/

























































































































































































































































































































































































Текст
Ε- Ε OCO - Ε
Α. . Перов
• к
ρ · отехника
УДК 621J7
Π 26
ББК 32. 965
Учебное пособие
Рецензенты
докт. техн. наук, профессор В.Н. Юдин;
канд. техн. наук, профессор A.M. Бонч-Бруевич
Перов А.И.
П26 Статистическая теория радиотехнических систем. Учеб. пособие для
вузов. - М.: Радиотехника, 2003,400 с, ил.
ISBN 5-93108-047-3
Рассмотрены проблемы статистической теории радиосистем. Кратко изложены
основы статистического описания событий н процессов; приведены статистические
модели сигналов, сообщений и помех, используемые в радиолокации, связи, навшадии.
радиоуправлении: даны основы теории статистических решений; представлены различные
типы задач синтеза оптимальных устройств и систем, решаемые статистической теорией
(обнаружение, различение, согласованная фильтрация, оценка параметров сигналов,
линейная и нелинейная фильтрация, экстраполяция и интерполяция информационных
процессов): изложены основы оптимальной пространственно-временной обработки
сигналов.
Для студентов радиотехнических специальностей вузов; может быть полезна
аспирантам и инженерам, занимающимся синтезом радиотехнических устройств
и систем.
УДК 621.37
ББК 32. 965
ISBN 5-93108-047-3
© Перов А. И., 2003
© Издательство "Радиотехника". 2003
ОГЛАВЛЕНИЕ
Предисловие 9
Введение 10
Глава 1. СТАТИСТИЧЕСКОЕ ОПИСАНИЕ СОБЫТИЙ
И ПРОЦЕССОВ 13
1.1. Понятие вероятности 13
1.2. Элементарные события. Случайная величина 14
1.3. Вероятностное описание случайных величин 15
1.4. Многомерные случайные величины 22
1.5. Условные функции распределения и плотности вероятности
случайных величин 26
1.6. Случайные процессы 27
1.7. Гауссовские случайные процессы 34
1.8. Марковские случайные процессы 41
1.8.1. Марковские случайные последовательности 41
1.8.2. Цепи Маркова 43
1.8.3. Марковские процессы 45
Глава 2. СТАТИСТИЧЕСКОЕ ОПИСАНИЕ СИГНАЛОВ,
СООБЩЕНИЙ И ПОМЕХ 51
2.1. Общие определения 51
2.2. Узкополосные сигналы 54
2.3. Статистические модели сигналов 55
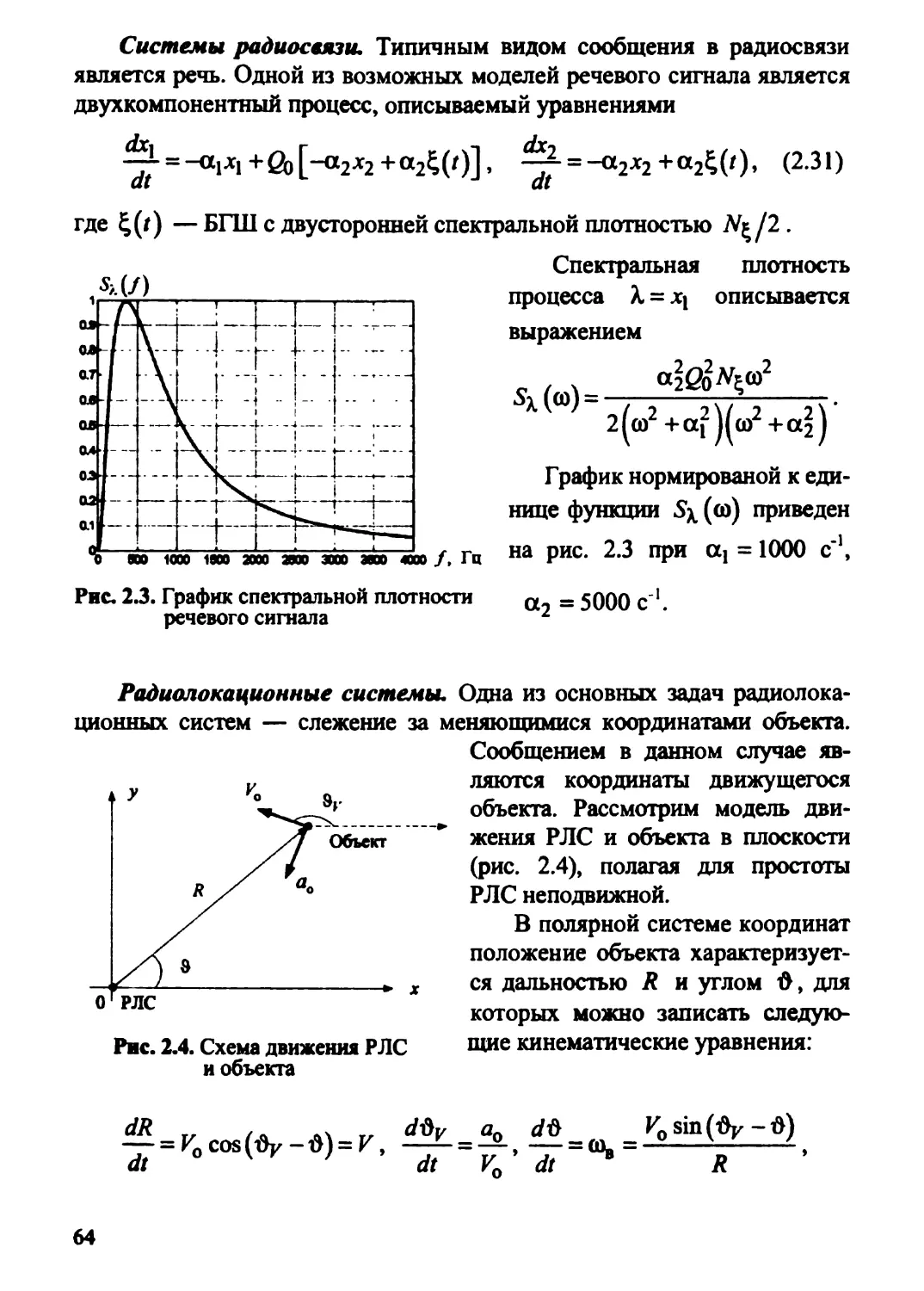
2.4. Статистические модели сообщений 63
2.5. Статистические модели помех 67
Глава 3. ОСНОВЫ ТЕОРИИ СТАТИСТИЧЕСКИХ
РЕШЕНИЙ 70
3.1. Общие положения 70
3.2. Решения, функция потерь, риск 71
3.3. Оптимальные решения >. 76
3.4. Оптимальные решения при наличии случайных
неинформативных параметров сигнала 79
3.5. Оптимальные решения при наличии случайных
параметров сообщения 81
Глава 4. ОБНАРУЖЕНИЕ СИГНАЛОВ 83
4.1. Постановка задачи обнаружения сигналов 83
4.2. Обнаружение детерминированного сигнала 84
4.2.1. Байесовское решение. Простая функция потерь 84
4.2.2. Байесовское решение. Обобщенная функция потерь ... 86
4.2.3. Небайесовское решение. Критерий Неймана—Пирсона 88
4.2.4. Формула для отношения правдоподобия Ό
3
4.2.5. Структура оптимального обнаружителя 92
4.2.6. Характеристики обнаружения 94
4.2.7. Обнаружение сигнала при коррелированной помехе ... 97
4.3. Обнаружение сигнала со случайными параметрами 102
4.3.1. Общее решение задачи обнаружения сигнала
со случайными параметрами 102
4.3.2. Оптимальный приемник обнаружителя сигнала
со случайной начальной фазой 104
4.3.3. Оптимальный приемник обнаружителя сигнала
со случайными амплитудой и начальной фазой 107
4.3.4. Оптимальный приемник обнаружителя сигнала
со случайными начальной фазой, амплитудой,
временем запаздывания и смещением частоты 110
4.4. Обнаружение сигнала по дискретной выборке 113
4.5. Обнаружение сигнала на фоне негауссовских помех 119
4.5.1. Обнаружение детерминированного сигнала 119
4.5.2. Обнаружение сигнала со случайными параметрами .... 121
4.6. Обнаружение пространственно-временного сигнала 123
4.6.1. Отношение правдоподобия для пространственно-
временного сигнала 124
4.6.2. Оптимальный алгоритм обнаружения
пространственно-временного сигнала 126
Глава 5. ОПТИМАЛЬНАЯ СОГЛАСОВАННАЯ
ФИЛЬТРАЦИЯ СИГНАЛОВ 134
5.1. Общие положения теории согласованной фильтрации
сигналов 134
5.2. Согласованные фильтры для некоторых типов сигналов 137
5.2.1. Согласованный фильтр для когерентной пачки
радиоимпульсов 137
5.2.2. Согласованный фильтр для когерентной пачки
радиоимпульсов с фазовой манипуляцией 140
Глава 6. РАЗЛИЧЕНИЕ СИГНАЛОВ 144
6.1. Различение двух детерминированных сигналов 144
6.2. Различение двух квазидетерминированных сигналов 150
6.3. Различение т детерминированных сигналов 152
Глава 7. ОЦЕНКА ПАРАМЕТРОВ СИГНАЛА 158
7.1. Постановка задачи оценки параметров сигнала 158
7.2. Общее решение задачи оптимального оценивания
параметров сигнала на основе теории статистических
решений 159
7.3. Оценки максимального правдоподобия 160
4
7.4. Свойства оценок максимального правдоподобия 162
7.4.1. Несмещенность 162
7.4.2. Эффективность 162
7.4.3. Достаточность 167
7.5. Свойства оценок случайных параметров 168
7.5.1. Смещенность оценок случайного параметра 168
7.5.2. Граница Рао—Крамера для оценки случайного
параметра 168
7.6. Оценка параметров сигнала, принимающих дискретные
значения 173
7.6.1. Байесовское решение 173
7.6.2. Небайесовское решение. Оценки максимального
правдоподобия 177
7.7. Оценка параметров сигнала с непрерывной областью
значений 177
7.7.1. Прямые методы решения задач оценки параметров
сигнала 177
7.7.2. Оценка параметров сигнала с помощью
дискриминаторов 182
7.8. Потенциальная точность оценок параметров сигнала 184
7.9. Оценка параметров сигнала по наблюдениям дискретной
выборки , 195
7.10. Оценка информативных параметров сигнала при наличии
случайных неинформативных параметров 197
7.10.1. Оценка параметров сигнала со случайной начальной
фазой 197
7.10.2. Оценка параметров сигнала со случайными
амплитудой и начальной фазой 200
7.11. Оценка параметров сигнала, наблюдаемого на фоне
коррелированного шума 201
Глава 8. РАЗРЕШЕНИЕ СИГНАЛОВ 204
8.1. «Разрешение - обнаружение» сигналов 204
8.2. «Разрешение - измерение» сигналов 206
8.3. Функция неопределенности сигнала по задержке и частоте .. 209
Глава 9. ОСНОВЫ ТЕОРИИ ФИЛЬТРАЦИИ
СЛУЧАЙНЫХ ПРОЦЕССОВ 216
9.1. Уравнение для апостериорной плотности вероятности
непрерывных процессов 218
9.2. Рекуррентное уравнение для апостериорной плотности
вероятности дискретных процессов 223
5
9.3. Рекуррентное уравнение для апостериорной плотности
вероятности дискретных процессов при наличии случайных
неинформативных параметров сигнала 225
9.4. Рекуррентное уравнение для апостериорной плотности
вероятности непрерывных процессов при наличии
случайных неинформативных параметров сигнала 227
9.5. Рекуррентное уравнение для апостериорной плотности
вероятности дискретных процессов, зависящих от
случайных параметров 229
9.6. Рекуррентное уравнение для апостериорной плотности
вероятности непрерывных процессов, зависящих от
случайных параметров 232
Глава 10. ОПТИМАЛЬНАЯ ЛИНЕЙНАЯ ФИЛЬТРАЦИЯ
ИНФОРМАЦИОННЫХ ПРОЦЕССОВ 236
10.1. Оптимальная линейная фильтрация непрерывных процессов 236
10.1.1. Общие уравнения оптимальной линейной фильтрации 236
10.1.2. Некоторые обобщения алгоритмов оптимальной
линейной фильтрации 241
10.1.3. Использование теории оптимальной линейной
фильтрации для синтеза сглаживающих цепей
следящих измерителей 242
10.1.4. Примеры синтеза оптимальных линейных систем
фильтрации 245
10.1.5. Оптимальный фильтр Винера 249
10.2. Оптимальная линейная фильтрация дискретных процессов 257
10.2.1. Рекуррентные алгоритмы оптимальной дискретной
линейной фильтрации 257
10.2.2. Пример синтеза оптимальной дискретной системы
фильтрации 264
10.2.3. Некоторые обобщения алгоритмов оптимальной
дискретной линейной фильтрации 266
10.2.4. Дискретный фильтр Винера 268
10.3. Оптимальная комбинированная калмановско-винеровская
фильтрация 270
10.3.1. Непрерывно-дискретная калмановско-винеровская
фильтрация 271
10.3.2. Дискретная калмановско-винеровская фильтрация ... 275
10.4. Оптимальная линейная экстраполяция и интерполяция 278
10.4.1. Оптимальная линейная экстраполяция 278
10.4.2. Оптимальное линейное интерполяция 280
6
10.5. Оптимальная линейная фильтрация при 286
коррелированных шумах наблюдения
Глава 11. ОПТИМАЛЬНАЯ НЕЛИНЕЙНАЯ
ФИЛЬТРАЦИЯ ИНФОРМАЦИОННЫХ
ПРОЦЕССОВ 292
11.1. Уравнения оптимальной нелинейной фильтрации
в гауссовском приближении 292
11.2. Дискриминатор и фильтр в оптимальной системе
фильтрации 298
11.3. Уравнения дискретной нелинейной фильтрации
в гауссовском приближении 306
11.4. Оптимальная непрерывно-дискретная фильтрация и
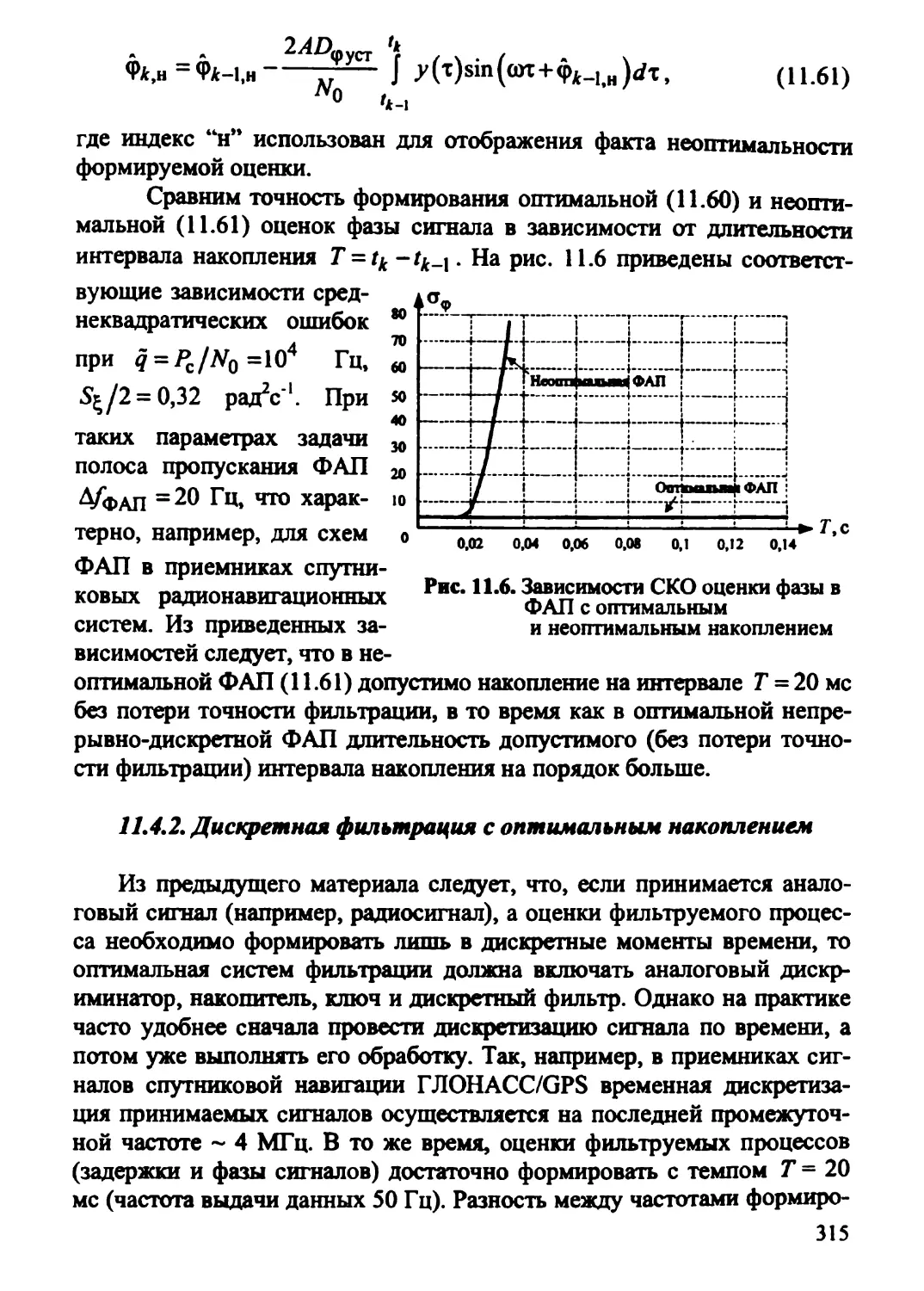
дискретная фильтрация с оптимальным накоплением 309
11.4.1. Оптимальная непрерывно-дискретная фильтрация ... 309
11.4.2. Дискретная фильтрация с оптимальным накоплением 315
11.5. Оптимальная нелинейная фильтрация при случайных
неинформативных параметрах сигнала 317
11.5.1. Общие алгоритмы оптимальной фильтрации
в гауссовском приближении 317
11.5.2. Оптимальная фильтрация информационных
процессов, переносимых сигналом со случайной
начальной фазой 319
11.5.3. Оптимальная фильтрация информационных
процессов, переносимых сигналом со случайными
начальной фазой и амплитудой 322
11.5.4. Оптимальная фильтрация при переменных
неинформативных параметрах сигнала 325
11.6. Оптимальная фильтрация информационных процессов в
присутствии дополнительных узкополосных помех 328
11.7. Оптимальная фильтрация при негауссовских помехах 330
Глава 12. ОПТИМАЛЬНАЯ КОМПЛЕКСНАЯ
ФИЛЬТРАЦИЯ 333
12.1. Радиолокационный двухдиапазонный комплексный
измеритель дальности 333
12.2. Комплексный измеритель дальности и радиальной скорости 338
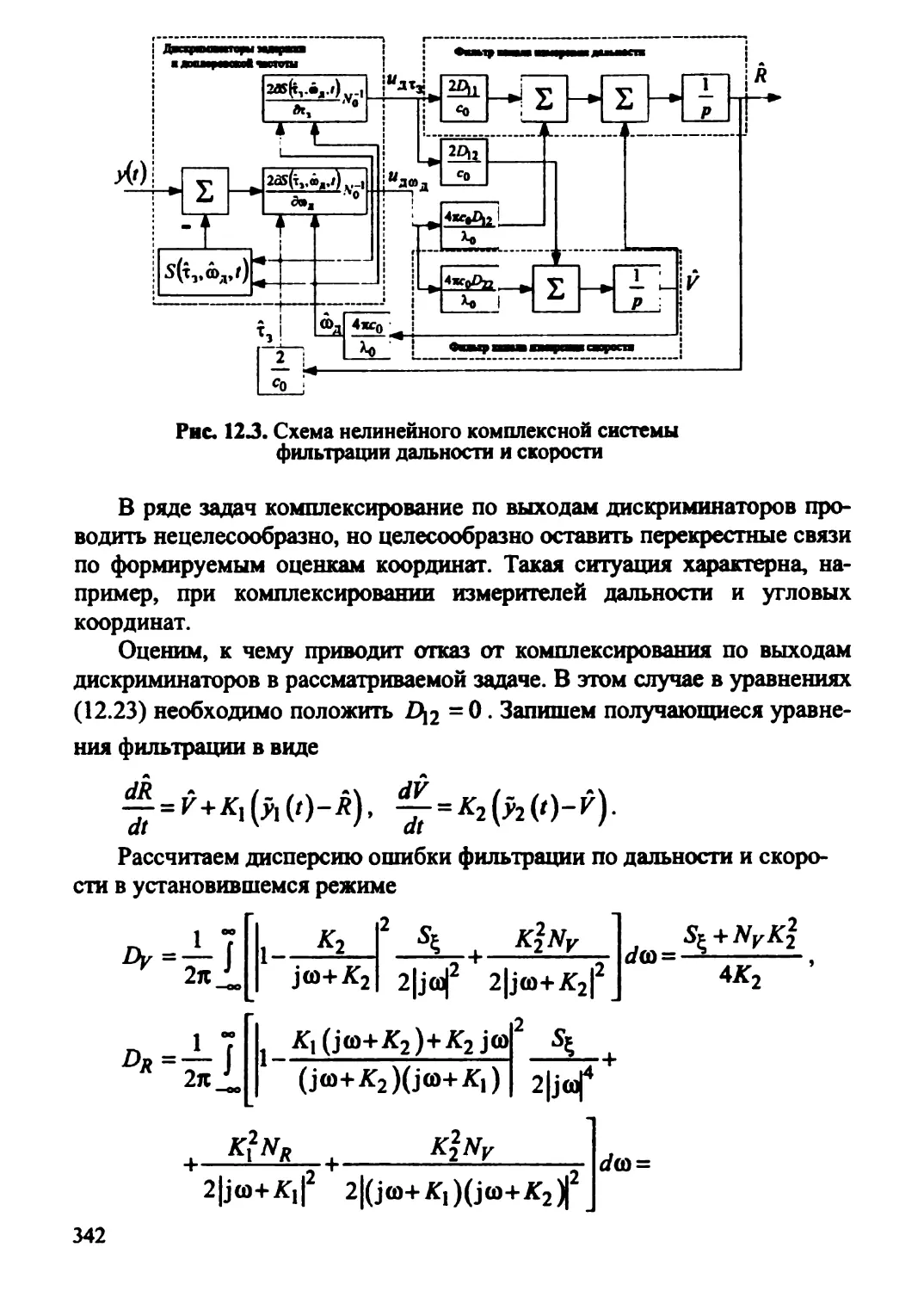
12.3. Модифицированный вариант комплексирования 344
Глава 13. АДАПТИВНАЯ ФИЛЬТРАЦИЯ СООБЩЕНИЙ ... 350
13.1. Постановка задачи адаптивной фильтрации 350
13.2. Показатели качества адаптивных систем фильтрации 352
13.3. Общее решение задачи адаптивной фильтрации 358
13.4. Многоканальные адаптивные системы фильтрации 361
7
13.5. Алгоритмы скользящей адаптации 368
13.5.1. Общее решение задачи по методу скользящей
адаптации 368
13.5.2. Алгоритм скользящего адаптивного приема
в непрерывном времени 370
13.5.3. Понятие контура адаптации 375
13.5.4. Алгоритм скользящего адаптивного приема
в дискретном времени 376
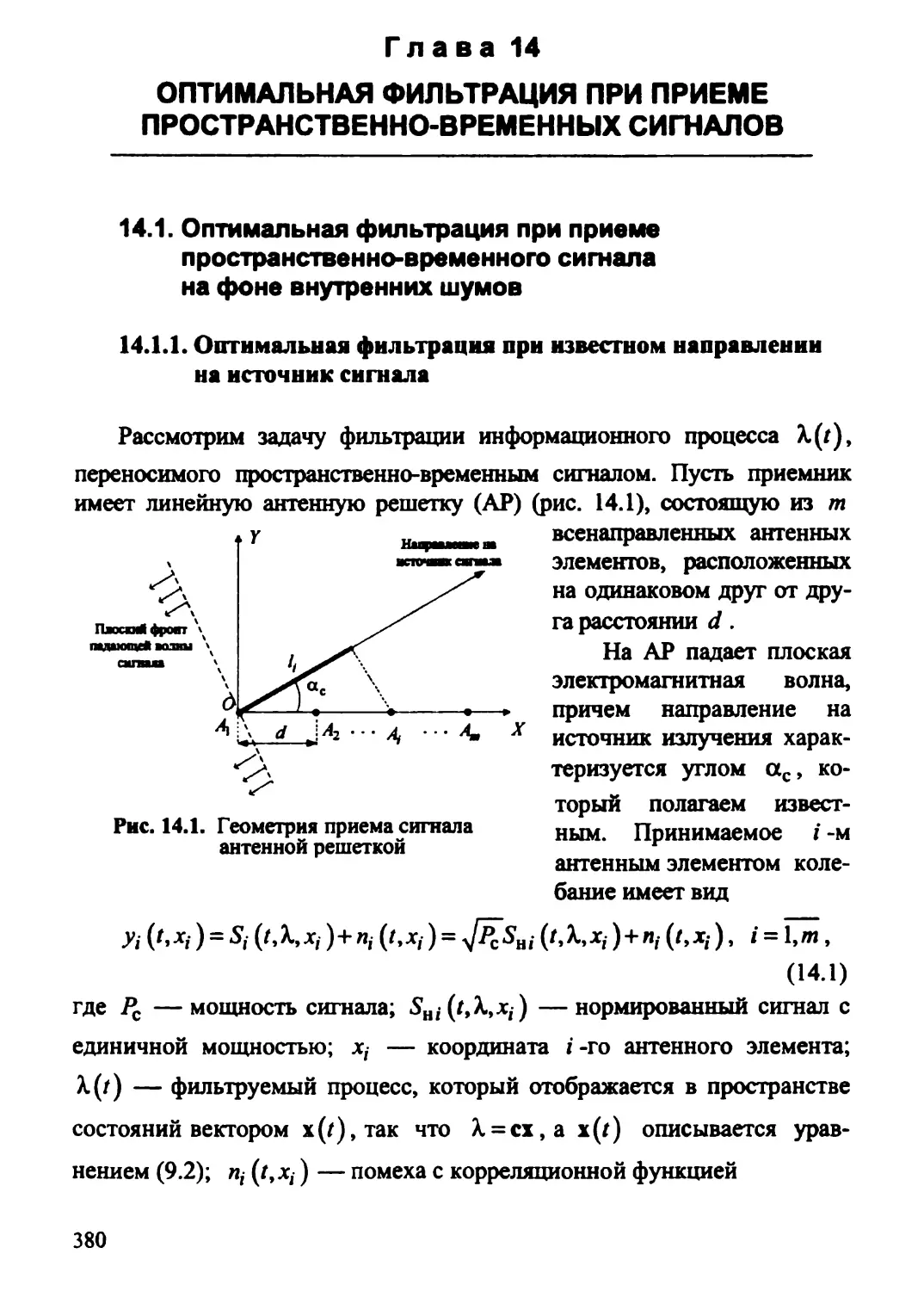
Глава 14. ОПТИМАЛЬНАЯ ФИЛЬТРАЦИЯ ПРИ ПРИЕМЕ
ПРОСТРАНСТВЕННО-ВРЕМЕННЫХ СИГНАЛОВ 380
14.1. Оптимальная фильтрация при приеме пространственно-
временного сигнала на фоне внутренних шумов 380
14.1.1. Оптимальная фильтрация при известном
направлении на источник сигнала 380
14.1.2. Оптимальная фильтрация при неизвестном
направлении на источник сигнала 384
14.2. Оптимальная фильтрация при наличии пространственно-
распределенных помех 389
Литература 398
8
ПРЕДИСЛОВИЕ
Предлагаемая вниманию читателя книга является учебным
пособием по курсу «Статистическая теория радиотехнических систем». Этот
курс, в соответствии с Государственным образовательным стандартом
высшего профессионального образования (2000 г.) по направлению
подготовки дипломированного специалиста 654200, «Радиотехника»,
входит в раздел «Специальные дисциплины» (СД), СП.01 - 200700
«Радиотехника», курс СД.05, объемом 100 часов. В предыдущих стандартах
образования данного курса не было, а отдельные его разделы входили в
различные курсы: «Радиоавтоматика», «Радиотехнические системы»,
«Радиолокация», «Радиоуправление» и др. При работе над книгой автор
опирался на опыт чтения лекций на радиотехническом факультете
Московского энергетического института (технического факультета).
Учебник включает 14 глав, каждая из которых посвящена
отдельной проблеме в общей статистической теории радиосистем. В первой
главе дается краткое изложение основ статистического описания
событий и процессов. Если читатель хорошо знаком с теорией вероятностей
и теорией случайных процессов, то данная глава при изучении может
быть опущена. Во второй главе приводятся статистические модели
сигналов, сообщений и помех, которые часто используются в
радиотехнических приложениях: радиолокации, связи, навигации,
радиоуправлении. Третья глава посвящена основам теории статистических решений,
которая является методологической базой, четко определяющей
понятие оптимальности принимаемых решений (алгоритмов обработки). В
последующих десяти главах рассматриваются основные типы задач,
решаемые статистической теорией радиосистем: обнаружение,
различение, разрешение, согласованная фильтрация, оценка параметров
сигналов, фильтрация информационных процессов. Порядок изложения
материала данных глав принят таким, чтобы последующий материал мог
использовать те или иные положения и формулы, полученные в
предшествующем материале. В то же время, данные главы написаны
достаточно «автономно», что допускает их изучение в произвольном порядке,
используя ряд необходимых формул как справочный материал.
Автор надеется, что данное пособие окажется полезным не только
студентам радиотехнических специальностей вузов, но и аспирантам и
инженерам, занимающихся вопросами синтеза радиотехнических
устройств и систем.
9
ВВЕДЕНИЕ
Радиотехнические системы (РТС) являются информационными
системами, осуществляющими передачу, прием и обработку информации в
интересах потребителя с использованием радиосигнала в качестве
переносчика. Отличительной особенностью условий функционирования
РТС является наличие радиоканала, под которым понимают
совокупность источника радиосигнала, среды его распространения и
приемника. Основное требование, предъявляемое к радиосистеме, состоит в
достоверном и своевременном получении необходимой информации
потребителем. Однако достоверному приему и извлечению информации
мешают реальные физические свойства приемопередающих устройств и
среды распространения сигнал, суть которых заключается, во-первых, в
случайных изменениях их параметров, а, во-вторых, в возникновении
помех, тоже имеющих случайную природу. Действительно, при
распространении радиосигнала через турбулентную атмосферу и ионосферу,
обладающих случайными коэффициентами поглощения и преломления,
происходит случайная модуляция радиосигнала по амплитуде, частоте и
фазе. Внешние естественные помехи создаются различными
электромагнитными процессами, происходящими в атмосфере, ионосфере и
космическом пространстве, которые также имеют случайный характер.
В приемных устройствах возникают случайные процессы (шумы),
обусловленные тепловым хаотическим движением электронов и т.д. Таким
образом, задача приема и извлечения информации в РТС решается в
условиях искажений сигнала и информации случайного характера.
Очевидно, что такие искажения снижают достоверность извлекаемой
информации, а, следовательно, надо принимать меры по ослаблению
влияния данных факторов, т.е., по сути, решать задачу оптимизации РТС.
Математическим аппаратом, позволяющим оперировать
случайными величинами и случайными процессами, является теория
вероятностей и математическая статистика. На возможность и целесообразность
использования статистических методов в радиотехнике одними из
первых указали работы А.Н. Колмогорова (1939 г.) и Н. Винера (1942 г.) по
синтезу оптимальных линейных систем фильтрации [2, 17].
Фундаментальной работой, посвященной систематическому применению методов
математической статистики в задачах радиосвязи, является теория
потенциальной помехоустойчивости В.А. Котельникова (1946 г.). За
прошедшие более чем 60 лет статистические методы настолько прочно
вошли в теорию РТС, что ни одна новая разработка не начинается без
детального анализа функционирования проектируемой системы в
условиях влияния случайных процессов и синтеза отдельных устройств и под-
10
систем статистическими методами. Все наиболее совершенные
радиосистемы, такие, например, как системы мобильной связи, спутниковой
радионавигации, спутникового телевидения, дистанционного
зондирования Земли и планет, базируются на рекомендациях и выводах,
полученных в статистической теории РТС.
Задачи анализа радиотехнических устройств и систем,
подверженных случайным воздействиям, рассматриваются в курсах
«Радиотехнические цепи и сигналы», «Радиоавтоматика» и др. В настоящем курсе
основное внимание уделяется методам статистического синтеза
оптимальных, т.е. в том или ином смысле наилучших, систем. Конечно,
после синтеза оптимальной системы естественно встает вопрос об анализе
характеристик полученной системы. Другими словами, синтез не
исключает необходимости анализа. Однако для проведения анализа в
учебнике не рассматриваются какие-либо новые методы, а
используются уже известные.
Задачи синтеза РТС классифицируются не по типу радиосистем
(радиолокационные, радионавигационные, радиоуправления или
радиосвязи), а по смыслу решаемой задачи: обнаружение, распознавание,
разрешение, оценка параметров сигнала и т.д. Такой подход позволяет дать
решение соответствующей задачи с единых теоретических позиций, а
особенности ее применения в той или иной РТС (характер априорных
данных, статистика распределений, тип сигнала и др.) иллюстрируются
на примерах.
Итогом синтеза РТС и конечной его целью являются:
оптимальный алгоритм обработки принимаемых сигналов в РТС;
структура оптимальной РТС, реализующая синтезированный
алгоритм;
количественная оценка качества работы РТС.
Все задачи синтеза РТС рассматриваются с единых позиций,
основанных на рассмотрении апостериорных плотностей вероятности
информационных процессов и байесовской методологии,
предусматривающей использование априорных сведений о сигналах, помехах и
информационных процессах. Если априорных сведений для решения
задачи статистического синтеза оказывается недостаточно, то используется
методология параметрической априорной неопределенности, также
допускающая рассмотрение апостериорных плотностей вероятности, но в
другом пространстве состояний. В рамках такого подхода естественным
образом возникают адаптивные РТС, которые в процессе работы
приспосабливаются к параметрической априорной неопределенности
условий работы. Для достижения наилучших характеристик РТС в условиях
априорной неопределенности адаптивные системы являются более
11
предпочтительными перед другими, такими, например, как
инвариантные или робастные системы. Для решения отдельных задач (например
оценки постоянных параметров сигнала) рассматриваются
небайесовские методы (например, метод максимального правдоподобия), которые
хорошо зарекомендовали себя на практике.
В учебнике рассматриваются задачи синтеза РТС как в
непрерывном, так и в дискретном времени. Последние приобретают все большее
значение в связи с бурным развитием вычислительных средств,
позволяющих в реальном времени реализовывать сложные оптимальные
алгоритмы обработки сигналов. Так, например, в цифровых приемниках
спутниковых радионавигационных систем (ГЛОНАСС, GPS)
обрабатываются сигналы 12 спутников и реализуются оптимальные
корреляционные алгоритмы, алгоритмы поиска, обнаружения и слежения за
фазой, частотой и задержкой сигнала.
Различным аспектам проблем статистического синтеза РТС
посвящена обширная литература (статьи, монографии, научные доклады на
конференциях и симпозиумах) как отечественная, так и зарубежная, и
число публикаций постоянно растет. Поэтому в списке литературы к
учебнику даны лишь основные (по мнению автора) отечественные
работы, в которых отдельные вопросы синтеза рассматриваются более
подробно, чем в учебнике, и с которыми будет целесообразно ознакомиться
особо заинтересовавшемуся читателю.
12
Глава 1
СТАТИСТИЧЕСКОЕ ОПИСАНИЕ СОБЫТИЙ
И ПРОЦЕССОВ
1.1. Понятие вероятности
Результаты многих физических измерений, опытов, наблюдений
меняются (возможно, незначительно) от одного сеанса их проведения к
другому. В этих случаях говорят о том, что интересующее нас событие
(результат) является случайным. При этом подразумевается, что оно в
принципе может быть осуществимо неограниченное число раз. Для
математического описания случайных событий вводят понятие
вероятности. Пусть некоторое случайное событие А можс; принимать конечное
число исходов ^,^2»—>^л · Практическое понятие вероятности
заключается в том, что относительная частота того или иного исхода
случайного события в каждой последовательности независимых повторных
испытаний приближается к соответствующей вероятности. Таким
образом, если имеется N результатов экспериментов, среди которых
событие А = At наступило пА (i) раз, то вероятность такого события
определяется как Р(А = Ai) = lim nA (i)/N .
В строгой математической теории вероятностями называют
значения некоторой действительной функции Ρ (А), определенной на
множестве (классе) некоторых событий А е А, которые
представляют собой результаты испытаний (опыта или наблюдения).
Вероятности (т.е. функцию Ρ (А)) вводят посредством определенных аксиом.
Пусть имеем множество событий А , которое обладает
следующими свойствами:
если Ае А и Be Α, το данному множеству событий принадлежат
также события АВ — произведение событий, заключающееся в
наступлении обоих событий А и В 9(А + В) — сумма событий, под которой
понимаю событие, состоящее в наступлении хотя бы одного из
событий А и В , (А - В) — разность событий, т.е. событие, состоящее в том,
что А происходит, а В не происходит;
множество А содержит достоверное / и недостоверное О события.
Вероятностью Ρ (А) события А называется определенная на А
однозначная действительная функция удовлетворяющая трем аксиомам:
13
Аксиома 1. Р(А)>0 для любого Ае А,
Аксиома 2. Р(1) = 1 для достоверного события Α = Ι,
Аксиома 3. Ρ(Α\νΑ2ν. ...) = Ρ(Αι)+Ρ(Α2)+... для любой
последовательности попарно несовместных событий Λι,Λ2»··· .
Из аксиом 1—3 следует, что 0<Р(А)<\. Если А = 0 —
невозможное событие, то Р(О) = 0.
Дополнительно к трем основным аксиомам вводится четвертая,
которая связывает «абсолютную» вероятность Р(А)9 относящуюся к
данному испытанию, и условную вероятность Р^/?), относящуюся к
испытанию, ограниченному дополнительным условием осуществления
события В. Условная вероятность Р(л|^) определяется следующей
аксиомой.
Аксиома 4. Вероятность совмещения событий An В равна
Р(АпВ) = Р(В)Р(Х\в). (1.1)
Формулу (1.1) иногда называют правилом умножения
вероятностей. Если Р(В) = 0, то вероятность Р(А η В) не определена.
Два события А п В называются независимыми (по вероятности),
если Р(АпВ) = Р(А)Р(В).
1.2. Элементарные события.
Случайная величина
Каждое множество событий Α = {Л,·} может быть представлено как
множество G = {-Ху} попарно несовместных событий Х}· ^ О, так что
каждое событие Ai есть объединение некоторого подмножества
событий Xj е Xj из G . Тогда Xj называется элементарным событием, а
G = v*y} — множеством элементарных событий (или
пространством выборок). Каждое множество Х^ элементарных событий Хк из G
соответствует некоторому событию Ак из множества А . В частности,
само G соответствует достоверному событию, а пустое множество из
G —невозможному событию.
14
Пусть 4»^2»-"»4ι — последовательность попарно несовместных
событий, образующих полную группу, т.е. Αχ иА2 U....U Д, = / . Тогда
из (1.1) для каждой пары событий А{, В имеет место формула Байеса
I
Случайная величина (СВ) есть любая переменная jc, значения
которой JeX образуют множество элементарных событий, или, другими
словами, обозначают точки в пространстве выборок.
В дальнейшем будем полагать, что все рассматриваемые случайные
величины заданы на интервале (-00,00).
1.3. Вероятностное описание случайных величин
Если СВ X принимает конечное (или счетное) число значений
{jc/ }, ι = 1, Ν, то она называется дискретной, и ее вероятностное
описание задается соответствующими вероятностями {/)· = Р(Х = jc,- )},
ι = 1, Ν, совокупность которых называют законом распределения веро-
N
ятностей. Очевидно, что £ Pi! = 1.
ι=1
Если область возможных значений СВ непрерывна, то говорят о
непрерывной СВ, для которой аналогом закона распределения
вероятностей является функция распределения Fx (jc) s F (jc) = P(X <x).
Другим определением непрерывной СВ может быть следующее:
действительная случайная величина X называется непрерывной, если
ее функция распределения F(x) непрерывна по jc и имеет кусочно-
непрерывную производную, которая называется плотностью
распределения вероятностей случайной величины (кратко — плотностью
вероятности (ПВ))
,(*-,)■ ы 1'**<'+*).£Ий
Дг-»0 Ax dx
Из определения (1.2) следует
(1.2)
\Х = х
15
P{X<x) = F(x) = J p(v)rfv,
Ρ(ή ί jr<^) = F(^)-F(^) = 7p(v)rfv, J />(v)</v = F(~) = l.
Иногда вместо плотности вероятности СВ удобнее использовать
характеристическую функцию, под которой понимают математическое
ожидание случайной величины Υ = eJ или, что то же самое,
преобразование Фурье от ПВ
0(jd) = Af[ejW]= J ej%(v)rfv. (1.3)
—©β
Обратное преобразование Фурье дает
'(*)-£ ϊφϋ*>β"]*Λ·
Числовые характеристики плотности вероятности.
Математическим ожиданием (МО) функции φ(Χ) от дискретной или
непрерывной случайной величины X называют
л/[<р(*)] =
Σψ(χί)ρ(χϊ) » х~ дискретная СВ,
I
оо
J φ(ν)/Κν)^ν» ^-непрерывная СВ.
Существуют различные числовые характеристики плотности
вероятности. Наиболее часто используются моменты. Моментом порядка
к случайной величины X относительно числа β называется МО
M[(X-Vfy\ix-Vf p{x)dx.
Начальным моментом (или просто моментом) порядка к называют
м[хк\
Центральный момент порядка к — это момент порядка к
относительно центра распределения тх = Μ [Χ], т.е. Μ \(Х - тх) .
16
Второй центральный момент Μ\(Χ-τηχ) называют дисперсией
Dx. Дисперсия характеризует концентрацию ПВ /?(jc) в окрестности
МО τηχ = Μ [Χ]. Используя неравенство Чебышева, можно записать
P(\x-mx\>e)uD/t2,
где ε > 0 — произвольное положительное число.
Таким образом, дисперсия характеризует меру рассеяния (разброса)
значений СВ относительно математического ожидания.
Примеры распределений и плотностей вероятностей случайных
величин.
Π ρ и м е ρ 1. Равномерное распределение (рис. 1.1):
р(х)=1/(Ь-а),хе(о,Ь). (1.4)
Среднее значение, второй момент и дисперсия равномерного
распределения равны
"Х=М{х\Л(а+Ь), ♦**>
't
0,=«[(,-ξ)2]=ΐ(*-„)2. *··,л·^Е^д25нС"омч,"0ГО
Равномерное распределение используется в радиотехнике,
например, для описания случайной фазы сигнала, принимающей значения на
интервале [-π, π].
м[*2].1(,.2-к.1+„(>),
1
Пример 2. Нормальное (гауссовское) распределение (рис. 1.2)
1
/»(*)"
Jb&X
гехр
{х-тх)
2D,
где /ηχ =М[х] — среднее значение; Ωχ — дисперсия.
Момент 2-го порядка определяется выражением
I МГУе
•I
M[x2] = Dx+mx2
β χ
Гауссовское распределение
широко используется в
радиотехнике, например, для
описания флуктуационных явлений в
аппаратуре.
Π ρ и м е ρ 3. Хи-квадрат
распределение (рис. 1.3).
Рис. 1.2. График ПВ нормального
распределения
Пусть Xi9 ι = 1,ιι —
совокупность независимых гаус-
совских случайных величин, имеющих нулевые МО и одинаковые
дисперсии σ2. Рассмотрим случайную величину
/=1
(1.5)
Распределение случайной величины Υ называют xu-квадрат
распределением с η степенями свободы. Плотность вероятности такого
распределения описывается формулой
где Г (я) —гамма-функция, определяемая как
Г(я)= Jv^"le"vi/v, при ?>0, (1.6)
о
Г(^) = (^-1) !,при q>0 и q - целое число *
Например: гЦ)=>/π , г[|]=^·
На рис. 1.3 приведены графики ПВ хи-квадрат распределения для
некоторых значений η при σ = 1.
Случай, когда η = 2, определяет экспоненциальное распределение.
Первые два начальных момента и дисперсия хи-квадрат
распределения соответственно равны
18
ту=М[Г] = жт2,
Λ/[>2] = 2*σ4+*2σ4,
D = 2*j4.
Если случайные
величины Χ;, ι = 1, и имеют
ненулевые математические
ожидания тх, то
распределение случайной величины
У, определяемой (1.13),
16 У
Рис. 1.3. График ПВ хи-квадрат
распределения
называется нецентральным хи-квадрат распределением, а
соответствующая ПВ имеет вид
Р(У) =
1
τβκγσ
4у+ш&)1г*
ch
( г ^
у/Утх
, >>>(),
(1.7)
где ch(z) = (ez+e z)/2 —гиперболический косинус.
Первые два начальных момента и дисперсия ПВ (1.7) равны
mY =M[Y] = na2+nmx9 Л/[у21 = 2ла4 +4a2nmjr +(nc? +пт2х\ ,
Ζ^ = 2/ισ4 +4<т2лт^.
Хи-квадрат распределение с двумя степенями свободы описывает,
например, распределение квадрата огибающей (или мощности)
радиосигнала.
Π ρ и м е ρ 4. Рэлеевское распределение (рис. 1.4)
Рассмотрим частный случай (1.5), а именно Υ = Х\ +х\, где Xi9
/ = 1,2 — независимые гауссовские случайные величины, имеющие
нулевые МО и одинаковые дисперсии σ2. Определим новую
случайную величину
Z = >/y=>/Ar,2+Ar?
Lt ГЛ2 . (1.8)
Данная случайная величина имеет рэлеевское распределение с ПВ
19
/М--^'1·"
G
z>0.
(1.9)
На рис. 1.4 приведен график
рэлеевской ПВ при σ = 1.
Первые моменты и
дисперсия рэлеевской ПВ равны
Λ/Γζ2] = 2σ2,
Ζ)ζ=(2-π/2)σ2
(1.10)
Рис» 1.4. График ПВ рэлеевского
распределения
В общем случае
рассматривается СВ Ζ = VF, где СВ Υ
определена в соответствии с (1.5). При этом ПВ СВ Ζ определяется
выражением
2(-2)/V
ΪΗ
Для момента к -го порядка данной ПВ
2\*/2-
Μ
[*H*rifr+*yil·}
а дисперсия распределения
£>ζ=Α/[ζ2]-«|.
Π ρ и м е ρ 5. Распределение Раиса (рис. 1.5)
Данное распределение является обобщением рэлеевского
распределения на случай, когда случайные величины Xi9 / = 1,2 в (1.5) имеют
ненулевые математические ожидания тх , в общем случае неравные.
Плотность вероятности для распределения Раиса определяется в виде
20
t \ z λ*1**2)!2* , ("λ ι ι г
P(z) = -£e 70 "T ]' s ~mxl+mX2, ^0, (1.11)
где /о (ν) — модифицированная функция Бесселя нулевого порядка,
которую можно представить рядом
/лл-У (ν/2)2ί
'окУ)- L .|Г/.^1Ч»
1=0 *!Γ(ι + 1)
ν>0.
На рис. 1.5 приведены
ПВ распределения Раиса при
σ = ΐΗί = 1;4.
Распределение Раиса
можно обобщить, если СВ Υ
определяется в соответствии с
(1.5), а СВ Ζ = VF. Плотность
вероятности в этом случае
определяется соотношением
ι г
Рис. 1.5. Графики ПВ распределения
Раиса
ί2 = Σ»1.· ζ-°·
Л(Я-2)/2 v<r; ы
где Ια (ν) — модифицированная функция Бесселя порядка α, которая
представляется рядом
/«00-Σ -
(ν/2)'
α+2ί
ito ι!Γ(α+ί+1)
, ν>0.
Распределения Рэлея и Раиса часто используют для описания
амплитудных флуктуации радиосигнала, в том числе в многолучевых
каналах распространения радиосигнала.
Преобразование случайных величин и их плотностей
вероятностей. При рассмотрении примеров различных распределений и
соответствующих им ПВ уже использовались функциональные
преобразования СВ, например (1.5), (1.7). Рассмотрим общий случай. Пусть СВ
X с заданной плотностью вероятности ρ χ (χ) подвергается функцио-
21
нальному преобразованию Υ = f(X), где /(*) —однозначная
детерминированная функция. Найдем ПВ ργ (у) СВ Υ.
Поскольку преобразование СВ детерминированное и однозначное,
то из того факта, что значение СВ X заключено в интервале [χ,χ + ίίχ],
следует, что значение СВ Υ будет находится в интервале
[/(*),/(* + dk)] = [j>,j> + rfy], где dy = f'(x)dx. Положим, что
существует однозначная функция А(*) = /_1(*). Тогда можно утверждать,
что вероятности указанных двух событий равны. Поэтому запишем
pY(y)dy = px(x)dx
или
PY (У) = Рх (х)\<Ь/М = Рх (h(y))\h'(y1l · (1.12)
Если функция Л(*) = /~1(*) — неоднозначная (например,
двузначная), тогда одному значению у соответствует два значения
х\ = h (у) и х2 = ^2 (у) · При этом выполнению события
y<Y<y + dy (1.13)
соответствует два несовместных события
jc, <X<xx+dxx и x2<X<x2+dx2. (1.14)
Следовательно, вероятность события (1.12) равна сумме
вероятностей событий (1.14), т.е. pY (y)dy = ρ χ (χλ )άχλ + ρχ (χ2 )dx2, что
приводит к следующей форме преобразования ПВ:
ру{у)=рх{Ш)ЩуЬрхЫу)Шу% Ό.15)
Обобщение на более сложные случаи (многозначные функции
h (*) = У"1 (*)) проводится аналогично.
1.4. Многомерные случайные величины
Пусть имеется совокупность случайных величин X;, / = 1, л . Если
нас интересует вся совокупность в целом, то удобно ввести понятие
векторной случайной величины Х = {АГ1,ЛГ2, ...,Хп}. По аналогии с
обычной СВ, векторная случайная величина (ВСВ) описывается вероят-
22
гостями [Pj =P(X = X|)}, i = l9N9 если множество возможных
значений всех СВ Xj конечно (или счетно), или функцией распределения
Fx(x) = F(*) = P(Xx<xbX2<x2, ... <Хп<хп), (1.16)
если множество возможных значений СВ непрерывно. В первом случае
говорят ό дискретной векторной СВ, а во втором — о непрерывной
ВСВ.
Для непрерывной ВСВ вводится ПВ
ρ(Σ)β lim P(**X\<*l+***··· ****** <**+***)_ ЭУ(х)
Δχ\...Δχη ах,...Эд:я
Δχ„->0
(1.17)
Функция распределения (1.16) обладает следующими свойствами:
1) Fx (χ) -» 0, когда хотя бы одна из компонент вектора χ
стремиться к -©в и Fx (χ) —»1, когда все компоненты вектора χ стремятся
к -и»;
2) Fx (χ) — неубывающая и непрерывная слева функция по
каждой из компонент вектора χ;
3) Fx(xi9...9Xi_i,oo9xi+l9...,xn) = Fx(xi,...,Xi_i9xM,...9xn).
Плотность вероятности (1.17) удовлетворяет следующим условиям:
1)р(х)*0;
оо оо
2) J ·· J p(xi,...,xn)dxx...dxn=l;
3) р(х\,—,хп) симметрична относительно любых перестановок
аргументов дс/;
4) при любом т<п выполняется равенство
оо оо
р(хь...,хт)= \ ... J p(xit...,xm,xm+l,...,xn)dxm+v.jb„ . (1.18)
—оо —оо
Свойство (4) называется условием согласованности ПВ. Оно
показывает, что из η -мерной ПВ всегда можно получить любую ПВ
меньшей размерности.
23
Характеристическая функция случайного вектора
X = {Λ"Ί, Хг, ..., Х„ }, по аналогии с (1.3) вводится формулой
Φ0θ) = Λ/Ι>Τχ1= J ^xp{i)dx. (1.19)
Обратное преобразование Фурье имеет вид
(2π)" L V
Характеристическая функция обладает следующими свойствами:
1) O(jB) — непрерывна и симметрична относительно своих
аргументов;
2)|Φ0Θ)|<1, Φ(0) = 1;
3)O(j*i,...J*w) = O(jd1,...,jdw,0,...,0);
4) если СВ Х{, ι = 1, л — независимые, то
ι=1
При работе с ВСВ наиболее часто приходится сталкиваться с
ситуацией, когда компоненты Xi9 ι = 1, π являются гауссовскими СВ с МО
т1, дисперсиями of и взаимными дисперсиями ajj . Как и выше,
введем векторную СВ Х = {Х{9Х2, ... >Хп}> МО которой обозначим как
тх. Определим корреляционную матрицу данной ВСВ как
Rx=A/[(X-mx)(X-mx)T].
Совместная ПВ гауссовских случайных величин дается формулой
Характеристическая функция, соответствующая этой η -мерной ПВ
и вычисленная по (1.19), равна
0(je) = exp|jmie-^eTRxe|.
24
Разложив экспоненту в правой части (1.19) в ряд Маклорена и взяв
затем МО от каждого члена ряда, получаем
<D(j6) = Af
1:2
i+jX*,A+rJ Σ *ι***Α+.
/=1
i,*=l
= l-bjXAf[x/]ul-bij2 Σ M[Xixk]Wk+... .
Таким образом, коэффициенты разложения характеристической
функции в ряд Маклорена определяются через начальные моменты
соответствующей ПВ.
Коэффициенты разложения логарифма характеристической
функции в ряд Маклорена называются кумулянтами (или корреляционными
функциями). Поскольку моменты и кумулянты получаются в результате
разложения характеристической функции или ее логарифма, то можно
найти выражения, связывающие эти характеристики.
При нелинейном преобразовании многомерной СВ с компонентами
Xi9 ι = 1,λ
Ъ=Ь{ХХуХъ...,Хп)у1=й (1.20)
совместная ПВ ρχ (х\,Х2>—>хп )преобразуется аналогично тому, как это
было в случае скалярных СВ (1.12). Положим, что для системы
уравнений (1.20) существуют однозначные обратные функции
^=Α,(^,Κ2,...,7Λ),ι=ΰ. (1.21)
Тогда совместная ПВ определяется формулой
= Ρ;τ(^(λ.Λ.···.Λι).···Λ(λ.Λ.··μΛ))Λ(λ.Λ.···.λ)»
(1.22)
где Jn{y\>yi>->yn) =
— якобиан преобразова
ЭА, ЭА,
Эц "' tyn
ння перемени
ых
(1.23)
25
Если обратные функции (1.21) неоднозначны, то в правой части
(1.22) следует брать сумму по каждой из однозначных областей, как это
было сделано в (1.15).
1.5. Условные функции распределения и плотности
вероятности случайных величин
В статистической теории радиосистем широко используются
условные функции распределения. Пусть имеем СВ X и некоторое событие
А. Условной функцией распределения F(x\A) называется условная
вероятность выполнения неравенства X < χ при условии
осуществления события А, т.е.
F(x\A) = P(X<x\A) = P(X<x,A)/P(A). (1.24)
Условная ПВ определяется выражением
, , ч Р(х<Х<х + Ах\А) dF(x\A)
р(х\А)= lim -* U»_L±J. (1.25)
v ■ ' Δχ->0 Δχ dx
Если в качестве события А определить факт принятия другой СВ
Υ значения у , то (1.24) принимает вид
р(у)
Если СВ X и Υ независимы, то из (1.26) получаем
р(х,у)-р(х)р(у). (1.27)
Эта формула выражает необходимое и достаточное условие
независимости двух СВ.
Приведенные выше соотношения естественным образом
обобщаются на случай ВСВ, если в (1.24)—< 1.27) вместо скаляров подставить
соответствующие вектора. Для ВСВ полезным оказывается еще ряд свойств
и определений. Положим, что в совокупности случайных величин Л",,
ι = 1,и определены вектора Х = {ЛГЯ}, Y={Ar1, ... ,Хп-\}> Тогда (1.26)
преобразуется к виду
р(хп\х\,...,хп-\)р{х\,...,хп-\) = р(хь...>хп)^
Повторив последовательно данную процедуру для р(х\,—,хп-\),
р(х],...,хп-2) и т-Д-> получим такое выражение:
26
p(xb-,Xn) = P(x\)I\p{xn-i\xb->xn-i-\)·
/=0
Используя свойство согласованности ПВ (1.18), можно получить
следующие правила «исключения» отдельных аргументов в условной ПВ:
1) исключение левого аргумента в условной ПВ р(х\,Х2 |*з»*4)
определяется формулой
оо
/>(*ΐ|*3>*4)= ί Ρ(^1^2^3^4)^2;
2) исключение правого аргумента в условной ВП ρ(χι,Χ2|*3»*4)
определяется как
оо
р(дс1,дг2|л4)= J р(хьХ2,Хз\х4)<Ьз =
оо
= J р(х\,Х2\хз>Х4)р{хз\*4)<Ьз · (1-28)
Частным случаем (1.28) является формула
оо
р{хМ= ί р(^Ь^з)р(^кз)Л2»
которая широко используется в теории марковских процессов.
Случайные величины Xt, / = 1, л называют взаимно независимыми,
если события Л',·*:*,, / = 1,л независимы при любых значениях χ,,
ι = 1, л. Для взаимно независимых СВ справедливы формулы
л л
^(*b-..,*J=n^(*i)» /7й-л)=П^/)·
ι=1 /=1
Если случайные величины Xi, ι = 1, л взаимно независимы, то они
и попарно независимы.
1.6. Случайные процессы
Наряду со случайной величиной, определенной как единичное
(разовое) событие или явление, для описания событий, развивающихся во
времени, вводят понятие случайного процесса (СП). Случайный процесс
27
можно определить как случайную функцию X(t) от независимой
переменной t. Термин «случайная функция» характеризует тот факт, что
при каждом фиксированном t значение функции X(t) есть случайная
величина. Каждое испытание (опыт) дает вполне определенную
функцию x(t), которая называемся реализацией СП или выборочной
функцией. Случайный процесс можно рассматривать как совокупность
реализаций {*(')}· Другая трактовка СП — совокупность случайных
величин, зависящих от времени t. Из нее следует, что для вероятностного
описания СП должны быть заданы распределения вероятностей систем
случайных величин X{=X(t{), Х2 = X(t2),....
Случайный процесс называют дискретным или непрерывным, если
дискретно или непрерывно распределение случайных величин Хх = X (tx),
Х2 = X{t2),.... Значение jc, случайной величины Х{ =X(tj) в момент
времени /, называется выборочным значением.
Случайный процесс называется случайной последовательностью
(процессом с дискретным временем), если независимая переменная t
может принимать лишь счетное число значений.
Рассмотрим для определенности непрерывную случайную
последовательность Jf (/,·), / = 1,2,.... Для описания такой последовательности
надо задать распределение случайной величины x(t\) и распределения
систем случайных величин [Л^),^^)], [Аг(/1),Лг(/2),Аг(г3)], ...
для каждого конечного множества значений ή,*2»'3» — · Для
вероятностного описания таких систем СВ можно использовать определения (1.16)
для функций распределения и (1.17) для ПВ, которые обладают
соответствующими свойствами. Так, например, для непрерывной
случайной последовательности необходимо задать совокупность ПВ
Р(Х\А)* ρ(χ\Α'*χ2>*2 )> ρ(χ\Α'·χ2>*2*3>*3 ) ИТ-Д-
Если /(*(Ί ).*(*2)>-»*(*л)) —некоторая функция от η
выборочных значений jcj = x(tx )9x2 =x(t2 ),...,*„ = x(tn ), то формула
M[f(xi,x2,...,xn)] =
оо ео
28
определяет среднее по ансамблю реализаций (множеству наблюдений),
если интеграл сходится абсолютно.
На практике наиболее часто используют A/[jc(/| )] — среднее
значение; A/ jc2(ii)| — средний квадрат, Α/ (χ(/|)-Λ/[χ(ί|)]) —
дисперсию, Af [jc(/i)jc(/2)] — корреляционную функцию. Раздел
теории случайных процессов, посвященный изучению лишь тех их свойств,
которые определяются указанными выше характеристиками, называется
корреляционной теорией. Эта теория дает полное описание одного очень
важного класса случайных процессов — гауссовских.
Для СП условные функции распределения и условные ПВ вводятся
аналогично тому, как это сделано в п. 1.5. Например, можно записать
p{xiA>x2>h) = p(x2>h)p{xbh\x2>t2)·
Для совместного вероятностного описания двух (или нескольких)
СП вводят совместные функции распределения и совместные
плотности вероятности. Например, для совместной ПВ имеем
р(*\А* - >Wm^'i; - ;уил)· О·29)
Два СП X{t) и Y(t) называются независимыми, если совокупность
значений первого процесса Χ{ίχ),Χ(ίι)9 ... *X{tn) не зависит от
совокупности значений второго процесса Ylt[ Ι,Κί^), ... »м'л) ПРИ любых
I I I
Необходимым и достаточным условием того, что два процесса
независимы, является то, что совместная ПВ (1.29) равна произведению
ПВ каждого из процессов, т.е.
= p(x\9t\i ...,xm*tm)p(yi't\'' »·;λλ)· Ο·30)
Для случайных процессов можно ввести условные функции
распределения и условные плотности вероятности
Р(ХЬ*\'· ~>хт>*т>У\>*Ь »·;ΛΛ)β
= />(*,,/,; ...9xMjm)p(yi,t\; ...;λλ|*ι.'ι; -.'т.'*)· О·31)
29
Для независимых СП (1.31) переходит в (1.30).
Наряду с ПВ, для описания случайного процесса могут быть
использованы характеристические функции (1.19).
Стационарные и нестационарные процессы. Случайный процесс
X(t) называется стационарным в узком (строгом) смысле, если все
конечномерные функции распределения вероятностей (и плотности
вероятности) любого порядка инвариантны относительно сдвига по
времени, т.е.
/>(*1>Ί"-'θ'»*2>'2"-'θί - >*m>'m-'o)= Р{ХЪ*\>Х2>*Ъ ->хт>*т)-
При решении ряда технических задач многомерные ПВ не
рассматривают, а оперируют только МО и корреляционными функциями
(корреляционная теория). В связи с этим вводят понятие стационарности в
широком смысле.
Случайный процесс X{t) с конечной дисперсией называется
стационарным в широком смысле, если его МО и корреляционная функция
инвариантны относительно сдвига по оси времени. Из этого
определения следует, что для таких процессов
mAr=const, ЛЛГ(/1,/2) = /еЛГ(/2-/1).
Два стационарных случайных процесса X(t) и Y(t) называются
стационарно связанными в широком смысле, если их взаимная
корреляционная функция инвариантна относительно сдвига по времени
= M[*(i1)r(i1+x)] = JR,fy(f2-fl). (1.32)
Заметим, что, если каждый из процессов X(t) и Y(t) является
стационарным в широком смысле, то это вовсе не означает, что они
являются стационарно связанными в широком смысле.
Корреляционная функция случайного процесса. Ввиду важности
корреляционных функций (КФ) стационарных процессов при
исследовании радиотехнических систем, приведем некоторые их свойства.
1. Абсолютное значение КФ при любом τ = /2 — ^ не превышает ее
значения при τ = 0, т.е. Rx (τ) < Rx (0) = Dx .
30
2. Корреляционная функция вещественного стационарного процесса
X(t) является четной функцией своего аргумента, т.е. Rx(x) =
= Μ-τ).
3. Взаимная КФ двух вещественных СП X(t) и Y(t) обладает
свойством: Κχγ (τ) = ϋγχ (-τ).
4. Если КФ непрерывна при τ = 0, то она непрерывна при всех
других значениях τ.
5. Для многих стационарных СП выполняется условие
limRx(x) = 0.
6. Преобразование Фурье от КФ есть неотрицательная функция,
которую принято называть спектральной плотностью случайного процесса
М<»)= ~fRx(x)c->mdx. (1.33)
Обратное преобразование Фурье от спектральной плотности СП
дает корреляционную функцию
Мх) = ^/М«>)е*«Л». (1.34)
На практике бывает удобно пользоваться нормированной КФ
которая при τ = 0 принимает значение гх (0) = 1.
Для упрощенного описания нормированной КФ часто указывают
лишь интервал τκ , при котором два значения СП X(t) и X(t±xK) в
среднем имеют заметную корреляцию. В качестве определения τκ
можно принять
τκ=τϊ rx{x)dX=\rx(x)dX.
Δ-~ 0
Геометрически τκ равно основанию прямоугольника с высотой 1,
имеющего ту же площадь, что и площадь между кривой гх (τ) и осью
абсцисс.
31
Спектральная плотность случайного процесса. Спектральная
плотность СП определяется в соответствии с (1.33) как преобразование
Фурье от КФ. Полагая в (1.34) τ = 0, получаем
RX(0) = Dx = ]sx{<*)dfy (1.36)
—оо
где (0=2я/.
Следовательно, дисперсия стационарного СП равна интегралу от
спектральной плотности.
Так как корреляционная функция СП четная относительно
аргумента τ, то из (1,33) следует, что спектральная плотность Sx (ω) — четная
функция относительно своего аргумента.
Из определений (1.33), (1.34) и свойства четности функций Rx (τ)
и Sx (ω) следует
S;r (ω)= J Rx (x)(cos((ui)~ }sm((ui))dx =
оо
оо оо
= J /?^(x)cos(on)i/T = 2j/?^(x)cos(iuT)i/T, (1.37)
-оо О
Rx (τ) = 2°jSx (27tf)cos(2nfx)df . (1.38)
о
Спектральная плотность Sx (ω) определена на положительных и
отрицательных частотах, т.е. является некоторой «математической»
конструкцией. В отличие от такого двустороннего спектра введем
одностороннюю («физическую») спектральную плотность Νχ(ω) =
= 2SX (ω). При этом выражения (1.37), (1.38) принимают вид
оо
Nx(<u) = 4JRx(z)cos(2nfx)dz9 /£0,
о
%(τ) = ~JNx(f)cos(2itfx)df9 />0. (1.39)
о
В радиотехнике «протяженность» спектральной плотности по оси
частот часто характеризуют термином ширина спектра или
эффективная ширина спектра. Ширину спектра Af можно определять по-
разному, например,
32
jSx(2itf)df
4Г--2 ,
Sx(2nf0)
где /о — некоторая характерная частота.
Иногда в качестве Δ/ выбирают ширину Δ/Ό^ спектральной
плотности на уровне 0,5ΝΧ (/0 ) ·
По параметру «ширина спектра» среди всех СП выделяют
узкополосные. Узкополосным называется СП, спектральная плотность
которого сконцентрирована в узкой полосе частот Δ/* около частоты
/о » Δ/". Если данное условие
Na ►
не выполняется, то процесс не
является узкополосным.
Рассмотрим СП, спектраль-
/
ная плотность которого приве- У
дена на рис. 1.6 и рассчитаем Рис. 1.6. Спектральная плотность СП
КФ такого СП
Λ(τ) = J N(f)cos(2nfx)df = N0^f^^^ cos (2nfQx)^
где Dx = Ν$Δ/ — дисперсия (мощность) СП (1.36).
Эргодические и неэргодинеские стационарные процессы. Для
некоторых стационарных процессов рассмотренные выше статистические
характеристики (МО, моментные функции, КФ и др.), полученные в
результате усреднения по большому числу реализаций, могут быть найдены
путем усреднения соответствующих величин по одной реализации
большой длительности. Стационарные случайные процессы, для которых это
обстоятельство справедливо, называют эргодическими:
\Т * 1т 2
™*= Jim7H')<"> Dx=tim-l(x(i)-mx) dt,
τ->οοΤ 0 τ->οοΤ 0
1 τ
**(τ) = Mm -\{x{t + x)-mx){x{t)-mx)dt.
2—2041 33
1.7. Гауссовские случайные процессы
Как отмечалось выше, для вероятностного описания СП
необходимо использовать совокупность соответствующих ПВ. Рассмотрим
случайную последовательность X{tt), / = 1,2,..., развивающуюся во
времени. В момент времени t{ имеем СВ X(t\), для вероятностного
описания которой необходимо задать ПВ p{x\9t\). В момент времени t2
для описания всего СП, т.е. совокупности СВ X(t\), Х(*2)> следует
задавать совокупность трех ПВ — p(x\,t\), р(*2»*2)» ρ(χ\Α'·χ2**2 )·
В следующий момент времени /3 полное вероятностное описание
задается системой ПВ />(*ι,'ι)> р(хь*г)* р{хъ>*ъ)> р(*\А*хг**г )»
/>0Мь*з»'з )> р{хг>*г*Ъ*Ь )» Р{х\А\х2**2%>хъ>Ь )· Л1*
последующих моментов времени вероятностное описание СП будет все более и
более сложным. На практике использовать такую математическую
конструкция неудобно. Поэтому целесообразно найти СП, для
вероятностного описания которых в любой момент времени /; требуется
ограниченное число ПВ, например, одномерной p(x\J\) и/или двумерной
р(х\,1\1Х2>*2 )* Простейшим примером такой СП является случайная
последовательность Jf (/,·), / = 1,2,... с независимыми значениями
X (/,), для которой можно записать
П
p{xbtx\x2,h\ ...;*„Л ) = Пр(*/>';)·
/=1
Такая СП задается совокупностью одномерных ПВ />(*/,'/), а для
стационарной СП требуется задание одной ПВ p(x,t).
Другим классом СП, для описания которых необходимо задавать
ограниченное число ПВ, являются гауссовские случайные
последовательности (ГСП), для которых ПВ любой конечной совокупности СВ
X(ti)y / = 1,2,...,/2 в произвольные моменты времени t{yt2,...,tn имеет
совместную гауссовскую (нормальную) ПВ
/»(»)- „/ I «р{4(*-МХ])Т*;г('-М[Х])}· (1.40)
34
где χ = |*ι *2 -*яГ» RX =μ\(χ-Μ[Χ])(χ-Μ[Χ])ί —
корреляционная матрица, элемент которой определяется как
^=^[И^/)-^)Ио)-,я^)]· о·41)
здесь т^. = Μ [Χ (/,)].
Для гауссовского процесса характеристическая функция
записывается в виде
*(je) = exp{jm^e-eTRA-e/2} =
In j л л
j Σ *чА -τ Σ Σ Λνμθνύμ
ν=1 2ν=1μ=1
(1.42)
Определения, приведенные для ГСП, остаются справедливыми и
для гауссовского случайного процесса, поэтому в дальнейшем для
простоты будут рассматриваться только ГСП.
Свойства гауссовских случайных последовательностей.
1. ГСП X(/,·), / = 1,2,... полностью определяется заданием МО
M[X(ti)] и КФ Rx(ihtj) (cMl.40Hl.42)).
2. Для ГСП некоррелированность значений последовательности, т.е.
выполнение условия Rx\tiftj)=0, тождественна их независимости.
Действительно, рассмотрим ρ (х{,tx; jc2 ,t2; ...,xn,tn ). Так как
Rx {ti>tj)= 0 для любых ί, * tj, то матрица R^ будет диагональной.
Таким образом, соотношение (1.40) можно записать в виде
ч2
р{*)~
(2Kf2ylDlD2..J)n
ехр
1 " (*-тх,)
2Д А
= П
,=1^/2^
•ехр
(*-**,)
А
= Пр(*/>'«).
ί=1
где Д· = ^ν — дисперсия СВ Х-,.
35
Справедливо и обратное утверждение: если значения ГСП
независимы, то они и некоррелированы.
3. Для ГСП понятие стационарности в широком и узком смысле
совпадают.
4. Условные ПВ значений совместно гауссовских
последовательностей X(tj) и Y(tt) или значений одной ГСП являются также гауссов-
скими. Это следует из формулы
р{х\у) = р(х,у)/р(у). (1.43)
Пусть имеем два вектора: X — η -мерный, Υ — т -мерный. Тогда
(1.43) принимает вид
ρ(Χ\Υ) = ρ(Χ,Υ)/ρ(Ύ). (1.44)
5. При линейных преобразованиях ГСП свойство «гауссовости»
сохраняется. Если на вход линейной системы с импульсной
характеристикой A (tk, //) воздействует ГСП X (/;), то при выполнении надлежащих
к
условий интегрируемости процесс Υ (tk ) = £ h (^, tx )Χ (ί,), получаю-
ι=1
щийся на выходе системы, будет также гауссовским. Справедливо и
обратное утверждение: если каждый линейный функционал от X(tj)
есть ГСП Y(tk), то Х(ц) также является ГСП. Это важное свойство
часто принимается за исходное определение гауссовской
последовательности X(tj).
6. При нелинейных преобразованиях свойство гауссовости
утрачивается. Если ГСП X(ti) подвергается нелинейному преобразованию,
например, вида Υ fa) = /(/,, Jf (//)), где /(·) - нелинейная функция
относительно X, то последовательность Y(ti) будет негауссовской.
Однако, если негауссовская случайная последовательность с
интервалом корреляции τκ воздействует на инерционную линейную систему (с
постоянной времени τ0»τκ), то процесс на выходе такой системы
приближается к гауссовскому (ПВ стремится к нормальной). Это
приближение тем лучше, чем сильнее выполняется неравенство тс » τκ .
7. С помощью линейного преобразования коррелированные
значения ГСП можно привести к некоррелированным. Заметим, что, если
корреляционная матрица R^ диагональная, то совместно гауссовские
36
CB - некоррелированные. Поэтому линейное преобразование, в
результате которого корреляционная матрица для преобразованных величин
будет диагональной, приводит к совместно гауссовским
некоррелированным величинам. Методика приведения матрицы к диагональной
форме с помощью линейного преобразования известна.
8. Гауссовские случанйные последовательности с
дробно-рациональной спектральной плотностью являются одновременно
марковскими (марковские случайные пореледовательности будут более
подробно описаны в п. 1.8).
9. При заданной дисперсии (средней мощности) ГСП обладает
максимальной энтропией, т.е. максимальной степенью неопределенности.
Гауссовские случайные последовательности наиболее часто
встречаются на практике, поэтому занимают особое место среди других
случайных последовательностей. Большинство встречающихся на практике
электрических явлений, таких, например, как дробовой шум, тепловые
флюктуации, собственный шум типового радиоприемника до детектора,
атмосферные и космические шумы, представляют собой суммарный
эффект большого числа сравнительно слабых элементарных импульсов,
возникающих в случайные моменты времени. Согласно центральной
предельной теореме теории вероятностей плотность вероятности суммы
СВ неограниченно приближается к нормальной с увеличением числа
слагаемых, независимо от того, какие ПВ имеют отдельные слагаемые.
При этом важно лишь, чтобы влияние отдельных слагаемых на сумму
было равномерно малым (приблизительно одинаковым).
Белый гауссовский шум. В дальнейшем будет часто использоваться
идеализированный случайный процесс — белый гауссовский шум (БГШ).
Приведем его определение и укажем специфические свойства.
Под БГШ n(t) понимается стационарный гауссовский СП с
нулевым МО и дельтаобразной корреляционной функцией:
Λ(τ) = ίφ(ί)ϋ(/+τ)] = ^δ(τ), (1.45)
где Ν0 — односторонняя спектральная плотность.
Преобразование Фурье от (1.45) дает равномерную спектральную
плотность Sn(f) = N0/2 для всех частот -<»</<оо. Такой процесс
имеет бесконечную дисперсию (мощность), поэтому является физически
нереализуемым, т.е. некоторой математической моделью. Однако такая
математическая модель оказывается очень удобной и широко
используется в статистической теории радиосистем.
37
Используя представление cos(jc) = — ieJJC+e }X\ и введя в (1.46)
Модель белого шума может быть получена из модели случайного
процесса, имеющего равномерную спектральную плотность в некоторой
полосе частот (рис. 1.6) и, следовательно, конечную дисперсию. Введем
для спектральной плотности (рис. 1.6) fn^n=f0-Af/2 и /тах =
= /о + 4Г/2. Корреляционная функция для такого процесса, в
соответствии с (1.39), описывается выражением
R(x)= YN0cos(2nfx)df9 />0. (1.46)
Jmin
условия /„у,, -» 0, /„и, -» «, получаем
Λ(τ)= *0 J^2tfx+e-j2tfx )# = ^ J ej2*t ^ = Λ[θ δ(χ)
С другой стороны, условия /„„η —» 0, /„„щ -» оо соответствуют
тому, что полосовая спектральная плотность (рис. 1.6) переходит в
равномерную с физическим уровнем Щ для положительных частот / > 0.
Поэтому, оперируя в дальнейшем в статистической теории радиосистем
с белым шумом, определенным в соответствии с (1.45) и имеющим
равномерную двустороннюю спектральную плотность Ν0/2, необходимо
помнить, что Ν0 — уровень спектральной плотности физического
шума, определенного лишь для положительных частот.
Наряду с БГШ, определенным как случайный процесс, можно
рассматривать белую гауссовскую последовательность, которую часто
называют дискретным белым гауссовским шумом (ДБГШ). Последний
термин, строго говоря, противоречит определениям, данным в п. 1.7, где
термин «дискретный» характеризует тот факт, что СП в каждый
фиксированный момент времени может принимать лишь конечное (счетное)
число значений. Когда говорят о ДБГШ, то имеют в виду, что
дискретны моменты времени, а значения процесса в каждый момент времени
принимают значения в некоторой непрерывной области. Тем не менее, в
учебной и научной литературе термин «дискретный белый гауссовский
шум» устоялся, поэтому в дальнейшем он и будет использоваться.
Для ДБГШ КФ задается в виде
*ij=M[n(ti)n(tj)] = c2nbiJ,
38
где
δ„ = ί су? — дисперсия процесса.
lJ [0, i*j9
Мгновенные значения ДБГШ, т.е. случайные величины л (',·),
имеют гауссовскую ПВ
" «2(<,)1
р(п(ьι))- -j=r ехР
ν2πσ»
(1.47)
2σ^
Дискретный белый гауссовский шум w (г,-) может быть получен из
непрерывного n(t) с помощью его усреднения на интервале Г = ί, -/,·_!
'.-1
Очевидно, что среднее значение СВ я (ί,) равно нулю, а дисперсия
*-р) Ν[»(0«(*)]Λ*-^. (1-48)
'/-ι Ί-ι
Возможен и обратный переход от дискретного времени к
непрерывному при Τ —» 0. Однако здесь возникает некоторая сложность с
представлением (1.47), так как в этом случае σ„ -> °°. Для преодоления этой
трудности для непрерывного БГШ определяют не ПВ мгновенного
значения процесса, а ПВ отрезка реализации, например длительностью Тр,
т.е. ρ(π(/))Ξρ^(ί),ί€Γί,/ + Γρ1). Тогда, записав совместную
(гауссовскую) ПВ /?(x|,f|;x|,f2;...;Xfi»f|,) для совокупности дискретных
отсчетов и выполнив предельный переход при Г —> 0, п—> ©о э т=пТ =
= const, можно получить следующее выражение:
р{п({))~екр\~)Гп2(5)Л. (1.49)
Формулу (1.49) можно трактовать как гауссовский закон
распределения для отрезка реализации БГШ.
Следствия для условных плотностей вероятности. Пусть имеем
два гауссовских вектора: X — η -мерный, Υ — т -мерный. Для
данных векторов можно записать
39
р(Х)ш
р(*)·
(2nf2^dct(Rx)
(27t)w>/det(RY)
50)
exp{-±(X-mx)TRi«(X-mx)},
βχρ{-1(Υ-ωγ)τΚγ'(Υ-«ηγ)}· Ο
Положим также, что X и Υ — совместно гауссовские процессы,
т.е. совместная плотность вероятности - гауссовская
/>(**) = n+m/\ exp{-l(Z-mz)TR^Z-mz)l, (1.51)
(2π) /2^(ΚΖ) ι 2 J
где Z =
mz =
[mx
ΙΏγ
Rz =
lXY
|RXY RY
Из свойства (1.44) следует, что условная плотность вероятности
/?(χ|Υ) — гауссовская, т.е. можно записать
ρ(χ|γ)=, у ι ι ^ex44(x"m^)TR^(x-m^)f
(2π)72^(κΧ|Υ) I J
(1.52)
Подставляя (1.50)—(1.52) в (1.44) и проделав несложные
преобразования, можно получить следующие соотношения
mX|Y =mx +RxyRy (Υ-ηΐγ), (1.53)
RX|Y=RX"-RXYRYRYX· О·54)
Из (1.53) следует, что условное математическое ожидание ηΐχΐγ
является линейной функцией от величин, входящих в условие, т.е. от
Υ. Но условное математическое ожидание, как будет показано далее,
является оптимальной оценкой вектора X при квадратичной функции
потерь. Отсюда вытекает еще одно следствие.
Пусть наблюдаем случайную выборку jct, дс2, ... ,*„. Определим
X = xi;, Υ — все остальные наблюдения. Будем интересоваться оценкой
£/ = А/[х/|Υ]. Тогда из (1.53) следует, что данная оценка является
линейной функцией от остальных наблюдений.
40
Определим теперь вектор X = Х-т^у. Докажем, что вектор X не
зависит от Υ, имеет нулевое МО и корреляционную матрицу
Rx = Rx "rxyry ryx ·
Действительно, подставляя (1.53), получаем
Α/[χ] = ΜΓχ-πιχ-Κχ|γΚγ1(γ-ηιγ)1 = 0.
Аналогично рассматривается
MfxiY-mYj^Mrjx-mx-RxYRY^Y-mYJlfY-mY)^
= Rx - RxyRy Ry =0.
Это доказывает некоррелированность рассматриваемых процессов,
а, следовательно, и их независимость.
1.8. Марковские случайные процессы
1.8.1. Марковские случайные последовательности
Пусть имеем моменты времени tbt2,...,*„,..., для которых
определена последовательность случайных величин Х\ = X(t\)tX2 = ^('2)»
...9Xn=X(tn)y... . РассмотримПВ p{x\,tx\x2,t2\...\xn,tn) ивыразимее
через условную ПВ
= ρ(^»^|χ1»ί1^2»/2;···;χΛ-1»ίΛ-ΐ)ρ(χ1»ήίχ2»ί2;···5χΛ-1·/4-ΐ)·
Случайная последовательность х\ = x(t] ),х2 = x(t2)» · · >
хп =*(;„),... называется марковской, если для любого η условная ПВ
Р{хп>*п\х\4>х2>*2'---'>хп-\>*п-\) зависит только от *(/„_!), т.е.
pK>^h^i;x2^2;";^-i»Vi)=p(^»^k-i»^-i)· О·55)
Рассмотрим три произвольных момента времени '*_ι,'*,'*+ι · На
основании (1.SS) можно записать
41
Анализируя (1.56), можно сказать, что, если известно состояние
марковской последовательности (МПС) в момент времени tk, то
будущее МПС (т.е. ее значение при /*+1) не зависит от прошлого состояния
МПС (при tk_x). Это характерное свойство МПС часто принимают за
определение.
Дадим еще одно возможное определение. Рассмотрим
р{хк+\>*к+Ьхк-\>*к-\\хк>*к) =
= р{хк+\>*к+\\хк-\>*к-Ьхк>*к)р(хк-\>*к-\\хк>*к) =
= р{хк+Ь*к+\ \хк>*к)р(хк-\>*к-\\хк>*к)·
Данная запись означает, что при фиксированном значении МПС в
настоящий момент времени tk будущее (при /^+1) и прошлое (при tk_\)
состояния МПС независимы.
Из приведенных определений следует, что для марковских
последовательностей любая «-мерная ПВ (совокупность которых полностью
описывает случайную последовательность) может быть представлена в
виде
л-1
/7(дс1,/1;дс2,/2;...;хл,/^ = /;(дс1,/1)Пр(^+1,/,+1К^,). (1.57)
/=1
Следовательно, описание МПС задается ПВ распределения
начального значения p(x\,t\) и совокупностью условных ПВ />(^+ι,ί,+ι|*/,*/),
которые называют плотностями вероятности перехода случайной
последовательности из одного состояния в другое. Для стационарных МПС
условная ПВ /? (χ,·+ι»/χ·+ι |jc/ , /у) не зависит от времени, т.е. имеем
P{*i+\\*i)·
Рассмотрим определение условной ПВ для произвольных случайных
векторов X и Υ. По определению (1.26)
/>(Χ|Υ) = ρ(Χ, ¥)//>(¥)· (1.58)
Умножим обе части равенства (1.58) на ρ(Υ) и проинтегрируем по
Υ. Тогда получаем
ip(X\Y)p(Y)dY = p(X). (1.59)
γ
42
Применяя свойство (1.59) к МП, получаем
оо
J р{хп>'п\Хп-и**-\)р(*п-Ь*п-\)<Ь*-\ =Р(*п>*п)· (160)
Зная начальное значение ρ(х} 9tx), переходные ПВ ρ[хм 9tM \xhtt)
и используя (1.60), можно вычислить ПВ p(xn,tn) в любой момент
времени tn.
Таким образом, вместо описания случайной последовательности в
виде совокупности ПВ имеем компактное правило (процедуру) (1.57)
для вычисления произвольной многомерной ПВ и выражение (1.60) для
вычисления одномерной плотности в любой момент времени гп .
Формула (1.60) может быть обобщена для условных вероятностей
перехода из одного состояния в другое
оо
p{*nMxkJk)= \ p(xnSn\xjSj)p(xj,tj\4,tk)<bj · 0-61)
Соотношение (1.61) называют уравнением Маркова или уравнением
Смолуховского.
1.8.2. Цепи Маркова
Пусть случайная последовательность Xfc ), i = 1,2,... может
принимать конечное число К дискретных значений дг ',дг ',..., дг '. В
дискретные моменты времени fi,/2,···>'„>··· значение процесса
скачкообразно изменяется, т.е. имеют место переходы χλ -» jc2 -»...-» хп -»...,
причем x(t\) = x\ — начальное значение. Полагаем также, что заданы
вероятностные законы изменения СП на каждом шаге из любого состояния
д^1', i = \,K в любое другое состояние дг"7', j = \,К, т.е. известны
условные
вероятности перехода Р\ х„ ,*п\Хп-\**п-\ г
Заданное описание случайной последовательности является
достаточно общим. Простой цепью Маркова (ПЦМ) называется случайная
(J)
последовательность, для которой вероятность значения х„; процесса в
момент времени tn зависит лишь от того, какое значение имел процесс
43
в предшествующий момент времени tn_\ и не зависит от значений
процесса в более ранние моменты времени, т.е.
{-ίψ &}г('1<Щ
Кроме ПЦМ можно определить сложную цепь Маркова порядка т,
как случайную последовательность, у которой вероятность нового
значения зависит от м предыдущих значений
p(x{jAx{i) *<') χ(νΑ-ρ(χΜ\χ® *(νΠ
г\лп \Λ\ >'"»Ли-т>'">Лл-1 Ι- I я Лл-т>'">Лл-1 г
Можно показать, что сложная цепь Маркова порядка т с помощью
известной методики может быть сведена к ПЦМ, но дня т -мерного
векторного процесса. Поэтому в дальнейшем ограничимся
рассмотрением лишь ПЦМ.
Аналогично случайным последовательностям, для ПЦМ
справедливо выражение для совместной вероятности
·(*!" .^'{Щ/^У^}
Для полного вероятностного описания ПЦМ необходимо записать
алгоритм, в соответствии с которым можно вычислить вероятности тех
или иных значений ПЦМ в произвольный момент времени tn по
известным вероятностям значений ПЦМ в другой произвольный (но более
ранний) момент времени.
Пусть в некоторый момент времени ty заданы вероятности
нахождения ПЦМ в том или ином состоянии р[ху' I = pj (5), j = \УК.
Рассмотрим произвольный момент времени tn>ts. Пусть известны
вероятности переходов PIjcJ ρί ]=π./ϊ С5»")» j = l*K* ί = 1,ЛГ, для
которых справедливы соотношения
к к
Σ/>/(5)=1' Х*//(5»я) = 1» У = 1>А\
к
Κβ (i,w)=Xic;/ (з,т)ки (т,п). (1.62)
/=l
44
Теперь вероятность /?, (η) = PI х}}'\ может быть рассчитана по
формуле
к
Pi{»)=lnji(s>»)Pj(s)- (1.63)
Приведенные выражения удобно представлять в векторно-матрич-
ной форме. Введем вектор P(/i) = |pj (п)рх(п) .../># (Л)| и матрицу
it(s,n) = [πβ (s,n)}. Тогда формулы (1.62), (1.63) принимают вид
?(n) = nT(s,n)?(s), n(s,n)-n(s9m)n(m3n). (1.64)
Кроме того, для матрицы n(s3n) оказывается справедливым
выражение
л-у-1
*(*.*) = Π л(у+/,у + 1 + 1), (1.65)
из которого следует, что для определения данной матрицы достаточно
знать последовательность матриц одношаговых вероятностей перехода.
Среди ПЦМ различают однородные и неоднородные. Однородная
цепь Маркова характеризуется тем, что вероятности перехода зависят
только от разности аргументов, т.е. n(s,n) = π(π -s).
Обозначим π(1) = π. Тогда из (1.65) имеем
п(п) = пп~\ (1.66)
а из (1.64), (1.65) получаем Рт (п) = Рт (Οπ""1.
Однородная цепь Маркова, для которой вероятности Рт (п) не
зависят от η называется стационарной.
1.8J. Марковские процессы
Непрерывный случайный процесс X(t) является марковским (МП),
если для любых последовательных моментов времени t0 <t{ <... < tn
условная ПВ р(хп^п\х\А\х2>*ъ->хп-\>*п-\) зависит лишь от
последнего значения χη_λ в момент времени tn^\, т.е.
45
Определение (1.67) формально совпадает с определением (1.55) для
марковских случайных последовательностей. Справедливыми остаются
и другие определения и свойства. В частности:
1) плотность вероятности перехода неотрицательна и нормирована
к единице
оо
Р{хп>*п\*п-Ь*п-\)*Ъ > \ р{Хп>*п\Хп-\>*п-\)<Ьп=1> (1.68)
2) плотность вероятности перехода p{xn,tn\xn-\,tn-\) переходит в
δ -функцию при совпадении рассматриваемых моментов времени, т.е.
lim ρ{χη,ίη\χη-\,*η-\) = 4Χη-χη-\)'> 0-69)
3) плотность вероятности перехода р{хп^п\хк^к) удовлетворяет
соотношению (1.61);
4) если задана начальная ПВ ρ(χϋ,ί0) и найдена ПВ перехода
р(хп>*п\хк>*к) Дл* произвольных xn,tn и x*,f*, то можно вычислить
все другие ПВ, например, двумерная ПВ в произвольный момент
времени t>t0 определяется
p{xo>h>x>t) = P(xQ>io)p(x>i\xo>to)> (1.70)
5) интегрирование (1.70) по xq позволяет получить одномерную
ПВ марковского процесса в произвольный момент времени
оо
p(x,t)= J/>(·*<),ΌМ^.'К.'о)^; (171)
6) если ПВ перехода зависит только от разности временных
аргументов τ = ί-ί',το
p(x,t\x',t') = p(x,x\x'), (1.72)
а МП называется однородным во времени.
Из приведенного описания МП следует, что при их описании
существенную роль играет ПВ перехода p(x,t\xo>to)» ' > 'о · Л™ нее можно
получить дифференциальное уравнению в частных производных [12]
46
где *„(*»') = Ι™ —/[х(/+А/)-х(/)]яр(х,/+Д/|х,/)Л.
Если первые два коэффициента Кх (*,/), K2 (x9t) отличны от нуля,
а остальные коэффициенты Kn(x9t) = 0 (л>3), то МП называется
диффузионным,
В дальнейшем будут рассматриваться только диффузионные МП,
поэтому введем более удобные обозначения Kx(x,t) = a(x9t)9
K2(x9t) = b(x9t).
Коэффициенты a(x9t) и b(x9t) называют коэффициентами сноса
и диффузии соответственно.
Для диффузионных МП уравнение (1.73) принимает вид
(1.74)
и называется уравнением Фоккера—Планка—Колмогорова (ФПК).
При фиксированном начальном значении х$ уравнение (1.74)
решается при начальном условии ρ (χ, t01х$, t0 ) = δ (χ - Xq ).
Бели значение МП в начальный момент времени /0 является
случайным и имеет ПВ р(хо>'о)» то эта ^® должна выбираться в качестве
начального условия для (1.74).
Одномерная ПВ p(x,t) для произвольного момента времени может
быть определена из (1.71) и (1.74), что приводит к уравнению
в котором оператор L(*) называют оператором Фоккера—Планка—
Колмогорова.
Диффузионный МП с коэффициентами сноса α(χ,ί) и диффузии
b(x9t) удовлетворяет стохастическому дифференциальному уравнению
47
:r=/(*.0+*(*.')S(0. *(h)=*o. О·76)
at
где ξ(/) -БГШсКФ /?ξ(τ) = 5ξ/2δ(τ),Β Дх,г) и g(x,t)
определяются из соотношений
в(д,,)в/(,,/)+1^(*,/)^М, *(*,,) = IS^2 (*,,)· (1.77)
Важной особенностью стохастических дифференциальных
уравнений типа (1.76) является то, что при их интегрировании в
подынтегральной функции стоит БГШ, который не удовлетворяет необходимым
требованиям «гладкости», для которых определен интеграл Римана. В
связи с этим в математике разработана специальная теория
стохастических интегралов. Существуют различные определения стохастического
интеграла, одно из которых введено Р.Л. Стратоновичем и получило
название симметризованного [9]. Не углубляясь в математические
тонкости (более подробно можно ознакомиться в [9, 12, 13]), отметим
лишь, что при таком определении стохастического интеграла
справедливы формулы классического дифференциального исчисления и
выражения (1.77) для коэффициентов сноса и диффузии. Отметим также, что
если в (1.77) коэффициент диффузии g(x,t) не зависит от χ, то все
определения стохастических интегралов эквивалентны. В частности, это
справедливо для линейного уравнения
4jL = F(t)x+G{t)b(t), x(to)**Q. (1-78)
Наряду со скалярным МП χ(ί) важную роль играют векторные
(многомерные) МП. Рассмотрим случайный вектор *(*) =
= |*1 (0 *г(0 ·*/ι(')| · Ее™ в выражениях (1.74)—(1.77) вместо
скалярной величины x(t) подставить векторную х(/), то тем самым будет
определен векторный марковский процесс. Уравнение (1.7S) для
векторного диффузионного МП преобразуется к виду
*fc!l.i(,M).
-ί^Μ'ΜΗί,^Μ'Μ]. <'")
48
где α, (χ,/), ι' = 1,л —коэффициенты сноса; ity(x,f), 1,7 = 1, л
—коэффициенты диффузии.
Векторный диффузионный МП может быть описан векторным
стохастическим дифференциальным уравнением
^ = f(x,0 + g(*,0S(0> *('o) = *o, (180)
где ξ(/) — т -мерный вектор БГШ с диагональной корреляционной
матрицей Κξ(τ) = 8ξ/2δ(τ),τ.β.Λ//(т) = ^/25(т), ί = ΰ, Λ/;/(τ) = 0,
i Φ j; f (χ,/) — η -мерный вектор; g(x,f) — матрица размером пхт.
Связь между коэффициентами сноса и диффузии и
коэффициентами уравнения (1.80) определяется выражениями
*(ж,0«/,(ж./)+7 Σ ^/gp/(x,/)^|M,
4/,ρ=1 όχρ
bij Μ=\ Σ St/a (χ,0^/(^0· (ΐ·8ΐ)
Линейная модель векторного МП описывается уравнением
^=F(o*+g(0!;(')> »('ο)=*ο· (ΐ-82)
Описание марковских процессов с помощью дифференциальных
уравнений очень удобно, так как позволяет поучить описание
оптимальных систем обработки таких процессов также в форме
дифференциальных уравнений. Учитывая это обстоятельство, приведем описание
марковских последовательностей в форме разностных уравнений. Пусть
имеем векторную случайную последовательность x(tk) = \k =
= |дг| (tk) х2 (/*) ... хп (tk )| , которая описывается разностным уравнением
ι^ί(ϊΗι*-ΐ)+8(ϊΗ,*-ΐ)ξΗ, *Ы = *0> (1.83)
где %к — векторный дискретный БГШ с матрицей дисперсий Οξ к .
Доказано, что случайная последовательность хк, описываемая
(1.83), является марковской.
Линейная модель марковской последовательности задается
уравнением
49
**=F*-i**-i+G*-£*_i, *Ы = *о. (1.84)
Для линейных моделей (1.82), (1.84) и начальном условии х0,
распределенном по гауссовскому закону, процесс х(/) и
последовательность \к являются гауссовскими. Поэтому их иногда называют гаус-
совско-марковскими процессами.
Маковские процессы играют основополагающую роль в теории
оптимальной фильтрации, которая подробно будет рассмотрена в гл. 9—13.
Контрольные вопросы κ главе 1
1. Как преобразуются плотности вероятности распределения случайных
величин при их функциональном преобразовании?
2. Что такое корреляционная функция случайного процесса и какую роль
она играет при его статистическом описании?
3. Чем отличаются определения стационарности случайных процессов в
широком и узком смыслах?
4. Какими вероятностными характеристиками описывается произвольная
случайная последовательность?
5. Какими вероятностными характеристиками описывается гауссовская
случайная последовательность?
6. Какими вероятностными характеристиками описывается марковская
случайная последовательность?
7. При каких условиях понятия марковский и гауссовский процессы
тождественны?
8. Дайте определение белого гауссовского шума. Какими свойствами
обладает такой шум?
50
Глава 2
СТАТИСТИЧЕСКОЕ ОПИСАНИЕ СИГНАЛОВ,
СООБЩЕНИЙ И ПОМЕХ
2.1. Общие определения
Радиотехнические системы (РТС) различного назначения являются
информационными системами, т.е. системами, которые предназначены
для передачи и извлечения информации. Под информацией понимают
совокупность сведений, данных о каких-либо событиях, явлениях или
предметах. Информацию, в широком смысле, можно определить как
совокупность знаний об окружающем нас мире. В таком понимании
информация является важнейшим ресурсом научно-технического и
социально-экономического развития общества. В отличие от
материального и/или энергетического ресурсов, информационный ресурс не
уменьшается при потреблении, накапливается со временем,
сравнительно легко и просто с помощью технических средств обрабатывается,
хранится и передается на значительные расстояния.
Для представления, передачи или хранения информации
используют различные знаки, символы, параметры и т.д., позволяющие выразить
(представить) ее в некоторой форме. Совокупность знаков, символов,
параметров, отображающих ту или иную информацию, называют
сообщением. Так, при телеграфной передаче сообщением является текст
телеграммы, представляющий собой последовательность отдельных
знаков — букв и цифр. При разговоре по телефону сообщением является
непрерывное изменение во времени звукового давления, отображающее
не только содержание, но и интонацию, тембр, ритм и иные свойства
речи. В радиолокации сообщение представляет собой изменяющиеся во
времени координаты объекта. Сообщения могут быть функциями
времени λ(/), например, речь при передаче телефонных разговоров,
температура или давление при передаче телеметрических данных,
спектакль при передаче по телевидению, координаты движущегося объекта
и т.п. В других случаях сообщение не является функцией времени
(например, текст телеграммы, неподвижное изображение и т.д.).
Если сообщение представляет собой функцию λ(/), принимающую
только определенные дискретные значения (например, 1 и 0), то его
называют квантованным или дискретным по уровню (амплитуде).
Сообщение (сигнал) с конечным числом дискретных уровней часто на-
51
зывают цифровым, поскольку уровни можно пронумеровать числами с
конечным числом разрядов.
Если же сообщение может принимать любые уровни в некотором
интервале, то они называются непрерывными или аналоговыми.
В некоторых случаях сообщение задают не на всей оси времени, а в
определённые моменты tk. Такие сообщения называют дискретными
по времени в отличие от непрерывных по времени, заданных на всей оси
t. Например, речь является сообщением непрерывным как по уровню,
так и по времени, а датчик температуры, выдающий ее значения через
каждые 5 мин, служит источником сообщений, непрерывных по
величине, но дискретных по времени.
Если сообщение (сигнал) принимает дискретные по уровню
(квантованные) значения в дискретные моменты времени, то его называют
дискретным квантованным сообщением.
На рис. 2.1 проиллюстрированы различные виды сообщений.
tit).
о /, /
I «2
6)
■'L·.- : : i...;....!
К\ ■ г it | Ч
* \\ t 1 Ι)! ι
*ι||ι ιι
*■ ι 4 -H
м 144-141-14-11 -J
0 /. и
г)
Рис 2.1. Виды сообщений: а — непрерывное; б — дискретное по времени;
в — квантованное; г — дискретное квантованное
Перенос сообщений (а следовательно, и информации) на расстояние
осуществляется с помощью какого-либо материального носителя (бу-
52
маги, магнитной ленты и т.д.) или физического процесса (звуковых или
электромагнитных волн, тока и т.д.). Физический процесс, несущий
передаваемое сообщение, называется сигналом. В качестве сигнала можно
использовать любой физический процесс, изменяющийся в
соответствии с переносимым сообщением. В РТС (например, радиолокационных,
радионавигационных, системах радиосвязи) перенос сообщений
осуществляется электромагнитными волнами. В то же время, в
радиоаппаратуре электромагнитное поле антенной системой преобразуется в
электрические сигналы S(λ,ί), которые в последующем тракте приемника
являются переносчиками сообщений. Физической величиной,
определяющей такой сигнал, является ток или напряжение. В современных
системах управления и связи также используют электрические сигналы.
Передача сообщения с помощью сигналов реализуется путем изменения
тех или иных параметров физического носителя в соответствии с
передаваемым сообщением. Этот процесс (изменения параметров носителя)
принято называть модуляцией. Сигнал передает (развертывает)
сообщение во времени. Следовательно, он всегда является функцией времени,
даже если сообщение (например, неподвижное изображение) таковым
не является.
Также как и сообщения, электрические сигналы могут быть
непрерывными и дискретными по времени, непрерывными и дискретными
по уровнюу цифровыми.
Электромагнитное поле можно рассматривать как пространственно-
временной сигнал S(r,X,/), где г — радиус-вектор некоторой точки
пространства. Такой сигнал всегда является непрерывным во времени и
по уровню.
Во многих РТС пространственно-временной сигнал S(r,X,/) на
входе системы может быть представлен в виде произведения S (г,λ,/) =
= F(r)S(X9t)9 т.е. в виде разделяющихся пространственной F(r) и
временной S(X%t) функций. В этом случае обработка сигнала
разделяется на пространственную (в антенне) и временную (в приемнике).
Учитывая это, в дальнейшем (если не рассматривается обработка
пространственно временного сигнала) под сигналом будем понимать временную
функцию S(λ,/).
В общем случае в радиосигнале могут переноситься несколько
сообщений, поэтому там, где это необходимо, будем рассматривать вектор
сообщений λ(/). Каждое отдельное сообщение λ, (/) связано с тем или
53
иным параметром сигнала (амплитудой, частотой, фазой, задержкой),
который в этом случае называется информативным. Для удобства
дальнейшего изложения сообщение λ(ί) будем отождествлять с
информативными параметрами сигнала. Параметры сигнала, не несущие
полезной информации (сообщений), называются неинформативными. В
различных приложениях в качестве информативных и неинформативных
могут выступать различные параметры сигнала. Например, в системах
связи с частотной модуляцией сообщение содержится в частоте сигнала,
а амплитуда и начальная фаза сигнала являются неинформативными
параметрами. При измерении дальности до объекта в радиолокации
сообщение закодировано в задержке сигнала, которая в этом случае
является информативным параметром. Если кроме дальности измеряется и
угловое положение объекта с использованием фазовых методов
пеленгации, то к информативным параметрам следует относить и фазу
сигнала. При приеме и обработке сигналов в РТС неинформативные
параметры не извлекаются и не передаются потребителю, однако их и их
свойства необходимо учитывать. Поэтому введем вектор μ
неинформативных параметров сигнала. При этом сигнал в общем виде представляется
как 5(λ,μ,ί).
2.2. Узкополосные сигналы
Рассмотрим общие статистические свойства радиосигналов
безотносительно к типам и свойствам передаваемых сообщений. В связи с
этим сигнал 5(λ,μ,ί) будем рассматривать как простой временной
процесс S(t). Такой сигнал можно представить в виде процесса с
изменяющейся амплитудой A{t) и фазой <p(f)
S(t) = A(t)cos(<uot+q>(t))9 (2.1)
где (uq = 2π/{); f$ — несущая частота сигнала.
Амплитуда и фаза сигнала в большинстве приложений меняются
существенно медленнее, чем несущая частота. Полоса спектра такого
сигнала Δ/J. « /0 , и поэтому сигнал называют узкополосным.
Для узкополосного сигнала широко используется комплексная запись
S(/) = Re[^(0ej^+<p('))].
54
При этом вводится медленно меняющаяся комплексная амплитуда
сигнала
S(t)«A(t)J*'\ (2.2)
а сам сигнал выражается через комплексную амплитуду
S(/)-Re[5(/)ei€V] = -[s(i)ejiV+S*(/)e-jcv],
где * — знак комплексного сопряжения.
Комплексная амплитуда сигнала (2.2) несет всю информацию о
сообщении λ, что и определяет целесообразность ее введения.
Пусть заданы два узкополосных сигнала S(t) и U(t)9 для которых,
в соответствии с (2.2), определены комплексные амплитуды S(t) и
(/(/). Рассмотрим произведение
5(/)i/(v) = iRe[s(0i/*(v)ej^('-v)+S(0i/(v)ejav>('+v)]. (2.3)
При ί = ν первое слагаемое в квадратной скобке (2.3) описывает
медленно меняющийся процесс, а второе — колебание с удвоенной
несущей частотой. Поэтому при вычислении корреляционного интеграла
можно записать
/+τ
/+τ
(2.4)
lS(t)U*(t)dt
t * L
где τ »\/f0 .
Свойство (2.4) позволяет существенно упростить анализ многих
РТС, содержащих инерционные звенья при использовании метода
комплексных амплитуд. В таких системах вместо (2.3) можно использовать
приближенное равенство
S(t)U(t)~{**[s(t)U'{t)], (2.5)
в котором не учитывается слагаемое с удвоенной частотой изменения.
2.3. Статистические модели сигналов
Пусть радиосигнал, излучаемый передающей системой, имеет вид
(2.1). При его распространении от места передачи до места приема он
55
подвергается различным случайным воздействиям (флуктуациям
параметров среды распространения, эффектам многолучевого
распространения, многоточечным отражениям от объектов и подстилающей
поверхности в радиолокации и др.), поэтому принимаемый сигнал становится
случайным. Для математического описания принимаемого сигнала
необходимо задаться той или иной его моделью.
В литературе описано множество моделей принимаемого сигнала,
которые в той или иной мере соответствуют рассматриваемой РТС и
условиям ее функционирования. Одной из таких моделей может
служить следующая. Сигнал в месте приема представляется в виде двух
составляющих: детерминированной и случайной, т.е.
+P(0^(^-x)cos(iub(/-T)+9(r-T)+e(0), (2.6)
где α и δ — соответственно амплитудный коэффициент и фазовый
сдвиг детерминированной составляющей сигнала, которые полагаются
постоянными на интервале наблюдения; β(/) и ε(ί) — амплитудный
коэффициент и фазовый сдвиг случайной составляющей сигнала,
которые в общем случае могут меняться во времени; τ — задержка
принимаемого сигнала относительно переданного.
Сигнал (2.6) можно записать в виде узкополосного колебания
5(/) = α(0^(ί-τ)Οθ8(α^(/-τ) + φ(/-τ)-ψ(0), (2.7)
где
а
(r) = J(acos(5)+p(/)cos(e(0))2+(asin(5)+p(/)sin(e(0)) =
= >/α2+β(/)2+2αβ(0οο8(δ-ε(/)), (2.8)
asin(6)+B(/)sin(e(/))
ψ(ί) = arete ν ; w—\-LlL (2.9)
ΨΚ) 8acos(5)+p(0cos(e(0)
— соответственно амплитуда и фаза принимаемого узкополосного
колебания, при этом a{t) характеризует амплитудные флуктуации
(замирания), а ψ (г) —фазовые флуктуации сигнала.
В ряде задач допустимо считать β(;) и ε(ί) независимыми
случайными величинами, причем фаза ε распределена по равномерному зако-
56
ну на интервале -π < ε < π: ρ (ε) = 1/2π, а амплитудный множитель β
— по рэлеевскому закону (1.9):
Перейдем от случайных переменных β, ε к новым переменным
α,ψ и рассчитаем ПВ ρ (α, ψ), используя (1.22). При выполнении
условия |ψ-δ|<π из (2.8)—(2.9) можно записать однозначные обратные
функции
П 2 I ~, ]Г7 α sin (φ)-αsin (δ)
* α cos (φ)-αcos (δ)
Якобиан преобразования (1.23) переменных равен
72(α,ψ) =
yja2 +α2 +2aacos(y-6)
Следовательно, совместная плотность вероятности амплитуды а и
фазы ψ принимаемого сигнала, рассчитанная по (1.22), определяется
формулой
а2 +<х2 -2aacos(\|f-6) I
/>(*,ψ) =
2iwr
-exp
2a2
0,
, при a>0, |ψ-δ|<π,
при других α,ψ.
(2.10)
Интегрируя (2.10) по ψ или а, получим одномерные плотности
вероятности для случайной амплитуды и фазы принимаемого сигнала для
модели (2.7)
Р(а) =—ехр
mm ·>·.
(2.11)
Ρ(ψ)
1 -ту acos(v-5)_Va
= —е 2σ+ V— 'Φ —<
2π σ>/2ΐί (σ ντ '/
~sin2(y-6)
|ψ-δ|^π, (2.12)
57
где Ф(х) = -=г J e ' l~ dt — интеграл вероятности.
Описанная модель принимаемого случайного сигнала часто
используется в системах радиосвязи. При α = 0 формула (2.11) переходит в
рэлеевский закон распределения амплитуды сигнала, который часто
используют в задачах радиолокации. Рэлеевскому закону подчиняются
также медленные замирания сигналов в радиолиниях, использующих
ионосферное или тропосферное рассеяние.
В дальнейшем при решении отдельных задач статистической
теории радиосистем будут использоваться следующие частные случаи
модели (2.7).
1. Детерминированный сигнал, т.е. сигнал с полностью известными
параметрами
5(/) = а0Л(г-т0)со8(о\)(/-х0)+ф(/-Хо)+¥о)· (2.13)
Такой сигнал является в определенном смысле идеализацией, так
как он не несет никакой информации. Однако его удобно использовать
для получения потенциальных (предельных) характеристик
оптимальных приемников.
2. Сигнал со случайной начальной фазой
5(/) = £ΐ()Λ(^-τ0)^8(ωο(/-το)+φ(/-τϋ)+ψ). (2.14)
Здесь, в отличие от (2.13), начальная фаза ψ принимаемого сигнала
полагается случайной величиной с равномерным законом
распределения на интервале [-π, π].
3. Сигнал со случайными амплитудой и начальной фазой
5(f) = aA(/-T0)cos((u()(f-x0)+9(r-x0)+y). (2.15)
При этом начальная фаза, по-прежнему, распределена равномерно на
интервале [-π, π], а амплитуда распределена по рэлеевскому закону (1.9).
Сигналы, описываемые детерминированными функциями, в
которых один или несколько параметров являются случайными величинами,
называют квазидетерминированнылш.
В радиолокации часто используют сигнал в виде пачек из N
радиоимпульсов с длительностью пачки хп . Различают когерентную и
некогерентную пачки радиоимпульсов. Если фазы высокочастотного
заполнения радиоимпульсов связаны между собой детерминированной
зависимостью, то имеем когерентную пачку\ в противном случае гово-
58
рят о некогерентной пачке радиоимпульсов. Когерентная пачка
радиоимпульсов с известной начальной фазой и амплитудой является
детерминированным сигналом, а аналогичная пачка со случайной начальной
фазой (для всей пачки) — квазидетерминированным сигналом.
Если амплитудные и/или фазовые флуктуации сигнала нельзя
считать медленными, то вместо случайных величин а и ψ в модели (2.7)
следует рассматривать случайные процессы α(ί) и ψ(ί). В этом случае
удобно перейти к представлению сигнала его комплексной огибающей
(2.2), которую во многих случаях можно считать комплексным
стационарным гауссовским СП. Под комплексным гауссовским СП
S(0 = S*(')+JM<) (2·16)
понимают процесс, действительная SR(t) и мнимая 5/ (/) компоненты
(квадратурные компоненты) которого являются гауссовскими СП.
Рассмотрим статистические характеристики огибающей и фазы
стационарного узкополосного комплексного гауссовского СП (2.16).
Запишем совместную ПВ квадратурных компонент SR и 5/ в
фиксированных сечениях СП (т.е. при фиксированном значении t = tk)
Pta.S/WtoMS/J-T-i-e 2σ2* -T-i—β 2σ' ,
yj2wcrR ^ImcTj
(2.17)
где /ид,/я/,а^,0/ — МО и дисперсии квадратурных компонент; при
записи (2.17) использован тот факт, что квадратурные компоненты
SR(t), Sj(t) — независимые СП.
2 2
Для упрощения последующих выкладок будем полагать oR = О/ =
= сг. Тогда из (2.17) следует
р(5/?,5,) = —j-exp
SR + S[ ntR + tnj SrIHr + S/ mf
2α2 2α2 σ2
Перейдем от декартовых координат SR,Sj к полярным
координатам A = y]sR+SJ , <p = arctg—. Тогда можно записать SR =Acos(y),
SR
59
Sf = Λ sin (φ). Якобиан преобразования переменных (1.23) в
рассматриваемом случае равен J2 (5, φ) = А. Поэтому для совместной ПВ
амплитуды и фазы, на основании (1.22) получаем
*2±~2^2 Л
ρ{Α,φ) = -е 2<? е*2 (2.18)
2лхг
Одномерную ПВ огибающей получается интегрированием (2.18) по
φ на интервале [-π, π]
_ A +mR+m/ _ А I \ J t л\
p(A)= J p(A,<p)d<9 = —e & τ~ J e d*>
-% <T 2π-π
a = arctg-^-. (2.19)
mR
Интеграл в правой части (2.19) вычисляется с помощью табличного
интеграла
i-J еХС05^</ц = /<,(*). (2.20)
2к-к
С учетом (2.20), для ПВ огибающей получаем
р{А) = фе ^J^i+iil (2-21)
что соответствует распределению Раиса (1.11).
Запишем квадратурные компоненты узкополосного сигнала S(t) в
виде
МО = **(')+**(')> $/(') = "/(') + */(')> ("2)
где, как и ранее, /лд,/я/ — МО (регулярные составляющие)
квадратурных компонент; xR (')»*/ (0 — соответствующие флуктуационные
составляющие.
Тогда для узкополосного сигнала S{t) справедливо выражение
5(0 = Re[(5Hi)+J^(0yuV] =
60
=K(0+^(0)cos(cu0o-K(0+^/(0)s^KO=5p(/)+5c(0»
где Sp(/)=/w/?(i)cos(c^)i)-m/(/)sin((ubO — регулярная
составляющая узкополосного сигнала; 5ξ(ί)= ^(Ocos(<flto0"^/(0s^n(<atoi) —
случайная составляющая сигнала.
Отсюда видно, что амплитуда регулярной составляющей сигнала
Ар = yjmR +mj . Следовательно, (2.21) можно записать в виде
Р(4-±*
А2+Л}
' 2а2
с2
, ΑΖ0.
(2.23)
Данная формула определяет распределение Раиса (см. также п. 1.3).
При отсутствии регулярной составляющей сигнала выражение (2.23)
переходит в распределение Рэлея (1.9). (Графики ПВ для распределения
Раиса приведены на рис. 1.S, а для распределении Рэлея — на рис. 1.4.)
Одномерная ПВ фазы получается интегрированием (2.18) по А на
интервале [0,°°]
ι — —
/>(ф) = ^е 2σ* +
mR cos (φ) + τηj sin (φ)
σ>/2π
ίmR cob{q)+mi sin((p) L a^"c 2α2
2π σ>/2π [
u = arctg-^-.
/Яд
i4pCos(q>-d)^
σ
Λρ28ίη2(φ-3)
2α2
(2.24)
При отсутствии регулярной составляющей сигнала, т.е. при А^ = 0,
выражение (2.21) преобразуется в равномерное распределение.
Плотности вероятности распределения фазы узкополосного гауссовского
сигнала для различных значений А^/о приведены на рис. 2.2.
Формулы (2.23)—(2.24) совпадают с (2.11)—(2.12), которые были
получены иным путем, а именно при исходном представлении сигнала в
виде регулярной и случайной составляющей (2.6).
61
3 φ-&, рал
Для учета временной
корреляции флуктуации
сигнала его случайные
составляющие *д (')»*/(0
квадратурных компонент в (2.22)
представляются в виде
марковских процессов
at
Рис. 2.2. Графики ПВ фазы узкополосного
гауссовского сигнала
at
(2.25)
где ξ*(ί)»ζ/(0 "~~ независимые БГШ с единичной односторонней
спектральной плотностью; σ — среднеквадратичное значение
флуктуации (параметр распределения Раиса (2.20)); α = 0,2 ... 5 Гц —
параметр, характеризующий ширину спектра флуктуации (τκ = 1/α — время
корреляции флуктуации).
В ряде задач синтеза радиотехнических систем бывает удобно в
качестве исходных процессов рассматривать не квадратурные
компоненты сигнала (2.16), а амплитуду A(t) и фазу φ(/) сигнала. При таком
подходе A{t) и φ(/) полагаются независимыми СП. В качестве
моделей изменения фазы сигнала часто используют следующие
φ(0 = ξ(')> (2·26)
(2.27)
(2.28)
где ξ(/) —БГШ с двусторонней спектральной плотностью #ξ/2·
Модель амплитуды сигнала представляется в виде
Λ(θ«ν^(ο+Λ2(θ.
где Ac (t),As (/) — квадратурные составляющие, которые описываются
уравнениями типа (2.2S) при рэлеевском распределении мгновенных
значений амплитуды.
62
2.4. Статистические модели сообщений
Как отмечалось в п. 2.1, радиосигнал используется для переноса
различных сообщений λ(ί), которые могут быть связаны с теми или
другими параметрами сигнала: амплитудой, частотой, фазой,
задержкой. В статистической теории радиосистем используется описание
сообщений в виде случайных процессов (или, в частном случае,
случайных функций) и их представление в пространстве состояний. При таком
подходе т -мерный вектор λ(ΐ) отображается в η -мерном
пространстве вектором х(/) = |jc| (t) jc2 (t) ... хп (ί)|Τ. Связь между двумя векторами
дается соотношением
λ(ί) = «(/), (2.29)
где с —матрица размером тхп.
Поясним (2.29) на примере. Пусть информационным параметром λ
является задержка сигнала τ. Положим, что она меняется во времени по
квадратичному закону, т.е.
*(0 = *o + *W+*io'2/2. (230)
Определим в двумерном пространстве состояний вектор χ = |τ Γτ|Τ,
где Vx = dx/dt — мгновенная скорость изменения задержки.
Дифференцируя (2.30) два раза по времени, получаем
dx/dt = Vx; dVx/dt = ch0; τ(0) = τ0; ^(0) = ^,
или в векторной форме
— = Fx+Goro; F =
0 1
Ιο οι
G =
При таком представлении матрица с в (2.29) имеет вид с = |ΐ θ|.
В η -мерном пространстве состояний вектор х(/) в общем случае
описывается нелинейным стохастическим дифференциальным
уравнением (1.80) или в частном случае — линейным уравнением (1.82).
Модели вектора состояния \к в дискретном времени задаются
уравнениями (1.83)—(1.84).
Приведем некоторые статистические модели сообщений для РТС.
63
Системы радиосвязи. Типичным видом сообщения в радиосвязи
является речь. Одной из возможных моделей речевого сигнала является
двухкомпонентный процесс, описываемый уравнениями
^ = -«ι*ι+βο[-α2*2+α2ξ(')]. -^· = -α2*2+«2ξ(0. (2·3Ι>
где ξ(ί) — БГШ с двусторонней спектральной плотностью Νξ/2 ■
Спектральная плотность
процесса λ = χχ описывается
выражением
ЛС/>
5λ(ω) =
α&ο^ξω2
2(ω2+α2)(ω2+ο^
600 1000 1900 2000 2900 3000 3900 4000
Рис 2.3. График спектральной плотности
речевого сигнала
График нормированой к
единице функции S\ (ω) приведен
f Гц на рис. 2.3 при а] = 1000 с"1,
а2=5000с1.
Радиолокационные системы. Одна из основных задач
радиолокационных систем — слежение за меняющимися координатами объекта.
Сообщением в данном случае
являются координаты движущегося
объекта. Рассмотрим модель
движения РЛС и объекта в плоскости
(рис. 2.4), полагая для простоты
РЛС неподвижной.
В полярной системе координат
положение объекта
характеризуется дальностью R и углом Ф, для
которых можно записать следую-
Рис. 2.4. Схема движения РЛС шие кинематические уравнения:
и объекта
dt ° v v ' dt V0 dt ^ R
64
^ = -Κο5ίη(^-θ)[^1-^]^Λ-βο5ίη(^-β),
Λ R [ dt ~dt\ r2
-v =
2V
(2.32)
a0cos(dp-d)
/г в /г
где Cug — угловая скорость вращения линии «РЛС—объект» (линии
визирования объекта).
Введем проекции ускорения объекта на линию визирования объекта
и на нормаль к ней: аъ (/) = -а0 sin (ϋγ -ϋ) и ан (t) = -α0 cos(&y - ϋ) .
Тогда уравнения (2.32) принимают вид
dR л, dV 7D /ч
</i» diSL· 2V αΗ(ί)
dt ^ dt R^ R
(2.33)
(2.34)
Уравнения (2.33), (2.34) описывают изменение полярных координат
объекта при произвольном его движении в плоскости, которое задается
проекциями ускорения aB(t) и au(t). Дальнейшее уточнение модели
движения определяется заданием моделей проекций ускорения объекта.
На практике используют три основных модели, которые аналогичны
(2.26)—(2.28), если в них вместо φ подставить ab(i) или aH(t).
Для описания модели движения (2.33)—(2.34) в пространстве
состояний введем векторы \ = \R V д (0в|т, а = |дв ан\ и запишем
где f(n) = \v (£ϋ ω, -2Ущ/я^; g(x) =
0
0
0
0
0
1
0
Щ
Радионавигационные системы. Рассмотрим в качестве примера
спутниковую радионавигационную систему (СРНС) ГЛОНАСС (или
3—2041
65
GPS). В приемниках сигналов таких систем осуществляется слежение за
задержкой τ огибающей сигнала (за задержкой дальномерного кода) и
фазой φ сигнала, которые пропорциональны дальности до
навигационных спутников: x = R/c0 , φ = 2πΚ/λο , где cq «3-108 mc"1 — скорость
света, λ0 «0,2 м — длина волны несущей частоты радиосигнала. Так
как в приемниках СРНС не измеряются угловые координаты спутников,
то в качестве модели изменения дальности используют упрощенный
вариант уравнений (2.30):
dR ., dV , ч ,_ ...
- = К, - = ,(,)· (2.35)
Для построения следящих систем за задержкой огибающей обычно
используют модель ускорения α(ί) = ξ(ί), где ξ(/) — БГШ с
двусторонней спектральной плотностью ΛΓξ/2. Вводя вектор χ = \R V\T,
выражение (2.35) преобразуется в векторное уравнение
*=F»+C£(/), (2.36)
dt
F =
0 1
0 01
G =
(2.37)
При использовании данной модели возникает вопрос о выборе
значения параметра Νξ, которое достаточно сложно обосновать
физически. В этом смысле более наглядной является модель ускорения в виде
^ = -αβ+αξ(0, (2-38)
at
где α характеризует скорость изменения ускорения (для авиационных
объектов Та=\/а= 1...60с), а среднеквадратичное значение са =
= Jo.N^/4 характеризует интенсивность ускорения (например, для
самолетов σα = 1...50 мс"2).
При использовании модели ускорения (2.38) необходимо
рассматривать вектор χ = \R V а\ , который по-прежнему описывается
векторным уравнением (2.36) с матричными параметрами
66
0 1 0
0 0 1
0 0 -α
, G =
0
0
α
F =
Можно показать, что в первом приближении при использовании
модели двумерной модели (2.36)—(2.37) спектральная плотность Νξ
выбирается из соотношения ЛГ* = ——, где аа и α, как и в модели
s α
(2.38), определяются интенсивностью и скоростью изменения
ускорения объекта.
При рассмотрении следящей системы за фазой сигнала в приемнике
СРНС в качестве модели также используют трехмерный вектор х =
= \R V α|τ, но матричные параметры в уравнении (2.36) определяют как
F =
Спутниковые радионавигационные системы являются пассивными,
т.е. приемник только принимает радиосигналы. В таких системах
важную роль играет уход частоты Δω опорного генератора, для которой
используется модель случайного процесса с экспоненциальной
функцией корреляции
άΑω
0 1 0
0 0 1
0 0 0
, G =
°i
0
1
л
! = -αωΔω+>/4αωσ^ξ1(/) ,
где ξ ι (t) — БГШ с единичной односторонней спектральной
плотностью; αω — параметр, характеризующий скорость ухода частоты
опорного генератора (для кварцевых генераторов αω «10 Гц).
2.5. Статистические модели помех
Шумовая широкополосная помеха* В различных
радиотехнических системах приходится иметь дело с различными видами помех.
Однако во всех случаях обязательным является наличие флуктуационного
шума, обусловленного собственными шумами радиоприемного
устройства, тепловыми и другими шумами окружающего пространства. Такие
шумы полагают белыми гауссовскими процессами (см. п. 1.7) с односто-
67
ронней спектральной плотностью N0 = кТш , где А: = 1,3810 23 Вт·с/К
— постоянная Больцмана; Гш — эквивалентная шумовая температура
(в градусах Кельвина), которая складывается из эффективной шумовой
температуры 71ц α антенно-волноводного тракта и шумовой
температуры Тшп приемника. Белый гауссовский шум является широкополосной
помехой.
Узкополосные помехи. Другим типом помех являются
узкополосные помехи, к которым относятся, например, импульсные и
непрерывные фоновые составляющие атмосферных и промышленных помех. В
достаточно общей форме узкополосную помеху можно представить в
виде
M0 = 4i(0^sK' + 9n('))>
где А^ (/) и φπ (г) - случайные амплитуда и фаза помехи.
Случайная фаза помехи может описываться уравнением (2.26) или
(2.27). Амплитуду узкополосной атмосферной и промышленной помехи
можно представить в виде суммы импульсной \ и фоновой А$
составляющих Ап=Ап+А^9 причем ПВ А^ описывается
логарифмически нормальным законом
Ил)=
ι
Л„ои ν2π
ехр
(ΐη(Λ)-ΐηΚ))
2σΙ
г\
а Λψ распределена по рэлеевскому закону (1.9).
Изменения Д, и А^ во времени можно описать стохастическими
уравнениями
1[ — L
-^- = -аи4,1п
^4аист2^„(0,
-j- = -«ф4ф +-^·+>/4αφσ|ξφ (г),
(2.39)
(2.40)
где ξ„(ί) и ξφ(/) — БГШ с единичной односторонней спектральной
плотностью.
68
Типовые значения параметров моделей (2.39)—(2.40) следующие:
<хи =500 ... 1000 Гц; (Хф = 1 ... 10Гц; σ„ = 0,01 ... 0,07 мкВ; σφ =
= (1 ...5)КГ* мкВ.
Широко распространенным типом помех являются импульсные
помехи. В результате теоретических и экспериментальных исследований
установлено, что ПВ импульсных помех в ряде случаев можно
аппроксимировать функцией
рШ-
23/4r(l/v)
ехр
КГ
где Г(*) — гамма-функция (1.6); ν — параметр, зависящий от типа
помехи и принимающий значения от 0,5 до 2; при ν = 1 получаем
распределение Лапласа
рШ=
ι
23/2<
-ехр
2'/Ч
(2.41)
Приведенные статистические модели сигналов, сообщений и помех
не исчерпывают их многообразие. В каждом конкретном приложении
они могут либо модифицироваться, либо используются другие модели.
Контрольные вопросы к главе 2
1. Чем по смыслу отличаются термины сигнал, сообщение, помеха!
2. Какие сигналы и процессы (сообщения) называются квазидетермини-
рованными?
3. Какие основные признаки (характеристики) узкополосного сигнала?
4. Дать определение огибающей и фазы узкополосного сигнала.
5. Является ли сообщение *(/), имеющее спектральную плотность
Sx (ω) = So/ω4 , марковским процессом и почему?
6. Как описывается корреляционная функция помехи, имеющей
равномерную спектральную плотность в заданной полосе частот?
69
Глава 3
ОСНОВЫ ТЕОРИИ СТАТИСТИЧЕСКИХ РЕШЕНИЙ
3.1. Общие положения
Одним из основных вопросов статистической теории РТС является
выбор наилучшей (в некотором смысле) системы. Методологической
базой такого выбора является теория статистических решений,
разработанная А. Вальдом. Формулировка основных положений этой теории не
связана ни с какими-либо частными задачами, ни с конкретными
критериями оптимальности. Поэтому она дает общий подход к решению
задач статистического синтеза различных динамических (в том числе и
радиотехнических) систем [5].
Прежде, чем излагать основы теории статистических решений,
сформулируем в возможно более общем виде те задачи, которые
решаются различными РТС.
В гл. 2 было определено, что РТС предназначены для передачи и
извлечения сообщений, закодированных в параметрах радиосигнала.
Сообщения имеют статистическую природу и требуют задания
соответствующих вероятностных распределений (или плотностей вероятности).
Данную статистическую информацию называют априорной, так как
исследователь располагает ею до проведения каких-либо измерений или
экспериментов. Пусть λ(ί) — сообщение, которое представляет собой
некоторый СП. Положим также, что, в соответствии с принятым в п. 2.3
представлением, λ(ί) отображается в пространстве состояний вектором
x(f), который, в свою очередь, является векторным СП. В дальнейшем
под х(/) будем понимать марковский СП (см. п. 1.8). В каждый момент
времени t данный СП характеризуется ПВ p(x,t), которая является
априорной ПВ. Для передачи сообщения λ(/) используется сигнал
5(/,λ(ί)). На входе приемника наблюдается реализация y(t)9
представляющая собой искаженный помехой сигнал. Наблюдаемую на
интервале времени [0,/] реализацию y(t) обозначим как Yq . В
результате обработки Yq можно извлекать дополнительную информацию об
интересующем сообщении. Эта информация также имеет статистиче-
70
скую природу, а соответствующие вероятностные распределения или
ПВ называют апостериорными (т.е. после проведения опыта или
эксперимента). Поэтому условную ПВ pfx,f Ig I называют апостериорной,
так как она описывает статистические свойства вектора χ в момент
времени / при условии, что проведены наблюдения У0'.
Результат извлечения информации из принятого сигнала
(наблюдений) часто можно трактовать как принятие решения о значении
сообщения либо в каждый момент, либо в заданные моменты времени.
Принятие таких решений называют оцениванием. Поэтому в дальнейшем
часто будет говориться об оценивании сообщений. В терминах
оценивания формулируются такие задачи как обнаружение, распознавание и
различение временных и пространственно-временных сигналов; оценка
параметров сигналов; фильтрация сообщений, сигналов, полей и
изображений; управление процессами и объектами и др.
3.2. Решения, функция потерь, риск
Решение. Радиотехнические системы предназначены для обработки
сигналов и информации, заключенной в них. Всякий результат такой
обработки в теории статистических решений называют решением, а сам
процесс обработки, который завершается тем или иным результатом
(решением), называют принятием решения.
В любом процессе обработки сигналов, информации и принятия
решений можно выделить ряд характерных признаков, главными из
которых являются следующие.
1. Всякое решение направлено на достижение какой-то цели,
выбирается из ряда возможных альтернатив (конечной или бесконечной) и
приводит к некоторым последствиям, по которым и должно оцениваться
качество этого решения.
2. Решение принимается с помощью доступной к моменту его
принятия информации двоякого рода. Одна ее часть обобщает прошлый
опыт и представляет собой совокупность априорных сведений. Другая
представляет совокупность данных наблюдения, получаемых в процессе
выработки решения непосредственно перед его принятием.
3. Как правило, доступная при принятии решения информация и
последствия от принятия того или иного решения имеют статистическую
природу, что определяется статистическим характером априорных
сведений, результатов наблюдения и т.п. Все это придает процедуре
принятия решений статистический характер.
71
4. Выбор решения из имеющихся альтернатив не обязательно
однозначно определяется имеющейся информацией. Он может допускать
элементы случайности или, как принято говорить, рандомизации.
Процедура случайного выбора решения предполагает, что для каждого
значения совокупности данных наблюдения и для каждого из возможных
альтернативных решений определены вероятности, в соответствии с
которыми и может быть принято любое из возможных решений. В данной
книге рассматриваются только проблемы детерминированного выбора.
Введем формальное описание правила принятия
детерминированного решения. Пусть Yq наблюдаемая реализация (наблюдение),
которая, с точки зрения статистической теории, является одной из
возможных в пространстве наблюдений Υ, т.е. Yq e Y. Всякое преобразование
м(*) наблюдаемых данных Yq , т.е. w(io), будем называть решающим
правилом или, другими словами, алгоритмом обработки. Множество
всех решающих правил (алгоритмов) обозначим через U, так что
uIYq j€ U. Как отмечалось выше, результатом обработки наблюдений
является решение, которое обозначим как d. Совокупность всех
возможных решений образует множество D (deO). Таким образом,
каждое нерандомизированное решающее правило (алгоритм) и
устанавливает однозначное соответствие между точками пространства
наблюдений Υ и пространства решений D,T.e. J = м(У0М. Решение d может
быть скалярным или векторным. Например, если ищутся оценки каждой
компоненты вектора состояния χ, то решение, под которым можно
понимать искомые оценки, будет векторным. Для векторного решения
имеем d = u(>Q 1.
Функция потерь. Выбор того или иного решения приводит к
определенным последствиям (результатам). Целесообразно эти последствия
оценивать по степени соответствия их поставленной цели. Для
количественной оценки такого соответствия вводят функцию потерьс(...9...)9
которая, естественно, должна зависеть от поставленной в задаче цели и
от принятого решения. Фиксируем некоторый момент времени t.
Определим в качестве цели вектор χ, соответствующий выбранному
моменту времени, а решением в данном случае будет вектор d. Таким
образом, для функции потерь можно записать c(x,d). Конечно, в качестве
72
цели может выступать само сообщение λ или какое-либо его
функциональное преобразование, а решение при этом будет скалярное d.
Поскольку этот факт не является принципиальным, то в дальнейшем будем
вести речь о функции потерь вида c(x,d).
При задании функции потерь во многом ориентируются на здравый
смысл. В прикладных задачах обычно требуется, чтобы функция потерь
удовлетворяла следующим свойствам:
1) c(x,d) — скалярная функция двух векторных переменных;
2) с(х,х) = 0, т.е., если решение совпадает с искомым вектором, то
потери равны нулю;
3) c(x,d])>c(x,d2) всегда, если p(x-d,)>p(x-d2), где ρ —
скалярная неотрицательная выпуклая функция;
4) c(x,dj) = (dj д) — свойство симметричности.
Функция потерь, обладающая всеми указанными свойствами
называется допустимой.
На практике чаще всего применяются следующие три вида
допустимой функции потерь:
1) квадратичная c(x,d) = ||x-d||l, (3.1)
2) модульная c(x,d) = |x-dL,
О, ||x-d|e<e/2,
3) простая c(x,d) =
(3.2)
Ι/ε, ||*-d|L>e/2.
\\Q
Здесь |*| — символ нормы вектора; ε = const; Q — неотрицательно
определенная матрица размером лхл, с элементами, выполняющими
роль весовых множителей.
Обычно в радиотехнических задачах норма вектора определяется
соотношениями
|x-dg=(x-d)TQ(x-d),
lx-d|e=^|x-d^=>/(i-d)TQ(x-d). (3.3)
Применительно к простой функции потерь часто рассматривают
случай, когда значение параметра ε в (3.2) стремится к нулю (ε -» 0).
При этом простую функцию потерь записывают в виде
73
c(x,d) = ft-5(x-d), (3.4)
r»6(x-d) = f °f ПРИ ***' j5(u)Ai = l;ft = const.
[oo, при d = x, _^
Строгий предельный переход в (3.2) при ε -» О дает Ь = «, но так
как значение 6 не влияет на результаты синтеза оптимальных систем,
то допустимо полагать Ь некоторой конечной величиной.
Если вектор χ принимает дискретные значения ir , ι = 1,2,..., то
аналогом функции потерь (3.4) является выражение
c(xW,d) = l-5x(/)d, (3.5)
О, при d*x^,
где δ (/) = \
символ Кронекера.
1, при d = x^.
Риск. Функция потерь c(x,d) = c(x(/),d(/)) = cix(/),ui}o)),
рассматриваемая в фиксированный момент времени t, является случайной
величиной, так как зависит от случайной величины χ(ί) и реализации
Ιο случайного процесса y(t), что затрудняет сравнение различных
решающих правил. Поэтому лучшие решающие правила логично
выбирать на основании сравнения усредненных значений потерь, которые
называют риском.
В зависимости от полноты усреднения при вычислении МО
функции потерь рассматривают несколько различных рисков. Наиболее
общим является средний риск, при определении которого функция штрафа
усредняется по совместной ПВ /?fx(i),Io) CB х(/) и случайной
реализации У0'
r(ufO = JJc(i(/).u(yi))p(i(i)flg)A(Orflg, (3.6)
где интегрирование ведется по области допустимых значений χ(ί) и Iq .
При записи (3.6) учтена временная зависимость информационных
процессов и наблюдений. В различных задачах средний риск можно
определять в текущем времени, на конечном временном интервале, для
74
различных временных интервалов относительно χ(ί) и y(t) и т.д.
Поэтому в последующих формулах, для общности рассуждений,
временной индекс будет опущен. Так, например, формула (3.6) будет
записываться как
г(и) = Яс(х,и(У))/7(х,У)^Г. (3.7)
Кроме среднего риска (3.7) часто используют условные риски,
представляющие собой условные математические ожидания функции
потерь. Используя формулу Байеса для совместной ПВ /?(х,У) =
= ρ(χ\Υ)ρ(Υ), запишем
r(n) = \jc(x9u(Y))p^\Y)p(Y)diLdY = lrps(Yiu)p(Y)dYi (3.8)
где
rpj(y,u) = Jc(x,u(y))/7(x|y>ft (3.9)
— апостериорный риск, т.е. при заданных наблюдениях Υ.
Из (3.8) видно, что любое решающее правило и определяет как
значение среднего риска, так и значение апостериорного риска, причем
экстремальные значения данных рисков имеют место при одном и том
же решающем правиле.
Другой условный риск f (x,u), который иногда называют функцией
риска, определяется для условной ПВ />(У|х), которая связана с
совместной ПВ выражением /?(х,У) = ρ(Υ\τ)ρ(\). В этом случае выражение
для среднего риска (3.7) можно записать в виде
г (и) = \jc{^u(Y))p{Y\x)p(x)didY = \f (ж, о)р(ж) А,
где
г(х,и) = /с(х,и(Г))/7(г|х>/У. (3.10)
Заметим, что условный риск r(x,u) определяется при
фиксированном значении χ, поэтому случайным «параметром» при этом является
только реализация У, и усреднение в (3.10) проводится только по Υ.
Относительно χ условный риск r(x,u) является обычной функцией
этой переменной, поэтому он и называется функцией риска.
75
3.3. Оптимальные решения
Термин «оптимальное» решение определяет наилучшее в заданном
смысле решение, т.е. в соответствии с заданным критерием сравнения.
Поэтому некорректно говорить об оптимальности того или иного
решения, не указывая на критерий сравнения.
В теории статистических решений при отыскании оптимального
решения рассматривают два крайних случая:
имеется полная априорная статистическая информация об
информационном процессе χ;
отсутствие какой либо априорной статистической информации о
процессе χ.
Байесовские решения. При наличии полной априорной
информации естественно определить оптимальным решением и0 такое, которое
минимизирует средний риск (3.7), т.е. средние потери от принятия
решения
r(u0) = min r(u) = min j\c(*yu(Y))p(*,Y)<hdY.
о о
Такое решение называется байесовским. Подчеркнем, что для
байесовского решения характерны два признака: полная априорная
статистическая информация об информационном процессе χ и критерий
оптимальности в виде среднего риска (3.7).
Из представления среднего риска в форме (3.8) следует также, что
оптимальное решение может быть найдено в результате минимизации
апостериорного риска, так как ρ(Υ) — положительно определенная
функция, не зависящая от и:
u0=arg min r (и). (3.11)
о
Таким образом, байесовское решающее правило минимизирует как
средний, так и апостериорный риски.
Рассмотрим примеры байесовских решающих правил для двух
наиболее часто используемых функций потерь: квадратичной и простой.
Подставляя выражение (3.3) для квадратичной функции потерь в
(3.11), запишем
^^|«.-2/е(«-^)л(«|у)А-0.
Отсюда находим
76
ио(у) = * = М*|у)Л. (3.12)
Таким образом, для квадратичной функции потерь оптимальное
байесовское решение (3.12) является апостериорным средним
значением вектора χ. Такое решение будем в дальнейшем называть
оптимальной байесовской оценкой вектора χ и обозначать χ.
Получим теперь байесовское решение для простой функции потерь (3.4):
u0(y) = x = arg niin J(i-5(x-u))/?(x|y)dx =
D
= arg тах/?(х|Г). (3.13)
Следовательно, оптимальным решением для простой функции
потерь является такое значение х, при котором АПВ />(х|У) достигает
максимума.
Так как понятие байесовского решения связано априорной ПВ
Pop (χ)» то можно говорят о байесовском решении относительно
заданной априорной ПВ р^ (х). Для каждой р^ (х) будем иметь свое
байесовское решение, так как апостериорная ПВ /?(х|у) зависит от
заданного априорного распределения а, следовательно, средний и
апостериорный риски также от него зависят.
В ряде задач может отсутствовать информация об априорной ПВ
/^(х), что не позволяет использовать байесовское решение. В этом
случае используют небайесовские методы выбора оптимального
решения. Небайесовские решения можно получить, исходя из функции риска
(3.10), которая для своего определения не требует априорной ПВ
/>ар (х) · Одним из таких решений является минимаскное.
Минимаксные (небайесовские) решения. Решение d* = u* (У)
называется минимаксным, если оно удовлетворяет условию
maxr(x,u*)<maxr(x,u)
для всех и, или в другой записи
max r(x,u*) = min max r(x,u), (3.14)
χ * ' α χ
т.е. если оно минимизирует максимальное значение условного риска.
77
Величина max rix,u*l называется минимаксным риском.
Для нахождения минимаксных решений в общем случае нет
конструктивных процедур, кроме доказанного Вальдом результата: при
некоторых несущественных допущениях минимаксное решение является
байесовским относительно наименее благоприятного априорного
распределения рарн (х). При этом минимаксный риск равен байесовскому
риску для рарн (х), а условный риск г ί х,u* J не зависит от χ.
Минимаксные решения часто используются при робастных
методах синтеза, которые малочувствительны к априорным данным.
Метод максимального правдоподобия. При определении функции
риска в (3.10) использовалась условная ПВ /?(У|х), которая
представляет собой ПВ наблюдений Υ, при фиксированном значении χ. Так как
значение вектора χ фиксировано, то он уже не является случайной
величиной, однако может рассматриваться как неизвестный параметр.
Условная ПВ /?(У|х), рассматриваемая как функция неслучайного
параметра χ, называется функцией правдоподобия 1(х).
Обратим внимание на различие между условной плотностью
вероятности />(У|х) и функцией правдоподобия 1(х). В первом случае
фиксируется значение χ и рассматривается ПВ реализации Υ, которой
соответствует заданное (фиксированное) значение χ, что можно
обозначить как Υ (χ). Следовательно, в этом случае имеем ρ{Υ(\)\τ). При
определении функции правдоподобия £(х) рассматривается принятая
реализация У, соответствующая некоторому (истинному) значению
хи, что обозначим как Υ(*Η), а параметр χ, стоящий в условии ПВ
р(У|х), меняется в пределах заданной области определения. Поэтому в
данном случае имеем 1(х) = р(У(хи)|х).
Функция правдоподобия широко используется для нахождения
небайесовского решения в задачах оценки постоянных параметров сигнала.
Зададим в (3.10) некоторое значение χ = хи и положим в качестве
с(хи,и(У(хи))) простую функцию потерь (3.4). Подставляя (3.4) в
(3.10) и используя свойство дельта-функции, получаем
78
r(U) = \(b-8(x-u(Y)))p{Y\x)iY = B-p(Y\u) = B-L(u), (3.15)
где В — константа, не зависящая от и.
Минимум функции риска (3.15) достигается при значении и = хм,
при котором функция правдоподобия 1(и) = /?(У(хи)|и) максимальна
L(£M) = max Z,(u) = max I(x). (3.16)
D X
Для нахождения оценки максимального правдоподобия необходимо
решить уравнение правдоподобия
аОД
Эх
. =0. (3.17)
Оценки максимального правдоподобия имеют ряд важных свойств,
которые более подробно будут рассмотрены в гл. 7.
3.4. Оптимальные решения при наличии случайных
неинформативных параметров сигнала
Как отмечалось в п. 2.1, в задачах приема и обработки
радиосигналов последние могут иметь как информативные, так и
неинформативные параметры. Выше была рассмотрена ситуация, когда сигнал
5(ί,λ(/)) имел только информативные параметры λ. Идеология
получения оптимальных решений при наличии неинформативных
параметров сигнала такая же, что и при их отсутствии.
Пусть сигнал 5(/,λ(/),μ) имеет векторный неинформативный
параметр μ, который полагаем векторной случайной величиной, т.е.
постоянной за время наблюдения. Сообщение, как и ранее, отображается в
пространстве состояний вектором χ. Полагаем, что заданы априорные
ПВ Рар(*) и РарЬ1)- Проведя наблюдения Yq, как и выше, можно
искать то или иное решение d = u ( Yq ). Однако в каждой реализации Yq
случайная величина μ имеет вполне конкретное значение, которое,
естественно, влияет на качество решения. Поэтому можно записать
ά(μ) = ιι(ίο,μ). Следовательно, функция потерь οτίχ,ιιίίο,μΐ) зависит
от случайных величин χ,μ и случайного процесса Yq , поэтому при оп-
79
ределении среднего риска необходимо проводить усреднение по
совместной ПВ ρ (χ,μ, У), т.е.
г(и) = Д[с(ж,и(ад)р(ж,|1,У)АВ/|и/Г =
= 0с(х,и(У,ц))/7(^|г)^ц]р(У)./У = |^5(и)р(>г)^, (3.18)
где
гр5(и) = 1\с(х,*(¥#))р(^\Г)^ (3.19)
— апостериорный риск.
Для квадратичной функции потерь (3.1) минимизация (3.19) дает
оптимальное решение
χ = \Ιχρ(χ,μ\Υ)άχάμ = \\χρ(τ\Υ>μ)ρ{μ\Υ)ώίάμ = μ(μ)ρ{μ\Υ)άμ>
(3.20)
где
χ(μ) = Ιχρ(χ\Υ,μ)<ίχ (3.21)
— условная оценка вектора χ при фиксированном значении
неинформативных параметров μ.
Используя формулу Байеса ρ(χ9μ,Υ) = ρ(Υ\χ,μ)ρ(τ,μ)9 средний
риск можно записать в виде
г(о) = /Яс(ж,и(ЗД)р(ж,|1,Г)Лй/|1^ =
где
Ρ(*,η) = ίί€(χ,η(Υ,μ))ρ(Υ\χ,μ)ρ(μ)άμάΥ (3.22)
— функция риска, которая отличается от (3.10) дополнительным
усреднением по неинформативным параметрам μ .
В частном случае, когда в качестве функции с(х,и(У^))
выбирается простая функция потерь (3.4), оценкой, минимизирующей
функцию риска (3.22), является оценка максимального правдоподобия,
определяемая из условия
хм =argmax Z(x), (3.23)
χ
где ί(χ) = \ρ(Υ\χ,μ)ρ{μ)άμ. (3.24)
80
Формула (3.23) получается аналогично тому, как это сделано в (3.15).
Для нахождения оценок максимального правдоподобия в этом
случае также можно использовать уравнение правдоподобия (3.17) с
заменой Ζ,(χ) на 1(х),т.е.
аад
Эх
. =0. (3.25)
χ = χ*
Отметим, что оценка (3.23) достаточно условно может быть названа
«оценкой максимального правдоподобия», так как она использует
априорную информацию о распределении ρ (μ) неинформативных
параметров сигнала. «Классические оценки максимального правдоподобия»
базируются на отказе от использования какой-либо априорной
информации. И, строго говоря, их надо было бы получать в результате
рассмотрения функции правдоподобия /?(7|χ,μ), вводя расширенный век-
|х|
тор ζ = I I и рассматривая уравнение правдоподобия (3.17) относитель-
N
но расширенного вектора ζ, что существенно усложняет задачу. В то
же время, физически понятно, что наличие и использование любой
априорной информации позволяет улучшить качество формируемых
оценок. Поэтому, если есть априорная информация о параметрах сигнала,
то ее нужно использовать для формирования любых оценок, в том числе
«оценок максимального правдоподобия» относительно информативного
вектора χ. В радиотехнических задачах априорные сведения о
распределениях таких возможных неинформативных параметрах сигнала как
начальная фаза и амплитуда известны. Поэтому относительно данных
неинформативных параметров рассмотрение оценок в соответствии с
(3.23) вполне оправдано.
3.5. Оптимальные решения при наличии случайных
параметров сообщения
«Неинформативные» случайные параметры могут быть присущи не
только сигналу 5(ί,λ(/)), но и сообщению λ(/). Пусть сообщение λ
отображается в пространстве состояний вектором χ, который является
векторным марковским процессом. Положим, что процесс χ (г)
описывается, например, уравнением (1.82), в котором матрицы F(f) и/или
81
G(i) зависят от случайного векторного параметра а, постоянного за
время наблюдения, т.е. F(a,i), G(a,f). В этом случае процесс χ(α,ί)
и сообщение λ (α, ί) также зависят от случайного параметра а.
Параметрами α могут быть, например, дисперсия сообщения, его ширина
спектра и др. Если потребителя интересует само сообщение λ, а не его
отдельные характеристики, то для него параметры α являются
неинформативными.
С точки зрения теории статистических решений данная задача
полностью эквивалентна той, что описана выше, т.е. задаче принятия
решения при наличии случайных неинформативных параметров сигнала.
Поэтому, заменив в (3.18), (3.19) μ на а, получаем необходимые
соотношения для среднего риска
r{u) = lllc(xyu(Y9a))p{wJ)dxdadY = jrps(u)p{Y)dY
и апостериорного риска
V (■) = Цс(х,и(Г,<х))р(х,а\Г)а1аа. (3.26)
Оптимальная оценка вектора χ при квадратичной функции потерь
дается выражениями, аналогичными (3.20), (3.21)
i = JJxp(x,a|y)i/xrfa = Ji(a)/7(a|y)i/a, (3.27)
i(a) = J^(x|y,a)</x. (3.28)
Соотношения (3.26)—(3.28) используются при синтеза адаптивных
систем фильтрации, работающих в условиях, когда не полностью
известны априорные статистические характеристики сообщения.
Контрольные вопросы к главе 3
1. Какое решение называется байесовским?
2. Чем байесовское решение отличается от минимаксного?
3. Чем байесовское решение отличается от решения максимального
правдоподобия?
4. Чем отличается байесовское решение в задаче приема сигнала со
случайными неинформативными параметрами от аналогичного решения
при приеме сигнала без неинформативных параметров?
5. Что такое апостериорная плотность вероятности и каково ее значение
в теории статистических решений?
82
Глава 4
ОБНАРУЖЕНИЕ СИГНАЛОВ
4.1. Постановка задачи обнаружения сигналов
Под обнаружением сигнала понимают анализ принятой реализации
y(t) на интервале времени [0,Г] с целью принятия решения о наличии
или отсутствии в ней полезной составляющей 5(/,λ), т.е.
составляющей, несущей сообщение λ, которая, в соответствии с определением
п. 2.1, названа сигналом. Данное определение предполагает, что кроме
сигнала в принятой реализации присутствуют другие составляющие,
которые относят к помехам л(/). Взаимодействие сигнала с помехой
(или помехами) может иметь достаточно сложный характер, что
математически может быть представлено функциональной зависимостью
y(t) = f(S(t,X),n(t)),
где f(x,y) —заданная функция двух переменных.
В данной книге будет рассматриваться простейший случай
аддитивного взаимодействия сигнала и помехи, т.е.
y(t) = S(t,X)+n(t). (4.1)
Математически задача обнаружения формулируется следующим
образом. Пусть неизвестен факт наличия или отсутствия сигнала
5(/,λ) в принятой на отрезке [0,Г] реализации y(t). Тогда можно
записать
( \ ί^(''^)+Λ(0» если сигнал присутствует,
Iя (')» если сигнал отсутствует.
По наблюдаемой реализации случайного процесса y(t) и
имеющейся априорной информации требуется решить: присутствует или
отсутствует сигнал в наблюдениях.
Задачу обнаружения можно сформулировать иначе, а именно — как
задачу оценивания случайного параметра. Для этого принятую
реализацию (4.1) запишем в виде
;μ(/) = ί>5(α)+Λ(0, '«Φ,Γ] . (4.2)
83
Параметр ϋ полагается случайной величиной, которая может
принимать одно из двух значений: д = 1 (что соответствует наличию
сигнала в наблюдаемой реализации) с априорной вероятностью Р\ ; д = 0
(что означает отсутствие сигнала) с априорной вероятностью (\-1\).
При этом задача обнаружения формулируется как задача оценки
значения случайной величины θ по наблюдениям (4.2).
В дальнейшем, для удобства обозначения, реализацию y(t),
ί€[θ,Γ] будем обозначать У0Г.
4.2. Обнаружение детерминированного сигнала
Начнем рассмотрение задач обнаружения с наиболее простого
случая приема детерминированного сигнала S{t), т.е. сигнала с полностью
известными параметрами, на фоне аддитивного БГШ n(t) с
двусторонней спектральной плотностью N0/2.
4.2.1. Байесовское решение. Простая функция потерь
Нахождение байесовского решения предполагает задание
статистических характеристик всех случайных величин и процессов. В
рассматриваемой задаче имеется один случайный параметр О, который может
принимать два значения: 0 и 1. Поэтому положим, что заданы априорные
вероятности Рар(\) = Рар{д= 1} наличия и Рар(0) = Рар{О = 0}
отсутствия сигнала в принимаемом колебании, причем Рар (1)+Рар (0) = 1.
Простая функция потерь для параметра, принимающего конечное
число значений, описывается соотношением (3.5), из которого следует,
что при правильном решении потери нулевые, а при неправильном —
равны единице. Оптимальным правилом решения при простой функции
потерь является такое решение (оценка Ь), для которой апостериорная
вероятность максимальна.
Так как параметр ϋ может принимать только два значения (0 и 1),
то имеем соответственно две апостериорных вероятности:/Ίύ = 1 У0 )
— вероятность того, что сигнал присутствует в принятой реализации;
84
Wd = 0 l© j — вероятность отсутствия сигнала в наблюдаемой
реализации. При этом оптимальное решающее правило можно записать в виде
Ь-1, при We-ikr) > /»(д=о|у0г).
"о
ю-
/ I т\ 1 т\ (43)
д = 0, приР(д = 1УЛ<Р(д = 0,У0г).
В соответствии с формулой Байеса (1.58), для апостериорной
вероятности ΡίθΙίο I можно записать соотношение
ρ(ϋ\γϊ)=ν>ν(ϋ)ρ($\δ).
где Рар (ϋ) — априорная вероятность того или иного значения
параметра д.
Тогда сравнение апостериорных вероятностей в (4.3) может быть
записано в виде
где ρ[Υο) — отношение двух условных ПВ; /?(У0г|д = П — ПВ
наблюдаемой реализации при условии наличия в ней сигнала;
ρ\Υ0 |й = 0] — ПВ наблюдаемой реализации при отсутствии сигнала.
Данное отношение (данную функцию) называют отношением
правдоподобия. В (4.4) h — константа, получившая название порога
сравнения или просто порога.
Таким образом, оптимальное байесовское правило обнаружения при
простой функции потерь сводится к вычислению отношения
правдоподобия р(У0 ) и сравнению его с порогом.
Оптимальное решающее правило (4.4) совпадает с известным в
литературе правилом, соответствующим критерию идеального
наблюдателя, и часто применяется в системах радиосвязи, когда известны
априорные вероятности Рар (1) и Р^ (0).
85
4.2.2. Байесовское решение. Обобщенная функция потерь
Обобщенная функция потерь, в отличие от простой функции, задает
потери в более общем виде. В рассматриваемой задаче обнаружения
возможны четыре ситуации:
1) сигнал в наблюдениях присутствует, и принимается решение, что
сигнал есть;
2) сигнал в наблюдениях присутствует, но принимается решение,
что сигнала нет;
3) сигнал в наблюдениях отсутствует, а принимается решение, что
сигнал есть;
4) сигнал в наблюдениях отсутствует, и принимается решение, что
сигнала нет.
Пусть d\ — решение о наличии сигнала (т.е. Ь = 1) и d0 —
решение об отсутствии сигнала (т.е. Ь = 0). При принятии правильного
решения (ситуации 1 и 4) естественно, как и раньше, полагать, что потерь
нет, т.е. они равны нулю. При неправильном принятии решения
(ситуации 2 и 3) потери отличны от нуля. Пусть соответствующие потери
равны c(p = l9d0) = c\Q —потери для ситуации 2 , а с(д = 0,^) = со1 —
потери для ситуации 3.
Сформулируем исходную задачу обнаружения в эквивалентной
форме: по наблюдениям текущей реализации (4.2), принадлежащей
множеству возможных реализаций Υ (т.е. γζ e Y), необходимо
вынести одно из двух взаимоисключающих решений: d0 или d\.
Решающее правило ы( У0 ) должно каждой реализации Yq eY
поставить в соответствие одно из решений </,·, / = 0,1, т.е. фактически
разбить область возможных реализаций Υ на две непересекающиеся
подобласти Υ| и Υ0, которым соответствуют решения dx и </0,
причем Yj U Υο = Υ» где U — знак объединения множеств. Формально это
можно записать так:
-К)-
*-1. если У0Г€*1.
д = 0, если Yq е\0.
Для нахождения байесовского решающего правила конкретизируем
выражение (3.7) для среднего риска
86
г(и) = /5р(1) J c{0p(Y<[\u = l)dY + Pap(0) I с01/>(г0> = о)</У,(4.5)
Yo Υ.
где ρίΐο |й) — условная ПВ наблюдаемой реализации при заданном
значении д.
Учитывая, что области Υ| и Y0 взаимосвязаны, т.е. Y| = Y\Y0, a
вероятностное пространств нормировано J р№[\ft)dY = 1, то справед-
Υ
ливо равенство
^(0)Jc01p(ibr|1» = 1) = -Pap(0)coi-PiIp(0)Jc01p(yor|d = l)^.
υ. ν0
и выражение (4.5) можно представить в виде
Yo Yo
+Рар(о)ст = J {Pap№op(Yo\i>=i)-Pap(o)c(np(Yo\u=o)}dY+
Yo
+^(0)q)i. (4.6)
Байесовское решение должно минимизировать средний риск г (и).
Из (4.6) следует, что, если выражение, стоящее в фигурных скобках
отрицательно, то средний риск будет меньше, чем в том случае, когда это
выражение положительно или равно нулю. Поэтому, определим область
* τ
Υ0 таким образом, что для входящих в нее реализаций У0 выполняется
условие
Pap(0)c0lp(Yl\D = 0)>Pap(l)cl0p(Y*\b = l) . (4.7)
Учитывая, что выражения, входящие в (4.7) положительны,
аналогичное неравенство можно записать и для интегралов
РаР(0) Ι οοιρ(γ<[\ϋ = θ)ίΥ>Ραρ(\) I cXQp(Yf\i>=l)dY.
< Yo*
Покажем, что для решающего правила ио(*о )» определяемого
соотношением (4.7), средний риск (4.6) имеет минимальное значение. Для
этого возьмем любое другое решающее правило щ \Υ0 ). Очевидно, что
87
для этого правила хотя бы для одной реализации Yq условие (4.7) не
выполняется, т.е. вместо знака ">" имеет место знак "<" или "=".
Поскольку выражения, входящие в (4.7), положительны, то это приведет к
тому, что значение Рар(0) j cq\P[Yq |0 = ОИУ станет меньше, а
Pap(l) J C|op(lo |й = 1)*/У —больше. Подставляя эти значения в (4.6),
γ*
получаем, что величина среднего риска увеличится. Отсюда следует
вывод, что решающее правило (4.7) является оптимальным. При
выполнении условия (4.7) принимается решение о том, что наблюдаемая
реализация относится к множеству Υ0, которому соответствует принятие
решения об отсутствии сигнала. Решение о наличии сигнала в
наблюдаемой реализации принимается при выполнении обратного
соотношения, которое удобно представить в виде
v ' />(г0г|а=о) МОсю
Таким образом, байесовское решающее правило обнаружения для
обобщенной функции потерь описывается соотношением
"о
(<0-
«-1. если р(г0 Ь^о>
(4.9)
д = 0, если р(У0г)<Ао
и сводится, как и выше, к вычислению отношения правдоподобия
р(Уо ) и сравнению его с порогом Aq, величина которого изменилась и
определяется не только априорными вероятностями наличия и
отсутствия сигнала, но и значениями потерь при неправильных решениях.
Отметим, что оптимальный алгоритм обнаружения для простой
функции потерь получается из оптимального алгоритма для
обобщенной функции потерь, если в нем положить потери при неправильных
решениях равными, т.е. c0i = с10.
4.2.3. Небайесовское решение. Критерий Неймана—Пирсона
Чтобы воспользоваться приведенными выше байесовскими
решениями (4.4), (4.9), необходимо знать априорные вероятности Ραρ(ϋ = 1)
88
и Ραρ(ϋ = 0) наличия и отсутствия сигнала. Однако на практике они
часто бывают неизвестны, например, в задачах радиолокации. В этих
условиях следует использовать небайесовские оптимальные решающие
правила, одно из которых получается на основе критерия Неймана—
Пирсона.
Решающее правило Неймана—Пирсона, как и байесовское,
разбивает область всех возможных реализаций Υ на две непересекающихся
подобласти Υ! и Υ0, для которых принимается соответственно
решение о наличии и отсутствии сигнала. Однако выбор этих областей
производится из других соображений.
В задаче обнаружения возможны два вида ошибок,
соответствующие ситуациям 2 и 3 п. 4.2.2:
ложная тревога, которую часто называют ошибкой 1 -го рода,
когда принимается решение о наличии сигнала в принимаемой
реализации, в то время как его на самом деле нет;
пропуск сигнала, которую называют ошибкой 2-го рода,
когда принимается решение об отсутствии сигнала в принимаемой
реализации, в то время как он есть.
Введем вероятности ошибочных решений:
вероятность ложной тревоги PF = Ρ{άχ \ϋ = θ) = PiY0 е Υ] \ϋ = Ο I;
вероятность пропуска сигнала β = P(d0\& = \) = />(ίο €^ι|τ = 0·
Величина PD = (1-β) есть вероятность правильного обнаружения.
Согласно критерию Неймана—Пирсона оптимальным решением
считается такое, которое обеспечивает максимум вероятности Рр
правильного обнаружения (или, что тоже самое, минимум вероятности
пропуска сигнала β) при заданной вероятности ложной тревоги Pf .
Опуская строгое доказательство, приведем конечный результат:
решающее правило Неймана—Пирсона и* (Yq) также описывается
выражением (4.4) и заключается в вычислении отношения правдоподобия
ρ\Υο) и сравнении его с порогом. Однако величина порога h отлична
от байесовского значения h (или Hq ) и выбирается из условия
89
т.е. вероятность того, что при отсутствии сигнала в принимаемой реали-
τ
зации Yq величина отношения правдоподобия превысит порог,
должна быть равна вероятности ложной тревоги PF .
В отличие от байесовских критериев, в которых не выделялись
ошибки 1-го и 2-го рода, а минимизировалась вероятность суммарной
ошибки, в критерии Неймана—Пирсона вероятностям ложной тревоги
(ошибка 1-го рода) и пропуска сигнала (ошибка 2-го рода) придается
различное значение. А именно, ошибка 1-го рода жестко фиксируется, а
ошибка 2-го рода — минимизируется. Конечно, в результате
минимизации ошибка 2-го рода становится минимальной. Однако абсолютное
значение этой минимальной ошибки не контролируется и жестко не
ограничивается. Такая ситуация характерна, например, для
радиолокации, где "ложная тревога" и "пропуск сигнала'* ведут к разным
последствиям, так как ложная тревога приводит к необходимости выполнения
целого ряда мероприятий по защите, в то время как пропуск сигнала не
приводит к какому-либо непосредственному действию, хотя и может
повлечь серьезные последствия.
4.2.4. Формула для отношения правдоподобия
Из приведенных выше результатов синтеза оптимальных
обнаружителей, как байесовских, так и небайесовских, следует, что все они
вычисляют отношение правдоподобия и сравнивают его с порогом.
Отличие при использовании различных критериев заключается лишь в
величине порога.
Отношение правдоподобия р(*о ) определяется, в соответствии с
(4.4), через условные ПВ наблюдаемой реализации при наличии и
отсутствии сигнала.
Для большей наглядности изложения перейдем от непрерывных
наблюдений (4.1) к дискретным. Для этого разобьем интервал времени
[0,Г] равноотстоящими точками ή, ί2> ···> *т> где гк~1к-\ =^/»
к = 19т. Сформируем дискретные отсчеты ук наблюдаемого процесс
путем его усреднения на временном интервале Td
Ук=^г\ y{t)dt . (4.10)
90
1 'ί 1 'ί
Обозначим Sk(X) = — J S(t,X)dt, nk =— J n{t)dt, где λ —
постоянный (скалярный или векторный) параметр сигнала.
Тогда можно записать
У* =5* (*·)+"* ·
Здесь пк — ДБГШ с нулевым МО и дисперсией
(4.11)
Л/[«*] = ^=А/
1 '* 1 '*
±-'f ) M[n(t)n(v)]dtdv = ^-.
(4.12)
Рассмотрим совместную условную ПВ совокупности отсчетов ук ,
(2πσ^)
(4.13)
Запишем отношение правдоподобия для совокупности наблюдений
>(iim)=
p(y,m|0,/t = l,m)
-ρ(-^ίθ*-%(Χ)ί·1/-ρ{-^|»ί1-
=βχρ|^-Σ5*(λ)ί^-|^(λ)>
(4.14)
91
При переходе к непрерывному времени нужно в (4.14) перейти к
пределу при Tj —> 0 и одновременном увеличении т -> °° . при этом
совокупность дискретных отсчетов {>ъ}*=Г/я ~^" пеРех°Дит в
отрезок непрерывной реализации y(t)> te [0,Г], а (4.14) принимает вид
p(lbr) = expj^-JS(/,X)iy(0~S(i,X)\//J. (4.15)
Обобщение (4.15) на случай векторных наблюдений
y(0 = S(a)+n(r)f (4.16)
где η(ί) — векторный БГШ с матрицей двусторонних спектральных
плотностей N„/2 , задаваемый выражением
p(Y0r) = expjjST(/,X)2N;,iy(/)-is(t,X)U. (4.17)
В различных задачах статистической теории РТС кроме отношения
правдоподобия часто рассматривается условная ПВ (4.13). При Td —> О
выражение для суммы, стоящее под знаком " ехр "переходит в
соответствующий интеграл, а сомножитель перед экспонентой, строго говоря,
стремится к бесконечности. Однако, поскольку данный сомножитель в
задачах синтеза оптимальных систем приема и обработки сигналов не
играет никакой роли (см., например, задачу обнаружения и формулу
(4.14)), то обычно полагают следующее представление для условной ПВ
наблюдаемой реализации в непрерывном времени
p(yor|S^X),/6[0,r]) = *exp|^JS^X)iy(0-|s^X)l*|,(4.18)
где к — произвольная фиксированная константа.
4.2.5. Структура оптимального обнаружителя
Структура оптимального обнаружителя вытекает из формул (4.4) и
(4.15). Учитывая, что отношение "неравенства" инвариантно
относительно монотонных преобразований, сравнение отношения
правдоподобия с порогом в (4.4) можно заменить сравнением с порогом логарифма
92
отношения правдоподобия, что, с учетом (4.15), приводит к
следующему алгоритму:
m(pO0)=^JS(OMO-O.5S(f))A>ln(Ao). <419>
^0 0
Обозначим через Ε энергию сигнала, которую определим
соотношением
т ,
E = jS2(t)dt. (4.20)
0
Тогда решающее правило (4.19) можно записать так:
AjJ,(,)S(,yr>A+ln(A()) = A. (4.21)
^0 о ^0
Выражение, стоящее в левой части (4.21) определяет оптимальный
алгоритм обработки наблюдаемой реализации y{t)> который получил
название оптимального приемника. Для выходного процесса иОп(0
оптимального приемника имеем
иоп(<)~\у№№, <е[0,Г]. (4.22)
^0 0
Практическая реализация оптимального приемника возможна в
двух формах. Первая — в форме коррелятора, структурная схема
которого приведена на рис. 4.1. Коррелятор представляет собой
перемножитель двух сигналов и интегратор.
Вторая форма вытекает из
того факта, что выражение 7±А
' "оп(0
ί *
л ί
(4.22) определяет линейное
преобразование реализации Τ jSitMN
y(t). Поэтому оптимальный '
приемник можно предста- Рис. 4.1. Структурная схема оптимального
вить в виде линейного приемника в форме коррелятора
фильтра, получившего
название согласованного. Известно [3], что процесс u(t) на выходе
линейной системы (фильтра) с импульсной характеристикой g(t)
описывается соотношением
93
u{t) = iy(t-x)g(xyix = iy{x)g(i-x)dx. (4.23)
о о
Сопоставляя (4.22) и (4.23), получаем, что импульсная
характеристика согласованного фильтра определяется выражением g(t-x) =
-2S(x)/N0.
Так как в обнаружителе решение принимается в момент времени Τ,
то импульсная характеристика согласованного фильтра обнаружителя
определяется как g(T-x) = 2S(x)/NQ . Более подробно согласованные
фильтры будут описаны в гл. 5.
Определив структуру оптимального приемника, структура
оптимального обнаружителя реализуется в виде оптимального приемника,
ключа, замыкающегося в момент времени t = Г, и устройства
сравнения с порогом (рис. 4.2).
*)„
-ψ
Оптимальный
приемник
s
Отсчет
при*=Г
Пороговое
устройство
' & = 1
. ►
! S-0
Рис. 4.2. Структурная схема оптимального обнаружителя
4.2.6. Характеристики обнаружения
Рассчитаем количественные характеристики оптимального
обнаружителя, под которыми понимают вероятность правильного
обнаружения PD и вероятность ложной тревоги PF .
Пусть сигнал присутствует в наблюдаемой реализации, т.е.
y(t) = S(t)+n(t). Тогда, в соответствии с (4.21) в момент времени
t = Τ на выходе оптимального приемника имеем СВ в виде
Si =lfbw^W^ = -f J(S(x)+*(x))*(x)</x,
"О О ^0 о
которая получается в результате линейного (интегрирование)
преобразования БГШ. Поэтому ξχ имеет гауссовскую ПВ />ι(ξι), МО тх и
дисперсия Г\ которой определяются выражениями
94
«,=Μ[ξ,] = Α/
L*oo
jy(x)S(x)d*
= M
-Ll(S(x)+n(x))S(x)dx
L*o0
2£
4
A=A/[(^-m,)2] = A/
\2
-t-ln(x)S(x)dx
2£
4
где Ε — энергия сигнала, определяемая выражением (4.20).
В отсутствие сигнала имеем y(t) = n(j) и на выходе оптимального
приемника в момент времени ί = Τ получаем СВ
7" 7"
ξ<> ~\yiy)S{x)dx~\n{x)S{x)dx,
которая также имеет гауссовскую ПВ р0 (ξο ) с параметрами
Плотности вероятности Α (ξι) и р0 (ξ0) изображены на рис. 4.3.
/*ο=Λ/[ξο] = 0, Д)=Л/
А1>А>
Λ«ι)
2£/ЛГ0
Рис. 43. Гауссовские ПВ при наличии и отсутствии сигнала
Рассмотрим обнаружитель, соответствующий критерию Неймана—
Пирсона. Согласно этому критерию задается вероятность ложной
тревоги Рр, т.е. вероятность превышения СВ ξ0 порогового уровня h
Pf = J Λ>(ξ)<*ξ = 1-Φ:
h
U2£/M
(4.24)
95
где Φ(λ·) = -=γ J e ' l2dt —интеграл вероятности.
ν 2π _00
Вероятность правильного обнаружения
рв-\рх{%№=\-ф
h
(4.25)
= 0,5 ft, =0,1 /у =0,01
Из формулы (4.24) следует, что вероятность ложной тревоги Р/г
однозначно определяется отношением порогового уровня h к величине
отношения q = E/NQ энергии сигнала к односторонней (физической)
спектральной плотности аддитивного шума, которое в дальнейшем
будем называть отношением сигнал/шум (с/ш). Поэтому при заданной
вероятности ложной тревоги PF и известном отношении сигнал/шум q
из (4.24) однозначно определяется требуемая величина порога А и, в
соответствии с (4.25), — вероятность правильного обнаружения.
Таким образом, можно рассчитать зависимости Pp(q) при
фиксированной вероятности ложной тревоги, которые называют кривыми
обнаружения (рис. 4.4).
Пользуясь кривыми
обнаружения, можно определить пороговое
отношение с/ш, т.е. величину Ап0р,
для которой при заданной
вероятности ложной тревоги PF
обеспечивается требуемая вероятность
правильного обнаружения PD.
На основании полученных
результатов можно сделать важный
вывод о том, что характеристики
обнаружения детерминированного
сигнала при оптимальном приеме
не зависят от формы сигнала, а
определяются величиной отношения с/ш.
На практике детерминированные сигналы, как правило, не
встречаются. Поэтому, приведенные результаты следует рассматривать как
верхний (теоретический) предел для характеристик обнаружения
(потенциальные характеристики).
Рис. 4.4. Кривые обнаружения
детерминированного сигнала
96
4.2.7. Обнаружение сигналов при коррелированной помехе
При выводе оптимального решающего правила (4.4)
использовались лишь общие положения теории статистических решений и не
использовались конкретные статистические свойства помехи. Поэтому
общее решающее правило, заключающееся в вычислении отношения
правдоподобия и сравнения его с порогом, справедливо и в том случае,
когда помеха коррелированна. Следовательно, структура оптимального
обнаружителя, приведенная на рис. 4.2, справедлива и в этом случае,
меняется лишь структура оптимального приемника, которая
определяется видом функции правдоподобия.
Функция правдоподобия при коррелированное помехе. Получим
выражение для отношения правдоподобия при наблюдении сигнала на
фоне помехи, имеющей функцию корреляции:
Аф('.)«('2)] = М<1.'2)· (4-26)
Для стационарной помехи Rn (t} ,/2) = R„ (t2 -1\) = Rn (τ), τ = /2 -1\.
Как и в п. 4.2.4, перейдем к дискретному времени и рассмотрим
дискретные наблюдения (4.10), в которых Μ Гл^л Л = /fy . Тогда гаус-
совскую совместную условную ПВ (4.13) можно записать в виде
р(у\>У2>-> Jb|s* (λ),* = !,«) =
(2n)m,2y[tetR
«ρΗς lU-^(X))(R)-.l(^-sy(X))
2*=ly=l
, (4.27)
где R = {Лф| — корреляционная матрица помехи.
При отсутствии сигнала совместная условная ПВ получается из
(4.27), если в нем положить Sk (λ) = 0. Учитывая это, выражение для
отношения правдоподобия в дискретном времени имеет вид
т т
ρ(ΐΓ) = θφ|ΣΣ5*(λ)(ΙΙ);Ι(^-0,^(λ))|. (4.28)
При 7j -» 0 и одновременном увеличении т -»°° совокупность
дискретных отсчетов {УкУ^Гт^^ пеРеходит в отрезок
непрерывной реализации y(t), /е[0,Г], а (4.28) принимает вид
4—2041 97
где функция Rn (ί^) — обратная корреляционной матрице помехи
(4.26), определяется из уравнения
О
Обобщение (4.29) на случай векторных наблюдений (4.16) дается
выражением
p(Y0r) = exp|nST(i1A)R;4'..'2)iy('2)-}s(i2,X)^2|,(4.31)
где R„ — корреляционная матрица вектора аддитивных помех.
Алгоритм работы обнаружителя при коррелированной помехе.
Вернемся к задаче обнаружения сигнала, наблюдаемого на фоне
коррелированной помехи. Воспользуемся формулой (4.29) для отношения
правдоподобия, и, переходя, как и раньше, от отношения
правдоподобия к логарифму, запишем решающее правило в виде
ТТ
H4h)G\h'b)y(h)*id'2*9 + H*o) = b' (4.32)
00
ТТ
где q^\\S{tx)Rn\tbt2)S{t2)dtxdt2
200
Рассмотрим случай стационарной помехи, т.е. ^(*2»'ι) =
= Rn (*2 -t\) = Rn (t\ -*2 )» и представим левую часть неравенства (4.32)
в виде
Ηθ|κ~4'-'ΐΜ'ΐ)*ΐ}*· (4-33)
Выражение, стоящее в фигурных скобках (4.33), является функцией
от t, т.е.
о
τ
Тогда формула (4.33) принимает стандартный вид jy(t)r\(t)dt, со-
о
ответствующий прохождению процесса y(t) через корреляционный
98
1 \
Χ -η J
! n
Τ nir)
"on(0
►
приемник с опорным сигналом η (г) или согласованный фильтр с
импульсной характеристикой g(r-x) = Ti(x). Структурная схема
оптимального приемника с
корреляционной обработкой приведена на Х^
рис. 4.5.
Для нахождения опорного
сигнала η(ί), поступающего на вто- Рис. 4.5. Структурная схема
оптимального приемника
рои вход коррелятора, умножим в форме коррелятора
(4.30) на S(t2) и проинтегрируем
от 0 до Г
JM'-Ί)\]ъЧ'-'2)Н'2)Лг Κ' = Η<2)δ('2-'ΐ)Λ2.
о Lo Jo
Из данного уравнения получаем интегральное уравнение Фред-
гол ьма 1-го рода для определения процесса η (г)
о
В частном случае некоррелированной помехи имеем Я (*-*]) =
= N0/26(f-r1) и уравнение (4.34) дает полученный ранее результат
η(0 = 25(0Μ).
В общем случае решение уравнения (4.34) является достаточно
сложной задачей. Поэтому на практике часто ищут приближенное
решение. Прежде всего полагают, что время корреляции помехи
существенно меньше времени Г наблюдения сигнала. При этом пределы
интегрирования в (4.34) можно заменить на бесконечные, т.е.
рассматривать уравнение вида
°JRn(t-ti)y](l)dt = S(tl). (4.35)
—во
Решение такого уравнения существенно проще и может быть
выполнено, например, известным способом, основанном на применении
преобразования Фурье.
Пусть £5(уш), £л(У(о), 5„(ω) — преобразования Фурье для
99
функций S(t)9 η(/), Rn(t) соответственно. Тогда, применяя к (4.35)
преобразование Фурье, получим
^(ωΚη(7ω)=5,(7ω)
или
*ηΟ*ω) = Μ;ω)/·Μω). (436)
Данное выражение определяет структуру физически
нереализуемого фильтра, так как нули и полюса функции К^ (уш) лежат как в
нижней, так и в верхней полуплоскости комплексного переменного ω. Тем
не менее, оно может быть полезным для физического понимания
процессов, происходящих в оптимальном фильтре. Пусть, например,
помеха представляет собой аддитивную смесь белого шума и узкополосной
помехи на частоте cOj,. В этом случае спектр SR (ω) такой
комбинированной помехи будет иметь вид SR (ω) = Ν0 /2 + Sn (щ - ω). Тогда из
(4.36) имеем
*η(7ω) =
*ο/2+5πΚ-ω)
Из данного выражения следует, что оптимальный согласованный
фильтр подавляет те составляющие спектра, где расположена
узкополосная помеха, т.е., по сути дела, получаем хорошо известный режек-
торный фильтр.
Вывод выражения для комплексного коэффициента передачи
оптимального физически реализуемого фильтра можно найти в [13].
Рассмотрим другой метод решения задачи обнаружения сигнала на
фоне коррелированной помехи, приводящий к иной структуре
оптимального приемника и получивший название "метод выбеливания".
Идея метода основана на предварительном преобразовании наблюдений
y(t) таким образом, чтобы после преобразования аддитивная помеха
стала некоррелированной (белым шумом). После этого можно
использовать оптимальный алгоритм обнаружения на фоне белого шума. Такая
процедура не нарушает свойства оптимальности алгоритма в случае,
если используемое линейное преобразование обратимо. Докажем этот
факт.
Пусть имеется оптимальная система (в нашем случае оптимальный
обнаружитель), которую будем называть системой 1 (рис. 4.6, а).
100
/-'Μ'))
*'\|
Oixufi
·)
Рис 4.6. Структурные схемы оптимальных систем:
а — оптимальная система; б — система
с предварительным обратимым преобразованием;
в — оптимальная система для обработки z(t)
На выходе системы получаем оптимальное решение в соответствии
с заданным критерием. В системе 2, приведенной на рис. 4.6, б, над
входным процессом сначала осуществляется обратимая операция
/{*>У (τ)) с Целью получения ζ(/), содержащего аддитивный белый
шум. Затем строится система, которая выполняет над z(t)
оптимальную операцию (в нашем случае оптимальное обнаружение) в
соответствии с тем же критерием, что и в системе 1. Докажем, что на выходе
системы 2 также имеем оптимальное решение. Очевидно, что система 2
не может давать решение, средний риск для которого меньше, чем у
системы 1, так как это противоречило бы утверждению о том, что система 1
оптимальна. Теперь покажем, что система 2 не может быть хуже, чем
система 1. Если бы это было так, то можно было бы построить систему,
показанную на рис. 4.6, в> которая осуществляет над z(t) операцию
f~x (τ,ζ(ί)) > обратную /(*, j>(t)), с целью получения процесса у (τ), а
затем пропускает у (τ) через систему 1. Такая совокупная система
будет работать так же хорошо, как система 1 (они идентичны по входу и
выходу). Так как решение, формируемое на выходе системы,
приведенной на рис. 4.6, в, получается путем операции над z(t), то оно не может
быть лучше, чем в системе 2. Иначе это будет противоречить
утверждению о том, что вторая операция в системе 2 является оптимальной.
Поэтому система 2 не может быть хуже, чем система 1.
В качестве предварительного преобразования наблюдаемого
процесса выберем линейное преобразование, т.е. линейный фильтр с изме-
101
няющимися во времени параметрами и импульсной характеристикой
й(/,т),такчто
z(f) = jA(M)y(x)rfx = J*(f,x)S(ffX)rfx+J*(ffx)n(x)rfx =
0 0 0
= 5(гД)+й(/),
где Λ/[*(/)«(ί+τ)] = #0/2δ(τ).
Из данного выражения следует, что процесс z(t) представляет
собой аддитивную смесь "нового" сигнала 5(ί,λ) и белого шума n{t).
Поэтому в последующем оптимальном приемнике обнаружителя в
качестве опорного сигнала следует использовать S(г,λ). Схема
оптимального приемника обнаружителя
для случая коррелированной
помехи принимает вид,
приведенный на рис. 4.7.
Структурные схемы рис. 4.5
и рис. 4.7 эквивалентны по входу
и выходу и являются двумя
вариантами построения
оптимального приемника для
коррелированного шума наблюдения.
У(Р
Мит)
—щ
X
А
h(t,T)
»
t
J
0
Τ sm
Рис. 4.7. Структурная схема
оптимального приемника при
коррелированном шуме наблюдения
4.3. Обнаружение сигнала со случайными
параметрами
В гл. 2 (формула (2.12)) описана одна из широко используемых
моделей сигналов - сигнал, представляющий собой детерминированную
функцию, в которой один или несколько параметров являются СВ.
Такие сигналы называют квазидетперминированными (см. гл. 2). Если из
указанных случайных параметров не извлекается информация, то они
еще называются неинформативными. Естественно, что наличие
случайных параметров у сигнала затрудняет их обработку, в том числе и
обнаружение, и требует получения новых оптимальных алгоритмов.
4.3.1. Общее решение задачи обнаружения сигнала
со случайными параметрами
Пусть наблюдается реализация
102
γ(ή = Μ(ί,μ)+η(ή9 0<ί<7\
где μ — случайные неинформативные параметры сигнала с априорной
ΠΒραρ(μ).
Рассмотрим для простоты байесовское решение для простой
функции потерь. В п. 4.2.1 показано, что оптимальное решающее правило
соответствует выбору оценки Ъ, для которой апостериорная
вероятность максимальна. Пользуясь свойством согласованности ПВ (1.18),
можно записать
Тогда отношение правдоподобия ρ [Yq j (4.4) может быть записано
в виде
(ут\_ ρ{γΖ\*=ι) Μ#Ι*-ι.μ)Λ»0Ο«»
Ρ[ο}=ρ(υΙ\»=ο)= „(к0>=о)
= /ρ(^Γ|μ)/7βρ(μ)ί/μ, (4.37)
где ρ(Υ0 |μ) — отношение правдоподобия при фиксированных
значениях параметров μ ; здесь учтено, что при отсутствии сигнала
наблюдения не зависят от параметров μ.
Далее, в соответствии с (4.4), отношение правдоподобия (4.37)
необходимо сравнить с порогом, величина которого такая же, что и в
задаче с полностью известным сигналом.
Структура оптимального обнаружителя в рассматриваемой задаче
получается такой же, что и на рис. 4.2. Изменяется только структура
оптимального приемника. Для получения структуры оптимального
приемника необходимо конкретизировать сигнальную функцию и
неинформативные параметры.
В радиотехнических задачах сигнальную функцию можно записать
в обобщенном виде
S(t,X^) = aA(t)cos(<u0t+<f>(t)+<f>0), (4.38)
где а — амплитуда сигнала; A{t) — функция амплитудной модуляции
сигнала; щ — несущая частота сигнала; φ(ί) — функция фазовой
модуляции; <Ро — начальная фаза.
103
В задаче обнаружения сигнала в качестве неинформативных
случайных параметров будем рассматривать амплитуду а и начальную
фазу <Ро.
4.3.2. Оптимальный приемник обнаружителя сигнала
со случайной начальной фазой
Пусть амплитуда сигнала известна, а начальная фаза неизвестна и
распределена по равномерному закону (1.4) на интервале [-π, π] ·
Вычислим усредненное отношение правдоподобия (4.37). С учетом (4.15)
запишем
=Ίκ i e^|-^J[^(OcosK'+¥(0+9o)f л|х
xexp\-^jy(t)aA(t)cos(<u0t+y(t)+y0)dt\d<p0 =
= exp
#00
°* V/,
2,0]Г06ЛГ(Г))=еХРШ/06"(Г)}(4-39)
где /0 (ρ) — функция Бесселя нулевого порядка от мнимого аргумента,
*2(/) = *с2 (*)+*? ('). (4-40)
t
0
t
^(0 = J>'W^(x)sin(cubx+9(x))i/x, (4.41)
о
τ
a = \A2(x)dx. (4.42)
о
Здесь при вычислениях была использована формула (2.20) для
табличного интеграла и принято допущение о том, что несущая частота щ
сигнала достаточно высокая, так что выполняется условие щТ »1.
104
Функция X(t) 9 определенная формулой (4.40), представляет собой
огибающую выходного колебания согласованного фильтра, a Xc(t) и
Xs (t), определяемые формулами (4.41), являются квадратурными со-
ставляющими этого колебания. Величину а, описываемую (4.42),
называют эквивалентной длительностью сигнала. При этом энергия
сигнала, определяемая в общем виде формулой (4.20), может быть
представлена как Ε = α2α/2.
Поскольку функция Бесселя, входящая в (4.39), является
монотонной функцией своего аргумента, то сравнение отношения
правдоподобия с порогом можно заменить сравнением аргумента с
соответствующим порогом, так что оптимальное решающее правило принимает вид
X(T)>hy (4.43)
2а
*ирЮ)
Из (4.43) следует, что оптимальный приемник обнаружителя
сигнала с неизвестной начальной фазой, получивший название
"некогерентного" (так как в нем не используется информация об истинном значении
фазы сигнала), должен выделять огибающую на выходе согласованного
фильтра. Структурная схема оптимального приемника, которую часто
называют фильтровой, приведена на рис. 4.8.
Я<)
фильтр
Детектор
.«
Рис 4.8. Фильтровая схема оптимального приемника
Другая возможная реализация оптимального приемника основана на
прямой реализации отношений (4.40), (4.41). Соответствующая схема,
называемая схемой квадратурного приемника, приведена на рис. 4.9.
! Ж0°ош(су+#Х/))
*<)
ι—*
X
X
i—»
ί
ft
ι
ί
.Δ
Ι Σ г
Ί Ι Χ'
Τ
1*ы\
τ1***)
Рас 4.9. Схема квадратурного приемника
105
Два канала квадратурного приемника позволяют получить
величины Хс и Xs, определенные выражением (4.41). Последующие
нелинейные преобразования выходных колебаний этих каналов формируют
огибающую X.
Выше был рассмотрен синтез байесовского оптимального
обнаружителя при простой функции потерь. Аналогичные по структуре
решения получаются при использовании обобщенной функции потерь и при
использовании критерия Неймана—Пирсона.
Вычислим количественные характеристики обнаружения. Из
формул (4.41) следует, что случайные величины ХС(Т) и XS(T)
распределены по нормальному закону с условными МО
mc =A/[Arc|90] = 0,5aacos(90),mJ =A/[ArJ|<p0] = 0,5aasin(<p0a)
и одинаковыми дисперсиями
Ds=Dc=D = N0a/4. (4.44)
Величины Xs и Хс можно считать практически независимыми, так
как взаимокорреляционная функция между ними приближенно равна
нулю
7*
M[XsXc] = ^JA2(t)sin(2(M + <?(t)))dt = 0.
2 О
Поэтому при наличии сигнала ПВ Р\(Х) случайной величины
X = у]Хс + X2 определяется законом Раиса (1.11)
Л(*)"^вр
V2W""~4 \[Ц£[ Х*0. (4.45)
Х2+(0.5аау
N0a/2
' *7
При отсутствии сигнала случайные величины Xs и Хс также
независимы, распределены по нормальному закону с нулевыми МО и
одинаковыми дисперсиями (4.44). Поэтому ПВ р0 (X) случайной величины
X = Jxt+XJ будет рэлеевской (1.9):
ЛХ ( 2Х2 ^
Для получения характеристик обнаружения воспользуемся
критерием Неймана—Пирсона. Тогда по заданной вероятности ложной тревоги
106
к hNOa
•HiU=expf_^
*0« 2
где
(4.46)
(4.47)
4Б ylN0a/A'
определяется нормированный пороговый уровень Aq , для которого
затем вычисляется вероятность правильного обнаружения
h hN0a
[ ^X2+(0,5aaf
ехр| -2 ^——'— |/0
N0a
2aX
W =
[No)
= J иехр
( u2+2E/N0)r (
my
(4.48)
Результаты расчетов по формулам (4.46)—(4.48) представлены на
рис. 4.10 сплошными
линиями, пунктирными
линиями приведены
аналогичные зависимости для
полностью известного сигнала.
Характеристики
обнаружения сигнала со
случайной фазой лежат правее
соответствующих
характеристик для
детерминированного сигнала.
Следовательно, одна и та же
вероятность правильного
обнаружения для сигнала со
случайной фазой достигается
при большем значении отношения с/ш, чем для детерминированного
сигнала. Однако, это различие не очень существенно (~ 1 дБ по мощности).
43.3. Оптимальный приемник обнаружителя сигнала
со случайными амплитудой и начальной фазой
Пусть теперь сигнал имеет случайную начальную фазу,
распределенную по равномерному закону, и случайную амплитуду, распреде-
Рис. 4.10. Характеристики обнаружения
для сигнала со случайной фазой
107
ленную по рэлеевскому закону (1.9). Тогда, в соответствии с общим
решением (4.37), отношение правдоподобия необходимо усреднить по
начальной фазе и амплитуде. Усредненное по начальной фазе
отношение правдоподобия определяется выражением (4.39). Усредним его по
амплитуде
JVn+ασ?
ехр
2σ?
щ{щ+ох£)
Х2(Т)
(4.49)
где X(t) — по-прежнему описывается выражениями (4.40)—(4.41) и
представляет собой огибающую на выходе согласованного фильтра.
Вводя среднюю энергию сигнала
£ = Λ/[£] = 0,5αΛ/[α2] = ασ*, (4.50)
выражение (4.49) можно переписать в виде
W-ш*
ехр
2Ε/Ν0
N0a(l+E/N0)
Χ2 (Τ)
(4.51)
Так же как и раньше, учитывая монотонный характер квадратичной
функции и экспоненты, можно перейти от отношения правдоподобия к
аргументу Х(Т) и записать решающее правило в том же виде, что и
(4.43):
\Х{Ц>к\ (4.52)
где
h-\ \ё,щ 'Чо+"*))·
(4.53)
Так как алгоритм обработки (4.52) не изменился, то и структура
оптимального приемника обнаружителя сигнала со случайными начальной
фазой и амплитудой также не изменилась и может быть представлена в
фильтровой форме (см. рис. 4.8) или в форме квадратурного приемника
(см. рис. 4.9).
108
Идентичность структур оптимальных приемников, однако, не
означает, что соответствующие обнаружители имеют одинаковые
характеристики обнаружения. Дело в том, что изменилась величина порога Л*
(4.53), а, следовательно, и вероятности превышения (или не
превышения) порога. Поэтому рассчитаем характеристики обнаружения,
например для критерия Неймана—Пирсона. При отсутствии сигнала ситуация
не изменилась, следовательно можно воспользоваться формулой (4.46).
При наличии сигнала ПВ СВ Х(Т) может быть получена
усреднением выражения для ПВ той же величины для задачи обнаружения
сигнала со случайной начальной фазой (4.45)
Л(*)=/т7-ехР
*2+(0,5αα)2
Ща/2
2аХ
а
hjexp
On
2ο2,
\da =
ΑΧ
exp
α(ασ^+ΛΓ0)
ΑΧ
oN0(E/N0+l)
2Χ2
a(ao^+iV0)
exp
2Χι
aN0(E/N0+l)
Вероятность правильного обнаружения определяется как
/
h
Ль2
φ+ασ2,/^)
= ехр
Л2
2(l+E/N0)\
(4.54)
где Ло определяется выражением (4.47), а Ё — формулой (4.50).
Из (4.54) и (4.46) можно получить следующее соотношение,
связывающее вероятности ложной тревоги и правильного обнаружения
Рв=Р№»>)=4^\я=Ё1щ
(4.55)
Характеристики обнаружения, рассчитанные по формуле (4.55),
приведены на рис. 4.11 сплошными линиями, а аналогичные характери-
109
стики для задачи обнаружения
детерминированного сигнала
— пунктирными линиями.
Из приведенных
зависимостей следует, что при больших
вероятностях правильного
обнаружения наличие случайной
амплитуды приводит к
заметному ухудшению
характеристик обнаружения.
Рис. 4.11. Характеристики обнаружения для сигнала
со случайными амплитудой и фазой
43.4. Обнаружение временного сигнала со случайными
начальной фазой, амплитудой, временем запаздывания
и смещением частоты
Для большинства РТС характерна ситуация, когда кроме
неизвестных (и случайных) начальной фазы и амплитуды неопределены также и
время запаздывания τ и смещение частоты 0)д, обусловленное,
например, эффектом Доплера. Общее решение задачи обнаружения сигнала в
этом случае достаточно сложно, поэтому рассмотрим приближенный
подход, который часто используется в теории оптимального оценивания.
Для решения поставленной задачи необходимо уточнить модель
сигнала (4.38). Положим, что на передающей стороне излучается сигнал
вида
S(t,X^) = a0A(t)cos((u0t + q>(t) + q>0),
где а0 —амплитуда излученного сигнала; A(t) —функция
амплитудной модуляции; щ — несущая частота; φ(ί) — функция фазовой
модуляции; фо — начальная фаза.
На входе приемника (после прохождения среды распространения)
сигнал описывается выражением (2.7), которое для небольших
интервалов времени, характерных для задачи обнаружения сигнала, может быть
представлено в виде
5(ίΧμ) = αΑ(ί-τ(ή)οο*(ω0(ί-τ(ή)+φ(ί-τ(ή)+ν0)9 (4.56)
НО
где а — случайная амплитуда; ψ0 — случайная начальная фаза; τ (г)
— задержка сигнала. При взаимном движении передатчика и приемника
задержка сигнала является функцией времени, которую часто
аппроксимируют параболой, т.е.
τ(0 = τ0+ν + ν2/2. (4.57)
Как было показано ранее, в обнаружителе осуществляется
корреляционная обработка сигнала на интервале времени Τ, типичное значение
которого Г = 2 ... 10 мс. Положим, что скорость сближения приемника
и передатчика V^ = 200 м/с, а ускорение сближения а^ = 50 м/с2.
Данные значения параметров движения характерны, например, для
самолетов. Тогда в (4.57) второе слагаемое равно 1/с0 [с], где с0 - скорость
света, а третье слагаемое — 6,25 10 /cq [с], т.е. на три порядка
меньше. Поэтому для задач обнаружения сигналов вместо (4.57) с
достаточной степенью точности можно полагать
τ(0 = τ0+ν· (4.58)
Модель (4.58) имеет два параметра: τ0 — начальная задержка
сигнала; То — скорость изменения задержки. Данные параметры в общем
случае являются случайными величинами. Подставляя (4.58) в (4.56),
получаем
5(α,μ) =
= aA(t-x0+x0t)cos(<u0(t-xQ-xQt)+v(t-z0+xQt)+yvQ). (4·59)
Выражение (4.59) можно еще более упростить, если принять во
внимание следующее:
задержка, обусловленная вторым слагаемым в (4.58), составляет - 3 не,
что несущественно для выделения информации из законов амплитудной
и фазовой модуляции, так как это сопоставимо с погрешностью
соответствующих средств временной синхронизации; поэтому ее можно не
учитывать;
составляющая ω^τ0 может быть отнесена к случайной фазе сигнала
ψο;
введем щх0 = шд = 2nfA, где /ц — доплеровское смещение
частоты сигнала.
С учетом сделанных допущений получаем окончательную модель
сигнала в виде
111
5'(/,λ,μ) = Λ4(/-τ0)οο8(((ύο+ωΛ)ί+φ(ί-τ0)+ψ0),
где имеются четыре случайных параметра: амплитуда а; начальная
фаза ψ0; задержка τ0, которую для удобства будем обозначать просто τ;
доплеровское смещение частоты шд.
Для строгой постановки задачи необходимо задать вероятностные
характеристики данных случайных величин. Для амплитуды и фазы
сигнала они были определены выше, для двух других параметров
зададим их в общем виде: /?(τ), те [х,^^,^] и />(од),
®д€[шдт1п,Шдтах].
В соответствии с общим принципом синтеза оптимальных
обнаружителей при наличии случайных параметров сигнала необходимо
усреднить условное отношение правдоподобия по (4.37) этим параметрам.
Усреднение по амплитуде и фазе было выполнено ранее. Строгое
усреднение по двум другим параметрам затруднительно, поэтому сделаем
следующее допущение. Заменим непрерывные области возможных
значений задержек и доплеровской частоты наборами дискретных
значений τι,τ2,...,τπ и сод1,шд2,...,шдт с заданными вероятностями ^(τ,),
ι = 1,л и P((uAj ), j = Ι,ιιι. Для такой постановки задачи усредненное
отношение правдоподобия (4.37) принимает вид
i-iy-i
где условное отношение правдоподобия р(У0г|хг-,шД7 J соответствует
ситуации, когда параметры Х/,<0ду фиксированы и выполнено
усреднение по случайным амплитуде и фазе сигнала, что, по сути,
соответствует решению задачи, приведенному в п. 4.3.3 при заданных значениях
τι.<4ί ·
Выражение (4.60) описывает многоканальный приемник, состоящий
из η χ m каналов, в каждом из которых стоит корреляционный
приемник (рис. 4.12).
Канальный корреляционный приемник осуществляет
корреляционную обработку сигнала со своими значениями параметров задержки τ,
и доплеровской частоты сод,. Сформированные значения квадрата оги-
112
бающей Хц подвергаются экспоненциальному преобразованию в
соответствии с (4.51). Сформированные таким образом значения условных
отношений правдоподобия Р^К^ду) умножаются на априорные
вероятности Р(ъ), Р(шду) и суммируются в соответствии с (4.50).
Полученное значение сравнивается с порогом А (4.4).
л(<-
Рис 4.12. Схема канального корреляционного приемника
Заметим, что в рассматриваемой схеме не удается перейти от
отношения правдоподобия к их логарифмам, как это было сделано в
п. 4.3.1—4.3.3. Другим существенным моментом является то, что при
решении задачи обнаружения сигнала не ставиться задача оценки
параметров, таких как задержка и доплеровская частота, поэтому
обнаружитель является в принципе многоканальным. Задача оценки параметров
сигнала будет рассмотрена в гл. 7.
4.4. Обнаружение сигнала по дискретной выборке
Современные приемники радиосигналов все в большей степени
переходят на принципы цифровой обработки сигналов. Так, например,
приемники сигналов спутниковых радионавигационных систем ГЛО-
НАСС и GPS используют цифровую обработку сигналов, начиная с
последней промежуточной частоты - 4 МГц. Поэтому задача обнаружения
сигнала часто решается для оцифрованного сигнала.
Как отмечалось в п. 2.1, различают два типа сигналов, связанных с
переходом от аналоговой к цифровой обработке. Во-первых, это
сигналы, непрерывные по амплитуде и дискретные по времени, а во-вторых,
— сигналы, дискретные по времени и по уровню, которые и являются
цифровыми.
ИЗ
Наиболее просто задача обнаружения сигнала решается для
непрерывных по амплитуде и дискретных по времени сигналов.
Обнаружение непрерывного по уровню и дискретного по времени
сигнала· Пусть наблюдается дискретная выборка
yk=Mk(X)+nk9 *el^, (4.61)
где λ — вектор постоянных параметров сигнала; пк - ДБГШ с
нулевым МО и дисперсией о^ (4.12).
Рассмотрим задачу обнаружения полностью известного сигнала, т.е.
положим 5, (λ) = S,. Обратимся к теории статистических решений (гл. 3)
и еще раз отметим тот факт, что она оперирует с общими понятиями
теории вероятностей и наблюдаемой реализацией У. Причем тип
выборки (непрерывная реализация или совокупность отсчетов) не имеет
принципиального значения. Поэтому, заменив в рассуждениях
непрерывную реализацию Υχ на дискретную выборку Υ™, легко можно
получить те же самые результаты.
Рассмотрим байесовский критерий обнаружения и простую
функцию потерь. В этом случае оптимальное решающее правило, по-
прежнему, имеет вид
N «ри р(чг)**.
[а = 0, при p(Y0m)<h0
и сводится, как и выше, к вычислению отношения правдоподобия
p(^|JW) и сравнению его с порогом h . Величина порога определяется
априорными вероятностями наличия и отсутствия сигнала (4.4).
Для отношения правдоподобия справедлива формула (4.14).
Учитывая монотонность функции " ехр ", решающее правило можно записать
для логарифма отношения правдоподобия, т.е. аналогично (4.21):
-τΣλ^>Α+Μ^). (4·62)
т 2
где Ε = £ Sk — мощность отсчетов сигнала на интервале наблюдения.
*=1
114
Структурная схема оптимального обнаружителя, по-прежнему,
имеет вид, приведенный на рис. 4.2, и включает оптимальный
приемник, ключ и пороговое устройство. Оптимальный приемник реализует
алгоритм левой части формулы (4.62) и может быть выполнен по схеме
коррелятора, включающего перемножитель наблюдаемых отсчетов ук
с опорными Sk/Gn и сумматор, или по схеме согласованного фильтра с
импульсной характеристикой g(m -i) = Si?.
При наблюдении сигнала на фоне коррелированной помехи с
функцией корреляции Ry = Μ \щпЛ алгоритм оптимальной обработки (4.62)
принимает вид
Σ Σ Л (»);! Sj > 0,5Σ Σ St (R)"1 S7· -Ып(Ао). (4.63)
Для стационарной помехи имеем Rjj = Rj_t = Л,_у . Обозначим
m
η/ = Σ^Γ-Λ·.
7=1
Тогда левую часть формулы (4.63) можно представить как
т
ит = ΣλΉ/ » а оптимальный приемник при коррелированной помехе
1=1
представляет собой коррелятор наблюдаемых отсчетов с опорным
сигналом η,-, т.е. имеет такой же вид, что и для аналогового сигнала (см.
рис. 4.5). Аналогично тому, как это было сделано в п. 4.2.7, можно
получить реализацию оптимального приемника по схеме рис. 4.7 с
обеляющим фильтром.
При записи наблюдаемого процесса в виде (4.59) не
конкретизировалось, каким образом получены дискретные отсчеты у^. Если при
синтезе обнаружителя желательно более полно учесть используемый
алгоритм дискретизации по времени, то это можно сделать.
Проиллюстрируем это на примере задачи обнаружения сигнала со случайными
амплитудой и фазой, а в качестве алгоритма формирования дискретных
отсчетов из непрерывного сигнала выберем (4.10), т.е. усреднение на
интервале дискретизации Г</.
Пусть на вход системы обработки поступает реализация у (г), в
которой сигнальная функция определяется соотношением (4.38). В ре-
115
зультате временной дискретизации процесса y(t) в соответствии с
алгоритмом (4.10), образуется последовательность значений ук вида
(4.61), в которой для сигнальной функции Sk (α,Φο) можно записать
1 't
Μβ·Φϋ) = ^Γ J a^(/)cos((uo/ + 9(/)+9o>//. (4.64)
Функции амплитудной и фазовой модуляции Λ(/),φ(ί) являются
медленно меняющимися функциями времени, поэтому на интервале
дискретизации Td их можно считать постоянными, т.е. A(t)= A(tk)y
ф(0 = ф('*) > *еЬк~Та**к]· После интегрирования в (4.64) получаем
SA(a.9o) = ^(^)!i^f^cos((ib(^-r<//2)+9(it)+<p0).(4.65)
Введем случайную фазу Фо =Фо~(00^//2 и коэффициент
sin (щТл /2)
К ss —^ '- < 1. Тогда (4.65) можно записать в виде
щТа12
М*>Фо) = ^ЫсЦ^'*+фЫ+Фо)· (4·66)
Таким образом, принятая модель дискретизации по времени
привела к появлению дополнительного множителя К<*\у который
характеризует уменьшение мощности полезного сигнала. При щТ^ «1
получаем К «1, и потери мощности не происходит.
Из соотношения (4.66) следует, что отсчет сигнальной функции S^ ,
полученный в результате временной дискретизации, формально можно
считать аналогичным аналоговой сигнальной функции ^(/,β,φο),
взятой в момент времени tk . Зависимость дискретного отсчета сигнала от
неинформационных параметров (амплитуды а и начальной фазы фо )
такая же, как и у аналогового сигнала. Из этого следует, что усреднение
отношения правдоподобия дискретной выборки по неинформационным
параметрам будет приводить к тем же формулам, что и в случае
усреднения отношения правдоподобия непрерывной реализации по тем же
параметрам. Так, например, при известной амплитуде сигнала и
случайной начальной фазе формула усредненного отношения правдоподобия
аналогична (4.39), а именно:
116
p(}f)=exp<
[ «vi
[ «4 Г
l°2 J
где U^NJITj;
У2 = У2 + У2
т
*с,т = Σ Λ-
*=1
<4('*)sinK'*
+фЫ);
(4.67)
(4.68)
(4.69)
к=\
Формулы (4.67)—(4.69) аналогичны формулам (4.39)—(4.41) для
аналоговой обработки сигналов. Поэтому структурная реализация
оптимальных приемников аналогична той, которая приведена на рис. 4.8,
4.9 при замене интеграторов на сумматоры.
Зависимость (4.67) усредненного по начальной фазе отношения
правдоподобия от амплитуды сигнала а такая же, что и в формуле
(4.39) для аналоговой реализации. Поэтому последующее усреднение по
случайной амплитуде приводит к результату, аналогичному (4.49):
'<*КН-£
αφ*—
йК2а2
4С?
ГО
ftH-"
<?п
σ* +0,5&Κ2σ2
exp
Κ2σ>
■X2(m)\. (4.70)
^(σϊ+Ο,δαΚ2^)
Введем, аналогично (4.50), Ё = 0,SaTjMla2 \ = diTjC2, — среднюю
энергию сигнала. Тогда формула (4.70) преобразуется к виду
1
ρ(ιϊ")-
l+K2E/N0
exp-j
K2E/N0
aj,a{l+K2E/N0)
ХЦт)
Сопоставление данного соотношения с аналогичной формулой
(4.S1) для случая обработки непрерывной реализации показывает, что
они тождественны с точностью до множителя К перед средней энер-
117
гией сигнала Ё . Так как К < 1, то это эквивалентно тому, что в
результате временной дискретизации происходит потеря в отношении с/ш, что
влечет соответствующее ухудшение характеристик обнаружения.
Данное обстоятельство является принципиальным по следующим
причинам. На входе приемника всегда имеется аналоговый сигнал.
Следовательно, если не накладывать на синтезируемую систему никаких
ограничений, то синтезированный оптимальный обнаружитель также
будет аналоговым и иметь наилучшие (потенциальные) характеристики
обнаружения. В рассмотренном выше примере синтеза обнаружителя по
дискретным отсчетам сигнала до синтеза на систему были наложены
ограничения, а именно: дискретизация входной реализации по времени.
Естественно, что любое ограничение, используемое в процедуре
синтеза, не может привести к лучшему решению, так как в противном случае
первое решение не было бы оптимальным (наилучшим). Следовательно,
навязываемая системе дискретизация по времени также не может
улучшить характеристики синтезируемой системы, что и было показано
ранее. Аналогичная ситуация будет возникать во всех задачах, которые
будут рассмотрены далее: разрешение сигналов, оценка параметров и
фильтрация сообщений. Однако отмеченное обстоятельство не снижает
актуальности синтеза и использования оптимальных дискретных систем
(в том числе и цифровых), так как при грамотном выборе шага
дискретизации по времени, ухудшение характеристик синтезированной
системы может быть весьма незначительным.
Обнаружение дискретного по времени и по уровню сигнала. Если
дискретизация по времени часто может рассматриваться как
непрерывная операция над сигналом (усреднение типа (4.10) является линейной
операцией), то дискретизация (квантование) по уровню относится к
классу нелинейных преобразований сигнала. В результате нелинейного
преобразования наблюдаемой реализации (4.61) ее ПВ становится нега-
уссовской. Причем негауссовским становится и распределение
аддитивной помехи. Поэтому для синтеза оптимального обнаружителя
необходимо пользоваться другими подходами (см. п. 4.5).
Если число уровней квантования достаточно велико, так что шум
квантования незначителен по сравнению с внутренним шумом
приемника, то аддитивную помеху можно, по прежнему, считать гауссовской
и использовать аппарат синтеза обнаружителей, описанный выше. При
этом возрастет дисперсия аддитивной помехи, что приведет к
дополнительному (к эффекту дискретизации по времени) уменьшению
эквивалентного отношения с/ш и соответствующему ухудшению
характеристик обнаружения.
118
4.5. Обнаружение сигнала на фоне негауссовских помех
Как отмечалось в п. 2.5, на практике встречаются ситуации, когда
помехи, на фоне которых принимается сигнал, являются негауссовски-
ми. Использование в этом случае обнаружителей, синтезированных для
гауссовской помехи, конечно, является неоптимальным, поэтому можно
искать иные алгоритмы обнаружения.
4.5.1. Обнаружение детерминированного сигнала
Рассмотрим задачу обнаружения детерминированного сигнала,
наблюдаемого в дискретные моменты времени (4.61) на фоне
некоррелированной помехи, мгновенные значения которой описываются ПВ
Общее правило обнаружения (4.4), заключающееся в вычислении
отношения правдоподобия и сравнении его с порогом, является
универсальным и не зависит от распределения помехи. Основная проблема
заключается в записи выражения для условных ПВ. Рассмотрим общий
подход к решению данной проблемы.
Учитывая принятое допущение о некоррелированности отсчетов
помехи, запишем выражение для отношения правдоподобия в виде
„(„.). fl*iaiai. (4.71)
v ; *=1 Р(Ук)
Прологарифмируем (4.71)
AmS]np(Yr)=l[^P(yk-Sky]np(yk)]. (4.72)
Разложим In p (yk - Sk) в степенной ряд
г=1 <! dyk
Подставляя (4.73) в (4.72), получаем
А..££^4ЬЕ$й2. (4.74,
Введем функции
119
характеризующие форму ПВ помехи, и запишем (4.74) в виде
во
/=1
где
(4.75)
(4.76)
(4.77)
Оптимальный обнаружитель принимает решение о наличии или
отсутствии сигнала в результате сравнения логарифма отношения
правдоподобия (4.76) с порогом. Следовательно, общая структура
оптимального обнаружения такая же, что и на рис. 4.2, и включает оптимальный
приемник, ключ и пороговое устройство. Различие заключается в
структуре оптимального приемника.
Оптимальный приемник (рис. 4.13) в этом случае состоит из
бесконечного числа каналов
Ук
H/iWr
в
(т)
1 . : —Ts; : ^
И Μ*) г
χ
Ч Σ
z,(m)
(4.76), выходы которых
суммируются. В каждом
канале приемника стоит
коррелятор, на один из
входов которого подаются
отсчеты наблюдаемой
реализации (4.61), прошедшие
нелинейное
преобразование (4.75), а на второй вход
поступают отсчеты Сигнала
Sk. прошедшие
полиномиальное преобразование
(возведение в ι -ю степень,
значение которой соответствует номеру канала).
При практической реализации многоканальных приемников число
каналов выбирают конечным, что влечет некоторое ухудшение
характеристик обнаружения.
Если сигнал Sk достаточно слабый по сравнению с помехой, то при
разложении в ряд (4.73) достаточно удержать два слагаемых, что
приводит к следующему приближенному соотношению (в (4.76), (4.77) надо
положить / = 1):
Рис. 4.13. Схема оптимального приемника
при негауссовской помехе
120
Α„. = Σ/ι(λ)^. (4.78)
*=ι
где
,, λ d]np(yk)
Φ*
В том случае получаем одноканальный приемник (верхняя ветвь в
схеме рис. 4.13), в котором реализуется корреляционный принцип
обработки сигнала. Однако входной сигнал подвергается дополнительному
нелинейному преобразованию.
Если помеха имеет гауссовское распределение, то нелинейный
преобразователь вырождается в линейный: Ук/Ъп ·
Для импульсной помехи, описываемой распределением Лапласа
(2.41), нелинейный блок (4.79) определяется выражением
/1(л)ят-«8*(л).
[1, при х>0,
где sign(x) = <0, при х = 0, —знаковая функция.
[-1, при х<0.
Таким образом, нелинейный блок представляет собой квантователь
на два уровня с нулевым порогом квантования.
4.5.2. Обнаружение сигнала со случайными параметрами
Общая методика обнаружения сигнала Sk (μ) со случайными
параметрами μ предполагает рассмотрение усредненного отношения
правдоподобия (4.37). Поэтому, используя определение (4.71)—(4.73),
запишем
ρ(^,μ) = βχρ(ΛΛ(μ)), (4.80)
к=\ы\ l] dy\
Усредняя (4.80) по ПВ ρ (μ), получаем
121
ρ(ΐΓ)=/βχρ(Α-ι(μ))ρ(μ)^μ.
(4.81)
В общем случае выполнить интегрирование в (4.81) не удается.
Рассмотрим частный случай слабого сигнала, при котором допустимо
представление (4.78)—(4.79). В этом случае (4.81) принимает вид
р(П" ) = Jexpf Σ /ι (Ук }Sk (μ))ρ(μ)<Ιμ. (4.82)
Рассмотрим сигнал со случайной начальной фазой
5Jt(9o) = fl4tcos(o]0ri/*+(p0). (4.83)
Подставляя (4.83) в (4.81) и выполняя интегрирование, получаем
р(Г ) = ^ J «ΡΙΣ А (Ук )аЛк coefou*+<p0)U<Po = /0 № ).
(4.84)
(4.85)
где
-*т - Хс,т + Х$,т >
Х5,т = 1Л(Ук)*к™*(щТак)3
к=\
Хсут = 1Л(Ук)АкМ<%Ък).
к=\
(4.86)
Так как функция Бесселя /0 (х) — монотонная, то сравнение
отношения правдоподобия (4.84) с порогом можно заменить сравнением
отсчета огибающей Хт с соответствующим порогом. Следовательно,
оптимальный приемник должен формировать согласно с алгоритмом
(4.85), (4.86), которому соответствует схема, приведенная на рис. 4.14.
^Akco4p0Tdk)
Л
л«Н
Usin(a>A*)
Рис 4.14. Оптимальный приемник для слабого сигнала
со случайной фазой и негауссовской помехе
122
Отличие схемы, приведенной на рис. 4.14, от аналогичной схемы
рис. 4.9, полученной для гауссовской помехи, заключается в наличии
нелинейного преобразователя на входе. Оптимальный обнаружитель при
негауссовской помехе будет иметь и другое значение порога при
принятии решения, что следует из сопоставления формул (4.84) и (4.39).
Аналогично можно решить задачу синтеза оптимального
обнаружителя сигнала со случайными фазой и амплитудой сигнала. Для этого
(4.84) надо усреднить по амплитуде сигнала аналогично тому, как это
сделано в п. 4.3.3. Нетрудно увидеть, что структура оптимального
приемника в этом случае будет такая же, что и на рис. 4.14. Изменится
лишь значение порога обнаружения.
Учет коррелированное™ помехи может быть проведен по методике,
описанной в п. 4.2.7. В результате проведенного по этой методике
синтеза одно из возможных решений заключается в использовании на входе
схемы рис. 4.14 обеляющего (декоррелирующего) фильтра.
4.6. Обнаружение пространственно-временного сигнала
Наиболее общее решение задачи обнаружения сигнала основано на
рассмотрении электромагнитного поля на входе антенной системы,
которое часто называют
пространственно временным
сигналом. На рис. 4.15 приведена
пространственная диаграмма
приема
пространственно-временного сигнала S(t,p), где ρ
— радиус-вектор точки приема
(антенной апертуры), заданный
в некоторой системе координат.
Будем полагать, что
антенна согласована по поляри- рис# 4.15. Пространственная диаграмма
зации с электромагнитным приема сигнала
полем, так что 5(/,р) можно
рассматривать как скалярную функцию. Учитывая, что апертура
приемной антенны ограничена некоторой областью Ω(*,>>,ζ), полагаем
peQ(x%y9z).
К пространственно-временному сигналу 5(/,р) добавляется поме-
ховый сигнал η (/,ρ), так что наблюдению доступна аддитивная смесь
123
;К'>Р) = $('.р)+"(',р). peQ(x9y9z))9 *е[0,Г]. (4.87)
Помеху л(/,р) будем полагать гауссовской с корреляционной
функцией Αί[/ι(ί,ρ)Λ(/+τ,ρ+Δρ)] = Λπ(τ,Δρ).
Для получения алгоритма обнаружения
пространственно-временного сигнала воспользуемся опять тем фактом, что общее правило (4.4)
получено для произвольной наблюдаемой выборки Υ. Основным
фактором, который нужно учесть при синтезе, является соответствующее
представление отношения правдоподобия.
4.6.1. Отношение правдоподобия для
пространственно-временного сигнала
Так же, как и в пп. 4.2.5, 4.2.7, для вывода формулы отношения
правдоподобия воспользуемся методом дискретизации, однако не по
времени, а по пространству. Разобьем аппретуру антенны на
пространственные элементы ΔρΛΔρ>,Δρζ и перенумеруем их тем или иным
образом от ι = 1 до Μ. Каждому i -му пространственному элементу
соответствует реализация
Л(0 = 5М)+*('.Й). 'е[0,Г].
Таким образом, имеем Μ -мерный вектор наблюдений y(i) =
= \у\ (О У\ (0 — Ум (f)| » Я11* которого можно записать обобщенное
выражение
y(0 = «S(0+n(f)f (4.88)
где д — параметр обнаружения, принимающий два значения: 0 или 1.
Рассмотрим помеху п(;) в виде некоррелированного по времени,
но коррелированного по пространству процесса, т.е.
*[■(/)■(/+!)] = Ε,δ(τ). (4.89)
Здесь элементы Rnij матрицы R„ отображают пространственную
корреляцию помехи между ι - и j -м элементами апертуры антенны.
Для векторного наблюдения (4.88) отношение правдоподобия имеет
вид (4.17), т.е.
124
ρ(γ0Γ ) = expj JST (t)Kl [у (0-jS(0 Μ · (4.90)
Заметим, что в (4.90) (в отличие от (4.17)) выражение, стоящее под
знаком интеграла, описывает обработку по пространственным
координатам (по индексам ι = 1, А/), т.е. по апертуре антенны.
Для пояснения соотношения (4.89) рассмотрим случай линейной
апертуры антенны, например, вдоль оси χ и простирающейся от χπύη
до Χπ^ , т.е. Ω(χ) = [.Xmin»*^^ ]. Пусть корреляционная функция шума
в (4.87) имеет вид
M[n(t9x)n{t+x9x+Ax)] = Rn(Ax)5{x).
Разобьем аппретуру антенны на элементы &с« τχ , где τχ —
параметр пространственной корреляции помехи. В этом случае элементы
корреляционной матрицы помехи в (4.89) имеют вид Rnij =
= Rn (|ι - j\ δχ), а подынтегральное выражение в (4.90) представляется как
(4.91)
При δχ -> 0 иМ-+« соотношение (4.91) переходит в формулу
sT(/)R;,(y(/)-{s(0J=»
=> ΥXTs(t,xl)IQl{xltX2)(y(t,X2)-0,5S(t,X2))dicldx2 , (4.92)
где R^ (xi,JC2) определяется из уравнения
J Rn(xbx)R~[(x9X2)dx = 8(x{iX2).
■*min
В (4.92) явно видна обработка пространственно-временного сигнала
по апертуре антенны. Если помеха однородна и некоррелирована по
пространству, т.е. Rn (х\, х2) = R„qS (*2 ~ *i ) > то (4·92) принимает вид
125
S^t)R-^y(t)-^YXJs(t,x)R^{y(t,X)-0,5S(t,x))dx.
При этом отношение правдоподобия (4.90) запишется как
ir*W , .
ехрП J S(t,x)RU(y(t,x)-035S(t9x))dxdt\
»ю-
(4.93)
Обобщая (4.93) на случай произвольной апертуры антенны
Cl(x9y9z), получаем
»№-
= ехр
J S(t,p(x9y,z))
oa(x,y,z)) Rno
(y(t,p(x,y9z))~S(t9p{w
(4.94)
Заметим, что спектральная плотность помехи Rn0 может зависеть
от времени и от пространственных координат, т.е. в общем случае в
(4.94) можно полагать Rn0 (t9x9y9z).
4.6.2. Оптимальный алгоритм обнаружения
пространственно-временного сигнала
Вычислив отношение правдоподобия по (4.94), оптимальное
решающее правило записывается стандартным образом (4.4)
«о
ю-
0=1,
6 = 0,
если
если
р(*оГ)**>.
p(Yor)<V
Так же как и в задаче обнаружения временного сигнала, сравнение
отношения правдоподобия с порогом можно заменить на сравнение
логарифма отношения правдоподобия с соответствующим порогом
ЦрК))=
S(t,p(x,y,z))(
τ
= J ί
oa(x,y,z))
126
*л0
y(t,p(x,y,z))-
S(t,p(x,y,z)))
dxdydzdt>\n{hQ).
(4.95)
В общем виде реализация оптимального приемника,
осуществляющего операции в соответствии с (4.95), может быть выполнена в виде
пространственно-временного коррелятора или
пространственно-временного согласованного фильтра. При этом, строго говоря,
пространственные и временные координаты взаимосвязаны.
Рассмотрим условия, при которых пространственно-временная
обработка распадается на пространственную и временную. Для этого
положим, что пространственно-временной сигнал S(t,p(x9y,z)) на апертуре
антенны Q(x9y9z)) может быть представлен в виде S(t,p(x9y,z)) =
= 5(r)/(p(jt,.y,z)). Такое представление допустимо, например, если
фронт принимаемой волны плоский, а запаздывание огибающей сигнала
на апертуре антенны много меньше времени корреляции сигнала.
Подставляя принятое представление в (4.94) и вынося временные функции
за знак интеграла по апертуре антенны, получаем
τ
j f(p(x9y,z))R^y(t,p(x,y9z))dxdydz \
h(p(Yor))"J*(0
№-
2
^jS2(t)dt I f2(p(x,y,z))dxdydz.
(4.96)
n(x,y,z))
Из этого выражения следует, что оптимальный приемник должен
выполнять операцию
"оЛ')Ф(') J f{p(x.y,z))R^y{t,p(x,y,z))dxdydz A,(4.97)
о [a(x,y,z)) J
а отсчет иоп (Г) на выходе оптимального приемника в момент времени
t = T должен сравниваться с порогом
Anop=ln(/to)+^j52(0A J f2(p(x,y9z))dxdydz.
Δ 0 n(x.y.z))
Из полученного выражения следует, что при обнаружении
пространственно-временного сигнала величина порога определяется
отношением суммарной энергии сигнала, принимаемой всей апертурой
антенны,
127
ΕΣ = ί§2(ήώ Ι f2{p{x,y,z))dxdydz.
Ο b(xty,z))
к спектральной плотности Rn0 помехи.
В (4.97) внутренний интеграл определяет обработку принимаемого
сигнала y(t3p(x3y,z)) по раскрыву антенны, т.е. пространственную
обработку. В результате такой обработки формируется временная функция
О(*о\*))
которая далее обрабатывается временным коррелятором. Таким
образом, в этом случае пространственно-временная обработка распадается
на пространственную и временную.
В качестве примера рассмотрим плоскую линейную антенную
решетку (рис. 4.16), состоящую из т всенаправленных антенных
элементов, расположенных на одинаковом расстоянии d друг от друга (часто
полагают d = λ/2, где λ — длина волны принимаемого сигнала).
Рис. 4.16. Схема приема сигнала антенной решеткой
Плоская волна приходит с направления, которое характеризуется
углом ас, отсчитываемым от оси X.
Для линейной антенной решетки в формуле (4.95) для алгоритма
работы оптимального приемника интеграл по раскрыву антенны
заменяется на сумму, поэтому можно записать
128
где
"on (Τ) = J Σ St (t,Xi )Я$ (Λ (/,*, )-0,55, (t9Xl )γι,
o/=i
Л(Ц) = ^(Ц)+»4(Ц·)
(4.98)
(4.99)
— принятое на i -м антенном элементе колебание.
Заметим, что (4.98), вытекающее из (4.93), справедливо для помехи,
не коррелированной по пространству и времени, т.е.
.А/[Я,(/,дс,)Пу(/ + т,д:у)] = Лл05(,.6(х) = ^-8(,5(т)
Положим, что сигнал S{t,x) — узкополосный и, следовательно,
может описываться комплексной амплитудой S(tyx). Пусть S{(t) =
= SAi (/, дг| = 0) соответствует комплексной амплитуде сигнала в момент
времени / на первом антенном элементе. Тогда комплексная амплитуда
сигнала на j-м антенном элементе равна 5/il(/,Jcl) = S,J (/,xl)eJ^,^ctc%
х t ч 27cdicos(ac) a / ч
где ф, (ас) = —-—-, а S, (/, х,) описывает огибающую сигнала.
А»
Переходя в (4.98) от действительных функций сигналов к
комплексным амплитудам и учитывая свойство (2.4), запишем
о "о b=i J
(4.100)
Если апертура антенны L = md такова, что в каждый момент
времени / огибающая 5{(f,jc,) на каждом антенном элементе равна
огибающей S\(t) на первом элементе, то для комплексной амплитуды
сигнала на ι-м антенном элементе получаем S|-(/fx,-) = Si(/)eJ^'ac'.
Тогда (4.100) может быть представлено в виде
No
fa(0ie_i*K)Ato)*
.0 »=l
Введем комплексный вектор входных сигналов
У (Ή* Μ) Η ('.*2> -Ут (t>Xmf.
(4.101)
5—2041
129
вектор Н(ас) =
eJ4>i(ac) tM*c) eJ<M<*c)
который описывает
пространственные характеристики решаемой задачи (геометрия и
положение антенны, направление прихода сигнала), и вектор комплексных
БГШ ή = \щ (t) ή2 (t) ... hm (t) |т с корреляционной матрицей
Αί[ή(ήητ(ί + τ)] = Ν0Ιδ(τ),
где I — единичная матрица.
Тогда наблюдения (4.99) можно записать в векторном виде
у(0 = Й(ас)51(0+п(/), (4.102)
а алгоритм работы оптимального приемника - в виде
]s;(t)[U**(ac)y(t)]*
(4.103)
В (4.103) преобразование
Я0 = Н*ТК)У(0 (4-W4)
соответствует пространственной обработке принимаемых сигналов, на
выходе которой формируется временная функция y(t), далее
обрабатываемая во временном корреляторе. С учетом (2.4) работу коррелятора
(4.104) можно записать через действительные функции
т
«on(r) = ^-jS1(0Re[^(0ejav]A>
^0 0
где S\(t) — временной сигнал, соответствующий первому антенному
элементу.
Кроме описанного выше, оптимальный пространственно-временной
обнаружитель можно представить в ином виде. В этом случае,
принимая во внимание векторное представление наблюдений (4.102), запишем
полное выражение для логарифма отношения правдоподобия (4.96) в
рассматриваемой задаче
ш(рК))=
= ^Rei|s;(00,T(aJy(')-^;(/)0*T(ac)n(ac)S,(0^] =
130
Н*т(ас)Й(ас)
т
Nn
Re
No
Τ
о
Re
К(0[Г(ас)*(0-^(|)]л
где
JS,*(0[$*T(«c)y(')-0,55, (0]Л , (4.105)
.о J
$ = Н(ас)[й,т(ас)Й(ас)]_1,а Й,т(ас)Й(ас) = т.
Введем эквивалентное наблюдение
>3n(0 = i*T(Oc)y(0 (4106)
и запишем (4.1 OS) в виде
Г г 1
1η(Ρ(Υ°Γ)) = 7^4 /^(')[>3»(0-«.5Si (/)] А . (4.107)
Преобразуем эквивалентное наблюдение (4.106)
Лкв(О = ^Т(«с)у(О = 0*Т(«с)(н(ас)5,(/)+п(О) =
= $*т(ас)Й(ас)5,(0+$,т(«с)п(0 =
= [й*т(ас)Н(ас)]",Й(ас)*т(ас)Й(ас)51(0+Р*т(ас)п(0 =
= 5,(0+«ж.(0· («·«*>
Произведение β Ty(f) представляет собой взвешенное наблюдение,
поэтому вектор $ т называют вектором весовых коэффициентов.
Рассчитаем корреляционную функцию эквивалентного шума,
входящего в (4.108)
M[n3KB(t)n3KB(t+x)] =
= Μ[^τ(α^ή(/)ή*τ(/)$] = ^τ(ας)ΓΚ)δ(τ) =
= Ν0 [Й*т (ас )Н(ас )]_1 Й*т (а С)Й (а с)[н*т (ас )Н (ас )]"1δ(τ) =
131
= ^0[н*т(ас)Й(ас)]"15(т) = ^0/т5(т).
(4.109)
Из приведенных соотношений следует, что в оптимальном
обнаружителе пространственно-временного сигнала сначала необходимо
выполнить пространственную обработку в соответствии с алгоритмом
(4.106). На выходе блока пространственной обработки формируется
временной сигнал (4.108), представляющий собой аддитивную смесь
комплексного временного сигнала S\ (t) и эквивалентного временного
шума лэкв (f) с эквивалентной спектральной плотностью (4.108). Далее,
в соответствии с (4.107) необходимо решить задачу обнаружения
временного сигнала S\(t) по эквивалентным наблюдениям (4.108), для
чего можно использовать результаты предыдущих материалов. Схема
оптимального приемника с раздельной пространственной и временной
обработкой приведена на рис. 4.17.
Л<)
!_
Оптимальный приемник
Блок
пространственной
обработки
Блок
временной
обработки
!
| wonV
j
Рис 4 17. Структурная схема оптимального приемника
Заметим, что при решении задачи обнаружения пространственно-
временного сигнала со случайной амплитудой и начальной фазой блок
пространственной обработки не претерпевает никакого изменения, а
изменяется лишь блок временной обработки, для синтеза которого
можно использовать результаты п. 4.3. То же самое утверждение
относится при приеме сигнала на фоне коррелированной по времени помехи.
Выше была рассмотрена ситуация, когда в пределах апертуры
антенны принимаемую волну можно считать плоской (рис. 4.18).
Плоский фронт волны
Сферический фронт волны
Рис. 4.18. Плоский фронт волны Рис. 4.19. Сферический фронт волны
132
Рассмотрим теперь другой случай, когда антенна принимает волну
со сферическим фронтом (рис. 4.19). Пусть некоторые параметры
сигнала меняются во времени, например, амплитуда (амплитудная
модуляция сигнала). Тогда в один момент времени распределение амплитуд
принимаемого антенной сигнала вдоль координаты χ одно, а в другой
момент времени — другое. Следовательно, для каждого момента
времени надо менять и структуру обработки по пространственной координате
(опорную функцию S(t9p(x,y9z)) в (4.94)), т.е. пространственная и
временная обработка взаимно связаны.
Так как любая принимаемая электромагнитная волна имеет
сферический фронт, то, строго говоря, оптимальная обработка всегда должна
быть взаимосвязанной пространственно-временной. Однако, если
апертура приемной антенны невелика, так что принимаемую волну можно
считать плоской и запаздыванием падающей волны по апертуре можно
пренебречь, то пространственная и временная обработка могут быть
разделены практически без потери оптимальности.
Контрольные вопросы к главе 4
1. Можно ли задачу обнаружения сигнала сформулировать как задачу
проверки гипотез? Сформулируйте эти гипотезы.
2. Каким образом критерий Байеса в задаче обнаружения связан с
критериями идеального наблюдателя, Неймана-Пирсона?
3. Чем определяется порог обнаружения при приеме детерминированного
сигнала?
4. Увеличивается или уменьшается порог обнаружения при приеме
детерминированного сигнала и сигнала со случайными
неинформативными параметрами и почему?
5. Что такое обеляющий фильтр, когда он используется в обнаружителе и
для чего?
6. В чем различие пространственно-временного и временного
обнаружителей?
7. Чем различаются структурные схемы оптимальных обнаружителей
при приеме сигнала на фоне гауссовских и негауссовских помех?
133
Глава 5
ОПТИМАЛЬНАЯ СОГЛАСОВАННАЯ
ФИЛЬТРАЦИЯ СИГНАЛОВ
5.1. Общие положения теории согласованной
фильтрации сигналов
При решении задачи обнаружения сигнала S(t) на фоне
аддитивной гауссовской помехи η(t) оптимальный приемник реализует
корреляционную обработку (4.22) вида (см. гл. 4)
u{T)-fy{t)S{t)ft9 (5.1)
о
где y(t) = S(t) + n(t) —наблюдаемая на интервале /Ε[θ,Γ] реализация.
Там же было показано, что корреляционный интеграл (5.1) может
быть представлен в виде
u{T) = fy{T-t)g{tYt = fy{t)g{T-t)dtyg{T-x)-S{T). (5.2)
О О
Таким образом, на выходе линейного фильтра с импульсной
характеристикой
^(0-5(7·-/) (5.3)
в момент времени Τ получаем такое же значение напряжения, что и на
выходе коррелятора (5.1). Линейный фильтр с импульсной
характеристикой (5.3) называется согласованным фильтром (СФ). Термин
«согласованный» имеет смысл согласованности импульсной характеристики
фильтра со структурой принимаемого сигнала.
Рассчитаем комплексный коэффициент передачи СФ
-ОС -X
- е-^г / S (v)eJ,,,v dv - е">ωΤ G*s (jai), (5.4)
134
где Gs 0*ω)= j S(v)e~JWV dv — комплексный спектр сигнала; «* » —
-χ
знак комплексного сопряжения.
Следовательно, комплексный коэффициент передачи СФ (5.4) с
точностью до множителя e"J0) , характеризующего запаздывание
отклика фильтра на время Τ, совпадает с величиной, комплексно
сопряженной с комплексным спектром сигнала. Поэтому, при прохождении
сигнала через такой фильтр фазовые сдвиги между отдельными
спектральными составляющими сигнала компенсируются, т.е. на выходе
фильтра все они складываются в фазе, и значение сигнальной
составляющей будет максимально.
Рассчитаем отношение с/ш на выходе СФ. Учитывая (5.2), сигналь-
Т
ная составляющая выходного отклика фильтра и$ (Г)« fS (t)dt ■= Ε .
О
Дисперсия шумовой составляющей на выходе СФ определяется
формулой
°СФ **М
\т τ
fn(t)S(t)dtfn(x)S(x)dT
О о
Οίε.
2
Следовательно, отношение с/ш а на выходе СФ в момент време-
ЛСФ
ни Τ равно
*сф=~2—7Г" ( '
Покажем, что отношение с/ш на выходе любого другого линейного
фильтра будет меньше, чем (5.5). Для этого воспользуемся
неравенством Шварца—Буняковского, согласно которому, если имеются две
произвольные (в общем случае комплексные) функции f(x) и g(x),
то выполняется соотношение
•2
}ГШ*Щ *}\f(xfdx}\g(xf*. (5-6)
-X I -X -X
причем знак равенства имеет место в том и только в том случае, когда
g{*)-cf{x). (5·7)
здесь с — некоторая константа.
135
Зададим дг = ω,
/*(G>)-Gs(jW)eiM7>/2*tfo/2, 8{ω)~Κ{)ω)4Ν^2, (5.8)
где Κ('}ω) — комплексный коэффициент передачи произвольного
линейного фильтра.
Подставляя (5.8) в (5.6) и разделив полученное выражение на
второй сомножитель, стоящий в правой части (5.6), получаем
1
fGs(j<a)K()0))eiwTd<A
1
GS(H2
2π
f N0\K(ivf/2άω
2π_{ Ν0
/2
άω.
(5.9)
Для фильтра с комплексным коэффициентом передачи Κ('}ω)
значение отклика на его выходе в момент времени Τ при подаче на вход
сигнала S(t) выражается в виде
ИФ (Г)-Т" / Mj<4)K(jtD)eJ">7" άω.
2π_
а его мощность
■>,^ 1
»№·
(2π)2
f Gs{i<a)K(\<a)J»TdA
Дисперсия шумовой составляющей на выходе фильтра
σφ-Τ"/^θ|^0ω)|2/2^ω·
2π
(5.10)
(5.11)
С учетом (5.10), (5.11) видно, что левая часть (5.9) есть ни что иное,
как отношение с/ш на выходе линейного фильтра с комплексным
коэффициентом передачи /C(j(o).
В правой части (5.9) стоит максимально возможное значение с/ш,
которое, в соответствии с (5.7) достигается тогда и только тогда, когда
G's (jco)e-J°,r Д/2лЛ/0/2 - cK{j<o)JnJ2
или
X(jai)-«?S(jai)e-iwr, (5.12)
136
где с — некоторая константа.
Формула (5.12) с точностью до несущественной константы
совпадает комплексным коэффициентом передачи (5.4) СФ. Следовательно, на
выходе СФ отношение с/ш максимально. Поэтому такой фильтр
называют оптимальный согласованным фильтром.
Заметим, что приведенное выше доказательство остается в силе,
если вместо белого шума с равномерной спектральной плотностью N0/2
использовать помеху с заданной спектральной плотностью Gn (ω).
При этом комплексный коэффициент передачи оптимального СФ
будет иметь вид
^(Н-г^е-J-r. з)
Gn (ω)
В общем случае комплексный коэффициент передачи (5.13)
соответствует физически нереализуемому фильтру, так как содержит
полюса в правой полуплоскости комплексной переменной. Для получения
физически реализуемого фильтра необходимо воспользоваться
известной методикой [3].
5.2. Согласованные фильтры для некоторых
типов сигналов
В радиотехнических системах используются различные сигналы.
Одними из широко распространенных являются периодические
импульсные сигналы. Так как энергия таких сигналов за период
повторения невелика, то задачу обнаружения решают на интервале времени Τ,
составляющем несколько периодов повторения импульсов. Поэтому в
дальнейшем будем говорить о приеме пачки из N радиоимпульсов.
5.2.1. Согласованный фильтр для когерентной
пачки радиоимпульсов
В общем случае когерентной пачкой радиоимпульсов называют
импульсный сигнал, у которого начальные фазы каждого из импульсов
связаны между собой детерминированной зависимостью. Рассмотрим
наиболее простую модель когерентной пачки радиоимпульсов, которая
получается модуляцией синусоидального колебания
последовательностью видеоимпульсов с длительностью импульса ти, периодом повто-
137
рения импульсов Тп таким, что Г - NTn. Сигнальная функция в этом
случае записывается в виде
*(')- Σ ^(/-'Tn)cos(o)o0, (5.14)
ι-Ο
где а — амплитуда сигнала; н0(/) — функция, описывающая форму
одиночного импульса, которую будем полагать прямоугольной, т.е.
ί 1, при 0 £ / £ ти,
[0, при / <0, t >хи.
«о('И
Так как начальная фаза сигнала известна, то для простоты она в
(5.14) взята равной нулю.
Спектр такого сигнала равен
т лм (м)гп
С50ш)-/5(/)е-^Л- 2 а / щь^-ЛГ^см^У*** dt -
'"-о *ти
ЛГ-1 Тп
Ъ a/Wo(v)cos(cu0v + (o0i7n)e-ji'<v+<T")dv. J ^(j<o)e-i"T",
ι-Ο о '-0
(5.15)
где
Guj 0<°)- /«о(v)cos(cjov +ωο/Τ,, )e"jo,v</ν
(5.16)
— спектр ι -го одиночного радиоимпульса.
Для упрощения дальнейшего анализа положим o)qTh - 2πμ, где μ
— целое число. Другими словами, будем считать, что на длительности
импульса укладывается целое число периодов высокочастотного
колебания. Тогда (5.16) преобразуется к виду
т
<Ч, (j«o)- GUo (ja)) = j^v)**^)*'*"* dv -
τ;ΐ
- /cosicoovje-^dv- /i(e^v+e-^v)e-Jwrfv-
εΧ·"ι>-«·>Κ _! e- JK+,,,K _ ι
j(o)0-(i>) ί(ωο+ω)
.(l_e-J«-LJ51_,(5.l7)
(об - со"
138
а для (5.15) справедлива формула
/-О
(5.18)
Принимая во внимание (5.4) и (5.18), запишем комплексный
коэффициент передачи СФ для пачки радиоимпульсов, полагая, что отсчет
на выходе СФ берется в момент окончания последнего импульса пачки,
*СФ О") - е"Нг-7>хи)aG^ (j(u)^leJ-Tn (5Л9)
/-о
Введем в рассмотрение СФ для одиночного радиоимпульса, отсчет
на выходе которого формируется в конце импульса, т.е. при Τλ - ти. С
учетом (5.4) и (5.17) запишем выражение для коэффициента передачи
такого фильтра
^col(jW)-/Cye-i<OT-G;(jW)-/:y(l-e-i-»)^T, (5.20)
где Ку — коэффициент усиления.
Из (5.20) следует, что фильтр, согласованный с одиночным
радиоимпульсом, включает линию задержки на длительность импульса,
сумматор и идеальный колебательный контур с коэффициентом передачи
Κκ{)ω).
jCJ
2 2
ωο-ω
(рис.5.1.).
Я<)
ц>
-*Л
Σ l· ·Χ0ω)
ИСФ
(')
Рис. 5.1. Схема СФ для одиночного радиоимпульса
С учетом (5.20), а также Τ = ΝΤη, формулу (5.19) можно
представить в виде
^ω)- Σ WjW).-i«*-w*
/-О
Таким образом, СФ для пачки радиоимпульсов включает СФ для
одиночного радиоимпульса, линию задержки на (Af-l) периодов
повторения и сумматор (рис. 5.2).
139
Я/)
КсфО») Π
ш
исф(Г-1 + ти)
Τ "
Рис. S.2. Схема СФ для пачки радиоимпульсов
В момент времени Γ-1+τ,, все задержанные отклики
суммируются в фазе, т.е. суммируются мгновенные отсчеты, соответствующие
максимальным значениям отношения с/ш для каждого импульса. Тем
самым осуществляется когерентное накопление полезного сигнала на
всем интервале наблюдения.
На рис. 5.3 приведена диаграмма, поясняющая работу СФ при
tf-3.
«Склады» с выход·
согласованного фильтр·
й—а,
Рис. S3. Диаграмма, поясняющая работу СФ при N - 3
5.2.2. Согласованный фильтр для когерентной пачки
радиоимпульсов с фазовой манипуляцией
В радиотехнических системах для повышения точности измерения
задержки, а, следовательно, и дальности до объекта необходимо
расширять спектр сигнала. Одним из способов такого расширения спектра
является дополнительная модуляция радиоимпульсов, например,
манипуляция фазы высокочастотного заполнения. Сигнал с манипуляцией на
π на длительности импульса описывается выражением
140
SiO-acosioiuf + fyji), Οί/ίτΗ, (5.21)
где θ, — последовательность нулей и единиц, чередование которых
определяется, например, семиэлементным кодом Баркера ·§ 11 0 01 (А·.
Повторив те же рассуждения, что и выше, приходим к формуле
(5.19) для коэффициента передачи СФ, в которой под G (j(o) теперь
надо понимать спектр одиночного радиоимпульса с дополнительной
фазовой манипуляцией. Получим для него соответствующее выражение.
Заметим, что фазовая манипуляция на π в (5.21) соответствует смене
знака амплитуды сигнала, т.е. может быть представлена в виде
амплитудной модуляции 5 (/) - дА, cos((uq/), 0 £ / з ти, где Λ,- -1 (если
fljf - 0) или А, - -1 (если Ь{ -1).
Введем также длительность кодовой посылки Тк (например, для
упомянутого выше семиэлементного кода Бракере Тк - 777) и для
простоты будем полагать, что на длительности кодовой посылки
укладывается целое число периодов высокочастотного заполнения.
Рассчитаем спектр фазоманипулированного семиэлементным кодом
Баркера импульса
τ
<V (jto)- G„u (jco)- /щ(v)cos(o)„v + θ,π)β->°" dv -
0
6 Hto
-J*, / cos(o)ov)e-JO,vrfv-
5-0 sTk
- 2 ** e"]wTk / «»(«0 (' + sTk ))e"J- di -
- 2 hs e"J°W71 J cos(o)oi)e-J"* Λ. (5.22)
i-0 0,
В (5.22) интеграл в правой части формулы совпадает с (5.17) с той
лишь разницей, что вместо длительности импульса τΗ стоит
длительность элементарной кодовой посылки Тк . Поэтому можно записать
СфмО«)-}со5(ш0/)е-^Л-(1-е-^)^т. (5.23)
о, ν 'ωό-ω-
141
Тогда (5.22) принимает вид
^о0со).|А5с-^Сфм0ш).
(5.24)
s-0
С учетом (5.19) и (5.24) запишем выражение для коэффициента
передачи СФ для одиночного радиоимпульса с фазовой манипуляцией
*СФ, Οω) = Ку e-i"*" С; (jco) = Ку е"^< £ h5 е^т< С*ФМ (jo) =
ХАЛ^у^ма«)е-^]е
5«0 L J
5-0
(5.25)
Введем в рассмотрение СФ для одиночной кодовой посылки, отсчет
на выходе которого формируется в конце посылки, т.е. при 7] « 7д . С
учетом (5.4) и (5.24) запишем выражение для коэффициента передачи
такого фильтра
*СФк (]ω) = Ку е-'"7"* С;м (j<o) - Ку (l-e"^ )->
щ -ω"
Теперь выражение (5.25) можно записать в виде
s-0
(5.26)
На рис. 5.4 приведена схема согласованного фильтра для
радиоимпульса с дополнительной фазовой манипуляцией.
Л')
Η А'сФкО">)
дНй-
мсф(0
■ 111 I I III
гк '« 1 1 '« !
Рис. 5.4. Схема СФ для одиночного радиоимпульса
с дополнительной фазовой манипуляцией
Из (5.26) следует, что СФ для радиоимпульса с фазовой
манипуляцией включает СФ для импульса элементарного кода, линию задержки
на длительность элементарного кода с числом отводов на единицу
меньше, чем число элементов кода, умножитель на hs на выходе s -го
отвода линии задержки и сумматор. Умножение на hs обеспечивает
142
«снятие» фазовой манипуляции сигнала с целью последующего
когерентного суммирования отсчетов на выходах линии задержки.
Схема СФ для пачки радиоимпульсов с дополнительной внутриим-
пульсной фазовой манипуляцией имеет такой же вид, что и на рис. 5.2, но
вместо СФ для одиночного радиоимпульса надо использовать схему СФ
для радиоимпульса с фазовой манипуляцией, приведенную на рис. 5.4.
Согласованные фильтры широко используются при построении
аналоговой техники. Однако в настоящее время все большее число РТС
переходит на цифровую обработку сигналов, при которой проще
реализовать корреляционную схему оптимального приемника. Так, например,
в приемниках сигналов спутниковых радионавигационных систем
ГЛОНАСС, GPS используются непрерывные фазоманипулированные на
π сигналы с периодом повторения кодовой последовательности 1 мс.
Если бы обработка сигналов в приемнике строилась как аналоговая,
то в обнаружителе сигналов с временем накопления 1 мс можно было
бы использовать СФ, описанный в предыдущем разд. (с числом
кодовых элементов 511 в системе ГЛОНАСС). Однако все существующие
приемники для данных систем на последней промежуточной частоте
- 4 МГц подвергаются дискретизации по времени и квантование по
уровню. Обнаружитель сигнала обрабатывает уже цифровую выборку и
всегда строится по схеме корреляционной обработки. Аналогичная
тенденция наблюдается и при разработке современных радиолокационных
систем.
Контрольные вопросы к главе 5
1. С какими характеристиками сигнала и как связан коэффициент
передачи согласованного фильтра?
2. Записать коэффициент передачи согласованного фильтра при приеме
одиночного видеоимпульса.
3. Записать коэффициент передачи согласованного фильтра при приеме
последовательности видеоимпульсов.
4. Что можно сказать о величине отношения сигнал/шум на выходе
согласованного фильтра?
143
Глава 6
РАЗЛИЧЕНИЕ СИГНАЛОВ
6.1. Различение двух детерминированных сигналов
Предположим, что в наблюдаемой на входе приемника реализации
y(t) может быть один из двух полезных сигналов S\ (t) или 52 (0»те·
y(t) = Sx(t)+n(t) или Я0 = М0+я(').'6[°.г]·
По наблюдениям y(t) на интервале времени [0,Г] и имеющейся
априорной информации необходимо принять решение о том, какой из
двух сигналов присутствует в принятом колебании. Данная задача
называется задачей различения сигналов.
Аналогично задаче обнаружения, задачу различения можно
сформулировать как задачу оценивания. Представим наблюдаемый процесс в
виде
Я0-Л$(/)+(1-*)$2(/)+и(/).
Параметр ΰ может принимать случайным образом одно из двух
значений: д = 1 (присутствует сигнал S\ (/)) с априорной вероятностью
Рар (1) и д = О (присутствует сигнал S2 (f)) с априорной вероятностью
/^p(0) = (l-/^,(l)). Задача различения в этом случае формулируется
как оценка значения случайной величины ϋ по наблюдениям
реализации y(t) на интервале времени /ε [θ,Γ].
В такой формулировке данная задача ничем не отличается от задачи
обнаружения, рассмотренной в гл. 4, поэтому можно воспользоваться
полученными там результатами. Так, например, при простой функции
потерь оптимальное решающее правило описывается соотношением
(4.4) и заключается в вычислении отношения правдоподобия и
сравнении его с порогом. Для вычисления отношения правдоподобия
необходимо определить две условных ПВ: /ЧУ0г|д=П, соответствующей
присутствию в наблюдениях сигнала S\ (/), и PiY^[ |d = 0j, соответст-
144
вующей наличию сигнала S2 (')· Данные ПВ определяются из общего
выражения (4.15)
p(y0^*.l)e*cxp|-^+^Jy(OSi(0*
ρ(#|*«θ)-*«φ J.^.+J.Jy(i)s2(^
где £Ί = J Si (/) A ; £2 = J ^2 (0* — энергии сигналов,
о о
Теперь оптимальное правило обнаружения можно записать в виде
или, переходя к логарифмам,
^-Ы0(*(')-ЗД)*>ь-^
Рар(0) Е.-Е-
1~д2 _
Μ
00
Μ1) *0
= Λ.
(6.2)
Таким образом, оптимальное устройство различения двух сигналов
имеет структуру, приведенную на рис. 4.2, и включает оптимальный
приемник, ключ и пороговое устройство.
Оптимальный приемник описывается соотношением
^0 0
"о о ^о о
Реализация оптимального
приемника устройства различения двух
сигналов возможна по двум схемам: од-
ноканальной (рис. 6.1) и двухканаль-
ной (рис. 6.2). Наряду с ними возмож-
на фильтровая реализация опта- г^и,0ттттаал
мального приемника, например, по оптимального приемника
двухканальной схеме (рис. 6.3). различения двух сигналов
уЩ-
i
к
i
S
»
τ
J
1 »Jt)
►
\(l)-S
»«
145
I 2Sl(l)/N0
A')
il
■H x
\2S2(t,
^_
Σ
ЦТ
uon(T)
)/*0
Рис. 6.2. Двухканальная схема оптимального
приемника различения двух сигналов
Я<)
Согласованный фильтр
*,(/)=S,(r-/)
Согласованный фильтр]
h2(l)=S2(T-t)
«Όπ(0
Рис 6.3. Двухканальная схема оптимального приемника
различения двух сигналов с СФ
Рассчитаем характеристики различения двух сигналов. Для этого,
как и в задаче обнаружения, введем две СВ
т
"о о
7*
^0 о
соответствующие двум ситуациям наличия одного или второго сигналов
в принимаемой реализации. Эти случайные величины распределены по
нормальным законам с МО и дисперсиями соответственно
т\-МЫ1 = » ^2=AflS2j = Γτ >
N0 N0
г> .*[«,-„ j»].2ffl±bz25il. ,«.3,
146
где Εχ2 = J S\ (i)S2 (x)dx — взаимная энергия сигналов,
о
Плотности вероятности ρ(ξ\) и ρ(ξ2) приведены на рис. 6.4, где
заштрихованы участки, соответствующие ошибочным решениям при
приеме одного или второго сигналов.
р&) 1 ДУА
Л ξΐ(2>
Рис. 6.4. Гауссовские ПВ при наличии одного из двух
сигналов и условные вероятности ошибок
Вероятность суммарной ошибки определяется соотношением
Рот =М0 J Р&К1+М°)М&2№ · (6·4)
-«о h
Наиболее наглядные результаты получаются при равенстве энергий
двух сигналов Εχ=Ε2=Ε и равных априорных вероятностях Рар (1) =
= /^р(0) = 0,5. Вводя понятие коэффициента взаимной корреляции rs
между сигналами Sx (f) и S2 (t)
rs=-iWS2(x)dt,
получаем следующее выражение для суммарной ошибки:
Аш=0,5
1
^JlUBL
J exp
ft-2g(l-r.))f
2D
г \
k+
ι 7
+ ζ I exp
V2JCDJ
(ξ+2<?(1-Γ,))2
2D
Γ
/ J
147
= 1-Φ
\' ° J
(6.5)
где Ф(*) —интеграл вероятности.
Таким образом, при известном отношении с/ш q = £/#о
вычисление вероятности полной ошибки для детерминированных
равновероятных сигналов с одинаковыми энергиями сводится к определению
коэффициента взаимной корреляции между сигналами. Так как интеграл
вероятности является монотонно возрастающей функцией аргумента, то
при одинаковом отношении с/ш наибольшей помехоустойчивостью
(наименьшей вероятностью ошибки) обладают сигналы, для которых
коэффициент взаимной корреляции минимален.
Коэффициент взаимной корреляции rs может изменяться от -1 (при
Sx (t) = -S2 (0) Д° +1 (если s\ (О = s2 (0 )· в том случае, когда rs = 0,
говорят, что сигналы ортогональны. Очевидно, что одинаковые
сигналы (rs =1) невозможно различить и поэтому Рош = =1-Ф(0) = 0,5.
Наоборот, если сигналы одинаковы и противоположны по знаку
(г5 = 0), то их различить легче, чем любые другие два сигнала
(например, ортогональные). Сказанное
иллюстрируется рис. 6.5, на
котором представлены результаты
расчетов по формуле (6.S).
Кривые, характеризующие
зависимость вероятности полной
ошибки Рош от отношения
сигнал/шум при оптимальных
методах приема детерминированных
сигналов, в радиосвязи принято
называть кривыми потенциальной
помехоустойчивости. Получим
такие кривые для некоторых
видов манипулированных сигналов,
применяемых в радиосвязи.
Рис 6.5. Зависимости вероятности
ошибки распознавания от значения
коэффициента взаимной корреляции
Амплитудная манипуляция (AM). При AM Si(f) = Л cos (ω/+ φ),
^2 (0 = 0, t € [Ο,Γ], где Λ,ω,φ — известные параметры сигнала.
148
Данная задача фактически сводится к задаче обнаружения
сигнала на фоне шума. Приняв в формулах (6.3) S2 (/) = 0, получим
mi=2E/N0=2q, Dl=D2=D = 2E/N0=2q, m2=0, Е = А2Т/2.
Так как энергии сигналов Sj (f) и S2 (/) не равны, то пользоваться
формулой (6.5) для расчета вероятности ошибки нельзя. Поэтому
воспользуемся общим определением (6.4). Значение порога А = E/NQ = q
находим из (6.2), Тогда
Рот = 0,5
= 0,5
шЬхр
( ъ-чГ
2D
J
χ Ι
-— \dx +
1/ξ +
k =
"7Г ί expl
= 1-Φ
0,5 —
= 1-0(0,5^),
(6.6)
Зависимости Рош (q) представлена на рис. 6.6 (кривая AM).
Частотная манипуляция (ЧМ). При ЧМ используются два
гармонических сигнала одинаковой амплитуды и длительности, имеющие
разные несущие частоты S](/) = i4cos(a)|/ + <p), 52(0 = ^0Οδ(ω2/ + φ)·
'i=sin((a)2-(oI)r)/[((o2-coI)r].
Коэффициент взаимной ^ Л>ш
корреляции минимален и
равен r5s-0,21 при
(ω2-ω,)Γ = 1,5π. Однако
на практике обычно
выполняется неравенство
(<02 - С0| )Т »1. Поэтому
можно положить rs = 0, и
для вероятности полной
ошибки, учитывая
равенство энергий сигналов, из (6.5)
получим
ТIV! ffl 4ΊΥ1 I 111 flCUlVID
149
I
i ι ι
\ r\! : i 1
\ |\l ! V ! 1
\фЦ \|чм ! N^am
_ \ _!__ _. _A ί L _^. . _l
Рис 6.6. Зависимости вероятностей
азличения
[ сигналов
ошибок различения для AM,
ЧМ и ФМ (
Зависимость вероятности ошибки от отношения сигнал/шум
приведена на рис. 6.6 (кривая ЧМ).
Фазовая манипуляция (ФМ). На практике часто используется ФМ
на π, при которой S\{t) = ^cos(ci)i), S2(t) = -Acos((ut). Для таких
сигналов rs = -1 и вероятность ошибки, согласно (6.5)
Рош =1-ф(72£/ЛГ0) = 1-ф(72?).
График этой функции представлен на рис. 6.6 (кривая ФМ).
Сравнивая зависимости на рис. 6.6 для AM, ЧМ, ФМ, видим, что
при одной и той же энергии элементарных сигналов из трех
рассмотренных видов манипуляции наибольшей помехоустойчивостью
обладает фазовая и наименьшей — амплитудная.
6.2. Различение двух квазидетерминированных сигналов
Так же, как и в задаче обнаружения сигналов, задача различения
может быть сформулирована и решена для случая наблюдения
квазидетерминированных сигналов, т.е. сигналов со случайными параметрами.
Рассмотрим задачу распознавания, когда принимаемые сигналы имеют
случайные начальные фазы, т.е. положим
Sl(t) = axA{(t)cos(<i)[t + q>l), S} (t) = a2A2(t)cos(<u2t + q>2)>
где а\,а2,Щ>(й2*А\ {t),A2 (0 — известные амплитуды, несущие
частоты и законы амплитудной модуляции сигналов; Φι,92 — начальные
фазы сигналов, которые полагаем независимыми и распределенными
по равномерному закону на интервале [0,2π].
В соответствии с общим подходом (4.37), для решения данной
задачи отношение правдоподобия (6.1) необходимо усреднить по
начальным фазам q>i,(P2
1 π π f 2 т 1
150
где jr,2(o=jfi(0+^(0. ^!(0=^L(0+Jf2.(0.
t t
*ic(') = J^(x)4(x)coe(ahx)rfxf *ΐ5(0 = J^(x)4(x)sin(a)ix)rfx,
о о
*2c(0 = J^(x)^2 (x)cos(cu2x)</x, X2i(0 = \y{x)A2 (x)sin(a>2x)rfx,
о о
τ τ
aj = Ji4i(x)i/x, a2 = Ji<2 (x)^x ·
о о
При вычислении интегралов в (6.7) использована формула (4.39). С
учетом (6.7), оптимальное решающее правило различения двух сигналов
принимает вид
j (2*ι v /7Л1/Г (2а2 ν /#ΙΛΪ f^i-^l P^(°)
^МтЩ^}^у
МО*
или логарифмируя
In/0
= h. (6.8)
Левая часть неравенства (6.8) описывает алгоритм работы
оптимального приемника для различения сигналов, который можно
реализовать, например, на базе корреляторов (рис. 6.7).
/
ι :^(fW.,/VNo
Л)
ЧБ-
x}<t)
<&}
ώ
ч-W
Рис· 6.7. Схема оптимального приемника для разрешения двух
сигналов со случайными начальными фазами
151
В (6.8) функции 1п/0
(2щ v Ϊ . —
1 —-Xt , ι = 1,2 определяют характеристики
#0 I
нелинейных блоков. Так как данные характеристики являются
монотонными, то эти нелинейные зависимости не имеют существенного
значения, и их можно пересчитать в соответствующие значения порогов. Так,
например, при равенстве энергий сигналов и равных априорных
вероятностях их присутствия в наблюдаемой реализации (6.8) эквивалентно
условию
Х\*Х2, (6.9)
т.е. при выполнении (6.9) принимается решение о наличии сигнала
5](/,(f>i), а при его невыполнении принимается противоположное
решение.
Аналогично могут быть получены схемы, реализующие алгоритмы
различения сигналов со случайными начальными фазами и случайными
амплитудами. Как и в задаче обнаружения сигналов, схема
оптимального приемника в этом случае будет аналогична схеме на рис. 6.7.
Изменятся лишь характеристики нелинейных блоков в двух каналах
приемника, а также пороги различения.
6.3. Различение т детерминированных сигналов
Рассмотрим более общую задачу, когда в наблюдаемой реализации
y(t) присутствует один из т возможных сигналов S/(f), / = l,m,
параметры которых полностью известны. Возможны различные варианты
формального математического описания данной задачи. Воспользуемся
следующим векторным описанием. Введем вектор сигналов
S(/) = \S\ (t) S2 (t) ... Sm (ί)| и случайный векторный (т -мерную
строку) параметр Θ, который может принимать т возможных значений
Θ^=|10...0|, θ^=|0 1...0|, ..., θ(/)=|0 0...1...0|, ..., θ^ =
= |θ 0 ... ΐ|. Тогда наблюдаемую реализацию можно представить в виде
>>(0 = eS(0+"(0> /е[0,Г],
а задачу распознавания сформулировать как задачу оценки значения
векторного параметра θ.
152
Априорные вероятности Pap(Si(t)) = Papi присутствия сигналов
т
Si (/), i = 1,/л полагаем заданными, причем £ Рарi = 1.
В отличие от всех ранее рассмотренных задач, где оцениваемый
параметр принимал лишь два возможных значения, в задаче различения
т сигналов оцениваемый случайный параметр принимает более чем 2
значения. Если вспомнить процедуру синтеза алгоритма оптимального
обнаружения (п. 4.2.1, формула (4.3)), то можно увидеть, что
оптимальное решение заключается в вычислении двух апостериорных
вероятностей — наличия и отсутствия сигнала, и выбора максимальной из них.
Математически выбор максимального значения из двух возможных
можно записать как сравнение их отношения с единицей, что и
приводит в итоге к пороговой схеме обнаружения. Вычисление апостериорных
вероятностей является принципиальным моментом в данной процедуре и
вытекает из идеологии теории статистических решений (см. гл. 3),
предписывающей минимизацию апостериорного риска, т.е. функции потерь,
усредненной по апостериорной плотности вероятности. В гл. 2
показано, что при простой функции потерь оптимальным решением является
оценка, для которой апостериорная вероятность максимальна. Учитывая
сказанное, решение задачи распознавания т сигналов будем искать в
виде оценки случайного параметра θ, для которой апостериорная
вероятность максимальна, т.е.
Рассмотрим совместную ПВ p\B*Yq ). Используя правило
умножения вероятностей (1.26), запишем
ρ(βΉ)=ρ(β\Υο)ρ(Υο)=ρ(Υο\ήΡ(β)· (6.Ю)
Из (6.10) находим
р(в|у0Г) = ср(г0Г|в)Р^(в), (6.11)
где с — константа, не зависящая от оцениваемого параметра θ.
Таким образом, апостериорные вероятности ΡΙΘ\Yq J
определяются априорными вероятностями Рар (Θ) значений неизвестного парамет-
153
pa и условной ПВ piУ0Г |θ]. Учитывая, что данная ПВ (4.18) отличается
от отношения правдоподобия (4.17) множителем к9 не зависящим от
оцениваемого параметра θ, то правую часть (6.11) запишем в виде
^(e|lbr) = qp(nT|e)/5p(e). (6.12)
где
p(lbr|e) = expJ^JeS(0(^(0-0.5ee(/))*
— отношение правдоподобия в рассматриваемой задаче различения т
сигналов.
Так как каждому значению θ'1' случайного вектора соответствует
сигнал 5, (/), то (6.12) может быть представлено как
ί = Γ«. (6.13)
Оптимальное устройство, реализующее различение т сигналов,
является многоканальным. В каждом i-m канале стоит оптимальный
приемник для выделения сигнала 5, (/); для детерминированных
сигналов — это коррелятор с опорным сигналом St (/). В момент времени Г
(время принятия решения) значение отсчета на выходе оптимального
приемника подвергается экспоненциальному преобразованию и
умножению на соответствующую априорную вероятность P^j наличия
данного сигнала в принимаемой реализации. В результате на выходе
каждого канала формируется своя апостериорная вероятность
Μ θ Φο )> среди которых далее определяется максимальная, а номер
канала, соответствующего максимальной апостериорной вероятности,
дает решение о том, какой сигнал присутствует в наблюдениях. Схема
оптимального устройства распознавания приведена на рис. 6.8.
На практике часто полагают априорные вероятности Р^ равными,
т.е. Papi = \/т. Если, к тому же, энергии сигналов равны, т.е. /?,·=£,
i= 1, т , то в оптимальном алгоритме различения сравнивать можно не
154
.2S,(/)/"o №/%
i^irtHI]
Ηπ
->j
'25.(/Улг0 ' |£./Αί0
Η Σ
Ρ
3 ντ^Ί
-**χρ(<
argmax/
Рис. 6.8. Схема оптимального устройства распознавания
т детерминированных сигналов
апостериорные вероятности (6.13), а лишь соответствующие
корреляционные интегралы. При этом схема, приведенная на рис. 6.8,
преобразуется в т -канальный корреляционный приемник, дополненный блоком
выбора максимального значения на выходе каналов. Такая схема
является естественным обобщением двухканальной схемы, приведенной на
рис. 6.2 и полученной для задачи разрешения двух сигналов.
Характеристики различения т сигналов рассчитать в общем случае
достаточно сложно, так как после экспоненциальных преобразований в
схеме рис. 6.8 получаем случайные величины с негауссовским законом
распределения. Поэтому рассмотрим более простой вариант задачи,
когда априорные вероятности P^j равны и оптимальное устройство
распознавания реализуется в виде многоканального корреляционного
приемника. В этом случае на выходе i -го канала формируется отсчет
К
0 0 "0
(6.14)
Совокупность случайных величин мК1, / = 1,/и имеет гауссовский
закон распределения.
Методика расчета полной вероятности ошибки следующая.
Рассматриваются условные распределения СВ мК1, i = l,m при
фиксированном сигнале Ss(t) в наблюдаемой реализации. Соответствующая
условная ПВ p(uKi,i = hm\Sj (ή) является гауссовской с вектором МО
155
m U) = \m\ U) m2 U) — mm (У)Г и матрицей дисперсий D(y) =
Поэтому запишем
p(uKi,i = l^\Sj(t)) = -
(2nd*(DV)))m,Z
хехрЦΣ £("*, --«,0)){D"'U)}w(«kv -«v (Л)}· (6.15)
Для ПВ (6.15) можно рассчитать условную вероятность
правильного решения, т.е. вероятность события uKj>uKi, i*j ν ιεΐ,ϋΐ, т.е.
значение отсчета в j -м канале больше (или равно) значений отсчетов
каждого из всех других каналов. Математически это записывается
следующим образом:
PD{j)= (6.16)
= J duKJ j ... J />(ик/,/ = 1,т|5у(/))Л^
—oo —oo —oo
Тогда полная вероятность ошибочного решения определяется
выражением
/^«Z0-/b(y))^^=—Z0-/b(y))=i-—Х^(У)-(б.17)
Наиболее просто вероятности (6.15) рассчитываются для
ортогональных сигналов с равными энергиями. В этом случае, во-первых, в
(6.14) можно не учитывать втрое слагаемое, так как оно одинаково для
всех отсчетов и не влияет на выбор максимального. Во-вторых,
п, (,\ \2E/N0 = 2q,j = s. J2E/N0 = 2q,j = s,
т.е. матрица D(y) —диагональная.
С учетом данных обстоятельств, (6.15) преобразуется к виду
156
p(uKi,i = l,m\Sj(t)) = —i—exp
(2π?)
—— £ и J^exp
и,
"У
"«У
lq
2ίί=1
(6.18)
Подстановка (6.18) в (6.16) и интегрирование по «внутренним»
т -1 интегралам распадается на произведение однотипных интегралов
— интегралов вероятности. Поэтому, выполнив необходимые
преобразования, получаем
PdU) = Pd =;/= J ехр{-1(д;-^)2}ф(дг)Л =
= ^=Jexp|-yJo(x+Vi)^· (6Л9)
Так как вероятности в (6.19) не зависят от индекса j, то
упрощается и выражение (6.17)
^ui=l-^D. (6.20)
Формулы (6.19)—(6.20) при /я = 2 переходят в формулу (6.6) для
задачи распознавания двух сигналов. В результате расчетов вероятности
полной ошибки при т > 2 можно убедиться в том, что она возрастает
при увеличении т. Физически это объясняется тем, что при добавлении
«новых» сигналов возникает дополнительная возможность принятия
ошибочных решений относительно них при тех же ошибках
относительно ранее использованных сигналов.
Контрольные вопросы к главе 6
1. Чем определяются характеристики различения двух
детерминированных сигналов? Какие сигналы имеют наилучшие характеристики
различения?
2. Чем структура оптимального приемника для различения двух сигналов
отличается от структуры оптимального приемника в задаче различения
т сигналов?
3. Что изменяется в структуре оптимального приемника при решении
задач различения детерминированных сигналов и сигналов, имеющих
случайные неинформативные параметры?
4. Дайте качественную оценку изменения характеристик различения
детерминированных сигналов и сигналов, имеющих случайные
неинформативные параметры.
157
Глава 7
ОЦЕНКА ПАРАМЕТРОВ СИГНАЛА
7.1. Постановка задачи оценки параметров сигнала
В гл. 2 отмечалось, что РТС являются информационными
системами, в которых радиосигнал является переносчиком информации, а
сама информация закодирована в том или ином параметре сигнала. При
приеме радиосигнала одной из важнейших задач является извлечение
передаваемой в нем информации. Бели параметр радиосигнала, в
котором содержится интересующая потребителя информация, постоянен за
время наблюдения (время принятия решения), то получение
информации о таком параметре называют оценкой параметра сигнала. В
статистической теории РТС оцениваемые параметры радиосигнала
описываются как случайные величины с заданным законом распределения.
Поэтому задача оценки также является статистической задачей, которая
формулируется следующим образом.
Пусть на отрезке времени [0,7] принимается реализация y(t),
представляющая собой аддитивную функцию сигнала £(;,λ,μ) и
помехи n(t):
y(t) = S{tXv)+n(t)9 te[0j], (7.1)
где λ = |λ!,λ2,...,λ^|τ — вектор информативных параметров сигнала,
подлежащих оцениванию; μ = |μ1,μ2,...,μ^| — вектор
неинформативных параметров сигнала, которые не представляют интереса для
потребителя; n(t) — БГШ с нулевым МО и двусторонней спектральной
плотностью N0/2.
В общем случае λ и μ принимают значения из непрерывных
многомерных областей Ωλ, Ωμ, на которых заданы априорные ПВ ρ (λ) и
/>(μ). По располагаемым априорным данным и наблюдениям (7.1)
необходимо сформировать оценку λ информативных параметров в том
или ином смысле наилучшую (оптимальную). Заметим, что в общем
случае потребителя не интересует оценка неинформативных параметров μ .
158
7.2. Общее решение задачи оптимального
байесовского оценивания параметров сигнала
на основе теории статистических решений
Рассмотрим сначала задачу оценивания параметров сигнала при
отсутствии неинформативных параметров.
В теории статистических решений (см. гл. 3) оптимальное
байесовское решение ищется для заданной функции потерь в результате
минимизации среднего риска (3.6). Для квадратичной функции потерь (3.1)
средний риск имеет смысл дисперсии ошибки оценки параметров
сигнала, а оптимальное решение λ определяется как оценка условного
среднего (3.12), т.е.
λ = \λρΙλ\γ£}άλ , (7.2)
где Y0 = {y(t)9 te [0,Г]} — наблюдаемая реализация.
Для простой функции потерь (3.4) оптимальная оценка — это такое
значение параметров λ, при котором апостериорная ПВ ρίλ\Υ0 1
максимальна, т.е.
l*=arg тах/7(х|у0Г). (7.3)
Здесь знаком «*» подчеркивается тот факт, что оптимальная оценка при
простой функции потерь в общем случае отличается от оптимальной
оценки (7.2) при квадратичной функции потерь.
ЕслиАПВ ρίλρο7] дифференцируема по λ и ее максимум
достигается во внутренней точке области определения оцениваемых
параметров, то оценку (7.3) можно найти в результате решения уравнения
др(\\у0т)
-»=0
ЭХ
или эквивалентного ему
9ΐηρ(λ|κ0Γ)
ЭХ
, - =0. (7-4)
Х = Х*
159
При наличии неинформативных случайных параметров μ с
априорной ПВ ρ (μ) оптимальная оценка для квадратичной функции потерь
определяется выражением (см. гл. 3, формула (3.20))
λ = /λ(μ)ρ(μ|#)</μ, (7.5)
где λ (μ) — условная оценка параметров λ при фиксированных
значениях μ , которая определяется при заданном μ (3.21); ρίμίοΓ) —mQm
стериорная ПВ неинформативных параметров.
Напомним, что оценки, полученные в результате минимизации
условного риска, называются байесовскими. Важной особенностью таких
оценок является наличие априорных ПВ ρ (λ) и ρ (μ).
7.3. Оценки максимального правдоподобия
Пусть сигнал содержит только информативные параметры λ ,
однако априорная ПВ их распределения неизвестна. В этом случае для
нахождения оценок параметров сигнала широко используют метод
максимального правдоподобия (см. гл. 3), при котором ищется оценка мак-
симального правдоподобия λΜ, определяемая из решения уравнения
правдоподобия (3.17), которое запишем в виде
д]пр(у£\Х)
эх ,- - -о. («)
Напомним, что условная ПВ /?(У0 |λ), рассматриваемая как
функция параметров λ, называется функцией правдоподобия.
Учитывая равенство ρΐλ\Yq ) = cp\Yq \λ)ρ(λ), нетрудно увидеть,
что (7.4) и (7.6) отличаются слагаемым 3ΐη/?(λ)/3λ. Следовательно,
байесовские оценки при простой функции потерь и оценки
максимального правдоподобия совпадают, если априорное распределение ρ (λ) —
равномерное.
Иногда бывает удобно вместо функции правдоподобия ρ(Υ0 |λ)
рассматривать отношение правдоподобия, т.е. нормированную функцию
160
Ранее отношение правдоподобия возникало в результате решения
задачи обнаружения сигнала (4.4) и широко использовалось в теориях
обнаружения и различения сигналов. В отличие от (4.4) в формуле (7.7)
подчеркнута зависимость отношения правдоподобия от фиксированного
значения оцениваемого параметра λ . Отношение правдоподобия также
можно рассматривать как функцию от детерминированного параметра
λ . Так как знаменатель в (7.7) не зависит от λ , то отношение
правдоподобия ρ Ι Υ0 |λ j, которое здесь для краткости будем записывать как
ρ (λ), можно использовать в уравнении правдоподобия (7.6) вместо
функции правдоподобия. Следовательно, оценки максимального
правдоподобия можно искать из эквивалентного уравнения
которое в дальнейшем также будем называть уравнением правдоподобия.
При наличии неинформативных параметров сигнала μ оценку
максимального правдоподобия следует искать из уравнения правдоподобия
(3.25), в которое входит усредненная функция правдоподобия (3.24).
Учитывая показанную выше допустимость использования в уравнении
правдоподобия отношения правдоподобия, аналогичная процедура
замены может быть сделана и для (3.25), т.е. оценку информативных
параметров можно искать из уравнения
31ηρ(λ)|
* =0, (7.9)
λ = λ.
VM
эх
где
ρ(λ)= ]ρ(λ,μ)ρ(μ)άμ. (7.10)
Оценка iM максимального правдоподобия первоначально была
определена эвристически, поэтому, в отличие от байесовских оценок, о ее
качестве, исходя только из определения (3.16), ничего определенного
нельзя сказать. Для определения свойств оценок максимального прав-
6—2041
161
доподобия были проведены серьезные исследования, в результате
которых доказан ряд важных свойств таких оценок.
7.4. Свойства оценок максимального правдоподобия
Свойства оценок максимального правдоподобия получены при
отсутствии неинформативных случайных параметров сигнала, поэтому
именно для такой задачи оценивания они будут изложены ниже. Кроме
того, для простоты изложения рассмотрим задачу оценки скалярного
параметра λ.
7.4.1. Несмещенность
Рассматривая условную ПВ ρΐϊ^, |λ], можно говорить о
наблюдениях Yq , которые зависят от некоторого неслучайного, но неизвестно-
τ
го, параметра λ. Пусть в результате обработки наблюдений Iq
сформирована некоторая оценка λ неизвестного параметра (некоторое наше
решение d = ulYQ ) = λ о значении оцениваемого параметра). Данная
оценка является функцией от наблюдений, т.е. λ\Υ0 ι, поэтому она
является случайной величиной. Если МО оценки λί У0 J равно
истинному значению параметра λ, то оценка называется несмещенной. Если
Λ/[λ] = /λ^(70Γ|λ)^οΓ=λ + Δλ(λ), (7.11)
то оценка называется смещенной, а Δχ — смещением оценки.
Смещение оценки в общем случае зависит от фактического значения
параметра λ.
7.4.2. Эффективность
Запишем выражение (7.11) в виде
ΐ(λ-λ-Αλ(λ))ρ(γ£\λ)<ίΥ£ =0. (7.12)
Полагая, что функция правдоподобия дифференцируема,
продифференцируем (7.12) по λ:
162
-J(l+Ai {λ))Ρ(γ^\λ)άΥΐ+ί(λ-λ-Αλ(λ))-^1άγΤ ш
= -(ΐ + Δ'λ (λ))+/(λ-λ-Δλ(λ))ί^1< =0.
(7.13)
Учитывая равенство
Э1п(/>(у0>)) J φ^λ)
ЭХ
'(#»
3λ
(7.14)
выражение (7.13) можно записать в виде
|(λ-λ-Δλ(λ))^(#|X)^i^2^(y0r \X)dYf = (1 + Δ^ (λ)).
(7.15)
Используя доказанное в математике неравенство Коши—Буняков-
ского
Л
J f(x)g(x)dx
\2
< //2(х)Л/«2(дс)Л,
причем знак равенства имеет место при
A*) = cg(x),
где константа с не зависит от χ, преобразуем (7.15) к виду
,\2
(7.16)
ΐ(λ-λ-Δλ(λ))2ρ(γϊ\λ)<1ΥΪ\\
>(ΐ + Δχ(λ)).
(dhi(p(Yl\x))
Βλ
7(Yj\k)dYl>
(7.17)
Первый интеграл в левой части (7.17) определяет дисперсию
ошибки оценки λ
|(λ-λ-Δλ (λ))' p(Yl \X)dYt = l(X-M[%]f Ρ(ΥΙ \X)dYj = ^,
(7.18)
163
поэтому (7.17) может быть представлено как
Ζ^>(ΐ+Δ'λ(λ))
'ain(p(ig>))*
ЭХ
Τ-1
>(ΐίΓ|λ)</#
(7.19)
Формула (7.19) называется неравенством Рао—Крамера. Если
оценка λ является несмещенной, то неравенство Рао—Крамера
принимает вид
Шр(гТ\\))
DX*
ЭХ
>(Yo\b)dYo
(7.20)
Правые части неравенств (7.19), (7.20) определяют нижние границы
для дисперсии ошибки любой смещенной или несмещенной оценки,
поэтому их называют границами Рао—Крамера.
Несмещенная оценка, для которой в (7.20) имеет место знак
равенства, называется эффективной и обозначается λ^.
Пусть Х,зф — некоторая эффективная оценка. Тогда по
определению эффективной оценки в (7.20) выполняется равенство, а условием,
когда неравенство Коши—Буняковского переходит в равенство,
является (7.16), которое в рассматриваемой задаче принимает вид
^=(Ч*)-И.
(7.21)
где φ (λ) — функция, не зависящая от Yq .
Равенство (7.21) должно выполняться для любого λ из области-
возможных значений Ωχ. Но оценка λ^ также принимает значение из
той же области Ωχ. Поэтому выберем такое значение λ = λ, для
которого (7.21) обращается в ноль, т.е. λ = λ^ ί Yq j . Тогда для (7.21) можно
записать
164
эх =(λ3φΚ)-λΜλ)=°·
Учитывая выражение (7.14) для производной логарифма функции
правдоподобия, приходим к следующему результату:
dp(Yf\x)
3λ
- = 0.
(7.22)
Но (7.22) есть не что иное, как уравнение правдоподобия.
Следовательно, если существует эффективная оценка λ^, то она совпадает с
оценкой максимального правдоподобия.
Получим эквивалентную форму записи правой части неравенства
Рао—Крамера (7.20). Для этого рассмотрим вторую производную
32ϊη(ρ(γΙ\λ))_Α
ЭХ
эх'
1
др(уТ\\)
/>(Го»
d2p(Yl\\)
эх
>(#>)
эх2
Э^Уо7»
>К»
эх
(7.23)
Умножим обе части полученного выражения на ρ\Υ0 |λ) и проин-
тегрируем по λ и У0 и™» Другими словами, усредним это равенство по
плотности pyYQГ|λ):
м[э21п(р(}Ьг|Х))/эХ2] =
=м
d2p(Yf\\)
ρ(υΪ\χ) эх2
dp(Y0T\x)
ok
165
Η[έ*('(**))Γ
Следовательно, неравенство Рао—Крамера (7.20) можно записать в
виде
1\>М-
ЭХ
4'(tf>))J
Выражение
JH[iM>(tfH)]
Ί2
г-
Μ
эх1
Г1
(7.24)
= -М
d2\n(p(Yl\x))'
ЭХ1
='/% (725>
получило название информации по Фишеру. Таким образом, дисперсия
любой несмещенной оценки не меньше величины, обратной
информации по Фишеру.
Обобщение неравенства Рао—Крамера на случай оценки
векторного (т -мерного) параметра λ дается следующим образом. Пусть
Κλ=Α/Γ(λ-λ)(λ-λ)Τ1 — корреляционная матрица ошибок
несмещенной оценки ά, состоящая из элементов Rg = М\ (λ,- - λ,- )(λ^ - Xj j .
Определим матрицу J = Wj/}, Uj = 1,/я с элементами
Jy=M
d]n(p(Yf\kp)n(p(Yl\k))
ЭХ,
эху
= -Л/
Э21п(/,(К|Х))
эх,эх,
. (7.26)
Матрицу J называют информационной матрицей Фишера.
Неравенство Рао—Крамера для нижней границы корреляционной
матрицы ошибок имеет вид
R**J"\ (7.27)
где J-1 — матрица, обратная информационной матрице Фишера J.
166
Если в (7.27) имеет место знак равенства, то оценки d,, i = l,m
называются совместно эффективными.
Применительно к оценке двух параметров λ] и λ2, считая эти
оценки совместно эффективными, из (7.26), (7.27) получаем
det(j)
Μ
[(^(Р(у1фх2)2у-'ЪмУ
Л12=/?21=г(11Д2)>/^Д;. (7.28)
Здесь г(Х1зХ2) — нормированная взаимная корреляционная функция
оценок λι и λ2, det(J) = 7i1J22-^i2.
Из сравнения формул (7.28) и (7.25) следует, что первый
сомножитель в правых частях первых двух формул (7.28) совпадает со средним
квадратом ошибки эффективной оценки одного параметра. Так как
всегда выполняется условие 0<г(ХиХ2)^1>ТО ясн0» чт0 наличие
конечной корреляции между оценками параметров всегда приводит к
увеличению среднего квадрата ошибки совместно эффективных оценок по
сравнению со средним квадратом ошибки эффективной оценки одного
параметра.
7.4 J. Достаточность
Рассмотрим выражение (7.21), где в левой части равенства от
наблюдений Yq зависит условная ПВ Ы>оГ|*-))' а в правой части
наблюдениями определяется только оценка ^(tf). Оценка W(yo7)
называется достаточной, если в результате обработки, т.е. при
выполнении преобразования sfai )* из наблюдений Yq полностью
извлечена информация об оцениваемом параметре, т.е. никакая другая обработ-
167
ка наблюдений (никакая другая функция gutf I) не может дать
дополнительной информации, касающейся оцениваемого параметра λ.
Необходимое и достаточное условие того, чтобы оценка λ = g\Y0 )
была достаточной, состоит в возможности факторизации функции
правдоподобия
p(Y^)-f(KUg(Yi))h(Yj)t
т.е. ее представления в виде произведения двух сомножителей, один из
которых зависит от истинного значения λ параметра и его оценки
λ = gyYQ ], а второй (7.28) зависит только от наблюдений Υζ и не
зависит от λ.
Достаточную оценку иногда называют достаточной статистикой.
7.5. Свойства оценок случайных параметров
7.5.1. Смещенность оценок случайного параметра
Пусть λ — случайный параметр с заданной априорной ПВ
Рар (^), а λ — некоторая его оценка. Вычислим МО оценки Л/ λ и
рассмотрим разность Αχ = λ-Λ/ Л, . Так как λ — случайная
величина, то Αχ также является случайной величиной. Но в соответствии с
данным в п. 7.4 определением Αχ — это смещение оценки.
Следовательно, для каждого конкретного значения λ, возможно кроме одного,
получаем Αχ Φ О, т.е. оценка случайного параметра при определении
(7.11) всегда будет смещенной. О несмещенности оценки случайного
параметра можно говорить лишь в среднем, т.е. о выполнении условия
Λ/Γλ-Α/[λ]1 = 0.
7.5.2. Граница Рао—Крамера для оценки случайного параметра
Пусть по результатам наблюдений Yq оценивается параметр
сигнала λ, представляющий собой СВ. Покажем, что средний квадрат
ошибки любой оценки λ при некоторых условиях имеет значение, которое
168
не может быть меньше нижней границы, определяемой обобщенным
неравенством Рао—Крамера.
Полагаются выполняющимися условия:
1. dp\X,Y0 J/ЭХ и Э ρ\λ,Υ0 )/ЭХ2 абсолютно интегрируемы по X
и ίο »
2. lim [рар (Х)А/[Х]} = 0, где Μ [λ] — условное МО ошибки при
заданном X
М[Х] = |[Х(У0Г)-Х]/7(У0Г|Х)^0Г. (7.29)
Рассмотрим равенство (7.29). Умножим обе части этого равенства
на рар (X), а затем продифференцируем по X
£[^(λ)ν[λ]].^|[λ(Γί)-λ],(^>),, (*)./#}-
Проинтегрируем полученное равенство по X
др(КУТ)
PapiWl^Z. -4 + ΐ[λ(ΐί)-λ]-^ΛΛί
Согласно условию 2, левая часть данного равенства равна нулю.
Следовательно, получаем
Я[Х(У0Г)-λ] P^x°'dkdYj = 1. . (7.30)
Учитывая формулу дифференцирования (7.14) представим (7.30) в
Α[λ(#)-λ] ^^ 'p(\,Yj)dWj-l. (7.31)
Введем две случайные величины
ξ(λ,κ0Γ)=λ(ΐΌΓ)-λ' ч(кг£)= toР* ^
ior
виде
169
и рассмотрим нормированные случайные величины
где Μ[ξ2] = /[λ(ΐίΓ)-λ]2P(XjZ)dXdYj ;
ГЭ1п/>(Х,У0г)|
(7.32)
И-J
ЭХ
ρ(λ,Ι^Γ)ί/λΛίΓ·
(7.33)
Из очевидного неравенства (ξΗ -ηΗ ) SO следует
причем знак равенства имеет место в том случае, если
ξΗ=ηΗ· (7-34)
Усредняя (7.33) по плотности вероятности p\KYq)9 с учетом
определения (7.32), получаем
1 > ΑξΗ (λ,Γ0Γ)η„ (x,YoT)p(KY0T)dMYf .
Подставляя в данное неравенство выражения (7.32) и учитывая
определения случайных величин ξ и η, приходим к следующему
неравенству:
^y^^p(^)i^s
■ ^К)-*]2 p(WoT)dUYoT JjJ
Гэ1пр(Х,У0г)
Эк
p(X,Yf)dXdYj ,
(7.35)
причем знак равенства, в соответствии с (7.34), имеет место при
170
!*£*Чч*н
(7.36)
где к — константа, не зависящая от λ.
Учитывая равенство (7.31), соотношение (7.35) можно представить
так:
1-1
/ΐ[λ(ίίΓ)-λ]2 p(KYl)dXdY<[ >
Я
(d]np(\,Y<f)
3λ
p(KY<f)dXdYl
В левой части полученного неравенства стоит средний квадрат Z);
ошибки оценки случайного параметра λ, поэтому его можно записать в
виде
1-1
Di*
я
(d]np(KYo)
эх
P(XJ^)dXdYj
(7.37)
Следовательно, физический смысл полученного неравенства
состоит в том, что средний квадрат ошибки любой оценки не превосходит
некоторой нижней границы, которая определяется выражением,
стоящим в правой части (7.37), и носит название нижней границы Рао—
Крамера для оценки случайного параметра.
Для оценки случайного параметра λ определим понятие
эффективной оценки λ,φ как оценки, дисперсия ошибки которой достигает
нижней границы Рао—Крамера (7.37), т.е.
%'
Я
ГЭ1ПР(Х,У0Г)
ЭХ
P(XjJ)dXdYl
С другой стороны, знак равенства в (7.37) имеет место при
выполнении условия (7.34). Проанализируем это условие, для чего
продифференцируем (7.36) по λ
d2]np(\,Yj)/d\2=-k. (7.38)
Используя формулу Байеса, запишем
171
ρ(λ,Υ<ί) = ρ(λ\γϊ)ρ(ΥΪ).
(7.39)
Подставляя данное соотношение в (7.38) и выполнив
преобразования, получаем
Э2 In plxWj)
ri—z=*·
3λ2
Дважды интегрируя данное уравнение, приходим к нормальной
апостериорной плотности
/7(х|у0Г) = ехр(-*Х2+с,Х + с2).
Следовательно, для эффективной оценки случайного параметра
апостериорная ПВ должна быть гауссовской.
Для неравенства Рао—Крамера (7.37) можно, также как и в п. 7.4.2,
получить эквивалентную форму записи, аналогичную (7.24)
% >-(м[э21ηρ(λ,Κ0Γ)/θλ2 J' =
= (а/|(Э1пр(х,У0Г)/эх)2
\-1
= Д
V
(7.40)
Учитывая представление (7.39), для второй производной, входящей
в (7.40), запишем
-М
Э21п/>(Х,К0Г)
ЭХ2
= -М
921ηρ(κ0Γ|λ)
3λ2
-Μ
921ηρ0„(λ)
9λ2
(7.41)
Здесь первое слагаемое в правой части учитывает информацию,
получаемую из результатов наблюдений, и совпадает с введенной в п. 7.4.2
информацией по Фишеру. Второе слагаемое в правой части (7.41)
учитывает априорную информацию.
Приведем без доказательства неравенство Рао—Крамера при оценке
векторного случайного параметра λ = {λ,·}, i-\,p . Пусть R^ =|Λ^·|,
i,j = \,p — корреляционная матрица средних квадратов ошибок, со-
172
ставленная из элементов Ry =Α/ΠλΙ·-λ,·)(λ^-λ^ П. Определим
матрицу J = \jy j, U j = 1» Ρ с элементами
Jij-M
Э1п(р(Х,Г0Г)) 3ΐη(ρ(λ,Κ0Γ))
ЭХ,
d\j
=-м
\η(ρ(λ,Υ<[))
dXfiXj
Неравенство Pao—Крамера для нижней границы корреляционной
матрицы ошибок имеет вид
Rl>J-\
(7.42)
где J"1 — обратная матрица.
Если в (7.42) имеет место знак равенства, то оценки случайных
параметров называются совместно эффективными.
7.6.0ценка параметров сигнала, принимающих
дискретные значения
Полойсим, что оцениваемый параметр λ может принимать
некоторое конечное множество значений, т.е. λ = {λ,}, i = l9p9 а
неинформативные параметры μ сигнала отсутствуют.
7.6.1. Байесовское решение
Для большей наглядности рассмотрим случай оценки одного
скалярного параметра λ. Пусть заданы априорные вероятности
возможных значений оцениваемого параметра ^ρ(λΙ·) = Ρ{λ = λ/}, так что
/'=1
Для получения байесовских решений, например (7.2), (7.3)
необходимо рассчитать апостериорные вероятности возможных значений
оцениваемого параметра. Используя формулу Байеса, запишем
Р(к\¥^сРар(Х,)р(¥1\К^
(7.43)
где константа с определяется из условия нормировки суммы
вероятностей к единице
173
c =
i=l v '
(7.44)
Подставляя (7.44) в (7.43), получаем следующий алгоритм для
вычисления апостериорных вероятностей:
^К)=мм^
(7.45)
Располагая апостериорными вероятностями, можно сформировать
ту или иную оптимальную оценку. Наиболее просто получается
оптимальное решение при простой функции потерь (7.3). Однако (7.3)
включает нелинейные операции, что заметно усложняет вычисления.
Поэтому, учитывая, что функция нахождения экстремума инвариантна
относительно монотонных преобразований, прологарифмируем (7.4S)
^(ρ(λ/.|κ0Γ)) = 1η(Ρ^(λ^)+1η(/,(κ0Γ|λΙ.))-1η[ΣΡαρ(λί)^(ΚοΓ|λΙ)
Последнее слагаемое в данном выражении является одинаковым
для всех апостериорных вероятностей. Поэтому при их сравнении его
можно не учитывать.
При фиксированных значениях λ,· условная ПВ ρΙΥ^Γ (λ,·), с
учетом (4.18), записывается в виде
τ
"0 0
(7.46)
p{Y^\\i) = ktxV\—\S{ai){y{t)-0>5S(<ai))dt
l^o о
Вводя обозначение ρ(λι) = 1η(Ρίλιуо)) и учитывая сделанные
выше замечания, (7.46) можно представить как
N,
00
ЛЬ
где E(kj) = JS (t,kj)dt — энергия сигнала при значении параметра
о
λ = λ,·.
Из (7.47) следует, что существенной по отношению к принимаемой
реализации {y(t), ίε[0,Γ]} является корреляционная обработка
174
^0 о
(7.48)
с опорным сигналом 5 (г, λ/), определенным для значения
информационного параметра λ, равного λ,-.
Алгоритм (7.48) по форме аналогичен алгоритму оптимального
приемника в теории обнаружения. Однако существенное отличие
состоит в том, что в нем опорный сигнал £(/,λ/) в общем случае (для
произвольного λ,·) не согласован с сигналом 5(/,λ) в принимаемой
реализации, так как λ,- * λ. Как следствие этого, действительно
"оптимальным приемником" алгоритм (7.48) будет лишь для того значения
λ,·, которое имеет место у сигнала в принимаемой реализации. Для всех
остальных значений λ/ алгоритм (7.48) не оптимальный. Такая
"неоптимальность" приводит к уменьшению значения корреляционного
интеграла (7.48), а, следовательно, уменьшению соответствующих
апостериорных вероятностей и их логарифмов.
Схема оптимального алгоритма оценки параметра λ (рис. 7.1)
представляет собой многоканальное устройство, в каждом / -м канале
которого стоит перемножитель входного колебания на свой опорный
сигнал 5(/,λ,·), интегратор и сумматор. Решающее устройство
выбирает максимальное из выходных сигналов каналов и определяет соответ-
ствующее оптимальное решение λ .
Λ)
|25(а2)/*0 jmn. ItafcpJ
pbill
№*P)/No |£яЛо'|1п(/Д
X
m
τ
I
1 ι 1
m
Η Σ
AJ
я
{
λ* =
vgnaxpfaj)
Рве. 7.1. Схема многоканального измерителя параметра сигнала
при простой функции потерь
175
Некоторое упрощение оптимального устройства оценивания
получается в том случае, когда энергия сигнала не зависит от оцениваемых
параметров λ. Такие параметры сигнала называют неэнергетическими.
При этом в (7.47) можно не учитывать последнее слагаемое, а в схеме
рис. 7.1 исключить первые сумматоры. Неэнергетическими
параметрами сигнала являются частота, фаза, а в ряде случаев и задержка.
Параметры сигнала, от которых зависит его энергия, называют
энергетическими. К ним относятся амплитуда, длительность сигнала, а
в ряде случаев задержка, когда при отдельных ее значениях сигнал
выходит за пределы интервала наблюдения [0,Г].
Оптимальный измеритель, приведенный на рис. 7.1, является
многоканальным устройством. На практике такие многоканальные
устройства широко используются в радиолокационных системах при оценке
задержки сигнала и доплеровского смещения частоты.
Получим теперь оптимальное решение для квадратичной
функции потерь. В этом случае оптимальная оценка, в соответствии с
(7.2), должна вычисляться как апостериорное среднее по формуле
λ = £λιΡ(λι-\Yq J. Следовательно, необходимо вычислить все
апостериорные вероятности pi λ, \Υ<[ ) = ср IYq |λ, )Ρ(λι), где с определяется в
соответствии с (7.44).
|2$(α,)/ΛΌ .£|/лг0
Рис. 7.2. Схема многоканального измерителя параметра сигнала
при квадратичной функции потерь
176
Существенной операцией для определения этих вероятностей по-
прежнему остается вычисление корреляционного интеграла (7.48).
Однако в дальнейшем необходимо выполнить ряд нелинейных
преобразований (экспоненциальное и нормировка, см. (7.44)). На рис. 7.2
приведена схема устройства оценивания параметра сигнала.
Из рис. 7.2 следует, что оптимальная система заметно усложняется.
Поэтому для решения практических задач чаще используют схему рис. 7.1,
формирующую оптимальную оценку для простой функции потерь.
7.6.2. Небайесовское решение.
Оценки максимального правдоподобия
yd)
i
X
1
5(Λλ.)
υ-ΐι
s(a2)
3
Η J
Оценки максимального правдоподобия, как следует из п. 7.2,
отличаются от байесовских оценок
отсутствием априорных вероятностей
Ρ(λ,·), i = Up· Поэтому схема
оптимального устройства
оценивания будет такой же, что и на рис.
7.1, но с отсутствием вторых
сумматоров (с компонентами
1п(/^р,)). В случае оценки
неэнергетических параметров сигнала
получаем наиболее простую схему,
приведенную на рис. 7.3.
Данная схема включает
набор корреляторов и блок
определения максимального значения.
_]>(Άρ)
Η J
I
Рис. 7 J. Схема многоканального
измерителя параметра сигнала
7.7. Оценка параметров сигнала
с непрерывной областью значений
7.7.1. Прямые методы решения задач
оценивания параметров сигнала
Если область возможных значений параметра сигнала непрерывна,
то (как показано в пп. 7.1, 7.2) оптимальные оценки параметров сигнала
ищутся в результате решения уравнений (7.4) или (7.8). Рассмотрим
оценки максимального правдоподобия и запишем уравнение (7.8) в
развернутом виде
177
ЭХ
'i-]y(t)S(<,X)d*-E{X)>l
Ν,
оо
Νη
= 0.
(7.49)
\Ь = К
В ряде задач решение данных уравнений удается получить
аналитически.
Оценка амплитуды радиоимпульса. Пусть сигнальная функция
описывается соотношением
(7.50)
5(/,λ)=4/Γ(ί-τ3)ϋθ8(ω/+φ0), /б[0,Г],
'«■6
при 0</<ти,
при г<0, />хи.
Положим, что все параметры сигнала, кроме амплитуда А ,
известны. Амплитуда сигнала является энергетическим параметром, поэтому
необходимо учитывать зависимость энергии сигнала Ε (А) от
амплитуды. Тогда уравнение правдоподобия (7.49) принимает вид
Ά \ 2АТ (А \ Ί
^ ^//('-^)с08(^ + фо)Ь(г)--/(/-Тз)с08(^ + фо)иГ
= 0.
А = А
Оно имеет решение
A = ±-]y(t)Sx(t)dt,
(7.51)
'Ю
где Ελ = jSi(i)dt, Sx (f) = /(f-T3)cos(w+<ft)) —нормированная сиг-
0
нальная функция.
Из (7.51) следует, что оптимальное устройство оценивания
представляет собой коррелятор входного колебания с опорным сигналом
5, (/)/£,.
Рассчитаем характеристики оптимальной оценки амплитуды. Так
как (7.51) определяет линейное преобразование входного процесса, то
оценка А — случайная величина, распределенная по нормальному
закону. Среднее значение оценки
178
Μ
и-
Μ
^/И(0+»(0)М')*
L^io
= A.
Таким образом, среднее значение оптимальной оценки амплитуды
равно ее истинному значению, т.е. оценка амплитуды сигнала -
несмещенная (см. п. 7.4.1).
Дисперсия оценки определяется выражением Μ \Ia-M\aY\ =
= Μ ί А - А) , т.е. равна дисперсии ошибки оценки амплитуды
Μ
[е-*?]-
м
1 г
A-—\{ASx{i)+n{t))S,{t)dt
*Ю
(7.52)
Таким образом, дисперсия ошибки оценки амплитуды
пропорциональна интенсивности аддитивного шума и обратно пропорциональна
длительности импульса.
Оценка начальной фазы радиоимпульса. Пусть теперь
оцениваемый параметр — начальная фаза φ0 сигнала (7.50). Уравнение
правдоподобия в этом случае запишется так:
г
Э
3φ0
L"o0
j y(t)Af к-ъ)со*(<м+Ъо)А
= 0.
(7.53)
Здесь учтено, что начальная фаза — это неэнергетический параметр,
поэтому второе слагаемое в исходном уравнении (7.49) опущено.
Выполнив в (7.53) дифференцирование, находим
г
jy(t)Af(t-x3)sm((ut+$o)dt = 0,
0
или % =-arctg
ly(t)f(t-T3)sin(<ut)dt
ly(t)f(t-b)cos((at)A
Ю
(7.54)
179
Схема оптимального устройства оценки начальной фазы сигнала
приведена на рис. 7.4.
sin (ω/)
Щ
у(<)
-aKtg(ux/u2) [%
"2
| cos(cuf)
Рис. 7.4. Схема устройства оптимальной оценки начальной фазы сигнала
Как следует из рис. 7.4 и формулы (7.54), устройство оценки
начальной фазы сигнала есть нелинейное устройство, прямой расчет
характеристик которого достаточно сложен. Поэтому отложим на
некоторое время расчет характеристик оптимальной оценки начальной фазы
сигнала.
В других задачах оценивания параметров сигнала аналитическое
решение найти не удается. В этом случае реализуются поисковые
процедуры нахождения решения уравнения правдоподобия.
Проиллюстрируем это на следующих примерах.
Оценка временного положения радиоимпульса по огибающей.
Временное положение радиоимпульса (7.S0) может определяться по
запаздыванию τ3 огибающей. Параметр запаздывания — это параметр
неэнергетический. Поэтому уравнение правдоподобия можно записать в
виде
О *тз
(7.55)
Согласно этому выражению, в оптимальном измерителе
осуществляется корреляционная обработка между входным колебанием и
производной по задержке от огибающей сигнала. При этом производная
играет роль опорного сигнала. Нахождение решения уравнения (7.55) может
быть реализовано с помощью схемы, приведенной на рис. 7.5. Входная
реализация y(t)y re [О,Г] запоминается. Для каждого значения τ3
вычисляется и запоминается значение корреляционного интеграла (на вы-
180
ходе интегратора схемы рис. 7.5). Далее фиксируется такое τ3, при
котором значение отсчета на выходе интегратора переходит через
значение «О». Это значение τ3 и принимается как решение задачи.
А<)
Г Τ
ι Η
Рис. 7.5. Схема поиска и оценки задержки сигнала
Таким образом, получена система последовательного поиска по
оцениваемому параметру. Недостатком данного метода является
необходимость запоминания наблюдаемой реализации и большая
длительность процедуры последовательного поиска.
Альтернативным решением является дискретизация непрерывной
области возможных значений оцениваемого параметра и использование
методов оценивания, описанных в п. 7.2. При этом получается
многоканальная система оценивания, которую можно интерпретировать как
систему параллельного поиска по оцениваемому параметру.
Оценка частоты радиоимпульса. Пусть оцениваемым параметром
является частота ω принимаемого сигнала. Запишем уравнение
правдоподобия
τ
Μ0/('-τ3)δίη(ώ* + φ0)Α = 0. (7.56)
о
Данное уравнение не решается аналитически относительно искомой
оценки ώ. Поэтому оптимальный измеритель должен находить корень
уравнения (7.56) путем перестройки частоты ώ опорного сигнала и
вычисления для каждого значения частоты корреляционного
произведения (7.56). Таким образом, получаем систему последовательного поиска
по частоте сигнала. Рассмотрим вопрос о возможной реализации такой
системы. Для этого представим (7.56) в виде
о
Эоз
181
-]y(t)f(: τ^005((ώ+δω)^φο)-^((ω-δω)^φο)Λ_0>
о 3 2δω
(7.57)
где δω — расстройка по частоте.
Поиск решения уравнения (7.57) может быть реализован
устройством, схема которого приведена на рис. 7.6.
Л<)
^-J х —4 х
Α ι
cos((a>+5o))r + (p0)
Μ х
ί
Ι Схема фиксации
перехода через О
-Τ ι
/(/-τ,) cos((<»-5o)f + <po)
Рис. 7.6. Схема поиска и оценки частоты сигнала
Другой возможный вариант построения устройств оценки
параметров сигнала основан на использовании понятия дискриминатора.
7.7.2. Оценка параметров сигнала с помощью дискриминаторов
Уравнение правдоподобия (7.8) можно решать каким-либо
итерационным методом, например, методом Ньютона. Суть любого
итерационного решения произвольного уравнения вида
Α(λ) = 0 '. (7.58)
заключается в следующем. Уравнение (7.58) приводится к виду
λ=φ(λ). (7.59)
Выбирают некоторое начальное приближение
λ(ο)
и вычисляют
последовательные приближения
λ('+,)=φ(λ(0),/ = ο,1,2,....
Итерационный процесс продолжается до достижения требуемой
точности решения.
182
Имеется много способов приведения уравнения (7.58) к виду (7.59).
Например, в методе Ньютона функцию h (λ) разлагают в ряд в точке
λ^'' с использованием лишь линейного члена разложения. При этом
(7.58) принимает вид
ЭЛ
•(^И^гМ*)-··
Полагая, что Эй , из (7.60) получаем
(7.60)
(7.61)
Вычисленное таким образом значение λ принимают в качестве
нового значения итерационной процедуры, т.е. λ*,+ ' = λ, и процесс
вычисления повторяется.
Так как в рассматриваемой задаче оценивания, например, в
соответствии с (7.8), имеем Α(λ) = 31η(ρ(λ))/θλ, а равенство нулю в (7.58)
выполняется при λ = λΜ, то (7.61) принимает вид
JL-x«-
эь[Р(хМ)]
эх
Ч»И)
ЭХ2
Таким образом, оценка максимального правдоподобия может быть
выражена через некоторое опорное значение λ^, = λ'1', лежащее в
окрестности λΜ, по формуле
*ы ~^оп
эЦр(хоп))
эх
Э21п(р(Х0П))1
ЭХ2
которую можно представить в виде
λ -λ --
ЩрМ)
эх
!«°(Ρ(λοη))Τ'
ах2 J '
(7.62)
183
Устройство, выделяющее информацию о рассогласовании между
оценкой параметра и его опорным значением, в радиоавтоматике
принято называть дискриминатором. Определим дискриминатор
выражением
31η(ρ(λοπ))
"д= 8λ (7'63)
и запишем (7.62) в виде
_ Э21п(р(Х0П))г. ,
Из курса радиоавтоматики [3] известно, что при малых
фиксированных рассогласованиях Δλ = λΜ - λοπ среднее значение процесса на
выходе дискриминатора определяется выражением
Поэтому, усредняя (7.63), получаем
5Λ(λοπ) = -Α/[321η(ρ(λοη))/3λ2].
Но, как следует из (7.24), при λοπ = λ правая часть полученного
выражения — это информация J по Фишеру. Следовательно, ΞΆ (λ) =
Введем дискриминатор с нормированной характеристикой
Э1п(р(Х0П))
ид,н (Лоп )
3λ
921η(Ρ(λοη))
ЭХ2
(7.64)
который иногда называют оптимальным дискриминатором.
Тогда оценка максимального правдоподобия (7.62 ) может записана
в виде
λΜ=λοπ+ιιΛΗ(λΟΙΙ). (7.65)
Формулы (7.64), (7.65) определяют сущность метода нахождения
оценок параметров сигнала с помощью дискриминаторов.
7.8. Потенциальная точность оценок параметров сигнала
Под потенциальной точностью оценок параметров радиосигнала
понимают нижнюю границу Рао—Крамера (7.24) для дисперсии ошиб-
184
ки оценки неслучайного параметра, т.е. оценки максимального
правдоподобия. Потенциальная точность характеризует тот предел точности
оценивания, который может быть достигнут только в результате обра-
τ
ботки наблюдаемой реализации У0 > т*е- бе3 учета априорной
информации. Потенциальная точность оценки векторного параметра
характеризуется корреляционной матрицей ошибок Rn0T, обратно
пропорциональной информационной матрице Фишера, элементы которой,
согласно (7.26), вычисляются как среднее значение вторых производных от
функции правдоподобия по оцениваемым параметрам.
Учитывая сказанное, рассчитаем потенциальную точность оценок
параметров сигналов для задач оценки параметров радиосигнала.
Потенциальная точность оценки амплитуды радиоимпульса.
Подставляя в общую формулу для отношения правдоподобия (4.15)
выражение (7.S0), описывающее радиоимпульс, запишем
1п(р(Л))= (7.58)
2 гг
=—ίΜθ4/4'-τ3)οο8(ω/+φοΜ^
^0 0
Дифференцирование (7.58) дважды по А приводит к следующему
выражению для потенциальной точности:
Di =D :=—ρ т = - ϊ = ^-, (7.59)
о
τ
где Ex=jSf(t)A; S1(f) = /(f-T3)cos(Q/ + (p0).
о
Формула (7.59) совпадает с выражением (7.52) для дисперсии
ошибки оценки амплитуды радиоимпульса, полученной прямым
расчетом для алгоритма оценивания (7.51).
Потенциальная точность оценки начальной фазы
радиоимпульса. Получим выражение для потенциальной точности оценки начальной
фазы радиоимпульса (7.50). Дифференцируя (7.58) дважды по <ро,
получаем
185
D- = П -
-1
._^0_ 1
А/{э21п(р(Фо))/Эф§} 2£ 2q'
(7.60)
где Е = 0,5А J/ (/-х3)Л = 0,54 τ„ —энергия сигнала; q = E/N0 —
отношение сигнал/шум.
Из (7.60) следует, что потенциальная точность оценки начальной
фазы определяется отношением энергии сигнала к спектральной
плотности аддитивного шума и не зависит от формы сигнала.
Потенциальная точность оценки задержки радиоимпульса по
огибающей. Для расчета потенциальной точности оценки задержки
радиоимпульса по огибающей необходимо (7.S8) дважды
продифференцировать по х3. Прежде всего заметим, что последнее слагаемое в этом
выражении представляет собой энергию сигнала. Если весь
радиоимпульс находится в пределах интервала наблюдения [0,Т], то его
энергия не зависит от временной задержки. Поэтому производная от этого
слагаемого равна нулю. Следовательно, получаем
S2
Л/
Η
lnp(x3)
N0
Т( ,чЭ2/('-х3) , 4J
Μ') 1г cosfo'-KPoH
о <щ
2А
2 Г
N,
-J/(<-b)
о о
э2/('-*з)
Эх?
dt,
(7.61)
где /(f-x3) = /(/-x3)cos((Of + <po).
Для проведения дальнейших вычислений в (7.61) запишем выражение
ί/('-τ3)/('-τ3)Λ = const,
(7.62)
которое не зависит от τ3, если радиоимпульс находится внутри
интервала наблюдения [0,Г]. Продифференцируем (7.62) два раза по τ3
J/('-x3)
3/('-τ,Κ^3/(,-τ3)θ/(/-χ3)
^
-dt + j
dt,
di3
dt = 0.
(7.63)
С учетом (7.61), (7.63) получаем следующее выражение для
потенциальной точности оценки задержки радиоимпульса:
186
Я,зф=А>шхэ =
-1
_ ^0 1
М{э21п(р(т3))/Эх32} 2£β2 2<rfJ2'
(7.64)
где β2 = |
Э5(/-т3)
Эт,
dt/jS2(t-x3)dt. (7.65)
/ о
Формула (7.64) известна под название формулы Вудворда (впервые
получившего ее) для дисперсии оценки задержки сигнала. Из (7.64)
следует, что потенциальная точность оценки временного запаздывания, как
и для предыдущих задач, обратно пропорциональна величине
отношения сигнал/шум q.
Рассмотрим смысл параметра β. Введем комплексный спектр £(jco)
сигнала S(t)
5(ίω)=/5(/)β"^Λ
о
и воспользуемся известными соотношениями
Τ
E=iS2(i9b№=±]\s(j*f
2π
</ω,
Тогда (7.65) преобразуется к виду
β2 = J ω2 \s{ja>f d(o/ J |s(ya>)|2 dco.
(7.66)
Из данного выражения следует, что β — нормированный второй
момент энергетического спектра сигнала, часто используемый в
качестве меры ширины частотного спектра сигнала.
С учетом этого, из (7.64) следует, что потенциальная точность
оценки временного запаздывания огибающей радиоимпульса обратно
пропорциональна квадрату ширины спектра сигнала.
Потенциальная точность оценки задержки по фазе сигнала.
Описание принятого радиоимпульса в виде (7.50) в принципе возможно,
но является в определенной степени идеализацией. Если на передающей
стороне излучен радиоимпульс
187
S(a) = ^/(/)cos(ci* + 90), te[0j]9
то на приемной стороне имеем
S(t9X) = Af(t-z3)cos((u(t-xz)+$0)9te[09T].
(7.67)
Из (7.67) видно, что задержка τ3 сигнала сказывается не только на
задержке огибающей, но и на изменении фазы сигнала, т.е. <ро =
= φ0-ωτ3. Если выше решалась задача оценки задержки сигнала по
огибающей при известной начальной фазе φ0, то это было не вполне
корректно, так как в этом случае фаза сигнала не являлась известной, но
есть СВ, которую, в принципе, можно считать неинформативным
параметром. Но в этом случае надо решать задачу оценки информативного
параметра при наличии неинформативного, т.е. использовать более
сложную теорию, которая будет описана в следующих разделах.
Рассмотрим теперь другую модельную ситуацию, когда излучается
синусоидальный сигнал, т.е. /(г)з1, а задержка сигнала оценивается
по фазе принятого сигнала. Для корректности будем полагать, что
неоднозначность измерения по фазе устранена, т.е. известно целое число
периодов высокочастотного колебания, входящих в ωτ3.
Как и выше, для расчета потенциальной точности оценивания
рассчитаем
Μ
Μ
Ιηρ(τ,)
Μ
-2A(Sf
"θ
-Α2Τΰ?
Nn
Τ
\y(t)cos{(o(t-x3)+%)dt
= -2q(02.
Следовательно, потенциальная точность оценки задержки по фазе
сигнала определяется выражением
А3,3ф=Дошт1
1
2qi£T
(7.68)
т.е. обратно пропорциональна отношению с/ш q и квадрату несущей
частоты сигнала. Поскольку обычно ω»β, то точность оценки
задержки по фазе сигнала существенно выше точности измерения по
задержке огибающей. Физически это вполне понятно, так как при
устраненной неоднозначности фазовых измерений точность определяется
периодом несущей частоты сигнала.
188
Потенциальная точность оценки задержки радиоимпульса
по огибающей и фазе сигнала. Наиболее точное решение задачи оценки
задержки радиоимпульса получается, если информацию извлекать как
из задержки огибающей, так и из фазы сигнала. Потенциальная
точность оценивания в этом случае легко получается из полученных выше
результатов и равна
Потенциальная точность оценки частоты сигнала. Частота
сигнала, также как и его фаза, является неэнергетическим параметром.
Поэтому при дифференцировании (7.50) по частоте последнее
слагаемое можно не учитывать. Тогда для соответствующей производной
получаем следующее выражение:
А/
&™(р(/))| = -^^{/(2«)2>'(0^/('-Хз)со«(ам+Фо)л| =
2 г^2о2
~- \{2mfs2{t,xz)dt. (7.70)
No о
Введем параметр
(Т IT V/2
a = \\(2mfs2(t)dt/jS2(t)dt
о /о
(7.71)
представляющий собой среднеквадратическую длительность сигнала.
Тогда потенциальная точность оценки частоты определяется выражением
д. =л . = ΐί = N° = Y (772)
'* °ш/ А/{э21п(р(/))/Э/2} 2£α2 2*α2 '
Таким образом, потенциальная точность оценки частоты обратно
пропорциональна отношению сигнал/шум и квадрату среднеквадрати-
ческой длительности сигнала.
Потенциальная точность совместной оценки частоты и
задержки сигнала (по огибающей). Рассмотрим часто встречающийся на
практике случай, когда совместно оцениваются запаздывание сигнала
(по огибающей) и его частота (или, что эквивалентно, доплеровское
смещение частоты при известной центральной частоте сигнала
189
/ = /о+/д)· Согласно (7.27) рассчитаем информационную матрицу
Фишера. Принимая во внимание определение (7.26), нетрудно увидеть,
что Jj ι = -2ф , a J22 = -2#α . Получим выражение для элементов
матрицы Фишера
J12 = *^21 = ~^
Э21пр(/,т3)
Э/дТз
LJ-i^^^bi*. (7.
^0 о *Тз
73)
Введем, по аналогии с (7.65), (7.71), параметр
а=
0 Лз / 0
(7.74)
Тогда выражение (7.73) может быть представлено в виде
Jn=Jix=2qJt. (7.75)
Определитель информационной матрицы Фишера равен
JUJ22 -З\г = 4q2aY -V (fif = V ία2β2 -Д* j
Элементы корреляционной матрицы ошибок совместных оценок
временного запаздывания и частоты равны
Д
ошхэ
ош/
'22
α
J\\Ji2-J\2 2?ία2β2-(/ί)21
-Λι _ β2
_ -/Ι2 ^
0Ш^ "^1^2-4 "2^а2Р2-й2]'
(7.76)
(7.77)
(7.78)
Из этих соотношений видно, что при fl = 0 ошибки оценок некор-
релированы (D ^ > =0). При этом (7.76) и (7.77) совпадают
соответственно с (7.64) и (7.72), полученными при раздельных оценках
задержки и частоты. При fi*0 дисперсии ошибок возрастают.
190
При фиксированном отношении сигнал/шум точность оценок
задержки и частоты можно повысить за счет увеличения эффективных
ширины спектра β и длительности α радиоимпульса. Однако эти
величины не являются полностью независимыми. Известно, что при
уменьшении длительности импульса ширина спектра увеличивается, и
наоборот. Согласно этому, точность оценки частоты сигнала (или
частотного сдвига) можно повысить, только понижая точность оценки
временного запаздывания, и наоборот.
Рассмотрим условия, при которых можно достигнуть максимальной
точности оценки и временного запаздывания и частоты. Прежде всего
необходимо обеспечить ft = 0. Далее, одновременный максимум
точности оценки временного запаздывания и частоты соответствует
минимуму произведения
-2
ЯоШхАш;=(2*сф)~
(7.79)
Отсюда следует, что повышения точности совместных оценок можно
достигнуть при увеличении отношения сигнал/шум q или произведения
αβ, т.е. произведения эффективной длительности сигнала на
эффективную ширину его спектра. Данную величину называют базой сигнала.
Потенциальная точность оценки угловой координаты объекта
фазовым методом. Рассмотрим задачу измерения угловой координаты
излучающего объекта
фазовым методом. Схема
измерения показана на рис.
7.7. Плоская волна падает
под углом д относительно
нормали к плоскости
антенны, состоящей из двух
элементов (^и 42)t
расположенных на
расстоянии d друг от друга.
Пусть на элементе 4 ?щс ъъ Схема ^^^ мегода ИЗМерения
имеем сигнал угловой координаты объекта
Sl(t) = Acos((ut+q>0).
Тогда сигнал на элементе А2 определяется как
(7.80)
191
S2(t) = Acos
' 2Ыь\л(Ь\\
(7.81)
где λ — длина волны, соответствующая несущей частоте сигнала.
С учетом аддитивных гауссовских помех наблюдаемые реализации
на входах антенных элементов имеют вид
л(0в*1(0+ч(0. <7·82)
»(0 = *2(') + "2(0· (7·83)
Шумы п\{г) и /i2(/) полагаем независимыми с одинаковыми
двусторонними спектральными плотностями Ν0/2.
Будем решать задачу оценки угловой координаты ϋ по
наблюдениям двух сигналов (7.82), (7.83).
Потенциальная точность оценки угловой координаты, по-
прежнему, определяется общим выражением (7.57). Однако, в данной
задаче имеем векторное наблюдение у(/) = |й(0 У2{^ » поэтому
необходимо воспользоваться формулой (4.18) для отношения
правдоподобия при векторных наблюдениях. Используя (4.18), запишем
Ь(0М0*+Ы0%(0*-*|
Lo о
где Ε = А Т/2 — энергия сигнала на каждом антенном элементе.
Дифференцируя (7.84) два раза по β и усредняя полученный
результат, получаем
"О
(7.84)
Μ
321η(ρ(ύ))"
Эд2
_-А2т\
No
27iJcos(d)
Ί2
= -2*
2nd cos (ϋ)
Следовательно, потенциальная точность оценки угловой
координаты фазовым методом равна
1
Di =Д
'*
ΟΏΐϋ
"* OUIW 2q[2luJcos^)/\]2 '
Точность оценивания возрастает с ростом отношения d/λ. Однако
данное отношение ограничено необходимостью обеспечения
однозначности фазовых измерений, т.е. должно выполняться условие
dcos{&)/\ < 1. С возрастанием угла ϋ точность оценивания убывает.
192
Потенциальная точность оценки угловой координаты объекта
амплитудным моноимпульсным методом. При амплитудном
моноимпульсном методе пеленгации используют две диаграммы
направленности антенн, смещенные относительно некоторого равносигнального
направления 00 (рис. 7.8).
При этом сигналы от
источника излучения на входах
соответствующих антенных элементом
имеют вид
Источник
F(*-Jh)
Sl(t) = AF($-$x)cos((ut + q>0)9
S2(/) = ^F(fl-fl2)cos(aw + <P0),
где F(x) — функция, описы-
F(S-S2)
вающая симметричную
относительно точки jc = 0 диаграмму
направленности (по амплитуде) *«· ™ ^оГГм^н^ловой
антенного элемента, например, координаты объекта
F(x) = sin(jt)/jt.
В задаче амплитудной пеленгации логарифм отношения
правдоподобия (7.84) принимает вид
Чр(*))«
N,
где £ι(θ) =
/Л (f)5, (i)A+jy2 (t)S2 (ί)Λ-0,5£, (fl)-0,5£, (d) |
о о
(7.85)
A2TF2^-^) A2TF2{b-b2)
~2 . El (*)- J
Дифференцируя (7.85) два раза по ΰ и усредняя полученный
результат, запишем
ч2"
Μ
Э21п(р(д))
Ъд2
-А2Т
Щ
= -2q
faF(«-«>)f (
(
9F(d-d2)
f3F(d-ftt)
Следовательно, для потенциальной точности измерения угловой
координаты амплитудным методом справедливо выражение
7—2041
193
А* =А....А= —
ошд
2q
^(fl-^j (ЩЬ-Ъ)*
Эд
э*
1-1
(7.86)
Максимальная точность оценки угловой координаты получается,
если излучатель находится на равносигнальном направлении до. При
этом (7.86) принимает вид
Чем больше значение производной dF(x)/dx диаграммы
направленности в точке jc = Δθ/2 , тем меньше ошибка оценки угловой
координаты.
Введем разностную диаграмму направленности ^д(^) =
= F(d-d2)-F(d-di), которую представим в виде функции от
аргумента δθ = ΐ>-ΐ>ο — отклонение угловой координаты д излучателя от
равносигнального направления ύ0
FA(fl) = F(6u+Afl/2)-F(6fl-Afl/2).
(7.88)
♦ ^
Функция FA (δΐ>) называется пе-
ленгационной характеристикой,
типичный вид которой приведен на
δί* рис. 7.9.
Продифференцируем (7.88) по д
dF^ip) JFb(bb) _
Рис. 7.9. Пеленгационная
характеристика
(7.89)
3F(5ft+Aft/2) 3F(5ft-Aft/2)
При ЬЬ = О формула (7.89) определяет крутизну 5П пеленгацион-
ной характеристики
_3*д(»)|
5П=-
Эд
_23F(Ad/2)
6д = 0 Эд
Следовательно, (7.87) можно записать в виде
194
т.е. потенциальная точность оценки угловой координаты
моноимпульсным амплитудным методом обратно пропорциональна квадрату
крутизны пеленгационной характеристики.
7.9. Оценка параметров сигнала по наблюдениям
дискретной выборки
Рассмотрим задачу оценки параметров сигнала, когда на интервале
[О, Т] наблюдается выборка, состоящая из К равномерно отстоящих друг
от друга (с шагом дискретизации Tj) отсчетов
y(k) = S(k,X) + n(k), k=UK, (7.90)
где S(k,X) = Af(kTd-x3)cos((ukTd+<f>0); n(k) — ДБГШ с нулевым
МО и дисперсией σ^.
Обозначим наблюдаемую выборку {y(k)}9 k = \9K как Yq 9
подчеркивая в этой записи, как и раньше, принадлежность наблюдений
заданному временному интервалу [0,Г].
Учитывая, что все положения статистической теории решений (см.
гл. 3) справедливы как для непрерывной, так и дискретной выборки
наблюдений, можно утверждать, что структура оптимальных оценок при
переходе от непрерывных наблюдений к дискретным не меняется.
Поэтому байесовской оптимальной оценкой для квадратичной функции
потерь (3.1) является оценка условного среднего (3.12). Оптимальной
байесовской оценке при простой функции потерь (3.4) соответствует
такое значение оцениваемого параметра (3.13), при котором
апостериорная ПВ достигает максимального значения.
Продолжая рассуждать аналогичным образом, легко увидеть, что
все результаты предыдущих материалов, базирующиеся на операциях с
ПВ рар (λ), ρίλ}^), руУц |λ), также остаются справедливыми.
Отличия возникают только при переходе к конкретной записи условной ПВ
ρ(Υ$ |λ) и связаны они с переходом от непрерывных наблюдений к
дискретным. При непрерывных наблюдениях указанная ПВ
определяется формулой (4.18), а в случае дискретных наблюдений (7.90)
соответствующая ПВ вычисляется через аналогичную сумму отсчетов
195
p(yj>) = *exp -^£5(/,λ)(>;(/)-0,55(/,λ)) . (7.91)
Согласно отличиям условной ПВ ρίΐ^Ιλ) в представлениях (4.18) и
(7.91), далее их можно формально учесть и в алгоритмах оптимального
оценивания, приведенных в п. 7.2—7.4. Необходимые изменения
сводятся к замене спектральной плотности ЛГ0/2 аддитивного шума на диспер-
Τ
сию сгп дискретного шума, интегрирования по времени J...A — на сум-
0
к
мирование Σ..., а текущего времени t — на дискретное время iTd.
Так, в п. 7.3, при оценке параметра, принимающего конечное число
дискретных значений, в схемах оптимальных устройств оценивания (см.
рис. 7.1—7.3) вместо интеграторов следует использовать сумматоры.
При оценке параметров, принимающих значения из непрерывной
области, оптимальные байесовские оценки для простой функции потерь
находятся из условия, аналогичного (7.4):
¥Ч(й^^
= 0, (7.92)
λ = λ
К
где Ε (λ) = £ S (ι, λ) — суммарная мощность отсчетов сигнала на ин-
/=1
тервале наблюдения.
Оценки максимального правдоподобия находятся из уравнения,
аналогичного (7.92), но не содержащего первого слагаемого.
Приведем в порядке иллюстрации конечные результаты решения
задач оптимального оценивания амплитуды и начальной фазы,
рассмотренных в п. 7.7.1.
Оценка амплитуды радиоимпульса. Оценка максимального
правдоподобия амплитуды сигнала определяется выражением
Λ1 »=l
196
где Sl(i) = f(iTd-x3)cos((oiTd+y0) — нормированная сигнальная
К
функция; Ех = £ 5, (/).
i=l
Оценка начальной фазы радиоимпульса. Для оценки
максимального правдоподобия начальной фазы сигнала имеем
iy{i)f{iTd-xz)un{iinTd)
м
90=-arctg^
ly(i)f(iTd-x3)cos((oiTd)
/=1
Аналогично решаются и другие задачи оценки параметров сигнала.
7.10. Оценка информативных параметров сигнала при
наличии случайных неинформативных параметров
Рассмотрим более общую задачу, когда сигнал кроме
информативных параметров λ, подлежащих оценке, содержит случайные
неинформативные параметры μ. В качестве неинформативных параметров, чаще
всего, выступают начальная фаза фо и/или амплитуда а сигнала, т.е.
S(t3X^) = aA(t)cos(<uot + (p(t) + <p0). (7.93)
Полагаем, что заданы априорные ПВ р^ (μ), в частности,
распределение начальной фазы — равномерное, а амплитуды — рэлеевское (1.9).
Будем искать решение в форме оценок максимального
правдоподобия. Общий подход, по-прежнему, основан на рассмотрении уравнения
правдоподобия (7.8), в котором отношение правдоподобия ρ (λ)
должно быть определено для рассматриваемой задачи, т.е. для наблюдения
сигнала, содержащего неинформативные параметры. Аналогичная
задача рассматривалась в п. 4.3.2, поэтому воспользуемся полученными там
результатами.
7.10.1. Оценка параметров сигнала со случайной
начальной фазой
Усредненное по фазе сигнала отношение правдоподобия
определяется формулой (4.39)
197
"М-Ч-ж*
(fH·
(7.94)
где
jr2(0=Ji(i)+jr,2(0,
ΛΓο(0 = ί>;(τ)^(τ)ΟΟδ(ω0τ+Φ(τ))ί/τ'
О
Jf5 (/) = />>(т)Л(т)5ш(ц)Т+ф(т))</т, α = \А2 (x)dx.
о о
Оценка амплитуды радиоимпульса со случайной начальной фазой.
Дифференцируя (7.94) по α и учитывая, что для радиоимпульса α = τ„ ,
а Э/0(дс)/Эд: = /1(х), где 1х(х) — функция Бесселя 1-го порядка от
мнимого аргумента, из уравнения правдоподобия (7.8) получаем
1х{2аыХ{Т)1щ) 2Х{Т)
аи =·
(7.95)
м Ι0{2άΗΧ(Τ)/Ν0) τΗ
На рис. 7.10 приведена зависимость первого сомножителя в (7.95)
, У , * от аргумента, откуда следует, что при
х»1 (т.е. 2aX(T)/NQ»\)
справедливо приближенное равенство
ам=2Х(Т)/хИ.
Следовательно, при больших
отношения сигнал/шум оценка
амплитуды радиоимпульса со случайной
начальной фазой пропорциональна
значению отсчета огибающей в момент
времени Τ на выходе квадратурного
Рис. 7.10. Зависимость функции приемника (рис. 4.9).
Ii(x)/Jq(x) от аргумента χ
Потенциальная точность оценки амплитуды определяется общим
выражением
-1
^=DouiA
м{д2]п(р(а))/да2у
198
которое при большом отношении с/ш принимает вид
%=^ошА=Т1· (7.96)
τ,
и
Сравнивая (7.96) с (7.59), видим, что при большом отношении с/ш
точность оценки амплитуды сигнала со случайной начальной фазой и
сигнала с известной фазой совпадают. Иная ситуация имеет место при
малых отношениях сигнал шум, когда точность оценки амплитуды
сигнала со случайной фазой становится заметно хуже точности оценки
сигнала с известной фазой.
Оценка задержки сигнала со случайной начальной фазой.
Рассмотрим задачу оценки задержки огибающей сигнала вида
5(/,λ,μ) = Λ4(/-τ3)ϋθ8((ΰΰ/ + φ0), (7.97)
где а — известная амплитуда; <Pq — случайная начальная фаза; A(t)
— огибающая сигнала; τ3 —оцениваемая задержка сигнала.
Отношение правдоподобия в рассматриваемой задаче,
по-прежнему, определяется формулой (7.94), в которой огибающая сигнала
определяется следующими соотношениями
ЛГ(/,т3) = >/^с2^^)+^2(Мз), (7.98)
t
Хс{1,хг) = \у{х)А(х-хъ)соъ{щх+у(х))ах ^
о
^ί(^τ3) = ί>;(τ)^(τ-τ3)δίηΚτ + Φ(τ))ί/τ·
0
Так как в (7.94) от оцениваемого параметра τ3 зависит только
огибающая сигнала (7.98), то уравнение правдоподобия конкретизируется в
виде
дХ(Т)\
дх3
m = 0. (7.99)
Дифференцируя (7.98) по τ3 и приравнивая числитель полученного
выражения нулю, приходим к следующим соотношениям:
Хс{ТЛ^Л^+ХЛтЛз)В1£^1 = 0; (7.100)
σΤ3 σΤ3
199
^#М=Ь(0^('-Хз)-(««)}л.
dX3 о <Л3
Как и в задаче оценки задержки детерминированного сигнала,
решение уравнения (7.100) должно проводится в режиме поиска решения
τ3, при котором оно выполняется. Схема, реализующая устройство
обработки наблюдаемой реализации y(t), приведена на рис. 7.11.
а4-т3)/ат,
Рис. 7.11. Схема устройства оценки задержки сигнала
со случайной фазой
В схеме присутствуют два квадратурных канала, характерных при
приеме сигнала со случайной фазой. В каждом из квадратурных
каналов есть ветвь свертка наблюдаемой реализации с опорным сигналом
ЭЛ(/-т3)/Эт3, равным производной огибающей по задержке. Данная
ветвь позволяет выявить отличия оценки задержки сигнала от
истинного значения задержки в каждом из квадратурных каналов. В процессе
перестройки τ3 ищется такое ее значение, при котором сигнал на
выходе устройства принимает нулевое значение.
7.10.2. Оценка параметров сигнала со случайными
амплитудой и начальной фазой
Усредненное по амплитуде и фазе отношение правдоподобия
определяется выражением (4.S1)
200
р(гЛ = J expi
KV ° ' l + E/N0 v I
2Ё1Щ
:х2(т)
(7.101)
[tf0ct(l+£/#0)
где Ё = М[Е] = аа% — средняя энергия сигнала; X{t) — огибающая
сигнала на выходе оптимального квадратурного приемника,
описываемая формулами (7.98).
Из приведенной формулы видно, что если оценивается
неэнергетический параметр сигнала, например, задержка, то уравнение
правдоподобия приводится к виду, совпадающему с (7.99), т.е. фактически
анализируется огибающая Х{Т). Таким образом структура оптимального
устройства оценивания совпадает с приведенной на рис. 7.10. Однако
точность оценивания получается иной. Так как формулы для отношения
правдоподобия (7.94) и (7.101) по-разному зависят от отношения с/ш q,
то при вычислении потенциальной точности по формуле (4.24)
получаются разные результаты.
7.11. Оценка параметров сигнала, наблюдаемого
на фоне коррелированного шума
Прием сигнала на фоне коррелированного шума приводит к
изменению структуры отношения правдоподобия, которое в этом случае
согласно (4.29) определяется как
р(1ЬГ)-^Ш5(*|ЛК"Ч'1.'2)[И'2)-^('2Д)]Л|Л2|·
При этом уравнение правдоподобия принимает вид
Ъ_тт
ЭХ;
-ίμ(/„λ)Λη-1(/„ί2)ί>;(/2)-ΐ5(ί2,λ)^ΙΛ2 =
= J ^%^*;' {tbh){y{h)-S{t2,X))dhdt2 = 0
00
Введем импульсную характеристику
Τ
η(/,λ)=|/?;ι(Μ1)5(/1,λ)Λ1,
о
которая удовлетворяет уравнению Фредгольма 1-го рода (4.34)
(7.102)
(7.103)
201
/Λη(Μ)η(α)Λ = 5(/,,λ).
(7.104)
Дифференцируя (7.103) по λ и подставляя результат в (7.102),
получаем
даыо-*<'А))*
3λ
λ=λΜ
= 0.
(7.105)
Уравнение (7.105) по структуре аналогично уравнению (7.49).
Однако вместо производной сигнала по оцениваемому параметру
используется производная функции η(ί,λ) (7.103) по тому же параметру.
Основная трудность в получении оценок параметров на основе
уравнения (7.105) является нахождение функции η(/,λ) в результате
решения уравнения Фредгольма (4.34). Ряд примеров таких функции
приведен в [5]. В частности, для гауссовского шума с экспоненциальной
функцией корреляции
Лл(х) = Д,е-а»М
имеем
4(«.X)-i
S(t,X)-
d2S(t,X)/&2
а:
(7.106)
(7.107)
Рассматривая в качестве оцениваемого параметра амплитуду
сигнала, т.е. λ = а, для радиоимпульса (7.50), формула (7.107) принимает вид
л(а)=
α„
2Д,
1+
'.*ϊ
α„
<L4(i-T3)cos(a>/+<p0).
(7.108)
Подставив (7.108) в (7.105) и выполнив необходимые
преобразования, получаем алгоритм оптимального оценивания амплитуды сигнала
2 т
а = — j y(t)A(t-x3)cos((ut+tp0)dt.
ти о
Данный алгоритм совпадает с (7.51), полученным для оценки
амплитуда сигнала, наблюдаемого на фоне белого шума, если, как и ранее,
Τ
обозначить 51(/) = ^(/-x3)cos(a)/+<p0), E\ = jS?(t)dt. Аналогично
о
202
можно показать, что алгоритм оценки начальной фазы сигнала (7.50)
также не меняется в случае наблюдения сигнала на фоне шума с
корреляционной функцией (7.106) и определяется выражением (7.54).
Контрольные вопросы к главе 7
1. При использовании метода максимального правдоподобия для
оценивания параметра λ детерминированной или случайной величиной
является данный параметр?
2. Что такое нижняя граница Рао—Крамера в теории оценок
максимального правдоподобия и как она определяется?
3. Что такое потенциальная точность оценок параметров сигнала?
4. Как зависит потенциальная точность оценок параметров сигнал от
отношения сигнал/шум?
5. В чем достоинство оценок максимального правдоподобия?
6. Какие оценки называются эффективными?
7. Что такое неэнергетический параметр сигнала и как свойство
«неэнергетического параметра» используется при получении оценок
максимального правдоподобия?
8. Чем байесовские оценки параметров сигнала отличаются от оценок
максимального правдоподобия?
9. Что такое уравнение правдоподобия и какова его роль в теории
оценок параметров сигнала?
10. Можно ли рассчитать и как потенциальную точность оценок
информативных параметров сигнала при наличии неинформативных
случайных параметров?
203
Глава 8
РАЗРЕШЕНИЕ СИГНАЛОВ
Многие РТС работают в условиях, когда на входе приемника
присутствуют несколько сигналов, и в этих условиях он должен решать
возложенные на него задачи. Типичным примером этого являются
радиолокационные системы (РЛС), работающие в условиях многоцелевой
обстановки. Возможность раздельного наблюдения близко
расположенных целей и раздельного измерения параметров каждой цели называют
разрешающей способностью РЛС. Так как измерение параметров цели
связано с измерение тех или иных параметров принимаемого сигнала, а
от каждой цели приходит свой сигнал, то можно говорить о разрешении
сигналов, под которым понимают возможность раздельного наблюдения
и измерения параметров сигналов. Говоря о разрешении сигналов,
всегда имеется в виду разрешение по тем или иным параметрам сигнала.
Если сигналы приходят с разных направлений, то говорят о разрешении
сигналов по направлению. Если сигналы имеют разную задержку, то
говорят о разрешении сигналов по задержке (или по дальности в РЛС) и т.д.
В статистической теории РТС под измерением параметров сигнала
понимают их оценивание. При этом сформулированную выше задачу
разрешения сигналов можно расширить, включив в нее параметр
обнаружения 0 (см. гл. 4). Такую задачу часто называют «разрешение—
обнаружение», для подчеркивания ее отличия от задачи «разрешение—
измерение», когда разрешение проводят по параметрам самих
принимаемых сигналов.
8.1. «Разрешение—обнаружение» сигналов
Задача «разрешение—обнаружение», по сути, является задачей
обнаружения сигнала S] (t) на фоне мешающих сигналов S/(f), ϊ = 2,/л
и аддитивного шума n(t). Рассмотрим, например, задачу с двумя
сигналами, которую сформулируем следующим образом.
На интервале [0,Г] наблюдается реализация
y(t) = ^(t)+S2(t)+n(t),
где Sj (/), S2(t) — известные сигналы; η(ί) — БГШ с нулевым МО и
двусторонней спектральной плотностью Ν0/2; ϋ — случайный пара-
204
метр, принимающий значения 0 с априорной вероятностью /> (0) или
lcPv(l).
Ставится задача оценки параметра ϋ, т.е. принятия решения о том,
присутствует или нет сигнал S\(t) в наблюдаемой реализации.
Отметим, что в данной постановке полагается, что при отсутствии сигнала
Si (t) наблюдения y(t), тем не менее, содержат сигнал $2 (*)·
Как и в гл. 2, имеем двухальтернативную задачу обнаружения,
поэтому общее решение дается выражениями (4.3), (4.4), т.е.
[ΰ=1. прир^Ы,
«оК)-. \ _' .
[ύ = 0, прир(У0Г)<А,
где h = Pap (0)jPap (l) — порог обнаружения;
pi° = /7Ϊ \; (8Л)
условные плотности вероятности P1IJfp = l) и ΡΐΥ0 |θ = 0]
определяются выражениями
2 т
p(Y0T\u = l) = kexp -^-J(S,(0+52(0)^(0-0,5(5,(0+52(0))ЛJ,
(8.2)
/>(у0г|д=0) = А:ехр|--^|52(0(у(0-0,552(0)Л ·
Подставив (8.2) в (8.1) и выполнив необходимые преобразования,
получим
p(r0r) = expj^j51 (ОИО-0,55, (0)dt^]sl(t)S2(t)dt\. (63)
Сравнение (8.3) с формулой (4.15), полученной для задачи
обнаружения сигнала на фоне только БГШ, показывает, что они отличаются
вторым слагаемым, стоящим под знаком экспоненты. Данное слагаемое
определяет взаимную корреляцию двух сигналов (взаимную энергию
205
τ
E\2=\S\{i)Si{i)dt). Если сигналы не коррелированны, то оно не
о
влияет на процедуру и характеристики обнаружения. Для
коррелированных сигналов характеристики обнаружения изменяются.
Переходя от сравнения отношения правдоподобия (8.3) с порогом к
сравнению соответствующих логарифмов, запишем
My{})Sx{tyt>^\n(h)^. (8.4)
Из (8.4) видно, что структура обнаружителя сигнала не изменилась.
Изменилось лишь значение порога обнаружения, и это изменение тем
больше, чем больше корреляция между сигналами.
Рассмотренную выше задачу «разрешения—обнаружения» можно
расширить, введя дополнительные альтернативы. Например, можно
рассмотреть следующие возможные альтернативы:
и<)=
При этом возникает необходимость оценивать четыре значения
случайного параметра θ, что приводит к многоканальной схеме
оптимального устройства оценивания, как это имело место, например, в
задаче различения м сигналов (см. п. 6.3).
8.2. сРазрешение—измерение» сигналов
Рассмотрим теперь задачу разрешения сигналов по параметрам. В
соответствии с принятым выше определением необходимо рассмотреть
задачу оценки параметров λ, сигнала, наблюдаемого на фоне
аддитивного шума n(t) и мешающего сигнала, который имеет ту же структуру
£(;,λ'), но иное значение оцениваемого параметра. Таким образом,
имеем наблюдение
Η0 = 5(/,λ) + 5(ί,λ>/ι(0, '€[0,7·]. (8.5)
В гл. 7 показано, что для отыскания оценок параметров сигнала
часто используют функцию правдоподобия или нормированное ее
значение. Нормировка при этом возможна на любую функцию, не зависящую
206
»(0.
5, (/)+»(/
S2 (')+"('
5,(0+S2(
).
).
г)+и(/),
0 = 0;
d = l;
ϋ=2;
а=з.
от оцениваемых параметров. Воспользуемся такой же нормировкой, что
и в п. 8.1. Введем функцию
v ' p(Y'\s(a)=o9s(tX))
= ехр|^Ь(/Л)(^(0-0,55(гЛ))Л-^-^(гЛ)5(г,Г)Л
1^0 о ^0 0
.(8.6)
Так же как и в задаче «разрешение—обнаружение», формула (8.6)
отличается от аналогичного выражения (7.46) в задаче оценки
параметров сигнала, наблюдаемого только на фоне БГШ, вторым слагаемым,
стоящим под знаком экспоненты. Данное слагаемое определяет
взаимную корреляцию сигнала и его копии, смещенной по оцениваемым
параметрам, т.е.
Τ
\y(kX)=jS(t9X)S(tX)dt. (8.7)
о
Таким образом, функция ψ (λ, λ') определяет характеристики
решения задачи «разрешение—измерения», а точнее, их отличие от
обычной задачи «измерения» параметров сигналов, т.е. их оценки при
наблюдении сигнала лишь на фоне БГШ. Поэтому эта функция может
быть принята как мера разрешающей способности сигналов по
параметрам. Обычно дня сигналов с конечной энергией используют
нормированную функцию
y(XX) = ±lS(a)S(tX)dt. (8.8)
Ео
τ
где Е = JS {tX)dt — энергия сигнала,
о
Функцию ψ(λ,λ'), определенную в соответствии с (8.8), называют
функцией неопределенности сигнала S (ί, λ) по параметру λ.
Для узкополосных радиосигналов, когда допустимо описание в
форме комплексных амплитуд 5(ί,λ), функция неопределенности
может быть представлена в виде
ψ(λΛ>^
js(a)s*(tx)dt\
(8.9)
207
Перейдем от рассмотрения отношения правдоподобия (8.6) к его
логарифму, т.е. рассмотрим функцию
7* Τ
#0 О #0 0
Фиксируем значения параметров λ и λ'. В гл. 4 введено понятие
оптимального приемника, реализующего корреляционную обработку
наблюдаемой реализации y(t) и опорного сигнала S(t) (4.22), т.е.
"οπ(0 = ^-Μτ)*(τ)/τ
или с использованием импульсной характеристики g(t -τ) = S(x)
«οπ(0 = -^-^(τ)§('-τ>/τ. (8.11)
#0 0
Подставляя (8.5) в (8.11), запишем выражение для среднего
значения процесса на выходе оптимального приемника
Α/["οπ(0] = ^-}«('-τ,λ)(5(τ,λ)+5(τΛ')^ =
#0 0 #0 0
= ^-Js(t,X)S(x,X>/x+^-}s(x,X)S(t,V>/t. (8.12)
#0 0 #0 0
Из (8.12) видно, что отклик на выходе согласованного с сигналом
S (г, λ) фильтра (согласованного приемника) при поступлении на его
вход двух сигналов отличается от аналогичного отклика при
поступлении на вход приемника одного сигнала таким же слагаемым, что (8.6).
Следовательно, корреляционный интеграл (8.7) определяет также и
характеристики оптимального корреляционного приемника при наличии
на его входе двух сигналов. Это еще раз подтверждает возможность
использования функции (8.8) в качестве меры разрешающей
способности сигналов.
Количественно разрешающую способность определяют по каждой
компоненте λ, (при всех остальных значениях δλ; = 0,у * ί) как значе-
208
ние Δλί, соответствующее сечению функции неопределенности
горизонтальной плоскостью на уровне 0,5.
8.3. Функция неопределенности сигнала
по задержке и частоте
Функция неопределенности сигнала была впервые введена Вудвор-
дом для временных сигналов в радиолокации. В качестве оцениваемых
параметров сигнала рассматриваются задержка τ3 и доплеровское
смещение частоты /д. Для узкополосного сигнала
и его смещенной по параметрам т3 и/д копии
$(ί,τ3+δτ3>Λ+δΛ) =
= ^(г-т3-бх3)со8(((юь+Шд+5Шд)/+ф(г-Тз-6Тз))
введем комплексные амплитуды
%»b.%)-^('-Ti-^)^K*kH(Mi"ei,))-i('-»4)ei,V·
Тогда, учитывая определение (8.9), функцию неопределенности по
задержке и частоте (доплеровскому смещению частоты) запишем в виде
JS(0S>-5r3)e~j^'J ,
о
ψ(δτ3.δΛ)=~
(8ЛЗ)
где £ = -
2
I 4<)S* {t)dt\
Функция неопределенности (8.13) обладает следующими свойствами:
наибольшее значение функция неопределенности принимает при
δτ3=0, 6/д=0, ψ(0,0) = 1; (8.14)
объем тела неопределенности ψ2 (5х3,6/*д) не зависит от вида
сигнала и равен
209
J |у2(5т3,5/д)^з^/д=2я.
(8.15)
Соотношение (8.15) является наиболее общей формулировкой
принципа неопределенности, согласно которому никакие виды модуляции не
могут изменить объема тела неопределенности.
При разных видах модуляции радиосигнала функция
неопределенности может деформироваться, однако при этом должны оставаться в
силе равенства (8.14) и (8.15). Поэтому, если сжать функцию
неопределенности по оси τ3, она расширяется по оси fA, и наоборот, при
сжатии ее по оси /ц получаем расширение по оси τ3. Если требуется
получить узкий пик в начале координат, то весь остальной объем функции
неопределенности должен быть распределен в плоскости τ3 и fA в
тонком слое на большой площади или в виде серии пиков. Наличие
последних означает возникновение неоднозначности оценки задержи и
доплеровского смещения частоты.
При решении вопроса о выборе формы сигнала необходимо
учитывать следующие требования: получение высокой точности измерения
параметров τ3 и /д; отсутствие (по возможности) неоднозначности
оценки; обеспечение высокой разрешающей способности.
Рассмотрим вопрос о связи функции неопределенности и точности
оценки параметров х3 и /д.Вп. 7.8 было показано, что потенциальная
точность совместной оценки задержки сигнала по огибающей равна
Яошх '-УМ
Ή
а частоты -
Э21пр(т3)/Д)
D ? =-1/М
где τ3 и /д берутся в точках истинных значений данных параметров.
Рассмотрим
Μ
921ηρ(τ„Λ),
ъ*
(8.16)
Дифференцируя (8.8) два раза по т3, получаем
210
32ψ(δτ„δ/Λ)
ΒδτΙ
от3=0,о/я=0
.±ϊ*<*/.£%^. <8
Эх
17)
Сопоставляя (8.16) и (8.17), видим, что они с точностью до
константы Ε совпадают. Но вторая производная функции неопределенности
характеризует ширину ее главного пика по соответствующему
параметру: чем больше значение модуля производной, тем уже пик.
Следовательно, ширина главного пика функции неопределенности по
параметрам τ3 и /д пропорциональна потенциальной точности измерения
данных параметров.
Разрешающая способность по τ3 и определяется как значения
отклонений δτ3, 6/д, при которых значение функции неопределенности
равно 0,5 в сечениях по соответствующим осям.
Прямоугольный радиоимпульс В качестве примера рассмотрим
прямоугольный радиоимпульс
S(t,X) = Af(t-x3)cos(((o+(oA)t + <pQ)3 te[0j],
при 0<ί<τ„;
при ί<0, *>хи.
Комплексная амплитуда сигнала равна S (t, λ) = Af (t - τ3)e* д '.
Тогда (8.13) принимает вид
ч;
ψ(δτ„δ/Λ) = —
lA2f(t-x,)f(t-x3-dt3)e
-jSoy
dl
[|sin(jc5/a (τΗ -|δτ3|))/πδ/ΛτΗ|, |8г,| й ти;
[θ, |δτ,|>τ„.
Сечения функции неопределенности ψ(δτ3,ζ/],) в двух плоскостях
определяются выражениями
ψ(°»δΛ) = \^η(τώ/ΆτΗ )/πδ/Λτ„|
и приведены на рис. 8.1 и 8.2.
211
Ыо,¥я)
ψ(δτ„θ)
^δτ, ^\Α
«Λ
Рис 8.1. Сечение функции неопреде- Рис. 8.2. Сечение функции
неопределенности плоскостью §/*д = 0 ленности плоскостью δτ3 = О
Сечение функции неопределенности на уровне 0,5 горизонтальной
плоскостью дают значения разрешающей способности
Δτ3=τΗ, 4Гд=1,2/ти. (8.18)
Из (8.18) следует, что при уменьшении длительности импульса ти
разрешающая способность по задержке увеличивается, а по частоте —
уменьшается, и наоборот. Это наглядно можно проиллюстрировать
графиками функции неопределенности в сечении горизонтальной
плоскостью на уровне 0,5 (рис. 8.3).
δ/,
«Λ
1.2/тиГ
δτ3
1,2/'»
-δτ.
_i_J
a) 6)
Рис. 8.3. Сечения функции неопределенностью горизонтальной
плоскостью на уровне 0,5: а — для «длинного» радиоимпульса;
б — для «короткого» радиоимпульса
212
Отметим, что два сигнала не могут быть разрешены, если значения
разности времен запаздывания и частот между ними лежат внутри
заштрихованной области.
Радиоимпульс с линейной частотной модуляцией. Как показано в
п. 7.8, для увеличения потенциальной точности совместной оценки
задержки и частоты сигнала используют сигналы с большой базой, для
которых произведение ширины спектра сигнала Afc на его
длительность АТС много больше единицы:
Д = 4ГСЛГС»1.
(8.19)
Величину В называют базой сигнала. Сигналы с В ~ 1 называются
простыми, а сигналы, для которых выполняется условие (8.19), —
сложными.
Сложные сигналы получаются в результате дополнительной
модуляции сигнала. Одним из типов сложных сигналов является импульсный
сигнал с дополнительной частотной модуляцией. Рассмотрим случай
линейной частотной модуляции (ЛЧМ), для которой
/(0 = /о+4Гм'Ли.
(8.20)
где yj) — начальное значение частоты; Afu — девиация частоты.
При линейном законе изменения частоты (8.20) его фаза изменяется
по квадратичному закону:
q>(t) = 2nf0t + KAfMt2/xH.
Следовательно, комплексная амплитуда для ЛЧМ-импульса
5(/Д) = ^(г-Хз)е^'7т"+<Л>) . (8.21)
Подставляя (8.21) в (8.13) и выполняя интегрирование, получаем
Ц(л(о/Д + ΑΤΜδτ,/τ„ )(τ„ -|Λ,|))|
ψ(δΜΛ) =
*(5/л+4№ЛиК
0,
|δτ3|<τ„;
δτ, >V
В сечениях 6/д =0и δχ3 =0 функция неопределенности
описывается выражениями
213
ψ(δτ3,0) =
ψ(ο,%)=
sm(KWMtoJzH)(xH-\bi3\))\
πύ/„5τ3/τΗ
Ο,
8ίη(πδ/ΛτΗ)|
\δζ3\<τΗ;
|δτ3|>τΗ;
Зависимость функции
ιψ(δνθ)
Η 0,5
IfVvvvv^ »
δτ.
неопределенности ψ(θ,δ/^) в сечении
δτ3 = 0 не изменилась и имеет вид,
приведенный на рис. 8.2.
График функции
неопределенности в сечении ψ(δτ3,0) приведен на
рис. 8.4, откуда видно, что для ЛЧМ-
импульса разрешающая способность
по задержке определяется величиной
девиации частоты Д^м, а не
длительностью импульса.
На рис. 8.5 приведен·
горизонтальное сечение функции
неопределенности ЛЧМ-импульса на уровне
0,5. Как видно из рисунка,
дополнительная частотная модуляция приводит к повороту главного лепестка
функции неопределенности, что вызывает уменьшение ширины пика в
сечении δ/α = 0.
При прохождении
ЛЧМ-импульса через оптимальный приемник
(сглаживающий фильтр) на выходе
получается «сжатый импульс». Если
определить длительность выходного
отклика по уровню 0,5 от
максимального значения отклика, то
можно показать, что она равна
Атвых=1,2/4/*д.
и/ум и
Рис. 8.4. Сечение функции
неопределенности плоскостью &/л = 0
>*,
Рис. 8.5. Горизонтальное сечение
функции неопределенности
ЛЧМ-импульса на уровне 0,5
Введем коэффициент сжатия
^сж -
ΔτΒ
= 1и4/м_
1,2
214
Теперь разрешающую способность по задержке можно представить
в виде
Δτ3 = 1,2/ДГм = τ„ Дсж - (8.22)
Сопоставляя (8.22) с (8.18), видим, что разрешающая способность у
импульсного сигнала с ЛЧМ в К^ выше, чем у обычного импульсного
сигнала. Разрешающая способность по частоте у обоих сигналов
одинакова и обратно пропорциональна длительности импульса.
Контрольные вопросы к главе 8
1. Что понимается под разрешением сигналов?
2. Что понимается под «разрешением—обнаружением», «разрешением—
измерением»?
3. Что такое функция неопределенности сигнала и какова ее роль?
4. Какими свойствами обладает функция неопределенности сигнала?
5. От чего зависят характеристики разрешения сигналов?
6. Какие сигналы называются сложными и почему?
7. Как связана функция неопределенности сигнала с потенциальной
точностью измерения его параметров?
215
Глава 9
ОСНОВЫ ТЕОРИИ ФИЛЬТРАЦИИ
СЛУЧАЙНЫХ ПРОЦЕССОВ
Выше рассматривались задачи статистической теории радиосистем,
в которых оцениваемые параметры не меняются за время наблюдения.
Если они меняются, то имеем задачу оценивания случайных процессов.
В отличие от задачи оценивания постоянных параметров сигнала, когда
оценка формируется в конце заданного интервала времени Г, в задачах
оценивания случайных процессов возможны различные комбинации
между текущим моментом времени, т.е. тем моментом, когда проведено
последнее наблюдение, и моментом, для которого формируется оценка
процесса. В соответствии с этим различают следующие задачи и типы
оценок:
если оценка ζ(ί) процесса ζ(/) формируется для того же момента
времени г, для которого получено последнее наблюдение, то говорят о
задаче фильтрации, а соответствующие оценки называют
фильтрационными;
если формируется оценка ζ(ί + τ) при наблюдениях у (v), ve [0,f],
то при τ > 0 задача оценивания называется экстраполяцией, а
соответствующая оценка называется экстраполированной;
если в описанной выше задаче полагается τ<0, то такая задача
оценивания называется интерполяцией, а оценки —
интерполяционными.
Наиболее часто встречаются задачи фильтрации случайных
процессов. При этом можно ставить и решать задачу фильтрации как самого
сигнала S(t), т.е. полагать ζ(ί) = 5(ί), так и задачу фильтрации
информационного процесса, т.е. принимать ζ(ί) = λ(ί). Первая
постановка более характерна для задачи обнаружения сигнала при его описании
случайным процессом [7]. Вторая — для задачи извлечения
информации из детерминированного или квазидетерминированного сигнала, т.е.
по сути, для оценки меняющихся во времени параметров сигнала. Круг
задач, связанных фильтрацией случайных информационных процессов
более широк и разнообразен для практических приложений, поэтому
сформулируем постановку данной задачи более подробно.
Пусть на интервале времени [0,г] наблюдается реализация
216
,(0=s(a(o)+«(0. (9.1)
где S(t,X(t))—сигнал, несущий информационный процесс λ(/); n(t)
— помеха.
Используя наблюдения (9.1) и априорную информацию о
статистических характеристиках процессов λ(/) и η (г), необходимо
сформировать оценку λ(ί), наилучшую в том или ином смысле.
Заметим, что в сформулированную постановку вписываются и
задачи оценивания постоянных параметров сигнала. При этом формировать
фильтрационную оценку можно в каждый текущий момент времени t, а
потребителю выдавать искомую оценку лишь в конечный момент / = Τ .
Поэтому можно говорить, что задача фильтрации случайных процессов
является более общей по сравнению со всеми описанными ранее
задачами.
В дальнейшем, в основном, будет рассматриваться задача
фильтрации, когда помеха в (9.1) является БГШ с нулевым МО и двусторонней
спектральной плотностью Щ/2. Обобщения на случай
коррелированных и негауссовских помех будут даны ниже.
Априорная информация о фильтруемом процессе λ(ί) может
задаваться в разной форме (см. гл. 1): в виде многомерных плотностей
вероятности или дифференциальных уравнений с заданными начальными
условиями. При использовании второго описания наиболее часто
используют представление λ(t) в виде компоненты многомерного
марковского процесса, т.е. полагают λ(/) = οχ(/), где x(t) — η -мерный
вектор, изменение во времени которого описывается
дифференциальным уравнением 1-го порядка, например, линейным:
i|-F(/)i+G(0S(0. *(Ό) = «0> (9-2)
где ξ(/) — т -мерный вектор БГШ с корреляционной матрицей
R5(x) = S5/25(x).
Наиболее полные и интересные результаты в теории фильтрации
получены при описании сообщений марковскими процессами (см. п. 1.8).
Поэтому в дальнейшем будет рассматриваться именно это направление
общей теории фильтрации.
217
В каждый фиксированный момент времени t значение случайного
процесса χ (г) является векторной случайной величиной, которая
описывается ПВ p(\j). В п. 1.8.3 показано, что для марковского процесса
(9.2) эволюция ПВ ρ(τ9ί) во времени описывается уравнением Фокке-
ра—Планка—Колмогорова (1.79). Плотность вероятности p(^t)
называют априорной, так как она описывает априорные статистические
сведения о процессе х(/). После того как проведены какие-либо
наблюдения y(t), связанные с процессом χ (г), статистические сведения о
данном процессе изменились, и они уже содержатся в апостериорной ПВ
(АПВ) р[χ \Yq) · Естественно ожидать, что АПВ, также как и априорная
ПВ, описывается некоторым дифференциальным уравнением. Если
такое уравнение получим, то будем располагать всей имеющейся
статистической информацией процессе χ (г) при заданных наблюдениях Yq ,
на основе которой далее можно искать те или иные оптимальные
оценки этого процесса.
9.1. Уравнение для апостериорной плотности
вероятности непрерывных процессов
Рассмотрим для простоты задачу фильтрации скалярного
непрерывного марковского процесса λ(ί) = x(t), полагая, что наблюдается
аддитивная смесь сигнала и БГШ
y(t) = S(X,i)+n(t).
Введем в рассмотрение совместную ПВ и, используя правило
умножения вероятностей, представим ее в виде
ρ(κγή=ρ(λ\γήΡ(γή,
где pik\Yq J — АПВ, которую для дальнейшего использования удобно
записать в виде pi λ, ί\γ$ Ι, подчеркивающим ее явную зависимость от
времени. Пусть на интервале времени проведено дополнительное
наблюдение реализации y(t). Введем приращение δΥ = У/+ и рассмот-
218
рим приращение bpaps апостериорной ПВ, обусловленное
приращениями 5/ и δΥ:
^ = p^(/+6/),i+&|y0'+&)-p(x(0,/|io')=
= [ρ(λ(ί+δή,ί+δί\γ^)-ρ(λ(ή,ί\γ^)\+
+[ρ(λ(ή,ΐ\^)-ρ(λ(φ\γή] = δραρία+δραρίΗ.
Здесь bpapSR — приращение АПВ, обусловленное изменением
сообщения (динамики) за время δ/, a SpapsH — приращение АПВ,
обусловленное приращением наблюдений δΥ.
При δ/-»0 приращение §р^д ПВ марковского процесса λ (г)
описывается уравнением Фоккера—Планка—Колмогорова (1.75),
которое можно представить в обобщенном виде
где /,(*) — дифференциальный оператор
Фоккера—Планка—Колмогорова (1.75).
Можно показать [9, 13], что при δ/->0 приращение АПВ δραρ5Η
описывается соотношением
dPapsH =
(λ,ο-|^(λ,/)/7(λ,/|^)^λΜλ,/|^)Λ,
^(λ,0=^τί1(ΗΟ-ο,55(λ,ο).
Таким образом, изменение АПВ
циальным уравнением
(9.3)
описывается интегрс-дифферен-
'(λ^)-\Ρ(λ,ήρ(λ,ί\γή(ίλ\ρ(λ,ί\γή
(9.4)
219
с начальным условием /?(λ,θ|θ) = р^ (λ), где р^ (λ) — априорная
ПВ распределения λ в момент времени / = 0.
Первое слагаемое в правой части (9.4) ведет к расширению
апостериорного распределения, обусловленному изменением марковского
процесса λ(/), а второе слагаемое — к его сужению, что вызвано
накоплением сведений о фильтруемом процессе в результате наблюдения
реализации y(t).
Уравнение (9.4) впервые получено русским математиком Р. Л. Стра-
тоновичем, поэтому в отечественной литературе оно часто называется
уравнением Стратоновича,
Для векторного процесса х(/), например (9.2), и векторных
наблюдений
y(0 = S(U)+n(0, λ(ί) = α(/), м[в(0пт(/+х)] = ^/26(т)
уравнение Стратоновича имеет вид
ф(*.'|*о)
dt
= φ(χ,/|γ£))+ F(x,/)-JF(x,/)p(x,/|y^Ux,/|yo)
(9.5)
с начальным условием /?(х,0|0) = /?^(х) и
F(x,/) = ST(cx,/)2N-1(y(/)-0,5S(cx,0).
Уравнение (9.5) описывает эволюцию во времени АПВ и будет
использовано в последующих материалах книги для синтеза алгоритмов
оптимальной фильтрации. Здесь же рассмотрим один частный случай,
когда фильтруемые параметры не меняются за время наблюдения, т.е.
Л/А = 0.
В этом случае оператор Фоккера—Планка—Колмогорова 1(*)з0
и уравнение (9.5) принимает вид
фН*о)
dt
F(m)-JF(*,,)p(x,,|yJ)^Ux,/|yo).
Представим данное уравнение в эквивалентном виде
220
A.
из которого следует очевидное решение
/7(х,/^) = Фар(х)ехр[}^(х,0Л
= c/V(*)exP
(9.6)
где Рщ, (χ) —априорная ПВ оцениваемых параметров.
В (9.6) экспоненциальный сомножитель — это отношение
правдоподобия р(х) (4.17). Таким образом, приходим к известному
результату, который заключается в том, что апостериорная ПВ может быть
представлена (с точностью до константы) в виде произведения
априорной ПВ Pjp(x) на отношение правдоподобия р(х).
Положим, что в качестве постоянного оцениваемого параметра
выбрана задержка сигнала, который в общем виде может быть записан как
S(r,T3) = a4(r-T3)cos(a^(/-T3)),
т.е. рассматривается задача оценки задержки сигнала, входящей в его
огибающую A(t) и фазу.
Полагая, что задержка сигнала не влияет на его энергию, уравнение
(9.6) в рассматриваемом случае могут быть записаны в виде
р(тз^|уо) = ФаРЮехР
( 2 '
N,
ly(t)aA(t-x3)cos((uo(t-x3))dt
оо
. (9.7)
Используя известное представление cos (a - β) = cos (a)cos (β)+
+sin(a)sin^), преобразуем (9.7) к виду
= Ф<*р(ь)ехР ^(cos((^t3)X^^t3)+cos(^T3)^^/,T3)) ,(9.8)
221
где
о
t
о
— квадратурные составляющие огибающей X(t,x2) =
= yjXc (ί,τ3)+Xs (ί,τ3) на выходе согласованного фильтра.
Так как щх3 определяет составляющую фазы сигнала, то, по
аналогии с (7.54), определим оценку этой фазы соотношением
Φ = ωοτ3 (0 = arctg Xs (г, τ3 )/Хс (г, τ3).
Тогда (9.8) можно записать в виде
(Τ \
(9.9)
Фиксируем момент времени t = T и рассмотрим' АПВ
/?ίτ3,Γ Уо ) = /(хз) как функцию τ3. Из (9.9) следует, что поведение
/(τ3) определяется медленно меняющейся функцией Х(Т,х3) и
быстро меняющейся периодической функцией cos(a\) (τ3 -τ3 (/))).
Наличие периодической функции приводит к периодическому характеру
АПВ, вид которой схематично приведен на рис. 9.1.
Многомодальность АПВ
л \\ \\
1 i
?ь
! Λ
приводит к проблеме
неоднозначности измерений. Это
обстоятельство обусловлено
попыткой оценивать задержку
сигнала по фазе несущего
колебания. Полученная в п. 7.8
оценка потенциальной
точности задержки сигнала по фазе
несущего колебания относятся
к случаю, когда оценка
находится в пределах главного
максимума АПВ, т.е. решена
проблема неоднозначности фазовых измерений. Отметим также, что АПВ,
222
и и и и υ ϊ
Рис· 9.1. Апостериорная плотность
вероятности
приведенная на рис. 9.1, является негауссовской. Поэтому
рассматриваемые в последующих главах приближенные алгоритмы фильтрации,
основанные на гауссовской аппроксимации АПВ, в таких задачах
оказываются неработоспособными.
9.2. Рекуррентное уравнение для апостериорной
плотности вероятности дискретных процессов
При синтезе дискретных систем фильтрации считаются заданными
дискретные уравнения ((1.83) или (1.84)), описывающие фильтруемый
процесс, и уравнения наблюдения в дискретном времени, например,
(7.90). Рассмотрим сначала задачу фильтрации одномерного МП λ* .
Используя правило умножения вероятностей, запишем два
эквивалентных выражения для условной совместной ПВ ρίλ^,^Ρο )
ρ(λ».Λ|ιί"1)=ρ(λ4|ι#)/»(Λ|ι#-,)-ρ(Λ|λΑ,^-1)ι»(λ4|ι#4).
Выразим из этого выражения апостериорную ПВ
р(хк\у0к) = ср(ук\Хк,¥0к-х)р(\к\¥$-]), (9.10)
где с — константа, не зависящая от λ.
Так как наблюдение у^ при фиксированном Хк зависит лишь от
шума пк и не зависит от предыдущих наблюдений Υ{ ~ι, то
РуУк^к^о'1)-р{Ук\^к)· Таким образом, уравнение (9.10) можно
записать в виде
p(h\Yo) = cp{yk\Xk)p(xk\Y0k-1). (9.11)
При к = 0, т.е. при отсутствии наблюдений, следует полагать
/>(λ0|ϊΌ°)=Μλο)· <912>
Условная ПВ р(у/с\^к) м<>жет быть найдена из уравнения
наблюдения (7.90). Ранее (в задачах обнаружения и оценки параметров
сигнала) мы имели дело, например (4.13), с условной ПВ совокупности
наблюдаемых отсчетов при заданном значении оцениваемого параметра.
В задачах фильтрации всегда будем иметь дело с условной ПВ одного
отсчета наблюдения при фиксированном значении оцениваемого про-
223
цесса в этом отсчете. Данная условная ПВ, рассматриваемая как
функция Хк , называется одношаговой функцией правдоподобия. Качественно
такую ситуацию можно пояснить следующим образом. Ранее
говорилось об оценке постоянных за время наблюдения параметров. Пусть,
например, это был один параметр д. Условная ПВ р(»|д) любого
отсчета наблюдений (it = \,N), рассматриваемая как функция
параметра д, была одной и той же. Поэтому, задание некоторого значения д'1'
полностью определяло как одношаговую функцию /*(>'* |д), так и
«многошаговую» функцию p\Y\ |д). Иная ситуация в задаче
фильтрации, когда оцениваемый параметр λ* меняется в каждый момент
времени. В этом случае одношаговая функция правдоподобия р(ук\^к)
зависит от одного параметра λ^. В то же время, условная ПВ
совокупности из N наблюдения зависит от N параметров: λ|, λ2, ...,λ*, ...,
Хдг. Поэтому в данном случае необходимо было бы рассматривать
функцию /ч!^^ ,λ2 ,...,Я^,...Д^1. В принципе это возможно, но
существенно усложняет проведение необходимых выкладок.
Условная ПВ ρίλ^ΐο*1) марковского процесса λ*, входящая в
(9.11), определяется уравнением, аналогичным (1.71):
p(h\Yo~l)= ] p(h-i\Yok-l)p{*-k\h-№k-i. (913)
—©о
где р(Хь |λ*_ι) — ПВ переходов МП, которая может быть найдена из
уравнения, описывающего фильтруемый процесс λ*, например (1.84).
Для расчета ПВ plkk \Yq~[ J используется полученная на
предыдущем шаге расчетов АПВ ρ[λ^_χ \Yq ], в которой учтены данные,
полученные из всех наблюдений, соответствующих интервалу времени
[θ,Λ-l], и ПВ ρ(λ^|λ^_ι) переходов МП λ. Следовательно, при
заданных наблюдениях Yq, , плотность вероятности /πλ* Ιο 1 для
момента времени к рассчитывается только по априорным сведениям о
224
фильтруемом процессе. Поэтому ее иногда называют
экстраполированной ПВ или плотностью вероятности экстраполированных значений
процесса.
Уравнения (9.11)—(9.13) позволяют рекуррентно вычислять
значение АПВ pikk \Yq j на k-u шаге по соответствующему значению той
же ПВ на предыдущем шаге. Начальным условием для такой
рекуррентной процедуры служит (9.12).
Обобщение задачи дискретной фильтрации на векторный случай
дается простой заменой в (9.11)—(9.13) скалярных процессов на
векторные. Полагая, как и выше, λ^ = сх^, где вектор х* описывается,
например, уравнением (1.83), запишем
p{4\\k0) = cp{yk\4)p{4\itX), (9.14)
ρ(χ*|Υο_1)= Ϊ p{*k-x\*tX)p{4\4-\)d4-\ . (915)
р(Хо|¥00) = рая(Хо). (9.16)
9.3. Рекуррентное уравнение для апостериорной
плотности вероятности дискретных процессов
при наличии случайных неинформативных
параметров сигнала
Рассмотрим задачу дискретной фильтрации, полагая, что сигнал,
несущий сообщение Xk = cxk, содержит неинформативные параметры
μ , которые постоянны за время наблюдения. В этом случае
наблюдаемый процесс имеет вид
Рассмотрение скалярного наблюдения не ограничивает общности
рассматриваемого подхода, а выбрано для простоты изложения.
Дополним постановку задачи соотношением μ^ = μ^{,
отображающим условие постоянства неинформативных параметров.
Iх* I
Введем расширенный вектор ζ* =
Щ
и соответствующую ему
АПВ p(zk\Y0k).
8—2041 225
Поскольку нас интересует только фильтрация процесса х* > то не"
обходимо получить выражение для АПВ piхк Μ 1. По свойству
согласованности ПВ имеем
р(»*|1Ь*)=1р(»*|1Ь*Ця1р(жьц|1Ь*Ц. (9Л7)
μ μ
С другой стороны, используя формулу Байеса, запишем
p(*k\Yo) = Cxp(Yok\*k)PaP{*k)- (918)
Подставляя (9.18) в (9.17), получаем
ρ(ι*|ΐί) = 4/ρ(ΐί|ΐ4.μ)^(ιέ,μ)^μ =
μ
^cx\p[Y^\\ki\i)pap{xk)pap{\i)d\i =
μ
= 4Ρ^(»*)Ιρ(%1»*.μ)^(μΗμ = 4Ρ^(»*)ρ(ΐί|»0· (9Л9)
где
р(уо \ч)=\р(уо \ч#)рор (μ)^μ · <9М)
μ
Аналогичные выражения можно записать для АПВ р(х* ίο h
р(хк |У0*-') = с2Рар (xk)p(Y0k-1 |х* ), (9.21)
p(Y0k-l\*k)= Ιρ(Υ^-%,μ)ραρ(μ)άμ.' (9.22)
μ
Представим АПВ р\хк |к0 ] в виде, аналогичном (9.14)
Р(*к \Υθ ) = Ф(Ук|«*)/»(»* К"')· (9-23)
Из сопоставления выражений (9.19Н9.23), получаем
р(ук\ч)=р(УокЫ)/р(Уок-%)=
226
= Ip(yo \ч^)Рар (μ)<ήι l\p№"l \ч>у)рар (μ)<*μ- (9-24)
И / μ
Уравнение (9.23) аналогично уравнению (9.14) с той лишь
разницей, что вместо одношаговой условной ПВ />(л|х*) в него входит
усредненная по априорной ПВ неинформативных параметров функция
/*(Л|х*)(9.24).
Уравнение (9.23) необходимо дополнить уравнением (9.15) для ПВ
экстраполированных значений /мхд.|У0~ I, которое не зависит от
неинформативных параметров μ.
Таким образом, уравнения (9.21)—(9.24) и (9.15) дают общее
решение задачи оптимальной нелинейной фильтрации при наличии
случайных неинформативных параметров сигнала, которые не меняются за
время наблюдения.
9.4. Рекуррентное уравнение для апостериорной
плотности вероятности непрерывных процессов
при наличии случайных неинформативных
параметров сигнала
Как следует из предыдущего матерала, при наличии
неинформативных параметров сигнала в уравнениях для апостериорной ПВ возникает
усредненная условная ПВ наблюдаемой реализации при заданном
значении фильтруемого процесса. Аналогичная ситуация возникает и в
задаче фильтрации непрерывных процессов. Для доказательства этого
факта определим наблюдаемый процесс как
>>(0 = 5(α,μ)+/ι(0, Μ[η(ήη(ί+τ)] = Ν0/2δ(τ) (9.25)
и рассмотрим совместную АПВ ρίχ,μ Уо)> Д™ которой можно
записать уравнение Стратоновича (9.5) для расширенного вектора ζ =
F(i,|M)- J ^(χ,μ,Ορ(χ,μ|Υο)^μΗχ^|γο)· (926)
Χ,μ J
227
р(х,0\0) = рар(х),
где !(*) — оператор Фоккера—Планка—Колмогорова для процесса
«(0;
3ΐη(ρ(κ0'|*>μ))
^(χ,μ,0 = 5(«,μ,ί)2Λ^,(>;(ί)-0,55(€χ>μ,0) = K-j( -;(9.27)
ρ ί ίο |χ,μ 1 = exp IJ F (χ, μ, τ)άτ\ — отношение правдоподобия.
Проинтегрируем (9.26) по μ
- J Ρ(τ,μ^)ρ(χ,μ\γήά*άμρίχ\γ^ (9.28)
где
/(χ,0 = |^(χ,μ,0ρ(χ,μ|Υ^μ. (9.29)
μ
Используя формулу Байеса, запишем
/>(χ>μ|γέ) = ςρ(Υ^|χ,μ)ρ<¥,(χ,μ) = οΙρ(ΥΟ|χ>μ)ρ<ν(χ,μ). (9.30)
Представим производную, входящую в (9.27), в виде
Э1п(р(}о'|х,Ц)) j 3ρ(ΐδ|ι,μ)
* ρ(κ0'|χ,μ) *
(9.31)
Подставим (9.30)—(9.31) в (9.29) и выполним необходимые
преобразования
,Эр(*оЫ Эр(у0'Н
= схРар (x)p(yj |x) V I И = F(x,/)p(x|YO), (9.32)
228
где
p(tfl»)=Jp(n>MMiO^. (9.33)
μ
. Э1п(р(г0'|х))
П*')' » · (9.34)
Подстановка (9.32) в (9.28) дает следующее уравнение для АПВ:
Ψ-MWY
F(x,0- J Ρ(τ,μ,ήρ(χ,μ\γήάιάμ\ρ(τ\γή (9.35)
Уравнение (9.35) совместно с формулами (9.33)—(9.34) дают
решение задачи оптимальной фильтрации при наличии неинформативных
параметров сигнала, не меняющихся за время наблюдения. Данное
уравнение отличается от аналогичного уравнения (9.5), справедливого при
отсутствии неинформативных параметров сигнала, функцией F(x,f),
которая теперь определяется в соответствии с (9.33)—(9.34).
9.5. Рекуррентные уравнения для апостериорной
плотности вероятности дискретных процессов,
зависящих от случайных параметров
В ряде задач фильтруемый процесс х* может быть задан с
точностью до вектора α случайных постоянных параметров, т.е. *к (а).
Такая ситуация возникает, например, когда в формирующих уравнениях
(1.83) или (1.84) те или иные матрицы, входящие в правую часть
уравнений, зависят от α. Рассмотрим для примера линейную модель
сообщения (1.84), которую запишем в виде
*к(<*) = **-!(<х)х*_,(а)+С*ч(α)ξ*_!, χ(/0) = *ο> (9·36)
где ξ* — векторный ДБГШ с матрицей дисперсий Οξ (α).
Для вектора случайных величин α можно записать тривиальное
уравнение
229
Положим, что наблюдается реализация ук = Sk (Хк (а))+пк ,
Μ [пкпт ] = Α,δ^,, где λ* (α) = стх* (α).
Как и в п. 9.3, введем расширенный вектор гк = I и
соответствии
вующую ему АПВ p(zJy<f I. Чтобы вектор гк был марковским
процессом, уточним модель (9.36) с учетом (9.37) в виде
Ч = **-ι («*-i )**-i («*-i )+G*-i («*-ι )%к-\ >
где ξ^_ι — векторный ДБГШ с матрицей дисперсий Οξ (а.к-\).
Для МП гк справедливы уравнения для АПВ (9.14)—(9.15) с
заменой \к на ък .
Однако во многих задачах фильтрации в большей степени
интересна не оценка расширенного вектора гк, а оценка процесса \к , которая
может быть найдена из АПВ /hxJIq )· Поэтому получим выражение
для данной АПВ. Для этого рассмотрим АПВ р\гк |У0 J для
расширенного вектора и, используя формулу Байеса, представим ее в виде
ρ(^|Υο*) = ρ(χ*,α*|ν0*) = ρ(ι*|Υο*.ο*)ρ(α*|Υο*). (9-38)
Интегрируя (9.38) по α, получаем
ρ(χ*|γ0*)= J р[Ч\\^ак)р[ак\\^)аак . (9.39)
Здесь plxk Yo,oc*) — условная АПВ вектора *к при заданных
наблюдениях Yq и фиксированных значениях параметра α.
Фиксация параметров α приводит уравнение (9.36) к разряду
уравнений с известными параметрами, а сообщение х* (°0 имеет
известные статистические характеристики. Поэтому АПВ р1\к Υο,α* 1
соответствует рассмотрению задачи фильтрации сообщений с
известными параметрами, и для нее можно использовать рекуррентные урав-
230
нения, аналогичные (9.14) — (9.16), но при условии фиксированного
значения а,т.е.
р(ч |*о .<**) = ср{Ук \ч>*к )р(*к |Υο"!.α*-ι), (9.40)
p(*k\*tl>*k-\)= i p(x*-i|Vo"1.a*-i)p(**|x*-i..aw)dkiW , (9.41)
Получим вьфажение для pfaJYo 1, входящей в (9.39). Для этого
рассмотрим условную ПВ piак%ук Yq"1 1. Используя формулу Байеса,
запишем
p(«*.y*|*o"I)=p(e*|Yo"I.y*)p(y*|x^I) =
= p(y*|Yo",.a*)p(a*|Yo"')·
Из полученной формулы следует, что
p(a^Yi) = cp(y,|Y0*-1,ait)p(ait|Yi-1), (9.42)
где с — константа, не зависящая от α, которая может быть найдена в
результате интегрирования (9.42) по a
1
с = ·
J P(yk\Yt\*k)p(*k\vtl)<ioik
С учетом постоянства параметров α, что отображается уравнением
(9.37), справедливы следующие выражения
p(y*|Yo"1.a*)=1p(y*|Yo~1.a*-i),
p(*k\Yr) = p(*k-x\*t1)- <9·43>
Последнее соотношение в (9.43) следует, в частности, из (9.15), если
его записать для вектора a.
С учетом (9.43) формула (9.42) принимает вид
231
^>(αi^|Yo*)=cp(yt|γ0*-^αA_1)^>(αi^_1|Yo*-,) (9.44)
и является рекуррентным уравнением для расчета АПВ ploLk Yq ) с
начальным условием
ρ(α0|γ00) = ραρ(α). (9.45)
Уравнения (9.39)—(9.41) и (9.44), (9.45) дают решение
поставленной задачи фильтрации сообщения λ*(α), зависящего от вектора a
случайных параметров. Применение данных уравнений для получения
оценок λ^ будет подробно рассмотрено в гл. 13.
9.6. Рекуррентные уравнения для апостериорных
плотностей вероятности непрерывных процессов,
зависящих от случайных параметров
Рассмотрим аналогичную задачу фильтрации непрерывного
сообщения λ(/,α), зависящего от вектора α случайных (постоянных)
параметров, описываемых априорной ПВ рар(а). Процесс λ(/,α) в
пространстве состояний зададим вектором χ(ί,α), так что λ(ί,α) =
= cx(f,a) и
£ = Ffca)i+G(/,a)t(0. х('о) = *о. (9-46)
at
где ξ(ί) — т -мерный вектор БГШ с корреляционной матрицей
R5(x) = S5(a)/25(x).
На вход приемника поступает реализация
y(0 = S(a^a))+ii(Of (9.47)
где n{t) — БГШ с двусторонней спектральной плотностью N0/2.
Задание α в виде случайных величин предполагает их постоянство
за время наблюдения, что математически может быть записано как
^ = 0,α(0) = α0, (9.48)
где а0 — случайная величина.
232
Уравнения (9.46)—(9.48) описывают расширенный МП ζ =
.Поэтому для апостериорной ПВ plzЩ 1 можно записать уравнение Стра-
тоновича (9.5)
-Ш.1(^(м|<))+
F(z,i)-jF(z,/)p(z,i|y0')^Uv|ib')
Li J
(9.49)
с начальным условием р{г,0\0) = ραρ(ζ) = рар(\)рар(а) и
F(z,0 = F(x(a),0 = S(cx(a),02V(>'(0-0,55(cx(a),i)).(9.50)
В (9.49) !(*) — оператор Фоккера—Планка—Колмогорова для
процесса х(/), так как составляющая дифференциального оператора,
соответствующая компоненте α, тождественно равна нулю вследствие
постоянства данных параметров (9.48).
Рассмотрим условную ПВ р(х Ιο,α). Поскольку при
фиксированном значении α процесс *(*), описываемый уравнением (9.46)
является марковским с известными статистическими характеристиками, то для
АПВ p(x|r0'.a)
можно записать уравнение Стратоновича (9.5)
-±1_^-1(,(ж|*.«))+
F{x(a),t)-JF(z,t)p[x\Y^a)dx Ц^д), (9.51)
X J
где !(*) — тот же дифференциальный оператор, что и в (9.49);
F(x(a),f) —описывается тем же соотношением, что и в (9.50).
Используя формулу Байеса, запишем
/>(ψ') = />(^^ (9-52)
233
Подставляя (9.52) в (9.49) и выполняя необходимые
преобразования, получим
F(x(o),0- J F(x(a),/)^(x,a|ro')^oUx|ro,,a)/>(a|y0').(9.53)
χ,α J
Домножим (9.51) на plotЬо)» вычтем полученное уравнение из
(9.53), а результат вычитания сократим на ρίτ 1q ,a). В результате
получим уравнение
ф(«|*о)
Л
\F(i(a),t)p(x\Yt,a)dx-
-1 Γ{τ(α),ήρ{τ,α\γήά%άα\ρ(α\γή. (9.54)
χ,ο
Обозначим
F(a,/) = jF(x(a),i)p(x|ib',a)rfx
Χ
и запишем (9.54) в виде
ф(а|г0')
(9.55)
А
#(а,0- J /=-(х(а),/)р(х,а|Уо')ли/аЫа|у0'). (9.56)
Уравнение (9.56) эквивалентно уравнению
</1п
v v ' n = F{a,t)- J F{x(a),t)p(x,a\Yl)aula. (9.57)
*■· w re
x,a
Второе слагаемое в правой части (9.57) — это число, поэтому
решение данного уравнения записывается в виде
234
ρ(α|^ο) = ^^χρ|}/;(α,τ)ί/τΙ/7ίν(α), (9.58)
где константа с находится из условия нормировки ПВ р(а№ ) к
единице и равна
с= J ехр|/^(а,т)^и^(а)^а. (9.59)
Уравнение (9.51) совместно с формулами (9.50), (9.55), (9.58)-(9.59)
дает общее решение задачи фильтрации сообщения, зависящего от
вектора случайных параметров. Конкретизация этих общих соотношений
для получения различных алгоритмов адаптивной фильтрации будет
дана ниже ( в гл. 13).
Контрольные вопросы к главе 9
1. Является ли АПВ случайного процесса детерминированной или
случайной функцией и почему?
2. Как изменится общее уравнение для АПВ при фильтрации квазиде-
терминированных процессов?
3. Как изменится общее уравнение для АПВ при фильтрации процессов,
переносимых детерминированным сигналом и сигналом, имеющим
случайные неинформативные параметры?
4. Как изменится общее уравнение для АПВ при фильтрации процессов с
априорно неизвестными статистическими характеристиками?
235
Глава 10
ОПТИМАЛЬНАЯ ЛИНЕЙНАЯ ФИЛЬТРАЦИЯ
ИНФОРМАЦИОННЫХ ПРОЦЕССОВ
10.1. Оптимальная линейная фильтрация
непрерывных процессов
10.1.1. Общие уравнения оптимальной линейной фильтрации
Уравнение Стратоновича (9.S) для АПВ в общем виде не решается.
Лишь в частном случае линейной фильтрации, когда уравнения
наблюдения и формирования сообщения линейные и априорная ПВ р^ (λ)
— гауссовская, уравнение (9.5) имеет точное решение.
Пусть фильтруемый процесс λ(/) описывается скалярным
уравнением
^=Γ(θλ+σ(/)ξ(θ, λ(ο)=λο, (юл)
at
где F(t), G(t) — известные функции времени, ξ(ί) — БГШ с
двусторонней спектральной плотностью 5ξ/2 , Xq - случайное число,
распределенное по гауссовскому закону с нулевым МО и дисперсией D^ .
Наблюдается реализация процесса
у(0 = Я(/)Х(0+я(0. (10·2)
где n(t) —БГШ с двусторонней спектральной плотностью Nq/2 .
При гауссовском распределении начального значения λ0 процесс
λ(/), описываемый линейным уравнением (10.1), является гауссовским.
Наблюдаемый процесс (10.2) в рассматриваемой задаче также является
гауссовским. Можно строго доказать [13, 15], что в этом случае АПВ
ρIX\Yq J — гауссовская, поэтому для нее можно записать выражение
ч2
>(λ>'|ίθ) =
4*&к
exp
(λ-if
2Dk
(10.3)
236
где λ(/) и I\(t) — среднее значение и дисперсия гауссовского
распределения; заметим, что по определению /\ = М\( λ-λ) La,
следовательно, Z\ —это дисперсия ошибки фильтрации процесса λ(ί).
Получим уравнения, которым удовлетворяют среднее значение λ и
дисперсия 1\ . Запишем оператор Фоккера—Планка—Колмогорова для
процесса (10.1)
= -F(t)p(x,t\Yi)-F(t)X VJ U γξ ^' ;. (10.4)
С учетом (10.4) уравнение (9.4) для АПВ принимает вид
фЫуо) / , л Μ**Μ
_Ш-^(0^|18)^(ох--Ш+
G2(t)S^2p(b>t\Yo)
дХ2
H(t)X^-(y(t)-0,5H(t)X)~
-]H(t)X±(y{t)-0,5H(t)X)p(Kt\Y&)dx\p(\,t\y$Y (10.5)
—β· "0 J
Перейдем от уравнения для />Ι λ, / |>о) к уравнению для
и = 1η Ι ρ Ι λ, ί Щ IJ. Учитывая, что
</1η(ρ(λ,ψ0')) j φ(λ,ί|#)
du_
dt
dt
р{ЦЧ) dt
du d\n(p(x,t\Yi)) l dp(x,t\Y{)
= p№) дХ '
дХ
эх
237
3λ2 3λ2 ρ(λ,ι\γή 3λ2
Гэ1п(^(х,/|^))
ЭХ
(10.6)
из уравнений (10.5)—(10.6) получаем
*.^(().,(l)xait^WS(Aja.fV
<* эх 4 эл2 lax I
V /
4*(θλ^(,(θ-ο,5*(θλ)-
L ^ο
- J Η(ήλ^(γ(ή-0,5Η(ήλ)ρ(λΜ)dX \p(\M).(lOJ)
Для гауссовской ПВ ρίλ,ί\Yq I (10.3) выражение для и имеет вид
где с (t) = - In (2πΖ\ (0)/^ — переменная, не зависящая от λ.
Запишем выражения для производных, входящих в (10.7):
^ = ^(ί)_Ι^(λ.χ)2+^(λ.χ)4(0,
A dt 2 dt v ' к ν 'Λ
Преобразуем выражение, стоящее в квадратных скобках (10.7):
H(t)X^-(y(t)-0,5H(t)X)-
-]H{t)\^,(t)-0.5H(t)\)pl\.t]fi)dk-±H(t)%y{t)-
-±H2(t)X2-±H(t)iy(t)+±H2(t)]x2p(xM)dX =
Щ No No -co v ' '
238
-jj-H(t)(X-i)(y(t)-H(t)i)-
-±ΗΗ')(λΛ)2+±Η*(<)Ι>Κ. (10.9)
При вьгаоде соотношения (10.9) учтено, что
J λ2ρ(λ,/|^)^λ-λ2(/)= J (λ-λ)2ρ{Κί\γήόλ = 1\.
Подставляя (10.8), (10.9) в уравнение (10.7), получаем
А 2 Α ν ' Α ν ' Λ
= -F(t)+F(t)iDJi'(X-i)+
+F(t)D? (λ-λ)2 +^&[-^« +D? (λ-λ)2 у
+^я(0(х-х)(Я0-я(0Ч-^я2(/)(х-х)2+^я2(/)^.
Приравнивая в (10.10) члены при одинаковых степенях разности
λ-λ, запишем
^=г(/)х+^(0я(/)^(0-я(/)х), (io.li)
Ά=2Γ(ί)0λ+β2{ίΛ_Η2{ί)2.^ (1012)
at 2 Nq
Начальные условия для уравнений (10.11), (10.12) определяются
следующим образом: λ(θ) = λο, Ζ\ (0) = /^ .
Уравнения (10.11) описывают линейную нестационарную
следящую систему, структурная схема которой приведена на рис. 10.1, где
2
#(*) =—I\H(t) — коэффициент усиления следящей системы. Ко-
эффициент усиления меняется во времени, в первую очередь,
вследствие изменения дисперсии ошибки фильтрации Z\ (/), которая
определяется уравнением Риккати (10.12).
239
ι ι—я*
Щ. ^-J
—»·
Рис. 10.1. Схема оптимальной следящей
системы
Оценка λ фильтруемого
процесса является средним
значением АПВ (10.3), т.е.
λ= J Цх|г0')</х.
Другими словами,
оценка λ — это оценка
условного среднего. В то же
время, из теории статистических решений (см. гл. 3) следует, что оценка
условного среднего минимизирует дисперсию ошибки фильтрации.
Следовательно, уравнения оптимальной фильтрации (10.11), (10.12)
формируют оптимальную оценку по критерию минимума дисперсии
ошибки фильтрации.
Приведем без вывода основные соотношения многомерной
линейной фильтрации векторного процесса х(')> определяемого уравнением
(9.2) в случае векторных линейных наблюдений
у(0=н(0х(0+«(0· (10ЛЗ)
Структура оптимального линейного фильтра описывается
уравнениями
^-F(0i+K(0(y(0-H(»)i).i(0)-*.
где
k(0=dx(0ht(/)2n;
-1
(10.14)
(10.15)
— матричный коэффициент усиления; Dx (t) — матрица дисперсий
ошибок фильтрации, которая определяется матричным уравнением Рик-
кати
4b.=F(0D, +d;f(0+^g(0s4gt(0-dsht(/)2n;'h(/)d; =
dt
-Р(0Вж+1^Р(г)+1с(08^Ст(0-^К(/)^Кт(/),
Dx(0) = DXo. (10.16)
Уравнения оптимального фильтра (10.13)—(10.16) во многом
аналогичны уравнениям (10.11)—(10.12), полученным для скалярного про-
240
цесса λ (г). Схема оптимального многомерно фильтра также
практически совпадает со схемой, приведенной на рис. 10.1, если в ней под
K,F,H понимать соответствующие матрицы, а связи между
отдельными блоками полагать векторными.
Приведенные выше уравнения оптимальной линейной фильтрации в
форме дифференциальных уравнений впервые были получены Р. Калма-
ном. [17] и носят его имя. Отметим, однако, что данные уравнения были
им получены иным путем: в результате непосредственной минимизации
дисперсии ошибки фильтрации с использованием методов
вариационного исчисления.
10.1.2. Некоторые обобщения алгоритмов оптимальной
линейной фильтрации
В ряде задач оптимальной фильтрации формирование
фильтруемого процесса х(/) обусловлено не только случайным формирующим
шумом ξ(ί), как это имело место в (9.2), но и некоторой
детерминированной составляющей, т.е.
£-F(f)x+B(0u(0+G(/)t(0. χ('θ) = χΟ> (10-17)
at
где u(/) —детерминированная векторная функция времени.
Так как уравнение (10.17) — линейное, то, следуя принципу
суперпозиции в линейных системах, можно утверждать, что добавление
аддитивного детерминированного возмущения В(/)и(/) в правую часть
уравнения (10.17) приведет к появлению дополнительной аддитивной
составляющей в процессе х(')> которая также будет
детерминированной, т.е. известной. Но тогда и в соответствующей оптимальной оценке
х(/) должна появиться точно такая же составляющая, так как
оптимальность оценки предполагает минимизацию среднего квадрата
ошибки Μ (x(f)-i(f)) . Но такая составляющая в оценке £(/) может
возникнуть лишь тогда, когда в правой части фильтра Калмана (10.14)
будет такой же возмущающий член, что и в (10.17). Приведенные
рассуждения на «физическом» уровне подтверждаются строгим
математическим выводом. В результате алгоритм оптимальной фильтрации
процесса (10.17) имеет вид
241
^ = F(/)i+B(/)«(0+K(0(y(/)-H(i)i),i(0) = io. (Ю.18)
Соотношение (10.15) для матрицы коэффициентов усиления и
уравнение для дисперсий ошибок фильтрации (10.16) при этом не
изменяются.
Другое обобщение алгоритма оптимальной линейной фильтрации
(10.14)—(10.16) дается на случай, когда формирующий шум ξ(/) и шум
наблюдения п(/) коррелированны. Такая ситуация возникает,
например, в задаче линейной фильтрации процесса на фоне коррелированной
помехи (см. п. 10.3). Положим, что
Λ/[ξ(0ητ(/+τ)] = ΨξΒ/2δ((τ)). (10.19)
Коррелированное^ двух шумов не влияет на структуру алгоритма
оптимальной фильтрации, т.е. уравнение для оценки процесса имеет вид
либо (10.14) при отсутствии детерминированной компоненты в
уравнении формирования, либо (10.18) при наличии такой детерминированной
компоненты.
Изменяется выражения для коэффициента усиления, которое теперь
имеет вид
Κ(/) = (θχ(/)ΗΤ(/)+α(0Ψξη/2)2Ν;1, (10.20)
а уравнение для дисперсий ошибок фильтрации записывается как
^=Ρ(θΒχ+Βτ1Ρ(θ4<ϊ(Οδξστ(/)^κ(/)Ν;ικτ(θ,
Dx(0) = DXo. (10.21)
Коррелированность шумов формирования и наблюдения повышает
точность фильтрации, так как в этом случае в наблюдениях (10.13)
информация о фильтруемом процессе содержится не только в первом
слагаемом, но и во втором, т.е. в шуме η (г).
10.1.3. Использование теории оптимальной линейной
фильтрации для синтеза сглаживающих фильтров
следящих измерителей
Аппарат теории оптимальной линейной фильтрации применяется в
различных областях радиотехники. В том числе, он может быть применен
242
при синтезе сглаживающих цепей радиотехнических следящих систем.
Как известно [3], радиотехническая следящая система (рис. 10.2)
включает в себя в качестве
jfrMM+nfrl
τ
Рис. 102. Обобщенная схема
радиотехнического следящего
измерителя
основных элементов
дискриминатор (Д) и сглаживающий
фильтр (Ф).
Дискриминатор является
нелинейным устройством,
выделяющим информацию о
рассогласовании δλ = λ-λ между сообщением и его оценкой.
Процесс z/д на выходе дискриминатора имеет регулярную составляющую
ί/(δλ) (МО процесса мд) и флуктуационную составляющую ζ(ί)
^(/) = [/(δλ)+ζ(/). (10.22)
Флуктуационный процесс, как правило, зависит от ошибки
слежения δλ, τ. е. ζ(',δλ). Однако в дальнейшем, для простоты, будем
полагать, что он не зависит от ошибки слежения.
Представление (10.22) является статистическим эквивалентом
(моделью) дискриминатора. Принимая во внимание (10.22) и вводя
операторный коэффициент переда-
КМ
чи К(р) фильтра в контуре
следящей системы, схему
(рис. 10.2) представим в
эквивалентном виде,
приведенном на рис. 10.3.
Зависимость математиче-
[/(δλ)
tit)
с/(х—λ)|—π
t
Σ
Ч*Йп
Λ.
Рис 10 J. Эквивалентная схема
следящей системы
ского ожидания U[OK)
выходного процесса дискриминатора от ошибки слежения
дискриминационной характеристикой.
Форма дискриминационной
характеристики приведена на рис. 10.4.
При большом отношении
сигнал/шум на входе следящей системы
ошибка слежения мала и не выходит за
пределы линейного участка
дискриминационной характеристики которая в
этом случае может быть представлена
в виде U (δλ) = SgtiX, где
δλ называют
-δλ
Рис. 10.4. Дискриминационная
характеристика
243
dUjbX)
a dSK
δλ = 0
— крутизна дискриминационной характеристики.
Следовательно, при большом отношении сигнал/шум следящую
систему можно линеаризовать (рис. 10.5).
Χ(ή
К(<)
-На
НЩ
Л.
г—*·
Рис. 10.6. Эквивалентная схема
линеаризованного следящего
измерителя
Рис. 10.S. Линеаризованная схема следящего измерителя
В линеаризованной схеме (рис. 10.S) флуктуационный процесс
ζ(ί) можно пересчитать на вход следящей системы, что приводит к
, ч , ν , ч эквивалентной схеме (рис. 10.6).
5?(τ)=λ(/)+»(/)
В данной эквивалентной схеме
двусторонняя спектральная
плотность шума й(/) равна N„/2 =
= Νζ/2Ξΐ , где #ζ/2 —
двусторонняя спектральная
плотность флуктуационного процесса ζ (г) на выходе дискриминатора, и
K(p) = SnK(p).
Свойства следящей системы (рис. 10.6) определяются
коэффициентом передачи К(р)9 который, в свою очередь, определяется
коэффициентом передачи К(р) фильтра в контуре следящей системы (рис. 10.2).
При изменении коэффициента передачи К(р) меняются свойства
формируемой на выходе следящей системы оценки λ. Следовательно,
можно ставить задачу выбора оптимального коэффициента передачи
Kopt (ρ), например, по критерию минимума дисперсии ошибки
фильтрации. В то же время, из курса «Радиоавтоматика» известно, что в
линейной следящей системе операторный коэффициент передачи от входа
системы к ее выходу Α^χ(ρ) = £(/?)/(ΐ + ΑΓ (/?)). Другими словами,
244
коэффициент передачи К (ρ) фильтра в контуре следящей системы
однозначно определяет коэффициент передачи К-^(р) всей следящей
системы и наоборот. Поэтому оптимизация К(р) эквивалентна
оптимизации К-^ (ρ). Но последняя задача оптимизации есть ни что иное,
как синтез огщшальыого фильтра для выделения (оценки) процесса
λ(/) из наблюдаемой реализации >>(/) = λ(/)+/ζ(/). При описании
λ(ί) в виде гауссовского МП (например, (10.1)) и шума n(t) - как
белого гауссовского, для синтеза оптимальной линейной следящей
системы можно использовать приведенные выше уравнения оптимальной
фильтрации.
10.1.4. Примеры синтеза оптимальных
линейных систем фильтрации
ПримерЮЛ. Рассмотрим задачу синтеза оптимального
линейного фильтра системы частотной автоподстройки. Полагаем, что
дискриминатор полностью задан, отношение сигнал/шум достаточно велико,
так что ошибка слежения мала и не выходит за пределы линейного
участка дискриминационной характеристики. Запишем воздействие на
входе эквивалентной следящей системы в виде y(t) = Cl(t)+h(t), где n{t)
— БГШ с нулевым МО и спектральной плотностью Nq/2. Частоту
Ω(/) будем описывать случайным процессом со спектральной
плотности
стью SqH= ,, 2 2V
(or+or J
ω2'
Процесс Ω(ί) с заданной спектральной плотностью может быть
отображен в пространстве состояний двухкомпонентным МП
x(/) = |xj jc2|t , который описывается следующими дифференциальными
уравнениями:
О(')-М0. ^-**. ^jf—оч+сад. (Ю.23)
где ξ(ί) —БГШ с спектральной плотностью 5ξ.
Запишем (10.23) в векторном виде
245
dx
= ¥χ+Οξ,(ί),
(10.24)
где F =
; в рассматриваемом примере матрица наблюде-
Л
|0 1 I |0|
|0 -а| |а|
нийН=|1 0).
Из общих уравнений (10.14)—(10.16), с учетом (10.24), получаем
следующий алгоритм оптимальной фильтрации
A-%+aLW,)-4).
dt
Ν,
й.н^Вч*)-*).
(10.25)
dt ^2 N0 dt ^2 ^2 N0
dt ^^ 2 N0
Схема оптимальной системы фильтрации приведена на рис. 10.7,
Kl=2EH/N0,K2=2El2/N0.
У(%
\
Σ
. ι
i
I
*ι! I
U* /:2^~ρ.
Σ
.<
\
α
\
L
<
k
i
—»-
λ2
1
i
λ,
Рис. 10.7. Схема оптимальной системы фильтрации
Рассмотрим установившийся режим работы следящей системы
(t —>«). В этом случае систему уравнений (10.25) можно решить
аналитически, что приводит к следующим выражениям для дисперсий
ошибок фильтрации:
aN_o
2
246
A,=^(VU2^-i), A2=A2iM)>
^2=^(аЧ/2-2АУ"о). Ρ = 5ξ/(α2ΛΓ).
Параметр ρ — безразмерный и определяет отношение
энергетических характеристик (спектральных плотностей) фильтруемого процесса
(сообщения) и аддитивного шума. Поэтому его можно назвать
отношением сообщение/шум.
В установившемся режиме коэффициенты усиления К}, К2
постоянны, а операторный коэффициент передачи фильтра в контуре
следящей системы (рис. 10.7) определяется выражением
ф р{ />+<*J ρ P+ot
Таким образом, в установившемся режиме в контуре следящей
системы оптимальным фильтром является фильтр, состоящий из
интегратора и пропорционально-интегрирующего фильтра. Оптимальные
значения параметров фильтра зависят от параметра сообщения α и от
отношения сообщение/шум ρ.
Коэффициент передачи К(р) сглаживающего фильтра в контуре
реальной следящей системы (в данном случае системы частотной
автоподстройки (рис. 10.2, 10.3)) связан с коэффициентом передачи
Κψ (р) синтезированной системы выражением К(р) = К^ {p)/SJX.
Следовательно, структура фильтра остается той же самой (интегратор и
пропорционально-интегрирующий фильтр), а изменяется лишь
коэффициент усиления на нулевой частоте. ν
Пример 10.2. Рассмотрим задачу фильтрации речевого
сообщения λ (г), передаваемому по каналу связи с БГШ. В гл. 2 представлена
одна из моделей такого сообщения в виде двухкомпонентного процесса,
описываемого уравнениями (2.28), которые для удобства приведем еще
раз:
-^- = -α1χ,+0()[-α2χ2+α2ξ(θ], -^- = -α2*2+α2ξ(')>
где ξ (г) —БГШ с двусторонней спектральной плотностью ίξ/2 .
Спектральная плотность процесса λ = х\ описывается выражением
247
*λΝ =
α220$Νξω2
2(ω2+α?)(ω2+α^)
На вход приемника поступает реализация y(t) = X(t)+n(t), где
и (/) — БГШ с двусторонней спектральной плотностью N0/2.
Введем вектор x(i) = |j:1 *2|т > который, также как и в предыдущем
примере, описывается векторным уравнением, однако с иными
матричными коэффициентами, а именно:
F =
-«ι
О
-аг(?о
-а2
,G =
«2
(10.26)
Матрица наблюдений по-прежнему равна Η = |l θ|.
Подставляя (10.26) в общие уравнения оптимальной фильтрации
(10.14)—(10.16), получаем
^- = -α,ή -α20οχ2 +^-(y(t)-xl),
dt
JVn
(10.27)
&.н*^ч,(.М).
dDu
dt
= -2αιΑ,-2α2α)Α2-
^2- = -2α1Α2-«2θ)β22-
2Д2!
"о '
2ΑιΑ2
Nn
(10.28)
^-«♦*M)-£.
0
Схема оптимальной линейной фильтрации, описываемая
уравнениями (10.27), приведена на рис. 10.8.
Уравнения (10.28) для дисперсий ошибок фильтрации в
установившемся режиме в данной задаче также могут быть решены аналитически.
Однако выражения получаются достаточно громоздкими и здесь не
приводятся.
Операторный коэффициент передачи фильтра в контуре следящей
системы рис. 10.8 определяется выражением
248
*ФЫ=
*ιΟ>+Ρ)
(р+щ)(р+а2У
α, Μ
λ,
Рис 10.8. Схема оптимальной
линейной фильтрации
rnV = a2(l-QoK2/Kx).
Из первого уравнения
(10.28) в установившемся
режиме следует, что
β = <*2 (!-№/*! ) =
= α2(1-βοΑ2/Αι) = ^ + αι+α2>0.
Ν0
Следовательно, 7β = 1/β > 0 и определяет постоянную времени
форсирующего звена в сглаживающем фильтре оптимальной следящей
системы.
10.1.5. Оптимальный фильтр Винера
Кроме дифференциальной формы представления оптимальных
линейных фильтров возможна интегральная форма, предложенная Н.
Винером и названая фильтром Винера.
Интегральное уравнение Винера. В своей работе [18] Н. Винер
рассматривал задачу фильтрации СП λ(/) по наблюдению y(t) на
интервале времени [0,/], связанному известной зависимостью с
фильтруемым процессом. Предполагалось, что известны корреляционная
функция Ry (ή,/2)наблюдаемого процесса y(t) и взаимная
корреляционная функция R\y(t\,t2) фильтруемого процесса λ(/) и Наблюдений
y(t). МО наблюдаемого процесса полагалось равным нулю.
Оптимальный фильтр искался в классе линейных фильтров,
формирующих следующую оценку:
о
по критерию минимума среднего квадрата ошибки
ε2(0 = Α/[(λ(0-λ*(0)2]·
(10.29)
(10.30)
249
В отличие от постановки задачи синтеза фильтра Калмана, Н. Винер
не задавал модель наблюдений в форме (10.2), а требовал лишь
зависимость наблюдений от фильтруемого процесса, причем известным
образом, который определяется заданием корреляционных функций
Другим отличием постановки задачи синтеза по Н. Винеру
являются априорные сведения, которые определяются заданием
корреляционных функций Ry{tx,t2)> Rkyih'h)· Данные априорные сведения
ослаблены по отношению к априорным сведениям в постановке задачи
калмановской фильтрации. Так, например, задание указанных взаимных
корреляционных функций совсем не говорит о том, что процессы λ(;)
и y(t) являются гауссовскими. В общем случае они могут быть негаус-
совскими. Для таких негауссовских процессов также можно искать
наилучшую оценку вида (10.29), т.е. в классе линейных фильтров. Однако,
это совсем не значит, что такая оценка будет наилучшей из всех
возможных, т.е. «абсолютно» оптимальной. Можно искать «нелинейные»
оценки, т.е. оценки, полученные в результате нелинейной обработки
наблюдений, которые будут иметь средний квадрат ошибки (10.30)
меньше, чем линейные оценки (10.29).
Еще одно отличие постановки задачи по Винеру заключается в том,
что помеха может быть коррелированным процессом.
В п. 1.7 показано (см. «Следствие для условных плотностей
вероятности»), что линейная зависимость условного математического
ожидания λ = |Х/?Ыу0']</Х от наблюдений y(t) является неизбежным
следствием лишь для совместно гауссовских процессов λ(ί) и y(t),
что имеет место в постановке задачи синтеза по Калману. Поэтому,
лишь в этом случае линейный фильтр является «абсолютно»
оптимальным, т.е. нельзя найти никакой другой системы обработки наблюдений
y(t), которая имела бы меньшее значения среднего квадрата ошибки.
Заметим, что в оригинальной работе Н. Винера рассматривался
обобщенный временной интервал [a9b] и оценка λ* (/) искалась для
произвольного момента времени /. Такая постановка охватывает как
задачи фильтрации (t = b)9 так и задачи интерполяции (/<Ь) и
экстраполяции (/ > Ь). В данной главе рассматриваются лишь задача
фильтрации, поэтому временной интервал определен как [0,/].
250
Преобразование (10.29) является линейным оператором над
наблюдениями у (τ), τ ε [θ,/], который обозначим как
G(tf) = \*(t) = ]g(t9x)y(x)dx. (10.31)
о
Докажем, что минимум среднего квадрата ошибки (10.30)
достигается для такой импульсной характеристики g0 (*»τ) и
соответствующего ей оператора G0 IYq J, при которых выполняется условие
J/[(x(i)-<%(li))^(v)]-J/[(X(/)-i(/))y(v)]-0
при всех ν е [Ο,ί], (10.32)
где
4') = G0(Y{) = X](t)='\go(t,T)yWdx. <10·33>
о
Физический смысл условия (10.32) заключается в том, что при
оптимальной оценке (10.33) текущая ошибка δλ(/) = λ(/)-λ(ί) не
коррелированна со всеми наблюдениями у (ν), ν ε [0,/].
Пусть gonT (/,τ) — импульсная характеристика, при которой
достигается минимум среднего квадрата ошибки (10.30), a Gom IYq j —
соответствующий ей линейный оператор. Положим, что gom(/,τ), при
которой (10.30) достигает минимума, отлична от go(tyx), для которой
выполняется условие (10.32), и g0 (*>τ) = £опт (*>τ)+§ίΚ'>τ) · В
соответствии с определением (10.31) можно записать G0\Yq ) = Goirr(lo)+
4*C(1$).
Запишем выражение для минимального значения среднего квадрата
ошибки
^mii
1П(0 = А/[(х(г)-Сопт(Го'))2] = А/[(х(0-С0(у0')-5(7(Уо'))2
(10.34)
251
Так как по определению оператора ^ο(*ο) разность
ίλ(/)—С70(^о)) некоррелированна с любым наблюдением .у(ν),
ν ε [θ, г], то она некоррелированна и с любой линейной комбинацией от
>>(ν), в том числе и с 5Gf Yq J. Следовательно:
"[(Μ0-^(^))βθ(ΐί)] = 0. (10.35)
Раскрывая правую часть (10.34) и учитывая (10.35), получаем
\2"
4io(0-^[(M0-Gb(li)) J + A/[5G2(y0r)]. (Ю.36)
Первое слагаемое в правой части полученного выражения есть
средний квадрат ошибки при использовании оператора G0 \Yq ), а
второе слагаемое — неотрицательно. В то же время, в левой части (10.36)
стоит минимальное значение среднего квадрата ошибки. Это возможно,
если 5Gi Yq J s 0, так как в противном случае использование оператора
О) (*о) Давало бы меньшее значение среднего квадрата ошибки.
Следовательно G0 ( Yq ) = GonT ί Уо J, что и завершает доказательство.
При оптимальном операторе GonT IYq\ средний квадрат ошибки
Выполнив в условии (10.32) необходимые преобразования, с учетом
равенства G0 ( Yq I = Goirr IYq j и приведенных в постановке задачи
определений корреляционных функций, получаем
t
^^ν) = /*ο„ΜΜτ,ν)</τ, ν6ΙΜ- (ια3?)
о
Таким образом, оптимальная импульсная характеристика gom (ι, τ)
находится из интегрального уравнения (10.37), которое называют
уравнением Винера, а импульсную характеристику £опт('>т) = £в(*»т) на"
зывают импульсной характеристикой фильтра Винера.
252
В общем виде уравнение (10.37) не имеет аналитического решения.
Стационарный фильтр Винера. Рассмотрим важный частный
случай, когда процессы λ (г) и y(t) — стационарны и стационарно
связаны в широком смысле (см. определения стационарности в п. 1.6).
Это означает, что корреляционные функции Ry(ti9t2) и R\y(ti%t2) за-
висят не от абсолютных значений моментов времени t{ и /2 > а лишь от
разности τ = /2 -/ι, т.е. имеем Ry (τ) и R^y (τ).
Кроме того, будем полагать, что интервал наблюдения
бесконечный. При этом пределы интегрирования в (10.37) следует положить
±°о. Однако, рассматривая синтез физически реализуемых фильтров,
пределы интегрирования полагаем [О,»].
При стационарном входном процессе y(t) и бесконечном
интервале наблюдения выходной процесс фильтра будет стационарным в
широком смысле, и оптимальный фильтр можно отыскивать в классе
линейных фильтров с постоянными параметрами, т.е. стационарных фильтров.
Учитывая принятые допущения, уравнение (10.37) принимает вид
о
Это интегральное уравнение для нахождения оптимальной
импульсной характеристики называется уравнением Винера—Хопфа. Его
решение возможно для процессов, спектральная плотность которых
описывается дробно-рациональной функцией
м«о—Ы· (1039)
в\ )
где л(ш2) = а0ш2т+А1ш2('я"1)+...+ат.1ш2+Ат, *
я(со2) = Аоа>2л +6,а>2(л~1) +...+£л-1<°2 +Ьп, т < η .
Процесс с дробно-рациональным спектром можно сформировать на
выходе физически реализуемого фильтра с коэффициентом передачи
Ку (jco), таким, что
253
ЫН2=м<°)'
(10.40)
при подаче на его вход белого шума с единичной спектральной
плотностью. Заметим, что сформулированным условиям удовлетворяет
процесс, отображаемый в пространстве состояний многомерным
марковским процессом, например (9.2), с постоянными коэффициентами сноса
и диффузии.
Один из возможных методов решения уравнения Винера—Хопфа
основан на введении обеляющего фильтра, который преобразует
входной процесс y(t) со спектральной плотностью (10.39) в процесс η (г) с
равномерной спектральной плотностью, т.е. некоррелированный
процесс. При этом, если операция такого преобразования является
обратимой, то из процесса η(ί) в результате обратного преобразования можно
получить исходный процесс y(t). Это, в частности, означает, что при
таких преобразованиях не происходит потери информации, и,
следовательно, не теряется свойство оптимальности фильтра (более подробно о
свойствах обратимых преобразований см. п. 4.2.7).
Из (10.40) следует, что в качестве обеляющего фильтра можно
выбрать линейный фильтр с частотной характеристикой
Ψ(]ω) = 1/^0(0) (10.41)
и соответствующей ей импульсной характеристикой £Ψ (τ) ·
Оптимальный стационарный фильтр Винера ищется в виде
последовательного соединения двух линейных фильтров (рис. 10.9):
обеляющего с коэффициентом передачи Ψ (j со) (импульсная характеристика
£Ψ (τ)) и линейного фильтра
фильтре ¥(j")
nW
фШМр С £афЬф]
λ(ί) с коэффициентом передачи
~~^ ^ιφ0ω) (импульсная ха-
Рнс 10.9. Оптимальный фильтр Винера в
форме последовательного соединения
двух фильтров
рактеристика £лф (τ)).
Из определения
коэффициентов передачи Ку (jco) и
Ψ^'ω) следует, что процесс η(t) имеет единичную спектральную
плотность, и, следовательно, его функция корреляции имеет вид
^(τ)-Ι.β(τ).
254
Определим теперь коэффициент передачи A^Qcd) линейного
фильтра в схеме рис. 10.9. На выходе фильтра необходимо получить
оптимальную оценку λ(ί) при условии, что на его входе действует
процесс η(0· Импульсная характеристика такого линейного фильтра
должна удовлетворять уравнению Винера—Хопфа, но при входном
процессе η(/)· Поэтому
Λλη(τ)=/^Λφ(ν)Λη(τ-ν)ί/ν = |^;ιφ(ν)δ(τ-ν)ί/ν = ^Λφ(τ),τ^Ο.
о о
При τ<0 импульсную характеристику физически реализуемого
фильтра можно доопределить как £лф (τ) = 0.
Рассчитаем корреляционную функцию
*λη(τ) = Μ
Ч') ί £Ψ(ν)>>(/-τ-ν)</ν
= J £ψ (ν)^ (τ+v)rfv = J g4, (-v)Rxy (τ-v)</v. (10.42)
Выражение (10.42) описывает прохождение через линейный фильтр
с импульсной характеристикой gy(-v) (коэффициент передачи
Ψ*0ω)) процесса ζ(/) = Λ^(ί). Такое преобразование можно
записать в частотной области как 5λη0ω) = Ψ*0ω)5χ>,(ω). Спектр
5χη (jω) определяется как преобразование Фурье от /?χη (τ), т.е.
SXl, (jco) = J Λλη (х)е-^ dx = J Λλη (x)e-i** dx+
— 0
+ ί Λλη(τ)β"^ί/τ = ^ηαω)+^ηαω),
поэтому он содержит составляющую ί£η 0ω)» все полюса которой
находятся в левой полуплоскости комплексной переменной joo, и
составляющую ίχη (joo) с полюсами в правой полуплоскости. Для физически
реализуемого фильтра необходимо взять только составляющую
255
^ληΟω)· Таким образом, получаем выражение для коэффициента
передачи линейного фильтра в схеме рис. 10.9
*лф ϋω) = #η (ja>) = [ψ* Qa>)SXy (ω)]* =
*;(ja>)
(10.43)
Коэффициент передачи стационарного фильтра Винера, учитывая
последовательное соединение обеляющего и линейного фильтров и
формулы (10.41), (10.43) для их коэффициентов передачи, записывается
как
*οπτΟ'ω) =
1
Mi«)
Μω)
*ίθ"ω)
(10.44)
Отметим в заключение, что выделение составляющей [.. .у ,
входящей в (10.44), основано на разложении функции, стоящей в квадратных
скобках, на неприводимые множители с последующим выбором тех из
них, для которых полюса находятся в левой полуплоскости
комплексной переменной jco.
Вывод фильтра Винера из уравнений фильтра Калмана. Другое
представление для импульсной характеристики фильтра Винера можно
получить, используя постановку задачи синтеза фильтра Калмана и
вытекающие из нее уравнения оптимальной калмановской фильтрации.
Пусть имеем скалярное наблюдение (10.2), в котором λ(/) —
фильтруемый процесс, отображаемый в пространстве состояний
векторным МП χ(ί), так что Х(/) = сх(/). Векторный процесс х(/)
описывается априорным уравнением (9.2).
Оптимальная оценка х(/) по критерию минимума дисперсии
ошибки фильтрации в сформулированной задаче определяется уравнением
фильтра Калмана (10.14), которое представим в виде
^-(К(0-К(ОЯ(/)е)«+К(/)ЯО.*(0)-Жо.
(10.45)
rfleK(/) = Dx(f)#(i)cT2Wo'.
Введем переходную матрицу Φ(ί,χ), удовлетворяющую
однородному уравнению
256
^М-(р(0-К(ОЯ(»)с)Ф(|,т).
с начальным условием Φ(τ,τ) = I.
Полагая, как и выше, х(0) = 0, решение неоднородного матричного
уравнения (10.45) можно записать через переходную матрицу Ф(/,х) в
виде
x(0 = JO(M)K(t)y(i)rfi =
о
= }φ(/,τ)Οχ(τ)Η(τ)€τ2^τν(τντ = }8(Γ,τ)^(τμτ,
о о
где g(t,T) = Q>(t,x)Ox(x)H(x)ct2Nq] —матричная импульсная
характеристика оптимального линейного фильтра.
Учитывая связь между вектором χ и процессом λ (г), запишем
1(г) = }сФ(м)К(т)у(х)Л =
о
= }сФ(/,т)Ох(т)Я(т)ст2ЛГо1у(х)^ = }^опт(/,т)у(тут,
о о
где ^опт(/,т) = сФ(/,т)Ох(т)стЯ(г)2Л^о1 — импульсная
характеристика фильтра Винера для рассматриваемой задачи.
10.2. Оптимальная линейная фильтрация
дискретных процессов
10.2.1. Рекуррентные алгоритмы оптимальной дискретной
линейной фильтрации
Так же, как и в задачах непрерывной фильтрации, задача синтеза
оптимальной линейной дискретной фильтрации может быть решена
строго, исходя из рекуррентных уравнений для АПВ (9.11), (9.13).
Пусть сообщение λ* описывается скалярным уравнением
λ* =Ft_,XA_,+<?*_&.„ (10.46)
9—2041
257
где ξ*_ι — ДБГШ с дисперсией σξ; λ0 — начальное значение
фильтруемого процесса, которое полагаем распределенным по гауссовскому
закону с нулевым МО и дисперсией σχ.
На вход системы обработки поступают дискретные отсчеты
ук=НкХк+пку (10.47)
где пк —ДБГШ с дисперсией σ^.
Из уравнения наблюдения (10.47) следует, что условная ПВ
р{Ук\^к) при фиксированном значении Хк является гауссовской с МО,
равным НкХкз и дисперсией σ„
/?(^|^)=-г=ТехР
{Ук-ПкЬ-к?
2ai
(10.48)
Плотность вероятности переходов р(Хк\Хк-[), в соответствии с
(10.46), также является гауссовской с МО Fk_{kk_i и дисперсией
σ*-ισξ> те·
/>(λ*|λ*-ι) = "χρ
(^k"Fk-\^k-])
2Gk-\<s{
(10.49)
где с — нормировочная константа.
Рассмотрим формулу (9.13) на первом шаге к = 1. Под знаком
интеграла этой формулы имеем: ρ (λ0 ί^) = ρ (λ0 ) — гауссовская функция;
/>(λι|λ0) — гауссовская функция. Так как инте1рал от гауссовской
функции есть также гауссовская функция, то условная ПВ ρΐλχ \Yq? I —
гауссовская. Далее обратимся к уравнению (9.11), из которого следует,
что апостериорная ПВ ρ\λ{\Yq) — также гауссовская функция,
поскольку она получается в результате перемножения двух гауссовских
функций. Рассуждая аналогичным образом далее, можно утверждать,
что АПВ ρ ί λ*4 \Yq~{ ) — гауссовская. Обозначим
258
во
λ*-ι= /λ^,ρ^.,^-1)^.,,
АЦП = J (λ*_! -λΑ_, )2 />(λΑΓ-1 |jb*_1 )^λ*-1
и запишем очевидное выражение для гауссовской функции
(10.50)
>Mtf-')=
у1Щ^\
-ехр
(λ*4-λ*4)
2/\,
1-1
(10.51)
Подставим (10.49), (10.51) в (9.13) и выполним интегрирование
p(bk\YQ l) = c, Jexp
(^k-Fk-\^k-\)
= С2ехр-{
2σ^-ΐσξ
\K-Fk-\bk-\)
ехр
2 \
2(/^ι^Μ+σ^,σ{)
Ρλ1-1 =
(10.52)
Подставляя (10.52), (10.48) в (9.11), получаем
ч2
(**-П-Д*ч) (yk-HkXkf
2(#-Α,*-ι+6*-ισ|) 2σ^
(10.53)
В то же время, как было показано выше, ПВ р\Хк Iq ) — гауссов-
екая с МО и дисперсией, определяемыми формулами (10.50) для момента
времени к. Поэтому можно записать выражение, аналогичное (10.51):
рЫ¥°к)=1Ш7'*>
рпБ^
2DKJt
2\
= с4ехр
(10.54)
Из соотношения (10.54) следует, что оценка Хк — это
коэффициент при Хк/1\к, а величина Dyj-i —коэффициент при кк/2.Вы-
259
деляя аналогичные члены в показателе экспоненты (10.53) и
приравнивая коэффициенты при указанных членах, получаем
h =^-i**-i +Hk^(yk -HkFk_{Xk_{)9 (10.55)
1 1 -+4- (Ю.56)
Уравнение (10.55) описывает структуру оптимальной дискретной
системы фильтрации, а уравнение (10.56) — изменение дисперсии 1\к
ошибки фильтрации и коэффициента усиления синтезированной системы
Кк=Нк^. (10.57)
В (10.56) можно выделить переменную
λ*=^-ιλ*-ι> (Ю.58)
которая по своей структуре повторяет регулярную компоненту
фильтруемого процесса (10.46). Значение λ* называют экстраполированной
оценкой.
Рассчитаем дисперсию экстраполированной оценки
Αι,* =*[(λ* -hf] = M[(Fk_{kk_{ +<*_&_, -^_,λ*)2] =
= ^2-.^,*-.+^2-,σξ· (Ю.59)
С учетом (10.59) уравнение для дисперсии ошибки фильтрации (10.56)
можно записать в виде
^ = ^,*+яЯ2· (Ю.60)
Из (10.60) следует, что всегда выполняется неравенство
At,* > &ktk у те· Дисперсия ошибки экстраполяции всегда больше
дисперсии ошибки фильтрации. Физически это объясняется тем, что
экстраполированная оценка Хк формируется по априорным данным и
наблюдениям Yq~{ , полученным на момент времени к-\, в то время как
оценка \к формируется по тем же априорным данным, и по данным
260
наблюдений Υ0 ={Υ0 ,^|, включающих как У0* *, так и текущее
наблюдение ук.
Оптимальная дискретная система работает следующим образом.
Пусть в (£-1)-й момент времени сформирована оценка λ*_ι
фильтруемого процесса. Используя данную оценку, формируется
экстраполированная на такт дискретной обработки оценка Хк по алгоритму
(10.58). После получения текущего наблюдения ук формируется
разностный процесс
vk=yk-HkXkb (10.61)
который иногда называют обновляющим процессом или невязкой
измерений. Процесс ν* несет информацию о расхождении текущего
значения Хк фильтруемого процесса и его экстраполированной оценкой λ* .
Далее разностный процесс vk умножается на весовой коэффициент Кк
(10.57) и используется для аддитивной коррекции экстраполированной
оценки λ,£, в результате чего формируется текущая оценка λ* (ее
иногда называют фильтрационной).
Из уравнения (10.60) следует, что
А - °^*
Следовательно, для коэффициента усиления (10.57) оптимальной
системы фильтрации можно записать эквивалентное выражение
К у\* (10.62)
Рассмотрим разностный процесс vk (10.61). Прежде всего отметим,
что он является гауссовским, так как получается в результате линейных
преобразований гауссовских процессов. Покажем, что он к тому же
является некоррелированным (т.е. типа белого шума). Для этого вычислим
корреляцию двух соседних отсчетов
Λ/[ν*ν*_, ] = Ai[(yk -Нк\к)(ук.х -Нк.{ккА)] =
= M[(Hk (Хк-\к)+пк)(Ны (λ*_, -λ*_, )+«*_, )] =
261
= HkHk-XFk_xM[(\k_x -λΑ4)(λΜ -tb-i)]-^FMA#[iwiiw] =
= HkHk_xFk_x {a/[(X,_, -λ*_, )2]-iwiwii [(λ*_, -λ*_, )2
= HkFk-\ \Hk-\i\tk-\ ~Kk-\Hk-\&к,к-[\-HkFk-\Kk-\Gn = 0 ·
(10.63)
При выводе (10.63) учтено выражение (10.62) и свойство
некоррелированности шумов л*,ξ*.
Аналогично можно показать, что некоррелированными являются
любые два отсчета обновляющего процесса. Заметим, что при выводе
(10.63) существенную роль играют формулы для оптимальных значений
коэффициента усиления (10.57), (10.62). Если использовать другие
значения коэффициента усиления, то процесс ν^ окажется
коррелированным. Это является важным признаком оптимальных систем фильтрации.
Некоррелированность процесса ν^ означает, что оптимальная система
извлекла из наблюдений ук всю возможную информацию о
фильтруемом процессе. Никакая другая дополнительная обработка процесса vk
не даст дополнительной информации о λ*, так как в белом шуме нет
никакой информации.
Дисперсия разностного процесса ν^ равна
Замечание. Обновляющий процесс вида (10.61) можно ввести и
в непрерывных системах фильтрации. При этом в оптимальной системе
фильтрации он также является некоррелированным гауссовским
процессом, т.е. БГШ, со спектральной плотностью, равной спектральной
плотности аддитивного шума наблюдения.
Схема оптимальной дискретной системы фильтрации приведена на
рис. 10.10, где ζ обозначает задержку на такт.
262
-йн
•4 ς ι—►
A
—ΓςΙ—
-2£
λ*
Рис 10.10. Схема оптимальной дискретной
системы фильтрации
\-l
Уравнения оптимальной фильтрации многомерной МП хк ,
которая описывается уравнением
*к = **-1**-1 +C*-ibw , *('о) = *о> (10.64)
где ξ* — векторный ДБГШ с матрицей дисперсий Οξ, при векторных
наблюдениях
у*=Н*х*+п*, (10.65)
где пк — векторный дискретный БГШ с матрицей дисперсий D„,
являются обобщением уравнений (10.55)—(10.60) и имеют вид
Ч = F*-i**-i»
Кк =DMHiD^ =DMHl(HiDx,H,+Dw)"1,
Кк =^-iDi,it-iFi-i +Gw^GLi.
Dx,V =0^+Н^Щ или Dxjt = (I-K*H*)DX|*
Здесь χ^ — оценка фильтруемого процесса; χ* — экстраполированная
оценка процесса; К* — матричный коэффициент усиления; Oxk —
матрица дисперсий ошибок фильтрации; Dx k — матрица дисперсий
ошибок экстраполяции.
Уравнения оптимальной фильтрации (10.66)—(10.70) называют
уравнениями фильтра Калмана (по имени автора, впервые их
получившего).
Так же как и в задаче фильтрации одномерного МП, введем
векторный разностный процесс
v*=y*-H*x*,
(10.66)
(10.67)
(10.68)
(10.69)
(10.70)
263
который в оптимальной системе фильтрации является БГШ с нулевым
МО и дисперсией
10.2.2. Пример синтеза оптимальной дискретной
системы фильтрации
Π ρ и м е ρ 10.3. Рассмотрим задачу дискретной фильтрации
дальности до цели, движущейся на встречном курсе с РЛС. Движение цели и
РЛС в плоскости описывается уравнениями (2.32). В качестве модели
ускорения a{t) вдоль линии визирования цели примем БГШ ξ (г) с
двусторонней спектральной плотностью ίξ/2 . Переходя от
непрерывных уравнений (2.32) к дискретным с шагом дискретизации Td,
например, методом Эйлера получаем следующую дискретную модель
изменения дальности до цели
где ξ* —ДБГШ с нулевым VJ и дисперсией Οξ = S^Tdj2.
Наблюдению доступны отсчеты дальности в аддитивной смеси с
ДБГШ
Л=Д*+**. А/[л|] = о*.
Введем вектор х = |/?* Р*|т . Записывая уравнения (10.71) в
векторной форме (10.64), получаем
, а также Η = |ΐ θ|. (10.72)
С учетом (10.72) уравнения оптимальной дискретной фильтрации
(10.66Н 10.70) конкретизируются в виде
*к-*к+К\ЛУк-**)* Д1=4-1+7А-1. 00.73)
Ук=Ук-х+К2>к(ук-Як),
K\Jk~Dy\jk№ . *2.* = А2>*/^ , 00-74)
Αι.* = А1Д-1 +2^Аг.*-1 +Ъ2Аг,*-1. (Ю.75)
264
ι Ъ
0 1
, G =
A 2,* = A2,*-l +7i/A22,it-l» ^22,* = ^22,*-l + <*ξ ,
Au=AiX/(Au+<^), Au=A2X/(Au+^). (10.76)
A22,* =^222jt-Au/(Au+^)-
Схема оптимального фильтра приведена на рис. 10.11 и
представляет собой дискретную следящую систему за параметром Rk. В
установившемся режиме К\ = const, К2 = const.
■Hi
ргйН^ЬЧЗ—ι *
ЧьЗ-Ч^} 4Zl]4^KJ>f
Рмс 10.11. Схема оптимального фильтра
В задачах радиолокационных измерений фильтр (10.73) с
постоянными параметрами часто называют (а-$Уфильтром. При этом
уравнения (10.73) записывают в виде
Л*=Л*+а(Л-^), Rk=Rk_x+TdVk_Xi
Td
где а и β —безразмерные параметры.
Дисперсионные уравнения (10.75)—(10.76) для дискретной задачи
фильтрации аналитического решения в установившемся режиме не
имеют, что затрудняет анализ дискретной системы фильтрации. При
малом шаге дискретизации Td «1/Δ/^ , где Δ/^ — полоса
пропускания следящей системы, анализ дискретной системы фильтрации можно
заменить анализом соответствующей непрерывной системы. При
Td —> 0 уравнения оптимальной дискретной фильтрации (10.73Н 10.76)
переходят в соответствующие уравнения оптимальной непрерывной
фильтрации, в которых дисперсионные уравнения имеют вид
^ΑΐΗ. = 2/λ 2А21и </А2и ~ 2А1иА2н
dt ^2и N0 ' dt ^2н Л^о
265
^UL.^-lSk, (Ю.77)
где W0/2 = ofo.
Система уравнений (10.77) в установившемся режиме имеет решение
А1и,усг=>/^^о/4, Α2Η,^τ=ν^θ/4'
^22и,уст =
Уравнения (10.73) описывают следящую систему с астатизмом 2-го
порядка. В установившемся режиме полоса пропускания такой
следящей системы определяется выражением
д- 1 2·Κ2yciTd + 2^1 уст ~3^1 уст^2уст7!/
2^1 усЛ 4~ 2^1 уст"* ^2 уст7!/
При малом шаге дискретной обработки Td полоса пропускания
пропорциональна квадратному корню из коэффициента усиления
v^o =yjK2ycr/Td по контуру следящей системы.
10.2.3. Некоторые обобщения алгоритмов оптимальной
линейной дискретной фильтрации
Так же, как и в случае непрерывной фильтрации, алгоритмы
оптимальной линейной дискретной фильтрации могут быть обобщены на
случай, когда уравнение формирования (10.64) включает
дополнительное регулярное возмущение, т.е.
ж* = F*_1x*_1 +B*_1u*_1 +С*_^_,, х(/0) = *о> (Ю.78)
где ιΐ£_] — известная функция времени.
Такие же рассуждения, что и в п. 10.1.2, приводят к тому, что в
уравнения формирования оценки также должна входить
детерминированная составляющая B^u^j. Так как в дискретном алгоритме
фильтрации (10.66)—(10.65) регулярная составляющая формирующего
уравнения определяет закон экстраполяции оценки, то приходим к выводу,
что при фильтрации процесса (10.78) в алгоритме оптимальной
фильтрации (10.66)—(10.70) изменяется лишь алгоритм формирования оценки
(10.67), который принимает вид
266
Остальные уравнения оптимальной фильтрации остаются без
изменений.
Если в постановке задачи синтеза оптимальной системы
фильтрации формирующий шум ξ*_ι и шум наблюдения заданы
коррелированными, т.е. М\ $кПтт = Ψξηδ^η > то в алгоритме оптимальной
фильтрации остается неизменным уравнение (10.66) для формирования
оценки х^, т.е.
Так как в шуме наблюдения содержится информация о шуме
формирования (в их взаимной корреляции), то уравнение для
экстраполированной оценки изменяется и принимает вид
** = F*-i**-i +КЫ (уы -Ныхы), (10.79)
Kjt-i =ε*_1ψξΙιο~1.
Заметим, что в алгоритме экстраполяции (10.79) участвуют
наблюдения ук_х, полученные на предыдущем шаге, в то время как в алгоритме
фильтрации участвую наблюдения у^, полученные на текущем шаге.
Так как изменилась экстраполированная оценка, то изменяется и
уравнение для матрицы дисперсий ошибок экстраполяции
Кк = (F*-i -κ*-ι )»Μ-ι (ϊ*-ι -к*-, )т +ск^си -kad„k; .
(10.80)
При этом матрицы коэффициента усиления и дисперсий ошибок
фильтрации рассчитываются по формулам
кк=Ъх,кн1(щЪж>кнк+ьпУ,
Пм=(1-КА.,)Вц. (10.81)
Форма записи соотношений (10.81) совпадает с одной из форм
записи уравнений (10.68) и (10.70). Однако численные результаты расчета
получаются различными, так как изменяется дисперсия ошибки
экстраполяции (10.80) и (10.70) соответственно.
Также как и в задаче непрерывной фильтрации, коррелированность
шумов формирования и наблюдения приводит к уменьшению дисперсии
ошибки фильтрации.
267
10.2.4. Дискретный фильтр Винера
Пусть априорные сведения о фильтруемом λ* и наблюдаемом
^процессах заданы в форме корреляционных функций Rxy(ktm) и
Ry(ktm). Рассмотрим задачу получения линейной оценки вида
* к
λ^ = Σ Skjyj * κοτοΡ^ минимизирует средний квадрат ошибки
7=1
ε,=Μ^(λ,-λ;)2
(10.82)
Сформулированная задача оптимальной линейной дискретной
фильтрации была впервые решена А.Н. Колмогоровым в 1939 г. [2], т.е.
раньше, чем фильтрация в непрерывном времени, разработанная
Винером (1942 г.).
Так же, как это было сделано в п. 10.1, можно показать, что
минимум (10.82) достигается при такой оценке λ* и соответствующей ей
оптимальной импульсной характеристики gkjom » ПР11 которых
выполняется условие
Λ/(λ*-λ*)Τ>>5 =0 привсех seTJ. (10.83)
к
Так как λ^ = £ й^олт-Уу » то» выполнив в (10.83) усреднение, по-
лучаем
MM- lgkjm*y(j\*)· (">·>*)
7=1
Таким образом, оптимальная импульсная характеристика фильтра
Винера ^>5огтт находится из решения уравнения (10.84).
Для стационарных и стационарно связанных процессов λ* и ук
корреляционные функции зависят от разности временных аргументов
ν = s-к, т.е. Rxy (v) и Ry (v). При бесконечном времени наблюдения
фильтр Винера будет стационарным, а его импульсная характеристика
находится из уравнения
268
к
^(ν)=Σ*>οητΜν-7),
7=1
которое является дискретным аналогом уравнения Винера—Хопфа
Сеязь оптимальной дискретной фильтрации по Винеру и Кал-
ману. Дискретный фильтр Винера, также как и его непрерывный
вариант, описывает оптимальную линейную систему фильтрации в
интегральной форме, которая может быть получена и в постановке задачи
дискретной калмановской фильтрации.
Пусть наблюдается процесс (10.47), в котором λ* =сх*
описывается компонентой многомерного МП хк, удовлетворяющего уравнению
(10.64). При такой постановке задачи однозначно определяются
корреляционные функции
RXy(k,m) = M[Xkym] = HkcRx(k,m)cT,
Ry(k,m) = M[Xkym] = HlcRx(k,m)cT +Rn(k9m).
Следовательно, выполнены условия постановки задачи синтеза
фильтра Винера.
Для сформулированной задачи оптимальная оценка,
минимизирующая дисперсию ошибки фильтрации, описывается уравнениями
(10.74), (10.75), которые запишем в виде
ik = (1-К*Я*с)Р4_,ж*_, +КкУк =Ф*,*_,х*-1 +КкУк , (10.85)
где I — единичная матрица,
Фк,к-,=(1-КкНкс)¥к^,
Кк — матрица коэффициентов усиления фильтра Калмана,
определяемая уравнениями (10.68)—(10.70).
Решим уравнение (10.85) на одном шаге
Ч =фМ-1ф*-1,*-2**-2 +·μ-ικ*-ιΛ-ι + Κ*Λ =.
1
/=0
где Фкк =1, Фм_2 =фк,к-\фк-\,к-2-
Выполнив решение еще на одном шаге, получаем
269
1
Ч =**,*-2Ф*-2,*-3**-3 + фМ-2К*-2>'*-2 + Z*k,k-i*k-iyk-i =
/=0
2
= *к,к-зЧ-г + Σ фк,к-1Кк-1Укч -
/=0
Продолжая решение далее на £ -1 шагах, запишем
ч = **,о*о + Σ ·μ-,·κ*-,·λ-ϊ ■ (10·86)
1=0
где
i-l
**,*-<· = Π *k-j,k-j-\. « = U;· w = ι ·
Так как обычно полагают ίο = 0, то, вводя обозначение
Е*,,=Ф*,,К„ (10.87)
представим (10.86) в виде
** = Σΐ*Λ. (Ю.88)
5=1
Из соотношения (10.88) следует, что gks — импульсная
характеристика дискретного линейного фильтра. Таким образом, оптимальная
оценка ik может быть получена на выходе линейного фильтра с
импульсной характеристикой g*5 (10.87).
Учитывая соотношение Хк = ex*, запишем выражение для оценки
фильтруемого процесса
к к
λ* = Σ*&^* = Σ Вк^тУз »
5=1 5=1
где gjt,JOirr =c**,5^5 ~ импульсная характеристика дискретного
фильтра Винера.
10.3. Оптимальная комбинированная
кламановско-винеровская фильтрация
В предыдущих материалах книги были приведены алгоритмы
оптимальной линейной фильтрации в дифференциальной (разностной)
(фильтр Калмана) и в интегральной (фильтр Винера) формах. Оба
фильтра в любой момент времени дают совершенно идентичные оценки
270
фильтруемого процесса с минимальной дисперсией ошибки
фильтрации. Естественно, встает вопрос об оптимальной системе фильтрации, в
которой сочетаются дифференциальные (разностные) и интегральные
алгоритмы обработки или, другими словами, алгоритмы Калмана и
Винера. Ниже будут рассмотрены два типа таких алгоритмов,
соответствующие двум различным задачам фильтрации.
103.1. Непрерывно-дискретная
калмаиовско-вииеровская фильтрация
Наблюдение (измерение) той или иной физической величины всегда
аналоговое, так как реализуется тем или иным физическим датчиком
(давления, температуры, радиолокатором, навигационным или связным
приемником и т.д.). В то же время информация может выдаваться
потребителю не непрерывно, а лишь в некоторые дискретные моменты
времени tk . Таким образом, можно ставить задачу синтеза оптимальной
системы фильтрации, которая в заданные (тактовые) моменты времени
tk формирует оптимальные (в смысле минимума дисперсии ошибки
фильтрации) оценки ik непрерывного процесса к('), описываемого
уравнением
£ = F(f)i+G(06(0. *('o) = *0 (Ю.89)
at
и наблюдаемого на фоне БГШ
у(0 = Н(0ж(0+и(0· (10·90)
В (10.89), (10.90) Μ[ξ(0ξτ('+τ)] = 8ξ/2δ(τ), м[п(г)пт(/ + т)] =
= Ν„/2δ(τ).
Так как фильтруемый процесс и наблюдения являются
непрерывными процессами, то рекуррентным фильтром, формирующим
оптимальные оценки процесса в каждый момент времени будет фильтр
Калмана (10.14), для которого запишем уравнение
i£ = F(0i+K(0(y(f)-H(0*). i(0) = io· (Ю.91)
at
Пусть задана равномерная сетка отсчетов tk, в которые необходимо
формировать оптимальные оценки \к , таких, что tk -/*-i = Td.
271
Положим, что в момент времени tk^ сформирована оптимальная
оценка \к_х. Проинтегрируем уравнение (10.91) на интервале времени
['*-!·'*]· Использую ту же методику, что и в п. 10.2, представим (10.91)
в виде
f-(F(/)-K(0H(/))i+K(0y(0.
(10.92)
Введем переходную матрицу Φ(ί,τ), удовлетворяющую
однородному уравнению
*Мв(Р(о-к(г)н(0)ф(м).
Л
(10.93)
с начальным условием Ф(т,х) = I.
Теперь решение неоднородного матричного уравнения (10.92) на
интервале времени [/*_ι,'*] можно записать через переходную матрицу
Φ(ί,τ) в виде
**я *('*) = Ф('/Ь'*-1 )**-! + I Ф(^^)К(х)у(х)Л =
'4-1
= i* + J Ф(/*,х)К(х)у(х)Л. (10.94)
Соотношение (10.94) является одной из форм оптимальной
непрерывно-дискретной фильтрации, которая реализуется схемой,
приведенной на рис. 10.12.
_й),
1
Ί х Г
5в('ь')
4F)
Σ
У
φ('*,'*-ι)
^—
ί
1
ч
г
_и
Рис 10.12. Схема оптимальной непрерывно-дискретной
системы фильтрации
В алгоритме непрерывно-дискретной фильтрации (10.94), так же
как и в алгоритме рекуррентной дискретной фильтрации, сначала
формируется экстраполированная оценка
272
**=Ф('ь'*ч)**-1- (10.95)
Однако, в отличие от дискретной фильтрации, для экстраполяции
используется переходная матрица Φ (**,'*-ι) фильтра Калмана. Это
отличие является принципиальным, так как физически более понятна
экстраполяция в соответствии с динамикой изменения априорного уравнения
(10.89), а не в соответствии с динамикой изменения оценки (10.91).
Принимаемые на интервале времени ['*-!»'*] наблюдения у (/)
обрабатываются в фильтре Винера в непрерывном времени
h
»»('*)= \ 1в(^^)у(х)Л,
где gв(^,τ) = Φ(^,τ)K(τ) — импульсная характеристика фильтра
Винера.
Сформированный на выходе фильтра Винера в момент времени tk
отсчет используется для коррекции экстраполированной оценки (10.95),
в результате чего получается искомая оптимальная оценка ik
фильтруемого процесса.
Возможна другая реализация оптимальной непрерывно-дискретной
системы фильтрации, которая получается, если воспользоваться
следующим представлением для переходной матрицы
•(Μμ) = ·*(Μ*-ι)- J Φ(ί,τ)Κ(χ)Η(τ)Φφ(νΗ)Λ, (10.96)
'*-ι
где Φ<φ(/,τ) — фундаментальная матрица априорного уравнения
(10.89), удовлетворяющая однородному уравнению
</Ф^Т)=р(/)Ф<у(/д) (10.97)
с начальным условием Фар (τ, τ) = Ι.
В справедливости (10.96) можно убедиться, продифференцировав
его по времени
_} ί^!ϋ!κ(τ)Η(τ)·„(ν*-ι)Λ-
пъ
- } (Ρ(0-Κ(ί)Η(0)Φ(/,τ)Κ(τ)Η(χ)Φν(τ,/*_,)Λ-
= (F(/)-K(/)H(r))x
|·*('.<*-ι)- J Φ(ί,τ)Κ(τ)Η(τ)Φίρ(χ,/Η)(/χ
= (Р(/)-К(/)Н(/))ф(/,/ы). (10.98)
Таким образом, приходим к уравнению (10.93), которое верно по
определению переходной матрицы Ф(/,х).
Подставляя (10.96) в (10.94), получаем
**=·^('*.'*-ι)**-ι +
+ )ф(/ьт)К(т)(у(т)-Н(х)Фа/,(х,^ч)х,ч)^ =
= ж* + J Ф(^,х)К(т)(у(х)-Н(т)хт)Л =
= ** + ) 8в(/ьх)(у(х)-Н(х)хт)Л, (10.99)
где ί* = Фдр (^,^_! )х*ч , χτ = Φαρ (ν*_, )х*_, —
экстраполированные с момента времени tk_x на моменты времени tk и i€(tk_xjk)
оценки фильтруемого процесса, gB('*>T) = *('*>T)K(x) —
импульсная характеристика фильтра Винера. Отметим, что в данном случае
экстраполяция осуществляется в соответствии с переходной матрицей
априорного уравнения (10.89).
Схема, реализующая оптимальный алгоритм
непрерывно-дискретной фильтрации (10.99), показана на рис. 10.13.
Схема представляет собой следящую систему комбинированного
типа. Для каждого момента времени / ε (tk_x ttk] формируется
разностный процесс
274
5
н(0
Фильтр Винера
•ЕШ^-на
ι
гвМ\
р»^л-1)|*-[| ζ1]
*ар{«к-\)
Рис. 10.13. Схема комбинированного калмановско-винеровского фильтра
v(0-y(')-HW=y(0-H(0*v('.'*-i)i('*-i).
который поступает на аналоговый фильтр Винера. Фильтр Винера
работает на интервале времени (tk-\,tk], в конце которого формируется
отсчет из (tk ). Оценка ik фильтруемого процесса формируется в
результате экстраполяции (в соответствии с переходной матрицей априорного
уравнения (10.89)) на момент времени tk оценки i*_i, полученной на
предыдущем шаге, с последующей ее аддитивной коррекцией на
величину отсчета, полученного на выходе фильтра Винера.
Схема непрерывно-дискретной фильтрации (рис. 10.13) получила
название комбинированного калмановско-винеровского фильтра, так как
она сочетает рекуррентную фильтрацию (замкнутая следящая систем)
по Кламану и фильтр Винера на каждом интервале времени (tk_Xytk\.
Причем фильтр Винера стоит внутри следящего кольца.
Отметим, что в комбинированном калмановско-винеровском
фильтре точность формирования оценок в моменты времени tk совпадает с
точностью оценок в аналоговом фильтре Калмана (10.14) в те же
моменты времени. Это следует, из того факта, что (10.99) получено в
результате интегрирования уравнения (10.14). Поэтому можно говорить о
том, что комбинированный калмановско-винеровский фильтр реализует
оптимальную обработку непрерывных наблюдений с целью
формирования оптимальных дискретных оценок фильтруемого процесса.
10 J.2. Дискретная калмановко-винеровская фильтрация
Рассмотрим задачу дискретной фильтрации многомерной МП χ* ,
которая описывается уравнением
275
i*=F*-i**-i+G*_^_,, х(*о) = Хо> (10Л0°)
где ξ* — векторный дискретный БГШ с матрицей дисперсий Οξ, при
векторных наблюдениях
у*=Н*х*+п*, (10.101)
здесь пк — векторный ДБГШ с матрицей дисперсий D„.
Уравнения (ШЛО)—(10.101) заданы в дискретном времени с шагом
дискретизации Tj.
В ряде приложений не ставится задача выдавать потребителю
информацию о векторе состояния х* в каждый момент времени.
Достаточно формировать оценки в более редкие моменты времени, но они,
по-прежнему, должны быть оптимальными, а, следовательно,
обрабатывать все имеющиеся наблюдения у*. Данная задача аналогична той,
которая рассматривалась ранее, с той лишь разницей, что наблюдения и
фильтруемый процесс описывается в дискретном времени.
Для удобства последующего изложения введем новую индексацию
последовательных моментов времени, приведенную на рис. 10.14.
Каждые два соседних отсчета отстоят
7* V-4 \ ' ' *~** ДРУГ °т Друга на интервал времени
Γ,/. Оценки фильтруемого процесса
Рис. 10.14. Временная диаграмма необходимо формировать в тактовые
моменты времени tk, к = 1, 2, ...
такие, что tk -tk_x =NTd=T9 tk_lJf = tk , tk_l0 = /*_,.
В принятых обозначениях фильтруемый процесс (10.100) и
наблюдения (10.101) на интервале времени [/*_],'*] описываются
соотношениями
**-i,, = F*-u-i**-u-l + G*-i,,-iS*-i,/-i, χ(^_,) = х*_1>0, (10.102)
У*-М-1 = Η^,^,χ^,^ +п^у.,, i = V/. (10.103)
Запишем уравнения дискретного фильтра Калмана для модели
(10.100)—(10.103)
**-ι,ι = *k-\j + к*-и {Ук-и -Щ-и*к-ц)>
Ч-и = Γ*4,ί-ι**-ι,/-ι> ' = ϊ*. (10.104)
276
где Kk_Xj — матрица коэффициентов усиления фильтра Калмана,
которая определяется уравнениями (10.68)—(10.70).
Решим уравнения (10.104) на N шагах, начиная с начального
значения i*_i· Используя методику, описанную в п. 10.2 и формулы
(10.85)—(10.86), запишем выражение
Ν-ι
*к = ·**-!**-! + Σ **;JM,tf-,KjM,tf-/y*-l.AM . (10.105)
/=0
/ \ м —
где Ф*;*-ц =Ф('ь'*-м); Φ*;*-ι,ΛΓ-ι = Π <bk-\tN-r,k-\tN-j-\ . « = 1.ЛГ;
у=0
φ*;*=ι
Уравнение (10.105) аналогично уравнению непрерывно-дискретной
фильтрации (10.94), но для дискретного описания фильтруемого
процесса (10.100) и наблюдений (10.101).
Для получения алгоритма комбинированной калмановско-винеров-
ской фильтрации воспользуемся соотношением для переходной
матрицы, аналогичным (10.96),
Ν-\
Фк;к-\ = Фарк\к-\ " Σ ·*;*-1,ΛΓ-ιΚ*-1ιΛΤ-ίΗ*-1,ΛΓ-/·β/ίέ-1,ΛΤ-ι^-1 »
ι=0
(10.106)
ΛΓ-/-1
где Фарк-iN-i-k-l = Π *k-\jl / = 0,tf-l; Φ^_^-ι=Ι — переход-
ная матрица априорного уравнения (10.102).
Подставляя (10.106) в (10.105), получаем
*к=фарк;к-\*к-\ +
ΛΓ-1 а
+ Σ &ktk-\,N-iKk-\,N-i {Ук-ЪМЧ-Вк-\,М-1фарк-иЫ-г.к-\*к-\) =
/=0
N-\ _
= ** + Σ ^tk-\tN-iKk-\tN-i{yk-\tN-i'-tlk-lN4ik-\tN-i;k-\)''
ι=0
//-1
= ** + Σ 8*;*-l,tf-i [Ук-lN-i -Bk-iN-i*k-\,N-i;k-\) > (Ю.107)
ι=0
гДе ik-iN-i-k-ι =фарк-\^-г.к-\*к-\ — экстраполированная на момент
времени tk-lN4 оценка; gk;k-\,N-i =фк;к-\.Ы-1Кк-\,М-1 —импульсная
характеристика дискретного фильтра Винера.
277
Уравнение (10.107) описывает дискретный комбинированный кал-
мановско-винеровский фильтр, схема которого аналогична той, что
приведена на рис. 10.13. Отличие заключается в том, что вместо
непрерывного фильтр Винера используется дискретный, а вместо аналогового
экстраполятора на текущий момент времени te (ί*-ι>'*1 используется
экстраполятор лишь на дискретные моменты времени tk_{j € (tk_x ,/* ].
10.4. Оптимальная линейная экстраполяция и
интерполяция
10.4.1. Оптимальная линейная экстраполяция
Во многих радиотехнических задачах возникают ситуации, когда
сигнал на некоторое время пропадает, но, тем не менее, оценку
информационного процесса необходимо формировать и в отсутствие
наблюдений. Такую задачу называют задачей экстраполяции.
Рассмотрим случай непрерывного времени. Пусть на интервале
времени [0,t\] проводились наблюдения y(f) = H(f)x(f)+n(f), где х(г)—
фильтруемый процесс, описываемый уравнением (10.89).
На интервале времени [0,rt] оптимальная оценка i(f) определяется
уравнениями фильтра Калмана (10.14)—(10.16).
При г > tx наблюдения отсутствуют. Требуется оптимальным
образом сформировать оценку i(/) при t>tx.
Напомним, что при решении задачи фильтрации ищется, прежде
всего, апостериорная ПВ /?(*,/ Yq] . Для линейной задачи фильтрации
АПВ является гауссовской, а ее МО i и дисперсия D, описываются
уравнениями фильтра Калмана. Эта же методология используется и для
решения задачи экстраполяции, т.е. необходимо рассмотреть
апостериорную ПВ ρίχ,ηΥο) при t>tx. Отсутствие наблюдений при t>tx
формально записывается как
у(г) = 0, t>tx. (10.108)
Уравнение Стратоновича (9.S) для АПВ записано для произвольных
наблюдений, в том числе и нестационарных. В момент времени / = t\
278
АПВ равна /,(*»ίΐ|γο ) с параметрами i(/,), Dx(f,). При l>/ь
учитывая (10.108), уравнение для АПВ принимает вид
φίχ,/Υό) / / . ч\ / ι \| / ι \
Кл} ' = L(p(x,t\%}), р(чШ= -/»(mi|y5).(10.109)
Данное уравнение есть ни что иное, как априорное уравнение Фок-
кера—Планка—Колмогорова (1.79) с начальным условием ρ Ι χ, tx Yq1 ).
Так как ПВ ρίχ,/ι Yq1 J — гауссовская, το /?(χ,/ΥΟ], порождаемая
(10.109), также будет гауссовской, и для ее определения необходимо
знать МО ϊ(/) и дисперсию Dx.
Уравнение для оценки получается усреднением априорного
уравнения (10.89) и имеет вид
~F(f)i, />/,, i(i|) = i(»i)· (ЮЛЮ)
Получим уравнение для дисперсий. Введем δχ = χ-χ и запишем
дифференциальное уравнение
^=f"f=F(/)6l+G(/H(/)- (Ш11)
По определению Οχ(/) = Λ/ίδχδχτ). Продифференцируем это
выражение по времени с учетом (10.111)
+Α/[δχδχτ]Γτ(/)+Α/[(θ(/)ξ)δχτ]+Λ/[δχ(α(ί)ξ)τ]. (10.112)
Вычислим математическое ожидание Μ (ϋ(ί)ξ)δχτ . Запишем
решение уравнения (10.111)
δχ(0 = δχ(ί,)+|Φ(/,ν)Ο(ν)ξ(ν)ί/ν,
Ί
где Φ (/.ν) —переходная матрица однородного уравнения
279
άΦ(ί,τ) , . . .
—^ = F(0«>(/,x),
с начальным условием Φ(τ,τ) = I.
Тогда для искомого МО получаем
Μ
&№'))
у
6x(i,)+JO(i,v)G(v)4(v)i/v
}φ(ί,ν)θ(ν)Μ[ξ(ν)ξΤ (0]GT (v)dv
I''
JO(/,v)G(v)-^5(f-v)GT(v)</v
=1g(0s^t(0-
Аналогичное выражение получается и для последнего слагаемого в
(10.112). Суммируя полученные результаты, окончательно запишем
^- = Ρ(ί)Οχ+Ο]ιΓτ(0+^(08ξΟτ(0.6]ι(/=ί1) = ϋ]ι(Ο·(10.113)
Уравнения (10.110), (10.113) дают решение задачи экстраполяции в
непрерывном времени.
Аналогичным образом решается задача экстраполяции при
фильтрации в дискретном времени. Более того, в структуре алгоритма
оптимальной дискретной фильтрации (10.66)—(10.70) уже есть алгоритм
одношаговой экстраполяции (10.67), (10.69). Если поступает новое
измерение, то экстраполированная оценка и ее дисперсия корректируются
в соответствии с уравнениями (10.66), (10.70). Если измерение не
поступает, то необходимо делать следующий шаг экстраполяции по тем же
уравнениям (10.67), (10.69).
10.4.2. Оптимальная линейная интерполяция
В задаче интерполяции процесса χ (г) по наблюдениям у (г) на
интервале времени [Ο,ί] необходимо получить оценку х(х) для момента
времени те [0,г], т.е. лежащего внутри интервала наблюдения. В
отличие от задачи фильтрации, в которой при формировании оценки χ (г) в
280
момент времени / использовались лишь наблюдения у (г), полученные
к этому моменту времени, в задаче интерполяции в формировании
оценки χ(τ) участвуют как наблюдения, полученные к моменту
времени τ, так и наблюдения, полученные после него. Понятно, что
увеличение объема наблюдений должно приводить к увеличению точности,
поэтому точность интерполированных оценок должна быть выше точности
фильтрационных оценок.
Различают три типа интерполяции:
интерполяция на фиксированном интервале, при которой
фиксируется интервал наблюдения / = const, а момент времени τ, для которого
ищется интерполированная оценка, может быть любым в пределах
интервала [О,/];
интерполяция в фиксированной точке, при которой фиксируется
момент времени τ, для которого ищется интерполированная оценка, а
время t > τ меняется, т.е. наблюдения продолжают поступать в
реальном времени;
интерполяция с фиксированной задержкой, при которой
поддерживается постоянной разность f-T = const>0, т.е. наблюдения
продолжают поступать в реальном времени и момент времени τ, для которого
ищется интерполированная оценка, также меняется, таким образом, что
f-x = const.
Рассмотрим задачу интерполяции в дискретном времени. Пусть на
интервале времени [Ο,λ] наблюдается реализация (10.65), в которой
фильтруемый процесс х* описывается уравнениями (10.64).
Оптимальную обработку во всех задачах интерполяции определяет
АПВ pixv Yq J, ν € 1, А при дополнительных ограничениях на характер
изменения и соотношение между индексами ν и к .
При выводе различных алгоритмов интерполяции удобно
оперировать с совместной АПВ piхкду Y<J 1, которая связана с
интересующей нас АПВ /?(xv Yq ) соотношением (см. (1.18))
р(1у|¥о*) = 2р(1*Ду|¥о*Ц. (10.114)
Ниже потребуется соотношение
281
ρ(χν|χμ,Υί) = ρ(χν|χμ,Υ(^-1) для всех 0£ν£μ£*, (10.115)
которое вытекает из равенств
^νΙνΥοΗΗνΥΓ1.^
= ρ(χν,χμ,Υ^-,,Υ*)/ρ(χμ,Υ^,,Υ*) =
= ρ(γ* |χν,Χμ,ΥΓ' )ρ(χν,*μ,νΓ )/р$ \НХ~1 )p(*V*t)"
= /'(Υί|χμ)/'(χν,*μ'Υ0μ",)//'(ΥίΚ)^(1'μ»Υ0Μ) =
= p(xv,Χμ,Υ^-' )Д(VY0M ) " #»("v IVY0M ) ·
Приводимая ниже методика вывода основана на получении
рекуррентных уравнений для совместной АПВ pixk,xv IYq j с последующим
получением обычной АПВ pixv Yq 1 по формуле (10.114).
Оптимальная интерполяция на фиксированном интервале.
Представим АПВ /?(х*ду Yq J в виде
/>(х*>*у|*о ) = ] />(**>*v>*v+i|Yo )^v+i =
= jf p(xv|x*^v+iYo )p(»*^v+i|Yo )*v+i · (ЮЛЩ
В соответствии с (10.115) имеем
р(ху|^Ду+1¥о) = р(ч|ху+1»уо) =
= ρ(χν|Υον)ρ(χν+1|χν)/ρ(χν+1|Υ0ν). (10.117)
Подставляя (10.117) в (10.116), получаем
p(**>*v|yo) =
282
= />(*ν|Υθ) J ρ(χ^ϊν+ι|Υο)ρ(χν+ι|4)/^(4+ι|ν0ν)Λν+ι .(Ю.118)
Формула (10.118) описывает рекуррентный алгоритм для АПВ
/м χ*,χν Υ0 I при фиксированном объеме наблюдений Yq . Начальным
условием для этого алгоритма является
ρ(**^|Χ?1βΑ = ρ(^|Χ?). (10119)
т.е. АПВ для задачи фильтрации, соответствующая моменту времени к.
После нахождения АПВ ρίχ*,χν Yq I искомая АПВ plxy Yq)
находится из (10.114).
Так как в (10.114), (10.118)—(10.119) все преобразования линейные,
то АПВ pixv Yq } является гауссовской и, следовательно, описывается
МО Хф и дисперсией D^. В результате достаточно громоздких
преобразований из (10.114), (10.118) получается следующий алгоритм
интерполяции на фиксированном интервале:
ж^ =iv +Κν(ίν+ιμ -Fviv), (10.120)
Kv =DxvFvDxv+i,
DHifc =Dxv+Kv(dxv+i|a-Dxv+1)k;, (10.121)
где xv , Ο,ν, Djy — оптимальная оценка и дисперсии ошибок
фильтрации и экстраполяции фильтра Калмана (10.66)—(10.70).
Уравнения (10.120), (10.121) решаются в обратном времени с
начальными условиями ik\k = χ*, D^ = D^ .
Принцип работы алгоритма интерполяции основан на
формировании фильтрационных оценок xv для всех моментов времени ve 1Д.
Данные оценки включают всю информацию, содержащуюся в
наблюдениях, полученных к моменту времени v. Далее в обратном времени
проводится коррекция этих оценок с целью включить в итоговую
(интерполированную) оценку информацию, заключенную в наблюдениях,
полученных после того, как была сформирована соответствующая
фильтрационная оценка. Причем в этой коррекции участвуют не сами
283
наблюдения, а соответствующие фильтрационные оценки, в которые
они уже вошли (которые являются достаточными статистиками).
Оптимальная интерполяция в фиксированной точке. В этой
задаче рекуррентное уравнение должно связывать АПВ /?fx*,xv Yq ) с
АПВ р(х£+1ду Yo+1). Данную задачу можно трактовать как задачу
фильтрации расширенного вектора гк =
по текущим наблюдениям
Yq , но при этом вторая компонента вектора гк с течением времени не
меняется. Исходя из этого, можно сразу записать рекуррентные
уравнения для , аналогичные (9.14)—(9.15):
p(xk+ljiv\Yt)= J р(хк*,\У&)р{хы\*к)<Ьк . (10122)
p(^*v\Vo+l) = cp(ik+ljLv\Y&)p{yk+l\ik+l), (10.123)
которые необходимо дополнить очевидным начальным условием
/mx*,xv Yo ) =p(xv Yo )» гДе ρ[*ν Yo ) — обычная АПВ для
задачи фильтрации.
Так как фильтруемый вектор гк является двухкомпонентным, то и
оптимальный фильтр для интерполяции содержит два блока. В одном
блоке формируются фильтрационные оценки i^ и сопутствующие им
параметры К*, D^, D^ (матричный коэффициент усиления и
дисперсии ошибок фильтрации и экстраполяции) в соответствии с
уравнениями фильтра Калмана (10.66)—(10.70).
Рекуррентные уравнения для второго блока, формирующего
интерполяционную оценку i^ и дисперсию D^u., полученные на основе
(10.122), (10.123), имеют вид
*v|* = *v|*-l + *v|* (** " *к). *v|v = *
ν »
v\k = Kv|*4Dx*-lF*-lDi*> Κν|ν = 1»
K.%,ii. — Κ.
284
Здесь, как и в предыдущем методе интерполяции, формирование
интерполированных оценок происходит в результате коррекции
фильтрационных оценок, причем наблюдения в этом процессе выступают не
непосредственно, а также через фильтрационные оценки.
Оптимальная интерполяция с фиксированной задержкой. В
данной задаче необходимо получить рекуррентную зависимость между
АПВ /?ίχ*,χν Yq) и /4x*+i>*v+i yo+1)· Требуемые соотношения
можно получить из (10.118), (10.122), (10.123). При этом уравнение
(10.118) надо рассматривать относительно переменной pix*,xv+i γο )
/>(**>*ν|γο) =
ρ(χν |y0v) J p(x*,xv+1 |Υ0*)ρ(χν+Ι |*v)//>(*v+l |γ0 )*ν+ΐ . (Ю.124)
а уравнения (10.122), (10.123) объединить и представить в виде
p(x*+ifXv+i|Yo+l) = 4P(y*+i|x*+i) i p(**^v+i|yo )ρ(»*+ι|»*)Λ* ·
(10.125)
При наличии в постановке задачи фиксированной задержки
δ = к - ν алгоритм (10.124)—(10.125) должен начинать работу с
начального условия /HX£-v**o Y*~VJ» которое можно вычислить, используя
алгоритм интерполяции в фиксированной точке (10.122), (10.123).
Уравнения для интерполированных оценок, вытекающие из
(10.124), (10.125), имеет вид
*v|* = Fv-l*v-l|*-l +^G*-l^GI-lFv-lDxit-l(iv-l|it-l ~**-l) +
*θ|*-ν = **-ν »
Κνμ = (l>xv-lFv-lDxv ) Kv^-lDxiMF*-lDifc ,
285
D^=Div-Kv|,K,H,D^K^-
-(Div-iFJ-iDii)" Β^.,ο^,μ., (d^fJ^d^ )"t ,
DxO|*-v=Dx*-v (Ю.126)
Как и в предыдущих задачах интерполяции, алгоритм (10.126)
работает совместно с алгоритмом фильтра Калмана (10.66)—(10.70) и
использует его оценку i^_j на предыдущем шаге, матричный
коэффициент усиления Kjt и матрицы дисперсий ошибок фильтрации и
экстраполяции. Однако, в отличие от предыдущих задач интерполяции,
текущее наблюдение у* обрабатывается непосредственно в алгоритме
(10.126), а не через оценку х^ (достаточную статистику).
10.5. Оптимальная линейная фильтрация при
коррелированных шумах наблюдения
До сих пор рассматривались задачи фильтрации процессов,
наблюдаемых на фоне белого (некоррелированного) шума. Теперь рассмотрим
задачу фильтрации дискретного процесса (10.64) по наблюдениям
(10.65), в которых шум пк является векторным МП, описываемым
уравнением
η^Α^,η^,+Β^,η^,, (10.127)
где Т|£_| —ДБГШ с матрицей дисперсий Οη .
Решение данной задачи получается в результате обобщения теории
фильтрации МП, приведенной в гл. 9, и базируется на теории условных
марковских процессов.
Рассмотрим расширенный процесс гк = I и покажем, что он яв-
|у*1
ляется марковским. Подставим (10.64) и (10.127) в (10.65) и выполним
ряд преобразований
= Η^.,χ*., + Α*_,η*_, + Α^,Η^,χ*., - Α^,Η^,χ*., + (10.128)
+ Η*0*_,ξ*_1+Β*_1η*_,=
= (H*FJM-A*-lH*-lW-l + А*-1У*-1 +H*G*-1^*-1 + B*-1TU-1 ·
286
Теперь для вектора гк можно записать разностное уравнение
где
ζ*-ι =
GT =
|ξ*-ι
Л/с-1
. Fz =
F*-i 0
*к-\
|H*G*-1 в*-
Таким образом, процесс гк является многомерным марковским
процессом. Положим, что такой процесс задан, т.е. известна ПВ
переходов ρ (гк \гк_х ) = ρ (*к, у к |х*_,, у*_,).
Рассмотрим АПВ р\\к Yq 1 и, используя свойство согласованности
ПВ, запишем
/>HY0 )= J ρ(**.**-ι|Υο )**-! · (Ю.129)
На основании формулы Байеса для ПВ р[*к,хк-\ Yo ) имеем
/ , .ч р(*к>Ук*к-\Ы~1)
р(*к*Ук U*-i»Yo_1 )p(**-i ко"')
*—,(„κ-) ('α,30)
Так как процесс z^ — марковский, то справедливо равенство
Подставляя (10.130) в (10.129) и учитывая (10.131), получаем
Ϊ ИХ*'У*|**-1>У*-1 )р(*к-1 |*0~')λ*-ι
ρ(χ*|υ0*) = - , ■ . .ν · (Ю.132)
(у*И
287
Данное уравнение является рекуррентным относительно искомой
АПВ р\\к |Υ0 j и, следовательно, дает решение задачи фильтрации при
коррелированном шуме наблюдения.
При выводе алгоритмов оптимальной фильтрации используется еще
одно уравнение, являющееся аналогом уравнения (9.15) для
экстраполированной ПВ. Используя формулу Байеса, запишем
Сопоставляя (10.132) и (10.133), получаем искомое уравнение
р(хк,ук\у$-х)= J р{ч>Ук\*к-ьУк-1)р(*к-1\*0~*)<Ьк-1-(10Л34)
Алгоритм оптимальной фильтрации получается из (10.132), (10.134)
аналогично тому, как это было сделано п. 10.1, т.е. ПВ р\\к Yq I,
р{гк\тк-\)> ρί^-ιρο"1)· /Ч^Ь^о) представляется в виде гауссов-
ских функций, которые подставляются в (10.132), (10.134). Далее
делаются необходимые матричные преобразования и приравниваются
соответствующие члены в левой и правой частях равенств. В результате
получаются следующие алгоритмы оптимальной фильтрации:
Ч = **-1**-1 + К* (у* - А*_!У*-1 - H*_ii*-!), (10.135)
К* = (f^D^H^, + 0*_11>ξ (H,G,_, )т )х
Χ^-,Ο^,Η^+Ο^"1, (10.136)
Du = Η,Ο,,,Βξ (H,G,_, )T +B,_1DT1Bj_1, (10.137)
Dx* = F*_1DXJt_1F*T_1 +0^_1ΟξΟί_1 -
-Κ,ίο,.,Β^Η,Ο,.,^+Ρ^Ο^Η;:,1 , (10.138)
где Нн = H*F*_, -AMHW . (10.139)
288
Кроме описанного выше, возможна иная методика вывода
уравнений оптимальной фильтрации. Введем процесс
ик=Ук-*к-\Ук-\- (10.140)
Из (10.128), с учетом определения (10.139), можно записать
u* =(H*F*-i -A*-iH*-i)x*-i +RkGk-\$k-\ +Β*-ιΉ*-ι =
«Η^ι^+ζ*.!, (10.141)
где
Cat—1 = H*G*-l5*-l + B*-1TU-1 >
a Λ/[ζ,ζ;] = Η,α,.1οξ(Η,ο,.1)τ+Β,.1οηΒί_1.
Вектор ик можно рассматривать как новые наблюдения,
представленные в форме (10.141), которые линейно зависят от фильтруемого
процесса χ, поэтому можно ставить и решать задачу оптимальной
линейной фильтрации процесса χ по наблюдениям (10.141). В этой задаче
шумы формирования и наблюдения коррелированны:
м [ξΗςχ_, ] = ϋξ (н*с*_, )т + Βλ_,ΒηΒί_,.
Поэтому для решения задачи оптимальной фильтрации необходимо
воспользоваться уравнениями (10.79)—(10.81). Применение этих
уравнений приводит а алгоритму, совпадающему с (10.135)—(10.138).
Преобразование (10.140) есть ни что иное, как обеляющий (помеху)
фильтр. Таким образом, решение задачи фильтрации на фоне
коррелированной помехи также как и в задачах обнаружения и оценки
параметров сигнала сводится к предварительному «обелению» помехи
линейным фильтром с последующим решением задачи оптимальной
фильтрации на фоне некоррелированной помехи. Обобщенная схема
оптимальной системы фильтрации приведена на рис. 10.15.
Рассмотрим задачу
оптимальной непрерывной фильт- У*
рации многомерного
марковского процесса х(/), оплсы-
Рис. 10.15. Схема оптимального фильтра
ваемого уравнением (10.89), при коррелированной помехе
при наблюдениях
у(0 = Н(/)х(0+п(0, (Ю.142)
10—2041 289
Обелжющнй ц* J Фильтр
фильтр Π Калыана
где п(/) —коррелированная помеха, описываемая уравнением
^ = Α(0η+Β(ί)η(/), Λ/[η(0ητ(ί+τ)] = Νη/2δ(τ).
Для получения уравнений оптимальной фильтрации воспользуемся
методом обеляющего фильтра. Продифференцируем (10.142) по времени
dy d№ „d\ dn
— = —x + H—+— =
dt dt dt dt
= A(0y + (H'(0+H(0F(/)-A(/)H(0)x+
+Η(θα(/)ξ(0+Β(Οη(')· (ю.мз)
Определим процесс на выходе обеляющего фильтра соотношением
u(i) = ^-A(i)y. (10.144)
at
Тогда, используя (10.143), имеем
ϋ(0 = Η*(ί)χ + ζ(0. (Ю.145)
где
h*(0=h'(0+h(0f(0-a(0h(0,
ζ(/) = Η(/)Ο(/)ξ(/)+Β(0η(/),
Α/[ζ(0ζΤ(/ + τ)] = |(Η(/)Ο(/)8ξ(Η(/)Ο(/))τ+Β(08ηΒΤ(0)δ(τ) =
= |Νζδ(τ),
Α/[ξ(0ζΤ(^τ)] = 18ξ(Η(0θ(/))Τδ(τ).
Как и в задаче дискретной фильтрации, формирующий шум ξ(/) и
шум ζ (г) эквивалентных наблюдений (10.45) — коррелированны.
Поэтому для получения алгоритма фильтрации необходимо использовать
уравнения (10.14), (10.20), (10.21). В результате получаем следующий
алгоритм:
^ = F(/)i + K(0(u(/)-H*(0i), i(0) = x0. (10146)
290
Κ(0 = (ϋχ(0Η*τ(0+Ο(/)8ξ(Η(0θ(0)Τ)2Ν^ (Ю.147)
^ = F(/)D1+DTxF(0^G(0S^T(0~K(r)N^KT(0,
I>i(0) = DXo. (10.148)
Уравнения (10.144), (10.14б)-( 10.148) определяют алгоритм
оптимальной фильтрации процесса х(')> наблюдаемого на фоне
коррелированной помехи.
Контрольные вопросы к главе 10
1. При каких условиях фильтр Калмана является абсолютно
оптимальным, т.е. нельзя найти никакого другого линейного фильтра, дающего
меньшую дисперсию ошибки фильтрации?
2. Чем постановка задачи синтеза фильтра Калмана отличается от
постановки задачи синтеза фильтра Винера?
3. Какую структуру имеет оптимальная система фильтрации
непрерывного процесса с формированием оптимальных оценок в дискретные
моменты времени?
4. Какие типы линейного сглаживания вы знаете? Дайте их определения.
5. Чем определяется закон формирования экстраполированных оценок?
6. Какую роль играют априорные сведения в задаче фильтрации?
7. К какому значению стремятся в установившемся режиме
коэффициенты усиления фильтра Калмана при фильтрации квазидетерминирован-
ного процесса и почему?
291
Глава 11
ОПТИМАЛЬНАЯ НЕЛИНЕЙНАЯ ФИЛЬТРАЦИЯ
ИНФОРМАЦИОННЫХ ПРОЦЕССОВ
Задача фильтрации называется нелинейной, если сообщение
описывается нелинейным дифференциальным уравнением и/или входит
нелинейно в наблюдения y(t). Задачи нелинейной фильтрации являются
типичными для радиотехнических приложений. Так, например, в
системах связи, радиолокации и радионавигации, когда полезная информация
(сообщение) передается путем модуляции частоты, фазы, задержки
сигнала, длительности радиоимпульсов и др., имеем случай нелинейной
связи сообщения и наблюдений. В ряде задач измерения координат
объектов радиолокационными методами изменение координат во времени
(которые в данном случае являются полезными сообщениями)
описывается нелинейными дифференциальными уравнениями, например,
(2.30Ь-(2.31).
В отличие от задачи линейной фильтрации гауссовских процессов,
когда АПВ является гауссовской, в задаче нелинейной фильтрации
АПВ, как правило, является негауссовской. Это, во-первых, приводит к
тому, что оптимальные оценки сообщения, соответствующие
различным критериям оптимальности, могут отличаться друг от друга. Так,
например, оценки условного среднего и максимума АПВ не совпадают
при несимметричных апостериорных распределениях. Во-вторых, даже
в рамках одного критерия оптимальности, например критерия
минимума дисперсии ошибки фильтрации, не удается получить точного,
замкнутого решения, так как АПВ описывается бесконечной цепочкой
взаимосвязанных моментов, квазимоментов или семиинвариантов (см.
гл. 1). Поэтому в теории оптимальной нелинейной фильтрации
используют те или иные приближенные решения. Практически наибольшее
распространение получило гауссовское приближение, при котором
АПВ полагается гауссовской.
11.1. Уравнения оптимальной нелинейной фильтрации
в гауссовском приближении
Известно несколько алгоритмов гауссовского приближения.
Приведем вывод одного из алгоритмов для одномерного марковского
процесса λ(/), описываемого уравнением
292
и скалярного наблюдения
y(t)S(X.t)+n(t).
где n(t)9 ξ(ί) — БГШ с двусторонними спектральными плотностями
Nq/2 и ίξ/2 соответственно.
Будем искать оценку условного среднего λ = Μ λ Щ , которая
является оптимальной по критерию минимума дисперсии ошибки
фильтрации. Аппроксимируем апостериорную плотность вероятности
ρ (λ Ιο) гауссовской
'№Ы
4*&к
exp
(Х-!)'
2Ζ\
(11.1)
где λ и Ι\ — среднее значение и дисперсия гауссовского
распределения.
В гл. 10 показано, что гауссовская АПВ (11.1) является решением
уравнения Стратоновича, если наблюдения зависят линейно от
фильтруемого процесса, а сам процесс описывается линейным
дифференциальным уравнением. При этом функция F(\9t) (9.3), входящая в
уравнение (9.4), зависит от λ квадратично. Воспользуемся этим фактом для
вывода приближенного алгоритма нелинейной фильтрации. Разложим
нелинейные функции /(λ,/), g(X,i), ^(λ,ί) в ряды в окрестности
точки оптимальной оценки λ и ограничимся конечным числом членов
/(λ,/)-/(λ,/)+^Μ(λ-λ), g(Kt)-g(i,t),
F(X,t)-F(\,t)+—±-!.(X-X)+ ^ '(λ-λ) . (11.2)
Учитывая (11.2), дальнейший синтез алгоритма фильтрации
проведем по той же методике, что и при выводе оптимального линейного ал-
293
горитма (см. п. 10.1). Запишем оператор
Фоккера—Планка—Колмогорова
ФМФ-Ч^И)-
э/(Ы
ь№)/(Ь)Ь*р№)
дХ 4 3λ2
3)
Подставляя (11.53) в уравнение Стратоновича (9.4) и переходя от
уравнения для ρΐλΐρ] к уравнению для « = 1ηΙρΙλЩ 11, с учетом
(10.6) получаем
dt
g
дХ
2(λ,,)5ξ
ι/(Μ+^Μ)
Эй
дХ
М)4-^г*М) 4-^Нъ
Э^(Ц ! #F(i.t)
-аГГ-Ч+Г-ЯГг "> 2 эх2
(11.4)
После подстановки (10.8) в (11.4) имеем
^ίΟ_Ι^(λ_λ)2+^·(λ-λ)^=
dt 2 dt v / "* V 7Л
df(i,t)
эх
.. 3/(λ,ί)
(λ-λ)
Αι
г
(λ,/)5ξ
4
dF(X,t)
ЭХ
(λ-λ)2
Э2^(Ц
Ma
2 (λ-λ)2-1«
2 9λ2 V ; 2 3λ2
Dk
(11.5)
294
Приравнивание в (11.5) членов при одинаковых степенях разности
(λ-λ] дает следующий алгоритм фильтрации:
dt Βλ λ ν ' 2 ^ ЭХ2
(11.6)
(11.7)
Выражения для производных функции F(X,t), входящих в (11.6),
(11.7), имеют вид
3λ2 Ν0 ЭХ2 VKf K }) Nn\
(11.8)
(dS(i,t)
ЭХ
(11.9)
Первым слагаемым в (11.9), как правило, можно пренебречь. Тогда,
подставляя (11.8), (11.9) в (11.6), (11.7), получаем
(ds(i,t)
ъ-Фь^^а
д\
(11.10)
(11.11)
Уравнения оптимальной в гауссовском приближении нелинейной
фильтрации (11.10)—(11.11) иногда называют расширенным фильтром
Калмана, так как они по структуре совпадают с уравнениями фильтра
Калмана (10.8)—(10.9) с заменой F(t)X на /(λ,/), F(t). на
3/(λ,ί)/θλ, Η (ή на ds(i9t)/d\.
Приведем без вывода уравнения гауссовского приближения для
задачи фильтрации многомерного МП χ(ί), описываемого уравнением
— = ί(χ,/)+8(χ,/)ξ(/), х(/0) = *о>
(11.12)
295
и векторных наблюдений
y(t) = S(X,t)+n(t), Х = сх, (11.13)
где п('), ξ(ί) — векторные БГШ с матрицами двусторонних
спектральных плотностей N„/2 и βξ/2 соответственно.
Уравнения фильтрации в гауссовском приближении
- = f(x,0+Ds(0 Ш'
(11.14)
dDx=dt(i,t)
dx
dt
Ds+Ds
fdf(x,/)
dx
где
+lg(i,t)Stf (i,t)+Dxl-\
Эх
Dx.
F(x,/) = 2S(cx,/)N;,(y(/)-0,5S(cx,/)),
(11.15)
(11.16)
а дифференцирование по векторному аргументу определяется
следующими правилами:
1) если φ(χ) —скаляр, а х —вектор, то
Эф(х)_
Эх
3φ(») 3φ(χ) 9φ(χ)|
0bC| OX2
аьс.
■строка;
2) если ф(х) —вектор, и χ —вектор, то
|3φ,(χ)/3χ, Эф,(х)/ах2 ... Эф,(х)/Эх,
эф2(х)/ах, эф2(х)/аг2 ... эф2(х)/ах,
Эф(х)
Эх
|Эфя(х)/ах, Эф„(х)/Эдг21 ... Эфп(х)/Эх„
-матрица.
Как и в скалярном случае, уравнение (11.15) можно упростить, если
не учитывать вторые производные от сигнальной функции.
Дисперсионное уравнение при этом принимает вид
А Эх * х
^R"*·"8^*·"-
296
-2D,
Эх
\т
п Эх Dx
(11.17)
Отметим одну особенность дисперсионных уравнений (11.17). Если
в линейном алгоритме фильтрации (10.16) уравнение для дисперсии
ошибки фильтрации (10.16) является детерминированным и может
быть проинтегрировано до начала обработки принимаемой реализации,
то в нелинейном алгоритме фильтрации (11.14)—(11.15) уравнение для
дисперсий ошибок фильтрации (11.15) содержит члены, включающие
текущую оценку χ (г) и, следовательно, оно должно интегрироваться в
процессе обработки реализации у('), т.е. совместно с уравнением для
оценки. Это существенно усложняет алгоритм фильтрации. · Поэтому
часто ограничиваются отысканием приближенного решения уравнения
для дисперсии ошибки фильтрации, например, усреднив уравнение
(11.17) на интервале времени Δ/, значительно превышающим время
корреляции флуктуационных помех, но меньшим времени корреляции
фильтруемого процесса.
Гауссовское приближение в задачах нелинейной фильтрации дает
хорошие результаты при больших отношениях сигнал/шум. В ряде
задач алгоритмы гауссовского приближения имеют удовлетворительные
характеристики при умеренных отношениях сигнал/шум. В то же время
встречаются задачи, например, фильтрация хаотических процессов,
адаптивная фильтрация, в которых гауссовское приближение дает
неудовлетворительные результаты, и необходимо искать другие
аппроксимации.
—%
©λ
f(i<)
С К
Рис 11.1. Схема нелинейной системы фильтрации
в гауссовском приближении
Оптимальный в гауссовском приближении нелинейный фильтр,
описываемый соотношениями (11.14), (11.15), может быть представлен
в виде нелинейной следящей системы (рис. 11.1).
297
11.2. Дискриминатор и фильтр
в оптимальной системе фильтрации
В схеме оптимальной системы фильтрации (рис. 11.1), как и в
любой следящей системе можно выделить дискриминатор и фильтр. В
п. 7.7.2 дано определение дискриминатора как устройства,
выделяющего информацию о рассогласовании между оценкой параметра сигнала и
его опорным (истинным) значением. Математически дискриминатор
был определен (7.63) как производная от логарифма отношения
правдоподобия по оцениваемому параметру. Если обратиться к уравнению
Стратоновича для АПВ (9.5) и вытекающему из него уравнению (11.14)
для оценки фильтруемого процесса в оптимальном нелинейной
фильтре, то следует заметить, что входящая в них функция F(*j) (11.16)
есть ни что иное, как логарифм одношагового отношения
правдоподобия. С другой стороны, в уравнение оптимальной фильтрации (11.14)
входит производная dF(x,r)/dx. Эти факторы дают возможность
выделить в схеме оптимальной нелинейной фильтрации дискриминатор.
Введем интервал времени Δ/ такой, что фильтруемый процесс
χ(ί)» const на этом интервале. Другими словами Δ/« т^, где х^ —
время корреляции фильтруемого процесса. Определим на интервале
времени Δ/ логарифм отношения правдоподобия
1ηρ(λ)= jF(x,0*= j2S(X,/)N-1(y(/)-0.5S(X,/))^.
Δ/ Δ/
Определим многомерный дискриминатор соотношением
М?(у(0-8(1,/))л«
1Су(0А. (11-18)
Последнее (приближенное) равенство в (11.18) выполняется для
многих радиотехнических задач, так как сигнал и его производная по
параметру слабокоррелированны.
Вернемся к уравнению (11.14) и вычислим входящую в него
производную от логарифма одношагового отношения правдоподобия
ρΐηρ(λ)Υ
λ = λ
= J2
Δ/
dS[X,t)
ЭХ
J2
Δ/
f as(x,/)
эх
298
{ Эх j-
f3£(M)axY
ЭХ Эх]
f3S(X,Q4T
= с
(щъу
= ст2
ЭХ
ЭХ
N?(y(t)-8(Kt)).
С учетом данного выражения запишем уравнение (11.14) в виде
3s(X,i)
эх
2rC(y(i)-S(cx,0). ("-Ι»)
Проинтегрируем обе части уравнения (11.19) на интервале времени
Δ/. Учитывая, что на этом интервале χ - const и D, = const, получаем
,ras(x,/)4T
§-ί(ί.ί)+1^(θ€τ/2
αί Δ/
= Г(х,0+Ох(0стид.
эх
2N-1(y(/)-S(i,0)* =
(11.20)
где 11д определяется (11.18).
Применительно к следящим системам операцию интегрирования на
интервале времени Δ/ в дискриминаторе можно не выполнять, так как
сама узкополосная следящая система выполняет роль интегрирования.
Поэтому дискриминатор следящей системы можно определить
соотношением
ЛТ
ид=2
(dS(ktj
эх
N^(y(0-S(X,/)),
(11.21)
что следует также из сопоставления (11.19) и (11.20).
Определению (11.21) соответствует также следующее
представление для дискриминатора оптимальной следящей системы:
■-(')-
ЭХ
dt
λ=λ.
(11.22)
С учетом (11.21) схему оптимальной системы фильтрации можно
представить как на рис. 11.2, где пунктиром выделены дискриминатор и
сглаживающий фильтр.
299
sR
г^'М^К^М
Τ
• г
ι ι
' ι
Фильтр
ι ι
1 I
• I
[ I
! L
Ч^мН
X
Рис. 11.2. Дискриминатор и фильтр в оптимальной
системе фильтрации
Из (11.21) следует, что структура дискриминатора определяется
структурой наблюдений у (г) (11.13), в том числе видом сигнала S(X,f)
и законом модуляции сигнала сообщением λ. Структура же
фильтрующих цепей (сглаживающего фильтра), в соответствии с (11.19)
определяется векторной функцией f (χ,ί), т. е. структурой фильтруемого
процесса (11.12), и не зависит от формы и вида модуляции сигнала.
Следовательно, при использовании гауссовского приближения синтез
оптимальной системы фильтрации может быть выполнен раздельно для
оптимального дискриминатора и оптимального сглаживающего
фильтра. Использование этого факта существенно упрощает синтез
оптимальной системы фильтрации. Так, например, если фильтруемый процесс
является гауссовским МП, т.е. описывается линейным уравнением
(например, (9.2)), то синтез сглаживающего фильтра можно провести по
методике, описанной в п. 10.1.3, с использованием теории оптимальной
линейной фильтрации.
Как отмечалось в п. 10.1.3, процесс на выходе дискриминатора
можно представить в виде статистического эквивалента
ιιΛ(0 = υ(λ-λ)+ζ('). (11-23)
где ϋ(λ-λ) = Α/[ιιΛ], ζ(ί) — среднее значение и флуктуационная
составляющая выходного процесса.
Полагая ошибку слежения δλ = λ - λ малой, линеаризуем функцию
ϋ(λ-λ) и запишем (11.23) в виде
M') = VMH('). (П.24)
где SA — крутизна дискриминационной характеристики.
300
При малых ошибках δλ = λ-λ (11.21) можно записать в виде
fas(x,^T
ид=2
ЭХ
N?(s(X,f)+M(i)-S(i,i))-
s(l.f)+^!il(x-i)+.(0-s(i,i)
f -ч_ /.*
_L-2(x-x)+„(,)
(11.25)
Усреднив (11.23) при фиксированной расстройке δλ, получаем
регулярную составляющую процесса ид (г)
А/[ид] = 2
as(x,r)| _,as(x,i)
эх
ν:
ЭХ
!(Χ-Χ).
Следовательно, крутизна дискриминационной характеристики
SA=2
fas (λ,/)
эх
Ν
_, *(Ч
ЭХ
(11.26)
Рассчитаем спектральную плотность процесса ид(/) на выходе
дискриминатора. Из (11.25) имеем
5(0-2
I l ;Ч'»(<)·
эх
Корреляционная функция этого процесса
Λ/[ζ(,)ζτ('+τ)] = ^
(ds(i,t)
эх
чт . т ,as(x,i+x)
301
. Γ Ί ,9S(M
Ν;'Μ[η(0ητ(ί+τ)]Ν;'-1^ =
3λ
L5(x)·
Следовательно, при малых ошибках слежения процесс на выходе
дискриминатора некоррелированный (белый шум), а его спектральная
плотность определяется выражением
.ds(Kt)
N" эх ~v
8ς/2 = 2
fas(3Lff)'
3λ
(11.27)
Заметим, что равенство спектральной плотности процесса на выходе
дискриминатора оптимальной системы фильтрации крутизне
дискриминационной характеристики является характерным признаком таких
оптимальных систем.
Поставляя (11.24) в (11.20), получаем уравнение линеаризованной
системы фильтрации
^ = f(i,0 + Dx(0cT[sfl(X-X)+C(0]= (П.28)
=f(i,0+D^0cTsfl(y(0-«)=f(i,0+i>x(0^(y(0-^),
где
(11.29)
y(f) = X + fi(f) = cx+fi(f)
— эквивалентное наблюдение, приведенное к фильтруемому процессу
χ(ί); при записи (11.28) учтено, что матрица SA невырожденная.
Рассчитаем корреляционную функцию шума η (г)
= S;18(x) = Nii/26(x).
(11.30)
С учетом (11.30) уравнения линеаризованной системы фильтрации
(11.28) можно записать в виде
302
f = f(i.0+2D1(0cTNi1(y(0-ci). (11.31)
Рассмотрим дисперсионное уравнение (11.17) для линеаризованного
режима работы системы фильтрации. С учетом (11.27), запишем
(эг(мрт
dt Эх
Эх
+^Β(χ,ί)8ξ8τ(χ,ί)-20χςτΝΪ1€θχ. (11.32)
Уравнения (11.31)—(11.32) по своей структуре напоминают фильтр
Калмана (10.14)—(10.16) и полностью с ними совпадают, если
фильтруемый процесс х('), описывается линейными уравнениями (9.2), т.е.
f(x,/) = F(/)x. Таким образом, при малых ошибках слежения синтез
системы фильтрации и анализ ее характеристик можно проводить для
эквивалентных линеаризованных наблюдений (11.29). Это существенно
упрощает анализ характеристик системы фильтрации, особенно, если
фильтруемый процесс описывается линейными уравнениями.
Пример 11.1. Рассмотрим задачу фильтрации фазы
гармонического радиосигнала. Так как модель изменения фазы сигнала определяет
лишь структуру фильтрующих цепей, то для простоты изложения будем
полагать, что фаза сигнала описывается линейным уравнением 1-го
порядка
^ = ξ(0, Α/[ξ(0ξ('+τ)] = 5ξ/2δ(τ). (Π.33)
Данное уравнение моделирует блуждание фазы автогенератора при
учете тепловых и дробовых шумов усилительного прибора и элементов
схемы. Наблюдаемая реализация имеет вид
y(t) = Acos(m+y{t))+n{t), Μ[η(ήη(ί + τ)] = Ν0/2δ(τ).
В рассматриваемой задаче S (φ, t) = A cos [ш + φ (t)), / (φ) = 0,
*(φ)«ΐ·
Подставляя данные соотношения в (11.14), (11.17), получаем
— = 9-sin((ut + <p)(y(t)- Acos(<ut + φ)), (Π·34)
dt N0
303
dt " 2
2^2dJ . 2, M
—sin (ω/+φ).
(H.35)
В правой части уравнения (11.34) высокочастотную компоненту
2sin((uf+^)cos(atf+ ф) = 8ш2(см + ф) можно отбросить, так как
частота сигнала ω много больше полосы пропускания следящей системы, и
вторая гармоника сигала существенно ослабляется. В результате
уравнение оптимальной фильтрации принимает вид
ί/φ _
Л
N.
>>(φίη(ωί+φ).
(11.36)
В уравнении (11.36) дискриминатор (фазовый) описывается
соотношением
^0
(11.37)
и представляет собой перемножитель, на один вход которого подается
реализация y(t), а на второй вход — опорное колебание sin (cor + ф).
Данное колебание может быть сформировано на выходе фазового
модулятора (ФМ), на один из входов которого подается оценка фазы φ, а на
другой — опорное колебание sin (ω/). В качестве фильтра следящей
системы используется интегратор, что определяется моделью
фильтруемого процесса (11.33). Уравнение (11.36) описывает работу системы
фазовой автоподстройки
(ФАП) (рис. 11.3).
Дискриминационная
характеристика фазового
дискриминатора
получается в результате усреднения
(11.37) на интервале
времени Δ/, для которого
fkp = <p-^ = const, т.е.
г(0»
sin(o>/)_
X
τ
ФМ
2ADJN0
Ρ '
Рис. 11 J. Оптимальная схема слежения за
фазой сигнала
Δ/« τκ , где тк - время корреляции следящей системы
Δ/
2Л
= J cos(av+ <ρ)5ΐη(ωί+φ)Λ = —$ίη(φ-φ). (11.38)
Ν{
0 Д/
#Ω
304
Уравнение (11.35) для дисперсии ошибки фильтрации также
усредним на интервале времени Δ/, в результате чего получаем
dt 2 N0
В установившемся режиме решение данного уравнения имеет вид
°^усг=^Щ/2А2 . (11.39)
Таким образом, дисперсия ошибки слежения растет с увеличением
интенсивности фазовых флуктуации генератора и интенсивности
аддитивной помехи и уменьшается при увеличении амплитуды сигнала.
Рассмотрим методику раздельного синтеза
дискриминатора и сглаживающего φ ильтра системы
Φ А П. Синтез дискриминатора проводится на основе (11.21), что сразу
приводит к выражению (11.37). Для синтеза сглаживающего фильтра в
контуре следящей системы линеаризуем дискриминационную
характеристику (11.38) дискриминатора (11.37) для малых ошибок фильтрации
Следовательно, крутизна дискриминационной характеристики
ΞΛ=Α2/Ν0.
Шум на выходе дискриминатора ζ(ί) = -2Α$υι((ύί + φ)η(ί)/Ν0
имеет спектральную плотность Νξ/2 = A /Nq .
После пересчета шума ζ (г) на вход эквивалентной следящей
системы (см. рис. 10.6) получаем эквивалентное входное воздействие
Я') = Ф(0+Й(<)> О1·40)
где спектральная плотность шума n(t) равна ΝΛ/2 = N^/SA =N0/A .
Рассмотрим синтез линейного фильтра Калмана для модели (11.33),
(11.40). Используя (10.11), (10.12) запишем
£-£сяо-ф)-^о><о-ф). <1М1)
2 с. ^2П2
(11.42)
<*Ρφ = 5ξ Ρ$ 5ξ А'Р<
dt 2 Να 2 Ν0
305
Из сопоставления (11.39) и (10.42) следует, что уравнения для
дисперсии ошибки фильтрации совпадают. Из уравнения (11.41) видно, что
в контуре следящей системы используется фильтр с операторным
коэффициентом передачи К^ (р) = К0/р, причем в установившемся режиме
К0уст=^А S^/2N0 = ^JqS^ , где q = A2/2N0 [с"1] — отношение
мощности сигнала к спектральной плотности шума на входе системы
фильтрации. Установившееся значение коэффициента усиления К0уст
фильтра Калмана совпадает с аналогичным значением в нелинейной
системе фильтрации (11.36).
11.3. Уравнения дискретной нелинейной фильтрации
в гауссовском приближении
Как и в аналогичной задаче нелинейной фильтрации непрерывных
процессов, задача оптимальной нелинейной дискретной фильтрации не
имеет в общем виде строгого замкнутого решения. Поэтому здесь так
же используются те или иные приближенные алгоритмы, наибольшее
распространение из которых получил алгоритм гауссовского
приближения. Вывод алгоритма гауссовского приближения такой же, что и для
непрерывных процессов и основан на разложении нелинейных функций
в соответствующие ряды. Поэтому приведем его без вывода.
Фильтруемый процесс описывается уравнением
*k =f*-i(**-ι)+8*-ι(**-ι)ξ*-ι. *('о)= *<ь
A/^] = D^, (11.43)
наблюдаемый процесс —
у*=s*(λ.*ho*, xk=ak, */[■*■;]=DA*· с11·44)
Уравнения оптимальной в гауссовском приближении дискретной
фильтрации будут такими:
**=**+Ι>ι*
I *Л*Л _г ^л . I._._*!_*/I OHl(yk-Sk(€Xk)),
Эх
= **+Di*
Эх
(11.45)
i*-f*-i(**-i). (И·46)
306
- эг*_,(х*_л rdfJfc_,(iit_1)Y
*&'*&-£
dx
(11.47)
(11.48)
В уравнении (11.48), как и в непрерывном времени, можно
пренебречь вторыми производными от сигнальной функции и представить его
в виде
Й
= D
Й-
(dSk(cik))TO dSk(ak)
Эх
dx
(11.48 α)
Здесь ik — оценка фильтруемого процесса; χ* — экстраполированная
оценка процесса; Dx^ — матрица дисперсий ошибок фильтрации;
Ъхк — матрица дисперсий ошибок экстраполяции.
Дискретная система фильтрации, описываемая уравнениями
(11.45)—{11.48), как и аналогичная непрерывная система, может быть
представлена в виде нелинейной следящей системы, включающей
дискриминатор и фильтр. Для получения такого представления определим
дискриминатор выражением (без накопления на интервале времени
Δ/« τκ)
ид* =
№Ы
V
эх.
λ=λ
8λ
»;'(у*-М**)) <1L49>
и запишем (11.45) в виде
х*=»*+1>ж*сТ
ЭХ
D«' (у* " S* (**)) = х* + DrtcTuflJt.
У*
"И"
II
Фпир
\Шй
*&)
4Ь
taM
Рис. 11.4. Схема дискретной оптимальной системы фильтрации
307
На рис. 11.4 приведена схема дискретной нелинейной системы
фильтрации, в которой выделены дискриминатор и сглаживающий
фильтр. Заметим, что в оптимальном дискретном дискриминаторе
функция S* (λ*) и ее производная dSk(Х*)/ЭХ берутся в точке
экстраполированной оценки λ*.
Введем статистический эквивалент для процесса (11.49) на выходе
дискриминатора
πΛ*»υ(λ*-**)+ζ*, (11.50)
где U (λ* - *кк ) = Μ [ицк ] — дискриминационная характеристика;
ζ* =
8λ
D^'n^ — флуктуационный процесс на выходе
дискриминатора.
При малой ошибке экстраполяции 5Х = Хк-Хк, лежащей в
пределах линейного участка дискриминационной характеристики, (11.50)
можно представить в виде
«Λ*=ν(λ*-λ*)+ζ*,
где вд =
f *»(**)
\Т
ЭХ
.!»*(**)
ЭХ
крутизна дискриминационной
характеристики.
Корреляционная функция флуктуационной составляющей ζ* равна
Μ
[ζ*ζΤ"] =
(as,(λ*)
эх
,ч?МУ
эх
δ^Ι. =Sn5;
ц°кт'
Следовательно, процесс на выходе дискриминатора является белым
шумом с матрицей дисперсий Ος = вд.
Как и в непрерывных системах фильтрации, при малых ошибках
экстраполяции и линейной модели фильтруемого процесса уравнения
(11.45)—(11.48) переходят в уравнения дискретного фильтра Калмана
(10.66)—(10.70), полученные для эквивалентных наблюдений:
у*=Х+п*=сх*+й*, (11.51)
308
В гауссовском приближении в дискретной системе структура
дискриминатора определяется структурой наблюдений у*, в том числе
видом сигнальной функции S*(X*), а структура сглаживающего
фильтра зависит только от типа фильтруемого процесса (его
структуры). При этом синтез дискриминатора и сглаживающего фильтра можно
проводить раздельно. Синтез дискриминатора проводится по формуле
(11.49). Синтез сглаживающего фильтра проводится для эквивалентных
линеаризованных наблюдений (11.51) по методике, описанной в п. 10.2.
Если в дискретных алгоритмах фильтрации (11.45)—(11.48) шаг
дискретизации 7^ устремить к нулю, то данные алгоритмы переходят в
соответствующие непрерывные алгоритмы (см. п. 11.1). Обратное
утверждение неверно, т. е. дискретизацией непрерывных уравнений
фильтрации нельзя получить дискретные уравнения фильтрации
(11.45)—(11.48). Это обусловлено тем, что структура дискретных
алгоритмов фильтрации предполагает формирование двух оценок:
экстраполированной \к и фильтрационной \к , а также соответствующих
матриц дисперсий ошибок экстраполяции и фильтрации. В непрерывных
же алгоритмах используется лишь одна фильтрационная оценка i(/) с
соответствующей матрицей дисперсий ошибок фильтрации. Уравнения
оптимальной дискретной фильтрации наиболее полно используют
априорную информацию о структуре фильтруемого дискретного процесса.
Поэтому при разработке дискретных алгоритмов фильтрации более
предпочтительно сначала провести дискретизацию исходных
уравнений, описывающих сообщение и наблюдаемый процесс, а затем
использовать уравнения оптимальной дискретной фильтрации (11.45)—(11.48),
а не осуществлять дискретизацию непрерывных уравнений
оптимальной фильтрации тем или иным методом.
11.4. Оптимальная непрерывно-дискретная фильтрация и
дискретная фильтрация с оптимальным накоплением
11.4.1. Оптимальная непрерывно-дискретная фильтрация
Алгоритмы комбинированной калмановско-винеровской
фильтрации гауссовских МП, рассмотренные в п. 10.3, могут быть
распространены на один частный, но очень важный для радиотехнических прило-
309
жений случай нелинейной фильтрации, когда фильтруемый процесс
является многомерным гауссовским МП и описывается уравнением
^ = F(0x+G(i)6(0. *(<o) = *0.
(11.52)
Как отмечалось в пп. 11.1, 11.2, при использовании гауссовского
приближения для синтеза оптимальной системы фильтрации структура
фильтруемого процесса χ(ί) определяет структуру сглаживающего
фильтра в контуре синтезируемой следящей системы (системы
фильтрации). Поэтому задание линейной модели фильтруемого процесса даст
линейный сглаживающий фильтр, что позволит проинтегрировать
уравнения оптимальной фильтрации с использованием аппарата переходных
матриц (см. п. 10.3). *
Наблюдению доступна аддитивная смесь сигнала и шума (11.13).
Поставим задачу синтеза оптимальной (в гауссовском приближении)
непрерывно-дискретной системы фильтрации, в которой
обрабатываются аналоговые (непрерывные) наблюдения (11.13), а оценки
формируются лишь в заданные (тактовые) моменты времени tk , которые будем
полагать расположенными на одинаковом интервале Τ друг от друга.
Рассмотрим уравнение оптимальной фильтрации (11.14), которое
запишем в виде
£ = F(,)i + Ds(0c4(<).
где (по определению (11.21))
,
(θα из)
Шх,гУ
ЭХ
\ у
= 2
ras(x,()Y
эх
!C(y(0-S(i,i)). (11.54)
Как отмечалось в п. 11.2, процесс на выходе дискриминатора (11.54)
можно представить в виде статистического эквивалента (11.23), а при
малой ошибке фильтрации δλ-λ-λ — в виде линеаризованного
статистического эквивалента (11.24).
Подставляя (11.24) в (11.53), получаем
£«F(0i+n,(0«T(s«-MH('>)«
= F(,)i + Ds(0cT(y(<W),
(11.55)
где y(f) = SaX+C(/).
310
Уравнение (11.64) линейно относительно £ и аналогично фильтру
Калмана (10.14). Поэтому для него можно сразу записать оптимальный
алгоритм непрерывно-дискретной фильтрации, аналогичный (10.99):
**=** + J Ф(^Д)Ох(т)ст(у(т)-8д^)Л, (Ц.56)
'*-ι
где Φ(ί£,τ) — переходная матрица, удовлетворяющая однородному
уравнению (см. (10.93))
^^=(f(0-d^)cts>M.
с начальным условием Φ(τ,τ) = Ι; ϊ* = Φ^ (ί* ,^-ι )**-ι> *τ =
= %(т»/ы)*н —экстраполированные с момента времени tk_\ на
моменты времени tk и te(tk_^tk) оценки фильтруемого процесса;
Фар(х>*к-\) — переходная матрица априорного уравнения (11.52),
удовлетворяющая однородному уравнению (10.97).
В (11.56) λτ означает, что оценку λ следует брать в момент
времени τ ε [ί*_ι,ί*], а так как фильтрованные оценки в промежуточные
интервалы времени не формируются, то следует брать
экстраполированные оценки λτ =0^ = сФ^ (v*-i )i*_i.
Учитывая (11.24) и (11.29), запишем ид (т) = у(т)-8д^.
Следовательно, уравнение непрерывно-дискретной фильтрации (11.56) можно
записать в виде
ж*=ж*+ ]ф(гьт)Ох(т)стид(тут.
(11.57)
'*-!
Наконец, подставляя (11.54) в (11.57), получаем еще два выражения
для алгоритма оптимальной непрерывно-дискретной фильтрации
**=** + J Φ(Ά>τ)ϊ>ι(τ)'
'*-!
= ί*+ \ Φ^,τ)Όχ(τ)€τ2
4-1
ЭХ
^(λ(τ),τ)ν
3λ
</τ =
(11.58)
N?(f{x)-S{H*).x))d*.
311
Схема оптимальной непрерывно-дискретной системы фильтрации,
описываемой уравнением (11.58), приведена на рис. 11.5.
Μ
sM ι
τ
V
£„('*.')
:»н(^
jBBip
ΗΣ
»«p('bfr-if»| z~l I
}^\ *ap(<.ltJ
Рис 11.5. Схема оптимальной непрерывно-дискретной
системы фильтрации
Оптимальная непрерывно-дискретная система фильтрации
включает аналоговый дискриминатор, оптимальный накопитель в виде фильтра
со сбросом в тактовые моменты времени ^ и с импульсной
характеристикой Йн('*»0 = *('*»0^х(ОсТ> экстраполятора с переходной
матрицей Φ^ίν^-ι). формирующего экстраполированную оценку
ϊτ = Φαρ (τ,^-ι )i*-i на каждый текущий момент времени те [f*_i»4fc ]»
ключа, замыкающегося в моменты времени tk; дискретного
сглаживающего фильтра.
Оптимальный накопитель в схеме рис. 11.5 занимает в структуре
следящей системы такое же место, что и фильтр Винера в схеме
комбинированной калмановско-винеровской фильтрации (см. рис. 10.13).
Однако это не есть фильтр Винера в чистом виде. В него не вошла
нормированная производная 2 IdS (λ(τ), τ)/θλ) Ν"1 (аналог матрицы 2ΗΤΝ^ в
фильтре Винера), которая отнесена к дискриминатору, так как является
основной дискриминирующей функцией («различителем») по
параметру λ.
При выводе алгоритма оптимальной непрерывно-дискретной
фильтрации (11.58) полагалось, что ошибка фильтрации δλ = λ-λ мала и
лежит в пределах линейного участка дискриминационной
характеристики. При этом лишь в начале интервала интегрирования (в момент
времени /*_ι) ошибка δλ — это ошибка фильтрации. Для всех осталь-
312
ных моментов времени те [tk-{,tk] ошибка δλ — это ошибка
экстраполяции. Рассчитаем дисперсию ошибки экстраполяции для
произвольного момента времени те \tk_x,tk ].
Экстраполированная оценка фильтруемого процесса определяется
выражением
*τ=«ν(ν*-ι)**-ΐ.
Выражение для текущего значения χτ фильтруемого процесса
получается в результате интегрирования априорного уравнения (11.52) на
интервале [ί*_ι»τ]
τ
h-\
Тогда для дисперсии ошибки экстраполяции можно записать
Οκ=Α/[(χτ-ΐτ)(χτ-ϊτ)τ] =
= <1V(v*-i)^[(**-i -i*-i)(x*-i -»*-ι)Τ]·^(ν*-ι)+
+ J J Фвр(т,0с(0А/^(05т(д)]ст(*)ф^(х,д)л^=
= *>ap (V*-l )Пхк-\*1р (V*-l ) +
+| J Φ^(ν)Ο(08ξΟτ(0Φ:ρ(τ,/)Λ.
Очевидно, что дисперсия ошибки экстраполяции 0Л возрастает
при увеличении времени экстраполяции х, и наибольшее ее значение
достигается в конце интервала интегрирования (в момент времени tk).
При большой длительности интервала T = tk-tk_i может оказаться,
что, хотя дисперсия ошибки фильтрации D^ мала, дисперсия ошибки
экстраполяции будет велика и, следовательно, ошибка экстраполяции
может выходить не только за пределы линейного участка
дискриминационной характеристики, но и даже за пределы апертуры
дискриминационной характеристики, т.е. будет иметь место срыв слежения.
Поэтому в нелинейной непрерывно-дискретной системе фильтрации сущест-
313
вует принципиальное ограничение на длительность интервала
дискретной обработки Г. В комбинированном калмановско-винеровском
фильтре такого ограничения не было — при любом значении Τ в тактовые
моменты времени tk формировались оптимальные оценки
фильтруемого процесса с минимальной дисперсией ошибки фильтрации.
Пример 11.2. Для задачи фильтрации фазы гармонического
сигнала, рассмотренной в примере 11.1, синтезируем оптимальную
непрерывно-дискретную схему ФАП. В данной задаче имеем F(f)sO,
Φα(;,τ) = 1, а крутизна дискриминатора ФАП находится из (11.38) и
равна 5Д = A /N0 . Поэтому уравнение для переходной функции
(матрицы) Φ(ί,τ) имеет вид
^ = _^Μ)φ(/,τ) = _^(θΦ(/,τ), Φ(τ,τ) = 1, (11.59)
где Dy(t) —дисперсия ошибки фильтрации фазы сигнала в
непрерывной ФАП, которая описывается уравнением (11.35).
Рассматривая установившийся режим работы ФАП, с учетом (1.39)
можно записать К^ = Js^A2/N0 , а решение уравнения (11.59) в этом
случае имеет вид Φ(ί,τ) = е *"χ .
Подставляя (11.37) и полученное выражение для Φ(/,τ) в (11.57),
находим уравнение для оптимальной непрерывно-дискретной ФАП
Щ=Ъ-1 ~ ϊ β-^('*-τ)βφ(τ)^(τ)δίη(ωτ+φ*_1)</τ.
Рассмотрим для простоты ФАП с установившимся значением
Друст. При этом уравнение для оптимальной оценки фазы упрощается
ф* = ф*-, -^CL ) е-^(^т) у(т)ип(«+фм )dx. (11.60)
На практике обычно используется простое усреднение процесса на
выходе дискриминатора ФАП, что соответствует формированию оценки
фазы по алгоритму
314
<р*,н=(р*-1,н—zr^-1 ЛФп(юх+Ф*ч,н)</т,
Νη
(11.61)
'*-ι
*>Ttc
Рис. 11.6. Зависимости СКО оценки фазы в
ФАЛ с оптимальным
и неоптимальным накоплением
где индекс "н" использован для отображения факта неоптимальности
формируемой оценки.
Сравним точность формирования оптимальной (11.60) и
неоптимальной (11.61) оценок фазы сигнала в зависимости от длительности
интервала накопления T = tk -tk_{. На рис. 11.6 приведены
соответствующие зависимости сред-
неквадратических ошибок
при q = Pc/N0=\04 Гц,
5ξ/2 = 0,32 ра/с"1. При
таких параметрах задачи
полоса пропускания ФАЛ
Α/φ απ = 20 Гц, что
характерно, например, для схем
ФАП в приемниках
спутниковых радионавигационных
систем. Из приведенных
зависимостей следует, что в
неоптимальной ФАП (11.61) допустимо накопление на интервале Τ = 20 мс
без потери точности фильтрации, в то время как в оптимальной
непрерывно-дискретной ФАП длительность допустимого (без потери
точности фильтрации) интервала накопления на порядок больше.
11.4.2. Дискретная фильтрация с оптимальным накоплением
Из предыдущего материала следует, что, если принимается
аналоговый сигнал (например, радиосигнал), а оценки фильтруемого
процесса необходимо формировать лишь в дискретные моменты времени, то
оптимальная систем фильтрации должна включать аналоговый
дискриминатор, накопитель, ключ и дискретный фильтр. Однако на практике
часто удобнее сначала провести дискретизацию сигнала по времени, а
потом уже выполнять его обработку. Так, например, в приемниках сит-
налов спутниковой навигации ГЛОНАСС/GPS временная
дискретизация принимаемых сигналов осуществляется на последней
промежуточной частоте - 4 МГц. В то же время, оценки фильтруемых процессов
(задержки и фазы сигналов) достаточно формировать с темпом Τ = 20
мс (частота выдачи данных 50 Гц). Разность между частотами формиро-
315
вания отсчетов наблюдаемых сигналов и формирования оценок
процессов составляет 8* раз. Таким образом, возникает задача построения
оптимальной системы обработки данных, поступающих с высокой
частотой, и формирования оценок информационных процессов с
существенно меньшей частотой. Данная задача, по сути, аналогична той, что
рассмотрена ранее, а также задаче линейной дискретной
комбинированной калмановско-винеровской фильтрации (см. п. 10.3.2). Поэтому
приведем основные соотношения без подробных выводов.
Фильтруемый процесс полагаем гауссовским марковским, т.е.
х*-1,/ = ^k-li-lH-U-l +G*-l,/-l5*-l,i-l» *('*-!) = х*-1,0 >
где ξ*,· — векторный ДБГШ с матрицей дисперсий Οξ.
Здесь и далее принята двойная нумерация временных отсчетов,
подробно описанная в п. 10.3.2 (см. рис. 10.14).
Наблюдается реализация Ук-\,1=3к-и{^к-и)+пк-и> гДе nkj —
векторный дискретный БГШ с матрицей дисперсий D„.
Оптимальная дискретная система фильтрации, формирующая
оценки £^ в тактовые моменты времени /* , описывается уравнением
Ν-\
ч = ч ++ Σ Vbk-iN-Pjk-iN-iC7 x
I 3S^_|f^_|· (^k-\tN—i\k-\ ) I _i / (r \\
x I ^T^ l Dn {yk-lN-i-Sk-lN-ifik-lN-it-l))*
\ J
где
•tt-U =ф{*к>*к-и)>фк;к-\,ЫЧ = Π *k-\tN-f.k-\.N-j-\ > »я1^;
J=0
фк;к =I ί φ*-1,ι;*-1,Μ = F*-1,/-1 "^жк-и^л*
SR — крутизна дискриминационной характеристики дискриминатора,
который определяется выражением
*цк-\.ы-г,к-\ = (п·63)
( ^к-\,ЫЧ fik-\,N-i;k-\)
дХ
Dn [Ук-иЫ-i - Sk-\.N-i fik-lN-i;k-\)) ·
316
С учетом (11.63) уравнение (11.62) принимает вид
Ы-\
** = Ч + Σ Фк;к-1М-^1к-1ЫЧ^к-1Ы-1;к-\ - (11.64)
1=0
В уравнении (11.64) второе слагаемое определяет оптимальный
накопитель отсчетов на входе дискриминатора следящей системы,
импульсная характеристика которого определяется выражением
8н*;*-1,ЛГ-1 = <bk;k-\tN-il}jk-lN-icT ·
Если время накопления Τ существенно меньше времени
корреляции фильтруемого процесса (или времени корреляции следящей
системы), то gH *;*-!,w-i e const на этом интервале времени и весовое
суммирование в накопителе трансформируется в обычное суммирование (с
равными весами) отсчетов с выхода дискриминатора.
11.5. Оптимальная нелинейная фильтрация при
случайных неинформативных параметрах сигнала
11.5.1. Общие алгоритмы оптимальной фильтрации
в гауссовском приближении
Рассмотрим задачу оптимальной фильтрации процесса х('),
передаваемого в сигнале S(г,λ,μ), где λ (/) = «(/), μ —вектор
неинформативных параметров сигнала, например, начальная фаза или
амплитуда, которые полагаем случайными величинами, постоянными за время
наблюдения, т.е. άμ/ώ = 0.
Общее уравнение для АПВ pi χ Щ 1 в рассматриваемой задаче
получено в п. 9.4 (уравнение (9.35)). Отличие (9.35) от аналогичного
уравнения (9.5), полученного для задачи фильтрации процесса χ (г)
при приеме сигнала, не содержащего неинформативные параметры,
отличается тем, что в него входит функция ^(м)» определяемая
из (9.33)—(9.34), вместо функции F(x9t), которая входит в (9.5).
Если вернуться к алгоритму оптимальной в гауссовском
приближении фильтрации (11.14)—(11.15), (11.2) полученному для условий,
когда неинформативные параметры сигнала отсутствовали, то увидим, что
в них входит функция F(x,/), которая определяет дискриминатор сле-
317
дящей системы. С учетом этого уравнения оптимальной в гауссовском
приближении фильтрации, в случае, когда сигнал содержит случайные
неинформативные параметры, постоянные за время наблюдения, могут
быть получены из уравнений (11.14), (11.17), если в них заменить
F(x,/) на F(x,/). Поэтому запишем
di
= f(x,/)+Dx(0
dt
dDT _df(x,/)
3F(x,r)Y
dx l·
(11.65)
dt
Эх D'+D'| Эх
+-%(ί,ή8&τ(χ,ή+
+D^!
dF(i,t)
dx
D*
(11.66)
Дискриминатор следящей системы определяется выражением (см.
(11.22)
»д(<) =
ί931ηρ(Υί|λ)
ЭХ
dt
М^пЧ
λ=λ,
(11.67)
с учетом которого (11.65) записывается в виде
^ = f(x,0+Dx(0c4(0.
полностью совпадающем (по структуре) с (11.20). Таким образом,
наличие случайных параметров сигнала привело к изменению только
структуры дискриминатора, и не затронуло структуру сглаживающего фильтра.
Аналогичные выражения можно записать и для задачи дискретной
дильтрации (11.43), (144), а именно
»и(*и)
—^— » Ч = h-\ \Ч-\) >
(11.68)
D,^ =
Эх
Ож,*-1
f9f*-i(i*-i)
Эх
+g*-i (i*-i )1>ξβί-ι (i*-i).
(11.69)
318
η"1 -ή"1 ЭГЭ^*(«*)ЛТ
(11.70)
где Fk(cik) = ]n[p(Y0k\*k)/p(Yt%)\, a p(Y0k\*k), р(г0к~1\хк)
определяются в соответствии с (9.20), (9.22).
Дальнейшая конкретизация уравнений оптимальной фильтрации
(11.68)—(11.70) получается при конкретизации соответствующих
параметров μ.
11.5.2. Оптимальная фильтрации информационных процессов,
переносимых сигналом со случайной начальной фазой
Пусть информационный процесс λ (/) = «(/) передается сигналом,
начальная фаза которого случайна, и постоянна за время наблюдения,
т.е. μ = φ0 и S(tX<f>0) = aA(t9X)cos((u0t + q>(t,X)+<f>0), где A(t,X),
φ(ί,λ) — законы амплитудной и фазовой модуляции, которые могут
зависеть от информационного процесса λ; а — известная амплитуда
сигнала. Случайная фаза (ро распределена равномерно на интервале
[-π,π].
Рассмотрим задачу непрерывной фильтрации. Так как
дискриминатор определяется только структурой наблюдений и для интервала
времени Δ/« τχ, много меньшего времени корреляции информативного
процесса, то при получении структуры дискриминатора будем полагать
для простоты χ = const. Усредненное по фазе отношение
правдоподобия pi Yq |xj вычислялось в п. 4.3.2 и имеет вид (4.39)
--{-fbfe'H· ("·71)
где /0 (*) — функция Бесселя нулевого порядка от мнимого аргумента,
X2(t9X) = X*(i.X)+X*(t9X)9 01.72)
319
Xc(t,X) = )y(x)A(x,\)cos((u0T+<p(T,X))dx,
о
t
Ar,(i,X) = J>-(x)^(x,X)sin(ou()x+9(x,X))i/x,
a = \A2{x,X)dx.
0
Определим функцию F{\,t) в соответствии с (9.34)
(11.73)
(11.74)
"м-Й-f-"*
(* v\
#0
_ ι ад(р |
ι
(2
ЪХМ)2адХ(д)
"оЭ< *gH
Ν* dr
(11.75)
Положим, что оцениваемый параметр λ — неэнергетический.
Тогда при формировании дискриминатора следящей системы в
соответствии с (11.67) первое слагаемое в (11.75) даст ноль, поэтому его можно
не учитывать. Следовательно, формулу для дискриминатора можно
записать в виде
"«(,)-^
(11.76)
Рассмотрим случай большого отношения сигнал/шум, для которого
гауссовское приближение дает хорошие результаты. В этом случае, как
показано в п. 7.10.1 (рис. 7.10), отношение двух функций Бесселя,
входящее в (11.76), можно положить равным единице и записать
приближенное выражение
"д(<) =
2а Э a*(l.i)
Ν0 3λ dt
Дифференцирование ΛΊ/,λ] по времени с учетом (11.72)—(11.73)
дает следующий результат:
320
+XS (ί,λ)>;(/)^(/,λ)8ίη(ω0/+φ(ί,λ))].
(11.77)
В п. 7.7.1 при решении задачи оценки начальной фазы сигнала было
получено выражение (7.54)
q>0(r) = -arctg
|^(τ)Λ(τ,λ)8πι(ωτ+φ(τ,λ))</τ
|^(τ)Λ(τ,λ)οο8(ωτ+φ(τ,λ))ί/τ
(11.78)
Заменяя в этом выражении Τ на текущее время / и учитывая
(11.72), (11.73), нетрудно увидеть, что
С учетом этих формул (11.77) принимает вид
^^ = ^(/μ^λ)οο8(^+φ^λ)+φο(/)). (11.79)
Подставляя (11.79) в (11.75), (11.76), получаем
F(x,0 = ^(0^^^cos(cu0/ + 9^X)+9o(0) = ^(0^(^^9o)i
..(ο-^)?('^(ί))
Afo
3λ
(11.80)
Выражение (11.80) отличается от аналогичного выражения,
получающегося при приеме полностью известного сигнала тем, что в
сигнальную функцию £(ί,λ,φ0) вместо истинного значения начальной
фазы сигнала входит ее оценка, которая определяется в соответствии с
(11.78) при текущем времени /. С увеличением времени наблюдения
энергия сигнала £(/) возрастает, и точность оценки начальной фазы
сигнала также возрастает.
Схема оптимальной системы фильтрации при наличии случайной
начальной фазы сигнала приведена на рис. 11.7.
11—2041 321
&_
■ί χ
Неоф/+<р(гд))|-у-^ π/2 [
Ур
χ
Μρ
ί
Φο
•а5(х,Фо)/а
DxC1
_ Ι ρ
Рис. 11.7. Схема оптимальной системы фильтрации при
наличии случайной начальной фазы сигнала
Оптимальная система фильтрации содержит основной блок оценки
информационного процесса и блок оценки неизвестной начальной фазы,
которая вводится в основной блок фильтрации. Метод приема сигнала с
оценкой начальной фазы называют квазикогерентным приемом сигнала.
Так как с течением времени ф0 —> <Pq , квазикогерентный прием сигнала
переходит в когерентный прием. При этом точность фильтрации
информационного процесса будет такой же, что и в случае приема сигнала
с известной начальной фазой.
11.53. Оптимальная фильтрации информационных процессов,
переносимых сигналом со случайными начальной фазой
и амплитудой
Если сигнал кроме случайной начальной фазы имеет и случайную
амплитуду, то отношение правдоподобия p(Jo|x) (П.71) необходимо
усреднить дополнительно по случайному распределению амплитуд. В
результате усреднения по рэлеевской ПВ распределения амплитуд, в
соответствии с (4.49), получаем
322
'<*>-й
In
No
Η
N0+<*(')<£ JV0(tf0+a(0<j2)
X2(t)
(11.81)
Положим, как и выше, что оцениваемый параметр λ —
неэнергетический, и пренебрежем первым слагаемым в (11.81). Обозначим для
простоты
/(<) = "
2σ2
N0(N0+a(t)al)
и представим (11.81) в виде
F(x,0 = /'(')*2M+/(<)
алг(х,р
Χ(Κή.
(11.82)
(11.83)
Подставляя в (11.83) выражение (11.81), запишем
f(x,o=/'(0*2M+
=Л0^2(^0+/(0^(0^(^05(^Фб(0.0. <11Л4>
где 5(X,90(/),/) = i4(/,X)cos((i\)/+9(r,X)+9o(i)) — нормированная
на амплитуду сигнальная функция; оценка начальной фазы сигнала
ф0(/) определяется в соответствии с (11.78) при текущем времени t,
а огибающая сигнала и ее квадратурные компоненты — формулами
(11.72)—(11.74).
Структура дискриминатора, получаемая в результате
дифференцирования (11.84) по λ, оказывается достаточно сложной. Существенное
упрощение можно получить, если полагать, что огибающая Χ(λ,ί) не
зависит от λ. В этом случае будем иметь
Э5(<Лфо(х))
«д (0 = /(')*(*.<)*(')-
эх
(11.85)
Дальнейшее упрощение получается, если заменить произведение
f(t)x(X,n его установившимся значением (а точнее, при большом
времени наблюдения) и принять допущение о высокой точности слеже-
323
ния, т.е. полагая λ «λ. При этих допущениях определим Χ(λ,η~
«;Р(г),где
X(i)«Jx*(t)+X*(t). (11.86)
Из (11.73) получаем приближенные вьфажения
Xc(/)«0,5aa(/)cos(<po), Xs (/)«0,5fla(/)sin(<p0), (11.87)
где a(/) определяется формулой (11.74).
Подставляя (11.87) в (11.86), получаем X(t) = 0%5aa(t). Учитывая
определение функции /(/) (11.82) и тот факт, что при увеличении
времени наблюдения а(/)-»°°, нетрудно увидеть, что
lim f(t)X(t) = a/NQ . Из данного выражения следует, что произведе-
ние f(t)X\Xtt)NQ является, по сути, блоком оценки амплитуды
сигнала, т.е.
a(t) = f(t)x(i,t)N0.
Таким образом, при большом времени наблюдения и высокой
точности фильтрации имеем эквивалентное формуле (11.85) представление
••w-i'W-hr^· ("'88)
где S (λ, ф0 (/),/) = α5(λ,φ0(ί),/) —сигнальная функция при
оценочном значении фазы сигнала.
Сопоставляя (11.88) с (11.80), видим, что структура
эквивалентного дискриминатора не изменилась, но в два раза уменьшился
коэффициент передачи дискриминатора. Это приводит к увеличению крутизны
дискриминационной характеристики в 2 раза, а спектральной плотности
шума на выходе дискриминатора в 4 раза. Однако величина
спектральной плотности эквивалентного шума, приведенного к оцениваемому
параметру (см. (11.29)) не изменится. Следовательно, точность
фильтрации процесса λ(/) также не изменится. Заметим, что данный вывод
является справедливым лишь при большом отношении сигнал/шум или
при / -» ©о .
324
4.λ) W«4"+q>(r,).|
H3feL
S.
φ
Up
xc
Up
-m«(.V(/A-e|J
χ,
X
Φο
*\dS(i,4o)fa-
/0
W x
Μ
-3-
^H
Рнс. 11.8. Схема упрощенного алгоритма оптимальной фильтрации
На рис. 11.8 приведена схема упрощенного алгоритма оптимальной
фильтрации в условиях, когда сигнал имеет случайные амплитуду и
начальную фазу.
11*5.4. Оптимальная фильтрация при переменных случайных
неинформативных параметрах сигнала
Если неинформативные параметры сигнала меняются во времени
случайным образом, т.е. имеем μ(/), то выполнить усреднение
уравнения Стратоновича для АПВ, как это было сделано в пп. 9.3, 9.4 для
постоянных μ , в общем случае не удается. Поэтому можно использовать
следующий приближенный подход. Прежде всего заметим, что в
рассмотренных в пп. 11.4.1, 11.4.2 задачах из усредненных уравнений
Стратоновича вытекали алгоритмы фильтрации, в которых
формировались текущие оценки начальной фазы фо(/) и амплитуды £(/),
которые использовались в блоке фильтрации информативного параметра.
Обобщая это положение на случай переменных неинформативных
параметров, будем искать совместную оценку как информативных λ(/),
так и неинформативных μ(/) процессов. Такие оценки можно
формировать на основе рассмотрения совместной АПВ piλ,μЩ ), для
которой можно записать уравнение Стратоновича, аналогичное (9.5). Отсю-
325
да следует, что оптимальными в гауссовском приближении алгоритма-
Щ0|
ми фильтрации расширенного вектора v(/) =
т
будут уравнения
(11.14)—(11.15), записанные для данного вектора ν (г).
Пример 11.3. Рассмотрим задачу фильтрации процесса λ(/) при
приеме реализации
7(i) = fl(i)^(X,/)cos(a\,/+9o(0)+4(/),
в которой неинформативные фаза ср0(г) и амплитуда a{t) являются
случайными функциями. Определим модели данных процессов
следующим образом:
*Р0 _,
^ = М<). *[M')«f (' + *)]- V28W·
(11.89)
Модель (11.89) описывает случайные блуждания фазы в
автогенераторе, а модель (11.90) описывает флуктуации амплитуды сигнала с
рэлеевским законом распределения мгновенных значений и шириной
спектра ~ α (см. п. 2.5).
Как и раньше, полагаем, что λ(/) отображается в пространстве
состояний вектором х(/), для которого, например, справедливо описание
(11.52). При этом λ = «. Введем расширенный вектор ν(/) = |α(/)
для которого запишем обобщенное уравнение формирования
f£-f(v)+Bn(0.
где r\(t) =
\щ
ш
. f (ν)-
Fx
-αβ+-
ad
,B =
G
О1
О1
Οι
fat
0
0.
0
1
(11.91)
326
Oj — столбец, состоящий из нулей; О1 — строка, состоящая из нулей.
Подставляя (11.91) в уравнения оптимальной фильтрации (11.14) и
переходя от вектора ν(ί) к его компонентам, получаем
± = η + Κπ(ή*α у° '(yto-Ssfrb.t)). (11.92)
^=.αί+^+/:ΰ(ί)5(λ,φ0,/)(>,(0-^(λ,φ0,ί)), (И.93)
^ = -K9(t)y(t)aA(Ut)smfot + h)> О1·94)
где 5(X,9o,i) = ;4(X,f)cos(cooi + <P<)(i)) — нормированная к амплитуде
функция сигнала; Kx(i), Ka(t), K^(t) — коэффициенты усиления
соответствующих блоков, для которых можно записать необходимые
соотношения на основе уравнений (11.15).
При записи уравнений (11.92)—(11.94) учтен тот факт, что ввиду
некоррелированности процессов х('), я (О» (ро(') элементы матрицы
взаимных дисперсий ошибок фильтрации равны нулю.
В уравнениях (11.92)—(11.94) можно выделить дискриминаторы по
каждой из оцениваемых компонент. В соответствии с определением
(11.22) запишем
■wM-;i^^*>-«i(U.O).
ujxX (0 —дискриминатор информативного процесса λ; ица (t)
—дискриминатор амплитуды а; ыдф (/) —дискриминатор фазы фо.
На рис. 11.9 приведена схема оптимальной системы фильтрации. Из
схемы и уравнений (11.92)—(11.94) видно, что в системе отсутствуют
перекрестные связи между разнотипными дискриминаторами и
оценками параметров. Так, например, сигнал мдх (/) с выхода дискриминатора
для информативного параметра не участвует в формировании оценок
327
фазы и амплитуды и т.д. Это является следствием отмеченной выше
некорелированности оцениваемых процессов.
α
*)1
гЧ X
Up
ф-Е
'£.Фо.')
<W
lijfaagigHiaLfg A 1J j
4*^—
\2dS^)/i
ГдкК*
й
Φ Η
cos(a>f+ φ0Μ-ι
HVp
Φο
I
lD,cT|
ΐ
ryu-
Рис 11.9. Схема оптимальной системы фильтрации
Характерной особенностью синтезированной системы является то,
что оценки всех процессов x(f), а(')> Фо(0 формируются на основе
следящих систем, в то время как в схеме рис. 11.8 оценки фазы и
амплитуды формируются по разомкнутой схеме. Использование методики
оценки расширенного вектора состояния в гауссовском приближении в
задачах фильтрации всегда приводит к следящим системам по всем
оцениваемым процессам.
11.6. Оптимальная фильтрация информационных
процессов в присутствии дополнительных
узкополосных помех
Многие РТС работают в условиях воздействия не только
внутреннего шума приемника, но и дополнительных внешних помех, например,
индустриальных или помех других РТС, работающих в том же
частотном диапазоне. В этом случае на вход приемника поступает аддитивная
смесь
ЯО- S(t,X)+S„ (t)+n(t).
(11.95)
328
Возможны различные описания помехового Sn(t) сигнала. Если
структура такого сигнала известна (например, это сигнал от связной
радиостанции, использующей частотно-модулированные сигналы), то
можно положить Sn (t,Xf), где Xj- соответствует процессу частотной
модуляции. Располагая характеристиками спектра частотной
модуляции, можно для процесса Xf (/) выбрать гауссовскую марковскую
модель вида (11.52). Если информация о структуре сигнала отсутствует, то
можно определить модель сигнала Sa(t) как узкополосный гауссов-
ский случайный процесс с заданной функцией корреляции. Рассмотрим
именно такую задачу. Пусть 5П (/) = схп (г), а х„ (*) описывается
уравнением
*п(<).
Л
= Απ*π+Βπξπ(0,
где ξπ (t) —БГШ с двусторонней спектральной плотностью Nn/2 .
Информационный процесс λ(;) также будем описывать
компонентой многомерного марковского процесса χ(ί).
Ставится задача: по принятой реализации (11.95) наилучшим
образом оценить процесс χ(ί). Запишем (11.95) с учетом представления
•М') = сп*п(')··
^(0 = 5(/,сх)+спхп(0+Л(0·
' * I
Введем расширенный вектор ζ(/) =
и обобщенный сигнал
S(i,z) = S(i,cx)+cxn(/). Тогда можно записать уравнения
оптимальной фильтрации процесса ζ , которые имеют вид
dt
= f(x,/)+
Nn
Mop^j-^w*
(y(t)-S(t,ci)-Sa(tj), (11.96)
4b
dt
π _
= Α„ϊ„ +
329
Nn
D«„ (0
f95(f,ci)Y
dx
+Dxn (0cT
(y(t)-S(t,ci)-Sa{t)), (11.97)
где S'n(r) = cin(/); Dx, Dn , Dx — матрицы дисперсий ошибок
фильтрации информативного процесса χ (г), взаимных дисперсий
ошибок фильтрации двух процессов и дисперсий ошибок фильтрации
неинформативного процесса хп (г) соответственно, для которых можно
записать матричные уравнения Риккати.
В алгоритме (11.96)—(11.97) осуществляется оценка помехи Sn (r)
и ее вычитание из наблюдаемой реализации. Поэтому такие алгоритмы
получили название компенсационных. Если рассмотреть аналогичным
образом случай помехи с частично известной структурой Sn [t,X/ ), то
компенсационная сущность алгоритма остается, т.е. из сигнала
необходимо вычитать оценку Sn(t) = Sn(t,Xf). При этом изменится второе
слагаемое в квадратных скобках формул (11.96)-(11.97), где вместо ст
будет стоять
ί^/,οΛ,)Υ
11.7. Оптимальная фильтрация при негауссовских помехах
Рассмотрим задачу дискретной фильтрации процесса λ* по
наблюдениям дискретной выборки yk = Sk (Хк )+пк, где пк —
некоррелированная шумовая последовательность. Плотность вероятности
распределения мгновенных значений задана р(пк) и может быть произвольной,
в том числе и негауссовской.
Из п. 11.3 следует, что в алгоритм оптимальной фильтрации
(11.45)—(11.46) наблюдения входят через функцию Fk(Xk), которая
определяется через логарифм отношения правдоподобия piY0 \xk\) как
Fk (λ* ) = ln(p(tf Ы))-1п(р(#-» \хк\)\
330
С другой стороны в п. 4.5.1 получены общие выражения (4.76)-(4.77)
для Л* =1п|р(У0 1**1)) при произвольной ПВ шума р(пк) в форме
к , ^ , , MY^\лр(уЛ
А*-!*(*). */(*) = lfi(yj)fj. fi{yj)~ w ·
Записывая аналогичные выражения для Λ^-ι и поставляя Л* и
Λ*_ι, получаем
М*0ЯЛ*-ЛМ=1/,(Л)^. (1L98>
/si
Если сигнал достаточно слабый по сравнению с помехой, то в
(11.98) можно ограничиться лишь первым членом, т.е.
d\np(у А
FkM = AMSk. /ι(Л)- —· (П.99)
dyj
Подставим (11.99) в алгоритм оптимальной фильтрации (11.45),
(11.46) и рассмотрим дискриминатор следящей системы (11.49)
Щ(Ьк) Mkfik)
Из (11.98) следует, что дискриминатор, в отличие от (11.49),
включает на входе дополнительный нелинейный блок, который преобразует
входную реализацию ук . Тип такого нелинейного преобразования
определяется видом ПВ р(пк). Для гауссовской ПВ р(пк) имеем /j (yk ) =
= Ук/<*п > т-е- нелинейное преобразование вырождается в линейное, а
дискриминатор (11.97) переходит в дискриминатор (11.49) (без учета
второго слагаемого, которым во многих радиотехнических задачах
можно пренебречь).
Контрольные шонросы κ глаше 11
1. Что такое гауссовское приближение в теории оптимальной нелинейной
фильтрации?
2. Как определяется дискриминатор в структуре оптимальной в гауссов-
ском приближении нелинейной системе фильтрации?
3. Чем определяется структура оптимального дискриминатора?
331
4. Чем определяется структура сглаживающего фильтра в структуре
нелинейной системы фильтрации?
5. Каким образом и когда может быть использована теория оптимальной
линейной фильтрации для синтеза сглаживающего фильтра
нелинейной системы?
6. Что изменяется и как в структуре оптимальной системы фильтрации
при решении задач приема сигнала на фоне гауссовской и негауссов·
ской помех?
7. Что изменяется и как в структуре оптимальной системы фильтрации
при решении задач приема сигнала на фоне коррелированной
гауссовской помех по сравнению с задачей приема сигнала на фоне
некоррелированной гауссовской помехи?
8. Как изменяется структура оптимальной системы фильтрации при
приеме сигнала неинформативной случайной фазой?
332
Глава 12
ОПТИМАЛЬНАЯ КОМПЛЕКСНАЯ ФИЛЬТРАЦИЯ
В задачах фильтрации информационных процессов основным
требованием, как правило, является высокая точность фильтрации. Если
выбрано описание фильтруемых процессов и определены наблюдения,
т.е. выбраны соответствующие измерительные датчики, то применение
теории оптимальной фильтрации приводит к наилучшим алгоритмам
обработки сигналов измерительных датчиков, которые обеспечивают
минимальное значение дисперсии ошибки фильтрации. В то же время
проектировщику системы хотелось бы знать, каким образом можно
добиться дальнейшего повышения точности фильтрации. Понятно, что для
этого надо повышать информативность наших наблюдений. Сделать это
можно двумя способами. Первый способ заключается в
использовании дополнительных датчиков одного и того же оцениваемого процесса.
Причем эти датчики должны быть независимыми, так как в противном
случае они не добавляют новой информации. Второй способ основан
на использовании датчиков процессов, отличных от оцениваемого, но
связанных с ним. Например, это могут быть измерители производных
оцениваемого процесса. Теория комплексной фильтрации занимается
именно такими задачами совместной фильтрации взаимосвязанных
процессов, в том числе и тождественных, при наличии измерений от
различных датчиков.
Синтез комплексной системы может быть выполнен с общих
позиций теории оптимальной фильтрации. Для этого достаточно ввести
обобщенный вектор измерений у (0» включив в него все наблюдения
(измерения), полученные от различных датчиков. Далее синтез
осуществляется на основе стандартных алгоритмов оптимальной
фильтрации, рассмотренных в гл. 10—11.
Рассмотрим примеры синтеза комплексных систем фильтрации.
12.1. Радиолокационный двухдиапазонный комплексный
измеритель дальности
Рассмотрим радиолокационную станцию, которая излучает в одном
направлении сигналы в двух диапазонах частот, например,
сантиметровом и миллиметровом. На вход приемника в этом случае также
поступают два сигнала, потому имеем два наблюдения
333
„(0 = S,(x3,0+«i(0. Α/[«,(0«,0+τ)] = ΛΓ0,/2δ(τ); (12.1)
Уг(0 = S2(τ„ί)+"2(0. Λ/[«2(ί)»20+τ)] = ^ο2/2δ(τ). (12.2)
Примем следующую модель изменения дальности во времени
х3 = 2Д/с0,
Л"У- Л ξ(/)' ^[«0ξ('+τ)]-^/2β(τ).
(12.3)
где с0 —скорость света.
Введем вектор x = \R K|t, для которого справедливо векторное
уравнение
(12.4)
£«Л+<ЗД.
где F =
|0 1
о οι
; g =
(12.5)
Определим вектор сигналов S(x3,i) = |5Ί (τ3,/) ^(Xj.i)) , вектор
шумов η = |л] «21 , векторное наблюдение у = \у\ у2\ , для которого
запишем выражение
y(/) = S(ts,0+n(/). (12.6)
Подставляя (12.4)—(12.6) в (11.14), (11.17), получаем
dV 2A2as>(2^eb»0/ /» »/,i/ \\
2Д2Э52(2Л/с0>/)/ о/ ., чч
(12.7)
334
dt ^2
Э5,(2Л/с0,г)
dR
2A2,
N,
01
fas,(2^/c0,/)
^>22=5ξ
Λ 2
(Э5,(2Л/с0,/)
2ΑιΑ2
fay2(2Jg/c0,/)
эл
ГЭ52(2Л/с0,/)
Ν,
01
*02
ЭД
#02
V» 2 (
2Α22
эл
Μ
01
dS2(2R/c0,t)
dR
2A22
Μ
(12.8)
02
Схема оптимальной комплексной системы фильтрации приведена
на рис. 12.1.
л(')
Л«
Дщштт»!
J V L J 2 ецО,.<)Ь
Ί ^ 1 Ί*ο. «ц Г
дтфпштрг
Ί Ъ 1 >oz », Г
32VT».^p
МД1
"д
rJ V
r*1 Zd
Τ"
2
Фнвър J
Ь-@№Ж1
гз Г1!-
|_£о_Г
Рис. 12.1. Схема оптимальной комплексной системы фильтрации
Поскольку имеется два датчика сигналов (12.1), (12.2), то схема
комплексной фильтрации содержит два дискриминатора задержки
сигнала
2 dS2(w)/ / \ „ /- ч\
и*2 =τ—τ* (л(0-%(ъ.о)·
(12.9)
Следовательно, уравнения комплексной фильтрации (12.7) можно
записать в виде
335
dR * 2£\х , ч 2D,, , ч
Л
^0
%
at с0 с0
(12.10)
Теперь введем для дискриминаторов (12.9) статистические
эквиваленты (11.23) и рассмотрим работу комплексной системы фильтрации
при малых ошибках, лежащих в пределах линейных участков
дискриминационных характеристик, т.е.
Ид1=*дг(*з-**)+&('). ΜΛ2=^2·(τ3-τ3)+ς2(0> (12л1)
где ζ\(ί), & (0 — флуктуационные процессы на выходах
дискриминаторов, которые являются БГШ с двусторонними спектральными
плотностями 5^/2 и S^2/2 соответственно.
Подставляя (12.11) в (12.10), получаем
f=^[v(*-^w]^[^(*-*hffc<4
(12.12)
Уравнения (12.12) линейны относительно оцениваемых параметров
и могут быть достаточно легко проанализированы.
Рассмотрим уравнения для дисперсий (12.8). Как следует из (11.26),
крутизны дискриминационных характеристик равны
*д.=-
fasKvOf
N.
01
at,
' Sr2~
N.
02
ГЭ52(т3>0
(12.13)
Подставляя (12.13) в (12.8), получаем
^'-т (ч +v \4Dt* ^-ги /с .с ИА1А2
cl
dDn-Si (<г + c )4A22
со2
dt 2
Преобразуя уравнения (12.12), получим
(12.14)
336
#^ + ^[(5-'+^)Л + |*(') + |«2(0-(5д.+5д2)л]-
-у+щ*'ч+8"\т-*].
cl
= ^-(5л1+5д2)[Я0-Л]. (1215)
Cq
где
«(O-f&W+ffeW· (12.16)
, с£ 5c,/2 + Sc2/2
Спектральная плотность шума Я(/) равна W/;/2 = -s.-*-i 2_ί_.
4 (*д1+*Д2)
Из (11.27) следует, что Sq/2 = 5д1, Sg/2 = 5Д2 . Поэтому можно
записать
Мя/2 = —£ ,. (12.17)
4(5д,+5д2)
С учетом (12.17) уравнения комплексной фильтрации
(12.14)—(12.15) при малых ошибках принимают вид
ί-^OM-i). £-^(0-*); „,,»,
^L-5L_2ft. (12.19)
dt 2 Να
Уравнения (12.18)—(12.19) — это уравнения фильтра Калмана для
фильтруемого процесса (12.3) и эквивалентных наблюдений (12.16).
12—2041 337
Таким образом, при малых ошибках фильтрации синтез и анализ
комплексной системы фильтрации эквивалентен синтезу и анализу
линейного фильтра Калмана для эквивалентного линейного наблюдения
(12.16). Такую задачу синтеза решить существенно проще, чем
исходную нелинейную задачу. В частности, в установившемся режиме
дисперсионные уравнения (12.19) имеют аналитическое решение
Aiycr^W^/4· Агусг^^й/4»
A22yct=>/sWP*74· <12·20)
Из (12.17) следует, что при любых 5д1 >0 и 5д2 >0 имеем
ЛГй/2<-^- = ЛГй1/2 и ΝΛ/2<-^- = Νί2/2,
45д1 45д2
где в правых частях неравенств стоят спектральные плотности шумов
эквивалентных линейных наблюдений для задач синтеза автономных
(однодиапазонных) радиолокационных измерителей дальности. Так как
дисперсия ошибки фильтрации растет при увеличении спектральной
плотности шума эквивалентных наблюдений (12.20), то дисперсия
ошибки фильтрации в комплексном измерителе всегда меньше, чем в
любом из автономных измерителей. Максимальный выигрыш в
точности фильтрации получается при S^ =S2jx и равен 2 ' = 1,68 раз по
дисперсии ошибки фильтрации дальности.
12.2. Комплексный измеритель дальности и
радиальной скорости
В задачах радиолокации, радионавигации и радиоуправления при
определении параметров движения подвижных объектов, как правило,
определяют задержку сигнала и доплеровское смещение частоты,
которые пропорциональны соответственно дальности R и радиальной
скорости сближения V. Так как скорость V является производной от
дальности, то, располагая двумя датчиками (задержки сигнала τ3 и до-
плеровского смещения частоты (од), можно ставить задачу синтеза
комплексной системы фильтрации дальности и радиальной скорости. В
отличие от рассмотренной ранее задачи, здесь различные датчики
измеряют различные компоненты многомерного процесса — координату и
ее производную.
338
Положим, что фильтрации по-прежнему подлежит вектор
х = |я К|т , который описывается векторным уравнением (12.4).
В рассматриваемой задаче на входе приемника имеем реализацию
у(0 = 5(х3.аь,/)+я(/), Λ/[*(0*(/ + τ)] = #0/2δ(τ),
где τ3 = 2R/c0 ; шд = 4nV/X0 ; λ$ —длина волны несущего колебания.
Если проводить полный синтез комплексной системы фильтрации
(как это было сделано в п. 12.1), то необходимо ввести вектор
<* I |Т 12/с0 ° I л
λ = τ3 cdJ , матрицу с = , такую, что λ = сх, и восполь-
| 0 4π/λο|
зоваться аппаратом теории оптимальной нелинейной фильтрации.
Однако, если нас интересует точность фильтрации при малых ошибках,
лежащих в пределах линейных участков дискриминационных
характеристик, то для синтеза и анализа линеаризованной системы можно
воспользоваться более простой теорией линейной фильтрации. Для этого
определим линеаризованные наблюдения
М0 = *(0+й*(0. ^[«*(')Μ'+τ)] = **/2δ(τ); (12.21)
h(t) = r(t)+"v(t)> M[Hy(t)ny{t + x)] = Ny/28(x); (12.22)
введем векторы у=\р\ Уг(, η = |nt й2|т и запишем наблюдения в век-
|1 о|
торомвиде y(f) = Hx+n(i), где Н= .
Уравнения фильтра Калмана для рассматриваемой задачи линейной
фильтрации имеют вид
dk
(12.23)
Λ.=2Λ -25ul-2Sb. ^-=λ 2ΑιΑ2 Щ2Я22
dt M2 NR Ny ' dt ^2 NR Ny '
dDn^S% 2A22 2D2;
dt 2 NR Ny
(12.24)
339
В установившемся режиме (t -»«>) система дисперсионных
уравнений (12.24) преобразуется в систему алгебраических уравнений,
которая имеет следующее решение:
jN,Nr(l+2S) Ny
2(1 + ^) ' ^ 2(1+Л?)·
^2усг=-1—Г-ЧТ"^' (1225)
2(1+>/р)
где ρ = Ny/S^NR —безразмерный параметр.
Как следует из (12.25), точность фильтрации зависит от
соотношения спектральных плотностей шумов в каналах измерения дальности и
скорости (от величины ρ). При ρ »1, что соответствует, например,
очень большому уровню шума в канале измерения скорости, из (12.25)
получаем
Alycr ~JN*№NR/4 , Агусг - VW»/4 ,
^ycr-^V^*/4· <12·26)
Формулы (12.26) соответствуют дисперсиям ошибок фильтрации в
автономном измерителе дальности (12.20). Таким образом,
эффективность комплексной системы фильтрации по сравнению с автономной
возрастает с уменьшением интенсивности аддитивного шума в канале
измерения скорости.
При ρ «1, например, при малом уровне шума в канале измерения
скорости, из (12.25) получаем
Dllyc-ylWr/*. А2усг=*к/2, Я22уст=>/^М4~· (12.27)
Точность измерения дальности в этом случае определяется только
уровнем шумов в каналах измерения дальности и скорости и не зависит
от спектральной плотности 5ξ динамического возмущения (ускорения
объекта).
Подставляя (12.27) в уравнение для оценки дальности (12.23),
получаем
#-^4AM-i)**M. (■*»>
340
Из (12.28) видно, что при условии р«1 оценка скорости V не
входит в уравнение для оценки дальности, т. е. фильтрация скорости в
отдельном канале не является необходимой для фильтрации дальности,
а в кольце слежения по дальности используется нефильтрованнное
наблюдение скорости yi{i).
Отсутствию наблюдения по дальности соответствует NR -» «>. При
этом из соотношений (12.26) следует
*А 1уст
Таким образом, наблюдение только в канале скорости приводит к
бесконечной дисперсии ошибки по дальности, в отличие от случая
наблюдения только в
канале дальности, когда
дисперсии ошибок по
обеим координатам
конечны.
Схема оптимального
линеаризованного
комплексного фильтра
приведена на рис. 12.2.
Из схемы рис. 12.2
нетрудно получить
схему реального
комплексного измерителя
дальности и скорости (рис.
щ
Σ
τ*
!_^
ш
Σ
Г
1
2UL
2^1
[Щ\
Nr
UhL
—ι
л1
ϊ\+
ΤΙ
l·*
—·>
-JLA
~Τ~Ί
ν
Рис. 12.2. Схема оптимального линеаризованного
комплексного фильтра
12.3), дополнив ее дискриминаторами дальности и доплеровской частоты:
2 Э5(х3,мд>/)
"дх, ="
ИдШ. -
*0
_2_
"о
оЧ,
'.(y(t)-S(z3,&a,t)),
5i^W0-5(vM)-
В схеме рис. 12.3 пунктиром выделены фильтры измерения
скорости и дальности. Видно, что в оптимальной комплексной системе
фильтрации есть перекрестные связи между каналами измерения
дальности и скорости, как по выходам дискриминаторов, так и по
формируемым оценкам координат R и V (оценка R вводится в канал
измерения дальности).
341
Рис 12 J. Схема нелинейного комплексной системы
фильтрации дальности и скорости
В ряде задач комплексирование по выходам дискриминаторов
проводить нецелесообразно, но целесообразно оставить перекрестные связи
по формируемым оценкам координат. Такая ситуация характерна,
например, при комплексировании измерителей дальности и угловых
координат.
Оценим, к чему приводит отказ от комплексирования по выходам
дискриминаторов в рассматриваемой задаче. В этом случае в уравнениях
(12.23) необходимо положить Г\2 = О . Запишем получающиеся
уравнения фильтрации в виде
Рассчитаем дисперсию ошибки фильтрации по дальности и
скорости в установившемся режиме
2π
1—
KlNy
ι —
d'-tJ
1-
}(й+К2
Ki(}to+K2)+K2}(^
2|j< 2|jco+tf2|2
2 4
AK2
(}ω+Κ2)(ΐω+Κι)
Ы
k?"r
k\nv
2|ja>+*,|2 2\{j<o+Ki)(ia)+K2f\
d(o =
342
= ВД , NVK2
4 щ (к{ + κ2)ь 4^/:2 (^ + * 2)' (12*29)
Найдем оптимальное значение K2, при котором дисперсия ошибки Dy
измерения скорости минимальна. Из условия dDy/dV = Q находим
^2 опт -<βξ/Νν · Дисперсия ошибки фильтрации скорости при
оптимальном значении К2от равна
А^шш=>/^^/4. (12.30)
Оптимальное значение К{от, минимизирующее дисперсию
ошибки измерения дальности, получается в общем случае достаточно
громоздким. Поэтому рассмотрим частные случаи.
При малом шуме в канале измерения скорости Νν -* 0 из соотно-
шения (12.29) получаем DR = к ' +——.
4 ЛК\
Оптимальное значение А"1опт равно КХот = yJNy/N^ . При этом
дисперсия ошибки измерения дальности определяется как
0*onr=WW4· 02.31)
Соотношения (12.30), (12.31) совпадают с аналогичными
соотношениями (12.27). Следовательно, при малых шумах в канале измерения
скорости комплексирование по выходам дискриминаторов является
несущественным, так как не приводит к заметному увеличению точности
фильтрации.
Рассмотрим случай больших шумов в канале измерения скорости.
Оптимальное значение К2 опт при этом стремится к нулю, и из
соотношения (12.29) получаем
Оптимальное значение А"1опт в этом случае равно К\от -
= VyJlS^Ny /NR . Дисперсия ошибки измерения дальности при
оптимальных значениях К{от и К2от определяется выражением
DRom=^N2Ry0^. 02.32)
343
Из соотношений (12.30), (12.32) следует, что при большом шуме в
канале измерения скорости дисперсии ошибок измерения дальности и
скорости растут с увеличением Νν, в то время как в системе с ком-
плексированием по выходам дискриминаторов дисперсии ошибок в
обоих каналах не зависят от уровня шума в канале измерения скорости
(12.26). Следовательно, при большом шуме в канале измерения
скорости целесообразно использовать систему с комплексированием по
выходам дискриминаторов.
Оценим выигрыш в точности измерений дальности и скорости,
который может быть получен в комплексной системе фильтрации. В
качестве комплексного измерителя рассмотрим систему с
комплексированием, как по выходам дискриминаторов, так и по оценкам координат.
Сравнение проведем с обычным измерителем дальности, который
описывается уравнениями (12.18)—(12.19), с установившимися значениями
дисперсий ошибок фильтрации (12.20).
Сопоставляя соотношения (12.20) с (12.26), (12.27), приходим к
выводу, что при большом шуме в канале измерения скорости точность
фильтрации дальности и скорости в комплексном и автономном
измерителях совпадают. При малом шуме в канале измерения скорости
точность фильтрации координат в комплексном измерителе выше, чем в
автономном. Величина выигрыша определяется соотношением
Aikomiui Aikomiui V ™V
и выигрыш тем больше, чем меньше уровень шума в канале измерения
скорости и чем больше интенсивность ускорения объекта и уровень
шума в канале дальности. При типичных значениях NR ~ 6,5 м2с,
Nv «0,01 mV1, ίξ «7 103 м2с'3 получаем 5 = 200 раз. Сопоставляя
данный выигрыш с выигрышом, который получается при комплексиро-
вании двух датчиков одной и той же координаты (двухдиапазонный
измеритель дальности, п. 12.1), видим, что комплексная обработка
сигналов, полученных с двух датчиков различных компонент фильтруемого
вектора состояния, в ряде ситуаций позволяет получить существенно
больший выигрыш в точности фильтрации.
12.3. Модифицированный вариант комплексирования
При комплексировании радиотехнических датчиков с
нерадиотехническими (например, датчиками инерциальных навигационных сис-
344
тем) возможна ситуация, когда наблюдаемый процесс для
радиотехнического датчика имеет вид, аналогичный (12.1), т.е.
Λ(/) = 5(λ,/)+*(/), Μ[η(ήη(ί + τ)] = Ν0/2δ(τ), (12.33)
где Х(/) = сх(/) —фильтруемый процесс, отображаемый в пространстве
состояний векторным МП χ (/) (например, (12.4)), а наблюдения нераднотехниче-
ского датчика линейны относительно λ(/),τ.β.
Λ(/) = λ(0+ε(/), (12.34)
где ε(/) —в общем случае коррелированный процесс, который в пространстве
состояний также отображается e(f) = bz(/) некоторым марковским
процессом z(/), описываемым уравнением
^-Р^+СДЛО, Μ[ξ,(/)ζ;(ί+τ)]-0,/2δ(τ).
Вьфазим формально λ (г) из (12.34)
Ч0=л (')-*(') (1235>
и подставим полученное выражение в (1233)
л(/) = 5(л(/)-е./)+1ц(/). (12.36)
В (1236) входят наблюдения >>ι(/), у2 (ή и случайный процесс ε(/).
Поэтому можно рассматривать задачу фильтрации процесса ε(/) по заданным
наблюдениям. Для решения данной задачи необходимо рассмотреть АПВ
p(z I|Q9l2o)i гДе Ιίο,ΐ2ο — реализации наблюдений (12.33), (12.34).
Данная АПВ описывается уравнением Стратоновича (9.5), которое в
данной задаче принимает следующий вид:
-L-L ^ = ΐ(ρ(ζ,ψ^^))+
F(z,0-jF(z,0/>(^ <1237)
345
где F(z,t) — производная по времени от логарифма функции
правдоподобия (9.27), т.е.
Ot
Представим функцию правдоподобия />(^о»^2о lz) ввиДе
ρ(Υΐθ>Υ2θ\*>) = ρ(Υΐθ\*>Υ2θ)ρ(Υ2ο\*)- (12-38)
Прежде всего отметим, что функция правдоподобия /MiiQ.I^ol2)
нелинейно зависит от параметра ζ. Из методики вывода алгоритма
оптимальной фильтрации в гауссовском приближении (см. гл.9) следует,
что функция F(z,t) разлагается в ряд в точке оценки ζ с удержанием
конечного числа членов разложения. Поэтому для алгоритма
оптимальной фильтрации наиболее существенным является тот из сомножителей
в (12.38), который более быстро меняется при изменении ζ . Если
дисперсия Г>дх =Л/ (λ(ί*)~Μ'*-ΐ)) приращения процесса λ(ί) за
малый интервал времени & = tk-tk_\ много больше дисперсии D^ =
= М (ε(ί*)-ε(/*_])) приращения процесса ε(/), то при изменении
ζ второй сомножитель в (12.38) меняется существенно медленнее
первого. Поэтому при синтезе алгоритма оптимальной фильтрации второй
сомножитель можно считать константой, т.е. полагать ρ(ϊΐο»*2θΙζ») =
= c/?(IiQ|z,l2o)>a функцию F{z,t) в (12.38) определять как
8h(j.(lft|i,rjj))
Тогда алгоритм оптимальной в гауссовском приближении фильтрации
вектора £(/) записывается в виде
(я('МЫ')-М). (Ш9>
— = Fzz+—
dt Щ\
dS(y2(t)-bi,t)
dz
346
^ = F2Dr+DrF2T+IGrQrGi-
-i»<
Гау(л(0-ьа.ОУау(л(о-м.о
* Ьг Ώ' · (1240)
Сформировав оценку έ (/) = bz (г), искомая оценка продесса λ (г)
определяется из (1235) как
1(0=л (0-2(0- (12·41)
Модифицированный алгоритм комплексной фильтрации (12.39)-
(12.419) является приближенным, тем не менее, при сделанных
допущениях точность фильтрации процесса λ(0 ухудшается несущественно. Покажем
это на примере.
Пример 12.1.Рассмотрим задэчукомплексированиярадиодалыюмераи
датчика линейной скорости (1222) инерциальной системы навигации. При этом
для простоты рассмотрим линеаризованные наблюдения радиотехнического
датчика вида (1121).
Так как нерадиотеянический датчик измеряет не саму дальность, а первую
производную дальности, то для использования методики модифицированного
комплекеирсвания проинтарируем (1222) y2(t) = R(t)+e(t), где dt/dt =
= nv (/). Уравнение (1236) в рассматриваемой задаче принимает вид
л(0=л(0-е(0+я*(0.
а уравнения фильтрации (12.39)—(12.40) конкретизируются как
^ = -2£i^M-^M-ctt=2iL
f--^(A(0-b(0-8))-^(»(0-A(0-«). 02.42)
dDE _ Nv 2DZ
(12.43)
Л 2 NR
В установившемся режиме уравнение (12.43) имеет решение
DtycT=ylNyNR/4.
Оценка дальности определяется в соответствии с (12.41) как
R = у2 -ε. Дисперсия ошибки такой оценки равна
347
^=Α/[(Λ-Λ)2] = Μ[(>,2-ε-(^-έ))2] =
= мГ(е-е)2] = ^#л/4. (12.44)
Выражение (12.44) совпадает с (12.27), которое получено для
оптимальной комплексной системы фильтрации при малом значении Nv. A
это как раз и означает, что дисперсия приращения ε (г) за малый
интервал времени Δ/, равная D^ - NyAt/2, меньше дисперсии приращения
дальности за тот же интервал времени.
Заметим, что уравнение (12.42) можно представить в виде
— = —ЧЛи(0-£),
A NRK'3K*yj }
где
Уэп(0=л(0-А(0=е(0-яЛ(0· (12·45)
Следовательно, фильтр (12.42)—(12.43) является оптимальным
фильтром для эквивалентного наблюдения (12.45), которое
представляет собой линейную комбинацию исходных наблюдений. Конечно, для
рассмотренной линейной задачи фильтрации эквивалентное
наблюдение (12.45) можно было ввести сразу. Однако при этом оставался бы
вопрос об оптимальности такого подхода. Из модифицированного
метода комплексирования эквивалентные наблюдения возникают из самой
процедуры синтеза и не требуют дополнительного обоснования. При
использовании же нелинеаризованного радиотехнического датчика
введение эквивалентного наблюдения эвристически весьма
затруднительно, в то время как модифицированный метод комплексирования дает
общий подход в форме уравнения (12.39).
Отметим еще одно достоинство модифицированного метода
комплексирования. В рассмотренной задаче оптимальная система
фильтрации включает одно дифференциальное уравнение (12.42), т.е. следящую
систему 1-го порядка, и одно алгебраическое уравнение (12.41), в то
время как в оптимальной системе получаем два дифференциальных
уравнения (12.23), т.е. следящую систему 2-го порядка. Следовательно,
модифицированный метод комплексирования позволяет получить
более простую систему фильтрации, что важно для практических
приложений.
348
В заключение отметим, что модифицированный метод компле-
ксирования в дискретном времени описан, например, в [13].
Контрольные вопросы к главе 12
1. Что понимается под комплексной фильтрацией?
2. Что будет происходить в двухдиапазонном комплексном измерителе
дальности при отключении одного из дискриминаторов?
3. При каких условиях в комплексном измерителе дальности и скорости
объекта можно отказаться от использования перекрестных связей между
выходами дискриминаторов?
4. При каких условиях можно использовать модифицированный метод
комплексирования?
349
Глава 13
АДАПТИВНАЯ ФИЛЬТРАЦИЯ СООБЩЕНИЙ
13.1. Постановка задачи адаптивной фильтрации
В предыдущих главах рассматривались задачи синтеза
оптимальных систем фильтрации в условиях, когда известны статистические
характеристики информационных процессов (сообщений). Такая
статистическая определенность задавалась в форме дифференциальных
уравнений (например (9.2)) с известными параметрами. Данная априорная
информация определяет оптимальные значения параметров
синтезированных систем, что позволяет достигнуть высокой точности
фильтрации. Однако во многих приложениях РТС работают в условиях
существенной априорной неопределенности, связанной с неопределенностью
статистического описания фильтруемых процессов. Так, например, в
системах связи громкость передаваемой речи и ее спектральные
характеристики могут меняться в широких пределах; в задачах радиолокации
характеристики маневра цели (интенсивность и время корреляции)
также могут быть различными. В этих случаях определить заранее
(априорно) характеристики фильтруемых процессов невозможно, а,
следовательно, невозможно и выбрать оптимальные значения параметров
системы фильтрации. Таким образом, возникает проблема априорной
неопределенности условий работы РТС.
Существуют различные подходы к построению следящих
измерителей при априорной неопределенности условий их работы [4, 5, 10].
Один из них состоит в том, чтобы оптимизировать структуру и
параметры приемника для наиболее сложных условий (интенсивное и
широкополосное сообщение, малое отношение сигнал/шум и др.). При таком
(минимаксном) подходе достигается минимум ошибок фильтрации,
когда эти ошибки максимальны. Построенные на его основе системы при
более благоприятных условиях работы (меньшая интенсивность
сообщения, меньший уровень шумов) оказываются неоптимальными. В ряде
случаев это может быть вполне приемлемо, так как сами ошибки при
более легких условиях работы относительно малы. Минимаксный
подход прост, он позволяет использовать системы с неперестраиваемыми
параметрами и ограничивать величину максимальных ошибок
фильтрации. Поэтому он получил определенное распространение на практике.
Для построения приемников в том случае может использоваться теория
оптимальной фильтрации и результаты, приведенные в предыдущих
350
главах. Однако с учетом растущих требований к точности фильтрации
он может оказаться недостаточным, так как не обеспечивает
минимизацию ошибок для всех условий работы системы.
Еще один способ преодоления априорной неопределенности
статистических характеристик сообщения состоит в построении измерителей,
инвариантных к этим характеристикам, т. е. не зависящих от них.
Приемник, инвариантный к статистическим характеристикам сообщения,
можно построить на базе комплексной системы фильтрации (см.,
например, п. 12.2), имеющей два или большее число входов, на которые в
смеси с помехами поступает сообщение. Инвариантность системы к
характеристикам оцениваемого процесса в этом случае достигается
путем соответствующей обработки входных сигналов и исключения
динамических ошибок воспроизведения сообщения.
Отмечая достоинства инвариантных систем, необходимо учитывать,
что при известных статистических характеристиках сообщения
результирующая точность фильтрации в инвариантном фильтре хуже, чем в
оптимальном, построенном с учетом знания этих характеристик.
Следовательно, платой за инвариантность фильтра является увеличение
ошибок фильтрации в нем при известных статистических характеристиках
сообщения.
Наиболее перспективным к построению следящих измерителей в
условиях априорной неопределенности является адаптивный подход. В
адаптивных (приспосабливающих) системах априорная
неопределенность статистических характеристик сообщений преодолевается
оцениванием их в процессе работы системы и использованием полученной
информации для оптимизации ее параметров. Часто неопределенность
характеристик сообщения может быть сведена к неопределенности
некоторых параметров принятой модели сообщения, например дисперсии
и(или) ширины спектра отдельных компонент, спектральной плотности
формирующих шумов на нулевой частоте и др. В этом случае говорят о
параметрической априорной неопределенности. В дальнейшем будем
рассматривать именно такой тип априорной неопределенности. Поэтому
сформулируем постановку задачи более подробно.
Пусть на вход приемника поступает реализация
И0 = $(а(*,а))+и(0, <13Л)
где λ(/,α) —фильтруемый процесс, зависящий от вектора α
неизвестных параметров, которые будем полагать случайными величинами с
заданной плотностью вероятности р^ (ос); задание α в виде случай-
351
ных величин предполагает их постоянство за время наблюдения, что
математически может быть записано как
do. Л /лЧ
— = 0,α(0) = α0,
где СЦ) — случайная величина.
Процесс λ(/,α) в пространстве состояний зададим вектором
х(/,сс),такчто λ(/,α) = «(ί,α) и
£ = Ffra)i+G(f,a)$(/)f х(/0) = *о> (13.2)
at
где ξ(ί) — т -мерный вектор БГШ с корреляционной матрицей
Κξ(τ) = δξ(α)/2δ(τ).
Если наблюдения линейно зависят от вектора χ(/,α), то имеем
γ(ή = Έί(ήτ(ί9α)+η(ή. (13.3)
Заметим, что в (13.1), (13.3) характеристики шума n(t) полагаются
известными.
Задача синтеза оптимальной системы фильтрации, по-прежнему,
заключается в нахождении оценки χ(ί) с минимальной ошибкой
фильтрации.
13.2. Показатели качества адаптивных систем фильтрации
Точность фильтрации. Адаптивные системы фильтрации
предназначены для оценки меняющихся во времени сообщений в условиях
априорной неопределенности их статистических характеристик.
Основным показателем качества их работы является точность фильтрации.
При описании сообщений случайными процессами точность
фильтрации характеризуется дисперсией ошибки фильтрации или среднеквад-
ратической ошибкой, которая для скалярного сообщения определяется
выражением
β«-^[(λ-λ)2].
Среднеквадратическое значение ошибки фильтрации зависит от
истинных значений неизвестных параметров α сообщений, их оценок ά,
352
формируемых в синтезированной системе и ряда других факторов.
Оценка α параметров сообщения, вырабатываемая адаптивной
системой, изменяется в процессе ее работы. Соответственно изменяется и
точность фильтрации сообщения. Для определения точности
фильтрации сообщения в адаптивном фильтре в переходном режиме, как
правило, прибегают к моделированию на ЭВМ.
Наряду с оценкой текущей точности фильтрации, полезным для
получения представления о возможностях адаптивных систем является
определение предельной точности фильтрации в таких системах.
Предельная точность фильтрации достигается, когда оценки ά параметров
фильтруемого процесса совпадают с истинными значениями α.
Задача определения предельной точности фильтрации в адаптивной
системе является сравнительно несложной и решается путем его
анализа в установившемся режиме известными методами радиоавтоматики
[3]. Для линейной модели сообщения (13.3) с известными
статистическими характеристиками и наблюдений (13.4) при оптимальной
структуре системы фильтрации в форме фильтра Калмана предельная
точность фильтрации определяется дисперсионными уравнениями Риккати
(см.гл.10). Найденная таким образом предельная точность фильтрации
сообщения определяет не только потенциальные возможности
адаптивного измерителя, но и его реальные возможности при высокой точности
адаптации.
Выигрыш в точности фильтрации. Важным показателем
качества работы адаптивных измерителей является выигрыш в точности
фильтрации, который может быть получен при их использовании.
Количественно оценить его можно величиной В, равной отношению сред-
неквадратических значений ошибок фильтрации в неадаптивной и
адаптивной системах
B=fK> <13·4>
где DH, Da —дисперсии ошибок фильтрации сообщения в адаптивной и
неадаптивной системе соответственно.
Знание среднеквадратических значений ошибок фильтрации в
адаптивных системах и выигрыша в точности фильтрации, который
обеспечивается их применением, дает достаточно полное представление об
эффективности использования таких систем.
Предельный выигрыш в точности фильтрации получается, если в
(13.4) под Da понимать предельную точность фильтрации в адаптивной
353
системе, т.е. такую точность, которая получается при точной адаптации
в установившемся режиме. Поясним это на примере.
Пример 13.1. Рассмотрим задачу фильтрации дальности до цели,
изменение которой во времени задается уравнениями
f= V' ^ = ξ(ί)' ^(<)ξ(<+τ)] = !-δ(τ). (13.5)
Пусть неизвестным параметром является спектральная плотность
5ξ формирующего шума. Наблюдается аддитивная смесь
,(/) = Д(/)+и(0, Μ[«(,)«(/ + τ)] = ^-δ(τ). (13.6)
Если параметр 5ξ известен, то оптимальная система фильтрации
описывается уравнениями
^у+^П(у.А), *±=™п[у_к). (13.7)
dt Ν0 V ' dt N0 V )*
^1 = 2Л 2Д|2' dDl2=D, 2Z)liA2
dt M2 N0 ' dt ^2 NQ '
*2ъЛ-*&, (13.8)
dt 2 N0
где Dy, i, j = 1,2 — элементы матрицы дисперсий ошибок фильтрации.
Система уравнений (13.8) в установившемся режиме имеет решение
Al,ycr=VM^0/4, A2,ycr=V^0/4,
^22^=^7^0/4. (13.9)
По определению предельной точности фильтрации в адаптивной
системе полагается, что оценка неизвестного параметра (в данном
случае 5ξ) в установившемся режиме совпадает с истинным значением, т.е.
5ξ = 5ξ. Следовательно, при идеальной адаптации в адаптивной
системе в установившемся режиме точность фильтрации будет
определяться выражениями (13.9), в частности для дисперсии ошибки оценки
дальности имеем
354
^=Ai,yCT=>/^oV^V4
(13.10)
В неадаптивной системе фильтрации будем применять алгоритм
(13.7), в котором используется некоторое априорно заданное значение
5ξ, отличное от истинного значения 5ξ. Следовательно, в фильтре
(13.7) используются коэффициенты усиления
(13.11)
На вход неадаптивного фильтра (13.7) с параметрами (13.11)
поступает реализация (13.6), в которой оцениваемый процесс R(t)
соответствует истинному значению 5ξ. Рассчитаем дисперсию ошибки
фильтрации в установившемся режиме в неадаптивном фильтре
1 °°
(j<*)2
(j(0) + Κι}ω + Κ2
(ja>) +Kij(u+K2
2
Ы
άω=
лк2кх лк,\х 2> Щк2)3/2 *&
Подставляя в (13.5) выражения (13.10) и (13.12), получаем
2V / 5ξ
(13.12)
(13.13)
Как следует из (13.13) предельный выигрыш в точности фильтрации
зависит только от отношения спектральных плотностей в адаптивном и
неадаптивном фильтрах и не зависит от спектральной плотности
аддитивного шума.
Для получения количественных оценок выигрыша в точности
фильтрации положи диапазон неопределенности по ίξ =0,5...20000 mV, что
примерно соответствует интенсивности ускорения цели а « 0,5... 100 м/с .
355
Рис. 13.1. Зависимость выигрыша в
точности фильтрации от χ
при 6ξ
&=0,5м2с-3
Рассмотрим две ситуации.
Сначала положим, что неадаптивный
фильтр настроен на
минимальное ускорение, т.е. 5ξ =0,5 м2с'3.
График зависимости выигрыша в
точности фильтрации от χ
приведен на рис. 13.1.
Из графика следует, что при
такой настройке неадаптивного
фильтра выигрыш в точности
фильтрации в адаптивном
фильтре может достигать 6 раз при
интенсивном ускорении цели.
Рассмотрим теперь
ситуацию, когда неадаптивный фильтр настроен на максимальную
интенсивность маневра цели, т.е. 5ξ =20000 м2с'3. График зависимости
выигрыша от расстройки χ в
этом случае приведен на
рис. 13.2.
Для такой настройки
неадаптивного фильтра величина
предельного выигрыша у
адаптивного фильтра не превышает 2
раз. Следовательно,
неадаптивный фильтр целесообразно
настраивать на максимальное
значение маневра цели, т.е. по
принципу минимакса.
Если к системе
предъявляются требования не только
успешного выделения сообщения,
но и определения характеристик
1JM-- -
Рис. 13.2. Зависимость выигрыша в
точности фильтрации от χ
при 5ξ= 20000 mV3
сообщения для их последующей идентификации, то показателем
качества работы системы является также точность оценок априорно
неизвестных характеристик сообщения.
Точность фильтрации сообщения и выигрыш в точности
фильтрации, обеспечиваемый применением адаптивных систем, являются
результирующими (итоговыми) показателями качества работы таких
устройств. Определение этих показателей в переходном режиме, а также в
356
условиях, когда не гарантирована высокая точность адаптации, как
правило, требует проведения моделирования на ЭВМ всей системы
фильтрации и поступающих на нее воздействий.
Сходимость процесса адаптации. Это необходимое условие
успешной работы адаптивной системы. Если алгоритм адаптации
обладает этим свойством, то оценки характеристик сообщения,
вырабатываемые фильтром в процессе адаптации, сходятся к истинным
значениям этих характеристик. Если в адаптивной системе адаптация
проводится не к параметрам сообщения, а в результате подстройки
некоторого «интегрированного» параметра системы, например, полосы
пропускания, то процесс адаптации является сходящимся, когда значение
этого интегрированного параметра сходится к оптимальному, которое
соответствует выбранному для подстройки критерию качества.
Исследования показывают [3], что не все алгоритмы адаптации
удовлетворяют требованию сходимости. Поэтому определение сходимости
процесса адаптации — один из важных этапов анализа таких адаптивных
измерителей.
Время адаптации. Пока процесс адаптации не завершен,
используемые в системе оценки неизвестных параметров сообщения даже при
сходящемся алгоритме адаптации значительно отличаются от истинных
значений. Это приводит к увеличению ошибок фильтрации. Поэтому
важно, чтобы время адаптации было достаточно малым. Если
характеристики сообщения постоянны во времени, то необходимо, чтобы время
адаптации было значительно меньше общей продолжительности работы
системы, так как только при этом условии адаптация может дать
существенный эффект. Особенно важно сокращение времени адаптации,
если характеристики сообщения изменяются во времени. При малом
времени адаптации адаптивная система успевает следить за изменением
характеристик сообщения и обеспечивается высокая точность
фильтрации. В противном случае, когда время адаптации велико, эффективная
адаптация не происходит.
Точность адаптации. Если неизвестные параметры сообщения
постоянны во времени, то в адаптивных системах со сходящимся
процессом адаптации ошибки оценивания этих параметров можно сделать в
установившемся режиме равными нулю. При изменяющихся во времени
параметров сообщения ошибки их оценивания даже в установившемся
режиме не равны нулю, что определяется наличием шумов и динамикой
изменения данных параметров. При этом возникает необходимость оце-
357
нить эти ошибки, так как высокая точность фильтрации сообщения
достигается, если точность адаптации также достаточно высока.
Чувствительность адаптивных измерителей. Еще одним
важным показателем качества работы адаптивных систем является их
чувствительность к изменению условий работы по сравнению с принятыми
при их синтезе. Значительный интерес представляет, в частности,
чувствительность адаптивной системы к изменению характера (модели)
сообщения. Описание сообщения марковским процессом невысокого
порядка в ряде задач является приближенным. Так, например,
приближенным является описание ускорения подвижного объекта одномерным
марковским процессом. Важно поэтому проанализировать работу
адаптивных систем и такие их показатели, как точность и выигрыш в
точности фильтрации, сходимость и время адаптации при отличии модели
формирования сообщения от расчетной.
При оценке возможностей адаптивных систем, адаптирующихся к
неопределенности характеристик сообщения, важную роль играет также
их чувствительность к изменению уровня шума (если в фильтре не
предусмотрена соответствующая адаптация), изменению крутизны
дискриминатора и других параметров заданной части измерителя.
13.3. Общее решение задачи адаптивной фильтрации
В гл. 3 описаны основы теории статистических решений, которая
определяет идеологию построения оптимальных систем. В соответствии
с данной теорией оптимальное решение ищется в результате
минимизации среднего риска (3.6). В сформулированной выше задаче адаптивной
фильтрации риск (3.6) будет зависеть от вектора случайных параметров
а, а, следовательно, также будет случайной величиной. Следуя
методологии теории статистических решений, в этом случае необходимо
провести дополнительное усреднение риска по ПВ параметров α, т.е.
рассмотреть средний риск вида
r(u) = flfc(i(o)iu(y))p(iioiy)*rfyrfa. (13.14)
Под оптимальной оценкой i(f) в задачах адаптивной фильтрации
будем понимать такую оценку, которая минимизирует средний риск
(13.14).
Принимая в качестве функции потерь c(x(a),u(y)) квадратичную
(3.1), получаем (см. гл.З), что оптимальной оценкой, минимизирующей
средний риск (13.14), является оценка условного среднего
358
*(')=/ J *(<*)ρ(*,α\γήάχάα, (13.15)
где p\x,aЩ j —совместная АПВ распределения значений
фильтруемого процесса χ и случайных параметров α.
Уравнение Стратоновича для АПВ ρ(χ,α\ϊή приведено в гл. 9
(см. (9.49)).
Используя формулу Байеса для совместной АПВ ρίι,οΒ,
формулу (13.16) можно представить в виде
х(0= J Ι *(α)ρ(χ,α\γξ)<ωα~
arain
amax °° / , \ / l \ ашю1
= J j х(а)р(г\г{,а)р{а\%)<Ыа = J τ(α)ρ{α\γήάα, (13.16)
где
i(a)= J x(a)/>(x|^a)</x (13.17)
— условная оптимальная оценка вектора χ при фиксированном
значении а.
Условная оценка χ (α) определяется для условной ПВ ρίχίο,α],
интегро-дифференциальное уравнение для которой приведено в гл. 9,
формула (9.59). Данная ПВ соответствует процессу (13.2) с известным
значением α, т.е. процессу с известными статистическими
характеристиками. Поэтому для оценки χ (α) можно записать уравнения
оптимальной фильтрации (11.14), (11.17) в случае нелинейных наблюдений
(13.1) или уравнением фильтра Калмана (10.14Н10.16) для линейных
наблюдений (13.3). Рассмотрим для простоты случай линейных
наблюдений и запишем
^l = F(r,a)x(a)+K(r,a)(y(r)-H(Ox(a)), х(0) = х0, (13.18)
at
к((,а)=пх(1,а)нТ({)2Щ1, (13.19)
359
Λ)* ία) ι
-^ = F(r,a)Dx(a)+Di(a)F(r,a)+iG(r,a)S^a)GT(r,a)-
-Dx (α)Ητ(t)2NtlH(t)Ol (a), Dx (0) = DX(). (13.20)
В гл. 9 получены выражения (9.58)—(9.59) для АПВ />(а|у0')
неизвестных параметров, которые перепишем для рассматриваемой задачи в
виде
■И*)-
ехр
J ехр
\F{a,x)dx
]P{a,x)dx
Рар(*)
Popedoms
(13.21)
(13.22)
F(a,t) = lF{x(a),t)p(x\Yt,a)dx;
Χ
/•(x(a),0 = (H(Ox(a))T2V(^(0-0.5H(Ox(a))· (13.23)
Условная ПВ />(хρο,α] для рассматриваемой линейной задачи га-
уссовская, что позволяет выполнить усреднение в (13.22) в явном виде
F(a,i) = jH(0«(a)2V(3'(0-0.5H(i)x(a))p(x|ib',a)A =
= H(r)i(a)(^(0-0,5H(r)i(a))-0,5rr[Dx(a)HT(0H(i)] ,(13.24)
где Тг [*] — обозначает след матрицы.
Для нелинейных наблюдений (13.1) можно воспользоваться
стандартной методикой (см. гл. 11) разложения нелинейной функции
SlcTx(a),rj в ряд по степеням разности (х-х(ос)) с удержанием
линейных членов разложения. В этом случае для Ffat) получается
приближенное выражение
F(a,r) = s(cTi(a),r)2 Νζι (*(*)-0.SS (cTi(a),f))-
360
-0,57r
Dx(a)
fo(cTi(a),;)
\T
2M
^ 3s(cTi(a),r)
Эх
. (13.25)
Соотношения (13.1$), (13.18)—(13.21) дают общее решение задачи
адаптивной фильтрации. Дальнейшая их конкретизация сводится,
практически, к тому, как трактовать формулу (13.16). При этом различают
два принципиально разных подхода, которые подробно
рассматриваются ниже.
13.4. Многоканальные адаптивные системы фильтрации
Практическая реализация адаптивного алгоритма фильтрации
(13.16), (13.18)—(13.21) возможна в следующей форме. Дискретизи-
руем область [Λπύη,οΐπ^] возможных значений параметров а, т.е.
полагаем, что α может принимать дискретные значения а,, / = 1, А/ из
заданной области. Интеграл в (13.16) при этом заменяется суммой, и
выражение для оптимальной оценки принимает вид
* = 1*ЫН<фо)> (13.26)
где Pi a, \Yq ) — апостериорная вероятность значения a = af·.
При дискретизации возможных значений вектора α выражение
(13.21) переходит в соотношение
i-w-тг
cxp\lF(ahx)dx\pap(ai
[о J
)
£ехр \JF{ahz)dx
м [о
kp(a<)
в котором /> (а,-) — априорные вероятности значений a = a,-.
Алгоритм (13.26) определяет структуру многоканальной
адаптивной системы (рис. 13.3). Она содержит набор фильтров, каждый из
которых рассчитан на оптимальное выделение информационного процесса
с параметром α = α,, вычислитель апостериорных вероятностей,
перемножители и сумматор. В процессе работы системы условные оценки
361
£(α,), формируемые на выходах канальных фильтров, умножаются на
вероятности /Ία,AYq\ и суммируются, образуя выходную
оптимальную оценку i. С течением времени апостериорная вероятность того
значения а,-, которое наиболее близко к истинному значению α,
стремится к единице, а вероятности остальных otj убывают до нуля.
Поэтому после завершения процесса адаптации из всех канальных
фильтров оказывается "включенным" лишь тот фильтр, параметры которого
соответствуют характеристикам принимаемого информационного
процесса.
ЛО
*Оп
Ча,) ■(
|*(оц)|
ν(α2) ., ч
1 |*lu2/
м Оптшмшшшй фвыр а2
-ΜΟπ
•
V(«Ai) !
Ζί
ΐ[μΚί
юадьный фвьтр а^—
»»
*■
Вычислитель
/{а,|г0'}/ = П7
№
XJf
ЬИ)Н
Г г-
| --►
V
L_+
>Ч _.
•
г~
xl·
ΣΓ
I**
Рис. 133. Схема многоканальной адаптивной системы
В многоканальной системе формируется вся АПВ Plot, \Yq 1
неизвестных параметров, а условные оценки i(ot/) фильтруемого процесса
усредняются по этой АПВ. Поэтому данный метод относится к
интегральным методам адаптации. Процесс адаптации здесь заключается в
перестройке апостериорных вероятностей /Ma,- 1q J.
Многоканальный адаптивный фильтр β задаче дискретной
фильтрации. В задаче дискретной фильтрации полагается, что
фильтруемый процесс задается уравнением (для простоты изложения взята
линейная модель сообщения)
M«) = F*-l («)**-! («)+G*-l(e)**-i. *('o) = *0> (13.27)
362
где ξ* —векторный ДБГШ с матрицей дисперсий Οξ (α).
Наблюдения также будем считать линейными и т -мерными
У* = Щ-\Ч-\ (α)+"*-ι. Л/[п*п5] = Όηδ% . (13.28)
Так как соотношения (13.14)—(13.17) являются общими и не
зависят от того, в непрерывном или дискретном времени сформулирована
задача фильтрации, то можно записать выражение для оптимальной
оценки сообщения в виде, аналогичном (13.16):
ik^afik(a)p(a\Y0k)da9 (13.29)
amin
где χ* (α) — условная оценка сообщения, определяемая уравнениями
фильтра Калмана при фиксированном значении α,
хк (α) = ϊ* (α)+ΚΑ (а)(ук-Щхк (a)), (13.30)
Μ«) = **-ι («)**-! («). <13·31)
Κ* (α) = Oxk (a)HjD;1 = DI>t (o)Hj (HjDioJ^ Hk + D„ )"', (13.32)
Kk («)» F*-i («)D«,*-i («)F*-i («)+G*-i («)»ξ (o)Gi_, (a), (13.33)
Di'* (a) = ϋ& (a)+Ηί_,ΟηΗ*_, или
Dxk (a) = (I -Kk (α)Η*_, )DI>A (a). (13.34)
Уравнение для АПВ pio.Щ J, полученное в п. 9.5 (формула (9.44),
запишем в виде
, , n piyjYo^.ajpfalYo*-') .
J/'(y*|Yo*4.a)p(a|Yo~>a
Как и в случае непрерывного времени, для получения практически
реализуемой системы область возможных значений параметров α ди-
секретизируем, что приводит к замене в (13.29) интегрирования на
суммирование, а ПВ заменяется на соответствующие вероятности
i* = Ii*(«,W«.K)· (13·36>
363
Для апостериорных вероятностей значений неизвестных параметров
можно записать выражение, аналогичное (13.35),
>α'Ν0=7Г—! L"LJ ->
ρ(α, |Υ0°)=Рар (a,), ι = \,М. (13.37)
Рассмотрим ПВ p(yjYo-,.a/)· Как следует из (13.27)—(13.28),
при фиксированном значении данная ПВ ос, является гауссовской с МО
Λφ^Υο^α,.^ΙΜ^α,), (13.38)
и матрицей дисперсий
M[(yt-HAxt(a/))(yit-Htxt(aI))T|Yo*-,,al] = HA,*(a,)Hl + Dl,.
Таким образом, можно записать
р(у*|*0~!.О|)- (13.39)
ехр{-^(у^ -Η,ϊ, (af))T(щКк («ι)ΗΪ + D„)~' (у, -Η,ϊ* (a,))}
Уравнения (13.30)—(13.34), (13.36)—(13.39) полностью определяют
алгоритм адаптивной многоканальной фильтрации.
Приведем пример работы многоканальной адаптивной системы.
Пример 13.2. Рассмотрим задачу адаптивной фильтрации
дальности до цели в дискретном времени. Положим, что изменение дальности
описывается уравнениями (13.27), в которых х = |Д К|т, а матрицы
F =
1 Td
0 1
,G =
о
, где Td —шаг временной дискретизации; Όξ = 1.
Наблюдаемый процесс (13.28) в данной задаче скалярный, а
матрица наблюдений равна Η = |l θ|. В качестве неизвестного параметра
364
определим интенсивность ускорения цели аа. Для синтеза
многоканальной системы полагаем, что σα принимает дискретные значения
otfl, i = lf A/.
Оптимальная оценка процесса х^ определяется соотношением
/=1 V ' '
где ik (aai) — условная оценка фильтруемого процесса при
фиксированном значении параметра cai, которая описывается уравнениями
At К<) = ** (σβι/)+% (σα>/)(Λ -Д* (σβ§ί),
П К, ) = ^-ι Κί )+*2* К; )(>>* - Д* К,),
** Κ,ί) = **-ι (σβ|ί )+ΓΛ_, (σβ§ί),
K\k {°aj) = Α ι К, )//>„ , К2к (aaJ) = Д 2 (σα>, )/θη .
Уравнения для дисперсий ошибок фильтрации Dy, ι, j = 1,2
приведены в (10.75)—(10.76). Апостериорные вероятности значения
интенсивности ускорения определяются рекуррентными соотношениями
Ρ(σ0>/ |У0*) = -^4 ! i-i-J '—,
где условная одношаговая функция правдоподобия в соответствии с
(13.39) дается формулой
*(Ук |*о*_1 ,°aj ) -τ- . , . ехр
2
(л-Д*К*))
2(Я+АиЮ)
Схема многоканального адаптивного измерителя дальности
приведена на рис. 13.4. В данной схеме апостериорные вероятности
PyOajVo ) значений интенсивности ускорения формируются
отдельными блоками, а перекрестные связи между блоками реализуют их
365
нормировку, так что %P\paj\Yq 1 = 1. Если в результате адаптации
некоторая P\paj \ζ\ι )""**» то остальные апостериорные вероятности
стремятся к нулю.
Ук
Н^Н^к.)К^№
-Лви)
"Н*2*(PjjJtH Σ 1
!Кав4льный фильтр 1
LiJpikJ
_i_
Иу^йСТЧдЬИ
я»к/)
■^04JT->R|>f^T--4tli
ный Дильта i * 1
ГКК]
*"b?PJ
Η*|_Σ Γ^^ΐίΤ**/fn Σ_r~*{* J~
"&(»..*#)
вив Aam«n L# Τ
Кмилышй фильтр Μ
ψ
¥у
Рис. 13.4. Схема многоканального адаптивного измерителя дальности
Рассмотрим характеристики многоканального адаптивного фильтра.
Положим Я(0) = 50 км, К(0) = - 500 мс"1, Td = 0,02 с, Dn=\0/Td м2,
Μ =3, аа\ =0,707 мс"2, аа1 = Ю мс"2, σα3 =50 мс"2. Положим также,
что априорные вероятности возможных значений интенсивности
ускорения равны,т.е. Рар[pai) = 1/3, i = 1,3.
На рис. 13.S приведены усредненные по 1000 реализациям
зависимости апостериорных вероятностей для различных истинных значений
интенсивности ускорения цели, из которых видно, что многоканальный
измеритель успешно адаптируется к априорно неизвестной
интенсивности маневра цели. При этом время адаптации к слабому маневру
(σα <10мс"2) составляет 4...6 с, а к интенсивному маневру цели —
2...4 с.
366
Рис. 13.5. Зависимости апостериорных вероятностей значении неизвестных
параметров для истинных значений интенсивности ускорения
цели: а — σβ = 0,707 мс'2, б — оа = 10 мс*2, в — са = 50 мс*2
На рис. 13.6 сплошными линиями приведены зависимости средне-
квадратических ошибок (СКО) измерения дальности (в метрах) для тех
же значений интенсивности ускорения цели, что и выше, а штриховыми
линиями — зависимости СКО в неадаптивной системе, настроенной на
максимальную интенсивность маневра цели сатах = 50 мс'2.
Из сопоставления зависимостей, приведенных на рис. 13.6, а
следует, что выигрыш по СКО измерения дальности при слабой
интенсивности маневра (σ^ =0,707 мс*2) составляет 2,2 раза, что соответствует
теоретической оценке, приведенной в п. 13.2. При увеличении
интенсивности маневра цели величина выигрыша уменьшается (рис. 13.6, б)),
а при равенстве истинной интенсивности маневра той, на которую
настроена неадаптивная система (рис. 13.6, в))9 выигрыш отсутствует.
367
СКО, м
СКО, м
ιβ Л с
СКО. м
Рис. 13.6. Зависимости СКО оценки дальности для истинных значений
интенсивности ускорения цели: а — аа = 0,707 мс"2,
б— σβ = 10 мс*2, в— Од = 50 мс*2
13.5. Алгоритмы скользящей адаптации
13.5.1. Общее решение задачи по методу скользящей адаптации
Рассмотренные многоканальные адаптивные системы фильтрации
достаточно сложны для практической реализации. Для построения более
простых адаптивных систем можно использовать следующее
обстоятельство. При большом отношении сигнал/шум, а также при большом
времени наблюдения АПВ pla\Υ$ 1 вектора а, описывающего неизвестные
статистические характеристики, является достаточно узкой по
сравнению с априорной плотностью распределения этих параметров и
сосредоточенной вблизи некоторого значения α = α*. Тогда в выражении
для оптимальной оценки (13.16) можно положить plaЩ Ι ~ δία-α* 1,
368
что приводит к соотношению
χ(τ) = α]Κχ(α)/?(α|^)</α = Υχ(α)δ(α-α*)</α = ί(α*).
®ηήη ^iran
В соответствии с полученным выражением задача адаптивной
фильтрации сводится к фильтрации информационного процесса при
оценочном значении а* неизвестных параметров.
Описанный подход, естественно, является приближенным, так как на
начальном этапе наблюдения апостериорная плотность вероятности
может быть достаточно широкой. Связанная с этим неоптимальность
полученного адаптивного фильтра окупается его сравнительной простотой.
На рис. 13.7 показана общая схема адаптивной системы (по методу
скользящей адаптации), которая состоит из двух блоков. Первый из них
является оптимальной системой фильтрации, рассчитанной на
выделение информационного процесса в
яо
Основной блок
фильтрации
(оптимальный фильтр
для а = о )
•Г
ϊΡΠ"
Блок адаптации
ш
У
Рис. 13.7. Схема адаптивной системы
по методу скользящей адаптации
предположении, что α = α .
Второй блок является блоком
адаптации. Он формирует
апостериорную оценку а* априорно
неизвестных параметров, которая
вводится в основной блок фильтрации
для подстройки его параметров.
Такая структура адаптивных
фильтров получила в литературе
название скользящей адаптации.
Характерной особенностью скользящих алгоритмов адаптации
является формирование точечной оценки неизвестных параметров, в
отличие от многоканальных адаптивных систем, в которых формируется
вся АПВ. За счет этого фактора и происходит упрощение алгоритма
адаптивной фильтрации.
Основной блок фильтрации описывается уравнениями оптимальной
фильтрации при оценочном значении а*. Для линейной модели
сообщения (13.2) и нелинейных наблюдений (13.1) эти уравнения имеют вид
Л^ ' = F(a*)x(a*)+
Л
■П. (а')
тэ*(1(сф)
ЭХ
2V(>>w-s(4a^'))'
13—2041
369
λ(α*) = «(α*),
dDx (α* ι τ ι
^ = F(a)DI+Dj(a>!G(a*)s5(a*)G(a*)-
ras(i(o·),/)'"
(13.40)
-2Dx(a*)cTcDx(a*)j
3λ
M7l.
(13.41)
Для оценки неизвестных параметров α можно использовать
различные критерии и подходы.
13.5.2. Алгоритм скользящего адаптивного приема
в непрерывном времени
В качестве оценочного значения а* вполне естественно выбрать
среднее значение АПВ plaЩ 1 a*=a= J αρίαЩ \da.
Алгоритм адаптивной фильтрации с использованием в качестве
оценки ά апостериорного среднего получил название алгоритма сколь-
зящего адаптивного приема.
Уравнение, описывающее эволюцию оценки ά, может быть
получено из общего уравнения (9.56) для АПВ plotщ 1. Напомним, что в
гл. 11 был получен алгоритм (11.14), (11.17) оптимальной фильтрации,
вытекающий из уравнения Стратоновича (9.5) для АПВ марковского
вектора χ при ее аппроксимации гауссовской функцией. Поэтому, если
принять для АПВ pi а Щ 1 гауссовскую аппроксимацию, то можно
воспользоваться уравнениями (11.16)—(11.17), заменив в них χ на а,
F(x,/) (см. формулу (11.16)) на F(oL,t) (см. формулу (13.24)), и
положив f(x,i)s0, g (χ,г) ξ 0. В результате получаем следующий алгоритм
работы блока адаптации:
370
= Da (0
Nn
Ηψϋ^^^Λψ
dD,
a _
= -Dr
(dS(a(a),t)
dt
T(a) = 7>
da
2 as(«(a),/)
tfn
da
Da-
, (13.42)
(13.43)
D,(a)
(as(ci(o),/)
\T
dx
IN,
л as(«(«).0
dx
При записи уравнений (13.40)—(13.43) полагалось, что
наблюдаемый процесс описывается выражением (13.1).
Раскроем производную сигнальной функции по параметрам а,
входящую в (13.42):
as(ci(a),f) as(i(a),i)a(ci(a))
Эа ЭХ Эа
Подставляя (13.44) в (13.42), запишем
ds(X(a),t)
(13.44)
da
dt
= Da(0
1 fW(&)Y
N0( da
fc3i(a)Y 2
( da J N0
J
3λ
(у(/)-5(сж(а).г))-
(13.45)
В (13.45) можно выделить дискриминатор (11.21) основного блока
фильтрации
«д(0 =
35(λ(ά),/)
#п
3λ
(Я0-5(сх(а),/)).
(13.46)
Поэтому обобщенную схему адаптивной фильтрации, приведенную
на рис. 13.7, можно уточнить и представить как на рис. 13.8.
Тот факт, что блок адаптации работает по сигналу с выхода
дискриминатора основного блока фильтрации, является примечательным
признаком. В гл. 10, 11 при обсуждении свойств оптимальных систем
фильтрации при известных статистических характеристиках сообщения
отмечалось, что процесс на выходе дискриминатора является
некоррелированным, т.е. белым шумом. При отклонении параметров системы
фильтрации от оптимальных данный процесс становится коррелирован-
371
At) J
1
«д(<
Основной бдоа
фильтрации
1
[одпмимый фильтр
дам а =)а*
)
?
•
α
Блок адаптации
«Μ.
<—
ным, а в параметрах этой
корреляции заключена информация о
соответствующих рассогласованиях
параметров системы. В адаптивной
системе фильтрации (рис. 13.8), когда в
ней еще идет процесс адаптации, ряд
параметров основного блока
фильтрации отличен от оптимальных
значений, что приводит к коррелиро-
ванности процесса ид(/), и именно
этот процесс подается в блок
адаптации с целью извлечения информации о том, как надо регулировать
оценки ά и, соответственно, подстраивать параметры основного блока
фильтрации, чтобы они стремились к истинным значениям а. В
результате такой адаптации (т.е. при ά—>α) процесс ua(t) на выходе
дискриминатора основного блока фильтрации станет
некоррелированным и процесс адаптации завершится.
Развернутая схема адаптивной системы фильтрации по методу
скользящего адаптивного приема приведена на рис. 13.9.
Рис. 13.8. Обобщенная схема
адаптивной системы по методу
скользящего адаптивного приема
Рис 13.9. Развернутая схема адаптивной системы фильтрации
по методу скользящего адаптивного приема
В (13.45) входит производная Эх(а)/Эсс, уравнение для которой
может быть получено дифференцированием по α уравнений основного
372
блока фильтрации (13.40). Пренебрегая второй производной
, получаем
</Μ(&)_3Τ(ά)Α/Α4.·„/Α4Χ(ά)
dt да да
!»(ά)+Ρ(ά)4^+
да
dD,(a) ds(i(a),t) ,, .* чЧ
,\2
да
-Ma)cTc^£W
ids(x(a),/)
дХ
(13.47)
Учитывая вьфажение (13.46) для процесса на выходе
дискриминатора основного блока фильтрации, а также тот факт, что при малых
ошибках рассогласования δλ = λ-λ справедливо соотношение (см.
(11.26)) 5Д =2NQXldS(k(a)j)/dX\ , где 5Д —крутизна
дискриминационной характеристики дискриминатора основного блока фильтрации,
уравнение (13.47) можно записать в виде
d Щ&) 3F(a)A/A4 / т \di(a)
л~^ ="to x(a)+(F(a)-D«(a)c ^)-^Γ+
ЭР, (а) т
(13.48)
Φ \
Ч (».№/*>*
_3 Μά)/5ο
фШАТр
*(ά)
да
Данное уравнение является линейным дифференциальным
уравнением относительно процесса α ι ^\
β ξ Эх (a)/da, т.е.
описывает линейный фильтр
(рис. 13.10), на вход
которого поступает процесс
Ыд(/) с основного блока
фильтрации.
Уравнения для
производных 3Dx(a)/da могут
быть получены в результате
дифференцирования (13.41)
по a. Если уравнения (13.41) имеют аналитическое решение в
установившемся режиме, то лучше сначала найти это решение, а затем взять
373
FW-D.fcVcV
Рис. 13.10. Схема линейного фильтра
в блоке адаптации
производную по α от установившегося значения. При этом получаем
более простое стационарное значение для матричного коэффициента
ЭОх(а)/Эа.
Отметим, что, согласно рис. 13.9 и 13.10, синтезированный блок
адаптации не затрагивает структуры дискриминатора и сглаживающего
фильтра основного блока фильтрации. Следовательно, дискриминатор и
сглаживающий фильтр можно синтезировать независимо от блока
адаптации. При этом можно использовать методику раздельного синтеза
дискриминатора нелинейной следящей системы и сглаживающего
фильтра (см. п. 11.2), причем сглаживающий фильтр синтезируется для
линейных наблюдений.
Пример 13.3. Рассмотрим задачу измерения дальности,
описанную в примере 13.1. Изменение дальности до цели описывается
уравнением (13.5), а неизвестным параметром полагается спектральная
плотность 5ξ формирующего шума. Наблюдения—линейные (13.6).
Основной блок фильтрации описывается уравнениями (13.7), (13.8),
а установившиеся значения элементов матрицы дисперсий ошибок
фильтрации—соотношениями (13.9)
^2,ycT=V^7Po7*·
(13.49)
Уравнение (13.49) для оценки неизвестного параметра в
рассматриваемой задаче конкретизируется как
f=V<>|
ч
(13.50)
а уравнение для дисперсии ошибки оценки неизвестного параметра
получается из (13.43)
dD
-3l—L^j
dt Nn %
Щк)
dS*
Уравнение для производной dR/dS^ получаем из (13.48)
dt dSf
as?
ΝΛ
dSf
dSf
374
Дифференцируя (13.49) по 5ξ, получаем
4>/2
Э&
'ν ^/4
ls5 J
ЭАг(^)
Э5>
/ Л«/2
*J
На рис. 13.11 приведены зависимости нормированной κ истинному
значению оценки 5ξ (f )/5ξ от времени для двух значений 5ξ =20 м2с*3,
5ξ = 2000 м2с"3, полученные моделированием адаптивной системы
фильтрации на ЦВМ при 5ξ (0) = 400 м2с"\ Ν0 = 20 mV1. Как видно из
рисунка, адаптация в целом проходит успешно, т.е. ίξ —> ίξ. Время
адаптации составляет 4.. .6 с.
AM
on
αα(
) :
t 4
<
I I
_^ ^#J
1 11
1· /. С
J ^_j ; ' J
J TV | \— J
ΐ t 4 · I U
a) 6)
Рис 13.11. Характеристики процесса адаптации:
a — 5ξ = 2000 mV3; 5ξ = 20 mV3
Отметим, что алгоритм адаптации (13.50) чувствителен к выбору
начального значения коэффициента Do (0), и при его неправильном
выборе сходимость оценки £ξ к истинному значению может нарушаться.
13*53. Понятие контура адаптации
Во многих алгоритмах с точечной оценкой неизвестных параметров
процесс адаптации и такие его характеристики, как сходимость,
продолжительность и точность можно проанализировать, представив адап-
375
3&j^\4mM
Дне
τ
ФНЧ
тивную систему в виде системы автоматического регулирования,
осуществляющей слежение за неизвестными параметрами. Другими
словами, в составе таких адаптивных систем можно выделить контур
адаптации. Для этого представим
уравнение (13.45) в виде схемы, приведенной
на рис. 13.12, где обозначено: Дис —
дискриминатор контура адаптации, ФНЧ
— фильтр нижних частот.
Из (13.45) следует, что ФНЧ— это
интегратор с переменным коэффициентом усиления Da (/), а
дискриминатор описывается соотношением
Рис 13.12. Контур адаптации
*да
(0=
( Эх(а)
95(λ(ά),/)
N.
ЭХ
(y(t)-S(ci(a)9t))-
ч
(3Ψ(ά)λΤ
da
(13.51)
Дискриминатор контура адаптации является устройством
безынерционным по отношению к изменениям параметра α и его оценки ά, а
его выходной процесс (13.51) зависит от рассогласования α-ά.
Случайный процесс (13.51) можно представить в виде суммы МО и
центрированной случайной составляющей
«да(0 = ^[ида(0]+Л(0·
При таком представлении А/[ида (/)] = U(a,a) —
дискриминационная характеристика дискриминатора контура адаптации, а
спектральная плотность процесса η(/) характеризует флуктуационную
характеристику дискриминатора.
В результате анализа дискриминационной характеристики U(a,a)
можно ответить на вопрос о сходимости процесса адаптации, а анализ
флуктуационной характеристики позволяет судить о точности
адаптации [3].
13.5.4. Алгоритм скользящего адаптивного приема
в дискретном времени
Рассмотрим задачу адаптивной фильтрации дискретного процесса
(13.27) при линейных наблюдениях (13.28).
376
Общая структура адаптивной системы фильтрации, построенной по
методу скользящей адаптации, остается такой же, как и в случае
непрерывного времени (см. рис. 13.8).
Основной блок фильтрации описывается уравнениями фильтра
Калмана (13.30)—(13-34) при оценочном значении ά неизвестных
параметров. Для получения оценки ά рассмотрим уравнение (13.35) для
АПВ неизвестных параметров. Введем гауссовскую аппроксимацию
АПВ на к - и (к -1) -м шагах
рШ)= | l txp\-Ua-akYO^(a-ak))t (13.S2)
V(2*fd«(Da*) l 2 J
/>(α|#-')= , l -«4>j-^(o-&w)TD5[.i(o-aw)l,
у1(2к)тdet^-i) [ 2 J
где т — размерность вектора неизвестных параметров a; D^ —
матрица дисперсий ошибок оценивания данного вектора на к -м шаге.
Условная ПВ plyk\γ£~ι9α\9 входящая в (13.35) является гауссов-
ской с МО
Μ^Ι^-',α,^Η^ία) (13.53)
и матрицей дисперсий
м[{ук -Η*ί* (α))2Ι^-',α,]ш5(a) = H,DM (a)Hj + D„. (13.54)
Подставляя (13.52)—(13.54) в (13.35) и логарифмируя полученное
уравнение, получаем
±(α-ά* )τ D^ (α-ά*) = ^(α-ά,_, )Τ D^_, (α-ά*_,)+
+v(a)+c,, (13.55)
где С] — константа, не зависящая от α,
v(a) = ±ln(*(a))+
+Ι(Λ - Η,ί, (α))τ Β-χ {*){yk -Η*ί* (α)). (13.56)
Разложим функцию ν (α) в ряд в окрестности точки ά*_| и
ограничимся тремя членами разложения
377
,(α)=ν(ά4_0+^^(α-ά*_,)+
1 / А \Т Э
+ι<°-α«> si
ip^r1)'10-*'-')- <l3">
Используя очевидное представление α - ά* = (α - ά*_ι)+
+(ά*-ΐ — ot^), подставляя его и (13.57) в (13.55) и приравнивая в
полученном выражении коэффициенты при одинаковых степенях разности
α - ά*_ι, получаем
ί9ν(ά,_,)Υ
da '
ά* = a*_1-DaA
Dai=I>ai-l +
_d
da
fav(at-,)Y
I *» J"
(13.58)
(13.59)
9ν(άι_ι)
Найдем выражение для производной —^—-, дифференцируя
За
(13.56),
3ν(ά*-ι)_
a(Htit(aA_,))
Среднее значение суммы двух последних слагаемых в (13.68) равно
нулю, поэтому можно принять
—^ ~и*-Н*х*(а4_,))Д (а*_,) — . (13.61)
Приближенное выражение для второй производной можно записать
в виде
'3v№h)Y ГЭ(НА(ам))У.,. .d(Htxt (&*-,))
Я («*-i J-
_э_
да
да
да
да
(13.62)
Подстановка (13.61)—(13.62) в (13.58), (13.59) дает итоговый
алгоритм работы блока адаптации
378
α* - α*_! + D^i? (aw )| — (Λ - Η*χ* (α*_,)),
(13.63)
Dii=Dci-l +
da
f3(HA(ow))
da
5 ^ te
(13.64)
Из (13.63) следует, что входным сигналом для блока адаптации
является разностный процесс (ук - Н^х* (ά^_ι)), который формируется в
основном блоке фильтрации.
Структура адаптивной дискретной системы фильтрации аналогична
той, что приведена на рис. 13.9, с заменой блоков обработки в
непрерывном времени (например, интеграторов) соответствующими блоками
обработки в дискретном времени.
Как и в непрерывном времени, уравнения для производной
Эх^ (ά^_! )/3α, входящей в (13.63)—(13.64), получаются
дифференцированием по α уравнений основного блока фильтрации (13.30)—(13.34).
Контрольные вопросы κ главе 13
1. Как определяется выигрыш в точности фильтрации в адаптивной и
неадаптивной системах фильтрации?
2. Что такое сходимость процесса адаптации и время адаптации?
3. Чем принципиально отличаются многоканальные адаптивные фильтры
от адаптивных фильтров, построенных по методу скользящего
адаптивного приема?
4. Что такое контур адаптации и как он описывается с позиций
радиоавтоматики?
5. Можно ли определить дискриминационную характеристику контура
адаптации и как?
6. Какими параметрами системы фильтрации определяется время
адаптации?
379
Глава 14
ОПТИМАЛЬНАЯ ФИЛЬТРАЦИЯ ПРИ ПРИЕМЕ
ПРОСТРАНСТВЕННО-ВРЕМЕННЫХ СИГНАЛОВ
14.1. Оптимальная фильтрация при приеме
пространственно-временного сигнала
на фоне внутренних шумов
14.1.1. Оптимальная фильтрация при известном направлении
на источник сигнала
Рассмотрим задачу фильтрации информационного процесса λ (г),
переносимого пространственно-временным сигналом. Пусть приемник
имеет линейную антенную решетку (АР) (рис. 14.1), состоящую из м
всенаправленных антенных
элементов, расположенных
на одинаковом друг от
друга расстоянии d.
На АР падает плоская
электромагнитная волна,
причем направление на
источник излучения
характеризуется углом ас,
который полагаем
известным. Принимаемое ι -м
антенным элементом
колебание имеет вид
Λ (',*,·) = Si (tXxj)+/!, (tyXj) = yfcSHi (tXxi;) +л, (t,Xi), ι = l,m,
(14.1)
где Pc — мощность сигнала; ^(',λ,*,·) — нормированный сигнал с
единичной мощностью; дс, — координата ι-го антенного элемента;
λ(/) — фильтруемый процесс, который отображается в пространстве
состояний вектором х(*),так что Х = сх,а \(t) описывается
уравнением (9.2); щ (/, дс/) — помеха с корреляционной функцией
Рис. 14.1. Геометрия приема сигнала
антенной решеткой
380
Μ[Λ^Λχ/)Λ^/ + τ,^)] = ΛΛθδ(/δ(τ) = ^δ(/.δ(τ). (14.2)
Так же как и в п. 4.6 полагаем, что сигнал S(t9X,x) —
узкополосный и, следовательно, может описываться комплексной амплитудой
S(t,X,x) (запаздыванием огибающей сигнала по апертуре АР можно
пренебречь).
Пусть S(t,X) = SAl(t9X9xx = 0) соответствует комплексной
амплитуде сигнала в момент времени / на первом антенном элементе. Тогда
комплексная амплитуда сигнала на ι'-м антенном элементе равна
^(tXx^Siay^l где фДа^ = ^Ц^^, λ0 -длина
волны принимаемого сигнала.
Вводя комплексную амплитуду SH (/,λ) нормированного сигнала с
соотношением 5 (ί, λ) = уЩ$и (ί, λ), комплексные векторы
У(<) = \У\(*>х\)У2(<>*2) -Ут{*>хтЦ'>
H(ac) = V^|ej0,(ac) ^М ... e^^f,
ή = |/ί,(0 МО ···"».(') f
с корреляционной матрицей Μ In (t) ή* Τ (/ + τ) = Ν0Ιδ (τ), запишем
наблюдения (14.1) в векторном виде
у(0 = Н(«с)5н('Л)+п(0· (14.3)
Чтобы использовать комплексную запись наблюдений (14.3), в
алгоритмах оптимальной фильтрации необходимо преобразовать
уравнение Стратоновича (9.5). Заметим, что входящая в него функция F(x>t)
— это производная по времени от логарифма отношения
правдоподобия. В то же время, для логарифма отношения правдоподобия в п. 4.6.2
(формула (4.105)) с использованием комплексных наблюдений вида
(14.3) получено следующее представление:
1η(ρ(Υί))-
381
= -i-Re
"о
jS*„ (τ,λ)Η*τ (Oc)(y (x)-0,5H(otc)SH (τ,λ)) dx
■ (14.4)
Дифференцируя (14.4) по времени, получаем выражение
^(х,0 = ^-КеГ^(гД)Н*т(ас)(у(0-0,5Н(ас)5н(/Д)) 1. (14.5)
Подставляя (14.5) в алгоритм оптимальной в гауссовском
приближении фильтрации (11.14), получаем
= F(/)x +
А
"о
( -v^.*
Эх
H*>c)(y(0-H(ac)SH (ί,β))
.(14.6)
Как и в (4.1 OS), преобразуем выражение
H*T(ac)(y(0-H(ac)5H^ci)) =
= Н*т(ас)у(0-Н*т(ас)Н(ас)5н('.сх) =
= H*T(ac)H(ac)[(H*T(ac)H(ac))"'H*T(ac)y(0-S„(/,cx)
= Н*т (ас )Н(ас )[$*т (ас )у (0-5„ (',«)] =
= Pcm[fr*>c)y(/)-SH(^x)],
где Н*т(ас)Н(ас) = Рсш;
$(ас) = Н(ас)[н'т(ас)Н(ас)]",=Н(ас)/(Рст).
Введем эквивалентное наблюдение
Л-(О-0*т(«сЖО
и запишем уравнение оптимальной фильтрации (14.6) в виде
(14.7)
(14.8)
(14.9)
i*=F(,)i+MV>Re
dt У) Щ
(К(и&)
-чЛТ
Эх
(Ли (t)-Sn ('.«))
(14.10)
382
Переходя от комплексных амплитуд к действительным функциям, с
учетом (2.4), получаем
(14.11)
Из уравнений (14.9), (14.11) следует, что оптимальная
пространственно-временная система фильтрации распадается на пространственную
(14.9) и временную (14.11). На выходе блока пространственной
обработки формируется временной процесс
Лкв(0 = Г(ас)у(0 = ГК)(н(ас)5н(^Л)+*(0) =
= 5„(α)+/ί3ΚΒ(0, (14.12)
в котором лэкв (/) — комплексный БГШ с двусторонней спектральной
плотностью N0/Pcm . Поэтому для эквивалентных наблюдений (14.12)
можно записать
Мл- (0]=л» (0=*('Д)+"экв (0· (14ЛЗ)
где лЭКв(0 — БГШ с двусторонней спектральной плотностью
N3KB/2 = N0/2Pcm.
Таким образом, временная система фильтрации (14.11) есть ни что
иное, как оптимальный временной фильтр для эквивалентных
наблюдений (14.13), формирующихся на выходе блока пространственной
обработки. Можно также показать, что уравнение для матрицы дисперсий
ошибок фильтрации D, (t) совпадает с (11.17), в котором надо
использовать спектральную плотность шума для эквивалентных наблюдений
(14.13).
Рассмотрим пространственную обработку принимаемых
колебаний (14.9), а более точно, сигнальную компоненту £/с =
= $ т (ас )Н (ас )5Н (ί,λ), где β т (ас) — вектор весовых
коэффициентов системы пространственной обработки; Н(осс)5н(/Д) — вектор
приходящих сигналов. В теории пространственно-временной обработки
сигналов используют понятие характеристики направленности, под
которой понимают зависимость комплексной амплитуды i/c(aco|ac»an)
на выходе системы пространственной обработки от направления прихо-
383
да ас0 пробного сигнала (гармонической плоской волны) при заданных
направлениях прихода полезного осс и мешающих осп (если они есть)
сигналов. Функция С/н (ас0 |ас,ап) = |(/с (ас0 |ас,ап )| называется
диаграммой направленности. В рассматриваемом случае мешающих
сигналов нет (внутренние шумы приемника не рассматриваются как
мешающие сигналы), поэтому можно записать
i>c(aco|ac) = $*T(ac)H(ac0).
Рис. 14.2. Диаграмма направленности
пятнадцатиэлементной АР
(14.14)
Диаграмма направленности
для пятнадцатиэлементной АР
приведена на рис. 14.2 при ас =
= 30 град и rf = X0/2.
Из графика видно, что
диаграмма направленности в
направлении на источник сигнала имеет
ярковыраженный максимум, что
обеспечивает наилучшие условия
приема полезного сигнала
(фокусировку на сигнал). При этом в
направлении на сигнал всегда
выполняется условие
$*>с)Н(ас) = 1
14.1.2. Оптимальная фильтрация при неизвестном направлении
на источник сигнала
Рассмотрим более сложную задачу, когда направление ас на
источник сигнала неизвестно. Будем описывать осс случайным процессом,
например:
da{
dt
с _
= Fcac+G^(/),ac(i = 0) = ac0e 0,180°,
(14.15)
где ξ(ί) —БГШ с двусторонней спектральной плотностью 5ξ/2 .
Область возможных начальных значений осс0 ограничена
интервалом [0,180°] с целью устранения неоднозначности измерений, обу-
384
словленной симметричностью задачи относительно оси X, что видно
на рис. 14.2 (симметричный максимум диаграммы направленности).
Учитывая то, что нас интересует оценка процесса λ(/),
направление прихода сигнала осс можно считать неинформативным параметром.
Наличие такого дополнительного, меняющегося во времени случайного
параметра, в соответствии с результатами п. 11.5.4, приводит к
необходимости рассмотрения задачи фильтрации расширенного вектора
'«(01
ν(0»
оэтом
= F(f)v +
.МО
Формально такая задача не отличается от рассмотренной
выше, поэтому запишем ее решение в форме (14.6)
Л
(y(i)-H(ac)5H(i,ci))
(14.16)
tfn
Re
d(n*(&c)s:(t,ci)j
где F(f) =
F(0 0
9v
, а для производной, стоящей в квадратных
скобках, справедливо выражение
э(нф(ас)^(/,а))
Эу
Э(йГ(*с)£('.«*)) Э(н'(ас)^(/>Сх))|
Эх
Эа-
СИ. 17)
Так как процессы х(/) и ас(/) не коррелированны, то матрица
дисперсий ошибок фильтрации Dv (/) является диагональной, т.е.
Id, о
Dv =
0 А,
. С учетом этого факта, а также (14.17), уравнение
(14.16) можно записать в виде двух уравнений
— = F(f)x +
+MlRe
#0
Гэ^О.сх)
Эх
Н*т(ас)(у(0-Н(ас)5и(/,сх))
,(14.18)
385
da,
- = ^cac +
dt
Re
U('.«)
^lj(y(0-0(ac)5H0,ci))
. (14.19)
Уравнение (4.19) совпадает с (14.6) с тем лишь отличием, что
вместо истинного значения ас в нем используется оценочное значение схс,
которое формируется в соответствии с (14.19). Учитывая это и проделав
такие же преобразования, что и в п. 14.1.1 (формулы (14.8)-(14.12),
нетрудно показать, что формирование оценки £ распадается на два этапа:
пространственную обработку в соответствии с алгоритмом
*»(') = 0*Τ(άο)*('). $(ac) = H(ac)/i> (14.20)
и временную обработку сформированных эквивалентных наблюдений
— = F(/)x + *v ' Re
dt W N0
Эх
(^экв(О-^н^сх))
. (14.21)
Таким образом, пространственная и временная обработки по
информационному процессу λ(ί) = οχ(/), по-прежнему, разделяются. При
этом настройка блока пространственной обработки определяется
оценкой ас углового положения источника излучения. Поэтому рассмотрим
уравнение (14.19). Заменим производную ЭН*(ас)/Эссс конечной
разностью
ЭН* (ас) Н* (ас +Дас/2)-Н* (ас -Дас/2)
Эаг
Ааг
Подставляя (14.22) в (14.19), получаем
dac _
Fcac +
S*(/,ci)|
'tfju,. +AaJ2)-H*(ac-Aac/2)V
Дсхс
(14.22)
(14.23)
НО
где Аас — фиксированная расстройка.
При записи (14.23) отброшено слагаемое вида
386
^ h(<*c)Sh ('>«)>
ν J
которое близко к нулю ввиду симметричности характеристики
направленности (см. рис. 14.2) относительно направления на максимум.
По аналогии с (14.20) введем параметры
β(ά0 +Дас/2) = Н(ас +Дас/2)/Рс/и,
$(ас -АОс/2) = Н(ас -Аас/2)/рст
и новое эквивалентное наблюдение
'до, (0 = ^(^Т(ас +Аас/2)-Гт (ас -Дас/2))у(,). (14.24)
Тогда (14.23) можно записать в виде
^=FA+^^R«[i-(',«iK<,(.)]=
= FA*2D&-VP'mS(,M)Rt[i^ ('У*"] ■ (14.25)
Следовательно, формирование оценки ас углового положения
источника сигнала также распадается на пространственную обработку
(14.24) и временную (14.25). Структура блока пространственной
обработки (14.24) аналогична (14.9) с той лишь разницей, что в нем имеется
«два канала обработки», в которых весовые коэффициенты β сдвинуты
на ±Аосс/2 относительно оценки ас. Как и в п. 14.1.1, для алгоритма
пространственной обработки (14.24) можно ввести понятие
характеристики направленности
^дс Ко|ac>Aac) = д^[Гт(*с +Δ<*с/2)-$*т (ас -Δαс/2)]й(ас0).
(14.26)
Для пятнадцатиэлементной АР с ί/ = λ0/2, Aac= 10 град и ac =
=30 град (0,523 рад) зависимость ^(otco) = Re[i/flC(ac0|ac)] при
единичной мощности сигнала приведена на рис. 14.3. Из графика видно,
что в окрестности истинного значения угла прихода сигнала <хс вид
функции С/д(асо) аналогичен поведению типичной дискриминацион-
387
ной характеристики с нулем при ас = ссс0. Следовательно, блок
пространственной обработки (14.24) выполняет функцию пространствен-
(/ ного (углового)
дискриминатора, на выходе которого
формируется временной
процесс (14.24),
поступающий далее в блок временной
фильтрации (14.25),
представляющий собой обычную
следящую систему.
Уравнения (14.20),
(14.21), (14.24), (14.25)
описывают пространственно-
временную систему обра-
Рис. 14.3. Характеристика направленности ботки, схема которой приве-
пространственного дискриминатора дена на рис. 14.4.
1 1 ! I ! '"Ι
ΤΥΠλΗ" "t~
J I ;
1Ц\
—fl
ι il
-Mi
ή)
•Блок прострввспсшюй обрабопсн
J
;
Р*т(ас)
χ
р,т(ас+Дас/2)Н-|
Lz
τ
:Бжж
Л фильтрации λ(()
«,(<)
Ш
i(r)
Рис. 14.4. Схема пространственно-временной обработки
В схеме можно выделить блоки пространственной и временной
обработки. Блок пространственной обработки включает три канала,
которыми формируются характеристики направленности в направлениях
<хс, ас+Лас/2 и ас-Лас/2. Блок временной обработки содержит
две подсистемы слежения: за информационным процессом λ (г) и за
направлением осс(/) на источник сигнала. Сформированная в блоке
временной обработки оценка осс (г) направления прихода сигнала
вводится в блок пространственной обработки с целью его фокусировки на
388
сигнал и подстройки нуля дискриминационной характеристики в
направление на сигнал.
14.2. Оптимальная фильтрация при наличии
пространственно-распределенных помех
Пусть кроме внутренних шумов приемника присутствуют помехо-
вые сигналы, приходящие с различных направлений а^ , j = 1,р . По-
прежнему полагаем, что АР — линейная (рис. 14.1), а все приходящие
сигналы имеют плоский фронт волны. Принимаемое i'-m антенным
элементом колебание в этом случае описывается выражением
^/(/,x,) = S',(/,X,xJ)+f Sn (/,χ^+Λ,^,^·), ι = ΰί, (14.27)
где щ (/, χ,) — внутренние шумы приемника с характеристиками (14.2);
Sj (/,λ, jc, ) — полезный сигнал с комплексной амплитудой Sj. (/,λ, jc, ) =
= S(i,X)eJ^ac' и известным направлением прихода осс; £„.(/,*,·) —
помеховые сигналы, которые также будем считать узкополосными и,
следовательно, допускающими описание комплексными амплитудами
\а (а \ ,v 2iuiicos(an )
(Здесь, как и выше, полагается, что запаздыванием огибающих сигнала
и помех по раскрыву АР можно пренебречь.)
Комплексные амплитуды помеховых сигналов Sn. (/) будем
описывать комплексными гауссовскими случайными процессами,
спектральная плотность которых равномерна в полосе пропускания
приемника и равна ΝΏ 0. Такие процессы удовлетворяют требованию узко-
полосности, так как полоса пропускания приемника много меньше
несущей частоты. В то же время в интересах синтеза оптимальной
системы приема их можно заменить БГШ с двусторонней спектральной
плотностью Νπ о /2 .
В общем случае комплексные амплитуды различных помеховых
сигналов могут быть коррелированны и задаваться корреляционной
матрицей A/[sn (t)s'j(/)] = Vn, где 8π(/) = |ίΠ| (0 42 (0 - $., ('f
389
— вектор комплексных амплитуд помеховых сигналов. Если помехи не
коррелированны, то Vn = Vn — диагональная действительная матрица,
диагональные элементы которой равны спектральным плотностям
соответствующих помех.
IIT
ап, ап, -ап и матрицу
αφ{ίΦπ,ι(θ} ехр{]фП2,(/)} ... ехр^фПр1(/)}
ехР^ФП|2(0} exP{j>n22(0} ·· βχρ{ϋΦπ#,2(θ}
С(',ап) =
ехр^Фп, *,(')} *χρ[)Φπ2 ».(')} ... ехр^фп^(г)Н
характеризующую пространственное положение помех. Тогда
наблюдения (14.27) можно записать в векторном виде
у (/) - Н(Ос )SH (a)+C(r,an )Sn (t)+m(t).
Введем суммарную помеху
■Σ (0 = C(/,o„)Sn (/) + ■(/)
с корреляционной матрицей
А/[вг(0пгт(/+х)] = (с(г,ап)У11С*т(/,ап)+ЛГ01)5(х) =
= ΝΣ(ί)δ(τ),
где
Ni(an) = C(/,an)VnC*T(/,an)+JV0I.
(14.28)
(14.29)
(14.30)
С учетом введенных обозначений, наблюдения (14.28) принимают
стандартный вид
y(f) = H(ac)5H(a)+Qj;(0, (14.31)
для которого можно записать уравнение оптимальной фильтрации
процесса х(/), аналогичное (14.5)
— = F(/)x+
dt W
+ Dx(/)Re
Эх
v
(14.32)
Н*т(Ос№К)(у(0-*(«с)*-('·«))
390
При ΝΣ = N0l уравнение (14.32) переходит в (14.5).
Рассмотрим выражение, стоящее по знаком Re[*] и преобразуем
его, аналогично тому, как это сделано в (14.7):
нфЧ«с)*еЧ<0(М-нК)*Л',сх))=
= H*T(ac)Nil(an)y(i)-H*T(ac)N£,(an)H(ac)SH(/,ci) =
= H*T(ac)Ni'(an)H(ac)x
= Н*т (ac )Ni] (an )H(ac)[$'T (ac,an )y (t)-SH (/,«)], (14.33)
где
$(ac,an) = Ν£' (an )H(ac )(й*т (ac )N^ (an )H(ac))"', (14.34)
Введем, как и выше (14.8), эквивалентное наблюдение
>э»(0 = Р*Т(«с.ап)у(0. (»4.35)
для которого после ряда преобразований можно записать
>-,K»(0 = ^T(ac.an)y(0 = (H*T(«e)Ni1K)H(ac))",H*T(ac)x
χΝΣ' (an)(H(ac)SH (α)+ήΣ(')Η„ (^Д)+лЭ1СВ (/). (14.36)
Рассчитаем корреляционную функция эквивалентного шума
"экв (')
Μ[пэкв (t)£ (/+х)] = (Н*т (ас)ΝΣ' (ап)Н(ас))"' Н*т (ас)ΝΣ' (απ )х
хМ [ήΣ 0 )ήΣΤ (,)]Ν£' (ап )(н*т (ас )Ν£! (ап )Н (ас))"' Η (ас) =
= (Н*т (ас )ΝΣ' (а,, )Н(ас))'' δ(τ) = #экв5(х),
где
"» («с.ап) = (Н*т (ас )Ν£· (оц, )Н (ас))"' (14.37)
— спектральная плотность эквивалентного БГШ.
391
С учетом (14.37) выражение (14.34) для вектора весовых
коэффициентов можно представить в виде
$(ас,ап) = ЛГэкв(ас,ап)^1(ап)Н(ас), (14.38)
а уравнение (14.32) —
i*=F(,)i+M)Re
dt V ' ЛГ,„
Эх
(>экв(0-4(^«))
(14.39)
Переходя от комплексных амплитуд к действительным функциям, с
учетом (2.4), получаем
dt K '
M)(^M)j(Re[>so(,)elw]-5.(.,«i)).(l4.40,
Из уравнений (14.35), (14.40) следует, что, как и п. 4.1.1,
оптимальная пространственно-временная система фильтрации распадается на два
раздельных блока — пространственной обработки (14.35) и временной
(14.40). На выходе блока пространственной обработки формируется
временной процесс
Лкв(0 = ^Т(ас>ап)у(0 = 5„(гД)+пэкв(/),
в котором Лэдв (г) — комплексный БГШ с двусторонней спектральной
плотностью N3KB (14.37). При этом
^е[Лкв(0] = >'экв(0 = 5н(^Д)+лэкв(0, (14.41)
где пэкв (t) —БГШ с двусторонней спектральной плотностью #?кв/2 .
Таким образом, временная система фильтрации (14.40) — это
оптимальный временной фильтр для эквивалентных наблюдений (14.41),
формирующихся на выходе блока пространственной обработки.
Заметим, что уравнение (14.40), описывающее блок временной
фильтрации, по форме полностью совпадает с уравнением (14.10).
Различаются они лишь характеристиками эквивалентного шума
наблюдения лэкв(г). Причем при отсутствии пространственно-распределенных
помех выражение (14.37) переходит в соответствующее выражение для
эквивалентного шума, входящего в (14.12), т.е.
^,κв(αc.«π) = (н*τ(αc)NΣ1(«π)H(αc))", =>
392
(^(ас)Щ1Ш(ас))''=Ы0/Рст.
Следовательно, в оптимальной пространственно-временной системе
влияние пространственно-распределенных помех можно оценивать по
изменению спектральной плотности эквивалентного шума наблюдений
(14.37) или, что более удобно, по изменению обратной величины
„ λ „ ч = Й*Т К )Ν£* (<*„ )Н(ас). (14.42)
Пример 14.1. Рассмотрим задачу приема сигнала, приходящего с
направления ас, при воздействии одной помехи, приходящей с
направления ап . При этом С(/,ап) является вектором.
Для определения N~^ (ас,ап ) в соответствии с (14.42) рассчитаем
обратную матрицу
Ni1 (απ) = [с(/,ап )VnC*T (,,ап )+Ν0ΐ]~λ. (14.43)
Для этого воспользуемся леммой об обращении матри-
ц ы, согласно которой в общем случае для произвольных комплексных
матриц M,P,Q
Гр"1 +м*т<г1м]~1 = р-рм*т [мрм*т +QJ"1 мр.
Обозначим Q = (Fn)"1= —, Ρ~Χ=Ν01, М*Т=С и М = С*Т.
mi
Подставляя данные выражения в (14.43) получаем
N£1(«n) = [c(an)KnC*T(an)+^0l]"1 =
= — Ι-ί— flC(a„)F =fC*T(an)I
Подставляя полученное выражение в (14.42), запишем
. (14.44)
1 1 *.т
^экв(ас.ап) Но
= -^-H*T(ac)H(ac)-
393
Μ
о;
Н*т(ас)С(ссп)
Г-Lc"
К)С(ап)+-
Π J
С*т(ап)Н(ас).
Далее, учитывая, что Н*т (/,ас )Н(/,ас) = Рст и Ст (ап )С* (ап) =
= т, получаем окончательный результат:
Гп|н*т(/,ас)С(осп)|2
_^с
Лэв(«с.«п) ^0
т —
PcN0(mVa/N0+l)
(14.45)
(14.46)
Введем qTljia = — отношение спектральных плотностей помехи
#0
и шума (отношение помеха/шум), Н(ас) = Н(ас)Д//^ и
нормированную спектральную плотность Nu(ac,an) = N3m(ac,aa)Pc/N0. Тогда
(14.45) принимает вид
1 ?п/ш|н,т(ас)С(ап)|
/ \ = ™ / \ *
^н(ас><*п) (^п/ш+0
На рис. 14.5 приведена зависимость 1/jVh как функция ас при ап =
= 30 град для семиэлементной АР
Как видно из рисунка, при
совпадении направления прихода
помехи с направлением на сигнал
спектральная плотность N3KB
существенно возрастает, что приводит
к заметному ухудшению условий
фильтрации информационного
процесса.
Рассмотрим диаграмму
направленности синтезированной системы,
которую по аналогии с (14.14)
определим как
Рис. 14.5. График зависимости
функции 1/ЛГи(ас)
^н(«соК.а„) = |с/с(асо|ас,ап)|2=|$*т(ас,ап)Н(ас0)|2. (14.47)
394
Подставляя (14.44), (14.45) в (14.38), а полученное выражение в
(14.47), запишем
\2
χ
^п/ш(н>т(ас)С(ап ))(с(ап )Н(ас0))
Нт(ас)Н(ас0)-
(^п/ш+0
(14.48)
Заметим, что при ас0 = ас всегда имеем ί/Η (ас |ас ,ап ) = 1, что
соответствует представлению (14.36), т.е. фокусировке системы на
полезный сигнал.
На рис. 14.6 приведены графики зависимости t/H(aco|acan)
для пятнадцатиэлементной АР.
Рис 14.6. Диаграммы направленности:
а — (Χς = 60 град, <хп = 30 град, q^ = 10 ;
б— ас =30град, сц, =30 град, q„/m=\0
Из рис. 14.6, а следует, что в синтезированной системе
характеристика направленности имеет максимум в направлении на сигнал и
минимум в направлении на помеху. Это качественно отличает
оптимальную систему от неоптимальных систем, например, компенсаторов
помех, в которых формируется только минимум характеристики
направленности на помеху и не контролируется ее значение в направлении на
сигнал.
395
Из рис. 14.6, б видно, что даже при совпадении направлений
прихода сигнала и помехи характеристика направленности равна единице, т.е.
система фокусируется на сигнал. Однако из этого графика
непосредственно не видно влияние помехи на систему в этой ситуации. Поэтому
необходимо проводить дополнительный анализ для оценки такого
влияния. В то же время, из графика рис. 14.5 сразу видно изменение
уровня помехи на выходе блока пространственной обработки.
Следовательно, с точки зрения оценки качества работы системы временной
фильтрации за информационным параметром более информативным
оказывается характеристика (14.45).
Еще одним критерием, часто используемым при оценке качества
блока пространственной обработки, является отношение мощности
сигнала к спектральной плотности суммарной помехи на выходе
данного блока qBhlx, с'1. Так как, в соответствии с (14.36), мощность
действительного сигнала на выходе блока равна единице, а спектральная
плотность суммарной помехи — Ν3ΚΒ , то получаем
W =!/#,„ = H*T(ac)Ni'(an)H(ac). (14.49)
Отметим один существенный факт. Уравнение (14.40) является
уравнением оптимальной фильтрации, в котором процесс
v(0 = Re[>',K,(OeJ<uo/]-5„(/,ci)
близок к некоррелированному процессу (белому шуму), спектральная
плотность которого минимальна и равна спектральной плотности
исходных наблюдений, т.е. в данном случае #экв [9, 13]. Из этого
положения следует, что обратная величина 1/ЛГэкв имеет максимальное для
данной задачи значение. Таким образом, в рассматриваемой
оптимальной системе отношение сигнал/(помеха+шум) на выходе блока
пространственной обработки, определяемое формулой (14.49), является
максимальным, т.е. наилучшим из тех которые могут быть достигнуты.
Другими словами, алгоритм пространственной обработки (14.34),
(14.35) максимизирует выходное отношение сигнал/(помеха+шум).
Контрольные вопросы к главе 14
1. При каких условиях алгоритмы пространственно-временной обработки
сигналов распадаются на раздельные: пространственный и временной
алгоритмы?
3%
2. Что такое характеристика и диаграмма направленности блока
пространственной обработки?
3. Чем отличаются структуры систем пространственно-временной
обработки при фильтрации параметров сигнала с известным и неизвестным
направлением прихода?
4. Что такое пространственный (угловой) дискриминатор, и как он может
быть сформирован?
5. Как изменится структура пространственного (углового)
дискриминатора при наличии пространственно-распределенных помех?
6. Как определяется отношение сигнал/(помеха+шум) на выходе блока
пространственно-временной обработки и какие его свойства ?
7. Как зависит значение диаграммы направленности в направлении на
сигнал от характеристик сигнально-помеховой обстановки?
397
ЛИТЕРАТУРА
1. Гришин Ю.П., Ипатов В.П., Казаринов Ю.М. и др. Радиотехнические
системы/ Под ред. Ю.М. Казаринова. — М.: Высшая школа, 1990.
2. Колмогоров AM. Интерполирование и экстраполирование
стационарных случайных последовательностей// Изв. АН СССР. Сер.
Математика, 1941, т. 5, № 1, с. 3-14.
3. Первачев СВ. Радиоавтоматика. — М.: Радио и связь, 1982.
4. Первачев СВ., Перов AM. Адаптивная фильтрация сообщений. — М.:
Радио и связь, 1991.
5. Репин ВТ., Тартаковский Г.П. Статистический синтез при априорной
неопределенности и адаптация информационных систем. — М.: Сов.
Радио, 1977.
6. Сейдж ЭМ., Меле Дж. Теория оценивания и ее применение в связи и
управлении. Пер. с англ./ Под ред. Б.Р. Левина. — М.: Связь, 1976.
7. Сосулин Ю.Г. Теория обнаружения и оценивания стохастических
сигналов. — М: Сов. радио, 1978.
8. Сосулин Ю.Г. Теоретические основы радиолокации и
радионавигации. — М: Радио и связь, 1992.
9. Стратонович Р.Л. Условные Марковские процессы и их применение
к теории оптимального управления. — М.: Изд. МГУ, 1966.
10. Стратонович Р.Л. Принципы адаптивного приема. — М.: Сов.
радио, 1973.
11. Тихонов ВМ. Оптимальный прием сигналов. — М.: Радио и связь,
1983.
12. Тихонов ВМ., Миронов М.А. Марковские процессы. — М.: Сов
радио, 1977.
13. Тихонов ВМ., Харисов ВМ. Статистический анализ и синтез
радиотехнических устройств и систем. — М.: Радио и связь, 1991.
14. Трифонов А.П., Шинаков Ю.С. Совместное различение сигналов и
оценка их параметров на фоне помех. — М.: Радио и связь, 1986.
15. Ярлыков М.С, Миронов М.А. Марковская теория оценивания
случайных процессов. — М.: Радио и связь, 1993.
16. Задачник по курсу «Основы теории радиотехнических систем»/ Под
ред. П.А. Бакулева и В.А. Вейцеля. — М.: Радио и связь, 1996.
17. Kalman R.E. A New Approach to Liner Filteringand Prediction
Problems// Trans. ASME, J. Basic Eng., 1960, vol. 82D.
18. Wiener N. Extrapolation, Interpolation and Smoothing of Stationary Time
Series. —N. -Y.: John Wiley, 1949.
398
Учебное издание
Александр Иванович Перов
Статистическая теория радиотехнических систем
Зав. редакцией И. Л. Кузьмина
Редактор-оператор Ю.А. Ковелина
Изд. № 79. Сдано в набор 01.03.2003.
Подписано в печать 09.04.2003. Формат 60 χ 90 1/16.
Бумага офсетная. Гарнитура Тайме.
Печать офсетная
Печ. л. 25. Тираж 3 000 экз. Зак. X· 2041
Издательство «Радиотехника».
103031. Москва, К-31, Кузнецкий мост, д. 20/6.
Тел./факс: 921-48-37; 925- 78-72, 925-92-41.
E-mail: iprzhimonline.ru
\v>\w. webcenter.ru Mprzhr /
. Отпечатано в ООО ПФ α Полиграфист"
160001, г. Вологда, ул. Челюскинцев, д. 3.
m
\
• ·
докто| техпичс ких тук, прос}) С( } каф дры
Ради τ ним ких чи м Моек веко го нерг -
тич юг ии τ τ τι (техш ч ког hi герсит та),
бласть научных инт< ре и - оптимальный π нем
игпалс ι г π с темах радионавигации радиол а-
ции и ради упр вл пия.
ISI1N 5-93Ю8-04 -
9"7 8 5 9·3 1 "080475
Тел./факс: (0· 5) 9 5- 241
E-mail: ipr hra online.ru
htt»://www.w bcenter.ru/4przhr/