валик прибора связан с рулевой колонкой 4 гибкой нитью, намо-
танной на рулевую колонку, и поворачивается только в одну сто-
рону при повороте рулевого колеса в обе стороны, как это и пока-
зано на схеме стрелкой А. Это осуществляется при помощи двух
храповых механизмов 5, соединенных с ведущим валиком.
Этот прибор, хотя и записывает усилие, но не выявляет харак-
тера его изменения ни по времени, ни по углу или радиусу по-
ворота.
За последнее время широкое распространение получил способ
тензометрирования для определения действующих сил и напря-
жений по деформациям работающих испытываемых деталей.
По этому способу можно определить действующие силы и напря-
жения в элементах рулевого управления при различных условиях
движения автомобиля для изучения прочности. При этом усилие
и угол записываются при помощи осциллографа. Один из таких
приборов, оборудованных проволочными датчиками и осцилло-
13* 195
графом, показан на рис. 124, а. Прилагаемое к колесу усилие опре-
деляется по деформации упругого элемента визуально по при-
бору или по записанному осциллографом изменению деформации
в процессе совершаемого поворота.
В качестве упругого элемента очень часто используют рулевой
вал. В некоторых случаях в качестве упругого элемента приме-
няется специальная тарированная вставка 1 (рис. 124, б), закреп-
ляемая на рулевом валу под рулевым колесом, угол поворота ру-
левого колеса отмечается с помощью датчика 4, перемещаемого
шестеренчатыми передачами 2 и 3.
Попытки использовать в качестве упругого элемента спицу
рулевого колеса были неудачными. Правильные результаты
можно получить, если спица работает на изгиб только от скручи-
вающего момента и полностью разгружена от других мо-
ментов.
На основании анализа конструкций приборов и опыта работы
автора по определению усилия на рулевом колесе можно сделать
вывод, что наилучшим прибором для этой цели является допол-
нительное рулевое колесо, в котором усилие измеряется в зави-
симости от деформации встроенного в него упругого элемента.
Такое динамометрическое колесо может быть поставлено на
любой испытываемый автомобиль без разборки и переделки руле-
вого механизма.
Для практических целей вполне достаточно и удобно исполь-
зовать динамометрическое колесо с механической записью изме-
ряемых параметров на меловой или обычной бумаге.
Разработанный автором такой прибор показан на рис. 125, а.
В основу метода записи усилия положен принцип деформации
упругого элемента, а в основу метода записи угла поворота руле-
вого колеса — принцип перекатывания ролика по рулевой колонке
или по плоскости, перпендикулярной к ее оси.
196
Выбор конструктивных элементов динамометрического рулевого
колеса. Основным параметром динамометрического колеса яв-
ляется характеристика упругого элемента, определяющего вели-
чину и изменение усилия, прилагаемого к ободу колеса при дви-
жении автомобиля на повороте или на испытательном участке
дороги.
Прилагаемое к рулевому колесу усилие зависит от веса, при-
ходящегося на передние колеса автомобиля, сложности поворота,
Рис. 125. Общий вид динамометрического рулевого коле-
са с механической записью параметров и его упругие
элементы переменной жесткости
197
его радиуса, скорости движения, условий поворота (в движении
и "и та месте) и других факторов. Кроме усилия на повороте ди-
:ам метрическое колесо должно записать и обратные удары, ne-
'e „аюциеся от неровностей дороги. При этом получаемая запись
должна быть удобной для пользования при малых усилиях,
действующих при плавных и легких поворотах, и больших уси-
лиях, возникающих при трудных и крутых поворотах и при пово-
ротах на месте, а также обратных усилий, передающихся при дви-
жении по неровной дороге. Следует иметь также в виду, что испы-
таниям могут подвергаться рулевые управления грузовых авто-
мобилей, автобусов и легковых автомобилей разного веса.
Для записи усилий различной величины упругий элемент дол-
жен быть сменным.
Удобно пользоваться динамометрическим колесом с двумя вин-
товыми пружинами переменной жесткости (рис. 125, б).
С помощью двух достаточно мягких взаимно сжатых пружин 1
можно записать в большом масштабе небольшие по величине уси-
лия, возникающие при небольших поворотах, и усилия, дей-
ствующие от управляемых колес (обратные удары). При дефор-
мации этих пружин на величину f вступают в действие более
жесткие пружины 2, которые вместе с пружинами 1 позволяют
записать большие усилия, возникающие в процессе совершения
крутых поворотов автомобиля.
Время движения автомобиля характеризуется длиной бумаж-
ной ленты, на которой производится запись прилагаемого к колесу
усилия. Запись усилия в зависимости от времени движения авто-
мобиля дает возможность установить изменения усилия в течение
всего поворота. По изменению усилия при повороте направо и
налево можно судить о состоянии отдельных механизмов и сочле-
нений рулевого управления, о соответствии их техническим ус-
ловиям и о других качествах и особенностях.
На рис. 126 для примера показаны кривые изменения усилия
на рулевом колесе, записанные во время движения автомобиля на
одном и том же повороте испытательного маршрута.
Кривая 1 получена при наличии жестких пружин и движении
бумажной ленты с большой скоростью во время испытания авто-
буса американского концерна Дженерал Моторе. Обработка ре-
зультатов испытаний по такой кривой на всех поворотах затруд-
нительна.
Кривая 2 записана при тех же пружинах, но при значительно
меньшей скорости движения ленты. Эта кривая компактнее, но
масштаб усилия недостаточен и величины усилия отсчитываются
с погрешностями.
Кривая 3 получена при той же скорости движения ленты, что
и кривая 2, но с более мягкими пружинами, поэтому отсчет уси-
лия более точный.
Кривая 4 записана при тех же пружинах, что и кривая 3,
но при очень малой скорости движения бумажной ленты во время
198
испытания автобуса фирмы Мерседес—Бенц, снабженного ги-
дравлическим усилителем. Принятая при этом скорость движения
бумаги, как видно, недостаточна.
Кривая 5, записанная при повороте автомобиля ГАЗ-66 с ги-
дравлическим усилителем с жесткими пружинами в приборе, не-
пригодна.
РккГ
20 Г
10
О
10
20
2/7 Г
10 -
О -
10 -
Рис. 126. Кривые изменения уси-
лия на рулевом колесе во время
поворота автомобиля при различ-
ной жесткости упругого элемента
в динамометрическом колесе
Очевидно, что кривая 3 наиболее приемлемая. Для оценки при-
нимаются наибольшие величины усилия при повороте направо
Pfitmx и налево Рлгаах, определяемые по средней кривой 6. Уси-
лиями, записываемыми в средней части графика во время перехода
с левого поворота на правый или обратно при прямом положении
управляемых колес, характеризуются обратные удары, передаю-
щиеся от неровностей дороги.
При движении по прямой и неровной дороге передаваемые на
рулевое колесо обратные удары изменяются чрезвычайно быстро
и направлены в разные стороны. Чтобы получить удобные для
199
пользования кривые, скорость движения бумажной Ленты дол-
жна быть значительно выше, чем при ее движении в процессе по*
ворота автомобиля, а в качестве упругого элемента следует при-
менять весьма мягкие пружины.
На рис. 127 показаны две кривые изменения усилия, передаю-
щегося на рулевое колесо, при движении по прямой и неровной
дороге. Кривая 1, записанная при наличии жестких пружин в ди-
намометрическом колесе, не отражает обратных ударов, и такую
кривую нельзя считать удовлетворительной. Кривая 2 получена
Рис. 127. Изменение усилий, передающихся на рулевое колесо при обратных
ударах и упругих элементах разной жесткости
при использовании мягких пружин и при большой скорости дви-
жения бумажной ленты. Такая кривая вполне приемлема.
Таким образом, в динамометрическом рулевом колесе упругий
элемент должен быть сменным и состоять из трех пар пружин,
две из которых должны иметь переменную жесткость; бумажная
лента должна иметь не менее двух скоростей движения (лучше
три).
На рис. 128 показаны три масштаба при различных применя-
емых упругих элементах в динамометрическом рулевом колесе,
полученные после тарировки и обработки.
В масштабе 1 для случая жестких пружин при усилии Рк
10 кГ работают одни более мягкие пружины, деления полу-
чаются достаточно крупные, а при усилии более 10 кГ деления ста-
новятся значительно мельче, и измеряемое усилие может дости-
гать 60 кГ.
В масштабе II, соответствующем пружинам средней жестко-
сти, деления до усилия Рк= 5 кГ получаются более крупные, а
после увеличения усилия становятся мельче, и измеряемое уси-
200
л не может достигать 30 кГ. В масштабе 111 для мягких пружин
деления крупные, и измеряемое усилие может доходить до 9 —
10 кГ.
Записывающий карандаш (иглу) можно установить на конце
рычага, прикрепленного непосредственно к дополнительному
рулевому колесу. При таком способе крепления карандаш пере-
мещается по дуге окружности, при которой конечные точки, ха-
рактеризующие величину усилия, отклоняются от нулевого по-
Рис. 128. Масштабы
усилий в зависимости
от жесткости приме-
няемых упругих эле-
ментов в динамоме-
трическом колесе
-г
—; — 60
50
--Г-40
-i- 30
—-~'i;
—^—10
—ЕЕ—о
--^6—10
—i i—20
Чг 30
—i-—w
-г- 50
—— 00
I
«Г
"Г
ложения. При этом чем больше усилие, тем больше карандаш
отклоняется в сторону от нулевого положения. Это затрудняет
расшифровку записываемых кривых и сопоставление их между
собой, особенно при сравнительной оценке разных автомобилей.
Следовательно, карандаш должен перемешаться ио прямой ли-
пни, перпендикулярной к нулевой линии.
Одна из возможных конструктивных схем записывающего
механизма с прямолинейным перемещением карандаша (иглы)
показана на рис. 129. Неподвижный держатель 1 имеет две скобы,
в которых на осях установлены рычаги 2 и 3, связанные между со-
бой двуплечим рычагом 4. Укрепленная на конце рычага 4 игла
(перо) перемещается ио прямой линии А—В, перпендикулярной
к нулевой линии. В середине рычага 3 установлена па оси тяга 5,
второй конец которой связан с рычагом 6, закрепленным на до-
полнительном рулевом колесе и перемещающимся в обе стороны.
Таким образом, при перемещении дополнительного колеса
относительно основного колеса рычаг 6 через тягу 5 перемещает
рычаги 3 и 4, а следовательно, и иглу.
201
Для удобства пользования, особенно для заправки катушки
лентой, пишущий механизм делают откидным, поворачивающимся
вокруг оси О—О закрепляющего его винта.
Запись производится на меловой бумаге заостренной стальной
иглой, которая прижимается к бумаге при помощи мягкой плос-
кой пружинки, закрепленной под рычагом 4.
Все оси рычагов имеют конические опоры и регулируются.
Рис. 129. Записывающий механизм с прямолинейным перемещением иглы
Для записи угла поворота рулевого колеса используется уст-
ройство с роликом, перекатывающимся по рулевой колонке
(рис. 130). Вращение ролика 1 через зубчатую передачу 2, гибкий
валик 3 и ролик 4 передается пишущему механизму. Один из
примеров одновременной записи угла и усилия приведен на
рис. 125, б.
Динамометрическое рулевое колесо с механической записью,
применяемое в НАМИ при испытаниях рулевого управления лег-
ковых, грузовых автомобилей и автобусов, было показано на
рис. 125, а. Такой прибор успешно применяется во время испыта-
ний рулевого управления с усилителем и без него при движении
автомобиля и в лабораторных условиях.
В табл. 6 приведены значения максимальных усилий, прила-
гаемых к рулевому колесу автобусов различных марок, в процессе
совершаемых ими поворотов при ипытаниях на городском испы-
тательном маршруте в условиях насыщенного движения город-
ского транспорта. Приведенные данные характеризуют действи-
тельные режимы работы водителя в условиях городской эксплуа-
тации. Они указывают на сложность некоторых совершаемых по-
воротов и на то, что трудность их выполнения различна. Однако
оценить легкость рулевого управления по этим данным затруд-
нительно.
Более определенной характеристикой легкости рулевого управ-
ления может служить средняя величина усилия, приходящегося
на один поворот испытательного маршрута:
Р
гк.ср — п ,
202
Рис. 130. Устройство с перекатывающимся роликом для записи угла поворота
рулевого колеса
6. Усилия в кГ на рулевом колесе различных автобусов в процессе
совершаемых поворотов на городском испытательном маршруте
№ поворотов ЛАЗ-695 без усилителя ЛАЗ-695 с пневматиче- ским усилителем ЛиАЗ-677 с гидравличе- ским усили- телем Дженерал-Мо- i торс без усили- теля сс с. а t с а с с 3 матическим уси- лителем Икарус-180 с гидравличе- ским усилителем Икарус-556 с гидравличе- ским усилителем Мерседес-Бенц с гидравличе- ским усилителем Икарус-242 с гидравличе- ским усилителем
№ 1 Ns 2
1 15 6,5 9,0 6,7 12,4 10,5 7,7 7,3 4,5 8,2
2 15 8,5 9,2 7,4 12,0 7,0 8,1 9,1 5,0 8,8
3 14 10,5 11,5 6,8 16,0 16,0 8,1 8,8 5,5 8,9
4 18 9,0 9,1 6,2 12,2 7,6 7,9 7,3 4,5 8,6
5 26 11,5 8,2 6,5 12,5 10,5 7,8 8,0 6,0 8,5
6 22 12,0 7,5 6,8 15,2 12,0 8,3 8,0 6,5 9,5
7 12 5,0 7,5 7,3 8,8 11,0 10,5 9,2 3,5 12,0
8 20 8,0 7,6 6,3 11,2 9,0 6,1 8,4 4,0 —
9 16 11,5 13,6 7,0 12,4 9,5 8,1 9,3 6,0 9,1
10 15 5,5 8,5 6,9 10,7 10,0 7,5 7,9 3,5 8,2
И 22 8,0 11,5 6,0 11,4 12,0 8,0 8,6 6,0 8,7
12 20 9,0 10,0 7,3 14,2 14,0 8,7 9,0 6,5 10,8
13 20 11,0 8,3 5,8 10,2 12,0 7,9 7,1 5,5 8,6
14 15 12,0 9,0 7,0 12,0 12,0 8,4 8,1 6,0 9,9
15 13 9,0 9,5 5,8 10,6 7,0 7,2 7,0 4,5 7,5
16 20 8,5 9,5 5,8 10,4 12,0 7,8 8,0 4,3 8,2
17 14 8,0 7,3 5,8 9,1 11,5 7,4 7,0 4,8 8,0
18 17 9,5 8,7 6,3 11,1 9.0 7,5 7,3 4,0 8,2
19 13 5,5 8,9 6,0 12,2 9,5 9,9 8,0 5,0 10,2
20 15 9,5 8,5 7,5 9,8 8,0 7,6 6,6 4,0 8,2
21 14 6,5 10,2 5,4 12,0 8,0 7,3 7,0 5,8 7,8
22 16 11,0 9,8 6,1 11,7 7,0 7,8 7,0 6,2 8,2
23 18 10,5 10,9 5,8 12,8 8.0 8,1 8,2 6,0 9,1
24 26 12,5 10,4 5,8 13,0 13,0 8,4 9,6 6,5 10,0
25 16 11,0 11,5 7,6 13,6 9,6 7,2 7,7 6,0 7,7
26 26 13,0 11,8 6,7 15,6 14,0 8,4 8,2 6,5 10,1
27 20 8,5 8,5 7,0 12,6 10,5 9,6 9,3 4,5 и,о
28 28 13,0 9,5 8,9 19,0 13,0 11,5 10,1 6,0 12,6
29 18 8,5 8,5 8,0 15,6 6,0 8,0 8,6 4,0 8,7
30 21 8,5 11,0 7,4 13,2 12,0 8,4 8,7 5,8 10,1
31 10 5,0 11,2 6,0 И,2 6,0 6,5 6,1 5,0 —.
32 26 11,5 12,1 8,2 17,2 13,0 10,0 9,5 5,5 11,2
33 19 9,0 9,1 7,6 10,6 12,0 6,7 7,0 6,0 —
34 20 12,0 11,6 6,7 12,0 п,о 8,3 8,2 5,5 9,1
35 25 13,0 13,5 6,3 16,0 12,0 11,6 12,0 4,0 11,4
36 25 10.0 10,5 8.1 14,0 11,0 8,1 7,8 6,0 7,4
37 20 9,5 10,0 6,0 11,0 10,0 6,6 7,2 5,5 —
Рк. ср 18,65 9,5 9,8 6,72 12,6 10,45 8,2 8,18 5,26 8,95
204
Где ti — чйсло Поворотов на Испытательном маршруте. Эти сред-
ние величины также приведены в табл; 6.
Ниже дана характеристика легкости рулевого управления раз-
личных грузовых автомобилей (без усилителей, кроме последних
двух), определяемая по усилию Рк ср для того же городского ис-
пытательного маршрута:
Автомобили Рк. ср кГ
ЯАЗ-210 . 27,3
МАЗ-200 ................ 20,5
МАЗ-502 . ............. 26,8
Броквей .... 12,7
УРАЛ 10,9
Гранит .................... 8,4
ГАЗ-51 .................... 8,4
Автомобили
Урал-375 .............
ЗИЛ-157 ..............
ГАЗ-63................
ГАЗ-66:
без усилителя . .
с усилителем ....
ФИАТ-690Н с усилителем
Рк. ср КГ
32,5
29,3
5.3
13,4
4,8
7,8
Рулевые управления автомобилей ГАЗ-51 и ГАЗ-63 доста-
точно легкие, и они принимаются за эталонные, по которым
сравниваются рулевые управления других автомобилей.
Определение усилий, действующих в элементах
рулевого привода
Для определения усилий, действующих в различных элементах
рулевого привода, разрабатывались различные приборы и уст-
ройства. При изучении вопроса стабилизации управляемых колес и,
в частности, для определения стабилизирующего усилия, дей-
ствующего от колес, Я. М. Певзнер разработал сдвоенную гидрав-
лическую рулевую сошку (рис. 131). Вильчатый рычаг 2 укреп-
ляют на валу 1 сошки рулевого механизма. На пальце 3 вильча-
того рычага подвешивают рычаг 4 с гидравлическим цилиндром
на конце. Два поршня 7 и 8 цилиндра удерживаются двумя крыш-
ками 9. Штифты 6 и 10 на концах вильчатого рычага упираются
в торцы поршней. Конец продольной тяги соединяют с шаровым
пальцем 5 на рычаге 4. Пространство между поршнями при по-
мощи шланга 11 сообщается с манометром 12 и с краном 13 на-
соса 14, предназначенного для заполнения системы маслом.
В связи с тем, что стабилизирующее усилие определяется при уста-
новившемся круговом движении автомобиля, его величину нахо-
дят визуально по манометру.
Для определения обратных ударов, передающихся от неров-
ностей дороги на управляемые колеса, и сил, действующих в руле-
вом приводе, автор разработал гидравлический наконечник 2
(рис. 132, а), навертываемый на продольную или поперечную
рулевую тягу 1. Внутри наконечника размещается гидравличес-
кий цилиндр /5, зажимаемый в головке между шайбами 4 и 7
205
втулкой 8. Внутри цилиндра установлены два поршня 6 с заклад-
ными манжетами 5 повышенной герметичности.
На выступающие из цилиндра концы поршней со сферически-
Рис. 131. Рулевая сошка с гидравличе-
ским датчиком для измерения давления
ми торцами опираются попе-
речина 3 и вкладыш 13 шаро-
вого пальца 10, которые через
второй вкладыш и шарик 11
прижимаются к поперечи-
не 12. Обе поперечины сво-
бодно скользят по прорезям
в наконечнике 2 и во втул-
ке 8. При помощи стяжных
болтов 9 и 14 вся система
регулируется гайками так,
чтобы соединение между пор-
шнями и шайбами с одной
стороны и поперечинами с
промежуточными деталями—с
другой было без зазора. Про-
странство между поршнями
заполняют маслом и через
штуцер 16 при помощи шлан-
га соединяют с самописцем,
изображенным на рис. 132,6.
Трубка Бурдона 17 закреп-
лена на основании 24. Подви-
жной конец трубки соединен
с рычажным механизмом 22
с записывающим пером 18.
Давление записывается на бумажной ленте, намотанной на
катушку валика 19. При вращении ведущего валика 20 небольшим
электродвигателем 23 бумажная лента, проходя через столик ос-
Рис. 132. Гидравлический наконечник с самописцем для определения усилия
в продольной и поперечной тягах и кривые изменения давления в продольной
тяге
206
нования, наматывается на другую катушку с валиком 21, соеди-
ненным с ведущим валиком пружинным ремнем. Намотанная на
катушку бумага все время прижимается плоской мягкой пружи-
ной для предотвращения разматывания.
Некоторые из примеров полученных кривых изменения давле-
ния в гидросистеме при движении автомобиля по булыжному шоссе
хорошего качества показаны на рис. 132, в.
Определение сопротивлений
управляемых колес повороту
Сопротивление управляемых колес, возникающее при движе-
нии автомобиля на повороте или при повороте колес на месте,
определяют для автомобилей с разными конструктивными дан-
ными и параметрами. Такая методика изучения сопротивления
управляемых колес повороту несовершенна. Конструктивные дан-
ные у разных автомобилей различны. Различны также и потери на
трение во всех сопряжениях рулевого привода, в том числе и в
поворотных цапфах, а эти потери являются одним из составляю-
Рис. 133. Экспериментальная передняя ось с изменяющимися конструктив-
ными параметрами
щих при определении сопротивления колес повороту. Методика
экспериментального определения сопротивления управляемых
колес повороту будет более правильной, а получаемые при этом
результаты ближе соответствовать действительным в том случае,
если потери на трение во всех сопряжениях рулевого привода оди-
наковы, а изменяться будут только изучаемые факторы в зависи-
мости от изменения конструктивных параметров. Это может быть
достигнуто при изучении происходящих явлений на одном и том
же автомобиле, но с изменяемыми изучаемыми конструктивными
параметрами.
Влияние установки управляемых колес можно исследовать
с помощью экспериментальной передней оси, в которой могут быть
изменены основные конструктивные параметры (углы установки
колес, плечо их поворота, углы развала и схождения и др.) и ве-
личина их заранее задана.
207
измерения углов поворота упра-
вляемых колес
Экспериментальная передняя ось (рис. 133) с изменяемыми
основными конструктивными параметрами разработана Я- М. Пев-
знером для изучения вопросов стабилизации управляемых колес.
Поперечный угол наклона шкворней изменяется клиньями 3 и
рычагами 2, которые изготовлены как одно целое с кулаками пе-
редней оси, поворачивающимися относительно ее балки на осях 1.
Продольный угол наклона шкворней
изменяется клиньями 5, подкладывае-
мыми между рессорами и площад-
ками оси.
Угол развала колес изменяется
поворотом фланцев 7 относительно
фланцев 6, скрепленных болтами. Из-
меняющийся при этом угол схожде-
ния колес регулируется длиной по-
перечной тяги 4. Плечо С поворота
колес изменяется положением вту-
лок 9, на которых установлены коле-
са. Втулки 9 навертывают на сту-
пицы 8 поворотных цапф.
Общие потери на трение во всех
сопряжениях рулевого привода вне
зависимости от сопротивления колес
повороту могут быть определены при
помощи поворотных кругов, на кото-
рых можно поворачивать управляе-
мые колеса без скольжения их по
поверхности измерительной площадки
(рис. 134).
Управляемые колеса обкатываются вокруг шкворней, поэтому
площадка 7, на которой стоит колесо, должна не только повора-
чиваться на шариках 4, но и перемещаться в поперечном направ-
лении. С этой целью площадка 3, расположенная под площадкой 7,
перемещается по шарикам 2, заложенным в поперечные канавки
площадок 3 и 1. Площадка 1 является основанием, на котором мон-
тируются и скрепляются обе верхние площадки винтами 5 и 6.
Для изучения влияния размера профиля шин ступицы экспе-
риментальной оси должны быть сделаны так, чтобы на них можно
было монтировать колеса с изучаемым профилем шин. Нагрузку
на управляемые колеса изменяют при помощи балласта, загру-
жаемого в ящик, укрепленный в передней части автомобиля.
ИСПЫТАНИЕ РУЛЕВЫХ МЕХАНИЗМОВ
Определение углового передаточного числа
Передаточное число выполненного рулевого механизма пра-
вильно может быть определено но тангенсу угла а наклона каса-
тельной к кривой, устанавливающей экспериментально зависи-
208
мость между углом ц> поворота рулевого вала н углом р поворота
вала сошки.
Углы поворота валов можно измерять различными способами:
1) угол <р — при помощи градуированной шкалы со стрелоч-
ным указателем, а угол р — простым угломером или градуиро-
ванной шкалой со стрелочным указателем (см. рис. 153);
2) угол ф — при помощи градуированной шкалы 2 (рис. 135)
со стрелочным указателем /, а угол р — более точно при помощи
оптического угломера 5.
Оптические угломеры можно приме-
нять по-разному:
1) одна из линеек угломера касается
гладкой плоскости 3 угольника, к которому
прикреплен рулевой механизм, а другая —
двух каких-либо точек рулевой сошки, но
одних и тех же при всех измерениях (рис.
135, справа);
2) одна из линеек угломера, как и
в первом случае, касается гладкой плос-
кости 3 угольника, а другая прижимается
к призме 4, имеющей две ровные и парал-
лельные стороны и привернутой к рулевой
сошке или ее валу (см. рис. 135, внизу);
3) одну из линеек прикрепляют к кон-
цу вала сошки и поворачивают вместе
с ним, а другую линейку при каждом
повороте рулевого колеса с помощью
уровня доводят до горизонтального поло-
жения.
Во всех случаях зависимость ф = f (0)
по полученным данным строится в виде
кривой. Неточности при измерении выпра-
вляются при построении кривой. Измерен-
ные углы поворота
Дф„ = Дф + ЛДф = Дф (1 + Л)
и
др„ - др + ВДр = др (1 + В),
где Дф и Др — действительные углы поворота;
Л и В — относительные ошибки при измерении.
Исходя из этого измеренное передаточное число
ij \ _ Дф (1 + Л) _. 1 + А
др (1 + В) 1фВ’
Рис. 135. Устройства для
определения углов пово-
рота валов рулевого меха-
низма
(101)
(102)
(ЮЗ)
гДе г<о — действительное значение передаточного числа.
Точность
С -- Ой)"
А — В \
1+В )
14 М. И. Лысов
(Ю4)
209
откуда
B = --5-t(a . (105)
Из рассмотрения последнего уравнения находим, что точность
измерения угла поворота вала сошки р должна быть выше точности
измерения угла поворота рулевого вала ср.
В соответствии с этим результаты измерений углов, получае-
мые при помощи градуированной шкалы со стрелочным указа-
телем или при помощи простого угломера, получаются совершенно
неудовлетворительными.
При использовании оптического угломера без каких-либо
приспособлений (см. рис. 135, справа) не обеспечиваются одни и
те же точки касания линейки угломера с рулевой сошкой, вслед-
ствие чего точность замера этих углов также получается неудов-
летворительной.
В случае применения призмы, прикрепляемой к сошке или
к ее валу, также не достигается абсолютно точного положения
линеек угломера, вследствие чего точность результатов измерений
недостаточна. В этом случае отклонение от первоначального на-
правления одной из линеек угломера вызывает искажение резуль-
татов.
В случае, когда одна из линеек оптического угломера повора-
чивается вместе с валом сошки, а другая устанавливается по
горизонтали, результаты измерений угла поворота вала сошки
достаточно точные. Однако значения углов поворота рулевого
вала, измеряемые при помощи градуированной шкалы со стрелоч-
ным указателем, получаются неудовлетворительные.
Наиболее точные результаты дает измерение оптическими при-
борами, но этот способ сложный и трудоемкий.
Интересным является способ непосредственной записи кривой
зависимости ф = / (₽) ПРП помощи специального самописца.
В этом случае ошибки при измерениях углов исключаются и ре-
гистрируется действительная зависимость между ними. Основным
недостатком последнего способа является необходимость приме-
нения длинных валиков в записывающем механизме, по которым
перемещается широкая бумажная лента. Широкая лента необ-
ходима для получения большого масштаба угла поворота вала
сошки. Так как кривая записывается в прямом и обратном на-
правлениях, то вследствие даже самых незначительных неточно-
стей в диаметре валиков, а также толщине и в ровности бумаги
кривая может быть искаженной и не вполне соответствующей дей-
ствительной. Кроме того, отсутствие сетки, координирующей
записанную кривую, чрезвычайно затрудняет отсчет углов по-
ворота валов. Поэтому и этот способ является нецелесообразным.
Кроме неточностей, получающихся в процессе измерения углов,
возникают затруднения и при пользовании кривой, устанавливаю-
210
Рис. 136. Устройства для
определения углового пере-
даточного числа
щей зависимость между ними. Из построенной кривой нельзя
получить особенно точных значений углов [3 или их прираще-
ния Ар, по которым определяется передаточное число. Поэтому
метод определения при помощи кривой угловой зависимости
нельзя считать вполне удовлетворительным.
Передаточное число автор предлагает определять путем под-
счета по непосредственно получаемым данным приращения углов
поворота валов. В данном случае руле-
вой вал должен поворачиваться на
равные углы с необходимой точностью.
При этом могут быть два варианта пово-
рота на равные углы: либо рулевого
вала на угол Аф, либо вала сошки на
угол Ар. Из-за большого трения в ру-
левом механизме со стороны сошки и
большого обратного передаточного числа
трудно осуществить поворот вала сошки
на малый, заранее заданный угол Ар
с большой точностью. Если же рулевой
механизм необратимый или выполнен
на пределе обратимости, то такой пово-
рот произвести невозможно.
Можно поворачивать рулевое колесо
и таким образом добиваться поворота
вала сошки на равные заранее заданные
углы Ар с большой точностью. Однако
такой процесс сложный и трудоемкий.
В этом случае нужно точно отсчиты-
вать оба угла: и вала сошки Ар, и
рулевого вала Аф.
Предложенный автором принцип из-
мерения углов поворота вала сошки Ар
при повороте рулевого вала на равные,
заранее заданные углы Аф с необходи-
мой точностью их отсчета является, сле-
довательно, наиболее правильным.
Рулевой вал предлагается поворачивать при автоматическом
отсчете равных углов Аф, вследствие чего измерять величину угла
при каждом повороте рулевого колеса не нужно, и весь процесс
упрощается. Это осуществляется при помощи специального уст-
ройства (рис. 136, а), состоящего из прикрепленного к рулевому
колесу угломерного диска 1 с радиальными канавками и прикреп-
ленного к рулевой колонке фиксирующего устройства.
Фиксирующее устройство состоит из кронштейна 6, на конце
которого в направляющей 4 расположен стережнь 3 квадратного
сечения. В вилке стержня на оси вращается ролик 2. Стержень
с роликом прижимается к угломерному диску плоской пружи-
ной 5. Ролик фиксатора, перекатываясь по угломерному диску при
14*
211
повороте рулевого колеса, заскакивает в канавки диска и автома-
тически фиксирует, таким образом, равные углы поворота руле-
вого вала. Каждому такому углу соответствует вполне опреде-
ленный угол поворота вала сошки.
Углы поворота вала сошки можно измерить с большой точ-
ностью при помощи оптического угломера с точной градуировкой
шкалы. Одна его линейка, как указывалось выше, должна быть
прикреплена к валу сошки специальным зажимом, а вторую ли-
нейку после каждого поворота рулевого колеса нужно доводить
до горизонтального положения при помощи уровня. Портативный
уровень также может быть прикреплен к этой линейке с помощью
другого зажима.
Наиболее точные данные углов поворота вала сошки полу-
чаются при измерении их посредством оптического уровня, при-
крепленного к валу сошки при помощи специального кронштейна
(рис. 136, б).
Рулевой механизм 8 (в данном случае автомобиля ЗИЛ-164)
укреплен для удобства работы на универсальном кронштейне.
На нарезанной части вала сошки закреплено гайкой ушко 9
кронштейна 7. Оптический уровень прикреплен к полке крон-
штейна при помощи двух зажимов 13. При повороте рулевого ко-
леса поворачивается вал сошки, а вместе с ним на тот же угол
поворачивается и кронштейн вместе с оптическим уровнем. Углы
поворота вала сошки измеряют следующим образом. После каж-
дого поворота рулевого колеса, т. е. от одной канавки угломер-
ного диска до другой, уровень со шкалой поворачивают вручную
до горизонтального положения воздушного пузырька 11, а затем
его положение точно устанавливают регулировочным винтом 12.
Угол поворота вала сошки отсчитывают при этом через объектив 10
по внутренней шкале, освещаемой сзади лампочкой.
На рис. 137 показаны кривые изменения передаточного числа,
полученного разными способами для трех рулевых механизмов.
Кривые на рис. 137, а построены для рулевого механизма «Гей-
мер» с глобоидальной передачей по данным, полученным простей-
шими измерительными средствами, т. е. с помощью градуирован-
ной шкалы на рулевом колесе со стрелочным указателем на колонке
и простого угломера на валу сошки (см. рис. 135). Для глобои-
дальной передачи передаточное число почти постоянно. Получен-
ные по этим кривым данные явно неудовлетворительны.
Кривые на рис. 137, б построены для рулевого механизма
с глобоидальной передачей автомобиля «Паккард» по данным, по-
лученным при автоматическом отсчете углов поворота рулевого
колеса и оптическом уровне, прикрепленном к валу сошки
(рис. 136). Изменение углов поворота валов с этими приспособле-
ниями и определение по ним передаточного числа производилось
4 раза.
Как видим, результаты измерений, полученные этим способом,
вполне удовлетворительны, они весьма близки к действительным.
212
Кривые на рис. 137, в построены для рулевого механизма с вин-
товой передачей и поворачивающейся гайкой грузового авто-
мобиля «Штеер» по данным, полученным при помощи угломерного
диска с фиксатором и оптического угломера с обычным уровнем.
825 705 585 -56.5 555 225 105 О 105 225 J65 665 535 705 825
825 705 585 665 Зб5 225 105 О 105 225 355 685 585 705 825
Рис. 137. Кривые изменения передаточного числа t(0 рулевого механизма,
определенного при разных способах измерения углов
Из последних кривых видно, что в этом случае точность повтор-
ных измерений угломерного диска с фиксатором также вполне
удовлетво р ите л ь н а.
На рис. 138, а показаны четыре кривые изменения передаточ-
ного числа рулевого механизма автомобиля «Москвич-401», имею-
щего рулевой механизм с глобоидальной передачей с трехзубым
сектором. Проведенная толстой штриховой линией кривая сред-
них значений передаточного числа чрезвычайно мало отличается
от данных четырех экспериментальных кривых.
213
Из приведенных на рис. 137, б и в и 138, а кривых видно, что
точность повторных измерений при работе с автоматическим от-
считывателем и оптическим уровнем или угломером получается
высокой, вследствие чего этот способ может быть рекомендован
для практического применения.
Большое влияние точности отсчета углов поворота и рулевого
вала и вала сошки указывает на необходимость точного центри-
рования угломерного диска на рулевом колесе. Несомненно, что
смещение центра диска от оси поворота рулевого вала вызовет
отклонение и в изменении угла поворота рулевого колеса, а сле-
довательно, п передаточного числа.
'-U
765 675 585 695 605 315 225 135 65 0 65 135 225 315 405 6 95 585 675 765
Рис. 138. Кривые изменения передаточного числа ia рулевых механизмов
На рис. 138, б показаны кривые изменения передаточного числа
рулевого механизма с червячной передачей автомобиля «МАК»
при сравнительно правильной установке угломерного диска на
рулевом колесе, а на рис. 138, в — при заведомо смещенном диске
от оси рулевого вала. Как и следовало ожидать, последние кривые
напоминают синусоиду. Максимальные и минимальные значения
чередуются через каждый оборот рулевого колеса.
В основу теоретического исследования влияния смещения
диска положен тот же принцип, который принят и при экспери-
ментальном определении передаточного числа, т. е. тот, который,
согласно сказанному выше, получается как частное от деления при-
ращения утла поворота рулевого вала А<р на соответствующее
ему приращение угла поворота вала сошки Ар.
Если центр угломерного диска смещен от оси вращения руле-
вого вала на величину эксцентрицитета е, то углы tpx, на которые
поворачивается рулевой вал, отличаются от углов <р0, составляе-
мых каждыми двумя смежными канавками угломерного диска и
принимаемых равными между собой при определении передаточ-
ного числа.
214
Схема на рис. 139 показывает, как влияет смещение угломер-
ного диска на величину угла поворота рулевого вала. При кон-
центричном расположении угломерного диска с центром 0t фик-
сирующий ролик (средняя его точка по длине) описывает окруж-
ность I.
Около оси 02 рулевого вала угломерный диск поворачивается
при смещенном его положении, и при этом фиксирующий ролик
описывает на угломерном диске окружность II.
Если при концентрично расположенном диске фиксирующий
ролик переместится по дуге AtBlt то при эксцентричном располо-
жении диска ролик переместится
по дуге АВ, смещенной от дуги
AjBp Радиус Rx дуги окружно-
сти II от центра диска будет пе-
ременным. При постоянном ради-
усе 7? перекатывания ролика по
угломерному диску дуга АВ, отли-
чающаяся от дуги A J3 ь и соот-
ветствует новому углу фЛ вме-
сто ф0.
Искомый угол фх определяется
из треугольника А02В:
1 / AR \ 2
cos фд = 1--g- • (106)
Из треугольника AOtB хорда Рис’ 139, Схема Для определения
1 г влияния эксцентрицитета е угло-
ДВ = мерного диска на изменение пере-
_____________________ даточного числа
= ]/' 7?х1+7?д2—2ВХ1ВХ2 cos фо- (Ю7)
Из треугольников А0г02 и BOjOg находим переменные ра-
диусы:
Rxi == R е — 2е7? cos ф; (108)
7?х2=:7?2 + е2 —2еВсо8(ф —фх). (109)
Решая совместно уравнения (107), (108) и (109), из уравнения
(106) получим искомое значение угла фл.
В связи с изменением угла фх передаточное число также из-
меняется:
(Ua(ПО)
тО
Исследование влияния величины радиального смещения диска
относительно оси рулевого вала на изменение передаточного числа
проведено для рулевого механизма с червячной передачей с заве-
домо постоянным передаточным числом.
На рис. 140 изображены экспериментальные кривые измене-
ния передаточного числа по углу поворота рулевого вала в зави-
215
снмостн от величины радиального смещения е диска. Средний
постоянный радиус окружности перекатывания ролика фикса-
тора по угломерному диску равен 140 мм. На последних экспе-
риментальных кривых, соответствующих смещению угломерного
диска на величину е = 7,5 мм, нанесена теоретическая кривая
изменения передаточного числа, построенная по данным, полу-
Рис. 140. Кривые изменения передаточного числа при различном
эксцентрицитете е угломерного диска
ченным по уравнениям (106)—(110). Точное совпадение теорети-
ческой и экспериментальных кривых свидетельствует о справед-
ливости установленных положений. Однако из приведенных на
рис. 140 кривых видно, что при определении передаточного числа
точность установки приспособлений для измерений углов поворота
валов, а также и точность их отсчета должны быть высокими.
Наибольшая ошибка в установке угломерного диска на рулевом
колесе, т. е. его смещение при указанном радиусе R, не должна
превышать величины е = 1,5 мм.
Определение трения и к. п. д.
Стенд для определения трения. На рис. 141 показана схема
стенда, разработанного в соответствии с новым методом оценки
рулевого механизма по усилию, прилагаемому к пальцу сошки.
Принцип работы стенда заключается в том, что усилие, при-
лагаемое к шаровому пальцу испытываемого рулевого механизма,
216
Рис. 141. Схема стенда для характеристики рулевого механизма по обратному трению и к. п. д.
преодолевает обратное трение, приведенное к оси вала сошки.
Величина этого усилия и его изменение по углу поворота вала
сошки регистрируются пружинным механизмом и записываются
на бумаге в виде кривой.
С одной стороны станины 21 на кронштейне 20 устанавливают
испытываемый рулевой механизм 1. С другой стороны станины
укреплен регистрирующий механизм, состоящий из рамы 5, по
направляющим 10 которой с помощью винта 11 двигается ползун 9.
Для устранения большого трения между винтом и боковыми
стойками рамы на концах винта установлены упорные шарико-
подшипники.
В двух втулках 19 ползуна в направляющих 8 может переме-
щаться почти без трения каретка 12. Между ползуном и кареткой
установлены две пружины 7, сжатые между собой посредством
двух болтов и фланца 6 на величину, несколько большую, чем по-
ловина полного их сжатия. Таким образом, при перемещении пол-
зуна относительно каретки пружины деформируются. Палец
сошки испытываемого рулевого механизма соединяют с кареткой
шатуном 4. Усилие, прилагаемое к винту, передается через пол-
зун, пружины, каретку и шатун на палец сошки рулевого меха-
низма. При вращении винта И ползун 9 перемещается и вследствие
имеющегося в рулевом механизме трения каретка 12, соединен-
ная с пальцем сошки, останется неподвижной. Одна из пружин
при этом сжимается, а другая разжимается до тех пор, пока уси-
лие, вызываемое их деформацией, не будет равно силе, способной
преодолеть обратное трение в рулевом механизме. По достижении
этого равенства сил каретка с шатуном и пальцем рулевой сошки
перемещаются вместе. Всякое изменение силы, преодолевающей
трение и действующей вдоль шатуна, отразится на величине де-
формации пружин, а следовательно, и на перемещении ползуна
относительно каретки. Ползун с кареткой и шатуном вместе пере-
мещаются из одного крайнего положения сошки в другое крайнее
и обратно в первоначальное на максимально возможный угол по-
ворота ее вала.
Изменение усилия, прилагаемого к сошке, записывается при
ее перемещении в обе стороны и отражает качество зацепления
той и другой стороны профилей передаточной пары и получается
в виде замкнутой кривой трения.
Пружины регистрирующего механизма деформируются в на-
правлении перемещения ползуна с кареткой по направляющим 10,
поэтому перо или карандаш, записывающие изменение деформации
пружин, перемещается в направлении, перпендикулярном к пе-
ремещению регистрирующего механизма. Механизм, удовлетворяю-
щий указанному требованию, показан на рис. 142.
В двухрычажных системах, состоящих из четырех двуплечих
рычагов 11 и двух одноплечих 12 каждая, наружные рычаги свя-
заны между собой расклепанными шпильками 10, а внутренние
рычаги свободно повертываются на шейках этих шпилек. Во
218
втулке 13, соединяющей концы одноплечих рычагов, таким же
образом укрепляется специальное перо или карандаш 14. Сво-
бодные концы конечных двуплечих рычагов укрепляются попарно
при помощи шарнирных петель 15 и 9 к ползуну 4 с одной стороны
и к скобе 6 каретки с другой. При перемещении ползуна 4 посред-
ством винта 7 относительно скобы 6, направляющие 2 которой
скользят в двух втулках 3, концы рычагов, закрепленных в пет-
лях 9 и 15, сходятся или расходятся в зависимости от направле-
ния движения ползуна. Карандаш при неподвижной скобе 6 и
Рис. 142. Регистрирующий (записывающий) механизм стенда
обратного трения типа ножниц
перемещающемся ползуне 4 движется по кривой О А в одну сторону
и по продолжению этой кривой ОВ — в другую сторону от ней-
трального положения, при котором пружины 1 находятся в пер-
воначально сжатом состоянии. По окончании записи кривой пи-
шущая система должна быть поднята. Для этого к скобе 6 прикреп-
лен эксцентрик 5, на котором установлено кольцо. Тяга 8, вверну-
тая в него, имеет на конце крючок, который за кольцо поперечины
при повороте эксцентрика поднимает пишущую систему.
Возникающее между карандашом и бумагой трение, хотя и не-
значительно, но все же искажает действительную величину уси-
лия, прилагаемого к пальцу сошки. Поэтому для записи целесо-
образно применять специальное перо, которое производит за-
пись чернилами.
Рассмотренная пишущая система отличается простотой изго-
товления, но имеет следующие недостатки:
1) по принципу действия записывающее перо перемещается
по дуге в обе стороны от нулевого положения, чем затрудняется
219
определение точки зацепления передачи, который соответствует
записываемое усилие;
2) перемещение пишущего пера в соответствии с принципом
действия рычажной системы происходит с уменьшением делений
в одну сторону от нулевого положения и с увеличением их в дру-
гую сторону;
3) возникающее в шарнирах трение, хотя и незначительно,
но приводит к искажению результатов испытаний;
4) получающиеся при износе шарниров зазоры не регули-
руются и в связи с этим не устраняются.
Рис. 143. Регистрирующий механизм стенда рычажного типа
Более совершенной является система, изображенная на рис. 143,
хотя принцип действия пружинного механизма тот же. Направ-
ляющие 2 скобы 6 перемещаются во втулках 3 ползуна 4 почти
без трения. С обеих сторон ползуна между скобой 6 и стенкой 22
установлены две пружины 1, сжатые до половины полной их де-
формации.
В оправе 9, подвешенной на петле 21 к скобе 6 каретки, уста-
новлены на трех осях рычаги И, 14 и 18. Рычаги 11 и 14 одинако-
вой длины соединены между собой рычагом 12, в середине кото-
рого укреплена втулка с отверстием для размещения пера 13.
Рычаги 14 и 15 представляют собой один угловой рычаг. Рычаги 15
и 18 соединены между собой пружинящим рычагом-рессорой 16.
Другой конец двуплечего рычага 18 соединен с ползуном 4
рычагом 19 при помощи кардана 20. Таким образом, когда пол-
зун перемещается относительно скобы при деформации пружин /,
220
перо 13 перемещается в обе стороны от нейтрального положения по
прямой, перпендикулярной к нулевой линии. Концы всех осей
конические и заходят в конические подпятники 10, ввертываемые
в гнезда оправы 9. Такие же конические соединения имеют и все
остальные рычаги пишущей системы, а также и петля 21. Появ-
ляющиеся во всех шарнирных соединениях пишущей системы за-
зоры регулируются затяжкой подпятников.
Для подъема пишущей системы в скобе 6 установлен вал 7
с прорезью, в которую заходит рычаг 5. Последний одним концом
шарнирно присоединен к скобе, а на другом его конце укреплена
тяга 8, имеющая крючок, который за кольцо оправы при повороте
вала поднимает пишущую систему. Для того чтобы пишущее
перо перемещалось правильно в плоскости стола, оправа должна
быть подвешена на вполне определенной высоте так, чтобы все
рычаги перемещались в плоскости, параллельной столу.
Система отличается еще тем, что шкала усилий записываемых
кривых имеет почти равномерные деления. На рис. 144 показаны
схемы обеих пишущих систем и соответствующие шкалы и диа-
граммы. По оси ординат отложена величина деформации пружин,
а следовательно, и величина усилия, прилагаемого к пальцу
сошки.
Верхняя ветвь верхней диаграммы записывается при движе-
нии сошки из крайнего правого положения в крайнее левое, а
нижняя ветвь — из крайнего левого в крайнее правое.
Верхняя веть нижней диаграммы нанесена второй пишущей
системой при движении сошки из крайнего левого в крайнее пра-
вое, а нижняя ветвь — обратно. Диаграмма трения записывается
на бумаге. Сбоку станины стенда укреплен стол 17 (см. рис. 141)
с двумя трубчатыми валами для бумаги, расположенными снизу.
Способ закрепления вала к столу показан на рис. 145, а.
В стенках 4 стола сделаны отверстия 5 с резьбой. Трубчатый вал 3
с прорезью для бумаги заканчивается цапфами с установленными
на них свободно вращающимися резьбовыми втулками 2, вверты-
вающимися в отверстия 5, и закрепленными на концах головками 1
(18 на рис. 141).
Для прохода цапф в стенках стола сделаны прорези. Длинная
бумажная лента, намотанная на один из валов, сматывается с него
по мере записи кривых, проходит поверх стола и наматывается
на другой вал.
Во время записи кривых (диаграмм трения) лента остается не-
подвижной. Для того чтобы лента была хорошо натянутой, валы
должны поворачиваться с достаточным трением. Это достигается
тем, что при ввернутых до упора в стенки стола втулках 2 валы
сжимаются с обоих концов торцами втулок и возникающее между
ними трение удерживает ленту в натянутом состоянии.
При записи конец рычага 19 (см. рис. 143), соединенный с пет-
лей ползуна 4, может перемещаться около вертикальной оси.
При подъеме пишущей системы этот конец поворачивается около
221
горизонтальной оси, поэтому должен соединяться с петлей пол-
зуна при помощи кардана.
Детали этого кардана показаны на рис. 145, б. Центральная
его часть 10 имеет две перекрещивающиеся оси 9 и И, конические
концы которых заходят в гнезда подпятников 6 и 8, ввертывае-
мых в ушки петли 7 и в гнезда пластин рычага 13. Пластины
Рис. 144. Схемы регистрирующих механизмов, соответствующие им
шкалы усилий и кривые обратного трения
222
этого рычага (19 на рис. 143) соединены в середине стойкой. Концы
пластин с обоих концов несколько отогнуты и стянуты винтами 12
(рис. 145, б). Этими винтами регулируется величина затяжки
конических соединений оси с гнездами рычага и устраняются
появляющиеся между ними зазоры при износе.
Рис. 145. Способ крепления валика с бумагой к столу стенда и кардан
пишущей системы
Рис. 146. Конструкции пера
Примеры конструкции записывающего пера показаны на
рис. 146.
Винт пишущей системы стенда вращается при помощи электро-
двигателя 13 (см. рис. 141) через червячный или шестеренчатый
редуктор 15. Электродвигатель и редуктор смонтированы на общей
площадке, укрепляемой к ста-
нине стенда. Валы всех трех
частей стенда (пишущей части
стенда, редуктора и электро-
двигателя) соединены между со-
бой кулачковыми муфтами 14 и
16, допускающими смещение и
отклонение валов. Для ограни-
чения величины крутящего мо-
мента, передаваемого от редук-
тора к винту пишущей системы
стенда и для предупреждения
повреждений регистрирующего
механизма между валом редук-
тора и винтом установлена
фрикционная муфта 16.
Конструкция этой муфты показана на рис. 147. На торцовой
стороне фланца 2, закрепленного на конце винта, имеются два
кулачка 3, расположенные по окружности одного диаметра.
Такие же два кулачка имеются на ведомом фрикционном диске 5,
помещенном между двумя ведущими дисками 1 и 6 с фрикцион-
223
ними накладками. Между фланцем 2 и диском 5 находится сред-
ний диск 4 с четырьмя гнездами для всех кулачков. В танген-
циальном направлении кулачки в гнездах размещаются почти без
зазора, а в радиальном направлении—с зазором и могут перемеща-
ться в них при отклонении оси одного вала относительно другого.
Ведущий диск 1 изготовлен как одно целое с втулкой 8, на-
саженной на вал 9 редуктора на шпонке, а другой ведущий диск 6
свободно установлен на втулке и удерживается от проворачива-
ния винтом. Все три диска сжимаются между собой жесткой пружи-
ной 10,подтягиваемой гайками/.
Фланец картера рулевого
механизма, которым он приле-
гает к лонжерону рамы авто-
мобиля, длина сошки и поло-
жение ее шарового пальца от-
носительно этого фланца в раз-
личных рулевых механизмах
значительно различаются. По-
этому кронштейн стенда, к ко-
торому укрепляется испытывае-
мый рулевой механизм, должен
обеспечивать все необходимые
его перемещения для точной
установки на стенде.
Рис. 147. Фрикционная соединитель- Рулевой механизм при испы-
ная муфта J г
тании устанавливают так, чтобы
рулевая сошка в нейтральном положении, соответствующем
середине зацепления передаточной пары, располагалась верти-
кально. При перемещении сошки из одного крайнего положения
в другое шаровой палец перемещается по дуге окружности, а свя-
занный с ним шатун стенда поворачивается около оси болтов
(см. рис. 143) пишущей системы. Для того чтобы не защемлялись
стяжные стержни каретки пишущей системы в их направляющих
втулках, необходимо, чтобы ось вала сошки испытываемого ме-
ханизма располагалась параллельно оси болтов шатуна и чтобы
центр шарового пальца сошки совпадал с центром шаровых
подушек головки шатуна.
Для уменьшения трения между направляющими стяжными
стержнями каретки и втулки ползуна угол, составляемый осью
шатуна при максимальных отклонениях относительно горизон-
тали, должен быть минимальным. Это получается тогда, когда
головка шатуна при вертикальном положении сошки смещена
по высоте от горизонтали на такую же величину, как и при край-
них ее положениях. Этим требованиям отвечает кронштейн, по-
казанный на рис. 148.
Влияние веса сошки и части шатуна на величину записывае-
мого усилия устраняется противовесом 2 (рис. 141) с рычагом 3,
закрепленным на валу сошки под гайкой.
224
Рис. 148. Универсаль-
ный кронштейн для
правильной установки
рулевого механизма на
стенде
При соблюдении указанных условий регистрирующий меха-
низм запишет диаграмму трения, весьма близко соответствующую
действительным потерям на трение в рулевом механизме. Общин
вид стенда с испытываемым рулевым механизмом показан на
рис. 149.
Определение к. п. д. рулевого механизма. В рулевом меха-
низме мощность передается от рулевого колеса к сошке п обратно.
Для оценки рулевого механизма к. п. д. в обоих направлениях
(прямой и обратный к. п. д.) имеет одинаковое значение. При
испытании на стенде одна величина для опре-
деления к. п. д. —крутящий момент на руле-
вом валу — заранее известна. Другая вели-
чина— крутящий момент, нагружающий вал
сошки, — определяется по величине усилия,
прилагаемого к пальцу сошки и записывае-
мого регистрирующим механизмом в виде
диаграммы.
Таким образом, могут быть получены все
данные для определения прямого и обрат-
ного к. п. д. рулевого механизма.
Для определения к. п. д. эксперимен-
тальным путем можно использовать рассмо-
тренный выше стенд. Один из валов руле-
вого механизма нужно нагрузить постоянным
крутящим моментом различной заранее за-
данной величин. Таким моментом может быть
нагружен только рулевой вал, так как вал
сошки, связанный с регистрирующим меха-
низмом стенда, не может нагружаться уси-
лием заранее заданной величины.
Нагружают рулевой вал при помощи грузов, подвешиваемых
на тонком стальном тросе, намотанном на шкив приспособления,
соединенный с валом. Для исследования передаточной пары с обеих
сторон зацепления на шкив приспособления наматывают два
троса в противоположных направлениях (рис. 150).
Шкив 3 с валом установлен в разъемной коробке 4 на шари-
коподшипниках. Вал 2 шкива соединен с рулевым валом испы-
тываемого механизма при помощи карданной передачи.
Кардан 1 связан с валом 2, а кардан 15 на другом конце кар-
данного вала жестко прикреплен к крестовине кольца, соедини-
ющегося со спицами рулевого колеса при помощи хомутов.
Для исключения потерь на трение в карданах необходимо,
чтобы ось шкива и ось карданного вала совпадали с осью руле-
вого вала. С этой целью коробку 4 прикрепляют к ушкам 12
основания 5 при помощи болтов 11, около которых она может
поворачиваться, образуя необходимый угол с горизонталью.
Два тонких троса 10, намотанных на шкив, сходят с него в двух
противоположных направлениях. Далее они проходят через
15 М. И. Лысов
225
осевые отверстия болтов 11, огибают направляющие ролики 9,
установленные на шарикоподшипниках, и заканчиваются тарел-
ками, на которые подвешивают грузы. Тросы удерживаются в та-
релках трением при помощи разрезных конических втулок, кото-
рые туго заходят в конические гнезда тарелок. Таким образом,
тарелки в зависимости от полного числа оборотов рулевого колеса
могут быть установлены на необходимом расстоянии от шкива.
При подвешивании круглых грузов с прорезями для тросов
на одну тарелку крутящий момент, действующий на вал шкива,
Рис. 149. Общий вид стенда для определения обратного трения рулевого меха-
низма
направлен в одну сторону, а при подвешивании грузов на вторую
тарелку — в другую. Для совпадения осей вала шкива и руле-
вого вала нагрузочное приспособление должно иметь возмож-
ность перемещаться в вертикальном направлении. Для этого
основание 5 прикреплено к вертикальным направляющим 7 при
помощи болтов 13 и 14 и удерживается на нем трением.
Вес нагрузочного приспособления для удобства пользования
уравновешивается противовесом 8, который подвешен на тросе,
перекинутом через направляющий блок 6.
Общий вид стенда с приспособлениями для определения к. п. д.
рулевого механизма показан на рис. 151.
Если при перемещении сошки электродвигателем груз будет
подниматься, то вал сошки является ведущим, а рулевой вал —
226
Рис. 150. Устройство для нагружения ру-
левого вала заранее заданным крутящим
моментом для определения к. п. д.
ведомым. В этом случае усилие, действующее на палец сошки
и записываемое регистрирующим механизмом, преодолевает трение
в рулевом механизме и крутящий момент, нагружающий рулевой
вал.
Если же при перемещении сошки груз опускается, то рулевой
вал будет ведущим, а вал сошки — ведомым. В этом случае уси-
лие, действующее на рулевой вал, преодолевает трение в рулевом
механизме, и усилие будет записано с учетом этих потерь.
Рис. 151. Общий вид стенда при определении к. п. д. руле-
вого механизма
Совершенно очевидно, что прилагаемое к сошке от шатуна
усилие при подъеме груза значительно больше усилия, действу-
ющего от сошки на шатун при опускании того же груза.
На рис. 152, а—в показаны три диаграммы трения, получен-
ные на стенде при трех разных крутящих моментах на рулевом
валу для определения к. п. д. рулевого механизма эксперимен-
тального грузового автомобиля ЗИЛ.
Верхние кривые 1 и 2, расположенные над нулевой линией,
характеризуют изменение усилий и Р2, прилагаемых к сошке
соответственно при опускании и подъеме груза при нагружении
рулевого вала крутящим моментом одного направления. При этом
соприкосновение деталей передаточной пары происходит одной
стороной их профилей.
228
Нижние кривые 3 и 4 соответствуют изменению усилий Pi
и Р2 при опускании и подъеме груза при нагружении рулевого
вала крутящим моментом другого направления. Детали переда-
точной пары соприкасаются при этом другой стороной их про-
РкГ
/60
1Z0
80
00
1/0
80
Рис. 152. Диаграммы трения для определения
к. п. д. рулевого механизма
филей. Следовательно, когда груз опускается, записываемое
усилие
где М — крутящий момент па рулевом валу;
— угловое передаточное число рулевого механизма;
Рх — прямой к. п. д.;
I — длина сошки;
Р — угол смещения сошки от вертикального положения.
В другом случае, т. е. когда груз поднимается, записываемое
усилие
cos f>
(112)
где i]2 — обратный к. п. д.
229
Эти усилия определяют по полученной диаграмме. Тогда пря-
мой и обратный к. п. д. можно вычислить по следующим уравне-
ниям:
_ Pt/cosP .
11 ~ Л1/ю ’
Т''“ P2l COS Р
Рис. 153. Простейшие устройства для определения к. п. д. руле-
вого механизма и углового передаточного числа
(ИЗ)
(П4)
Для некоторых конструкций рулевых механизмов можно
принять следующие значения прямого к. п. д.
Глобоидальная передача с вращающимся роликом на шариках 0,80—0,85
Винтовая передача с циркулирующими шариками и зубчатой па-
рой .... ....................................... 0,80—0,90
Кривошипная передача с одним вращающимся пальцем . . 0,75—0,85
Червячная передача с зубчатым сектором . . 0,6—0,7
За рубежом также публиковались материалы об определении
к. п. д. экспериментальным путем. Конструктивная схема одного
приспособления показана на рис. 153.
Рулевой механизм 3 укреплен на кронштейне 7. На валу сошки
сидит рычаг 5, к которому подвешен груз 6. Динамометр 2 при-
соединяют одним концом к спице рулевого колеса, а другим —
к неподвижной опоре.
330
Груз перемещают по длине рычага и отмечают показания дина-
мометра. По получаемым таким образом данным при известных
передаточном числе рулевого механизма и расстояниях прило-
жения сил до осей поворота валов определяют величину прямого
и обратного к. п. д.
Основным недостатком этого приспособления является то,
что испытание происходит при трении покоя, а не скольжения
или качения, что в значительной степени искажает действительные
значения определяемого к. п. д. Кроме того, значения к. п. д.
могут быть получены лишь в от-
дельных точках линии зацепле-
ния передаточной пары. Рас-
смотренный выше стенд, при-
меняемый в НАМИ, записывает
величину усилия и его измене-
ние в виде диаграммы по всей
длине линии зацепления пере-
даточной пары для обоих на-
правлений передачи усилия и
крутящего момента. Две гра-
дуированные шкалы 1 и 4, укре-
пленные соответственно на ру-
левом колесе и на валу сошки, дй
со стрелочными указателями А
предназначены для измерения „У ’
углов поворота валов и опре-
деления по ним углового пере-
даточного числа.
Способы тарировки регистри- Рис. 154. Приспособление для тари-
рующего механизма. Зависи- Ровки регистрирующего механизма
rj при помощи гирь
мость между перемещением пера
по описываемой им кривой в од-
ном направлении от нейтрального его положения и по про-
должению этой кривой в другом направлении и усилием, дей-
ствующим вдоль шатуна на пружины пишущей системы, опре-
деляется тарировкой. Тарировку можно выполнить различными
способами.
Устройство для тарировки регистрирующего механизма рас-
смотренного выше стенда при помощи гирь показано на рис. 154.
На болты каретки вместо шатуна надевают ушки двух тонких
стальных лент 1, вторые концы которых соединяют при помощи
траверсы 4. На шейку середины траверсы подвешивают тарелку 5
для гирь. Обе ленты огибают направляющие ролики 2, установ-
ленные на шарикоподшипниках на пальцах специальных крон-
штейнов 3.
Для тарировки механизма силой другого направления крон-
штейны с направляющими роликами переставляют на другой
конец станины стенда.
231
Тарировку начинают с нагрузки, равной нулю. При пере-
мещении пишущей системы перо записывает прямую нулевую
линию. После этого укрепляют ленты и на их траверсу подвеши-
вают тарелку с гирями.
Под действием нагрузки пружины деформируются, и записы-
вающее перо смещается в соответствующую сторону. При пере-
Рис. 155. Тарировочная диаграмма записывающего механизма и построе-
ние шкалы усилия
мещении пишущей системы перо запишет отрезок прямой линии,
параллельной нулевой линии. При следующей нагрузке перо
дополнительно сместится, и при перемещении пишущей части
оно запишет новый отрезок прямой линии.
Такие отрезки записываются до полного сжатия пружин
пишущей системы при увеличении и уменьшении груза в обе
232
стороны от нулевой линии. Таким образом, получается ступен-
чатая диаграмма с двумя значениями перемещения пера для
каждого значения действующей на пружины силы.
Записанная таким способом тарировочная диаграмма пока-
зана на рис. 155, а. Вследствие имеющегося трения горизон-
тальные отрезки, полученные при увеличении и уменьшении
груза, соответствующие одному и тому же усилию, не вполне
совпадают в отдельных точках. Для получения более точных
данных тарировку повторяют несколько раз.
На рис. 155, б показана зависимость между средними значе-
ниями s перемещения пера, откладываемыми по оси ординат, и
Рис. 156. Динамометрическое устройство для тарировки регистрирующего
механизма
соответствующими им значениями нагрузки, откладываемыми
по оси абсцисс. Искомая шкала усилий получается следующим
образом. Через равные интервалы отложенного по оси абсцисс
усилия Р проводят ординаты до пересечения с кривыми, а из
полученных точек — горизонтали до пересечения с осью ординат.
Отсекаемые на ней отрезки с переменным масштабом и образуют
искомую шкалу.
Тарировка регистрирующего механизма при помощи гирь,
хотя и не вполне удовлетворительна, отличается, однако, про-
стой, поэтому такую тарировку можно применять в тех случаях,
когда она проводится редко.
Вследствие трения в направляющих роликах для лент и, воз-
можно, не вполне точного деления пополам нагрузки по лентам
тарировочные диаграммы могут получиться несколько искажен-
ными и недостаточно точными.
При исследовательских работах и тогда, когда устанавливают
пружины разной жесткости, тарировку производят часто. В этих
случаях желательно применять тарировочное приспособление,
обеспечивающее большую точность. С этой целью разработано
динамометрическое тарировочное устройство (рис. 156), которое
при одностороннем действии динамометра обеспечивает двусто-
233
роннюю тарировку регистрирующего механизма стенда и дает
более точные тарировочные данные.
На основании 11 установлена рамка на роликах 3 с шарико-
подшипниками. Рамка состоит из двух поперечин 1 и 7, скреп-
ленных двумя стяжками 4 и 10. Между поперечинами рамки
установлен динамометр, одно ушко которого подвешивают на
крючке 2, укрепленном в поперечине 1, упирающейся в неподвиж-
ный левый угольник основания. Другое ушко динамометра про-
ходит через отверстие правого угольника и соединяется со скобой 6
пальцем 5. При перемещении вилки 9 и скобы 6 вправо действу-
ющее от нее усилие передается через палец 5 на второе ушко
динамометра. Таким образом, динамометр растягивается за вто-
рое ушко и показывает действующее усилие. При перемещении
скобы влево действующее от нее усилие передается на попере-
чину 7 и далее через стяжки 4 и 10 на поперечину 1 и крючок 2 —
на первое ушко динамометра. Второе его ушко в этом случае
висит на полукруглой выточке пальца 5, упирающегося в правый
неподвижный угольник. Поэтому динамометр при растяжений
за левое ушко будет также показывать действующее усилие. Для
перемещения скобы 6 в другую сторону (влево) отверстие для
пальца в ней выполнено овальным, а зазор между стенкой скобы 6
и поперечиной 7 должен быть минимальным. Положение попере-
чины для этой цели регулируется гайками 8, навернутыми на
стяжки 4 и 10. Положение динамометра относительно угольников
основания также должно регулироваться, что и осуществляется
гайкой, навертываемой на крючок 2. Гайка имеет втулку, входя-
щую плотно в отверстие поперечины 1. Таким образом, от дей-
ствующей на скобу 6 силы как вправо, так и влево динамометр
работает в обоих случаях на растяжение.
Для тарировки устройство устанавливают на станине стенда
(рис. 157) и укрепляют к ней болтом 1 в том месте, где распола-
гается кронштейн для крепления рулевого механизма. Вилку 2
скобы приспособления присоединяют к вильчатой части шатуна 3,
соединенного с кареткой пишущей системы стенда. Для правиль-
ного расположения тарировочного устройства на стенде отверстие
в его основании под болт сделано овальным.
Перемещение пера при тарировке должно быть записано
в виде ступенчатой диаграммы, как это показано на рис. 155, а.
В данном случае регистрирующий механизм связан с динамо-
метрическим устройством с помощью шатуна 3 (рис. 157) и не
может перемещаться вдоль стола. Поэтому для отметки линии,
соответствующей каждому значению действующего вдоль шатуна
усилия, бумага должна сдвигаться в направлении, перпендику-
лярном к направлению перемещения бумаги при записи диаграмм
трения.
Для этого продольные валики со стола снимают, а к его
основанию прикрепляют с обеих боковых сторон два кронштейна
с валиками 4 для бумаги.
234
Рис. 157. Общий вид стенда при тарировке с динамометрическим устройством
Для того чтобы бумага была хорошо натянута на столе, валики
должны поворачиваться в своих кронштейнах со значительным
трением. Это достигается жесткими пружинами, поставленными
между головками, за которые поворачивают валики, и стенками
кронштейнов.
При перемещении бумаги путем поворота валиков за головки
на ней записывается отрезок прямой линии, соответствующий ну-
левой нагрузке. Затем поворотом маховика 5 редуктора регистри-
Рис. 158. Диаграммы обратного треиия рулевого механизма
с глобоидальной передачей при различной затяжке подшипников
червяка
рующий механизм нагружают до определенного усилия (напри-
мер, 5 кГ), указываемого динамометром 6. Бумагу снова переме-
щают, и на ней записывается новый отрезок прямой линии, соот-
ветствующий данной нагрузке. Такие отрезки записывают при
нагружении до полного сжатия пружин регистрирующего меха-
низма и при постепенном уменьшении нагрузки (через каждые
5 кГ) в обе стороны от первоначального нулевого положения пера.
Чтобы исключить возможные искажения записи диаграммы из-за
неточного направления бумаги во втулку 17 оправы 9 (см. рис. 143),
укреплен контрольный карандаш, который при перемещении бу-
маги записывает прямую линию.
Тарировочная диаграмма, записанная с таким устройством,
отличается большей точностью, чем при тарировке при помощи
гирь.
Точность воспроизведения диаграмм и действительные потери
на трение. Точность воспроизведения диаграмм оценивают срав-
236
нением диаграмм путем совмещения их одна на другую или путем
многократной записи одной диаграммы на другой.
На рис. 158 изображены четыре диаграммы трения рулевого
механизма с глобоидальной передачей, совмещенные по две одна
на другой.
Каждая пара диаграмм записана при различном трении в опо-
рах червяка, вызываемом различной их затяжкой при помощи
протарированного устройства с пружиной (рис. 159).
Для большего выявления неточностей диаграмм, получа-
ющихся при их записи, в регистрирующем механизме установлены
слабые пружины 1 (см. рис. 143), при которых получается круп-
ный масштаб для усилий.
Рис. 159. Пружинное устройство для затяжки
подшипников червяка при испытаниях руле-
вого механизма
Рулевой механизм, которому соответствуют диаграммы тре-
ния на рис. 158, отличается высоким к. п. д., вследствие чего
величина силы, преодолевающей в рулевом механизме трение,
мала, а следовательно, незначительным получается и различие
в диаграммах.
На рис. 160 показаны диаграммы трения рулевого механизма
с червячной передачей типа установленного на автомобиле
МАЗ-200. Вверху записаны три диаграммы одна на другой,
а внизу одна диаграмма. Все они получены при одних и тех же
условиях испытаний.
Точное воспроизведение диаграмм на рис. 160 и весьма малая
разница в диаграммах при их совмещении (см. рис. 158) свиде-
тельствуют о точной работе записывающего механизма.
Оценить действительные потери можно путем сравнения запи-
санной диаграммы с теоретической (действительной) при испыта-
нии такого рулевого механизма, который отличался бы заведомо
постоянным трением. Таким является рулевой механизм с червяч-
ной передачей, где и угол подъема витка червяка, а также и шаг
237
и угол наклона зубьев сектора постоянны. Диаграммы трения для
одного из таких механизмов показаны на рис. 160.
Усилие, записываемое в виде диаграммы, направлено вдоль
оси шатуна 4 (см. рис. 141).
Если момент обратного трения рулевого механизма, приведен-
ный к валу сошки, имеет постоянное значение, равное /«, то дей-
Рис. 160. Диаграммы обратного трения рулевого механизма с червячной
передачей
ствующее вдоль оси шатуна и преодолевающее этот момент трения
при любом положении сошки усилие
Р^~г^, (И5)
I COS Р ’ ' ’
где I — длина сошки;
Р — угол, составляемый осью шатуна с касательной к окруж-
ности перемещения шарового пальца сошки.
Если при перемещении сошки вправо момент трения равняется
mlt а при перемещении ее влево т2, то действующие вдоль осп
шатуна усилия Р, — и Р2 = будут равны записывае-
мым на диаграмме усилиям в точке, соответствующей р = 0.
При перемещении сошки из крайнего левого положения в край-
нее правое усилие
Р _
1 I COS Р
(116)
238
При перемещении сошки из крайнего правого положения
в крайнее левое усилие
(117)
2 / COS Р '
На рис. 161 сплошными линиями показана экспериментальная
диаграмма трения рулевого механизма с червячной передачей.
Из этой диаграммы находим, что при перемещении сошки вправо
действующее вдоль оси шатуна при |3 = 0 усилие /\ = 58 кГ,
а при перемещении ее влево усилие Р2 = 73 кГ. Принимая мо-
менты трения т, ит2в обе стороны перемещения сошки постоян-
ными, по уравнениям (116) и (117) определяем изменения усилий
Рис. 161. Экспериментальная и теоретическая диаграммы обратного тре-
ния рулевого механизма с постоянным трением
Ptn Р2 в зависимости от угла р. Полученная диаграмма изменения
этих усилий показана штриховой линией.
Близкое совпадение экспериментальной диаграммы трения
с теоретической (штриховая линия) указывает на то, что реги-
стрирующий механизм записывает потери на трение в рулевом
механизме, близкие к действительным.
Разная величина моментов трения при перемещении сошки
вправо и влево, а также и некоторые отклонения усилий от теоре-
тических их значений в отдельных точках диаграмм трения соот-
ветствуют действительным.
Приведенные на рис. 160 диаграммы обратного трения запи-
саны при совершенно освобожденном от усилий рулевом колесе
для оценки регулировки нового рулевого механизма.
В условиях эксплуатации автомобилей вращение рулевого
вала бывает затрудненным. Это происходит вследствие повышен-
ного трения, которое является результатом или чрезмерной за-
тяжки деталей износа рабочих поверхностей, или недостаточной
смазки. Затрудненное вращение рулевого вала может быть также
вызвано усилием, прилагаемым к рулевому колесу при переходе
автомобиля с поворота на прямолинейное движение. В этом слу-
239
чае водитель не освобождает полностью рулевое колесо, а при-
тормаживает его с некоторым усилием с тем, чтобы получить
движение автомобиля по нужной кривой поворота.
РкГ
200 4
100
120 -
80 '
40 -
М=5кГ-см
80
120
too
too
но-
во
40
о
40
80
120
160
too
120
80
40
О
40,
00
120
160
М=10кГ-см
Z
М=15 кГ-см
М=20 кРем
4
160
120
80
40
О
40
ВО
120
160
Рис. 162. Диаграммы обратного тре-
ния рулевого механизма с червяч-
ной передачей при нагружении ру-
левого вала различным крутящим
моментом
В условиях лабораторных ис-
пытаний затрудненное вращение
рулевого вала получают двумя
способами: 1) созданием повы-
шенного трения в опорах червяка
рулевого вала изменением затяж-
ки его подшипников; 2) нагруже-
нием рулевого вала постоянным
крутящим моментом,
можно заранее задать
вольно изменять.
Величину трения, возникаю-
щего от затяжки подшипников
червяка, нельзя определить, в то
время как прикладываемый к ру-
левому валу крутящий момент
может быть точно измерен. По-
этому второй способ следует счи-
тать более правильным.
Рулевой вал нагружают при
нагрузоч-
показан-
который
и произ-
помощи специального
кого приспособления,
кого выше на рис. 150.
Диаграммы трения рулевого
механизма с червячной переда-
чей типа установленного на авто-
мобиле МАЗ-200 при нагружении
рулевого вала крутящим момен-
том М различной величины по-
казаны на рис. 162. Они как видно,
резко изменяются при повышении
момента М.
Оценка рулевого механизма по приращению радиуса
беззазорного зацепления и по зазорам в передаче
Приборы для контроля глобоидальных червяков. Для проверки
глобоидального червяка применяется специальный прибор
(рис. 163). Его действие основано на том, что при перекатывании
ролика по витку червяка салазки, на которых установлен вал
с роликом, перемещаются по прямой, перпендикулярной к оси
червяка при всех положениях ролика. Перемещение салазок
при повороте червяка отмечается индикатором.
Глобоидальный червяк 11 установлен на двух опорах: 12 и
неподвижной (базовой) 3. С витком червяка зацепляется ролик 10,
240
установленный в головке вала сошки. Вал расположен в салазках 9
на опорах и может в них поворачиваться. Радиус зацепления
в середине червяка при этих условиях соответствует действитель-
ному. Салазки 9 перемещаются по вертикальным направляющим 5
и 8 на шариках. Ролик прижимается к витку червяка силой
Рис. 163. Прибор для производственного контроля глобо-
идальных червяков
собственного веса салазок и вала. Червяк поворачивают за го-
ловку 2 на определенные углы, отсчитываемые по шкале /. Ра-
диус зацепления меньше начального радиуса нарезки червяка,
поэтому при его повороте салазки с валом и роликом переме-
щаются по направляющим. Величина этого перемещения отме-
чается индикатором 7, укрепленным на стойке 6. Ножка индика-
тора упирается в лапку 4, прикрепленную к направляющей 5.
В некоторых конструкциях таких приборов изменение перемеще-
ния салазок с роликом записывается в виде кривой.
16 М. И. Лысов 241
измерение, в данном приборе
Рис. 164. Индикаторный прибор для
контроля и исследования глобоидаль-
ной передачи в сборе с картером ру-
левого механизма
Головка 2 соединяется с глобоидальным червяком при помощи
шлицованного конца вала, заходящего в шлицованную часть
червяка. Так как шлицы сделаны в нижней части червяка, то
базовой опорой червяка, относительно которой производится
>лучается нижняя его опора 3
(на рис. 163).
С помощью такого прибора
можно создать червяк с зара-
нее заданными конструктив-
ными данными и проконтроли-
ровать его.
Применяемый в условиях
производства прибор (рис. 163)
служит для проверки правиль-
ности расположения среднего
сечения глобоидального червяка
относительно его опор при на-
резании витка. Он пригоден
для отдельного червяка, но не-
применим для глобоидальной
передачи в целом.
Действительное изменение
радиуса беззазорного зацепле-
ния получается тогда, когда
ролик перемещается не по пря-
мой, перпендикулярной к оси
червяка, а по радиусу к на-
чальной образующей дуги гло-
боидального червяка. Величина
действительного радиуса заце-
пления из-за особенностей гло-
боидальной передачи меньше,
чем радиус начальной образую-
щей дуги червяка, поэтому ра-
диус беззазорного зацепления
значительно изменяется по углу
поворота червяка. Изменение
величины радиуса получается
еще больше, если кроме радиального смещения осей имеется еще
осевое смещение червяка. При этом ось вала сошки не распола-
гается в плоскости среднего наименьшего сечения червяка, что
возможно в конструкциях, где середина зацепления не регули-
руется. Если к тому же применяемый в передаче ролик распола-
гается вне осевой плоскости червяка, то правильное зацепление
его с витком нарушается.
Для рулевого механизма с глобоидальной передачей оценоч-
ный критерий — приращение радиуса беззазорного зацепления —
отличается от принятых для других передач.
242
На рис. 164 показан индикаторный прибор, позволяющий
оценить конструктивные особенности глобоидальной передачи
в сборе с картером, которые зависят не только от конструкции,
но и от качества изготовления.
Действие прибора основано на том, что применяемый в нем
вращающийся ролик постоянно прижимается к витку червяка
по направлению радиуса зацепления и, смещаясь в этом направ-
лении от оси поворота вала при повороте червяка, выявляет
действительное изменение радиуса беззазорного зацепления на
всем участке зацепления передаточной пары.
Вместо вала сошки в картер рулевого механизма в сборе
с червяком п рулевым валом вставляют вал 9. Как одно целое
с этим валом выполнена стойка 7. К ней двумя шпильками при-
креплен рычаг 6 с вилкой, в которой установлен двуплечий ры-
чаг 4. Один конец этого рычага сделан тоже в виде вилки, и в ней
установлен вращающийся на пальце ролик 1. Рычаг 4 и ролик 1
поворачиваются на осях с минимальным трением. Ролик уста-
навливается в приборе под тем же углом, что и ролик в головке
вала сошки исследуемого рулевого механизма.
Для возможности установки ролика под необходимым углом
рычаг 6 вместе с рычагом 4 и роликом 1 может поворачиваться.
Осью поворота рычага 6 служит ось болта 8, которая проходит
через центр ролика. Рычаг 6 с роликом повертывают с помощью
связанного с ним шарнирно винта и гайки.
Точная установка угла наклона ролика осуществляется при
помощи шкалы на стойке 7 и нониуса на рычаге 6.
Ролик прижимается к витку червяка пружиной 2. Один ее
конец опирается в верхнее плечо рычага 4, а другой — в гайку-
барашек, навернутую на тягу 5, головка которой соединена шар-
нирно с рычагом 6. Для ограничения хода рычага 4 на тяге уста-
новлена ограничительная трубка. Изменение радиуса беззазор-
ного зацепления отмечается индикатором 3, прикрепленным
к рычагу 4 хомутом.
Для соответствия показаний индикатора истинным значениям
необходимо, чтобы плечи рычага 4 были равны.
Угол поворота червяка отсчитывают по шкале со стрелочным
указателем. Шкала может быть прикреплена или к рулевому
колесу, или к валу червяка, на который он посажен для прове-
дения испытаний, а стрелочный указатель — к рулевой колонке
или к втулке картера рулевого механизма.
Общий вид прибора в картере рулевого механизма в сборе со
шкалой для измерения угла его поворота показан на рис. 165, а.
При проведении измерений этим прибором шкалу индикатора
устанавливают на нуль в середине зацепления ролика прибора
с червяком исследуемого рулевого механизма. Затем ролик пере-
мещают в одно из крайних положений, а от него в другое край-
нее положение и обратно к середине зацепления. Таким образом
определяется изменение приращения радиуса беззазорного за-
16* 243
цепления за полный угол поворота вала сошки или червяка
между крайними положениями. При этом для каждого значения
угла поворота червяка получаются два значения радиуса безза-
зорного зацепления.
Для исключения возмож-
ных отклонений в показаниях
индикатора, которые могут ис-
казить действительные значе-
ния, измерения повторяют два
или три раза, получая для каж-
дого угла поворота червяка че-
тыре или шесть величин радиу-
са беззазорного зацепления.
Средние величины из всех полу-
ченных данных будут весьма
близки к действительным зна-
чениям (рис. 165, б).
Рассмотренный прибор по-
зволяет еще изучить изменения
в состоянии зацепления чер-
вяка с роликом, перемещаю-
щимся как в плоскости, прохо-
дящей через ось червяка, так
и в плоскости, смещенной от
оси на любое заранее заданное
расстояние, и изучить влияние
этого смещения.
Рис. 165. Индикаторный прибор для исследования глобоидальной пере-
дачи и кривые изменения приращения радиуса беззазорного зацепления
С помощью прибора можно установить изменение состояния
зацепления при разных углах установки ролика в головке вала
сошки.
244
Результаты измерений показывают, что указанный выше
оценочный критерий действительно характеризует испытываемые
рулевые механизмы. Достаточно точная повторяемость получае-
мых результатов при многократных замерах для одного и того же
рулевого механизма доказывает, что принцип, положенный
в основу прибора, правильный.
Экспериментальный рулевой механизм для исследования гло-
боидальной передачи. Угол наклона витка глобоидального чер-
вяка изменяется в больших пределах по длине, а зацепляющийся
с витком червяка ролик устанавливается в головке вала сошки
под постоянным углом. В связи с этим вал сошки с роликом не
Рис. 166. Экспериментальный рулевой механизм
может быть установлен в картере по оси, около которой наре-
зается виток червяка, а смещается ближе к его оси вращения.
Теоретические исследования влияния этих факторов на зацепле-
ние передаточной пары нуждаются в экспериментальной про-
верке. Эти факторы оказывают влияние и на трение в рулевом
механизме. Не выявлено влияние на зацепление и трение смеще-
ния ролика в направлении вдоль осп вала сошки относительно
осевой плоскости червяка.
Для разрешения подобных вопросов по зацеплению и трению
в рулевом механизме автор разработал экспериментальный руле-
вой механизм с глобоидальной передачей (рис. 166), в котором
все конструктивные параметры переменные.
Экспериментальный рулевой механизм представляет собой
открытый сварной картер 1, в котором исследуемый червяк вместе
с подшипниками может перемещаться вдоль своей оси. Вал 2
сошки с роликом может перемещаться в двух направлениях:
вдоль своей оси перпендикулярно ей и оси червяка.
В первом случае меняется положение ролика относительно
осевой плоскости червяка, а следовательно, меняется и положение
точки его соприкосновения с витком червяка. Это перемещение
осуществляется посредством регулировочного винта или шайб,
устанавливаемых на валу сошки и прилегающих к его головке.
В связи с тем, что зацепление передаточной пары нарушается,
необходимо ввести другое перемещение вала сошки в направлении,
245
перпендикулярном к оси червяка. Для этого фланец картера,
в котором на подшипниках установлен вал сошки, сделан съемным
и перемещающимся относительно картера, что позволяет осуще-
ствить зацепление с необходимыми зазорами без защемления
ролика с червяком.
Перемещение вала сошки в направлении, перпендикулярном
к оси червяка, необходимо для изменения радиуса зацепления.
Для этого ролик устанавливают в специальной головке 3
(рис. 166), которая закрепляется в головке 4 вала сошки гайкой.
Радиус зацепления изменяется при помощи шайб, устанавливае-
мых в гнездо головки 4 под головку 3.
Для изучения влияния угла установки ролика на зацепление
и трение в рулевом механизме головка 3 может поворачиваться
на любой угол в головке 4 вала сошки.
Экспериментальный рулевой механизм того же принципа
устройства имелся и для изучения кривошипной передачи.
При исследовании влияния изменяемых параметров на трение
в рулевом механизме необходимо, чтобы трение, возникающее
между роликом и сопряженными с ним деталями, было постоян-
ным. Это особенно относится к конструкции со скользящими
шайбами, прилегающими к торцам ролика. В такой конструкции
перекос ролика, допущенный между ушками головки, неточности
в углах его установки, радиуса зацепления и других параметров
могут совершенно исказить действительное влияние изучаемых
факторов на зацепление и на трение в рулевом механизме. В экспе-
риментальном рулевом механизме эти факторы остаются постоян-
ными, и при исследованиях определяется действительное влияние
изменяемых параметров на зацепление и на трение.
Исследования вопросов зацепления и трения в глобоидальной
передаче, проведенные с экспериментальным рулевым механизмом,
показали следующее.
1. Принцип, положенный в основу конструкции эксперимен-
тального рулевого механизма, действительно позволяет разре-
шить основные вопросы зацепления и трения в конструкциях
с глобоидальной и кривошипной передачами.
2. Достаточно точная повторяемость получаемых эксперимен-
тальных данных при многократных измерениях и записях кривых
указывает, что простая, но правильно выполненная конструкция
экспериментального рулевого механизма дает результаты, соот-
ветствующие действительным.
3. Ряд вопросов зацепления глобоидальной передачи может
быть разрешен в экспериментальном рулевом механизме по при-
ращению радиуса беззазорного зацепления при помощи инди-
каторного прибора, показанного на рис. 164. Для исследования
влияния угла установки ролика в головке вала сошки на зацеп-
ление с витком червяка вилка прибора с установленным в нем
роликом поворачивается относительно вала прибора так, что
ролик может составлять с его осью любой угол от + 10° до —5°.
246
Стенд для измерения зазоров в передачах рулевых механизмов.
В соответствии с новым методом измерений зазоров по свобод-
ному ходу сошки, а не рулевого колеса, для оценки конструктив-
ных особенностей передачи автор разработал стенд (рис. 167),
записывающий кривую изменения холостого хода сошки в за-
висимости от угла поворота ее вала. Величина холостого хода
сошки определяет в некотором масштабе величину зазоров в дан-
ной точке зацепления передаточной пары. При повороте рулевого
колеса записывается холостой ход сошки в ряде точек, и орди-
наты образуют кривую изменения зазоров по всей длине линии
зацепления передаточной пары.
Стенд предназначен для установления конструктивных осо-
бенностей передачи и сравнительной оценки по этому признаку
рулевых механизмов различных конструкций; исследования влия-
ния конструктивных и производственных факторов на зацепление
передаточной пары; для производственного контроля при наладке
станков для нарезания червяков и для контроля передачи при
сборке рулевого механизма.
Действие стенда основано на том, что для устранения зазора
в передаче рулевая сошка испытываемого рулевого механизма
получает от шатуна возвратио-качательиое движение под дей-
ствием силы одной и той же величины во всех положениях сошки.
От электродвигателя 1 через червячную передачу редуктора 2
при помощи специального кулачка 6 и оттяжной пружины 18
беспрерывно двигается вперед и назад стержень 9, установленный
на неподвижных опорах 8 и 19. На этом стержне размещен пол-
зун 10, который при помощи вильчатого шатуна 20 соединен
с сошкой 22 испытываемого рулевого механизма, укрепленного
на кронштейне.
Концы рычагов шатуна связаны с ползуном 10 при помощи
жесткой распорной скобы 27 и кардана 17. Концы шатуна 20
при ввертывании в них винтов прижимаются к распорной скобе 27.
Эта пара винтов, ввернутая до упора в гнезда опорных втулок,
образует первую горизонтальную ось кардана. Вторая пара
винтов, ввернутая до упора в гнезда других опорных втулок,
вставленных во внутреннее кольцо 25, образует вторую (верти-
кальную) ось кардана.
Кольцо 25 надевается на отросток втулки 13 и зажимается
на нем гайкой 26.
Головка шатуна для облегчения сделана весьма малой, а к сошке
прикрепляется хомутик 21 с шариком, который и располагается
между шаровыми подушками головки шатуна.
Шарик может быть прикреплен к сошке различными спосо-
бами. Шарик можно ввернуть непосредственно в хвостовик ша-
рового пальца сошки (рис. 168, а). Для этого в его торце высвер-
ливают и нарезают отверстие. Шарик можно укрепить в одной
из частей хомута, который прикрепляют к сошке двумя болтами
(рис. 168, б).
247
nil'll'
Рис. 167. Схема стенда для определения зазоров в передаче рулевых механизмов разных конструкций
Шарик можно также укрепить в отверстии пластины, закреп-
ляемой гайкой на хвостовике шарового пальца сошки (рис. 168, в).
Для того чтобы получить расстояние от шарика до оси вала сошки
любой нужной величины, на пластине делают ряд отверстий,
в одно из которых ввертывают хвостовик шарика. Пластину
можно повернуть на пальце сошки так, что при короткой сошке
указанное расстояние увеличивается (рис. 168, г), а при длинной
сошке уменьшается (рис. 168, в). Для короткой сошки с раскле-
панным пальцем делают устройство, показанное па рис. 168, д.
Рис. 168. Способы крепления шарика
к рулевой сошке испытываемого рулевого
механизма
Рис. 169. Установка кулачка и
возвратной пружины с устрой-
ством для изменения силы пред-
варительного ее натяжения
Прижимать одну деталь передаточной пары рулевого меха-
низма к другой при устранении зазора нужно с одинаковой силой.
Такая сила создается за счет трения между беспрерывно движу-
щимся стержнем 9 (см. рис. 167) и установленными на нем втул-
ками 13 и 14. Средняя втулка 14 относительно двух крайних 13
поджимается рессорой 15 с помощью нажимного винта 16, которым
и регулируется величина силы трения.
Такая конструкция сопряженных между собой трех втулок
создает совершенно разгруженную от внешних сил систему и
вполне обеспечивает в скользящем соединении силу трения по-
стоянной величины.
При перемещении стержня посредством кулачка (рис. 169, а)
ползун 10 (см. рис. 167), связанный с сошкой 22 шатуном 20,
увлекается силой трения и перемещается па величину, допу-
скаемую имеющимся в передаче зазором. На остальной длине
хода стержня, сообщаемого кулачком, стержень проскальзывает
249
во втулках ползуна. Тот же самый процесс происходит и при
перемещении стержня под действием оттяжной пружины 18
в другую сторону.
Сила, необходимая для устранения зазора в рулевом меха-
низме, преодолевает трение в опорах вала сошки и сальнике,
часть силы Рс веса сошки с кривошипом или сектором и часть
силы Рш веса шатуна. В зависимости от угла наклона сошки 0
эта сила
(И8)
^ = (^ + P,«)tg₽ + -rE^-.
Рис. 170. Пишущая система с угловым отклонением пищу-
щего пера
Момент трения т в опорах вала сошки имеет сравнительно
малую, но постоянную величину. Малы и значения Рш. Поэтому
основное влияние на величину силы Ра оказывает величина Рс.
Силы Рш и Рс уравновешиваются противовесом 24, укреплен-
ным на рычаге 23, вследствие чего сила
Силу натяжения пружины 3 (рис. 169, б) регулируют спе-
циальной втулкой 1, имеющей ряд ступенчатых прорезей, в ко-
торые входит шпилька 2 стержня. Вследствие различной длины
прорезей на втулке можно найти необходимую для работы ме-
ханизма силу натяжения пружины.
Величина перемещения шатуна с ползуном для данной точки
зацепления передаточной пары должна быть записана в виде линии
на диаграмме. Для этой цели служит пишущая система (рис. 170),
которая может состоять из двуплечего рычага 4 и углового 2,
связанных между собой промежуточным рычагом 3 (серьгой).
250
Записывающее перо / при этом будет перемещаться по дуге окруж-
ности.
Для получения диаграмм зазоров в разном масштабе длины
рычагов 4 и 2 делают переменными.
При перемещении ползуна 10 (см. рис. 167) с пишущей си-
стемой вдоль оси стержня перо перемещается в том случае, если
второй свободный конец двуплечего рычага 12 остается неподвиж-
ным. Это осуществляется запорной тягой 4, которая проходит
через стойку 5 и в нужный момент зажимается винтом с рычагом 7
через коромысло 3.
Если в одной точке линии зацепления записываемая пером
линия располагается с одной стороны нулевой линии, а в другой
точке — с другой ее стороны, то судить о величине и характере
изменения зазоров в передаче не представляется возможным.
Поэтому пишущее перо должно иметь вполне определенное на-
чальное положение, от которого начинается запись и в которое
перо должно возвратиться обратно в конце записи зазора. Для
этого двуплечий рычаг 12 оттягивается пружиной до упора ушка
этого рычага в регулировочный винт. Затяжка и освобождение
тяги также должны происходить в один и тот же момент за каждый
оборот кулачка.
В зависимости от формы кулачка и моментов затяжки и осво-
бождения тяги диаграмма изменения зазора в передаче может
быть расположена с двух сторон от нулевой линии или с одной ее
стороны. Диаграмма, расположенная с одной стороны от нулевой
линии, показывает суммарный зазор между двумя соседними про-
филями витка червяка и зацепляющейся с ним деталью. Диаграмма,
расположенная с двух сторон от нулевой линии, показывает за-
зоры от некоторой средней делительной поверхности каждого из
профилей червяка порознь. Подобная диаграмма могла бы ука-
зать причину и место возможных отклонений в зазорах против
допустимых или принятых. При одностороннем расположении за-
писываемая диаграмма может лежать над нулевой линией или
под ней.
Для получения диаграммы зазоров, расположенной по обе
стороны от нулевой линии, а также в ту или другую сторону от
нее, записывающий механизм должен иметь специальное устрой-
ство (рис. 170). От этого устройства требуется, чтобы записываю-
щее перо перемещалось как в одну, так и в другую сторону от
нулевой линии и возвращалось на нулевую линию при перемеще-
нии его с одной и с другой стороны записываемой диаграммы.
Для этой цели на ось двуплечего рычага 4 (рис. 170) установлена
шарнирная вилка 6, рычаги которой стягиваются пружиной 5.
Двуплечий рычаг 4 имеет два ушка 10, в которые упираются
регулировочные винты 8, ввернутые в рычаги вилки и затянутые
контргайками. С другой стороны рычаги вилки упираются в не-
подвижные стойки 7, которые и определяют нулевое положение
двуплечего рычага.
251
Регулировочные винты 8 должны быть ввернуты в вилку так,
чтобы не было зазора между ними и ушками рычага 4, а также
между стойками 7 и рычагами вилки. При этом условии двуплечий
рычаг всегда будет занимать одно и то же нулевое положение.
При повороте двуплечего рычага вместе с ним поворачивается и
720 360 ,! if,О 7?ОЧ>°
Рис. 171. Диаграммы изменения зазоров в передаче рулевого меха-
низма при различном ее расположении относительно нулевой линии
один рычаг шарнирной вилки. Другой ее рычаг, удерживаемый
упорной стойкой, остается неподвижным, при неподвижной тяге 9.
Обратное перемещение двуплечего рычага происходит под
действием пружины, которая оттягивает рычаг вилки до упора
в другую сторону. Этот рычаг через регулировочный винт воздей-
ствует на двуплечий рычаг, который, дойдя до нулевого положения,
упирается вторым своим ушком в регулировочный винт второго
рычага шарнирной вилки.
252
Диаграммы изменения зазоров, записанные такой пишущей
системой вверх, вниз и в обе стороны от нулевой линии, показаны
на рис. 171.
При перемещении пера по дуге окружности конечные точки
записываемых им линий, образующие кривую изменения зазора As,
отклоняются относительно вертикали, т. е. от начальных точек,
расположенных на
нулевой линии. Чем больше размах пера, тем
больше его отклонение от
начального положения, и
кривая изменения зазора
по длине линии зацепления
передаточной
©
пары полу-
да-
мм
hfi-
Рис. 172. Пишущая система с прямолинейным перемещением пишущего
пера и диаграмма изменения зазоров в передаче
#7-1
чается чрезвычайно искаженной. Это затрудняет обработку диа-
грамм, а также и сравнение их для рулевых механизмов различных
конструкций. Поэтому необходимо, чтобы перо перемещалось по
линии, перпендикулярной к нулевой линии.
Такая запись может быть осуществлена при помощи рычажной
системы в виде шарнирного четырехугольника (рис. 172, а).
Второй конец углового рычага 4 связан с коромыслом 2. На одном
его конце установлено перо 3, а другой связан шарнирно с повод-
ковым рычагом 1. Для удобства пользования перо сделано откид-
ным, что осуществляется при помощи кулачка.
Такая пишущая система, показанная также на рис. 167, за-
писывает прямолинейную диаграмму (рис. 172, б). Линии весьма
близки к прямым и перпендикулярны нулевой линии, вследствие
чего форма кривой получается достаточно точной.
При перемещении пишущей системы во время поворота руле-
вого колеса запорная тяга должна быть освобождена. Для полу-
253
чения диаграммы, характеризующей действительное изменение
зазоров в передаче, процесс затяжки и освобождения тяги должен
быть особенно четким. Это осуществляется механизмом, показан-
ным на рис. 173.
На одном конце стержня 3, расположенного в опорах стойки 2,
укреплена вилка 1 с роликом, а на другом конце — шарнирно
коромысло 5, которое тягой 4 соединено с неподвижной опорой, а
тягой 7 — с рычагом зажимного винта.
Стержень с роликом прижимается к кулачку пружиной 6,
тяга которой также прикреплена к коромыслу 5.
Запорный механизм управляется или при помощи основного
кулачка 6, как это выполнено на рис. 167, или дополнительного
кулачка, размещенного ря-
Рис. 173. Запорный механизм стенда
правлении (при перемещении сошки
дом с основным.
Весь процесс записи
зазора, происходящий за
один оборот кулачка, раз-
бивается на следующие
фазы:
1) устранение зазора
в передаче рулевого меха-
низма в прямом направле-
нии (при перемещении
сошки справа налево) и
запись его величины;
2) устранение зазора
в передаче в обратном на-
слева направо) и возвраще-
ние пера в первоначальное положение;
3) освобождение запорной тяги и поворот вручную рулевого
колеса на желаемый угол для записи зазора в новой точке зацеп-
ления передаточной пары;
4) затяжка запорной тяги.
В течение двух первых фаз и последней рулевое колесо должно
оставаться неподвижным. При достаточно большой скорости дви-
жения пера оно в конце записи зазора перемещается по инерции
дальше, чем нужно, вследствие чего диаграммы получаются с ис-
кажением. Основным фактором, влияющим на скорость переме-
щения пера, является профиль кулачка.
Хорошие результаты получаются тогда, когда профиль ку-
лачка образован архимедовой спиралью, уравнение которой имеет
вид:
р = <2<Р,
или
dp = adq>,
(119)
(120)
где а — постоянная спирали.
254
Левая часть уравнения (120) представляет собой скорость
изменения радиуса р кулачка по углу его поворота <р, а следова-
тельно, и скорость перемещения пера, которая равна постоянной
величине Со.
Если кулачок должен быть построен на начальной окружности
радиуса г0, то уравнение восходящей части его профиля будет
иметь вид
Р = г0 + Соф; (121)
изменение радиуса г0 при этом происходит по прямолинейному
закону.
Перо перемещается от нулевого положения до максимального
отклонения принудительно при помощи кулачка. Обратное его
движение происходит под действием пружины 5 (см. рис. 172)
и может быть свободным или ограниченным.
При свободном перемещении под действием пружины записы-
вающее перо по инерции заходит за нулевую линию и тем больше,
чем больше ход пера. Диаграмма, записанная с переходом за нуле-
вую линию, показана на рис. 173 вверху. Чтобы исключить ненуж-
ные записи за нулевую линию, обратное перемещение записы-
вающего пера должно быть ограниченным и совершаться по нис-
ходящей части профиля кулачка. Эта часть профиля должна быть
очерчена той же кривой, что и восходящая часть, чем будет обес-
печена постоянная скорость движения пера обратно в первона-
чальное положение.
Однако постоянная скорость движения пишущей системы от
нуля до максимума также не обеспечивает совершенно правильных
результатов испытаний. При больших перемещениях перо по инер-
ции перемещается несколько дальше. Наиболее точная запись
величины зазора без каких-либо искажений получается тогда,
когда перо перемещается с уменьшающейся скоростью при любой
величине зазора. Это может быть получено при условии, если при-
ращение радиуса кулачка происходит не по прямой линии, а по
кривой, обращенной выпуклостью вверх. Возвращение пера в пер-
воначальное положение должно происходить также с уменьша-
ющейся скоростью. Правильная запись диаграммы холостого хода
сошки получается при использовании кулачка 2, у которого при-
ращение профиля Ар выполнено по кривой 1, изображенной на
рис. 174. При повороте кулачка от 0 до 120° его радиус остается
постоянным, при повороте на угол от 120 до 210° радиус изме-
няется по кривой, обеспечивающей уменьшающуюся скорость дви-
жения пера. При угле а = 210° величина р достигает наибольшего
необходимого значения и затем изменяется по кривой обратной
кривизны, позволяющей получить при небольшом угле поворота
кулачка наибольшую разность в радиусах кулачка. Это происхо-
дит до угла а = 260°. При а = 260-J-3200 перо возвращается в пер-
воначальное положение. Этот участок кулачка выполнен по кри-
вой, обеспечивающей уменьшающуюся скорость движения пера.
255
После этого при а = 310-4-360° радиус кулачка резко умень-
шается. На этом участке затягивается запорная тяга.
Кулачок, показанный на рис. 174, управляет всеми отдельными
процессами работы стенда. К кулачку (см. рис. 169, а) слева
прижимается ролик стержня, справа — ролик запорного меха-
низма.
Другим фактором, влияющим на скорость перемещения пера,
является взаимное расположение плеч рычагов и, главным обра-
зом, двуплечего рычага /2 и углового 11 (см. рис. 167). Этот до-
статочно простой вопрос разрешается графически. Путем построе-
ния рычажной системы при разных положениях рычагов и задан-
ной их длине определяют величину перемещения пера при равных
углах отклонения короткого плеча двуплечего рычага.
Рис. 174. Кривая изменения радиуса кулачка и его профиль
Пишущая система на рис. 172, а разработана исходя из наи-
выгоднейшего расположения плеч рычагов, обеспечивающего
перемещение пера с наименьшим отклонением от постоянной ско-
рости.
Общий вид разработанного в НАМИ стенда для определения
зазоров в передаче показан на рис. 175.
Диаграммы зазоров записываются на бумаге, которая распо-
лагается на столе, укрепленном к станине стенда под пишущим
механизмом. Для удобства работы применяют длинную бумажную
ленту, которая намотана на валик, проходит поверх стола и по
мере записи диаграмм сматывается с одного валика и наматы-
вается на другой валик.
Процесс записи диаграмм должен происходить в строгом соот-
ветствии со скоростью вращения кулачка и с положением его вы-
сокой части относительно запорного ролика. Рулевое колесо
нужно поворачивать точно в заданное время, так как иначе запись
диаграммы искажается (рис. 176).
Наклонные и перечеркнутые линии на диаграмме 1 получаются
тогда, когда начинают поворачивать рулевое колесо прежде, чем
запорная тяга будет освобождена от затяжки. Более длинные
256
линии на диаграмме 2 образуются при незначительном дополни-
тельном повороте вперед рулевого колеса, а более короткие линии
на диаграмме 3 — при обратном незначительном повороте руле-
вого колеса. Следовательно, в момент записи зазора рулевое колесо
должно быть совершенно неподвижным. Другим фактором, влия-
ющим на точность измерения зазоров, является частота записы-
ваемых ординат на диаграмме (рис. 177). Из приведенных па
Рис. 175. Общий вид стенда для измерения зазоров в передаче руле-
вого механизма
рис. 177 пяти диаграмм видно, что чем чаще располагаются орди-
наты зазоров, тем точнее получается кривая их изменения по
длине линии зацепления.
Судить о точности воспроизведения диаграмм можно только
при их сопоставлении, что и видно на диаграммах 1—4 (рис. 178).
На рис. 179 показаны диаграммы изменения зазоров As в пере-
дачах рулевых механизмов разных конструкций.
Диаграммы 1 и 2 характеризуют зацепление глобоидальной
передачи рулевых механизмов фирм Геммер и Паккард. Зазоры
на диаграмме 2 изменяются недостаточно правильно: при повороте
налево они увеличиваются, а направо — уменьшаются. Диаграм-
ма 3 получена при испытании рулевого механизма с кривошипной
передачей автомобиля Студебекер; диаграмма 4 — при испытании
червячной передачи типа примененной на автомобиле МАЗ-200
и диаграмма 5 — глобоидальной передачи легкового автомобиля
17 м. И. Лысов 257
ГАЗ. Зазоры в последней передаче изменяются наиболее правильно
и характеризуют наибольшую долговечность передачи.
Результаты испытаний рулевых механизмов различных кон-
струкций (рис. 179) показывают, что приведенный выше оценочный
критерий изменения зазоров в передаче действительно характе-
ризует испытываемые объекты.
as мм
Рис. 176. Диаграммы изменения зазоров As в передаче рулевого механизма с раз-
ными ошибками при их записи
258
Рис. 177. Диа-
граммы измене-
ния зазоров As
в передаче одно-
го рулевого ме-
ханизма с раз-
личной частотой
записи ординат
AS мм
Рис. 178. Диаграммы изменения зазоров в глобоидаль-
ной передаче рулевого механизма автомобиля ГАЗ-51,
Каждому перемещению пера соответствует вполне определен-
ное перемещение шатуна и пишущей системы в целом. Зависимость
между этими перемещениями определяется тарировкой. Переме-
щение пера при этом записывается на бумаге, а перемещение пи-
Рис. 179. Диаграммы изменения зазоров в передаче рулевых меха-
низмов различных конструкций
шущей системы измеряется индикатором 1 (рис. 180), который
прикрепляют на стойке к станине стенда посредством хомутиков
так, что подвижный его стержень упирается в торец стержня 4
пишущей системы.
При перемещении стержня пишущей системы (при повороте
муфты 2) до нужного показания индикатора пишущее перо от-
260
клонится на определенную величину. Для фиксации этого поло-
жения пера бумагу нужно перемещать так, чтобы перо записало
отрезок прямой линии, параллельной нулевой линии. Запись про-
изводится как в прямом, так и в обратном направлении переме-
щения пера. Бумага при тарировке должна иметь возможность
Рис. 180. Устройство для тарировки записывающего механизма стенда
перемещаться вдоль стола в обе стороны. Для этой цели продоль-
ные валики снимают, а вместо них к торцам основания стола укреп-
ляют кронштейны с валиками 3 для бумажной ленты.
Тарировочная диаграмма (вверху) и построение шкалы (внизу):
изображены на рис. 181.
Рис. 181. Тарировочная диаграмма и построение шкалы для измерения
зазоров в передаче
261
Показания А индикатора в миллиметрах откладывают по оси
абсцисс на нижней диаграмме, а величину отклонений пишущего
пера S' мм отмечают по оси ординат справа. Эти отклонения под-
считывают по средним значениям в прямом (S’n) и в обратном (So)
направлениях перемещений пера, записанных на верхней тари-
ровочной диаграмме. По этим данным строится кривая зависимости
между этими величинами (рис. 181, внизу).
Разделив ось абсцисс на нижней диаграмме прямыми на равные
отрезки и перенося точки их пересечения с построенной кривой
влево на ось ординат, по-
Л8 мм
Рис. 182. Диаграммы изменения зазоров в пе-
редаче с различной степенью регулировки
зацепления передаточной пары
лучаем искомую шкалу
(рис. 181, внизу слева)
перемещений пишущего
пера.
Если испытываемый ру-
левой механизм отрегули-
ровать с предварительным
натягом или с беззазор-
ным зацеплением переда-
точной пары, то записы-
ваемая при этих условиях
диаграмма изменения за-
зоров не будет отражать
действительных конструк-
тивных особенностей пере-
дачи и не даст истинного
представления ни о за-
цеплении, ни о состоя-
нии деталей передаточной
пары.
При большом переда-
точном числе рулевого ме-
ханизма предварительный натяг деталей передаточной пары почти
не ощущается на ободе рулевого колеса при его повороте. Поэтому
записываемая диаграмма может получиться искаженной на тех
участках, где соприкосновение передаточной пары происходит
без зазора или с натягом (середина диаграммы 1 на рис. 182).
Основное значение имеет форма кривой изменения зазора.
Величину As определяют от минимального значения в середине
или в какой-либо другой точке зацепления.
Минимальный зазор между зацепляющимися деталями может
быть отрегулирован различными способами в зависимости от кон-
струкции рулевого механизма.
Для получения истинного изменения зазора в передаточной
паре рулевого механизма диаграмму нужно записывать с неболь-
шим зазором по всей длине линии зацепления (диаграмма 2).
Такая диаграмма характеризует передаточную пару как в от-
ношении конструктивных особенностей, так и по износу и пра-
262
вильности регулировки зацепления. На рис. 183 показан другой
пример изменения зазоров при различных регулировках переда-
точной пары.
Кривая 1 получена при регулировке зацепления, рекомендуе-
мой фирмой. Вследствие беззазорного зацепления, т. е. чрезмер-
ного затягивания деталей почти по всей длине линии зацепления
передаточной пары, зазор выявляется только в опорах вала сошки
и совершенно не отражается изменение возможного зазора в пе-
редаче.
Рис. 183. Диаграммы изменения зазоров в передаче при раз-
личной регулировке передаточной пары
Кривая 2 получена при отсутствии предварительного натяга
передаточной пары, т. е. при зазоре по всей длине линии зацеп-
ления. Кривая 3 соответствует беззазорному соприкосновению
деталей на небольшом участке а их зацепления, но без натяга, а
кривая 4 — незначительному натягу на двух небольших участках а
и Ь.
Как видно, форма кривых 1, 3 и 4 меняется только на тех уча-
стках, где зацепление происходит без зазора или с предваритель-
ным натягом деталей передаточной пары.
При устранении зазора в рулевой передаче пишущая система
стенда записывает проекцию дуги, по которой перемещается ша-
рик, укрепленный на сошке на расстоянии 1Х от оси ее поворота.
Эта проекция дуги равна А.
Величина А зависит от длины 1Х и угла р поворота сошки.
Поэтому наибольший интерес представляет угловой зазор 6,
263
т. е. угол, на который поворачивается сошка в каждой точке
зацепления передаточной пары рулевого механизма. Схема для
определения углового зазора показана на рис. 184.
Хорда
Ло= -------/-Л--6Т’ (122)
COS ( Р -]-\
но
До = 21 х sin -J-. (123)
Решая оба уравнения
Д = 21 х sin cosQi -р 4)
(124)
Рис. 184. Схема для опре-
деления углового зазора 6
совместно, получим
ных углах р
или
А
— — 2 sin cos
(₽ +4) = sin®+6)
sin |3. (125)
При выводе последнего уравнения не учтено влияние угла от-
клонения шатуна от горизонтального положения. При большой
длине шатуна угол небольшой, а следовательно, весьма мало и
влияние его на получаемые результаты.
На рис. 185 показаны кривые изменения величины в за-
висимости от углового зазора 6 для разных углов |3, построенные
264
Рис. 186. Влияние величины углового
зазора 6 на изменение относительного
А
зазора -j— в зависимости от угла откло-
нения В сошки
по уравнению (125). При малых значениях До и б длина дуги До
перемещения шарика бесконечно мало отличается от хорды До,
вследствие чего эти величины можно принять равными между
собой. Для каждого угла |3 и соответствующей ему величины Д, а
следовательно, и — по кривым (рис. 185) можно определить
угловой зазор б, а по его значению и величине 1К по уравнению (123)
определяется истинное перемещение До шарика.
Для выявления влияния угла отклонения сошки от вертикаль-
ного положения на получаемые результаты испытаний угловой
зазор б считаем постоянным
по всей длине линии зацепле-
ния передаточной пары. При
А
этом условии отношение -р-,
характеризующее зазоры в пе-
редаче, значительно изменя-
ется в зависимости от угла
поворота вала сошки и от
величины углового зазора б.
На рис. 186 показаны
кривые изменения отноше-
А
ния при четырех разных
значениях углового зазора б
в зависимости от угла откло-
нения р сошки. При малых
угловых зазорах б в пере-
даче влияние угла |3 отклонения сошки ничтожно. Кривая при
6=1° очень мало отличается от прямой. При больших же зазорах
в передаче (б = 10° и 5°) влияние весьма значительно и пренебре-
гать им не следует.
Для червячной передачи (цилиндрический червяк и червячная
шестерня или сектор), для глобоидальной и шестеренчатой пере-
дачи зазор в зацеплении
х = Д04Ч (126)
1Х
где Ro — радиус зацепления зубьев сектора или шестерни.
Для передачи типа цилиндрического червяка и кривошипа
величина и характер изменения зазора в значительной степени
отличаются от тех же показателей других передач. Если Ro —
радиус кривошипа, то истинное перемещение
= = Л Луу- (12?)
Zxcos
Палец кривошипа в этой передаче, как известно, перемещается
по дуге окружности, по длине которой и определяется истинное
265
его перемещение. Зазор х между пальцем кривошипа и витком
червяка представляет собой проекцию истинного перемещения Д„
на прямую, перпендикулярную к витку червяка в точке его сопри-
косновения с пальцем.
Схема для определения зазора х в этой передаче показана на
рис. 187.
Зазор
х = A„cos (₽ + + а0) ,(128)
где а0 — угол наклона витка
червяка к начальной его образу-
ющей.
Подставив значение Дге из
уравнения (127), получим
Рис. 187. Схема для определения за-
зора х в кривошипной передаче в зави-
симости от линейного зазора А
2R0 sin ~ cos (р + А -+- а0) .
(129)
Верхний знак (—) в при-
веденном уравнении соответст-
вует повороту червяка направо,
а нижний знак (+) — повороту
налево при левом направлении
нарезки. Для правого направления знаки меняются на обратные.
Таким образом, для кривошипной передачи рулевого меха-
низма имеем следующие измерители зазора: проекцию Д переме-
щения пальца сошки; истинное перемещение До пальца сошки;
угловой зазор б и зазор х между пальцем кривошипа и витком
червяка.
Расчетные данные и построенные на рис. 188 кривые 1—3
всех приведенных измерителей показали, что форма всех кривых
сохраняется, а изменяется лишь величина ординат и главным
образом при больших углах поворота вала сошки. Поэтому запи-
сываемые на стенде кривые холостого хода сошки с достаточной
точностью можно принять за кривые, характеризующие изменение
зазоров в передаче.
Методика определения зазоров в передаче по профильным со-
ставляющим. Диаграммы зазоров в передаче, два примера кото-
рых приведены на рис. 172 и 179, показывают изменение зазоров
в зависимости от угла поворота вала сошки или рулевого колеса и
вполне характеризуют конструктивные особенности передачи,
определяют состояние рулевого механизма при износе передаточной
пары и его пригодность для работы на автомобиле.
266
Для конструкций с двумя парами профилей такая диаграмма
определяет также и изменение зазоров между ними. Для много-
профильных конструкций рулевых механизмов с червячной пере-
дачей (см. рис. 25, а) или реечной (см. рис. 16 и 17) с несколькими
Рис. 188. Сравнительные диаграммы оценочных параметров криво-
шипной передачи Л; До; S и х в зависимости от угла отклонения Р
рулевой сошки
(три, четыре или пять) парами зацепляющихся профилей переда-
точной пары диаграмма зазоров характеризует указанные выше
особенности и качества рулевого механизма в целом, но не опре-
деляет той пары профилей передаточной пары, к которой отно-
сятся эти зазоры.
Особенно большие искажения в процесс соприкосновения про-
филей и в изменение зазоров между ними вносят износные фак-
торы.
Подробную характеристику зацепления передаточной пары
дает профильная диаграмма, определяющая зазоры между каждой
парой профилей порознь. Зазоры между ними измеряют щупом.
При этом вал сошки нагружается моментом, стремящимся воз-
вратить его из повернутого положения в среднее для того, чтобы
267
что для этой передачи с зубьями сектора
&SHM
Рис. 189. Методика определения зазо-
ров в многопрофильной передаче по
профильным составляющим зазоров:
а — схема передачи; б — предполагаемые
зазоры между профилями передачи; в —
действительные зазоры между профилями
иг — результирующая диаграмма зазоров
в передаче
одноименные (правые или левые) профили передаточной пары по-
стоянно соприкасались.
На рис. 189, а показана схема передачи с восемью соприка-
сающимися между собой профилями зубьев сектора и рейки.
Можно считать,
разной толщины (средний наиболее толстый, два следующих—
более тонкие и два крайних — самые тонкие) зазоры между
каждой парой сопрягающихся
профилей порознь будут изме-
няться так, как показано на
рис. 189, б.
При повороте рулевого ко-
леса в обе стороны от среднего
положения профили 1—8 и
Г—8' соприкасаются в следу-
ющем порядке. При перемеще-
нии рейки, например, вправо
от среднего положения, в со-
прикосновении с ее профилем 4
находится профиль 4' сектора.
Тогда зазоры между этими про-
филями равны нулю. Зазоры
в передаче определяются зазо-
рами между четвертыми и пя-
тыми профилями. Так как ме-
жду профилями 4 и 4' зазоры
равны нулю, то зазоры в пере-
даче определяются зазорами
между профилями 5 и 5'. При
дальнейшем перемещении рейки
зазоры между профилями 5 и 5'
увеличиваются, а между профи-
лями 3 и 3' уменьшаются, и за-
зоры в передаче в этот период
определяются зазорами между
четвертыми и третьими профи-
лями. При дальнейшем перемещении рейки зазоры между профи-
лями 2 и 2' постепенно уменьшаются и становятся равными нулю при
повороте вала сошки на некоторый угол р. С этого момента в со-
прикосновение вступают эти профили 2 и 2' и в зацеплении на-
ходятся два зуба сектора — средний и следующий за ним. При
дальнейшем перемещении рейки профили 4 и 4' постепенно вы-
ходят из соприкосновения и зазоры между ними увеличиваются.
В этот период зазоры в передаче определяются зазорами между
третьими и вторыми профилями. При дальнейшем перемещении
рейки зазоры между профилями 3 и 3' увеличиваются и зазоры
в передаче определяются зазорами между вторыми и первыми
профилями.
268
Зазоры между пятыми, шестыми, седьмыми и восьмыми про-
филями при этом перемещении рейки увеличиваются.
В таком же порядке происходит соприкосновение между пя-
тыми и седьмыми профилями при перемещении рейки влево от
среднего положения. В этом случае зазоры в передаче опреде-
ляются сначала зазорами между пятыми и четвертыми профилями,
затем пятыми и шестыми, далее шестыми и седьмыми, и, наконец,
между седьмыми и восьмыми.
Профильные зазоры, измеренные при помощи щупа, в передаче
выполненного рулевого механизма изменяются так, как показано
на рис. 189, в.
Результирующая диаграмма зазоров в передаче показана на
рис. 189, г. Как видно, эта диаграмма и предполагаемая, пока-
занная на рис. 189, б, достаточно сходны.
Такой процесс определения зазоров позволяет отработать кон-
струкцию передачи и режущий инструмент для нее, установить
порядок соприкосновения между профилями и найти оптимальную
продолжительность зацепления каждой пары профилей, обеспе-
чивающую наибольший срок службы рулевого механизма с пра-
вильным зацеплением.
ИСПЫТАНИЯ УСИЛИТЕЛЕЙ РУЛЕВОГО УПРАВЛЕНИЯ
Усилители рулевого управления испытывают на стенде в ла-
бораторных условиях и на автомобиле в условиях эксплуатации.
На стенде усилитель оценивают в сборе в соответствии с уста-
новленными оценочными параметрами и критериями [91 опреде-
ляют показатели его технической характеристики: усилия Рк
и Р, прилагаемые к рулевому колесу соответственно при работе
без усилителя и с усилителем в зависимости от сопротивления
повороту; эффективность действия Э усилителя, определяемая по
указанным величинам; усилия Ро и Т — прямого и обратного
включений усилителя; угол <р поворота рулевого колеса, при
котором усилитель включается в действие; реакция R усилителя
на рулевое колесо; расход V рабочей среды; давление р в силовом
цилиндре и др. Отдельные элементы усилителей можно испыты-
вать на том же комплексном стенде, что и усилитель в сборе, или
на специальных стендах. Отдельные испытания производят при
помощи общеизвестных приборов или специальных устройств [9].
Наибольшее влияние на работу усилителя оказывают конструк-
ция распределителя и его размещение в системе рулевого управле-
ния. Распределитель оценивают по усилию S и по углу поворота
рулевого колеса, при которых усилитель включается в действие.
Известно, что на работу усилителя влияют конструктивные
факторы основных его элементов. При исследовании иа стенде
влияния какого-либо изменяемого фактора на изучаемые пара-
метры, характеризующие работу усилителя или его элементов,
необходимо, чтобы все другие факторы были постоянны. Это можно
выполнить при испытаниях на специальном стенде, ио условия
269
работы усилителя на стенде должны быть близкими к эксплуата-
ционным. В отдельных случаях применяются форсированные усло-
вия испытаний.
На автомобиле в условиях эксплуатации усилитель оценивают
качественно и количественно и определяют те же показатели и
параметры, что и в лабораторных условиях. В отличие от стендо-
вых испытаний, где результаты получаются в зависимости от
произвольно изменяемого фактора (например, сопротивления по-
вороту), при испытаниях на автомобиле на результаты влияют
сопротивления управляемых колес повороту, возникающие в ес-
тественных условиях эксплуатации.
Стенды, приборы и устройства для испытания усилителей
и их элементов в лабораторных условиях
На стенде прилагаемое к рулевому колесу усилие вместе с уси-
лием, действующим от силового цилиндра усилителя, должно
преодолевать сопротивление повороту, которое создается тормо-
зом. Величину тормозного момента, имитирующего сопротивление
колес повороту, можно задать различной и изменять в необходимых
пределах.
В связи с тем, что усилитель оценивают по соотношению уси-
лий, отнесенных к рулевому колесу, то и сопротивление управ-
ляемых колес повороту на стенде нужно оценивать усилием Рк
на колесе при работе без усилителя.
На рис. 190, а показана схема разработанного автором стенда
для испытания рулевого механизма с усилителем любой конструк-
ции и с разной компоновкой его элементов. К верхней раме 2
станины стенда прикреплен рулевой механизм 3 с закрепленным
на рулевом колесе динамометрическим колесом. Сошка приводом
соединена с распределителем усилителя и далее продольной тя-
гой 9 с ведущим элементом (барабаном) тормоза 10, вмонтирован-
ного в станину стенда. К станине стенда прикреплен и силовой
цилиндр 4 усилителя.
Ведомый элемент тормоза, т. е. вал с рычагом 8, связан с пру-
жинным устройством 7, предназначенным для измерения тормоз-
ного момента, регистрируемого записывающим устройством 5.
Пружинное и записывающее устройства смонтированы на стойке 6.
Рулевое колесо поворачивают вручную с любой необходимой
скоростью — от нормальной до максимально возможной. Тормоз
должен обеспечивать постоянство момента посредством груза 1
при всех скоростях перемещения его элементов. Значения тормоз-
ного момента должны быть одинаковы при прямом и обратном по-
вороте рулевого колеса. Колодочный тормоз одинаковых моментов
не обеспечивает.
Для стенда пригоден только фрикционный дисковый (рис. 190, б)
или ленточный тормоз. Тормозной момент характеризуется или
непосредственно его величиной Мт, или грузом 1, прилагаемым
270
к рычагу привода и затормаживающим тормоз с заданным тормоз-
ным моментом.
Для дисковых тормозов зависимость тормозного момента от
приводного не меняется при повторных торможениях, поэтому
величину тормозного момента можно каждый раз при испытаниях
не записывать, а достаточно установить такую зависимость после
отработки и приработки всех звеньев тормоза. Число дисков и
максимальный тормозной момент многодискового тормоза зависят
от мощности испытываемых усилителей и качества фрикционной
обшивки. Тормозной момент можно изменять в больших пределах,
включая большее или меньшее количество ведомых дисков путем
сцепления разного их количества с валом тормоза скользящими
шпонками. На этом стенде можно испытывать и рулевые меха-
низмы со встроенным гидравлическим усилителем.
В этом случае распределитель и силовой цилиндр размещены
в одном блоке с рулевым механизмом (рис. 191). Принцип дей-
ствия стенда при этом не изменяется. Гидронасос, питающий гидро-
усилитель рабочей жидкостью, приводится во вращение от электро-
двигателя, установленного на стенде.
271
Опыт работы на этом стенде показал, что фрикционный диско-
вый тормоз дает достаточно точные результаты.
Усилие на рулевом колесе и угол его поворота (вручную) из-
меряют при помощи динамометрического колеса с механической
записью.
Развиваемый тормозом момент измеряется при помощи пру-
жинного устройства и регистрируется самопишущим прибором
(рис. 192, а).
Рис. 191. Стенд для испытания рулевого механизма со встроенным
гидравлическим усилителем
Перемещение рычага 1 тормоза через винт 2 и тягу 3 передается
на угловой рычаг 4 и далее через тягу 6 и рычаг 14 — на стяжки 8,
которые перемещают рычажную систему с записывающим пером 10.
Два рычага 7, стягиваемые пружиной 9 и касающиеся концами
стойки 12, посредством винтов 11 устанавливают рычажную си-
стему с пером 10 всегда в первоначальное — нулевое положение.
Все рычаги соединены регулирующимися осями с коническими
опорами, а рычаги 4 и 14 и тяга 6 — при помощи двух карданов 5.
Пишущая система опирается на подставку 13 и вместе с ней
может быть повернута вокруг оси винтов 15. Зазор между пером 10
и бумагой регулируется винтом 16.
272
Масштаб тормозного момента может изменяться в зависимости
от положения тяги 3 на винте 2 и винте рычага 4.
При испытаниях усилителей различной силы измеряемый мо-
мент тормоза должен записываться в разных масштабах. Для этого
Рис. 192. Записывающий механизм и пружинное устройство для
измерения момента сопротивления повороту
пружинное устройство 7 (см. рис. 190, а) должно быть сменным и
различной жесткости. На рис. 192, б показаны два варианта смен-
ного упругого элемента: с двумя и четырьмя взаимно сжатыми пру-
жинами.
18 М. И. Лысов
273
Таким образом, при данном записываемом сопротивлении
повороту определяются усилия на рулевом колесе при работе без
усилителя и с усилителем.
Для исследования других параметров, например, скорости
вращения рулевого колеса и скорости срабатывания усилителя
рулевое колесо нужно поворачивать с любой определенной заранее
заданной скоростью от электродвигателя через редуктор и ко-
робку передач.
На рассматриваемом стенде усилители испытываются с одно-
временной записью усилия на рулевом колесе и момента сопро-
тивления повороту. Такую оценку усилителя и отдельных его эле-
ментов следует считать наиболее правильной.
Определение сопротивляемости усилителя обратному вклю-
чению. Оценка сопротивляемости усилителя обратному включе-
нию особенно важна для пневматических усилителей. В качестве
оценочного параметра, характеризующего сопротивляемость уси-
лителя обратному включению, принята сила Т, действующая
вдоль продольной тяги и включающая усилитель с обратной
стороны.
На рис. 193, а показана принципиальная схема, а на
рис. 193, б — общий вид устройства для измерения силы Т,
встроенного в стенд для испытания усилителей. Силу можно
измерить или записать любым из известных способов: осцилло-
графом, самопишущим прибором и др.
В случае, приведенном на рис. 193, сила измеряется при по-
мощи динамометра, встроенного в привод стенда между тормозом
и распределителем. Динамометр встроен в раму так, что он изме-
ряет силу в обе стороны включения распределителя. При пово-
роте рулевого колеса динамометр растягивается до момента
включения распределителя. Показание динамометра в этот мо-
мент и является искомым. При одних и тех же соотношениях плеч
рычагов включающего устройства и плеч рычагов стенда могут
быть получены вполне сравнимые результаты испытаний для
оценки усилителей разных конструкций.
Оценка распределителя усилителя. Выше оценивалась сила
сопротивления всех элементов усилителя в сборе обратному вклю-
чению. Кроме такой общей оценки разработана методика оценки
отдельных элементов усилителя и, в частности, оценки сопротив-
ляемости распределителя включению.
Сопротивляемость распределителя включению определяется
по силе S, действующей вдоль тяги распределителя. Эта сила
также может быть измерена или записана любым из известных
способов.
В связи с тем, что процесс включения распределителя или
открытия впускного клапана воздухораспределителя происходит
в течение непродолжительного времени, определить силу, необ-
ходимую для включения, и тем более ее изменение путем визуаль-
ного наблюдения чрезвычайно трудно. Поэтому силу лучше за-
274
Рис. 193. Устройство
для определения вели-
чины сил при обрат-
ном включении усили-
теля
18;
писывать при помощи разработанной автором динамометрической
тяги (рис. 194, а). Одна часть разрезной тяги 1 заканчивается
трубой, а другая — поршнем. Обе части соединены между собой
Рис. 194. Динамометрическая тяга с самописцем для определения
сил сопротивления включению распределителя
двумя взаимно сжатыми пружинами 2, усилие сжатия которых
регулируется пробкой. Действующая вдоль тяги сила опреде-
ляется по деформации пружин и записывается при помощи при-
бора 3, встроенного в обе части тяги.
276
Бумажная лента перемещается с постоянной скоростью при
помощи небольшого электродвигателя через шестеренчатый ре-
дуктор. Общий вид динамометрической тяги, встроенной в при-
вод воздухораспределителя пневматического усилителя, и запи-
сываемая ею кривая показаны на рис. 194, бив.
Сила, необходимая для открытия впускного клапана усили-
теля, изменяется в процессе включения. Максимальное значение
она имеет в момент отрыва клапана от седла, а затем несколько
уменьшается и остается по-
стоянной в течение всего пе-
риода наполнения силового
цилиндра как при повороте
рулевого колеса направо,
так и налево.
Определение расхода ра-
бочей среды. Расход воздуха
пневматическим усилителем
определяется при помощи га-
зового счетчика, включенного
в систему через ресивер, обе-
спечивающий малое давление
отработавшего воздуха. При
определении расхода рабочей
среды в зависимости от ка-
кого-либо изменяемого фак-
тора угол поворота рулевого
колеса должен быть постоян-
ным. При определении рас-
хода рабочей среды в зависи-
мости от угла поворота руле-
вого колеса значения изме-
Рис. 195. Устройства для поворота руле-
вого колеса на заранее заданные углы
няемых углов должны быть постоянными при всех опытах.
Для точного отсчета углов поворота в пределах до 720° раз-
работано устройство, показанное на рис. 195. На диске, прикреп-
ленном к рулевому колесу, сделано 24 резьбовых отверстия, рас-
положенных на равных расстояниях одно от другого. В отверстия
ввертывают два пальца, образующие определенный угол.
К рулевой колонке (рис. 195, а) прикреплен хомут, имеющий
палец, расположенный между двумя пальцами диска. Таким обра-
зом, при повороте рулевого колеса на угол, определяемый двумя
пальцами диска, обеспечивается точный его отсчет, начиная с 15°
и далее через каждые 15° до 345°.
Установленный на палец хомута угольник (рис. 195, б), по-
ворачивающийся одним пальцем диска, позволяет получить точ-
ный отсчет угла поворота рулевого колеса на угол 720°.
Определение давления в силовом цилиндре. Максимальное
давление в силовом цилиндре можно оценить визуально по мано-
метру. Процесс нарастания в начале поворота и падения в конце
277
нужно записывать осциллографом, самопишущим прибором с ин-
дикаторной головкой или любыми другими способами.
Процессы нарастания и падения давления особенно важны для
оценки пневматического усилителя, так как наполнение силового
цилиндра сжатым воздухом и его освобождение происходят в те-
чение определенного времени. Гидравлический усилитель всегда
заполнен рабочей жидкостью. Изменение давления в силовом ци-
Рис. 196. Индикатор с самописцем и диаграмма изменения давле-
ния в силовом цилиндре усилителя
линдре пневматического усилителя записывают прибором с инди-
каторной головкой (рис. 196, а). Кривая (рис. 196, б) нарастания
давления в начале поворота и падения в конце зависит от многих
конструктивных факторов и характеризует сопротивление рас-
пределителя, воздухопроводов и других элементов, а также дей-
ствительные процессы, получающиеся при совершении поворота.
Протекание средней части кривой зависит от сопротивления
повороту и характеризует величину максимального давления
в силовом цилиндре при совершении того или иного поворота.
Показанный на рис. 196, а прибор может применяться как при
стендовых, так и при эксплуатационных испытаниях.
Тарировка измерительных приборов. Тарировка динамометри-
ческого колеса с нелинейной характеристикой пружин должна
278
быть точной, так как возникающее во всех сопряжениях трение
искажает получаемые при тарировке результаты. При движении
автомобиля возникающее в шарнирах трение устраняется и запи-
сываемая кривая соответствует действительной.
Для тарировки динамометрическое колесо прикрепляют к вер-
тикальной стойке (рис. 197, а), а к ободу колеса крепят проволоч-
из двух стальных тросов с поперечными
перемычками, выполненными так, что
оба троса располагаются по средней
окружности обода рулевого колеса. На
тарелки концов троса поочередно под-
вешивают грузы.
ную ленту, состоящую
Рис. 197. Устройство для тарировки динамомет-
рического рулевого колеса и тарировочная
кривая
Для тарировки постепенно нагружают колесо с одной стороны
до полного сжатия пружины, а затем постепенно разгружают его,
после чего повторяют то же с другой стороны. При этом записы-
вают тарировочные отрезки в виде ступенчатой кривой. Тарировку
производят четыре—пять раз.
По оси абсцисс откладывают значения нагрузки, приложенной
к концу троса, а по оси ординат — величины отклонений записы-
вающего пера, определяемые по тарировочной кривой. Отклоне-
ние пера при нагружении откладывают справа от ординаты, а его
отклонение при разгружении — слева (рис. 197, б).
Отклонения пера при нагружении правого конца троса откла-
дывают над осью абсцисс, а при нагружении левого конца — под
осью абсцисс. При наличии большого количества точек по обе
стороны каждой из ординат можно с достаточной точностью по-
строить тарировочную кривую (рис. 197, б). Разделив ось абсцисс
на равнозначные деления и перенося точки пересечения ординат
этих делений с кривой на ось ординат, получим искомый масштаб
279
усилий динамометрического рулевого колеса с установленными
в нем пружинами.
Зависимость тормозного момента от груза, затормаживающего
тормоз, определяется тарировкой при помощи устройства с встроен-
ным в него динамометром. Устрой-
ство должно быть таким (рис. 198,а),
чтобы при одностороннем действии
динамометра пружинный механизм
с самописцем можно было тариро-
вать в обоих направлениях враще-
ния тормоза.
Выверенный динамометр 2 встроен
в две расположенные одна в другую
рамки 1 и 3. Рамка 1 закреплена на
основании 6 стенда. При перемеще-
нии рычага 7 тормоза вверх, для чего
повертывают гайки 5, передвигается
рамка <3, растягивающая динамометр
за верхнее ушко. При перемещении
тормозного рычага 7 вниз переме-
щается поперечина 4, и динамометр
растягивается за нижнее ушко.
Таким образом, каждому переме-
щению записывающего пера соответ-
ствует определенное показание дина-
мометра. По получаемым таким пу-
Рис. 198. Устройства для тарировки пружинного измерителя
момента сопротивления повороту и динамометрической тяги
с самописцем
тем данным строят шкалу развиваемого тормозного момента
в обоих направлениях его действия.
Распределитель включается в обе стороны, поэтому динамо-
метрическую тягу делают двустороннего действия.
Тягу тарируют на основании 10 в виде швеллера (рис. 198, б),
на одном конце которого на кронштейне 9 подвешен один конец
280
тяги. Другой конец тяги закреплен в динамометрическом устрой-
стве 8 двустороннего действия. Стержень тяги перемещают в труб-
чатой направляющей кронштейна 9 путем навертывания на стер-
жень двух гаек, размещенных по обе стороны направляющей.
Принцип действия динамометрического устройства такой же,
как и устройства, показанного на рис. 198, а. Каждому значению
усилия, отмечаемого динамометром, соответствует определенное
положение записывающего пера, которое отчеркивается при пере-
мещении бумаги. Таким образом, получается ступенчатая тари-
ровочная кривая, как и при тарировке динамометрического
колеса.
Самописец с индикаторной головкой (см. рис. 196, а) вклю-
чается в пневмо- или гидросистему с изменяемым давлением.
Тарировка производится по выверенному манометру с наиболее
точными делениями шкалы, включенному в общую тарировочную
систему. Отрезки тарировочной кривой записывают как при
нагрузке, так и при разгрузке системы.
Процесс тарировки не отличается от рассмотренных выше.
Испытания усилителей на автомобиле
в условиях эксплуатации
При движении автомобиля в условиях эксплуатации можно
определить действительные значения режимов работы усилителя,
эффективность действия, расход рабочей среды, сопротивляемость
обратному включению и другие параметры.
Оценочные параметры и аппаратура
В условиях эксплуатации усилители оценивают по тем же
оценочным параметрам и той же аппаратурой, что и при стен-
довых испытаниях.
Техническая характеристика усилителя определяется уси-
лиями на рулевом колесе Рк и Р при работе соответственно без
усилителя и с усилителем, а также показателем эффективности
действия и усилием Ро, при котором усилитель включается в
работу.
Прилагаемое к рулевому колесу усилие в процессе совершае-
мого поворота находят любыми известными средствами и, в част-
ности, с помощью показанного на рис. 125 динамометрического
рулевого колеса. Один из примеров его применения на автобусе
ЛАЗ-695 при испытаниях пневматического усилителя приведен
на рис. 125, а.
Расход рабочей среды характеризует ряд эксплуатационных
качеств усилителя и является параметром для сравнительной
оценки однотипных усилителей разных конструкций и величи-
ной, необходимой для расчета мощности и производительности
гидронасоса и компрессора.
281
Расход жидкости, потребляемой гидравлическим усилителем,
и воздуха, потребляемого пневматическим усилителем, находят
по показаниям расходомера и газового счетчика, в который отра-
ботавший воздух поступает из ресивера с весьма малым давлением.
Давление р в силовом цилиндре характеризует происходящие
в нем рабочие процессы, конструктивные его размеры и размеще-
ние в системе рулевого управления. Давление в процессе совер-
шаемого поворота записывается с помощью осциллографа, само-
писца и др.
Давление в силовом цилиндре пневматического усилителя
можно записать самописцем с индикаторной головкой (см.
рис. 196). Для определения давления в обеих полостях силового
цилиндра индикаторную головку соединяют с ними при помощи
двухходового крана.
При эксплуатационных испытаниях усилителя определяют
также и показатель маневренности автомобиля на поворотах.
Для автомобиля с усилителем показатель маневренности рав-
няется отношению времени t2, необходимого для совершения
поворота при работе без усилителя, ко времени tlt необходимому
для совершения того же поворота при работе с усилителем.
Эта оценка относится не столько к автомобилю, сколько к усили-
телю, и характеризует эффективность действия усилителя в отно-
шении маневренности автомобиля на поворотах.
Опыт работы с усилителями показал, что время поворота можно
определить по времени действия прилагаемого к колесу усилия и
по времени поворота рулевого колеса за весь процесс совершае-
мого поворота.
Условия и методика эксплуатационных испытаний
Усилитель испытывают на автомобиле, на площадке, свобод-
ной от всякого движения, и на специальных маршрутах.
Испытания на свободной площадке проводятся для определе-
ния усилий на рулевом колесе при крутых поворотах, совершае-
мых по траекториям в виде змейки и восьмерки, при движении
автомобиля со скоростью 20—25 км/ч и по инерции, а также при
крутых поворотах, совершаемых на режиме холостого хода дви-
гателя. В последнем случае автомобиль двигается по инерции
с выключенным сцеплением.
При испытании усилителей на автомобиле, движущемся по сво-
бодной площадке, определяют запаздывание действия усилителя
и оценивают производительность насоса при резких поворотах
движущегося по инерции автомобиля.
В первом случае вследствие большого сопротивления в трубо-
проводах и ряда других причин поток масла и сжатого воздуха
не успевает следовать за перемещением поршня силового цилин-
дра, и усилие на рулевом колесе резко увеличивается. Во втором
случае испытания имитируют работу автомобиля в горных усло-
виях при спуске, когда двигатель работает на пониженных числах
282
оборотов, при которых насос гидравлического усилителя может
не развивать достаточного давления, а процесс наполнения сило-
вого цилиндра пневматического усилителя может излишне затя-
нуться. В этих условиях усилие на рулевом колесе резко воз-
растает и поворот производится с затруднением. Если в пневма-
тическом усилителе резкий рост усилия наблюдается только
в первый момент, то гидравлический усилитель при отсутствии
подачи рабочей жидкости может действовать как гидротормоз
в течение всего поворота. Поэтому такие испытания обязательно
должны предшествовать испытаниям в горных условиях.
Выбор испытательных маршрутов. Для проведения эксплуата-
ционных испытаний следует выбирать три маршрута: городской
с насыщенным движением транспорта; равнинный, в пригороде
или на шоссе; в горной местности.
Городской маршрут должен иметь большое количество пово-
ротов разной сложности, в том числе с наиболее крутыми поворо-
тами под углом 90—100—110° и зигзагообразными, в которых,
например, крутые правые повороты переходят в крутые левые и
наоборот.
Испытания в городских условиях при насыщенном движении
транспорта характеризуют эффективность работы усилителя при
совершении автомобилем как обычных, так и сложных и особенно
трудных поворотов. В этих условиях работа водителя наиболее
трудная и оценка работы усилителя особенно необходима.
В связи с тем, что движение автомобиля подчиняется всем
условиям работы насыщенного городского транспорта, каких-
либо искусственных приемов, например, совершение поворота
с резкой излишней крутизной или, наоборот, срезание угла пово-
рота, водитель при испытаниях применить не может. Получаемые
поэтому результаты испытаний соответствуют или близки дей-
ствительным.
Испытания усилителя в городских условиях производятся
с целью определения его силовых качеств и всех других оценоч-
ных параметров.
Равнинный маршрут выбирают с тем расчетом, чтобы автомо-
биль мог развивать высокие скорости движения, но при этом
должно быть много поворотов различной сложности с различным
состоянием дорожного покрытия.
Усилитель на автомобиле, движущемся по равнинному мар-
шруту, испытывают для определения сопротивляемости его обрат-
ному включению. При этом оценивают склонность к вилянию
управляемых колес, способность держания дороги автомобилем
и другие явления, возможные при высоких скоростях движения
автомобиля. Наблюдения в этих условиях производятся визуально,
а закономерность тех или иных явлений регистрируется с помощью
соответствующей аппаратуры.
Испытания усилителя в горных условиях представляют осо-
бенно большой интерес при движении автомобиля с пневматиче-
283
Повороты
Рис. 199. Усилия на рулевом колесе автобуса «Шоссон» и эффективность действия пневматического усилителя
ским усилителем на спуске. В этом случае тормоза и другие меха-
низмы с пневматическим приводом действуют интенсивно, и дав-
ление в ресивере может быть ниже нормального, вследствие чего
одновременная работа тормозов, усилителя рулевого механизма
и пневматического привода других механизмов может оказаться
менее эффективной, чем при нормальном рабочем давлении.
Испытания при движении автомобиля под уклон обязательны
и для гидравлических усилителей. Они позволяют установить
производительность гидравлического насоса при работе двигателя
на холостом ходу. Если производительность насоса при этих
Рис. 200. Изменение показателя эффективности действия усилите-
лей в зависимости от сопротивления повороту колес:
1 — для автобуса ЛАЗ-695;.2 — для автобуса «Шоссон»
условиях получается недостаточной, повороты автомобиля, осо-
бенно крутые, совершаемые с повышенной скоростью, будут вы-
полняться с затруднением, и движение становится небезопасным.
Для обеих конструкций усилителей особенно важным является
установление степени обеспеченности рабочей средой при необхо-
димых значениях давления и производительности во время совер-
шения крутых поворотов на спусках.
Методика испытаний. Силовые качества усилителя оценивают
по данным, получаемым на городском маршруте по средним зна-
чениям за 8—10 заездов. Испытания проводят при работе без уси-
лителя для получения значений усилий Рк (рис. 199, а), харак-
теризующих сопротивление повороту, и с усилителем для получе-
ния значений усилий Р (рис. 199, б) на рулевом колесе при работе
с усилителем. Отношение первого усилия ко второму является
показателем Э эффективности действия усилителя на каждом
отдельно взятом повороте (рис. 199, в). Однако кривые изменения
величин Рк, Р и Э на поворотах недостаточно характеризуют уси-
литель и не выявляют других его силовых качеств.
Более полно характеризует силовые качества усилителя кри-
вая изменения величины Э в зависимости от изменения сопротив-
ления повороту Рк (рис. 200).
285
На такой кривой кроме всех прочих данных для усилителя
с центрирующими пружинами в точках и А2 выявляется вели-
чина усилия, при котором усилитель включается в действие.
Расход рабочей среды в гидравлическом усилителе характери-
зуется изменением объема силового цилиндра в процессе совершае-
мого поворота, а следовательно, и углом поворота рулевого колеса.
В пневматическом усилителе расход воздуха зависит от мно-
гих конструктивных и эксплуатационных факторов, поэтому такие
испытания необходимы.
Рис. 201. Изменение расхода воздуха пневматическим усилителем в течение
одного заезда по городскому маршруту
Для оценки характера поворота, качества дорожного покры-
тия на поворотах и на участках между поворотами измеряют рас-
ход воздуха, затрачиваемого на каждый поворот, и расход воз-
духа между поворотами. Воздух расходуется по разным причинам
и, прежде всего, вследствие обратного включения усилителя.
Таким образом, расход воздуха отражает все процессы, происхо-
дящие в течение одного заезда автомобиля по заданному маршруту
(рис. 201). Жирные вертикальные линии соответствуют расходу
воздуха на поворотах, отмеченных по оси абсцисс цифрами. Пол-
ный расход воздуха, получающийся между поворотами, отмечен
точками.
Протяженность пути между поворотами различна, поэтому
кроме полного расхода приведен удельный расход на 1 м пути,
отмеченный горизонтальными линиями. Внизу по оси абсцисс
отмечено качество дорожного покрытия между поворотами: бу-
286
лыжное — точками, с ухабами — волнистыми линиями. На оси
абсцисс треугольниками отмечена длина маршрута в километрах.
Из диаграммы видно, что расход воздуха на разных поворотах
получается различный. Для плавного, хотя и длинного поворота,
воздуха требуется меньше, чем для более короткого, но сложного,
зигзагообразного поворота.
Расход воздуха на участках между поворотами зависит от
местных помех, но в основном от количества обратных включений
усилителя при наезде на неровности дороги, причем без соверше-
ния полезной работы.
На участке с булыжным покрытием расход воздуха в несколько
раз больше, чем на более длинном участке, но с ровным асфаль-
товым покрытием.
Таким образом, полный расход воздуха, потребляемый усили-
телем за каждый заезд, делится на производительный расход
равный сумме расходов на всех поворотах, и непроизводитель-
ный У2, равный сумме расходов на всех участках между поворо-
тами. По средним значениям полного расхода воздуха и его со-
ставляющих, полученных за несколько (шесть—восемь) заездов,
можно объективно оценить усилители разных конструкций.
Оценка усилителя по сопротивляемости обратному включению
при лабораторных испытаниях производится по усилию, действую-
щему от продольной тяги и включающему усилитель с обратной
стороны. В связи с тем, что измерять это усилие в дорожных
условиях трудно, оценку дают по другим параметрам. Так, на-
пример, сравнительную оценку пневматических усилителей произ-
водят на одном и
по соотношению
том же городском испытательном маршруте
т _ Vi
Н в—W
(130)
Пневматические усилители разных конструкций можно срав-
нивать по сопротивляемости обратному включению, определяя
непроизводительный расход воздуха V2 при движении автомобиля
на мерном участке с неровной поверхностью определенной длины.
Большое влияние на величину расхода V2 при обратном вклю-
чении усилителя оказывают конструктивные особенности воздухо-
распределителя, величины усилия предварительного сжатия цен-
трирующих пружин и связанная с ним величина усилия Рп на
рулевом колесе, при котором включается усилитель. Влияние
этих факторов оценивается так же, как указано выше, при дви-
жении по городскому маршруту или на специальном мерном уча-
стке с неровной поверхностью.
Гидравлический усилитель по сопротивляемости его обратному
включению оценивают или по перемещению золотника распредели-
теля, или по изменению давления рабочей жидкости в полостях
силового цилиндра при движении по прямой и неровной дороге.
287
Усилие Ро зависит от конструкции распределителя, усилия
предварительного сжатия центрирующих пружин, передаточного
числа привода распределителя, трения во всех его узлах и других
факторов. Усилие Ро оказывает большое влияние на расход воз-
духа пневматическим усилителем, на частоту перемещения золот-
ника, а следовательно, и на гидродинамическое воздействие на
гидронасос гидравлического усилителя.
Измеряется усилие Ро динамометрическим колесом (см.
рис. 125, а).
Рис. 202. Самописец и кривая изменения давления в силовом ци-
линдре пневматического усилителя автобуса при совершении
поворота
Способность усилителя воспринимать обратные удары опреде-
ляется при прямолинейном движении автомобиля с разной ско-
ростью в пределах 30—50 км/ч с наездом поочередно правым и
левым колесом на неровности высотой 50, 75, 100 и 125 мм, уста-
новленные на расстоянии 20—30 м одна от другой.
По давлению в силовом цилиндре при испытаниях в эксплуата-
ционных условиях можно установить, соответствуют ли размеры
силового цилиндра данному автомобилю, оценить компоновку
силового цилиндра в системе рулевого управления и т. д.
Изменение давления р в силовом цилиндре характеризует
весь процесс совершающегося поворота (рис. 202).
Нарастание давления в начале кривой вызывается потерями
в трубопроводах и в других элементах системы, особенностями
поворота и, в отдельных случаях, индивидуальными качествами
водителя. В данном случае давление нарастает чрезвычайно быстро
до наибольшей необходимой величины, предопределяемой сопро-
тивлением повороту. Средняя часть кривой характеризует про-
цесс поворота: сопротивление колес повороту сравнительно не-
288
оольшое, и поворот совершается при давлении ниже максималь-
ного. Правая часть кривой соответствует процессу выпуска отра-
ботавшего воздуха в атмосферу: давление воздуха падает резко
без запаздывания.
ИСПЫТАНИЕ РУЛЕВЫХ МЕХАНИЗМОВ И УСИЛИТЕЛЕЙ НА ИЗНОС
И УСТАЛОСТНУЮ ПРОЧНОСТЬ
Срок службы рулевого механизма на автомобиле зависит глав-
ным образом от качества зацепления передаточной пары, т. е.
насколько изменение зазоров при ее износе отвечает эксплуата-
ционным требованиям. По этому же признаку сравнительная
оценка рулевых механизмов различных конструкций производится
по результатам испытаний на износ рабочих поверхностей дета-
лей передаточной пары на автомобиле в условиях эксплуатации
и в лаборатории на специальных стендах.
Лабораторные испытания рулевых механизмов на износ и
надежность являются важнейшим завершающим этапом всего
комплекса работ по созданию рулевого механизма. Такие испыта-
ния весьма важны для тех конструкций рулевых механизмов,
у которых ряд деталей нагружен от встроенного усилителя [9].
В условиях работы автомобиля рулевой механизм и все детали
рулевого управления находятся под действием статических сил,
возникающих во время поворота автомобиля, и под действием ди-
намических сил, передающихся на управляемые колеса при
движении по прямой и неровной дороге. Несомненно, что разный
характер нагрузок вызывает и разные виды износа. Исходя из
этого сложное действие на рулевое управление сил, возникающих
в условиях эксплуатации, при лабораторно-стендовых испытаниях
нужно разделить на более простые действия отдельно статических
сил и динамических сил.
В первом случае рулевой механизм испытывают на износ в ла-
бораторных условиях, изменяя нагрузку, количество поворотов
и угол поворота рулевого вала. При этих испытаниях рабочие
поверхности истираются и разрушаются [10].
Во втором случае рулевой механизм испытывают, изменяя
динамическую нагрузку по величине, направлению и частоте при-
ложения, также в лабораторных условиях. При этих испытаниях
происходит усталостное разрушение рабочих поверхностей и от-
дельных деталей передаточной пары.
Стенды для испытания рулевых механизмов на износ
На стенде должны воспроизводиться такие нагрузки, которые
были бы несколько больше, чем силы, действующие на испытывае-
мый механизм в эксплуатации.
При лабораторных испытаниях должно в основном проверяться
действие статических сил, вызывающих наибольший износ.
19 м. II. Лысов 289
Рис. 203. Стенд с кривошипной и шестеренчатой передачами для испытаний рулевых механизмов на износ
На стенде для таких испытаний рулевому валу придают воз-
вратно-вращательное движение с помощью кривошипно-шатун-
ного механизма, реверсивного гидромотора, реверсивного электро-
двигателя или специального реверсивного устройства. Вал сошки
затормаживают изменяемым моментом заданной величины посред-
ством гидравлического или фрикционного тормоза.
В стенде с кривошипно-шатунным приводом (рис. 203) враще-
ние рулевого вала осуществляется от электродвигателя через чер-
вячную, кривошипно-шатунную и шестеренчатые передачи. Вал 1
сошки испытываемого рулевого механизма располагается, как
обычно, в кронштейне, укрепленном на раме стенда, а рулевая
колонка — в хомуте 8. На конце рулевого вала укреплена ше-
стерня 9, которая приводится во вращение через шестерни 10, 11
и 12. Шестерня 12 поворачивается на некоторый угол кривошипно-
шатунным механизмом. Палец кривошипа укреплен в диске 13,
который получает вращение от электродвигателя через редуктор 14.
Угол поворота рулевого вала зависит от радиуса кривошипа
и общего передаточного числа шестеренчатой передачи. Радиус
кривошипа изменяют путем перемещения пальца в прорези диска.
Реактивное усилие на пальце рулевой сошки создается с по-
мощью гидротормоза 19 за счет сопротивления перетеканию жид-
кости во время перемещения поршня в гидравлическом цилиндре.
В данном случае отверстия для перетекания жидкости сделаны
в самом поршне и имеют постоянное сечение. Сопротивление по-
току масла изменяют перепускным краном 3.
Величину усилия, действующего на палец сошки, определяют
по давлению масла, наблюдаемому по манометру 2, и рабочей
площади поршня.
Цилиндр гидротормоза качающийся и укрепляется на раме
посредством ушков и кронштейна, соединенных между собой шар-
нирно пальцем 18.
Общий вид простейшего устройства для предварительных испы-
таний рулевых механизмов на износ показан на рис. 204. Здесь
использован обычный поперечно-строгальный станок. Возвратно-
поступательное движение ползуна станка преобразуется в воз-
вратно-вращательное движение рулевого вала с помощью реечной
передачи.
Испытываемый рулевой механизм 7 прикрепляют к столу при
помощи кронштейна. Рулевой вал 3 проходит через полый вал
шестерни редуктора 2 и соединяется с ним посредством муфты,
состоящей из двух фланцев 4 и 6 и укрепленного между ними эла-
стичного диска 5. С шестерней редуктора 2 зацепляется рейка 1,
прикрепленная к ползуну станка. Рулевая сошка серьгой соеди-
няется со штоком тормозного гидравлического цилиндра 10, при-
крепленного к столу станка на кронштейне.
Усилие, действующее на палец сошки, определяется по пока-
заниям манометров 8. Его величину можно регулировать про-
ходным сечением канала в штоке при помощи рукоятки 9.
19* 291
В стенде с гидравлическим приводом (рис. 205) возвратно-вра-
щательное движение рулевого вала осуществляется при помощи
лопастного реверсивного гидромотора. От вала гидромотора 6
движение передается рулевому валу испытываемого рулевого ме-
ханизма 9 через редуктор 7 с цилиндрическими шестернями и ре-
дуктор 8 с коническими шестернями.
Жидкость, засасываемая из бачка 3 шестеренчатым насосом 4,
приводимым во вращение электродвигателем 2, поступает в гидро-
Рис. 204. Стенд с кривошипно-кулисным приводом для
испытаний рулевых механизмов на износ
мотор 6 через пусковое устройство 5 и возвращается в бачок
после совершения рабочего процесса. Рулевой вал испытываемого
рулевого механизма 9 проходит через полый вал ведомой шестерни
конической передачи редуктора 8 и зажимается цанговой муфтой.
Рулевая сошка соединяется со штоком гидротормоза 1 шатуном.
Давление в цилиндре может регулироваться изменением проход-
ного сечения канала в штоке с помощью поршня, перемещаемого
в штоке посредством червячной передачи 10, укрепленной на вто-
ром конце штока.
Испытываемый рулевой механизм укрепляют на кронштейне,
который может быть точно установлен на фундаментной плите.
На той же плите в соответствии с положением сошки устанавли-
вается и цилиндр гидротормоза 1.
Действующее от пальца сошки усилие определяется по показа-
ниям манометров, сообщающихся с обеими полостями цилиндра
гидротормоза. Схема действия гидросистемы стенда показана на
292
рис. 206. Масло из бака 19 засасывается шестеренчатым насосом 2
и под давлением поступает в пусковую коробку 7, откуда направ-
ляется по трубкам 3 и 8 в кран 11 и в золотниковую коробку 15.
Из последней оно направляется в одну из полостей цилиндра
гидромотора 17 для совершения рабочего процесса. Отработавшее
масло поступает из цилиндра
в золотниковую коробку 15 и по
трубке 14 — в масляный бак.
В пусковой коробке 7 имеется
сдвоенный кран с контрольным
регулировочным клапаном. Пус-
ковой кран 4 перекрывает доступ
потоку масла в золотниковую
15. Через перепускной
Рис. 205. Стенд с гидромотором для испытаний рулевых механизмов на износ
кран 5 поток масла направляется обратно в бак 19 по трубке 1
По той же трубке в бак проходит избыток масла, прошедший через
контрольный клапан 6, отрегулированный на необходимое давле-
ние посредством винта и пружины.
Поток масла в ту или другую рабочую полость цилиндра на-
правляется при помощи четырехгребневого золотника 16, пере-
крывающего впускные и выпускные отверстия золотниковой ко-
робки. Золотник перемещается вдоль коробки под давлением
масла, поступающего из пусковой коробки по трубке 3 в торец
крана 11 и далее по осевому каналу 12 в пробке 10 крана, а затем
по одному из радиальных отверстий в соответствующую трубку 9
или 13 — к торцу золотниковой коробки или в сливную трубку 18.
Пробка крана повертывается автоматически с помощью спе-
циального устройства, смонтированного на валу гидромотора.
В стенде с реверсивным электродвигателем (рис. 207) воз-
вратно-вращательное движение рулевого вала осуществляется
за счет переключения направления вращения вала электродвига-
теля.
На кронштейне 1, закрепленном на плите 5, смонтирован испы-
тываемый рулевой механизм 2. Возвратно-вращательное движение
1622 293
рулевой вал получает от электродвигателя 3, соединенного с ру-
левым валом через соответствующую передачу. Вал сошки по-
средством карданной и цепной передач соединен с гидротормо-
зом 4.
В НАМИ разработан стенд (рис. 208), в котором рулевой вал
получает возвратно-вращательное движение от электродвигателя 1
через несколько механизмов: планетарный редуктор 2, редуктор
со сменными шестернями, реверсивные и угловую 12 передачи.
Выходной вал 3 планетарного редуктора стенда посредством
шестерен соединяется с валом 4 реверсивной передачи, на котором
установлены две электромагнитные муфты. Обе муфты имеют
по концам конические шестерни 5 и 6 реверсивной передачи, по-
294
Рис. 207. Стенд с ревер-
сивным электродвигате-
лем для испытаний ру-
левых механизмов на
износ
295
стоянно сцепляющиеся с одной центральной конической шестер-
ней 7, получающей возвратно-вращательное движение.
Электромагнитные муфты с помощью винта 8 переключаются
микровыключателями 10 и 11 и реле. Кнопки микровыключателей
нажимаются ползуном 9, перемещающимся по винту переключаю-
щего устройства.
При включении той или другой электромагнитной муфты цен-
тральная шестерня 7 вращается в любую сторону. Таким образом,
в этом механизме осуществляется перемена направления вращения
рулевого вала.
Вал центральной шестерни 7 при помощи упругой муфты соеди-
нен с валом угловой передачи 12, в полом валу 13 которой закреп-
ляется цанговым зажимом рулевой вал испытываемого рулевого
механизма.
В приводе стенда между реверсивной передачей и рулевым
валом вращающихся масс с большим моментом инерции нет.
Поэтому пауза между моментами выключения одной муфты и
включения другой получается весьма малой и составляет около
0,5 сек.
Вал 14 сошки затормаживается гидротормозом 15 с любым
заранее заданным сопротивлением.
Рулевой механизм нагружается следующим путем. Шаровой
палец сошки тягой соединяется со штоком гидротормоза (рис. 209),
представляющего собой цилиндр, в котором перемещается пор-
шень со сквозным штоком. Обе полости цилиндра заполнены мас-
лом и соединяются между собой каналами, выполненными в штоке
с обеих сторон поршня. Проходное сечение каналов регулируется
при помощи золотника, установленного в штоке и перекрываю-
щего один из его каналов.
В золотнике имеется радиальный трехгранный канал, который
в сочетании с каналом прямоугольного сечения в штоке позво-
ляет очень плавно изменять сопротивление потоку масла, а сле-
довательно, и давление в гидротормозе.
Основными условиями, обеспечивающими получение правиль-
ных результатов при испытании рулевых механизмов на износ,
являются постоянство действующего момента и скорости враще-
ния рулевого вала за каждый цикл и за весь процесс испытаний
и возможность достаточно точного их измерения.
Гидросистема (гидротормоз), применяющаяся для нагружения
вала сошки при наличии устройства для регулировки давления
рабочей жидкости, обеспечивает достаточное постоянство дей-
ствующего реактивного усилия.
В стендах, работающих с применением кривошипно-шатунного
механизма (см. рис. 203), скорость вращения рулевого вала,
а следовательно и вала сошки, изменяется в течение каждого
полного поворота как в правую, так и в левую сторону. В этом
случае скорость перетекания рабочей жидкости изменяется, а сле-
довательно, изменяются давление и нагрузка на сошку.
296
В стенде, в котором применяется кривошипно-кулисный ме-
ханизм (см. рис. 204), эти изменения очень велики. Скорость
ползуна получается переменной в процессе его движения за каж-
дый цикл, но и различной и, кроме того, скорость при прямом
вращении рулевого вала и вала сошки получается в несколько
раз меньше, чем при обратном. Следовательно, нагрузка на
Рис. 209. Гидротормоз с самописцем и кривая изменения
давления в полостях цилиндра тормоза
сошку также переменная. По этой причине стенд с кривошипно-
кулисным механизмом пригоден только для предварительных
испытаний на износ рулевых механизмов.
В стенде с реверсивным электродвигателем или гидромотором
скорость вращения рулевого вала и вала сошки постоянна, что
и способствует получению достаточно постоянной нагрузки на
сошку.
Изменение давления в цилиндре гидротормоза может быть
записано при помощи самописца, включенного в полость гидро-
тормоза (рис. 209), в виде кривой при перемещении поршня из
одного крайнего положения в другое и обратно. Давление резко
растет в момент трогания поршня из крайнего его положения,
297
достигает максимального значения (при данной регулировке
перепускного отверстия) и остается таким почти в течение всего
хода сошки, а затем резко падает при перемене хода на обратный.
Таким образом, почти на всем ходе поршня из одного его крайнего
положения в другое нагрузка на сошку остается почти без изме-
нения.
Постоянство сил, действующих на детали рулевого механизма,
обеспечивается реечной или цепной передачей (см. рис. 207),
соединяющей вал сошки с гидротормозом. Однако в реечной и
цепной передачах возникают значительные потери на трение,
которые не учитываются показаниями манометров гидротормоза,
вследствие чего нагрузка на детали рулевого механизма возра-
стает на величину этих потерь.
В действительных условиях работы рулевого механизма ру-
левая сошка значительно отклоняется от нейтрального положе-
ния, поэтому изменяются и силы, действующие на его детали.
Вследствие этого способ соединения рулевой сошки с качающимся
гидротормозом или с шатуном (см. рис. 203 и 205) обеспечивает
более точное определение действующих сил.
Гидротормоз создает постоянный режим для конструкций с по-
стоянным передаточным числом. Для конструкций с переменным
его изменением вращение вала сошки, а следовательно, и нагрузка
гидротормоза также получаются переменными.
Для испытаний на износ рулевых механизмов с резко пере-
менным передаточным числом нагружать вал сошки нужно фрик-
ционным тормозом дискового или ленточного типа. Колодочный
тормоз дает разные значения момента при повороте барабана
в разные стороны и для таких испытаний непригоден.
Определение режима работы
при испытаниях рулевых механизмов на износ
Величина износа деталей рулевого механизма и состояние их
рабочих поверхностей зависят в большой степени от режима
работы, назначаемого при проведении испытаний: скорости вра-
щения рулевого вала, прилагаемого к рулевому колесу, усилия
и угла его поворота. При этом режим работы рулевого механизма
должен быть напряженным. Следует заметить, что режим работы
рулевого механизма при стендовых испытаниях отличается от
эксплуатационного режима. Прилагаемое к рулевому колесу
усилие в условиях эксплуатации достигает иногда весьма большой
величины, но действие его кратковременное. Прикладываемое
при стендовых испытаниях усилие, хотя и меньше максимального,
встречающегося в эксплуатации, но действие его продолжительное,
и оно поддерживается постоянным в течение всего процесса
испытаний.
Скорость вращения рулевого колеса следует принимать наи-
большую, встречающуюся в эксплуатации и равную 1 об/сек.
298
Более высокие скорости вращения, превышающие эксплуатацион-
ные, могут привести к отступлениям от действительных условий
работы рулевого механизма, а следовательно, вызвать искажения
износных явлений.
Усилие, прилагаемое к ободу рулевого колеса, принимаем
максимально допустимым для длительной работы рулевого ме-
ханизма на стенде при износных испытаниях. Оно должно состав-
лять 35—40% от усилия Рк, прилагаемого к рулевому колесу
при повороте управляемых колес на месте.
Угол поворота рулевого вала или вала сошки определяет
длину изнашиваемых участков передаточной пары, т. е. количество
зубьев зубчатой пары и длину винтовой канавки винта, подвер-
гающихся износу, но не характеризует нагрузочного режима.
Исходя из того, что исследованиям на износ подвергаются
все элементы передаточной пары, поворот вала сошки и рулевого
вала при стендовых испытаниях рекомендуется производить на
максимально допускаемые углы. Так, например, в рулевом ме-
ханизме автомобиля МАЗ-500 (см. рис. 16) внутренние профили
крайних зубьев сектора контактируют только с наружными
профилями крайних зубьев гайки. В связи с этим угол поворота
вала сошки нужно выбирать по перемещению крайних зубьев
гайки. Для полного и одинакового нагружения всех профилей
зубьев гайки угол (3 поворота вала сошки в каждую сторону от
среднего ее положения должен быть равен 48°.
Стенд для испытания рулевых механизмов
на усталостную прочность
Для испытаний рулевого механизма на усталостную прочность
знакопеременная нагрузка прилагается к шаровому пальцу
сошки. При этом проверяют шаровой палец, рулевую сошку,
вал сошки, иголки и шарики ролика и подшипники пальца кри-
вошипа.
Принцип действия стенда (рис. 210) основан на том, что
к пальцу сошки испытываемого рулевого механизма прилагается
сила, которая благодаря вращению эксцентрично расположенного
груза дважды изменяется и по величине, и по направлению за
каждый оборот вала. Рулевой вал поворачивается в обе стороны
на некоторый угол посредством привода, в результате чего нагру-
жаются разные точки соприкосновения деталей передаточной пары.
На роликоподшипниках неподвижной опоры 7 стенда уста-
новлен валик, на котором укреплен маятниковый рычаг. В го-
ловке 4 верхней головки этого рычага также на подшипниках
установлен приводимый карданным валом от электродвигателя 13
вал, на конце которого укреплен рычаг с грузом 5.
На маятниковом рычаге укреплен ползун 6, в вилке которого
зажимается шаровой палец сошки испытываемого рулевого ме-
ханизма 3, прикрепляемый неподвижно к кронштейну 1 стенда.
299
В показанной на рис. 210, б конструкции карданный вал 9
соединяется не непосредственно с валом электродвигателя 13,
а через редуктор 14 и гидрообъемную передачу 15. При наличии
гидрообъемной передачи число оборотов карданного вала, а сле-
довательно, и число ударов в единицу времени может регулиро-
ваться в широких пределах. В этом случае может быть применен
электродвигатель переменного тока с постоянным числом обо-
ротов.
Рис. 210. Стенд вибрационного типа для испытаний рулевых механизмов па
усталостную прочность
При вращении вала в головке 4 возникающая от эксцентрично
расположенного груза 5 центробежная сила действует на шаровой
палец сошки с переменной по величине и по направлению силой
Р = АР<Зг sin а, (130)
где М — масса эксцентрично расположенного груза с рычагом;
со — угловая скорость вращения вала;
г — радиус от оси вращения вала до центра тяжести
массы;
b и а — расстояние от оси поворота рычага соответственно
до оси вала и до центра шарового пальца сошки;
а — угол поворота рычага от вертикального его положения.
300
Максимальные усилия, передающиеся на палец сошки, полу-
чаются при а = 90° и 270°, и тогда
Р = Mufr —.
а
Рулевой вал поворачивается рычагом 2, на конце которого
укреплен шаровой палец. Последний располагается в головке
тяги 8, получающей возвратно-поступательное движение от криво-
шипа 10 червячного редуктора 11.
Шкив редуктора приводится во вращение ременной переда-
чей 12 от шкива, укрепленного на фланце кардана.
На этом же стенде можно испытывать рулевые механизмы на
передачу обратных ударов. Для определения коэффициента пере-
дачи ударов к рулевому колесу нужно укрепить самопишущее
динамометрическое рулевое колесо с весьма слабыми пружинами,
способными улавливать малые силы Рк, передающиеся от сошки
к рулевому колесу.
В заводских условиях, где рулевой механизм выпускается,
как правило, одной конструкции, стенды для испытаний на износ
и усталостную прочность могут быть более простыми (см.
рис. 203).
На раме стенда смонтирован динамический пульсатор. Груз 16
выполнен в виде отдельных секторов, насаженных на вал 15,
установленный на рычагах 6, качающихся на оси 5. Груз вра-
щается от электродвигателя при помощи двух цепных передач 4
и 7. Пульсирующее усилие, возникающее при вращении эксцен-
трично расположенного груза, передается от качающегося ры-
чага 6 на палец рулевой сошки штангой 17, соединенной с ушками
рычага пальцем.
При испытании рулевого механизма на усталостную проч-
ность шток гидротормоза отсоединяется от пальца рулевой сошки
и к нему присоединяется штанга качающегося рычага. Угол
поворота рулевого вала при испытании на динамическую на-
грузку принимается меньшей величины, чем при испытании на
износ.
В результате объединения испытаний на износ и усталостную
прочность стенд получается более компактным и простым. На нем
можно проследить изменение износа или разрушение деталей или
их рабочих поверхностей при одновременном действии сил.
Стенды для испытания усилителей
рулевого управления на износ
На стендах, показанных на рис. 203 и 205, можно испытывать
рулевые механизмы с усилителем, причем усилитель может быть
встроенным или отдельным. Усилитель питается от насоса, при-
301
водимого отдельным электродвигателем. Управление усилителем
осуществляется обычным способом при повороте рулевого колеса.
Оригинальный метод испытаний на износ гидравлических
усилителей применил завод «Автопогрузчик». Испытаниям под-
вергаются одновременно два спаренных между собой усилителя
так, что один из них является активным, а другой реактивным.
В полости силового цилиндра первого усилителя поступает рабо-
чая жидкость под давлением. Второй усилитель выполняет функ-
ции гидротормоза.
Глава УШ
РЕКОМЕНДАЦИИ ПО ВЫБОРУ ТИПА И РАЗМЕРОВ
ОСНОВНЫХ ДЕТАЛЕЙ РУЛЕВОГО УПРАВЛЕНИЯ
Учитывая многогранность вопросов, определяющих выбор
конструкции и основных размеров, невозможно дать широкие
рекомендации по выбору типа механизмов рулевого управления;
поэтому ниже приведены некоторые рекомендации, включающие
принципиальные и новые предложения, разрешаемые в следующих
направлениях.
1. Выбор типа и размеров основных деталей рулевого управ-
ления.
2. Облегчение рулевого управления п выбор рационального
передаточного числа рулевого механизма п закона его изменения.
3. Повышение срока службы рулевого управления.
РУЛЕВЫЕ МЕХАНИЗМЫ
Выбор типа рулевого механизма
Опыт отечественного и зарубежного автомобилестроения по-
казал, что на автомобилях применяются рулевые механизмы
весьма разнообразных конструкций. При выборе типа рулевого
механизма нужно учитывать не один, а ряд следующих факторов:
1) надежность, долговечность;
2) обеспечение безопасности движения;
3) легкость управления п поворотливость автомобиля;
4) способность амортизировать обратные удары;
5) сложность, трудоемкость п технологичность конструкции;
6) удобство обслуживания;
7) ремонтопригодность;
8) стоимость.
Глобоидальная передача применяется на автомобилях различ-
ных типов. Она достаточно проста в производстве, а поэтому ее
стоимость невысокая. При надлежащей точности изготовления
глобоидальная передача может отвечать основным требованиям
эксплуатации. Однако применение ее ограничивается автомоби-
лями только малого п среднего веса (массы), а получить перемен-
ное передаточное число, являющееся перспективным фактором,
как это было рассмотрено выше, чрезвычайно сложно.
303
Кривошипная передача применяется на некоторых легковых
автомобилях и грузовых малой грузоподъемности, несколько
больше на грузовых автомобилях средней грузоподъемности и
устанавливается преимущественно на грузовых автомобилях боль-
шой грузоподъемности. Кривошипная передача применялась на
грузовых автомобилях ЗИЛ и ЯАЗ и на троллейбусах ЗиУ.
Кривошипная передача по сравнению с другими передачами
имеет наибольшие потенциальные возможности для улучшения
и совершенствования конструкции рулевого механизма. Рулевой
механизм с кривошипной передачей наименее сложный и наи-
более полно отвечает перспективам и требованиям эксплуатации.
Такой рулевой механизм может применяться на всех автомоби-
лях от малолитражных легковых до сверхтяжелых грузовых.
Передаточные числа кривошипной передачи могут изменяться
в широком диапазоне по величине и по характеру в зависимости
от угла поворота рулевого вала. При этом размеры деталей сохра-
няются. Важной особенностью кривошипной передачи является
возможность в процессе эксплуатации регулировать зазоры и
предварительный натяг во всех узлах рулевого механизма. При
выборе конструкции рулевого механизма следует учитывать и
вопросы легкости управления.
Известно, что работа водителя на автобусе труднее и сложнее,
чем на грузовом автомобиле, и облегчать труд водителя нужно
не только путем уменьшения усилия на ободе рулевого колеса,
но и путем уменьшения угла его поворота. Достаточно сказать,
что на каждой остановке водитель производит четыре поворота.
В связи с этим рулевой механизм для автобусов должен иметь,
кроме обязательного усилителя, рулевую передачу с переменным
передаточным числом, уменьшающим угол поворота рулевого
колеса.
Эти условия обеспечивает конструкция рулевого механизма
с кривошипной передачей.
Червячная передача на первый взгляд достаточно проста по
конструкции и долговечна. Однако наличие трения скольжения
между контактирующими деталями вызывает необходимость в до-
полнительных производственных операциях для удовлетворения
основным требованиям эксплуатации. Этим усложняется про-
изводственный процесс, а случайные производственные погреш-
ности и отступления от точности выполнения нарушают надеж-
ность работы червячной передачи.
Исходя из сказанного рулевой механизм с червячной переда-
чей применять не следует.
Винтовая передача с зубчатой парой и циркулирующими ша-
риками обладает высоким к. п. д. Такая конструкция рулевого
механизма широко применяется на автомобилях всех типов.
Однако конструкция такого рулевого механизма достаточно
сложная, детали винтовой передачи и зубчатой пары должны
обрабатываться с высокой точностью.
304
Таким образом, для легковых автомобилей и грузовых авто-
мобилей малой и средней грузоподъемности рекомендуется при-
менять рулевой механизм с глобоидальной передачей с двухгреб-
невым и трехгребневым роликом, а для грузовых автомобилей
большой грузоподъемности и сверхтяжелых автомобилей и тяга-
чей — рулевой механизм с винтовой передачей и циркулирующими
шариками. Для городских и многоместных автобусов целесооб-
разнее использовать рулевой механизм с кривошипной передачей
и переменным передаточным числом.
Выбор диаметра вала оошки
Из всех деталей рулевого механизма наибольшим моментом
при повороте рулевого колеса нагружен вал сошки. Сопротив-
ление управляемых колес повороту зависит от веса автомобиля,
приходящегося на переднюю ось, размера шин, радиуса поворота
и других факторов, поэтому момент, передаваемый от рулевого
механизма на поворотную цапфу, будет различным для разных
автомобилей.
В связи с тем, что соотношение длин рулевой сошки и ры-
чага поворотной цапфы близко к единице, можно считать, что
почти весь момент, преодолевающий сопротивление колес пово-
роту, передается через вал сошки. Обратные удары, возникающие
при наезде одним из передних колес автомобиля на неровности
дороги, передаются на рулевое колесо. При этом вал сошки также
находится под полной ударной силой. Таким образом, основным
размером, определяющим соответствие рулевого механизма при
его выборе или расчете проектируемому автомобилю, является
диаметр вала сошки.
Значение диаметра можно найти из выражения
где k — запас прочности;
М — момент, определяемый из уравнений (26)—(32);
то — предел прочности при кручении.
Выражая М через вес Gx, приходящийся на управляемые
колеса, коэффициент трения р, плечо поворота г и длины рыча-
гов 1С и 1Р получим
d = । / —Z~ • ^гк. и d = y/r-^i-, (131)
О,2-то 1Р гт
где
__ (О,2-/рТо)
Т (рЛг/с)
По этой формуле при т = 52 кПсм3, соответствующем прибли-
зительно рулевому механизму автомобиля ГАЗ-51, на рис. 211
построена кривая 1 изменения диаметра d вала сошки в зависи-
20 М. И. Лысов 305
306
Рис. 211. Изменение диаметра вала сошки рулевых механизмов в зависимости от нагрузки на передние колеса
мости от веса Gx. Для сопоставления размеров, получающихся
по формуле (131) и кривой 1, с размерами, применяемыми в авто-
мобильной практике, на том же рисунке приведены данные по
рулевым механизмам отечественных автомобилей и зарубежных
фирм и отдельных автомобилей и автобусов. Цифрой 2 обозначена
кривая, построенная по данным для рулевых механизмов с кри-
вошипной передачей типа Росс производства Цанрадфабрпк;
3 — рулевых механизмов с винтовой передачей и встроенным
гидроусилителем производства фирмы Рейс; 4 — рулевых меха-
низмов с винтовой передачей и встроенным гидроусилителем
производства фирмы Кальцони; 5 — рулевых механизмов с гло-
боидальной передачей типа Геммер без усилителя производства
фирмы Цанрадфабрпк; 6 — рулевых механизмов с винтовой пере-
дачей и встроенным усилителем и с шатунно-кривошипной парой
производства той же фирмы.
Фирма Цанрадфабрпк выпускает рулевые механизмы двух
типов: для легковых автомобилей и грузовых автомобилей малой
грузоподъемности, у которых Gt «с 4500 кГ, и для грузовых авто-
мобилей, имеющих Gx = 4000ч-12 ООО кГ и выше. Для автомоби-
лей с весом Gx = 15 000 кГ фирма использует вал сошки диа-
метром d = 75 мм.
Как видно, расчетная кривая 1 весьма близко совпадает
с кривыми, построенными по данным для рулевых механизмов,
выпускаемых зарубежными специализированными фирмами.
Кривая 7 построена по данным для рулевых механизмов оте-
чественных автомобилей и автобусов. Из этих данных видно, что
напряжения в сечениях вала сошки рулевых механизмов отече-
ственных автомобилей находятся в зоне допускаемых.
Кроме данных по рулевым механизмам специализированных
фирм на рис. 211 приведены данные по рулевым механизмам от-
дельных зарубежных автомобилей и автобусов. В частности,
точка 8 соответствует рулевому механизму автобусов фирм Хен-
шель и Бюсспнг; 9 и 10 — автобусов «Икарус» модели 180 (сочле-
ненного) и модели 550 (одинарного) соответственно с весом 6050 кГ
и 5650 кГ. Диаметры полого вала сошки рулевого механизма этих
автобусов равны 50 и 28 мм. Такой полый вал эквивалентен
сплошному валу с диаметром 48,3 мм, который и отмечен. Точ-
ками 11, 12 и 13 отмечены одинаковые диаметры валов, применяе-
мых соответственно на грузовом автомобиле фирмы МАК и авто-
бусах фирмы Мерседес-Бенц и ДМС, точкой 14 — на грузовом
автомобиле «Мерседес» и точками 15, 16, 17 и 18 — диаметры валов
одного диаметра для грузовых автомобилей фирм Броквей, Уайт,
ДМС и Студебекер разного веса.
Как видно, многие данные конструкций рулевых механизмов
зарубежных автомобилей располагаются вблизи предлагаемой
расчетной кривой. Исключение составляют рулевые механизмы
некоторых автобусов, в которых диаметр вала сошки назначается
несколько больше, чем у автомобилей других типов. Из приве-
20* 307
денных данных видно, что результаты расчетов достаточно близко
совпадают с данными выполненных конструкций.
Приведенная на рис. 211 кривая позволяет рекомендовать
основные параметры рулевых механизмов, приведенные в табл. 7.
7. Основные параметры рулевых механизмов
Диаметр d вала рулевой сошки в мм Меж осевое расстояние К в картере в мм Допустимая нагрузка на управляемые колеса в к Г при отсутствии усилителя Тип передачи рулевого механизма
23,4 43,5 До 600 Глобоидальный червяк и двухгребневый или трех- гребневый ролик (см. рнс. 24, 25, 26, 27)
52,5 600—1100
28,7
50,8
32 59,5 1100—1800
61,5
66,6
68,3
35 68,3 1800—2400 *
38 90 2400—3300
Двухступенчатая с вин- товой передачей и зубчатой парой с встроенным гидро- усилителем (см. рис. 17)
42 90 3300—4200
45 76 4200—6600 ** Двухступенчатая с вин- товой передачей и зубча- той парой (см. рис. 16)
50 105,5 5500—6500 **
45 90 4200—6600 ** Кривошипная с резко умень- шающимся передаточным числом (см. рис. 214)
* Гидравлический усилитель, встроенный в рулевой привод, допускает увеличение веса на управляемые колеса на 20%. * * С гидравлическим усилителем, встроенным в рулевой привод.
Повышение срока службы рулевого механизма
Одним из показателей, характеризующих срок службы и при-
годность рулевого механизма для работы на автомобиле, является
характер изменения зазоров в передаче за полный поворот руле-
вого колеса.
308
Опытом эксплуатации и экспериментальной проверкой уста-
новлено, что передаточная пара должна быть выполнена без
зазора в середине зацепления и с зазорами в обе стороны от сере-
дины (кривая 1 на рис. 212). Такой закон изменения зазоров
в передаче может быть обеспечен конструкцией передачи или
получен искусственным путем.
ЛР мм.--------------
Рис. 212. Изменение зазоров в передаче
309
По такой кривой изменяются зазоры в рулевых механизмах
с винтовой передачей и двумя полугайками (см. рис. 18) и с глобо-
идальной передачей (см. рис. 23—26). В других механизмах,
например в механизме с кривошипной передачей (см. рис. 19
и 20), желаемое изменение зазоров достигается искусственно путем
изготовления канавки червяка с переменной глубиной.
Однако изменение зазоров, обеспечиваемое конструктивными
особенностями передачи, не всегда компенсирует износ, возника-
ющий в процессе работы.
Рис. 213. Трение в рулевых механизмах импортных авто-
мобилей при износе:
1 — автомобиля с рулевым механизмом фирмы Геммер; 2 — авто-
мобиля фирмы Панар; 3 — автомобиля фирмы Бейслер
Рулевой механизм с глобоидальной передачей. На рис. 213
показано несколько примеров, характеризующих неудовлетвори-
тельное зацепление передаточной пары при износе разных импорт-
ных рулевых механизмов с глобоидальной передачей.
Обратное трение в рулевом механизме, характеризуемое си-
лой Рс на сошке в середине зацепления, вследствие большего
износа получается меньшим, чем в обе стороны от середины.
При повороте рулевого колеса как вправо, так и влево более
высокое обратное трение затрудняет управление, вследствие чего
безопасность движения автомобиля понижается.
Первоначально рулевые механизмы некоторых отечественных
автомобилей имели также недостаточно удовлетворительное за-
цепление при износе. Зазоры в передаче изменялись по кривой 1
(см. рис. 212).
Для правильного зацепления передаточной пары в течение
всего срока службы рулевого механизма на автомобиле зазоры
в передаче и приращение радиуса ДУ? беззазорного зацепления
должны изменяться так, чтобы на небольшой длине линии зацеп-
310
ления они имели минимальное значение, затем достаточно резко
увеличивались и далее оставались постоянными или увеличи-
вались до полного угла поворота рулевого колеса, как это по-
казано кривой 2. Такие результаты можно получить при эксцен-
тричном червяке, для которого
А/?о = AZ? + А/?',
где А/? — установленное выше приращение радиуса беззазор-
ного зацепления концентричного червяка [см. урав-
нение (39)1, полученное в результате радиального
смещения оси вала сошки ближе к оси червяка;
А/?' — дополнительное приращение радиуса беззазорного за-
цепления, получающееся вследствие эксцентричности
червяка.
Величина А/?' определяется по приведенным на рис. 214
данным следующим путем:
А/?' = Rx — R;
pt 1? cos Р EF R cos Р + q (1 — cos <р) #
Х COS рл COS рх ’
COS = ..; tg = -р .
т 1 + tg2 рх cos р 4-^(1 — cos<f>)
Решая совместно приведенные выражения, получим
А/?' = Rx — R — R | j/ I-cos₽ + (1 — costp)j2 4- sin2p — 1 [.
311
На рис. 215 показаны кривые дополнительного приращения
радиуса беззазорного зацепления при различной величине эксцен-
трицитета q червяка.
Эффективность применения эксцентричного червяка проверена
экспериментально на автомобилях М-20 «Победа». Рулевые ме-
ханизмы двух таких автомобилей, испытывавшихся на износ,
выполнены с рекомендуемым зацеплением (кривая 3 на рис. 212).
После пробега свыше 100 000 км рулевые механизмы обоих авто-
мобилей были вполне пригодны для дальнейшей работы. Характер
изменения зазоров в передаче после этого пробега мало отличается
от кривой 3.
600 080 360 2',0 120 О 120 200 380 080 600
Рис. 215. Кривые приращения радиуса беззазорного зацепле-
ния (при различной величине эксцентрицитета q червяка)
С таким же зацеплением выполнены рулевые механизмы авто-
мобилей «Москвич-407) (кривая 4) и грузового автомобиля
ЗИЛ-150 (кривая 5).
Подобный характер изменения зазоров можно получить сдви-
гом режущих кромок обрабатывающего инструмента (долбяка)
при нарезании червяка. Такая система применяется в рулевом
механизме автомобиля ГАЗ-12 (кривая 6).
Все трущиеся и катящиеся поверхности рулевого механизма
по мере работы подвержены износу, вследствие чего между де-
талями появляются зазоры, понижающие устойчивость движения
автомобиля по прямому направлению и ухудшающие качество
зацепления передаточной пары. В практике известны некоторые
методы повышения срока службы передаточной пары с правильным
зацеплением при износе.
Например, глобоидальный червяк предварительно незначи-
тельно смещают в осевом направлении в сторону регулируемого
подшипника. Таким образом, влияние осевого смещения червяка
можно рассматривать различно. Оно ухудшает качество зацеп-
ления передаточной пары, особенно при большой величине сме-
щения. Но при небольшой величине преднамеренное осевое сме-
312
щение в определенном направлении удлиняет срок службы пере-
даточной пары рулевого механизма без частых регулировок.
При износе подшипников червяка их обоймы при регулировке
сближаются. Если один из подшипников неподвижный (нерегу-
лируемый) и его обойма расположена в гнезде картера рулевого
механизма, то при регулировке перемещают обойму второго под-
шипника. При этом зацепление в рулевом механизме сначала не
вполне правильное, но по мере износа неподвижного подшипника
червяк смещается по оси, и плоскость среднего его сечения при-
ближается к оси вала сошки. Зацепление передаточной пары при
этом улучшается и получается правильным, когда плоскость
среднего сечения червяка совпадает с осью вала сошки. При даль-
нейшем износе нерегулируемого подшипника плоскость среднего
сечения переходит за ось вала сошки, и зацепление передаточной
пары снова ухудшается. Таким образом, срок службы рулевого
механизма значительно повышается.
Рулевой механизм с винтовой передачей и зубчатой парой.
В основу конструкции рулевого механизма, единой для всех гру-
зовых автомобилей большой грузоподъемности, многоместных
автобусов и троллейбусов, принят рулевой механизм типа при-
мененного на автомобиле МАЗ-500 (см. рис. 16). Он имеет в пере-
даче две ступени: винтовую передачу с циркулирующими шари-
ками и зубчатую пару. Изменяющиеся зазоры в передаче осуще-
ствлены в зубчатой паре — наиболее изнашивающейся части
рулевого механизма.
Зазоры в зубчатой паре рулевого механизма, увеличивающиеся
в обе стороны от середины зацепления, получаются в результате
изготовления зубьев сектора разной толщины: средний зуб наи-
более полный (нормальной толщины), соседние с ним зубья не-
сколько тоньше, а крайние зубья самые тонкие. Толщина зацеп-
ляющихся с ними зубьев гайки одинакова. Разная толщина зубьев
сектора получается при их нарезании путем смещения оси на-
резки зубьев относительно оси вала (см. рис. 81). Для зубьев
сектора рулевого механизма МАЗ-500 это смещение (эксцентри-
цитет) п = 0,5 мм. Получающиеся при этом зазоры в зубчатой
паре изменяются по кривой 2 (см. рис. 82).
В точке А происходит зацепление соседнего со средним зубом
сектора, в точке Б — с крайним.
При изучении износа зубчатой пары рулевых механизмов типа
МАЗ-500 в условиях эксплуатации установлено, что средние
зубья пары изнашиваются больше соседних с ними настолько, что
эксцентрицитет п — 0,5 мм в трудных случаях эксплуатации
становится недостаточным. Зазоры в передаче, получающиеся
при указанном эксцентрицитете, не компенсируют зазоров, воз-
никающих при износе зубьев. Одним из эффективных мероприя-
тий, способствующих повышению срока службы рулевого меха-
низма, является увеличение зазоров между крайними зубьями,
превосходящих зазоры, возникающие при износе средних зубьев.
1622 313
Полученные при изучении этого вопроса результаты позво
ляют рекомендовать нарезать зубья сектора с эксцентрицитетом
и = 1,0 мм. При этом предполагается, что получающиеся зазоры
в передаче, изменяющиеся по кривой 3 (см. рис. 82), должны
вполне компенсировать зазоры, возникающие при износе зубьев,
в связи с чем срок службы рулевого механизма значительно повы-
шается. Эффективность этого мероприятия была проверена экспе-
риментально. Испытания рулевых механизмов, применяемых на
автомобиле типа МАЗ-500, на износ производились на стенде,
показанном на рис. 208. Результаты испытаний показали, что
наиболее интенсивный износ зубьев происходит в течение первого
периода работы рулевого механизма. Дальнейший износ зубьев
получается весьма малым. Повышенные зазоры объясняются
износом неровностей, получающихся из-за наличия следов резца.
Гак, например, если за первые 35 тыс. циклов работы зубчатой
пары на стенде получился износ зубьев гайки As = 0,14 мм, то
за следующие 65 тыс. циклов он увеличился только на 0,04 мм,
а за следующие 100 тыс. циклов на 0,01 мм.
Как видно, при взаимной приработке рабочих поверхностей
зубьев срок службы зубчатой пары может быть очень большим
при обеспечении зазоров между крайними зубьями.
Для повышения срока службы рулевого механизма типа при-
менного на автомобиле МАЗ-500 можно рекомендовать два меро-
приятия: шлифование профилей зубьев и увеличение зазоров
между крайними зубьями за счет уменьшения толщины зубьев
сектора. Результаты испытаний показали, что шлифованные зубья
меньше изнашиваются. Однако для этого мероприятия требуются
специальное оборудование и дополнительные производственные
операции.
Другое мероприятие — увеличение зазоров между крайними
зубьями — заключается в том, что зазоры, возникающие при
износе зубчатой пары, компенсируются конструктивно заданными
зазорами между крайними зубьями, превосходящими по своей
величине зазоры, получающиеся при износе средних.
Если по эксплуатационным данным результирующий износ
средних зубьев сектора и гайки вместе превышает износ крайних
зубьев на величину 0,12—0,20 мм, то очевидно, что на такую же
величину конструктивно заданные зазоры между крайними
зубьями гайки должны быть больше, чем между средними.
Такое соотношение зазоров между зубьями получается при
нарезании зубьев сектора с эксцентрицитетом п = 1,0-г-1,2 мм.
Так, например, при эксцентрицитете п = 1,0 мм (см. рис. 82)
зазоры между зубьями при зацеплении получаются следующими:
среднего зуба сектора: ₽ = 0; As = 0;
соседнего со средним зуба сектора; ₽ = 24°; As — 0,1 мм;
крайнего зуба гайки: р = 36°; As = 0,22 мм;
крайнего зуба гайки с переходом его за среднюю ось на 4°:
Р =- 40°; As 0,27 мм.
314
При этом профильные поверхности зубьев могут быть обрабо-
таны со следами резца. Как видно, это мероприятие, наиболее
доступное для производства, обеспечивает необходимые зазоры,
и их регулировка при износе неровностей средних зубьев стано-
вится вполне возможной.
Результаты испытаний показали, что при нарезании зубьев
сектора с эксцентрицитетом п = 1,0-4-1,2 мм зубчатая пара ру-
левого механизма типа применяемого на автомобиле МАЗ-500
может работать без замены неограниченное время с правильным
зацеплением ее зубьев.
РУЛЕВОЕ КОЛЕСО
Рулевое колесо не только дает возможность водителю изме-
нять или поддерживать заданное направление движения автомо-
биля, но и служит опорой водителю, так как воспринимает все
силы, возникающие при изменении режима движения (скорости,
направления, при движении по неровностям и др.). В связи с этим
крепление рулевого колеса в кабине должно быть надежным.
За все время применения рулевого колеса на автомобилях
изменились только материал облицовки, число спиц и располо-
жение ступицы относительно обода.
Экспериментальными исследованиями установлена зависимость
между усилием, прилагаемым к ободу рулевого колеса, и углом
его поворота при различных углах плоскости его наклона. Для ав-
томобилей различных типов эти факторы оказывают разное влия-
ние на утомляемость водителя и удобство управления автомо-
билем.
Обычное рулевое колесо, расположенное перед водителем,
имеет ряд недостатков. Рулевое колесо большого диаметра затруд-
няет посадку водителя. Если диаметр мал, то требуется прилагать
к ободу колеса большие усилия, поэтому затрудняется управление
автомобилем. При высоком расположении обода рулевого колеса
ухудшается обзорность дороги и щитка приборов, при низком рас-
положении водитель ударяется о него коленями и неудобно управ-
лять педалями. Рулевое колесо, расположенное перед водителем,
является источником тяжелых травм при внезапном торможении,
наезде автомобиля или аварийных столкновениях. Рекомендуемые
для таких случаев ремни безопасности не решают этой проблемы.
Для устранения некоторых из упомянутых недостатков имеется
ряд предложений. Так, можно применить упругий телескопиче-
ский рулевой вал или вал, деформирующийся в осевом направле-
нии при достижении больших травмирующих сил, действующих
на рулевое колесо.
Для облегчения посадки водителя рулевое колесо иногда де-
лают откидным, поворачивающимся на шарнире (рис. 216, а и б).
Имеются предложения заменить одно обычное большое рулевое
колесо двумя меньших размеров, установленными на концах тра-
315
верен рулевой колонки (рис. 217) или вертикально по обе стороны
водителя (рис. 218).
Траверса, закрепленная на рулевой колонке (рис. 218), имеет
две оси, на которых установлены два маховичка с прикрепленными
снизу звездочками. Оба маховичка соединены с рулевым валом
посредством двух цепных передач. Некоторым преимуществом
двухколесной конструкции рулевого механизма является лучшая
обзорность дороги. Очевидно, что и опорные качества такой кон-
Рис. 216. Рулевое колесо с откид-
ным ободом
Рис. 217. Общий вид и конструктивная
схема рулевого управления с двумя ма-
ховичками, установленными по концам
поперечной траверсы
струкции для водителя лучше. Однако поворачивать два махо-
вичка вместо одного центрального колеса менее удобно. На ободах
маховичков может быть приложено значительно меньшее общее
усилие. Поэтому конструкция с двумя маховичками может приме-
няться только тогда, когда в систему рулевого управления встроен
усилитель. Возможно, что такая конструкция (рис. 217) эстети-
чески воспринимается лучше, чем конструкция с обычным руле-
вым колесом.
Есть предложения обычное круглое рулевое колесо в середине
или два с обеих сторон водителя заменить одной рукояткой, управ-
ляющей не только поворотом управляемых колес, но и скоростью
движения и торможением автомобиля. Но рукоятка не может
служить опорой для водителя, поэтому такую конструкцию сле-
дует считать непригодной,
316
Размеры обода рулевого колеса. Автомобильные фирмы при-
меняют рулевые колеса разных размеров, различающихся во мно-
гих случаях всего на несколько миллиметров: 406, 413, 417, 419,
432, 438 мм и т. д.
По диаметру D рулевые колеса отечественного производства
разделяются на следующие три группы в зависимости от типа
автомобиля:
Тип автомобиля D в мм
Легковые, микроавтобусы, грузовые малой грузоподъемности 400 и 425
Грузовые средней грузоподъемности и автобусы средней вместимо-
сти ............................................................ 450 и 480
Грузовые и тягачи большой грузоподъемности, многоместные авто-
бусы и троллейбусы . ..................................... 550
Посадка ступицы рулево-
го колеса на рулевой вал.
Посадка ступицы рулевого
колеса на рулевой вал долж-
на обеспечить центрирование
рулевого колеса относительно
оси рулевого вала и пере-
дачу крутящего момента.
Посадка ступицы рулево-
го колеса производится на
конусе со шпонкой или на ко-
нусе с остроугольными шли-
цами (рис. 219). За послед-
ние годы второй способ полу-
чает широкое распростране-
ние и, в частности, применя-
ется на автомобилях «Запо-
Рис. 219. Посадка сту-
пицы рулевого колеса
на шлицы и конус ру-
левого вала
317
рожец», «Москвич» и автомобилях ГАЗ всех модификаций.
Посадка ступицы на шлицах позволяет установить спицы ру-
левого колеса симметрично, что особенно необходимо для двух-
спицевых колес.
В табл. 8 приведены основные посадочные размеры рулевых
валов.
8. Посадочные размеры рулевых валов
Автомобиль ^2 В мм в мм Шлицы 1 в мм Резьба
в мм Ко- личе- ство F в мм Размеры в мм И в мм
«Запорожец» «Москвич» 19 25 16 36 11 3 1М12Х 1,25 8
ГАЗ 20 26 18 36 и 3 1М16Х 1,5 8
ШАРОВЫЕ ПАЛЬЦЫ
От надежности и долговечности шаровых шарниров рулевого
управления зависит безопасность движения автомобиля. Шаровые
пальцы имеют сложную форму, но размеры отдельных элементов
Рис. 220. Изменение диаметра сферы шарового пальца в зависимости от
нагрузки, приходящейся на передние колеса
пальца и размер его шаровой части находятся в определенном
соотношении, поэтому палец характеризуют по диаметру сферы.
Приведенные ранее рекомендации по выбору размера вала сошки
рулевого механизма полностью относятся и к выбору размера
318
сферы пальца шаровых шарниров рулевого управления, подвер-
гающихся изгибу и износу.
По рекомендуемому выше уравнению (131) на рис. 220 построена
кривая 1 изменения диаметра сферы пальца в зависимости от веса,
приходящегося на управляемые колеса. Данные по шарнирам
некоторых зарубежных конструкций (кривая 2) располагаются
достаточно близко к расчетной кривой 1. Цифрой 3 обозначена
кривая, характеризующая размеры сферы пальцев отечественных
автомобилей.
Шаровые пальцы поперечной тяги меньше нагружены, чем
пальцы продольной тяги, поэтому их можно было бы делать раз-
ных размеров, но исходя из условия унификации целесообразно
их изготовлять одного размера.
На основе расчетов, отражающих прочность и износ шаровых
пальцев, и опыта эксплуатации можно рекомендовать размеры
пальцев, изменяющихся по кривой 4. Весьма близкие к этим реко-
мендуемым размерам нормалью ОН 025—197—67 установлены
размеры шаровых пальцев для автомобилей новых моделей.
Ниже для шаровых пальцев разных диаметров приведен реко-
мендуемый диапазон нагрузок, приходящихся на управляемые
колеса:
Диаметр сферы
пальца в мм . . 20 22 25 27 30
Вес, приходящий-
ся на управляе-
мые колеса, в кг До 600 600—900 900—1250 1250—1600 1600—2400
Диаметр сферы
пальца в мм . . 35 40 45 50
Вес, приходящий-
ся на управляе-
мые колеса, в кг 2400—3400 3400—4900 4900—7000 7000—10 000
ПУТИ ОБЛЕГЧЕНИЯ РУЛЕВОГО УПРАВЛЕНИЯ
Беспрерывное удлинение радиуса действия, повышение ско-
ростей движения автомобилей и стремление к облегчению управле-
ния вынуждают искать новые решения. Так, например, недоста-
точная чувствительность действия усилителя может быть причи-
ной аварий при высоких скоростях движения автомобиля в слу-
чае неожиданно возникшего препятствия. Небольшие обратные
удары, передающиеся на рулевое колесо, при длительном движе-
нии автомобиля могут оказаться более утомительными, чем частые
повороты рулевого колеса.
Следовательно, облегчение рулевого управления автомобилей
достигается не одним мероприятием, а несколькими:
уменьшением усилия, прилагаемого к ободу рулевого колеса;
уменьшением угла поворота рулевого колеса;
уменьшением пути движения рук водителя при повороте руле-
вого колеса.
319
Затруднения в управлении автомобилем в процессе совершаё-
мого поворота возникают преимущественно из-за сопротивления
колес повороту, действия стабилизирующих сил и наличия вну-
тренних потерь на трение в узлах рулевого управления и, в част-
ности, в поворотных цапфах и в рулевом механизме.
С повышением грузоподъемности автомобилей и главным обра-
зом с увеличением веса на переднюю ось управление ими во время
поворота становится все более затруднительным. Облегчение руле-
вого управления особенно необходимо для транспортных машин
(троллейбусов и многоместных автобусов), работающих в трудных
городских условиях. Тяжелое управление ими утомляет водителя,
и безопасность движения понижается. Поэтому разрешение во-
s. Передаточные числа рулевых механизмов
Рулевой механизм (модель, фирма автомобиля или фирма рулевого механизма) Тип автомобиля Положение рулевого колеса
Крайнее левое Среднее Крайнее правое
ГАЗ-51 Грузовой 20,5
ГАЗ-13 «Чайка» Легковой 18,2
ГАЗ-М20 «Победа» » 18,2
ГАЗ-М21 «Волга» и
ГАЗ-12 » 18,2
«Москвич 407» » 17,0
ЗИЛ-110 » 20,5
ЗИЛ-111 » 17,5
ЗИЛ-130 Грузовой 20,0
МАЗ » 23,5
Берлие Легковой 15,0
Додж » 16,6
Мак Грузовой 21,0
Опель Легковой 15,2
Паккард » 20,0
Студебекер » 21,5
Уайт Грузовой 18,0
Форд » 18,5
Рио » 28,0
Ауто-Унион Гоночный 9,0 12,0 11,7
Броквей Грузовой 23,4 19,6 23,4
Бюссинг » 26,0 19,5 26,0
Воксхолл Легковой 25,8 15,7 25,8
Дейтц Грузовой 17,0 20,2 17,5
Интернэшнл » 20,0 18,0 20,0
МАИ » 17,5 23,9 19,5
Мерседес » 12,9 16,1 14,1
Студебекер » 22,0 18,0 22,0
Хорьх Легковой 18,0 20,0 18,0
Шкода Грузовой 11,5 15,7 12,5
Росс » 20,0 24,0 19,0
» » 12,0 20,0 12,0
» » 15 22,0 15,0
» » 12,0 22,0 12,0
» (с усилителем) » 18,0 24,0 18,0
320
проса легкости управления такими автомобилями приобретает
особую важность.
В процессе развития грузовых автомобилей большой грузо-
подъемности и многоместных автобусов усилие, прилагаемое води-
телем к рулевому колесу, уменьшали тремя способами: увеличе-
нием углового передаточного числа рулевого механизма; умень-
шением вредных потерь на трение в рулевом механизме и повы-
шением его к. п. д.; применением усилителей.
Достаточно большое угловое передаточное число рулевого
механизма может в значительных пределах снизить усилие, при-
лагаемое к рулевому колесу во время поворота автомобиля, но оно
не может быть особенно большим, так как при этом значительно
увеличиваются углы поворота рулевого колеса. В связи с тем, что
работа водителя при всех значениях передаточного числа остается
одной и той же, увеличение передаточного числа не дает ожидае-
мых результатов в отношении легкости управления тяжелыми
автомобилями.
В табл. 9 приведены полученные экспериментальным путем
значения передаточного числа рулевых механизмов различных
конструкций в крайнем левом, среднем и в крайнем правом поло-
жении рулевого колеса.
Как видно из табл. 9, передаточные числа в рулевых механиз-
мах по величине весьма различны как для легковых, так и для
грузовых автомобилей.
В табл. 10 приведены данные по передаточным числам рулевых
управлений разных зарубежных автомобилей. Следует отметить,
10. Передаточные числа рулевых управлений
некоторых зарубежных автомобилей
Фирма в- изготовитель автомобиля Без усилителя С усилителем
рулевого мехнизма общее рулевого механизма общее
Америкэн 24 29 17,5 21,2
Бюик 28 33,4 17,5 18,5
Додж 24 28,7 15,7 18,8
Кадиллак .— —— 17,5 21,7
Крайслер 20,4 30,2 15,7 19,2
Линкольн — — 17,0 20,4
Меркурий 19,9 27,0 16 21,6
Меркурий 24,0 31,0 17 22
Олдсмобил 24 28,3 17,5 20,7
Плимут 24 28,7 15,7 18,8
Понтиак 24 28,3 17,5 22
Рэмблер 24 28,4 17,5 20,8
Студебекер 20 28 20 26,5
Форд 19,9 27 16 21,7
» 24 30,3 17,5 21,9
Шевроле 20 25,4 20 25,4
» 24 28 17,5 20,4
Чеккер 24 28 17,5 19,0
21 М. И. Лисов
321
что применение усилителя позволяет сделать общее передаточное
число и передаточное число рулевого механизма ниже, чем при
отсутствии усилителя.
Уменьшение вредных потерь на трение и повышение к. п. д.
всех элементов механизмов рулевого управления позволяет не-
сколько уменьшить работу на рулевом колесе, способствует об-
легчению управления и получению хорошей стабилизации управ-
ляемых колес и, казалось бы, решает в какой-то степени постав-
ленную задачу. Однако при движении автомобиля по плохой
дороге все силы, возникающие при качении колес по неровностям
дороги, передаются почти без потерь на рулевое колесо в виде
ударов, вследствие чего управление автомобилем чрезвычайно
затрудняется.
Таким образом, уменьшение потерь на трение и повышение
к. п. д. рулевого управления разрешает частично поставленную
задачу, но необходимо при этом искать пути снижения передачи
обратных ударов на рулевое колесо.
Выбор рационального передаточного числа
рулевого механивиа
Применяемые за рубежом рулевые механизмы выполняются
как с увеличением, так и с уменьшением передаточного числа
по углу поворота рулевого колеса. Рулевой механизм автомобиля
«Воксхолл» имеет передаточное число, изменяющееся симметрично
от 15,7 в середине до 25,8 при повороте рулевого колеса в обе
стороны на 720° (см. табл. 9). Рулевой механизм автомобиля «Зо-
диак» фирмы Форд имеет передаточное число, изменяющееся
от 18,5 в середине до 15,5 при повороте рулевого колеса налево
и до 12,0 направо. Подобные же изменения передаточного числа
наблюдаются во многих рулевых механизмах и других автомо-
билей.
Переменное передаточное число или присуще конструкции
рулевого механизма, как в винтовой передаче, или передаточное
число делают переменным преднамеренно. При этом считалось, что
передаточное число рулевого механизма должно назначаться пере-
менным исходя из силовых воздействий. При движении по пря-
мому направлению сопротивление управляемых колес повороту
небольшое, поэтому передаточное число должно быть наименьшим.
При повороте управляемых колес на большие углы сопротивление
их повороту наибольшее, а следовательно, передаточное число
должно быть большим.
Если раньше фирма Росс делала рулевые механизмы с переда-
точным числом, изменяющимся по кривой 1 (рис. 221), то исходя
из указанных соображений фирма стала выпускать механизмы
с новым передаточным числом, изменяющимся по кривым 2 и 3.
Анализ конструкций рулевых механизмов с кривошипной
передачей и переменным передаточным числом показал, что изме-
322
пение передаточного числа по кривой 1 получается при нарезке
червяка с постоянным углом наклона его витка, а следовательно,
и с постоянным шагом по образующей цилиндрической поверх-
ности.
Известно, что поворачивать автомобиль направо несколько
труднее, чем налево, поэтому иногда считается, что и передаточное
число при повороте направо должно быть больше. Этому условию
новый закон изменения передаточного числа рулевого механизма
Рис. 221. Кривые изменения передаточного числа рулевых механизмов
фирмы Росс по кривой 3 не отвечает. Понижение передаточного
числа при повороте направо вызвано условиями изготовления.
Очевидно, червяк с передаточным числом, изменяющимся по
кривой <3, нарезается также при постоянном угле наклона витка,
кроме тех участков, где его величина резко изменяется. Наимень-
шее значение передаточного числа при движении автомобиля
по прямой и наибольшее на поворотах считалось основной осо-
бенностью новой конструкции рулевого механизма фирмы Росс
с кривошипной передачей (кривые 2 и 3).
Английская фирма Ханнум изготовляла рулевые механизмы
с винтовой передачей (см. рис. 94, а) также с переменным переда-
точным числом, изменяющимся по кривой 4 (рис. 221). Такое
изменение передаточного числа предопределяется конструкцией
передачи. Обе фирмы считают, что высокая чувствительность ко-
лес к повороту при движении по прямому направлению является
одним из преимуществ их рулевых механизмов. Однако такое
утверждение ошибочно. При малом передаточном числе рулевого
21* 323
механизма автомобиль очень чувствителен к повороту и «рыскает»
по дороге, что особенно заметно при высоких скоростях движения.
Для подкрепления своих доводов фирма Ханнум сопоставляет
при одних и тех же значениях угла р поворота вала сошки свою
конструкцию рулевого механизма с другой, у которой передаточ-
ное число имеет противоположный закон изменения, т. е. умень-
шается при повороте рулевого колеса (кривая 5).
Такое сопоставление неправильно. Сопоставлять две кон-
струкции рулевых механизмов с
Рис. 222. Изменение углов поворота
рулевых валов с постоянным, увели-
чивающимся и уменьшающимся пере-
даточным числом
различным характером измене-
ния передаточного числа можно
только при условии, что упра-
вляемые колеса, а следователь-
но, и рулевая сошка поворачи-
ваются на один и тот же угол р.
При этом определяется и сопо-
ставляется угол ф поворота ру-
левого колеса при различном
изменении передаточного числа.
Такое правильное сопоставле-
ние тех же конструкций руле-
вых механизмов показано на
рис. 222 кривыми 2 и 3 отно-
сительно прямой 1 при посто-
янном передаточном числе.
Как видно, при повороте
управляемых колес на один и
тот же угол р рулевое колесо
должно быть повернуто на раз-
ные углы ф. Угол ф получается
меньшим при понижающемся
передаточном числе (кривая 5
на рис. 212), в связи с чем и
чувствительность к повороту автомобиля с таким изменением
передаточного числа получается более высокой.
Передаточное число рулевого механизма должно назначаться
исходя не из силовых воздействий, как рекомендуется фирмами
Росс и Ханнум, а из условия удобства управления и повышения
поворотливости автомобиля, улучшения маневренности и легкости
управления. Передаточное число рулевого механизма также уве-
личивается вследствие повышения скоростей движения.
При большем передаточном числе поворот управляемых колес
на малые углы при поддержании прямолинейного движения авто-
мобиля на высоких скоростях происходит более плавно и точно.
Работа водителя становится менее напряженной, поэтому при дви-
жении по прямому направлению нужно назначать большое пере-
даточное число рулевого механизма. Однако при большом переда-
точном числе водителю труднее совершать крутые повороты авто-
мобиля. Углы поворота рулевого колеса получаются при этом
324
очень большими. Особенно велики они при движении по извили-
стой дороге с крутыми поворотами. При таких поворотах води-
тель автомобиля значительно снижает скорость движения, чтобы
успеть повернуть рулевое колесо на необходимый при этом боль-
шой угол.
Снижение скорости движения автомобиля приводит к умень-
шению его поворотливости. Высокие показатели поворотливости
получаются при малом передаточном числе рулевого механизма.
Однако при этом значительно ухудшается управляемость автомо-
биля при движении по прямой. Эти два крайне противоположных
требования могут быть удовлетворены только при переменном
Рис. 223. Рулевой механизм с резко уменьшающимся передаточным числом
и кривая изменения передаточного числа
передаточном числе рулевого механизма. Однако существующие
конструкции рулевых механизмов с переменным передаточным
числом этим требованиям не отвечают.
Наиболее удовлетворительным в этом отношении является
рулевой механизм с резко уменьшающимся передаточным числом,
изменяющимся по кривой 6 (см. рис. 221). При движении по пря-
мому направлению передаточное число наибольшее. В обе сто-
роны от этого среднего участка передаточное число резко умень-
шается. Далее оно может быть постоянным или немного умень-
шающимся до полного поворота рулевого колеса.
Такой закон изменения передаточного числа впервые был пред-
ложен автором и опубликован в журнале «Автомобильная и трак-
торная промышленность» № 8, 1948 г.
Резко уменьшающееся передаточное число, изменяющееся
по любому заранее заданному закону, может быть получено в ру-
левых механизмах с кривошипной и глобоидальной передачами.
Образец первого из них показан на рис. 223. Такой эксперимен-
тальный рулевой механизм для автомобиля «Москвич-407» испы-
тывался на стенде и на автомобиле.
Первоначально передаточное число было выполнено с перепа-
дом, значительно большим, чем в любом из встречающихся в зару-
325
бежной практике. Оно равнялось 19 в середине и было постоянным
до поворота рулевого колеса на угол 60°, затем резко уменьшалось
до 14 также в течение поворота на угол 60° и далее оно посте-
пенно уменьшалось и доходило до 10 при полном повороте вала
сошки. Испытания показали, что такое изменение значительно
уменьшает угол поворота рулевого колеса только при крутых
поворотах автомобиля и мало заметно при часто встречающихся
поворотах. Значительного повышения усилия на рулевом колесе
Рис. 224. Кривые изменения углов по-
ворота рулевых валов:
1 — постоянным и 2 — с резко уменьша-
ющимся передаточным числом
при дорожных испытаниях не
наблюдалось.
В связи с этим был изгото-
влен другой образец рулевого
механизма с резким перепадом
передаточного числа также и
при малых углах поворота ру-
левого колеса. При движении
автомобиля по прямой переда-
точное число равняется 19 и
остается таким до угла 30° по-
ворота рулевого колеса в обе
стороны от среднего его поло-
жения. С 30° до 75° угла пово-
рота рулевого колеса передаточ-
ное число резко уменьшается
с 19 до 11 и далее, начиная
с угла 75°, постепенно умень-
шается и доходит до 8 при
полном повороте сошки. При
таком изменении передаточного
числа сохраняются все качества
движения автомобиля по пря-
мому направлению и обеспечи-
вается наиболее высокая его
поворотливость на большинстве поворотов.
На рис. 224 показано изменение угла ф поворота рулевого
колеса в зависимости от угла 0 поворота вала сошки для стандарт-
ного рулевого механизма с глобоидальной передачей (кривая /)
и второго образца экспериментального рулевого механизма с кри-
вошипной передачей (кривая 2).
Уменьшение угла поворота рулевого колеса Дф для первого
экспериментального механизма показано кривой Дфх и для вто-
рого образца — кривой Дф2-
Как видно из кривых, принятое резко уменьшающееся переда-
точное число рулевого механизма действительно дает большое
уменьшение угла поворота рулевого колеса и особенно при крутых
поворотах автомобиля, и такое решение в конструкции рулевого
механизма для автомобилей массового применения следует счи-
тать правильным.
326
При резко уменьшающемся передаточном числе нужно ожи-
дать и резкого повышения усилия на рулевом колесе. Однако
испытания такого рулевого механизма на автомобиле показали,
что при совершении иногда встречающихся особенно крутых пово-
ротов повышение усилия на рулевом колесе (по сравнению с уси-
лием при стандартном рулевом механизме) не превышает 60%.
Это объясняется тем, что управляемые колеса повертываются за
счет двух разных факторов: упругой деформации шин и скольже-
ния их по дороге.
Для более объективной оценки рулевого механизма с резко
уменьшающимся передаточным числом были проведены испыта-
ния двух автомобилей со стандартным рулевым механизмом и
с новым (рис. 223) на небольшой площадке по траектории в виде
«восьмерки». При сравнении высказывалось предпочтение руле-
вому механизму, требующему большее усилие на рулевом колесе,
но при меньшем угле его поворота.
Таким образом, рулевой механизм с переменным передаточным
числом может быть выполнен с кривошипной и глобоидальной
передачами, причем первая конструкция наиболее совершенна.
Вместе с изменениями в передней оси (уменьшением плеча пово-
рота управляемых колес и увеличением бокового угла наклона
шкворней и применением усилителя) такая конструкция обеспе-
чивает наиболее высокие качества рулевого управления как
в отношении легкости и удобства, так и поворотливости автомо-
биля. В связи с этим рулевой механизм для автобусов должен
иметь переменное передаточное число, резко уменьшающееся
в обе стороны от середины.
Рулевой механизм с резко уменьшающимся передаточным чис-
лом может быть рекомендован для применения не только на авто-
бусах, но и на перспективных легковых и грузовых автомобилях.
Амортизация обратных ударов,
передающихся на рулевое колеоо
Амортизация обратных ударов, передающихся на рулевое ко-
лесо, может быть осуществлена различными способами.
На автомобилях с обычной системой рулевого управления без
применения гидравлического усилителя обратные удары могут
быть амортизированы путем создания повышенного трения в со-
членениях рулевого вала. На автомобилях, снабженных гидрав-
лическим усилителем в рулевом управлении, для амортизации
обратных ударов может быть использована гидравлическая система
усилителя.
В зависимости от режима работы автомобиля обратные удары
по-разному воздействуют на водителя. Так, например, в условиях
городского движения или в карьерах обратные удары могут быть
большой величины, но действие их кратковременное. При дли-
тельном движении по прямой и неровной дороге обратные удары,
327
передающиеся на рулевое колесо, по величине весьма малы, но
действие их продолжительное и они особенно способствуют утом-
ляемости водителя.
Такие условия возникают при междугородном сообщении,
поэтому амортизация малых обратных сил, передающихся на ру-
левое колесо междугородных автомобилей, является одним из важ-
ных вопросов безопасности движения.
Обратные удары могут быть уменьшены в результате повыше-
ния трения в рулевом управлении и, в частности, в рулевом меха-
низме; повышения углового передаточного числа рулевого меха-
низма и рулевого управления в целом; повышения силового пере-
даточного числа рулевого управления, осуществляемого путем
уменьшения плеча поворота управляемых колес.
Повышенное трение в узлах рулевого управления действи-
тельно уменьшает передачу обратных ударов на рулевое колесо,
но одновременно вызывает затруднение в управлении автомобилем
в прямом направлении и ухудшение качества стабилизации управ-
ляемых колес. Действующий при этом стабилизирующий момент
может быть недостаточным для преодоления трения, и водитель
вынужден сам обратно поворачивать рулевое колесо, что затруд-
няет управление. Следовательно, такое мероприятие рекомендо-
вать не следует.
Однако повышенное трение, вызванное преднамеренно только
в определенных узлах рулевого механизма или на некоторых углах
поворота рулевого колеса, заметно не затрудняет поворот в пря-
мом направлении рулевого колеса, но значительно снижает обрат-
ные удары, передающиеся на рулевое колесо, и решает в опреде-
ленной степени поставленную задачу. Так, например, в рулевых
механизмах с глобоидальной винтовой и кривошипной передачами
повышенное трение может быть вызвано посадкой ролика, гайки
и пальца кривошипа в их подшипниках с некоторым преднатягом.
В конструкции механизма с шариковой гайкой преднатяг в по-
садке гайки на шариках в средней части винта и с зазорами в обе
стороны от середины может быть осуществлен за счет меньшей глу-
бины нарезки канавки винта в средней его части и нормальной
глубины по концам винта, как это показано на рис. 16.
Момент трения ролика, пальца кривошипа в подшипниках или
шариковой гайки на винте, равный 5—10 кГ-см, вполне достато-
чен для того, чтобы значительно снизить передачу обратных уда-
ров на рулевое колесо при езде по булыжной дороге или дороге
с разбитым асфальтовым покрытием.
Преднатяг деталей в отдельных узлах, вызывающий повышен-
ное трение в рулевом механизме, увеличивает также износостой-
кость и обеспечивает работу рулевого механизма без необходи-
мости частых регулировок зазоров.
В рулевом механизме с реечной передачей для уменьшения
обратных ударов применяются две предварительно сжатые цен-
трирующие пружины, установленные по обеим сторонам рейки.
328
Если сила обратных ударов не превышает сил сжатия центрирую-
щих пружин, то удары не передаются на рулевое колесо.
Большое угловое передаточное число в большой степени спо-
собствует как уменьшению передачи обратных ударов, так и повы-
шению легкости рулевого управления. Однако при большом пере-
даточном числе управление автомобилем при совершении крутых
поворотов затрудняется, скорость движения на поворотах значи-
тельно понижается и маневренность ухудшается.
Силовое передаточное число может быть значительно увеличено
за счет уменьшения плеча поворота колеса, вследствие чего пере-
дача обратных ударов резко снижается.
С уменьшением плеча поворота управляемых колес динамиче-
ские силы, передающиеся от неровностей дороги, становятся
значительно меньше, и нагрузка на детали рулевого управления
существенно снижается. Таким образом, все детали рулевого
управления не испытывают больших напряжений от действия
динамических сил, и возможность возникновения усталостных
разрушений деталей уменьшается. В связи с тем, что силы, дей-
ствующие на рулевой механизм от неровностей дороги, значи-
тельно меньше, чем при обычном плече, величина обратных уда-
ров, передающихся на рулевое колесо, становится малой.
Проведенные автором исследования рулевых механизмов пока-
зали, что обратное трение в процессе работы механизма на авто-
мобиле значительно изменяется, а следовательно, изменяется и
амортизация обратных ударов, вследствие чего нужно ввести регу-
лируемое устройство.
Конструктивно это может быть устройство в виде тормоза,
встроенного между неподвижной рулевой колонкой и вращаю-
щимся рулевым колесом так, что оно может включаться в зави-
симости от условий движения и быть отрегулированным до необ-
ходимого тормозного момента.
Один из примеров установки такого устройства (тормоза) под
рулевым колесом показан на рис. 225, а, а его конструкция —
на рис. 225, б. На ступицу рулевого колеса 1 напрессовано тормоз-
ное кольцо 5, которое охватывается разрезным хомутом 2. Сере-
дина хомута болтом 3 удерживается в прорези разрезной втулки 4,
жестко закрепленной на рулевой колонке 6 двумя болтами. Концы
хомута 2 стягиваются болтом с головкой 7, воздействующей через
пружину 8. С внутренней стороны эти концы разжимаются другой
пружиной 9. Таким образом, в зависимости от условий эксплуата-
ции величину момента тормоза можно регулировать. Вращение
рулевого колеса при совершении поворота производится без за-
труднений, так как возникающее в тормозе трение небольшое,
а прямой к. п. д. рулевого механизма достаточно высок.
Обратный к. п. д. значительно меньше прямого, а с учетом
большого передаточного числа рулевого, механизма получается,
что возникающее в тормозе трение вполне достаточно для погло-
щения малых, но беспрерывно действующих обратных сил.
329
Следует отметить, что амортизация обратных ударов сопро-
вождается ухудшением стабилизации управляемых колес. Поэтому
тормоз должен быть отрегулирован так, чтобы возникающий в нем
Рис. 225. Устройство для амортизации
обратных ударов, передающихся от
управляемых колес на рулевое колесо
момент трения, амортизируя
малые обратные силы, как мо-
жно меньше влиял на стабили-
зацию управляемых колес. При
движении по дорогам с частыми
поворотами тормоз можно от-
ключить и снова включить при
прямолинейном и длительном
движении автомобиля.
УСИЛИТЕЛЬ РУЛЕВОГО УПРАВЛЕНИЯ
Выбор типа усилителя и компоновки его элементов
При выборе типа усилителя следует учитывать: показатели
его работы, долговечность, сложность конструкции, стоимость,
ремонтопригодность, необходимый уход в эксплуатации и другие
особенности, связанные с его применением. Из всех известных
конструкций усилителей рулевого управления наиболее отрабо-
танными являются два: пневматический и гидравлический.
Пневматический усилитель обычно применяется на грузовых
автомобилях, автобусах и троллейбусах, имеющих пневматиче-
скую систему для привода тормозов, дверей и др. Простота кон-
струкции, небольшая стоимость в производстве, невысокие тре-
бования к обслуживанию при эксплуатации являются положи-
330
тельными факторами пневматического усилителя. Однако неболь-
шое давление в системе (7—8 кПсм2) ограничивает применение
пневматического усилителя на грузовых автомобилях большой
грузоподъемности. Получающийся при этом силовой цилиндр
с большими габаритными размерами трудно размещается в системе
рулевого управления такого грузового автомобиля.
Высокое давление гидросистемы (40—100 кПсм2) обеспечивает
определенное преимущество гидравлического усилителя перед
пневматическим.
Силовой цилиндр гидравлического усилителя размещают в при-
воде системы рулевого управления или встраивают в картер
рулевого механизма. При размещении силового цилиндра в руле-
вом приводе конструкция рулевого механизма может быть любой.
П. П. Лукашенко в своих исследованиях показал, что при рас-
положении силового цилиндра с правой стороны автомобиля на-
грузка на элементы рулевого управления получается наиболее
равномерной.
В конструкциях рулевого механизма с встроенным в картер
силовым цилиндром под полной нагрузкой находятся основные
детали (вал сошки, рулевая сошка, шаровой палец сошки, про-
дольная тяга и рычаг поворотной цапфы с шаровым шарниром),
поэтому необходимо увеличить их размеры. Повышенные напря-
жения получаются также в тех сечениях лонжерона рамы, где
прикрепляется рулевой механизм.
Некоторые преимущества встроенной конструкции сводятся
на нет недостатками. Так, например, одна из положительных осо-
бенностей — компактность — затрудняет доступ к основным уз-
лам усилителя, монтаж и демонтаж рулевого механизма и увели-
чивает его вес. Главным же недостатком остаются большие на-
грузки на основные его детали.
Компоновка распределителя оказывает большое, а в отдельных
конструкциях — решающее влияние на работу усилителя и руле-
вого управления. Выше было показано, что от кинематики при-
вода к распределителю зависит надежность включения усилителя.
Открытие проходных сечений золотника и впускного клапана воз-
духораспределителя должно быть полным при всех положениях
рулевой сошки и связанного с ней распределителя. Их взаимное
расположение при поворотах в крайнее положение не должно
нарушать открытия проходных сечений и возвращения золотника
и впускного клапана в нейтральное положение, а следовательно,
нарушать работу усилителя. Так, например, распределитель
пневматического усилителя, расположенный на раме, вклю-
чается неудовлетворительно из-за деформаций всех деталей, рас-
положенных между ним и рулевым механизмом, причем чем больше
нагрузка, тем хуже включается распределитель. При установке
распределителя на кронштейне, прикрепленном к картеру руле-
вого механизма (см. рис. 38, в и г) включение получается полным
при всех больших нагрузках. В другом случае при ограниченном
331
ходе головки сдвоенной рулевой сошки распределитель включается
не полностью также при больших углах поворота, причем чем
больше угол поворота вала сошки, тем меньше открытие впуск-
ного клапана.
В гидравлических усилителях, в которых силовой цилиндр
с распределителем спарен с продольной тягой (см. рис. 41, а),
большое влияние на работу распределителя оказывает угол, со-
ставляемый рулевой сошкой с осью цилиндра. При малых значе-
ниях этого угла, т. е. при больших отклонениях рулевой сошки,
работа усилителя может нарушаться. В одних случаях он не вклю-
чается, в других — не выключается пли включается без воздей-
ствия водителя. На работу гидравлического усилителя такой
спаренной конструкции (см. рис. 41, а) большое влияние оказы-
вает трение, возникающее в распределителе. Для уменьшения
трения между взаимно перемещающимися поверхностями уста-
навливают втулку с шариками (см. рис. 41, а). Таким образом,
правильной следует считать такую компоновку распределителя,
при которой положение рулевой сошки относительно оси цилин-
дра не оказывает влияния на перемещение золотника или впуск-
ного клапана. Примеры правильной компоновки распределителя
приведены на рис. 34, а; 39, б и в; 37; 40; 41, в; 42 и 43. Распре-
делитель в этих конструкциях встроен в картер рулевого меха-
низма и в продольную или поперечную тягу. Положительные
результаты работы усилителя на автомобиле «Урал-375» подтвер-
дили это положение. В некоторых случаях в рулевом управлении
с усилителем понижается устойчивость прямолинейного движения
автомобиля при движении по неровной дороге, нарушается само-
возврат управляемых колес и ухудшается управляемость автомо-
биля, сопровождающаяся недостаточной послушностью управляе-
мых колес, из-за недостаточной чувствительности усилителя и др.
Все эти факторы приводят к понижению безопасности движения
автомобиля. Теоретические исследования [уравнения (95)—(100)
и рис. 118] показали, что наиболее высокие показатели работы
усилителя могут быть достигнуты при компоновке распредели-
теля по схеме 6 (см. рис. 118 и 119) плп с тангенциальным включе-
нием золотника плп впускного клапана, встроенных в рулевой
вал до передаточной пары рулевого механизма (см. рис. 43, 45, 51).
Характеристики конструктивных решений
элементов распределителя
Влияние центрирующего усилия на работу усилителя. Отдель-
ные конструктивные решения усилителя плп его элементов можно
оценить по результатам теоретических (см. рпс. 111, 113, 114
и др.) пли экспериментальных их исследований.
В пневматическом усилителе большой непроизводительный
расход воздуха получается при прямом и обратном его включении
при наличии взаимно сжатых центрирующих пружин или весьма
332
малой силе предварительного сжатия Центрирующей пружины.
Результаты испытаний таких образцов усилителей показали, что
в первом случае расход воздуха V в среднем составляет 1250 л,
а во втором 600 л. При испытаниях рулевого управления автобуса
«Шоссон» с пневматическим усилителем с весьма малой силой пред-
варительного сжатия пружины расход воздуха (рис. 226) изме-
няется в больших пределах — от 2890 л при центрирующем уси-
лии 3 кГ jip 1350 л при усилии 9 кГ. Следовательно, производи-
тельный расход воздуха Vtl, затрачиваемый на совершение пово-
ротов, остается почти без изменения, и полный его расход умень-
шается главным образом за счет непроизводительного расхода,
3000
2000
1000
Рис. 226. Расход воздуха усилителем:
полный, производительный и непроизводительный в зависимости от цен-
трирующего усилия на автобусе «Шоссон»
получающегося при обратном включении усилителя. Подобные
результаты наблюдаются и при испытании гидравлических усили-
телей разных конструкций, выполненных без предварительно сжа-
тых центрирующих пружин. В таких усилителях эффективность
действия при малых сопротивлениях колес повороту получается
также высокой.
Так, например, в усилителе одного из автобусов (рис. 227)
кривая 1 изменения показателя эффективности начинается не от
единицы, а значительно выше, и при малом сопротивлении пово-
роту Рк = 10 кГ он равняется 3,6. В усилителе другого автобуса
показатель эффективности (кривая 2) изменяется неудовлетвори-
тельно. Имеющееся трение в золотниковой паре, реактивные эле-
менты и взаимносжатые пружины значительно снижают беско-
нечные значения показателя эффективности. Тем не менее непроиз-
водительная его область заметна и особенно при весьма малых
сопротивлениях включению распределителя (до Рк <5 кГ), при
которых показатель эффективности достаточно высок, хотя в этом
нет необходимости. Первая половина кривой 2 приближается к тео-
ретической. Во второй ее половине оказывают влияние реактивные
элементы. В усилителе с таким распределителем при большом по-
ззз
казателе эффективности и малом сопротивлении непроизводитель-
ная область особенно велика, а следовательно, и непроизводи-
тельный расход жидкости наибольший.
Применение предварительно сжатых центрирующих пружин
коренным образом изменяет происходящие процессы. Пневматиче-
ский усилитель такой конструкции включается только по дости-
жении усилия на рулевом колесе 7,0—7,5 кГ, и показатель эффек-
тивности действия, равный при этом единице, повышается далее
Рис. 227. Изменение показателя Э эффективности действия усилителей
в зависимости от сопротивления Рк колес повороту
(кривая 3) и доходит до 2,8 при сопротивлении колес повороту
Рк = 40 кГ. Усилие на рулевом колесе при этом равно 14,3 кГ
вместо 40 кГ при работе без усилителя.
Показатель эффективности изменяется по выпуклой возрастаю-
щей кривой, как и при теоретическом его изменении. Обратного
включения усилителя в пределах силы предварительного сжатия
пружин (7,0—7,5 кг) не наблюдается.
Характеристика сил, действующих в рулевом приводе. При дви-
жении автомобиля по прямой дороге обратные удары, передаю-
щиеся на рулевое колесо от управляемых колес, следует разделять
на два вида: малые ударные силы, беспрерывно действующие от
неровностей дороги, и большие ударные силы, возникающие при
наезде на большие неровности, дорожные ухабы, выбоины и пр.
Величина обратных ударов от неровностей дороги и их коли-
чество в единицу времени или на 1 км пути зависит от состояния
334
дорожного покрытия и трения в рулевом приводе и, в частности,
в рулевом механизме. Если это трение очень мало, то все удары
передаются на рулевое колесо и воспринимаются руками води-
теля.
Усилия, передающиеся во время движения автомобиля на
рулевое колесо при обратных ударах, велики. При прямолиней-
ном движении по ровному булыжному покрытию они достига-
ют 1,5 кг, по булыжному покрытию среднего качества 3 кГ и
на отдельных выбоинах доходят до 5,5—6 кГ. Изменение этих
сил было записано при помощи динамометрического рулевого
колеса. Скорость движения автомобиля была при этом 60 км/ч
по ровному булыжному покрытию и 45—50 км/ч по другим до-
рогам.
Усилитель с распределителем в продольной тяге обратно вклю-
чается силами, действующими в рулевом приводе до рулевого меха-
низма. Эти силы могут быть записаны разными способами: само-
писцем при помощи гидроустройств, осциллографом или любыми
другими средствами.
В качестве примера на рис. 228 приведены диаграммы измене-
ния давления р в гидроцилиндре рулевого привода с диаметром
поршня 70 мм, записанные самописцем по времени I движения
автомобиля ГАЗ-20 по разным дорогам: 1 и 2 — по асфальтовому
покрытию, новому и в хорошем состоянии; 3 и 4 — по булыжному
покрытию, ровному и в хорошем состоянии; 5, 6 и 7 — по булыж-
ному покрытию в плохом состоянии; 8 — по разбитому шоссе.
На диаграммах 5, 6, 7 и 8 участки а, в и д соответствуют пово-
ротам автомобиля при объезде разных выбоин. Совершенно оче-
видно, что скорости движения автомобиля были различны: по
асфальтовому покрытию скорость составляла 70—80 км/ч, по бу-
лыжному в хорошем состоянии 40—50 км/ч, а по плохому булыж-
ному покрытию и разбитому шоссе 18—25 км/ч.
Давление в гидроцилиндре при движении по асфальтовому
покрытию в хорошем состоянии было 5,2—7,8 кГ/см2-, по ровному
булыжному покрытию 10,4—11,9 кГ/см2\ по булыжному покрытию
в плохом состоянии 16,9—18,2 кГ/см2.
Действующие от колес на продольную тягу усилия от мелких
неровностей даже при движении по хорошему асфальтовому по-
крытию достигают 100—200 кГ, а на ровном булыжном покрытии
400—460 кГ. Сила ударов на отдельных ухабах плохого булыжного
шоссе доходит до 650—700 кГ.
Как видно из приведенных диаграмм, количество больших
ударных сил, возникающих на ухабах, мало, тогда как количе-
ство мелких ударов в некоторых случаях особенно велико.
Статистическим подсчетом найдено, что изменение величины
усилия на рулевом колесе и давления в гидроцилиндре происхо-
дит по кривой, напоминающей гиперболу.
Характеристика конструктивных решений распределителя.
При наличии усилителя большие ударные силы во всех случаях
335
эксплуатации автомобиля воспринимаются усилителем. Мелкие
удары в зависимости от конструкции распределителя восприни-
маются или механической системой и руками водителя, или уси-
лителем. Обратное включение усилителя под воздействием мелких
ударных сил зависит от конструкции распределителя.
При наличии центрирующих пружин в распределителе обрат-
ные удары в пределах силы предварительного их сжатия пере-
даются на рулевое колесо. Если при этом рулевой механизм имеет
высокий обратный к. п. д., то эти ударные силы передаются почти
Рис. 228. Изменение давления в гидроприводе под действием обратных
ударов при движении автомобиля по дорогам с разным покрытием
без потерь. Силы, превышающие предварительное сжатие центри-
рующих пружин, включают усилитель, и эти силы восприни-
маются усилителем.
При отсутствии в распределителе предварительно сжатых цен-
трирующих пружин усилитель свободно включается управляемыми
колесами, а имеющееся в распределителе трение и другие сопро-
тивления не могут противостоять силам, возникающим от неров-
ностей дороги. Следовательно, при движении автомобиля по не-
ровной дороге вся работа ударных сил воспринимается пневмо-
системой или гидросистемой, и распределитель такой конструкции
беспрерывно включает в действие усилитель. Так же беспрерывно
включается в действие распределитель с взаимносжатыми пружи-
нами.
Наиболее вредными для работы усилителя без центрирующих
предварительно сжатых пружин являются небольшие удары,
336
количество которых на 1 км пути или в единицу времени движений
автомобиля наибольшее.
Беспрерывное включение распределителя под воздействием
этих небольших ударных сил в течение длительного времени вызы-
вает повышенный износ деталей распределителя и гидравлического
насоса, питающего систему. Износ резиновых уплотнительных
колец круглого сечения получается недопустимым, и утечка рабо-
чей жидкости становится очень большой. Вместе с резиновыми
кольцами изнашиваются и все рабочие кромки золотника и его
гильзы, образующие проходные сечения в распределителе, осо-
бенно, если золотник цен-
трируется рабочими кром-
ками.
В связи с тем, что ход
золотника очень мал (от
0,4 до 2—3 мм), то естест-
венно, что износ кромок
получается большим.
Если заменить уплот-
няющие кольца сплошного
круглого сечения манже-
тами квадратной или С-об-
разной формы, то срок
службы автомобиля может
повыситься без заметной
Рис. 229. Характеристики распределителей
с различным износом золотниковой пары
потери рабочей жидкости,
но при этом не устраняется основной недостаток — износ рабо-
чих кромок золотниковой пары. Этот износ характеризуется
перепуском рабочей жидкости через сопряжения, а следовательно,
нарушением закона изменения давления в зависимости от хода
золотника.
На рис. 229 показаны кривые статической характеристики,
т. е. изменения давления р в зависимости от перемещения s золот-
ника для пяти распределителей. Кривая 1 соответствует распре-
делителю с максимальной чувствительностью действия, характе-
ризуемой ходом а золотника. Кривая получена при испытании
рулевого механизма типа Сагинау с встроенным в его картер уси-
лителем, используемого на легковом автомобиле фирмы Студебе-
кер. Несмотря на то, что распределитель этого усилителя имеет цен-
трирующие пружины, перелом кривой на участке b весьма заметен.
Кривые 2 и 3 соответствуют новым распределителям с меньшей
чувствительностью действия и кривые 4 и 5 — распределителям
с пониженной чувствительностью действия и с особенно большим
износом кромок золотника и гильзы.
Участок b на кривой 1 и особенно на кривых 4 и 5, на котором
нарушается закономерность протекания процесса, характеризует
износ рабочих кромок золотника и его гильзы на этой длине их
сопряжения.
22 м. И. Лысов
337
Кроме деталей распределителя, изнашиваются детали всех
узлов гидросистемы и в частности гидронасоса. При беспрерывном
перемещении золотника в гильзе давление в системе становится
пульсирующим и достигает значительной величины. Износ дета-
лей насоса приводит к падению производительности и давления,
а следовательно, и к нарушению действия усилителя.
Применение в распределителе центрирующих предварительно
сжатых пружин, сопротивляющихся включению усилителя при
большом числе малых ударных сил, в несколько раз снижает
нагрузку на распределитель и гидронасос и повышает их долго-
вечность.
При определении усилия предварительного сжатия центри-
рующих пружин следует учитывать их расположение в системе
рулевого управления.
Если приведенные выше значения сил отнести к продольной
тяге автомобиля, то они при движении по дорогам с разным по-
крытием будут иметь следующие значения (в кГ):
По асфальтовому в хорошем состоянии ......... 60—90
По ровному булыжному ........................ . 120—140
По булыжному в плохом состоянии . 190—220
По разбитому шоссе ............................. ... . 200 и выше
Если величину усилия предварительного сжатия пружины за-
дать равной 140—180 кГ, которая соответствует усилию 2,5—4,0 кГ
на рулевом колесе, при котором включается усилитель, то все
мелкие удары на асфальтовом покрытии и ровном булыжном по-
крытии и многие удары при движении по булыжному покрытию
в плохом состоянии будут изолированы от гидросистемы, и обрат-
ного включения усилителя, вызванного неровностями дороги,
не произойдет.
Характеристика распределителя и выбор проходных сечений.
Основными факторами, определяющими работу усилителя, яв-
ляются чувствительность действия и степень его запаздывания.
Чувствительность действия усилителя в большой степени за-
висит от ширины проходных сечений золотниковой пары распреде-
лителя и характеризуется величиной хода золотника, при котором
давление изменяется от минимального до максимального.
Степень запаздывания характеризуется величиной хода золот-
ника, при котором давление почти ие изменяется и начинает воз-
растать только в конечной точке.
На рис. 230 показаны характеристики распределителя, т. е.
кривые изменения давления в зависимости от перемещения золот-
ников разных конструкций при разной ширине проходных сече-
ний золотниковой пары.
Для золотника, которому соответствует кривая /, повышение
давления начинается при ходе 5 золотника на величину 0,15 мм,
после чего давление резко возрастает и доходит до максимального
при дополнительном ходе золотника на величину 0,22 мм. Повы-
шение давления по кривой 2 наступает после перемещения золот-
338
ника на величину 0,31 мм, после чего резко возрастает и доходит
до максимального при дополнительном ходе золотника на вели-
чину 0,22 мм.
Наблюдающийся на кривых 1 и 2 резкий, почти мгновенный
рост давления рабочей жидкости, характеризующий чувствитель-
ность действия, вызывает ударную нагрузку на все элементы ги-
дравлической системы, в связи с чем долговечность работы ее
деталей понижается. Очевидно, что более плавное изменение дав-
ления исключает ударную нагрузку и способствует повышению
срока службы элементов системы.
Плавное нарастание давления по-
лучается, если кромки золотника за-
туплены или скруглены и имеют фа-
ски (местные или полные по всей
окружности золотника), как на золот-
никах, характеризуемых кривыми 3,
4 и 5. Эти золотники вызывают разную
степень запаздывания и разную чув-
ствительность действия усилителя.
Золотник, которому соответствует
кривая 3, выполнен без запаздыва-
ния и с наибольшей чувствительно-
стью действия. Давление начинает
повышаться тотчас же при его пере-
мещении. Кривую 4 дает золотник с
запаздыванием, как по кривой 1, но
с пониженной чувствительностью действия усилителя. Максималь-
ное давление наступает при дополнительном перемещении золотника
на величину 0,75 мм. Кривая 5 относится к золотнику с тем же
запаздыванием, что и золотник, имеющий кривую 2, но с чувстви-
тельностью действия, равной чувствительности золотника, харак-
теризуемой кривой 4.
Очевидно, наиболее оптимальным является золотник (кривая 3)
с наименьшей степенью запаздывания и наиболее высокой чув-
ствительностью действия с плавным изменением давления за весь
рабочий процесс.
Как видно, изменяя величину свободного хода золотника и
форму его рабочих кромок, можно получить оптимальную харак-
теристику распределителя с наименьшей степенью запаздывания
и желаемой чувствительностью действия. В качестве примера
можно привести гидравлический усилитель автопогрузчика, для
которого размеры проходных сечений распределителя выбирали
по результатам экспериментального исследования его с золотни-
ками разных размеров. С целью исключения ударных нагрузок
рабочей жидкости на элементы гидросистемы кромки золотников
выполнены с полными фасками по всей окружности его кромок
размером 45°X0,5. Характеристики распределителя с разными
указанными выше золотниками показаны на рис. 231.
22* 339
Выполненные на кромках золотников фаски позволили полу-
чить весьма плавное нарастание давления при всех проходных
сечениях. Однако в распределителе с золотником, имеющим про-
ходные сечения As — 0,3 мм, получаются весьма большие потери.
Такой золотник непригоден. При ширине проходных сечений
0,9 и 1,1 мм чувствительность действия недостаточна. Усилитель
работает с большим запаздыванием. Свободный поворот рулевого
колеса в обе стороны от среднего положения получается излишне
большим и утомительным для водителя. Исходя из сказанного
для автопогрузчика был выбран
золотник с шириной проходных
сечений 0,5 мм.
Рис. 231. Характеристики распре-
делителей с разными проходными
сечениями золотниковой пары
Рис. 232. Золотник распределителя ру-
левого механизма «Марлес» с фигурным
очертанием кромок проходных сечений
На рис. 232 показана часть распределителя рулевого меха-
низма «Марлес» со встроенным гидравлическим усилителем, в ко-
тором кромка тангенциального золотника, размещенного в кор-
пусе 2, имеет фигурное очертание.
В положении Г золотника проходные сечения полностью от-
крыты, в положении 1" — закрыты, а в положении 1 — частично
открыты.
Выбор конструкции распределителя. Распределитель, который
не имеет предварительно сжатых центрирующих пружин и бес-
прерывно включается под действием всех, даже самых малых,
обратных сил, не может быть рекомендован для грузовых автомо-
билей, хотя иногда применяется.
Конструкцию распределителя нужно выбирать в зависимости
от назначения автомобиля и условий его работы. Так, например,
на грузовых автомобилях (ЗИЛ-130, ГАЗ-66, МАЗ, КрАЗ и Урал),
работающих преимущественно на неблагоустроенных дорогах,
в карьерах, по бездорожью и др., распределитель должен иметь
предварительно сжатые центрирующие пружины и реактивные
элементы. Такими элементами снабжаются распределители, при-
меняемые на автомобилях ЗИЛ-130 и Урал-375. На этих автомо-
340
билях малые обратные удары воспринимаются механической си-
стемой и руками водителя и только большие ударные силы —
гидросистемой. Это способствует повышению срока службы рас-
пределителя и гидросистемы.
Легковые автомобили работают на дорогах с более ровным по-
крытием, в связи с чем действие обратных ударов на механизмы
рулевого управления незначительно. Для них сила предваритель-
ного сжатия центрирующих пружин должна определяться из усло-
вия сохранения стабилизации управляемых колес и быть немного
больше силы обратного трения рулевого механизма. Так, напри-
мер, усилитель типа Сагинау легкового автомобиля фирмы Студе-
бекер включается в действие при усилии на рулевом колесе 2,8 кГ.
По-видимому, достаточно близким к оптимальному следует
считать включающее усилие 2—3 кГ для легковых автомобилей
и 4—6 кГ для грузовых автомобилей.
При этом следует иметь в виду, что вся система рулевого
управления упруга и прежде всего рулевой вал в что обратное
трение рулевого механизма в большей или меньшей степени сни-
жает величину обратных ударов на рулевое колесо.
В связи с этим и вопрос утомляемости водителя разрешается
по-разному. При работе городских и особенно междугородных
автобусов преимущественно на благоустроенных дорогах, встре-
чающиеся неровности малы, но количество их велико. Малые
обратные удары, передающиеся в течение длительного времени
движения автобуса на руки водителя, утомляют его значительно
больше, чем значительное усилие, которое он прилагает к руле-
вому колесу на поворотах, в связи с чем безопасность движения
значительно понижается. Поэтому на междугородных автобусах,
движущихся по благоустроенным дорогам, распределитель должен
гасить все малые ударные обратные силы. Распределитель без
центрирующих предварительно сжатых пружин способен гасить
эти силы. Применение распределителя такой конструкции, хотя и
менее долговечного из-за беспрерывного его включения под дей-
ствием малых обратных сил, на междугородном автобусе может
быть вполне оправданным. Распределитель такой же конструкции,
гасящий все малые ударные силы, должен применяться и на лег-
ковых автомобилях, работающих преимущественно на благо-
устроенных дорогах. Не только автобусы, но и все другие автомо-
били, предназначенные специально для дальних междугородных
перевозок, должны иметь распределитель, гасящий все малые
обратные ударные силы.
Таким образом, распределитель без центрирующих пружин
удовлетворяет последним требованиям восприятия малых удар-
ных сил, но при этом понижаются износостойкость и долговеч-
ность распределителя. Вопросы восприятия малых ударных сил
от дороги, высокой износостойкости и долговечности можно
было бы решить одновременно с помощью распределителя с пе-
риодической подачей рабочей жидкости в силовой цилиндр, но
341
с непрерывной ее циркуляцией от гидронасоса через распредели-
тель [1]. В этом комбинированном распределителе при пере-
крытых проходных сечениях силового цилиндра все удары от до-
роги воспринимаются силовым цилиндром и далее рамой автомо-
биля, минуя гидросистему и механическую связь управляемых
колес с рулевым колесом. Распределитель такой конструкции
особенно необходим для транспорта дальнего действия, может
применяться и на всех других автомобилях.
Рис. 233. Гидравлический распределитель с непрерывным пото-
ком жидкости от насоса и с периодическим ее поступлением
в силовой цилиндр
Комбинированный распределитель (рис. 233) состоит из кор-
пуса 4, соединенного жесткой обратной связью с управляемыми
колесами, и золотника 3, шток которого соединен с тем или иным
звеном рулевого механизма. Распределитель имеет реактивные
камеры 6, соединенные с каналами 9 и 12 силового цилиндра 13.
Золотник центрируется шайбами 7, прижимающимися предвари-
тельно сжатыми пружинами 5 одновременно к торцам золотника
и корпуса распределителя. Рабочая жидкость от насоса поступает
по каналам 2 и далее через сливные сечения, образуемые тремя
средними гребнями золотника, на слив по каналу 1. Обе полости
силового цилиндра соединены с корпусом распределителя кана-
лами 9 и 12, перекрываемыми гребнями золотника 11 к 8.
При повороте рулевого колеса золотник смещается и один
из каналов (9 или 12) сообщается с напорной магистралью, а дру-
гой — через центральный канал 10 со сливным /,
342
Гидравлические системы с перекрытым силовым цилиндром
вполне амортизируют обратные удары. Однако они могут пол-
ностью нарушить стабилизацию управляемых колес. Для того
чтобы перекрытие силового цилиндра оказывало наименьшее
влияние на стабилизацию колес, усилие предварительно сжатых
центрирующих пружин должно быть меньше стабилизирующего
усилия. В этом случае при переходе с поворота на прямолинейное
движение водитель, притормаживая рулевое колесо, удерживает
золотник в приоткрытом состоянии. Обе полости силового цилин-
дра не сообщаются с гидросистемой, и стабилизация управляемых
колес не нарушается.
ЛИТЕРАТУРА
1. Батта Т. М. Самолетные гидравлические устройства. М., Оборон-
гиз, 1946.
2. ГонигбергЕ. М. Гидроусилители рулевого управления автомобилей
ЗИЛ. «Автомобильная промышленность», 1961, № 10.
3. Гинцбург Л. Л.. «Автомобильная промышленность», 1960, № 1.
4. Драв ников А. Б. Автопогрузчики. М., Машгиз, 1955.
5. Закин Я. X. Методы анализа маневренных свойств автопоездов.
М., Автотрансиздат, 1961.
6. Иванов Ю. В. Проверка технического состояния рулевого управле-
ния и шкворневых соединений автомобиля. М., Автотрансиздат, 1960.
7. Лысов М. И. Развитие конструкций рулевых механизмов. — «Авто-
мобильная и тракторная промышленность», 1948, № 8.
8. Л ы с о в М. И. Механизмы рулевого управления автомобиля. М., Маш-
гиз, 1950.
9. Лысов М. И. Методика и результаты испытаний рулевого управле-
ния с усилителем. «Автомобильная промышленность», 1958, № 8.
10. Лысов М. И. Методика и результаты испытаний рулевых механизмов
на износ. «Автомобильная промышленность», 1959, № 7.
11. Л ысовМ. И. Расчет рулевых механизмов с переменным передаточным
отношением. «Автомобильная промышленность», 1961, № 5.
12. Л ы с о в М. И. и К о р о л е в А. И. Методы испытаний рулевых управ-
лений. М., Машгиз, 1953. Труды ОАЛ. Вып. 4).
13. Чудаков Е. А. Расчет автомобиля. М., Машгиз, 1947.
14. Bichop А. Е. Variable Ratio Steering Gear. «SAE Journal», 1959,
March.
15. Gough V. E. The Application of Power Assistance to the Steering of
Wheeled Vehicles. «Proceedings of the Automobile Division», The Insti-
tution of Mechanical Engineer», 1953—1954, № 4.
16. Koch К. M. Center point steering axles. «SAE Preprints», № 368B.
17. M о n г о e T. I. Descussion, of steering problems on Modern Heavy Trucks
«SAE Preprints», № 386A.
ОГЛАВЛЕНИЕ
Предисловие .................. 3
Глава 1. Назначение и классифи-
кация рулевого управления
и его элементов ............. 5
Рулевые механизмы............. 8
Рулевой привод ..... 9
Усилители рулевого управления 22
Глава II. Основные конструкции
рулевых механизмов .... 25
Рулевые механизмы с шестерен-
чатой передачей............. 25
Рулевые механизмы с кулач-
ной передачей............... 26
Рулевые механизмы с винтовой
передачей................... 26
Рулевые механизмы с криво-
шипной передачей............ 34
Рулевые механизмы с червячной
передачей................... 37
Конструктивные решения основ-
ных узлов рулевого меха-
низма ...................... 44
Устройства, применяемые для
регулировки зазоров . 47
Глава 111. Усилители рулевого
управления ................. 53
Принцип действия усилителей 53
Компоновка элементов уси-
лителей .................... 57
Распределитель .............. 63
Центрирующий элемент 75
Реактивное устройство ... 76
Источники питания усилителей 78
Глава IV. Оценочные параметры
и критерии механизмов руле-
вого управления ............ 85
Рулевое управление в целом 85
Рулевой механизм ............ 87
Усилители рулевого управления 92
Глава V. Основы теории и рас-
чета рулевых механизмов . . 97
Определение расчетных сил . . 97
Теория и расчет глобоидальной
передачи............... J 03
Расчет червячной передачи . 123
Расчет винтовой передачи . . 126
Теория и расчет кривошипной
передачи ................... 133
Расчет рулевых механизмов с
переменным передаточным
числом ..................... 143
Глава VI. Расчет усилителей
рулевого управления .... 163
Определение размеров силового
цилиндра.................... 163
Расчет центрирующего элемента 164
Расчет распределителя . . . 169
Расчет реактивных устройств 172
Устойчивость усилителя ... 175
Усилители дифференциального
действия.................... 181
Чувствительность действия уси-
лителя ..................... 182
Влияние действующих сил, кон-
струкции привода и к. п. д.
на работу усилителя . . 183
Глава VII. Испытания меха-
низмов рулевого управления 191
Оценка легкости рулевого
управления.................. 191
Испытание рулевых механизмов 208
Испытание усилителей рулевого
управления ................. 269
Испытание рулевых механизмов
и усилителей на износ и уста-
лостную прочность .... 289
Глава VIII. Рекомендации по
выбору типа и размеров ос-
новных деталей рулевого
управления ................... 303
Рулевые механизмы .... 303
Рулевое колесо .............. 315
Шаровые пальцы .............. 318
Пути облегчения рулевого уп-
равления ................... 319
Усилитель рулевого управления 330
Литература................... 343
Михаил Иванович ЛЫСОВ
РУЛЕВЫЕ УПРАВЛЕНИЯ АВТОМОБИЛЕЙ
Техн, редакторы: Н. В. Тимофеевка, Е. П. Смирнова Корректор А. А. Свастика
Переплет художника Л. С. Вендроеа
Сдано в набор 16/Ш 1972 г. Подписано к Т-14348. Формат 60Х90х/1в Бумага Ле 2. Тираж Уч.-изд. л. 21,6 Цена 1 р. 22 к. печати 1/1Х 1972 г. 12 000 экз. Печ. л. 21,5 Зак. № 1622
Издательство «Машиностроение», Москва, Б-66, 1-й Басманный пер., 3
Ленинградская типография № 6 Главполиграфпрома Комитета по печати
При Совете Министров СССР. 193144, Ленинград, ул. Моисеенко, 10