/





















































































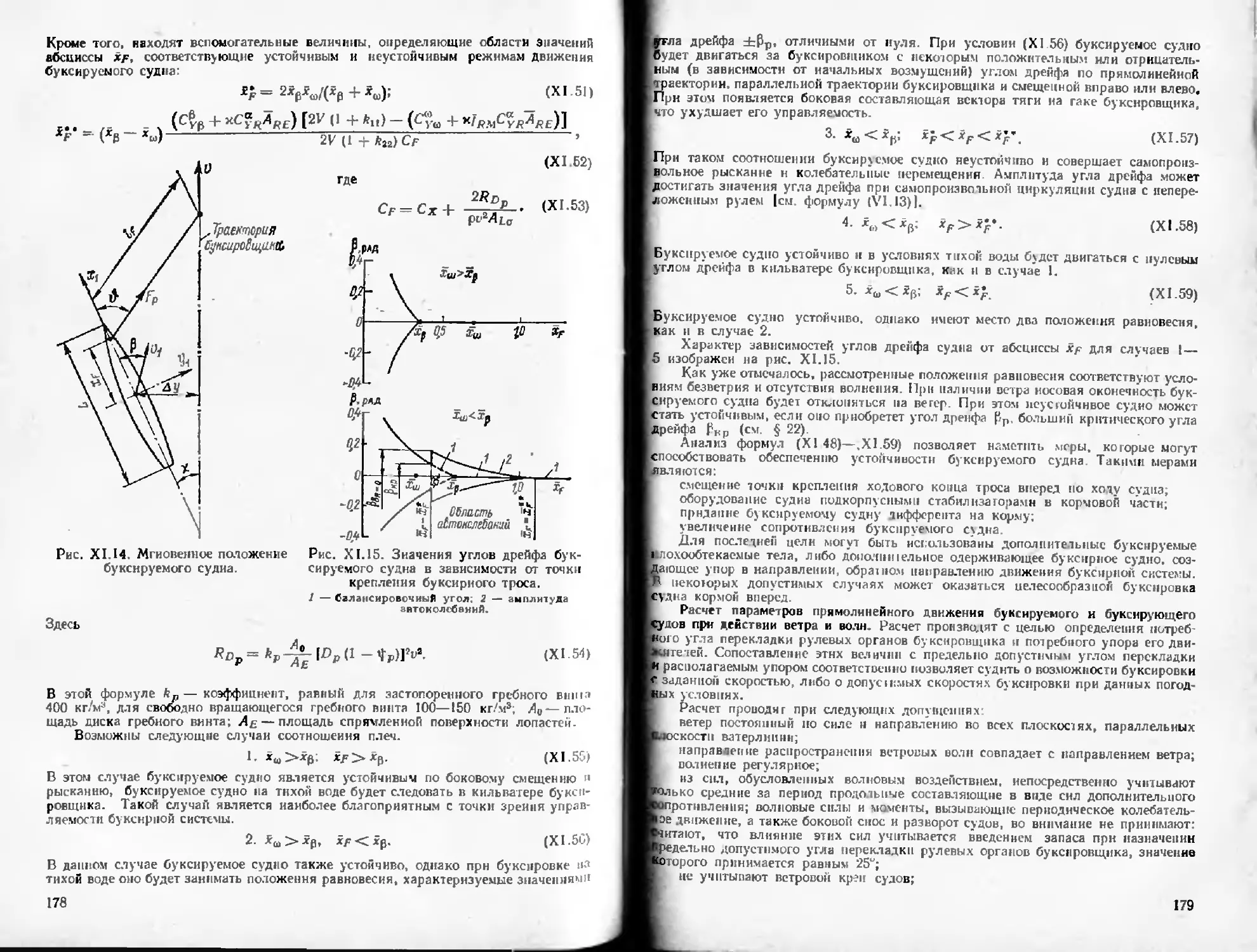






















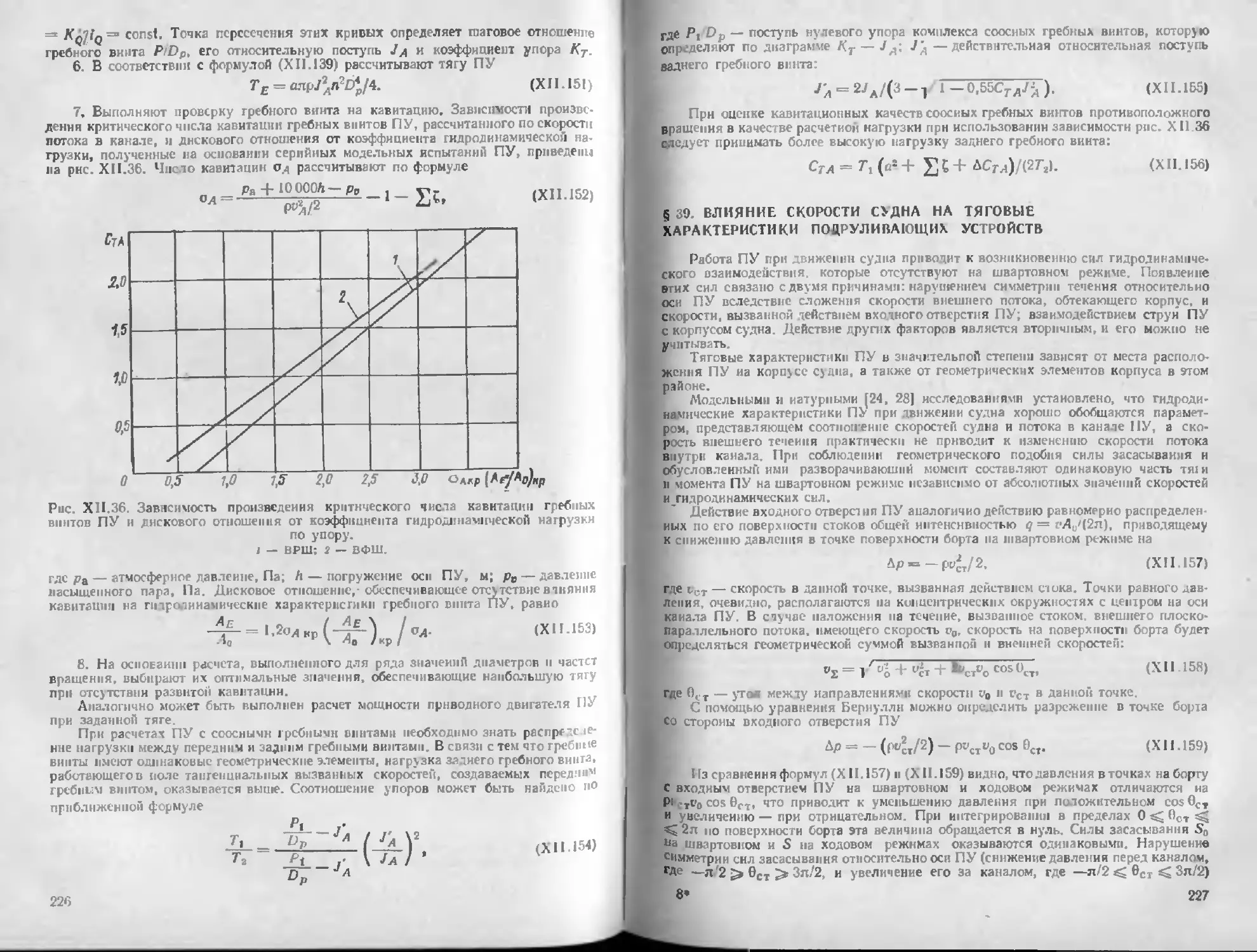




























































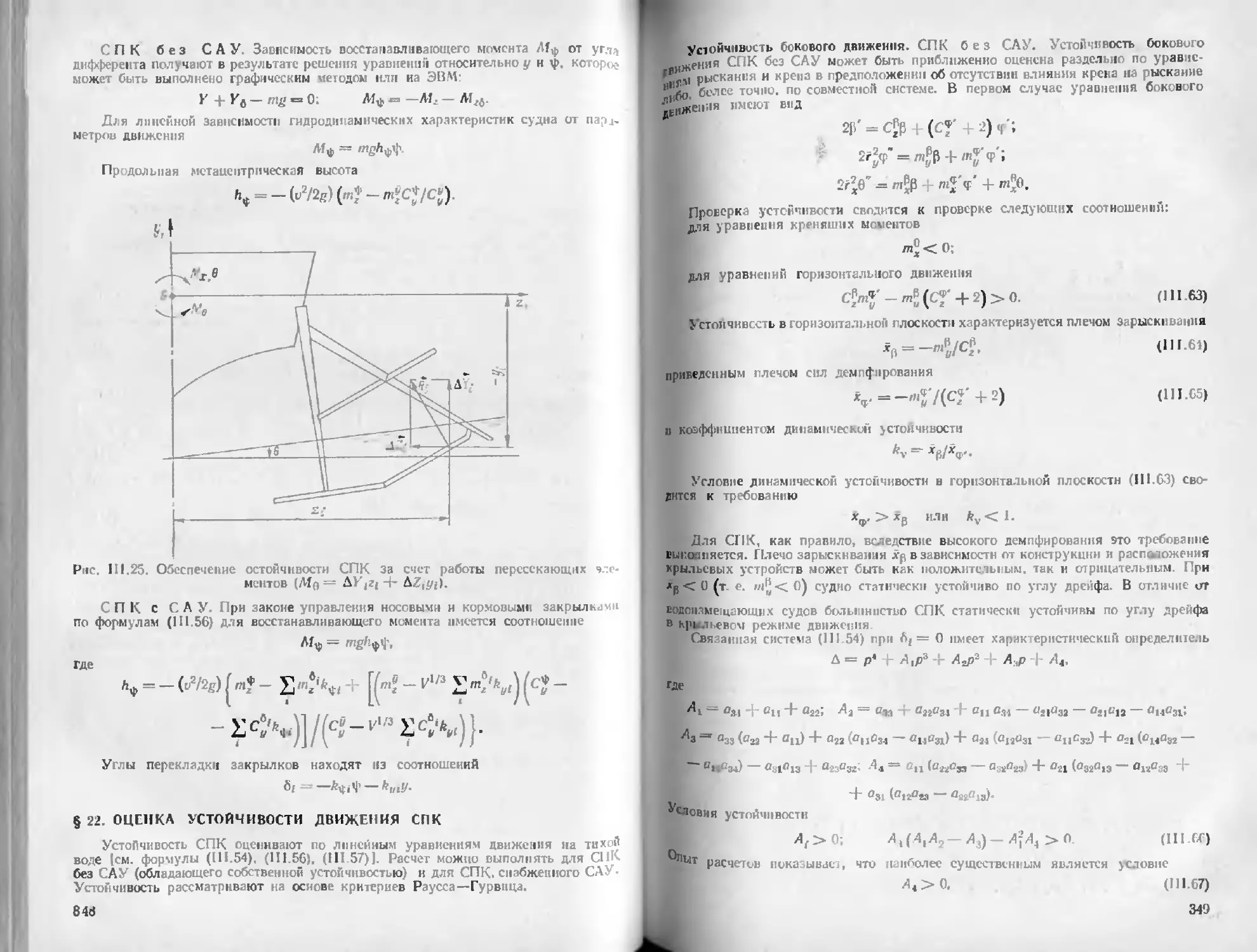



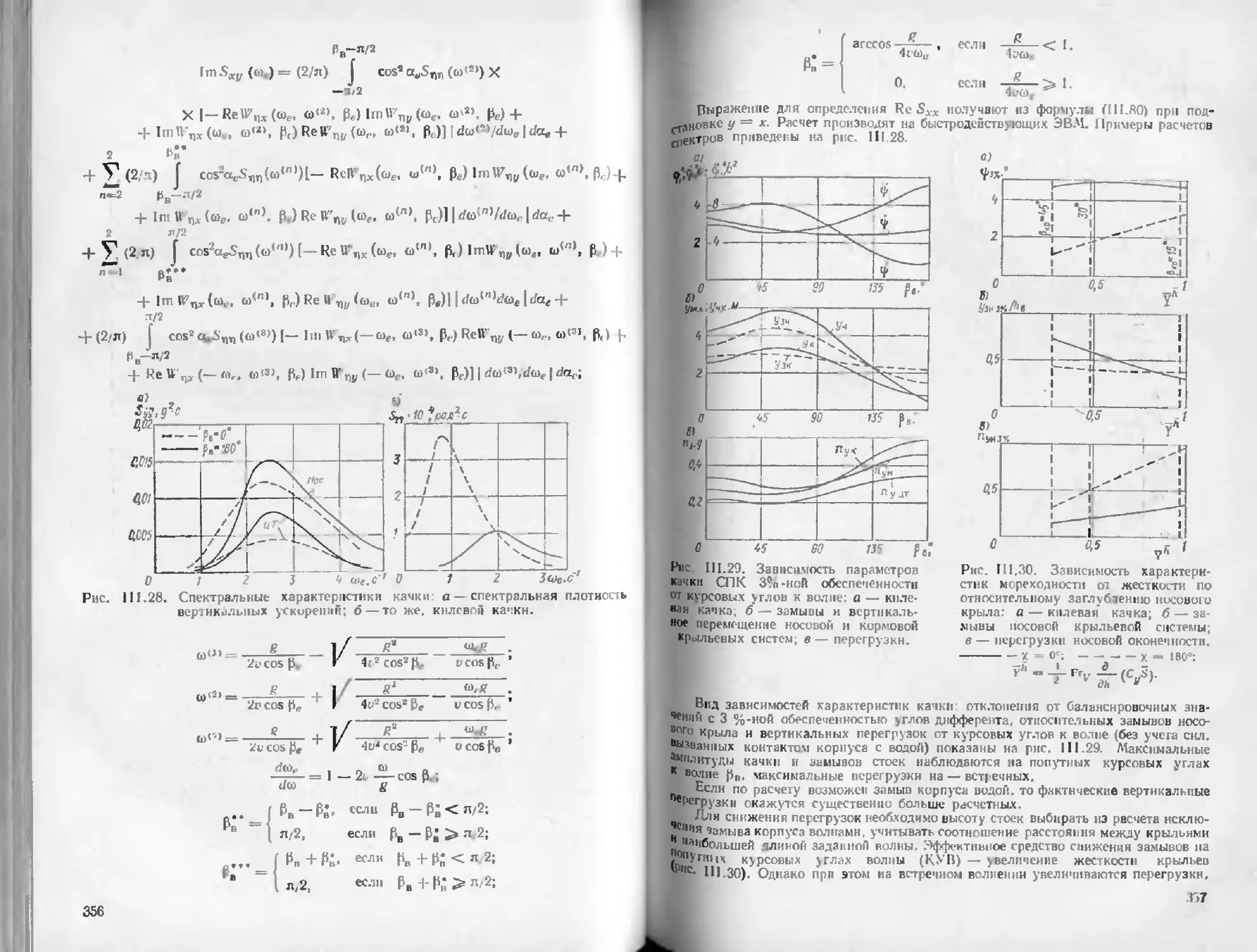




























































































Текст
СПРАВОЧНИК
ПО ТЕОРИИ
КОРАБЛЯ
3
СПРАВОЧНИК
ПО ТЕОРИИ
КОРАБЛЯ
В трех томах
Под редакцией
Я. И. Войткунского
Управляемость
водоизмещающих судов
Гидродинамика судов
с динамическими
принципами поддержания
Том третий
Ленинград
„Судостроение"
1985
ББК 39.42-С1
С74
УДК [609.12.001.11 : 532] (031)
Научные редакторы проф. д-р техн наук А А Русецкий,
проф др техн, наук Е. Б. Юдин
Ship Theory Handbook. Ed by Y 1. Voitkounski. In 3 Volumes. Vol. 3.
Manoeuvrability of conventional Ships. Hydrodynamics of Gliders Hydro-
foils and Hovercrafts. Leningrad. «Sudostroenie». 1985, p. 544. ISBN
Mel hods for the determination of hydrodynamic forces acting on ship hull»
rudder «nd steering nozzle are given. Information on hydrodynamic characteristics ©I
high-speed marine vehicles is arranged in a systematic way.
The book Is aedressed torescarch staff n-ival architects and students.
C74 Справочник по теории корабля В трех томах. Том 3.
Управляемость водоизмещаюших судов. Гидродинамика су-
дов с динамическими принципами поддержания/Под
ред. Я. И Войткуиского. —Л Судостроение, 1985. —
544 с., пл
ИСБН
Приведено описание сил н моментов, действующих на корпус судия, изло-
жены методы расчета рулей и поворотных насадок, систематизированы сведения
по гмдродкнлммчеекнм характеристикам судов с динамическими принципами под-
держания.
Для кнжеиерпв-судостроигелеП, научных работников и студентов корабле-
строительных специальностей.
39.42-01
г 3605030001)—оез
048 (01) 85 12 ~®5
(g) Издательство .Судостроение» , 1985 г.
от НАУЧНЫХ РЕДАКТОРОВ
«Справочник по теории корабля» состоит из трех томов, содержащих следую-
щие разделы: том 1 — «Гидромеханика», «Сопротивление движению судов», «Су-
довые движители»; том 2— «Статика судов», «Качка судов»; том 3 — «Управляе-
мость водоизмещающих судов», «Гидродинамика судов с динамическими принци-
пами поддержания».
Справочник является практическим пособием для инженеров и научных работ*
инков, занимающихся гнтроаэродннамикой, динамикой, проектированием н эксплуа-
тацией судов; он также может быть использован студентами кораблестроительных
специальностей. Ранее изданные справочники по теории кора&тя (С. Н. Благове-
щенский. Статика и качка. Л.. Судпромгттз, 1950; С. II. Благовещенский п А. II. Хо-
- лодклнн. Статика и качка. Л., Судостроение, 1975; Я. И. Нойткунскнн, Р. Я- Пер-
ший и И. Л. Титов. Ходкость и управляемость. Л., Судпромгнз, I960; Я- И. Войт-
кунскиГт, Р. Я. Першнц и И. А. Титов. Судовые движители н управляемость. Л.,
Судостроение, 1975) завоевали широкое признание научно-технической обществен-
ности н учащихся вузов. Данный трехтомник охватывает основные разделы выше-
названных справочников и помимо традиционных разделов теории корабля включает
новый раздел «Гидродинамика судов с динамическими принципами поддержания»,
обобщ иные данные по которому до сих пор отсутствовали.
’ Значительному изменению подверглось изложение прежних разделов. Это
вызвано не только появлением новых эффективных теоретических подходов и ме-
S тодов расчета различных мореходных качеств судов, но н значительной переорнен-
тациен выполнения таких расчетов на ЭВМ, что позволило включить многие ранее
практически трудно реализуемые методы в инженерную практику. Однако программы
I сложных расчетов могут быть различными, к тому же при современном быстром про-
грессе в области вычислительной техники они часто устаревают еще до выхода
книги в свет, поэтому в соответствующих разделах трехтомника содержатся лишь
Я общие сведения о составлении исходной информации. Наряду с широким осве-
щением отечественных достижений в области гидромеханики судна в книгу вклю-
чены итоги ряда зарубежных разработок, опубликованных в трудах международ-
ных конференций и в периодической печати. Ряд материалов Справочника пред-
ставляет результаты, полученные авторами данного издания. Приводимые в конце
каждого раздела указатели литеоатуры содержат в основном наиболее общие или
последние по времени нубтикацнн.
Изложение сведений рассчитано на читателя, знакомого с основами птдромсха-
пики судна. Соответственно назначению книги расчетные формулы большей частью
даются в виде окончательного результата. Тем не менее в тексте указываются прин-
ципиальные положения и исходные допущения, принятые в основу рекомендуемых
методов н формул, а также пределы их применимости. Описана физика рассматрн-
в. ем их явлений и процессов.
В последние готы значительное внимание за рубежом и в СССР уделялось
унификации обозначений в области гидромеханики судна. Такая унификация была
разработана международными конференциями опытовых бассейнов (МКОБ). Cta-
нако данная система обоз'ычепнн еще нс нашла повсеместного применения в оте-
чественной практике. Учитывая нецелесообразность полного отступления от тради-
ционных систем отечественных обозначений, принятых в гидромеханике и проекти-
ровании судов, в Справочнике лишь частично применяется система, близкая к ре-
5
ксмендовгш'ой МКОБ; это по., вад нт оценить степень ее эффективности и не будет
31 1рудиять использование ранее изданной литературы.
Авторы первого раздела: А Ш. Л фр е м о в и Н. А. См о л и и а (§ 27—
29); Л. Д. Гофман (§ II, 30); Э. П Лебедев (§38-41); Р. Я. П е р-
шиц (§ 1 — 8, 14, 16—25. 31, 32, 36 и 37); Р. Я. Першин и Л П. Тумашик
(§ 9, 13), Л. Л. Р у с е ц к п й л А. И. Нем зер (§ 35); Н. А. Смол и-
11 а и А. П Т \ м а ш и к (§ 10); Л П Тума ш и к (§ 12, 15, 26, 33);
В I Ч у ш е в (§ 42); Е. Б. Юдин (§ 34), Е. Б. Ю д и и и А П. Т у м а ш и к
(§ 43). Авторы приносят благодарность II. К. Собо-wey за помощь при подготовке
материалов § 7 в части описания планарных механизмов.
Авторы второго раздели: А. Ш. Афремов (§ 18, 21—25, 36, 38, 43, 44);
A. UJ. Афремов п С. Е. Б а ж е н о в (§ 41, 42); Л. Ш. Афремов и
В А. В а л ь д м а и (§ 19, 20); A. Ill. А ф р е м о в и В. К. Дьяченко
(§ 34); А Ш. Афремов, В. А. В о р о и н и и О. Л. 3 а н пев (§ 35, 37);
А. Ш. Афремов п О. Л. Зайцев (§ 39); Л1. А. , Б а с и н (§ 13);
М. М, Буньков (§ 4—9’); В. К. Д ь я ч е в к о (§ 33); О Л. Зайцев
(§ 40); Т. А. 3 a ii и с в а и С. Д. Прохоров (§ 31); Б М. Зеленок я ft
(§ 32); В. В Кличко (§ 28): В. В. Кличко и С. Д. Прохоров (§ 27);
Б В. Косов (§ 14) Л. Б. Лукашевич (§ 10—12, 15, 17); М. А. М яв-
лю д о в (§ 53—61); Е. В. Николаева (§ 16); С. Д. Прохоров (§26,
29, 30); А. А. Р у с е ц к и й (§ 1—3, 62, 63); Ю. М. С а д о в и и к о в (§ 45—50,
52); Э. Л. Фишер (§ 51).
Научными редакторами тома 3 являются докт. техн, наук проф Е. Б. Юдин
(раздел первый) и докт. техн, наук проф. А. А. Русецкий '(раздел второй). Ими
разработан план тома, определено основное содержание глав и осуществлено науч-
ное наблюдение при подготовке коллективом авторов материалов тома.
Раздел первый
УПРАВЛЯЕМОСТЬ
ВО ДО ИЗ ME [ДАЮЩИХ
СУДОВ
ОСНОВНЫЕ ОБОЗНАЧЕНИЯ
Al, — площадь погруженной части ДП
Aij, — приведенная площадь погруженной части ДП.
Л— площадь руля (одного).
А не — эффективная площадь рулей.
Are — относительная эффективная площадь рулей.
Ar+r — площадь рулей.
Лд+/?р — площадь комплекса руль—рудерпост.
Ау — площадь парусности.
AVB — площадь проекции надводной части судна на плоскость китель-
шпангоута.
Avl — площадь проекции надводной части судна на продольную верти-
кальную плоскость.
В — ширина судна по ватерлинии.
tft — хорда руля.
Сдх — аэродинамический коэффициент ветровой т<ни спинальной силы
Сдг— аэродинамический коэффициент боковой (портальной) составляющей
силы ветра.
Сам — аэродинамический коэффициент ветрового момента.
См — коэффициент момента корпуса.
См а — приведенный коэффициент ветрового момента.
Сир — коэффициент позиционного момента корпуса.
Cmr—коэффициент момента от сил. действующих на руль.
Gvfw — коэффициент демпфирующего момента корпуса.
С^(р — коэффициент производной позиционного момента корпуса по углу
дрейфа.
С£!о) — коэффициент производной демпфирующего момента корпуса по угло-
вой скорости.
Слт?—коэффициент нормальной силы руля.
Сх — коэффициент тангенциальной силы корпуса.
Схл — приведенный коэффициент ветрового сопротивления.
Cxr—коэффициент сопротивления руля
Су — коэффициент нормальной силы корпуса.
Суд — приведенный коэффициент нормальной составляющей силы ветра.
С} р — коэффициент позиционной нормальной силы корпуса.
Суш — коэффициент демпфирующей нормальной силы корпуса.
Cf.p — коэффициент производной позиционной нормальной силы по углу
дрейфа.
Суш — коэффициент производной демпфирующей нормальной силы по угло-
вой скорости.
Сун — коэффициент производной боковой силы руля но углу атаки.
7
Cqr— коэффициент момента иа баллере руля
Ст0 — коэффициент нагрузки гребного винта по упору.
De. — диаметр установившейся циркуляции.
Г-'г — число Фруда.
Гр — сила тяги па гаке или буксирном устройстве.
F,,x — проекция силы тяги Fp иа ось х.
Fpg — проекция силы тяги F,, иа ось у.
Fx — проекция силы тяги САУ на ось х.
Fy — проекция силы тяги САУ на ось у.
С — ускорение свободного падения.
— высота пера руля.
1гг — момент инерции .массы судна относительно оси г.
k,j — коэффициенты присоединенных масс.
L — длина судна по действующей ватерлинии.
Irm — отстояние руля от мидель-шпангоута.
Мд — аэродинамический (ветровой) момент, действующий на судно.
Мв — момент от действия воли.
Л1Н11 — инерционный момент.
Мр — момент от сил, развиваемых САУ.
Mr— момент от сил. действующих на руль.
Л(р — позиционный гидродинамический момент иа корпусе.
Л1,ц — демпфирующий гидродинамический момент на корпусе.
Alv — гидродинамический момент вязкой природы.
т — масса судна.
Rr — радиус установившейся циркуляции.
Rn — среднее увеличение сопротивления на волнении.
Т — упор движителя.
Тд — осадка кормой.
Тр — тяга движителя.
Тр — осадка носом.
— осадка иа миделе.
I — время.
I* — коэффициент засасывания.
vxr—скорость обтекания руля
v — линейная скорость судна
. ё — безразмерная линейная скорость судна.
— истинная скорость ветра.
г'с — линейная скорость на установившейся циркуляции.
— исходная скорость хода судна
ir — относительная (кажущаяся) скорость ветра.
о.г — составляющая скорости v по оси х.
vu — составляющая скорости v по оси у.
V — объемное водоизмещение судна.
Р — угол дрейфа судна.
бд—Угол перекладки руля.
Ар — угол перекладки поворотной насадки,
Vi — угол начнльиого дифферента судна.
4г — угол ходового дифферента судна.
х — коэффициент влиниия корпуса.
Х£ — эффективный коэффициент влияния корпуса и винта на руль (на-
садку).
—коэффициент влияния винта.
А. — относительное удлинение (руля).
— присоединенные массы.
р — плотность воды.
Рл — плотность воздуха.
<т — приведенный коэффициент полноты погруженной части диаметраль-
ной плоскости судна.
«р0 — угол скорости.
у — курсовой угол.
S
<0 — угловая скорость.
й — безразмерная угловая скорость.
й>с — безразмерная угловая скорость на установившейся циркуляции.
Wr 1{ — безразмерная угловая скорость корпуса судна (без рулей или пово-
ротных насадок).
Глава I
ОБЩИЕ СВЕДЕНИЯ ОБ УПРАВЛЯЕМОСТИ СУДОВ
$ 1. СУДНО КАК УПРАВЛЯЕМАЯ СИСТЕМА
Каждое надводное самоходное судно совершает те или иные управляемые дви-
жения в горизонтальной плоскости и, следовательно, является управляемой систе-
мой. Как всякая управляемая система судно состоит из объекта управления, сред-
ства управления и управляющего устройства
Непременной частью объекта управления является корпус судна, движением
которого управляют. В состав объекта управления входят и движители, если они не
служат средствами управления. К объекту управления может относиться н непере-
кладывасмын руль.
Под средствами управления понимаются устройства (например, рули, винты,
подруливающие устройства и т. п.), с помощью которых к объекту управления
могут быть преднамеренно приложены нужным образом направленные силы.
Под управляющим устройством понимается система, осуществляющая управ-
ление. Эта система может либо полностью состоять из приборов и мех-анизмов, либо
включать в свой состав человека (судоводителя, рулевого). Управление, которое
ведется без участия человека, называется автоматическим, с участием человека—
ручным.
Под термином «управление» понимается такая организация того или иного
процесса, которая обеспечивает достижение определенных целей. Относительно
судна этот процесс заключается в реализации управляемого движения, при котором
решается задача управления. Например, для портового буксира такой задачей яв-
ляется заранее обусловленное перемещение буксируемого объекта, для сейнера
может стоять задача обмета косяка рыбы кошельковым неводом, а для бурового
судна — задача удержания его над точкой бурения.
Наиболее общей задачей управления, стоящей перед всеми самоходными су-
дами независимо от наличия других задач, является перевод судна по заданной
траектории из одной точки на поверхности воды в другую.
* Задача управления судном может быть достигнута различными приемами, в ка-
ждом случае она отличается целью управления, т. е. указанием тех свойств, кото-
рыми управляемое движение должно обладать, чтобы задача управления быва вы-
полнена. Так, наиболее общая задача управления при движении судна в откры-
том море, когда точность следования по заданной траектории может быть относи-
тельно низкой, выполняется путем управления курсом с периодическим внесением
поправок в заданный курс па основании оценки фактического местоположения су-
дна. В этом случае в периоды времени, ограниченные корректировкой курса, целью
управления является поддержание заданною ксрса, а в течение корректировки
эта цель состоит в заданном изменении курса. Если то же судно движется в уз-
кости по створной линии, отмеченной ствопнымн знаками, то цель управления
состоит в том, чтобы выдержать нулевое поперечное смешение судна от этой линии.
Таким образом, цель управления движением судна всегда состоит в поддержа-
нии постоянными либо в изменении каких-либо величин, определяющих движе-
ние судна. Все такие величины, называемые координатами, делятся на две
группы — входные и выходные. Под входными координатами понимаются вели-
чины, изменение которых ведет к изменению движения судна (например, частота
вращения гребного винта итн угол перекладки руля). Выходными координатами
являются элементы управляемою движения судна (скорость, угловая скорость,
9
Юре, смещение и т. п.). Та выходная координата, поддержание или изменение
h торон является целью управления, называется управляемой (или регулируемой)
координатой. Таких координат в управляемой системе может быть несколько.
В процессе управления управляющее устройство обязательно учитывает эту
координату, однако кроме нее moivt учитываться и другие координаты, изменение
которых не является целью управления. Такие коорД! паты называются наблюдае-
мыми. Например, при ведении судна по компасу рулевой учитывает ие только те-
кущий и заданный курс судна (управляемая координата), но и скорость отклонения
стрелки компаса, т. е. угловую скорость судна (наблюдаемая координата).
В состав управляющего устройства входят три элемента: чувствительный эле-
мент (датчик), измеряющий текущие значения наблюдаемых к управляемой коорди-
нат; преобразующий элемент, вырабатывающий сигнал, обязаюльно учитывающий
Ряс. I.I. Принципиальная схема замкнутой системы.
рассогласование между текущими и заданными значениями управляемой коорди-
наты; исполнительный элемент, осуществляющий в соответствии а выработанным
сигналом требуемое воздействие иа средство управления и меняющий тем самым
входную координату.
Принципиальная схема судна как управляемой системы изображена на рис. 1.1.
Направленность действия каждой части системы указана стрелками. Движенце объ-
екта управления приводит к изменению наблюдаемых и управляемой координат,
которое фиксируется чувствительным элементом управляющего устройства и пе-
редается на преобразующий элемент. В последний вводится также заданное значе-
ние управляемой координаты (уставка), с которой сравниваются текущие значения
этой координаты, и с учетом наблюдаемых координат вырабатывается сигнал, посту-
пающий иа исполнительный элемент. Этот элемент воздействует на средство управ-
ления, входная координата меняется и иа объект управления передается то или иное
усилие, приводящее к изменению элементов движения судна.
Благодаря учету текущих значений управляемой координаты (следствия уп-
равления) при выработке величины входной координаты (причины управляемого
движения), т. е. благодаря обратной связи, вся система получается замкнутой.
В принципе такую систему можно разомкнуть, лишив ее или одной из составных
частей, или какой-либо связи между этими частями В том случае, если размы-
кание системы происходит либо путем лишения системы управляющего устройства,
либо нарушением обратной связи, судно представляется разомкнутой системой,
которая может двигаться, ио управлять которой нельзя.
Разомкнутая система, представляющая судно, состоит из объекта управления
и средства управления, причем от типа последнего зависит состав объекта управ-
ления. Так, если средством управления в такой системе служит гребной винт, то
в состав объекта управления войдет руль, и наоборот.
Состав замкнутой управляемой системы зависит не только от состава разомк-
нутой системы, но и от управляемой координаты. Вследствие этого, состав замк-
нутой управляемой системы, представляющей судно, в процессе управтения, со-
10
провождающсмся переходом от одной управляемой координаты к другой, все время
меняется. Но изменение состава системы ведет и к изменению ее свойств. Cuciejy
с переменным составом можно рассматривать как различные системы с разными
свойствами, переходящие одна в другую. Связь между этими системами указана
в § 3, а свойства систем наложены в § 4.
§ 2. СРЕДСТВА УПРАВЛЕНИЯ СУДНОМ
Общая классификация средств управления (СУ) судов показана на рис. 1.2
[II]. При движении судна приходится управлять не только поворотом судна в<>-
кру । вертикальной осн, но и скоростью, поэтому представленная классификация
включает и средства управления, позволяющие регулировать эту скорость. Од-
Випко в последующих главах настоящего раздела справочника системы, управляемые
по скорости, не рассматриваются.
Псе СУ подразделяются га главные средства управления (ГСУ) и вспомо-
гательные средства управления (ВС\).
Отличительно!! особенностью ГСУ, предназначенных для использован ня при
наличии скорости, является то, что для их действия необходима работа главных
двигателей судна.
Главные средства управления делятся на главные движительттые устройства
(ГДУ), тормозные устройства (ТУ), изгибающие устройства (НУ), рулевые уст-
ройства (РУ) и главные движнтельно-рулевые устройства (ГДРУ). С точки зре-
Г иия управления суднам интерес представляют только рабочие органы этих уст-
ройств, предназначенные для создания передаваемой на корпус силы.
Главные движителытые устройства создают силу, приближенно по направле-
нию совпадающую с диаметральной плоскостью судна, поэтому они используются,
когда цель управления состоит в поддержании или изменении скорости судна (см.
I раздел третий т. I).
I Тормозные устройства, также создающие силу в направлении диаметральной
плоскости (ДП), предназначены в отличие от главных движнтельных устройств не
для произвольного управления скоростью, а лишь для уменьшения скорости пе-
[ реднего хода. Действие тормозных устройств проявляется только при наличии
I скорости судна, для набора которой используется главный двигатель, и лишь с уче-
том этого обстоятельства тормозное устройство может быть отнесено к ГСУ. Если
I судно имеет скорость переднего хода, то ТУ.может действовать п при неработающем
I главном двигателе, когда судно движется по инерции. Кроме тою, ТУ использу-
ется и при работе винта на задний ход (режим реверса).
Принцип действия всех существующих ТУ заключается в увеличении сопр,>-
1 тнвлення воды движению судна. Достигается это ухудшением обтекания корпуса
путем выдвижения или откидывания тормозных щитов, выбрасыванием за борт
тормозных парашютов, раскрытием составных частей (чаш) носового бульба н т. н.
| (рис. 1.3) Тормозные устройства являются аварийным средствам управления и
[ используются, как правило, только в критических ситуациях.
Изгибающие устройства составных судов или толкаемых составов представляют
собой специфические устройства, рабочим органом которых служит сам корпус
судка либо корпуса барж толкаемого состава (рис. I 4). Изгиб составных судов
F применяется для облегчения прохода крупнотоннажного речного состава по из-
вилистым рекам с узким судовым ходом. Отдельные суда состава счаливаются в
нитку и соединяются шарнирно, благодаря чему переднее судно имеет возмож-
ность поворачиваться па некоторый угол относительно заднего, что ведет к ломаному
изгибу оси состава. Шарнир снабжен размещаемым на палубе устройством прину-
дительного поворота и удержания взаимного положения судов. Изгибающих
устройств по длине состава может быть несколько.
Изгиб состава, меняя его форму, приводит к изменению усилий, действующих
на движущийся корпус со стороны воды, и тел самым изринет движение состава.
Наряду с изгибом, к управлению составом обязательно привлекаются кормовые
, рули толкача, иногда подруливающие устройсЛа, размещаемые в специальной но-
совой приставке, я также находящиеся на пей рули, облегчающие изгиб.
Наиболее распространенными главными средствами управления являются
РУ и ГДРУ.
11
Рис. 1.2. Классификации средств управления.
12
Рулевые устройства отличаются тем, что их действие проявляется только при
наличии скорости судна; Рулевые устройства поэтому эффективны только при ра-
боте главных движителей (или в течение короткого времени после остановки послед-
них) и непригодны для обеспечения управляемости судна на предельно малых ско-
ростях хода и без хода.
Под термином «ход» понимается процесс перемещения судна в направлении
ДП под действием приложенной к судну тяги. Термин «без хода» не означает,
что судно неподвижно, а свидетельствует лишь об отсутствии продольной тяги,
либо об отсутствии продольной проекции скорости движения судна. В последнем
случае судно может двигаться лагом (т. е. в плоскссти шпангоутов судна) или
вращаться относительно точки, расположенной на ДП. Под термином «предельно
малая скорость хода» следует понимать скорость около I м/с н менее.
В качестве рабочих органов РУ применяются рули п поворотные насадки на
гребные винты, размещаемые, к*к правило, в корме судна.
Рнс. 1.3. Схема тормозных устройств: а — выдвижные шиты;
б — откидные щиты; в — парашюты; г — раскрывающийся но-
совой бульб.
Руль представляет собой крыло, которое поворачивается вокруг вертикаль-
ной оси и располагается в потоке воды за корпусом судна. Для увеличения ско-
рости обтекания руля его часто размещают полностью плн частично в струе, отбра-
сываемой гребным винтом.
Действие руля основано иа том, что гидродинамическая сила, возникающая
на пера руля прн наличии угла атаки, че;сз связи руля с корпусом (например,
через баллер руля, см. рнс.' 1.5) передается на корпус судна.
Сила, возникающая на руле, пропорциональна квадрату скорости обтекания
руля или приближенно квадрату скорости движения судна. Поскольку гидродина-
мические силы и моменты, возникающие на корпусе судна, также пропорциональны
квадрату скорости движения, эффективность работы руля на малых скоростях прак
ти тески от скорости хода нс зависит (при безветрии). Если скорость хода велика,
вффективность руля может уменьшаться в результате кавитации руля или в резуль-
тате проникновения к рулю атмосферного воздуха (аэрации). Для защиты от аэра-
ции руль следует размещать за кормой судна таким образом, чтобы при перекладке
его профиль не выходил за горизонтальную проекцию действующей ватерлинии и
по возможности был удалей от нее, в особенности от»транца' кормы.
Руль состоит из пера руля и баллера руля (рнс 1.5). Перо руля представляет
ссбой тело, непосредственно воспринимающее гидродинамическое давление Часто
под термином «руль» понимают только перо руля. Баллер руля служит для пово-
13
рота пера руля относительно вертикальной оси и для крепления пера руля к кор-
пусу судна.
Судовые руля могут быть классифицированы следующим образом:
А. По способу соединения пера руля с корпусом судна (рис. 1.6): а) прос-
тые — с несколькими опорами на ахтерштепие; б) полу подвесные — висящие
на баллере и опертые на корпус или специальный
кронштейн в одной точке по высоте руля; в) подвес-
ные — полностью висящие на баллере.
Рис. 1.5. Схема руля.
I — перо руля. 2 — баллер
руля; 3 — обвод актер-
штевня.
Рио. 1.4. Схема изгибаемого состава.
Б. По положению оси баллера относительно пера руля (рис. 1.5). а) неба-
лансириые — с осью баллера, размещенной в носовой части руля непосредственно
в районе передней кромки пера; б) балансирные — с осью баллера, расположен-
ной на некотором удалении от передней кромки пера руля.
Полуподвесные балансирные рули называются также полубалаиснриымн. По-
ложение оси баллера по хорде руля сильно влияет на величину момента, деиствую-
щего на руль относительно осн баллера. Этот момент называется моментом иа бал-,
лере.
24
судах, имеющих развитым кор-
кгк правило, бывают балансир*
Рис. 1.7. Схема руля за рудер-
постом.
I — перо руля; 2 — баллер руля?
3 — рудерпост.
В. По форме профиля руля: я) плоские; б) обтекаемые
В настоящее время простые плоские рули иногда применяются на несамоходных
судах. Современные рули самоходных судов имеют обтекаемый профиль.
Для рулей чаще всего используются обтекаемые профили трех видов — про-
фили ГМСА, НЕЖ (Н. Е. Жуковского) и ЦАГИ. В табл. 1.1 приведены толщины
сечений этих профилен, т. е. расстояния между крайними точками профиля по ши-
рине, в процентах от максимальной толщины, измеренные по оси, перпендику-
лярной к оси симметрии.
Простые рули применяются на транспортных
новой дейдвуд. Полуподвесные и подвесные рули,
ними. Эти рули весьма широко используются иа
судах всех классов и назначений. Нсбаланснр-
н”ые подвесные или полуподвесные рули практи-
чески не применяются.
Разновидностью простых небаланспрных
рулей являются рули за рудерпостом (рчс 1.7),
отличительная особенность которых заключается
в том, что они имеют общий профиль с рудер-
постом (в непереложенном положении). Таким
образом, комплекс руль — рудерпост представ-
ляет собой разрезной руль, передняя часть
1 которого (рудерпост) не перекладывается. Как .
правило, протяженность (хорда) рудерпоста
составляет 0,10—0,25 хорды профиля всего
комплекса.
На судне могут быть установлены одни,
два, три и больше рулей. Один руль разме-
щается в ДП (за винтом у одновинтового судна),
два руля, как правило, устанавливаются за
гребными винтами двухвинтовых судов. Рули
за рудерпостом применяются чаще всего на
крупнотоннажных одновинтовых судах и всегда
уст 1авлнваются за гребным винтом.
Угол поворота рулей относительно ДП
судна называется углом перекладки рулей. Под термином «перекладка» понимается
процесс поворота руля из одного положения в другое. Максимальный угол пере-
кладки обычных рулей составляет, как правило, 35°. Дальнейшая перекладка руля
невыгодна, поскольку она приводит лишь к небольшому увеличению силы, дей-
ствующей на руль, но одновременно ведет к резкому увеличению момента иа балле-
ре, что диктует необходимость утяжеления привода рулей и роста мощности ру-
левой машины.
Суммарная площадь рулей, необходимая для обеспечения управляемости, зави-
сит от размеров и назначения судна, формы кормы, максимальной скорости хода и
расположения руля относительно винта. Для сравнения рулей различных судов
принято выражать площадь рулей Ад+д в долях произведения длины судна
па осадку:
(1.1)
Коэффициент К для различных судов имеет следующие значения:
Тип судна К
Трансатлантические быстроходные пассажирские суда . . . 85
Трансатлантические грузоаые и грузопассажирские суда .... БО-^70
Грузовые суда дальнего плавания .... 40—60
Суда каботажного плавания • 40—50
Морские бужеиры .... . . . . о о . . . . 30—40
Речные винтовые суда , . ............................ 12—22
Речные колесные суда.............................' . . . . 9—Id
Шлюпки . . . . ........ . ... 18—25
Линейные корабли ........................................' , 35—40
Легкие креЛсеры . . . . ...................... . . 45—60
Эсминцы ............................................ .... 26—40
15
Площадь руля реального судна должна выбираться с учетом как приведенных
данных по коэффициенту Л', так и результатов расчета управляемости либо данных
модельных испытаний. Допустимо также выбирать площадь руля по хорошо заре-
комендовавшему себя прототипу с обводами кормы, близкими к обводам кормы про-
ектируемого судна. Однако совершенно недопустимо выбира1ь площадь руля только
по результатам расчета максимальной кривизны траектории судна, так как назна-
чение руля заключается также в придании судну должной устойчивости прямоли-
нейного движения к управляемости при действии ветра и волнения.
В последнее время получили распространение так называемые роторные рули.
Роторный руль представляет собой поворотное перо, перед которым расположен
цилиндр, способный вращаться вокруг собственной оси, соосной с осью поворота
основного пера. Лобовая часть этого цилиндра и основное перо образуют общий
крыловой профиль.
Таблица 1.1. Толщины сечений обтекаемых профилей рулей
в процентах максимальной толщины
Профили Отстояние сечения от передней кромки. % хорды
0 1.25 2.5 5.0 10. •» 20.0 30.0
NACA 0 31.6 43,6 59.2 78.0 95,6 1U0.U
НЕЖ 0 33,1 45,2 62,2 81,9 98.0 99,0
ЦАГИ 0 45,4 62.0 81,9 96.5 99,6 92.2
Профили Отстояние сечей ия от переднеЛ кромки, ° хорды
40.0 50.0 ьо.о 70.0 80.0 90. 0 юо.п
NACA 96,7 88,0 76,1 Ь1,0 13.7 24,1 2,1
НЕЖ 94.0 81,7 66,7 48.0 30.0 15,0 0
ЦА1И 77.4 58.8 43.6 30.2 18,4 8.9 2,0
Вращение цилиндра может осуществляться различными способами: с помо-
щью гидравлических двигателей, механических и гибких передач, электродвигателей,
расположенных в самом теле руля или корпусе судна.
Направление вращения цилиндра зависит от знака угла перектадки пера руля,
за исключением зоны углов ±10’. внутри которой цилиндр остается неподвиж-
ным.
Благодаря вращению цилиндра, расположенного в носовой части руля, обте-
кание основного пера при углах перекладки, больших 35—40е, происходит без срывз
потока, как это бывает у рулей обычной конструкции. Вследствие этого роторные
рули могут перекладываться на углы 70—80°, при этом эффективность рулей увели-
чивается пропорционально углу перекладки. Судно, на котором установлен ротор-
ный руль, может разворачиваться практически на месте. Эффективность роторною
руля как средства управления судном существенно повышается в случае установки
его в струе гребного винта. Это свойство роторных рулей особенно важно для обе-
спечения маневрирования на малых скоростях хода (при маневрировании в портах,
при швартовных операциях и др.), когда обычные рули работают плохо.
На ходовых режимах, при которых не требуются большие перекладки руля,
эффект вращения цилиндра практически отсутствует. Цилиндр останавливают, и
роторный руль работает как обычный.
Поворотная направляющая насадка на гребной винт представляет собой коль-
цевое крыло, закрепленное на баллере и окружающее гребной винт. Кроме баллера,
насадка может быть также шарнирно соединена со специальным кронштейном на
корпусе судна. Насадка, прикрепленная только к баллеру, именуется подвесной,
опирающаяся на кронштейн, —полуподвссной (рис. 1.8). Основное назначение лю-
16
gon (в том числе н поворотной) |исаткн заключается в повышении КПД движнтельного
комплекса.
Поворотная направляющая насадка на гребнон винт в качестве органа управ-
ления судном по своему действию аналогична рулю. При перекладке насадки на ней
возникает гидродинамическая сила, передающаяся на корпус и вызывающая поворот
судна. Если сопоставить боковую (подъемную) силу, возникающую при ходе судна
на переложенной насадке и на размещенном в винтовой струе руле аналогичной фо-
рмы в проекции на ДП судна, то на насадке эта сила оказывается примерно на 40 —
50 % большей Преимущество насадки в этом отношении обусловлено тем, что пере-
ктатка насадки ведет к интенсивному отклонению потока, отбрасываемого винтом,
и, как следствие, к значительному повороту вектора тят комплекса впит — пово-
ротная насадка. Этот поворот тем больше, чем меньше скорость хода и больше наг-
рузка винта, поэтому наибольшее отклонение вектора тя! и наблюдается в швартов-
ном режиме работы комплекса.
На судне могут быть установлены одна или две поворотные насадки. Если на
одновинтовом судне имеется одна насадка, то она в соответствии с приведенной клас-
сификацией всегда относится к группе рулевых устройств. Если же на двухвинтовом
судне поворотных насадок две. то к группе рулевых устройств они будут относиться
лишь в том случае, если конструкция привода обеспечивает совместную (т. е. в одном
направлении и на одинаковый угол) перекладку насадок. В том случае, когда при
вод допускает раздельную перекладку (т. е. каждая насадка может быть переложена
на любой угол в любом направлении независимо от другой насадки), насадки называ
югся раздельными, и тогда они относятся к группе главных движителыю-рулевых
устройств. Однако, даже и в последнем случае эти насадки при движении судна на
скоростях свыше 3—4 уз перекладываются совместно (либо перекладывается только
одна насадка).
Важной характеристикой поворотной насатки является расположение осн бал- /
лера по длине насадки. Для осуществления поворота насадки необходимо, чтобы
плоскость, в которой располагаются вершины лопастей гребного винта, соййадвла
с поперечной плоскостью, проходящей через ось баллера. Поскольку гребной винт
всегда располагается в сечении с наименьшим внутренним диаметром, от положе-
ния оси баллера по глине иасадкн зависит форма профиля насадки.
Положение оси баллера по длине насадки в сильной степени влияет на гидро-
динамический момент на баллере насадки, который должен быть преодолен при ее
перекладке. При переднем ходе момент на баллере оказывается минимальным в слу-
чае расположения оси баллера на 25—30 % длины насадки от носовой кромки.
С ростом отстояния оси баллера от носовой кромки момент на баллере резко воз-
17
растает. На заднем ходу момент на баллере прн указанном смещении оси баллера
уменьшается.
Если на двухвинтовом судне устанавливают раздельные поворотные насадки,
ось баллера целесообразно размещать посредине длины насадки. При этом с целью
уменьшения гидродинамического момента на баллере в хвостовой части насадки дол-
жен быть укреплен стабилизатор, чаще всею неподвижный относительно насадки.
Теоре|ическнй чертеж подобной насадки показан иа рис. 1.9.
Угол поворота насадки относительно ДП судна составляет, как правило, 30—
35°. В непереложенном положении ось поворотной насадки чаще всего совпадает
в осью гребного винта.
Рис 1.9. Теоретический чертеж насадки со стабилизатором (размеры даны в долях
внутреннего диаметра насадкн Dp}.
Главные движительно-рулевые устройства, в отличие от РУ, обеспечивают
управляемость судна не только при наличии скорости хода, но и без нее. К рабочим
органам ГДРУ относятся любые главные движители и насадки к ним, способные
» снять направление тяги в широких пределах. На средних и больших скоростях хода
боковая сила этих устройств меняется пропорционально квадрату скорости, однако
при уменьшении скорости хода боковая сила падает не до нуля, а до некоторого
< пределениого значения, различного для разных устройств. В случае, если судно
< борудовано ГДРУ, рулевое устройство на нем может отсутствовать. Аналогично
I У действие ГДРУ сопряжено с работой главных двигателей.
Главные двнжительпо-рулевые устройства: крыльчатые движители, поворотные
винтовые колонки, раздельные поворотные насадки, фланкирующие рули, неподвиж-
ные несоосные насадки. Крыльчатые движители описаны в гл. XI третьего раз-
дала первого тома Справочника. Краткое описание поворотных винтовых колонок,
I тздельных поворотных насадок, фланкирующих рулей и неподвижных шсоос-
ных насадок приведено ниже.
18
Рис. 1.10. Раздельные поворотные
насадки.
Раздельна поворотные насадки (РПН) могут Гиль установлены на двухвинто-
вых судах She насадки по своим отводам не отличаются от обычных поворотных
насадок. Отличительной их особенностью заключенной в конструкции привода,
является независимая (раздельная) нх перекладка (рис. 1.10). Должна быть обе-
спечена возможность лет кого и удобного реверсирования каждого винта, заключен-
ного в насадку. Иногда вместо обычных винтов фиксированного шага (ВФ1Н) с этой
целью применяют винты регулируемого шага (ВРШ).
Для раздельной перекладки насадок необходимо, чтобы поворот каждой насадки
осуществлялся отдельной рулевой машиной. При этом вместо одной рукоятки уп-
равления (или штурвала) в рулевой рубке устанавливают две рукоятки. Преду-
сматривается также возможность совместного управления обеими насадками, для
чего рукоятки управления спаривают либо механическим, либо электрическим пу-
тем. Усложнение привода РПН по сравнению
е обычными насадками окунаются преиму-
ществами в управляемости судов, обеспе-
чнваемимп РГ1Н. Поэтому последние находят
все более широкое применение на речных су-
дах и буксирах-толкачах, а также иа мор-
ь ских буксирах-каптовщиках
Раздельные поворотные насадки при ре-
I жиме работы гребных винтов враздрай (т. е.
при работе одного впита на передний, а вто-
рогс на задний ход) обеспечивает широкое
1 изменение положения равнодействующей тяг
' комплексов по длине судна, а также позво-
в ляет развить значительную боковую силу
при отсутствии хода судна. Действие РПН
Д основано иа том, что переложенная насадка
V в швартовном режиме работы гребного винта
^отклоняет струю последнего и тем самым мс-
няет направление Тягн комплекса винт—на-
садка. Раздельная перекладка насадок иа
судне с винтами, работающими враздрай,
К позволяет, меняя направление векторов тяги,
радикально влиять на величину и положе-
, Ине равнодействующей тяг.
Эффективность действия РПН максп-
мальва при отсутствии хода судна. Для удержания судна без хода с рвботаюши-
К ми винтами необходимо, чтобы эти впиты работали враздрай. При этом наиравле-
F мне равнодействующей тяг будет зависеть от положения насадок.
Если обе насадки переложены внутрь, т с. задними кромками к ДП судна
I (рис. 1.11, а). равнодействующая тяг винтов R, направленная в сторону винта,
I работающего иа передний ход (правый винт с тягой Fa, отклоненной от ЦП из
I угол «Гц), приложена за кормой судна иа значительном расстоянии от последней,
I и момент равнодействующей относительно миделя судна оказывается весьма боль-
I шим. При таком положении насадок на судне, винты которого работают враздрай,
I последнее совершает разворот на месте тем более интенсивный, чем больше угол
I поворота векторов тяг, определяемый углами персклвдки насадок.
Если при работе винтов враздрай обе насадки переложены наружу, т. е. зад-
ними кромками к бортам судна, то равнодействующая тяг, как ясно из рис. 1.11. б,
располагается в нос от насадок в пределах корпуса судна или вне его и nanpaj-
| лена в сторону борта, на котором расположен винт, работающий на задний ход.
Равнодействующая вызывает дрейф судна в том же направлении. При малых углах
перекладки насадок, когда равнодействующая располагается в носовой части судна,
Г последнее не только .дрейфует, но и поворачивается в сторону, определяемую направ-
I леннем упоров гребных винтов (на рис. 1.11,6—против часовой стрелки). При
больших углах перекладки насадок равнодействующая перемешается к корме и
направление вращения судна меняется без изменения режима работы винтов. Если
точка приложения равнодействующей но длине судна при некотором среднем угле
’ перекладки насадок совпадает с центром сопротнвлснтя воды при боковом двнже-
। нии судна, последнее дрейфует без вращения, т. е. движется лагом.
19
Таким образом, РПН позволяют прикладывать к произвольной подлине точке
судна произвольно направленную силу, что в конечном итоге и определяет манев-
ренные свойства судна с РПН.
В настоящее время РПН установлены па многих судах отечественного флота.
Маневренные возможности этих судов примерно одинаковы.
Поворотная винтовая колонка (ПВК) представляет собой гребной винт (или
комплекс винт—насадка), направление тяги которого может меняться в широких
пределах вследствие поворота устройства относительно осн, перпендикулярной к оси
гребного винта (рис. 1.12).
Если ось гребного винта колонки параллельна ДП судна, ПВК является глав-
ным двнжнтельпым устройством. Действие ПВК как ГДРУ проявляется при по-
вороте ее на некоторый угол относительно вертикальной оси. Как правило, угол
Рис. 1.11. Схема сложения векторов тяг комплексов: а — перекладка насадок
внутрь; б — перекладка насадок наружу; в — совместная перекладка насадок.
поворота ПВК составляет 360°, что позволяет менять направление тяги ПВК, ие
прибегая к реверсированию приводною двигателя. Поворотные винтовые колонки
в качестве ГДРУ применяются па судах, к маневренным свойствам которых предъ-
являются высокие требования, а скорость их невелика. К таким судам относятся,
например, плавучие краны, паромы, портовые буксиры, рыбодобывающие и пожар-
ные суда и др.
Если на судне установлены две ПВК, каждая из которых может поворачиваться
независимо от другой, эффективность их действия повышается. Принципиально
схема действия иа судно сил от ПВК ие отличается от соответствующей схемы,
относящейся к раздельным поворотным насадкам (см. рис. 1.11), однако углы от-
клонения векторов тяг в случае ПВК не ограничены, а поэтому и эффективность
двух ПВК, используемых как ГДРУ, оказывается много большей эффективности
РПН (при равной мощности устройств).
В 70-х годах некоторые зарубежные фирмы начали выпускать устройсша, со-
стоящие из двух ПВК, объединенных с автоматизированной системой управления
ими. Такие устройства (например, движители «Hmnaia-Z-пеллер», выпускаемые
в Японии) кардинально укрощают управление ПВК. сводя участие человека (руле-
вого) к постановке в определенное положение рукоятки, задающей требуемое направ-
ление перемещения или поворота судна. Автоматизированная система по сигналу от
этой рукоятки поворачивает в необходимое положение обе ПВК.
Рис. 1.12. Принципиальная
схема поворотной колонки.
1 — приводной двигатель вин-
та: 2 — двигатель поворота ко-
лпаки; 3 — приводной вал; 4 —
конический редуктор: 5 — гон-
дола; б — гребной вал; 7 —
гребной винт: 3 — баллер-
При расчете маневров, выполняемых пот действием ПВК, допустимо считать,
что величина тяги колонки при повороте последней не меняется по сравнению с тя-
гой неперсложенной колонки в швартовном режиме ее работы, а направление тяги
меняется в соответствии с поворотом колонки (т. е. угол отклонения вектора тяги
равен углу поворота колонки).
Фланкирующие рули, применяемые в иностранном судостроении иа речных
и озерных буксирах-толкачах, представляет собой систему рулен, расположенных
за и перед винтами в винтовой струе (рис. 1,13), причем совместная перекладка всех
рулей, размещенных перед винтами, происходит независимо от совместной перекладки
г рулей за винтами. Работа винтов враздрай при со-
сответствующей перекладке рулей обеспечивает по-
лучение боковой силы желаемого направления.
Часто под термином «фланкирующие рули» пони-
мают точько рули, расположенные перед винтами
181.
Неподвижные несоосныс насадки представляют
собой новое средство управления, предложенное
Р Я- Першинем. В отличие от обычных неподвиж-
ных насадок, соосных с гребным винто.м, эти иа-
I садки повернуты вокруг вертикальных осей зад-
ними кромками к ДП судна с таким расчетом, чтобы
I продолжения осей насадок пересекались иа ДП за
кормой судна (рис. 1.14). Угол отворота насаток
от осей гребных валов ап составляет около 4—8°.
Поскольку при малых углах отворота насадки от
линии вала тяга комплекса винт — насадка прак-
тически совпадает с осью насадки, равиодснствую-
. щая тяг обоих комплексов приближенно распола-
[ гается в точке пересечения осей насадок, а измене-
нием частоты вращения винтов, в том числе винтов,
[ работающих враздрай, направление равнодействую-
щей может быть изменено на любой угол.
Вспомогательные средства управления (ВСУ)
характерны тем. что для их работы включения
главных' двигателей не требуется, поскольку ВС)*
оборудованы собственными двигателями. Предназ-
начены ВСУ для обеспечения управляемости судна
I только на предельно малых хотах и без хода, и эф-
фективность их, как правило, растет по мере
уменьшения скорости хода. Судно, оборудованное
ВСУ, должно иметь обычный руль пли любое дру-
гое РУ. Иногда ВСУ устанавливаются на суда,
снабженные ГДРУ,
Вспомогательные средства управления по ха-
рактеру своего воздействия на су ди о подразделяются
ва (ПУ) и вспомогательные движнтельно-рулеиые
создают тягу, ориентированную относительно судна определенным образом (как
правило, нормально к ДП), вторые — тягу, направление которой может меняться
в широких пределах.
Подруливающее устройство чаще всего представляет собой движитель, разме-
щенный в поперечном канале подводной части корпуса в носу или в корме судна.
В качестве движителя ПУ обычно устанавливают ВФШ или ВРШ, либо крыль-
чатый движитель или насос. Канал ПУ может быть прямым либо изогнутым, вса-
сывающее отверстие канала может располагаться на одном ypoei е с вы.'отным от-
верстием или на разных уровнях (рис. 1.15), однако все этн особенности имеют зна-
чение лишь при проектировании ПУ, но с точки зрения управляемости важны
только местоположение устройства по длине судна и тяга этою устройства."
Тяга движителя в поперечном канале всегда направлена нормально к ДП
судна, поэтому движение судна в устоииях безветрия при о.шом ПУ сводится к вра-
щению судна, не имеющего хода. Это вращение, однако, неизбежно сопровождается
перемещением судна в сторону оконечности, на которой расиотожеио ПУ, так
иа подруливающие устройст-
устройства (ВДРУ). Первые
21
что. строго говоря, год действием тяги одного ПУ вращение судна на месте (т. е.
при нулевой проекции скорости движения на ДП) невозможно. Причина этого ясна
из рис. I.I6 Для вращения судна на месте необходимо, чтобы центр циркуляции О
(т. е. точка, вокруг коюрой вращается судно) лежал на ДП пли па ее предо. -
женин. Поскольку сила от ПУ /'и приложена в оконечности, центр циркуляции,
по крайней мере в установившемся вращении, должен располагаться между центром
тяжести G и противоположной оконечностью судна. Как ясно иэ рис. 1.16, а,
пр» таком расположении центра циркуляции центр тяжести судна имеет окружную
Рнс. 1.13. Фланкирующие рули.
Рнс. 1.14. Нсшмвижные иессосиые насадки.
скорость, и, следовательно, на судно действует центробежная сила, направленная
в сторону ПУ и вызывающая смещение судна. В результате эпюра скоростей от-
дельных точек судна имеет не такой вид, как показано иа рнс. 1.16, а, в такой,
как это изображено на рис. 1.16, б. Центр циркуляции неизбежно отходит от ДП
судна, а само судно, вращаясь, ощутимо перемещается в сторону оконечности, на
которой расположено ПУ. Эту особенность движения судна необходимо учитывать
в процессе эксплуатации су ilia с ПУ. Нежелательное смещение судна можно цен-
трализовать работой главных движителей.
Вращение судна на месте под действием ПУ без привлечения главных движи-
телей (что не всегда возможно из-за ограничения минимальной частоты вращения
последних) может быть достигнуто, только если иа судне установлены два ПУ
(одно в носу, другое в корме). Такое расположение ПУ обеспечивает также и дви-
жение судна лагом (или удержание его против бокового ветра). Движение лагом
в принципе возможно и при одном ПУ, но только па двухвинтовых судах при работе
винтов враздрай.
22
Недостатком движителя в поперечном канале является потеря водоизмещения
судна на величину объема канала ПУ, а достоинством — хорошая защищенность
движителя ПУ. Последнее обстоятельство является решающим, поэтому ПУ нашли
весьма широкое распространение на самых разнообразных судах (рыбодобывающих
И рыбообр батывающих, пассажирских, исследовательских, нефтеналивных и т. п.).
Разновидностью ПУ, применяемой, главным образом, на буровых судах с целью
динамической их стабилизации над точкой бу рения, являются откидные винтовые
колонки, которые могут быть размещены в определенных местах вдоль Вортов судна
подруливающих устройств: о, б — с изогнутой трубой;
Рис I 15 Основные виды подруливающих устройств: а, б — с изогнутой трубой;
в — с прямой трубой: а — с забором и выбросом воды на одном уровне; д — с за-
бором и выбросом воды на разных уровнях; е — с крыльчатым движителем.
и использованы в качестве средств управления в соответствующей автоматнческт 1
В системе. Колонки могут быть убраны (откинуты) при переходе судна и иоставлет и
в рабочее положение при удержании судна в процессе бурения.
Вспомогательные движительпо-рулевые устройства могут состоять из крыль-
чатых движителей, поворотных винтовых колонок и активных рулен (ЛР).
В качестве ВДРУ ПВК применяются на судах, к которым предъявляются вы- .
В сокис требования в отношении управляемости на предельно малых скоростях хода,
а также на судах, которым по условиям эксплуатации необходимо длительное врет i
без хода удерживать в определенном положении ДП или находиться в определеин'. й
точке открытого моря. К таким су там относятся рыбоперерабатывающие базы, ок
анографичеекке и научно-нсслетовательскне суда, клбелеу кладчики, суда для «<•-
- служивания нефтяных промыслов, плавучие буровые установки и др. Поворотит *•
| Винтовые колонки, используемые как ВДРУ, выполняются, как правило, откидг-
23
ваюшимися или выдвижными. Эго позволяет убрать устройство внутрь корпуса, если
надобность в нем отсутствует, что предотвращает увеличение сопротивления воды
движению судна из-за лобового сопротпвтения ПВК, а также поломки последних.
Одним нз видов ПВК является активный руль. Этот руль представляет собой
Рис. 1.16. Эпюры скоростей судна
при вращении: а — на месте; б — со
смещением вдоль ДИ
Хин — центробежная сила
Рис 1.17 Схема активного руля.
редко.
Главные и вспомогательные твижвтелыю-рулевые устройства, а также под-
руливающие устройства, обладают общим свойством, которое заключается в их
способности создавать боковую сиду, действующую на судно, не имеющее хода.
Поэтому все перечисленные устройства объединяются термином «средства активного
управления» (САУ), под которыми понимается любое сочетание специальных уст-
ройств и главных движителей, способное создавать боковую силу на судне, ход
которого отсутствует. На схеме рис. 1.2 средства активного управления выделены
в виде области, очерченной пунктиром.
Средства активного управления, установленные на конкретном судне, могут
быть образованы как устройствами какой-либо группы, так и путем сочетания уст-
гребным винтом, расположенным зл задней
кромкой руля (рис. 1.17). Обычно для
увеличения тяги винта последний снабжа-
ется насадкой, жестко связанной с пером
руля. Как правило, винт АР приводится
во вращение погруженным водоохлаж-
даемым электромотором, вмонтированным
в перо руля и закрытым грушевидным об-
текателем Помимо такой схемы привода
ЛР существуют также конструкции, в
которых вращение ротора двигателя,
установленного в корме судна, пере-
дается к винту ЛР через полый баллер.
При перекладке ЛР помимо подъем-
ной силы, возникающей иа пере руля,
боковую составляющую дает также и тяги
гребного винта, роль которой по сравне-
нию с силой, действующей на перо, тем
большая, чем меньше скорость судна. По-
этому при эксплуатации ЛР электромотор
последнего включают лишь на предельно
малых скоростях хода и выключают его.
когда скорость судна под действием глав-
ных движителей превышает 3—4 уз.
Дополнительным назначением АР
является обеспечение малой скорости хо-
да судна, недостижимой при использова-
нии главных движителей из-за ограни-
чения минимальных частот вращения
двигателей. Мотор и "винт АР выбирают
из условия, чтобы судно, снабженное АР,
могло двигаться пол мотором этого руля
со скоростью 3—4 уз Поскольку винт
ЛР работает при такой скорости в режи-
ме, близком к швартовному, при выборе
ЛР можно ориентироваться на примерное
значение упора винта в этом режиме.
Суда с ЛР имеют возможность со-
вершать разворот без хода практически
иа месте. С этой целью привод руля де-
лается с таким расчетом, чтобы угол пе-
рекладки руля достигал 70—90°.
Активные рули, широко применяв-
шиеся в зарубежном судостроении в тече-
ние 50—70-х годов, в настоящее время
устанавливаются на суда сравнительно
24
ройств отдельных групп. Так, судно может быть одновременно оборудовано ПУ
и РПН, т. е. средства активного управления его представляют сочетание ГДРУ
и ПУ
• Эффективность любого САУ в общем случае определяется величиной и на-
правлением равнодействующей тяги всех устройств, составляющих САУ, а также
моментом от пары, сбразонанпой этой силой и реактивном силон, ей противодейству-
ющей. Роль последней может играть сила инерции, сила сопротивления воды пере-
мешению судна, сила от воздействия ветра, реакция пирса или швартовного троса
и т. п. Этот момент в сильной степени зависит от местоположения обеих сил г,о
длине судна, поэтому возможность преднамеренного изменения точки приложения
равнодействующей тяги САУ всегда является желательной.
Наличие такой возможности определяется числом устройств, составляющих
САУ. Если на одновинтовом судне установлено, например, одно ВДРУ, то линия
действия его тяги всегда прокатит в районе расположения устройства вне зависн-
, мости or того, работает ли главный гребной вчнт. У двухвинтового судиа работой
вннтов враздрай можно в некоторой степени сместить положение равнодействующ* й
I от упоров винтов и тяги движнтелыю-рулевого устройства, однако для того, чтобы
линия действия равнодействующей и, следовательно, положение точки ее пересе-
чения с ДП судна могли меняться в широких пределах, необходимо, чтобы на судне
I были установлены, по крайней мере, два устроиства, разнесенные по длине или ши-
I рине судна. В некоторых случаях вторым устройством может служить руль, распо-
ложенный в винтовой струе. При любом расположении устройств, составляющих
САУ, равнодействующая (или ее составляющие) тяги всех устройств и точка
. ее приложения к ДП по длине судиа могут быть выражены через величину и
направление тяги н геометрические характеристики расположения каждого
устройства.
Эффективность всех САУ. определяемая соотношением сил, создаваемых ими,
и гидродинамическими силами, возникающими ни 'корпусе судна, резко умень-
шается по мере роста скорости судна. Наибольшей эффективности САУ достигают
при работе в швартовном режиме. Этим свойством САУ определяетсп их назначение,
которое состоит в обеспечении управляемости судиа, не имеющего хода или движу-
щегося с предельно малой скоростью хода. При предельно малой скорости хода
отличием в тяге САУ по сравнению со швартовным режимом их работы в большин-
стве случаев можно пренебрегать.
Управляемость судиа на малых скоростях имеет весьма большое значение для
судовождения. В узкостях и в гаванях при значительном скоплении судов последние
вынуждены передвигаться и маневрировать на предельно малых скоростях хода.
Так как на таких скоростях в реальных условиях плавания даже прн слабом ветре
суда, не имеющие САУ, теряют управляемость, для ее обеспечения издавна приме-
няются буксиры, роль которых с точки зрения управляемости сводится к прило-
жению к корпусу судна внешних сил, направленных необходимым образом отно-
сительно судна. Но способ обеспечения управляемости судна с помощью буксиров
обладает существенными недостатками (необходимость в свободном пространстве
вокруг судиа, потребном для маневрирования буксиров, возможность обслуживания
судов лишь в местах, где имеется развитое и дорогостоящее буксирное хозяйство),
поэтому с начала 50-х годов на суда стали устанавливать САУ.
За последние десятилетия САУ распространялись все шире, и в настоящее
время большинство новых судов, по крайней мере во юизмещеинем 4000—5000 и3
и выше, снабжаются САУ. Подробные сведения о САУ содержатся в 16].
§ 3. КИНЕМАТИКА СУДНА
Для описания движения судна как замкнутой системы, управляемой по различ-
ным координатам, необходимо установить кинематическую связь между этими коор-
динатами. Для этого достаточно рассмотреть циркуляцию судна — процесс дви-
жения судиа при перекладке руля (или другого средства управления) из нулевого
положения на некоторый угол и удержании его в этом положений т. е. переходный
процесс, совершаемый разомкнутой системой прн единичном изменении значения
входной координаты. Термином «циркуляциях обозначается не только указанный
процесс, но и сопутствующая ему траектория движения судна.
25
Различают три периода циркуляции: маневренный, эволюционный и устано-
вившийся. Маневренный период по времени совпадает с продолжительностью пере-
кладин руля. Эволюционный период начинается с момента окончания перекладки
руля и заканчивается, когда элементы движения судна перестанут изменяться
во времени. Установившийся период начинается с момента окончания второго пе-
риода и длится все время, пока руль находится в переложенном положении. Движе-
ние судна в третьем периоде принято называть установившейся циркуляцией.
В первых двух периодах циркуляция судна представляет собой кривую пере-
менной кривизны, в установившемся периоде — окружность. Форма циркуляции
судна показана иа рис, 1.18. Началом циркуляции является точка иа линии перво-
начального курса, совпадающая с центром тяжести судна в момент начала пере-
кладки руля. Для количественной характеристики циркуляции используются сле-
дующие величины:
1. Диаметр установившейся циркуляции Dc.
Рис, 1.18. Циркуляция судна.
Рис. 1.19. Сутно на установившейся
циркуляции.
G — центр тяжести: р — центр вра-
щения; а — произвольная по длине
судна точка.
2. Тактический диаметр циркуляции DT — расстояние между ДП судна в' на-
чале поворота и ее положением после изменения первоначального курса судна
на 180°.
3. Выдвиг 11 — расстояние, на которое смещается центр тяжести судна в на-
правлении первоначального курса от точки начала циркуляции до точки, с которой
совпадает центр тяжести в момент изменения курса на 90°.
4 Прямое смещение lt — кратчайшее расстояние от линии первоначального
курса судна до точки, с которой совпадает центр тяжести в момент изменения курса
на 90°.
5. Обратное смещение 13—расстояние между линией первоначального курса
и параллельной ей касательной к траектории движения в начальные периоды пово-
рота, т. е. смещение центра тяжести в сторону, обратную направлению поворота.
Величины DT. 13, /г и 13 в долях тиаметра установившейся циркуляции
Dc лежат в относительно узких пределах для судов различных классов н в сред-
нем составляют:
DT = (0,9ч-1,2) Ос; Zj = (0.6ч-1.2) Ос; !3 = (0.5ч-0.6) Ос;
/3 = (0ч-0,1) £>с. Значения Dr, lt, 13 и Z. могут быть непосредственно измерены
по кривой циркуляции судна, построенной иа основании расчета или полученной
модельными или натурными испытаниями.
При движении судна иа установившейся циркуляция (рис. 1.19) каждая
точка ио длине судив описывает окружность. Эти окружности имеют общий центр.
26
именуемый центром циркуляции (точка О иа рис. 1.19). iioi между ДП судна
и касательными к этим окружностям (векторами скорости каждой точки) называется
утлом дрейфа. Угловая скорость всех точек cv.ina одинакова и постоянна во времен и,
а линейная скорость зависит от отстояния /?„ данной точки от центра циркуляции.
Последнее отстояние носит название радиуса циркуляции точки.
Угол дрейфа при центре тяжести р, радиус циркуляции центра тяжести Rc
и линейная скорость центра тяжести v принимаются обычно за характеристики
движения судна на циркуляции. Таким образом, пот терминами «угол дрейфа
судна», «радиус циркуляции судна» и «скорость cv л а иа циркуляции» понима-
ются соответствующие характеристики центра тяжести судна.
Угол дрейфа, радиус циркуляции и линейная скорость каждой точки а судна
по длине могут быть выражены через величины Р, 7?с и о с помощью формул
Р« = Р — arctg (ха Rc); (1.2)
г> __ р cos Р ___ р _______cosp_________. .. ...
K,,-Kccosp„ с cos |fi — arig (хо /?е)| ’ ' ’
Зтесь р0, R,,, t’u — угол дрейфа, радиус циркуляции н линейная скорость
точки а; х„ — отстояние точки а от центра тяжести судна.
На ДП (или на ее продолжении) находится точка, угол дрейфа в которой
₽ = 0. Положение этой точки, носящей название центра вращения, по длине судна
характеризуется значением
хц. в = Re sin Р. (1.5)
Положение центра вращения геометрически определяется .точкой пересече-
ния с ДП перпендикуляра, опущенного на нее из центра циркуляции (см.
рис. 1.19). Отношение’расстояния xIL в к длине судна L
хц. в = Хи. п £ = (RC,Z.) sin Р (1.6)
характеризует относительное отстояние центра вращения от центра тяжести судна.
Величина хП. в слабо зависит от радиуса циркуляции Rc. Для судов различных
классов эта величина при углах перекладки рулей, превышающих 20е, лежит в
пределах
Хц. в = 0,35-8-0.60, (1.7)
т. е. центр вращения располагается в районе носовой оконечности. Во всех точках,
расположенных в корму от центра вращения, поток при циркуляции набегает со
стороны наружного борта, в районе, расположенном в нос от центра вращения,
поток набегает со стороны внутреннего борта.
Радиус циркуляции, отнесенный к длине судна (Rc '£), носит название отно-
сительного радиуса циркуляции. Относительный диаметр циркуляции равен DC!L =
= 2Rc''L. Время поворота судна на 360“ называется периодом циркуляции и опре-
деляется формулой
Тс = 2aRjv. (1.8)
Угловая скорость вращения судна на установившейся циркуляции выражашея как
го = V, Rc = 2л Тс- (1.9)
В маневренном н эволюционном периодах циркуляции элементы движения
судна меняются во времени, н для их описания вводят две системы координат: под-
вижную, связанную с судном, н неподвижную, связанную с Землей (рис. 1.20), На-
чало подвижной системы совпадает с центром тяжести, ось х направлена по ДП
в нос судна, а ось у — в плоскости шпангоута на правый борт. Неподвижная си-
стема координат, как правило, выбирается с таким расчетом, чтобы до рассматри-
ваемого движения ее начало совпадало с центром тяжести, а ось лежала бы в ДП.
Все указанные ниже величины будут совпадать с аналогичными величинами, исполь-
зуемыми в навигации, если предположить, что ось х0 неподвижной системы коор-
динат располагается в плоскости земного меридиана.
I
27
Движение судна по криволинейной траектории и мгновенное положение его
па горизонтальной плоскости характеризуют следующие выходные координаты;
а) угол дрейфа Р — угол между вектором скорости данной точки судна по
длине и ДП, положительный при отсчете угла Р от вектора скорости по ча-
совой стрелке (если смотреть на судно сперху);
6) кривизна траектории 1 /?, — величина, обратная мгновенному радиусу тра-
ектории Ra данной точки судна подлине; кривизна положительная, если центр
кривизны находится справа от судна;
в) линейная скорость данной точки судна v\ v > 0 при переднем ходе судна;
г) угловая скорость ы — угловая скорость вращения судна вокруг верш-
калькой оси, положительная при вращении по часовой стрелке;
Д) уг<м изменения курса у — угол между неподвижной осью х0 и ДП судна.
В дальнейшем этот угол будет именоваться курсом. Положительный угол у укатай
на рис. 1.20;
Рис. 1.20. Оси координат и
элементы неустаиовившегося
движения судна.
е) угол скорости <|'о — угол между вектором скорости данной точки судна по
длине н неподвижной осью .vc.;
ж) продольная скорость ихп— составляющая вектора скорости данной точки
судна в проекции на неподвижную ось
з) поперечная скорость — составляющая вектора скорости данной точки
судна в проекции на неподвижную ось уи,
и) продольное смещение Хпя — расстояние, на которое смещается данная точка,
судна по длине в направлении неподвижной оси х0;
к) поперечное смещение у01 — расстояние, иа которое смещается данная точка
судна по длине в направлении неподвижной оси ув
Кинематическая связь между всеми указанными величинами устанавливается
следующими зависимостями
ы = dy dt — vlRs + dP 'di; (1.10)
= z — P; (1-11)
t>x0 = <1*4* 'dt = v cos <p0; (1.12)
vvo = dy^s/dt = v sin <fD; (1.13)
*b« = 1 ocosqpdf; (1.14)
б
т/и5= [ v sin фр dt.
(1.15)
28
Среди выходных координат только две (угловая скорость « и курс у) являют-
ся общи'*» Д-чя всех точек судна, расположенных на его Д11. Остальные координаты
зависят от положения точки по длине судна. «Формулы (1.1С)-(1.15) справедливы
для каждой фиксированной точки, однако в случаях, специально не оговоренных,
считается, что рассматриваемая точка совпадает с центром тяжести судна или при-
ближенно с точкой, лежащей на прямой пересечения мидель шпангоута с ДП
судна.
Все выходные координаты могуг быть приведены к безразмерному виду путем
использования понятия о безразмерном времени, под которым понимается отноше-
ние текущего времени / ко времени прохождения судном, идущим с исходной скоро-
стью ос, расстояния, равного длине судна L. Безразмерное время равно
1 = I (ц/Г). (I 16)
В безразмерном виде упомянутые величины равны 6 = v/ve\ (1.17)
R, = R,‘L; (J. 18)
1, И» = £//?в = «с! (1 19)
ы = ы = vfRa + Jp 'rfT =- + </p A; (1.20)
«*0 = Р5г</Ц1 = вс<к<Гг: <1 21)
= 5 sln W (1 22)
1 *•« -= Xos/Z. = J 6 cos <pc A; (I 23)
Sot = Vto/L = J 0 сов фо dr. (I 24)
Величины р, у и <рв безразмерны. Связь безразмерной угловой скорости с кур-
сом выражается как
т
Х=|йЛ. (1.25)
Все маневры, совершаемые судном, условно подразделяют на сильные н слабые.
Первые характеризуются значительным изменением скорости и по сравнению с
исходной скоростью t>ft, вторые — пренебрежимо малым различием этих скоростей,
позволяющим полагать 6=1. Естественно, что при слабых маневрах все угловые
координаты малы, поэтому можно полагать sin Р = Р. sin = <рс, cos р = cos <рв =
= 1 В соответствии с этим для слабых маневров выражения (1.2)—(1 4), (1.12)—
(1.15) и (1.20)—(1.24) приобретают- внд:
Га = Р ~ *а Re, (1 26)
Ra = Re, (1-27)
t'e — u; (I 28)
t'Ifl = n; (I 29)
t
= (I3i)
0
t
yos= (vtydi; fi.32»
о
й = I 7< 4-jp'th — 6c-j-c/p Jr; (133)
йхп=1.‘ (134)
»|/0=д,в: (135)
*es = *; (1.36»
г
Й)3 = j <Мт- (137)
о
Выражение (1.26) можно записать с помощью безразмерных величин
Ра — Р = ^а/7?с === Р *<№ci (I -38)
Где
Яа = xa'L. (1.39)
Таким образом, при слабых маневрах безразмерная продольная скорость »дв
равна безразмерной скорости v, безразмерная поперечная скорость совпадает
С углом скорости фо, а безразмерная угловая скорость со с точностью до малой ве-
личины Jp/dx равна относительной кривизне траектории йс. Последнее обстоя-
тельство позволяет записать формулу (1.38) в следующем приближенном виде:
Ра = Р — хай (1.40)
Выражения (1.27). (1.28) и (1.40) показывают, что скорости и радиусы тра-
ектории всех точек судна по длине одинаковы, одиако углы дрейфа оказываются
различными
Среди всех выходных координат судна как управляемой системы чаще всего в ка-
честве управляемых используются такие:
продольная скорость vI0 = и, что позволяет менять скорость хода судна;
продольное смещение х04, без учета которого невозможно остановить судно
в заданной точке акватории;
угловаи скорость со. которая определяет скорость поворота судна;
курс %, позволяющий судну двигаться в заданном направяеннн;
угол скорости фр с помощью которого можно корректировать направление
движения судна, сносимого ветром или течением;
поперечное смещение у„3, без учета которого судно не может двигаться по
заданной траектории.
Если управляемой координатой является продольное смещение х^г. то в ка-
честве наблюдаемой может выступать скорость и, если управление ведется по кур-
су X, то наблюдаемой может быть угловая скорость со, прн управлении по ува
наблюдаемыми могут быть со, х 11 ‘To-
Входной координатой в системах, управляемых по скорости и и продольному
смещению xcs, является частота вращения гребного винта (винтов) п. В системах,
управляемых по угловой скорости со, курсу х. углу скорости ф0 и поперечному
смещению уве, входной координатой чаще всего служит угол перекладки руля
(рулей) б/?.
Кроме указанных в качестве управляемой координаты можно рассматривать
и кривизну траектории 1//?в [11].
30
§ 4 . УПРАВЛЯЕМОСТЬ И МАНЕВРЕННОСТЬ
Судно как управляемая система определенного состава обладает и некоторыми
маневренными свойствами, которые проявляются в процессе его движения в тех
или иных условиях плавания. Маневренные свойства состоят из управляемости н
маневренности [111.
Управляемостью называется способность ехдна двигаться по выбранной судо-
водителем пли заданной траектории. Управляемость судна обеспечивается, если
управляемая координата системы при определенном н целесообразном управляю-
щем воздействии изменяется в желательном направлении.
Маневренность — это способность системы менять элементы движения, в том
числе и управляемую координату, с некоторой достижимой скоростью.
Из сказанного следует, что управляемость характеризует преднамеренное
изменение справляемой координаты в нужном направлении без учета скорости
этого изменения, определяемой маневренностью. Таким образом, управляемость
определяет принципиальную возможность совершения системой какого-то заданного
процесса, маневренное it — возможность обеспечения должной скоротечности этого
процесса. Отсюда следует, что потеря маневренности системы приводит н к потере
ее управляемости, поскольку изменение любого элемента движения с нулевой ско-
ростью невозможно
Под целесообразным управляющим воздействием понимается воздействие, от-
вечающее цели управления и требующее наличия обратной связи в системе, поэтому
управляемость является свойством замкнутой системы. В отличие от этого маневрен-
ность присуща и разомкнутой системе, способной совершать переходные процессы.
Управляемость судна как системы, регулируемой по курсу, включает два свой-
ства — устойчивость и поворотливость
Устойчивость является общим свойством, присущим любой управляемой си-
стеме. Под этим термином понимается способность системы восстанавливать перво-
начальные значения выходных координат и, в частности, управляемой координаты,
после прекращения действия некоторого возмущения, нарушившего эти значения.
Поворотливость измеряется угловой скоростью или .максимальной кривизной
траектории судна, и по ранее данному определению маневренности она характе-
ризует маневренность системы, управляемой по курсу.
Кривая, связывающая все возможные значения входной координаты с соответ-
ствующими установившимися (равновесными) значениями выходном (в частности,
управляемой) координаты, называется статической характеристикой системы.
Для оценки управляемости судна особую роль играет статическая .характеристика
системы, управляемой по относительной кривизне траектории <ос. Соответству-
ющая зависимость ще = / (Ьц) именуется диаграммой управляемости (см. § 22).
Глава 11
СИЛЫ И МОМЕНТЫ, ДЕЙСТВУЮЩИЕ НА КОРПУС
СУДНА НА ГЛУБОКОЙ ТИХОЙ ВОДЕ
§ 5. КЛАССИФИКАЦИЯ СИЛ ДЕЙСТВУЮЩИХ НА СУДНО
Для решения задачи одв1жении судна в горизонтальной плоскости необходимо
знать силы и моменты, действующие на судно. Все силы, действующие на движу-
щееся судно, можно разделить иа три группы, движущие, внешние и реактивные [111.
К движущим относятся силы, которые создаются средствами управления суд-
ном и вызывают то или иное преднамеренное его движ'ение. Примером таких сил
являются упор гребного винта, подъемная сила руля, силы от САУ, силы, действую-
щие на паруса, реакция весел и т. п.
Примерами внешних сил являются силы от ветра, от морского волнения, от те-
чения реки. Эти силы обусловлены энергией, источники которой находятся вге
судна, а действие этих сил вызывает непреднамеренное его движение которое, как
правило, должно быть нейтрализовано.
31
Реактивные силы, действующие в основном на подвойную часть судна, возни-
кают как результат движения судна паа действием сил первых двух групп и зависят
от линейных и угловых ускорений, утла дрейфа, линейной и угловой скорости.
Кроме того, эти силы зависят оз числа Фруда Fr и числа Рейнольдса Ре.
Если судно в начальный момент времени совершает прямолинейное равномерное
движение, то зависимостью указанных сил от изменения чисел Fr и Re в процессе
маневра, совершаемою судном, можно пренебречь, так как при переходе от прямо-
линейного движения к криволинейному скорость хода судна, а следовательно, и
величины Fr и Re меняются сравнительно мало. Влияние чисел Re проявляется лишь
при числах Re < 1,3-10°, не характерных для натурных судов, поэтому указанным
влиянием можно пренебрегать практически при любой исходной (т. е. до начала ма-
невра) скорости хода судна. При определении сил и моментов, действующих на судно,
число Fr должно учитываться, поскольку его влияние прн значительном изменении
исходной скорости хода проявляется заметным образом.
Реактивные силы и моменты действующие на корпус судна, подразделяются
по природе нх возникновения и по характеру движения, прн котором эти силы воз-
никают. По природе возникновения они делятся иа две категории; силы и моменты,
обусловленные инертностью судна как твердого тела и инертностью воды (инерци-
< шые силы) и гидродинамические силы нсинсринонной природы, обусловленные вяз-
костью ВО1Ы
Проекции суммарных реактивных сил и моментов, действующих на криволи-
нейно движущееся судно, представляются в виде
X = ^иц + Av; У = ^ин4' ^v- Al = Мцц4- ЛГу, (П.1)
где индексы «ни» и ст» характеризуют инерционные и вязкостные составляющие
Определение указанных сил может быть проведено как теоретическим путем,
путем эксперимента с моделью судна, для которого требуется найти силы, так и пу
тем расчета енл по материалам, основанным на обработке результатов испытаний
серии моделей.
Инерционные силы обычно находятся теоретическим путем. Наибольшая точ-
ность определения сил вязкой природы достигается при непосредственном экспери-
ментальном их исследовании на модедн судна, для которого производится расчет,
однако такой способ весьма трудоемок. Развитие теоретического пути оценки сил
второй категории является заслугой К. К. Федяевского [16| н Г. В. Соболева
|15|, которые разработали ряд способов теоретического определения усилий,
возникающих на судовых корпусах простых форм, однако учет всего многообра-
зия формы корпуса потребовал в дополнение к iндродинамическочу анализу'
ввести в результаты исследования поправки, почерпнутые из Эксперимента Наи-
более простым и надежным является определение сил по данным испытаний
схематизирован нон серии моделей.
По характеру движения судна реактивные силы также делятся на две каиго-
рнн: силы и моменты, возникающие прн равномерном прямолинейном движении
с постоянным углом дрейфа (позиционные силы), и добавочные силы и моменты, обус-
ловленные вращением судна вокруг вертикальной оси (демпфирующие силы)
Подразделение сил и моментов по характеру движения судна справедливо, строго
юворя, только при линейном характере зависимости сил и моментов от элементов
движения. При наличии нелинейностей указанное подразделение можно рассматри-
вать как удобный в практическом отношении прием, дающий ошибку в окончатель-
ном результате суммирования позиционных и демпфирующих сиз и моментов. Удоб-
ство такого деления сил заключается в том, что для решения отдельных задач уп-
равляемости часто используются только позиционные или только демпфирующие
силы и моменты. Так, прямолинейное движение судна прн наличии ветра сопровож-
дается в основном воз и и к новей нем позиционных сил, a i ри врвще|П1и судна ни месте
иод действием САУ возникают только демпфирующие силы и монеты.
Таким образом, общие выражения для сил и моментов, денстующих па корпус
судна при его криволинейном движении, записываются как
X = ^ин _Ь A’v = Лин 4* -Хр 4* А'м; (Н.2)
= ^нн + I v = ^ин 4* 1(14* (113)
Л1 = Л(и11 + Mv = .-Мин 4- <Ир 4- «о- (I 1 4)
82
В этих выражениях индексы «Р» и «оэ отмечают соответственно позиционные ели
демпфирующие неннерцноииые силы и моменты, под величиной Мии понимается
инерционный момент за вычетом составляющей, входящей в момент Мр, [см. формулы
(И 21)—(11.22)].
Реактивные силы возп<кают не только на корпусе судна, но и на выступающих
частях последнего и. в частности, на рулях. Во многих случаях силы ia выступаю-
Ких частях не выделяют как самостоятельные, а относят к силам, действующим на
Ькорпус. В частности, такой подход удобен при расчетах движения судна с большими
[углами дрейфа (например, при расчетах движения судна лагом, г. е. в поперечном ио
[отношению к ДП направлении, иод действиемСАУ). когда оценка сил. действующих
па руль, затруднительна. В этих случаях, если соответствующая схема расчета не
I предусматривает перекладки руля, систему' корпус — пепереложеиный руль целе-
сообразно рассматривать как единое целое относя площадь руля к площади кормо-
вого дейдвуда
Часто к силам, действующим па корпус, в расчетах управляемости судов относят
и силы, действующие иа винт Прн повороте судна иа винтах возникает боковая села,
обусловленная косым обтеканием винта из-за наличия угла дрейфа. Эта сила а также
момент ее относительно начала координат, могут быть учтены при оценке сгл и
моментов, действующих на судно. Величина этой силы определяется формулой
Уор = 12Ко„ - К (dKQjdJF)] Atg ₽р, (П 5}
где п — частота вращения винта; Kqb — коэффициент момента винта в швартовном
режиме; Jс — относительная поступь винта; Рр — угол скоса потока перед винтом.
Боковая сила, возникающая иа винтах, мала по сравнению с силами, дейст-
вующими на корпус и руль, поэтому в практических расчетах управляемости судов
следует учитывать только ее момент. При расчете гидродинамических характеристик
судна в соответствии со схемой, изложенной в § 7 этою раздела, в специальном
учете этого момента нет необходимости, поскольку данные о демпфирующем моменте
получены на основании испытаний самоходных моделей и, следовательно, учитывают
некоторое среднее значение момента от боковой силы иа винтах.
§ 6. ИНЕРЦИОННЫЕ СИЛЫ И МОМЕНТЫ
Для судна. ДН которого явтяется плоскостью симметрии в осях, связанных
с судном (см. рис. 1.20), инерционные силы и моменты согласно [31 с учетом принятых
обозначений равны
Х'ии = — (Щ + >-н) (А’х'^0 + ("I + 7-2») + >-авь>г: (11.6)
И„н = - («4 lK)(dvu dt)— (nt + ?-n) — X±a(d(i> dO; (И.7)
(Инн — — ((г. -|- 7-вв) (Ло dt) — ?.ae (duy dt) -4- (А|. — ?аа) vxvy \ItvxO3.
(П.8)
Если начало координат размещается вблизи центра тяжести илн мидель-шпзн-
гоута судна, то можно пренебречь асимметрией судна относительно поперечной вер-
тикальной плоскости, проходящей через начало координат, и считать Х-в = 0.
Присоединенные массы Л,,. Х2. и присоединенный момент инерции л„ связаны
с элементами судна соотношениями
?-и = ЛцрЕ; (II 9)
?.а, = *22рГ (11 10)
(11.11)
где масса воды
т = рЕ (11.12)
2 ll/р Я. И ВоПткунского. т. 3 33
С учетом выражений (II.9)—(II 12), а также равенств vx = ucos₽, vv =
= —в sin f инерционные силы Хп|| и >'1ГН и момент Мии могут быть представлены
как
А'нн = —рУ (1 + *ц) (dv/dt) cos ₽ + pV (I -f- *U)X
Xu (dfbdf) sin p — pV t'<o sin ₽; (II.13)
Уин = pV (I 4- *as) (dv/dt) sin P + pV (1 + *SS)X
Xu (dfi/dt) cos 0 — рУ (K-jf *n) u® cos P; (П. 14)
Л1И|1 = — ln (1 + *ee) (dw/dt) 4- pV (ftn — ki2)o2 sin P cos 0. (11.15)
Выражения (II.13)—(11.15) справедливы для любого движения судна в горизон-
тальной плоскости, в том числе и для движения со сколь угодно большими углами
дрейфа, вызванного САУ. В случае, когда движение судна происходит под действием
гребных винтов и рулевого устройства, угол дрейфа при маневрировании судна, как
правило, не превосходит 10—15°, что позволяет положить
sin р = р и cos р = 1 (II 16)
и упростить выражения (11.13)—(II. 15):
Х,!И = —рУ (1 + *„) (dv/dl) + pV (1 + ku) о0 (dfi.d!) - рУ (1 +
+ *2!) ыо0, (II 17)
У.щ = РУ (1 + *2!) Р (dvi'dt) + рУ (I + v (dfrdl) -
— рУ(1 4- *п)уй; (11.18)
Л1иц — J гг (I *en) (dw/dt) — рУ (*ц — *4г) огР. (11,19)
Коэффициенты присоединенных масс ku. k2t и Л„в могут быть определены как для
трехосных эллипсоидов по графикам рис. П.11, 11.12 раздела первого т. I в фу нации
отношений 2ТЫ В и L/B судна, либо расчетом с использованием гипотезы плоских
сечений |3, 5, 8], а также различными экспериментальными способами.
В частном случае прямолинейного равномерного движения судна с углом
дрейфа
Л',!Н=У«я = 0 (11.201
момент Л1НИ при малых углах дрейфа
Мин = -рУ (*ц — *42) и’₽ (11.21)
и при больших углах дрейфа
Мин = —РУ (*п — *44) °2 sin 0 cos 0. (11.22)
В частном случае установившейся циркуляции судна выражения для инерцион-
ных сил и моментов имеют вид:
при малых углах дрейфа
Анн = — РУ (I 4- *г2) (11.23)
УиИ = -рУ(14-*11)о®; (11.24)
Л*ни = -РУ (*и - *22) «’₽; (Н.25)
при больших углах дрейфа
Л1П1 = -рУ (1 4- *22) ОЫ sin 0, (11.26)
Уин = — рУ (I 4- *и о® cos 0; (11.27)
Мин = —РУ (*п — *22) si» Р cos р. (11.28)
Выражение (11.20) показывает, что позиционные силы инерционных составляю-
щих не содержат. Позиционный момент включает инерционную составляющую оп-
ределяемую формулами (11.21) и (11.22). Если применяемый метод расчета управляе-
мости судна основан на аппроксимации результатов серийных модельных испытаний.
34
инерционные составляющие позиционного момента содержатся в приведенных
ниже материалах, а потому в дополнительном учете этих составляющих нет необхо-
димости.
Демпфирующие моменты инерционных составляющих не содержат.
§ 7. НЕИНЕРЦИОННЫЕ СИЛЫ И МОМЕНТЫ СУДОВ
Позиционные силы и моменты. Силы и моменты, действующие на корпус судна
при прямолинейном движении с постоянным углом дрейфа, могут быть найдены
испытаниями модели судпа в аэродинамической трубе или опытовом бассейне, а также
.в процессе испытаний моделей иа ротативных установках или иа планарных меха-
низмах.
При проведении таких испытаний считается, что безразмерные коэффициенты
сил и моментов могут быть непосредственно перенесены на натурное судно. Вопрос
о погрешностях, возникающих при таком переносе, и о средствах уменьшения этих
погрешностей в настоящее время недостаточно изучен.
Испытания модели в трубе менее трудоемки, чем в бассейне, однако при испы-
тании в опытовом бассейне можно учесть влияние волнообразования, вызванного
движением модели, т. е. чтсла Fr.
I Дублированная относительно плоскости ватерлинии модель неподвижно укреп-
ляется в потоке аэродинамической трубы под различными углами дрейфа (т. е. yi-
лам1 между ДП модели и направлением набегающего потока при повороте модели
1в плоскости ватерлинии). Силы и моменты, действующие на модель, измеряются
с помощью динамометров. Силы, измеренные в трубе, обусловлены только вязкостью,
а момент включает и инерционную составляющую по выражению (11.22).
Материалы испытаний модели в аэродинамической трубе обычно представляются
в виде безразмерных коэффициентов сил и моментов в системе координат, связанных
с моделью.
Сх = Х'(р'2)Л^; (П.29)
1Су = Г/(р/2) е-Ас, , (11.30)
СМ = Al/(p/2) v*AlL. (11,31)
Эти коэффициенты в совокупности называются позиционными гидродинамиче-
скими характеристиками судна; Сх — коэффициентом тангенциальной силы; Су —
коэффициентом нормальной силы и См — коэффициентом момента.
В выражениях (11.29)—(11.31) обозначено: A, У, Л1 — замеренные при опыте
значения тангенциальной силы, нормальной силы и момента соответственно; v —
скорость потока в аэродинамической трубе; Al — площадь ДП дублированной мо-
Де и; L—длина модели.
Позиционные гидродинамические характеристики судна могут быть найдены
и исследованием модели судна в опытовом бассейне, для чего плавающая на поверх-
hocti воды модель крепится к динамометру, установленному на буксировочной те-
лежке. Крепление модели осуществляется таким образом, что она имеет свободу
всплытия и днфферентовкн, что позволяет, |спытывая модель при различных скоро-
стя < движения, установить влияние числа Fr па позиционные силы и моменты.
Ви время испытаний определяются те же составляющие силы и момент, что и при ис-
следоваинн дублированных моделей в аэродинамической трубе.
Позиционные гидродинамические характеристики зависят от соотношения г.тав-
иых размерений н ф ормы обводов судна. Поскольку проводить испытания всех про-
Всктируечых судов, включая варианты обводов, невозможно, единственный практи-
чески применимый путь оценки этих характеристик состоит в расчете последних
на базе аппроксимации результатов испытаний рационально спроектированной
V серии моделей.
Нижеследующие материалы, полученные Н. 11. Анисимовой [1], позволяю г рас-
считать позиционные гидродинамические характеристики судна прн любых по ве-
личине углах дрейфа.
В осях, связанных с судном (см. рис. J.20. начало координат совладает с центром
тяжести или приближенно с мндсль-шпангоутом), позиционные силы и моменты, дей-
ствующие иа корпус судна, выражаются следующим образом:
Хр = СХр (р/2) (1132)
>/₽=сГр(р/2)^Л/л; (11.33)
А1В = Сд/р (р/2) г/2 ЛlqL (I I 34)
Структурные формулы, определяющие коэффициенты Сх6. Cyft и в диапазоне
(углов дрейфа от 0 до 180°, имеют вид
С%р = — 0.075sin |[л — arcsln(Схо/О,О75)] [I — (Мх)||; (II 35)
Сур = 0,5Cf.g sin 20 cos 0 с, s 1п20 4- с3 sin4 20; (II ,36)
Сдгр = »ij s»i20 4- sin 0 4- m3 sir? 20 4- m4 sin'* 20, (11.37)
где 0 — угол дрейфа судна (0 = 0 соответствует переднему ходу).
В формуле (11.35) обозначено: 0 — хгол дрейфа в град сах; фх — угол, опреде-
ляемый в градусах по графику рис. II 1; СХо = ХЦ|/(р/2) — коэффициент
сопротивления воды движению судна прн нулевом угле дрейфа; Х^---------сопротив-
ление воды движению судна при скорости р0.
Входящая в формулы (11.32)—(11.34) приведенная площадь погруженной части
ДП судна подсчитывается по формуле
И t0 = LTuv, (11.38)
где о — приведенный коэффициент полноты погруженной части ДП судна |см.
формулу (11.39)]
Коэффициенты С^р, с2, с3, mt, та, тэ и определяемся произведением или сум-
мой следующих параметров формы корпуса:
С% = /(о. UB, TJL, ф); с2 = ) (о, L/B, TjL, ц);
с9 = f (L/B. Ты/Ь. ф); /71! = / (о, UB. Тм L. ф);
= / (о); т3 = / (о. UB, ф); т4 = j (о, Тм/(_. Ч).
В этих выражениях величина ф представляет коэффициент продольной полноты
корпуса
Ф =
тде — коэффициент общей полноты; 0М — коэффициент полноты мвдель-шиа;.-
гоута.
36
Приведенный коэффициент полноты го! ружейной части ДП О, необходимый для
определения коэффициентов с,- и гп, для судов с кормой обычной формы, подобной
изображенной иа рис. II.2. подсчитывав 1ся по формуле
3 Ас
20 —г LTM
0.051
+ L
(ti
(11.39)
Эта формула справедлива, если входящая в нее величина определяется по тео-
ретическому чертежу с 21 равноотстоящим шпангоутом (шпангоут 0 — перпендикуляр
а = I
Рис П.З. К опретеленню номера пограничного шпангоута с а — судно с дейд-
вудом; б — су тио без дейдвуда.
Рис. 11.4. К опре телепню площади Лс: а — судно с кронштейнами гребных валов;
в — судно с обтекателями гребных валов; в — судно с рулем за рудерпостом; г —
судно с построечным дифферентом.
к основной плоскости из точки пересечения действующей ватерлинии с форштевнем,
Шпангоут 20 — с ахтерштевпем).
В формуле (11.39) i — номер теоретического кормового шпангоута, пограничного
Между шпангоутами Ll-образной и V-образной формы Шпангоут с номером i характе-
ризует точку по длине судиа, в которой кормовой дейдвуд сливается с корпусом
В случае, если судно ие имеет дейдвуда и U-образная форма шпангоута сохраняется
Иа протяжении всей кормовой оконечности, под шпангоутом номера i следует по-
нимать первый, считая с кормы, шпангоут, контур которого касается основной
Плоскости. В зависимости от положения шпангоута i подлине судна его номер может
«рыть как целым, так и дробным. При выборе пограничного шпангоута и установле-
нии его номера следует руководствоваться примерами, показанными на рис. II 3
37
В формуле (11.39) Ас — площадь, дополняющая контур кормовой части погружен-
ной ДП судна до прямоугольника. Площадь Ас определяется по боковой проекции
теоретичМкш'б Тгсртежй С выступающими частями судна или по боковому виду чер
тежа общего расположения. При определении (планиметрировании) площади А
надлежит руководствоваться примерами рис. 11.4.
Важным является вопрос о необходимости засчитывать в площадь Ас площадь
проекции иа ДП судна рулей или поворо!иых насадок. Ответ на этот вопрос зависит
от того, в каком расчете будут использованы гидродинамические характеристики
судна. Если схема расчета содержит в качестве параметра угол перекладки руля
(например, расчет циркуляции судна), в площадь Ас следует включить к площадь
руля. В противном случае (например, при расчете управляемости под действием толь
ко СЛУ) площадь руля не должна засчитываться в площадь Ас. Такая зависимость
Рис. 11.5. Теоретические чертежи кормовых частей судов; а — с сигарообразной
кормой; б — с утолщенным дейдвудом.
порядка определения площади Ас (и, следовательно, найденных в конечном итоге
гидродинамических характеристик судна) от схемы расчета объясняется тем, что
в первом случае, когда силы, возникающие на рулевом устройстве, оцениваются от-
дельно, для расчета нужны гидродинамические характеристики собственно корпуса
судна. Во втором же случае, когда в рассчитываемом маневре ие предполагается
перекладка руля, представляют интерес гидродинамические характеристик» си-
стемы корпус—руль, которые могут быть ориентировочно получены в предположении,
что площадь кормового дейдвуда увеличена на площадь руля, т. е. последняя пло-
щадь в площадь Ас ие включена. Учитывая сказанное, на рис. 11.4 площадь руля (н
его кронштейна) выделена двойной штриховкой. На практике часто возникает не-
обходимость в выполнении расчетов управляемости одного и того же судна в различ-
ных условиях его эксплуатации, когда требуется оцепить как маневры, обусловлен-
ные рулем, так и маневры, совершаемые с помощью САУ. Во избежание двойного
определения гидродинамических характеристик (прн значении Ас. включающем и
не включающем площадь руля) в этих случаях допустимо использовать для расчета
эффективности САУ данные о гидродинамических характеристиках, полученных при
условии, что площадь руля засчитана в площадь Ас.
Площадь Ас должна подсчитываться для случая посадки судна па ровный киль.
Если судно имеет построечный дифферент, для определения площади Ас необходимо
на чертеже бокового вида повернуть действующую ватерлинию относительно точки
ее пересечения с мидель-шпангоутом с таким расчетом, чтобы она стала параллельна
основной, а затем вычислить площадь Ас, используя новое положение ватерлинии
(см. рис. II.4, е).
При определении площади Ас в соответствии с примерами рис. 11.4 следует
иметь в виду, что эти примеры относятся к судам с обычной формой кормы (см.
рис. 11.2), батоксы которых в корме ие имеют значительных искривлений. Однако у
_j,nOBc сигарообразной кормой (рис. II.5, а) и с утолщенным дейдвудом (рис. 115 6)
батоксы в корме имеют значительную S-образность; к таким судам второй член
лаомулы (И.39) неприменим. Р. Я Периши установил |Н|, что вне зависимости
величины площади А, коэффициенте подобных судов можно определять по при-
ближенным формулам:
для судна с сигарообразной кормой
о = 0.975+ 4^-Oh(П 40)
для судна с утолщенным дейдвудом
0 = О,962 + у^ОЫ-фа)- (П-41>
Здесь ф1 — тангенс угла статического дифферента судна, определяемый формулой
Рис. II.6. Угол ходового диффе- Pec. II.7. Коэффициент nij
рента ф2.
Жит график рис II 6, характеризующий угол ходового дифферента в зависимости ог
числа Фруда Fr = gL, в качестве параметра принята величина xg — xg L,
представляющая собой отношение абсцессы центра тяжести судна xg (если считать
От мндель-шпангоута) к длине судна. Величина xg должна определяться прн посадке
судна иа ровный киль, абсцисса xg считается положительной, если центр тяжести
судна лежит в пос от мндель-шпангоута и отрицательной в противном случае.
Коэффициент т2 находится по графику pec. II.7.
Коэффициенты C\l« с.2, с3, т,. т3 и rni определяются с помощью составленных
Н- II. Анисимовой 11 Г номограмм (рис. 11.8—11.13) по вычисленным значениям о,
L'fi, TK!L и <р. Номограммы делятся на две группы- с одной свободной шкалой и
С1ля определения коэффициентов ся. т3 и т4) и с двумя свободными шкалами и и и>
(для определения коэффициентов Сур, сг и mJ
L Способ пользования номограммами следующий: для определения искомой ве-
пучииы, например с3 ио номограмме рис. П.10, надлежит отметить на свободной
111 кале и точку, лежащую на одной прямой с заданными значениями ф и L/В, затем
Вайтн искомое значение с3, лежащее на прямой, соединяющей точку, отметенную па
йжале и с точкой, соответствующей заданному значению T3l/L. При номограммах
J- Двумя свободными шкалами операция по отметке точек па них должна быть про-
Кп&на дважды. Свободная шкала иомограммы может лежать не только в стороне,
39
-0,50
Рис. JI.8. Номограмма для определения коэффициента Сур.
.9f0; L/B =- 6;
-0,30
-Ц«)
-050
-0,60
-0,70
-0,60
-0.90
-7,00
-7,70
- 7,20
-7,30
- »,</0
-7,50
— 7,60
Рис. 11.9. Номограмма для определения коэффициента с,.
Ключ: О—ф—а; и—L/B—u., w—T^/L—c,. Пример: о «= U.960; ф — 0,70; L/B — 6; с, — 0.6В.
40
r cs
-0,30
L-0
Рис. II. Ю. Номограмма для определения коэффициента с,. •
Ключ: < —L/B—и. u—T^/L—ig Пример; <f •= 0,70; l/B •= 6;
TM/-L - 0.06; Ig-= 0.10.
Рнс. II.lt. Номограмма для определения коэффициента т,.
Ключ: о-Ч- «; и-LlH и-, ш—i ,-L—т,. Пример: О •= O.SSO; ф = 0.70;
Ljb = 6; Т L — 0.05. n»t 0,050.
но и между шкалами с нанесенными на них значениями тех нлн иных величин, как
на номограмме для определения коэффициента ш4. Под каждой номограммой указан
ее ключ, т е. порядок приложения линейки к соответствующим шкалам, н дается
пример на определение искомой величины.
После определения коэффициентов Суд, с2. с3, т(, т2, т3, т4 по формулам
(11.35)—(11.37) может быть выполнен расчет гидродинамических характеристик судна
в зависимое!и от углов дрейфа. Во всем диапазоне углов дрейфа от 0 до 180“ эти ха-
-0,054
’-0tQ52
-0025
-С.022
-0,020
-0,018
-О,Со
Рнс. 11.12. Номограмма для определения коэффициента т3.
Ключ: a—L/B—u; u—tf—m,. Пример: а = 0,950; L/B = 6: <р — и.70;
т, — 0.027.
рактеристнкн требуются только для расчетов эффективности САУ. В случае же расче-
тов движения судна с обычным рулевым устройством, когда угол дрейфа не превы-
шает, как правило, 10—15й, в использовании формул (11.35)—(11.37) нет необходи-
мости. При малости угла дрейфа ф в предположении, что sin ₽ = ф, sin 2ф = 2ф
и cos ф = I, а также с учетом малости членов 1бСзФ*. 8"'зФ3 и 16ш.ф4 формулы
(11.35)—(11.37) приобретают вид
СЛВ = СЛо; (Ц.43)
Сур = С?..рф + с2ф2; (11.41)
слф = (2"Ч + rn2) ₽ = С$(Вф. (11.45)
Определение величин С^р с2, с3, т1, /н2, т3 и т4 по графикам н номограммам
целесообразно, если расчет управляемости конкретного судна выполняется вручную.
42
И. П. Мел Козерова составила следующие аппроксимирующие выражения, пригодные
для использования в машинных расчетах:
‘ Ходовой дифферент ф3:
при Fr = v0/l/rfiL< 0,34
ф2 = 0;
a)
(11.46)
С)
(1147)
6
0,930 -
2
МчО -
I..
a,s№ -
0,960 -
5-
Ц9/С -
ASM
0.999 *-
1.CC0 -
nit,
-0.06С
- а озо
-с.сгс
'-0
--С.0Ю
—0,026
'—0,0:9
а
4,61
С. 62 - -
С.60~-~
°‘5B-~-Uf75
0.57-—
6,66--0.78
г. 66
слг
4 77
ОС.'С
9.060
- С. 010
- - 0,080
-0.79
- С.80
-0,81
-0,62
o',022-
CfiZO-
Рис. 11.13. Номограмма для определения коэффициента пц.
Ключ: п—ч—и-, u — T^'L—ntf Пример: о = 0.350; ф = 0.70; 7^/L “
-= 0.05; m, = 0.020.
где для xg —0,015
= 525х^ + 32.35xg + 1.032;
= - 345х£ + 22,95xg - 0,661;
q = 50.7х^ 4- 3.725xg + 0,1017;
для xg > —0,015
= 8I0x* + 24,6*g 4- 0.853;
bt = — 620ij - 19,9xg - 0.565;
q = 12li= 4- 3,84ig 4-0,0925;
в) при 0,42 < Fr 0,46
ф>2= a, Fr 4- 6i,
(II 48)
(11.49)
(11.50)
(II 51)
(11.52)
(H. 53)
(II 54)
43
где для xg < —0.02
д1 = —5х| —O,55ig + O.15[;
\ = 2,5х| — 0,055xg — 0,058;
для — 0.02 < Xg 0
вх = —0,375xg4- 0.153;
5, = 2х= + О.ОЗх* — 0.0583;
для ig > О
aj = —0,375xg + О 153;
bt = 1,5xg + 0.005J? — 0.0583;
г) при 0,46 <« Fr 0,54
ф2 = a, Fr+ bt,
где для xg —0,04
а, = O.75xg + 0.12;
bt = —O.55xg — 0,043;
для — 0,04 < JPg < —0,01
а, = 0.5xg + 0,112;
bt = —0.42xg —0,0391;
для xg > —0,01
a, = 0,25xg + 0,11;
bt = —0,2967xg — 0.0379;
Д) при 0.54 < Fr< 0.60
44 = а, Fr»+ bt Fr -f- С|,
где
(11.55)
(11.56)
(11.57)
(11.58)
(11.59)
(II 60)
(11.61)
(11.62)
(11.63)
(11.64)
(11.65)
(11.66)
(11.67)
(Н68)
в, = -1.875^-0.1917; (И 69)
^ = 2.4^ 4- 0.277. (11.70)
Q = —О,9083х₽ — 0.0730. (11 71)
2. Коэффициент силы С^,р:
Cy₽=cj^+ftj. (11.72)
где
а3 = 0,2392<r — 0.4009<p+ 0.1815; (Ц.7,3)
ba = 0,4033<рг - 0.6965Ф 4- 0,3263; (ц.74)
® = CaU4-*2. (Ц 75j
где
а, = 16,67 (Тм/£)« - П.92 (Тм/£) 4- 0,06; (Ц.76)
^»= —261,1 (TM/t)14- 213,6 (TM'Z.) — 2,468; (11.77)
U = «j (L/fi) 4-ot, (11.78)
где
a) при 4 L/B 6:
44
если 0.93 < с С 0,95,
а, = 375о» — 725, «а + 349.5;
ft, = 3000а2 — 5702с + 2723;
если 0,95 < о С 0.97,
о,г= 150л2— 293,5а + 141,97;
ft, = 800а2 — 1560а + 773.5;
если о 5> 0.97,
а, = —1,137а2 + 0.24а — 0,753;
ft, = —4,667а + 17,57;
б) при 6< Li В 6:
если 0.93 С а С 0,95.
а, = 1000а2 — 1898а + 900;
6, = 1800а2 — 3494л + [705;
есля 0,95 а 0,97,
а, = 175а2 — 339,8а + 163,9;
ft, = —30а + 38,42;
если а > 0.97,
а, = —0.5а — 0 485;
А, = 516,7а» — 1032а + 523,7;
в) при 8<L L‘B С 10:
если 0,93 а 0 95,
а, = 350а2 — 664,5а +314,96;
ft, = ЗбООо» — 6928а + 3339;
если 0,95 < а С 0,97.
а, = — 1.5а+ 0.985;
ft, = 2000а2 — 3894а + 1901;
если 0,97 < о < I 0.
а, = 1,5а + 0,985;
ft, = 316,67а2 — 629 5о + 318,0.
3. Коэффициент силы et;
<г = а"} и ft»,
Где при TWL 0,04
а3 = (Т’м /.)* + 0,85 (Гм7.) + 0.0311;
Ь3 = -55 (7м+)! + 7,85 (TM/t) + 0,124;
при 0.04< TjL С 0.06
"э = (Т’м L? + 0.615 (TM<L) + 0,0405;
ft3 = 40 (7м+)« - 0,1 (7М/Д) + 0,29;
(11.79)
(11.80)
(II 81)
(И 82)
(II 83)
(II 84)
(П 85)
(В 86)
(11.87)
(II 88)
(11 89)
<11. 90)
(II 91)
(В 92)
(II 93)
(11.94)
(В 95)
(II 96)
(И 97)
(II 98)
(В 99)
(II 100)
(11.101)
45
при 0,06 <5 TM'L с 0,08
а3 = -5 (Тм/£)’ + 1,05 (TM/L) + 0,036;
*э = -Ю (Гм/£)г + 2,5 (7 м. /.) + 0.314;
U = а,о + bt,
где
fli = 54,46ф — 59,43;
Ь, = — 31,44<р+ 46,8;
SB = а2 (UB) 4- b.t.
где при 11 2
аг = —0.0105U2 — 0,058511 + 0,985;
b2 = 0,061V — 0,6511 + 2,91;
при 2< U 5
а2 — 0,00111- — 0,07911 + 0,98;
ba = —0,02671V — 0,4111 + 2,78;
при II > 5
а, = —0,0051V — 0,01511 + 0.81,
Ь2 = 0,031V — 0,8911 4- 3,76.
4. Коэффициент силы с3:
с3 = аД1 4- Ь2,
где
а2 = 2,569 (Тм/£)г — 0,5805 (TM'L) 4- 0,00183;
Ьг = —27,7 (7M'Z.)=4- 6.428 (Гм/(_) — 0,01749;
И = а, (Z.. В) 4- bi,
где при 0,55 С Ф С 0,72
Qi = 24,65ц- — 29,67<р 4- 7,547.
при 0,72 < ф < 0,85
О| = 5.917<р — 5.3:
при 0,55 С Ч ^0.68
bi = —60,44ф24- 74,61ф — 9.255;
при 0,68 <2 Ч- 0,85
bi = — I0,08q 4- 20,34.
5. Коэффициент момента т^
mi = ajG 4- bi,
где
°i = -0,1317 (Тм/£)= 4- 0,05358 (Гм'£) 4- 0.000181;
*1 = —2,361 (TM/Z.)‘4- 0.8653 (TH!L) — 0,000161;
С = GO0 4- 0-иг
где при 0,55 q 0,70
Но = —235а2 4- 474,2а — 235,8;
= —74,67<рг 4- I Ю,9ф - 39,64;
46
(II 102)
(11.103)
(II. 104)
(11.105)
(П.106)
(II 107)
(11.108)
(11.109)
(II. НО)
(11.111)
(И. 112)
(II ИЗ)
(III14)
(11.115)
(11.116)
(II.117)
(II.118)
(II.119)
(11.120)
(II.121)
(II. 122)
(11.123)
(11.124)
(II.125)
(11.126)
(11.127)
при 0,70 < Ф < 0,85 (11.128)
По = —210о2 4- 422.9а - 207,2;
G = 12ц 2 — ₽,йф — 0,64; (11.129)
при U> 4 U = IV 4- G,P; (11.130)
6„ = -1,311 Г 7,8; (11.131)
= 0,02333 (Z./B)2 — 0,045 (L'B) 4- 1,187; (II 132)
При U<4 Gu = -1,3114- 2,6; (11.133)
(Sro = 0,01792 (UB? 4- 0,1275 (L/B) 4- 6,113. (11.134)
6. Коэффициент момента т2:
In (1.023a) mz~ II.60 — 9,29* (11.135)
7. Коэффициент момента т3;
m3 = a2U 4* bt. (11 136)
где a2 = (e8’2093S<r0,7728-10‘a — l,873) 10‘a; (II 137)
b2 = (—e7*47F93’0.4404-10"S4- 5,709) 10 ’; (11.138)
й,С I- bi (11.139)
u о- 1.029’
где a, = 31.26 — 9,0I46e°-°€M47 L,B\ (11.140)
bi = 8,6245e010714'9 L B — 31,26. (11.141)
Примечание. Если о > 1. то и расчете ко-ффицнепта т, следует принимать 0 = 1.
8 . Коэффициент момента mti
mt - em4 4- 6ц.
где при 7М L <; 0 028
G„4 = —71,88 (Гм6)2 4- 4.238 (Г„/Д) - 0,066;
прн 0,028 < Tv/L < 0.040
= -9,375 (7М L}2 4- 0.8875 (Тм L) - 0,0212;
при Ты. L > 0,040
Gm4 = —3,833 (Тм L)2 4- 0 415 (7Ы .) — 0,01117;
Gu = 0,0082711 — 0,017;
U = Uv 4- Gs.
где при 0,55 Ч sj 0 64
U, = —140,62ц2 4- 180,62<р — 53,35;
при 0,64 < <1 < 0,74
U, = —56,67ц2 4- 75,1 Оф — 20,2;
при 0,74 < ф С 0.85
Щ = —216,7ц2 4- 312.8ц — 108,51;
(II.142)
(11.143)
(II 144)
(II 145)
(11.146)
(II. 147)
(II 148)
(11.149)
(11.150)
47
при 0,93 <р < 0 96
6Я = 1900а1 — 3696а + 1796;
при 0,96 <; а 1,0
= 3917о- — 810,4а + 416,4
9 Коэффициент момента С^р для малых углов дрейфа
смр = 2™< + м.2.
(II.I5I)
(II. 152)
(11.153)
Демпфирующие силы и моменты. Определение демпфирующих сил и моментов,
обусловленных наличием вращения судна вокруг вертикальной осн, может быть вы-
полнено путем исследования модели судна на ротативной установке либо на пленар-
ном механизме
Ротативные установки представляют собой устройства, позволяющие осуществ-
лять круговое движение модели относительно вертикальной осн и измерять силы я
Рис. II.14. Схема ротативной установки, подвешенной в центре.
1 — ось вращения нижней фермы: 2 — электромотор: 3 — редуктор; 4 — леерное огражде-
ние; Ь — верхняя ферма: 6 — инжняя ферма: 7 —• динамометр: X — модель
моменты, действующие на модель |14]. Обычно ротативные установки размещаются
в прямоугольных либо круглых (циркуляционных) бассейнах Размеры ротативных
установок, используемых для измерения гидродинамических характеристик моде-
лей судов, колеблются я пределах от 15 до 75 м, если считать по наибольшему диа-
метру траектории испытываемой модели Максимальная линейная скорость мотели
на различных ротативных установках составляет от 3 до —25 м/с
Конструктивно ротативные установки могут быть либо подвешенными в центре
(рис. II 14), либо опертыми на круговой рельс, уложенный по борту бассейна
(рис. II 15). На вращающейся относительно вертикальной оси ферме размещается
тележка, несущая динамометр и прикрепленную к нему модель. Крепление мо-
дели осуществляется с помощью штыря, который располагается по длине модели
в районе ее мидель-шпангоута. Крепление обеспечивает свободу всплытия н удиф-
фереиювки модели.
Модель вместе со штырем может быть повернута в горизонтальной плоскости к
закреплена в любом заранее выбранном положении, г. е. модели можно прнда1ь лю-
бой угол дрейфа. Перемещением тележки вместе с динамометром и моделью вдоль
вращающейся фермы достигается изменение кривизны |раекгорин модели регулиро-
вкой частоты вращения фермы — изменение скорости движения модели
Прн опыте в процессе установившегося движения модели измеряются две состав-
ляющие силы, действующей на модель, и гидродинамический момент относительно
точки крепления штыря к модели. Демпфирующие силы и моменты находятся как
разность сил и моментов, измеренных при вращении модели на ротативной установке,
и позиционных сил и моментов. Последние могут быть определены одним из способов,
описанных выше, либо найдены по результатам дополнительных опытов, проведен-
ных на ротативной установке. Основания для таких опытов сводятся к следую-
щему (111-
Результаты испытаний на ротативной ус!ановке представляются в виде графика
(рнс. II. 16, а), по осн ординат которого откладывается соответствующий безразмер-
ный коэффициент С(, а но осн абсцисс — относительная кривизна траектории wc.
48
Параметром служит угол дрейфа модели р. Для любой ротативной установки суще-
ствует некоторая зона, примыкающая к нулевой кривизне, в которой малая относи-
тельная кривизна прн определенной длине модели L недостижима Граиицы этой зоны
на графике рис. 11.16, а отмечены вертикальными пунктирами.
Рис. 11.15. Схема ротативной усгаионки. опертой на круговой рельс.
Рис. 11.16. К определению позиционных характеристик на ротативных уставов
Ках а — представление результатов испытаний; б — действительный и фиктивный
центры циркуляции модели.
На рис. II. IG, б представлена схема движения модели на ротативной установке
(вид сверху). Модель в положениях /, II и /// (крайнее периферийное положение)
вращается вокруг центра О Если допустить, что симметрично положению III су-
ществует фиктивный центр Ot, вокруг которого также может вращаться модель
49
положениях III 1Г и /', то вращению модели вокруг центра О но траектории поло-
жительной кривизны йс > 0 с углом дрейфа р > 0 будет соответствовать вращение
модели вокруг центра О, по траектории отрицательной кривизны с отрицательным
углом дрейфа ₽<• 0. Поэтому если ось абсцисс на рис, И.16, а продолжить за начало
координат в сторону отрицательных ыс, то иа график можно нанести точки, соответ-
ствующие положениям модели Ш. // и / с отрицательным утлом дрейфа | —f | = (3,
которые должны лечь на одну кривую с точками, характеризующими рассматривае-
мый коэффициент при > 0 и f > 0. Естественно, что для построения этих точек
необходимо провести дополнительные испытания модели в положениях /, II и 111
также и с отрицательными углами дрейфа. Кривые, полученные при йс > О и
<• 0 (т. е. с положительным и отрицательным утлом дрейфа Р), легко соединить плав-
ной кривой, точка пересечения которой с осью ординат определит позиционное
значение данного коэффициента (пунктирные кривые на рис. 11.16, а). Таким обра-
зом. ротативная установка позволяет получать позиционные силы и моменты путем
интерполяции, что обеспечивает достаточную точность.
Рис. 11.17. Схематический чертеж модели с воздушным винтом.
J — мигающие лампочки; 2 — электромотор, 3 — таходинамо; 4 — колонка: 5, 12 — гаЛки-
барашки; 6 — воздушный аинт; 7 — лимб; й — каретка; 9 — указатель частоты вращения
воздушного винта: 10 — аккумуляторы; 11 — рельсы
Принцип действия любой ротативной установки закчючается в том, что модели
придается заданное движение, определяемое скоростью, радиусом кривизны и углом
дрейфа, и измеряются гидродинамические усилия, действующие на модель. Однако
возможен и другой принцип измерения сил и .моментов, при котором задается сила,
вызывающая круговое движение модели, а измеряются элементы этого движения.
Практическая реализация указанного принципа, предложенная и осуществлен-
ная Р. Я. Першинсм |11 ], состоит в том, что на палубе плавающей модели уклады-
вают рельсы, по которым можно перемешать колонку, снабженную воздушным вин-
том, создающим силу, приложенную к модели (рис. II 17), Из-за различия плопю-
стей воты и воздуха скорость потока, вызванного винтом, оказывается во много раз
большей скорости движения самого впита, поэтому последний практически работает
в швартовном режиме ирн любом движении модели. В связи с этим, цротарировав
упор винта в зависимости ог частоты его вращения и измерив последнюю при опыте,
легко найти как силу, вынуждающую движение модели (она зависит только от ча-
стоты вращения винта), так н ее направление, совпадающее с направлением оси воз-
душного винта. Перемещая колонку с воздушным винтом вдоль модели и поворачи-
вая ее на разные углы относительно ДП модели, можно получить любое движение
последней и измерив его элементы, найти гидродинамические силы и моменты,
действующие на модель при ее движении.
Как указывалось выше, наряду с ротативными установками для определения
гидродинамических сил и моментов применяют планарные механизмы.
Планарные механизмы (в иностранной литературе — сокращенно РЛ1А1) пред-
ставляют собой электромеханические устройства, способные сообщать испытывае-
мой модели судна гармонические колебательные движения заданных частоты, ампли-
60
ды и фазы по отдельной координате или по некоторой специально выбранной сово-
купности координат Планарные механизмы устанавливают иа буксировочных те-
лежках опытовых бассейнов, что обеспечивает буксировку испытываемой модели
с заданными изменяющимися во времени кинематическими параметрами и одновре-
менное измерение действующих иа модель со стороны жидкости сил и моментов.
Компоненты этих сил представляются следующими структурными зависимостями
от параметров движения:
FXi (Il 154)
»=о
Где j = 0. 1,2, у, у + I — число слагаемых, удерживаемых в структурных выра-
жениях для данной компоненты силы. >] — характеристика режима работы гребных
пиитов lrof;l. Kjl. I₽,7I. Itf/jl. loyl, |/(/|, lsf/1 — массивы вещественных
чисел; Си — неизвестные постоянные для данной модели коэффициенты.
Периодический характер задаваемых модети движений и измеряемых сил поз-
воляет применить к выражению (11.154) преобразование Фурье.
Путем аппроксимации полученных эксперимента.и,но зависимостей коэффициен-
тов ряда Фурье от варьируемых при испытаниях характеристик колебательного дви-
жения модели аналитическими выражениями определяют искомые постоянные коэф-
фициенты С,;.
Если, например, для компоненты У выражение (11.154) представить в виде
Y = Cy^Vj- 4- Cyiy -f- СуД’у -4- Су^й + Су^’д-Су 4- Су^с^щ 4- Cy^u^Vy л 4
4- С yvx и г] 4- С, v -х т) 6Я (II. 155)
н принять следующие законы движения модели:
ЦА. = V- vy = бу = I) = = 0;
Ct) = <!>„! sin (J,/; <i> = OjWfn COS Oy/,
то получим
1" (t) = Cy3<Jlwm cos a{t 4- Cy t wm sin о,Л (11.156)
IIpiiMeiiпи преобразование Фурье, будем иметь
<4|У = СуэП|ЮП|, BlY — Су^уыт1
I откуда
Суя == И|у OjCDni; Су6 = fl, у cu)nt, (11.157)
где Лп- и Bty — коэффициенты разложения функции Г (г) в ряд Фурье
При других законах движения для определения коэффициентов Су/ необхо-
димо, как указываюсь выше, варьировать кинематические параметры модели н
применять те или иные методы аппроксимации зависимостей коэффициентов Фурье
от кинематических параметров.
Исследования моделей на ротативных установках н с помощью воздушного
винта позволили определить структуру демпфирующих сил и моменюв. Демнфнруто-
^Жая тангенциальная сила при любых углах дрейфа невелика, н в практических рас-
четах сю можно преиебрегцть. Таким образом, можно считать, что
Аы = 0 (II. 158)
Демпфирующая нормальная сила, «акже небольшая по величине, проявляемся,
главным образом, на больших углах дрейфа в диапазоне свыше бОЛ Поэтому при ма-
лых углах дрейфа допустимо полагать, что
Fo = 0. (11.159)
51
Демпфирующий момент корпуса при малых углах дрейфа, соответствующих
маневрированию судна с обычным рулевым устройством, может быть найден по
формуле
А,« = - Giw (р. 2) (11 160)
где C“to—коэффициент демпфирующего момента.
Коэффициент может быть вычислен с помощью формулы Р. Я. Першина и
И. П. Мелкозеровой
С“(1) = (0-739 + 8.7 Гм//.)(1,6Ца2-2.А73о + 1,33) (II 161)
Коэффициент демпфирующего момента получен на базе испытаний самоходных
двухвинтовых моделей судов, поэтому он включает демпфирующий момент от боковой
силы на винтах
Суммарный момент неиперцнонной природы, действующий при малых углах
дрейфа на корпус судна, движущегося но криволинейной траектории, имеет вид
Afv = Л1В + - С»ф (р 2) ,?Al„ IП - С“„ (р 2) vALoL>v. (11 162)
Для установившейся цирку линии, когда w = г /?4, формула (11.160) приобрс-
*ает вид
Л,ы - ~ см« Ф'2) ^ALaL" (I /?с) (11.И З)
Суммарный момент, дейсшуюшмй на корпус судна при установившейся цирку-
ляции, равен
= c?fP 2) <Р 2) ^A,„L2 (1 /?,). (II 164)
Сведения о демпфирующих силах и моментах при больших углах дрейфа со-
держатся в § 26.
0 8. НЕИНЕРЦИОННЫЕ СИЛЫ И МОМЕНТЫ
ТОЛКАЕМЫХ СОСТАВОВ
Номограммы рис. II.8—11.13 и выражения (11.46)—(11.153). (11.161) для оп-
ределения неииерциоииых сил и моментов одиночного судна неприменимы к толкае-
мым речным составам, все более широко используемым иа внутренних водных
путях В связи с этим иа ротативной установке Новосибирского института инжене-
ров водного транспорта были проведены систематические испытания моделей составов
стандартной компоновки — одпоннточных с формулами Т + 1. Т + I + 1 и Т +
4- 1 + 1+1 и двухниточных с формулами Т+2, 7* + 2+2иТ-|-2 + 2 + 2. Буква
Т означает столкач», цифрами отмечается количество барж в каждом ряду, если
считать от толкача.
Двухниточпые составы имели толкач, ДП которого совпадала с продольной осью
состава, т. е толкач счаливался с обеими нитками барж. Испытания проводились
с баржами различных обводов (саио- и ложкообразными) с варьированием относитель-
ных размерений толкача и барж. Испытания показали, что коэффициенты неинер-
циоииых сит н моментов сильно зависят от способа компоновки и числа барж, т:о
не от типа обводов барж и от зазоров между баржами состава (в реальных пределах).
Все испытания проводились как иа глубокой воде, так и в условиях мелководья.
Гидродинамические силы н моменты, действующие иа состав, могут быть представ-
лены выражениями
X = Ся ((> 2) Т^-
У = Су ((>.2) TMLv\
Al = Сун (р/2) T^Lfv3.
(И 165)
(И. 166)
(11.167)
52
Согласно данным В Г. Павленко 18] в диапазоне 0 <• Р <• 0,5 и0<(1>< 0.9
коэффициенты Су и См имеют следующую структуру:
Су = dP + c2f | Р | + сьй + с4| Р | й; (11. 168)
См = с5Р — CtP!w. (II. 169)
Коэффициенты с4 в формулах (11.168) и (11.169) зависят как от геометрических
элементов состава, так и от мелководья и могут быть представлены в виде
cl~C{oac., (11.170)
где с1а> — коэффициент с. прн 7\JH -+ 0. т. е. для глубокой воды (Н — глубина ак-
ватории); С( — коэффициент, учишваюшнй влияние мелководья.
Коэффициенты с(оо определяются формулами
csoo = —с»;
с^оо = f4v + 0,34m;
С500 ~~ I 0,17/1,
Cjoo = Cju + 0.46л.
(11.178)
(11.171)
(11.172)
(11.173)
(II. 174)
(11.175)
(11.176)
(11.177)
I Величины m 11 h. учитывающие соотношения размерений толкача и барж, под-
считываются но формулам
ш = 1Т (7Т — 1.17);
_ /т (I 1.17)
7Ц >г(7т- 1)1
(II I79>
в КОТОрыС
/t = L7/T.c; (II 180)
/г = Л,. т Тм. б. (11.181)
I Здесь Z.T — длина толкача; £с — обшая длина состава; Ты, т — осадка толкача;
Тм г, — осадка барж состава
[ Формулы (I! 17])- (II 177) справедливы, если все баржи имеют одинаковую
осадку, а величины th и й находятся в пределах — 0,2 < m -г 0,4 и —0,08 < п <
< 0.0»
Коэффициенты с,, учитывающие влияние мелководья, равны единице, если
ТМ'И <0.7. Под величиной Тм понимается выражение
Lpn 7м/Я>0,7 коэффициенты ё; определяются выражениями
di = 1 + 20 (Тм H)«;
< = 1 + 1,3 (Тм Н)»;
«, = 1 — 2.8 (Т„ Н}.
г4 = 1+ 4.7 (Гм'//Н;
с, = 1 -|- см (7М W;
c, = 1 + Cji (Ты И) + c5J (TM [if.
(11.182)
(II.183)
(11.184)
(11.185)
(11.186)
(II. 187)
(II. 188)
(II. 189)
В табл. II I приведены значения коэффициентов в формулах (11.171)—(11.177),
01.187) и (11.189).
53
Таблица II.1. Коэффициенты для расчета гидродинамических характеристик
тоткаемых составов
Коэффи- циенты Одноииточпыс составы Двухннточиыс составы
Т + 1 Т + 1 1 Г + । + + i + I 7 4-2 Г + 2 4- 2 7+2 + + 2+2
Чо 0,21 и, 19 0.16 0,21 0,16 0,15
С2О 0,30 0.27 0.26 0.35 0,30 0.27
Чс 0,10 0.07 0,05 0,05 0,04 0,03
Чс 0,30 0.25 0,22 0,31 0,26 0,23
сво 0,033 0.024 0,020 0.016 0,009 0,007
f60 0.012 0.016 0,019 0,021 0.019 0,017
f70 0,11 0,1.3 0,14 0.13 0,11 0,09
СЬ1 6,1 5,8 5,5 6.4 5.5 4 6
0,5 0,9 1.4 3.3 2.9 2.6
Чг 21 15 9 4 10 16
Глала HI
СИЛЫ И МОМЕНТЫ ОБУСЛОВЛЕННЫЕ
ВОЗДЕЙСТВИЕМ НА СУДНО ВЕТРА И МОРСКИХ ВОЛН
§ 9 АЭРОДИНАМИЧЕСКИЕ СИДЫ И МОМЕНТЫ
Под аэродинамическими силами и моментами понимаются усилия, обусловлен-
ные перемещением судна относительно воздуха и приложенные к надводной части
судна. Эти усилия достигают значительных величин при наличии ветра.
Ветер представляет собой турбулентный воздушный поток, скорость еа которого
имеет пульсационный характер н является случайной функцией времени. Для коли-
чественного описания скорости ветра применяется аппарат теории случайных функ-
ций.
В общем случае скорость ветра складывается из двух составляющих — средней
скорости [математического ожидания б0 (t)|. постоянной в течение определенного
промежутка временит, колеблющегося от 10 мни доЗ—5 ч, и переменной составляю-
щей, являющейся случайной стационарной центрированной функцией времени,
удовлетворяющей требованию эргодичности. Переменная составляющая, в свою оче-
редь, состоит из турбулентной уот и волновой i‘ur, составляющих Турбулентные пуль-
сации скорости ветра наблюдаются во всех направлениях, однако для оценки управ-
ляемости и условий удержания судна на месте важны пульсации в направлений сред-
ней скорости ветра. Волновая составляющая скорости ветра определяется морски!
волнением. При развитом ветроволиовом процессе, когда характеристики его яв-
ляются стационарными функциями, средняя скорость ветра, волновая и турбулент-
ная составаяющне скорое i и ветра совпадают с генеральным направлением бега ваш.
Для определения спектральных плотностей турбулентной $т и волновой 50
составляющих скорости ветра можно рекомендовать следующие формулы:
D, а.
<н,|>
где са — круговав частота; DVq — дисперсия, вычисляемая ио формуле
54
—. —- 2/3 (по средним статистическим данным) — коэффициент затухания; гл =
0,65-10"5б’10 — аэродинамическая шероховатость подстилающей поверхности;
и «а то — средняя скорость ветра иа высок* г = 10 м
Спектральная плотность волновой составляющей скорости ветра вычисляется
нотой же формуле, что и спектральная плен кость ординат морского волнения, если
в ней изменить только величину дисперсии:
/?Св = 1,49ft2,
гдеРг — дисперсия ординат волнения; р, = 0,82d|; aj — средняя частота волнения;
Jij — расчетная длина морской волны.
I Наряду с приведенными формулами для вычисления суммарной спектральной
плотности переменной составляющей скорости ветра можно также пользоваться фор-
мулой Давенпорта
(HI 3)
9 5- IO ’Zrrn
Sa (CT(i) —
(III 4)
("1 5)
где k = 0,005 — коэффициент сопротивления подстилающей поверхности.
Средняя скорость ветра прн развитом встроим новом процессе изменяется в за-
висимости от высоты г над уровнем моря по закону
б = С |П <гг">
*' °0 К h<)'
где йДо — средняя скорость ветра на заданной высоте, например на высотега ~ 10 м.
т. е. vao б„ (10) = йи 10.
I Средняя скорость ветра па высоте 6 м над уровнем моря в зависимости от балль-
ности определяется шкалой Бофорта (табл. 111.1).
Таблица показывает, что скорость шквалистого ветра может примерно вдвое
превышать среднюю скорость, поэтому мгновенная сила от ветра может примерно
в четыре раза превосходить среднюю ситу. В связи с этим сила от ветра может счи-
таться постоянно»! лишь с учетом кратковременности действия шквала н, как след-
ствие. относи юльно слабого его влияния на движение судна.
I Сила от ветра, действующая па судно, зависит от скорости ветра, скорости
судна, площади и конфигурации надстроек, расположения и 1абарнтов палубного
Груза а также от угла между ветровым потоком и диаметральной пвоскостью судна
Таблица III.1, Шкала Бофорта
IS ал ли Характер ш-тро Скорость ветра на высоте 6 м над поверхностью моря, м/с
средняя при шквале
0 Штиль 0—0,5 1.0
1 Тихий ветер 0,6—1,7 3,2
Ь 2 Легкий ветер I 8—3,3 6.2
3 Слабый ветер 3 4—5,2 9.6
4 Умеренный ветер 5.3—7,4 13.6
5 Свежий ветер 7.5—9.8 17.8
6 Сильный ветер 9.9-12.4 22.2
7 Крепкий ветер 12,5—15.2 26.8
( 8 Очень крепкий ветер 15.3—18.2 31.6
9 Шторм 18.3-21.5 36,7
10 Сильный шторм 21.6—25.1 42,0
и Жестокий шторм 25,2—29 0 47 5
12 Ураган >29,0 53,0
55
При произвольном маневрировании судна в поле постоянного ветра неизменным ос
лается только расположение надстроек н палубного груза, а величина и направле-
ние скорости судна относительно воздуха непрерывно мепяютсн.
Для удобства расчетов скорость ветра часто представляется ие случайной, а де-
Герминнрованной функцией времени Существует несколько видов этой функции.
Среди которых можно рекомендовать вид, показанный на рис I1I.I. С возрастанием
скорости ветра в порыве Ban®* направление остается неизменным, а при уменьшении
скорости до vgc направление ветра уо изменяется на 45° по отношению к генерал»,
ному направлению. Значение скорости ветра в порыве определяется последним столб-
цом шкалы Бофорта, а для промежутка времени, при котором скорость падает. vat =
== 0,65бО0
Рнс. III.I. Зависимости скорости и направления ветра от
времени.
— Г« — G = 10 с; !, — /,«=/, — ». =
= 60 с; «» — «.- 300 с.
Силы ветрового воздействия в связанной с судном системе координат вычис-
ляются по формулам
*л — ’ В' (III 6)
= 1 гСayVav~r^v L’ 04 7)
‘^а = (1П-8)
где аэродинамические коэффициенты САх- Cay и Сам зависят от утла кажущегося
ветра ук.
При решении большинства задач для математического описания сил от ветра
мгновенное положение и скорость сьдна связывают с полем постоянного ветра, для
чего используют понятия истинного и кажущегося ветра. Под истинным понимается
ветер в координатах, связанных с Землей Кажущийся ветер — это ветер в коорди-
натах, связанных с судном; и только от него завися! аэродинамические силы и мо-
менты.
Если судно неподвижно, скорости истинного и кажущегося ветра совпадают.
Если судно движется, скорость истинного ветра геометрически складывается со ско-
ростью потока, обусловленного движением судна, так что скорость кажущегося ветра
отличается от скорости истинного ветра тем больше, чем больше скорость судна.
Истинный н кажущийся ветры характеризуются скоростями va и vr и углами уп
и уц соответственно. Угол истинного ветра у0 отсчитывавши от той же неподвижной
оси, от которой отсчитывается курс судна у (рис. III.2). Угол кажущегося ветре уд
в каждый момент времени отсчитывается от ДП судна.
66
Скорость va и угол т0 истинного ветра, как правило, при оценке движения судиа
являются величинами заданными. Связь между ними н необходимыми для оценки
мсилнй от ветра величинами vr и "уд, определяемая мгновенным положением судна
на поверхности воды, представляется как
= о* + о2 4-2ovcos(Ya —х + 0); (Ш9)
О -Г Ос cos (ytJ X 4" 0) а П 11 1 п\
у„ = arccos— --- — р. (41 14)
н I7 v'i +1'" + ‘^ov cos (va — X + ₽)
где ® — скорость движения судна.
При прямолинейном движении судна в поле ветра, характеризуемого ско-
ростью оа и углом ул, угол дрейфа судиа р становится равным курсу X. и формулы
(11).9) и (111.10) приобретают вид
= va + ь'2 4- 2tov cos уо; (Ш. 11)
______у + cos уо___________в
уд = arccos^ + ^ + 2VooCosy0 Р (III 12>
Аэродинамические силы и мо-
менты выражаются формулами
1.6)-(П1.8).
Аэродинамические коэффициен-
ты тангенциальной силы Сдх,
нормальной силы С'Ау и момента
СА зависят от угла уд и от осо-
бенностей формы надводной части
судна. Выражения, описывающие
указанные зависимости и основан
вые на аппроксимации результатов
аэродинамических испытаний моде-
лей надводных частей судов, при-
ведены ниже.
Поскольку влияние тангенци-
альной аэродинамической силы иа
движение судна мало, точность оцен-
ки коэффициента Сах особой
Рис. III.2. Истинный и кажущийся ветры
роли не играет; величину этого
коэффициента можно найти, используя данные рнс. IX.5. Из других имеющихся
материалов можно указать на формулу А. Д. Гофмана |5]
Сах='.ЗСаХ(0И1’(-г -v«).
(III.13)
относящуюся к двухостровным речным судам, и на выражение, полученное
А П. Тумашиком применительно к крупнотоннажным танкерам,
САХ =. 0,03 4- 0,08 cos уд. (III. 14)
Входящий в формулу (111.13) коэффициент Сдд (0), представляющий коэффи-
циент САХ при уд = 0 (т. е при встречном ветре), определяется приближенной фор-
мулой •
(0.60-10ф1)ЛуВв + 0,25ЛуВ11 + 0,60АГВк
<- АХ (0) -----------------, (111.15}
в которой А\, Ис, Лув ( н — площади проекций иа плоскость шпангоута над-
водного борта, носовой и кормовой надстроек судиа соответственно, а ф1 — тангенс
Угла дифферента судна, определяемый формулой (11.42).
Выражениями (III. 13) н (II 1.15) можно пользоваться для всех типов двухостров-
”ых судов, если расстояние между надстройками превышает размеры последних.
Нормальная аэродинамическая сила и аэродинамический момент весьма сильно
^ияют на движение судна. Наилучшим способом определения этих коэффициентов
67
следует считать испытание модели надводной части рассчитываемого судна для чего
необходимо производить круговую продувку модели в аэродинамической трубе.
Если результаты испытаний модели отсутствуют, зависимость коэффициента Сду
от утла уя данного судна может быть подсчитана по приближенной формуле, являю-
щейся аппроксимацией результатов испытаний серии моделей речных судов и при-
годной для всех типов судов с плохообтскаемымп надстройками:
Слу = 1,05 sin у*. (II 1.16)
Для определения коэффициента момента Сдм применяется приближенная фор-
мула
Сам = 1,05 ^0.25 + 6 — slnv«- (III. 17)
Входящая в формулу (111.17) величина б представляет относительное отстояние
центра парусности боковой поверхности надводной части судна (центра тяжести
площади) от мидель-шпангоута, т. е.
6 = 7ц. „L (111.18)
где Ьц. п — отстояние центра парусности от мидель-шпангоута.
Величина бц, п принимается положительно!!, если центр парусности располага-
ется в нос от мидель-шпангоута, и отрицательной при расположении центра парусно-
сти в противоположном направлении.
Более общие результаты, относящиеся к судам с произвольно расположенными
надстройками любой формы, могут быть получены по материалам И. П. Мелкозеро-
вой и Р. Я Першина. Согласно этим материалам аппроксимирующие зависимости,
определяющие коэффициенты Сду н Сд,м, имеют вид
САУ = 0 - 28S*03) [1 4- S„ (1,12 - 65Ё)] (7f + 0,62) smТл 4-
|I +<к(1,12-65Е2)Г
(Ill 19)
Сдлг — (F + 0,04) sin 2yIf — 0.257' sin 4yfi + 1,47 sin 1.5 (90 — | — 90 |) —
-Ё(3„+3К0з)А;п1[1 4-sln(4Yfi-90)J; (III.20)
+ lp—д--------(0,02y^— 1,8) sign Cyi.irl • (III.21)
L и J
В этих формулах СдЛ( — коэффициент аэродинамического момента судна
с одной сплошной по длине надстройкой; u — коэффициент аэродинамического
момента судна с двумя разнесенными подлине надстройками: F = ILL — относитель-
ная высота надводного борта судна; = ^i'Lu'^VL — относительная площадь
парусности надстроек судна — суммарная площадь парусности всех надстроек
и рубок); 51(0;1 = ^4уг.нс <4уц — относительная площадь парусности носового ко-
зырька (-4yi.I0J — площадь парусности козырька); б — относительное положение
центра парусности судна в целом, определяемое формулой (III.18); /р = lp/L —
относительное расстояние между виу |реннимн стенками двух разнесенных по длине
судна надстроек (/р — расстояние между надстройками); если Zp > 0,5, то в формуле
(111.21) следует принимать Zp = 0.5.
Коэффициент f в формуле (111.19) при F <0,005 или F > 0,1 равен 0, при
0,005 < F <0,1
f = 0.53Ег — 5.7Е 4- 0.03. (111.22)
Коэффициент fem в формуле (III .20) равен 1,0 при ул < 90’ н пулю при уд > 90’.
Под величинами -4vtM п н Лудб 1( понимаются площади парусности меньшей ц
большей надстроек «киветствепно
53
Символ sign Сам означает, что знак второго члена формулы (Ill 21) совпадает
со знаком величины САм при данном уд. В формулах (111.20) и (111.21) угол уд
берется в градусах.
Формулы (111.19)—(III.21) не содержат дифферента судна в явном виде, однако
они применимы для произвольно сидящего судна, поскольку опыты показали, что
наличие дифферента на коэффициенте Сфу сказывается незначительно, а коэффи-
циент Сам меняется при наличии дифферента так же, как и при соответствующем
ему смещении центра парусности Иначе говоря, влияние дифферента полностью
учитывается изменением величины 6.
Формула (111.19) сравнительно мало уточняет коэффициент Сду по сравнению
с формулой (HI 1G). однако для коэффициента Слдт расхождение между результа-
тами расчета по формулам (111.20)—(I II 21) н (III.17) может оказаться весьма значи-
тельным. Особенно это относится к судам, палуба которых в одной из оконечностей
на большом протяжении свободна от надстроек.
l Для примера иа графике рнс. II 1.3 показаны значения коэффициента С дм
Для модели, боковой вид которой изображен на рисунке, с центром парусности, сме-
щенным в корму, н с палубой, свободной от надстроек в носовой ее части. Видно, что
при ветре, направленном со стороны носовой оконечности, характер кривой, рассчи-
танной по формуле (111.20). резко отличается от характера кривой, рассчитанной по
формуле (111.17). Экспериментальная кривая, также нанесенная на этот график,
показывает, что формула (111.20) значительно лучше соответствует опыту, чем фор-
мула (Ш.17).
§ 10. ГИДРОДИНАМИЧЕСКИЕ СИДЫ И МОМЕНТЫ
От ДЕЙСТВИЯ ВОЛН
Величины гидродинамических сил и моментов, возникающих на корпусе судна
при действии морских воли, зависят от высоты и частоты волн, скорости судна и на-
правления его движения по отношению к волнам и определяются суммой переменной
(периодической) и постоянной (точнее, медленно меняющейся) составляющих.
69
Постоянные силы и моменты могут оказать заметное влияние на поведение судна
при малых скоростях, характерных, в частности, для режимов позиционирования.
В настоящее время общепризнанные методики их расчета отсутствуют. Поэтому для
конкретного судна указанные силы и моменты определяются обычно эксгерименталь
иым путем. Результаты испытаний по определению постоянных составляющих сил
и моментов на регулярном волнении представляются в виде безразмерных коэффи
ииентов:
силы сопротивления
Ж,
С*Х = ^^Г' (Ш.23)
боковой силы СвК = 2ГВЛ (III 24)
момента СвМ = AfB. (III 25)
где Св — амплитуда регулярной волны.
Зависимости коэффициентов С„х, С„у. Свм от относительной длины и курсо-
вого угла волны рв позволяющие судить о порядке рассматриваемой категории сил,
показаны иа рис. II 1.4
Переменные составляющие волновых возмущений — боковой силы )'в и мо-
мента рыскания Л46 — рассчитываются в предположении отсутствия рыскания и
дрейфа судна. Считается, что величины и Л1„ изменяются по гармоническому
алкену с частотой встречи судна с волной ык.
Прн движении судна на регулярном волнении со скоростью о курсовым утлом
Р„ к направлению бега волны с частотой и высотой hB — 2СВ величины и Л/а
определяются формулами
К в = *'in cos<uBC (111.26)
AfB = Maa sin<oBC (III .27)
где
®к = <00(I — V--2-COSPb); (11128)
g
I7на — амплитуда возмущающей боковой силы; Л1пп — амплитуда момента рыска-
ния, обусловленного воздействием регулярной волны.
60
Период изменения боковой силы и момента рыскания рассчитывается по формуле
Т = 2л (п„ (III 29)
Ходящие в формулы (111.26)—(111.27) амплитуды силы и момента определяются
соотношениями
•' (II 1.30)
(111.31)
ГЮ П, RT
Л1 «= а, Л1«
где a, — амплитуда угла волнового склона, при этом
иВл =
Ев—амплитуда волны; k—частота формы (см. раздел первый т. 1);
<111.32)
Рис. 111.5. Поправочные коэффициенты xIltp, xtllp.
= pgVx* sin pe;
Wb = slrl ₽.;
(III.33)
(HI 34)
(111 35)
х»нр C°S Рв ^1 d
СМП „ P^Z-ct о
2 ,вр 1г1 «<а,
(111.36)
e
Яс — погружение центра величины под ватерлинией.
В свою очередь коэффициенты х1кр, «гир находятся в функции от параметра
W-|cosfB] по рис. И 1.5
На реальном нерегулярном морском волнении возмущающие боковая сила Ув
в момент рыскания Л1в являются стационарными случайными процессами, которые
характеризуются спектральными плотностями. Необходимые для их расчета пере-
даточные функции силы н момента относительно угла волнового склона выражаются
Формулами
№ — Yv-
и г. и — 1 ...
Wn « _=-«<
Здась ) AIJ находятся no соотношениям (111.33) (III 34)
(111,37)
(111.33)
61
Глава 71
СИЛЫ И МОМЕНТЫ, ВОЗНИКАЮЩИЕ
В ОСОБЫХ РЕЖИМАХ ДВИЖЕНИЯ СУДНА
§ II. ВЛИЯНИЕ ограничений фарватера
на гидродинамические характеристики судна
Под ограничением фарватера понимается наличие у него твердых границ, рас-
положенных достаточно близко к судовому ходу, чтобы оказывать практически
заметное влияние на гидродинамические характеристики судна н, соответственно,
иа параметры его движения. Такое влияние возникает обычно, когда глубина
воды Н становится менее четырех осадок судна или расстояние от судна до стенки
становится меньше, чем четыре ширины судна.
В этих случаях на корпусе судна возникают дополнительные силы н моменты,
вызванные взаимодействием судна с границами фарватера.
На гидродинамические характеристики двнжнтельно-рулевых комплексон
обычных (не водометных) судов указанные ограничения фарватера практического
влияния не оказывают.
Влияние ограничения глубины фарватера. Присоединенные массы
суди а. Ограничение глубины фарватера приводит к существенному возрастанию
присоединенных масс судна вследствие обусловленного стеснением потока увели-
чения местных скоростей обтекания корпуса.
Относительное увеличение присоединённых масс па мелководье достаточно
стабильно, мало зависит от соотношений главных размерений судна, его полноты
и формы обводов п может быть представлено коэффициентами
где ?‘Поо> —величины продольной н поперечной присоединенных масс и
присоединенного момента инерции при движении судна на глубокой воде;
1-ыН — те же величины при движении судна на мелководье с глубиной Н
На рис. IV. I приведены полученные В. И. Коганом графики зависимостей £п,
А22, £иот ТЫ'Н для корпусов судов большой полноты с бу as 0,8 и для построенных
на тех же глашсых размерениях трехосных эллипсоидов с бу = 0,52 15). Практичес-
кое совпадение кривых, относящихся к различным значениям коэффициента бу и к
различным формам обводов, позволяет пользоваться указанными графиками для
судов с пропзрвольной полнотой.
Графики ис. IV. 1 применимы для случаев движения судов в доволновых режи-
мах, когда Ft 0,16 и число Фруда по глубине [Ггн = о/Kg// J 0,6.
Силы вязкостной природы. Под силами вязктком природы
подразумеваются гидродинамические силы A'v, и момент Alv, деоснствуюшие на
корпус судна при установившемся криволинейном движении с безразмерной угло-
вой '"коростью й и углом дрейфа р.
В условиях ограниченного фарватера силы А\, н .момент Mv увеличиваются
с ростом степени мелководья. Линейные составляющие поперечной силы н момента
возрастают вследствие увеличения на мелководье эффективного удлинения судна
как крыла малого удлинения н полноты эпюры поперечной нагрузки.
Нелинейные составляющие поперечной силы и момента возрастают вследствие
уменьшения относительного зазора (II—Тм)/Т^, затрудняющего поперечное обтека-
ние корпуса н увеличивающего отрывную составляющую коэффициента Су попереч-
ной силы в отношении, мало зависящем от формы шпангоутных сечен ни (рнс. IV.2).
Применительно к транспортным судам в доволновых режимах движения изме-
нение гидродинамических характеристик иа мелководье определяется с помощью
полученных В. И. Коганом графиков рнс. IV.3 и IV 4 Значения коэффициентов
= *=• Сушн/Сусх»: ~ C.MfW/Cifpoo! — СЛ1ын/^Л1ь>«>' ха*
62
бактеризующих изменение позиционных н демпфирующих производных силы Vv
и цемента Mv в доволновых режимах, достаточно стабильны и могут использоваться
пля широкого круга транспортных судов с произвольной формой обводов.
Для судов внутреннего и смешанного плавания, а также для крупнотоннажных
танкеров, обладающих большом полнотой » 0,8, влияние мелководья на гидро-
динамические характеристики может быть определено с помощью графиков
рис. IV.5—IV 7 Коэффициент для этих судив практически постоянен и равен
$ = 1.0-
При движении судна со скоростью, превышающей указанные выше пределы
доволновых режимов, изменение гидродинамических характеристик, зависящее
Рнс, IV, 1. Влияние мелковочья па присоединенные массы судна.
I — t v• «= 0 52; 2 — 6 v = О-8-
в этом случае от трех параметров Н 7'ы, Fr. Fr^, становится более сложным и в зна-
чительной мере определяется формой обводов судна и его ходовым дифферентом.
На рис. IV.8 и IV.9 показан типичный вид зависимостей гидродинамических
Характеристик корпуса грузового судна от числа Фруда иа мелководье
Влияние близкорасположенной стенки и наклонного дна. При движении судна
параллельно вертикальной стенке с нулевым или малым положительным углом
Дрейфа (нос судна дальше ст стенки, чем корма) скорость протекания воды между
судном и стенкой вследствие местного стеснения потока возрастает, давление па-
Аает и на судне развивается поперечная сила направленная к стенке (сила «под-
сасывания»), и момент М,. стремящийся развернуть нос судна от стенки (так назы-
ваемый «эффект свободной воды а) Центр давления гидродинамических сил в этих
случаях располагается в кормовой оконечности судна.
При движении судна вдоль стенки с большим положительным углом дрейфа
характер обтекания корпуса изменяется. Скорость течении в зоне между корпусом
судна и стенкой становится меньше скорости судна, и давление в этой зоне стано-
**Пя положительным Поперечная сила Y„ меняет знак, получая направление ст
63
стенки, в точка ее приложения перемещается в носовую оконечность судна. Таки-,
образом, момент Л1, сохраняет свое направление, по-пцеЖ1 ем обусловлю и
«эффект свободной воды».
Рис. IV.2. Влияние мелководья ьа ы|ыьн\ю сеставлиющую
поперечной силы шпангоутных сечении
позиционные составляющие попереч-
ной силы и моменте на корпусе транс-
портного судиа
Рис. IV 4 Влияние мелководья на дем-
пфирующие составляющие попереч
ной силы и момента на корпусе транс-
портного судна
Явления, происходящие при движении судна вдоль наклонной стенки и над
наклонным дном, качественно ие отличаются от явлений, происходящих при двнже
ним вдоль вертикальной стенки. Величины У„ и Ms прн этом зависят уже не только
от1 относительного отстояния судна от стенки S/В или S/L, ио и от угла ее наклона.
64
При достаточном приближении судна к стенке величины г < и Л1, могут дости-
гать весьма больших значений. Кроме того, воздействие стенки обычно усугубляется
влиянием мелководья, так как глубина воды у стейки обычно невелика.
Для ориентировочной опенки силы Ум развивающейся иа судне при движении
вдоль стенки с уклоном 45°, можно пользоваться графиком рис. IV. 18 при b!В =
__ 8 0 (случай большой удаленности второп стенки канала).
В общем случае при движении судна
воды момент М, может превосходить
величину Mr-
Рис. IV.5. Влияние мелководья па
позиционную составляющею попереч-
ной силы на корпусе судиа с большой
полнотой.
на расстоянии менее его ширины от уреза
Рис. IV.6. Влияние мелководья на
позиционную составляющую момента
на корпусе судна с большой полнотой.
Рис. IV.7. Влияние мелководья на
Демпфирующую составляющую мо-
мента иа корпусе суша с большой!
полнотой.
Рис. IV.8. Вид зависимости попереч-
ной силы на корпусе судна от числа
Фру та па мелководье (щс = 0,67;
H,TN = 3,5).
I Прн движении судна над дном, имеющим боковой уклон, с нулевым или малым
утлом дрейфа, при котором носовая оконечность судна рвзвернута в сторону более
глубокой воды, на корпусе судиа развивается подсасывающая поперечная сила Ур,
Направленная в сторону возвышения дна, и момент Л1д, разворачивающий нос
сУДна в сторону более глубокой воды. Центр дав тения гидродинамических сил рас-
полагается при этом в кормовой части судна. Значительное понижение давления
Гоне между стенкой и кормовой частью судна, которое и образует в основном силу
FD> вызывает понижение уровня воды в этой зоне и обнажение дна. За понижением
Уровня следует волна, наносящая значительные повреждения берегу.
W При больших углах дрейфа, прн которых носовая оконечность судна развернута
сторону более глубокой воды, поперечная сила Уд меняет направление, обращаясь
сторону глубокой воды, а момент Мд сохраняет свой знак.
О
П/Р Я. И Войткуиского. т. 3
65
Систематические исследования взаимодействия корпуса судна с наклонным диод
не проводились. Однако отдельные модеаьные испытания и опыт судовождеи ।
подтверждают, что даже при малых склонах дна. составляющих 5—6е к горизонте,
Рис. IV.9. Вид зависимости момента
на корпусе судна от числа Фруда на
мелководье (йс = 0,67; Н/Тм == 3,5).
величины У'о и Л1д могут быть весь а а
значительными и moi у т являться причине
серьезных аварий
Для решения задач, связанных с
швартовными операциями, особенно вы-
полняемыми прн ветре, представляет ин-
терес сопротивление воды движении
судна у стенки лагом Изменение коэфф,
цнента сопротивления воды движению
судна лагом определяется в этом случле
двумя параметрами: относительной глуб;
пой воды Н 7\, и относительным отстгя
нием судна от стенки S.B. Величина этого
изменения в виде коэффициента kw —
= C№'/CWoo в зависимости от степени мел-
ководья при различных относительных от-
стояниях судна от стенки приведена на
графике рис. IV. 10. Кривая S/В = оо сс-
ответс1вует движению судна лагом на мелководье прн отсутствии боковых ограни-
чений фарватера. Значения йн на оси ординат соответствуют движению судна лаге,
у вертикальной стенки при неограниченной глубине воды.
Рис. IV. 10. Влияние вертикальной боковой стенки и мелководья на сопротпвлеш
воды движевию судна лагом.
Влияние канала. При движении судна в канале ограничения фарватера оказь
вают иа гидродинамические характеристики судна более сильное влияние, чем ме.'
ководье и боковая стенка, хотя общий характер этого влияния и сохраняется. Пр.
движении судна по оси канала как позиционные, так и демпфирующие составляют!
гидродинамических сил резко возрастают. Величины гидродинамических сил прл
движении судна по осп канала зависят от глубины, ширины и уклона стенки канал:
Систематические данные о них имеются только для каналов с уклоном стенок 45
На рис. IV. II—IV. 14 приведены приближенные зависимости для коэффицие I-
тов возрастания позиционных и демпфирующих составляющих гидродинамичеси! х
сил на корпусе судна, движущегося в канале с шириной Ь, глубиной Н и уклоном
66
|сгеио1 45’, по сравнению со значениями этих же составляющих на мелководье с глу-
биной Н.
При принятой форме выражений для коэффициентов
ей _ /рР
KYb — ^Y{iHb,^Yf,H’
г(й __ /~»0> f
KYb — ^YwHb.'^YuiH1
еР ___рР /рР .
ЯЛГЛ — с Mf,Hblb Mftfi-
__ /"»W
К.МЬ —
Рис. IV.И. Влияние канала на пози-
ционную производную поперечной
| силы на корпусе судна.
Рис. IV. 12. Влияние канала на позя-
Рис. IV. 11. Влияние канала на демп-
фирующую производную момента на
корпусе судна.
значения позиционных и демпфирующих производных пя судна, движущегося
По осн канала с шириной Ь и глубиной II, определяются по фюрмулам
<-?'рнь = СУ(^У^УЬ
Смрнь = СЛ.р/'?/л№;
“ Н’иП b*
_________ /-CO tO t©
ъМъ>НЬ — иЛГшя.ИяЛР»-
Аналогичные зависимости для коэффициентов увеличения присоединенных
*гасс судна Лг2 и Хвв в канале по сравнению с их величинами на мелководье приве-
дены на рис. IV. 15. IV. 16. При принятой для этих коэффициентов форме выражении
значения присоединенных масс прн движении судна в канале с шириной Ь и глу-
биной Н определяются по формулам
?-гг//Ь = 1 /IV
ЪеНЬ = ?-ee^ e^eeft- J
При движении судна параллельно осп канава на расстоянии т] от последней иа
р°Рпусе судна развиваются дополнительная гидродинамическая поперечная сила /ч,
67
Рис. IV. 16. Влияние канала на при-
соединенный момент инерции.
Рис. IV. 15. Влияние канала на при-
соединенную массу.
68
стремящаяся увеличить смещение судна от осп канала, и дополнительный гидроди-
намический момент Л!,,. стремящийся развернуть судно носом к оси канала.
На рис. IV. 17 приведены значения производных и CJ, в зависимости от
относительной ширины капала по зеркалу воды b В н отношения Тк/Н прн наклоне
стенок канала 45°.
Графики рнс. IV. 17 относятся к малым значениям относительного смещ пня
fj = t|/L судна от осп канала.
Прн значительном смешении судна от осп канала величина поперечной гидро-
динамической силы У( может быть определена с помощью графика рнс. IV. 18
в функции относительного расстояния S/В (см. схему на рисунке) и относительной
ширины канала Ь В. ГрАфнк nocipoen для относительной глубины /7 Тм = 1,40.
раллельно оси канала на расстоянии S от стенки капала.
£ 12. ГИДРОДИНАМИЧЕСКИЕ СИЛЫ
ВЗАИМОДЕЙСТВИЯ МЕЖДУ СУДАМИ
I При движении в жидкости двух и более тел на близком расстоянии друг от
друга на них возникают дополнительные силы, обусловленные гидродинамическим
взаимодейств нем.
Наиболее распространенными режимами движения судов, прн которых прояв-
ляется гидродинамическое взаимодействие между ними, являются режимы обгона
и встречного движения, а также движения вблизи стенки канала, причальной стенки
и прн передаче грузов траверзным способом.
Теоретические методы определения сил и моментов гидродинамического взапмо
действия базируются на предположении, что жидкость невязкая, несжимаемая
Движение жидкости считается безвихревым, числа Фруда малыми, и свободная по-
верхность уподобляется твердой стейке. Судовые корпуса заменяются эквивалент-
ными трехосными эллипсоидами, имеющими те же соотношения главных размере-
ний, что н соотношения главных размерений корпусов. Векторы скоростей двнже-
вия центров масс эллипсоидов считаются параллельными
В такой постановке решение задачи об определении сил и моментов гидроди-
намического взаимодействия при нулевых углах дрейфа и постоянных скоростях
Дьижгнпя каждого эллипсоида получено Ю. М. Мастушкнным. Результаты рас-
чета величин боковой силы и момента показывают следующее.
В С уменьшенном относительного расстояния между судами коэффициенты боко-
вой силы и момента гидродинамического взаимодействия на корпусе резко возра-
69
стают по нелинейному закону. Коэффициенты боковой силы и момента при плоек*. <4
обтекании в три—лить раз больше, чем при пространственном обтекании тел в| -
щения с примерно одинаковой формой меридионального сечения отсюда следует,
что на судак с прямолинейными бортами в подводной части корпуса а также с боль-
шей осадкой возникают относительно большие силы гидродинамического взанм*>-
действия. Наибольшие силы гидродинамического взаимодействия, действующее ia
суда, возникают в момент, когда мидель одного судна находится на траверзе миделя
другого судна. Наибольшие по абсолютной величине моменты гидродинамического
взаимодействия возникают в том случае, если мидель одного из судов находится
примерно иа траверзе кормы судна-партнера. Обгон одного судна другим по хара -
теру действия и величине сил и моментов гидродинамического взаимодействия болте
опасен, чем встречное расхождение судов. При обгоне и при встречном рас.хождеш ।
двух судов наибольшая опасность возникает для судна меньших размеров. Силы и
, моменты гидродинамического взаим<
/' - действья оказываются наибольшим;!,
х—xJ-_____------------есл” абсолютные величины скоростей
---। — L1J_ движения судов примерно равны др* г
Ут____________________________________дру rv.
, Силы п моменты гндродинамиче-
. ского взаимодействия представляются
в виде безразмерных коэффициент* о
боковой сизы
Рис. IV. 19. Схема действия сил и момен-
тов гидродинамического взаимодействия.
1, 2 — суда.
Суьз = 2Уиз/роЧГм (IV. I)
и момента
CwB8 = 2Л1в8/рвЧ»Гм (IV.4)
определяемых в системе координат
показанной на рис. IV. 19.
В формулах (IV.3), (IV.4) УР,,
Д/вз — сида и момент гидролинами*'
ского взаимодействия; L, Тя — длин i
и осадка судна, Для которого опред -
ляются рассматриваемые силы Поло-
жительные направления Ум н Л1UJ показаны на рис. IV. 19 применительно к
судну, обозначенному цифрой /.
Практическая методика расчета коэффициентов Суи и Сл<РЗ разработа!
Ю. М. Мастушкиным [7] дтя случая обгона одного судна другим па равных или
близких постоянных скоростях.
Расчет сил и моментов гидродинамического взаимодействия по указанной м
тодике обеспечивает приемлемую точность оценки сит при движении судов с нуле-
выми углами дрейфа.
Однако в ряде случаев при совместном движении судов, например при переда
грузов на ходу траверзным способом, из-за натяжения канатных дорог и влйяния
ветра углы дрейфа могут заметно отличаться от нуля. Более общие формулы, при-
годные дтя расчета сил и моментов гидродинамического взаимодействия в режимах
совместного движения, в том числе с углами дрейфа, не равными нулю, были разра-
ботаны М. П Возпой и А. П. Тумашиком. Эги формулы, полученные иа базе те*"
ретнко-экспериментачьного способа определения гидродинамических характеристик,
имеют вид
Сувз = ot cos2 (Я/Й./3) + а2РР + ДР; (IV.5)
Смвз = fcj sin (2лга, 3) fr;Pi + ДР, (IV Г)
где
7"> .
01 = -f— е 1 О :
*-г
о3 = 0,0081аве-я4 (*£*" *).
(IV.7)
(IV.8)
70
a3 = -0,032--°i К*-’); (IV.9)
а* = 0,79 -г 0,10 (4^“ 1>9У ; (IV. 10)
а3 = 0,82 — 0,12 ф-; (IV. U)
= 7.2m] 4- 8/й, — 6,5; (IV. 12)
ас |аа + Т" Ф II (IV 13)
bi = 0,23 e~b*kvl; L3 (IV. 14)
bi = 0,0058V_ft*(feo‘'1); (IV. 15)
Ь^-О.ОЗОе-Мф-’); (IV. 16)
b3 -0,68 + 0 07 — 2,4^ ; (IV. 17)
/>5 = 0,72 — 0,06 4^-; (IV 18)
be = 2,4m£ + — 6,6rfi2 — 3; (IV. 19)
др = P2—Pj. (IV.20)
I В выражениях (IV.5)—(IV.20) индекс «I относится к рассматриваемому судну,
индекс «2> — к судну-партнеру; тг = 2т!Ьг — относительное смещение мндель-
'шпангоутов судов в продольном направлении; ho — заданное расстояние между
днамет ильными плоскостями судов.
Величина т считается положительной, если судно-партнер опережает рассма-
триваемое судно, т. е. если судно, расположенное справа, отстает, то при расчете
действующих на него сил гидродинамического взаимодействия следует принимать
т > 0; при расчете сил гидродинамического взаимодействия, приложенных к судну,
расположенному слева (которое в этом случае впереди), следует принимать т < 0.
I Формулы (1V.5)—(IV.20) годятся для расчета силы и момента гидродинамиче-
ского взаимодействия меньшего из судов, движущихся в условиях глубокой воды
и в отсутствии волнообразования. Эти же формулы можно применять для расчета
кввффициеитов Сгвз и Слтвз большего судна, если его длина мало отличается от
Длины судна-партнера.
Для условий мелкой воды с учетом ватиообразования коэффициенты силы I
Момента гидродинамического взаимодействия выч! тяготея по формулам
С»’пэ = ^*//COS--iyi- 4. ky^ + (аар, + а3 + *1)! (IV.21)
Счдд = (kn sin 2л”а + + (fc2P* + b3 ДР) (kn + ky), (IV.22)
He
Кн = I + 10 exp [—0,786
(IV.23)
— коэффициент, учитывающий влияние мелководья; Н — глубина воды; ky и ky —
коэффициенты, учитывающие влияние волнообразования.*
Коэффициенты ky н ky определяются по рис. IV.20 для относительных глубин
"ум = 1,5; 2,5 и 5,0. В промежутке указанных значений Н'ТК коэффициенты ky
J* находятся интерполяцией по трем точкам Величина коэффициентов ky и ky
при Н1Тн > 5 принимается такой же, как и при /7.ТЫ = 5.
71
Для определения коэффициентов ky и по графикам рис. IV.20 при промежу-
точных значениях чисел Фруда Гг = о/, gL необходимо пользоваться линейной
интерполяцией.
Рис. IV.20. Влияние волнообразования на силу и момент гидродинамического
взаимодействия в зависимости от глубины фарватера, скорости хода и относитель-
ного смещения судов в продольном направлении.
Поскольку степень влияния волнообразования иа силу и момент гидродин;
я и чес кого взаимодействия существенно зависит от отношения глубины воды к осадке,
при расчетах управляемости совместно маневрирующих судов на мелководье иедо-
72
пустимо учитывать только м лководье и не учитывать волнообразование. Из
рис. IV.20 видно, что даже при значительных отношениях II. Ти влияние волнообра-
зова 1вя проявтяется прн весьма малых скоростях хода.
При движении судов иа близком расстоянии друг от друга наряду с появлением
сил гидродинамического взаимодействия происходит также изменение присоединен-
ных масс корпусов по сравнению с присоединенными массами прн движении в без-
граничной жидкости. Имеющиеся в настоящее время материалы, позволяющие
учесть изменение присоединенных масс, относятся к случаю движения эллипсоида
вращения вблизи твердой стенки (см. гл. II первого разделах. I) и к случаю дви-
жения судов-катамаранов. Эти материалы показывают, что при движении тела
I вблизи твердой стенки присоединенные .массы и присоединенный момент инерции
корпуса возрастает по сравнению с безграничной жидкостью. При движении кор-
nvca в составе судна-катамарана увеличивается только его присоединенная масса
в'продольйам направлении; присоединенная масса в боковом направлении и присое-
диненный момент инерции уменьшаются. Прн движении двух судов величины при-
I соед । юиных масс и момента инерции будут зависеть от фазы относительных колеба-
ний судов в поперечном направлении и в отличие от движения одиночного судна не
будут оставаться постоянными.
Если, однако, рассмотреть случай, когда расстояние между судами по траверзу
равно 1,5 ширинам корпуса, то общее изменение инерции корпуса с учетом массы
судна не превысит 10 "и. В расчетах обгона и встречного расхождения судов таким
измен и нем присоединенной массы и момента инерции можно пренебречь.
Разработанные к настоящему времени расчетные схемы определения сил и мо-
ментов гидродинамического взаимодействия прн встречном расхождении судов
I являются весьма сложными и не могут быть пока что рекомендованы для широкого
I использования.
Результаты расчетов показывают, что по мерс сближения двух судов при встрече
иа них вначале действуют сизы и моменты, отталкивающие носовые оконечности
[ друг от друга. В дальнейшем поперечные силы н моменты изменяют свой знак, сила
присасывания достигает максимума по абсолютной величине при выходе миделей
судов на общий траверз (т = 0), а момент прн т2 = ±0,4. Как и при обгоне, наи-
большие по величине силы и моменты гидродинамического взаимодействия паблю-
дают я при равных по модулю скоростях судов, т. е. при г, = vs. Влияние утла
к дрейфа иа поперечную силу оказывается незначительным, в то время как на момент
гидродинамического взаимодействия весьма заметным. Влияние расстояния между
[бортами судов и ограниченности глубины фарватера проявляется практически так же,
как и при обгоне одного судна другим, и может быть оценено по формулам (IV.3),
(IV.23).
$ 13. СИЛЫ, ОБУСЛОВЛЕННЫЕ ТЕЧЕНИЕМ
I При плавании судна в акваториях с течением последнее оказывает заметное
влияние на траекторию судна относительно земли. Течение можно рассматривать
.как некоторую переносную скорость воды, в которой судно совершает относительное
движение.
[ Течение, как и ветер, характеризуется скоростью от н направлением ут. Изме-
гиения скорости н направления течения являются нерегулярными нестационарными
[процессами. Однако вследствие медленного изменения этих параметров при расчет-
ной опенке движения судна они считаются постоянными. Направление течения
Считается независящим от направлений ветра и волнения.
Если судно движется со скоростью t>0 на прямолинейном равномерном течении
^относительно неподвижной системы координат XoOi£fo> то согласно рнс. IV.21 проек-
ции скорости судна относительно воды на продольную х н боковую у оси опреде-
ляются по формулам
VX = Vlo + 1'т cos (ут + X); (IV.24)
vv = L'«/o— vt sin <Tt + X).
(IV.25)
ГДе vyt — проекции скорости судна относительно дна на связанные осн коорди-
нат; гт — скорость течения; ут и х— угол течения и курс, отсчитываемые от оси 01хо.
73
Силы инерционной природы, действующие на корпус судна на прямолинейном
равномерном течении, записываются в виде
А'и11 = — т + moV) ш — Хн + Х^со + X26w»; (I V .26)
= "m T- ~ <1 V-27>
— rfy
или с учетом (IV.24), (IV.25) и соотношения —' = ш
Рис. IV.21. Система координат XoOi№-
Аии--------(/и ф- Хц) —*- + (т Р Хгг)Х
X гуо + XjbCi)*; (IV.28)
1111 = — (Яг + X-2j)—jjj-----
— (т+ Х11)ол<в —Хгв-^-. (IV.29)
Инерционный момент относитель-
но вертнкалы1О|"< оси, проходящей че-
рез центр масс, равен
. , , da
Л^ин-----(1ц + > ае)
— (Хаг —'^n)vxvi/ — ^seOjt® — X2e ’
(IV.30)
Обычно при расчетах дннамню
иесимметриен судна относительно
мндель-шпангоута пренебрегают, пола
гая Xj, = 0. Однако если гидродина-
мические коэффициенты корпуса опре-
деляются экспериментальным путем
или с помощью номограмм (см. § 7
раздела первого), то влияние иеснммет
рни частично учитывается слагаемым!
/«go2 и t.2lsvxvu, которые входят в
гидродинамические силы Xv и момент корпуса Afv. Момент Mv, полученный экс
периментальным путем, учитывает также и слагаемое (Х^—Xu) vxt'y, которое не
обходимо исключить из выражения инерционного момента. Такны образом
окончательные выражения инерционных сил и момента имеют вид
Хип--------(Я1 + Xft) jt* + (П1 + Х22) ПдШ;
(IV.31)
Гиа = - (т + х«) -^2. - (Щ +- Хи) (I V.32
ч. ,, . - .
^ни Uzi + лбб)
(IV.33)
При проведении динамометрических испытаний на ротативной установке по
определению гидродинамических характеристик корпуса в составляющие изме-
74
Гряемой силы входят также компоненты, обусловленные центростремительным уско-
реинем. Им соответствуют слагаемые (т + А2а) и (и + Лп) оти>, которые должны
быть соответственно йсктючены из выражений (IV.31) и (IV.32).
Морское течение практически всегда можно считать прямолинейным, поскольку
В радиус закругления струй такого течения на нескатько порядков больше длины
судна. Как видно из сопоставления с формулами (II.3)—(II.5), никаких пперцион-
. них сил, обусловленных таким течением, при движении судна не возникает. Влияние
_ морского течения сводится к простому переносу движущегося произвольным обра-
зом судна со скоростью течения. Если судно удерживается от сноса течением, то на
него де 1Ствуют такие-же силы, как и при равномерном движении со скоростью
Ж течения в спокойной воде.
Однако при проходе судном криволинейного участка реки или канала с тече-
нием на судно, кроме сил, рассмотренных в § 6 и'7, действуют еще сила соскаль-
* зывапня и сила Кориолиса.
В Природа возникновения первой силы связана с тем, что па криволинейных
। участках реки вследствие влияния центробежной силы вода у внешнего (вогнутого)
। берег приподнимается, а у внутреннего (выпуклого) нескатько опускается, и в ре-
-- зультате появляется поперечный уклон воды, направленный от внешнего берега
к внутреннему. В этих условиях судно как бы соскальзывает под уклон к внутрен-
нему берегу, причем сила соскальзывания равна
Л'с = рК(о?7?с),
(IV.34)
где от — скорость течения; Rc — радиус траектории движения судна.
Формула (IV.34), равно как и последующие, справедлива прн упрощающих
предположениях о том, что канал (участок реки) и линии тока в нем являются
круговыми, а судно совершает установившееся движение вдоль одной линии
тока
Если судно совершает циркуляцию радиусом /?с со скоростью относительно
воды v на течении, имеющем скорость тт > 0 (судно идет вниз по течению), то инср-
циот пая (центробежная) сила прн малых углах дрейфа равна
/пп = -ри -tРт)8 --рУ (-£- + (iv.35)
ж /<С \ Ас Ас /
Первый член выражения (IV.35) представляет собой центробежную ситу от
Хдвпжеиня судна относительно воды, второй — от переносного движения воды.
На треп < — силу Кориолиса, явтяющуюся следствием криволинейности переносного
^Движения. Сравнение (1V.35) с (IV 34) показывает, что сила соскальзывания уравпо-
^вещивает силу инерции в переносном движении, поэтому прн решении задачи о дви-
Женни с дна на закруглении реки пли канала с течением обе указанные силы можно
не учитывать, а считать, что сила инерции, действующая на судно, складывается из
сил| определяющейся выражением (11.24), и силы Кориолиса.
Таким образом.
/ин = — pv (1 -г feu) WO — 2pVweT,
(IV.3G)
где w = v Rc — хгловая скорость судна в относительном движении.
Выражение (fV 36) показывает, что при прямолинейном равномерном движении
I сУдна инерционная сила отсутствует. Точно так же /;1ц = 0 н при v = 0, т. е.
Н® случае, если судно без хода относительно воды сплавляется вниз по течению па
вакругленпом повороте реки. При ит = 0, т. е. при отсутствии тече тя в круговом
Дайале, исчезает татько сила Кориолиса.
Знак последней силы зависит от знака ет. Прн t'T > 0, т. е. прн ходе судна вниз
I во течению, сила Корнолнса совпадает с основной инерционной силой, при пт <5 О,
F- е. при х де судна про ив течения, сила Кориолиса меняет знак, и абсолютное
"Вачепне инерционной силы, дснс1вующен >ж судно, уменьшается.
75
Глава I
СИЛЫ, РАЗВИВАЕМЫЕ СРЕДСТВАМИ
УПРАВЛЕНИЯ СУДНОМ
§ 14. СИЛЫ ОТ РУЛЕЙ И ПОВОРОТНЫХ НАСАДОК
Силы, действующие на рулевое устройство (руль итн поворотную насадку)
зависят от элементов движения судна. Эти силы, а также их моменты относительно
центра тяжести или мидель-шпапгоута судна могут быть определены только прн
малых углах дрейфа, поскольку прн ботыпнх углах дрейфа и, как следствие, боль-
ших углах атаки руля или насадки па последних возникает срыв потока.
Силы, действующие па переложенные на угол 6/? (или бд) руль (или поворотную
насадку) иа судне, которое совершает вызванное перекладкой руля криволинейное
движение, с учетом взаимодействия между рулевым устройством и корпусом в осях,
связанных с судном (рис. V.1), имеют вид
Xr = Сх R (Р, 2) v2Are', (V. I)
}'«=СУ«(р/2)Л1я£ —
= Гуц — ке Ч-------------j (Р/2) v А^Е. (V.2)
В выражении (V.2) учтено, что угол атаки руля ад (или насадки ад) равен
(р + ~ “)• (V-3>
AloMein указанных сил может быть представтеи как произведение силы Yr
на расстояние между рулем и мидель-шпангоутом судна Irm'.
Л,« = *Wr.\i ~ cYr'rm ~ке (р Ч—~~ ° (Р/2) v~Are- О’
В выражениях (V.2)—(V.4) под величиной ltt4 понимается отношение
Gi.w ~~
Если судно движется прямым курсом с углом дрейфа, то сила E’r и момент Mr
имеют вид
Yr = Суд хеР) (Р/2) v~A^E\ (V.6)
dlfl = Cy^l^Rl (^>R± XfP) (P/2) V~ArE' -7)
В формулах (V.6) н (V.7) знак Ч* при берется в случае, если направления
утла дрейфа |) и утла перекладки 6П противоположны, н знак —, если эти нап-
равления совпадают (рис. V.2).
При необходимости коэффициент Сд-r может быть найден по материалам гл. XII,
однако для расчета управляемости судна этот коэффициент требуется сравнительно
редко.
Величины ARe н входящие в формулы (V.l)—(V.7). определяются
различно для обычных рулен, изображенных на схеме рис. 1.5, рулей за рудерпостом
(рис. 1.7) н поворотных насадок (рис. 1.8).
Коэффициент CyR равен произведен н.о
C'yr = кСу%, (V.8)
76
в котором коэффициент k учитывает боковую силу па корпусе судна, обусловленную
перекладкой руля или насадки. Коэффициент k имеет следующие значения: для
обыч1 ых рулен — 1,0, для рулей за рудерпостом — 1,3, для поворотных насадок —
09
ССр
Коэффициент Су'Ц представляет собой тангенс угла наклона кривой СУЛ =
= /(ап) РУЛЯ (или насадки). Для обычных рулей этот коэффициент определяется
гидродинамическими характеристиками изолированного руля, для рулей за рудер-
постом и поворотных насадок — характеристиками, учитывающими режим работы
гребного впита.
Величину CyR для обычных рулей можно найти непосредственно по графику
еавнсимостн CYR — f (ап) рассчитываемого руля либо по формуле
<V9>
Рис. V.2. К определению знаков
в формулах (V.6) и (V.7).
где — площадь руля; Л/? — высота пера руля, если считать по оси баллера;
ея — поправочный коэффициент, равный единице для прямоугольных и трапе-
циевидных рулей; для полубаланснрных рулей он определяется по графику
рис V.3 в зависимости от величины hRlA^.
Для рулей за рудерпостом коэффициент Су^ зависит от нагрузки гребного винта
И определяется эмпирической формулой Р. Я. Першина
~ 1 4- 2/А. 1 1 ’4 г* + 0,17 б7-10)
в которой (рис. V.4, в)
где X — относительное гидродинамическое удлинение комплекса руль — рудер-
пост, AR*Rp— площадь комплекса; Ьц+кр — хорда комплекса;
bR = bR,bR+Rpi (V.12)
77
где бц — относительная хорда руля; Ьд — хорда руля;
2,55Г
(V.I3)
(V.I4)
где Сто— коэффициент нагрузки винта по упору; Т — упор впита при скорости
хода ц>; Dp — диаметр ввита.
Для поворотных насадок коэффициент Cv£ определяется по следующей эмпи-
рической формуле Р. Я- Першица (рис. V.4. б':
[1 + 0.25(/1 Ь CTv + 1)21Г1 -(О.45-О.35Ал)|4-О.5СГ1
Су°----------------------------2Z^
где Хд — отпосшсльпое удлинение насадки;
?.о = Lq D Q'-
Рнс. V.3. К определению
коэфф! циеита сц.
ty А5)
Ld — длина насадки; Dq— минимальный внутренний диаметр насадки, Сте —
коэффициент нагрузки впита, определяемый формулой (V.13).
Величина Are, входящая в формулы (V.1)—
(V.7), представляет собой приведенную (эффектив-
ную) площадь рулевого устройства
Дтя обычного руля площадь A re равна пло-
щади руля, если последний в непере.тоженном по-
ложении не попадает в струю гребного винта. Если
руль хотя бы частью площади понадает в винтовую
струю, под приведенной площадью /Ire понимается
площадь некоторого фиктивного руля, не стоящего
за винтом, подъемная сила которого равна подъем-
ной силе руля, расположенного за впитом.
Приведенная площадь обычного руля выра-
жается формулой
^ле= j4jro+(IСуг), (V.I6)
где А до—площадь части руля, не попадающей в
поток от вннта; Ддпр — площадь части руля, рас-
положенной в винтовой струе.
два руля, приведенная площадь Are определяется
Если па судне имеются
формулой
ЛдЕ = Ал+Я» о + ^(Я+Я> Dp (I + CrJ,
в ко юрой
Л(л+я> о — 2Aro',
AlR-rRi Dp — 2AR[)p'
(V.I7)
(V.18)
(V.19)
При определении площадей Aro н Днор поток, отбрасываемый винтом, прини-
мается параллельным ватерлинии (рис. V.5). Для полуподвесиого руля, навешен-
ного иа кронштейн, площадь кронштейна в площадь руля не засчитывается.
Для руля за рудерпостом площадь Are равна площади комплекса руль—рудер-
пост лп+Лр.
Для поворотных насадок под площадью Are понимается площадь боковой по-
верхности насадок
/1пЕ = Ze>rDdLd, (V.20)
где Zd — число поворотных насадок иа судне.
Входящий в формулы (V.3)—(V.7) коэффициент у-е представляет собой приве-
денный коэффициент влияния корпуса и винта на направление потока, набегающего
на рулевое устройство. Коэффициент Х£ равен
У-Е = KKDp. (V.2I)
где х—коэффициент влияния корпуса; Х/>р— коэффициент влияния винта.
78
Коэффициент х для наиболее часто встречающихся форм кормы и расположения
рулевого устройства имеет следующие значения.
1. Если руль навешен на кормовой дейдвуд либо расположен за кормовым
дейдвудом па расстоянии, меньшем 0,5 хорды руля, х = 0,3.
2. Если рули расположены по бортам от кормового дейдвуда и хотя бы частично
нросктируются иа него па чертеже бокового вида, х = 0,3.
Рнс. V.4. Геометрические характеристики: а — руля за рудерпостом;
б — поворотной насадки.
I 3. Если рули расположены в ДП или по бортам судна в корму от кормового
дейдвуда на расстоянии, большем 0,5 хорды руля, либо если па одновинтовом
судне установлен руль за рудерпостом, х = 0,5.
4. Если поворотная насадка раз*
мешается в ДП судна за кормовым
дейдвудом, х = 0,5.
Рис. V.5. К определению площа ей
Л/?о и
Рис. V.6. Коэффициент хдр для руля
за рудерпостом.
1 5. Если поворотные насадки размещаются по бортам судна, а кормовой дейдвуд
невелик пли отсутствует совсем, х - 0.7.
। 6. Если при крейсерской корме судно имеет небольшой дейдвуд, предназначен-
ный для постановки судна в док, х = 0,9.
’ 7. Если судно имеет транцевую корму без дейдвуда или с малым дейдвудом,
оканчивающимся в районе 17-го теоретического шпангоута или ближе к носу, х = I.
Коэффициент влияния винта xWj) для обычных рулен равен
Л<к+кю + Ая+П» Г>п V1 Сго ,
xDd —a-------—i-------- п'-i-V > - < V-22*
p Ая+я;о + Ал+я> Dp (1 +
, Для рулей за рудерпостом коэффициент хо учитывает не только влияние струи
от винта, но и влияние изменения формы комплекса руль—рудерпост при перекладке
79
руля. Этот коэффициент может быть найден по полученному Р. Я. Першнцем эксп
риментальному графику рис. V.6 в функции коэффициента нагрузки впита пи
упору Ctv » относительной хорду руля 5р.
Коэффициент xD для поворотной насадки равен
xDp = 0,752 — 0.052СГо. (\ .23)
§ 15. СИЛЫ ОТ СРЕДСТВ АКТИВНОГО УПРАВЛЕНИЯ
Управляемость многих судов иа малых ходах обеспечивается установкой на
них средств активного управления, т. е. устройств, позволяющих создавать боковую
силу па судне, не имеющем хода В зависимости от назначения, типа и условий
эксплуатации состав н мощность этих устройств на различных судах могут суще-
ственно отличаться. Так, па обычных транспортных судах отношение мощности
устанавливаемых средств активного управления к площади диаметральной пло-
скости судиа иа превыи)ает обычно 1 кВт/м2. На судах с динамическими принци-
пами позиционирования (буровые суда, суда для проведения геодезических иссле-
дований, нпжснсрио-геологическнх изысканий и др) мощность подруливающих
устройств сопоставима, а иногда н превосходит мощность главных движителей, со-
ставляя 7 кВт/м2 и более. Поэтому, есан в первом случае средства активного управ-
ления выполняют вспомогательные функции, то во втором становятся, по существу,
главными средствами управления.
Эффективность САУ характеризуйся величиной тяги, создаваемой устройством
на швартовном режиме. Однако в режимах, отличных от швартовного, величина
тяги и, следовательно, эффективность устройств не остаются постоянными, изменяясь
не только в зависимости от потребляемой в данный момент мощности, но и от ско-
рости и направления набегающего на корпус судна потока. Например, подруливаю-
щие устройства типа «винт в трубе» работоспособны при скоростях хода судна, не
превышающих 5—6 уз, рабочие диапазоны скоростей для крыльчатых движителей
и винтовых колонок оказываются значительно шире.
Задачи, связанные с определением сил. создаваемых средствами активного
управления, можно подразделить на две. Первая из них состоит в выборе места рас-
положения САУ по длине судна и потребных величин сил, которые необходимо при-
ложить к судну для выполнения им заданных стандартных маневров — удержа-
ния или paacopoia па месте, прямолинейного движения в условиях ветра, волнения
и течения. Очевидно, что вопросы изменения эффективноеiи устройств в этом слу-
чае значения не имеют Не имеет значения также и тип САУ.
Полученные таким образом силы, равные по величине потребным тягам подру-
ливающих устройств, могут быть практически реализованы различными САУ.
Выбор последних зависит от многих факторов, среди которых существенную роль
играют гидродинамические, обусловленные взаимодействием устройства с корпусом
и набегающим потоком.
Да'ппыс. па основании которых проводится гидродинамический расчет САУ
(§ 38, 39 раздела первого), относятся к наиболее простым режимам движения и не
позволяют вычислить действительные величины сил, которые создаются средствами
активного управления в режимах, характеризуемых изменением углов дрейфа от О
до 180' и радиусов кривизны траектории от 0 до со. Поэтому реальные возмож-
ности САУ, выполняющих функции вспомогательных устройств, уточняются в про-
цессе эксплуатации судов, а для судов с динамическими принципами позициониро-
вания требхются специальные исследования сил н моментов, создаваемых выбран-
ными средствами активного управления. Величины этих сил и моментов входят
в уравнения движения, используемые, в частности, для разрабо1ки автоматических
систем динамической стабилизации, а также для расчетной оценки внешних возму-
щений, при которых обеспечивается безопасная эксплуатация судна.
Гидродинамические проблемы оценки взаимодействия САУ с корпусом и пото-
ком чрезвычайно сложны и с трудом поддаются теоретическому анализ». Поэтому
методы определения тяговых характеристик устройств базируются, главным обра-
зом. на результатах испытаний моделей устройств и судов.
Подруливающие устройства типа «винт в трубе» . Для измерения сил и момен-
тов, создаваемых подруливающим устройством типа «винт в трубе», на модели судна
80
„станав1нваются модели подруливающих устройств, соответствующие но коли-
честву, месторасположению и геометрическим размерам, выбранным ьа основании
реше in” указанных выше задач, натурным устройствах!. Особенность нзгоювления
Доделен ПУ состоит в том, что не требуется, как правило, полного конструк!явного
соответствия их натурным устройствам. Так, впиты регулируемого шага можно за-
менить винтами фиксированного шага с эквивалентным упором в швартовном ре-
жиме работы. Полученные в процессе испытаний абсолютные величины сил и момен-
тов, действующих на модель судна от подруливающего устройства, представляются
в виде безразмерных коэффициентов, равных отношению тяги п момента при задан-
ном режиме движения к тяге и моменту па швартовном режиме. Эти коэффициенты
^читаются одинаковыми для модели и для натурного судна прн сходных режимах
работы устройств. Режимы работы устройств при одинаковых на модели н натуре
углах дрейфа хар ктернзуются отношением скорости движения модели пли судна
«скорости струн на выходе ПУ. Используя реальные тяговые характеристики нв-
TVnillJX VrrnflWCTn НЯ HIRan7ORLin\l ПСЖИМС И
турных устройств иа швартовном режиме и
модельные безразмерные коэффициенты тяги
на различных ходовых режимах, можно го-
лучить фактические значения сил и момен-
тов. действующих на судно со стороны уста-
Рис. V.7. Влияние угла дрейфа
и отношения скорости судна к ско-
рости струи на относительную бо-
ковую силу, создаваечую ПУ.
и отношения скорости судна к ско-
рости струп на относительный мо-
мент, создаваемый ПУ.
оказывается достаточной для практн-
новленных па нем ПУ. Точность метода
ческих расчетов.
Гидродинамические сила и момент, создаваемые ПУ типа «впит в поперечном
Канале*. преде1ав1яются в виде
>znr = >'и11.Р|; Мпу = Гшв^пуР.м.
(V.24)
где УП|В — значение тяги на швартовном режиме; /ну — расстояние от ПУ до центра
Масс судна; Ру. Рм — коэффициенты влияния.
I Если в носовой или кормовой оконечностях рядом друг с другом располагаются
несколько НУ, объединенных в группу, ю /пу вычисляется по формуле
/ПУ = "Y" У] /пу’ (V.25)
/=1
f Здесь k — количество подруливающих устройств в группе; /пу, — отстояние
f-го ПУ от центра масс.
Коэффициенты влияния и Р.м прн фиксированном положении ПУ являются
сложными функциям-i отношения скорости потока к скорости струи на выходе НУ
и угла дрейфа. Скорость струи на выходе ПУ определяется по формуле
ис — [ ) шв.'!1 >ПУ >
гДе Л пу — площадь сечения ПУ.
(V.26)
81
Для примера на рис. V.7, V.8 показаны зависимости коэффициентов Ry и
от угла дрейфа р при различных отношениях скорости судна к скорости струн на
выходе ПУ для бурового судна. Приведенные зависимости относятся к случе.о
когда чрноврсменпо работает носовая группа из трех устройств, расположена х
в точках по длине с относительными координатами = /пУ|/^ = 0,372; О,3'<7
и 0,423. Струя, отбрасываемая ПУ на левый борт, при положительных углах дрсй<]а
была направлена против набегающего потока, прн отрицательных углах дрейфа —
по потоку.
Из рисунков видно, что существуют режимы движения судна, прн которых тг..а
и момент, создаваемые расположенными в оконечности подруливающими устрой-
ствами, могут заметно превосходить по величине их значения на швартовном рс-
И/¥щв
жиме. Эффективность подруливающих устройств в этом случае растет. Однако то
обстоятельство, что эффективность ПУ по сравнению со швартовным режимом уве-
личивается при направлении струн навстречу набегающему потоку, не позвотж
практически воспользоваться этой благоприятной особенностью. Реальные режим11
движения чаще всего характеризуются совпадением направлений струи и потока
(0 = —90-г-0г). и угол дрейфа играет отрицательную роль.
Отрицательное влияние утла дрейфа согласно приведенным данным усугубляемся
с увеличением отношения т. е. с уменьшением загрузки ПУ. Из этого следует,
что на судах с динамическими принципами позиционирования выгоднее вместо одно о
ПУ большой мощности устанавливать несколько устройств меньшей мощпост .
Это обеспечивает как резервирование па случай выхода из строя каких-либо
устройств, так п более баагопрнятные условия работы. Выключая прн определение х
устовиях часть ПУ и поднимая таким образом загрузку оставшихся устройств, мож о
уменьшить падение тяги и, следовательно, более экономно расходовать мощности.
Сказанное выше о влиянии скоростей потока и струн, а также утла дреГкра
справедливо в случае, если отстояние оси i-ro ПУ от свободной поверхности соста г
ляет ие менее одного диаметра отверстия ПУ. Если же расстояние осн ПУ от свсб •
ной поверхности меньше одного диаметра ПУ, в практических расчетах следу’-1'
положить Ушв = 0.
Выдвижные колонки. Выдвижные колонки (ВК), пли опускаемые подр •
лпвающие устройства (ОПУ), представляют собой комплекс гребион винт — насадк
который опускается под днище судна. В К могут быть либо поворотные, либо исго-
воротные. В первом случае оии способны разворачиваться относительно вертикал >'
пой осн на угол 360е, во втором — ось насадки неподвижно устанавливается п<Д
определенным углом к диаметральной плоскости. Этот угол, как правило, равен 9С •
82
1 Эффективность комплекса винт—насадка характеризуется кривыми действия
Кд- гл VIII раздета первого) получаемыми в свободной воде или в присутствии
корпуса расчетным или экспериментальным нулем. Направление набегающего по-
тока в этом случае совпадает с осью симметрии насадки.
Чтобы определить тягу, создаваемую ВК при произвольном движении судна,
указанных кривых действия недостаточно. На рис. V.9 приведены зависимости,
показывающие изменение тяги изолированных колонок при изменении скорости,
частоты вращения винта и угла дрейфа. Для примера взяты результаты испытаний
труппы из трех одновременно работающих ВК. Нулевому углу дрейфа соответствует
их положение, прн котором осн симметрии насадок перпендикулярны к набегаю-
потоку. Изменение угла дрейфа («таки) ВК осуществлялось поворотом плат-
A//max
—
//Н
V ?с=0.Л/ / till
ж !
//&
У//-0Л5
7 Н-о,ч
Уй— V /If W -2 0 5 0 0 60 0 0 рс
V
Рис. V.10. Влияние угла дрейфа и отношения скорости судна к скорости струи на
относительное сопротивление, создаваемое изолированной ВК
формы, на которой крепились всеете с динамометром и электродвигателем колонки.
При положительных углах дрейфа струя от гребных винтов отбрасывалась по на-
правлепно набегающего потока, при отрицательных—навстречу потоку. Компо-
нента V соответствует силе, направленной вдоль осн насадки, компонента X —
силе, направленной' перпендикулярно к оси насадки
На рис. V.IO показана зависимость Х/Хтах ВК в диапазоне углов ±90° от v'Vc,
ГАе ^пих — сила сопротивления, создаваемая работающей колонкой, при Р = 0,
На рис V.11 —зависимость отношения Хщах к Кшп, полученная для различных
колонок и нх сочетании В общем случае при р > 0 (направление струи совпадает
а Направлением набегающего потока) величина А'тах = А'1тах/УШЕ может быть пред-
ставлена как
Атах = А(о/ос). (V.27)
6 = 2— для одиночной изолированной колонки; k= 1,65—для групп из
адУх и трех колонок.
83
Скорость струп tv в этом случае согласно 16] определяется по формуле
(V.28)
(V.29)
i’c = V;
Атах = k (Р^Ор/2) Wc.
Как показывают результаты испытаний, в золе углов атаки Р от О до 90е отно-
шение Х/Хтх зависит, главным образом, только от величины этого угла, при 0>
> Р > —90’ величина Х/Атах зависит п от угла дрейфа, нот отношения v'vr.
Сила У (см. рнс. V.9) при Ь<5 р<- 90° может быть вычислена по формуле
К = Кшв |1 — [1 (^//^/шв)р=9ос] sin Р|. (V .30)
V.П. Влияние угла дрей-
отношения скорости судна
Рис.
фа и
к скорости струн на относитель-
ное сопротивление, создаваемое
изолированным ВК Р = 0г).
I — одна ВК: 2 — группа ВК.
Поскольку у винтов регулируемого шага кривые действия по у пору при изме-
нении шага впита смещаются относительно друг друга примерно па постоянную в<.
личину, то величина (У l''uin)p-<xje, которая
определяется по кривым, аналогичным кривым
рис. V.9, не будет явно зависеть от шага вин-
та. Шаг винта будет проявляться только в вс
личине УгаЕ н, соответственно, vc.
При 0 > Р > 90' зависимость Y от Р и
vivc носит более сложный характер, изменяясь
с углом дрейфа примерно пропорционально
sin зр.
Относительно простые зависимости сил, со-
здаваемые изолированными ОПУ, существенно
усложняются в случае его работы в присутст
вин корпуса.
На рис. V.12—V.14 представлены величины
Х/Л'щах, Е/Гши, а также коэффициент измене-
ния момента М.'МШВ, создаваемые теми же
ОПУ, установленными иа модели судна, относи-
тельно центра масс модели. Как и в предыдущем
пункте, данные относятся к модели, в посевов
части которой была установлена группа из трех
ОПУ.
Приведенные результаты показывают, что
если направление струи, отбрасываемой ОПУ
близко к направлению набегающего потока, сн
лы, создаваемые этими устройствами в присутст-
вии корпуса, мало отличаются от таковых для изолированных ОПУ. Отличие обу-
словливается в основном изменением засасывания и коэффициента попутного пото-
ка. Дополнительная безразмерная сила сопротивления X. Хтах от работающих
ОПУ в диапазоне углов дрейфа 0—180е практически не зависит от v/vc, В остальных
случаях силы и моменты, создаваемые ОПУ в присутствии корпуса, резко отли-
чаются от сил, возникающих на изолированных устройствах.
Кроме того, значительное влияние на тяговые характеристики ОПУ оказывает
не только присутствие корпуса, но и его форма. Поэтому, как и в случае ПУ типа
«впит в трубе», необходимые для практического использования результаты по влия-
нию корпуса на эффективность ВПУ можно получить только в процессе модельных
испытаний.
Поворотные колонки с винтом в насадке, Гидродинамический эффект поворот-
ной колонки аналогичен рассмотренному выше для ОПУ, однако определение сил.
создаваемых колонками при произвольном движении судна, значительно сложие<
так как наряду с изменением угла дрейфа необходимо учитывать и поворот колонок
относительно диаметральной плоскости судна.
На рис. V.J5 показана диаграмма, характеризующая изменение сил, создавас
мых установленной в носовой оконечности судна поворотной колонкой, в связанной
с судном системе координат при различных углах поворота колонки 6И, нулевом
угле дрейфа к различных величинах отношения v'vc.
«4
J Система координат, соответствующая приведенной диаграмме, представлена
яа рнс. V.16.
На рнс. V.I7 показаны зависимости относительного угла отклонения вектора
ТЙГи колонки от ее осн от угла 6К, построенные по данным диаграммы. Здесь
— угол отклонения вектора тяги при 6К = 90 .
к скорости струи иа относительное сопротивление, создаваемое
ВК в присутствии корпуса.
I Имея подобные зависимости, для расчета сит в связанной с судном системе
координат можно рекомендовать следующие приближенные формулы:
Л = РК sin(\ + 6«); (V.31)
PKcos(6K + 6j; (V.32)
Ря~ РШЕ + (/'’фЕ+*тах - Рше) sin2(бк- рм) - ДР| cos (6К - рм) [. (V 33)
Здесь величина ДР характеризует падение тяги колонки от скорости хода судна
, Чри 6К = 0. Приближенно
ДР = Л, (рЛО| 2) vcc, (V.34)
где ft,— коэффициент наклона кривой действия колонки в присутствии корпуса
(см рис. V.9, р = —90J.
85
Момент, создаваемый поворотными колонками относительно вертикальной оси
проходящей через центр масс судиа, определяется умиожет нем силы Y па плечо, р„в'
ное отстоянию колонки от центра масс.
Крыльчатые движители. Изолированные крыльчатые движители (КД) создав т
силу Р, величина и направление которой зависят от поворота центра управления
М(Мшв
относительный момент, создаваемый ВК в присутствии корпуса.
и величины эксцентриситета. На швартовном режиме значения этой силы в проек-
циях на связанные с судном оси системы координат можно определить по формулам
X = Р cos ая; Y = Р sin as. (V.35)
Величина P определяется либо путем модельных испытаний, либо расчете
Соответствующие этому методики предусматривают для открытого КД, т. е. К
установленного под днищем судна, проведение испытаний или расчетов примети-
телыю к швартовному режиму, режиму свободного хода либо режиму выхода 1'3
циркуляцию. Данные о величинах сил, создаваемых КД при произвольном движе-
нии, практически отсутствуют. Можно указать только результаты, полученные
О. В. Рождественским в процессе модельных испытаний КД при прямолинейны-1
движении модели судна с нулевым углом дрейфа. Результаты этих испытаний пр И-
ведеиы иа рис. V.18—V. 19 в виде зависимостей безразмерных коэффициентов тя Н
86
iz г в направлении продольной оси судиа и боковой тяги Леу от угла поворота центра
^правления сх3 и относительной поступи J = v.vg, где v — скорость судна: vg =
J. nD — окружная скорость цапфы лопасти; п — частота вращения движителя;
Л диаметр по осям лопастей.
’ Ест пренебречь углом скоса потока в районе движителя, обусловленным кор-
пусом. то изменение местного угла дрейфа pw приведет к изменению па такую же
величину угла поворота центра управления Фактически угол поворота центра
управления определяется по формуле (рис. V.20)
aJ* = as + PM. (V.36)
I Прн определении величин и КеУ при as = к’* по кривым на рнс. V.18 и
V.19 силы, создаваемые крыльчатым движителем в связанной с судном системе
□ординат вычисляются по формулам
X = Рх cos рм — Pv sin Рм; (V .37)
Y = —Ру cos рм — Рх sin Рм,
где
Здесь А = DI
Рх = КсХ (р/2) PY = К'у (р/2) Av*.
(V.38)
(V 39)
— площадь гидравлического сечения движителя.
87
Момент создаваемый КД относительно центра пасс, определяется по форм} 1f
М = У1КД, (V 10)
где /кд — отстояние КД от центра масс судна; /Кд > °, если движитель смсищ,
в нос от центра масс.
Угол дрейфа ₽м вычисляется по формуле (IX.67)
Приведенные выражения приближенно справедливы для открытого движителя.
Если же крыльчатый движитель используется как вспомогательный и устанавли-
вается в поперечном канале, действие его будет аналогично действию ПУ типа «вш Т
в трубе».
Активные рули Гидродинамические силы, действующие на активный руль (Л
можно представить в виде двух проекций иа осн связанной с судном системы коор-
динат. Одна из проекции X, направленная вдоль диаметральной плоскости судна,
условно называется сопротивлением, другая, перпендикулярная к первой, Y — С
копой силой. Схема сил. действующих на ЛР, показана на рис. V.21. Как и в слу-
чае обычного руля, гидродинамические силы, действующие на АР, создают отнеся-
тельно баллера крутящий момент Однако величина этого момента ие оказыва<г
88
ЙВкого-либо влияния на характеристики управляемости судна и поэтому в уравие-
Княх движения не учитывается.
Г Гидродинамические силы, создаваемые АР, можно представить В виде суммы
Lnex составляющих
X-----Xn~XP-XD; (V.41)
И = У П + У Р + У Di О' ’42)
^де Xr, Уп — сила сопротивления н боковая сила, действующие иа перо руля;
v YP — упор к боковая сила действующие иа движитель комплекса; ad. УD
I сопротивления и боковая сила, действующие на направляющую насадку в ко-
^0 потоке.
I Если направляющая насадка отсутствует, то Л'о = 0. У д = 0.
I Схема гидродинамического расчета характеристик АР 16] предполагает исполь-
зование результатов систематических испытании судовых рулей, гребных винтов
в направляющих насадках, а также результаты систематических исследований
взаимного влияния друг на друга элементов активного руля.
В Данные по определению гидродинамических характеристик обычных рулей
и гидродинамических характеристик поворотных насадок содержатся в § 35, 36,
необходимые материалы для расчета сил, действующих на гребные винты, можно
найти в третьем разделе т. I Справочника.
[ Основные исходные данные для расчета гидродинамических сил, действующих
на АР: геометрические элементы пера активного руля, геометрические элементы
’Движительиого комплекса, мощность приводного двигателя и габариты его обте-
кателя, заданная скорость хода п0.
I Предполагаются известными также величины попутного потока корпуса судна
♦р. Коэффициент засасывания I* принимается равным нулю.
Последовательность расчета сил, возникающих на активном руле при задан-
ной скорости хода для каждого угла перекладки руля бр. если ход судна обеспечи-
Чается только действием движителя руля, состоит в следующем.
89
1. Определяется скорость аксиального потока в месте расположения движи-
теля ЛР
va = i-о (I - фр) (1 — фо) cos fe6n, (V.43)
где фо ~ 0,2 — коэффициент попутного потока, обусловленный наличием обтека-
теля приводного движителя; k — коэффициент, учитывающий влияние пера руля
на скос потока в месте расположения движителя, вычисляемый но формуле
k = 0,43 + 0.02/. + 0.000756^. (V .44)
Рио. V.19. Зависимость
коэффициента баковой
силы КД от угла пово-
рота центра управления
н поступи.
Здесь Л — удлинение пера руля.
2. По потребной тяге движителя АР Хе, равной сопротивлению судна при ско-
рости и0, по диаграммам серийных испытаний винтов в насадках (гл. XII т. 1) опре-
деляется коэффициент тяги винта = X/pn2D4 в зависимости от относительной
поступи J = va/nD.
3. Вычисляется вызванная аксиальная скорость в плоскости движителя
90
где сп для реальных удлинений руля может быть вычислено по формуле
сп = 0.525 + + 0,13^-|-У . (V 46)
4. Действительный угол атаки пера активного руля находится из выражения
(V.47)
5. Силы, действующие на перо активного руля, вычисляются по формулам
Хп — 1 ,2Сдя (р,2) (св 4- t>a ср)® 4r; (V.48)
У я = ху Суя (Р/2) (Го + va ср)1 Лп, (V.49)
где Схп н Суя — гидродинамические коэффициенты изолированного руля
(см § 35).
I Коэффициент 1,2 учитывает увеличение сопротивления пера руля, обеспечи-
те юе обтекателем, коэффициент Ху находится по графикам рнс. V.22.
91
6. По данным систематических испытаний поворотных насадок определяют;я
Cvn и Суо а зависимости от величин fe6 и CJo = fefe, /nJ”. Соответственно
— C\D (pt>5/2) n£|m|ii/D; (\ 50»
Ур= Cyo(pi>2 ^)nDmln/Di (V.51)
где А'д, Y'd — тангенциальная и нормальная силы, действующие на ЛР.
Тогда
= Х^созЛбд 4-y^sin ('’-52)_
Г q ” Y 0 cos А'бд Xsin *j3>
Поскотьку тяга Хе гребного винта ЛР в рассматриваемом режиме известна
(так как коэффициент засасывания равен 0, она по величине совпадает с упором),
Хр = Хе~, У р = Хк tg Абд. (V.54)
Суммарные силы, действующие на активный руль, представляются в виде з.
впспмостп этих сил от угла перекладки АР и относительной поступи гребного винта.
Прн подстановке этих сил в уравнения движения их удобнее аппроксимировать
аналитическими зависимостями от 6 и J.
Точность, обеспечиваемая расчетными методами, оказывается достаточной для
опенки подведения судна под действием активного руля в зоне перекладки до 40—45
Для получения гидродинамических характеристик АР в общем случае движе-
ния, как и для рассмотренных выше средств активного управления, требуется про-
ведение модельных испытаний, которые в силу множества варьируемых параметрон
оказываются весьма трудоемкими
В заключение следует отметить, что указанные выше методы определения си.
и моментов, создаваемых САУ, предполагают справедливость гипотезы стационар-
ности. Методики, а также расчетные схемы, которые бы позволяли учесть нестацяо-
нариость движения судна, особенно в условиях волнения, на силы и моменты, созда-
ваемые САУ, в настоящее время не разработаны.
Глава VI
ДВИЖЕНИЕ СУДИЛ НА ТИХОЙ ГЛУБОКОЙ ВОДЕ
§ 16. УРАВНЕНИЯ ДВИЖЕНИЯ СУДНА,
УПРАВЛЯЕМОГО РУЛЕМ ИЛИ ПОВОРОТНОЙ НАСАДКОЙ
Исследование свойств судна как системы, управляемой по различным коорди-
натам, принципиально возможно либо путем расчета тех или иных движений (харак-
терных маневров) судиа, либо путем моделирования характерных маневров, осу-
ществляемого с помощью физических или электронных моделей. В последнем слу
час часто используются аналоговые ЭВМ, позволяющие не только рассчитывать пара-
метры движения судна при заданном управляющем воздействии, но и моделировать
процессы упрамення его движением.
Прн моделировании на физических моделях задача исследования сводится
к выбору характерных маневров и к осуществлению их па самоходной нлавающ '<
модели судиа. Такой путь, часто применяемый в реальном проектировании, не
всегда возможен. Поэтому наряду с ним широко применяются расчеты либо электрон
ное моделирование, дтя осуществления которых необходимы уравнения движет
судна.
Расчетными методами могут быть легко обследованы влияния иа процессы
управления различных конструктивных паризитов судка, а также внешних усло-
вий плавания.
Уравнения движения, используемые для расчета пли электронного моделиро-
вания, зависят от намеченных характерных маневров н от предполагаемых внеш-
них условий плавания судна.
S2
Уравнения движения судна как замкнутой системы состоят из уравнений дви-
жения разомкнутой системы, кинематических уравнений связи между выходными
ординатами, □ также закона управления, связывающего входную координату
наблюдаемыми н управляемой. Настоящий параграф посвящен уравнениям дви-
«М1НЯ разомкнутой системы. Наиболее употребительные уравнения связи ука-
аны в § 3
Уравнения движения могут быть безразмерными и размерными. В последнем
лучае два уравнения имеют размерность силы и одно — момента. Обычное движе-
те передним ходом судна, управтяемого рулем, сопровождается возникновением
больших по величине углов дрейфа, что позволяет сравнительно просто записать
равнения, характеризующие это движение.
Основой любых уравнений движения явтяются зависимости всех действующих
на судно сил от входной и выходных координат системы
При составлении уравнений движения обычно используют следующие упро-
иощие допущения:
1. Вертикальные перемещения судиа в процессе движения считают пренебре-
що малыми; движение судна потягается происходящим в плоскости ватерлинии.
[ 2. Принимают, что наклонения судна в плоскости шпангоута .малы и не оказы-
вают влияния на величину гидродинамических сил.
¥ 3. При вычислении инерционных сил, действующих на судно, считают, что
•удно симметрично не только относительно ДП, ио и относительно мидель-шпан-
зута и что центр тяжести судиа располагается в плоскости мидель-шпангоута.
4. Влияние изменения числа Фруда, а также посадки (дифферента н средней
:адки) судна в процессе маневра не учитывают.
5. При определении действующих па судно гидродинамических сил н моментов
^инерционной природы полагают, что прн неустановнвшемся движении в каждый
омеит времени они равны силам и моментам, действующим на судно, совершающее
гационарное движение с теми же мгновенными элементами, т. е. используется ги-
ртеза стационарности.
. Уравнения движения судна удобно составпять в связанных осях. Начало коор-
динат располагается в точке, лежащей иа липин пересечения ДП с мндель-шпаигоу-
%м (или приближенно в центре тяжести судна), ось х направляется вдоль ДП в нос,
ось у — в плоскости мидель-шпангоута на борт. Ест и судно движется с помощью
зебиых винтов и управляется рулевым устройством, то уравнения движения разом-
нутой системы имеют вид
X + Хп + ТЕ = 0; (VI. 1)
Y + Yr = 0; (VI.2)
Al + = 0. (VI.3)
В этих уравнениях X, У—проекции гидродинамической силы, действующей на
сорпус судна (включая инерционную); Хц, Уд — проекции гидродинамической
1лы, действующей на руль; Те — тяга гребных винтов судиа; Af — момент отно-
Ьелыю начала координат, действующий иа корпус; Мп — момент от руля отио-
тельно начала координат.
С учетом формул глав II и V уравнения движения судна, управляемого рулем,
Юют вид
—рУ (I + fen) (dv.'dt) + рУ (I + /ги) гф (dfr’df) —
— рУ (1 + ад иор - Сх0 (р/2) v*ALa -
- Схп (р/2) t>2ARE + 7'я = 0; (VI 4)
рУ (I 4- М (dv/dt) Р + (>V (I + ад v (dfr'dt) —
- рУ (I + Л„) oto + (Cr£p + c”p | p I) (p/2) t?ALo -
-С?'ф/г -’1г(Р + ~ '”)] (p/2) = °: <V1 5>
(1 + Лб6) (rfw/Л) + CpVIR (p,2) v2Alолр - (p,2) vALoL2u> +
T CyrIr — x£ --------------Ц—' ~ 0’ O’ 1-6)
93
Общий метод упрощения системы (VI.4)—(VI,6) заключается в разделе цщ
уравнений. Для определения двух неизвестных функций fl = f (/) и со = f (/) доста-
точно иметь систему двух дифференциальных уравнений (VI.5) н (VI.6). Поскольку
изменение скорости хода в процессе маневра мало влияет иа элементы движения
(угол дрейфа и кривизну траектории), последние могут быть найдены из сметы u
уравнений (VI.5) и (V 1.6) в предположении, что v = const пли dvidt = 0.
Уравнение (V 1.4) принципиально может быть использовано для определении
скорости хода v. Однако вследствие того, что тяга гребных винтов от элементов дви-
жения зависит неопределенно, а зависимость коэффициентов сопротивления кор,
пуса и руля от углов их атаки нелинейна, оказывается целесообразнее определят,,
изменение скорости хода исходя из других соображений (см. § 17 раздела первого)
С учетом допущения о постоянстве скорости хода уравнение (VI.5) приобретает
вид
pl- (1 + v - pV (I + mb 4- (C^fl - r₽ I) (p/2> v~ALq -
— С“Л — x£ (fl-(—(p/2) Are = (J (VI. )
Система уравнений (VI.6) и (VI.7) является нелинейной, поскольку в уравне-
нии (V1.7) имеется член, содержащий fl | fl|. Поэтому решение системы в замкнутом
виде невозможно, и для определения искомых функций fl = / (/) и ы = f (/) необхо-
димо прибегать к численному интегрированию уравнений.
Для того чтобы получить приближенное решение системы (VI.6) и (VI.7) в ко-
нечном виде, можно прибегнуть к линеаризации уравнения (VI.7). С этой целью
выражение (11.44) СУр = tf-pfl + с2₽ можно представить в виде
+ ссР5 = Cypfl (V 1 )
и подобрать коэффициент Су так, чтобы равенство (VI.fi) удовлетворялось прн не-
котором заранее выбранном значении угла дрейфа fl = fl' Второй распространен-
ный путь линеаризации заключается в отбрасывании нелинейных членов в выр -
женпях (Н 44) и (VI.8). что равносильно первому способу линеаризации прн fl
= fl' = 0. Во втором случае Сур = Cf-p.
Конечный результат расчета элементов движения судна в большой степс).и
зависит от выбора угла fl'. В случае если угол fl' выбран малым (в частности, нуле-
вым), решение системы уравнений может привести к выводу о том. что угол дрейфа
и угловая скорость судна стремятся к бесконечности, а установившаяся циркуля-
ция не наступает вовсе. Чтобы избежать такого противоречащего физическому с.мыс у
решения, прн расчете элементов неустановившегося движения судна в сильном мт-
неврс целесообразно выбирать в качестве утла р’ значение угла дрейфа данного су tna
при установившейся циркуляции с углом перекладки руля, равным наибольшему
утлу'перектадки при совершении рассчитываемого маневра. Для этого необходимо
предварительно рассчитать элементы установившейся циркуляции по нелннейи '•
уравнениям (схема такого расчета изложена в § 18), а затем, положив fl’ = р,.
найти коэффициент С\ р по выражению
С,,р — С^-р + c2flf. (VI .9)
Элементы движения судна, которые получаются при этом после интегрирова-
ния дифференциальных уравнении движения, совпадают с действительностью линь
при установившейся циркуляции с наибольшим при выполнении маневра углом пе-
рекладки руля ио содержат тем большую ошибку, чем больше разница между прД'
вой п левой частями выражения (VI.8) при найденном из (VI.9) значении коэфф
циента Сур и углах дрейфа, меньших flc. Ошибка, проистекающая от линеариза-
ции уравнения (VI.7) описанным способом, заставляет рекомендовать использова-
ние линеаризованных уравнений для расчета сильных маневров лишь в исключи*
тельных случаях, когда применение ЭВМ по каким-либо причинам невозможно
Уравнения, линеаризованные путем отбрасывания нелинейных членов в выр-1'
женнях (11.44) н (VI.8), вообще недопустимо использовать для расчета сильны*
94
девров, поскольку такой расчет при отсутствии устойчивости движения разомкну*
д системы может привести к результатам, ошибочным нс только в количественном,
, и в качественном отношении. Однако такие уравнения хорошо описывают движе-
ie седна в слабых маневрах, поэтому они весьма широко используются прн опенке
дойчивости движения судна (см. гл. VII первого раздела), а также прн расчете рыс-
1нпя судна на волнении.
С учетом сказанного система линеаризованных уравнений (V 1.6) и (VI.7) приоб-
щает вид
pl' (1 + Л2,) -j (еф/Л) - pV (1 + *„) в<о 4- С; р ((./2) o2/lLcP -
- с?я [X - (₽ + «) ] (р/2) = о; (VI Ю)
(1 + М + C!w«P/2) <Р/2) вЛ£о£2«> +
+ С?я [бЛ - Х£ (F cd) ] (0/2) v~ARE = U. (VI. 11)
I С помощью выражения (1.16) и формул
св = й(цД); 0’112)
d|i d( = (dP dr) (с0 6); (VI 13)
dcD dt = (dco dr) (t«e L)2 (V 1.14)
i, принимая во внимание, что вследствие допущения о постоянстве скорости хода
= с0, систему уравнении (VI 10)—(VI.11) можно привести к следующему безразмер-
оыу виду:
dfi dx -}- <?2iP + r21® + — 0’ (V I 5)
dio'dt + <?31р + г31Т° + «э/п = О (VI 16)
:кбо к двум независимым уравнениям
dpp/dx- + 2р (dP'dr) + <?Р_= —s21 (dfK dt) + s₽n;
I cFw.'dr2 + 2p (dco Wt) + <7<jJ = —Ss! (dbR dT) + s6n.
В уравнениях (VI 15)—(VI.18) обозначено
^гВ^бсЛ + ^yrkeare^ .
451 ~ 2V(14-fec2)
^YR{ RM'lFARF^ ~ 2V (1 +^i|) _
Гг,~ 2V(t-*22)
_ cyrarfl .
511 2I'(I +*.г) ’
_ P^-3 ~ Cyr1rm*eare)
<7з,_ 2/.z(I+*.e)
_ р13(сжАо + ^r^ru^e^rf) ,
31 2/^(1+^)
_ О1-' Cyr1 rmare .
31 “ 2/г1 (1 + *ee) ’
2p = 921+
<7 = РзИз! — ЧцГ-гй
s = — rgiSji;
s = — SsiCjji,
(\ 117)
0’1.18)
(\ 1 19)
(VI 20)
(VI.21)
(VI 22)
(VI. 23)
(VI.24)
(VI.25)
(VI.26)
(V 127)
(\ 1.28)
95
Решение линейных дифференциальных уравнении (VI.17) или (VI.18) позволяет
при сделанных допущениях приближенно определить ocHOBiiue элементы двнжс тин
судна— угол дрейфа р п безразмерную угловую скорость ш — при условии, что
задан закон перек-яадкн руля во времени = / (/) пли бп = / (т)
Положение судна на плоскости в каждый момент времени т может быть опр>
делено путем расчета курса /. угла скорости ify, продольного смещения xos и ,.
перечного смещения uos (см. § 3).
Дифференциальное уравнение для расчета курса / имеет вид
rf^'dr* + 2р (if-y'dt") •]- 9 (d/.'dx) = — s;ll (<(6П </т) + s6n. (Vlity
Угол скорости <рс находится по выражению (1.11). а продольное и поперечт ое
смещения х,|ч и уйв определяются выражениями (I 23) и (1.24) Сделанное дону те
пне о постоянстве скорости хода приводит к значению относительной скорости v =
= I. Однако при подсчете продольного и поперечно-
го смещений при сильном маневре судна от этого
допущения целесообразно отказаться и учитывать
падение скорости в соответствии с рекомендациями
§ t7. При этом курс/также должен быть подсчитан
с учетом падения скорости хода.
Определение элементов движения судна сво-
дится к интегрированию уравнении (VI.I7) и
(VI.18), а также уравнения (VI 29) При заданном
законе перекладки руля во времени эти уравнения
могут быть проинтегрированы в конечном виде
Система нелинейных уравнений (VI.6)—(VI.7,
в безразмерном виде записывается как
dp dx + 921р + г,,щ 4- зг/п + /т,р | Р I = 0; (VI 30)
t/ш dx + дл1Р + г3|Ш 4- s8|6п = 0. (VI 31)
Рис. VI. I. Закон 1И‘|нклтд-
ки руля при циркуляции
судна.
Решить такую систему тля неустановнвшегося движения можно только численно,
однако для установившегося движения, при котором dp dx — dwdx = 0, решение
получается в конечном виде. Для такого движении можно принять р > 0, и тогда
уравнения приводятся к виду
9s iP + 6>|Ы + s-i^k + й,рг = 0.
</зтР + '•цш + Хз|^д = 0.
Входящие в эти уравнения коэффициенты 92| и равны
1 21 (I 4- А22)
~ 2V'(l-r*22)
(VI.32 т
(VI.33)
(VI.34)
(VI.35)
§ 17. НЕУСТАНОВИВШЕЕСЯ ДВИЖЕНИЕ СУДНА
Среди множества маневров, совершаемых судном, особую роль играет цирку-
ляция (сы. § 3), поскольку в переходном процессе, обусловленном единичной пере-
кладкой руля, выявляется маневренность судна как системы, управляемой по р <*
личным координатам. Наиболее целесообразно рассчитывать циркуляцию суд: т
на ЭВМ, используя систему нелинейных уравнений движения (VI 30)—(VI.3D-
В некоторых случаях качественная картина движения может быть получена J
основе решения линейных уравнений, которые интегрируются в конечном индс-
Закон перекладки руля при циркуляции судна можно представить графике'1
рис VI.I, Руль перекладывается на заданный угот 6/<о за безразмерное вр< я
= hi^L, (\ 1-5°)
96
а затем остается в переложенном положении. Здесь — время перекладки руля,
зависимость угла перекладки от времени может считаться линейной. Таким образом.
0 периоде перекладки руля (в маневренном периоде циркуляции)
тр, (VI.37)
р в эволюционном и установившемся периодах
бЛ = 6/?О- (VI.38)
L Линейные дифференциальные уравнения (VI.17). (VI 18) и (VI.29) при таком
законе перекладки руля удобно интегрировать по участкам, первый из которых
соответствует маневренному, а в юрой — эволюционному и установившемуся пери-
одам циркуляции.
Определение угла дрейфа. В первом участке интегрирования дифференциальное
уравнение (VI 17) с учетом (VI 37) приобретает вид
rf-p + 2р (dP'dr) + <?Р = (б^о тл) (st — s21). (V1.39)
Общин интеграл уравнения (VI.39)
р = С,еп*т 4- Cte,,*T + -^1— т - -^2..+ . /VI .40)
Ъ? Ч ’й
Постоянные интегрирования Ct и Сг определяемые начальными условиями
при т = О
Р = dp dT = О (VI 41)
равны
г* = {s +,sa+ 2р lslQ}]‘- <V1 -42)
С. = — -------------{s + п, |s2I + 2р (s <7) I). (VI .43)
TW(n2 — И|)
Величины «J и пл— корни характеристического уравнения
пг + 2рп 4- q = О. (VI.44)
Определяемые выражением
nllS — — р ± 1Ч>- — q. (VI.45)
Дифференциальное уравнение (V 1.17) во втором участке интегрирования имеет
<Р₽ dt- + 2р (dP rfT) + <?Р = s6ro. (VI.46)
Общий нп1сграл этого уравнения
р - Сяе"'‘1 + CZ"1 + (s q) 6fl0. (V1.47)
Постоянные С3 к Ct определяются нач^тьиымн условиями при т = 0 (отсчет
времени для второго участка ведется заново от нуля)
Р = РТ/? н d₽ dx = (dfl'dx) (VI.48)
В^еРт/? •* (dP'dt)t^ — значения угла дрейфа и его производной в момент времени т^ж
^тветстоующнй окончанию первого участка интегрирования.
Величины и (dp.'dT)T^ определяются из выражения (V1.40)
ft,-c/e«+c/e*+w.,>--6-g- + (vi.«>
*'К ч
(dp dT)t/? = + C2n/iXR + (6r0/tr) (s q). (VI .50)
П/р Я. И Войткунского, т. 3
97
4
Постоянные интегрирования с учетом начальных условий (VI.48) равны
Cj_ [Prn <м)^о]»г-№^)тд ; (VI51)
п2 — г.л
с = _ [Ртр-^МЯ»-<^^Т« VI5
1 "а — "1
Коэффициенты nj и пг определяются выражением (V1.45).
Определение безразмерной угловой скорости. В первом участке интегрирования
дифференциальное уравнение (VI. 18) с учетом (VI.37) приобретает вид
(Paldv + 2р (dw/dt) + що = (6до'тн) (st — s-и). (VI .53)
Общ п"| интеграл этого уравнения
w = D.en‘T D^n'x + — т - $з1 +2Р^'?>., (VI.54)
Ъ? <7 <7
Постоянные интегрирования Е>( и D„ находятся по начальным условиям при
Т = 0
w = dto/dx = О, (VI.55)
и равны
= т Г6”0 1 +Я» + 2Р <4 W}; (VI. 5«<’
vrV v*t ~ z|iJ
Di = ~ W(n?-«i) {® + + 2P (®'Ч)П' <VI 57
Кории характеристического уравнения (V1.44) определяются по (VI.45).
Во втором участке интегрирования дифференциальное уравнение (VI. 18) имеет
вид
dWdt* + 2р (dw/d-t) + <jto = sfino (VI 5(
Общий интеграл уравнения (VI.58)
«о = Dsen’x + Dten,x 4- (V<?) бно- (\ 1 59)
Из начальных условий при т = О
ю = wT и dco/dx = (dw/Л)- , (Vl.f-4
11 п
где и (d(i.dr)XR —значения to и dw dx в момент, соответствующий окончанию
первого участка интегрирования, находятся постоянные интегрирования D3 и £>4’
1“тл ~ (® ‘7) 6/?°] dx) тд
£)э --------------------
(VI .61)
и, —
п — (s. <7) Лдо] п, — (dw/di) тд
ла —
Величины и определяются выражениями
ш = + о/*т« + 6Д0 (ЗД - Sal--t--2p(^
тл Я
(d^!d-x)XR = Р1п1е’,‘Тя + + (вдо/тд)
Кооффтшенты nt и п2 находятся по выражению (V 1.45).
(VI.C4)
98
Безразмерная угловая скорость, найденная по выражениям (VI.54) и (VI.59),
получена в предположении о постоянстве скорости хода судиа в течение циркуляции.
Поправка к значениям величины ы, учитывающая падение скорости хода, может
быть найдена дополнительно.
Опреде сине курса Курс судна в конечном виде может быть определен лишь
при допущении о постоянстве скорости хода в течение циркуляции, поэтому приве-
денными ниже выражениями можно пользоваться только в случае приближенной
справедливости этого допущения, например в случае, когда угол перекладки руля
и кривизна траектории циркуляции малы н падением скорости хода можно пре-
небре ь.
В первом участке интегрирования уравнение (VI.29) с учетом (VI.37) имеет вид
<РХ<'А* + 2р (cPx'dx1) + q (Л/ Л) = (6дО тл) («т — s,t)- (VI.65)
Общий интеграл уравнения (VI.65)
ОС = £0 + £1еп*'1 + /_ (fin0. тн) (s q) г — (6л0 тл) —-----------2р s * т.
2 Я
(VI.66)
Постоянные интегрирования Lo, Li н Z.s определяются начальными условиями
прн т = О
X = dyjdx = Jtydx* = О (VI 67)
и равны
£| = 0RO тп<?) [ J/л, (п2 — «о I {S + пг [s3i + 2р (s'9) ]}; (VI.68)
£. = — (бпо тп<?) [ 1/л2 (л2 — л,}] (S -г л1 [s3i + 2р (s<?) I}; (VI.69)
1-о = — L, - Lt. (VI 70)
Коэффициенты nt и па определяются по выражению (VI 45).
Во втором участке интегрирования дифференциальное уравнение (VI.29) при-
С обретает вид
«Рх dx* 2р («Рх ат1) 4 q (</х dx) = s6Ro. (VI.71)
Общий интеграл этого уравнения равен
X = l ot + Лаеп,т + £Z,X + (s <7) 5лот (VI 72)
Начальные условия для определения постоянных интегрирования £01, L3 н 1ц
при т = О
X = Х1п; d'L dr = (J/AfT)^. (VI.73)
Величины у , (rfX ^T)Tj и (<Р"Х ЛЕ)тп определяются выражениями
Д/.’,. + л/>>» + ^,а[, (4-_ А) ,v,.74)
(VI 75)
= Llrrleni1n + Ln'er'txn + (^ro/tr) (*/?)• (VI 76)
4*
99
Постоянные интегрирования tel-, 1Я и L, равны
Коэффициенты nt и л2 определяются по выражению (VI.45).
Для определения курса х может быть также использовано соотношение
X = f <й dt. (VI.80)
о
Для вычисления х по имеющимся значениям угловой скорости достаточно
вычистить интеграл (VI.80) с переменным верхним пределом.
Определение угла скорости. В соответствии с выражением (1.11) угол скоро-
сти cf0 определяется через курс х и угол дрейфа 0 как <рп = х — 0
В первом участке интегрирования угол скорости <рс должен определяться раз-
ностью значений курса _х. подсчитанного по формуле (VI.66), и угла дрейфа 0, полу-
ченного из формулы (VI.40).
Во втором участке интегрирования для определения угла qc должны быть
использованы результаты расчетов по формулам (V1.72) и (V1.47). Найденные таким
образом утлы скорости cfD не содержат поправки иа падение скорости хода при
циркуляции.
Мгновенная перекладка руля. Расчетные формулы для определения элементов
движения судна упрощаются, если предположить. что руль судна перекладывается
на борт мгновенно (в действительности время перекладки рулей реальных судов
ст нулевого положения па борт, как правило, составляет 7—15 с). Как показывают
расчеты, предположение о мгновенной перекладке руля не вносит существенных
изменений в результаты определения элементов движения судна.
В соответствии с указанным допущением угол перекладки руля
бд — О' 1 81)
н необходимость в интегрировании по участкам отпадает.
Дифференциальные уравнения для определения величин 0, w и х соответствуют
в этом случае уравнениям (V1.46), (VI.58) и (VI.71). Общие интегралы этих урав-
нений определяются выражениями (VI.47), (VI.59) и (VI.72).
С учетом начальных условии при т = 0
0=ю = Х = О; ^- = -з216лО; = (VI .82)
постоянные интегрирования Сэ, С4, D3, Dt, Lot, La и равны
Ся------— n J ] ](s/<J л2 — s2| 1; (V 1.83)
C4 = Ifyio («2 — nJ] "i — (VI.81)
D3 — —|8ло (n2 — nJ] [(s.'i?) n2 — Siil; (VI.85)
Dt = (n2 — nJ] [(s/<J n, — SaJ, (VI.86)
Z.s = — [бдо/л] (n2 — nJ] ((sAJ na — Sail; (VI.87)
Lt = Rno n2 (n2 — nJ] [($/<?) n4 — %,]; (VI.88)
L , = —L3 - L.. (V 1.89)
JOO
Угол скорости ф,, для каждого момента времени т находится по выражению
(I П)
Мгновенный радиус кривизны траектории Мгновенный радиус кривизны траек-
тории RB находится по выражению (1.10): <и = v/Rs + или в безразмерном виде
по выражению (1.20): (о = й-.'/?я_+ dP'dx
[ Для определения величины Rs необходимо положить 6=1, так как элементы
b движения Р и (а получены в этом предположении.
Из выражения (1.20) при 6 = 1
= ____________
К (и — (d₽ dx)
Производная dp/dt, входящая в выражение (VI.90), находится с помощью
I следую х формул:
а) прн законе перекладки руля в соответствии с рнс VI.I в первом участке
В(интегрирования
(VI.90)
перекладки руля в соответствии с рис. VI. 1 в первом участке
dp,dT = (>)/’ + С1Пзеп-х ф (6f{0'Tit) (s.g); (VI .91)
во втором участке интегрирования
d₽ dx = Csn,en* * + С4лаеп’т; (VI. 92)
б) при мгновенной перекладке руля
dp dx = С8п1₽Л1Т С1ягеП1\ (VI .93)
Отличие выражения (VI .92) от (VI.93) состоит в том, что отсчет времени в первом
них ведется от времени tr. принимаемого за нуль, а во втором — от нуля
Функция dp/dx = / (т) имеет ярко выраженный максимум. Время, соотвотству-
lee максимуму, определяется формулой
)п
(VI.94)
I Подстановка времени т* в формулы (VI.92) и (VI.93) позволяет определил,
максимальное значение производной dp-'dx.
Скорость хода судна. Расчет скорости хода судна прн неуста повившемся движе-
нии может быть выполнен путем решения уравнения (VI 4) совмесню с уравнениями
(VI 6 и (VI./). Можно, однако, существенно упростить решение уравнений, если
(использовать приближенный прием, состоящий в непосредственной оценке закона
падения скорости судна при совершении им циркуляции. Г. Е. Павленко пред-
ложил формулу для определения мгновенной скорости судна на эволюции
б = 1 — |1Р sin2 (л'2) (т%), (VI.95)
где (|р — относительное падение скорости судна па установившейся циркуляции
= EL; (VI.%)
'Л,
то — безразмерное время установления скорости, равное тр = 6 при мгновенной
перекладке руля.
В результате формула (VI 95) записывается как
6 = 1 — (1 — 6С) sin2 0,26т, (VI.97)
ГЛс vc = vc/vQ. (VI.98)
к Если по данным расчета угла дрейфа Р время его установления окажется боль-
шим шести, в формулу (VI.95) вместо тр = 6 следует подставить значение тр, соот-
*гствующее установлению угла дрейфа
После определения величины б = f (т) может быть найдено приближенное зна-
чение угловой скорости
Wcorr — we, (VI 99)
101
где величина со определяется формулами (VI.64) или (VI.59). Затем по формуле
(VI.80) находится исправленное значение курса х. а по формуле (I.l I) — испра-
вленное значение угла скорости <рс.
Координаты точек траектории. Для вычисления координат точек траектор
центра тяжести судна (продольного и поперечного смещений судна) служат фор-
мулы (1.23) и (1.2’4). Расчет по этим формулам_должен проводиться с испольэов -
пнем значений безразмерной угловой скорости сосогг и значений угла скорости^,
найденных в соответствии с изложенными выше указаниями.
Расчет движения судна на циркуляции по линейным уравнениям удобно вести
в следующем порядке.
I. 'Производится расчет элементов установившейся циркуляции судна по ме-
тоду, изложенному в § 18.
2. Выбирается угол перекладки руля оло. при котором судно выходит иа цир-
куляцию.
3. По данным расчета элементов установившейся циркуляции находится угол
дрейфа судна ре, соответствующий углу перекладки руля бдо. и по формуле (VI.9)
определяется коэффициент Cyg. Коэффициенты Сур и с2 заимствуются при этом из
расчета элементов ус1<шовнвшейся циркуляции. Из того же расчета берутся значе-
ния коэффициентов С^.р, Cjto.*£, ГдЛ1. Суд и приведенная площадь руля ARE.
4. По формуле
/22 = 0,05pVL’ (VI. 100)
подсчитывав 1ся .момент инерции массы судна относительно вертикальной оси, про-
ходящей через его центр тяжести
5. По графикам рис. И.II и 11.12 первого раздела т. I определяются в фуик
цни 2TV'B и I В коэффициенты присоединенных масс и £cs и коэффнции.г
присоединенного момента инерции Л-
6. По формулам (VI. 19)—(VI.24) рассчитываются коэффициенты r2f, ssi
flan rai и Ssi-
7. С помощью формул (VI.25)—(VI.28) определяются коэффициенты 2р. с,
6 и s.
8 В соответствии с выражением (VI.45) находятся корни характериствческого
уравнения и п3.
9. Задается закон перекладки руля.
В случае если перекладка руля принимается мгновенной, дальнейший ра че.
ведется в следующем порядке-
а) определяются постоянные С3, С4, Da и Dt в соответствии е формулами
(VI.83)—(VI.86) и величины fip0(sp) и бяо (yfl);
б) по формуле (VI.47) для выбранных значений безразмерного времени т рас-
считывается угол дрейфа 0;
в) для тех же значений времени т рассчитывается безразмерная угловая ско-
рость <о по формуле (VI.59);
г) по результатам расчета функции Р = f (т) определяется время установле-
ния тг;
д) если те > 6. по формуле (VI.95) рассчитывается зависимость о = f (т) Если
тр < 6. то эта зависимость рассчитывается по формуле (VI.97). Скорость движения
ла установившейся циркуляции вС1 входящая в формулы (VI 95) или (VI.97), за-
имствуется из расчета элементов установившейся циркуляции (см. § 18);
е) по формуле (VI.99) подсчитывается значение wCorr с учетом пад ния скорости
хода;
ж) по формуле (VI.80) рассчитывается курс судна X!
з) по формуле (1.11) находятся значения угла скорости %;
н) с помощью формул (1.31) н (1.32) рассчитываются продольные и поперечное
смещения центра тяжести судна х0, и
В случае есля перекладка руля происходит за конечное время /р, порядок
расчета сводится к следующему:
а) по формуле (V1.36) определяется безразмерное время перекладки руля Тц',
102
б) с помощью формул (VI 42), (VI 43), (VI.56) и (VI.57) рассчитываются по-
стоянные Сх, Ct. Dt и D4, а также выражения
бро s . бдО sa[ + 2р (sig) . бдо $ и бдо 4- 2р (s <?) .
XR Я ' хп q ’ xa q xr q ’
в) выбираются значения времени т интервале от 0 до tn, для которых с по-
| мощью выражения (VI.40) находятся значения угла дрейфа Р; по формуле (VI.54)
определяется безразмерная угловая скорость <и, а по формуле (VI.91) — произ-
|водная dji/dt;
г) по выражениям (VI.49), (VI.50), (VI 63) и (VI.64) находятся значения Рт ,
_____________ Л
(dpdT)T^, и (dor. dx)xR Эти значения могут быть также непосредственно заим-
, етвованы из расчета Риш,
д) по формулам (VI.51), (VI,52), (VI.61) и (VI.62) определяются постоянные С3,
Ct. D3 и Dt. а также величины 6 по (s'fl) и 6яо (*’<7):
е) при выбранных значениях времени т, отсчитываемого от времени тп, по вы-
ражениям (VI.47), (VI.59) и (VI.92) находятся значения функций Р. ш п dp/dT.
Дальнейший расчет соответствует пунктам г—и расчета прн мгновенной пере-
кладке руля
§ 18. УСТАНОВИВШЕЕСЯ ДВИЖЕНИЕ СУДНА
На тихой воде возможны два режима установившегося движения судна: прямо-
линейное движение (при отсутствии сил, развиваемых средствами управления)
и установившаяся циркуляция, т. е криволинейное движение при постоянной
I величине и неизменном положении относительно корпуса судна векторов сиз, раз-
виваемых средствами управления.
Общий способ расчетного определения элементов установившейся циркуляции
состоит в составлении н решении уравнений установившегося движения судна.
Уравнения движения судна с рулем или поворотной насадкой на установив-
шейся циркуляции приведены в § 16 |см. (VI.32)- (VI.33)]. Решение системы этих
уравнений дает для установившегося значения угла дрейфа формулу
рс = + <*'*><* , (VI. Ю1)
а для установившегося значения безразмерной угловой скорости
ЙГ = --^В-+?1Р': . (V1. Ю2)
Г31
Поскольку уравнения (VI.32) и (VI.33) написаны в предположен ни о постоян-
1стве скорости хода судна, т. е. при условии, что v — v0. связь между значением <йс,
(полученным из этих уравнении, и величиной относительного радиуса циркуляции
Rc= R‘L на основании формул (1.9) и (VI 12) устанавливается следующим соот-
шяиеипем:
' Для отыскания величины может быть использована формула (V1.102), из
которой следует
Л»|
(VI. 104)
103
Величины /?с н «с .могут быть также определены непосредственно, без вы-
числения рс. по формулам
ь ± У Ь2 — 4ас Rc - Ча (VI. 105)
— Ь ± )' 6* — 4ос «с- 2с (V 1.1 Of.)
в которых а = Мз/*я + (VI. 107)
Ъ = qq3i — З^бмЗмбя; (VI. 108)
С -w (VI. Iff;
В формуле (VI. 105) квадратный корень должен быть взят со знаком +, если
</Я1 > 0- 11 со знаком —, если fl31 <j 0. Правило знаков для формулы (VI. 106) —
Обратное.
Если «73| * 0, то величины йс и <*>е находятся по формуле
Rc — 1/<йс = —Vsi^ei^n)- (VI.110)
По найденному нз формул (VI.105) или (VI. 106) значению йс или легко
определить рс> для чего служат (формулы
гз1 + (VI. Ill)
4nRc
ИЛИ
ре = _ . (VI. 112)
931
В случае если для определения йс используется формула (VI. 104), расчет (V
должен производиться по формуле (VI. 101).
Величины <?21 гг1, s21, (fat, r3i, s3|, q, s, s и ftj, входящие в формулы (VI.101)—
(VI. 109), определяются выражениями (VI.35), (VI.20)—(VI.24), (VI.26)—(VI.2х)
н (VI.34).
С помощью формул (VI.101) н (VI.102) могут быть найдены элементы движения
судна с любым углом перекладки руля, в том числе и с пулевым.
В случае если О, для расчета угла дрейфа и относительного радиуса цирку-
линии судиа при нулевом угле перекладки руля служат формулы
₽ft=-(9'V31): (VI. Hi)
RCt= ЬЧо = Л rtJqq.i- (VI.114)
В случае если q 0, угол дрейфа, безразмерная угловая скорость и относитель-
ный радиус циркуляции равны
P^ = wea = 0; (VI. 115)
~RC( -t-oo, (VI. 116)
т е. в этом случае судно при нулевой перекладке руля совершает прямолинейн-'С
движение.
Установившаяся циркуляция судов с углом перекладки руля, равным нулю,
неоднократно наблюдалась при натурных испытаниях. Радиус такой циркуляции,
как правило, весьма существенно превышает величину радиуса циркуляции судна
с рулем, положенным на борт.
Порядок расчета элементов установившейся циркуляции судна зависит от того,
производится ли одновременно расчет эволюционного периода циркуляции и п°
какой схеме (учитывающей нелинейность зависимости боковой силы от угла дрейф-’
или пет).
10-1
В случае если такон расчет производится по схеме, учитывающей нелинейность,
<го расчет элементов установившейся циркуляции ведется в следующем порядке.
I. Задаются значения угла перекладки руля 6Ка, при которых рассчитываются
элементы циркуляции
2. По формуле (VI 101) при выбранных значениях угла рассчитывается уста-
новившееся значение угла дрейфа р£. Коэффициенты q, йь г31 и s заимствуют при
этом из расчета эволюционного периода циркуляции.
3. С помощью формул (VI.102) и (VI.104) для каждого выбранного значения
6ДЗ рассчи1ываюзся относительный радиус установившейся циркуляции Rc и без-
размерная угловая скорость шс. Величины Rc и ы£ могут быть также рассчитаны
и по формулам (VI. 105) и (VI.106), причем результаты расчета от выбора формул
не зависят.
В случае если элементы эволюционного периода циркуляции рассчитываются
по линейным уравнениям или если они не рассчитываются совсем, расчет элементов
установившейся циркуляции удобно вести в следующем порядке
I. Составляется сводная таблица исходных данных расчета по форме табл. VI. I.
Примечания: I. В случае еечн на судне нет ни руля за рудерпостом, ня поворот-
ной насадки, в табл. VI. I не вписываются данные по п. 19—26 Если, кроме того, руль не
расположен за i ребныы винтом, в таблицу не нужно вносить данные по п. 27 н 29.
2 Если на судне имеется руль за рудерпостом, то в таблицу нс вписываются данные по
п. 13—1К и 23 — 26.
3. Если на судне нет рулей, а имеются поворотные насадки, в таблицу не вписываются
данные по п. 13—22.
1 4. Поправочный коэффициентCjj (п. 41) должен определяться только для полуваланенр-
яых рулей.
| 5. От величины момента инерции массы судна 1гг и коэффициентов присоедипснисй
массы »и н к,, результаты расчета элементов установившейся циркуляции не зависят. Эти
величины введены в таблицу исходных данных, поскольку они определяют значение каждого
нз коэффициентов <?,(.. /уд,, Зд и Л,. При практических расчетах элементов установившейся
циркуляции судна можно полагать ktt — hu “ 1.
2. Рассчитываются вспомогательные величины в соответствии с табл. VI.2.
Примечание. В случае если рули не размещены за гребными винтами, величии в
г-Го в Расчете не используется и нндьбнпсть в ее определении отпадает. Тогда A re = А R рr
11 Х£ = х.
3. Рассчитываются коэффициенты q^, ць, q, s н s.
Примечание. В случае если элементы установившейся циркуляции рассчиты-
ваются по формулам (VI.IOI), (VI.102) и (VI. 101), определять величину з не требуется.
4. Дальнейший расчет выполняется в порядке, изложенном выше примсни-
гелыю к случаю, когда расчет эволюционного периода циркуляции выполнен в соот-
Втствии со схемой, учитывающей нелинейность зависимости Сур = / (Р).
Правильность расчета (в отношении возможных арифметических ошибок) может
Ьть легко проверена, если, как это бывает в большинстве случаев, рассматриваемое
:удио как разомкнутая система ие обладает собственной устоичивостью прямолиней-
ного движения (в этом случае коэффициент q < 0). Для проверки достаточно по
Формулам (V11I.9) и (VIII.10) определить величины Рг. к и шг. к а затем по фор-
муле (VIII.8) найти угол В осях Р€ = /(6К), (»£ = f либо Rc = f
дочка, определяемая формулами (VIII.8)—(VIII. 10), при правильном расчете эле-
ментов установившейся циркуляции должна совпасть с кривыми Рс, шс или Rc
в функции угла перекладки руля 6д соответственно.
’ Скорость хода судна па установившейся циркуляции (линейная скорость центра
[яжести судна vc) всегда меньше скорости на прямом курсе о0 при неизменной
ющиости, подводимой к винтам. Падение скорости судна иа циркуляции пронсхо-
1Ит из-за того, что часть тяги движителя «расходуется» на создание продольной
'роекдпи центростремительного ускорения (вследствие наличия угла дрейфа),
В также на преодоление сопротивления переложенного руля.
Теоретическими исследованиями и опытами установлено, что относительное
Уменьшение скорости различных судов, совершающих установившуюся циркуляцию
Одинакового относительного радиуса, оказывается практически близким. Это дает
105
Таблица VI.I Исходные данные для расчета поворотливости судна
Кв п/п. Накмсиоввннс величины Определение величины
1 Объемное водоизмещение судна V, ы’ Задано
2 Длина судна по ватерлинии L, м >
3 Ширина судна по ватерлинии В м >
4 Осадка средняя Ты, м »
5 Осадка носом Тр м »
6 Осадка кормой Та, м
7 Коэффициент общей подноты бу По теоретическому черте жу судна
8 Коэффициент полноты мидель-шпангоута Рм То же
9 Коэффициент продольной полноты <р
10 Отношение длины к ширине судна L/B Задано
11 Отношение осадки к длине судна TM/L >
12 Абсцисса ЦТ судна при посадке его иа ров- ный киль, считая от 10-го теоретического шпангоута Xg, м >
13 Число рулей zr >
14 Отстояние осей баллеров рулей от 10-го тео- ретического шпангоута /дм. м >
15 Площадь каждого руля Ar, м?
16 Птошадь той части руля, которая прн ну- левом угле перекладки ие попадает в струю винта Дед, ы- В соответствии с указа- нием § 14 (см. рис. V.5)
17 Птощадь той части руля, которая при угле перекладки 0е попадает в струю винта Ardp, м1 То же
18 Высота пера каждого руля, считая по оси баллера Лр. м Задано
19 Площадь комплекса руль—рудерпост Ar+rp № »
20 Хорда комплекса руль—рудерпост 6д+рр м
21 Хорда руля Ьц, м »
22 Отстояние оси баллера руля за рудерпостом от 10-го теоретического шпангоута Омь м »
23 Число поворотных насадок гд
24 Минимальный внутренний диаметр поворот- ной насадки Do, м »
25 Длина поворотной насадки Ld, м »
26 Отстояние осей баллеров поворотных наса- док от 10-го теоретического шпат оу та Irm. м »
27 Число ВИНТОВ
28 Диаметр винтов, за которыми расположены рули Dp, м
29 Упор каждого из винтов, за которыми рас- положены рули или которые заключены в поворотные насадки Т, кН
30 Расчетаая скорость хода судна на прямом курсе о,, м/с Задано
31 Момент инерции массы судна 1а, т-м2 По формуле (VI. 100)
32 Номер теоретического шпангоута, являюще- гося пограничным между шпангоутами С-об- разнон и V-образной формы. В соответствии с указ; ниямн § 7 (см. рис. 11.3 по теоретическому чертежу с 21 равноотстоящим шпангоутом
10b
П роиоломние табл. V/ 1
К» п/п. Наименование величины Определение величины
33 1 !лощадь. дополняющая контур кормовой В соответствии с указа-
34 части ДП судна до прямоугольника (при посадке судна на ровный киль) Л<-, м2 Коэффициенты влияния корпуса k. х ниями <7 и примерами рнс. 11.4 В соответствии с рекомсн-
35 Удвоенное отношение осадки к ширине дациями § 14
36 37 судна Коэффициент присоединенной массы т Коэффициент присоединенной массы k2i | По графику рис. 11 15 пер-
38 Коэффициент присоединенного момента [ вого раздела т. 1
39 инерции Лйв > Относительная абсцисса судна xg L
40 Отношение hh'AR —
41 Поправочный коэффициент сд По графику рис. V 3
«снование рекомендовать для использования при расчетах падения скорости хода
юр.мулы, единственным аргументом в которых является величина Rc (или <вс).
i Формулы эти либо основаны на решении уравнения (VI.4) с теми или иными
Упущениями о характере работы винтов судна при циркуляции, либо являются
чисто эмпирическими, базирующимися па результатах обработка данных модельных
Или натурных опытов. К числу первых относятся формулы, предложенные А М Ба-
синым’ [3):
ty ।
vc = — = , - -
10 I Н 3,9 R~c
и К. К. Федяевскнм [16]:
(VI.117)
(VI. 118)
I Формула (VI. 117) дает хорошие результаты для речных судов, формула
(VI 118) — для морских.
L Скорость хода судна иа устаиовнвше>*|ся циркуляции может быть также полу-
чена и с помощью чисто эмпирических формул Г А. Фирсова [17]
Йс = th О,4О8ЯС (VI.1I9)
ВЛН Р. Я. Першина [4]
% ____I
J^+1,9 I + 1,9ш2 ’
(VI. 120)
I Последняя формула, весьма удобная для практических расчетов, может при-
гепяться во всех случаях, когда Нс > I (wf<c 1).
Скорость хода судна на установившейся циркуляции может быть также опре-
иена с помощью графика рнс. VI.2.
Использование всех приведенных формул для определения скорости хода судна
й циркуляции дает близкий результат. Как показывает опыт их применения, ие-
Ольшое отклонение в скоростях, наблюдаемых в действительности, от расчетных
бусловливается, главным образом, влиянием сопротивления рулей, несколько
отличающегося у реальных судов от сопротивления рулей, установленных па мо-
107
Т в б л и ц а VI.2. Сводка расчетных формул
Л’» 11/11. HdiiMCtioaatnie величины Расчетная формула Примечание
1 Относительное отстоя- Ir'L
нис рулей пли поворот- ных насадок от 10-го
теоретического шпап-
2 гоута 1пм Число Фруда 1г vJVHl g= 9,81 м'с2 (уско- рение свободного па дения)
Тангенс угла начахь- Та - If
3
ного дифферента суд- на ф! • м
4 Тангенс угла ходового дифферента судна фа — Определяется по гра- фику рис, II 6 либо
! + 20 - /. 7 %i по формулам (11.46)— (11.71)
5 Приведенный коэффи- циент полноты ДИ
судна о 0.05-1 ('и -Ь фД + у.-,-- • м.
Ci Приведенная площадь ДП судна Д £Тмо Определяется с по-
7 Коэффициент нормаль- —
нон силы мощью номограммы
рис. 11.8 либо фор- мул (11.72)—(11.96)
8 Коэффициент нормаль- — То же. рис. 11.9 ли-
нон силы г» бо формулы (11.97)—
111.113)
9 Коэффициент момсн- — Тоже, рис. 11.11 ли-
та бо формулы (11.122) (11.134)
10 Коэффицнен । момен- — 1оже. рис. 11.7 либо
та т2 формула (11.135)
11 Коэффициент позицион- ного момента f jjfp 2щ। ф- тг Определяется с ио-
12 Коэффициент демпфи- —
рующего момента С^1(1) мощью формулы (11.161)
13 Удлинение обычного руля X WR
14 Удлинение руля за рудерпостом ? Ад+Р^Р+кр
15 Относительная хорда
руля за рудерпо- стом 6/?
16 Относительное у улице- пне насадки Ад Ld [>D
1U8
u/u w
Продолжение табл. VI .2
Наименование величины Расчет» is формула Примечание
Коэффициент нагрузки винта по упору С-г„ Угловой коэффициент подъемной силы Су{/ обычного руля руля за рудерпо- стом поворотной насад- ки Приведенный угловой коэффициент подъем- ной силы С“Л Приведенная площадь Are- обычного руля руля за рудерпо- стом поворотных насадок Коэффициент влияния вин га r.Dp' обычного руля руля за рудерпо- стом поворотной насад- ки Приведенный коэффи- циент влияния корпу- са Х£ 2nc-R 1 _Н 2 л. i+Lk‘“+ + 1-4 Л2 + 0.47Стс {|1 + 0.25 (/1 +СгН- + 0г1 X X 11 - (0.45 - -0,35/.d]J:2Xd4- 4Zq Ы~<*Н А до + AnOj, (1 + Cpt.) AWr ZdkDd.Ld Aro + АрОр К1 + Cyo Aro + Ardp (1 + CTv) 0,752 — 0,052СГп xxDp Определяется с по- мощью формулы (V. 13) Коэффициент cr для прямоугольных и трапециевидных ру- лей равен единице Если судно имеет не- сколько рулей, под площадями Лдо и ARDp понимаются Л|Л+Л)0 и ARDp - A<R+fb гр Определяется с по- мощью графика рнс. V 6
109
долях. результаты испытаний которых послужили основой для вывода эмпирических:
формул (Vl 119) и (VI. 120) и построения графика рис. VI 2
В случае когда руль размещен вне струн винта, а корма судна имеет значи-
тельный подзор, угол атаки руля на циркуляции существенно уменьшается по
сравнению с углом перекладки из-за влияния угла дрейфа, и расчетное значение ско-
рости хода иа циркуляции оказывается, как правило, несколько меньше действи-
тельного. Наоборот, если рули судна размещены за винтами, падение скорости кода
судиа на циркуляции оказывается несколько большим, чем по данным расчета.
Исходная скорость хода, с которой судно совершает прямолинейное движение
до перекладки руля, влияет на элех енты установившейся циркуляции лишь в слу-
чае. когда число Fr превышает 0,3. При меньших числах Fr указанное влияние
практически ие проявляется.
Методика расчета, изложенная выше, позволяет иайтн связь между исходно:
скоростью хода и радиусом циркуляции, для чего следует провести расчет устаио-
Рис. VI.2. Относительная скорость
судна на установившейся циркуляции.
Рис. VI.3. Относительное увеличение
радиуса циркуляции по мере роста
числа Fr.
вившейся циркуляции судка при различных исходных скоростях. Эта зависимость
представляет практический интерес только для быстроходных судов, число Fr кото-
рых достигает 0,5—0,6.
Данные натурных испытаний быстроходных судов показывают, что зависимость
радиуса циркуляции при неизменном (максимальном) угле перекладки руля от
«сходной скорости имеет вид, изображенный иа графике рис. VI.3. По оси орлпна
отложено отношение радиуса циркуляции при данном числе Fr к радиусу цирку
ляцип при числе Fr, меньшем 0,3. С помощью этого графика можег быть найдено
приближенное значение радиуса циркуляции быстроходного судна при большой
скорости хода в случае, если радиус циркуляции при малой скорости (при Fr<j
<5 0.3) известен (например, определен расчетом).
Глава VII
УСТОЙЧИВОСТЬ УСТАНОВИВШИХСЯ РЕЖИМОВ
ДВИЖЕНИЯ СУДНА
§ 19. ПОНЯТИЕ ОБ УСТОЙЧИВОСТИ ДВИЖЕНИЯ
В реальных условиях плавания на судно действуют случайные возмущения,
влияющие на характер его движения. Причинами таких возмущений являются мор-
ские волны, ветер, неравномерность в работе гребных винтов, случайные пере-
кладки руля на малые углы и т п. Все они в совокупности стремятся изменить
веданный режим движения судна. Для наличия устойчивости установившегося
движения судиа необходимо, чтобы по прекращении действия случайного возмуш
ния первоначальные элементы движения судна восстановились,
Л0
Оценка движения судна актуальна, главным образом, для сукна с рулевым
устройством, движущегося под действием гребных винтов. При маневрировании
судна на предельно малых скоростях под действием САУ устойчивость движения,
как правило, интереса не представляет, поскольку маневренные возможности судна
I при таком движении определяются другими обстоятельствами. Исключение соста-
I ваяют режимы позиционирования судов специального назначения, например бу-
Е рОВЫХ.
В большинстве случаев движение судна с большими углами дрейфа под дей-
Иствием СЛУ устойчиво. Опенка устойчивости движения, изложенная в настоящей
I главе, относится в связи с этим только к судам с рулевыми устройствами.
Восстановление элементов движения судна с рулем (поворотной насадкой)
Кю прекращении действия случайного возмущения может происходить как автома-
Вгически (без перекладки руля), так и с помощью перекладки руля. В первом случае
движется разомкнутая система, и ее устойчивость именуется собственной устойчи-
весть о судна. Во втором случае движение совершает замкнутая система’
Если по прекращении действия какого-либо возмущения судно как разомкнутая
система при неподвижном руле возвращается к прежнему (исходному) режиму
И движения его первоначальное движение является устойчивым. Есзи песте прекра-
^ения действия возмущения прежние элементы движения судна без перекладки
руля не восстанавливаются, исходное движение судна является неустойчивым.
| При исследовании устойчивости движения судна целесообразно рассматривать
возм щение какой-либо одной выходной координаты (угла курса, поперечного сме-
щения, скорости и т. п ) и судить об устойчивости по тому, сохраняется ли велн-
I чина данной координаты в новом установившемся движении судна, наступают! м
пос. е прекращения действия возмущения. Таким образом, заключение о наличии
отсутствии устойчивости зависит от того, возмущение какой выходной коер»
Г ди паты рассматривается.
Принципиально разомкнутая система может быть устойчивой только по ско-
ростн хода, углу дрейфа или угловой скорости, по другим выходным координатам
разомкнутая система всегда неустойчива. При этом устойчивость судна по скорости
I хода обеспечивается всегда и в особом рассмотрении не нуждается, собственная
Устойчивость по углу дрейфа и угловой скорости наступает у судна при определен-
иых условиях. Устойчивость по углу дрейфа и угловой скорости обеспечивается
^Кновременно, поэтому о собственной устойчивости судиа можно судить иа основании
исследования устойчивости системы по одной из этих координат.
I О собственной устойчивости судна при прямолинейном установившемся движе-
нии можно судить по уравнениям (VI 17) или (VI. 18). Общие ннтнралы этих урав-
нений содержат члены еп‘т и ег1,т. В этих членах корни характеристического уувв-
Ввенн : (VI.44) ГЦ и и2 являются для данного судна постоянными величинами.
| Для того чтобы возмущение координаты с течением времени убывало, несб-
холимо выполнение условий Л] •< 0 и ла <; 0. Если эти условия не выполняются,
судно собственной устойчивостью прямолинейного движения ис обладает.
Из выражения (VI.45) видно, что оба корня характеристического уравнения
и л3 будут отрицательны лишь при условии, что р > 0 и q > 0. Выражения (VI.25),
(VI 35) и (V 1.23) показывают, что условие р >0 всегда выполняется для любого
^удна поэтому собственная устойчивость прямолинейного движения судна опрс-
^Вляется только знаком коэффициента q. Если по результатам расчета окажется,
что q 0. это будет свидетельствовать о наличии собственной устойчивости судна.
Судно, обладающее собственной устойчивостью прямолинейного движения,
> устойчиво н прн любом установившемся криволинейном движении. Если судно
собственной устойчивостью прямолинейного движения не обладает, существует
некоторый критический режим его криволинейного установившегося движения,
характеризуемый критическими значениями радиуса циркуляции /?fK (или без-
размерной угловой скорости <огк). угла дрейфа Ри и угла перекладки руля бЯ1(,
при котором движение судна становится устойчивым. Двпжеи_ие судна будет устон-
янвэ и при любых режимах, удовлетворяющих условиям Rc<Rch, йс >
Критическое значение утла дрейфа при q < 0 определяется по формуле
Рк------
(VII.1)
111
Величины q, rai и /i, выражаются формулами (VI.26), (VI.23) и (VI.34) соот-
ветственно. _
Критические значения радиуса циркуляции Цсн (или безразмерной угловой
скорости Шск) н угла перекладки руля бПк могут быть найдены по формулам
RCV = ; (V11.2)
ш(Н + ssi<7
Сдк = —fla'4/iiZ3ls. (VII. 3)
Если судно не обладает собственной устойчивостью, поддержание прямолииег
лого движения судна возможно лишь с помощью рациональной перекладки руля,
т. е. в этом случае судно представляется замкнутой системой. Поскольку откло-
нение судна от заданного курса носит случайный характер, период и величин-1
перекладки руля также являются случайными величинами, зависящими не только
от гидродинамических характеристик руля и корпуса судна, но н от состояния
погоды, закона работы управляющего сигнала авторулевого, опытности и вниматель-
ности рулевого, конструкции рулевого привода и т. п. Аналогично этому случай-
ными величинами являются периоды и амплитуды рысканья судна.
Судно как замкнутая система должно быть устойчиво по любым выходным коор-
динатам, однако условия соблюдения устойчивости по различным координатам
не совпадают, поэтому в § 20 и 21 приводится подробный анализ устойчивости
движения судна. Этот анализ основан иа описании слабого маневра судна линей
ними дифференциальными уравнениями и на линеаризации законов управления
рулем.
Безразмерные линейные уравнения движения судна в слабом маневре можиэ
записать в виде
+ flsiP + — 0;
—Ь <7я| Р + гз1<0 4- s3i^r = 0;
со = dyjdi.
= х - Р;
фс == dyjdi.
(VII.4)
(VII,5)
(VII Ct
(VII. 7»
(VII.м
Первые два уравнения составляют систему уравнений, остальные добавляются
к этой системе, если исследуется устойчнность относительно координат X- Фс> «ли у .
Уравнения (VII.4)—(VII.8) содержат пять неизвестных (₽, со, х. ф0 »
каждое из которых принципиально может быть принято за управляемую коорди-
naiy, и один параметр (угол перекладки руля Последовательным исключением
ш системы этих уравнений всех неизвестных, кроме одной, можно получить урав-
нения относительно каждой управляемой координаты
с/:(! , с/Р u </бп А . О1
—+ 2р——+rfn, (\I1.9)
JgL + 2р-^-^ + ^R: (VI1.10)
4Ц- + 2р-^- + 9-^ = -хя, (VH11)
ат* ' di- di di
(VII 1-»)
J12
Все уравнения (VII.9)—(VI 1.13) представляют собой уравнения движения
разомкнутой системы. Для замыкания систем необходимо связать единственный
параметр уравнений (угол 6П) с соответствующей управляемой н наблюдаемыми
координатами, что наиболее просто достигается в предположении об использовании
в качестве управляющего устройства судна регулятора, линейные законы работы
которого можно представить структурными выражениями для каждой системы,
управляемой по координатам:
по углу дрейфа
бп = -Лр₽; (VII. и)
по угловой скорости
Cr = -Kuw; (VII. 15)
I по курсу X
б = -Кый - Л'хх; (VII. 16)
I по углу скорости ф0
6n = -Kl..«-KxZ-K»<PP: (VII 17)
по поперечному смещению
6д— К^у Л'ффо ^уУок- (VII. 18)
Выходная координата в последнем члене законов (VII.16)—(VII. 18) является
управляемой, остальные координаты в этих законах — наблюдаемые.
Коэффициенты Kt в законах (VII.14)—(VII.18) называются коэффициентами
Кггулироваиня.
Г Подставляя законы (VII. 14)—(VII.18) в соответствующие уравнения (VII.9)—
(VII. 13), легко получить уравнения движения линейных замкнутых систем, пред-
Ввляющих судно.
I Комплексное исследование устойчивости этих иерархических систем было
Выполнено А. 11. Тумашиком при участии Р. Я. Першина.
§20. УСТОЙЧИВОСТЬ ПО УГЛУ ДРЕЙФА,
УГЛОВОЙ СКОРОСТИ И КУРСУ
I Для получения условий устойчивости замкнутой системы по углу дрейфа сле-
дует подставить линейный закон управления (VII.14) в уравнение (VII.9). Последнее
приобретает вид
<f2(i , , u л
+ °* J? + = 01
(VII. 19)
fll = 2p-s2lA-p; (VI 1.20)
c2==o+sAp. (VII.21)
I Необходимо иметь в виду, что у судна с рулем, расположенным в корме, коэф-
Шиенты q2I, r31, 2р, s и s всегда положительны, коэффициенты г21, зг1, <?31 и s3!
сегда отрицательны, а коэффициент q может быть любого знака.
I Условия устойчивости системы второго порядка, как известно, состоят в а, > 0
J*ая > 0. Выражения (VII.20) н (VII.21) показывают, что прн любом Л’р> 0 коэф-
фициенты о, и сг увеличиваются но сравнению с коэффициентами 2р и q соответ-
ственно, т. е. замкнутая система, управляемая по закону (VII. 14), оказывается
Рттойч шее разомкнутой.
I Если разомкнутая система неустойчива, то легко указать минимальное зиа-
F**iHe коэффициента регулирования /<р, обеспечивающее устойчивость замкнутой
fBCTe ы
Ар > — q 's.
(VI 1,22)
113
Устойчивость системы резко меняется, если в Законе управления учитывается
не угол дрейфа Р при ЦТ (или мидель-шпангоуте) судна, а угол дрейфа 0О неко.
торой точки А, отстоящей на расстоянии ха от ЦТ по длине судна, т. е. если
«л = -Ma. (VII.23)
На основании (1.40) угол
Ра = ₽ —~xj>>. (VII.24)
Подстановка (VII.23) и (VII.24) в систему уравнений (VII.4)—(VII.5) позео- .
лист получить уравнение второго порядка относительно Рс в виде (VII.19), где
«1 = 2р — salXp + s31Kpiu (V11.25)
п
= q + sXfj - iK^a. (VII.2C)
Сравнение (VII.25) с (VI 1.20) показывает, что при ха> 0, т е. при учете утла
ра в точке, расположенной в носовой части судна, коэффициент af уменьшается
и, в принципе, может стать отрицательным прн достаточно большом значении коэф-
фициента регулирования Хр. Из сравнения (VII.26) е (VII.21) ясно, что коэффи-
циент оа при росте ха > 0 также уменьшается и становится отрицательным, если
> Ч + sA'p.
Так как знак коэффициента а2 для устойчивости системы является определя-
ющим, условие устойчивости может быть записано в виде выражения
ха < fa'sity + (s's), (VI 1.27)
из которого ясно, что при любой устойчивой разомкнутой системе (т. е. прн q> С)
и при любом ~> 0 может быть указана удаленная в носовом направлении точка
А учет угла дрейфа при которой приводит к потере устойчивости замкнутой си-
стемы. Причина такого положения очевидна, и заключается она в появлении поло-
жительной обратной связи в законе управления (VI 1.23).
Если q > 0, то для наличия устойчивости при любом (произвольном) Хр> О
необходимо, чтобы плечо 2а подчинялось условию
xa<ss. (VII.28)
Если система собственной устойчивостью ие обладает (<? < 0), то минималыо
необходимый для обеспечения устойчивости замкнутой системы коэффициент регу-
лирования Л’р равен
Х₽ > — Ч (« — $*<i)- (VII.29)
Коэффициент Хр будет положителен если s— sxd> 0, откуда для ха получается
уезовие (VII.28). Сравнение формул (VII.29) и (V1I.22) показывает, что при ха> О
величина минимально необходимого коэффициента Kfj оказывается большей, чем
при ха — 0, при ха = sis он обращается в бесконечность.
Замкнутая система, регулируемая по угловой скорости, имеет закон упра-
вления
6Д = -Хиш, (V1J.S0)
подстановка которого в уравнение (VI 1.10) даст
d!io , do , — .
= 0, (\ 11.31)
где
O1=2p-s31Xtt; (VI 1.32)
ла = <7-I-sXu. (VII.S3)
Аналогично рассмотренной системе устойчивость замкнутой системы при Ка Т'
> 0 и здесь оказывается большей, чем устойчивость разомкнутой. Если q < 6. 10
условие устойчивости замкнутой системы состоит в
Kv^-qis. (VI 1.34)
114
Система, регулируемая по курсу х. имеет закон работы регулятора
6П = _ КхХ. (VII.35)
. уравнение (VII. II) приводится к вид)'
$+0>-£г+'3*-Й + 0зХ=о, (VII.36)
где
а1= 2p-s31Ku; (VII.37)
at= q + ЗКы-Гз.Кх: (VII.33)
c,= sKx. (VII.39)
Условия устойчивости системы третьего порядка заключаются в at > 0, аг >
О О, а3> 0 и otas — а3 > 0.
В рассматриваемой системе наблюдаемая координата ы — dX dt явно влияет на
Устойчивость, поскольку при ?<0и любом А"х устойчивость системы можно обес-
1 лечить соответствующим выбором коэффициента Ка. Легко заметить, что при соблю-
дении условия (VII.34) рассматриваемая система становится устойчивой при сколь
угодно малом положительном коэффициенте Ку Вместе с тем выражения (VII.38)
и (VII.39) показывают, что устойчивость сохраняется и при любом возрастании
коэфф тента Ку.
I Если рассматриваемая система ие содержит наблюдаемой координаты ь>, т. е.
управляется по закону
6л = -КхХ. (VI 1.40)
коэффициенты уравнения (VI 1.36) приобретают вид
= 2р; (VII.41)
ai ~ Я — ssiKy, (VII.42)
a3=SKy. (VII.43)
Если Q > 0, система устойчива при любом Ку > 0, если q <; 0 то условием
1ЛИЧИЯ устойчивости является
(VII 44)
| При соблюдении условия (VII.44) такая система будет устойчива и по коорди-
1ате <о, поскольку возмущение последней приводит и к возмущению управляемой
coop in наты %-
S 21 УСТОЙЧИВОСТЬ ПО УГЛУ СКОРОСТИ,
ПОПЕРЕЧНОЙ СКОРОСТИ И ПОПЕРЕЧНОМУ СМЕЩЕНИЮ
В § 3 отмечалось, что для слабых маневров безразмерная скорость поперечного
смещения (безразмерная поперечная скорость) совпадает с утлом скорости, поэтому
•ниже рассматривается только система, регулируемая по фр. Закон управления та-
к°й системой имеет вид
— КцУ.— Ki'fo- (VI 1.45)
с Подстановка этого выражения в (VI 1.12) приводит к уравнению
4^+c‘-S£-+^-^r-+°'^=°- (VH.46)
• котором
Cj = 2р — 5Э]А'И + д2|Аф; (VII.47)
«г = Я + sKw — s31A'x — (s + s3I)
os = sA'x +
(VI 1.48)
(VII.49)
115
Условия устойчивости рассматриваемой системы остаются такими же, как
и условия предыдущей системы, т. е. а1> 0, аа > 0, аа > 0 и atat — о3> О.
Из рассмотрения первых трех уравнений ясно, что свойства этой системы отлц.
чаются от свойств предшествующей. Выражения (VII.47)—(VI 1.49) показывают,
что с ростом положительного значения K<f возрастает только коэффициент о3, в то
время как коэффициент С] уменьшается и при некотором Kv может изменить знак.
Поветеине коэффициента аа прн этом определяется знаком суммы s4-sM.
Верхняя граница коэффициента регулирования при угле скорости, соответству-
ющая потере устойчивости системы, определяется либо условием ахаа—а8 ~ О,
либо й| = 0, а также иг = 0 (если sH- s31 > 0).
Из двух последних условий следует
< - -2р~-31^ ; (V11 5ft)
Sj|
к <, (VII 51)
Выражения (VII.47)—(VII.49) показывают, что если обеспечена устойчивость
системы, управляемой но у, то рассматриваемая система будет устойчива при сколь
угодно малых положительных значениях коэффициента Аф. Однако в отличие ст
систем, управляемых но и у. линейная система, управляемая по <р„, теряет устой-
чивость с возрастанием коэффициента регулирования К^, т. е. зона допустимых
значений К,? ограничена сверху. Потеря устойчивости замкнутой системы может
происходить на судне, как обладающем, так и не обладающем собственной устойчи-
востью, так что причина потери устойчивости со свойствами разомкнутой системы
прямо ие связана.
Тем не менее на неустойчивом судне протяженность зоны допустимых значений
оказывается меньшей, чем на устойчивом. Так, если в законе управления наблю-
даемые координаты не учитываются, т. е.
= (VI 1.52)
то коэффициенты уравнения (VII.46) равны
а, — 2р + suKv: (VI 1.53)
os = ? — («4 ®з>) Кц, (VII.54)
аа=^ф (VI 1.55)
и если з 4- s31 0, то устойчивость системы при q < 0 вообще ие может быть обес-
печена. Если же. что не характерно для реальных судов, s 4 s31 < 0, то при q < 0
наряду с ограничением этой зоны сверху, которое следует из (VII.53),
Kw<-2ptsal, (VI 1.56)
на основании (VII.54) появляется еще и ограничение снизу
K»>?.'(s + %). (VII.57)
Вопрос о том. не перекроют ли эти границы друг друга и ие окажется ли си-
стема неустойчивой, может быть решен только применительно к конкретному судну.
Условия обеспечения устойчивости системы, регулируемой по поперечному
смешению ЦТ судна уйя, сводятся к следующему.
Линейный закон управления этой системой записывается в виде
6п = - - Ахх - Кф<ро - KySos- (V11-5Ы
После подстановки (VII.53) в (VII, 13) получается уравнение
116
котором
а, = 2р — s3lKw + s^A',,; (VI1.60)
о2 = q + «Л'ш — s3,/\x — (s + sJ() K<f + S2tKv; (VH.61)
a3 = + I * * * 5 * * ВКф - (s + s.n) Ku; (VII.62)
a2= sKy. (VI 1.63)
| Устойчивость системы четвертого порядка обеспечивается при ах > 0, а2 > О,
1дя >• О, а4 > 0 и О|а2а3 — > 0.
Г Из (VII.61) и (VII.62) видно, что если обеспечена устойчивость системы, регу-
[днруемой по <р„, то рассматриваемая система будет устойчивой при сколь угодно
Ьалых значениях коэффициента регулирования 7(р. Условия (VI 1.60)—(VI 1.63)
оказывают, что в данной системе влияние роста коэффициента регулирования при
Ьравляемой координате оказывается таким же, как и в системе, регулируемой
Ело <рг.: устойчивость системы при увеличении Ку теряется. Действительно, из выра-
жений (VII.61) и (VII 62) следует, что с ростом Л'(/> 0 коэффициенты аг и аг
Уменьшаются (последний при s+ зя1> 0) и устойчивость обеспечивается лишь при
Ку < - —+ ~ + 5з|) K'f-, (VI1.64)
или
хКу + SK/f
'Ь <- ----—i----------—
s + ’З]
(VI 1.65)
I Верхняя граница устойчивости может также определяться максимальным зна-
мением коэффициента Ку. вытекающим из условия 0|а>03 — oja4 — > 0.
Таким образом, системы, управляемые по углу' скорости 4V. поперечной скоро-
сти и поперечному смещению Цин, в отношении устойчивости идентичны и в то
Ь время резко отличаются от сметем. управляемых по угловой скорости ы и курсу х
^кюда следует, что обеспечение должной устойчивости судна как системы, упра-
вляемой, например, по курсу, еще не гарантирует устойчивости того же судна как
Ьстсмы, регулируемой по поперечному смешению.
F Особенно наглядно это проявляется, если в законе управления системой, регу-
лируемой но уОк, не учитываются наблюдаемые координаты, т. е.
(VII.66)
Тогда коэффициенты уравнения (VI 1.59) приобретают вид
о, = 2р. (V 11.67)
— q + s-iiKy. (VII.68)
«з = —(s + s3|) Kg, (VI 1.69)
at= ihy. (VI 1.70)
I Если, как это обычно бывает, сумма s + s;)i > 0. то условия (VI 1.69) и (VI 1.70)
В Овместн.мы и система оказывается неустойчивой, хотя аналогичная система,
Управляемая по курсу, как ясно из (VII 42) и (VII.43), устойчива.
। Причина резкого отличия устойчивости гнетем управляемых по <pt. и «/по
Г* Устой-и востп систем, регулируемых по о» и у. заключается в особенностях сн-
управляемой по углу дрейфа fl 111 I. В этом убеждас!.: ажс формальное рас-
гОтреиие коэффициентов и о».
В Поскольку фс, = х — ₽ закон управления (VI 1.52) можно записать в виде
6n=-Xq<po=-K4.(Z-p)=-^x + /<4₽. (VII 71)
указывающем, что влияние утла Р приводит к появлению положиаельной обратной
язи в законе (VII.52). Отсюда ясно, что коэффициенты о, и а2 системы, регулп-
»е*ой по <ро, должны образовываться путем добавления к членам, характернзу-
117
юшим разомкнутую систему соответствующих членов, заимствованных из систем,
управляемых по X и 3 (последние с противоположным знаком).
На основании формул (VII.20) и (VII.41) коэффициент at должен быть равен
01=20-*- snK9, (VII. 72)
а из формул (VII.21) и (VII 12) следует, что коэффициент
0g = Q — sKq> “ 7 ($ “F ®Я1) 77,^, 1^ 11.73)
что полностью совпадает с выражениями (VII.53) и (VII.54)
Выражения (VI1.72) и (VII.73) получены в предположении, что угол дрейфа
в законе (VII.71) и, следовательно, в системе, регулируемой по чс> учитывается
в точке Л, по длине судна совпадающей с ЦТ (или приближенно с мидель-шпаиго-
утом) Но перенос этой точки в носовом направлении снижает устойчивость систем!г,
регулируемой по 0. Следовательно, такой перенос увеличивает устойчивость системы,
управляемой по %.
Действительно, если система управляется по закону
бд = —Kv (х — Ра) = —(х — р + х„ы) = —КфХ + Ач0 — (VII М)
то на основании (VI 1.25), (VII.41), (VI 1.26) u (VI 1.42) коэффициенты а2 и са раы ы
д, = 2р + Sji/Q, — SziK^ia’, (VII.75)
Ot = q — ЗА® + sKf.Xu — i3lK4 = q — (s 4- s31) K4 + «К,хй; (VII.76)
ая=«Кф. (VI 1.77)
Выражения (VI 1.75) и (VII.76) показывают, что устойчивость системы с законом
управления (VII.74) растет по мере удаления в носовом направлении от ЦТ судна
Точки А, в которой учитывается угол дрейфа. Но угол равен поперечной ск>
расти , поэтому безразлично, как определяются эти величины в процессе упуа
_ . dSa
вления судном — путем ли измерения угла дрейфа или путем учета , наприме,*,
дифференцированием измеряемой зависимости yu = t (т). Важно лишь, в какой точке
А по длине судна учитывается ф0 или —-—.
Естественно, что устойчивость системы, регулируемой по уа, также опреде-
ляется положением точки А и растет с удалением этой точки в носовом направлении.
Глава VIИ
КРИТЕРИИ УПРАВЛЯЕМОСТИ СУДОВ
§ 22. ДИАГРАММА УПРАВЛЯЕМОСТИ
В настоящей главе описываются критерии управляемости судна на тихой воде-
Основным критерием управляемости судна служит статическая характерно!! ха
системы, управляемой по относительной кривизне траектории <ос = £//?„. Крив ”•
изображающая эту характеристику, именуется диаграммой управляемости.
На рис. VIII I изображены диаграммы управляемости судна, не обладают»143
собственной устойчивостью прямолинейного движения, и судна, устойчивое на
прямом курсе против возмущений угла дрейфа и угловой скорости В положипЛ"*
ном направлении по оси абсцисс диаграммы отложены углы перекладки руля на пГ9*
вый борт, в отрицательном — иа левый борт. Положительным значениям отг»
тельной кривизны соответствует поворот судна в сторону правого борта, ь’Р*4'
цательным — в сторону левого.
118
Диаграмма управляемости может быть получена расчетом либо определена
путем испытаний натурного судна или его модели.
При построении диаграммы управляемости неустойчивого судна расчетным
Ьрутем_для получения прилегающих к началу координат точек, в которых производ-
ная dt) dRR < О может быть использована связь между величинами Р и 6д, которая
Ьодучается из уравнений (VI.32) и (VI.33) путем исключения из них неизвестной и
(VIII. 1)
Задаваясь значениями ₽, меньшими р1(, по формуле (VIII.I) легко определить
догветствующие этим значениям углы перекладки руля бв, после чего можно поду-
рить точки иа диаграмме ыс — f (би) подста-
новкой найденных значений бв при выбран-
ных Р в формулу
ЙС = -.М + ^ , (VI 11.2)
вытекающую из уравнения (VI.33).
Г Все приведенные формулы написаны
тля положительных значений р и <ос, по-
•'вт зму при практическом расчете диаграммы
Крравляемостн следует вычислить только
Крчки диаграммы, лежащие выше оси вбснпсс.
К(ривые диаграммы, характеризующие отри-
цательные значения шс, получаются двойным
Керкальным отображением кривых, лежащих
Кыш оси абсцисс, относительно прямых,
^'оходящих под углом 45° к осям координат.
И|еобходимо отметить, что симметричность
^Ьаграммы управляемости относительно этих
Кйклонных прямых является следствием того,
Кто в изложенной схеме расчета не учиты-
Кьстся асимметрия в поворотливости судна.
Характерная, например, для одновинтовых
Суков. Поэтому диаграммы управляемости,
полученные путем модельных или натурных
испытаний одновинтовых судов, как правило, лишены указанной симметрии.
I С помощью диаграммы управляемости можно решить следующие вопросы.
I 1. Определить, обладает ли судно собственной устойчивостью прямолинейного
жжения. О наличии собственной устойчивости свидетельствует положительное
do-
Значение производной —т-— в начале координат. Зта производная при 0в — О
Рис. VIII I. Диаграммы управляе-
мости судов.
1 — устойчивое судно; 2 — кеустойчи-
ВО€ суДно.
О равна
Л» \
<1бд /бр=0
(VI 11.3)
ч
| Поскольку коэффициент s иа переднем ходу судна всегда положителен, знак
(Указанной производной определяется только знаком коэффициента q, которым
* является основным критерием наличия собственной устойчивости прямолиней-
*го движения судна.
I 2 Найти критические значения угла перекладки руля б2(к н относительной
ДРивизпы ы£К. Эти значения определяются положением первой критической точки
ВЧяграммы, в которой производная с обращается в бесконечность. Как видно
>рис VII 1.1, для судна, обладающего собственной устойчивостью, первой крнти-
Т^ской точки диаграммы вообще не существует. Для судна, ие обладающего соб-
ве той устойчивостью прямолинейного движения, имеются две первые критические
119
точки, относящиеся к разным ветвям диаграммы управляемости (верхняя точка
к верхней ветви, нижняя — к нижней) В случае, если</ = 0, обе первые критические
точки совпадают с началом координат диаграммы.
3 Численно оценить возможность обеспечения устойчивости замкнутой сц.
стемы, управляемой по угловой скорости й и движущейся прямолинейно 111 | Г|рц
таком движении различие между безразмерной угловой скоростью <о и относитель-
ной кривизной траектории <ис исчезает, и на основании формул (VII.34) и (V111.3)
минимальный коэффициент регулирования Кш, необходимый для обеспечения устой-
чнвости замкнутой системы при отсутствии собственной устойчивости судна (т. е,
при q <; 0), равен
К - > J >------------* (VI11.4)
(eWfjdOR)^^
Фс=0
Чем меньше коэффициент тем легче управлять судном, т, е. требовл, ня
к совершенству управляющего устройства снижаются Если судно обладает соб-
ственной устойчивостью (?>0), то для обеспечения устойчивости замкнутой си-
стемы коэффициент Кы может иметь сколь угодно малое значение, отличное от нуля.
/ du>c \
Если диаграмма управляемости патучена расчетом, то величина Д
а/ о
может быть определена по формуле (VI11.3). Эта же величина .для диаграммы упра-
вляемости, найденной экспериментально, приближенно равна
(V111.5)
V /йд-0 46П((
4. Оценить поведение судна при значительных перекладках руля Если судно
обладает собственной устойчивостью прямолинейного движения, то любое изменение
положения руля из установившейся циркуляции приводит к однозначному изме-
нению элементов этой циркуляции При этом если, например, судно первоначально
циркулировало вправо, то после перекладки руля на любой сколь угодно малый
угол левого борта оно входит в левую циркуляцию со сколь угодно бапьшим ра-
диусом Для судна, не обладающего собственной устойчивостью, характерна неодно-
значность зависимости элементов движения от угла перекладки руля, которая про-
является в зоне углов перекладки, лежащих между значениями первых критиче-
ских углов 6д|{. При перекладке руля на правый борт судно циркулирует вправо
и ие меняет направления своего вращения по мере перекладки руля в сторону левого
борта до тех пор, пока угол перекладки не достигнет отрицательного угла б/?н (г. е,
руль ие окажется переложенным па угол 6/?к на левый борт). По достижении руло
угла перекладки судно, изменив направление циркуляции, начинает вращаться
влево с относительной кривизной траектории ыг, соответствующей точке на нижней
кривой диаграммы при угле перекладки = 6д,, Иначе говоря, при би= эле-
менты движения судна, соответствующие верхней критической точке, меняются на
элементы движения, соответствующие нижней ветви диаграммы.
Аналогично этому при перекладке руля вправо иа судне, совершающем цирку-
ляцию на левый борт (нижняя ветвь диаграммы), по достижении рулем значения
6д = бПк элементы движения, соответствующие нижней критической точке, меняются
на элементы движения, соответствующие верхней ветви диаграммы На диаграмме
рис VI 11.1 это изменение условно показано в виде вертикальных пунктирны*
лип ий.
Изменение элементов движения судна при й/^ = ддк происходит только в и*
правлении от критической точки к ветви диаграммы, по не в обратном направлена".
Для того чтобы получить элементы движения, соответствующие, например, верхи»1'
критической точке, необходимо предварительно ввести судно в циркуляцию прав<ч<>
борта, а затем уменьшать угол перекладки до значения 6д = 6дк. Естественно,
для ввода судна в правую циркуляцию его необходимо предварительно вывеет"
из левой циркуляции, для чего потребуется патожить руль на угол, не меньший тог»
значения, которое соответствует нижней критической точке.
120
При любом угле перекладки руля, лежащем в диапазоне между критическими
илами перекладки 6д„, судно, не обладающее собственной устойчивостью, способно
циркулировать как иа правый борт, так и иа левый.
f 5. Определить область значений относительной кривизны ид, в которой устой-
чивое установившееся движение судна как разомкнутой системы невозможно. Эта
рласть на диаграмме управляемости находится между значениями безразмерной
тловон скорости <7т, к, соответствующими верхней и нижи ей первым критическим
очкам диаграммы Для судна, обладающего собственной устойчивостью указанная
дасть отсутствует.
[ 6. Найти относительную кривизну установившейся циркуляции судна с не-
креложенным рулем (б/? = 0), определяемую точками пересечения кривой диаг-
раммы управляемости с осью ординат.
7 Определить относительную кривизну <о, (и, следовательно, радиус цирку-
ляции Г<) для любого угла перекладки руля, в том числе и максимального.
I Таким образом, диаграмма управляемости дает достаточно полное представле-
ние о маневренных возможностях судна. Это позволяет использовать диаграмму
управляемости не только в качестве критерия управляемости конкретного судна
", выбранными формой корпуса и рулевым устройством, ио и как средство для вы-
полнения проектировочного расчета iеометрических элементов судна, обеспечнва-
вщих заданную его управляемость.
| 23. ПРОЕКТИРОВОЧНЫЙ РАСЧЕТ КОРМОВОГО ПОДЗОРА
И ПЛОЩАДИ РУЛЯ СУДНА
I Все схемы расчета, изложенные в гл. VI, основаны па том, что геометрически г
ементы рассчитываемого судна заданы, а расчет управляемости является по-
бочным. Цель такого расчета заключается в опенке управляемости судна с заранее
Вранными геометрическими элементами.
В работах [10. 131 предложен способ проектировочного расчета, цель которого
тстоит в непосредственном подборе геометрических элементов корпуса и руля про-
Ьктируемого судна, обеспечивающих ему заданную управляемость.
I Главные размерения судна, от которых сильно зависит его управляемость,
выбираются из условия обеспечения показателей ходкости и удовлетворения требо-
ваний, диктуемых назначением судна. Единственным элементом формы корпуса,
Влияющим иа управляемость, который может меняться в каких-то пределах для
улучшения управляемости судна, является форма кормы, приближенно характери-
зуемая приведенным коэффициентом полноты диаметральной плоскости судна о.
Кроме того, для обеспечения управтяемостн судна проектировщик может выбирать
юфектив тую площадь руля А/?л
[ Это позволяет рассматривать обеспечение управляемости как задачу о выборе
ианпыгоднейшего сочетания между коэффициентом о судна с заданными главными
Измерениями и эффективной площадью руля Аде. Выбранное сочетание должно
Обеспечивать заданную поворотливость и приемлемую устойчивость судна. При этом
Всегда желательно, чтобы площадь руля А др была по возможности минимальной,
Так как увеличение ее связано с ростом момента на баллере (см. гл. XII раздела
первого), и, как следствие, с усложнением и утяжелением рулевого устройства.
I Поставленная задача решается с помощью рассмотрения особой точки диа-
граммы управляемости, названной [13] второй критической точкой (в отличие от
Первой критической точки, рассмотренной в § 22). Под второй критической точкой
понимается точка диаграммы, соответствующая установившейся циркуляции дан-
ного судна с нулевым углом атаки руля, т е. в условиях, когда на руле не возникает
боковой силы. Элементы такой циркуляции совпадают с элементами установивше-
гося криволинейного движения судна без руля.
I Угол атаки руля при установившейся циркуляции судна определяется фор-
мулой
“нА-МН'кЛ О'ш.с)
Если а/? = 0 (условие существования второй критической точки), то угол перс-
*ладки руля равен
«К = Ы₽ + 'яЛ). (VIII 7)
121
Элементы движения судна, угол атаки руля которого равен нулю, совпадав
с элементами движения корпуса со всеми выступающими частями, ио без ру. я
поэтому б« = вЯ = »{£(₽г.к + /ЯЛ<йг к), (VIII.8)
где б£ представляет абсциссу второй критической точки диаграммы управляемост
а Рг к и <1>г н — угол дрейфа и относительная кривизна циркуляции «голого корпу. »
судна (без руля).
Ордината второй критической точки может быть найдена расчетом по форму-
лам, полученным из условия, что площадь руля Are = 0:
2-Г^-(,+Мс§т-4А
₽е. к = —; (VI11.9)
с2ЬЛ!ь>
СЛ1В
Й*г. к — —Рг. к. (\ III.10)
. слгш
Таким образом, положение второй критической точки диаграммы управляе-
мости не зависит от площади руля, а определяется только формой корпуса и коэф-
фициентом влияния Х£. Если предполо-
жить, что тип и расположение рулевою
устройства для данного проектируемого
судна выбраны и тем самым определен
коэффициент Xf, то с помощью формул
Рис. VIII.2. Кривая вторых крити-
ческих точек и заданная диаграмма
управляемости.
(VI 11.8)—(VII 1.10) можно легко иаита
координаты вторых критических точек,
соответствующих ряду произвольно на-
значенных значений коэффициента о.
Если нанести (см. рнс VI 11.2) значе-
ния йг к и f>R иа график, по оси абсцисс
которого отложен угол перекладки руля
6r, а по оси ординат — относительная
кривизна со,-, то кривая, проведенная по
этим течкам, будет представлять геомец и-
ческое место вторых критических точек
данного судна, причем каждая точка зюн
кривой будет соответствовать вполне
определенному значению коэффициента о. Любая диаграмма управляемости этою
судна с любым коэффициентом о и рулем любой площади пересечет геометрическ >е
место вторых критических точек при значении а. отмеченном на кривой вторых
критических точек.
Сказанное позволяет, используя кривую вторых критических точек с отмечен- •
ними на ней значениями о, непосредственно определить коэффициент о, отвечающий
любой наперед заданной диаграмме управляемости судна, для чего достаточно лишь
нанести заданную диаграмму управляемости на график, изображающий кривую
вторых критических точек. То значение о. которое будет отвечать точке пересече гя
этих кривых, и будет искомой величиной приведенного коэффициента полноты д
мегральиой плоскости а. Важно отметить, что эффективная площадь руля Are,
необходимая для осуществления заданной диаграммы управляемости судна с фор? '>i
кормы, определяемой выбранным таким образом значением коэффициента о. 6;>Д*'Т
наименьшей возможной.
Основная трудность прн выполнении проектировочного расчета заключи*
в выборе заданной диаграммы управляемости, обеспечивающей как заданную i-0- I
воротлпвость, определяем) ю значением ь>г при максимальном угле перекладки ру
так и приемлемую устойчивость движения судна. Согласно рекомендациям
Е. Б. Юдина, основанным па расчетном исследовании управляемого движения судов
прямым курсом, для обеспечения должной устойчивости судна как замкнутой
стемы в условиях тихой воды необходимо, чтобы относительная кривизна циркуля'
цпи судна с непереложениыч рулем ыСе не превышала 0,2 от относительной крив'1* I
122
1Ы циркуляции судна при максимальном угле перекладки руля. При выпол-
зни такого условия оказывается, что первый критический угол перекладки
щже невелик и имеет приемлемое значение.
Имея в виду неизбежную неточность расчета, при реальном проектировании
елесообразпо полагать, что заданное наибольшее значение относительной кри-
иэны <ос судна будет достигаться при перекладке руля на 30°, а не на 35° (макси-
зльный угол перекладки руля большинства судов), что обеспечивает некоторый
inac расчета.
Таквм образом (см рнс. VIII.2), наиболее благоприятная диаграмма управляе-
йГ1/йСв = 0,2. (VII 1.11)
, Однако проведение кривой через две заданные точки содержит элемент неопре-
деленности, поэтому целесообразно заменить действительную заданную диаграмму
Приближенной, полученной линейной аппроксимацией действительной диаграммы
В зоне углов перекладки руля 15—30°. Такая линейная аппроксимация отсекает на
си ординат отрезок й>сусп, относящийся к ш при выполнении условия (VIII.11)
как
ус усл/“с,в — 0,333.
(VIII. 12)
| Таким образом, приближенная заданная диаграмма управляемости судна в осях
L = / (С^) представляет собой прямую (см. рнс. VI1I.2), проходящую через
точки й£1с (известную по техническому заданию на проектирование судна) и йе.уся,
Ввязанную с через (VIII. 12).
I Пересечение этой прямой с кривой вторых критических точек определяет
положение второй критической точки данного судна и тем самым определяет искомое
рачение коэффициента о. Отыскание этого коэффициента облегчается, если го
(атериалам расчета кривой вторых критических точек построить зависимость йг. к =
I f (о), а затем по оси ординат этого графика отложить значение ш* (ординату вто-
ой критической точки, найденной с помощью прямой, имитирующей заданную
даграмму управляемости). Абсцисса точки графика ыг. к =/(о), соответствующая
начепию ы*, определяет искомое значение коэффициента о.
Для нахождения площади рупя ] 10] достаточно использовать Формулу, опре-
Вляющую эффективность руля Е, т. е. нормируемое Регистром СССР произведение
(с^ю&тяя- С^тях) LT^a
f Л (1 — X t*1™* — I X —Ыпмх \ *
(VI 11.13)
В этим выражении
_ ( СУ0ГЕМ + -р/ + С^1Ру cgfHM&tmx
, ₽пих =------------------------------—----------------------------------
„ 1г’ялг
(VIII.14)
А =2 4 4- о + * >) (VI 11 • ,5>
I Здесь ытах — наибольшая относительная кривизна циркуляции, оговаривав-
в техническом задании на проектирование судна; — угол дрейфа судна,
рКлветствующий относительной кривизне wmax.
При размещении руля приходится учитывать н другие обстоятельства, прямо
г эффективностью руля не связанные (например, величину остаточного момента на
123
баллере, зависящую от взаимного положения руля и винта), поэтому для руля, стоя»
щего за впитом, получить по найденной величине Е необходимую площадь руля
в конечном виде невозможно (до точного размещения руля относительно вин-
та нельзя определить коэффициент С уц).
Однако для руля, не попадающего в винтовую струю, могут быть предложены
простые формулы, позволяющие определить необходимую площадь руля Ад = Лдр
непосредственно.
Если считать, что высота пера руля, определяемая из конструктивных сооб;и-
женнй, известна, то из выражения (V.9)
= —(VII 1.16)
1+4Х
h‘R
легко получить для подвесного руля
и для полуподвесиого руля
/^(£-1-1,7^)
R ~ 7.1Л^ —2£
(VIII. 18)
Таким образом, проектировочный расчет площади руля судна сводится к под-
счету двух величин по формулам (VIII.13) — (VIII. 15), а также к определению
площади Ar по формулам (VIII. 17) или (V111.18), если руль не стоит за винтом.
Поскольку диаграмма управляемости судна, у которого коэффициент о н пл<»-
щадь руля Л/j определены проектировочным расчетом, точно совпадает с действ -
тельной диаграммой соответствующей заданной, надобность в последующем пове-
рочном расчете отпадает, что резко упрощает процесс проектирования судна.
Проектировочный расчет площади руля судна по формулам (VI И. 13)—(VIII 15)
может быть выполнен независимо от того, рассчитывается ли коэффициент о онис.
ным методом иди нет. В последнем случае для подсчета величин Cf р, с^, CJJ, и
C"(t0 надлежит пользоваться коэффициентом о, определенным по теоретическому
чертежу судна в соответствии с рекомендациями гл. II раздела первого. Однако
проектировочный расчет только руля будет учитывать лишь одну точку диаграммы
управляемости (заданную относительную кривизну ыгоах, соответствующую макс
мальному углу перекладки руля), т. е руль будет выбран лишь исходя из заданной
новоротлнвост । судна без учета устойчивости его движения Поэтому прибегать
к такому расчету можно лишь в случае, если есть уверенность в том, что долж-
ная устойчивость судна обеспечена. При этом следует иметь в виду, что полученная
площадь руля может оказаться большей той, которая была бы досгаточной, если
бы коэффициент о рассчитывался методом, описанным выше.
Поскольку диаграмма управляемости не учитывает влияния внешних нагрузок
па судно, достаточность площади руля, полученной проектировочным расчетом,
следует проверить оценкой управляемости судна при наличии ветра в соответ-
ствии с рекомендациями § 24.
Г лава /X
ДВИЖЕНИЕ СУДНА ПРИ ДЕЙСТВИИ ВЕТРА
§ 24. ДВИЖЕНИЕ СУДНА. СНАБЖЕННОГО РУЛЕМ
Одно из назначений рулевого устройства — обеспечение управляемости судна,
движущегося при действии на него ветра. Действие ветра на судно сводится к нрн*
ложению к его надводной части аэродинамических сил и моментов (см. § 9 перво1'0
124
Ьдддела), приводящих к появлению ветрового крена и влияющих на элементы
горизонтального движения.
Если судно совершает криволинейное движение (например, установившуюся
циркуляцию), влияние ветра сводится к искажению траектории движения так, что
последняя представляет собой линию, подобную изображенном на рис. IX. 1.
При прямолинейном движении судна постоянно действующий па пего аэроди-
намический момент стремится развернуть судно н привести его к ветру (т. с. вывести
восом на ветер) или увалить под ветер, а аэродинамическая сила вызывает снос судна
[(смещение в направлении, поперечном к курсу). Для предотвращения сноса и раз-
ворота судна под действием ветра приходится перекладывать руль. Если пере-
кладка руля па максимальный угол допускаемый данным рулевым устройством,
недостаточна дтя поддержания заданного
направления движения, то управляемость
судна теряется, поскольку двигаться в за-
данном направлении оно не может. Управ-
ляемость судна практически теряется и в
том случае, если угол перекладки руля,
На npatntHui Serrig
Рис IX.I. Типичная траектория
I установившейся циркуляции судна
ветре.
при
Рис. IX.2. Прямолинейное движение судна
прн ветре.
поддержания прямолинейного движения будет лишь немногим
необходимый для _____________
меньше максимального угла перекладки руля (например, на 3—5°), так как прн этом
окажется невозможным выравнивание рысканья судна от случайных воздействий
(волнения, порывов ветра и т. п.).
| При прямолинейном движении судна в условиях ветра постоянного угла пере-
кладки руля, необходимого для удержания судна на прямом курсе, не существует,
поскольку руль в этом случае необходимо непрестанно перекладывать для выравни-
вания рысканья судна. Однако эта перекладка осуществляется не относительно ну-
левого положения руля, а относительно некоторого отклонения, которое и прини-
мается за средний угол перекладки руля.
В Если при действии ветра заданной силы и наихудшего с точки зрения потери
Управляемости направления судно способно двигаться прямолинейно, то исследова-
ния управляемости при криволинейном движении нс требуется, поскольку любое
Кэме! ение курса судна ставит его в более благоприятное по отношению к ветру поло-
жение Таким образом, расчетным маневром, достаточным для оценки управляе-
мости удпа при действии ветра, является прямолинейное движение [4]
Решение задачи об элементах прямолинейного движения судна существенно
Упрощается при введении следующих допущений.
k 1. Ветер принимается постоянным по силе и по направлению во всех плоско-
параллельных плоскости ватерлинии
I 2. Силы и моменты, вызванные волнением, во внимание не принимаются.
I 3. Изменение скорости судка, обусловленное действием ветра, не учитывается.
I Отношение скорости, вызванной впитом, к скорости судна полагается по-
^аниым для всех скоростей и одинаковым как прн движении судна на тихой воде,
а* н при наличии ветра
В 5. не учитывается качка судна, а также ветровой креп.
125
Система уравнений прямолинейного движения судка при наличии ве- а
(рис. IX.2) имеет следующий вид
Кр-Гл-Гя=0! ]
Л1р-Л1л+Мя = 0. J
(U.I)
Здесь Ур — нормальная к ДП составляющая гидродинамических сил, действующих
на подводную часть корпуса судна; Уд — нормальная к ДП составляющая аэроди-
намических сил, обусловленная действием ветра на надводную часть судна; Ур —
нормальная к ДП составляющая гидродинамических сил, приложенных к рулю;
Л1р. Мд, Mr — моменты от сил Ур, Уд и УЯ относительно мидель-шпангоута судна’
Эти силы и моменты определяются формулами (11.33), (П.44), (III.7), (V.2), (11.34),
(II 45). (I1I.8) и (V.4) соответственно. С учетом этих формул система (IX.1) может
быть приведена к виду
сг₽2 + ур + cyrv-eare/alo) ₽ — ^ay (VR/Vf (Рл/Р) avl/Alo
— CyR 6R = 0;
(*-Л1₽ ~ CYRlRMkEARe/ALc) Р + CYRlRM (ARe/ALo) ~
~ САМ (Vr/V)2 (Рд/Р) avl!Alo ~ °-
В результате решения системы (IX.2) угол дрейфа равен
₽ = —н 4- j/u3 4- си (vR/u)- ,
где
_ cy^rm + СЛ|р .
2c/rv
(IX 2)
(IX 3)
(IX 1)
(IX 5)
(IX ti)
Для определения среднего угла перекладки руля служит фор
6Д = АСЛ v Вр.
в которой
Л = Paavl/(.Parec^'r1 rm)>
= (CAi₽ — Cyr!rm*eare!al.o), (.^yr1r.v^re^Lo)-
При помощи выражений (IX 3) н (IX.5) можно вычислить угол дрейфа ₽ воз;
пикающий под действием ветра, и средний угол перекладки руля бя, необходимый
для обеспечения прямолинейного движения судна прн различных направлениях
кажущегося ветра и для разных отношений скорости кажущегося ветра vr и скоро-
сти судна v. Отношение vr'v непосредственно содержится в выражениях (IX.31 •'
(IX.5), а направление кажущегося ветра, определяемое углом уя входит в эти вы-
ражения через коэффициенты Слу и Слм. зависящие от уд. Способы определения
этих коэффициентов изложены в § 9 первого раздела.
Условие потерн судном управляемости при действии ветра заключается в том,
что при некотором максимально возможном отношении va!v средний угол переклатк1*
руля достигает допустимого у гла перекладки, выбираемого из тех или иных cov ’л*
жеинй. Это условие может быть найдено путем расчета средних углов переклатк'1
руля прн различных отношениях v^/v и углах ул, выбора наибольшего из сред "!'
углов перекладки и сравнения его с некоторым допустимым углом перекладки, on
деляемым далее. Практически, однако, достаточно рассчитать средний угол i i'®*
кладки лишь при одном угле уд, соответствующем ветру, направленному под угЛ'”*
126
J
10 (т. е. попутному ветру, иаправтенне которого составляет 50 по отношению
ДП судна).
Приведенные иа рис. IX.3 схемы позволяют установить, что средний угол пере-
вдки руля прн попутном ветре оказывается значительно большим, чем при
ггречном.
Если встречный ветер направлен с правого борта судна (рис. IX.3. с), то во избе-
анне сноса с заданного направления движения судно должно двигаться с углом
эейфа Р таким образом, чтобы носовая оконечность судна отклонялась ин ветер,
а судно при этом действуют; сила Уд, вызванная ветром и приложенная в нос от
идель-шпаигоута; гидродинамическая сила Ур, приложенная также в нос от ми-
!ль-шпаигоута; сила на руле Yr. Поскольку приложенные таким образом силы Уд
Рис. IX.3. Действие
ветра; а — встречного; б — попутного.
Ур и моменты этих сил относительно мндель-шпапгоута в значительной мере взаимно
равиовешнваются, роль руля в этом случае сводится только к уравновешиванию
юности сил Уд и Ур, а также их моментов. Сила Yr и, следовательно, средний
гат перекладки руля оказываются малыми, а направление перекладки — неопре-
делепным.
I Если на то же судно действует с правого борта попутный ветер (рис. IX.3, б),
Во угол дрейфа ₽ имеет то же направление, что н в разобранном выше случае, сила Ур
приложена в нос от мндель-шпангоута, но сила Уд, действующая в прежнем на-
равлении, оказывается приложенной в корму от мидель-шп'ангоута. В результате
Кптличие от случая действия на судно встречного ветра прн попутном ветре момент
от силы иа руле должен преодолевать ие разность, а сумму моментов от сил Ур
|У^. Поэтому угол перекладки руля оказывается во много раз большим, чем в пер-
м случае, а направление перекладки руля, характеризуемое потребным направ-
Нннем момента от силы на руле, является вполне определенным; руль должен быть
ррсложен на подветренный борт. Отсюда ясно, что для судов с обычными образо-
рниямн подводной и надводной частей наиболее опасным с точки зрения потери
'правляемостн является попутный ветер.
| Расчеты показывают, что наибольший угол перекладки руля при постоянной
Ворости vr в большинстве случаев соответствует направлению кажущегося ветра,
•ри котором ул = 130°. Таким образом, наиболее опасным с точки "зрения потери
Рравляемости является попутный кажущийся ветер, направленный под углом 50°
кормы.
' Однако при постоянной скорости истинного ветра ео скорость кажущегося
Втра Од зависит от угла yR, т. е. она не является постоянной. В этих условиях
Виболее опасный угол кажущегося ветра несколько сдвигается в сторону меньших
127
значений ур Однако результаты расчета при уя = 130® и Тп, соответствующее,
максимуму отношения va!v, отличаются на величину, лежащую в пределах точности
самого расчета, что на практике позволяет ограничиться расчетом угла перекладки
руля бн лишь при одноVI значении yn = 130J.
Направление кажущегося ветра, при котором угол перекладки руля достигает
наибольшею значения, не совпадает с направлением, соответствующим наиболь-
шему значению угла дрейфа судна, Наибольший угол дрейфа возникает прн встреч,
ном ветре, направленном под углом около ун = 60° к ДП судна.
В исключительных случаях, главным образом для мелкосидящих тихоходных
судов с очень большим отношением В.ТМ (порядка 15—20), угол дрейфа при носо-
вых ветрах может достигать столь больших значений, что он начинает лимитировать
управляемость судна прн ветре. В таких случаях необходимо определить угол дрейфа
судна при = 60°. Обычно считается, что управляемость судна прн данном ветре
обеспечивается, если наибольший угол дрейфа судна не превосходит 30е.
Допустимый угол перекладки руля 6^а может быть определен по выражен j
= 6R шах — — 6ft т. u> (1 X ?)
где 1ПЛХ— максимальный угол перекладки руля данного судна; 6rb — у юл
перекладки, обеспечивающий выравнивание угла рыскания судна на волнении;
бд г. в — угол перекладки, необходимый для выравнивания угла рысканья судна
на тихой воде.
Угол перекладки 6Яо может быть оценен согласно рекомепдаиш Ю. М Масту ш-
кина [7 J, в соответствии с которой 6«в, по крайней мере для исследованных промыс-
ловых судов, составляет около 7°.
Угол т в может быть принят равным абсолютному значению критического
угла перекладки так как па тихой воде перекладка руля на угол всегда
приводит к изменению направления вращения судна Учитывая, что угол б«К1 как
правило, ие превосходит 3°, с некоторым запасом можно считать сумму
-| т в = 10’ и определять допустимый угол перекладки по формуле
6/?л = |Вах — Ю • (IX.6)
Практический расчет условий потери судном управляемости под действием
ветра сводится к определению отношения vaiv, при котором средний угол пере-
кладки руля бя. необходимый для прямолинейного движения судна, равен допу-
стимому углу перекладки Для определения искомого отношения vaiv необхо-
димо предварительно найти отношение ty/v, отвечающее равенству 6/? =
Последнее отношение определяется формулой
vR'o — I (& — V b2 — )/(2а>,
в которой
Ъ = - 2 1СЛЛ1 (Ви -|- 6Ял); 1
° = А САМ: с = |
(IX '•)
(IX 10)
Коэффициенты Cay и Сам. необходимые для расчета по формуле (1Х.9), со-
ответствуют углу кажущегося ветра yf{ = 130’. Определив отношение on/v, мзжио
по формуле (1Х.З) найти значение угла дрейфа судна Р. соответствующее прямсти-
пейпому движению прн действии кажущегося ветра, направленного под vi Lnl
= 130е.
Поскольку наиболее опасным с точки зрения потери судном управляемое'11
является попутный ветер, скорость кажущегося ветра всегда оказывается мсньн-е
скорости истинного ветра. Так как практический интерес представляет оценка у пр a J'
ляемости судна прн действии заданного истинного ветра, от отношения од'г и< ,е"
сообразно перейти к отношению vatv. Последнее может быть найдено на основа 111
выражения
VJV = /1 + (Ъ/у)3 - 2 (ви/а) cos (уя 4- Р), (1Х1Ч
128
’Um я в виду, что уп =- 130 = 2,269 рад. нетрудно получить окончательно
1V?=1 1 + (?л>')2 - 2 (vrIv) cos (2.269 4- fl). (IX.12»
^'Результаты расчета удобно представлять в виде графика, изображающего зави-
вмость скорости истинного ветра, опасного с точки зрения потери судном управ-
^Немостн, от скорости судна. По осн ординат этого графика можно отложить и
Килу ветра в баллах (рис. IX 4).
^Целесообразность расчета управляемости судна при действии ветра определяется
Мргожпыми отношениями скорости ветра и скорости судна, а также отношениями
Пощади A\ l парусности судна к площади А^а подводной части ДП и площади Аь0
^Эффективной площади руля Ащ-. Вероятность
‘пот 'И судном управляемости при ветре тем
Ьльше, чем меньше полная скорость судна н
Ьлыпе отношение Aio!Are, поэтому расчет
Нрравляе ос и при ветре должен производиться
мо всех случаях, когда полная скорость проек-
тируемого судна выбирается меньшей полной
Ккорости судна-прототипа пли когда отношение
Ai jAre проектируемого судна превышает ана-
логичное отношение судна-прототипа.
, I В сильной степени способствует потере
уц|завляемостп прн ветре увеличение отношения
AvdAijQ. Наибольшим отношением A^e'Alo
вреди морских судов обладают порожние гру-
Квые суда и грузопассажирские суда. Средине
Кнные об отношении Ау/'А/О для указанных
(удов сводятся к следующему:
Грузовые суда:
с макс и мил иным грузом при I СО %
|В запасов...................... . . 0.9--1,3
без груза при 10 % запасов .... 2,0—3,2
И^узопассажнрские судя:
< с грузом и всеми пассажирами прн
Г 100 % запасов .................. 1,5—2.3
без грузя и пасса.киров при 10 %
В запасов .........................2.2—3.3
Рис. IX.4. Результаты расчета
управляемости судна прн ветре.
В Расчет управляемости проектируемого морского судна необходимо произво-
ть во всех случаях, когда отношение Л|-£.Мдо приближается к верхней границе
Мазанных значений или превышает ее.
$25. ДВИЖЕНИЕ СУДНА, СНАБЖЕННОГО СРЕДСТВАМИ
АКТИВНОГО УПРАВЛЕНИЯ
К Основная цель расчета движения судна под действием САУ заключается в оценке
Г* эффективности, т. е. в оценке тех возможностей в отношении управляемости,
(Которые судно приобретает в результате оборудования его САУ.
I Оценки эффективности САУ производится на основании расчета тех или иных
Маневров судна, для выполнения которых предназначено данное САУ. Для орнен-
?ирово того назначения потребнон тяги устройств, составляющих САУ. за рас-
четный маневр, по предложению Р. Я. Псршниа. обычно принимают операцию само-
сгоя ельной швартовки судна в стесненной акватории при ивличии ветра заданной
жрлльност г |6| Сила расчетного ветра, при котором должна обеспечиваться швар
Р«вка, составляет 6 баллов по шкале Бофорта (см. табл. HI. 1).
Jf Самостоятельная швартовка судна в условиях стесненной акватории нодразде-
ется иа три независимых маневра. Во-первых, судно на предельно малом ходу
Влажно войти в гавань н, не теряя управляемости, подойти к району пирса. Во-
М°рых, вблизи пирса судно должно развернуться и занять определенное по отноше-
к пирсу положение. В-третьнх, судно в течение времени, достаточного для
г Дачи концов на пирс, должно удерживаться в этом положении без хода и дрейфа.
ВГ Л/Р Я И ВоПткуиского, г 3 129
Т’.остед'НН! маневр, самый трудный из mpcqiic-ieniii-ix, выполним далеко не всггдя
Однако удержание судна без хода и дрейфа является дтя швартовки элемент^
желательным, по не необходимым при некотором навыке команды. Возмакы (-1ь
совершения каждого из указанных маневров оценивается численно.
При наличии ветра разворот судна иа месте сопровождается дрейфом под
стянем ветра При этом иа подводную часть корпуса судна действуют гидродннамп-
веские силы я моменты, обусловленные дрейфом. Эти силы и моменты в один*
случаях могут способствовать, в других — препятствовать развороту судна. Ц<Ль
расчета заключается в установлении возможности разворота при заданном вс р,,_
чго сводится к опенке возможности удержания ДП дрейфующего судна в sapai её
заданном положении, произвольном по отношению к направлению ветра.
Задача об удержании судна в момент швартовки без хода и дрейфа очень проста,
если в гавани нет течения. Эта задача сводится к составлению и решению уравш n<ii
равновесии судна под действием аэродинамической нагрузки и усилий от САУ.
Каждый из трех указанных маневров имеет и самостоятельное значение. Так,
например, управляемость при предельно малых скоростях судна может погреб©!
ваться прн проходе узкостей, разворот суди* при ветровом дрейфе бывает необходим
при выполнении задач, связанных с промыслом или погрузочно-разгрузочными опе-
рациями и т. п Поэтому приводимые ниже способы расчета могут быть исполь.зов: гы
и для отдельных случаев оценки эффективности САУ, предназначенных для выпол-
нения специальных задач.
Выполнимость каждого из перечисленных .маневров зависит от внешних условий
плавания судна: ветра, волнения, течения. Волнение вызывает периодические сме-
щения и повороты судна, которые ие могут быть предотвращены с помощью САУ.
Однако малые периодические перемещения судна, вызванные волной, практически
не меняют положения его в пространстве, поэтому учет волнения при оценке гоз-
можности совершения судном тех или иных маневров нецелесообразен. В отличие
от этого, ветер, действующий продолжительное время в одном направлении, спообсн
вызвать весьма значительные перемещения и развороты судна, поэтому САУ в основ-
ном предназначаются для преодоления действия ветра. Действие течения отличается
от действия ветра только тем, что силы от течения приложены к подводной, а не
к надводной части судна.
Расчетные маневры судна, определяющие эффективность САУ, не вкзю'тют
маневры, для оценки которых требуются данные о демпфирующих гидродинами-
ческих характеристиках корпуса при больших углах дрейфа. Поэтому для расчета
эффективности САУ в соответствии с нижеприведенными схемами необходимы только
данные о позиционных гидродинамических характеристиках корпуса, оценивае-
мых по формулам, номограммам н графикам § 7 первого раздела и об аэродинами-
ческих характеристиках надводной части судна. Последние могут быть найдены
по материалам § 9 Коэффициент Сах может быть также определен no графику
рнс. IX.5, на котором приведены несколько наиболее характерных графических
зависимостей коэффициента Сах от угла уд. Положительному значению Слх на
этом графике соответствует сила Ха, направленная в корму судна.
Для подсчета сил Хд, Уд и момента ЛГд следует использовать скорость ветра гд
относительно судна, т. е. скорость кажущегося ветра. В условиях кегдэ
судно имеет более или менее значительную скорость, скорость кажущегося в ipa
как по значению, так и по направлению может заметно отличаться от скорости истин-
ного ветра (см. § 9). Однако при оценке эффективности САУ, имея в виду вреде ьно
малую скорость движения судна, в учете различия между кажущимся и истинным
ветром нет необходимости и под величиной од, входящей в выражения для аэроди-
намических сил и моментов, вполне допустимо понимать скорость истинного ветра.
При выполнении расчетов эффективности САУ с применением графическ >х
способов гидродинамические и аэродинамические характеристики судна целесыб-
разно подсчитывать заранее в функции углов Р и уд и представлять их в виде гра-
фиков. Аэродинамические характеристики должны включать кривую СаХ = ‘
выбранную из числа кривых рнс. IX 5 или рассчитанную по материалам § 9.
Кроме сил, действующих на подводную и надводную части корпуса сул"3-
в расчете эффективности САУ должны быть также учтены силы, действующих’ 1,9
судно со стороны САУ. Эти силы сводятся к равнодействующей тяг отделы ых
устройств, составляющих САУ, которая может быть выражена через значение н
130
направление тяги каждого из устройств и геометрические параметры этих устройств
g общем случае, когда CAN способно создавать не только боковую но и продоль-
ною силу, положение точки приложения равнодействующей удобно характеризо-
вать отношением момента равнодействующей относительно какой-либо фиксиро-
ванной точки (например, точки, лежащей иа линии пересечения мндель-шпангоута
с ДИ судна) к составляющей, нормальной по отношению к ДП судна.
Б При координатных осях, изображенных на рис. I 20 (начало координат на
ш еле судна), формулы, определяющие две составляющие равнодействующей Fx
g Tv и отстоя г не хг точки приложения равнодействующей к ДП от миделя, имеют
Ьедмоший вид:
I Рнс. IX.5. Коэффициенты С.,л' судов различных архитектурных типов.
I Для ПУ (рнс. IX.6, о)
Где и F„ —тяги носовою и кормового ПУ соответственно (положительные на
вавы । борт), /н и /„ — отстояния носового и кормового П\ от миделя (положи-
тельные в нос от миделя):
дтя ГДРУ и ВДРУ, разнесенных по длине судна (рис. IX Ь, б),
Fx = F„ cos а„ -I- F„ cos aK;
Fu — F „ sin a.. 4- FK sin aK;
r, I, (ГХ 14)
K _ ’ii'ii Sin ctn + Fkil( sn> aH
? ~ F„ sin a„ -г /•„ sin al; *
те Fa и FK — тягн носового и кормового ГДРУ или ВДРУ соответственно; ап
аи — углы поворота векторов тяг от ДП, отсчитываемые по часовой стрелке
б* 131
(нулевые ан и aF соответствуют напр влению тяг вдоль ДП в иос судна); 1п и /„ —
отстояния носового и кормового ГДРУ изи ВДРУ от мнделя (положительные в под
ОТ миделя);
для ГДРУ или ВДРУ, разнесенных по ширине судна (рис. IX.6, в).
F,= fflcosan+F„cosan; 1
Fy = Fj, sin a.i + Fn sin an; J
Fj, cos «л — Fn cos a„ b_ ..
Fn sin «л + Fn sin ccn 2 + САУ’ ' *
где F„ н Fn — тяги левого и правого ГДРУ или ВДРУ соответственно; ал и а„ —
углы поворота векторов тяги от ДП, отсчитываемые по часовой стрелке (нулевые ол
Рис. IX.6. Силы от САУ: a — при ПУ; б — прн ГДРУ пли ВДРУ, разнесенных
по длине судна; в — при ГДРУ или ВДРУ, разнесенных по ширине судна.
и а„ соответствуют направлению тяг вдоль ДП в нос судна); Ь — расстояние меж ту
ГДРУ или ВДРУ по ширине судна, /саУ — отстояние ГДРУ или ВДРУ от мк-
деля (положительное в пос от мнделя).
При расчете Fx. Fv и хр наибольшая трудность возникает в определении углов я/.
Если ВДРУ представляет собой крыльчатый движитель или поворотную колонку,
размещенные в свободной воде под плоским участком днища судна, следует считать,
что углы а.1 определяются только направлением отбрасываемой струи, зависяшг'1
от положения эксцентриситета в приводе движителя или угла перекладки поворот-
ной катанки. Аналогично этому в случае активного руля углы aj определяются
только углами перекладки руля.
При наличии на судне раздельных поворотных насадок (РПН) связь угла по-
ворота тяги ар с углами перекладки насадок определяется графиками, полученными
Р. Я. Першицсм н приведенными на рнс. IX.7. Верхние графики характеризуют
влияние относительной длины насадок, нижние — коэффициента компенсации-
В предположении о независимости влияния относительной длины насадки >
коэффициента компенсации иа угол ар последний может быть представлен к к
аР = <Ш> <1Х17)
132
где “Fo — угол aF при перекладке на угол Од основной насадим серин; k{ — коэф-
ь шиент влияния относительной длины насадки; k2 — коэффициент влияния коэф-
«циеита компенсации насадки.
Графики для определения коэффициентов kt н k2 представлены на рис. IX.8.
помощью этих графиков и формулы (IX. 17) угол ар может быть определен для
збой насадки с любыми геометрическими характеристиками.
Тяга комплекса винт—насадка при иеотклопениой насадке и неизмененной
стоте вращения винта, работающего на передний ход. практически не зависит от
ементов наса ikh н примерно равна тяге того же винта без насадки. Прн работе
нта на задний ход тяга комплекса несколько падает, составяяя для различных
нс.
IX.7. Зависимость утла отклонения вектора тя1н ар от угла перекладки на
садок: а — Ide = 0.5; б — Ide ~ 0,М.
адок около 90 % тяги комплекса с винтом, работающим на передний ход, прн
же частоте вращения. Изменение тяги при перекладке насадки оказалось Ирак
(•чески одинаковым для всех насадок и идентичным при работе винта на передний
и задний ход.
На рнс. IX.9 показана осродпсиная кривая отношения тяги комплекса
1 данном угле перекладки касатки к тяге F^^o комплекса с пспереложен
насадкой:
% = = (IX. 18)
(веденные материалы относятся к изолированному комплексу винт—насадит
е учитывают влияния корпуса судна.
Весьма сложным представляется определение углов а; в случае фланкирующих
ей, однако в отечественной практике такие рули ие применяют, поскольку нх
•ктивность уступает эффективности РПН.
Если тяги F, и углы а( известны, по формулам (IX. 13)—(IX. 16) легко опре-
Ить данные, необходимые для расчета эффективности САУ. В случаях когда
L3J
СЛУ представляют ссбсй сочетание ПУ, ВДРУ пт. и.. формулы (IX.13)— (IXjg,
должны быть использованы последовательно для определения суммарной рав|.о.
действующей.
Цель расчета эффективности САУ заключается в исследовании возможности
совершения судном тех или иных заданных маневров в определенных условиях пта.
Рис IX 8 Коэффициенты влияния kx (с) и k2 (б).
ванпя. Поэтому результатом расчета является либо определение условий, при ко-
торых возможно маневрирование судна с заданным САУ. либо выбор тяги движл-
угла перекладки насадок
телси САУ, обеспечивающей маневрирование при заданных внешних условиях.
В первом случае по формулам (IX.13)—(IX.'S)
можно определить значения величин Fx, F„ и
xf. Во втором — следует определять лишь функ-
циональные зависимости этих величии от тяги
отдельных устройств с тем, чтобы после подо г-
новки зависимостей в соответствующие уравне-
ния найти потребную тягу.
Практически для большинства расчетов
нет необходимости в оценке значеннг Fx, I , и
хр при всех возможных сочетаниях тяг А. и
углов поворота векторов at отдельных устройств,
составляющих САУ. Достаточно лишь опрс л’-
лить значения этих величин при максималг > >
тягах и таких углах cq, прн которых достигается наибольшее значение бокового
упора Fy или произведения Fyxp.
Управляемость судна, идущего с малой скоростью, прн ветре заданной силы
обеспечивается, сети судно может прямолинейно двигаться в любом заранее о<;с-
ловлеином направлении (см. §24). При выполнении соответствующих расчс:,’®
обычно задается сила ветра и ищется та скорость, при которой судно, оборудован! ее
конкретным САУ с известными значением тяги и точкой ее приложения, coxpai'rCT
возможность прямо чиненного движения. Подобные расчеты, проведенные для р®3"
134
^ичных значений тяги или разных вариантов расположения устройств, позволяют
выбрать тяги и расположение САУ, сбеспечивающ! е управляемость судна при зя-
^Кнном ветре
I При рассмотрении затачи об управляемости судна при наличии ветра необ-
годимо различать два случая использования САУ. Первый пз них заключается
в управлении с помощью этих средств судном, движущимся под действием главных
кижнтелен. Этот случай всегда характерен для судов, оборудованных в качестве
САУ ПУ, а также, как правило, для судов с ГДРУ, Если движение судна осуществ-
ляется главными движителями, с их помощью всегда можно получить ту или иную
-------------- ---------- _ ---------- ------« м поддержания — ‘"
применяются не
валую скорость, а поэтому в рассмотрении условий
Ннмости. Во втором случае использования САУ они
•правления судт ом, но и для обеспе-
JСенин хода с*тот случай характерен
<ля судов с ВДРУ когда главные
Аивижигели этих судов не работают.
При сравнительно малой тяге ВДРУ,
у, определяемой на создание как попе-
Кечной, так и продольной (по отноше-
нию к судну) тяги, вопрос об обес-
печении той или иной скорости не
»жет решаться в отрыве от управ-
нет необхо-
только для
пе-.
Вот
ляемости судна.
| Управляемость судна при ис-
пользовании главных движителей. Для
расчета управляемости при действии
' (ветра на судно, ход которого обеспечн-
|Иается главными движителями, доста-
точно решить систему из двух урав-
пгений проекций позиционных боковых
*ел и моментов. Третье уравнение —
Гравнеиие проекции продольных сил —
этом случае движение судна удов-
летворяется автоматически.
Прямолинейное движение судна в
словиях ветра сопровождается воз-
икиовеиием угла дрейфа, направлен-
ного всегда так, чтобы пос судна отклонялся от направления движения в сторону
*орта на который набегает ветровой поток (рис. IX.10). В соответствии с рнс. IX.10
равней 1 я равновесия прямолинейною движения судна имеют вид
-Уд+Ур- Fv + YK = 0;
^А + ^Р PyXF = О’
(IX. 19)
>есь Y Ур, Fu, Yp — проекции на ось у аэродинамической силы, гитродинамн-
^^кой сизы, равнодействующей тяги САУ и боковой силы руля соответственно;
МА и А1р — моменты аэродинамической н гидродинамической сил относительно
йель-iui ангоута судна.
Г В развернутом виде система уравнений (IX. 19) приобретает вид
I ~~^аv ~£~ vravl' с 1 е p2j4io — + cywвяд + ХР) "2*ле = °:
“*-АЛТ ~ + СЛ1р v~ALc ~ FyxF ~ CYHlRMI" + !Ф) у « Лк£=0.
(IX.20)
I Вз первого уравнения этот) системы
U ~ с1 Р 2 9~Ai-C ~ С ’А ~т~ + С YR (—®Лд + х₽) 7Г р2?1КЕ-
(IX.21)
135
После подстановки этого выражения во второе уравнение системы (IX.20) и преоб-
разований можно получить
р
7^ (с.»м — Wf) = cw — с» p'f —
-Суя-^7(2р+-Цг-')(-лрд+х»')« <1Х22)
где хр = XF/L.
Левая часть уравнения (IX.22) при данном отношении v^’v зависит только < т
угла ун, а правая — только от угла 0. Уравнение (IX.22) решается на ЭВМ лкГ о
графически. Используя зависимости Сур = / (₽) и Сдтр = / (0), сначала про.
водят расчет правой части уравнения (1Х.22), который ведут до значения угла 0,
соответствующего максимальному численному значению формулы, выражают ij
правую часть уравнения, но не свыше 0= 90°. Затем при нескольких выбранных
значениях отношения vn/v с использованием зависимостей Суд = /(Уд) и СА(/1 =
= / (Уд) рассчитывают левую часть уравнения (IX.22) в диапазоне углов ул пт
О до 180°. После этого на ось ординат графика, по оси абсцисс которого откладыв; т
углы 0, наносят значения левой и правой частей уравнения. При этом правый
часть нзбражают в виде одной кривой, а левую часть, ие зависящую от Р, — в ви..е
прямых горизонтальных линий, соответствующих каждая своему значению уп.
Точка пересечения прямых с кривой определяет утлы 0 отвечающие фиксировали м
значениям углов ул при выбранном отношении vR{v.
Боковую тягу САУ Fy определяют но формуле (IX.21) при соответствующих
значениях углов уп и 0.
Расчет, выполненный для разных отношений позволяет установить ю
предельное отношение vR/v, при котором значение /^достигает максимума тя;и
выбранного САУ, и, следовательно, определить ту скорость движения, при котор н
сохраняется управляемость судна в условиях ветра заданной силы.
В большинстве случаев при таком расчете нет необходимости в оценке углов 0
прн всех возможных углах уп, а достаточно лишь найти 0 прн угле yR = 12( --
-ь 140'. Ветер, направленный под таким углом, является наиболее труднопреодоли-
мым при выбранном САУ (с точки зрения загрузки последнего).
Иногда встречаются суда, у которых управляемость лимитируется ие тягой
САУ, а значением угла дрейфа. Мелкосидящие тихоходные суда с большой парус-
ностью, снабженные ГДРУ, часто при сравнительно небольших ветрах приобретают
стать значительные углы дрейфа (порядка 30—40° и более), что прямолинейное д| н-
женпе таких судов совершается почти лагом. Поскольку такое движение нельзя
признать нормальным, приходится вводить ограничения по углу дрейфа. ОбЫ' о
считается, что предельно допустимый угол дреифа судна составляет 30°, и ест»
В условиях заданного ветра судно не может двигаться с меньшим углом дрейфа,
оно признается неуправляемым.
Результаты расчета удобно представить в виде графика, построенного для ветра
заданной балльности (рис. IX. 11). По оси абсцисс этого графика откладывают ско-
рость движения судна v, а по оси ординат—поперечную тягу САУ Fy и утол
дрейфа 0. Сравнение значений, патученпых расчетом, с допустимым значений
угла дрейфа 0 = 30° и тягой, развиваемой данным САУ, позволяет оценить дна»'
зон скоростей, в котором сможет двигаться рассчитываемое судно при задачи "
ветре.
Управляемость судна при использовании только САУ. Для расчета упрагл ie-
мостп судна (рис. IX. 12), движущегося под действием только САУ (поворот *1*
колонок, крыльчатого движителя или активного руля), необходимо решить систему
из трех уравнений
—Ха + -Xp + Fx = 0; )
-Ил + ГР-Г„ = 0; (IX -в)
“•Л,Л + л,р - ГуХЕ = °
136
Здесь Ха, лр. гх — проекции иа ось х аэродинамической силы, гидродинамической
силы и равнодействующей тяги САУ соответственно. В развернутом виде система
уравнений (IX.23) может быть записана как
X ^Ai.a + Fx = °!
~СЛГ “Mvr + Сур -у ^ALO — fj, = 0|
~СЛМ ~2~ vPAVL^ + СЛ10 1 ALCL ~ Fffp — °-
(JX.24)
Первое уравнение этой системы дает
= CZX “jf'1'^ув — САр-у v~ALa-
Рис. IX.II. Результаты расчета тяги
САУ Fy и угла дрейфа р.
второго у расценив системы (IX.24)
Рис. IX. 12. Схема сил, действующих
ла судно, перемещающееся при по-
мощи САУ.
= СУРТ ^Alc ~CAV^ WVL.
(IX.26)
Аналогично предыдущему случаю расчета управляемости судка при движении
эд главными движителями уравнение (IX.26) и третье уравнение системы (IX.24)
огут быть сведены к соотношению
~j7“ — 1 Л1хд) = C.vp — CypXF» (IX.-27)
Ьволяющему графическим путем найти зависимость углов дрейфа судна от направ-
ления ветра (если соответствующий расчет нс ведется с помощью ЭВМ).
Решение системы уравнений (IX.24) без применения ЭВМ удобно вести в сле-
ощем порядке.
1. При заданной скорости ветра vr выбирают несколько расчетных скоростей о.
2. Находят отношения v^v и вычисляют значения левой части уравнения
1.27) прн всех углах yR, лежащих в диапазоне от 0 до 180е.
3. Подсчитывают правую часть уравнения (IX.27) в диапазоне углов дрейфа
О до Р, отвечающего максимальному значению правой части. Значения правой
ти откладывают на графике в Зависимости от Р.
137
4. На этот же график наносят значения левой части уравнения (IX.27). Точки
пересечения этих значений с построенной ранее кривой дают значения углов
дрейфа при определенных отношениях vn/v и углах yfi.
5. По формулам (IX.25) и (IX.26) определяют значения тяги Fx н бокового
усилия Fg, необходимых для обеспечения прямолинейного движения судна с вы-
бранными скоростями с прн ветре, имеющем скорость ir.
6. Проверяют возможности одновременного создания тяг Fx и Fu выбран-
ным САУ с заданной тягой на швартовах Ашв либо непосредственно определяют
тягу на швартовах Л|пп, достаточную для обеспечения прямолинейного движения
судна с выбранными значениями скорости движения
при ветре заданной балльности. Расчет, преследующий
вторую из указанных целей, непосредственно связанную
с выбором того или иного САУ, обеспечивающего само-
стоятельную швартовку, проводят в следующем порядке.
Сначала находят потребную тягу САУ Fv и угол по-
ворота вектора упора ар при выбранных скоростях дни-
жения судна. На основании схемы рис. IX.13
jft
= arcsin
(IX.29»
Затем от величины FB необходимо перейти к тяге на
швартовах Е1ив. Для этого вводят предположение о том.
что падение тяги в зависимости от скорости перемеще-
ния переложенного иа угол ар устройства может быть
оценено путем учета только продольной по отношению
к оси устройства составляющей скорости (иначе говоря
предполагают, что поперечная скорость ие влияет на
тягу устройства). Тогда тягу устройства иа ходу FB мож-
но выразить через тягу устройства на швартовах FmB как
Fc = Gue — *b»i. (IX.30»
где i'i — проекция скорости движения САУ на направле-
ние его тяги; kv — коэффициент падения тяги с ростом
скорости. В расчетах потребной тяги fBJn коэффициент Vo
целесообразно выбирать, ориентируясь иа кривую
= / (о) какого-либо конкретного устройства, анало-
гичного рассчитываемому. Ввиду практической линейности такой кривой коэф-
фициент kB равен
Рис. IX. 13.
сил, возникающих иа
САУ.
Схема
к» = (Гши - fo)/n. (1X.3I)
Рассматривая движение судна прямым курсом с углом дрейфа р и САУ, струя
которого и, следовательно, направление тяги отклонены иа угол ар от ДП судна
(см рис. IX. 13), легко выразить скорость of
и, = V COS (Of + Р).
(ix.331
Следовательно,
Отсюда
+ VC0S(ar + P)-
(IX.33)
(IX.34)
При выполнении расчетов саедует иметь в виду, что при определении угла Qf
по формуле (IX.29) необходимо учитывать знак продольной тяги Fx. В случае
если Fx > 0, т. е. тяга САУ направлена в нос судна, угол ар лежит в первой
четверти. Если же Fx < 0, то угол ар находится во второй четверти, т. е. пре-
вышает 90е.
Разворот судна при наличии ветра может совершаться двояко. Если равно-
действующая тяги САУ нормальна к ДП (например, на судне с бездействующи'’11
133
Iглавными движителями работает одно ПУ), судно, разворачиваясь, дрейфует под
действием ветра с углом дрепфа, меняющимся во времени п зависящим от направ-
ления ветра по отношению к ДП. Если равнодействующая тяги может быть по
заданному закону отклонена от ДП на любой угол (например, при работе главных
движителей на судне с одним ПУ), угол дрейфа судна можно принудительно удер-
живать около значения Р = 90е, и тогда судно будет разворачиваться паивыгодней*
I шим образом с точки зрения пространства, необходимого для совершения маневра.
В обоих случаях разворота необходимым и достаточным условием его сов<р-
шення является возможность с помощью выбранного САУ удерживать ДП судна
1в произвольном по отношению к вору положении.
Рис. IX. 14. Схема сил, действующих на дрейфующее судно:
а— тяга САУ нормальна к ДП; б — угол дрейфа Р= 90е.
Тяга САУ нормальна к ДП судна (рис. IX. 14, а). Уравне-
ния равновесия судна прн удержании ДП в определенном по отношению к ветру
положении в этом случае имеют вид
-Лл+Л'р = 0; 1
= (IX.35)
_Л1?) + Л1е_д/к=о. J
₽ развернутом виде система (IX.35) может быть записана так:
“САЛ ~4~1ЪАУВ +СЛ₽-|- b'2^L<j= 0;
CAy-y-tVvL-Cyp-r ^/а+^=0; } (1X36)
САМ — -у v~ALq^ + FVxF — °- I
139
CitcieMy (IX.36) в безразмерном виде выражают следующим образом:
—Сах
|24^- + cx3=°:
' *Lo
Cay
.2
I =0;
(1Х.37)
Сл.м
-Смр-Ь "F
~ l'R^LoC
|2=о.
Из первого уравнения этой системы находят отношение
(,vn!v)2 ~ слр/1слх VWO ^vo/^Lcl. (IX.3ftj
которое подставляют во второе уравнение системы (IX.37). После преобразовании
определяют
"X 3’i
В результате подстановки выражений (IX.33) и (IX.39) в третье уравнение системы
(IX.37) получают
смр — cypxF ~ сд. —77 — Слухе) 4
Левая часть уравнения (IX.40) зависит только от ума дрейфа ₽, а правая — от
умов Р и Решая это уравнение графически, можно для каждого направления
ветра найтн соответствующий ему угол дрейфа, а затем по формулам (IX.39) и
(IX.33) вычислить потребную тягу САУ Fv н скорость дрейфа и при заданной ско-
рости ветра vr.
Угол дрейфа Р = 90° (рис. IX. 14, б). В случае если тяга САУ подби-
рается таким образом, что угол дрейфа при любом направлении ветра составляет
90J (судно дрейфует лагом), уравнения равновесия судна имеют вид
—Хл — Хр + Fx = 0: 1
-Уд + Ир-Г^О;
—Л1Л 4- Л4р — = 0. J
(IX.41)
Учитывая, что при Р = 90° тангенциальная сила Хр и гидродинамический момеш ЛЦ
близки к пулю, можно в уравнениях (IX.41) ими пренебречь. Тогда система ураз-
нений приобретает вид
-ХЛ т Fx = 0.
_Ул + Гр-Г„=0;
(IX.42)
В развернутом виде систему (IX.42) можно переписать следующим образом:
—С ах ~2~ vr^vb + Сх= 0;
Сду — Сур -2- v'ALg + Fv = 0;
С А М ^КЛ VL С + Гuxf = 0.
(IX. 43)
UQ
Из первого уравнения этой системы определяют продольную составляющую тяги
= (IX.44)
Совместное решение второго и третьего уравнений системы (IX.43) позволяет найтн
г — г JL ri/ Чм 2 (IX.45)
1/ ^IL Суинге (IX.46)
Коэффициент Сув, входящий в (IX.46), в данном случае равен коэффициенту сл
из выражения (I 44).
Формулы (IX 44)—(IX 46) дают возможность найти величины Fx, Fu и v
в зависимости от направления н скорости ветра.
§ 26. ОБЩИЕ УРАВНЕНИЯ ДВИЖЕНИЯ СУДНА
Действие САУ, рулей и главных движителей может приводить к изменению
утла дрейфа судна от 0 до ±180° и радиуса кривизны траектории от 0 (вращение
на месте) до со (движение по прямолинейной траектории). В этих условиях спра-
ведливость ряда допущений, принятых в § 24 и 25, нарушается и отдельные
категории сил и моментов требуют уточнения с учетом дополнительного влияния
факторов внешней среды и особенностей режимов работы САУ и главных движителей.
Основными возмущающими факторами внешней среды, действию которых под-
вержено плавающее на поверхности моря судно, являются ветер, волнение и тече-
ние. Данные по математическому описанию ветра и ветровым силам приведены
в § 9 описание сил от морского волнения — в § 10 первого раздела. Способы
учета влияния течения изложены в § 13.
Гидродинамические характеристики корпуса судна в зависимости от угла дрейфа
и кривизны траектории определяются методами, изложенными в гл. 11. Угол
ДР< ифа в общем случае вычисляют по формулам
1г'т
arccos----, если < 0;
(IX 47)
—arccos —, если > 0,
v v
гд
1=1ГГ+ЧГ~ (IX.48)
Ьсорость обтекания корпуса, или скорость судна относительно вщы.
Кривизну траектории движения судна под действием САУ удобно характери-
зовать не параметром й = L'R, а обобщенной кривизной траектории О, связанной
С ы соотношением
Й = <д/| 1 + ы» (IX.49)
И изменяющейся от 0 .то ±1. Отучаю й = 0 соответствует прямолинейное движение,
рлучаго Q = il — вращение на месте.
Как показывают результаты испытаний и как отмечалось в § 7, влияние вра-
щения на силу сопротивления и боковую силу корпуса чаще всего невелико. По-
этому в практических расчетах этим влиянием обычно пренебрегают и считают, что
коэффициенты гидродинамической силы сопротивления и боковой силы зависят только
ОТ угла дрейфа н при вращении судна остаются такими же, как и при прямолиней-
ном движении, т е.
Сх = Сл-р; Су — С) р.
(IX 50)
141
-Ь------0,05 ) + 0,45 (о - 0,955). (IX.55)
Напротив, влияние вращения судна на гидродинамический момент корпус
относительно мидель-шнангоута весьма существенно. Значение указанного монета
может быть определено го формуле
Mv = J^L [ Cjupv1 - CaIuL’ I о I ш - CAiw (v» + sin nft] , ’ (1X.5>,
где С,ив — коэффициент момента прн вращении на месте. Точные значения коэффи-
циентов Сир. С.мп и Сд1Ш можно получить прн испытаниях моделей судов в опытз-
вых бассейнах. Если результаты модельных испытаний отсутствуют, коэффициент
Сл!р находят по данным § 7, а коэффициенты С'л1и н Смш — по формулам
C,Uo = 0.05%; (IX.5?)
СМа = + й, | sin ₽ | + а2 {1 - cos [(2л - 410 [) cos 0 + 0.1 1 sin 20 ]]}. (IX.53)
где сг — коэффициент боковой силы корпуса при угле дрейфа 0 = 90°; С^|£|)|) —
производная коэффициента демпфирующего момента прн угле дрейфа Р = 0; реко-
мендации по вычислению Сд[Шо содержатся в § 7 [см. формулу (11.161)];
а, = 0,09 - - 0,0033 (4 ~ 7) “ 20 ("77 “ °-005)? +
+ 0,4 (а - 0,9) + 0,05 (0М—0.9); (IX.541
os = 0,008 -g- + 0,9 (
Здесь L, В, T’jt — длина, ширина и осадка судна; 0М—коэффициент полноты ми-
дель-шпаигоута.
Приведенные выражения получены А. П. Тумашнком путем обработки резуль-
татов испытаний серии моделей’ судов.
Легко заметить, что прн малых 0 н ft формулы (IX.51) н (IX.53) можно при-
вести к виду, принятому прн расчете диаграммы управляемости (см. § 22).
Коэффициент гидродинамической силы сопротивления Сд-р определяют по
формуле
Схр = 0.5 (Сд-з - Сд-о - (СХв + Сх0) cos 0] + b, sin2 р + bt sin3 p sin 20, (IX.56)
где Сд-Э, Схо — коэффициенты сопротивления при углах дрейфа, равных 180 н 0°
соответственно. Коэффициенты bt и bt могут быть найдены только эксперименталь-
ным путем. Поэтому, если гидродинамические характеристики корпуса находят
по графикам и номограммам Справочника, следует пользоваться формулой (II.+
если же характеристики определяют путем испытаний корпусов моделей судов,
то для аппроксимации зависимости коэффициента С.ур от 0 лучше применять вы-
ражение (IX.56).
Силы, создаваемые САУ. рассмотрены в § 15.
Из существующих САУ наибольшее распространение на судах получили 11^
типа «винт в трубе», а также поворотные и неповоротные винтовые колонки, спуска
мые под днище судна. При составлении уравнений их движения во многих слу-
чаях используют упрощенные представления сил и моментов, создаваемых САУ-
Сила обычно считается постоянной и равной ее значению в швартовном режиме,
а момент — равным произведению силы на отстояние устройства от центра масс.
Такне допущения применимы, когда САУ используют в качестве вспомогатель-
ных н когда ошибка в расчете компенсируется как запасами, заложенными в за-
данные внешние возмущения, так н нео1 ре .(елейностью соответствия реальных
внешних воздействий расчетным. Сказанное имеет место прн оценке возможностей
прямолинейного движения при ветре, разворота и удержания иа месте, а так
при выборе потребной эффективности, т. е. состава, мощности и расположения по
длине судна САУ.
Если уравнения движения являются основой для разработки систем динам»
ческой стабилизации судов, выбора нх характеристик и алгоритмов управления,
указанные допущения оказываются слишком грубыми н могут повлиять на каче-
142
I ствениую н количественную сценку поведения судна. Особенно прн режимах, когда
I нагрузка подруливающих устройств, характеризуемая от пошей нем скорости ебте-
| калия корпуса к скорости струи на выходе устройства, небольшая. Как следует
|из результатов, приведенных в § 15, влияние угла дрейфа на тягу и момент уст-
ройств типа «винт в трубе» и винтовые колонки в этом случае весьма заметно.
Таким образом, форма представления сил и моментов^ создаваемых САУ, за-
висит от типа устройств и от конкретной задачи, решаемой с помощью уравнений
движения.
Силы, создаваемые рулями. Установленные за гребными винтами рули при
[движении судна с малыми скоростями можно рассматривать как кормовое ПУ.
I которое благодаря струе, отбрасываемой гребным винтом, создает при перекладке
| руля боковую силу. Очевидно, что развиваемый гребным винтом упор, а следова-
Iтельио, и боковая сила па руле в значительной мерс зависят от интенсивности внеш-
I н IX возмущений, действующих в направлении продольной оси судна, т. е. нагру-
|рок, обусловленных ветром, волнением, сопротивлением буксируемых устройств
I и т. п. Поэтому, в частности, на судах с динамическими принципами стабилизации
[рули могут в ряде случаев использоваться как эффективное средство управления
1 даж при удержании па месте.
Так как коэффициенты нагрузки гребного впита в режимах движения, при
| которых используются САУ, могут изменяться в широких пределах, для расчета
[сил, возникающих на руле, следует пользоваться формулами, отличными от формул,
| приведенных в § 14.
Боковая сила па руле, стоящем за гребным винтом, в общем случае может быть
найдена из выраэкения
Кн = СуИ Лй-1-сТ^ , (IX.57)
где Суп — коэффициент подъемной силы руля; Т — упор гребного винта;
J ARDp/ADlj, если ARDp/ADp< 1;
*• — । । > (1 А. Оо I
I 1. если ARDpiADp > 1.
I Здесь Ajn)p — площадь части руля, попадающей в струю гребного винта; ADj) —
[площадь диска винта. Коэффициент Сун, как показывают результаты модельных
и ытаний, зависит не только от угла атаки а, но и от коэффициента нагрузки греб-
нбго винта. В § 14 показано, что прн небольших коэффициентах нагрузки винта,
[соответствующих режиму' свободного хода, в зоне докритнческих углов атаки
СУЯ = CYii^ (IX.59)
’Производная коэффициента подъемной силы руля в (IX.59) считается равной про-
изво .ной коэффициента подъемной силы изолированного руля Су/? из. Прн углах
атаки а, больших критического, когда наступает срыв потока. Суд « I. С ростом
Коэффициента нагрузки винта происходит уменьшение значения CyR, н при срыье
лоток падение боковой силы на руле проявляется слабее. Коэффициент боковой
силы иа руле приближенно можно записать в виде
Су?? = Су?? sin а. (IX.СО)
Коэффициент C“R вычисляют по формуле
= Су/? шв + (Суд иэ СуД шв) Х/?р (2 *Rp), (IX.6I)
где Суд шв — производная коэффициента боковой силы руля на швартовном ре-
жиме;
х _ Ано г А пор |Г1 — Сур
Лр Ало + (1 + Cfp)
(IX.62)
143
коэффициент влияния впита. Согласно результатам испытаний, проведенных
А Д. Гофманом, ШВ = 0.82. Значения производной подъемной силы изоли-
рованного руля С™^и1 находят по материалам §35.
Уюл атаки руля а, как и в § 14. вычисляют по формуле
“ = (1ХСЗУ
Где Рм—местный угол дрейфа (в месте установки руля);
К£ = кхр. (1X.G4)
Здесь к — коэффициент влияния корпуса; кр — коэффициент влияния винта на угол
нулевой подъемной силы руля, равный
*₽ = «Лр + О-б^прО (1Х65>
В этой формуле
= (IX.66)
где — отстояние передней кромки руля от диска гребного впита; Dp — диаметр
гребного винта.
Местный угол дрейфа рм можно найти из выражении
(агссоз-^-, если v„ + lD.,<o < 0;
(IX-67)
—arccos , если vy J- lR4<» > 0.
Здесь
fu = | t'i + + /«,«<>)-. (IX.69I
Коэффициент влияния корпуса x при малых значениях кинематических пар
метров считается постоянным (см. § 14), независящим от местного угла дрейф i
В общем случае произвольного движения судна значение этого коэффициента опре-
деляют по приближенной формуле
к = 0,5 [I + х0 — (1 — х0) cos 2₽м], (1Х.6')>
г ie х0 — коэффициент влияния корпуса при малых углах дрейфа, вычисляемы
по рекомендациям § 14.
Дополнительное сопротивление, возникающее прн перекладке руля, находят
из выражения
Хп= Схп(а)(-^-Ап+ст), (IX. 70»
где Сдп (а) — коэффициент сопротивления изолированного руля.
По приведенным выражениям вычисляют компоненты сил, возникающих u i
руле при работе винта на передний ход и прн движении судна передним ходом
Оценка силы иа руле, появляющейся прн работе гребного винта в режимах реверс
н контр реверса, расчетным путем затруднительна, так как необходимые для этот '
данные отсутствуют.
Изложенная методика определения сил, возникающих на руле прн произволь-
ном движении судна, является приближенной и рекомендуется только при отсутстви
возможности проведения модельных испытаний. В случае если модельные испыта-
ния судна проводят, приведенные структурные выражения могут быть использованы
для обработки результатов испытании.
144
С учетом материалов, изложенных в настоящем параграфе, уравнении движения
дна над действием САУ и рулен в условиях ветра и морского волнения имеют
Д
{tn 4- Xji) ~~— (m 4- Z22) v,jb> = Xpv 4- Л'д 4* .\'R 4- А'в 4- А'во 4- АЛ 4- Fx + Тр,
(IX 71»
(т 4- ?гг) & 4* (m 4* Хи) o.,<i> = Kpv 4" Ьл 4- 1’п 4- 1ц + Уио 4- Al 4* Yp 4- Fu;
(IX.721
I (Fti 4- ^«e) — Afpv 4" 4“ Ma 4- A^n 4- A4B 4- Л1во 4" АА1 4- Af f) 4- Afp,
(IX,73»
ие Xflv, I'pv Afpv — проекции i озициониых гидродинамических сил и момента
вязко природы на корпусе; Af^v — демпфирующий гидродинамический момент
экой природы иа корпусе; Х^, Уд. А1д — проекции аэродинамической силы и
рмент надводной части корпуса; Лр. УR. Л4П — проекции силы н момент, обус-
рвленные действием руля; Хп, Уп, А1Н — проекции переменной составляющей
нпы и момент, создаваемые волнением; Х^, ¥ь*. Мь<> — проекции постоянной
вставляющей силы и постоянный момент от волнения; АХ, АГ, ДА1 — проекции
□волнительных сил н момент, действующие иа судно (от буксируемых устройств
т. п_); Fx, by. Мр — проекции сил н момент, создаваемые САУ; 1}>. А1р — боко-
1Я сила и момент, обусловленные работой гребных винтов. Сила У р и момент Alp
называют существенное влияние на параметры движения судиа только прн работе
itioro из винтов на за until ход. Если же на двухзальном судне оба гребных
Инга создают упоры одного направления, силой >'р н моментом Мр можно нренс-
Ьечь. Уравнения (IX.71)—(IX.73) записаны в связанной системе координат.
При движении судиа иа волнении присоединенные массы А1(, Х2г и нрисоедн-
еиный момент инерции корпуса не остаются постоянными, изменяясь в завнен-
рсги от частоты волнения. Кроме того, в уравнениях движения, описывающих
рлеб; тя судиа, появляются слагаемые, обусловленные дополнительным демпфи-
раине.ч из-за волнообразования, пропорциональные проекциям скорости коло-
вший и также зависящие от частоты.
I Учет указанных факторов необходим, если уравнения движения, выступающие
роли математической модели судиа как объекта управления, служат основой для
1зработкн атома шческои системы управления. В этом случае, как правило, тре-
гется также учет бортовой, килевой и вертикальной качек.
I Строго говоря, уравнения (IX.71) (IX.73). записанные во временной области
содержащие коэффициенты, зависящие от частоты колебаний, справедливы не для
ех режимов движения. Даже для условий регулярного волнения частота, а слс-
вательно, i коэффициенты уравнений являются известными постоянными Беля-
шами только в период установившихся ко, ебаннй, в то время как прн переход-
ах процессах, из которых складывается реальное движение судна, эти величины
знобятся неопределенными. Подобное имеет место и в условиях нерегулярного
•нения.
J Режимы, в которых проявляются маневренные свойства судна под действием
АУ, главных движите ей и рулей, характеризуются низкими частотами коле-
|||нй. При этих режимах указанной зависимостью можно пренебречь. Слагаемые,
ЛУ щовленные вот новым демпфированием, следует из уравнений исключить, а при-
чиненные массы надо определять прн частоте, равной пулю. По этой же причине
Уравнения не вводятся переменные составляющие сил и моментов от волнения,
только в отдельных случаях, когда ставится вопрос определения потребной эффеК"
ШностиСАУ, необходимых для удержания судна иа месте, в уравнения включаются
•стояииые составляющие сил и моментов от волнении, вызывающие дрейф.
145
Используя выражения, описывающие каждую из входящих в уравнения (IX 71]
и (IX.72) категорию сил. а также допущения, оговоренные выше, можно получ: ь
следующую систему уравнений движения судна в горизонтальной плоскости:
(м Zu) м = (т VyO — Сдр —g А^ —
г Рл « Л V* Z~* I » / Iх'2 1 , Т \ . С I Т
— Сах—2— ^ГЛ — / , Схнп (ал) Лл 4- с7л) + Сх + Те\
Л-1
(т 4- >.и) —-£-----— {т 4- 7,п) 4- -Ау- Лд0 4-
+ сдг ~ 2^ Ave ~ У (~2~~ + cTkj sin ak + ?у + 'V
л=1
+ ?-.,) ~ = рЛ2~ [ - CMeL2101 © - СЛ(И ± (0= 4-
4- £*<?) sin 4- Сам —% R AvlL 4-
(IX.74)
+ Супцем — Лд 4 СГь) sin <ху 4- Mr 4- Afp.
Л-1 j
Здесь п — количество рулей.
Систему (IX.74) прн необходимости можно дополнить уравнениями связи, по-
зволяющими вычислить координаты центра масс судна в неподвижной системе ко-
ординат (см. рЯс. 1V.21), которые имеют вид
-^р- — vx cos X — vv sin x — v-t cos Yt-‘
= v„ cos x 4- *>x sin x +1'г sin yT,
(IX.75)
а также уравнениями, описывающими работу и закон управления приводами ру-
левых устройств, главных движителей и САУ.
Решение системы уравнений (IX.74)—(IX.75) можно получить только с помошы0
вычислительных машин. Если для этого используются аналоговые вычислителю:
машины, то гидродинамические характеристики корпуса и средств управле :я-
а также аэродинамические коэффициенты удобнее задавать в виде графиков in1*
таблиц. При решении уравнений на ЭЦВМ удобнее пользоваться аппроксимацнон-
ними формулами, заменив в последних тригонометрические функции отношениям»
скоростей:
cos р = vxfv, sin 0 = —tyv. (IX.7°)
146
В этом случае система уравнений (1л.74) будет иметь вид
(т + Хп) - = (ш + ?.гг) ои<й + (—-—2—~-'—“ ~ w*
, t о , „ь (Лл . с (,AVR А
+ + 2&-.— ) ~^Г~ + АХ ~~Г~ ™ ~
~ У, СХПк СМ (^7" + сГ*) + FX + ТЕ'
к— t
dvU I « Сл Vu
(m + X22) - jj--(m + ' ll) W ~ ( 2CVP -7- +
+ C2 Ы - 16c3-------------
рлл»<- Г v4
2 cAYvk
(IX.77)
- 2 СУ>^ (-? Ax + fT0 sin a* + + VP>
ft=l
(/« 4- ?-ee) -^T = — 2miVxVy + mtWy + лг»~7Г- —
4*|u3 v C„„ I
— ki/n4 о—* у ‘ -V. 4- Смо^' I ь> I w 4----— + T-W) sin nQ I x
Я J
t>ALllL Paavll c 2 , У' C1 I ( |W* л ,
x —2------1------2 СЛЛ1УЛ + / 1 ‘-yRFR.M ЛК +
4-cT^ siua;i + A!f.. + Afp
n dvv dvn du _
[«лагая • = —тг- = —77- = to = 0. можно нолччпгь уравнения для частного
I ut al ш
Случая установившегося прямолинейного движения судна под денсгвне.м САУ и
Руля. Для расчетов параметров становившегося дв окения гидродинамические
147
коэффициенты корпуса удобнее представлять через \гол дрейфа и записывать ур<®,
нения так:
(£*2. ... Cy° _ Сх» ± fr*' cos р + fcj sinSp -I-
+ Ь. sin ₽ sm 20 ) СЯЛ^ -
- 2 СХ«» (“*> Л" + с7>) + + = 0:
Л=1
(0,5С^р sin 20 cos (j + <?t | sin 0 | sin -f- c3 sin3 20 x
X | sin 20 I) o2 + 2L^l. „г _
(1X.78)
~ 2 C'iRk A[t + CT*} S‘n *k + + =
ft=l
(mt sin 2p 4- m2 sin p 4- "»з sin3 2p 4- m4 | sin 2p | sin3 2₽) X
v РА1.ОЬ 2 РдЛ'Ь c 2 , ф wx . x
л —2------° "<----2---- -4 M R "* / 1 C 1rm X
x Ar + cTx>)+ + ,xip = °-
Уравнения (IX.77) можно использовать для выбора потребной эффективпссти
САУ н главных движителей, обеспечивающих либо прямолинейное движение, либо
удержание на месте. В этом случае, как отмечалось выше, момент Мр надо пред-
ставить как сумму произведений боковых составляющих тяг каждого САУ па
отстояние его от центра масс, а компоненты Yр и Л1р положить равными nj.w.
Если оценивается возможность удержания судна на месте в условиях ветра,
течения и волнения, следует принять и = от, 0 = ут, vR = т>о н в уравнения вис- н
постоянные составляющие сил и момента от волнения, вызывающие дрейф судна.
Процедура определения потребной эффективности САУ зависит от того, как ic
тины устройств предполагаются к установке на судне и используются ли при ма-
неврировании рули и гребиые винты. Если число возможных способов использо-
вания средств управления оказывается больше одного для обеспечения движения
вдоль продольной оси судна (например, носовая и кормовая поворотные колонки)
и больше двух для обеспечения движения в направлении, перпендикулярном ЯП
(ге же колонки или два ПУ типа «винт в трубе» в сочетании с рулевым устройств м
н т. п.), то система уравнений (IX 78) не позволяет подучить однозначное решетив
и для выбора состава н мощности САУ необходимо сформулировать дополнительна
условия. Обычно используется условие минимума мощности, потребляемой вами
средствами управления в рассматриваемом режиме движения.
Другие частные случаи установившегося движения судна под действием С
и руля из системы (IX.77) можно получить только для условий тихой стоячей во И
н безветрия. К этим случаям относится разворот судна па ходу н разворо! и3
месте. Последний маневр приближенно описывают уравнением
С.мо ру3 | <о | ш = Л1к + .Mf + Л1Р, (IX J4»
из которого определяют скорость или время разворота на заданный угол.
14В
Чтобы оценить возможность разворота судна без хода при наличии ветра, вол-
генпя и течения, достаточно использовать только третье уравнение системы (IX.77),
Положив в нем Смш = 0. а гидро- и аэродинамические коэффициенты равными их
Максимальным значениям по абсолютной величине, которые имеют место при углах
дрейфа । углах кажущегося ветра в пределах 45—60 и 120—I35,:i. Прн условии
•«f I> | -ф- A^L | - | СТм avll | 4 | Л,иох | СIX .80)
□ворот будет возможен.
Глива X
РЫСКАНИЕ СУДНА НА ВОЛНЕНИИ
h 27. УРАВНЕНИЯ ДВИЖЕНИЯ СУДНА НА ВОЛНЕНИИ
И РАСЧЕТ ПАРАМЕТРОВ РЫСКАНИЯ
I Параметры бокового движения судна, движущего я на волнении, — углы
рыскания %, дрейфа fi, перекладки рулен — определяют из решения следующей
системы дифференциальных уравнений:
~~т.—Е + Л11 Р | л + rgjto + Si|6n = Ув:
—F ЧзгР + rgtio 4- — A1B;
<ty.
dt
>десь
I> = T^b/[(1 + A'aa) pt'Vr|;
Л1В = AIb/KI + A'ee) /«];
^21 = L r2i — r2I;
= Satt1. Фи = (r 7.)~; = r31t'/7;
®3i — sai E)2,
(X.l)
(X.2)
(X.3)
(X.4)
io </21 ftf, r3(, s2I, ?M, r31, £ц — коэффициенты, определяемые суммарными гидро-
инамнческнми характеристиками корпуса судна и двнжнтельно-рулевого ком-
пе :а по формулам (VI.20)—(VI.24) и (VI.35).
Для решения системы (X.I) необходимо знать закон изменения угла перекладки
|гля во времени. Такой закон можно получить для случая, когда судно стабили-
зуется на курсе авторулевым. В авторулевом формируется сигнал оуПр. управ-
Тющнй рулевой машиной и имеющий обычно следующую структуру:
аупр ' floX + at ‘ OjCn + Оз J X М-
(Х5)
юледнее слагаемое, введенное для придания регулируемой системе астатизма,
Цо влияет на поведение судна прн движении на волнении и прн оценке пара-
гроз рыскания може! не учитываться. Рекомендуется следующий порядок выбора
Ьффнциентов авторулевого.
I. Рассматривают переходные процессы no х и определяют диапазон изме-
нив коэффициентов, обеспечивающих приемлемую динамику судна на тихой поде.
149
2 Уточняют эти коэффициенты путем расчета рыскания на попутных курсор
углах.
3. С выбранными значениями коэффициентов проводят оценку рыскания на
встречном волнении.
Угловая скорость перекладки руля в зависимости от управляющего сигнала
изменяется по закону (рнс. Х.1, о)
®л = (з (°уир)- (X <>)
Угол и угловая скорость перекладки руля ограничены значениями fy? тах и бд т.1Х
соответственно. Обычно mox = ЗУ. Закон перекладки руля авторулеьым с учстгм
перечисленных ограничении может быть аналитически записан в виде
Рис. Х.1, Функции, учитывающие ограничения по угловой скорости (о) и углу (С)
перекладки руля.
где/j (6д1) — функция, учитывающая ограничения по углу перекладки руля
(рис. Х.1, б);
fx (f’ynp) —
/з (сгупр). если |5К1 |<6д ггах^
/з (°ynp)i если 6д1пуцр^0, I вдт I 6д max!
О, если бдхЛуцр > 0, | Ст | max-
(X .')
Если максимальная скорость перекладки руля достаточно велика, то пере-
кладка осуществляется в «скользящем режиме». Это означает, что с высокой сте-
пенью точности выдерживается соотношение
оуПр = 0 (X 10)
и угол перекладки без учета ограничений получается из решения уравнения (X ICj
относительно бд:
6r = ">tX + "‘z-jt-,
(X П)
где
mt =—а^'а^, т.г=—ах!аг. (X.I2)
Параметры рыскания судна на волнении определяются из решения системь1
(X.I) и уравнений авторулевого (Х.6)—(Х.9). Решение уравнений в зависимости
от цели исследования может выполняться двумя методами: спектральным и метод* **
непосредственного интегрирования. Спектральный метод предпочтительнее в те*
случаях, когда необходимо определить не только амплитуды параметров рыскат ня»
но н спектральные плотности. Прн этом рассматривают линеаризованную систему
уравнений движения Судна. При вычислении параметров движения методом itvitO"
150
иного интегрирования наиболее полно учитываются нелинейности в гидро-
гскнх характеристиках и в системе управления. Расчеты спектральным
для двухмерного волнения могут быть выполнены без применения ЭВМ,
методом непосредственного интегрирования выполняют на ЭВМ.
28. РЫСКАНИЕ СУДНА НА РЕГУЛЯРНОМ ВОЛНЕНИИ
Параметры рыскания судна на регулярной волне изменяются по гармониче-
сому закону с частотой <ок В этом случае угол рыскания равен
X = Хо cos (“k< + ех)- (X 13)
этой форм’ ле
Ха = «воХо (Х.14)
-амплитуда угла рыскания, где
Уо — | В’пво*| — l/r(Re “во’/)2 + (Im W «во*)2’
( е' если Re IT „>0;
Е х “во*
I л — е‘ если Re И’ „<0
' А В0Л
сдвиг фаз между волной и рысканием. Здесь
в* = arcstn -j-zp—5-
Р“во*
(X 15)
(X 6)
(Х.17)
Fan0X = ‘ 1т ^“во* — комплексная передаточная функция угла
>ыскания у по отношению к углу волнового склона аво, определяемая формулами
Х.23)—(X.24)
I Аналогичные соотношения имеем для углов дрейфа и перекладки рулей
Р = Ра cos (ы1;| + ер); (Х.18)
Йн = «нвсо5(ык/ + ев). (Х.19)
’асчет амплитуд Ро. бЛа и фаз ер, ей выполняют по формулам (X.14)—(Х.17) при
амепе передаточной функции Й7ав()5£ на №'«вПр и 11;'апОдн. Если закон перекладки
>уля определяется выражением (Х.П), то расчет и Eg может быть также вы-
юлнен по формулам
6Ла = Ха + т_“к; (Х.20)
fe= ®х+ ДЕ, (Х.2 )
де
Де = агезш — тг(|)ч ------_ (Х.22)
I mj + лгл>'£
В результате решения линеаризованных уравнений движения судна (X. I) и
Х.11) для реальной н мнимой частей передаточных функций й7апоХ. WaBOp ^’воля
юлучнм выражения
4х (“и, °к) = сз(шв- Ик)/К| (шк) + Сг(шк)]» (Х.23)
1,11 Чо* = С< <“»’ (“к) + Cs (“«Я: (Х 24>
Re Чо*1 “к) = с' “к)-'(С5(юк) + сб(“к)]'. (Х-25)
Im "'"«вой “к) = Св (“в-“к)/[С1 (Ч<) + (О)к)]; (Х.26)
|Re 1 ав и (wB, то,) ~ tni Re H7aBQX (cay, ^к) — <йвш2 Ini U ^во^ ^в* ^к)* (X 2/)
I 11,1 и'<Хво6п («В. Юк) = mi Im U авОх(ыв, ы,:) + 0>кшг Re 1ГавПх (Ив. <ак)- (Х .28)
lol
Здесь
Cl («к) = “к (- 2? - m2S3l) - <X 2°)
ci Ю = -o>2 + “к (9 - m2sr + /ni53i); <x 30)
Cg (wB Wh) — — Ci (<йк) ^31Л (<ов, <£>к) + Во (юв, ыв) [wKCi (юв) ?21Сг (юв)];
(X.3I)
С* (<лв, С1>в) = Сз (ык) (о)в, wK) - Во (ci)b, <ов) [— ?2|Cj (сов) — *ацСв (сйи)];
(Х.32)
Сб(“к)=9-“к; (X 33»
Св (Ш1;) = 2рщк; (X.3I)
Ci (<ов, <1>к) = А, (ыв, <1>ц) [Св (о>и)г31 Ся (10ц) сон] 4- гaiC« (wIt) Вв ((ов, й>к) 4-
4- Re №аволп (ыв, о>ц) |С5 (ок) — wBs2iCB (Ь)к)| Ini aBBfn (ыв, ь->к) X
X [WuSaiCj (юв) 4- ЗцСв (а*к№ (X
Ct (<1)в, Шк) = Л„ (<1)к, <1>ц) [-Г3[Св (СОц) 4- шК^-5 (WtJ] + С2[Сь (10|() Ве (<1)в, ЮК) -}-
-f- Re И пВ()бя (®В. е^к) I— Ся (сов) sp Ci>ks2jCb (шк)1 4-
4- 1 in и’«ЕОби (“в. «М HpCs (“к) — wKS2iCe (со,')]. (Х.36)
где
2р = <?2] 4* Г31;
Ч — <731^31 93Й21 I (X д?)
®Х = *Я1 9Я1 — ^31^211
gp = ®3lT 21 — Яг^З!-
Л (“в. <ок) = I и"аво> в <“»• “к> |/Н’ + *22) Р^П; (X 38)
Вв(<°в. ш«) = | WaBBAIB (WB> wk) |4(1 + *«e) In]- (Х.39)
Пример расчета параметров рыскания на регулярном волнении. Рассмотрим
сухогруз со следующими основными характеристиками: V = 5000 м3; L = 100 м;
v = 10 м/с; AL6 = 448 №: АпЕ = 10 м2; !гх = 25 015 500 кН-м; zc = 2,5 м. Коэф-
фициенты системы автоматического управления курсом сухогруза равны; rnt = 1;
mt = 10 с. Характеристики волнения: Л„, ?, = ’3,0 м; К — 60 м; Рв = 45е.
По формулам § 6 н 7 определяем коэффициенты присоединенных масс и ги-
дродинамические характеристики судна: *,2 = 0Л8; *в6= ^.40; с3 = 0,413; СуК —
= 1,84; С₽ир = 0,092; С“т = 0,0683; хп = 0,3; hj = 0; е = 0,48.
По выражениям (IV.13) первого раздела т. 1 и (III.32) находим собственна,к>
частоту волны и амплитуду угла волнового склона: <ов = 1,01 с-1; ав0= 0,157.
Частоту и период встречи судна с волной рассчитываем по формулам (II 1.28) н
(111.29): <й„= 0,275 с’1 7=22,8 с.
По соотношениям (Х.4), (Х.37) определяем коэффициенты: ф21= 0,129 с ,
Аз: = —0,0551 с'2; = —0,683, ?81 = 0,455 м'1; За = 0,0124 с*’; s3J = 0,0126 с’?
hi =0; 2р = 0,584 с’1; sp = —0,0142 с"*; за = —0,00231 с"3; ф = 0,021 с"3.
Расчет характеристик возмущающего воздействия вслиеиия 40. Во провошм
поформулам (111.33)—(111.38), (Х.38), (Х.39): kL | cos ₽в I = 7 4;х1кр = U,16;xal()
= 0.32; v..t = 0,139; xm = 0,183; = 4820,29 кН; Л1£ = 33 3228,41 кН-м; =
= 0,0651 с"1; Во= 0,0951 с"?.
Коэффициенты С, и передаточные функции находим в соответствии с выраже-
ниями (Х.23)—(Х.36), (Х.38). (Х.39): С, =—0,0514’3; Са = —0,00521 с’3; G
= —0.00139 с'•; С, = 0.000685 с’»; Се =—0.0546 с"2; С, = 0,161 с-3; С-
= —0,0062 с*4; Св = -0,00596 с~‘; Re Wa х= —0,596; Im U^x - 0,294;
152
Re ГавоР = -0,214; Im IVa^p = -0,206; Re U = -1,40; Im BZaB(|ftR =
- —1,34.
Амплитуды углов рыскания, дрейфа, перекладки рулей определяем по форму-
лам (X.I4), (X 15), (Х.20): у0 = 0,664 рад. /о = 0,104 рад = 6,0г; 6До = 1,94 рад;
бДи = 0,304 рал = 17,4°; Ро = 0,297 рад. р., = 0.0466 рад == 2,7°.
Расчеты для различных знач-ний курсовых углов рв показывают, что на попут-
ных курсовых углах (Рв<90°) рыскание существенно больше, чем на встречных.
Максимальных значении рыскание судна достигает при рв — 45°.
Характерная зависимость амплитуды
угла рыскания у от курсового угла Рв
приведена па рнс. X .2.
§ 2». РЫСКАНИЕ СУДНА
НА НЕРЕГУЛЯРНОМ ВОЛНЕНИИ
Расчет рыскания спектральным мето-
дом. При вижеини судна на нерегулярном
। волнении угол рыскания у, угол лргйфа
Р и угол перекладки руля 6Я являются
। стационарными случайными функциями
времени. При расчете мореходности ис-
[пользуют следующие характеристики
стационарного случайного процесса х (I):
дисперсию £>хх, амплитуду с заданной
^степенью р, %. обеспеченности х . сред-
ний период Гер, спектральную плот-
ПОСТЬ 5 ху
Расчет дисперсии может быть
ос
РХХ = J (Re?tt-QB0X -ь I н^Хох) р- -Чй йи*>. (X 40)
для судна, движущегося ка двумерном
волнении.
выполнен по формуле
млн
Яхх= Jsxx(<oc)^.. (X 41)
о
Спектральную плотность Szy определяют в функция от частоты колебаний
судна <ое= |ю„| н в зависимости от курсового утла рв выражают следующим
образом. Для попутных курсовых углов ^0 < рв <90 ), если <ot < <о^’ где
= Р, (4п cos рД (X 42)
Sxx~ (Х.43)
*-i
При k — 1, 2
s^K) = l^4<1xKfr,iwe’ М- ЮЛ 1-
+ М. «Ml МГ X
X SK [<’ (<0е, рв)] | /°1в Г>| ) . (х 44)
153
Прн k = 3
С* (“Л = (Re?lF'W [“-3' " to'] +
+
Im2u4ox “ “J1
Н3’К- м]*
, I doA3' (<> р )
х$::к3>.. р.)]|
Если 0 < Рв < 90° к we > <i)“’, то
Sxx = Sxx(^)-
Для встречных курсовых углов (90 < Р8 < 180°)
\х = ^хх (*“«)•
(Х.45)
(Х.46)
(X 47)
Зависимость собственной частоты волны сов от частоты ше и курсового угла Рв
определяется выражениями
(ше- Рв) — 20C0SPb _1/ у 4о2 cos рв Weg .
0C0SpB ’ (X.48)
W (“е- ₽в)- 2t)C0SpB 1/ g2 ь>. g .
г 4о2cos рв OCOsPb ’
°в (“?• ₽в) 2l>COS|5D d<0c . 1/ . ^rg .
1 Г 4v2 cos Рп “в*’ - 2о-у—cosPB. 0 COS Рв ’ (X.49)
Реальную и мнимую части передаточной функции рассчитываемого параметра х,
где х= х; р; 6Л. находят по формулам (Х.23)—(Х.28), в которых полагают: при
и =1,2 сов = й>‘") (и,, Pu). wK=we: при п =>= 3 wB = о>’вп (ые, Рв), ык =
= —We.
Пример расчета дисперсии и амплитуды с обеспе-
ченностью 3% угла рыскания. Расчет выполняют для судна, пара-
метры которого и гидродинамические характеристики приведены иа с. 152. Расчет
проводят для курсового утла рв = 45‘ и волнения интенсивностью 5 баллов.
Расчет ведут в табличной форме (табл. X.I). Для различных значений <ои рас
считывают:
а) частоту' встречи судна с волной <вк по формуле (III.28) — п. I;
б) по графикам рнс. 111.5 коэффициенты х1нр, хг1.р— п. 2 (йв [ cos рЕ I
= | cos Pi, | <ов, п. 3, 4;
в) параметры Ао, Bt, характеризующие возмущающее воздействие волнения,
по формулам (111.33) —(111.38). (Х.38), (Х.39) —п. 5 [ехр (—о; ?f.g)J, п.6-9
(Ху, хт), п. 10 = xg^__Ll_) , п, п ^во = х<псо^
г) коэффициенты С1# Сг. С3, С, ио формулам (X.29)—(X.32) — п. 12—23:
д) реальную н мнимую части передаточной функции угла рыскания по отю»
шенню к углу волнового склона по формулам (Х.23) и (Х.24) — п. 25, 26;
154
3
1.5 e_0l-G0‘S- е.01-80‘8- g_0I-Zi''8- с-01 -90'5 £.01 'Ofr’Z— i-.Ol -61> t_oi-zri- 5-01 •ь’0‘1 W9 0 SO'0— 600 о91 1С1‘0—
I г, 0,082 12,2 -0,08 -0,02 0,65 -5,36-10"= -1,45- 10'= -2,94-10"* -1,13-10'“ —2,51-Ю"2 -9,67-10-“ —2,46. КГ3 4,1- 10’3
г. 0,228 8,7 0,03 0,2 0,735 2,42-10_“ 0,153 1,82-10'3 0,114 1.13-Ю-5 6,95-10’2 -3,46- КГ2 1,07-10*а
3 о с 0,316 5,8 0,36 0,52 0,813 0,342 0,419 3,99- Ю-2 0,373 0,260 0,153 -6,86- ГО-2 -1,36 10‘2
0.7 0,347 3,5 0,75 0,81 0,883 0,820 0.686 0,177 0,762 0,384 0,188 -8,32-Ю'3 -2,21-10“2
О 0,32 1,8 0,93 0,93 0,9.38 1,14 0,826 0,602 1,34 0,534 0,169 -7,04-10-“ — 1,46-Ю’2
X X Ё а «к -— Wg (1 — 0,72or) АД | cos Рв|= «в-7,2 Х1кр XSK р exp (—0,255<i)g) x, = (3) (1+0,48 ^1) (5) (4) 0,707 (1 + 0,4 0,0809 (3)/Шд = (5) [(7)+(8)| /Io = 0,469 (6) Bo = 0,505 (9) о® Ct - -0,71 (l)a+ 0,002 31 C2= -(1)3+ (l)-0,0567
2 п/п 1 2 3 4 5 6 7 8 9 10 11 12 13
155
Продолжение табл X 1.
е) спектральную плотность волнения Sj* по формуле (V.I26) второго разде-
ла т. 2;
Шп
ж) подынтегральную функцию/=(Re? U7aBOx+ Im? 5ц — п. 28—30.
Для нахождения дисперсии Dxx заменяем интеграл (Х.40) суммой по (формуле
трапеций;
D/х = J f <“»'> Ло ~--?у-У (<0,1) Аю„ = 1,82• 10”.
Амплитуду угла рыскания с обеспеченностью 3 % х3% определяем по выражению
Хз% = 2>64 /1,82-10-’» 0,113 рад » 6,5°.
I ' На рис. Х.З представлена характерная зависимость спектральной плотности
угла рыскания Sxx от частоты <ДС для встречного (₽в = 135°) и попутного (рв =
= 45е) волнения. Видно, что при рв =
= 45° значение Sxx неограниченно уве-
личивается при ые -*• со^11. Это связа-
но с тем, что при <ас -* Ф‘11 пронзвод-
I dwB
вая —-------► оо.
d(oe
Зависимость угла рыскания судна
от курсового угла Рв в случае движе-
ния на нерегулярном двумерном вол-
►ненин аналогична зависимости, полу-
ячейкой для регулярного волнения и
приведенной па рнс. Х.2, из которого
видно, что при Рв = 0° X — 0°, при
Рв = 45° рыскание судна максималь-
но. Прн дальнейшем увеличении кур-
Ьсового угла углы рыскания резко
^уменьшаются. Следует, однако, заме-
тить, что в действительности ампли-
туды углов рыскания при движении
судиа на реальном морском волнении
слабее зависят от курсового угла.
[Анализ данных натурных испытании
показывает, что хорошо согласуются
С этими данными результаты расчетов, X
‘выполненных для курсовых углов Рп = 45° и Рн > 90е'. Оценку рыскания судна
на курсовых углах рв — 0 и Рв = 90° м жно выполнять по соотношениям
Рнс, X 3. Спектральная плотность угла
рыскания 5’хх Для судна, движущегося
на двумерном волнении.
X (Рв = 0е) = X (Рв = 45е); х (Рв = М') = (0,7+0.8) Х (₽в = 45е),
. где х (Рв — 45°)—расчетная амплитуда угла рыскания, соответствующая курсо-
I вому углу Рь = 45\
Расчет рыскания методом непосредственного интегрирования. Углы рыска-
I Чия, полученные спектральным методом, обычно оказываются заниженными посраь-
£ пению с экспериментальными данными, что связано, в первую очередь, с иеуче-
F том нелинейностей в законе работы авторулевого. Указанное обстоятельство может
быть принято во внимание при оценке рыскания путем непосректвенного интс-
г ировання системы дифференциальных уравнений (Х.1), (Х.71—(Х.9) на цифровых
•Ии моделирующих машинах.
Функции Ув. Л1в, характеризующие возмущающее воздействие возненпя, опи-
сь® ют стационарные случайные процессы. Коэффициент когерентности между Ув
157
и Л1В равен
^=|Ху.м|75ГГ^. _ _ <Х{*»
где Sj-^ —совместная спектральная плотность процессов Уо (0 и Л1Ц (О: S- - —
спектральная плотность процесса )'в (0; S— - —спектральная плотность процесса
Л10 (/). _
Случайный процесс ¥в (/) представляют в внте суммы двух стационарных слу-
чайных процессов: _ _
>'„(/) = ГН1 (Z)-f- 1 BI(0- (Х.51)
Здесь ИВ1 (I) — стационарная случайная функция, когерентная с процессом
Ува (П — стационарная случайная функция, статистически независимая от Мв (!)
Спектральные плотности процессов 1'в1 (/) и У n2 (Z) выражают соотношениями
5Г,Г. = ^:' <Х’52'
Рис. X.4. К определению амплитуд и частот гармоник возмущающего воздействья
волнения.
Необходимую для расчета рыскания рассматриваемым методом временную реал и
заиию возмущающей боковой силы н момента рыскания записывают в виде суммы
гармонических воздействий:
т
Рщ = Е Л. cosК/ + **”); (X-54)
?в2 = £ C£cos(w;,Z f е'2-j; (Х.55)
*==1
Л1В = shl + e<8>). (X 5G)
i-l
где A(., Ct, B{ — амплитуды составляющих гармоник; v>e[, <o'f — частоты состав-
ляющих гармоник; ej-1’, ej-2’, ej.31 —фазы, являющиеся случайными числами, рав"
номер но распределенными в интервале 0—2л.
Амплитуды и частоты состав.!: ю цнх гармоник определяют следующим образом:
I) строят графики S— ?, S— -, S-- в функции от частоты ше;
2) на графике S- — (ше) диапазон изменения частоты <ае делят на т участков
(обычно принимают т = 5-^-10), причем участки выбирают таким образом, чтеб^
15#
Ьлощади F,„i (рис. Х.4, а) были приблизительно равны между собой в зоне ма-
ксимума 5— ((0 4—0,5)5-- с5-~ (ыг) < S—— ),
Л1Л1 V М.и max .ММ max ' М.М пых)
3) в соответствии с выполненным разбиением определяют площади Fy t;
4) вычисляют амплитуды А[, В{ и частоты <о₽:
At = 1 2FYti si£n 1т5Г.Й’ (Х.57)
fii = I (X.58)
5) выполняют разбиение кривой S— - таким образом, чтобы > а I а были приблизительно равны между собой в зоне максимума Sy — ; 6) вычисляют амплитуду С; н частоту еА: площади FY*t
Ci = | 2f7~; (Х.60)
, <<"+ = 2 (X 61)
При выборе частот (ue. и ш'; должно соблюдаться условие
* “н,
(Х.62)
означающее, что случайные процессы, замененные первой и второй суммой в фор-
муле (X.5I), не корродированы между собой.
Вычисление амплитуд н частот гармонических воздействий может быть также
выполнено н другим способом с использованием интегральных кривых /— - ,
/р — , /—определяемых соотношениями
7г,у1(“4= (
О
7у,у, (“<) = .[ sr2y,(“.)<4-;
о
“е
J—(io,) = I 5 — (to )Ло.
Л1Л1 ' e> £ Л1М ' */ • •
(X.G3)
Интегральная кривая I- _ (tof) приведена на рис. Х.4, б. Прн (ае = 0 -
в 0, прн <о, —► оо [D--—днеперси «волнового возмущения
Л4 (01. Кривую/-— разбивают на части так, чтобы в зоне максимума
спектральной плотности S- — (участок CD) эти части 5/— - были приблизительно
Равны между собой. В соответствии с произведенным разбиением вычисляют &/— —
и®7—Аналогичным способом выполняют разбиение кривой /— - (ше). При
этом должно соблюдаться условие (Х.62). Дальнейший расчет производят но фор-
мулам
Л. = ^/26/- - (<•>„) sign Ims--;
В.= /26/м.м
С‘=» 2d'r,r,K-)
где
б/-1Г, К.) = /Г1,- К") - /Г1Г1 КГ);
6/Xrii К.) = 'м.й «!‘1 - 'мм КГ).
67у.у, “ 'y.y. «’ ) - /у,у. (“£
ь>«!’ + “г?. , 4?’+ 4)*
4/ =--------2----- ’ " =---------2--------•
(Х.6Ц
(X 65)
(X (*)
(X.67I
Спектральные плотности Sy- и S- - вычисляют по формулам (Х.43)—(Х.47).
Необходимые для расчета передаточные функции приведенной возмущающей бо-
ковой силы У'в и приведенною момента рыскания Л1в определяют по выражениям
Re И у = 4; ReU'„ =0 ]
в0 В" I (X 6Н>
ImU'n - = 0; ImU' .--B0
во* во1’ 1
Совместная спектральная плотность процессов YB (0 и Л1„ (I), равная Sy- =
= Re S—-Ч-1 Im S- ... в данном случае приобретает вид S - = i'ImS-- и
г 51 г 51 У Л( У Л1
в зависимости от курсового угла выражается следующими соотношениями.
I. Для попутных курсовых углов (0 < ₽в < 90 ):
если определяемой по формуле (Х.42):
lin и = 2 lm 4*4 К); <х.69)
*=i
при k = 1, 2
1,П S^<K) = {,m “ %„v К*114, Рв). *> ] К*’ К. Рв) 4] -
- Rc U an()y К*’ (4 Рв). 41 lm ^'а11((м [<*’ К* Рв). <’> ]} X
х M]l н*> ₽.)]| --<п7ц7’-'и) |: <Х 7°>
Im $PL (oj = /Re [с<3> (Ч> ₽J, - <ое] Im [о,1,3» (о,. 0в)> - И(.]-
- Im ^авоГ К’ (4- Рв)- - 4] Re №’авпхг К3' (4- Рв)- - 4]) X
X [Ы‘‘ Рв)3 ЗкН3> (4- Р„)]| Рв) [. (X.7D
160
если <t>e > со
» то
•п^Г.м (“.)= '«’4^(4). (Х.72)
2. Для встречных курсовых углов (90 < р„ < 180°)
Im S--(«..)= Im 5^1 (шг). (Х.73)
Зависимость собственной частоты toj,** от частоты ые и курсового угла опре-
деляется выражениями (Х.48).
Г лава XI
УПРАВЛЯЕМОСТЬ СУДОВ
В ОСОБЫХ РЕЖИМАХ ДВИЖЕНИЯ
.§30. УПРАВЛЯЕМОСТЬ СУДОВ В УСЛОВИЯХ
ОГРАНИЧЕННОГО ФАРВАТЕРА
Управляемость судна на мелководье. Наиболее наглядно особенности управляе-
мости судна на мелководье выявляются при анализе уравнений, характеризующих
установившееся циркуляционное движение судна (см. § 18).
Прн установившемся движении суша на циркуляции поперечная сила руля
(мала по сравнению с поперечными силами, действующими иа корпус судна. Таким
образом, в равновесии действующих на судно поперечных сил определяющую роль
играет отношение проекций центробежной силы и силы дрейфа, которые в урав-
нениях (VI.30) и (VI.32) выражаются соответственно безразмерными величинами rsl<i>
В <?2|Р.
Прн переходе судна, движущегося г.о траектории с данным радиусом кривизны
(ы, = const) с глубокой воды на мелководье слагаемое гг1о> практически сохра-
няет свое значение, в то время как безразмерная боковая сила <?г1 Р при не-
изменном угле дрейфа существенно возрастает (см. § И). Сохранение равновесия
в этих условиях возможно лишь за счет существенного уменьшения утла дрейфа.
[ Уменьшение угла дрейфа при циркуляционном движении судна па мелководье
може быть очень значительным. Для его опенки можно воспользоваться следу-
ющим уравнением, которое получается из формул (VI.30) и (VI.31) путем исклю-
чения Од
фи ft- - — (<?>, Рг 4- МП
=---------—---------------. (XII)
— Л31 +• Гз1
Это уравнение устанавливает соотношение между безразмерной угловой скоростью
Удиа о>£ и углом , рейфа на установившейся циркуляции Рс. Оно ие зависит от
характеристик движигелыю-рулевого комплекса судна н отражает только осо-
бенности формы корпуса и месторасположения двнжителыю рулевого комплекса,
Поэтому его можно назвать корпусной характеристикой судна.
Зависимости flc = f (6»е) имеют вид. показапныи на рис XI.I
Уменьшение углов дрейфа судна на мелководье приводит к тому, что скорость
судна иа циркуляции в условиях мелководья падает в меньшей степени, чем иа
глубокой воде, и соответственно относительная скорость Сс = возрастает.
Приближенная оценка относительной скорости судна на мелководье может быть
осуществлена с помощью графика, приведенного на рис. XI.2, который построен
J>o материалам модельных и натурных испытаний. При этом
6 П/р Я. И ВоЛТкунскосо, т. 3
161
Зависимость безразмерной угловой скорости й>е (или относительного днамстра
циркуляции DJL} от угла перекладки руля определяется уравнением (VI.5-4).
Рассматривая гидродинамический момент как сумму позиционной и демпфи-
рующей составляющих, т. е. См (₽с. йс) = С.мр + Сма, можно видеть (см. § ц
первого раздела), что переход судна на мелководье при заданных значениях fif и ,Ь£
сопровождается возрастанием обеих составляющих момента. В то же время, к.щ
было показано выше, значения углов дрейфа ₽с при циркуляционном движении
судна на мелководье существенно уменьшаются по сравнению с их значениями >а
глубокой воде. Уменьшение углов дрейфа компенсирует возрастание коэффициы а
позиционного момента, связанное с влиянием мелководья. В результате позиционная
составляющая гидродинамического момента при движении судна по траектории
постоянной кривизны с изменением глубины воды изменяется мало. Демпфирующая
же составляющая, зависящая только от й. иа мелководье резко возрастает. Увели-
чение демпфирующей составляющей гидродинамического момента требует соотвц-
Рис. XI. 1 Зависимость рс от йс
на глубокой воде и мелководье.
Рис. XI.2. Влияние мелководья иа паде-
ние скорости судна на установившейся
циркуляции.
ствуюшего возрастания величины Суп в уравнении (VI.35), что приводит к необ-
ходимости увеличения угла перекладки руля, а следовательно, и к ухудшению по-
воротливости судна в целом.
Расчет диаграммы управляемости судна на мелководье производится в соответ-
ствии с методикой, изложенной в § 22 первого раздела, с учетом изменения гидр и-
иамнческнх характеристик корпуса судна на мелководье (см. § II).
Диаграмма управляемости судна иа мелководье и на глубокой воде приведена
на рис. XI.3.
Для приближенной оценки ухудшения поворотливости судна иа мелково/ie
можно пользоваться графиком рис. XI.4, построенным по данным модельных и
натурных испытаний. Коэффициент характеризует снижение
поворотливости судна при наибольшем возможном угле перекладки руля.
Устойчивость прямолинейного движения судна. В § 22 для оценки устойчивости
прямолинейного движения судна использовались величины и £Л|)р. харакнр-
зуклцие поведение судна в режимах пологих установившихся циркуляций. Однако
такая оценка является косвенной. Для более строгой оценки устойчивости пря^о-
- С/ОЬ I
линейного движения судна используют производную -у-1 , т.
наклона касательной к диаграмме управляемости в начале координат.
|в _0> 0 соответствует устойчивому судну, | = 0 — нейтраль-
I Н
ному и ——— <0— судну, у которого устойчивость прямолинейного дв ьС'
|ер=°
хтол
<-'6д
ния отсутствует.
162
На рис. XI.5 показан типичный вид начальных участков диаграмм управляе-
iocth устойчивого и неустойчивого судов на (лубокой воде н на мелководье. Для
добства сопоставления диаграммы управляемости повернуты иа 90°. Из рисунка
идно, что в зоне йс- < йгкр, т. е. в зоне движения судна прн удержании иа курсе,
устойчивость движения на мелководье у обоих судов меньше, чем на i лубокой воде,
хотя значения йг0 и 6п кр на мелководье могут н уменьшаться. Таким образом,
ререход судна с глубокой воды на мелководье сопровождается одновремен-
Рнс. XI.3. Диаграмма управляемости
судна на глубокой воде и мелководье.
ным снижением поворот тивостн и
устойчивости прямолинейного движе-
ния.
Рис. XI.4. Влияние мелководья на
безразмерную угловую скорость суд-
на (1>с на установившейся циркуля-
ции с наибольшим углом перекладки
ру. я.
X — натурные испытания.
При переходе на мелководье меняются также характеристики маневра «зигзаг».
Так, перерегулирование, т. е. угол зарыскнвання судна после перекладки руля для
сдерживания, на мелководье значительно меньше, чем иа глубокой воде.
Рис. XI.5. Влияние мелководья на зависимости йс от 6/? в начальном участке
Диаграммы управляемости: а—неустойчивое судно; б — судно, устойчивое при
прямолинейном движении и на глубокой воде.
I — глубокая в.1Дз. 2 — мслкопоАьЬ.
На рис. XI.6 приведены результаты натурных испытаний супертанкера, пллю-
стрнру клине последовательное ухудшение устойчивости его прямолинейного движе-
ния I поворотливое in по мере уменьшения глубины воды под килем
Управляемость судна при движении вдоль сгеики и над наклонным дном. В § II
^Ко показано, что асимметрия 01 равичення фарватера (наличие стенки, уклона дна)
вызывает появление иа корпусе судна значительной полеречной силы г4 или Уд
тЬомента Als пли .Мд, разворачивающего судно носом в сторону «свободной воды*.
Рачения ys, Yd 11 'Ws> весьма велики, и удержание судна на курсе парал-
6* IG3
лслько стенке или урезу воды с помощью перекладки руля в сторону стенки или
мелкой воды обычно затруднительно. Прн приближении кормы судна к берегу всле
сгвие его разворота на движителях развивается дополнительная подсасывающая сила
увеличивающая как силы Ye, YD, так и моменты Ms, MD.
Па рнс. XI.7 приведены характерные зависимости угла перекладки руля
необходимого для удержания судна па курсе при движении вдоль образующей
наклонного дна, от относительных глубины воды Н Тм в ДП судна и скорости
FrH = vl^gll. Из рисунка видно, что с уменьшением запаса воды под днищем судна
н увеличением скорости необходимый для удержания судна на курсе угол гс .
кратки руля возрастает.
При чрезмерном приближении к урезу воды или к стенке судно оказывается
неспособным к удержанию на курсе с помощью руля, теряет управляемость и не-
удержимо уходит в сторону глубокой воды. Наиболее опасно приближение к стенке
или движение над наклонным дном при расхождении судов в каналах или на узких
участках. Стремясь осуществить расхождение иа возможно большем траверзы'•
рассюянии от встречного судна, судоводители зачастую подходят на опасно близкое
расстояние к боковой стенке берегу или заходят на наклонное мелководье. Ouci 1 ь
действие моментов Л1 , или Мд в этих условиях не всегда представляется возможным,
так же как и удержать судно от уклонения в сторону глубокой воды. Наиболее
распространенной ошибкой в подобной ситуации является попытка снижения ско-
рости судна. При уменьшении частоты вращения гребного винта скорость с' за
в начальный момент остается неизменной, а затем достаточно медленное! ижается до
значения, соответствующего вновь установленной частоте вращения гребного винда.
Прн этом относительная поступь гребного винта в начальный момент резко возра-
стает, а затем медленно убывает до номинального значения. Гребной винд может
перейти при этом в игральный или даже турбинный режим работы, а его упор —
уменьшиться до нуля. С исчезновением струи гребного випта резко падает
тивиостъ руля и судно теряет управляемость полностью. Поэтому снижение частоты
вращения гребного винта при расхождении со встречным судном допустимо только
на расстоянии, гарантирующем снижение скорости судна и восстановление упор-4
гребного випта. В случае если зарыскнвание в сторону глубокой воды уже произошло,
1С4
иннственио правильным решением может быть лишь экстренное увеличение частоты
фащення гребного винта с целью повышения эффективности руля и предотвраще-
на столкновения.
Управляемость судка при движении в канале. Как было показано в § 11, позн-
[иоииые и демпфирующие составляющие поперечной гидродинамической силы и
(омента на корпусе судна при его движении в канале возрастают но сравнению с их
Качениями на мелководье. По мере сужения канала точки приложения обеих со-
шляющих перемещаются к миделю. причем плечо демпфирующей составляющей
доосительно миделя убывает быстрее, чем плечо по i ц тонной составляющей. Такое
^отношение плеч позиционной и демпфирующей составляющих поперечной гн.тро-
ес. XI.7. Зависимость угла перекладки руля, удерживающего судно на прямом
грее при двнжен ш пат наклонным дном вдоль его образующей, от относительной
глубины воды.
Динамической силы па корпусе свидетельствует о дальнейшем ухудшении устой-
чивости прямолинейною движения судна при его переходе с мелководья в канал и
Пр последующем еуженив канала. Указанное ухудшение устойчивости нрямоли-
иейиого движения усугубляется действием поперечной еилы и момента Д1П
развивающихся иа корпусе при смещении судна от оси канала (см. § II).
J Для рассмотрения устойчивости прямолинейного движения судна в канале
юльзуемся уравнениями § 16, записав их в координатах ф-ы (у = y!L — ошо-
Е»ное поперечное смещение ЦТ судна от оси капала) и введя в них члены, отра-
1не действие силы )'п и момента Д1Ч
Игносителыюе смещение у и угол дрейфа в ЦТ () связаны зависимостью
f, = — vuv = —~lv = —dy = (XI.2)
ачим
Фса1. . ФА1ОС3
2с (1 Ч-А’и)' ^3t 2(г1(1-)-£м)
165
it сохраним обозначения § II для величин ifo, ^ai-, r2I, r3j, s2,-. s3], р. q, s. Тогда
линейные уравнения движения судна в канале можно записать в виде
— 9— Q»9 + 'пй + «2|6р + Ри$ = 0; |
_ _ ( (М-3)
& — <1Я1У + r3i^> + «31^п + Psiff = 0 I
Исключив нз сравнений (XI.3) безразмерную угловую скорость б. получим уравне-
ние третьего порядка относительно смещения судна от осп капала:
9 +2ру + (9 — Рп'п) 9 + r31psi9 = S2i6j? — «вя- (X1 4)
Его характеристическое уравнение имеет вид
А3 + а3№ + о3?. -f- р3 = о, (XI 5)
где О) == 2р; сз = гз1Рз1-
Прямолинейное движение судна по осн прямолинейного канала неустойчиво
относительно поперечного смещения, если
°|°2 _ 2р (д — Рг|С2|) । (XI 6)
°3 Л21Р31
В этом случае уравнение (XI.5) имеет комплексные сопряженные корни с положи-
тельной вещественной частью.
Корни уравнения (XI.5) могут быть определены путем непосредственного ре-
шения кубического уравнения.
§ 31. УПРАВЛЯЕМОСТЬ СУДОВ НА ЗАДНЕМ ХОДУ
Управляемость на заднем ходу суша с рулевым устройством всегда существе! о
уступает управляемости прн переднем ходе. В большинстве случаев судно иа задкм
ходу с помощью только руля управляться не может и для изменения направления
его поворота приходится прибегать к изменению частоты вращения одного нз греб-
ных винтов или к реверсированию одновинтового судна. Если при тихой пою.е
можно управлять данным судном с помощью только руля, то. как правило, при
слабом ветре управляемость этого судна полностью теряется.
Резкое отличие в управляемости судов иа переднем н заднем ходу обусл
лено влиянием дрейфа судна, возникающего под действием боковой силы руля пги
его перекладке, и влиянием гребных винтов, на которых в результате перекладки
руля возникает боковая сила, противоположная по направлению силе, действующи!
на переложенный руль.
Сущность первой (основной) причины ясна из рассмотрения сил и моментов,
действующих на судно прн перекладке руля.
При перекладке руля на перстнем ходу иа руле возникает боковая сила Уд
(рис. XI 8, в) Если приложить к ЦТ судна две равные и противоположно направ-
ленные силы Уи, то лс1ко заметить, чго сила Уд вызывает поворот судна под дей-
ствием момента Уя/д.м н дрейф (смещение) судна в сторону действия силы )п-
Наличие дрейфа приводит к появлению угла дрейфа р (см. эпюру скоростей набе-
гающего на судно потока иа рис. Х1.8, а), что, в свою очередь, обусловливает
появление ва корпусе судна боковой силы Ур, приложенной на переднем ходу в нес
от ЦТ и по направлению противоположной силе Yr. Момент от этой силы Ур>₽
направлен в ту же сторону, что и момент YrIrm. и, следовательно, способствует
повороту судна в требуемом направлении.
На заднем ходу судна (рнс. XI.8, б) сила Уд, возникающая на руле, также при-
водит к появлению момента YrIrm и дрейфу судна. Однако сила Ур, обусловленная
дрейфом, дает в этом случае момент Ур*'р, противоположный по направлению мо-
менту YrIrm. Таким образом, поворот судна на заднем ходу совгршаещя но.’1
действием разности моментов Уд/лд| и Ур/р, а не под действием суммы этих мо-
ментов, как на переднем ходу.
Указанная причина справедлива не только для начальных моментов движения
судна, но и в дальнейшем. Особенно резко она проявляется прн выходе су |,,а
ICC
•О установившейся циркуляции, так как угол дрейфа в этом случае имеет макеммаль-
значение. Поэтому для многих судов, обладающих способностью поворачивать
ра заднем хоту в сторону перекладки руля с прямого курса, выход из установив-
шейся циркуляции оказывается невозможным.
Направление вращения судна на заднем ходу зависит от соотношения мо-
ментов YrIjim и Урхр в начальниц пернот после перекладки руля. Для увеличе-
ния момента YrIrm можно увеличить плошать руля или увеличить эффективность
Нулевого устройства (например заменить руль поворотной насадкой). Иногда
Кодобные мероприятия улучшают управляемость судна на заднем хо iy, однако, как
Ьравпло, они являются малоэффективными, поскольку рост силы } ц приводит к росту
[силы Ур.
руля на переднем («) и за днем (6) ходу
В Момент Урхр зависит как от силы Гр, определяемой формой корпуса судна,
Г Так и от плеча хр гидродинамической силы, обусловленного распределением пло-
Ядадн ДП суша по длине, а также размерами и расположением выступающих
^част и. Значение силы Ур иа заднем ходу су па практически не меняется по сравне-
нию с ее значением па переднем ходу. Изменить значение этой силы без кардииаль-
,Ного изменения формы корпуса и соотношения главных размерений судна практц-
Чески невозможно. Единственной величиной, иа которую можно повлиять сравии-
тельно простыми средствами, является плечо хр гидродинамической силы, которое
^№рсделямгся положением центра давления воды на корпус при заднем холе судна.
ТОчевщно, что плечо хр будет тем меньше, чем ближе к носовой части судна рас-
Положен центр давления/Отсюда ясно, что для улучшения управляемост судов
9 Ва заднем ходу целесообразны следующие мероприятия:
Л всемерное уменьшение плоша г неподвижных выступающих частей в корме
сУДна;
увеличение площади ДП судна в носовой его части;
167
как
Рис. XI.9. Возможные диаграм-
мы управляемости судна на
заднем ходу.
1 — устойчивое судно; 2 — не-
устойчивое судно.
увеличение подзора кормы;
придание судну дифферента на нос.
Среди перечисленных мероприятий наиболее эффективными являются 1чр.
вое и второе Известны случаи, когда удаление, например, неподвижной направ-
ляющей насадки на гребной винт или установка сравнительно небольших неделек
в районе форштевня обеспечивали управляемость иа заднем ходу судов, до этого
совершенно неуправляемых. Третье из числа перечисленных мероприятий но
эффективности уступает двум первым. Диффереитовка судна иа нос, способст-
вуя уменьшению момента от сил, действующих на корпус, одновременно
ухудшает работу руля за счет приближения его к свободной поверхности
воды.
Наиболее важной характеристикой управляемости судна на заднем ходу яв-
ляется критический угол перекладки руля, определяющий возможность выхода
судна из установившейся циркуляции.
Выполненный А. Ш. Афремовым н Р. Я. Першнцем анализ выражений, опре-
п переклацки руля, так и вид диаграммы управ-
ляемости судна на заднем ходу, показал, что
абсолютное значение критического угла пере-
кладки руля на заднем ходу во много раз пре-
вышает значение этого угла для переднего хода.
Кроме того, судно на заднем ходу в зоне угл >в
перекладки руля, превышающих критический
угол, может поворачиваться либо в сторону пе-
рекладки руля, либо в противоположную сторо-
ну. Диаграмма управляемости судна, повора-
чивающегося в сторону, противоположт у ю
перекладке руля, приведена на рнс. XI.9.
Управляемое ь судна, иллюстрируемая ди-
аграммой рис. VIII. I характеризуется тем, чю
судно поворачивается в сторону перекладки |ч-
ля. и называется прямой. Прямой управляе-
мостью всегда обладают суда при переднем ходе.
Управляемость, характеризуемая диаграммой
рис. XI.9, называется обратной, нею суда moist
обладать только при заднем ходе.
Если критический угол перекладки р\ тя
| бвьр | больше максимального или превышает
(равный приблизительно 20° при набегании во. ы
со стороны задней кромки пера), то судно на заднем ходу при помощи руля не
может выйти из установившейся циркуляции. Для таких судов представляет ин щчс
способность при перекладке руля с прямого курса на угол, меныпий критнческо.о,
следовать в сторону перекладки руля. Эта способность именуется частичной управ-
ляемостью и представляе!ся весьма полезной в реальных условиях, так как о д-
но, обладающее частичной управляемостью, при наборе заднею хода развор<ли-
вается в нужном направлении.
Управляемость судов, которые могут на заднем ходу выйти из установившейся
циркуляции, называется полной.
По характеру управляемости на заднем ходу суда разделяют па несколько
категорий (рис. XI. 10). Суда, обладающие полной управляемостью, могут иметь
прямую иян обратную управляемость Суда, имеющие полную прямую управляе-
мость выводятся из установившейся циркуляции перекладкой руля иа борт, проти-
воположный направлению вращения; суда, имеющие полную обратную управ-
ляемость, — иа борт, соответствующий направлению циркуляции. Суда с полней
прямой управляемостью могут не быть частично управляемыми. Для noBopi ia
таких судов с прямого курса в сторону перекладки руля последний должен бшь
положен па угол, больший критического, в противном случае судно войдет в цир-
куляцию противоположного направления. Суда, обладающие полной обратной ynpi п*
ляемоегью. при любой псрек 1адке руля с прямого курса поворачиваются в сторонV,
противоположную направлению перекладки. Частично управляемые суда неспособны
выходить из установившейся циркуляции с помощью руля, ио прн перекладке рул”
с прямого курса следуют в направлении перекладки К неуправляемым отвесе ы
угол срыва потока с пера руля
суда, которые не способны выходить из установившейся циркуляции, а при пере-
кладке руля с прямого курса ие поворачиваются в направлении перекладки.
г ' Приведенная классификация относится к судам, прямолинейное движение ко-
торых иа заднем ходу не обладает собственной устойчивостью. При собственной
устойчивости суда иа заднем ходу имеют полную прямую управляемость при на-
личии частичной.
Рнс. XI. 10. Классификация управляемости судов иа заднем ходу.
132 УПРАВЛЯЕМОСТЬ СУДОВ НА КРИВОЛИНЕЙНЫХ
УЧАСТКАХ ПУТИ ПРИ ТЕЧЕНИИ
[ Материалы § 13 и гл. VI данного раздела позволяют составить уравнения дви-
жения судна на криволинейном участке пути с течением и оценить управляемость
судна та этом участке.
Если пренебречь влиянием присоединенных масс на силу Кориолиса, то урав-
нения установившегося движения судна согласно формулам (IV.36), (VI 5) и (VI 6)
I рнобретут вид
- pV (I + *„) «о - рУ + (С?рР + с2₽*) п2ЛСо -
-^к[бй-х£(р + ^.- <o)]-|-^re = 0; (XI.7)
СЛ1В "5“ v'ALol Р — * !<> +
+ /ДЛ| бд - иЕ (р + <->) ] 4г ^ARE. (XI .В)
t Поскольку эти уравнения описывают установившуюся циркуляцию заданного
* Радиуса Rc, различие между исходной скоростью Пр и текущей и перестает игрвть
W Роль. В связи с этим при приведении уравнений (л1.7) и (Х1.8)_к безразмерному
можно считать, что угловая скорость судна и = и//?с = ьл'/Д, а угловая
Моро ь течения о>т = tT. R1 = b\vTvlL, где Ст = vr/v — относительная скорость
Учения.
При сделанном в § 13 предположении о том что судно движется иа закругле-
ИИИ канала по одной из линий тока воды, т. е. при равенстве радиуса течения Нг
169
Н радиуса траектории судна Rc, значения ш н сог оказываются одинаковыми и
представляют собой относительную кривизну сос.
Знак величины ёт зависит от того, движется ли судно впнз (бт > 0) пли вверх
(бт <• 0) по течению.
В безразмерном виде уравнения движения судна записываются как [II]
</2iP + ''si10 + + Л1Р2 + К = 0; (XI.9)
<?31₽ +'si10 + = 0. (XI, 10)
где
К — — 2(|>хТ'т I 4" (XI. II)
а остальные члены определяются формулами (VI.20)—(VI.24) и (VI.35). Прн отсу г-
стони течения Рт = 0) или на прямолинейном течении (сот = 0) эти уравнения
переходят в обычные [см. (VI.32) и (VI.33)].
Таким образом, уравнения движения судна иа криволинейном течении содер-
жат член К, представляющий собой в безразмерном виде силу инерции Кориолиса
массы судна. Этот член при ioT = const и йт = const является постоянным, и
решение задачи сводится к решению уравнений (XI.9) и (XI. 10) при заданных зна-
чениях коэффициента К (т. е. значениях шт и ит). Значениях ш = = шт для
конкретного кругового канала является заданным, и цель расчета заключается
в определении угла перекладки руля Ъц и угла дрейфа судна ₽ при различных
Значениях относительной скорости течения 6Т.
Если из уравнении (XI.9) и (XI. 10) нсктючить угод б/?, то получится урав-
нение
Л15ч>Р’ — 41 + sea -Ь /<43| = 0, (XI. 12)
решение которого
р = As,,) _ (Х I 13)
2nls,I
После подсчета по этой формуле угла р легко определит!, и угол Ьи по выраже-
нию (XI. 10).
Формулы (XI.13) и (XI.10) позволяют выполнить качественный анализ влия-
ния силы Кориолиса иа углы Р и 6/? судна, следующего вверх или вниз по те-
чению, если учесть, что для судна, идущего передним ходом, всегда коэффициенты s.
6, Л1 •• гЯ1 положительны, a s3, и дя, отрицательны [12]
У судиа, идущего вниз по течению, ёт>0 и в соответсшип с формула! (XI И)
К <• 0, поэтому член Rs3l будет положителен и угол дрейфа окажется тем боль
шим, чем больше относительная скорость течения в.г. Но согласно формуле (XI. 10)
увеличение р ведет к уменьшению .угла перекладки руля, и при опредопеиннх
условиях оп может стать даже отрицательным.
Обратная картина наблюдается, если судно идет вверх (против) течения. Здесь
уже с ростом абсолютного значения относительной скорости течения ьт у.мень
шается угол дрейфа р и растет угол перекладки руля 6/;.
Таким образом, с точки зрения поворотливости су дна лимитирующим является
проход по закруглению реки или капала вверх по течению, однако движение судиа
вниз по течению ipeOyer большей ширины судовою хода, поэтому для речных
составов значительной длины последнее движение можс! оказаться наиболее трудным
§ 33. УПРАВЛЯЕМОСТЬ СУДОВ, ДВИЖУЩИХСЯ
НА БЛИЗКОМ РАССТОЯНИИ ДРУГ ОТ ДРУГА
Управляемость судов, движущихся на близком расстоянии друг от друга,
следует рассматривать для дву х режимов движения — обгона одного судна , >у-
гнм и встречного расхождения, — совершаемых на параллельных курсах.
170
Расчет управляемости при обгоне одного судна другим основывается на ква-
вистатическом подходе, который допустим вследствие малости относительных ско-
ростей движения. Искомыми параметрами прн расчете являются средний угол
дрейфа судиа 0 и средний угол перекладки руля 6/?. необходимые для компенсации
сил н моментов гидродинамического взаимодействия. Расчет проводят для не-
скольких последовательных значений продольного смешения т при заданном рас-
стоянии Лй между ДП судов.
Расчетная схема определения углов 0 и основывается иа общих уравнениях
неустановившсгося движения судов при обгоне, при выводе которых используют
следующие допущения: рассматривают условия равновесия судна только в боко-
вом направлении; скорости обгоняющего и обгоняемого судов при вычислении
сил и моментов ппродинамического взаимодействия полагают постоянными и оди-
наковыми. Последнее допущение прн расчетах управляемости обеспечивает некото-
рый запас в безопасную сторону, так как согласно материалам § 12 значения коэф-
фициентов ент и моментов гидродинамического взаимодействия при одинаковых
скоростях движения оказываются наибольшими. Существующая методика опреде-
ления этих коэффициентов также разработана для указанного случая движения.
При таких допущениях система уравнений, описывающих неустаповнвшесся
движение судов в процессе обгона одного судна другим, имеет следующий влд;
+ <721 -^7 01 + Л1 77101101 + ^1“1 + 77 ~
+ a2t -р— 0! + 4>о| Д0 ti’i —р—г— ДЛ0 + w10 -р (- Со — — 0; (XI. f 4)
L.* i-i *-| *-'1 I
rf(Ol . Vi q . V| I J #i » ! | • gj ]
—T.---F <?S1 -7T- 01 + r3t ~j— W1 + S3I -ту 01 r &31 -ту Л0 +
HI i-i
+ 77 -£7 + x’«i 77 + ci4i = °; (XI > 5)
-^7- + <?21 -r- 02 + ЛГ -Г- I 021 02 + + sJi -7-6/гг + fl!I -/2- 02 F
ui L>2 ^2
+ -p. Д0 + w- -p- 4- Дйо + a ju -p. + Q A = 0: (X1.16)
i-з J-2 •'i *"2
Ло2 , . 1’3 n . . 1'2 . , 1'3 s 1 1'3 й I
~dT + q" 17p2 + Гз i тт"2+Sji T76/?1 + Oji tt рг +
+ -^7 + w-’ -ц- = °: (XI.17)
-^- = ^ (Xi.18)
-^- = щ2; (XI. 19)
Д0 = 02-р|. (XI.20)
Входящие в уравнения (XI.14)—(XI.17} коэффициенты <?21-, ftf, гг1. 5г,-. gs„
/•„,. S31 и аналогичные коэффицвен гы со звездочкой вычисляют по формулам (V 1.21)—
(VI.25) н (V1.35). а остальные— но формулам
о21 = ^1^2 (кн Ч" ^’у)* «л = nJ “Ь ^7)’
6Sj = A'jOg (kit - А'у); = °з (^7/ + ^к)’ (^1
171
»10=Л1О1 рн cosa(-^p-) 4-Ay Ш1 = — W) = Aj «| Г. CayAvU Р ... A . = - W [*hcos’ (yr1) + kY]: (XI. 23) AH cos2 4-Ay];] • a-1- (XI24) ^H COS 3 ) + J • J r. CAYAVL2 Рд . ,v, or.
“u 2Vt (I + ka) p ’ ~u 2V.t (I 4- A2’2) p Oji = — kibt {kit + *aj); Оз] = — k'b* (k‘H + k\ t>3i “ — k2bt (kH 4- kuY, &3t = b’bg (k*H 4- k\ m.. b h. Г b.. elr, ( , Д..1 . у | Л . £ Uj (); (xi.26) ). (XI.27)
nZvI 1 tt'20 = + tt'j = A t>|6 \ 3 } "J' l 2nm, \ , , . 1 . (XI 28)
““ \ 3 } ’ кн sin 2n3— ) 4- hM ; (XI 29)
sin + *м] ; (XI .30)
21 щ (1 4- ^j4.4^VL2^-2P.4 (XI.31)
2/tit (1 4" ket) ’
где L<7 mi . k. . (XI 32)
1 i (1 4- ’ ' 2Vf (1 4-WJ’
II 1 + te| е0 = -^-(1+^); Djj \ Dj / (XI.33)
= 2m/Lt\ m, = —2mi'Ll. (XI.34)
Величины, необходимые для вычисления коэффициентов уравнений (XI.14)—(XI.17),
определяются по данным § 12, Коэффициенты, отмеченные звездочкой, соответст-
вуют судну, расположенному справа (судно 2. рис. XI. II), коэффициенты без
звездочки — судну, расположенному слева (судно 1). В принятой системе коорди-
нат, показанной на рнс. XIII, продольное смещение т считается положительным,
если судно 1 отстает от судна 2, Изменение значения т зависит от относительной
скорости судов и может быть получено из уравнения
dm „
— — V,— с,- (XI.35)
Отклонение текущего значения расстояния между ДП судов по траверзу Дй, от
веданного Ни находят но уравнению
dbh
—-------MZ. - ₽») - MX. - Аг). (X1 %)
Расчет средних углов дрейфа fy, fy и средних углов перекладки рулей б^, б^8,
необходимых для компенсации действия ветра и сил гидродинамического аэаиыо-
172
действия при обгоне, проводят по уравнениям (XI 14)—(XI,17)
при
и (XI.20)
<Фг _ А1>1
dt ~ dt ~ dt
— - ДЛ,> - в>1 = = 0;
v2 = oI = o0, Средние углы перекладки рклей находят из уравнений (XI. 15) и
(XI. 17):
f>Ri —-------(<?31 + °si) fl + ^31Д₽ + k]; (XI-37)
Рис. XI. 11. Схема движения судов при обгоне.
Подстановка выражений (XI.37), (XI.38) в формулы (XI.14) и (XI.16) позволяет
получить уравнения для определения Pi и рг:
IPilf>+j-Mi +-ГГЛР + ^ = 0; (XI 39)
«1*31 «ls3l
lhlPe + тНгРг 4-т^г-ДР + ^‘ = 0; (XI.40)
'll S3I nls3l
др = ₽»-₽! (XI 41)
Решение системы уравнений (XI.39)- XI 41) может быть получено графическим
методом. С этой целью из уравнения (XI.39) находят рь а из уравнения (XI.40) —
Рг, которые при выбранных исходных данных зависят только от Af:
Здесь
« С1*1 = —r-f1* . ; (XI.43)
Dl’,==hrW(fi",A₽+(ХМ4)
173
где
Sp> =(<?$?’ +e5i‘,)sj*>; (XI.45)
B'tV = b2t >s3** — &зГ '4 Г ‘; (Xi .46)
K1'*1 = s.n 1 l^'io1 + J —4* * [wi!’ + Q‘Щ<г i ]•
(XI.47)
Звездочки в скобках в приведенных выражениях означают, что при выщсленин
коэффициентов со звездочкой составляющие его члены должны быть взяты тоже
со звездочкой, а длина — равной длине судна 2. По коэффициентам со звездочкой
находят угол Р2, ио коэффициентам без звездочки — угол р,_
Задавшись рядом значений Дра и вычислив по формуле (XI.42) углы Pi и
Р искомое решение можно получить из условия ДР8 = ЛРрас = Рг~Р1
। Расчет средних углов дреифа pj и ра и средних углов перекладки рулей
I) 6/;2 ведут в следующем порядке
j 1. По формулам (IV.7)—(IV 19) прн заданных т и Ло вычисляют коэффициенты
бил и моментов гидродинамического взаимодействия. По методике настоящего Спра-
вочника или поданным испытаний моделей в опытовом бассейне производят расчет
коэффициентов <?2l, ft,. г2|, s2i, ?я1, rsl, для обоих судов. Если заданы скорость
и направление истинного ветра, по формулам (III I)—(III. 12) определяют кажу-
щуюся скорость и кажущийся угол ветра. Углами дрейфа судов прн вычислении этих
Параметров можно пренебречь. По значению кажущегося угла ветра находят аэро-
динамические коэффициент надводной части корпуса Cay и Сам каждого нз
судов (см. § 9)
2. С помощью формул (XI.21)—(XI.34), (XI.43)—(XI.47) вычисляют коэффи-
циенты уравнений (XI.39) и (XI.40), по которым для ряда значений Др проводят
расчет величин Р, в Р2. По найденным из условия Др = дррас значениям р, н Р2
определяют бд| и 6/?2.
Пример расчета управляемости судов при обгоне. Произведем расчет управтяе-
мости двух судов, главные размерения которых следующие: Lt = 160 м, Д2 = 150 м;
В[ = 19 м, 1?2 = 16 м; 7\ц = 7,5 ы, 7*112—5,5 м; = 18 000 м®, V2 = 7000 м1;
AVLl = 1900м2, Аус? = 1500м2; lzll = 22 500000 кН -м-сг, /„2 = 750 000 кН-м с2.
Коэффициенты qti, Л(, r2i, silt q3l, тЯ1, и Sa( имеют следующие значения: для
судна 1 — j21 = 0,41; Л, = 2,05; г21 = —0,59; s21 = —0.14; ?а1 = —5,7; гя| = 4,65,
s3i = — l,4j; для судна 2 — </’i = 0.99; ЛТ = 4,65; г Г, = — 0,57; зТ. =—0,175;
q’l = -7,9; тф, = 7,6; s.?, = —1.85.
Расчет проводим для следующих условий: ветер отсутствует; продольное сме-
щение судов т = 32 м; расстояние между бортами судов 30 м. между ДП Ло = 47,5 ы;
движение судов происходит в неограниченной акватории со скоростями, при которых
влиянием волнообразования можно пренебречь.
Расчет коэффициентов уравнений (XI.37), (XI.38) и (XI.42) по формулам
настоящего параграфа для указанных условий дает: т, = 0.40; тг = —0.427;
= 1,0, а21 = —Д.018; ft21 = —0,0393; а3( = 0,85; ЬЯ1 = 0.87; wlu = 0,015; BJU=
= —0,085- 5 =1,225; Вн = 0,176; Си = 0; w = —0,0325; С = 0.422; С, = 0,
о2‘, = — 0,108; М, = 0.05. nJ, =—0.037; % = —1,11; цф, = —0.026; иф, =
= —0.14; s* = 3,05; В^ = —0,29; С* = 0; к1* = 0,022; С* = 0;D = —0,0605Лр-г
4- 0 0112; D* = 0.034АР — 0.0026
Дальнейший расчет ведем в табличной форме (табл. XI.1) с помощью .микро-
калькулятора. По результатам расчета строям графики зависимостей Лр,1ас, Pi
и Р2 от ДРз (рис. XI. 12). Условие Дра = ДРрас дает Р, =—0.0215 рад; К. =
= 0,0048 рад.
По найденным значениям ₽! и Р- с помощью формул (Х1.37) и (XI.38) вычис-
ляем = 0,029 рад = 1,7“ н = —0,099 рад = —5,7’.
По аналогичной схеме проводят расчет и для других значений т и h0.
Как видно из приведенного примера, расчет без помощи ЭВМ управляемости
Судов при обгоне оказывается довольно громоздким. Поэтому иа практике все
расчеты удобнее проводить с применением ЭВМ.
174
Результаты расчета в виде зависимости среднего угла дрейфа и среднего угла
перекладки руля каждого из судов от т представлены иа рис. XI. 13. Из рисунка
вцдио, что изменение продольного смещения при выбранных расчетных условиях
сопровождается заметным изменением равновесных положений судов, т. е. углов Pt
и Непрерывная смена равновесных положений в процессе обгона является при-
чиной повышенной рыскливости судов, требует предельного внимания и осторож-
ности при управлении руле*!, особенно в начальный период, когда нос обгоняющего
судна выходит иа траверз кормы судна-партнера.
Кроме влияния гидродинамического взаимодействия процесс обгона имеет
и другие особенности, которые предъявляют к судам, в основном обгоняющему, повы-
шенные требования в части управляемости. Это прежде всего влияние действий
рулевого обгоняемого судна на действия рулевого судна-партнера.
Рис. XI. 12. К расчету управляемости
судов при обгоне.
ЗДрЛД
Рис XI. 13. Изменение средних углов
дрейфа и углов перекладки руля при
обгоне.
В отличие от традиционной задачи поддержания заданного курса, выполняемой
рулевым находящегося в одиночном плавании судна, задачей рулевого, управ-
ляющего обгоняющим судном, является поддержание заданного поперечного рас-
стояния между судами. Как показано в § 21. управление по поперечному смещению
оказывается значительно сложнее,чем управление по курсу.Главные причины этого
заключаются в увеличении числа координат, учитываемых рулевым, в отрицатель-
ном влиянии угла дрейфа иа устойчивость движения, также в том,, что процесс
изменения бокового смещения во времени происходит с большим запаздыванием
по отношению к перекладке руля и. следовательно, труднее поддается исправлению.
Отмеченные факторы проявляются в значительно большей степени, если обгон
осуществляется в фарваторе ограниченной глубины. В этих условиях, как было
показано в § 12, силы и моменты гидродинамического взаимодействия благодаря
влиянию дна и волнообразования оказываются значительно большими, чем на глу-
бокой воде. Для того чтобы уменьшить влияние волнообразования на мелководье,
Таблица XI.I. Расчет средних углов дрейфа
ряд
Величина 1 0 0.01 0,02 0,03
D = —0,0605 ДР+ 0,0112 ₽i [по формуле (XI.42)| £• = 0.034 Др — 0,0026 Р- [no (XI.42)] ^Ppac ~ Рг — Pi 2 3 4 5 6 0.011 20 -0.025 00 -0,002 60 0,007 00 0,032 00 0,010 60 -0,024 00 -0,002 20 0,005 50 0,029 50 0,010 00 -0,022 50 -0,001 87 0,005 00 0,027 50 0,009 40 —0,021 00 —0,001 55 0,004 50 0,025 50
175
судоводители вынуждены снижать скорость движения, в результате чего возрастает
роль ветра и удлиняется время процесса обгона. Поэтому все существующие пра-
вила плавания запрещают судоводителям осуществлять обгон иа ограниченны^
по габаритам морских фарватерах, если расстояние между судами по траверзу не
удается обеспечить достаточно большим. Оценку безопасного расстояния между
судами проводят по среднему углу перекладки руля, который не должен превышать
15°. В настоящее время практическая методика, позволяющая подобным образом
оценить безопасность движения судов при встречном расхождении, не разработана,
так как квазнстатический подход к решению уравнений движения в этом случае
неприменим, поскольку даже прн малых абсолютных скоростях судов их продольное
смещение изменяется достаточно быстро. Благодаря инерциош ости расходящихся
на встречных курсах судов влияние знакопеременных сил и моментов гидродинами-
ческого взаимодействия проявляется слабо и равновесие (в том смысле как оно рас-
сматривалось при обгоне) не наступает. Расчеты показывают, что в условиях неогра-
ниченного фарватера и при расстоянии между бортами, равном полутора ширинам
корпуса, два одинаковых по размерам судиа могут разойтись даже без управления
рулями.
Из этого, однако, не следует, что встречное расхождение является безобидным
процессом, не требующим специального изучения Безопасность судов прн встреч-
ном расхождении как и при обгоне, существенно зависит и от условий плавания (ве-
тра, волнения, глубины и т. д.), н от квалификации рулевых. Вопросы безопас-
ности судов при совместном маневрировании с каждым годом приобретают все боль-
шее значение.
Перспективы разработки способов оценки управляемости судов при встречном
расхождении связаны с созданием судоводительских тренажеров, позволяющих
исследовать процессы встречного расхождения с учетом навигационной обстановки,
параметров окружающей среды я индивидуальных особенностей человека-рулевого.
§ 34. УПРАВЛЯЕМОСТЬ СИСТЕМЫ, СОСТОЯЩЕЙ
ИЗ БУКСИРОВЩИКА И БУКСИРУЕМОГО НА ТРОСЕ СУДНА
В процессе эксплуатации судов возникает необходимость буксировки одного
судиа другим. Буксирующее и буксируемое суда вместе с буксирной связью (тро-
сом) образуют буксирную систему (или буксирный состав).
Важным эксплуатационным качеством буксирной системы является ее управ-
ляемость. Это качество обеспечивается прн двух основных условиях: если букси-
руемое судно устойчиво к возмущениям по боковым перемещениям и рысканию и
если эффективность рулевых органов буксировщика при наличии воза сохраняет-
ся достаточно высокой.
Выполнение первого условия достигается, как правило, за счет стабилизи-
рующего действия буксирного троса, сила натяжения которого при поперечном
и угловом отклонении бусируемого судна от прямолинейной траектории буксиров-
щика стремится вернуть судно иа эту траекторию. Однако эффект твиость стабнли
зирующего действия троса зависит от свойств буксируемого судна и в некоторых
случаях при отсутствии собственной устойчивости судиа к возмущениям по угловой
скорости рыскания может оказаться недостаточной. В этих случаях, как показали
Е Б. Юдин и А Г. Маковский I20J, возникают боковые перемещении и ры-
скание. носящие на тихой воде характер автоколебаний.
Поскольку режим буксировки при наличии автоколебаний является недопу
стимым. условия их возможного появления должны определяться заранее, что со-
ставляет одну нз задач расчетов управляемости буксирной системы. Другой задачей
расчетов является проверка эффективности рулевых органов буксировщика 1191.
При располагаемой эффективности рулевых органов управляемость буксиров-
щика изменяется под воздействием тяги иа гаке и ветроволиовых возмущении.
Если в результате указанных воздействий потребный для удержания буксировщика
с возом на заданном курсе при заданном состоянии погоды и произвольном направ-
лении ветра угол перекладки его рулевых органов становится больше предельно
допустимого, то управляемость теряется. Случаи потерн управляемости могут быть
выявлены путем расчетов параметров условного установившегося прямолинейного
движения буксир) емого и буксирующего судов с учетом действия на них ветра.
176
олп и реакции буксирной связи. В ходе таких расчетов определяют значения по-
гребного угла перекладки рулевых органов буксировщика в различных условиях
Сдавания При этом следует учитывать, что вероятность потери управляемости
буксировщика возрастает, если по тем или иным причинам не могут быть исполь-
Ьоваиы рулевые органы буксируемого судна, способные оказать влияние па устой-
чивость и параметры его движения, а следовательно, н на значение и направление
тяги на гаке. Вследствие этого в качестве расчетного должен приниматься как наи-
Ьудший случай неподвижных рулевых органов буксируемого судна.
Г Поскольку способность сохранения управляемости в условиях ветра к волно-
вых возмущений зависит от скорости буксировки, при расчетах следует также
определять потребный для обеспечения расчетной скорости упор движителей букси-
ровщика прн наиболее неблагоприятном с этой точки зрения направлении ветра.
Остановлено, что направление ветра, при котором для данной скорости буксировки
Ьребуется наибольший угол перекладки рулевых органов, не совпадает с наихуд-
шим в смысле потребного упора. Однако если для обеспечения данной скорости рас-
полагаемого упора окажется недостаточно и при некотором направлении ветра
Щедрое ь буксировки заметно уменьшится, то потребный угол перекладки руля
ожет превзойти предельно допустимое значение.
[ Таким образом для прогнозирования управляемости буксирной системы должны
•ть произведены расчет устойчивости буксируемого на тросе судиа в условиях
<ихой воды и расчет параметров установившегося движения буксируемого и букси-
рующего судов при действии иа них ветра и волн. _
Расчет устойчивости буксируемого судна иа тихой воде. Этот расчет производят
при следующих допущениях:
I действие буксирного троса с точки зрения его влияния на устойчивость счи-
тается эквивалентным действию однозвенпого шарнирного стержня;
коренной конец троса, закрепленный на буксировщике, движется равномерно
прямолинейно;
скорость поперечных перемещений ходового конца троса, закрепленного на
Byксируемом судне, мала по сравнению с продольной составляющей скорости, кото-
рую принимают равной скорости движения буксировщика;
длина буксирной связи в несколько раз превосходит длину буксируемого судна
(что характерно для морской буксировки);
В * рулевое устройство буксируемого судна бездействует;
судно движется иа спокойной воде при безветрии
Мгновенное положение буксируемого судиа изображено на рис. XI.14.
Исходными данными для расчета являются геометрические и гидродинамические
Характеристики корпуса и рулевых органов судна, а также плечо приложения
яги троса — хр. Требуемые гидродинамические характерце гики рассчитывают
е основании материалов гл. 11, либо определяют по результатам модельных испы-
таний. Необходимо располагать следующими гидродинамическими характеристн-
к ми корпуса и рулевых органов: СА; Cf-p: С“ы 'при отсутствии данных полагается
явным нулю); Сд|р; ^п- ^’22
Для оценки устойчивости и определения равновесных положений буксируемого
уДн вычисляют относительные значения плеч позиционных сил хр, демпфиру-
ющих сил хш и плеча приложения тяги хе по формулам
_ ^мр— kIrmCvrAre .
____________+ k1RMC‘YRARE_________
___________________________________________________“ 2V (1 +Лц) л )
-------------(СЬш + Х‘«Л1С¥НЛЯ^
хр = xplL.
(XI.48)
(XI.49)
(XI.50)
17Г
Кроме того, находят вспомогательные величины, определяющие области значений
абсциссы xf, соответствующие устойчивым и неустойчивым режимам движения
буксируемого судна'
f • = 2хр^/(хр + хш); (XI 51)
(Сур + *Cyrare) [%v О + *и) — + *6?.мСуяЛЛЕ)]
*f' =' (*В — *w) 2V (1 + *M) Cf
(XI 62)
где
Рис. XI.14. Мгновенное положение
буксируемого судиа.
Рис. XI. 15. Значения углов дрейфа бук-
сируемого судна в зависимости от точки
крепления буксирного троса.
1 — балансировочный угол; 2 — амплитуда
автоколебаний.
Здесь
*°₽=*₽^7|Z)*(1-Wva-
(XI. 54)
В этой формуле kp—коэффициент, равный для застопоренного гребного вшит
400 кг/м3, для свободно вращающегося гребного винта 100—150 кг/м3; Лд—пло-
щадь диска гребного винта; Ае — площадь спрямленной поверхности лопастей.
Возможны следующие случаи соотношения плеч.
1. хш>хр; хд>хр. (XI.55)
В этом случае буксируемое судно является устойчивым по боковому смещению и
рысканию, буксируемое судно на тихой воде будет следовать в кильватере букси-
ровщика. Такой случай является наиболее благоприятным с точки зрения управ-
ляемости буксирной системы.
2. *ш>хр, х/г<хр. (XI.50
В данном случае буксируемое судно также устойчиво, однако прн буксировке из
тихой воде оно будет занимать положения равновесия, характеризуемые значениями
178
rwia дрейфа ±₽p, отличными от нуля. При условии (XI 56) буксируемое судно
1удет двигаться за буксировщиком с некоторым положительным или отрицатель-
ным (в зависимости от начальных возмущений) углом дрейфа по прямолинейной
траектории, параллельной траектории буксировщика и смещенной вправо или влево.
При этом появляется боковая составляющая вектора тяги иа гаке буксировщика
что ухудшает его управляемость.
3. хш<5р; ipхF< ip”_ (XI.57)
Прн таком соотношении буксируемое судно неустойчиво и совершает самопроиз-
вольное рыскание н колебательные перемещения Амплитуда угла дрейфа может
достигать значения угла дрейфа при самопроизвотьнон циркуляции судна с иепере-
ложенным рулем |см формулу (VI. 13)1.
Хр~^>Хр*. (XI.58)
Буксируемое судно устойчиво и в условиях тихой воды будет двигаться с пулевым
углом дрейфа в кильватере буксировщика, как и в случае 1.
5. x(u<x6; xF<x* (XI.59)
Буксируемое судно устойчиво, однако имеют место два положения равновесия,
как и в случае 2.
Характер зависимостей углов дрейфа судна от абсциссы хр для случаев 1—
5 изображен на рис. XI.15.
Как уже отмечалось, рассмотренные положения равновесия соответствуют усло-
виям безветрия и отсутствия волнения. При наличии ветра носовая оконечность бук-
сируемого судна будет отклоняться на ветер. При этом неустойчивое судно может
стать устойчивым, если оно приобретет угол дренфа больший критического угла
[дрейфа РНр (см. § 22).
Анализ формул (XI 48)—,XI.59) позволяет наметить меры, которые могут
способствовать обеспечению устойчивости буксируемого судна. Такими мерами
ввляются:
смещение точки крепления ходового конца троса вперед по ходу судна;
оборудование судна подкорпуснымн стабилизаторами в кормовой части;
придание буксируемому судну дифферента на корму;
свеличенне сопротивления буксируемого судна
Для последней цели могут быть использованы дополнительные буксируемые
лохообтекаемые тела, либо дополни тельное одерживающее буксирное судно, соз-
дающее упор в направлении, обратном направлению движения буксирной системы.
Б некоторых допустимых случаях может оказаться целесообразной буксировка
судна кормой вперед.
Расчет параметров прямолинейного движения буксируемого и буксирующего
(удов при действии ветра и волн. Расчет производят с целью определения нотреб-
|ого угла перекладки рулевых органов буксировщика и потребного упора его дви-
штетей. Сопоставление этих величии с предельно допустимым углом перекладки
располагаемым упором соответственно позволяет судить о возможности буксировки
заданной скоростью, либо о допустимых скоростях буксировки при данных погод-
ых условиях.
Расчет проводят при следующих допущениях:
ветер постоянный ио силе и направлению во всех плоскостях, параллельных
Вескости ватерлинии;
направление распространения ветровых волн совпадает с направлением ветра;
волнение регулярное;
из сил, обусловленных волновым воздействием, непосредственно учитывают
Мько средние за период продольные составляющие в виде сил дополнительного
^противления; волновые силы и моменты, вызывающие периодическое колебатель-
9е движение, а также боковой снос и разворот судов, во внимание не принимают:
титают, что влияние этих сил учитывается введением запаса прн назначении
тедельно допустимого угла перекладки рулевых органов буксировщика, значение
Порого принимается равным 25°;
не учитывают ветровой крен судов;
179
влиянием гидродинамических нагрузок на буксирный трос и его провисанием
пренебрегают.
Схема движения судов в составе буксирной системы приведена на рис. XI.И>.
На этом же рисунке приведены обозначения входящих в расчеты величии. Все
величины, относящиеся к буксируемому судну, снабжены индексом *1>) величины,
относящиеся к буксировщику, индекса не имеют.
Для выполнения расчетов используют уравнения установившегося прямолг
нейного движения судов, дополненные слагаемыми, учитывающими влияние буксир-
ной связи, сопротивление на волнении н сопротивление гребных винтов буксируе-
мого судна. С учетом принятых обозначений системы уравнений движения имеют
следующий вид
для буксируемого судна
Xai + А'р, + /?в1 + Ropi — Fp сб® Oi = 0; ।
- Kpi 4-+ sin «,=(); | (XI.60)
Mai — Mfii + 1RmYRi + x^Fp sin t), = 0;J
для буксировщика
Xa 4- Хр 4- 4- F p cos 0 — = 0; ।
Ул-Ур + Кл-£р51п0 = 0; (XI 61)
Ma~ Mp + IrmY R — XfFpSin 0 = oJ
Рис. XI.16. Схема движения судов при букси-
ровке на волнении.
В соответствии с принятыми допущениями справедливы следующие дополни-
тельные соотношения:
{h-P1=f)-₽; у«,4- ₽, = уД+ ₽. (XI.62)
Величину /?оР1 определяют по формуле (XI.54).
Значения дополнительного сопротивления на волнения /?в1 и RB вычисляют
по формуле Л. С. Шифрина
/?в = (XI
где pw — коэффициент, равный
Pip = IJJJJJfi (XI.
Л» — высота воли. Коэффициенты —/в можно найти по графикам, приведенным
ив рис. XI.17 и XI.18.
Для выполнения расчетов должны быть заданы: геометрические характеристики
судов; направление и скорость ветра (учитывая, что реальные скорости движения
Рис. XI.17. Графики для определения коэффициентов
** = Хв — длина волны, (\Д)0 = -д*'*/'—•
\Л1/С)цр
101
буксирной системы невелики и существенно меньше расчетных скоростей ветра,
кажущееся направление н кажущуюся скорость ветра можно принимать равными
истинным); баллы волнения (направление распространения волн принимают соот-
ветствующим направлению ветра); угол заклинки (или перекладки) рулевых орга-
нов буксируемого судна; абсцисса точки крепления ходового конца троса на букси-
руемом судне; скорость буксировки; абсцисса точки крепления коренного конца
троса на буксировщике (положение гака).
Искомыми величинами являются: угол дрейфа буксируемого судна Pi; угол межд
направлением вектора тяги троса и ДП буксируемого судна Oj; тяга Fp; упор
движителей буксировщика 7; угол дрейфа буксировщика Р; угол между направ-
лением вектора тяги троса и ДП букировщика О; угол кажущегося ветра дли
буксировщик^ Т/?; угол перекладки рулевых органов буксировщика б/?. Первые три
величины определяют из уравнений (XI.60), остальные—из (XI.61) и (XI.62).
Для удобства выполнения вычислений систему уравнений (Х1.60) представляют
в виде
^2~vR^VBlCXXl + ~2~v2^LalCXl + PwiPZ ---------Ь
+ ftp [Dpl (i _ фр1)]>иг = Fp cos oi; (xi .65)
,СДГ1----+
+ V^REi^YЛ1 (®R1 — xPj) — p S'n (XI.66)
FM ,,2 л P д f''
~2~vR^VL\^ЛЛП 2~u —
-----y- llRMCYRl (fy?l ~' x₽l) = *FlFp (XI.67)
Исключая из уравнений (X1.66) и (XI.67) величину FpsinOi, получим уравнение
для определения угла дрейфа Р,;
(САМ1 - XF,CAY1) = (C.MJJ, - iFiCyP1) +
Р и лЕо1
+ (*F1 + /дли) >1я£1С?Л1 <б«1 — Яр1)- (XI.68)
Величины Сд,Ч1 и CAYl являются функцией угла у/^; CmBi и CyBi — угла Pi.
Поэтому левая часть уравнения есть функция величин уд| н vr/v [обозначим ее
Ф1 = Фг (V/?i, vr/v)]; правая — функция Pi u t>Ri [обозначим ее Ft = Ft (Pi, 6ri) 1-
Решение уравнения (XI.68) ищут графическим способом. Для этого графически
изображают семейство функций Ф (y/?i) при различных значениях vr/v, а также
семейство функций Ft (рг) нрн различных значениях б/?|. На оси ординат гра-
фика Fr (Pi) откладывают значение, соответствующее Ф1 нрн заданных значе-
ниях ТЯ1 и vr/v, и проводят прямую, параллельную оси абсцисс. Абсцисса, соответ-
ствующая пересечению этой прямой с кривой F, (Pi), определяет искомое значение Л
(рис. XI.19). Серия подобного рода процедур позволяет построить график зависи-
мости Pi от Уй| прн различных значениях vr/v. Пользуясь формулой (XI.С' ).
определяют поперечную составляющую тяги Fp#1 = Fp sin в|, соответствуют}®
заданным расчетным условиям, а по фюрмуле (X 1.65) — продольную составляющую
Fpxl = Fp cos 0|. Но известным Fpxl и Fp#i находят значения и Fp:
«1 = arctg (Fp(/1/FpJtl); (X1.6')
Fp = Fpxl/cos 0b (XI.7v)
182
,,Расчеты повторяют для нескольких значений у/?, в диапазоне от 0 до 180° и для
•нескольких значений скорости и при заданной скорости ветра vp.
После определения величии Pt. О, и Fp для указанных расчетных случаев
переходят к вычислению параметров движения буксировщика Предварительно
устанавливают, при каких направлениях ветра (иначе — при каких значениях
углов уф) составляющие тяги Fpxl и Fpvl имеют наибольшее значение. Для судов
обычной архитектуры максимум продольной составляющей тяги Fpxt достигается
при кажу немея угле ветра уд, 60v, максимум поперечной составляющей Fpvl —
прн 17?1 » 120-=-130°. Дальнейшие расче-
ты целесообразно производить только для
тех значений уД1, которым соответствуют
Рнс, XI. 19. Oi ределение углов дрей-
фа буксируемого судна.
Рис. XI.18. График для опреде-
ления Рч/Окр.
[Для этого систему уравнений движения буксировщика (XI.61) представляют
в виде
П « О О О ^В'-
х + х + Рп-Р£ ——F
+ Fpcoso (XI.71)
А-иЛ-41ЬСЛУ р — Fp sin ® = Yr' (XI.72)
-Ду- „----оМьдСмр — xFFp sin & = IrmYr. (XI .73)
На основании уравнений (IX.72) и (XI.73) с учетом обозначений
Фо (Та9 = (СЛД, + (XI.74)
Fo Ф» = — v*ALo (СЛ1р + ГямСур) + (1ЛД1 + xF) Fpsin Q. (XI.75)
е xF берется с учетом знака (в корме—отрицательный), получаем уравнение
:я определения угла |>
ф» (Тл) =/=« (₽). (XI.76)
Для решения уравнения (XI,76) используют графо-виалитическнй способ. С этой
целью для каждого расчетного значения параметра уд! строят графики функ-
ций Фо и Fs при нескольких произвольных значениях угла дрейфа ₽f. Значения
аргументов уд и О, необходимые для вычисления функций Фв и Fo, определяют
по соотношениям (XI.62) при заданном Удх и соответствующих ему значениях Pi и
f>i. Таким образом,
YHi = Тн1 + Pi—Pi! (XI.77)
«J = ei-Pi+P|. (XI.78)
Аргументом функций Фо является угол уд,, вычисленный по формуле (XI 77); аргу-
ментом семейства функций Fo — угол дрейфа Рь параметром является и.
Ординаты кривой Фд (Yni). соответст-
вующие определенным значениям ₽(, пе-
реносят с графика Фв (Yri) на график
Fo (Pi). Прн этом Ф представляют уже
функцией от Р|. Пересечение кривой Ф„
с соответствующей кривой F, дает иско-
мое значение угла дрейфа Р при данных
о и Yri- (рис. XI.20). Затем определяют
искомые значения уд и О по формулам
(XI.77) и (XI.78), в которых Р| заменяют
на найденное значение р. Соответствую-
щие расчеты повторяют при другом ис-
ходном значении угла уд(.
Далее по формулам (XI 71) и (XI.72)
находят для полученных значений аргу-
ментов ул, Р н в значения потребной тя-
ги буксировщика Тд и потребной силы
на рулях YПосле этого вычисляют по-
требный упор движителей буксировщика
(XI.79)
0,25
0/0
Рис. Х1.20. Определение углов дрейфа
буксировщика.
nit
’ 0/5 050 0,55 ОБО 0,65 0/0 075 $v
Рис. XI.21. График для определения
коэффициента засасывания.
Здесь t* — коэффициент засасывания, определяемый но графику рнс. XI.21.
Заключительным этапом расчета является нахождение потребного угла перекладки
рулей (или поворотных насадок) буксировщика по формуле
= 7--------------х-----+ (XI .80)
(СГ +-£-иМд£)
где С, Суд и хе—коэффициенты, определяемые по формулам (IX.57), (IX.СО)
и (IX 64) соответственно. При расположети рулей за гребными винтами и малых
скоростях буксировки допустимо пользоваться формулой
= (XI.81)
Здесь Судшв — коэффициент подъемной силы руля, находящегося в струе греб-
ного винта, работающего в близком к швартовному режиме, бд — хорда руля;
184
jflp — диаметр гребного bhi та; Т — потребный упор гребных винтов. Для руля
еа открытым гребным винтом CyR шв » 0,50, для руля за гребным винтом в на-
садке С£Яшв ~ 0,85.
Результаты вычислений потребного упора при наихудшем направлении ветра
и различной скорости буксировки, а также потребного угла перекладки рулей при
наихудшем направлении ветра и различной скорости буксировки представляют в виде
графиков в зависимости от скорости буксировки (рис. XI.22 и XI.23). На этих
графиках наносят значения располагаемого упора буксировщика и предельно допу-
стимого угла перекладки рулей в виде горизонтальных линий. Пересечение этих
Рнс. XI.22. Результаты расчета потреб-
ного упора буксировщика.
• I — располагаемый упор буксировщика;
о' — зона допустимых скоростей Буксировки
по располагаемому упору.
потребного угла перекладки рулей
буксировщика.
I — допустимый угол перекладки ру-
лей; и' — v" — зона допустимых ско-
ростей буксировки по условиям упра-
вляемости.
(горизонтальных линнн с кривыми потребных значений указывает значение предельно
' допустимой скорости буксировки прн данных погодных условиях.
I В случае буксировки иа предельно малых скоростях возможно возникновение
(ситуации, когда буксировщик разворачивается носом под ветер, а не иа ветер, как
[обычно. Эту возможность следует учитывать при выполнении расчетов, и при графо-
Fаналитическом решении уравнения (Х1.76) надо задаваться не только положитель-
иыми. но и отрицательными .'качениями угла дрейфа.
Производя оценки управляемости буксирной системы, необходимо иметь в виду
Ь следующее
1. В отличие от случая движения одиночного судна, для которого потеря
[управляемости при ветре возможна только при скоростях движения, меньших неко-
торого предельного значения, при движении буксирного состава имеется зона
'Допустимых скоростей с нижней н верхней границами, вследствие чего потеря упра-
вляемости состава возможна как при скоростях, меньших нижней границы этой
[зоны, так и при скоростях, больших ее верхней границы.
ь 2. Потребная тяга буксировщика прн движении с возом навстречу волнам и
, ве -ру с курсовым углом 0“ значительно меньше, чем прн движении с другими кур-
ковыми углами, и, следовательно, указанный режим движет я нс может являться
(онред ляющим.
Располагаемая тяга буксировщика должна позволять развивать необходимые
укорости буксировки при произвольных курсовых углах ветра, так как в против-
ном случае не будет обеспечиваться управляемость состава.
Глава XII
ГИДРОДИНАМИЧЕСКИЙ РАСЧЕТ
СРЕДСТВ УПРАВЛЕНИЯ СУДНОМ
§ 35. РАСЧЕТ СУДОВЫХ РУЛЕЙ
Проектирование судового руля подразделяется на два последовательных этапа.
Первый этап заключается в выборе площади руля, необходимой для придания
судну заданной поворотливости и устойчивости на курсе (см. § 23 первого раздела).
В процессе второго этапа определяют гидродинамические характеристики выбранного
руля, которые нужны для расчета прочных размеров рулевого устройства и выбора
мощности рулевой машины. При выполнении второго этапа уточняют геометрические
элементы руля с таким расчетом, чтобы создаваемая им подъемная сила была наи-
большей, а момент, необходимый для его перекладки, наименьшим. В настоящей
главе рассматривается второй этап проектирования руля, а именно поверочный рас-
чет руля, основные геометрические элементы которого заданы.
В качестве расчетного обычно принимают случай движения, когда на судне,
двигающемся прямолинейно с полной скоростью переднего хода, руль перекла-
дывается на максимальный угол. При этом условно считается, что за время пере-
кладки руля скорость и направление движения судна не меняются и, следовательно,
скорость и направление потока, набегающего на руль, определяются прямоли-
нейным движением судна. Поскольку последнее предположение ие вполне точно,
силы и моменты действующие на руль, в действительности должны быть несколько
меньше расчетных, что обеспечивает некоторый запас Представление о таком ре-
жиме движения судна положено в основу изложенного ниже метода расчета.
Расчет руля производят в следующей последовательности,
1. Определяют безразмерные гидродинамические характеристики изолирован-
ного руля, т. е. руля, находящегося в свободной воде.
2, Вычисляют коэффициенты влияния корпуса на характеристики руля; для
расчета руля эти коэффициенты должны быть известны с большей точностью, чем
это требуется для расчета управляемости.
3. Вычисляют коэффициенты влияния гребного винта на характеристики руля.
4 Вычисляют силы и моменты, действующие иа руль, с учетом перечисленных
факторов.
Судовой руль представляет собой крыло, работающее в потоке, возмущенном
за счет влияния расположенных впереди руля гребных винтов н корпуса. Геометри-
ческую форму руля характеризуют следующие параметры.
Площадь руля Ля — площадь, ограниченная контуром проекции неперело-
женного руля на ДП. Площадь части руля, расположенная перед осью баллера,
носит название площади балансирной части руля. Отношение площади балансирной
части ко всей площади есть коэффициент компенсации К. Для реальных рулей К =
= 0,05^-0,35.
Высота руля йр — расстояние, измеренное по оси баллера между нижней кром-
кой руля и точкой пересечения оси баллера с верхней частью контура руля; Адо —
высота балансирной части руля. Ширина (хорда) руля Ьд — размер в ДП. пер-
пендикулярный к оси баллера. Средняя ширина (хорда) руля—отношение пло-
щади руля к его высоте:
бдер = Ar^r- (XII.I)
Профиль руля — контур сечения его плоскостью, перпендикулярной к оси
баллера. Расстояние между сто крайними точками соответствует хорде Ьд Отно-
сительная толщина профиля f — отношение наибольшей толщины профиля к длин
хорды. Для различных рулей I = 0,1+0,3.
Расстояние от передней кромки до максимальной ординаты профиля, отнесен-
ное к хорде, называется относительным положением максимальной толщины про-
филя ₽.
1S6
Относительное удлинение руля л — отношение высоты руля к его средней
ширине:
^ = Ал/ЬЛср-Лй/Лд. (XI 1.2)
Для реальных рулей X = 0,5-*-3,0.
Рис. XII.I. Составляющие гидродинами-
ческих сил, действующих на руль.
Положение руля относительно набегающего на него потока характеризуется
следующими величинами:
а) углом перекладки руля — углом поворота руля относительно оси баллера,
измеренным в плоскости, перпендикулярной к осн баллера; обычно 6д = 30— 40е;
б) углом атаки руля ай — углом, образованным плоскостью симметрии руля
и плоскостью, проходящей через направление набегающего потока и ось баллера;
углом атаки элемента руля называется угол между хордой руля и проекцией скорос-
ти набегающего потока на плоскость,
перпендикулярную к оси баллера.
Равнодействующая Р гидродина-
мических сил, приложенных к рулю,
обычно раскладывается иа составляю-
щие по осям, связанным с набегающим
на руль потоком: подъемную силу Ри
и сопротивление Рх, или по осям,
связанным с рулем: нормальную Рп
и тангенциальную Pt составляющие
(рис. XI 1.1). Значение сопротивления
практически совпадает со значением
проекции равнодействующей на ДП
судна, значение подъемной сити —
со значением проекции равнодейст-
вующей на плоскость шпангоута.
Составляющие гидродинамических сил связаны между собой следующими соот-
ношениями:
Fn = Pv cos бд + Рх sin 6п; (XI1.3)
Р( = PjCosfip —Pwsin6R. (XI 1.4)
Точка пересечения равнодействующей с плоскостью симметрии руля называется
центром давления, ее отстояние от передней кромки руля есть абсцисса центра давле-
ния хп.
Момент равнодействующей относительно осн баллера носит название гидроди-
намического момента на баллере, его величина характеризуется зависимостью
Mn = Pn(xR-an), (XI 1.5)
где oR — отстояние осн баллера от передней кромки руля.
Гидродинамические силы, действующие на руль, могут быть выражены через
безразмерные коэффициенты. При расчете рулен применяют обычные безразмер-
ные коэффициенты Суд, Схв, Сдд, С,р. равные отношению соответствующих
сил к произведению рЛдо2/^, а также коэффициент момента Смл равный отно-
шению момента к величине рЛд6дсри2'2:
Pfy. *, П, О = СУИ. ХЯ, Л’Л. /дР^Д^/2* (XI 1.6)
Mr = СлгдрЛдйдсриг,2. (XII.7)
•езразмерный коэффициент центра давления равен
С/) = хд/йд ср. (XI 1.8)
Очевидно, что
СЛ1д = Сл,д(Со —К). (XII 9)
При выполнении расчета руля понимают следующее правило знаков: подъем-
ная и нормальные силы считаются положительными, если они действуют справа
Палево прн взгляде иа руль сверху в направлении его движения; сила сопротивле-
187
ния и тангенциальная сила считаются положительными, если они направлены от
передней кромки руля к задней; положительный момент относительно баллера дей-
ствует по часовой стрелке. При этом положительный угол перекладки руля соответ-
ствует перекладке на правый борт.
Определение гидродинамических характеристик изолированного руля. Судовой
руль представляет собой крыло малого аэродинамического удлинения. Вследствие
этого соотношения линейной теории крыла конечного размаха как несущей линии,
дающие хорошее согласование результатов расчета по ним с опытными данными длн
крыльев, удлинение которых Л > 3, не могут быть непосредственно использованы
в расчетах рулей. Нелинейная теория крыла малого удлинения позволяет с достаточ-
ной степенью точности рассчитать гидродинамические характеристики крыльев,
близких к прямоугольным, однако форма рулей в плане зачастую существенно от-
личается от прямоугольной. Поэтому наиболее надежным методом определения
гидродинамических характеристик судового руля является испытание его модели в
аэродинамической трубе или опытовом бассейне. Особенно это касается моментных
характеристик рулей.
Поскольку далеко не всегда оказывается возможным провести исследовании
в лабораториях соответствующей модели руля, для его расчета могут быть исполь-
зованы результаты' продувок рулей и крыльев малого удлинения. В случае значи-
тельного отличив геометрических элементов рассчитываемого руля от рулей, для
которых имеются результаты продувок, его гидродинамические характеристики
могут быть получены путем интерполяции характеристик ближайших по своим
элементам рулей либо с использованием сводных графиков, характеризующих
влияние геометрических элементов руля на его гидродинамические характеристики
Иа рис. Х11.2 приведены гидродинамические характеристики рулей наиболее
характерных форм. На рис. ХП.З приведены сводные графики, иллюстрирующие
влияние удлинения на гидродинамические характеристики полуподвесных рулен.
Только в тех случаях когда не представляется возможным воспользоваться ре-
зультатами экспериментального исследования характеристик руля, может быть ре-
комендован расчет их на базе теории крыла малого удлинения (см. гл IV первого
раздела т. 1).
Учет влияния корпуса судна. При прямолинейном движении судна влияние
корпуса из гидродинамические характеристики руля обусловлено тремя основными
факторами: наличием попутного потока за корпусом судна; наличием скосв потоки
в горизонтальной плоскости; наличием обшивки корпуса у верхнего торца руля
Влияние последнего фактора, которое проявляется как эффект твердой стенки,
даже при малом угле перекладки приводит к увеличению подъемной силы не ба ее
чем на 5—10 %, при больших углах перекладки оно пренебрежимо мало. Поэтому
этот фактор можно не учитывать.
Влияние попутного потока проявляется различно в зависимости от того, на
ходится лн руль полностью либо частично в струе гребного винта или вне ее.
Если руль находится вие струн гребного винта, для вычисления скорости с',
набегающего на него потока используют коэффициент номинального попутного по-
тока фрн:
VA = М1 (XII Ю)
Коэффициент номинального попутного потока определяют следующим образом
А. Дли одновинтовых (однорулевых) и двухвинтовых судов с рулем в ДП.
навешенным иа кормовой дейдвуд или расположенным непосредственно за ним. при
коэффициенте общей полноты Оу = 0,5-т-0,8— по графику рнс. XII.4; при ~-
0,8 — по следующим формулам:
при U-образной форме шпангоутов в корме
Флн = 0,35 4- 2 (бу - 0,8);
при V-образной форме шпангоутов в корме
ф„и = 0,30 + 3,6 (бу - 0,8);
прн сигарообразной корме
фрв = 0,48 + 2 (бг - 0,8).
188
(XII. П»
(XII Г-’)
(XI 1.13)
Рис. XII.2. Гидродинамические характеристики рулей с профилем NACA (см. табл. 1.1): а — подвесной руль:
I =0,21, К = 0,25, Ьа/Ьв = 0,8; б — полуподвесной руль: Л = 1,8, i = 0,18, К = 0,2, h^lh^ = 0,5.
iea
Рнс. XII.3. Влияние удлинения на гидродинамические харак-
теристики рулей.
190
Для двухвинтовых судов с рулями по Оортам, если они удалены от ДП не более чем
на 0,1 В, могут быть использованы те же формулы.
Б. Для двухвинтовых судов с рулем в ДП, расположенным в кормовом подзоре,
а также для двухвинтовых судов с двумя рулями, смещенными от ДП более чем на
0,1 В,
%и = ФР (ХИН)
(метод определения расчетного коэффициента попутного потока для гребного винта
см. § 14 третьего раздела т. 1).
Если руль частично находится в струе гребного винта, скорость потока, набегаю-
щето на его часть, не попадающую в струю, рассчитывают по формуле
‘’Л = М1-М.
(XII.15)
где
ФРР = М>- (X 11.16)
Коэффициент Ср для одновинтовых судов равен 0,8, для двухвальных судов с рулями
в ДП — 1,0. Коэффициент фрр = фр при бортовом положении рулей.
деления коэффициента номи-
нального попутного потока.
। Метод расчета скорости потока, набегающего
на часть руля, находящуюся в струе винта,
^изложен в настоящем параграфе в материале,
посвященном учету влияния гребного винта.
Обусловленный влиянием корпуса скос по-
тока в горизонтальной плоскости приводит к
изменению среднего угла атаки руля на величи-
ну этого скоса, а также к изменению его гидро-
динамических характеристик за счет неравно-
мерности поля скоростей в пределах хорды руля.
Первая из этих поправок не зависит от угла
^перекладки руля и приводит к смещению кри-
вых гидродинамических характеристик па по-
[стояниую величину, вторая поправка отсутст-
вует, когда руль установлен параллельно ДП
[судна, и возрастает по мере увеличения угла перекладки. Очевидно, что поправка
к углу атаки должна вводиться только для бортовых рулей, в случае расположе-
1 ния руля в ДП она равна нулю. Что касается второй поправки, то она играет наи-
более существенную роль для рулей, расположенных в ДП; прн расчете бортовых
рулей она не учитывается.
Поправки, обусловленные скосом, вычисляют в функции от величины Рок, ко-
торую определяют по формуле
Рок = РоЧлЛ1.! ср’ (XI 1.17)
где Ро— максимальное значение угла скоса поминального попутного потока в месте
расположения руля; од<-р — средняя по перу руля аксиальная скорость. Метод рас-
чета ид ср изложен в материале, посвященном учету влияния гребного винта.
f Величина р0 для судов с V-образной кормой может быть вычислена по формуле
Р„ = 5l0z1v /sinvL. (XII.18)
.Угол Yt, если руль расположен иа борту судна (рис XI 1.5, а), — угол между ДП
и прямой, проведенной на корпусе теоретического чертежа через середину размаха
руля перпендикулярно к линии теоретического шпангоута, удаленного от места рас-
Ьоложения руля в нос судна не менее чем на одну теоретическую шпацию. Если
руль расположен в ДП судна (рис. XII.5, б), yt — угол между ДП н прямой, прове-
Виной на корпусе теоретического чертежа через точку, лежащую па уровне середины
’азмаха руля и смещенную к борту на четверть ширины судна, перпендикулярно
f линии теоретического шпангоута, удаленного в нос судна от места расположения
>у.' я не менее чем на одну теоретическую шпацию. Величина Л v, входящая в формулу
ьХЦ.18), — расстояние (в масштабе судна) по указанной прямой между ближаг шим
В нос от руля теоретическим шпангоутом н шпангоутом, расположенным на две тео-
ретические шпаинн в нос от пего.
191
Значение Ро Для судов с U-образной и сигарообразной кормой, характерной для
крупнотоннажных судов с бу = 0,800-5-0,875, принимается равным 15°.
Учет влияния корпуса для однорулевых и двухвальных двухрулевых судов н;.и
бу > 0,8 и смещении рулей от ДП, меньшем 0, Ifi, производят путем введения сим-
метричных относительно нулевого угла перекладки поправок к коэффициентам ги-
дродинамических сил и момента изолированного руля. Для этого вычисляют
*в = *7?ср(1-К) (XII. 19)
— среднюю хорду небалансириой части руля;
бб = Кб/? срЛя'Лйб (XII.20)
— среднюю хорду балансирной части руля;
Рис, XII.5. Схема определения у, и dv для: а— бортового руля; б — руля, рас-
положенного в ДП.
ДСуйк — б/iPvi [2 (1 К) + Рок1;
(XII.21)
(XII 2J)
АСхКк = 0.
лг _______ X Рои
°Я с₽
(XI 1.23)
Для подвесного руля
142
бб = Kftfl Ср-
(XI 1.24»
Расчет ведут для случая перекладки руля на один (правый) борт, и в формулах
КН 21)—(XI 1.23) принимают 6r > 0. Вычисляют коэффициенты и строят зависи-
CyRk — СуЛяз + ЛСудк ;
R к ~ См1{ из iu
Схвк = Схяил;
Суя к = Суйксовб^ + Схвк sinfi/?;
Со„ = £*^+ К,
к Сл/?к
(XI 1.25)
(XI1.26)
(XI 1.27)
(XI 1.28)
(XI 1.29)
,е СурЯз, CmRk3< Car из. Cd из—безразмерные гидродинамические характери-
нки изолированного руля. Кроме того, определяют Сук к при 6Я= 0 н экстраполи-
|тот кривую Соц до 6r = 0.
Прн перекладке руля на левый борт значения гидродинамических коэффициен-
>. прн соответствующих углах перекладки могут быть получены по формулам
cyrk(— = — CykjJSr); (xi 1.30)
CmRk (— б/?) = — CmRk (M- (XII.31)
I Учет влияния корпуса для двухвальных двухрулевых судов с бу = 0.5-5-0.8
[с бу >0,8 при уо>0,1В производят путем смещения кривых безразмерных
Тдродинамических коэффициентов Суяиз, См«Из. СхяИзнаУГ0Л Рок. причем кри-
во Cd из предварительно экстраполируют до нулевого угла перекладки. Для пра-
fro руля Рок > 0, смещение кривых производят налево. Для левого руля Рон < 0
смещение кривых производят направо. В этом случае кривые гидродинамических
Зрактеристик строят для перекладки руля на оба борта, а производная подъемной
елы но углу перекладки С£я к сохраняет то же значение, что и для изолированного
уля, т. е. С?я к = С?я |13.
Г Учет влияния струи, отбрасываемой гребным винтом. Прн учете влияния
ребного винта используют следующую схему распределения скоростей в потоке за
Иском гребного вннта.
1. Радиальные вызванные скорости отсутствуют.
2. Аксиальные вызванные скорости сохраняют постоянное значение во всех
яках гребного винта.
3. Тангенциальные вызванные скорости постоянны по радиусу гребного винта,
меняя знак на его осн.
Аксиальная скорость в струе вннта определяется зависимостью
ода = М 1(1 — Ко) + V 1 + сГо1.
(XII 32)
ил = ц, (1 — ФР);
Кй~ 2 (* + Г1 + «* )
6^= 0,002557/(0^),
£ = x/R
(XI 1.33)
(XI 1.34)
(XI 1.35)
(XI 1.36)
-г- отстояние от плоскости диска винта до оси баллера руля; R — радиус греб-
го винта). Коэффициент Ко вводят лишь в случае, если х^ 1,5; при х > 1,5 при-
дают Ко - 1-
? П/р Я. И. Войткунского, т, 3 193
Среднюю аксиальную скорость для пера руля попадающего в струю гребного
винта лишь частично, определяют по формуле
VA ср = V VA + —( Аа~ ра)’ (XII.37)
где Арор — часть площади руля, обдуваемая струей винта.
Угол скоса потока, обусловленный наличием тангенциальных скоростей, равен
«о •= 6BZ
Kq /1 4- CTv — 1
Л'т + ств ’
(X11 33)
где W—коэффициент, характеризующий направление вращения винта: W = 1
для винта правого вращения, W = —1 дня винта левого вращения; Kq к Кт — коэф-
фициенты момента и упора гребного винта.
Воздействие струн гребного винта помимо увеличения скорости потока, набе-
гающего на перо руля, проявляется через влияние ее границ и закручивание поп ка.
Влияние границ струи приводит к уменьшению эффективного угла атаки руля иа зна-
чение угла скоса.
Угол скоса зависит от угла перекладки руля, его элементов н расположения от-
носительно струи, от соотношения скоростей в струе гребного винта и вне ее и про-
порционален коэффициенту индукции, определяемому по приближенной фор'.о-1е
= ^1 + 7Р—' -«оМ» (XI1-39)
1 l/i . С
Г 1+-^-сГо
Здесь Xi — удлинение части руля, расположенной в струе гребного винта:
?-1 = Л^Ор <хп-40)
194
- высота части руля, расположенной в струе гребноговянта); — коэффициент,
деляемый по графику рнс XI 1.6; — коэффициент, учитывающий боковое
1еиие руля относительно оси гребного винта:
Г 1 — 0,3 | £ | при 0
[1,7(1— |л/|) при 0,5^ 5 < К
(XI 1.41)
$ = y/R (ХП.42)
боковое смещение оси баллера от продольной оси гребного винта); ЛСф — коэф*
!ент, учитывающий разницу попутных потоков в струе гребного винта и вне ее:
„ _иЛа-^"2+СГе,
Ф «4. + ^ СТ° '
(XII.43)
ф,,р — фр и Ка = I коэффициент К$ = I.
. Х11.7. Схема определения площадей выше и ниже осн гребного винта: а —
патвесной руль; б — полуподвесной руль.
Производную коэффициента подъемной силы руля по углу перекладки с учетом
яния гребного винта и корпуса при нулевом угле атаки вычисляют по формуле
суЯв = С?Як(|-Ки). (XII.44)
Закручивание потока приводит к возникновению не зависящей от угла пере-
1ки поправки к коэффициенту подъемной силы руля, определенному с учетом влня-
корпуса. Эта поправка равна
ДСу/? , = «о (I - IУ I) У в, (ХИ -45)
ХЦД ср '
Ияь — площади частей руля, расположенных в струе гребного внита соот-
Твеино под и над продольной осью движителя (рис. XII 7) К ординатам кривой
1К(6д), построенной на оба борта, прибавляют поправку ДСуд3, в результате
находят коэффициент подъемной силы с учетом влияния вращения струи
Угол скоса Дп3 определяется разностью абсцисс кривых Суд к <£>/?) н Суд 3 (6д)
чках пересечения этих кривых с осью абсцисс (рнс. ХП.8, а).
Да:, = ак0 — as0. (X11.46)
л Дак0 = 0 для одновальных судов, двухвальных судов с рулем в ДП и дв хваль-
: двухрулевых судов с бу >0,8 и смещением рулей к борту р0 0,18. Для
хвальных двухрулевых судов с бу = 0,54-0,8 i бу > 0,8 и уа > С,1В принимают
== PtIK
Угол «-л, > 0, если кривая Суд 3 оя) пересекает ось абсцисс справа от начала
тдниат, и аэ0 < 0, если это пересечение находится слева от начала координат;
> 0, если кривая Суд 3 (6д) лежит левее кривой Суд н (6д), и Дст3< 0, если кри-
Судв(бд) лежит правее кривой Суд к (6Д).
В соответствии со значением и знаком угла Даэ производят смещение кри-
Схдк (бд) и С.мяи(бд), построенных для правого и левого борта, получая крю
сХЯз (6л) и Cmrs (рис. ХП.8, б и а).
195
В полученную кривую Суп в (бд) вводят поправку иа влияние границ струи.
Полагая 6р > 0 при перекладке на правый борт и Or <0 при перекладке на левый
борт, вычисляют угол скоса от влияния границ струи
°с« = к” ~ (X11 47)
Положительные значения асн откладывают вправо от кривой Суп 8(6r), в отрица-
тельные— влево (рис. XII.9). Полученную кривую Cj'rb(6r) принимают за осн >ву
для последующего расчета. Обычно допуск ют, что Схп в (бл) = Скл а (бр).
Рис, XI 1.8. Схема корректировки безразмерных характеристик руля с учетом
аакрутки потока.
Далее вычисляют аффективное удлинение руля
^YR в»
(XII 48)
где
CYR в* “ ^YR из 0 — ^11) — (X 11.49)
производная коэффициента подъемной силы руля, работающего в составе изолиро-
ванного движителыю-рулевого комплекса, по углу перекладки при бл = 0; Кх =
= 0,875 для подвесного руля,
«‘“ТтЧ'+т)-
(XI 1.50)
дчя полуподвесного руля.
По графику зависимости коэффициента центра давления иепереложениого руля
от удлинения Сдо (?.) (рис. XII. 10) определяют значения Сд0 для К, соответству -
щего рассчитываемому рулю, СПов для Х, и i аходят разность
Do = С Do в С Do- (X11
Для всех углов перекладки получают разность ДСуЛ = Суп в— Суп к и вычисляют
обусловленную влиянием границ струи поправку к коэффициенту момента
ACjmr — С^ п в ДСдо -|- ЛСуд (Сдк — К). (X11.52)
196
3»тем вы 1исляют поправку, обусловленную перемен юстыо углов атаки по корде
р\ я:
дсм/?в = — СУ7?в(('п~ К) bR ср Даэ| 6Д |, (XII.53)
где — ордината присоединенного П-образиого вихря, определяемая в функции
lot по графику рис. XII 10;
6ясР = bR ср R. (X 11.54)
Величину Дое, вводят в формулу (X11.53) с учетом знака. Значения ДС.мяв одинаковы
при перекладках руля на правый и левый борта. Для прямоугольного руля, пол-
н ютью пересекающего струю гребного винта, АСмпв = 0
Вис. XII.9. Схема введения скоса
потока.
Для полуподвесного руля, v которо-
го кронштейн попадает в струк5 гребного
вннта. необходимо дополнительно учиты-
вать возникновение асимметрии в обтека-
Рнс. ХИЛО. Зависимости Со„ и орди-
наты присоединенного вихря от учли,.
нения.
нии руля за счет угла скоса о^, вызванного закруткой потока на кронштейне руля,
[посредством введения попр< ки ДСл(якр- Для згою определяют зависимое ь
Смп гг- И®) фиктивною руля за рудерпостом с хордой Ьи и удвоенной высотои
('1л—Лдб) полуподвесного руля (хорда комплекса bH = bB + bg). По формулам
методики расчета гидродинамических характеристик руля за рудерпостом (см.
S 36) находят параметры
^(Я+Л|))Ф ~ (!,К~,1ПбУ1 (XI 1.55)
\«+«р)Ф= 4(ЛЯ — лЛс^7Л(«ФЯ1г) Ф: (XII.56)
^лф = ^в^н (XII 57)
Производная подъемной силы фиктивного руля равна
с> Яф =--------2-J----(1.69-0.89бИф). (XII.58)
1 +7---------
Коэффициент момента Сл<п ф вычисляют по формуле
СИ/?ф = (0.IS -|- 0.23 | )6ft (XII 59)
с учетом знака угла перекладки: бд > 0 при нерек адке на правый борт; 6ц < 0 —
•та левый.
197
£ Таблица XII I Формулы для вычисления Лдпр при различных положениях руля относительно гребного винта
Схема Соотношения размеров Формула
- /й- + Ук > /?; а> 0; 6> 0 я№ , ! п" Он пр = —2 Ун 1 R —ук—R aresin
4 V й2 + у* > Я; я> 0; Ь> 0 л пр — -аук- — -Х-^иТ/^-уй-а/^-с / uv . VR3 - аг aresin — aresin 2)-
\у« Ш /о2-гУк < R'< /й2 + у« > а С 0; * > 0 . 1 г>: / . VR2 — а2 . «к Ar Пр = — R ^aresin aresin -$у — g (ук R‘ — Ук 4- о И R" — о2) + сур
— 1 <3 7 .У* Q: о; о A V А + + ? % -4 А V ° . n/?J ЛЯ пр = —2 R* -Ьук--^ (ук T^R: - Ук — ь | R~ — / Ун , . И /?! - ы 1 aresin ^r+ aresin Й2)-
н ~hfyx се от о V V А 'а? + + л *4. А Сз -е> _ ч ° л я^3 , 4л пр — ~~2— R1 — (а + *) Ун — — -+-(!> KR2-y-+aVR2 — a ! . |//? aresin H aresin -— )-
„У< 1 + у2 > R' V^ + y-K < R-, а> 0; Л < 0 Ar пр = ~2~ R~ ~ — (ук 1 . /₽3 - ts . wa \ агсып = aresin | К r\ / ? — Ук -j- Й P Л2 — Й2) + ftyK -
Приме я а н и е В формулы для Ар лг величины a'W b подставляются положительными.
где I — плечо, рассчитываемое для передней кромки руля по формуле
,и..<=-Гг’б + 41ЭТП* (XIL76)
о Q I SIU O/f I
для задней кромки
z _J_6 2 ^-R
/з-«- 3 в ‘ 3 Istndnl
(XI 1.77)
Для случая одновременного попадания в струю как передней, так и задней кро-
мок руля поправки ДСуя и ДС.мя рассчитывают по формулам
ДСУЛ „ = О.ЬСул к Л»в.п.к -Мпв.,.2< (XI1.78)
Ая
ДСмя к — 0,5Сгя в
ЛЯЬЯ ср
где Ляв.и.в соответствует ЛЯ11 для
соответствует АИв для задней кромки
Рис. XII.14. Распределение давления при
кавитации крыла.
”л
(XI 1.79)
передней кромки руля; АЯв. п
руля
Кавитация рулей. На рулях бы-
строходных судов при больших ско-
ростях движения может возникать ка-
витация (см. гл. V первого раздела и
гл. V третьего раздела т. 1), при кото-
рой наблюдается перераспределение
давления по поверхности руля, при-
водящее к существенному перемещению
центра давления к кормовой части про-
филя. Поскольку при начальных ста-
диях кавитации коэффициент подъем-
ной силы крыла остается неизменным,
это явление приводит, как правило,
к резкому увеличению гидродинамиче-
ского момента на баллере руля.
Обтекание элемента крыла харак-
теризуется эпюрой распределения дав-
ления, показанной на рис. XII. 14.
Если прн некотором значении скорости
судна v н угла перекладки руля 6В на поверхности руля возникает кавитация, то
это означвет, что в некоторой точке профиля давление р совпадает с давлением ро
насыщенных паров воды при данной температуре. При дальнейшем увел имении ско-
рости иди угла перекладки разрежение в рассматриваемой точке ие может пре-
взойти этого значения, поэтому увеличение разрежения происходи г только в смеж-
ных точках профиля. Указанное перераспределение давления приводит к смещению
точки приложения подъемной силы в корму профиля. Поскольку центр давления,
по крайней мере при больших углах атаки, расположен в корму от осн баллера,
такое смещение центра давления приводит к росту, иногда весьма значительному*
мемеша ив баллере
С наступлением развитой кввнтации коэффициент момента начинает уменьшаться,
что обусловлено уменьшением коэффициента подъемной силы иа руле и смещением
центра давления к передней кромке. Последнее явление происходит, видимо, вслед-
ствие влияния давления на иекавптнрующей стороне руля.
Для иллюстрации этого явления па рис. XII.15 показаны зависимости коэфф i
циентов подъемной силы Сур н центра давления Сд от угла атаки при различных
числах кавитации для руля с профилем NACA (см. табл. 1.1). Там же сопостав-
лены кривые коэффициента момента при числе кавитации ст = 0,7 и в отсутствие ка-
витации. Как видно из рисунка, обусловленное кавитацией увеличение гидро-
динамического момента весьма существенно.
202
Таким образом, кавитация приводит к изменению гидродинамического момента
и может потребовать увеличения мощности рулевого привода или, во всяком случае,
изменения (увеличения) коэффициента компенсации руля.
На рнс. XII 16 и X11 17 показаны экспериментальные зависимости коэффициента
подъемной силы от числа кавитации для подвесных рулей с различным удлинением
и относительной толщиной, а на рис XII 18— график смешения центра давления
при изменении числа кавитации от 2,5 до 0,7 для двух профилей с различным поло-
жением с максимальной относительной толщины прсфиля.
Анализ этих графиков дает основание считать, что: 1) влияние кавитации про-
является при относительно меньших скоростях н сказывается г елее заметно на про-
Рис. XII.15. Зависимости Суд (с), Cd и Смд(б) от при различных числах кави-
тации для полуподвесиого руля с профилем КАСА: А — 1,6, ?= 0,21, йдл'Ад =
= 0.5, К = 0,25.
фнлях с большим удлинением и большой относительной толщиной; 2) положение
Центра давлений относительно более стабильно для профилей, максимальная толщина
которых смешена в сторону задней кромки. Поэтому при проектировании рулен бы-
строходных судов следует принимать толщину профили минимально допустимой из
конструктивных соображений, а максимальная толщина профиля должна распола-
гаться на 30—35 °о хорды от передней кромки.
Для относительного удлинения руля рекомендации не приводятся, так как этот
элемент выбирается обычно из чисто конструктивных соображений.
Схема расчета гидродинамических характеристик кавитирующего руля остается
такой же, как и некавитпрующего, только исходные гидродинамические характери-
стики изолированного руля следует выбирать из данных испытаний в кавитацион-
ной трубе. Поскольку максимальные значения моментов на баллере ка-
витирующего руля могут наблюдаться ие при наибольшем значении скорости судна,
расчет надо выполнять для диапазона скоростей от соответствующей началу возник-
новения кавитации до наибольшей.
Число кавитации руля, расположенного за корпусом судна вне струи винта, вы-
числяют по формуле
о = Ра-^Р^ят —Pt (X11.80)
203
204
где Ar., — погружение середины размаха руля. Число кавитации руля за винтом
определяют по аналогичному соотношению, в которое вместо скорости v'A подставляют
скорость т'л ср- Если при скорости полного хода о <2, необходимо учитывать влия-
ние кавитации.
Исходные гидродинамические характеристики кавитируцошего руля в тех слу-
чаях, когда испытания не проводятся, принимаются по прототипам
Расчет сил и моментов, действующих иа руль при движении судна передним
и задним ходом. Передний ход. Гидродинамические силы и моменты, дей-
ствующие на руль при движении судна передним ходом, определяют по формулам
(XI 1.6) и (X 11.7), в которых с= vA ,.р. а С\ д, Сдд, С,уд, Сцп — безразмерные коэф-
фициенты гидродинамических сил и моментов, полученные на основании внесения
поправок в характеристики изолированного руля состав которых зависит от рас-
положения руля относительно вннта и корпуса. Обычно при расчете руля
определяют только нормальную силу Рп н момент Л1И.
Если рассматривают кавитирующий руль, то в за-
висимости от расположения руля относительно струн
гребного винта необходимые поправки вносят в гидро-
динамические характеристики изолированного руля
при всех расчетных числах кавитации.
При установке на судне двух рулей, работающих
от одной рулевой машины, производят суммирование
моментов, действующих па правый и левый рули.
При этом следует иметь в виду, что момент прн пере-
кладке правого руля на правый (левый) борт равен
моменту прн перекладке левого руля на левый (правый)
борт с противоположным знаком
Задний ход. В этом слуюе определяют коэф-
фициент расчетного попутного потока
(X 11.81)
Рнс. X 11.18. Зависимость
смещения Cd при изме-
нен IH числа кавитации
о» 2 5 до 0,7 от положе-
ния максимальной тол-
и рассчитывают скорость обтекания руля для случая,
когда он расположен вне стру и винта;
РА» = Ц.З (I -Чз). (XI 1.82)
щины профиля,
где 1'03 — скорость заднего хода судна
Влияние гребного винта на руль прн движении корабля задним ходом прояв-
ляется в значительно меньшей степени, чем при движении передним ходом. При
движении задним ходом перо руля располагается перед диском гребного винта, ко-
торый вызывает здесь только аксиальные скорости. Средняя аксиальная скорость пе-
ред диском вннта может быть вычислена ио формуле
°Ла ч = 0,35г'ла (1 - Л'3) () 1 + Ст„х - 1), (XII 83)
где Стиз.х ~ коэффициент нагрузки винта на заднем ходу Коэффициент Ка онреде-
ляют по выражению
Кл = X, J г0.6 - Д (XII 84)
Таким образом, скорость потока, набегающего на руль при заднем ходе судна,
равна сумме
р-4 ср. з = °Аз + 1Яа э- (XI 1.85)
Гидродинамические сиды. действующие иа руль, определяют по формулам
(XII.6) и (XII 7), в которых С> н, С’хд. Сдд. Сд|д — безразмерные гидродинамиче-
ские характеристики изолированного руля па заднем ходу, a v = vA г_ я—для руля,
расположенного за винтом, u v = — для руля, расположенного вне винтовой
струн.
Пример расчета гидродинамических характеристик руля. Теоретический чертеж
судна, для которого рассчитываем руль, приведен на рис. XII 19 и XII.20. Исходные
данные для расчета следующие L = 200 м; В = 31,8 м; бу = 0,818; число рулей
Яр = I; число винтов лв = I; направление вращения винта — правое; Дд — 40 м ,
20>
BebxHM na/iyfa
Рис XU.19. Теоретический чертеж судна (кормовая Рис XII.20 Теоретический чертеж судна (корпус),
оконечность, руль),
206
К = 0,2; Лд = 8,56 м; 6дср = 4.67 м; Л = 1,83; 1 = 0,21; Лдб=4,2 м; отстояние
нижней кромки руля от оси гребного винта а — 3,86 м; отстояние верхней кромки —
b = 4,69 м; с ='0,34 м; Лд3 = 6,55 м; расстояние (в плоскости шпангоута) от осп
вннта до плоскости переложенного руля у = 0; расстояние (в плоскости батокса)
от плоскости диска вннта до осн баллера х = 5,24 м; Dp (R) = 5,76 2,88) м; Лв =
= 5,76 м; скорость переднего хода ч0 = 7,35 м/с = 14,3 уз; упор вннта при скорости
переднего хода Т = 874 070 Н; мощность на валу гребного впита W = 81 695 кВт;
частота вращения гребного винта л = 2,05 об/с; скорость заднего хода ода = 5,14м/с=
= 10 уз; плотность воды р = 1 т/м3.
Расчет вспомогательных величин.
1. Коэффициент расчетного попутного потока по данным исследования кол-
кости = 0,454.
2. Скорость потока, набегающего на гребной впит,
од = v0 (1 — фр) = 7,35 (I — 0,454) » 4,01 м/с.
3. Коэффициент нагрузки винта
- ЪМ2ЬЪТ 0.00255-874 070 л ,о
г° = ~DV~ = 5jgM;o~ * 4’,8'
(ГА
4. Скорость потока, набегающего на часть руля, находящуюся в струе гребного
винта,
Ма = VA К1 -I- С Го = 4.01 |/1 +4,18 « 9,13 м/с,
так как £ = x!R — 5,24/2,88 ~ 1,82 > 1.5, т. е. Ко = 1.
5. Коэффициент номинального попутного потока для судна с V-образной кор-
мой (см. рис. XII.20) и бу >0,8
фр11 = 0,3 + 3,6 (бу — 0,8) = 0,3 + 3,6 (0,818 — 0,8) » 0,365.
6. Скорость потока, обтекающего руль за корпусом судна в отсутствии гребного
винта,
Од = vb (1 — фрН) — 7,35 (1 — 0,365) г» 4,67 м/с.
7. Коэффициент расчетного попутного потока в месте расположения руля, стоя-
щего за винтом вне струн гребного винта,
фрр = 0,8фрП = 0.8-0,365 = 0,292.
8. Скорость потока, набегающего на часть руля, не попадающую в струю греб-
ного Впита,
° А = Чо (' - ’fpp) = 7.35 О - °.292) ~ 5.2 “/С-
9. Хорды приведенного пол у подвесного руля:
средняя хорда балансирной части
Ь@ = КЬд ербд. Адо — 0,2-4,67-8,56/4,2 л? 1,9 м;
средняя хорда небаланенрной части
Ьв = Ьд ср (1 — К) = 4,67 (1 - 0,2) « 3,74 м;
средняя хорда части руля, лежащей ниже пятки кронштейна,
Ьн = Ло + Ъв = 3,74 + 1.9 = 5.64 м.
10. Площадь руля, попадающая в струю гребного вннта:
площадь части руля, попадающей в струю гребного вннта и лежащей ниже
осн внита (см. рис. XI 1.19),
= Rb„ = 2.88-5,64 ~ 16,24 м1;
площадь части руля, попадающей в струю гребного винта и лежащей выше оси
гребного вннта,
ЛИа = (Я - с) Ьв + cbn = (2,88 - 0,34)-3,74 + 0,34-5,64 « 11,42 m'j
207
суммарная площадь
AliDp = + АПг - 16,24 + 11.42 = 27.66 м».
II Удлинение части руля, находящейся о струе гребного впита,
>. i = Лв/^кор = 5.76V27.66 ~ 1,2.
12. Средняя скорость потока по размаху руля
Ср = (UAa ~ VA ) =
= 1' 5.2*+^^ (9,13s—5,2s) = 8,12 м/с.
13 Коэффициенты упора и момента гребного винта
Л- Т "74 070 о 14
Лг “ pn2D< ~ 1000 2.053 5 76*
1000Л' 1000-81696
~ 2лрл3Р£ " 6,28 ЮОО-2,5-»-05,76“ * 1 ’
W'= I
14 Число кавитации руля
„ PH + Ря —Ри
I 2
— Р*Дср
где гидростатическое давление рн = РйЛпз = 1000-9,81-6.55 = 64 256 1 м’; атмос-
ферное давление р& = 101 336 Н/м-; даваение насыщенных пароп воды ро =
= 1472 1+м2;
101 338 + 64 256 — 1472 ~ г
0.5-1000-8,12*
Поскольку о = 5 > 2, учет втияиия кавитации не производим
15. Коэффициент расчетного попутною потока прн движении задним ходом
ifd = 0.7ф,,= 0,7-0,454 = 0,318.
16. Скорость обтекания руля прн отсутствии гребного винта на заднем ходу
раз = Ров (1 - Фз) = 5,14 (I -0,318) = 3,51 м'с.
17. Скорость обтекания руля, расположенного за гребным винтом, иа заднем
коду
одаз = 0.35а^э (1 — Кэ) (|/”1 Су-р з х — 1),
где
К3 = x!V 0,6 + ха = 1,82/|^0,6 + 1.82* = 0,92;
Сгоз. х Сто = 4,18;
ОАаз = 0,35 • 3,51 (I — 0,92) (К 1 + 4.18 — 1) « 0.13 м/с;
РД ср. я = РДаз + Рд,. — 3,64 м с
Данные по гидродинамическим характеристикам рассчитываемого руля иа перед-
нем и заднем ходу в изолированном действии привечены на рнс. XII.2, б. Производ-
208
|ая коэффициента подъемной силы изолированного руля на переднем ходу при 6Л =
= 0 составляет Сун „л = 1,66.
Учет влияния корпуса
1. По теоретическому чертежу судиа (см. pic. XII.20) определяем у£ = 41 ,
Лу= 7,0 м. Вычисляем углы скоса
Ро= 5IO4¥|AsiDT,/L = 510-7-prsin 41 /200= 14,5° = 0,253 рад;
₽0к - №>.4 С₽ "= 0.253- 4,67/8,12 = 0.146 рад.
2. Определяем поправки к коэффициентам подъемной силы и гидродинамиче-
ского момента изолированно!v руля
ДС> я,. «= !>„„ (2 (1 — 2К) + Рок] 6 л = 0.1966л;
iC.UR к =
0.146
— 4,«7а
Ьк
ЬК Ср
5 Н' + ^’=
8,56
1,9’
н Лр «
2
3,742 —
8,00
2
1,9»
6п = 0.1ПЗд.
3. Значения ЛС¥П11 и ЛСиЯк вычисляем втабл. XII 2 Там же определяем зна-
чения гидродинамических характеристик руля, расположенного за корпусом. Коэф-
фициенты С/)к, С’лвк» Суп,„ Сагяк представляем графически (рис. XI 1.21—
X 11.23),
7 абл и ца XII.2. Определение поправок к коэффициентам подъемной силы
и гидродинамического момента изолированного руля
и гидродинамических характеристик руля, расположенного за корпусом
1 t-YR из CYR к Qi c-J X X or я a3
1 9 0 0 0 0,007 0 0 0 0 0,130
5 0.145 0,017 0,162 0,015 0,163 —0.017 0.010 —0.007 0 157
10 0,290 0.031 0,324 0,045 0,327 —0,025 0,019 —0,006 0,182
15 0 430 0,051 0.481 0 105 0 492 —0,020 0.029 —0.009 0,218
20 0,555 0,068 0,623 0,175 0,646 —0,009 0,039 0,030 0.246
25 0,655 0,085 0,740 0,255 0,779 0,008 0.018 0.056 0,272
30 0,720 0,103 0,823 0,340 0.883 0.026 0,058 0,084 0 295
35 0,745 0,120 0,865 0,425 0,952 0,041 0.068 0,109 0.314 -
40 0,705 0.137 0,842 0,510 0.973 0.055 0.077 0.132 0.336
, Значение Сг>к при 8f, = 0 получаем экстраполяцией кривой Ср (6Я) до бп = 0
(см. рис XII 21). Производная подъемной силы руля за корпусом прн дя = 0
С-’»'пк= 1.й6-
L Учет влияния гребного винта,
f I. Угол скоса потока, обусловленный наличием тангенциальных скоростей,
равен (при И* = I)
а, = (+'
Kq I I + Cr„ — 1 = 0.024 КI +4.18-1
«Т И + CTu °.19 /1 +4.18
= 0.425 рад.
20)
2. Для опредетения коэффициента индукции вызванной влиянием гранип струи,
вычисляем коэффициенты Ку. К$ и по кривым рис. XI 1.6 в зависимости от h^'R
= 2,98 и a R = 1,34 получаем параметр Пд:
/Су = 1-0,3 |j|= I (5 = 0);
2 + СГе 9.133-5,21’2 + 4,18 я - 0 66
Ст° — 9,13*+ 5,51® 4,18 -°''52- Л°-°Л6-
3. Находим коэффициент индукции границ струн гребного винта
к _ 6
к« ~
покук$ =
- I/ l + ^S£.Crv
г Ац
--' jf.1*!'1*-1 ПМ.П 7.ЭД «0.267.
U + 6 V1 + ^,.,8
4. Производная коэффициента подъемной силы по углу перекладки с учетом
влияния гребного винта и корпуса прн 6Я ~ 0 равна
фицнента центра давлений руля
от с учетом влияния кор-
пуса.
УЯв ~ с У Ли
1,86(1 —0 267) »
« 1,36.
5. Рассчитываем поправку к коэффициенту
подъемной силы, обусловленную закручиванием
струи гребного вннта и не зависящую от угла
перекладки руля:
ЛГ П inn Лв[ —ЛДз
3 — “0 (1 ~ I V I) Ar
&<
X
40
X1.36 — 0,088.
6. Зависимость коэффн цента подъемной силы с учетом влияния вращения псту*
Чаем Графически (см. рис. XII.22) прибавлением ДСудак ординатам кривой Cjrri
Определяем углы скоса
“ко = 0" ^30 ;
Л«3 = ctln — ct эо = 0 ( 3) = 3
7. Производим смещение кривых Смп н(®к) 11 Схк к(^н) Hfl Д°з и строим
Cmr0(1>r) и СхдЭ(6я) (см. рис. XII.22 и XII.23).
8. Угол скоса от влияния границ струп вычисляем по формуле
а« = (6п - “вв) = 1-eSee(6л + 3) = 0,366 (бн + 3)‘
Результаты расчета приведены
(6Н — aso) =
ниже:
П р а
кривые
«Я
°ск
2,9
10
15
6.6
20
2Б 30 35
10.2 12.1 13.9
40
О R
— 10
— 2.6
— 25
— 30 —35
6.2
— 40
—13.6
210
См
Рнс. XI 1.22. Получение зависимостей коэффициентов подъем- Рис. XII,23. Получение зависимо.™ коэффици-
нои силы и сопротивления от бд с учетом влияния корпуса ента момента на баллере от с хчртоы влияния
и гребного винта. корпуса и гребного винта.
211
9. Получаем кривую Суп в(®п), откладывая положительные значения вправо
от кривой Суяэ (fin), а отрицательные влево (см. рис. XII 22).
10. Для вычисления эффективного удлинения руля определяем параметры
в* и Кк:
С™ а. = CYR и, 0 - *..) = '-66 (I - 0,268) «
^=^гЦ1 + -г)=-йН,+
II. Эффективное удлинение руля равно
2СЧпп> 2-1,215
э-Кг2л-С?Лв, 0,553-2л—1,215 1,и°-
12. По графику рис. XII. 10 определяем значения Со0, соответствующего
руля, и Слоэ Для и находим их разность:
CDo= 0,211; CDM = 0,188;
ACDo = CDm — CDo = 0,188 — 0,211 = —0,023.
13. В табл. XI 1.3 определяем поправку к коэффициенту момента, обусловлен-
пую влиянием границ струи гребного винта:
ЛСжп = Суп в ДСпо + ДСуя (Рок — К),
где ДСуп = С> п в — С»'я и-
14. Вычисляем поправку к коэффициенту момента, обусловленную перемен-
ностью углов атаки по хорде руля:
ДСЛ1Я в = - Cy-R в (Cn — К) fR ср Даз I ®R I»
где Cjn в= 1,36; Сп = 0,646 находим по рис. ХП.10; 6Лср= Ъ?ср^ = ^,67<2,88 =
= 1,622; Дав = 3° = 0,0524 рад.
ДС.мп в = —1,36 (0,646 — 0.2)2-1,622-0.0524 | Bn I = —0,023 | «л |.
Поправка ЛСмп в не зависит от знака угла перекладки руля, поэтому вычисляем ее
только при перекладке на один борт:
«П......... 0 5 10 IB S0 25 30 35 40
6п. ред . . 0 0.087 0,174 0,262 0.349 0.436 0.524 0,611 0,698
АСЛ1Пв - • п —О.пО2 — 0.004 — 0,006 — 0,008 — 0,010 — 0,012 — 0,014 — 0.016
15. Для вычисления поправки к коэффициенту момента, обусловленной за-
круткой потока и кронштейном руля, определяем параметры фиктивного комплекса
руль—рудерпост:
площадь фиктивного комплекса руль—рудерпост
Л^+Яр)* = 26,1 ~Л«б) = 2'5-64 <8-56 ~4-2) х 49-18 М,1
удлинение фиктивного комплекса руль — рудерпост
_ 4(Лл-Лип)» 4 (8,56-4,2)»
<Л+Д/>)Ф------^(R+Rp)4> 115461
относительную хорду фиктивного комплекса
6лф = = 3,74/5,64 » 0,663;
212
Т а б л я и а XII.3. Вычисление поправки к коэффициенту момента, обусловленной влиянием гриннн струи гребного винта
н IV 3V О . 1Л LO LO О> — счеоошчэ БАШРОД 8§5SS3§§ Н ШТШ 00=00000
* эо ! 0,006 5 —0,004 0 —0,006 9 -0.006 5 -0,004 3 -0,001 3 0,000 4 —0,000 8 —0,004 6 —0.001 6 —0,002 8 0,003 4 0.009 8 0.0I6 6 0.021 2 0,022 2 0,015 2
* 1 S 0,136 0,114 0,095 0,072 0,046 0,018 -0,018 —0 043 —0,070 -0.04.3 —0,018 0,018 0,046 0,072 0,095 0,114 ' 0,136
Q <£> 1 т 0,33b 0,314 0,295 0,272 0,240 0,218 0,182 0 157 0,130 т 0,157 0.182 0,218 0,246 0,272 0.295 0,314 0,336
о Q т 1 р а в ы й бор —0,020 5 -0,019 1 -0,017 2 —0,015 0 —0,012 2 —0,009 4 -0,006 9 -0,004 1 -0,001 5 Левый бор 0 001 3 0,00.3 9 0 006 7 0,009 4 0,011 7 0.013 8 0.015 4 0,016 3
0,048 —0.035 -0 073 —0,090 —0,093 —0.071 —0,024 0 018 0,065 0,107 0,154 0,191 0,21.3 0,230 0,22.3 0,195 0,112
чг
т 0,842 0,865 0,823 0,740 0,62,3 0,481 0,324 0.162 0 —0,162 —0,324 -0,481 -0,62.3 0,740 -0,823 —0,865 —0,842
« ИЛэ о» 0,890 0,830 0,750 0,650 0,530 0,410 0,300 0,180 0,065 —0,055 —0.170 —0.290 —0,410 —0.510 -0,600 -0,670 -0,730
о* * <о - Ю о IQ о 1Л О о оюо^сжсюо । — —. сч сч со с? — 1 1 1 1 1 1 II
213
производную подъемной силы фиктивного руля
С?Я* = ~ '’69 “ =
Л(Я+«,) Ф
=-----— I 0,663 (1,69 — 0,89 0,663) = 2.153.
1 + 1.546
16. Поправку к коэффициенту момента ДСд^д Кр. обусловленную закруткой по-
тока и наличием кронштейна руля, вычисляем в табл. XII 4, в которой KFp — коэф-
Таблица XI 1.4 Вычисление поправки к коэффициенту момента,
обусловленной закруткой потока и наличием кронш еина руля
Ля *КР СМК Ф ДСЛ1Л кр Ккр с Ч R ф кр
П р а в ый борт Левый борт
40 0,44 0,583 0,048 7 —5 0,82 —0.043 —0.006 7
35 0.39 0,480 0.035 6 —10 0.74 -0,094 —0.013 2
30 0.34 0,386 0,024 9 —15 0,65 —0,154 —0.019 0
25 0.28 0,300 0,016 0 —20 0,56 -0,223 —0,023 7
20 0.22 0,223 0,009 3 —25 0.44 —0.300 —0.025 1
15 0.17 0 154 0.005 0 -30 0.34 —0,386 —0,024 9
10 0,12 0,094 0.002 1 -35 0 23 —0,480 —0,021 0
5 0,08 0,043 0.000 6 —40 0 14 -0,583 —0,015 5
0 — 0 —0,003 0
финиент, определяемый по графику рис. XII.II в функции углов и ас =
= 0,425 рад = 24,3“ (гребной винт правого вращения); Afjun ф— коэффициент мо-
мента фиктивного руля за рудерпостом, равный
C4R Ф = Cyr Ф (0.18 + 0.23 1|) = 2,453 (0,18 + 0.23 1[)
Для этого находим площадь части руля, расположенной за кронштейном (см.
рнс. XII. 19);
Дяз. „= Ьв (R — с) = 3.74 (2.88 — 0.34) а 9,5 м2.
Так как = I, поскольку Даэ = 3е > О, то
АС чн кр = Л^нрСмп фЛн а. Ь&ВИ 1 (.Apfirt ср) =
= KnpCjMR 4 -9,5-3,74,(40 4,67) = 0,19КкрСЛ1п ф.
Прн 6Д = 0 ДСмнкр= —0,003.
17. В табл. XII.5 вычисляем коэффициент момента:
Сдщ в = Смп з + ЛСЛ1Я + &Смн в + ЛС.чр Ир.
Для этого значения Сл1вз находим по рис. XII.23, ДСмд— в табл. XI 1.3, ЬСмв
в п. 14, ДСмкир—в табл. XII.4.
Результаты расчета приведены иа рис. XI 1.23.
18. Смещение руля в горизонтальной плоскости отсутствует, поэтому коэффи-
циенты Схд3, Суп в и Cmr в принимаем в качестве окончательных: Схн — Сдп»!
214
Ья = Суд в', Слщ —Смяв- Кроме того, вычисляем коэффициенты нормальной
силы Cnr и центра давления:
Сл я = Cyr cos бн + Cxr sin Cqr = r ,R К
^ЛЯ
19. Вычисляем нормальную силу и момент, действующие на ру ть на переднем
। заднем ходу. Поскольку на заднем ходу гидродинамические характеристики сим-
метричны по бортам, то вычисление нормальной силы и момента производим только
для > 0. На переднем ходу ,тп/’г,Н;Л«.Н'-м
^Я-Г“лсР>1Л=0.5-8,12г.40СЛ^
= 13l9CVft;
Л*.? — CMR _2-вЛсрЛЛ*Яср = 0'®'8',2гХ
X40-4,67CA1R = 6158Сад.
Н заднем ходу
^ = СЛ7?-е-н» срзЛк = 0.5-3,642Х
X 40-Сл/? = 265Сл1£, ;
= С-^-1д ср 3АцЬкер = О 5 64 X
X 40-4.67Сл|/? = 1238Сад= 1238CArJi.
В последних выражениях C^r, Cmr соот-
ветствуют безразмерным гидродинамическим характеристикам изолированного руля
а заднем ходу. Результаты расчета приведены на рис. X 11.24.
Таблица XII.5. Вычисление коэффициента момента CmR в
Рнс. XII.24 Гидродинамические
усилия, действующие на руль, на
переднем и заднем ходу.
ЙЯ°Д СМН з ДС.М я ЛСМЯ в ДСМЯ кр CMR в
40 0,148 Правы) —0,014 0 борт —0.016 0,048 7 0,167
35 0,125 —0,023 1 —0.014 0.035 6 0.124
30 0,099 —0,024 I —0.012 0.024 9 0.088
25 0 073 —0 021 5 —0.010 0,016 0 0.058
20 0 04Б —0 016 5 —0.008 0,009 3 0.031
V 15 0,020 —0,010 7 —0,006 0,005 0 0,008
10 0.001 —0.006 5 —0,004 0,002 1 —0,007
5 —0 008 —0 004 9 —0,002 0,000 6 —0,014
0 —0,005 —0,006 1 0 —0,003 0 -0,014
—5 0,0035 Левый —0,003 3 борт —0,002 —0.006 7 —0,008
— 10 0,008 0,001 1 —0,004 —0,013 2 —0,008
1 —15 0,001 0,010 I —0,006 —0.019 0 -0.014
। —20 —0,017 0,019 2 —0,008 —0,023 7 —0.030
—25 —0,041 0,028 3 —о.ою —0.025 1 —0,048
—30 —0.067 0,035 0 —0,012 —0,024 9 —0,069
—35 —0.094 0,037 6 —0,014 —0,021 0 —0,091
—0,119 0.031 5 —0.016 —0,015 5 —0,119
215
§ 36. РАСЧЕТ РУЛЕЙ .ЗА РУДЕРПОСТОМ
Расчет гидродинамических характеристик рулей за рудерпостом производится
по схеме, предложенной Р. Я. Пермицем. Эта схема основана на следующих пред-
положениях: а) высоты пера руля и рудерпоста одинаковы; б) высота пера руля при-
мерно равна диаметру винта, за которым расположен руль; в) руль в рудерпост имеют
общий профиль.
Расчет позволяет оценить силы н моменты, действующие на переложенный руль,
и боковую силу, действующую на рудерпост прн переднем < • :удна. Расчет руля
на заднем ходу можно производить по схеме, изложенной в § 35, в предположении,
что рудерпост отсутствует.
Исходными данными расчета являются: площа ть руля Ад, м*. площадь комп-
лекса руль—рудерпост А л+др, мг; высота пера руля Iir, м; хорда руля Ьп, м;
хорда комплекса руль—рудерпост 6п+пр. м; скорость судна на переднем ходу гп,
м/с; упор винта Т, Н (кге), при скорости рп; диаметр винта Dp, м.
Расчет ведут в следующем порядке.
1. По материалам третьего разлета т. 1 или формулам (XII.II) — (XII.13)
данного раздела определяют коэффициент попутного потока фр. Этот коэффи-
циент можно принимать по результатам испытаний мо ели данного судна.
2. При помощи формулы
17 л — L'n 0 М*г) (XI 1.86)
определяют скорость потока, набегающего на винт. 3. По формуле
С7.с = 2,55Т/(рСХ) (XI 1.87)
находят коэффициент нагрузки винта по упору. 4. Определяют относительную хорду руля
(XI 1.88)
5. Рассчитывают относительное [лннепие комплекса
хЛ+«р = лк/лК ряр. (XI 1.89)
6. По формуле
са 2л^ СтЛ+Нр (XII.90)
М^р) 2 । 14 Ц+(, +0.47
определяют производную подъемной силы комплекса по углу атаки. 7. Прн помощи формулы
с?«=сУ{/?-РЛр)(1-69 - 0.896Л) (XI 1.91)
вычисляют производную подъемт ой силы, действующей на руль. 8. По формуле
CYR ~ (XII >2)
где — угол перекладки руля в радианах, находят коэффициент подъемной силы
руля прн заданных углах перекладки.
9. Вычисляют коэффициент центра давления
CD = 0,18+ О,236Л — 0,012СГо. (X 11.93)
10. В предположении, что Суп ~ Сун» по формуле
Сл1п = СуиСо (XI1-64)
определяют коэффициент момента руля прн различных углах перекладки
216
II, При помощи формул
(XI 1.95)
AJ/J==CM/?^-epV/J <XI196>
находят подъемную силу и гидродинамический момент иа баллере руля при различ-
ных угтах перекладки 6р.
12. Поформуле (IX .70) находят приближенные значения сопротивления руля Xr
в зависимости от упора винта и углов перекладки руля.
13. По формуле
*=1 Yji + Ajj (X 11.97)
подсчитывают значение равнодействующей гидродинамических сил, действующих
на руль,
14. По формуле
= CY (Л+«р) “ AR+RJJf>R <х 11 -98)
иахо ят подъемную силу, действующую на комплекс руль—рудерпост.
15. Разность
ИЛ+Яр - Ун = Уцр (XI 1.99)
определяет боковую силу, действующую иа рудерпост.
При выборе рулевой машины к гидродинамическому моменту должен быть до-
бавлен соответствующим образом рассчитанный момент трения баллера в подшип-
никах.
§ 37. РАСЧЕТ ПОВОРОТНЫХ НАСАДОК
Ниже приводится предложенная Р. Я. Псршпием схема расчета гидродинамиче-
ских характеристик поворотных насадок, основанная на обработке результатов ис-
пытаний серин моделей насадок. Схема охватывает случаи расчета насадок со стаби-
лизаторами н без них. Эта схема может быть использована для расчета поворотных
насадок, работающих как на переднем, так и на заднем ходу судиа.
। Исходными данными расчета являются: минимальный внутренний диаметр на-
садки Од, м; длина насадки Lp. м; отстояние оси баллера от входного сечения на-
садки 1р£. м; диаметр выходного сечения насадки Dp вых. м; хорда стабилизатора
насадки Ь$р. м; высота пера стабилизатора hsp=DpBUX, м: расстояние между
передней кромкой стабилизатора и плоскостью выходного сечения насадки btso, м;
скорость судна на переднем ходу v'n, м'с; упор винта Тп, Н (кгс), при скорости v„;
скорость судна па заднем ходу oj, м/с; упор винта T.t, И (кгс), прн скорости о';
диаметр винта Dp. м; число винтов судна Zp\ всшонзмешенне судна V, №; коэффи-
циент общей полноты судна бу, длина судна по ватерлинии L, м.
Примечания: 1. Данные о величинах V, Су и L необходимы тотько в том слу-
чае, если отсутствуют сведения о коэффициенте попутного потока
2. Если сведения об упоре bi ита иа заднем ходу суди отсутствуют, то для приблн-
•кеиных расчетов допустимо принимать, что коэффициент нагрузки винта по упору па заднем
ходу равен тому же коэффициенту ил переднем ходу, т. е. что
Порядок расчета гидродинамических сил и моментов действующих на поворот-
ную насадку, сводится к следующему.
I. По формуле
Fr = v'jV SL (XI 1.100)
находят число Фруда.
217
2. При помощи формулы Э. Э. Па имел я
z 1/ Vv
фрп =0,1656/ |/ ^-------------------Дфд
(ХИ.101)
или формул (XII.11) — (XII.13) находят коэффициент попутного потока корпуса
судна на переднем ходу. Величина Дфр равна
Дфр = 0,1 (Fr - 0,2) > 0. (X11.102)
Если о коэффициенте попутного потока имеются надежные экспериментальные све-
дения, надобность в его расчете отпадает.
3. По формуле
Фрз=0.7Фрп (XII 103)
определяют коэффициент попутного потока на заднем ходу вудна.
4. При помощи формул
^n = »n(l-t-...)'. (XI 1.104)
сэ=1'з(* -%з);
(ХН 105)
Определяют скорость потока набегающего на винт, прн переднем и заднем ходе судна,
5. Находят коэффициенты нагрузки гребного винта по упору для переднего и
ваднего хода судна
СГоп = 2,55Тп/(рО*о«). (XI 1.106)
CTv 3 = 2.557s/(pDX). (XI 1.107)
6. Определяют относительную длину насадки Хд = LoIDd. (XII.108)
7, Находят коэффициент компенсации насадки 1'ОЕ = 1О£.^О- (XII.109)
8. Определяют относитель юе удлинение стабилизатора Xsd = hso’bsD- 9. Подсчитывают коэффициент, характеризующий положение относительно насадки. (XII НО) стабилизатора
61SD = blSD bSD (XII.Ill)
10. По формуле
[1 + 0,25 (/1 - Crv+ 0 1(1— (0 45 - 0.35Xd)1 , Сто (XII 112)
2Xn + 4?.д
определяют производную подъемной силы насадки по углу атаки. В этой формуле
Сг0= Cj-ju для переднего хода и Ср0= Стов для заднего хода судна.
11. По формуле
CyD=C“o6D, (XII 113)
где 6д — угол перекладки насадки в радианах, находят коэффициент подъемной силы
насадки прн заданных углах бд для переднего (Суд п) и заднего (Суд j хода судна.
12. С графиков рис. X 11.25 снимают значения коэффициентов а и 6 при заданных
углах перекладки насадки и значениях Cj-0 = Стоц для переднего и Сг„ = Стоа
для заднего хода судна.
13. По кривым рис. XII.26 находят значение коэффициента центра давления Сдп
для переднего хода, а по кривым рнс. X 11.27 — значение C'D3 для Заднего хода судна.
218
14. По формуле
Сг.> = СОп (° + ь1ое) [('-786d - 0,37) + (1 ,64-2,I26D) XD](XI1 114)
определяют коэффициент центра давления для переднего хода судна, отсчитываемый
от передней кромки насадки.
15. По формуле
СО3 = C'D3[a + b(l- lD£)] [(1,78бд - 0,37) + (1,64 - 2. |26О)XD] (X11.115)
Рис. X 11.25. Графики для определения коэффициентов а (о) и b (б).
получают коэффициент центра давления для заднего хода судна, отсчитываемый от
Задней кромки насадки.
16. При помощи формул
Смоп = Cyd niCon —IdeY, (XII 116)
Смо a~ Cyd a (I — Cd3 — Ide) (XII. 117)
находят коэффициенты момента для переднего и заднего хода судна.
17. По формулам
’-Оп = СУО П -у- (ХИ 118)
(XII.119)
^з = сУО3-5-«О^о; (XII 120)
= э (XII 121)
219
подсчитывают значения подъемной силы и гидродинамического момента на баллере
насадки без стабилизатора прн переднем и заднем ходе судиа. Отрицательное значе-
ние момента на баллере при переднем ходе отвечает моменту, стремящемуся увели-
чить yi ол перекладки насадки, положительное — стремящемуся уменьшить этот угол.
При затем ходе положительный момент стремится увеличить угол перекладки па-
са яки.
18. Прн помощи формул
»sn = t'n(/l +с7оп+ 0/2;
(XII.122)
Рис. XI 1.26. Коэффициент Сд„ для Рнс. X 11.27. Коэффициент для
переднего хода судна. заднего хота судна.
19. С помощью формулы
cTSn-2"/(i+^) (Xll.lau
находят производную подъемной силы стабилизатора по углу атаки на переднем ходу.
1 20. 11о формуле
res„ = (0,16D + 0 1436^) (4,5 — 3,5Xn) (X11.125)
определяют угол атаки стабилизатора иа переднем ходу судна при заданных углах
перекладки насадки.
21. По формуле
Cysn = C?'S«“sn (XII 12С)
рассчитывают значения коэффициента подъемной силы стабилизатора на переднем
ходу судна.
22. По формулам
ySn - Cys п -у" *'Sn6SD*S£>; (X11.I27)
^Яз CYS з ^s^SD^SD
(Xi 1.128)
определяют подъемные силы стабилизатора при переднем и заднем ходе судна.
23. 11о формулам
Л1.чп = [(1 — ^de) L-d — (6гео — 0.25) ft.so] Ks„; (XI1.129)
Ms, = [(1 - 1De) Ld + (0.75 - 5lSD} >'sd] Ys3 (X11.130)
подсчитывают моменты на баллере насадки, обусловленные влиянием стабилизатора.
24. Суммарные подъемные силы, действующие при переднем и заднем ходе судна
на насадку со стабилизатором, соответственно равны
VDSii = >'d„ + »'si1; (XII.131)
>,OS3 = J/Da + HSa. (Xi I 132)
25. Суммарные гндродииамп»сские моменты, действующие прн переднем и зад-
нем ходе судна на насадку со стабилизатором, соответственно равны
t п = Won + Af.cn; (XI 1.133)
26. По кривым рис. XII.28, характеризующим коэффициент сопротивления на-
садки, выбирают значения коэффициентов Cxd в и Cxd а при коэффициентах нагрузки
винта С-рсп и Ствз и заданных углах перекладки насадки 6О.
27. По формулам
ЛОл — CXD л » (XI 1.135)
XD3 = CXD (X1I.I36)
определяют собственное сопротивление насадки для переднего и заднего хода
судна.
28, По формулам
^Dn=l ^bSn + ^bn! (XI1.137)
*03= ) (XI 1.138)
находит значения равнодействующей силы при переднем и заднем ходе судна.
221
При выборе рулевой машины гидродинамические моменты Моп< Моз- MDSa
и Моз 1 должны быть увеличены на соответствующее каждому из этих моментов зна-
чение момента трения баллера в подшипниках, рассчитанное должным образом.
в 38 ГИДРОДИНАМИЧЕСКИЙ РАСЧЕТ ПОДРУЛИВАЮЩИХ
УСТРОЙСТВ НА ШВАРТОВНОМ РЕЖИМЕ РАБОТЫ
Основным расчетным режимом работы ПУ является для большинства обычных
судов швартовный, поскольку 11У предназначены для обеспечения операций, прн ко-
торых скорость судна пренебрежимо мала, и создание максимально возможной тяги
ПУ при заданной мощности требуется именно на этом режиме.
Элементы гребного впита, выбранные исходя из швартовного режима, оказыва-
ются приемлемыми и на ходовых режимах работы вследствие слабой зависимости
скорости потока в канале от режима работы ПУ.
Тяга ПУ складывается из двух составляющих: упора гребного винта и силы за-
сасывания на корпусе. При отсутствии гидравлических потерь эти составляющие ока-
зываются равными по значению. Сила засасывания приложена к борту судна
с входным отверстием канала ПУ и направлена в сторону действия упора.
В случае реального ПУ часть упора гребного винта затрачивается на преодоле-
ние ги травлического сопротивления канала, форма которого по условию равенства
тяги ПУ при работе па оба борта должна быть симметричной относительно ДП.
Несовершенство выбросного сопла ПУ, обусловленное этим обстоятельством, при-
водит к отличию средней скорости в сечении канала од н скорости в струе на далеком
расстоянии от ПУ vt. Обозначая соотношение этих скоростей а= с/ид, можно на-
писать следующие выражения для тяги ПУ н упора, создаваемого его рабочим орга-
ном,
Т£ = р^А(,с; (XII.139)
Г=р^А0(а’+ Х\) 2- (XU.140)
где Ав — площадь поперечного сечения канала ПУ; а = о0 + Ап (а0—значение
коэффициента а при Рг> = 90°; До — изменение а при Ро < 90°); Vg — сумма коэф-
фициентов гидравлических потерь в канале. Коэффициент а определяется геометриче-
скими параметрами входного и выходного отверстий канала: отношением r.Dp ра-
диуса закругления кромок канала и диаметра впита и утлом Рг, между поверхностью
корпуса в месте расположения ПУ и его осью.
Для канала 11У присущи следующие виды гидравлических потерь
сопротивление входа:
сопротивление защитных решеток, устанавливаемых на входе и выходе канала;
сопротивление обтекателя углового редуктора, расположенного в канале и обес-
печивающего передачу крутящего момента, создаваемого приводным двигателем,
гребному валу;
сопротивление поворота в случае применения ПУ с изогнутой осью канала;
гидравлическое трепле о стенки канала.
£22
Значения коэффициентов указанных составляющих сопротивления получены ня
основе анализа экспериментальных данных.
Значения коэффициента а0 н коэффициента гидравлического сопротивления
входа tsxe в функции г Dp при Ро = 90е приведены на рис. XII 29, изменение этих
коэффициентов Да и Л£Вх при измснеиин ро—на рис X 11.30. Зависимость коэффи-
циента гидравлического сопротивления защитных решеток £рР1П от коэффициента стес-
нения k потока решеткой, представляющего отношение площади Л)1е,п канала в свету
к полной площади Ав его поперечного сечения, изображена па рнс. XII.31. Стержни
решетки имеют симметричный профиль поперечного сечении длиной Ь = 0 14DP
при максимальной толщине е = 0.266.
Наличие в канале обтекателя угловой колонки приводит не только к увеличе-
нию нагрузки гребного винта, но к дополнительному изменению коэффициента мо-
мента вследствие изменения структуры поля скоростей в диске гребного винта. При
этом из-за неепмметрпи конструкции гидроди-
намическое взаимодействие между гондолой и
Рис. XII.30. Зависимость Да и ДсвхотРб-
Рис. XI 1.31. Зависимость коэффи-
циента сопротивления защитных
решеток на входе и выходе канала
11У от k.
лениях потока через капал ПУ. Это взаимодействие зависит также от коэффи-
циента гидродинамической нагрузки движителя ПУ. Коэффициент дополнительной
нагрузки гребного впита ДСрд, вычисленный по скорости цд, it коэффициент влия-
ния неравномерности потока в канале i'q в функции относительного диаметра гондо-
лы d = d Dp и коэффициента нагрузки гребного винта при отсутствии угловой
колонки С'гд показаны на рис. XI 1.32. Изменение длины гондолы в пределах
(0,65+ 1,25) Dp ие приводит к заметному изменению ДСрл и iq.
Зависимость коэффициента сопротивления, вызванного поворотом оси ка-
нала, £пов °т угла поворота а приведена на рис. X 11.33.
Коэффициент гидравлического трения при относительно коротких длинах ка-
нала ПУ невелик и может быть с достаточной степенью точности рассчитан ни фор-
муле Блазиуса
tTp= 0,3I64/nj (Rel/4Dp). (XI 1.141)
Где /пу — длина канала; Re = v^Dp v — число Рейнольдса.
Приведенные зависимости позволяют определить коэффициент нагрузки греб-
ного винта ПУ по упору
Стд = (во + Да)2 + ££ + ЬСта- (XII.142)
Коэффициент нагрузки гребного винта Стд без учета его взаимодействия с гон-
долой, необходимый для определения ДСуд. равен
СТА = («о + М2 + (х| 1 143>
Наиболее рациональным является расчет с применением систематических диа-
грамм характеристик гребных винтов, приспособленных для работы в составе Г1У.
Основным конструктивным отличием таких гребных винтов является необходимость
применения симметричного относительно продольной н поперечной осей профиля
223
поперечного сечения лопастей винтов фиксированного шага (ВФШ) н плоских лопа-
стей винтов регулируемого шага (ВРШ) с профилем сечения лопастей, симметричным
относительно продольной оси. Диаграммы гидродинамических характеристик ВРШ
с дисковым отношением Ае/Ао=О,67 и числом лопастей г= 3 приведены in
рис. XII.34 и XII.35, где Кт и Kq — коэффициенты упора и крутящего момента на
валу гребного винта. PDp — шаговое отношение; /д— относительная поступь,
ЧА - КПД.
Рис. XI 1.32. Зависимость ДСгл u i'q от d.
Геометрические характеристики сечений лопастей этих ВРШ следующие:
0,6 О.т о. в 0.9 1.0
0.614 0.710 0.738 0.663 0
0.0275 0,0228 0.0179 0.012S 0,0075
В качестве профиля сечения
лопасти ВРШ применен профиль
КАСЛ-16, имеющий нулевую кри-
визну. Подробные данные по гео-
метрическим н гидродинамическим
характеристикам гребных винтов
приведены в работе [6|.
Расчет достижимой тяги П>
при известной мощности приводного
двигателя Рр выполняют в следую-
щей последовательности. Потеоре
тическому чертежу судна в месте
установки ПУ измеряют угол на-
клона борта pj, и длину канала /пу-
Из конструктивных соображений
Рис-. XI 1.33. Зависимос1ь коэффициента со-
противления поворота канала ПУ от угла
поворота.
назначают коэффициент стеснения потока защитной решеткой и радиус закругле-
ния кромок капала г/Пр При отсутствии ограничений по значениям диаметра и
частоты вращения расчет производят для нескольких значении Dp прн 3—4 значе-
ниях частоты вращения п.
1. Для данного диаметра н частоты вращения рассчитывают коэффициент крутя-
щего момента без учета гондолы
Kq = IOOOPDn5/(2npn3D/;),
где = 0,95 — КПД механической передачи.
(XII. 1«)
224
2. По графикам рнс. XII.29—XII.31, XII.33 определяют ас, £пч0, Ла, Д£вх,
Среш- £пов' Коэффициент £тр нахотят по формуле (XII 141). Ориентировочное
значение скорости потока в канале, необходимой для расчета числа Re, составляет
од 3 0,34 (\'rPb/Dp)- (XII 145)
3. Определяют величины
а ~ а0 + Да. (X11.146)
— £нх о 4~ Л£вх ~г vneiu ~Ь Епов £тр (XII 147)
Рис. XI 1.35. Диаграмма Kq—J । ВРШ.
и коэффициент нагрузки по упору без учета гондолы угловой колонки
C7 4=oS+l]y- (XII.148)
4. В функции от С'тл и il определяют по графикам рис. X 11.32 АСуд и iq.
Затем находят расчетную нагрузку н коэффициент момента гребного вннта ПУ
Суд = Суд + ACj-д, Kq— Kq/iq. (XII.149)
Реальное значение d составляет 0,45—0,50.
г 5. Для ряда значений J , рассчитывают Кт прн постоянном СТА = +
н- ДСуд:
Кт = лСуд/= /8. (XI 1.150)
Кривую Ку = [ (J.i) при Су 1 — const наносят на диаграмму Ку — J д. На эту же
Диаграмму с помощью диаграммы A'q — J а наносят кривую Ку — / (J д) при Kq =
8 П/р Я. II ВоПтктнекого, т 3 225
= Kq/Iq^ const. Точка пересечения этих кривых определяет шаговое отношение
гребного винта Р Dp, его относительную поступь Ja и коэффициент упора Кт
6. В соответствии с формулой (XII.139) рассчитывают тягу ПУ
ТЕ = олр/>г/^/4. (XII 151)
7, Выполняют проверку гребного винта на кавитацию. Зависимости произве
дени я критического числа кавитации гребных винтов ПУ, рассчитанного по скоросг i
потока в канале, и дискового отношения от коэффициента гидродинамической на-
грузки, полученные на основании серийных модельных испытаний ПУ, приведены
на рнс. XII.36. Чисто кавитацнн и,, рассчитывают по формуле
<М = (XII.152)
винтов ПУ и дискового отношения от коэффициента гидродинамической нагрузки
по упору.
1 — ВРШ: 1 — ВФШ.
где ра — атмосферное давление, Па; Л — погружение осп ПУ, ы; рв — давление
насыщенного пара, Па. Дисковое отношение,-обеспечивающее отсутствие втияиня
кавитацнн на гитролииамические характеристики гребного винта ПУ, равно
8. На основании расчета, выполненного для ряда значений диаметров и частот
вращения, выбирают их оптимальные значения, обеспечивающие наибольшую тягу
при отсутствии развитой кавитации.
Аналогично может быть выполнен расчет мощности приводного двигателя ПУ
при заданной тяге
При расчетах ПУ с соосными гребными винтами необходимо знать распре"с ie-
нне нагрузки между передним и задним гребными винтами В связи с тем что гребные
винты имеют одинаковые геометрические элементы, нагрузка заднего гребного винта,
работающегов поле тангенциальных вызванных скоростей, создаваемых передни4
гребным винтом, оказывается выше. Соотношение упоров может быть найдено по
приближенной формуле
226
где Pt Dp — поступь нулевого упора комплекса соосных гребных винтов, которою
снределяют по диаграмме Кт — J А; J'A —действительная относительная поступь
ваднего гребного винта
Гл = 2/а/(3 —) 1— 0,55Сгд7^ ). (XII.155)
Прн оценке кавитационных качеств соосных гребных винтов противоположного
вращения в качестве расчетной нагрузки прн использовании зависимости рис. XII 36
следует принимать более высокую нагрузку заднего гребного винта:
СТА = Ti(as+ £}£ + ДСгд)/(2Гг). (XII. 156)
§ 39 ВЛИЯНИЕ СКОРОСТИ ОДНА НА ТЯГОВЫЕ
ХАРАКТЕРИСТИКИ ПОДРУЛИВАЮЩИХ УСТРОЙСТВ
Работа ПУ прн движении судна приводит к возникновению сил гидродинамиче-
ского взаимодействия которые отсутствуют на швартовном режиме. Появление
втих сил связано с дв\мя причинами: нарушением симметрии течения относительно
осн ПУ вследствие сложения скорости внешнего потока, обтекающего корпус, и
скорости, вызванной действием входного отверстия ПУ; взаимодействием струи ПУ
с корпусом судна. Действие других факторов является вторичным, и его можно не
учитывать.
' Тяговые характеристики ПУ в значительной степени зависят от места располо-
жения ПУ иа корпусе судна, а также от геометрических элементов корпуса в этом
районе.
’ Модельными и натурными [24 , 28) исследованиями установлено, что гидроди-
намические характеристики ПУ при движении судна хорошо обобщаются парамет-
ром, представляющем соотношение скоростей судна и потока в канале ПУ, а ско-
рость внешнего течения практически не приводит к изменению скорости потока
внутри канала. При соблюдении геометрического подобия силы засасывания и
обусловленный ими разворачивающий момент составляют одинаковую часть тши
н момента ПУ на швартовном режиме независимо от абсолютных значений скоростей
и гидродинамических сил.
Действие входного отверстия ПУ аналогично действию равномерно распределен-
ных по его поверхности стоков общей интенсивностью </ = 'А '(2л), приводящему
к снижению давления в точке поверхности борта па швартовном режиме на
Др = -р^т/2, (XII 157)
где vCT — скорость в данной точке, вызванная действием стока. Точки равного дав-
ления, очевидно, располагаются на концентрических окружностях с центром иа оси
канала ПУ. В счучае наложения на течение, вызванное стоком, внешнего плоско-
параллельного потока, имеющего скорость е0, скорость на поверх пости борта будет
определяться геометрической суммой вызванной и внешней скоростей:
»£= ) + уст + cos0ct. <ХИ 15й)
где 0,г — утов между направлениями скорости и0 и гст в данной точке.
| С помощью уравнения Бернулли можно определить разрежение в точке борта
со стороны входного отверстия ПУ
Др = — (pt?cT/2) - pvctv0 cos 0„. (X 11.159)
I Из сравнения формул (XII. 157) н (X 11.159) видно, что давления в точках на борту
С входным отверстием ПУ на швартовном и ходовом режимах отличаются на
₽i -Tt'o cos 6ГТ, что приводит к уменьшению давления при положительном cos flCT
и увеличению — при отрицательном. При интегрировании в пределах 0 0ст
2л по поверхности борта эта величина обращается в нуль. Силы засасывания 50
iia швартовном и S на ходовом режимах оказываются одинаковыми. Нарушение
симметрии сил засасывания относительно оси ПУ (снижение давления перед каналом,
гДе —л 2 0СТ > Зл/2, и увеличение его за каналом, где — л/2 С бет < Зп/2)
8* 227
приводит к смешению точки приложения силы засасывания по направлению, обрат-
ному направлению скорости внешнего потока (рнс. X 11.37). Таким образом, наличие
внешнего потока, ие изменяя силу засасывания, обусловленную действием входного
отверстия, приводит к изменению по сравнению со швартовным режимом плеча ее
приложения на величину Д/,„ что увеличивает разворачивающий момент относительно
миделевого сечения корпуса носового ПУ и уменьшает разворачивающий момент кор-
мового ПУ при движении судна передним ходом. Смещение точки приложения равно-
действующей зависит от относительных размеров канала ПУ и корпуса. На
рис. XII.38 показана зависимость отношения этой величины к диаметру ПУ, равного
ct = &l,lDp, от отношения скоростей v0Iva (кривая /).
Согласно гидродинамическому расчету ПУ на швартовном режиме сила засасы-
вания равна
Рис. XI 1.37 Распределение давления вблизи входного отверстия ПУ.
— •--------------шввртовный режим;----------ходовой режим.
Отсюда дополнительпын разворачивающий момент, создаваемый ПУ при движегнн
судна,
о(2—л)— Vr
ДД1., = TecsD„----------— . (XII 161)
Следует отметить, что действие входного отверстия приводит к возникновению до-
полнительного сопротивления движению судна (сопротивления стока) ДА1 =pQrn,
где Q — секундный расход через сечение канала. Наличие этой силы также привозит
к изменению разворачивающего момента. Поскольку он пропорционален скорости
движения судна, прн относительно высоких скоростях движения изменение суммар-
ного момента может оказаться заметным. Приближенно считая точкой приложения
сопротивления стока кромку канала, получим дополнительный момент
ДЛ1П = р^еоДц/пь 2, (XII. 162)
где /пу — длина канала ПУ. Очевидно, что направление действия этого момента сов-
па ист с направлением разворачивающего момента ПУ относительно миделевого
сечения корпуса при носовом расположении ПУ и противоположно— при кормовом.
Другой причиной изменения характеристик ПУ является взаимодействие струн
ПУ с корпу м при обтекании ее сносящим потоком. Приближенной аналогией,
поясняющей механизм этого взаимодействия, является обтекание твердого цилиндра
поперечным потоком. При таком обтекании перед цилиндром образуется зона повы-
шенного давления, а но бокам — эоны пониженного давления, которые вследствие
отрыва потока распространяются в область, находящуюся позади цилиндра. Пло-
2М
щЯчь этой зоны существенно бозьше, чем площадь зоны повышенного давления.
Если цилиндр примыкает торцом к стенке, то вследствие отмеченного и меиеиня дав-
ления иа стенке возникает сила. Экспериментальные исследования подтверждают
качестве! ное совпадение картин распределения давления на стенке вблизи твердого
цилиндра и струи того же диаметра. Характерное распределение давления около
струи, выходящей из твердой стенки, показано на рнс. X 11.39.
Таким образом, истечение струи ПУ в сносящий поток, начиная с самых малых
величин скорости этого потока, приводит к возникновению на корпусе отрицательно!
силы засасывания, уменьшающей тягу П>
Аналогия с твердым цилиндром давая ка-
чественное объяснение этому явлению, не мо-
жет дать приемлемых количественных ре-
зультатов вследствие искривления осп струн
под воздействием внешнего потока, которое
приводит к искажению поля давлении на кор-
пусе и на значительном расстоянии от места
выхода струн.
На основе анализа экспериментальных
данных н визуальных наблюдений за разви-
тием струн в сносящем потоке И. Г. Шапош-
никовым [1В] предложена схематизация та-
кого течения 11ри этом струя заменяется вих-
ревыми системами ,'1ля обчспеченн! скорости
Рис. XII.38. Относительное смещение
точки приложи ня равнодействующей
Рис. XI 1.39. Распределение давления
сил Засасывания.
на твердой стенке вблизи выхода
I — со стороны входа потока 2 — со сто-
роны струи ПУ.
струн.
------• — экспериментальные данные:
------результаты расчета.
течения внутри струн по выходному отверстию ПУ располагаются равномерно
распределенные источники.
Результаты расчета, выношенного по такой схеме, удовлетворительно согла
суются с экспериментальными данными Интегрирование*значении давлении дао
отрицательную силу засасывания на корпусе S. значение которой уже при vui'va~
— 0 5 соизмерим о с тяюй ПУ па швартовном режиме. Завис) л ость отношения
S к тяге ПУ Те от v0!ia- приведенная па рнс. XI .40, может быть использована
Для ориентировочных оценок. Результаты расчетов показали, что по мере увеличе-
ния va зона разрежения за каналом ПУ распространяется в направлении скорости
внешнего потока, и точка приложения силы засасывания, возникающей на борту
судна с выходным отверстием ПУ, смещается. Вследствие этого падение разворачи
вагощего момента носового ПУ относительно миделя меньше, чем падение тяги.
Относительная величина смещения силы S показана иа рис. XII.38. Разворачи
вающпе моменты для носового н кормового НУ соответственно равны
A4n = 7'F“(lDM-cJiD/J); (XI 1.163)
ДЛ1/н = ТгЗ (1Dm + csDp), (XII.164)
где /о1[— расстояние от миделя до осн канала ПУ.
229
С учетом изложенного тяга и момент ПУ на ходу
7'fD=rC(l -S);
= Alf 4- ДЛ1а + ДЛ1д — Д.М;П;
Л11К - Mf - ДМ, - ДЛд - ЬМ}К,
(XI 1.165)
(ХП.166)
(XII. 167)
где
Mf = Te!dv
(XII.168)
При расчете характеристик кормового ПУ, очевидно, следует принимать скорост
потока с учетом пограничного слоя. Приближенно можно считать t>0 = 0,515 v, (I —
-фр).
Зависимости (XI 1.165) —
(XII. 167) дают лишь ориентировоч-
ные значения характеристик ПУ,
поскольку не учитывают особен-
ностей геометрии корпуса судна.
Более точным способом опре-
деления тяговых характеристик ПУ
является модельный эксперимент.
Прн этом кроме соблюдения гео-
метрического подобия и равенства
Рис. X 11.40.
засасывания,
имодействпем
Относительная сила
обусловленная вза-
струн со стен кон.
Рнс. XII.41. Характеристики носового н
кормового ПУ.
/, 4 — тяга и разворачивающий момент Носове го
ПУ, 2, 3 — тягл и разворачивающий момент
кормового ПУ.
скоростей vJva для
соотношений ж _ ___ _______ .. ____г_. ___________ ___________
подобия по числу Fr. Типичные зависимости Т Ео/Т Е и MJMf от о0/од для н но-
вого и кормового 11У при двнжепиня судна передним н задним ходом показаны на
рис. XII.41.
Обращает внимание увеличение тяги носового ПУ прн движении судна задним
ходом. Такое явление отмечается для судов с полными обводами н, по-видимому,
связано с отдалением момента отрыва потока от корпуса за счет действия вход-
ного отверстия ПУ. При этом вследствие неснмметрни пограничного слоя па
корпусе возникает сила, направленная в сторону действия тяги ПУ.
Дополнительное воздействие па характеристики кормового ПУ оказыв к*'
скорости, индуцированные главным движителем. Очевидно, что величина этого
влияния связана с коэффициентом гидродинамической нагрузки главного дви-
жителя Сур. Уменьшение тяги и разворачивающего момента кормового ПУ судна,
движущегося задним ходом, показано на рнс. XII.42.
Существует ряд способов увеличения эффективности носового ПУ при движении
судна передним ходом: установка дополнительного канала за каналом ПУ, выравни-
вающего давления па противоположных бортах судна [22], выдвиг насадки из вы-
ходного отверстия канала, придание поперечному сечению струи обтекаемой
формы и др. Эффективность применения последнего показана на рнс. XI 1.43.
230
модели к натуры необходимо соблюдение
Изложенная оценка влияния скорости иа характеристики ПУ относится к дв! •
жению судна с нулевым или малыми (равными 10—15е) углами дрейфа. Такое движе-
ние представляет наибольший интерес. Например, при позиционировании буровых
судов целесообразно удержание их от сноса течением действием главного движителя.
Рис. XII.43.Эффективность ПУ с различными формами поперечного сечения канала,
I — с круговой; 2 — с овальной.
потребление мощности которым будет минимальным при ориентировании ДП по
направлению скорости течения, и парирование ветроволиовых нагрузок ра-
ботой ПУ. При влияние скорости внешнего течения в практических рас-
четах может не учитываться.
1 Некоторый интерес представляет движение судна лагом под действием тяги ПУ.
В этом случае тяга 11У может быть определена по формуле
Тес = Те [1 — (ц/ид)!. (XII.169)
На режимах сдерживания судна от ла ового сноса тяга остается практически неиз-
менной.
231
§ 40. ВЫБОР ОСНОВНЫХ ЭЛЕМЕНТОВ И ГИДРОДИНАМИЧЕСКИЙ
РАСЧЕТ ПОВОРОТНЫХ КОЛОНОК
В качестве расчетного режима работы поворотной колонки как САУ обычно
принимается швартовный, поэтому проектирование ее двнжитсльиого комплекса
достоверно может выполняться только с применением систематических диаграмм
гидродинамических характеристик движителей. По причине высокой гидродина-
мической нагрузки движителя для поворотных колонок чаще всего применяют
гребные вин гы в направляющих насадках, что позволяет существенно (на 20—30 %)
повысить гидродинамическое качество двнжительио-рулевого устройства.
Наличие в составе поворотной колонки
обтекателя углового редуктора приводит к
взаимодействию между обтекателем и двн-
житсльпым комплексом и изменению гидро-
динамических характеристик последнего по
сравнению с характеристиками комплекса в
свободной воде, на основании которых со-
ставлены систематические диаграммы. Это
взаимодействие на швартовном режиме свя-
зано с дополнительно» неравномерностью
распределения скоростей в диске гребного
винта н появлением па обтекателе силы за
Рнс. ХП.44 Гитро'шнамнческне характеристики поворотной колонки.
сасывания, уменьшающей тягу комплекса. Тяга поворотной козонки и мощность,
потреб, яемая ею, с учетом указанного фактора равны
7t = (I—I*); (XII.170)
Рр = АцРл(Ор'р-2л, (XII.171)
где А'е и Aq — коэффициенты тяги н крутящего момента па валу гребного вин.а в
насадке в свободной воде; I* — коэффициент засасывания на швартовном режиме
гэботы поворот нон колонки; in — коэффициент влияния неравномерности потока.
Обычно I* = 0.07-J-0.10; iq — 1,03-ь 1,05.
Экспериментальными исследованиями показано, что значение t* практически
не зависит от относительного диаметра обтекателя d Dp при его изменении от 0,40
до 0,75 н угле между образующей обтекателя н осью гребного винта не более у = 25ь.
Увеличение угла пак юна образующей приводит к заметному снижению гидродинами-
ческого качеС1ва комплекса Af./A'^3. Так, при у » 30е А£/Ад/Зсннжается примерно
а 10%, уменьшение у до 15“ говышас! гидродинамическое качество на 2—3%.
Увеличение d'Dсвыше 0,75 также приводи! к резкому уменьшению гидродинами-
ческого качества. При выборе элементов направляющей насадки следует иметь
в виду, что оптимальное значение коэффициента раствора цаеадкн дли’швартов-
232
него режима работы составляет около 1,4. Прн относительном удлинении насадки
1,'Dp — 1 может быть достигнуто также увеличение тяги колонки на 3—5 % по срав-
нению с тягой комплекса, насадка которого имеет общепринятое значение удлине-
ния, равное 0,5- 0.6.
Характерные зависимости коэффициентов продольной силы X. совпадающей
с направлением скорости набегающего потока, боковой силы V. крутящего момента
на валу гребного винта Q и момента Qz. скручивающего баллер колонки, от поступи
прн различных углах перекладки показаны на рнс. XI 1.44, где
= A7(p^D*); KY = Y^nW\);
Рис. X 11.46. Коэффициент момента на баллере
•-------тянущий комплекс,----------толкающий
комплекс
Значение момента, скручивающего баллер поворотной колонки, в сущест-
венной степени зависит от расстояния между диском гребного винта и осью поворота
колонки. Анализ гидродинамических сил, возникающих на насадке в косом потоке,
показывает, что значение угла атаки элементов направляющей насадки оказы-
вается отличным ог значения угла атаки прн осевом потоке. Экспериментальное
подтверждение этого дано А. М. Чудновским. Снды иа передней по отношению к на-
бегающему потоку половине насадки оказываются большими, чем на задней Для
толкающего варианта комплекса, когда баллер колонки располагается перед вхо-
дящей кромкон насадки, моменты сил, направленны* вдоль н перпендикулярно
оси движителя, имеют разные знаки, для тянущего — одинаковые (рис. X 11.45).
Значения Kq1 при различных расстояниях двнжнтельного комплекса от оси баллера
колонки показаны на рис XI 1.46 Как видно из рисунка, при заданном рабочем
Диапазоне значений относительных поступеп в случае толкающего двнжнтельного
комплекса может быть выбрано расстояние Ь, которое обеспечит минимальное зна-
чение момента. Значение Kq. для тянущего варианта с такими же относительными
размерами оказывтется существенно выше, в связи с чем мощность привода пово-
233
рота такой колонки должна быть выше, а также должна быть увеличена прочность
баллера. Это является основной причиной относительно редкого применения пово-
ротных колонок с тянущим движительным комплексом.
Расчет ходкости судна в том случае, если колонку используют в качестве ре-
зервного движители, выполняют с помощью диаграмм гидродинамических харак-
теристик. Такой расчет не представляет трудностей. Взаимодействие колонки
с корпусом судна исследовано мало. Прн практических расчетах коэффициенты
взаимодействия не учитывают, что допустимо при расположении колонки ниже
основной плоскости корпуса судиа.
При выборе диаметра и частоты вращения гребного винта следует иметь в виду,
что гидродинамическое качество дшгжнтелыюго комплекса гребной винт — на-
правляющая насадка зависит от шагового отношения гребного винта и резко сни-
жается прн шаговых отношениях, меньших 0,7. Наибольшее значение гидродина-
мического качества соответствует PiDp= 1,0+1,4
Гидродинамический расчет движителя активного руля аналогичен расчету
движителя поворотной колонки. При этом следует учитывать взаимное влияние
движителя и пера руля, которое в основном сводится к уменьшению углов нате-
кания потока на движитель и перо руля и к увеличению скорости обтекания пера
руля
Действительный угол атаки пера руля вычисляют по формуле
- . и» sin 6» ..., . ,
а = 6R — arctg------------т—, (X11.172)
vu + 4 cos bn '
где
скорость, обусловленная действием движителя.
Действительный угол натекания потока иа движитель активного руля может
быть принят приближенно равным 0,5 бд
При выборе элементов движителя следует иметь в виду, что коэффициент q
для швартовного режима работы движителя, который является расчетным, состав-
ляет 1.2—1.3. Подробно расчет активного руля изложен в работе [51.
§ 41. СРАВНИТЕЛЬНАЯ ОЦЕНКА РАЗЛИЧНЫХ СРЕДСТВ
АКТИВНОГО УПРАВЛЕНИЯ
Наиболее универсальным САУ является поворотная колонка, которая наряду
с обеспечением высокой эффектинности управления может быть использована и
как резервное средство движения, что весьма важно для судов с дизельной энер-
гетической установкой, минимально возможная скорость которых ограничивается
6—7 уз из-за неустойчивости малой частоты вращения дизеля. Основным недостат-
ком конструкции этого типа является малая защищенность и опасность ее механи-
ческого повреждения Этого недостатка лишены ПУ. однако их гидродинамиче-
ская эффективность на 10—15 % ниже, чем эффективность поворотных колонок
прн том же гидравлическом сечении рабочею органа. Кроме того, тяга ПУ с уве-
личением скорости судна резко падает, ирн качке и волнении верхние кромки ка-
нала 11У приближаются к свободной поверхности воды, что может привести к про-
pbiBV воздуха и также к падению тяги ПУ. Вследствие этого для буровых или иссле-
довательских судов, осуществляющих позиционирование в открытом море, наибо-
лее целесообразным является использование поворотных колонок, имеющих высо-
кую гидродинамическую эффективность. На таких судах применяют также водо-
ые вые ПУ с Т-образной формой канала или опускные ПУ, представляющие собой
угловые колонки с фиксированным направлением тяги. Предпочтительная область
применения ПУ с прямолинейным каналом — обеспечение портовых операций,
когда волнение и качка практически otcjtctbjiot.
Потребная тяга САУ определяется расчетом необходимого маневра судна при
заданных внешних условиях; течении, волнении, ветре (см. § 25), Для предварн-
234
тельного выбора ее значения могут быть использованы статистические данные по
тяге, отнесенной к площади погруженной части ДП: для обычных судов 100—
200 кН м2; для судов, в задачи которых входит длительное позиционирование
в открытом морс, до 1000 кН/м2.
Гидродинамическое качество различных САУ па швартовном режиме работы
представляющее собой отношение KEi'Kq3, приведено ниже:
ПУ с ВРШ ........................................................2.85
ПУ с соосными гребными винтами противоположного крещения ...... 3,20
ПУ с крыльчатым движителем................................ . . 2,65
Водометное ПУ ...................................................2,45
Выдвижное ПУ с ВРШ ........................................ . . 3.30
Поворотная колонка с гребным г в л Том в в аправляющсП наевдке .... 3,6*
Поворотная колонна с гребным ввитом без насадки ... .... 2.60
Крыльчатый движитель . ....................2,37
Активный руль .. ........ ..... 2,34
Указанная величина пропорциональна тяге, создаваемой САУ:
TF = 30,2(P^Dp)2''3КЕ К%3 (XI1.174)
где Рп — мощность приводного двигателя САУ, кВт.
В настоящее время в практике отечественного и зарубежного судостроения
конструкции, мощность и основные типоразмеры САУ стандартизованы. Мощность
известных конструкций достигает 4000—4500 кВт при диаметре гребного винта
около 5 м
Глава XHI
ИСПЫТАНИЯ СУДОВ
6 42. МАНЕВРЕННЫЕ НАТУРНЫЕ ИСПЫТАНИЯ СУДОВ
При проведении натурных маневренных испытаний судов, как правило,
предусматривают выполнение следующих маневров и испытаний:
.Циркуляция», «Одерживаппе», «Знгэаг», «Прямая» и «Обратная спираль»,
«Изменение курса» при использовании руля или поворотной насадки;
«Циркуляция», «Зигзаг» при использовании ПУ;
тормозные испытания — экстренное торможение на переднем и заднем ходу,
движение по инерции.
В большинстве случаев в процессе испытаний производят измерения параме-
тров движения судна.
В некоторых случаях, в особенности при проведении научно-исследователь-
ских работ, выполняют и другие маневры, а также производят допошнтельные
измерения, в частности замер момента на баллере руля.
Подготовка испытаний. Перед началом испытаний разрабатывают рабочую
программу и карты маневрирования, производя! подготовку измерительной аппа-
ратуры н отрабатывают взаимодействие испытательной партии и судоводителей.
В период подготовки судна к испытаниям производят проверку исправности
рулевых устройств; устанавливают н опробуют в действии измерительную аппа-
ратуру; обеспечивают заданную программен загрузку судна и определяют его
водоизмещение по кривым элементов теоретического чертежа на основе замерен-
ной осадки н плотности воды; определяют начальную метацентрическую высоту
по результатам расчетов или креп ваоня.
Условия проведения испытаний. Значения скорости судна и загрузки для каж-
дого маневра определяют в зависимости от назначения судна В общем случае ма-
невренные испытания производят при спецификационных значениях водоизме-
щения и осадки. Распределение загрузки должно обеспечивать посадку судна прн
отсутствии крена. Отклонения от заданных программой значений фиксируемых
параметров не должны превышать: водоизмещение — примерно 3 %, крен — прн-
235
близителыю 1э, разность между осадкой носом и кормой — примерно 0,04 м, обо-
роты винта для заданной скорости — приблизительно 3 %. Глубина в районе ис-
пытаний не должна быть менее наибольшего значения, определяемого как Н =>
— \[ВГм или Н = 2,75 vs/g, где В, Ты н о4 — ширина, осадка и скорость, уз,
судна соответственно.
Маневры «Прямая» и «Обратная спираль», «Зигзаг», «Одерживавне», а также
испытания управляемости с использованием ПУ производят при силе ветра, ие
превышающей 2 балла ио шкале Бофорта. Остальные маневры выполняют при вол-
нении моря не более 3 баллов н силе ветра, не превышающей 4 баллов по шкате
Бофор! а.
Измерительная аппаратура. Для получения необходимой информации в про-
цессе проведения маневренных испытаний могут быть использованы как штатные
судовые информацнонно-нзмернтельные системы, так и специально изготовленная
измер тельная аппаратура. Выбор средств измерения определяется Допустимой по-
грешностью. особенностями судна, возможностью регистрации н оперативного
контроля необходимых параметров с использованием судовых систем. Для удобства
обработки материалов целесообразно производить спнхропиуж) запись измеряемых
параметров (кроме траектории судна) с использованием самописцев, осциллографов
или магнитозапнсывающей аппаратуры. В процессе испытаний производят изме-
рение и регистрацию траектории движения судна, угла и угловой скорости изме-
нения курса, углов крена и перекладки руля, скорости судна и частоты вращения
гребного вннта. Определяют также скорость и направление ветра с использованием
апеморумбометров, а >акже оценивают состояние моря по данным визуальных на-
блюдений или гидрографической службы.
Измерение траектории движения судна целесообразно производить с исполь-
зованием судовых радиолокационных claimin'! или штатных навигационных при-
боров Большинство современных судов оборудуют автопрокладчпками, позволяю-
щими регистрировать картину маневрирования судна. В отдельных случаях, при
повышенных требованиях к точности измерения, особенно при выполнении тормо-
жения, могут быть использованы фазовые радиометрические и радиолокационные
методы измерения, требующие специальной подготовки, развертывания береговых
постив и размещения дополнительной аппаратуры на судне.
Прн отсутствии приборов специальной конструкции с компенсацией центро-
бежных сил следует применять оптические методы измерения угла крена. Обяза-
течьным условием в этом случае является возможность наблюдения линии гори-
зонта.
Измерения угловой скорости н угла курса, углов крена, перекладки руля,
скорости судна и частоты вращения впита производят, как правило, с использова-
нием штатных судовых систем — авторулевого, лага и тахометров.
Методика проведения испытаний. Циркуляция. Циркуляцию произ-
водят на об.1 борта на максимальной, средней н малой скоростях судна с максималь-
ным углом перек адки руля. Маневр выполняют следующим образом: при движении
судна прямым курсом с заданной скоростью быстро перекладывают руль па мак-
симальный угол па прапый борт (ПБ) и выдерживают его в таком положении до
момента изменения курса судна на 54O'J относительно первоначальною (по репи-
теру гирокомпаса). 11осле этого руль возвращают в исходное положение, судно
выводят па новый курс. После достижения заданной скорости и прохода вызван-
ной волны повторяют маневр на левый борт (ЛБ).
Если циркуляция с большими углами перекладки рулей прн максимально)!
скорости дизельных судов приводит к перегрузке двигателей, то испытания прово-
дят при несколько поннжеинон скорости, чтобы не изменять положение регуля-
торов подачи топлива па циркуляции.
В процессе выполнения маневра производят регистрацию траектории судна,
угла крена, скорости судна н частоты вращения впита в зависимости от времени.
Фиксируют продолжительность изменения курса на 90 и иа 180°, крен и потерю
скорос'111 па циркуляции. Результаты испытаний оформляют в виде диаграмм, при-
веденных па рис. X1I1.1.
О д е р ж и в а н н е. Этот маневр выполняют прн наибольшей скорости судна
в следующей последовательности: при движении судна полным ходом на прямом
курсе руль перекладывают на ПБ иа угол порядка 20°; после выхода судна на
236
установившуюся циркуляцию руль возвращают в нулевое положение и выдер-
живают до момента достижения постоянного значения скорости изменения курса
(контроль осуществляют по величине электрического сигнала, снимаемого с соот-
ветствующего блока авторулевого)
Маневр повторяют на ЛБ.
По результатам испытаний строят зависимости скорости изменения курса от
времени х = f (0 и определяют конечное значение «о = х (рис XIII.2).
Рис. XIII.1. Маневр «Циркуляция»: а — циркуляционный круг и его элементы;
б — зависимость скорости судна от времени; е — диаграмма выдвига и смещения.
Зигзаг. Испытания производя! на максимальной и средней скоростях судна
следующим образом при движении судна па прямом курсе с заданной скоростью
персктадывают руль с максимальной скоростью на ПБ на угол 20е и выдерживают
его в таком положении до момента изменения курса судна на 20° на ПБ; в момент
изменения курса на 20е на ПЬ отноентатыю первоначального перекладывают руль
с максимальной скоростью на 20° ЛБ и выдерживают его в таком положении до мо-
мента изменения курса судна на 20° на ДБ относительно первоначального.
237
Таким образом выполняют не менее 2 перекладок руля на ПБ и на ЛБ, и за-
тем руль возвращают в первоначальное положение. В процессе испытаний регистри-
руют угол курса и угол перекладки руля, угол крена при зарыскиванни судна на
ЛБ и ПБ, частоту вращения винта в начале н в конце маневра.
По результатам испытаний строят диаграмму, приведенную иа рнс. XII1.3.
Прямая спираль. Маневр выполняют следующим образом: прн двн-
жепш судна с постоянной скоростью на прямом курсе руль перекладывают на 25°
ПБ и удерживают его в таком положении до момента установления постоянного
значения угловой скорости х = ь>с; прн достижении постоянного значения у угол
Рис. Х111.2. Параметры маневра
«Сдерживание»: а — устойчивое
судно; б— неустойчивое судно.
Рнс. XIII.3. Маневр «Зигзаг».
псректадки руля уменьшают на 5° и выдерживают его в новом положении до мо-
мента установления постоянного значения у.
В указанной последовательности продолжают пены гания до тех пор, пока
руль не будет переложен с 25’ ПБ на 25° ЛБ. Маневр повторяют на ЛБ. В диапа-
зоне углов перекладки руля ±5° ступени перекладки уменьшают до 2°.
В процессе выполнения маневра регистрируют угол перекладки руля и скорость
изменения курса судна. По результатам испытаний строят диаграмму, приведенную
на рис. XIII.4
Изменение курса (определение диапазоне скоростей судиа н частоты
вращении гребного винта, при которых судно еще слушается руля). Маневр выпол-
няют следующим образом: при движении судна на прямом курсе со скоростью 6—
8 уз руль перекладывают на 10° ПБ и выдерживаю! в таком положении в течение
30 с, после чего руль перекладывают на 10“ ПБ и также выдерживают в течение
30 с; р\ль возвращают в нулевое положение и выдерживают в этом положении в те-
чение 30 с; после возвращения судна к прямому курсу и достижения первоначаль-
ной скорости повторяют маневр с перекладкой руля на 35°.
Испытания повторяют со снижением скорости на I уз до значения скорости,
при которой судно больше не слушается руля В процессе испытаний регистрируют
и записывают данные, приведенные в табл. XIII.I.
Экстренное торможение ив переднем и заднем ходу.
Испытание проводят на полной и малой скоростях судна. При движении па прямом
£38
курсе по команде «Полный назад! производят реверс иа полный задний ход. Руль
выдерживают в нулевом положении до полной остановки судиа.
В процессе испытаний регистрируют траекторию судна е момента подачи коман-
ды до полной остановки, фуре, скорость судиа и частоту вращения гребного винта,
В зависимости от времени, время с момента подачи команды «Полный назад» до мо-
мента остановки двигателей, время развития полной мощности назад до полной
остановки судна. При наличии возможности установки торсиометра н упоромера
производят синхронную регистрацию упора, момента и частоты вращения гребного
винта. Аналогично выполняют маневр на заднем ходу.
Результаты испытаний оформляют в вше диаграмм, приведенных на рис, XIII,5.
Рнс. XII 1.4. Параметры маневра «Спираль»: а — устойчивое судно;
б — неустойчивое судно.
Движение по инерции. При движении судна на полном переднем
коду отключают двигатель. Руль удерживают в нулевом положении. Измерения
и оформление результатов испытаний производят аналогично указанному в пре-
дыдущем случае.
Циркуляция с использованием подруливающих
устройств. Маневр выполняют при скоростях судна, равных 0—8 уз, анало-
Таблица XIII.I. Маневр «Изменение курса» при пониженной скорости
Угол перекладки руля Наибольшее откло- нение от курса» гряд руля Наибольшее откло- нение от курса» град
V >* У»
6 5 4 3 6 5 4 3
Начало 10е ПБ 0 0 0 0 Начало 35° ПБ 0 0 0 0
Конец 10е ПБ Конец 35° ПБ
Начало 10° ЛБ Начато 35° Л Б
Конец 10° ЛБ Конец 35° ЛБ
Начало 0° Начало 0
Конец О' Конец 0°
239
гичио маневру «Циркуляция» при наибольшей мощности ПУ и нулевом положении
руля. Исходный курс судна — по вс ру.
Знгзвг с пело ьз ван нем подруливающих уст-
ройств. Маневр выполняют аналогично маневру «Зигзаг» прн наибольшей
мощности ПУ и при нулевом положении руля. Угол изменения курса при пере-
ключении ПУ с ПБ на Л Б равен примерно 10°. Данпазон скоростей судна при ис-
пытании 3 G уз, исходный курс суд| — по ветру.
Рнс. XIII.5. Экстренное торможение па передтм ходу.
§ 43. СОСТАВЛЕНИЕ МАТЕММ ИЧЕСКОЙ МОДЕЛИ СУДИЛ
ПО ДАННЫМ МОДЕЛЬНЫХ ИЛИ НАТУРНЫХ ИСПЫТАНИЙ
Для решения многих практических задач, связан 1ых с разработкой судово-
дительских тренажеров, авторулевых, навигационных систем и др., необходимо
располагать матемашческой моделью судна как объекта управления, т. е. диффе-
ренциальными уравнениями движения судна.
В основе традиционных методов составления таких уравнений, как видно из
предыдущих параграфов, лежат испытания для определения гидродинамических
характеристик корпуса и средств управления судном либо оттельиых физических
моделей судов. Недостатками этих методов являются большой объем испытании
для получения массива данных, подлежащих дальнейшей обработке п преобразо-
ван ню к виду, удобному для практического использования, а также необходимость
использования сложных экспериментальных установок (iianpuxtep, ротативной,
планарного механизма), число которых весьма ограничено. В тех случаях когда
гидродинамические характеристики определяются расчетным путем с исполь-
зованием номограмм и теоретических зависимостей, остается, как правило, неяс-
ным вопрос о погрешнее!и с которой вычисляются коэфф| цн 1ты уравнений.
Учитывая эти обстоятельства, в настоящее время наряду с традиционными ис-
пользуют т кже методы, позволяющие при заданной стр к уро уравнений движе-
ния получать коэффициенты уравнений по результатам измерений параморов дви-
жения судна или модели. Эти методы, основанные па теории идентификации систем,
для своей реализации требуют, как правило, применения ЭВМ. И только для част-
240
яых структур уравнении, записанных для условии тихой неподвижной воды и без-
ветр in, удастся отпосшельно просто определить неизвестные коэффициенты урав-
нений без привлечения ЭВМ.
1 Прн существующих средствах измерений наиболее доступными и наиболее
точно измеряемыми параметрами являются курс, угловая скорость и ск< ть судна
или его модели. Однако эти параметры ие дают полной информации об идентифи-
цируемой системе, в которой присутствуют еще угод дрейфа и его производные.
(Поэтому чаще всего прн решении задачи идентификации ограничиваются упро-
шенной математической моделью судна, пригодной для описания маневров изме-
nei иг курса [15]
, Так. например, XIV Международной конференцией опытовых бассейнов
|МКОБ) наряду с полными математическими моделями, описывающими движение
судна, рекомендовано в задачах управляемости использовать уравнение вида [29]
Лг. + (Г, 4- Г2)-~- 4- Щ 4- II (о) =
(XIII.1)
коэффициенты которого определяются по данным натурных нзн модельных испы-
таний.
Уравнение (XIII. 1} мож т бы > получено из нстемы ypaeuei нй вида
“гт—F 7iiP + ------ И (w) 4- — 0;
ш Чз1
—I" 7aiP 4~ r3iCJ 4* ssi^R — 0.
(XIII 2)
причем T,T2=\/q-. Tt t- T = 2p.'q\ К = S'q; KT — — 7 = 721r3i — q3^u,
s = ffaiS-zi —7siSsi 2p = r-n 4- <72i-
Ча:то функцию II (co) представляют кубической параболой:
Il (w) = Т*| | | <J) 4- V^OJ3-
(ХШ.З)
1 Если судно не обладает устойчивостью прямолинейного движения (q< 0).
то Г| <5 0; Т2> 0; /< < 0; v, < 0; Т3 > 0; если обладает такой устойчивости
[7 > 0). то Т| > 0; Тг > 0; К > 0; v, >0; Т3 > 0. Знак va зависит ие только от
устойчивости судна, по и от вида диаграммы управляемое при больших 6д.
W В приведенной системе (X III.2) второе уравнение совпадает по структуре с урав-
Випем (V1.32), в то время как первое отличается от (VI.3I). Эю отличие сбу-
Мювлеио фюрмой представления боковой гидродинамической силы па корпусе,
ксюрая в свете рекомендации МКОБ определяется ие углом дрейфа, а угловой
Скоростью. Такое представление боковой гидродинамической силы можно полу-
чить если формальи принизь, что полюс поворота
f со = | IJ-
(XIII 7)
• де = [Т 7',1^i1(/al; kt —v, \*|.
Для нахождения коэффициентов уравнения (XII1.1) используют эксперимен-
тальные зависимости е»с (бй) на установившейся циркуляции и записи изменения
кинематических параметров при маневре «Зигзаг». Зависимость тог (6Й) позволяет
определить коэффициенты V,, v2 и К. а данные маневра «Зигзаг»— коэффициенты
1. Т, и Т3. которые будут* зависеть от скорости судна.
Для вычисления коэффициентов v,. v2 и К зависимость ыс от 6П представляют
в виде
= «I + с > | «г | Б
(XIII.5)
1=1 К; аг = V, К; а3 = vsK. Чис етые зпачеи к эфф> цнентов ап к-
С|,мацнн и,. аг и ач иа тба ее просто определяют путем применения метода «вырав
иивзпияэ. При этом производят следующие вычисления.
Выбирают ряд значений аргумента иС( с шагом Дшс, дтя которых определяют
значения вел1чнпы wCi-
241
Вычисляют
у = ®н И----------§я[_ . = 2й)с( 4 (XII1.6)
Строят график зависимости Yi от Х|, который аппроксимируют прямой. Отрезок,
отСекйп1Ь)й зтбй прямой на оси Y, равен Y (0) = а2 Де>с. а тангенс угла ее наклона
v Л7
и оси X равен = а8 Д<о£, откуда
аг=У (0); Дад Оз = "jjy/ &ы<> (XIII 7)
Значение с находят по формуле
<4 = —-------------—----------------- . (XIII
Методы вычисления коэффициентов 7\, Т,, Та, используемые в настоящее время,
базируются, в основном, на минимизации функционалов, отражающих требования
наибольшей близости экспериментальных и'полученных расчетом значений кi не-
матических параметров (метод максимального правдоподобия, метод минимума
квадрата ошибки н др.).
Если в качестве функционала выбрать интеграл
/= |(«эке-«)*Л. (XII 1.9)
о
где шэ11С — экспериментальное, а <о —рассчитанное значения угловой скорости,
то для вычисления коэффициентов Ть Т2 и Т3 можно составить уравнения чувст-
вительности
+ (Л + Тг) й, + u, (1 + 2v, | <о | + 3v!l0«) = -Тг£> — <i>;
ТгТгй2 + (Г, + Т2) й3 + иа (1 + 2vi | <й | + 3v2(o») = — <i>;
Т1Т2й + (Tj + 7j) й3 + йэ (I + 2vj | o) | + 3v2<o5) = Абд,
(XIII. 10)
Seo du, . _ d2ui ; cfCfl
где “'=^7= Ui=-rfT’ u,=-rfp-’ 6n = "dr-
Совместное решение уравнения (XIII. 1) и системы (XIII. 10) прн начальных
условиях
щ (0) = й, (0) = О (XIII.Н)
позволяет найти частные производные интеграла (XI1I.9)
t
= -2 f («аис - «) «1 Л (X111 12)
о
и применить одни нз методов ею минимизации.
Сходимость методов зависит от точности начального приближения коэ<]фИ'
цвентов Т(, для задания которых можно воспользоваться следующими рекоменда-
циями:
, в? , (XIII 13)
<и0 яЛх°
где ю — значение производной угловой скорости в точке ы = 0, которая может
быть определена графическим способом; Ах — амплитуда угла курса; о — частота
установившихся колебаний при маневре «Зигзаг»;
|7’!|®|Г8|«(О,1О4-О,15) |Л|. (XIII Н)
242
. Подбор коэффициентов Т, можно осуществить на аналоговых ЭВМ и без исполь-
еования функционала (X1II.9), взяв за основу рекомендованные начальные зна-
чения коэффициент >в и потребовав, чтобы эксперимснталь ые н расчетные зна-
чення частоты установившихся колебаний и амплитуды угла к енв совпадали,
» а сдвиг между двумя процессами во времени равнялся тулю.
Если кинематические параметрь прн ма 1евре «Зигзаг» получены нрн иачаль-
« еых условиях: t = 0; ь> = 0; х = О = 0, вычисление коэфф «mei гов Tt можно
В осуществить по следующей схеме.
Интегрирование уравнения (X 11.1) по времени при указанных i ачальных
! условиях дает
Рис XIII.6. Вид модулирующих функ- Рис. XIII.7. Изменение кннематиче-
Ции. скнх параметров судна при маневре
«Зигзаг» н определение слагаемых
уравнений (XII 1.18).
j Чтобы с помощью уравнения (X 11.15) определить коэффициенты о. b и с, сле-
дует его еще один раз проинтегрировать по времени. В результате повторного ин-
тегрирования, выбирая пределы интегрирования ть т2 и тя, можно получить
Кловия, связывающие измеряемые кинематические параметры и х с искомыми
коэффициента* i т. е
о
>э — Д'б) dt dt — с j 6Л dt = 0, i = I; 2: 3.
(XIII.16)
I На практике, однако, удобнее в л ьзоваться другим методом, предвари-
^В>но умножив все слагаемые уравнения (XIII. 15) иа функции А,-, вид которых
доказан на рис. XI 11.6. Интервал времени т, в котором определены функции Ftl
^Иуст выбирать так, чтобы в него укладывались 3—4 размаха колебаний
<ри. XIII.7). Для вычисления коэффициентов а, Ь и с в этом случае надо решить
систему уравнений
ЗФ
tit
d/4 — nF-
-dr = tofi’
(XIII. 17)
dl-ti
dt
243
при начальных услов! их I = 0; <о = 0; 6ц = 0. Ф — 0 /д = 0 и определить
величины
2
Л — ~ (Хт 2Хт( з);
L = т (Х< ®Хзт/4 * ®Хт 2 ~ 2Хт ч);
^з= “^“(Хт 2/-т 6 " ^Хч-г/6 ^Хзт/e ^Хзт 6 2х</б»
которые входят в следующую систему
oLi + Мп — с/ег 4- /at = О;
c£g Ь1ц — c^aa 4" ^я — 0;
uZ. bl $— <Лз4- 1st — 0
(XIII 18)
(XIII 9)
Смысл входящих в формулы (XIII.18) величин ясен из рис. XIII 7
Определив коэффициенты а, 6 н , значения 7\ Тг и 7j можно найти по фор-
мулам
Ч\ = -у- + (sign b) j/ ci
?г = — - (sign t>) J (_Ly_0;
r8 = -i-.
(XIII 20)
Более точное по сравнению с (XIII.1) уравнение получается, если вместо си-
стемы (XIII 2) рассмотреть систему вида
+ flsiP + 72101 + /1 (Щ) == —sti^n!
—Ь fl + '’si01 4- 1г ы) = —ssi®Hi
где dt = о dt L‘ ш = hiL 'o;
/Jw) = v, | ю | w + vso)3;
= Hj | (О I <0 + HaCi)S.
(XII .21)
(ХТП 22)
Здесь «! и n2 — коэфф i nei ы момента, аналогичные по смыслу коэффициент?'
сн ы V, и vt
Система (XIII.21) приводится к одному уравнению второю порядка относи-
тельно переменной й:
Д^-+ (2р + -^Л + fl°> + (flat s — flsi i) = s6n - S31 (XI 11.23)
« “ \ dm / яп> u 1
Здесь 2p, ч и 5 определяются формулами (VI.26), (VI.27) и (VI.29). Обозначая
fl»."i-flsi'i = »'i; 1 (XI 11.24)
9 |л« — <?31vt = J
244
с учетом формулы XIИ.22) получим:
+ (2р + 2nt ш | 4- 3ntcB2) + I (о,(й +
_ — —__________________ titjS п
+ с2св | ш | + а3соя — 6Д) = — %i .
(XIII 25)
где О| = ф'®; a2 = mlfs-, а3 = m^s. Определение коэффициентов этого уравнения
V ирон в |дят по записям параметров со, v и бк при маневрах «Установ евшаяся пир
кутят я», «Вход в циркуляцию» н «Одержав тис» («Выход нз циркуляции»), Ис-
г пользе я ука внные за шеи, строят кривые й (т) на режимах «Вход в циркуляцию»
1 и «Од ржнванис и кривую ыс (6ц) Коэффициенты в,, йг н а3 определяют с псполь-
зов ।пнем крив и «о? 0д) аналогично тому, как это описано выше примы it тыю
к коэффициентам u2 i о3 |см. ф рмулы (XII 1.7) i XI 1.8)1. Остая иые коэффн-
Кцкснты уравнения (XIII.25) находит в следующем порядке.
Т Рас магривают совместно два переходных процесса, соответствующих режи-
мам «Вход в циркуляций» и «Одержнваинс». Применительно к устойчивому седлу
они изображу ы иа рис. XIII.8.
И сопоставлен 1Я характера изменения кии и<тическнх параметре в в указаи-
пых режим х пр i т о.5йс. где т0 -(?с соответствует моменту. когдай досшгает
значения 0,5йс, вытек ют следующие приближенные раве ictb .
dr2 /т*т0 5й « 0;
" ,т>то.5йс '
0;
(XI 11.26)
Уравнение (XI11.23) г imi телыю к рас матрнваемым режимам запишется
соответственно в виде:
для режима «Вход в циркуляцию»
-^7“ + (2р 4- 2л, | со | 4- Зп.ш2) 4- s (^св 4- а2 | ь> | ш 4- очё? — 6П) = 0;
(XIII.27)
дл режима «Одерживай не»
— (2р 4-2'h I й, |) s (QjO, 4-аг] | mJ. (ХП1.28)
При паписанн I п следнего уравнения приято во внимание, что в да сном режиме
При с >т05йе значение й х ло, а 6П = О
| ^Учитывая равенства (X 11.26) н п дета вл я я в уравнен! (XIII.27) вместо
(а
его значение нз уравнения (XI 11.28), получаем:
2л* (св 4- ь>1 j Зпгсв2 4- s l^i cou +
+ о» (св 1 ы | 4- wi ю, |) 4- о3ы’ — 6Я] = 0.
(XIII 29)
245
Интегрируя уравнение (XI 11.29) почленно в пределах от т0 BSp до if. будем иметь
(XI11.30)
[а2 (ы’ + <U|) + c3a?] dr,
| Для нахождения отношений коэффициентов n^s и л8 5 используют метод >вы-
1рави 1вания». Для его реализации вычисляют значения фу кций X (г,) =
С (т/)'Р (Ti); У От) = —Ф (ъ)’Р (т,). Тогда уравнение (X 111.31) принимает вид
-ф- + -^-Х = Е. (XIII.32)
Зн hhhjJj/Jjh находят как коэффициенты уравнения прямой. При этом Y (0) =
| Для неустойчивого судна функции Р (т£), Q (tJ н Ф (т;) будут иметь несколько
отличные выражения:
Р (т.) = w2 — uf - 0,5 (шс — ш0)2;
(?(Т;) = Й3—(й£-й0)3;
Ф (\) = [°1 (Ч + %) - М (т< - T0,S (<5c_Og)) +
f KR+^i)+ °зС« +w’)JdT,
т0.5 (&c—O0)
(XI 11.33)
где йо — безразмерная угловая скорость судна при бп = 0.
Для определен ня трех оставшихся неизвестных 2р, s и $31 используют кривую
в менения ы (т) или (т) на начальных участках переходных режимов с момента
терек-тадки руля до момента т = т0 Уравнение (XI 11.25) представляют в виде
2л । — 3dg —du
(Рш , „
^ + 2р
Рнс. Xlll.fi. Изменение кинематических параметров при входе судна в цирку
линию (и) н при сдерживания судна (б).
+ сцш 4- с2 | w | и 4- с3ш3 — 6К j 4- s3I = о.
По пенное двукратное интегрирование этого уравнения, например, примени-
тельно к режиму сдерживания прн начальных условиях (rt<o»/rfT)x=iO = 0;
= <»с: (ъд)г=о = Дает следующее равенство:
шс + 2р j (<>,
“Л + -у- (w3 — и3)] dr 4-
+ рт] (aIto1+eX + eX-6fi)dtl + s3, J(6«-6№)dT= О, (ХШ.З!)
о О J о
или
2pL (т.) + SA1 (тг) + s3lH (т() = R (Т1). (XIII.35)
Выражения для функций L (тг). М (Т|), А/(Т|), R (Т() можно получить, сопостав-
им формулы (XIII.34) и (XIII 35).
Для нахождения искомых коэффициентов 2р, ли s.. уравнение (XIII.35) пред-
яэвдяют в виде
или
-у-Р(т<)+-у-<2(Т|)=—Ф fri)- (ХШ.ЗО
Выражения для функций Р (т4), Q (Tf) и Ф (т4) легко получить из сопоставления
формул (X1II.30) и (XI1I.3I).
246
247
откуда 5*|- 2pXi = Yгде
При этом 5 = У (U); 2р = dY/dX;
Для контрольного определения численного значения коэффициента следует
произнести экстраполяцию графика функции ш'т1 на начальном участке режима
«Вход судна в циркуляцию» и определить ее значение прн х = 0 (либо применить
ту же процедуру для функции (<о — <Ьс)/ха на начальном участке режима^ «Одер-
1 I d2<"
живапне»). Полученное значение будет соответствовать значению t 0»
df>
равному — sai-^r, а
Для определения угдовой скорости ы прн использовании уравнения (XI 11.25)
входящие в него величины й и dr следует выразить через (о и dt по формулам (X 111.21)
и решать его совместно с уравнением, описывающим изменение текущей скоросп
судна v при том или ином маневре, которое приближенно представляется в виде
(и! + ?.,,)--Ь х„, (т 4~ Xjj) -)—Л0Сл'и- = Те,
где значения коэффициента Сх и тяги Те принимают по данным расчета ходкости,
а величину хш определяют по результатам замеров скорости v и угловой скорости ю
иа установившейся циркуляции судна или его модели (при dvlat = 0) в предполо-
жении, что тяга Те при переходе от прямолинейного движения к криволинейному
остается неизменной, а ее фактическое изменение учитывается коэффициентом хш
УКАЗАТЕЛЬ ЛИТЕРАТУРЫ
I. Анисимова Н Н Позиционные гидродинамические характеристики с>дсв при
произвольных углах дрейфа — Судостроение. 1968, К« 5, с 4
2. Афрсмов А. Ш. Рыскание судов па волнении. — Труды UIIHIt нм. вкад. А. 1>. Кр -
доев. 1966. вип. 232. с. 3—20.
Я. Басин А М. Ходкость и управляемость судов М.. Транспорт. 1968
4. Войткуискнй Я- и.. Псршиц P. Я., Thiob И. А. Справочник по теории корабля
Л., Судостроение. 1973.
5. Гофман А Д. Теория и расчет поворотливости судов внутреннего плавания.
Судостроение. 1971.
6. Лебедев Э. П., Псршиц Р. Я., русепкчй А. А. и др. Средства активного упрввле*
вин судами. Л., Судостроение, 1969.
248
7. Мастушкнн Ю М Управляемость промысловых судов. М Легкая я пищевая
промышленность, 1981.
8. Павленко В Г Маневренные качества речных судов. М.. Транспорт, 1979.
9. Першиц Р. Я Нормирование эффективности средств активного управления суд-
ном. — Судостроение. 1973. М 9. с. 8—Л.
10. Першнц Р. Я. Проектировочный расчет площади руля судна. — Судостроение.
1981, М 10. с. 10—11.
>1. першнц Р Я. Управляемость н управление судном. Л.. Судостроение. 1983.
12. Псршиц Р. Я.. Немзер Л И Об управляемости судна на течении. — Труды НТО
Судпрома. 1971. вып 169. с. 4—8
13. Першнц Р. Я-. Юдин L Ь. Выбор кормового подзора н площади руля судив с по-
мощью второй критической точки диаграммы управляемости. — Судостроение, 1966, № 6,
с. 6— >0
14. Русскими Л Л. Оборудование и организация iидроаэродииамическнх лабораторий
Л., Судостроение. 1975.
15. Соболев Г. В. Управляемость корабля и автоматизация судовождения. Л., Судо-
строение. 1976
16. Федяевский К. К-, Соболев Г. В Управляемость корабля. Л., Судпромгнэ. 1963.
17. Фирсов Г. А. Формула для расчета крена корабля нв установившейся циркуля-
ции. — ИЭв. АН СССР. О1Н. 1946. У» 5, с. 679—68?.
18. Шапошников И Г Оценка взаимодействия подруливающего устройства с корпу-
сом судна. Труды НТО нм. акад. А. Н. Крылова Л . Судостроение. 198|. вып. 358, с. 61 — 79
19. Юдин Е- Б. К расчету управляемости океанских буксиров. — Судостроение. 1984.
М 7. с. 9—10
20. Юдин Е. Б.. Маковский А. Г Анализ самопроизвольною рыскания буксируемых
судов. — Судостроение. 1975, А« 4 с. 15—17.
21. Alrernoff Л Sh., Nikolaev Е Р. Jawing o' a Ship Steered by an Automatic Pilot
In Rough Seas. — Journal Mechanical Enqlncering Science, 1972, vol. 14. N 7.
22. Brix J. Doppelquerstrahlanlage der Einfluft der Tunnelabstandes auf die Querkraft
Und die I eistungaufnalnne. — Hansa. 1974, N 218. S. 2027—2040.
23. Collate G. Potenzlal Thcoreibclie Untersuchung der Hydrodlnamlschen Nechselwlr-
Rung rweicr SchlflskCrper, — Schiff und Halen, 1963, N 12.
24. FuftnoM., Sari ta T. Experlmcnlal Studies on the Effectiveness of the Side Thruster. —
Kapsai Zosan Kokami. 1978. N i68. p. 35—44
25. Newlon R. N. Some Notes on Interaction Effects between Ships Close Aboard In Deep
Water. —• Shipbuilder and Marine Engine Builder, 1961. vol. 68, N 641.
26. Nikolaev E. P and Lebedeva M. P. Он the Scale Effect in Ship Model Manoeuvring
Tests. — 16th ITTC Newsletter, 1979. Ok!.. N 1.
27 Mkotaev E., Lebedeva M. On the Nature of Scale Flfect In Manoeuvring Tests wilh
Full-Bodied Ship Models- — I3**1 Symposium on Navat Hydrodynamics. Tokyo. 1980.
28. Norrbln N H Steuern bei gerlnger Fahrt Problems und Hitfsmlttel — Hansa, vol
101, N 10. S. 1011 — 1027.
29 Proceedings ol the 14lh ITTC, Ottawa. t975.
30. TantguchiK. Watanabe K., Kasai И. Investigations Intothe Fundamental Characte-
ristics and Operating Performances of Side Thruster. — Mitsubishi Technical Bulletin. 1965.
N 35.
3|. Voancssemky Q. 1., Afrcmoll A. S. Melhod for Solving Nonlinear Problems of Ship
[Motions in Three-dimensional irregular Waves. — Jubilee Memorial W. P. A. van L amine*
ren Amsterdam, I97t).
Раздел второй
ГИДРОДИНАМИКА СУДОВ
С ДИНАМИЧЕСКИМИ
ПРИНЦИПАМИ ПОДДЕРЖАНИЯ
gCHOBHblE
ОБОЗНАЧЕНИЯ
Ао — площадь диска гребного винта
Ас — площадь спрямленной поверхности лопастей.
Ае/Ао — дисковое отношение.
а = hB!'2 — амплитуда волны.
Вд и В — ширина судна по скуле на миделе и на редане.
ВТр — ширина судна по скуле на транце,
о — хорда крыла (пластины).
С — коэффициент полного сопротивления натуры
Сдд — коэффициент сопротивлении воздуха.
Сар, Ср, — коэффициенты сопротивления соответственно высту-
Сг, Сд пающих частей, давления, трения, трепня из-за
шероховатости обшивки.
во = С/(?Вях) — коэффициент статической нагрузки.
Ср — коэффициент нагрузки гребного винта по упору.
D — диаметр гребного винта.
Dxx—дисперсия процесса х (0.
Вц—диаметр циркуляции.
е — максимальная толщина профиля.
ес — максимальная стрелка прогиба средней линии про-
филя.
Я — ускорение свободного падения.
G — сила тяжести (водоизмещение) судна.
h и hlb — погружение и относительное погружение крыла.
hB — высота волны.
hd и hq — поперечная и продольная начальная метацентри-
ческая высота.
[х, 1ц, 4 — моменты инерции массы судна относительно соот-
ветствующих осей.
I — относительная поступь гребного винта.
Кр и Kq — коэффициенты упора и момента гребного винта.
L, В, Т — главные размерения судна.
Век — длина судна по скуле.
La, Вп, Тп — размерения, характеризующие воздушную подушку.
I — размах крыла; смоченная длина пластины.
Мд н Му — восстанавливающие моменты по крену и по диффе-
ренту.
m — масса судна.
п — частота вращения гребного винта.
Пу н лг — вертикальные и боковые перегрузки соответственно.
Р — шаг сечения лопасти.
PD — шаговое отношение.
Рв — мощность энергетической установки.
Ре — буксировочная мощность судна.
250
Ръ — атмосферное давление.
рв — давление насыщенных паров.
рп — избыточное давление в ресивере.
Ри = Pn'lf'Sf-) — относительное давление в воздушной подушке (ВП).
Рн 11 Рк — давление в монолитных элементах носового и кормо-
вого гибких ограждений (ГО).
Q — расход воздуха, воды
fipi' 2G.Р _
— коэффициенты расхода соответственно по высоте и
и 0о= площади ВП.
R — полное сопротивление натурного судна.
Rp — сопротивление давления.
Rp—сопротивление трения.
Ra — дополнительное сопротивление трения из-за шеро-
ховатости обшивки.
Ялл, 11 Rap — сопротивление соответственно воздуха, крыльев и
выступающих частей.
Ягр. в. ^ирон ) — сопротивление соответственно наклонного гребного
н J вала, кронштейнов валопроводов и рулен.
/?ц — радиус циркуляции.
лн — радиус ступицы.
S — площадь.
— площадь проекции корпуса на мнделевое сечение.
— спектральная плотность волновых ординат.
$лх — спектральная плотность случайного стационарного
процесса.
Т — упор гребного винта.
v — скорость судна.
пА — поступательная скорость гребного винта.
ьв — скорость ветра.
V—объемное водоизмещение судна.
ITx, v—передаточная функция от процесса х (/) к про-
цессу у (/).
А^ — продольная сита, возникающая при дифференте судна.
xg — абсцисса центра тяжести (ЦТ).
Xg = Xg,l. — относительная центровка.
xp»t — значение амплитуды процесса х (/) с обеспеченно-
стью р %.
2н — боковая сила, возникающая нрн накрененни судна.
2 — число лопастей гребного винта.
Zp — количество гребных виитов.
а — угол атаки профиля.
ав — угол волнового склона.
Одоо и Дод — угол нулевой подъемной силы профиля, соответ-
ствующей безграничному потоку, и изменение этого
угла, обусловленное влиянием свободной поверх-
ности воды.
₽ — угол дрейфа.
Ра- ‘Га. Ча — амплитуды соответствующих величин.
Рв — курсовой угол волны
Рир н ^кр — Углы килеватости и стреловидности крыла
Рк. ₽р. Ртп — углы килеватости иа миделе, редане и Транце.
У — удельный вес воды.
6 и Лс — относительная толщина и кривизна профиля.
6g — угол отклонения закрылка,
в — обратное качество судна.
251
»1D — пропульсивный КПД.
Но — КПД гребного винта в свободной воде.
>. — удлинение крыла; относительное смоченное удлине-
ние пластины.
?в — длина волны
v — кинематическая вязкость.
р — плотность воды.
рв — плотность воздуха.
оЛ — число кавнтацнн гребного винта прн скорости
— угол рыскания.
4 — угол дифферента.
й — площадь смоченной поверхности судна.
ш — круговая частота волн.
Шн — относительная частота встречи судна с волной.
Г лава I
ГИДРОДИНАМИЧЕСКИЕ И КОНСТРУКТИВНЫЕ
ОСОБЕННОСТИ СУДОВ С ДИНАМИЧЕСКИМИ
ПРИНЦИПАМИ ПОДДЕРЖАНИЯ (СДПП)
§ 1. ОСНОВНЫЕ ПРИНЦИПЫ ДИНАМИЧЕСКОГО ПОДДЕРЖАНИЯ
КЛАССИФИКАЦИЯ СДПП
Равновесие неподвижного водонзмещающего судна определяется взаимодей-
ствием двух сил — силы тяжести и гидростатической силы поддержания При дви-
жении судна с малыми п умеренными скоростями эти силы по-прежнему определяют
равновесие судна, но по мере роста скорости гидродинамические силы возрастают и
оказываются соизмеримыми с силами гидростатической природы. Рост гидродина-
мических сил сопровождается изменением посадки судия и приводит к посюпенному
выходу его корпуса нз воды н уменьшению смоченной поверхности. Режим движе-
ния. прн котором поддержание судна определяется главным образом гидродина-
мическими силами, называется глиссированием
При глиссировании гидродинамические силы поддержания формируются не-
nocpcjeiBeiiiio иа корпусе судна, которому для этой цели придается специальная
форма. Применение такой формы в режиме глиссирования приводит к значительному
увеличению гидродинамического качества, что обусловлено отмеченным выше умень-
шением площади смоченной поверхности. Для режима глиссирования характерно
существенно меньшее, чем при водоизмешаюшем режиме значение коэффициента
сопротивления движению.
Подъем корпуса из воды н снижение сопротивления за счет уменьшения пло-
щади смоченной поверхности может быть достигнуто также в результате примене-
ния специальных устройств, создающих допо1нителы1ые силы поддержания. Кон-
струкция этих устройств зависит от природы используемых сил поддержа-
ния.
Известны следующие категории сил поддержания; гидростатические силы,
гидродинамические силы, аэростатические силы, аэродинамические силы.
I и д р о с т а т н ч е с к и е силы формируются на погруженных частях
корпуса и играют определяющую роль при поддержании водонзмещающих судов
Гидролинам и чес к и е силы, обусловленные скоростью движения,
образуются либо непосредственно на корпусе (глиссирующие суда), либо на под-
водных несущих крыльях (суда на подводных крыльях) Поддержание судов на под-
водных крыльях на расчетном режиме определяется практически полностью гидро-
динамическими силами, поскольку объемы погруженных частей крыльев н стоек
относительно малы.
Принципиально возможно создание судов с комбинированной схемой поддер-
жания, позволяющей использовать как гидродинамические, так и гидростатнче-
252
сине силы поддержания, создаваемые погруженными гондолами значнтепыюго
объема.
Аэростатические силы применяют на судах иа воздушной по-
душке (СВП). Поддержание таких судив осуществляется за счет повышенного дав-
ления воздуха в замкнутой области воздушной подушки. Амфибийные СВП имеют
гибкое ограждение по всему контуру подушки. Поддержание их достигается только
за счет аэростатических сил. Область воздушной подувши скеговых СВП ограни-
чивается гибким ограждением в носу и в корме. По бортам эти суда имеют жесткие
стенки — скеги, на которых создаются также гидродинамические и гидростати-
ческие силы. Поэтому скеговые СПВ являются судами с комбинированным прин-
ципом поддержания.
Аэродинамические подъемные силы обра-
зуются на воздушных несущих элементах и крыльях Аппараты, использующие
только аэродинамические силы поддержания, являются самолетами, если они дви-
жутся на большом расстоянии от поверхности воды, или экрапоплапами, если они
движутся нв малой высоте и реализуют эффект опорной поверхности. И в том и
другом случае они представляют собой летательные аппараты. Однако аэродинами-
ческие силы можно использовать и на скоростных судах наряду с другими катего-
риями сил поддержания; подобные суда называются судами с воздушной разгруз-
кой. Приведенная выше классификация естественно относится только к расчет-
ному режиму движения; без хода плавание всех судов с динамическими принципами
поддержания обеспечивается гидростатическими силами.
§ 2. ОБЩАЯ КОМПОНОВКА И ТИПЫ СДПП
Обводы корпуса глиссирующих судов (ГС). Чтобы эффективно использовать
гидродинамические силы, развивающиеся на днище судна при движении с боль-
шими скоростями, днищу ГС придают форму, обеспечивающую глиссирование по
поверхности воды с высоким гидродинамическим качеством RD. Поскольку глис-
сирование сопровождается значительными перепадами давления н растеканием жид-
кости по днищу в поперечном направлении, приводящим к образованию брызговых
струй, переход от днищ» к борту должен исключать замывание этими струями бор-
тов судна.
Указанным условиям в наибольшей степени удовлетворяют обвозы с плоским
днищем и острыми скулами. Однако движение судна с подобными обводами на вол-
нении будет сопровождаться ударами и значительными перегрузками, а его сопро-
тивление на тихой воде при промежуточных скоростях окажется существенно выше,
чем у судна с традиционными обводами. В то же время удовлетворение требова-
ниям мореходности (снижение перегрузок) связано с переходом к килеватой форме
днища и скругленным скулам и ведет к росту сопротивления в режиме глиссирования.
Поэтому обводы реальных ГС выбирают исходя из компромисса между требова-
ниями мореходности и ходкости, причем преимущественный учет того или иного
фчктора определяется назначением судна н районом его плавания.
Как правило, глиссирующие катера имеют остроскулыс обводы с килеватым
днищем, причем кнлеватость возрастает от кормы к носовой оконечноегн (рис. 1.1, а).
Различают обводы с ичоскокилеватым днищем, у которых наклон днищевой ветви
шпангоута постоянен но ширине судна и обводы с изогнутокилевым днищем, угол
кнлеватисти которого убывает от ДП к борту (рис. 1.1. 6) Последний тип обводов
характеризуется более высоким значением гидродинамического качества и мень-
шими перегрузками на волнении. Однако технологически строительство катеров
с такими обводами значительно сложнее.
Для морских катеров характерно также применение комбинированных об-
водов — кругпоскулых в носовой оконечности и с острыми скулами в корме
’рис. 1.1, в). Переход от скругленных обводов к острым скулам осуществляется,
как правило, в сечении, расположенном несколько в нос от мидель-шпангоута.
Возможно применение обводов с «обратной» килеватостыо, носящих обычно
название обводов типа «морских саней» (рис. !.!,«)• Для катеров с такими обво-
Лами характерна высокая устойчивость на курсе, существенно меньшее брызго-
образование на тихой воде и волнении при удовлетворительных значениях гидро-
динамического качества.
253
ь
I
Рнс. 1.L Обводы i лидирующего судна, а — ослроскулые; б—с изпгнутокилеватым днищем; в — комбинированные;
«морские сани».
254
Эффективным средством повышения гидродинамического качества ГС при вы-
соких значениях числа Фруда является применение поперечных уступов на днище —
реданов. Однако катера с обводами в виде реданов обладают высоким гидродина-
мическим качеством только при малой удельной нагрузке на днище, и поэтому
подобные обводы находят применение только для гоночных катеров.
ГС, существенно отличаясь от водонзмещающнх судов по соотношению глав-
ных размерений и форме теоретического чертежа, в то же время достаточно близки
к ним по компоновке движительно-рулевого комплекса.
Крыльевые устройства судов иа подводных крыльях (СПК). Эти устройства
должны обеспечить прн всех скоростях движения на крыльях: равенство подъем-
ной силы крыльев силе тяжести судна; устойчивость движения судна в продоль-
ной и поперечной плоскостях; заданные углубления крыла и клиренс между днищем
судна и свободной поверхностью; малую реакцию иа ветровал новые возмущения.
Указанные условия могут быть удовлетворены в результате конструктивных
решений. 1) применением крыльев, смоченная площадь которых зависит >т осадки
судна; 2) использованием эффекта падения подъемной силы крыта по мере его при-
Рис. 1.2. Крылья с переменной площадью смоченной поверхности.
В зависимости от того, какое из названных конструктивных решений реали
ауется, применяются следующие основные типы крыльевых си-
стем: с пересекающими свободную поверхность элементами; с малопогружен-
иыми элементами; с автоматическим ре1улированлем подъемной силы несущих
элюентов.
Пересекающие свободную поверхность элементы ие являются единственным
средством изменения площади погруженных в воду крыльев. Аналогичный эффек
может быть достигнут за счет применения многоярусных крыльевых систем тина
«этажерки», либо пчтем установил наряду с основным крылом дополнительных
стартовых крыльев Типичные конструкции крыльев с переменной смоченной пло-
щадью показаны на рис. 1.2.
Малопогруженнымн называются крылья, для которых относительная глубина
погружения h/b не превышает 1,0—1,5, причем свободная поверхность оказывает
сильное влияние на их гидродинамические характеристики. Эти крылья обычно
выполняются плоскими ити малокилеваты.ми; они имеют трапециевидную или стре-
ловидную форму в плане. Некоторые конструктивные компоновки таких крыльев
приведены на рнс. 1,3, а. Недостатком малопогружеиных крыльев является их
расположение вблизи свободной поверхности в зоне интенсивного влияния вол-
новых возмущений. Поэтому они нашли применение главным образом иа судах,
которые эксплуатируются в условиях волнения менее трех баллов.
Глубокопогруженные крылья имеют простую, близкую к прямоугольной или
трапециевидной форму в плане Поскольку свободная' поверхюсть мало вли-
яет на гидродинамические характеристики таких крыльев, они оборудуются сред-
ствами регулирования гидродинамических характеристик Наиболее широко при-
меняемыми устройствами для регулирования подъемной силы этих крыльев яв-
ляются поворотные закрылки. Аналогичный эффект может быть достигнут за счет
поворота крыла в целом. Распространены также вентилируемые крылья, измене-
ние подъемной силы которых достигается за счет подачи воздуха. Схематические
255
компоновки глубокопогруженпых крыльев приведены на рнс. 1.3, б. Наряду с крыль-
евыми схемами, использующими определенный способ регулирования подъемной
силы, возможно применение в рамках одной крыльевой схемы различных прин-
ципов управления подъемной силой. Например, крыло, пересекающее свободную
поверхность, оборудуют устройствами, автоматически регулирующими его подъ-
емную силу; в носовом крыле иногда предусматривают пересекающие элементы,
а кормовое крыто выполняют глубокопогружеиным. В составе одного крыла мо-
гут быть малоно! ружейные и глубокопогруженные элементы.
Поперечная остойчивость судов при движении па крыльях обеспечивается
либо за счет изменения подъемной силы малопогруженных крыльев, в зависимости
от расстояния от свободной поверхности, либо за счет входа и выхода нз воды опре-
деленных площадей, пересекающих свободную поверхность элементов. Поэтому
Рис. 1.3. Компоновки малопогруженных (а) и глхбокопогружеиных (б) крыльев.
крыльевые системы, использующие подобные элементы, обладают естественной
остойчивостью. Крылья с глубокопогруженными элементами подобной остойчи-
вости не имеют, н поэтому требуется применение системы автоматического управ-
ления органами изменения подъемной силы.
Продольная остойчивость СПК обеспечивается применением двух крыльевых
ciicie.M. устанавливаемых в иос н в корму от центра тяжести (ЦТ). Возможно ра.
личное распределение нагрузки между системнмп крыльев в носу и корме (рис. 1.4).
Приблизительно одинаковые значения нагрузок, воспринимаемых носовой и кор-
мовой системами крыльев (40—60 характерны для схемы типа «тандем». Схемы,
у которых основная часть нагрузки (80—90',’и) воспринимается носовыми крыль-
ями, называется схемами самолетного типа; восприятие основной части нагрузки
кормовым крылом типично для схемы «у1К<1».
Одна из споем крыльев, носовая или кормовая, может выполняться разрез
ной — разделенной ил две части по размаху крыта. Применение разрезных крытье
позволяет обеспечить наиболее благоприятную интерференцию между носовой
и кормовой системами.
Некоторое распространение получила так называемая трехточечная схема
прн которой наряду с носовой н кормовой системами крыльев устанавливаются
дополнительные крылья в районе ЦТ.
Движигельный комплекс совмещается обычно с кормовой крыльевой системой,
органы управления располагают как на носовых, так и на кормовых крыльях
Подводные крылья служат нс только для снижения сопротивления судна при
больших скоростях движения, ио и являются эффективным средством повышения
мореходности. Наиболее высокими характеристиками мореходности обладают СПК.
оборудованные глубокопогруженными автоматически управляемыми крыльями,
256
достаточно высокий уровень мореходности может быть реализован па схемах с пе-
ресекающими свободную поверхность элементами, особенно при наличии систем
стабилизации качки. Основной характеристикой крыльевой системы, определяю-
щей уровень мореходности, является клиренс — расстояние от днища до свобод-
ной поверхности воды при ходе па крыльях. С увеличением клиренса возрастает
высота волн, преодолеваемых судном без замыва днища и значительных перегру-
зок. Увеличение клиренса сопровождается ростом длины стоек и массы крыльевой
системы, а также снижением гидродинамического качества прежде всего при про-
межуточных скоростях судна в районе «горба» сопротивления.
СПК с большим клиренсом имеют значительную осадку на плаву, что затруд
няет их эксплуатацию и базирование. Поэтому подобные суда чтст оборудуются
системами подъема крыльев. Подъем крыльев не только облегчает базирование,
Рис.] 1,4. Схемы крыльевых устройств с различным распределением нагрузки по
длине.
/ — «тандем»; // — самолетного типа; /// — «утка»: /V — с разрезным носовым крылом;
V — с разрезным кормовым крылом; V/ — трехточечная.
но и улучшает условия обслуживания и ремонта крыльев. Однако он приводит
к определенному усложнению конструкции н значительному увеличению ее массы.
Как правило, подъемными выполняются схемы с глубокопогруженными крыль-
ями. Типичные схемы подъема крыльев показаны на рис. 1.5.
Суда иа воздушной подушке амфибийного типа (СВПА). Эти суда поддержи-
ваются избыточным статическим давлением, создаваемым работой вентилятора.
В отличие от сил поддержания иа ГС и СПК указанная сила формируется при лю-
бой скорости судна, начиная от нулевой.
В процессе движения СВПА область повышенного давления находится во взаи-
модействии с набегающим воздушным потоком и водной поверхностью. Практи-
ческое применение в судостроении получили два способа образования воздушной
подушки (ВП) — камерный и сопловой, принципы действия которых ясны из" схем,
приведенных на рнс. 1.6.
Для СВПА характерно наличие гибких элементов, ограждающих область из-
быточного давления. Ходовые и мореходные качества СВПА в значительной мере
[определяются конструкцией этих элементов. Хотя СВПА поддерживаются практи-
чески только за счет сил аэростатической природы, через гибкое ограждение (ГО)
I осуществляется контакт СВПА с водой при движении на волнении и при маисв-
' рировании, а также контакт с неровностями твердой опорной поверхности.
На рнс. 1.7 показан вид снизу несущего комплекса СВПЛ. Система ГО огра-
ничивает обтасть по периметру и делит ее на секции в плане. Деление на секции
способствует созданию перепада давления между участками ВП и обеспечивает
продольную и поперечную остойчивость. ГО предназначено ие только для уплот-
9 П/р Я- И. В Лткунского, «. 3
257
Рис. 1.6. Схемы формирования воздушной подушки: а — камерная; б — сопловая.
258
пения ВП по периферии, по и для исключения по возможности контактов жесткого
кош ура с волнами и неровностями поверхности суши. В настоящее время приме-
няются различные конструкции ГО. Схемы поперечных сечений ГО показаны на
рис. 1.8. Первая схема состоит нз двух ярусов: так называемого монолитного эле-
Mcnia. обладающего большой податливостью в вертикальной плоскости, н относи-
Рнс. 1.8. Схемы поперечных сечений ГО: двухъярусная (/) и Бертена (//).
Рнс. 1.9. Компоновка движительно-рулевого комплекса CBIIA.
тельио более жесткнх^иавесных элементов. Эти элементы, открытые внутрь ВП,
формируют истечение воздуха. Они могут деформироваться в горизонтальной пло-
скости прн контакте с неровностями опорной поверхности. Указанная схема наи-
более распространена. С некоторыми изменениями она используется как для пери-
ферийных, так и для секционирующих элементов ГО.
Вторая схема, имеющая принципиально иную конструкцию, применяется
на СВПА французской постройки и состоит нз ряда замкнутых цилиндрических
или конических камер с подводом воздуха в каждую камеру.
1 Поскольку основным свойством СВПА, определяющим их эксплуатационные
характеристики, является практическое отсутствие контактов с опорной поверх-
ностью движители и органы управления этих судов располагаются на палубе. Ти-
пичная компоновка движительно-рулевого комплекса СВПА показана на рнс. 1.9.
9* 2S9
Суда на воздушной подушке скеговогп типа (СВПС). Эти суда отличаются нали-
чием жестких бортовых элементов — скегов. Скеги, будучи частично погружен-
ными в воду, создают гидростатическую, а прн двнжеишГсудна и"гидродинамн-
ческую силы поддержания, обеспечивают остойчивость п исключают расход воз-
духа по бортам судна. Мощность, расходуемая на поддержание СВПС, существенно
меньше, чем для СВПА.
Носовые н кормовые ГО СВПС имеют конструкцию, принципиально сход-
ную с ГО СВПА. Эти ГО обеспечивают минимальный аазор с поверхностью воды
Рис. 1.10. Общая компоновка
СВПС.
для уменьшения истечения и повышают мореход-
ность судна за счет снижения вероятности касания
свода жесткого корпуса с волнами.
Иа рис. 1.10 показана схема общей компонов-
ки несущего комплекса СВПС и простейшей кон-
струкции ГО. Носовое ГО представляет собой ряд
открытых навесных элементов, аналогичных эле-
ментам нижнего яруса ГО СВП \, ио закрепленных
непосредственно на жестком корпусе судна. Кор-
мовое ГО сходно с монолитным элементом двухъярус-
ного ГО СВПА. Иногда кормовое ГО дополняется
навесными элементами. Скеги СВПС используются
также для размещения движительного комплекса
и органов управления.
§ 3. ДВИЖИТЕЛЬИЫЕ КОМПЛЕКСЫ СДПП
Движители СДПП могут быть классифициро-
ваны по двум признакам 1) среде, протекающей
через диск движителя; 2) способу преобразования
энергии в <ягу. По первому признаку движители
подразделяются на три группы, в каждую нз ко-
торых входят: гребные винты и водометные движи-
тели; воздушные винты и вентиляторные движители;
газоводомстпые движители. Рабочей средой для движителей первой группы яв-
ляется вода, для второй группы — воздух, для третьей — газоводяная смесь
По способу преобразования энергии в тягу различают движители: 1) лопаст-
ные, в которых такое преобразование происходит с помощью лопастного механизма;
2) прямоточные (нелопастные), в которых непосредственно давление газа преобра-
зуется в вызванные скорости потока.
По существу, все движители, имеющие практическое применение, относятся
к категории лопастных, лишь некоторые газоводометные движители являются пря-
моточными. Наибольшее применение получили движители, рабочей средой которых
является вода, т. е. гребные винты н водометные движители.
Их можно рассматривать как основные типы движителей ГС, СПК и СВПС. Воз-
душные движители применяют на судах, не имеющих контакта с водой, прежде всего
на СВПА. Движители, работающие в воде, подразделяют по peжвмv работы на
кавитирующие и некавитирующие (в зависимости от того, воз-
никает или нет кавитация лопастного механизма).
г-'. Различают естественную, или паровую, кавитацию и искусственную кавита-
цию, или вентиляцию. При естественной кавитации сплошность
жидкости разрывается за счет снижения давления, и давление в кавитационных
кавернах близко к давлению насыщенных паров воды. Прн искусствен-
ной кавитации разрыв сплошности происходит в результате подачи в зоны
разряжения воздуха нлн газа, давление в кавернах близко к давлению в невоз
мущенном потоке жидкости. Форма течения при искусственной кавитации обычно
близка соответствующей нулевому числу естественной кавитации.
Для гребных винтов СДПП харакюрио наличие развитой естественной кави-
тации, приводящей к изменению гидродинамических характеристик гребного винта.
Естественная кавитация лопастных механизмов водометного движителя, как пра-
вило, не допускается и может возникать лишь кратковременно в процессе разгона
судна. Движители этого типа являются иекавитнрующими.
2G0
Искусственная кавитация характерна для гребных винтов. пересекающих
свободную поверхность, и возникает в результате 11рорыва*возду.ха в области раз-
режения на лопастях гребных винтов. Искусственную кавитацию применяют также
для повышения эффективности полностью погруженных кавитирующих винтов.
рабо|ающ||х"иа промежуточных режимах. Разработана конструкция водометного
движителя. нсп ттьзующая особенности развитого кавитационного течения для по-
вышения эффективности. Это так называемые вентилируемые водометные движи-
тели.
Конструкции двттжительных комплексов, применяемых на СДПП, и их раз-
мещение весьма разнообразны и зависят в первую очередь от тина судна/Поэтому
ниже рассмотрены движнтелытые комплексы ГС, СПК, СПВА и СПВС.
На ГС, как и па водоизмещающих судах, наиболее часто устанавливают греб-
ные винты с подводом мощности через наклонный требног вал. Типичная компо-
новка двпжнтелытого комплекса ГС показана на рнс. 1.11. Опорные конструкции
гребного вала обычно выполняют в виде одноланых или двулвпых кронштейнов;
Рис. 1.11. Компоновка твнжнтельного комплекса с гребными винтами на ГС.
Рис. 1.12. Расположение греоного винта па мелкосидящем ГС.
иногда их оформляют в виде единого обтекателя. Двнжителытые комплексы этого
типа обладают достаточно высоким КПД- Основной нх недостаток — обусловлен-
ный наклоном вала скос потока, приводящий к опасности кавитационной эрозии
гребных винтов. ГС, особенно речные, часто эксплуатируются в условиях мелко-
водья. На них целесообразно устанавливать движители, нс увеличивающие осадку
судна, вращающиеся части которых защищены от повреждении прн касании кор"-
пусоч дна.
Одним нз способов защиты движителей является применение тоннельных об-
водов. приводящих, как правило, к некоторому ухудшению пропульсивных харак-
теристик ГС. Схема размещения движителей на мелкосидящем быстроходном ка-
тере показана на рнс. 1.12.
Радикальное средство уменьшения осадки — применение водометных движи-
телей. Компоновка движителя зависит от расположения выброса воды, перераба-
тываемой движителем, — выше или ниже внтерлнннн. Наиболее распространены
надводный н ттолунодводный выброс струи, обеспечивающие наиболее удобный
подвид мощности к рабочему колесу и упрощающие форму водовода. Схема разме-
щения водометного комплекса ГС показана на рис. 1.13.
Недостатком водометных движителей является относительно более низкая
эффективность. а также необходимость для обеспечения заднего хода применять
специальные реверсивно-рулевые устройства, поворачивающие на 180® струю,
отбрасываемую движителем, без изменения направления вращения рабочего колеса.
На ГС можно устанавливать вентилируемый водометный движитель, к рабо-
чему колесу которого на расчетном режиме подается воздух. Этот движитель отли-
чается от обычного водомета более простой конструкцией и реверсированием за счет
изменения направления вращения. Схема -такого движителя н его размещение при-
261
ведены на рнс. 1.14. На небольших и быстроходных ГС применяют полупогружепные
гребные BHHTi i
Основной особенностью размещения гребных винтов на СПК является большое
их огсюяние от Днища судна, равное сумме клиренса и заглубления винта под сво-
бодной поверхностью прн подводе мощности через наклонный вал. Это обуслов-
ливает значительный угол наклона гребного'вала, а следовательно, н скоса потока,
набегающего на винт.
Рис. 1.13. Размещение водометною комплекса на ГС.
Рнс. 1.15. Подвод мощности к винту СПК через наклонный
вал с V-образным редуктором.
Как показывает опыт проектирования гребных винтов, увеличение угла скоса
потока на ходу судна свыше 15° приводит к заметному падению КПД. Практически
невозможным оказывается и исключение эрозионных повреждений. Для умень-
шения угла наклона вала при заданном отстоянии винта от дяища прибегают к сме-
щению двигателя в вое судиа. Одиако это связано с увеличением длины вала и
размеров выступающих частей, что ведет к росту сопротивления воды движению
судна, особенно в процессе разбега н выхода судиа иа крыльях Кроме того, сме-
щение двигателя в нос СПК вызывает определенные затруднения в общей компо-
новке н размещении судна
Одни нз путей преодоления указанных трудностей — применение V-образного
редуктора (рнс. 1.15), позволяющего разместить двигатель в кормовой или сред
262
нен чисти судна (прн этом все трудности, связанные с наклоном вала, оста-
ются).
На морских СПК, клиренс которых особенно большой, используют Z-образ-
ные передачи мощноеih — так называемые угловые колонки, позволяющие устра-
нить скос потока и значительно улучшить условия работы гребного винта. Приме-
няют два типа колонок: с одиночными винтами, расположенными за корпусом гон-
долы. н с парными винтами одни из которых размещается в носу, а другой в кор-
ме гондолы колонки.
Схема одновинтовой колонки приведена иа рис. 1.16, а. Двухвинтовая колонка
американского корабля «Хай Пойнт» показана на рис. I 16, б.
Одновинтовая колонка создает лучшие условия для работы движителя, так
как вмиг расположен в осевом относительно равномерном потоке. Однако подоб-
ная компоновка не обеспечивает передачи большой мощности вследствие трудности
размещения редуктора в гондоле сравнительно небольшого диаметра. Разделение
Рис. 1.16. Схемы колонки: а — одновинтовой; б — двухвинтовой.
мощности между двумя гребными винтами облегчает конструирование редуктора
и позволяет умепьшшь диаметр гондолы. Однако струя, отбрасываемая носовым
винтом, обусловливает значительную неравномерность потока в диске кормовою
винта, что может явиться причиной его интенсивной эрозии. Кроме того, каверны,
возникающие прн кавитации носового винта при замыкании на гондоле к стойке
колонки, могут вызвать эрозионное разрушение тела колонки. Мощность угловых
колонок ограничена. В настоящее времи наибольшая мощность колонок единич
и ого производства ие превышает 15 тыс. кВт. Создание же более мощных передач
связано с конструктивными и техническими труднощямн. Дополнительным недо-
статком колонок является высокая шумность кавитирующих гребных винтов и
редуктора, расположенного в гондоле. Эти недостатки угловых колонок наряду
с их дороговизной и трудностями обслуживания нижнего редуктора заставляют
искать иные решения. Подобным решением является применение водометных дви-
жителей. имеющих в качестве лопастного механизма осевой или центробежный
иисос. Схемы водометною движителя с осевым и центробежным насосом показаны
"а рнс. 1.17, а и б.
Водометные движители уступают по КПД гребным винтам в диапазоне ско-
ростей до 50—60 уз, но прн больших скоростях, когда КПД гребных винтов сни-
жается из-за кавитации, водометные движители, рабочие колеса которых не кавн
тируют, оказываются столь же и даже более эффективными. Расположение рабочих
колес внутри корпуса существенно упрощает схему подвода мощности, позволяет
отказаться от сложных угловых редукторов, что, по существу, снимает ограниче-
ния но предельной мощности Кроме того, благодаря пекавитиру1ощнм рабочим
Колесам водометы обладают также лучшими акустическими качествами, а их кон-
струкция дает возможность использовать звукопоглощающие покрытия водоза-
борника.
Помимо указанных основных типов движителей на СПК возможно применен не
г<1зоводометных движителей в сочетании с водометными движителями, т. с. подача
сжатого газа за рабочим колесом. Однако имеются лишь проектные прорабо|кн
Такнх движителей, а их практические реализации неизвестны.
263
Для СВПА применение движителен, имеющих в качестве рабочей среды воду,
нецелесообразно, поскольку оно лишает судно одного нз основных преимуществ —
амфнбийностн.
Наиболее распространенными движителями на СВПЛ являются вивдуш-
иые винты, которые располагаются на колонках на палубе судна. Возможны две
компоновки двнжитетыюго комплекса: на колонках в гондолах устанавливаю!
Рис. 1.17. Схемы водометного движителя СПК с осевым (а) и центробежным (б)
насосом.
I — двигатель: 2 — выброс воды: 3 — водоззбор.
двигатели, вращающие винты, либо в гондоле размещают угловой редуктор, а мощ-
ность передается вертикальным валом от двигателя, расположенного в корпусе
судна (рис. 1.18). Вторая схема существенно сложнее, но позволяет лучше органи-
зовать брызгозащпту воздухозаборника и водоотделеине иа входе в двигатель.
Рнс. 1.18. Подвод мощно-
сти к воздушному Bui ту
СВПА.
Поскольку нагрузка движителей СВПА по упору
велика, одно нз эффективных средств повышения
КПД — применение направляющих иасадок. Однако
из-за технологических трудностей изготовления и экс-
плуатационных недостатков ( в частности, эрозии
внутренней поверхности) направляющие иасадки при-
меняют сравнительно редко. Недостатками воздушных
винтов является ограниченная мощность в одном агре-
гате и большие размеры. Поэтому в последние годы
получили распространение воздушные вентиляторные
движители, обладающие лучшими акустическими
качестамн и большей компактностью. Такне двп
жители показаны иа рнс. 1.19.
На малых СВПА применяют еще одну схему
воздушного движителя — непосредственный выброс
воздуха нз полости ВИ. Однако вследствие малого
гидравлического сечения эффективность таких дви-
жителей невысока
На СВ11С. не обладающих амфибийностью. пред-
почтительнее использовать движители, рабочей средой
которых служит вода. Конструктивно оправдано рас-
положение движителей в скеге, что позволяет не увеличивать осадку судна и свести
до минимума размеры выступающих частей.
Серьезными проблемами при создании подобных движителей является защита
от прорыва воздуха в водозаборннк нз области ВП и обеспечение эффективной ра-
боты движителя иа промежуточных режимах. Первая проблема решается путем
специальной профилировки скегов и установки защитных пластин со стороны ВП.
Для решения второй проблемы применяют регулируемые водозаборннкн, позволя-
ющие изменять расход воды через рабочее колесо движителя.
264
На СВПС можно также использовать гребные винти с подводом мощности
чер*ч наклонный гребной вал. Проблема защиты таких винтов от прорыва воздуха
оказывайся еще более острой, чем в случае применениягводометных движителей.
Видимо, это одна из причин использования вентилируемых гребных винтов, для
которых, по крайней мерс на полном ходу, прорыв воздуха из подушки ие'приводит
Рис. 1,19. Вентиляторные движители СВПА.
к нарушениям режима работы движителя. Однако обеспечение разгонных характе-
ристик движителя остается сложной проблемой, для решения которой обычно при-
меняют винты регулируемого шага.
На СВИС возможно применение вентилируемых водометных движителей.
Глава 1J
ГЛИССИРУЮЩИЕ СУДА
§ 4 ОСНОВЫ ГИДРОДИНАМИКИ ГЛИССИРОВАНИЯ
Глиссированием — скольжением по поверхности воды — обычно на-
зывают такое движение судна, при котором поддерживающая сила на 90—95 %
обусловлена динамической реакцией воды. О различии между плаванием и глис-
сированием можно судить по кинематической картине потока, характеризующейся
наличием в носу у глиссирующих судов интенсивного отбрасывания масс воды,
образующих брызговую пелену, а в корме — плавного стекания струн с днищевой
поверхности без замыва транца.
Изменение скоростного режима судна удобно проследить с помощью диаграммы
зависимости погружения носа, миделя и кормы судна в функции от числа 1'Гу =
^-17> Д® V , где V — G/pg (рис. II 1). Эта диаграмма предложена Г. Е Павленко.
Для приближенной количественной оценки различных режимов быстроход-
ности судна можно выделить следующие три режим: первый (Fry 1.0) — пла-
вание второй (1,0^ Fry ^3 0)— переходный; третий (Fry >3,0)— глиссиро-
вание. При относительно малых скоростях, отвечающих условиям первого режима.
сУДа имеют несколько большую осадку, чем в статическом положении.
265
На границе первого и второго режимов нос судна достигает наибольшего по-
гружения и при дальнейшем увеличении скорости начинает выходить из воды.
Вместе с тем вследствие продолжающегося понижения давления в кормовой части
наблюдается погружение кормы В этом, в сущности, можно видеть первое прояв-
ление эффекы глиссирования; днтце судна, наклоненное под некоторым углом
атаки к направлению движения и перемещающееся с относительно большими ско-
ростями, создаст динамическую силу поддержания. Одна ко относительное значение
этой силы еще небольшое. Опыты показывают, что лишь прн Fry 3,0 сила под-
держания на 90—95 % обусловливается вертикальной составляющей гидродина-
мического давления и приводит к существенному уменьшению средней осадки и
росту дифферента на корму.
В дальнейшем дифферент судна, достигший своего наибольшего значения в на-
чале третьего режима, снова начинает уменьшаться; асимптотическим пределом
описанного процесса оказалось бы положение судна с нулевой осадкой и с днищем
под некоторым углом атаки касающимся поверхности воды.
Рис. 11.1. Зависимость погружения или всплытия носа, миделя и кормы судна от
числа Фруда:
I — плавание; II — переходный режим; III — глиссирование.
Существующие теоретические методы расчета гидродинамических характери-
стик глиссирующих поверхностей предполагают, что жидкость является невяз-
кой н могут быть условно разделены иа две группы: первая основана на теории
потенциала, а вторая базируется на гипотезе плоских сечений.
Наиболее полно глиссирование теоретически исследовано в рамках плоской
задачи. Лннениая теория рассматривает глиссирование поверхностей при предельно
малых углах атаки и строится в предположении, что вызванные скорости частиц
жидкости малы по сравнению со скоростью движения. Э|« теория разработана как
для невесомой, так и для тяжелой жидкости Нелинейная теория позволяет полу-
чшь решение задачи о глиссировании с произвольными углами атаки, однако при-
ходится пренебрегать весомостью жидкости и волнообразованием.
Линейная теория глиссирования но поверхности невесомой жидкости, основы
которой заложены Вагнером (1081, привела к установлению важной аналогии между
глиссирующей поверхностью п крылом, позволяющей использовать данные теории
крыла для расчета гидродинамических характеристик поверхностей. Установлено,
в частности, что подъемная сила глиссирующей пластины равна половине подъем-
ной силы крыла соответствующей формы, движущегося в безграничной жидкости,
а сопротивление составляет половину сопротивления крыла, вызываемого нормаль-
ным давлением.
На рис. II.2. а и б соответственно показаны линии тока, характеризующие
обтекание полностью погруженной и глиссирующей пластины. В обоих случаях
с задней кромки поток сходит плавно по касательной к омываемой нм поверхности.
Прн малых углах а, образуемых пластинами с направлением скорости набегаю-
266
шег потока, характер обтекания в области, лежащей ниже пластин, та-
кой же.
Существенное различие наблюдается вблизи передней кромки. Вместо струй-
ного обтекания наблюдаемого у глиссирующей пластины, при котором часть жид-
кости течет вперед, образуя обратную струйку, толщиной в, передний край крыла
обтекается жидкостью снизу вверх с относительно большой скоростью, что приво-
дит к образованию силы подсоса.
Как показали Вагиер и Вейниг, в основной области нижней части крыла и
глиссирующей пластины при малых углах а (практически до а = 8+ 10°) распре-
деление скорости и давления одинаково Область брызгообразования играет незна-
чительную роль в формировании результирующей сил давления, действующих
на пластину, поэтому глиссирующая пластина испытывает такую же силу, как
Рнс. 11.2. Сравнение обтекания погруженной (о) и глиссирующей пластины (б)
при малых углах атаки.
1 — давление иа нижней стороне; 2 — точка подсоса: S —< подсаеыввющая сила.
инжняя часть крыла Данный вывод служит базой для переноса многих резуль-
татов, полученных в теории крыла, в область исследования глиссирующих поверх-
ности
Для оценки подъемной силы Ry и сопротивления Rx, действующих на единицу
ширины плоской или слабоизогнутои глиссирующей пластины бесконечного размаха
в невесомой невязкой жидкости. Справедливы следующие формулы:
Rv = (npti®/2) I (а + 2ссП)-, (11.1)
Rx — (лре®/2) 1аг; (11.2)
где I — смоченная длина пластины, ес — стрелка прогиба. Согласно формуле (II. 1)
продольный прогиб глиссирующей пластины может оказывать существенное влияние
иа подъемную силу, причем действие его эквивалентно соответствующему изменению
угла атаки а.
Плоская форма днища глиссера не является оптимальной; придание глиссиру-
ющей поверхности соответствующей выпуклости, обращенной кверху, позволит
значительно улучшить ее качество.
Исследование глиссирования слабоизогнутого контура по поверхности тяжелой
Жидкости сводится к определению потенциала скорости возмущенного течения,
отвечающего условию постоянства давления иа свободной поверхности, непротека-
иия на контуре, отсутствия свободных волн далеко впереди контура п вызванных
скоростей иа бесконечно большой глубине. Решение этой краевой задачи было
Получено Л. И. Седовым [66] методами теории волн.
При глиссировании пластины по поверхности тяжелой жидкости подъемная
сила может быть определена по формуле Л. II. Седова
’жрг
267
Как видно из последнего соотношения, влияние весомости жидкости проявляется
в уменьшении подъем юй силы. По мере возрастания скорости (Fr-*oo) фор-
мула (II.3) переходит в формулу (11.1). Численные расчеты, выполненные
Ю. С Чаплыгиным 178], показали, что результаты теории глиссирования по по-
верхности невесомой жидкости и теории глиссирования по поверхности тяжелой
жидкости полностью совпадают при числах Fr^4,25.
Нелинейная задача о глиссировании пластины по поверхности невесомой жидко-
сти, являющаяся типичном задачей теории струн, была поставлена С А. Чаплы-
гиным н подробно рассмотрена в работах М. И. Гуревича, Л. Р. Ямпольского
и II. И. Калинина [26, 271. За рубежом получило известность решение
Грина [86, 87J. В настоящее время плоские нелинейные задачи теории глиссиро-
вания рассматриваются в соответствии со сл< дующей схемой [27] поток, пабега
ющнй иа пластину, расположенную под произвольным углом атаки по отношению
к направлению скорости на бесконечности, раздваивается — основная часть его
проходит под пластиной, а в противоположном направлении вдоль пластины течет
струйка конечной толщины. Смоченная длина пластины не задается, а определяется
в ходе решения. Решение сводится к отысканию комплексной характеристической
функции и вызванной комплексной скорости и осуществляется путем конформного
отображения области течения на какую-^ибо область с известными границами,
например полукруг или полуплоскость.
В ранних работах, посвященных решению нелинейных задач глиссирования,
рассматривалась более общая схема, в которой смоченная длина пластины зада-
валась произвольно, а направление свободной струйки не фиксировалось. Не-
однозначность получаемых решений предопределила переход от этой общей схемы
к частной, позволяющей нз множества решений выбрать единственное соответст-
вующее действительности.
Нелинейная задача о глиссировании изогнутого контура решена Франке
[27]. Глиссирование ломаного контура в нелинейной постановке было рассмотрено
в работах [54, 55, 56]. Влияние конечности глубины на гидродинамические харак-
теристики гдпеенрующен пластины нсследсвалось Ю. С Чаплыгиным [78], С. А Ча-
плыгиным [79] и Грином [86, 87]. В рамках плоской нелинейной задачи
осуществлен учет взаимодействия несущих поверхностей реданных глиссирующих
судов |25], рассмотрено движение глиссирующей пластины с отбором жидкости
с ее поверхности [76] произведен а гализ взаимодействия подводною крыла и глис-
сирующей поверхности [521.
Плоская нелинейная задача помимо неединственности решения обладает еще
одним существенным недостатком: ее решение справедливо только вблизи тела.
Уровень свободной поверхности по мере удаления от глиссирующей пластины опу-
скается, стремясь к—сю. Стремление преодолеть указанную ограниченность не-
линейной задачи привело к построению нелинейных решений с использованием
сращиваемых асимптотических разложении. Такое решение приведено в работе
Тинга и Келлера [107] Вся область течения разбивается па две зоны'
внутреннюю и внешнюю. Течение во внутренней области в ближайшей окрестности
пластины принимается в соответствии с классическим решением плоской нелинейной
задачи, а течение вдали от пластины рассчитывается как вызываемся; перемещением
по свободной поверхности расположенного в районе пластины импульса давлении.
По.Д! ое решение, справедливое во всей области течения, получают путем сращива-
ния внешнего и внутреннего решений.
Основываясь на аналогии между обтеканием плоского крыла и глиссирующей
пластины прн относительно малых углах атаки и достаточно больших числах Фруда.
можно установить связь между коэффициентом подъемной силы и относительным
смоченным удлинением пластины конечной ширины X = 1/В
я(а + 2ес/1)
1 + 2Х
(II.1)
Обычно в теории глиссирования вместо Су рассматривают коэффициент чина
мичес кой на грузки
Ln ~ РУ3
268
где В — ширина судна. Очевидно, С„ = СЛ/^. Тогда формула (114) заменится
соотношением
лк (а 4- 2ес//)
Св I ’
Если к < 1,5, последняя зависимость хорошо согласуется с серийными испытаниями
Зотторфа и Замбрауса.
Прн постановке пространственных задач, решаемых методами теории потен-
циала, днище глиссирующего судна рассматривается как несущая поверхность,
движущаяся по поверхности невязкой жидкости. Движение жидкости, вызыва
емое перемещу нем глиссера, принимается эквивалентным движению определяемому
перемещением по поверхности потока некоторого распределения давления. Иссле-
дование сводится к нахождению потенциала вызванных скоростей, удовлетворя-
ющего уравнению Лапласа в области, занятой жидкостью, и к системе раничных
условий на ее границах: на поверхности тела, на свободной поверхности, па стенках
канала и дне (если они имеются) и на бесконечности. Граничные условия линеари-
зуются в предположении, гго судно является плоским, а углы дифферента
(атаки) — малыми. Это допущение позволяет решать рассматриваемую задачу с ис-
пользованием аппарата линейной теории волн, ошако.в то же время накладывает
на получаемые результаты ограничения, которые будут указаны ниже.
Определение гидродинамических характеристик глиссирующей поверхности
заданной формы сводится к рассмотрению интегрального уравнения глиссирования,
характеризу ощего распределение нагрузки по несущей поверхности. Вид это о
уравнения для движения по поверхности безграничной тяжелой жидкости был
независимо получен А. Н. Панчепковым [57, 58] и Маруо |96].
IПосредственное отыскание решения интегрального уравнения глиссирования
связано с непреодолимыми математическими трудностями. Сходство его с интеграль-
ным уравнением, определяющим распределение циркуляции по размаху крыла
конечного-удлинения, позволяет использовать в процессе решения приближен )ые
методы, существующие в теории крыла. Одно приближение, вводимое при исследова-
нии движения удлиненных глиссирующих тел, строится в предположении, что
длина судна намного больше его ширины: B/L -s- 0. Это допущение соответ-
ствует аппроксимации Джонса [93], используемой прн анализе движения
крыльев предельно малого удлинения. Второе приближение, принимаемое при рас-
смотрении относительно коротких широких глиссирующих поверхностей, эквива-
лентно теории несущей линии (см т. 1, разд. I, гл IV). В o6oix указанных
случаях интегральное уравнение глиссирования существенно упрощается.
Прн k-t-oo вид интегрального уравнения, как показано В. К. Лабазниковым
[45[, существенно зависит от формы глиссирующей поверхности в плайе. В случае
глиссирования треугольной поверхности с большими скоростями (1*г-»-оо) расчет
гидродинамических характеристик сводится к определению функции суммарного
гидродинамически! о давления В работе Маруо [96] расчет указанной функции
связан с интегрированием выражений, содержащих полные эллиптические интегралы
первого н второго рода. Выбранное Маруо представление не позволяет произ-
вести анализ глиссирования поверхности : параллельными боковыми кромками.
В работе В. К. Лагазиико |45] специально исследовался вопрос о решении
интегрального уравнения глиссирования при к-*-оо, когда максимальная ширина
несущей поверхности расположена произвольно по д. ше. Аналитическое нредста
вленне обводов и в этом случае позволило довести цо конца расчет гидродннами
ческих характеристик и проанализировать их зависимость от параметров, опреде
Ляющих форму несущей поверхности. Формулы, полученные Маруо, могут,
быть выведены из формул работы [45] как частный случай.
Прн использовании данных решений согласно работам [45 н 96 [ следует иметь
в виду, что онн справедливы чншь npi определенных соотношениях угла атаки
11 Удлинения. Линеаризация граничного условия иа свободной поверхности, вве-
денная при постановке задачи, справедлива если к-*-оо, только когда а <£1/к
'-равнение рас ютов В. К Лабазиикова с данными экспериментов, показавшее
Удовлетворительное согласование лишь прн а < 4°, подтверждает сказанное.
° случае глиссирования тел малого удлинения к-*-0 интегральное уравнение
Ио°Д1,ТСЯ К обобщенному уравнению несущей линии с сингулярной и регуляр-
и частями ядра, определяющему распределение нагрузки по размаху. Для рс-
269
шения этого уравнения в задачах теории крыла пользуются обычно одним из двух
методов: методом Глауэрта, основанным на отыскании решения в виде рядов
Фурье, или методом Мудьтгоипа |36], связанным с использованием механиче-
ской квадратуры Гаусса, В работе [45] решение отыскивается в виде ряда
Фурье, что дает возможность преобразовать исходное уравнение в бесконечную
систему алгебраических уравнений. Для определения коэффициентов уравнений
этой системы получены рекуррентные формулы, расчеты по которым при задании
формы несущей поверхности в виде рядов осуществляются на ЭВМ. Результаты,
полученные В. К. Лабазннковым в этой части, полностью согласуются с данными
расчетов, приведенных в работе Маруо.
Нелинейная задача о движении глиссирующей поверхности конечного размаха
по поверхности невесомой жидкости решалась Шеном и Огильви [102]
с использованием метода сращиваемых асимптотических разложений. В работе
1102 ] рассматриваются две области, определяющие возмущенное течение: 1) область
в окрестности глиссирующей поверхности, размеры которой соизмеримы со смочен-
ной длиной; 2) внешняя область, определяемая расстояниями от глиссирующей
поверхности, соизмеримыми с размахом. В качестве решения во внутренней области
принимается решение плоской нелинейной задачи, полученное Грином [86].
Решение во внешней области определяется движением но поверхности жидкости
системы распределенных особенностей в области расположения несущей поверх-
ности. Указанные решения затем сращиваются. В процессе сращивания удается
учесть влияние скоса потока, обусловленного конечностью размаха, на характери-
стики плоской глиссирующей пластины.
Все перечисленные выше решения посвящены определению гидродинамических
характеристик глиссирующих поверхностей простейшей (плоской, треугольной
или прямоугольной в плане) формы, движущихся, главным образом, с предельно
малыми углами атаки. Построенные па использовании методов теории несущей
поверхности эти решения не учитывают ряда специфических для явления глисси-
рования моментов. Например, в них не получает физической интерпретации наличие
таких явлений, как брызгообразован не и срыв потока с боковых кромок (скул) [961
Схемы, предлагаемые в работах [45 и 9о] для расчета реальных глиссирующих
судов, применимы лишь прн углах дифферента много меньших, чем оптимальные.
Оптимальные, соответствующие достижению максимального гидродинамического
качества углы ходового дифферента реальных глиссирующих судов составляют
в зависимости от килеватости днища и удлинения корпуса 3—4°, т. е. несколько
менее 0,1 рад. Удлинение многих глиссирующих катеров ие превышает X = 5.
Таким образом, величины ф и I/Х имеют практически одинаковый порядок, и, сле-
довательно, результаты решений согласно работам [45 н 96] для случая Л-*-оо
к наиболее выгодному режиму глиссирующих судов оказываются непримени-
мыми.
Сущность метода плоских сечений в задачах гидродинамики глиссирующих
судов сводится к следующему. В пространстве двумя бесконечно близкими парал-
лельными плоскостями, нормальными к продольно» осн связанной системы коор-
динат, выделяют элементарный слой, сквозь который кик бы приходит рассматри-
ваемое тело или несущая поверхность. Течение, возникающее в этом элементарном
слое при прохождении через него различных участков тела, полагают плоским,
являющимся следствием движения контура, «вырезаемого» элементарным слоем.
Скорость движения контура считают раиной проекции скорости движения тела
иа плоскость «пронизываемого» слоя [471. Рассчитывая таким образом элементарные
компоненты гидродинамических характеристик, полные значения сил и моментов,
действующих на тело, определяют интегрированием.
В случае использования метода плоских сечений вносят предположение о не-
зависимости течений в сечениях, а также пренебрегают перетеканием жидкости
в направлении, нормальном к плоскостям элементарных сечений. Это допущение
равнозначно отбрасыванию в определяемых характеристиках членов порядка (1/Х)~.
Очевидно, физическая схема метода плоских сечеинй тем более соответствует дей-
ствительности, чем больше удлинение рассматриваемого тела или несущей поверх-
ности .
Прн движении глиссирующего судна с некоторой скоростью v и углом диффе-
рента смоченная поверхность его может быть разделена на две зоны, соотношение
между размерами которых определяется формой корпуса и посадкой судна. Первая
270
зона, расположенная между точкой встречи киля со свободной поверхностью и пло-
скостью шпангоута, проходящего через точки пересечения передних границ смо-
ченной поверхности с линиями скул, омывается бс-з срыва потока на скулах. Режим
глиссирования, прн котором указанный характер обтекания наблюдается на всей
длине несущей поверхности, принято называть глиссированием «на треугольнике»,
так как в это.ч случае проекции смоченной поверхности на основную плоскость судна
представляет треугольник. Обтекание корпуса во второй зоне, находящейся непо-
средственно за первой ниже по потоку, характеризуется наличием срыва струй на
боковых кромках. Течение жидкости в элементарном слое, расположенном в про-
странстве нормально к линии киля, оказывается существенно различным в зави-
симости от того, какой из участков смоченной поверхности проходит через слой.
В первой зоне, а также при глиссировании на треугольнике течение в элементарных
сечениях подобно движению жидкости, возникающему при автомодельном погру-
жении клина с постоянной скоростью. Течение в сечениях, вырезаемых пронизыва-
емым слоем при прохождении через него второй зоны, соответствует погружению
клипа конечной ширины со срывом потока с конструктивных кромок.
В ранних работах по теории глиссирования принималась несколько иная схема-
тизация течения при движении «на треугольнике» и на полной ширине. Г. F.. Па-
вленко была предложена теория, построенная иа допущении, аналогичном введен-
ному Вагнером в теории удара, и состоящая в том, что воздействие жидкости
на движущееся по ее поверхности тело определяется энергией, которую должно
затратить это тело иа преодоление присоединенной массы жидкости. В соответствии
с этим допущением элементарные компоненты гидродинамической реакции, действу-
ющие в сечениях глиссирующей поверхности, определялись с использованием дан-
ных об ударной присоединенной массе плоской пластины.
Дальнейшее развитие теория глиссирования в рамках метода плоских сечений
получила лишь в 40—50-х годах. Так. в работе Штейнера [106] было, предложено
раздельно находить силы, действующие на участки несущей поверхности, глис-
сирующие в различных режимах. Для определения элементарных компонент сил,
действующих па участке поверхности днища, глиссирующем без смачивания
скул, использовалось решение Вагнера о погружении малокплеватого клина,
В расчет сил на участке, глиссирующем на полной ширине, производился с исполь-
зованием решения Д. К. Бобылева [131 о струйном обтекании клина в безгранич-
ной жидкости.
Схема расчета, аналогичная предложенной Штейнером, била независимо
разработана в СССР [71 ]. Выполненные в середине 50-х годов исследования погру-
жения в жидкость профилей со срывом струй на кромках позволили усовершенство-
вать указанную схему в исправлении учета влияния свободной поверхности на
силы, развивающиеся на участке, глиссирующем па полной ширине. В работе (72]
А. И. Тихоновым и Г, К. Колосовым определение элементарных компонент гидро-
динамической реакции в сечениях, погружающихся со срывом, осуществлено с ис-
пользованием решения Г. В. Логвпновича о так называемом переходном сопроти-
вления клина, позволяющего оценить влияние погружения скул па значение
подъемной силы.
Прн помощи усовершенствованной таким образом схемы удалось решить задачи
об установившемся глиссировании плоскокнлеватых пластин и о входе в воду киле-
ватых тел [72], о глиссировании плоскою! леватой поверхности в канале бесконечной
глубины |55, 60) В рамках указанной схемы произведен учет влияния сложной
профилировки на гидродинамические характеристики глиссирующей поиерхно-
Срявненне расчетов гн (родннамнчееккх характеристик глиссирующих поверх-
ностей, выполненных по методу плоских сечений, е данными экспериментов — см.,
например, |71] — показывает, что расчетная схема метода в целом правильно от-
ражает основные черты физических процессов, сопровождающих движение тел
в режиме глиссирования. Имеющаяся погрешность определяется общими допуще-
ниями метода. Г. В Логвнновнчсм, в частности, показано [47], что к заметным
ошибкам при определенных сочетаниях углов ходового дифферента и килева-
тости р приводит пренебрежение перетеканием жидкости вдоль несущей поверх-
ности. Следствием этого же допущения является и отсутствие возможности учесть
*арактерное для глиссирующих судов падение давления у транца. Продольное
перетекание может быть приближенно учтено путем введения в расчетные завнен-
271
мости поправочного коэффициента у= ^1 + tg р~) . Очевидно, величина у, тем
ближе к единице, чем больше угол килеватости и чем меньше дифферент. Так, со-
поставление гидродинамических характеристик пластины прн Р = 22,5°, рассчи-
танных с использованием этой поправки и без нее, с данными опытов Л. И. Седова
и А. Н. Владимирова [47] показывает, чго учет продольного перетекания имеет
смысл лишь прн ф > 5°.
В вязкой жидкости схема силовою воздействия потока иа глиссирующую
поверхность значительно отличается от принятой выше а именно, кроме
результирующей гидродинамического давления RN, перпендикулярной к пластине,
здесь появляется сила трения Rp, лежащая в плоскости пластины. В связи с этим
суммарное воздействие вязкой жидкости на глиссирующую поверхность приводится
Рис П.З. Схема силового воздействия потока на пла-
стину, глиссирующую на поверхности вязкой жидкости.
к силе R, составляющей с ней некоторый угол (рис. 11.3). Проекции силы R иа
направление движения и нормаль к нему, т. е. полное сопротивление и подъемную
силу, будем по-прежнему обозначал, соответственно буквами Rx и Ry.
Исходя из представления об отсутствии каких-либо других сил, кроме сил тре-
ния, определяющих собой физически наличие проекции на плоскость пластины,
находим
Rx = Ry tg а + Rpcos а.
§ 5. СОСТАВЛЯЮЩИЕ СОПРОТИВЛЕНИЯ ГЛИССИРУЮЩИХ СУДОВ
МЕТОДИКА ПЕРЕСЧЕТА ДАННЫХ МОДЕЛЬНЫХ ИСПЫТАНИЙ
НА НАТУРУ
Сопротивление воды движению глиссирующего судна слагается из сопротивле-
ния трения Rp и сопротивления ывлеиня Rp, причем этн составляющие сопротив-
ления характеризуются следующими особенностями:
а) площадь смоченной поверхности О, определяющая сопротивление трения,
существенно зависит от скорости судна;
б) сопротивление давления прн заданной нагрузке в основном определяется углом
ходового дифферента ф, и связано ие только с образованием волн, но непоявлением
брыл оной струн под действием значительных градиентов давления на участках
глиссирующей поверхности, соприкасающихся с возмущенным уровнем воды.
Проекция реакции брызговой струи, направленная в сторону, противоположную
движению глиссирующего судиа, представляет собой брызговое сопротивление,
доля которого в сопротивлении давления с повышением относительной скорости
возрастает.
При глиссировании, как и в режиме плавания, сопротивление трения составляет
значительную часть от общего сопротивления. На рис. II.4 показано соотношение
272
мсЖЛУ сопротивлением трения и сопротивлением давления для одной нз моделей
серии быстрохотиых катеров в зависимости от числа 1-Ту прн различных значе-
ниях коэффициента статической нагрузки Cg = G/yB# . Доля сопротивления
трения, в зависимости от режима движения, составляет от 20 до 85%, причем
с ростом относительной скорости она увеличивается. С уменьшением коэффициента
ста пиеской нагрузки доля сопротивления трения в общем гидродинамическом
сопротивлении при одинаковой относительной скорости возрастает.
Прн расчете сопротивления трения глиссирующих судов используют формулу
Прапдтля — Шлпхтинга для коэффициента турбулентного трения гладкой пла-
стины
0,455
(lg Re)2’58 ‘
(11.5)
В работах [29, 61, 100] показана возможность применения этой формулы несмотря
на существенные отличия в обтекании пластины прн глиссировании по сравнению
с продольным обтеканием.
Рис. 11.4 Соотношение между сопротивлением давления (/) н сопротивлением тре-
ния (//) для модели БК-1 систематической серии, а — Св — 0,427; б — Cq— 0,854.
Определение остаточного сопротивления глиссирующих судов, основными
составляющими которого являются брызговое и волновое сопротивление, основано,
главным образом, на эксперименте с моделями в опытовом бассейне. Особенность
буксировочных испытаний моделей глиссирующих судов в опытовом бассейне заклю-
чается в том, что необходимо обеспечить соответствие с натурным глиссером линии
приложения буксирующего усилия и устранить сопротивление воздуха постановкой
перед моделью аэродинамического щита. При различных скоростях посадка модели
глиссирующего судна и площадь ее смоченной поверхности изменяются, поэтому
в процессе эксперимента необходимо наряду с измерением сопротивления н скорости
измерять площадь и длину смоченной поверхности. Для этого фотографируют
или визуально замеряют длину смоченной поверхности вдоль скулы ZCM. ск, вдоль
кнля /см. к н осадку на транце с последующим расчетом величины Q по теорети-
ческому чертежу. Средняя смоченная длина /См. ср определяется соотношением
М СР= 0,5 (/см. СК "Ь ^см. к)-
Прн исследованиях ходкости глиссирующих судов, как и прн изучении ходкости
судов других типов, используется моделирование по числу Фруда, т. е. FrM= FrH.
Поскольку в этом случае подобие по числу Рейнольдса не соблюдается, для пересчета
на натуру используется гипотеза Фруда о равенстве для модели и натуры коэффи-
циентов остаточного сопротивления. Тогда в предположении, что поверхность на-
турного судна, как и модели, является технически гладкой, пересчет на натуру
Может быть осуществлен по формуле
Rh — (Rm — Rfom) к* + Rfoh- (П.6)
В формуле (11.6) RM— Rfom представляет собой остаточное сопротивление, пере-
считываемое по кубу масштаба.
273
При моделировании по Фруду масштабный эффект проявляется наиболее за-
метно в сопротивлении. Он может быть оценен величиной
Ф _ ем — Си
_ л R ь , CF>. ,
1 ак как обратное качество е = - ф , то после преобразований
и Сд
приведенного выражения для О, принимая коэффициент Сго по формуле (II.5),
получим
ко.з
° I + N^cfy2 (0,7лф — 1,4Са)°-8 В®’3 ’
где .V — постоянная величина, не зависящая от масштаба к.
Анализ показывает, что О растет с уменьшением ф и возрастанием Ср, так как
с ростом Сд и уменьшением ф увеличивается доля сопротивления трепня в полном
сопротивлении. Масштабный эффект растет также с уменьшением абсолютных раз-
меров модели. Прн очень малых абсолютных размерах на масштабный эффект могут
оказать влияние не только силы вязкости, но также и силы поверхностного натя-
жения. Из опытов следует, что для глиссирующих судов нс следует брать ширину
мотели меньше чем 0,3 м.
Полное сопротивление натурного глиссирующего судна может быть предста-
влено в следующем виде:
= RP + Rfc + Ra I- Rap + Raa- (П.7)
Разделив обе части равенства (11.7) на (рь*/2) Q, получим
С» - Cjj -f- CFn Сд + Сдр + Сдд.
Формула пересчета сопротивления с модели на натурное судно при FrM = Ггн
примет вид
Си = Сц Сром Сдон + С а + Сдр Сад.
Режим течения в пограничном слое для натурных глиссирующих судов всегда
турбулентен; для моделей судов этого типа турбулентный режим течения наступает,
если Re 1-10®. При пересчете на натуру за характерный линейный размер для
глиссирующих судов принимается средняя смоченная длина /см. ср.
На моделях шероховатость практически отсутствует, а надбавку на шерохова-
тость для натурного судна следует принимать в зависимости от состояния поверх-
ности корпуса судна. Суммарная надбавка па шероховатость для натурных метал
лическнх судов принимается равной = 0,4-10'3, а для деревянных Сд
= (0,10+0,15)-КГ*.
Сопротивление выступающих частей обычно определяется в ходе испытаний
модели с установленными па ней рулями и валами, выполненными в соответствующем
масштабе. Вследствие того что абсолютные размеры выступающих частей относи-
тельно малы,
С АР м =/= Сдр к-
На ьбавка иа выступающие части па модели уменьшается с ростом числа Re, причем
с достаточной для практики степенью точности можно принять, что Св м прн
Re >1-10° стремится к постоянной величине. Поэтому сопротивление выступа-
ющих «истей можно пересчитывать по кубу масштаба.
Сопротивление выступи ощих частей глиссирующих судов допустимо прибли-
женно учитывать как процентную надбавку к сопротивлению «голого» корпуса.
Ниже приведены такие надбавки на сопротивление выступающих частей для модели
трехвального безредаиного глиссирующего судна:
Frv . 1.0 1.5 2.0 2.5 3,0 3.5 4.0
Ядр/КТ' „ - % ....... 2.0 5.7 7,5 9.8 12.4 17.5 20
Аналогичные данные могут быть получены после обработки результатов модель-
ных испытаний и для других типов глиссирующих судов.
274
Для малых Глиссирующих судов и катеров, оборудованных подвесными мото-
рами. надбавку на сопротивление полнотой части двигателя рассчитывают по при-
ниженной формуле [16]
Rap = 1,32»*,
которая получена в результате испытаний подвесного двигателя марки «Вихрь»
и определения сопротивления его подвойной части.
Для малых глиссирующих судов, оборудованных стационарными двигателями
небольшой мощности, надбавку на сопротивление выступающих частей (для одно-
валыюго глиссирующего судна) в практических расчетах также можно учитывать
как процентную надбавку к сопротивлению голого корпуса:
Ггг ................. 1,0 1,5 2,0 2.6 3.0 3.5 4.0
Ядр/«г. н- % 2 3 4 7 II 15 19
Надбавка на сопротивление выступающих частей быстроходных судов и кате-
ров, предназначенных для эксплуатации в переходном режиме (Frv 4^ 2,5), опре-
деляется ио данным следующей таблицы:
К Судно САР
PrL <0,5 0,5 «J Fr£ <1,0
Одновинтовое 3—5 6—8
Двухвинтовое 8—10 10—12
Трехвннтовое 12—15 15—20
В тех случаях, когда нет близкого прототипа, сопротивление выступающих
частей можно приближенно рассчитать по формуле
Rap = Rrp. в + R« >сн k Rp-
I Сопротивление наклонного гребного вала
Rrp. и = Сх Гр. в (pu-/2) SH. в.
где коэфф! цпент Сжгр. в= 0,2; 5ц. в — площадь наклонного вала.
Сопротивление кронштейнов валопроводов и рулей определяется по однотипной
формуле
Rkpoh. р — крон, р (pv® 2) Supon, р.
где S1(p(J1I р — площадь боковой поверхности кронштейна, руля.
Коэффициент сопротивления кронштейна или руля прн безотрывном обтекании
Сх крон, р = 2C/Tofe,
где CpQ— коэффициент трения гладкой пластины; k — коэффициент, учитывающий
кривизну поверхности (для рулей k= 1,1, для кронштейнов k = 1,2).
Сопротивление воздуха следует учитывать нс только для глиссирующих судов,
но и для судов, эксплуатирующихся в переходном режиме. Это сопротивление
Приближенно вычисляют по формуле
Raa = Сдл (рв/2) (v ± vD)« Sx> (II.8)
^<е С.4д = 0,8-1-1,0 — безразмерный коэффициент, зависящий от формы надстроек;
Я—площадь поперечное сечения иадво иой части. В скобках выражения (II.8)
принимается знак «+» прн встречном ветре и знак «—» при попутном.
275
Для практических расчетов можно использовать следующую приближенную
формулу:
Сдл = (£«'«) ю-’.
Таким образом, полное сопротивление глиссирующего судна определяют, как
правило, по данным испытаний его модели с выступающими частями:
«и Сп(рок/2)Й.
Зная /?н, можно определить буксировочную мощность
Ре R«va.
В табл. II.i приведен пример пересчета данных модельных испытаний на на-
турное судно, модель которого с выступающими частями (в масштабе 1:15) испытана
в опытовом бассейне. Кинематическая вязкость воды при испытаниях модели =
= 1,16-10~“ ма/с, для судна vH = 1,57-10” м2/с (при /О = 4СС). Расчет выполнен
без учета воздушного сопротивления, так как модель судна испытывалась без аэро-
динамического щита.
Таблица II. 1. Расчет сопротивления и буксировочной мощности судна
по результатам модельных испытаний (С^-Ю3 == 0>40)
Величина Значения
вм, м/с 1.0 2,0 3,0 4.0 5,0 6,0
Rm. Н 8,0 43,0 94.0 121,0 163.0 182.0
1,253 1,183 1,378 1,333 1,253 1,117
См = 10s ром/2ам 12,50 17,60 14.80 11 Ю 9 57 8,50
1с р м ы 2,69 2.60 2,80 2.66 2,56 2,43
R _ Ем/срм. ]0-о VM 2,32 4,50 7,25 9,17 11,10 12,60
CfoM= f (ReM)- I03 3,82 3.42 3,15 3,04 2.95 2,88
С/?м ~ (См — Cfqm)’ I®3 8.68 14,18 11,65 8,06 6,62 5,62
/-CPH ~ KtpM' ы 40,4 39,0 42.0 39,8 38,4 36.5
ц, = Vким, м/с 3,87 7,74 11.60 15.50 19,35 23,20
Re„ = ^срд -10 8 1,00 1,92 3.10 3,94 4,74 5 40
Cfoh = f (Re„)-103 2.13 1,94 1.82 1,76 1,72 1,70
С = (Сд 4- Cf0 к + 11,21 16,52 13,87 10,22 8,74 7,72
+ Сд) 10s
282 266 310 300 285 265
Яи = С„(р1-=/2)Ян. Н 17000 135 000 296 000 376 000 476 000 560 000
Ре = /?нЦ|. кВт 657 I 020 3 390 5 720 9 100 12 700
он. уз 7,5 15,0 22.5 30,1 37,6 45,0
276
9 6. РАСЧЕТ СОПРОТИВЛЕНИЯ СУДОВ,
ДВИЖУЩИХСЯ В РЕЖИМЕ ГЛИССИРОВАНИЯ
Метод расчета сопротивления воды движению глиссирующих судов с остроску-
лой без ре даииой формой обводов и произвольно заданными параметрами корпуса
позволяет оценить буксировочное сопротивление глиссирующих судов в диапазоне
чисел Fr по водоизмещению 1,0^ Fry ^4,5 и при следующих соотношениях
основных параметров, характеризующих главные размерения корпуса, нагрузку
и центровку:
Г = (Сск'Вж) = 3,75 т- 7,00, -= 0 21+0,314
CG = 0.427+ 0,854; хв = 0,35+0,45.
где LCK - длина судна по скуле, м; Ви — ширина судна по скуле на миделе, м
рХ — угол внешней килеватости на миделе, рад; xg — относительная центровка-
Обратное качество е — Rr_K/G «голого» корпуса глиссирующего судна с произволь-
ными параметрами, характеризующими его главные размерения, нагрузку н цент-
ровку, определяется ио формуле [29]
'(»«• со- г- ₽ж)”М;«,- Со,- То- + +
+ (Д)О<С^С«.) + (^)О<Г +
+4
+ <г« -1-’ <г - А)+(-»&•). <*« - <"> - р>.)+
+(тгМ ‘с“ - с“-> <г- +- с“.) <₽» - "«J+
с0.)=(Г-ч+
Г 3 [йС„Й= „<с° C“-)<L V + 3 ф , +
г 4 )„ <е»—₽«•><*- - v+4- (К4ф)о (с°_ с“.>гх
Х(Р,-?Ж.) + 4-(й^ф-)0<С<!-<;О.)(11Ж-₽К.)3- <".9>
277
Значения производных в разложении (П.9) следует" находить по табл. It.2,
а значения e0(xgo, COo, L& ₽Кс). пересчитанныеиа натуру для различных Fry и G,—
по графикам рнс. 11.5.
Пример расчета сопротивления безреданиого трехвгльиого глиссирующего
суша с остроскулымн обводами корпуса (обшивка деревянная) приведен в табл. П.З.
Рис. 11.5. Зависимость обратного качества е0 от силы тяжести G
для различных чисел Fry.
Исходные данные судна:
Сила тяжести G, кН ..................................................615
Скорость Fg, уз . . .................... 44
Длина по скуле LCK, м .... ......... ... ..............25.0
Ширина по скуле ип миделе м . . ................ 6.2
Угол внешней ки.кчмтостн на миделе ₽>. РЭД .........................0.27
Отстояние ЦТ в нос от транца х&, ы . . . . . . . 9,2
Проекция надводной части на мидстевос сечение Sjj, м! .... 10
Расчет безразмерных характеристик судна:
*g = Xg/LCK = 0,368; Со = 0,443;
L - LCK/Bt = 4,80; Рн = 15,5° - 0.27 pa i.
По формуле (II.9) определяется для заданного числа Fr поправка 5е, учитыва-
ющая различие безразмерных характеристик (xg Cq, L, Рх) рассчитываемого судна
и модели-прототипа (таб; 11.4), имеющей следующие безразмерные характеристики
xgo — 0,40. Сс> = 0 598 /0 = 5 25 р^( — 0,27 рад. Введенный индекс «0» обозна-
278
Таблица II.2. Значения производных в разложении (11 9)
279
Jg Таблица 11.3. Пример расчета сопротивлении глиссирующего судна
Параметры Frv
1,0 1.5 2.0 2.5 3.0 3.5 4.0
Ггу V g yv 6,22 9,40 12,51 15,65 18,70 21,90 25,10
е0 (см. рис II. 5) 0,047 0.084 0.108 0.130 0,136 0,137 0,143
ев+ бе 0,053 39 0,098 07 0,118 98 0,128 07 0,133 5 0,137 80 0,146 68
Rt.k — (^о "4" 6f) G, II 32 834 60 313 73 172 78 763 82 102 84 747 90 308
/?ЛР, Н 614 3 220 5 460 7 850 10 350 14 650 17 900
Ra = СА (рс«/2) Qe. Н 22 52 81 102 115 147 183
„ _ $Мр0"о и Raa —Q“ ~ Пн’ ы 203 460 816 1 270 1 820 2 490 3 250
R = Rr.v 4* Ra Н 33 673 60 200 79 529 87 985 94 387 104 034 111 541
р£ = /?он. кВт 209 602 I 000 1 380 1 760 2 280 2 790
as. уз 12,1 18,25 24,3 30.4 36.3 43,5 48.7
Таблица Л.4. Определение поправки
Параметры Fry
1.0 1.5 2.0 2,5 3,0 3,5 4,0
(де/дхе)л -0,100 —0,230 —0,150 -0,096 0,007 0,135 0,255
(dn/digo)(xg - xgo) 0,003 20 0,007 35 0,004 80 0,003 07 0,000 22 —0,004 32 —0,008 16
(де./дСо)0 0,057 0,080 0,073 0,055 0,010 -0,042 —0,092
(де/дСо)0 (Cq — Cq0) -0,008 60 -0.012 10 -0,011 -0,008 30 -0,001 51 0,006 35 0,013 90
(de/dL)e —0,021 5 —0,031 5 -0,029 3 -0,018 4 -0,004 0 0,003 0 0,008 0
(de/dL)0 (Г- Го) 0,009 65 0.014 20 0,013 20 0,008 30 0.001 80 -0,001 35 -0,003 60
(<94е/с)*4) 0 8,75 5,75 2,75 1,88 3,80 4,50
(д’е/^)(Хв-*го)=/2 0 0,004 50 0,002 96 0,001 42 0,000 97 0,001 96 0,002 32
(о»=е/<ЭС^) 0,25 0 0,16 0,19 0.25 0,36 0,28
(^Сс)(Сс-ССо)‘/2 0,002 87 0 0,001 84 0,002.13 0,002 88 0,004 14 0,003 22
(52е/с)1г)о 0,010 0 0,018 2 0,024 0 0,006 8 0.003 7 0,002 0 0
(дЧ/дТ2) (L- Г0)2/2 0,001 00 0,001 82 0,002 40 0,000 68 0 000 37 0,000 20 0
Л JJ О -0,740 -0,003 57 0,135 0,001 94 -0.037 -0,002 52 —2,60 0,000 40 —0,055 0.000 12 0.10 —0,000 35 0 0
3,5 —0,862 -0,004 15 0,070 0,001 01 -0,050 -0,003 40 -3,64 0,000 56 -0,020 0,000 04 —0,04 —0,000 14 0 0
О л -1,060 -0,005 12 0,070 0,001 01 —0,055 -0,003 74 3,66 0,000 57 0 0 -0,06 0,000 21 0,015 —0,000 15
иэ см —0,838 —0,004 05 0,106 0,001 53 -0,075 -0,005 10 -3,16 0,000 43 -0,035 0 000 7 -0,03 0,000 10 1 0,032 5 -0,000 33
о см —0.865 —0 004 17 0,245 0,003 53 —0,047 -0,003 20 —1,60 0,000 25 -0,290 0.000 62 -0,06 0,000 21 0,045 -0,000 45
1,5 -0,515 —0 002 48 0,237 0,003 42 -0,043 —0,002 92 -2,72 —0,000 42 -0,167 0,000 36 0,05 -0.000 17 0.032 -0.000 32
— 0 0 0 059 0.000 85 -0,033 —0,002 24 1,00 -0,000 16 -0,020 0,000 04 0,05 -0,000 17 0,005 —0,000 05
Параметр Z . СО ь? Я н н £ 'i 'i d £ £ " । - । 7 7 । 1 о. | О 1 1 о Я 1* s — о о i Ч « ° е> ~ — = o-s — ^-=,-5":=: <j р |ГГ Р Р р |S р Р § Р Т} Ца 'го ЭД ЭД ЭД эд О c»Q0 <«ЭД ЭД эд /2 Л? Н «Ч 1 к 14 w 14 14 IX IX О У О ^О (7© ГОГЪ Рз «Т} ro<T>'0'orof^>‘<i | GJ <дР 00 00 cd'* С w °7о *7ь? Й % я, % l—l •—< — l__J I—» 1—1 * *—t
282
•taw характеристики прототипа. Ре ультаты расчета (см. табл. II.3) показаны
на рис. И.6 в виде зависимости буксировочной мощности от скорости vB. В ра-
боте [61] изложен более простой приближенный метод определения сопротивле-
ния глиссирующих остроскулых судов.
§ 7. ВЛИЯНИЕ ОСНОВНЫХ
ПАРАМЕТРОВ КОРПУСОВ
ГЛИССИРУЮЩИХ СУДОВ НА ИХ
СОПРОТИВЛЕНИЕ И ВЫБОР
ИХ ОПТИМАЛЬНЫХ СООТНОШЕНИЙ
Влияние изменения основных пара-
метров корпуса глиссирующих судов иа
их сопротивление удалось выявить при
испытаниях серии моделей глиссирующих
судов.
Форма шпангоутов. С целью опреде-
ления влияния формы шпангоутов на со-
противление глиссирующих судов были
испытаны тевять моделей систематиче-
ской серии БК с одинаковыми главными
размерениями, ио отличавшиеся формой
обводов (рис. 11.7). Модель БК 1 имела
остр< скулую по всей длине форму шпан-
гоутов, характерную для мореходных
безретанных глиссирующих судов. Отли-
чительная особенность модели БК-2 —
скругленные у киля шпангоуты. Форма
обводов модели БК-3 от транца до 5-го
теоретического шпангоута полностью со-
впадала с формой обводов модели БК-1,
а в носовой части шпангоуты были «ле-
кального» типа. Модель БК-4 имела редан-
ную форму обводов, причем форма шпан-
гоутов носовой и кормовой частей повто-
ряла форму шпангоутов модели БК-1;
лишь на миделе был сделан постоянный
Рис. 11.6. Сравнение расчета Ре =
— f (аз) по методу, изложенному в § 6,
и при пересчете данных испыта> ий
модели того же глиссирующего судиа
в опытовом бассейне.
по высоте поперечный уступ (редан).
Форма обводов модели БК-5 (смешанная) характеризовалась наличием острой
скулы в корме (от транца до 5-го теоретическою шпангоута) и крсглоскулыми
обводами в носу. В отличие от модели БК-3 эта модель имела форму обводов как
у мореходных быстроходных судов предназначенных для эксплуатации в пере-
ходном режиме
Для модели БК-6 были выбраны обводы редаиного судна с повышенной килева-
тостыо на редане. Модель БК-7 имела обводы типа «моногердон», а модель БК-8 —
обводы типа «циссоида». Смешанная форма обводов модели БК-9 характеризовалась
линией слома, расположенной выше скулы. Анализ результатов испытаний первых
четырех моделей показал, что их сопротивления прн малых относительных
скоростях различаются незначительно.
Из графиков на рис. II.8 следует что использование обводов моделей БК 7,
ВК-8 и БК-9 целесообразно только при малой скорости (Frv«C2,2), причем наи-
меньшее сопротивленце имеет модель БК-9. В начальной стадии глиссирования
и в режиме чистог глиссирования (при Fry > 2.7) применение обводов моделей
ЬК-7, БК-8 и БК-9 нецелесообразно.
В области чисел Fry<2,2 прн носовых центровках хя и малых значениях
коэффициента статической нагрузки Со смешанная форма обводов имеет
некоторое преимущество по сравнению с остроскулой формой (реданной и безредан-
н°й); при кормовых центровках Jtg и больших значениях коэффициента
статической нагрузки Cq смешанная форма на малых скоростях практи-
283
Рис. И.7а. Корпус модели БК-1.
Рис. II.7г. Корпус модели БК-5.
284
285
Рнс. 11,7д. Корпус модели БК-6.
286
Рис. П.7з. Корпус модели БК-9.
287
чески равноценна форме обводов с острой скулой С ростом скоростей движения
предпочтительнее становится остроскулая форма обводов.
Сравнение сопротивления моделей с реданами и без них показывает, что при
Со = 0,598 в зависимости от изменения относительной центровки xg от 0.35 до 0,45
граница рационального использования обпадов с реданами соответственно сдан
гается от Ггг = 3 0 к Frv - 3,9. То же самое происходит и прн увеличении значения
коэффициента статической нагрузки. Если при значении Сд = 0,427 целесообразнее
применять образования с реданами начиная от Frv =3,1, то при Cq—0,854 сопро-
тивление моделей с реданами выше, чем беа реданов
Применять образования^ с реданами для быстроходных судов, движущихся
в ежиме глиссирования, целесообразно лишь при малых значениях коэффициента
статической нагрузки (Сд 0.5).
Изменение ковффициевта статической нагрузки. На малых и средних скоростях
движения (Fr,, 2,5) основную долю в полном сопротивлении глиссирующего судна
1 ' 2 3 Ч Frv 5
Рис. П.8. Зависимость обратиогоУкачества е от числа Fry для моделей серии БК
составляет остаточное сопротивление, на которое оказывает существенное влияние
изменение относительного удлинения. С уменьшением этого удлинения, а следова-
тельно, с увеличением водоизмещения н коэффициента статической нагрузки в соот-
ветствии с диаграммами рис. II.9, а остаточное сопротивление возрастает. Кроме
того, в переходном режиме с ростом Сд повышается ходовой дифферент. Выше-
изложепиое следует из формулы
е = ф + Cfk Fr2v/(2C^3), (11.1 °)
полученной из выражения
в = ф Ь СрХ/Св.
При высоких скоростях (в режиме глиссирования) ходовой дифферент суще-
ственно уменьшается, и основную толю в полном сопротивлении составляет сопро-
тивление трения. С уменьшением коэффициента статической нагрузки при Frv =
— const повышается доля трения в полном сопротивлении глиссирующего судна.
Поскольку тлииа смоченной поверхности модели в режиме глиссирования при
изменении Сд меняется незначительно, то сопротивление трения оказывается обратно
пропорциональным величине С^/3. Таким образом прн больших значениях чисел
Fry обратное качество определяет в основном второй член выражения (II. 10)>
который при Frv = const с увеличением CQ уменьшается, т. е. растет гидродинами-
ческое качество глиссирующего днища.
В случае смещения относительной центровки в корму в диапазоне от xg =0.4
до х = 0,35 граница оптимальных чисел Frv, изменяется от Fry = 3,0 до Fry = 4,0.
288
Следовательно, обратное качество глиссирующего судна, если числа Гги высокие,
становится меньше при больших значениях Cq и кормовых центровках.
Положение ЦТ. Анализ влияния положения ЦТ по длине иа сопротивление
глиссирующего судна позволяет сделать следующие выводы: на малых и средних
скоростях (Frv 2,5). когда остаточное сопротивление играет основную роль, сме-
щение ЦТ в нос снижает обшсе сопротивление вследствие уменьшения углов ходо-
вого дифферента; прн высоких скоростях (Fr 2,5) в полном сопротивлении пре-
Рис. 11.9. Зависимость обратною качества е от числа Ггр
для мотели 6К-1: а— при различных Се: б— при различ-
ных хя.
обладает сопротивление трения, поэтому благоприятной оказывается кормовая
Центровка при которой уменьшается площадь смоченной поверхности (см.
рис. 11.9,6).
I Изменение относительной длины. Изменение коэффициенга статической нагрузки
И относительной центровки как было показано выше, оказывает существенное вли-
яние на сопротивление воды движению глиссирующего судна. Поэтому влияние на
1сопротив теине изменения основных параметров теоретического чертежа глиссиру-
ющих судов следует оценивать при постоянных значениях коэффициента статической
Нагрузки и относительной центровки.
Н О степени влияния на сопротивление измен > ня относительной длины (I с|: Ад)
г^зволяет судить рнс. 11.10, иа котором показана зависимость обратного качества
™ относительной длины при различных числах Fr(/ по водоизмещению
10 П р я. Н. ВоПткунского, т 3 289
Изменение угла внешней китеватости на миделе (редане). Один из основных
параметров, определяющих гидродинамические характеристики глиссирующих
судов, — форма поперечных сечений днища. Она изменяется по длине для ре>льных
судов поэтому се принято характеризовать формой мпте.ть-шпанготта. Для по-
Рис. 11 10. Зависимость обратного качества с от относительной
длины (£ск/£ж) ляя различных чисел Fry.
Рис. 11.11. Зависимость обратного качества е от числа Fry при
Рр = const
вышевия мореходности профили мидель-шпангоута выбирают с искривлением у скул
Увеличение угла внешней килсватостн иа редане приводит к существенному росту
сопротивления воды движению глиссирующего судна (рис. II. И).
Втияние угла внешней килеватости мидель шпангоута на сопротивление глис-
сирующих судов с образованиями без реданов оказывается сложным Анализ резуль-
татов испытаний серии БК показывает, что при всех значениях относительной длины
наименьшее сопротивяение на тихой воде имеют модели при ₽к = 14-16°.
290
Результаты анализа влияния на сопротивление изменения основных - пара-
метров, характеризующих форм} обводов и соотношения главных размерений кор-
п г а также центровку и нагрузку моделей серии БК, дают основание сделать
следующие выводы.
В диапазоне изменения относительных скоростей I <: Fr^, 4,5 существенное
влияние иа сопротивление воды движению глиссирующего судна оказывают форма
шпангоутов, коэффициент статической нагрузки, относительная центровка, относи-
тельная длина, угол внешней килеватости на миделе. Поэтому, проектируя глисси-
рующие суда, на выбор указанных параметров нужно обращать особое внимание.
Изменение сужения кормовой оконечности н угла внешней килеватости иа транце
при Frv 3,5 ие приводит к заметному изменению сопротивления глиссирующих
судов, следовательно, выбирая эти параметры в указанном диапазоне скоростей,
следует исходить из условия обеспечения лучшей мореходности, управляемости
Рис. 11.12._3ависнмость от числа Fry оптимальных значений: а—относительной
центровки Xg о1)7_б — коэффициента статической нагрузки Cq опт; в — относитель-
ной длины lOut; в—угла внешней кглеватости иа миделе Рхопт-
н т. д. При движении с очень высокими скоростями (Frf 4.0) сужение н прида-
ние кормовой оконечности некоторой килеватости позволяет улучшить ходовые
1качества глиссирующих судов.
Для нахождения оптиматьиых соотношений параметров корпуса глиссирующего
судна в зависимости_от его режима движения быта решена задача об экстремуме
Функции е (xg, Cg. L, ₽х), зависящей от четырех параметров: jrg. Cq. L и
Указанная функция представляет собой ряд Тейлора, в котором опущены члены,
содержащие производные четвертого н более высокого порядков. Экстремальные
значения данной функции могут быть определены из следующих уравнений:
_^_=0; * =0; Л-=0; -^-=0.
Такие вычис тения были выполнены для чисел Fr^, = 2,5^ 4,5. Полученные
оптима; иые значения параметров показаны на рнс. 11.12 в виде следующих зави-
симостей:
опт = f (Frv); CG опт = (Frv); ^ипт = (Цщ Дь)опт — 1 (FrV’): ₽М опт = / (Frr)-
? Оптимальные значения относительной центровки при числах 2,5 Fr^.
^4,5 находятся в пределах 0,37—0,41 (рис. 11.12, а). Эти значения наиболее при-
еМ-е*щ для глиссирующих судов.
’ Рассмотрение зависимости С0опт = f (Fr|.) (рис. 12,6) показывает, что с уве-
Рнчеццеч чисел Frv растут и значения оптимального коэффициента статической
нагрузки. Последнее хорошо согласуется с выводами, сделанными на основании
формулы (II.10). Зависимость оптимального значения относительной длины от
числа Frk (рис. 11.12, в) имеет бочее сложный характер. Так, с увеличением числа
Fry в диапазоне 2.5 С Fr^. <1 3,25 оптимальные Значения относительной длины
резко уменьшаются, при Fr-, = 3,25-т- 3,75 они остаются практически постоянными,
а при Ffj, > 3,75 увеличиваются. Последнее хорошо согласуется с результатами
экспериментального исследования сопротивления моделей серии, разработанной
Клементом и Блаунтом (291.
Оптимальные значения угла внешней килеватости на миделе прн изменении
режима быстроходности глиссирующего судна (рис. 11.12, г) меняются незначи-
тельно и находятся в пределах 14—16°.
Результаты решения рассмотренной задачи, показанные иа рис. II. 12, а—г
позволяют в начальной статин проектирования достаточно легко определять опти-
мальные соотношения параметров корпуса вновь проектируемого глиссирующего
судна.
§ 8. УПРАВЛЕНИЕ ГИДРОДИНАМИЧЕСКИМИ ХАРАКТЕРИСТИКАМИ
ГЛИССИРУЮЩИХ ПОВЕРХНОСТЕЙ. РАСЧЕТ СОПРОТИВЛЕНИЯ
ГЛИССИРУЮЩИХ СУДОВ С ТРАНЦЕВЫМИ ПЛИТАМИ
Управление гидродинамическими характеристиками глиссирующих поверх-
ностей может осуществляться различными способами, которые условно могут быть
разделены на две группы:
Рис. П.13. Схема распределения
гидродинамической нагрузки вдоль
днища глиссирующих судов: а —
безреданпое судно; б — реданное
судно; в — судно с вентилируемым
днищем.
1) изменение физических констант жидкости в непосредственной близости от
несущей поверхности за счет вентиляции;
2) механизация глиссирующей поверхности, состоящая в использовании раз-
личного рода управляемых транцевых плит и интерцепторов.
Вентиляция глиссирующих поверхностей может осуществляться естествепш м
путем и искусственно. К судам с естественной вентиляцией отно-
сятся глиссирующие суда с поперечными реданами (рис. 11.13). При движении
такого судна с высокой скоростью за реданом образуется полость или каверна,
сообщающаяся с атмосферой в местах выхода редана к скулам и заполненная возду-
хом, находящимся под давлением, равным атмосферному рКвв — Рч- Правильн i'«
выбором профилировки рсдаиои и их компоновки можно обеспечить судну треб'-
емую посадку и достаточно высокое гидродинамическое качество (рнс. 11.14).
Благодаря принудительной подаче воздуха пли иного газа на днище глисспг ’
ющего судиа при искусственной вентиляции возникает дополни-
тельная сила поддержания, обусловленная повышенным по сравнению с атмосфер
292
ным давлением в области отрывного обтекания днища ркав — (см. рис. 11.13).
Наличие дополнительной силы поддержания наряду со снижением полного сопро-
тивления из-за уменьшения сил трения позволяет заметно увеличить гидродинами-
ческое качество К = G R судна (рис. 11.15).
Использование вентиляции иа глиссирующих судах связано с необходимостью
принципиальных изменений традиционных форм обводов. Практика китеростроения
знает лишь единичные примеры подобных проработок, например построенное в США
судно «Дииаплейн» (391.
Применение транцевых плит позволяет воздействовать иа характеристики
корпусов глиссирующих судов за счет изменения продольной профилировки их
несущих поверхностей. Эффективность транцевых плит особенно высока в переход-
ном режиме движения при относительной скорости судна Fr^. = 2-5-3. В отдельных
случаях, если правильно выбраны углы пере-
кладки благодаря использованию транцевых
плит удается практически полностью устранить
горб сопротивления (рис. II. 16).Эффективность
действия транцевых плит как средства управле-
ния посадкой глиссирующего судна и снижения
его сопротивления зависит также от относи-
6
2Р Ц,0
Рис. 11.15. Влияние подачи воздуха под
днище глиссирующего судиа на его гидро-
динамическое качество.
/ — при подаче воздуха; 2 — без подачи цозду.чз.
Рнс. 11.14 Зависимость отно-
I шеи и я сопротивления рединного
и безредапного катеров от отно-
сительной скорости
FrB = v/Г gB.
тельной нагрузки, характеризуемой коэффициентом Со, и относительного поло-
жеиня ЦТ по длине С увеличением Сс и смещением ЦТ в нос активность
транцевых плит несколько снижается Перекладка транцевых плит приводит к по-
вышению максимально достижимого качества, соответствующего минимуму кривой
буксировочного сопротивления. Вместе с тем относительная скорость, которой
соответствует минимальное сопротивление, падает с ростом угла перекладки. Упра-
вление плитами должно быть достаточно оперативным, так как при перекладке иа
большие углы судно может зарываться. Использование транцевых плит на относи-
тельно коротких глиссирующих судах при кормовых центровках позволяет, кроме
того, повысить устойчивость хода на высоких скоростях.
Значения подъемной силы Ry и шарнирного момента Л!11л. возникающих па
транцевой плите при перекладке ее на угол а 12", могут быть вычислены по фор-
мулам
= л 1 + их Cv (,,v^/2) fnnftwi;
О 24
;Мпл ~ Л 1 -J- ],4Х С</ (Pv~/2) ^л^пл.
г,е Л'(Ргд, X) — поправка на конечность числа Фруда, определяемая по графику,
приведенному иа рис. 11.17, в зависимости от удлинения транцевой плиты и скорости
УДНа; X •= 6Пл /пл— удлинение транцевой плиты (Ь||П и /пл— соответственно ши-
Рина и длшта плиты); Си(а) — коэффициент подъемной силы, определяемы!! в зави-
симости от угла перекладки плиты а и отношения L = LCH /пл(^см — смоченная
«чина) по графикам, показанным на рис. 11.18.
293
Для расчета сопротивления «ломаных* глиссирующих пластин и катеров с тр."
певыми плитами может быть применен метод, приведенный в работе [61}, Corp -
тнв>.*.ие «ломаной» глиссирующей пластины
R = С tg if + Rf.
где G — нагрузка на глиссирующую поверхность, Rf — сопротивление трении
Для расчета по этой формуле кроме нагрузки и дифферента необходимо знать пл
Рис. 11.16. Зависимость сопротивления п дифферента от скорости модели судна (а)
при G НИХ) Н и различных углах перекладки транцевых плит (б).
шаль смоченной поверхности, которая определяет сопротивление трения. I
заданной нагрузке дифферент и смоченная поверхность плоской пластины изме-
няются в зависимости от скорости движения и относительного положения ЦТ по
длине (центровки). Влияние на сопротивление отклонении формы глиссирующей
поверхности от плоской пластины учитывается путем введения в значения угла
ходового дифферента и смоченного удлинения поправок иа угол кплеватостп, а также
поправок иа относительные размеры и угол перекладки транцевой плиты. е
последние поправки могут быть определены по графикам, приведенным на рис. I ’
и 11.20, где показаны производные угла дифферента глиссирующей поверхности °
углу перекладки плиты бфйа (FTp> ^g) и относительный прирост смоченного удли*
294
Рис. 11.17. Поправка иа ко-
нечность числа Фруда вводи-
мая в расчет гидродинамиче-
ских характеристик транцевых
плит.
Рнс. И. 18. Зависимость коэффициента подъемной силы иа транцевой
плите от угла ходового дифферента, угла перекладки и относительной
смоченной длины.
295
нения «ломаной» глиссирующей пластины по сравнению с плоской ДХ/Лс(Ргв; С6;
а; mA Сначала определяем значение коэффициента гидродинамического момента
т0 = (/пЛ + xg)/b. Затем, задаваясь рядом значений скорости движения, по соот-
ветствующим величинам FrB и найденному значению mG находим согласно графику
|6J 1 на рнс. IJ.20, г соответствующие удлинения плоской пластины Ао. Далее по
графику на рис. II .20, 5 Св/ф(Лп, Frn) определяем значения отношения Св/ф и
вычисляем углы ходового 'дифферента ф. На этом первая часть расчета заканчи-
вается.
Рнс. 11.19. Влияние относительной ско-
рости движения и коэффициента про-
дольного момента па значение произ-
водной угла дифферента по углу пере-
кладки транцевой плиты.
1 — ,пс — — "’с (® 'пл) “
= 7,0; 3 — r»G (В /пл) — 7.5.
Рис. 11.20. Относи тельное приращение смоченного удлинения глиссирующей по-
6)
297
Рис- 11.20. Относительное приращение Смоченного удлинения глнссирхющси по-
верхности по сравнению с плоской пластиной (в — щд = 1.3) и характеристики
плоских пласт! н (е и д).
298
I На втором этапе для каждого 1.3 выбранных значений скорости судна по гр.т-
Гфнкам, приведенным на рис. 11.19 и 11.20, находим поправки к углам дифферента
Дф/ЛфПд. FrB) и к удлинению &X/Xfl(FrB, тд, Сс) в зависимости от у . откло-
нения поворотного элемента. Затем определяем:
углы ходового дифферента
ф = фо-г-аЭф. да-,
смоченное удлинение
>. — + (Ла Хо)
b значения смоченной длины
=
и площади смоченной поверхности
С = Х£2.
Рис. 11.21. Относительное снижение сопротивления схемзтнч-
। ой модели глиссирующего судна прн различных углах пере-
кладки транцевой плиты.
------ расчет: Оно — эксперимент.
По найденным углам ход< вого дифферента рассчитываем сопротивление Rp «=
== (' tg>|' (при малых ф Rp = бф). Сопротивление трення получим по формуле
Rfe = Сг° (ре2'2) ft,
где Ср —коэффициент сопротивление трения эквивалентной пластины, определя-
емый по формуле Прандтля - Шлих гни га (И.5) в зависимости от чиста Re =
= I'LeM v,
11оправку к коэффициенту сопротивления па шероховатость поверхности Сд
принимаем в соответствии с рекомендациями § 5. Полное сопротивпепие определяем
суммированием сопротивления Rp и сопротивления трепня.
Па рнс. 11.21 показаны результаты расчета по предложенному методу относи-
тельного изменения сопротнвтения гтиссируюшей пластины с транцевой птитой
lipii значениях угла перекладки а 3 н 6 . Там же нанесены значения прироста
сопротивления, определенные экспериментально.
I Хорошее совпадение экспериментальных и расчетных данных позволяет поль-
зоваться предлагаемым методом для расчета сопротивления «ломаных» гянссиру-
•ощнх пластин умеренного удлинения Х = 1ч-3 и малых глиссирующих судов с
Францевыми плитами.
§ 9. МОРЕХОДНОСТЬ ГЛИССИРУЮЩИХ СУДОВ
I Движение глиссирующего судна на волнении прстставтяст собой сложный
Нестационарный процесс, причем в зависимости от мгновенного положенья судна
относительно волны н курсового угла изменяется механизм их взаимодействия.
299
Рис. 11.22. Зависимость параметров килевой качки 4 а (и) и вертикальной качки 2гв/йа (С) модели БК-1 от
числа Fry для различных значений отношения
300
I Движение судна на волнении сопровождается значительной потерей скорости,
которая изменяется в пределах каждого периода встречи с волной.
Сложность физических явлений, сопровождающих движение глиссирующего
судне па волнении, не позволяет построить достаточно строгую теоретическую
модель и разработать методы расчета качки и дополнительного сопротивления на
волнении. Для получения систематических данных о дополнительном сопротивлении
и параметрах качки глиссирующих судов можно использовать результаты мореход-
ных испытании моделей серии БК. Испытания моделей серии проводились при
" 1,0, характерном для мореходных глиссирующих судов большого водоизме-
щения. Относительная центровка моделей составляла = 0,40.
Рис, 11.23. Зависимость относительного дополнительного conpoiпаления Ы&С
от числа Fry при различных значениях отношения AB/t и /1Ш'ХВ = 1/30.
Прн движении на волнении глиссирующее су то испытывает значительные вер-
тикальные перегрузки, воздействие которых приводит к уменьшению его скорости.
В результате этого судно оказывается в переходном режиме. Поэтому параметры
к«чкн и дополнительного сопротивления мо irieri серин БК были исследованы в пере-
ходном режиме движения (1,0 Frv 3,0). представляющем наибольший практн
ческнн интерес ня современных мореходных глиссирующих судов. Испытания
моделей серии БК. имеющих различную относительную длину л угол внешней
килеватости, покатывают, что эти параметры незначительно влияют на дополни-
тельное сопротивление. Поэтому для приближенной оценки дополнительного сопро-
тивления, максимальных перегрузок »„1ЛХ н параметров качки па волнении вновь
проектируемого су тиа можно использовать данные, полученные для исходной мо-
дели серин БК-1 иа регулярном волнении (рис. 11.22—11.21).
301
С целью приближенного расчета дополнительного сопротивления глиссирующею
судна, движущегося в условиях нерегулярного волнения, применяют методику
А. И. Вознесенского и Г, А. Фирсова для водоизмещающнх судов П41.
Исследование килевой качки судов на встречных курсах к волне показывает,
что распределение амплитуд килевой качки на нерегулярном волнении может быть
определено с достаточной для практики точностью, если известно двухмерное распре-
деление высоты и длины волны, т. е. известны размеры волн, составляющих рас-
сматриваемое нерегулярное волнение. Для построения кривых распределения
амплитуд килевой качки достаточно на основе результатов модельных испытаний
оценить амплитуды вынужденной качки судна на правильном волнении, соответ-
ствующем по размерам волн каждой из воли рассматриваемой нерегулярной после-
довательности, и составить таблицу их
распределения. Распространение этого ме-
тода на дополнительное сопротивление
судна на нерегулярном волнении позво-
ляет наметить путь для его приближенной
оценки по данным о дополнительном со-
противтении его модели на правильном
волнении в опытовом бассейне.
Считается, что среднее значение ра-
боты сил дополнительного сопротивления
при преодолении судном ряда одинаковых
или близких по размерам волн, отделен-
ных волнами других размеров, равно ра-
боте сил сопротивления при преодолении
тех же волн, соединенных в регулярную
последовательность. Указанное допущение
может быть записано в виде следующего
ЗС
равенства:
Рис. 11.21. Зависимость вертикальных ____
перегрузок лшах (в долях g) от угла ARvT = ARlvlTl,
внешней килеватости рд при разлнч- .— „ „
ных значениях Fr , где ~ среднее дополнительное сопро-
тивление на нерегулярном волнении;
v — средняя скорость на нерегулярном волнении; Т — время движения судиа в рас-
сматриваемой последовательности нерегулярных воли; —дополнительное со
противление на 7-й волне; 14— скорость на i-й волне; Tj — продолжительность
движения иа 7-й волне.
Таблица 11.5. Расчет дополнительного сопротивления прн движении
глиссирующего судна на волнении со скорстью и, = 48 уз при = 1/30.
*в й 1 и rt+.L^J WI + I 2 — й И р1 г|°| х‘ ’W7 ДЛ;Т| кН
0—10 10—20 20—30 30—40 40—50 50—60 60—70 5 15 25 35 45 55 65 2,24 3,87 5.0 5,92 6,70 7,42 8.06 2,80 4 84 6,25 7,40 8.36 9,25 10.01 27,5 29,54 30,95 32,10 33,06 33,95 34,71 0,181 0,508 0,807 1,09 1,36 1,62 1,87 0,04 0,04 0,07 0.11 0,13 0,12 0,11 0,007 24 0,020 32 0,056 49 0,120 0,177 0,194 0,206 0,781 0,009 4 0,026 0 0,072 5 0,154 0,226 0.249 0,264 3,92 14,1 23,6 40,5 58,4 89,4 119,0 0,037 0,366 1,71 6,24 13,2 22,3 31,4 75,3
302
Пренебрегая колебаниями
= v, тогда Д7? =-------
скорости судна на волнении, можно положить, что
= X ARiTt. Произведение удобно суммирс-
гать не дтя каждой волны, а для некоторого интервала длины воля со средней
для него высотой. Внутри каждого интервала дополнительное сопротивление мож-
Рис. 11.25. Интегральная
Г — значения вероятности
кривая распределения длины волн.
встречи both разной длины.
но считать постоянным и равным его значению для середины рассматриваемого
интервала.
Расчет среднего дополнительного сопротивления судиа па неправип•
ном волнении выполняют в такой последовательности:
I. Находят значения AR, для ряда выбранных интервалов длины волн (см.
рис. П.23). Полученную для заданного
судна н его скорости кривую зависимости
дополнительного сопротивления судна от
длины волны (прн постоянной крутизне
1/30) пересчитывают на заданную высоту
воли полагая, что в соответствии с ра-
ботои [14 | дополнительное сопротивле-
ние прямо пропорционально квадрату вы-
соты волны. Для волнения, равного 4.
5, 6 7 баллам, наибольшая длина волны
считается соответственно 40, 70, 120 и
1Т0 м
2. Рассчитывают значение Tj, которое
представляет относительную продолжи-
тельность движения судна по волнам,
объединенным в Г-н интервал. Очевидно,
’Г пропорционально среднему кажущемуся
периоду волн Г-го интервала и вероят-
иостн встречи воли, длина которых за-
ключена в этом же интервале. Кажущийся
период в зависимости от длины волн ,
7г = Л,/(1,25| Л" о).
Рис. 11.26. Паспортная диа!рамма
(Л — ограничительная характеристи-
ка двигателя).
В Вероятность длины волн i-ro интервала pi определяют по интегральной кривой
Распределения длины волн, изображенной па рнс. 11.25. С графика непосредственно
*огу быть сняты значения вероятности pt = F(+l — Ft. Зиля значения Ti и Pt
Л”я выбранных интервалов длины войн, можно найти произведения T;pi и искомое
значение величины т( = T/pf : ХТ,-р{.
. 3. Среднее дополнительное сопротивление судна на нерегулярном волнении
F5” находят суммированием произведении ART, для всего диапазона длины воли.
303
отвечающего рассматриваемом} состоянию поря. Весь расчет дополнительного
сопротивления может быть сведен в табл. 11.5. В таблице приведен в качестве при-
мера расчет дополнительного сопротивления глиссирующего судна водоизмещением
С = 2000 кН прн движении его иа волнении 5 баллов. Скорость судил на тхоп
иоде составляет 48 уз (24,7 м/с)
Значение дополнительного сопротивления на нерегулярном волнении во всем
диапазоне длины волн внесено в столбец для Д/?, таСьт. 11.5. Согласно вычнедс-
i ням искомое дополнительное сопротивление при скорости 48 уз равно 75,3 кН,
что составляет около 23 % сопротивления на тихой воде.
На основе аналогичных расчетов при других скоростях и с учетом действия
ветра была определена мощность Ре при ходе судна на волнении. Иа рис. 11.26
представлена безразмерная паспортная диаграмма, на которой значения 'Ре от-
несены к максимальной мощности Ртяк двигателя, а частота его вращения п —
к максимальной лтох. Нижняя кривая рисунка соответствует движению на ти-
хой воде, а верхняя — иа волнении.
Глава III
СУДА НА ПОДВОДНЫХ КРЫЛЬЯХ
§ 10. ОСНОВЫ ГИДРОДИНАМИКИ ПОДВОДНОГО КРЫЛА
В отличие от крыла самолета (крыла в безграничном потоке, подводное крыло
СИК в рабочем режиме обтекается вблизи свободной поверхности воды Близость
свободной поверхности н влияние весомое in воды обусловливают специфику методов
гидродинамики подводного крыла. Наряду с классической теорией крыла для реше-
ния задач гидродинамики подводною кры ьт необходимо использовать результаты
теории волновых движении жидкости. Одним m основных соотношений указанной
теор in является граничное условие па свободной поверхности, характеризующее
постоянство давлении на пси и выраженное в линейном приближении для стаци-
онарного движения следующей формулой:
-^ = -ТТй-Fu. ("’.И
где t»x ио—горизонтальная составляющая вызванной скорости и скорость на-
бегающего потока; Ег = 17/gt> — число Фруда по характерному линейному раз-
меру, например хорде крыла Ь: уп — ордината волны, вызванной обтеканием крыла.
Подводное крыло рассматривается в системе координат xyz, начало которой
(рис. II 1.1) находится на уровне невозмучцениой свободной поверхности над крылом,
ось ох направлена по скорости потока, ось от — перпендикулярно к скорости вдоль
свободной поверхности (поперек потока), ось oij — вертикально вверх Вертикальная
плоскость хоу проходит через середину крыла.
Если рабочие режимы обтекания крыльев СПК соответствуют числам Fr = 5-1-7,
а волновые ординаты над крылом составляют дич ь незначительную долю его хорды
(0,15—0,20), то на основании формулы (III.1) можно прийти к следующему заклю-
чению: в практически интересных случаях обтекания подводного крыла допустима
предположить равенство нулю горизонтальной составляющей вызванной скорости
на свободной поверхности воды. Эго предположение при незначительном усложнении
метода исследования позвотяет свести задачу о подводном кры«е к задаче о крыле
в безграничном потоке, воспользоваться отработанными в авиационных задачах
математическими моделями крыла и в итоге довести теоретические решения до про-
стых инженерных мегодик расчета, имеющих достаточную для практических целен
точность.
Если рассматривать обтекание крыла безграничным потоком н использовать,
как мбычно, представление несущей поверхности в виде системы присоединенных
и свободных вихрей [24, 36), то для удовлетворения условию равенства нулю гори-
304
|онтал1>иых вызванных скоростей в плоскости хог (плоскости, соотыястврощси рас-
колом синю свободной поверхности. — см. рнс II 1.1) достаточке дополнительно
« основной вихревой системе симметрично этой плоскости (в верхнем полупро-
стран тве) поместить фиктивную систему, имеющую те же интенсивность и знаки
вихрей Прн исследовании влияния телесности подводною крыла п использовании
Еедс^авленпя объели ых профилен в виде распределения источников для удовлет-
ворення указанному условию элементы фиктивной системы источников должны иметь
те "же значения интенсивности, по противоположные знаки |311.
Опнсзииая схематизация использована при построении матемаhi теской модели
1ро.1ировтииого подводного крыла конечного размаха (без учета взанмодсйсшня
^Кентов несущей системы СПК) в решениях, доведенных до расчетных методик.
Опа базируется на применении методов несущей линии и несущей поверхности
fgu. т. I, ризд. I, гл. V). В первом нз этих методов используются конформные
отображения для решения плоской задачи. Учет пространственности об1екапня
приводит к 1ипегродиффереициалы1ому уравнению крыла конечного размаха, реше-
ние которого для оптимального крыта (с минимальными индуктивными потерями)
может быть получено в конечном виде. Второ! метод обусловливает необходимость
рассмотрения ните! ральиых уравнений н прн введении различных упрощающих
допущений (например, замене непрерывного распределения интенсивности вихревой
поверхности дискретными вихрями) сводится к решению систем ашебранческих
сравнений. осуществляемому обычно па ЭВМ
Внесение в упомянутые методы дополнений необходимо для учета кавитации,
относящейся наряду со свободной поверхностью воды к специфическим особенностям
гидродинамики подводного крыла.
Помимо естественной паровой кавитации возможна искусственная кавитация,
при которой образование каверны обусловлено принудительной подачей воздуха
ьа поверхность крыла (вентилируемые крылья).
| Степень развития кавитационных явлений определяется безразмерным пара-
ми + - Ро
метром — числом кавитации о --------'.„.ЧВ---• гДе " — глубина погружения
pt'2/2
рассматриваемого сечения крыла под свободной поверхностью воды.
При обтекании подводного крыла возможны несколько типов кавитации:
а) кзвитаиия профиля, определяемая режимом обтекания продольного сечения
крыла;
б) кавитация концевых вихрей, обусловленная в основном характером распре-
деления нагрузки в районах концевых сечений крыла;
в) капп пиши районов притыкания к поверхности крыла стоек inn угловых
KpoiiOK передачи мощности к движителям.
305
Теоретическому расчету в нтстоящее время поддается только кавитация на про-
филе, которая в основном и определяет гидродинамические характеристики подвод-
ного крыта
Отличительная особенность гидродинамики подводных крыльев СПК — необ
ходимость учета нх взаимодействия, обусловливающего существенное изменение
характеристик кормового крыла по сравнению со значениями, соответствующими
его обтеканию в изолированном состоянии. Носовое крыло при определении харак-
теристик может рассматриваться как изолированное.
Рис II 1.2. Геометрические параметры несущей поверхности подводного крыла:
а—г—форма крыла в плане (с—прямоугольная, б в — трапециевидная; е -
стреловидная); д—и — форма поперечной вертикальной проекции крыла [о
плоское крыло; е—и — килеватые крылья с одинаковой (е, з) и различной (ж, и)
килсввтостью участков, полностью погруженные (е, ж) и пересекающие поверх
и ость воды (з, к)1-
Из сказанного следует, что учет взаимодействия подводных крыльев СПК прежд
всего зависит от возможности опредеюння параметров потока, возмущенного носо-
вым крылом, для района расположения кормового крыла (формы волновой поверх-
ности над этим крытом и углов скоса натекающего потока), т е от решения волне-
вой задачи, Послед! ее не поддается схематизации, существенно упрощающей мето
исследования, подобно проведенной при определении характеристик изолированного
крыла. Поэтому требуется удовлетворять условию (III. 1) без каких-либо допущении.
На втором зтапе учета взаимодействия элементов несущей системы СПК для
определения характеристик кормового крыла необходимо решить задачу о подвод
ном крыле, обтекаемом неравномерным потоком с резко изменяющимися в налравле-
•ЧОБ
Hiiu размаха скосами при произвольной (неплоской > форме свободной поверхности
°0Д Методики определения характеристик крыльев СПК с учетом их взаимодействия,
евврпботанные на основании численного решения волновой задачи [48). в связи
со сложностью вычислений в объеме, несоизмеримом с возможным при ручном счете,
предусматривают обязательное использование ЭВМ.
I Попытки приближенных решений задачи о волнообразовании за подводным
крылом, основанных на косвенном учет» условия (III. I), например [80. 81], при-
вели к получению данных, позволяющих лишь определить длину и глубину волно-
вой впадины за полностью погруженным горизонтальным крылом Эти данные
недхгаточиы для количественного учета взаимодействия крыльев СПК, ио могут
Сыт’ использованы для качественной опенки прн выборе рациональной компоновки
крыльевой системы.
Рнс, 111,3. Геометрические параметры профиля крыла.
, (*). Уа (х), с (х). ес (х) — ординаты верхней В нижней сторон профиля, его толщин» и ор-
дината средней линии в рассматриваемом сечении; Ь — хорда профили.
I Разработка методов гидродинамики подводного крыла базируется на учете его
определяющих геометрических параметров. К ним относятся форма в плане, проек-
ция на вертикальную поперечную плоскость и профилировка крыла.
। Форма подводного крыла в плане (рнс. III.2. а—г} характеризует распределение
хорд по размаху. Основные типы формы — прямоугольная трапециевидная и стре-
ловидная (угол стреловидности Хкр передней и задней кромок крыла измеряется
между соответствующими кромками и осью ог, направленной поперек потока).
Прн использовании теории несущей линии конфигурации присоединенного вихря,
заменяющего несущую плоскость, для рассматриваемой формы в плане соответствует
конфигурации линии, отстоящей от передней кромки крыла на расстоянии, рав-
ней местных хорд. При определении характеристик крыла методом вихревой по-
верхности элементы ее распределяются по всеп области, ограниченной контуром
формы крыла в плане.
Форма проекции несущей поверхности иа вертикальную поперечную плоскость
(рис. 111.2,5—и) характеризует кнлеватость подводного крыла, которая может
быть нулевой у плоского крыла или отличной от нуля у кнлеватого и у имеющего
участки с одинаковой или различной килеватостью Если плоские крылья — пол-
ностью погруженные, то килеватые могут быть как полностью погруженными, так
и пересекающими поверхность воды.
Помимо указанных иа рис. II 1.2 сплошных подводных крыльев, середина кото-
рых совпадает с ДП корпуса, возможны также раздельные кры 1ья, состоящие из
Двух элементов, разнесенных по ширине н аналогичных какой-нибудь нз рассмотрен-
ных форм.
Профиль крыла (рис 1113) задается ординатами верхней засасывающей,
11 ннжнеи, нагнетающей, сторон yt (х) н уй (х) в пределах хорды b. С помощью
этого представления толщина профиля в произвольном сечении по хорде может быть
। определена в виде разности ординат е(х) = yt (х) — уа (х), а характеристика его
кривизны ордината средней линии, — в виде нх полусуммы сс (х) = lj/i (х) +
~г У- (х)р2. Для гидродинамического расчета подводного крыла обычно достаточно
оперировать величинами, характеризующими максимальные значения геометрп-
307
четких параметров профиля: хордой ft, относительной толщиной 6 = elb (е — ма-
ксимальная толщина) н углом пулевсй подъемной сиды сс^м, соответствующим
безграничному потоку и зависящим от кривизны профиля (стрелки прогиба средней
липин).
Для подводных крыльев, работающих в режиме обтекания без кавитации в не-
посредственной близости от поверхности воды и в условиях ее пересечения, обычно
используют профили с заостренной передней кромкой — серповнд! ые или ceiNCirr-
ные, а также профили типа сегментных со смешенным к носику положением макси-
мал ь юй толщины (профили Зотторфа — Алексеева!.
С целью предотвращения неблагоприятных последствий кавитации форма про-
филя и угол его атаки выбираются такими, чтобы эпюра разрежений на засасыва-
ющей (верхней) стороне профиля была по возможности более равномерной, а макси
мяльное значение коэффициента разрежения по абсолютной величине не превышало
расчетного значения чиста кавитации о. Существует специальный класс кавита-
ционно-устойчивых профилей (для глубокопогруженны.х крыльев, рассчитанных
на умеренные скорости о >0.2, это профили со скрепленным носиком — Вальх
вера, ВС-б, ПИ, NACA-16, N.\CA-6t>). Наиболее сложным в выборе формы профизч
оказывается одновременное выполнение требовании гидродинамики, согласно кото-
рым необходимо уменьшение толщины профиля с ростом скорости, н требовании
прочности, обусловливающих необходимость сохранения потребной толщины для
всех скоростей. Перспективными в этом отношении являются профили с S обртзиои
нагнетающей (нижней) стороной, позволяющие увеличить толщину крыла, рассчи-
танного иа высокие скорости обтекания.
§ 11. ГИДРОДИНАМИЧЕСКИЙ РАСЧЕТ НЕСУЩЕГО КОМПЛЕКСА СПК.
ПЕРЕСЧЕТ ДАННЫХ МОДЕЛЬНЫХ ИСПЫТАНИЙ НА НАТУРУ
Для проектирования несущего комплекса судна на подводных крыльях необ-
ходимо знать основные гидродинамические параметры, которые характеризуются
двумя главными категориями данных: I) о силах поддержания, обеспечивающих
устойчивое движение СПК на различных скоростных режимах, н 2) о силах contu
гивдеиня воды, преодолеваемых судном в указанных режимах. Для морских СПК
учет условий движения с}диа на вотиенпи. cipruo говоря, всегда должен предусма-
тривать определение указанных данных. Однако методически более удобно раз-
делить гидродинамический расчет тлкогоСПК на два эыи.1: I) для условий движения
на тихой воде, по результатам которого может быть определена исходная геометрия
несущего комплекса cvaiia; 2) по учету влияния волнения с корректировкой, в ел?
чае необходимости, выбранного иа первом этане варианта геометрии. Поэтому вли-
яние волнения принято отиоешь к третьей ка егорпи данных, объединяемых пони
тием «основные гидродинамические параметры несущего комплекса СПК», а две
первые категории считать cuuibcicib}ющнми условиям движения на тихой вол»
Получение перечисленных данных снизано с необходимостью определен- и
характеристик несущих поверхностей СПК, которыми у судив этого типа являются
корпус и крыльевые устройства. Под характеристиками ( идродниамическимп!
несущих поверхностей СПК понимаются прежде всего развивающиеся на них силы,
а также взаимосвязь сил с условиями (Упекания поверхностей (скоростью обтеь.
нпя, удаленностью от поверхности воты, возможностью проникновения атмосферного
воздуха, особенностями конструкции, влияющими на формирование потока). В ук;.
занно.м смысле гидродинамические характеристики корпуса зависят главным образом
(если не считать гидростатических архимедовых сил) от формы днищевой пове .-
мости, которая у СПК близка к форме, аналогичной поверхности глиссирующих
судов, и может быть задана конфигурацией поперечных сечений в функции от их
положения по длине.
Характеристики крыльевых устройств отражают свинства как основных несущих
элементов (подводных крыльев), создающих силу поддержания, так н вспомогате-ч-
иых элементов, которыми являются стойки н элементы жесткости, конструктивно
объединяющие крылья с корпусом. Значения характеристик перечисленных эле-
ментов опреде шются формой их плоскостей, профилировкой н наличием упранл!
емых органов (например, закрылков на крыльях, рулей на стойках). Для крыльев
также важно расположение их плоскостей относительно поверхности воды: пил*
308
ностыо п глубоко погруженные, с малым погружением, пересекающие указанную
Поверхность В суцест i й мере характеристики крыльевых устройств зависят
от скорости обтекания, так как прн определенных ее значениях начинает разнк-
раться кавитация и возникают подсосы воздуха, приводящие к отрывам потока.
Г Значения гидродинамических параметров несущего комплекса СПК являются
,, функциями его компоновки, т. е. распределения нагрузки между крыльями, их
взаимного расположения по длине н ширине, конфигурации днищевой поверх но тн,
поверхности стоек крыльевых устройств, стартовых алеманов и элементов двнжн-
тельного комплекса, расположения крыльев относительно корпуса. Здесь на кно
1ме1ь правильно ппйтн характеристики сил поддержания п сопротивления несущего
комплекса в целом, работающего как система элементов, т. е, помимо основных сил
/честь также и взаимодействие между этими элементами.
г Существенное влияние на основные гидродинамические параметры СПК ока-
зывает волнение Прежде всего указанное влияние приводит к значительному изме-
нению мги венных значен! и и, де 1ствующнх на несущие элементы, по сравнению
с соответствующими условиями движения на тихой воде. Кроме того, у СПК с крыль-
ями, не оборудованными управляемыми органами, нелинейность характеристик
пжводных крыльев при движении иа волнении обусловливает падение средней
(за период качки) нодьемпон сивы, «проседание* н изменение ходового балансиро-
вочною дифферента судна II, как следствие, за счет увеличения замываемой площади
стоек н изменения углов атаки крыльев — возрастание силы сопротивления по
сравнению с ее значением на тихой вате. У судов с автоматически управляемыми
крыльями прирост сопротивления па волнении возникает в результате отклонения
органов управления (и.шрпмер, закрылков), необходимого для обеспечения устой-
чивого похтержання СПК в этих условиях.
’ Определяющим средств м отработю несущею комплекса СПК является модель-
ный эксперимент. Моделирование производится но числу Фруда, ко1Да нагрузка
принимается обратно пропорциональной кубу масштаба. Для этих условий можно
считать, что подобие по ситам давления н волнообразованию практически соблю-
дается, т. с. для модели и натуры коэффициенты подъемной силы, волнового и
виду кп о с ipo । в 1СННЯ крыльев, посадка СПК и параметры взаимодействия
крыльев 0Д1Н < о ы. Масштабный эффект наиболее заметен в сопротивлении трения.
Однако, согласно имеющимся материалам |31], коэффициенты вязкостного сопро-
тивления крыльев мотели ч натуры могут быть приняты одинаковыми с небольшой
сшибкой в безопасную сторону, если при выборе масштаба модели исходить из не-
обходимости обеспечения для крыльев числя Re 5- 10а. Здесь также следует
имс1ь в виду, что нз условия подобия нрн глиссировании ширина корпуса модели
СПК должна быть не менее 0,3 м.
Применительно к указанному пересчет сопротивления модели на натуру может
производиться приближенно по кубу масштаба, т. е.
4 = к'^м'
где к — масштаб мотели.
§ 12. РАСЧЕТ НЕСУЩИХ ХАРАКТЕРИСТИК ИОДВОДНО1О КРЫЛА,
ОБТЕКАЕМОГО БЕЗ КАВИТАЦИИ
Под несущими харакгеристикимп подводного крыла пониманием исличины,
необходимые дтя определения его подъемной силы Ru. Данные по подъемной силе
позволяют найти и индуктивное сопротивление подводного крыла /?х{ =/?„а, —
индуктивный угол скоса, обусловленный влиянием сбегающих с крыла свободных
вихрей).
J Основной характеристикой является безразмерный коэффициент подъемной
с,1лы крыла
Сг/=/?. (0,5pe!S). (111.2)
ресь S — несущая площадь крыла (или ее горизонтальная проекция для киле-
вого крыла), зависящая от распределения хорд по размаху. Коэффициент Су
. 309
линейно зависит от углов атаки в их рабочем диапазоне, и для подводного крыта
может быть представлен как
Су = Су кр^эф = Сркр (а + в0« ^ае)> ’ I
где С“ кр—производная коэффициента подъемней силы рассматриваемого крыла
по углу атаки; а,,!, — эффективный у юл ятякн, складывающийся из геометрического
угла атаки а, угла нулевой подъемной силы (н. п. с.) Двое, соответствующего б»
граничному потоку, и изменения угля н. п. с. Доц, обусловленного влиянием сво-
бодной поверхности воды и зависящего также от относительной толщины 6 и D
профиля крыла.
Таким образом, для определения подъемной силы должны быть заданы
размах крыла I. распределение хорд по размаху Ь (;), углы н. п. с. сечений
а0ос, соответствующие безграничному потоку, и относительные значения
С^кр1 Дао и слг — ai*
толщины профиля б. Расчету подлежат
Для плоского пот одного крыла, рас-
положенного горизонтально, с формой в
плане, близкой к прямоугольной,
Рис. III.4. Влияние свободной поверхно-
сти воды на значение производной коэф-
фициента подъемной силы подводного
профиля по углу втакн.
Рнс. III.5. Относительны"i ’рирост i -
дуктнвпого угла скоса подводного
крыла за счет влияния свободней
поверхности.
h — nor PS ление; I — рлзмах крыта.
где у (Я)—функция, характеризующая влияние свободной поверхности воды га
производную коэффициента подъемной силы подводного профиля по углу атак i
и определяемая по графику на рис. II 1.4; Я = ft b — относительное погружен’е
крыла; а» = 5.5 — производная коэффициента подъемной силы по углу ата;-:ч
профиля, обтекаемого безграничным потоком; А. = I b — удлинение крыла; С
функция от Ы1 (отношения погружения к размаху крыла), характеризующая пр’ -
рост индуктивного угла скоса за счет втияния свободной поверхности; графическая
зависимость ее показана н рис. 111.5.
Величину Дс^ подводного крыла находят по формуле
Да0= (Я) — «С,ЛС (Л).
(Ill 5)
где функции 0й и 0ес характеризуют влияние телесности н кривизны средней лит и
профиля подводного крыла (их определяют по графикам на рнс. 111.6 и III.7 в за-
висимости от относительного погружения Я); 6— относительная толщина профи 1е:
а,, « задается в радианах по данным продувок. Для определения оо рекомендуется
формула Е. А Крамарева 31]
а0«=1,926с (III')
(6С — стрелка прогиба средней линии профиля).
310
После подсчета коэффициента п дъсмю! силы по формуле (III.3) может быть
наГ’Леи и коэффициент индуктивного сопротивления прямоугольного подводного
(.рЫЛв
By с2
Сл.| = -^-?(Л/). (II 1.7)
Часто бывает необходимо определить несущие характеристики подводных
Крыльев, форма в плане которых отлична от прямоугольной, а плоскости ие гори-
зонта типы, т. е. имеют углы килеватости. В этом случа< относительные погру-
жения различных сечений крыла, в отличие от рассмотренного случая, будут не-
Ниже приведена схема расчета несущих характеристик иестреловндиого крыла,
е операции и обозначения записываются для полуразмаха крыла, если крыло
ь’мстрично относительно вертикальной продольной плоскости, проходящей через
его среднее сечение, н дня размаха — в противном случае.
^Вбычно форма в плане реального крыла СПК может быть задана некоторым
числом и у кв несущей поверхности, представляющих трапеции с прямолиней-
ными вх дяще и вы дяшей кромками и определяемых длиной горизонтальной
проект,! ас к /, х рдами bit , и Ь2.его начального и конечного сечений. Про-
филировка участка задается средними относительной толщиной профиля 6| =
= 0.5 (6L j + 62< () и углом и. и. с. Да оо , = 0,5 (an » j t 4- а0 »2 ,). Углы
килеватости плоскостеп участков 0 р,.
^Втя рассматриваемого погружения крыла находят погружения всех грииичиых
речении с в поверхности ft, , и Л... выраженные п размерном виде
н.тн в ха| т ihom линейном размере, (в’качестве которого может быть принята
Л1<Лая |на, например хорда нижнего сечения крыла). Определяют
Разиях (или полуразмах для симметричного крыла)
т
L= V I,
1=1
® дГ лнненном размере. Если послединн m-й участок пересекает поверхность
= ^1. m tg Ркр /п- (III .8)
| Необходимо следить за тем, чтобы найденная по форму ле (1118) 1,пне превышала
в^О!,структивнмо величину, заданную геометрией реального крыла.
И ры |исляют относительные погружения граничных ссчснпй участков ; =
t и f>i, i = Л., i fc;, t и средние относительные погружения участков
311
ficp । = 0,5 (Лц/й2> t). По графику на рнс. II 1.4 снимают знг.'иятя т, = у |Л4, >
н определяют значение этой функции для всею крыта
С учетом кплеватостн участков находят производную коэффициента подъемной
силы профиля по углу атаки, соответствующую безграничному «стоку, для j Яс-
ем. трнваемого крыла
ГП
5,5 VI
с« кр — £ / , /1 COS Рцр (.
i=l
Вычисляют среднее значение отношения погружении крыла к размаху
где Рспм — 2 Для крыла, симметричного относительно среднего сечения; р,.1П| = I
для несимметричного крыта.
С графика на рнс. II 1.5 снимают величину £ в функции oi hrv,'l и определив т
удлинение крыла
2р,.„мГ
Л = i
1' (*1.1 +*2, i)h
По формуле (II 1.4), где вместо д« нт (й) используют о» нтК1„ находят С? .
С учетом килсватостн участков полечнтыв.ют значение угла и. п. с. кун ,
соответствующее безграничному потоку.
I
а0 <*> нр-------------
Л1
\т аи ос ;
Zj COSpup t
1
С графиков на рнс. III.6 и III.7 снимают значения = 06(fif|)i) и й», : =
= &ec(^cpi)» по формуле (II 1.5) рассчитывают До,,/, затем определяют изменение
угла н. п. с. крыла в целом на рассматриваемом погружении
По формулам (III.3) и (III.7) находят коэффициенты Су и Cxi, теле чею |<м.
формулу (III.2)] могут быть определены размерные подъемная сп..и и иидукипине
сопротивление подводного крыла
Rg = Су (р-Л 2) S и Rxi ~ Cxl (рЛ2) S.
Пример.
Крыло состоит из двух участков несущей поверхности, не симметрично относ I-
телыго среднего сечения, н имеет форму, размеры н взаимное расположение плоек т-
стей, показанные на рнс. II 1.8. Профиль крыла — ссчмеит с оhioi.tiтельными толы ч-
намн граничных сечений б111= 0,0534, б21 = б|>а “ 0,0548, б2>2 == 0,0518. Ji. я
первого участка средняя относительная |’о.тщниа б, •=- 0,5 (0,0534 + 0,0548)
= 0,0541, для второго ба = 0,0548. Поскольку для сегментного профиля е0= 0,56.
то в соответствии с формулой (III.6)= 1,92-0,0271 «« 0,052 иаи«1= 1,92 »
X 0,0274 « 0.0526. Любой нз участков крыла может пересекать поверхность вод ь
312
kje.ViwuiMtJe для расчета тригонометрические функции: cos f\:pi — 0,992;
cos PKf. .= 0.9325; tg flItpl = О 126- tfi Ркрз = 0.406.
растет проводят для погружения крыла й= «i,t = 1,0. Тогда «i,t = 1,0,
а* == fi, , = | — 1,875-0,126 « 0.764. Так как hltl > 0, то первый участок пол-
ностью погружен т /, = 1,875. Если крыло пересекает поверхность воды вторым
пртастком, то в соответствии с формулой (111.8) /а = 0,764 : 0,406 х 1,882. Поскольку
1.882 < 2 64 (т. е. полученная /а меньше конструктивной длины), то полу ченную
длину 1г = 1,882 не корректируют.
П Далее расчет выполняют в указанной выше последовательности:
L = 1,875 4- 1.882 = 3,757;
«,.1=1,0; й21, =-5^51 «0,592; йср1 = 0,5 (1 + 0,592) = 0,796;
«i.j = 0,592; fij.j = 0;
ficp2 = 0,5 (0,592 -г 0) = 0,296;
у, (0,796) = 0,915; у2 (0.296) = 0,74;
| Тир = (0.915-1.675 +-
4-0,74-1,882) « 0,827;
I 1;р = -у^-(1,875-0,992 +
+ 1,885-0,9325) к 5,3;
= —д+т и1 + °'76‘Ч •1’675 +
+ (0,764 + 0)-1,682] «0,117;
I (0,117) = 1,46;
Рнс. 111.8. Геометрические параметры
несущей поверхности подводного крыли,
рассматриваемою в ттртьмеве.
2-3,76-1
* (14- 1,29)-1,875+ (1,29 + 1,29)-1,832 J>09;
а _ 0,827-5.3
Чкр- 0.K27-5.3
+ 3,14-3.09
1,46
2,63;
О6| (0,796) = 0,0013; (0,796) = 0,036;
Дав1 = 8-0,0541-0,0013 — 0,052-0,036 « -0,00131;
0ва (0,296) = 0,012; 0гс2 (0,296) = 0,093;
Ла^ = 8-0,0548-0,012 — 0,0526-0,093 = 0.00038;
I / 0,00131 О СОО38 \
Дао ир = к---------(W ‘1 ’870 + ' 0А»325“ ’1 )
а0 цр = а0 «. цР — Даи 1!р = 0,0514 + 0,000455 « 0,055;
Су = 2.63 (а т- 0,055);
на основании формул (III.5) и (1П.9)
«3= .l36,,.M.
О, I Ч • utU J
— 0,000455;
%4>
Например, для а = 0,02, а следоьате.тыто, аЭ([, = 0,02 + 0,055 0 072 могут
бить определены С„ = 2,63-0,075 = 0,197 н CTJ = 1,04-0,075?= 0,0058.
Изложенный приближенный способ расчета несущих характеристик подвод
кого крыла позволяет получить достаточно достоверные результаты по суммарным
силам. Для сравнения отметим, что в рассмотренном расчетном примере уточненный
мето I, основанный на решении с использованием ЭВМ ннтегродифференциального
уравнения крыла конечного размаха, дает следующие значения указанных характе-
ристик С“к = 2.CI, а0 к , = 0 0529, CKija2^ = 1 02 (по подъемной силе эти значе-
ния практически совпадают с экспериментальными).
Учет влияния стреловидности крыла на подъемную силу [31 ] состоит в замене
величины с» в формуле (1114 на и<» cosХнр (где У. к г — угол стреловидности крыла)
и в определении функций у (й), (й), 0ес (й) и величины Дос,, через соответствующие
характеристики нормального профиля (профиля крыла получаемого сечением его
плоскостью, перпендикулярной к несущей линии)
§ 13. УЧЕТ ВЛИЯНИЯ КАВИТАЦИИ НА ХАРАКТЕРИСТИКИ
ПОДВОДНОГО КРЫЛА
О появлении иа подводном крыле тех или иных кавитационных явлений можно
судить по значению критического числа кавитации оьр. В первом приближении онр
приравнивается минимальному значению коэффициента разрежения на поверх-
ности профиля
Рис. 111.9. Диаграмма для выборе сегментных профилей.
н может быть определено теоретически для безотрывного обтекания крыла. Резуль-
таты такого определения для обтекания крыла безграничным потоком, представлен-
ные в виде диаграмм искомой величины в функции от относительной толщины б
и крнзизны средней линии для профилей с острым н скругленным носиком (напри-
мер. для сегмента н профиля \ACA-66), приведены на рнс 111 9 u 111,10.
314
Используя приведенные диаграммы, можно подобрать профиль рассматривае-
мого класса, у которого при заданном значении коэффициента подъемной силы Су
и нулевом значении угла атаки относительно хорды кавитация иа засасывающей
стороне не будет наступать вплоть до требующейся величины о|;р.
Специфические особенности развития кавитации на профиле характеризуются
следующими тремя основными диапазонами углов атаки:
1. Большие положительные углы атаки а > б. В этом случае независимо от
формы нагнетающей стороны каверна всегда начинается с носика профиля. Достаточно
четко здесь выделяются три режима кавитационного обтекания: 1) частичная кави-
Рис. 111.II. Относительные величины, характеризующие зависимость коэффн
ниента подъемной силы плоско-выпуклого сегментного профиля при кавитации Су
для различных значении относительной толщины 6 в функции от числа кавитации о
(нее величины отнесены к значению коэффициента подъемной силы прн бескавита-
цноппом обтекании
тация. когда длина каверны не превышает 0.6—0,75 корды профиля; 2) переходный
режим, соответствующий длине каверны 0,75—1,3 хор <ы 3) режим развитой кав>
тацнп, прн котором относительная длина каверны больше 1,3.
2. Диапазон безударных углов атаки, когда модуль угла атаки меньше или ра-
вен относительной толщине профиля. В этом диапазоне наблюдается большое разно-
образие форм кавитационных каверн, характер развития которых завнсш от геоме-
трических параметров профиля. Однако четко выделить режимы кавитационного
обтекания и формы каверн нс всегда удается. Считается, что дли этих углов атаки
существуют два режима кавитационного обтекания: 1) режим частичной кавнтацнн,
когда зона, в которой наблюдаются кавитационные явления, целиком расположена
в пределах хорды профиля; 2) режим развитой кавитации, когда кавитационные яв-
ления охватывают эону, превышающую хорду профиля
3. Диапазон больших отрицательных углов атаки. Здесь вновь, как н'в первом
случае, выдетяются три режима кавитационного обтекания.
В режиме частичной кавнтацнн изменение сил, действующих на крыло, незначи-
тельно. Наибольшую опасность в отношении прочности и вибрации крыла предстаи-
316
дяет переходный режим, в котором наблюдаются четко выраженные автоколебания
кавитационной каверны го длине с размахом, приближенно равным хорде крыла.
Этот режим колебаний характеризуется некоторой универсалы он безразмерной по-
стоянной, позволяющей для определения частоты колебаний п каверны в с”’ (Гн)
подучить
п — 0,2v, b.
(П1.9)
/}5
Используя формулу (III.9), можно предсказать возможную частоту вибрации
подводных крыльев в переходном режиме кавитации.
I Режим развитой кавитации характеризуется уменьшением амплнту ы н увели-
чением частоты колебании каверны, снижением подъемной силы и возрастанием со-
противления крыла.
На рнс. II 1.11 показаны расчетные зависимости С,/Суд,, в функции от о/Су г,к
для плоско-выпуклых сегментных профилен прн различных отношениях 6/С„пк.
соответствующие обтеканию крыла безграничным потоком {Си ок — коэффициент
подъемной силы профиля прн бескавпта-
ционном обтекании). Приведенные теорс- ф
тическпе результаты с достаточной сте- £0
пенью точности характеризуют влияние
числа кавитации и относительной толщи-
ны профиля на его подъемную силу в
первом и третьем диапазонах углов атаки.
В диапазоне vr-тов атаки безударного вхо-
да гидродинамические характеристики
профиля аналогичным образом не могут
быть определены. Поэтому необходимо
либо проведение эксперимента, либо вы
полненне расчета иа ЭВМ по одному из
разработанных в настоящее время алго-
ритмов [35], (см. т. I, разд. I, гл VI).
Для подводного крыле обязателен
учет влияния свободной поверхности во-
ды. Указанное втнянне па начало кави-
тации для нулевого угла атаки может
быть оценено с помощью эксперименталь-
ной зависимости <р (fi) (рис. II 1.12). полученной В. Т Соколовым н обоснованной
расчетными данными. Критическое число кавитации профиля за счет влияния сво-
бодной поверхности становится равным
о
Z
Рис. III. 12. Относительное падение
разрежения на засасывающей стороне
подводного профиля за счет влияния
свободной поверхности воды.
ОкрД = «нр'Г(й).
(111.10)
а коэф рнцнеит подъемной силы профиля, соответствующий началу кавитации заса-
сывающей стороны при нулевом угле атаки, определяется в виде
cUk = cUh - « - С ~ Ф («>]- (IН 11)
Здесь К — коэффициент полит ы эпюры разрежения на засасывающей стороне про-
филя (для профилей со скругленным носиком типа Вальхнера. NACA-16, NACA 6G
А = 0,8, а для профилей с острым носиком типа сегментных Л’ = 0,76).
В режиме развитой кавнтацнн влитппс свободной поверхюсти воды иа значе-
ния коэффициента подъемной силы учитывается с помощью завис) мости Су/а от й
” ° я [7]. график которой показан па рпе. III.13.
Приведенные ма ериалы могут быть использованы для определения зависимости
коэффициента подъемной силы потводного крыла от угла атаки с учетом влияния ка-
витацнп. Расчет осуществляют в такой последовательности.
1. Указанную зависимость определяют для подводного профиля (крыла бсско-
'ечиого размаха).
1а. На основании графических зависимостей, приведенных на рнс. III.II,
и Данных § 12 сгроят график Си (а) для заданного значения числа кавитации и
©о (безграничною потока).
317
16. По методике, изложенной в§ 12, определяют линейную зависимость Су (а. Я
соответствующую бескавитационному обтеканию профиля вблизи свободной поверх
кости:
Су <я* Су Кр (Л I + яо Кр (Я)]-
1в. По графику на рис. III. 13 строят зависимость Ср (а. Я) профиля в режиме
развитой кавитации.
1г. По формулам (III.10) и (III.II) определяют значение Срд. при котором начи-
нается кавитация, и на линейной зависимости, рассчитанной по п. 16, находя
точку, соответствующую этому значению Срд (верхней границе диапазона углов атак1-
при бескавитацнонном обтекании профи я для заданного о).
Рис. II 1.13. Зависимость относительного коэффициента подъемной силы подвод-
ного супер кавитирующего плоского профиля Су'я от относительного числа кавн
тацнн а,а для различных значений безразмерного погружения Я = hb н соответ
ствующей этим трем параметрам относительной длины кавитационной каверн* i
luaijb.
---------Я «= const;---------I — const.
le. Две ветви Зависимости, определенные (с учетом п. 1г)поп. 1бн I в, соединяют
плавной кривой, аффинной (растянутой или сжатой) по отношению к аналогичной
кривой для Л —- оо, построенной в соответствии с п. 1а.
2 На втором этапе на основании полученной, для профиля зависимост
Су («, Я, о) при использовании выражения теории несущей лнннн (см. ниже) р
считывают кавитирующее подводное крыло конечного размаха. Точность расч
удовлетворительна, если удлинение крыла X 3, длина каверны меньше размаха,
крыло расположено в горизонтальной плоскости и форма его в плане незначительно
отличается от прямоугольной. Расчет выполняют последовательными приближениям!-
318
2а В нулевом приближении принимают, что зависимость коэффициента подъсм-
п0)1 силы крыла конечного размаха от угла атаки такая же, как и у профиля (крыла
бесконечного размаха).
| 26. Для каждого угла атаки а (из принятого к расчету ряда значений) находят
индуктивный угол скоса по формуле
(<z) ='^7ГС(Л 1)’
= Р S — удлинение крыла; С (hil) — функция, учитывающая влияние свобод-
ной поверхности воды на изменение индуктивного скоса потока по сравнению с
для безграничной жидкости (см. рис. II 1.5).
| 2в. Для каждого а вычисляют соответствующую этому углу величину а — at
I по графику Су (а, Л, о), полученному для профиля на первом этапе расчета, опреде-
ляют новые значения Су ( — аг fi, о).
I Процесс повторяют до тех пор, пока для каждого из рассматривавшихся углов
атаки отличия в значениях Су, найденных на (<—1)-м и i-м приближениях, нс превы-
сят требуемую точность расчета.
§ 14. РАСЧЕТ ХАРАКТЕРИСТИК СРЕДСТВ УПРАВЛЕНИЯ
ПОДЪЕМНОЙ СИЛОЙ ПОДВОДНОГО КРЫЛА
I Одна из важнейших задач, решаемых при проектировании СПК, — обеспече-
ние стабилизации движения такого судна. Оно может быть достигнуто двумя прин-
ципиальными путями: созданием самостабилнзированных крыльевых систем (с мало-
погруженными крыльями и крыльями, пересекающими поверхность воды) или систем
с принудительным управлением подъемной силой посредством автомата. Второй путь
считается перспективным в отношении создания СПК повышенной мореходности.
В настоящее время нашли применение три типа подводных крыльев с регу тируе-
мой подъемной силой: поворотные крылья, крылья с закрылками к вентилируемые
крылья (рис. III.14). Специфика проектирования таких крыльев, в отличие от фик-
сированных крыльев, дополнительно характеризуется необходимостью обеспечения
достаточ! ой эффективности органов управления и оптимизации потребных энергети-
ческих затрат
Поворотное крыло. Расчет несущих характеристик поворотного крыла выпол-
няют в соответствии с методикой, изложенной в § 12. Дополнительно в рассматривае-
мом случае необходимо найти продольный момент относительно осн поворота крыла
(шарнирный момент). Указанный момент определяет мощность приводных механиз-
мов и является поэтому основной характеристикой для проектирования системы
управления поворотными крыльями.
I Приведенный ниже приближенный метод расчета iiiapi ирного момента при без-
^Вывном обтекании поворотного крыла основан иа материалах, изложенных в ра-
ботах [9. 24, 31, 44].
Коэффициент продольного моменте Л!г
г 0,5pci2b5
может быть представлен в виде следующей линейной зависимости от коэффициента
подъем юй силы:
. clmi
mz — тгп 4- — Gy
(шго — коэффициент момента при Су = 0). В качестве положительного принимают
ромеит, способствующий увеличению угла атаки.
Ж Величину лтд) определяют как
Шд, — Y (Й) /П.о 00,
319
Puc. III.14. Типы подводных крыльев с регулируемой подъемной силой:
а — поворотное крыло; б — крыло с закрылком; в — вентилируемое крыто
при подаче воздуха на верхнюю (?) н нижнюю (2) стороны крыла.
320
где V (Я) — функция, характеризующая влияние свободной поверхности воды на
подъемную силу профиля, а тг0 <» — коэффициент момента при Су = 0, соответствую-
щий безграничному потоку. Последний коэффициент может быть гайден по графику
па рис. III. 15, представляющему зависимость отношения шг0ОО/есот xf . Здесь ₽_=
= 0.5 [<,’1 (х) + уъ (*)]; tjt (х) и yt (х) — уравнения верхней и нижней сторон про-
филя; = xeJb — безразмерная абсцисса сечения профиля относительно его ио-
С11кз. соответствующая указанному максимальному значению ес.
Производная dmc/dCy для момента, определенного отиосительш юснка крыла,
близка к постоянной величине:
Тогда коэффициент момента (относительно носика крыла)
шги (Я) — у (й) тги оо — 0.25CJ, (fi), (III 12)
где Сг/(й)— находят в соответствии с рекомендациями § 12.
Коэффициент шарнирного момента относительно осн поворота, безразмерное
отстояние которой от носика крыла составляет Хц0В = хпов/Ь, будет
,пг поп — + * । щСу- (III.13)
Для выбора положения осн поворота
крыла необходимо знать положение центра
давления (ЦД)—точки приложения равно-
действующей гидродинамических сил. Абс-
цисса этой точки относительно носика крыла
определится как
ния коэффициента момента, дей-
П’гп
J __ _
'П- — --
+ 0,25.
(III.14)
<^У
ствующего на профиль типа сег-
ментного прн нулевой подъемной
силе, к безразмерной стрелке про-
гиба средней линии (шгСсю/ес) от
относительной абсциссы, соответ-
ствующей сечению с ыакепмаль-
Формулы (III. 12)—(III.И), строго гово-
ря, справедливы для крыла прямоугольной
формы в плане. У применяющихся же на
практике поворотных крыльев форма в плане
обычно не является прямоугольной. Поэтому
для! выбора положения оси поворота таких
крыльев вводят понятие эквивалентного пря- иым прогибом ес.
моугольного крыла со средней аэродинами-
ческой хордой (САХ), относительно которой и производят вычисления по форму-
лам (III.12)—(111.14). Эквивалентное крыло должно иметь одинаковые с рассмат-
риваемым крылом плошать, а также значения подъемной силы н продольного мо-
мента прн одних и тех же условиях обтекания. Геометрические параметры эквива-
лента го крыла, показанные на рнс. [11.16. — хорду Ья и положение носика такого
крыла относительно носика исходного крыла — находят по формулам
1/2
Ъа = -у- J I'1 (г) с/г;
-1/2
1/2
*а = -у- j X (г) b (г) dz,
-1/2
(III 15)
(III.16)
Н Ь (г) — текущая хорда; х (г) — уравнение передней кромки исходного крыла.
Используемые поворотные крылья обычно характеризуются симметричной
Формой в плане, постоянной стреловидностью передней и задней кромок и парал-
Пр я. И. Войти у некого, т. 3 321
дельностью боковых кромок корневой хорде (см. рис. 111.16). С учетом справедли-
вости для таких крыльев выражения
±я_,
t>t I \ Чк /
где 1)н = ь0,ьк — сужение крыла (Ьп и Лк — корневая и концевая хорды), геометри-
ческие параметры эквивалентного крыла на основании формул (III. 15) и (1П.1С)
могут быть получены в виде
Ъ
rl ____ _______
to ~ 12 'hl ’
где Л = P/S — удлинение; Хкро — угол стреловидности передней кромки крыла.
3 +4kU1k + 1)
? tC 7нп „ П. + 2
Рис. 111.16. Геометрические параметры реального крыла и экви-
валентного ему условного прямоугольного крыла
Положение оси поворота для выбранного крыла в размерном виде определит я
как
Хпов — *о [(*а I'o) + Хдов W’a/l'olb
Безразмерная абсцисса хпов вычислена относительно хорды эквивалентного кры .
При движении СПК на волнении для парирования внешних возмущений подом-
ная сила крыльев должна непрерывно изменяться в некоторых пределах. Если диа-
пазон регулирования подъемной силы охарактеризовать величиной &Сд — амта-
ту ой отклонения безразмерного коэффициента этой силы от расчетного значе-
ния Сд расч- соответствующего условнячтихой воды, то предельные значения коэф -
циентов запишутся в виде
Су mm = Су расч &Су’,
С вшах = Су ра ч И ^Су.
В большинстве случаев коэффициент Су 1П|П1 являющийся нижней грашиг-й
диапазона регулирования, близок к нулю. Для улучшения стабилизации важно зо
возможности расширить диапазон 0 Су ej Cs m3X за счет увеличения Су max 11 •’°'
биться сохранения минимально возможного шарнирного момента.
При назначении диапазона регулирования необходимо иметь в виду, что п[ е-
дельно достижимые Ситах ограничиваются максимальным коэффициентом подъе. '°"
силы прн кавитации. Поэтому график потребных величин Cv диапазона регулнре 3'
пня всегда слетует сопоставлять с кавитационной диаграммой крыла.
322
Возможны два случая (рис. 111.17):
а) для всех скоростей движения СПК необходимые значения Су крыльев соот-
ветствуют бескавитацнонной зоне (рис. 111.17 о); обтекание крыла только безотрыв-
ное без возникновения кавитации;
б) линии Су min и Cv щах- или одна из них, пересекаются с границами бескавита-
Гнонной и каши анионной зон (рис. 111.17,6); в этом случае крыло работает в двух
LLciraax — нрн движении СПК ia тихой воде без кавитации и на волнении с кави-
тацией.
Последний случай наиболее вероятен, когда крыльевое устройство помимо уп-
Я)вдяст элементов оборудовано также неуправляемыми и пересекающими поверх-
intcTb воды элементами, поскольку ввиду необходимости компенсировать возмущаю-
щие силы на этих элементах требуется перекладка поворотною крыла на большие
углы. Наиболее характерным для такого двух режимного обтекания крыла является
Существенное возрастание шарнирного момента иа оси поворота при возникновении
^Ирации за счет смещения ЦД ио направлению к задней кромке профиля.
^Максимальное значение коэффициента момента кавитирующего крыла
Рис. 111.17. Влияние кавитации на выбор потребного диапазона регулирования
коэффи тента Си для поворотного крыла: а — безотрывное обтекание крыла внутри
потребного диапазона Су; б — двухрсжимное обтекание (безотрывное и кавита-
ционное).
1 — граница зон безотрывного и кавитационного обтекания крыла.
где Дх — наибольшее возможное расстояние между осью поворота и положением
ЦД крыла. Для проведения расчетной оценки в качестве верхнего предела коэффи-
циента подъемной силы Cv,Ilax может быть принято значение числа кавитации, соот-
ветствующее рассматриваемой скорости движения:
Су max = °-
симметричных профилей и профилей со ср i i .ti i h, кривизна которой
в пределах хорды меняет знак (S-образных профилей), при плавном обтекании поло-
жение ЦД практически постоянно (близко к Ь/4 ат носика). При кавитации же про-
исходит смещение ЦД на расстояние (0,154-0,2) Ь от указанного положения к задней
кромке. Поэтому у поворотною крыла с таким префнлем, предназначенного для ра-
боты в дву х режимах обгекання, ось поворота целесообразно располагать в некотором
вредней положении диапазона изменения ЦД. Тогда максимальные значения коэф-
фициента шарнирного момента будут
nl: max = ± 0,1С^ щах-
fr. Д-1я кавитационно-устойчивых профилей (типа Вадьхиера, ВС-6, ПИ) макенмзль-
Н(* значение коэффициента шарнирного момента может быть принято равным
s ГП; max = mzo-
11*
323
Крыло с закрылком. Приведенный ниже способ расчета характеристик подвод-
ного крыла с закрылком основан на материалах работ |24, 31, 39, 79).
Коэффициент подъемной силы крыла в рассматриваемом случае будут определять
углы ат ки а и < к. онения закрылка о3:
Су == Су кр (а аокр) + Су Кр^3>
где первое слагаемое в правой части находят в соответствии с метолом, изложенным
в§ 12, а производную коэффициента подъемной силы крыла по углу отклонения за-
крылка рассчитывают как
^кр = «С“кр. <1 1-17)
где коэффициент эффективности закрылка
Рис. 111.18. Геометрические параметры профиля с закрылком.
|SB — плошадь закрылка, S — полная площадь крыла (включая закрылок); 5НПмл —
площадь осевой компенсации закрылка — площадь части закрылка, расположенной
перед осью вращения, рис. 111 181.
Новыми ио отношению к ранее использовавшимся безразмерным коэффиингп-
там здесь являются к эффициенты подъемной силы закрылка и шарнирного моме> а
на его осп в| а еш я
р ___ . т ____ J'^n|:i
и,~ (ро2/2)5э ’ 3 (po*,2)53fta ’
е Ry । и Л1ШЗ — размерные подъемная сила н шарнирный момсн ; 6Я — хор .а за-
крылка. Эти коэффициенты записываются в следующем виде;
Суз =
ш = m10 + т“а +
Здесь Су3у и — коэффициенты подъемной ci дык шарнирного .момента закрыли,
прн а = 6Э = 0; C“s, m“, С®3 и m* — производные эт их коэффициентов по углам ат аки
крыла и отк. оиення закрылка.
Производные коэффициента шарнирного момента на оси поворота закрылка ио
углам атаки и отклонения находят по формулам
ш“ = -0,12^(1-3,6-^)с“кр;
----0 4[1-6,5(^ш) '2]^1<р,
где С“крс учетом влияния конечности размаха и свободной поверхности воды сп|<-
дсляют по методике § 2.
324
Производные безр зиерного коэф< ишиента по а и 6 , и коэффициенты CffM
и mjo рассчитывают по формулам теории крыла конечного размаха
сй — (111.19)
1 + л'- ’
с Суло « (111 2(1)
I +rUa»C ял ’
^зо°° (П1.21)
,nJ0 1 4* удсо^/л/ *
где фу жции у и £ вычисляют ио методнкс§ 12: а<®= 5,5. Величины с индексом ею,
соотвстс зугошие результатам решения плоской задачи, находят следующим обра
зом
I стоящие в числителе выражении (III. 8) н (111.19) для произвольного профиля
С“ 3 « = (0,292yS/S.) (fJ (1 - 0,06ф?);
С®зте = (У°оО^3)(<р/.т
q> = arccos (I — 2Sa/S);
стоящие в числителе выражении (1 I 20) и (111.21) для плоско-выпуклого сег-
мента
Последние две формулы могут быть также применены и для профилей, отличных
°т сегментных. В этом случае следует использовать относительную толщину «экви-
валентного» сегментного профиля бэ получаемую по относительной ординате средней
вчини расчетного профиля ecs/b в районе иосика закрылка (т. е. при it = 1 — 5а)
в вцдс
^а =
где X—коэффициент, определяемый по графику ia рис. 111.19
Заметное преимущество как управляемого органа перед каждым из рассыотрел-
’’•х типов механизированного крыла имеет комбинация поворотного крыла с отклоияе-
ь,м Закрылком. В этом случае увеличивается диапазон изменения подъемной силы,
иижаются потери гидродинамическою качества, становятся менее интенсивными
благоприятные последствия кавитации. Коэффициенты подъемной силы такого
°мСИ1 нровашюго крыла и шарнирного момента на осн закрылка находят в соот-
Гсгвии с методикой настоящего пункта, а при расчет коэффициента шарнирного
325
момента на оси поворота всего крыла помимо значения коэффициента, определяемо! 0
по способу предыдущего пункта, следует дополнительно учесть величину
Дт2 = —1,75у(й)]/ ^-(1
)Ч-
Вентилируемое крыло. Управление подъемной силой вентилируемого поле
него крыла производится за счет поддува воздуха на засасывающую пли нагнетаю-
щую (верхнюю или нижнюю) поверхность через воздушные магистрали, проложен, це
в теле стоек н несущих элементов. Методы теоретического расчета параметров та-
сегментного профиля, от относительной хорды закрылка.
кого управления не разработаны. При проектировании вентилируемых крыльев
обычно используют результаты экспериментальных отработок
Основной характеристикой, позволяющей применять указанный способ регули-
рования подъемной силы крыла, является объемный расход воздуха прн атмосферh-tm
давлении Q (м’/с), подаваемого на поверхность крыла для поддержания заданы. го
режима вентиляции Относительный расход записывается в виде
Q -= Q.'vF,
где F— площадь сечения крыла в направлении размаха, определяемая произвсьс*
нне.ч длины вентилируемой части крыла на максимальную толщину профиля (м-)-
Установлено, что зависимость коэффициента подъемной силы крыла Сы от т-
носительного расхода воздуха О характеризуется наличием трех главных участ в
(рис. 111.20). Первый участок (Q 0,01) соответствует частичной вентиляции, ког^а
воздушная каверна не выходит за заднюю кромку крыла. Здесь подъемная сила
почти не зависит от расхода воздуха, и характеристики крыла близки к значениям,
соответствующим безотрывному обтеканию. Отмечается лишь некоторое возрастав'1®
сопротивления, обусловленное наличием отверстий (или щелей) для подачи воэду48,
326
К Второй участок (Q = 0,01 0.05) характеризуется интенсивным изменением коэф-
фициента подъемно» силы в зависимости от расхода воздуха. Подъемная сила при
подаче воздуха иа засасывающую поверхность крыла уменьшается, а при подаче
на'на нетающую поверхность, особенно у крыла с двояко-выпуклым профилем, уве-
личивается. В этом режиме отмечается возрастание длины воздушной каверны и вы-
ее за пределы несущей поверхности крыла. Возможность регулирования подъ-
емной силы за счет подачи воздуха на втором участке ограничивается некоторым от-
носительным расходом, называемым критическим (Qbp).
На третьем участке зависимости Су ((?) при Q> QKp подъемная сила крыла для
постоя! лого значения угла атаки не меняется с увеличением расхода подаваемого
воздуха и достигнутое ее значение
оказывается предельным. С увеличе-
нием угла атаки критическое значе-
ние относительного расхода воздуха
возрастает (от 0.01 до 0.05).
Согласно тайн м теории для зна-
чений коэффициента подъемной силы
(при числе кавитации о 0) и резуль-
татам экспернмеита (30] диапазон из-
менения коэффициента Су при подаче
воздуха на обе стороны крыла может
быть
АС,, = 56.
Такое изменение достигается при по-
даче воздуха ва засасывающую и на-
гнетающую стороны крыла в пропор-
ции 3'2
I Наиболее плавное и удобное для
регулирования подъемной силы с по-
мощью вентиляции изменение Cj (Q)
соответствует расположению выходных
отверстии (или щелей) для подачи воз-
духа иа расстоянии от носика крыла,
составляющем 0,6—0.7 хорды профиля.
Потребная мощность воздуходув
ки, обеспечивающей подачу воздуха.
Ч°*<-1 быть определена по крптнче-
скэму> значению расхода;
Л’ = ОирР »1
Рис. 111.20. Зависимость коэффициента
подъемной силы вентилируемого крыла
от относительного расхода воздуха при
постоянном значении угла атаки в случае
нодачн воздуха на засасывающую (/) и
па нагнетающую (2) поверхность крыла.
1. Il, III — номера характерных участков
зависимости.
№ Скр и р — размерные критический расход и давление подаваемого воздуха на
»ыхо«е из отверстий; т] — КПД воздуходувки (для проектных проработок т] ss 0,6).
Давление подаваемого воздуха р определяется максимальным погружением
• ыл । при движении СПК на волнении. Указанное погружение может быть принято
Р4риымй = 1,1йв3ус, где Лв3,., — высота волны трехнроцентной обеспеченности пре-
дельного для проектируемого судна волнения.
S 15. >ЧЬТ ВЗАИМНОГО ВЛИЯНИЯ КРЫЛЬЕВ СПК
^Приведенные выше способы расчета характеристик подводных крыльев соответ-
^гауют их обтеканию в изолированном состоянии.
В Действ! телы ыы же условиям отвечает обтекание крыльев СП1\ в составе »е-
системы судна, включающей в общем случае, для переходного режима дви-
ння, также корпус. Здесь при определении характеристик какого-либо элемента
Цс|~‘ с,1с*ех,ы недостаточно ограничиваться учетом только его собственных
С,!*е1РОв: взаимодействие элементов, являющееся неотъемлемым свойством лю-
системы, обусловливает наличие зависимости характеристик любого »з элемен-
тов также к от параметров остальных. Например, для переходного режима движс-
ния СПК принципиальное математическое представление подъемной силы i-г эле-
мента несущей системы (любого из крыльев пли корпуса) может быть записано в виде
функции
F {*,1 [' +/ц ( >Г ХЛ* ' ' ” Xinf ХЛ|’ ' • '
м’+М*/**• • •’...............+Ч(Г'‘................х*"л)]ь 01122>
где х£1, xf2.х.П( — nt параметров f-го элемента (скорость обтекания, погружение,
углы атаки сечений, профилировка, форма несущей поверхности и т. д.), определяю-
щих значения его характеристик при обтекании в изолированном состоянии, а х£].
*&!• •••’ xknh — "j 11 nk аналогичных параметров /-го и fe-ro элементов си-
стемы, которые в условиях взаимодействия являются apt ументами некоторых <] у нк-
цноиатьиых зависимостей /(£, характеризующих приращение параметров х/( рас мв-
триваемого элемента. Для крыльевого режима движения СПК число аргументов
функций fu уменьшиться па одну группу (группу параметров корпуса).
Определение функций [.t Лг^.АДмЛ) 11 составляет задачу учета взаимною
влияния элементов несущей системы СПК. Эта задача, как о том можно судить даже
по общему виду выражения (111.22), достаточно сложна в математическом отношении,
и ее решение в итоге сводится к необходимости использования ЭВМ для получения
количественных результатов. Соответствующие программы, реализующие решение
рассматриваемой задачи (48], разработаны и используются при выполнении расч -
пых исследований и отработок крыльевых систем. Однако простые методики, позво-
ляющие провести достаточно детальный расчет характеристик несущих систем
С11К произвольного вида с учетом взаимного влияния крыльев вручную, пока i.e
разработаны.
Ниже приведены материалы рекомендательного характера по качественной и
приближенной количественной оценке взаимного влияния крыльев для основною
режима движения СПК при полном отрыве корпуса от воды. Для этого режима вза-
имодействие крыльев сводится в основном к изменению параметров течения в районе
кормового крыла за счет влияния носового, выражающемуся в деформации свс<"од-
ной поверхности воды и появлении углов скоса в натекающем потоке. Влияние кор-
мового крыла из носовое ввиду достаточно большого расстояния между крыльями
в гидродинамическом смысле мало и может определяться только косвенно через
парамо! ры судна в целом (т. е. че-рез изменение его посадки, а следовательно и ус-
ловий обтекания носового крыла, обусловленное изменением каких-либо параме ров
кормового крыла).
Рациональное использование взанмодейсишя крыльев будет состоять в вы-
боре такого нх расположения но длине и ширине (если крылья раздельные, ра не-
сенные по ширине) корпуса, чтобы кормовое крыло на расчетной скорости иахо. I-
лось в зоне потока за носовым крылом с положительными скосами (увеличивают imh
углы атаки). В этом случае вследствие отклонения набегающего потока от горизон-
тали на положительные утлы скоса подъемные силы в сечениях крыла, чтобы остаться
перпендикуляр) ымн к скоростям потока, должны отклоняться от вертикали впе >ед,
обусловливая появление индуктивной тяги. Таким образом, при расположении кор-
мового крыла в зоне положи!ельных скосов зз носовым крылом общее сопротивление
крыльевой системы за счет взаимного влияния несущих элементов может оказаться
меньше суммы сопротивлений составляющих ее крыльев, обтекаемых в изолирован-
ном состоянии, при одной п той же подъемной силе в обоих случаях.
На рнс. 111.21 приведена диаграмма распределения скосов в потоке за подводным
крылом, на которой заштрихованные зоны /, // и Ш соответствуют положительным
скосам. По осям координат здесь отложены относительные величины, характеризую-
щие расстояние по длине между носовым и кормовым крыльями х//в (отнесенное
к длине волновой впадины за носовым крылом /в) и расположение кормового кр для
относительно носового по ширине г/l (в долях размаха носового крыла /). Поскольку
крытьевые системы СПК всегда симметричны относительно ДП диаграмма постр ei.a
только для полуширины области возможного расположения крыльев.
328
Длина волновой впад| иы за носовым крылом в долях ею хорды приближенно
>(Mnei быть определена по формуле
/„= t.95Fr,XXU1
(111.23)
где Р*» — число Фруда носового крыла (Ьп— хорда крыла, м); ?.п =
г= /и Sii — удлинение крыла. Приведенной диаграммой можно руководствоваться
Ррн выборе компоновок несущен системы СПК
Пример. Для СПК с относительной скоростью движения, рассчитанной по
хорде носового крыла, Ргц = 5,82 при размахе носового и кормового сплошных
крыльев (середина которых совпадает с ДП корпуса) 1„= 8,12 м и 1„ = 12,6 мне
удлинением п хордон носового крыла Л„ =
'-= 6.1 и Ьи = 1,335 м по конструктивным
соображениям возможны три варианта
установки крыльев иа корпусе при рас-
стояниях между ними по длине 22. 25,3
и 28,7 м Требуется выбрать оптимальный
из них.
Определяем необходимые значения
координат точек, характеризующих рас-
положение на диаграмме кормового кры-
ла относительно носового. Полуразмах
кормового крыла в долях размаха носо-
вого /к/2состаькт /н = 6,3 : 8.12 яв 0,776.
Длина Волкове i впадины в долях хорты
носового крыла/ь = 1,95-5,82 > 6,l«s28.
Расстояния между крыльями по длине в
долях хорды носовою крыла Х/Ь„ = 16,5;
19 и 21,5. а в долях длины волновой впа-
дины — 0,59. 0,68 н 0.77.
Расположение отрезков, перпендику-
лярных к оси х 1и, с абсциссами 0,59; 0,68
н 0,77 и максимальной ординатой 0,686 от-
носительно заштрихованных зон и опреде-
лит удатность той или иной компоновки.
Очевидно, наименее удачен первый ва-
риант, у которого значительная часть
Рис. Ill 21. Диаграмма распределения
скосов в потоке за подводным крылом
lD — Длина волновой впадины за иры_п< -м
с размахом С I. 11, III — номера зон
потока с положительными скосами.
поверхности кормового крыла будет располагаться в зонах с отрицательными ско-
сами потока. В качестве оптимального по соображениям взаимодействия
следует считать третий вариант, тля которого харакгерен наиболее
полный н глубокий охват поверхности крыла зонами потока с положительными
скосами.
Форма диаметрального сечения волновой впадины за носовым крылом, по ко-
торой можно судить о максимальном изменении уровня свободной поверхности воды
в рассматр шаемом сечении по длине корпуса, с использованием формулы (111.23)
u результатов работы (81 ) приближенно выражается как
Ув = - С,„ ( —+ 0.65 - 3
sin----------=,
l,95FrH> X,,’
(Ill 24)
где fiH = hH — относительное погружение носовою крыла
Углы скоса по поверхности кормового крыла будут определяться двумя состав-
«яющнмн волновой и обусловленной индукцией свободных вихрей, сошедших с но
совогэ крыла.
Среднее значение вертикального угла волнового скоса иа кормовом крыле.
Учетом рскомеидацчй работы (31 ] и общих соображений теории волновых движений
329
жидкости о падении вызванных скоростей по глубине [43], на основании форму.1Ь1
(111.24) запишется в виде
Дав = - 0,75е 1,95 Fr“ * '"-----С™л-_ / °’5Lr". 4- 0,65 - X
1.95 Fr1U Z„\ г /
X cos------П*____ (111 • 23)
I,95Frnl ZH
(/iH — погружение кормового крыла).
Формула (111.25) дает приближенное значение среднего угла волнового ск
на поверхности кормового крыла для крыльевой системы, близкой к схеме «т зи-
яем» (два сплошных крыла, несущих примерно одинаковую нагрузку). Если размах
кормового крыла су ществеино превышает размах носового (например, в схеме «утка»),
то найденное по этой формуле значение yi. а справедливо только для той части то-
верхиостн кормового крыла, которая по ширине соответствует размаху носов го
крыла. Для остальной части поверхности угол волнового скоса при оценке взаны
действия может быть принят равным нулю.
Аналогичным рекомендациям можно следовать и при рассмотрении крыльевых
систем с каким-либо (носовым или кормовым) раздельным крылом, состоящим из
двух разнесенных по ширине элементов. В этом случае кормовое крыло (или один
из злементов раздельного кормового крыла) всегда будет находиться частично и я
полностью вне зоны потока, соответствующей расположению по ширине носового
крыла (или его элементов)
Для приближенной оценки углов вертикального скоса, индуцируемых свобо -
ними вихрями носового крыла в точке поверхности кормового крыта с безразм -
ними координатами х, /1|(, г (в качестве характерного линейного размера удобно при-
нимать хорду носового крыла), можно использовать следующую формулу:
д~ = C,IH f____________г — 2п1________
г «л 1 (г — zulJ* + (Лк — Лщ)1
/х2 + (Лк - Л.ц)2 -г (z - Ziu)1 J (z ~ Zl«)a + ~ Ли1)В
X
Гх: + (Лк-йва)г + (г-гнг)г
(III.26)
где Ли1, й114, гн| и гя> — погружения и отстояния по ширине от ДП корпуса правого
и левого (если смотреть в нос судна) торцов носового крыла или соответствующ >х
торцов какого-либо из элементов раздельного носового крыла; если торец располож i
в право от ДП, то значение координаты гЯ1- положительно, если влево, то отрицательна
(дтя сплошного носового крыла г,ц > 0, 7II2< 0, для раздельного — первая пара rHi
в г113 положительна, вторая отрицательна).
Для раздельного носового крыла угол скоса, индуцируемый его свобод 1Ы и
вихрями на поверхности кормового крыла, будет определяться двумя составляют •
Даг — Лаг + Даг,. (111.27)
соответствующими правому и левому элементам крыла, каждая из которых м кет
быть вычислена по формуле (111.26). Прн эюм гП|2 = —гн»г г(122 = —zHiv Лц|„--=
=Л1|21, ЛНга = Л|1(1 (дополнительные индексы относятся:*!* к правому, а «2» к левому
элементам).
Если hK — Лц{ = 0, а г — гн, <; е,пи. где етя — максимальная толщина носов * °
крыла, то в формуле (111.26) множитель
__________г — 2н1__________
(г — гн|)® + (Лк — Лщ)2
330
перед квадратной скобкой в соответствующем выражении следует заменить на г —
2\ib
Суммарный угол вертикального скоса потока в течках поверхности кормового
крыта определится в виде
вск = Дав+ ДаГ‘
i Средние значения этого у гл а скоса можно использовать для корректировки не-
сущих характеристик кормового крыла как
~ (а + ао« к Даок + аск ср); U*' -2®)
CxiH = Сди ~^Н Ек — аС1,Гр^ J (Ill.29)
«ск ср = Дав ср + ДИГ ср,
где С^. «ооок1 Даок ^к определяют в соответствии с методикой § 12.
Среднее по размаху кормового крыла значение угла волнового скоса находят
по формуле (111.25)
ср ~~
«ей кормовое крыло по ширине расположено полностью внутри следа от носового
крыла (/к /п, /п, t„ — размах и носового и кормового крыльев; ширину следа от
рисового крыла принимают соответствующей ширине крыла) или, если l„ >/и,
Дс<в ср = Д<хБЛ/ь//1;,
где Л/,, — часть размаха кормового крыла, расположенная по ширине внутри следа
носов о крыла.
В Среднее значение вертикального скоса, индуцируемого свободными вихрями но-
coiioi о крыла на поверхности кормового, на оснований выражения (1 П.26) может быть
найдено в виде
= O-OPCj,,. Г fa,-г,,,)»+(/!„-/.„,)•
Г Ср I (гна — -ш)г + У>к — й| J-
X ^-?„3)« + (/,w-ft,l2y 1 (П130)
(zni — гн2,г + (Лк — Лц»)а J
При hHi = Л|: и ?ni = (здесь допустимо также i — }) в формуле (111.30)
слетхет принимать йк —Лн; = 0, г,(; — г„р = ет„. В частном случае, когда крылье-
вая система СПК состоит из двух одинаковых крыльев (/п = /„, h„ = h^, гн1- = г„(),
средний скос на кормовом крыле от свободных вихрей носового крыла может быть оп-
ределен как удвоенный индуктивный скос на крыле, обтекаемом безграничным по-
током, т. е.
ДаГср = 2£|ц/л^-н.
В Последнее выражение нфор.мулв (III.30) при гк, — г„; = еп1ц в этом частном слу-
чае дают близкие результаты.
I Для раздельного юсового крыла в соответствии с формулой (111.27)
Д0£Гср = 2ЛаГГср,
Где 4arfcp — средний угол скоса па кормовом крыле, определенный по формуле
^30), от свободных вихрей любого элемента носового крыла.
Ков Hco6x^™o помнить, что во всех приведепиых формулах линейные размеры (бо-
Це координаты и погружения крыльев, размахп, толщины) записывают в безраз-
> р * 1 в,|де отиосят к °Диому и тому же характерному размеру, в частности, к
р- е носового крыла.
331
§ 16. ГИДРОДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ СТОЕК СПК
Основной характерной особенностью расположенных в вертикальной плоскости
стоек, связывающих подводные крылья с корпусом, является их обтекание в уело-
виях пересечения с поверхностью воды. Указанная особенность обусловливает брыэ.
гообразование, аэрацию поверхности этих эзементов (просос атмосферного воздуха),
специфическое развитие навигационных каверн, взаимодействие кавитации и аэра-
ции.
Теоретические решения по определению характеристик стоек для перечисленных
форм течения а связи со сложностью задачи пока ие получены. Способы расчета их
гидродинамических характеристик, излагаемые ниже, во многом основаны па резуль-
татах экспериментальных исследований указанных элементов при различных ре-
жимах обтекания.
Характеристики крыльевых стоек прежде всего определяются развивающимися
па них силами. Боковую силу, действующ}го на стойку при наличии угла дрейфа,
рассчитывают по формуле
г = ct (pt'<2) sc.
где С£ — безразмерный коэ4х|шциепт боковой силы, определяемый как
Сг=АРЛ (III.31|
|А — эмпирический коэффициент, зависящий от формы профиля стойки; р — угол
дрейфа, рад; fi = h'b — относительное погружение стойки (й и Ь — высота погру-
женной части и хорда стойки)); Sc~hb— площадь погруженной части.
Формула (111.31) — результат обработки материалов испытаний стоек с различ-
ной профилировкой, применяемой в практике проектирования. Указанная формула
справедлива в диапазоне относительных погружений 0< ft 2 для углов дрейфа,
ие превышающих предельные. Значения коэффициентов А и предельных углов дрей-
фа Рпреа АЛ” различной профилировки стоек приведены в табл. 111.1,
Полное сопротивление стойки, пересекающей поверхность воды,
R = RV+RS (111.32)
Таблица 111.1. Характеристики боковой силы, развивающейся иа стойке
при дрейфе
Режим обтек .ши я fun профиля Относительная толщи к в Коэффи- циент А Предель- ный у КХЛ дрейф? пред*
Плавное обтекание Сегмент / 0,05—0,07 t 0,08—0.1 1,54 1,05 6 10
со сходом потока Профиль Манделя (см. 0,08—0.09 1.32 9
с острой задней гибл. V.3)
кромки Профиль с нулевым ка- витационным сопротив- лением п скругленным носиком 0,07—0.08 1.41 5
Сегмент с обрезанной хвостовой частью 0,08—0,09 1,68 9
Обтекание с венти- Парабола ( 0,06—0,07 1.37 5
ляцней тупой эат- t 0,09—0,10 1.63 5
ней кромки и су- Профиль с нулевым ка- 0,08—0,09 1,28 6
иервентиляцией внтацнониым сопротив- лением н острым «оси- ном Прямощекий клин 0,16—0,18 1.80 8
332
где Ry и R<j — соответственно вязкостная и брызговая составляющие сопротивле-
ния- Формула (111.32) справедлива для значений чисел Фр>да по хорде стойки
рг== v/V gb > 5. соответствующих скоростям крыльевого режима движения СПК,
при которых волновой составляющей сопротивления можно пренебречь.
Вязкостное сопротивление определяют по формуле
Ry = kCF. (рЛ2) 2SC, (111.33)
где ft — коэффициент, учитывающий телесность и в общем случае кривизну профиля.
Для удлиненных профилен стоек с достаточной для оценочного расчета точностью
fro представляют линейной зависимостью
ft = 3.8b6-i- 0.9.
Коэффициент сопротивления трепня гяадкой пластины вычисляют по формуле
Пранд л я—Шлихт инга
Ср. = 0,455/(lg ReR8 (111.34)
Брызговое сопротивление, если исходить из стандартной формулы с учетом си-
лы трения брызговой пелены,
Rs = Cs (рег/2) Ss.
где Сз — коэффициент брызгового сопротивления, a Ss — площадь брызговой пе-
лены, омывающей поверхность стойки над ватерлинией, соответствующей невозму-
щенному уровню поверхности воды, определяется следующими эмпирическими зави-
симостями:
для Fr <• 9
Rs = рт-=*2 [Сл,-О’9 + °’2Л + 0,156 (9 - Frr 1(Г8 + 0,046 (6 —0,1)] ;
I для Fi > 9
Rs = pvsb2 [cFo ~°’2Д + 0.046 (6 - 0.1)] .
Здесь CF„ вычисляют ио формуле (ill.34).
I Доля брызгового сопротивления в полном сопротивлении стойки возрастает
гомере уменьшения погружения и может составлять от 20 до 50 % В общем балансе
сопротивления крыльевой системы судна иа брызговое сопротивление приходится от
5 до 10 % суммарной величины
I Изменение сил на стойке, главным образом боковой, по сравнению с силой со-
ответствующей коэффициенту, определяемому по формуле (111.31), а для некоторых
режимов даже направления суммарной боковой силы может быть достигнуто за счет
принудительной подачн воздуха (принудительной вентиляции) на одну из сторон
Мйкн Управление боковой силой иа стопках указанным образом может быть цс-
пользовано как для снягня нежелательных нагрузок па стойках ирн маневрирова-
нии СПК (например, на равви >ых стойках угловых подач мощности к гребпым вин-
там), так в для улучшения поворотливости или устойчивости судна.
Количественно надбавку за счет принудительной подачи воздуха к коэффициенту
чоковой силы иевеитнлируемого профиля, определяемому формулой (III 31), можно
пнйти поданным табл. Ill 2 для режима суиервснтнляцнн (длина установившейся
“оздушнои каверны превышает хорду профиля), когда увеличение расхода воздуха
практически не сказывается иа изменении боковой силы Возрастание сопротивле-
ния стойки при вентиляции составляет ие ботее 10 %.
При 1.0<2 Л < 1.5 коэффициенты ДСг (р) могут быть определены по линейной
пнтерп >ляцин
Н Наиболее целесообразная форма выходных отверстий для принудительисй
®*‘1ггнляции стоек — щели с относительной шириной = 0.007+0,010.
Ксположение щели должно соответствовать ее отстоянию от носика стойки на вели-
„ "У *|ц = 0,28. Для принудительной подачи воздуха предусматривают давление
“Системе р > 300 кПа.
333
Таблица 111.2. Надбавка к боковой силе, развивающейся на стойке
при поддуве
и Сторона поддува (0) (0 в рад) Пределы при- менимости по р.
0,5—1,0 1,5—2,0 f Нагнетающая ( Засасывающая ( Нагнетающая 1 Засасывающая 0,143—0 2680 —(0,09 + 0 770) 0,174—0,394b —(0,09 4- 0.4050) 0-9 3-9 0-10 3—8
Расход воздуха на выходе из щели для режима супервентиляции
Q = ры |г2Др рв.
где ц — коэффициент расхода отверстия (р = 1 ддя сплошной щели и р = 0,55 для
круглых отверстий); со — суммарная площадь выходных отверстий; Др = — р., —
перепад давлений в системе (Р] —давление в системе; pt — давление на выходе,
Л>2 = Ро + pghср; /1ср — среднее погружение стойки)
Указанный расход, приведенный к безразмерной форме, должен быть не меньше
критического (Q > (?кр = 0,1), представляющего минимальное значение относитель-
ного расхода воздуха в м3/с)
Q = QivSn.
при котором еще возможен режим супервептиляпин стойки (о — скорость движения
судна; Sn = hcm; ет — максимальная толщина стойки).
(11
§ 17. РАСЧЕТ СОПРОТИВЛЕНИЯ ДВИЖЕНИЮ СПК
Расчету сопротивления воды, строго говоря, должно предшествовать определе-
ние параметров посадки СПК. Для установившегося движения судна в условиях
тихой воды указанные параметры находят нз решения системы уравнений равнове-
сия см и моментов, действующих па СПК на заданной скорости и. Например, для
крыльевого режима эти уравнения будут иметь вид
С^н (Р^ 2) S„ СуВ SR = mcg',
+ C^KSKxK — 0,
где коэффициенты подъемной си 1ы носового и кормового крыльев Син и Сик опреде-
ляют соответственно по формулам (111.3) и (111.28); т — масса СПК; *н и — аСс"
ниссы крыльев относительно 1[Т судна.
Коэффициенты подъемной сипы крыльев — достаточно сложные функции пара-
метров посадки СПК (угла дифферента н положения ЦТ по высоте), не позволяют е
получить значения указанных параметров в виде конечных решений системы (Ill
Соответствующие же приближенные методы ее решения, например графический [311,
достаточно громоздки.
В последнее время разработаны методы совместного определения посадки н со-
противления СПК на основе численного решения уравнений движения судна (см.,
например, работу [49]), позволяющие найти эти величины как для тихой воды, iaK
и для волнения, и не только в крыльевом режиме, но н с учетом влияния корпуса.
Однако ввиду сложности алгоритма решения уравнений движения судна н необхо-
димости выполнять вычисления в очень большом объеме такое определение пара-
метров посадки и сопротивления СПК возможно только с помощью ЭВМ.
Ниже приведен способ расчета сопротивления воды движению СПК для задан-
ной посадки. В режиме движения на крыльях суммарное сопротивление СПК
7? = + Rap + Л.4А-
334
I Сопротивление крыльев определяется соотношением
.V
^кр = У' Сх) (pcs/2) Sj.
=1
I Здесь N— число крыльев, составляющих несущую систему (обычно N = 2),
С , и Sj — коэффициент сопротивления и площадь j-ro крыла.
, Коэффициент сопротивления у-го крыла
Cxj — CxFj + 6-xly.
I Коэффициент вязкостного сопротивления Cxvj определяют согласно работе (31 ]:
Cxi'j = 2Cf,j |1 4- ](/пу + 0,5) (Фу,ky.]) 0,5] Ср/},
где Ср* — коэффициент сопротивления трения гладкой пластины [см. формулу
(Ш.34) I для хорды /-го крыла; mj — 0,5 прн Си) — 0,15-1-0,20, /Ну = 0,75 при Су/ =•
0,5+0,6;
= 1 - Г2 <*>°-6; = 1 - (0,5 4 бу) в-2е/ 6
(бу н Лу — относительные толщина профиля и погружение /-го крыла); Cui — коэффи-
циент подъемной силы у-го крыла для рассматриваемой скорости движения.
Коэффициент индуктивного сопротивления Ск^ определяют для носового крыла
по формуле (III.7), а для кормового — по формуле (111.29).
Сопротивление выступающих частей складывается из сопротивления наклон-
ного гребного вала, сопротивления кронштейнов и сопротивления стоек;
Rap — Rrp. в + ^«рон + Ret-
Сопротивление наклонного гребного вала (в случае наличия вала)
«гр. s> — Cx гр. в (ро2/2) Sn, в,
где Сх г в = 0,2; Sn. в — площадь проекции валопровода на вертикальную попереч-
ную плоскость.
Сопротивление кронштейнов (прн наличии валопровода)
ЯкГОН = Сх Кроц (рыг/2)
$крон«
где
Сх крон = 2Cpks + Сх 1;ав С£; Cs = 0.246-/Х;
(fes=l,2— оэффщнент, учитывающий кривизну поверхности; Сгнае3
= (л,8)б2 [1 + (л Fr2)] — коэффициент сопротивления при срывном обтекании
кроншт йна с клиновидным профилем; Л — hib и 6 = ет fc — удлинение погружен-
ной части и относительная толщина кронштейна).
Сопротивление стоек Rc определяют в соответствии с рекомендациями § 16
(эта составляющая включает также сопротивление элементов движительиого ком-
плекса обычно совмещаемых с крьиьевыми стойками, таких как обтекатели коло-
нок передач мощности к гребным винтам н водопроводящих трактов водомета).
Сопротивление воздуха
Raa = Сил (Рв^г/2) О,
а,еОлд — 0,5+0,6; £2 — площадь проекции надводной части судна на вертикальную
поперечную плоскость.
Помимо указанных составляющих сопротивления должно быть также учтено
^противление рулей и сопротивление гондол угловых передач мощности или водо-
Сборников водомета, если последнее не вошло в расчет КПД движителей.
В режиме движения, соответствующем совместному обтеканию крыльев и кор-
Jfa, суммарное сопротивление СПК запишется в виде
R — /?корп + Rup + Rap 4 Raa>
335
где /?Корп — сопротивление корпуса. Посадку и сопротивление СПК в этом режиме
определяют силы, возникающие на корпусе (архимедовы и гидродинамические)
и на крыльях, н их взаимное изменение на различных скоростях. По мере увеличь,
ния скорости доля сил поддержания, приходящаяся на крылья, возрастает, а прц.
ходящаяся на корпус — ьмеиьшается. С ростом скорости падает и гидродинамическое
-кзчество корпуса. Максимального значения суммарная сила сопротивления R до.
стигаст при скорости СПК, соответствующей силе поддержания, создаваемой ко >цу.
сом п равной 25—35 % водоизмещения судна (доля сопротивления корпуса сосгав-
ляет 0.4—0,6 полного сопротивления СПК). Указанное максимальное значение
называемое также горбом сопротивления СПК, представляет основную характеру,
стику сопротивления судна в этом режиме, подлежащую определению. Однако paj.
работка методов расчета сопротивления для случая совместного обтекания крыльев
и корпуса связана со значительными трудностями, которые вызваны необходимое! ю
учета особенностей обсекания incj-
ших |юверхнос1ен СПК.
В рассматриваемом режиме дщ
ния при возрастании скорости, а следо-
вательно, приближении сопротивле-
ния СПК к значению горба, носовая
оконечность судна начинает зсплыват
и передняя граница смоченной по-
верхности днища приближается к но-
совому крылу. Затем при скорости,
соответсшующей горбу сопротивле-
ния. сплошной поток отрывается от
корпуса позади носового крыла
вследствие образования за этим крылом
волновой впадины и вновь примыкает
к днищу уже за миделем корпуса. В
месте отрыва основного потока н вверх
от его границы в носу днище обтека
ся тонкой брызговой пеленой. Прн
дальнейшем увеличении скорости все
большая часть поверхности корпуса
поднимается над водой, обусловливая
падение
полного
Рис. 111.22. Зависимость сопротивления
СПК от скорости движения судна.
«пл max- «горб- «кр mln- «кр таз- “горб-
“кр. опт — характерные значения сопроти-
влений СПК (максимального в режиме пла-
вания гербового, минимального и максималь-
ного в крыльевом режиме движения) и соот-
нетствующие этим сопротивлениям скорости.
сопротивления СПК по
отрыва корпуса от воды
крыльевого режима зиа- -
сравнению со значением горба. После
сопротивление судна достигает минимального для
ния.
Все отмеченные особенности обтекания корпуса и
ществениым образом сказываются на сопротивлении СПК в переходном режиме дви-
жения. Однако полностью учешь их при использовании только ручного счета i е-
возможно.
Сопротивление СПК предлагается определять расчетом, изложенным выше спо-
собом, только для крыльевого режима. При этом допустимо ограничиться расчетом
величины R лишь для одной максимальной скорости движения. Для всех остальных
скоростей крыльевого и переходного режимов значения сопротивления могут бы ь
найдены с помощью табл. 111.3, объединяющей результаты обработки данных о со-
противлении построенных СПК. и с помощью приводимых ниже аппроксимируют я
зависимостей.
Буквенные символы, используемые в табл. III.3 и аппроксимирующих зависи-
мостях, обозначают скорость и сопротивление на границах трех скоростных диапазо-
нов, соответствующих режимам плавания, переходному н крыльевому, и значений
этих величии для горба сопротивления СПК-
Для условий движения судна на тнхой воде: uDJI tnax — максимальная скорость
режима плавания СПК. соответствующая первой по скорости точке перегиба кривей
сопротивления (рис. 111.22); /?пп пых = Я ('•'пл тахН “горб— скорость, соответствую-
щая горбу сопротивления CHR, /?ГОрб = R (“горб): 1’кр опт — скорость, соответ-
ствующая минимальному сопротивлению СПК при движении в крыльевом режиме'-
/?,(р пип = К(1'кропт); “кр max — максимальная скорость движения СПК в крыльев™1
режиме; /?1;р п,ах = R (»кр max).
336
изменения посадки судна су-
К Таблица Ш.З. Относительные величины, характеризующие зависимость
сопротивления СПК от скорости
— Условия движем ня Относительная характеристика Крыльевая систем» СПК
с фиксирован- ными крыльями (пересекающими понерхность воды) С ПОЛНОСТЬЮ ГО’ гружен и ымн автоматически управляемыми крыльями
Тихая вода Режим движем ня на крыльях /?кр mm max ь'кр онтА*кр max 0,6 0.7 0.7 0,73
Режим движения при совместном обтекании крыльев и корпуса Яцл max ^кр mm ^ГОрб’ tnm Vnn тзх/Ь'кр max 1’глрб/^кр max 1.1 1.3 О.з 0,4 1,3 15 0,35 0.42
Волнение Аг'кр max/t’iip max Д ?npmaxzR (l'n max) Д/?кр min//?Kp mln 0,25 0,45 0,22 0.12 0.1G 0,14
A^ropO ^горб 0,17 0.12
Зависимости сопротивления СПК от скорости для условий тихой воды в раз-
личных скоростных диапазонах могут быть представлены следующими функциями:
для первого диапазона скоростей при 0 <• и ипл тах
= Г/3_Е---------------+1V-11;
1° L X l'n.i шах / J
I для второго диапазона при опл щах < v £'кр опт
Rn = (2тР - Cav- + Ctv- -|0 ;
С] = /?горб — «во mini * 2 = (Икр опт — uropO)Ji
Cj == 3 (Cup опт 4" Ц-орб): i — бЦ;р oin°i'op6'
^Б = ^ГОрб°Горб 1(*кр ОПтЛ'гОрб) (З^ГОрб икр опт) ’
— ($кр min/^горб) (Зт>кр опт СрщтО)!»
дтя третьего диапазо ia при t’„p ппт <: ° < «кр пик
। __ /?кр mln
» __ о К|Ч>тп Янрснк ( Г’кр опт Xs/ ° V
। К1П — «кр max ~Б--------~7 ~7 ГТ" I Г----------I I Т---------1 } •
Кир max / । ек1) пит \ \ °кр max / ХЧфоШ ’
X Гкр шах ’
337
В табл. 111.3 приведены также данные для движения СПК на предельном i.iq I
рассматриваемого судна волнении, характеризующие (по отношению к условиям дв
жсиня на тихой воде) прирост сопротивления за счет влияния волнения н уменьше-
ния максимальной скорости крыльевого режима вследствие ограниченной мощное щ
двигателей или вследствие того, что эксплуатация СПК иа волнении при более высо-
ких скоростях невозможна. Использованные здесь символы означают: ДРКр max
прирост сопротивления СПК на волнении для максимально возможной скорое,и
крыльевого режима
с'в шах = с'кр max (1 — Лстах/^кр max)
(At'max — уменьшение максимальной скорости крыльевого режима на волнении
1'кр max соответствует устовиям движения на тихой воде); R (ив max) — сопротивле iiie
СПК на тихой воде при о = нв тах; ARIW min и А/?горо — приросты сопротивления
на волнении для скоростей Окропт и оГорб)-
Зависимость сопротивления СПК иа волнении
/?„ = /?(! + Дй/Д)
от скорости может быть построена по заданным трем характерным точкам (ЯВгого>
RB кр min- Rb кр max) 8 виде плавной кривой, аналогичной кривой R (о) для услов)
движения судна на тихой воде.
§ 18. МЕТОДЫ ОЦЕНКИ МОРЕХОДНОСТИ
И УПРАВЛЯЕМОСТИ СПК
Мореходность и управляемость СПК можно оценивать, а крыльевые элементы и
органы стабилизации выбирать путем испытаний буксируемых и автономных саме
ходных моделей, а также расчетом.
По испытаниям буксируемых моделей в мореходном бассейне на регулярном
волнении определяют передаточные функции качки и перегрузок СПК. Этн даннь
позволяют выполнить расчет движения СПК иа нерегулярном волнении, если не
возникает кавитации подводных крыльев (ПК).
По испытаниям буксируемых моделей с углами дрейфа и крена в буксировочном 1
бассейне, а также с углами дрейфа, крена и на различных рвднусах циркуляции
ротативной установке определяют гидродинамические силы и моменты на ПК, по '
которым может быть выполнен расчет управляемости, устойчивости на курсе и осто'
чпвостн СПК. Испытания самоходных автономных моделей позволяют получи
параметры мореходности СПК на нерегулярном волнении и оценить управляемост
Расчетные методы основаны на определении гидродинамических характерней г<
ПК экспериментально или расчетом в соответствии с § II. Необходимые для расч
тов динамики СПК вертикальные н боковые гидродинамические силы на ПК и обу -
ловленные ими моменты (кренящнн, дифферентующий и рыскания) находят по г i-
потезе стационарности 'силы однозначно зависят от мгновенных значений угла атак')
и заглубления ПК).
Угол атаки крыльевого элемента с углом килеватости ркр в плоскости, нормал
нон к размаху, прн местном угле дрейфа р, и местном угле атаки ai составит
at cos ркр + Р, sin Ркр sign zf,
н коэффициент подъемной силы элемента Су с углом килеватости Рвр определяют г э
соотношению, аналогичному выражению (II 1.3),
= с“г («I + ₽t ‘g₽Kpslgnzf). (Il I.3f
Коэффициент боковой силы
Ся= — C^tgP^signz.J (III.37)
Ркр > 0 для элементов с прямой килеватостью.
Для Стоек коэффициент боковой силы вычисляют поформуле(П1 31).Силы,во.
пикающие при перекладке закрылков, определяют в соответствии с формулой
(111.17). Соотношения для действующих на СПК моментов приведены ниже.
338
, .t УРАВНЕНИЯ БОКОВОГО ДВИЖЕНИЯ СПК
§ 1
I Пр» расчете бокового движения принята система координат, приведенная на
III 23.
РиС’Одно движется на регулярном волнении, курсовой угол бега волн Рв. Длина
,„Ы Хв- высота hB = 2с, круговая частота
1 — заданный курс; 1 — генеральное направление бега поли! 3 "
неправ еине бега вдементарноЛ волновой системы.
(III 38)
Г Уравнение волновой поверхности в системе координат рнс, 111.23 имеет вид
>]в = a cos (kDx cos рв — kuz sin рв — сйцО;
<1>я — < — v ((£>-/g) cos pB.
Для описания бокового движения СПК используют следующие параметры:
Ккорость судна v, курсовой угол (угол рыскания) <р; угловую скорость рысквния ф =
Ч Plfl Угол дрейфа р; угол крена 0. Установившийся разворот характеризуемся ра-
339
анусом /?ц или диаметром циркуляции D = При движении иа волнении пред,
сгавтяют интерес также боковые перегрузки ЦТ nz = zig и точки судна с координа-
той х. пг (х) = г (x)'g.
Приняты предположения: 1) скорость судна постоянна; 2) ₽, ф, 0 — малые ь,-
лнчины; 3) днище СПК не контактирует с водой; 4) отсутствует взаимовлияние
бокового движения и движения в продольной плоскости.
Расчет бокового движения можно выполнять в линейном и нелинейном при/пи-
женин. Пеаннейиые уравнения бокового движения СПК на волнении имеют вед
ши ф — ф) = Z -г nigd + Z^
)v<i = Ма + М^;
/х() = Afx4- Д1де»
Z (х) = V (P — <i) — Хф.
(11 .39)
Координаты траектории ЦТ судна в неподвижной системе координат определ нот
из соотношений
ig = v cos (ф — ₽), ze = — t) sin (ф — p). (111.40)
В уравнениях (111.39) обозначено: Z, Му, Л1Х — соответственно гидродинамиче-
ская боковая сила, моменты рыскания и крена прн непереложениых органах управ-
ления; Zft. Mu(l, Л1х6 — те же 1 омпоненты, обусловленные перекладкой органов уп-
равления (закрылков, рулей). Эти величины рассчитывают по формулам
Z = Cz (ро2/2) Г2/3; Ze = C!b (ptr/2) К2/3:
Му = ти (рвЕ/2) V; Alw6 - ти6 (рвЕ/2) V;
Л)х = тх (реЕ/2) V; Л1хв = тхГ> фо»,2) V;
т = pW.
(111.41)
Гидродинамические коэффициенты, входящие в формулы (111.41), выражаю ея
формулами
С2 = У} С215,; ту = — V Сг1§/х4;
*Г £
тх ~ , (6-zi^ri/i ^i^jZ,);
-- (111.42)
= z , AC jS i; /Иуд = — У ACz^jSjXj',
mx6 = (ЛСгбЛ£/ — &Cy6JSj2}).
Здесь i и j—индексы соответственно крыльевых элементов, на которые мож| :>
разбить крыльевую систему СПК, и органа управления; С2,. Cyt — коэффициенты б< -
ковой и нодъемиоп силы на i-м элементе; 5/ j=S/ ^(ftl)/V2''3; 5, j—характерная пло-
щадь т-го крыльевого элемента или /-го органа управления; х/ = х//V1'3; yt — y^V
il-z-JV 3;xhyh ti — координаты ЦД i-го элемента; AC26j, ACv6;— прираще-
ния коэффициента боковой н подъемной силы при перекладке /-го органа управ
ления.
Значения площа; и S, и координат х,, yit z, определяют по чертежу крыльевой
системы (см. рнс. 111.23). Расчет гидродинамических коэффициентов С2/, Cvi, AC-/u
АС^у производят с учетом выражений (111 36). (111.37) в соответствии с данными § 12
Эти коэффициенты являются функциями угла атаки eq, дрейфа Р , заглубления At
соответствующего крыльевого элемента и углов перекладки органов управления бг
Сг1, yi — Сг1, yi (а/, Pi, б/); ACj^i, y6i = ACi6q yQi (6t). (111.43)
340
Величины а,, Р/, Л; характеризуются соотношениями
ai — aic + aiin Pi — Pic Pie’-
A| = (hie + 4(b) I (htc + *liв)’
(III.44)
I (x) =
1 при x^O;
О при x<0.
Здесь «ic> Pic- hfC обусловлены параметрами движения СПК «in, Pin, 4ie соответст-
вуют возмущающему воздействию волнения. Под сцс понимают приращение угла
злаки i-го элемента, вызванное вращением судна вокруг продольной осн:
а/с = г,0/и. (111 45)
Угол дрейфа находят ио формуле
Pic = P— Ч(<М) + У> (III.46)
Заглубление
hie. ~ hnt + ZjO. (Н -^)
где hnt — заглубление i-го элемента в равновесном положении.
Для ajB, PiB и Ц(в имеются соотношения:
aiB = (aco/u) sin (Лпх4 cos рв — Авг, sin рв — ы,(/);
р(в = (aw/u) sin ₽в cos (kDXi cos PB — sin PB — (M);
t]jB = a cos (AbXj cos PB — /’вг{ sin ри — co, i)
(111.48)
При автоматическом управлении движением СПК (работает САУ — система
автоматического управления) уравнения (111.39) дополняются уравнениями пере-
кладки органов управления
б, = 6г (<р, 0). (111.49)
Например, при управлении по курсу носовым и кормовым рулями, а по крену —
перекладкой враздрай (в элеронном режиме) носовых и кормовых закрылков, ли-
неаризованные упрощенные законы управления имеют вид
Ьр. н.к = ^в,к<₽Я:*Фи,кф; ) (п15о)
®э. II. К = ^’е II, "Ь ^6 и. к®' J
Здесь др — угол перекладки руля; индексы «и» и «к» относятся к носу и корме соот-
ветственно; дэ — угол перекладки закрылков в элеронном режиме (знак «+» принят
Для кормового руля). В законах (111.50) не учитываются перекладки, необходимые
Для стабилизации продольного движения.
В общем случае система соотношений (111.39) — (111.49) решается на ЭВМ.
। Если СПК совершает достаточно пологие маневры, при которых коэффициенты
Гидродинамических сил на крыльевых элемента- и погруженные площади являются
линейными функциями от углов атаки, дрейфа и заглубления, то расчет бокового
Движения су-диа можно выполнить по линейным уравнениям. Они имеют вид
/пор ~ % Р + (4* тли) ф + ( Z 4- /ng) 0 4- Z 0 4- , Z ' д, 4- ZB;
'Л = *<Р 4- + лф 4- Л$ 4 V 4- Л^:
4 ( 1 * * - Э I )
/х6 = Л^р 4- Л4*Ф 4- Л1°0 4- Л4хе 4- £ + "хи!
z (х) _= v (р — ф) — лф.
311
Коэффициенты уравнений определяют по формулам
(pt2/2) v2'3; z* = cf (pp/2) v = (i и) Л1 p;
Z° = C? (pl’/2) V2/3; Z° = C®' (pc/2) V ;
Л1» - mJ (po:/2) И; Л1* = mf (pu/2) V'1 ► Л1» = mJ (рЛ'2) 1';
AiJ = mJ' (pu 2) Vl/3;
Al₽ = mx (рЛ2) V; 11J = т*' № V*-3;
Л1® = /nJ (pt^/S) V; AlJ = ng (pvi2) V4 3;
= Cx‘ (pv/i) V2’3; AlJ' = mJ' (ptuM V. Alj' = mJ' (рЛ2) V.
В ходящие в эти формулы производные гидродинамических коэффициентов,
кроме производных по 0’ = 0 (|/1^3/г). могут быть определены эксшримеитально пу-
тем испытаний модели СПК на ротативной установке или расчетом по формулам
Cj = V <?Р S,.; CJ' = — V С®, 5 х,.;
Cj-= V (С^Д +.СЛ'гкр,);
<Т= Г (^л+СгЛ)^.;
'^ = СГ;
'"2=-^(^Дл + сг/^кр Е;
=-^№ + Cj,zI)Si7i;
»5-^(4»<-<?Л)5,; (",га
< = -Х
nlx = 1j [( •zi^izr + ^г/^(2кр l) УI ~
— Cyi^l) г(]$й
cj' = cj's,.; mJ' = - cj'^;
mxl = S. (СиУ{ - C*iz )•
Здесь й =ft/V,/3; zFp 4 — гкр f/V,/3; гнр4 — координата точки пересечения наклонного
крыльевого элемеша с поверхностью воды (см. рис. 111.23).
342
Входящие в выражения (111.52) производные гидродинамических характеристик
определяют в соответствии с данными § 12 и по формулам (III.36) и (111.37). Произ-
одпые Sj снимают с чертежа.
В.змущающне силы и моменты ZB. МуВ и Мхв выражаются соотношениями
ZB = МуВ = аМуВ\ Л1*в — дЛ1дв»
ZB = ZBj cos toB/ 4- ZBj sin <oBC
AiWB = AiyBi cos wKl -г Ai,,BJ sin wB(;
-•'1 B == .‘llxiii cos wBl "I* Uxbs sin toB/j
ZB1 = У; ZHU- ^ВЯ— S 2B!|,
A i = । Hj/BHt A'I^b» = S AlyB2/,
t
AIxbi — M„ Bli; A1xlrt — £ AlxBai’.
I
ZBll = (PO/2) s,. {[(C* + CZ(S'7S,) 0;V1'3 + cP to sin pB] X
X cos (kuxt cos ₽B — kDzt sin PB) 4-
+ C* o> sin (feBx( cos PB - kvzt sin ₽„)};
ZB2f = <₽“ 2> si {-c“ocos (Vicos Рв — Visin Pn) +
1(4- [(CH + CzlShjSt) v/Vl 3 + CP to sin PB] sin (A‘Bx, cos 0B - kBz{ sin ₽„)];
Al i si = xi^ni' ail
Al n = Bit» *WjtB2( — 4|ZB2i a .
FBll = (pv/2) s,. {[CulSi!SI + V. V1'* + cP to] X
X cos (feBx, cos PB — kBzl SHI PB) F
+ tfi™ s'n (*bx< cos Рв — sin Рв)}; (111 53)
YB2i = (P^'2) Si {—C“iw coS (ftB*i cos PB “ sin p„) +
+ + С* ) о, 0'3 + CP to] X
X sin (feaXj cos pB — krfi sin pB)).
Из (111.39) и (III.51) следуют уравнения бокового движения СПК на тихой
^е. если положить амплитуду волны а = 0 (соответственно ctjB = PtB = i)iB —
«Ze=AfJCB = AfJ,B = O).
Для расчета устой1 ивос и и поворотливости СПК иа тихой воде могут оказаться
Удобными 1 равнения бокового движения СПК в безразмерном виде.
I Принято
т = tv: V1''3.
Производные по т обозначены штрихом, например,
№ <р' = dqi/dT = 41'
юго, :Xiy — prx ftV5'3; Frv = ?/) gV1,3.
343
Уравнения бокового движения СПК на тихой воде в безразмерной форме вира.
каются
О + flnP + 4- О]а6 4- Оц0 — ^ii^iJ
i
Ч * + °лР + a22ff + °2з0 + °а«0 = У I
1
И’ OjjP 4- 4- СэзО + о jO =- У , isjSj.
(Н1.54)
Уравнения траектории имеют безразмерный вид
х"е = cos (<р — Р); z'g = sin (<f — fl).
Здесь а = -С*/2; с12 = -(^’/2) - 1; а13 = —(С«/2) - (1 Fr?); о,, =
= -С»'/2; o2l = -m' (2г£); о,2 = -m»'/(2rj); я,3 =-т«/(2г?); c24 =
= -,пр7(2^); аз1 = -Ч‘/(2^); fl.i2 = -«’5'/(2/x)i a33 = -",S/(2G);
°з4=-"‘х (2'1); fcu=c^72; *2.=ш?/(2/к); <’3i=,nx7(2^)-
§ 20. УРАВНЕНИЯ ПРОДОЛЬНОГО ДВИЖЕНИЯ СПК
Системы координат, принятые при расчете продольного движения СПК, при-
ведены на рис. 111.24.
Продольное движение характеризуют следующие параметры: скорость судна с>;
угол дифферента ф; вертикальное смещение ЦТ у, вертикальные ускорения точки
с координатой х у (х) [или вертикальные перегрузки п,, (х) = у (х).'я). Представляют
также интерес замывы носовой и кормовой стоек у3 к. уя к.
Значения ф, у, узи>определяют по отношению к исходному балансировочному
режиму (в балансировочном режиме полагают у = ф = уя Hj u — 0). Нестациоиар-
иость движения учитывают коэффициентами npiicoeai пенных масс на ПК.
Нелинейные уравнения продольного движения СПК на регулярном волнении
с параметрами, указанными в § 19, имеют вид
(т + Х22) у + = У + Ув — mg]
U2 т ^вв) Ф + S — Mt h Й1_.о;
У W = У + *Ф>
Уз и, к = —У — *н, кФ + >1в (*и, к)-
(111.55)
Здесь У, Л1г — вертикальная сила и дифферентуюшнй момент при непереложенных
органах управления: Уд, АЦд—вертикальная сила и дшрферентующий момеи,
обусловленные перекладкой дакрылков.
Входящие в уравнения (III 55) величины определяют по формулам, аналогич-
ным (III.4 ):
У = Су (рог/2) V213; -Иг = тг (pv2/2) У;
¥б = СУ6 1 Р“2/2) 1/2/3; лЬб = тг6 (рог/2) У,
где Су — ^CytSi] mz— ^jX^CyiSi] С^— y^&Cy^iSi] *1 AC•
1 I I
В формулах (111.55^ ^22 ^2 i* ^26 i ^66 ~£•
344
Присоединенная масса води i-ro крыльевого элемента
где Sni = Si cos Р1;р; — размах крыла.
Гидродинамические характеристики ПК Cvi и ЛСч6г определяют, как и в § 19,
в функции ог углов атаки я заглубления соответствующего крыла и углов пере-
нтадки закрылков.
При расчете возмущающего воздействия волнения ie уч! ывается окт ян ie
крыла от ДП (полагается г, = 0):
Cyi = Cyi (а,, ₽ь Л,у: Л ?ч ei = \СУ 61 (бД; 3, = S( th,). V2/3.
I Углы атаки cz/ (принято, что в балансировочном режиме сс, = 0) и дрейфа Р,
определяются формулами
Рис. 111.21. Системы координат для расчета продольного движения СПК.
1 — нсходиля истерлиини.
В Заглубление ht выражается формулой, аналогичной (111.44),
hi = Vki — У — *<Ф Ь »Пв) 1 <hoi — у — Ь фв).
Характе изуюшие воздействие волнения скосы aiH, р,-в и ордината т],-в опреде-
ляются формулами (111.48), в которых принято г, = 0.
При работе С\У уравнения (111.55) дополняют уравнениями перекладок за-
крылков
Л, = б. (ф. у).
Упроше шые законы управления носовыми б„ и кормовыми б|( закрылками имеют
ВИД
6и = «I = -АЛ - - kv,& 1 f (] 1
\ = 62 = -*<к’1‘ - ЧкФ - ^кУ - ki/Ky- I
При этом k„ > 0, kK < 0. В общем случае система уравнении должна быть решена
па ЭВМ
В линей) м приближу л авпенпя продольного движения выражао си так:
Н" + /чы) у 4- ?-2ьф -- Y{‘y + 1 “у + 1А + Г’Ч + У УЧ- У„
i
+ м ф + W = л^у + л,гУ Ь -W/'I + + 5 + И.в;
*
У (*) = У + Уз н, и = — У — Mi, кФ + Пв (Mi, н)-
(111 57)
345
Здесь
К* = С*' (ри,2) V2/3; Г* = С» (pp2/2) l/,/3; K* = cj* (p«<2) Г;
г* = (pt2/2) V2/3; = cj‘ (pt’®/2) V2/3; M% «= mf (po/2) K;
Л1* = (pt,2/2) I'2''3; = mI' (pv, 2) И/3; AlJ = mf (pt?/2) V;
Л1’( = тг‘ (P^ K-
Входящие в эти соотношения позиционные производные могут быть определены
экспериментально иа модели СПК или расчетом по характеристикам крыльевых
е лментов:
4 = - £СУ = - 2(CFiS? + с2л); су'-------------------------------£43А=
4= ^ = c6y‘s,,
= - S (СуЗ + 4$,) i,.; mf = - X
т'г ~ X (43< — ^yl'^iXi — Cyi' i *») Xi ’ "'г' = Cy'\xi-
I
Обусловленные волнением возмущающую силу Кп и момент М1В вычисляют
по формулам
Кв = вЕв; Л(гв = оАДв; Кв = Eel cos <ак< 4-KBJsin шк/;
= Afj U1 COS W / -f* Alz B2 sin УBl, В = i Bl, 2<i
i
Mz in, в = У, Mz Bj( tij Mt B1> = XjYB1> »/.
i
Ветчину Ец, ti определяют по формулам (111.53).
Из приведенных уравнений могут быть получены уравнения продольного двину:
пин СПК на тихой воде, если в них положить о = 0 н соответственно ос<в = Р1В =
= Uio = 1" в в
§ 21. РАСЧЕТ ПОПЕРЕЧНОЙ И ПРОДОЛЬНОЙ
остойчивости СИ к
Остойчивость СПК в режиме на ПК определяется, так же как и у водоизмс
щающих судов, зависимостью восстапавтивающего момента от угла крена или
дифферента.
Поперечная остойчивость СПК может быть получена экспериментально путем
опытов с моделью или из натурном судне либо расчетным способом — на основании
решения уравнений бокового движения (см. § 19).
Остойчивость СПК с работающей САУ и без САУ определяют для трех слу
чаев:
1) при воздействии крепящего момента рули направления не перекладываются
(6j — 0), судно входит в циркуляцию;
2) одновременно с приложением кренящею момента перекладывается руль
направления таким образом, чтобы обеспечить удержание судна на прямом кур ’
W =* 0):
3) предполагается, что промежуток времени после иакреиення судна ма
поэтому можно пренебречь рысканием н дрейфом судна, обусловиинымн крепом,
руль находится в ДП.
34G
СПК без С А У. Зависимость AJ(tст 0 для каждого из рассмотренных с лучаев
ложно определить путем решения уравнений, следующих из формул (111.39). (III.51),
сс. и принять ф = в = О = О Тогда получим соотношения-
1) угол перектапки руля 6, = 0; Л1В = —тх (0, 0, ч)(ро=/2)Г;
тгф + Z 4- mgQ = 0; Л1В — 0;
2) ф = 0; И1, = —wix |O. |т) — гплР (pv1 2) V; 1
Z + 4-Ze = 0; Л1,, 4-= 0: J
3) ф = 0; 0=0; 6, = 0; Л1о = -mx (0) (рЛ12) I'.
(111.58)
(111 59)
I Уравнения (111.58) н (111.59) решают графически или методом последовательных
приближений.
I Для линейной зависимости гидродинамически}: характеристик судна и ₽ И О
момент определяют по формуле
Ьосстанавливаюшип
/40 = —mgM),
причем начальную метацентрическую высоту Л получают по соотношениям:
I) если 6 = 0, то h = Л, = Л3 + АЛ,; 1
I 2) если ф = 0, то h = h2 — h3 4- ЛЛг; 1 (111.60)
' 3) если 0 = ф = 6 = 0. то Л = Л3;
hJ = -FrXl/,/3: 1
I Д/|| = р|3 (а21°32 —°сА1) —°23 (dlld.i — аГ?'з|)]/(°11022 —°I2°2|)‘. I
(III.61)
Aft, — (u/g) г* [013(^2,8^ — аз|82р) — 0-23 (ацбзР — азАр)]/(опй2р ~ °2161р); 1
I 6ip= бц; ^2p = ^ai; ^зр= б31. J
(111.62)
Значения a ц и Ьц см. на с. 344.
I Возникновение восстанавлиааюшсго момента при отсутствии САУ объясняется
в основном возникновением дополнительных сил иа пересекающих крыльевых эле-
ментах при накрснснии СПК (рнс 111.25).
I СПКсСАУ. Работа САУ обеспечивает, как правило, малые углы крена СПК,
.поэтому зависимость гидродинамических характеристик судна от параметров движе-
ния можно считать анион ной.
Предполагают, что стабилизация СПК по крену осуществляется перекладкой
носовых и кормовых закрылков в элеронном режиме. Поскольку прн определении
остойчивости рассматривают установившийся угол крена, то в законе перекладки
вакрт яков учитывают лишь слагаемые, пропорциональные углу крена:
и — М н0: ба к — W>-
Начальную метацентрическую высоту Л получают из соотношений, аналогич-
ных (111.60):
1) если 6=0, то Л = Л, = Ля 4- АЛ,;
I 2) если <р = 0, то Л = Л, = Ла 4“ ДАг;
3) если р = ф = 6, = 0. то h = Ла;
Л3 = -FrvVl 3(^4- А-ОЛЭП + ^еЛ,к)-
Величину Дй|_ 2 определяют по форм лам (111.61) и (111.62),
Продольную остойчивость находят нз уравнений продольного движения (111.55),
”о-лагая ф = у = ф — у = D.
341
СПК без САУ. Зависимость восстанавливающего момента Му от уг.ц
дифферента получают в результате решения уравнений относительно у и ф которое
может быть выполнено графическим методом или иа ЭВМ-
Е + Кд — mg = 0; Му == —М. — Mi6.
Для линейной зависимости гидродинамических характеристик судна от пар>
метров движения
Му — mghyty.
Продольная метацентрическая высота
% = - №g) («♦ - т«С*/С*).
Рис. 111.25. Обеспечение остойчивости СПК за счет работы пересекающих эле-
ментов (Л10 = Ч-
СПК с САУ. При законе управления носовыми и кормовыми закрылками
по формулам (111.56) для восстанавливающего момента имеется соотношение
Му =
Где
аф=- (ад [«♦ - s 4%, + [(«•,’ -1/1/3 е т") (с? -
-ec>41)]/(^-v/,/3ecX()}-
Углы перекладки закрылков находят из соотношений
«г = — — ЬшУ-
§ 22. ОЦЕНКА УСТОЙЧИВОСТИ ДВИЖЕНИЯ СПК
Устойчивость СПК оценивают по линейным уравнениям движения иа тихой
воде (см. формулы (111.54), (1П.56), (111 57)]. Расчет можно выполнять для С1
без САУ (обладающего собственной устойчивостью) и для СПК. снабженного СА
Устойчивость рассматривают на основе критериев Раусса—Гурвица.
846
ш
^Устойчивость бокового движения. СПК без САУ. Устойчивость бокового
*ен11я СПК без САУ может быть приближенно оценена раздельно по уравис-
1р1'। рыскаиня и крепа в предположении об отсутствии влияния крена на рыскание
so белее точно, по совместной системе. В первом случае уравнения бокового
дкнжеп1я имеют вид
20' = ф + (Cf + 2) ф';
2г=<р" = ф + m’V;
2г’0" = щРр 4- пг^'ф’ + ф.
Проверка устойчивости сводится к проверке следующих соотношений:
д я уравнения креняших моментов
тх< 0;
для уравнений горизонтального движения
Ф^'-т2(С?'+ )>0. (HI 63)
Устойчивость в горизонтальной плоскости характеризуется плечом Зарыскнвання
^=-Ч/сР- <п,-64>
приведенным плечом сил демпф трования
V=-</(Cf+0 (III.65)
и коэффициентом динамической устойчивости
*v =" *₽/V-
Условие динамической устойчивости в горизонтальной плоскости (III.63) сво-
дится к требованию
V >ЛВ или *v<L
Для СПК, как правило, вследствие высокого демпфирования это требование
Еыг.оапяется. Плечо зарыскнваиия хр в зависимости от конструкции и распложения
крыльевых устройств может быть как положительным, так и отрицательным. При
е. судно статически устойчиво по углу дрейфа. В отличие от
водоиямещающих судов большинство СПК статически устойчивы по углу дрейфа
в крыльевом режиме движения
Свя энная система (JH 54) при — 0 имеет характеристический определитель
Д = р* 4- А,р3 4- АаД- -| А,р 4- А4,
где
4. = о3) Сц + а22; Аа — а-п 4- а22°з1 °и с.г: — °г1иза — йлста — йнозъ
= П33 (coj + о41) 4- а22 (йц024 высз1) 4* ам (°u°3i — °ысзг) 4" °21 (°назг —
ci м) e31°i3 4- °2зСзг: = аи (с22сзз — Оз2Й2з) 4* (Оза^ю — О1асзз 4”
4- ^31 (°12^23 - ^йг°1з)-
^Г-ТОВИЯ устойчивости
А;>0; '11(41А2 — А,)— АрЦ > б. (III.ГС)
^Чт расчетов показывает, что наиболее существенным является условие
А4>0, (111.67)
При соблюдении этого условия остальные, как правило, оказываются выполиец.
ными
На условие (III 67) наибольшее влияние оказывает производная
Ч = -2-(СгА?4+СЛ?вм)?,
i
вначение которой определяется размерами и углом килеватостн пересекающих с по
бодную поверхность подводных крыльев, а также производная
i
Если т* > 0. то при наружном угле крена на циркуляции возможна спираль,
пая неустойчивость — при входе судна в циркуляцию возникает наружный крен,
который в силу ш® > 0 обусловливает увеличение кривизны траектории, п процесс
нарастания 0 н ф может оказаться неустойчивым.
С Л К с САУ. Устойчивость исследуют путем моделирования замкну юй
системы судно—автомат на ЭВМ. При линейном законе работы автомата используют
известные методы анализа устойчивости линейных систем.
Устойчивость продольного движения. Для СПК без САУ ее определяют во
известным критериям линейной системы (III.57), если положить У „ = МгВ=Ь{ = 0,
исходя из выражений для коэффициентов характеристического определителя Рас-
четы показывают, что наиболее существенным оказывается условие статической
устойчивости
— х,р>0, (П1.ь8)
где фокус по высоте
фокус по углу дифферента
\
Условие (III.68) означает, что жесткость по заглублению крыльевой системы
в носу должна быть больше, чем в корме (например, более развиты пересекаю .не
элементы), в то же время производная подъемной силы по углу днффере 1та
крыльевой системы должна быть меньше в носу, чем в корме.
Устойчивость СПК с САУ оценивается на основе рассмотрения
совместной линейной системы движения СПК км. формулы (111.57)] н урав ie-
ний описывающих работу САУ |см.. например, формулы (111.56)] по извес 1 ым
методам теории автоматического управления
§ 23. РАСЧЕТ ПАРАМЕТРОВ УСТАНОВИВШЕЙСЯ ЦИРКУЛЯЦИИ
Параметры установившейся циркуляция рассчитывают путем решения системы
(111.39), если положить Р' = ф" — 0' = 0* = 0. В линейном приближении из урав-
нений (111.54) следует
ф' = Jj'i’i; <Р} = Д<ГД/Д
А = —С® - ш® (^М’ — С? m®) +
4- ш® — С^'т )
V,= +
+4' c?m!J)i
с’’ = cf + 2; = С® 4- 2, Fry.
(Ill 19)
350
Относительный диаметр циркуляции Du = Оц- L определяют но формуле
ёц = (1',/3/£)2.-ф'.
у гды крена и дрейфа рассчитывают по аналогичным соотношениям
0= V0,; Р= 0( = Ло1Л/ A; Pi = Др;6< Л;
I_с*- (,n0< - m>;')+< (cf< - CJX) -(Ф«г - Ч’Х);
( = -с®' ««"2 - «) + - с?О - "•> (<« - с‘Х').
В случае СПК, стабилизированного по крену (так называемый плоский разво-
рот), язи при малом влиянии крена на поворотливость получим
* *( ” = —а-----в,- ”
с>*
С^т'У — m^Cj'
* 0, = - + ш?Р + V) I«I?.
Соотношения для ф, н Р( можно также преобразовать к виду
(III 70)
Рис. III.26. Влияние крена на
диаметр циркуляции при постоян-
ном угле перекладки руля.
где Хр н вычисляют в соответствии с формулами (III.64) и (111.65), а х, —без-
размерная координата Ц.Т на i м органе управления.
Из формул (111.70) видно, что для судна,
статически устойчивого по углу дрейфа (хр<
< 0), эффективно носовое расположение руля
по сравнению с кормовым В этом случае на-
ряду с более крутой циркуляцией меньше
утты дрейфа, а следовательно, и меньше бо-
ковые :нлы на стойках Для статически не-
устойчивого СПК более крутая циркуляция
•сбеспе ивается при управлении кормовым
рулем.
Влияние крена на поворотливость в со-
ответствин с выражениями (Ill 69) может
быть различным: при ffiJJ > 0 (соответст-
вует носовым пересекаюшнм элементам с
прямой килеватостью) наружный (ноложн-
татьный) креп уменьшает диаметр циркуля-
" - ’ “ - д
и’чг D, а при «1*2 < 0 увеличивает
(рис III.26).
§24 РАСЧЕТ ПРОДОЛЬНОЙ КАЧКИ И ПЕРЕГРУЗОК СПК
ЧА РЕГУЛЯРНОЙ ВОЛНЕНИИ
Параметры продольного движения СПК на волнении определяют путем ре-
”тения па ЭВМ системы (111.55). Однако едовлетворительное приближение можно
Иолучлть также при решении линейном системы (III.57). Выполняют расчет днффе-
351
рейтаф, вертикального перемещения у, ускорения в ЦТ$ и в точке судна о абецис.
сой к у(х), замыиов носовой у3 м и кормовой yiK крыльевых систем. Прн рс^,
ннй системы (111.57) каждая из этих величин окажется гармонической функций
времени с частотой ы,;, например
Ф = фв cos (шк/ + еф);
</ = у a cos (coKZ + еи).
где величины с индексом «а» (фп, j/a) означают амплитуду, а &ф, ер — фазу Соотвег-
ствующего параметра.
Амплитуды рассчитывают по формулам
Фа = a I « пф I:
Уа = a I К пр I
У сР'ч$|
(41.71)
и т. д. Фазы находят из соотношений
= arclg (Im IV^/Re U',14)
и т. д. Передаточные функции определяют из системы (111.57) известными методами
Ц4|.
Уравнения (111.57) записывают в операторной форме. В частности, если САУ
не работает (6, = 0).
И7,l(m 4- ?.г5) р2 — Y,:jp — )zvl 4- [> гер~ — >'*Р — У1*'! =
= ки1- ‘У BS;
«’ш, [W “ МгР “ Ч] + » Пф (Ч + Чв) Р- ~ МЪ> - Л,1) =
= Мг В1 — 1М3 в2.
Полагают р~ (й>„. Систему решают относительно IV вд и #7^. В частности,
М7Ч„ («к) = Ду A (III 73)
где определители Д и Ду имеют вид
Л = Re Д -г I 1m А;
Re Л = [(т 4- ?22) + И [(/, + ?.С6) ш; + Ч ] - ^Л1V +
+ М + >•*) М + ч?) + >'ЧМ;
1ш А = ((т + х22) о; 4- у | A'lX + [(/, + Ц) и® + Л|Ф] Г^к -
- ('-2бшк + Лф - (*»“«+г*) Л1Х;
Ду = RcAf, + ilmAv;
ReA, = - [(/г 4- М 0“ 4- Л1'1] ГВ1 - УВ,Л1 4-
Я'^к 4-^)чи.+ЧП2‘'Ч;
1»п.\ = -ГП1М?Ч 4- [(/, + М ш® 4- Л4?] рв2 + Ч в/Ч -
— (7-го 4- 1 'О Alj в2-
(II 1.74)
(111.75)
С учетом соотношения (111.38) для ык из формулы (III.73) следует зависимость
передаточных функций от частоты волны 0. Аналогичный внд имеют передаточный
функции для других параметров движения СПК.
352
Входящнг в формулы
'определяют из выражений
нсстн.
(111.71) абсолютные величины перетаточных функций
(111.73)—(111.75) по известным соотношениям. В част-
|nW = I ДрР : |А|2.
где. например.
| Л |3 = Re3 А + 1m3 Д.
| Расчеты ио формулам, аналогичным (111.71), показывают, в частности, что
существенное влияние на наиболее важный параметр качки — вертикальные пере-
грузки в ЦТ Пр цт = yig — оказывает отношение длины волны к расстоянию LK
между носовой н кормовой системами ПК (рнс. 111.27).
При работе СЛУ в форм} ты (111.57) вместо б, подставляют соотношения для
законов управления (111.56). Далее решаю по формулам, аналогичным (III.71),
Углы перекладок органов управления в
нос) бн н корме 6В находят по формулам
бц = би. n COS (Ы„/ + QH);
6i. = 6к. a COS (со,,/ ф е6к);
б„ a = a|U\1(4,|:
бк. а = а | И 1)бк |.
§25. РАСЧЕТ КАЧКИ И ПЕРЕГРУЗОК СПК
НА НЕРЕГУЛЯРНОМ ВОЛНЕНИИ
Рис. 111.27. Влияние отношения
расстояния между крыльями
к длине волны на вертикальные
ускорения
Расчет выполняют для вертикальной кач-
ки СПК, описываемой уравнениями (111.57).
По результатам расчета движения СПК на
нерегулярном волнении определяют статнс-
тические характеристики параметров движе-
ния — дисперсии Dxx, амплитуды с заданной степенью обеспеченности хрЯ , а так-
же, в случае необходимости, спектральные плотности соответствующего парамет-
ра Slr.
Значение амплитуды со степенью обеспеченности р % определяется законом
Рэлея но формуле
'«-''«К-тяг
*3% = 2.64JC,
где X = |' Dxx,
* Реальное морское волнение является трехмерным и нерегулярным. В качестве
приближенной схемы морского волнения можно принять схему двумерного нерегу-
лярного волнения.
Двумерное волнение. Полагают, что судно движется с курсовым углом 0В к на-
правлению бега воли (см. рнс. 111.24). По соотношениям (111.73) рассчитывают пере-
“аточные функции параметров качкн судна в зависимости от частоты волны <в.
Аналогично формуле (Х.41) разд. I дисперсия параметра х
ФО
Dxx J | Г2 Sfln (<i>) Ли.
oJ
(II 1.76)
12
П/Р Я. И Войткукского. т. 3
353
В частности, дисперсии килевой качки, угловой скорости и ускорения килевсд
качки определяются формулами
СО
0^ = 1 117,)♦ Р «ЧП (“)
о
= J “к м I Г Ч> <®>) d“-
О
По аналогичным соотношениям следует рассчитывать дисперсии вертикалы: *
перемещений скоростей и ускорений центра тяжести судна.
Передаточная функция для перегрузок у (х) в точке СПК с абсциссой х в сост-
ветствни с уравнениями (И 1.55) имеет вид
(х) = nS +
Тогда, как известно,
I М I2 = I lV/n₽ I3 + *: I I2 + 2*Re (Vn*).
где — комплексно-сопряженная функция с U7,^;
Дисперсия перегрузок в точке с абсциссой х
D6 (*) S U) = + 2xReD^ + x*D^, (111 .’8)
где
ReD^ = J (co) Re ((111 7<J)
о
Передаточные функции
= <Ок"/Пй’ Ай= ’ш* Аф’
Для судов, снабженных САУ. дисперсию углов перекладок йи и бк рассчи ы-
вают по формулам, аналогичным (111.76):
DfB,H= ]°|“^н,к|-лпп^йш-
о
Расчет спектральной плотности параметров движения СПК выполняют по
мулам, приводимым в§ 29 разд. 1. Дисперсии по формулам (111.76) и (111.77) мои-«о
вычислять без применения быстродействующих ЭВМ.
Трехмерное волнение. Полагают, что судно движется с курсовым углом f,, п0
отношению к генеральному направлению бега волн (см. рис. 111.23 и 111--’!)
Дисперсию параметра х определяют по формуле
я/2 со
4 J J cos2 «Ап (ш) I Ах <“<• » Ре) Г
—л.-2 О
где Ре = Рв — «®; ® COS р4.
354
-
Л/2 оо
Рфф = J dcze — cos-a^^ (со) | U Лф (юк, ы, Pdpdco;
—л/2 о
Я/2 сю
D^= J da, J -^-cos?a(,S411 (w) w® | U''n^, ((i)K, u, p,)|2rfa>;
—л/2 0
П/2 oo
= J da J — °s2 a S.m (t,> “* I tt чф (“к- “ ₽-) I2
—Л/2 0
Диалогичные формулы (с подстановкой соответствующей передаточной функ-
ции И 1 справедливы для у, у, у и других параметров качки.
Дисперсии вертикальных перегрузок в точке А с абсциссой х можно вычислять
по. формулам (111.78). причем величину Re рассчитывать по соотиошени t
эквивалентному (111.79)
I |||||| П/2 оо
Re ddv = 4" f [cos2 “А'-(ш) Re )du>-
—Jt/2 О
Спектральная плотность произвольного параметра х н взаимная спектральная
плотность параметров хну определяются соотношениями
Srx(roP) = ReSxx(cof);
sxv (<1>г) = R Sxy (wf) 4 i 1 in Sxy (co0).
бв-л/2
Re Sxu (cof) = (2 л) j cos® (co«®') (Re It nx. «о,., co ®>. pe) X
I xReU\p((De. ш<а\ flr) 1шП\и(й)е. ю<2», pe) (Wer сИ*\ Ре)] X
Рв
И: | de>(2,/rfcoe | аае - У} (2 л) J cos2 acS41) [Re 1Рпх (юе, со(п>, ре) х
п=1 Рв—л/2
X Re 1Гпв(ы,.. w(n), pJ+ Im U”,)v.(wC1 ti/'1*. pc) Im 1ГВД (<ое, w(n>, fj x
X I | dag 4 V (2 л) J cos2a,Snri (ш‘п>) x
X [Re IT пл (we> ю"1’, pe) Re tF4ff (oe, (5e) +
4- lm 1ГЧД. (<oC1 o'"», pe) Im (co,, o'"», pe)] | d<o(n>/d<oe | da 4-
+ (2,я) j cos’ot^^(©'»>)[ReГпх(-й>в, w‘3>, p₽) Re 1ГЯВ (-e>e, <o<5>, p„)-|-
Рв-л/2
I + Im (_Ш{,. ots,, pc) Jmirw(-coc, co«>, pe)J | dw«>/da)e |dae; (III.80)
Рв-Я/2
Im Sxv (ю4) = (2/л) j cos® aaSntl (co<2)) X
—a/2
X |-RelFllx(coe, <o<2>, pj ImU^tOe, co'2’, pe) +
4-Imtt'nx(co,, co«>, p() RelTni/(cor, co(®>, pc)] |dco<->/dwe |d«e 4-
Pb
4- У (2'4) J cos-aeS4n(a>'n‘)l- Rel^nxK. Pe) PJ+
n'Ts PB--4/2
+ ImUnx(coe, co*"’, p,) Re 1ГВД (<oe. co<n), pf)l | d^nifdar |dac +
Я/2
+ У (2,.л) J cos2aeSn,1(w(',’)[—ReW’tlx(we, p,) ImW ne (co«, со(л,1 f,) +
n*“l Pb**
4- Im lV'n:r(co,., co<n), pr) Re U (<ae, co(n), Pe)l | dco(n,d<oe |с/аг 4-
rt/2
4- (2/л) j cos2 a. (co’»’) I— 1 in U’nx(—coe, W3’. ₽«) Relt"вд (— co,., co<31, p,) p
P„-«/2
+ Re (— r.v, <o‘3J, pp) Im W ni/ (— <oe, ш<3>, pf)] | dco‘3>(tf<oe | dac;
wa>=__6__________1/
2vcosp, V 4r2 COS2 p, ocosp,,
(S, = E , I / 8l_____________________•
= 2t> COS pe I 4v" COS2 Pe v cos Р,- ’
С I f R2 , w j;
1 — COS Ре + И COS2 Ре V COS Pe ’
dcof , _ co o
, =1 — 2c- — cos p.;
dco g
.. I ₽b— есл“ Pb — P;<”/2:
I n/2, если PB — Рд > л 2;
... = r pb + Pb. po+p; <«2;
“ ~ l л,2, если рв 4- p; > л/2;
356
arccos —-—
0.
если —-— < I.
W€i>.
если —— > 1.
4ua(
Выражение для определения Re Sax получают из формулы (111.80) пр i под-
—ановке у = х. Расчет производят на быстродействующих ЭВМ. Примеры расчетов
спектров приведены на рис. 111.28.
Ri 111.29. Зависимость параметров
качки СПК 3?п-иой обеспеченности
от курсовых углов к волне: а — киле-
вая качка; б — замывы и вертикаль-
ное перемещение носовой и кормовой
крыльевых систем; в — перегрузки.
Рис. I 1.30. Зависимость характери-
стик мореходности от жесткости по
относительному заглублению носового
крыла: а — килевая качка; б — за-
.мывы носовой крыльевой системы,
в— перегрузки носовой оконечности.
Вид зависимостей характеристик качки: отклонения от балансировочных зна-
чений с 3 %-ной обеспече! костью углов дифферента, относительных замывов носо-
°°Г|) крыла н вертикальных перегрузок от курсовых углов к волне (без учета сил.
вызванных контактом корпуса с водой) показаны на рис. 111.29. Максимальные
“Иплитуды качки и замывов стоек наблюдаются на попутных курсовых углах
* волне Jin, максимальные перегрузки на — встречных.
Если по расчету возможен замыв корпуса водой, то фактические вертикальные
1еРегрузки окажутся существенно больше расчетных.
Для снижения перегрузок необходимо высоту стоек выбирать из расчета нсклю-
С|,|,я замыва корпуса волнами, учитывать соотношение расстояния между крыльями
наибольшей длиной заданной волны. Эффективное средство снижения замывов на
^пугннх курсов! х углах волны (КУВ) — увеличение жесткости крыльев
^МШ.ЗО). Однако при этом на встречном волнении увеличиваются перегрузки.
Рис. HI.31 Распределение вертикальных
перегрузок nv по длине СПК.
1 — ₽ = 0 (попутное волнение); 2 — ₽в =
= 90‘ (лаговое волвеиие); 3 — ₽в = ISO®
(встречное вол некие).
Рис. II 1.32. Влияние работы САУ на
характеристики мореходности.
—... — неуправляемое движение:-------
движение с работающей САУ.
Рис. II 1.33. Зависимость
вертикальных перегрузок пв
в ЦГ от высоты волы;
/ — СПК ия полностью окру-
женных АУПК; // —СПК без
стабилизации; III — глиин-
рующне суда. I — «СнфлаАт
НБ7»; 2 — «Долфии» <со раз-
личным источникам): 3 — «Хай
По А нт»: 4 — «Тукумкэри»; 5 —
«Пегасус»: 6 — Р+?0 «Сучтл-
фиш»; 7 — проект КПК фирмы
«Боинг»0 модель 923-12 А; —
«Флиппер»: у — РТ-150ДС;
10 — «Домнеон» (го ризлич! м»
источникам): // — PT-50: i "
РТ-20; 13 — «Бра Д'Ор»; । i
«Метеор».
Ъваивые взаимодействием кры ьев с водой, возрастают амплитуды килевой качки.
Экспериментальное распределение вертикальных перегрузок в долях g по
1ЙНс СПК (401 иллюстрирует рис. III.3i.
Как следует из формул (111.78), зависимость Dyy (.г) является параболической.
. .а рисунке видны точки с минимальным значением перегрузки. Обычно минимум
перегрузок находится в районе ЦТ ближе к корме (в этом случае Re > 0),
максимум перегрузок чаще всего наблюдается в носовой оконечности судна,
^’ашюнальиым средством уменьшения качки СПК является применен! е САУ
jtjpiic Ш.32 видно, что применение САУ наиболее эффективно на попутных КУВ.
В эт < случае удается в несколько раз сократить амплитуды килевой н вертикальной
пачки; перегрузки снижаются не так сильно, однако уменьшается вероятность уда-
ров корпуса о волну.
I ||!илучш11ми мореходными характеристиками обладают суда с полностью по-
груженными автоматически управляемыми подводными к ыльями (АУПК). Харак-
терные для построенных СПК различных типов вертикальные перегрузки в ЦТ при
ватах 3%-ной обеспеченности показаны на рнс. 111.33. Из рисунка следует, что
приемлемые ускорения для пассажирских СПК на неуправляемых крыльях могут
быть обеспечены прн относительном высоте волны до hn/Vlli = 0,4, а для СПК
с АУПК эти пределы расширяются до йв/У1/3 = 0,7.
Глава IV
СУДА НА ВОЗДУШНОЙ ПОДУШКЕ
§ 26. ОСНОВНЫЕ СООТНОШЕНИЯ, ХАРАКТЕРИЗУЮЩИЕ
ОБРАЗОВАНИЕ ВОЗДУШНОЙ ПОДУШКИ
Н Движение судна на воздушной подушке (СВП) сопровождается перемещенном
по Поверхности жидкости облаон избыточного давления, создаваемого работой
вентилятора. Эта область может поддерживать судно н прн отсутствии его посту-
и. тел аного движения.
Для описания гидродинамических и эксплуатационных характеристик СВП
вводится ряд параметров и безразмерных коэффициентов, представляемых для
амфибийных и скеговых СВП в несколько различной форме. Некоторые нз них
приведены в перечне основных обозначений, остальные поясняются в тексте ио
мере их использования.
В Как было отмечено в гл. 1, практическое применение нашли камерный и сопло-
1,1 й способы образования воздушной подушки (ВГ1), используемые, как правило,
в комбинациях. В камерной схеме реализуется простейший механизм истечения,
11 зависимость между избыточным статическим давлением в ВП ра, расходом воз-
луха Q н высотой отрыва кромок камеры ha над жестким экраном в предположении
° Двумерном характере потока выражается соотношениями (рнс. IV.1, а)
Q— ео11Л|Ь'|б • 41=1 2₽1г'(’о • (IV.1)
где /„ — длина периметра истечения, м. Коэффициент сужения струн е0 зависит
формы кромки и ориентации прилежащей к экрану стенки камеры; значения е0
~?и плоской с острой кромкой стейки камеры прн заданном внешнем угле наклона
Степки 63 к горизонту приведены ниже:
6»
О 45 90 135 160
-.............. 0,500 0.637 0.611 0,746 1,000
ъ
некоторых источниках (841 выражается в виде полинома.
Работоспособность сопловой схемы (рнс. IV. 1, 6) предполагает наличие хорошо
Лорнированных струй. При тех же допущениях (о двумерном течении и жестком
Pwie) разработан ряд способов количественных опенок параметров схемы, ко-
Р'-че । одробно рассмотрены в литературе 177, 84 J н др. Для определения основ-
359
ных параметров сопловой схемы — коэффициента давления kp и коэффициента
расхода Qt в зависимости от параметра X, характеризующего геометрию тече,
[31 ] — расчетах обычно применяют следующие формулы
ё, = —«=.= '(1-«-*);
Иц V2Рр/Рв Х
X = J— (1 — sin 0()
(IV .2)
Смысл дополнительно введенных обозначений ясен из рассмотрения схемы
па рнс. IV 1,6.
Рнс. IV. 1. Схемы «Ц.ЮСКО1О» истечения при камерном (а) и сопловом
(6) способах образования воздушной подушки.
Самым общим количественным критерием, позволяющим сопоставлять разл>г1-
ные типы СВП между собой, равно как и сравнивать их с другими транслортиычи
средствами, является пропульсивное качество
ku — Gv.'ZP D
(f—наибольшая скорость, м с; £ Рр— потная установтенная мощность, ')
Прн отсутствии затрат мощности на поддержание, например для СПК,
*о =
1Де k=G'R — гидродинамическое качество несущего комплекса СПК; — про-
пульсивный КПД.
Для более дифференцированных оценок СВП пользуются иногда понятием
приведенного относительного сопротивления Ro, учитывающего энергозатраты из
поддержание:
Ro — R 4- Ru*
где R = RIG-, R„ = PuQ^rJ(Cvx\uy
КПД нагнетателя tj,, определяется отношением гидравлической мощности ВП
к полном мощности нагнетателя
Неудобство использования последнего выражения состоит в необходимости от'"1'
скаиня отношения являющегося в общем случае функцией многих I 3*
метров.
360
с 27. ОГРАЖДЕНИЯ ВОЗДУШНОЙ ПОДУШКИ И ПРИНЦИПЫ
JlX РАБОТЫ В СОСТАВЕ НЕСУЩЕГО КОМПЛЕКСА СВП
В Огр.ждеиия воздушной подушки помимо выполнения своих прямых функций —
формирования эоны повышенного давления н обеспечения поддержания — в значн-
.^льной мере обусловливают ходовые и мореходные качества СВП. Рассмотрим
принципы их работы и основные элементы.
Гибкие ограждения СВП амфибийного типа. На рис. IV.2 показана принци-
пиальная схема ГО СВПА. Монолитный элемент ГО представляет собой оболочку,
замыкающуюся на жесткий корпус СВПА по его периферии, образуя верхние (один
и более) ярусы ограждения. Фирма монолитного элемента поддерживается за счет
ц^ьпочного давления, распределенного по его внутренней поверхности с пере-
падом pv в части, граничащей с атмосферой, и рр — р„ в части, обращенной
к ВП Монолитные элементы могут состоять из двух и более ярусов за счет исполь-
зования продольных проницаемых диафрагм, не
создающих перепада давления внутри элемента.
Монолитный элемент служит промежуточ-
ным резервуаром на пути воздушного потока
от нагнетателя через жесткий корпус к нижнему
ярусу ГО (он называется также гибким ресиве-
ром). Элементы нижнего яруса в основном
снабжаются воздухом через отверстия в нижней
части гибкого ресивера, обеспечивающие тре-
буемый перепад давлений kp = рр ри между
гибким ресивером (рг) и ВП (/>„).
Монолитный элемент легко деформируется
в вертикальном направлении, обусловливая пе-
редачу нагрузки иа жесткий корпус вследствие
изменения значения и направления усилий в
заделках монолитного элемента на корпусе н
давления внутри элемента. Вертикальная жест-
кость при заданной высоте монолитного эле-
мента обратно пропорциональна количеству
ярусов и зависит от геометрии его поперечною
сечения.
Волыним разнообразием отличаются сек-
ши иные элементы ГО, обычно навешиваемые
снизу на монолитный элемент и образующие
нижний ярус ГО (отсюда их другие названия: навесные или съемные элементы).
Наиболее широко используют открытые съемные элементы, схема которых пока-
зана па рис. 1V.3. а. Главные свойства открытых элементов: способность удер-
живать перепад давления только с открытой стороны; обеспечение устойчивости
за счет контакта боковых стенок смежных элементов; малая нзгнбная жест-
кость в направлении, перпендикулярном к плоскости симметрии элемента. Перечис-
ленные особенности обусловливают использование открытых навесных элементов в
носовой и бортовой частях нижнего яруса, не подверженных опасности загребания
лолы или запела за препятствия.
Так называемые закрытые элементы, используемые в нижнем ярусе, обычно
представляют собой оболочку. близкую по форме к конической с отверстием в ниж-
^^В'сечсниой части (рис. 1V.3, б). Воздух в каждый из таких элементов подается
срез отверстия в гибком ресивере. За счет сохранения устойчивости формы и обра-
яиния струнной завесы ряд подобных элементов способен удерживать перепад
^члений разных знаков. Поэтому элементы такого типа, как правило, используют
Чижпнх ярусах внутреннего контура ГО. В зарубежной практике известно прнме-
«Ние элементов указанного типа, размещаемых но всей площади ВП и замыка-
непосредственно на жесткий корпус (921
t Сходны: функции выполняют и «глухие» элементы, составляющие третий ши
‘‘ЦИониых или навесных элементов (рнс. 1V.3, в). Они сообщаются с гибким ресн-
сЛ?1*' ио практически не имеют истечения в ВП и снабжены лишь небольшими
асР<-тиямн для стока воды прн выходе СВП иа подушку. Глухие элементы отлц-
361
Рис. 1V.2. Схема устройства
бортового ГО СВПА.
/ — жесткий корпус; 2 — двухъ-
ярусный монолитный элемент; 3 —
проницаемая диафрагма: 4 — г 1-
крытые напеспые элементы
чаются разнообразием формы. Их применяют на внутренних контурах, где
предусмотрена струйнан завеса, и в кормовом ГО
Наиболее сложны в исполнении элементы кормовой части ГО (рис. IV.3, г),
в которых с целью обеспечения наибольшей податливости при их взаимодействий
с опорной поверхностью используют сложные гибкие конструкции — сопловые
устройства 7, реданы 2, а также клапанные системы 3, позволяющие путем стриц-
лпвания воздуха при деформации элемента снижать давление в кормовом ГО
Схема ГО, параметры формы ее элементов и гидравлические параметры обус.юв-
Ливают в конечном счете получение определенных характеристик поддержания,
ходкости н мореходности СВПА Однако до настоящего времени не установлено об-
щих количественных зависимостей, описывающих указанную связь. Поэтому выбор
Рис. IV.3. Схема ГО СВПА с секционированием ВП в плане: а — открытые эле-
менты; б — закрытые элементы; в — глухне элементы; е — кормовое ГО в про-
дольном сечении с соплом (7), реданом (2) и клапанным устройством (3).
рациональных схем и основных параметров ГО в каждом конкретном случав
в значительной мерс основывается на опыте проектирования н представлениях
о принципах работы ГО в составе несущею комплекса СВП.
В конструкции ГО СВПА обычно реализуются следующие основные принципы
1. Наличие двух типов поэтажно расположенных элементов конструкции ГО,
совместная работа которых обусловливает «отслеживание» ограждением неровностей
опорной поверхности при движении СВПА Так, при прохождении гребня вотны
благодаря местному увеличению давления в навесных элементах нижнего яруса,
сблизившихся с поверхностью (см. рис IV.2), верхний ярус, деформируясь подобно
рессоре, уменьшает перегрузку и амплитуду колебаний жесткого корпуса СВП.
Навесные элементы смещаются вверх вместе с монолитным элементом и как бы
огибают волну, в основном сохраняя свою форму, обусловливая тем самых эффек-
тивность струйной завесы. Описанный принцип работы ГО обеспечивает удовлетво] i -
тельную мореходность и амфнбийность СВП и при непосредственном контакте ГО
с поверхностью.
2. Секционирование ВП в плане путем разделения ее площади иа участки про-
дольными и поперечными гибкими килями, составляющими внутренний или секциони-
рующий контур ГО. Главное назначение кнлей — обеспечение остойчивости при на-
клонениях СВП. ГО внутреннего контура должны выдерживать перепад давлен;1Й|
возникающий при повышении давления в секции опушенного борта или окопе4'
ности. Конструкция киля должна в то же время обеспечивать его податливость при
контакте с поверхностью во избежание роста сопротивления и повреждения кн.’Я
На рис. JV.3 показана схема распространенного способа секционирования
и типичной конструкции киля.
362
з. Такое распределение вертикальной жесткости ГО по периметру ВП. при ко-
,ором наибольшая жесткость придается носовым участкам ГО, а наибольшая
дудатливость обеспечивается кормовым его частям. Требуемое распределение же-
сткости достигается использованием одноярусного монолитного элемента в косо-
i вой оконечности и двьх- или трехъярусного в корме, применением полукруглой
я плане носовой оконечности, обусловливающей более устойчнвуюформу монолита —
близкую к тороидальной. Указанное распределение вертикальной жесткости по
„шне СВП способствует увеличению продольной устойчивости движения СВП
за счет снижения вероятности затягивания ГО при возникновении развитого кон-
такта носового участка монолитного элемента с водой. «Мягкость» кормового ГО
позволяет умерить размахи кил свои качки и снизить нагруженность гидродинамиче-
скими силами наиболее сложной по конструкции кормовой части ГО.
Рис. 1V.4. Эскиз теоретического
чертежа корпуса скега СВИС типо-
вых обводов.
Рис. IV.5. Схемы носовых ГО
СВПС в виде секционных элемен-
тов, замыкающихся на корпус (о),
и двухъярусного ГО с проницаемым
могол 1тиым элементом (б).
| Здесь описаны тишь основные элементы ГО СВПА и главные принципы их
раб ы Возрастающее muchообразие используемых элементов не исключает приме-
нения в дальнейшем существенно новых технических решений
Ограждение воздушной подушки СВП светового типа. Ограждения ВП СВПС —
комбинированного типа: жесткие погруженные скеги по бортам и гибкие или по-
яужесчкне ограждения в оконечностях. К настоящему времени сложилась относи-
тельно устойчивая форма обводов скегов, для которых характерна, как правило,
плоская внутренняя стенка по всей его длине, выраженная линия скулы с подъемом
носовой оконечности, цилиндрическая вставка, обычно значительной длины, и
транцевая корма (рис. IV.4). Скеги быстроходных СВПС по наружному борту иногда
Сн' ккаются брызгоотбойиыми брусьями, продольными и поперечными реда-
нами.
Соотношение главных размерений скегов колеблется в широких пределах,
И выбор го значения обусловлен многими факторами. Так, узкие скеги, предпочти-
Ttl ьпые для получения наивысшего гидродинамического качества на тихой воде,
обеспечивают требований, предъявляемых к остойчивости мореходности. В ряде
СлУ' лев увеличение ширины скегов или развитие кормовой оконечности в форме
Финальной наделки вызвано использованием водометных движителей.
в Концевые ограждения воздушной подушки СВПС отличаются большим разно-
в°Кзи.‘м В тех наиболее распространенных случаях, когда они изготавливаются.
363
подобно ГО СВПА. из резинотканевых материалов и по этому принципу могут быть
названы кнбкими носовыми и кормовыми ограждениями СВПС, они принципиально
сходны с соответствующими участками ГО СВПА. Однако наличие водонзмещающщ
несущих элементов, скегов, приводит к тому, что вклад ГО в общее соиро
тивление движению СВПС существенно меньше, а роль в обеспечении остойчивости
н мореходности менее ответственна, чем у СВПА. Кроме того, скеги обуслов..ц.
вают раздельную работу концевых ограждений, причем в условиях близких к схеме
«плоского отсека», в отличие от ГО СВПА, представляющего единую пространствен-
ную оболочку сложной формы. Поэтому при проектировании концевых ГО СВПС
используют относительно простые технические решения. Так, в отличие от СВПА
С полукруглой формой иоса носовые ограждения СВПС, как правило, ограничи-
вают BII по прямой линии Проявлением упрощенного подхода является применение
носовых ГО без |ибкого ресивера с замыканием открытых секционных элементов
на жесткий корпус (рис. IV.5, о), а также ограждения с проницаемым в ВП монолит-
ным элементом и навесными элементами (рис. IV.5, б). Наряду с упрощенными
схемами на СВПС. особенно мореходных, используют и многоярусные схемы с kp > 1.
С целью повышения продольной остойчивости движения в носовой оконечности
СВПС иногда применяют двухрядные ГО с подачей воздуха в межрядное простр.н-
ство. Прн этом обычно используют простейшую схему ГО. Указанное решение, по
существу, аналогично секционированию в плане ВП СВПА; оно усложняет схему
несущего комплекса и целесообразно лишь в тех случаях, когда узкие скеги не обес-
печивают требуемой устойчивости движения. В литературе описано влияние вгж-
иейших факторов, характеризующих эту схему, на ходовые и мореходные качества
СВПС 133].
Известны попытки разработки схем конструкции ограждений из композитных
материалов, в частности из тканей, армированных пластиком, с использова) нем
пружинных амортизаторов или иных механических устройств. Подобные огражден ия,
опробованные на ряде зарубежных опытных СВПС, не получили пока распростра-
нения, по-видимому, вследствие их сложности и ненадежности работы в условиях
волнения В отечественной практике композитные кормовые ограждения применяют
иа речных СВПС.
Другое конструктивное решение для иемореходных СВИС — использование
кормовых ограждений в виде понижающегося и переходящего в глисснруюш о
поверхность свода жесткого корпуса — применено в проектах речных СВПС «Луч»
и «Зарница».
§ 28 РАСЧЕТНЫЕ И ЭКСПЕРИМЕНТАЛЬНЫЕ МЕТОДЫ
ОПРЕДЕЛЕНИЯ ХАРАКТЕРНО И К ГО
В практических расчетах параметров формы гибких О1ражденпй ГО ввод тся
следующие предположения относительно свойств материала ограждении, способа
передачи усилий н распределения давления по их поверхности 131 ]:
материал ограждения считается абсолютно гибким, невесомым и нерастяжнм им;
при расчете формы поперечного сечения цилиндрических элементов ГО про-
дольными напряжениями пренебрегают;
избыточное давление в монолитных и глухих секционных элементах прини-
мается равным давлению в жестком ресивере; для секционных элементов, открытых
по отношению к ВП, — равным давлению в подушке.
Влияние навесных элементов на форму верхних ярусов ГО, зависящее от соот-
ношения высоты нижнего яруса и ГО в целом, в каждом случае рассматривается
отдельно.
Принятые допущения позволяют определение формы цилиндрических элем-*'
тов свести к расчету полоски единичной ширины при постоянном значении напря-
жения по периметру элемента. Уравнение равновесия гибкого контура в згой
случае имеет вид
гт = р.г.
н ' t
Поперечное напряжение ор связано с избыточным давлением внутри элемента fi
(по отношению к внешнему давлению) и радиусом кривизны г. Отсюда следует, чТ°
364
1оП€рсч ,ы сечения Цилиндрических элементов гибких ограждений представляют
дуги окружностей постоянных радиусов, сопрягающихся в точках перепада
давления.
I расчет параметров ф рмы многоярусных ограждений, включающих элементы
оззличных типов может быть разделен на ряд задач.
'' расчет одноярусных монолитных элементов. Для одноярусного монолитного
злемента (рис. IV.6, о) справедливо соотношение
^т>
k р — 1
Г1 — ri
(IV.3)
где t'n = (*р — Ч Таким образом, при заданных значениях kp и положении
точки С, определяющей границу ВП и высоту h, можно, варьируя значения радиуса
кривизны внешнего участка монолитного элемента rt, получить ряд значений
радиуса внутреннего участка rt.
Рис. IV.6. Схемы поперечных сече-
ний ГО: а — одноярусный монолитный
элемент при точечном контакте с опор-
ной поверхностью; б — одноярусный
элемент при контакте конечной дли-
__ иы; в—двухъярусный монолитный
элемент с навесным элементом
Дтя общего случая прн конечной протяженное и зоны контакта ГО с поверх-
ностью составляют трансцендентные уравнения (31], основанные на использовании
Условия (IV.5) и геометрических соотношений (рис. IV.6, б}.
° “ lf>< 0 — cos cts) — (1 — cos «!>];
5 = 1 + „ - (sin а, — е„ sin а2);
а1 Т- *KaJ
(IV 4)
ft = ---------(I — cos »г).
а1 + *Иа2
Здесь все линейные величины отнесены к длине гибкого контура /-. Случаю точеч*
*®го Контакта элемента с опорной поверхностью соответствует/ = 0. При этом в си-
Счс (IV.4) независимыми остаются только два первых уравнения
о- Ча рис. IV.7—IV. 10 приведены номограммы, полученные В. В. Клнчко на
0?’°ве решения системы (IV.4), для параметров ft, rj, r2, alt аа, а и b при наи-
lcc употребите imiux значениях ft,, = 1,25 к ftp= 1 30.
365
Пример. Дли элемента, схема которого приведена на рнс. IV.2, а, заданы,
Ь = 2,6 м, /i = 0,98 м, kf = 1,30 и положение нижней точки элемента на однсД
вертикали с точкой В, т. е. а» = 180', С гр фика рнс. IV'.10 по значению Л/ft =
= 0,377 определяют значение о = b/L = 0,463; отсюда L = 5,62 м Согласно номо.
грамме на рис. IV.9 г, — 0,69, о = 0,14 и dj = 0,72, следовательно, г\ = £7, ~-
= 3,9 м, а = aL = 0,8 м, — 57,3' -0,72 sw 41° и г2 = 8ц/-, = 0.9 м.
Рнс. IV.7. Номограмма для определения параметров б и Л по заданным значениям
Л/Л н а, прн k}, = 1,25 (е — 0,2).
Расчет многоярусных монолитных элементов. Рассматриваемый расчет отли-
чается от предыдущего тем, что необходимо установить длину и углы наклона
внутренних проницаемых продольных диафрагм, существенно усложняющих си-
стему уравнений. Наиболее рациональный путь определения параметров формы
многоярусных монолитных элементов при проектировании ГО — графоаналитиче-
ский. При этом задают положение точек ? и £ (см. рнс. IV.6. в), а положение точек «4
и В находят построением. Варьируя величину г3 определяют радиус дун АЕ и
угол наклона диафрагмы к горизонту яд из условия равновесия узла Е путем
366
«строения параллелограмма действующих в точке £ поперечных усилий. Так кам
явленш в °б°их ярусах одинаково, вместо значений напряжений иа перпенднку-
яса к радиусам г2 и г3 можно отложить отрезки, равные самим радиусам, построить
них параллелограмм и через его вершину и точку £ провести прямую. Получен-
ная прямая определяет направление линии действия усивня от диафрагмы DE на
„эссматриваемый узел. На практике прямую проводят через точку £ и точку пере-
сечения окружностей радиусов г2 и г3. После выбора г2 величину rL находят из
оавеиства (IV.3) прн заданном коэффициенте давления kr, а длину диафрагмы DE
Кают с чертежа.
Определение параметров формы монолитных элементов двоякой кривизны,
дчя вычисления параметров формы монолитных элементов двоякой кривизны, на-
пример в носовой оконечности или на угловых участках кормы, применяют графиче-
ский метод, получивший название метода совмещенных сечений. Используют год-
твержде юс практикой предположение, что напряженное состояние этих участков
в основном обусловлено продольными напряжениями в горизонтальных сечениях.
Поэтому тим сечениям придают круговую или эллиптическую форму при обеспече-
нии плавных нормальных сечений. Построение иллюстрируют схемы на рис. IV 11, и
и б. Форму контура ВП и, следовательно основной линчи монолитного элемента
принимают в виде полуокружности. Затем через вертикальную ось, проходящую
через центр полуокружности, проводят через равные угловые промежутки плоско-
сти — от плоскости шпангоута до ДП. Сечения хгоиолытиого элемента этими пло-
скости п строят на одном совмещенном чертеже. Внутренние ветви ссченнй от его
иижне точки до корпуса судна обычно принимают одинаковой кривизны. На чер-
Тс*е совмещенных сечений они сливаются в дугу одного радиуса Построение на-
ружных ветвей совмещенных сечений целесообразно производить одновременно
с выбором «формы жесткого корпуса в носовой оконечности. Для повышения устей
^Вкти формы ГО в случае замыва при переходе от бортового сечения к сечению
1,0 ДП обычно обеспечиваю подъем внешней линии крепления ГО к корпусу по
равнению с бортовым участком и смещают в кос ее проекцию на основную t лоскосгь
"° отношению к основной линии монолитного элемента. Подъем внешней линки
*РеНлЕння от бортового сечения до сечения в ДП составляет обычно G = (0,5-ь 1.0) X
а! смещение проекции наружной точки крепления ГО в ДП относительно
^^Вной линии /{ = (1,0-ь 1,5) Лм 8, где Лм. э —высота монолитного элемента.
В Обводы монолитного элемента строят одновременно в нормальных сеченняЯ
8 сечениях по ватерлиниям с согласованием точек пересечения иа обеих проек-
367
циях, подобно практике разработки теоретических чертежей судна. Ватерлицц»
внутренней части монолитного элемента проецируют в виде полуокружнос 4
а ватерлинии внешней части, как указывалось выше, — в внде полуокружностей
или полуэллипсов.
Расчет параметров формы кормового гибкого ограждения. Рассматривается
типичная схема ко нового ограждения, состоящая из монолитного элемента и За.
крепленных на нем навесных элементов (рис. IV. 12), На участок В К действует
давление, равное рр — рп; на ED эпюра давления принимается в виде треугольника
с величиной рр, в точке £; на участок ЕМ. представляющий дугу окружности
радиусом г0 действует избыточное давление. Тогда уравнение моментов относи-
тельно точки В
Мв = Rtl,/2 + /?2 | ВС | — Я, | BL |.
(IV.5)
ЗС8
Выражения для сил:
~ (₽р Pn) It! Rt — ~2~Рр I ED I: R3 = Pfro-
(IV.6)
После подстановки выражений (IV.6) и снятых с чертежа геометрических величин
в уравнение (IV.5) из ус юаня Мв = 0 определяют г0 по формуле
Fn + 1« 1г + с + cos (<Pi + <Ps) + t dg (<j>i + <j>s)
2[sin(<h + + ’
где все линейные величины отнесены к длине отрезка
рнг. IV.10. Номограмма для определения параметров flt а, а( и Я по заданным зна-
чениям Б, h/b и а, при ftp = 1,30 (е = 0,231).
Методом последовательных приближений варьируя величины с, <р/ и tpt,
др ходят такое значение г0, при котором точки В и 41 лежат на одной горнзон-
!алц и смещение точки D по горизонтали в корму относительно вертикали, ирохо-
*«щей через точку М, составляет (из условий обеспечения минимального прироста
^противления на волнении по результатам модельных и натурных испытаний)
личину порядка Д а; (0,03-5-0,10) Я ц_в, где Ян й —высота навесного элемента.
№лее через точку А, которая соответствует внешней линии крепления ограждения
корпусе, и точку 41 проводят окружность радиусом гг, определяемым положе-
<ем точек А и 41 Центры окружностей о, и <?± лежат на одной вертикали.
360
Последовательность построения внутренней ветви сечения монолитного эле.
мента такая:
! Находят графически суммарный вектор сил давления R' на контур BKDE,
линия действия которого проходит через точку В.
2. Определяют в точке В равнодействующую R сил
Я'= 7?! + К, +/?,; |Я"|-|Яз| + |Рр^|: Я=Я +Я*.
3. Через точку В проводят перпендикуляр к линии действия равнодействующей
сил Я н радиусом = | R | (рр — рп) отмечают внутреннюю ветвь сечения moi-v
литного элемента.
Экспериментальные методы определения характеристик ГО. Расчетные метоТ"
вычисления параметров формы ГО не учитывают реальных свойств материала
и технологических особенностей их изготовления. Кроме того, ряд характерен к
моделей СВП в целом можно определить лишь иа основе испытаний.
370
Стендовые испытания буксируемых моделей СВП над твердым экраном и водной
^ЩКостью проводят на стендах, устройство одного из которых показано на схеме
„HC.lV.13. Модель 1 крепится к подвижному пилону динамометра 2, установленного
Р тележке 3. Тележка по рельсам может передвигаться из положения над про-
дрвчпчм твердым экраном 4 в положение над расположенным рядом баком 5 с во-
яой- Устройство динамометра позволяет проводить испытания как с жестко закреп-
ленной относительно экрана моделью, так и при обеспечении модели свободы всплы-
тия, крена и Дифферента.
В ходе стендовых испытаний корректируют форму ГО, определяют характе-
ристики подъемной системы, продольную и поперечную остойчивость над твердым
•креном и над водой. Одна из часто встречающихся задач — приведение расхода
возд ха к требуемому значению при заданном k Для этого полный расход воздуха
представляют в виде суммы значений
(? = (?,+ (?2+ (?s+ Q„
3е Ci — расход воздуха через монолитный элемент ГО на участке нос—борта;
аи~|РасХОЯ В03ЛУха чеРез кормоаое ГО; 03 — то же, через секционные огражде-
’’"Я ВП; — то же, через отверстия нз жесткого корпуса судна в ВП.
Для корректировки обычно выбирают наибольшим по расходу воздуха уча-
ток ГО нос—борта, Ветчину Q, представляют в виде
<21 = «1-^ /2 (рр - ри)/р0. (IV.7)
И Вместе с тем
<?1 = Q - (<?> + <2» + QJ, (I V.8)
371
где Qi, Q3 н 04 — определяют с помощью аналогичных (IV.7) формул, если Р3,
вестны площади истечения S2, S3 и S4 и выбраны соответствующие каждому
участку коэффициенты истечения е2, и е4 [27]. Используя формулы (IV.7)
и (IV.8), находят значение е2. Полагая его одинаковым для начальной величины $
и для исправленной 3[, можно определить Д5 = S, — SJ, если отнести всю раз.
иицу между требуемым и полученным значениями расхода воздуха к участку
нос—борта. После экспериментальной проверки правильности корректировки при
необходимости находят таким же способом дополнительную поправку во втором
приближении.
Принципы моделирования гидравлических параметров ВП и механических
свойств ткани ГО изложены в § 30.
§ 29 ОПРЕДЕЛЕНИЕ ЭНЕРГОЗАТРАТ НА ПОДДЕРЖАНИЕ СВП
Поддержание СВП в общем случае обеспечивают:
равнодействующая вертикальных составляющих сил, обусловленных статиче-
ским давлением в ВП;
соответствующие компоненты реактивных сил за счет действия струйных эле-
ментов ограждения ВП;
аэродинамическая подъемная сила на корпусе, обусловленная поступательной
скоростью СВП;
гидродинамические или гидростатические силы поддержания на контактиру-
ющих с водой элементах СВП.
Перечисленные составляющие находятся в различных соошошепнях, определяе-
мых типом СВП. его режимом движения, видом и состоянием опорной поверхности
и т. п. Однако в практических расчетах ограничиваются оценкой первой и послед-
ней из указанных составляющих остальными пренебрегают вследствие их малости.
Способы приближенных опенок некоторых второстепенных компонент силы под-
держания описаны р работах 110 31 |
Оценка мощности для поддержания СВПА. Применительно к СВПА полагают,
чю сила тяжести судна полностью уравновешивается вертикальной составляющей
равнодействующей статического давления PDS„, где Sn—площадь ВП, определяем; я
периметром периферийного ГО
Механизм реализации поддерживающих усилий сводится к суммарному дей-
ствию избыточного распределенного давления на жесткие часта корпуса и усилий
в заделке ткани ГО па корпусе, возникающих при натяжении элементов ГО я их
рабочем состоянии.
Для расчета энергозатрат на поддержание СВПА можно использовать формулу
Рц — PnQ/’ln. с- (Н 9)
Здесь Рц — полная мощность на налу рабочего колеса нагнетателя, Н-м.'с; т;п. с —
КПД подъемной системы.
Величина р„ давления в ВП определяется силой тяжести судна и площадью
ВП pD = G Su. С рост<м Рп возрастает при прочих равных условиях по квадратич-
ному закону горб волнового сопротивления, увеличивается глубина впадины в ре-
жиме висения над водой, измельчаются капли в бры.зговой пелене и увеличивается
высота ее распространения. Весьма существенна роль давления в обеспечении проч-
ности ГО и выборе характеристик движительно-иагпетагельного комплекса. Избы-
точное давление в ВП СВПА выбирается в относительно узком диапазоне значений
(1000—4000 Па). Параметр (7, характеризующий удельную нагрузку для СВПА,
составляет О = Ggp-S3'2 = (0,8-т-.3,0)- 10а.
Объемный расход воздуха Q в формуле (IV.9) характеризуется при прочих ра»'
пых условиях зазором между нижними кромками ГО и жестким экраном. Выбор
величины 0 диктуется, однако, не столько значением указанного зазора {клиренс-'1)'
сколько требованиями, предъявляемыми к мореходности СВПА, так как возмож-
ность устойчивого движения на волнении прежде всего определяется быстродействий
восстановления ВП после кратковременных, но значительных потерь воздуха пр'*
качке. Увеличение расхода воздуха обусловливает меньший износ контактируют!'11'
с поверхностью элементов ГО. В то же время чрезмерный расход влечет за coCf*
372
__г сопротивления движению за счет возрастания его импульсной составляющей,
flo опыту проектирования и эксплуатации отечественных СВПА коэффициент рас-
хода Ол =_Q/(hu /2О’.рв) составляет 0.12 sg Qh 0.20. В зарубежной практике
де-тдчина Ок достигает 0,30 и бдлыпих значений. При проектировании расход воз-
обычно выбирают в процессе мореходных испытаний модели на волнении за-
пзнной интенсивности.
А Наиболее надежный способ оценки расхода воздуха для достижения требуемого
к1нрснсаЛц при заданной нагрузке СВГ1 к геометрии ГС)— модельный эксперимент,
моделирование ведется по числам Фруда, т. е. Оц = Гк3, где к — линейный мас-
штаб моделирования. Это предопределяет следующие соотношения для основных
параметров ВП модели («м») и натуры («и»):
Рис. IV. 13. Схема стенда для испытаний моделей СВП,
КВ ходе эксперимента устанавливают обычно более общие зависимости (характе-
ристики подъемной системы связывающие фактический подъем hn жесткого кор-
пуса СВПА над опорной поверхностью — жестким экраном и водой — с оборотами
вентилятора, расходом воздуха и давлением в ресивере). Эти зависимости отражают
сложный процесс, при котором с ростом оборотов вентилятора возрастают не только
расход воздуха и клиренс, ио и давление в гибком ресивере, обусловливая изменение
параметров формы ГО, в частности, его высоты йго =/'„ — Ли.
Для расчетной оценки расхода игидуха. необходимого дли достижения задан-
ного клиренса (или обратной задачи), рекомендован ряд методов [31, 77 J. Большая
часть из них, однако, основана иа решениях задач о хорошо сформированных
Двумерных струйных течениях, получаемых в лабораторных условиях на калибро-
ванпых жестких соплоиых устройствах. Современные ГО. например показанные
1|а рис. IV 3, не в полной мере обеспечивают формирование правильной струйной
завесы, причем характер течения на различных участках периметра ВП вследст-
в,,е конструктивных особенностей ГО оказывается различным. Б тех случаях,
когдт структура потока ближе к камерному принципу истечения (как правило,
в кормовой части и при значениях относительной высоты навесных элементов на
остальных участках ГОйн. э'Лго>0.25), рекомендуются простейшие приемы расчета.
Пример. Определить высоту отрыва ннжних кромок ГО от экрана в режиме
сепия СВПА при следующих условиях (рис. iv.il):
Полный расход воздуха <?. м1 е ............................. 500
Давление в 13Г1 Рп, Ии’ .................................. .... S500
Ширина ВП L)fl. м ............................................ 15
Периметр ВП м ............ 100
Внешний угол между образующей:
навесных элементов и горизонтом в,.’......................... 45
наш с в ого элемента (гибкого редана) кормового ГО я горизон-
том 0,,“.................................................. 150
373
Искомый клиренс определяют по формуле (IV. 1)
Л и = (XWni’iJ-
Тип течения, соответствующий камерной схеме ВП, рассматривают в двух ва.
риантах:
для всего периметра ВП, за исключением кормы (2И1 = 85 м, eoi = 0,537^
см § 26);
Для кормового участка (/П2 = 15 м, кв4 = 0,84).
Скорость истечения по всему периметру ВП (м/с)
t’n = 2рп/рв ~ 64.
Искомый клиренс (м)
Рис. IV. 14. Схемы исте-
чения воздуха нз ВП ,дя
расчета клиренса СВПА
при заданной геометрии
ГО и гидравлических ха-
рактеристиках ВП с —
поперечное сечение; С~
продольное сечение.
Л„ - , . Q, . «0.130.
1'и (К«|*Н1 ’I *'<re*n«)
Из аналогичных предпосылок исходят при определении расхода по зада| пому
клиренсу над твердым экраном. В тех случаях, когда схема истечения блгзка
к сопловой, можно применять формулы (IV.2), примеры использования которых
приведены в работах |39, 77). Однако поскольку решающая роль в определения
потребного расхода воздуха отводится мореходным испытаниям модели, для его
прибчижеиных оценок целесообразно пользоваться наиболее простыми расчетными
средствами, позволяющими суммарный расход воздуха однозначно определять клн'
репсом для заданной геометрии периферийного ГО и давления в ВП.
Особенности режима висения СВП \ над водой сводятся к местному (в u сДе
лах площади ВП) понижению уровня свободной поверхности иа величину 6л|,3‘
кую к pgpn — изменениям усло'вий истечения воздуха по периметру ВП, в шло’1
способствующим «уплотнению» подушки, а также к интенсивному брызгообр^ Ей’
нню, связанному с дополнительными затратами энергии. Суммарное везде .1бн4
последних двух факторов таково, что подъем СВПА над основанием водяной вп.1_||,|й
несколько выше, чем над жестким экраном прн прочих равных условиях ,
Соотношения между гидростатической высотой р£Рц. клиренсом Л„ и bih
ГОЛгО АЛ» современных СВПА таковы, что практически во всех случаях Н1'ь.п,!
кромки ГО в режиме висения (без хода) оказываются ниже уровня исвозмушч 1 °
свободной поверхности, а жесткий корпус значительно выше ее. С ростом пос и1*
тельной скорости СВПА впадина за счет инерционности жидкости постепени 11
374
„едируется, и при относительных скоростях Гтд — 2,0 : 2,5 в условиях тихой воды
Кд-ьем СВПЛ над уровнем свободной поверхности практически эквивалентен подъему
жестким экраном. В литературе описаны методы приближенной оценки меня-
{„щегося со скоростью профиля свободной поверхности [10|.
10 I вменения в параметрах ВП связанные с днфферентовкой судна в процессе
оазгол I. а также с воздействием набегающего воздушного потока на условия истече-
ния нз ВП, малы и в практических расчетах не принимаются во внимание.
Входящий в выражение (IV.9) для мощности нагнетателя коэффициент »)пс
представляет собой отношение гидравлической мощности ВП p„Q к полной мощ-
ности вентилятора. Современные СВП-V характеризуются значениями т]п. с =
0,35-5-0,50. Прн анализе и количественной оценке т)П-с следует иметь в виду
рода потерь полного напора: «полезные потери», связанные с необходимостью
создания повышенного по отношению к ВП давления в гибком ресивере для при-
дания ГО заданной формы и требуемой степени жесткости, и потери обусловленные
прохождением воздушного потока через воздуховодный тракт. Потери первого рода
сЛуслозлены коэффициентом давления Ар =-^2-> 1. Значения kp— важнейшего
В г-
пзраметра определяющего форму и динамику ГО, — устанавливаются прн проек-
тировании ГО и обычно равны 1,20—1.45. Потерн в тракте стремятся свести к
минимуму. Их определяют специальной продувкой модели воздуховодного тракта
или расчетом по элементам через коэффициенты сопротивления на входе в шахту вен-
тнчятора, в проточных каналах воздуховода, на входе в ВП и т. п. Коэффициенты
берут из справочной литературы—см., например, работы (27, 77). Удельная энерго-
вооруженность СВПА, относящаяся к подъемной системе, для реальных судов обычно
составляет 15—30 кВт/т.
Особенности расчета мощности иа поддержание СВПС. Учитываемые в расчетах
компоненты сил поддержания СВПС — избыточное давление в ВП и гидростатиче-
ские силы плавучести скегов. Воздушная подушка скегового СВП при расчете
энергозатрат на поддержание может рассматриваться как «плоский отсек» амфибий-
ного СВП, ограниченный по бортам скегами Входящие в используемую формулу
(IV.9) величины нуждаются, однако, в специальном комментарии
Давление в BI СВПС определяет характер тех же физических явлений, что
идти СВПА, но величина его более сложным образом связана с силон тяжести
и геометрическими параметрами судна из-за комбинированного принципа поддер-
жания. При назначении давления в ВП СВПС, выбираемого с учетом изложенных
выше факторов, исходят обычно из предельного достижимого давления в ВП рл лик
в режиме без хода, соответствующего такой посадке судна иа ровный киль, когда
внутренняя ватерлиния скегов совпадает с их основной плоскостью, но истечения
воздуха из-под скегов еще нет. В общем случае величина рп ,„Е определяется
силой тяжести судна, соотношением размерений ВП и скегов, их формой обво-
лов, геометрией ГО в оконечностях, или концевых ограждений, как их иногда
Называют применительно к СВПС.
Ж, Определить наибольшее давление в ВП можно приближенно, исходя из
допущения о равномерно распределенной нагрузкеG по всей площади поддержания S
определяемой наружными ватерлиниями скегов и ГО. т. е. ри тах = G S. Эта оценка
вчоане точна применительно к СВПС со скегамн в форме прямоугольных пон-
Тонов.
Для плоскокилсиашх скегов с углом килеватости Р к вертикали в пределах
^адкн наружного борта наибольшая доля силы тяжести СВПС, которая может
№Ть воспринята ВП, составляет
7; _ Pll 1 1 -1* 4Gg tg Р— 1
иП ПЫХ--------7----------------------“-----
° 2GB tg Р
G
г*е (Г„ _.
_ п
Л1 Значения р„ длщ следует уточнить с использованием соотношений статики судна
Сло г°гда' К0ГДа скеги имею: относительно большую ширину и характеризуются
г, фюй формой обводов, меняющихся по длине судна. В этих случаях при расчетах
^адки СВПС необходимо принимать во внимание также объем по фактическою ва-
375
терлинию водоводов водометных движителей, который должен быть нсключ-н
из погруженного объема скегов при неработающих движителях. На расчетных с ко.
ростах посадка СВПС. строго говоря, должна рассчитываться с учетом вертикальной
состав тяющсй равнодействующей эпюры давления на стенках проточной части водо.
метного движителя, равно как и иа всех других его элементах.
Абсолютное значение избыточного давлении в ВП СВПС — обычно того же г о.
рядка, чго п для амфибийных СВП. но его верхний предел в принципе ограничен
в меньшей степени, в частности за счет применения относительно простых схем ГО,
прочность которых легче обеспечить по сравнению с прочностью периферийных
ГО СВПА Параметр U. характеризующий относительную нагрузку на опорную
поверхность, для СВПС составляет G = (2-t-4,5)-10г Здесь нагрузка G отнесена
к несущей площади 5, ограниченной ГО и наружной ватерлинией скегов.
Дтя скеговых СВП выбор расхода Q еще в большей мере, чем для амфибийных,
обусловливается достижением требуемых мореходных качеств По опыту проектнро.
вания и эксплуатации отечественных СВПС коэффициент расхода укладывается,
как правило, в пределы 0.015 Од 0.030, т. е. практически на порядок ниже,
чем для СВПА. Однако необходимо иметь в виду следующее. На СВПС в ряде
случаев отмечаются высокочастотные колебания, соответствующие второй резо-
нансной частоте, — так называемая «тряска», обусловленная проявлением сжимае-
мости воздуха. Одна нз мер борьбы с этим явлением — значительное, против
номинального, увеличение расхода воздуха с регулировкой его подачн специаль-
ными устройствами. Поэтому следует предусматривать такую возможность и при
оценке вероятности возникновения колебаний н руководствоваться рекомендациями,
изложенными в § 36.
С ростом скорости поступательного движения несколько меняется соотноше-
ние сил поддержания от ВП и на скегах. Эго происходит за счет изменения посадки
СВП деформации свободной поверхности вдоль скегов, а также благодаря частичному
развитию на них гидродинамических сил При употребительных соотношениях
нараме>ров несущей системы СВПС давление в ВП на расчетной скорости мало
отличается от значения р|||Пах при о = О, и задача приведения нх в cootBCTCiette
обычно не ставится Более того, стремление к снижению сопротивления движению
в расчетном режиме на тцхой воде и к уменьшению перегрузок на волнении обуслов-
ливает иногда некоторое снижение давления в ходе поиска оптимальной посадки
модели путем корректировки режима работы нагнетателя, положения по длине
ЦТ или положения но высоте ГО в оконечностях Как отмечалось, расчетная оценка
давления в ВП и расход воздуха в режиме без хода являются ориентировочными.
Окончательно эти параметры определяют в процессе мореходных испытаний мо-
дели па волнении заданной балльности.
Относительные энергозатраты на создание ВП для СВПС существенно ниже,
чем для СВПА, прежде всего за счет относительно меньшего периметра истечения
и, как следствие, меньшего расхода воздуха. В то же время снабжение воздухом
ВП СВПС обычно осуществляется в разнесенных по длине ВП точках, к которым
воздух транспортируется по шахтам и каналам сложной конфигурации, иногда
с различными вариантами раздачи. Поэтому потери полного напора (несмотря 113
orcyiciBiic в ряде случаев «полезных потерь» за счет kt, = 1) могут быть значитель-
ными н должны определяться на завершающих этапах проектирования путем гро-
дувок всех вариантов трактов.
Реальные энергозатраты на обеспечение поддержания составляют 2—3 кВт.т
для речных судов и 3—6 кВт.т и более для мореходных СВПС.
§ 30. СОСТАВЛЯЮЩИЕ СОПРОТИВЛЕНИЯ ДВИЖЕНИЮ СВП
Й ПРИНЦИПЫ ИХ МОДЕЛИРОВАНИЯ
В зависимости от целей исследования компоненты полного сопротивления СВП
выделяются по их физической природе, месту реализации на элементах СВП ли°°
по смешанному принципу. Примером последнего подхода может служить следуюш2”
классификация основных укрупненных составляющих;
волновое сопротивление, обусловленное перемещением распределенного ^зВ’
лепив в ВП;
376
j-ндродинамическое сопротивление скегов и выступающих частей (включающее
„ставляющие трения, формы, волновое, брыэговое и пр.);
с0С гидродинамическое сопротивление ГО (включающее те же составляю-
•Я^реактнвная составляющая сопротивления (или тяти). обусловленная неснмме-
ричным выдувом воздуха из BI1 (с уче ох взаимодеис1вня воздушных струй с во-
ой и набегающим воздушным потоком);
* профильное воздушное сопротивление надводной части СВП;
импульсное воздушное сопротивление.
В практических методах расчета полное сопротив iemie меже , подразделят я
на составляющие и иначе.
В зависимости от типа CBII, режима его движения, а также состояния моря
Бкчад отдельных компонент оказывается различным Гак, вторая из перечислен-
ных cociaB-тяющих характерна только для СВПС, а две последних являются опре-
деляющими для СВПХ при движении с высокой скоростью на тихой воде и относи-
тельно малы для СВПС Вместе с lev в условиях волнения. об> чпо сопровождаемого
ветром, меняются практически все компоненты сопротивления.
Вол новое сопротивление R .обязан нос действию распределенного в пределах п о-
щяди ВП статического давления, связано с расходом энергии иа волнообразование
при поступательном движении СВП. причем волнообразование возможно н без не-
посредственного контакта жестких или гибких элементов конструкции СВ11 с во-
дой. Сила сопротивления реализуется в этом случае как горизонтальная состав-
ляющая нормального давления па элементах СВП. ограничивающих ВП; наиболь-
шего значения эта сила достигает прн максимальном дифференте судна иа корму,
обусловленном формой впадины иа свободной поверхности под ВП При этом го|>б
сопротивления определяется давлением в ВП, а также ее удлинением и фор ой
в плане.
Импульсное сот ротпвление. связанное с затратами энергии иа вовлечение в дви-
жение вместе с судном масс воздуха, забираемого вентилятором, для СВПА за
счет высокой скорости судна и относительно большого расхода воздуха в ВП дости-
гает иногда 20—30 '<. полного сопротивления. Сила импульсного’ сопротивления
является результирующей давления, в основном приложенного иа внутренних
поверхностях возд хозаборннка нагнетататя. и равна i>BQvu — скорость СВП
0Т1ЮСИГШЫЮ воздушной среды).
Две рассмотренные составляющие — единственные из перечисленных в класси-
фикации. поддающиеся теоретической опенке с достаточной степенью точности.
Определяя волновое сопротивление CBI1. исходят из предпосылки, что энергия,
расходуемая на его преодоление’, равна энергии волнообразования прн перемещении
ио поверхности воды равномерно распределенного импульса давления, форма в плане,
СВ)')С11Ие И СК0Р0СТЬ РаспР0С1Ра|,епия которого соответствует характеристикам
Для определения волнового сопротивления CBI1 пользуются результатами рас-
четов, выполненных иа основе общего решения задачи о движении по поверхности
весом.; । жидкости распределенного импульса давления. В частности, широко ис-
“йльзую! графики Ньюмена и Пула [97 |. Для расчета сопротивления амфибийных
-ВП рекомендованы результаты, получс! iue Т. А Зайцевой [73]. учитывающие
Характерную для этих судов форму в плане — близкую к прямоугольной корму н
^’укруглую носовую оконечность (рис. IV 15)
Волновое сопротивление екеговых СВП. воздушная подушка которых, как
“Равндо, прямоугольной формы в плане, удобно рассчитывать, пользуясь данными,
олучеинымн Б А) Зеленским (рис. IV. 16). Им же показано, что для употребнтель-
размерений скегов их вкладом в волновое сопротивление СВПС можно преисб-
е*чь, поскольку волновое сопротивление в этом случае представляет собой малую
ВДичину, пропорциональную (£,.„//п)4.
| Ч». ^Всте с тем, однако, теоретические результаты не согласуются с опытом при
Ы!£ «догорбовых> числах Ргц. Область достоверноегн расчетных данных зависит
Сочета *пя числа Fr; н параметров B1I Для практических оценок волнового
ГРогнвтения СВП приведенные на рис IV. 15 и IV. 16 результаты систематических
Ьп,., 70в рекомендуется использовать при следующих значениях относительных ско-
’* и удлинений ВП: Fr£ > 0,4 при L [В 5; FrL > 0,5 при I. /В < 6.
377
Ввиду значительных трудностей, возникающих прц попытках теоретическою 0||,
ределения других составляющих сопротивления, для их оценки прибегают к экснс-
риментам на стендах, в опытовых бассейнах, кавитационных и аэродииамкчесм^
трубах. Поскольку количество основных параметров для СВП в общем случае врсьча
велико и одновременное моделирование по всем критериям подобия оказывайся прни.
ципиально невозможным |10|. при экспериментах о моделями СВП выбирают в, „
пейшие критерии.
Определение гидродинамического сопротивления скегов СВПС, как н uo^vlj.
мацающих судов, основано на выделении составляющей сопротивления трения ц.
Рис. IV. 15. Влияние удлинения ВП с полукруглой носовой око-
нечностью на коэффициент волнового сопротивления СВИЛ.
дели и пересчете ее па натурные числа Re с моделированием оставшихся компонент
по числам Fr,. Наличие области повышенного давления ио внутренней ватерлинии
скега затрудняют определение площади смоченной поверхности, скрытой огнепосреД
ственного "наблюдения, и площади, омываемой на некоторых участках брызговон
нелепой пли воздушно-водяной смесью. Для определения смоченной поверхности
используют подводную съемку или расчетио-эмпнрическнй метод, взятый за ос.юв)
рекомендуемого ниже способа расчета сопротивления СВПС. С целью учета npoci?aH
ственного характера обтекания скегов, отрыва потока и внхреобразовання иа крем‘
K.ix рекомендуется введение поправки к коэффициенту трения, вычисляемого но<рР'
муле Прандтля — Шлнхтипга. Поправочный коэффициент Се, вводимый в фо-?*1’
множителя к расчетному значению коэффициента трения, иа основе обработки эксн®
рнмеитальных данных, полученных. в частности, В. II. Шадриным, равен 1,1—I.2-
Сопротивление выступающих частей (ВЧ) СВПС в зависимости от компонов
двнжнтельно-рулевого комплекса может составлять 30 % и более от сопротив.1 1
378
-сов. Оценка этой составляющей основана на проведении испытаний скега с ВЧ
« ьавптационном бассейне и изолированных ВЧ в кавитационной трубе.
® С наибольшей условностью оценивается гидродинамическое сопротивление ГО.
Применительно к СВПА его относят к составляющим, моделируемым по числу Гг^,
полагая, что частичный контакт ГО с водой главным образом реализуется как отрыв-
ное обтекание навесных элементов. Такой подход к определению рассматриваемой
компоненты в условиях волнения должен приводить к завышению гцдродннамнческо-
р, сопротивления по результатам пересчета вследствие возрастания дали трения
дрп замыве монолитной части ГО. Однако по результатам сопоставительных опенок
данные модельных н натурных испытаний в целом находятся в удовлетворительном
^Вветствин [91], что, по-внднмо.му. объясняется противоположным влиянием дру-
гих н моделируемых факторов, возможно, таких как брызгообразование. До иастоя-
Рис. IV. 16. Влияние удлинения ВП на коэффициент волнового сопротивления
СВПС Л'в = pgRU!fPitLn в зависимости от чисел Фруда.
’чего времени пет методов раздельного определения компонент сопротивления ГО
СВИЛ. Известны лишь попытки выделения и пересчета на натуру отдельных состав-
ляющих концевых ГО СВПС [)05|.
Специфическая для СВП реактивная составляющая (или тяга) в соответствии
ссе физическим содержанием моделируется по Фруду.
Ж Ьвиженне СВП сопровождается интенсивным брызгообразованием. Поскольку
ввД«вие процессов брызгообразования для модели н натуры по критерию Вебера
(We) не может бьнь обеспечено, соответствующая компонента сопротивления обус-
ивлеппая взаимодействием с водой воздушных cipyft, элементов ГО н жесткого кор-
Wca СВП, не моделируется. Брызговое сопротивление нельзя отделить и от других
к°мп нсвт. Вследствие этого пересчет по Фруду выделяемой части гидродинамиче-
ского сопротивления, включающей н брызговую составляющую, обусловливает мзеш-
№1ЫГ| эффект, влияние которого па сопротивление СВП д настоящего времени ко-
личественно не оценивалось.
ИЬ.Большую сложность представляет вопрос о моделирования механических
Ж^тв ткани ГО. влияние которых на гидродинамические характеристики установ-
лено экспериментально.
Один из возможных упрощенных подходов к способу моделирования свойств
Тп‘Р и сводится к следующему. Поскольку проекция сиды тяжести
₽«И1ы площади материала ГО натуры (20—50 НЛг) на нормаль к рассмагрнвае-
участку ГО, как правило, иа 2—3 порядка меньше действующего на участок
^р*ада давления то влиянием силы тяжести ткани пренебрегают. Относительная
Ж’ч'мацпя реальных тканевых материалов ГО при изгибе или растяжении в составе
1 379
конструкции ГО обычно не превышает нескольких процентов, что практически Нв
Отражается на гидродинамических характеристиках СВП. Поэтому принцип моде,
лирования заключается в том, чтобы удельный вес и упругие относительные деф р.
нации материала ГО модели были меньше или равны соответствующим значениям
для натуры [81|. Применительно к используемым тканевым материалам модели
эти условия, как правило, выполняются, и изложенными соображениями оправдц.
вается наиболее распространенный подход к моделированию свойств ткани ГО.
Вводимые иногда уточнения прн моделировании свойств материала ГО законе,
мерны лишь в тех случаях, когда пренебрежимо мало влияние сжимаемости воздуха
или приняты меры по его учету (см § 36). Если можно ожидать заметного проявлю
ния указанного эффекта, его неконтролируемое влияние на характеристики ГО как
упругой несущей системы и динамику СВП в целом приобретает первостепенное зпа-
ченне, и попытки корректного моделирования свойств материала ГО теряют смысл.
Помимо трудностей указанного характера моделирование прн исследованиях
СВП осложняется необходимостью всестороннего учета сил аэродинамической при.
роды, которые соизмеримы, а иногда и превышают по значению гидродинамические
силы. Причем кроме обоснования выбора критериев подобия в специальной разработке
нуждаются методические вопросы техники эксперимента. Например, искажение потя
скоростей в воздушной среде в месте расположения модели, вызываемое движущейся
буксировочной тележкой, а также малость чисел Re для воздуха вынуждают исклю-
чать тем или иным способом воздушное сопротивление при измерении полного сопро-
тивления модели СВПА в опытовом бассейне. На буксировочных тележках обычного
типа это частично достигается либо установкой ограждающего щита, изолирующего
модель or набегающего воздушного потока, либо путем повторной буксировки модели,
закрепленной над водой с неработающим вентилятором.
Не.моделируемое аэродинамическое воздействие на модель при ее буксировке
в опытовом бассейне оказывает влияние иа посадку обычно свободно дифференгую-
щейся в процессе буксировки модели, что, в свою очередь, обусловливает изменение
ее гидродинамических характеристик. Это должно учитываться в методах испита! tili
и пересчета их результатов на натуру.
Аэродинамические характеристики СВП получают иа основе продувок моделей
в аэродинамической трубе, моделируя опорную поверхность неподвижным экраном,
экраном с «бегущей» поверхностью или «зеркально отображенной» моделью (75).
Как правило, используют жесткие модели с имитацией обводов ГО в рабочем состоя-
нии.
Существенно иметь в виду, что вследствие перераспределения доли компонент
в общем балансе сопротивления при пересчете на натуру, прежде всего применительно
к СВПС, представление об оптимальном несущем комплексе, составленное на основе
испытании модели, может существенно измениться при переходе к натуре. Поэтому,
например, при сопоставптвйыюм анализе серийных модельных испытании предпочти-
тельней опираться на материалы пересчета результатов модельных испытаний на
натуру заданного масштаба.
§ 3» РАСЧЕТ СОПРОТИВЛЕНИЯ ДВИЖЕНИЮ СВПА
ИА ТИХОЙ ВОДЕ
Определение сопротивления движению но результатам модельных испытаний-
Метод основан на решении уравнений равновесия сит и моментов, действуют»*
на СВПА в продольной плоскости, коэффициенты которых определяются экспери-
ментально.
Па рис. IV. 17 приведена схема сил и моментов, действующих на СВПА в уста-
новившемся режиме. В иоючион системе координат уравнения равновесия продель-
ных сил и мочен гов, действующих относительно оси, проходящей через ЦТ СВ11‘-
имеют вид
Яг + = R = Т СО5 Ф * У; 1 -jy 10)
Л1Г + Л»а + М„ + Мо = Л1 = Тгт. J
Здесь Rr = Rw + Кд — гидродинамическое сопротивление (/?» — волновое с®"
противление ВП; Rr—остаточное сопротивление, включающее все компонс <tU'
380
условленные непосредственным взаимодейстшгсм ГО с водой, а также реактивную
Итавляющую); Ра —- аэродинамическое профильное сопротивление; /?и — импульс-
S воздушное сопротивление; Т — упор движителей. полагаемый равным R вслед-
ствие малости угла ходового дифферента ф и в предположении, что взаимодействие
"рзду питых винтов с корпусом отсутствует; Мг — момент гидродинамических сил;
®, момент аэродинамических сил профильного сопротивления: Л7„ — момент от
импульсного сопротивления, приложенной в плоскости среза воздухозаборника
в'петателя. — момент, обусловленный изменением положения подлине ЦТ
£ВПД относительно его исходного положения (Ho = G zr— отстояние ЦТ
СБ11Д от оси движителей, измеренное по нормали к ней в связанной системе коорди-
нат .спа.
Начало координат о располагается в ЦТ СВПА в его исходном положении.
Рис. IV. 17. Схема сил и моментов, действующих иа СВПА.
Уравнения (IV. 10) путем отнесения сил и моментов соо1ветственио к • - 5П
р,,с’
~2~ ouZ.n, где Ло и 5и — длина и площадь ВП, приводятся к безразмерному виду
Сг + Св -|- Си -г Ср;
mr + Wa + - mC = С/т
(IV 11)
Гидродинамические характеристики СВИЛ получают путем испытаний геоме-
трически подобной модеян (без воспроизведения палубной архитектуры) в опытовом
“ассейие за аэродинамическим щитом, изолирующим модель от воздействия иабегаю-
П|его воздушного потока. Гели ГГд м = Fr^ ([ и хСм = *С11. то обеспечивается ра-
*истводля модели (<м») и натуры («и») относительного гидродинамического соиротив-
,еНн” Л>г — G прн одинаковых углах дифферента ф.
I Непосредственные результаты испытаний, получаемые обычно в форме зависимо-
-теи (Гг£) нф = ф (I'rL) в возможно более широком диапазоне изменения
рольной центровки, представляют в дальнейшем в виде графиков Сг = С,, (ф)
”₽ = %(Ф) для ряда значений Fr£
Графики Сг(ф) н /лг (ф) аппроксимируют аналитическими зависимостями на
Ka1(eiKax кривых, включающих ожидаемый диапазон расчетных углов дифферента. —
,а нравило. 0,5—1,5*' па корму При этом обычно ограничиваются линейными пред-
цТ^еипями, используя иногда для Сг(ф) аппроксимацию квадратичной параболой,
случаях решение системы уравнений (IV.11) возможно без привлечения ЭВМ.
^Коэффициенты аэродинамического сопротивления Са и момента та определяют
Результатам продувок жестких моделей, воспроизводящих форму ГО в его рабо-
381
чем состоянии и палубную архитектуру СВПА. Модель, как правило, испытыв^
вблизи неподвижного экрана, имитирующего опорную поверхность. По результата^
исследований, проведенных В. В. Кличко, использование жестких моделей обуете,
ливает некоторое завышение аэродинамического сопротивления СВПА. Тем не
вследствие технических трудностей испытания моделей СВП с вентиляторами и pQ
проводят в аэротрубе лишь в исследовательских целях.
Коэффициент профильного воздушного сопротивления Св определяют описан,
ныы способом и, как правите, принимают ие зависящим от угла дифферента. Прн Нс,
пользовании на СВПА развитою оперения, размещенного в зоне обдувки винтами,
скорость обдувки рассчитывают по методам, применяемым при расчетах судовыа
рулей, изложенным в § 42 данного раздела. Определяемую экспериментально фунц.
цию гла(ф) обычно аппроксимируют линейной зависимостью.
Коэффициент импульсного сопротивления вычисляют по формуле
С--------В" — %® (1\ 1Э1
“ 0,5рв^5п t’Sn ( 12>
Здесь 0 — полный расход вентилятора, включая и ту его часть, которая отводится
иногда на охлаждение двигателей.
Полагая, что сила импульсного сопротивления приложена в плоскости среза
воздухозаборника нагнетателя, получим коэффициент
/Пц — Cuzn, (IV.13)
где ia — гаL — относительное расстояние от ЦТ СВПА до плоскости среза возду хо-
заборпика.
Влияние ветра (встречного или попутного) на аэродинамические коэффициенты
может быть учтено следующими дополнительными множителями:
^ав -' тли ^в,пвг | щ
Спв == А-ВСН: глны = I
где Ьа = (о ± cB)/v (св — скорость ветра).
Располагая значениями перечисленных коэффициентов, нз системы уравнений
(IV, I1), можно при заданных значениях G, хс, Оно определить угол ходового диф-
ферента ф и соответствующее ему полное сопротивление движению СВПА R
Пример. Расчет сопротивления движению амфибийного катера иа ВП для iu«
родного хозяйства. Исходные данные для расчета:
Сила тяжести катера С. Н....................... 7-10*
Длина ВП 1п, и ............................... Ю.С
Площадь ВП $п, м*................................. 45,3
Расход воздуха Q. м’,с............................. 33
Коэффициент давлсиия .............................. 1.3
Расстояние по высоте от ЦТ катера, ы:
до оси винтов гу ................... 0.59
До плоскости среза воздухозаборника ги ....... 0.46
Расстояние ЦТ катера по длине от внешней линии крепления ГО
в корме Хд ............ - ........... 6,14 (Лхс *= 0)
Для получения гидродинамических характеристик испытана модель клер3
в масштабе 1 : 4. На рнс. IV. 18 приведены результаты измерений /?г нф в опытов»1
бассейне за аэродинамическим щитом в диапазоне изменения продольной центр0’’
кн —0.020 <5 хс <3 0,023. Полученные зависимости путем перестроения приветен1*
к виду Ср(ф) н тр(ф) при нескольких значениях числа Fr^. Образцы график09,
построенных дтя Ггд а 0,65 и Гг^ = 0,80, а также аппроксимирующие их в
чем диапазоне углов ф линейные зависимости показаны на рнс. IV,19.
В соответствии с линейным приближением
Сг = -^(Ф-Фс); тг=^(ф-фт).
382
ч«сь ’k и —JrlbI дифферента при нулевых значениях Сг (ф)н тт (ф) соответствен*
^Аналогичные операции выполняют дай всех требуемых значений Гг^.
Аэродинамические коэффициенты Са и та. полученные иа основе продувов
аэротрубе жесткой модели катера в масштабе 1 : 5 вблизи неподвижного экрана
и нулевом угле дифферента, равны соответственно с£ = 0,100; mg = 0,030.
Рис. 1У.18. Зависимость угла ходового дифферента (а) и относительного гидро-
динамическою сопротивления (б) .модели СВПА от чисел Фруда.
1 — *с = 1.225 м; 2 — хс = 1.255 к: 3 — = 1.285 н. 4 — *а — 1.30 м; 6 — Лд —
«= 1,33 м; 6 — Хд -- 1.34 М.
^ВПроизв дные коэффициентов силы сопротивления и момента, в данном случае
"РНннТме по результатам продувки модели близкого прототипа, составляют
дСв
04
дтв
= 0 01.
14=0
°гда в линейном приближении та — mg + —| ф.
уравнений С„ и т„ определяют расчетом по формулам (IV. 12)
И (1^«ффициенты
383
Рис. IV. 19. Зависимость коэффициентов гидродинамического сопротивления (о) и момента (б) от угла
ходового дифферента.
384
Подстановка лннеиных функций, аппроксимирующих зависимости Сг(ф).
L (ф). "'а (Ф). в систему уравнении (IV.17) позволяет получить следующее выраже-
ние для угла дифферента:
= (С, Ч г - С . - CJ + + т, + тС — ОТ,Ч,Я
С,г,.-т'г-т’в
рез .-.п.таты расчета приведены на рис. 1V.20.
Расчет сопротивления движению без проведения испытании. Теоретически’
нссле она я щеинс накопленного экспериментального материала, выполнен-
ные Т. А Зайцевой, позволяют применять способы приближенного определения гид-
родинамических коэффициентов уравнений (IV. 11) без проведения модельных испы-
таний-
Рис. IV.20. Результаты расчета сопротивления движению и угла ходового диффе-
рента натурного СВПА.
пересчет с модели на натур) а предположении линейной зависимости Ср <ф> и mf |ф);
• — тоже, с учетом линейных н квадрптнчиых членов функций Ср (ф! и тр (ф);
----------------------------расчет но приближенным формулам.
Вы । пелен не коэффициентов Сг н тг основано на обработке описанными выше
приемами зависимостей /?г (BrL) и ф (Г’гд). получаемых следующим образом. Гидро-
динамическое сопротивление СВПА представляют в виде суммы составляющих
Rr =
R
С,
Rjj , Rn
С. G '
(IV 15)
Волновое сопротивление Ru вформуле (IV. 15) определяют по графикам на рис. IV.15.
«Статочное сопротивление Rr находят по формуле, полученной в результате обра-
ботки методом регрессионного анализа экспериментального материала по испытаниям
‘•Оделей амфибийных СВПА:
Rn
- —0,000 19 + 0.709 39лС11 4-0,075 59 (10хсп)г-0,104 70(ЮхОп)’ —
- 0,162 29 Frz хСп + 0,002 53 Fr[ + 0,008 15 Гг, +0,013 63ак +
+ 1.618 75а,+С11 - 0,021 23а0 - 2.224 25<х0х0п +
+ 0,211 62()6 — 0,200 41 jZn kp + V.OOO 60ni л.
I.j
Я- 1! Всйткуиского. т. 3
(IV 16)
38о
Формула включает следующие важнейшие параметры, характеризующие нссущцд
комплекс СВПЛ и условия его движения
*№ = ХСП11 w rrL^tt^L-, Qt~ » Zn = L« В>
I zPu Ph
G = —G—; *p = ₽p.'pn: Лго = ftro-in-
f«sn
В формуле (IV.1€) л-п — отстояние ЦТ судна no длине от ЦТ площади ВП, хСп > q
при смешении ЦТ судна в корму от ЦТ площади ВП; «с — угол, характеризующий
податливость бортовых участков ГО в вертикально» плоскости (рис. 1V.2J); «и _
I)
Рис. IV.2I. Бортовые (а) и кормовые (б—ж) сечения ГО: а — двух- и одноярус'
иые бортовые монолитные элементы; б — элемент с соплом и реданом при иаямчяи
клапана на внутренней ветви монолитного элемента; в — элемент с соплом и РсД3’
ном при бркго « 0,8fcp; г — то же, при 6ркго = *р; д — «глухой» элемент с (*'
даном; е — «глухой» элемент в форме двойного конуса («супер-конуса*); ж — то №
при дополнительном монолитном элементе.
аналогичный параметр для кормового участка ГО; т — параметр, численное эи>"
ченне которого (т = I, 2, 3, 4, 5) характери ует конструктивный тип кормового г
весного элемента ГО в соответствии со схемами рис. 1V.2I; п — число ярусов №•
литиого элемента на бортовых участках ГО. *
Варьировавшиеся схемы ГО нс исчерпывают всего многообразия применяй #
конструкций кормового ГО. Назначая т для заданного ГО, следует подбирать
жайшнй прототип, ориентируясь на схемы рнс. 1V.21 для т = 1*4-5.
Формулу (IV. 16) рекомендуется применять прн оценке остаточного соп
иия амфибийных СВП с полукруглой в плане носовой оконечностью и ГО
3S6
^ярусного th la с использованием определяющих параметров в следующих пре-
делах.
l rL = 0,6-и 2,2; *Сп = —0 02 + 0.0-1, 0 = 0.015 + 0,030;
Оч = 0,010 + 0,025; Ап = 1,75 + 2,50; kp = 1.2 + 1,4.
0 = 0.05 + 0.08; аб = —0,30 ; 0,50; (—0,15 + 1,5аб) ак (0,3+-1,5а6);
п — 1; 2; т — 1; 2; 3; 4, 5.
При (*;< O.0I5 х~п = —0.01+0,04.
Угол ходового дифферента
Ф — фш + фн-
Здк. ф»— средний угол волнового склона, образуемы i профилем свободной по-
верхности в районе BI1 СВПА с горизонтом, принимаемый численно равным фда =
== /? *G; фн — эффектыиый угол дифферента, за которым принята разность между
кодовых углом дифферента ф иф-т. Его определяют по формуле
S „ = — 0,005 84 0.613 07xGn + 0.279 37i(;n/F L 0 0 24а,( 0 039 23ас -|
S -
+ O.i 47 45GA„ — 0.719 24 -g 99-—0,002 S5m.
Лго
ha Ф' мула пригодна с учетом тех же ограничений, которые введены для формулы
Ж. 161-
Приведенные формулы позволяют определить зависимости /?г (Fr£, хс) и ф (Fr^,
лс) и перейти от ннх к функциям С’г (ф) и m (ф) прн дискретных значениях Fr£.
К Коэффициенты аэродинамической природы Си и ши рассчи1ывают во формулам
(IV.12) и (IV' I ). Коэффициент профильного воздушного сопротнвтеиня Сл и мо-
мента /ла ио результатам осреднения П. С. Ворониным материалов испытаний зна-
чительного числа моделей для приближенных-оценок сопротивления могут быть
приняты равными: Са = .0,10+0,12; та = 0.03+ 0,04. Алгоритм pacueia в этом
слЬзе полностью соответстухт использованному в расчетном примере с учетом упро-
щений в части аэродинамических характеристик.
В При выполнении систематических расчетов целесообразно использовать ЭВМ
евведе! । । ходных экспериментальных данных/?r(FrL), ф(Рг£),
либо теор тн скн и эмпирических зависимостей Rw(Fr^J, Rn (Fr^J. ф (^rt).
% I®.)-
Hi рис. IV.20 показаны результаты расчетов сопротнвтеиня движению и угла
ходоцог > дифферента на lypnoro катера, проведенных рекомендуемым методом. За-
висимости Сг(ф) и /лг (ф) аппроксимировались 1реучленом второй степени и линей-
ной функцией соответственно. Видно, что результаты расчета с i спользованием дан*
В модельных испытании и по рекомендуемым формулам находятся в удовлетворн-
ельи. м соответствии.
Приведенные в нас оящем разделе систематизированные теоретические и экспе-
^^тальиые свс.те| ня п зволяют решать и ряд других практн юских задач проекти-
рования, не прибегая к проведению эксперимента.
5 ’2. РАСЧЕТ СОПРОТИВЛЕНИЯ ДВИЖЕНИЮ СВПС
”А ТИХОЙ ВОДЕ
Определение сопротивления СВПС поданным модельных испытаний. Как и для
ЭТ'Чбнниых СВП, модельные испытания СВПС в опытовом бассейне проводят с со-
Р-<ением подобия по числу Fr, . Метод пересчета результатов модельных ист алий
^ВатУРУ основан нз выделении остаточного сопротивления модели RtiK путем вы-
Ц>" 387
питании сопротивления трении скегов /?рсвм ИЗ полного сопротивления нтщ.
лп Rn:
Rn м — ^М — Rp ск. м-
В этом случае остаточное сопротивление включает следующие основные компогешц.
волновое сопротивление воздушной подушки и скегов;
сопротивление скегов, обусловленное отрывным обтеканием транца, а 1«кахе
кромочным вихреобразовапием;
гидродинамическое сопротивление ГО;
воздушное профильное и импульсное сопротивление.
Перечисленные компоненты в данном методе пересчитывают на натуру ио числу
ГгД
К« Кп м к3.
Сопротивление трения скегов модели Rp св. м вычисляют на основе оценки < ми.
чсиноц поверхности скегов 5CI(. м и коэффициента трения Ср по формуле Прандгля—
Шлихтннга для заданного числа Рейнольдса модели Рем
^ск.м = ^0(КМ°-^ск.И.
Поправочный коэффициентЬр. учитывающий специфику обтекания скотов, нртншм;-
ют в пределах 1,1 —1.2.
Для оценки площади смоченной поверхности скегов используют расчетный ме-
тод, основанный на обобщении теоретических и экспериментальных псаведоват iiii,
свидетельству тощих о том, что фор.мх- свободной поверхности воды можно рассчиты-
вать исходя из решения зачали о движении импульса давления ВП по поверхности
жидкости без учета втиянття скегов. Для расчета формы и площади счоченпон i с-
верхиосгн скегов заданных обводов в этом случае необходимо располагать лишь эк-
сперимента.тьнцмн данными о посадке модели (значениями угла дифферента и высо-
той всплытия ЦТ).
Относите.!! но простая формула для расчета формы свободной поверхности воды
получается, если использовать решение задачи о движении импульса давления Ы1
в канале безграничной глубины. Ширину канала выбирают такой, что Степан практи-
чески не влияют па форму свободной поверхности в ближайшей окрестности импульса
давления. Для случая CBIIC можно считать, что импульс давления Bl I распреде.чн
по закону
f-"> - 5Р7 [° (’+ т) -“(' - т) ] [“ (’ + Т-) -
где 0 (х) = 0 при х< 0 и 0 (л) = I при х>0; В„. Здесь и далее коор-
динаты х, у отнесены к Ln Тогда для формы свободной поверхности воды
II (х, у) = z'p'p,, имеем
я sin (оп'2) sin (опх)
2 ~ [FrL I on + (2лн/б}‘)
3b8
c b = 6 Ln — относительная ширина капала;
, 9 / лпл~' \
Ло = 7.й /6', Дт — — sin I —-— ). л = 1, 2, . . .;
ял \ b /
1*Jn==p7-| 1 + (.InnFri./*)' .
Сопоставление результатов расчетов поданной формуле с результатами исныта-
KiHt и материалами киносъемки показало, что изложенный подход к оценке емс чеиной
поверхности может обеспечить удовлетворительную точность, если для длины ВП
1п ширины ВП Ва. ширины скегов бск 11 чисел Fr выполняются соотношения Lu
B„>5Bck. 0.4^Ftl< 1,5.
свободной поверхности воды вдоль бортов скега модели СВПС.
^^Крешнего бортз: —---------расчет; о — эксперимент: для внутреннего борта: — —
♦ — эксперимент. I — зона прорыва возд>ха нз ВЛ Н двухфазного обтекания скега;
2 — основная линия скега.
На рис. IV.22 сопоставлены теоретические и экспериментальные результат
оценки формы профиля свободной поверхности для модели СВПС прн /0 =
fin 5fiCK. Frt=O.«.
Изложенный подход ие позволяет однозначно оцени ь пр рыв воздуха из ВП.
приводящий к оголению скега или двухфазному его обтеканию. Нз опыта модельных
йены ainiii известно, что истечения воздуха из BII может не быть. даже если свобод-
ная поверхность по внутреннему 6opiy скега находится ниже основной плоскости.
В разработанном алгоритме расчета смоченной поверхности скегов принято, что
возд\ х прорывается из ВП в данном сечении с продольной координатой х и, следова-
тельно скег не замывается водой, если свободная поверхность по внутреннему борту
находится ниже основной плоскости и. кроме того, выполняется неравенство Д11<3
И I, где ДП — относительный перепад уровнен свободной поверхности по внешнему
и внутреинеых бортам скега. Согласно этому приближенному условию прорыв воз-
Дтя случая, иллюстрированного графиком па рис. IV.22, имеется практически
80 всей зоне 1.
Рассчитав изложенным способом площадь смоченной поверхности 5екм, можно
Определить сопротивление трения скегов натурногоСВПС по формуле
RpCK и = l^F^Fo(^ei ) + Сд] -у р (Гц^скм) »
Rin— натурное число Рейнольдса; Сд = 0,4-1(Г3—коэффициент, учитываю-
Очй шероховатость поверхности скегов. Значения kp принимают в тех же пределах,
вторые указаны выше для модели.
I Полное сопротивление натурного СВПС
Ли = Rf СКВ 4- Rr н-
Приближенная схема учета влияния движителей основана на допущении, что
работа приводит к изменению посадки натурного СВПС, соответствующему измД
нению центровки при модельных испытаниях от некоторой рас1 е ной величннр $
до эффективного значения j?c В соответствии с этим подходом относительно, С(£
противление нату i гоСВПС с учетом влияния движителей для расчетного значенщ
центровки $с определяется в bi де
<IV 17)
D
где—— (х„) — относительное сопротивление натурногоСВПС, пересчитанное пс. но,
' с'
д • ° '
де ьиым испытаниям для расчетного значения центровки; —
охс
производная по центровке для относите’ кого сопротивления натурного СВПС, вц.
чж'т изд
численная в точке расчетной центровки хс; Сдв — плечо силы тяги движителен < ь
носителыю ЦТ, отнесенное к длине ВП. со своим знаком (Сдв < 0, если под действьем
работы движителей угол дифферент уменьшается).
Частную производную в формуле (IV.17) можно определить приближенно ирг.
считывая на натуру результаты модельных испытаний при двух дополнитслыи »
центровках
*G = хс ± Дхс.
где Дхс — шаг изменения центровок относительно расчетного значения.
Получаемые при этом значения относительного сопротивл пш натурного СЕГС
/?*/Св позволяют i айти
? Г | X ) 1 в||
L сн с J хъ
Формулу (IV. 17) можно уточнить, если известен коэффициент засасывания де«-
жителя 7:
Рассмотренный метод оценки сопротивления натурного СВПС отличается боль-
шой трудоемкостью, поэтому его целесообразно использовать лишь на ответе.ып-
ных. заключительных стадиях проектирования.
Метод расчета сопротивления СВИС по регрессионным уравнениям. Для пред-
варительных оценок рекомендуется метод, основанный на статистическом аиа. зе
многочисленных экспериментальных н расчетных данных, полученных в пренье#
испытаний моделей СВПС различных масштабов в опытовом бассейне и при переече#
этих резу штатов на натурные суда.
Объектом регрессионного анализа являлась сумма компонент сопротивления м°‘
дели /?{ ч, остающихся при вычитании волнового сопротивления ВП R^n из полп°г
сопротивления моде и RM, измеренного при испытаниях:
7?О Ч = Rd Ru) M-
Здесь все составляющие отнесены к pgi-n- Волновое сопротивление рассчитывают I10
графикам на рис. IV. 16 с учетом указанных на с. 377 пределов наибольшей
верности теоретических результатов.
390
l^^^jtfn^onpcfle.'ieiiiiH величины /?пм рекомендуется следующее уравнение регрессии;
I «о м = (°'285 + °'763 FrL - °-259 FrL - 2-37 I Р~) «ск + 1.241 v- +
'Q
+ (Ol5ei _ °-® кк ~ °-Э9К“) *с"+
+ р.401-^-+ ^0.023 2 ррт- —0.135 j GCI(j ~р- • (IV.19)
= GCK/(f'l^n) ~ относительная нагрузка на скег; \к = LJbCK — уд.ти-
neiiiK скега. Эффективная относительная центровка скега
Статис нческий анализ расчетных значений сопротивления /?0 натурных СВПС
и моделей показав, что величина Kl- определяемая в виде
Ri_____Rw
<,v-20’
GM G
являет я только функцией масштаба, т. е. Kl — Kl (к). Таким образом,
масштабный коэффициент Kl можно найти в зависимое!и от длины ВП натурного
СВПС. На рис IV.23 приведена рекомендуемая зависимость для коэффициента Kl-
В соответс вин с формулой (IV.20) относительное сопротивление натурного
СВП( [можно вычислить в виде
^- = Kl-^-+(1-Kl)-^-. (IV.21)
В Формула (IV.21) — основная в предлагаемом методе расчета. Для определения
сопротивления модели Кы используют уравнение (IV.19) и график на рнс. IV.16;
+ / \ Ки (1п. FrJ.
GM GM \ pgGM /
ИВлияние движителей на сопро1г.ысние натурного СВПС можно учесть на основе
формул (IV 17) или (IV'. 18). в которых дтя производной по центровке от сопротивле-
вия G], принимают аппроксимацию
I ST Hr М ~ Kl !(о-0078/4— °-327гтИ F-------------------0498 +
OXQ L <-311 J J\i з-ск VlL) GCK
4- 1,404 -уу-----f- (о,023 2 рЬ- — 0 I э) j - (IV 22)
Форму з (IV'.22) получена с использованием уравнении (IV. 19) и (IV.20).
^^^Вфективную центровку скега, входящую в формулы (IV. 19) и (IV.22), вычис-
ляют. вводя коэффициент нагрузки на скеги Кек — 2GCu,G. Тогда
I _ 1—/Со.
КскХ(! 2Аск ‘
П наеденные соотношения позволяют полностью рассчитать сопротивление мо-
НК' и натурного СВПС, нс нрпбешя к эксперименту.
391
Пример. Расчет сопротивления натурного СВПС и соответствующей мо.^^
для одной центровки без учета влияния движителей. Исходные данные:
Длина НИ /п, м...................................................€5
Удлинение ВП Хл................................................ 5.0
* скегов X.................................................40.0
Относительная сила тяжести ад •= O/l>g(-n.................. 0.00.10
Коэффициент нагрузки иа скеги Кг|1 ..................... ...... 0,30
Относительная центровке Хд . , ... 0,4и
1. Определяют относительные значения давления ВП н нагрузку на сксг
Рп — Од (l — К к) Ап = 0,0105;
Clh = -|-СдКСк = 0,001)45.
2. По графику иа рнс. IV.23 находит .масштабный коэффициент К^ = 0,937.
3. С использованием графика па рнс. IV. 16 вычисляют относительное воя новое
Сопротивление СВИС д 1Я ряда чисел 1 г/ в диапазоне or 0,4 до 1,2
4. По уравнению регрессии (IV. 19) определяют величину Яом См для принятого
ряда чисел Фруда и полное сопротнвяет не модели /?ч GM масштаба к = 1 : 20.
5. По формуле (IV.21) вычисляют относительное сопротивление натурного
СВПС R, G,,.
Результаты расчета показаны иа рис. IV.24
Для оперативного пересчета эксперимента тьных результатов па натуру, I'3"
пример с целью определения оптимальных значений параме ров несущего комплекс®
пли выбора дальнейших ппправлепнй экспериментальных исследований, может г.р11'
меняться кгмбииированиый способ. Результаты модельных испытаний пересчитт тают
иа натуру по формуле (IV 21), а влияние движителей учитывают с помощью стеттЮ"
шеттий (IV. 17). (IV. 18) и (IV.22)
§ 33. J.ОПОЛНИТГЛЬНОЕ СОПРОТИВЛЕНИЕ СВП
ПРИ ДВИЖЕНИИ НА ВОЛНЕНИИ
Прн движении СВП на воянении в условиях ветра претерпевают изменение пр3®'
тическн все составляющие сопротивления, указанные в § 30. Наиболее простой и рзс*
пространепный способ оценки прироста сопротивления — эксперимент с моде |Ы°>
392
I .Kcupytvoft С постоянной скоростью на регулярном на пенни В этом случае крн-
.ппн подобия должны быть лопат иены данной и высотой ватин (относнтелы ы ве-
i'.piiiiiii}, инерционными х |рыктер|1С1пкам11 модели, а также расходно-напорной ха-
рактеристикой вент ил ятора.
Дополнительное сопротивление Л/? определяется как разность сопротивления
юдели при движении на волнении и на тихой воде, пересчитываемая иа нату[у по
uVgv масштаба. Следует, однако, иметь в виду, что подобный пересчет относитель-
юго прироста сопротивления может приводить к ошибкам, особенно для скегоьых
СрП, в области значений частоты ворсин с волной. близких ко второй резонансной
стоте. которая не моделируется по числу Frt (см. § 36).
Нередко возникает необходимость расчета дополнительного сопротивления на
нерегулярном волнении в натурных морских условиях по материалам испытании бук-
сируемой модели в бассейне на регулярном волнении В случае линейной качки
это можно осуществить, если провести испытания модели на волнах различной длины
и затем определить суммарное осреднениое значение сопротивления для заданного
спектра морского волнения, используя принцип суперпозиции. Однако для этого
необходим большой объем модельных испытаний Па практике часто пользуются
приближенной оценкой, приписывая значение сопротивления, полученного для ре-
гулярной волны высотой й,„ условиям нерегулярного волнения с высотой волны
3%-ной обеспеченности Лв,„, = где коэффициент К,, выбирают в пределах
1,5^ Л'л 2.0, основываясь на энергетических соображениях и опыте пересчета.
(Для оперативной, хотя и весьма приближенной оценки дополнительного сопро-
тивления СВП па волнении, можно вгспользоваться рекомендациями работ [82, 95],
основанными на ретультатах обобщения экспериментальных материалов, получен-
ных в опытовых бассейнах и в натурных условиях. Согласно этим рекомендациям до-
полнительное сопротивление иа волнении определяется формулой
AR =20.10-*(-^-)5‘
\ йго ! *
где $„ площадь воздушной подушки.
Один из возможных подходов к расчетному определению сопротивления СВП
на пат цепи и предусматривает условное разделение прироста сопротивления на ряд
^^^Ивляющих. Ниже приведены рекомендации В. К. Дьяченко по их приближен-
ной оценке в предположении о линейности продольной качки в плоскости хоу.
К I. Составляющая ватновон природы. Эта компонента, в свою очередь, подраэ-
де. яется па две части (ось у направлена вертикально вверх):
AR, = [ J Ар dxdz; (IV 23)
ы
ARt -= | j Ар - ’ - dx *. (I V.24)
и
^НЬ'Улы (IV.23) и (IV.24) применимы как для амфибийных, так и для скеговых
’-ВП Составляющая &Rt представляет собою силу сопротивления, возникающего
З’Ч движении пульсирующей системы давления над недеформпрованной волной.
»Ма AR, появ 1ЯСТСЯ вследствие дополнительной деформации свободной поверхности
йоДыт],, при пульсации избыточного дав тения Ар [28, 83 J. Величину A/?t определяют
1° формуле
I \/?! = &Rly + AR1W,
соответствует вертикальной, Д(?,ф — килевой качке. Пульсацию давле-
"я ор в воздушной подушке в линейном приближении представляют в виде разли-
чия и ряд Тейлора по малым приращениям кинематических параметров
У — М»: *f ~ У — ’) в: Ф — аП1
Ж % — дць1'дх с сохранением татько линейных членов ряда.
393
Выполнению расчетов дополнительного сопротивления на волнении предШ(5.
ствуют расчеты продольной качки в линейном приближении и получение зависимостей
у = а}у cos (со/ — б„);
ф = (а Кв) (—2л) sin
Подстановка указанных соотношений, где а — амплитуда волны, в выражен^
(IV.23) н (IV.24) приводит к следующим расчетным формулам:
&R1U = ~ai^~ Pl,4^ssin [” 7Гcos ₽в] ’
ДЯтф = в1 л Чг4с cos л
Рис. 1V.25. Типовые амплитудно-частотные и фазочастотные характеристики киле-
вой 6ф) и вертикальной (/„. &и) качки СВП.
I — fjj, СВПС; 2 — I СВПС; 3 — /ф СВПА: 1 - f СВПА.
V„s = !и [(0,02 — R) sin бу - 0.04 cos 6j + 0,04:
Ч'ус = fy [(/? - 0,02) cos б„ — 0 04 sin 6VI + 0,02 - /?xw;
(xL<-MI)“s6*-|’-“s""'*-TT’5$-K*] +0'°i;
Уфс=/ф Ц----0.01)моб*+ 0,02cos6ф] -0,02.
Значения амплитудно-частотных fy (гоО, (сож) и фазочастотных характерном
by (й>1). (“!> гДе
<о( = ИLdi^-o [1 — (со g) cos pu]
определяют либо экспериментально, либо расчетным путем. В первом приближен11
они могул быть найдены по липовым графикам, приведенным на рис. IV.25.
Условная вертикальная жесткость несущей системы СВП
Г ф Дйг°..
р _ __________1____________дк/,__________l_ _j_ , д/>ГО .
|_ф —2(Zrp— 1) ф—2(Л;, — I) 2 1 * dkp J’
394
При использовании графиков на рис. IV 25 безразмерные собственные значения
частоты определяют по формулам
& — 1, — iiLn jC. — ]/
и у 2Лн ’ *♦ У 2Р; •
Величину Для скегсвых СВП принимают равной нулю. При отсутствии сек-
ционирования подушки для обоих типов судов = 0, так как при изменении
дифферента пульсации давления ье происходит. Величины Яф для обоих типов
сс-Д чв принимают по результатам экспериментов, либо в соответствии с реко-
мендациями § 34.
Редукционные коэффициенты *v в определяют по рис. IV.26.
Вторая госта вляюшая дополни-
Тс.т Hioro волнового сопротивления на
основа! ян работы (83]
8.Л’ Г / -> 9 X
№‘“ гаг>х'[г‘’
Граф 1кн для определения коэффи-
циентов г„ н гл приведены иа
рис. IV.27.
2 Сопротивление, вызв ное уве-
личением замыва гибкого ограждения
амфибийных СВП, можно вычислить
по (Нфмуле
\Pr = Cjf 0,5-о!/ггсЛв.
Cmohci 1ая длина иа волнении (сред-
няя за период)
т
L„ = 4" J F (О Л-
и
Рнс. IV.26. Зависимость редукционных
коэффициентов х* и хи от отношения
длины волны к длине воздушной подушки.
Величина F (/) принимает следующие значения:
F (О = 0. если <р = -4?-------, f/7/lR .Ф < °!
' ’ 2 ф — (<Эг)в dr)
F (/) = /, если <р > /и 3;
F (t) = 3«f, если 0 < ф < /и 3.
Периметр гибкого ограждения I, находят с учетом хиты секционирующих
килей; С3 = 1.2С?в (Сдп—коэффициент турбулентного трения плоской пластины).
Зи теине С3 может быть уточнено но результатам эксперимента с б ковой секший
Гибког > ограждения СВПА традиционного типа.
Для судов скегового типа дополнительное сопротивление, вызванное замыв м
скегов вычисляют с учетом увеличения замыва только внутренней части скега о
старо |М подушки, полагая, что по внешнему участку борта вода не поднимается выше
Скулы или брызгоотбоиинка (83 ]. Тогда
\Rf = 0,8CfuP0.5l 2Lna
3. Корректировка сил аэродинамической природы за счет ветра может быть
делана по формулам § 31.
На графике рис. IV.28 пс казаны результаты расчетов по изложенным рскоыст га-
Чкям в соответствии с материалами работы [109].
^^Эксперимента тъиые материалы дали возможность разработать эффективные ме-
Ы оценки дополнительного сопротивления на волненнн, основанные иа регрессион-
анализе экспериментальных результатов.
3<5
Т. Л Зайцевой получена приближенная формула для опёнки прироста сопротид.
ленни СВПА иа встречном ватненнк. позволяющая на ранних стадиях проект Ир()Пэ,
ния обходиться без модельного эксперимента,
= 0,001 36- Лв (о,2376 4- 0.0672FQ /Q +
+ [FrL (0.721 6 - 0.0504Frt — 2,353хСп 4-2,551Гг£х£п
- 0,058»., - 2,044(?ft + Зл1$) 4- 4- I9.28^n
- —о — 0 (И) 43
0.01956ы 4- О,ООО48а? — 2 29G — -? ----0,050 2ак 4-0,058 2аб —
Afp I
(IV 25)
- 0,016 25<? 4- 0.002 95а( ] —0,051
Рис. IV.27; Зависимость коэффициентов волнового сопротивления гу и от отно-
сительной частоты встречи с волной.
1 - Frz. = ' s - l rL “ 2; 3~ ' rL = J-
где H„ = hB/hro —относительная высота волны. = hj'hro — относительная вы*
сота носовых н бортовых навесных элементов; Лв ^U/Ln — относи тельная длин*
волны; w = У (2л Хи) + Fix (2л/лп) — относительная частота встречи с волной:
= Q„ (AroK2G рв) 1 — коэффициент расхода воздуха, q — количество полны»
разъемов в кормовой части ГО; тс — параметр, хзраыернзующий тип кормового И1"
веского элемента (ы> = I, 2, 3, 4 и 5 в соответствии со схемой на рнс. IV. 21); / — коли-
чество диафрагм в ГО (величина I задается дискретно I = I при отсутствии диафр<1ГМ*
1 = 2 при одной протпвовнбрацнопной диафрагме по бортам, 1 = 3 при наличии Л|1Г5
фрагмы по бортам, а также диафрагмы прошв затягивания ограждения в нот’В0*1
части ГО).
Различие в индексации т и w на рис. IV.21 обе словлено спецификой поведен11
кормового ГО на волнении; остальные обозначения в формуле (IV.25) совп|-1;,'°
с принятыми для формулы (IV. 16).
3%
Изменение среднего значения угла ходового дифферента при движении СВПА
L волнении определяется приближенной формулой
Дф—0.0С235 + йв (б,0554FrL — 0,1081 4-2,146 1^л —
— 0, IO7Frz/3 + 0,017 33^ — 0,02764аб) + fi, [Fr£ (0,5375*с —
— 0,3039 — 3,397FrLjt£ -ф 0.07303Х„ ф- 0.1 l(?h) — 0.2467 ф- 0,00926m ф-
|+ 3.029G + 0,121 ЗК„ — 0,0189?.® — 0.005 54 (Ар — |)-‘ + 0,002ЗВи./] 4-
+ 0,1099fiBFrt.
Формулами для определения ДА’,6 и Дф рекомендуется пользоваться в следую-
щем диапазоне величии:
рГ£ = 0.64-1,4 = 0,34-0,6; Qh = 0,14-0.25;
fiB = 0.34-0,8, ?в = 0,74-2,5; = 1,54-3,5;
ftp = 1,14-1,5 w= 1, 2, 3, 4, 5;
0(5 = 04-0.5; ф= 1, 2, 3; 7= 1, 2, 3
Пределы изменения остальных параметров со-
впадают с рекомендациями § 31. При малых
значениях расхода воздуха (Qh < 0,12) диапазон
изменения относительной центровки необходимо
сокращать до хС|, = 04-0,04.
I Расчет полного гидродинамического сопро-
тивления и среднего угла ходового диффе-
рента '|г.в при движении на волнении выпол-
няют по формулам
Яг. и = Я.» + Rn 4* AR1 Фг в—Фи- Фн4*Лф>.
I Полное сопротивление движению СВПА на
вол пен и и и среднее значение угла ходового
дифферента определяют при решении системы
уравнений (IV. 10) с учетом изменений в силах
и моментах аэродинамической природы в соот-
ветствии с формулами (IV. 14).
Для приближенного расчета полного со-
противления модели СВПС на регулярном вол-
нении Б М Зеленским на основе статистической
обработки экспериментальных данных полу-
чено следующее уравнение регрессии:
В RM % = 0.0518 1-0,1671-^4- l8,2GFrL—
И-0,0798)'г£. — 0.039 6/.J?rL — 0,013 5<й +
+0 ОООЗБсо’+0,101 h. Fr; —0.019 6XB. (1V.26)
Рнс. IV.28. Результаты растта
сопротивления СВП на вол-
нении.
---------по 4’ормутыы — — --------
но материалам работы 1108). т —
тикая Вода; Д — hn — 0,9 м; 3 —•
= 1.8 м.
Здесь Lc — длина кормовой части ВП при поперечном секционировании, отпесенгая
^ВИнне подушки; А„ - lr)L — отпоситетьная высота волны (Нгк—высота
1*1ГЛ).
К С счетом формул (IV.26) и (IV. 14) прирост сопротивления на волнении иатур-
«ого СВПС в первом приближении оценивается с использованием масштабного мни-
*"теля KL (см. § 33)
АРи|бц = Л7.Д/?М GM,
Д7?н и АТ? - соответственно прирост сопротивления натурного СВПС п модели
® biaIiicuiih Такая оценка предполагает, что большая часть прироста сопротивле-
иа волнении обусловлена увеличением площади смоченной поверхности скегов.
8-Л
При использовании регрессионных формул для опенки сопротивления движенцу
СВПА и СВПС нерегулярность волнения в натурных условиях учитывается введ^
иней эффективной высоты регулярной волны в соответствии с приведенными в начал
§ 33 рекомендациями для коэффициента пересчета
§ 34. ОПРЕДЕЛЕНИЕ СТАТИЧЕСКОЙ ОСТОЙЧИВОСТИ СВП
Остойчивость СВП в водонзмещающем режиме определяется теми же методами
что и для водоизмещающнх судов (см. том 2, раздел 1), и в данном разделе ие рас
яривается.
Остойчивость СВП характеризуется диаграммой статической остойчивости;
диаграммы для режима на ВП без хода амфнбниного и скегового CBfj
приведены на рио. IV 29 в безразмерном виде
Д1е (В) = Mo/(/7igB), А4ф (i|) = Л1ф (mgl.)
Поперечную Ле и продольнуюйф нтчаль-
иую метацентрическую высоту вычисляют по
диаграммам Alg (0) и Л1ф (ф):
= (1/nig) <ЭЛ1е ’5О; й() =. Л& В,
Лф = (1,/ng) д.Мф'дф: йф = Лф L
По опыту эксплуатации СВП обычно
принимают следующие минимальные значе-
ния йд и йф:
'е
Ф
0,9-1
Рис. IV.29. Диаграммы продоль-
ной и поперечной остойчивости
схематизированных скегового и ам-
фибийного СВП.
------- Мф и--------------ме_-
(скеговое СВП типа 2KSES): О — Л1ц
над экраном: — — -» — их —
Afg над водой (амфибийное СВП).
СВПА . .
СВПС . .
Остойчивость амфибийных СВП. В режи-
ме на воздушной подушке остойчивость ам-
фибийных СВП обеспечивается за счет пере-
распределения давления воздуха в ВП прв
крене или дифференте судна. Это обусловле-
но в основном секционированием ВП ро-
дольными и поперечными килями (рнс. IV.30).
Восстанавливающий момент создастся также
силами на гибких ограждениях ВП при по-
гружении их в воду или при приближении к
экрану.
Остойчивость СВП сложным образом за-
висит от скорости судна и угла дрейфа Ос-
тойчивость без хода определяют для случая
нахождения судна над твердым экраном н над водой. Первый случай соответствует
нахождению судна над грунтом или льдом, в также движению над водой с пре-
дельно большой скоростью судна, потому что при высоких скоростях деформация
поверхности воды мала и последняя может рассматриваться как твердый экран
При накренен ин или дифферентовке судна наряду с восстанавливающим момен-
том возникает боковая или соответственно продольная Лф сила. Они являются
реактивными силами, связанными с истечением воздуха из-под приподнятой кромки
ГО (см. рис. IV.30). Эти силы в соответствии с экспериментальными данными за не
сыв.тют в виде
Ze=feemgW, Хф = —fe^zzigi)-. (i\ )
Коэффициенты feg > 0 и Лф > О зависят от расхода воздуха в ВП, конфигурация
ГО и обычно меняются в пределах: fee = 0,24-0.4, Лф = 0.6ч-0,8. При больших знй*
чениях расхода воздуха коэффициенты feg и Лф приближаются к единице. Это1
зультат соответствует предельному случаю, когда подъемная сила ВП мало зав'1'
сит от расстояния до экрана. ГО не деформируется и, следовательно, сизы в гор*1'
зонтальной плоскости Zq и Хф являются проекциями подъемной силы ВП, раа'в'В
примерно силе тяжести судна.
398
I Остойчивость вмфнбийиых СВП определяют экспериментально (путем опытов
моделями или натурными судами) пли расчетным путем.
с Модель должна быть подобна натуре в соответствии с критериями моделирован ня
. § 30). Необходимо обеспечить подобие крутизны расходо-напорной характеристи-
ки вентиляторной установки фм = Фн> где ф — безразмерная крутизна харак-
теристики вентиляторов (индекс *м» относится к модели, «н> — к натурному
СУДИ').
Результаты испытании модели над твердым экраном и над водой приведены на
1V.29. Над твердым экраном восстанавливающие моменты бол ше чем над во-
дой". что объясняется деформацией воды под действием давления в ВП
Модельными и натурными испытания-
ми показано, что восстанавливающий мо-
мент существенно зависит от расхода воз-
духа Q в ВП или коэффициента kp давле-
ния в ресивепе (рис. IV.31).
Рис. IV.30. Система координат, ис-
пользуемая при креновании моделей
I СВП.
J— продольный кил!-; 2 — поперечный киль.
Рис. IV.31. Влияние kp иа остойчн-
весть амфибийных СВП.
• Уменьшение расхода воздуха (или kp) по сравнению с номинальным приводит
при некоторых малых его значениях к резкому падению Лц. При дальнейшем умень-
ukiii н Q практически до нуля остойчивость возрастает, приближаясь к остойчивости
в вотоизмещающем положении.
I Остойчивость амфибийного СВП можно определить приближенно теоретическим
расчетом Прн выполнении расчетов дополнительно используют следующие
исходные величины: к}Л — коэффициент перепада давлений между i нбким секциони-
рующим килем и воздушной подушкой; LK — длину секционирующего киля в воз-
душной подушке; ДА— рази сть значений высоты гибкого секционирующего киля
и гибкого ограждения; ййг0 dkp — параметр жесткости формы гибкого ограждения
(производную вычисляют в расчетной точке Q рп, hp), А)о=йН|-о/йп; Sp — площадь
иоперенюго сечения гибкого ресивера; SltB, SRH — площади сечений между секци-
онирующим килем и периферийным гибким ограждением в ДП судна в носовой и кор-
мовой оконечности соответственно; £р, — коэффициенты гидравлического со-
противления перетеканию воздуха в ресивере и внутри воздушной подушки в носо-
вой I кормовой оконечностях (обычно принимают tp = 1.8, tn = tn = 2); ех —
|ксэффи ie>iT, учитывающий число секционирующих килей; е, = 1 прн одном киле,
*1= 1,2 при двух килях.
, Начальную поперечную относительную метацентрическую высоту судна на
•Пвартовах определяют по формуле
fie= (0,24 Pn}dp.'de-(yg 4-hro)(l-Ае)/вп. (IV 28>
Производную (l/Рп) др/дО в формуле (IV.28) находят в результате решения квад-
Ратио уравнения
k р„ оО ) L Ф-2(*р— 1) 4 2р«йи 4 4Й„ okp (аР *|) +
(2 Рн)Рп-ЬвЛЛГ1 1 ~1/ 1 др Г 6 (а',(?||)Ф 1 _ Вп _
2С?иИ*ц — 1 -I + ' Ри l-Св + 4>~2^р-О J 4 ‘
399
Выполнению расчетов по формуле (IV 28) предшествует вы шсленне слсдхющпх it у,
дящих в формулу г.ромежу ючиых величин:
Q,,
Ли-----,
I 2Ри'Рв/е
(IV :9)
где в = 0,56 при парении над экраном, в = 0,53 при парении под водой;
6 = 10 ) 2рп Рв
Коэффициент Стр находят также в результате решения квадратного уравнения «по-
ложительное- значение корня)
28(fep- I)
Ф 2(<гр-1)
-2(Л,.- I)
где тв = 1,673 при парении над водой. rnv = 1.78У при парении над экраном.
При расчете по формуле (IV.28) коэффициент Zip определяют из выражения
2 | 2р„р, | - ж 1 L . д |/ ‘ <»’ L Г р(! оо * г р„ т
I 2р,| |'п- /ц ( Vi) г ।
1 с>Р .°'"
Рп W \|ф| +
2 I — ।
Величина
а = HSp |л2ри/1>в lZ2op <p.
Посте вычисления значения й0 по формуле (IV,28) находят начальную мета-
центрическую высоту по формуле
/1в = Я0Вц.
Остойчивость скеговых СВП. Остойчивость скеговых СВП в водойзмещающем
режиме, когда избыточное давление воздуха в ВП отсутствует, определяют таким же
образом, как и водоизмещаюшнх судов (см. т. 2, разд. I). В режиме на ВП остойчи-
вость скеговых СВП обеспечивается за счет изменения гидростатической силы под-
держания на скегах при накрененин или Д1«|х|ерентивке, причем давление воздуха
в ВП приводит к уменьшению остойчивости. Остойчивость может быть определена
экспериментально на моделях или натуре, либо расчетам. Ниже приведено опи-
сание упрощенного способа расчета. Решаются следующие два урдвпення
Рп (0) (К) + PIjI'ck (”) = О- (IV.30)
— Рп (0) s„ (0) /„ (») X Л1,„.к = Л1„. (IV.31)
Здесь 3|, (0) — п юшадь ВП при пакрсненни судии; 1'<к— эффективный погружен-
ный обьем скеюв (рис. IV.32); 1П — плечо кренящего момента ВП, 1а = (у& — »/ц) *
X sin 0 — г„ cos 0 (wn н г0 — соответственно ордината и аппликата центра илошМ11
накрененной ВЛ). Величины l'cl! (Н), 1ц (0) вычисляют в соответствии с чертеже*
При определении рп (0) могут быть выделены три зоны углов крена: I) 0 < 0
< 0|, 2) 0] < 0 < 0г; 3) 0 >• 02. Если 0 < 0ь то давление р„ (I)) принимают |1L
стоя иным, равным давлению рп (О) в ВП неиакрененного судна Оба скега находятся
в воде. При 0| < 0 < Oj дивлен не в ВП падает, оба скега по-прежнему на*1»дягс*
в воде, однако поднятый скег погружен лишь настолько, чтобы нсниючить вы*с“
воздуха из ВП Сети судно накренено на уюл 0 > 0л, поднятый скег выходит и
воды, дав leone в ВП рн = 0. В этом случае сила тяжести судна у рдвновешив^,с
лишь гидростатической силой на погруженном скеге и части днища.
400
И Пчниимают. что при угле креня О, внутренняя ВЛ грохотит по нижней кромке
wnroro скега, внешняя — выше па АГ = p,|/(fig) Рассчитывают Vcn (0) и Sn 0)
разных 0 при этом условии Далее строят зависимость
/<<>) = pgyt.B((>) 4-p„Xu(0)
находят графически 0, из условия, обусловленного формулой (IV 30)
" 1 /(0,1 = 0.
I Для нахождения 0„ пловотят ВЛ через нижнюю кромку поднятого скега, причем
к.">1то наружная и внутренняя ВЛ совпадают. Строят зависимость pgV'CK (0) и на-
доят 0; из условия
РЮ-К „ ((),) = G. (I V.32)
Значение рп (6) при Oj < 0 < 0г определяют нз уравнения
Рп (6) =IG — pgVcK (0) |/ |5П (0) |
“•‘Утренняя ВЛ проходит через нижнюю кромку подпитого скега, а наружная —
выше ц£, величину АГ = р„ (pg). Уравнение (IV.32) должно решаться методом по-
следов единых приближений, поскольку VCK(0) зависит от наружной ВЛ, и. сле-
a°Bai !лыю, от р„ (0).
, Кренование выполняют при последовательном увеличении угла 6. По формуле
V-3'ц находят восстанавливающий момент, причем гидростатический момент от
с*и,1 олретеляю! в соответствии с известными правилами расчетов для Зодоизмс-
№uouinx С)ДОВ.
^КНолучснный резу. ызт Митягин нриб.11|жеииым ввиду условное!» закона изке-
"еини дп (Q). На рис. IV'.33 показаны графически принятый в расчете и эксперимен-
’’Ч'Ный (с учетом истечения воздуха из ВП при накрепенин судна и расходоиапор-
*' характеристики вентилятора) законы изменения (0). Влияние этой аппрок-
'Чаннп на зависимость Л1(1 (0) оказывается обычно несущественным.
401
Начальная метаиентрн«еская высота скегового СВП может быть определена
формуле 1,0
ho = ггф + (V'ch I ) If с— 0.5(7' + То)]— I'Jg— 0,5(7" -j-7"o)], (IV.3jj
где г ф = (7Х1 — }п) /я1 = 2/3 J z[dx и /« = 2,3 J гМх — моменты цК(>
' Z‘C,< _ п £с,‘
пни соответственно площади внешней и внутренней ВЛ; г, н z2— ординаты ccctbcJ
ственно внешней и внутренней ВЛ\ . 0,5VCK = J $си dx — эффективный об-Д
/ ^ск
скега; Scl( —эффективная площадь шпангоута (часть площади шпангоута, отсек,-[«j.
линней внешней ВЛ и перпендикуляром, восстановленным к ней нз точки пер»сече]
ния внутренней ВЛ с копту пом шпангоута, см. рис. 1V.32);
Рис. IV.33. Диаграмма остойчиво-
сти скегового СВП (V7Sn3|/2 = 0,1;
Sctt'Bn = 0.15; i/g/B — 0,42)
--------зависимость М (в) в режиме на
Н1;-----то же. на плаву;-------------
аппроксимация давления £п в ВП при
расчете диаграммы; • — эксперимент.
Ус = |1/(0.5Уси)] J ^5СКЛ
LCK
(Уя — ордината ЦТ шпангоутного сече-
ння); Т н То — осадка соотве ственно
по внешнюю и внутреннюю ВЛ.
Если степень гидростатической раз.
грузки мала и Tiyg < 1, то в случае тон-
кнх скегов прямоугольной формы из фор.
мулы(1У.ЗЗ) получают приближеннее вы-
ражен ие для йе:
/|q = йрВ; /t0 = (pg 2/>п) —— yg\ yg =
«= Vg/B-
Продольная остойчивость скегового
СВП может быть найдена аналогичным
методом. В зоне малых углов дифф .рента
можно пренебречь изменением давления
воздуха в ВП.
Для начальной остойчивости спра-
ведлива формула
.Мф= С//фф,
где Н.$ = — yg; /?ф = /г/У /2 = /г1 — /.2 — эффективный момент ширин»
ВЛ скегов относительно осп ог; (/«,»— момент инерции внутренней и внешней ва-
терлинии судна соответственно относительно оси oz).
§ 35 УРАВНЕНИЯ ДВИЖЕНИЯ СВП НА ВОЛНЕНИИ
СВП благодаря стабилизирующему действию ВП по сравнению с водоизмсигаю-
щими или глиссирующими судами обладают преимуществами в отношении море Д'
нести, особенно на больших скоростях. Одной из наиболее важных характеристик
мореходности быстроходного судна является вертикальная перегрузка в разли1 uS
его точках. Расчеты, модельные и натурные испытания показывают, что ур««нь
перегрузок у СВП на высоких скоростях в 2— 4 раза ниже, чем у сопоставимы*
по массе водоизмещаюши.х судов. Причина такого различия обусловлена тем, чт°
движение па волнении водоизмещаюши.х судов, особенно на больших скоростях.
провождается возникновением интенсивных гидродинамических нагрузок иа КОТ
пусе. У СВП контакты днища с водой в основном отсутствуют, и воздействие волг,г
нття на судно отражается главным образом в вызванных изменением объема и ’
щади истечения воздуха нз ВП пульсациях давления Уровень перегрузок на <
различных конструкций характеризует рис. IV.34. х
Качка СВП может быть определена экспериментально в результате моде. § **
испытаний пли по натурным данным либотеорстнчсски — на основании решения у Раг
нении качки СВП.
402
Экспериментальное прогнозирование (на моделях) мореходных качеств СВП
”йВа»яст в наибольшей степени учесть конструктивные особенности судна.
п«<ак° иепосредственное использование результатов модельных испытаний
*** .атпипози ь к заметным ошибкам как sniinv
’ ,!«ет приводить к заметным ошибкам как ввиду _
м‘ ответствия волнения в бассейне натурному,
1 к и. что особенно важно, вследствие связанной со
1 кпмаемостью воздуха принципиальной невосгроиз-
птих'ости при модельных испытаниях пульсаций
^рдения в ВП (см $ 36). Поэтому для CBI1 особое
рачение имеют теоретические методы определения
иоргходных качеств
К Основные предположен ня, принятые прн со-
^автепии уравнений движения СВП, следующие
Г поверхность воды прн прохождении судна не
«ефорч фуется, в частности не искажается под
действием давления н ВП форма волны (это ана-
лог гипотезы акад. А. Н. Крылова для водонзме-
шаюш1 ч судов);
связь между давлением н плотностью воздуха в
каждой секции ВП и в ресивере описывается адна-
ljaTH4ecKiiM законом;
втекание воздуха в ВП и истечение нз ВП ппн-
нято квазисташюнариым, плотность воздуха прн
нсте ипп равна плотности атмосферы;
ГО не деформируется, силы на ГО не учиты-
ваются.
к «такт днища с водой отсутствует.
Уравнения качки СВП являются в общем случае
нелинейными, однако прн малой относительной кач-
ке возможна линеаризация этих уравнений. Ниже
приведены уравнения продольной н бортовой качки
амф ийиых н скеговых СВП
Уравнения продольной качки амфибийных
Принятая система координат показана иа
1,0
0,5
0,2
г—yv
Wo—o-
x-f
I-3
v-s
«”о,
0-8
0,5 1,0 UBlh„
Рис. 1V.34. Зависимость вер-
тикальных ускорений ске-
тоаых (/—4) и ач^нбинных
(5— 8) СВП от параметра
I — SRNi 2 — SRNS; 3 —
SRN6; 4 — SRN2: 5 - XR3;
С — SkMRl. 7 — SES-I00B;
» — SES-I00A.
СВП П инятая система координат показана на рис. IV.35, а. Продольная
качка СЬП характеризуется следующими параметрами:
вертикальное перемещение ЦТ судна у,
угол дифферента ф;
В вертикальная перегрузка п (х) точки
судна с абсциссой х;
У
• 1V.J5. Системы координат в уравне-
1 Продольной (а) и поперечной (б) качки
СВП на волнении.
И !/ > 0 соответствует перемещению ЦТ вверх, > 0 — дифференту иа корму.
И” Рассматривается движение вразрез регулярному волнению. Курсовой угол
И.Ри = 0° ДЛЯ попутного волнения; рв = 180° для встречного волнения.
ВЦ разделена па носовую и кормовую секции секционирующим ограждением.
^Нян.мзется следующая схема образования Bfl; воздух от вентилятора поступает в
403
ресивер; нз ресивера — в ВП и далее вытекает из-под ГО наружу. Каждая секцр
ВП питается автономно. Расходонапорные характеристики обеих веитнлякрн'/Ч
установок (подающих воздух в носовую н кормовую секции) считаем одниакиы,1Ми *
виданными. Возможно обратное течение воздуха через вентилятор (Qu < 0) рь?
QB < О избыточное над атмосферным давление в ресивере принимается
Рв „
Рр = 2 7557- + Рро.
где SB — площадь рабочего сечения вентилятора; е — коэффициент сжатия струи.
Рро — давление в ресивере прн Q„ = 0.
Уравнения продольной качки СВП имеют вид [321
/.ф =.- Piii^niXjii + Рпа^цз-Хщ;
тУ — Pui^m Риг-Sia — G.
(1V.34)
Здесь р,ц. 3 — избыточное над атмосферным давление в носовой и кормовой сек-
пнях ВП, Snl, j — площадь носовой н кормовой секций ВП; хп|, : — плечи пр пря-
жения сил давления, действующих на судно от носовой в кормовой секций Bi .
Эти уравнения должны решаться совместно с уравнениями баланса расхода
воздуха, поступающего в ресиверы и в носовую и кормовую секцию ВП:
Qni Qi —
Ц pt ^Pi't
ТРа dt ’
Qpi Qni —
Wj dP„t
TPa dt
d\Vi I
dt ’ J
(IV 35)
где QM| = Qn (Ppi — Pnt) — расход воздуха, подаваемого вентилятором в i-fl реси-
вер; Qpi и Qut — расход воздуха из г-го ресивера и i-й секции В! 1 соответственно:
QPi = ‘Spi If 2|/>rif, p,d 1 (Ppi - Pu<);
r Ph
Qm = Qli + Qai + Q3f.
Q I : Qs- Qw — — Qs>
Qli = e]/-^!!j-5Hl1^4Pu£;
’ i'll
Qai = *1 —-Pn>l SH2t sign a,i;
Г Рв
Qs = „ I / ^iPnS-PH.I Sb3 s,g[1 _ piji).
r |'b
5mi — С1Л11 (X,); Xj = ; x’s —-------1
‘ nP
5ц21 = 2 [ Лм W dx’>
*c
5||22 = 2 Л| (x) <ix;
-V2
Sh3 — Pu P'll (-^c) — Л,|0 (xb) + ЛисЬ
AH = h-l (h-y.
(IV 36)
(IV.37)
404
Л,* <Y> = л1.о (v) + v + *4 - ’|в (г):
*. = ».о + Bnyh - 4 <- • )’ (4f- - \') -
.- cos'tT {COS ы"‘ [ Sln (Ц±_ cos рв) + (- 1/ sill (Me cos P ) 1 +
+ sir a>Kt (- 1)‘ [cos(A^- cos pu _ cos (kux,. cos fQ ] ’;
Ц = + (- I)' *c: I (-0 = I up» > > 0. I (*) = 0 nP" * < °
(IV.38)
,Xc__абсцисса секционирующего ограждения). Уравнение водны »]п (х 7) с
8MlujHTvaoii а принято и виде (111.38).
| Уравнения (IV.34) — (IV.38) ыогутбыть решены численно на ЭВМ. На рнс. 1V.36
приведены в качестве примера результаты расчета качки СВП, основные размерения
шпорою близки к размерам судна В11-7 (ри(.—давление в ВП на тихой аодс).
Цэряс. IV.36, в частности, следует, что прн движении амфибийных СВП на волнении
увеличивается средняя осадка судна. Закон изменения давления в секциях ВП
нажег существенно отличаться от гармонического. Это связано с импульсным ха-
рактером вытекания воздуха из Bl I, обусловленным периодическим замыканием пло-
щади истечения воздуха из ВН.
Уравнения продольного движения скеювых СВП. Продольная качка скего-
BtxCBIl рассматривается в системе координат рнс. 1V.35,«. Уравнения качки судна
имеют вид [2, 22]
mif = 1 п + 2У - mg', /гф = Л1 и + (IV.39)
Q« - Q« =
iv
</р» , rftt' .
(It dt ’
(IV. 40)
U СцВ(| (/iu — h0) - - LnBny — xnuLnBu cos <uKt
dK'idl — Z.uBbp -f- У-ааЕцВдО)!; sin <oltf,
УП — SfiPn — Л7д] — У иг,,;
Уск = J Уск dx; AfZCK = J x) CKctx.
ип = 2 sin (kBLn cos ph/2) (kBLu cos pB).
В Рдсход воздуха из-под ограждений Qn, скорость ц, и площадь истечения 5И
определяют по формулам
Qu = гс.Л; с» = р 2р^* sign р»;
^и = S|t. н + s„. н + S,|S;
5И. н = ЛпЛп Un) (носовое ГО);
^’и и= йиЛ.1(Ак) (кормовое ГО);
*н
$B3=2J Л|| (X) dx (скеги).
(IV 41)
4(15
Рис, IV 36. Параметры продольной качки амфибийного СВП
па встречном волнении (XB/Z.D = 1,3; АВ'ЛП = 0,5; Fr/_ = 1.2):
а — относительная вертикальная y.hB и К|1леваяф/аи качка; б —
отношение давления подушки к статическому для носовой phl рпг
и кормовой р„а рпс секций ВП; в — перегрузки в носу пи и ЦТ
ПИТ-
406
силы иа скегах включают составляющие гидростатической природы, вол юв го
и дязк0СТ|.О1О демпфирования и силы инерции жидкости.
^к = Рё\к + »,д + ^ + г1;:
Hl = A'ckV ys = -P-Pn2|Vn'1 lcsr (JC) + (ж)1;
un = — у — Хф + Оф — Пи; Г (X) = — /»;/ (— Л*);
К. - -ф-Ч. {4- -.«8[(3.S + 7.4^-)^]};
eg = 0,6; сх = 0,3 4- 0 71 (t’n),
уч = (%); и = pS;KK (Рек):
Р* = 2рвскК (рек) Ctg Рек» К (Рек) = g I *
(IV.42)
где I (•’) определяют по формулам (IV.38). Уравнения (IV.39) — (IV.41) решают
на ЭВМ [2, 23].
Уравнения поперечной качки снегового СВП в положении лагом к волне без
Мда с учетом ветровой нагрузки Предполагается отсутствие килевой качки. Попе-
речная качка характеризуется следующими параметрами:
Т вертикальное перемещение ЦТ у;
угол крена 0;
боковое смещение ЦТ г.
^^Кстема координат приведена па рис. IV.35, б. Направление бега волн совпадает
с осью ог Ординату волны л]в и горизонтальную скорость частиц воды в в^угне £в
определяют для левого (индекс «1») и правого (индекс «2») скегов по формулам
Пв1, г = ° cos (fcBz,f, — й>/); tui.i = cos (feBzti, — of),
где в качестве осредненных координат левого н правого скегов принято =
= ±0.5 (fin + ВГ1!). Знак «-}-» относится к индексу «1».
[ Уравнения движения судна имеют в д
ту = и„ + ЕсК1 + Угь2 — mg;
1д0 = Л4дп 4- Мхск 4" Л1ха:
znz = Zn 4- Zcki 4* Zcki 4*
(IV «)
MxcK = (Vchi — Vсиг) г1 4* ^cm (j>g----2 ^Clt2 ------------)
Уц Pilin’ Za = PlJn (*1b2 — ’Ibi);
Л1лп — Po^n (Га T'l) {Уя — 0>6 (T1 — Г2 J
^*1*1,2 — T’o 4- У — z1>20 + Чвиг1 \т.2 = ^нl.2^
^1.2 ~ ~f,ul.2l (—hiil. ')
Горизонтальные составляющие сил на скегах
2Ск = zs 4- Zu;
г » пТ'2 .
Zii = —ртог; ]i; = pL——;
Zs = — 0,5Схраг I vt IFендп; Cz = 1.
407
Относительные значения скорости вертикального vn и бокового перемещений си<Л
»п1,« = — У + т + )вт,а
vth» = i — (yg— O,5T1(J)0 — I
Компоненты KCi<i.a находят по формуле
ск1.2 ~ ^ск1,2^-
Величины У'ск1 2 определяют по соотношениям (1V.42), при этом подстав тЯИ)т
Т1>4 вместо Т (х) н i-nJ а вместо ип Ветровую нагрузку рассчитывают по формулам
Z = C2a-0,5pHOgSs; ,МлВ = Zj (j/a— !/«).
где Р„ — скорость ветра; S.-i — площадь парусности; уа — высота центра парус-
ности над Oil.
Уравнение для давления в BII прн расчете поперечной качки то же, что и для
продольной качки (см. формулу (1V.40)]. Площади истечения в данном случае рис-
считывают по формулам
*.,2
ин, н = Ля (11( с!:. Sf.3 I- 0и1 + hni),
И. К = ^011, к + 0 ^*И Н, К = ^1111, 01-11, к)-
Об ем ВП
IT = |^Bn (/|D I- у — Ли)--J— sin (ЛвЯц 2) cos <о/j L.
§ 36. ВЛИЯПИГ. СЖИМАЕМОСТИ ВОЗДУХА НА ДИНАМИКУ СВП
В уравнении (IV 4 ) продольной качки СВП слагаемое (I TPJ (Др|,Л) учиты-
вает сжцраемость воздуха в ВП. Расчеты, основанные на непосредственном hiiici|>h-
ровапии уравнений, показывают, что это слагаемое влияет на качку СВП (рнс. IV 37).
В н которых случаях, однако, роль сжимаемости воздуха может оказаться ы. ушс-
ственной.
Для оценки указанного влияния надо рассчитать амплитуду пульсации 'Va
давления воздуха в ВП при вынужденной качке над твердым экраном с частотой ые.
В линейном приближении значение — отношение 6ра к амплитуде брИ1> Полуни-
ной в предпол женин о несжимаемости воздуха, выражается формулой
= = . г (IV 44)
ОД 1 I I -f- хг
где
« -1-^.1 IJ’e.l -_____________________!__• I I _/_Lx_L\-2ic-
I (iQ Is ур» c' I dQ Is | d(? j ’ I dp |e V q i / pu
p„ — избыточное давление в ВП в равновесном положении.
В качестве крн1ерня влияния сжимаемости воздуха на качку СВП предлаг,нтсЯ
принять величину и0 или к.
Если х„—т- I нлн х 1 (например, х < 0,2), то сжимаемость на качку < о11
t е в. нет.
Из формулы (IV.44) •
х = A q.) hnmj7<D,/(ypaQH), (1V 45^
где А (ф) — ф, (1 + (ф'2)1.
408
<09
Зависимость между хн (значение к для натурного судка) и хы (значением для
дели в масштабе к) аыражается формулой
«м кх(1.
Для модели влияние сжимаемости в |7к раз меньше, чем для натуры. Поэтому
если у судна влияние сжимаемости невелико (хи 1), то у модели оно тем более прь.
небрежпмо мало и допустим непосредственный перенос результатов модельных море,
ходных испытаний на натуру. Если же и„ ж I. то такой перенос, особенно в случае
вертикальной качки, обусловливает большую погрешность,,и прогнозирование мере,
кодностн судна возможно лишь на основании расчета.
Из формулы (1V.45) видно, что для равенства критериев у модели и натур!. црн
проведении модельных испытаний внешнее давление ря должно быть умепь ец0
в 1/к раз (моделирование по числу кавитации, достигаемое в кавитационном басе 1С)_
Но в этом случае у менышггся плотность воздуха в ВП. Таким образом, без измс iei ня
конструкции на геометрически подобной модели СВП моделирование качки невоз-
можно принципиально.
Из рассмотрения формулы (1V.45) следует:
1. При низких значениях частоты качки со,- -г- 0 — случай стационарного движе-
ния судна или на попутном волнении — х -> 0 и роль сжимаемости невелика.
2* Величина х обратно пропорциональна расходу QK. Поэтому у скеговых СВП.
Имеющих относительно меньший расход воздуха, роль сжимаемости в качке в .ще,
чем у амфибийных.
3. Влияние сжимаемости воздуха на качку СВП убывает при уменьшении ф
4 Малая высота ВП Лп ослабляет влияние сжимаемости воздуха на качку.
Высота же йп выбирается тем большей, чем больше высота волны. Поэтому у море-
ходных СВП. обладающих высокими ограждениями ВП, роль сжимаемости воз уха
более существенна, чем у судов, рассчитанных на тихую воду и малые волны.
Для расчета х нужно знать we. Обычно в качестве исходного выбирается
значение шг частоты встречи судна с регулярными волнами. Достаточно точно оце-
нивается влияние сжимаемости воздуха на амплитуду качки СВП. однако, допу-
скается погрешность в оценке этого влияния на пульсации давления воздуха в ВП
н, следовательно, на перегрузки. Последнее обусловлено тем. что на близкие к гармо-
ническим колебания судна, происходящие с частотой его встречи с волной, наклады-
ваются пульсации, происходящие с собственной частотой toj, связанной со сжимае-
мостью воздуха, причем
со»= KgPaV (*„/>„)• (1 <б)
Подставляя со» <т>2 в формулу (IV.45), получим
хс = х (<£>а) = Т-4 (ф) (5ц/<?„) | РиЛцС/Ра-
Зависимость между хс натуры (хс,п) н модели в масштабе к (хс. ы) выражается фор-
мулой
«с. м= I КХс.ц
В табл. IV'. I приведены значения х, х0 и хс для амфибийных и скеговых ВП
(натура и модель), движущихся на встречном волнении 5 баллов при скорости су Ж®
50 уз.
Из таблицы следует, что для рассмотренного натурною скегового СВП ь
сжимаемости существенна и непосредственный перенос результатов модельных нс И'
танин на натурное судно в этом случае недопустим. Для амфибийных СВП влиЯ"111
сжимаемости невелико (z.u = I), и приближенно качка судна может быть оценена п
модельным испытаниям. т
Вместе с тем и у натурных судов, и у моделей амфибийных н скеговых СВП м01}0.
возникнуть колебания со второй резонансной частотой. Поскольку частота этих
лебапнй’не моделируется, возможна существенная погрешность в прогнозиров-11”1
пиковых значений перегрузок судна по данным модельных испытаний. а
Таким образом, для предварительной оценки влияния сжимаемости возп*а я
продольную качку СВП должны быть вычислены для заданного режима двп*е11
критерии xfl. v. и Ис-
410
у я Г ,ч 11 u а IV I Критерии влияния сжнмаехссти па качку СВП
1 Тип суди» к Месс», 1 Поминало ь»дП г ас ж од иг з духа *»’, с Масштаб модели Ив X хс
Скегое е 2KSES 2200 2(Н.О 1 11атура 1 Модель 1 : 25 6,43 0.996 2,1 0.064 2,7 0.54
SRK2 27 ICO | Нату ра { Модель 1 : Я 0,996 0,9998 0.85 0,01 0.58 0.2
е- SKV1 IH) >С5 1 Натура 1 Модель 1 : 15 0,925 0,9996 0.41 0 03 1.34 0.35
ИЕсли fe 1 (х < 0.2). то роль сжимаемости невелика и оценка качки СВП мо-
жет пДяюднтъся поданным модельных мореходных испытаний. Если хс ~ 1. то воз-
можна ошибка в определении пиковых значений пульсация давлений в ВП и пере-
грузок. Приближенная оценка по данным модельных испытаний допустима в случае
продольной качки амфибийных СВП, скеговых СВП с малой высотой ВП, на попут-
ном РПЛ||< 11ВII.
* Влияние сжима » ости воздуха на борт юую качку' СВП иеве.и ко, н поэтому воз-
модлн непосредственный перепое результатов модельных испытаний на натуру.
§37 РАСЧЕТ ПАРАМЕТРОВ КАЧКИ СВП ПРИ ДВИЖЕНИИ
ВРАЗРЕЗ РЕГУЛЯРНОМУ ВОЛНЕНИЮ И ПРИ ПОЛОЖЕНИИ ЛАГОМ
К ВОЛНЕ В ЛИНЕЙНОМ И НЕЛИНЕЙНОМ ПРИБЛИЖЕНИИ
В Расчет качки СВП производится путем решения уравнений § 35. В общем случае
решение этих уравнений выполняется на ЭВМ. В аинейно.м приближении возможно
аналитическое определение параметров качки.
Качка скеювых СВП на встречном регулярном волнении. Особенности поведе-
ния судна на волнении, описываемые системой уравнений (1V.39)—(IV.42), иллюстри-
^Ктся на гримере расчета качки схематизированного судна, близкого к 2KSES (см.
Гнс 1V.37) |2|.
При качке СВП происходит смещение среднего положения ЦТ вниз по сравнению
с сто положением на тихой воде, и судно совершает колебания около нового сред-
него положения. Расстояние между этих! положением ЦТ судна и исходным представ*
аят г среднюю проса. ;у АТСГ; средняя осадка скегов ГСр при этом составит
7'ср = Го+ АТср.
и Дифферентф и погружение ЦТ судна у изменяются по закону, близкому к гармо-
««ческому, с частотой встречи судна с волной «к. Среднее давление в ВП меньше
шипя в ВП, соответствующего равновесному положению судна па тихой воде
р“ что п объясняет увеличение средней осадки Характер зависимости от времени
JtpiBKa.ibiibix перегрузок совпадает с характером изменения давления в ВП. Поло-
*игт.|Ы1ые перегрузки как в носовой оконечности, так и в ЦТ больше отрицательных.
^2+3 о"'" расход возАуха, вытекающего из-под носового и кормового ГО, достигает
^^^ксоиоставлсиия расчетов по уравнениям (IV.39)—(IV.42) для натурного су/на
Bu.te.iii в масштабе 1 : 25 видно, что осциллограммы давления и перегрузка натуры
эа',ет,,° различаются, У модели СВП наблюдаются ясно выраженные высо-
•'а гстные пульсации. Появление последних может быть объяснено возникновением
Л.'[ Смыкании полости ВП колебаний модели с собственной частотой ш»
411
Между собственной частотой натуры й>2Н н модели (0гЬ1. выполненной в масштаб
к, существует соотношение
ы»т = о>2н-,к-
Зависимость между частотой встречи с волной модели со,,. м и натуры ®КЛ. как т;зВе>
стно, выражается формулой
«к.м = <>«.„ Г к.
Отношение собственной частоты к частоте встречи с волной для модели оказывается
больше. чем для натуры:
е»2м'®|(,у = | Ь'К-йЬц/Юк.и»
Это и объясняет i алнчне более заметных пульсаций с частотой на осцилло:рамме
модели.
Рис. 1V.38. Зависимость относительных амплитуд вертикальной качки от опто- I
снтелыюн длины волны. Расчет качин натурного судна по нелинейным (-----------)
и по линейным (— • —) уравнениям; расчет (------) качки для модели (к = I : 25: I
йо % ~ 0.5; Frv = 2.5).
На рис. IV.38 приведена зависимость от относительной длины волны амплитуды I
вертикальной качки модели и натуры. Прн относительной длине волны ?.n/Ln = ОД I
соответствующей для натуры частоте встречи с волной, равной собственной ч тоге
(иа, наблюдается резкое превышение относительной качки натуры по сравнений I
с качкой модел) Результат объясняется тем, что для модели при том же значсн и I
kr,//.n частота встречи с волной о>„ в 5 раз меньше собственной частоты <>2. I
р течет продольной качки скеговых СВП в линейном приближении. При опреДР I
Ленин параметров качки в линейной постановке вводят следующие дополнительны I
допущения:
воздух при качке вытекает нз ВП только из-под носового ограждения; I
скеги имеют в шпангоутном сечении прямоугольную форму по всей длине В 1 I
секционирование ВП отсутствует;
расхо юнапорная характеристика вентиляторов линейна.
Параметры качки судна описывают соотношениями
у = уа cos (wKt + г,): ф — фа cos (ь>|(/ + ег). бр = бра cos + е3);
'fip — пульсация давления в ВП но отношению к р110).
Рассматривают встречное волнение рп = 180е.
412
Амплитуды качки п давления находят по формулам
4 * т *i; фа = <i /х" + х<; ftp, = а У х[ + х%;
1? । =- ха./ЛТ> • Й •’а = Л'з Л’з! !Й •'а — ха А’в-
^Значения 1; определяют из решения следующей системы линейных алгебраиче-
ских уравнений;
в
У* fli/Xj = bj: i = 1 -* 6.
K‘
j<e'>dll',1,ll,cl,TIJ системы выражают формулами
. eu = «22 = - (ш + 2p^J ьН + 2pgB,.K( ; «|2 = - o2l = 2A’tK/ (%;
• «ТВ - »»—s, — £nBn- °.W = «« = - ('г + 2 Д' X + i'£l,Ak,6:
Дл — Л43 — 6; Сзз = — -4|/-u5l; U&1 = rf?ea = t£n I'' 2pD/p»»
ft52 “ £,CI “ ~ Лв4 ~ ₽ (/ n^ir 2) Г 2PlI ppi
I ^55 = C6B “ <Qn ^Рл) [(1 Ч Ь 0,5|; oM — — OgB = И o^WYPa»
fl|}t T1 ЛН — <;»C = rt?3 = rt24 — Д*‘5“^3| 3 ° 12 — С3в = a41 = U | > = <l« — «54 = 0*3=0;
1 - ’ H МЛ к — |КйО sin k/2); =* — (4 Ч’в) ,VCb<i) sin (А’ц£п/2)^
ta = — (ОвЦиЛи sin (M-л 2) — 0,5/ij cos (/гн£п 2)j Лгс1<со;
*4 = 1 (!•«-»* - pXk) K'.'M si" (V/) - (Ч. 2\) cos (M n/2)J;
bf, = »/?,, I 2fii Ph cos ik„LB.2y.
bs—~ г tin I 2Pn Pt, «In (*тЛт1'2) — l2B„ft> Z?K) Sill (M „/2);
t,cK = l,/,.: л/. =РЛА/12.
где ЛГц определяют по одной нз формул (IV 42). р — присоединенная масса на с и-
шниую длину шпангоута; ее вычисляют по одному из выражений (IV.42).
На рис. iV.38 в качестве примера приведены результаты расчетов качки по при-
веденным формулам. Из рисунка следует, что сопоставляемые данные близки в эоне
лл| иных (>.в/£ц > 3) и коротких (XB/Ln < 0.8) волн. В то же время в области зна-
чений частоты, близких к резонансным, решения, соответствующие линейным и не ли-
нейным уравнениям, значительно различаются. Таким образом, использование ли-
нейного приближения приемлемо в тех случаях, когда колебания судна относительно
смиового профиля невелики.
5 38. УСТОЙЧИВОСТЬ ПО ВЫСОТЕ И АВТОКОЛЕБАНИЯ СВП
На тихой воде у СВП могут возникнуть интенсивные автоколебания по крепу,
,шф|хреиту и высоте. Оцепить условия возникновения и амплитуды колебании но
кРепу можно путем решения па ЭЦВМ уравнений бортовой качки (IV.43). У cxeto-
fcwx СВП автоколебания по крену могут возникнуть в случае приложения к судну
’экого постоянного кренящего момента, при котором осадка скега на борту, выходя-
щем и воды, становится малой по сравнению со статической проегкткой волы в BI).
Для амфибийных СВП эффективных расчетных методов определения условий
ВОДкиовсаия автоколебаний по крену в общем случае не предложено и автоколс-
'ф|Ця оцениваются по модельным испытаниям
Автоколебания по высоте скеговых СВП могут возникнуть при потере устойчп-
^п «в малом». Критерием устойчивости по высоте для СВП, находящегося над
^^biM экраном, при пренебрежении деформацией ограждений ВП, является усло-
х, > I. (IV 47)
413
Если условие (IV.47) не выполняется, го судно обладает колебательной неуст0(.
чпвостъю. возникают автоколебания СВП с частотой, близкой к резонанс, й ш [CJ*
формулу (IV.46)].
Величину Xj рассчитывают но формуле
Xj = и10 (1 + 2vt?clI), (IV Эд)
где х|0 = (1/ф + 0.5) (ТРа'ри) Лв1 Лп;
@ (I ф 4“ 0,5) Qu (1 4~ А’яз) j 2у/!цЛп (1 - Pn^fl
°СК Sag (1 - G) }'g (I - G) Pa WaQii (1 <F + 0.5)
2pnC / Рп у %|Л„
Y*Pu \ Pa ' Qu 4* + 0.5)
Здесь обозначено:
ft" = tiS^y ’ S" = Q (l'"£)
(S„ — площадь истечения воздуха из ВП). Зависимость 5„ (у) получают по те< ,е-
тическому чертежу. В частном случае, когда расход воздуха из ВП происходит
только из-под HocoBoi ГО, имеющего при равновесном положении су дна зазор йОи
постоянный по ширине
5И = В (Лон 4- р); вХ|[ ду = В; hu л Л.ц.
При малой относительной ширине скегов
2ВСК В < 0.15
условие (IV.47) (без учета сил на скегах) можно записать в виде
к10> I (IV. 19)
Условия (IV.47) н (IV.49) показывают, что модельные испытания не позволяют
судить об устойчивости натурного судна по высоте. В выражение (IV.48) .для х,
и х10 входит отношение ра рп. Для модели зто отношение больше, чем длт на-
туры (см. § 37), поэтому пату риое судно может оказаться неустойчивым, хотя его
модель устойчива.
Из формулы (IV.48) следует, что для повышения устойчивости и устранения
авгоколй5аний необходимо уменьшать безразмерную крутизну расхолонапориой
характеристики вентилятора ф, а также высоту ВП h„ и увеличивать й„. Увеличение
йп достигается уменьшением длины участка ограж гений, из-под которых вытекает
воздух. Величина йи растет также согласно формуле (IV.48) с увеличением расхода
воздуха.
Расчетная оценка устойчивости по высоте амфибийных СВП в случае, если чала
деформация ГО по сравнению с амплитудой вертикальных перемещений СВП < ча-
стотой ш., выполняется путем проверки соотношения (IV 49).
§ 39. ВЛИЯНИЕ НА КАЧКУ СКЫОВЫХ СВП ГЛЧВНЫХ
РАЗМЕРЕНИЙ И ХАРАКТЕРИСТИК IIУГНЕТАЮЩИХ ВЕНТИЛЯТОРОВ
Значения амплитуд качки и перегрузок скеговых СВП иллюстрируют граф"101
на рис. IV.39, пл которых приведены результаты испытании ряда схематпзирив31'
пых моделей и натурных судов 139]
Серийные расчеты по уравнениям § 37 при вариации основных конструктивны*
параметрон показывают следующее |2].
Увеличение удлинения L„'BD приводит к уменьшению относительных размах,”
килевой и вертикальной качки, ускорения судна. Уменьшение высоты скегов от* •
до 1,4йв мало влияет на параметры качки, дальнейшее уменьшение йп до 1.2/iH х*’-
ливлнвает резкий рост качки и перегрузок судна.
С увеличением ширины скегов Вск растут относительные размахп качки, пер
грузки н уменьшается средняя осадка судна. Предельно допустимые соотнои •'1
414
жлУ шириной и высотой скегов, при которых для данной высоты волны Лв отсут-
* удары волн одннше судна, могут быть получены путем расчета на ост ванни
И^пеннй относительных перемещений точек днища н воды. Если это перемещение
JfnbUie клиренса на тихой воде, то возникают улары воли одннше. Характер полу-
gCMofl в ходе таких расчетов зависимости иллюстрирует рнс. IV.40, из которою
ч?ещет, что с уменьшением относительной высоты скегов й1( Лв для предотврашеняп
*^ра волы одннше требуется увеличивать ширину скегов.
Рис. IV.39. Относительная качка моделей скеговых СВП на встречном и лаговом
^Внегии: а —- модель К на встречном волнении (/1в'йр) = 0.45; Fr/. — 0.66); 6 —
модель В на встречном волнении (hB ht, = 0 45 Fr/. ' - 0,86); в — модель R на встреч-
ен волнении (ftllAn = 0,44; Fr/.= 0,83); г—модель В на встречном волнении
fttj.'hj, = 0,46; Fr/_ = 1.31); д— модель R на лаговом волнении (йь йп = 0,44;
0,83); е — модель В иа лаговом волнении (йв йп = 0,42-5-0,46; Fr/, = 0,66).
1 - '1'а/а0 (относительная килевая качка); 2 — 2ра/Лп (|>тиосител1.иая аертинплья.-я качка);
3 — 03,С‘О (относительная бортовая качка).
Основные конструктивные параметры серии моделей сксговых СВП (см. рис IV.39)
Параметр Модель R Модель К Модель В
₽nsn/Km 0,81 0.97 0.Ь7
1.9 2.2 2.07
1 ”D/«tn 0.021 0.023 0.022
В Возрастание безразмерн ill крутизны расходонапорной характеристики веити-
wopa эт ф = 0,2 до ф = 1,5 приводит к существенному росту перегрузок, размахов
В^Кп, средней осадки. Дальнейшее увеличениеф не влияет на качку, но несколько
®личнвает перегрузки.
4)5
Возрастание относительного расхода воздуха в ВП Q — ’pg (к^2д д ।
в диапазоне 0,1 < Q< 0.5 мало втняет на размахи качки, но обусловливает
перегрузок и уменьшение ерцанен осадки. При Q < 0,15 резко увеличивается Ср^
1яя осадка Год, что вызывает рост перегрузок.
Па рис IV 40 приведены в качестве примера зависимости характеристик к;.>1К(,
от некоторых конструктивных параметров.
§ 40. СТАБИЛИЗАЦИЯ СКЫОВЫХ СВП НА ВОЛНЕНИИ
Под стабилизацией качки СВП понимается умерсние размахов качки и ncpcrpF
зок нрн движении на волнении. Наиболее важна стабилизация вертикальной качк
и вертикальных ускорений. Это связано с относительно высокими значениями у«^
эанных параметров (например, вертикальные ускорения нрп кичке могут Д0СТ1.|Г^‘|
3(т— см. § 39| и с требованиями, предъявляемыми к обитаемости таких судов I > в
В настоящее время разработаны следующие способы уморения размахов качки
перегрузок, основанные на регулировании пульсаций давления воздуха в воз..утш
подушке:
1) выпуск воздуха из ВП через отверстия регулируемой площади.
2) уменьшение крутизны расхотоиапорной характеристики вентиляторов;
3) регулируемая подача воздуха в ВП.
416
I Как показывают расчеты ira ЭВМ и испытания СВП, при использовании яих
В(»л/П1' У'fetibiiieiiiie перегрузок сопровождается увеличением средней осадки, что
с_||В.»тит к росту сопротивления и палению скорости судна.
^^К>гла< н<> результатам испытаний опытного су ша SES-ЮОЛ (рнс. 1V.41), при
К(дерых осуществлялась стабилизация качки путем ынуска воздуха нз ВП через
Рис. IV.41. Эффективность работы системы стабилизации на судне SES-100A па
волиеннн 3 балла (йвз% - 0.9 м): а — осциллограммы ускорений nv н давления в ВП
рв, 6 — среднеквадратичные вертикальные ускорения ли в зависимости от кур-
ik сивого угла к волне 0В.
I — бе.» стабилизации (и - 41 уз); И — при работающей системе стабилизации (о “« 35 уз);
/ — ускорения п рубке; 2 — ускорения в ЦТ
регулируемое отверстие с максимальной площадью SOT = 0.0IS,, [91), на волнении
1 пыла было достигнуто трехкратное умерсние перегрузок, ио скорость судна упала
на 6 ут.
J 41. УРАВНЕНИЯ БОКОВОЮ ДВИЖЕНИЯ СВП
И 13окии<к движение СВП рассматривается в системах координат на рис. 1V.42.
Оно описывается теми же параметрами, что и у СПК (см. § 19) курсовой угол <р.
угловая скорость рыскания ф ыи, угод дрейфа 0. угол крена 0. Установнв-
Рнс. IV.42. Системы координат, при-
нятые нрн исследовании управляе-
мости.
поворот характеризуется радиусом /?ц или диаметром циркуляции
» )р тление по курсу скеговыми СВП осуществляется гидродинамическими ор-
I чи пли поворотными соплами водометов) — см. гл. I,
•’и* ные СВП управляются по курсу аэродинамическими рулями или поворот-
ll
Я В/|. я. и ВаЯтк/некого, т 3 -117
иыми воздушными винтами. Маневрирование СВП описывается системой нелшцж
дифференциальных уравнений
m ох it 4” L’j |f) == Хр Ха —| Ху - Xg 4“ 7".
п> ( vt t — vxay) = Zr (- Za + Zp 4 ZB 4- mgkjfr,
Iу id&v/dt} = Afу,. + Al4- Aljfp 4- Мрв 4* AA1e;
ix (^л=) = л),г4-'М,а4-л»йр4- .w,B-2.ve(co_rt);
dxe„/dt — v cos (<f — P);
dz^dt — —и sin (ф — P);
dtp dt = <ow;
vx = v cos P;
nt = v sin P.
<IV.5oj
В формулах (IV.50 T — суммарная тяга движителей; Zn, М^, Mxv — Исковая
сила, моменты рыскания и крепа, обусловленные силой на движителях грп косен
обтекании; ДА1В — управляющий момент рыскания, обусловленный разностьк т г
движителей правого н левого борта — ПБ и ЛБ (за счет различия в углах установки'
лопастей винтов регулируемого шага или частоты вращения движителей) Индекс
«а» относится к аэродинамическим, а «г» к гидродинамическим составляющим с л
в моментов на корпусе СВП, которые определяются по фо мулам
Z* — С л ФЛ) ^.:РВ\\
Мца = ['"* (Ph) + а
< = "Ч. (Ро)
zr ж- С-, (I г. р, «).о,Ерс->!'э;
Л^г = [ntjic (Fr, P, 0) 4* (Fr) (wi/l','3/[)]0,5pt?V*;
X™Cw(Fr, p, 0) 0,'pt "F •
Ma = mxr (Fr, P, 0)-0,5pt’V - /nt-ftv0.
(1V.5I)
Расчет on осительной скорости ветра t'Q, курсового угла ветра относительно
судна Рв В * * 11 Угла аэродинамического дрейфа Р производится по формулам
« о = v 4- к® — 2 V cos (рв — р);
Р« = ф - <Гв.
sin ра = (о sin р — о, sin pB)/i'ft;
COS pd — (O COS P — L'B COS PhJ/Oq.
(IV.52)
В формулах (IV.50)—(1V.52) также обозначены: Cxa, Cza, mya, mxa — поэипконн^
аэродинамические, a Cxr, Czt, туг, mxr — позиционные гидродинамические ко»"
финиенты корпуса СВП; m au и — коэффициенты аэродинамическое н гнДР®"
динамического демпфирующих моментов; индексер» относится к управляющим L1 3,1
и моментам, возникающим вследствие перекладки органов управления;^— :С‘41
фшцнеит влияния угла креиа иа боковую силу на корпусе СВП без хода в реж ме
ВП. Для скеговых СВП = 0, тля амфнб| йных СВП величину fcg находят в ® е
ствин с рекомендациями § 34. Коэффициент опротивлення бортовой качке Л’в сПГ
деляют экспериментально.
Системы уравнений (1V.50)—(1V.52) решают в общем случае иа ЭВМ.
41е
малых у г чах дрейфа н крена и отсутствии ветра (ев = 0) движение СБП
^^Иают системой линейных уравнений (в функции безразмерного времени т =
T^jl ’)
V df'dr + pn₽ + pls&v + pl30 + p,46 = 0;
duty dt ф p.,p d- p2.C>y + p.30 + pa4 = 0;
da0 dt? + p31p + p3,a>y + p33fi p346 = 0;
dq ‘dt — &u'.
Им = VyVl/*/v.
(IV, 53)
И Значения коэффициентов уравнений (IV.53) вычисляют в зависимости от типа
СВП пи формулам, приведенным в табл. IV.2.
К Ко*) и шенты суммарных аэрогнтродннамических сил выражают я в нде
Ct = Сгг 4- kiaCia -J- Сгв;
Р^у — Р1уг + “Ф ГТ 1»
тх = /плг ~г ^таК1ха *Ф mAB;
A-2a = PBSa/(PVz'3);
*mn = W-b/V1*-
(IV.54)
В формулах IV.54 и табл. 1V.2 обозначены: Сгп, т„в, тхв — коэффициенты
боковых сил и моментов на работающих движителях СВП;
-г =V(pV5/3): г;=/Л/((,Г );
Таблица IV.2 Коэффициенты уравнений бокового движения
Ьч»*«ф
СИНА
СВПС
Р11
Ри
Р1Э
Рн
Р21
~ (<^+С?.)/2
— 1 — С“р /2
-O.5(C»r + 2fro/F.v)
-о.ЧА6а1)
-т112?ги
-0.5С»г
-0.^5,
—
-</2^
Р21
Рл
,в Ь г 72?21',/3
' гарнаалр1у*
Р32
Р".
— mxi2fx
- (тх~ 2ghe7° ) 2r-x
^аСгввр^2г2г№ | - С^рур72г^
Р«
Дли кермовых рулей < 0.
И-
419
С° —коэффициент гидродинамической силы на рулях скеговых CB1I;
коэффициент аэршниамнческоП силы при перекладке рулей амфибийных
Sp = Sp/V2;‘ — относительная площадь (суммарная) гтродниамических pv.-,(j’
§ 42. ГИДРО- И АЭРОДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ СВП
Коэффициенты гидродинамических позиционных сил н моментов, вхо.ц!ЦИ|
в формулы (IV.5I), определяют при испытаниях буксируемой модели СВП в опыТ(м
вом бассейне. Данные испытаний представляют в виде зависимости безразмерна*
коэффициентов С1Г, С.г, т^. и /пх1. от углов дрейфа, крепа и числа Г г в сеязагпой
системе координат (см. рнс. IV.42). Коэффициент демпфирующего момента m^ia-
ходят при испытании буксируемой модели на ротативной установке (1. 51].
Аэродинамические характеристики корпуса скеговых и амфибийных СВП без
учета влияния струй движителей определяют экспериментально в аэродинамической
трубе на геометрически подобной модели. Влияние движителей на аэродинамиче-
ские характерце тки амфибийных СВП учитывают по формулам, приведенным ниже.
Гидродинамические харакюристки скеговых СВ Па рис. IV.43 показана
зависимость позиционных характеристик корпуса схематизированной модели CFH
от углов дрейфа р и числа Frj. |51 | Зависимости от р коэффициентов боковой силы
Сц. и момента рыскания туг близки к линейным при Р < 3°. С увеличением числа
^r£ п1рг И | *"гг | уменьшаются. ПриРг^> I скегоьые СВП обычно статически устой-
чивы на курсе < 0). Коэффициенты демпфирующего мох опта м 'и в зави имсс™
От Fry и у глниеиня £ц«Вп имеют следующие значе) ия:
Fr у Удлинение
2 3 5
0,9 -2,1 —4,3 —6,8
2,3 2.8 -0.9 — 1,5 —4.5
—0.5 —0,8 — 1.4
—0.4 -0.7 — 1 4
42U
I При отсутствии экспериментальных данных нлн данных побчнзким прототипам
’ --ьЬициенты, входящие в правые части соопюшеннй (IV.51), могут быть определены
^формулам [4J
R Сгг = С»| -|- С^: п^г = -f- /п^2>
"% = О + = - С.-А/Г'/3’
причем
Czj = Д( sin р — Bj sin Р | cos Р |;
rn#/ — С( sin Р + Dj sin Р | sin Р .
Здесь
*н
=-- (1 V2'3) [ Т, (х) dx; ct = си + с,,.
П '**
и Л>1
Ch = \ kk1/V C2i = (.%. V) j J.,. (х) Т] dx-.
*и
Dt = 0 I ) [ Tt^xdx; £, = £„ + £„;
r«
Г u = Л/к;Ч'г/3; Eu = (1 /У4/3) j p,. (x) rf (x) x dx,
XK
гас Г,,; — осадка транца t-ro скега; T( (x) — осадка шпангоутного сечения iто скега
(i - 1, 2) с абсциссой х, х,; — абсцисса транца ске! ов; х„ — абсцисса носовогоuniaii-
гоуттио сечення с осадкой Г, (х„) — 0. р( — коэффициент, учитывающий форму
шпангоутного сечения скега с абсциссой х.
^^Кросив индекс 1. определим коэффициент р по графику на рнс. IV.44 [64] в <.<-
«пепмостн от относительной ширины £,„ (х) Т (х) и коэффициента полноты площади
шпангоута Sr„ (x)/[flCH (х) Т (х) ] (Scl. — погруженная площадь шпангоута).
И Осадка шпангоутов i-го скега 7( (х) выражается утлом крена 0 и ф >мон волио-
*>!< впатины, образующейся вследствие движения системы давления СВП с углом
[3, 5]. Приближенно Г, (х) можно определить по формуле
Т-, (х) = keiPn,'pje — фх — рк. л (х) + г,0, (IV 55)
г4е ф _ х L, цта. еГ0 находят по данным рнс. IV.45; —
^стояние кнлевон линии от С »П (у,( л С 0 прн КЛ ниже ОН); г/ = (—I)* 0,5Л„ —
’пплнката «-го скега.
М Коэффициент учитывающий обусловленную волнообразованием среипюю
чросадку СВП на ходу, определяют в зависимости от значения Fr^:
Гг£ . .................. 0.4 0.5 0.G 0.8—1,2
*г, ............... ‘5 2 1.5
. Поскольку осатка 1 го и 2 го скегов различается только прн наличии крена
Н- формулу (I V.55) ], то прн 6 = 0 достаточно найти коэффициенты силы и момен-
00 'м одном скеге и удвоить результат
Гидродинамические и суммарные коэффициенты сил и моментов на корпусе
Фибнйных СВП. Позиционные гидродинамические характеристики корпуса онре-
1,iKJlca экспериментально. Рис. IV.46 иллюстрирует характер зависимости позн-
4Д
ционннх характеристик корпуса схематизированноюСВП типа SR№ отугла дм.-.!
₽ и числа Frv [ 11.
Рассч пывая поворотливость амфибийных СВП, ел.муст полагать — o |q
При расчете неустановившнхся режимов движения амфибийных МВП можно орЧ€1)
тироваться на значения т^У = k (Fr^J m”». Здесь Z> = (0.5,Fr^) L^V' 3/S4
Шуи — полученные расчетом значения коэффициента демпфирующего мо
мента, определяемого в функции Frt
Рис. 1V.45. Значение угла ходстсго
дифф» рента ф в зависимости от чнс.а
Ггд (^п = 4).
Рис. IV.44. Коэффициент р в функции
от относительной ширины BrH Т и ко |ф-
фнциента полноты нлощадн шпанго-
утных сечений SCHlBrnT.
Рис. IV.46. Гидродинамические коэффициенты корпуса амфибийных СВП в з;
симостн от утла дрейфа ₽.
----- — гидр динамические коэффициенты: — —-------суммарные еэрогидроднн М1
сине коэффициенты.
На рис. IV.46 приведены коэффициенты суммарных аэрогнтродпнампческих сг
1см. формулы (IV.54)1, используемые при расчетах управляемости СВП в уело®"’
безветрия. При малых углах дрейфа (Р < 5 ) и FrL < 2,5 относительная роль аЭ]1
динамических составляющих в суммарных силе и моменте на корпусе СВП «Хы4
мала и основную роль играют гидродинамические силы. Относительная рать аэро
намнческих составляющих возра тает с увеличением угла дрейфа (свыше 5—11
н Frv.
Аэродинамические коэффициенты корпуса СВП. Аэродинамические характер
стики СВП определяются путем модельных испытаний в аэротрубе. На рнс. 1‘ (
показаны типичные зависимости позиционных характеристик от угла аэродниам»
422
Кгс ЛГ(Ря l-'H Вращательные производные находят экспериментально;
Еыч> «>*-(0.4-^ 0.5).
Сиды, возникающие при перекладке рулей СВП Силы, создаваемые
„ р кения для боковой силы на аэрорулях Zp и обусловлен-
рцхТэтои сплои моментов рыскания Alи крена Мхр имеют вид
zP = tL. p6 0,5pBo2Sa;
*»уР=-ск рЧ’0.5₽в^.;
«*р = C^.₽M-W'X
(IV.56)
где С®, р — коэффициент боковой силы на аэрорулях; в — угол перекладки руля,
Хр 11 У? — соответственно абсцисса и ордината центра площади руля.
Рис 1\ .47. Аэродинамические характеристики моделей проектов амфибийных
' СВП при круговом изменении угла аэродинамического дрейфа Pd.
И 1.11— обозначения модеаеП.
] Аэродинамические характеристики рулей амфи-
6 и I и ы х СВП. У ч е т влияния движителей и а аэродинами-
ческие характеристики амфибийных СПП. Коэффициент С®а
ходящий в формулы IV.56), определяют, по предложению П. С. Воронина, со-
гл».ио формуле
С$> ₽ = С?.. Р I [(! - М (14-/) s;/5p + $;/S J (1 v.57)
3v ь С® (> , получают в аэродинамической трубе иа модели без движителей; Sp —
(Иощэдь руля, S' и S" — части площади руля, расположенные соответственно вне
струи и в струе винта. Ветчины kp и / выражаются формулами
kp = ЬЭлЦ.лШц, 4- 1,9.ч)?.р (/ 4- Ijj, У
/=1 14-2,557,ЛрЕ^-1. } (IVt>8)
"с lip — удлинение части руля, находящейся в струе винта,- Хр — удлинение руля;
ге - упор изолированного винта; Г„ = 0,87’„ (Тк — упор комплекса винт—иа-
; DB — диаметр винта.
^Влияниеструи вннга на аэродинамические коэффициенты корпуса СВП (см. § 41}
Мщвают по форму лам
К ^га (Ра) = 0. on (Ра) т а ои — Ct р. OI J: |
тда (Ра) = ,пц б. он (Ра) -* а оп — ту б. оп]’> : (IV.59)
I mxa (P.i) = mx С. он (Ра) 4" а [n,.v cm — tnx б. onL ’
423
Индекс «оп» относится к аэродинамическим характеристикам модели без Дв
жителей, ио со всеми выступающими частями, которые определяют при пролуок '
в аэродинамической трубе; индекс «6. оп» относится к аэродинамическим характеру
стикам модели без оперения, которые также получают в аэродинамической тру^
в зависимости от угла аэродинамического дрейфа Ра
« = (^пАм.) + (> - *оп) ( 1 + /) (S’on/Son)- (I V.60)
где A'W| и / можно вычислить по формулам (IV.58), еели индекс ср» заменить на <оп,
и учесть, чтоХ: „„ и Хоп — удлинение находящейся в струе винта части оперения и
удлинение оперения соответственно; Son — площадь оперения; SBn н S"n — части
площади оперения, расположенные соответственно вне струп и в струе винта.
Силы, создаваемые гидро динамическим и рулями.
Боковая сила иа руле Zr, и обусловленные этой силой моменты рыскания Л11р и крена
Л1хр определяют но формулам
Zp = С*р б 0,5pv2Sp;
Л1,р = -Сгй116хр0,5рр!5г;
(IV.61)
Здесь 8р — площадь руля; хр, ур — абсцисса и ордината центра площади руля.
Способы определения, а также данные о коэффициентах боковых сил на рулях
Cfr приведены в § 14 разд. I.
Боковые силы, возникающие и а работающих движи-
телях. При движении СВП по криволинейной траектории иа его движителях воз-
никает боковая сила ZB, приводящая к появлению моментов рыскания и крена
Л11В. Эти составляющие вх |дят в расчеты динамики.
Для гидродинамических движителей расчет величин ZB, AtВ11 и Л1дв производится
по формулам
гв = (с«si» р + с“>) -o.sv’pv2'3;
мив = ("&sln р +
Мх„ = (m?«sln₽ + тх£Лу) O,^v-Vx.
(IV 62)
г₽ _ УгР — г1“и_______X’ JE С*3 ' тйУ |=> Х'е2г₽
2»i' "‘ук Д.' 1 .И' "‘ук
< I 1
„(6 = Х’>-С₽. ffl4s = -Vjr«fl'.I
I I
причем Xi = х4/уь3. ei = Ui/v''3 — относительные абсцисса и ордината точки при-
ложения боковой силы ZBl иа /-М движителе Коэффициент С₽в< определяется сле-
дующими соотношениями (индекс «/» опускаем):
для водометов (<? — расход водомета)
с£, = — 2Q (cV2/a); (IV 63)
для гребных винтов
С« =------Г- ) <|V 641
п \ / X DBnP 1 Q
где fi — частота вращения, об/с, Du — диаметр вннта; Кд —коэффициент момента
на швартовах, Р = РОЪ — относительный шаг нулевого момента; — ои|1<|1'
тельное положение ЦД иа лопасти.
424
воздушных пиктов могут быть использованы формулы, аналогичные фсрму-
^(1V.62)—(IV.64). прн замене в них скорости относительно воды на относительную
Сорссть ветра г0, а р, Р на р„, ра. Например, для ZB вместо выражения по формуле
Sy 62) имеем
2В = (СР» sin ₽а + О.бр.г^2'3.
-43. ОСТОЙЧИВОСТЬ НА ХОДУ, ПОВОРОТЛИВОСТЬ, КРЕН
fjA ЦИРКУЛЯЦИИ И УПРАВЛЯЕМОСТЬ (ВП В УСЛОВИЯХ ВЕТРА
I На основе экспериментального определения гидродинамических характеристик
(с-ч- 5 ” решения уравнений (IV.50) для установившегося режимов, а также га
дей'ове испытаний самоходных автономных моделей CBII можно получить, что погг-
Рис. IV.48. Втияние скорости судна на
поперечную остойчивость амфибийных
g св|]-
Рнс IV.49. Влияние угла дрейфа иа диа-
грамме поперечной остойчивости амфи-
бийных СВП
Р'пая остойчивость этих судов на хоту отличается от остойчивости на стопе
^В. IV.48). В частности, набиодается падение остойчивости при Fr, = 0.6. что
связано с формой волнового профиля. 11ри больших числах Fr^ остойчивость прибли-
жает । к остойчивости над твердым экраном.
| В случае движения с дрейфом (например, при ветре или на циркуляции) остой-
чивость может существенно изменяться, причем если углы дрейфа р большие, поест а
«ас иваюпшн момент уменьшается при крене па подветренный борт (рис. IV.49).
^еиие остойчивости обусловлено затягиванием ГО внутрь ВП вследствие его кон-
’акта с набегающим потоком воды и возникновением на контактирующей части со-
Йютивлсння. Вследствие смещения ЦД подушки относительно ЦТ судна н сопро-
’Чвлення возникает дестабилизирующий момент.
Вбл и ц a IV.3. Конструктивные параметры ГО и судна,
Мияющне на затягивание ГО
К >МфЗМ1'1р Диспезсн применяемых величин Пояснение
| V'i« (1.15—1 Предпочтительна большая величина
Вн /к 5—7,5 Предпочтительна малая величина
0,1—0.2 То же
й 1-2 Предиочтшельна большая величина
0,01—0,03 То же
425
Конструктивные параметры ГО и судна, влияющие на затягивание ГО и pt.Ko 1
дацнн по их выбору приведены в табл. 1V.3. 1е,<-
По данным модельных испытаний может быть построена зона доп,
мых углов дрейфа и скоростей судна, при которой сохраняется положите^'
ная остойчивость (рис. IV.50).
Поворотливость н креп на циркуляции рассчитываются в предположении
скорость судна постоянна. 170
Амфибийные СВП. Расчет поворотливости можно выполнять приближение,
пренебрегая влиянием крена на поворотливость, а также с учетом этого влиющ?’
В первом случае, когда вращательными производными гидродинамических енд й
моментов пренебрегают, решаются уравце.
ния установившегося поворота судна,
лученные из формулы (1V.50):
Сг(Р) + 2й^+С^(д) = 0;
^(₽>-qp (б)хе = о.
Рис. IV. 50. Допустимые углы дрейфа
СВП SRN5 в зависимости от скорости
судна.
Здесь
С;р(е) = Сг..р(в)*га-
Из этой системы находим зависимость
относительного диаметра циркуляции д
от Р __
D = D L = 2Р|/3/(йв/.) =
= - 4(Р1 3/L). (Сг (?) + (/лу (?) xr,)J.
В линейном приближении
с;„(б)=^б
и этим определяется зависимость 6 (?):
а = ’М₽)/(*Р<г)
На основании полученных зависимостей D (?) и б (?) строят графики 1} (6) к
? (6), характеризующие поворотливость н дрейф на циркуляции (рис. IV.5
Из рнс. IV.S1 следует, что возможно существование предельного угла пере-
кладки рулей бПрВ3. при превышении которого судно не будет на заданной скорости
описывать установившуюся циркуляцию. Возможна также неоднозначность зависи-
мости диаметра циркуляции Т> от угла перекладки руля 6. Пунктирные участки на
рис. IV.5I, соответствующие углам дрейфа ?> ?т. относятся к неустойчивом ияр-
куляции.
В случае малых углов дрейфа ? при линейной зависимости Ct (?) и (Р) >'~
пользуют соотношения
? = бх1,с;>Р;
D --4 (И'3Д) [С^б (1 + Ф(Х)]
Угол крена на циркуляции определяют по формуле
е = [тх (?) + a ,c;®6]/(2/Frg - ««(?)) (IV
Здесь др Ур/V1'3 — ордината центра площади руля;Гг| =
С учетом ? (б) строят график 0 (6).
426
I Fran имеются результаты испытаний по определению влияния крена на гндро-
'-^мнче кие характеристики rnv и Сг, параметры циркуляции находят путем реше-
р11Я системы уравнений
сг (Р) + 2^ + с*°е-нс'р = 0;
/^(Р) 4-^0- с;рхр = 0;
тж <0) ~ ("* ~2.Fr ) 0 + ррС'р = О.
Здесь С;е = С®+Ле,Рг^
систему решают в след юшем порядке:
1. Определяют зависимость угла перекладки руля от р
В = (>.<₽) [("'л - 2/F^) «v<₽) -
И (0)mSJ [«^г +«-2>-г/=)хр]. (IV.66)
И?. С учетом соотношения (1V.66) по формуле
(1\ .65) вычисляют зависимость угла крена 0
от ₽
I 3. Н (ходят зависну ть D (Р) по ф рмуле
В=- (4v l) [сг (П) с;£б । c:duj.
I В случае малых углов дрейфа Р, D и 0
определяют по формулам
0 =С^Рг(^-2^О +
+ IX (X- 2/Fr?) -
—(4и‘3Д) (с;₽« + ф + ф'е).
В Скег гые СВП. Для скеговых СВП пово-
Р ИЛИ вое гъ рассчитывают без учета и с уче-
те1 влияния крепа. В первом стучае рас-
^^кполияют следующим образом. На основа-
нии системы (IV.50) находят зависимость D (Р)
по формуле
D(P) = -2(1’ 3Д.)[/п^ +-
Н + хг(2 + С>)1 (р) + ХрС; (Р)].
Определяют
6, = - (р) + хрСг (р) I. +
I +^0 + Ф)].
В*3W’ «пент С'р (Л) вычисляют по формуле
Рис. 1V.5I. Зависимость пара-
метров циркуляции — относи-
тельного диаметра D, угла дрей-
фа Р и угла креиг 0 — от угла
перекладки руля 6 для амфи-
бийного СВП типа SRN2.
1 и ? — устойчивые эоны: 3 —
неустойчивая аон<>.
Сгр<6) \С;р<6)-
шт зависимость noipcCuoro коэффициента боковой силы на руле (ДР (6) от Р по
С;Р<6) -- [%<Р) ч «>» •'«„]/*₽
427
Далее с учетом графика зависимости С zp (f>) опретеляют для каждого значеипя о
величину угла перекладки руля 6. Если зависимость Сг$ (б) может быть аппрокс|ц,я.
ропана линейной
C'2PW = C^.
угол б находят по формуле
й(Р)=кф)+^ч1 (*Рс;2)
Угол крепа па циркуляции в этом случае определяют по формуле
О = [тх (₽) + т**йи + урС'гр (б)]fl2/Er£ - т" (р)].
При отсутствии экспериментальных данных крен можно рассчитать по этой формуле,
пол < га я = 0.
Исходя из полученных зависимостей D (₽), С (Р), 0 (?) стрсят графики D (б р (й)
и 0 (б). характеризующие поворотливость и дрейф СВП на циркуляция.
Если допустима линеаризация ги троаэродииамических характеристик, тс ;.3
определения D, Р и 0 применяют следующие расчетные формулы:
D = <21',/3Д) (1/С^ б) - т1’ (2 + С>)1 [*, ^ + «?]•
₽ = - <#> [лт> + х( (2 + С>)1/[фн> - т> (2 + С»].
0 = — (l/n< ) (С;*б»р + m*P+ raj’vibj; (IV G7)
= '«?-2/*Ч-
Если имеются результаты испытаний о влиянии крена иа характеристики » и а
Сг, параметры циркуляции находят в следующем порядке:
1. Опреамяют зависимость угла перекладки руля 6 от Р по формуле
6 = Мс;₽д)-
где
А = - ,л>М: + хр [(2 + СУ) <* - С»] -
-0, [(2+С>)<-С>>];
Др = — Сг (Р) «“») + ти (р) [(2 + /л*’’ —
--х(Р)|(2 + С>)^_С>>]
2. Вычисляют зависимости йр (р) и D (Р) по формулам
(Р) = Ды/Д.
Т) (р) =
дш = - Сг (Р) ($Х + + ту (Р) - n>:°) ч- mx (Р) (хрС« +
3. Определяют угол крена на циркуляции 0 с учетом зависимостей С (Р) •: LOv
по формуле (IV.67). Исходя нз полученных зависимостей D (Р), б (р), 6 (Р) стр-'
графики D (6), Р (6), 0 (б).
42Я
^Управляемость СИП при ветре характеризуется диапазоном курсовых углов
к ветру в котором средства управления судном по курсу обеспечивают его прямоли*
Kioc движение. Мето тки расчета для амфибийных и скеговых СВП близки,
В Оценив, я возможность удержания судна на прямом ку рее, полагают, что потреб-
уй для этого балансировочный угол перекладки рулей Ас должен быть меньше пре-
Eibiior А , на некоторую величину ДА. Здесь АС — угол, потребный для стабилиза-
ции курса судна около заданного значения. В случае предельного угла 6т » 30°
ю принимают ДА = 10ч- 15‘, т. е. 6П = 6т — ДА = 15-5-20° и Ас < 15°.
fc.ni по результатам расчета при заданном ветре балансировочный угол пере-
пад е допустимого А„ при любых курсовых углах Рв К не-
то судно может совершать полный разворот при ветре. Если балансировочный
[гол Ар < А„ лишь в некотором диапазоне курсовых углов, то судно не может
дсрснти из одной зоны курсовых углов в другую.
| При ра че зон курсовы углов к ветру, в которых в можно удержание су на
прямом курсе, решают систему уравнений прямолинейного движе'ния, следующую
из уравнений (IV.50),
“Г* иг ^pZ]> =
ZB + Zr -)- Zp = 0.
Отсюда получают
В I"-. > (Р J + Ир, 0 Cia (Ра)] = - (1 б2) [ШЛГ (Р) (Xp/V1-4) С„ (₽)]. (IV.68)
Из формул (IV.52)
1-0 = 1 + <’2. - 2% (Рв - Р); (IV.69)
„ . «in Р— 5„ sin Р„
Ра — <‘Г»И1-------S-----—
И
при cos (5 — гв cos fB > 0,
рп = arcsi„ slnPB-6BSH.p„ +n
I'JI
1 i:p>i cos P — 6„ cos pb ^0
^Всмы уравнений (IV.66>—(1 V.70> решают для заданного значения Рп относи ио
Вшвсстных р 1 Ра. Решение можно выполнить графически. Строят графики левой
ш уравнения (IV.6S) (от ра) и правой (от Р): получают кривую / зависимости
Jh Г1 Согласно уравнениям (IV.69)—(IV.70) строят кривую 2 для рп (р), Пересече-
кривых 1 и 2 находят балансировочные значения р н ра для данного Рв.
Далее определяют noipeCnyio боковую си.,у на рулях по формуле
(IV 70)
3|есь ха = — рПрд (Ра) С;в (p)J L. 11,3 — относительная абсцисса центра npi оже-
ния боковой аэродинамической силы; Яг = —тух. (р) Сгг (Р) — относительная абс-
КЖса центра приложения боковой плродниамическсй силы, х,, - Xp/V1^3—отно-
сительная абсцисса руля.
Исходя из соотношений (IV 56)—(1\ 61) определяют потребный коэффициент
Иконой силы на руле.
Для амфибийных СВП
С„(Ре) ^ар~^ (1V.7I)
I По полученному значению C'z& (6) находят балансировочный угол перекладки
ГУля Для скеговых СВП справедлива формула
С.\. 16) = - ^Cit f) V2 (X , - ХГ)Д/Р - ХГ).
429
По графикам С’р ( ) определяют балансировочные углы перекладки руля 6б.
рактер зависимостей 0а (₽0), ₽ (Рв) и 6 (Рв) приведен на рис. 1V.52. Как видно и'
рисунка, для рассчитанного судна при 6 , = —20° невозможно удержать судц0 Нв
курсе в зоне курсовых углов к ветру 40 < ₽ < 90Q. С уменьшением т„ и r, J
это наблюдается, например, при высоких скоростях амфибийных СВП и малом да?
лецин в ВП (см § 42) — из формулы (IV.68) следует, что Ра-> 0 и согласно вцр-
жен ню (IV.71) уменьшается потребная для балансировки сила иа рулях.
§ 44. КРИТЕРИИ УСТОЙЧИВОСТИ
БОКОВОГО ДВИЖЕНИЯ НА ТИХОЙ
ВОДЕ И ПРИ ВЕТРЕ
Устойчивость бокового движении СВГ]
определяют иа основании уравнений § <ц
Поскольку взаимовлияние рыскания и крена
обычно невелико, на начальных стад, эд
проектирования можно ограничиться раз.
дельным рассмотрением устойчивости плос-
кого движения по курсу, полагая крен нуле-
вым, н устойчивости по крену (см. § 34 и’43).
Скеговые СВП. Устойчивость двнж нт
скеговых СВП, как показывает опыт, доста-
точно оценить лишь для случая безвет ня.
Если отсутствует влияние крена на рыскание,
условие устойчивости СВП имеет вид
Рис. IV.52, Балансировочные кри-
вые для амфибийного СВП типа
SRN2 прн ветре. фА _ т₽ (2 + > 0. (IV 72)
J — эона устойчивого движения; II — у \ /
зона неустойчнаого движения. Влияние крена обычно приводит к ухуд-
шению устойчивости СВП. Для скеговых
СВП устойчивость движения на циркуляции, как правило, обеспечена, если удовле-
творяются условия устойчивости прямолинейного движения (IV.72).
Если на циркуляции существенно меняются производные гидродинамических
характеристик и то устойчивость на циркуляции можно проверить по условию
(IV.72). Для этого в качестве производных нужно взять их значения при угле дре> фа
иа циркуляции.
Амфибийные СВП. Для прямолинейного движения на тихой воде, пренебр гая
(Ь,. А
влиянием крена на рыскание н полагая получим условие устойчивости
< 0.
Таким образом, для устойчивости при безветрии судно на воздушной подушке
должно быть статически устойчивым на курсе. Как показано в § 42, с ростом скоро-
сти судна значение гидродинамического слагаемого гл^р убывает. Поэтому для устой-
чивости скоростных амфибийных СВП или СВП, движущихся над грунтом, требуется
выполнение условия
^в<0.
(IV.73)
При учете взаимовлияния рыскания и крена должно удовлетворяться более жест-
кое условие
(IV-
тх
Поскольку обычно т* < 0, т£ <0 (см. § 42) и гл;® < 0, то нз формулы (IV.'М)
следует
430
Таким образом, в отличие от условия (1V.73) при учете крена требуется придание
'судну определенной стати' еской устойчивости (тем большей, чем меньше остойчи-
рвсть
। Устойчивость амфибийных СВП на циркуляции определяется условиями
^(₽ц)<о; с?(М<о. (iv 75)
I Если не учитывать гидродинамические силы (наг ример, при движении судна над
поверхностью земли или в случае относительной малости i’r н | ф |, что воз-
можна при больших скоростях Fr/. >2), то вместо условий (IV 75) используют соот-
ношения для аэродинамических коэффициентов
1V.53. Траектории амфибийного СВП типа SRN2 в зависимости от углов 6
трекла, ки рулен: а — траектории движо ия; б — осциллограмма параметров
К движения.
J Д 1НХИН вод.1. й < вгм. эгтпйчивпе диоксине; 1 — тихая вода, в > 6 ; вход в иеуправляе-
I кий разворот; 3 — ветер, устойчивое движение; 1 — ветер, неустойчивое движение.
J Условия (IV 75) или (IV.7G)— (IV 77) означают, что угол дрейфа иа циркуляции
Рв нс должен превышать величин, прн которых Сг и ту достигаю! экстремальных
ЗАчемий. Условие (IV.77) практически всегда выполняется. Критическим может
явиться условие (1V.76) Поэтому в ряде случаев должны вводиться ограничения на
Угол перекладки руля.
I В соответствии с $ 42 на кривой суммарного коэффициента гидродинамического
Ортита возможно появление двух экстремумов (см. рис. IV.46) Существуют две
Вмы устойчивых циркуляций и зона неустойчивой циркуляции. В зоне устойчивых
иирк ляций m (f>u) < 0, в зоне неустойчивой /п® > 0.
I Режимы циркуляций, неустойчивых из-за невыполнения условия (1V.75), пока-
иа рис. IV.51 пунктиром
И. [Примеры траекторий движения СВП, полученные интегрированием уравнений
В*.5О) в зависимости от утл в перекладки рулей, приведены на рис. IV 53 В случае
Превышения некоторого предельного значения угла перекладки судно начинает со-
Рршать резкий разворот с быстрым нарастанием утла дрейфа. Этот угол может быть
«еикше, чем предельно допустимый угол, следующий из расчета устойчивости уста-
("овьвшейся циркуляции, так как при быстрой перекладке рулей в эводюцион ом
[’иоде циркуляции угол дрейфа превышает установившееся его значение, следова-
ть но, будет больше значения, прн котором т < 0.
И Устойчивость при ветре. Под устойчивостью в данном случае понимают способ-
МСть судна, получившего мазое возмущение по курсу, дрейфу или угловой скорости
431
рыскания, после окончания действия этого возмещения вернуться на прежний курс^
без перекладки руля (в отличие от условий ус гои чн вост н бокового движения при
ветрнп, когда устойчивость означает сохранение прямолинейною движения).
Устойчивость исследуется на основании уравнений § 41. Считается, что суд110
движется заданным курсовым углом по оиюшению к ветру. Прямолинейное дииН(
ине обеспечивается благодаря перекладке рулей на угол 6g, судно имеет гпдроднцл^
ческии Рг> н аэродинамический (Ja. б дрейфы (см. § 43).
Изменения скорости судна и и относительной скорости ветра Ц> прн отклонении
судна от положения равновесия ие учитываются. Условия устойчивости СВГ1 имеют
вид
(l-p£)CPrcfBa(ir-/I)>0;
+ 1’0*та'яЙ < °;
к но (L (’'-’.78)
C$r+P>G*X“<0;
(с? + (< - > 0
Все производные коэффициентов гидро- в аэродинамических сил взяты при fig.
литспровочных углах Ц и рн Особый интерес представляют попутные (0В = О’) ц
в; тречиые (₽„ = 180s) курсовые углы к ветру.
Попутный ветер. Нрпрв = О" итфорыул (IV.78) следуют условия устой-
чивости
Хг<*а:
"'vr (-бХ,Х?<0: ]
(C?i + ) [mSr + S'E" ~ *МтЙ] > 0 j
(IV.79)
(IV.80)
Встречный ветер. При = 180° характерны условия устойчивости
Хг > *«; П,у: + < 0
Приведенные соотношения показывают, чюдля обеспечения устойчивости СВП
при попутном ветре н обходимо чтобы фокус (центр приложен! я) i пдродинамнче
ской очковой силы находился ближе к корме, нежели фокус аэродинамической боко-
вой силн. Для устой* ивости СВП при встречном ветре требуется выпол! епие обрат
кого условия — фокус гидродинамической боковой силы должен располагаться
бзнже к носу, нежели фокус аэродинамической боковой силы
При попутном ветре, если ов < 1 (Ра.б = 0°), положение фокуса аэродинамиче-
ской силы совпадает с его положением при встречном ветре. Поэтому, очевидно, не
возможно Данному СВП обеспечить устойчивость на курсе как прн попутном (если
i'B < 11, так и при встречном ветре.
При попутном ветре, если vB > 1 (скорость ветра больше скорости судна),
а fa 6 — 180 , производная trf ” имеет большее значение (см рис IV 47), чем при
|4и - 0 Обычно добиваются обеспечения статической устойчивости ио аэроднш,м№
вескому моменту при Ра = 0
А
1/8
В этом случае при ра = 180°
(180°) >0
Кроме тою, аэродинамический фокус при Ра = 180’ расположен обычно бпп-
к корме, нежели аэродинамический фокус при ₽, = О’:
432
прн попутном ветре со скоростью, которая больше скорости судна (ов > Г),
Едение (IV.79) о разносе фокусов может быть выполнено, однако, часто не ьь.яо,г
>„il.icH условие (IV.80).
Зоны хстойчивссги по курсовому углу к ветру для СВП типа SRiX2 указаны на
p«-Liv-5'2-
1 Благодаря автоматическому управлению рулем достигается устои ое движение
СИП к ветру при любом курсовом угле, когда максимальный угол перекладки рулей
-рсвышает потребный балансировочный угол.
рент в процессе входа су дня в циркуляцию прн ветре будут превышены те зпл-
чГ,1 (И р И Ра. при которых ВЫПОЛНЯЮТСЯ условия устойчивости (IV 78), то суд > со-
^Kuihi неуправляемый резкий разворот, с нарастанием углов дрейфа до90'. Примеры
«пйскт эрий судна при ветре, полу»ен1>ых решением уравнений § 41, приведены па
р'к IV.53. ’
Глава V
КАВИ ТИРУЮЩИЕ ГРЕБНЫЕ ВИНТЫ
§ 45 ОСОБЕННОСТИ ДЕЙСТВИЯ И РАСЧЕТА
КАВИТИРУЮЩИХ ПЧЬНЫХ ВИНТОВ
В течение длительного использования на судах гребных вниз в их конструкция
постоянно изменялась и совершенствовалась применительно к новым условиям экс-
плуатации. Наиболее существенный фактор, повлиявший иа развитие требных вин-
тов, — кавитация Вследствие того, что кавитация приводит к ухудшению характс
расти к гребных винтов, на протяжении многих лет предпринимаются попытки к уст-
paitei ню или, но крайней м -ре. к ослаблению ее.
I Эффективным средством борьбы с кавитацией греб! ых винтов прн задан! ой ско-
^Ми судна является уменьшение натрузки, приходящейся на единицу площади
лопастей При заданном упоре и диаметре винта патрузка может быть снижена за
счет ,'ве.пимения дискового отношения, а также применения для прг филирования
.тенистей сечен ни, обладающих равномерной эпюрой разрежеии на засасывающей
поверхности. Некавитирующпе гребные винты находят широкое нрименс! ие: 1 х
iHBiio используют и иа быстроходных судах п| I скоростях до 30—35 уз. Ме-
^^Ьих проек!ироваиня изложены в разд 1П т. 1 Справочника.
I По мере даты ет шего повышения скоростей движения судов ограничивать развн
ше кавитации иа лопастях винтов -таиовится все труднее, а устранять ее полностью
то многих случаях невозможно Более того, прн режимах работы, близких к тем i.a
•вторых работают винты наиболее быстроходных современных судов, широколопаст-
ые |ребные впиты оказываются малоэффективными. Учитывая это обстоятельство.
Ьркадсмик В. Л. По.|дюнш! еще в начале 40-х годов впервые указав иа необходимо, т ь
изд >я нового типа гребных винтов, названных су 1.еркавнтируюиц мн [6, 50, 62)
Рирактернаи особенность супсркавнтнрующих винтов — применение в них профилей
Миновидною типа, с вогнутой нагибающей поверхностью. В дальнейшем было
«оказано, что при проектировании гребных винтов, предназначенных для работы на
Развитых стадиях кавитации, к нковидиая профилировка не всегда является огит-
ыатьной.
В Р.1 иные геометрические параметры кавитирующих гребных винтов ботее
с" 1ыю влияют на их эффективность, чем у искывитпрующи.х винтов, причем эю
11'"япце может иметь качественно иной характер, коэффициент подъемной силы эте-
Мнтов их лопастей определяется не только углом атаки, ио и числом кавнтацнн, при
Котором работает рассматриваемый элемент. Однако основная особенность кавши-
Рл^'.ццх гребных винтов заключается в наличии на лопастях развитых каверн. Ка-
|*ериы, стесняя поток м жду лопастями, изменяют условна их обтекания, приводят
|К "скривлению потока > изменению угла атаки.
Впервые практический метод расчета кавитирующих гребных винтов был нред-
в .50-х годах Э. Э Наямелем |59]. Этот метод основан на предположении о том,
433
что при постоянной относительной поступи угол атаки каждого нз элементов лопаг
не изменяется независимо от степени развития кавитации. Несмотря на ряд приця'75‘
схематизаций метод Э. Э. Папмеля в течение длительного времени являлся единстве*
ным теоретическим методом, который использовался в отечественной практике^'
расчете гребных винтов быстроходных судов.
В дальнейшем Н. Н. Поляхов применил допущение о том, что кавитациоц|)Ьй
каверны являются тонкими и замыкаются на конечном расстоянии от винта [g]
Это позволило определить общие зависимости между вызванными скоростями и Н;
грузкой, которым подчиняются кавитирующие гребные винты, и рассчитать их ri,
дродинамнческие характеристики. Н. И. Поляховым была показана возможно^?
использования при проектировании кавитирующих винтов вихревой теории иеков,
тирующего винта (в этом случае влияние кавитации сводится только к измгнещ-ю
гидродинамических характеристик сечений лопастей, а влиянием телесности кавита-
ционных каверн пренебрегают).
Как показывают наблюдения, на расчетных режимах при развитой кавитащ*
толщина каверн становится значительной, достигая 15—20 % расстояния ме л<
пастями Возникающее стеснение потока оказывает существенное влияние
на поле скоростей, а следовательно, н на гидродинамические характеристики
винта.
Учет влияния телесности кавитационных каверн возможен в рамках вихревой
теории несущей линии [30, 50], однако наиболее корректное решение можно пат,
чнть на основе теории несущей поверхности.
Рациональный подход к исследованию кавитирующих гребных винтов с нспать-
зованнем линеаризованной теории несущей поверхности был предложен В М lai
рентьевым |46]. В рамках допущений этой работы можно записать следующее гыр;
жеине для поля давления, создаваемого кавитирующим гребным винтом в стаигсна,
иых условиях:
(V.
др
--------— интенсивности «диполей» и «источ
дп дп
где и5|( — площади лопасти и каверны соответственно; р— коэффициент д
ния; [р] = р+ — р_ И
ин кош; пе — нормаль к поверхности н S..: Rh — расстояние между нроизв< лыюй
точкой простране 1ва н положением элементарной особенности.
В формуле (V.1) первый член выражает возмущения в жидкости, сбтслов
ленные нагрузкой, а второй — телесностью системы лопасть—каверна В линеа
ризованной постановке Э1 и две составляющие можно искать независимо одна ст
другой.
Для некавитирующего винта функции распределения нагрузки |р] н тстшииы
[—^1 известны, и поэтому имеются все данные для решения проектировочном
Л10 J
задачи.
В случае кавитирующего винта задана лишь нагрузка |р|, а
размеров каверн, которые заранее неизвестны и должны находиться в процессу
шения задачи. Это н составляет основные трудности при разработке пракпи сск>
методов расчета кавитирующих винтов
Таким образом, возмущения от нагрузки [р 1 для кавнтнруюших и некавнтнр
ющнх в ни iob могут опрсдетяться едиными методами. Для отыскания же пси'111
зависящей от толщины каверны, необходимо использовать динамические гРа”
ннчное условие, выражающее постоянство дав тения в каверне:
Г -у^-1 зависит
I Aic J
ст
т,
₽ = —ол.
434
I С использованием формулы (\. I) условие (V 2 можно записать в следующем
В11Де
— Л/ i
°s ~ (f2 + xf)1'2 + f2 + л? v =
с. V.I. Зависимость удельного упора гребного винта от скорости движения и
максимальной толщины сечений от относительного радиуса.
ПоР тионально касательной составляющей вызванной скорости от нагрузки гребного
•Инта на границе каверпы; 0н и 0к — угловые координаты начала и копна каверны;
толщина кавитационной каверны.
^Совместное решение интегрального уравнения (V.3) н уравнения
°к
J -^40 = 0. (V.4)
0О
Ража >щего условие замкнутости каверны иа каждом радиусе, позволяет опреде-
fь размеры каверны лопасти кавитирующего гребного винта Решение системы
^еннй (V.3) и (V 4) сопряжено с большими вычислительными трудностями даже
435
при использовании современным ЭВМ. В качестве первого приближения для опь,-
лсиня размеров каверн при проектировании кавитирующих гребных винтов ищ***
использовать экспериментальные данные или результаты решения задач об обт{.и0
ним плоских кавитирующих решеток профилей [50|
При практическом проектировании кавитирующих гребных винтов необходим-
учитывать еще два обстоятельства: опасность возникновения кавитационной Эре.ни
а также повышенный уровень нагрузок на лопасти. Причины первою из них об» ctvb^
лены наличием кавитационных явлений, а второго— увеличением удельного'yn<J_
в соответствии с выражением
Т Кт ,
O2- = P-T^^. (V.5)
Зависимость Т D2 = [ (и<0, построенная на основании статистических данных, при.
Т[)
веден а па рис VI Па этом же рисунке показана зависимость А (г), где А = у
X 10"* Нм2, позволяющая определять максимальную толщину сечении лоиасч-й
е (г) при проектировании гребных винтов; 1 = чд.пО.
§ 46. ВЗАИМОДЕЙСТВИЕ ГРЕБНЫХ ВИНТОВ БЫСТРОХОДНЫХ
СУДОВ С ЭЛЕМЕНТАМИ НЕСУЩЕГО КОМПЛЕКСА
На быстроходных судах вследствие гндроаэродннамнческон интерференции
между корпусом, несущими элементами, движителями и органами управ синя ре-
зультирующие силы и моменты для комплекса не будут равны сумме выичин соот-
ветствующих харвкчеристик изолированных честей Поэтому прн расчете суммарных
гидроиэродипамическнх характеристик необходимо учитывать эффекты взаимо-
действия. Для их учета необходимо определять' 1) пате скоростей, обусловленное
несущими элементами в области расположения гребных винтов; 2) силы, возникаю-
щие на гребных винтах в заданном пате скоростей; 3) вл ияние гребных вин юн на
гидродинамические характеристики несущих элементов п иа сопротивление судна
в целом.
Ниже последовательно рвссмогрены перечисленные особенности взаимодействия
и приведены формулы для их определения.
I. Скорости, индуцированные несущими элементами, можно определять с по
пользованием гидродинамических особенностей Выбор схемы, .заменяющей несущий
элемент (подводные крылья, глиссирующее днище и скеги), зависит от его келшо-
пинки с гребным винтом.
При вычислении, например, вызванных подводным крылом скоростей на некото-
ром от него удалении (более хорды крыла) допустима его схема!нзания путем замены
одиночным 11-образным вихрем, состоящим нз отрезка присоединенного вихря
интенсивностью Гс и двух полубсскоиечных вихревых нитей той же инпнеив-
пости.
Определяя взаимодействие скега или днища с туннелем, используют особенно-
сти типа источников и стоков Для глиссирующих судов обычных обводов цате ско-
ростей характеризуется главным образом углом скоса потока.
Выражения для расчета скоростей покажем на примере СПК, чребные винты к
торых компонуются, как правило, с кормовым крылом (рис. V.2). Следователь»-
носовое крыльевое устройство установлено от гребных винтов на достаточнобтып
расстоянии и его можно заменить подковообразными вихрями. Примем что н да®
крыльевое устройство состоит из двух геометрически подобных крыльев, енм
трично расиатожепиых относительно ДП, с торцов которых сходят свободные
1—4. Поскачьку гребные винты находятся в непосредственной бчи.зостн оз корм в
крыла, последнее схематизируется несущей поверхностью. Mfli-
Ниже приведены общие выражения для вызванных скоростей несущих
тов в системе координат, связанной с кормовым крылом (см. рис. V.2). Эти скор
представлены в безразмерном виде: все линейные размеры отнесены к размаху
436
у,-того крыла /к, а сами вызванные скорости — к скорости иоступатальиого движе-
ния судна V.
___________________________У — Ун______________________________________
(У -МЧ[г-(-1)'/,<]-’
У. (-»?-, . 6------------- Л ! * A (V.8)
/5 у- t-U-(-I)']- j х? + 4Г + [S — (—1)'JJ)
F** у = у !*' ^n=Z»I1'/K; б,, = />,,./ь; 7и = 1ц//к; Гк = 1; Сип. /н. *•<
Г с »к, ‘к. йи — коэффициент подъемной силы, размах, хорда соответственно носо-
0'1 с и кормового крыла
В Функции 7| н 7« поражаются формулами
V / in Г . г — ( -1V х
7, (—1)' arctg——
7“f L I х2 + у’+ к-(-!)'Г2 *
— arctg
г-(-])/ к + 6,<1.
J + + r + k-t-iyT J’
/| = V (-1)' [ Arcsli —1 ( 1)1------------ Arcsh г~< I
L + Гл- + У2 J
(V 9)
(V Ю)
В Формулы (V.6)—(V.10) позволяю! вычислить вызванные скорости, нндуцирме-
Ги' несущими элементами п области расположения движителей СПК. Полученные
Мжые показывают, что среди вызванных скоростей основная роль принадлежит
С'Тнкзлыюи составляющей от свободных вихрей носового и кормового крыльев.
437
которая направтгна сверху вниз. Для крыльевой системы типа «тандем», прннр^-
= О, I» = 1, 2= О, получим скос потока, обусловленный этой скоростью ай
2 f
ev = ^-(5„с#п+о.55ксик)(-1И (V.nj
Из формулы (V.11) следует, что в ДП одновинтового судна (г = 0)
6 в ---(j (6иС1/и + °-5®кс'»к). {V 12)
в сечении г = 0,5 (двухвинтовое судно)
Рнс. V.3. Схема расположения гребного вннта в туннеле.
В качестве примера иоформулам (V. 12) и (V. 13) рассчитаем скос потока в районе
осей движителей СПК -Ракета» (одновинтовое судно, Zp = 1) и «Метеор» (двухвин-
товое судно, Zp = 2). Для этих судов можно принять
В„ = 5К = 0.6; 1„ = 4 ы; /н = 1.2 м; у = 0,2; Сун С\к — 0,2
Получим значения относите >иой вертикальной вызванной скорости (б )г _| =
= —0,04; (v ), —о =—0,13, эквивалентные углам скоса потока (q), ,= 2,3°;
(,0z/j-2=7-5°-
Таким образом, несущие элементы могут существенно изменять поле скоростей
в области расположения двнжите ей СПК, что необходимо учитывать прн расчетах
ходкости.
Для глиссирующих судов в качестве расчетною угла скоса потока ре «ен-
дуется принимать
Чр = <fo + 0,5 (фх + <р0), 'V.H1
где <р0 — установочный угол между линией вала и основной линией; ф\ — ледовой
угол дифферента па расчетной скорости; фо — У го-1 подъема батокса в районе распс
ложен ня гребных винтов.
На быстроходных судах в некоторых случаях применяют туннельные кормов»’
образования. Это позволяет размещать в туннелях гребные винты оптимального Д
метра без существенного увеличения осадки судна и угла наклона гребного J'1-1
В случае уменьшения скоса по сравнению с обычными обводами улучшаются кави»
ционные и эрозионные качества гребных винтов. Рациональное же использован'
гребных винтов на скеговых судах на воздушной подушке возможно только пр ’ ’
расположении в туннелях скегов. Схема размещения "гребных винтов в туши е *
казана на рнс. V.3. Для расчета поля скоростей в этом случае более предпочтите,|Ь '
экспериментальные методы.
438
I Рекомендуемые конфигурации туннелей приведены на рис. V.4. Значения номи-
цл1ьиого попутного потока и> и угла скоса потока <рР для этих конфигураций туп-
1,ёля в зависимости от положения винта по длине туннеля хв / и степени его заглубле-
ния й = св D при заглублении туннеля бу = 6Г'£) = 0,1 показаны на рис. V.5.
помощью туннельных образований кормы илн скегов (см. рнс. V.4) можно
уменьшить скос потока, набегающего на гребной винт. Степень выравнивания потока
Рис. V.4. Рекомендуемые конфигурации туннелей.
1 — h l = 0.00: I = 2.5: 2 — h'l = 0.15 I = 2,0.
Рис. V.5. Зависимость m н <pp от положения гребного винта по длине туннеля (а)
И и от степени заглубления винта в туннеле (б).
В ’ угол скоса потока ц : -------- — козгффкцне it попутного потока w; 1 и // —
И первый II второй вариант конфигурации туннеля r «=>j —бг
и
рас.-.,-! по мере смещения гребного винта в корму о: максимальной глубины туннеля;
ель ни a w несколько уменьшается. Увеличение степени заглубления винта' в тун-
рель приводит к возрастанию значений ® и <рр.
Па р ic. V.6 приведены значения коэффициента засасывания прн коэффициенте
№р эки гребного винта Ст = 0,2. Протяженность туннеля за винтом равна 1,5
“ Л тра вита. По мере удаления гребного винта в корму от максимальной глубины
вине я коэффициент засасывания убывает. Засасывание уменьшается вследствие
что иа части стенкн туннеля перед гребным винтом результирующая
рачен и давления, вызванного винтом, направлена в сторону движения судна.
полученным данным можно определить коэффициент влияния корпуса —
I f п
~Г—[г, Расчеты показывают, что величина -ци >1,0, т. е. туннельные обводы
^Вопрнятно влияют на пропульсивным коэффициент.С увеличениемxBflвеличина Чн
439
несколько уменьшается, однако это уменьшение в диапазоне 0<хв/1<0.5 нсвпНк
Если принять во внимание необходимость уменьшения скоса набегающего на вщ»
потока, целесообразно устанавливать гребной винт в районе 0.25 хи,7 о 5
2. При работе гребного винта в неравномерном потоке в общем случае nJSie,
ияются не только упор и момент, ио появляются дополнитетьные поперечные силы и
моменты которые влияют как иа тяговые характеристики винта, так н на сопрстиц.
ленис судна. Помимо принятых обозначений примем дополнительно следуюи1Не,
1>0 — осевая составляющая
скорости движения винта относительно невозмуикт>|1С£
жидкости; безразмерные осевая н окружная составляю,
щне скорости попутного потока
их = Vx've. &t = i'y е0; ц, = с'л cos <[;
<р — угол между осью вращения винта н осью ол V-M_
рис. V.2); /„ := Uy/itfJ.
Обозначая
dKTll*, о*) (dKr\O.
dr df ) '
dKq (/*, <т*) / dKq
dr \ df ) ’
где
, I - Pv , n^)COS2<p
1 ° = -(i—•
dKT dKn
& -d/-и определяются для рассматриваемого
винта л равномерном потоке, получим следующее
выражения для средних значений коэффициентов упора
и момента гребного винта в неравномерном псле ско-
ростей
Рис. V.6. Зависимость ко-
эффициента засасывания t
от положения гребного
винта по длине туннеля
для / и И вариантов
конфигурации туннеля
и ,и
kqU- °л) = =-27 х
xj +
0 г„
Линия действия среднего упора Т* пройдет через точку с координатами (t/f, г,):
, Уг 1
/< -2лК-
I ( ( ^dr ~У C0S ° di>’
0 'Н
/* sill <t df dif,
1де
„о ____
rT------7----
44<J
Средине значения коэффициентов составляющих поперечной сити
‘.-ffe—Erf
0 'н
2л 1
° fH
Линии действия составляющих поперечной силы ku п kc в плоскости диска винт*
,йдут через точки с координатами
и ,н
гл 1
- г* 1 |‘ f I ЧКп \в , , - ,2 -О sin® fl
г»=-ц = ~^\ Jhfr) 0+м
О 'н
Ц-^-У "+»>,<!»
гй _ 'н_______________________
j ("ky +
'н
В равномерном потоке уг = zf = 0, т. е. упор направлен по оси вращения греб-
вого винта, а все поперечные силы равны нулю
1 Для выполнения расчетов гидродинамических сил и моментов необходимо пред-
варительно установить распределение сил по радиусу рассматриваемого винта в рав-
номерном потоке при различных значениях относительной поступи н чисел кавита-
ции. Рассматривая кавитирующие винты, наиболее важно располагать спосоСм
расче а сил в переменном поле скоростей, основанным на использован пи суммарных
гидродинамических характеристик этого же гребного винта в равномерном потоке,
которые можно определить экспериментально. Для этого необходимо знать Закон
Распределения нагрузки по радиусу гребного винта в равномерном потоке. Если, иа-
чрвмер, закон близок к эллиптическому, то
dKr.Q В Кт ,о ----------------—---------
“~dr ~ ~1 л (I — rj* 1 — г) ( — »•//)
* тогда
2л I
В<'’ °д) = f J КТ. Q V. °л) (’ + 1 U-/)(!-*„) dr <Ю.
0 '11
I (V 15)
А По формуле (V 15) с использованием численных методов математики кривые
винта пересчитывают с равномерного на заданный неравномерный поток.
К? Силы, возникающие при работе гребных винтов в неравномерном поле скоро-
могут оказывать существенное влияние па гидроаэродинамические характери-
1"| быстроходных судов.
441
Известно, что гидроаэродинампческое качество быстроходных судов, поддс».Ш
ине которых обеспечивается в основном силами гидроаэродинамической прц>, **
изменяется в пределах К = G R = 5ч-20, где R — буксировочное сопротнвти ।'|
судна. Поскольку' суммарный упор движителей у Г чг R G К. т. е. упор соц-^*е
рим с силой тяжести самого судна, то эти силы могу г оказать большое влияние ца,
садку, а следовательно, ня его сопротивление и распределение нагрузки между ’
сущими элементами Кроме силы упора в зависимости от расположения и Условна
работы иа движителях могут возникать и дополнительные поперечные усилия, влИ|”
нне которых также необходимо учитывать
Влияние вызванных скоростей гребных винтов быстроходных судов на хар4КТ6 |
рчстики несущих элементов, как показывает опыт, в реальных условиях шало й
поэтому' ниже рассматриваться не будет.
Посадка конкретного судна определяется его силой тяжести и положением ц-р
по длине. Влияние движителей на посадку целесообразно свести к изменению значе-
ний этих параметров.
Поправка на силу тяжести судна определится следующим образом. Если
значить Т — упор движителя, направление которого совпадает с осью отхсдящеД
от него струм, a ky — поперечное усилие, причем hu J. Т, ло при Z? движшелях по-
лучим
— У1 vJ + кпд'
т=1
где индекс «у» отвечает вертикальным составляющим соответствующих сил. В после-
дующем индекс «х» будет относиться к их горизонтлльным составляющим. Тогда рас-
четное значение силы тяжести судна составит
G” = G — &?яв. (V.16)
Аналогично, если дополнительный момент от суммарных сил движителя относи-
тельно поперечной оси, проходящей через ЦТ суди i. равен
6 И = тт + тк.
изменение центровки составит
t>Xg = 6AI G.
т. е. за расчетную центровку следует принимать
x| = xg + 6xg. 0'17)
В этом случае, сети известны зависимости сопротивления рассматриваемого судив
без учете влияния движителей R = j (о. G, xg>, расчетное сопротивление селив
с работающими движителями можно найти по тем же зависимостям, ио вместо дги-
ствптельной силы тяжести G и центровки хе судна достаточно принять их пррреден-
ные значения в соответствии с выражениями (V.I6) и (V.I7). т. е определить сопро"
тпаление как функцию R' = f (v, G*. x’J
На основании приведенных выше результатов получены соотношения для вВ-
полиения расчетов ходкости быстроходных судов.
Если буквой <JB обозначить угол между направлением упора движителя и -’ко-
ростыо движения судна, то расчетный упор должен составить
а пропульсивный коэффициент
«1 'I • /, , ''у X А1Я
по_’|‘> 1, 1— u*-"1"), 1 - бх \ +T*cos<pB Т*1еФв)’
гдет]о — КПД движителя в свободной воде (изолированного); и fa — к тэффицно
увиливающие влияние неравномерности потока соответственно на упор н на м0Ч с.
движителя; vx — средняя подпеку движителя осевая относительная скорость, <*’-
доеденная несущим комплексом.
442
Коэффициенты ix и t2, а также поперечные составляющие снт, возникающие на
Ищоиеле прн работе в неравномерном поле скоростей, могут быть вычислены на ос-
С^влним приведенных выше данных (см с. 440).
Mho анатогнн с зависимостями для вод< иэмсщающих судов нз формулы (V 18)
Ебучим выражения для некоторых приведенных коэффициентов взаимодействия
ЛыН f аходи ы х ст дов:
, AR
u.* = vZ, /• = ^tg<TB—
^^Впииснальпой компоновке движителей с несущим комплексом приведенный кгэф-
засасывания для быстроходных судов может иметь отрицательный знак.
Кв общем случае, когда на судне есть Z,, разнородных ио составу и виду движи-
►но-моторных установок, пропульсивный коэффициент определяют следуюии м
с6разом:
z> lzn
”.D=- \ lzA>J X PVJ, <V'9)
1=1 I I
и PDj — соответственно пропульсивный коэффициент и мощность /-го дви-
жителя в составе данного судна.
§ 47. РЕЗУЛЬТАТЫ СИСТЕМАТИЧЕСКИХ ИСПЫТАНИЙ
КАВИТИРУЮЩИХ IPEbHWX ВИНТОВ
В В настоящее время отсутствуют приемлемые для практики методы иовсрсч-
расчета кавитирующих гребных винтов. Поэтому при выполнении расчетов
xv Кити быстроходных судов необходимо использовать экспериментальные данные.
^^Кедние не<бход'<мы также для определения основных элементов вннта на ранних
стад! ях его проектирования.
В Советск м Союзе разработано шесть систематических серий кавитирующих
^Ираы.х винтсв. которые тир ко используются в практике проектирования ден-
^шелей для быстроходных судов: I) серия СК; 2) серия сильнокавитирующих трех-
^Ьстпых винтсв; 3) серия пяти.топастпых винтов; 4) серия К суперкавитирую-
тцих винтов: 5) серия винтов с повышенной прочностью лопастей; 6) серия винтсв
сЬтперцепторами.
Полные данные о первых трех сериях наложены в работах |2. 501. Ниже прп-
sc_iты основные результаты испытаний серии винтов с повышенной прочностью,
«рч* К н винтов с интерцепторами Даны также обобщенные диаграммы серии СК.
к< трые удобны ддя выбора основных элементов винтов в процессе их проектиро-
В6.1ИЯ.
| Систематическая серия кавитирующих гребных винтов с повышенной прочностью
^Настей. В связи с ростом скоростеп быстроходных судов и увеличением их энерю-
^В^жснисстн требуется повышение прочности лопастей и эффективности гр<б-
пых винтов таких судов в широком диапазоне измерения скоростей движения. Ис-
нз этих условий и была спроектирована данная серия.
Д Серия трехлопастных гребных винтов с дисковым отношением Ас/Ло-=О95
влоит из четырех моделей. Шаговое отношение н кривизна нагнетающей псверх-
и^-т переменны по радиусу. Основные геометрические элементы моделей серин
ч«све 'ны в табл. V. 1 п на рнс. V.7.
К Кривые действия гребных виигсв этой серии при отсутствии кавитации и дтя
Г” кавитационных режимов (Од = 2,54-0,2) показаны на рис. V.8—V II. Pi
^^Ьальный диапазон применения гребных винтов этой серии vs =204-60 уз.
Систематическая серия К суперкавитирующнх гребных винтов с клиновидной
Чрофи жировкой лопастей. Ее основные геометрические характеристики изменяются
^Милующих пределах: А/?.4О = 0.34-5-1,10; P D = 1,0 5- 1,8; Z = 2+ 3.
Кривые действия суперкавитирующнх винтов, имеющих Л£/Ао= 0,8; 2=3
= 1.0; 1,4 и 1,8, приведены сг ответственно иа рис. V. 12—V. 14. Все геоме-
’►чческие элемешы этих винтов одинаковы с элементами винтов серии СК; рвз-
й'.ие заключается лишь в тем, что максимальная толщина сечений расположена
V ча середине хорд, как в серии СК, а на выходящих кромках. Спрямленный ксн-
443
тур лопасти к сечения суперкавитирующих винтов серии К прн Др/Д,
показаны иа рнс V 15. Суперкавнтирующне винты целесообразно применять
скоростях более 50 уз.
Винты с интерцепторами. Для повышения тяговых характеристик гребцу
винтов при развитой кавитации и регулирования гидродинамических характерцу/
таких винтов целесообразно использовать интерцепторы. Ниже приведены резу,
т..гы систематических испытаний гребною внита с интерцепторами.
Элементы вннта: Лл^До—0.8; P.D— 1,4 Z = 3. Для удобства установки
п замены интерцепторов выходящие кромки лопастей выполнены прямолинейными
Таблица V.1 Геометрические элементы серин гребных вишов
с повышенной прочностью лопастей
9 b D Л. 10* Виыср модели
1 2 в 4
Р г> о,- 1о> Р D Л,- И “ Р л Л,- 10* Р D л,- ю
0.35 0.51 90,2 1.11 -9.8 1,33 -9.8 1.56 —9,8 1.80 —9 >
0,30 0,55 78.7 1.11 0.9 1,33 0.9 1.56 0.9 1.80 0,9
0.40 0,62 (0.8 1.11 13,3 1,33 14.7 1.56 16.0 1 80 |6,5
0.50 0.68 46.3 I 11 13,3 1,33 15,0 1.5(> 16,6 1.80 18.5
0,00 0.71 36,7 1.11 и.о 1.33 12,9 1.56 14,5 1,80 16.4 14.6
0,70 0.72 29,0 1.12 8.3 1.34 10.5 1,56 12.4 1,80
0,80 0,67 23.0 1 14 6.0 1,35 «.6 1.57 11.0 1.80
0.90 0,55 17,4 1.17 4 4 1.36 7 5 1,57 10,8 1.81 |4.2 13.5
0,95 0,42 16.2 1.18 3.8 1,37 7.2 1.58 10.9 1.81
1,0 0 — 1.19 — 1,38 — 1.58 — 1.81
441
Put. V ti. Кривые действия модели JVs J.
445
446
щам — макиимальная высота пнтерцептопа на относительном радиусе г =
+ 0,5 (I — гц\ Диапазон изменения относительной высоты интерцепторе в
еи составляет —0,03 6П ^+0,05. На рис. V. 17 приведены кривые д й-
® я этого винта без интерцепторов (6И = 0).
И, читывая многозначный характер кривых действия кавитирующих винтов
№№ерцепюраын, была разработана следующая форма их представления; к крн-
I' А й 1вия испытанного кавитирующего винта без интерцепторов б„ = 0 (см.
|V.17) прилагается серия графиков (рис. V.18) с зависимостями Л“ = К“/ЛГ
Иф = *1"/'1о в функции от 6Н при Од = const и различных скольжениях S] =
447
= I — ///*, где Кj- и Kr, t]q и i]0 — соответственно коэффициенты упора и lyn„
гребного вннта с интерцепторами и без них; /* —относительная поступь нулсЧО1/
упора.
В данном случае нрн построении кривых рнс. V. 18 в качестве параметра Пэи
пято скольжение, чтобы этими графиками можно было воспользоваться и для при'
блнженной оценки влияния интерцепторов на крины*' действия гребных впито'
с другими элементами.
Рнс. V. 11. Кривые действия мо ли № 4.
Сообщенные диаграммы винтов серин СК приведены па рис. V.19—V.22. Нт тля
граммах при Лд7Дп = const для различных Р/D и о , построены зависимости Кг („
и Четах (/) При о.л = const в условиях развитой кавитации независимо от
зависимость Ку (/) представлена общими кривыми, которые пересекают «атм<г
сферные» кривые К? (/) под углами, близкими к прямому. В переходных стал4”
кавнтацнн кривые Kr U. од) относятся уже к конкретному винту с P.'D = c°"s
н обозначены теми же линиями, что и А*/- (/) прн отсутствии кавитации
Жирными линиями на диаграммах нанесены кривые Чотах (А °Л>- состоя|Ш
из двух систем: горизонтальной 4jmax (Л Р'О) при Од = const и вертикально1
4omaxG> ад) ПР“ — const. Первая представляет собой огибающую кр|,в^'°
максимальных значений КПД гребных винтов с различными PID н од = c0'ls”
448
П/р Я. ВоАткунского, т. 3.
4 19
-о,е — б>‘ 4
К^О 0,6 0,7 0? c
0£
0,5 у
O.'f 0,3 ОЛ
I XJ? _0£,
02 —
о, I — 7,2
0,7 OJS 03 V 1.1 1,2 1.3 1
Рис. V.13. Кривые действия суверкавитнрующего винта (P/D — 1,4).
f 11
«А
л’!'* ол
лч,г7\ч%° \6‘ i_// —X! Ъ \
-Гл(? к
-0,3
0> ~0.e J3— -0,7 y/- — •
<0 . L у
08. се^-
3^" ^)3_ Ол —j ^<*’г 45
1,0 1,1 1,2 1,3 /,4 1,5 j
Рис. V 14. Кривые действия суперкавнтирующего винта (Р D = 1,8).
450
вторая является кривей, проходящей через максимальные значения КПД с Р,'д _
= consl при различных числах кавитации.
По диаграммам можно определить максимальное значение КПД
различных числах кавитации. Этому значению КПД в каждом с.пч.
соответствует точка пересечения кривых, ориентированных Г0Р||зо;па.ПЬ1"!
9о^лх(Л Pf) и вертикально Потах(Л °л).
Рнс. V.15. Спрямленный контур ло-
пасти и сечения суперкавитирующнх
винтов серии К прн ЛгМ0= 0,8.
Обобщенные диаграммы,
строенные для четырех зпачснп-;
дискового отношения (Л, <д ч
= 0,65; 0,80; 0,95 и 1,10),мог>г
быть использованы при проекта...
Рис. V. 16. Лопасть гребного винта
с интерцептором.
452
|,,c- V.18. Оценки эффективности интерцепторов: а — при атмосферном давлении;
453
Рис. V.20. Диаграмма /—ал—т]0 ,».» для Ае!А9 — 0,80.
ь
пых судов. Для этого необходимо нанести на каждую из них кривую погребш х
коэффициентов упора и далее методом интерполяции найти оптимальные э 1емец.
ты гребного винта из данной систематической серии: Ас/А0 н P/D.
§ 48. ВЛИЯНИЕ ОСНОВНЫХ ГЕОМЕТРИЧЕСКИХ ЭЛЕМЕНТОВ
КАВИТИРУЮЩИХ ГРЕБНЫХ ВИНТОВ НА ИХ ГИДРОДИНАМИЧЕСКИЕ
ХАРАКТЕРИСТИКИ
Как отмечалось в § 45, для кавитирующих гребных винтов характерны не-
сколько иные, чем для некавитирующнх винтов, зависимости между геометрии
скнми элементами винта и его гидродинамическими характеристиками. Ниже при-
ведем анализ этих зависимостей Результаты его положены в основу выбора основ-
ных элементов гребного винта, предшествующего проектированию гребных винтов
по вихревой теории.
Рис. \ .23. Влияние контура спрямленной поверхности лопасти на гидродинамиче-
ские характеристики кавитирующих гребных винтов.
--------------------контор >,---------контур 2; ——. — контур 3.
лопастей. В отличне от некавитирующнх гребных внитов число лопа-
Чнсло
стей обычно сильно сказывается иа гидродинамических характеристиках кави-
тирующих гребных винтов. Каверны, стесняя поток между лопастями, ухуд и а ют
условия нх обтекания и усугубляют развитие навигации. Поэтому для кавитирую-
щих гребных винтов число лопастей следует принимать минимально возможным.
Наиболее распространенное число лопастей винтов быстроходных судов составляет
Z = 3. Как показано в работе [50], с целью ослабления эрозионных повреждений
в некоторых случаях увеличивают число лопастей до Z = 5. Однако винты с так! м
числом лопастей можно использовать при скорости судна не свыше 30—35 уз, при
большей скорости резко падает нх эффективность.
Контур лопасти и дисковое отношение. На рис. V.23 показано влияние контура
спрямленной поверхности лопасти на гидродинамические характеристики кавити-
рующих гребных винтов. Из рисунка следует, что по мере развития кавитации
изменяется рациональная форма этого контура. Так, при отсутствии начальны?
стадий кавитации более выгодным является контур /, ЦТ площади лопасти кото-
рого наиболее удален от оси винта. По мере же уменьшения числа кавитации бо.те
эффективными становятся контуры 2 и 3. Следовательно, на кавитирующих гребиы*
винтах целесообразно больше нагружать внутренние сечения лопастей, рабств10'
щие прн относительно меньшей'степени развития кавитации. Проектируя гребные
впиты современных быстроходных судов, рационально использовать контур >ю
типу 2 ЦТ площади спрямленной поверхности лопасти при таком контуре распо-
ложен на относительном радиусе fg = 0,59. На практике дисковое отношение не]
лесообрвзио выбирать с использованием диаграмм систематической серии СК. Я11*
сковое отношение гребных внитов которой изменяется в диапазоне Ад/Аи53
458
s= 0,G5-i- 1.Ю (см. § 47), а контур лопасти соответствует контуру 2. Значения отно-
сительной ширины лопасти b D в зависимости от радиуса для дискового отношения
0.95 серин СК приведены в таба. V.I. Для других значений дискового
^ношения этот параметр определяется формулой
I
I 0,95 •
Я ArJAn = 0,95
I Дисковое OTHOHiei не винтов быстроходных судов следует выбирать исходя
и дву х режимов движения: для полного хода и горба сопротивления, причем
за основу при дальнейших этапах проектирования необходимо принимать боль-
I шее из рассчитанных значений.
Рис V.24. Диаграмма для оценки оптимальной кривизны нагнетающей поверх
' кости лопастей кавитирующих гребных внитов.
I Имеющийся опыт позволяет рекомендовать для гребных в* итов быстроходных
судов в зависимости от их скорости следующие значения дискового отношения:
t’5 = 254-30 уз — Ае1Ап = 0,80;
1'5 = 304-35 уз — А с1 Ав = 0,95;
05 >35 уз—21£/Ло= 1,10.
I Форма сечений лопасти. Качество кавитирующего профиля возрастает по мере
уменьшения угла атаки вплоть до момента начала кавитации нагнетающей поверх-
йссти, что приводит к возникновению кавитационной эрозии. Поэтому угол атаки
1 кривизна сечений лопасти кавитирующего гребного винта должны обеспечивать
Дез основных условия:
Я 1) заданный коэффициент подъемной силы при наибольшем качестве;
I 2) отсутствие кавитации нагнетающей поверхности профиля.
| Как показывает опыт, последнее условие удовлетворяется для гребных винтов
«ременных быстроходных судов с сегментной профилировкой лопастеи в диа-
№<оне /, соответствующгм геометрическому углу атаки элемента лопасти па отно-
сительном радиусе г = 0.6, около 7,5—S'" 1291
| Важным геометрическим параметром кавитирующих гребных винтов является
кри шзна нагнетающей поверхности сечений лопастей. Это объясняется тем, что
пор кавитирующих гребных винтов, в отличие от обычных, в основном создается
за счет нагнетающей поверхности. Кроме того, увеличение кривизны сопрово-
дила я снижением толщины каверн, что также благоприятно сказывается на
^фиктивности винта. Наглядное представление об этой особенности кавитирующих
ребных винтов дает диаграмма, выражающая зависимость оптимальной кривизны
Пег етаюшей поверхности в фу нкиин от коэффициента нагрузки Су при различных
'Пелах кавитации (рис. V.24). Диаграмма построена иа основании результатов
459
испытаний систематической серии гребных винтов с дисковым п шаговым отн,
пнями ДеЛ4с=0,8, P'D = 1,4, в которой максимальная кривизна нагнетающей
поверхности /*. в долях от хорды соответствующего сечения лопасти Ь, изменялась
в пределах ог — 12!Ь=—0.014-0,06. Отрицательной кривизне lt<0 отвечают
двояковыпуклые профили, а /. > 0 — выпукло-вогнутые. Прн этом макс1'м,И1 _
пая кривизна /» располагалась посредине хорды соответствующего сечения. }(,
диа!раммы следует, что для достижения заданного коэффициента нагрузки ==,
— const по мере уменьшения числа кавитации требуется все большая крип> а
нагнетающей поверхности. Наибольшая кривизна ограничивается ввиду опасности
кавитации нагнетающей стороны профиля.
Таким образом, каждому режиму нагрузки и кавитации соответствует зре.
деленное значение кривизны нат негаютцей поверхности лопастей, при котором до
стигастгя максимальный КПД винта
Рис. V.25. Схематизированный про-
филь с интерцептором.
Рнс V.26. Сравнительные размеры
кавитационных каверн различных
типов профилен: и — авиационного;
б — сегментного; о — клиновид-
ного.
е ав 3 £ сег
Оптимальное значение максимальной кривизны нагнетающей поверх rtni
сечений лопастей н ее положение по хорде сечений можно найти, используя меюды
вихревой теории гребного винта (см. § 49) Рекомендации по определению толщин
сечений лопастей гребных винтов, обеспечивающих требуемую прочность, изложены
в § 45
С развитием кавитации оптимальное положение максимальной кривизны на-
гнетающей поверхности профиля перемещается к его выходящей кромке, что отве-
чает смешению и положения центра давления (ЦТ.) в корму. Теоретическое ре-
шение показывает, что при числе кавитации, стремящемся к нулю, иа оптимальном
суперкавитирующсм профиле ЦД должен быть сосредоточен па его выходящей
кромке Конструктивно такое распределение давления можно обеспечить за счет
использования интерцепторов. Схематизированным профиль с интерцептором по-
казан па рис. V.25.
Основным фактором, отличающим действие кавитирующего гребного винта
от некавитирующего, являются наличие каверн в межлопасгиом пространстве.
Увеличение толщины каверн снижает гидродинамические характеристики гребных
винтов. Чтобы предотвратить резкое падение эффективности гребных винтов, ра-
ботающих в глубокой стадии кавитации, необходимо наряду с выбором оптималь-
ной кривизны использовать специальные профили, обеспечивающие малые толши11Ы
кавитационных каверн.
Существенное влияние па толщину кавитационной каверны профиля прч не-
больших углах атаки, характерных для элементов лопастей па расчетных режимах,
оказывает значение входящего угла уих, образованного хордой и касательной к за-
сасывающей поверхности профиля у передней кромки. С уменьшением этого у'ГЛЛ
снижается толщина кавитационной каверны. Например, нз трех профилей — ави3'
шюпного типа, сегментного и клиновидного (рнс. V.26) — при одинаковой макси-
мальной их толщине наибольшей толщиной кавитационной Каверине будет об.ыДаГЬ
авиационный профиль и наименьшей — клиновидный.
4ti0
Таким образом с целью профилирования лопастей гребших винтов, предна-
значенных для работ в усилиях глубокой стадии кавнтацнн, целесообразно ис-
пользовать клиновидные профили с минимально возможной относительной тол-
1Ц11неП. отвечающей условиям прочности.
На рнс. V.27 изображены крт гые действия гребных винтов с («вилковыми основ-
ными геометрическими элементами (1, /10 = 0,80; Р D — 1 4; 1 «= 3) при сегмент-
ной । клиновидной пргфилирггких. Из этою рисунка следует, например, что ха-
Какгер изменения КПД винтов качественно отличается. В частности, КПД впита
с клиновидной профилировкой в ишреким диапазоне изменения режимов работы
с развитием кавптвиии не умеиыгается по сравнению с бескатптпнюпным обте-
каиием, как у винтов с сегментной npc.cj пдпровкой, а наоборот, возрастает. В ре-
Рис. V.27. Крипые действия (ребных винтов, отличающихся фор-
мой сечений лопастей я —сегментный профиль; б—клиновид-
ный (супер^звиткрующий) профиль.
жиме развитой кавнтацнн при лл - 0.2 максимальное значение КПД вннта с кли-
новидной профилировкой на За % выше, чем обычного. Однако такие пииты усту-
пают винтам с сегментным профилем сечений лопастей на режимах отсутствия ка-
витации и при частичной кавитации. Это в ряде случаев огриццчцвлег применение
винтов с клиновидной профилировке й. Например, у судов па годводиых крыльях
для преодоления горба соиротив^хш я необходима высокая эффективность пиитов
•на режиме разгона. Скорости, еоотЕстствутсшие горбу сопротивления. обычно та-
ковы, что винты работают в начальной стадии кавнтацнн или при сс отсутствии.
Используя винты с клиисвиднгП 1'р<фп.|цровксп, необходимо иметь запас мощности
Механической установки, чтсбы компенсировать падение КПД па этом режиме.
В противном случае может оказат! ся целесообразным применение винтов с сегмент-
ным или компромиссным профилем сечений лопастей. Для выбора того или иного
профиля сечений в протесе проектирования гребною винта могут быть испойьзо-
иы результаты систематических испытаний кавитирующих гребных винтов.
Шаговое отношение. Онтит«тьнсе значение шагового отношения устанавли-
Ьиется па основании расчета по вихревой теории (см. § 49) или по днаграмхам се-
рийных испытаний моделей кавитирующих гребных винтов (см. § 4/).
Влияние шагового отношения на тяговые характеристики иекавнтпру тощих
и Кавитирующих гребных винтов существенно различно. Так, если с изменением
шагового отношения PD соответственно изменяется н упор Т иекапитир у тощего
винта, то в режиме развитой кавнтацнн при постоянном числе кавитации од = const
и прочих равных условиях шаговое отношение весьма слабо влияет на упор греб-
Вог винта. Для иллюстрации отмеченной особенности кавитирующих гребных
винтов на рис. V.28 приведена зависимость Кт (/, o.i, PID) одной из систематн-
461
ческих серий/ Из рисунка видно, что при развитой кавитации и ад = const коэф,
фициеит упора практически не зависит от шагового отношения. Существенное по-
вышение тяговых характеристик при больших скоростях могут обеспечить греб-
ные винты с интерцепторами (см. § 47).
§ 49. ПРОЕКТИРОВАНИЕ ИЗОЛИРОВАННЫХ КАВИТИРУЮЩИХ
ГРЕБНЫХ ВИНТОВ
Проектировочному расчету гребных винтов по вихревой теории предшеств 'ет
выбор некоторых его основных элементов.
В результате предварительных расчетов ходкости судна с использованием
диаграмм серийных испытаний кавитирующих гребных винтов устанавливают)
достижимую скорость судна vs, потребный упор Т, диаметр D, коэффициент упора
Кт и относительную поступь /.
Па основании рекомендаций, изложенных в § 48, выбирают число лопастей Z,
дисковое отношение Ае/.4й и контур спрямленной поверхности лопасти Ь(7) проек-
тируемого гребного вннта. Используя методы оценки прочности, изложенные
вт. 1,разд. III. гл. VIII. Справочника, вычисляют максимальную толщину сечений
е (г). Далее переходят к проектировочному расчету гребного вянта по вихревой
теории.
В настоящее время разработаны практический метод н программа проектиро-
вочного расчета кавитирующих винтов на основе теории несущей поверхности
(см. § 45). Применяются ЭВМ с большим быстродействием н объемом памяти. Если
использование таких ЭВМ невозможно, гребные винты рассчитывают по прибли-
женной схеме, основанной на теории несущей линии, но также учитывающей ко-
нечность толщины кавитационных каверн [50].
Основные положения последнего меч ода следующие. Рассматривают режимы
развитой кавнтацнн, при которых каверны замыкаются на конечном расстоянии
от впита, а течение в струе за кавернами имеет такой же характер, как и за некави-
тирующим винтом. Исходи из эквивалентности течения на бесконечности в струе
равноупорных кавитирующего н иекавитирующего гребных винтов находят диа-
метр н режим работы эквивалентного некавитирующего винта, что позволяет опре-
делить распределение циркуляции по радиусу известными методами вихревой тео-
рии несущей линии (см. т. I, разд. III, гл. II). Предполагают, что основные теорети-
ческие соотношения для вихревых составляющих вызванных скоростей те же. что
и прн отсутствии кавитации, а оптимальный закон распределения циркуляции
принимают" таким же, как дли иекавитирующего винта.
462
Основываясь на этих предположениях, можно рассчитать распределение подъ-
емной силы по радиусу, а затем по известным значениям коэффициента подъемной
сипы и местного числа кавитации найти угол атаки и кривизну селений лопастей
как элементов крыла бесконечного размаха. Эти величины должны удовлетворять
деум условиям: обеспечению заданного Су при наибольшем качестве и отсутствию
•витании на нагнетающей стороне лопасти.
Влияние телесности каверн иа поле вызванных скоростей вннта проявляется
1вояким образом. Во-первых, стеснение потока кавернами приводит к некоторому
гненьшению скорости непосредственно перед гребным ввитом по сравнению с ее
[печением при отсутствии кавитации. Это учитывается с помощью теории идеаль-
ного движителя при выборе эквивалентного некавитирующего винта. Во-вторых,
наличие каверн в пространстве между лопастями приводит к возникновению допол-
Ьительпых вызванных скоростей, которые необходимо учесть прн определении
взаимного влияния лопастей кавитирующего вннта. Последнее выражается в ис-
кривлении и скосе потока, обтекающего лопасти винта, и учитывается в расчете
[путем введения поправок к шагу н кривизне нагнетающей поверхности лопасти,
вычисленным на основании теории несущей линии. Ниже приведены основные со-
отношения, необходимые для проектирования кавитирующих гребных винтов по
этом методу.
Выражения для осевых вызванных скоростей и диаметров струи на бесконеч-
ности:
ДЛя иекавитирующего движителя
^зОоо = -^=/^+Сг — Ц
где ФаОа! — вызванная скорость на бесконечности за движителем!
для Кавитирующего движителя
_ С гк .
(V2OJ
где бс = vJva — средняя скорость на входе в движитель, определяемая выраже-
нием
2(ол- сгь)К1 е
2 ИТ
(V.2I)
Параметр, характеризующий стеснение потока кавернами, выражает отношение
площади сечения каверн fK к площади сечеиия между кавернами
е ----—----.
А.--Гн
> Условие равенства вызванных скоростей на бесконечности позволяет опреде-
лить коэффициент нагрузки иекавитирующего движителя
Сг°-(1+-§7)2-1- <v22>
463
Исхода из условия равенства диаметров струи на бесконечности можно наиги
диаметр эквивалентного нскавитнрующего движителя
Переходя к реальному кавитирующему винту, допустимо приближенно пред-
положить. что вызванные им на бесконечности скорости и распределение циркуля-
ции будут такими же. как у неклвптпрующего винта, режим работы которого опре-
деляется соотношениями
А - ^Гг • / — 1к
— вихревая составляющая скорости натекания иа элемент лопасти. Тогда
ф(| п .пент подъемнси силы элемента лопасти определится из уравнения
с 2лГк cos р,
" ’ /А |еЩ Р - «Ч 2) ’
(V.26)
Ро ле того, как найден коэффициент подъемной силы, необходимо рационально
Карать угол атаки и кривизну шинетающей поверхности профилей сечений ло-
™гти-
И Для создания заданного С,, угол атаки н кривизна нагнетающей поверхности
цементов лопастей должны быть изменены с учетом особенностей потока, обтекаю-
Кето лопасти кавитирующего гребного винта. Эти особенности создаются за счет
скзрсстей, вызванных вихревой системой впита и телесностью его лопастей и каверн.
где К(11 и /,.— соответственно коэффициент упора и относительная поступь кави-
тирующего гребног винта
Разиина в диаметрах и режимах работы эквиваленты* кавитирующего и не-
кавитирующего винтов возрастает по мере увеличения степени развитии кавита-
ции (роста толщины каверн).
Для определения циркуляции и вызванных скоростей можно воспользоваться
известными формулами и диаграммами для оптимального некавнтирующего греб-
ного винта. По значению идеального коэффициента нагрузки винта С ft и отио
ентелыюй поступи Х,= рд/(лЦцл) с помощью диаграмм для индуктивного коэф-
фициента полезного действия Пг находят индуктивную поступь винта >., = Х/Л)»
и тангенс угла индуктивной поступи tgpf = if/r. Затем можно определить зна-
чения окружной и осевой составляющих вызванной скорости на бесконечности
за винтом
Вихревая составляющая неоднородности потока учитывается поправками (501.
(\ 23)
Циркуляцию скорости на каждом радиусе винта вычислим по формуле
= 0,067 9 (Лс — I) Ср;
(V.27)
или, переходя к безразмерным величинам, найдем
г - Г» k_^lL
л/7и1’Л Z ’
(V.2I)
где k — поправка Гольдштейна (см. с. 469).
Поскольку предполагается, что вихревые системы эквивалентных кавнтнру о-
щего и некавнтирующего винтов на бесконечности одинаковы, значения циркуля
цнн скорости вокруг сходственных элементов лопастей также будут одинаковыми
(Гк = Г„). Тогда безразмерное значение циркуляции вокруг элемента лопает»
кавитирующего винта запишется в виде
Гк-Г.(Оо.Ок). (V.25)
Если предположить, что закон нарастания вихревой составляющей вызванной
скорости не зависит от степени развития кавитации, то можно записать уравнение
связи лопасти с потоком
Аа|( = 1.54 (ka — 1) Су. (V.28)
Ьр коэффициенты к,- u ka представ яют собой отношения относительной кривизны
и угла атаки профиля в составе лопасти винта (подученные по теории несущей по-
«ности) к кривизне и углу атаки профиля в п оском потоке при тех же коэф-
фициенте подъемной силы н распределении нагрузки по хорде (см с. 469)
I Для расчета влияния телесности кавитационных каверн получены следующие
поправки
Дбг( =
П5 Р/
е, — sin рг
л cos Р*
=-----------—гг-
Р( ЫН р,
Ue Ft В) и F2 (В) — вспомогательные функции, графики которых показаны на
Рис V.29;
2Vf — 1,25ёц (gj — sin pf)
О< (Р< — sin P,)
(V.29)
2 2лад
В В формуле (V.29) iK — eK/t (cK—толщина кавитационной каверны на выхо-
1«Щей кромке профиля; t = 2nr Z — шаг решетки)
464
465
Для определения ёк рекомендуется использовать данные рис. V.30. На рис v ,
приведены зависимости ёк иа относительном радиусе г = 0,6 от геометричесиегг, *1
ла атаки элемента лопасти для гребных винтов а различной формой сечений л 'г'
. Р/D 1
a = arctg—-_arctg__,
«к
У
45
№
03
Ц2
10
я расчета толщину каверны определяют по кривым, приведенным на рис. V.30.
jipii вычислении диаметра эквивалентного иекавитирующего вннта параметр в
Ьделяют как е = - к/ —, где (ек//)ср — среднее значение толщины ка-
I (£ц/*)ср
чриы, которое составляет 0,88 -у-1 .
После проектировочного расчета вннта выполняют контрольный расчет проч-
^К> по методам, изложенным в т. I Справочника.
В* Пример. Исходные данные для расчета- коэффициент упора Ктк = 0,096;
тельная поступь / = 1,05; число кавитации 04= 0,25; дисковое отношение
^£Л|=0,95; число лопастей Z=3; профиль сечения лопасти—сегментный.
К Значения относительных ширины
ниже
н толщины
лопастных
сечений приведены
0,530
0.066
0.G
0.711 5
0.031 9
0.020 2
0.9Т
0,119
0.016 2
_ осительиый радиус ступицы гн~ 0,2.
^К1о диаграммам серийных испытаний кавитирующих гребных винтов с сегме т-
^Морофилировкой лопастей (см. § 47) находят шаговое отношение PiD — 1,4.
3 кем определяют относительную толщину каверны.
Г На относительном радиусе ? = 0,6 шаговый угол
I Р,£>
36’39';
Рис. V.30. Зависимости при F =к 0,6
от а.
О-Л£М0 = 0.5; • -ЛЕ/Ло = О,в|
д “ ЛЕ/А0 = '-°-
Рис. V.3I. Зависимость относитесь ей
толщины каверны от формы профи ш.
• — сегментный профиль: О •— клннмид-
ни А преф иль.
угол поступи
Р к-0,6 — arct(» — 29 10 ;
Рис. V 32 Распределение ёв по г
при различных местных числах кавитации os = sin1 ₽.
На рно. V.32 показано распределение ёк/ёк (г = 0,6) по радиусу винта
После определения поправок находя в*
говый угол и кривизну нагнетающей поверх*
ности лопасти
Ч>Н= Pi + ак + Аан + Д«и1
62х = 62 + Лба + Дб8|.
Основные этапы расчета описаны в е.
Необходимо отметить некоторые особенности.
Расчету гребного вннта по элемен-
там предшествует расчет ходкости по
диаграммам систематических модел чы*
испытаний (см. § 47). Дело в том, что при кон-
кретном проектнроваиннгребных винтовс<ьч-
но задаются характеристики механической
установки н кривая сопротивления судна а
скорость судна и диаметр винта подлежат определению. В первую очередь нахо-
дят дисковое отношение и число лопастей. Предварительно выбирая шаговое тне-
шение вннта по диаграммам, необходимо иметь в виду, что в расчет по приведение-
му выше методу заложено условие работы профилей сечений лопастей при miiiiH'
пальнем угле атаки, соответствующем отсутствию кавитации на нагнетают*?
поверхности. Как отмечалось выше, для винтов с сегментным профилем ceSfiЧ1
лопастей эти режимы находятся в диапазоне геометрических углов атаки а = 7"^®
на относительном радиусе г = 0,6.
В результате предварительного расчета ходкости становятся известными |,с”
водные данные для проектирования по вихревой теории (Хг, /, ол). Необходим)10
466
геометрический угол атаки
а = фн — Р = 7 29 ;
(местное число кавитации
os = ол sin2 Р = 0,059 3;
относительная толщина каверны (см. рис. V.3I)
|?=0.6 = 0,148
И Определение диаметра и коэффициента нагрузки эквивалентного некавнтирую-
Чег j винта и индуктивной поступи:
Сгк = —-^- = 0,222; ёк ср = 0,88.0,148 «0.13;
п 'к
'«п-тт-таг»0'4’4-
По формуле (V.21)
2 0,472-1.072
2,072
2,144
1.035.
Согласно формуле (V.22)
0,226.
467
По формуле (V.20)
«--0.1072; /„ _ 1.01; X, - Л. » 0„Ж
Принимают: если Cy,i = 1,08, Су0 = 0,2'1, то >],- = 0,88 (рис. V.33) и ;
= /о/нг = 0,384. '
Дальнейший расчет выполняют в Форме табл. V.2 с использованием даницу
приведенных на рис. V.30, V.32, V.34 и V.35. В ск Ч5ках дан номер строки, Показы’
вающин порядок расчета.
Таблица V.2. Расчет шагового отношения и относительной кривизны
нагнетающей поверхности лопастей гребного винта
Порядок расчета Расчетные величины Значения
1 ? o,3 0,6 0.8 0.95
2 b/D 0,55 0,711 5 0,672 5 0,419
3 6 0,066 0,031 9 0.020 2 0,016 2
4 lg Pi 1,28 0,640 0,480 0,404
о 1 + (4)3 2,64 1,410 1,230 1,163
6 wt [формула (V.23) 1 0,137 0 0,123 2 0.106 0 0,094 5
7 йа [формула (V.23)] 0,107 0,192 7 0,221 0,234
8 k (рис. V.34) 0,745 0.79 0,645 0,352
9 Го [формула (V.24)) 0,010 2 0.019 5 0,018 2 0.010 52
10 Ги [формула (V.25J1 0,010 I 0.019 3 0,018 0 0,010 420
И COS Pi 0,616 0,842 0,902 0,927
12 Pi 52° 32е 37' 25“ 38' 22
13 sin Pi 0,786 0,539 0 433 0,375
14 ён 0,148 0,148 0.125 8 0,062 9
15 т A( 0,888 1,775 2.37 2,bl
16 (!5)-(6)/2 0,819 5 1,713 2,317 2,763
17 C„-(2) (формула (V.26)] 0,047 7 0,059 6 0.044 1 0.021 9
18 0,086 8 0,083 8 0.065 5 0,052 3
19 0,625-(14) 0,092 5 0,092 5 0,078 6 0,039 3
20 b|l -(19)1 1,102 1,102 1,085 1,041
21 (20) + (7)/2 1,158 1,198 1,196 1. 57
22 (21)a + (16)? 2,01 4,38 6.79 8,975
23 °S ’ °л (22) 0,124 0,057 1 0.036 8 0.027 8
24 «к. 1,64 1,35 0,97 0.85
25 Л, -0,018 5 0,002 4 0,003 7 0,003 5
26 kc (рис. V.35) 2,02 1,82 2,40 3,49
27 ka (рис. V.35) 2,73 2,21 2,30 3.22
28 Дбо [формула (V.27) I 0,006 01 0,004 67 0,006 22 0,008 84
29 Дак [формула (V.28)] 0,150 1 0.156 0,131 1 0,195 6
30 v, = (16) (11) 1,33 2,02 2,565 2.980 6
3! (30)—(13) 0,542 1,481 2,132 2,605 о
32 В [формула (V.29)] 31.9 17,18 17.88 35.12
33 h\ (см. рнс. V.29) 0,007 7 0,015 22 0,014 5 0,007 01
34 f2 (см. рнс. V.29) +0.032 +0,066 1 0.062 0,03
35 (11)7(31) 1.135 0,651 0,424 0,355
36 Д621 = (35)-(33) 0,008 75 0,008 54 0,006 15 0,002 49
37 Дак, = 57,3-(35)-(34) 2,085 2,125 1,506 0,610
38 ф= (12) + (24) + (29) + (37) 55,87 36,46 28,24 22,81
39 PiD = nr t ф 1,39 1,392 1,349 1,254
40 62x = (25) + (28) + (36) —0,003 7 0,015 6 0.016 1 0,014 8
46й
2j0 2.5 4,0 3.5 *.0 V ko in 6.0
Vh
Рис. V.31. Поправка па конец»
iiuciL числа лопастей,
Рнс. V.35. Поправки к кривизне профиля лопасти и к углу
атаки иа оливине несущей вихревой поверхности.
с. V.36. Распределение относительной кривизны нагнетающей поверхности
н шагового отношения но радиусу спроектированного впита.
4 69
Результаты рас |ета представлены на рис V.36. Сравнение с данными экгцп.
римента показывает что расчет по приведенной cxeMi обеспечивает приемлемую
для практики степень точности.
§ 50. РАСЧЕТ КАВИТИРУЮЩИХ ГРЕБНЫХ ВИНТОВ
В КОСОМ ПОТОКЕ
Гребные винты большинства быстроходных судов работают в неравномерно,,
потоке, который характеризуется наличием в основном дополнительных составляю-
щих скоростей, обусловленных особенностями компоновок н влиянием несущИх
комплексов. На судах же, оборудованных наклонными гребными валами, вннтц
работают в практически равномерно скошенном потоке
Для расчета гидродинамических характеристик гребных винтов в i
потоке могут быть использованы формулы, приведенные в § 46- В этом слуЧас
00 = 0/,= о cos ; vx = 0; G( = vB tg <(: sin 0. В результате
о од. / Ар [ 4-/ tg sn)
С достаточной для расчетов ходкости степенью точности гидродинамические
Рис. V.37. Графики для определения /ф. а — ф = 10г; б — ф = 14°*
ft —угол поворота лопасти.
470
з терн нки гребчых винтов в косом потоке можно определить по приблнжен-
« формулам
2я
оа) = -2^| kt.q(1v- °а)
О ф
2л
kv(l, = КоС/фОд) sinfldflj
о ф
Кг С^я” ° а) находит по данным испытаний винтов в кавитационных трубах в рав-
но» :рчвм потоке, а значения мгновенной поступи /ф—из уравнен 1Я
> = arct₽_____________________-____11'_____________________
Ф В I'2 (> + tga <Р sin« О) +(1 + rff) nl tg <₽ sin fl + л3?н'
Графики для определения /с прн углах скоса потока 10 и 14 приведены ,
рнс. V.37.
В процессе работы винтов в неравномерном по окружности поле скоростей
(косом потоке), если оптимальные шаг и кривизна элементов лопастей впита опге._
делены исходя нз условий работы на заданном режиме в равномерном потоке, Х)о,
жет возникать кавитация нагнетающей поверхности лопасти и, следователыц,
кавитационная эрозия Поэтому, проектируя кавитирующие гребные винты ра]
ботаюнше в косом потоке, необходимо обеспечить отсутствие кавитации нагнетаю-
щей поверхности лопастей при всех их угловых положениях. ('. этой целью еледует
откорректировать элементы оптимального гребного вннта, выбирая кривизну его
сечений с учетом максимальной мгновенной поступи
.____________/соэ<ф —<Г„)
<Г пах - , _ tg (Ч,_<(.о) . / лг
на каждом радиусе, где <[0 = 5е- Кривизна получается меньше оптимальной (в з.>
внсимости от угла скоса потока и режима работы винта). Для обеспечения задан-
ного коэффициента упора необходимо соответственно увеличить шаговое отношение.
Получив зависимость max = / (7) для заданных 1 и ср, определяют по рсзу1Ь1
татам серийных испытаний (для гребного винта с первоначально рассчитанным
шаговым отношением P.D) значения коэффициента упора А'|, соответствующее
/чипах каждому рассматриваемому сечению Далее одним нз известных методов
(см. § 49) рассчитывают откорректированное значение кривизны средней нянин
сечения 6* н с целью обеспечения заданного упора корректируют шаговое отношение
— = лг ig (arctg (Р D) 4- Аа’|,
где Да* = 115 (6С — 6*).
§ 51. ПРОЕКТИРОВАНИЕ ГРЕБНЫХ ВИНТОВ
В СОСТАВЕ УГЛОВЫХ КОЛОНОК
Проектирование движнтельного комплекса гребные винты — угловая колонка
сводится к последовательному решению двух задач. I) выбору элементов корпуса
колонки; 2) выбору элементов гребных винтов.
Прн работе винта вблизи корпуса колонкн между ними существует взаимо-
действие, приводящее к изменению гидродинамических характеристик гребного
вннта по сравнению с их значениями в свободной воде к к изменению сопротивления
колонки. Коэффициенты взаимодействия зависят от режима работы гребного винта
(нагрузки, числа кавитации), а также от геометрических элементов комплекса (со-
отношения диаметров винта и гондолы колонки, относительного удлинения гон-
долы и др.). В движитетьных комплексах с парными гребными вин гимн помимо
взаимодействия с колонкой носовой винт влияет на кормовой. Поскольку расстоя-
ние между гребными винтами составляет около двух диаметров вннта, кормовой
винт практически не оказывает воздействия на работу носового винта.
Выбор формы корпуса угловой колонки. При выборе формы обводов гондолы
и стойки угловых колонок быстроходных судов (см. рис. I 16) необходимо обес-
печивать наименьшее сопротивление движению при отсутствии кавитации на Гс'
жиме полного хода.
Гондола выполняется в виде тета вращения с относительным удлинением (от-
ношением дииш гондолы I к ее максимальному диаметру d) 4 < I'd < 7. Прн эт«'«
бескавитациониое обтекание гондолы имеется до скорости около 60 уз.
Для сечений погруженной чести стойки принимают профили типа N )С 1
или Манделя. Безразмерные координаты этих профилей представлены в табл. v.J-
Абсциссы точек профиля отнесены к длине хорды, а ординаты — к максимально'
толщине. т
Максимальную относительную толщину погруженной части стойки определи™
из условия отсутствия кашпацни на полной скорости судна при нулевом угле дре»*
по эмпирической формуле
условие (V.30) должно соблюдаться н в месте сопряжения стойки с гондолой. В рай-
Вю пересечения свободной поверхности воды профиль стойки выполняют в виде
К»даетр 1чного сегмента с острыми кромками.
фзблнцв V.3. Безразмерные координаты профилей NACA-16 и Манделя
1 Профиль N АСА-16 Профиль Мпнделя х b Профиль NACA-16 Профиль Манделя
0 0 0 0,5 1,00 0,990
0 025 0,300 0,322 0,6 0.972 0 928
0 050 0.420 0,461 0,7 0 878 0.816
0.075 0,505 0,563 0,8 0,700 0 650
0,10 0,576 0.650 0,9 0.420 0 432
0,20 0,777 0,861 0,95 0,236 0,293
0,30 0,903 0,966 1.0 0,010 0
1 0,40 0,976 1,000
Проектирование одиночного кормового гребного винта. Взаимодействие оди-
ночного кормового винта с корпусом колонки характеризуется коэффициентом
попутного потока а>, засасыванием / и влиянием неравномерности потока на момент /2.
Для угловых колонок быстроходных судов с относительным удлинением гон-
^Вы I,d = 44-6 и отношением диаметра впита к диаметру гондолы D;d = l,4-(- I 8
Кыптчина w составляет 0,03—0,05 За стойкой находится область подторможенного
отока наименьшее значение скорости в плоскости стойки составляет около 0.7—
0,8 скорости набегающего потока. Коэффициент засасывания имеет значения 0,04—
0.0G, а коэффициент влияния неравномерности потока на момент близок к единице.
Прн выборе этемептов кормового винта и выполнении расчетов ходкое i коэф-
Вит ы взаимодействия учитывают в процессе определения скорости потока 1л,
Втекающего на гребной винт, относительной поступи / и числи кавитации о41
а также полезной тяги гребного впита Д, но формулам
ол = о{1-^); / Од = --(-^,3 ; Г,= 7-(1-0.
[ Поскольку поле скоростей, создаваемое корпусом колонки в месте расположе-
ния гребного вннта, .характеризуется незначительной окружной неравномерностью,
^я таких движительиых комплексов можно проектировать оптимальные по про-
^дьсивным качествам гребные винты. Винты проектируют либо по диаграммам
серийных испытаний (см § 47) с учетом коэффициентов взаимодействия, либо по
вп (ревой теории (см. § 49) с учетом радиальной неравномерности поля скорсспй
&т Iоплатой. В последнем случае предполагают, что каждый элемент лопасти рабо-
Мет как элемент лопасти оптимального гребного винта в равномерном поле ско-
ра ч1, характеризующемся местным значением скорости набегающею потока
на данном радиусе.
Проектирование парных гребных винтов. Прн выборе геометрических элемен-
тов парных гребных винтов используют тот же подход, что и прн расчете соосных
вп 1тов. Предпатагают, что каждый винт комплекса можно рассматривать как оди-
нс Н1ЫЙ винт в свободной воде, если учесть изменение ноля скоростей и значений
^•вления, вызванных работой второго вннта и присутствием корпуса катонки.
Ш»’катьку размеры колонок таковы, что расстояние между гребными винтами со-
ставляет 1,5—2 диаметра винта, влиянием кормового гребного вннта на работу
рсового пренебрегают. Влияние колонки сводится к созданию попутного потока
(ю = 0,064-0,08). Поток в месте расположения носового гребного винта является
Практически безвихревым, поэтому перед колонкой давление повышается. Зна-
Еине давления может быть вычислено по уравнению Бернулли. С учетом сказанного
Иосительная поступь / и число кавитации ол носового гребного вннта, рассчи-
473
тайные по скорости потока, натекающего на винт, определяются выражениями
п о. + 2w — «А
/ = /„(1-®); lv = ~^’, <r„’-------------------
Кормовой винт работает в струе носового вннта, и режим его работы характери-
зуется:
сасыванни для парных греб- о -f- р
НИХ ВИНТОВ. <ТК = , , , .---ГД-
[l + CWx/vJJ1
Необходимые для его проектирования данные о вызванных носовым винтом ско-
ростях ч>х, Wt и давлении f> с учетом влияния колонки определяют эксперименталь-
ным путем [50].
Прн выборе элементов парных гребных винтов необходимо обеспечить равен-
ство крутящих моментов (для улучшения условий работы редуктора). Рекомен-
дуется также принимать диаметр кормового гребного вннта несколько меньше
диаметра носового (DK = 0,93+0,97 £>ы), чтобы избежать попадания кавити-
рующих концевых вихрей носового вннта на лопасти кормового вннта.
Изменение коэффициента засасывания движнтельного комплекса с парными
гребными винтами от коэффициента нагрузки, рассчитанного по суммарному
упору винтов, показано на рис. V.38. По кривым действия н коэффициенту
засасывания комплекса расчет ходкости выполняется изложенными ниже ме-
тодами.
§ 52. РАСЧЕТ ХОДКОСТИ БЫСТРОХОДНЫХ СУДОВ
И ПОСТРОЕНИЕ ПАСПОРТНЫХ ДИАГРАММ
КАВИТИРУЮЩИХ 1РЕБНЫХ ВИНТОВ
.Методы н последовательность выполнения расчетов ходкости зависят от ха-
рактера задания и полноты исходных данных Конечная же цель такого рас*
чета — установление оптимальных элементов движителей с учетом предъявляемых
к ины требований и получение необходимых материалов для надежного и опера-
тивного определения характеристик ходкости судна при различных услотгях
его эксплуатации. Расчет выполняют в несколько этапов.
I На первом этапе приближенно определяют основные элементы гребных
бинтов. Достижимая скорость судна в начале расчета неизвестна, поэтому расчет
ведут последовательными приближениями.
При расчете ходкости быстроходных судов заданными, как правило, явля отся:
I. Сила тяжести G и положение ЦТ ио длине судна xg.
Й. Геометрические элементы н гидродинамические характеристики не утег°
комплекса. „
3. Кривая буксировочного сопротивления судна е выступающими частями К-
474
1 4. Количество Zp гребных bihitcb. В ряде случаев задается предельно допусти-
мей диаметр.
Т 5. Характеристика энер1етнческсй установки PD (л), передаточное отношение
редуктора ip, КПД передачи г)$.
К Далее определяют ноле скоростей в области расположения гребных винтов.
1 Для расчета ходкости на данном этапе достаточно найти осредиениые по диску
движители Ав значения
brfs-
и вт ислить расчетный угол скоса потока, в к спором работает движнтельный комп-
лекс,
| Ч₽ = <Ро + 57.3 о„,
где <Го — установочный угол между линией вала и направлением движения. Для
глиссирующих судов рекомендуется использовать формулу (V. 14).
Если приняты разнотипные движители судна, количество которых равно т,
н если к движителю k подводится мощность Pok> то ”а этом этапе расчета для ряда
Г данных скоростей расчетный упор
г* =——----------pDh . (v.3i)
cos фг,
} Рог
I Далее для каждой скорости определяют чисто кавитации Од. На основании
диаграмм гидродинамических характеристик гребных винтов, приведенных в § 47,
находят их геометрические элементы, расчетный режим работы н потребную мощ-
ность в первом приближении
I Полученные выше данные позволяют построить зависимости Рць М и при
найти достижимую скорость судна и геометрические элементы греб-
ших винтов, включая диаметр О/ в первом приближении.
I II. На втором этапе расчета уточняют элементы гребных винтов с учетом тре-
бчяаннй прочности (см. § 45) и достижимую скорость судна. С этой целью:
Г по формулам § 46 определяют гидродинамические характернстикн гребных
вингов в неравномерном потоке;
. на основании формулы (V.31) получают расчетное значение упора движителя k
Ti = -сЛф-; Рм + * -м; (V з2)
Z . PoPlDf
I по аналогии с этапом I уточняют элементы гребных винтов н энвчеиия /, А у,
*U а также в соответствии с формулой (V. 18) находят пропульсивные коэффициенты;
Г по формуле (V.19) определяют общий пропульсивный к эффициент
находят потребную суммарную мощность
ГП _ ?<А
D 75,Wls
т т
Сели Рд = 2 PDi, то расчет на этом этапе закончен; прн Pq РО( произвол
Ь'тся соответствующая его корректировка.
47В
В случае необходимости оптимизации элементов гребных винтов:
на расчетные значения /, Кт, аА проектируют гребной винт согласно вихр^
вой теории;
уточняют кривизну сечений и распределение шага по радиксу;
изготовляют и испытывают в кавитационной трубе модель спроектированного
гребного винта;
с использованием полученных кривых рассчитывают ходкость судна н уточняют
его максимальную скорость.
111. Для судов с динамическими принципами поддержания гребные внпщ
с выбранными геометрическими элементами проверяют иа режим горба сопротив-
ления, которому соответствует скорость vr. С этой целью при нескольких значениях
частоты вращения по кривым действия определяют потребную мощность и полез-
ную тягу движителя Полученное значение потребной мощности на данном режи-
ме сопоставляют с ограничительной ха-
Rn.xH рактеристикой двшателя. Если потребная
Рис. V.39. Кривые буксировочного
сопротивления и угла ходового диф-
ферента глиссирующего судна.
мощность превышает располагаемую, то
необходимо откорректировать элементы
движителей на основании результатов по-
вторного расчета ио и. II. Если указан-
ною превышения нет, то находят мак-
симальную полезную тягу движителя
Т. max при потном использовании мощ-
ности двигателя. Для надежного выхода
судна иа основной режим движения вели-
чина Т,.], пшх должна превышать дс тю
сопротивления, приходящуюся на данный
движитель в 1,1—1,2 раза Это превыше-
ние определяется еще и заданной м ре-
ходностыо— увеличением сопротив гения
судна при движении в условиях расчет-
ного волнения
IV Зактючительный этап расчета
ходкости судна — построение паспортных
диаграмм, которые представляют собой
два овмещенных графика с общей осью
абсцисс V, уз и на которые ио осп
ординат при пП| = const наносят значения
Те и Pd-
Используя паспортные диаграммы, решают многие практические задачи:
определяют зависимость скорости судна и потребляемо!! мощности при задан-
ном водоизмещении от частоты вращения двигателя;
устанавливают достижимую скорость судна в случае изменения водоизмещения
и других внешних фактоРов Паспортные диаграммы необходимы также д оп-
ределения экономических режимов движения н дальности плавания судна при
различных режимах его эксплуатации.
Пример. Исходные данные для расчета ходкости н построения паспортной
диаграммы:
расчетная сила тяжести глиссирующего судия G = 750 кН;
число гребных винтов Zp = 2;
погружение оси винта /ц, = I м;
установочный угол гребных валов q0 = 11°;
мощность механической установки Рд = 2 X 1620 кВт при номинальной ча-
стоте вращения двигателя пт = 2500 об. мин;
изменение мощности по частоте вращения, соответствующее ограничитель!*0
харакгерметике двигатели. Значения его мощности приведены ниже:
пт р. об'мин........................ 1000 1500 2000 2500
PD. кВт.............................. 600 900 1200 *620
передаточное число реду ктора
ip = 0,412 и КПД валопровода т]з == 0,Ч?'
476
I частота вращения гребных внитов (в об, с)
л„ = 2500 -^£-1 = 17,2;
I 60
I диаметр гребного винта не должен превышать Dmax 1,0 м;
I кривые буксировочного сопротивления (е) ц угла ходового дифферента
(v) приведены на рис. V.39.
fuc. V.40. Кривые действия гребного винта (Л£'/1с= 1,1 u P.D =1,6; 7=3).
------------------------------ф - 0;----------V = 12”.
Требуется определить оптимальные элементы гребных винтов; рассчитать мак-
1мально достижимую скорость судна; построить паспортную диаграмму.
1. В первом прибтиженнн но расчету устаиовтено, что о* = 40 уз.
2. Для о = 40 уз:
Ра = 100 000 11; «Гр = <р0 -ь 0.5фх = 12а, = 0,515е cos q „ = 20 2 м с; ол =
[0,54; 7 -= 61 000 I); Лп = 1,75. 1
По кривым действия моделей серин находят оптимальные элементы1 Л£/Ло =
• 1.1; Р/D = 1,6. В этом случае / = 1,2, t]0 = 0,66, т. е. потребная мощность
477
составит Рд = 3160 кВт, а располагаемая равна Рд = 3240 кВт. Во втором lh
ближеник для глиссирующего судна можно принять
И 11^ 3240 .п _
° =u I зТбб 40,5 уз‘
3. По формулам § 46 выполняют расчет кривых действии гребного винта и но.
перечной силы в косом потоке прн фг, = 12э (рис. V.40 и V.4I).
Рис. V.4I. Коэффициент поперечной силы гребного вннта
прн <р = 12°.
4. Полученные выше данные позволяют произвести расчет ходкости рассма-
триваемого судна во втором приближении:
о - 40,5 уз; Ro — 101 000 Н, vA = 20,4 м с;
Оу} «= 0,53; ^ = 0,040; К? = 0,21.
По формуле (V.32) находят = 51 500 Н, т. е. kn = 1,85. На основании кри-
вых действия в косом потоке (рис. V.42) определяют I = 1,25, т]<> = 0,655
В соответствии с формулой (V.I8) пропульсивный коэффициент t;d=I,01X
ХЧо = а потребляемая одним гребным винтом мощность
PD = R°%- = 1610 кВт.
1b4sZp
В дальнейших приближениях нет необходимости, так как Рд яг Р”. Диаметр
гребного вннта (в м)
D =—= 0,95, т. е D<Dnua.
ni
Таким образом, с выбранными гребными вянтамн максимальная скорость дан*
него судна прн G = 750 кН и полном использовании мощности механической Ус"
тановкн составит v = 40,5 уз.
5. Для рассматриваемого судна устанавливают спедующнй ряд значении й"
стоты вращения двтателя (в об/мин); идв = 1000; 1500; 2000; 2500.
478
)Рис. V.42. Паспортная
ипзграмма кавитирующего
гребного винта.
I Выполняют расчеты по п. II для каждого нз принятых значений и ряда скоро-
В4 судна при Ь = 0,95 м с использованием кривых действия, по результатам ко-
тц . строится пвсп ртная диаграмма (см. рнс. V.42). На эту же диаграмму на-
косят располагаемою мощность двигателя Рд (пдв) н соответствующую ей предель-
ную тягу гребного вннта ТВр.
Г iaea VI
ВОДОМЕТНЫЕ ДВИЖИТЕЛИ.
ПРОЕКТИРОВАНИЕ И ГИДРОДИНАМИЧЕСКИЙ РАСЧЕТ
S 53. ОСНОВНЫЕ ЗАВИСИМОСТИ, ОПРЕДЕЛЯЮЩИЕ
Гидродинамические характеристики
(осевых водометных движителей
I Водометный движитель (рнс. VI. 1) включает следующие основные части:
| водозаборное устройство, предназначенное для приема воды из свободного
Потока и подачи к рабочему колесу;
Ц рабочее колесо, которое передает энергию двигателя потоку, протекающему
через движитель;
19 сопло, формирующее струю, реактивная сила которой создает тягу движителя;
J реверсивно-рулевое устройство, обеспечивающее изменение направления дей-
ствия тяги движителя без реверса приводного двигателя.
•479
Тяга водометного движителя определяется соотношением
Р = m (14 — i0), (Vi ()
где tn = apviA; — масса воды, протекающая через движитель за секунду (Д,
площадь сопла движителя); vt — скорость потока в струе движителя; С(,^~
рость натекающего на движитель потока.
В общем случае площадь выбросного отверстия сопла водометного движителя
не равняется площади поперечного сечения струи на бесконечности за движнг См
(a 1) Значение коэффициента а зависит от формы образующей сопла степени
остаточной закрутки потока и ряда других обстоятельств.
Прн расчетах водометных движителей тягу удобно представлять в беэразмеп
г 2Р
ном виде Cri =
Грузки по пл
эта BC.TH'iiti называется коэффициентом
о щ а д n
Рис. VI.I Схема подометного
движителя.
I — водозаборное устроПсшо: 2 _
рабочее колесо; 3 — сопло; 4 _
реверсивно-рулевое устройство.
Как правило, диаметр рабочего колеса водометного движителя отличается от
диаметра сопла Поскольку габариты движителя определяются размерами рабо-
чего колеса, при практических расчетах н конструировании движителя оказы-
вается удобным оперировать с коэффициентом нагрузки по площади диска рабочего
колеса Лз
Введя понятие коэффициента поджатия соп.п p = A('As, получим
Сп = Cj-s fr-
Согласно определению и формуле (VI. I) коэффициент нагрузки связан с отно-
сительной скоростью в струе движителя vi соотношением
V, = 0,5 + /0,25 -г Cr&'2f • б -2)
Ускорение потока в струе движителя происходит под действием напора, соз-
даваемого рабочим колесом. Необходимый напор может быть найден с помощью
формулы
в, с'о
Я= —(I + Сс) - (I - Со) + Л
где коэффициент потери напора в сопле движителя
Cc = 2gftc/n?;
коэффициент потерн напора в водозаборной части движителя
Со = 2гЛв/в§.
480
II Значение напора насоса удобнее представлять в виде
Я = (</%) (<.’ (1 ч- L) - I + to «], (VI .3)
еде h = igh/v^ — относительная высота подъема струи.
Полезная работа движителя равна произведению тяги на скорость движения,
а энергия, подведенная к насосу, — произведению напора расхода (объемного),
удельного веса, деленному на КН I рабочего колеса КПД водометного движителя
определяемый как отношение полезной работы к затраченной, составит
В _ Pv«
” ~ “W пр"
ИЛИ
2(6,-1) .... ,
4 б;(1 +Q ГТСГП5’4>
I Первый член правой части формулы (VI.4) принято называть КПД струн во-
иого движители
В 2(й, —1)
Пс~ 1ГЦ|+Сс)_|+г1+Л •
Г На рис \ 1.2 приведена зависимость >]г от коэффициента нагрузки по площади
огра при постоянных значениях суммы uo+й. Каждому коэффициенту потерн
напора в водозаборинке соответствует свое оптимальное значение коэффициента
нагрузки, при котором КПД получается наибольшим.
Для заданной величины Сдя имеется конструктивное поджатие сопла 0. при
квгором достигается наибольший КПД движителя.
I Если направление скорости в,- не совпадает с направлением движения судна,
Ку дет существовать составляющая реактивной силы струи 4Р, нормальная к на-
1р>илепию движения судна. При отклонении струи на угол а от направления лвп-
ж ши судна сила ДР и тяга авняипсли определяются следующими выражениями:
В ДР mt1, sin i\ I' = m (t1, cos a — t'J.
большинстве случаев целесообразно отклонение струи движителя вниз, так как
глав тающая реактивной силы струн направлена вверх н, как правило, хмепь-
1 т сопротнвтение судна па величину ДР 1г. Поскольку от действия силы ДР сни-
Жггся сопротивление судна, эффективная тяга движителя будет
I Р= Р+^=mp((cosa + -^^-) —ь0].
Ктевидно. наибольшая эффективная тяга соответствует максимуму величины
C’ts я + (sin a/fc). т. е. tg a = 1 k. Оптимальный угол отклонения струи, прн ко-
^Вом получается наибольшая эффективная тяга, a= arctg 1Д. Если значения гн-
К>г«Ч1111ам'|1ческого качества на СПК реальные (fe = 7 -j- 10). возможно увеличение
оп дьенвпого КПД за счс| отклонения струи на 2—1 %
I В случае большой скорости судна появляется опасность возникновения кави-
*«Ц Bi, вызывающей снижение эффектнанести движителя. При работе водометных
Л'ижнтелей наиболее вероятна кавит. пня на лопастях рабочего колеса. Кавита
и'ое качество рабочего колеса определяется наряду с нагрузкой числом
в и гадин
И п
s t>vs
В* П р Я II. ЦаПткунского. г. 3
481
Связь между местным числом кавитации с8 и числом кавитации, рассчитан-
р— Р
пым по скорости судна ст0 — • определяется формулой
„ Од 4~ 1 — Кх> —
ав= vl
(VI.Б)
§ Б4. ВЗАИМОДЕЙСТВИЕ ДВИЖИТЕЛЯ С КОРПУСОМ СУДНА
В настоящее время нет теоретического решения вадачи о взаимодействии в<^
домеиюго движителя с корпусом судна, на основе которого можно выполнять прйк'
тнческие расчеты, поэтому при расчете движителей прибегают к испытаниям сам
482
^Мюй модели судна в опытовом бассейне. Если выбросное сопло находится выше
Ковия воды, например за транцем быстроходного судна, то струя движителя мало
•1-итет на характер обтекания корпуса судна, а следовательно, и ею сонротивле-
ние. В этом случае на сопротивление судна влияет только водозаборный натру
уде н асход воды через него, а также изменение параметров потока, втекающего
движитель.
Г Гидродинамические характеристики движителя корпуса судна в первом i ри-
1*Ж.ении будут соответствовать такой скорости свободного потока, энергия кото-
на бесконечности перед движителем равна осреднеинон энергии потока, вте-
^а|зшсго 1 движитель. Отличие этой скорости от фактической скорости движения
^Ьга определяется коэффициентом попутного потока трения: vp » (1 -J- ш) о,.
floiei HHtwbHufi попутный поток судна не оказывает влияния на гидродинамиче-
ски характеристики водометного движителя. Попутный поток трения w зависит
от того, какая часть пограничного слоя корпуса судна проходит через гндравли-
чеснпе сечение движителя. ____________________.
На рис. VI.3 приведена зависимость to
дл глиссирующего судна н скегового
от безразмерного расхода Q. кото-
рый показывает, какая часть пограннчно-
^с.тоя всасывается з дв |жнтс. ь:
I ё = -5-
| BLva •
II На натурных судах толщина погра-
ничного слоя иная, чем иа исследованных
иоде ях. Поэтом данные о попутном
пМоке. полученные по модельным испы-
таниям (см. рис. VI.3). при расчете водо-
ис.ных движителей должны быть откор-
ректированы. Ориентировочный пересчет
попутного потока с модели на натуру
нож > выполнить по следующей формуле:
«у,.С)
« lgReH )
I Для движителя работающего вблизи
Сие юти
| тяга движителя
| Р = *; |О| —
Рис. VI.3. Зависимость коэффициента
попутного потока трения от относи-
тельного расхода воды через движи-
тель.
корпуса судна, имеем следующие зави-
( — ш) о,];
относительная скорость в струе движителя
Si = 0.5 4- ] 0,25 + Crs (jpg :
напор рабочего колеса
н - -g-I6?(! + Се»- (* - W<* -а’)‘ + Ч
I коэффициент полезного действия струн
„____________________________() — «)!___________.
10 v (1 ’
I местное число кавитации перед рабочим колесом
ао-К»-£о)(1 -ш)»-й .
16'
483
Водозаборное отверстие н расход воды через движитель изменяют картщ
обтекания кормовой оконечности судна, что в ряде случаев влияет иа сопротцв,17
иие судна. Изменение сопротивления судна принято называть сопротивлением Во_
дозаборннка 7?вод. С учетом сопротивления водозаборника тяга двнжите я буд,т
Т = Р — /?вод| а эффективность движителя определит формула
2 - (< — Ц’>) [1 - (Диол Р)| Чр. к
Коэффициент 1 — (/?В0П/Р) в формуле для пропульсивного коэффициента и
как и w, изменяет оптимальное в смысле КПД значение Cj-s/p.
В случае подводного выброса воды из сопла движителя, который характерец
для водонзмешающих судов и прн движении многих судов с малой скоростью, имеется
дополнительное взаимодействие корпуса судна с движителем. Давление на срезе
сопла отличается от атмосферного и определяется формой обводов корпуса и ско-
ростыо судна. В свою очередь струя движители может изменить сопротивление судна
за счет сил подсасывания, создаваемых струей движителя. При проектировочных
расчетах движителя этим взаимодействием пренебрегают; его учитывают, когда
выполняют расчет судна с использованием результатов модельных испытаний.
Формулы настоящего раздела i рнменяют дтя проектировочною расчета эле-
ментов осевых водометных движителей и для предварительных расчесов их тяго-
вых и энергетических характеристик. Эти зависимости не в ватной мере учитывают
ряд факторов, например влияние неравномерности потока, втекающего в движитель,
что может привести к существенным погрешностям прн определении тяги и КПД
движителя Поэтому Для окончательных расчетов ходкости судов рекомендуйся
использовать результаты самоходных испытаний моделей, оборудованных водомет-
ными движителями с принятыми для конкретного проекта элементами.
§ 55. ВОДОЗАБОРНЫЕ УСТРОЙСТВА
ОСЕВЫХ ВОДОМЕТНЫХ ДВИЖИТЕЛЕЙ
Коэффициент полезного действия водометного движителя и кавитационные
качеств рабочего колеса в значительной степени обусловлены гидродинамвчаигм
н внешним сопротивлением водозаборника. степенью равномерности потока, под-
водимого водозаборннком к рабочему колесу.
Гидравлическое н внешнее сопротивление водозаборника. а также струк ура
потока перед рабочим колесом зависят от конфигурации водоприемного патрубка
и трубопровода, их геометрических размеров, относительной скорости протекания
веды через водозаборный трубопровод t>s, чистоты обработки поверхностен и т. п.
Теоретические методы расчета оптимальных обводов и размеров водоз;бсрин-
ков, а также их гидравлического и внешнего сопротивления практически не раз-
работаны. Поэтому определение сопротивления водозабора нков и выбор их элемен-
тов при проектировании движителей производятся по результатам модельных ис-
пытаний
На рнс. VI.4 приведены коэффициенты гидравлического сопрстиЕЛи.ня
водозабор ни ков глиссирующего судна, полученные В М Грннпрессом и М А Вес-
ниным на основе анализа результатов модельных и натурных иепыишнй
Значения коэффициентов гидравлического сопротивления tu водозабора вкоп,
найденные при испытании серии макетов водометных движителей СПК, припециы
на рис. VI.5 Эскиз макета водозаборника показан на рис. VI 6 Па рис VI 7 ьр1'
ведены значения коэффициента гидравлического сопротивления во входном патрубка
Приближенно ватные потерн напора водозаборника прн различных углах нак.-ога
стойки можно определить суммированием коэффициентов £, найденных по кривым
рис VI8 и VI9
Со = Cses + Сях-
Приведенные экспериментальные данные о гидравлических потерях испе.ть
ауют для предварительных расчетов водометных движителей.
Прн проектировании водометных движителей скоростных судов необходим0
выбрать элементы водозаборника такими, чтобы обеспечивались высокая эф!1**
484
। кость движителя иа эксплуатационных скоростях, близких к скорости пол-
ого хода, н тяга, достаточная для уверенного разгона судна. С этой целью необ-
Ьдимо получить как на полном ходу, так к в районе горба сопротивления неболь-
шие значения гидравлического и внешнего
сопротивления, т. е. обеспечить на обоих
режимах работы движителя отсутствие
ичи незначительное развитие кавитации
кромок входного патрубка водозаборни-
ка. Оптимальные условия для этого соот-
Рис VI.4 Коэффициент гидравличе-
ских потерь в водозабор пике осевого
водометного движителя (ОВД) глис-
сирующего сучна
1 — ПЬ = 2,25; 2 — 1,'Ь — 3,0; 3 — 1,'Ь —
«= 4.5 (5 — ширина входного отверстия
ВиД’>заборкика).
Рнс. VI.5. Коэффициент гидравличе-
ских потерь в водозабор инке иолно-
иапорпого типа ОВД для СПК У гол
наклона стойки 45'.
' - лвхЛ’з = °-475: * - Лвх,'Да =0,650;
3 ~ лпк!А1 •= 0-940.
еэствуют равенству скорости втекания потока скорости движения судна: йвк = I.
всход воды через водометный движитель при постоянной частоте вращения рабсь
го колеса мяло зависит от скорости судна. Па режиме разгона расход воды меньше,
см на полном ходу, лишь на 10—20%, в то
рс.мя как скорость судна на данном режиме ___________________
Рис. VI.6. Схема пояионапорпого вито-
заборника ОВД. для СПК.
Рис. VI.7. Коэффициент гидравли-
ческих потерь в но.тиоиапориом
водозабор нике ОВД для СПК, рас-
считанный по скорости
у Поэтому условие vкх = I одновременно на обоих режимах ие выполняется
>г гозяборинк, выбранный из условия рвх = 1 на полном ходу, будет иметь на
сжимах разгона й|.х 1, и его гндртвл (ческое сопротивление окажется настолг-
Ь болыинм, чю избежать кавнтацнн рабочего колеса и соответствующего падения
ги водометного движителя ниже допустимого па переходном режиме невозможно.
485
При выборе водозаборного патрубка из условия обеспечения на переходном
Жиме условия йвк = I, на полном ходу йвх< I. поэтому для отсутствия кав»па'
цни внешней поверхности водозаборного патрубка (с целью утилизации силы поп"
сасывання на кромках водозабор ника) его лобовую площадь необходимо принять
чрезмерно большой. Очевидно, это приведет к недопустимым габаритам водозабор**
Рис. VI.8 Влияние угла наклона стой-
ки водозабориика ОВД для СПК на
коэффициент гидравлических потерь.
Рис. VI 9. Коэффициент гидравличе-
ских потерь во входном патрубке пол-
нонапорного водозабор ника.
Г — в 0.475; 2 - ^вх/^з = 0.650;
3 - Лих1Ай = 0.S1O.
ника н соответствующему увеличению его внешнего сопротивления, т е. к сни
жению эффективности движителя на полном ходу. До недавнего времени предла
галось компромиссное решение. На режиме разгона принимали наибольшее зна
чение овт > I, при котором еше возмож-
но обеспечить тягу движителя, достаточную
Рис. VI. 10. Схема полнонапоркого водо-
забор пика с подвижным центральным
телом.
I — положение центрального тела при раз-
гоне судна; г — то же, при полном ходе судна.
Рис. VI. II. Схема пот и она пор в ого
водозаборннка с откидывающейся
степной.
1 — положение стенки кр» разгоне
судна, 2 — то же, при полном ходе
судна.
для разгона судна. В результате эффективность движителя на полном ходу го
сравнению с оптимальным в отношении КПД движителем снижалась умеренно.
Более радикальный способ решения проблемы двухрежимност и — примене-
ние водозаборного устройства, эффективная площадь входного отверстия которою
большая в процессе разгона и соответственно небольшая на режиме полного хода.
Подобного изменения гидравлического сечения достигают различными способами-
Регулируемые водозаборные устройства можно подразделить на три группы
К перво й группе относятся устройства у которых площадь водоза-
борного отверстия изменяется принудительно каким либо механическим прпвс"
дом. К этой группе относятся, в частности, водозабориики СПК с подвижным W"
тральным телом и откидывающейся стенкой, а также сташческнй водозябеР'
ник СВП скегового типа с подвижным сводом. Схемы этих водозаборных устройс'11’
и принцип нх действия показаны иа рис. VI.10—VI 12.
II К о второй группе относятся водозаборные устройства, у которых
И1еиенпе площади гидравлического сечения входного патрубка осуществляется
,.1 счет перераспределения давления при смене режима работы движителя. Подоб-
ных устройства снабжаются невозвратными клапанами, которые открывают водо-
Ьборчые отверстия на режиме разгона, когда давление в водозаборннке меньше
Инпиего давления, и закрывают их при повышении давления па полной скорости
^k|ia. Схема одного из возможных вариантов устройства приведена на рис. VI. 13.
К третьей группе относятся устронства с дополнительными кана-
ками. которые гидродинамически запираются на одном нз режимов работы двн-
Ькит- я за счет срывного обтекания; тем самым достигается требуемое изменение
Ьдравшческого сечения входного патрубка водозаборннка. Эти устройства не
Ьмеют подвижных элементов, как водозаборннки первых двух групп.
Р . VI. 12. Схема статического шмоза-
| борника с подв| жпым сводом.
I — положение свода прк разгоне судна; 1 —
I то же, при полном ходе судна.
Рис. VI. 13. Схема полнонапорного
водозабор ника с невозвратным кла-
паном.
! — положение затвора клапана при раз-
гоне С) дна. 2 — то же. при пол ион ходе
судна.
Из рассмотренных решений проблемы
I Из рассмотренных решений проблемы двухрежпмности в д заборник более
пфепективно то, на котором основаны конструктивные схемы третьей группы
В этом случае не требуется приме! ения специальных (часто очень сложных н гро-
Ь»дк !Х) механизмов'для управления регулируемыми элементами отсутствуют
Какие-либо подвижные элементы, снижающие надежность устройства. Эффектна
io-ть таких в хдозаборных устройств оказывается не меньшей, чем других рас-
Кптренных устройств. Нанбольн нй выигрыш в эффективности за счет применения
Ьэухрежнмиых водозаборннков достигается на СПК, имеющих енльновыражен-
мй горб сопротивления.
Г Одна из возможных конструкций даухрежнмного водозаборпика показана иа
piu VI. 14. Схемой предусмотрена установка на водозаборннке движителя СПК
к оптимальными элементами для движения на полном ходу дополнительных водо-
Ваборпых патрубков расположенных таким образом, что после выхода судна на
ежим движения на крыльях они оказываются выше ходовой ватерлинии. Подоб-
нве размещение дополнительных водоприемных патрубков позволяет снижать
гидравлическое сопротивление прн разгоне судна путем выбора патрубков надле-
жащих размеров н конфигураций без значительного ущерба для характеристик
движителя на полном ходу. Проточная часть водозаборного устройства в районе до-
полнительных патрубков спрофилирована так, что статическое давление в потоке
[внутри водовода окажется равным атмосферному давлению при движении СПК
на крыльях. Благодаря этому исключается сколько-нибудь значительное истече-
ние воды нз дополнительных патрубков на данных режимах н нет необходимости
останавливать на дополнительных патрубках невозвратные клапаны На рис. VI. 15
'гидравлическое сопротивление подобного водозаборпика сопоставлено с резуль-
татами компромиссного решения. Некоторое увеличение гидравлического со-
противления прн vs — 0.54-0.7 связано с уменьшением сечения водовода и нали-
вшем дополнительного сопротивления в районе верхних водозаборных устройств.
Внешнее сопротивление статического водозаборпика, выполненного запод-
нцо с поверхностью корпуса судна, близко к нулю, если нет срывного обтекания
и кавитации входного патрубка Прн выдвижении деталей водозаборпика под пло-
437
скость днища судна сопротивление водозаборннка увеличивается. Оно может быть
оценено по формулам для водозабор ников полнонапорного типа
^вод — Сх^РП^/2,
Рнс. VI. 14. Схема двухрежимного водозаборннка СПК.
1 — ocironiiofi водозаборный гл рубок: 2 — дополи нт ел ьвый водозаборный пвтрубпк
--------ВЛ, соогиетствующвя режиму разгона судия:-------- ВЛ. соответствуюшоя
полному ходу судне иа крыльях
Рис. VI. 15. Коэффициент гидравлических потерь в водозаборнике ОВД для С11К.
1 — «оипроииссный» подоэаборник; 2 — даухрежигпый водизайориик.
В случае кавитации внешней (наружной) стороны входного патрубка сопро-
тивление волозаборника при внешнем обтекании возрастает, поскольку при кан'*
тации уменьшается подсасывающая сила, образующаяся иа водозаборном сопле.
Сила подсасывания, если отсутствуют кавитация и отрыв потока, не зависит от
внешнего очертания и формы поперечного сечення входного патрубка; опа опре-
деляется по формуле
Р = O,5pt'g^BX (I — vBX. tja.
488
f> случае равномерного распределения давления по внешней поверхности входного
патрубка каишация отсутствует при соблюдении неравенства
'По)2
(VI 7)
Ось бсОсза
Осркикл
А
I А
I Профиль водозаборного патрубка, обеспечивающего равномерное распределе-
ние давления, получить весьма сложно Рекомендуется для пол юнапориых водо-
заб |рников использовать профили, применяемые для воздухозаборников авиацион-
К* двигателей скоростных самолетов, например профиль NАСА-1, ординаты внеш-
него контура которого приведены в табл.
Внутренний профиль воздух заборни-
ка представляет собой дугу окружности
k/Kn, 0.0244 4- 0,976 ГАвх 71П1.
Принятые обозначения поясняет
ри- VI. 16.
I Форма воздухозаборника NACA-1 не-
сколько отличается от оптимального при
котором давление распределено равно-
мерно по поверхности, поэтому отношение
ргп^вх, рассчитанное по формуле (V1.7).
нс обеспечивает отсутствия кавнтаини. На
рнс. VI.17 приведены критические числа
кавитации дтя серии водозаборников. по-
лученные в результате испытания моде-
лей. На рис. VI. 18 показано влияние утла
скоса натекающего потока па минимальное
значение критического чиста кавитации.
I Кавитационные характеристики статических водозаборников (рис. VI. 19)
можно оценить с помощью диаграмм (рнс. VI.20) коэффнцненюв разрежения па
Кепках плоских водозаборников, построенных В. А. Фроловым. Контур плос-
кие
Рис. VI. 16. Эскиз входного патрубка
полнонапорного водозаборннка.
кого водозаборннка следует прини-
мать подобным контуру диаметраль-
ного сечения статического водозабор
V>
Рнс. VI. 17. Критическое число кавитации
[входного патрубка полнонапорного
заборника.
/ — кавитация внсшисЛ поверхности;
имитация пнутршнеЛ поперхности.
I ^п»/^вх = Т.Т’. 2 — .4Jn'Ae4 — 3.8;
Ап/Лвх 2,5; 1 ~ ^ni 'еж
ния потока па критическое число
кавитации входного патрубка пол-
нонапорного водозаборннка типа
NACA-1.
во.то-
Инка. Координаты контуров плоских водозаборников приведены в табл. VI.2 в
оответствнн с рнс VI 19
I При выборе элементов водозаборного устройства работающего вблизи корпуса
судна, следует учитывать наличие пограничного слоя. В случае наружного диффу-
зорного течения (скорость потока перед входом в водоэзбориик уменьшается) может
Таблица VI.I. Ортииаты внешнего контура профиля NACA-1
х,4 , L х L г L х t г L
0 0 0.10 0,361 3 0.50 0,826 9
0,004 0.066 3 0,15 0,-153 0 0 60 0 891 1
0,010 0,103 8 0.20 0,537 0 0.70 0,939 5
0.0IS 0,12’2 0.25 0,591 5 0,80 0.973 5
0.025 0,165 7 0,30 0,648 9 0,90 0,994 4
0.050 0,243 6 0,40 0,747 5 1,00 1,000
оказаться, что наиболее Энергонасыщенная часть пограничного слоя (в относитель-
ном движении — наиболее подторможенная) не преодолеет градиента давления па
входе в водозаборник — произойдет отрыв части пограничного слоя, н он будет
сноситься в виде свободных вихрен. Это вызывает увеличение сопротивления судна,
уменьшение попутного потока трения и эффективности движителя.
Та 6. и на VI.2. Геометрические элементы плоских водозаборннков (иактоп
Вол о яаборн ик № I Водозаборннк № 2
скол, нижняя часть свод нижняя часть
х !1 X -0, —У. А В —
0,0 0,5 1.0 2,0 3,0 4,0 5.0 6.0 6.5 7,0 0 50 0.54 О,5Г. 0,46 0.28 0,12 0.034 0,028 0.000 3 0.000 0 0,0 0.50 0.760 0.800 0.900 0.920 0.930 0,940 0,950 0,955 0,960 0,500 0,470 0,455 0,456 0,470 0.474 0.478 0.481 0,487 0,490 0,500 0,540 0, 40 0,540 0.539 0,530 0.526 0,522 0,518 0,512 0,508 0,500 0.0 0,50 1,00 1,50 2,00 2.50 3,00 3,32 0,50 0,54 0.52 0,39 0,20 0,061 0,001 3 0,000 0,0 0,30 0,50 0,60 0,70 0,72 0,73 0,735 0,50 0,483 0.471 0,476 0,487 0,496 0,500 0,510 0.54 0.54 0.54 0.54 0.532 0,526 0,515 0,510
Водозаборннк № и ВиЧО : ЮТ
свод ннжвяя часть С ПОД
X 6 i -В, -в. X р
0.0 0,50 1,00 2,00 3,04 4,0 5.000 6,0 7,00 7,97 7,50 0,50 054 0,56 0.454 0,184 —О 116 —0,328 —0,456 —0,495 —0,500 —0,499 0,0 0,5 1.0 1.5 1.6 1.7 1,75 1,80 0,500 0,465 0,430 0,395 0,389 0,382 0,387 0,42.3 0,540 0,540 0,539 0,511 0.500 0.471 0,460 0,423 0,0 0.5 1.0 1.5 2,0 2.5 3,0 3,3 0,5о 0.536 0.460 0,117 -0.193 —0 412 —0 4 '0 —0 499
490
| Для исключения кавитации рабочих колее водозаборные устройства водометных
«•жителей скоростных судов проектирую таким образом, чтобы статическое давле-
ние в зоне перед рабочим колес м было повышенным Поэтому внутри водозаборника
Бздается градиент давления, который обусловливает срыв потока. Подобный срыв
У1
Ию VI. 19. Схема водозаборника быстроходного глиссирующего судна и СВП.
мла 4 )
К* - Ц| БоДозаборник < s В<1Д4 изборник Л» 1
|И СВОД нижняя часть СВОД нижняя часть
0,0 • 0/0 •or U* £ fc- 3,0 fr u !? V 0.500 0.535 0.542 0,454 0,275 0.080 —0,130 —0.300 —0.410 —0,470 —0,494 —0,500 0.(.<1 0.50 0,60 0,70 0,72 0,73 0,735 o.fto 0.467 0.4Ы 0 484 0,494 0,500 0,510 — 0.540 0.540 0,540 0.532 [ 0,525 0,518 0.510 X 0,00 0,50 1,00 3.00 4.00 5.00 7.00 9.00 11 00 12.00 1.3.00 13,60 У 0,500 0.540 0,570 0,512 0,363 0,172 —0.168 —0.394 -0.483 —0,497 —0.4998 —0.500 0.00 0.50 0.70 0.80 0.90 0 95 0 955 0.960 -S. 0,500 0,465 0,453 0.453 0,470 0,487 0 490 0,500 ~У> 0,5-10 0,540 0,540 0,539 0,530 0.5I2 0.508 0,500
И*4 ° Водозабор ни к Л.1 7
• с НОД нижняя часть
— Vi —У» * 0 -У,
К) К-О 1.2< 13о 1.4<> 9 42 1 4‘" 0.500 0.465 0.4.:9 0 421 0.438 0,478 0,490 0 510 0,540 0.540 0,540 0,540 O.54D 0.53J 0.530 0,510 о.о 0,50 1,0О 1 50 2.(0 2,33 0.500 0,536 0,398 0,108 0.005 и,000 0.0 9.50 1 СО 1 50 1,60 1.70 1,75 1.80 0.50 0,465 0.430 0.395 0.388 0,382 0,383 0.420 0.5*10 0.540 0,539 0,512 0,493 0,469 0,459 0,420
491
Приводит к увеличению гидравлического сопротивления водозаборпика вблизи
корпуса судна по сравнению с изолированным водозаборинком и к появлению боль-
шой неравномерности потока, натекающего на рабочее колесо водометного движителя
Кроме гидравлического и внешнего сопротивления водозаборного устрой j
иа эффективность водометного движителя СПК влияет сила тяжести воды в трубо-
проводах движителя, которая снижает полезную нагрузку судна либо увеличивает
водоизмещение. Уменьшение эффективной тяги движителя равно дополнительному
сопротивлению судна, обусловленному увеличением водоизмещения от приема
воды в движитель, и определяется формулой Д/? = Дб.'Л(А — гидродинамическое
качество суша).
Рис VI 20. Зависимость критического числа кавитации
а—дли свода водозаборннка (см. табл. VI.2)
2 — ёрасч й-4. ? “расч " Oq “ 0.5: 3 ёрасч = 0.4. = 0,2: Т —*
1расч — 0.9 « 0.2.
б — для нижней части волозаборииков 1—7.
На ранних стадиях проектирования силу тяжести воды можно рассчитывать по
<|ормуле
3C.,3sO[).2Z + 2+l£^
(VI S)
§ 56. РАБОЧИЕ КОЛЕСА ВОДОМЕТНЫХ ДВИЖИТЕЛЕЙ
В качестве рабочих колес водометных движителей обычно применяют осевые и
ценгробежные насосы. Путем комбинации нескольких насосов можно получить
необходимое для водометною движителя сочетание напора и расхода.
Возможны два основных пути для определения элементов рабочих колее гбес-
лечивающих требуемый напор прн заданном расходе. Первый, наиболее простои и
надежный, заключается в использовании результатом систематических модельных
испытаний, которые в справочных материалах приводятся в виде зависимостей
коэффициентов нап ра Кц = П и момента Kq — М (щг[)ь от коэффициента
расхода Кч— Q '1D3. Диаграммы н графики напорных и моментных характери-
стик пасосоп ОВД, а также общепромышленных осевых (ОП-3, ОП-5, О-Ь) 11
центробежных (12Д-13, 12Д-19) насосов, рекомендуемых для водометных дья*
жителей, приведены иа рис. Vl.21—VI.28. На рнс. V1.29 и VI.30 показаны эле-
менты лопастных систем насосов ОВД Диаграммы н графики позволяют под-
бирать рабочее колесо, обеспечивающее содоме!ному движителю наибольший КПД
Если не удается обеспечить требуемый нанор (или расход) одной ступенью,
возможно использование двух- и трехступепчатых рабочих колес (число стуселен
4'12
ожег быть н больше). Потный напор рабочего колеса определяется как сумма папо-
ов ступеней. Рассчитанный как сумма напоров одпостуneiriaiux насосов напор
^многоступенчатого рабочего колеса в достаточно широком диапазоне поступи отли-
чается от измеренного не более чем па 3—5%. Это справедливо также прн работе
попастсй осевою насоса в условиях развитой кавитации
Трудность «бсспечения требуемого напора одной ступенью может быть обуслов-
лена двумя причинами:
। 1. Необходимый коэффициент напора Л1( больше предельного, который можно
олучнть с помощью исследованных насосов. В этом случае разбивку напора по сту-
еням рационально производить равномерно с целью унификации элементов рабо-
их колес.
2. Невозможно обеспечить требуемый напор из-за возникновения кавитации
.юпастей. На установившихся режимах движения СДПП следует избегать работы
[насосов при развитой кавитации, поскольку кавитация приводят к резкому сниже-
нию КПД и возникновению эрозионных разрушении элементов движителя Число
ступеней определяется условиями бескавитапношюн работы каждой ступени. По
диаграммам рнс. VI.23—VI.28 находят при рассчитанном коэффициенте расхода
числе кавнтаинн os предельный коэффициент напора, который можно получить
* одной ступени. Вторая ступень рабочего колеса будет работать в зоне повышсп-
ого давления, созданного первой ступенью. Поэтому число кавитации для второй
гупеии отличается от л$ Действующее число кавитации для шорой ступени
°.S2
r^2g.
а
Io рассчитанному значению o.s2 н Л'в аналогичным образом находят предельный
напор второй ступени. Д я третьей степени число кавитации вычисляют по формуле
На кратковременных режимах работы (например, во время выхода судна на
крылья) для улучшения компоновки движителя иногда выгодно допустить кави-
тацию лопастей рабочего колеса, если обеспечиваются требуемые тяговые харак-
теристики. Напорные характеристики насосов при развитой кавитации можно опре-
Re.iuTL тальки по данных! модельных испытаний. На рнс. VI.22 и VI.28 приведены
ндпорные характеристики рабочих колес при развитой кавитации, полученные
путем испытаний моделей в условиях равномерного натекания потока Напор ра-
Ввчих колес с кавитирующими лопастями в реальных условиях меньше, чем i одно-
родном потоке Снижение напора зависит от характера неоднородност» потока,
конструкции рабочего колеса, режима работы п должно быть в каждом конкретном
рлучае определено в результате испытания моделей. Молельные испытания показы-
вают, что уменьшение напора вследствие неоднородности потока может достигать
25 %; момент иа валу рабочего колеса снижается в меньшей степени. Эффективность
рабочего колеса в этих случаях уменьшается па 10—20 ®о.
На стадии проектирования движителя, когда известны характеристики привод-
ен» двигателя (мощность па валу н частота вращения рабочего колёса) для подбора
коса целесообразно дополнительно использовать моментные диаграммы. Диаграммы
оказывают зависимость коэффициента момента Kq от коэффициента расхода. Од-
яко с помощью диаграмм напорных характеристик, приведенных в литературе,
г всегда удается подобрать насос в качестве рабочего колеса осевого водометного
движителя. В этом случае основные элементы рабочих колес определяют расчетным
путем.
Число ступеней рабочего колеса зависит от предельного напора, который может
оСесп ч ть одна ступень при заданных диаметре п частоте вращения рабочего колеса.
Бграннчением служит либо предельное значение вызванной тангенциальной ско-
риетн, которая не может превышать окружную скорость элемента лопасти U —
р 2ллг, либо кавитация лопастей, не позволяющая получчть большой напор прн
Достаточно высоком КПД. Напор рабочего колеса
Н = Uvt!g,
493
Рис. VI.21а. Диаграмма напорных характеристик чешрсхлопастных насосов ОВД.
I Предельный теоретический напор осевого насоса, определяемый диаметром
ст шцы в районе выходящих кромок, где окружная скорость лопасти наименьшая,
Составляет // = l/jT/g. Предельный теоретический коэффициент напора, который
кажет быть обеспечен осевым насосом.
g.
I Достижимый напор рабочих колес увеличивается при увеличении диаметра
ступицы в районе выходящих кромок. Реальное значение предельного коэффициента
liaiiopa составляет
К.ч < 0,7<4г.
(VI.9)
Предельный напор одной ступени рабочего колеса, если еще отсутствует кави-
—... ---------- графика зависимости критической
Гания лопастей, можно определить с помощью
нагрузки насоса, при которой кавитация па ло-
пастях начинает влиять на напорные характе-
ристики, от произведения суммарной ширины
uioiiacrcH на относительном радиусе 0.925 и
числа кавитации (рнс. VI.31). Этот график для
у (рбства расчетов перестроен в виде завнспчсс-
чи критического коэффициента напора от ксэф-
фн. пента расхода при постоянном произведении
суммарной ширины лопастей на радиусе 0.925
нч число кавитации (рис. VI.32)
I С помощью графика (рис. VI.32). а также
ф юмулы (\ 1.9) определяют предельный напор
1О.ИЮЙ ступени рабочего колеса и находят нуж-
Н'« число ступеней. Если коэффициент напора
|Ок. тывается меньше, чем соответствующее зиа-
I'uwtue, пол) чепное по i рафику на рнс VI.32 и
ф.»муле (VI.9), то можно создать одноступен-
ч вое рабочее колесо, в противном случае прн-
1х'>лится прибегать к использованию многосту-
шнчатых рабочих колес. Оптимальное раенре-
_ кеине иа!рузок по ступеням многоступенчатого
Ь.хоса с позиции кавитационных качеств соот-
ветствует одинаковому запасу на кавитацию у
в »х ступеней, при критическом числе кавитации
витасти всех ступеней начинают кавитировать
рдвовремепип. Этому условию при двухст упен-
маюм рабочем колесе приниженно соответствует распределение нагрузки на
Первую ступень 35 %, из вторую — 65 °6: при трехступенча)ом: па первую сту-
Вни - 12 “о. на вторую —28%. на третью — 60 %
I Для приближенною определения необходимого числа ступеней рабочих колес
1н.< самых ранних стадиях проектирования водометного движителя построены диа-
граммы зависимости критическою числа кавитацин по скорости судна от коэфхрн-
Мепта нагрузки Сть и поджатия сопла Р для одно-, двух- н трехступенчатых рабочих
волге (рис. V1.33).
I С целью обеспечения наплучтих значений КПД рабочего колеса, его массы и
[Га тритов целесообразно принимать суммарную ширину лонасгей (равную Zb\ нан-
м ьшей. Ограничением служит опасность возникновения кавитации на лопастях и
Крывного характера обтекания лопасти.
Минимальную суммарную ширину лопастей, обусловливающую бсскавнташюи-
I ;ю работу рабочего колеса, можно определить по ptic. VI.32. .Минимальное зпачс
biuc суммарной ширины лопастеп, при котором достигается безотрывное обтекание,
исходят по диаграмме зависимости наименьшей густоты решетки от коэффициентов
Шпора и расхода (рис V1.34)
I При выборе числа лопастей рабочего колеса обычно исходят из следующих
рЬображспий: конструктивно трудно выполнить рабочее колесо с числом лопастей
497
Рнс. VI.23. Гидродинамические
характеристики центробежных
насосов 13Д-13 (-----) и
12Д 19 (-----).
1
Рис. VI.25. Диаграммы насоса ОП-3: а — напорная, б — моментная.
500
Мелее шести-семи; прн возрастании числа лопастей уменьшаются осевой размер ра-
(jn'iero колеса н габариты движителя, однако несколько ухудшаются кавитационные
качества вследствие загромождения сечения и увеличения относительной толщины
допастсй. Поэтому не рекомендуется предусматривать больше шести топаете» отг й
сгупени рабочего колеса; прн трудности обеспечения бескавнтацнонной работы число
ропастей следует уменьшить до трех-четырех.
[ Шаговый угол н кривизну сечений лопасти можно определить по одному нз
мс'одов, принятых в насосостроеннн. Достаточно простой метод расчета шага и
1рпвизны лопастей осевого насоса, который приводит к удовлетворительным резуль-
татам, приведен в работе 1631.
I Рассмотренные гидродинамические характеристики н методы расчета относятся
к । асосам общепромышленного назначения, для которых характерно создание напора
1 основном за счет приращения потенциальной энергии, ибо при перекачке жидкости
скоростной । пор струи, вытекающей из насоса, является потерянной энергией.
С целью уменьшения этих потерь насосы снабжают диффузорными аппаратами а
Мофилн лопастей насосов выбирают таким образом, чтобы большая часть
энергии, передаваемая потоку лопастной системой, носила потенциальный харак-
। «Ф
Для создания тяги водометный движитель должен ускорять поток; дав теине
М входе в рабочее колено движителя незначительно отличается от давления на срезе
|срлла, в ряде случаев оно даже больше давления на срезе сопла. Поэтому колесо
движителя должно создавать напор главным сбразом в результате приращения ки-
нетической Энергии. Диффузорное течение в пределах рабочего колеса водометного
Ьвн жителя, характерное для общепромышленных насосов, вызывает значительную
И'отерю энергии н обусловливает увеличение габаритов н массы рабочего колеез
III связи с этим рабочее колесо водометного движителя целесообразно изготовлять
диффузорных аппаратов, а профилировку его лопастей выполнять таким образом,
чтобы избежать или существенно уменьшить диффузориость течения. С уменьшением
|Д1 |к] узорности течения в насосе снижается давление на упорный подшипник которое
Шожет быть значительным у обычных рабочих колес прн малых значениях коэффи-
циент» поджатия сопла.
I Осевое усилие на валу райо тег колеса определяется формулой
P=nW-np(^)2ln-5--^(^)2--^ 4^,-^)*. (VI.10)
I C i пользованием формулы (VI. 10) были выполнены систематические расчеты
fr-aoio усилия на валу, результаты которых приведены на рнс. VI.35 в виде зави-
очшетн безразмерного коэффициента упора Кт от относительного радиуса ступицы
различных значений коэффициентов расхода и напора рабочего колеса. Осевое
Вилие иа валу рабочего колеса может быть существенно уменьшено путем выбора
Ьшметра ступииы на выходе нз лопастной системы; это важно при разработке водо-
Ветных движителей болынои мощности, поскольку создание для них упорных под-
П'н пинков представляет сложную проблему
I I Рабочие колеса рассматриваемого типа характеризуются снижением удельного
слепня не только на подшипники, но и на лопасти. Это благоприятно сказывается
а прочностных характеристиках лопастей. Запасы на прочность увеличиваются
501
у
505
Рис VI,29. Геометрические элементы
четырсхлопастных насосов ОВД.
1 — относительная толщина лопастей; 2 —
относительная ширина лопастей; 3 — ша-
говое отношение; ! — относительный про-
гиб лопастей.
Рис. VI.30. Геометрические элемент i
шестнлопастного насоса ОВД.
Рис. VI.31. Критический коэффициент
нагрузки осевого насоса.
Рис. VI.32. Диаграмма критическо. э
напора для осевых насосов (otb!D "
= 4,0 при t — 0,925).
MW
Рис. VI.33. Диаграмма критических чисел кавитации ОВД для СПК: а — одноступенчатою; б — двухступенча-
того; в — трехстуценчатого.
507
п вследствие уменьшения длины лопасти с увеличением диаметра ступицы, что при-
водит к снижению изгибающих моментов на корневых сечениях.
На рис. VI.36 приведены гидродинамические характеристики двухступенчатого
бездиффузорного рабочего колеса.
Рнс. VI.34. Минимальная гус-
тота лопастей решетки при
безотрывном обтекании.
Рнс. VI.35. Зависимость коэффициента
упора на валу осевого рабочего колеса.
Рнс. VI.36. Напорная характеристика
двухступенчатого осевого рабочего ко-
леса с уменьшенной дифф) зоркостью
лопастной системы.
§ 57. СОПЛО ВОДОМЕТНОГО ДВИЖИТЕЛЯ
Сопло водометного движителя формирует струю, необходимую для обеспечен.Iя
тяги. Площадь на срезе сопла меньше, чем на входе в нею, поскольку рабочее колесо
создает избыточную потенциальную энергию — повышенное давление, которое
необходимо преобразовать в кинетическую энергию струи, т. е. получить прираще-
ние скорости. Поджать сечение сопла можно в результате сужения наружного тртбо-
508
ip эвода, как это показано иа рнс. V 1.37, либо расширением центрального тела кото-
И1г является продолжением ступнпы спрямляющего аппарата. В этом случае струя,
готская из кольцевого отверстия, будет иметь форму полого цилиндра. Второй вид
•рмлення сопла рационален при большом днтметре ступнпы последней ступени
рабочего колеса, так как позволяет значительно сократить длину сота.
Г Зависимость площади сопла движителя н расчетного сечения струн на беско-
нечности неоднозначна и во многом обусловлена формой внутренних обводов сопла.
I случае нулевого утла наклона касательной к профилю сопла на срезе н прн отсут-
ствии закрутки струи площадь сопла практически равна расчетному сеченню струи.
При наличии угла наклона образующей сопла площадь струн, как правило, меньше
площади сопла С увеличением утла наклона касательной к образующей сопла ие-
с ответствие расчетной площади струп и площади среза сопла возрастает. Предельное
кначение соответствует истечению нз отверстия в плоской стейке при острых краях;
коэффициент поджатия струи равен 0.64.
Рис. \ 1.37. Схемы сопл ОВД.
f — ппджатиг >.1ружноА стенкой водовода; 2 — поджатие вн>треиннм теапы.
Кроме наклона образующей фактическое сечение среза сопла может отличаться
с- расчетного еще вследствие дополнительного поджатия из за образования погра-
ничного слоя на стенках сопла. Влияние пограничного слоя при поджатии наруж-
ного трубопровода незначительное; оно существенно больше при поджатии цен-
тральным телом.
Гидравлическое сопротивление сопла в случае плавно изменяющейся кривизны
практически не зависит от конфигурации образующей сопла. Потери давления прн
жороню обработанных стейках сиг.га и умеренной ею длине не превышают 1—2 “4
от скоростного напора потока иа выходе из сопла.
С целью сокращения длины движителя в некоторых случаях совмещают сопло
со спрямляющим аппаратом рабочего колеса Это рационально, поскольку поджатие
потока и пределах лопастной системы спрямляющего аппарата позволяет умень-
шить диффузорность потока и снизить гидравлические потери. Однако прн проекти-
ровании сопла, совмещенного со спрямляющим аппаратом рабочего колеса, недо-
пустимо доводить выходящие кремкп лопастей аппарата до среза согма. Агчосфср-
мый воздух может прорываться на засасывающую сторону лопастей, что приведет
к работе движителя на нерасчетном режиме н снизит его эффективность.
Опыт эксплуатации водометных движителей показывает, что при недостаточ-
ном отрицательном градиенте давления в сопле движителя, который, как правило,
Вюянляе1ся вследствие большой кривизны образующей сопла или из-за технологиче-
гких изломов на внутренней поверхности, происходит отрыв потока от стенок сопла.
'Режим работы движителя г называется отличным от расчетного, н происходит рас-
гдгласоваиие нагрузки двигателя и движителя. Поэтому при выборе обводов сопла
кледует стремиться к отрицательному градиенту давления по потоку на всем его
гротяжеггнн и избегать изменения принятых обводов в угоду упрощения технологии
г аготов.тения сопла.
§ 58. ПРОЕКТИРОВОЧНЫЙ РАСЧЕТ ВОДОМЕТНЫХ ДВИЖИТЕЛЕЙ
ГУДОВ С ДИНАМИЧЕСКИМИ ПРИНЦИПАМИ ПОДДЕРЖАНИЯ
М ПОСТРОЕНИЕ ПАСПОРТНОЙ ДИАГРАММЫ
В начале проектирования движителя обычно известны мощность двигателя,
сриентировсчная скорость полного хода, буксировочное сопротивление, допустимые
Габариты движителя. Выбирая конструктивную схему движителя, необходимо для
509
саыовсасывания воды во время разгона судна предусматривать расположение осн
вала движителя в районе рабочих колес ниже ватерлинии при минимальной возмож-
ной осадке судна в момент запуска движителей. На основании проектировочных
расчетов следует выбрать диаметр рабочего колеса, площадь выбросного сопла
(или коэффициент поджатия fl); тип и размеры водозабориика; количество ступеней
рабочих колес: элементы лопастей рабочих колес н спрямтяющих аппаратов (число
лопастей, ширину и толщину их, шаг и кривизну сечений); оптимальную частоту
вращения рабочего колеса. Схемы расчетов водометных движителей, работающих
в свободной воде н вблизи корпуса суди,,
различаются. Рассмотрим схему проекти-
ровочного расчета водометных движителей
СПК, в которые вода поступает из потока,
практически не возмущенного корпусом
судна.
1. Задают 3—4 значения диаметра
рабочего колеса в допустимом диапазоне.
2 Рассчитывают относительную мощ-
ность с учетом ориентировочной скорост
полного хода, в первом приближении
КПД рабочего колеса следует принять
равным ~0,80. Относительная мощность
pD _ 75РЛТ]Г п
(ре3 2) .4s
(VI II)
3. По диаграммам относительной
мощности (рис VI.38) определяют опти-
мальное по КПД значение поджатия соп-
ла Р и наибольший достижимый при из-
вестных значениях Рд коэффициент на-
грузки Cts-
4. Рассчитывают число кавитации и
коэффициент нагрузки на переходном ре-
жиме движения
'nep —
20 000
Р^пёр
Cts nep —
Рис VI.38. Диаграмма относительной
мощности ОВД.
vi'icP
где k — коэффициент, характеризующий
превышение тяги даижителя над сопро-
тивлением судна на переходном режиме:
принимается исходя нз условий эксплуа-
тации равным 1,2—1,4
5. По найденным значениям пер, ст|ге1, и при использовании диаграмм при-
веденных на рнс. VI.33. определяют наименьшее число ступеней рабочего колеса,
при котором удовлетворяется условие бескавнтаиноиной работы, т. е. онр< апер-
Если при оптимальных по КПД значениях fl не удается обеспечить бескавн-
тацноннуто работу рабочих колес, то следует по рис. VI.33 получить нов к-
значение fl. соответствующее ёкр<аг1ер В дальнейших расчетах оставляют
только значения диаметра рабочего колеса, отвечающие наименьшему числу
ступеней.
6. Уточняют по корректированному значению fl коэффициенты нагрузки на
полном ходу при использовании диаграммы на рнс. VI.38.
7. Находят ориентировочно площадь смоченной поверхности подводной части
водозабориика Л и силу тяжести воды в водозаборнике G 1см. формулу (VI.8)1
8. Определяют, как увеличивается сопротивление судна в результате грцема
веды в движитель над ватерлинией и наличия сопротивления водозабориика ЛЯ —
610
к Cx0,5poj А, и рассчитывают соответствующее, значение коэффициент»
нагрузки
ACrs = Т-.---- •
pi'-Л.Ч
9. Вычисляют (Cts — ^C/ s) D1; строят зависимость этой величины от диаметра
и выбирают в первом приближении оптимальный диаметр рабочего колеса, соответ*
Етвующнй максимуму величины (Суs—ACys) D~-
10. В ожидаемом диапазоне достижимой скорости судна задают 3—4 значения ц>
и рассчитывают для заданных скоростей ₽р и Ср,у. Буксировочное сопротивление
Ьрпннмают с учетом дополнительного сопротивления А/?
11. По диаграмме относительной мощности, приведенной _иа рис. VI.38, он ре-
вел я ют Суs и оптимальный коэффициент Р, соответствующие Рд.
12 Путем графического сопоставления величин Cps, рассчитанных согласно
и 10 и II, находят достижимую скорость судна ;'и, при которой значения коэффк*
ццентов нагрузки одинаковы, и коэффициент поджатия f
13. По формуле (VI 2) определяют оу и объемный расход воды через движитель
Q = t’iMsP-
14. По диаграммам кавитационных характеристик входного патрубка (рнс. VI. 17
и VI. 18) или по формуле (VI.7) находят площадь входного сечения водозабориика и
по лобовую площадь, при которых отсутствует кавитация на полном ходу. Для
у чу чтения тяговых характеристик движителя на режиме разгона судна площадь
Входного сечения водозабориика следует принимать возможно большей. В случае
Применения двухрежимного водозабориика площадь входного патрубка целесо-
образно выбирать из условия равенства скорости на входном сечении —0 95е»,
, е. ~ 0,95.
15. Для выбранного варианта водозабориика определяют коэффициент потерн
напора Се на полном ходу, используя результаты испытаний моделей, приведенные
на рис. VI.4—VI.8 и VI 15, или данные по судну-прототипу.
16. Рассчитывают напор рабочего колеса по формуле (VI.3).
17 Учитывая, что осевые насосы имеют, как правило, наилучшие КПД и кави-
тационные качества при А’(? = 0,14-0,6, находят диапазон оптимальных значений
частоты вращения рабочего колеса л =Q (0,44-0.6) О3. В этом диапазоне выбирают л
с учетом обеспечения расчетного напора при известном числе ступеней рабочего
колеса Рассчитывают Кц.
18. С помощью диаграмм напорных и кавитационных характеристик, приведен-
ных на рнс. \ 1.23—VI.28, находят распределение нагрузки по ступеням многосту-
пенчатых рабочих колес и их элементы.
Для движителя строят паспортную диаграмму по следующей схеме:
1. Задают в интересующем диапазоне ряд скоростей судна и при каждой ско-
рости несколько значений тяги.
2. Рассчитывают коэффициент нагрузки Cps-
3. Определяют по формуле (VI 2) относительную скорость на срезе сопла и/.
4. С помощью формул (VI. 1), (VI.3), (VI.5) находят расход Q, напор Н. местное
пиело кавитанпп о.$.
I 5. По диаграммам рис VI.23—VI.28 для выбранного насоса метолом последо-
с тельных приближений определяют коэффициенты Кн, KQ и частоту вращения л.
первом приближении задают коэффициент К'9 и с графика напорных характери-
стик снимают значение Кн (если предварительно был сделан проектировочный
расчет К',? принимают равным расчетному!. Частоту вращения в первом приблнже-
»• i определяют по известному расходу и напору
______Q . . |/~7Г~
1 коил ’ Л| “ г Кн1)х
Ватем находят частоту вращения во втором приближении л2 = 0,5 (л, -f- я,'). По
мстоте вращения п2 рассчитывают коэффициенты расхода К" и напора К'н во втором
Ирибэижеиии и по диаграммам Кц~ / (А’ф определяют Kq, соответствующий
511
расчетному коэффициенту напора K7J: для последующего приближения принимают
К~ = 0.5 ~Ь Л’с). Как правило, при расчетах останавливаются на п<>-
скольку Л'" и К9 оказывают-ся достаточно близкими.
6 С диаграмм Kq = f (Kq\ o.s) снимают значение коэффициента момента при
найденном Kq н рассчитывают мощность (в л. с.), расходуемую для создания при.
мятой тяги: Pf> = pD = дЯдл’О®.
7 . Строят вспомогательные графики зависимости ₽д и п от с’о Для принятых зна-
чений тяги.
8 На основании вспомогательных графиков определяют зависимости тяги и
мощности от скорости судна при постоянной частоте вращения рабочего колеса,
т. е строят паспортную диаграмму.
Рассмотрим схему проектировочного расчета водометного движителя, работа-
ющего вблизи корпуса судна:
I. Задают 3—4 значения диаметра рабочего колеса в допустимом диапазоне.
2. Рассчитывают по формуле (VI. 11) относительную мощность Рд; по скорости
vp = i’„(l —ш) в первом приближении принимают ш = 0.1; к= 0.75+0,8.
3. Используя диаграмму на рис. VI.38, определяют оптимальное значение под-
жатия сопла Р и максимальный коэффициент нагрузки С/s по скорости vp.
4 Рассчитывают число кавитации н коэффициент нагрузки на переходном ре-
жиме. Наличием пограничного слоя можно пренебречь, т. е. выполнять расчеты но
формулам, приведенным в и 4 предыдущей схемы.
5 По диаграммам на рис. VI 33 определяют число ступеней рабочего колеса,
при котором отсутствхет кавитация на переходном режиме (окр < п1Юр).
С По формуле (VI 2) находят скорость выброса струн из сопла i>, н устанавли-
вают расход воды через движитель Q.
7. Определяют безразмерное значение расхода воды через движитель Q
= Q (ccZ В). ширину водозаборинка В принимают равной диаметру рабочего колеса
а в случае невозможности размещения водовода такой ширины — максимально
возможной из конструктивных соображений.
8. По графику (рис. VI 3) находят в зависимости от Q коэффициент попутного
потока для модели и пересчитывают его для натурного судна в соответствии с форму-
лой (VI.6). Приведенные пл рис. VI.3 результаты модельных испытаний получены
при числе Re я: 2- 10ь.
9. По данным испытаний моделей прототипа определяют коэффициент сопроти
влеиня водозаборинка С\. В предварительных расчетах сопротивление водозабор-
пика /?ВОд. выполнении! о заподлицо с плоскостью днища судна, может быть принято
равным 3—5 % оттягн движителя (conpoi пиления корпуса судна), т. е I — RBou К ~
= 0,03+0,05.
10. Строя! зависимость величины CtsD*. которая пропорцноналыи
Tv№, от заданных значений диаметра рабочего колеса. Согласно полученному графику
определяют оптимальный диаметр, соответствующий максимуму велнчи пл
Cr sD1
11. В ожидаемом диапазоне достижимой скорости судна задают 3—4 значения
скорости г'р и рассчитывают значения Рр ио диаграмме на рис VI.38; определяю-
Crs и оптимальный коэффициент Ф
12. По формуле (VI.2) находят величину vt, а по ее значению — Q и Q; по ip ।
фику па рис. V1.3 определяю! коэффициент попутного потока модели, который пер
считывают согласно формуле (VI.6) на натурное значение »и.
13. Рассчитывают значения скорости судна, соответствующие заданным в n. I
скоростям vp: I'o = [',,•(!—Ы)ц)
14 По зависимости 7’= CTS (1 — /)> (2v'-As) находят тягу движителя. Коэф-
фициент I устанавливают по прототипу или назначают в диапазоне t = 0.03—0.о\
15. Строят графики для Т = f (t'o) в /? = f (vB) и определяют расчетную сь
рость судна, которая соответствует равенству Т = R. Такны же путем находят со л
512
Ьстствующие расчетной скорости коэффициенты u>v /, Cj^.. п также величины
F»и °
16. По формуле (1 1.3) рассчитывают напор рабочего колеса. Коэффициент
(гидравлических потерь водозаборинка получают по данным модельных испытаний,
например по рнс. VI 4—1'1.9.
17. Определяют диапазон оптимальной частоты вращения рабочего колеса п =
t- Q (0,44-0,6) D3, в котором выбирают я с учетом обеспечения расчетного капора
три намеченном числе ступеней рабочего колеса.
18. По диаграммам напорных и кавптаипонных характеристик наосов, при-
lk-деппым на рис. VI.23—VI.28. выбирают распределение нагрузки ш» ступеням и
элементы рабочего колеса, имеющего наибольший КПД.
Расчет паспортной диаграммы водометного движителя с выбранным рабочим
(колесом может быть выполнен по следующей схеме:
1. Задают в иитересующе*! диапазоне ряд скоростей ер и при каждой скорости
кесколько значений тяги движителя Р.
2. Рассчитывают коэффицнен г нагрузки Crs и определяют согласно формуле
(VI.2) относительную скорость на срезе сопла движителя V;.
3. Находят расход воды через движитель Q н значение коэффициента попутного
потока ms —с помощью графика на рнс. VI.3 и формулы (VI.6).
4. В соответствии с фюрмуламн (VI.3) и (VI.5) вычисляют напор рабочего ко-
леса и число кавитации в водоводе перед рабочим колесом oj.
5. По диаграммам рнс. VI.23—VI.28 методом последова1ельиых приближений
определяют коэффициенты напора Кц. расхода и момента Kq, соответствующие
найденным значениям Q, II и п5.
6. Рассчитывают мощность, подведенную к рабочему колесу. Рр = !)Xq«uD6 и
[скорость судна г>„'(1 — it’s).
7. Строят вспомогательные графики зависимости Рр и я от дня принятых
значений тяги движителя.
8. На основании вспомогательных графиков создаю! иасноргную диаграмму.
Tniy движителя с водозабор пн ком находят по заданной тяге Т Р (1 — /), где I оп-
ределяют так же. как при проек!нровании движителя (/ — 0.03 0.05)
§ 59. ПРИМЕР ПРОЕКТИРОВОЧНОГО РАСЧЕТА
ВОДОМЕТНОГО ДВИЖИТЕЛЯ СПК
Рассчитаем водометный движитель морскою катера на подводных крыльях
водоизмещением около 6 т со скоростью 28—30 уз. Ориентировочная кривая букси-
ровочного сопротивления приведена
на ряс. VI.39. Катер снабжен двига-
телем, внешняя характеристика кото-
рого показана на рис. VI 40 Вознышс-
пис оси выбросного сопла вал уровнем
воли при движении на крыльях сколо
0.4 м. Конструктивного ограничетп
диаметра рабочего колеса пет.
К Буксировочное сопротивление на
режиме выхода па крылья соог-
ветс!вует скорости 2 уз и составляет
7000 Н. Для надежной эксплуатации
катера необходимо обеспечить превы-
шение тяги над сопротивлением на
28—30 “о. т. с. ТЯ1Э движителя при
этой скорости должна быть около 10 кН, чго существенно превышает тягу, необ-
ходимую для скорости 28—30 уз. Поэтому за основной расчетный режим принята
скорость, соотве|ствующан выходу на крылья Для выбора оптимального диа-
чрра рабочего колеса рассчитаем наибольшую достижимую тягу движителя ив
Режиме выхода па крылья н при полном ходе (табл. VI 3)
I Поданным табл. 11.3 построен график зависимости достижимой тяги на режиме
выхода на крылья и эффективной тяги (с учетом внешнего сопротивления водоза-
Ктпнка и влияния веса воды в движителе выше ватерлинии на сопротивление) от
Рис. VI.39. Буксировочное сопротивление
СПК.
*7 П/р Я- И. ВоПткунского. т. 3
513
диаметра рабочего колеса (рис. VI.41). Оптимальным является диаметр рабочего
колеса, равный 350 мм. Тяга на промежуточном режиме составляет несколько более
10 кН, а эффективная тяга близка к максимально достижимой. Дальнейшие расчете
связанные с выбором элементов рабочего колеса, выполнены только для D = 0.35 м
колеса.
1 — режим выхода СПК на крылья:
2 — режим кода СПК на крыльях,
Т а б л и ц а VI.3. Пример расчета ходкости
Режим выхода на крылья
i = 12 уз, t>0= 6,18 м/с, п0 = 5,0, Pd = 190 кВт. ||г. кПвп = 0.8
Режим полного хода
1 = 30 уз, о, = 15,45 м/с, п0= 0,82
Параметры Задх>нн idi'i D, м
0,26 0.30 0.36 0,40
/Ц = (л 4)D2 0,049 1 0,070 6 0,096 2 0,125 8
Определение достнж ।м о й тяги д в и ж и т е л Я
и а режиме выхода на к р ь ЛЬЯ (и = 12 уз)
Рд> (формула (VI. 11)] 25.2 17,5 12,8 9,8
CTs (Р"С- ' 1-39) 8,3 6,5 5,2 4.1
fi (рис. VI..39) 0.35 0.35 0.35 0.35
Р = СгзЛ.у(|ч2) eg 8,20 9.25 10,10 10,30
”кр2 = 1 (рис. \ J.33) 13,0 10.0 8,5 6.5
uKpZ = 2 (рнс. VI.33) 8,0 5,6 4,8 4,1
aKJtZ = 3 (рис. VI.33) 5.5 4,5 3.5 2.5
Определение достнж имей Я Г II (I н ходе
на к р ы л l Я X (0 = 30 уз)
Pl> (формула (\ 1.11)] 1,62 1,12 0,82 0,64
Cpg при j) = 0.35 1,05 0,78 0,60 0,47
Р = Crs&s (р''2) г® 6,30 6,70 7,05 7,20
А водозаборннка, м® 0,44 0,59 0,76 0,94
R водозаборннка (Сх = 0,016) 0,86 1,15 1.49 1.84
G воды [формула (\ 1.8)) 86 142 172 241
А/? = Glk 0,18 0,30 0,36 0,52
7 Р — Рпол — 5.26 5,25 5,20 4.86
514
Определение элементов рабочего колеса приведено ниже
D. и . .... 0.35
Cy.s/f .........................................И.85
v{ 1см. формулу (V 1.2)1 ... ..... ......3.26
Q — ы'/С .... ......... ... 0,689
.... ...... . . 1,11
U (см. рнс. V1.9)....... . ............1.2
Н СбЛ'«)Н.О2*; - 1+ toJ .... 22.2
л = 040.4+ 0,6D*'i, об/с 23—40
л (принимается), об.'с . . . , . ................35
as , --------1 .... 2,7
*8
Ки •= Н.И'О1 . . . О, U8
Л.? = 0/пО* . ... 0,46
Рнс. V I 42. Паспортная диаграмма ОВД для СПК.
По диаграммам напорных характеристик подбираем двухст упенчаюе рабочее
колесо:
первая ступень Р D — 0,9 (диаграмма на рис. VI.21);
вторая ступень ОД-1 (диаграмма па рнс. VI.24).
Тяговые характеристики движителя н потребную мощность определяем путем
расчета (табл. V1.4) и построения паспортной диаграммы (рис. \ 1.42).
В приведенных выше расчетных схемах предусмотрено использование диаграмм
графиков н других справочных материалов, полученных по осреднеииым данный
модельных испытании водозабор ников и рабочих колес в изолированием действии.
В предварительных расчетах не учитывают индивидуальные конс!руктивные осо-
бенности вновь проектируемого движителя; взаимодействие его элсменюв определяют
приближенно. Все это может привести к заметным погрешностям в расчетах, осо-
бенно если кавитационные качества движителей не высокие. После выбора основных
элементов движителя рационально провести испытание модели и при необходимости
внести корректировку в элементы движителя. По результатам испытаний гадели
уточняют тяговые характеристики движителя и скорость судна.
17* и15
Т а б л и u а VI.4. Расчет паспортной анаграммы
Величины - . f
12 1
Р (задается) 10,00 8,00 6,00 4,00
СУзФ 16,2 12,95 9,7 6,47
Ч 3,38 3,09 2,76 2,36
Q = 0,664 0,606 0,542 0,463
VS = ро* I 115 I 02 0,911 0,78
to 1,15 0,80 0,7 0,23
Н 23,0 18,55 4 50 96
Ка (задаем) 0,455 0,455 0,460 0.460
л’= Q'KJF 34 31,1 27,5 23,5
Кн= 0,162 5 0,157 0,156 5 0,142
Ка = / (Кн) 0.450 0,454 0,454 0,464
(Kq+ К^) 2 0,452 — 0 457 0 462
„ 2Q 4 lAtf+AeJD3 34,2 - 27 7 23 4
Ktli = Hm^D- 0,160 — 0,154 0,144
= f 0,451 —. 0,456 0,463
Aq — / (А'вз) 0,134 0,132 0.130 0.125
Pd 241 178 124 72
п 2050 I860 1690 1410
§ 60. РЕВЕРСИВНО-РУЛГВЫЕ УСТРОЙСТВА
ВОДОМЕТНЫХ ДВИЖИТЕЛЕЙ
Водометные движители снабжаются реверсивными устройствами. Эти устрой-
ства отклоняют струю, истекающую из сопла движителя и* ~180°, что приводит
к изменению направтеиия действия силы реакции струи, а Значит, и направления
тяги движителя Путем отклонения струи движителя с помощью рулевого устрой-
ства можно получить боковую ситу для управления судном Обычно реверсивное и
рулевое усгройства совмещают в единую конструкцию, которая получила названпе
реверенвио ру.чевого устройства (РРУ).
Предельное значение боковой и продольной силы н наибольшая эффективность
РРУ достигаются в случае равномерного отклонения всех частей струи движителя
на одинаковый угол а. Согласно закону количества движения боковая сила равна
У = рт>;<41 sin а, при этом тяга движителя уменьшится на величину ДР = ре?А( (1 —
— cos а). Качество рулевого устройства определяется отношением боковой силы Y
к силе сопротивления ДР предельное значение качества рулевого устройства k
= sina/(l—cos а).
В случае поворота струи на 180°, соответствующего реверсу, изменение тяги
движителя будет 2pt^<4z 11рн реверсе струи на швартовном режиме предельное воз
можное значение тяги движителя равно тяге переднего хода и составляет pi;/(.
Реальное качество рулевого устройства, предельные боковое усилие и тяга
заднего хода, обеспечиваемые РРУ. существенно меньше приведенных значении
из-за неравномерного отклонения струн, потерь на трение, брызгообразован ня,
растекания струн в поперечном направтснин. Обычно Гидродинамические харак-
теристики РРУ определяются путем модельных испытаний на специальных стендах
и испытании судов с водометными движителями н РРУ па швартовном п ходовс'|
режимах.
РРУ можно условно подразделить на две группы. К первой относятся
РРУ, состоящие из камеры за соплом водометного движителя и каналов заднего
хода (рис. VI,43). При реверсировании задняя стенка камеры перекрывается рулями
или специальным и заслонками; вода, истекая через каналы заднего хода, создает
516
ло
г 9,00 7,00 5.00 3,00 8,00 6.00 4 00 2,00
4,78 3,69 2,64 1,582 2.06 1.545 1.030 0,515
2,12 1,95 1,75 1.52 1.64 1.51 1.37 1,22
0,726 0,669 0.60 0.521 0.806 0,742 0.674 0,600
0.70 0,644 0,578 0,501 0.511 0,499 0.453 0.403
0.15 0 12 0.09 0.06 0 07 0.06 0,05 0.04
20.9 17.9 13,3 9.9 22,6 17,4 12.2 7,32
Ю 455 0,475 0,475 0.480 0,485 0,485 0.490 0.500
37 2 32.9 29,5 25.3 38.8 36,70 32,1 28,0
0,123 0,135 0,125 0, 26 0,122 5 0,105 5 0,096 7 0.076
0 478 0,469 0.476 0.476 0,479 0.487 0.496 0.508
0,470 0,472 — 0.178 0,481 0.486 0.494 0,506
36.0 33.1 — 25,4 39.2 36,6 31.85 27,6
0 132 0,133 0.125 0,120 0,106 0.98 0.079
0,471 0,471 — 0,476 0,481 0.486 0.495 0,507
0,118 0.116 0.114 0.112 0,108 0,102 0.089 0,080
218 189 132 83 293 225 130 7G
2160 1980 1770 1520 2340 2190 1910 1690
тягу обратного направления. Каналы заднего хода могут быть изготовлены поворот
ними, что позволяет обеспечить повышенную управляемость судна из заднем ходу
Разновидность подобной конструкции ।
1’РХ с поворотным барабаном-соплом
приведена на схеме рис. \ I 44 При ре-
версировании РРУ с камерами изменяет-
Рнс. VF.44. Схема РРУ с поворотным
барабаном.
/ — поворотный барабан с каналами зад-
него хода; 2 — камера; 3 — клиновые
рулн-эаслонки камеры.
Рнс. VI.43. Схема РРУ с камерой и
каналами заднего хода (вид сверху).
t и 2 —• положение рувей соответственно на
переднем и заднем ходу судна.
ся режим работы водометного движителя; скорость протекания воды через движи-
тель снижается, загрузка двигателя увеличивается.
517
У второй группы РРУ реверсирование струи движителя осуществляется в пр •
делах специальных профилированных заслонок, которые иногда примыкают к к -
налай заднего хода. Схема РРУ с заслонками показана па рнс. VI.45. РРУ этен
группы оказывают меньшее влияние иа режим работы движителя в процессе реве
спрования.
Эффективность реверсивного устройства оценивается тягой заднего хода
швартовых, которая измеряется в долях от тяги переднего хода при одинаков ।
Рис. VI.45. Схема РРУ с за-
слонками и каналами зад-
него хода.
1 — положение реверсивnofl за-
слонки на переднем ходу; 2 —
положение реверсивной зпсжш-
ки при репс рее; 3 — клииовоЛ
руль, 4 — каналы заднего ходя.
мощное। и приводного двигателя или одинаков
частоте вращения рабочих колес. Тяга заднего х<
да у лучших образцов РРУ достигает 60—65 % ть
переднего хода; в среднем она составляет 45—55
В качестве рулевого элемента устройства ис-
пользуют один или два клиновых руля, установ-
ленные за соплом движителя, реже применяют ко-
робчатые и кольцевые рули, а также поворот™ ,е
сопи водометных движителей. Сравнительная эф-
фективность этих конструкции рулевых устройс
для компоновки водометного дв |жителя с надвот
ным выбросом струи на режиме управления судном
по курсу (угол поворота органа управления до 10е)
и прн предельной боковой силе (поворот рутей па
25—4(Г) показана в табл. VI.5.
В табл. VI.6—VI.8 приведены результаты ис-
пытания моделей РРУ с одним и дв>мя рулями i..i
режиме управления при различных значениях хон-
ды и расположения рулей.
Гаэродинамические характеристики РРУ на ре-
жиме управления представлены в виде безразме;
пых коэффициентов боковон силы Су — 2Y ’(Р^с)
сопротивления Сх = 2 АР н момента С„,—
= 2ЛЦ(.е^).
В формулах и таблицах приняты следующие
обозначения rfc—диаметр сопла водометного дви-
жшеля (стенда); И — момент на балтере руля,
положительное значение момента направлено в
сторону перекладки руля; b — хорда руля; />0 —
расстояние между рулями: а— угол поворота руля
от нейтрального положен ия(см. рнс. VL43).
На РРУ водометных движителей с надводным выбросом струн не рекомендуется
применять рели оГнекаемон формы, поскольку па таких рулях в диапазоне углов
перекладки до ~ 15“ практн гескн ист боковой силы, необходимой для управ.те! ич
Таблица VI.5. Гндроднпа'Н.ческие характеристики РРУ на режиме у правки in
Режим Элемент управления СУ * а. в
Один руль 0.1 0.040 0,0285 10
1 Два руля 0,12 0,025 0.0045 4,8 10
1 Коробчатый руль 0, К) 0.035 — 28 10
Поворотное сопло 0.095 0.028 0,050 3,4 4
Один руль 0.48 0,42 0,095 1.1 40
2 Два руля 0,49 0,34 0,024 J.4 33
Коробчатый руль 0,48 0,26 0,045 1,9 25
Поворотное сопло 0 43 0,23 0.143 1 9 22
518
Таблица VI.6. Гидродинамические характеристики РРУ с одним рулем
Характери- стика РРУ а. • b dc (к 0.5)
0.2 0,4 0.6 1.0
5 0.025 0,026 0,027 0,1129
10 0,040 0 065 0.080 0,100
си 20 0,070 0.120 0.165 0,240
40 0,100 0.197 0.292 0.475
0 0.004 3 0,008 2 0.OII 7 0,018 5
5 0.004 8 0,009 2 0,013 0 0.020 0
сх 10 0 008 8 0,017 2 0.025 2 0,040 5
20 0.032 0 0.056 0 0,078 0 0,120
40 0.112 0.206 0,298 0.420
0,002 0.003 9 0,010 0
10 0.001 0.003 6 0.009 0 0,023 5
с' 20 0,002 0.007 0 0,017 7 0.049 0
40 0.004 0.013 0 0,030 0 0,095 0
Т а б л и u а VI.7. Гидродинамические характерно>ики РРУ с двумя рулями
(b„'d = 0.68; Л= 0,5)
— 0 6 Ч9С = 1.0
а, ° С1/ Сх £|Г1 С„ ^irt
0 0,00 0,020 0,00 0,000 0.035 <>,000
5 0.035 0,025 0,008 0.07G О 045 0 019
10 0,090 0.040 0.015 0.167 0,075 0,038
15 0.163 0.070 0,023 0,265 0,127 0.060
20 0,240 0.115 0,031 0.372 0.205 (1.080
23 0,315 0.175 0 038 0 96’ 0.305 0,107
30 0,375 0.240 0,043 0.540 0.430 0.122
35 0,430 0.300 0,045 0,605 0.525 0.129
Таблица \ 1 8. Гидродинамические характеристики РРУ с двумя руянмн
(t>!d = ba d.-; к= 0,5)
а» ° М*с *. о.в b rfc — 1.12
СУ С* СЛ>2 c.* Сд Gni
0 0,000 0.007 0.000 0,000 0.000 0,000 0 ООО 0,000
5 0,075 0,025 0,003 0,005 0,028 —. 0.000 0,000
10 0.159 0,045 0,006 0,012 0,060 0.010 0,000 0,000
la 0,225 0.075 0,007 0,022 0.123 0,035 —0.018 0,020
25 0,383 0,205 0,006 5 0,037 0.280 0,137 —0,055 0,046
35 0,515 0,100 0,003 5 0,039 0.525 0,340 -0,103 0,088
519
судном. Физически это объясняется тем, что на выпуклой нагнетающей стороне
руля осредненпое давление нс становится больше атмосферного при перекладке его
па — 15'', а на засасывающей стороне давление не снижается вследствие прорыв,
на ее поверхность атмосферного воздуха. На РРУ обычно применяют рули клино-
видной формы; для улучшения прочностных характеристик руля форма его сечении
может быть принята в виде параболического клипа.
§ 61. ВЕНТИЛИРУЕМЫЙ ВОДОМЕТНЫЙ ДВИЖИТЕЛЬ
Проблема стабильной работы движителей вблизи свободной поверхности воды,
когда попадание атмосферного воздуха в гидравлическое сечение движителя, осо-
бенно при волнении, неизбежно, радикально решается использованием в движителях
Рнс. VI.47. Тяговые характеристики ВИД при различном по1ружеини оси вала.
1 — h/D = 0,8; 3 — Л/D « 0.6; 3 и б — h.'D = 0.33: Ч — h/D = 0,0; S — Л/D = 0,25
вентилируемых лопастных систем. При работе подобных движителей на лопастях
образуются воздушные каверны, полости которых соединены с атмосферой. Тяга
вентилируемых водометных движителей (ВВД) создается на основном режиме работы
только за счет повышения давления на нагнетающей стороне лопасти. Поэтому такие
движители практически не изменяют гидравлические характеристики во время
520
I — режим вентиляции ьыходящнк кромок } — режим срыва с входящей кромки,
б — с рабочим колесом, имеющим кавитатор на входящей кромке.
I — режим беявевтпляпионного обтекания: ? — сход каверны с клпитатпра: J — етод каверны с входящей кромки?
с рабочими колесами, оборудованными интерцепторами различной высоты (значения i дли Ке соответствует указанным для Kq).
521
работы в потоке, насыщенном воздушными пузырями, и в случае часычного оголения
гидравлического сечения. ВВД состоит из водозаборпика, приводного вала с крон-
штейном н рабочего колеса, размещенного на выходном участке водозаборника.
Для полной вентиляции лопастей, которая происходит при смыкании воздушиои
каверны на лопастях с атмосферным воздухом, компоновка движителя на корпусе
судна должна предусматривать контакт струн с атмосферным воздухом, т. е, над-
Рис. VI.49. Схема рабочего колеса: а—с клиновидными сечениями лопастей:
б — с кавита горами на засасывающей стороне лопастей.
водный или полузатопленный выброс струн. Пример компоновки ВИД с корпусом
быстроходного судна показан на рнс. VI.46.
Кроме малой чувствительности к наличию воздуха в натекающем потоке ВВД
jiweei следующие гидравлические и конструктивные особенности:
I. Обладает высоким пропульсивным коэффициентом при малой нагрузке (до
~0,6—0.7); с увеличением коэффициента нагрузки свыше одного-двух КГ1Д этого
522
фектнвность интерцепторов, установ-
ленных на рабочих колесах ВВД.
движителя резко снижается. Эта особенность обусловлена тем, что воздушные ка-
верны на лопастях более чем вдвое уменьшают профильные потери в лопастной
системе; при увеличении нагрузки толщина каверн возрастает, уменьшая тем самым
гидравлическое сечение движителя и его эффективность.
2 В есловиях отсутствия вентиляции лопастей или при неполной вентиляции
лопастей КПД движителя х менынается.
3. На эффективность движителя большое влияние оказывает гидравлическое
сопротивление н ноле скоростей в водозабор инке Наибольшая ффск гнвпость дви-
жителя соответствует короткому п прямому водозаборинку.
4. Максимум коэффициента тяги движнтелл соответствует критической отно-
сительной поступи, при которой вентиляция лопастей движителя начинается с вхо-
дящей кромки лопастей. С уменьшением относительной поступи коэффициент тяги
движителя резко снижается Характерная
зависимость коэффициентов тяги и мо-
мента от относительной поступи приве-
дена па рис. VI.47. Подобная зависимость
коэффициента тяги затрудняет разгон су-
дов, имеющих повышенное сопротивление
на переходных режимах, например СПК-
5. Тяга ВВД при малых значениях
относительной поступи существенно зави-
сит от погружения оси рабочего колеса.
Увеличение тяги движителя при его
погружении позволяет з I счет соответ-
ствующего выборапосадкнсудиа па режиме
разгона преодолеть горб сопротивления.
Расчет тяговых характеристик ВВД
производится с использованием результа-
тов испытаний самоходных моделей судов
в опытоном бассейне. Мегоднкон испыта-
ний предусмотрено определение тяги дви-
жителя, уменьшен поп на сопротивление выступающих частей, относящихся к дви-
жителю (валы, кронштейны, водозаборник). Поэтому при определении скорости
судна следует рассчитанные значения тяги движителя сопоставлять с сопротив-
лением «голого» корпуса судна.
Результаты испытании ряда моделей ВВД приведены на рис. V1.48 в виде за-
висимости коэффициентов тяти н момента от относительной поступи / = vJ(nD)
рассчитанной по скорости модели Геометрические элементы рабочих колес и водо-
водов приведены на рис VI 4!>. Для получения на модели относительной толщины
пограничного слоя, близкой к натурной, длина корпуса самоходной модели была
уменьшена па соответствующую величину. Поэтому безразмерные характеристики
модели п натурного ВВД практически одинаковы. В случае применения рабочих
колес с интерцепторами необходимо для натурного движителя откорректировать
высоту интерцептора. С этой целью можно использовать график на рис. VI.50, по-
казывают тй зависимость относительной высоты интерцептора от числа Re. График
получен на основе анализа натурных испытании ВВД. Число Re рассчитано по мест-
ной скорости обтекании профиля сечения лопасти 7 = 0,8.
Расчет тяговых характеристик ВВД и потребляемой мощности выполняется
идентично распету характеристик осевого водометного движителя по результатам
модельных пспытпинГт.
Глава VII
ВОЗДУШНЫЕ ДВИЖИТЕЛИ
§ 62. АНАЛИЗ ЭФФЕКТИВНОСТИ ВОЗДУШНЫХ ВИНТОВ
Воздушные гребные винты в сочетании с легкими двигателями авиационного
тина позволяют скомпоновать простую по схеме двнгательнодвижительную уста-
новку, обладающую малым весом иа единицу мощности. Однако низкая плотность
523
воздуха и ограничения по размеру диаметра воздушных винтов приводят к тому,
что на судах эти движители работают при существенно больших коэффициентах
нагрузки, чем гидравлические движители, и уступают нм неэффективности. Поэтому
воздушные впиты применяют точько иа амфибийных СВП, для которых отсутствие
контакта с водой является важнейшим эксплуатационным требованием.
К настоящему времени методы аэродинамического расчета и проектирования
воздушных винтов самолетов детально разработаны. Однако расчетные и эксплуа-
тационные условия воздушных винтов СВП существенно отличаются от самолетных.
Это сказывается на их геометрических и аэродинамических характеристиках. В част-
Т>С
Рис. VII.1. Идеальный КПД и коэффициент качества воздушных винтов.
I — область реальных КПД воздушных винтов самолетов; — область коэффициентов
качества Винтов самолетов; 3 — то же, винтов СВП.
пост, коэффициенты нагрузки воздушных винтов СВПЛ на расчетном режиме
находятся в диапазоне 1,5—8,0, что близко или превышает нагрузку, соответству-
ющую взлетному режиму самолета.
Относительно высокие коэффициенты нагрузки, при которых индуктивные
noiepu играют определяющую роль, позволяют оценивать эффективность воздуш-
ных винтов иа основе идеального коэффициента полезного действия с учетом поправки
на коэффициент качества, который на этих режимах достаточно стабилен Представим
КПД воздушного винта как произведение
Чв = Л!?.
где С — коэффициент качества, а идеальный КПД
2
Т), — ------—_
I +1 ' + О
Б_’1
Значение коэ|ф|ни1е1.та качеств удобно определить по графику (рис. VII.1k
где в зависимости от K09(|x|Hiuiieiiia нагрузки нанесена кривая идеального КПД
двнжнте in. На этом же графике заштрихована область реальных КПД серийных
авиационных винтов н даны кривые КПД вингов СВП SRN-4, OSK-5 и B1I-7. Как
следует из этого графика, величина С колеблется в диапазоне 0.8—0,9 при расчет-
ных значениях коэффициента нагрузки н в диапазоне 0,7—0,8 при больших не-
расчетных нагрузних.
Аналогичные оценки могут быть сделаны и для винтов в направляющих насад-
ках. которые в случае значикиытых нагрузок, характерных для воздушных нянтов
СВП, обеспечивают попишемте тяги движнтелыюго комплекса. Идеальный КПД
--------- пдслльняя тяга; -------- реаль-
ная тягл; ф — пиит D 5,79 ч, /V»* 2500 К Вт.
О — впит D «= 6,4 м. N 2800 кВт.
Для определения досиикимого идеального КПД воздушного впита в широком
диапазоне скоростей при переменной нагрузке удобно пользоваться зависимостью
КПД от скорости и нагрузки винта
где 0 I3K-т------g--- (мощность дана в кВт).
I I'D V*
Ф Ф. Болотиным показано, что значения КПД реальных воздушных винтов
СВП в зависимости от параметра х хорошо согласуются с криоои тц (рнс. VII.2).
причем связь между реалмтым и идеальным КПД характеризуется коэффициентом
качества ч = 0.85.
Об эффективности воздушных винтов судят также по зависимости тяги, при-
ходящейся на 1 кВт подводимой мощности, от отношения мощности к площади
диска движителя Зависимости строят для различных скоростей движения. Пре-
дельные кривые могут быть построены нехотя нз теории идеального движители.
Очевидно, реально достижимая тяга будет меньше этого предела, причем степень
снижения характеризуется коэффициентом качества. На графике рис. VII.3 при-
ведены кривые предельной тяги для скоростей и — 0 и v = 50 уз, а также расчетные
значения реальной тяги Кроме того, нанесены точки, характеризующие винти
построенных СВП
525
На графике рис. VII.4 приведены систематические данные об идеазыюй тяге
иа швартовах воздушных винтов различных транспортных средств, в том числе
СВП. Данные касаются как свободных винтов, так и внитов в направляющих на-
садках, причем действительный выигрыш за счет применения насадок оказывается
существенно большим, нежели это следует иэ теории идеального движителя. Согласно
данным рнс. V1I.4 увеличение тяги на швартовах вследствие использования направ-
ляющих насадок на реальных СВП составляет 35—40 %. По мере роста скорости
Г’ис. VI 1.4 Зависимость удельной тяги воздушных пинтоз на швартовах от нх
нагрузки мощностью.
1 — винты СВП в свободной воде: U — ввиты СВП и насадке; III — винты саыелегоз;
IV— винты вертолетов; -------теоретический расчет: /—впиты в насадке; 2 — винт
в свободной воде.
судна и, следовательно, снижения нагрузки движителя эффективность направля-
ющих насадок уменьшается. Поэтому установка насадок целесообразна лишь для
увеличения тяги иа горбе сопротивления. Прн движении судна на большой скорости
выигрыш, достигаемый в результате нх применения, незначителен.
Использование насадок на воздушных вннтах ограничено ввиду различных
конструктивных и технологических трудностей. В частности, для обеспечения за-
зоров между концами лопастей н профилем насадки, не превышающих 0,3—0.5 “а
диаметра внита, а также для исключения ударов кромок лопастей о те то насады’
конструкция самой насадки, а также крепление ее и опор винтов на корпусе должны
быть жесткими. Реализация этих требований связана с увеличением веса судна.
526
Кроме того, брызг», попадая в диск впита, отбрасываются к его периферии и могут
вызвать разрушение внутренней обшивки теза насадки — так называемую брызго-
вую эрозию.
§ 63. ПРОЕКТИРОВАНИЕ ВОЗДУШНОГО
ДВИЖИТЕЛЬНОЮ КОМПЛЕКСА
Воздушные винты СВП работают при значительно более высоких коэффициентах
нагрузки, чем винты самолетов Однако нх расчетный режим близок к взлетному
режиму воздушных винтов современных тяжелых самолетов, поэтому многие тен-
денции в развитии конструкции этих внитов проявляются и при проектировании
винтов СВП. В частности, для таких винтов характерны высокие значения расчет-
ных Cv элементов лопастей. Поэтому применяют профили значительной кривизны
с повышенной относительной толщиной. В связи с тем. что возможности увеличения Су
ограничены, а рост ширины лопасти лимитируется значением шарнирных моментов,
преодолеваемых приводом их поворота, наблюдается тенденция к возрастанию числа
лопастей винтов до 6—8. Результирующая скорость обтекания лопастей за счет
окружных и вызванных CKOpociefi может оказаться близкой к скорости звука, по-
этому принимаются меры по уменьшению влияния сжимаемости. В частности, рас-
сматривается возможность применения специальных закритическнх профилей с S-
образной нагнетающей стенкой и распределение циркуляции с уменьшенной нагруз-
кой концевых сечений.
Практический расчет воздушных внитов выполняют обычно на основании диа-
грамм. построенных по данным экспериментального исследования винтов либо их
моделей в аэродинамической трубе.
Геометрические параметры, определяющие форму воздушных винтов, а также
аэродинамические характеристики. используемые при построении диаграмм, и их
вид принципиально не отличаются от аналогичных параметров и характеристик,
применяемых в судостроении. Однако они представлены в несколько иной форме,
принятой в авиации.
Геометрические элементы воздушных винтов принято характеризовать следу-
ющими величинами: г = r/R — относительный радиус элемента лопасти; Ь = 6 D —
относительная ширина элемента лопасти; с — c'D — относительная толщина про-
филя сечения; 7 =/ ^ — относительная вошутость профиля; k — число лопастей
винта; о = kh — покрытие диска винта; <р° — угол установки сечения лопасти;
4n,7s — угол установки лопасти на олюентельном радиусе г = 0.75.
Аэродинамические характеристики воздушных гребных винтов представляют
в безразмерной форме:
коэффициент тяги а = Т (рл'2Е>4);
коэффициент мощности Р = Р. (рл*£1*);
коэффициент м смеша х ~ М'Урл2^*); '
коэффициент относительной г.остунн X—vlnD‘,
. . . Tv а .
коэффициент полезного действия 1] — —ту- = — А.
Л р
Диаграммы дчя проектирования воздушных винтов содержат следующие за-
висимости геометрических и аэродинамических характеристик:
I) кривые относительной ширины 6 (7) и относительной толщины с (7) лопастей;
2) крьзые закручки ; (г);
3) кривые относшслыюй вогнутости / (г);
4) сетки аэродинамических характеристик в виде кривых Р (Х<р”,75) с кривыми
постоянных значений КПД; кривые a
5! кривые гг|„ при фиксированных углах установки лопастей.
Па рис. VI 1.0 указаны характеристики винтов, установленных па СВП SRN-4.
Наряду с диаграммами, приведенными на рнс. VI! 5. для расчетов воздушных вин-
тов нспотьзхкп дна!ряммы типа Папмеля, прнменяех-ые при проектировании греб-
ных внитов. Поскольку судовые воздушные винты действуют при больших коэффи-
циентах нагрузки, нх диаметр tceiaa меньше оптимального, особенно если расчет
выполняется с учетом преодслеиия горба сопротивления. Поэтому при выборе эле-
ментов шштов обычно исходят из наибольшего и.х диаметра, обусловленного кон-
527
Структнвиымн соображениями, а также ограниченного значениями скорости обте-
кания концов лопастей в связи с влиянием сжимаемости воздуха па аэродинамические
характеристики винта. Показано, что сжимаемость воздуха практически не сказы-
вается на работе винтов прн числе М = v'c3 не более 0,8—0,85 (cs — скорость звука).
Число М для концов лопастей винта определяется по формуле
М _ Ко* 4- (л£>л>-
Са
На рис. VII.6 показаны кривые (ziD)Iip= f (о), позволяющие оценить соответ-
ственно критическое значение диаметра или частоты вращения. В тех случаях, когда
к шумности винтов предъявляются специальные требования, предельное число М
для концов лопасти принимается не более 0.6
Расчет по диаграммам испытаний воздушных винтов выполняют теми же мето-
дами, что и расчет обычных гребных винтов, когда диаметр ограничен конструктив-
ными соображениями.
В зарубежной практике проектирования воздушных винтов используют также
вспомогательные коэффициенты, определяемые соотношениями
r=Q.SD г =0.50
10’ г 64 г
* = -&- J br3dr' = J c^dr’
r—O.ID г=0,1D
где Ь. Су — местные значения хорды и коэффициента подъемной силы элехкчьа
лопасти (лнпейпые размеры в формулах даны в футах).
Коэффициент Д пропорционален мощности, потребляемой вши ом при заданных
значениях Су н кривизны сечений лопасти. Сбившие значения А соответствуют
лопастям с уширенным концом, а меньшие значения — лопастям, ширина которых
уменьшается но мере увеличения радиуса. Если коэффициент Си и кривизна перс
меппы по радиусу лопасти, то потребляемая винтом мощность определяется ш ли-
чиной Суц.
Таким образом, влияние изменения формы сечений лопасти и ее формы в плане
характеризуется значениями коэффициентов Л и Cj,n. Очевидно, эти коэффициенты
должны применяться в совокупности с коэффициентом нагрузки Ст. который опре-
деляет индуктивный КПД воздушного винта.
Для практического выбора элементов винтов используют диаграммы на рис-
VII.7, на которых представлены значения удельной тяги Т/Ро в зависимости от коэ|
фицненгов А и С^п. Приведенные диаграммы построены для четырехлопаст ।ых
шипов со скоростью вращения концов лопастей 2|о м-'с, швартовного режима Н
скорости судна 50 уз. Кривые даны для двух значений удельной мощности v>D .
528
Как следует из графиков увеличение коэффициентов А и С1/п приводит к повы-
шению эффективности пиитов. Удельная тяга уменьшается с ростом удельной мощ-
ности и скорости судна. При большей скорости судна, когда умепыпается нагрузка
винта, возможно некоторое снижение оптимальных значений А н С,,,,.
Ограничения в диаметре и частоте вращения воздушного впита и ширине лопа-
cieii приводят к тому, что предельная мощность, которая может быть реализована
одним воздушным впитом, не превышает 6000—7000 кВт. Если необходимо исполь-
зовать большую мощность, то ее следует распределить между несколькими винтами,
что затрудняет компоновку двигательпо-двнжнюльной установки.
Одним из конструктивных решений является применение соосных винтов про-
тивоположного вращения. Очевидно, вследствие уменьшения гидравлического су-
чения КПД комплекса будет ниже КПД двх х одиночных винтов такого же диаметра
Рис. VI 1.7. Диаграммы для выбора моментов винтов: п —v~ 50 уз.; б — v = 0.
Сйтпако потери, связанные с уменьшением аксиального КПД до некоторой степени
компенсируются улучшением окружного КПД в результате влияния тангенциальных
скоростей переднего впита па работу заднего. Тем не менее потеря КПД у соосных
ншпов но сравнению с КПД двух одиночных винтов составляет 17—20 %.
Соосные винты можно проектировать, используя диаграммы одиночных винтов
Метод расчета соосного комплекса аналогичен методу расчета соосных винтов на
колонке, изложенному в § 51. Скорость в диске переднего винта определяется по
формуле
t’o= ( + «>xlv)v,
где w'.— скорость, иызв.шг.ая задним винтом в диске переднего. Скорость в диске
заднего винта рассчитывается по аналогично!! формуле, однако, вместо w'x под-
ставляется а1,, представтяготая собой скорость, вызванную передним винтом в диске
заднего Кроме того, для заднего винта вводится фиктивная частота вращения
где а'р — Taiiieiimia.TbiiaH скорость, вызванная в диске заднею впита передним.
Расчет ведется последовательными приближениями, причем в первом прибли-
жении передний винт рассматривается как изолированный.
Иногда из-за ограничений в размещении двигателей и вследствие высокой ча-
стот их вращения необходимо выбирать значения М, превышающие критические.
В этом случае в характеристики винта должны быть внесены поправки, учитыва-
ющие влияние сжимаемости воздуха. Приближенно влияние КПД ниша можно оце-
нить, рассматривая его в функции от числа М для концов лонашеп с помощью кри-
вых на рис. VI 1.8. Для более точных расчетов вишои. работающих при закрнтиче-
ckiix значениях частоты вращения, необходимо воспользоваться продувками, про-
веденными при соответствующих числах М.
529
I
Условия размещения воздушных винтов на судах, в особенности на СВП, суще-
ственно отличаются от условий их размещения на самолетах, в частности площадь
их диска может быть затенена надстройками. В этом случае необходимо учитывать
взаимное влияние винта и корпуса, вводя аналогичные коэффициенты взаимодей-
ствия для гребных винтов. В настоящее время систематические данные о таких коэф-
фициентах отсутствуют. Можно лишь использовать данные о взаимодействии винтов
с мотогондоламн, если двигатели расположены вне корпуса; подобные данные со-
держатся в авиационной справочной литературе.
Основной недостаток воздушных виптов в качестве движителей амфибийных
СВП — большие размеры. Поэтому наряду с воздушными винтами на амфибийных
СВП применяют и другие типы воздушно-реактивных движителей. К ним относятся
так называемые вентиляторные движители. При этом можно исполь-
зовать как автономные вентиляторы, предназначенные только для создания тяги,
так и вентиляторы, обеспечивающие тягу и создание воздушной подьшки.
Для расчета вентиляторного движи-
теля с автономным вентилятором при-
годны те же соотношения, что и для рас-
чета водометного движителя.
Рис. VII.8. Поправка к КПД воз-
душного винта в функции числа М.
Рнс. VI 1.9. Схема вентиляторного
движителя.
Тяга такого движителя (рнс. VII.9) определяется cooi ношен нем
Те = РО (й{ — о), (VII.Ii
где Q— расход вентилятора; г,-—скорость выброса воздуха из сопла движителя;
v — скорость па входе в вентилятор. Пропульсивный коэффициент движителя
’Id = T,v/P-
Мощность, потребляемая вентилятором в этом случае,
Р=
где Н — напор, создаваемый вентилятором; т]с.— КПД вентилятора.
Напор, преодолеваемый вентилятором, характеризуется величиной
Н = Hi + O.Sjv'ch.
Здесь f/f— гидравлические потери в проточном тракте.
Используя это выражение, можно выразить пропульсивный коэффициент в виде
Если принять = 1, Гн = О, формула (VII.2) преобразхется в обычное соотноше-
ние теории идеального движителя.
Как и для воздушного винта, значение КПД удобно представтять в функции
коэффициента нагрузки, который для невязкой жидкости записывается в виде
БЗО
Зависимость идеального КПД струп от величины v-Jv, пропорциональной на-
грузке движителя Сг, показана на рис. VII.10. Наибольшее значение i]D = I есте-
ственно соответствует v/v= 1,0. Максимальное значение реального КПД. учиты-
вающее вязкие потерн и эффект ивносгь вентилятора, нс превышает 0,5 н соответ-
ствует V['v порядка 1,75. Поскольку наибольшее значение КПД воздушного винта
составляет около 0,6, переход к вентиляторному движителю может быть оправдан
только общепроектными соображениями.
Если вентилятор позволяет создать гс только тягу, ио н воздушную подушку,
эффективность двпжительного комплекса можно
однако величина Q должна представлять собой
не полный расход вентилятора, а только часть
его, используемую на обеспечение движения.
В случае применения несущего вентилятора
также для обеспечения движения необходимо
учитывать, что соотношение (VII.I) может
быть записано в виде
7е = 2р1(Е - pQo,
где ри— давление в ресивере воздушной подуш-
ки; F — площадь выходного отверстия движи-
теля.
Соотношение свидетельствует о линейной
зависимости между давлением рн и тягой дви-
жителя. В то же время горб сопротивления,
обусловленный волнообразованием, в процессе
разгона судна возрастает пропорционально
квадрату давления. Это препятствует использованию вентиляторных движителей
такого типа на крупных СВП с высокими значениями давченпя р„. Возможно при-
менение в качестве движителей осевых автономных вентиляторов, расположенных
и короткой проточной части, выполненной в виде направляющей насадки. Такие
вентиляторные движители, имеющие в качестве рабочего колеса многолопастиой
воздушный винт, можно рассчитать методами, разработанными для воздушных вин-
тов в направляющих насадках.
Рнс. VII. 10. Оценка идеального
КПД вентиляторного движи-
теля.
указатель литературы
I Афремов А Ш Богданов А. И., Мд тиновскан В. А Николаев Е. П. Влияние
Гидродинамических сил на управляемость СВП. — Труды НТО Судпрома. 1972. вып. 180,
с 202—2И.
2. Афремов А Ш . Зайцев О» А., Николаев Е. П Теоретическое исследование влияния
основных конструктивных параметра» на продольную качку сксгового СВП. — В сб.: Во ь
росы судостроения, 1978, ныл. 18, с. 123—133.
3. Баженов С. Е. Гидродинамические производные СВИ. обусловленные сугцествооя-
11 нем Зоны повышенного давления в BU. — В сб.: Вопросы судостроения Сер. «Проекти-
рование судов». 1979. вып. 20. с. 24—35.
4, Баженов С, L Метод расчета гидродинамических характеристик, олред/гяющлч.
управляемость скеговых СВП. — В Сб.; Вопросы судостроения. Сер «Проектирование су-
дов». 1981. вып. 27. с. 128—137.
5. Баженов С. Е. Определение формы волновой поверхности при установившейся Цир-
куляции СВ11. — В сб.; Вопросы судостроения. Сер. «Проектирование судов», 1979. вып. 20,
с. И —23.
6. Басин А М.. Миннович И Я Теория и расчет гребных винтов Л , Судостроение!
I9G3.
7. Басни М А.. Шадрин Б. П Гидродинамика крыла вблизи границы раздела сред
Л . Судостроение. 1980.
8 Баскаков И Я -» Таничсв Б Г Система стабилизации движения СПК. — В сб.;
Судостроение за рубежом. 1969, Кв II» с, 39 — 65.
531
9. Белоцерковский С. М. Тонкая несущая поверхность п дозвуковом потоке газа.
М Наук в, 1965.
Ю Бенуа Ю Ю и др. Основы теории судов на воздушной подушке. Jl.f Судостроение
1970.
11. Ьнсп пи hi хофф Р Л., Эшли Х-. Халфмэи Р. Л, А>роупругость. М., ПЛ. 1958.
12. Благовещенский С. И., Хол одел ин А Н. Справочник по статике и динамике корабля.
Т- 1. Л.. Судостроение. 1976.
13. Бобылев Д. К. Заметка о давлении, производимом потоком неограниченной ши-
рины ла две стенки, сходящиеся под каким бы то ни было углом. — Журнал Русского физико-
химического общества Т. Х111. М.. :881. с. 17 — 25.
14. Бородин II. К., Нецветаев IO. А Качка судов на морском полпенни. Л.. Судо-
строение. 1969.
15. Бородай Н К.. нецветаев Ю« А. Мореходность с^дон л , Судостроение, 1982,
16. Буньков М М.„ ГриияреСС В. М.. Садовников Ю, М Мототодка «Про<ресс» пляс
мотор «Вн\рь-30». — В сб.: Катера и яхты. 1975, № 5. с. 39—4 1
17. Буньков М. М. Определение оптимальных соотношений параметров корпуса бы-
строходных катеров. — Труды ИТО Судпрома. I96G. вып. 73. С. 308—318.
18. Ваганон А М. Проектирование скоростных судов. Л.. Судостроение, 1978.
19. Ван-Т.1Ак Я. .Методы волмущеиий в механике жидкости. Я... Мьр, 1967.
20. Вентиель F С. Теория вгроятн<стей М., Паука. 1969.
21, Войткуиский Я И.. Псршиц р. Я., Титов И А, Справочник по теории корабля
{Судовые движители и управляемость!. Л.» Судостроение. 1973.
22. Воронин В А, Влияние гидродинамических сил рллличноб природы п-i снегах
ня Продольную качку СВП. — В сб.; Вопросы судостроения. Сер. «Проектированне судов».
>979, вып. 20. с. 61 — 66.
23. Воронин В. А. Численное решение системы уравнений продольной качки СВП
снегового типа с помощью ЭВМ. — В сб.: Вопросы судостроения. Сер. «Проектирован}»*
судов», 1979, вып. 20. с. 53—59.
24. Го<т>бсв В. В. Лекции по теории крыла. М., ГИТТЛ. 1952.
25. Гуревич Ч. И» К вопросу о глиссирующих пластинках «тандем». — Технические
заметки НАГИ. 1935, Л» 48. с. 22—41.
26. Гуревич .4. И Ямпольский А. Р, О движении глиссирующей пластины. — Тех-
ника воздушного флота, 1933. Л? >0. с. 5—7.
27. Гуревич М. И Теория струй идеальной жидкости. М., Фиэчатгнз, 1961.
28. Дьяченко В К. Волновое сопротивление системы пульсирующих давлений при
движении иа волнении. — Тезисы докл. иа Всесоюзном научно-техническом симпозиуме
по вопросам повышения пропульсивных кзчрстя и эксплуатационных характеристик отече-
ственных перспективных суден. Л., Судостроение. 1978. с. 60—62.
29. Егоров И. Т., Буньков ,М. Ч., Садовников Ю М. Ходкость и мореходность глиссн*
рующнх судов. Л.. Судостроение. 1978.
30. Егоров И Т., Садовников Ю. .4., Исаев И. II., Басни VL А. Искусствен на я кави-
тация Л.. Судостроение. 197 |,
31. Егоров II. Т . Соколов В Т- Гндродкиампкэ быстроходных судов. Л., Судострое-
ние, 1971.
32. Зайцев О. А Нелинейные уравнен и я продольной качки СВП амфибийного типа. —
В сб.: Вопросы судостроения. Сер. «Проектирование судов’». 1979, вып. 20. о. 36— 44.
33. Зайцева Г- А., Прохорове. Д., Шаталов В. В Некоторые результаты модовый ix
и натурных испытан ini по опенке ходкости Скеговых СНП. — Сборник статей НТО имени
акад. А. П. Крылова. Л.. 1981. с. 112—lift.
34. Злобин Г. П,, Смнге.тъскнй С. П. Суда на подводных крыльях и воздушной по-
душке. Л.. Судостроение. |976.
35. Иванов А II. Гидродинамика развитых кавитационных течений. Л.. Судостроение,
)с?о
36. Карафолн Е V роднцлмикв крылл самолета, несжимаемая жидкость. М., Изд.
АН СССР. 1936.
37. Кацман Ф Ч.. Пустошным А. Фа, Штумпф В М. Пропульсивные качества морских
судов. Л., Судостроение. 1972.
38. КолчсоВ Г. К. Определение подъемной силы, действующей мл сужающиеся гидро-
лыжи при глиссировании ло годе. — Технические отчеты ЦАГП. <959. вып. 16», с. I —21.
ЭР. Кошллев Б. А о Косорукое А» И., Литвиненко В А. Спр пючднк по проектиро-
ванию судов с динамическими принципами поддержания. Л.» Судостроение, 1986.
532
40. Колызасв Б. А., Косорукое А. И., Литвиненко В А. Особенности проектирования
судов с динамическими принципами поддержания. Л., Судостроение, 1974.
41. Кочни Н. Е. Гидродинамическая теория решеток. М., Гостсхнздат, 1949.
42, Кочни Н. Е. Теория крыла конечного размаха круговой формы а плане. Соб. <оч.а
т. II. Изд-во АН СССР. 1919.
43. Кочни Н. Е , Кибел и И. А., Роле Н. В. Теоретическая гидромеханика. 4.1. М.,
ГИТТЛ. 1955.
44. Кравец А. С. Характеристики аоняииокныч профилей. М.. Оборонно, 1939.
45. Лабазников В К. Теоретическое определение и исследование гидродинамических
характеристик глиссирующих судов. — Лвторсф. днсс. кпид техн. паук. Одесса. изд,
ННМф» 1971.
46 Лаврентьев В. М. Гидродинамика шнроколопрстных гребных винтов. — Труды
НТО Судпром'1, 196:1.
47. Логвннпвич Г. Я. Гидродинамика течений со свободными границами. Киев, Наукопа
дум кт. <969.
48. Лукашевич Л Б. Параметры пространственного потока при обтекании крыла
вблизи свободной поверхности весомой жидкости. — Известия ЛИ СССР. Сер. «Мех эн в на
жидкостей и газа». 1979, N. 2, с. 54—62.
49. Лукашевич А. Б., Скафтымпв Л. В. Численное решение задачи о продольном дви-
жении судна и а подводных крыльях па регулярном вол иск ин с учетом ударов корпуса о по-
ду. — Труды НТО Судпрома, 1976, вып. 242, с. 162— 177.
50 Мавлюдов М Л., Руссцкин А А., Садовников Ю М,, Фишер Э. Л. Движители
быстроходных судов. 2-е изд.. Л., Су дек троение. 1982.
51. Николаев Е. П., Смолина И. А. Основные особенности гндрод|П1.1Мпческнх харак-
тер нСтн к и метод расчета управляемости скеговых СВП. — В сб.: Вопросы судостроения.
Сер. «Проектирование судов», 1979, пып, 20. с. 3—10.
52. Орлов Ю. Ф. О глиссировании пл истины в присутствии связанного вихря по по-
верхности ндеазьний жидкости конечной глубины. — В сб.; Гидродинамика судна. Горь-
кий, Волго-Вятское книжное изд-во. 1967, с. 9—14.
53. Остославсжий И. В., Калачев П. С. Продольная устойчивость п управляем ость
самолета. М., Оборонно. 1Ч.=>1.
54, Павчспко А €., Солпвей С. Б. К расчету сил, действующих ив ломаную глисси-
рующую пластину. — В сб.: НТО Судпрома. 19“i. пып. 168. с. 303—ЗОй.
55 Опвленко А. Г... Солпвей С. Б. О переходном с ол роти плен и и клина, погружаю-
щегося между вертикальными стенками, и глиссировании плоской мл енатоИ поверхности в ка-
пало бесконечной глубины. —• В сб.: Тезисы докчадот hi XXIV Всесоюзной нлучцо-тсхим-
чсской конференции по теории корабля (Крыловские чтения). НТО Судпрома, <975,
с. 168-169.
56 Павленко А С.» Соловей С. Б. Расчеты упрэвтяомых Транцевых плит. — В сб.;
Катера ц яхты, <972. .V* 6, с. 38—40.
57, Паггчснков Л Н- Гидродинамика подводного крыла. Киек. Внукова думка, 1965
58. Ппичсниоо А Н. Некоторые задачи и методы гидр один ям и ки больших скоростей. —
В сб.: Современные методы гидродинамики. Киев. Паукова думкч, 1967. с. < — 35.
59 Папмель Э. Э Практический расчет гребною пинта. Л.. 1936.
- 60. Парышсв Э. А. Влияние вертикальных стенок канала на удар н глиссн ропак не
плоской ил еватой плтстмны. — Технические отчеты ЦА1 Н, <961. вып. 212, с. 1 — 19.
61. Передьмутр А. С. Проектирование обводов и выступающих частей быстроходных
катеров. — Труды НАГИ, 1944, вып. 544.
62. Поздюннн В. Л. Су перка витирующие впиты. — Известия АН СССР. ОН Г. 1944,
Л; 1. 2. с. 58—78.
63. Пф.пейчерср К- Центробежные и осевые насосы. М.—Л., нзд. ОНТИ. 1957.
64. Риман И, С. Экспериментальное определение коэффициента сопротивления трения
прн глиссн ров чини плоских пластин. — Технические отчеты ЦАГП. 1947. вып. 106,
с. 10—16
65 Седов Л. И. Методы подобия и размерности в механике. М., Наука, 1965.
66 Гедпв Л. И. Плоские задачи гндродгиамики и аэродинамики. М.. Техтсорстцздат,
1956.
67. Семсцов-Тян-ШанскиГ| В= Б.. Благовещенский С» II Хозодилвн Л. Н. Качка ко-
рабля Л., Судостроение, <969.
68. Соболев Г В. Управляемость корабля н автоматизация судовождения. Л.ь Судо-
строение. 1976.
533
69 Соболев Г. В. Упряпчяечость судов с динамическим принципом годдеожинич Л.,
изд. ЛКИ. 1976.
70. Степанов Г. Ю Гндродияам< ческая теория аппаратов на воздушной подушке
М., Машгнэ. 1963.
71. Тихонов А. II., Соколов В. А., Кузнецов А. Б. Гичред <н. мичесвие силы. Действую*
«дне на плоскокилспатые пластины при установившемся движении. — Труды НАГИ. 195
С. ! — 29.
72 Тихонова И., Колосов Г К. Гидродинамические характеристик i плоскойплсиятых
ллястни при установившемся глиссировании я входе в воду с постоянной скоростью И ПО-
СТОЯННОМ угле приводнения. — Сб. работ по гидродинамике. БНИ ЦАП1. 1959. е 140—166.
73. Титов И А , Егоров И. Т., ДроГмеш.ов П Ф Ходкость быстроходных судои Л
Судостроение. 1979.
74. Тихой в А. И. Глиссирование килепатых пластин со скуловыми образованиями- —
Труды ЦАГЦ, 1968. Вып. 9b8.
75 Трсщевскин В. И. и др. Аэродинамически Л эксперимент в судостроении. Л.. Суд
строение. 1970.
76. Френкель М. И., Городецкий Л. 3. Влияние отбора и выброса жидкости с поверх л-
стп глисснр>юшей пластинки ит ее гидродинамические характеристики — В сб.: Гидр
дннлмнка быстроходных Судов. НТО Судпроча. 1968. вып- 104, с. 134—141.
77. Ханжонков В. И. Аэродинамика аппаратов на воздушно Л подушке. М.» Машине
строение. 1972.
78. Чаплыгин Ю. С. Глиссирование плоской плястннкн бесконечного размаха по по-
верхности тяжелой жидкости. — Труды НАГИ. [910. пип. 508. с. 3—45.
79. Чалчыгии С. А , Аржвнников И С. К теории открылка и закрылка. — Труды
НАГИ. 1931, вып Ш5. с. 3—13.
80. Эпштейн Л. А О расчете впадины за подводным крылом конечного размах л и пл-
скоб глиссирующей пластинкой. — В сб.: Проблемы гидродинамики н механики сплошной
среды М., Наука. [969.
81. Эиштекк Л. А. Методы теории рлзмерностеЛ и подобия я задачах гидромеханики
судов Л., Судостроение. 1970.
82. Chaplin I. В, Amphiblons Surface Effect Vehicle Technology — Past, Prrvnt ard
Future. AlAA Paper. 74 — 318. 1974. p. 17.
83- Doktor* L. 1 Hydrodynamic Power Rjcllalrd by a Having and Pitching Vir-Ctnivon
Vehicle. — Journal o! Ship Research, June 1978. S. 67—79.
84. ElslyG , Devereux A. Hovercraft Design and Construct ion. David and Charles New t^n
Abbot. 1968
85. Glaneri H. The Elements o! Aerofoil and Aircrew Theory. Cambridge. University Press,
1926
86. Green A. E The gliding of в pkite on a Slreim of finite depth. Proc. Cnmbrldgr Pl’il.
Soc.t 1935, vol. 31. p. 4, 1936, vol. 32» p. I; 19<8. vol. 31. p f.
87. Green A. E Note of Ihr Gliding oi a Plale on the Surficeot Stream. Proc. Cambridge
Phil. Soc . 1936. vol. 32. p. I.
88. Hover Foil News. 1973. vol. 4« N I.
89. Hovering Craft and Hydrofoil. 1971. VI1. vol. 10. N 10. p. 60—85.
90. Hovering Craft and Hydrofoil. 1978, vol. |7, N 8—9. p. 21—38.
91 itih 1TTC Proceedings, vol. I. Leningrad. USSR. 1981.
92. Janes Surface Skimmers. — Hovering craft and Hydrofoil. London. 1962.
93. Jones R. T Properties of low aspect-rat In pointed Wings at Speeds below -nd ahow*
the speed of song. NACA Rep.» 1946, p. 835
94. Marine Technology, 1973, vol. 10. N 3, p. 105—III.
95. Mantle P. 1. A technical Summary ol Air Cushion Craft Development. PU T NSRDF
1975. Report N 4727. Bethesda, p. 59.
96 Manio H. High and low r.spect-ratio approximation of planing Surfaces.—Schllfslcc);-
nlk, 1967, Hefl 72. S. 57—64.
97. Newman J., Poole F. The wave Resistance of a moving Pressure Distribution In a Canal
DTMB Report, March >962, N l6l5.
98. Ocki M. D. and Moran D D. Seakeeping Qualify of Advanced Marine Vehicles fr
Design Applications. — Journal of Hydronautics, July l9/9, p. 13—20.
99. Ockl M. D.. Moran D. D. The Analysis of Ship Motion and Seakeeping Qwality F-
the Design ol Advanced Marine Vehicles. DWT NSRDC. PRADS— international SympOSHin
on Practical Design in Shipbuilding. Tokyo. Oct. 1977, p. 381—388.
534
100. Savitsky D., Ross £ Turbulence Stimulation on the Boundary Layer of Planing
Surface. Pari 11. Preliminary Experimental Investigation. — Rep. 1952, 111 (Experimen-
tal Stevens Institute of Technology).
101. Schertcl H-. Supramar Л. G. Design and operating Problems of commercial Hydro-
loll Boats.— Hovering Crafl and Hydrofoil. |9GI, vol. 1, N 3. p. 4—7
102. Slicn Y. 1.. Ogilvie T. E. Nonlinear hydrodinamic Theory for finitspan planing Sur-
faces. Int. Shipbuilding Progress, 1972, vol. lb, p 1.
103. Skolnlek A. CREW COMBAT System Pertormance Requirements in the Operational
Environment of Soil.ice Effect Ships. — Naval Engineers Journal. 1974, N 6. vol. 86. p. 15—34.
101. Slinton Jones R. Some Design Problem ol Hovercraft. — Aerospace Engineering
February 1961.
105. Status of Hydrodynamic Technology as Related to Model Tests ol High-Speed Marine
Vehicles, Report Number DINSRDC-81 026. 1981.
106. Steiner .4. F. Analysis ol planing Data for use in Predicting hydroillnamic impact
Loads NACA. TN. 1918, N 1691.
107. Ting L Keller J II. Planing ol a flat Plale at high Troude number. — the Physics
of Fluids. 1971, vol. 17. N 6.
108. Wagner II. Uber Sloss- und Gleitvorgange an der Oberllachc von Flussigkeiteii.
7ЛММ, 1932, H. 4. S 193—213.
109. Wheeler R L. An Appraisal of Preseul and Future large Commercial Hovercraft. —
RINA, 1975, p. 231 — 23™
HO. Wheeler R. L Recent L'niied Kingdom Hovercraft Development. — Journal of
flydioneulics January 1978. vol. 12. N 1. p. 3—17.
HI. Wilson R. A., Wells S. M.> HeberC. L. Powering Prediction for Surface Eflect Ships
Based on Model Results. — journal ol Hydronautics, October 1979. vol. 13. N H, p 116
ОГЛАВЛЕНИЕ
От птучппх редакторов .........
РАЗДЕЛ ПЕРВЫЙ
УПРАВЛЯЕМОСТЬ водоипн шлющих ГУДОВ.
Основные обозначения ....................................... 7
Глава 1. Общие свечения об управляемости еутон , ж g
$ 1. Судно как упр.ввлясмпя система............. . в
§ 2. Средства управлений судном................ .... н
§ 3. Кинематика судна ..........
§ 4. Уп ран тя см ость и маневренность .... ... 3|
Глава II. Силы и моменты, Тейс гпующис ид корпус судна ил 1лу<юмоп тияоА
воде........................................................................ 3|
§ 5. Классификация сил, действующих нл судно........................ ... 31
§ С. Инерционные Силы и моменты ................. , .............. 33
§ 7. Нгинсрцнонпые силы и моменты судов............
§ 8. !leintrpmiOHные силы и моменты толкаемых гост..нон .
Главе III. Силы н моменты, обусловленные во «действием на Судно ветра
II МОрСкИХ RI11II , .................................................
§ 9. Аэродинамические силы и моменты..................... , 51
§ 10. Гидродинамические сипы и моменты от действия наш . . . . . 59
Глава IV. Силы и моменты ro шикающие в особых режимах движения судит
§ И. Влияние ограничений фарн.пч ра на г ид роди и а мнятскис Характеристики Судна г',’
$ 12. Гидродинамические силы ны и моде Истин я между гудами. ..... . nJ
§ 13, Силы, обусловленные течением.................................... ... 73
Глвва V. Гилы, развиваемые средствами умравтепия судном. .... 76
§ 14. Силы от рулей и поворотных н нс в до к .... .... 7 6
§15. Силы от средств активного управления ... .... ... 80
Глава VI, Движение судна На тихой глубокой воде . ,..................
4 16. Уравнения движения судии, управляемого рулем или погорел пей ц с, дк*.п <£
§ 17. Пеустановиншссся движение судна............ ...................... «ф
§ 18. Установившееся движение судна......................................... ЮЗ
Глава VII. > стоим ив ость установившихся режимов движения судка. . . ПО
§ 19. Понятие об устойчивости движения ..................., ....... ц()
§ 20. Устойчивость по углу дрейфа, угловой скорости и курсу................. ЦЗ
$ 21. Устойчивость по углу скорости, поперечной скорости и поперечному смещению Ц5
536
Глава VIII. Критерии управляемости судов........................................ ИЗ
§ 22. Диаграмма управляемости = . . . ............................. . . 118
$ 23. Проектировочный расчет кормовою подзора н площади руля судия. ... 121
Гланя IX. Движение судна при действии ветра................................... 124
§ 21. Движение судна, снабженного рулем................................. >24
§ 2В. Движение судна, снабженного средствами пктияногп управления....... 129
§ 26. Общие уравнения движения судна ........................................ 1'11
I л а в о X. Рыскание судна на волнении................................. 149
§ 27, Уравнения движения судна на волнении н расчет параметров рыскания . . . IJ9
§ 28. Рыскание судна на регулярном волнении........................ - . 151
§ 29, Рыскание судна на нерегулярном волнении.................................. 183
Глава XL Управляемость судов в особых режимах движения . ...................... 161
§30. Управляемость судов в условиях ограниченной! фарватера.............. . IG1
§ 31. Управляемость судов на заднем ходу ..................................... 166
§ 32. Управляемость судов на криво.? ни ей к их участках пути при течении .... 169
§ 33. Управляемость судов, движущихся иа близком расстоянии друг от друга. . . 170
§ 34. Управляемость системы, состоящей из буксировщика и буксируемого на тросе
судив............................................... ................... 176
Главе XII. Гидродинамический расчет средств управления судном.................. Т?6
§ 35. Рисчет судовых рулей . , ........................................... . 1>6
§ 36, Расчет рулей за рудерпостом ............................................ /16
§ 37. Расчет поворотных насадок .............................................. 217
§ 38. Гидродинамический расчет подруливающих устройств на швартовном режиме
работы.................................................................. 2#2
§ 39. Влияние скорости судна на тяговые характеристики подруливающих устройств 1’27
§ 40. Выбор основных элементов и Гидродинамический расчет поворотных колонок 232
§41. Сравнительная оценка различных средств активного управления.............. 231
Г л а в в XIIL Испытания судов................................................. 235
§ 42. Маневренные натурные испытания судов .................................... 235
§ 43. Составление математической модели судна во данным модельных «ли натур-
ных испытаний ...................................................... 2 к
Указатель литературы........................................... 248
РАЗДЕЛ ВТОРОЙ
ГИДРОДИНАМИКА СУДОВ С ДИНАМИЧЕСКИМИ ПРИН-
ЦИПАМИ ПОДДЕРЖАНИЯ ..................... ?5П
Основные обозначения.......................................... 23-)
Глава L Гидродинамические и конструктивные окобенвости судов с дина-
мическими принципами поддержания (СДПП) .................................... 252
§ I. Основные принципы динамического поддержания. Классификация СДПН . 232
§ 2. Общая компоновка и типы СДПП .................................... . 253
$ 3. Двнжительные комплексы СДПП ... ............................... . 260
Главе U. Глиссирующие суда ... , . , .............................. 265
§ 4 Основы гидродинамики глиссирования............. . . ... . 265
§ Б. Составляющие сопротивления глиссирующих судов. Методика пересчета дан-
ных модельных испытаний на натуру ......................................... 272
§ 6. Расчет сопротивления судов, движущихся в режиме глиссирования .... 277
§ 7 Влияние основных параметров корпусов глиссирующих судов на их сопроти-
вление и выбор их оптимальных соотношений .................................. 283
§ 8 Управление tндродипамическими характеристиками глиссирующих поверх-
ностей. Расчет сопротивления глиссирующих Судов с транцевыми плитами 292
§ 9. Мореходность глиссирующих судов........................................... 299
637
Глава HI. Суда на подводных крыльях . . . . ........ 304
§ 10. Основы гидродинамики подводного крыла .................................. 304
§ II. Гидродинамический расчет несущего комплекса СПК. Пересчет данных модель-
ных испытаний на натуру....................................................... ЗС8
§ 12. Расчет несущих характеристик подводного крыла, обтекаемого без кавитации 3G9
§ 13. Учет влияния кавитации на характеристики подводного крыла................ 314
$ 1*1. Расчет характеристик средств управления подъемной силой подводною крыла 319
§ 15. Учет взаимного влияния крыльев СПК............................... ... 327
$ 16. Гидродинамические характеристики стоек СПК • . ........ 332
$ |7. Расчет сопротивления движению СПК .......... ........ 334
§ 18, Методы оценки мореходности и управляемости СПК ... 333
§ 19. Уравнения бокового движения СПК............................. . - - 339
§ 20. Уравнения продольного движения СПК ..................................... 341
§ 21. Расчет поперечной к продольной остойчивости СПК . . 346
§ ?2. Оценка устойчивости движения СПК....................................... 348
$ 23. Расчет параметров установившейся циркуляции .... . . 350
§ 21. Расчет продольной качки и перегрузок СПК па регулярном волнении. . . . 351
§ 25. Расчет качки и перегрузок СПК на нерегулярном полпенни................. 3“»3
Глава IV. Суда на воздушной подушке............................................ 359
$ 26. Основные соотношения, характеризующие образование воздушной подушки 359
$ 27. Ограждения воздушной подушки и принципы их работы в составе несущею
комплекса СВП . ,............................................................ 361
§ 2В. Расчетные и экспериментальные методы определения характеристик ГО. . . 364
$ 29, Определение энергозатрат на поддержание СВП ....................*. . . 372
§ 30. Составляющие con роти в чей ня движению СВП н принципы их модели ровни ня 370
§ 31. Расчет сопротивления движению СВПА на тихой воде ...... . . 3BQ
§ 32. Расчет сопротивления движению СВПС на тихой воде .... 387
§ 33. Дополнительное сопротивление СВП при движении на волнении.............. 392
$ 34. Определение статической остойчивости СВП ............................... 393
§ 35. сравнения движения СВП на волнении ...................................... 40?
§ 36. Влияние сжимаемости воздуха на динамику СВП.............................. 498
§ 37. Расчет параметров качки СВП при движении вразрез регулярному пол пению
I прк положении лагом к волне а линейном и нелинейном приближении ... 411
§ 38 Устойчивость по высоте и автоколебания СВП.............................. 41»
§ 39. Влияние на качку скеговых СВП главных размерений и характеристик нагне-
тающих вентиляторов ......................................................... 414
§ 40 Стабилизация снеговых СВП на волнении ................................... 416
§ 41 Уравнении бекопого движения СВП.......................................... 417
§ 42. Гидро- н аэродинамические характеристики СВП ............ 421
§ 43. Остойчивость на ходу, поворотливость, крен на цирку акции и управляемость
СВП в условиях ветра.......................................................... 425
§ 44. Критерии устойчивости бокового движения на тихой воде и при ветре. . . . 4»
Глава V. Кавитирующие гребные винты.......................................... 433
$ 45 Особенности действия и расчета кавитирующих гребных винтов................ 433
§ 46. Взаимодействие гребиык винтов быстроходных судов с элементами несущего
комплекса .................................................................... 436
§ 47 Результаты систематических испытаний кавитирующих гребных винтов . . , 443
§ 4В. Нчияиие основных геометрических элементов кавитирующих гребных винюо
$ на их гидродинамические характеристики . ....................................... 4 3
49. Проектирование изолированных кавитирующих гребнык винтов................... 452
§ 50. Расчет кавитирующих гребных винтов в косом потоке........................ 47)
§ 51. Проектирование гребных винтов в составе угловых колонок. ................ 47?
$ 52. Расчет ходкости быстроходных судов и построение паспортных диаграмм
кавитирующих гребных винтов ............................................. 4’1
Глава VI. Водометные движители. Проектирование и гидродинамический
расчет ....................................................................... 479
§ 53. Основные зависимости, определяющие гидродинамические характеристики
осевых водометных движителей ......................................... 479
538
§ 51. Взаимодействие движителя с корпусом суди,............................... 482
§ 55. Водозаборные устройства осевых водометных движителей.................
4 56. Рабочие колеса водометных движителей ................................... 422
4 57. Сопло водометного движителя............................................. 5и8
4 68. Проектировочный расчет водометных движителей судов с дни 1мнческими
прннпппаыи поддержания и построение паспортной диаграммы................ 509
4 59. Пример проектировочного расчета водометного двнкителя СПК............... 513
S 60. Реверсивно-рулевые устройства водометных движителей............. .... 5|6
4 6|. Вентилируемый водометный движитель...................................... 520
Глава VII. Воздушные данжнтстн................................................ 523
$ 62. Анализ вффектнвиостн воздушных винтов .................................. 52)
§ 63 Проектирование воздушного движнтельиого комплекса ....................... 527
Указатель литературы....................................... 531
СПРАВОЧНИК
ПО ТЕОРИИ
КОРАБЛЯ
В ТРЕХ ТОМАХ
Под редакцией
Я. И. Войткунского
ТОМ ТРЕТИЙ УПРАВЛЯЕМОСТЬ ВОДОИЗМЕЩАЮЩИХ СУДОВ.
ГИДРОДИНАМИКА СУДОВ
С ДИНАМИЧЕСКИМИ ПРИНЦИПАМИ ПОДДЕРЖАНИЯ
Заведующий редакцией И Г. Русецкиа
Редакторы: Н I] Долинина. Л И, Кускова, Н. Н Саяпина
Корректоры; В. В Румянцев, Н М. Меаияскач. В. (О Catoxuna
Ггхянчсский редактор Л. //, Казаков
Переплет художника Б, Н. Огенчакопи
ПБ А*в 821
Сдано о набор 21.05.85. Подписано в печать 27.11.85. М-30915.
Фирма? 60X90* l/i« Бум «га типографская Х₽ 2. Гарнитура лнгерат}'риая.
Печать высокая. Усл- неч. л. 34.0. Усл. кр.-отт. 34.0. Уч.-изд. л. 41.0.
1 и раж 10 700 эиз. Изд. № 3962-84. Заказ № 131. йена 2 р. 40 к.
Издательство «Судостроение». 191065, Ленинград, ул. Гоголя. 6.
Ленинградская типография № 6 ордена Трудового Красного Знамени
Ленинградского объединения «Техническая книга» им. Евгении Соколовой
Союзполнграфпрома при Государственном комитете СССР
по делам издательств, полиграфии и книжной торговли.
193144. г. Ленинград, ул. Моисеенко. Ю
В 1985 ГОДУ
В ИЗДАТЕЛЬСТВЕ «СУДОСТРОЕНИЕ»
ВЫЙДУТ В СВЕТ;
АКСЮТИН Л Р. БОРЬБА С АВАРИЯМИ МОРСКИХ СУДОВ
ОТ ПОТЕРИ ОСТОЙЧИВОСТИ. — Л.: Судостроение. — 10 л.,
ил. — 55 к.
На основании многолетних исслсдопаний автора и обобще-
ния отечественных и зарубежных публикаций, среди которых
книга автора «Аварии судов пт потери остойчивости» (1975 г.),
даны рекомендации но предотвращению аварий судов от потери
остойчивости, заключающиеся в основном в совершенствовании
требований к ней, методов ее контроля и технологии перевозок
грузов. Приведены результаты анализа большого числа аварий.
Для судостроителей, зксплуатацноиннков и может быть
полезна судоводителям.
ООО
ЗАДАЧНИК ПО ТЕОРИИ, УСТРОЙСТВУ СУДОВ И ДВИЖИ-
ТЕЛЯМ: Учебное пособие. Друзь Б. И., Магула В. И., Азоп-
цев А. И. и др. —2-е изд., перераб. и доп. — Л.: Судострое-
ние. — 15 л., ил. — В пер.: 65 к.
Представлено около 500 задач и примеров, сгруппированных
но разделам изучаемых курсов: форма и размерения корпуса
судна; основы гидромеханики; плавучесть; остойчивость; непо-
топляемость; управляемость; качка; мореходные качества судна
с динамическими принципами поддержания; ходкость; судовые
движители; прочность корпуса; судовые устройства.
Первое издание книги вышло в 1468 год.
Д ля студент он кораблестроительных вузов и курсантов
высших инженерно-морских училищ.