








Автор: Меркулов В.И. Канащенков А.И. Дрогалин В.В. Богачев А.С. Забелин И.В.
Теги: авиация и космонавтика летательные аппараты ракетная техника космическая техника радиолокация электроника радиотехника электротехника авиация радиоуправление
ISBN: 5-93108-036-8
Год: 2003




РАДИОУПР1
АВИАЦИОННЫЕ
СИСТЕМЫ
РАДИОУПРАВЛЕНИЯ
Том 2
Радиоэлектронные си
самонаведения
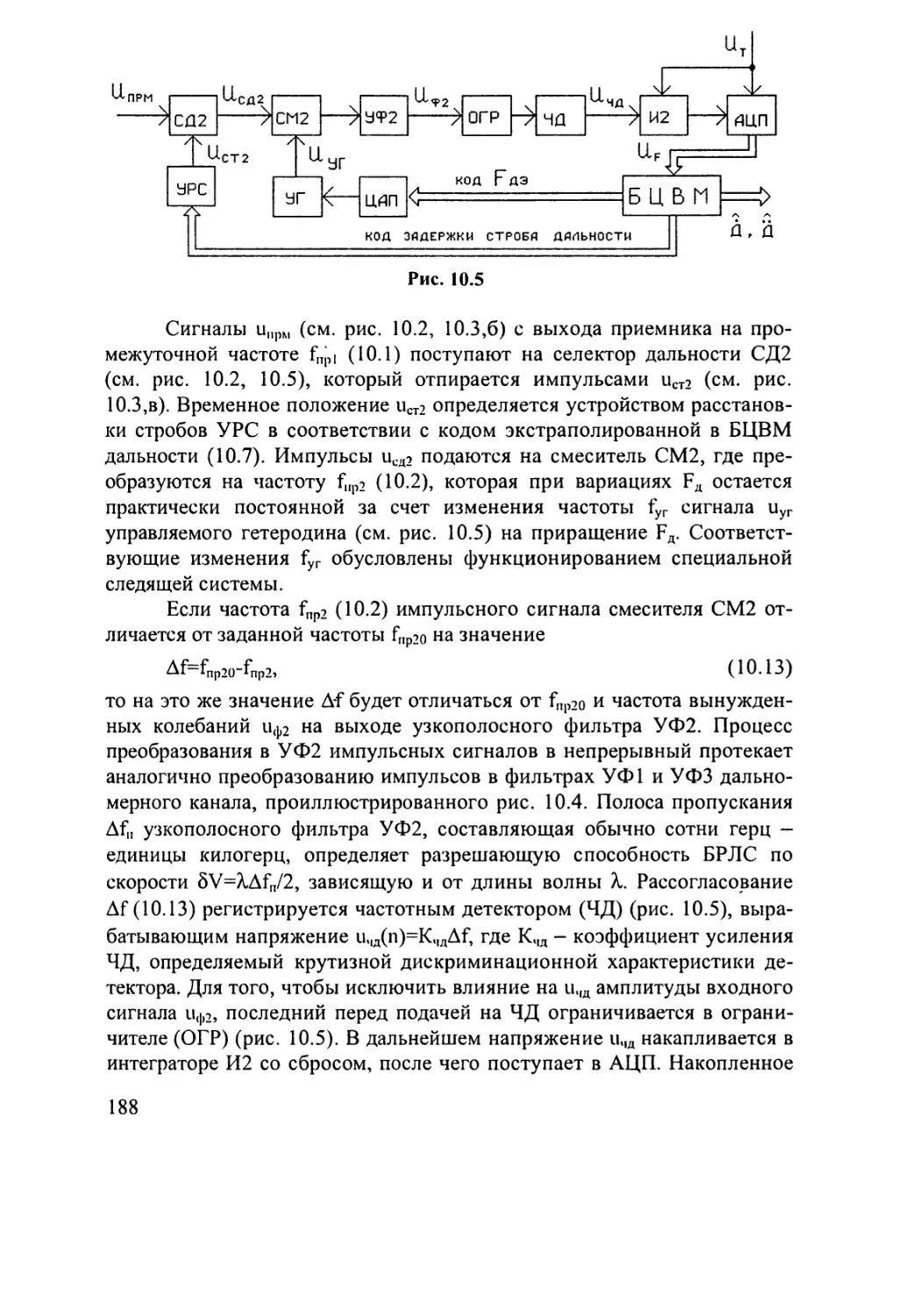
РАДИОТЕХНИКА
Авиационные системы
радиоуправления
В 3-х томах
Под редакцией
А. И. Канащенкова и В. И. Меркулова
Том 1
Принципы построения систем радиоуправления.
Основы синтеза и анализа
Том 2
Радиоэлектронные системы самонаведения
Том 3
Системы командного радиоуправления.
Автономные и комбинированные системы наведения
Том 2
Радиоэлектронные
системы самонаведения
Москва, “Радиотехника”, 2003
УДК 629.7.058.53 ' = / z
Р15 ‘
ББК 32.95
Серия “Авиационные системы радиоуправления”
Редакционная коллегия:
главный редактор - д.т.н., проф. А. И. Канащенков
зам. главного редактора - к.т.н., проф. В. И. Меркулов
члены редколлегии: д.т.н., проф. В. Н. Антипов; д.т.н., проф. А. И. Перов;
д.т.н., проф. И. С. Рыжак; д.т.н., проф. В. Н. Саблин; с.н.с., к.т.н. О. Ф. Самарин;
д.т.н., проф. Б. Г. Татарский
Меркулов В.И., Дрогалин В.В., Канащенков А.И., Богачев А.С.,
Забелин И.В., Лепин В.Н., Самарин О.Ф., Сарычев В.А., Соловьев
А.А., Турпецкий Л.С., Чернов В.С., Шуклин А.И.
Р 15 Авиационные системы радиоуправления. Т. 2. Радиоэлектронные
системы самонаведения/ Под ред. А. И. Канащснкова и В. И. Меркулова. -
М.: “Радиотехника”, 2003. - с.: ил.
ISBN 5-93108-036-8
Изложены принципы построения и особенности функционирования авиаци-
онных радиоэлектронных систем самонаведения и современные алгоритмы их син-
теза и анализа, основанные на представлении процессов и систем в многомерном
пространстве состояний,.
Для научных работников и инженерову связанных с проектированием и эксплуа-
тацией систем радиолокации и радцоуЬра&&и& Может быть полезна препода-
вателям, аспирантам и студентам радиотехнических факультетов ВУЗов.
ISBN 5-93108-036-8
УДК 629.7.058.53
Р 15
ББК 32.95
© Авторы, 2003
© Радиотехника, оформление, 2003
ОГЛАВЛЕНИЕ
Предисловие ....................................................... 9
Глава 7. Методы наведения самолётов и ракет
и алгоритмы траекторного управления ими .......................... 12
7.1. Общие сведения о радиоэлектронных системах
самонаведения ........................................ 12
7.2. Общая характеристика методов наведения
самолётов и ракет .................................... 13
7.3. Методы самонаведения самолётов и алгоритмы
траекторного управления ими........................... 15
7.3.1. Метод прямого наведения при ручном управлении .... 15
7.3.2. Наведение в наивыгоднейшую упреждённую
точку встречи при ручном управлении................ 18
7.3.3. Алгоритмы директорного и автоматического управления ... 22
7.4. Методы наведения ракет и алгоритмы
траекторного управления ими........................... 23
7.5. Оптимизация алгоритмов траекторного управления
самолётами и ракетами ................................ 30
7.5.1. Потенциальная точность самонаведения...............31
7.5.2. Оптимизация алгоритма наведения на воздушные цели .32
7.5.3. Оптимизация алгоритма наведения на наземные цели .36
7.5.4. Оптимизация алгоритма наведения на малоразмерные
наземные цели при использовании активного
синтезирования апертуры антенны ....................40
7.5.5. Оптимизация алгоритма наведения на наземные цели
при использовании полуактивного синтезирования
апертуры антенны ...................................47
Глава 8. Принципы построения и особенности
функционирования информационно-вычислительных систем ... 55
8.1. Особенности построения и функционирования ИВС
многофункционального самолёта......................... 55
8.2. Особенности построения и функционирования ИВС
ракет «воздух-воздух» ................................ 63
8.3. Особенности построения и функционирования ИВС
противокорабельных ракет.............................. 71
8.4. Тенденции развития ИВС боевых самолетов ............... 85
8.4.1. Тенденции развития ИВС зарубежных самолетов........85
8.4.2. Структурная схема ИВС самолета F-35 ..............91
8.5. Методика оценки чувствительности ИВС к точности
используемых измерителей .............................. 93
8.6. Чувствительность ИВС самолёта к точности
измерителей при самонаведении в наивыгоднейшую
точку встречи.......................................... 96
8.7. Чувствительность ИВС ракеты «в-в» к точности
измерителей при использовании метода
пропорционального наведения ........................... 99
8.8. Чувствительность ИВС ЛА к точности измерителей
при оптимальном наведении на воздушную
маневрирующую цель.................................... 101
8.9. Чувствительность ИВС ЛА к точности измерителей
при оптимальном наведении на наземные цели............ 103
8.10. Чувствительность ИВС ракеты к точности
измерителей при ее наведении на наземные цели
в режиме синтезирования апертуры антенны ............. 106
Глава 9. Принципы построения бортовой вычислительной
системы......................................................... 112
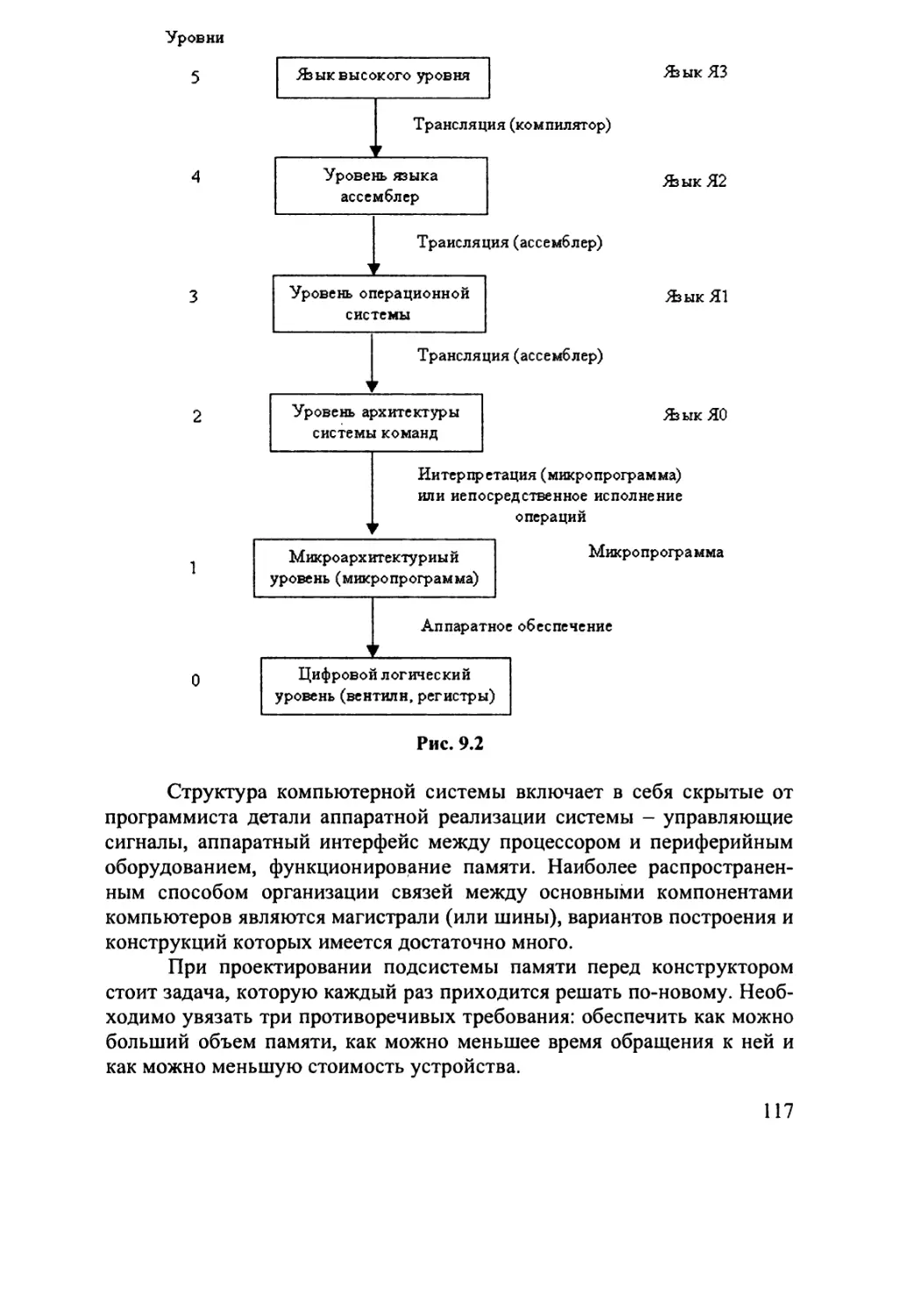
9.1 Структурная схема ВВС................................. 112
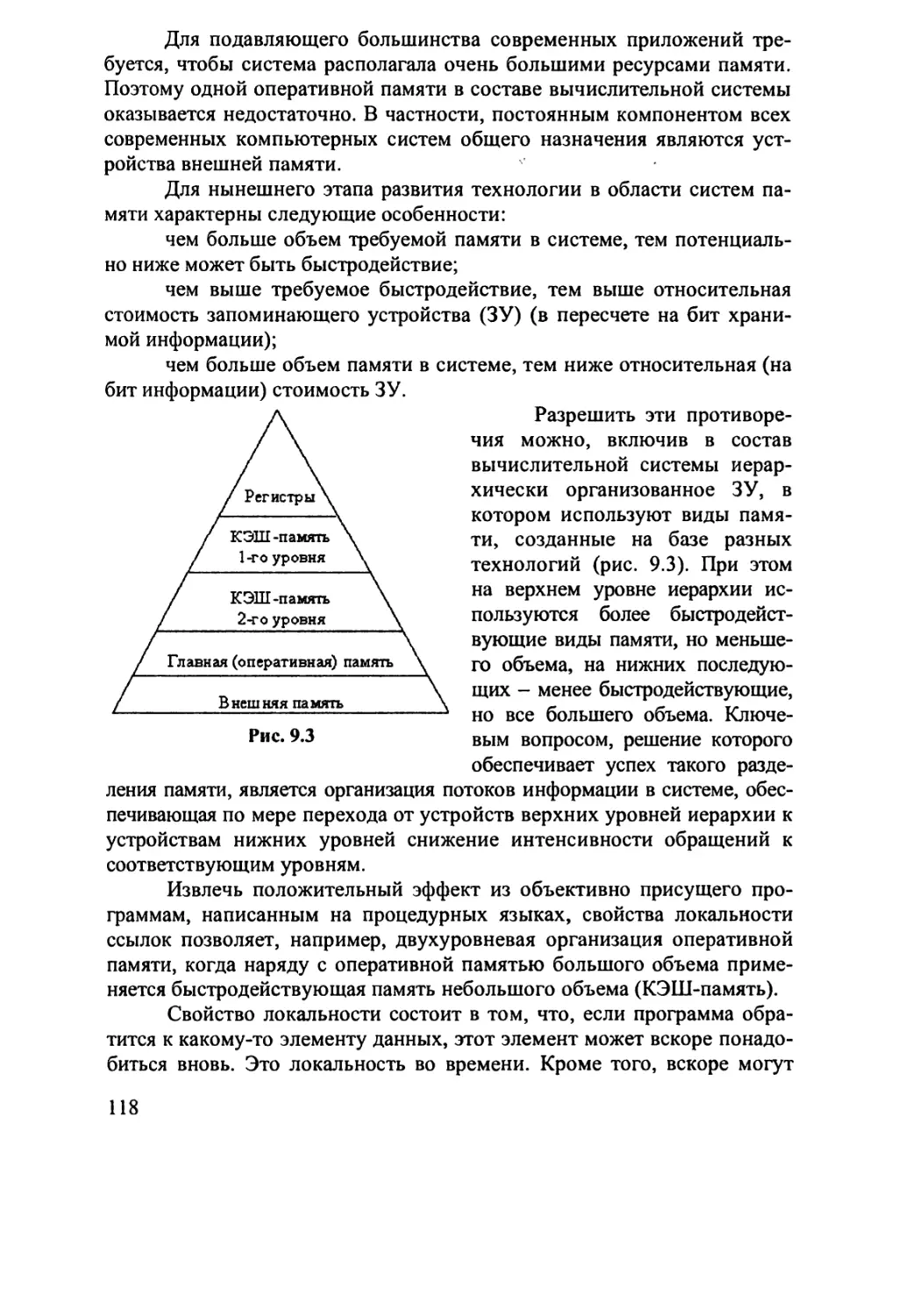
9.2. Технология открытых систем .......................... 114
9.3. Вычислительные средства для ВВС ..................... 115
9.3.1. Архитектура и структурная организация
вычислительных средств.............................. 115
9.3.2. Универсальные микропроцессоры .................. 121
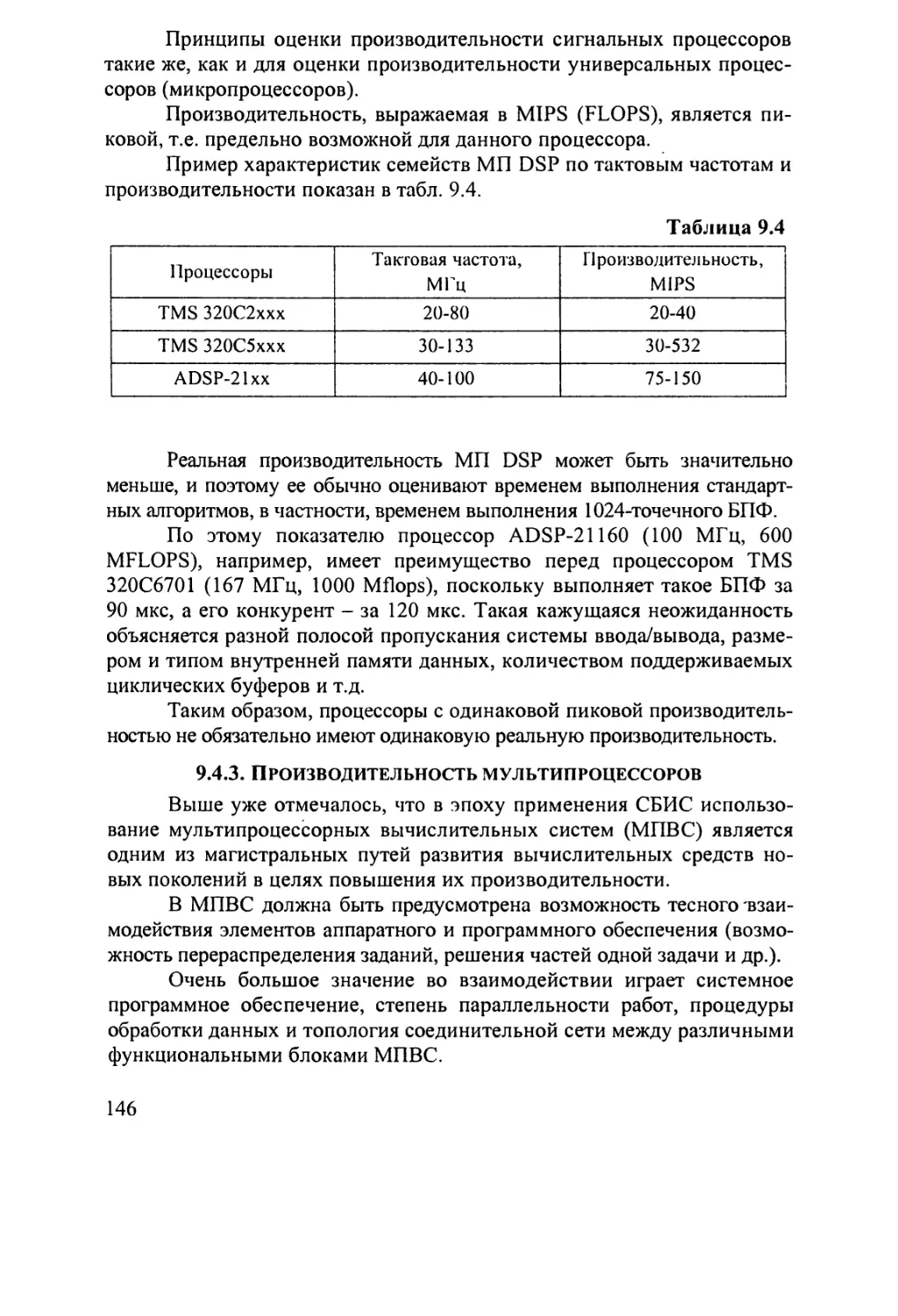
9.3.3. Микропроцессоры для цифровой обработки сигналов .125
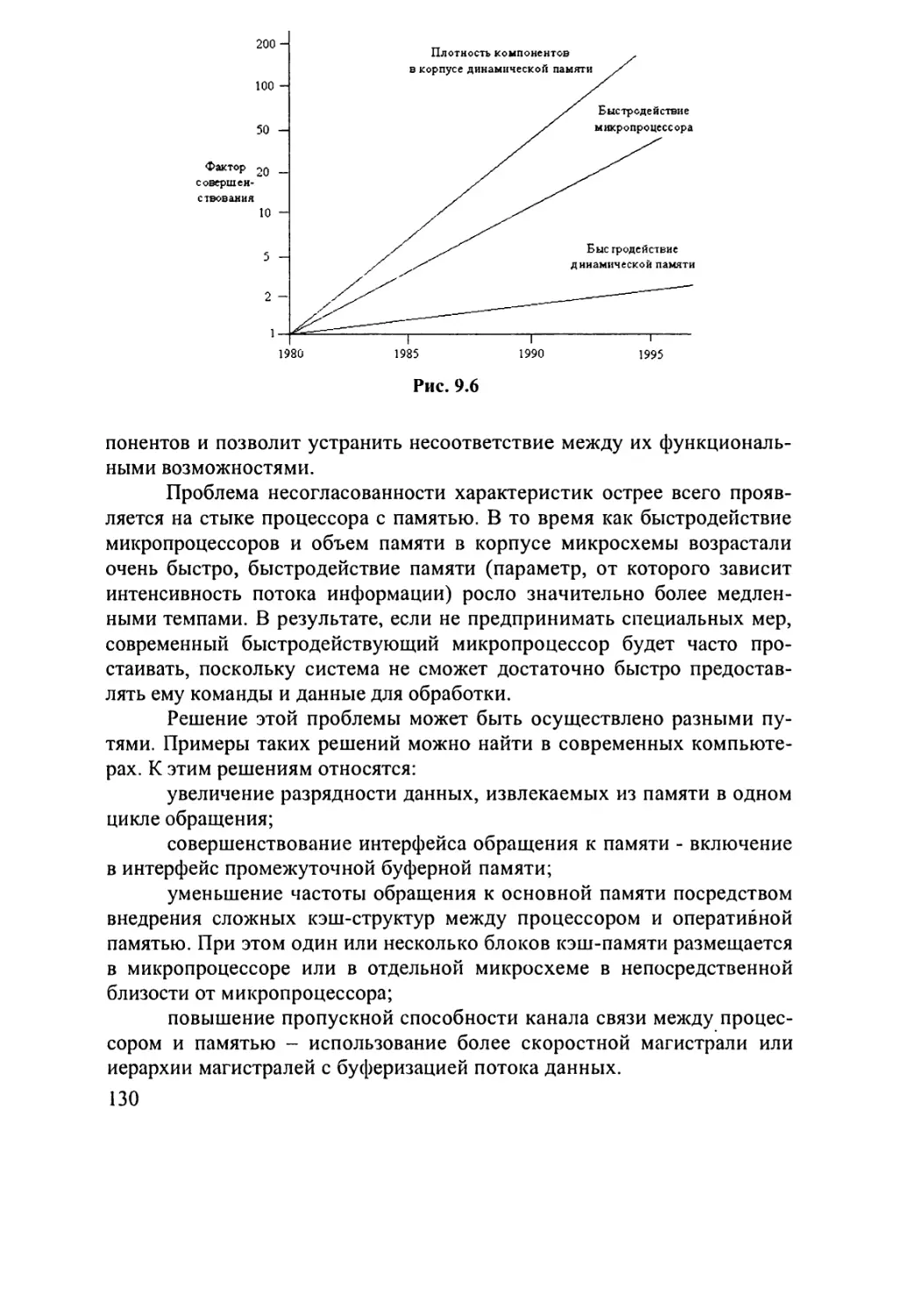
9.3.4. Баланс производительности компонентов........... 129
9.3.5. Параллелизм процессов обработки информации
в вычислительных системах ......................... 132
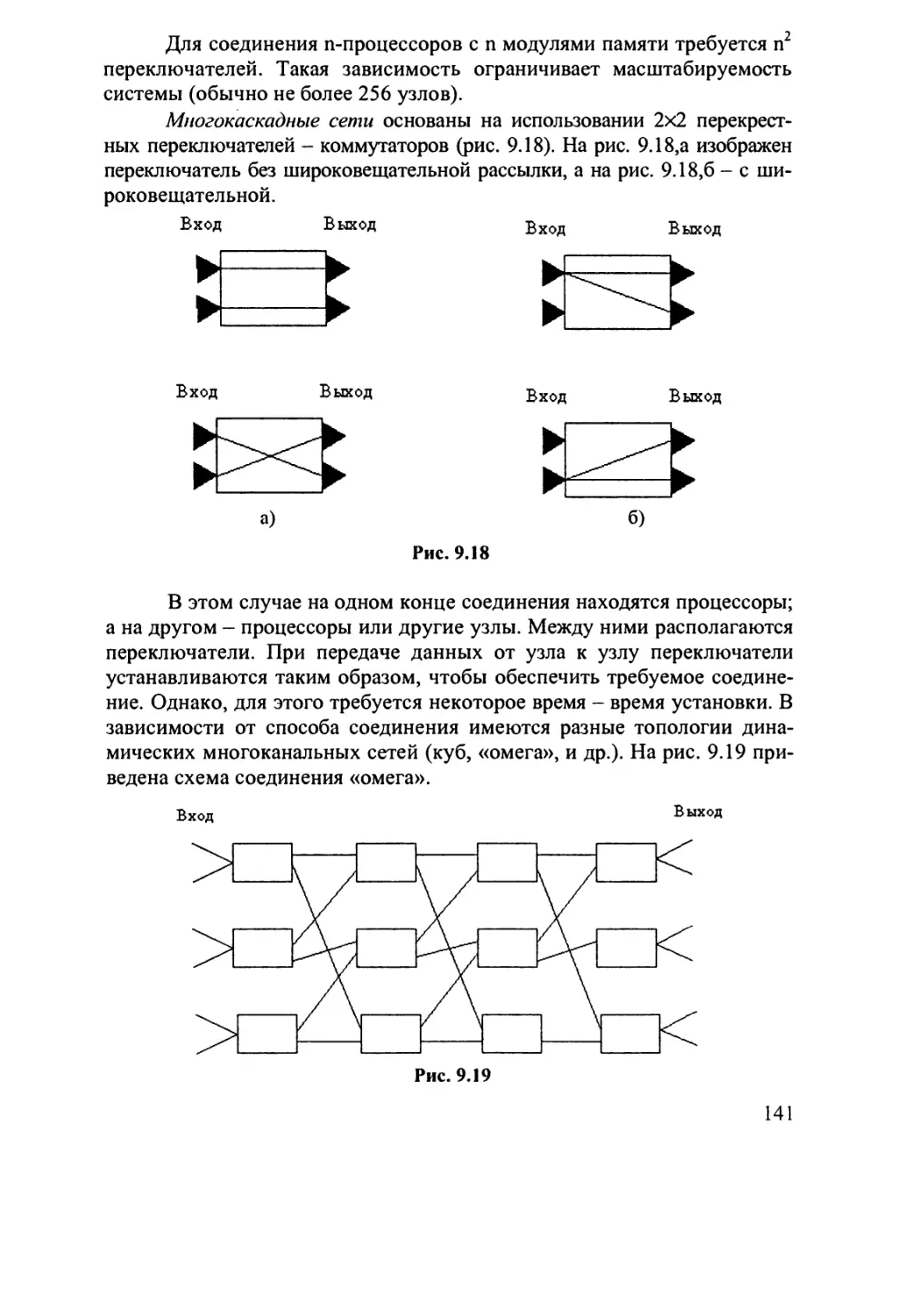
9.3.6. Коммуникационная сеть в параллельных
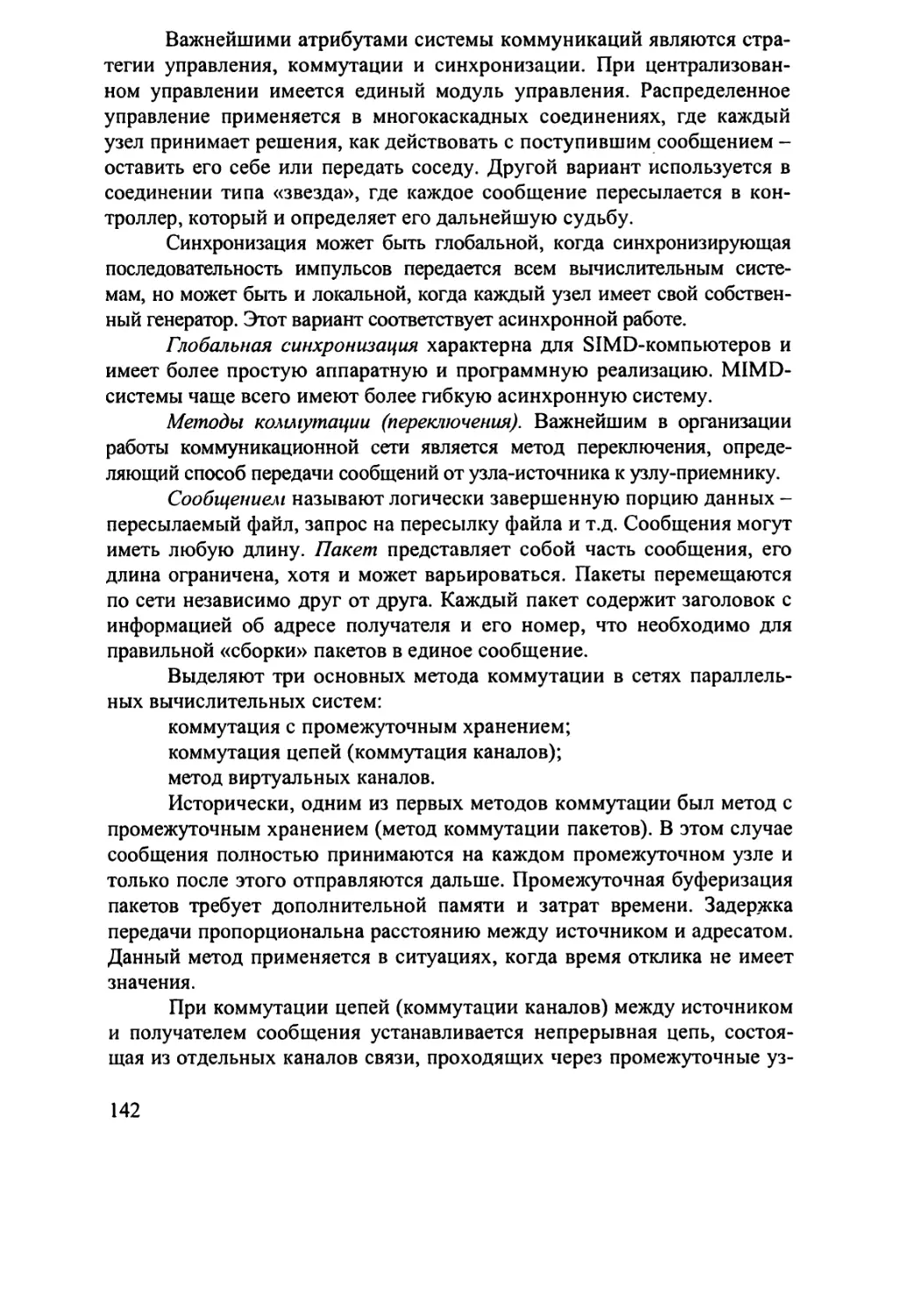
вычислительных системах ........................... 138
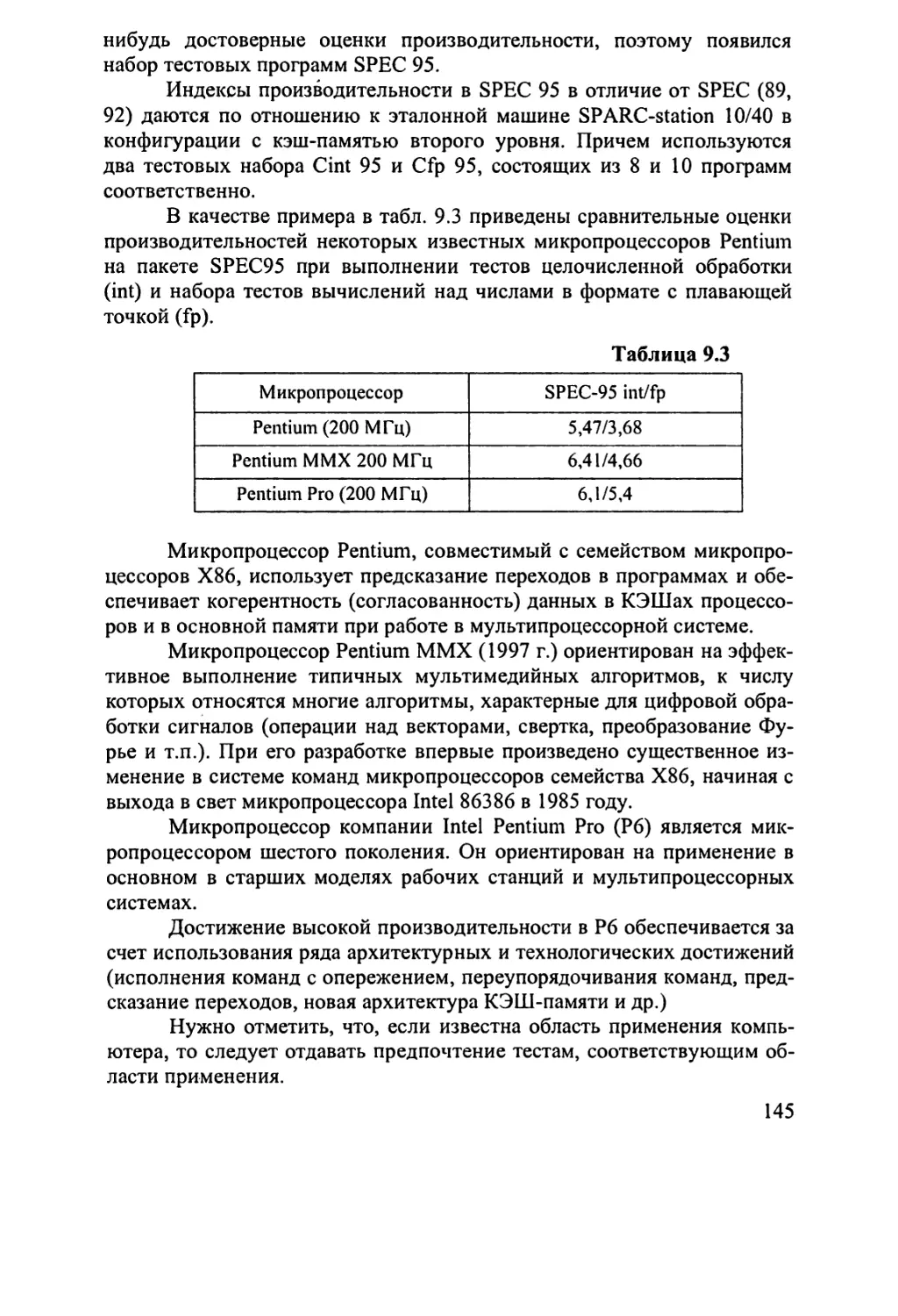
9.4. Производительность микропроцессоров ................. 143
9.4.1. Пиковая и реальная производительности .......... 143
9.4.2. Измерение реальной производительности
микропроцессора.................................... 144
9.4.3. Производительность мультипроцессоров............ 146
9.5. Бортовые вычислительные системы...................... 148
9.5.1. Стандартный интерфейс........................... 149
9.5.2. Магистрально-модульная архитектура компьютера . 151
9.5.3. Сетевые интерфейсы............................. 154
9.6. Отечественные базовые средства вычислительной техники . 160
9.7. Программное обеспечение ............................ 164
9.7.1. Системное программное обеспечение ............. 164
9.7.2. Функциональное программное обеспечение......... 167
9.8. Краткие комментарии ................................ 173
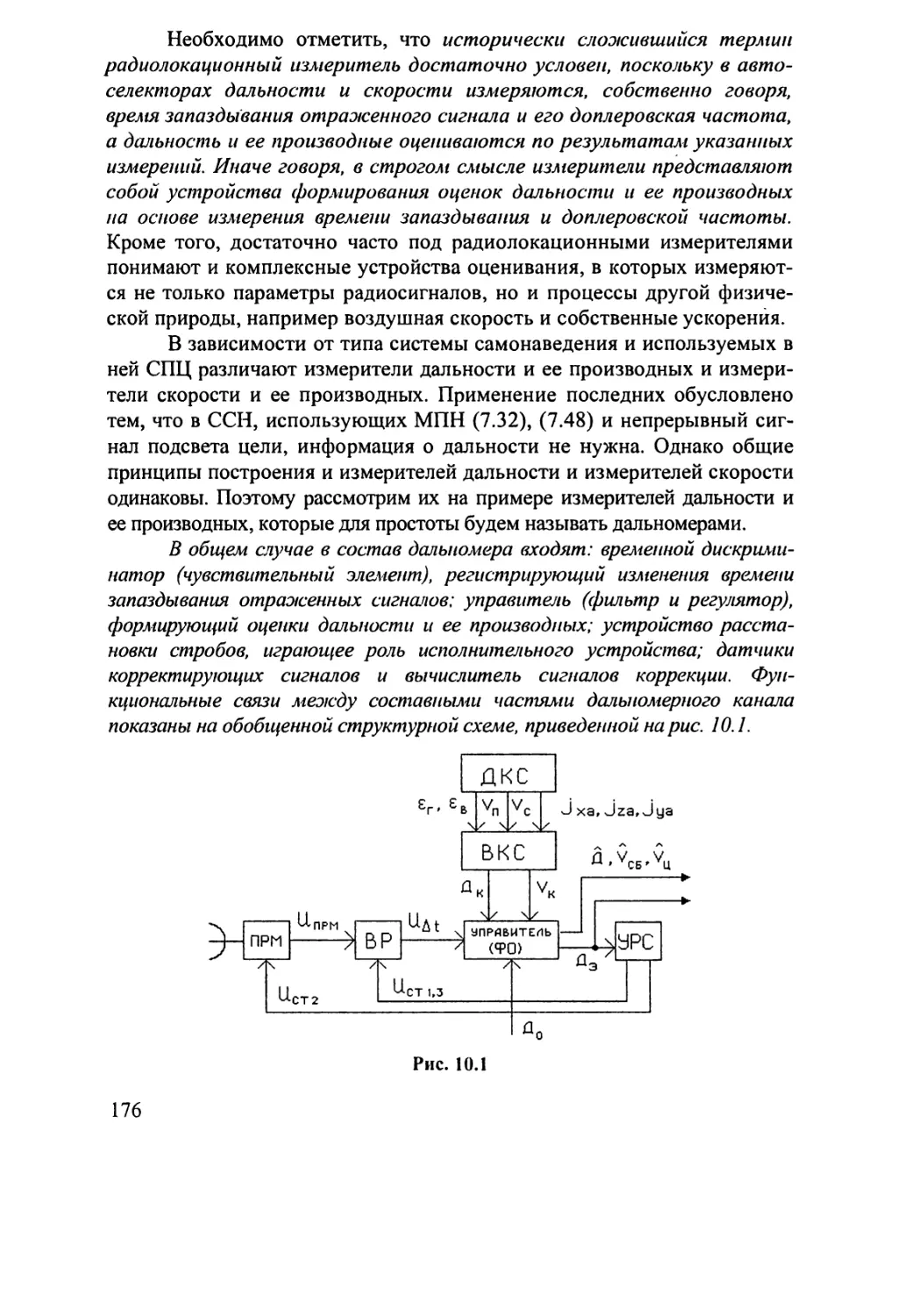
Глава 10. Измерители дальности и се производных
в режиме сопровождения одной цели ............................. 175
10.1. Принципы построения измерителей дальности
и скорости .......................................... 175
10.2. Классификация измерителей дальности и ее производных 178
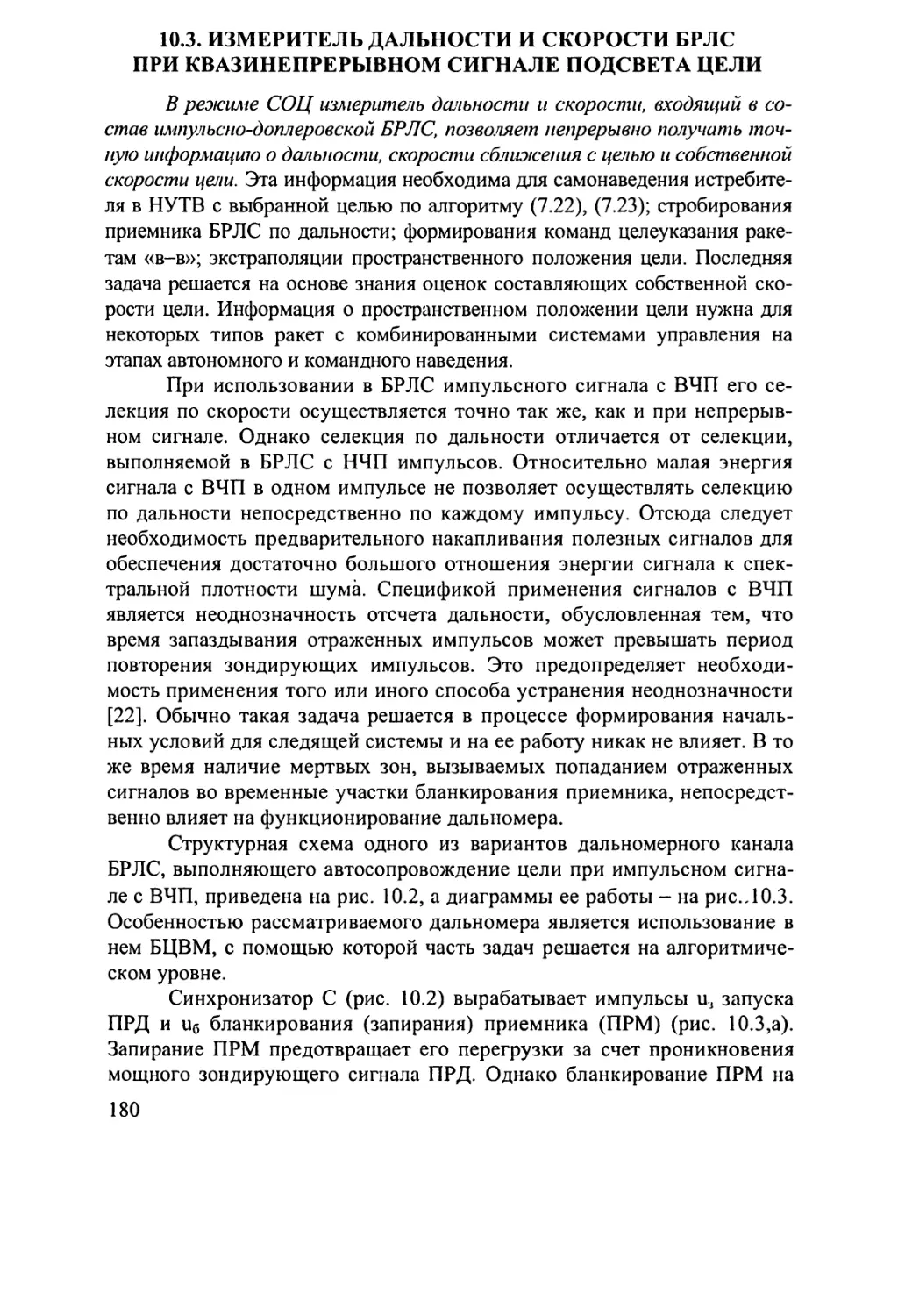
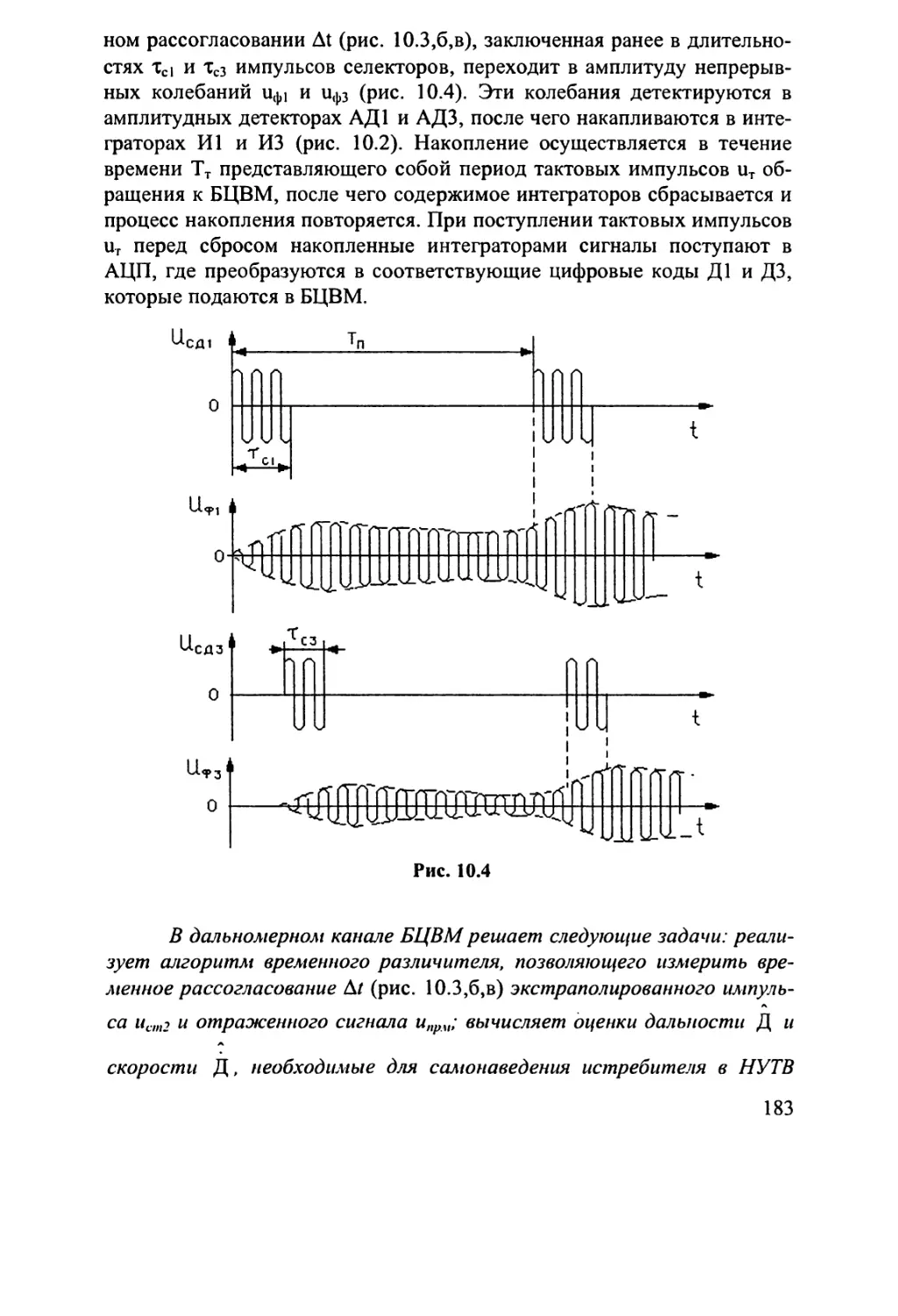
10.3. Измеритель дальности и скорости БРЛС
при квазинепрерывном сигнале подсвета цели .......... 180
10.4. Измеритель скорости и ускорения БРЛС
при квазинепрерывном сигнале подсвета цели .......... 187
10.5. Измеритель скорости и ускорения РГС
при непрерывном сигнале подсвета цели ............... 190
10.6. Многоконтурный измеритель дальности
и ее производных с независимым оцениванием
скорости сближения .................................. 193
10.6.1. Многоконтурный измеритель дальности
и её производных с измерением времени запаздывания
отражённых сигналов .............................. 196
10.6.2. Многоконтурный измеритель скорости
и её производных с измерением доплеровской частоты .... 219
Глава 11. Измерители углов и угловых скоростей линии
визирования в режиме сопровождения одной цели.................. 214
11.1. Принципы построения и классификация угломеров ..... 214
11.1.1. Угломер с позиционной коррекцией и индикаторной
стабилизацией .................................... 216
11.1.2. Угломер со скоростной коррекцией и индикаторной
стабилизацией .................................... 219
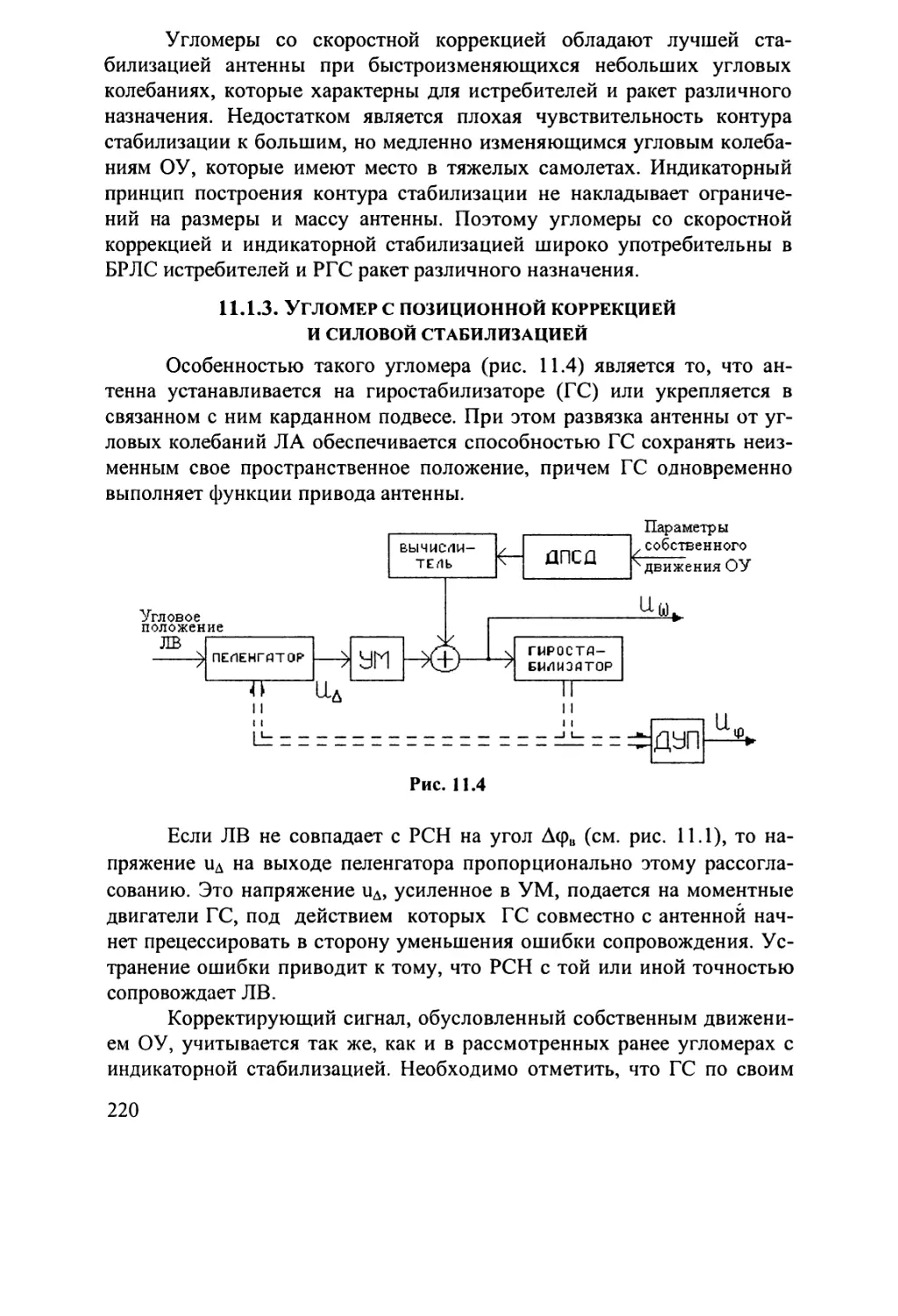
11.1.3. Угломер с позиционной коррекцией и силовой
стабилизацией ..................................... 220
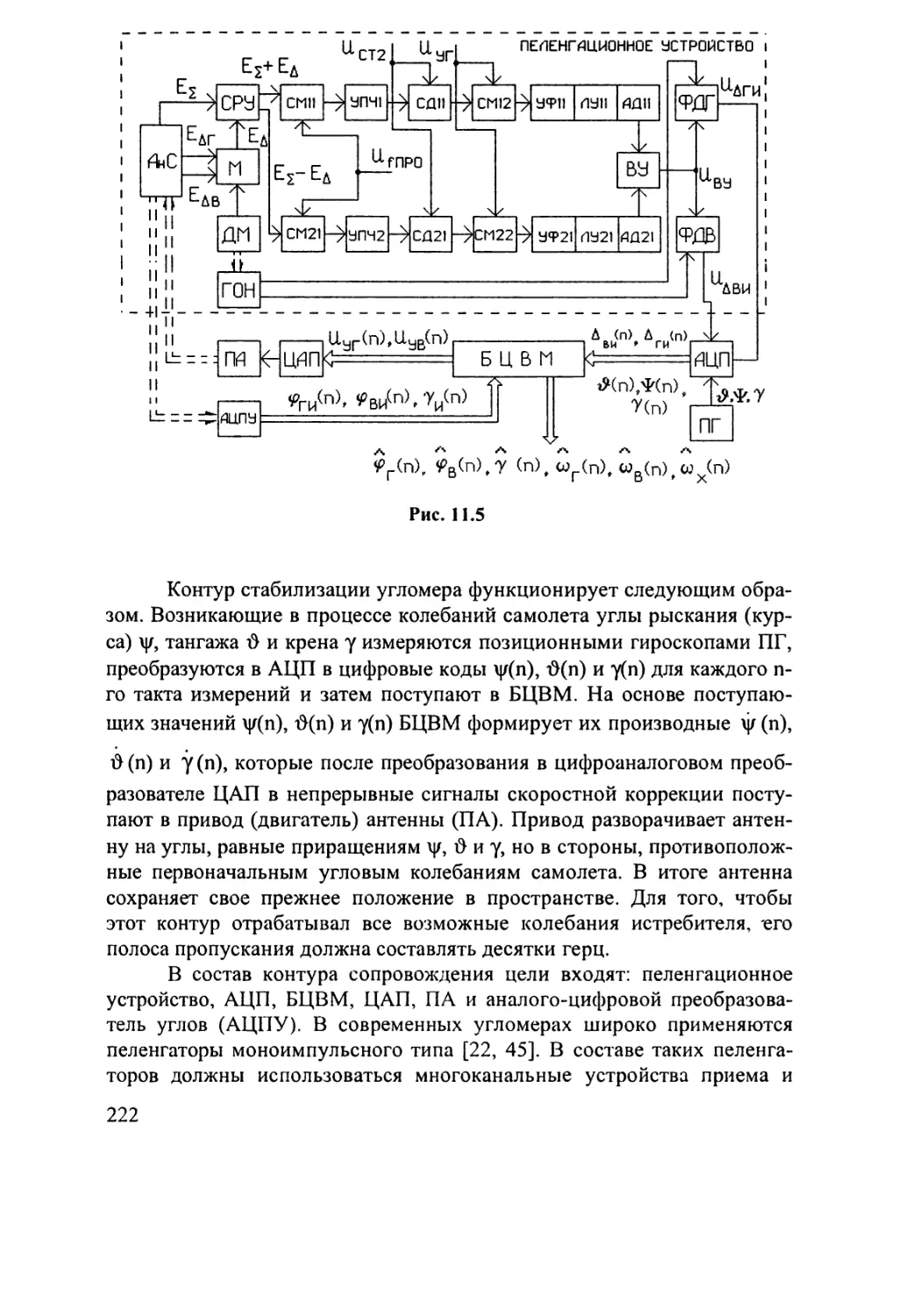
11.2. Угломер БРЛС при квазинепрерывном сигнале
подсвета цели........................................ 221
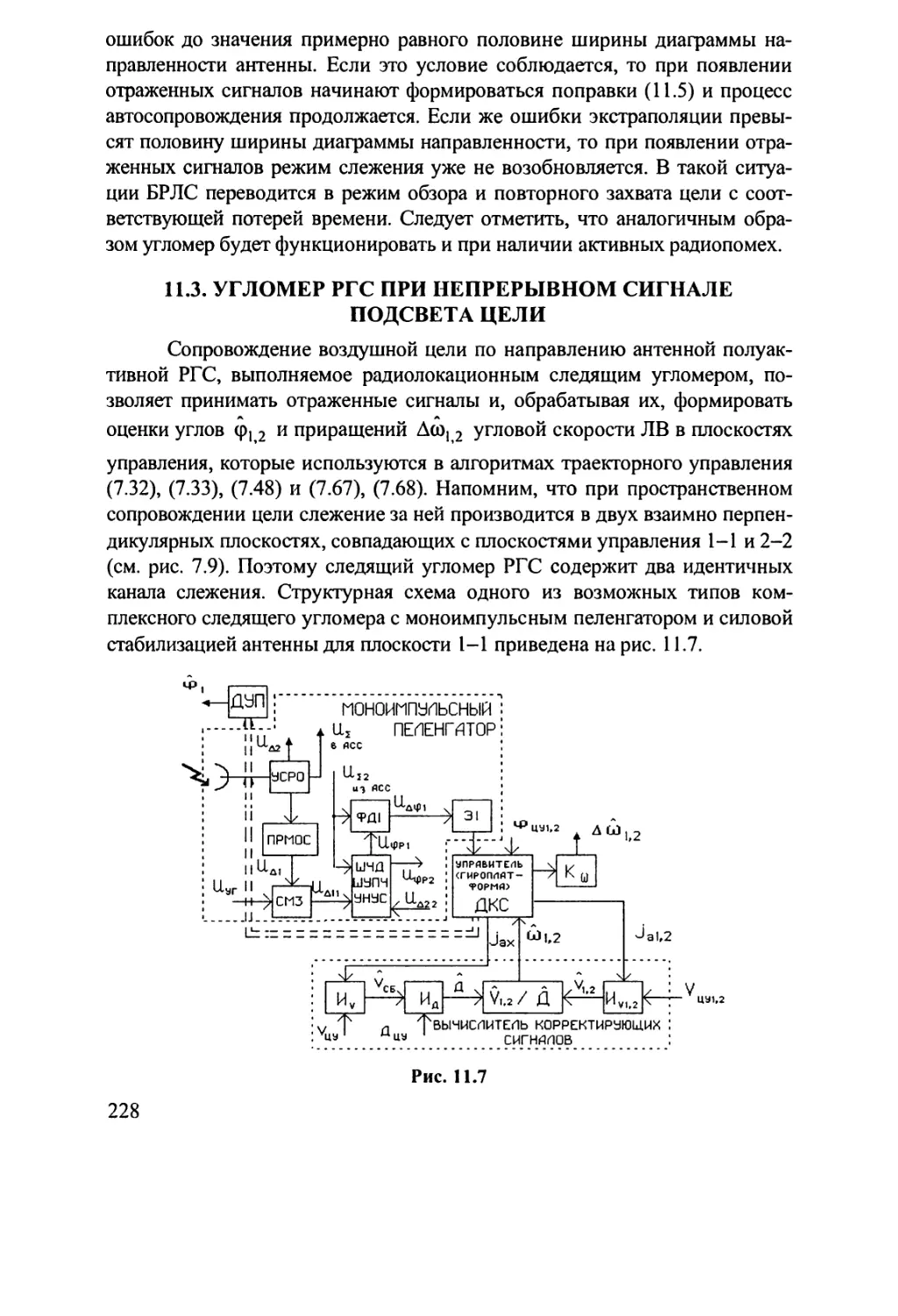
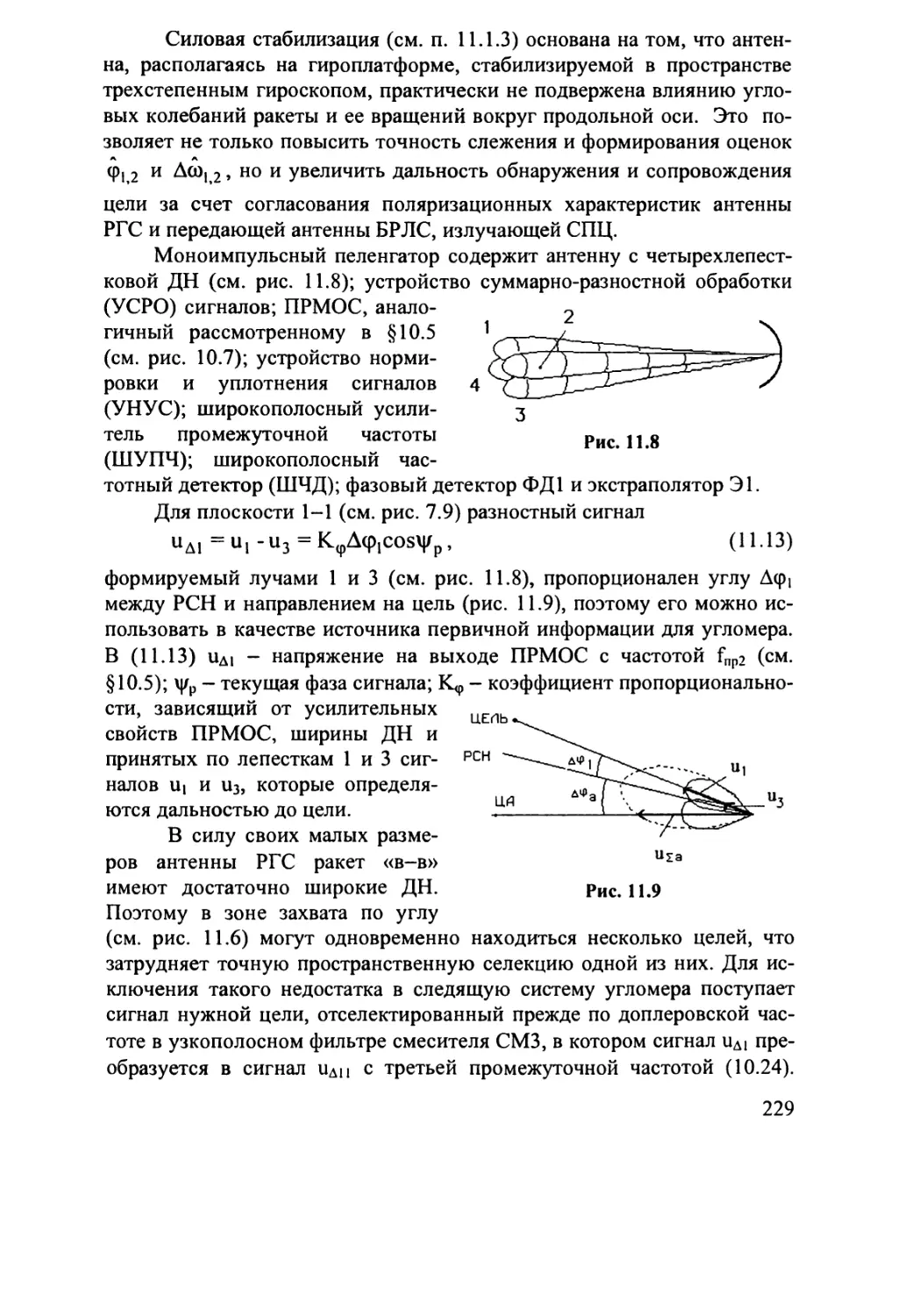
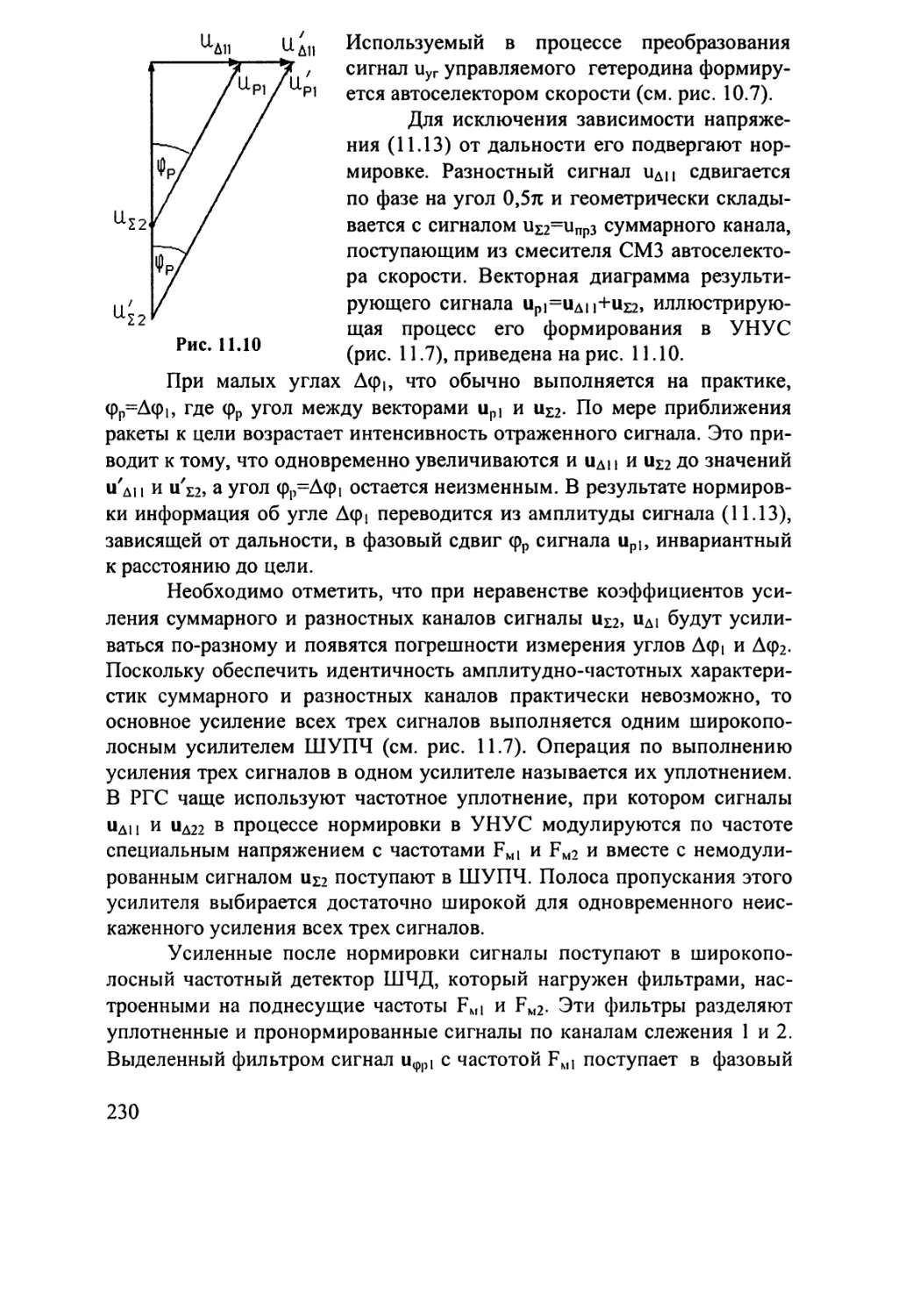
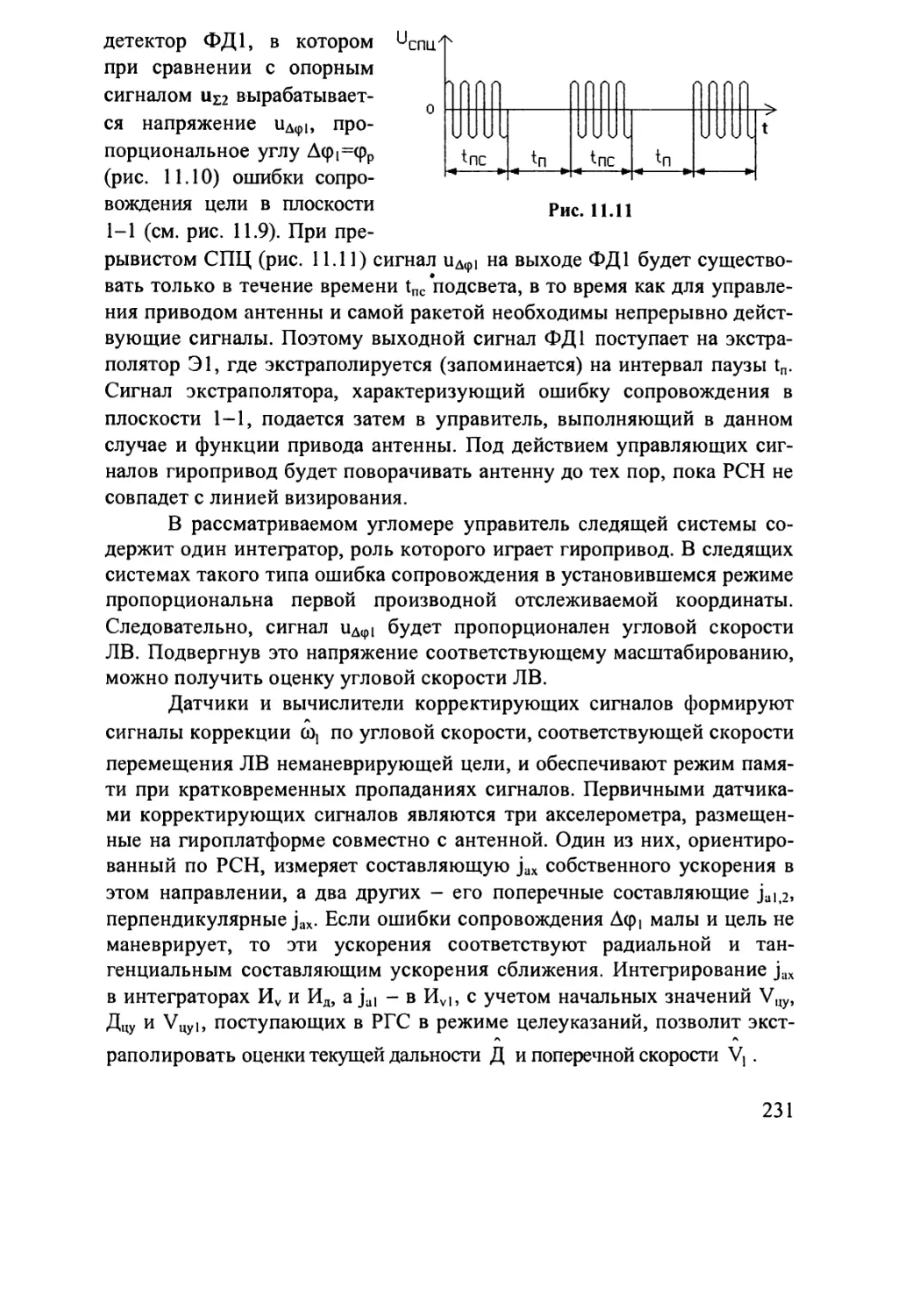
11.3. Угломер РГС при непрерывном сигнале подсвета
цели.......................................... 228
11.4. Угломер пассивной РГС ....................... 233
11.5. Квазиоптимальный угломер для сопровождения
интенсивно маневрирующих целей..................... 238
11.5.1. Выбор и обоснование исходных моделей.'...239
11.5.2. Синтез оптимального регулятора...........242
11.5.3. Выбор коэффициентов штрафов функционала
качества ....................................... 243
11.5.4. Синтез квазиоптимального фильтра ...... 247
11.5.5. Структурная схема угломера ..............251
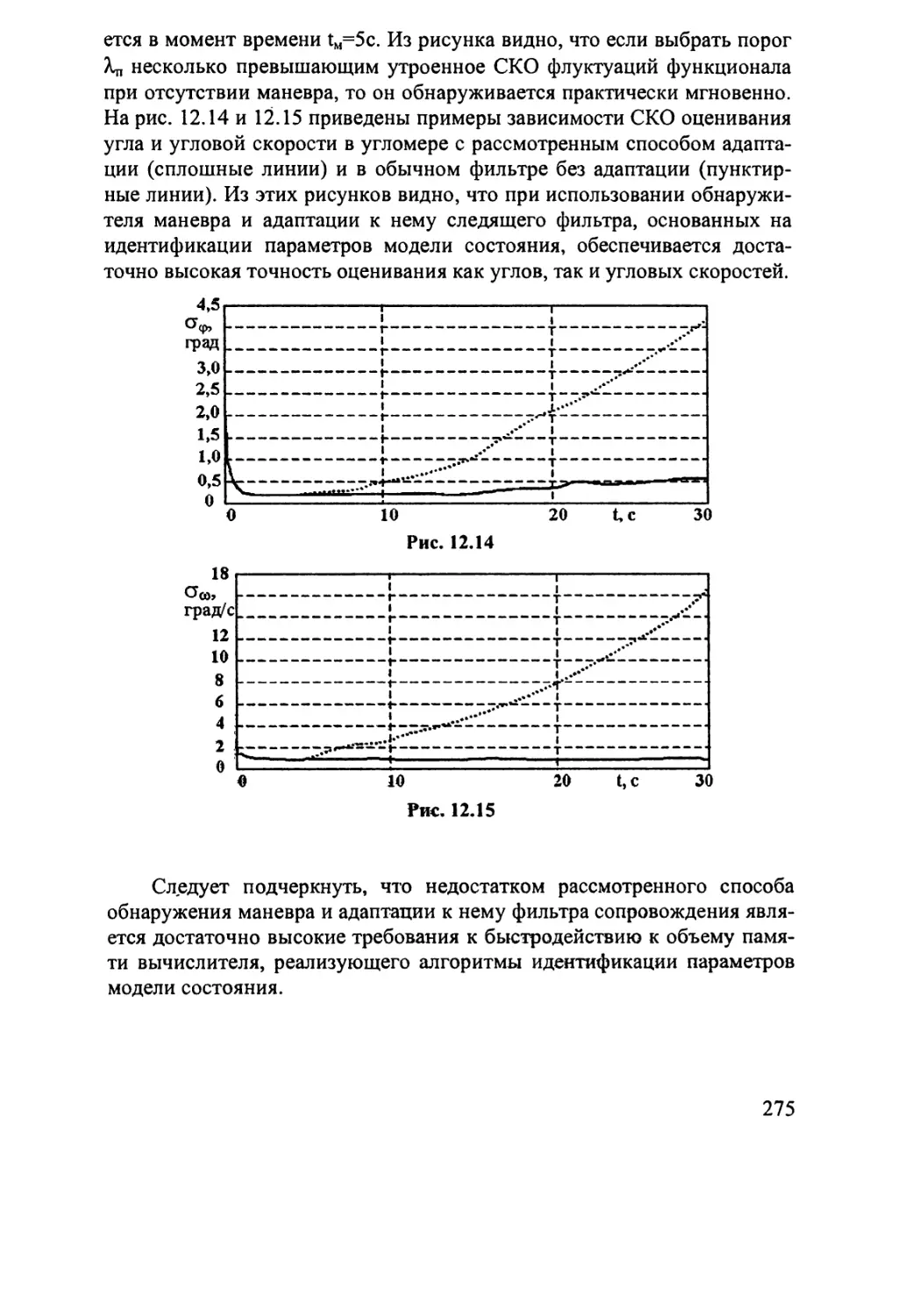
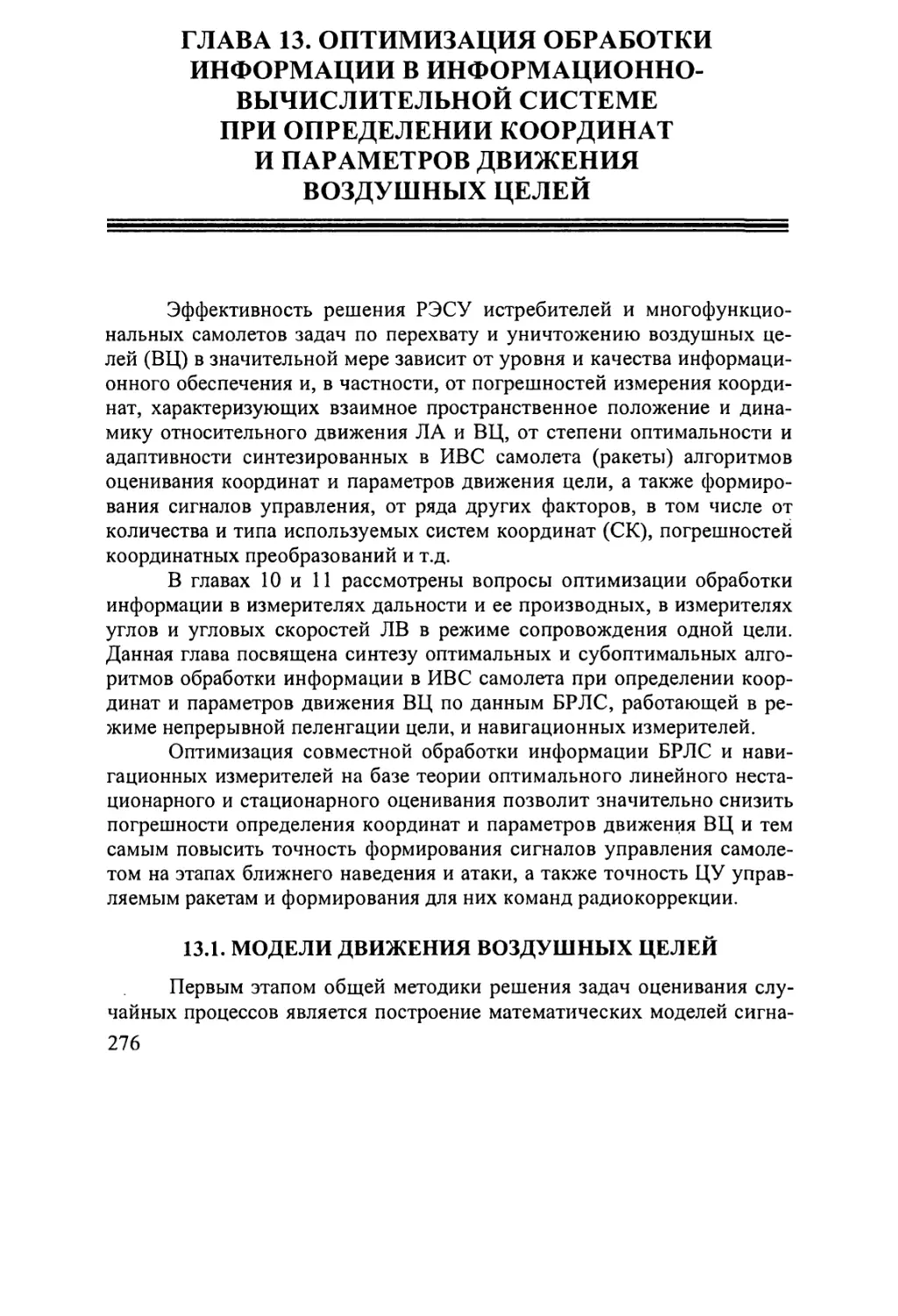
Глава 12. Обнаружение маневров цели и адаптация
к ним фильтров автосопровождения ........................ 257
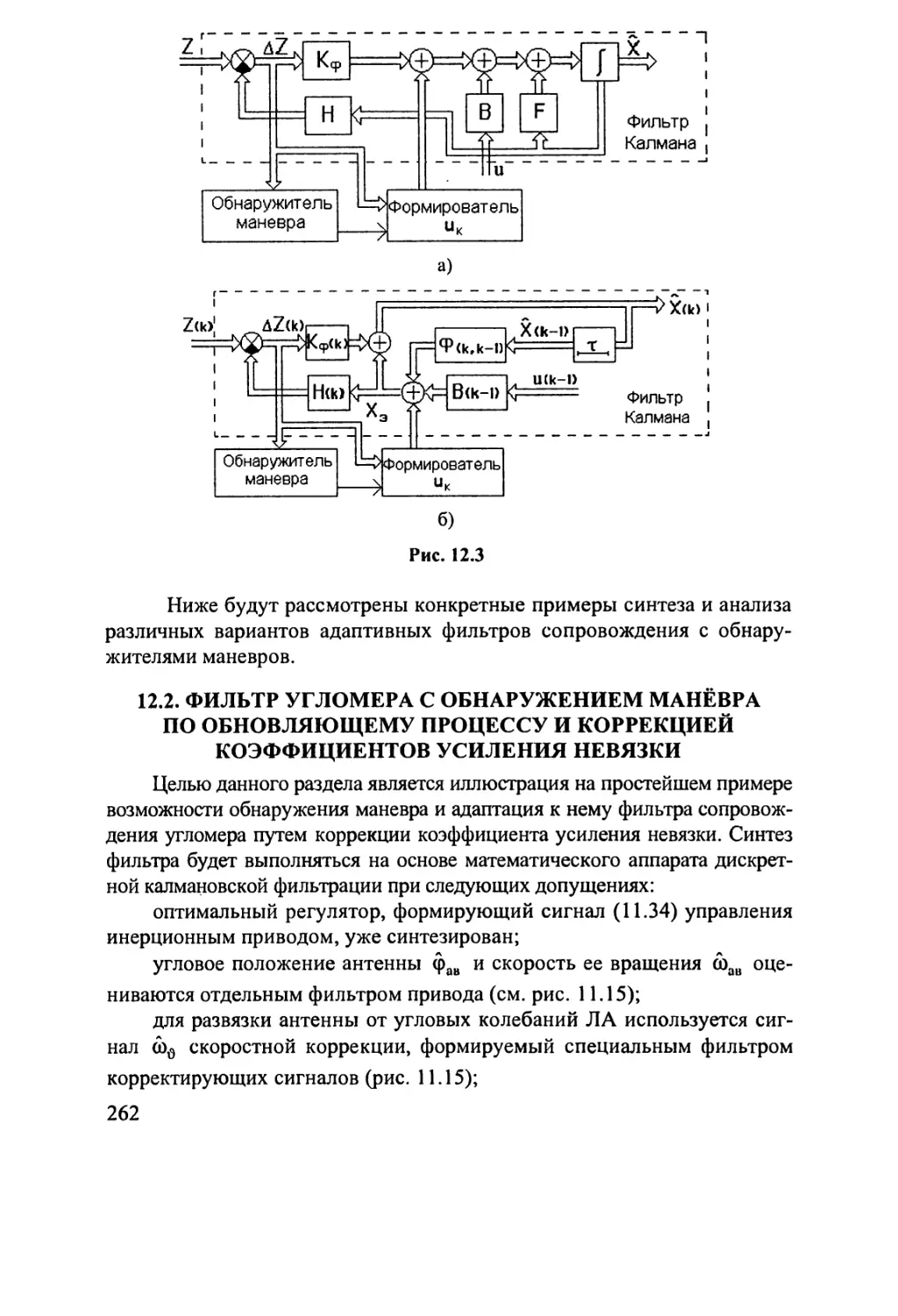
12.1. Алгоритмы обнаружения маневров цели, основанные
на анализе обновляющего процесса................... 259
12.2. Фильтр угломера с обнаружением манёвра
по обновляющему процессу и коррекцией
коэффициентов усиления невязки..................... 262
12.3. Фильтр дальномера с обнаружением маневра
и оптимальной коррекцией прогноза ................. 267
12.4. Фильтр угломера с обнаружением маневра
по результатам идентификации параметров
модели состояния................................... 270
Глава 13. Оптимизация обработки информации
в информационно-вычислительной системе при определении
координат и параметров движения воздушных целей.......... 276
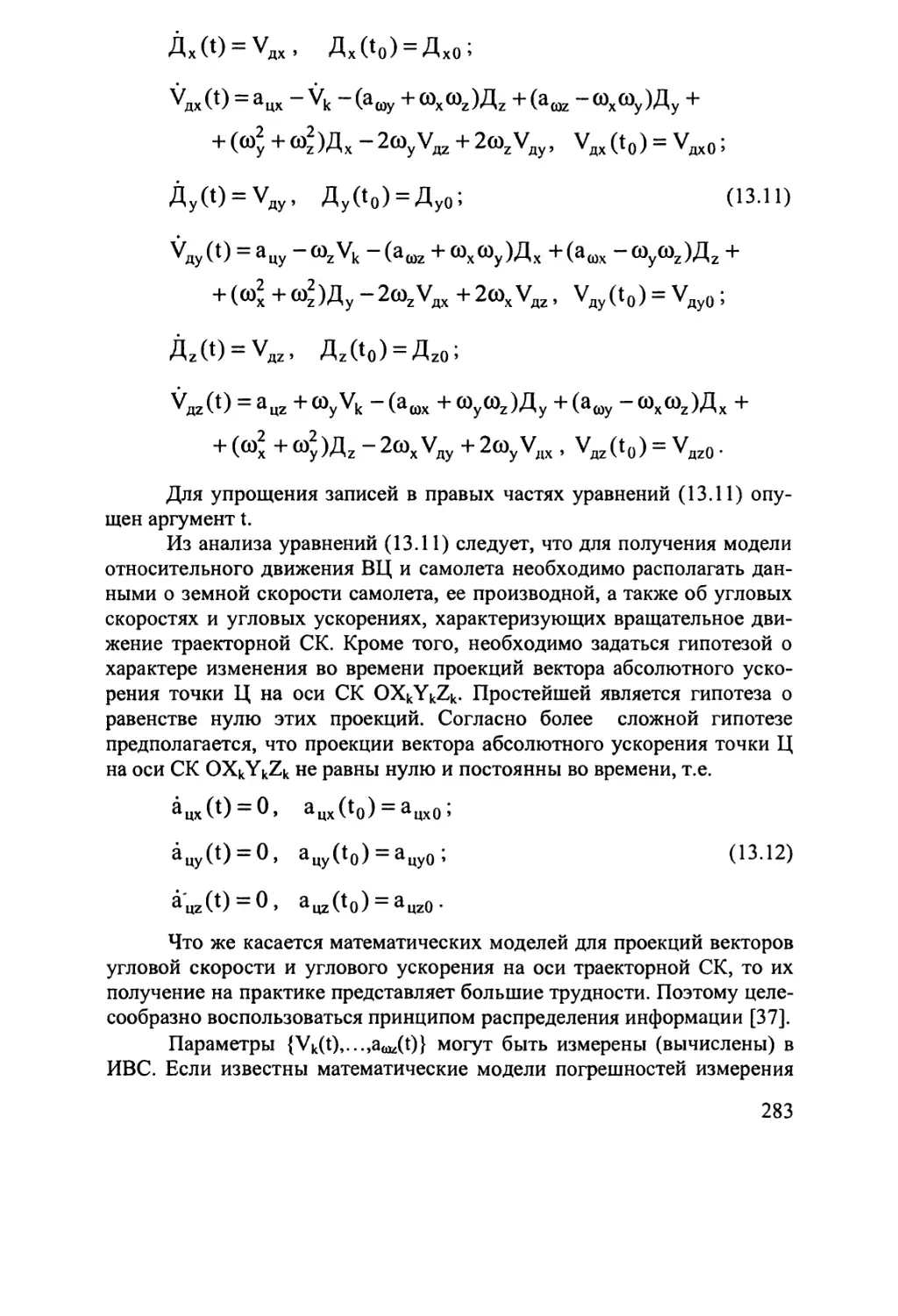
13.1. Модели движения воздушных целей ............. 276
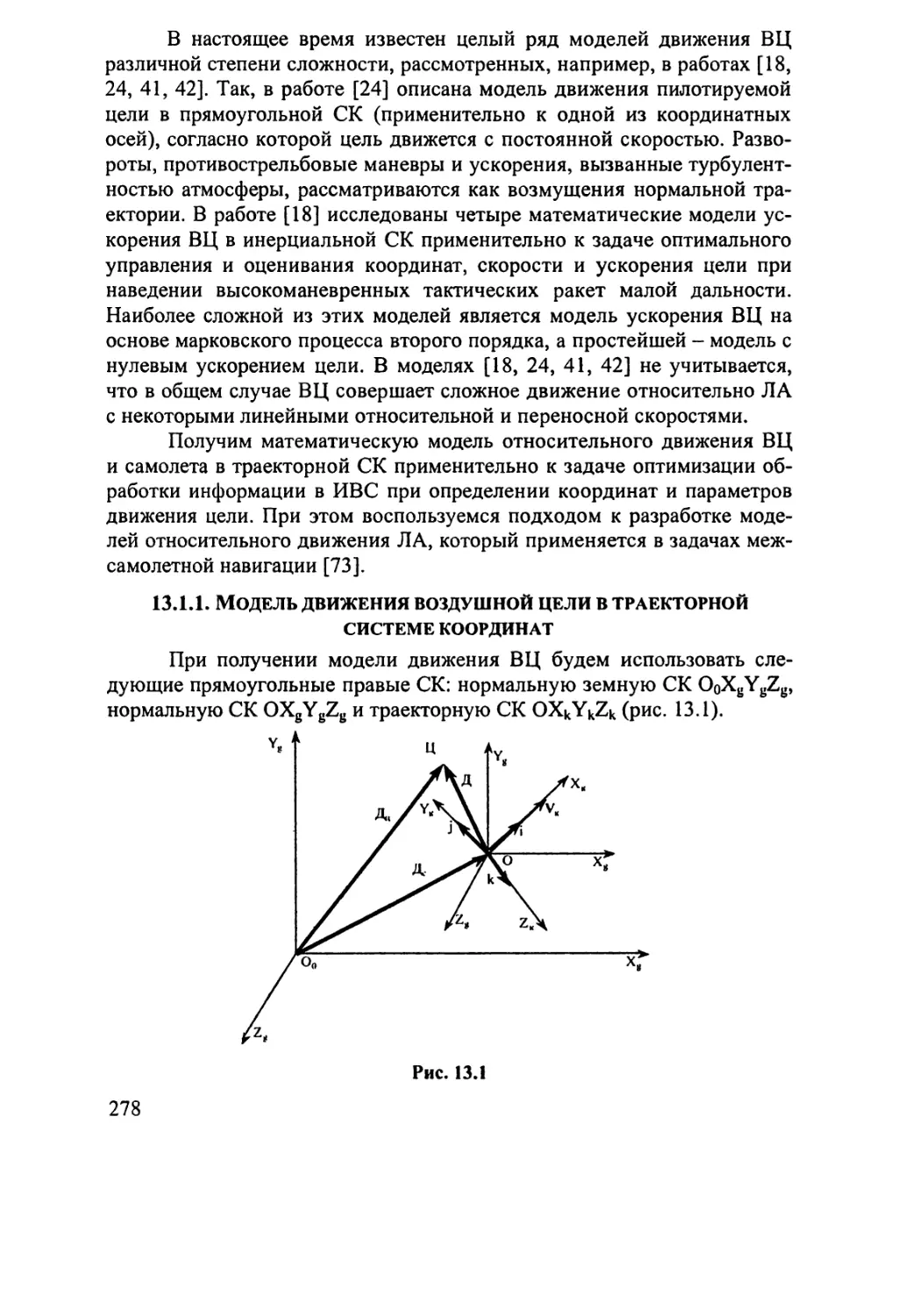
13.1.1. Модель движения воздушной цели
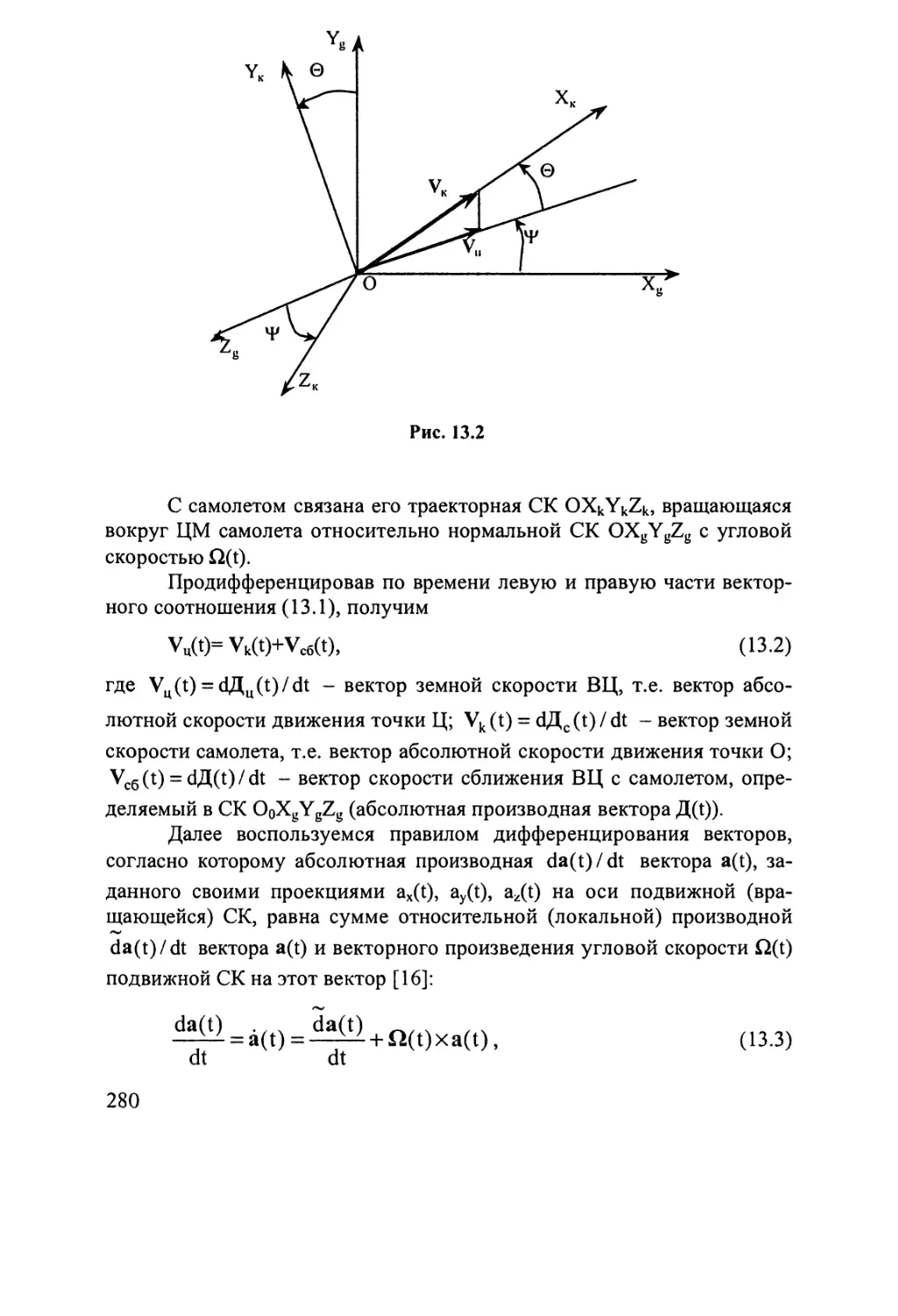
в траекторной системе координат..................278
13.1.2. Модель движения воздушной цели
в антенной системе координат ....................287
13.2. Постановка задачи синтеза субоптимального
алгоритма обработки информации при определении
параметров движения воздушной цели............ 290
13.3. Синтез субоптимального алгоритма обработки
информации при определении параметров движения
воздушной цели..................................... 294
Глава 14. Автоматическое сопровождение целей
в режиме обзора ............................................. 299
14.1. Особенности функционирования РЭСУ
при автоматическом сопровождении целей
в режиме обзора.................................... 300
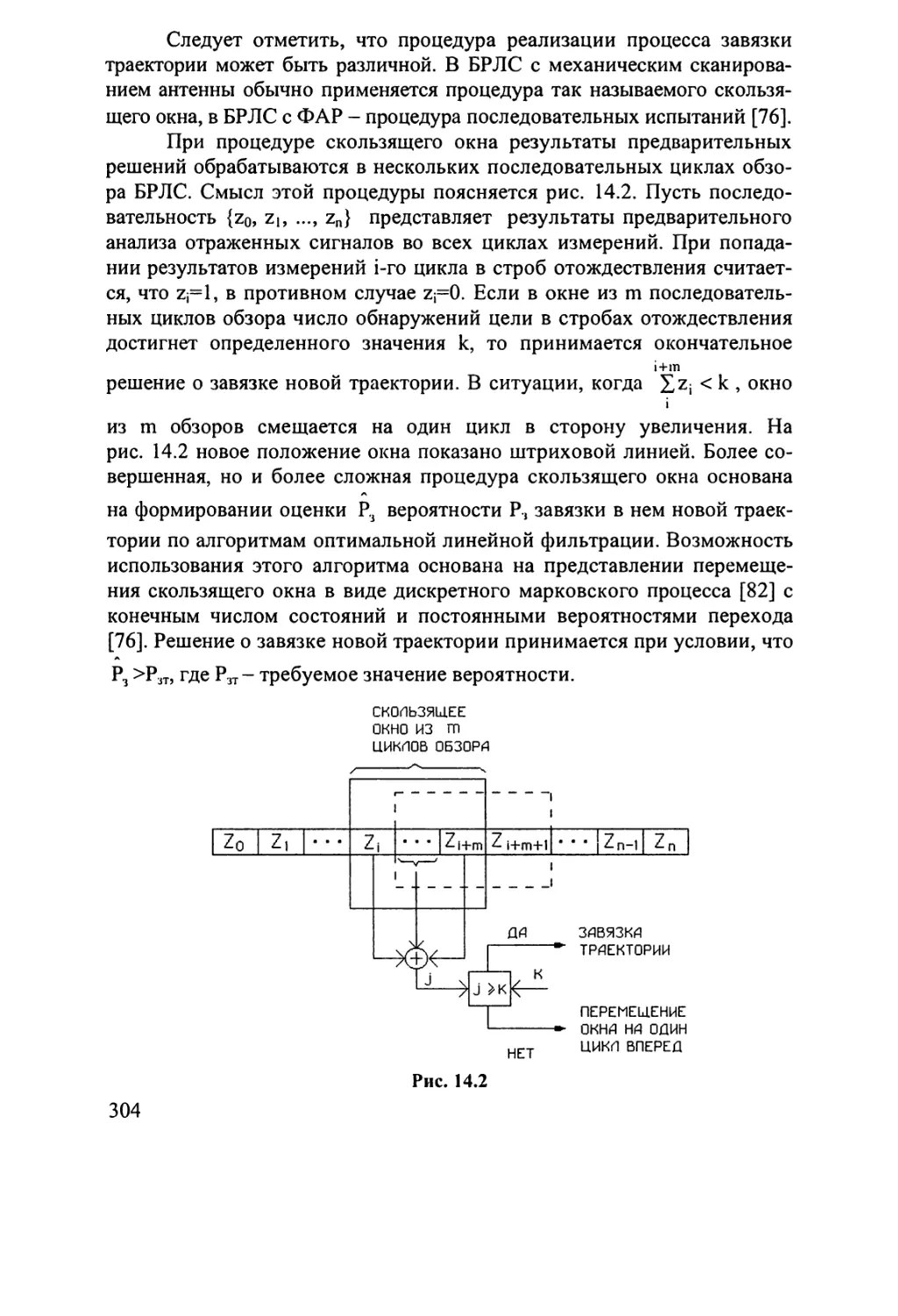
14.2. Завязка траекторий............................... 303
14.3. Идентификация результатов измерений ............. 306
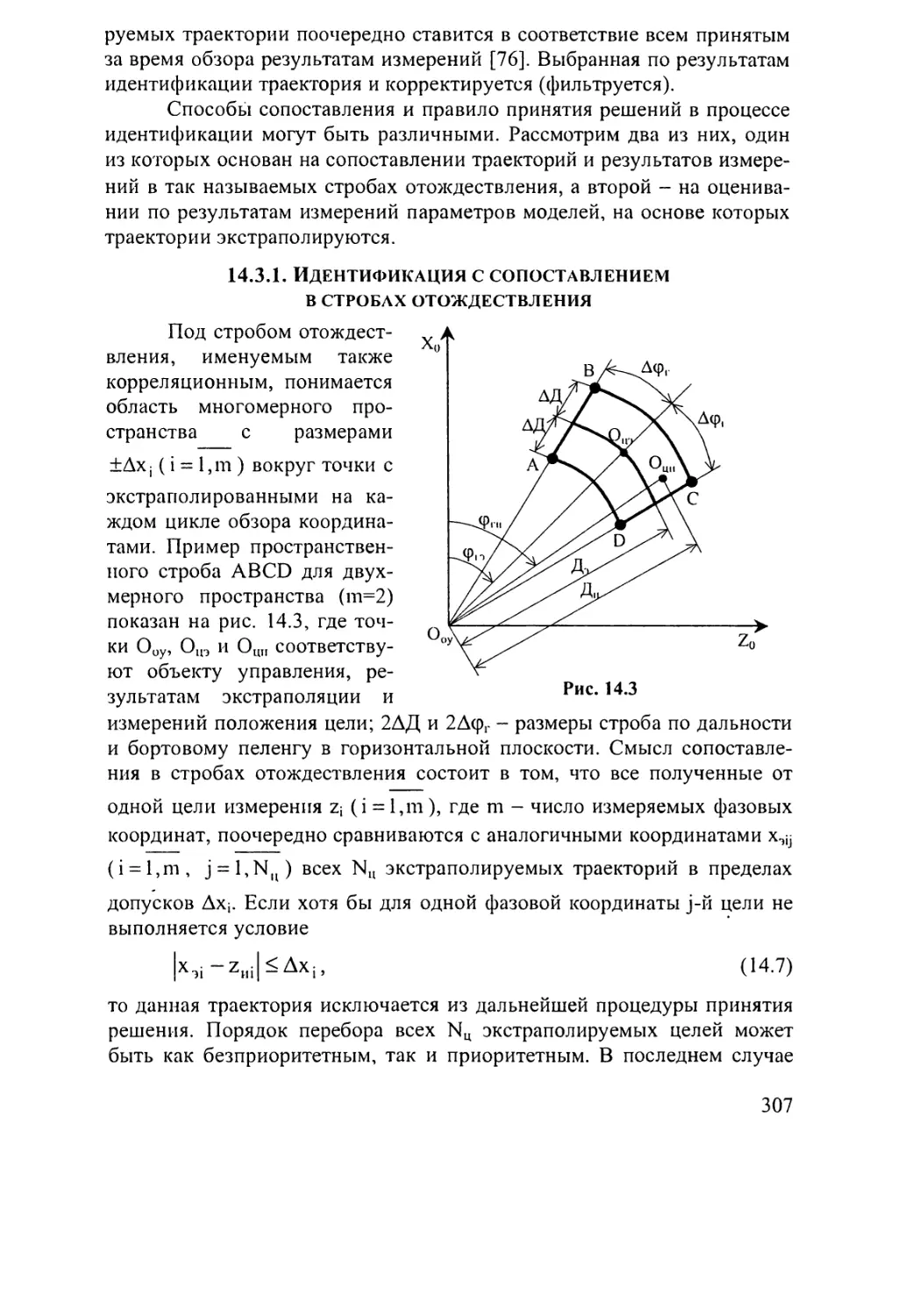
14.3.1. Идентификация с сопоставлением в стробах
отождествления...................................307
14.3.2. Идентификация с оцениванием параметров
исходных моделей ................................310
14.4. Алгоритмы АСЦРО с идентификацией измерений
в стробах отождествления и а-, р-фильтрацией ...... 311
14.5. Алгоритмы АСЦРО с бесстробовой идентификацией
измерений по модели состояния и аналого-дискретной
фильтрацией........................................ 317
14.5.1. Выбор и обоснование исходных моделей......318
14.5.2. Алгоритмы оптимального оценивания
сопровождаемых траекторий........................321
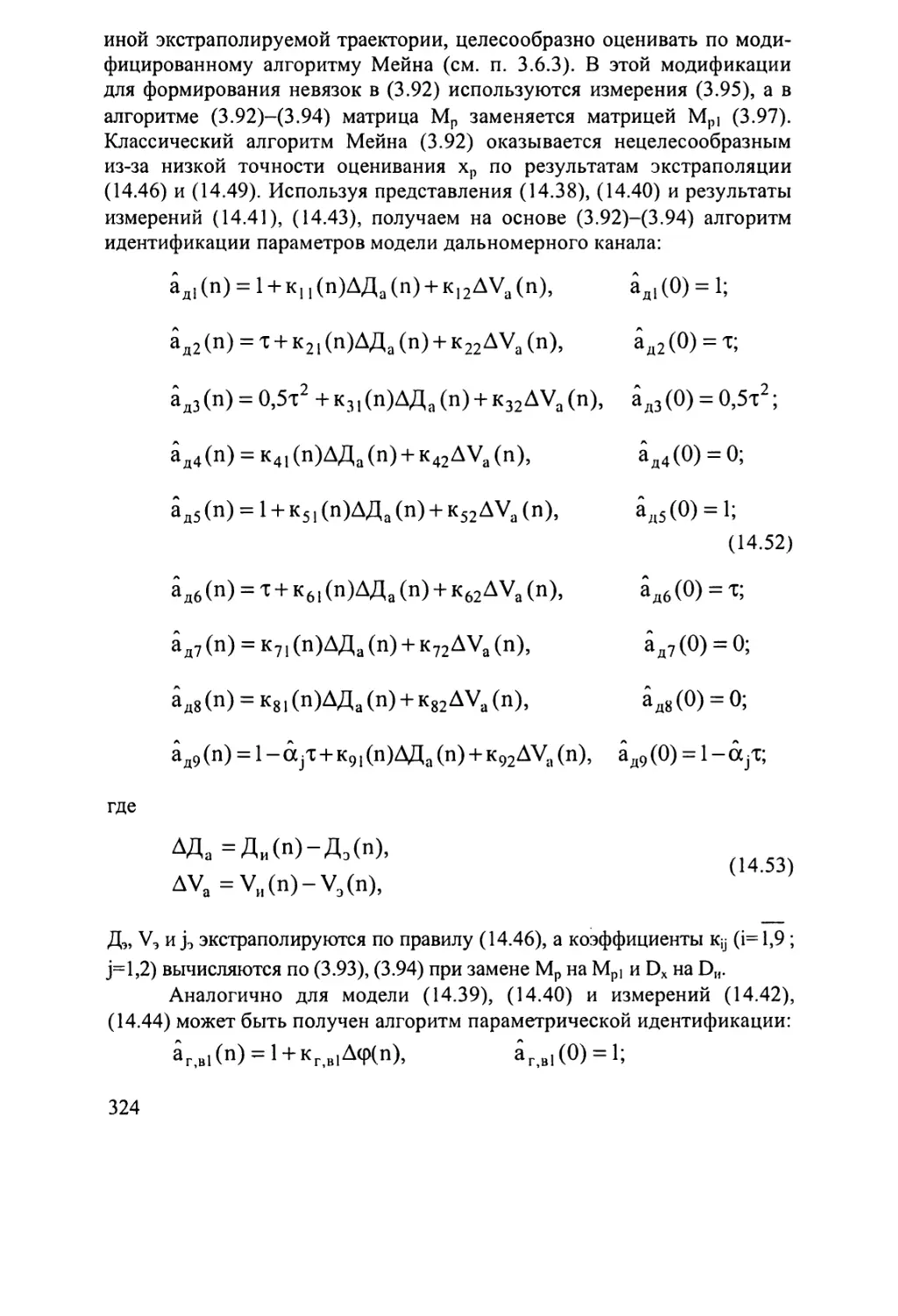
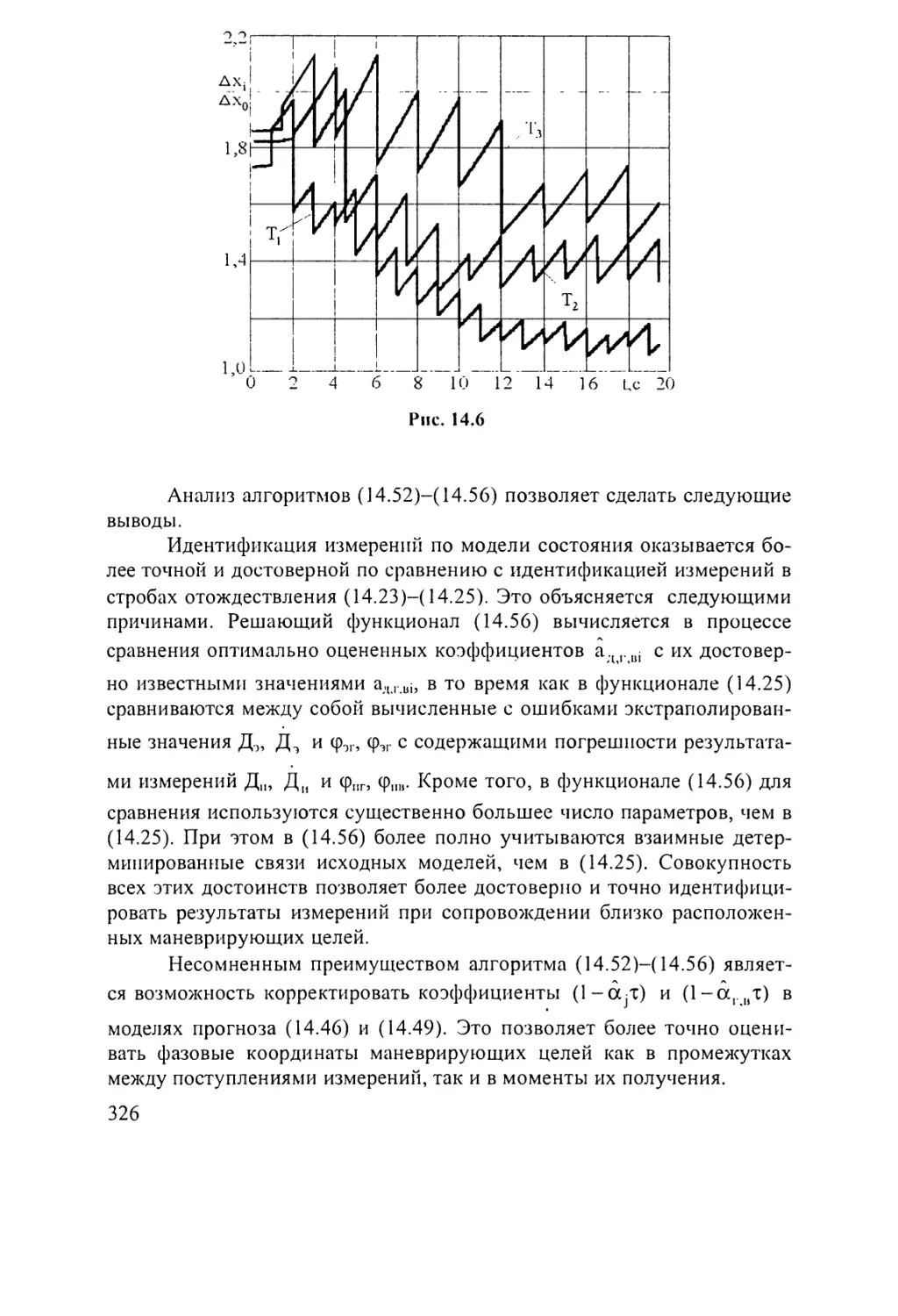
14.5.3. Идентификация измерений по модели состояния .323
14.6. Автоматическое сопровождение целей
при использовании программируемого обзора ......... 327
Глава 15. Динамические структурные схемы радиоэлектронных
систем самонаведения......................................... 331
15.1. Уравнения объектов управления ................... 332
15.2. Уравнения управляющих систем..................... 335
15.3. Уравнения информационно-вычислительных систем . 339
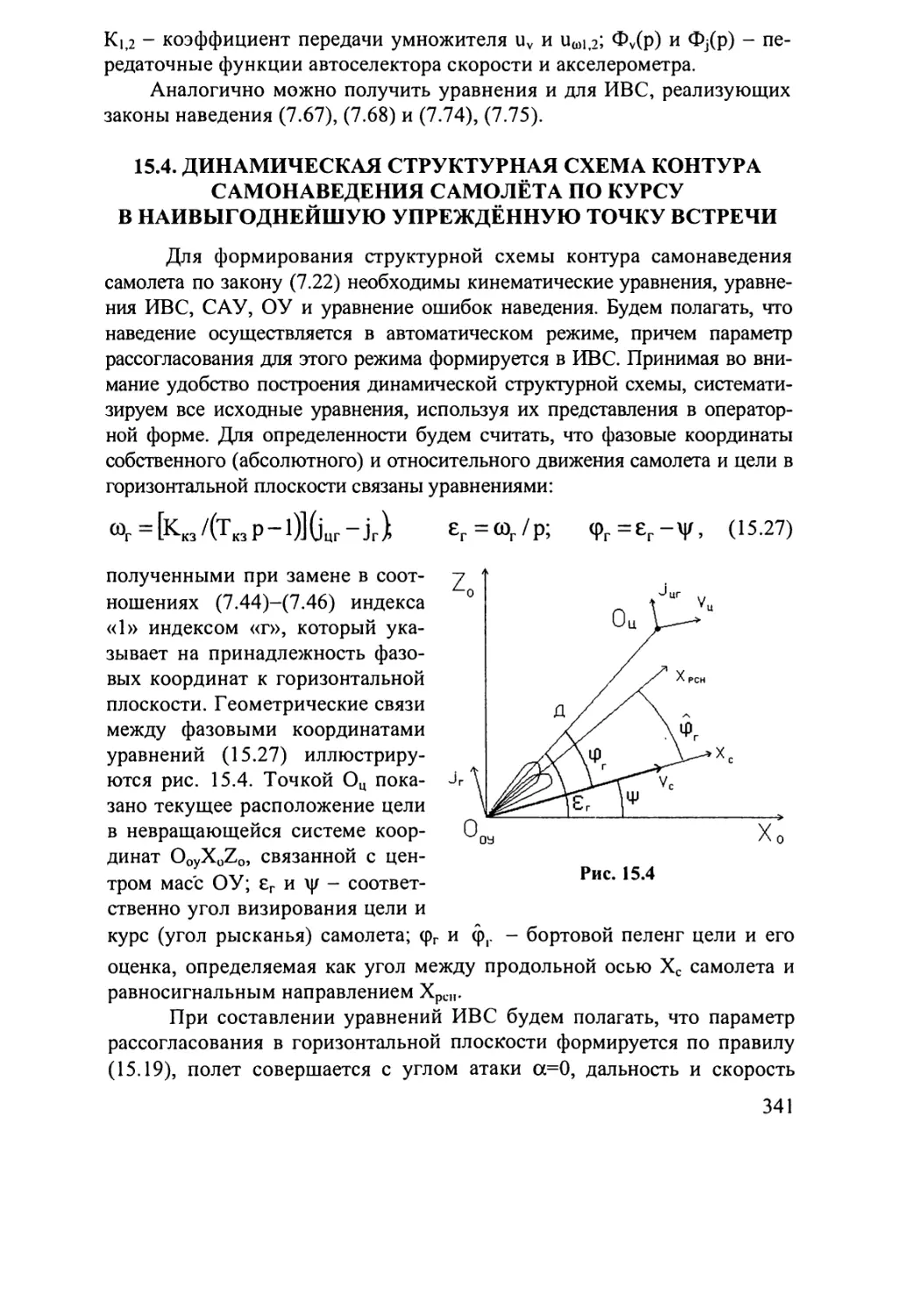
15.4. Динамическая структурная схема контура
самонаведения самолёта по курсу
в наивыгоднейшую упреждённую точку встречи........... 341
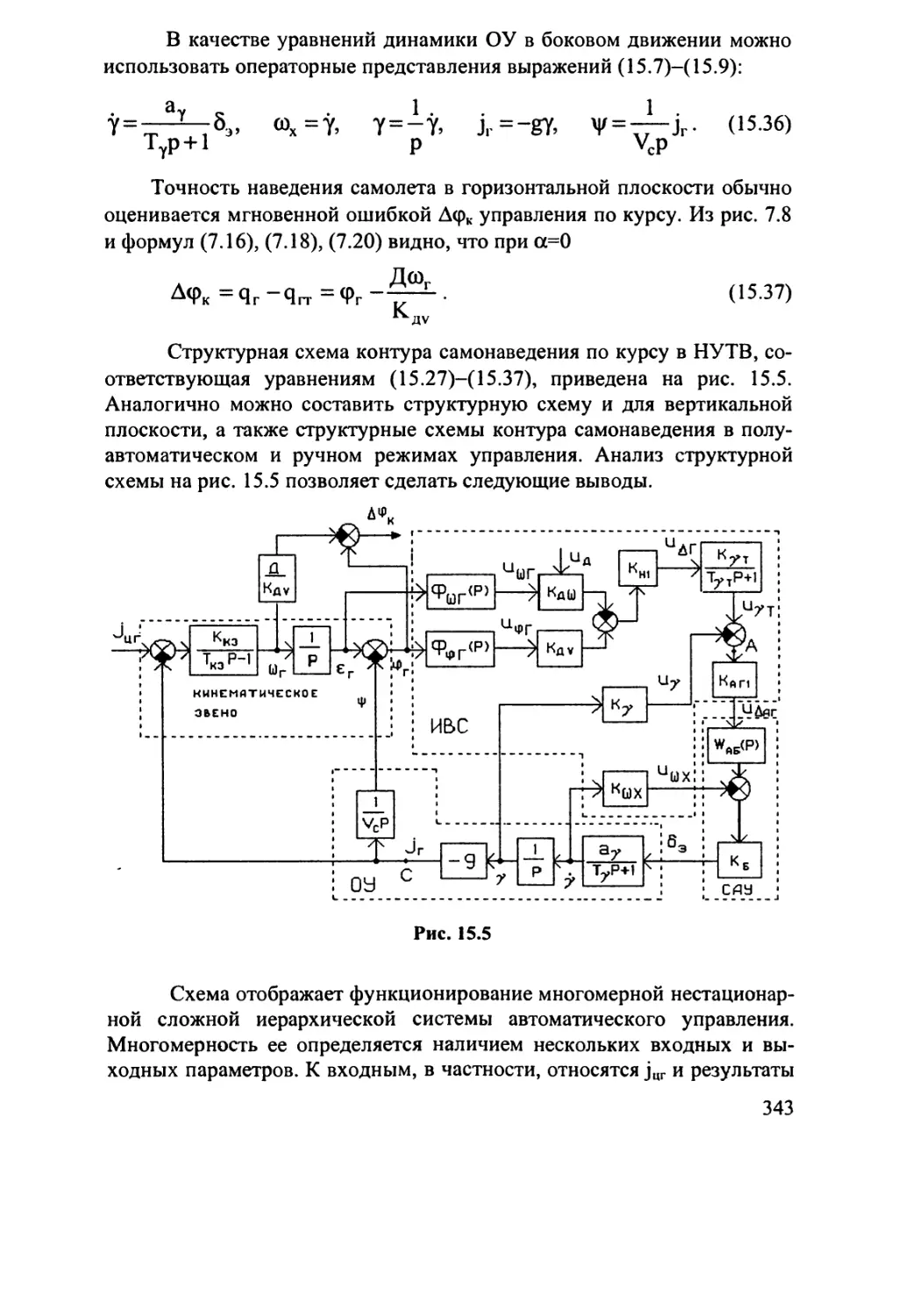
15.5. Динамическая структурная схема контура
самонаведения ракеты при использовании метода
пропорционального наведения ....................... 344
Глава 16. Тактико-технические показатели радиоэлектронных
систем самонаведения......................................... 347
16.1. Дальность действия............................... 347
16.2. Разрешающая способность.......................... 352
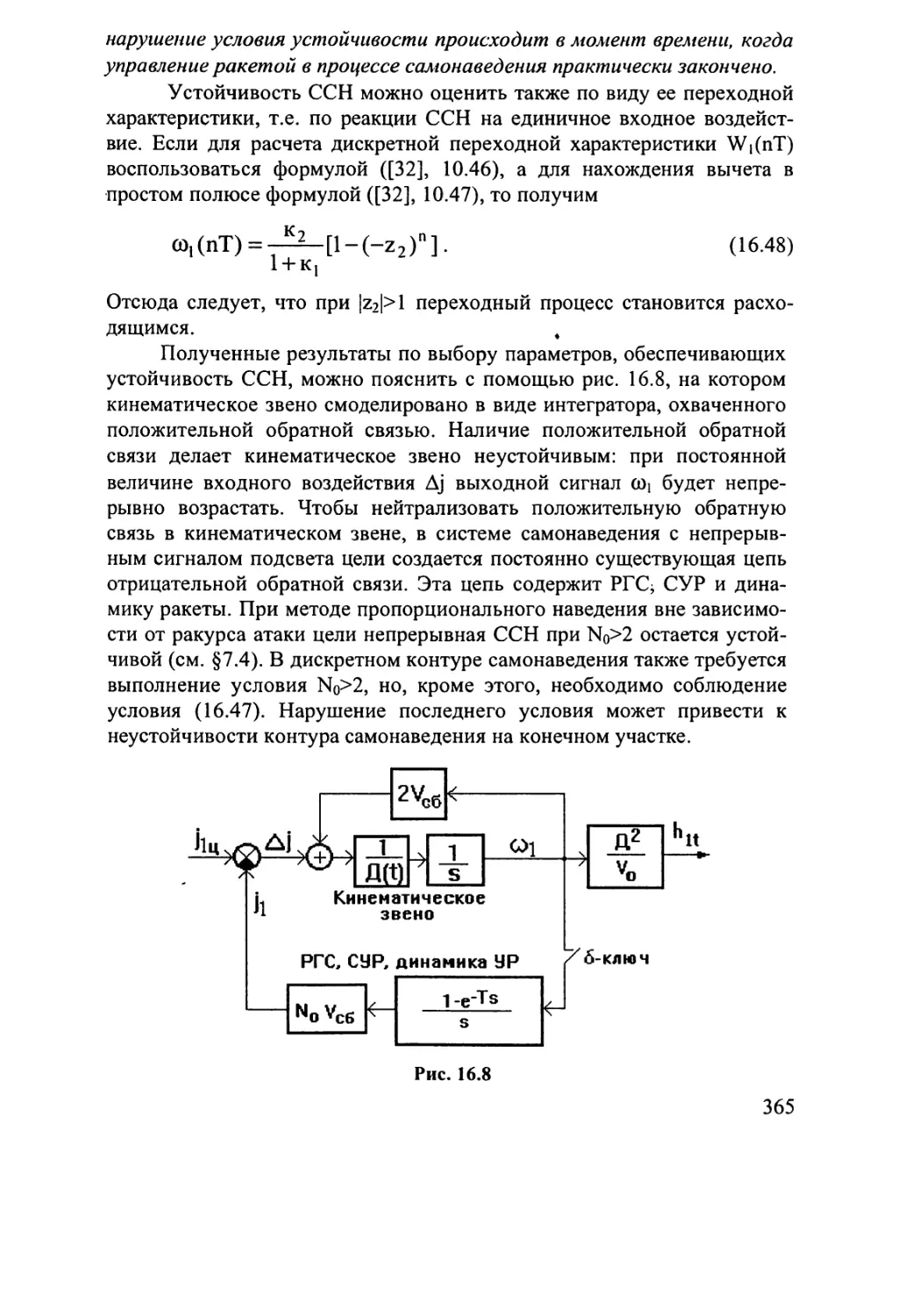
16.3. Устойчивость систем самонаведения................ 354
16.3.1. Устойчивость системы самонаведения самолета
по курсу в наивыгоднейшую упрежденную
точку встречи ......................................355
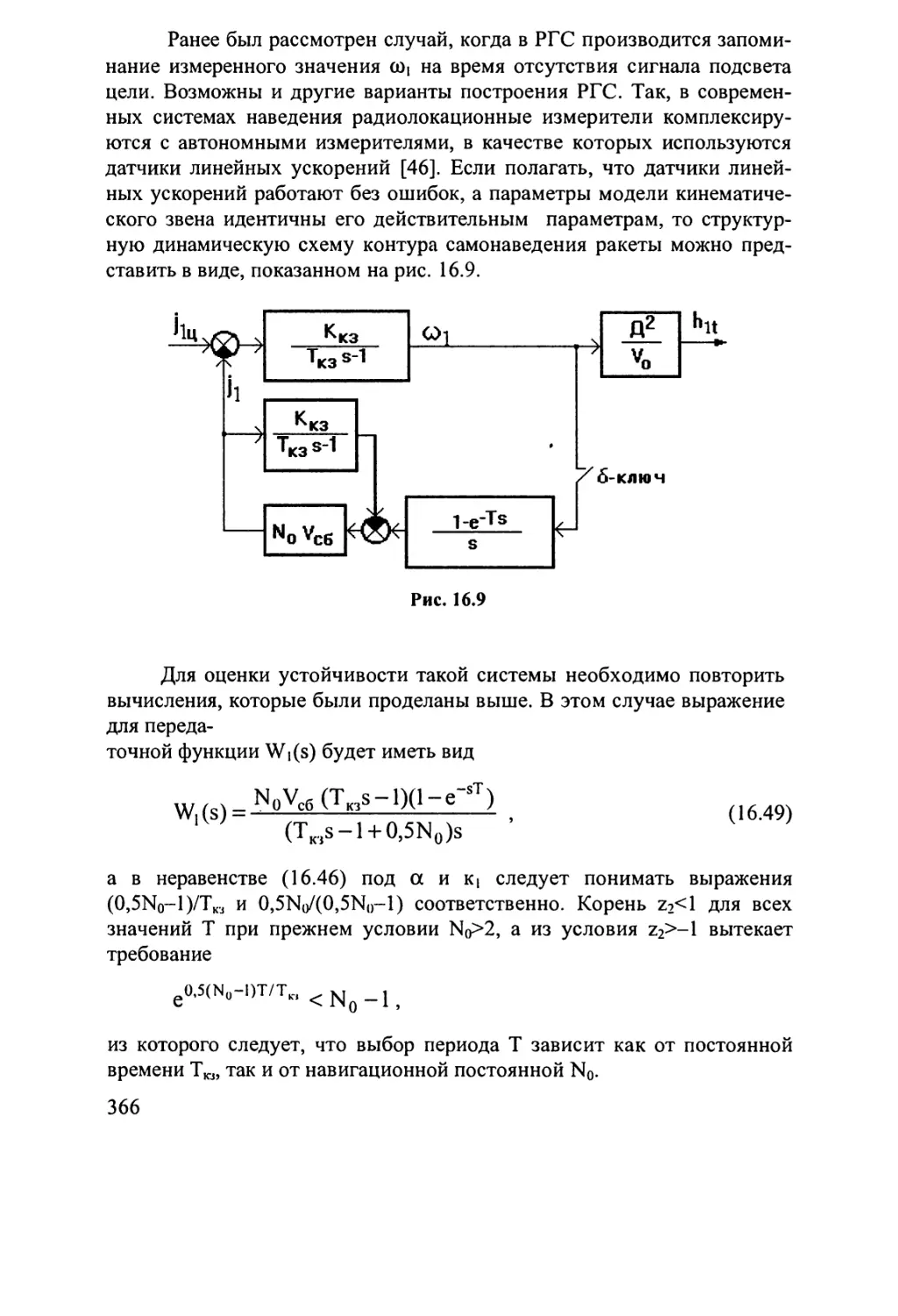
16.3.2. Устойчивость контура самонаведения ракеты
при использовании метода пропорционального
наведения...........................................359
16.3.3. Устойчивость контура самонаведения ракет «в-в»
с полуактивной РГС и прерывистым сигналом
подсвета............................................361
16.4. Точность систем самонаведения.................... 367
16.4.1. Динамические ошибки системы самонаведения
самолета по курсу в наивыгоднейшую упрежденную
точку встречи ......................................367
16.4.2. Флуктуационные ошибки системы самонаведения
самолета по курсу в наивыгоднейшую упрежденную
точку встречи ......................................368
16.4.3. Динамические ошибки системы управления ракетой
при ее пропорциональном самонаведении...............370
16.4.4. Флуктуационные ошибки системы управления ракетой
при ее пропорциональном самонаведении...............371
16.4.5. Динамические ошибки системы самонаведения
ракеты «в-в» с полуактивной РГС
при прерывистом СПЦ.................................374
16.4.6. Флуктуационные ошибки системы самонаведения
ракеты «в-в» с полуактивной РГС
при прерывистом СПЦ.................................377
Перечень сокращений ......................................... 380
Литература .................................................. 385
ПРЕДИСЛОВИЕ
Уважаемый читатель! Вашему вниманию предлагается второй том
трехтомной монографии «Авиационные системы радиоуправления», яв-
ляющийся вторым переработанным и дополненным изданием книги с
аналогичным названием, которая была выпущена в свет в 1998 г.
За годы, прошедшие после выпуска первого издания были обоб-
щены и подготовлены к изданию новые материалы, часть из которых
была написана по просьбе читателей.
В т. 2 книги поставлена дать читателям определенный объем зна-
ний по теории построения, тактико-техническим показателям и основам
применения авиационных радиоэлектронных систем самонаведения
(РЭССН). Его содержание способствует уяснению роли и места радио-
электронных измерителей в системах самонаведения самолетов и ракет
различного назначения.
Спецификой книги является то, что изложение в ней ведется на
двух уровнях. Первый - отражает современное состояние РЭССН, а
второй - перспективные алгоритмы, синтезированные на основе мате-
матического аппарата стохастической теории оптимального управления
(СТОУ), в том числе с использованием процедур фильтрации и пара-
метрической идентификации. При обсуждении оптимальных, в том или
ином смысле, алгоритмов функционирования РЭССН большое внима-
ние уделено конкретным методам синтеза и анализа на основе пред-
ставления процессов и систем в многомерном пространстве состояний.
При этом определенное внимание в книге уделено приемам упрощения
трудоемких процедур синтеза и анализа оптимальных систем.
Изложение материала осуществляется на основе системного под-
хода к вопросам синтеза и анализа радиоэлектронных измерителей с
учетом их взаимодействия с датчиками другой физической природы,
вооружением и летательными аппаратами, как объектами управления.
Во втором томе книги рассматриваются современные и перспек-
тивные методы самонаведения самолетов и ракет, алгоритмы функцио-
нирования радиолокационных измерителей, осуществляющих инфор-
мационное обеспечение этих методов, и алгоритмы формирования сиг-
налов управления наводимыми объектами. При этом оптимальные и
квазиоптимальные алгоритмы функционирования РЭССН и их состав-
ных частей синтезируются и анализируются на основе математического
аппарата СТОУ, рассмотренного в первом томе. Основное внимание в
книге уделено синтезу перспективных алгоритмов траекторного управ-
ления самолетами и ракетами, а также многоконтурных и адаптивных
радиолокационных измерителей, позволяющих обеспечить высокие по-
казатели точности, быстродействия и устойчивости сопровождения ин-
тенсивно маневрирующих объектов в режимах непрерывной пеленга-
ции и одновременного сопровождения нескольких целей.
По сравнению с первой редакцией в монографию добавлен мате-
риал по синтезу оптимальных методов наведения самолетов и ракет на
наземные объекты в системах с активным и полуактивным синтезиро-
ванием апертуры антенны и их чувствительности к точности исполь-
зуемых измерителей. Кроме того, добавлен материал по принципам по-
строения и особенностям функционирования информационно-вычис-
лительных систем авиационных противокорабельных ракет и анализу
контуров управления ракет «воздух-воздух» с полуактивными головка-
ми самонаведения при использовании прерывистых сигналов подсвета
цели.
В состав второго тома книги включены две новых главы. В одной
из них рассматриваются вопросы оптимизации процедур обработки ин-
формации при определении фазовых координат абсолютного движения
воздушных целей, в другой - особенности построения и функциониро-
вания бортовых вычислительных систем. Кроме того, в отдельную гла-
ву выделены материалы по обнаружению маневров целей и адаптации к
ним следящих радиолокационных измерителей.
Книга написана на основе материалов открытой отечественной и
зарубежной литературы и исследований авторов. Используемый мате-
матический аппарат и объем знаний по радиоэлектронике, необходимый
для понимания содержания книги, не выходят за пределы программ ра-
диотехнических ВУЗов.
Монография рассчитана на научных работников и инженеров,
связанных с проектированием и эксплуатацией систем радиолокации и
радиоуправления. Она будет полезна преподавателям, аспирантам и
студентам авиационных и радиотехнических ВУЗов. Перечень приня-
тых сокращений, а также список литературы приводятся в конце книги.
Ссылки на формулы и рисунки, начинающиеся с цифр 1-7 соответству-
ют главам первого тома монографии.
Труд по написанию книги распределился среди авторов следую-
щим образом: предисловие, §§ 8.1, 8.4, 11.1-11.3, 14.1-14.4 и 16.1 напи-
саны А.И. Канащенковым; §§ 7.4, 7.5, 8.8, 8.9, 10.2-10.4, п. 10.6.1,
§ 11.5, глава 12, §§ 14.5, 14.6, 15.1-15.3, 15.5, 16.2, п.п. 16.4.3 и 16.4.4
-В.И. Меркуловым; §§ 7.3, 8.7, п.п. 10.6.2, 16.3.2 и 16.4.4 - В.В. Дрога-
линым; глава 13 - А.С. Богачевым; §§ 7.1, 7.2, 8.5, 8.6 и 10.1 -
В.Н. Лепиным; §§ 9.1, 9.2, 9.4 и 9.5 - А.А. Соловьевым; § 9.7 -
О.Ф. Самариным; §§ 9.3, 9.6 и 9.8 - совместно А.А. Соловьевым и
О.Ф. Самариным; §§ 10.5, 11.4, 15.4, п.п. 16.3.1, 16.3.3, 16.4.1, 16.4.5 и
16.4.6 - В.С. Черновым; § 8.3 - совместно В.А. Сарычевым и Л.С. Тур-
нецким; § 8.10 - совместно И.В. Забелиным и А.И. Шуклиным.
ГЛАВА 7. МЕТОДЫ НАВЕДЕНИЯ САМОЛЁТОВ
И РАКЕТ И АЛГОРИТМЫ ТРАЕКТОРНОГО
УПРАВЛЕНИЯ ИМИ
7.1. ОБЩИЕ СВЕДЕНИЯ О РАДИОЭЛЕКТРОННЫХ СИСТЕМАХ
САМОНАВЕДЕНИЯ
Как самостоятельный вид радиоэлектронные системы самонаве-
дения (ССН) применяются для управления пилотируемыми летатель-
ными аппаратами (ЛА) на этапе ближнего наведения, а также для наве-
дения ракет «воздух-воздух» («в-в») и «воздух-поверхность» («в-п»)
малой и средней дальности действия. Кроме того, ССН используются
как составные части (подсистемы) комбинированных систем наведения,
особенно на конечных участках траектории.
Структурные схемы радиоэлектронных ССН самолетов и ракет со-
ответствуют схемам, приведенным на рис. 1.1 и 1.2. Отличие от других ви-
дов систем - лишь в составе ИВС. В частности, самолетная система может
включать теплопеленгатор (ТП) и бортовую радиолокационную систему
(БРЛС), а информационно-вычислительная система (ИВС) ракеты - голов-
ку самонаведения. При этом выделяют системы с радиолокационными го-
ловками самонаведения (РГС), тепловыми (ТГС), лазерными (ЛГС) и теле-
визионными головками самонаведения (ТВГС).
Напомним (см. §1.3), что системы самонаведения самолетов мо-
гут работать в трех режимах: автоматическом, полуавтоматическом (ди-
ректорном) и ручном, в то время как ракетные ССН - только в автома-
тическом. Состав измеряемых (оцениваемых) фазовых координат, а со-
ответственно состав измерителей ИВС самолетов и ракет определяются
методами самонаведения и алгоритмами траекторного управления.
7.2. ОБЩАЯ ХАРАКТЕРИСТИКА МЕТОДОВ НАВЕДЕНИЯ
САМОЛЁТОВ И РАКЕТ
Под методом наведения понимается закон формирования тре-
буемой фазовой траектории, наведение по которой позволит поразить
цель. Фазовые координаты требуемого движения находят путем преоб-
разования фазовых координат относительного и абсолютного движения
цели и объекта управления. Правило формирования управляющих сигна-
12
лов, именуемых также параметрами рассогласования, по которому
определяется несоответствие реальных фазовых координат xyi объек-
та управления (ОУ) их требуемым значениям xTi (\ = 1,г/ называется
алгоритмом траекторного управления. Для самолетов параметры рас-
согласования обычно формируются по правилу
Ai=xyi-xTi, (7.1)
а для ракет
Ai=xTi-xyi, ( (7.2)
где i = 1,г — число управляющих сигналов. Чаще всего Aj (i=l,2) форми-
руются для двух взаимно ортогональных плоскостей управления, в ко-
торых размещаются рулевые органы.
В общем случае, метод наведения должен обеспечивать: мини-
мум времени наведения; максимальную дальность действия радиоэлек-
тронной системы управления (РЭСУ); минимальные мгновенные пере-
грузки ОУ; минимальный расход энергии управляющих сигналов; прак-
тическую реализуемость; инвариантность РЭСУ к условиям примене-
ния; сопряжение с методами, используемыми РЭСУ на предыдущих
этапах выполнения боевой задачи; сопряжение с методами наведения
(прицеливания) используемого оружия.
Для выполнения первых четырех требований траектория наведе-
ния должна быть как можно более прямолинейной. Практическая реали-
зуемость подразумевает возможность формирования оценок всех необ-
ходимых фазовых координат относительного и абсолютного движения
цели и ОУ при существующих датчиках информации (измерителях), ре-
альных объемах памяти, быстродействии и разрядности бортовых вы-
числителей и реальных расходах энергии на управление ЛА. Инвари-
антность предусматривает наведение во всем требуемом диапазоне
дальностей, скоростей и высот независимо от наличия и скорости ветра
и направления (ракурса) перехвата.
Используемые методы самонаведения самолетов должны обеспе-
чивать работоспособность РЭСУ при переходе от этапа дальнего наве-
дения к ближнему и учитывать вид оружия, особенности его примене-
ния и наведения. Например, если антенна РГС или приемник оптоэлек-
тронных систем ТГС неподвижны, то истребитель нужно наводить так,
чтобы в любой момент времени продольная ось ракеты, совпадающая с
направлением продольной оси самолета, была направлена на цель. Ме-
тоды, реализующие такое наведение, называются прямыми или метода-
ми погони. Если чувствительные элементы ракеты (антенна РГС) спо-
собны поворачиваться, то можно реализовать наведение в упрежденную
точку встречи. Обычно пространственный угол упреждения представ-
ляют в виде двух компонент qrr и qBT в горизонтальной и вертикальной
плоскостях.
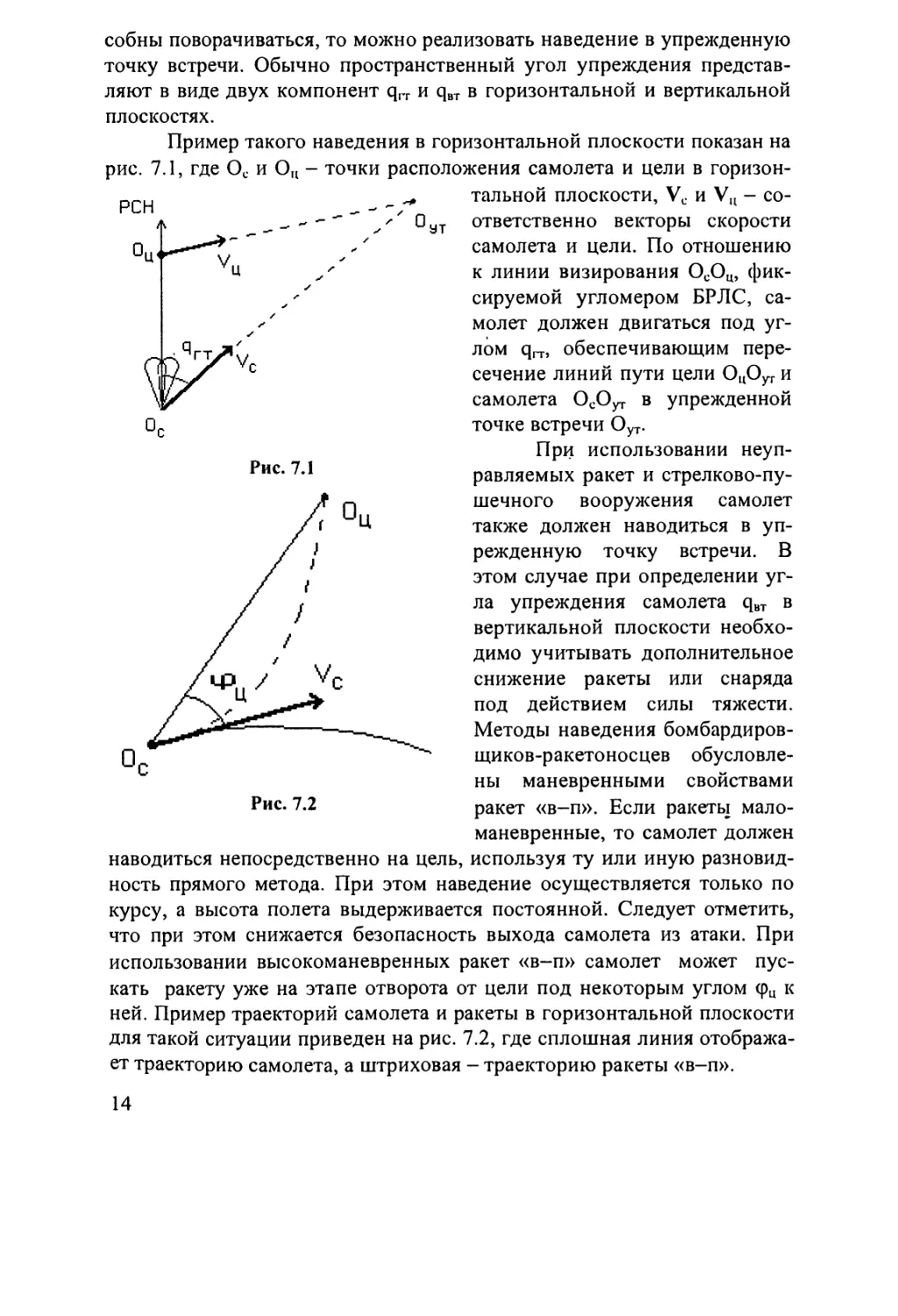
Пример такого наведения в горизонтальной плоскости показан на
рис. 7.1, где Ос и Оц - точки расположения самолета и цели в горизон-
тальной плоскости, Vc и V,i - со-
ответственно векторы скорости
самолета и цели. По отношению
к линии визирования ОСОЦ, фик-
сируемой угломером БРЛС, са-
молет должен двигаться под уг-
лом q™ обеспечивающим пере-
сечение линий пути цели ОцОуг и
самолета ОсОут. в упрежденной
точке встречи Оут.
При использовании неуп-
равляемых ракет и стрелково-пу-
шечного вооружения самолет
также должен наводиться в уп-
режденную точку встречи. В
этом случае при определении уг-
ла упреждения самолета qBT в
вертикальной плоскости необхо-
димо учитывать дополнительное
снижение ракеты или снаряда
под действием силы тяжести.
Методы наведения бомбардиров-
щиков-ракетоносцев обусловле-
ны маневренными свойствами
Рис- 7-2 ракет «в-п». Если ракеты мало-
маневренные, то самолет должен
наводиться непосредственно на цель, используя ту или иную разновид-
ность прямого метода. При этом наведение осуществляется только по
курсу, а высота полета выдерживается постоянной. Следует отметить,
что при этом снижается безопасность выхода самолета из атаки. При
использовании высокоманевренных ракет «в-п» самолет может пус-
кать ракету уже на этапе отворота от цели под некоторым углом <рц к
ней. Пример траекторий самолета и ракеты в горизонтальной плоскости
для такой ситуации приведен на рис. 7.2, где сплошная линия отобража-
ет траекторию самолета, а штриховая - траекторию ракеты «в-п».
Необходимо отметить, что при пуске ракет с полуактивными РГС
маневр самолета-носителя ограничен диапазоном углов, в пределах ко-
торого еще возможен подсвет цели сигналами БРЛС самолета. Ракеты с
активными и пассивными РГС не ограничивают маневры самолета по-
сле пуска ракет.
При наведении ракет «в-в» на движущиеся воздушные цели в за-
висимости от условий применения могут использоваться как прямые
методы, так и методы наведения в упрежденную точку встречи, а для
ракет «в-п», как правило, - различные модификации прямого метода.
7.3. МЕТОДЫ САМОНАВЕДЕНИЯ САМОЛЁТОВ
И АЛГОРИТМЫ ТРАЕКТОРНОГО УПРАВЛЕНИЯ ИМИ
7.3.1. Метод прямого наведения при ручном управлении
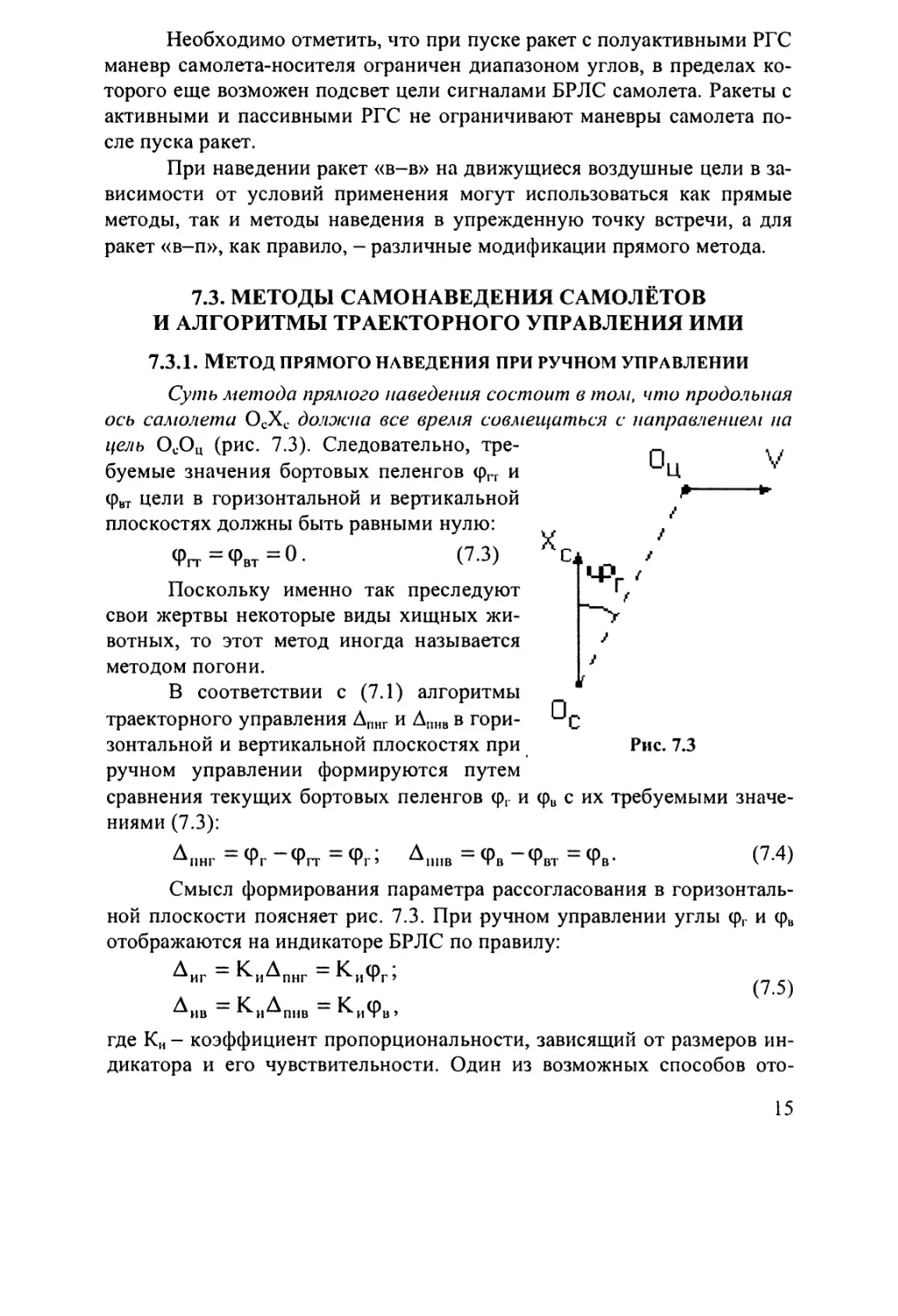
Суть метода прямого наведения состоит в том, что продольная
ось самолета ОСХС должна все время совмещаться с направлением на
цель ОСОЦ (рис. 7.3). Следовательно, тре- _ . .
буемые значения бортовых пеленгов фгг и
фвт цели в горизонтальной и вертикальной *
плоскостях должны быть равными нулю:
Фгг=Фвт=0- (73) ХС* /
’-Рг *
Поскольку именно так преследуют 1
свои жертвы некоторые виды хищных жи- >
вотных, то этот метод иногда называется
методом погони. у
В соответствии с (7.1) алгоритмы
траекторного управления Апнг и Апнв в гори- ° с
зонтальной и вертикальной плоскостях при Рис. 7.3
ручном управлении формируются путем
сравнения текущих бортовых пеленгов фг и фв с их требуемыми значе-
ниями (7.3):
△пнг Фг Фгт Фг> △пив Фв Фвт Фв
(7.4)
Смысл формирования параметра рассогласования в горизонталь-
ной плоскости поясняет рис. 7.3. При ручном управлении углы фг и фв
отображаются на индикаторе БРЛС по правилу:
△иг “
△ив=КиД
= КиФг;
~ Кифв,
(7.5)
где Ки - коэффициент пропорциональности, зависящий от размеров ин-
дикатора и его чувствительности. Один из возможных способов ото-
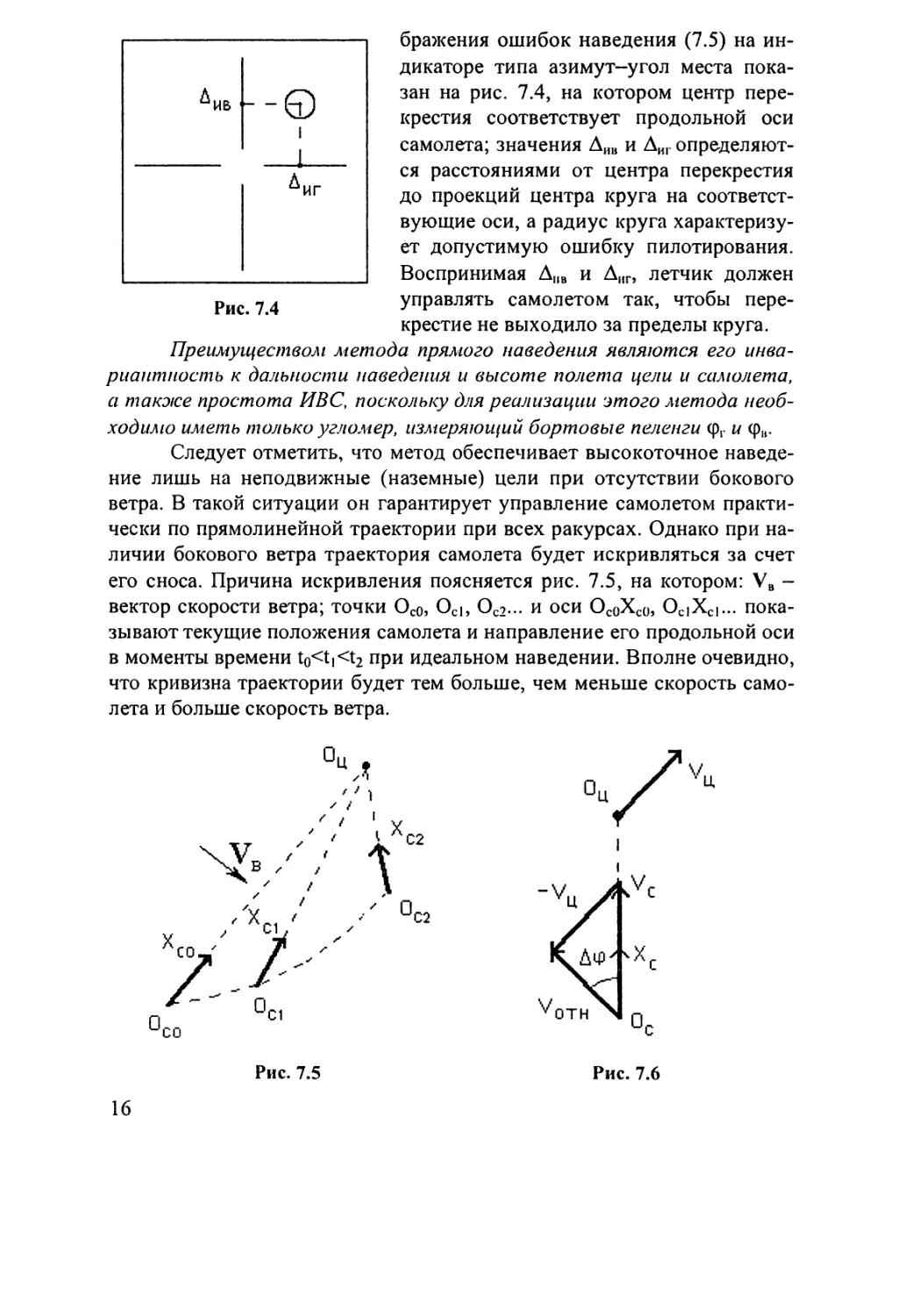
Рис. 7.4
бражения ошибок наведения (7.5) на ин-
дикаторе типа азимут-угол места пока-
зан на рис. 7.4, на котором центр пере-
крестия соответствует продольной оси
самолета; значения Дин и Диг определяют-
ся расстояниями от центра перекрестия
до проекций центра круга на соответст-
вующие оси, а радиус круга характеризу-
ет допустимую ошибку пилотирования.
Воспринимая Д1|В и Днг, летчик должен
управлять самолетом так, чтобы пере-
крестие не выходило за пределы круга.
Преимуществом метода прямого наведения являются его инва-
риантность к дальности наведения и высоте полета цели и самолета,
а также простота ИВС, поскольку для реализации этого метода необ-
ходимо иметь только угломер, измеряющий бортовые пеленги (рг и (рн.
Следует отметить, что метод обеспечивает высокоточное наведе-
ние лишь на неподвижные (наземные) цели при отсутствии бокового
ветра. В такой ситуации он гарантирует управление самолетом практи-
чески по прямолинейной траектории при всех ракурсах. Однако при на-
личии бокового ветра траектория самолета будет искривляться за счет
его сноса. Причина искривления поясняется рис. 7.5, на котором: VB -
вектор скорости ветра; точки Ос0, Ocj, Ос2... и оси Ос0Хсо, ОС|ХС|... пока-
зывают текущие положения самолета и направление его продольной оси
в моменты времени t0<t|<t2 при идеальном наведении. Вполне очевидно,
что кривизна траектории будет тем больше, чем меньше скорость само-
лета и больше скорость ветра.
При наведении на движущиеся воздушные цели прямой метод
обеспечивает, в общем случае, полет самолета по криволинейной траек-
тории (кривой погони). Причиной искривления является тот факт, что
мгновенное направление взаимного перемещения цели и самолета, оп-
ределяемое направлением вектора относительной скорости, в основном
не совпадает с направлением на цель (рис. 7.6).
Если перехват цели осуществляется из задней полусферы (ЗПС),
то кривизна траектории будет незначительной и самолет сможет выпол-
нять маневры преследования с допустимыми поперечными перегрузка-
ми. Если же перехват выполняется из передней полусферы (ППС)
(рис. 7.7), то на конечном участке траектории самолет все равно должен
быть выведен в ЗПС. При этом кривизна траектории может потребо-
ваться настолько большой, что выполнить такой разворот в допустимом
диапазоне поперечных перегрузок невозможно. В результате либо будут
иметь место недопустимо большие ошибки наведения, либо самолет
разрушится при движении по заданной траектории, отмеченной на
рис. 7.7 точками Ос0 ...Ос4. Точки Ou0...Ou4 указывают положение цели в
те моменты времени, когда самолет находится в точках Ос0...Ос4. Наве-
дение по криволинейной траектории приводит к уменьшению дальности
действия РЭСУ и увеличению времени наведения. Последнее предопре-
деляет увеличение вероятности срыва наведения за счёт противодейст-
вия противника. Однако наиболее значимым недостатком ме-тода пря-
мого наведения является ограничение направлений перехвата движу-
щихся целей только задней полусферой.
На практике также используются и разновидности метода прямо-
го наведения: флюгерный и путевой. При флюгерном методе с направ-
лением на цель совмещается ветт»р'ро^ду]инпн сКорос^ш самолета,
пространственное положение которого мало о7пВЬМ$ся отколоже-
, ..-м J
л fl
ним продольной оси ЛА. При путевом методе с направлением на цель
совмещается вектор путевой скорости. Такой прием позволяет сни-
зить влияние бокового ветра на точность наведения.
7.3.2. Наведение в наивыгоднейшую упреждённую точку
ВСТРЕЧИ ПРИ РУЧНОМ УПРАВЛЕНИИ
Алгоритм траекторного управления при наведении наивыгод-
нейшую упрежденную точку встречи (НУТВ) широко используется при
самонаведении истребителей на воздушные цели. При ручном управле-
нии он формируется в соответствии с законом:
△иг — кн (Яг — Чгг )’ (7.6)
△ив — Кв (Яв — Я ВТ )• (7.7)
Здесь Анг и Апв “ параметры рассогласования в плоскостях бокового и
продольного движения; qrr и qBr - требуемые наивыгоднейшие углы уп-
реждения; К„ - коэффициент пропорциональности.
При использовании в качестве средств поражения ракет с полуак-
тивными РГС к РЭСУ истребителя предъявляются наиболее жесткие
требования, поскольку необходимо стабилизировать в пространстве из-
мерительную систему координат БРЛС. Это вытекает из требования со-
гласования плоскостей поляризации сигналов, излученных станцией
подсвета цели, и отраженных сигналов, принимаемых РГС, при манев-
рах истребителя по крену. В таких условиях углы q^ и qr фиксируются в
горизонтальной плоскости, а углы qBT и qB- в вертикальной. Кроме того,
после пуска ракеты самолет-носитель должен продолжать двигаться в
направлении цели, подсвечивая её.
Суть метода наведения в НУТВ для горизонтальной плоскости
иллюстрируется рис. 7.8, на котором OcX0Zo - подвижная земная систе-
ма координат, начало которой Ое совмещено с центром масс самолета;
Оц - точка расположения цели в этой системе координат; Д - расстоя-
ние до цели; ¥ц - вектор скорости цели; VCT и Vc - требуемый и факти-
ческий векторы скорости истребителя; qru - угол между линией ОсОи
визирования цели и линией OuOyi пути цели; £г - угол визирования це-
ли; Aqr=qr-qrr - текущая угловая ошибка наведения.
При определении угла q^ наведения в наивыгоднейшую точку
Оу.г будем полагать, что самолет вооружен ракетами с полуактивными
РГС. Тогда после пуска ракеты в точке Опр самолет будет продолжать
двигаться в том же направлении, подсвечивая цель вплоть до точки Окс
окончания самонаведения. В точку Окс самолет попадает в тот момент,
когда ракета, пролетев после пуска расстояние OripOyT=(Vc+Vp)tp, встре-
чается в точке Оут с целью. Здесь Vp и tp - собственная скорость ракеты
Рис. 7.8
и время ее полета. На момент поражения цели самолет находится от нее
на удалении ОксО^УрГр^р. Кроме того, будем полагать, что Vu=const,
VcT=Vc=const, цель не маневрирует и высота полета не изменяется в те-
чение всего времени наведения t„.
Проектируя на линию визирования и нормаль к ней участки тра-
ектории самолета, цели и ракеты, находим:
Д = VctH cosQrr + Vptp cosq^ - Vut„ cosqru ; (7.8)
VnSinqru =VctHsinqrr + VptpSinqrr. (7.9)
Аналогично можно получить кинематические уравнения
4 = Vucosqru-Vccosqrr , (7.10)
Дсог =Vcsinqrr-Vusinqnj, (7.11)
где со,. = - угловая скорость линии визирования (ЛВ). Уравнение
(7.10) характеризует скорость изменения дальности. Если проекция Vc.
cosqn. скорости самолета на ЛВ больше проекции Vucosqru, то Д < 0 и
дальность до цели уменьшается в процессе наведения. Уравнение (7.11)
характеризует поперечную (нормальную) составляющую скорости. При
его получении учтено, что проекция VcSinqn. вращает линию визирова-
ния против часовой стрелки, поэтому она считается положительной. В
то же время проекция V4cosqru, вызывающая вращение ЛВ по часовой
стрелке, считается отрицательной.
Домножив обе части (7.11) на tH, получим
ДсоДн ~ VctH sin qn. — VutH sin qru•
Из сравнения этого равенства с (7.9) следует
Vptpsinqn. = -Д<о,Л„; sinqrr = -Д(О,Ли /(Vptp). (7.12)
Время наведения tH можно найти из соотношения (7.8)
t Д-Vptpcosq^ Д-Vptpcosq^
Vccosqrr-Vucosq,.lx -Д
где было учтено равенство (7.10). Для расчета tH достаточно часто вме-
сто (7.13) используют более грубое приближение
tH=(A-Vptp)/(-4), (7.14)
основанное на приближенном равенстве cosq^l. После подстановки
(7.14) в (7.12) будем иметь:
Дсо,.(Д-Vptp) дсо
sin qr =---.----; (7.15)
flVptp Кду
кду=ДУр(р/(Д-Ур1р); (7.16)
qrr = arcsin (Дсог/кду). (7.17)
Еще более грубым приближением является соотношение
qn. =ДСО,./Кду, (7.18)
полученное на основе допущения sinq^q^.
При реализации метода наведения в НУТВ в различных системах
для расчета q^ используются соотношения (7.12), (7.13), либо (7.17),
либо (7.18). Отличаясь вычислительными процедурами, все эти разно-
видности закона формирования qn обладают общими свойствами, кото-
рые удобно анализировать на примере (7.16) и (7.18). В результате мож-
но сделать следующие выводы.
Метод наведения в НУТВ инвариантен к условиям применения,
т.е. закон формирования q^ не изменяется при изменении высоты, даль-
ности, скорости сближения и направления (ракурса) перехвата. Всера-
курсность метода обусловлена изменениями qrr при изменениях Д, Д
сог и вида управляемой ракеты, определяющего ее баллистическую даль-
ность Др=Ур1р. Необходимо отметить, что в реальном диапазоне
дальностей и скоростей цели и самолета максимальные значения qrr оп-
ределяются величинами 60...65°.
Важной особенностью метода является практическая прямоли-
нейность траектории самолета-перехватчика при наведении на неманев-
20
рирующую цель. Это предопределяет реализацию максимальной даль-
ности действия РЭСУ при минимальных затратах энергии и времени
наведения. По этой причине, а также в силу хорошего согласования ме-
тода наведения самолета с методами упреждающего наведения ракет
точка Оут (см. рис. 7.8) и называется наивыгоднейшей.
Следует, однако, отметить, что при маневрах цели требуемая тра-
ектория наведения самолета искривляется.
Подобным образом можно получить аналоги (7.12), (7.13) и
(7.17), включая соотношение
qBT = Д(Ов/кду , (7.19)
определяющее правило формирования требуемого угла упреждения в
вертикальной плоскости. Здесь: сов - угловая скорость ЛВ в вертикаль-
ной плоскости, а Кду вычисляется по формуле (7.16).
В стабилизированной в пространстве измерительной системе ко-
ординат, которая применяется для наведения ракет с полуактивными
РГС, текущие значения углов qr и qB, используемые в (7.6) и (7.7), фор-
мируются по законам:
qr = <рг + a sin у; (7.20)
qB =<рв +OCCOSY, (7.21)
где (рг и (рв- бортовые пеленги целей в горизонтальной и вертикальной
плоскостях, измеряемые угломером БРЛС со стабилизированной в про-
странстве антенной; а и у - соответственно углы атаки и крена. Необ-
ходимость учета в (7.20) и (7.21) вторых слагаемых обусловлена тем,
что мгновенное направление движения самолета совпадает с направле-
нием вектора его скорости, которое отличается от положения строи-
тельной оси на значение угла атаки. При наличии крена угломер со ста-
билизированной антенной по-прежнему измеряет проекции бортового
пеленга в горизонтальной <рг и вертикальной <рв плоскостях, в то время
как пространственное положение угла атаки изменяется. Последнее и
вызывает появление проекций ocsiny и occosy угла атаки на горизонталь-
ную и вертикальную плоскости.
Принимая во внимание (7.18)-(7.21), можно преобразовать алго-
ритм траекторного управления (7.6), (7.7) к виду:
△it = кц(Фг+asin /кду) ; (7.22)
△„в =кц(фВ+аСО8у-Д(0в/кду). (7.23)
При ручном управлении самолетом параметры рассогласования
(7.22) и (7.23) выводятся на экран БРЛС так же, как и параметры рассо-
гласования прямого метода, показанные на рис. 7.4. Однако электрон-
ное перекрестие теперь будет соответствовать не продольной оси само-
лета, а требуемым значениям q^ и qBT. Летчик должен пилотировать так,
чтобы центр перекрестия не выходил за пределы кольца.
Сравнение алгоритма наведения в НУТВ с алгоритмом наведения
(7.4) позволяет прийти к заключению, что первый, реализуя всеракурс-
ное наведение в любом диапазоне дальностей и скоростей сближения
независимо от высоты практически по прямолинейной траектории, яв-
ляется более совершенным. Однако при этом требуется значительно бо-
лее сложная ИВС. В состав такой ИВС, кроме вычислителя qrr и qBT,
должны входить датчики информации, формирующие оценки бортовых
пеленгов срг и фв, угловых скоростей линии визирования (0г и (0в, дально-
сти Д и скорости ее изменения Д, а также углов атаки а и крена у. Для
формирования оценок <рг, <рв, (0г и (0в могут быть использованы угломер-
ный канал БРЛС, теплопеленгатор и авиационный стрелковый прицел
(АСП). Оценки Д и Д могут быть сформированы дальномерным кана-
лом БРЛС, а оценки а и у - датчиком угла атаки и позиционным гиро-
скопом. Из сказанного следует, что при реализации алгоритма наведе-
ния в НУТВ обязательно должна использоваться БРЛС.
Рассмотренный алгоритм наведения в НУТВ наиболее употреби-
телен в ССН истребителей на воздушные цели с применением различ-
ных видов управляемых и неуправляемых ракет и стрелково-пушечного
вооружения.
7.3.3. Алгоритмы директорного и автоматического
управления
Особенности функционирования РЭСУ в директорном и автома-
тическом режимах достаточно подробно рассмотрены в §1.3. Поэтому
более детально рассмотрим процедуру формирования параметров рас-
согласования в плоскостях бокового и продольного движения.
В директорном режиме, независимо от используемых методов
наведения, параметры рассогласования в плоскостях бокового Адг и
продольного Адв движения формируются по законам:
Адг =Кдг(т-тт); (7-24')
Адв Кдв (fly Аут)* (2*25)
Здесь ут и пут - требуемые значения крена и нормальной перегрузки; у и
пу - их фактические значения; кдг и кдв - коэффициенты пропорциональ-
ности. Требуемые значения ут и формируются путем функциональ-
ных преобразований параметров рассогласования Апиг, Дпнв (7.4) при
прямом наведении либо параметров Днг, Днв (7.6), (7.7) при использова-
нии наведения в НУТВ. В процессе функциональных преобразований
Ут — )> Пут — ^*в(^ПНВ ) ’ (7.26)
yT=fr(AHr), nyT=fB(AHB) (7.27)
могут учитываться инерционные свойства системы автоматического
управления (САУ) и самолета, а также необходимость фильтрации
(сглаживания) результатов преобразований в целях уменьшения влия-
ния случайных возмущений. Параметры рассогласования (7.24) и (7.25)
отображаются на индикаторе БРЛС и используются летчиком для
управления самолетом. Следует отметить, что при учете в (7.26) и (7.27)
инерционных свойств САУ и самолета летчику в процессе устранения
Ддг и Ддв достаточно выполнять функции усилительного звена.
В автоматическом режиме параметры рассогласования в плоско-
стях бокового Даги продольного Дав движения формируются по закону:
Aar=Kar(Y-Yr); П-28)
△ав =кав(пу-пуг)> (7-29)
где каг и кав - коэффициенты пропорциональности. Процедура форми-
рования заданных сигналов ут и в (7.28) и (7.29) аналогична процеду-
ре их вычисления в директорном режиме. При этом достаточно часто в
(7.28) и (7.29) используются и аналогичные директорному режиму зави-
симости. Сформированные в результате параметры рассогласования
(7.28) и (7.29) поступают непосредственно в САУ для управления само-
летом.
Необходимо подчеркнуть, что состав ИВС РЭСУ в директорном
и автоматическом режимах несколько усложняется. При прямом наве-
дении в состав ИВС кроме угломера должны входить датчики угла кре-
на (позиционный гироскоп) и нормальной перегрузки (акселерометр).
При наведении в НУТВ в состав ИВС должен еще входить акселеро-
метр. Кроме того, несколько усложняются и алгоритмы функциониро-
вания вычислителей за счет необходимости вычисления (7.26)-(7.29).
7.4. МЕТОДЫ НАВЕДЕНИЯ РАКЕТ И АЛГОРИТМЫ
ТРАЕКТОРНОГО УПРАВЛЕНИЯ ИМИ
Для наведения ракет используются различные разновидности как
прямого метода, так и методов наведения в упрежденную точку. Из по-
следних наиболее известен метод пропорционального наведения (на-
вигации), который широко используется в ССН ракет «в-в». При этом
методе требуемое поперечное ускорение (перегрузка) в плоскости уп-
равления должно быть пропорционально угловой скорости ЛВ и скоро-
сти сближения ракеты с целью:
Jt1,2 = N0Ve6 COj 2 ; (7.30)
Пт1,2 = /g)Vc6CO|t2 • , (7.31)
Здесь индексы 1, 2 соответствуют плоскостям управления, в которых
расположены рулевые органы; jTi>2 и nTh2 - соответственно требуемые
ускорения и перегрузки; No - навигационный параметр; g - ускорение силы
тяжести; Vc6=- Д - скорость сближения; coL2- угловые скорости ЛВ.
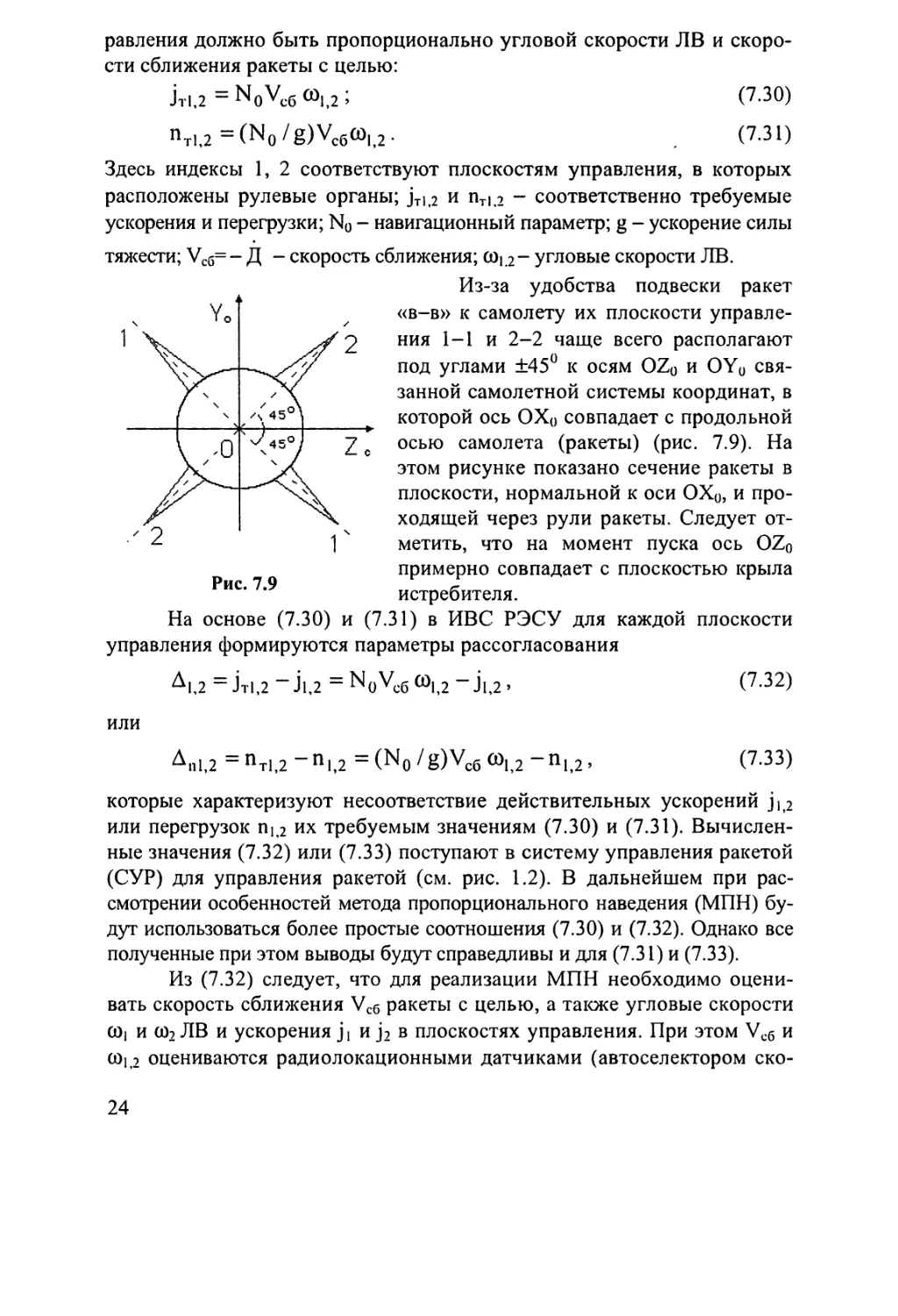
Из-за удобства подвески ракет
«в-в» к самолету их плоскости управле-
ния 1-1 и 2-2 чаще всего располагают
под углами ±45° к осям OZ0 и OY0 свя-
занной самолетной системы координат, в
которой ось ОХо совпадает с продольной
осью самолета (ракеты) (рис. 7.9). На
этом рисунке показано сечение ракеты в
плоскости, нормальной к оси ОХ0, и про-
ходящей через рули ракеты. Следует от-
метить, что на момент пуска ось OZ0
примерно совпадает с плоскостью крыла
истребителя.
На основе (7.30) и (7.31) в ИВС РЭСУ для каждой плоскости
управления формируются параметры рассогласования
△1,2 = Jti,2 “Ji,2 = N0Vc6 С0| 2 - Ji,2» (7.32)
или
△nl,2 = Пт1,2 “П1,2 = (No /g)Vc6 СО12 “П1,2 > (7.33)
которые характеризуют несоответствие действительных ускорений ji>2
или перегрузок nL2 их требуемым значениям (7.30) и (7.31). Вычислен-
ные значения (7.32) или (7.33) поступают в систему управления ракетой
(СУР) для управления ракетой (см. рис. 1.2). В дальнейшем при рас-
смотрении особенностей метода пропорционального наведения (МПН) бу-
дут использоваться более простые соотношения (7.30) и (7.32). Однако все
полученные при этом выводы будут справедливы и для (7.31) и (7.33).
Из (7.32) следует, что для реализации МПН необходимо оцени-
вать скорость сближения Vc6 ракеты с целью, а также угловые скорости
COj и о)2 ЛВ и ускорения jj и j2 в плоскостях управления. При этом Vc6 и
<х>1,2 оцениваются радиолокационными датчиками (автоселектором ско-
рости и угломером РГС), а ускорения - акселерометрами, сориентиро-
ванными по плоскостям управления.
Особенностями МПН, предопределяющими его широкое приме-
нение, являются всеракурсность, практически прямолинейная траек-
тория наведения и всевысотность. Всевысотность метода следует из
того, что рули ракеты в процессе наведения отклоняются на такие углы,
при которых
Jl,2 = Jt1,2 = N()Vc6 ^1,2 • (7.34)
При изменении высоты изменяется плотность воздуха, что при-
водит к изменению эффективности рулей. При этом автоматически из-
меняются углы их отклонения до тех пор, пока не будет выполняться
равенство (7.34).
Прямолинейность траектории ракеты проще всего доказывается
при условии, что скорость ее полета постоянна, цель не маневрирует по
направлению, a Noul. В такой ситуации при достаточно точном наведе-
нии, когда ДК2 малы, после деления левой и правой частей (7.32) на No
получим равенство
△1,2 / No = Vc6 COj 2 “ ji,2 / No, (7.35)
в котором
△1,2/No = 0; j!,2/No=O. (7.36)
Тогда из (7.35) и (7.36) вытекает тождество
Vc6(O12=0. (7.37)
Поскольку Vc6^0 (иначе ракета не перехватит цель), то из (7.37) сле-
дует, что C0i,2=0. Это свидетельствует о том, что в процессе наведения ЛВ
перемещается параллельно самой себе. На рис. 7.10 этот факт иллюстриру-
ется параллельностью штриховых линий, отображающих мгновенные по-
ложения ЛВ в различные моменты времени. Из рисунка, приведенного для
плоскости 1-1, видно, что для обеспечения параллельности линий визиро-
вания необходимо, чтобы выполнялось равенство
Vusin(e, - ) = Vpsin(e, - $р|), (7.38)
где Е) - угол визирования цели в плоскости управления 1-1 (рис. 7.9);
13р1 и $ц1 ~ путевые углы движения ракеты и цели в этой плоскости. Так
как E)=const, Vp=const и цель не маневрирует (Vu=const, i3ul=const), то на
основании (7.38) правомочно утверждать, что Ei-i3pi=const, т.е. ракета
летит по прямолинейной траектории.
Из (7.36) и (7.37) следует, что чем больше No, тем прямолинейнее
траектория полета ракеты, тем больше дальность действия РЭСУ при
том же запасе топлива. Однако выбирать очень большие значения нави-
рационного параметра нецелесообразно. Это объясняется тем, что в ре-
альных РЭСУ Уеб и (0|2 оцениваются с погрешностями, которые затем с
коэффициентом пропорциональности No преобразуются в ошибки
формирования требуемого ускорения, а соответственно и в ошибки на-
ведения. В такой ситуации с увеличением N() требуемая траектория все
больше выпрямляется, но одновременно возрастают и промахи ракеты.
Следует отметить, что траектория наведения становится практически
прямолинейной уже при No=3 [47].
Всеракурсность, характеризующая способность РЭСУ наводить
ракету под любыми углами к направлению движения цели, обеспечива-
ется тем, что в зависимости от
направления атаки изменяются
значения Уеб и 0)|2. Это автома-
тически приводит к изменению
значения j.rL2 (7.30), а соответст-
венно и требуемого угла упреж-
дения qT| (рис. 7.10). Для под-
тверждения этого заключения
рассмотрим кинематические
уравнения в плоскости управле-
ния 1-1 в предположении, что
цель и ракета не маневрируют.
Геометрия взаимного перемеще-
ния цели и ракеты в этой плоскости показана на рис. 7.10. Проектируя
скорости Vu и Ур на ЛВ и нормаль к ней, получаем
Д = Vu cos(E| - дц1) - Vp cos(et - ор1); (7.39)
Део, = Vp sin(E, - dp,) - Vu sin(E, - $Ц1), (7.40)
где (Oj = £j, а правило учета знаков различных проекций такое же, как и
в (7.10) и (7.11).
Для упрощения дальнейших выкладок будем полагать, что коси-
нусы всех углов примерно равны 1, а синусы - своим аргументам. Тогда
(7.39) и (7.40) преобразуются к виду
Д = \-Ур; (7.41)
Део, =Vp(e, -др|)-Уц(£| -OH1) = (Vp -VJE, + УцДц| -VpOpl. (7.42)
Используя (7.41) в (7.42), будем иметь
До)) + ДЕ, = Уц13ц1 - Vpi3pl. (7.43)
Дифференцируя (7.43) по времени при Vu=const, Vp=const, получаем
гД^+Дф, =VU^U1-Vp^pl;
(7-44)
ЛА ЛА
где было учтено, что Ej = , Д = 0, Vc6 = -Д , а поперечные ускорения
цели и ракеты определяются соотношениями jul = Vui5ul, jj = Vpli5pl.
Соотношение (7.44) можно представить в виде уравнения неко-
торой динамической системы, преобразующей фазовые координаты аб-
солютного движения цели и ракеты (jui, ji) в координаты относительно-
го движения Д, VC6 и ojj. Передаточная функция указанной системы, ус-
ловно называемой кинематическим звеном, имеет вид:
WK3(p,t) = ккз/(Ткз р-1) (7.45)
при
ккз = l/(2Vc6), Ткз =Д/(2Усб) . (7.46)
Передаточная функция (7.45) отображает нестационарное, неус-
тойчивое квазистатическое звено, реализуемое на практике в виде инте-
гратора, охваченного положительной обратной связью. Структурная
схема этого звена показана в левой части рис. 7.11.
Рис. 7.11
При идеально точном наведении, когда в (7.32) Лк2=0, ji=N0Vc6(Oi.
В такой ситуации эквивалентное звено, включающее ИВС, СУР и раке-
ту (см. рис. 1.2), можно представить в виде усилителя с коэффициентом
усиления N0Vc6. Очевидно, что ССН, показанная на рис. 7.11, будет ус-
тойчива тогда, когда коэффициент передачи N0Vc6 в цепи отрицатель-
ной обратной связи (ООС), замыкаемой через jb будет превосходить ко-
эффициент передачи 2Vc6 в цепи положительной обратной связи (ПОС)
кинематического звена: N0Vc6>2Vc6. Отсюда следует, что при
N0>2 (7.47)
ССН, реализующая МПН, будет обеспечивать устойчивое наведение
при любых ракурсах перехвата.
Кроме отмеченных достоинств МПН, обеспечивающих всевы-
сотное и всеракурсное наведение по практически прямолинейной траек-
тории, его преимуществом является хорошее сопряжение со всеми ме-
тодами самонаведения истребителя, которые могут использоваться на
этапе, предшествующем пуску ракет.
Следует отметить, что МПН инвариантен к воздействию ветра на
наводимую ракету. Это обусловлено тем, что под действием ветра будут
изменяться значения O)L2 угловых скоростей ЛВ, а соответственно и те-
кущие значения ускорений jTi>2. Последнее и будет вызывать соответст-
вующие изменения угла упреждения qTh2 (см. рис. 7.10). Недостатком
МПН является плохая управляемость ракеты па больших дальностях.
Из (7.40) следует, что на больших расстояниях Д угловая скорость
V sin(e, - О I) - Vu sin(ei - Оц1)
CD. = —-----------!~ 0 .
д
Следовательно, в таких ситуациях jTL2~0 и первоначальные ошиб-
ки пуска, обусловленные погрешностями прицеливания (целеуказания),
не будут устраняться. Кроме того, при наличии ошибок A(0i 2 оценива-
ния угловых скоростей ЛВ для CDi 2~0 будут иметь место очень большие
относительные погрешности А(0| 2/(0| 2, а значит, и большие ошибки
управления.
Необходимо подчеркнуть, что некоторые из рассмотренных дос-
тоинств МПН реализуются лишь при наведении на неманеврирующие
цели. При перехвате маневрирующих целей появляются существенные
промахи. В таких условиях более приемлем метод пропорционального
наведения со смещением. Для этого метода алгоритм траекторного
управления определяется соотношением
^cl,2 ~ N()VC6 (°\2 +Дй\2)-jl,2 ’ (7.48)
в котором (0| 2 - угловые скорости ЛВ, рассчитанные при условии, что
цель не маневрирует, a А(Оц2 - измеряемые комплексным угломером
РГС приращения угловой скорости ЛВ, вызванные маневром цели. Если
по каким-либо причинам, например из-за воздействия преднамеренных
радиопомех, невозможно воспользоваться информацией о Vc6, то в
(7.32) и (7.48) используют какое-то среднее значение Vc6. Кроме того,
28
при этом употребительны разновидности прямого наведения, рассмот-
ренного в п. 7.3.1.
При наведении ракеты с большим углом упреждения qT| (см.
рис. 7.10) антенна РГС, сопровождающая цель по направлению, будет
развернута по отношению к продольной оси ракеты на угол (p~qTi, близ-
кий к максимально возможному углу поворота ф|Пах. В такой ситуации
маневр цели, показанный на рис. 7.12 штриховой линией, может при-
вести к невозможности ее сопровождения по направлению, поскольку
необходимый угол пеленга становится больше максимально возможно-
го угла поворота антенны РГС. Во избежание срыва сопровождения це-
ли по направлению угломером РГС, а соответственно и срыва перехва-
та, используют метод наведения с постоянным углом упреждения. При
этом параметр рассогласования вычисляется по алгоритму
Ayl,2 Кф(Ф1,2 + Фдоп 1,2 ) •
Здесь Ф1,2 - бортовые пеленги
цели в плоскостях управления;
Фдоп1,2 ” допустимые углы визи-
рования в этих плоскостях, при
которых маневр цели не приво-
дит к срыву ее сопровождения по
направлению. Необходимо отме-
тить, что в (7.49) углы фЬ2 отсчи-
тываются от продольной оси ра-
кеты, а углы фДоп1,2“ от линии ви-
зирования, т.е. имеют противо-
положный знак (рис. 7.13).
При использовании алго-
ритма (7.49) наведение осущест-
вляется, в общем случае, по кри-
волинейной траектории (сплош-
ная линия на рис. 7.13). Отме-
ченная особенность приводит к
уменьшению дальности действия
РЭСУ. После уменьшения ф| ? до
значений фД0П|.2 РЭСУ опять может
перейти на ту или иную разновидность пропорционального наведения.
В системах самонаведения ракет «в-п» параметры рассогласо-
вания обычно формируются в горизонтальной и вертикальной плоско-
стях, поскольку именно в этих плоскостях (курса и тангажа) размеща-
ются их рулевые органы. Для наведения на неподвижные и малопод-
вижные наземные и надводные цели часто используют метод флюгер-
ного наведения, при котором с направлением на цель совмещается век-
тор воздушной скорости ракеты. Если параметры рассогласования для
плоскостей курса и тангажа формируются в стабилизированной по кре-
ну системе координат, то алгоритм флюгерного траекторного управле-
ния ракетой «в-п» определяется соотношениями
△фг “Чг’ Афв "”Чв> (7.50)
где qr и qB вычисляются по формулам (7.20) и (7.21). Основной недоста-
ток флюгерного наведения состоит в достаточно сильном влиянии бо-
кового ветра на точность наведения. При необходимости парирования
ветра используют либо МПН, либо метод последовательных упрежде-
ний, называемый иногда методом погони с дополнительным углом уп-
реждения [47]. Причем дополнительный угол упреждения выбирают
пропорциональным угловой скорости линии визирования. С учетом
этой особенности закон формирования параметров рассогласования в
горизонтальной и вертикальной плоскостях определяется уравнениями
△луг “ КфгФг + К-ООГ^Г > △пув ~ ^фвФв + К-ООВ^В • (*7.51)
В (7.51) Кфг, Кфв и КШ1, К(1)в - постоянные коэффициенты, значения
которых выбираются так, чтобы траектория наведения была близка к
прямолинейной; (рг и (рв - бортовые пеленги цели в горизонтальной и
вертикальной плоскостях; оог и оон- угловые скорости ЛВ в этих плоско-
стях. Из (7.51) следует, что для реализации метода последовательных
упреждений в состав ИВС РЭСУ ракеты должен входить угломер, фор-
мирующий оценки углов (рг, (ри и угловых скоростей сог, (0в.
7.5. ОПТИМИЗАЦИЯ АЛГОРИТМОВ
ТРАЕКТОРНОГО УПРАВЛЕНИЯ САМОЛЁТАМИ
И РАКЕТАМИ
Состав ИВС РЭСУ определяется алгоритмом траекторного
управления ЛА. Используемые в настоящее время разновидности зако-
нов управления основаны на достаточно грубых предположениях. К та-
ким предположениям относятся отсутствие маневра цели и ОУ и пре-
небрежение сильной зависимостью угловой скорости линии визирова-
ния от дальности на последнем участке траектории наведения, непо-
средственно перед поражением цели. Кроме того, в рассмотренных ра-
нее законах траекторного управления не учитывалась экономическая
сторона процесса наведения, связанная с затратами энергии на управле-
ние наводимым ЛА. В связи с этим целесообразно рассмотреть алго-
ритмы траекторного управления самолетами и ракетами, оптимальные
30
по критерию точность-экономичность. Такие алгоритмы позволяют по-
лучить ССН совместно наилучшие как по точности, так и экономично-
сти. Наиболее просто такие алгоритмы могут быть получены на основе
математического аппарата статистической теории оптимального управ-
ления в процессе минимизации локальных функционалов качества (1.5).
Однако для решения этой задачи необходима модель состояния (2.7),
(2.8), фазовые координаты которой функционально связаны с показате-
лями точности.
7.5.1. Потенциальная точность самонаведения
Смысл понятия точности РЭСУ и её показатели были рассмотре-
ны в §5.1. Для систем самонаведения наиболее важным показателем
точности является промах. Вполне резонно предположить, что промах
ССН будет обусловлен не только параметрами самой системы, но и ус-
ловиями ее применения. Полагая каналы управления ССН в различных
плоскостях идеальными и не влияющими друг на друга, определим для
вертикальной плоскости зависимость текущего промаха от условий па-
ведения, определяемых мгновенными
относительного движения цели и ОУ.
На рис. 7.14 показано взаим-
ное расположение ОУ и цели (Оц) на
текущий момент времени t в верти-
кальной плоскости в невращающей-
ся системе координат ОоуХоУо, свя-
занной с центром массы Ооу объекта
управления. На этом рисунке: У и
Уц- векторы скоростей ОУ и цели;
О и 0ц - углы наклона траекторий
движения ОУ и цели; Ев - угол визи-
рования цели; hBl - текущий промах,
определяемый как наименьшее рас-
стояние между целью и ОУ в плос-
фазовых координат
значениями
Рис. 7.14
кости рассеяния. Примем, что начиная с рассматриваемого момента t,
цель и ОУ движутся прямолинейно и с постоянной скоростью в направ-
лении вектора относительной скорости У0=У-Уц.При этом наводимый
ЛА пройдет от цели на минимальном расстоянии hBt^sin|i, где ц - угол
между направлением относительного движения и ЛВ на момент времени t.
Из рис. 7.14 видно, что О)в= £ B=Vosin^. Откуда 8тц=Дсов/У0.
Тогда
hBl = Д2сов / Vo .
(7.52)
Аналогичное соотношение
Ьг(=Д2сог/У0 (7.53)
можно получить и для горизонтальной плоскости. Если в качестве ОУ
используется ракета «в-в», сечение которой показано на рис. 7.9, то
вместо вертикальной и горизонтальных плоскостей могут быть исполь-
зованы плоскости управления 1-1 и 2-2 с соответствующей заменой в
(7.52) и (7.53) индексов «в» и «г» на индексы «1» и «2».
Очевидно, что конечный промах
hiK = Д2(01к / V0K , (7.54)
определяемый дальностью Дк, угловой скоростью Л В coiK (i=r, в, 1, 2) и
относительной скоростью VOK на момент tK окончания наведения, будет
тем меньше, чем больше V0K и чем меньше Дк и coiK. В идеальном случае
для попадания ОУ в контур цели необходимо выполнять условие
Wi=(DiK=0.
7.5.2. Оптимизация алгоритма наведения
НА ВОЗДУШНЫЕ ЦЕЛИ
Целью данного параграфа является синтез алгоритма траекторно-
го управления ЛА (самолетом или ракетой) в процессе его наведения на
воздушную маневрирующую цель. Такой алгоритм позволяет обосно-
вать состав ИВС системы самонаведения, оптимальной по локальному
функционалу качества, учитывая одновременно требования точности и
экономичности управления. Допустим, что каналы управления ЛА не
влияют друг на друга. Опираясь на это предположение, далее будем
рассматривать процесс наведения только в одной горизонтальной
плоскости. При этом будем полагать, что цель маневрирует с
мгновенными поперечными ускорениями jur, а ОУ - так, что модуль
скорости сближения остается постоянным. Последнее допущение,
являясь в общем случае нестрогим, позволяет существенно упростить
математические выкладки. Кроме того, примем, что все фазовые
координаты измеряются идеально точно. С учетом всех этих
предположений задачу синтеза можно сформулировать следующим
образоДля ОУ, перемещение которого относительно цели определяется
кинематическим уравнением
2Д 1 / х г
wr ~ “ Jur J+^cor » (7.55)
необходимо найти закон изменения требуемого бокового ускорения jri,
обеспечивающий минимум локального функционала качества
I = mJ(co,
t
-®r)2q<o+JujKjdt ’•
0
Уравнение состояния (7.55) отличается от кинематического урав-
нения (7.44) лишь наличием центрированного гауссовского возмущения
с известной спектральной плотностью Gw. В реальных условиях на-
личие этого шума обусловлено целым рядом причин, к которым, прежде
всего, можно отнести турбулентность атмосферы и нестабильности сго-
рания топлива в двигателях цели и ОУ. В (7.55) и (7.56) (Оп- и сог - тре-
буемое и текущее значения угловой скорости JIB; jr и jur - боковые ус-
корения ОУ и цели в горизонтальной плоскости; Д и Д - дальность от
ОУ до цели и скорость ее изменения; qw и Kj - коэффициенты штрафов
за точность управления и величину обобщенного управляющего сигна-
ла Uj. Особенностью используемой модели состояния (7.55) является ее
адаптация к условиям применения, обусловленная учетом влияния
дальности, скорости и маневров цели и ОУ.
Из (7.53) для текущего промаха следует, что для получения hrl=0
необходимо обеспечить требуемое значение угловой скорости ЛВ (0^=0.
Тогда сигнал управления UjT, оптимальный по минимуму функционала
(7.56), будет совместно наилучшим как по точности наведения (промаху
hrr), так и энергии, затраченной на управление.
Поскольку уравнение состояния (7.55) линейное, шум гаус-
совский, а функционал качества (7.56) квадратичный, то на основании
теоремы разделения (статистической эквивалентности, см. п. 2.1.3) син-
тез алгоритмов управления на первом этапе будет выполняться на осно-
ве детерминированной модели (7.55) при условии, что ^(ОГ=0, а текущие
значения (ог, Д и Д известны точно.
Сравнивая (7.55), (7.56) и (2.7), (1.5), находим
хт=соГ1. =0; ху=сог; Q = qM; К = ^; Ву=-1/Д; (7.57)
uj=j.-- )цг • (7.58)
Подставив (7.57) и (7.58) в (3.35), получим зависимость
ujT =-^-(0г =^(0г, (7.59)
AKj д
где
a=qa)/Kj, (7.60)
обеспечивающую минимум функционала (7.56).
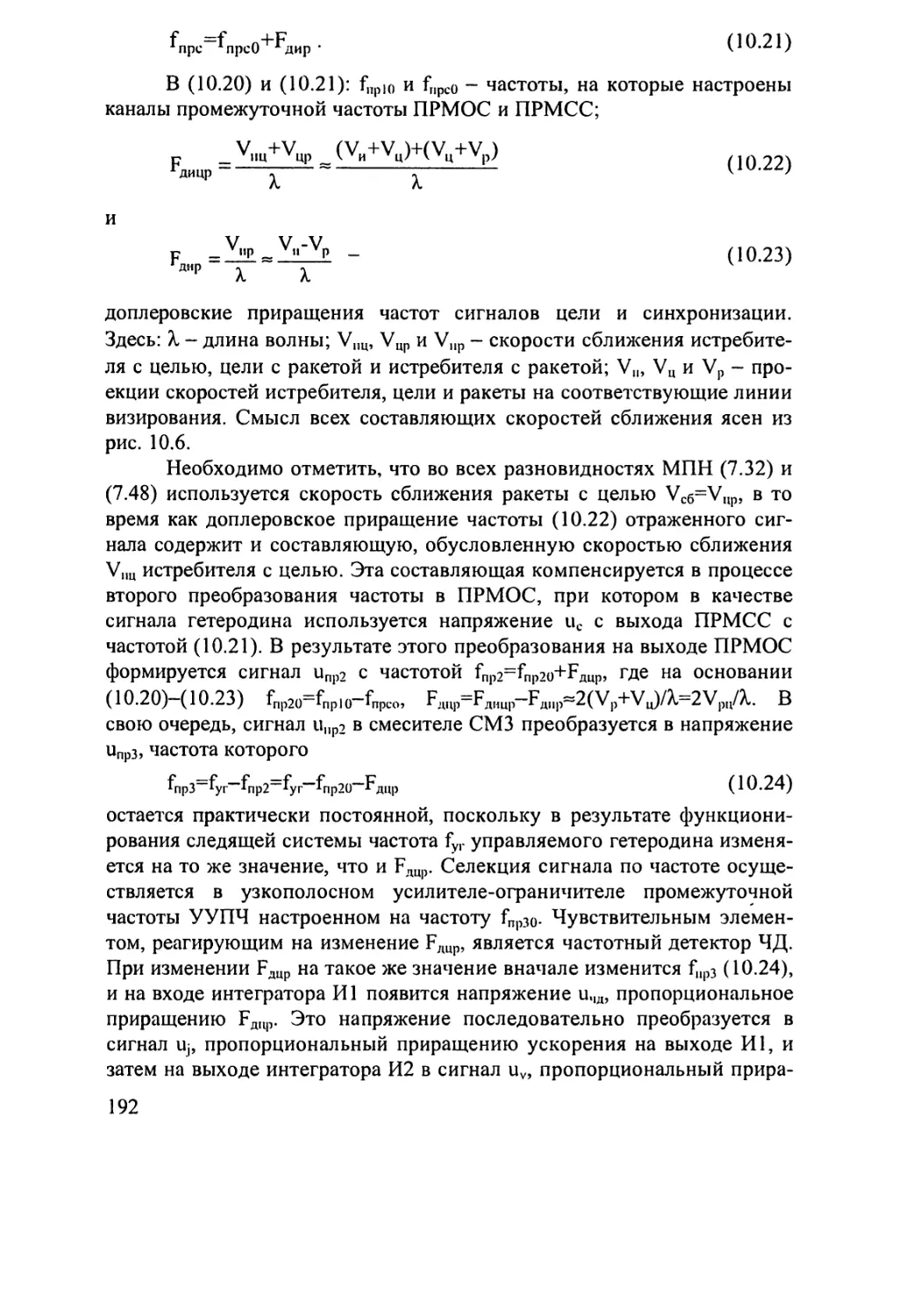
Используя (7.59) в (7.55), при ^шг=0 будем иметь:
In О),
сог г2Д г а
г = -j—dt-j—r-dt.
Чо оД ЬД2
Введем новую переменную Д=Д0+Д t. Тогда
Д
1псог
= -2 J
“г» Д,д д«.д
а я
ДДЯ»
где со1О и До - значения угловой скорости ЛВ и дальности на момент на-
чала самонаведения. Отсюда следуют равенства:
1п Ч-Д2 = _а а = а До-Д
Чо До ДД ДДо Д ДоД
(ог = ехр<
а До-Д
д[ ДоД
_ Др^гО „-at
д2
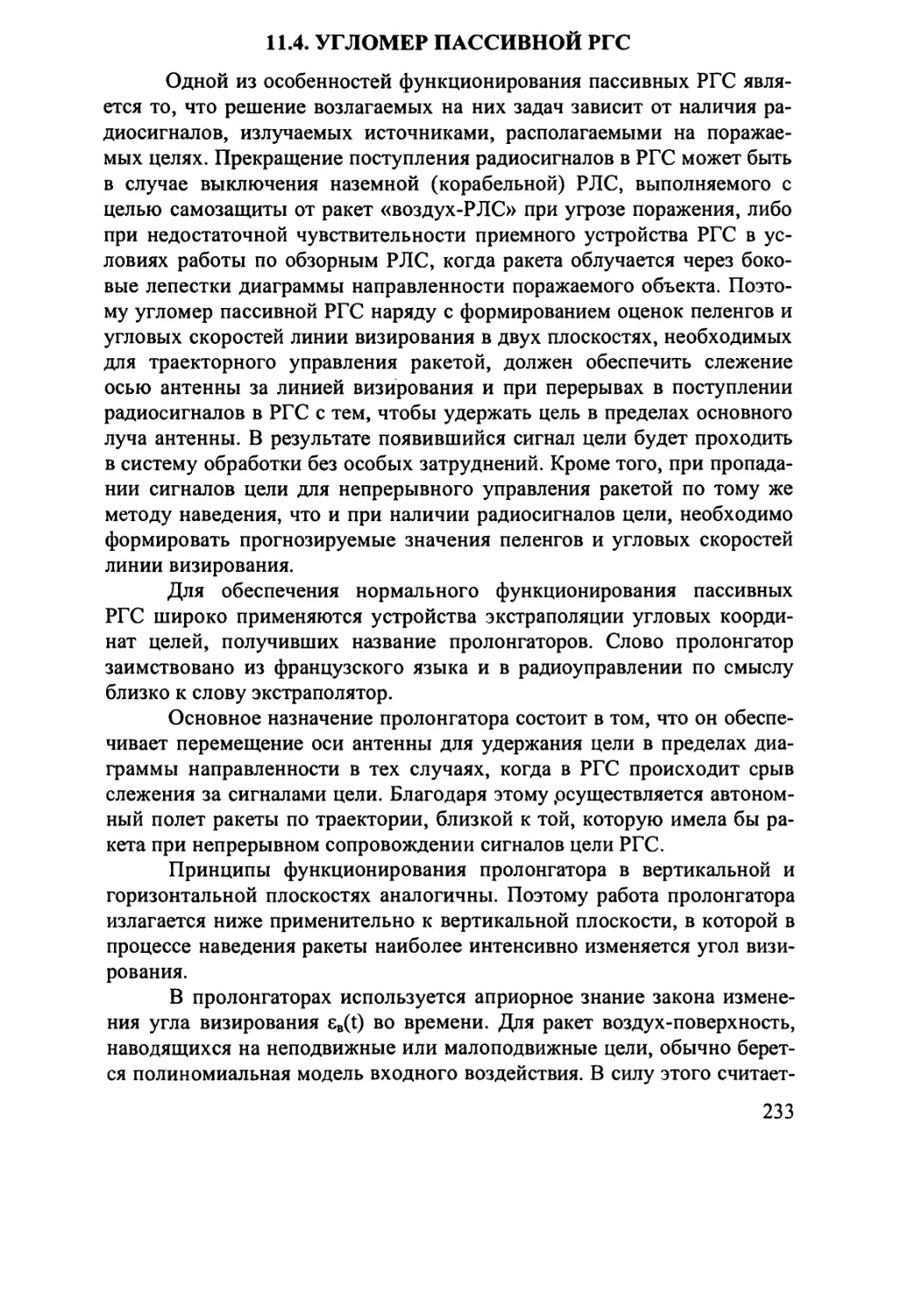
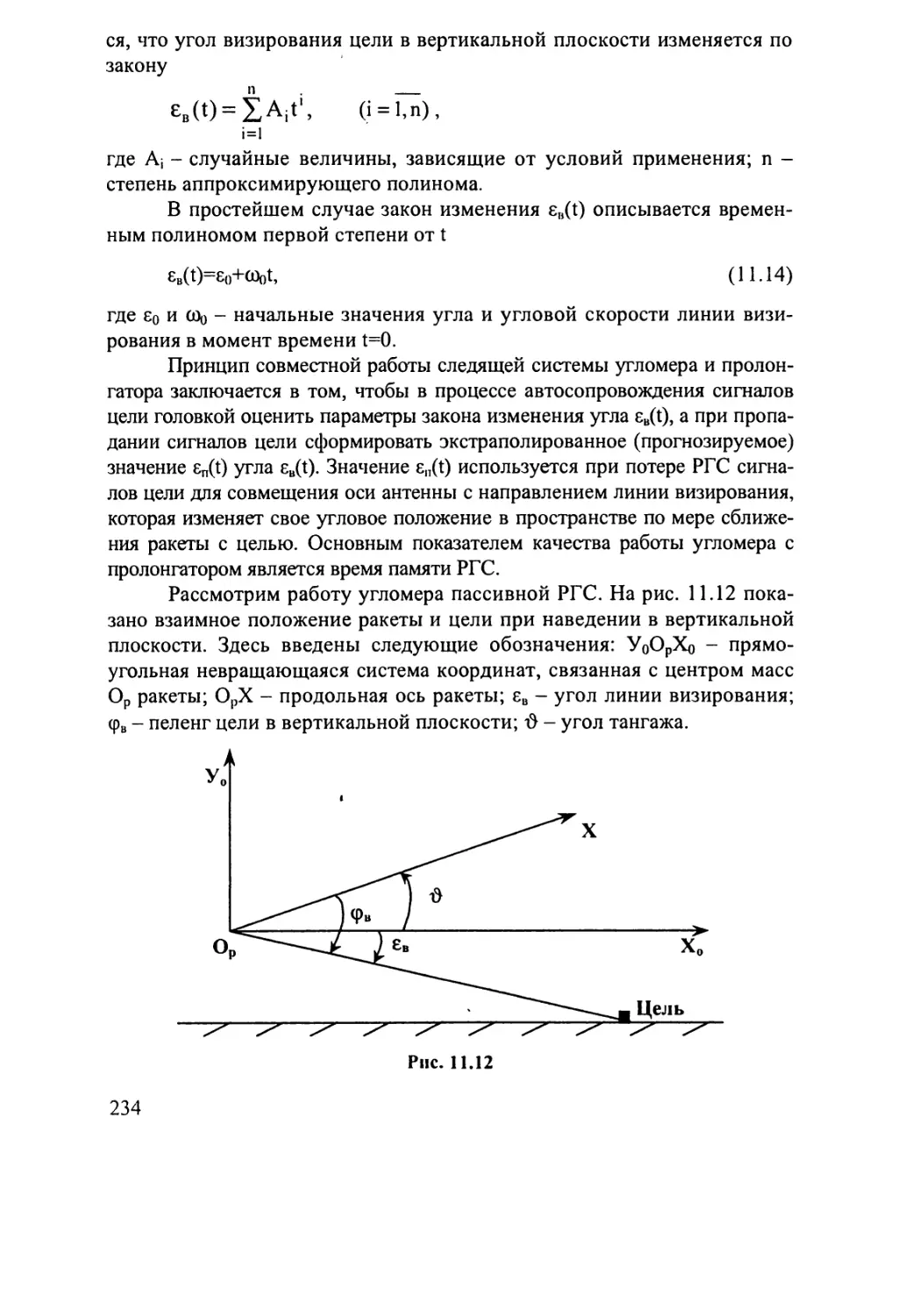
(7-61)
При получении (7.61) было учтено, что Г=-(Д0-Д)/Д и введено обозна-
чение
т ДоД'
(7.62)
Здесь Т по своему смыслу - постоянная времени процесса убывания уг-
ловой скорости ЛВ от начального значения (о10 к меньшим текущим
значениям. Потребуем, чтобы к моменту tK окончания управления, когда
Д=ДК, угловая скорость была равна нулю. Из (7.53) следует, что этому
моменту будет соответствовать промах h1K=0. Полагая, что этот процесс
происходит за время ЗТ, получаем
т____До Дк
зд
Сопоставление (7.62) и (7.63) показывает, что
а _ ЗДД0
Д До~Дк
(7.63)
(7.64)
Используя (7.64) в (7.59), будем иметь
ЗДп
11л='пп Vc6 СО,., (7.65)
До “Дк
где было учтено равенство Vc6= - Д .
Принимая во внимание выводы теоремы статистической эквива-
лентности (п. 2.1.3), на основании (7.58) получаем закон наведения
ЗДП - .
Jrr = " Vc6 COr+jul., (7.66)
До _ Дк
обеспечивающий минимум функционала (7.56) при наличии в (7.55)
возмущений и погрешностей измерений скорости сближения и угловой
скорости ЛВ. Алгоритм траекторного управления для этого метода на-
ведения определяется соотношением
ЗДп - а : :
△ог “ J rr — Jr ~ “jZ Z Vc6 С0г + jur ~jr . (7.67)
До “Дк
Аналогичным образом можно получить параметр рассогласова-
ния и для вертикальной плоскости:
△ов = ЗД°П Vc6 ©в + jUB - jB . (7.68)
До Дк
Анализируя (7.67) и (7.68), можно сделать следующие выводы.
Полученные алгоритмы траекторного управления позволяют реа-
лизовать оптимальное по минимуму функционала (7.56) самонаведение,
совместно наилучшее по точности и экономичности управления.
В состав ИВС оптимальной ССН на воздушные маневрирующие
цели должны входить устройства оптимального оценивания Vc6, сог, сов,
Jun Jun и jr, jB. Оптимальные оценки Vc6, сог, сов, jlu. и jUB можно полу-
чить в БРЛС, обрабатывая радиосигналы, отраженные от перехватывае-
мой цели. Оценки jr и jB собственных поперечных ускорений доста-
точно просто формируются по результатам измерения jr и ju акселеро-
метрами, сориентированными по соответствующим осям. Следует от-
метить, что такая ИВС сложнее существующих, поскольку требует оце-
нивания поперечных составляющих ускорения цели, не поддающихся
непосредственному измерению. Кроме того, в такой ИВС необходима
информация о дальностях начала До и окончания Дк самонаведения. Ес-
ли законы (7.67) и (7.68) используются для самонаведения истребителя,
то в качестве Д() используется дальность захвата цели БРЛС, а в качестве
Дк - предполагаемая дальность пуска ракет. Для ракетных ССН «в-в»
роль До играет дальность целеуказаний, поступающая в ракету из БРЛС
истребителя. Значение Дк известно для конкретного типа ракет.
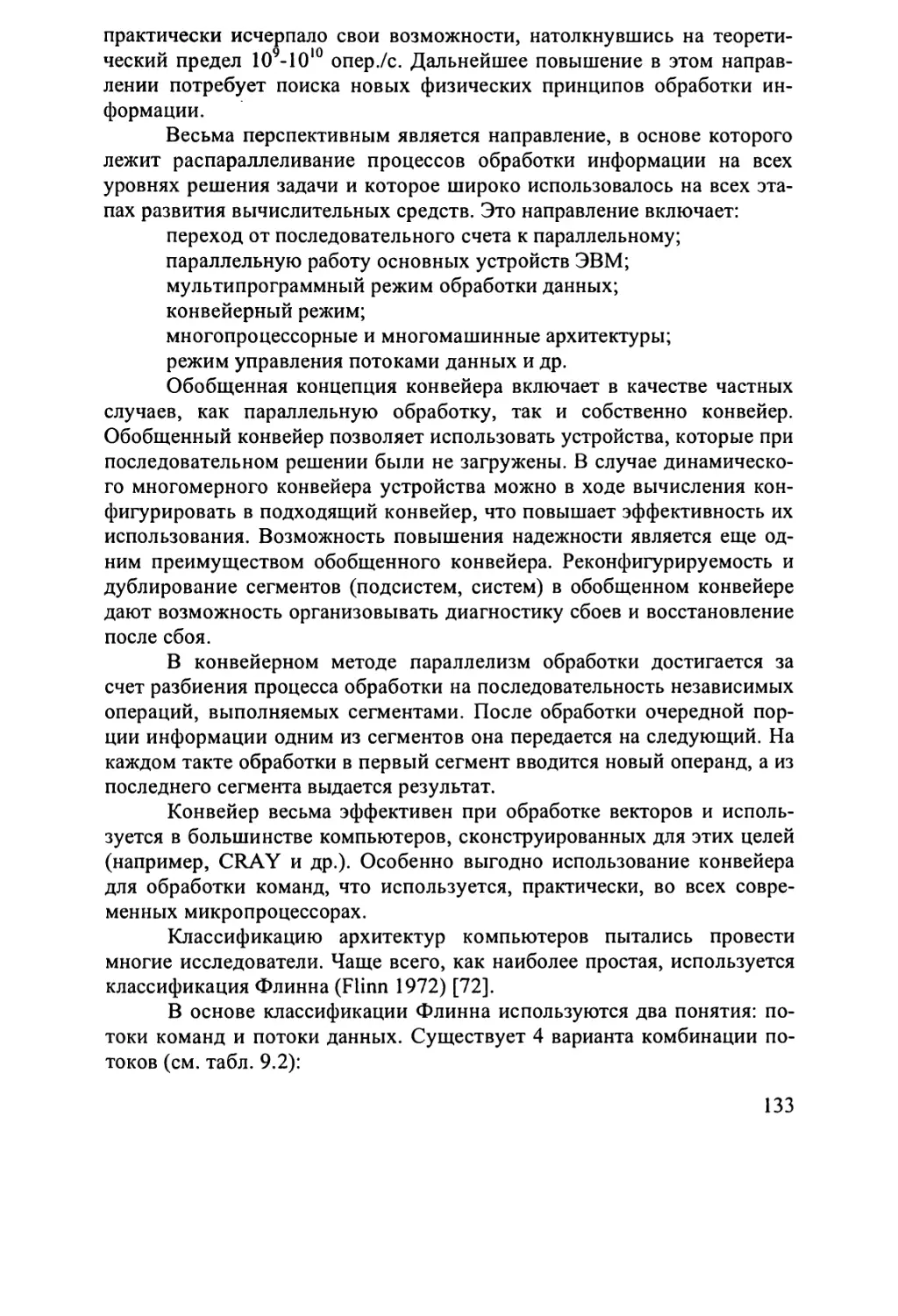
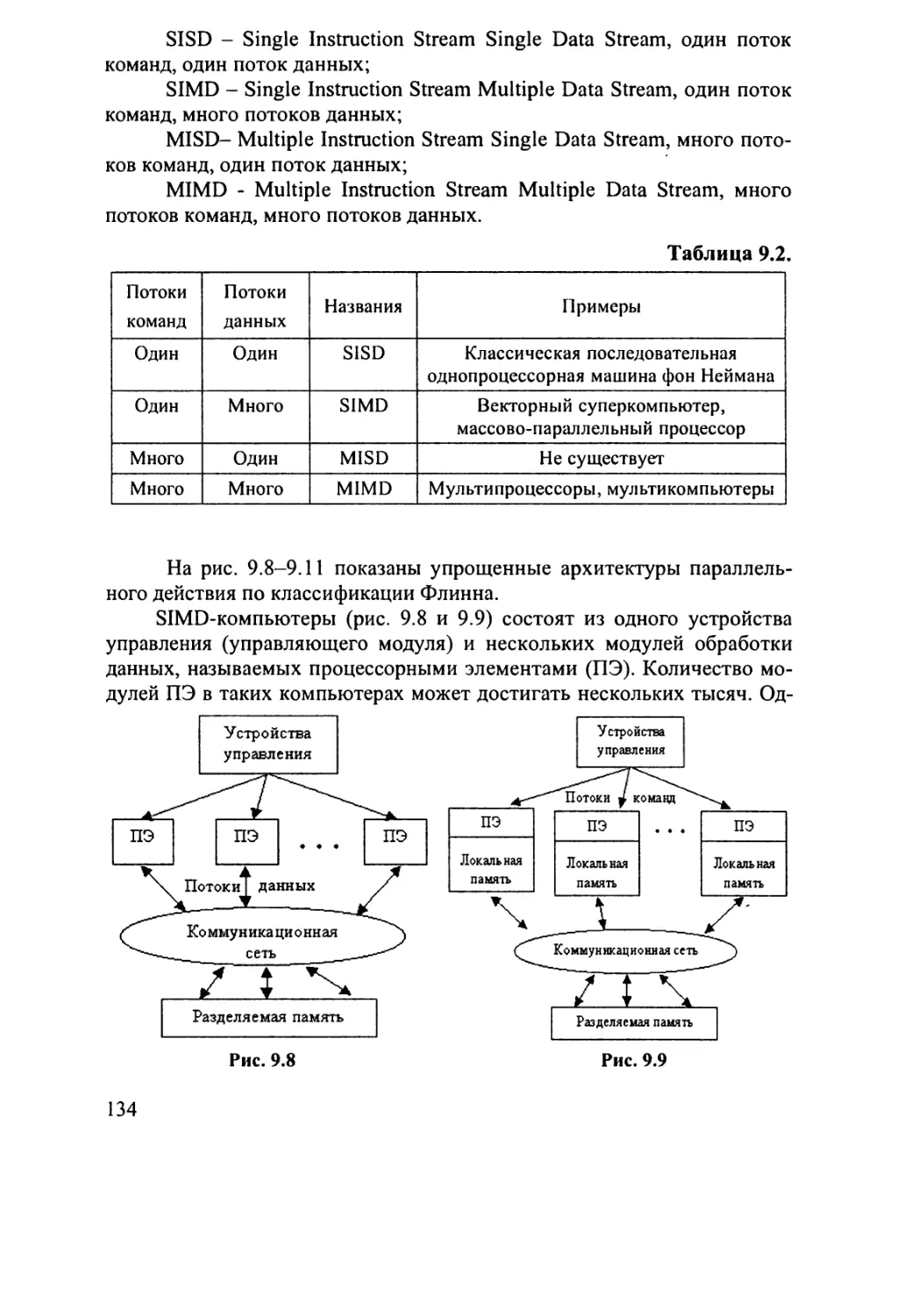
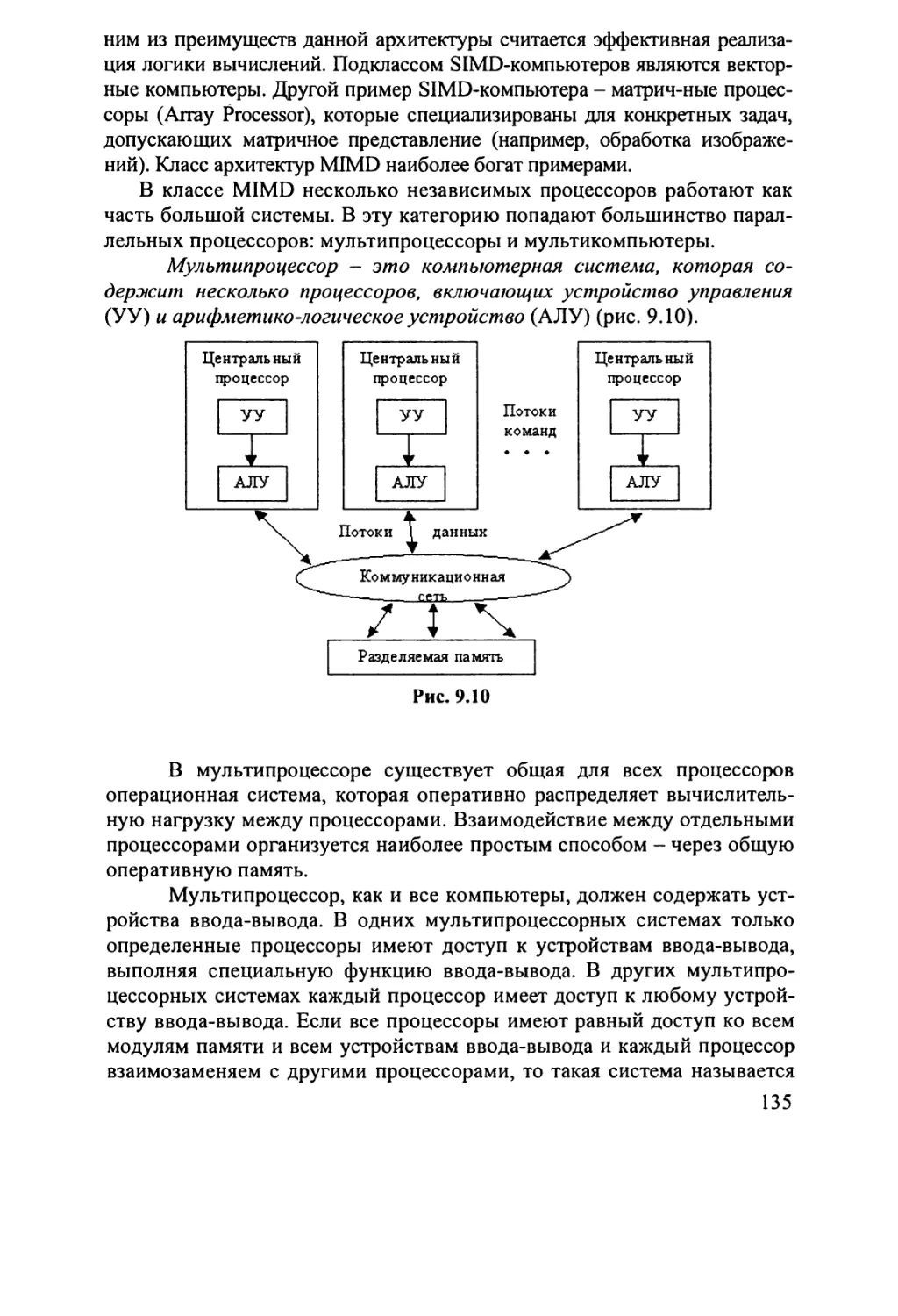
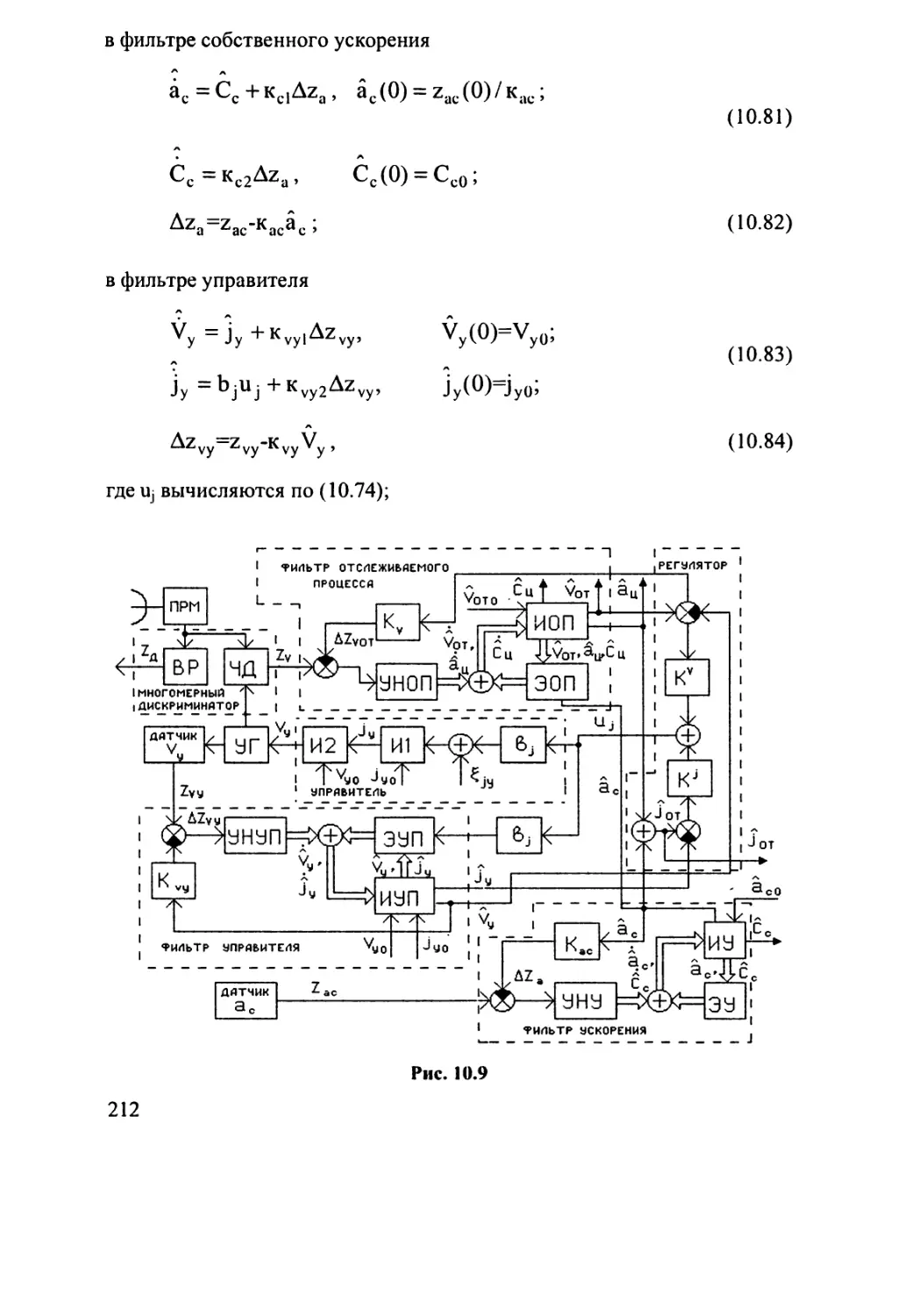
Обратим внимание на тот факт, что для неманеврирующей цели
(jm=0, jUB=0) оптимальный алгоритм траекторного управления вырожда-
ется в разновидность МПН (7.32) при условии, что Ь1о=ЗДо/(До-Дк). Это
свидетельствует о том, что оптимальный метод наведения является все-
ракурсным, всевысотным и обеспечивает наведение по практически
прямолинейной траектории. Причем для ДойДк, навигационный пара-
метр No=3. Для малых дальностей До, сравнимых с Дк, N(J>3, что предо-
пределяет более энергичный маневр ОУ при наведении на цель. Если же
цель маневрирует (jur ^0, то оптимальный алгоритм соответствует
разновидности МПН со смещением (7.48), для которого поправка Асо
зависит от условий применения, определяемых значениями До и Дк.
В заключение отметим, что закон (7.67) и (7.68) будет оптималь-
ным по минимуму функционала (7.56) только при условии, что требуе-
мые перегрузки не превышают их максимально допустимых значений.
7.5.3. Оптимизация алгоритма наведения
НА НАЗЕМНЫЕ ЦЕЛИ
При синтезе наилучшего, в некотором смысле, закона наведения
самолетов и ракет на наземные цели примем во внимание некоторые
особенности этих целей и наводимых на них ракет «в-п».
Радиоэлектронные ССИ, как правило, используются для наведе-
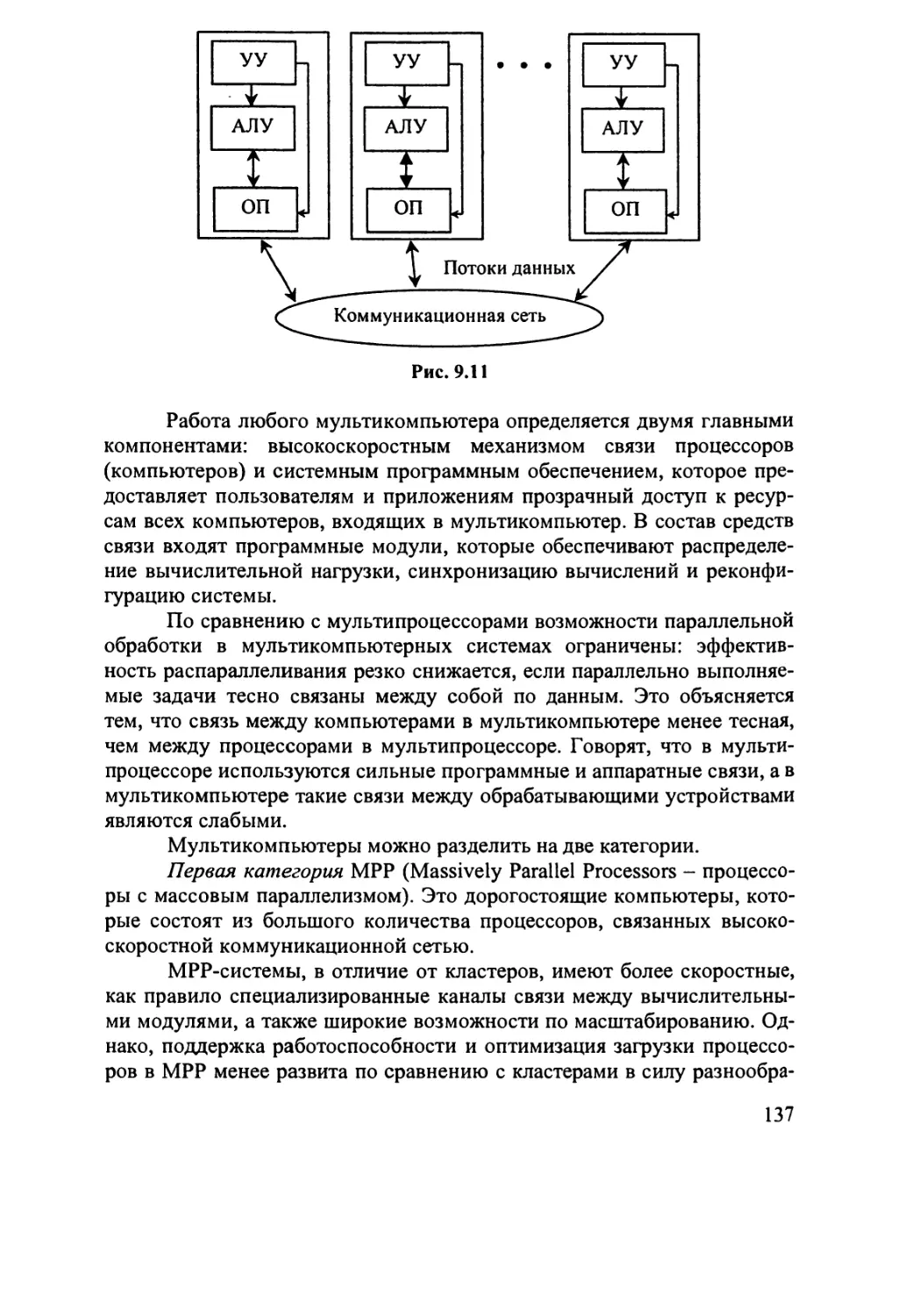
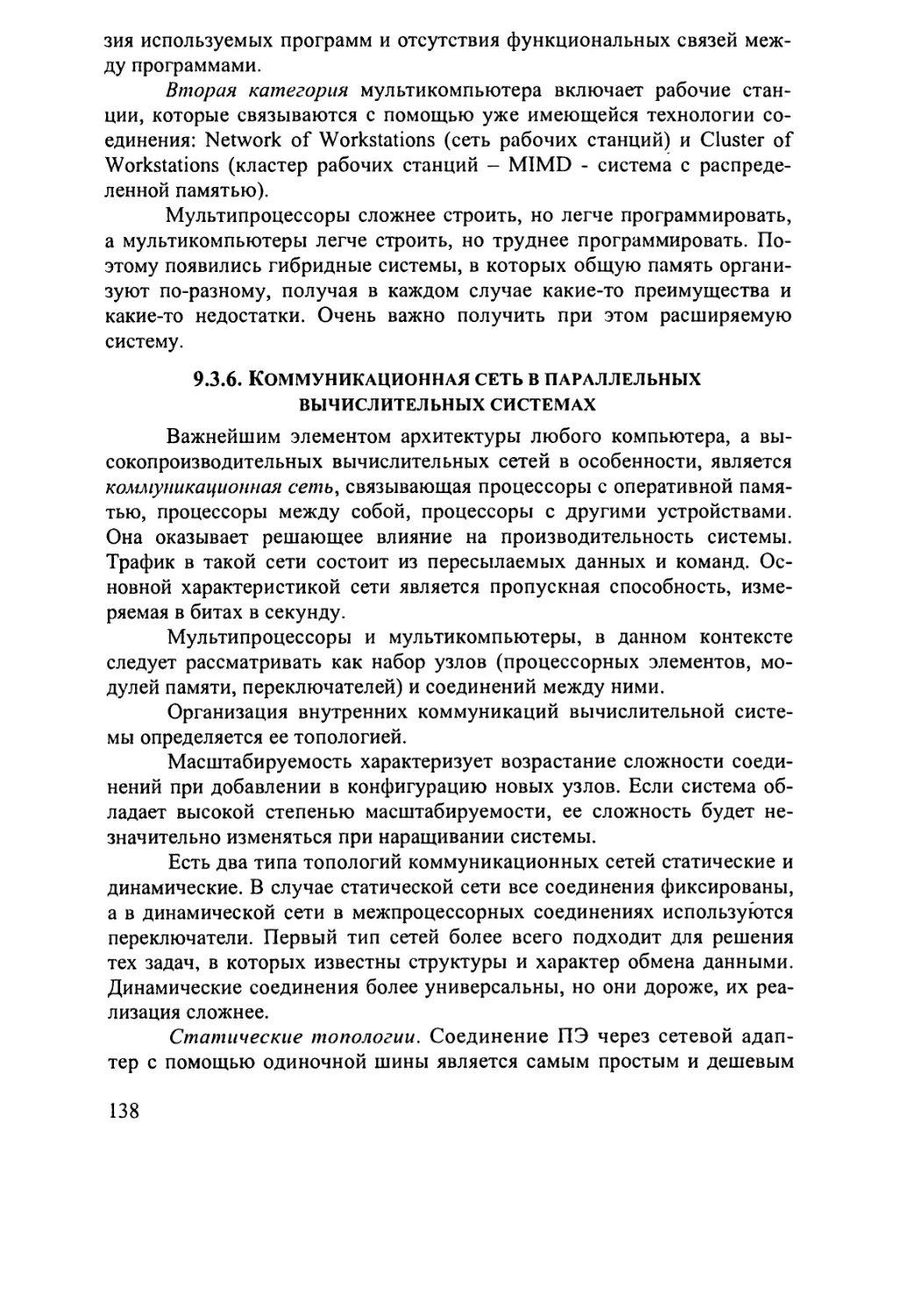
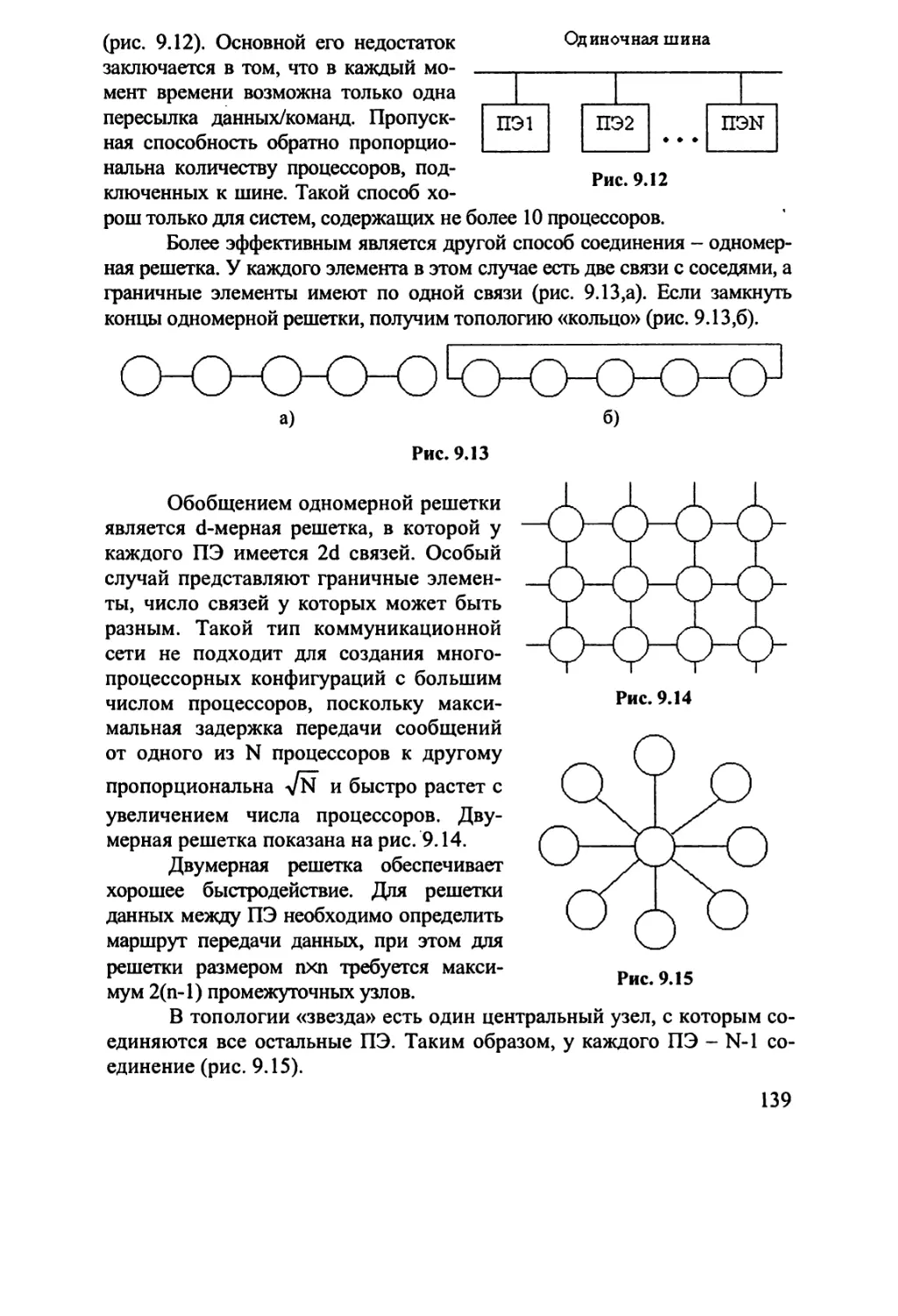
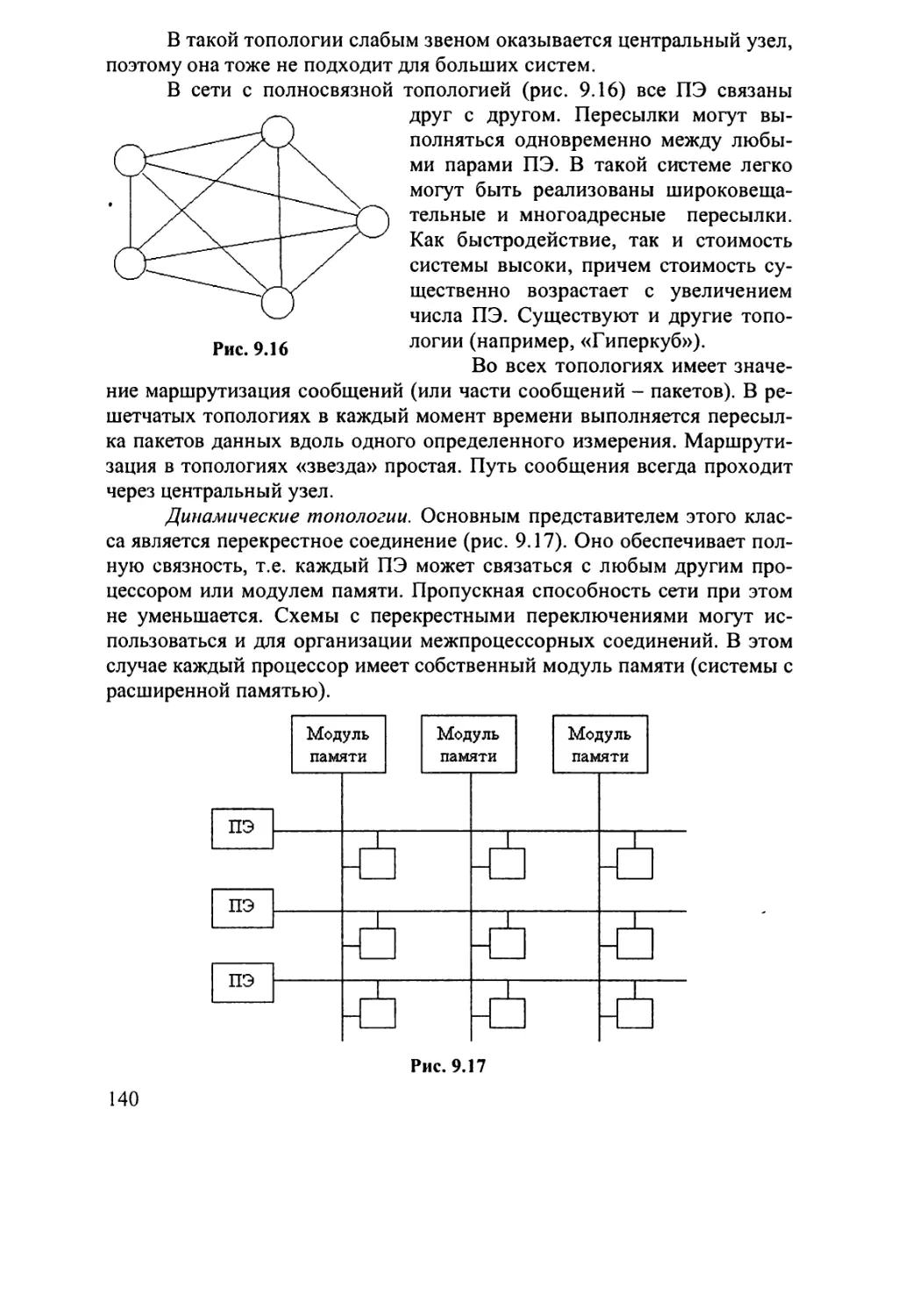
ния на наземные (надводные) цели, обладающие хорошим радиолока-
ционным контрастом. Такой контраст позволяет эффективно селектиро-
вать цели на фоне земной (водной) поверхности. К таким целям отно-
сятся крупные неподвижные объекты (железнодорожные мосты, стоян-
ки самолетов, промышленные застройки и т.д.) на земной поверхности
и корабли различного назначения на море. Однако скорость хода даже
быстроходных кораблей пренебрежимо мала по сравнению со скоро-
стью полета самолета или ракеты «в-п». В связи с этим скоростью
уничтожаемых целей можно пренебречь.
Наземные (надводные) цели обладают достаточно сильной ПВО.
Поэтому для обеспечения безопасности самолета-носителя дальность
пуска ракет «в-п» должна быть больше радиуса зоны ПВО. Такие
большие расстояния ракета преодолевает с помощью маршевого двига-
теля при наличии большого запаса топлива. Принимая во внимание не-
обходимость значительной по массе боевой части, можно утверждать,
что ракеты «в-п» должны иметь существенно большие размеры и массу
36
по сравнению с ракетами «в-в». Это предопределяет для них значи-
тельно меньший диапазон боковых перегрузок, а соответственно и бо-
лее жесткие требования к прямолинейности траектории наведения, что
актуально и для повышения экономичности процесса управления, и для
увеличения дальности пуска ракет.
Использование для наведения самолетов и ракет «в-п» большой
дальности метода пропорционального наведения, основанного на учете
угловой скорости ЛВ, не оправдывает себя из-за плохой управляемости
на начальных участках траектории, особенно при боковом ветре, и на-
личия начальных ошибок наведения (см. §7.4).
Прямой метод наведения, использующий угловые ошибки управ-
ления, также нецелесообразен из-за низкой точности наведения на ко-
нечном участке вследствие влияния ветра, что особенно проявляется
при наведении на подвижные надводные цели. В связи с этим желатель-
но получить алгоритм траекторного управления, в котором учитывают-
ся как ошибки наведения по углу, так и угловая скорость ЛВ. Такой за-
кон будет одинаково эффективным как на больших, так и на малых рас-
стояниях до цели. Необходимо подчеркнуть, что для самолетов и ракет
«в-п» самонаведение на наземные цели выполняется обычно лишь в го-
ризонтальной плоскости. В вертикальной плоскости обеспечивается по-
лет самолетов на заданной высоте, а для ракет «в-п» - полёт, вклю-
чающий три участка (рис. 7.15). На первом участке осуществляется про-
граммный набор высоты, на втором - полет с постоянной высотой и на
третьем - пикирование в режиме самонаведения.
Рис. 7.15
Полагая каналы управления независимыми, синтезируем алго-
ритм наведения ЛА в горизонтальной плоскости, совместно наилучший
по точности и по экономичности. В математическом плане эту задачу
можно сформулировать следующим образом.
Для объекта управления, угловое положение которого относи-
тельно неподвижной цели определяется системой уравнений:
<Рг =(0r+t + £ ;
д
(7.69)
<0, + (7-70)
АЛ гА
необходимо найти требуемый сигнал управления jrr, оптимальный по
минимуму функционала качества
1 = Му<
фу-ФгТТчф
0-сог О
°Тфу-фг
qJL0-O)r
+ jjrkjdt •
О
(7.71)
В (7.69)-(7.71): <рг - бортовой пеленг цели; <ру - угол упреждения, рав-
ный углу сноса за счет ветра; ^фг и - центрированные гауссовские
возмущения, характеризующие флуктуации бортового пеленга и угло-
вой скорости сог ЛВ; Д и Д - дальность до цели и скорость сближения с
ней; и q(1) - штрафы за точность управления, a kj - штраф за значение
сигнала управления jr, под которым понимается боковое ускорение ОУ.
Следует отметить, что соотношение (7.70) является разновидно-
стью уравнения (7.55) для случая, когда боковое ускорение цели равно
нулю. Такая ситуация справедлива как для неподвижной цели, так и для
малоподвижной цели, движущейся с постоянной скоростью. Смысл
введенных обозначений поясняется рис. 7.16, где для горизонтальной
Хо
Рис. 7.16
плоскости в невращающейся
земной системе координат
показаны: точки расположе-
ния цели Оц и объекта управ-
ления Ооу; векторы требуемой
VoyT и фактической Voy скоро-
стей ЛА. Необходимо отме-
тить, что при наличии ветра,
направление и скорость кото-
рого характеризуются векто-
ром Vu, полет к цели по пря-
мой ОоуОц возможен в том
случае, если требуемый бор-
товой пеленг фгг будет равен
углу упреждения <ру. Вполне очевидно, что при полете ОУ к цели по ли-
нии ОоуОц (под углом фгг =фу) угловая скорость линии визирования бу-
дет равна нулю, т.е. 0)^=0. Из (7.53) следует, что в такой ситуации те-
кущий промах hrT=0. Данное обстоятельство поясняет способность
функционала (7.71) учитывать требования точности наведения.
Поставив в соответствие (7.69)-(7.71) и (2.7), (1.5), получим
Подставив (7.72) в (3.35), найдем закон изменения требуемого
бокового ускорения ОУ:
jrr = (фу - Фг )+ • (7-73)
Kj4 к1д
Тогда алгоритм траекторного управления ЛА при наведении на назем-
ную цель описывается соотношением
△or =jrr-jr =^M<Py-<Pr)+-^-®r-Jr- (7-74)
kjA К]Д
Аналогично можно сформировать закон
△ов=]вт-]в=--^гфв+-^-Ч-]в (7.75)
KjA к]Д
для наведения ракеты «в-п» в вертикальной плоскости на конечном
участке траектории. Индексы «в» учитывают в (7.75) принадлежность
фазовых координат к вертикальной плоскости. Кроме того, было учтено
отсутствие угла сноса в вертикальной плоскости.
Анализ (7.73)-(7.75) позволяет сделать следующие заключения.
Полученный метод наведения (7.73) является частным случаем
метода последовательных упреждений (7.51) и отличается от него не-
стационарным характером коэффициентов, учитывающих в требуемом
законе наведения веса ошибок управления фу - фг и сог. При этом на
больших расстояниях до цели, когда Д велика и сог~О, закон (7.73) вы-
рождается в разновидность прямого метода, называемую иногда путе-
вым методом. Причем, чем меньше скорость Д, тем сильнее действие
ветра и влияние ошибки (ру - (рг на сигнал управления. При неизменной
скорости полета значение весового коэффициента q^Kj Д), учитываю-
щего влияние ошибки по углу фу-фг, остается неизменном. В то же
время по мере уменьшения дальности Д возрастает влияние второго
39
компонента ц(1)(Ог/(^Д) сигнала управления. Это возрастание, обуслов-
ленное не только увеличением сог с уменьшением дальности, но и уве-
личением весового множителя q(t/(Kj Д), становится особенно значи-
тельным на малых расстояниях до цели. Следовательно, в процессе по-
лета, по мере приближения к цели в законе управления происходит пе-
рераспределение влияния ошибок управления от фу-фг на начальных
участках в пользу ошибки по (О, на конечных участках траектории.
Синтезированный алгоритм наведения, реализуя минимум функ-
ционала качества (7.71), позволяет получить ССН, совместно наилуч-
шую как по точности управления, так и его экономичности.
Сигнал управления зависит не от абсолютных значений коэффи-
циентов штрафов цф, q(D и к,, а от их отношений q<p/Kj и q0/Kj, что сущест-
венно облегчает их выбор. Отношения q<p/Kj и q(1/Kj должны быть такими,
чтобы при максимально возможных значениях ошибок управления
фу-фг и со,., для минимальных значений | Д | и Д требуемые поперечные
перегрузки не превышали допустимые значения. Методика выбора от-
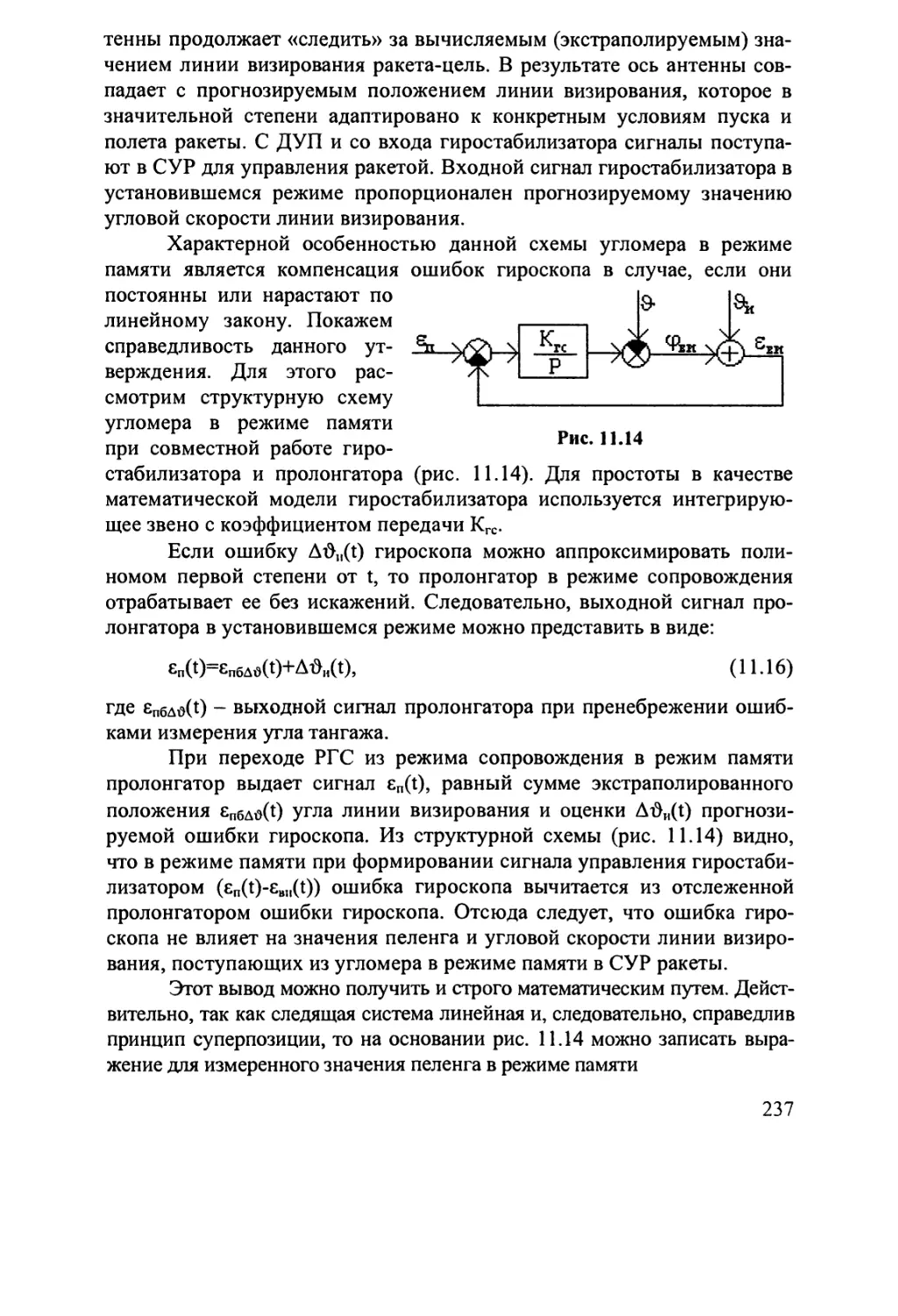
ношений коэффициентов штрафов, обеспечивающих минимальную ди-
намическую ошибку в установившемся режиме при заданной длитель-
ности переходных процессов, была рассмотрена в §3.5.
В состав ИВС, реализующей алгоритм управления (7.74), (7.75),
должны входить устройства формирования оценок дальности Д, скорости
Д , угла сноса фу, бортовых пеленгов фг и фв, угловых скоростей av и оов ЛВ
и собственных ускорений jr и jB. При этом оценки Д, Д, ф,., фв и сог, сов
могут быть сформированы в РГС, оценки jr и jB - путем обработки пока-
заний акселерометров, а для получения оценок фу можно использовать до-
плеровский измеритель скорости и угла сноса (ДИСС).
7.5.4. Оптимизация алгоритма наведения
НА МАЛОРАЗМЕРНЫЕ НАЗЕМНЫЕ ЦЕЛИ ПРИ ИСПОЛЬЗОВАНИИ
АКТИВНОГО СИНТЕЗИРОВАНИЯ АПЕРТУРЫ АНТЕННЫ
Одним из способов улучшения разрешающей способности РГС
ракет «в-п», предназначенных для наведения на малоразмерные назем-
ные цели (МНЦ) является использование синтезирования апертуры
(СА) антенны или доплеровского обострения луча (ДОЛ) [63, 64]. Од-
нако желаемый эффект улучшения линейного разрешения по азимуту
при использовании СА или ДОЛ достигается лишь в том случае, если
ракета движется под достаточно большим углом к линии визирования
МНЦ, в то время, как для её поражения линия пути ракеты должна сов-
падать с ЛВ. В связи с этим алгоритмы траекторного управления долж-
ны одновременно удовлетворять противоречивым требованиям к задан-
ному линейному разрешению и линейному промаху. Такие алгоритмы
должны обеспечивать полёт ракеты по криволинейной траектории, при
которой на начальном участке, при полёте под некоторым углом к ЛВ,
реализуется требуемое линейное разрешение по азимуту, а на конечном
- доворот, позволяющий получить высокоточное наведение на МНЦ.
Необходимо отметить, что при полёте по криволинейной траек-
тории возрастает расход энергии, затрачиваемой на управление ракетой,
в связи с чем более актуальной становится задача улучшения экономич-
ности закона наведения. Удовлетворить противоречащим друг другу
требованиям обеспечения высокой разрешающей способности, точно-
сти и экономичности наведения в условиях реальных ограничений на
располагаемые поперечные перегрузки при использовании традицион-
ных методов наведения [46, 49] невозможно. Следует подчеркнуть, что
поочередное эмпирическое использование на различных участках тра-
ектории различных методов наведения не позволяет получить приемле-
мых результатов из-за трудности определения момента перехода с од-
ного закона на другой, возникновения значительных переходных про-
цессов и сложности обеспечения экономичности.
Весьма перспективным направлением синтеза сложных законов
наведения, совместно наилучших по противоречивым требованиям точ-
ности, разрешающей способности и экономичности является использо-
вание математического аппарата СТОУ.
Ниже будут использованы простейшие алгоритмы этой теории,
которые позволяют для системы (2.7), предназначенной для отработки
процесса (2.8), при наличии измерений (2.16) сформировать сигнал
управления (3.35), оптимальный по минимуму локального функционала
качества (1.5).
Синтез будет выполнен при условии, что соблюдаются следую-
щие допущения:
известны значения требуемой линейной разрешающей способно-
сти по азимуту, длины волны и полосы пропускания доплеровского
фильтра;
наземная цель движется в произвольном направлении с постоян-
ной скоростью, величина которой существенно меньше скорости полета
ракеты;
известны диапазон ]доп располагаемых перегрузок ракеты, макси-
мально допустимая угловая скорость (0ДОП линии визирования и мини-
мально допустимый при синтезировании бортовой пеленг срдоп цели;
на борту ракеты имеются достаточно точные измерители дально-
сти до наземной цели и скорости сближения с ней;
известен допустимый промах, текущее значение которого опре-
деляется соотношениями (7.53);
канал наведения ракеты в вертикальной плоскости практически
не влияет на канал управления в горизонтальной плоскости.
Последнее допущение позволяет осуществлять независимый син-
тез управления в горизонтальной и вертикальной плоскостях. При этом
наибольшую сложность представляет синтез закона наведения в гори-
зонтальной плоскости, для которой и будут выполнены все необходи-
мые математические выкладки.
Выбор исходных моделей состояния для синтеза алгоритма тра-
екторного управления в горизонтальной плоскости осуществляется ис-
ходя из назначения системы, возможности измерения используемых фа-
зовых координат и их связей с требованиями, предъявляемыми к системе.
Использование аппарата СТОУ предполагает знание моделей
управляемого (2.7) и требуемого (2.8) процессов. Для определения зако-
на изменения хт в приложении к решаемой задаче рассмотрим зависи-
мость линейного разрешения АРГС по азимуту от взаимного располо-
жения цели и наводимого объекта.
Рис. 7.17
Пусть на ракете, находя-
щейся в т. Ор на удалении Д от
неподвижной цели Оц и движу-
щейся со скоростью Vp под уг-
лом фр к ней (рис. 7.17), форми-
руется сигнал подсвета цели с
длиной волны X, который после
отражения от цели принимается
на объекте управления. Тогда
доплеровская частота отраженного сигнала определяется соотношением
а частота сигнала, отраженного от точки Опр, отстоящей от Оц на рас-
стояние А/т, равное требуемому линейному разрешению по азимуту-,
может быть рассчитана по формуле
2Vpcos(<pr +А/Т/Д)
(7.77)
Следует подчеркнуть, что в зависимости от точности аппрокси-
мации, могут быть получены различные формулы, связывающие между
собой требуемое разрешение Д/т с условиями применения ракеты, опре-
деляемые конкретными значениями Vp, фр, Д. Ниже будет рассмотрен
наиболее простой случай, который базируется на аппроксимации (7.77)
рядом Тейлора в линейном приближении. При таких условиях
F -= 2Vp C0S Фг 2Vp sin Фг А/т г 2Vpsin<pr д/т
др X X Д д X Д ’
где было учтено равенство (7.76).
Для того, чтобы разрешить т.т. Оц и Оцр полоса пропускания доп-
леровского фильтра в приёмнике АРГС ракеты не должна превышать
величины
ИЛИ
где
AF = Ffl
2V_sin<pr д/
Р ___ р______' Г
др" X д
?.С0. А/
др —
X
V sin<p,
сог =—Е-------
д
угловая скорость ЛВ цели. Из (7.78), (7.79) можно получить:
2Vpsinq)r
А, AFk
Д/т =---
т 2m
(7.78)
(7.79)
(7.80)
(7.81)
(7.82)
Отсюда следует, что для реализации требуемого разрешения Д/т
траектория движения ракеты должна быть такой, чтобы бортовой пе-
ленг цели удовлетворял условию
. ДДБХ
ф™, = arc sin —---. (7.83)
Жгг 2УрД/т 7
Анализ (7.83) позволяет придти к следующим заключениям.
Бортовой пеленг фп., необходимый для реализации требуемого
линейного разрешения Д/т по азимуту, зависит как от параметров систе-
мы обработки сигналов ДР, X, так и от условий применения Д и Vp.
При прочих равных условиях для обеспечения более высокого ли-
нейного разрешения по азимуту необходимо более сильное искривление
траектории полёта ракеты, характеризуемое большими значениями <рг.
В общем случае рассматриваемая система наведения предназна-
чена для стабилизации линейного разрешения по азимуту, обеспечивае-
мого выбором бортового пеленга (7.83), высокоточного вывода ракеты
на цель, обеспечивающего минимизацию промаха (7.53) при условии
(Огг=0,
(7.84)
и минимизации расхода энергии управляющих сигналов.
В связи с этим в состав модели должны как минимум входить <рг и
сог. Геометрические соотношения между координатами абсолютного и
относительного движения
наземной цели и ракеты в
горизонтальной плоскости
приведены на рис. 7.18.
На этом рисунке в
земной невращающейся
системе координат XOZ по-
казано текущее расположе-
ние ракеты Ор и цели Оц.
Вектор Уц характеризует
скорость и направление
движения цели, а Урт и Ур -
требуемый и фактический
векторы скорости ракеты;
<ргг - требуемое значение
бортового пеленга, при ко-
тором обеспечивается заданное разрешение Л/т (7.81); jr - поперечное
ускорение ракеты; ег - угол визирования цели.
Из рисунка видно, что геометрические связи абсолютных и отно-
сительных фазовых координат соответствуют модели (7.69) и (7.70).
Необходимо отметить, что и <рг и сог достаточно просто оцениваются
существующими измерителями.
Функционал качества (1.5), оценивающий эффективность закона
наведения, должен учитывать: ошибки (ргг-(рг управления по бортовому
пеленгу, используемые для стабилизации линейного разрешения (7.81)
по азимуту; ошибки согг-сог управления по угловой скорости визирова-
ния, по которым можно оценить величину текущего промаха, и расход
энергии сигналов управления jr. С учетом этих особенностей миними-
зируемый функционал может быть получен в виде соотношения:
I = My
Фгг-фгТГЧф
corr - co, 0
0 Фгт-Фг
Чо>Л®гг-Юг
t
+ JjpKjdt
0
(7.85)
в котором цф и q(0 - штрафы за точность управления по углу и угловой
скорости, a kj - штраф за величину сигнала управления.
Сопоставив (7.85) с (1.5), а (7.69), (7.70) с (2.7) будем иметь:
Ху
К = Kj, u = jr (7.86)
Используя (7.86) в (3.35) получим закон наведения
jrr = -Ч-(Фгг - Фг )+ -^7 “г > (7.87)
KjA KjA
где ф,.,. = агс5т[(цХДру(2УрД/т)] определяется из (7.83). Тогда алго-
ритм траекторного управления ракетой при наведении на наземную
цель описывается соотношением:
△г = JrT-jr =-Ц-(Фгт-Фг )+^77 Ч-Jr- (7-88)
К]д К]Д
Анализ (7.87), (7.88) позволяет сделать следующие заключения.
Для реализации (7.88) необходимо иметь устройства (алгоритмы)
оценивания дальности, скорости сближения с целью, бортового пеленга,
угловой скорости линии визирования и собственных скорости и попе-
речного ускорения ракеты. Такой состав измерителей не накладывает
никаких ограничений на практическую реализуемость метода.
Полученный закон наведения (7.87) является нестационарной
разновидностью метода последовательных упреждений [52]. В этом за-
коне на больших расстояниях, когда Д велика и сог~О, управление опре-
деляется первым слагаемым. В такой ситуации полет ракеты будет осу-
ществляться под углом фг~фгг к цели, обеспечивающим стабилизацию
требуемой разрешающей способности. При этом по мере уменьшения Д
и увеличения сог начинает возрастать влияние второго слагаемого
Чша)|./к;Д сигнала управления. Влияние этого слагаемого становится
особенно значительным на малых расстояниях до цели. Следовательно
в процессе полета, по мере приближения ракеты к цели, в законе управ-
ления происходит плавное перераспределение влияния ошибок управ-
ления от <Ргг“<Рг, стабилизирующих разрешающую способность на на-
чальном участке наведения, к ошибкам по сог, минимизирующим теку-
щий промах на конечном участке траектории.
Вес ошибок по углу и угловой скорости, определяющий перерас-
пределение приоритетов в законе управления, зависит от соотношения
штрафов q<p/Kj и qG/i<j. При этом выбором к, - коэффициента штрафа за
экономичность добиваются выпол-нения условия jr<jr доп, при котором
текущие управляющие перегрузки не превышают предельно допусти-
мых значений. Манипулируя q<p и q(0 можно варьировать моментом вре-
мени перехода от преимущественного управления по углу к управлению
по угловой скорости.
Изменения относительных фазовых координат системы (7.69),
(7.70) с законом наведения (7.87) иллюстрируются эпюрами, приведён-
ными на рис. 7.19-7.24, а возможный вид траектории в горизонтальной
плоскости - на рис. 7.25. На этих рисунках: Дн - дальность пуска; <рТ|Пах,
содоп, jaon, Ьдш, - максимальные значения бортового пеленга, угловой ско-
рости ЛВ, поперечного ускорения и промаха; А/т - требуемое линейное
Исследования полученного ал-
горитма показали, что он: позволяет
обеспечить на начальном участке на-
ведения стабилизацию требуемого
линейного разрешения (рис. 7.24), а
на конечном участке минимизацию
текущего промаха ракеты (рис. 7.23);
дает возможность достаточно просто
и плавно перераспределять приорите-
ты в управлении между обеспечением
требуемого линейного разрешения по
азимуту и допустимыми промахами ракеты; позволяет достичь приемлемо-
го качества функционирования алгоритма в целом.
Следует отметить, что при использовании других исходных мо-
делей состояния могут быть получены другие алгоритмы траекторного
управления [43, 44].
7.5.5. Оптимизация алгоритма наведения на наземные
ЦЕЛИ ПРИ ИСПОЛЬЗОВАНИИ ПОЛУАКТИВНОГО
СИНТЕЗИРОВАНИЯ АПЕРТУРЫ АНТЕННЫ
Анализ систем радиоуправления ракетами «в-п» с синтезирова-
нием апертуры антенны или ДОЛ [1, 53, 54], дающим возможность се-
лектировать малоразмерные цели на фоне земной (водной) поверхности,
позволяет придти к заключению о достаточно малой дальности их об-
наружения и сопровождения. Причинами этого являются малая мощ-
ность бортового передатчика ракеты и криволинейность траектории ее
полета, за счет которой теряется до 15% дальности действия [54].
Отсюда следует, что для захвата наземной цели визирными сис-
темами ракеты при нахождении ее на подвеске самолет-носитель дол-
47
жен заходить в зону активного противодействия систем ПВО. Исполь-
зование ракет «в-п» с комбинированными системами наведения, преду-
сматривающими достаточно большой участок автономного полета, пре-
допределяет необходимость выполнения сложных процедур идентифи-
кации цели с последующим захватом на траектории.
В связи с отмеченными особенностями весьма перспективным
является использование полуактивных систем радиоуправления ракета-
ми с синтезированием на них апертуры антенны. Использование полу-
активного принципа построения систем радиоуправления дает возмож-
ность говорить о существенном увеличении дальности самонаведения
на малоразмерные наземные цели. Такая возможность предопределяется
следующими причинами:
использованием существенно более мощного передатчика сигна-
ла подсвета цели, размещаемого на борту самолета-носителя ракеты;
наведением ракеты на цель практически на прямолинейной тра-
ектории, что обеспечивает по сравнению с активными системами уве-
личение дальности наведения.
Следует, однако, отметить, что в полуактивных системах потре-
буются более сложные алгоритмы функционирования информационно-
вычислительных систем, обусловленные необходимостью согласован-
ного управления, как ракетой, так и самолетом-носителем.
Рассмотрим основные зависимости линейного разрешения по
азимуту от условий применения для ракеты «в-п» использующей полу-
активное синтезирование. Пусть на самолете, находящемся в точке Ос
на удалении Дс от неподвижной цели Оц и движущемся со скоростью Vc
под углом фс к ней (рис. 7.26), формируется сигнал подсвета с длиной
волны X, который после отражения от цели принимается на ракете, рас-
положенной в точке Ор на удалении Др от цели и движущейся со скоро-
стью Vp под углом фр к ней.
Рис. 7.26
Тогда доплеровская частота сигнала, отраженного от цели и при-
нимаемого на ракете, которая определяется динамикой взаимного пере-
мещения самолета-носителя, цели и управляемого средства поражения,
определяется соотношением
Fflp - (vc cos (pc + Vp cos Фр)/ X.
(7.89)
В свою очередь доплеровскую частоту сигнала, отраженного от
точки Оцр земной поверхности, удаленной от цели на расстоянии Д/т,
равную требуемому линейному разрешению можно рассчитать по формуле
АД
Г = vecos|(pc+^ l+Vcos ф„ + ——j / X.
лр Дс р 1 д
д,
(7.90)
р
Следует отметить, что в зависимости от точности аппроксимации
Р'др могут быть получены различные формулы, связывающие между со-
бой требуемое разрешение Д/т с условиями применения самолета и ра-
кеты, определяемыми конкретными значениями Vc, <рс, Vp, <рр. Ниже бу-
дет рассмотрен наиболее простой случай, который базируется на ап-
проксимации (7.90) рядом Тейлора с использованием линейных членов
разложения. При таких условиях
ГУ vc Vc . Д/т v V . д/
др X X Дс х р X р др
„ Vc . Д/т v . д/
= F.. „ —sin фс —L sm ф„ —31,
др X Vc Дс X Жр Др
где было учтено равенство (7.89).
Для того, чтобы разрешить точки Оц и Орр, полоса доплеровского
фильтра на ракете не должна превышать величины
AF = F -F' = -^-8тфс-^- + -^-зтф -^ =
др др X Y Дс X УрДр
^(ОСД/.Г озрД/т_(,<ос+о>рМ
XX X
V sincp V sincp
где сос =— --— и сор =—1----5--угловые скорости линии визиро-
Дс Др
вания цели с самолета и ракеты. Из (7.91) можно получить, что требуе-
мое разрешение на ракете, определяемое соотношением
Д/ = kAF , (7.92)
(0с+(0р
зависит от длины волны сигнала подсвета цели, полосы пропускания
доплеровского фильтра приемника ракеты и динамики взаимного пере-
мещения самолета и ракеты относительно цели. В свою очередь из
(7.92) следует, что для получения на ракете требуемого разрешения Л/т
носитель должен перемещаться таким образом, чтобы его угловая ско-
рость линии визирования удовлетворяла требованию
AAF
<осг=-;—“ (7.93)
д/.г
Анализ (7.93) позволяет придти к следующим заключениям:
1. Для получения требуемого разрешения ракета может двигаться
независимо по различным траекториям: как по прямолинейным, реали-
зующим условие top=0, так и криволинейным, при которых (ор^0. В пер-
вом случае можно использовать хорошо отработанные разновидности
пропорционального наведения. В последнем случае уменьшится даль-
ность наведения, однако можно будет использовать те же алгоритмы
траекторного управления, что и при активном синтезировании. Кроме
того, возможно и использование промежуточных вариантов.
2. В общем случае, траектория движения самолета-носителя оп-
ределяется требуемым разрешением, шириной полосы пропускания до-
плеровского фильтра приемника ракеты, несущей частотой (длиной
волны) сигнала подсвета цели и законом наведения ракеты. Для реали-
зации требуемой траектории движения самолета на него необходимо
передавать с ракеты значения top угловой скорости ее линии визирова-
ния цели. В частном случае при использовании на ракете метода про-
порционального наведения на наземную неподвижную цель, когда top«0,
самолет может двигаться по программной траектории, реализующей
условие
XAF
toc т =--
сг Д/т
(7.94)
Необходимо отметить, что в такой ситуации нет необходимости
передавать с ракеты на носитель значения top, однако, угловая скорость
toCT должна в 2 раза превышать то значение, которое необходимо для
реализации активного синтезирования [54].
Задача синтеза алгоритмов траекторного управления самолетом-
носителем и ракетой «в-п» наилучших в том или ином смысле может
быть решена различными способами. Весьма перспективным является
способ локальной оптимизации, позволяющий достаточно просто найти
закон управления, совместно наилучший по точности и экономичности.
Этот способ позволяет для системы (2.7), предназначенной для отработ-
ки процесса (2.8), при наличии измерений (2.16) сформировать сигнал
управления (3.35), оптимальный по минимуму функционала (1.5)
Пусть эволюции самолета-носителя и наводимой ракеты опреде-
ляются кинематическими уравнениями (7.70)
(7.95)
(7.96)
в которых: (ос и (Ор - угловые скорости линий визирования цели с само-
лета и ракеты; Дс и Др - удаление цели от самолета и ракеты; Дс Др-
скорости изменения Дс и Др; jc и jp - поперечные ускорения самолета и
ракеты, играющие роль управляющих сигналов; и £р - возмущения,
обусловленные внешними воздействиями (например, ветром, турбу-
лентностью атмосферы).
Поставив в соответствие (7.95), (7.96) и (2.7), получим:
Необходимо для системы (7.95)-(7.97) найти вектор Uj сигналов
управления, оптимальный по минимуму функционала
Сравнивая (7.98) с (1.5) приходим к заключению, что
411 0 кн
. 0 q22_ _ 0
0 О)ст
, Х.г =
K22J ®рт
(7.98)
(7.99)
Используя (7.97) и (7.99) в (3.35), получим соотношения для тре-
буемых значений поперечных ускорений jCT и jpT, обеспечивающих ми-
нимум функционала (7.98):
jpT=—Я4-(шрт-шр). (7.101)
К22Др
Достоинством полученного управления является автономность
требований к ракете и самолету-носителю: ракета должна обеспечивать
минимум промаха (7.53)
Дрюр
Др
(7.102)
а самолет - реализацию требуемого разрешения (7.92) за счет выдержи-
вания закона (7.93). В свою очередь из (7.102) следует, что для обеспе-
чения нулевого промаха необходимо выполнение условия
СОрт=0.
(7.103)
Тогда с учетом (7.93), (7.103) и (7.100), (7.101) метод наведения
самолета и ракеты может быть получен в виде соотношений:
Jct
ди XAF
К1 1Дс - ^т
-(Ьр-б)с
(7.104)
jpT=~(7.105)
К2?Др
Анализ (7.104), (7.105) позволяет придти к следующим заключениям:
сигналы управления определяются, ошибками управления, кото-
рые характеризуются несоответствием текущих значений сос и сор их
требуемым величинам соС1 и сор.,.;
вес ошибок управления зависит от соотношения штрафов (qn/KH
и Цзг/кгг) за точность и экономичность и обратно пропорциональны рас-
стояниям Дс и Др до цели. Последнее очень важно для ракеты, предо-
пределяя увеличение ее чувствительности к ошибкам управления по
мере приближения к цели.
Сравнение (7.105) с (7.59) позволяет придти к заключению, что
для управления наведения ракеты с полуактивным синтезированием
может быть использован закон (7.66)
jp,=^^-Vc6i,p. (7.106)
До Дк
в котором До и Дк - соответственно дальности пуска ракеты и оконча-
ния управления, и для которого справедливы все выводы, полученные
при анализе (7.66).
Принимая во внимание (7.106) можно заключить, что алгоритм
траекторного управления ракетой «в-п» с полуактивным синтезирова-
нием будет определяться соотношением.
ЗД - .
Ap=jp,-jp=^^Vc(!o>p-jp, (7.107)
Эволюции относительных
фазовых координат самолёта и ра-
кеты с полуактивным синтезиро-
ванием в процессе её наведения
показаны на рис. 7.27 - 7.32, а тра-
ектории их полёта в горизонталь-
ной плоскости на рис. 7.33. При
этом кривые под номером 1 соот-
ветствуют самолёту-носителю,
кривые 2 - наводимой ракете.
В заключение отметим, что для реализации этого алгоритма с но-
сителя необходимо подавать команды целеуказания по дальности пуска
Дп, скорости сближения и бортовому пеленгу цели <рс. На самой ракете
необходимо формировать оценки Vc6, d)p и j .
ГЛАВА 8. ПРИНЦИПЫ ПОСТРОЕНИЯ
И ОСОБЕННОСТИ ФУНКЦИОНИРОВАНИЯ ИВС
8.1. ОСОБЕННОСТИ ПОСТРОЕНИЯ
И ФУНКЦИОНИРОВАНИЯ ИВС
МНОГОФУНКЦИОНАЛЬНОГО САМОЛЁТА
Информационно-вычислительная система самолета, предназна-
ченная для формирования параметров рассогласования (см. рис. В.1),
представляет собой сложную, комплексную, иерархическую структуру.
Она включает в себя совокупность датчиков параметров собственного и
относительного движения ОУ и цели, бортовую вычислительную сис-
тему (БВС), систему индикации и устройства сопряжения с оружием.
Перечень задач, решаемых ИВС самолетов, определяется общими зако-
номерностями их работы, рассмотренными во введении и §1.1. При
этом конкретный состав датчиков зависит от метода наведения.
Сложность и комплексный характер ИВС обусловлены необхо-
димостью решать задачи самонаведения независимо от конкретных
условий применения. Это предопределяет использование различных
методов наведения, датчиков различной физической природы и разных
режимов управления ЛА. Иерархический способ построения позволяет
существенно экономить аппаратурные и вычислительные затраты в
процессе наведения. В зависимости от вида информации, способов ее
получения и физической природы используемых сигналов все датчики
объединяются в системы более низкого уровня (подсистемы) по отно-
шению к ИВС. Радиоэлектронные измерители параметров относитель-
ного движения ОУ и цели и некоторых параметров ее абсолютного
движения объединяются в составе БРЛС. Датчики этих же параметров в
оптическом и инфракрасном диапазонах функционируют в составе оп-
то-электронной системы (ОЭС). Датчики параметров собственного
движения самолета объединяются в системы воздушных сигналов
(СВС) и курсовертикали (СКВ), которые в дальнейшем будем называть
системой автономных датчиков (САД). Функциональные связи между
этими подсистемами для ИВС многоцелевого самолета, позволяющей
реализовать современные методы наведения на наземные и маневри-
рующие воздушные цели, показаны на рис. 8.1.
Рис. 8.1
В такой ИВС можно выделить две группы режимов функциони-
рования, обеспечивающие самонаведение самолета на воздушные цели
и на наземные объекты. В первую группу входят: режим поиска и обна-
ружения целей; автоматическое сопровождение нескольких целей в
режиме обзора (АСЦРО) и режим сопровождения одиночной цели
(СОЦ), именуемый также режимом непрерывной пеленгации (РНП).
Вторую группу составляют режимы картографирования земной поверх-
ности, в том числе и использующие синтезирование искусственной
апертуры антенны [63, 64], которые позволяют решать задачи навига-
ции, а также обнаружения и сопровождения наземных целей.
Режимы поиска и обнаружения воздушных и наземных целей вы-
полняются либо БРЛС, либо ОЭС, либо совместно обеими системами.
Они дают лишь общую картину воздушной и наземной обстановки и
формируют начальные условия (целеуказания) для функционирования
ИВС в других режимах, в которых, собственно, и решаются задачи са-
монаведения.
При АСЦРО, наряду с одновременным, автоматическим сопро-
вождением, цели ранжируются по степени опасности. При этом ИВС
формирует вектор А параметров рассогласования (рис. 8.1), благодаря
которому самолет наводится или на наиболее опасную цель, или на
геометрический либо энергетический центр группы целей. Одновременно
для каждой i-й опасной цели, число которых ограничено числом Np имею-
щихся на борту ракет, вычисляются зоны разрешенных пусков (ЗРП) в виде
интервалов ДрпшХ| Дрты от максимально разрешенной Дртах; до минимально
разрешенной Др1П1П1 дальностей. Кроме того, для каждой j-й из Np ракет
формируются свои команды целеуказания для пуска по i-й цели. При ис-
пользовании ракет с АРГС это дает возможность пускать все Np ракет по
различным целям при выполнении условий:
Др mini — Д. — Др maxi’ (&-0
cos<pricos(pBi >(0,7-0,9), (i = l,Np). (8.2)
Конкретные значения ограничений в правой части неравенства
(8.2) определяются энергетическими возможностями ракет при ликви-
дации первоначальных ошибок пуска по направлению, которые обу-
словлены бортовыми пеленгами фг и (рв целей в горизонтальной и верти-
кальной плоскостях.
АСЦРО может выполняться несколькими способами. Наиболее
простой из них сопровождение на проходе (СНП), осуществляемое в
процессе последовательного просмотра всей зоны обзора антенной
БРЛС либо чувствительными элементами ОЭС. Другой способ, назы-
ваемый программируемым обзором, основан на выборочном просмотре
пространства только в направлениях сопровождаемых целей. Такой
способ АСЦРО пока реализуется лишь в БРЛС с фазированной антен-
ной решеткой (ФАР).
Если точность целеуказаний (вектор хцу на рис. 8.1) в режиме
АСЦРО недостаточна для эффективного применения ракет, либо упот-
ребляются ракеты с полуактивными радиолокационными головками
самонаведения (ПАРГС), требующие постоянного подсвета цели, то
используется режим СОЦ. В этом режиме в БРЛС или ОЭС оценки
требуемых фазовых координат (векторы хрлс, хоэс) непрерывно фор-
мируются только для одной цели, на которую и осуществляется самона-
ведение. Объектом для поражения может быть либо наиболее опасная
цель из сопровождавшихся ранее при АСЦРО, либо цель, указанная
системой командного радиоуправления, либо любая цель, выбранная
самим летчиком. Как и раньше, для этой цели формируется зона разре-
шенных пусков и команды целеуказаний (ЦУ) ракетам. При выполне-
нии условий (8.1) и (8.2) по этой цели может быть осуществлен пуск
одной или нескольких ракет. Достоинством режима СОЦ является более
высокая точность самонаведения самолета и целеуказаний ракетам, чем
в АСЦРО. В качестве недостатков можно отметить потерю информации
о всех других целях и наличие явного демаскирующего признака подготов-
ки атаки, связанного с постоянной фиксацией излучения сигналов подсвета
цели (СПЦ) в направлении перехватываемой цели.
Бортовая вычислительная система, как правило, строится по фе-
деративно-централизованному модульному принципу. В ее состав вхо-
дят ЦВМ-диспетчер, управляющая всеми режимами работы ИВС в це-
лом и ее составных частей, и ЦВМ, входящие в состав БРЛС, ОЭС и
системы единой индикации (СЕИ). С помощью этих ЦВМ выполняется
первичная обработка сигналов, поступающих от целей, и вторичная
обработка, в результате которой формируются оценки всех фазовых
координат, необходимых для самонаведения самолета, и целеуказания
ракетам. ЦВМ СЕИ кодирует и преобразует поступающие оценки и
сигналы к масштабу и виду, удобному для воспроизведения на индика-
торах и восприятия экипажем. Необходимо отметить, что в роли дис-
петчера может выступать любая из ЦВМ, входящих в состав БРЛС,
ОЭС и СЕИ.
Суть модульного принципа состоит в формировании математиче-
ского обеспечения ЦВМ в виде отдельных блоков (модулей) программ.
Такой прием позволяет постоянно модернизировать отдельные алго-
ритмы функционирования БРЛС, ОЭС, СЕИ и ИВС в целом, не затраги-
вая остальные.
Обмен информацией между различными ЦВМ, БРЛС, ОЭС, САД
и СЕИ осуществляется, в основном, в цифровом виде через специаль-
ные мультиплексные линии (шины) связи.
Вектор параметров рассогласования А формируется в ИВС путем
преобразования фазовых координат собственного движения цели, само-
лета и их относительного движения, которым на рис. 8.1 соответствуют
векторы хц, хс и хот„. В автоматическом режиме управления самолетом
параметры рассогласования поступают непосредственно в САУ и ото-
бражаются для контроля в СЕИ. В ручном и директорном режимах они
индицируются в СЕИ. Сюда же передается для отображения и различ-
ная информация от САД (хсад), БРЛС (хряс), ОЭС (хоэс) и ракет, нахо-
дящихся на подвесках (x10lj), которая позволяет летчику управлять
самолетом и его системами. Кроме того, в СЕИ поступают сформиро-
ванные в БРЛС и ОЭС признаки: маневра (ПМ) цели, приоритета опас-
ной цели (ППОЦ), типа цели (ПТЦ) по принятой классификации и по-
мех (ПП).
Информация от командной радиолинии управления (КРУ)
(рис. 8.1) используется в ИВС для самонаведения в виде признака пора-
жаемой цели (ППЦ), предназначенной для уничтожения, и оценок даль-
58
ности Дкру и скорости Дкру, которые применяются при вычислении
параметров рассогласования в условиях отказов дальномерных каналов
БРЛС и ОЭС.
В устройствах сопряжения (УС) различные команды, поступаю-
щие из ИВС к ракетам, размножаются по числу подвесок и масштаби-
руются под конкретный тип ракет. Через эти же устройства в ИВС по-
ступают сигналы xr01.j, свидетельствующие о степени готовности ракет
к применению.
Система автономных датчиков представляет собой совокупность
измерителей различной физической природы. В общем случае в САД
формируются оценки: углов тангажа Ф, курса и их производных too,
векторов собственных ускорений jT=[jr jB jn] и скорости
Vc‘=[Vcr VCB Vcn], где индексы «г», «в» и «п» соответствуют горизон-
тальным, вертикальным и продольным составляющим; барометриче-
ской высоты Нб; углов атаки а, скольжения Р и крена у.
Современные БРЛС многофункциональные системы, способ-
ные решать задачи информационного обеспечения процессов уничто-
жения воздушных и наземных целей. Следует отметить, что необходи-
мость перехвата сверхманевренных воздушных целей [9, 11, 30] требует
расширения состава вектора хряс оцениваемых координат и предъявляет
более высокие требования к точности, устойчивости и быстродействию
алгоритмов их оценивания.
В БРЛС, как правило, являющихся импульсно-доплеровскими, в
общем случае реализуются следующие режимы [56]. Вначале использу-
ется многорежимная процедура поиска и обнаружения целей однолепе-
стковым лучом, при которой в зависимости от ориентации диаграммы
направленности (ДН) антенны используются СПЦ либо с высокой
(ВЧП) и средней (СЧП) частотами повторения при обзоре в нижней
полусфере, либо с НЧП при просмотре верхней полусферы. При этом
захватываются цели по доплеровской частоте с последующей ее селек-
цией. Такой прием позволяет обнаружить максимально удаленные цели,
причем в качестве СПЦ используют последовательность когерентных
импульсов с ВЧП. Далее выполняется процедура обнаружения с оцени-
ванием дальности по сигналам с ВЧП, СЧП или НЧП в зависимости от
направлений луча антенны и полета цели. На встречных курсах целесо-
образны сигналы с ВЧП, а на догонных с СЧП. Информация о дально-
сти, скорости сближения и угловых координатах, полученная в этом
режиме, используется в качестве начальных условий для АСЦРО или
СОЦ.
При АСЦРО поэтапно решаются следующие задачи: «завязка»
траекторий сопровождаемых целей на основе результатов первичных
измерений, полученных в режиме поиска и обнаружения; экстраполяция
(прогноз) всех фазовых координат завязанных траекторий, необходи-
мых для самонаведения и ЦУ ракетам в промежутках между поступле-
ниями измерений; идентификация (отождествление) результатов изме-
рений для их привязки к конкретным экстраполируемым траекториям;
коррекция (фильтрация) результатов прогноза траекторий по идентифи-
цированным измерениям; ранжирование целей по степени их опасности.
В общем случае для реализации современных и перспективных методов
наведения (7.4), (7.22), (7.23), (7.32), (7.48), (7.67), (7.68) и (7.74), (7.75),
(7.88), (7.104) в этом режиме БРЛС должна для каждой цели формиро-
вать вектор оценок xpjie
Д Д Фг Ф„ <й,. Йи jllr jilB • Одновременно в
БРЛС формируется ППОЦ, используемый в СЕИ. Кроме того, для прогно-
зирования пространственного положения цели, используемого в процессе
наведения ракет с комбинированными системами управления большой и
средней дальности, необходимы оценки горизонтальной, вертикальной и
продольной составляющих У1Ц., Уцв и УЦ1| скорости цели.
В режиме СОЦ в БРЛС формируется тот же набор оценок, только
с более высокой точностью. Обусловлено это существенно большим
временем накопления сигналов, применением более сложных исходных
моделей и использованием высокоточной моноимпульсной пеленгации
целей. Если противник использует активные помехи, в БРЛС формиру-
ются ПП, индицируемые в СЕИ и вызывающие включение соответст-
вующих средств помехозащиты.
Для ракет с ПАРГС режим СОЦ используется в варианте дис-
кретно-непрерывной пеленгации. Суть этого режима состоит в том, что
БРЛС работает в течение некоторого времени Ц в обычном импульсном
(дискретном) режиме на несущей частоте f;l, а в течение некоторого
времени tH - в режиме непрерывного излучения с частотой fH, несколько
отличной от частоты f4 (рис. 8.2). Непрерывное излучение применяется
для подсвета цели при наведении на нее ракет с ПАРГС. Кроме того,
путем дополнительной модуляции сигналов с f,( на борт ракеты могут
передаваться специальные сигналы хрк радиокоррекции (рис. 8.1), с
помощью которых уточняется траектория ее полета при наведении на
маневрирующую цель. Дискретно-непрерывное излучение в одном час-
тотном диапазоне позволяет существенно снизить демаскирующий
признак пуска ракет с ПАРГС, который имел место при отдельном пе-
редатчике непрерывного СПЦ в другом диапазоне волн.
t д t н t д t
Рис. 8.2
Для получения информации о количественном составе плотной
группы целей и индивидуального высокоточного наведения на конкрет-
ные объекты внутри нее в БРЛС можно использовать специальный ре-
жим с высоким разрешением. В этом режиме, как правило, употребля-
ются сложные сигналы, база которых существенно превышает единицу.
Эффект улучшения разрешающей способности БРЛС достигается за
счет сжатия сигналов в процессе обработки. Кроме того, улучшение
разрешения по угловым координатам может быть достигнуто за счёт
выбора специальной траектории полета, позволяющей реализовать
доплеровское обострение луча антенны [29].
В режиме распознавания цели классифицируются по типам на
основе анализа отраженных сигналов. Распознавание может быть вы-
полнено по широкому классу признаков. Однако наиболее распростра-
нена классификация целей на основе спектрального анализа принятых
сигналов с выделением составляющих, обусловленных вращением тур-
бин двигателей самолетов или винта вертолетов и вибрацией обшивки
ЛА. По этим признакам можно достаточно достоверно установить кон-
кретный тип цели. Результат распознавания в виде ПТЦ поступает в
СЕИ и в алгоритмы формирования вектора xpjlc, вызывая их соответст-
вующую адаптацию.
В режиме ближнего боя, осуществляемого в условиях визуальной
видимости целей, БРЛС формирует команды ЦУ управляемым ракетам.
При этом пространственная селекция цели выполняется за счет маневра
истребителя, в результате которого цель попадает в зону захвата БРЛС.
При наличии ФАР эта задача может быть решена за счет электронного
управления лучом.
БРЛС является ведущей при совместной работе с ОЭС в процессе
сопровождения целей на больших расстояниях и при использовании
ракет с РГС большой и средней дальности. В таких режимах, кроме
выдачи информации в СЕИ и БВС для формирования параметров рассо-
гласования и команд ЦУ ракетам, БРЛС вырабатывает и ЦУ для ОЭС. В
соответствии с этими командами ОЭС осуществляет подслеживание за
целями, сопровождаемыми БРЛС.
Самонаведение с помощью БРЛС отличает большая дальность и
высокая точность наведения, всепогодность и многообразие информа-
ционных режимов, что позволяет обеспечить эффективное функциони-
рование ИВС при действии по разнообразным целям и в различных
тактических ситуациях. Недостатком такого самонаведения является его
низкая скрытность, обусловленная достаточной простотой обнаружения
излучаемых БРЛС сигналов.
С помощью ОЭС можно решать задачи обнаружения, оценивания
требуемых фазовых координат и формирования команд ЦУ ракетам в
простых метеоусловиях. В состав ОЭС, как правило, входят [26]: опти-
ко-локационная станция (ОЛС), состоящая из обзорно-следящего ТП и
лазерного дальномера, и нашлемная система целеуказаний (НСЦУ).
В зависимости от условий применения ОЭС обеспечивает: скрытное
обнаружение и сопровождение целей; автоматическое сопровождение
целей в режиме обзора; сопровождение одиночной цели и нашлемное
целеуказание.
Скрытное обнаружение и сопровождение целей осуществляется
по их тепловому излучению с помощью ТП. Следует отметить, что в
этом режиме в ОЭС формируются оценки только угловых координат
целей, что позволяет осуществлять на них наведение, используя лишь
разновидности прямого метода (7.4).
Режимы АСЦРО и СОЦ обеспечиваются в процессе совместной
работы ТП и лазерного дальномера. При этом в дальномерном канале
формируются оценки Д и Д . С учетом этих оценок в канале ТП могут
быть вычислены <рг, (рв, О)г, сов, и jul. jUB, что позволяет реализовы-
вать современные и перспективные методы наведения с упреждением
(7.22), (7.23), (7.67), (7.68) и (7.74), (7.75).
В режиме нашлемного целеуказания (НЦУ) летчик, поворачивая
голову, осуществляет обнаружение и визирование цели с помощью
специального нашлемного визирного устройства (НВУ). После совме-
щения визирной марки НВУ с целью летчик выдает в ОЛС или ракеты с
ТГС разрешение на захват цели, и в них поступают команды целеуказа-
ния хнцу. Следует отметить, что использование НСЦУ позволяет значи:
тельно ускорить процедуру применения ракет с ТГС.
Если при совместной работе с БРЛС главенствующая роль отво-
дится ОЭС, то из нее в БРЛС поступают целеуказания, в соответствии с
которыми радиолокатор осуществляет подслеживание за той же целью.
Алгоритмы самонаведения с помощью ОЭС отличают высокие
точность наведения и скрытность работы. Недостатками являются
меньшая дальность действия и существенная зависимость показателей
эффективности от метеоусловий.
Следует отметить, что в современных и перспективных ИВС доста-
точно часто используется комплексная обработка информации, поступаю-
щей от БРЛС, ОЭС и спутниковых навигационных систем (СНС), с высо-
кой точностью формирующих оценки координат хс, zc местоположения ЛА
и скоростей хс, zc их изменения (рис. 8.1). Достаточно широко в ИВС
используется также информация от станции радиотехнической разведки
(СРТР) о координатах радиоизлучающих целей, режимах работы их радио-
технических устройств и параметрах излучаемых ими радиосигналов [17].
Весьма перспективным направлением повышения помехозащи-
щенности БРЛС является использование ее совместной работы со стан-
цией активных помех (САП), дающей возможность реализовать так
называемую активную помехозащиту [29].
Как правило, СРТР и САП входят в состав комплекса радиоэлек-
тронной борьбы (КРЭБ), который может решать и самостоятельные
задачи по подавлению радиотехнических систем противоборствующей
стороны [29].
В заключение отметим, что ИВС других типов самолетов (истре-
бителей, бомбардировщиков и т.д.) в общем случае соответствуют схеме
на рис. 8.1, но могут иметь меньшее число режимов функционирования.
8.2. ОСОБЕННОСТИ ПОСТРОЕНИЯ И ФУНКЦИОНИРОВАНИЯ
ИВС РАКЕТ «ВОЗДУХ-ВОЗДУХ»
Информационно-вычислительные системы ракет, называемые
иногда радиолокационными головками самонаведения, включают сово-
купность измерителей различной физической природы и вычислитель.
Измерители являются источниками первичной информации о парамет-
рах относительного движения цели и собственного движения ракеты.
На основе этой информации вычислитель решает следующие задачи:
используя априорные сведения, формирует оценки необходимых
параметров относительного и абсолютного движения, не поддающихся
непосредственному измерению;
выбирает алгоритм (метод) наведения ракеты на цель, наилучший
по какому-либо критерию для данных условий применения;
для выбранного метода вычисляет параметры рассогласования
Дц2, характеризующие степень несоответствия действительных пара-
метров движения ракеты их требуемым значениям;
анализирует помеховую обстановку и при необходимости вклю-
чает те или иные средства помехозащиты, подключает нерадиотехниче-
ские измерители, либо перенацеливает ракету на постановщик помех;
формирует сигналы подготовки и управления для радиовзрывателя.
В зависимости от способа формирования сигнала подсвета цели
различают радиоэлектронные ССН с активными, полуактивными и пас-
сивными РГС. В активных РГС передатчик, формирующий СПЦ, и при-
емник, обрабатывающий отраженные от цели сигналы, размещены на
ракете.
Использование активных РГС повышает автономность самолета-
носителя, поскольку не накладывает никаких ограничений на его ма-
невры после пуска ракеты. Возможность выполнения энергичного ма-
невра после пуска ракеты «в-в» снижает вероятность поражения про-
тивником истребителя и позволяет сразу переключаться на перехват
других целей. Однако на ракете «в-в» невозможно установить мощные,
обладающие большой массой, передатчики и антенны больших разме-
ров, поэтому дальность действия активных РГС ракет «в-в» достаточно
мала. Это ограничивает область их применения ракетами малой дально-
сти, либо комбинированными системами на конечном участке наведе-
ния (например, AIM-120, РВВ-АЕ). В РГС ракет «в-п» такие ограниче-
ния проявляются в существенно меньшей степени, поэтому в них может
быть реализована большая дальность действия. Следует отметить, что
необходимость облучения цели существенно снижает скрытность рабо-
ты активных РГС и позволяет противнику использовать радиопоме-
хи [23].
В полуактивных системах передатчик СПЦ, облучающий цель,
размещается на борту самолета, а приемник отраженного сигнала - на
ракете. Необходимость постоянного облучения цели сигналами БРЛС
носителя после пуска ракеты существенно ограничивает его маневриро-
вание и не позволяет самолету вести одновременный бой с несколькими
целями. Кроме того, включение передатчика СПЦ является демаски-
рующим признаком, дающим противнику возможность определить
момент пуска нашей ракеты и предпринять соответствующие меры по
ликвидации угрозы. Однако в полуактивных РЭСУ можно реализовать
большую дальность действия, поскольку на борту самолета использует-
ся существенно более мощный передатчик и антенна с большими раз-
мерами, чем на ракете. Полуактивные РГС употребительны в ракетах
«в-в» как малой, средней, так и большой дальности. Кроме того, они
используются и в комбинированных системах на последнем участке
наведения.
В пассивных системах источником радиосигналов являются сами
цели, поэтому на ракете устанавливается только приемник. Пассивные
РГС в основном используются в противорадиолокационных ракетах
«в-п». В ракетах «в-в» они находят ограниченное применение лишь для
поражения достаточно близко расположенных самолетов постановщи-
ков помех.
В общем случае активные РГС работают с импульсными сигналами
с НЧП, СЧП и ВЧП. В последнем случае говорят о системе с квазинеп-
рерывным излучением (КНИ). В некоторых типах полуактивных РГС ис-
пользуются непрерывные, либо прерывистые СПЦ (участок tH на рис. 8.2).
В процессе функционирования РЭСУ информационно-вычисли-
тельная система формирует параметры рассогласования (см. рис. 1.2), ко-
торые поступают в СУР в качестве управляющих сигналов. Следует отме-
тить, что при решении этой основной задачи ИВС выполняет и ряд вспомо-
гательных функций, без которых невозможно вычислить параметры рассо-
гласования. К этим функциям относятся: поиск, прием и селекция радио-
сигналов, как отраженных от цели, так и передаваемых с борта самолета;
анализ, направленный на повышение достоверности того, что выделенный
радиосигнал отражен от нужной нам цели. Кроме того, на основе информа-
ции, поступающей от датчиков собственного движения ракеты и извлечен-
ной из радиосигналов, измеряются (оцениваются) все фазовые координаты
ее собственного и относительного движения, необходимые для реализации
используемого метода наведения. Функциональные связи между устройст-
вами, решающими перечисленные задачи, могут быть отражены на обоб-
щенной структурной схеме ИВС.
Обобщенную структурную схему АРГС можно выделить из схемы
на рис. 8.1, устранив ОЭС, КРУ, УС, СЕИ и КРЭБ. Кроме того, из перечня
режимов работы необходимо исключить режим АСЦРО. Обобщенная
структурная схема ИВС ракеты «в-в» с ПАРГС, реализующая современ-
ные методы наведения (7.48), (7.67) и (7.68), приведена на рис. 8.3 [47].
СИСТЕМА
АВТОНОМНЫХ
ДАТЧИКОВ
КОМАНДЫ
ПОДГОТОВКИ
И ЦЕЛЕУКАЗАНИЯ
Д V
ЦУ ' ЦУ *
^ЦУ1,2 * N ЦУ1,2
СИГНАЛЫ
КОНТРОЛЯ
И ОБРАТНОЙ
СВЯЗИ В
АППАРАТУРУ
ИСТРЕБИТЕЛЯ
ПРИЕМНИК
СИГНАЛОВ
СИНХРО-
НИЗАЦИИ
\/ LJ~C
X ПРИЕМНИК
-) । । ОТРАЖЕННОГО
J <г СИГНАЛА
МОДУЛЬ ОБРАБОТКИ
ИНФОРМАЦИИ
УСТРОЙСТВА ПОИСКА, ОБНАРУЖ. СЕЛЕКЦИИ И АНАЛИЗА СИГНАЛОВ КАНАЛ ОЦЕНИВАНИЯ Д и УСБ
КАНАЛ УПРАВЛЕНИЯ АНТЕННОЙ
УСИЛИТЕЛЬ
МОЩНОСТИ
И ПРИВОД
АНТЕННЫ
Д , УсБ, Л,2
A 11
ОС 1 1
ВЫЧИСЛИТЕЛЬ
ПАРАМЕТРОВ
РАССОГЛАСОВАНИЯ
^1,2 , $1,2 , Д Wi,2 ,
△ 1,2
_ е> сур
J Ц1,2
Wl,2 ИЗ ВЫЧИСЛИТЕЛЯ ДС
Рис. 8.3
Необходимо отметить, что если состав измерителей ИВС
определяется используемым методом наведения, то состав и принципы
работы устройств поиска, обнаружения и анализа определяются видом и
способом формирования сигнала подсвета цели. Следует также
подчеркнуть, что и принципы функционирования измерителей в значи-
тельной мере также определяются видом СПЦ. На структурной схеме
(рис. 8.3) устройства поиска, обнаружения и анализа сигналов, а также
измерители объединены в модуль обработки информации.В общем
случае ИВС РЭССН ракеты «в-в» может работать в трех режимах:
целеуказания, поиска и обнаружения цели при захвате ее на траектории
и формирования параметра рассогласования. Первые два режима
являются подготовительными, а собственно, само самонаведение вы-
полняется в третьем режиме.
В режиме целеуказания из аппаратуры истребителя в модуль об-
работки информации поступают команды подготовки ракеты к работе и
команды ЦУ (рис. 8.3). По командам подготовки подаются питающие
напряжения в ИВС, настраиваются приемники каналов синхронизации
и отраженного сигнала на частоту СПЦ и тестируется работоспособ-
ность всей аппаратуры ракеты. По командам ЦУ измерители и вычисли-
тели подготавливаются к сопровождению цели, выбранной для пора-
жения. В соответствии с этими командами антенна РГС разворачивается
в направлении на цель, либо в упрежденную точку, в которой будет
находиться цель в момент взятия ее на автосопровождение. Наличие
команд целеуказания по дальности Дцу и скорости сближения Уцу опре-
деляется используемыми методом наведения и сигналом подсвета цели.
Если в РГС используется непрерывный СПЦ, то подается коман-
да ЦУ по скорости сближения Vny (доплеровской частоте), в соответст-
вии с которой будут селектироваться радиосигналы только той цели,
скорость сближения с которой соответствует скорости целеуказания.
Если в РГС используется импульсный СПЦ, то в модуль обработки
поступает команда ЦУ по дальности, в соответствии с которой прием-
ник отраженного сигнала будет отпираться только на время прихода
сигналов, отраженных от цели, отстоящей от истребителя на нужную
дальность Дцу. При квазинепрерывном СПЦ подаются команды ЦУ по
дальности и по скорости. Кроме того, команды ЦУ по дальности, скоро-
сти сближения и угловым скоростям линии визирования поступают в
качестве начальных условий в вычислители, экстраполирующие пара-
метры относительного движения ракеты и цели в автономном режиме
работы РЭСУ, предшествующем захвату цели на траектории, и в случае
воздействия на нее радиопомех. Готовность ИВС к работе контролиру-
ется по специальным сигналам контроля, поступающим в аппаратуру
истребителя по цепям обратной связи (рис. 8.3).
Необходимо отметить,
что в зависимости от вида СПЦ
поиск и селекция сигнала, от-
раженного от перехватываемой
цели, выполняются по-
разному. При импульсных
СПЦ с низкой частотой повто-
рения (НЧП) поиск сигнала
осуществляется по дальности.
Эта операция выполняется
путем перемещения следящих
полу стробов иСТ| и ист3, форми-
руемых в дальномерном канале
(канале оценивания Д и Vc6,
иц
а)
U-CT
6) о
Ы-ст
6)
О
Рис. 8.4
рис. 8.3), в обе стороны относительно некоторой дальности До
(рис. 8.4,6). Если дальность пуска Дп была меньше дальности захвата Д3,
то До=ДцУ. При Д„>Д3, когда захват осуществляется на траектории, До
формируется в вычислителе системы наведения ракеты. После совпаде-
ния во времени следящих полустробов дальномера и импульса иц, отра-
женного от цели (рис. 8.4,а,в), поиск прекращается и решается задача
обнаружения. В процессе решения этой за дачи осуществляется накоп-
ление сигналов, имеющее целью повышение вероятности правильного
обнаружения.
Кроме того, обнаруживаемый сигнал анализируется на его
принадлежность к цели либо постановщику помех. Анализ выполняется
по энергетическому признаку, так как прямой сигнал активной помехи
во много раз превышает сигнал, отраженный от цели. Если в процессе
анализа принимается решение о принадлежности обнаруженного сигна-
ла постановщику помех, то либо включаются средства помехозащиты,
либо продолжают использоваться результаты измерений и экстраполя-
ции автономных датчиков, либо происходит перенацеливание ракеты на
постановщик помех. В последнем случае употребляется прямой метод
наведения (7.4).
Если принимается решение о принадлежности обнаруженного
сигнала перехватываемой цели, то измерители ИВС переходят в режим
автоматического сопровождения цели по дальности и направлению, а
РЭСУ переводится в режим формирования параметра рассогласования
(самонаведения).
В этом режиме в дальномерном канале формируются оценки Д и
Vc6, а в угломерном канале оценки углов <р^2 и приращений угловых
скоростей Асо, 2 • Оценки Vc6 и До), 2, а также рассчитываемые вычис-
лителем автономной системы (АС) оценки C0j 2 используются для фор-
мирования параметра рассогласования (7.48), а оценки ф, 2 - для вы-
числения параметров рассогласования (7.49) при методе наведения с
постоянным углом упреждения. Если ракета наводится по алгоритму
(7.67), (7.68), то в угломерном канале еще формируются оценки jul 2
поперечных ускорений цели. Знание оценки Д позволяет селектировать
по дальности импульсы, отраженные от перехватываемой цели, путем
отпирания приемника отраженных сигналов только на время их прихо-
да. Эта особенность позволяет повысить помехозащищенность РЭСУ в
целом. Начало отсчета для оценивания дальности задают импульсы
СПЦ, поступающие в приемник сигналов синхронизации через антенну
Асс (см. рис. 8.3).
По пространству (направлению) цель селектируется за счет
направленных свойств антенны Аос путем ее поворота в направлении,
определяемом оценками углов ф, 2 •
При непрерывном СПЦ для селекции сигналов, отраженных от
цели, используется доплеровская частота Fpu, пропорциональная скоро-
сти сближения ракеты с целью. В полуактивной РГС частота Fpu выде-
ляется как разность частот двух сигналов. Один из них, отраженный от
цели, принятый антенной Аос и усиленный в приемнике отраженных
сигналов, содержит доплеровское смещение частоты, обусловленное
скоростью сближения истребителя с целью и цели с ракетой. Второй
сигнал (ис, рис. 8.3) содержит доплеровское смещение частоты, вызы-
ваемое скоростью удаления ракеты от истребителя. После вычитания
частот сигналов, поступающих в приемники отраженных и синхронизи-
рующих сигналов, формируется сигнал, поиск и селекция которого
выполняется в модуле обработки. При дальности Дп-Д3 поиск этого
сигнала осуществляется относительно частоты Fuy=2Vuy/X, которая ус-
танавливается командой целеуказания Уцу по скорости, измеренной в
БРЛС истребителя. Если ДН>Д3, то поиск производится относительно
частоты Fo=2 Усбэ /X, где Усбэ - оценка скорости, экстраполированной
в автономной системе наведения ракеты. Поиск осуществляется путем
изменения по линейному закону частоты специального гетеродина. При
некотором значении этой частоты сигнал промежуточной частоты при-
емника отраженных сигналов (ПРМОС) попадает в узкополосный
фильтр, после чего поиск прекращается и начинается этап обнаружения
и анализа.
68
Селектируемый сигнал анализируется на его принадлежность не
только цели, либо постановщику помех, но и земле. Этим самым ис-
ключается захват и сопровождение сигнала, отраженного от земли, вме-
сто сигнала, отраженного от низколетящей цели. Анализ проводится по
энергетическим и частотным различиям сигналов излучаемых поста-
новщиком помех и отраженных от земли либо от цели.
Принятие решения о принадлежности обнаруженного сигнала к
постановщику помех приводит к тем же последствиям, что и при ис-
пользовании импульсных сигналов. Если принимается решение, что
обнаруженный сигнал принадлежит земле, то выдается команда на во-
зобновление поиска сигнала цели по частоте. При принятии решения о
принадлежности анализируемого сигнала к перехватываемой цели из-
мерители РГС переходят к его автоматическому сопровождению по
доплеровской частоте, выполняемому автоселектором скорости (кана-
лом оценивания Vc6 рис. 8.3), и по направлению, осуществляемому
угломером, а РЭСУ переводится в режим самонаведения. Оценка Vc6,
формируемая автоселектором скорости на основе измерения доплеров-
ской частоты Fpu, поступает в вычислитель параметров рассогласования
для реализации методов наведения (7.48), (7.67), (7.68). Угломерный
канал при непрерывном СПЦ функционирует так же, как и при им-
пульсном сигнале с НЧП.
При использовании квазинепрерывного сигнала поиск и селекция
цели производятся как по дальности, так и по доплеровской частоте. В
процессе обнаружения цели имеет место такой же анализ сигнала на его
принадлежность к постановщику помех, земле либо цели, что и при
использовании непрерывного СПЦ. После перехода к автоматическому
сопровождению цели по дальности, скорости и направлению устройства
оценивания Д и Vc6 формируют оценки дальности Д и скорости Vc6.
При этом Д оценивается по времени запаздывания отраженного сигнала,
а скорость - по частоте Fpil. Наличие информации о дальности позволяет
повысить помехозащищенность РЭСУ за счет отпирания приемника
только на время прихода сигналов, отраженных от цели.
При квазинепрерывном СПЦ необходимо устранять неоднознач-
ность отсчета дальности, поскольку время запаздывания отраженного
сигнала может превышать период повторения импульсов СПЦ. Если
невозможно обеспечить однозначность отсчета, дальность не оценива-
ется и слежение по ней не реализуется. В такой ситуации отраженный
сигнал селектируется не по дальности, а по периоду повторения, что
позволяет также обеспечить стробирование приемника на время прихо-
да отраженных импульсов. Целесообразность такого приема обусловле-
на тем, что при вычислении (7.48) и (7.67), (7.68) не требуется знания
текущей дальности. Принцип работы угломерного канала остается тем
же, что и при использовании СПЦ других типов.
Входящие в систему автономных датчиков измерители парамет-
ров собственного движения (см. рис. 8.3), к которым относятся прежде
всего акселерометры и гироскопы, выдают информацию об ускорениях
jx и ju и углах тангажа О и рысканья \|/. На основе измерения jx и jj ? в
вычислителе автономной системы формируются оценки 6о12 и j12,
используемые в (7.48) и (7.67), (7.68). Гироскопические датчики позво-
ляют развязать антенну РГС от угловых колебаний ракеты, что повыша-
ет точность и устойчивость сопровождения целей по направлению.
Особенностями пассивной РГС (рис. 8.5) является использование
широкодиапазонной антенны (ША) и широкополосного приемника
ШПРМ. Необходимость в таких приемниках и антеннах обусловлена тем,
что частота принимаемых сигналов в общем случае заранее неизвестна.
Рис. 8.5
Пассивная РГС может работать в трех режимах: ЦУ, самона-
ведения и памяти (экстраполяции). В режиме ЦУ из бортовой аппара-
туры самолета-носителя кроме команд подготовки поступают команды,
определяющие направление на излучающую цель и настройку РГС на
основные параметры принимаемых от нее радиосигналов: несущую
частоту f„ и период повторения Тп. По этим же параметрам в модуле
обработки осуществляется и автоматическая селекция. Пространствен-
ная селекция обычно выполняется следящим угломером с фазовой пе-
70
ленгацией, а селекция по fH и Тп с помощью следящих за этими пара-
метрами устройств (алгоритмов).
Достоинством фазового способа измерения углов является высо-
кая точность. В качестве недостатка можно отметить неоднозначность
отсчета углов, которая устраняется специальными приемами. В процес-
се сопровождения целей по направлению в угломере РГС формируются
оценки фг, <рв бортовых пеленгов цели и их производных со,., сов в
горизонтальной и вертикальной плоскостях. Наличие этих оценок по-
зволяет формировать вектор параметров рассогласования Л, соответст-
вующих разновидностям прямого метода (7.4), либо метода последова-
тельных упреждений (7.51). Если в состав ИВС ракеты входит допле-
ровский измеритель скорости и сноса, вычисляющий оценки скорости
Д и угла сноса <ру, и экстраполятор дальности, вычисляющий оценку
дальности Дэ до цели, то наведение может выполняться и более совре-
менным методом (7.74), (7.75).
В режим памяти ИВС переходит при пропадании сигналов цели.
В этом режиме ракета наводится по экстраполированным значениям
всех требуемых фазовых координат. Экстраполяция, как правило, осно-
вана на гипотезе изменения состояния с постоянными скоростями,
имевшими место на момент пропадания сигналов. Следует отметить,
что в режиме памяти в селекторе цели одновременно экстраполируется
несущая частота и период повторения сигналов. Эта особенность дает
возможность возобновить процессы автоматического сопровождения
сигналов цели, а соответственно и самонаведения при повторном появ-
лении ее сигналов без перехода в режим поиска.
В заключение отметим, что модули обработки информации раз-
личных ИВС можно реализовать как аппаратурно, так и программно.
Более подробно функциональные связи ИВС ракет «в-в» во всех
режимах работы будут рассмотрены в третьем томе монографии.
8.3. ОСОБЕННОСТИ ПОСТРОЕНИЯ
И ФУНКЦИОНИРОВАНИЯ ИВС ПРОТИВОКОРАБЕЛЬНЫХ
РАКЕТ
С позиций системного подхода рассмотрение такой сложной тех-
нической системы как РЭСУ противокорабельных крылатых ракет
(ПКР) в целом и ее составляющих следует начинать с анализа внешних
условий ее функционирования, т.е. с анализа условий боевого примене-
ния (БП), определения особенностей ПКР среди ракет класса «в-п» и на
этой базе выявления внутренних особенностей их РЭСУ, обеспечиваю-
щих управление ПКР для поражения надводных морских целей (МЦ)
при специфичных для данного театра военных действий (ТВД) воздей-
ствиях на входе такой системы. Поэтому вначале кратко рассмотрим
особенности условий БП ПКР.
К основным по условиям БП ПКР относятся требования по обес-
печению всепогодности, круглосуточности и возможности стрельбы в
любое время года и практически в любой точке земного шара, так как
вода покрывает его большую часть.
Безусловно, что среди всех авиационных ракет класса «в-п» ПКР
являются на первый взгляд наиболее простыми. Это связано с тем, что
морской фон, на котором обнаруживаются МЦ, является в значительной
степени однородным. Однако это утверждение в последнее время все
чаще подвергается корректировке. Во-первых, потому, что структура
морского волнения при значительной его бальности перестает быть
однородной, так как на поверхности моря могут образовываться анома-
лии, особенно ярко проявляющие свое влияние при малых углах визи-
рования и значительной степени зависящие от ракурса наблюдения [20].
Во-вторых, современные ПКР должны обеспечивать наведение на МЦ,
которые могут находиться как в открытом море, так и вблизи берега,
например, в бухтах, шхерах и, пр., перепады которого по высоте созда-
ют естественный фон со структурой, резко отличающейся от взволно-
ванной водной поверхности. Современные тенденции развития МЦ
направлены, прежде всего, на снижение их заметности, что переводит
задачу обнаружения в другой, более сложный класс, даже на «классиче-
ском» фоне - типа взволнованная морская поверхность.
Большой разброс условий применения МЦ накладывает сущест-
венные ограничения на возможности БП ПКР и выдвигает определен-
ные требования к составу и техническим характеристикам датчиков
ИВС ПКР в обеспечении селекции и измерения координат МЦ.
Современные МЦ - корабли и их соединения обладают мощным
огневым вооружением, развитой разнообразной активной системой
индивидуальной и коллективной противовоздушной обороны (ПВО) с
большой дальностью действия, включая самолеты дальнего радиолока-
ционного обнаружения (ДРЛО) и морскую авиацию. На практически
ровной морской поверхности в большинстве случаев отсутствуют есте-
ственные образования, например остров или высокий мыс, для укрытия
авиационного носителя ПКР. Поэтому ни один из современных кораб-
лей серьезного класса не позволит скрытно и безнаказанно приблизить-
ся к нему самолету-носителю ПКР. Это предопределяет в открытом
море минимальную дальность безопасного пуска ракеты с самолёта-
носителя как рубеж в сто и более км от МЦ.
С этих позиций следует рассматривать ПКР как дальнобойное
противокорабельное оружие, классифицируемое специалистами по
назначению (2] как тактическое (TH) (дальность пуска до 150 км), опе-
ративно-тактическое (ОТН) (до 500 км) и оперативное (ОН) (более 500
км), с соответствующими ИВС для обеспечения наведения. Скорости
полета ПКР на траектории могут быть как дозвуковые (0,7...0,9 М), так
и сверхзвуковые (более 2М), а сами траектории могут быть как высот-
ными (до десяти и более км), так и низковысотными (единицы и десятки
метров).
Указанные причины привели к тому, что современные и перспек-
тивные ПКР имеют большую дальность полета и практически реализуют
принцип «пустил-забыл», который требует полной автоматизации работы
ИВС без какого-либо контакта с самолетом-носителем после пуска.
Подавляющее большинство ПКР сегодня снабжено обычной бое-
вой части (ОБЧ) проникающего типа и для поражения такого прочного
объекта как МЦ требуется обеспечить точное пропадание ПКР в контур
МЦ, а еще лучше - в центр ее живучести для увеличения поражающего
воздействия. Поэтому ПКР относят к высокоточному оружию (ВТО),
как показано в §1.1, и они фактически реализуют современный принцип
ракетной атаки - «выстрел-поражение».
Практически все классы МЦ снабжены развитыми средствами ра-
диоэлектронного противодействия (РЭП) системам управления оружия
противника, предназначенными для дезорганизации и срыва ракетной ата-
ки, например, путем постановки активных и пассивных помех ИВС ПКР с
радиотехническими и оптикоэлектронными информационными каналами
(ИК). Поэтому ИВС ПКР должны обладать высокой помехоустойчивостью
и скрытностью работы. Кроме того, должны быть реализованы меры по
снижению заметности ПКР, например, можно использовать низковысот-
ный полет на высоте 5-30 м над гребнями волн.
Одной из основных особенностей МЦ следует считать их под-
вижность и маневренность в процессе несения ими боевого дежурства,
постоянное изменение их местонахождения в море. Поэтому отсутству-
ет возможность заблаговременного, до вылета, расчета точных коорди-
нат МЦ. Отсюда и применение ПКР с самолета-носителя возможно
только по результатам оперативной разведки всеми ее видами (космиче-
ские ЛА, самолеты ДРЛО, собственные БРЛС носителя и др.). За время
полета ПКР на большие дальности область возможного положения цели
(ОВПЦ) из-за ее непредсказуемого маневрирования имеет большой
радиус неопределенности относительно точки начального ЦУ в момент
пуска ПКР, что, в отличие от стрельбы по стационарным наземным
целям, требует соответствующей корректировки траектории полета ПКР
на конечном участке. На этом конечном этапе наведения следует рас-
сматривать МЦ как движущуюся цель и применять соответствующие
законы наведения, причем ИВС должна также учитывать противозенит-
ные маневры, применяемые некоторыми ПКР.
В настоящее время одиночные плавания МЦ редки и для ведения
боевых действий обычно формируются корабельные соединения, на-
пример, авианосные соединения, корабельные ударные группы, группы
ракетных катеров, конвой, отряды десантных судов и т.п., содержащие
главные и вспомогательные корабли (охранение). В этих условиях в
ИВС ПКР необходимо проводить классификацию, распознавание и
селекцию МЦ в группе, т.е. ИВС должна обладать свойствами избира-
тельности для нанесения максимального ущерба и достижения наи-
большей эффективности атаки. Такие процедуры предполагают, что
сигнал от цели структурирован, например, совокупностью локальных
центров рассеяния. Следовательно, здесь уже РЭСУ имеет дело с сиг-
налами от МЦ как от цели сложной пространственно-временной
структуры.
Конструкция ИВС ограничена жесткими рамками малых габари-
тов ПКР и должна выдерживать разнообразные значительные механи-
ческие воздействия (тряска, вибрации, удары), в том числе в процессе
взлета, полета и посадки самолета-носителя. Естественно, существуют
ограничения и по энергопотреблению ИВС на борту ПКР.
К важнейшим особенностям БП ПКР следует отнести то, что
возможно как одиночное, так и групповое применение ПКР в составе,
залпа из нескольких ракет, запущенных даже с нескольких самолетов-
носителей [78]. Количество ракет в залпе зависит от важности и защи-
щенности МЦ. Высокая плотность налета ПКР при массированной атаке
приводит к перенасыщению пропускной способности индивидуальной и
коллективной системы ПВО и увеличению вероятности ее прорыва. При
этом часть ПКР с установленными на них средствами постановки помех
может использоваться в качестве ложных целей для дезинформации
системы ПВО.
Для достижения высокой плотности налета с помощью ИВС ПКР
на траектории полета производится формирование наиболее эффектив-
ных боевых порядков групп ракет, пуск которых осуществлен с рубежей
вне зоны поражения системы ПВО. Маршрут полета каждой ПКР рас-
считывается и программируется в зависимости от расположения МЦ в
группировке. При этом ПКР может повторить заход на цель при прома-
хе по вновь рассчитанной в ИВС новой траектории. В случае необходи-
мости летчик может изменять запрограммированную траекторию поле-
та и решаемую боевую задачу.
В целом, рассмотренные условия БП определяют тактические ха-
рактеристики и допустимые зоны пусков ПКР, определяющие досягае-
74
мость как основной показатель ПКР, а избирательность, точность и
помехозащищенность как основные показатели ИВС.
ИВС ПКР предназначена для решения главной тактической зада-
чи - обеспечения попадания ракеты в контур корабля, а еще желатель-
нее - в наиболее уязвимую область его конструкции (задача высокоточ-
ного избирательного наведения). Поэтому ИВС является ключевым
звеном в структуре РЭСУ ПКР, сложной организационно-технической
системой, управляющей процессами сбора и переработки информации и
принятия решений.
В процессе функционирования РЭСУ в ИВС на основе добывае-
мой и доступной информации формируется вектор Д|,2 параметров рас-
согласования между требуемыми и текущими фазовыми координатами
ПКР, которые поступают в СУР в качестве управляющих сигналов на
рулевые органы и на управление двигателем ПКР, замыкая тем самым
контур управления. При решении этой основной задачи на различных
этапах полета ИВС выполняет и множество вспомогательных функций
и задач, без которых невозможно вычислять параметры рассогласования
и управлять процессом наведения, т.е. ИВС является многофункцио-
нальной системой с иерархической структурой построения.
В целом, современные РЭСУ ПКР, в соответствии с классифика-
цией §1.1, относятся к комбинированным РЭСУ. Информация от датчи-
ков различной физической природы может обрабатываться в ИВС ПКР
независимо друг от друга, либо объединяться и обрабатываться сов-
местно.
ИВС современных ПКР являются многоканальными, комплекс-
ными и, в той или иной степени, интегрированными [8]. Понятие мно-
гоканальности подразумевает, что в ИВС обработка информации осу-
ществляется совокупностью близких по структуре и характеристикам
процедур, реализуемых соответствующими параллельными каналами,
уменьшение числа которых приводит к обязательному ухудшению так-
тико-технических показателей (ТТП) системы в целом. Спецификой
комплексирования в ИВС ПКР по сравнению с ИВС других типов явля-
ется возможность использования магнитометрических и гидроакустиче-
ских источников информации. Под интегрированием понимается спо-
собность отдельных систем или устройств (например, антенн, процес-
соров сигналов и данных) обслуживать несколько разнородных систем.
Сейчас интегрированные ИВС с объединением аппаратных и про-
граммных средств разрабатываются и создаются в рамках концепции
радиоэлектронного оборудования нового поколения [7].
Применительно к системам наведения и целеуказания для высо-
коточного оружия многоканальность, комплексность и интегрирован-
ность проистекают от желания повысить информационные возможности
систем за счет увеличения номенклатуры применяемых датчиков (сен-
соров) с помощью которых оценивается окружающая обстановка. Логи-
ка такого наращивания размерности информационного пространства
применяемых сигналов достаточно проста и очевидна, поскольку соот-
ветствует магистральному направлению развития информационных
систем, функционирующих в сложных условиях. Во-первых, объедине-
ние оказывается необходимым, когда обработка сигналов от одних сен-
соров немыслима без каких-либо других сигналов. Например, реализа-
ция режима синтезирования антенного раскрыва предполагает знание
точных (с точностью до долей используемой длины волны) координат
антенны в пространстве и их производных. Здесь необходима совокуп-
ность сигналов от собственной микронавигационной системы ИВС или
сигналов от соответствующих систем управления полетом ПКР. Во-
вторых, таким образом, может быть обеспечена информационная избы-
точность пространства сигналов, «цементирующая» его для устойчиво-
сти к разнообразным мешающим факторам, например, помехам, возму-
щениям условий наблюдения (туман, пыль, траекторные нестабильно-
сти, ошибки измерения и т.п.). В-третьих, появляется возможность
адаптироваться к наблюдаемым объектам, в том числе и проникать
сквозь толщу стелсовских покрытий и т.п. Здесь характерной оказыва-
ется процедура выбора наиболее информативного сенсора для данной
наблюдаемой обстановки. Весь же информационный канал должен быть
одинаково «прозрачен» для любых применяемых сигналов. В-четвер-
тых, совокупность разнообразных сигналов позволяет сформировать
более цельный и детальный образ МЦ.
Интеллектуальность ИВС непосредственно базируется на достиже-
нии определенного высокого уровня их многофункциональности при соот-
ветствующем комплексировании и интегрированности. Интеллектуаль-
ность связывается с постулированием, что указанная система может функ-
ционировать в условиях, не предусмотренных при ее создании [4, 6, 7].
В современных РЭСУ ПКР при проведении ракетного удара
можно выделить несколько наиболее характерных этапов (фаз).
Перед пуском в процессе совместного с носителем полёта в ПКР
производится контроль ее аппаратуры, выставка ИНС и ввод в ИВС
полетного задания (ПЗ). После старта ПКР осуществляется выведение
ее на маршевую траекторию и обеспечение сближения с ОВПЦ. При
подлёте к ОВПЦ ИВС производит уточнение относительных координат
заданной МЦ и ПКР, а затем производит коррекцию маршевой траекто-
рии полёта ПКР в направлении на точку встречи с целью.
После завершения маршевого участка траектории на определенной
дальности до МЦ начинается конечный участок полета - с постоянным
информационным контактом с целью, полет, в течение которого осуществ-
ляется самонаведение ПКР на МЦ с использованием одного из двухточеч-
ных методов наведения, рассмотренных в 7 главе. При этом информация о
фазовых координатах ПКР формируется в ИВС датчиками собственного
движения, а источником информации о цели являются сигналы, посту-
пающие от самой цели. На этапе самонаведения устраняются все ошибки
пространственного положения ПКР относительно МЦ, и минимизируется
промах для попадания в контур цели или в ее заданную область.
На самом последнем до встречи с целью участке полета ПКР су-
ществует «мертвая зона» управления (см. §1.2).
Этапы наведения ПКР имеют существенные различия и на каж-
дом из них решаются свои характерные задачи, применяется свой метод
наведения, а, следовательно, и используется соответствующий состав
измерителей фазовых координат РЭСУ, требуемых для реализации ис-
пользуемого закона наведения.
Функциональные связи между устройствами, решающими
перечисленные задачи, могут быть отражены на обобщенной
структурной схеме ИВС ПКР, приведенной на рис. 8.6. Обмен
информацией между различными структурными элементами ИВС
осуществляется, в основном, в цифровом виде через специальные
мультиплексные линии (шины) связи.
Рис. 8.6
Рассмотрим более подробно задачи, решаемые ИВС на каждом из
приведенных выше этапов наведения, и привлекаемые для этого аппа-
ратно-программные средства.
Задачи ИВС в процессе совместного с носителем полета и при
предстартовой подготовке ограничиваются самоконтролем полетного
задания и выставкой ИНС. В результате летчик получает из ИВС сигнал
готовности ПКР к применению. В состав ПЗ обычно входят параметры
требуемой траектории для вывода ПКР в район цели и сведения о МЦ,
полученные от БРЛС самолета-носителя или из других источников. ПЗ
формируется в виде двух векторов.
Первый - это вектор требуемого маршрута полета ПКР в район
ОВПЦ, как правило, в нормальной прямоугольной земной системе коорди-
нат в виде рассчитанных перед пуском требуемых законов изменения во
времени координат ПКР х^ =[х0 у0 z() Vx0 Vy0 Vz0 jx j, j2 t], или в
виде набора х{ =[Д Д Н О \|/ у jx j| j2 t] относительных координат
и параметров полета в полярной системе.
Второй - это вектор хчцу=[Дцу VIiy <рцу1 <рцу2 Т„Ю1] целеуказа-
ния для ПКР, содержащий данные разведки о дальности до цели и ее
скорости, ее характерных особенностях, размеры зоны ОВПЦ, моментах
включения тех или иных датчиков и устройств ИВС.
На маршевом участке полета обычно используется метод наведе-
ния по фиксированной траектории, при котором основной задачей ИВС
является необходимость постоянного сравнения параметров расчётной
траектории, находящейся в модуле хранения ПЗ, с параметрами теку-
щей реальной траектории, измеренными с помощью датчиков собствен-
ного движения ПКР. В случае их расхождения, ИВС осуществляет вы-
работку вектора параметров рассогласования Д|<2 и производится кор-
рекция траектории полета для возвращения ПКР на заданную траекто-
рию или на одну из кратчайших траекторий, обеспечивающих сближе-
ние ПКР с ОВПЦ.
Координаты вектора хсад измеряются бортовой САД, входящих в
ИВС, которые представляют собой совокупность измерителей различ-
ной физической природы координат собственного движения ПКР.
В общем случае в САД формируются оценки: трех углов ориен-
тации - тангажа курса \|/ и крена у и их производных со0, cty; трех-
мерных векторов собственных ускорений jT=Ljr jB jn] и скорости
=[Vpt. Vpu VpiI], где индексы «г», «в» и «п» соответствуют горизон-
тальным, вертикальным и продольным составляющим; высоты Н; углов
атаки а и скольжения р.
В современные и перспективные САД ИВС ПКР включаются
датчики параметров собственного движения различной физической
природы, а именно бесплатформенная инерциальная навигационная
система (БИНС) и радиовысотомер (РВ). Типовые датчики системы
воздушных сигналов летательных аппаратов, такие как датчики воз-
душной скорости и баровысотомеры не могут быть использованы в
ИВС ПКР, так как обладают низкой точностью измерения соответст-
вующих параметров. Например, баровысотомер по своим характеристи-
кам не может обеспечить полет ПКР на высоте 5-10 м.
Применение именно БИНС на борту ПКР обусловлено упоми-
навшимися массогабаритными ограничениями и современными дости-
жениями в технике построения таких систем, обеспечивших их невысо-
кую стоимость и конструктивную простоту. БИНС содержит лазерные,
волоконно-оптические или микромеханические гироскопы, либо датчик
угловой скорости (ДУС) и акселерометры, жестко связанные с корпусом
ПКР. Они измеряют ускорения и угловые скорости, позволяющие с
помощью вычислителя определять ненаблюдаемые параметры вектора
хсад, используемые при вычислении параметров рассогласования. Дат-
чики САД используются также для осуществления развязки антенны от
угловых колебаний ПКР, что повышает точность и устойчивость сопро-
вождения целей по направлению.
Основным недостатком инерциальных систем навигации являет-
ся накапливаемая во времени ошибка местоопределения, величина ко-
торой зависит от времени полета. Поэтому при подлете к ОВПЦ необ-
ходимо организовать просмотр зоны поиска МЦ не только с учетом ее
маневренности, но и с учетом неопределенности положения ПКР, зави-
сящей от дальности полета и накопленной ошибки оценки собственных
координат. Например, при дальности пуска 300 км радиус области не-
определенности местоположения дозвуковой ПКР в районе цели может
составить величину 1-2 км, что, естественно, затрудняет решение зада-
чи поражения МЦ. Эта проблема решается определенными методами
коррекции накопленных ошибок БИНС. Кроме этого точность работы
БИНС зависит от расположения точки нахождения ПКР на земном ша-
ре, что ограничивает ее тактические характеристики в районах с маг-
нитными аномалиями. Существенным достоинством ИНС является то,
что она может вырабатывать навигационные параметры с достаточно
высоким темпом, позволяющим отрабатывать случайные угловые эво-
люции ПКР и обеспечивать ее управляемый полет.
Высокая эффективность спутниковых систем навигации для
ВТО, продемонстрированная в ходе агрессии стран НАТО в Югославии,
привела практически к обязательному включению в состав ПКР аппара-
туры СНС, работающей с космической навигационной системой
GPS/ГЛОНАС. Бортовая аппаратура СНС малогабаритна и позволяет в
любой точке Земли определять такие навигационные параметры как
текущее трехмерное местоположение ПКР и скорости его перемещения
по всем трем осям с высокой точностью, но с низким темпом выдачи
навигационных параметров, который не превышает 1-5 Гц. Точность
определения вектора фазовых координат ПКР зависит [19] от количест-
ва и взаимного расположения космических аппаратов, находящихся в
зоне радиовидимости ПКР.
В обычном режиме работы СНС точность определения местопо-
ложения ПКР определяется ошибкой 50-100 м, а в режиме точного из-
мерения ошибка может достигать 5-10 м, скорость измеряется в зави-
симости от режима со средней квадратичной ошибкой (СКО) 0,3 и
0,1 м/с, соответственно. Высота полета, при этом, как видно из приве-
денных показателей, измеряется с недостаточной точностью для обес-
печения низковысотного полета над морской поверхностью.
Так как СНС является радионавигационной системой, доступной
массовому пользователю, на ее работу существенное влияние оказывают
различного рода помехи, и поэтому она имеет низкую помехоустойчивость.
Еще одной особенностью является диктат стран, владеющих кос-
мическим сегментом СНС, поскольку они могут «отключать» опреде-
ленные регионы от соответствующего спутникового навигационного
обеспечения.
Следует иметь в виду также возможность пропадания сигналов
спутников, например из-за затенения, и потерю информации на некото-
рое время. Указанные зависимости качества и надежности работы СНС
от многих факторов определяют ее низкий уровень целостности и на-
дежности, что не позволяет использовать ее в качестве основного и
единственного источника информации о фазовых координатах состоя-
ния такого высокоскоростного объекта как ПКР, являющегося к тому
же важнейшим объектом при ведении РЭБ.
В настоящее время во всем мире магистральным путем повыше-
ния точности определения навигационных параметров на борту движу-
щегося объекта, в том числе на борту ПКР, является создание и исполь-
зование интегрированных инерциально-спутниковых систем навигации,
в которых комплексное использование данных от БИНС и СНС сохра-
няет достоинства и в значительной степени снижает влияние недостат-
ков каждой из них [70].
В процессе автономного полета на маршевом этапе в заданных
маршрутных точках по командам ИВС, в соответствии с ПЗ, могут осу-
ществляться повороты траектории полета ПКР, рассчитанные заранее
для того, чтобы противник не разгадал основное направление удара и не
смог организовать интенсивную оборону в этом направлении. В данном
случае также используется метод наведения по заранее рассчитанной
фиксированной траектории, хотя она и не прямолинейна.
Использование РВ, который обеспечивает на всех этапах полета
измерение высоты полета в большом диапазоне и с высокой точностью,
позволяет осуществлять полет ПКР над гребнями волн на высоте 5-10 м
с ошибкой 2-3 м, чего невозможно достичь иными способами, напри-
мер, с помощью баровысотомера, имеющего большую инерционность и
обеспечивающего только грубое измерение высоты.
На расчетной дальности от ОВПЦ на маршевой траектории в за-
данный ПЗ и хранящийся в памяти ИВС момент времени Твкл включает-
ся ГСН, входящая в состав ИВС. Величина этой дальности обычно со-
ставляет несколько десятков км и зависит от потенциальных возможно-
стей ГСН, типа МЦ и заданной вероятности ее обнаружения. После
включения ГСН осуществляет обзор зоны ОВПЦ, поиск и обнаружение
находящихся в ней МЦ. Обзор зоны ОВПЦ и поиск МЦ осуществляется
в процессе полета до момента ее обнаружения. Если в осматриваемой
зоне обнаружено несколько МЦ, составляющих корабельную группи-
ровку, в ИВС по определенному правилу производится анализ принятых
ГСН сигналов для классификации, распознавания и выбора из состава
группы заданной МЦ, в соответствии с ее характерными признаками,
хранящимися в памяти ИВС. Далее производится захват выбранной МЦ
и ее автоматическое сопровождение по всем доступным для ГСН фазо-
вым координатам.
С этого момента в РЭСУ начинается этап самонаведения. На вхо-
де ИВС присутствует сигнал от цели, несущий всю доступную инфор-
мацию о ее фазовых координатах, а каналы оценивания координат цели
и их производных в ИВС на основе информации, извлеченной из радио-
сигналов, непрерывно формируют требуемые для используемого закона
наведения оценки, которые поступают в вычислитель параметров рас-
согласования ИВС. Самонаведение ПКР на МЦ в дальнейшем обычно
осуществляется со снижением на предельно малую высоту полета око-
ло 5 м.
Если полет по маршрутной траектории для скрытности происхо-
дил на низкой высоте, то для обзора ОВПЦ с большого расстояния в
заданной точке траектории ПКР из режима низковысотного полета
осуществляет маневр «горка» на заданную высоту, обеспечивающую
прямую видимость ОВПЦ. Далее переход к этапу самонаведения
происходит по рассмотренному выше алгоритму.
В настоящее время в России и за рубежом в качестве источника
первичной информации при контакте с целью на этапе самонаведения,
используют датчики различной физической природы, как радиоэлек-
тронные, так и оптикоэлектронные, а также их комбинации.
В ПКР большой дальности действия наибольшее распростране-
ние получили ИВС, содержащие радиолокационные ГСН, как наиболее
удовлетворяющие рассмотренным выше условиям БП, особенно в части
всепогодности и дальности сопровождения целей. Поэтому в дальней-
шем будем рассматривать именно их.
В зависимости от способа формирования сигнала подсвета цели,
как показано в §8.2, различают радиолокационные системы самонаведе-
ния ПКР с активными, полуактивными и пассивными ГСН.
Полуактивные ГСН распространены в основном среди РЭСУ
ПКР малой и средней дальности. Пассивные ГСН применяются в про-
тиворадиолокационных ракетах (ПРР) при стрельбе как по МЦ, так и по
наземным целям, и не имеют существенных отличий по принципам
построения, поэтому можно считать, что они достаточно подробно рас-
смотрены в §8.2. Поэтому в дальнейшем рассмотрим более подробно
специфику ИВС ПКР с активными радиолокационными ГСН (АРГС),
как нашедшими наибольшее применение в современных ПКР [3]. Сле-
дует иметь в виду, что большинство АРГС имеют в качестве одного из
возможных режимов режим пеленгации источника активной помехи и
они могут обеспечивать самонаведение на него ПКР.
Отметим, что основным недостатком АРГС является низкая
скрытность ее работы, обусловленная возможностью обнаружения из-
лучаемых ею зондирующих сигналов станциями предупреждения об
облучении, размещенными на МЦ, что позволяет системе РЭБ органи-
зовать постановку активных и пассивных помех АРГС. В связи с этим в
последнее время в АРГС внедряются методы радиолокации с использо-
ванием в качестве зондирующих сверхширокополосных (СШП) слож-
ных шумоподобных сигналов, в том числе с перестройкой несущей
частоты в широком диапазоне, фазоманипулированных по псевдослу-
чайному закону и др., в значительной мере снижающих этот недостаток
[33-36,61].
Радиолокация с использованием СШП сигналов удовлетворяет
всем основным современным требованиям, обеспечивая: высокое про-
странственное разрешение цели, вплоть до получения радиоизображё-
ния МЦ; высокую скрытность процесса локации; предельно достижи-
мую помехозащищенность; нейтрализацию новейших технологий «ра-
дионевидимости» типа «Стеле».
На конечном участке наведения АРГС выполняют
управляемый обзор морской поверхности в заданном диапазоне
углов в районе ОВПЦ;
внутриобзорную и межобзорную обработку принимаемых сиг-
налов;
обнаружение, классификация, распознавание и выбор цели;
захват и автосопровождение цели;
оценивание координат МЦ и их выдачу в формирователь пара-
метров рассогласования;
распознавание фрагмента цели и обеспечение избирательного и
высокоточного наведения в заданную область МЦ;
анализ помеховой обстановки и, при необходимости, включение
средств помехозащиты, либо перенацеливание ракеты на постановщик
активных помех;
формирование сигналов подготовки и управления для системы
подрыва БЧ.
Анализ приведенного перечня задач показывает, что для боль-
шинства из них к настоящему времени разработаны методы, аппаратура
и алгоритмические процедуры, обеспечивающие решения, близкие к
оптимальным. Исключением является задача распознавания фрагмента
цели, математическая постановка и алгоритмы решения которой в на-
стоящее время не до конца отработаны. При включении в состав ИВС
информационных каналов высокого разрешения, например АРГС с
синтезированием апертуры антенны появляется принципиальная воз-
можность наведения ракеты в области повышенной уязвимости (ОПУ)
цели. Например, для МЦ - надводного корабля в перечень таких облас-
тей входят погреба боезапаса, топливные цистерны, машинное отделе-
ние. Обеспечение наведения в ОПУ позволяет существенно повысить
вероятность поражения МЦ одной ПКР, или, другими словами, снизить
необходимое для поражения число ракет.
Для решения задачи определения положения ОПУ на изображе-
нии МЦ необходимо обеспечить формирование и ввод в составе ПЗ в
память ИВС образа МЦ в диапазоне работы датчиков ИВС [5]. При этом
задача оценки относительного положения ракеты и точки прицеливания
- ОПУ, может быть сведена к задаче поиска наблюдаемого при визиро-
вании фрагмента на общем изображении цели.
На структурной схеме АРГС (обведенной пунктирной линией на
рис. 8.6) устройства поиска, обнаружения и анализа сигналов, а также
измерители координат цели и их производных объединены в модуль
обработки информации ИВС, который можно реализовать как аппарат-
но, так и программно, при цифровой обработке сигналов. В состав
АРГС, естественно, как и в любой активный радиолокатор, входят так-
же передатчик (ПРД) зондирующих сигналов, приемник отраженных
сигналов и антенная система с переключением приемо-передачи (ППП).
Угловое положение диаграммы направленности антенны задается из
системы управления антенны (СУА). Ширина ДНА антенны, опреде-
ляемая ограниченным диаметром ракеты и длиной волны передатчика,
составляет единицы и доли градуса.
В современных АРГС обычно используется моноимпульсный ме-
тод пеленгации в горизонтальной и вертикальной плоскостях, который
позволяет сравнительно просто построить системы автоматического
сопровождения целей по направлению (АСН).
В качестве СПЦ в АРГС наиболее часто используются зонди-
рующие импульсы в сантиметровом или миллиметровом диапазонах
длин волн. Это определяет состав и принципы работы устройств поиска,
обнаружения и анализа сигналов, которые достаточно подробно рас-
смотрены в других разделах книги. Захват и автосопровождение МЦ, а
также оценка ее координат и их производных также происходит по рас-
смотренным там же правилам.
Так, если в режиме захвата принимается решение о принадлеж-
ности обнаруженного и анализируемого сигнала к цели, то измерители
АРГС переходят в режим автоматического сопровождения цели по
дальности и направлению, а при когерентной обработке сигналов и к
автоматическому сопровождению принимаемого сигнала по доплеров-
ской частоте, обеспечивающему сопровождение цели по скорости.
В режиме автосопровождения цели в дальномерном канале АРГС
по времени запаздывания отраженного сигнала формируются оценки
дальности Д и скорости ее изменения Д = -Vc6. В угломерных каналах
АРГС оцениваются углы ф112, угловые скорости 2 и их приращения
Att)12 в плоскостях управления. Оценки Vc6, coL2 и До\2 используются
для формирования параметра рассогласования (7.48), а оценки ф12 - для
вычисления параметров рассогласования (7.49) при методе наведения с
постоянным углом упреждения. Если ракета наводится по алгоритму
(7.67), (7.68), то в угломерном канале формируются и оценки jul<2 попе-
речных ускорений цели.
Наличие информации о дальности до цели позволяет повысить по-
мехо-защищенность АРГС за счет отпирания приемника только на время
прихода сигналов, отраженных от цели. По пространству цель селекти-
руется за счет направленных свойств антенны путем ее поворота в на-
правлении на МЦ, для чего в процессе сопровождения целей по направ-
лению в угломере АРГС формируются оценки ф, 2 бортовых пеленгов
цели и ф[ 2 их производных. В когерентных АРГС сигнал цели селекти-
руется также по доплеровской частоте Гд соответствующей следящей
системой, что также существенно повышает помехоустойчивость АРГС.
В процессе автосопровождения цели постоянно проводится ана-
лиз принимаемого сигнала на его принадлежность к постановщику по-
мех либо цели. Анализ обычно выполняется по энергетическому при-
знаку, так как сигнал активной помехи во много раз превышает сигнал,
отраженный от цели.
Если в процессе анализа сигналов принимается решение о при-
надлежности обнаруженного сигнала постановщику помех, то либо
включаются средства помехозащиты, либо продолжают использоваться
результаты измерений и экстраполяции автономных датчиков, либо
происходит перенацеливание ракеты на постановщик помех. В послед-
нем случае употребляется прямой метод наведения.
Принимаемый сигнал анализируется на его принадлежность не
только цели, либо постановщику помех, но и морской поверхности.
Этим самым исключается захват и сопровождение сигнала, отраженного
от морской поверхности. Анализ проводится по энергетическим и час-
тотным различиям сигналов отраженных от моря либо от цели. Эти
меры также повышают помехоустойчивость АРГС и ИВС в целом.
При пропадании сигналов цели, например из-за воздействия по-
мех, АРГС переходит в режим памяти по измеряемым координатам и
выдает их экстраполированные значения. В этом режиме ПКР наводит-
ся по экстраполированным значениям всех требуемых фазовых коорди-
нат, соответствующих используемому закону наведения. Это дает
возможность возобновить процессы автоматического сопровождения
цели в АРГС, а соответственно, и самонаведения ПКР, при повторном
появлении сигналов цели без перехода в режим поиска и обнаружения
цели в условиях дефицита времени.
На последнем участке наведения в «мертвой зоне» сигналы управ-
ления не формируются и полет ПКР происходит по экстраполированным
данным или с фиксированными углами отклонения рулей. Более подробно
особенности функционирования и функциональные связи ИВС ПКР во
всех режимах будут рассмотрены в третьем томе монографии.
8.4. ТЕНДЕНЦИИ РАЗВИТИЯ ИВС БОЕВЫХ САМОЛЕТОВ
8.4.1. Тенденции развития ИВС зарубежных самолетов
При проектировании современных ИВС ЛА, и особенно истреби-
телей, необходимо решить следующие задачи:
разработать эффективные методы наведения на воздушные и
наземные цели;
создать эффективный комплекс бортового радиоэлектронного
оборудования (БРЭ.О), осуществляющий информационное обеспечение
всех используемых методов наведения;
решить задачу повышения эффективности самого процесса про-
ектирования и отработки БРЭО ЛА;
решить задачу повышения эффективности эксплуатации, имея в
виду легкость обучения пользователя, упрощение эксплуатации, сокра-
щение времени обслуживания и легкость модернизации борта.
Каждый новый шаг в создании самолета и его оборудования со-
провождается попытками использовать более совершенную технологию
проектирования. Это объясняется желанием вложить в перспективный
самолет все достигнутые к тому времени передовые научно-техничес-
кие результаты работ, с тем, чтобы получить большую эффективность
комплекса и по возможности сократить сроки и стоимость разработок.
БВС являются одной из главных составных частей бортового оборудо-
вания, определяющих архитектуру БРЭО, и их развитие происходит в
тесной взаимосвязи.
В последние десятилетия в США и странах НАТО развитие авио-
ники, прежде всего бортовых вычислительных средств ЛА, определя-
лось тремя основными программами: DAIS, Pave Pillar и Pave Расе [60],
последовательность выполнения которых и связи между ними показаны
на рис. 8.7. Цель данных программ: повышение надежности, сокраще-
ние стоимости, уменьшение нагрузки на экипаж, уменьшение потреб-
ляемой мощности и решение задач масштабируемости.
-------------------------1------1------1--------------------------->
1980 1990 2000 1,год
CIIIAF-16, F-18, F-22 JSF
Рис. 8.7
Реализация первой из них завершилась в начале 80-х годов разра-
боткой стандартной мультиплексной шины передач данных (стандарт
MIL-STD-1553В), стандартной архитектуры процессора данных (стан-
дарт MIL-STD-1750A) и языка программирования ДЖОВИАЛ. Полу-
ченные результаты трудно переоценить, так как они определили прин-
ципы построения федеративной архитектуры вычислительной системы
самолетов на основе мультиплексной шины передачи данных со скоро-
стью 1 Мбит/с, которая реализована практически на всех самолетах
США: В-1В, F-14, F-15, F-16, F-18, их модификациях и др.
Вслед за программой DAIS в середине 80-х годов реализуется
программа Pave Pillar. В рамках этой программы было разработано се-
мейство унифицированных модулей на основе сверхбыстродействую-
щих интегральных схем (VHSIC). Разработана технология сетевой вы-
сокоскоростной (50 Мбит/с) передачи данных на основе волоконно-
оптических линий связи (ВОЛС), что обеспечило повышение общей
надежности всего комплекса БРЭО (прежде всего за счет уменьшения
количества межсистемных соединений) примерно на 35%, уменьшение
массогабаритных показателей, снижение потребляемой мощности,
уменьшение рабочей нагрузки на экипаж и, наконец, сокращение стои-
мости разработки и эксплуатации самолета.
Реализация программы Pave Pillar позволила сделать следующий
шаг в построении модульной архитектуры авионики и отходе от ис-
пользования федеративной архитектуры вычислительной системы са-
молета. Результаты, полученные в процессе выполнения этой програм-
мы, широко использовались при разработке авионики, создаваемой по
программе ATF, а затем самолета F-22.
ИВС самолета F-22, базирующаяся на использовании интегриро-
ванных БВС (рис. 8.8), несомненно, может рассматриваться как наибо-
лее совершенная в части использованных решений и технологий, архи-
тектуры вычислительных средств и является базой и отправной точкой
для дальнейших работ по совершенствованию архитектурного построе-
ния ИВС боевых самолетов следующего поколения [60].
Под «интеграцией» понимается процесс упорядочения, согласова-
ния и объединения структур и функций в технических средствах на всех
уровнях их организации в процессе прогрессивной эволюции. Интеграция на
уровнях кристаллов интегральных схем, модулей и систем повышает мно-
гофункциональность и увеличивает надежность за счет уменьшения коли-
чества соединений. Степень интеграции может служить показателем уров-
ня прогрессивного развития любой технической системы.
Программа Pave Расе была направлена на разработку действительно
высокоинтегрированной модульной ИВС следующего поколения самоле-
тов на основе последних перспективных технологий. Боль шим достижени-
ем этой программы является проработка типовой архитектуры ИВС, кото-
рая может использоваться для самолетов XXI века. Основные характери-
стики потоков информации и вычислительных средств в интегрированной
ИВС боевых самолетов XXI века показаны на рис. 8.9 [60].
ОО
ОО
Нашлемная система
Рис. 8.8
ОО
Оптоэлектронные
датчики РЭП
200 Мбит/с
160 Мбит/с,
Датчики
N-тепловизионной
.____£М£ЗДШ------>
160 Мбит/с
Вычислительные средства ИК-систсмы
Процессор Процессор
сигналов данных
25 Гопер/с 50 млн.опер/с
20МЙДЙХ 10 М байт
500 М бит/с
500
Мбит/с
Вычислительные
средства СЕИ
Датчики
Т*тепловкзнонноЙ
. СИУПМЫ
Датчики
ИК-снстемы
Датчики
РЛС
800 Мбит/с
-10 кбит/с
200 Мбйт/с
Вычислительные средства
РЛС
Процессор Процессор
сигналов данных
15 Голер/с 75 млн.опер/с
65 Мбайт 15 Мбайт .
-10 кбит/с
Процессор данных
200 млн.опер/с
2.2 Мбайт
2750 Мбит/с
Информационно*
управляющее
поле
кабины
_________________ 1000 Мбит/с
Радиоэлектронные
датчики РЭП •
Вычислительные средства
РЭП
Вычислительные
средства экспертной
системы
Процессор сигналов
2 Гопер/с
4 М байт
Радио*
высотомер
Датчики НС и
госопозновання
Процессор
сигналов
2 Гопер/с
10 Мбайт
Вычислительные средства
НС
Процессор
данных
150 млн.опер/с
25 Мбайт
-10 кбит/с'
Процессор данных
1500 мли.опер/с
20 Мбайт
ф -100 кбит/с
Вычислительные
средства задач
верхнего уровня
-10 кбит/с
<-* Интерфейс VMS
100 Мбит/с
Процессор
сигналов
2 Гопер/с
ЮМбдйт.
Процессор
данных
100 млн.опер/с
-10 кбит/с
Процессор данных
450 млн.опер/с
20 Мбайт
Рис. 8.9
60 Мбит/с каждый
2 интерфейса EMS
-100 кбит/с
База
данных
----------------»
Видеосистема
1 Гбайт
При разработке программы создания ударного истребителя JSF
(Joint Strike Fighter) - самолета 2010 г. упор сделан на реализацию сис-
темы интегрированной обработки информации от различных датчиков
(интеграция датчиков); на использование общих аналоговых средств
обработки; использование общих цифровых модулей обработки сигна-
лов и данных в одном крейте; использование унифицированной борто-
вой сети, поддерживающей создание мультипроцессорного суперком-
пьютера; применение передовых технологий в части первичных и вто-
ричных источников питания, средств охлаждения модулей, конструк-
тивных решений; сопряжение с оружием (основным стандартом являет-
ся MIL-STD-1760) и, наконец, использование передовых технологий
поддержки разработки программного обеспечения и технического об-
служивания.
Ключевым моментом в этой структуре является разработка цен-
трализованной высокоинтегрированной открытой масштабируемой ар-
хитектуры вычислительной среды, построенной на специально спроек-
тированных бортовых супермультипроцессорах и единой унифициро-
ванной сети передачи данных.
В структуре интегрированных супермультипроцессоров, наряду с
модулями процессоров общего назначения (данных), используются мо-
дули процессоров обработки сигналов и изображений, графических
процессоров, а также модули ввода-вывода (интерфейсные модули).
Одной из ключевых проблем построения перспективных бортог
вых средств вычислительной техники программы JSF является пробле-
ма перехода к унифицированному протоколу взаимодействия и по-
строение на его основе унифицированной бортовой сети.
Унифицированная сеть передачи данных перспективной ИВС долж-
на обеспечивать высокую скорость передачи информации, малую задерж-
ку, процесс вычислений в «жестком» реальном времени, использование
разделяемой памяти. Эта сеть должна быть масштабируемой, с поддержкой
как малых, так и больших систем. Она должна обеспечивать функциониро-
вание распределенных и централизованных переключателей, а также элек-
трическую и оптическую среды передачи информации. Сеть должна обес-
печивать передачу информации как на малые, так и на большие расстояния
и иметь относительно невысокую стоимость.
При построении унифицированной сети по программе создания
истребителя JSF рассматривались такие интерфейсы, как Fiber Channel
(FC), Myrinet, Scalable Coherent Interface Real-Time (SCI/RT), Serial Ex-
press, Gigabit Ethernet (GE), ATM (Asynchonous Transmission Mode),
Firewire (IEEE 1394), а также возможность использования сетевого ин-
терфейса AS-4074, реализованного в F-22.
Четыре из них (SCI, Fiber Channel, ATM, Myrinet) уже имеют
коммерчески доступные элементы технической реализации. Лидерами в
этой группе являются интерфейсы SCI/RT (IEEE Pl596.6 SCI for Real-
Time Applications) и Fiber Channel FC-AE.
При построении вычислительной среды ориентация сделана на
применение отработанных коммерческих интерфейсов и компонентов.
В качестве физической среды передачи информации предполагается
использовать волоконно-оптические каналы, что обеспечивает не толь-
ко высокую скорость, но и повышенную надежность передачи данных.
Ориентация на использование в вычислительной среде перспективных
самолетов высокопроизводительных мультипроцессоров, позволяющих
выполнять любую обработку информации (обработку сигналов, изо-
бражений, реализацию методов искусственного интеллекта и т.д.), сде-
лана в силу того, что практически нет другого альтернативного пути
обеспечения требуемых ресурсов для решения функциональных задач
на борту перспективных самолетов.
Необходимо отметить, что рассмотренные программы разрабаты-
вались не под конкретно заданный самолет, а в целях создания научно-
практического задела для разработки перспективных и модернизиро-
ванных ЛА различных поколений.
С целью снижения степени риска и затрат в течение жизненного
цикла при определении архитектуры использован положительный опыт,
накопленный в ходе осуществления всех предыдущих программ.
8.4.2. Структурная схема ИВС самолета F-35
В основу ИВС самолета F-35, разрабатываемого по программе JFS,
положена архитектура PAVE РАСЕ, которая была признана в качестве
адекватного развития исходной архитектуры ИВС истребителя F-22.
ИВС, структурная схема которой показана на рис. 8.10, включает
шесть основных компонент:
систему интегрированных радиотехнических датчиков - А;
систему оптико-электронных и ИК-измерителей - Б;
центральную вычислительную систему - В;
систему отображения информации и управления работой ком-
плекса (оборудование кабины) - Г;
систему автоматического управления полетом - Д;
систему управления вооружением - Е.
В системе А используется два «уровня» интеграции: уровень
приемо-передающих антенных устройств (апертур) и уровень блоков
предварительной обработки информации. Более широкая интеграция
систем осуществляется на уровне программной обработки информации
в центральной вычислительной системе.
Рис. 8.10
Основными элементами центральной вычислительной системы В
(см. рис. 8.10) являются:
совокупность стандартных вычислительных модулей, реализую-
щих решение тактических задач и функций сигнальных процессоров;
высокоскоростная шина информационного обмена ЭВМ с ком-
плексами радиочастотных и оптико-электронных систем, а также с ин-
формационно-управляющим полем кабины пилота;
обычные шины информационного обмена центральной вычисли-
тельной системы с системами самолетного оборудования.
Одной из важных задач, стоящих перед разработчиками, является
сокращение числа сетей обмена данными (на самолете F-22 использова-
но 5 шин обмена данными). ИВС самолета F-35 в перспективе должна
иметь две волоконно-оптические сети обмена данными, которые будут
соединять радиотехническую и оптико-электронную подсистемы с цен-
тральным процессором, и центральный процессор с бортовыми систе-
мами управления полетом. Для управления вооружением, находящимся
на внешних подвесках, использована шина обмена данными стандарта
Mil-Std-1760. Она позволяет осуществлять информационное обеспече-
ние любых видов обычного (неядерного) оружия.
Высокие характеристики ВВС достигаются главным образом за
счет следующих организационных и технических мероприятий.
1. Стандартизации, унификации аппаратуры и использования вы-
сокопроизводительной шины внутреннего интерфейса, которая обеспе-
чит преобразование информации, обмен данными и будет обладать
функциями волоконно-оптического приемника/передатчика, высоко-
скоростной шины обмена данными, сети передачи данных. Это позво-
лит снизить стоимость вычислительной системы и повысить ее надеж-
ность.
2. Снижения количества специализированных вычислительных
модулей.
3. Обеспечения тесной взаимосвязи между группами модулей или
кластерами внутри БВС. Распределенная память и простое модульное
программное обеспечение позволят значительно повысить эффектив-
ность использования аппаратуры в целом.
8.5. МЕТОДИКА ОЦЕНКИ ЧУВСТВИТЕЛЬНОСТИ ИВС
К ТОЧНОСТИ ИСПОЛЬЗУЕМЫХ ИЗМЕРИТЕЛЕЙ
В современных радиоэлектронных ССН в ИВС могут использо-
ваться различные алгоритмы траекторного управления с разными набо-
рами измерителей и алгоритмами формирования оценок фазовых коор-
динат абсолютного и относительного движений цели и ОУ. В связи с
этим представляет интерес степень влияния различных датчиков ин-
формации на точность самонаведения. Эту задачу можно решить, ис-
следуя чувствительность ИВС к точности этих датчиков.
Для оценки чувствительности ИВС к точности используемых из-
мерений (оценок) употребительны все методы и показатели, рассмот-
ренные в §6.1. Рассмотрим подробнее наиболее простую методику оце-
нивания текущей чувствительности ИВС по модели состояния. При
этом в качестве показателя чувствительности используем ошибку фор-
мирования параметра рассогласования, обусловленную погрешностями
измерений (оценивания).
Анализируя алгоритмы траекторного управления, изложенные в
гл. 7, можно прийти к следующим заключениям:
в общем случае алгоритмы траекторного управления являются
нелинейными многомерными функциями
Д = f(X|,x2,...,xn) (8.3)
фазовых координат х, (i = 1,п ) относительного и абсолютного движения
ОУ и цели;
в реальных ИВС формирование параметров рассогласования
A = f (X|, x2,..., xn ), (8.4)
осуществляемое по оценкам xbx2,...,xn всегда выполняется с ошибками
Ад=Д-Д, (8.5)
обусловленными наличием погрешностей
AXj = Xj - xi5 i = l,n (8.6)
оценивания (измерения) используемых фазовых координат.
Рассмотрим в общем плане зависимость ошибок (8.5) формиро-
вания параметров рассогласования при следующих допущениях:
имеют место как динамические, так и флуктуационные ошибки
оценивания (8.6);
ошибки Axj независимы и достаточно малы, что обеспечивает на-
ведение ОУ с допустимой точностью.
Принимая во внимание сделанные допущения, выражение (8.4)
можно разложить в ряд Тейлора относительно точных значений хь ог-
раничившись линейными членами:
Л / \ 11
Д = f(x1,x2,...,xn)+2;YiAxi ,
1=1
(8.7)
где Лх; - ошибки оценивания (8.6), а коэффициент чувствительности
df(X|,x2,...,xn)
dXj
(8.8)
аналогичен коэффициенту чувствительности (6.3). Подставляя (8.3) и
(8.7) в (8.5), получим
9
п
Дд^^Дхр (8.9)
1=1
Учитывая наличие в (8.6) динамических Дх,д и флуктуационных
Лх.ф ошибок, можно выделить аналогичные компоненты ДддИ Ддф в (8.9):
Дд =ддл+дд<|> = Х^АХщ + ХТ.Дх^ . (8.10)
i=l i=l
В общем случае и динамические и флуктуационные ошибки
представляют случайные процессы, обусловленные воздействием боль-
шого числа факторов. Поэтому на основании центральной предельной
теоремы можно считать, что ошибки (8.6) имеют гауссовский закон
распределения. Тогда для оценки точности формирования параметров
рассогласования можно удовлетвориться знанием математического
ожидания
тд = i Yimxi> mxi = м{Дх,}
i=l
и дисперсий
(8.Н)
(8.12)
где mxi и Dxi математическое ожидание и дисперсия ошибок измере-
ния (оценивания) i-й фазовой координаты. При получении (8.12) было
учтено допущение о независимости ошибок Ax,.
Если закон изменения динамических ошибок Дх,д является де-
терминированным, то для оценки точности формирования параметра
рассогласования пользуются установившимися значениями ошибки
п
ДАду = SJiAxwy , (8.13)
полученными для установившихся значений Дх,ду. Необходимо отме-
тить, что в соотношениях (8.10) (8.13), которые и применяются для
оценки чувствительности ИВС к точности измерителей, коэффициенты
у, обусловлены используемым методом наведения, а значения ошибок
Дх,д и Дх{ф рассчитываются в процессе анализа конкретных типов изме-
рителей при конкретных законах изменения координат Xj.
Если динамические ошибки случайны, то чувствительность ИВС
оценивается по формуле (8.12), в которой дисперсии погрешностей
измерений фазовых координат определяются суммарным воздействием
и динамических и флуктуационных ошибок. При детерминированном
характере изменения фазовых координат чувствительность ИВС можно
оценить по предельно возможной ошибке формирования параметра
рассогласования:
△дmax = ^Дду . (8.14)
В дальнейшем при исследовании различных типов ИВС будем
использовать именно такой случай. Кроме того, будем полагать, что
флуктуационные погрешности измерений (оценивания) независимые
гауссовские процессы с нулевым математическим ожиданием.
8.6. ЧУВСТВИТЕЛЬНОСТЬ ИВС САМОЛЁТА
К ТОЧНОСТИ ИЗМЕРИТЕЛЕЙ ПРИ САМОНАВЕДЕНИИ
В НАИВЫГОДНЕЙШУЮ ТОЧКУ ВСТРЕЧИ
Чувствительность ИВС самолета к точности измерений (оценок)
будет оцениваться по абсолютной (8.5) и установившейся (8.13) ошиб-
кам формирования параметра рассогласования и математическому ожи-
данию (8.11) и дисперсии (8.12) при следующих условиях:
самонаведение в НУТВ выполняется по закону (7.22), (7.23), в
котором фазовые координаты - детерминированные функции времени;
значения Др=Ур!р в (7.16) известны точно;
каналы наведения в горизонтальной и вертикальной плоскостях
независимы и не влияют друг на друга. Последнее предположение дает
возможность ограничиться рассмотрением алгоритма траекторного
управления в одной, например горизонтальной, плоскости. С учетом
(7.16) и (7.18) и используемых оценок закон наведения (7.22) может
быть представлен в виде:
. . . Д(о,.(д-дР)
+ ос sin у--Z-----—
ДДр
(8.15)
Поставив в соответствие (8.15) и (8.4), получим xt = фг, х2 — ос,
х3=у, х4=Д, х5=Д, х6=(0г, п=6. Учитывая эти обозначения в
(8.8) и (8.9), находим
ДДг=К„ Д(рг + sin уДос + occosyAy -
ДДр
= К„ Дфг+sinyAa+acosyAy-ql
2Д-Др АД ДЦ । Дц.
Д-Др Д Д Ч
(8.16)
В (8.16) qrr определяется формулами (7.16) и (7.18); ошибки
Дфг=фг-фг, Дос = ос-6с, Ду = у-у, ДД = Д-Д, дд = Д-Д,
Д(0г = 0)г — 0)г имеют динамическую и флуктуационную составляющие.
Если фазовые координаты <рг, со, а, у, Д и Д изменяются по де-
терминированным законам, то динамическая ошибка формирования
параметра рассогласования (8.13) в установившемся режиме определя-
ется соотношением
ДАгдУ = К„ Д<ргду +sinyAaay +асозуЛулу -
2Д Др ДДдУ АДдУ Асогду
~ q гт------------------:--•------• ' $ •1')
Д-Др Д д сог
\ /J
Следует подчеркнуть, что выражение (8.17) нестрогое, так как
коэффициенты при установившихся погрешностях измерений Даду,
Дуду, ДДду, ДДду и До)гду могут быть функциями времени. Иначе говоря,
это соотношение, анализируемое на основе принципа замороженных
коэффициентов (§4.1), справедливо лишь для каждого конкретного
момента времени.
Поскольку математические ожидания флуктуационных погреш-
ностей измерений равны нулю, то на основании (8.11) можно утвер-
ждать, что математическое ожидание тДг случайной ошибки Ддг форми-
рования параметра рассогласования также равно нулю.
При независимых погрешностях измерений (оценок) Axj (i = l,6)
дисперсию ИДг ошибки (8.9), определяемую на основе (8.12), можно
вычислить по формуле
РДг=К2н- Рф + sin2 yPa + a2 cos2 уРу+
2 (2Д-Др)2 Рд Рд РЩг
ГГ[ (Д-Др)2 Д2 Д2 со2,-
(8.18)
где D(p,Da,DY,D4,D^ и D(01. дисперсии погрешностей измерения
(оценивания) бортового пеленга <рг, угла атаки а, угла крена у, дально-
сти Д, скорости Д и угловой скорости линии визирования (От. Анализ
соотношений (8.16) (8.18) позволяет сделать следующие выводы.
Ошибка формирования параметра рассогласования в ИВС само-
лета при его наведении в НУТВ зависит от точности измерителей, вхо-
дящих в ее состав, типа используемой ракеты, определяющего значение
Др, и условий применения, характеризуемых конкретными значениями
у, а, qrr, Д, Д и а)г. При этом условия применения определяют не только
относительные погрешности измерений (ДД/Д, ДД/Д и Д(ОГ/(ОГ), но и
вес, с которым они учитываются в общей ошибке Дд. Следует отметить,
что, целенаправленно изменяя условия применения, можно уменьшить
влияние погрешностей измерений на чувствительность к ним ИВС. Так,
при прочих равных условиях, совершая перехват цели точно на встреч-
ном или догонном курсах, когда qrr=0, при уН), можно существенно
снизить влияние погрешностей измерителей на точность формирования
параметра рассогласования (8.16).
В (8.16) можно выделить три группы составляющих:
ДАг = ДДл +ДДд +ДАу • (8.19)
Одна из них
ДДа = KH(sinyA(X + (XcosyAy) (8.20)
обусловлена ошибками автономных датчиков. Вторая
определяется дальномерным каналом БРЛС, а третья
Дду=Кн Дфг-Чгг^-
сог
(8.22)
зависит от точности функционирования ее угломерного канала. Анало-
гичные составляющие можно выделить и в (8.17), и (8.18).
Если в соотношения (8.20)-(8.22) подставить значения всех фазо-
вых координат в реальных диапазонах их изменений, то окажется, что
при Кн =1, ДдА и Ддд изменяются от тысячных до десятых долей граду-
сов, в то время как Дду может варьироваться от десятых долей до единиц
градусов и более. Отсюда следует, что ИВС наиболее чувствительна к
точности функционирования угломерного канала БРЛС, который влияет
на точность наведения самолета в НУТВ гораздо сильнее, чем дально-
мерный канал РЛС и система автономных датчиков.
Относительный вклад отдельных измерителей в общую ошибку
формирования рассогласования в реальном диапазоне дальностей, ско-
ростей и бортовых пеленгов для одного из вариантов ИВС иллюстри-
руются рис. 8.11.
Рис. 8.11
Предельно возможная ошибка формирования параметра рассо-
гласования (8.15) за счет погрешности измерений (оценивания) опреде-
ляется соотношением (8.14), в котором ДддУ и Ад вычисляются по фор-
мулам (8.17) и (8.18).
В заключение отметим, что все выводы, полученные в процессе ана-
лиза чувствительности ИВС для канала наведения в горизонтальной плос-
кости, будут справедливы и для наведения в вертикальной плоскости.
8.7. ЧУВСТВИТЕЛЬНОСТЬ ИВС РАКЕТЫ «В-В»
К ТОЧНОСТИ ИЗМЕРИТЕЛЕЙ ПРИ ИСПОЛЬЗОВАНИИ
МЕТОДА ПРОПОРЦИОНАЛЬНОГО НАВЕДЕНИЯ
Чувствительность ИВС ракеты «в-в» к точности измерений (оце-
нок) будет определяться по методике, изложенной в §8.5, при следую-
щих условиях:
самонаведение ракеты выполняется по методу пропорционально-
го наведения (7.32)
△1,2 = N0Vc6 СО] 2 - j]?2 (8.23)
на основе оценок Vc6 , о)] 2 и jL2, формируемых соответственно авто-
селектором скорости, следящим радиолокационным угломером и аксе-
лерометрами;
каналы управления в плоскостях 1 1 и 2 2 (см. рис. 7.9) незави-
симы и не влияют друг на друга.
На основании последнего условия рассмотрим алгоритм траек-
торного управления только для плоскости 1 1. Сравнивая (8.23) и (8.4),
можно прийти к заключению, что х, = Vc6, х2=со1 и x3=j1, п=3.
Тогда на основе (8.8) и (8.9) можно получить
ДД1 = No(O^Vc6 + N0Vc6 Acot - Aj,, (8.24)
где AVc6 = Vc6 - Vc6, AiOj = €0,-0),, Aj, = j, - j,.
При детерминированном законе изменения фазовых координат
Ve6, j[ динамическую ошибку формирования параметра рассогласо-
вания в установившемся режиме можно вычислить по формуле
Дд1дУ = N^AV^y + N()Vc6 Д(0|ду - А)|ду. (8.25)
Здесь ДУсбду, Д(0|ду и AjjAy - установившиеся динамические ошибки
оценивания скорости, угловой скорости ЛВ и ускорения.
Поскольку средние значения всех флуктуационных погрешностей
измерений равны нулю, то математические ожидания флуктуационной
составляющей ошибки (8.24) также равны нулю. Дисперсию случайной
составляющей (8.24) можно определить по формуле
Вд1 = No<o?Dv + N^Vc26Dlo + Dj. (8.26)
В (8.26) Dv, D(0 и Dj - соответственно дисперсии погрешностей
измерений V, Wj и jj.
Анализ выражений (8.24)-(8.26) позволяет прийти к следующим
заключениям.
Чувствительность ИВС к точности измерителей ракеты, наводи-
мой по МПН, определяется не только погрешностями измерений, но и
условиями применения. При прочих равных условиях наведение ракеты
с углом упреждения, при котором С0| ~ 0, позволяет обеспечить мини-
мальные погрешности формирования параметра рассогласования. Од-
нако на практике такой прием можно реализовать лишь при перехвате
неманеврирующей цели. В такой ситуации наибольший вклад в общую
ошибку формирования параметра рассогласования вносит угломерный
канал РГС, формирующий оценку d),. При перехвате маневрирующей
цели на малых расстояниях 0)| может достигать значений 30-40 7с [30].
Тогда автоселектор скорости также может вносить значительный вклад
в общую ошибку (8.24), существенно превышая вклад, вносимый по-
грешностью Aji измерения ускорения jh На основании (8.14), (8.25) и
(8.26) предельная возможная ошибка формирования параметра рассо-
гласования, обусловленная погрешностями измерений, будет опреде-
ляться соотношением
Ад! max Д^сбду + ^0Х:б ^Цду Al Iду + + ^0 V:6 ^(0 + ^j •
(8.27)
Принимая во внимание идентичность каналов управления в плос-
костях 1 1 и 2 2, можно утверждать, что все выводы, полученные для
канала 1 1, будут справедливы и для канала 2 2.
8.8. ЧУВСТВИТЕЛЬНОСТЬ ИВС ЛА
К ТОЧНОСТИ ИЗМЕРИТЕЛЕЙ
ПРИ ОПТИМАЛЬНОМ НАВЕДЕНИИ
НА ВОЗДУШНУЮ МАНЕВРИРУЮЩУЮ ЦЕЛЬ
Чувствительность ИВС ЛА к точности измерений при оптималь-
ном наведении на воздушную маневрирующую цель будем оценивать
по методике, изложенной в §8.5, при следующих условиях:
самонаведение ЛА осуществляется по закону (7.67), (7.68), со-
вместно наилучшему по точности и экономичности;
начальная дальность До в (7.67), (7.68) случайная величина, ха-
рактерная для каждой конкретной процедуры самонаведения;
каналы траекторного управления в различных плоскостях незави-
симы и не влияют друг на друга.
Последнее предположение позволяет рассматривать в дальней-
шем только один канал, например (7.67). Сопоставляя (7.67) и (8.4),
можно заключить, что Xj = До , х2 = Vc6, х3 = cor, х4 — jur, х5 — jr,
п=5. Тогда на основании (8.8) и (8.9) можно получить формулу
ад“+ 14J1" ~4'' <S2S)
(Д0-Дк) До-Дк До-Дк
для мгновенных значений ошибок формирования параметра рассогласова-
ния (7.67). В этом соотношении АД0=Д0~До, AVc6=Vc6— Vc6,
Acor = cor — О)г, Ajur = jur — jur Ajr = jr - jr соответствующие
погрешности измерений (оценивания). Из (8.28) следует, что установив-
шаяся динамическая ошибка формирования параметра рассогласования
Д _ ЗДкУзб Ч ДД + ЗДрСОг ду ЗДрУсб . _ д.
Йо-Д.)г ° Д»-А ’ А-Д. ’ ’ У'
(8.29)
где А]цгду установившаяся динамическая ошибка оценивания jur.
Принимая во внимание центрированный тип флуктуационных
погрешностей измерений, можно прийти к заключению, что математи-
ческое ожидание флуктуационной ошибки процесса (8.28) также равно
нулю. Дисперсия этого процесса определяется соотношением
ЗДк У;б
.(До-Дк)2.
Одо
ЗДо^г
До “Дк.
Dv +
зДоЧб
До “Дк.
О(о + Ojuu
+ Djr.
(8.30)
Здесь D4o, Dv, Djur и Djr - дисперсии измерения (оценивания) соот-
ветствующих фазовых координат.
Анализируя (8.28)-(8.30), можно сделать следующие выводы.
Чувствительность ИВС ЛА к точности измерителей при опти-
мальном наведении на маневрирующую воздушную цель зависит не
только от погрешностей измерений, но и от типа ССН, предопределяю-
щего значение Дк, и условий применения, обусловливающих конкрет-
ные значения До, Vc6, сог и jUI.
Если закон (7.67) используется для наведения истребителя, то значе-
ния АДо определяются ошибками захвата цели на автосопровождение
дальномерным каналом БРЛС. При использовании (7.67) для наведения
ракет «в-в» большой дальности АДо - ошибка целеуказания по дальности,
поступающего в ракету из БРЛС истребителя. В ракетах «в-в» малой даль-
ности с АРГС, захватывающих цель на подвеске, АДо обусловлена ошибкой
захвата цели дальномером головки самонаведения.
Рассматриваемая ИВС наиболее чувствительна к точности функ-
ционирования угломерного канала, который вносит наиболее весомый
вклад в формирование ошибки АДог (8.28). При этом следует подчерк-
нуть, что на малых расстояниях до цели из-за угловых шумов может
существенно возрасти значения D0) (п. 5.2.4). В ИВС истребителей и
ракет большой дальности, для которых До существенно превышает Дк,
влияние ошибки АД0 весьма незначительно. В то же время в ИВС ракет
малой дальности при ДК<ДО<2ДК влияние ошибки АД0 может быть су-
щественным. Ошибка AVc6 проявляется достаточно сильно при больших
значениях (0г, что имеет место на малых расстояниях до интенсивно
маневрирующей цели. Ошибки оценивания ускорений цели и ОУ влия-
ют меньше других погрешностей измерений и их влияние не зависит от
значения остальных фазовых координат. Для ослабления влияния по-
грешностей на точность формирования параметра рассогласования, а
соответственно и на точность наведения, целесообразно начинать само-
наведение на максимально возможных дальностях До и заканчивать его
при минимальных значениях Дк. Кроме того, желательно выполнять
самонаведение точно на встречном, либо догонном курсах, когда сог=0.
Предельно возможная ошибка формирования параметра рассогласова-
ния определяется соотношением
Адогтах ^Догду + »
(8.31)
в котором Ддогду и ЭДог вычисляются по (8.29) и (8.30).
Учитывая идентичность алгоритмов траекторного управления
(7.67) и (7.68), можно утверждать, что выводы, полученные для (7.67),
будут справедливы и для (7.68).
8.9. ЧУВСТВИТЕЛЬНОСТЬ ИВС ЛА
К ТОЧНОСТИ ИЗМЕРИТЕЛЕЙ ПРИ ОПТИМАЛЬНОМ
НАВЕДЕНИИ НА НАЗЕМНЫЕ ЦЕЛИ
Как и ранее, чувствительность ИВС ЛА к точности измерителей
будет оцениваться по методике, рассмотренной в §8.5. При этом можно
полагать, что выполняются следующие условия:
самонаведение ЛА осуществляется по закону (7.74), (7.75), опти-
мальному по критерию (7.71);
каналы траекторного управления в различных плоскостях незави-
симы и не влияют друг на друга.
Последнее предположение позволяет анализировать только один
канал, например (7.74). Из сравнения (7.74) и (8.4) следует, что Xj = Д ,
х2 = фу, х3 = сог, х4 = Д , х5 = со,., х6 ~ j,., п=6. Тогда на основании
(8.8) и (8.9) можно получить
А Ч<р(фу-Фг)Ал , д„
Адоо = —ъ------ДД + ~7Г Д(Ру -
К]Д К;Д
Чф А
—ТД(Рг-
К]Д
_Я^дд + _Я^Д(0 Д) (8.32)
К;Д2 Kjfl
где АД=Д-Д, Дфу = фу-фу, Аф,. =ф,. —ф,., АД = Д-Д,
Асо,. = со,. — со,., Aj,. = j,. —• j,. ошибки оценивания используемых в (7.74)
фазовых координат. Поскольку эти координаты изменяются по детер-
минированным законам, то при формировании (7.74) в установившемся
режиме будет иметь место динамическая ошибка
А Чф (фу Фг ) л п I ^Ф /л л \
△догду — j-TJ △Дду + А (Дфуду ~ДФгду)“
KjA KjZA
п2 АДду + п А^гду А)гду ’ (8.33)
KjA KjA
которая анализируется на основе метода замороженных коэффициентов
для установившихся динамических погрешностей оценивания АДду,
Дфуду» Дфгду» ДДду» Д^гду, Д]гду
Центрированный характер флуктуационных составляющих оши-
бок оценивания позволяет утверждать, что математическое ожидание
флуктуационного компонента (8.32) будет равно нулю. В свою очередь,
дисперсию этого компонента можно вычислить по формуле
(8.34)
в которой Вфу, Вфг, D;r и Dj - дисперсии ошибок оценивания
соответствующих фазовых координат.
Анализ (8.32)—(8.34) позволяет сделать следующие выводы.
Чувствительность ИВС ЛА к точности измерителей при опти-
мальном наведении на наземную цель зависит не только от ошибок
оценивания используемых фазовых координат, но и от требований к
точности и экономичности, предъявляемых к ССН, и условий ее приме-
нения, обусловливающих значения Д, Д , сог, (ру и (рг.
Чем выше требование к точности наведения, определяемое в
(7.74) значениями коэффициентов штрафов цф и qw, тем чувствительней
ИВС к ошибкам оценивания АД, Дфу, Д(рг, АД и Д(0г. Экономичные
системы наведения, характеризуемые большими значениями коэффици-
ента Kj , менее чувствительны к точности оценивания перечисленных
фазовых координат.
В (8.32) можно выделить три группы ошибок
Адог-Адога Адогд Адогу» (8.35)
обусловленных влиянием различных типов измерителей. Первая из них
△доп. =-^;АФу -Air
К;Д
определяется автономными датчиками. Вторая
(8.36)
Яф(фу-Фг)дд Чф“гАД
Догд
к]Д Д ^Д Д
(8-37)
A
зависит от точности дальномерного канала БРЛС или РГС, а третья
Д^у=^-Д<ог-^-Д<Р,
К)Д KjA
(8.38)
обусловлена погрешностями функционирования радиолокационного угло-
мера. Аналогичные составляющие можно выделить в (8.33) и в (8.34).
Для снижения ошибки (8.36) целесообразно осуществлять наве-
дение с высокой скоростью Д, используя экономичную низкоточную
по угловой ошибке <ру <рг (7.74) систему управления. Принимая во вни-
мание малость относительных ошибок ДД/Д и ДД/Д в (8.37), можно
утверждать, что дальномерный канал БРЛС (РГС) весьма незначительно
влияет на общую погрешность (8.35) формирования параметра рассо-
гласования (7.74). Основной вклад в нее вносит угломерный канал, при-
чем обусловленная им ошибка (8.38) возрастает по мере уменьшения
дальности и перераспределяется в пользу точностей оценивания (Ор
Относительный вклад отдельных измерителей в общую ошибку форми-
рования рассогласования в реальном диапазоне дальностей, скоростей и
бортовых пеленгов иллюстрируются рис. 8.12.
Предельно возможная ошибка формирования параметра рассо-
гласования (7.74) определяется соотношением
А Дог max = ^Аогду + ^V^Aor » (8.39)
в которой Ддогду и Вдог рассчитываются по формулам (8.33) и (8.34).
Все выводы, полученные при анализе чувствительности горизон-
тального канала ИВС, имеют смысл и для вертикального канала (7.75).
8.10. ЧУВСТВИТЕЛЬНОСТЬ ИВС РАКЕТЫ
К ТОЧНОСТИ ИЗМЕРИТЕЛЕЙ ПРИ ЕЕ НАВЕДЕНИИ
НА НАЗЕМНЫЕ ЦЕЛИ В РЕЖИМЕ СИНТЕЗИРОВАНИЯ
АПЕРТУРЫ АНТЕННЫ
Чувствительность ИВС ракеты «воздух-поверхность» к точности
измерителей при ее наведении на наземную цель в режиме синтезиро-
вания апертуры антенны будет оцениваться по методике, изложенной в
§8.5 при следующих условиях:
самонаведение ракеты осуществляется по закону (7.88), совмест-
но наилучшему по точности, экономичности и линейной разрешающей
способности по азимуту;
законы изменения бортового пеленга цели, угловой скорости ли-
нии визирования, а также дальности до цели являются детерминирован-
ными;
все используемые измерители имеют как динамические, так и
флуктуационные погрешности;
флуктуационные погрешности измерителей представляют собой неза-
висимые центрированные гауссовские процессы с известными дисперсиями;
каналы траекторного управления ракетой в различных плоско-
стях независимы и не влияют друг на друга.
Последнее предположение дает возможность проводить анализ
только для одного канала, например, горизонтального. Учитывая выраже-
ние (7.83) в законе наведения (7.88) соответствующий алгоритм траектор-
ного управления ракетой в режиме синтезирования апертуры антенны с
наведением на наземную цель можно представить в следующем виде:
/
А Чф
Дг =—— фг -arcsin
KjVC6 I
ДААР
2A/TVC
(8.40)
Разложив это соотношение в ряд Тейлора относительно точных
значений всех фазовых координат, и ограничившись линейными члена-
ми разложения после вычитания точных значений параметров рассогла-
сования получим:
q<p XAF__________1_______
кЛб | / п 2_др V
J4- —--------
V 1л 2Д/Т J
К]Д
Чф
кЛ2б
Чф
кЛе
(
arcsin
А
V2
vc
Д XAF
Vc 2Д/Т
"Фг ДУсб +
AAF 1
Д/т
.14-
AVC +
д aaf
vc 2Д/Т
-5^-Дфг +-5^-Д(0г — Aj,
KjVc6 KjA
(8.41)
где Ддг - ошибка формирования параметра рассогласования, а
АД=Д-Д, AVc6=Vc6-Vc6, AVC=VC-VC, Афг=фг-уцг, Асо^ш-d),.,
Ajr=jr-jr - соответственно ошибки измерения (оценивания) дальности
до цели, скорости сближения с ней, собственной скорости ракеты, бор-
тового пеленга цели и угловой скорости линии визирования в горизон-
тальной плоскости и поперечного горизонтального ускорения ракеты.
При детерминированном характере изменения используемых фазовых
координат, опираясь на метод замороженных коэффициентов (§4.1),
можно получить выражения для установившихся значений динамиче-
ских ошибок. Эти формулы получаются из (8.41) путем замены в них
мгновенных ошибок АД» AVc6, AVC, Афг, АсОг и Ajr на их установившиеся
значения АДУ, AVc6y, AVcy, Афгу, АсОгу и Ajry.
Общий анализ (8.41) дает возможность сделать следующее за-
ключения. Чувствительность алгоритма траекторного управления к
точности измерителей зависит не только от ошибок оценивания исполь-
зуемых фазовых координат, но и от требований к точности и экономич-
ности, предъявляемых к системе наведения, и условий ее применения,
обусловливающих значения Д, Vc6, Vc , фг, и j,..
Чем выше требования к экономичности процесса управления, оп-
ределяемые значениями коэффициентов штрафов kj, тем менее он чув-
ствителен к ошибкам оценивания. Высокоточные системы наведения,
характеризуемые большими значениями коэффициентов цф, q(0 более
чувствительны к точности оценивания фазовых координат.
В общем случае в (8.41) можно выделить три группы ошибок:
Адп~Адгд+(Адгд+Адгусб)+(Адгф+Адга)),
обусловленных влиянием различных типов измерителей. Первая из них
А
_ ^Ф
Аг А — Т~
KjVc6
(8.42)
определяется автономными датчиками. Вторая -
Адгд
АдгУсб
XAF
KjVc6 A/TVC
Чф
arcsin
L (д AAF]
} [vc2AZTJ
КрЦ2
Д XAF
Vc 2A/T
-Фг дЧб
(8.43)
(8.44)
1
зависит от точности дальномерного канала. Третья группа:
Л Яф А
△м>=—„ дфг;
KjVc6
Л — Am
аДгЮ п аш1
KjA
(8.45)
(8.46)
обусловлена ошибками угломерного канала РГС. В (8.43)-(8.46) индек-
сы Д, V, ф и со в левой части формул означают, что соответствующие
составляющие ошибок формирования параметра рассогласования обу-
словлены соответственно ошибками оценивания Д, V, ф и со.
Поскольку флуктуационные составляющие погрешности измери-
телей представляют собой центрированные процессы, то математиче-
ские ожидания флуктуационных компонент ошибки (8.41) будут равны
нулю. На основании (8.41) дисперсия ошибки формирования параметра
рассогласования Dar может быть вычислена по формуле
г -12
Чф XAF
KjVc6 I
J4-
Д AAF
Ч 2Д/Т
-Ч-Ч
К;Д2
Ид +
-|2Г
Чф
[KjV26 J L
arcsin
Д AAF
Vc 2Д/Т
~Фг
DVc6 +
4<р
_KjVc6_
AAF
Vc2 Ч Г"
J4-
Д AAF
Vc 2Д7Т
\2
2
Д
1
2
2
-2
Чш
К)Д
Ошг + Di,
(8-47)
где Ид, DVc6, E>vc, Е>фг, Dwr, Djr - соответственно дисперсии ошибок оце-
нивания дальности до цели, скорости сближения, собственной скорости,
бортового пеленга цели и угловой скорости линии визирования в гори-
зонтальной плоскости и горизонтального ускорений ракеты. Общий
анализ (8.47) приводит к тем же заключениям, что и анализ динамиче-
ских ошибок.
Необходимо отметить, что знание соотношений (8.41) и (8.47) да-
ет возможность определить величину допустимых ошибок измерений
(оценивания) при которых общая ошибка формирования параметра
рассогласования не превышает заданной величины Адгмакс. Для решения
этой задачи воспользуемся принципом равнопрочности в соответствии с
которым предполагается, что все составляющие, обусловленные раз-
личными ошибками оценивания фазовых координат вносят равный
вклад в общую ошибку. В этом случае, пренебрегая ошибками акселе-
рометров, можно определить допустимые значения ошибок оценивания
фазовых координат по следующим формулам:
АДдоп Ддгмакс
q<p AAF
KjVc6 A/TVC
’4_f
V„ 2zVT
К]Д
; (8.48)
(8.49)
(8.50)
(8.51)
доп А
‘Агмакс
Чсо
(8.52)
К,Д
1
Из (8.48)-(8.52) видно, что допустимые ошибки оценивания фа-
зовых координат зависят не только от максимально допустимых значе-
ний ошибок формирования параметра рассогласования ДДгмакс коэффи-
циентов штрафов за точность-экономичность, требуемого линейного
разрешения по азимуту, но и от конкретных условий применения Д,
Vc6, Vc, фг, d)r.
Проведенные исследования влияния ошибок оценивания фазовых
координат (8.48)-(8.52) в реальном диапазоне их изменения позволили
определить вклад каждого измерителя в величину ошибки формирова-
ния параметра рассогласования. Результаты исследования одного из
вариантов наведения ракеты, характеризующие этот вклад, показаны
на рис. 8.13.
1
Aka
0,8
0,7
0,6
0,5
0,4
0,3
0,2
0,1
0
-0,1
0 10 20 30 40 50 60 70 90 t,c Ю0
Рис. 8.13
Г<лФ
i Дю ; 1 ДД \ ". V7^' = Г/ !
—
Исследования полученных зависимостей чувствительности ИВС
к точности измерителей позволяет сделать следующие заключения:
наибольший вклад, вносимый в общую ошибку формирования
параметра рассогласования, приходится на угломерный канал при нали-
чии наиболее жестких требований к измерению угла пеленга;
в целом полученный алгоритм траекторного управления (8.40)
можно реализовать при существующих измерителях.
ГЛАВА 9. ПРИНЦИПЫ ПОСТРОЕНИЯ БОРТОВОЙ
ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЫ
9.1 СТРУКТУРНАЯ СХЕМА ВВС
Выше (см. §8.1) рассматривалась обобщенная структурная схема
ИВС самолета, включающая ВВС, построенную по федеративно-цент-
рализованному принципу. Уровни обработки информации в такой ВВС
достаточно схематично иллюстрируются рис 9.1. В структуре такой
ВВС имеются программируемые процессоры сигналов, входящие в сос-
тав БРЛС и ОЭС. С их помощью выполняется первичная обработка сиг-
налов, получаемых от целей. Такая обработка предполагает преобразо-
вание физических полей e(x,t) различной природы, содержащих инфор-
мацию о фазовых координатах х собственного и относительного движе-
ния ЛА, в электрические сигналы z(x,t), их преобразование в видеосиг-
нал, оцифровку и предварительную фильтрацию.
На втором уровне выполняется вторичная обработка процессора-
ми данных, в рамках которой осуществляется формирование оценок
х i (i = 1, и) фазовых координат Xj. Эти оценки используются для управ-
ления всеми бортовыми подсистемами и датчиками информации.
На третьем уровне производится обобщение и обработка инфор-
мации, поступающей от всех систем, и формирование сигналов управ-
ления во всех режимах работы ИВС в интересах боевого применения, в
том числе для управления ЛА. Одновременно формируются сигналы
для передачи на индикаторы СЕИ и их преобразование к виду, удобно-
му для восприятия экипажем ЛА.
Обмен информацией между различными БЦВМ (процессорами)
БРЛС, ОЭС и других подсистем осуществляется, в основном, в цифро-
вом виде по линиям связи.
Связующим звеном между теоретическими достижениями в об-
ласти обработки информации и управления в ИВС и практически дости-
гаемыми в БВС показателями качества систем являются алгоритмы и
реализующие их в вычислительных средствах БВС программы.
Однако федеративная архитектура БВС на базе автономных
БЦВМ в подсистемах является промежуточным этапом в развитии ар-
хитектуры бортовой авионики. Это связано как с концепцией построе-
ния бортового оборудования перспективных боевых самолетов (в том
числе БВС), так и достижениями в создании электронной элементной
базы для вычислительной техники общего и специального назначения.
Повышение степени интеграции электронных схем и появление
микропроцессоров дали возможность по-новому организовать многие
виды систем обработки информации. Основной особенностью этой но-
вой организации является объединение (интеграция) в одной системе
большого количества сложно организованных функционально и интен-
сивно взаимодействующих между собой устройств (процессоров, памя-
ти и т.п.). Последние могут быть при этом удалены друг от друга на де-
сятки метров. В таких системах для связи устройств используют ло-
кальные сети различных типов. При этом в вычислительных сетях для
параллельной работы устройств необходимо обеспечивать высокие ско-
рости обмена информацией, быстрые и гибкие способы управления
доступом устройств к сети.
9.2. ТЕХНОЛОГИЯ ОТКРЫТЫХ СИСТЕМ
Одной из основных современных информационных технологий,
определяющих эффективность вычислительных систем всех уровней и
назначений, является технология открытых систем, которая обеспечива-
ет взаимодействие компонентов систем друг с другом как на программ-
ном, так и на аппаратном уровнях.
Основой, обеспечивающей реализацию открытых систем, служит
совокупность стандартов, с помощью которых унифицируется взаимо-
действие аппаратуры и всех компонентов программной среды: языков
программирования, средств ввода-вывода, графических интерфейсов,
систем управления базами данных в сетях и т.п. В результате сотрудни-
чества многих национальных и международных организаций был опре-
делен набор стандартов, учитывающих различные аспекты применения
открытых систем.
Открытость характеризует глобальный процесс стандартизации
аппаратных и программных средств, направленный на достижение со-
вместимости и переносимости продуктов большого числа независимых
поставщиков. Расширению рынка открытых систем способствуют:
отсутствие патентов или авторских прав на спецификации,
отсутствие лицензионной платы за использование стандарта,
доступные спецификации, полученные в результате открытого
обслуживания пользователей крупнейшими ведущими мировыми фир-
мами-производителями.
Практика разработки и производства современных военных сис-
тем наземного, морского, воздушного и космического базирования, по-
зволяет говорить об изменении подхода к формированию технической
политики создания компьютерных бортовых или наземных управляю-
щих специализированных систем.
Новый подход заключается в широком использовании готовых
аппаратных и программных компьютерных технологий открытого типа
ранее широко апробированных и/или стандартизованных на рынке об-
щепромышленных гражданских приложений. Это так называемые
COTS-технологии двойного назначения (Commercial Off-The-Shelf -
«Готовые к использованию») [65].
COTS-технологии - это технологии, нормативная база которых
развивается и поддерживается как в рамках международных (1ЕС/МЭК,
ISO) и национальных (ANSI, DIN, IEEE, ГОСТ) организаций по стан-
дартизации, так и в рамках крупных профессиональных международных
консорциумов (AR1NC, PCISIG, VITA, PICMG, GrouplPC и т.д.).
Стандартизация ведется совместными усилиями большого числа
конкурирующих, в том числе наиболее крупных (Motorola, HP, IBM,
SUN и т.д.) компаний, производителей совместимой серийной техники.
В качестве примера открытых COTS-технологий системного
уровня для приложений повышенной надежности можно указать ряд
стандартных магистрально-модульных шинных интерфейсов VMEbus,
PCI, CompactPCI, Industry Pack, PMC (PCI MezzanineCard), PC-MIP, PC-
104, сетевые и коммуникационные интерфейсы - Ethernet, FDDI, MIL
1553, RS422/485, ARINC 429/629 и т.д.
Открытыми COTS-технологиями стандартами де-факто можно
назвать ряд известных операционных систем (ОС) общего назначения
(UNIX и др.) и реального времени (VxWorks, OS9, pSOS+, VRTX, QNX,
OSE, LynxOS) и, соответственно, широкий класс инструментальных
технологий разработки программного обеспечения (ПО) с использова-
нием языков: C/C++, АДА и т.п.
В COTS-технологии попадают архитектуры процессоров, сетей,
графики; инструментальные программные технологии, прикладное и
инструментальное ПО для различных ОС, полупроводниковые техноло-
гии и т.д., вплоть до идеологии (алгоритмы, методологии) продуктов.
Таким образом, сегодня для реализации спецсистем в подавляю-
щем большинстве случаев ставится вопрос о выборе и адаптации ряда
конкретных компьютерных COTS-технологий, а не разработка новой
сквозной технологии.
COTS-технологии - это инструмент создания систем, их техноло-
гическая основа. Они позволяют использовать огромный парк готовых
покупных аппаратных и программных компонентов, при необходимости
разрабатывать и производить собственные оригинальные модули и про-
граммное обеспечение, концентрируя основные усилия на внедрении и
сопровождении собственной целевой системы, разработке прикладного
ПО в минимальные сроки.
В условиях быстрого морального старения микросхемных набо-
ров при наличии сменных стандартных модулей и интерфейсов упроща-
ется модернизация системы.
Применение технологии открытых систем предполагает знание
международных интерфейсов (стандартов), позволяющих создавать
программно-аппаратные средства, конфигурация которых определяется
назначением системы.
9.3. ВЫЧИСЛИТЕЛЬНЫЕ СРЕДСТВА ДЛЯ ВВС
9.3.1. Архитектура и структурная организация
ВЫЧИСЛИТЕЛЬНЫХ СРЕДСТВ
Важнейшими компонентами любой компьютерной системы (под-
системы) являются оперативная (или главная) память, центральный
процессор (ЦП), подсистема ввода/вывода, система магистралей (ком-
мутаторов), обеспечивающая взаимодействие всех перечисленных ком-
понентов, и системное программное обеспечение [31].
При описании вычислительных систем принято различать их ар-
хитектуру и структурную организацию.
Архитектура вычислительной системы - система основных
функциональных средств, доступных пользователю, и принципов орга-
низации процесса переработки информации на уровне операций над
массивами и задачами в целом. В число характеристик архитектуры
входят набор машинных команд, формат разрядной сетки для представ-
ления данных разных типов, механизм обращения к средствам ввода-
вывода и метод адресации памяти.
Система команд компьютера представляет собой встраиваемый в
компьютер машинный язык (ЯО), на котором человек может общаться с
компьютером.
Однако использование такого примитивного машинного языка
неудобно для человека и с течением времени появился ряд уровней язы-
ков (абстракций), каждый из которых надстраивается над языком более
низкого уровня. Таким образом преодолеваются сложности при обще-
нии человека с компьютером.
Если для выполнения программы, написанной на языке Я1, каж-
дая команда Я1 заменяется на эквивалентный набор команд в языке ЯО
исполняющей машины, имеет место трансляция. В этом случае вместо
исходной программы на Я1 выполняется объектная программа на ЯО.
Если после выборки каждой команды из программы на Я1 проис-
ходит выполнение эквивалентного ей набора команд на ЯО, то имеет
место интерпретация. Программа, выполняющая такой перевод называ-
ется интерпретатором.
При применении обоих методов компьютер в конечном итоге
выполняет набор команд на языке ЯО, эквивалентных командам Я1. Од-
нако следует помнить, что процесс программной интерпретации языка
более высокого уровня требует дополнительного времени для своего
выполнения.
Создание целого ряда языков, каждый из которых более удобен
для человека, чем предыдущий, продолжается и по сей день. В общем
случае, архитектура компьютера может рассматриваться в виде' ряда
уровней, связи между которыми показаны на рис. 9.2.
Под структурной организацией компьютерной системы подра-
зумевается совокупность операционных блоков (устройств) и их взаи-
мосвязей, обеспечивающая реализацию спецификаций, заданных архи-
тектурой компьютера.
Уровни
Рис. 9.2
Структура компьютерной системы включает в себя скрытые от
программиста детали аппаратной реализации системы - управляющие
сигналы, аппаратный интерфейс между процессором и периферийным
оборудованием, функционирование памяти. Наиболее распространен-
ным способом организации связей между основными компонентами
компьютеров являются магистрали (или шины), вариантов построения и
конструкций которых имеется достаточно много.
При проектировании подсистемы памяти перед конструктором
стоит задача, которую каждый раз приходится решать по-новому. Необ-
ходимо увязать три противоречивых требования: обеспечить как можно
больший объем памяти, как можно меньшее время обращения к ней и
как можно меньшую стоимость устройства.
Для подавляющего большинства современных приложений тре-
буется, чтобы система располагала очень большими ресурсами памяти.
Поэтому одной оперативной памяти в составе вычислительной системы
оказывается недостаточно. В частности, постоянным компонентом всех
современных компьютерных систем общего назначения являются уст-
ройства внешней памяти.
Для нынешнего этапа развития технологии в области систем па-
мяти характерны следующие особенности:
чем больше объем требуемой памяти в системе, тем потенциаль-
но ниже может быть быстродействие;
чем выше требуемое быстродействие, тем выше относительная
стоимость запоминающего устройства (ЗУ) (в пересчете на бит храни-
мой информации);
чем больше объем памяти в системе, тем ниже относительная (на
бит информации) стоимость ЗУ.
Рис. 9.3
ления памяти, является организация
Разрешить эти противоре-
чия можно, включив в состав
вычислительной системы иерар-
хически организованное ЗУ, в
котором используют виды памя-
ти, созданные на базе разных
технологий (рис. 9.3). При этом
на верхнем уровне иерархии ис-
пользуются более быстродейст-
вующие виды памяти, но меньше-
го объема, на нижних последую-
щих - менее быстродействующие,
но все большего объема. Ключе-
вым вопросом, решение которого
обеспечивает успех такого разде-
гоков информации в системе, обес-
печивающая по мере перехода от устройств верхних уровней иерархии к
устройствам нижних уровней снижение интенсивности обращений к
соответствующим уровням.
Извлечь положительный эффект из объективно присущего про-
граммам, написанным на процедурных языках, свойства локальности
ссылок позволяет, например, двухуровневая организация оперативной
памяти, когда наряду с оперативной памятью большого объема приме-
няется быстродействующая память небольшого объема (КЭШ-память).
Свойство локальности состоит в том, что, если программа обра-
тится к какому-то элементу данных, этот элемент может вскоре понадо-
биться вновь. Это локальность во времени. Кроме того, вскоре могут
потребоваться элементы данных, адреса которых мало отличаются от
адреса данных, используемых в настоящий момент. Это локальность в
пространстве. Свойство локальности ссылок в текстах программ состав-
ляет основу организации всех систем КЭШ-памяти.
В работе устройств ввода-вывода основное внимание уделяется ор-
ганизации взаимодействия устройств ввода-вывода с прочими компонен-
тами компьютерной системы, в частности, методам программного ввода-
вывода по прерыванию и прямого доступа к памяти. Оптимизируются так-
же интерфейсы между модулями ввода-вывода и внешними устройствами.
Совершенствование вычислительной техники в направлении по-
вышения производительности, надежности, живучести, удобства про-
граммирования и использования (эксплуатации) представляет собой
непрерывную цепь изменений архитектуры, структуры и элементной
базы компьютеров и вычислительных систем. Развитие архитектуры
определяется совершенствованием языков программирования, а разви-
тие структуры - прогрессом элементной базы и стремлением наилуч-
шим образом реализовать требуемую архитектуру.
В языках программирования допускается широкая вариация ти-
пов данных и создание новых типов. Следует сказать, что платой за пре-
доставление гибкости программирования является увеличение времени
исполнения программ.
В качестве примера на рис. 9.4 показана обобщенная архитектура
простейшего компьютера с системной шиной PCI (Peripheral Component
Interconnect - межсоединение периферийных компонент).
Различные шины в этой архитектуре соединяют компьютерную
систему в единое целое. При этом применяется многоуровневая струк-
тура шин (интерфейсов) разной производительности.
Основным недостатком одноуровневых интерфейсов является
единая магистраль, работающая в режиме с разделением времени, что
является причиной конфликтов при распределении ресурсов (магистра-
лей, памяти, устройств ввода-вывода и др.).
Достаточно эффективным способом повышения пропускной спо-
собности интерфейса является многоуровневая организация, при кото-
рой кроме основной параллельной системной магистрали вводится не-
сколько дополнительных, ориентированных на работу с определенными
классами устройств. В этом случае суммарная пропускная способность
интерфейса увеличивается.
Ключевыми компонентами данной архитектуры являются мосты
между шинами. Мост это устройство, обеспечивающее динамическое
соединение двух (или более) различных по производительности и логи-
ке работы шин (интерфейсов) для передачи данных в одинаковых или
различных форматах данных.
К)
о
Рис. 9.4
Мост PCI-PCI связывает одну шину PCI с другой шиной PCI
(расширение). Мост PCI-ISA связывает шину PCI с шиной ISA (industry
Standard Architecture - стандартная промышленная архитектура), к ко-
торой могут быть подключены принтер, модем и др. Мост PCI-SCSI
(Small Computer System Interface -интерфейс малых компьютерных сис-
тем) служит для подключения высокоскоростных устройств ввода-
вывода (SCSI-дисков, магнитных лент и т.п.). Работа с монитором обес-
печивается графическим адаптером (сопрягающим устройством). Мост
PCI-VME связывает шину PCI с шиной VME (Versabus Module Europe-
bus). Для взаимодействия с низкоскоростными устройствами ввода-
вывода (например, мыши и клавиатуры) применяется шина USB (Uni-
versal Serial Bus - универсальная последовательная шина), которая сей-
час широко используется в персональных компьютерах.
Из архитектуры компьютера, показанного на рис. 9.4, видно, что
реализация значительных потенциальных возможностей современных
микропроцессоров зависит от их окружения (интегральных микросхем и
других радиоэлементов), которое осуществляет электрическую и логи-
ческую связи процессора и остальных частей системы компьютера, ока-
зывая влияние на общую производительность. Специализированный
набор микросхем системной логики называют чипсетом (chipset), его
внутренняя структура и функциональные возможности должны быть
тесно увязаны с особенностями архитектуры конкретных вариантов
микропроцессоров, на работу с которыми они ориентированы. Кроме
того, такой набор создается с учетом различных конфигураций компью-
теров и возможного разнообразия решаемых задач.
Разработка и производство чипсетов является сложной научно-
технической задачей, с которой могут справиться только мощные фир-
мы, владеющие новейшими компьютерными технологиями. Потенци-
альные возможности чипсетов могут быть реализованы только в составе
соответствующей материнской платы, от архитектуры которой в значи-
тельной степени зависит окончательный набор функций, который может
быть уже или шире того, что определено архитектурой чипсета.
9.3.2. Универсальные микропроцессоры
Основу процессорных модулей в настоящее время составляет
микропроцессор (МП). Он представляет собой обрабатывающее устрой-
ство, служащее для выполнения арифметических и логических опера-
ций над данными, для обращения к оперативной памяти и внешним уст-
ройствам и для управления ходом вычислительного процесса. В на-
стоящее время существует большое число разновидностей МП, разли-
чающихся назначением, функциональными возможностями (архитекту-
рой), структурой и реализацией.
Наибольшей специализацией и разнообразием функций обладают
микроконтроллеры-управляющие устройства, выполняющие функции
логического анализа и управления. Аппаратная сложность микрокон-
троллеров по сравнению с МП ниже, а функции логического управления
более развиты.
Современные технологии, обеспечивающие создание большого
числа транзисторов (млн. штук) на кристалле, позволяют производить
МП в виде законченного устройства, заключенного в один корпус
(сверхбольшую интегральную схему - СБИС). Различные выполняемые
функции и сферы применения обусловили специализацию таких СБИС:
МП для универсальной обработки данных и МП для цифровой обработ-
ки сигналов (ЦОС).
Универсальные МП предназначаются для применения в универ-
сальных вычислительных системах, в том числе, персональных компь-
ютерах, в рабочих станциях и массово-параллельных ЭВМ. Основной
их характеристикой является наличие развитых устройств для эффек-
тивной реализации операций с плавающей точкой над 32, 64 разрядны-
ми и более длинными операндами.
Цифровые сигнальные процессоры рассчитаны на обработку в
реальном времени цифровых данных, образованных путем оцифровы-
вания аналоговых сигналов (см. уровни обработки, рис. 9.1). Это обу-
словливало их сравнительно малую разрядность и преимущественно
целочисленную обработку. Однако современные сигнальные процессо-
ры способны производить вычисления с плавающей точкой над 32-40-
разрядными операндами.
Многие годы основной тенденцией в разработке новых компью-
теров было усложнение универсального процессора - расширение сис-
темы команд, набора режимов адресации, увеличение количества спе-
циализированных регистров и т.д. Это так называемая CISC-архитек-
тура (Complex Instruction Set Computer), компьютер co сложным набо-
ром команд.
Однако анализ программ, написанных на языках высокого уров-
ня, создал предпосылки для разработки нового типа архитектуры про-
цессоров-И18С-архитектуры (Reduced Instruction Set Computer), компь-
ютеров с сокращенным набором команд.
Результаты этих исследований и определили ключевые характе-
ристики RISC-процессоров: небольшое количество команд фиксирован-
ного формата, большое количество регистров и применение компилято-
ров, оптимизирующих использование регистров, с упором на рацио-
нальную организацию работы конвейера операций.
Сокращение набора команд уже создает достаточно хорошие
предпосылки для повышения эффективности работы конвейера, по-
скольку алгоритм выполнения команд становится более регулярным и
лучше предсказуемым. Кроме того, RISC-архитектура лучше подходит
для применения технологии задержанного выполнения команд и пере-
компоновки других команд в программе, что также повышает эффек-
тивность работы конвейера.
Здесь следует отметить следующие реализованные важные на-
правления в области архитектуры и структурной организации совре-
менных компьютерных систем, основанные на:
1) концепции семейства машин, которая предусматривает опре-
деленное дистанцирование архитектуры компьютера от его структурной
и схемной реализации, в рамках которой потребителю предлагается
функциональный ряд компьютеров, разных по производительности и
стоимости, но имеющих одинаковую архитектуру;
2) микропрограммном управлении, облегчающим разработку и
упрощающим структуру устройства управления процессором, и хорошо
сочетающимся с концепцией семейства компьютеров;
3) применении кэш-памяти - промежуточной быстродействую-
щей памяти, включенной между процессором и главной оперативной
памятью^ входящей в иерархию уровней памяти компьютера и позво-
лившей существенно повысить его производительность;
4) конвейерной организации, позволившей на практике реализо-
вать принцип совмещения операций при последовательной обработке
команд программы (примерами служит конвейер выполнения машин-
ных команд и векторная обработка).
При реализации конвейера команд происходит совмещение рабо-
ты различных стадий их исполнения (выборки команды, декодирования,
выборки операндов и т.д.). Могут быть использованы сразу два конвей-
ера для двух одновременно выбираемых и исполняемых команд. Но в
этом случае, как и в случае с одним конвейером, нужно следить за тем,
чтобы эти две команды не конфликтовали друг с другом при использо-
вании ресурсов (например, регистров), и ни одна из них не должна зави-
сеть от результата выполнения другой. Это делает либо компилятор,
либо дополнительное аппаратное обеспечение.
Можно еще увеличить число конвейеров, но это требует гро-
моздкого аппаратного обеспечения. Вместо этого используется один
конвейер с большим количеством функциональных блоков (несколько
арифметико-логических устройств, блоков загрузки и др.). Такие систе-
мы часто называют суперскалярными.
В табл. 9.1 для сравнения приведены характеристики некоторых
процессоров CISC-, RISC- и суперскалярной архитектуры.
Таблица 9.1
11араметр CISC-системы RISC-системы Суперскалярные системы
IBM 370/168 VAX 11/780 Intel 80486 SPARC MIPS R4000 Power PC Ultra SPARC MIPS RI0000
Год разработки 1979 1978 1989 1987 1991 1993 1996 1996
Количество команд в наборе 208 303 235 69 94 225 - -
Размер команды, байт 2-6 2-57 1-11 4 4 4 4 4
Количество режимов адресации 4 22 11 1 1 2 1 1
Количество универсаль- ных регистров 16 16 8 40-520 32 32 40-520 32
Размер управляющей памяти, Кбайт 420 480 246 - - - - -
Размер кэш-памяти, Кбайт 64 64 8 32 128 16-32 32 64
Переход на RISC-архитектуру означает кардинальное изменение
многих существующих взглядов на принципы построения процессоров.
Рост производительности RISC-процессоров обеспечивается за счет тех-
нических достижений и быстрого прогресса в области разработки ком-
пиляторов.
Однако в развитии RISC-процессоров при наращивании их вы-
числительной мощности по мнению специалистов, стали проявляться
«предкризисные явления». Среди проблем можно отметить сложность
логики, обеспечивающей загрузку функциональных исполнительных
устройств, проблемы пропускной способности и задержек при обраще-
нии к разным уровням иерархии памяти - от КЭШ-памяти до оператив-
ной памяти (ОП).
Нерешенность этих проблем грозит простоями функциональных
устройств (ФУ) современных суперскалярных микропроцессоров, т.е.
понижением их производительности. Поэтому была предложена кон-
цепция архитектуры с использованием сверхбольшого командного сло-
ва VLIW (Very Large Instruction Word). В такой архитектуре команда
состоит из ряда полей, каждое из которых управляет работой отдельно-
го блока процессора. Таким образом, все командное слово (длина слова
64 и более разрядов) определяет поведение всех блоков процессора, т.е.
применяется технология явного параллелизма на уровне команд. Это
однозначно диктует появление в архитектуре большого числа ФУ и
сверхбольших файлов регистров.
Задача обеспечения эффективного распараллеливания работы от-
дельных блоков возлагается при этом на компилятор, который должен сге-
нерировать машинные команды, содержащие явные указания на
одновременное исполнение операций в разных блоках. Безусловно, это
вызывает сложные проблемы разработки соответствующих компиляторов.
В архитектуре VLIW имеются проблемы выбора длины команды,
влияющей на эффективность использования программной кэш-памяти;
проблемы «масштабирования» микропроцессора (возможность наращи-
вания ФУ). Серьезным фактором, снижающим эффективность VLIW-
процессоров, являются команды ветвления, зависящие от данных, зна-
чения которых становятся известны только в процессе вычислений.
На сегодняшний день для повышения производительности мик-
ропроцессоров используются два способа: повышение тактовой частоты
и усложнение логики планирования вычислений и внутренней структуры.
9.3.3. Микропроцессоры для цифровой обработки сигналов
Системы цифровой обработки сигналов призваны решать зада-
чи обработки, сокращения избыточности и передачи информации в
реальном масштабе времени применительно к различным прикладным
областям (связи, системам управления, радиолокации и др.)
Эволюция теории и техники ЦОС напрямую связана с достиже-
ниями в области микроэлектроники и компьютерных технологий. В со-
временной теории и практике ЦОС существуют четыре основных взаи-
мосвязанных направления [31], основанные на:
цифровой частотной селекции сигналов;
быстрых алгоритмах обработки сигналов;
адаптивной и оптимальной обработке сигналов;
обработке многомерных сигналов и полей.
В теории цифровой частотной селекции сигналов наибольший
эффект получается при многоскоростной обработке на основе эффектов
прореживания по времени и по частоте.
Второе направление - быстрые алгоритмы обработки сигналов,
ориентировано на построение высокоскоростных алгоритмов ЦОС пу-
тем сокращения операций и замены операций умножения операциями
сложения и сдвига. К таким алгоритмам, прежде всего, относятся мно-
гочисленные модификации алгоритма быстрого преобразования Фурье
(БПФ) и методы теоретико-численных преобразований.
Третье направление - адаптивная и оптимальная обработки сиг-
налов охватывают широкий сйектр методов решения задач оптимальной
фильтрации и обработки сигналов в условиях априорной неопределен-
ности о характере исследуемого динамического процесса.
Четвертое направление - обработка многомерных сигналов и
полей, является развитием обработки одномерных сигналов.
В первой половине 80-х годов началась эра СБИС обработки сиг-
налов DSP (Digital Signal Processing) - нового класса микропроцессоров
(TMS 32010 фирмы TI и др.). Этот класс микропроцессоров представлял
собой семейство однокристальных микроЭВМ с внутренней архитекту-
рой, ориентированной на высокоэффективную программно-аппаратную
реализацию классических алгоритмов ЦОС.
В результате интенсивных разработок в значительной степени вы-
росли вычислительная производительность и другие ресурсы однокри-
стальных МП ЦОС. Уменьшение стоимости и расширение функциональ-
ных возможностей СБИС обработки сигналов способствовали широкому
практическому использованию методов ЦОС в различных сферах научной
и производственной деятельности с учетом ограничений, накладываемых
внутренними ресурсами применяемых сигнальных процессоров.
Отличительной особенностью задач цифровой обработки сигна-
лов [25] является поточный характер обработки больших объемов дан-
ных в реальном времени, требующий от технических средств высокой
производительности и обеспечения возможности интенсивного обмена с
внешними устройствами. Это достигается в настоящее время благодаря
специальной архитектуре сигнальных микропроцессоров и проблемно-
ориентированной системе команд.
В МП DSP применяется гарвардская архитектура вычислитель-
ной системы в отличие от фон-неймановской, в которой и команды и
данные хранятся в единой памяти. В гарвардской архитектуре для хра-
нения программы (команд) и данных используются различные устрой-
ства памяти. Соответственно, в системе имеются два комплекта шин для
этих устройств. В такой системе можно одновременно производить опе-
рации обращения к различным устройствам памяти, что повышает про-
изводительность МП DSP. Количество шин, особенно шин данных, в
различных МП DSP существенно отличается, что также влияет на их
производительность.
Архитектура сигнальных МП определяется несколькими базовы-
ми операциями, которые используются в алгоритмах цифровой фильт-
рации и спектрального анализа.
В дополнение к использованию в сигнальных МП известных мето-
дов сокращения длительности командного цикла, характерных для RISC-
процессоров (конвейеризация микроинструкций и инструкций, размещение
большинства операндов команд в регистрах, разделение шин команд и дан-
ных и т.п.), они обладают высокой степенью специализации.
Характерным для сигнальных процессоров является наличие ап-
паратного умножителя, позволяющего выполнять умножение двух чи-
сел за один командный цикл. В универсальных процессорах умножение
обычно реализуется за несколько тактов.
Другой особенностью МП DSP является наличие в системе ко-
манд таких операций, как умножение со сложением (с указанным в ко-
манде числом выполнений в цикле и с правилом изменения индексов
используемых элементов массивов), инверсия бит адреса, разнообраз-
ные битовые операции. В МП DSP реализуется аппаратная поддержка
программных циклов и кольцевых буферов. Один или несколько опе-
рандов извлекаются из памяти в цикле исполнения команды.
Использование в МП DSP обработки данных в формате с пла-
вающей точкой обусловлено рядом причин и, в частности, широким
динамическим диапазоном обрабатываемых сигналов. Работа с данны-
ми в формате с плавающей точкой существенно упрощает и ускоряет
обработку, повышает надежность программы, поскольку не требует вы-
полнения операций округления и нормализации данных, отслеживания
ситуаций потери значимости и переполнения.
Следует отметить, что решение задач ЦОС на универсальных
процессорах при примерно равных тактовых частотах может занимать в
несколько раз больше времени по сравнению с процессорами DSP, так
как последние являются проблемно-ориентированными.
В числе наиболее распространенных МП DSP можно назвать из-
делия компаний Motorola (56002, 96002), Texas Instruments (TMS
320Cxx), Analog Divices (21xx, 210xx). В семействах имеются модифи-
кации для применения в многопроцессорных системах.
В качестве примера на рис. 9.5 приведена структура микропро-
цессора DSP 96002 фирмы Motorola [25]. Это 32-разрядный однокри-
стальный микропроцессор с устройством обработки данных в формате с
плавающей точкой. Он содержит 1024 слова памяти данных, разделен-
ной между памятью данных X и Y, 1024 слова программной памяти, два
ППЗУ, двухканальный контроллер прямого доступа в память (ПДП),
подсистему начальной загрузки программы, а также встроенные средст-
ва отладки и эмуляции.
00
Рис. 9.5
Центральное процессорное устройство (ЦПУ) состоит из трех функ-
ционирующих параллельно 32-разрядных исполнительных устройств:
арифметико-логическое устройство (АЛУ) данных, устройства генерации
адреса и устройства управления программой. Процессор содержит два
идентичных порта расширения памяти, обеспечивающих интерфейс с раз-
личными типами памяти (SRAM, DRAM, VRAM). Каждый порт может
быть преобразован в интерфейс, который обеспечивает возможность про-
стой интеграции процессора в мультипроцессорную систему.
В микропроцессоре используются:
устройство умножения с накоплением (разрядностью 32x32);
специализированный набор команд;
аппаратная поддержка выполнения программных циклов и быст-
рого возврата из прерываний;
расширенная до 1 К слов кэш-память команд;
пять 32-разрядных адресных шин - внутренних однонаправлен-
ных шин адреса X и Y, программной адресной шины и двух внешних
адресных шин;
семь 32-разрядных шин данных - внутренних двунаправленных
шин данных X и Y, внутренней двунаправленной глобальной шины дан-
ных, внутренней двунаправленной шины данных ПДП, внутренней дву-
направленной программной шины данных и двух внешних шин данных;
внутрикристалльная память микропроцессора, включающая 1024
слова программной памяти (RAM), две независимых памяти данных по
512 слов каждая (RAM), два независимых ПЗУ емкостью 1024 слова и
ПЗУ начальной загрузки емкостью 64 слова;
внешняя память процессора 2х232 3 2-разрядных слов для команд
и данных.
При этом производительность микропроцессора на тактовой час-
тоте 40 МГц составляет около 20 MIPS и 60 MFLOPS.
Аналог микропроцессора DSP 96002 - микропроцессор 1В577 -
используется в отечественных вычислительных средствах семейства
«Багет» (в программируемых процессорах обработки сигналов).
9.3.4. Баланс производительности компонентов
В то время как быстродействие новых моделей процессоров (микропро-
цессоров) возрастает очень быстро, темпы роста производительности
других компонентов компьютера несколько отстают от них. В качестве
примера на рис. 9.6 показан график изменения характеристик компо-
нентов в процессе совершенствования технологии их производства в
1980-1995 годах [71]. В результате перед разработчиком системы всегда
стоит задача выбора такого варианта архитектуры и структурной орга-
низации, который обеспечит оптимальный баланс характеристик ком-
понентов и позволит устранить несоответствие между их функциональ-
ными возможностями.
Проблема несогласованности характеристик острее всего прояв-
ляется на стыке процессора с памятью. В то время как быстродействие
микропроцессоров и объем памяти в корпусе микросхемы возрастали
очень быстро, быстродействие памяти (параметр, от которого зависит
интенсивность потока информации) росло значительно более медлен-
ными темпами. В результате, если не предпринимать специальных мер,
современный быстродействующий микропроцессор будет часто про-
стаивать, поскольку система не сможет достаточно быстро предостав-
лять ему команды и данные для обработки.
Решение этой проблемы может быть осуществлено разными пу-
тями. Примеры таких решений можно найти в современных компьюте-
рах. К этим решениям относятся:
увеличение разрядности данных, извлекаемых из памяти в одном
цикле обращения;
совершенствование интерфейса обращения к памяти - включение
в интерфейс промежуточной буферной памяти;
уменьшение частоты обращения к основной памяти посредством
внедрения сложных кэш-структур между процессором и оперативной
памятью. При этом один или несколько блоков кэш-памяти размещается
в микропроцессоре или в отдельной микросхеме в непосредственной
близости от микропроцессора;
повышение пропускной способности канала связи между процес-
сором и памятью - использование более скоростной магистрали или
иерархии магистралей с буферизацией потока данных.
Нужно не забывать и об устройствах ввода-вывода, как правило
осуществляющих интенсивный обмен с периферийными устройствами,
что потребует так же соответствующих решений.
В качестве примера на рис. 9.7 показана структурная схема пер-
сонального компьютера, на которой цифрами 1-9 показаны «узкие мес-
та» в его архитектуре [57]. На рисунке показаны значения теоретически
достижимой пиковой пропускной способности различных интерфейсов
и устройств, а так же указаны реальные значения этих величин, полу-
ченные в ходе замеров на разных системных платах.
Шина IEEE1394 ~ 50 МБ/с
Рис. 9.7
Из рисунка видно, что скорость работы встроенной в микропро-
цессор КЭШ-памяти 600-3200 Мбайт/с (т. 1) не ограничивает общей
эффективности системы.
Совсем другое наблюдается при обмене данными с внешними
КЭШ-памятями (второго и третьего) уровня (т. 2), расположенными на сис-
темной плате. Для этой памяти показатели падают до 130-230 Мбайт/с (со-
ответственно для операций записи и чтения). Это будет заметно только
в системе, остальные компоненты которой (особенно видеокарта и опе-
ративная память) работают с более высокой скоростью.
Реальная скорость обмена с оперативной памятью (т. 7) далека от
теоретически достижимого значения 800 Мбайт/с (т. 4) и зависит в ос-
новном от модели чипсета, установленного на системной плате. Таким
образом, сегодня низкая скорость работы с оперативной памятью стано-
вится серьезным «тормозом» в повышении эффективности компонен-
тов. Решение проблемы возможно либо с появлением новых чипсетов,
более корректно работающих с памятью, либо с внедрением новых ви-
дов памяти, либо переходом на другую архитектуру системной шины.
Теоретически достижимая пропускная способность шины PCI
(т. 5) до 132 Мбайт/с уже сегодня не удовлетворяет требованиям пере-
сылки огромных объемов графической информации. Поэтому видео-
контроллеры перемещаются на интерфейс AGP (Accelerated Graphics
Port - ускоренный графический порт). Этот интерфейс (т. 3) предназна-
чен исключительно для подключения видеоадаптеров к отдельной (не
связанной с системной шиной) магистрали AGP, имеющей выход непо-
средственно на системную память.
Внедрение нового протокола РС1, предусматривающего частоту
шины 66 МГц и скорость до 528 Мбайт/с (при ширине шины 64 бита), тре-
бует новых системных плат с 64-битными разъемами и чипсетов, поддер-
живающих этот протокол. Однако, самое главное состоит в том, что реаль-
ная пропускная способность PCI (т. 8) гораздо ниже предельно допустимой.
По интерфейсу EIDE (т. 6) можно передать максимум 16 Мбайт/с.
Реальные замеры (т. 9) показали, что данные пересылаются со скоро-
стью от 8 до 13 Мбайт/с. Поэтому неизбежен переход на интерфейс
IEEE1394 (Institute of Electrical and Electronic Engineers 1394 - стандарт
института инженеров по электротехнике и электронике №1394).
Это последовательный интерфейс с пиковой пропускной способ-
ностью сегодня 50 Мбайт/с. Разрабатываются модификации интерфей-
са, способные передать 200 Мбайт/с и даже 800 Мбайт/с.
Таким образом, необходимо все время помнить об обеспечении
оптимального соответствия между функциональными возможностями
применяемого процессора (микропроцессора), памяти, устройств ввода-
вывода и связывающих их магистралей (интерфейсов).
9.3.5. Параллелизм процессов обработки информации
В ВЫЧИСЛИТЕЛЬНЫХ СИСТЕМАХ
Повышение производительности ВС за счет увеличения произво-
дительности элементной базы (повышение частоты работы элементов)
132
практически исчерпало свои возможности, натолкнувшись на теорети-
ческий предел 1О9-1О10 опер./с. Дальнейшее повышение в этом направ-
лении потребует поиска новых физических принципов обработки ин-
формации.
Весьма перспективным является направление, в основе которого
лежит распараллеливание процессов обработки информации на всех
уровнях решения задачи и которое широко использовалось на всех эта-
пах развития вычислительных средств. Это направление включает:
переход от последовательного счета к параллельному;
параллельную работу основных устройств ЭВМ;
мультипрограммный режим обработки данных;
конвейерный режим;
многопроцессорные и многомашинные архитектуры;
режим управления потоками данных и др.
Обобщенная концепция конвейера включает в качестве частных
случаев, как параллельную обработку, так и собственно конвейер.
Обобщенный конвейер позволяет использовать устройства, которые при
последовательном решении были не загружены. В случае динамическо-
го многомерного конвейера устройства можно в ходе вычисления кон-
фигурировать в подходящий конвейер, что повышает эффективность их
использования. Возможность повышения надежности является еще од-
ним преимуществом обобщенного конвейера. Реконфигурируемость и
дублирование сегментов (подсистем, систем) в обобщенном конвейере
дают возможность организовывать диагностику сбоев и восстановление
после сбоя.
В конвейерном методе параллелизм обработки достигается за
счет разбиения процесса обработки на последовательность независимых
операций, выполняемых сегментами. После обработки очередной пор-
ции информации одним из сегментов она передается на следующий. На
каждом такте обработки в первый сегмент вводится новый операнд, а из
последнего сегмента выдается результат.
Конвейер весьма эффективен при обработке векторов и исполь-
зуется в большинстве компьютеров, сконструированных для этих целей
(например, CRAY и др.). Особенно выгодно использование конвейера
для обработки команд, что используется, практически, во всех совре-
менных микропроцессорах.
Классификацию архитектур компьютеров пытались провести
многие исследователи. Чаще всего, как наиболее простая, используется
классификация Флинна (Flinn 1972) [72].
В основе классификации Флинна используются два понятия: по-
токи команд и потоки данных. Существует 4 варианта комбинации по-
токов (см. табл. 9.2):
SISD - Single Instruction Stream Single Data Stream, один поток
команд, один поток данных;
SIMD - Single Instruction Stream Multiple Data Stream, один поток
команд, много потоков данных;
MISD- Multiple Instruction Stream Single Data Stream, много пото-
ков команд, один поток данных;
MIMD - Multiple Instruction Stream Multiple Data Stream, много
потоков команд, много потоков данных.
Таблица 9.2.
Потоки команд Потоки данных Названия Примеры
Один Один S1SD Классическая последовательная однопроцессорная машина фон Неймана
Один Много S1MD Векторный суперкомпьютер, массово-параллельный процессор
Много Один MISD Не существует
Много Много MIMD Мультипроцессоры, мультикомпьютеры
На рис. 9.8-9.11 показаны упрощенные архитектуры параллель-
ного действия по классификации Флинна.
SIMD-компьютеры (рис. 9.8 и 9.9) состоят из одного устройства
управления (управляющего модуля) и нескольких модулей обработки
данных, называемых процессорными элементами (ПЭ). Количество мо-
дулей ПЭ в таких компьютерах может достигать нескольких тысяч. Од-
Рис. 9.8
Рис. 9.9
ним из преимуществ данной архитектуры считается эффективная реализа-
ция логики вычислений. Подклассом SIMD-компьютеров являются вектор-
ные компьютеры. Другой пример SIMD-компьютера - матрич-ные процес-
соры (Array Processor), которые специализированы для конкретных задач,
допускающих матричное представление (например, обработка изображе-
ний). Класс архитектур MIMD наиболее богат примерами.
В классе MIMD несколько независимых процессоров работают как
часть большой системы. В эту категорию попадают большинство парал-
лельных процессоров: мультипроцессоры и мультикомпьютеры.
Мультипроцессор - это компьютерная система, которая со-
держит несколько процессоров, включающих устройство управления
(УУ) и арифметико-логическое устройство (АЛУ) (рис. 9.10).
Рис. 9.10
В мультипроцессоре существует общая для всех процессоров
операционная система, которая оперативно распределяет вычислитель-
ную нагрузку между процессорами. Взаимодействие между отдельными
процессорами организуется наиболее простым способом - через общую
оперативную память.
Мультипроцессор, как и все компьютеры, должен содержать уст-
ройства ввода-вывода. В одних мультипроцессорных системах только
определенные процессоры имеют доступ к устройствам ввода-вывода,
выполняя специальную функцию ввода-вывода. В других мультипро-
цессорных системах каждый процессор имеет доступ к любому устрой-
ству ввода-вывода. Если все процессоры имеют равный доступ ко всем
модулям памяти и всем устройствам ввода-вывода и каждый процессор
взаимозаменяем с другими процессорами, то такая система называется
SMP (Symmetric Multiprocessor - симметричный мультипроцессор).
SMP функционирует под управлением одной операционной системы.
Территориальную распределенность мультипроцессор не поддер-
живает - все его блоки (модули) располагаются в одном или нескольких
близко расположенных конструктивах, как и у обычного компьютера.
Основное достоинство мультипроцессора - его высокая производи-
тельность, которая достигается за счет параллельной работы нескольких
процессоров. Так как при наличии общей памяти взаимодействие процес-
соров происходит очень быстро, мультипроцессоры могут эффективно вы-
полнять даже приложения с высокой степенью связи по данным.
Еще одним важным свойством мультипроцессорных систем яв-
ляется достаточно высокая отказоустойчивость, обеспечиваемая за счет
снижения производительности при отказе каких-либо элементов.
Количество процессоров в SMP, как правило, ограничено (не
превышает 32). Использование SMP обеспечивает:
масштабирование приложений путем их применения без преоб-
разования на новых более производительных аппаратных средствах;
программирование на базе разделяемой памяти;
одинаковое время доступа ко всей памяти;
возможность пересылки сообщений с большой пропускной спо-
собностью;
поддержку соответствия данных, расположенных в совокупности
КЭШ-памятей и блоках основной памяти, неделимые операции синхро-
низации и блокировки.
Кластерная система образуется из вычислительных модулей (ВМ)
по структуре SMP, объединенных системой связи или разделяемыми уст-
ройствами внешней памяти, например дисковыми массивами. Для образо-
вания кластерных систем используются либо специализированные фирмен-
ные средства, либо универсальные локальные и глобальные сети (Ethernet,
FDDI и др.). Размер кластера может достигать десятков модулей ВМ.
Создание больших мультипроцессоров связано с некоторыми
трудностями. Чтобы избежать проблем связывания процессоров с памя-
тью были предложены вычислительные системы, состоящие из взаимо-
связанных компьютеров, у каждого из которых имеется своя собствен-
ная оперативная память (ОП), а общей памяти нет. Такие вычислитель-
ные системы называются мультикомпьютерами (рис. 9.11).
Операционная система в процессоре мультикомпьютера не может
получить доступ к памяти, относящейся к другому процессору, просто
путем выполнения, например, команды «чтение». Ему приходится отп-
равлять сообщение и ждать ответа. Именно способность операционной
системы считывать слово из отдаленного модуля памяти с помощью
команды «чтение» отличает мультипроцессоры от мультикомпьютеров.
136
Рис. 9.11
Работа любого мультикомпьютера определяется двумя главными
компонентами: высокоскоростным механизмом связи процессоров
(компьютеров) и системным программным обеспечением, которое пре-
доставляет пользователям и приложениям прозрачный доступ к ресур-
сам всех компьютеров, входящих в мультикомпьютер. В состав средств
связи входят программные модули, которые обеспечивают распределе-
ние вычислительной нагрузки, синхронизацию вычислений и реконфи-
гурацию системы.
По сравнению с мультипроцессорами возможности параллельной
обработки в мультикомпьютерных системах ограничены: эффектив-
ность распараллеливания резко снижается, если параллельно выполняе-
мые задачи тесно связаны между собой по данным. Это объясняется
тем, что связь между компьютерами в мультикомпьютере менее тесная,
чем между процессорами в мультипроцессоре. Говорят, что в мульти-
процессоре используются сильные программные и аппаратные связи, а в
мультикомпьютере такие связи между обрабатывающими устройствами
являются слабыми.
Мультикомпьютеры можно разделить на две категории.
Первая категория МРР (Massively Parallel Processors - процессо-
ры с массовым параллелизмом). Это дорогостоящие компьютеры, кото-
рые состоят из большого количества процессоров, связанных высоко-
скоростной коммуникационной сетью.
МРР-системы, в отличие от кластеров, имеют более скоростные,
как правило специализированные каналы связи между вычислительны-
ми модулями, а также широкие возможности по масштабированию. Од-
нако, поддержка работоспособности и оптимизация загрузки процессо-
ров в МРР менее развита по сравнению с кластерами в силу разнообра-
зия используемых программ и отсутствия функциональных связей меж-
ду программами.
Вторая категория мультикомпьютера включает рабочие стан-
ции, которые связываются с помощью уже имеющейся технологии со-
единения: Network of Workstations (сеть рабочих станций) и Cluster of
Workstations (кластер рабочих станций - MIMD - система с распреде-
ленной памятью).
Мультипроцессоры сложнее строить, но легче программировать,
а мультикомпьютеры легче строить, но труднее программировать. По-
этому появились гибридные системы, в которых общую память органи-
зуют по-разному, получая в каждом случае какие-то преимущества и
какие-то недостатки. Очень важно получить при этом расширяемую
систему.
9.3.6. Коммуникационная сеть в параллельных
ВЫЧИСЛИТЕЛЬНЫХ СИСТЕМАХ
Важнейшим элементом архитектуры любого компьютера, а вы-
сокопроизводительных вычислительных сетей в особенности, является
коммуникационная сеть, связывающая процессоры с оперативной памя-
тью, процессоры между собой, процессоры с другими устройствами.
Она оказывает решающее влияние на производительность системы.
Трафик в такой сети состоит из пересылаемых данных и команд. Ос-
новной характеристикой сети является пропускная способность, изме-
ряемая в битах в секунду.
Мультипроцессоры и мультикомпьютеры, в данном контексте
следует рассматривать как набор узлов (процессорных элементов, мо-
дулей памяти, переключателей) и соединений между ними.
Организация внутренних коммуникаций вычислительной систе-
мы определяется ее топологией.
Масштабируемость характеризует возрастание сложности соеди-
нений при добавлении в конфигурацию новых узлов. Если система об-
ладает высокой степенью масштабируемости, ее сложность будет не-
значительно изменяться при наращивании системы.
Есть два типа топологий коммуникационных сетей статические и
динамические. В случае статической сети все соединения фиксированы,
а в динамической сети в межпроцессорных соединениях используются
переключатели. Первый тип сетей более всего подходит для решения
тех задач, в которых известны структуры и характер обмена данными.
Динамические соединения более универсальны, но они дороже, их реа-
лизация сложнее.
Статические топологии. Соединение ПЭ через сетевой адап-
тер с помощью одиночной шины является самым простым и дешевым
138
(рис. 9.12). Основной его недостаток
заключается в том, что в каждый мо-
мент времени возможна только одна
пересылка данных/команд. Пропуск-
ная способность обратно пропорцио-
нальна количеству процессоров, под-
ключенных к шине. Такой способ хо-
Од и ночная шина
Рис. 9.12
рош только для систем, содержащих не более 10 процессоров.
Более эффективным является другой способ соединения - одномер-
ная решетка. У каждого элемента в этом случае есть две связи с соседями, а
граничные элементы имеют по одной связи (рис. 9.13,а). Если замкнуть
концы одномерной решетки, получим топологию «кольцо» (рис. 9.13,6).
а)
б)
Рис. 9.13
Обобщением одномерной решетки
является d-мерная решетка, в которой у
каждого ПЭ имеется 2d связей. Особый
случай представляют граничные элемен-
ты, число связей у которых может быть
разным. Такой тип коммуникационной
сети не подходит для создания много-
процессорных конфигураций с большим
числом процессоров, поскольку макси-
мальная задержка передачи сообщений
от одного из N процессоров к другому
пропорциональна Vn и быстро растет с
увеличением числа процессоров. Дву-
мерная решетка показана на рис. 9.14.
Двумерная решетка обеспечивает
хорошее быстродействие. Для решетки
данных между ПЭ необходимо определить
маршрут передачи данных, при этом для
решетки размером пхп требуется макси-
мум 2(п-1) промежуточных узлов.
Рис. 9.14
В топологии «звезда» есть один центральный узел, с которым со-
единяются все остальные ПЭ. Таким образом, у каждого ПЭ - N-1 со-
единение (рис. 9.15).
В такой топологии слабым звеном оказывается центральный узел,
поэтому она тоже не подходит для больших систем.
В сети с полносвязной топологией (рис. 9.16) все ПЭ связаны
Рис. 9.16
друг с другом. Пересылки могут вы-
полняться одновременно между любы-
ми парами ПЭ. В такой системе легко
могут быть реализованы широковеща-
тельные и многоадресные пересылки.
Как быстродействие, так и стоимость
системы высоки, причем стоимость су-
щественно возрастает с увеличением
числа ПЭ. Существуют и другие топо-
логии (например, «Гиперкуб»).
Во всех топологиях имеет значе-
ние маршрутизация сообщений (или части сообщений - пакетов). В ре-
шетчатых топологиях в каждый момент времени выполняется пересыл-
ка пакетов данных вдоль одного определенного измерения. Маршрути-
зация в топологиях «звезда» простая. Путь сообщения всегда проходит
через центральный узел.
Динамические топологии. Основным представителем этого клас-
са является перекрестное соединение (рис. 9.17). Оно обеспечивает пол-
ную связность, т.е. каждый ПЭ может связаться с любым другим про-
цессором или модулем памяти. Пропускная способность сети при этом
не уменьшается. Схемы с перекрестными переключениями могут ис-
пользоваться и для организации межпроцессорных соединений. В этом
случае каждый процессор имеет собственный модуль памяти (системы с
расширенной памятью).
Рис. 9.17
Для соединения n-процессоров с п модулями памяти требуется п2
переключателей. Такая зависимость ограничивает масштабируемость
системы (обычно не более 256 узлов).
Многокаскадные сети основаны на использовании 2x2 перекрест-
ных переключателей - коммутаторов (рис. 9.18). На рис. 9.18,а изображен
переключатель без широковещательной рассылки, а на рис. 9.18,6 - с ши-
роковещательной.
Вход Выход Вход Выход
Рис. 9.18
В этом случае на одном конце соединения находятся процессоры;
а на другом - процессоры или другие узлы. Между ними располагаются
переключатели. При передаче данных от узла к узлу переключатели
устанавливаются таким образом, чтобы обеспечить требуемое соедине-
ние. Однако, для этого требуется некоторое время - время установки. В
зависимости от способа соединения имеются разные топологии дина-
мических многоканальных сетей (куб, «омега», и др.). На рис. 9.19 при-
ведена схема соединения «омега».
Вход
Выход
Рис. 9.19
Важнейшими атрибутами системы коммуникаций являются стра-
тегии управления, коммутации и синхронизации. При централизован-
ном управлении имеется единый модуль управления. Распределенное
управление применяется в многокаскадных соединениях, где каждый
узел принимает решения, как действовать с поступившим сообщением -
оставить его себе или передать соседу. Другой вариант используется в
соединении типа «звезда», где каждое сообщение пересылается в кон-
троллер, который и определяет его дальнейшую судьбу.
Синхронизация может быть глобальной, когда синхронизирующая
последовательность импульсов передается всем вычислительным систе-
мам, но может быть и локальной, когда каждый узел имеет свой собствен-
ный генератор. Этот вариант соответствует асинхронной работе.
Глобальная синхронизация характерна для SIMD-компьютеров и
имеет более простую аппаратную и программную реализацию. MIMD-
системы чаще всего имеют более гибкую асинхронную систему.
Методы коммутации (переключения). Важнейшим в организации
работы коммуникационной сети является метод переключения, опреде-
ляющий способ передачи сообщений от узла-источника к узлу-приемнику.
Сообщением называют логически завершенную порцию данных -
пересылаемый файл, запрос на пересылку файла и т.д. Сообщения могут
иметь любую длину. Пакет представляет собой часть сообщения, его
длина ограничена, хотя и может варьироваться. Пакеты перемещаются
по сети независимо друг от друга. Каждый пакет содержит заголовок с
информацией об адресе получателя и его номер, что необходимо для
правильной «сборки» пакетов в единое сообщение.
Выделяют три основных метода коммутации в сетях параллель-
ных вычислительных систем:
коммутация с промежуточным хранением;
коммутация цепей (коммутация каналов);
метод виртуальных каналов.
Исторически, одним из первых методов коммутации был метод с
промежуточным хранением (метод коммутации пакетов). В этом случае
сообщения полностью принимаются на каждом промежуточном узле и
только после этого отправляются дальше. Промежуточная буферизация
пакетов требует дополнительной памяти и затрат времени. Задержка
передачи пропорциональна расстоянию между источником и адресатом.
Данный метод применяется в ситуациях, когда время отклика не имеет
значения.
При коммутации цепей (коммутации каналов) между источником
и получателем сообщения устанавливается непрерывная цепь, состоя-
щая из отдельных каналов связи, проходящих через промежуточные уз-
лы. После этого выполняется передача данных. Коммутируемый канал
устанавливается только на время соединения отправителя и адресата.
Уменьшить задержки при передаче данных позволяет метод вир-
туальных каналов. В этом случае пакеты накапливаются в промежуточ-
ных узлах только тогда, когда недоступен очередной канал связи. В
противном случае, пересылка выполняется немедленно и без буферизации.
9.4. ПРОИЗВОДИТЕЛЬНОСТЬ МИКРОПРОЦЕССОРОВ
9.4.1. Пиковая и реальная производительности
Одним из основных показателей эффективности БВС является
ее производительность, под которой обычно понимают скорость вы-
полнения программ или объем вычислительной работы, которую спо-
собна выполнить система за заданный промежуток времени. Объем
этой вычислительной работы связан непосредственно с производитель-
ностью микропроцессоров, для которых существуют две оценки - пико-
вая производительность и реальная производительность.
Пиковая (техническая) производительность представляет собой
теоретический максимум быстродействия компьютера при идеальных
условиях [31]. Она достигается при обработке бесконечной последова-
тельности не связанных между собой и не конфликтующих при доступе
в память команд. При этом предполагается, что все операнды выбира-
ются из внутрикристалльной кэш-памяти данных, а команды - из кэш-
памяти команд. Практически, ни одна вычислительная система не в со-
стоянии работать с пиковой производительностью.
Для определения пиковой производительности нужно знать толь-
ко тактовую частоту процессора и число арифметических конвейеров.
При тактовой частоте 1 МГц пиковая производительность одного ариф-
метического конвейера при выполнении операций с плавающей точкой
соответствует 1 MFLOPS (Million Float Operations Per Second) или 1
MIPS (Million Instruction Per Second) при выполнении операций с фик-
сированной точкой (если за такт получается один результат).
При выполнении реальных прикладных программ эффективная (ре-
альная) производительность микропроцессора может существенно (до нес-
кольких раз) быть меньше пиковой, так как характеристики функциониро-
вания микропроцессора зависят от программы и обрабатываемых данных.
Для оценки производительности различных вычислительных
средств в мировой практике наибольшее распространение получило
использование наборов характеристик для той или иной области приме-
нения вычислительной техники задач. Время выполнения каждой из
задач набора составляет основу для расчета индекса производительно-
сти оцениваемого вычислительного средства.
Индекс производительности является относительной оценкой,
показывающей, на сколько быстрее или медленнее исследуемое вычис-
лительное средство выполняет подобные задачи по сравнению с неко-
торой широко распространенной базовой (эталонной) ЭВМ.
9.4.2. Измерение реальной производительности
МИКРОПРОЦЕССОРА
При измерении реальной производительности используются два
вида тестов: тесты компаний - производителей компьютеров для собст-
венного применения и тесты, создаваемые усилиями групп пользовате-
лей. Последние специально предназначены для выбора компьютеров и
ПО, наиболее подходящих для определенных прикладных задач. Такой
подход позволяет получить наиболее точные оценки производительно-
сти для конкретного класса приложений.
Наиболее часто оценка производительности универсальных микро-
процессоров выполняется по результатам выполнения контрольных задач,
при решении которых используется набор группы тестов SPEC (Standard
Performance Evaluation Comporation), например SPEC (89,92,95) [31].
Пакет SPEC 89 включает в себя два тестовых набора: Cint 89, со-
стоящий из четырех программ целочисленной обработки, и Cfp 89, объ-
единяющий шесть программ со значительным объемом операций над
числами с плавающей точкой двойной точности. Все десять модулей
представляют собой достаточно сложные программы на языках С и
FORTRAN с широким спектром решаемых задач - от оптимизации мат-
риц булевой логики до моделирования замещения атомов в квантовой
химии. За базовую ЭВМ, по отношению которой вычисляется индекс
производительности, взята известная ЭВМ DEC VAX 11/780.
В пакеты тестовых программ SPEC 92 в показатели SPEC int 92 и
SPEC fp 92 включены дополнительные тесты, в том числе для мульти-
процессорной работы. При этом методика расчета индексов производи-
тельности осталась такой же, как и в SPEC 89.
Появление следующего набора тестовых программ SPEC 95 обу-
словлено развитием микропроцессоров (повышением производительно-
сти и увеличением объема внутрикристалльной памяти), совершенство-
ванием компиляторов, стремлением учесть требования стандартов от-
крытых систем, а также скорректированным после появления SPEC 92
представлением об актуальности различных областей приложений.
Современные микропроцессоры выполняют тесты SPEC 92 в те-
чение интервалов времени от долей секунды до нескольких секунд, что
вносит в измерения достаточно большую погрешность. Объем кода про-
грамм и данных SPEC 92 таков, что программы и данные могут размес-
титься в кэш-памяти процессора. Это не позволяет получить сколько-
144
нибудь достоверные оценки производительности, поэтому появился
набор тестовых программ SPEC 95.
Индексы производительности в SPEC 95 в отличие от SPEC (89,
92) даются по отношению к эталонной машине SPARC-station 10/40 в
конфигурации с кэш-памятью второго уровня. Причем используются
два тестовых набора Cint 95 и Cfp 95, состоящих из 8 и 10 программ
соответственно.
В качестве примера в табл. 9.3 приведены сравнительные оценки
производительностей некоторых известных микропроцессоров Pentium
на пакете SPEC95 при выполнении тестов целочисленной обработки
(int) и набора тестов вычислений над числами в формате с плавающей
точкой (fp).
Таблица 9.3
Микропроцессор SPEC-95 int/fp
Pentium (200 МГц) 5,47/3,68
Pentium MMX 200 МГц 6,41/4,66
Pentium Pro (200 МГц) 6,1/5,4
Микропроцессор Pentium, совместимый с семейством микропро-
цессоров Х86, использует предсказание переходов в программах и обе-
спечивает когерентность (согласованность) данных в КЭШах процессо-
ров и в основной памяти при работе в мультипроцессорной системе.
Микропроцессор Pentium MMX (1997 г.) ориентирован на эффек-
тивное выполнение типичных мультимедийных алгоритмов, к числу
которых относятся многие алгоритмы, характерные для цифровой обра-
ботки сигналов (операции над векторами, свертка, преобразование Фу-
рье и т.п.). При его разработке впервые произведено существенное из-
менение в системе команд микропроцессоров семейства Х86, начиная с
выхода в свет микропроцессора Intel 86386 в 1985 году.
Микропроцессор компании Intel Pentium Pro (Р6) является мик-
ропроцессором шестого поколения. Он ориентирован на применение в
основном в старших моделях рабочих станций и мультипроцессорных
системах.
Достижение высокой производительности в Р6 обеспечивается за
счет использования ряда архитектурных и технологических достижений
(исполнения команд с опережением, переупорядочивания команд, пред-
сказание переходов, новая архитектура КЭШ-памяти и др.)
Нужно отметить, что, если известна область применения компь-
ютера, то следует отдавать предпочтение тестам, соответствующим об-
ласти применения.
Принципы оценки производительности сигнальных процессоров
такие же, как и для оценки производительности универсальных процес-
соров (микропроцессоров).
Производительность, выражаемая в MIPS (FLOPS), является пи-
ковой, т.е. предельно возможной для данного процессора.
Пример характеристик семейств МП DSP по тактовым частотам и
производительности показан в табл. 9.4.
Таблица 9.4
Процессоры Тактовая частота, МГц Производительность, MIPS
TMS 320С2ххх 20-80 20-40
TMS 320С5ххх 30-133 30-532
ADSP-21xx 40-100 75-150
Реальная производительность МП DSP может быть значительно
меньше, и поэтому ее обычно оценивают временем выполнения стандарт-
ных алгоритмов, в частности, временем выполнения 1024-точечного БПФ.
По этому показателю процессор ADSP-21160 (100 МГц, 600
MFLOPS), например, имеет преимущество перед процессором TMS
320С6701 (167 МГц, 1000 Mflops), поскольку выполняет такое БПФ за
90 мкс, а его конкурент - за 120 мкс. Такая кажущаяся неожиданность
объясняется разной полосой пропускания системы ввода/вывода, разме-
ром и типом внутренней памяти данных, количеством поддерживаемых
циклических буферов и т.д.
Таким образом, процессоры с одинаковой пиковой производитель-
ностью не обязательно имеют одинаковую реальную производительность.
9.4.3. Производительность мультипроцессоров
Выше уже отмечалось, что в эпоху применения СБИС использо-
вание мультипроцессорных вычислительных систем (МПВС) является
одним из магистральных путей развития вычислительных средств но-
вых поколений в целях повышения их производительности.
В МПВС должна быть предусмотрена возможность тесного взаи-
модействия элементов аппаратного и программного обеспечения (возмо-
жность перераспределения заданий, решения частей одной задачи и др.).
Очень большое значение во взаимодействии играет системное
программное обеспечение, степень параллельности работ, процедуры
обработки данных и топология соединительной сети между различными
функциональными блоками МПВС.
Производительность МПВС в большой степени связана со спосо-
бом использования ресурсов общей оперативной памяти. При большом
количестве комплексируемых процессоров возможно возникновение
конфликтных ситуаций, когда несколько процессоров обращаются к
одним и тем же областям памяти. Это снижает эффективность МПВС.
Вторым серьезным недостатком МПВС является проблема
коммутации абонентов и доступа их к общей оперативной памяти.
Эффективность МПВС зависит от того, как конкретно решена эта
проблема аппаратурно-программными средствами.
При применении МПВС следует также помнить, что эффектив-
ность (производительность) МПВС в большой степени зависит от доли
в алгоритмах параллельных вычислений в сравнении с последователь-
ными. Если доля последовательных операций велика, то на значитель-
ное ускорение вычислений рассчитывать не приходится.
Оценку ускорения S компьютера, включающего р процессоров,
при значении f - доли последовательных операций можно получить из
соотношения
s<-----------,
f+(l-f)/p
где 0<f<l; f=0 - полностью параллельные программы; f=l - полностью
последовательные программы.
Так, если в исполняющейся в динамике программе 10% последо-
вательных операций (f=0,l), то, сколько бы ни использовалось процес-
соров, ускорение работы программы более чем в десять раз не получит-
ся (причем это верхняя оценка, если нет других влияющих факторов на
ход вычислительного процесса).
Самым естественным способом реализации параллельной обра-
ботки является простое присоединение ряда процессоров к общей шине.
Однако производительность в такой системе повышается линейно с уве-
личением числа процессоров только до тех пор, пока не наступают ог-
раничения, связанные с проблемами взаимодействия. Согласно хорошо
известному предположению (гипотезе) Минского для широкого класса
алгоритмов взаимодействие между N процессорами с коллективным ра-
спределением ресурсов, соединенными общей шиной, ограничивает
рост производительности величиной log2N [66]. Современные конструк-
торы «суперкомпьютеров» использовали ряд параллельных структур и
достигли повышения производительности в соответствии с законом
Амдала (Amdahl): N/log2N. Для архитектур на базе систолических про-
цессорных матриц был достигнут исключительно высокий коэффициент
повышения производительности, практически равный N.
Рис. 9.20
На рис. 9.20. графиче-
ски представлено увеличе-
ние быстродействия при од-
новременно работающих
процессорах для этих трех
случаев. На этом рисунке:
1 - 100%-ная производитель-
ность (систолические реше-
тки); 2 - закон Амдала (су-
перкомпьютеры); 3 - пред-
положение Минского (огра-
ничения, связанные с кон-
фликтами на шине в много-
процессорных системах).
9.5. БОРТОВЫЕ ВЫЧИСЛИТЕЛЬНЫЕ СИСТЕМЫ
Необходимость создания для каждой бортовой вычислительной
системы уникальной конфигурации разнообразных устройств обработки
сигналов и данных и периферийных устройств ставит на первое место
вопрос о принципах их соединения и обеспечения согласованного
функционирования процессов обработки и управления вводом/выводом
и непосредственно самого ввода/вывода.
Накопленный в последние годы задел в области современных
вычислительных средств и экономическая целесообразность технологии
открытых систем определили дальнейший путь развития ВС - модуль-
ность с опорой на стандартизацию.
При этом подразумевается модульность на трех уровнях:
корпус (крейт) для установки модулей;
модуль (на основе платы-носителя электрорадиоэлементов);
мезонин (более низкий уровень модульности; дополнительная
плата, устанавливающаяся на основную плату-носитель).
Для разработчиков ИВС это означает возможность создавать от-
крытые модульные комплексы из готовых программных и аппаратных
модулей разных производителей, соединенных системой магистралей
(интерфейсов). Они получают доступ к профессионально разработан-
ным широко распространенным спецификациям открытых стандартов,
для которых не требуется приобретение патентов и которые не защище-
ны авторским правом. При этом такие стандарты, как правило, развива-
ются, отражая постоянно растущий потенциал базовых технологий.
Большое разнообразие информационно-вычислительных систем
достигается благодаря компоновке (соединения) разных устройств (мо-
дулей, БЦВМ) посредством интерфейсов.
Если использовать готовые модули, то именно от выбора интер-
фейсов и их характеристик во многом зависит качество создаваемой
вычислительной системы.
Успехи микроэлектроники побуждали инженеров совершенство-
вать интерфейсы: увеличивать их быстродействие, расширять разряд-
ность магистралей и усложнять логический протокол функционирова-
ния. В свою очередь, новый интерфейс воплощался не только в новых
СБИС, но и влиял на структуру микропроцессора. Эффективность их
использования во многом зависит от совершенства именно интерфей-
сов. Наряду с логическими трудностями в разработке интерфейсов при-
ходится решать проблемы электромагнитных наводок и помех, которые
воздействуют именно на интерфейсы, снижая их надежность и ограни-
чивая возможности повышения их быстродействия.
9.5.1. Стандартный интерфейс
Под стандартным интерфейсом понимается совокупность уни-
фицированных аппаратных и программных средств, необходимых для
реализации взаимодействия различных функциональных элементов в
автоматических системах сбора и обработки информации при услови-
ях, предписанных стандартом и направленных на обеспечение инфор-
мационной, электрической и конструктивной совместимости указан-
ных элементов (ГОСТ 23633-79, ISO, IEEE).
Аппаратная часть интерфейса состоит из линий — представ-
ляющих собой электрические цепи, обеспечивающие физические связи
между модулями; шин - совокупности линий, объединенных по функ-
циональному назначению; магистралей - совокупности шин; приемопе-
редающих элементов; функциональных устройств, обеспечивающих
обмен информацией по магистрали; устройств питания и диагнос-
тики.
Программная часть интерфейса обеспечивает логическое
управление функциональными устройствами, организацию обмена по
магистралям, контроль и диагностику состояния интерфейса.
Информационная совместимость представляет собой согласо-
ванность взаимодействия модулей в соответствии с логической органи-
зацией системы. Логическую организацию определяют: структура и
состав шин; способы кодирования и форматы команд, данных, адресной
информации и информации состояния; правила обмена информации
между модулями; способы передачи информации по магистралям; воз-
можности мультипроцессорной обработки данных.
Условия информационной совместимости влияют на объем и
сложность программно-аппаратных средств, а так же на основные тех-
нико-экономические показатели интерфейса и системы.
Электрическая совместимость представляет собой согласован-
ность статических и динамических параметров электрических сигналов,
обеспечивающих обмен информации по магистралям интерфейса. Ус-
ловия электрической совместимости определяют: тип используемых
элементов и их нагрузочные характеристики; параметры сигналов и
пределы их изменения; особенности согласования линий и их длину;
требования к источникам и цепям электрического питания; требования
по помехоустойчивости.
Условия электрической совместимости влияют на скорость обме-
на данными, допустимое число подключаемых устройств, их конфигу-
рацию, расстояние между устройствами, помехозащищенность.
Конструктивная совместимость представляет собой согласо-
ванность конструктивных элементов интерфейса, предназначенных для
обеспечения механического контакта электрических соединений и ме-
ханической замены схемных элементов, блоков, устройств. Конструк-
тивная совместимость определяет: типы соединительных элементов
(разъем, штекер, распределение видов связи внутри соединительных
элементов); конструкции платы, каркаса (крейта), стойки; конструкции
кабельных соединений.
Качество стандарта на интерфейс определяется возможностью
его адаптации к различным по характеру задачам. Стандарт на интер-
фейс должен учитывать современные тенденции развития науки и тех-
нологий, максимально приближаться к идеологии открытых систем.
Основными характеристиками интерфейсов являются: функ-
циональное назначение, количество магистралей (шин) и способов их
организации, пропускная способность (скорость передачи информации)
магистралей (МБ/с), стоимость, надежность. Оптимальным является
интерфейс, обладающий требуемой пропускной способностью и адап-
тацией к решаемой задаче при минимальной стоимости.
Стандартные интерфейсы создаются на основе четырех основных
взаимосвязанных принципов проектирования современных открытых
систем: группового принципа, принципа модульности, унификации и
взаимозаменяемости.
Принцип группового проектирования заключается в создании ря-
да (семейства) функционально и конструктивно подобных устройств
(модулей, систем) определенного назначения, соответствующих разно-
образным условиям их использования. Основная задача группового
проектирования - достижение максимальной универсальности и со-
вместимости модулей внутри каждого ряда интерфейсов.
Принцип модульного построения состоит в рациональном разде-
лении системы (устройства) на совокупность более простых функцио-
нально и конструктивно законченных блоков (агрегатов, модулей) с
целью совершенствования их технических характеристик, а также обес-
печения высокопроизводительных способов производства и эксплуата-
ции. Модули объединяются в нужных количествах и нужной номенкла-
туре с помощью унифицированных систем связей.
Принцип унификации заключается в минимизации номенклатуры
составных узлов, блоков, устройств, модулей и связей между ними при
условии рациональной компоновки и эффективного функционирования
устройств или системы в целом. Интерфейс можно рассматривать как
результат унификации связей и устройств сопряжения составных эле-
ментов компьютеров и систем.
Принцип взаимозаменяемости основывается на возможности мо-
дуля обеспечивать в устройстве (компьютере) различные функции по
его установке и подключению без дополнительной конструкторской
доработки. Взаимозаменяемость является следствием унификации.
Таким образом, интерфейс предназначен для унификации внутри-
системных и межсистемных связей и устройств сопряжения с целью эф-
фективной организации существующих и перспективных элементов ВС.
9.5.2. Магистрально-модульная архитектура компьютера
Для магистрально-модульной архитектуры центральным звеном
является система магистралей (интерфейсов), соединяющих различные
конструктивные элементы аппаратуры.
В бортовом радиоэлектронном оборудовании используются три
вида связей: внутримодульные, внутрикорпусные, межкорпусные (меж-
крейтовые).
Из наиболее известных стандартных шин и интерфейсов, которые
применяются в настоящее время в промышленной автоматике и бортовом
оборудовании можно назвать шины VME (Versabus Module Europebus),
PCI, SCSI-2, ISA и МПИ (ГОСТ 26765.51-86), а также последовательные
интерфейсы МКИО (ГОСТ 26765.52-87, аналог MIL-STD-1553В), обмен
биполярным кодом (по ГОСТ 18977-79), RS232, RS432, Ethernet.
Поскольку для модулей процессоров и ввода/вывода наиболее
распространенными являются высокопроизводительные шины VME и
PCI их использование при модульном конструировании кратко рассмот-
рено ниже.
Многопроцессорная магистральная функционально-модульная
система в стандарте VME созданная на основе 32-х разрядного процес-
сора фирмы Motorola серии 68000, используется для организации силь-
но-связанных средств обработки, хранения и связи с периферийным
оборудованием.
На сегодня в мире существуют сотни процессорных плат модулей
VME, которые выпускаются десятками компаний. Часть из них поддер-
живают 64-разрядную передачу данных, большая часть - 16- и 32-раз-
рядную.
Конструктивно в основу шины VME положен самый популярный
механический стандарт - «Евромеханика» (европлаты формата 3U
(100x160 мм) и 6U (233x160 мм)).
По мере возрастания потребности в большей пропускной способ-
ности шины, вызванной появлением более быстрых процессоров, шина
VME стала узким местом между ЦП и памятью, между ЦП и быстрым
общесистемным вводом/выводом.
Поскольку разработчики микроэлектронных компонентов быстро
повышали степень интеграции кристаллов, производители модулей ста-
ли объединять на процессорных платах блоки с большей функциональ-
ностью. Появились одноплатные компьютеры, которые на одной плате
способны интегрировать все функциональные элементы вычислитель-
ного ядра (мощный процессор, вторичная кэш-память, DRAM (динами-
ческая память с произвольным доступом), SRAM (статическая RAM),
EPROM (стираемое программируемое запоминающее устройство), ...) и
общесистемный ввод/вывод, используя локальную шину PCI. Это не
только способствовало разгрузке трафика шины VME, но и делало сис-
тему более многофункциональной и дешевой.
На VME стали возлагаться функции интенсивного обмена с уст-
ройствами ввода/вывода, предназначенными для непосредственной свя-
зи с объектом, и функции обмена данными между различными VME-
процессорами (общего назначения, сетевыми, графическими, интеллек-
туальными контроллерами с собственными мощными процессорами,
модулями ввода/вывода и т.п.) в качестве быстрого сетевого интерфейса.
Шина PCI - выполненная в соответствии с открытым стандартом
на высокопроизводительный локальный интерфейс между подсистемой
процессор/память и периферийными компонентами, потенциально пе-
рекрывает большую часть возможностей известных стандартных шин
ввода/вывода персонального компьютера (ПК) ISA, EISA, MCA и VL.
Группа, работавшая над спецификацией PCI, добилась того, что
эта локальная шина стала привлекательна в качестве стандартизованно-
го современного интерфейса не только в ПК и в высокоуровневых сер-
верах, но и в широком классе промышленных и военных встраиваемых
приложений реального времени.
PCI обладает всеми характеристиками открытой стандартной
шины ввода/вывода:
высокой пропускной способностью (64 Мбайт/с при 32-разряд-
ных передачах и 512 Мбайт/с при 64-разрядных при максимальной так-
товой частоте магистрали 66 МГц);
стоимостной эффективностью (оптимизирована для непосредствен-
ного взаимодействия компонентов без использования связующих схем);
процессорной и программной независимостью (компоненты ши-
ны PCI могут быть полностью совместимы с существующими драйве-
рами и прикладными программами, драйверы устройств могут перено-
ситься на разные классы платформ);
автоконфигурированием (стандарт PCI требует, чтобы PCI-уст-
ройства имели некоторый набор регистров конфигурации, в которых
содержится информация об устройстве и которые поддерживают авто-
конфигурирование);
масштабируемостью (совместимых в одной системе 32- и 64-раз-
рядных компонентов);
широкой поддержкой независимых конкурирующих производи-
телей.
Стандарт на PCI специфицирует сигнальную среду, временные
диаграммы, электрические соединения и их топологию, назначение кон-
тактов разъема и т.п.
Таким образом, локальная синхронная шина PCI является орга-
ническим дополнением асинхронной шины VME для внутриплатных
межсоединений, позволяя использовать расширяющуюся номенклатуру
микроэлектронных внутриплатных PCI-компонентов, повышая произ-
водительность и гибкость создаваемых VME систем, уменьшая сроки
разработки и стоимость конечных систем.
Приведем некоторые существующие микроэлектронные одно-
кристальные компоненты/микросхемы PCI: PCI-SCSI-2, PCI-Ethemet,
Мост PCI-ISA, Мост PCI-VME, PCI-VME64, Мост PCI-PCI.
Большим преимуществом системы PCI является имеющееся раз-
нообразное программное обеспечение.
В 1995 г. на базе PCI была представлена спецификация версии 1.0
нового стандарта, получившего название «Compact PCI», пригодного
для создания широкого класса надежных промышленных и военных
встраиваемых приложений. Стандарт предусматривает использование
промышленного евроконструктива 3U (100x160 мм) / 6U (233x160мм),
который позволяет функционировать модулю в условиях повышенных
требований к вибро- и термостойкости за счет проверенной годами экс-
плуатации конструкции и компоновки плат, легко вентилируемых и
легко поддающихся замене. Compact PCI полностью совместим со спе-
цификацией PCIV2.XX.
Compact PCI использует любые широкодоступные PCI-полу-
проводниковые компоненты от большого числа независимых производите-
лей. Поэтому программное обеспечение, работающее на РС1-компьютерах
будет функционировать без модернизации в Compact PCI-системе.
В Compact PCI используется системный соединитель,
стандартизованный как МЭК 1076-4-101 (235-штырьковый
пятиразрядный разъем с 47 контактами в ряду и шагом 2 мм).
Стандарт Compact PCI еще не имеет такого широкого распро-
странения как VME.
Мезонинные технологии обеспечивают с помощью специальных
плат еще один, более низкий по сравнению, например, с модулями ши-
ны VME уровень модульности. Типичный размер мезонинных плат
74x144 мм. Они являются функционально законченными изделиями и
устанавливаются на плату-носитель (в стандарте VME или каком-либо
другом). Стандартные установочные габариты платы при этом не меня-
ются - мезонины устанавливаются поверх нее. Плата-носитель имеет
два гнезда для подсоединения мезонина.
Мезонинная технология сегодня - это средство модульного на-
ращивания функциональных возможностей. Взяв за основу типовую
плату, разработчик может добавить к ней специальные пользователь-
ские функции, реализованные в готовом мезонинном модуле.
Существует широкая номенклатура мезонинных плат: многока-
нальные ЦАП, АЦП, цифровой ввод/вывод, электронно-программиру-
емое ПЗУ (EEPROM), ФЛЭШ-память (FLASH), SRAM, графические
контроллеры, различные типы сетей и интерфейсов.
Особенно широко распространено несколько стандартов: PCI
Mezzanine Card (IEEE 1386/1), Industry Pack (IP).
Как показывает опыт, модульность на уровне мезонинов обеспе-
чивает удивительную гибкость при интегрировании системы, резко по-
вышает ремонтопригодность и снижает стоимость ЗИП.
9.5.3. Сетевые интерфейсы
В отечественных авиационных системах основополагающим се-
тевым протоколом обмена принят ГОСТ 26765.52-87 Изменение 1 (MIL-
STD-1553B+NOTICEII). Внедрение этого протокола обмена в авиаци-
онное бортовое оборудование позволило перейти к интеграции вычис-
лительных средств с использованием магистрально-модульных иерар-
хических систем информационного обмена с программным управлени-
ем потоками информации. Обмен информацией осуществляется асин-
хронно методом двусторонней поочередной передачи информации по
принципу «команда-ответ». Информация передается по линии последо-
вательным цифровым биполярным фазоманипулированным кодом в
виде сообщений, состоящих из командных слов, слов данных и ответ-
ных слов. Массовость применения этой шины объясняется следующими
факторами:
линейной архитектурой локальных сетей;
возможностями резервирования;
поддержкой как простых, так и интеллектуальных узлов;
высокой электрической защищенностью;
широкой доступностью компонентов;
гарантированным детерминизмом в условиях реального времени.
Линейная архитектура локальных сетей идеально подходит для
подключения распределенных устройств, находящихся на борту само-
лета или транспортного средства. По сравнению с двухточечными со-
единениями шина имеет меньшую длину соединительных кабелей (про-
водов), что обеспечивает снижение общего веса транспортного средства
и экономию пространства (объема). Простота подключения и отключе-
ния узлов сети облегчает обслуживание и ремонт.
Благодаря двойному резервированию шины, протокол по ГОСТ
26765.52-87 обеспечивает отказоустойчивость и автоматическое пере-
ключение на дополнительные каналы, прозрачные для программного
обеспечения.
Суть поддержки как простых, так и интеллектуальных узлов со-
стоит в том, что к шине могут подключаться как неинтеллектуальные
устройства, обеспечивающие взаимодействие датчиков и исполнитель-
ных механизмов с системой, так и интеллектуальные (вычислительные)
модули с распределенными подчиненными устройствами.
Высокая электрическая защищенность обусловлена подключени-
ем узлов к шине через трансформатор, что обеспечивает полную элек-
трическую изоляцию устройств от сети, снижая тем самым риск повре-
ждения распределенных вычислительных средств.
Широкая доступность компонентов обеспечивается тем, что ин-
тегральные схемы для этой шины давно уже реализованы в стандартных
корпусах для расширенного и военного температурных диапазонов и
могут применяться в самых жестких условиях эксплуатации. Информа-
ция по шине передается в коде «Манчестер-2» (самосинхронизирую-
щийся биполярный код без возвращения к нулю).
Гарантированный детерминизм в условиях реального времени
обеспечивается организацией обмена по типу команда-ответ, которая
гарантирует предсказуемость взаимодействия устройств в условиях ре-
ального времени.
Несмотря на все привлекательные стороны шины MIL-STD-
1553В, которые способствовали ее широкой популярности, ее примене-
ние в более скоростных по обмену информацией военных системах
сдерживается довольно низкой скоростью последовательной передачи
данных - всего 1 Мбит/с.
Обеспечение необходимой помехоустойчивости при передаче
информации, а также скорости ее передачи и расширения функциональ-
ных возможностей осуществляется применением ВОЛС.
Волоконно-оптический кабель (световод) основан на использовании
в качестве проводящей среды сверхпрозрачного стекловолокна. Теоретиче-
ский предел пропускной способности световода определяется сотнями
Гбит/с (на практике уже достигнута скорость в несколько Гбит/с).
Помимо высокой скорости передачи к достоинствам световода
следует отнести его высокую помехозащищенность, небольшую массу и
способность передавать информацию на большие расстояния.
К недостаткам - относятся трудности организации ответвлений
(создание волоконно-оптических разветвителей).
В 1989 г. в США появился стандарт MIL-STD-1773, который со-
вместим на уровне программных и основных технических средств со-
пряжений с протоколом обмена MIL-STD-1553B, но рассчитан на при-
менение ВОЛС с возможностью увеличения скорости передачи до
40 Мбит/с.
Развитием стандарта ГОСТ 26765.52-87, которое позволяет уве-
личить скорость передачи данных до 20 Мбит/с, является стандарт
ГОСТ Р 50832-95, базирующейся на технологии информационного об-
мена STAN AG 3910.
ГОСТ Р 50832-95 определяет использование дополнительной вы-
сокоскоростной шины (ВШ), реализованной на основе ВОЛС. ВШ
управляется низкоскоростной шиной (НШ) в соответствии с ГОСТ
26765.52-87. Скорость передачи данных по ВШ составляет 20 Мбит/с, а
размер массивов передаваемых данных - до 4К 16-разрядных слов. При
такой функциональной структуре шин обеспечивается сохранение цен-
трализованного доступа и наработок в области аппаратно-программных
средств по ГОСТ 2675.52-87, а так же постепенное внедрение ВОЛС в
отечественные бортовые системы реального времени.
Современная отечественная цифровая элементная база в настоя-
щее время также способна реализовать протоколы обмена со скоростью
порядка 20 Мбит/с.
Комплексирование радиоэлектронных датчиков в составе ИВС с
использованием ГОСТ Р50832-95 следует рассматривать как заключи-
тельный этап применения апробированной и известной идеологии
управления обменом с централизованным методом доступа.
В последнее время при разработке (модернизации) авиационных
ВС реального времени в связи с усложнением организации обмена воз-
никает проблема передачи постоянно возрастающих объемов информа-
ции. Экспертные оценки величин совокупного трафика на межсистем-
ном уровне имеют достаточно большой разброс в получаемых оценках.
156
Нижняя оценка совокупного трафика порядка 10-15 Мбит/с характери-
зует современные эксплуатируемые авиационные ВС различных типов
летательных аппаратов. Верхняя оценка совокупного трафика относится
к предполагаемым перспективным ВС новых ЛА и составляет прибли-
зительно 1 Гбит/с и более [60].
Обеспечение таких скоростей обмена в настоящее время невоз-
можно без использования стандартных протоколов передачи информа-
ции в локальных вычислительных сетях (ЛВС) общего применения с
учетом особенностей функционирования аппаратуры авиационных ВС в
реальном масштабе времени.
Если стоит задача проектирования ВС для перспективных ЛА
следующего поколения, нужен выбор и внедрение перспективной еди-
ной унифицированной сети межсоединений авионики с использованием
воле.
При объединении большинства бортовых источников и приемни-
ков информации в авионике в единую сеть последняя должна обладать
следующими основными характеристиками:
приемлемой рыночной стоимостью и коммерческой жизнеспо-
собностью;
возможностью применения различных топологий физической
среды в соответствии с протокольными ограничениями;
технической скоростью передачи - не менее 1 Гбит/с на узел;
величиной задержки доступа к сети <1 мкс;
выполнением специальных требований к функционированию в
реальном масштабе времени;
отказоустойчивостью;
надежностью, тестируемостью;
ремонтопригодностью;
небольшим форматом заголовка для наиболее часто используе-
мых типов сообщений;
одинаковой эффективностью передачи коротких и длинных по
размеру сообщений в едином потоке;
поддержкой режима одновременных реализаций множества со-
общений;
поддержкой передачи информации различного предназначения с
различными характеристиками: команд и управляющей информации (тре-
буемая скорость передачи единицы и десятки Гбит/с), тестовой информа-
ции, информации технического обслуживания, информации от датчиков и
видеоинформации (требуемая скорость передачи единицы Гбит/с);
малой величиной разрядной ошибки (Рош< 1012 ош/бит);
реализацией функций обнаружения, коррекции и регистрации
ошибок;
малым временем входа в синхронизацию при передаче информа-
ции (небольшой формат синхропреамбулы);
минимальными мощностями потребления и компактными конст-
руктивами.
В настоящее время наиболее распространены следующие сетевые
технологии: SCI (масштабируемый когерентный интерфейс), называе-
мая также расширяемый связный интерфейс (РСИ), Fibre Channel (FC),
Myrinet, ATM (Asynchronous Transfer Mode) и Gigabit Ethernet (GE) сре-
ди которых наиболее реальным кандидатом на применение в аппаратуре
перспективных зарубежных систем управления вооружением является
технология SCI (РСИ), которая соответствует общему представлению
организации перспективных сетей на основе передачи сообщений и раз-
деления общей памяти.
Для SCI имеется наряду с основным протоколом IEEE Std. 1596-
1992 ряд регламентирующих приложений к нему:
IEEE Pl 596.2 по организации КЭШ-памяти при большом количе-
стве процессоров;
IEEE Pl596.3 по характеристикам физического уровня кодирова-
ния передаваемой информации в SCI;
IEEE Pl596.4 по организации широкоформатного интерфейса с
памятью;
IEEE Pl596.6 по логике организации обмена при функциониро-
вании в реальном масштабе времени SCI/RT.
SCI предназначен для организации связей как на межмодульном,
так и на межсистемном уровне в БВС, в том числе для систем жесткого
реального времени. Интерфейсный узел, выполненный по стандарту по
IEEE 1596-92, показан на рис. 9.21 [80]. Пакет сообщения поступает из
Рис. 9.21
входного канала на дешифратор адреса. Если адрес в заголовке соответст-
вует коду адреса, присвоенного узлу, то весь пакет направляется во вход-
ной буфер FIFO («первый пришел» - «первый обслужен») и далее на обра-
ботку в прикладные схемы узла. В противном случае пакет попадает в про-
ходной буфер FIFO и если ключ открыт, пакет пропускается в выходной
канал. Может случиться, что до момента прибытия пакета был уже начат
вывод другого пакета (обработанного прикладными схемами) через выход-
ной буфер FIFO и ключ. В этом случае сразу после окончания выдач ключ
открывается для проходного пакета. Емкость буферных FIFO должна быть
достаточна для приема нескольких пакетов.
Каналы, соединяющие узлы друг с другом, могут быть исполне-
ны в виде коаксиального кабеля, оптоволокна или кабеля с 16-ю линия-
ми. Пропускная способность коаксиального кабеля 1 Гбит/с при длине в
десятки метров, оптоволокна по стандарту тоже 1 Гбит/с, но при длине
в километры.
Простейшая структу-
ра SCI - колечко (рис. 9.22).
Колечко может содержать
от двух до 65536 узлов. В рис> 9 22
большом колечке время
продвижения информации через все узлы слишком велико, поэтому для
компоновки больших систем колечки соединяются при помощи пере-
ключателей (коммутаторов). Так например на рис. 9.23 приведена
структура сети, состоящей из трех колечек А, Б, В, объединенных пере-
ключателем (узел 3). Любой узел этой сети может передавать сообще-
ния любому другому узлу в системе .через узел 3. Возможны и иные
произвольные структуры.
В дополнение к переключателям (коммутаторам), в системе SCI
предусмотрена еще одна структурная единица - мост. Он отличается от
переключателя тем, что соединяет системы с разными логическими
протоколами. Такие объединения важны потому, что в них, наряду с
новейшей аппаратурой, можно использовать и произведенную ранее, а
также аппаратуру, предназначенную для выполнения простых функций.
Можно присоединить и иную магистраль. На рис. 9.24 показан пример
такой гибридной системы.
Рис. 9.24
Стандарт SCI допускает построение аппаратуры систем при раз-
ной полноте использования возможностей, представленных стандартом.
Базовый логический протокол SCI послужил основой как для
создания современных суперкомпьютеров, так и для обновления систем
с протоколом PCI. Расширения (стандарты) нацелены на компоновку
систем, содержащих тысячи процессоров, и систем реального времени,
выполняющих сложные задачи в течение заданного интервала времени.
Впервые многопроцессорные системы удалось распределять в
пространстве, практически не снижая их быстродействия. В военных
приложениях SCI может стать основной интерфейсной системой буду-
щей авионики, внедрение которой зависит от носителя аппаратно-
программной поддержки этого протокола для жестких условий реально-
го времени.
9.6. ОТЕЧЕСТВЕННЫЕ БАЗОВЫЕ СРЕДСТВА
ВЫЧИСЛИТЕЛЬНОЙ ТЕХНИКИ
Разрабатываемые и модернизуемые БВС ЛА базируются, как пра-
вило, на применении отечественных магистрально-модульных средств
вычислительной техники межвидового применения. В них используют-
ся рассмотренные выше основные достижения в архитектуре и структу-
ре вычислительных средств.
В настоящее время получили распространение вычислительные
средства семейства «Багет» [10].
Семейство ЭВМ «Багет» обеспечивает:
унификацию средств вычислительной техники и программного
обеспечения на базе открытой архитектуры;
поддержку всех этапов жизненного цикла средств вычислитель-
ной техники и программного обеспечения;
возможность построения вычислительных систем различной
конфигурации на основе унифицированных магистралей межмодульно-
го обмена и стандартизованных конструктивов электронных модулей (в
конструктивах «Евромеханика-би» и PC/104-Plus PCI-Only). Модули
разработаны как с воздушным, так и кондуктивным охлаждением для
работы в особо жестких условиях эксплуатации;
возможность построения вычислительных систем различной
производительности на базе одно- и многопроцессорных конфигураций
с использованием процессоров различных архитектур и средств общего
программного обеспечения.
В рамках этого семейства ЭВМ используются следующие базо-
вые платформы создаваемых вычислительных средств:
а) для высокопроизводительных многопроцессорных серверов -
микропроцессор 1В579 (аналог МП Super SPARC), системная шина
VME, операционная система типа Unix;
б) для управляющих ЭВМ и вычислительных комплексов -
микропроцессор 1В578 (аналог R3081 MIPS), системная шинах VME,
операционные системы реального времени или типа Unix;
в) для программируемых процессоров обработки сигналов - микро-
процессор 1В577 (аналог DSP96002 фирмы Motorola), специальная высоко-
скоростная системная шина, операционная система реального времени.
Используя свойства «открытости» магистрально-модульных вы-
числительных систем «Багет», можно:
разрабатывать дополнительные электронные модули необходи-
мого функционального назначения;
изменять комплектность базовых ЭВМ;
самостоятельно доукомплектовывать базовые ЭВМ серии «Ба-
гет» дополнительными электронными модулями и функциональными
устройствами;
самостоятельно создавать вычислительные комплексы необходи-
мой конфигурации, используя отдельно поставляемые электронные мо-
дули и функциональные устройства;
модернизировать уже созданные вычислительные системы, заме-
няя их отдельные базовые составные части на усовершенствованные
программно-совместимые аналоги.
В семействе ЭВМ «Багет» [10] разработаны следующие контрол-
леры в виде мезонинных плат с шиной PCI в стандарте РМС:
интерфейс ГОСТ 26765.52-87 (MIL-STD 1553В, «Манчестер-2»);
интерфейс ГОСТ 26765.51-86 (Q-bus);
интерфейс IEEE-802.3 (Ethernet);
интерфейс ГОСТ 18977-79 (ARINC-429);
интерфейсы IDE, CENTRONICS;
интерфейс SCSI-2;
графический контроллер.
. Мезонинные платы устанавливаются на процессорные модули. В
настоящее время ведутся работы по созданию сетевых контроллеров
для работы с оптоволоконными линиями связи с повышенной частотой
работы (>1 Ггц).
В качестве примера [10] на рис. 9.25 приведен общий вид
мезонинной платы контроллера интерфейса по ГОСТ 26765.52-87
(MILDSTD1553В, «Манчестер-2»). Мезонинная плата имеет один резерв-
ный канал этого интерфейса с пропускной способностью канала 1 Мбит/с
и обеспечивает режимы работы в качестве контроллера, оконечного уст-
ройства и монитора.
На рис. 9.26 приведен общий вид VME-модуля центрального
процессора с использованием микропроцессора 1В578. Модуль имеет в
Рис. 9.25
Рис. 9.26
своем составе микропроцес-
сор 1В578 с частотой работы
50 МГц, ста-тическое ОЗУ
емкостью 16 Мбайт, репро-
граммируемое постоянное за-
поминающее устройство емко-
стью 32 Мбайт, три интерфейса
типа RS-232C, один интерфейс
RS-422, три программируемых
таймера, один сторожевой тай-
мер, контроллер дискретных
входных/выходных сигналов,
два слота PCI в стандарте РМС
для подключения двух мезо-
нинных плат. Модуль может
управлять дополнительными
VME-модулями (многопроцес-
сорная работа). Модуль имеет
производительность 37,1 VAX
MIPS (Dhrystone 2.1). Габариты
модуля 233x160 мм.
Характеристики некоторых ЭВМ «Багет» для обработки данных
приведены в табл. 9.5, а для обработки сигналов - в табл. 9.6.
Таблица 9.5
ЭВМ «Багет» для обработки данных
Наименова- ние ЭВМ Краткая техническая характеристика
Тип микропро- цессора Шина Объем ОЗУ/РПЗУ, не менее Используемые операционные системы
БАГЕТ-33 1В578 VME 16М6/32М6 ОС реального времени
БАГЕТ-53 1В578 VME 16М6/32М6 ОС реального времени
БАГЕТ-83 1В578 PCI 4Мб/1,5Мб ОС реального времени
Таблица 9.6
ЭВМ «Багет» для обработки сигналов
Наименова- ние ЭВМ Краткая техническая характеристика
Тип микропро- цессора Шина Объем ОЗУ/РПЗУ, не менее Используемые операционные системы
БАГЕТ-25* 1В577, 1В578 Спец. VME 8М6/8М6 Специализированное ПО
БАГЕТ-55- 04* 1В577, 1В578 Спец. УМЕ 8М6/8М6 Специализированное ПО
Примечание: * ЭВМ отличаются составом модулей и условиями эксплуатации
В качестве примера на рис. 9.27 и 9.28 приведены соответственно
общий вид ЭВМ «Багет-55-04» и ЭВМ «Багет-55-04» со снятой верхней
крышкой.
ЭВМ «Багет-55-04» пред-
ставляет собой специализирован-
ную комбинированную многопро-
цессорную ЭВМ для цифровой
обработки радиолокационных,
оптических и акустических сигна-
лов, а также решения задач управ-
ления в реальном масштабе вре-
мени. ЭВМ состоит из програм-
мируемого процессора обработки
сигналов и управляющего вычис-
лительного устройства, объеди-
ненных общей магистралью обме-
Рис. 9.27
на VME. Она предназначена для
работы в особо жестких условиях
эксплуатации.
Конструкция ЭВМ, пока-
занная на рис. 9.28, имеет один
модуль процессора обработки
данных, четыре модуля обработки
сигналов (МОС) и один модуль
буфера данных. Максимальная
конфигурация ЭВМ допускает
установку до 7 МОС. Габариты
ЭВМ «Багет-55-04» 198x257x433.
Модуль процессора обработ-
ки сигналов имеет четыре сигналь-
ных микропроцессора 1В577. Мо-
дуль МОС с микропроцессорами
1В577 с частотой работы микро-
процессоров 40 МГц имеет пиковую
производительность 25 млн.оп./с
при выполнении базовых операций БПФ или до 300 MFLOPS.
Планируется изготовление микропроцессоров 1В577, 1В578 и
1В579 с увеличенной частотой работы и модулей с большим количест-
вом микропроцессоров.
9.7. ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ
Создание современных информационно-вычислительных систем
предполагает разработку программного обеспечения для ВС, которое,
являясь программным обеспечением реального времени (ПО РВ), вклю-
чает функциональное программное обеспечение (ФПО) и системное
программное обеспечение (СПО). При этом СПО может быть покупным
изделием, а ФПО полностью или частично (часть может быть заимство-
вана) разрабатывается при создании новой ИВС.
Разработка программного обеспечения любого выше упомянуто-
го типа требует инструментального программного обеспечения, которое
помогает разрабатывать ФПО и СПО.
9.7.1. Системное программное обеспечение
Системное программное обеспечение используется для управле-
ния вычислительной машиной во время выполнения или разработки
других программ. СПО во время выполнения программ служит для ди-
намического распределения ресурсов вычислительной машины и вы-
полнения требований к окружению программ на фазе их использования.
Первым, наиболее распространенным, компонентом системного
программного обеспечения является операционная система (ОС). За го-
ды, прошедшие после своего возникновения, ОС превратились из отно-
сительно простого в невероятно сложное ПО, которое решает следую-
щие задачи:
реагирует на все отказы, регистрирует их, распределяет работу,
управляет процедурами восстановления и возобновления работ;
обрабатывает прерывания, идущие от других подсистем, машин,
часов, операторов и т.д.;
планирует выполнение работ на машине, «решая», когда начать
выполнение некоторой работы, так как в данный момент доступны все
необходимые для нее машинные ресурсы;
ведет списки используемых устройств и поступающих заданий с
учетом их приоритетов;
выполняет функции, необходимые для работы прикладных про-
грамм, поскольку в ней имеются программы сортировок, печати и за-
грузки, и программистам уже нет необходимости создавать собственные
их версии;
связывает между собой программы, тем самым множество раз-
личных частей программ (может быть даже написанных разными про-
граммистами), будут работать как одно целое;
управляет хранением данных и их восстановлением;
управляет вводом/выводом информации;
управляет взаимодействием с пользователем;
защищает свои собственные программы от «порчи» новыми, не
отлаженными программами, впервые введенными в систему;
выполняет восстановление функции, осуществляет дублирова-
ние, переключение, диагностическое и другое тестирование.
Первая и главная причина появления ОС заключается в желании
достичь максимального использования ресурсов машины. Вторая при-
чина - облегчить возможность внесения изменений, а третья - повысить
производительность труда программистов, избавив их от дублирования
работ.
Вторым компонентом системного программного обеспечения яв-
ляется система управления базами данных (СУБД).
Самым большим достижением СУБД стало весьма значительное
облегчение процесса внесения изменений в программное обеспечение.
Благодаря СУБД облегчается модификация прикладных программ, ло-
гической и физической структур файлов данных. Во многих случаях
СУБД решает, стоит ли вносить изменения или нет.
Второй причиной создания СУБД является стремление к эконо-
мии пространства для файлов.
Третья причина - это необходимость повысить достоверность
информации в файлах. Достоверность повышается благодаря уменьше-
нию общего числа файлов. И, наконец, с появлением СУБД облегчается
доступ к данным.
Почти все системы управления базами данных отделены от ОС. К
преимуществам использования системного программного обеспечения
следует отнести:
увеличение модульности и улучшение защиты информации, уп-
рощение процесса внесения изменений в программы;
избавление прикладных программистов от необходимости затра-
чивать большие усилия на сопровождение стандартных программ;
уменьшение простоев, которое доводит до максимума использо-
вание аппаратуры;
исключение дублирования информации во внешних файлах, по-
зволяющее лучше использовать память.
Можно отметить следующие недостатки СПО.
1. В силу универсальности системных программ СПО снижается
скорость их выполнения по сравнению со специализированными систе-
мами.
2. Системные программы велики, сложны, их часто трудно ис-
пользовать надлежащим образом.
3. СПО не всегда обладает гибкостью, достаточной, чтобы удов-
летворять всем индивидуальным требованиям.
Бортовое СПО обычно включает операционную систему реального
времени (ОС РВ). СУБД используется при разработке ПО с целью автома-
тизации процесса внесения изменений и экономии сил программистов.
В качестве примера ОС РВ можно привести операционную систему
VxWorks фирмы Wind River Systems, предназначенную для применения во
встроенных системах «жесткого» реального времени (системы с малым
временем реакции на события). Основные временные характеристики про-
изводительности VxWorks (для микропроцессора МС68020/16МГц): время
переключения между задачами - 17 мкс, максимальное время блокировки
внешних прерываний - 8 мкс. Временные параметры VxWorks строго де-
терминированы и не зависят от нагрузки в системе.
Операционная система VxWorks является системной с кросс-
средствами проектирования прикладного ПО.
В качестве инструментальной ЭВМ для систем автоматического
проектирования (САПР) прикладного ПО РВ VxWorks используются
графические рабочие станции фирм Sun, DEC, Hewlett Packard, IBM и
др. Для целевых микропроцессорных архитектур Intel 386/486 и
Motorola 68К поддерживается САПР ПО РВ на РС/АТ-совместимых
компьютерах.
В стандартную конфигурацию САПР ПО РВ VxWorks входят:
компилятор языка С, удаленный (remote) отладчик уровня исходного
языка, ядро операционной системы и системные библиотеки в объект-
ных кодах, аппаратно-зависимые модули в исходных текстах. В качест-
ве дополнительных инструментальных средств имеются следующие
программные продукты фирмы Wind River Systems:
Micro works - сокращенная версия VxWorks для простых встро-
енных применений;
WindView - анализатор динамического поведения системного и
прикладного ПО РВ;
StethoScope - средство мониторинга целевой системы и сбора
данных в реальном масштабе времени;
VxSim - симулятор целевой системы;
BSP Porting Kit - пакет средств для адаптации VxWorks к кон-
кретной аппаратуре пользователя;
WindX - графический интерфейс X-Windows реального времени;
Wind C++ - система проектирования ПО реального времени на
объектно-ориентированном языке C++;
VxMP - библиотека для построения мультипроцессорных систем
реального времени.
9.7.2. Функциональное программное обеспечение
Общая характеристика и показатели сложности. Функциональное
программное обеспечение предназначено для решения основных и вспомо-
гательных задач ИВС. В качестве вспомогательной, но весьма важной зада-
чи можно назвать задачу обеспечения устойчивости функционирования ПО
в условиях наличия ошибок в программах, появления сбоев и частичных
отказов в ИВС, а так же всевозможных клинчей и перегрузок в БВС.
Существенным требованием к ФПО является возможность разви-
тия программной системы, что предусматривается фазой жизненного
цикла ПО - сопровождением, но при этом необходима разработка
большого объема хорошо сопровождаемой документации.
Требования обеспечения устойчивости и развития ФПО приводят
к необходимости использования открытой модульной архитектуры
ФПО ИВС.
Большие объемы ФПО современных ИВС и необходимость со-
провождения требуют применения апробированных технологий, со-
блюдения стандартов и автоматизации, прежде всего, рутинных работ.
В связи с высокой сложностью ФПО разрабатывается в виде по-
следовательности наращиваемых по функциям версий.
Обычно различают математическую (техническую) и логическую
сложность программного обеспечения. Чтобы охарактеризовать слож-
167
ность используют те или иные показатели. Так, например, в [79] пред-
ложены две группы показателей: сложность проектирования и слож-
ность функционирования. Сложность проектирования определена в ви-
де трех компонентов:
сложности программных модулей,
сложности структуры данных,
сложности структуры комплекса программ и связей между моду-
лями.
Показатели сложности функционирования связаны с потреблени-
ем ресурсов ВС и включают:
временную сложность, характеризуемую длительностью испол-
нения комплекса программ,
программную сложность, определяемую объемом памяти, необ-
ходимым для размещения всего программного комплекса,
информационную сложность, представляемую объемом памяти,
требуемой для накопления и хранения информации, используемой про-
граммами.
Деление показателей на две группы достаточно условно, так как в
действительности уровень использования ресурсов ВС и их доступность
зависят не только от сложности функционирования, но и структурной
сложности, в частности, степени взаимодействия программных моду-
лей. Эти взаимодействия в итоге определяют возможность распаралле-
ливания процессов вычисления и организацию памяти БВС.
Методы разработки и технологии создания. Разработка ФПО
(алгоритмов, временных диаграмм, протоколов, программ обработки
информации и управления, а так же комплектов программной и конст-
рукторской документации) в значительной степени определяет стои-
мость и длительность разработки, а так же эффективность решения ос-
новных целевых задач ИВС.
Методы разработки программного обеспечения интенсивно раз-
вивались на протяжении последних пятидесяти лет и представляют со-
бой сегодня некоторую синтезированную научную дисциплину с ис-
пользованием математических методов и инженерных расчетов, моде-
лирования и методов управления разработкой, а так же технологий,
поддерживающих процессы жизненного цикла (ЖЦ) ПО. Современная
технология создания сложного программного обеспечения включает в
себя регламентированные производственные процессы, поддерживае-
мые автоматизированными средствами и комплексом руководящих до-
кументов, а также соответствующей организацией работ коллектива
специалистов, часто довольно крупного, а иногда и объединенного в
кооперацию.
Такие технологические процессы должны регулировать выполне-
ние этапов системного анализа, проектирования, написания программ
(модулей), отладки, испытания, документирования, а так же управление
работой специалистов и поддержку эксплуатации и сопровождения про-
граммного обеспечения.
Технология создания и развития программного обеспечения опи-
рается на используемую модель его ЖЦ. Модели ЖЦ программного
обеспечения неоднократно изменялись, отражая тот или иной подход к
методам проектирования ПО и его разработке в целом.
Наиболее простой и часто используемой является каскадная мо-
дель ЖЦ, суть которой сводится к описанию некоторой последователь-
ности этапов (каскадов) ЖЦ и их довольно сложного взаимодействия
между собой [77].
Рост сложности ФПО, плохая обозримость сложного ФПО, вызы-
вающие уже на этапе разработки требований большие затраты людских
ресурсов и времени, привели к созданию модели ЖЦ с использованием
прототипа [14]. Суть этой модели заключается в расширении стадии
разработки за счет введения в нее этапа создания прототипа (макета
разрабатываемого ФПО), его анализа, уточнения требований к ФПО и
переходу к его полномасштабной разработке.
Появление фонтанной модели ЖЦ [83] связано с возникновением
объектно-ориентированного проектирования и программирования, в
рамках которых создаются классы объектов, собираемые в библиотеки.
Суть объектно-ориентированного подхода сводится к упрятыванию
лишней с точки зрения пользователя информации и к четким определе-
ниям интерфейса объекта и порядка его взаимодействия с другими объ-
ектами. При этом предполагается, что объект будет использован не
только в текущей разработке ФПО, но и ряде последующих разработок,
используя принцип наследования. Это многократное использование и
образует «фонтан».
Жизненный цикл программного обеспечения обычно описывает-
ся в терминах функциональной декомпозиции. Основной вопрос сис-
темного анализа и проектирования заключается в формулировании от-
вета на вопрос: что делает система? Методы функционального проекти-
рования и функциональной декомпозиции, используемые для решения
задачи, основаны на интерпретации проблемного пространства и его
преобразовании в пространство возможных решений как взаимозависи-
мое множество функций или процедур.
Функциональная декомпозиция представляет собой методику
анализа и проектирования «сверху вниз». Хотя анализ и проектирование
не является синонимами, большинство известных методов системного
анализа и проектирования имеют много общего. •
При использовании функциональной декомпозиции, сначала сис-
тема рассматривается с точки зрения ее назначения, а процедуры и ал-
горитмы только подразумеваются разработчиком. Затем на стадии де-
тального проектирования решаются вопросы о способах организации
необходимых процессов. Для поддержки этой методики, основанной
главным образом на потоках данных, используются диаграммы потоков
данных, словари данных и структурные схемы.
Функциональную декомпозицию удачно поддерживают появив-
шиеся ранее процедурные языки. Добавление в эти языки подпрограмм
позволило достигнуть определенной степени автономности и закрыто-
сти от пользователя несущественной для него информации.
Проектирование «сверху вниз» вводит определенную дисципли-
ну, которой должны подчиняться системный аналитик и программист.
Основным недостатком метода проектирования «сверху вниз» является
наличие большого числа ограничений, которые затрудняют применение
современных методов программирования. К таким ограничениям следу-
ет отнести:
отсутствие учета эволюционных изменений;
описание системы одной функцией, что может быть не всегда це-
лесообразно;
базирование системы на функциональных методах, при которых
игнорируется аспект организации структур данных;
невозможность многократного использования.
В объектно-ориентированном проектировании в простейшем слу-
чае участвуют данные и процедуры. В нем уменьшена зависимость от
процедур, и данные группируются вместе с процедурными функциями.
При декомпозиции с использованием объектно-ориентированного мето-
да система рассматривается как совокупность объектов (иногда назы-
ваемая категорией или классом объектов). Анализ и проектирование
высокого уровня осуществляются с использованием не только этих объ-
ектов, но и услуг, выполняемых ими. Для этого используется модель
типа «клиент-обслуживатель», в которой объекты взаимодействуют
друг с другом посредством сообщений. Сообщение передает информа-
цию, вызывает объекты для выполнения процедуры и т.д. Использова-
ние модели «клиент-обслуживатель» приводит к тому, что система опи-
сывается как «движимая ответственностью» [83].
Детальное проектирование, включающее в себя реализацию про-
цедур и спецификацию структур данных, откладывается на более позд-
нее время. Элементы детального проектирования являются собствен-
ными элементами объекта, поэтому они относятся только к концепции
сокрытия от пользователя несущественной информации. Следователь-
но, алгоритмические процедуры и структуры данных не являются более
«замороженными» на уровне системного проектирования. В результате
этого система, основанная на представлении объекта, становится более
гибкой, т.к. изменения на уровне реализации осуществляются легче, без
внесения изменений в сам системный проект. Важным моментом явля-
ется то, что структуры данных не нужно указывать на самых ранних
стадиях проектирования. Категории данных могут обеспечить основу
идентификации объекта, вокруг которой затем строится интерфейс. По-
строение объекта использует абстракцию данных, а не фиксацию кон-
кретных структур данных в спецификации объекта.
Ввиду того, что разработка объектно-ориентированной програм-
мы происходит главным образом «снизу вверх», различие между ста-
диями проектирования программы и написания текста менее заметно,
чем в жизненном цикле систем, основанных на использовании функ-
ционального подхода. Однако на этой поздней стадии целесообразно
внутри программных модулей, называемых в объектно-ориентирован-
ной системе классами, использовать средства функциональной деком-
позиции на высоком уровне и системного проектирования «сверху
вниз», например, диаграммы потока данных. Другими графическими
средствами, используемыми на различных стадиях жизненного цикла
объектно-ориентированных систем, являются графы взаимоотношений
объектов, диаграммы «клиент-обслуживатель», диаграммы наследова-
ния свойств и графы сотрудничества.
В отличие от традиционного анализа структурированных систем,
основанного главным образом на функциональной декомпозиции «свер-
ху вниз», объектно-ориентированные проектирование и анализ имеют
много атрибутов как проектирования «сверху вниз», так и проектирова-
ния «снизу вверх». Причем проектирование «снизу вверх», по всей ви-
димости, преобладает. Одной из целей создания объектно-ориентиро-
ванных систем является построение универсальных классов для созда-
ния библиотек.
Анализ «сверху вниз» и проектирование классов «снизу вверх» яв-
ляются самыми трудными участками всего жизненного цикла объектно-
ориентированных программ. Поэтому они должны быть либо параллель-
ными, либо, по крайней мере, итеративными. Для того, чтобы программу
можно было многократно и успешно использовать, в стадию проектирова-
ния должны входить существующие хорошо проверенные классы.
В объектно-ориентированном методе существует высокая степень
перекрытия не только между проектированием и программированием, но и
между спецификацией требований и проектированием систем.
Описание объекта на высоком уровне на относительно ранних
стадиях проектирования информационных систем позволяет програм-
мистам начать работу до завершения анализа систем. В этом случае тре-
бования могут быть изменены по мере улучшения понимания пользовате-
лем своих потребностей, и это не повредит стадии проектирования про-
граммы. Первоначальное описание должно состоять из устойчивых объек-
тов, которые можно указать уже на ранних стадиях, и которые вряд ли
сильно изменятся при добавлении новых требований. Эти объекты могут
быть представлены программистом как группы объектов, которые нужно
программировать на самой ранней стадии с высокой степенью уверенно-
сти, что даже в случае изменения спецификации системы (или аннулирова-
ния проекта), эти классы все равно найдут применение.
Кластеры классов могут проектироваться и быть реализованы
изолированно от системы. Это означает, что требования к системе и
порожденные проектированием кластеры затем передаются программи-
стам для детального проектирования и реализации. Позднее они будут
интегрированы в окончательный проект системы методами «снизу
вверх». Это значительно упрощает итерацию между анализом требова-
ний к системе и проектированием системы, т.к. проекты не основаны на
первых (и часто менее всего информированных) решениях, как это бы-
вает в случаях функционального проектирования «сверху вниз».
Нилсе, в качестве примера, приведен перечень и состав первых
версий ПО для самолета F-22, которые разрабатывались в виде после-
довательности функционально наращиваемых версий. На сегодня из-
вестен состав первых пяти версий [58].
Первая версия - Блок 1.0 включает ОС, задачи БРЛС и некоторые
задачи системы связи, навигации и идентификации (CNI).
Вторая версия - Блок 2.0 включает дополнительно задачи инте-
грации информации датчиков и организацию индивидуальной помехо-
защиты.
Третья версия - Блок - 3.0 предусматривает введение дополни-
тельных режимов работы БРЛС и РЭБ.
Четвертая версия - Блок 3.1 интегрирует бортовую информаци-
онную систему с объединенной системой распределения тактической
информации JTIDS.
Версия 5 - Блок 4.0 включает дополнительную задачу интеграции
информации всех апертур с ее выдачей на нашлемную систему отобра-
жения при ведении ближнего воздушного боя с применением ракеты
AIM-9X.
Объем ПО версии 5 оценивается в 1,7 миллионов строк кода, объ-
ем версии 1 составляет 50% от версии 5. Испытания авионики были
начаты с ПО версии 1 в 1998 году, передача в серийное производство с
ПО Блок 4.0 планируется на 2004 год.
Приведенный пример показывает, что сроки разработки и испы-
тания авионики во многом определяются сроками разработки ПО.
9.8. КРАТКИЕ КОММЕНТАРИИ
В заключение главы необходимо отметить наиболее важные на-
правления развития бортовых вычислительных систем.
Эффективность модернизируемых и перспективных ИВС истре-
бителей во многом будет определяться степенью использования дости-
жений научно-технического прогресса компьютерных технологий и
уровнем интеллекта, реализуемого в бортовых системах. От этого будут
зависеть объем и качество решения задач, совершенство ИВС и воз-
можности их применения в сложных условиях.
Процесс развития вычислительных средств с применением концеп-
ции открытых систем затрагивает на современном этапе все направления
компьютерной технологии, от производства электронных компонентов до
принципов организации параллельной обработки информации.
Основным (критичным) параметром компьютерной системы яв-
ляется производительность. Однако, создать сбалансированную систему
с максимальным использованием возможностей имеющихся на сегод-
няшний день компонентов является не простой задачей. При этом за
счет изменения архитектуры (структуры) и функций одних компонентов
часто стремятся компенсировать недостаток производительности или
функциональных возможностей других.
Проведенный краткий анализ взаимовлияния современных архи-
тектуры, структуры и элементной базы вычислительных средств пока-
зывает, что дальнейшее увеличение производительности ВС в основном
будет достигаться не за счет роста тактовой частоты работы элементной
базы, а за счет распараллеливания процессов обработки информации.
К основным принципам построения ВС можно отнести:
модульность и унифицированность, позволяющие строить ВС
путем унифицированного соединения модулей;
программируемость структуры, дающая возможность выполнять
настройку структуры компьютеров ВС и сети линий связи с целью по-
лучения ВС адекватной решаемым задачам;
виртуализация ресурсов и иерархичность построения программ-
но-аппаратных средств, которые позволяют представить вычисления
как систему совместно протекающих процессов, а ВС - как совокуп-
ность виртуальных подсистем;
адаптация алгоритмов функционирования к количеству и харак-
теру решаемых ВС задач.
Полнота реализация этих принципов определяется возможностя-
ми технологии на текущем этапе и соображениями оптимального выбо-
ра соотношения эффективность/стоимость.
Стремительные темпы совершенствования элементной базы и
принципиально новые решения построения компьютеров сопровожда-
ются не менее бурными изменениями в ОС реального времени, управ-
ляющих распределением ресурсов БВС и процессом выполнения всех
программных компонентов, а так же в программно-аппаратных инстру-
ментальных средствах разработки функциональных программ для при-
ложений.
Особенно тесной в системах реального времени становится связь
архитектуры компьютера, операционной системы и ФПО.
ГЛАВА 10. ИЗМЕРИТЕЛИ ДАЛЬНОСТИ
И ЕЕ ПРОИЗВОДНЫХ
В РЕЖИМЕ СОПРОВОЖДЕНИЯ ОДНОЙ ЦЕЛИ
10.1. ПРИНЦИПЫ ПОСТРОЕНИЯ ИЗМЕРИТЕЛЕЙ
ДАЛЬНОСТИ И СКОРОСТИ
Измерители дальности и ее производных, используемые в ИВС
систем самонаведения, предназначены для формирования оценок даль-
ности до цели, скорости сближения с ней, абсолютной скорости цели и
автоматической селекции сигналов цели по времени запаздывания от-
раженного сигнала (дальности) и доплеровской частоте (скорости
сближения). В силу важности последней задачи указанные измерители
часто называют автоселекторами дальности и скорости.
В результате автоматической селекции в каналы формирования
оценок дальности и скорости поступает сигнал только от одной цели.
Вследствие этого точность оценивания повышается на 1 2 порядка по
сравнению с измерителями, в которых оценивание осуществляется без
предварительной селекции [46]. Суть селекции по дальности состоит в
отпирании приемника БРЛС (РГС) только на время прихода сигнала,
отраженного от нужной цели. Селекция по скорости состоит в узкопо-
лосной фильтрации отраженных сигналов, при которой узкополосный
фильтр настроен на доплеровскую частоту, обусловленную скоростью
сближения с селектируемой целью.
Сформированные в измерителях оценки дальности Д и скорости
сближения Vc6 = -Д используются в алгоритмах траекторного управле-
ния, реализующих методы наведения в НУТВ (7.22), (7.23), пропор-
ционального наведения (7.32), (7.48) и оптимальные методы наведения на
воздушные (7.67), (7.68) и наземные (7.74), (7.75) цели. Кроме того, в сис-
темах самонаведения самолетов оценки Д и Vc6 используются в качестве
команд целеуказаний ракетам, а в системах самонаведения ракет для очув-
ствления радиовзрывателей [12]. Оценки собственной скорости цели Уц
используются в комбинированных системах наведения самолетов и ракет
для экстраполяции пространственного положения цели.
Необходимо отметить, что исторически сложившийся термин
радиолокационный измеритель достаточно условен, поскольку в авто-
селекторах дальности и скорости измеряются, собственно говоря,
время запаздывания отраженного сигнала и его доплеровская частота,
а дальность и ее производные оцениваются по результатам указанных
измерений. Иначе говоря, в строгом смысле измерители представляют
собой устройства формирования оценок дальности и ее производных
на основе измерения времени запаздывания и доплеровской частоты.
Кроме того, достаточно часто под радиолокационными измерителями
понимают и комплексные устройства оценивания, в которых измеряют-
ся не только параметры радиосигналов, но и процессы другой физиче-
ской природы, например воздушная скорость и собственные ускорения.
В зависимости от типа системы самонаведения и используемых в
ней СПЦ различают измерители дальности и ее производных и измери-
тели скорости и ее производных. Применение последних обусловлено
тем, что в ССН, использующих МПН (7.32), (7.48) и непрерывный сиг-
нал подсвета цели, информация о дальности не нужна. Однако общие
принципы построения и измерителей дальности и измерителей скорости
одинаковы. Поэтому рассмотрим их на примере измерителей дальности и
ее производных, которые для простоты будем называть дальномерами.
В общем случае в состав дальномера входят: временной дискрими-
натор (чувствительный элемент), регистрирующий изменения времени
запаздывания отраженных сигналов: управитель (фильтр и регулятор),
формирующий оценки дальности и ее производных; устройство расста-
новки стробов, играющее роль исполнительного устройства; датчики
корректирующих сигналов и вычислитель сигналов коррекции. Фун-
кциональные связи между составными частями дальномерного канала
показаны на обобщенной структурной схеме, приведенной на рис. 10.1.
Рис. 10.1
Сигналы unpM, задержанные по отношению к излученному сигна-
лу на время 13=2Д/с, где с скорость света, поступают на вход времен-
ного различителя (ВР). Временной различитель (дискриминатор) фор-
мирует сигнал иД1, пропорциональный времени At несовпадения отра-
женного сигнала ипрм и сигнала иСТ2 экстраполированной дальности Дэ.
Для определения знака ошибки используются два строба ист1, и^з, рас-
положенные симметрично относительно середины сигнала ист2. Изме-
ренное значение иД1 подается в фильтр оценивания (ФО), в котором
формируются оценки Д, Vc6 и Уц, поступающие к потребителям
информации, и оценка Дэ дальности, экстраполированной для следую-
щего такта измерений. В аналоговых дальномерах Дэ= Д. Поскольку
сигналы Дэ управляют работой устройства расстановки стробов (УРС),
то ФО часто называют управителем. В качестве начальных значений До
в дальномерах БРЛС используется дальность захвата цели, а в дально-
мерах РГС - дальность целеуказаний. Под действием сигнала Дэ УРС
формирует импульсы стробов ист2, поступающие в ПРМ и истЬ истз, по-
даваемые на ВР. Сигнал ист2 обеспечивает автоматическую селекцию
целей по времени запаздывания отраженных сигналов, а сигналы истЬ
ист3 выделение сигналов ошибки иД1.
При кратковременных пропаданиях сигналов цели дальномер пе-
реводится из режима автосопровождения в режим экстраполяции (памя-
ти). В этом режиме к потребителям поступают значения дальности Дэ,
экстраполированные с учетом значения скорости Vc6 на момент пропа-
дания сигналов.
Датчики корректирующих сигналов (ДКС) используются для по-
вышения точности и устойчивости сопровождения целей, увеличения
времени памяти (экстраполяции) при пропаданиях входных сигналов и
для формирования оценок скорости цели Vu. В качестве ДКС обычно
используются: датчик воздушной скорости, измеряющий собственную
скорость самолета Vc; ДИСС, измеряющий продольную составляющую
путевой скорости Vn; акселерометры, измеряющие составляющие уско-
рений jxa, jza, jya, и гироскопы, измеряющие углы ег и Ец, характеризую-
щие положение антенны в пространстве. Необходимость гироскопов
обусловлена тем, что достаточно часто для повышения точности изме-
рения ускорений акселерометры располагаются совместно с антенной
на гироплатформе и ориентируются по осям антенной системы коорди-
нат XaYaZa, в которой ось ОаХа направлена по линии визирования цели.
В то же время собственная скорость Vc и продольная составляю-
щая путевой скорости Уп измеряются в связанной системе координат,
ось ОСХС которой сориентирована по направлению продольной оси ЛА. Для
пересчета этих скоростей в визирную (антенную) систему координат, в
которой оцениваются дальность и скорость сближения, и необходимо знать
углы Ег и ец. Вычислители корректирующих сигналов (ВКС) формируют
сигналы коррекции Дк по положению (позиции) и VK по скорости путем
преобразования измерений ДКС. При этом результаты измерений ДКС
преобразуются в систему координат и в масштаб, принятые в дальномере.
Следует отметить, что рассмотренная структурная схема является обоб-
щенной и в конкретных типах дальномеров могут иметь место некоторые
отличия. В частности, в дальномерах, используемых в БРЛС, могут отсут-
ствовать датчики и вычислители корректирующих сигналов.
Структурная схема измерителя скорости и ее производных анало-
гична схеме на рис. 10.1 при условии, что вместо временного различителя и
устройства расстановки стробов используются частотный дискриминатор и
управляемый гетеродин. При этом вместо корректирующего сигнала Дк в
управитель поступает сигнал коррекции по ускорению jK.
10.2. КЛАССИФИКАЦИЯ ИЗМЕРИТЕЛЕЙ ДАЛЬНОСТИ
И ЕЕ ПРОИЗВОДНЫХ
Дальномеры различают по типам временных различителей и
управителей, способам коррекции, видам используемых сигналов под-
света цели, способам реализации алгоритмов оценивания дальности и
ее производных м числу контуров, используемых в следящей системе.
По типу временных различителей выделяют дальномеры с усили-
тельными и интегрирующими дискриминаторами. В усилительных дис-
криминаторах выходной сигнал формируется по закону
uAl=KAt,
где К - коэффициент усиления, определяемой крутизной дискримина-
ционной характеристики ВР.
В интегрирующих BP uAt=jKAtdt, что позволяет повысить
о
чувствительность дальномера к рассогласованию At.
По числу операций интегрирования, выполняемых в управителе,
различают дальномеры с астатизмом первого, второго и иногда третьего
порядка. Управители (фильтры оценивания) с астатизмом первого по-
рядка позволяют формировать оценки Д, а управители с астатизмом
второго и третьего порядков - оценки, соответственно, Д, Vc6 и Д ,
Vc6 , jC6 , гДе jC6 “* оценка ускорения сближения.
По способам коррекции выделяют дальномеры с позиционной
коррекцией, в которых осуществляется коррекция по дальности Дк и
дальномеры со скоростной коррекцией, использующие сигналы VK кор-
рекции по скорости.
В зависимости от вида СПЦ применяют дальномеры, исполь-
зующие импульсные сигналы с НЧП, СЧП и ВЧП. Последние два сиг-
нала иногда называют квазинепрерывными.
По способам реализации алгоритмов оценивания (управителей)
различают дальномеры с аппаратурной и программной фильтрацией. В
последнем случае могут быть использованы как аналоговые, так и дис-
кретные алгоритмы оценивания.
В зависимости от числа замкнутых контуров в следящей системе
дальномеры могут быть одноконтурными и многоконтурными. В одно-
контурных дальномерах ВР, управитель и исполнительные устройства
(УРС) входят в состав единого контура. При таком способе построения
следящей системы невозможно одновременно обеспечить высокую
точность и хорошую устойчивость сопровождения маневрирующих це-
лей, так как условия достижения высокой точности противоречат усло-
виям получения хорошей устойчивости. В частности, для уменьшения
динамических ошибок, играющих основную роль при сопровождении
маневрирующих целей, необходимо увеличивать порядок астатизма
управителя. Однако это сопровождается утратой устойчивости [59, 62].
Для сохранения устойчивости в одноконтурных дальномерах использу-
ются специальные корректирующие звенья, которые, в свою очередь,
ухудшают точность.
В настоящее время наиболее употребительны одноконтурные
дальномеры с астатизмом второго порядка, поскольку формирование
оценок Д, Vc6 и jc6 в одноконтурных дальномерах с астатизмом
третьего порядка очень проблематично.
Весьма перспективны многоконтурные следящие системы, в ко-
торых функции обеспечения точности и устойчивости дальномера в
целом распределяются по различным контурам. Алгоритмы функцио-
нирования многоконтурных измерителей можно сформировать на осно-
ве математического аппарата СТОУ.
Все рассмотренные классифицирующие признаки применимы и
для измерителей скорости с учетом особенностей их работы. В частно-
сти, в качестве СПЦ в измерителях скорости используются либо непре-
рывные, либо квазинепрерывные сигналы.
Рассмотрим некоторые виды измерителей дальности и скорости,
функционирующих в составе ССН самолетов и ракет при различных
сигналах подсвета цели.
10.3. ИЗМЕРИТЕЛЬ ДАЛЬНОСТИ И СКОРОСТИ БРЛС
ПРИ КВАЗИНЕПРЕРЫВНОМ СИГНАЛЕ ПОДСВЕТА ЦЕЛИ
В режиме СОЦ измеритель дальности и скорости, входящий в со-
став импульсно-доплеровской БРЛС, позволяет непрерывно получать точ-
ную информацию о дальности, скорости сближения с целью и собственной
скорости цели. Эта информация необходима для самонаведения истребите-
ля в НУТВ с выбранной целью по алгоритму (7.22), (7.23); стробирования
приемника БРЛС по дальности; формирования команд целеуказания раке-
там «в-в»; экстраполяции пространственного положения цели. Последняя
задача решается на основе знания оценок составляющих собственной ско-
рости цели. Информация о пространственном положении цели нужна для
некоторых типов ракет с комбинированными системами управления на
этапах автономного и командного наведения.
При использовании в БРЛС импульсного сигнала с ВЧП его се-
лекция по скорости осуществляется точно так же, как и при непрерыв-
ном сигнале. Однако селекция по дальности отличается от селекции,
выполняемой в БРЛС с НЧП импульсов. Относительно малая энергия
сигнала с ВЧП в одном импульсе не позволяет осуществлять селекцию
по дальности непосредственно по каждому импульсу. Отсюда следует
необходимость предварительного накапливания полезных сигналов для
обеспечения достаточно большого отношения энергии сигнала к спек-
тральной плотности шума. Спецификой применения сигналов с ВЧП
является неоднозначность отсчета дальности, обусловленная тем, что
время запаздывания отраженных импульсов может превышать период
повторения зондирующих импульсов. Это предопределяет необходи-
мость применения того или иного способа устранения неоднозначности
[22]. Обычно такая задача решается в процессе формирования началь-
ных условий для следящей системы и на ее работу никак не влияет. В то
же время наличие мертвых зон, вызываемых попаданием отраженных
сигналов во временные участки бланкирования приемника, непосредст-
венно влияет на функционирование дальномера.
Структурная схема одного из вариантов дальномерного канала
БРЛС, выполняющего автосопровождение цели при импульсном сигна-
ле с ВЧП, приведена на рис. 10.2, а диаграммы ее работы - на рис.Л0.3.
Особенностью рассматриваемого дальномера является использование в
нем БЦВМ, с помощью которой часть задач решается на алгоритмиче-
ском уровне.
Синхронизатор С (рис. 10.2) вырабатывает импульсы и3 запуска
ПРД и иб бланкирования (запирания) приемника (ПРМ) (рис. 10.3,а).
Запирание ПРМ предотвращает его перегрузки за счет проникновения
мощного зондирующего сигнала ПРД. Однако бланкирование ПРМ на
180
время излучения импульсов ПРД приводит к появлению мертвых зон
временных интервалов тб, для которых отраженные от цели сигналы не
будут обрабатываться в ПРМ вследствие его запирания бланкирующи-
ми импульсами иб. Следовательно, информация о целях, заключенная в
сигналах, которые попадают в мертвые зоны, будет утрачена. Во избе-
жание этого целесообразно изменять частоту повторения Fri=l/T„
(рис. 10.3, а) так, чтобы сигналы сопровождаемой цели попадали в зону
прозрачности Тп тб между бланкирующими импульсами.
Рис. 10.2
Рис. 10.3
Отраженные от цели сигналы через антенный переключатель
(АП) (рис. 10.2) поступают на вход ПРМ, где усиливаются и преобра-
зуются на промежуточную частоту
Гпр1=Гпро+Рд, (10.1)
где fnpo - собственно промежуточная частота, а Рд - доплеровское сме-
щение частоты принимаемых сигналов.
Из ПРМ импульсы ипрм (рис. 10.3,6) с частотой fnpi, запаздываю-
щие на время Ц=2Д/С по отношению к излученным сигналам, подаются
на селекторы дальности СД1-СДЗ, которые отпираются соответствую-
щими импульсами стробов Ucti, uCT2 и uct3 (рис. 10.3,в,г). Временное по-
ложение этих стробов определяется устройством расстановки стробов
по кодам задержек, формируемым в БЦВМ. При этом положение строба
ист2 (рис. 10.3,в) соответствует времени задержки 1зэ=2Д.>/с, где Дэ - экс-
траполированная дальность. Стробы иСТ| и истз расположены симмет-
рично относительно середины, uct2 (рис. 10.3, в,г). Длительности Tci и тсз
импульсов на выходе селекторов определяются временами перекрытия
отраженного сигнала ипрм и стробов иСТ| и ucr3. Таким образом, информа-
ция о временном рассогласовании At (рис. 10.3,6,в) экстраполированно-
го строба исг2 и отраженного импульса ипрм переносится в длительности
tCi и тс3 выходных импульсов селекторов СД1 и СДЗ.
Сигналы с выходов селекторов поступают на смесители
СМ1-СМЗ (рис. 10.2), на вторые входы которых подаются сигналы Uyr
управляемого гетеродина с частотой fyr. Эта частота формируется в
специальном измерителе скорости сближения так, что ее приращения
равны приращениям доплеровской частоты Рд. С учетом (10.1) частота
fnp2 = fyr-f„pl = fyr-fnpo-Рд (10.2)
на выходе смесителей остается постоянной даже при изменении Рд.
Выполнение такой операции дает возможность использовать для даль-
нейшего выделения полезных сигналов высокодобротные узкополосные
фильтры УФ1, УФ2 и УФЗ с постоянной настройкой на частоту fnp2o.
При поступлении сигналов с частотой fnp2 на УФ1 и УФЗ ампли-
туды вынужденных колебаний Цф| и иф3 на их выходах (рис. 10.4) будут
пропорциональны временам тС| и тс3 воздействия входных импульсов, а
соответственно и временам совпадения селекторных импульсов иСТ| и
истз с отраженным сигналом (рис. 10.3,б,г). После окончания селектор-
ных импульсов иСД| и исд3 (рис. 10.2) в высокодобротных фильтрах УФ1
и УФЗ будут существовать собственные слабозатухающие колебания
вплоть до прихода следующих импульсов иСД| и исд3, после чего процес-
сы будут повторяться (рис. 10.4). В результате информация о времен-
ном рассогласовании At (рис. 10.3,б,в), заключенная ранее в длительно-
стях тС| и тс3 импульсов селекторов, переходит в амплитуду непрерыв-
ных колебаний Пф1 и Цф3 (рис. 10.4). Эти колебания детектируются в
амплитудных детекторах АД1 и АДЗ, после чего накапливаются в инте-
граторах И1 и ИЗ (рис. 10.2). Накопление осуществляется в течение
времени Тт представляющего собой период тактовых импульсов ит об-
ращения к БЦВМ, после чего содержимое интеграторов сбрасывается и
процесс накопления повторяется. При поступлении тактовых импульсов
ur перед сбросом накопленные интеграторами сигналы поступают в
АЦП, где преобразуются в соответствующие цифровые коды Д1 и ДЗ,
которые подаются в БЦВМ.
Рис. 10.4
В дальномерном канале БЦВМ решает следующие задачи: реали-
зует алгоритм временного различителя, позволяющего измерить вре-
менное рассогласование At (рис. 10.3,б,в) экстраполированного импуль-
са ист2 и отраженного сигнала ипри; вычисляет оценки дальности Д и
скорости Д, необходимые для самонаведения истребителя в НУТВ
(7.22), (7.23); формирует оценки VLl собственной скорости цели, необ-
ходимые для экстраполяции ее пространственного положения; рас-
считывает период повторения Тн, обеспечивающий попадание отра-
женного сигнала в зону прозрачности Тп—Т^ (рис. 10.3,а,б); для выбран-
ного периода повторения Тн вычисляет длительности импульсов Тип
передатчика, обеспечивающую постоянство средней энергии излучае-
мых сигналов.
Временной цифровой дискриминатор можно реализовать в соот-
ветствии с алгоритмом [1]
ДД(п)=Д(п)-Дэ(п)=АКадСтнп(п)/2, (10.3)
А.ДЗ(П)-Д1М. (10.4)
Здесь Д(п) - дальность до цели измеряемая на n-м цикле по времени запаз-
дывания t, отраженного сигнала (рис. 10.3,6); Дэ(п) - код экстраполирован-
ной дальности, определяемой задержкой tn строба ист2 (рис. 10.3,в); ДД(п) -
код рассогласования реальной и экстраполированной дальностей; Д1(п) и
Д3(п) - коды, характеризующие время (дальность) перекрытия стробов ист!
и ист3 с отраженным сигналом; Ст11П/2 дискрет дальности, определяемый
длительностью импульса т11П; Кад - коэффициент преобразования АЦП,
представляющий цену младшего разряда БЦВМ.
Безразмерная величина А (10.4) представляет относительное вре-
менное рассогласование At (рис. 10.3,в). Если отраженный сигнал ипрм
полностью совпадает со стробом ucrl (Д1(п)=1, ДЗ(п)=0), то А=-1. Когда
отраженный сигнал совпадает со стробом ист3 (Д1(п)=0, Д3(п)=1), А=1.
Во всех остальных случаях -1 <А< 1.
Оценки дальности Д и скорости Д формируются по алгоритму
а, р фильтрации:
Д(п)=Дэ(п) + а(п) ДД(п), Д(0)=Д0; (10.5)
Д(п)=Д(п-1)+ДД(п), Д(О)=До; (10.6)
1 т
Д э(п)=Д(п-1)+ТтД(п-1). (10.7)
Начальные условия До и До для (10.5) и (10.6) определяются в
режиме захвата цели [1], а коды АД(п) формируются в процессе реали-
зации (10.3) и (10.4).
Алгоритм а, р фильтрации в дальномерном канале базируется на
использовании прогноза (экстраполяции) Д и Д на основе гипотезы
относительного движения с постоянной скоростью. Поскольку на прак-
тике дальность может меняться с переменной скоростью, и имеют место
ошибки экстраполяции, то результат прогноза дальности и скорости в
(10.5) и (10.6) корректируется по результатам измерения дальности с
помощью БРЛС. Постоянные коэффициенты а и р в (10.5) и (10.6),
учитывающие вес корректирующих поправок АД (10.3) при формирова-
нии оценок Д и Д, определяются исходя из требования устойчивости
дальномера в целом.
По экстраполированной дальности (10.7) в БЦВМ вычисляются
коды задержек стробов, поступающие в устройство расстановки стро-
бов УРС (см. рис. 10.2), которое и определяет временное положение
стробов uCT1, иСТ2 и Пстз на временной оси (см. рис. 10.3,в,г). Сформиро-
ванные в (10.5) (10.7) оценки Д и Д дальности и скорости использу-
ются в алгоритме (7.22), (7.23) для наведения на сопровождаемую цель.
Для прогнозирования пространственных эволюций цели необхо-
димо знать не только значение (модуль), но и направление вектора ско-
рости цели Уц. Для его оценивания в БЦВМ вычисляются три проекции
Уцх, Уцу и Vuz в невращающейся системе координат XYZ. Один из
наиболее простых способов оценивания этих проекций основан на пред-
положении равенства вектора относительной скорости V0TH = Vc — Vu
и вектора оценки скорости сближения Vc6 = -Д . Тогда из векторного
равенства Уц = Vc — Vc6 следуют скалярные тождества:
V =V — V =V -Vfi V =V -Vr (108)
VUX CX VCOX’ цу су тсбу’ uz VCZ VCOZ yxv.wy
Для реализации (10.8) векторы собственной скорости и скорости
сближения представляются в виде проекций в той же системе коорди-
нат, что и вектор Уц.
Расчет периода повторения Т„, обеспечивающего попадание от-
раженного сигнала в зону прозрачности (см. рис. 10.3,а,б), начинается с
вычисления времени задержки
1.,э=2Д,/с (10.9)
экстраполированного строба исг2 в следующем такте. В свою очередь,
t33=NKpTn+T3H) (10.10)
где NKp - кратность неоднозначности, определяемая числом целых пе-
риодов Тп, входящих в интервал t3„ а тэн временное (неоднозначное)
запаздывание ucr2 по отношению к предыдущему импульсу ПРД (см.
рис. 10.3,в). Из (10.10) следует, что при фиксированном значении t:n
изменением Тп и NKT можно реализовать любое значение тэп в том числе
и такое, которое обеспечивает размещение строба ист2 примерно посре-
дине зоны прозрачности (см. рис. 10.3,а,в). Эта задача решается сле-
дующим образом.
В память БЦВМ закладывается массив значений Trii периодов по-
вторения (i = 1,N), для каждого из которых вычисляется относительная
задержка
Qji=tn/Tni==Ti;pi+T3Hi/Tni=Ni;j4-Qi. (10.11)
В (10.11) tn определяется соотношением (10.9), a Q, относитель-
ная неоднозначная задержка.
Кратность вычисляется по правилу
NKpi = ENT [Q.}i],
где ENT операция взятия наименьшего целого. Тогда из (10.11) следует, что
Qi=Q3i-ENT[Q0i].
Задавшись неоднозначным относительным положением строба
Qo, которое соответствует середине зоны прозрачности, можно для каж-
дого Tni вычислить разность
△Qi=IQi-Qol- (Ю.12)
Тот период Tni, для которого (10.12) будет наименьшей, обеспе-
чивает попадание отраженного сигнала в зону прозрачности.
Длительность Tlini импульсов, позволяющая при выбранном пе-
риоде Tni обеспечить постоянство средней мощности передатчика, оп-
ределяется по формуле
^Hni=Tni/Q,
где Q - заданная скважность импульсов.
Вычисленные значения Tni и т1111{ в виде цифровых кодов посту-
пают из БЦВМ в синхронизатор (рис. 10.2), который на следующем
такте и формирует последовательность импульсов с соответствующими
периодом повторения Tni и длительностью TIini.
Если в процессе функционирования БРЛС имеют место кратко-
временные пропадания сигналов ипрм, то ЛД в (10.5) и (10.6) становится
186
равным нулю и дальномер переходит в режим памяти. В этом режиме
Д получается в результате экстраполяции (10.7) на основе значения
скорости Д , имевшей место на момент пропадания сигналов.
При использовании СЧП алгоритм формирования оценок дально-
сти и скорости (10.3) (10.7) остается тем же, что и при ВЧП. Для даль-
номерного канала при СЧП специфично усложнение алгоритма выбора
частоты (периода) повторения импульсов БРЛС, поскольку при работе
по низколетящим целям в спектре отраженного сигнала отсутствуют
зоны, свободные от мешающих отражений [22]. При этом наибольшую
интенсивность мешающие отражения имеют в альтиметровой зоне и в
зоне главного лепестка диаграммы направленности. В связи с этим при
СЧП период следует рассчитывать так, чтобы исключить пропадание
отраженного сигнала как в мертвую зону, так в альтиметровую и зону
главного лепестка.
10.4. ИЗМЕРИТЕЛЬ СКОРОСТИ И УСКОРЕНИЯ БРЛС
ПРИ КВАЗИНЕПРЕРЫВНОМ СИГНАЛЕ ПОДСВЕТА ЦЕЛИ
В режиме СОЦ измеритель скорости и ускорения, входящий в
состав импульсно-доплеровской БРЛС, позволяет непрерывно получать
точную информацию о скорости и ускорении сближения с целью. Эта
информация может быть использована в алгоритмах помехозащиты
БРЛС, самонаведения истребителя и целеуказания ракетам. Кроме того,
она дает возможность высокоточно селектировать принимаемые сигна-
лы по доплеровской частоте. Необходимость такой селекции обусловлена
спецификой работы каналов автосопровождения по дальности и скорости
при импульсных сигналах с ВЧП и СЧП. При использовании таких сигна-
лов селекция по скорости (доплеровской частоте) осуществляется узкопо-
лосным фильтром после преобразования импульсов в непрерывные коле-
бания. При такой процедуре селекции оценки скорости и ускорения фор-
мируются на основе измерения доплеровской частоты.
Отселектированный по доплеровской частоте сигнал поступает и
в угломерный канал, что позволяет сопровождать по направлению
единственную цель. Необходимость такой предварительной селекции
цели обусловлена плохой разрешающей способностью БРЛС по углам.
При одновременном нахождении в пределах диаграммы направленно-
сти нескольких целей, сопровождение одной из них без предваритель-
ной селекции по доплеровской частоте становится затруднительным.
Структурная схема измерителя скорости и ускорения, в состав кото-
рого входит БЦВМ, приведена на рис. 10.5 [1]. На этой схеме приняты обо-
значения, использованные на рис. 10.2 при рассмотрении дальномера.
Рис. 10.5
Сигналы unpM (см. рис. 10.2, 10.3,6) с выхода приемника на про-
межуточной частоте fnpi (10.1) поступают на селектор дальности СД2
(см. рис. 10.2, 10.5), который отпирается импульсами ист2 (см. рис.
10.3,в). Временное положение ист2 определяется устройством расстанов-
ки стробов УРС в соответствии с кодом экстраполированной в БЦВМ
дальности (10.7). Импульсы исд2 подаются на смеситель СМ2, где пре-
образуются на частоту flip2 (10.2), которая при вариациях Бд остается
практически постоянной за счет изменения частоты fyr сигнала иуг
управляемого гетеродина (см. рис. 10.5) на приращение Бд. Соответст-
вующие изменения fyr обусловлены функционированием специальной
следящей системы.
Если частота fnp2 (10.2) импульсного сигнала смесителя СМ2 от-
личается от заданной частоты fnp2o на значение
4f=fnp20-fnp2> (10.13)
то на это же значение Af будет отличаться от fnp20 и частота вынужден-
ных колебаний иф2 на выходе узкополосного фильтра УФ2. Процесс
преобразования в УФ2 импульсных сигналов в непрерывный протекает
аналогично преобразованию импульсов в фильтрах УФ1 и УФЗ дально-
мерного канала, проиллюстрированного рис. 10.4. Полоса пропускания
Afn узкополосного фильтра УФ2, составляющая обычно сотни герц —
единицы килогерц, определяет разрешающую способность БРЛС по
скорости 8V=XAfn/2, зависящую и от длины волны X. Рассогласование
Af (10.13) регистрируется частотным детектором (ЧД) (рис. 10.5), выра-
батывающим напряжение цчд(п)=КчдАГ, где Кчд - коэффициент усиления
ЧД, определяемый крутизной дискриминационной характеристики де-
тектора. Для того, чтобы исключить влияние на ичд амплитуды входного
сигнала и(|)2, последний перед подачей на ЧД ограничивается в ограни-
чителе (ОГР) (рис. 10.5). В дальнейшем напряжение ичд накапливается в
интеграторе И2 со сбросом, после чего поступает в АЦП. Накопленное
напряжение сбрасывается тактовыми импульсами ит с периодом повто-
рения Тт, который представляет временной интервал обращения к
БЦВМ. АЦП преобразует накопленное напряжение в цифровой код
uF(n)=K4HaAf(n),
где Кчна обобщенный коэффициент передачи ЧД, накопителя и АЦП, п
номер такта обращения к БЦВМ, a Af определяется (10.13). Коды uF(n)
подаются в БЦВМ, которая решает следующие задачи:
преобразует код uF(n) с весом Кв в код рассогласования по частоте
AF(n)=KBuF(n); (10.14)
формирует оценки доплеровской частоты Бд и ее производной Рд;
формирует оценки Д и Д скорости и ускорения сближения с целью;
обеспечивает функционирование канала сопровождения по скоро-
сти в режиме памяти при кратковременных пропаданиях сигналов при-
емника.
Оценки Рд и Рд формируются по алгоритму а, Р фильтрации в
соответствии с уравнениями:
Рд(п)=Рдэ(п)+арДР(п), Рд(°)=Е?дО; (10.15)
Рд(п)=Рд(п-1)+^ AF(n), Рд(0)=Рд0; (10.16)
1 т
Рдэ(п)=Рд(п-1)+ТтРд(п). (10.17)
Здесь: Рдэ(п) - экстраполированный для следующего такта код допле-
ровской частоты; ocF, pF - коэффициенты усиления невязки измерения
AF (10.14). Начальные условия Рд0 и Рд0 для (10.15) и (10.16) определя-
ются в режиме захвата. Физический смысл алгоритма (10.15) (10.17)
идентичен смыслу алгоритма (10.5) (10.7), который использовался в
дальномерном канале.
Экстраполированный код Рдэ(п) (10.17) обеспечивает режим сле-
жения по частоте и доплеровскую селекцию сигналов (см. рис. 10.5). В
ЦАП он преобразуется в сигнал управления, определяющий такое зна-
чение частоты fyr управляемого гетеродина, при котором промежуточ-
ная частота fnp2 (10.2) будет весьма незначительно отличаться от часто-
ты fnp2o настройки узкополосного фильтра УФ2.
Оценки скорости и ускорения формируются по алгоритму:
Д(п)=-0,5Х Бд(п)Кск; (10.18)
Д(п)=-0,5Х F;i(n)Kyc. (10.19)
Знак минус в (10.18) и (10.19) учитывает то обстоятельство, что
при сближении истребителя с целью, когда Гд >0, Рд>0, дальность до
нее уменьшается, т.е. Д <0, Д <0. С помощью размерных коэффициен-
тов Кск и КуС безразмерные коды Рд (п) и Рд (п) пересчитываются в раз-
мерные значения скорости и ускорения.
Необходимо отметить, что в алгоритм а, Р фильтрации (10.15)—
(10.17) заложен режим памяти по Гд при кратковременных пропаданиях
входных сигналов ипрм (см. рис. 10.5). В такой ситуации AF(n) в (10.15) и
(10.16) приравнивается нулю и код Рд(п) изменяется с постоянной ско-
ростью Рд (п), имевшей место на момент пропадания сигнала приемни-
ка. В соответствии с изменением F будет продолжаться изменение
частоты fyr управляемого гетеродина. В результате при появлении сиг-
нала ипрм процесс автосопровождения будет продолжен без перехода в
режим захвата.
При сигналах с СЧП может иметь место неоднозначность отсчета
скорости, которая отсутствует при сигналах с ВЧП. Во избежание этого
в режиме СЧП необходимо применять специальные меры по устране-
нию отмеченной неоднозначности [22].
10.5. ИЗМЕРИТЕЛЬ СКОРОСТИ И УСКОРЕНИЯ РГС
ПРИ НЕПРЕРЫВНОМ СИГНАЛЕ ПОДСВЕТА ЦЕЛИ
Непрерывный СПЦ используется для наведения ракет «в-в» с
полуактивными РГС. Взаимное расположение истребителя И, цели-Ц и
ракеты Р в процессе полуактивного наведения показаны на рис. 10.6.
Измерители скорости и ускорения, называемые в таких РГС автосе-
лекторами скорости, предназначены для автоматической селекции
сигналов цели по доплеровской частоте и формирования оценок скоро-
сти и ускорения сближения. Оценка Vc6 скорости сближения исполь-
зуется в алгоритмах пропорционального самонаведения (7.32) и (7.48).
Рис. 10.6
Информация об ускорении jc6 используется в алгоритмах защиты
РГС от различного рода помех. В частности, по оценке этого ускорения
можно констатировать факт применения уводящих по скорости помех
[23] и экстраполировать оценки скорости сближения в режиме памяти.
Непрерывный СПЦ и специфика полуактивного наведения и из-
мерения скорости полета ракеты «в-в» предопределяют ряд особенно-
стей следящего измерителя. К ним относятся: существенно больший,
чем в БРЛС, диапазон измеряемых ускорений; необходимость компен-
сации доплеровской частоты, обусловленной отлетом ракеты от самоле-
та-носителя.
Структурная схема измерителя скорости и ускорения полуактив-
ной РГС с непрерывным СПЦ, построенного с учетом отмеченных осо-
бенностей, показана на рис. 10.7.
НА УГЛОМЕР
Рис. 10.7
Принятый головной антенной Аг сигнал цели усиливается в при-
емнике отраженного сигнала ПРМОС и преобразуется на промежуточ-
ную частоту
f* =f 1 р
Апр1 АпрЮ ’ гдицр*
(10.20)
В это же время прямой СПЦ принимается хвостовой антенной Ах
ракеты, усиливается в приемнике сигнала синхронизации ПРМСС и
преобразуется в напряжение ис с промежуточной частотой
fnpc ^лрсО+Рдир • (10.21)
В (10.20) и (10.21): fnpl0 и fripc0 - частоты, на которые настроены
каналы промежуточной частоты ПРМОС и ПРМСС;
^^-<V“+V“);(V“+V'-) (10.22)
и
V V -V
F = ,,р - 11 р - (10.23)
дир XX
доплеровские приращения частот сигналов цели и синхронизации.
Здесь: X - длина волны; V1IU, Vup и VHp - скорости сближения истребите-
ля с целью, цели с ракетой и истребителя с ракетой; V,„ Vu и Vp - про-
екции скоростей истребителя, цели и ракеты на соответствующие линии
визирования. Смысл всех составляющих скоростей сближения ясен из
рис. 10.6.
Необходимо отметить, что во всех разновидностях МПН (7.32) и
(7.48) используется скорость сближения ракеты с целью Vc6=VIlp, в то
время как доплеровское приращение частоты (10.22) отраженного сиг-
нала содержит и составляющую, обусловленную скоростью сближения
V1IU истребителя с целью. Эта составляющая компенсируется в процессе
второго преобразования частоты в ПРМОС, при котором в качестве
сигнала гетеродина используется напряжение ис с выхода ПРМСС с
частотой (10.21). В результате этого преобразования на выходе ПРМОС
формируется сигнал ипр2 с частотой fnp2=fnp2o+Fw, где на основании
(10.20)—(10.23) fnP2o=fnpio-fnpco, Fnup=FAHup--FAlip«2(Vp+VJ/X=2Vpll/X. В
свою очередь, сигнал и11рз в смесителе СМ3 преобразуется в напряжение
ипрз, частота которого
fnP3=fy -fnp2=fyr-fnp20-Faiip (10.24)
остается практически постоянной, поскольку в результате функциони-
рования следящей системы частота fyr управляемого гетеродина изменя-
ется на то же значение, что и Fw. Селекция сигнала по частоте осуще-
ствляется в узкополосном усилителе-ограничителе промежуточной
частоты УУПЧ настроенном на частоту fnp30. Чувствительным элемен-
том, реагирующим на изменение FJlup, является частотный детектор ЧД.
При изменении Рдцр на такое же значение вначале изменится flip3 (10.24),
и на входе интегратора И1 появится напряжение ичд, пропорциональное
приращению РД11р. Это напряжение последовательно преобразуется в
сигнал Uj, пропорциональный приращению ускорения на выходе И1, и
затем на выходе интегратора И2 в сигнал uv, пропорциональный прира-
192
щению скорости Vup. Под действием uv частота f>T управляемого гетеро-
дина УГ изменяется так, чтобы ичд—>0. Использование в следящей сис-
теме двух интеграторов обеспечивает память по ускорению. Наличие
такой памяти позволяет при кратковременных пропаданиях входных
сигналов с частотой fnp2 сохранить (запомнить) на входе И2 сигнал Uj.
Под действием этого запомненного сигнала напряжение uv на выходе
И2 будет изменяться со скоростью, пропорциональной приращению
ускорения, имевшему место на момент пропадания полезного сигнала.
В итоге после появления ипр2 процесс слежения будет продолжен.
Включение между интеграторами корректирующего звена (КЗ) обусло-
влено необходимостью обеспечения устойчивости следящей системы.
В следящей системе с двумя интеграторами имеет место ошибка
сопровождения, пропорциональная второй производной отслеживаемой
координаты, в данном случае производной ускорения. Поэтому при
энергичных маневрах цели или ракеты, в частности, за счет увеличения
ее скорости после старта, могут появиться ошибки слежения по частоте,
превышающие половину ширины дискриминационной характеристики
ЧД. В такой ситуации происходит срыв сопровождения. Во избежание
этого в следящую систему вводится отмасштабированный в вычислите-
ле корректирующих сигналов корректирующий сигнал Ujxp собственного
ускорения ракеты. В качестве датчиков корректирующих сигналов ис-
пользуются акселерометры, расположенные обычно на гироплатформе
вместе с антенной. Начальные условия uvuy для И2, определяющие пер-
воначальную частоту fyr, поступают из БРЛС в ракету, пока она еще
находится на подвеске.
Скорость сближения ракеты с целью оценивается путем форми-
рования в смесителе СМ4 сигнала инд с частотой Fw=fyr fnp2o fnp3o-
Выделяемая в СМ4 частота Рдцр с помощью частотного детектора ЧДУ
преобразуется в напряжение, пропорциональное скорости сближения.
Это напряжение в качестве сигнала Vc6 и используется в алгоритмах
траекторного управления (7.32) и (7.48).
10.6. МНОГОКОНТУРНЫЙ ИЗМЕРИТЕЛЬ ДАЛЬНОСТИ
И ЕЕ ПРОИЗВОДНЫХ С НЕЗАВИСИМЫМ ОЦЕНИВАНИЕМ
СКОРОСТИ СБЛИЖЕНИЯ
Недостатки рассмотренных измерителей дальности и ее произ-
водных обусловлены одноконтурным принципом построения их следя-
щих систем. В одноконтурных системах (см. рис. 10.1) чувствительный
элемент (собственно измеритель), устройство формирования оценок
(управитель) и исполнительный орган (генератор следящих стробов и
управляемый гетеродин) включены последовательно. При таком их
взаимодействии условия достижения высокой точности противоречат
условиям хорошей устойчивости. При этом дальность и скорость оце-
нивается на основе достаточно грубых моделей, в основу которых по-
ложены гипотезы движения с постоянной скоростью либо с постоянным
ускорением. Кроме того, достаточно часто оцениваемые значения даль-
ности и скорости снимаются с исполнительных устройств (см. рис.
10.7). Такой способ неизбежно приводит к увеличению динамических
ошибок и затягиванию переходных процессов, предопределяя время
отработки ошибок захвата интервалом 1,5...3 с.
В то же время появление на вооружении ряда стран сверхманев-
ренных истребителей [9, 30] (см. п. 1.1.3) предъявляет существенно
более жесткие требования к точности, быстродействию и устойчивости
систем автосопровождения. Следует отметить, что одноконтурные сле-
дящие измерители не удовлетворяют совокупности этих требований. В
частности, использование таких маневров, как «кобра Пугачева» и «ко-
локол», приводит к появлению в отслеживаемой дальности производ-
ных, порядок которых превышает порядок астатизма существующих
следящих систем, и, следовательно, приводит к срыву сопровождения
(см. п. 5.2.1).
Рассмотрим принцип построения многоконтурных следящих изме-
рителей дальности и ее производных с независимой оценкой скорости
сближения, основанный на алгоритмах СТОУ (§§2.1, 3.3). Получение неза-
висимых оценок скорости базируется на их формировании в различных
каналах: в одном на основе обработки результатов измерения времени за-
паздывания, а в другом - на основе измерения доплеровской частоты. На-
личие двух независимых оценок скорости сближения позволяет существен-
но улучшить помехозащищенность измерителя, особенно при защите от
уводящих по дальности и скорости помех [23]. Далее будут не только рас-
смотрены особенности построения и работы многоконтурных квазиопти-
мальных следящих систем, но и обращено внимание на основные этапы
синтеза алгоритмов их функционирования.
Синтезируемый дальномер предназначен для информационного
обеспечения существующих и перспективных методов наведения само-
летов и ракдт с комбинированными системами управления (см. п: 7.5.2)
на интенсивно маневрирующие цели. Он должен с высоким быстродей-
ствием устойчиво формировать высокоточные оценки дальности, ско-
рости сближения, ускорения и его производной, а также составляющие
скорости цели во всем возможном диапазоне скоростей и ускорений при
сопровождении сверхманевренных объектов. Оценки дальности и ско-
рости сближения используются в алгоритмах наведения (7.22), (7.48) и
(7.67). Оценки проекции скорости цели на ЛВ необходимы для экстра-
поляции ее пространственного положения. Оценки ускорения и его
производной применяются в алгоритмах определения маневров цели и
помехозащиты для констатации факта применения уводящих помех.
Следящую систему измерителя дальности и ее производных бу-
дем синтезировать при следующих допущениях:
для подсвета цели используется квазинепрерывный сигнал, кото-
рый накапливается в процессе первичной обработки;
частота повторения импульсов, обеспечивающая попадание от-
раженных сигналов в зону прозрачности (см. рис. 10.3,а,б), выбирается
алгоритмическим способом и непосредственно не влияет на работу
следящей системы;
точная оценка Vc проекции собственной скорости ЛА на ЛВ
сформирована в СВС на основе измерений датчика воздушной скорости
(ДВС) и бортовых пеленгов цели, оцененных угломером;
первичным датчиком информации является оптимальный двухмер-
ный дискриминатор дальности и скорости, формирующий измерения:
гд=Кд(Д0.г-Ду)+^ди; (10.25)
zv=Kv(V0T-Vy)4v„- (10.26)
Здесь: гд и zv напряжения на выходе временного и частотного разли-
чителей; Кд и Kv коэффициенты передачи различителей, определяе-
мые крутизной их дискриминационных характеристик и зависящие от
параметров СПЦ и соотношения энергии сигналов к спектральной
плотности шумов; Дот и V0T отслеживаемые дальность и скорость; Ду и
Vy отслеженные (управляемые) дальность и скорость; £дп и £vn цен-
трированные белые шумы измерений с известными односторонними
спектральными плотностями Оди и GVH.
В общем случае алгоритмы СТОУ дают возможность получить
многомерный дискриминатор в рамках синтеза следящего измерителя
[48]. Однако такой подход, позволяя повысить точность оценивания на
единицы процентов, приводит к настолько существенному усложнению
алгоритмов функционирования, что становится весьма проблематичным
вопрос их практической реализации. Усложнение обусловлено тем, что
в таком случае приходится использовать алгоритмы нелинейной опти-
мальной фильтрации. Эти алгоритмы требуют вычисления коэффициен-
тов усиления невязок на каждом цикле, так как эти коэффициенты зави-
сят от текущих оценок. В то же время раздельно синтезируя дискрими-
натор и цепи вторичной обработки, можно практически без потери точ-
ности использовать существенно более простые алгоритмы линейной
фильтрации, которые более предпочтительны и с точки зрения обеспе-
чения сходимости процесса оценивания (см. §4.2).
Для синтеза оптимального измерителя на основе алгоритмов
СТОУ [48] необходимо иметь модели отслеживаемого и управляемого
процессов, модель наблюдений (измерений) и выбрать функционал
качества. В дальнейшем будем полагать, что измеритель оптимизирует-
ся на основе локальных функционалов качества (1.5). Синтез будет
выполняться в два этапа. На первом будут получены алгоритмы функ-
ционирования измерителя дальности и ее производных, базирующиеся
на наблюдении времени запаздывания отраженных сигналов. На втором
- алгоритмы работы измерителей скорости и ее производных, основан-
ные на наблюдении доплеровской частоты.
10.6.1. МНОГОКОНТУРНЬГЙ ИЗМЕРИТЕЛЬ ДАЛЬНОСТИ
И ЕЕ ПРОИЗВОДНЫХ С ИЗМЕРЕНИЕМ ВРЕМЕНИ ЗАПАЗДЫВАНИЯ
ОТРАЖЕННЫХ СИГНАЛОВ
Выбор и обоснование исходных моделей. Для перехвата сверх-
маневренных целей с использованием современных и перспективных мето-
дов наведения необходимо иметь оценки отслеживаемой дальности Дот,
скорости V0T и ускорения j0T сближения, а также оценку Vu проекции
скорости цели на линию визирования. Тогда модель отслеживаемого про-
цесса можно представить в виде системы дифференциальных уравнений:
д =v Мот vot’ Дот(0)_Дото; (10.27)
Хэт ОТ —а Цс , VOT(0)=VOTO; (10.28)
ас—^ас’ ас(0)=ас0 ; (10.29)
О^ц+^ац ’ ац(0)~ац() . (10.30)
Модель заданной части (управителя) дальномера должна учиты-
вать возможность устойчивого управления исполнительными устройст-
вами, определяемую условием управляемости (2.27), и обеспечения
режима памяти при кратковременных пропаданиях радиосигналов. Для
дальномера исполнительными устройствами являются генератор сле-
дящих стробов, входящий в состав УРС (см. рис. 10.2), и опорный гене-
ратор, формирующий сигнал опорной частоты для оптимального вре-
менного различителя. С учетом этих замечаний
Ay = Vy, Ду(0) = ДуО; (10.31)
Vy = bvuv4yv. V/0)^. (10.32)
В (10.27) (10.32) ас и ац собственное ускорение и ускорение цели по
линии визирования; а коэффициент, характеризующий маневренные
свойства цели; bv коэффициент эффективности сигнала управления uv;
£ас, £ац и ^yv центрированные гауссовские шумы с известными одно-
сторонними спектральными плотностями Gac, Gau и Gyv.
Использование более простой модели (10.29) для собственного
ускорения ас, по сравнению с моделью (10.30) для ускорения цели, оп-
равдано тем, что процесс (10.29) может измеряться акселерометром.
Поэтому неточности прогноза процесса (10.29) можно компенсировать
результатами его наблюдения. Отсутствие в модели фазовой координа-
ты для скорости цели определяется тем, что в СВС имеется оценка соб-
ственной скорости Vc ЛА. В результате проекцию скорости цели на
линию визирования можно оценить алгебраическим сложением оценок
проекций VOT и Vc. При выбранной модели состояния (10.27) (10.32)
измерения должны обеспечивать выполнение условия наблюдаемости
(2.25). Из этого условия следует, что для оценивания всех компонент
вектора состояния необходимо в каждой группе функционально связан-
ных координат наблюдать хотя бы наименьшие производные. Следова-
тельно, для оценивания (10.27) (10.32) как минимум нужно наблюдать
Дот и Ду. Кроме того, для возможности раздельной оценки ац и ас необ-
ходимо наблюдать ас. Информацию о Дот и Ду можно получить от дис-
криминатора (10.25) и от датчика управляемой дальности, а информа-
цию об ас от акселерометра. С учетом этих замечаний модель наблю-
даемого процесса представим в виде алгебраических уравнений:
2д=кд(Д0Т-Ду)+^ди ; (10.33)
гду ~КдуДу +^дуи’ (10.34)
2ас“"^ас^с^аси • (10.35)
Здесь гду и zac напряжения на выходе датчика сигнала заданной части
и акселерометра; кду и кас коэффициенты передачи измерителей; £дуп,
£аСП центрированные гауссовские шумы измерений с односторонними
спектральными плотностями Сдуи и GaciI. В общем случае в состав опти-
мальной РЭССН, синтезированной на основе алгоритмов СТОУ, входят
оптимальные фильтр и регулятор [48]. Поскольку исходные модели
(10.27) (10.35) линейные, а шумы гауссовские, то при квадратичных
функционалах качества задачи синтеза оптимальных фильтра и регуля-
тора могут решаться независимо.
Синтез оптимального регулятора. В составе измерителя даль-
ности и ее производных регулятор должен решать две задачи: выраба-
тывать сигнал управления, обеспечивающий бессрывное сопровожде-
ние сигнала цели следящими полустробами (см. рис. 10.36,г); формиро-
вать сигнал комбинированной обратной связи в оптимальный фильтр
(см. рис. 3.6). Для решения этих задач необходимо для заданной части
(10.31), (10.32), предназначенной для отслеживания процесса (10.27),
(10.28), при наличии наблюдений (10.33)—(10.35), сформировать сигнал
управления uv, оптимальный по минимуму функционала (1.5):
Дот Ду 411
У LVOT-VyJ[q21
4|2 Дот Ду
422 _ _ Vqt “ Vy
+ juX,dt
о
(10.36)
в котором qn, q 12=421 и q22 - коэффициенты штрафов за точность сле-
жения по дальности и скорости, a ku - коэффициент штрафа за сигнал
управления.
Сопоставляя (10.27), (10.28) и (10.31), (10.32) с (2.8) и (2.7), а
(10.36) с (1.5), будем иметь:
хт = [Дот Vot]T> Ху=1Ду Vy]T> U = UV, K=ku ,
Используя (10.37) в (3.35), получаем алгоритм функционирова-
ния оптимального регулятора:
«V =^(Д,Д)-^(Чт-Уу)=КдДЦ+К¥АУ, (10.38)
ku ku
где
ДД=Дот-Ду, AV=VOT-Vy (10.39)
ошибки слежения по дальности и скорости, а
Ka=bvq21/ku, Kv=bvq22/ku (10.40)
коэффициенты усиления ошибок слежения.
Анализ (10.38)-( 10.40) позволяет сделать следующие заключения:
регулятор представляет собой систему с ООС по всем управляе-
мым координатам Ду и Vy;
для функционирования регулятора необходимы оптимальные
оценки Дот, Ду и V0T, Vy;
сигнал управления зависит как от ошибок сопровождения по
дальности Дот Ду, так и ошибок по скорости VOI. Vy;
вес ошибок в сигнале управления определяется соотношением
штрафов за точность слежения и экономичность q2|/ku и q22/ku.
Следует отметить, что учет в (10.38) ошибок сопровождения по
скорости позволит сделать более устойчивым процесс сопровождения
маневрирующих целей.
Выбор коэффициентов штрафов функционала качества. Из
(10.38) (10.40) следует, что сигнал управления, а соответственно точ-
ность и экономичность регулятора зависят от соотношения штрафов
q2j/ku и q22/ku за точность слежения и управляющие сигналы. Конкрет-
ные значения этих штрафов будем искать по методике, изложенной в п.
3.5.1. Эта методика позволяет найти значения штрафов, обеспечиваю-
щих максимально высокую точность регулятора в установившемся ре-
жиме при заданных ограничениях сигналов управления uv<Uaon и пос-
тоянной времени ТД<ТДОП отработки ошибок захвата
ЛД0=Дот0-Ду0, AA0=Vo.t0-Vy0. (10.41)
В процессе реализации этой методики будем полагать, что вы-
полняются следующие условия:
в момент захвата имеют место максимально возможные ошибки
ДДо=ДДП1ах, AV0=AVmax одного знака;
известны значения допустимого сигнала управления идоп и пре-
дельно допустимой постоянной времени регулятора Тдоп;
все виды возмущений в моделях (10.27) (10.35) отсутствуют, в
результате чего Дот =Д0Т, Ду=Ду, a VOI.=VOT, Vy=Vy;
закон изменения Дот определен гипотезой движения с постоянной
скоростью, при которой
Дот=Уот=0. (10.42)
Смысл и правомочность первых трех допущений разъяснены в п.
3.5.1. Последнее допущение обусловлено необходимостью уравнивания
размерностей векторов хт и ху. Поскольку сигнал управления (10.38)
(10.40) зависит не от конкретных значений коэффициентов штрафов, а
от их соотношений, то в дальнейшем будут выбираться не сами коэф-
фициенты штрафов, а непосредственно коэффициенты Кл и Kv передачи
ошибок слежения.
Используя (10.27), (10.42) и (10.31), (10.32) в (3.48), составим
уравнение для ошибок слежения:
412 АД
q22]jbv
ДД = ДУ; (10.43)
ДУ=-ЬуКдДД-ЬуКУду> О °-44)
где были учтены соотношения (10.37). Продифференцировав (10.43) по
времени с учетом (10.44), получим
ДЦ+ЬУК v ДД+ЬУКД ДД= 0. (10.45)
Из этого уравнения следует, что текущие ошибки по дальности
АД и скорости AV = АД, а также устойчивость регулятора зависят толь-
ко от параметров самого дальномера (bv, Кд и IC).
Переходные процессы в регуляторе, определяемые параметрами
дальномера, можно исследовать, проанализировав решение однородно-
го уравнения (10.45):
ДД= С^'+Сге*2', (10.46)
где С] и С2 определяются начальными ошибками АД0 и AV0, a Xj и Х2
вычисляются по формуле (3.49):
; о °-47)
X2=-0,5bvKv-0,5-J(bvKv)2-4bvKfl . (10.48)
Анализируя (10.46)—(10.48), можно прийти к следующим заклю-
чениям. Общее решение (10.46) однородного уравнения (10.45) свиде-
тельствует о том, что для обеспечения максимально высокой точности
(нулевых ошибок) в установившемся режиме достаточно выполнить
условия Xj<0 и Х2<0.
Во избежание перерегулирования необходимо, чтобы Xj и Х2 бы-
ли вещественными, т.е. чтобы
bv(Kv)2>4K?. (10.49)
Поскольку bv>0, Кд>0 и Kv>0, то выполнение условия (10.49) при-
водит к неравенству Л,|< Х2. В такой ситуации постоянная времени Тд
дальномера с достаточной для практики точностью определяется наи-
меньшим по модулю корнем
-X^l/Тд, (10.50)
значение которого зависит от параметров bv, Кд и Kv регулятора. Кроме
того, значения Кд и Kv должны быть такими, чтобы (10.38) удовлетворя-
ло условию (3.50). Используя наихудший случай: иу=идоп, ДДо=ДДтах,
ДУ0=ДУ1пах и ТД=ТДОП, на основании (10.38) получаем
Kv = идоп~КДдДо (10.51)
AV0
Подставив (10.50) и (10.51) в (10.47), находим
кд = ЬуТдопидоп-АУ0
ЬуТдоп(ДД0+ДУ0Тдоп)
j^v = ЬуТд0пидоп+ДДо
Ь Ддоп(ДД0+ДУ0Тдоп)
(10.53)
Анализ (10.52) и (10.53) позволяет сделать следующие выводы.
Выбранные значения Кд и Kv реализуют максимальную точность
в установившемся режиме (ДД=0, ДУ=0) слежения при заданных огра-
ничениях сигнала управления и постоянной времени дальномера. При
этом Кд и Kv зависят не только от параметров bv следящей системы и
накладываемых на нее ограничений идоп, Тдоп, но и от точности устрой-
ства поиска и обнаружения радиосигналов, которое обусловливает пер-
воначальные ошибки ДДо и ДУ0.
В рассматриваемом дальномере можно реализовать лишь посто-
янные времени Тдоп>ДУо/(Ьуидоп). Это свидетельствует о том, что при про-
чих равных условиях для повышения быстродействия дальномера необхо-
димо увеличивать коэффициент Ьу усиления управляющего сигнала и его
допустимое значение идоп. Кроме того, необходимо повышать точность
захвата сигнала цели по скорости, уменьшая тем самым ДУ0.
Синтез квазиоптимального фильтра. Синтез фильтра дально-
мера будет осуществляться на основе моделей (10.27) (10.35), опреде-
ляющих обобщенный вектор состояния
*=1дОг VOT ас ац Ду Vy]r (10.54)
и вектор измерений
|?Д ^ду Zac] .
Поскольку модели линейные, шумы белые, то для синтеза фильт-
ра можно использовать алгоритм оптимальной линейной фильтрации
(3.61)—(3.63), для реализации которого необходимо решать систему
уравнений размерностью (3.65)
N1=N+0,5N(N+l)=6+0,5-6-7=27, (10.55)
где N=6 - размерность обобщенного вектора состояния (10.54).
Обратим внимание на то, что в составе обобщенного вектора со-
стояния (10.54) можно выделить компонент собственного ускорения
(10.29), которое измеряется акселерометром (10.35). Это позволяет
сформировать оценку ас по модели (10.29) на основе измерений (10.35)
независимо от других фазовых координат. Точно так же в составе
(10.54) можно выделить группу управляемых координат Ду и Vy (10.31),
(10.32), для которых можно сформировать независимые оценки Ду и
Vy на основе измерения (10.34).
С учетом отмеченных особенностей исходный вектор состояния
(10.54) можно разбить на три подвектора: хот=[Дот V0T а01.]',
ху=[цу Vy ]', х;,=ас, для каждого из которых может быть синтезирован
свой отдельный фильтр. Такой прием, называемый декомпозицией
(расщеплением) фильтра, дает возможность практически без потери
точности определить все требуемые оценки при существенно меньшем,
по сравнению с (10.55), количестве решаемых уравнений
Нф1=3+(3-4)/2+2+(2-3)/24-1+(1-2)/2=16, что существенно упрощает про-
цедуру вычисления оценок и структуру фильтра. В связи с этим ниже
раздельно синтезируем три фильтра:
ускорения на основе уравнений
ЭсЧас’ ас(0)=ас0; (10.56)
Zac~касас+^аси ’ (10.57)
фильтра управителя по моделям
Ду=Уу, Ду(0)=Ду0,
. ’ (10.58)
Vy=bvuv4y, Vy(0)=Vy0,
2ду— КдуДу~*^эдуи (10.59)
и фильтра отслеживаемых координат, базирующегося на моделях
ДОТ=УОТ , ДДОЬ/и,
VOT=au+ac, VOT(0)=VOTO, (10.60)
V=-aau+U- ац(0)=ац0,
zot—гд'*’КдДу—ЕдДот+^ди] • (10.61)
Здесь (10.60) и (10.61) получены из (10.27) (10.30) и (10.33) с учетом
сформированных в других фильтрах оценок ас и Ду; £ДИ| центриро-
ванный гауссовский шум с односторонней спектральной плотностью
6ди1=6дн+Сду, где G^y спектральная плотность ошибки оценивания
процесса Ду.
Поставив в соответствие (10.60) с (2.13) и (10.61) с (2.16), получим
(10.62)
Подставив (10.62) в (3.61) (3.63), можно определить:
Дот “ Vqt +KOT1^ZOT » Дот(0)“ДотО »
VOT~ац+ас+кот2 от » Vot(O)“YdtO »
ац= - а ац + kot3Azot , ац(0)=0,
где
AzOT = Zqt — Кд Дот = %д ~~ Кд (Дот — Ду),
(10.63)
(10.64)
a KOTi (i=l,3) переменные коэффициенты усиления невязки (10.64),
вычисляемые по формулам (3.62) и (3.63).
Для (10.58) и (10.59) ху=[цу Vy ]r, u=uv, Ву=[о bj,
0 1
0 0
F =
у
г = гду , Н=[кду 0]. Тогда
Ду = Vy + ку1 Az;jy, Ду(0) = гду(О)/кду ;
Vy = bvuv + ку2 Агду, Vy(0)=Vy0,
где ку। и кУ2 - коэффициенты усиления невязки
△гду — гду “ КдуДу ’
(10.65)
(10.66)
вычисляемые по формулам (3.62) и (3.63).
Аналогично на основе (10.56) и (10.57) можно получить алгоритм
функционирования фильтра ускорения:
a =KnAzn, ar(0)=z.lr(0)/Kqr;
V u d ’ V X / <KA / dC ’
Az.
4 du aU U
(10.67)
(10.68)
Соотношения (10.31), (10.32), (10.38), (1O.33)-( 10.35) и (10.63)-
(10.68) и определяют алгоритм функционирования квазиоптимального
измерителя дальности и ее производных. Квазиоптимальность алгорит-
ма вызвана следующими причинами. В результате декомпозиции ис-
ходного вектора состояния (10.54) в полученных фильтрах были утра-
чены взаимные связи и корректирующие поправки, обусловленные
невязками (10.64), (10.66) и (10.68), вычисленными в других фильтрах.
Кроме того, в измерителе (10.33) полагалось K;i=const, в то время
как крутизна временного дискриминатора является функцией дально-
сти. Следует отметить, что полученный алгоритм фильтрации основан
на использовании коэффициентов усиления невязок, вычисленных для
вполне определенной (усредненной) статистики возмущений. При из-
менении условий функционирования, связанных с типом сопровождае-
мой цели, дальностями до нее и видами ее маневров, принятая стати-
стика не будет соответствовать той, которая была заложена при синтезе
фильтра. В результате реальная точность оценивания ухудшается по
сравнению с теоретической, рассчитанной по формуле (3.63) для вы-
бранной статистики.
Для всех алгоритмов фильтрации начальные условия выбираются
по правилам, изложенным в п. 3.6.1. В заключение отметим, что в рас-
сматриваемом алгоритме только в первичных датчиках (10.33)-(10.35)
используются аппаратурные средства, а все остальные операции могут
выполняться алгоритмически в БЦВМ. Рассмотренные алгоритмы мож-
но рекомендовать для применения как в БРЛС, так и АРГС для сопро-
вождения интенсивно маневрирующих целей.
Структурная схема дальномера. Структурная схема измерителя
дальности и ее производных, приведенная на рис. 10.8, получена на ос-
новании уравнений первичных измерителей (10.33) (10.35), заданной
части (управителя) (10.31), (10.32), алгоритмов формирования сигналов
управления (10.38) (10.40) и оптимальных оценок (10.63) (10.68). На
этой схеме: ПРМ радиолокационный приемник отраженных импуль-
сов; ЧД и ВР - частотный детектор и временной различитель оптималь-
ного многомерного дискриминатора, формирующего наблюдаемые сиг-
налы (10.25) и (10.26); УРС устройство расстановки стробов, управ-
ляемое сигналом Ду с выхода управителя (10.31), (10.32) в виде двух
интеграторов И1 и И2; ОГ опорный генератор, управляемый сигналом
Vy и используемый для подстройки частоты опорных стробов; УНОП и
УНУП соответственно усилители невязок отслеживаемого и управ-
ляемого процессов, реализующие в (10.63) и (10.65) коэффициенты кот!,
кОт2, кот3 и ку1, ку2; ЭОП и ЭУП экстраполяторы отслеживаемого и
управляемого процессов, обеспечивающие в (10.63) и (10.65) прогноз
оцениваемых процессов в соответствии с выбранными моделями со-
стояния (10.27) (10.32); ИОП, ИУП и ИУ интеграторы, выполняющие
операции интегрирования правых частей уравнений фильтрации (10.63),
(10.65) и (10.67); Vc оценка проекций собственной скорости на ЛВ,
Рис. 10.8
поступающая из СВС; Vu - оценка проекции скорости цели на линию
визирования, используемая для экстраполяции пространственного по-
ложения цели.
Рассматриваемый дальномер представляет собой многомерную,
нестационарную, многоконтурную систему. Многомерность обуслов-
лена наличием нескольких входных (гд, гду, zac) и нескольких выходных
сигналов. При этом часть выходных сигналов в виде оценок Дот, V0T ,
ац и Уц поступает к потребителям информации, а часть - в виде сигна-
лов ас, Ду, Ду, V , Vy используется для внутреннего потребления.
Нестационарность дальномера обусловлена наличием в фильтрах пе-
ременных коэффициентов усиления невязок кот1, Кот2, кот3, куЬ ку2 и ка,
которые изменяются от своих наибольших значений в момент начала
работы до наименьших в установившемся режиме. Такое изменение
коэффициентов дает возможность быстро отработать начальные ошиб-
ки захвата цели за счет широкой полосы пропускания фильтров. В то же
время существенно более узкая полоса в установившемся режиме по-
зволяет обеспечить хорошее сглаживание случайных возмущений.
В рассматриваемом дальномере можно выделить несколько ти-
пов контуров. Три из них, типичные для фильтровых систем, образова-
ны за счет ООС по наблюдаемым фазовым координатам в процессе
формирования невязок Az0T (10.64), Агду (10.66) и Aza (10.68). Четвертый
замыкается на ВР посредством ООС через управитель, УРС и ОГ. В нем
используется сформированный в регуляторе сигнал управления uv
(10.38), (10.39), реагирующий на ошибки не только по дальности, но и
по скорости. Специфичен пятый контур, образованный цепями, по ко-
торым в фильтр управителя вводится комбинированный управляющий
сигнал bvuv, учитывающий эволюции наблюдаемых Дот и Ду и ненаблю-
даемых V0T и Vy координат.
Многоконтурный тип следящей системы позволяет разрешить
противоречия между требованиями одновременного обеспечения высо-
кой точности, быстродействия и устойчивости. Высокие точность и
быстродействие, обеспечиваемые фильтром отслеживаемого процесса,
обусловлены следующими особенностями дальномера. Во-первых, к
потребителям поступают непосредственно оценки Д01 и V0T, а не их
запаздывающие аналоги Ду и Vy, как это имеет место в одноконтурных
системах. Во-вторых, оценки Дот и V0T формируются по более точным
моделям (10.27)—(10.30), в которых учитываются маневры не только
самого ОУ (ас), но и цели (ац), что особенно важно при сопровождении
206
интенсивно маневрирующих целей. В третьих, оценки Даг, VOT и ац
вычисляются по более совершенным алгоритмам калмановской фильт-
рации, которые отличаются от а, р алгоритмов переменными, адаптив-
ными к априорной статистике коэффициентами усиления невязок.
Высокое быстродействие предопределено исключением из цепей
формирования оценок Дот, V0l и ац наиболее инерционной части УРС
и ОГ. Проведенные исследования показали, что постоянная времени
отработки начальных ошибок захвата в фильтре отслеживаемого про-
цесса на один два порядка меньше, чем в одноконтурных следящих
дальномерах с двумя интеграторами.
Высокая устойчивость сопровождения цели следящими стробами
обеспечивается контуром управителя за счет использования оптималь-
ного сигнала управления (10.38) и (10.52), (10.53). Спецификой такого
управления является то, что в нем наряду с ошибками по дальности
используется и корректирующая поправка, обусловленная ошибками по
скорости. Использование такой поправки адекватно снижению порядка
астатизма управителя, что собственно и является причиной повышения
запаса устойчивости. Кроме того, учет в сигнале управления ошибок по
скорости предотвращает выход динамических ошибок ДД за пределы
линейного участка дискриминационной характеристики ВР при манев-
рах цели и ОУ. Эта особенность, наряду с оптимизацией Кд и Kv, обес-
печивает бессрывное сопровождение сигнала цели во всем реальном
диапазоне скоростей и ускорений сближения. Поскольку к потребителю
поступают оценки из фильтра отслеживаемых координат, а не из упра-
вителя, то последнему не предъявляется высоких требований к точности
отслеживания следящими стробами сигналов цели. Вполне достаточно,
чтобы ошибка ДД не превышала половины ширины дискриминацион-
ной характеристики ВР. В такой ситуации на вход формирователя оце-
нок Дот, V0T и ас по-прежнему будут поступать результаты измерений
z4, обеспечивая его функционирование. В то же время в контуре упра-
вителя может быть сделан основной упор на обеспечение устойчивости,
а не точности. Кроме того, выбирая коэффициенты Кд и Kv в (10.38) по
правилу (10.52), (10.53), учитывающему реальные ограничения, можно
избежать нелинейных режимов работы регулятора, что также повышает
его устойчивость. Устойчивость формирования оценок в фильтрах от-
слеживаемых координат в маневренном воздушном бою обеспечивается
не только устойчивой подачей сигналов za, но и введением корректи-
рующей поправки ас, учитывающей маневр. Это особенно важно для
измерителей, входящих в состав АРГС ракет «в-в», поскольку после их
пуска на этапе разгона возникают большие собственные ускорения ас.
Если не учитывать этого ускорения, то ошибка АД может выйти за пре-
делы линейного участка дискриминационной характеристики, что при-
водит к срыву сопровождения цели, а соответственно и срыву наведе-
ния. Учет ас необходим и в дальномерах РЛС, установленных на ис-
требителях со сверхманевренными свойствами.
Устойчивость фильтра управителя повышается за счет введения в
него комбинированного сигнала коррекции bvuv. В рассмотренном дально-
мере необходимо отметить очень высокую степень избыточности инфор-
мации. Так, информация о дальности до цели содержится в оценках Дот,
Ду и в сигналах Ду на выходе управителя. Информация о скорости сбли-
жения имеется в V0T, Vy и Vy. Такая избыточность позволяет применять
высокоэффективные алгоритмы защиты от различного рода помех.
10.6.2. Многоконтурный измеритель скорости и ее производных
С ИЗМЕРЕНИЕМ ДОПЛЕРОВСКОЙ ЧАСТОТЫ
Рассматриваемый измеритель предназначен для формирования оце-
нок скорости и ее производных в процессе сопровождения интенсивно
маневрирующих целей. Сопровождение таких целей требует оценивания не
только скорости и ускорения, как это было принято в рассмотренных ранее
измерителях (§10.3—10.5), но и производной ускорения, которая требуется
для повышения точности и устойчивости сопровождения и для констатации
факта начала интенсивного маневрирования.
Для синтеза измерителя скорости и ее производных используем
алгоритмы СТОУ по методике, изложенной в п. 10.6.1. Эта методика
позволяет для заданной части (управителя)
Vy = Jy, Vy(0)=V 0;
у у (10.69)
jy — 6jU j + jy, jy(O)-jyO>
предназначенной для отслеживания процесса
V0T ~ Jot-ац+ас, VOT(0)-VOTo >
ас Сс, ас(0) ас0 ,
ац=Сц, ац(0)=ац0 ; (10.70)
Сс=^с , Сс(0)=Сс0;
Сц=-ацСц+^сц, Сц(0)—Сц0 ;
при наличии наблюдений
Zv~ Kv(VoT~Vy)"H^vH ’
zvy—Kvy Vy+^ууи» (10.71)
Z ас —К ас а с аси
сформировать сигнал управления Uj, оптимальный по минимуму ло-
кального функционала качества (1.5)
1=Му
Vor"Vy qV| ।
JoT-Jy _Qv21
Qv12 V0T"Vy
Qv22jL Jor"Jy
t
4- J Uj Kjdt
0
(10.72)
В соотношениях (10.69) (10.72): jy управляемое (отслеженное)
ускорение сближения; bj коэффициент усиления сигнала управления
ац, ас и Сц, Сс соответственно проекции ускорений цели и ОУ и их
производных на ЛВ; ац коэффициент учитывающий маневренные
свойства цели; zv, zvy и zac измеренные сигналы на выходе частотного
дискриминатора (10.26), датчика управляемой скорости (управляемого
гетеродина) и акселерометра; ку, куу и кас коэффициенты передачи
датчиков; £jy, £с, £сц и £уи, £ууН, £аси центрированные белые шумы со-
стояния и измерений с известными односторонними спектральными
плотностями; qvn, qvi2=qV2i и qv22 коэффициенты штрафов за точность
слежения по скорости и ускорению; Kj коэффициент штрафа за управ-
ляющий сигнал.
Состав вектора управляемых координат (10.69) выбирают, исходя
из необходимости формировать сигнал управления с учетом ошибок как
по скорости, так и по ускорению, и с учетом обеспечения памяти по
ускорению при кратковременных пропаданиях радиосигналов. При
выборе состава вектора отслеживаемых координат (10.70) принималось
во внимание требование устойчивой селекции по доплеровской частоте
(V0T) сигналов, отраженных от интенсивно маневрирующих целей, и
необходимость формировать оценки VO1. , j0T, ас, ац, Сс и Сц. Оцен-
ки V01 могут быть использованы в современных и перспективных ал-
горитмах наведения и помехозащиты, информация о j0l, ас, ац, Сс и
Сц необходима для повышения точности и устойчивости оценивания
скорости при интенсивном маневрировании ОУ и цели, а также при
экстраполяции ее пространственного положения. Кроме того, эти оцен-
ки также употребительны в алгоритмах помехозащиты, особенно от
уводящих по дальности и скорости помех, и для констатации факта
начала маневра цели. Поскольку все исходные модели линейные, шумы
гауссовские, функционал качества квадратичный, то в соответствии с
выводами теоремы разделения (п. 2.1.3) оптимальный регулятор и
фильтр будем синтезировать раздельно.
При синтезе регулятора для уравнивания размерностей векторов
управляемых и отслеживаемых координат будем полагать, что в (10.70)
ас=0 и ац=0 при асо=0, ацо=0. Тогда, сопоставляя (10.69) с (2.7), (10.70)
с (2.8) и (10.72) с (1.5), получаем
Подставляя (10.73) в (3.35), определяем алгоритм функциониро-
вания оптимального регулятора
Ь ;С1 v91 Л Л *
Uj = ^7~~(VOT-Vy)+^——(j0T-jy)=KvAV+KJAj, (10.73)
Kj Kj
где AV= Vor-Vy и △j=j0T-jy - ошибки слежения по скорости и уско-
рению, a Kv=bjqV2i/kj, KJ==bJqv22/kJ - коэффициенты передачи регулятора
по ошибкам слежения. Если использовать методику оптимизации коэф-
фициентов Кд и Kv, изложенную в п.п. 3.5.1 и 10.6.1, то можно найти их
значения:
Kv - Ь/ГудЦуд “ А)о
~ Ь|Туд(ДУ0 + Д)0Туд) ;
(10.74)
Kj_ Ь/Г2уДЦуд+ДУ0
Ь,Туд(ДУ0+Д)0Т¥Д) ’
обеспечивающие минимальные ошибки слежения в установившемся
режиме при заданных ограничениях сигнала управления Uj<UV4 и посто-
янной времени TV<TVA отработки максимально возможных ошибок за-
хвата по скорости AV0 и ускорению Aj0.
(10.75)
(10.76)
(10.77)
(10.78)
(10.79)
Анализ (10.75) позволяет сделать следующие заключения. Значе-
ния коэффициентов Kv и KJ зависят не только от параметров заданной
части (bj) и накладываемых на регулятор ограничений (Uw Туд), но и от
точности устройства поиска и захвата сигнала цели по доплеровской
частоте, предопределяющего ошибки AV0 и Aj0. Следует отметить, что в
полученном регуляторе можно реализовать лишь постоянные времени,
удовлетворяющие условию Tvfl>Ajo/bjUva.
Для упрощения процедуры формирования оценок всех требуе-
мых фазовых координат обобщенного вектора состояния (10.69), (10.70)
x=[voT ас ацСс Сц Vy jy]1 используем принцип декомпозиции, рассмот-
ренный в п. 10.6.1. В результате будут отдельно синтезированы фильт-
ры собственного ускорения на основе уравнений
ас Сс, ас(0) ас0 ,
Сс=^с, Сс(0)=Сс0;
zac"~Kac^c^~^acH >
управителя, использующего модели
Vy=Jy> Vy(0)=Vy0;
jy“bjUj+^jy, jy(0)~jy0?
ZVy~Kvy Vy+^vyH »
отслеживаемых координат, базирующегося на
VOT=au+ac> VOT(0)=VOT0 ;
Сц, Яц(0) ац0,
Сц="ацСц + ^сц> Сц(0)—Сцо;
zvor = ZV + кЛу = KV VOT + ^VHl • (10.80)
В моделях (10.80) и (10.81) ac и Vy оценки собственного ускорения и
отслеженной скорости, полученные в первых двух фильтрах; шум изме-
рений £vhi отличается от шума £уи (10.71) на величину добавок, вызван-
ных ошибками оценивания Vy.
Использование для выбранных трех типов исходных моделей ал-
горитма оптимальной линейной фильтрации дает возможность сформи-
ровать оценки:
в фильтре собственного ускорения
ас = Сс + кс1 Aza, ас(0)= zac (0) / кас;
(10.81)
Сс = KC2Aza, Сс(0) = Сс0;
Az=zac-Kaca с; (10.82)
cl dv dv V 7 v '
в фильтре управителя
Vy — jy +kv jAzvy, v (0)-V 0,
Л / (10.83)
jy — Ь jU j + К Vy2 Az Vy, jy(0)-jy05
Azvy=zVy-KvyVy, (10.84)
где Uj вычисляются no (10.74);
1ZA
ФИЛЬТР ОТСЛЕЖИВАЕМОГО
ПРОЦЕССА
BP
чд
I МНОГОМЕРНЫЙ '
I ДИСКРИМИНАТОР
AZvot
ДАТЧИК
УГ «г* И2 <
Zyy
Ф AZVyi
0—4[унуп
Kvy
РЕГУЛЯТОР
=ф|И0П
Сц
УН0П
son
J У
HI
J от
' ^cO
'УО
Ку
Vot
------а-
VIFJm
2>ИУП
Уот о Уот
Jyo
УНУ
ЭУ «
ФИЛЬТР УСКОРЕНИЯ
J
Рис. 10.9
УПРАВИТЕЛЬ
эуп К
Jy
ФИЛЬТР УПРАВИТЕЛЯ
ДАТЧИК
ac
У
Z
в фильтре отслеживаемых координат
VOt ац+ас+кУОТ1 AzV0T, Vot(0)=Vot0;
Сц “ЬКуот2 △^vot ’ ац(0)=0; (10.85)
-
С ц а цС ц "Ьк У0Т з Az У0Т, Сц(0)=0.
Здесь
Azvcn=zv-Kv(V0T-Vy), (10.86)
а ас и Vy формируются в фильтрах (10.82) и (10.84). Соотношения (10.69),
(10.71), (10.74) и (10.82) (10.87) и определяют алгоритм функционирования
квазиоптимального измерителя скорости и ее производных.
Структурная схема, соответствующая этому алгоритму, приведе-
на на рис. 10.9, где УНУ усилитель невязок ускорений; ЭУ и ИУ
экстраполятор и интегратор фильтра ускорения. Остальные обозначе-
ния те же, что и в схеме дальномера на рис. 10.8. С поправкой на кон-
кретный вид фазовых координат для алгоритма и структурной схемы
справедливы все выводы, сделанные в п. 10.6.1.
ГЛАВА 11. ИЗМЕРИТЕЛИ УГЛОВ
И УГЛОВЫХ СКОРОСТЕЙ ЛИНИИ ВИЗИРОВАНИЯ
В РЕЖИМЕ СОПРОВОЖДЕНИЯ ОДНОЙ ЦЕЛИ
11.1. ПРИНЦИПЫ ПОСТРОЕНИЯ И КЛАССИФИКАЦИЯ
УГЛОМЕРОВ
В режиме СОЦ измерители углов и угловых скоростей ЛВ, именуе-
мые для простоты угломерами, предназначены для непрерывной про-
странственной селекции цели и информационного обеспечения процессов
наведения ЛА. Анализ алгоритмов траекторного управления, ра-
ссмотренных в п.п. 7.3.1, 7.3.2, §7.4, п.п. 7.5.2-7.5.5, показывает, что в об-
щем случае в угломерах должны формироваться оценки углов, угловых
скоростей ЛВ и поперечных ускорений цели в плоскостях управления.
Все перечисленные задачи решаются в угломерах с помощью ко-
мплексной следящей системы, в состав которой входят чувствительный
элемент (пеленгатор), управитель, исполнительное устройство (привод
антенны), датчики и вычислитель корректирующих сигналов.
Автоматическая селекция цели по направлению выполняется за
счет направленных свойств чувствительных элементов (например на-
правленных антенн), которые с помощью специальной следящей систе-
мы сопровождают цель по угловым координатам. При этом на вход
ПРМ поступают сигналы, отраженные лишь от целей, расположенных в
пределах диаграммы направленности антенны, что, собственно, и по-
зволяет обнаруживать эти цели и измерять их координаты.
Углы, угловые скорости и поперечные ускорения целей оце-
ниваются либо в управителях следящих систем, либо в специальных
фильтрах, которые могут выполняться как аппаратурно, так и алгорит-
мически в БЦВМ.
В угломере пеленгаторы вырабатывают сигналы, пропорциональные
угловой ошибке сопровождения цели чувствительным элементом. На рис.
11.1 эта ошибка в вертикальной плоскости определяется углом Асрн между
равносигнальным направлением (РСН) антенны и направлением на цель.
На этом рисунке Оа и Оц точки расположения ОУ и цели в невращающейся
системе координат XoOaYo, связанной с антенной; ОаХоУ - продольная ось
ЛА; ОаХа - равносигнальное направление; ев и <рцв - угол визирования и
214
бортовой пеленг цели; <рав - угол
поворота антенны относительно
продольной оси ЛА; О - угол
тангажа. Управители, наряду с
формированием оценок, преобра-
зуют сигналы пеленгаторов в
управляющие сигналы, с помощью
которых привод (исполнительное
устройство) поворачивает чувст-
вительный элемент до тех пор,
пока не выполнится условие
Дфв=0. Рис. 11.1
В угломерах ДКС обеспечивают: развязку антенны от угловых коле-
баний ЛА; улучшение динамических свойств следящей системы; формиро-
вание оценок угловой скорости ЛВ при маневрировании ОУ. В качестве
ДКС чаще всего используются гироскопические приборы и датчики пара-
метров собственного движения (ДПСД), к которым относятся измеритель
путевой и воздушной скорости, а также акселерометры.
Суть развязки состоит в том, что независимо от угловых коле-
баний ЛА тем или иным способом сохраняется пространственная ори-
ентация антенны, а соответственно и возможность получения от-
раженных сигналов от вполне определенной цели.
Улучшение динамических свойств следящей системы при введении
корректирующих сигналов обусловлено повышением ее чувствительности
к малым входным воздействиям, снижением перерегулирований в процессе
их отработки и расширением диапазона угловых скоростей, в котором уг-
ломер обеспечивает бессрывное сопровождение целей.
Необходимо отметить важную роль гироскопических приборов в
формировании оценок угловой скорости ЛВ маневрирующих ЛА. Из
рис. 11.1 видно, что Е^фцв+О. Тогда угловая скорость линии визирования
«в=ёв=фцв+0 = соцв+юд. (11.1)
Если наводимый ЛА не маневрирует, то O=const, д=соо=0 и
со^сОцв можно измерить угломером без гироскопических приборов. Если
же ОУ маневрирует, то O^const, и в угломере обязательно
должна учитываться составляющая со^, измеряемая (оцениваемая) с
помощью гироскопа. Аналогичный вывод можно сделать и для горизон-
тальной плоскости. В вычислителе корректирующих сигналов все сиг-
налы коррекции пересчитываются в соответствующем масштабе к сис-
теме координат, принятой в угломере.
Угломерные устройства классифицируют по типам пеленгаторов,
приводов и ДКС. По типу пеленгаторов выделяют радиолокационные,
тепловые, лазерные и телевизионные угломеры [47]. Среди радиолока-
ционных различают пеленгаторы с последовательным и параллельным
способами формирования РСН. В последнем случае пеленгаторы часто
называют моноимпульсными.
Приводы антенн бывают электромеханическими, гидравлически-
ми и гироскопическими. Электромеханические приводы представляют
собой двигатели переменного или постоянного тока, функционирующие
совместно с порошковыми муфтами. Гидравлические приводы, позво-
ляющие реализовать очень большие усилия, дают возможность обеспе-
чить очень высокое быстродействие. Их недостатками являются слож-
ность эксплуатации и низкая живучесть, обусловленные наличием тру-
бопроводов (шлангов) с рабочей жидкостью. Гироскопические приводы
обеспечивают хорошую стабилизацию антенны в пространстве при уг-
ловых колебаниях ЛА, однако могут поворачивать антенны лишь с ма-
лой массой и небольшими габаритами.
В зависимости от вида корректирующего сигнала, используемого в
угломере, различают позиционную (по углу) и скоростную (по угловой
скорости) виды коррекции. В первом случае источником информации об
угловом положении ЛА является позиционный гироскоп, измеряющий
углы О и V тангажа и рыскания (см. рис. 11.1). Во втором случае - скорост-
ной гироскоп, называемый также датчиком угловой скорости, который
измеряет соо= О и (0^= ф . Если позиционный гироскоп выполняет функции
лишь измерителя (индикатора) $ и у, то говорят о позиционной коррекции
с индикаторной стабилизацией. Если гироскоп играет еще и роль привода
антенны, то имеет место силовая стабилизация. При скоростной коррекции
обычно используется индикаторная стабилизация.
Поскольку по своей конструкции и динамическим свойствам уг-
ломеры, работающие в различных плоскостях, идентичны, то угломер-
ные каналы будем рассматривать для одной плоскости.
11.1.1. Угломер с позиционной коррекцией
И ИНДИКАТОРНОЙ СТАБИЛИЗАЦИЕЙ
Обобщенная структурная схема такого угломера показана на
рис. 11.2. В этом угломере в качестве ДКС используется позиционный
гироскоп (ПГ), измеряющий угловое положение продольной оси ЛА в
невращающейся системе координат, и датчики параметров собственно-
го движения ДПСД. Функции вычислителя корректирующих сигналов
выполняют преобразователь, преобразующий измеренный ПГ угол 13н
(у„) в напряжение u# (u^), и вычислитель, пересчитывающий измерен-
216
Рис. 11.2
ные параметры собственного движения в напряжение илвс, пропор-
циональное углу поворота ЛВ за счет собственного перемещения ОУ. В
качестве пеленгатора обычно используют моноимпульсные устройства,
позволяющие мгновенно сформировать напряжение ид, пропорциональ-
ное углу отклонения цели от РСН. На рис. 11.1 этот угол характеризует-
ся величиной Дфв. Особенности построения пеленгаторов различных
типов подробно рассмотрены в [22].
Управитель, состоящий из одного или двух интеграторов И и
сумматоров 1, 2 и 3, определяет порядок астатизма следящей системы, а
соответственно и ее возможности сопровождения маневрирующих це-
лей, в том числе и при кратковременном пропадании входных радио-
сигналов. Привод включает в себя усилитель мощности (УМ), двигатель
ДВ и датчик сигналов обратной связи (ДОС).
В зависимости от частных решаемых задач в угломере можно
выделить контуры автосопровождения цели и стабилизации.
В состав контура автосопровождения входят последовательно со-
единенные пеленгатор, управитель и привод антенны. При отклонении
цели от РСН на выходе пеленгатора появляется напряжение рассогласова-
ния ид. Это напряжение через управитель поступает в привод антенны,
который поворачивает антенну так, чтобы ид—>0. Двойными штриховыми
линиями на рис. 11.2 и далее отображаются механические связи.
Контур стабилизации предназначен для развязки антенны от уг-
ловых колебаний ЛА и улучшения динамических свойств угломера в
целом. В состав этого контура входят датчики и вычислители корректи-
рующих сигналов, сумматоры 1, 2 и 3 и привод антенны. При повороте
корпуса ЛА в той или иной плоскости управления (например, верти-
кальной) ПГ сохраняет ориентацию своих измерительных осей в про-
странстве. Это дает возможность измерить мгновенное приращение
углов, характеризующих пространственное положение продольной оси
ОУ. Измеренные значения приращений (например, Ои) преобразуются в
напряжения (и$) в масштабе, принятом в контуре автосопровождения.
Это напряжение усиливается в УМ и поступает в ДВ, который повора-
чивает антенну на угол, равный приращению угла поворота корпуса ЛА,
но в противоположную сторону. В результате антенна сохраняет свою
пространственную ориентацию несмотря на угловые колебания ОУ.
Динамические свойства угломера улучшаются также за счет до-
полнительных корректирующих сигналов илвс и иос, вводимых в контур
автосопровождения через сумматоры 2 и 3. Под действием илвс двига-
тель поворачивает антенну на угол флвс изменения положения линии
визирования, обусловленный собственным движением ОУ. Это позво-
ляет отслеживать в контуре автосопровождения не бортовые пеленги
цели, а только их приращения относительно углов флвс. В результате при
той же полосе пропускания этого контура можно уменьшить динамиче-
скую ошибку. Поскольку двигатель ДВ по своим свойствам адекватен
интегратору, то с помощью иос, сформированного в ДОС, можно сни-
зить порядок астатизма следящей системы, а соответственно повысить
устойчивость слежения.
Следует отметить, что скорость угловых колебаний ЛА существенно
превышает скорость изменения углового положения ЛВ. В связи с этим
полоса пропускания контура стабилизации может достигать 11...20 Гц, на
порядок превышая полосу пропускания контура сопровождения.
В рассмотренном угломере информация об угловом положении
цели снимается с датчика углового положения (ДУП) антенны в виде
напряжения иф, а информация об угловой скорости ЛВ - со входа УМ в
виде напряжения uw. Нужно отметить, что формирование информации,
необходимой для потребителей, в контуре автосопровождения с после-
довательным соединением чувствительного элемента (пеленгатора),
управителя и исполнительного устройства (привода антенны) приводит
к появлению существенных недостатков, причины и суть которых рас-
смотрены во вступительной части §10.6. Угломерные устройства такого
типа чаще всего используются в РГС ракет «в-п» и в БРЛС обзора зем-
ной поверхности [47], которые обладают массивными антеннами боль-
ших размеров. В таких угломерах аппаратурно реализуются ДКС, пе-
ленгатор и привод антенны, в то время как все другие узлы могут быть
реализованы алгоритмически в БЦВМ.
11.1.2; Угломер со скоростной коррекцией
И ИНДИКАТОРНОЙ СТАБИЛИЗАЦИЕЙ
Принцип построения такого угломера (рис. 11.3) аналогичен
принципу построения угломера с позиционной коррекцией, рассмот-
ренного в п. 11.1.1. Отличие состоит только в том, что в качестве ДКС,
измеряющего параметры угловых колебаний ЛА, используется ДУС,
устанавливаемый на антенне. При этом ДУС, измеряющий (оцени-
вающий) скорость угловых колебаний ОУ, может представлять собой
либо скоростной гироскоп, либо совокупность позиционного гироскопа
и устройства дифференцирования его измерений. Применение коррек-
тирующего сигнала по угловой скорости позволяет улучшить точность
слежения за маневрирующими целями, а корректирующее звено в упра-
вителе - улучшить устойчивость слежения.
Рис. 11.3
В режиме стабилизации угловые колебания ЛА передаются ан-
тенне, где они воспринимаются ДУС. В результате прецессии гироскопа
возникает напряжение, которое для вертикальной плоскости характери-
зуется соотношением (см. рис. 11.1)
иш = kd(<paB+O)/dt,
где к - коэффициент пропорциональности.
Напряжение uw, усиленное усилителем мощности УМ подается в
двигатель, который поворачивает антенну в сторону, противоположную
стороне отклонения оси ЛА. При точно функционирующем контуре
автосопровождения (фав«фцв) напряжение иа), поступающее к потребите-
лям информации, будет соответствовать угловой скорости ЛВ. Инфор-
мация о бортовом пеленге цели, как и ранее, снимается с ДУП в виде
напряжения иф.
Угломеры со скоростной коррекцией обладают лучшей ста-
билизацией антенны при быстроизменяющихся небольших угловых
колебаниях, которые характерны для истребителей и ракет различного
назначения. Недостатком является плохая чувствительность контура
стабилизации к большим, но медленно изменяющимся угловым колеба-
ниям ОУ, которые имеют место в тяжелых самолетах. Индикаторный
принцип построения контура стабилизации не накладывает ограниче-
ний на размеры и массу антенны. Поэтому угломеры со скоростной
коррекцией и индикаторной стабилизацией широко употребительны в
БРЛС истребителей и РГС ракет различного назначения.
11.1.3. Угломер с позиционной коррекцией
и силовой стабилизацией
Особенностью такого угломера (рис. 11.4) является то, что ан-
тенна устанавливается на гиростабилизаторе (ГС) или укрепляется в
связанном с ним карданном подвесе. При этом развязка антенны от уг-
ловых колебаний ЛА обеспечивается способностью ГС сохранять неиз-
менным свое пространственное положение, причем ГС одновременно
выполняет функции привода антенны.
Рис. 11.4
Если ЛВ не совпадает с РСН на угол Дфи (см. рис. 11.1), то на-
пряжение ид на выходе пеленгатора пропорционально этому рассогла-
сованию. Это напряжение ид, усиленное в УМ, подается на моментные
двигатели ГС, под действием которых ГС совместно с антенной нач-
нет прецессировать в сторону уменьшения ошибки сопровождения. Ус-
транение ошибки приводит к тому, что РСН с той или иной точностью
сопровождает ЛВ.
Корректирующий сигнал, обусловленный собственным движени-
ем ОУ, учитывается так же, как и в рассмотренных ранее угломерах с
индикаторной стабилизацией. Необходимо отметить, что ГС по своим
свойствам адекватен интегрирующему звену. В связи с этим оценка
угловой скорости в виде напряжения иш снимается с выхода УМ. Оцен-
ка бортового пеленга цели в виде напряжения иф поступает к потребите-
лям от датчика углового положения антенны.
Поскольку гироскопические приводы не могут развивать боль-
шой мощности, то угломеры с силовой стабилизацией чаще всего ис-
пользуются в РГС ракет «в-в» с малоразмерными легкими антеннами.
11.2. УГЛОМЕР БРЛС ПРИ КВАЗИНЕПРЕРЫВНОМ СИГНАЛЕ
ПОДСВЕТА ЦЕЛИ
В режиме сопровождения одной воздушной цели угломер, входя-
щий в состав импульсно-доплеровской БРЛС, решает следующие задачи:
обеспечивает непрерывную пространственную селекцию цели,
позволяющую получать отраженный от нее сигнал;
непрерывно оценивает углы пеленга (рг и фв и угловые скорости
(Ор и (Оц в горизонтальной и вертикальной плоскостях, знание которых
необходимо для реализации алгоритмов наведения (7.4), (7.22), (7.23) и
выдачи команд целеуказания в ракету «в-в»;
оценивает угол у крена антенны и скорость сох его изменения,
которые используются для стабилизации антенны в пространстве.
Решение последней задачи позволяет предотвратить потерю соп-
ровождаемой цели при выполнении истребителем маневров с креном.
Кроме того, стабилизация антенны обеспечивает максимально возмож-
ную дальность наведения ракет с полуактивными радиолокационными
головками самонаведения. Следует, однако, подчеркнуть, что для реше-
ния этой задачи необходимо также стабилизировать в пространстве и
антенну ракеты, гарантируя наиболее благоприятные условия приема
радиоволн с определенной поляризацией. Стабилизация антенны БРЛС
в пространстве необходима и при передаче на борт наводимой ракеты
команд радиокоррекции.
Структурная схема угломерного канала импульсно-доплеровской
БРЛС, позволяющего решать перечисленные задачи, показана на рис. 11.5.
Особенностями этого канала являются: применение скоростной коррек-
ции с индикаторной стабилизацией; моноимпульсная пеленгация целей
с использованием квазинепрерывного сигнала их подсвета; алгоритми-
ческий способ решения широкого класса частных задач с помощью
БЦВМ. В связи с тем, что общие принципы таких угломеров были уже
рассмотрены в п. 11.1.2, основное внимание обратим на особенное ти
функционирования моноимпульсного пеленгатора и решение некото-
рых задач угломера с помощью БЦВМ.
?г(п), ?в(п),У (п), wr(n), WB(n), wx<n)
Рис. 11.5
Контур стабилизации угломера функционирует следующим обра-
зом. Возникающие в процессе колебаний самолета углы рыскания (кур-
са) \|/, тангажа $ и крена у измеряются позиционными гироскопами ПГ,
преобразуются в АЦП в цифровые коды \|/(п), Ф(п) и у(п) для каждого п-
го такта измерений и затем поступают в БЦВМ. На основе поступаю-
щих значений \|/(п), т5(п) и у(п) БЦВМ формирует их производные ф (п),
О (п) и у (п), которые после преобразования в цифроаналоговом преоб-
разователе ЦАП в непрерывные сигналы скоростной коррекции посту-
пают в привод (двигатель) антенны (ПА). Привод разворачивает антен-
ну на углы, равные приращениям у, О и у, но в стороны, противополож-
ные первоначальным угловым колебаниям самолета. В итоге антенна
сохраняет свое прежнее положение в пространстве. Для того, чтобы
этот контур отрабатывал все возможные колебания истребителя, 'его
полоса пропускания должна составлять десятки герц.
В состав контура сопровождения цели входят: пеленгационное
устройство, АЦП, БЦВМ, ЦАП, ПА и аналого-цифровой преобразова-
тель углов (АЦПУ). В современных угломерах широко применяются
пеленгаторы моноимпульсного типа [22, 45]. В составе таких пеленга-
торов должны использоваться многоканальные устройства приема и
обработки сигналов с высокой идентичностью каналов. Требования к
идентичности можно снизить, использовав различные способы уплот-
нения сигналов. На рис. 11.5 приведена схема угломера с модуляцион-
ным уплотнением.
Антенная система (АнС) формирует суммарный Ez и два разностных
сигнала: Ед- в горизонтальной и Е^ в вертикальной плоскостях, причем
Едг = Едго cosy = к! (Ф,. - Фаг)cosy ;
(11.2)
Едв = Едвосозу = kj(фв -фав)СО8ф
Здесь фаг и фав - проекции угла между РСН и продольной осью ЛА в
горизонтальной и вертикальной плоскостях; ЕДг0 и ЕДв0 - амплитуды
сигналов; kj - коэффициент пропорциональности; \|/р - текущая фаза
принятого радиосигнала. В модуляторе (М) оба разностных сигнала
складываются и образованная сумма Ед=Едг+Едв модулируется по ам-
плитуде синусоидальным напряжением с частотой Q, определяемой
частотой вращения двигателя модуляции (ДМ). В суммарно-разностном
устройстве (СРУ) формируются два сигнала Е^+Ед и Е^-Ед, которые
усиливаются в двух приемных каналах. Поскольку в каждом из них
усиливаются одновременно и суммарный и разностный сигналы, то
требования к идентичности каналов снижаются. В смесителях СМИ и
СМ21 сигналы преобразуются на промежуточную частоту fnpl (10.1), после
чего поступают в усилители промежуточной частоты УПЧ1 и УПЧ2.
Следует отметь, что из-за
недостаточно узкой диаграммы
направленности АнС пространст-
венная селекция может оказаться
неэффективной, поскольку в те-
лесном угле ±0/2, где 0 - ширина
диаграммы направленности, могут
одновременно находиться не-
сколько целей. Такая ситуация для
вертикальной плоскости XoOaYo
показана на рис. 11.6 для двух
целей Ц1 и Ц2. В связи с этим,
прежде чем сформировать сигнал
управления антенной так, чтобы РСН была направлена на нужную цель
(например, Ц1), необходимо ее проселектировать по другим признакам.
Квазинепрерывный СПЦ позволяет выполнить указанную селекцию и
по дальности и по скорости. Сигнал нужной цели по дальности выделя-
ется каждым приемным каналом в селекторах дальности СД11 и СД21 с
помощью строба ucr2 (см. рис. 10.3, в), сформированного в измерителе
дальности и скорости (см. рис. 10.2). Сигналы по доплеровской частоте
(скорости сближения) выделяются узкополосными фильтрами УФ 11 и
УФ21 (см. рис. 11.5) после преобразования на вторую промежуточную
часто ту fnp2 (10.2).
В процессе преобразования частота fyr напряжения иуг управляе-
мого гетеродина изменяется так, что ее приращения равны изменениям
доплеровской частоты принятых сигналов. Сигнал иуг с требуемой час-
тотой fyr формируется в канале сопровождения цели по скорости (см.
рис. 10.5). Выделенные в УФ И и УФ21 непрерывные сигналы (см. рис.
10.4) поступают в логарифмические усилители ЛУП и ЛУ21 с лога-
рифмической амплитудной характеристикой, для которых амплитуда
ивыХ сигнала на выходе связана с амплитудой UBX входного сигнала со-
отношением UBbIX=kJiylgUBX, где клу - коэффициент усиления.
С помощью операции логарифмирования можно реализовать так
называемую нормировку сигналов. Суть ее состоит в исключении зави-
симости сигналов угломерного канала от мощности принимаемых сиг-
налов (дальности до цели). В общем случае сигналы (11.2) определяют-
ся не только ошибками пеленгации фв-ф11в и фг-ф;п-, но и коэффициентом
к|, который зависит от мощности принимаемых сигналов. При прочих
равных условиях мощность увеличивается по мере уменьшения дально-
сти. В такой ситуации вариации ЕДг и ЕДв (см. рис. 11.5) за счет измене-
ния дальности воспринимаются пеленгационным устройством как из-
менения углов, что приводит к погрешностям их измерения. Процесс
устранения этих ошибок путем нормировки сигналов поясняется ниже.
Продетектированные в амплитудных детекторах АД11 и АД21
сигналы, пропорциональные логарифмам от амплитуд Е1О+ЕДо и Е1о-Едо,
поступают на вычитающее устройство ВУ. Символами Е10 и Едо обо-
значены амплитуды на входе суммарно-разностного устройства. При-
нимая во внимание то, что разность логарифмов есть логарифм частно-
го, находим амплитуду сигнала на выходе ВУ:
иву = KBy[lg(^o +ЕДО)-№-Ед0)]== К,у ,
" ьдо
(11.3)
где ЕДо«Е1О, а Кву - коэффициент передачи ВУ. Алгебраическое сум-
мирование Ехо±Едо позволяет избежать отрицательных значений сигна-
лов, для которых операция логарифмирования не имеет смысла. Дом-
ножив числитель и знаменатель дроби в (11.3) на 1+ЕДо/Е1о и пренебре-
гая величинами (ЕДо/ЕЕо)2 второго порядка малости, имеем
UBy =KBylg(l + 2EA0/E£0).
(П.4)
Из (11.4) следует, что информация об угловом положении цели;
заключенная в Едо, переходит в нормированное соотношение EAt/Ezu.
При изменении дальности до цели Едо и Его изменяются примерно в
одинаковое число раз, а их соотношение остается практически неизмен-
ным. Это и позволяет исключить зависимость сигналов угломерного
канала от дальности до цели.
Сигнал вычитающего устройства определяется соотношением
uBy=UBysin(Qt+(pc), где UBy, вычисляемое по (11.4), характеризует угловое
рассогласование РСН и ЛВ цели, а фаза фс указывает направление этого
рассогласования. Модуляционная частота Q зависит от скорости враще-
ния двигателя модуляции ДМ. В фазовых детекторах ФДГ и ФДВ сиг-
нал иву преобразуется в два напряжения постоянного тока:
иДга = KAUBycos<pc;
иДви =Кдивузтфс.
(П.5)
Здесь Кд - весовой коэффициент, а иДп1 и иДвп характеризуют
ошибки сопровождения по углу в горизонтальной и вертикальной плос-
костях. В качестве опорных для ФДГ и ФДВ используются сдвинутые
по фазе на 90° сигналы с модуляционной частотой Q, которые форми-
руются генератором опорных напряжений ГОН под действием двигате-
ля модуляции ДМ.
Измеренные значения рассогласований иДг|1 и иДвн поступают в
АЦП, где преобразуются в соответствующие коды Аги(п) и Ави(п), после
чего подаются в БЦВМ, которая в составе угломера решает следующие
задачи:
вычисляет корректирующие поправки по сигналам гироскопиче-
ских измерителей;
оценивает углы фг, фв и угловые скорости сог, <ов ЛВ, которые не-
обходимы для самонаведения истребителя;
вычисляет сигналы управления для привода антенны ПА, обеспе-
чивающие сопровождение цели по направлению (пространственную
селекцию);
гарантирует функционирование следящей системы в режиме «па-
мять» при кратковременных пропаданиях сигналов.
Для сокращения выкладок рассмотрим алгоритмы решения пере-
численных задач только в вертикальной плоскости, поскольку для гори-
зонтальной плоскости они имеют тот же смысл.
Сигнал коррекции, с помощью которого стабилизируется антенна
при угловых колебаниях истребителя в вертикальной плоскости, опре-
8—3806 225
деляется численным дифференцированием результатов измерения тан-
гажа в двух соседних тактах
u^(n) = (K<>/TT)[^n)-^(n-l)], (11.6)
где Ко - коэффициент передачи гироскопа, Тт - период обращения к
БЦВМ. В приводе антенны, выполняющем функции интегратора, кор-
ректирующие сигналы (11.6) преобразуются в отклонения антенны,
позволяющие стабилизировать в пространстве ее РСН.
Оценки сов (п) угловой скорости сов могут формироваться на ос-
нове различных способов, включая алгоритмы а, Р фильтрации, кото-
рые были рассмотрены в §§10.3 и 10.4. Рассмотрим способ, основанный
на использовании следящей системы с двумя интеграторами. Функции
одного из них выполняет двигатель (привод антенны) (рис. 11.5), а вто-
рой воплощается алгоритмически в БЦВМ путем численного решения
уравнения Л! =КПАВ, где Ки - коэффициент усиления интегратора, а Ав -
результат потенцирования (антилогарифмирования) рассогласования
(11.5). Производную А| сигнала А| приближенно можно представить в
виде (А|(п)-А1(п-1))/Тт=КнАв(п-1). Отсюда можно получить дискретный
алгоритм интегрирования
Д1(п) = Д|(п-1) + КиТтДв(п-1), (11.7)
который реализуется в БЦВМ.
В пользу следящей системы с двумя интеграторами свидетельст-
вуют два фактора. В такой системе имеют место динамические ошибки,
обусловленные только второй и более высокими производными отсле-
живаемого параметра, и отсутствуют вносящие наибольший вклад
ошибки, вызываемые первой производной (в данном случае угловой
скоростью). Кроме того, в системе с двумя интеграторами достаточно
просто реализовать режим памяти при кратковременных пропаданиях
сигналов. Следует отметить, что повышение порядка астатизма за счет
введения второго интегратора (11.7) существенно снижает запас устой-
чивости следящей системы. Во избежание этого в БЦВМ вычисляется
сигнал коррекции
Д2(п) = К.корДв(п-1). (11.8)
В результате угловая скорость оценивается алгебраической сум-
мой (11.6), (11.7) и (11.8):
®в(п) = Км[Д,(п) + Д2(п) + ud(n)]. (11.9)
Сформированная таким образом оценка сов и используется в алго-
ритме самонаведения истребителя в НУТВ (7.22), (7.23). В соотношени-
ях (11.8) и (11.9) Ккор и Кш - соответствующие весовые коэффициенты.
226
Сигнал управления uyB антенной вычисляется в БЦВМ по алго-
ритму
иув(п)-Д,(п)+Д2(п). (11.10)
После преобразования в ЦАП он поступает в ПА, вызывая ее пе-
ремещение в вертикальной плоскости в сторону уменьшения рассогла-
сования Дфв=фв-фав (см. рис. 11.1), а соответственно и (11.5). Измерен-
ные датчиком углового положения значения углов пеленга фав=фви и
фаг=фги, преобразованные в АЦПУ в коды фвн(п) и фгн(п), подаются в
БЦВМ. После дополнительной фильтрации оценки фв(п) и ф,.(п) ис-
пользуются в алгоритмах наведения (7.4) и (7.22), (7.23).
В процессе функционирования радиоэлектронных следящих систем
всегда имеют место кратковременные пропадания входных радиосигналов.
Одной из основных причин такого пропадания является изрезанность диа-
грамм переизлучения реальных воздушных целей. В результате из-за угло-
вых колебаний цели, например за счет турбулентности атмосферы, сигналы
на входе приемников БРЛС будут значительно изменяться и даже на корот-
кое время пропадать. Отсутствие сигнала на входе следящих систем предо-
пределит прекращение процесса автосопровождения и соответственно срыв
процесса наведения истребителя. В такой ситуации необходимо возобно-
вить режим поиска и захвата цели, что приведет к потере жестко лимитиро-
ванного в боевых условиях времени.
Режим автосопровождения цели при отсутствии отраженных от
нее сигналов, называемый также режимом памяти либо экстраполяции,
в рассмотренном угломере сохраняется следующим образом. При про-
падании входных сигналов перестают формироваться ошибки сопрово-
ждения (11.5) (иДгн=0, идвн=0). В такой ситуации Дг=0, Дв=0 и в алгорит-
мах (11.7) и (11.8) соответственно Д|(п)=Д|(п-1), Д2(п)=0. Тогда из (11.9)
и (11.10) следует, что оценки угловой скорости и сигнал управления
будут формироваться по алгоритмам
wB(n) = Кш[Д|(п-1)+ ue(n)] = (b(n -1); (11.11)
иув(п) = Д1(п-1), (11.12)
основанным на сохранении информации об угловой скорости на момент
пропадания сигналов.
Следовательно, несмотря на отсутствие входных сигналов антен-
на по-прежнему будет поворачиваться в пространстве с той же угловой
скоростью, а в алгоритмы траекторного управления по-прежнему будут
поступать теперь уже экстраполированные оценки фв, фг и сов, 0)г.
Однако экстраполяция по закону (11.11) и (11.12) выполняется с ошиб-
ками и время ее выполнения (время памяти) ограничивается накоплением
ошибок до значения примерно равного половине ширины диаграммы на-
правленности антенны. Если это условие соблюдается, то при появлении
отраженных сигналов начинают формироваться поправки (11.5) и процесс
автосопровождения продолжается. Если же ошибки экстраполяции превы-
сят половину ширины диаграммы направленности, то при появлении отра-
женных сигналов режим слежения уже не возобновляется. В такой ситуа-
ции БРЛС переводится в режим обзора и повторного захвата цели с соот-
ветствующей потерей времени. Следует отметить, что аналогичным обра-
зом угломер будет функционировать и при наличии активных радиопомех.
11.3. УГЛОМЕР РГС ПРИ НЕПРЕРЫВНОМ СИГНАЛЕ
ПОДСВЕТА ЦЕЛИ
Сопровождение воздушной цели по направлению антенной полуак-
тивной РГС, выполняемое радиолокационным следящим угломером, по-
зволяет принимать отраженные сигналы и, обрабатывая их, формировать
оценки углов ф] 2 и приращений AcOj 2 угловой скорости ЛВ в плоскостях
управления, которые используются в алгоритмах траекторного управления
(7.32), (7.33), (7.48) и (7.67), (7.68). Напомним, что при пространственном
сопровождении цели слежение за ней производится в двух взаимно перпен-
дикулярных плоскостях, совпадающих с плоскостями управления 1-1 и 2-2
(см. рис. 7.9). Поэтому следящий угломер РГС содержит два идентичных
канала слежения. Структурная схема одного из возможных типов ком-
плексного следящего угломера с моноимпульсным пеленгатором и силовой
стабилизацией антенны для плоскости 1-1 приведена на рис. 11.7.
Рис. 11.7
Силовая стабилизация (см. п. 11.1.3) основана на том, что антен-
на, располагаясь на гироплатформе, стабилизируемой в пространстве
трехстепенным гироскопом, практически не подвержена влиянию угло-
вых колебаний ракеты и ее вращений вокруг продольной оси. Это по-
зволяет не только повысить точность слежения и формирования оценок
<р1 2 и △С0!,2» но и увеличить дальность обнаружения и сопровождения
цели за счет согласования поляризационных характеристик антенны
РГС и передающей антенны БРЛС, излучающей СПЦ.
Моноимпульсный пеленгатор содержит антенну с четырехлепест-
ковой ДН (см. рис. 11.8); устройство суммарно-разностной обработки
(УСРО) сигналов; ПРМОС, анало- 2
гичный рассмотренному в §10.5 V у _________} ___________\
(см. рис. 10.7); устройство норми- /тТ/)
ровки и уплотнения сигналов 4
(УНУС); широкополосный усили- 3
тель промежуточной частоты Рис 118
(ШУПЧ); широкополосный час-
тотный детектор (ШЧД); фазовый детектор ФД1 и экстраполятор Э1.
Для плоскости 1-1 (см. рис. 7.9) разностный сигнал
ид1 =u! -ll3 =КфДф1созур, (11.13)
формируемый лучами 1 и 3 (см. рис. 11.8), пропорционален углу Лф|
между РСН и направлением на цель (рис. 11.9), поэтому его можно ис-
пользовать в качестве источника первичной информации для угломера.
В (11.13) ид| - напряжение на выходе ПРМОС с частотой fnp2 (см.
§10.5); \|/р - текущая фаза сигнала; К<р - коэффициент пропорционально-
сти, зависящий от усилительных
свойств ПРМОС, ширины ДН и
принятых по лепесткам 1 и 3 сиг-
налов U| и u3, которые определя-
ются дальностью до цели.
В силу своих малых разме-
ров антенны РГС ракет «в-в»
имеют достаточно широкие ДН.
Поэтому в зоне захвата по углу
(см. рис. 11.6) могут одновременно находиться несколько целей, что
затрудняет точную пространственную селекцию одной из них. Для ис-
ключения такого недостатка в следящую систему угломера поступает
сигнал нужной цели, отселектированный прежде по доплеровской час-
тоте в узкополосном фильтре смесителя СМ3, в котором сигнал иД1 пре-
образуется в сигнал иди с третьей промежуточной частотой (10.24).
Используемый в процессе преобразования
сигнал иуг управляемого гетеродина формиру-
ется автоселектором скорости (см. рис. 10.7).
Для исключения зависимости напряже-
ния (11.13) от дальности его подвергают нор-
мировке. Разностный сигнал иДц сдвигается
по фазе на угол 0,5л и геометрически склады-
вается с сигналом uE2=unp3 суммарного канала,
поступающим из смесителя СМ3 автоселекто-
ра скорости. Векторная диаграмма результи-
рующего сигнала upi=uAii+ue2, иллюстрирую-
щая процесс его формирования в УНУ С
(рис. 11.7), приведена на рис. 11.10.
При малых углах Дфь что обычно выполняется на практике,
фр=Лф|, где фр угол между векторами ир1 и U£2. По мере приближения
ракеты к цели возрастает интенсивность отраженного сигнала. Это при-
водит к тому, что одновременно увеличиваются и иди ии^ до значений
и'Дц и u'Z2, а угол фр=Дф| остается неизменным. В результате нормиров-
ки информация об угле Дф| переводится из амплитуды сигнала (11.13),
зависящей от дальности, в фазовый сдвиг фр сигнала ирЬ инвариантный
к расстоянию до цели.
Необходимо отметить, что при неравенстве коэффициентов уси-
ления суммарного и разностных каналов сигналы uI2, цД| будут усили-
ваться по-разному и появятся погрешности измерения углов Дф| и Дф2.
Поскольку обеспечить идентичность амплитудно-частотных характери-
стик суммарного и разностных каналов практически невозможно, то
основное усиление всех трех сигналов выполняется одним широкопо-
лосным усилителем ШУПЧ (см. рис. 11.7). Операция по выполнению
усиления трех сигналов в одном усилителе называется их уплотнением.
В РГС чаще используют частотное уплотнение, при котором сигналы
Цдц и иД22 в процессе нормировки в УНУС модулируются по частоте
специальным напряжением с частотами FM| и Fm2 и вместе с немодули-
рованным сигналом uZ2 поступают в ШУПЧ. Полоса пропускания этого
усилителя выбирается достаточно широкой для одновременного неис-
каженного усиления всех трех сигналов.
Усиленные после нормировки сигналы поступают в широкопо-
лосный частотный детектор ШЧД, который нагружен фильтрами, нас-
троенными на поднесущие частоты FM| и Fm2. Эти фильтры разделяют
уплотненные и пронормированные сигналы по каналам слежения 1 и 2.
Выделенный фильтром сигнал ифР| с частотой FMi поступает в фазовый
детектор ФД1, в котором
при сравнении с опорным
сигналом <>£2 вырабатывает-
ся напряжение иДф1, про-
порциональное уГЛу Дф[=фр
(рис. 11.10) ошибки сопро-
вождения цели в плоскости
1-1 (см. рис. 11.9). При пре-
рывистом СПЦ (рис. 11.11) сигнал иДф| на выходе ФД1 будет существо-
вать только в течение времени tnc подсвета, в то время как для управле-
ния приводом антенны и самой ракетой необходимы непрерывно дейст-
вующие сигналы. Поэтому выходной сигнал ФД1 поступает на экстра-
полятор Э1, где экстраполируется (запоминается) на интервал паузы tn.
Сигнал экстраполятора, характеризующий ошибку сопровождения в
плоскости 1-1, подается затем в управитель, выполняющий в данном
случае и функции привода антенны. Под действием управляющих сиг-
налов гиропривод будет поворачивать антенну до тех пор, пока РСН не
совпадет с линией визирования.
В рассматриваемом угломере управитель следящей системы со-
держит один интегратор, роль которого играет гиропривод. В следящих
системах такого типа ошибка сопровождения в установившемся режиме
пропорциональна первой производной отслеживаемой координаты.
Следовательно, сигнал иДф1 будет пропорционален угловой скорости
ЛВ. Подвергнув это напряжение соответствующему масштабированию,
можно получить оценку угловой скорости ЛВ.
Датчики и вычислители корректирующих сигналов формируют
сигналы коррекции со, по угловой скорости, соответствующей скорости
перемещения ЛВ неманеврирующей цели, и обеспечивают режим памя-
ти при кратковременных пропаданиях сигналов. Первичными датчика-
ми корректирующих сигналов являются три акселерометра, размещен-
ные на гироплатформе совместно с антенной. Один из них, ориентиро-
ванный по РСН, измеряет составляющую jax собственного ускорения в
этом направлении, а два других - его поперечные составляющие jai>2,
перпендикулярные jax. Если ошибки сопровождения Дф| малы и цель не
маневрирует, то эти ускорения соответствуют радиальной и тан-
генциальным составляющим ускорения сближения. Интегрирование jax
в интеграторах Иу и Ид, a ja| - в ИУ|, с учетом начальных значений Vuy,
Дцу и Vuyi, поступающих в РГС в режиме целеуказаний, позволит экст-
раполировать оценки текущей дальности Д и поперечной скорости V] .
Вычисленные по формуле (bj ^Vj/Д оценки угловой скорости
ЛВ поступают в управитель. Под действием этих сигналов антенна уг-
ломера разворачивается с угловой скоростью, определяемой оценкой
cbj. Если цель не маневрирует, то скорость поворота антенны соответ-
ствует угловой скорости ЛВ и РСН направлена на цель. При маневре
цели оценка (bj, полученная на основе обработки результатов измере-
ний собственного ускорения ракеты, не будет соответствовать реальной
угловой скорости (01 линии визирования. За счет этого несоответствия
появится угол Лф| (см. рис. 11.9) и Напряжение рассогласования идь
Под действием этого сигнала антенна угломера изменит свою скорость
на величину A(Oj =(0|-(0i, а напряжение иДф| будет пропорционально
значению Л (Oj.
После масштабирования в звене с коэффициентом передачи К(0
(см. рис. 11.7) напряжение иДф| поступает в виде оценки А ц в алгоритм
траекторного управления (7.48), использующий пропорциональное са-
монаведение со смещением. Оценки cpj, применяемые при наведении
ракеты с постоянным углом упреждения (7.49), формируются ДУП ан-
тенны, механически связанным с ее осью. При пропадании входных
радиосигналов процесс сопровождения цели по направлению будет
продолжен за счет поворота антенны со скоростью (Dj, определяемой в
вычислителе корректирующих сигналов. Аналогичным образом функ-
ционирует угломерный канал РГС и в плоскости 2—2.
При захвате цели на траектории первоначальные ошибки могут
оказаться настолько большими, что цель окажется далеко в стороне от
РСН (точка ЦА на рис. 11.9). В такой ситуации коэффициент направ-
ленного действия антенны по суммарному каналу будет мал и принятый
сигнал uZ2 окажется недостаточным для достоверного обнаружения
цели. При таких условиях используется так называемое угловое обна-
ружение, выполняемое по разностным сигналам иД| и иД2, которые при
больших Дф|,2 достигают больших значений. Если напряжение
иу =|ид1| + |ид2| превышает некоторый порог, то принимается решение
о наличии цели и замыкается цепь слежения по направлению. Угломер
устраняет начальные большие ошибки Аф1э2, совмещая РСН с направле-
нием на цель. В итоге в АСС возрастает интенсивность суммарного
сигнала, осуществляется его обнаружение и процесс сопровождения по
угловым координатам осуществляется обычным способом.
11.4. УГЛОМЕР ПАССИВНОЙ РГС
Одной из особенностей функционирования пассивных РГС явля-
ется то, что решение возлагаемых на них задач зависит от наличия ра-
диосигналов, излучаемых источниками, располагаемыми на поражае-
мых целях. Прекращение поступления радиосигналов в РГС может быть
в случае выключения наземной (корабельной) РЛС, выполняемого с
целью самозащиты от ракет «воздух-РЛС» при угрозе поражения, либо
при недостаточной чувствительности приемного устройства РГС в ус-
ловиях работы по обзорным РЛС, когда ракета облучается через боко-
вые лепестки диаграммы направленности поражаемого объекта. Поэто-
му угломер пассивной РГС наряду с формированием оценок пеленгов и
угловых скоростей линии визирования в двух плоскостях, необходимых
для траекторного управления ракетой, должен обеспечить слежение
осью антенны за линией визирования и при перерывах в поступлении
радиосигналов в РГС с тем, чтобы удержать цель в пределах основного
луча антенны. В результате появившийся сигнал цели будет проходить
в систему обработки без особых затруднений. Кроме того, при пропада-
нии сигналов цели для непрерывного управления ракетой по тому же
методу наведения, что и при наличии радиосигналов цели, необходимо
формировать прогнозируемые значения пеленгов и угловых скоростей
линии визирования.
Для обеспечения нормального функционирования пассивных
РГС широко применяются устройства экстраполяции угловых коорди-
нат целей, получивших название пролонгаторов. Слово пролонгатор
заимствовано из французского языка и в радиоуправлении по смыслу
близко к слову экстраполятор.
Основное назначение пролонгатора состоит в том, что он обеспе-
чивает перемещение оси антенны для удержания цели в пределах диа-
граммы направленности в тех случаях, когда в РГС происходит срыв
слежения за сигналами цели. Благодаря этому рсуществляется автоном-
ный полет ракеты по траектории, близкой к той, которую имела бы ра-
кета при непрерывном сопровождении сигналов цели РГС.
Принципы функционирования пролонгатора в вертикальной и
горизонтальной плоскостях аналогичны. Поэтому работа пролонгатора
излагается ниже применительно к вертикальной плоскости, в которой в
процессе наведения ракеты наиболее интенсивно изменяется угол визи-
рования.
В пролонгаторах используется априорное знание закона измене-
ния угла визирования eB(t) во времени. Для ракет воздух-поверхность,
наводящихся на неподвижные или малоподвижные цели, обычно берет-
ся полиномиальная модель входного воздействия. В силу этого считает-
ся, что угол визирования цели в вертикальной плоскости изменяется по
закону
eB(t) = f АД (i = U),
i=i
где Aj - случайные величины, зависящие от условий применения; п -
степень аппроксимирующего полинома.
В простейшем случае закон изменения 8B(t) описывается времен-
ным полиномом первой степени от t
eB(t)=e()+coot,
(И.14)
где 80 и CDo - начальные значения угла и угловой скорости линии визи-
рования в момент времени t=0.
Принцип совместной работы следящей системы угломера и пролон-
гатора заключается в том, чтобы в процессе автосопровождения сигналов
цели головкой оценить параметры закона изменения угла 8B(t), а при пропа-
дании сигналов цели сформировать экстраполированное (прогнозируемое)
значение 8n(t) угла 8B(t). Значение 8n(t) используется при потере РГС сигна-
лов цели для совмещения оси антенны с направлением линии визирования,
которая изменяет свое угловое положение в пространстве по мере сближе-
ния ракеты с целью. Основным показателем качества работы угломера с
пролонгатором является время памяти РГС.
Рассмотрим работу угломера пассивной РГС. На рис. 11.12 пока-
зано взаимное положение ракеты и цели при наведении в вертикальной
плоскости. Здесь введены следующие обозначения: У0ОрХо - прямо-
угольная невращающаяся система координат, связанная с центром масс
Ор ракеты; ОрХ - продольная ось ракеты; 8В - угол линии визирования;
<рв - пеленг цели в вертикальной плоскости; О - угол тангажа.
С учетом принятых правил отсчета углов, выражение для угла
eB(t) можно записать в виде
’ eB(t)=(pB(t)-HXt).
Изменение угла eB(t) во времени t обусловлено взаимным пере-
мещением ракеты и цели и происходит сравнительно медленно по срав-
нению с изменением угла тангажа.
Структурная схема угломера пассивной РГС представлена на рис. 11.13,
на котором изображены следящее угломерное устройство с позицион-
ной коррекцией и силовой стабилизацией, гироскоп, измеряющий угол
тангажа O(t), и пролонгатор, содержащий два интегратора и форсирую-
щее звено в качестве корректирующей цепи.
в СУР
Рис. 11.13
Угломер работает в двух режимах: сопровождения и памяти (про-
лонгации), функционирование которых происходит последовательно.
В режиме сопровождения сигналов, поступающих от радиоизлу-
чающей цели, ключи Кл1 и КлЗ замкнуты, а ключ Кл2 разомкнут. При
отклонении цели от оси антенны пеленгатор вырабатывает сигналы, под
действием которых ось антенны совмещается с линией визирования
(направлением на цель). Для этого выходные сигналы пеленгатора уси-
ливаются в усилителе мощности УМ| и далее подаются на вход гиро-
стабилизатора. В установившемся режиме сигнал на входе гиростабили-
затора иш пропорционален угловой скорости линии визирования. Угло-
вое положение гиростабилизатора характеризуется углом ег, в идеаль-
ном случае совпадающим с углом ев. Выходные сигналы ДУП и усили-
теля мощности УМ2 поступают в СУР, где используются для выработки
сигналов траекторного управления ракетой, например, по методу после-
довательных упреждений (7.51).
При суммировании измеренных значений углов пеленга (рви и танга-
жа снимаемых соответственно с ДУП и гироскопа, образуется измерен-
ное значение угла визирования £BI1(t), совпадающее с точностью до ошибок
измерения углов пеленга и тангажа с истинным значением угла £B(t). С
сумматора значение £BH(t) поступает на вход пролонгатора, представляюще-
го собой следящую систему с астатизмом второго порядка. В качестве уст-
ройства стабилизации, обеспечивающего структурную устойчивость про-
лонгатора, используется форсирующее корректирующее звено.
На выходе пролонгатора, отрабатывающего входное воздействие
£BH(t), формируется выходной сигнал £n(t). Так как пролонгатор имеет аста-
тизм второго порядка, то он обладает памятью входной величины и ее пер-
вой производной, что и используется в режиме памяти (пролонгации).
Если входное воздействие изменяется с постоянной скоростью
(11.14), то в установившемся режиме динамическая ошибка равна нулю
и выходной сигнал £n(t) равен входному £BIi(t). Если £BII(t) изменяется с
постоянным ускорением, то в установившемся режиме будет иметь ме-
сто динамическая ошибка по ускорению
△£вду= d)0 / Ка ,
где ка - коэффициент передачи пролонгатора по ускорению, равный
произведению коэффициентов передачи первого и второго интеграто-
ров и корректирующего звена; 6)0 - угловое ускорение линии визирова-
ния в момент времени t=0.
В случае потери сигналов цели в РГС угломер переходит в режим
памяти, при этом ключи Кл1 и КлЗ размыкаются, ключ Кл2 замыкается и
вход первого интегратора обнуляется. Пролонгатор, запоминая входную
величину и ее первую производную в момент прекращения автосопровож-
дения сигнала цели, будет продолжать выдавать сигнал по закону
en(t)=en(T)+en(T)(t-T) (11.15)
где т - момент пропадания сигналов цели; £п(т) и £„(т) - значения угла и
угловой скорости линии визирования в пролонгаторе в момент времени т.
В режиме памяти задающим воздействием для угломера является
угол £п, значение которого должно теперь отслеживаться антенной. На
гиростабилизатор поступает сигнал, равный разности между углом £n(t),
выдаваемым пролонгатором, и углом £BH(t), поступающим с сумматора.
В результате гиростабилизатор поворачивает антенну таким образом,
чтобы разность углов (£n(t)-£BI1(t)) стремилась к нулю. При этом ось ан-
тенны продолжает «следить» за вычисляемым (экстраполируемым) зна-
чением линии визирования ракета-цель. В результате ось антенны сов-
падает с прогнозируемым положением линии визирования, которое в
значительной степени адаптировано к конкретным условиям пуска и
полета ракеты. С ДУП и со входа гиростабилизатора сигналы поступа-
ют в СУР для управления ракетой. Входной сигнал гиростабилизатора в
установившемся режиме пропорционален прогнозируемому значению
угловой скорости линии визирования.
Характерной особенностью данной схемы угломера в режиме
памяти является компенсация ошибок гироскопа в случае, если они
постоянны или нарастают по
линейному закону. Покажем
справедливость данного ут-
верждения. Для этого рас-
смотрим структурную схему
угломера в режиме памяти
при совместной работе гиро- Рис. 11.14
стабилизатора и пролонгатора (рис. 11.14). Для простоты в качестве
математической модели гиростабилизатора используется интегрирую-
щее звено с коэффициентом передачи Кгс.
Если ошибку A$n(t) гироскопа можно аппроксимировать поли-
номом первой степени от t, то пролонгатор в режиме сопровождения
отрабатывает ее без искажений. Следовательно, выходной сигнал про-
лонгатора в установившемся режиме можно представить в виде:
еп(0 £пбдо(0+ДД<(0>
(11.16)
где еПбдо(0 - выходной сигнал пролонгатора при пренебрежении ошиб-
ками измерения угла тангажа.
При переходе РГС из режима сопровождения в режим памяти
пролонгатор выдает сигнал £n(t), равный сумме экстраполированного
положения £Пбдо(0 угла линии визирования и оценки At>„(t) прогнози-
руемой ошибки гироскопа. Из структурной схемы (рис. 11.14) видно,
что в режиме памяти при формировании сигнала управления гиростаби-
лизатором (£n(t)-£im(t)) ошибка гироскопа вычитается из отслеженной
пролонгатором ошибки гироскопа. Отсюда следует, что ошибка гиро-
скопа не влияет на значения пеленга и угловой скорости линии визиро-
вания, поступающих из угломера в режиме памяти в СУР ракеты.
Этот вывод можно получить и строго математическим путем. Дейст-
вительно, так как следящая система линейная и, следовательно, справедлив
принцип суперпозиции, то на основании рис. 11.14 можно записать выра-
жение для измеренного значения пеленга в режиме памяти
Ф„,=—— £..------— йн-----2— О, (1117)
Тр + 1 и Тр + 1 и Тр + 1 z
где р - символ дифференцирования, а Т=1/кгс - постоянная времени
следящей системы угломера в режиме памяти.
В (11.17) первое слагаемое обусловлено выходным сигналом про-
лонгатора, второе - сигналом с гироскопа, а третье - углом тангажа.
Подставляя в (11.17) значения угла (11.16) и измеренное значение угла
тангажа O„(t)=O(t)+A$H(t), получим
1 1 о 1
Фни = 7—7 (£„бдо + )- тг—7 ($+Ади)- 7+77 $ = ZT—7 еибдо " $ •
Тр + 1 Тр + 1 Тр + 1 Тр + 1
(11.18)
Таким образом, если в режиме сопровождения постоянная или
нарастающая по линейному закону ошибка гироскопа отслеживалась
пролонгатором без ошибок, то в режиме памяти ошибка гироскопа ком-
пенсируется.
Аналогичные соотношения можно получить и для угловой скоро-
сти линии визирования.
С появлением сигналов цели угломер переходит в режим сопро-
вождения.
Выше был рассмотрен случай изменения угла EB(t) во времени по
линейному закону. Однако этот угол может изменяться по закону, кото-
рый описывается полиномом второй степени от t. В этом случае в ре-
жиме сопровождения будет иметь место динамическая ошибка при
формировании пролонгатором угла еп. Кроме того, отсутствие в системе
с двумя интеграторами памяти по ускорению приведет к тому, что в
режиме памяти разность между значением угла еп и истинным значени-
ем ев угла визирования будет нарастать и цель может выйти из основно-
го лепестка диаграммы направленности антенны РГС. Время памяти
будет в этом случае небольшим.
Возможны различные варианты устранения данного недостатка. В
частности, в режиме памяти целесообразно на вход первого интегратора
пролонгатора подавать сигнал программного углового ускорения, завися-
щего от дальности до цели, высоты полета и других факторов и в идеале
равного истинному значению углового ускорения угла визирования ев.
11.5. КВАЗИОПТИМАЛЬНЫЙ УГЛОМЕР
ДЛЯ СОПРОВОЖДЕНИЯ ИНТЕНСИВНО МАНЕВРИРУЮЩИХ
ЦЕЛЕЙ
Появление на вооружении ряда стран сверхманевренных самоле-
тов [9, 11, 29, 30] предъявляет существенно более высокие требования к
238
точности, быстродействию и устойчивости сопровождения целей сле-
дящими угломерами. Однако принципы функционирования рассмот-
ренных угломерных устройств, основанные на формировании оценок
углов и угловых скоростей ЛВ в одном контуре, в котором одновремен-
но решаются и задачи сопровождения цели антенной, не позволяют
одновременно улучшить все перечисленные показатели (см. §10.6).
Кроме того, с помощью традиционных угломеров нельзя сформировать
оценки поперечных ускорений цели, необходимые для реализации алго-
ритмов траекторного управления (7.67), (7.68). И более того, для угло-
меров с механическим приводом антенн весьма актуален вопрос эконо-
мии энергетических затрат на управление.
При синтезе РЭССН, в которых можно существенно снизить от-
меченные недостатки, перспективно использование алгоритмов СТОУ,
на основе которых можно синтезировать многоконтурные системы,
совместно наилучшие как по точности и быстродействию, так и по ус-
тойчивости и экономичности сопровождения. Рассмотрим пример син-
теза угломера, предназначенного для информационного обеспечения
процесса наведения на интенсивно маневрирующую воздушную цель,
при следующих допущениях:
угломер входит в состав БРЛС истребителя, вооруженного раке-
тами «в-в» с АРГС, причем и самолет, и ракеты используют алгоритм
траекторного управления (7.67), (7.68);
в составе БРЛС имеется измеритель (см. п. 10.6.1), форми-
рующий достаточно точные оценки дальности Д и скорости сближения
Д с интенсивно маневрирующей целью;
каналы угломера не влияют друг на друга и решают идентичные
задачи, в связи с этим ниже будет рассматриваться синтез угломерного
канала только в вертикальной плоскости;
в качестве чувствительного элемента используется моноимпуль-
сный пеленгатор с суммарно-разностной обработкой сигналов;
в состав привода антенны входят инерционный усилитель мощ-
ности и электродвигатель, в совокупности аппроксимируемые переда-
точной функцией
Wnp(p) = b/p(Tp + l); (11.19)
датчиками корректирующих сигналов являются позиционный ги-
роскоп и акселерометр, измеряющий нормальное ускорение ЛА.
11.5.1. Выбор и обоснование исходных моделей
При выборе исходных моделей состояния необходимо принимать
во внимание следующие обстоятельства.
Для информационного обеспечения алгоритмов траекторного
управления (7.22), (7.23) и (7.74), (7.75) и выдачи команд целеуказаний
в ракету, наводимую по закону (7.67), (7.68), в угломере должны фор-
мироваться оценки бортового пеленга <рв, угловой скорости линии ви-
зирования 0)в, нормальных ускорений цели jLlu и истребителя jB.
Модели состояния должны обеспечить достаточно высокую точ-
ность экстраполяции оцениваемых координат в различных условиях
применения с учетом изменения дальности, скорости сближения и ма-
невров цели и истребителя.
Набор, фазовых координат, входящих в состав модели, должен
позволить высокоточно стабилизировать антенну, для чего желательна
не только позиционная, но и скоростная коррекция.
Привод антенны, наряду с вращением антенны, должен обеспе-
чивать память по угловой скорости при пропаданиях входных радио-
сигналов и учитывать в законе формирования сигнала управления
ошибки не только по углу, но и по угловой скорости. Последнее прин-
ципиально необходимо для бессрывного сопровождения интенсивно
маневрирующих целей.
С учетом всех этих особенностей обобщенный вектор состояния
можно представить в виде совокупности фазовых координат:
ёв=<ов. ев(0) = ев0; (11.20) В
2Д 1 ®B=~wB+-(jUB-jB), сов(О) = сов0; (11.21)
Зцв ]цв(°)“ JlibO’ (11.22)
Jb ~ ^Jb ’ — jflO ’ (11.23)
O = C0d, o(0) = o0; (11.24)
= (11.25)
Фав=Чв> Фав (0) ~ Фавв ’ (1L26)
1 b й)ав =--(0aB+-utfl+£(O, C0(0) = CD aU rjp do rjp UJ ^UJ 7 du v / dBli (11.27)
В соотношениях (11.20)-(11.27) Еи и сов - угол визирования цели и угло-
вая скорость ЛВ; Д и Д - дальность до цели и скорость ее изменения;
Кв и Jb “ нормальные ускорения цели и истребителя; aj - коэффициент,
240
учитывающий маневренные свойства цели; 13- и со^ - угол тангажа и
скорость его изменения; - коэффициент, характеризующий ширину
спектра угловых колебаний ЛА; <рав и соав - угол поворота антенны и
скорость ее вращения; иш - сигнал управления приводом; b и Т - коэф-
фициент усиления и постоянная времени привода; ^jU, £jB, и - цен-
трированные белые шумы с известными односторонними спектральны-
ми плотностями GjU, GjB, GCin5 и G0)a.
Геометрические соотношения между углами, поясняющие смысл
уравнений (11.20), (11.24) и (11.26), показаны на рис. 11.1. Уравнения
(11.21) и (11.26), (11.27) получены на основе соотношений (7.44) и
(11.19). Для описания эволюций jUB и со^ использована известная модель
Зингера [76].
Первичные измерители (формирователи наблюдаемого процесса)
должны гарантировать формирование оптимальных оценок всех фазо-
вых координат вектора состояния (11.20)—(11.27). Возможность такой
гарантии может быть определена на основе критерия наблюдаемости
(2.23)-(2.25). Из этого критерия следует, что в любой группе функцио-
нально связанных координат, подлежащих оцениванию, должны как
минимум наблюдаться нулевые производные оцениваемых координат.
В нашем случае к таким координатам относятся ев, 13 и <рав. Следует
отметить, что 13 может наблюдаться позиционным гироскопом, <рав -
датчиком углового положения антенны, а ев - совокупностью гироско-
па, ДУП и моноимпульсного пеленгатора (см. рис. 11.1). Кроме того,
для раздельного формирования оценок jLlB и jB необходимо измерять
хотя бы одну из этих фазовых координат. Ускорение jB проще всего
определить акселерометром. С учетом сделанных замечаний и приня-
тых допущений модель наблюдений описывается соотношениями:
Z] = Кд(ев-^-фав)со8\ир+^д; (И-28)
22=Крв+^ви; (11.29)
z3 = Kdo+U; (11.30)
z4 — К-ффав+^<ри • (11.31)
В этих соотношениях zb z2, z3 и z4 - соответственно напряжения
на выходах моноимпульсного пеленгатора, акселерометра, позиционно-
го гироскопа и датчика углового положения антенны; Кд, Kj, и Кф -
их коэффициенты передачи; ур - текущая фаза сигнала промежуточной
частоты на выходе приемника разностного канала пеленгатора; £д, ^ви,
и £фн - центрированные белые шумы измерений с известными одно-
сторонними спектральными плотностями GA, GBH, Go,, и Сф|1. Проверка
(11.20)-(11.27) и (11.28)-(11.31) по критерию наблюдаемости (2.25)
показывает, что выбранная пара «состояние-наблюдение» полностью
наблюдаема.
Поскольку исходные модели (11.20)-(11.31) линейные, возмуще-
ния гауссовские, то при квадратичных функционалах качества задачи
синтеза оптимального фильтра и оптимального регулятора могут ре-
шаться раздельно (п. 2.1.3).
11.5.2. Синтез оптимального регулятора
Оптимальный регулятор в составе угломера должен:
вырабатывать сигнал управления, обеспечивающий бессрывное
сопровождение антенной интенсивно маневрирующей цели;
формировать сигнал комбинированной обратной связи в опти-
мальный фильтр (см. рис. 3.6);
обеспечивать высокоточную стабилизацию антенны в простран-
стве при угловых колебаниях ЛА.
Для решения этих задач необходимо, чтобы для привода (11.26),
(11.27), предназначенного для отслеживания процесса (11.20), (11.21)
при наличии наблюдений (11.28)-( 11.31), был сформирован сигнал
управления и0), оптимальный по минимуму функционала качества (1.5):
1 = Му<
£в-$
,ч-ц>
Фав 411
^ав_ 421
4i2T ев~$
-фав
~ Чв
+Ju^kudt-.
о
(11.32)
В (11.32) qn, qi2=Q2i и q?2 - коэффициенты штрафов за точность слеже-
ния по углу и угловой скорости, a ku - коэффициент штрафа за сигнал
управления иш.
Сравнивая (11.20), (11.21) и (11.26), (11.27) с (2.8) и (2.7), а
(11.32) с (1.5), получаем
Хт=[ев-$ “в“юоГ> ху = [фав “авУ> u = u
0 1 0 1
> Fv =
0 -2Д/Д у 0 -1/Т
(11.33)
Ву
0
ь/т
411 412
421 422
K = ku .
Подставив (11.33) в (3.35), найдем сигнал управления
U“ = тГ(ёв -А-Юав) = К.<РД(р + К<йДСО, (11.34)
где
Дф = ёв--а-фав) AO)=G)B-G)d-G)aB (11.35)
- ошибки сопровождения по углу, угловой скорости и стабилизации, а
K’=bq2l/(Tku), K“ = bq22/(Tku) (11.36)
- коэффициенты ошибок сопровождения.
Из (11.34)-(11.36) следует, что:
регулятор представляет собой систему с ООС по всем управляе-
мым и стабилизируемым координатам;
сигнал управления зависит как от ошибок сопровождения по уг-
лу, так и по угловой скорости;
вес ошибок в сигнале управления определяется динамическими
свойствами привода (b/Т) и соотношением штрафов на точность и эко-
номичность (q2i/ku и q22/ku)i
для функционирования регулятора необходимо иметь фильтр,
формирующий оптимальные оценки ев, 13, фав и 0)в, <Ь0, соав.
11.5.3. Выбор коэффициентов штрафов функционала качества
Выбор коэффициентов штрафов функционала качества (11.32),
позволяющих обеспечить максимально высокую (допустимую) точ-
ность регулятора в установившемся режиме при заданных ограничениях
на величины сигнала управления и0)<иад и постоянной времени Тф<Тфд
процесса отработки ошибок захвата
△Фо = ев0 - О0 - Фав0, Дсоо =g>bO-g>m-4bo (Н-37)
проведем по методике, изложенной в п. 3.5.1. При этом будем полагать,
что выполняются следующие условия:
в момент захвата цели имеют место максимально возможные
ошибки Дф0 = Дф1Пах , Д(00 = Д(0П1ах одного знака;
известны допустимые значения сигнала управления и посто-
янной времени Тфд;
все виды возмущений в моделях (11.20)—(11.31) отсутствуют, в
результате чего ев=ев, тЗ=тЗ, Фав=ФаВи сов=сов, а)о=(Оо, соав=(оав;
закон изменения ев определяется гипотезой сов =0 и =0, что не
принципиально и предназначено для упрощения процедуры вычисления
ошибки слежения по углу в установившемся режиме.
При точном наведении самолета по закону (7.68)
ЗДо
jB = ----— Vc6 (0B + jUB = -N01 Д(0в + jUB, (11.38)
До" Дк
где N01 = ЗД0 /(До - Дк).
Используя (11.38) в (11.21), получаем уравнение
<bB=^(Noi-2)®B> ®в(0) = СОвО. (11.39)
Тогда на основании (11.20), (11.24), (11.26) и (11.39), (11.25),
(11.27), (11.34), (11.36) ошибки сопровождения цели по углу и угловой
скорости будут определяться соотношениями:
Дф = (0в - (00 - С0ав = Дю;
(11.40)
Л 1 b ь
Д(й=й)в-(йд-(Ьав = д(^01 -2)Ч + «в(од+-соав--К<₽Дф--КшДа>=
Д 1
£(N01-2) + -
Д Т
(Н.41)
При получении (11.41) принято во внимание, что (Оав=сов-До>(Оо
(см. рис. 11.1). Продифференцировав (11.40) по времени с учетом
(11.41), найдем
“ ГЬ (О 1
Дф+ -К +-
т т
(11.42)
Из этого уравнения следует, что устойчивость сопровождения
определяется только параметрами заданной части (b, Т) и регулятора
(Кш, Кф). В то же время точность сопровождения цели равносигнальным
направлением зависит как от параметров заданной части и регулятора
(b, Т, К(0, Кф), так и от условий применения (Д, Д, (0в, со^) и
N01 =ЗД0/(До-Дк).
Переходные процессы в регуляторе можно исследовать в процес-
се анализа решения
Дф = Cjexp^j t) + C2exp(X2t)
(Н.43)
однородной части (11.42), в котором С1 и С2 определяются начальными
ошибками Дфо и Дсо0, а Х| и Х2 находятся из соотношения (3.49):
ЬКю + 1
т
,ЬКФ
4----;
Т
(11.44)
Х2 =-0,5
%Кю + 1
Т
„ькф
4----
Т
(П-45)
X,
Анализ (11.43)—(11.45) позволяет сделать следующие выводы.
Решение (11.43) говорит о том, что для устранения начальных
ошибок захвата достаточно выполнить условия Xi<0 и Х2<0.
Во избежание перерегулирования в процессе отработки началь-
ных ошибок захвата необходимо, чтобы корни Х| и Х2 были веществен-
ными, т.е. (ЬКШ+1)2>4ЬТКФ. Тогда справедливо неравенство -Х|<-Х2. В
этих условиях постоянная времени Тф регулятора с достаточной для
практики точностью определяется наименьшим по модулю корнем
Л =1/Тф, (11.46)
значение которого зависит от параметров заданной части и регулятора.
Следует учесть, что величины Кф и Кш должны быть такими, что-
бы (11.34) удовлетворял условию (3.50). Используя наихудший случай
и^иад, Тф=Тфд, Дф=Дфо и Асо=Асо0, получаем
К“ = (июд-КфДф0)/Дсо0 . (11.47)
Подставляя (11.46) и (11.47) в (11.44), находим
<0 ТфДЬи «Д + (ТфД - Т)Д(О0
Кф = —----------------------; (11.48)
ТФдЬ(ТфдД<о0+д<Ро)
Тф\ьиюд-(ТфД-Т)Дф0
К = ---------. (11.49)
ТфдЬ(ТфдАюо +Д<Ро)
Анализируя (11.48) и (11.49), можно сделать следующие выводы.
В рассматриваемом угломере можно реализовать только посто-
янные времени Тфд>ТА(00/(Ьи(0д+Асо0). Поэтому для повышения быстро-
действия отработки ошибок захвата необходимо увеличивать b и и(1)д.
Кроме того, необходимо уменьшать первоначальную ошибку захвата по
угловой скорости Дсо0.
Величина коэффициентов усиления Кф и Кш ошибок сопровожде-
ния цели по углу и угловой скорости зависит не только от параметров
угломера, но и от точности устройств захвата цели по направлению,
реализующих начальные ошибки Дфо и Дсо0.
Значения ошибок сопровождения цели по углу и угловой скоро-
сти в установившемся режиме определяются только частным решением
неоднородного уравнения (11.42). Это обусловлено тем, что уже при
Г>ЗТфд собственные ошибки следящей системы, вычисляемые по фор-
муле (11.43), практически равны нулю. Отыскивая частное решение
неоднородного уравнения (11.42) в классе функций
△фуст = Аев + Всов + се+ ,
△фуст = ДсОуст = Асов + Ссод, (11.50)
△фуст ~ △®уст — ’
на основании (11.42) получаем равенство
0+
—— ^+СШь)+-К‘₽(ДЕв+Всц1+Сд+О10Ъ) =
Д 1
^(N01-2)+-
Гл
“в +
Из этого равенства находим
А.о, с=о, в><н.,-2)дН D
дьк4’ ьк?
. [д+ (NOi-2)Дт] (1-а0Т)
△фус. = ю ч + -г;;’ “о •
Необходимо подчеркнуть, что решение (11.51) является прибли-
женным, поскольку основано на представлениях (11.50) в рамках гипо-
тезы о замороженных коэффициентах.
Из (11.51) следует, что Дфуст зависит от параметров угломера (Ь,
К^, Т), параметров системы самонаведения (NOi) и условий применения
(Д, Д, со,, сов).
Если установившаяся ошибка Д(руст, вычисляемая по (11.51), пре-
вышает допустимое значение, то по (11.48) и (11.49) вычисляются но-
вые значения Кф и Кш, для которых затем определяется время Тф пере-
ходных процессов, новые значения Д(руст и т.д. до получения приемле-
мого результата.
11.5.4. Синтез квазиоптимального фильтра
Фильтр угломера будем синтезировать на основе моделей
(11.20)-( 11.31) обобщенного вектора состояния
хт=[ев Ч jUB jB О сов <рав ©ав] (11.52)
и вектора наблюдения
zT = [zj Z2 z3 z4]
в предположении, что Ди Д в (11.21) оцениваются в отдельном изме-
рителе дальности и скорости (п. 10.6.1).
Поскольку исходные модели линейные, а шумы белые, то для
синтеза фильтра можно использовать алгоритм оптимальной линейной
фильтрации (3.61)-(3.63), для реализации которого необходимо решать
систему уравнений размерностью (3.65)
Ny = N+ 0,5N(N+ 1) = 8 + 0,5-8-9 = 44, (11.53)
где N - размерность вектора состояния х (11.52). Решение системы
уравнений такой высокой размерности в реальном масштабе времени
предъявляет достаточно жесткие требования к быстродействию и объе-
му памяти БЦВМ. Поэтому используем принцип декомпозиции исход-
ного вектора состояния (11.52), позволяющий сформировать квазиоп-
тимальные оценки всех фазовых координат при существенно меньших
вычислительных затратах (§4.3). На основе этого принципа в составе
векторов состояния (11.20)-(11.27) и наблюдения (11.28)-( 11.31) можно
выделить группы подвекторов, которые позволят раздельно оценить
фазовые координаты. В состав таких групп можно включить следующие
уравнения:
jB(O) = jBO; (11.54)
z2 = KjjB 4jBH> (11.55)
позволяющие синтезировать фильтр собственного ускорения;
ад = ^0, (И56)
сод = -а0(00 + , со0 (0) = (Ово;
z3=Kde+U> (H-57)
дающие возможность сформировать оценки $ и со в фильтре коррек-
тирующих сигналов;
ФаВ=ЧВ> Фав (°) = ФавО ’
1 Ь
“aB=-’4B + “Uo>+U> соав(О) = соавО; (11-58)
z4 = Кф(рав+£фи, (11.59)
обусловливающие формирование оценок фав и соав в фильтре привода
(управителя);
ёв=сов, £в(0) = £в0;
®в =-^“B+i(jUB-jB)> ®в(°) = “во; (Ц-60)
д Д
)цВ ®рЦВ )цВ(0) — JubO ’
z0T = z, + КдОсоБУр + Кдфав cosvp = Кд£в cosyp + £Д1, (11.61)
определяющих возможность получения оценок ев , соа и jLlB в фильтре
отслеживаемых координат. Здесь (11.60) и (11.61) записаны с учетом
оценок Д , Д , jB, д и фав, сформированных в других фильтрах; £Д| -
центрированный гауссовский шум с односторонней спектральной плот-
ностью Сд| = GA+G^+G^aB, где и Сфав - односторонние спек-
тральные плотности ошибок оценивания процессов Ф и фав.
Разбив оптимальный фильтр угломера на четыре подфильтра,
можно уменьшить число решаемых уравнений по сравнению с (11.53):
1-2 2-3 2-3 3-4
Nvl=l + — + 2 + — + 2+— + 3+—= 2 + 5 + 5 + 9 = 21
у* 2 2 2 2
и тем самым ослабить требования к объему памяти и быстродействию
БЦВМ.
Сопоставив (11.60) и (11.61) с (2.13) и (2.16), получим
^от “ к JubP ’ U — , z — ZOT ,
(11.62)
Подставив (11.62) в (3.61)—(3.63), сформируем алгоритм оценивания:
Ёв =wB+KOT1cos\|/TAz1, ёв(О) = евО; (11.63)
Л 2Л - 1 л
Ч =—F<0B + HjuB-jB) + K0T2c0sVrAzi> wb(0) = (0b0; (11.64)
Д Д
jUB =-aJjuB+KoT3CosVTAz1, jUB(0) = 0; (11.65)
Azt =zOT -KAeBcosvp =zt -Кд(ев -0-<paB)cosvp ; (11.66)
Кот1 ~ ЗВцКд/Сд!,
кот2 ~ 2D21Ka/GA| , (11.67)
котЗ = 2D3IKA/GA1;
D11=2D21-D3K3/GA1, Dh(O) = D11o;
D2i = 2D22 -^D2i +4-D3l - Р2[в"К1 t D21(0) = 0;
Д Д GM
D22 = — D32 Д D22 A. D22(0) = D22o ;
Д Д GA1
D3l=D23-ajD3,-D3|P||K^ , D31(0) = 0; (11.68)
gai
D32 =4d33 -|^A + <Xj ]d32 - D^P2>Ka , D32(0) = 0;
Д Д Gai
\ /
D2 К2
D33 =-2ajD33A + 0,5Gju, D33(O) = D33o.
При получении (11.68) были учтены следующие обстоятельства: по-
скольку матрица D симметричная, то D|2=D2b D|3=D3b' D23=D32; при
Н=[КдСО8\|/р 0 0] слагаемое 2DH,G’,1HD в (3.63), содержащее сверхвы-
сокочастотные составляющие cos2\|/p, было усреднено на основе равен-
ства cos2\|/p=0,5+0,5cos2\|/p. При этом слагаемые 0,5cos2\|/p были исклю-
чены из процесса вычисления (11.68).
Правомочность усреднения Dy (i = 1,3, j = 1,3) обусловлена двумя
причинами. Во-первых, матрица D характеризует точность оценивания
медленно изменяющихся траекторных параметров ев, сов и jiw. Во-
вторых, современные БЦВМ еще не обладают быстродействием, позво-
ляющим учитывать при вычислениях Dy сверхвысокочастотные слагае-
мые, содержащие cos2\|/p.
Особенностью алгоритма (11.63)-(11.68) является необходимость
текущего вычисления коэффициентов матрицы D (11.68), поскольку их
значения зависят не только от времени, но и от значений Д и Д, по-
ступающих из автоселектора дальности и скорости.
Аналогично можно сформировать алгоритмы функционирования:
для фильтра собственного ускорения
jB=K4>jAzj- jB(0) = z2(0)/Kj,
AZj =z2-KjjB;
для фильтра корректирующих сигналов
^=сЬв + кфй|Дгй) -0(0) = z3(0)/Ke,
= -aocoe + кф02Дг0, соо (0) = 0,
Дгй = z3 -
и для фильтра привода
Фав = ®ав + K<|xpl^z<p > Фав (0) = z4 (°) 7 Кф’
? 1„ b „ (11.73)
®ав ~ ~у *^ав "1” гр Ufa + Кфф2^2<р ’ ®ав(0) — GJaB(j,
Дгф = z4 - Кффав , (11.74)
(11.69)
(11.70)
(П-71)
(11.72)
где иш формируется в регуляторе (11.34). Здесь кф], кфоь кф02 и к^,
кф(р2 - коэффициенты усиления невязок (11.70), (11.72) и (11.74), опре-
деляемые по стандартным формулам (3.62), (3.63). В общем случае их
можно вычислить один раз и запомнить в БЦВМ при алгоритмическом
способе реализации фильтров, либо реализовать в виде усилителей с
переменным коэффициентом усиления при аппаратурном воплощении.
Совокупность уравнений (11.63)-(11.74) и определяет алгоритм
функционирования квазиоптимального фильтра угломера. Квазиопти-
мальность фильтра обусловлена следующими причинами.
Коэффициенты усиления всех невязок вычисляют для вполне оп-
ределенной априорной статистики. При изменении условий функциони-
рования, связанных с изменением типа сопровождаемой цели, видов ее
маневров и статистики возмущений, коэффициенты усиления невязок
будут отличаться от их оптимальных значений, что и приведет к ухуд-
шению точности фильтрации.
В результате декомпозиции исходного вектора состояния в полу-
ченных фильтрах малой размерности были утрачены взаимные связи
и корректирующие поправки, обусловленные невязками (11.70), (11.72)
и (11.74).
11.5.5. Структурная схема угломера
Структурная схема синтезированного угломера, приведенная на
рис. 11.15, получена на основе моделей первичных измерителей (11.28)
-(11.31), заданной части (привода) (11.26), (11.27), алгоритмов вычис-
ления сигнала управления (11.34) и квазиоптимальных оценок (11.63)-
(11.74). Особенностью схемы является то, что УСРО вырабатывает сиг-
налы Zj и z£, при этом сигнал Z| используется для получения невязки Azi
(11.66), a Zj - только в качестве опорного сигнала для модулятора М и
фазового детектора (ФД). Модулятор М формирует в (11.66) прогноз
наблюдения Кд (ё - Ф- (рав) cos\|/p путем модуляции сигнала суммарного
канала z£ сигналом разности оценок (е - Ф - фав). Фазовый детектор реа-
лизует в (11.63)-(11.66) операцию умножения cos\|/p и Azr Возникаю-
щие при этом составляющие удвоенной частоты отфильтровываются
низкочастотным фильтром ФД и дальнейшего участия в формировании
оценок не принимают. Сигналы с выхода ФД усиливаются с коэффици-
ентами K0Ti (i = 1,3) и поступают в каналы вычисления оценок ев, сов и
jUB, где Ие, Иш и HjU - соответствующие интеграторы. Коэффициенты
кот, усиления невязок, зависящие от текущих оценок Д и Д (11.67),
(11.68), невозможно определить заранее и следует вычислять в процессе
формирования оценок. Это обстоятельство отличает полученный
фильтр отслеживаемого процесса от традиционного фильтра Калмана.
Начальные условия £в0 и совО формируются в БРЛС в режиме захвата.
ФИИЬТР УСКОРЕНИЯ
Рис. 11.15
Невязка Агф для фильтра привода (управителя) вычисляется по
правилу (11.74). Усиленная в УНУП в Кфф1 и Кфф2 раз (11.73), она сум-
мируется с результатами прогноза О)ав
1 b ,
и формируемы-
ми в ЭУП. Вычисленные таким образом правые части (11.73) интегри-
руются в ИУП, в результате чего и образуются оценки <рав и соав. Из-
меренные ПГ мгновенные значения z3 используются для определения
невязки (11.72). После усиления в усилителях невязок корректирующих
сигналов (УНКС) в Кф0! и Кфограз (11.71) она суммируется с результата-
ми прогноза со$ и -ос$соо, формируемыми в экстраполяторе корректи-
рующих сигналов (ЭКС). Интегрируя полученную сумму, интеграторы
корректирующих сигналов (ИКС) вычисляют оценки # и Фильтр
ускорения, вырабатывающий оценку jB по алгоритму (11.69), (11.70),
аналогичен фильтру, рассмотренному в п. 10.6.1.
Оценки фцв =€в-тЗ- (см. рис. 11.1) и wB, jUB поступают к потре-
бителям информации для реализации тех или иных методов наведения,
алгоритмов помехозащиты и определения маневров цели. На основании
ошибок £в-'0-фав и wB-(id-d)aB в регуляторе формируется управ-
ляющий сигнал u0) (11.34), под действием которого привод поворачива-
ет антенну так, чтобы РСН совмещалось с направлением на цель.
Если цель отклонилась от РСН, то на выходе УСРО формируется
сигнал z^O и появляется невязка Az^O. Под действием усиленной не-
вязки изменяются значения оценок ев , сов и jUB. Это приводит к ошиб-
кам £в-Ф-фав и Ц» “ “ сЬав > предопределяющим возникновение
сигнала управления uw и поворот антенны в сторону, соответствующую
уменьшению сигнала zh
При изменении углового положения ЛА в пространстве вариации
измеряются ПГ, что приводит к изменению невязки Az^ и оценок Ф и
сод. Под действием этих оценок сигнал управления uw изменяется так,
что антенна поворачивается в сторону, противоположную отклонению
ЛА, сохраняя тем самым свою пространственную ориентацию.
Спецификой рассмотренного способа развязки антенны от угло-
вых колебаний самолета является использование смешанной коррекции
как по положению (позиционной), так и по скорости (скоростной). Это
позволяет улучшить точность стабилизации антенны в пространстве, а
соответственно и точность формирования всех оценок. Еще одной осо-
бенностью угломера является использование корректирующих сигналов
не только при управлении антенной, но и при формировании невязки
(11.66). Тем самым компенсируются мгновенные изменения zb вызванные
эволюциями тЗ- и (0$, путем вычитания соответствующих оценок 13 и со$
независимо от инерционного процесса поворота антенны приводом.
Анализ структурной схемы угломера на рис. 11.15 позволяет сде-
лать следующие выводы. Синтезированный угломер представляет собой
многомерную, нестационарную и многоконтурную следящую систему.
Многомерность обусловлена наличием нескольких входных (zb zz, z2,
z3, z4) и нескольких выходных (£в, фцв, сов, jUB, О, , фав , йав, фаВ)
соав) сигналов. При этом часть оценок (фцв, сов, jUB) поступает к потре-
бителям информации, а остальные используются в самом угломере.
Нестационарность угломера связана с наличием в фильтрах перемен-
ных коэффициентов усиления невязок кот1, кот2, к^з, Кф,, Кф^ь Кф02 и Кфф1,
Кфф2 большинство из которых изменяются от своих наибольших значе-
ний в момент начала сопровождения до существенно меньших в уста-
новившемся режиме. Такое изменение этих коэффициентов обеспечива-
ет быструю отработку ошибок захвата за счет широкой полосы пропус-
кания фильтров. В установившемся режиме узкая полоса пропускания
фильтров позволяет сгладить случайные возмущения. Кроме того, не-
стационарность фильтра отслеживаемого процесса обусловлена пере-
менными коэффициентами Д и Д модели (11.60), используемой для
прогноза сов. С одной стороны, наличие таких коэффициентов делает
модель (11.60) более адаптивной к условиям применения, но с другой -
приводит к резкому возрастанию дисперсии D22 (1 1.68) ошибок оцени-
вания сон на малых расстояниях Д до цели. Эта особенность, усиленная
ростом интенсивности угловых шумов (п. 5.2.4), может увеличить даль-
ность Дк окончания самонаведения, что нежелательно.
В следящей системе угломера можно выделить несколько типов
контуров. Четыре из них, образованные цепями формирования невязок
Azj (11.66), Azj (11.70), Az0 (11.72) и Агф (11.74), типичны для фильтро-
вых систем. Пятый контур замыкается на антенне через ее привод и
регулятор, а шестой образуется цепями подачи из регулятора комбини-
рованного сигнала иш коррекции в фильтр привода. Особенностью этого
сигнала является то, что он формируется не только по наблюдаемым
координатам ев, Ф и фав, но и по оцениваемым сов, (0$ и соав.
Многоконтурность следящей системы одновременно обеспечива-
ет высокую точность, быстродействие, устойчивость и помехозащи-
щенность угломера в целом.
Высокая точность, гарантируемая фильтрами отслеживаемого
процесса и корректирующих сигналов, объясняется следующими при-
чинами. Во-первых, к потребителям поступают непосредственно оценки
Фцв и wb > а не их запаздывающие аналоги фав, соав, как это имеет место
в одноконтурных системах. Во-вторых, оценки £в, сов и jliu формиру-
ются по более точным адаптивным моделям (11.20)-(11.22), в которых
учитываются изменения дальности, скорости и маневр не только ОУ, но
и цели, что особенно важно при сопровождении интенсивно маневри-
рующих целей. В-третьих, оценки ев , сов и jHU вычисляются по более
254
совершенным алгоритмам калмановской фильтрации, которые отлича-
ются от а, р алгоритмов переменными коэффициентами усиления невя-
зок, адаптивными к априорной статистике. В-четвертых, более высокой
точностью измерений zh обусловленной лучшей стабилизацией в про-
странстве антенны за счет использования смешанной коррекции. Это
позволяет осуществлять в фильтре отслеживаемого процесса более точную
коррекцию результатов прогноза по исходным моделям (11.20)-(11.22)
результатами измерений.
Высокое быстродействие предопределено исключением инерци-
онного привода антенны из цепей формирования оценок ев, сов и jUB,
поступающих к потребителю. Это дает возможность уменьшить посто-
янную времени отработки ошибок захвата в фильтре отслеживаемого
процесса на 1-2 порядка по сравнению с одноконтурными угломерами.
Высокая устойчивость сопровождения антенной линии визирова-
ния цели обеспечивается инерционным приводом за счет использования
оптимального сигнала управления (11.34). Особенностью этого сигнала
является то, что в нем учитываются ошибки сопровождения цели не
ТОЛЬКО ПО углу (£ц-$-фав), но и п0 угловой скорости (сов - сос - соав)
при реальных ограничениях на сигнал управления и требуемое время
переходных процессов в регуляторе (11.48), (11.49). Учет в законе
управления (11.34) ошибок по угловой скорости позволяет бессрывно
сопровождать цели во всем реальном диапазоне изменения угловых
скоростей ЛВ. Улучшение условий бессрывного сопровождения целей
обеспечивается и повышенной развязкой антенны от угловых колебаний
ЛА. Поскольку информация к потребителям поступает не из управителя
(привода), то к контуру сопровождения цели антенной не предъявляется
требований высокой точности слежения. Вполне достаточно, чтобы
текущая ошибка £в-13-фав не превышала 0/2 половины ширины диа-
граммы направленности. В такой ситуации на вход УСРО будут посту-
пать отраженные от цели сигналы, обеспечивая тем самым устойчивое
формирование наблюдения zh а соответственно и оценок фци, сов и jUB.
Сопровождение цели будет бессрывным, если максимально возможная
ошибка сопровождения по углу
А<Ртах = ев - $ - Фав = АФуст + 2д/°11 + Da + D(paB > 2 >
где Афуст определяется соотношением (11.51), Du вычисляется при ре-
шении (11.68), а дисперсии и D9au ошибок оценивания тангажа и
углового положения антенны - при решении соответствующих уравне-
ний Риккати. Устойчивость формирования оценок фав и соав обуслов-
лена введением в фильтр привода комбинированного корректирующего
сигнала uw из регулятора.
Высокую помехозащищенность угломера можно обеспечить бо-
лее совершенными алгоритмами защиты, основанными на использова-
нии очень высокой избыточности информации. Так, информация об
угловом положении цели содержится в оценках Фцв = £в-Ф, Фав и фав, а
об угловой скорости ЛВ - в оценках О)в и а)д + соав.
При кратковременных пропаданиях сигналов Z| процесс со-
провождения цели будет продолжаться за счет использования экстрапо-
лированных в фильтре отслеживаемого процесса оценок ев и о)в и за-
помненного в приводе значения 0)ав.
В заключение отметим, что в рассмотренном угломере аппа-
ратурным способом реализуются только первичные измерители, моду-
лятор и фазовый детектор. Все остальные операции могут быть выпол-
нены алгоритмически в БЦВМ.
ГЛАВА 12. ОБНАРУЖЕНИЕ МАНЕВРОВ ЦЕЛИ
И АДАПТАЦИЯ К НИМ ФИЛЬТРОВ
АВТОСОПРОВОЖДЕНИЯ
Под маневром понимается любое движение цели, при котором в
отслеживаемых фазовых координатах появляются производные вто-
рого и более высоких порядков. В приложении к каналам оценивания
дальности, скорости и угловых координат - это движение с постоян-
ными либо переменными линейными или угловыми ускорениями.
Обнаружение маневра цели очень важно как с тактической, так и
технической точек зрения. Несвоевременное обнаружение начала ма-
невра цели достаточно часто приводит к срыву атаки из-за запаздыва-
ния адекватного изменения пространственного положения ОУ. Следст-
вием этого запаздывания может быть уход цели из зоны возможных
атак и потеря позиционного превосходства в бою. В техническом плане
интенсивное маневрирование цели может существенно ухудшить дос-
товерность обнаружения [28], а также точность и устойчивость автома-
тического сопровождения цели следящими измерителями. Причины
этих явлений рассмотрены в п. 5.2.1. В одноконтурных следящих изме-
рителях с низким порядком астатизма продолжительный маневр неиз-
бежно приводит к срыву автосопровождения из-за того, что ошибка
слежения превышает половину ширины линейного участка дискрими-
национной характеристики (см. рис. 3.3). В оптимальных многоконтур-
ных измерителях такой маневр может либо ухудшить точность оцени-
вания в фильтрах отслеживаемого процесса (см. рис. 10.8, 10.9 и 11.15),
либо вызвать расходимость процесса оценивания. Оба явления обуслов-
лены несоответствием моделей, используемых при синтезе фильтра,
реальному закону изменения отслеживаемых фазовых координат [76].
Для возникновения расходимости особенно благоприятно начало ма-
невра в те моменты времени, когда фильтры автосопровождения уже
работают в установившемся режиме с наименьшими коэффициентами
усиления невязок и наименьшей полосой пропускания.
В связи с отмеченными обстоятельствами в состав современных
и перспективных следящих измерителей целесообразно включать спе-
циальные устройства (алгоритмы) обнаружения маневра и коррекции
(адаптации) параметров или структуры фильтров в соответствии с ре-
9—3806
257
альной обстановкой. Актуальность этой проблемы существенно возрас-
тает в связи с расширенным приемом на вооружение передовых стран
сверхманевренных самолетов. Спецификой этих самолётов является
возможность реализации сложных законов пространственных эволю-
ций, при которых возникают производные отслеживаемых координат
высоких порядков.
Анализ процедур сопровождения маневрирующих целей позво-
ляет выделить три направления синтеза алгоритмов обнаружения ма-
невров и адаптации фильтров.
К первому направлению можно отнести синтез алгоритмов функ-
ционирования следящих фильтров на основе моделей состояния высо-
кой размерности (N>3), позволяющих оценивать ускорения и их произ-
водные. Примером таких алгоритмов являются законы формирования
отслеживаемых фазовых координат, рассмотренные в п.п. 10.6.1, 10.6.2
и §11.5. Их достоинство состоит в постоянном контроле процесса ма-
неврирования сопровождаемой цели по оценкам продольных и попе-
речных ускорений и их производных. Кроме того, начало маневра цели
не требует изменения параметров и структуры алгоритмов оценивания.
Недостатком указанных алгоритмов является большая сложность и
более высокие требования к объему памяти и быстродействию БЦВМ.
Второе - основано на алгоритмах параметрической идентифика-
ции используемых моделей состояния по результатам измерений фазо-
вых координат (п. 3.6.3). Если цель не маневрирует, то результаты иден-
тификации параметров моделей практически совпадают с их апри-
орными значениями. Несоответствие идентифицированных и априор-
ных значений параметров моделей свидетельствуют о наличии маневра.
В такой ситуации в алгоритмах фильтрации априорные значения пара-
метров моделей заменяются идентифицированными, что позволяет
предотвратить расходимость процессов оценивания (п. 3.7.1).
Третье - отличает использование специальных обнаружителей
маневра и устройств коррекции параметров либо структуры фильтров.
Такой прием характерен, как правило, для фильтров не выше второго
порядка, вполне удовлетворяющих требованиям точности и устойчиво-
сти сопровождения неманеврирующих и слабо маневрирующих целей.
В режиме сопровождения неманеврирующих целей эти алгоритмы дос-
таточно просты и не требуют больших объемов памяти и высокого бы-
стродействия вычислителей. После обнаружения начала маневра либо
корректируются параметры фильтров (как правило, коэффициенты уси-
ления невязок), либо изменяется их структура за счет более сложных
моделей состояния, учитывающих маневр. В последнем случае требова-
ния к БЦВМ повышаются только во время маневрирования цели. Наи-
более известные способы обнаружения маневра цели основаны на ана-
лизе невязки (обновляющего процесса).
12.1. АЛГОРИТМЫ ОБНАРУЖЕНИЯ МАНЕВРОВ ЦЕЛИ,
ОСНОВАННЫЕ НА АНАЛИЗЕ ОБНОВЛЯЮЩЕГО ПРОЦЕССА
Маневр цели является одной из основных причин расходимости
процессов фильтрации, поэтому для обнаружения маневра могут быть
использованы все приемы обнаружения расходимости (см. §4.3).
Возможность формирования решающего правила, позволяющего
в (3.68) достоверно определить начало маневра в процессе анализа
обновляющего процесса (невязки)
Az(k) = z(k)-H(k)x,K. (12.1)
где хэк = Ф(к, к - 1)х(к -1) + В(к - l)u(k -1), основана на следующих
его свойствах [76]. В линейном оптимальном фильтре невязка представ-
ляет собой центрированный гауссовский белый шум с ковариационной
матрицей
DAz(k) = H(k)D(k, k - l)HT(k) + D„(k). (12.2)
С момента начала маневра условия функционирования фильтра уже
не будут соответствовать моделям состояния, положенным в основу синте-
за. В такой ситуации фильтр Калмана перестает быть оптимальным, а об-
новляющий процесс уже не обладает перечисленными свойствами. Следо-
вательно, для обнаружения маневра могут быть использованы:
отклонения среднего значения невязки от нуля M{Az}^0, являю-
щиеся следствием появления смещённости оценки;
отличие закона распределения Az от гауссовского;
несоответствие реальных дисперсий невязок их теоретическим
значениям, определяемым равенством (12.2).
К настоящему времени известно достаточно много алгоритмов,
основанных на перечисленных особенностях невязки [76]. Рассмотрим
некоторые из них.
- Один из самых простых алгоритмов основан на свойстве гауссов-
ских процессов (12.1) практически достоверно существовать в интервале
-3757 <^<3757 (i = hM), (12.3)
где Dh - дисперсии (12.2) невязок. Если все составляющие Az, невязок
удовлетворяют условию (12.3), то с вероятностью Р=0,997 принимается
решение об отсутствии маневра. Если хотя бы одна из невязок Az, не
удовлетворяет условию (12.3), то принимается решение о начале маневра.
Второй способ основан на вычислении функционала правдоподобия
L_p(Az(k)z(k),Hl)
p(Az(k)z(k),H0)
(12.4)
на основе результатов всех измерений z(k), полученных к моменту вре-
мени к. В (12.4) p(Az(k)|z(k),Hj) - плотность условной вероятности
наличия гипотезы Н| (маневр есть), a p(Az(k)|z(k),H0) - плотность
условной вероятности существования гипотезы Но (маневра нет). Если
L>Xn, где Хп - определенный порог, то принимается решение о наличии
маневра. Процедуру (12.4) можно распространить на функционалы
правдоподобия, соответствующие гипотезам Hj существования вполне
определенных типов маневров. На практике эту процедуру вычисления
часто заменяют более простой процедурой согласованной фильтрации.
Структурная схема такого обнаружителя для дискретного фильтра Кал-
мана приведена на рис. 12.1, где hjk (j = l,M) - весовые функции
фильтров, согласованных с сигналами определенных маневров. Выход-
ные сигналы фильтров, после возведения в квадрат, поступают в уст-
ройство поиска экстремума УПЭ. Если после прихода очередного ре-
зультата измерений z(k) наибольший сигнал, выбранный в УПЭ, пре-
вышает определенный порог X, то принимается решение об обнаруже-
нии маневра. В такой ситуации изменяются либо параметры фильтра
Калмана, либо его структура за счет усложнения моделей состояния
Ф(к,к-1), или вводится специальный управляющий сигнал и(к-1).
Рис. 12.1
Один из наиболее удачных способов обнаружения маневра с по-
следующим адаптивным изменением в (3.68) коэффициента усиления
невязки (3.70) основан на использовании алгоритма нерасходящейся S-
модификации фильтра Калмана (см. п. 3.7.2). При использовании этого
алгоритма начало маневра идентифицируется по выполнению условия
(3.117), а коэффициент усиления невязки (3.70) корректируется по пра-
вилу (3.71), (3.116), (3.118). Обобщенная структурная схема такого
фильтра с обнаружением маневра приведена на рис. 12.2.
Если маневр отсутствует, то S(k)=l и фильтр функционирует по
типовому алгоритму (3.68)-(3.72). При появлении маневра, возрастает
невязка Az, возрастает коэффициент S(k) (3.118) и увеличивается кор-
ректирующее влияние невязки на неточный прогноз.
Следует отметить, что использование рассмотренной процедуры
обнаружения маневра и адаптации к нему фильтра следящей системы
для аналоговых алгоритмов фильтрации является затруднительным.
Более универсальными с точки зрения применения как в аналого-
вых, так и дискретных фильтрах являются способы, основанные на кор-
рекции прогноза состояния управляющими добавками (3.35) и (3.124),
(3.125).
Структурные схемы калмановских фильтров с оптимальной кор-
рекцией прогноза состояния при маневрах для аналоговых и дискрет-
ных систем показаны на рис. 12.За,б.
Если маневра нет, то эти фильтры работают по типовым алго-
ритмам, формируя оптимальные по минимуму СКО оценки. После сра-
батывания обнаружителей в алгоритмы фильтрации вводятся аддитив-
ные управляющие поправки uK(t) [51] или uK(k) [50], что позволяет уто-
чнить прогноз, снизить ошибки оценивания и предотвратить расходи-
мость процедур фильтрации.
Рис. 12.3
Ниже будут рассмотрены конкретные примеры синтеза и анализа
различных вариантов адаптивных фильтров сопровождения с обнару-
жителями маневров.
12.2. ФИЛЬТР УГЛОМЕРА С ОБНАРУЖЕНИЕМ МАНЁВРА
ПО ОБНОВЛЯЮЩЕМУ ПРОЦЕССУ И КОРРЕКЦИЕЙ
КОЭФФИЦИЕНТОВ УСИЛЕНИЯ НЕВЯЗКИ
Целью данного раздела является иллюстрация на простейшем примере
возможности обнаружения маневра и адаптация к нему фильтра сопровож-
дения угломера путем коррекции коэффициента усиления невязки. Синтез
фильтра будет выполняться на основе математического аппарата дискрет-
ной калмановской фильтрации при следующих допущениях:
оптимальный регулятор, формирующий сигнал (11.34) управления
инерционным приводом, уже синтезирован;
угловое положение антенны фав и скорость ее вращения (Ьав оце-
ниваются отдельным фильтром привода (см. рис. 11.15);
для развязки антенны от угловых колебаний ЛА используется сиг-
нал 0)0 скоростной коррекции, формируемый специальным фильтром
корректирующих сигналов (рис. 11.15);
каналы угломера независимы и идентичны, поэтому в дальней-
шем будет рассмотрен только канал сопровождения цели в вертикаль-
ной плоскости;
эволюции бортового пеленга <рцв и его угловой скорости соцв оп-
ределяются моделью
Фцв(к)=<р11В(к-1)+тЧв(к-1), Фцв(0)=ФцвО;
Чв(к)=(1-тциХв(к-1)+^0(к-1), Чв(0)=ЧвО;
в качестве измерителя используется моноимпульсный пеленга-
тор, формирующий наблюдение
z(k) = Кд [<рцв (к) - <рав (к)]+ £д (к). (12.6)
В моделях (12.5) и (12.6): т - интервал дискретизации во времени; 0См -
коэффициент, характеризующий маневренные свойства цели; Кд - крутиз-
на пеленгационной характеристики пеленгатора; и ^д - центрированные
гауссовские шумы с известными дисперсиями D(o и Од. Геометрические
соотношения между различными углами поясняются на рис. 11.1.
Для модели состояния (12.5) при наличии наблюдения (12.6) не-
обходимо синтезировать алгоритм формирования оценок фцв и Лцв
(3.68)—(3.71) с обнаружением маневра цели по правилу (3.117) и авто-
матической коррекцией коэффициентов усиления невязок (3.70) по
закону (3.71), (3.116), (3.118).
Преобразуем наблюдение (12.6) к виду
zy (k) = z(k) + Кдфав(к) = Кдфцв(к) + £Д1, (12.7)
более удобному для использования в алгоритмах калмановской фильт-
рации. Здесь фав - оценка углового положения антенны, формируемая
в фильтре привода; £Д| - эквивалентный центрированный дискретный
белый шум с дисперсией DA|=DA+ КдПф, в которой - дисперсия
ошибок формирования оценки фав.
Поставив в соответствие (12.5), (12.7), (2.20), (2.21) и (3.69),
(3.72), получим
Ф(кХ-1)=
"1
0
(12.8)
Используя (12.8) в (3.118), вычислим весовой коэффициент
SB(k)=
____________Az2(k)-DAI(k)__________
KA [DH(k-l)+2TD21(k-l)+T2D22(k-l)]
при S > 1,
1, при S<1,
(12.9)
где
Az(k) = z(k) - Кд [<рцвэ (к) - фав (к)]
(12.10)
- невязка измерений (обновляющий процесс). Априорные ковариации
Du(kJc-l)=SB(k-l) [Dll(k-l)+2O2l(k-l)+T2D22(k-l)]> Dn(0)=D||0;
D21(k,k-l) = Dl2(k,k-l) = SB(k-l){(l-TaM)x
x[D21(k-l)+ TD22(k-l)]}, D2l(0) = 0; (12.11)
D22(k,k-l)=SB(k-l)j(l-TO(M)2[D22(k-l)+D(O(k-l)]}, D22(0) = D220
вычисляются по формуле (3.116), а апостериорные ковариации
D11(k) = (l-K<1)1KA)D11(k,k-l);
D2i(k) — D|2(k) — D2i(k,k - 1)-k(|)2KaD| i(k,k -1); (12.12)
D22(k) = D22(k, k -1) -кф2КдО21 (k, k -1)
определяются no (3.71). Коэффициенты усиления невязки формируются
в соответствии с (3.70):
Кф1 ~ к)ц(к)Кд/ВД|, кф2 = D2l(k)KA/DA|. (12.13)
Подставляя (12.8), (12.10) и (12.13) в (3.68) и (3.69), получаем:
Фцв (к) = Фцв,(к) + кф|Аг, фцв (0) = фцв0;
. (12.14)
®цв (к) = соцвэ (к) + кф2 Az, юцв (0) = <оцв0;
Фцвэ(к) = Фцв(к -1)+тюцв(к -1);
(12.15)
соЦвэ(к)=(1-там)6)цв(к-1).
Совокупность уравнений (12.9)-(12.15) определяет алгоритм функ-
ционирования фильтра сопровождения цели по направлению с обнаруже-
нием маневра и автоматической коррекцией процесса фильтрации.
Структурная схема этого фильтра приведена на рис. 12.4, где Км
характеризует усилительное звено с коэффициентом усиления
Км=1/ К^ Du(k-l) + 2ATD21(k-l) + AT2D22(k-l) к
необходимым для вычисления весового коэффициента SB (12.9).
Рис. 12.4
Приведенная схема отличается от схемы традиционного фильтра
Калмана дополнительным контуром обнаружения маневра, в котором
вычисляется и анализируется коэффициент SB. Если цель не маневриру-
ет, то SB=1 и фильтрация выполняется по традиционному алгоритму
(3.68)—(3.72). После начала маневра закон изменения угла <рцв и угловой
скорости (0цВ уже не будет соответствовать модели (12.5), что приведет
к неправильной экстраполяции (рцв и С0цВ (12.15), возрастанию невязки
(12.10) и увеличению весового коэффициента (12.9) до значений SB>1. В
свою очередь, увеличение SB приведет к возрастанию коэффициентов
Кф1 и Кф2 (12.13) и усилению в (12.14) корректирующего влияния невязки
(12.10) на результаты оценивания. В итоге оценки фцв и соцв прибли-
жаются к своим реальным значениям <рцв и соцв, уменьшаются невязки и
коэффициенты SB, Кфj и кф2 и т.д.
Момент, когда выполняется условие SB>1, считается началом ма-
невра, и с этого момента начинается его специальная индикация. Угло-
вая скорость ЛВ (Ов оценивается путем суммирования соцв с сигналом
скоростной коррекции.
На рис. 12.5 сплошной и пунктирной линиями показаны эпюры за-
висимости ошибки сопровождения по углу маневрирующей цели при ис-
пользовании рассмотренного выше приема обнаружения маневра с после-
дующей коррекцией коэффициента усиления невязки и при его отсутствии,
а на рис. 12.6-12.8 приведены графики зависимости коэффициентов SB и
Кфь кф2 от времени. Эти рисунки иллюстрируют ситуацию, когда до начала
маневра угловое движение цели соответствует закону (12.5), положенному
в основу синтеза фильтра отслеживаемого процесса, а с момента tM=5c на-
чала маневра оно определяется гипотезой движения с постоянным угловым
ускорением. Из приведенных рисунков видно, что коэффициенты усиления
невязок изменяются в реализуемом на практике диапазоне, маневр обнару-
живается с небольшим запаздыванием, а вызываемая им ошибка сопровож-
дения по углу эффективно устраняется.
Рис. 12.5
1
к<„
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
О
О 5 Ю 15 t,c 20
Рис. 12.7
Достоинством рассмотренного алгоритма является простота об-
наружения маневра и устранения вызываемого им процесса расходимо-
сти следящего фильтра.
12.3. ФИЛЬТР ДАЛЬНОМЕРА С ОБНАРУЖЕНИЕМ МАНЕВРА
И ОПТИМАЛЬНОЙ КОРРЕКЦИЕЙ ПРОГНОЗА
Еще одним достаточно эффективным способом обнаружения ма-
невра с адаптацией к нему фильтра сопровождения цели является при-
ем, рассмотренный в п. 3.7.3, который базируется на оптимальной кор-
рекции прогноза. Ниже будет рассмотрен этот прием на примере дис-
кретного фильтра оценивания дальности и скорости .
Пусть по модели состояния
Д(к)=Д(к-1)+У(к-1)т,
V(k)=V(k-l)4v(k-l),
и измерениям
ди(к)=д(к)Чл,
Д(О)=До;
V(O)=Vo
(12.16)
(12.17)
на основании формул (3.68)-(3.72) был синтезирован дискретный
фильтр
Д(к) = Дэ(к) + кф1[Ди(к)-Дэ(к)],
До(О) = Д3;
V(k) = Уэ(к) + кф2[Ди(к) - Д э (к)],
Vo(O) = V3
(12.18)
Дэ(к) = Д(к-1) +У(к-1)т;
Уэ(к) = У(к-1),
(12.19)
в котором Д, V, Д, У - соответственно дальность до цели, скорость сбли-
жения с ней и их оптимальные оценки; Ди - измеренное значение дально-
сти; £v; - центрированные дискретные белые шумы с дисперсиями Dv и
DOT; Дз и V3 - значения дальности и скорости в момент захвата.
Следует отметить, что при отсутствии маневра, когда закон измене-
ния дальности соответствует модели (12.16) фильтр устойчиво формирует
оптимальные оценки (12.18). При наличии маневра, когда появляются ус-
корение и его производные, прогноз (12.19) не будет соответствовать ре-
альным условиям и в (12.18) появятся ошибки оценивания. Это дает воз-
можность представить алгоритм оценивания в виде соотношений
Д(к) = Дэ(к) + ид(к) + кф1[Д„(к)-Дэ(к)], До(О) = Д3
(12.20)
V(k) = V, (к) + u v (к) + кф2 [Д и (к) - Д э (к)], Vo (0) = V,
где Дэ и V3 - определяются формулой (12.19), а ид, uv - аддитивные до-
бавки, оптимальные по локальному функционалу качества
1= [ци(к)-Д(к)]2я + [ид uv]
(12.21)
Здесь: q и Kj ь к22 - коэффициенты штрафов за точность приближения Д
к Дн и величину сигналов управления ид, uv.
Используя (12.17) и (12.21) в (3.125), (3.124) получаем
Ry =[htQph+kJ'htqp =
ки 0
0 К22
q=
q
q+кц
о
i
о
1
о
(12.22)
ид(k) = Ry{[К - НКф(к)] [z(k) - Нхэр(к)] }=
q
q+кц
о
[Ди(к)-Дэ(к)]
ид(к)=5^_М[ди(к)_дэ(к)])
Ч + К" (12.23)
uv=0.
С учётом (12.23) алгоритм (12.20) преобразуется к виду:
Д (к) = Д,(к) + q(1~K^ Az(k) + кф1 (k)Az(k),
q + Кц (12.24)
V(k) = Уэ(к) + кф2(к)Дг(к),
где Az(k)=A,(k) - Д„(к).
Структурная схема фильтра оценивания дальности и скорости,
соответствующая (12.19), (12.24) приведена на рис. 12.9.
Дэ(к)
Рис. 12.9
Анализ полученного алгоритма даёт возможность сформулиро-
вать следующие выводы.
При выбранной матрице Кр функционала качества (12.21) корректи-
рующая поправка (12.23) прогноза формируется только по дальности. При
этом величина этой поправки зависит от текущего значения невязки Ди-Дэ,
параметров корректируемого фильтра (к<р1) и соотношения штрафов за
точность приближения Д к Ди и величину сигнала управления.
В ситуациях, когда манёвр отсутствует и ДИ=ДЭ, поправка ид
очень мала и не оказывает никакого влияния на точность оценивания.
При маневрировании невязка возрастает и увеличивается ид. Превыше-
ние сигналом ид некоторого порога Хп и является признаком начала ма-
невра, после констатации которого и начинается коррекция прогноза.
Алгоритм оценивания, оптимальный по минимуму функционала
(12.21), по сравнению с алгоритмом калмановской фильтрации (12.18)
приводит к усилению корректирующего влияния невязки.
Если ограничения на величину поправки ид не учитываются
(ки=0),то Д (к)—>Д„(к).
При учёте в матрице Кр функционала (12.21) членов к^О и к2^0
можно получить и корректирующий сигнал и#0.
На рис. 12.10 показаны зависимости СКО ошибок фильтрации
рассмотренного выше алгоритма при условии, что в момент времени
tM=5c начинается интенсивный маневр по скорости, при котором в зако-
не изменения дальности содержатся ускорение и его производные, для
фильтра с коррекцией прогноза состояния (сплошная линия) и без кор-
рекции (пунктирная линия). На рис. 12.11 показана эпюра изменения
управляющего сигнала ид.
180
Q „ M
140
120
100
80
60
40
20
0
без коррекции
с-кЬррёкц1!еи
5
10 t, с
Анализ проведенных исследований алгоритма (12.17), (12.19),
(12.24) позволяет сделать следующие заключения.
При малых ошибках захвата и в процессе сопро-вождения нема-
неврирующих, либо слабоманеврирующих (с небольшим постоянным
ускорением) целей рассмотренный и типовой (3.18) алгоритмы обеспе-
чивают практически одинаковую точность.
При наличии больших, близких к максимально возможным, ошибок
захвата и в процессе сопровождения интенсивно маневрирующей цели (при
большом постоянном ускорении, либо появлении его производной) исполь-
зование процедуры фильтрации с адаптивной коррекцией прогноза дает
возможность обеспечить бессрывное сопровождение цели и существенно
повысить точность оценивания дальности при весьма незначительных вы-
числительных затратах.
Обнаружение маневра происходит с некоторым запаздыванием,
величина которого зависит от его интенсивности и значения порога
Следует отметить, что рассмотренный вариант формирования
поправок прогноза не обеспечивает улучшение точности оценивания
скорости.
12.4. ФИЛЬТР УГЛОМЕРА С ОБНАРУЖЕНИЕМ МАНЕВРА
ПО РЕЗУЛЬТАТАМ ИДЕНТИФИКАЦИИ ПАРАМЕТРОВ
МОДЕЛИ СОСТОЯНИЯ
Недостатком обнаружителей маневров, рассмотренных в §§12.2 и
12.3. являются запаздывание обнаружения маневра и сравнительно не-
высокая точность оценивания производных отслеживаемых координат.
Это объясняется тем, что параметры фильтров корректируются только
либо изменением коэффициентов усиления невязки, либо введением
аддитивных поправок прогноза. Существенно большую точность оце-
нивания при сопровождении маневрирующих целей обеспечивают
фильтры с адаптивной коррекцией, как коэффициентов усиления невяз-
ки, так и параметров моделей, используемых для экстраполяции состоя-
ния оцениваемого процесса. Возможность такой адаптации основана на
текущей идентификации параметров модели состояния, в результате
которой формируются оптимальные по минимуму СКО оценки фу
коэффициентов фу фундаментальной матрицы модели состояния (3.86).
Если цель не маневрирует, то оценки фу практически совпадают с их
априорными значениями фу и фильтр отслеживаемого процесса функ-
ционирует по традиционному алгоритму фильтрации. Если цель начи-
нает маневрировать, то появляются отличия фу от фу. Решающие пра-
вила о начале маневра могут быть различными. В наиболее простом
варианте это правило сводится к проверке условий
|фц-фц|>4’ <12-25>
где Ху - определенный порог для каждого коэффициента матрицы
Ф(к,к-1). Если хотя бы для одного (двух, трех и т.д.) коэффициента
выполняется условие (12.25), то принимается решение о начале маневра
и соответствующей коррекции фильтра.
Более совершенным правилом принятия решения о начале ма-
невра является выполнение неравенства
N,N
1=ЕРу(Фу-Фи) >^п. 02.26)
i=l
j=l
в котором весовые коэффициенты Qy и порог Х„ выбираются в результа-
те специальных исследований.
Рассмотрим фильтр сопровождения цели угломера с идентифи-
кацией параметров модели состояния по алгоритму Мейна (п. 3.6.3) и с
обнаружением маневра по правилу (12.26).
Пусть для модели состояния (12.5) при наличии измерений (12.6)
был синтезирован алгоритм (12.10)-(12.15) формирования оценок фцци
соцв бортового пеленга цели фцв и скорости его изменения соцв (см.
рис. 12.4) при условии, что SB=1. Структурная схема этого фильтра
(рис. 12.12) отличается от схемы фильтра на рис. 12.4 только тем, что
вместо конкретных постоянных значений коэффициентов 0, 1, Ат и т.д.
матрицы Ф(к,к-1) (12.8) использованы их обобщенные представления
фу (i=l,2, j=l,2).
Алгоритм параметрической идентификации модели (12.5) будем
синтезировать по закону (3.92)-(3.94) при следующих предположениях:
вектор параметров
ат(к) = [ф11(к,к-1)ф|2(к,к-1)ф21(к,к-1)ф22(к,к-1)], (12.27)
где фц(к,к-1)=1, ф12(к,к-1)=т, ф2|(к,к-1 )=0, ф22(к,к-1)=1-там следует из
(12.8), изменяется по закону
а(к) = а(к-1); (12.28)
в качестве измерений используются оценки
Хот =[фцв(к) ®цв(к)? =M(k)a(k) + ^(k), (12.29)
формируемые в фильтре отслеживаемого процесса по алгоритму (12.14)
и (12.15). В наблюдении (12.29)
й„,(к-1) 0 0 j
О 0 Ф„,(к-1) й„,(к-1)]'
а ^-(к) = |£ф(к-1) ^(к-1)]1 - вектор центрированных ошибок оцени-
вания фцв и 0)цВ с известной матрицей D дисперсий (12.12). Подставляя в
общем виде ковариационную матрицу
^all Dal2 Dal3 Da|4
Da = Da21 Da22 Da23 Da24 (12.31)
Da3i Da32 Da33 Da34
Da41 Da42 Da43 Da44_
в соотношения (3.93), (3.94), можно найти матричный коэффициент
усиления невязок
«11 «12
Кфа = K21 «22 (12.32)
K31 «32
.«41 «42.
Рис. 12.12
Используя (12.27)-(12.30) и (12.32) в (3.92), получим алгоритм:
Фи(к) = Фц(к-1) + к11Аг1 +k12Az2, фц(0) = фц =1;
ф|2(к) = ф12(к-1) + к21ДХ|+к22Дг2, ф|2(0) = Ф12 =т;
4>2|(k) = <t>2l(k-i) + K31Azl+K32Az2, ф2,(0) = ф21 =0;
ф22(к) = ф22(к-1)+к41Дг1 +k42Az2, Фгг^Фгг =(!-тоО
оценивания параметров фу исходной модели (12.5). В (12.33):
Azj = фцв (к) - фцв (к -1 )ф, ,(к -1) - ©цв(к -1 )ф12 (к -1);
Дг2=6)цв(к)-фцв(к-1)ф21(к-1)-ц1В(к-1)ф22(к-1)
- невязки «измерений». Структурная схема идентификатора параметров
модели состояния, соответствующая алгоритму (12.33) и (12.34), приве-
дена на рис. 12.12. Особенностью этого алгоритма является необходи-
мость вычисления в реальном масштабе времени коэффициентов к^
(i = l,4, j = l,2) матричного коэффициента усиления (12.32) в течение
всего времени идентификации. Это обусловлено тем, что матрица М
(12.30) нестационарная и зависит от конкретных условий применения.
Обнаружение маневра по решающему правилу (12.26) ил-
люстрируется структурной схемой, показанной на рис. 12.12.
Квадраты разностей (ф^ -фу)2 априорных и апостериорных ко-
эффициентов фундаментальной матрицы Ф(к,к-1) (12.8) суммируются в
весовом сумматоре ZQij. Если результат суммирования превысит неко-
торый порог Хп, то выдается специальный сигнал для индикации начала
маневра. Кроме того, уточненные в результате оценивания значения
фу параметров модели, соответствующие реальному маневру, через
коммутатор поступают в фильтр отслеживаемого процесса. Тем самым
уточняется прогноз оцениваемого процесса (12.15), корректируется не-
вязка (12.10) и изменяются коэффициенты Кф] и Кф2 усиления невязки
(12.13). В результате такой адаптации фильтр отслеживаемого процесса
Рис. 12.13
продолжает формировать точные
оценки фцв, (Ьцв и при маневриро-
вании цели.
Если условие (12.26} не вы-
полняется, то принимается реше-
ние об отсутствии маневра цели. В
такой ситуации коммутатор оста-
ется запертым, и фильтр формиру-
ет оценки фцв и Лцв по традици-
онному алгоритму.
На рис. 12.13 приведен
пример изменения функционала
(12.26) при маневре средней ин-
тенсивности с постоянным угло-
вым ускорением, который начина-
ется в момент времени tM=5c. Из рисунка видно, что если выбрать порог
Хп несколько превышающим утроенное СКО флуктуаций функционала
при отсутствии маневра, то он обнаруживается практически мгновенно.
На рис. 12.14 и 12.15 приведены примеры зависимости СКО оценивания
угла и угловой скорости в угломере с рассмотренным способом адапта-
ции (сплошные линии) и в обычном фильтре без адаптации (пунктир-
ные линии). Из этих рисунков видно, что при использовании обнаружи-
теля маневра и адаптации к нему следящего фильтра, основанных на
идентификации параметров модели состояния, обеспечивается доста-
точно высокая точность оценивания как углов, так и угловых скоростей.
4,5
Оф,
град
3,0
2,5
2,0
1,5
1,0
0,5
0
Следует подчеркнуть, что недостатком рассмотренного способа
обнаружения маневра и адаптации к нему фильтра сопровождения явля-
ется достаточно высокие требования к быстродействию к объему памя-
ти вычислителя, реализующего алгоритмы идентификации параметров
модели состояния.
ГЛАВА 13. ОПТИМИЗАЦИЯ ОБРАБОТКИ
ИНФОРМАЦИИ В ИНФОРМАЦИОННО-
ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЕ
ПРИ ОПРЕДЕЛЕНИИ КООРДИНАТ
И ПАРАМЕТРОВ ДВИЖЕНИЯ
ВОЗДУШНЫХ ЦЕЛЕЙ
Эффективность решения РЭСУ истребителей и многофункцио-
нальных самолетов задач по перехвату и уничтожению воздушных це-
лей (ВЦ) в значительной мере зависит от уровня и качества информаци-
онного обеспечения и, в частности, от погрешностей измерения коорди-
нат, характеризующих взаимное пространственное положение и дина-
мику относительного движения ЛА и ВЦ, от степени оптимальности и
адаптивности синтезированных в ИВС самолета (ракеты) алгоритмов
оценивания координат и параметров движения цели, а также формиро-
вания сигналов управления, от ряда других факторов, в том числе от
количества и типа используемых систем координат (СК), погрешностей
координатных преобразований и т.д.
В главах 10 и И рассмотрены вопросы оптимизации обработки
информации в измерителях дальности и ее производных, в измерителях
углов и угловых скоростей ЛВ в режиме сопровождения одной цели.
Данная глава посвящена синтезу оптимальных и субоптимальных алго-
ритмов обработки информации в ИВС самолета при определении коор-
динат и параметров движения ВЦ по данным БРЛС, работающей в ре-
жиме непрерывной пеленгации цели, и навигационных измерителей.
Оптимизация совместной обработки информации БРЛС и нави-
гационных измерителей на базе теории оптимального линейного неста-
ционарного и стационарного оценивания позволит значительно снизить
погрешности определения координат и параметров движения ВЦ и тем
самым повысить точность формирования сигналов управления самоле-
том на этапах ближнего наведения и атаки, а также точность ЦУ управ-
ляемым ракетам и формирования для них команд радиокоррекции.
13.1. МОДЕЛИ ДВИЖЕНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ
Первым этапом общей методики решения задач оценивания слу-
чайных процессов является построение математических моделей сигна-
276
лов, помех, информационных и сопутствующих процессов. При исполь-
зовании концепции переменных состояния их формирование эквива-
лентно разработке математических моделей состояния и наблюдения
[82]. При решении задач оценивания координат и параметров движения
ВЦ принципиальное значение имеет выбор модели движения (траекто-
рии) цели.
Характер и траектория движения ВЦ зависят от многих факторов
и условий, таких, как тип цели (самолет, ракета), высота и скорость по-
лета, маневренные возможности цели, противодействие противника,
действие случайных возмущений, обусловленных, в частности, турбу-
лентностью атмосферы и т.д. Выбор той или иной модели движения ВЦ
определяется рядом соображений. Обычно при разработке модели дви-
жения цели задаются некоторой гипотезой о характере движения. Про-
стейшей гипотезой является предположение о том, что вектор скорости
цели постоянен во времени, т.е. цель не маневрирует. Более сложной
является гипотеза, согласно которой ВЦ непрерывно маневрирует в
пространстве, т.е. вектор скорости цели изменяется во времени. Иногда
используют гипотезу о периодическом маневрировании цели. При такой
гипотезе в процессе обработки информации возникает задача обнару-
жения и определения вида маневра, его продолжительности и статисти-
ческих характеристик (см. главу 12).
Как следует из вышесказанного, задание гипотезы движения ВЦ
не исчерпывается только указанием предполагаемого характера измене-
ния координат (детерминированный или случайный процесс) и выбором
подлежащих оцениванию параметров. Кроме того, необходимо на осно-
ве теоретических исследований и анализа реальных траекторий ВЦ дать
достаточно полное описание их возможных маневров. В общем случае
обобщенная гипотеза о статистической модели движения ВЦ включает
в себя совокупность гипотез, определяющих вид траекторий движения
целей, и возможные статистические характеристики маневров. На осно-
ве обобщенной гипотезы проектируются как системы автоматического
сопровождения целей, так и системы оптимального оценивания коорди-
нат и параметров движения ВЦ [41].
Важную роль при разработке математической модели движения
ВЦ играют выбор СК, а также определение компонентов вектора со-
стояния, векторов входных управляющих и возмущающих воздействий.
На практике стремятся получить такие модели, которые были бы доста-
точно простые и в то же время правильно отражали реальные траекто-
рии маневрирующих целей. Кроме того, необходимо, чтобы они строи-
лись с учетом особенностей функционирования измерителей координат
и параметров движения ВЦ, используемых при решении задач оценива-
ния и управления на базе этих моделей.
В настоящее время известен целый ряд моделей движения ВЦ
различной степени сложности, рассмотренных, например, в работах [18,
24, 41, 42]. Так, в работе [24] описана модель движения пилотируемой
цели в прямоугольной СК (применительно к одной из координатных
осей), согласно которой цель движется с постоянной скоростью. Разво-
роты, противострельбовые маневры и ускорения, вызванные турбулент-
ностью атмосферы, рассматриваются как возмущения нормальной тра-
ектории. В работе [18] исследованы четыре математические модели ус-
корения ВЦ в инерциальной СК применительно к задаче оптимального
управления и оценивания координат, скорости и ускорения цели при
наведении высокоманевренных тактических ракет малой дальности.
Наиболее сложной из этих моделей является модель ускорения ВЦ на
основе марковского процесса второго порядка, а простейшей - модель с
нулевым ускорением цели. В моделях [18, 24, 41, 42] не учитывается,
что в общем случае ВЦ совершает сложное движение относительно ЛА
с некоторыми линейными относительной и переносной скоростями.
Получим математическую модель относительного движения ВЦ
и самолета в траекторной СК применительно к задаче оптимизации об-
работки информации в ИВС при определении координат и параметров
движения цели. При этом воспользуемся подходом к разработке моде-
лей относительного движения ЛА, который применяется в задачах меж-
самолетной навигации [73].
13.1.1. Модель движения воздушной цели в траекторной
СИСТЕМЕ КООРДИНАТ
При получении модели движения ВЦ будем использовать сле-
дующие прямоугольные правые СК: нормальную земную СК O0XgYgZg,
нормальную СК OXgYgZg и траекторную СК OXkYkZk (рис. 13.1).
При решении задач перехвата и уничтожения ВЦ начало нормаль-
ной земной СК О0 совмещается с пунктом наведения или с некоторой ус-
ловной (опорной) точкой на поверхности Земли. При математическом опи-
сании динамики полета в атмосфере земные СК (в том числе СК O0XgYgZg)
обычно считаются инерциальными, а Земля принимается плоской, т.е.
осуществляется пренебрежение вращением местной вертикали при движе-
нии ЛА. При таких допущениях вектор абсолютной скорости движения
центра масс ЛА заменяется на вектор земной скорости¥к, а вектор абсо-
лютной угловой скорости на вектор угловой скорости относительно
нормальной земной СК (земной угловой скорости) [39]. Направление осей
OoXg, OoZg неизменно относительно Земли и выбирается в соответствии с
задачей. Например, оси OoXg и OoZg могут ориентироваться по касатель-
ным (соответственно к географическому меридиану на север и к географи-
ческой параллели на восток), проходящим через точку О0. Ось O0Yg на-
правлена вверх по местной вертикали.
Нормальная СК OXgYgZg - это подвижная система координат,
начало которой О обычно совмещается с ЦМ ЛА, ось OYg направлена
по местной вертикали, а оси OXg, OZg - в соответствии с задачей, в ча-
стности, параллельно осям нормальной земной СК (при относительно
небольших расстояниях между точками О0 и О).
Начало траекторной СК OXkYkZk совмещено с ЦМ ЛА, ось ОХк
совпадает с направлением вектора земной скорости Vk, а ось OYk лежит в
вертикальной плоскости, перпендикулярной плоскости OXgZg и проходя-
щей через ось ОХк. Ось OYk обычно направлена вверх от поверхности Зем-
ли. Ось OZk направлена вправо от оси ОХк и всегда параллельна местной
горизонтальной плоскости Земли (плоскости OXgZg). Использование траек-
торной СК позволяет достаточно просто задавать вектор абсолютной (зем-
ной) скорости Vk движения ЛА, так как он направлен вдоль оси ОХк. В этой
СК наглядно представляются радиусы кривизны траектории движения ЛА
в горизонтальной и вертикальной плоскостях. Направление осей траектор-
ной СК относительно нормальной СК определяется углом пути (курса,
рыскания) \|/ и углом наклона траектории 0. Угол \|/ - это угол между осью
OXg нормальной СК и направлением вектора путевой скорости У„ ЛА -
проекции вектора Vk на плоскость OXgZg, а угол 0 определяется между
плоскостью OXgZg и вектором Vk (рис. 13.2).
Положение ВЦ (точка Ц) и самолета (точка О) в нормальной зем-
ной СК OoXgYgZg определяется векторами Дц и Дс (рис. 13.1). Относи-
тельное положение цели характеризуется вектором Д, так что выполня-
ется векторное соотношение
ДЦ(О=ДС(О+Д(О. (13.1)
С самолетом связана его траекторная СК OXkYkZk, вращающаяся
вокруг ЦМ самолета относительно нормальной СК OXgYgZg с угловой
скоростью Q(t).
Продифференцировав по времени левую и правую части вектор-
ного соотношения (13.1), получим
Vu(t)=Vk(t)+Vc6(t), (13.2)
где Vu(t) = ^u(t)/dt - вектор земной скорости ВЦ, т.е. вектор абсо-
лютной скорости движения точки Ц; Vk (t) = дДс (t) / dt - вектор земной
скорости самолета, т.е. вектор абсолютной скорости движения точки О;
Vc6 (t) = dfl(t) /dt - вектор скорости сближения ВЦ с самолетом, опре-
деляемый в СК O0XgYgZg (абсолютная производная вектора Д(0).
Далее воспользуемся правилом дифференцирования векторов,
согласно которому абсолютная производная da(t)/dt вектора a(t), за-
данного своими проекциями ax(t), ay(t), az(t) на оси подвижной (вра-
щающейся) СК, равна сумме относительной (локальной) производной
da(t)/dt вектора a(t) и векторного произведения угловой скорости S2(t)
подвижной СК на этот вектор [16]:
^Г=а(0=^Г+ОДха0)’ (133)
где a(t)=ax(t)i+ay(t)j+az(t)k; i, j, к - орты подвижной СК; символ “х” озна-
чает операцию векторного произведения.
Согласно правилу дифференцирования (13.3) абсолютная произ-
водная вектора Д(Г) имеет вид
Д(0=уд(0+адхД(0, (1з.4)
где V4(t) = 6Д(1) / dt - вектор относительной скорости точки Ц; (t) -
вектор угловой скорости вращения траекторной СК относительно СК
OXgYgZg. Подставив (13.4) в выражение (13.2), получим
Vu(t)=Vk(t)+V,(t)+ (t)xA(t). (13.5)
Выразим абсолютное ускорение точки Ц через составляющие ус-
корений в СК OXkYkZk, применив правило дифференцирования (13.3) к
векторам в правой части соотношения (13.5). В результате после ряда
преобразований абсолютная производная вектора скорости точки Ц бу-
дет описываться следующим уравнением:
^^ = уц(1)=^^+адхук(1)+-^+2адхУл(1)+
at at at
+ ая(1)хд(1)+одх[адхд(1)]. (1з.б)
at
Векторное уравнение (13.6) можно представить в виде
ац(0=аотн(1)+апер(1)+акор(0> (13.7)
где
au(t) = dVu(t)/dt и a0TH(t) = dVa(t)/dt -
абсолютное и относительное ускорения точки Ц;
апер(9=-^^+адхУк(0+-^хД(0+адх[адхД(0] -
at at
полное переносное ускорение точки Ц;
акор(0 = 2П(1)х¥д(0-
поворотное или кориолисово ускорение.
Векторные уравнения (13.7) и (13.6) могут быть также получены
с использованием теоремы Кориолиса о сложении ускорений [16].
Из (13.7) следует, что относительное ускорение
аотн(0~ ац(0~ anep(t)~ aKop(t)« (13.8)
Представим векторы au(t) и a0TH(t), а также векторы, входящие в
выражения для ускорений anep(t) и aKOp(t), в виде разложений по ортам i,
j, k СК OXkYkZk. В результате получим следующие векторные соотно-
шения:
ац(0~ацх( 0 i+ацу (t)j t) k,
а0Тц (t) = dVfl(t)/dt = Vw(t)i + Vw (t)j + VflZ(t)k,
где
VJll(t) = dVfll(t)/dt, (/=x,y,z);
Va(t)=VJJX(t)i+Vay(t)j+VUt)k;
Д(0=Дх(0;+Ду(0]+Дг(0к;
VJW(t) = Ax(t); Vay(t) = Ay(t); Vaz(t) = Az(t); (13.9)
dVk(t)/dt = Vk(t)i;
f2(t)=Wx(t)i+<Oy(t)j+coz(t)k;
dfl(t) / dt = ашх (t)i + ашу (t)j + awz(t)k ,
где ашх (0 = ®x(t), а<оу (t) = «у (t), ,ашг(t) = wz(t) - проекции вектора
углового ускорения a^t) на оси траекторной СК.
Кроме того, применим правило координатного представления к
векторным произведениям, входящим в выражения для ускорений anep(t)
и aKOp(t). Согласно данному правилу, например, векторное произведение
□(1)хД(() с использованием проекций данных векторов на оси СК
OXkYkZk может быть представлено в виде определителя
i j k
£l(t)xA(t)=det oix(t) toy(t) coz(t) =[toy(tWz(t)-®z(t)Ay(t)]i+
Дх(0 Ду(0 Дг(9
+1Ч(0Дх(t)-<ox(1)Дг(t)]j + [сох(ОДу(t)-соу(0Дх(t)]k . (13.10)
В результате координатного представления в (13.8) векторных
произведений с учетом соотношений (13.9) и выполнения ряда преобра-
зований для проекций относительного ускорения ВЦ получим следую-
щую систему дифференциальных уравнений:
Дх(О~ Удх> ДхСо)- ДхО ’
Vux(O ~ ацх Ч ~ (ашу + ®х®г)Дг ”1* (a<oz — ®х®у )Ду
+ ((Оу + (Ог)Дх - 2(ОУУда + 2шгУду, Удх (t0) = Удх0;
Ду(О = Уду, Дуа0) = Ду0; (13.11)
Чу (О = ацу - Ч Vk - (аюг + (ОХ(ОУ )ДХ + (ашх - соусо2)Д2 +
+ («х + “г)Ду -2cozVax + 2сохУдг, Уду(t0) = Уду0;
Az(0 = VflZ, ДгОо) = ДгО»
Уда(О = auz + coyVk _(аюх + соусог)Ду + (atoy -сохсог)Дх +
+ («х + ^у)Дг “ 2(ОХУду + 2соуУдх , Удг(to) — Удго •
Для упрощения записей в правых частях уравнений (13.11) опу-
щен аргумент t.
Из анализа уравнений (13.11) следует, что для получения модели
относительного движения ВЦ и самолета необходимо располагать дан-
ными о земной скорости самолета, ее производной, а также об угловых
скоростях и угловых ускорениях, характеризующих вращательное дви-
жение траекторной СК. Кроме того, необходимо задаться гипотезой о
характере изменения во времени проекций вектора абсолютного уско-
рения точки Ц на оси СК OXkYkZk. Простейшей является гипотеза о
равенстве нулю этих проекций. Согласно более сложной гипотезе
предполагается, что проекции вектора абсолютного ускорения точки Ц
на оси СК OXkYkZk не равны нулю и постоянны во времени, т.е.
^цх(0 = 0, &цх (to) = ацхО »
ацу(0 = 0, ацу(t0) = ацу0 ; (13.12)
aijz(t) t), ацг(tq) ацго.
Что же касается математических моделей для проекций векторов
угловой скорости и углового ускорения на оси траекторной СК, то их
получение на практике представляет большие трудности. Поэтому целе-
сообразно воспользоваться принципом распределения информации [37].
Параметры {Ук(0,...,аш(0} могут быть измерены (вычислены) в
ИВС. Если известны математические модели погрешностей измерения
(вычисления) данных параметров, описываемые дифференциальными
(разностными) уравнениями, то согласно принципу распределения ин-
формации в уравнения (13.11) вместо истинных значений параметров
{Vk(t)„. .^(t)} подставляются разности между измеренными (вычис-
ленными) значениями параметров и погрешностями их измерения (вы-
числения). Например, вместо угловой скорости cox(t), входящей во вто-
рое уравнение системы (13.11), необходимо подставить (DXH(t)-8cox(t), где
<A«i(t) - измеренное значение угловой скорости, a 8cox(t) - погрешность
ее измерения.
Дополнив преобразованную систему (13.11) дифференциальными
уравнениями (13.12) и уравнениями, описывающими погрешности
измерения (вычисления) параметров {Vk(t),...,a0)z(t)}, получим матема-
тическую модель относительного движения ВЦ и самолета в траек-
торной СК. В этой модели в качестве переменных состояния будут
выступать параметры {Дх(0, V4X(t),aux(t),... ,aIXX(t)}, а также погрешности
{8Vk(t),...,8awz(t)} в совокупности с дополнительными параметрами,
используемыми для их описания. При этом измеренные значения пара-
метров VklI(t) и V kH(t) будут играть роль детерминированных управ-
ляющих воздействий, а параметры {(DXIi(t),...,a(oZII(t)} - известных функ-
ций времени при переменных состояния.
Использование принципа распределения информации позволяет
решить проблему априорной неопределенности в задании параметров
{V^t),...^)}. Однако, получающаяся при этом модель относительно-
го движения ВЦ и самолета является громоздкой и достаточно сложной
для практической реализации в силу своей нелинейности, нестационар-
ности и большой размерности (более девяти переменных состояния).
Данная математическая модель может быть упрощена, если пре-
небречь погрешностями измерения (вычисления) параметров
{Vk(t),...^(t)} ввиду их малости. Низкий уровень погрешностей изме-
рения (вычисления) данных параметров в современных ИВС достигает-
ся благодаря реализации в них алгоритмов оптимальной (субоптималь-
ной) комплексной обработки навигационной информации. Получаемая
в этом случае математическая модель относительного движения ВЦ и
самолета становится линейной и описывается девятикомпонентным
вектором состояния
х -[Дх Чи ацх Ду V4y ацу Д2 УД2 ацг] •
Располагая измеренными (вычисленными) значениями парамет-
ров Дх, Ду и Дг, а также статистическими моделями и соответствующи-
ми статистическими характеристиками погрешностей их определения,
можно приступать к синтезу оптимальных (субоптимальных) алгорит-
284
мов оценивания координат и параметров движения ВЦ в непрерывном
(дискретном) времени. Значения Дх, Ду и Дг и статистические характе-
ристики погрешностей их определения могут быть вычислены по дан-
ным измерений БРЛС, функционирующей в РНП, и навигационных из-
мерителей угловых координат ИВС.
Анализ полученной после сделанных упрощений математической
модели относительного движения ВЦ и самолета в траекторной СК
OXkYkZk (несмотря на отмеченные ранее преимущества использования
данной системы координат) показывает, что она по-прежнему остается
достаточно сложной для практической реализации. Поэтому задача со-
стоит в том, что бы опираясь на вышеизложенный подход и используя
полученные аналитические соотношения, в наибольшей степени упро-
стить математическую модель движения ВЦ. Это можно сделать за счет
уменьшения ее размерности и учета специфики функционирования
БРЛС в РНП, которая состоит в следующем [81].
В процессе непрерывной пеленгации БРЛС сопровождает одну
ВЦ по дальности, скорости сближения (доплеровской частоте) и угло-
вым координатам. При этом в БРЛС автоматически измеряются: даль-
ность до цели Д(0, скорость ее изменения ДО), углы пеленга цели в
азимутальной cpr(t) и угломестной cpB(t) плоскостях, а также угол поворо-
та антенны БРЛС по крену (угол крена антенны) ya(t). Кроме того, вы-
числяются угловые скорости (D,.(t) = dcpr(t)/dt, coB(t) = dcpB(t)/dt и
a\(t) = dya(t)/dt.
При измерении координат и параметров движения ВЦ использу-
ется ряд правых прямоугольных СК, в том числе самолетная связанная
OXYZ, установочная OXyYyZy и антенная OXaYaZa системы координат.
Все указанные СК, как и траекторная СК OXkYkZk, имеют начало в ЦМ
самолета. При применении в БРЛС антенны зеркального типа выносом
ее относительно ЦМ самолета пренебрегают. Установочная СК OXyYyZy
повернута вокруг оси OZ относительно СК OXYZ на установочный
угол антенны БРЛС ца (рис. 13.3). При функционировании БРЛС в РНП
ось 0Ха антенной СК 0XaYaZa ориентируется по равносигнальному на-
правлению диаграммы направленности (РСН ДН) антенны.
Измерение дальности Д(1), ее производной ДО) и угловых коор-
динат осуществляется в антенной СК, причем углы <pr(t) и <pB(t) характе-
ризуют собой угол отклонения ЛВ цели в антенной СК относительно
осей OXyYyZy (с учетом угла %,(t)). Взаимное положение осей антенной
и связанной СК, как видно из рис. 13.3, определяется углами пеленга
ВЦ фг и фв, а также углами ца и уа.
В алгоритмах обработки информации БРЛС для определенности
координатных преобразований переход от установочной к антенной СК
осуществляется по определенным правилам, например, путем последо-
вательных поворотов на углы уа, (рц и <рг (рис. 13.3).
Антенная СК OXaYaZa вращается с угловой скоростью Qa(t) отно-
сительно нормальной земной СК OoXgYgZg и соответственно нормаль-
ной СК OXgYgZg. При этом в процессе движения самолета и ВЦ ось ОХа
антенной СК, совпадающая с РСН ДН антенны, постоянно ориентиру-
ется на цель, т.е. в направлении вектора Д. Таким образом, направление
оси ОХа совпадает с ЛВ цели в антенной СК.
В алгоритмах обработки информации необходимо учитывать, что
измерение дальности и угловых координат ВЦ БРЛС осуществляет с
погрешностями. В результате этого ось ОХа антенной СК, ориентируясь
по РСН ДН, не совпадает с истинным пространственным положением
ЛВ цели, которое определяется углами ег и ев, отсчитываемыми от со-
ответствующих осей лучевой ОХлУл7л и нормальной OXgYgZg СК
(рис. 13.4).
Получим математическую модель движения ВЦ в антенной СК.
При этом будем исходить из того, что при решении задач перехвата и
уничтожения ВЦ практически определить, насколько отличаются вет-
ровые потоки в районах цели и самолета, невозможно. Поэтому обычно
в алгоритмах обработки информации на этапах наведения самолета и
атаки ветер не учитывается, а земная и воздушная скорости отождеств-
ляются как для самолета, так и для ВЦ [39]. С учетом вышесказанного в
дальнейшем для вектора воздушной скорости ВЦ будем использовать
прежнее обозначение Уц, а для вектора воздушной скорости самолета -
соответственно Vc.
13.1.2. Модель движения воздушной цели
В АНТЕННОЙ СИСТЕМЕ КООРДИНАТ
Проанализируем движение точки Ц (см. рис. 13.3 и 13.5). Как и
при получении модели движения цели в траекторной СК, далее для оп-
ределенности СК OXaYaZa будем именовать подвижной, а СК O0XgYgZg
(и соответственно с точки зрения вращательного движения СК
OXgYgZg) - неподвижной. Движение ВЦ (точки Ц) по отношению к
подвижной СК определим как относительное, а саму СК OXaYaZa - от-
носительной. Движение ВЦ по отношению к СК OoXgYgZg, принимае-
мую за неподвижную, определим как абсолютное, а саму СК O()XgYgZg
(и соответственно с точки зрения вращательного движения СК
OXgYgZg) - абсолютной. Антенная СК вращается, как отмечалось выше,
с угловой скоростью Qa(t) относительно СК O0XgYgZg и OXgYgZg.
Пренебрегая различием ветровых потоков в районах расположе-
ния самолета и ВЦ, абсолютную производную вектора Vu(t) согласно
правилу дифференцирования векторов (13.3) можно представить в виде
векторного соотношения
dVu(t) dVu(t)
—^2 = Vu(t) = —^ + £2a(t)xVu(t), (13.13)
dt dt
где dVu(t)/dt = au(t) - вектор абсолютного ускорения ВЦ; dVu(t)/dt -
вектор относительного ускорения цели (локальная производная); Vu(t) -
вектор воздушной скорости ВЦ, который в СК OXaYaZa может быть
представлен в координатной форме
Vu(t)= Vux(t)i+VIly(t)j+Vuz(t)k, (13.14)
где Vux(t), Vuy(t), Vuz(t) - проекции вектора Vu(t) на оси антенной СК; i, j,
k - орты СК OXaYaZa.
Соответственно входящая в (13.13) относительная производная
вектора воздушной скорости цели V„(t) в проекциях на оси OXaYaZa
имеет вид
+ + (13.15)
at
В соответствии с (13.13) имеем
dV..(t)
—iLZ = au(t)-fta(t)xV„(t).
(13.16)
Представим векторное соотношение (13.16) в проекциях на оси
антенной СК. Векторное произведение Qa(t)xVu(t) аналогично (13.10) с
использованием проекций данных векторов на оси СК OXaYaZa может
быть записано в виде определителя
i j
fta(t)xVu(t)) = det coax(t)
Vux(t)
®ay (0
V„y(t)
k
4z(t)
Vuz(t)
(13.17)
Обозначив в (13.16) u(t)=- a(t)xVu(t) и раскрыв определитель
(13.17), получим
U(t) = [Waz (t)Vuy (t) - (Йау (t)Vuz(t)]i + [coax (t)Vuz(t) - coaz (t)Vux (t)]j +
+ [®ay(t)Vux(t)-<oax(t)Vuy(t)]k. (13.18)
Векторному соотношению (13.16) с учетом (13.14), (13.15) и
(13.18) будет соответствовать система дифференциальных уравнений
Vux(t) = ацХ(0 + 4z(t)Vuy(t) -4y(t)Vuz(t), Vux(t0) = vuxo ;
Чу(О = ацу(О + <йах(ОУцг(О-<оа2а^цх(О, Vuy(t0) = Vuy0; (13.19)
ХкО) = auz(t) + <oay(t)Vux(t)-coax(t)Vliy(t), Vuz(t0) = Vuz0.
Аналогично (13.12) воспользуемся гипотезой о постоянстве про-
екций вектора абсолютного ускорения цели au(t) на оси антенной СК. В
соответствии с такой гипотезой получим
ацх(О“" ацх (to) — ацхо,
ацу(9 = 0, auy(t0) = ацу0; (13.20)
auz(9 auz(tg) auz0,
где aux(t), auy(t), auz(t) - проекции вектора au(t) на оси СК OXaYaZa.
Как и при получении модели в траекторной СК, воспользуемся
принципом распределения информации для преодоления априорной
неопределенности в задании математических моделей угловых скоро-
стей coax(t), coay(t) и coaz(t), входящих в (13.19). Учитывая, что в современ-
ных БРЛС широко используются оптимальные и квазиоптимальные
(субоптимальные) алгоритмы оценивания угловых координат ВЦ и со-
ответствующих угловых скоростей (см. §11.5), погрешностями опреде-
ления проекций вектора a(t) можно пренебречь.
Подставив в (13.19) измеренные (вычисленные) значения угло-
вых скоростей, с учетом (13.20) получим систему дифференциальных
уравнений, описывающих математическую модель движения ВЦ в ан-
тенной СК:
Чх (0 = а цх (9 + Чги (9vuy (9 - Чуи (9 Vuz (t), vux (t 0) = Vux0;
ацх(9 0, ацх(to) — ацХо ’
vUy (9=ацу (9+Чхи (9Vuz (9 - 4zh (t)Vux (9. Vuy (t0 ) = Vuy0;
auy(t) = O, auy(t0) = auy0; (13.21)
289
10—3806
vuz(t) = auz(t) + coayH(t)Vux(t)-OJaxi1(t)Vliy(t), Vliz(to) = V,lz0;
aliz(t) —0, auz (to) — allz0,
и определяющую вектор состояния
xT(t) = [vux(t) aIlx(t) Vliy(t) auy(t) Vuz(t) aIlz(t)].
Математическая модель (13.21) является линейной. Она значи-
тельно проще ранее полученной модели в траекторной СК, так как
уменьшилась ее размерность до шести переменных состояния. Кроме
того, не требуется определять проекции вектора углового ускорения на
оси антенной СК. Следует однако отметить, что модель движения ВЦ в
антенной СК является менее детальной по сравнению с моделью в тра-
екторной системе координат. В частности, она не позволяет непосредст-
венно получить оценки проекций вектора относительной скорости ВЦ.
Недостатком обеих полученных моделей движения ВЦ является то, что
в них не учитываются случайные воздействия, которым подвержены
самолет и цель.
13.2. ПОСТАНОВКА ЗАДАЧИ СИНТЕЗА СУБОПТИМАЛЬНОГО
АЛГОРИТМА ОБРАБОТКИ ИНФОРМАЦИИ ПРИ
ОПРЕДЕЛЕНИИ ПАРАМЕТРОВ ДВИЖЕНИЯ
ВОЗДУШНОЙ ЦЕЛИ
Как отмечалось ранее, решение задачи синтеза оптимальных (су-
боптимальных) алгоритмов оценивания координат и параметров движе-
ния ВЦ требует знания математических моделей состояния и наблюде-
ния. Компоненты вектора состояния описываются дифференциальными
уравнениями (13.21). Получим векторное соотношение наблюдения.
При сделанных допущениях относительно ветровых потоков век-
торное соотношение (13.5) применительно к антенной СК принимает
вид
Vu(t) = Vc(t) + Vfl(t) + na(t)xA(t). (13.22)
Соответственно векторное соотношение наблюдения согласно
(13.22) можно представить в форме
vu„ (t) = VCH (t) + Уди (t) + Яаи (t) x Ди (t), (13.23)
где индекс «и» означает измеренное (вычисленное) значение соответст-
вующих векторов.
Выразив векторы, входящие в (13.23), через их проекции на оси
антенной СК, получим
уци (9 = уцхи (Oi + уцуи (t) j + V„ZH (t)k;
VCH (t) = VCXH (t)i + VcyH (t) j + VCZH (t)k;
Уди(0 = Ди(91, Ди(0 = Ди(0ь (13.24)
Лаи (9 = Чхи (t)i + Чуи (9j + Чги (9к .
В векторно-матричной форме записи уравнения (13.24) имеют вид
Ки(9 = [уцхи(9 v„y„(t) VUZH(t)];
VcT„(t) = [VCXH(t) VcyH(t) VCZH(t)];
УдТи(9 = Ьи(9 0 о]; (13.25)
Ди(9 = [Ди(9 0 0];
^аи(0 = [<йахи(0 ^ауи(О С°аги(0] •
Проекции векторного произведения аи(0хДн(0 на оси антенной
СК с учетом (13.25) могут быть получены аналогично (13.17):
i
«aH(t)xflH(t) = det COaxH(t)
Ди(0
j к
^ауи(0 ^агиО)
о о
= Чги (Оди (t) j - «ауи (ОДи (Ок • (13.26)
С учетом (13.24) и (13.26) система скалярных соотношений на-
блюдения, соответствующих векторному выражению (13.23), приводит-
ся к виду
VUXH(0 = VCXH(t) + AH(t);
уцуи(9 = Vcy„+Чги(9Ди (9;
(13.27)
Уцги(9 ~ Усги Чун(9Ди (9 •
Проекции вектора Vc(t) на оси антенной СК вычисляются в ИВС
путем координатных преобразований вектора воздушной скорости са-
молета VCH(t), измеренного в скоростной СК (рис. 13.6) с учетом углов
атаки а, скольжения р, а также углов <рг, <рв, уа и |1а. Они определяются
соотношением
VCXH(t) vCH(t)
VcyH(t) =MH(t) 0
vC2H(t) L°
(13.28)
где M„(t)={[<pni(t)][(pe„(t)][Ya„(t)][a„(t)+ga][P„(t)]}; [•] - матрица коорди-
натных преобразований, в которой используется измеренное значение
соответствующего угла.
Измеренные (вычисленные) значения проекций вектора скорости
цели образуют вектор наблюдения
zT(t) = [z,(t) z2(t) z3(t)], (13.29)
где Z|(t)—VUXH(t), Z2(t)—VUyH(t), Z3(t)-VUZII(t).
Как следует из (13.27) и (13.28), погрешности измерений (вычис-
лений) проекций вектора VUII(t) обусловлены погрешностями определе-
ния первичных параметров: Vc(t), Д(1), Д(1), углов и угловых скоро-
стей. Эти погрешности на практике обычно аппроксимируются адди-
тивными стационарными белыми гауссовскими шумами, образующими
вектор погрешностей измерений (шумов наблюдения)
^(t)=[U(t) ^y(t) U(t)l-
(13.30)
При вышеуказанной аппроксимации вектор „(t) имеет следую-
щие статистические характеристики:
M{^H(t)}-0, M{^H(t)^(t + T)}= 5(т), (13.31)
0,5Nx 0 0
где Е = 0 0,5Ny 0 - матрица спектральных плотностей
0 0 0,5Nz
(интенсивностей) шумов наблюдения, определяемая на основе стати-
стических характеристик погрешностей измерения (вычисления) пер-
вичных параметров; 3(т) - дельта-функция. Таким образом, вектор на-
блюдения (13.29) с учетом (13.30) может быть представлен в виде
z(t)=V„(t)+^„(t),
ИЛИ
z1(t) = Vux(t) + ^x(t);
z2(t) = Vuy(t) + ^y(t); (13.32)
гз(0 = Vuz(t) + ^HZ(t),
где Vux(t), Vuy(t), Vlu(t) - истинные значения проекций вектора скорости
цели Vu(t) в антенной СК.
В совокупности уравнения состояния (13.21) и соотношения на-
блюдения (13.32) содержат всю необходимую информацию для реше-
ния задачи синтеза оптимальной (в рамках сделанных ранее допущений)
системы оценивания параметров движения ВЦ в СК OXaYaZa как в не-
прерывном, так и в дискретном времени с использованием алгоритмов
оптимальной линейной фильтрации (см. п. 3.6.1). При переходе от
(13.21) и (13.32) к соответствующим цифровым аналогам задача синтеза
оптимальной системы оценивания может быть решена и в цифровой
форме. Однако, поскольку современные БЦВМ (процессоры) имеют
достаточно большую разрядность (16 разрядов и более), при переходе
от дифференциальных уравнений (13.21) и соотношений наблюдения
(13.32) к цифровым аналогам модели состояния и наблюдения остаются
практически линейными, поэтому эффектом квантования по уровню
можно пренебречь. В результате этого синтез оптимальной системы
обработки информации сводится по существу к синтезу оптимальной
дискретной системы.
Для получения практически реализуемого алгоритма оценивания
постановку задачи синтеза подвергнем дальнейшему упрощению. С
этой целью осуществим декомпозицию вектора состояния x(t), описы-
293
ваемого системой дифференциальных уравнений (13.21), на три незави-
симых подвектора, каждый из которых соответствует одной из осей СК
OXaYaZa [81]. Например, первый подвектор состояния
х{ (t) = [Vux (t) ацх (t)] определяется дифференциальными уравнениями
Vux (t) = ацх (t) + ша2И (t)Vuy (t) - соауи (t)Vu2(t), Vux (t0) = Vux0 ;
&цх (0 — 0 > ацх(1о)-ЭцхО-
Представим вектор u(t) (13.18) в векторно-матричной форме
uT(t)=[ux(t) uy(t) uz(t)],
где
ux (t) = (0az.i (t)Vuy(t) - <0ayH(t)Vuz(t);
uy (t) = Чхи (t)Vuz(t) - CO™ (t) Vux (t); (13.33)
~ ®ауи 0)Уцх 0)~ ®ахиО)^цу (t) .
Проведение вышеуказанной декомпозиции вектора состояния
приводит к тому, что в субоптимальной системе оценивания параметров
движения ВЦ будут реализованы три независимых, практически иден-
тичных канала обработки информации применительно к каждой из осей
СК OXaYaZa. Благодаря этому вектор u(t) может рассматриваться как
известный вектор управления. При этом при вычислении ux(t), uy(t) и
uz(t) согласно (13.33) будут использоваться оценки соответствующих
проекций вектора скорости цели, полученные в соседних независимых
каналах.
Ниже приведено решение задачи синтеза субоптимального алго-
ритма обработки информации для одного из независимых каналов, при
этом для упрощения записей индексы у компонентов векторов состоя-
ния и наблюдения опущены.
13.3. СИНТЕЗ СУБОПТИМАЛЬНОГО АЛГОРИТМА
ОБРАБОТКИ ИНФОРМАЦИИ ПРИ ОПРЕДЕЛЕНИИ
ПАРАМЕТРОВ ДВИЖЕНИЯ ВОЗДУШНОЙ ЦЕЛИ
Для одного канала согласно (13.21) с учетом (13.33) вектор со-
стояния и уравнения, определяющие его динамику, имеют вид
xT(t) = [V(t) a(t)];
V(t) = a(t) +u(t), V(t0) = V0;
a(t) = O, a(t0) = a0. (13.34)
В соответствии с (13.32) наблюдение для одного канала описыва-
ется соотношением
z(t) = V(t) + £llv(t). (13.35)
Дискретный аналог моделей (13.34) и (13.35) определяется урав-
нениями:
V(k)=V(k-1 )+та(к-1 )+ти(к-1), V(O)=Vo;
а(к)=а(к-1), а(О)=ао; (13.36)
V„(k)=V(k)4„(k).
(13.37)
При векторно-матричном представлении имеем:
х(к) =
V(k)
а(к)
Ф(к,к-1)
1
О
z=V„; Н=[1 0]; (13.38)
М{ §„(к)}=0; М{ £,„(к)$ H(j)}=D„5kj,
где Dn - дисперсия шумов наблюдений; 5kj - символ Кронекера; т - ин-
тервал дискретизации.
Используя (13.38), при конкретизации алгоритма оптимальной
дискретной фильтрации (3.68), (3.69), получим
V(k) = V3(k) + Kv(k)[VH (k) - V3(k)], V(t0) = V(0) = Vo ;
(13.39)
a(k) = a(k -1) + ка (k)[VH (k) - V3 (k)], a(t0) = a(0) = a0,
где V3(k) = V(k-l) + T[a(k-l) + u(k-l)]; Az(k) = VH(k)- V3(k) -
невязка измерений, а коэффициенты kv и ка рассчитываются по форму-
лам (3.70)-(3.72).
На практике часто удается обеспечить вполне приемлемое каче-
ство оценивания, используя постоянную для всех моментов времени
матрицу коэффициентов передачи фильтра (например, матрицу их ста-
ционарных значений или рассчитанных на определенный момент вре-
мени) [82]. Наиболее эффективен такой подход к определению матрицы
Кф(к) (3.70) с точки зрения достижения приемлемой точности оценива-
ния для стационарных систем. С учетом вышесказанного, подставив в
(13.39) постоянные коэффициенты kv и ка, получим
V(k) = V3(k) + Kv[V„(k)-V,(k)] , V(O) = Vo;
a(k) = a(k-l) + Ka[V„(k)-V,(k)], a(O) = ao. (134°)
Разностные уравнения (13.40) определяют структуру субопти-
мального линейного дискретного фильтра, которая является идентичной
для всех трех независимых каналов обработки информации. Необходи-
мые для формирования оценок Vux(k), Vuy(k) и Vuz(k) проекций век-
тора скорости цели на момент tk управляющие сигналы вычисляются в
соответствии с соотношениями (13.33) на момент tk_j:
ux (к -1) = C0az„ (к -1)vuy (к Ч) - С0ауи (к - I)VUZ (к -1) ;
иу(к —1) = <вахи(к —l)Vuz(k-l)-coaZH(k —l)Vux(k —1); (13.41)
uz (к -1) = соауи (к -1) Vux (к -1) - соахи (к -1) Vuy (к -1).
Структурная схема субоптимальной системы дискретного оцени-
вания параметров движения ВЦ может быть построена на основе эле-
ментов, реализующих в БВС алгоритм (13.40), выражения (13.41) для
управляющих сигналов, а также соотношения (13.27) и (13.28), в соот-
ветствии с которыми вычисляются измеренные значения проекций век-
тора скорости цели на оси антенной СК. Элементы, выполняющие вы-
шеуказанные функции по обработке информации в БВС, на структурной
схеме (см. рис. 13.7) обозначены соответственно каналами и блоками. В
состав структурной схемы субоптимальной системы дискретного оце-
нивания параметров движения ВЦ входят три независимых идентичных
канала обработки информации, блок формирования по данным БРЛС и
навигационных измерителей ИВС измеренных значений проекций век-
тора скорости цели на оси СК OXaYaZa, блок формирования управляю-
щих сигналов ux(k-l), uy(k-l) и uz(k-l), а также блок координатных пре-
образований (рис. 13.7). Каждый из трех каналов обработки информа-
ции представляет собой субоптимальный линейный дискретный фильтр
Калмана, реализующий алгоритм (13.40) применительно к одной из
проекций вектора скорости цели на оси антенной СК.
На рис. 13.8. в качестве примера представлена структурная схема
субоптимального дискретного фильтра Калмана, формирующего оценки
Vux(k) и ацх(к). Коэффициенты передачи фильтра Калмана kvx и ках
вычисляются на основе совместного решения уравнений (3.70)-(3.72) с
учетом конкретных исходных данных.
БВС ИВС
Рис. 13.7
Решение указанных уравнений дает возможность также выпол-
нить количественную оценку потенциальных характеристик точности и
помехоустойчивости каждого канала обработки информации. Количест-
венную оценку потенциальных характеристик точности и помехоустой-
чивости субоптимальной системы дискретного оценивания параметров
движения ВЦ в целом можно осуществить на основе математического
моделирования.
Рис. 13.8
В заключение отметим, что рассмотренный выше субоптималь-
ный алгоритм оценивания фазовых координат цели является привлека-
тельным по критерию «точность - вычислительные и аппаратурные за-
траты». В тоже время следует подчеркнуть, что в практике разработки
БРЛС могут быть использованы как более точные, но достаточно слож-
ные алгоритмы, так и менее точные, но более простые процедуры фор-
мирования оценок скорости и ускорения цели (см. п. 10.6.1).
ГЛАВА 14. АВТОМАТИЧЕСКОЕ СОПРОВОЖДЕНИЕ
ЦЕЛЕЙ В РЕЖИМЕ ОБЗОРА
Автоматическое сопровождение целей в режиме обзора пред-
ставляет собой специфический режим функционирования РЭСУ. В этом
режиме один самолет может осуществлять одновременный прицельный
пуск нескольких ракет (наведение других самолетов) по различным це-
лям, что существенно расширяет его боевые возможности. Возможность
одновременного уничтожения достаточно удаленных друг от друга це-
лей основана на непрерывном получении точной информации о фазо-
вых координатах относительного движения самолета и поражаемых
объектов. Эта информация используется как для управления самим са-
молетом, так и для выдачи команд целеуказаний в ракеты и формирова-
ния команд радиокоррекции при наведении ракет большой дальности с
комбинированными системами управления. При этом в зависимости
от типа РЭСУ полет самолета может выполняться либо по програм-
ме, либо путем его наведения на геометрический центр сопровож-
даемых целей или наиболее важную из них. Кроме того, ракеты
должны иметь активные РГС, позволяющие реализовать принцип
«пустил-забыл» [30].
Одновременное сопровождение нескольких целей широко ис-
пользуется в РЭСУ самолетов радиолокационного дозора, самолетов
истребителей и бомбардировщиков. Поскольку наиболее высокие тре-
бования к точности и устойчивости сопровождения целей предъявляюся
к РЭСУ истребителями именно им и будет уделено основное внимание.
Традиционный режим последовательного просмотра всей зоны
обзора БРЛС, используемый в процессе поиска и обнаружения воздуш-
ных объектов, непригоден для одновременного ведения боя с несколь-
кими целями. Это объясняется следующими причинами.
В режиме обзора имеет место большая дискретность поступления
информации, в то время как управлять самолетом и выдавать команды
ЦУ ракетам нужно непрерывно. Так, в РЛС с механическим сканирова-
нием антенны период обзора, определяющий интервал дискретности,
может достигать нескольких секунд. За это время взаимное расположе-
ние истребителя и целей может измениться на несколько километров. В
связи с этим точность информации об их относительном движении в
промежутках между поступлениями отраженных сигналов оказывается
299
низкой. Кроме того, в такой ситуации очень мала достоверность привяз-
ки (идентификации) результатов вновь получаемых измерений к кон-
кретным целям. Последнее обусловлено тем, что по этим результатам
достаточно трудно судить о том, принадлежат ли они наблюдавшейся
ранее и переместившейся цели либо отраженный сигнал принимается от
вновь появившегося объекта.
Следует подчеркнуть, что для традиционного режима обзора ха-
рактерна низкая точность оценивания фазовых координат относитель-
ного движения даже в моменты прихода отраженных сигналов, что де-
лает невозможным формирование команд ЦУ ракетам с требуемой точ-
ностью. В связи с этим в РЭСУ вынуждены переходить к режиму СОЦ,
в котором обеспечивается существенно более высокая точность измере-
ний. В таком режиме луч антенны все время направлен на одну цель,
что существенно демаскирует подготовку атаки. Кроме того, при этом
теряется информация о всех других целях. В условиях маневренного
группового боя такая потеря может привести к непоправимым послед-
ствиям. Отмеченные недостатки традиционных режимов обзора и СОЦ
и явились причиной разработки и внедрения алгоритмов АСЦРО.
14.1. ОСОБЕННОСТИ ФУНКЦИОНИРОВАНИЯ РЭСУ
ПРИ АВТОМАТИЧЕСКОМ СОПРОВОЖДЕНИИ ЦЕЛЕЙ
В РЕЖИМЕ ОБЗОРА
Автоматическое сопровождение целей в режиме обзора, реали-
зуемое в процессе совместного функционирования БРЛС и БВС, вы-
полняется в несколько этапов, включающих: формирование первичных
измерений; завязку траекторий; экстраполяцию относительных фазовых
координат (траекторий) всех сопровождаемых целей в промежутках
между поступлениями от БРЛС результатов измерений; идентификацию
поступающих результатов измерений на их принадлежность тем или
иным экстраполируемым траекториям; коррекцию (фильтрацию) той
или иной экстраполированной фазовой траектории по результатам
идентифицированных измерений; ранжирование целей по степени их
важности; сброс сопровождаемых траекторий.
Формирование первичных измерений включает в себя все этапы
первичной обработки радиосигналов, начиная от их обнаружения и
кончая получением отсчетов дальности, скорости сближения и борто-
вых пеленгов в горизонтальной и вертикальной плоскостях. Необходи-
мо отметить, что результаты измерений скорости можно получить толь-
ко при импульсных сигналах с ВЧП и СЧП. При обзоре пространства
однолепестковой диаграммой направленности бортовые пеленги в гори-
зонтальной плоскости обычно отсчитывают по середине пачки отра-
женных импульсов, а в вертикальной - по номеру строки [27].
Под завязкой траекторий понимается процесс взятия на сопро-
вождение новых целей, появляющихся в зоне обзора БРЛС. Экстраполя-
ция представляет процесс прогнозирования всех фазовых координат
относительного движения целей и истребителя, которые используют-
ся для управления самолетом и выдачи команд ЦУ ракетам «в-в». При
экстраполяции в декартовых координатах прогнозируются эволюции
проекций Дх, Ду, Д, дальности до цели на оси стабилизированной в про-
странстве системы координат OXYZ и их производных Дх , Ду, Дг
(см. главу 13). Такой способ позволяет выработать текущие команды
радиокоррекции в процессе наведения ракет с комбинированными сис-
темами управления в автономном режиме.
Для формирования текущих сигналов управления истребителем и
выдачи команд целеуказаний ракетам наиболее употребительна экстра-
поляция измеренных (оцененных) значений дальности Д, скорости Д,
бортовых пеленгов <рг и <рв и угловых скоростей (0г и (0в ЛВ в полярной
системе координат, связанной с центром массы самолета. Фазовые ко-
ординаты обычно экстраполируются с минимальными СКО по алгорит-
му (3.78), с помощью которого удобно сочетать процедуру оптимальной
по минимуму СКО экстраполяции с последующей оптимальной по ми-
нимуму СКО фильтрацией (коррекцией).
Идентификация результатов поступающих измерений преследу-
ет цель определить ту из экстраполируемых траекторий, которой по
тем или иным признакам наиболее достоверно соответствуют полу-
ченные наблюдения. Правила установления такого соответствия могут
быть различными и будут подробно обсуждены в §14.3.
В зависимости от требований к точности сопровождения и вы-
числительных возможностей БВС коррекция (фильтрация) экстраполи-
рованных траекторий по идентифицированным результатам измерений
может выполняться по различным законам. Наиболее употребительны
для этого алгоритмы ос, р и оптимальной линейной аналого-дискретной
фильтрации [76], в том числе и рассмотренных в §3.8.
Поскольку число целей может превышать число ракет на борту
истребителя, то для их эффективного применения желательно знать
степень опасности (важности) сопровождаемых объектов. В связи с
этим необходимо выделять наиболее опасные (важные) цели, которые
целесообразно уничтожать в первую очередь. Одним из наиболее ис-
пользуемых признаков (критериев) опасности является минимум отно-
шения дальности к скорости. Смысл этого критерия состоит в вычисле-
нии времени tB, оставшегося до встречи с сопровождаемой целью, по
результатам экстраполяции (измерения) дальности и скорости. Та цель,
для которой вычисленное значение tB=|Д/ Д | окажется наименьшим, и
считается наиболее опасной [27].
Сброс цели с сопровождения выполняется в рамках анализа ре-
зультатов измерений в процессе завязки траекторий и идентификации
наблюдений. Если в результате анализа выясняется, что полученные
результаты не идентифицируются ни с одной из экстраполируемых тра-
екторий и при этом не выполняются условия завязки новой траектории,
то цель исключается из процесса сопровождения.
Логические связи между рассмотренными этапами АСЦРО пока-
заны на рис. 14.1.
Рис. 14.1
В настоящее время различают две разновидности АСЦРО. Одна из
них, называемая сопровождением на проходе, используется в БРЛС с
механическим сканированием антенны. В такой БРЛС все этапы
АСЦРО выполняются в процессе последовательного просмотра антен-
ной всей зоны обзора, имевшей место в режиме поиска и обнаружения
целей. Другая более перспективная разновидность АСЦРО, называемая
программируемым обзором или активным сопровождением, находит
применение в БРЛС с ФАР. В такой БРЛС за счет электронного управ-
ления луч антенны скачкообразно перемещается от одной цели к другой
по результатам экстраполяции их пространственного положения. Такой
прием, исключая просмотр зон отсутствия целей, позволяет существен-
но сократить интервал дискретности поступления информации от БРЛС
и тем самым значительно повысить точность и устойчивость сопровож-
дения всех целей. Следует отметить, что очередность пеленгации всех
сопровождаемых целей может быть самой различной, включая как по-
очередное облучение всех объектов, так и более частое зондирование
наиболее важных целей.
14.2. ЗАВЯЗКА ТРАЕКТОРИЙ
Завязка новой траектории осуществляется по результатам изме-
рений дальности Д, скорости Д и бортовых пеленгов фг и фв после про-
верки их принадлежности всем сопровождаемым целям. Если в резуль-
тате проверки выяснится, что полученные измерения Дн, Дн и фгн, фви
не соответствуют ни одной из экстраполируемых траекторий, то прини-
мается предварительное решение о наличии новой цели (завязка траек-
тории). Поскольку процесс обнаружения случаен, то принятое предва-
рительное решение нуждается в дополнительном подтверждении. Суть
подтверждения состоит в том, что по результатам первого измерения
прогнозируется положение цели для следующего цикла. Относительно
прогнозируемого положения формируется строб отождествления, назы-
ваемый также корреляционным, в котором и ищется отраженный сигнал
на следующем цикле измерений. Затем процедура повторяется для сле-
дующего цикла измерений. Если в m последовательных циклах цель
обнаруживается k<m раз, то принимается окончательное решение о на-
личии в зоне обзора БРЛС новой цели. После этого результаты послед-
них измерений заносятся в специальный файл БВС в качестве началь-
ных условий для последующей экстраполяции новой фазовой траекто-
рии. Для принятия окончательного решения чаще всего используется
логика обнаружения два из двух, два из трех, три из трех и три из четы-
рех [76].
Качество функционирования алгоритмов принятия решения о
наличии новых целей характеризуется достоверностью и скоростью
завязки траекторий. Количественно достоверность завязки оценивается
вероятностью принятия правильного решения об обнаружении цели.
Эта вероятность возрастает с увеличением вероятности правильного
обнаружения БРЛС и числа циклов проверки перед принятием оконча-
тельного решения. Скорость завязки характеризуется временем реакции
алгоритма принятия решения, под которым понимается интервал вре-
мени между входом новой цели в зону обзора БРЛС и принятием реше-
ния о ее наличии. В общем случае это время - случайная величина, по-
этому обычно используют его математическое ожидание и дисперсию,
аналогами которых являются среднее число циклов до принятия реше-
ния и дисперсия их отклонений.
Следует отметить, что процедура реализации процесса завязки
траектории может быть различной. В БРЛС с механическим сканирова-
нием антенны обычно применяется процедура так называемого скользя-
щего окна, в БРЛС с ФАР - процедура последовательных испытаний [76].
При процедуре скользящего окна результаты предварительных
решений обрабатываются в нескольких последовательных циклах обзо-
ра БРЛС. Смысл этой процедуры поясняется рис. 14.2. Пусть последо-
вательность {z0, Zi, ..., zn} представляет результаты предварительного
анализа отраженных сигналов во всех циклах измерений. При попада-
нии результатов измерений i-ro цикла в строб отождествления считает-
ся, что Zj=l, в противном случае г,=0. Если в окне из m последователь-
ных циклов обзора число обнаружений цели в стробах отождествления
достигнет определенного значения к, то принимается окончательное
i+m
решение о завязке новой траектории. В ситуации, когда Xz. < к , окно
i
из m обзоров смещается на один цикл в сторону увеличения. На
рис. 14.2 новое положение окна показано штриховой линией. Более со-
вершенная, но и более сложная процедура скользящего окна основана
на формировании оценки Р3 вероятности Р3 завязки в нем новой траек-
тории по алгоритмам оптимальной линейной фильтрации. Возможность
использования этого алгоритма основана на представлении перемеще-
ния скользящего окна в виде дискретного марковского процесса [82] с
конечным числом состояний и постоянными вероятностями перехода
[76]. Решение о завязке новой траектории принимается при условии, что
Р3 >РЗТ, где Рзт- требуемое значение вероятности.
СКОЛЬЗЯЦЕЕ
окно из m
ЦИКЛОВ 0Б30РЛ
НЕТ ЦИКЛ ВПЕРЕН
Рис. 14.2
В БРЛС с ФАР для завязки траекторий обычно используется ал-
горитм последовательной проверки гипотез истинности принятия реше-
ния о наличии новой цели (Н|) и ложности этого решения (Но). Проце-
дуру оптимального по минимуму СКО оценивания гипотез Н] и Но по
результатам измерений z, (рис. 14.2) можно выполнить по алгоритмам
обнаружения на основе бинарных наблюдений, которые рассмотрены в
[69, 74]. Следует отметить, что способ последовательного обнаружения
в БРЛС с ФАР обеспечивает в среднем более высокую скорость завязки
траекторий, чем способ скользящего окна. Эта особенность обусловле-
на, в частности, тем, что в БРЛС с ФАР можно направлять луч антенны
непосредственно в предполагаемом направлении сопровождаемого объ-
екта и затрачивать существенно меньше времени на просмотр зон, сво-
бодных от целей.
Важным фактором, влияющим на достоверность и скорость за-
вязки целей, является размер стробов отождествления. С одной сторо-
ны, увеличение размеров этих стробов позволяет повысить вероятность
повторного обнаружения интенсивно маневрирующих целей на сле-
дующем цикле измерений. Однако, с другой стороны, увеличивается
вероятность попадания в большой строб совсем другой цели. В связи с
этим представляет интерес обоснование оптимальных в некотором
смысле размеров корреляционных стробов.
Суть одной из наиболее простых методик выбора размеров стро-
бов отождествления состоит в следующем. Пусть на k-м цикле обзора
получены некоррелированные измерения (2.21)
zi(k) = xi(k) + ^Ili(k),(i = l,m), (14.1)
по которым принято предварительное решение о наличии цели. При
этом для следующего цикла фазовая координата Xi экстраполируется по
закону
xi(k + l) = xi(k) + ki(k)T. (14.2)
В (14.1) и (14.2) ^„i(k) - центрированный гауссовский шум с известной
дисперсией D^; Т - интервал времени между двумя обзорами. Если ско-
рость х(к) в (14.2) не измеряется, то она полагается случайным гаус-
совским процессом с нулевым средним. Дисперсия этого процесса Dxi ,
учитывающая степень неопределенности возможных значений скорости,
определяется по правилу (3.67). В такой ситуации разность измерений
Az = z(k +1) - z(k) = x(k)T + £ui (k +1) - (k), (14.3)
обусловленная перемещением цели за время Т, также представляет цен-
трированный гауссовский случайный процесс с дисперсией
DAz, =Dx1T2+2D111. (14-4)
Тогда для разности измерений Az практически достоверно будет
выполняться условие -3-jDxjT2+2DKi <Az < 3^DxiT2 +2Dni . Отсюда сле-
дует, что величину
AXi =ki.1TD~T?+2D~ (14.5)
можно использовать в качестве строба отождествления для фазовой ко-
ординаты х,. На практике коэффициенты кн, определяющие заданную
вероятность попадания Azj в выбранный строб, выбираются в пределах
l<ki3 <2. (14.6)
Необходимо отметить, что для различных фазовых координат х, и на
разных циклах измерений значения ки могут выбираться различными.
Недостаток рассмотренного подхода - нестрогость допущения о
гауссовском характере распределения неизмеряемых скоростей х;, за-
кон распределения которых более точно соответствует равновероятно-
му. Однако этот недостаток проявляется лишь при выборе размеров
первого строба для второго цикла измерений, после которого уже мож-
но вычислить скорость х;, рассчитать более точное значение дисперсии
Dxi и скорректировать размеры строба. Если же скорость х, измеряет-
ся (вычисляется), то в формуле (14.5) дисперсия Dxi . определяется дис-
персией Dxlli. измерений (вычислений) скорости. В такой ситуации
применение формулы (14.5) является более правомерным.
В [76] рассмотрен другой способ получения (14.5), основанный
на использовании свойств распределения квадратичной формы Az2D^!
по закону Хи-квадрат.
14.3. ИДЕНТИФИКАЦИЯ РЕЗУЛЬТАТОВ ИЗМЕРЕНИЙ
Под идентификацией или отождествлением результатов изме-
рений понимается процесс принятия решения об их соответствии той
или иной экстраполируемой траектории. Этот процесс включает два
этапа. На первом этапе результаты измерений сопоставляются со всеми
экстраполируемыми траекториями. На втором - выбирается одна из
траекторий, по тем или иным критериям наиболее достоверно соответ-
ствующая результатам измерений. Необходимо отметить, что первый
этап может выполняться и по другой стратегии. Каждая из экстраполи-
руемых траектории поочередно ставится в соответствие всем принятым
за время обзора результатам измерений [76]. Выбранная по результатам
идентификации траектория и корректируется (фильтруется).
Способы сопоставления и правило принятия решений в процессе
идентификации могут быть различными. Рассмотрим два из них, один
из которых основан на сопоставлении траекторий и результатов измере-
ний в так называемых стробах отождествления, а второй - на оценива-
нии по результатам измерений параметров моделей, на основе которых
траектории экстраполируются.
14.3.1. Идентификация с сопоставлением
В СТРОБАХ ОТОЖДЕСТВЛЕНИЯ
Под стробом отождест- А
вления, именуемым также
корреляционным, понимается
область многомерного про-
странства с размерами
±AXj (i - 1 ,m ) вокруг точки с
экстраполированными на ка-
ждом цикле обзора координа-
тами. Пример пространствен-
ного строба ABCD для двух-
мерного пространства (гп=2)
показан на рис. 14.3, где точ-
ки Ооу, Оцэ и Оцп соответству-
ют объекту управления, ре- v
Рис 14 3
зультатам экстраполяции и
измерений положения цели; 2ДД и 2А(рг - размеры строба по дальности
и бортовому пеленгу в горизонтальной плоскости. Смысл сопоставле-
ния в стробах отождествления состоит в том, что все полученные от
одной цели измерения z, (i = l,m), где m - число измеряемых фазовых
координат, поочередно сравниваются с аналогичными координатами x3ij
(i = l,m, j = 1,NH ) всех Nu экстраполируемых траекторий в пределах
допусков Дх,. Если хотя бы для одной фазовой координаты j-й цели не
выполняется условие
(М.7)
то данная траектория исключается из дальнейшей процедуры принятия
решения. Порядок перебора всех Nu экстраполируемых целей может
быть как безприоритетным, так и приоритетным. В последнем случае
очередность сопоставления определяется приоритетом (важностью) од-
ной цели перед другими.
Процедура принятия решения о соответствии измерений Zj той
или иной из экстраполированных целей, удовлетворяющих условию
(14.7), также может быть различной. Наиболее простым является прави-
ло принятия решения по первому
выполнению условия (14.7). Такой
алгоритм принятия решения приго-
ден лишь для достаточно разнесен-
ных в пространстве целей. Если же
сопровождаемые цели расположены
достаточно близко, то принятое ре-
шение может оказаться недостовер-
ным, так как условию (14.7) могут
удовлетворять результаты экстрапо-
ляциии другой цели. Пример такой
ситуации показан на рис. 14.4, где
точками О1П| и Оц.,2 показано распо-
ложение целей 1 и 2 по результатам экстраполяции их траекторий, точка
О11П соответствует положению цели по результатам измерений.
Более достоверна процедура принятия решения после дополни-
тельной обработки результатов сравнения x3ij-zHi для всех траекторий,
удовлетворяющих условию (14.7). В качестве меры окончательного со-
ответствия измерений zni той или иной j-й траектории с координатами
x3ij может использоваться расстояние между точками 0IOj и точкой Оцн,
соответствующей полученным измерениям. Та траектория, для которой
это расстояние будет наименьшим, и будет считаться идентифициро-
ванной. Для случая, приведенного на рис. 14.4, результатам измерений
соответствует вторая траектория Оцэ2, поскольку ОЦ.,2ОЦИ<О1П]О1Ш. В ка-
честве критерия идентификации может использоваться и минимум квад-
ратичной формы
l = minZ(x->ij-zi)l 2qii>
(Jj i=l
(14.8)
в которой qn - размерные коэффициенты, определяемые важностью i-й
фазовой координаты. Та траектория, для которой квадратичная форма
(14.8) будет наименьшей, и считается истинной.
Следует отметить, что для близко расположенных целей интерва-
лы между поступлениями от них результатов измерений могут быть
очень малыми. В таких условиях составляется матрица расстояний
O,njOH1 для всех j-x целей, прошедших проверку (14.7), и всех получен-
ных i-x результатов измерений. Идентификация измерений осуществля-
ется либо на основе перебора всех расстояний по определенным прави-
лам с последовательным исключением наименее достоверных вариан-
тов [76], либо по правилу (14.8) с последовательным перебором всех
траекторий для каждого измерения.
Достоверность рассмотренных алгоритмов идентификации мож-
но повысить путем предварительной классификации экстраполируемых
траекторий по различным признакам (прямолинейные траектории, тра-
ектории маневрирующих целей и т.д.).
Размеры стробов отождествления должны одновременно удовле-
творять двум условиям. С одной стороны, они должны обеспечить по-
падание результатов измерений от соответствующей цели внутрь строба
при любых реальных законах движения сопровождаемого объекта. С
другой стороны, число попаданий мешающих сигналов внутрь строба
должно быть минимальным. Суть одной из самых простых методик вы-
бора размеров стробов состоит в следующем.
Пусть на k-м цикле получены независимые измерения (14.1). При
этом цель экстраполируется по закону (14.2), в то время как на самом
деле она перемещается с относительным ускорением а,, представляю-
щим гауссовский процесс с известной дисперсией DUj. В такой ситуации
разность измерений на (к+1)-м и к-м циклах будет представлять случай-
ный гауссовский процесс
△zi=z(k4-l)-z(k)=x,i(k4-l)+^„i(k-*-l)-*-aiT2/2-z(k)-x,i(k>-^„i(k) (14.9)
с дисперсией
DAZi=2DX3+DlliT4/4+2D,1, (14.10)
где DX3 - дисперсия ошибок прогноза, вычисляемая по формуле (3.85).
Для гауссовского процесса (14.9) с дисперсией (14.10) можно опреде-
лить доверительный интервал
AXj = kiA/2Dx3 + DaT4 /4+2D„ , (14.11)
в который разность Az; (14.9) будет попадать с заданной вероятностью.
Обычно выбирают 1<к,<2. Если идентифицируемая цель и ОУ движутся с
постоянными скоростями, то второе слагаемое в (14.11) можно опустить.
На практике цели идентифицируется обычно в стробах отождеств-
ления по дальности, скорости сближения и бортовым пеленгам в горизон-
тальной и вертикальной плоскостях. Если при этом процессы экстраполя-
ции и фильтрации выполняются по оптимальным алгоритмам, то размеры
стробов уменьшаются от своих первоначальных, достаточно больших раз-
меров (14.5), до меньших значений (14.11) в установившемся режиме. Эта
особенность обусловлена уменьшением величин DX3 в (14.11) вследствие
уменьшения в (3.85) дисперсий D(t) ошибок фильтрации.
14.3.2. Идентификация с оцениванием параметров
ИСХОДНЫХ МОДЕЛЕЙ
Существенным недостатком идентификации результатов измере-
ний в стробах отождествления является относительно низкая ее досто-
верность при сопровождении маневрирующих целей. Это связано с не-
обходимостью применения достаточно больших корреляционных стро-
бов (14.11), поскольку в процессе идентификации сравниваются три
случайных процесса: измерений, экстраполяции и ускорений маневров.
Кроме того, сравнение в стробах отождествления возможно лишь по
небольшому числу измеряемых фазовых координат (т <4) и в ходе его
не учитываются внутренние детерминированные связи экстраполируе-
мых фазовых координат.
Необходимо отметить, что в РЛС, использующих при АСЦРО
идентификацию в стробах отождествления, разрешающая способность
по всем координатам определяется не параметрами сигналов и антенн, а
размерами стробов. Поскольку при сопровождении интенсивно манев-
рирующих целей размеры стробов выбираются достаточно большими,
то это предопределяет ухудшение разрешающей способности.
Кроме того, сам факт выбора в качестве решающего правила по-
рогового критерия (14.7) является нерациональным по крайней мере по
двум причинам. Одна из них обусловлена сложностью назначения оп-
тимального размера строба, адаптирующегося к быстро изменяющимся
условиям сопровождения маневрирующих целей. Другая - предопреде-
лена низкой вероятностью правильного принятия решения вблизи гра-
ниц стробов, когда даже небольшая погрешность измерений может из-
менить решение об их соответствии той или иной траектории на проти-
воположное.
Более совершенными являются алгоритмы, так называемой, бес-
стробовой идентификации, основанные на формировании решающего
правила по минимуму того или иного квадратичного функционала. В
таком функционале можно учесть и предысторию движения и вероят-
ность появления тех или иных траекторий и важность отдельных сла-
гаемых для процедуры идентификации в целом и т.д.. Такой подход по-
зволяет получить высокодостоверное решение, не принимая во внимание
абсолютную величину функционала, а лишь определив его минимальное
значение в процессе перебора траекторий. С другой стороны, абсолютное
значение функционала, либо его составных частей, зависящих от несоот-
ветствия измерений и прогноза идентифицированной траектории можно
использовать для адаптации процесса коррекции в алгоритмах адаптив-
ной аналого-дискретной фильтрации, рассмотренной в §3.8.
Один из наиболее перспективных алгоритмов бесстробового
отождествления результатов измерений основан на идентификации па-
310
раметров исходных моделей (3.86), которые применяются для прогноза
(3.69) эволюций целей в промежутках между приемом отраженных от
них радиосигналов, по правилу (3.92)-(3.94). Если после измерений ре-
зультаты оценивания a, (i = 1,п2 ) параметров а, (3.91) переходной мат-
рицы Фр(к, к-1) совпадают с теми их значениями, которые использова-
лись в модели (3.86), то принимается решение о том, что эти измерения
соответствуют экстраполируемой фазовой траектории. Резкое отличие
результатов оценивания а, хотя бы от одного из априорных значений а,
свидетельствует о том, что результаты измерения не соответствуют
данной экстраполируемой траектории. Перебирая все траектории, мож-
но с высокой достоверностью установить ту, которой соответствуют
принятые радиосигналы. В качестве критерия идентификации удобно
использовать минимум квадратичной формы
л э
1 = тЫ£(а|-а;) qnk
ы 1=1
(14.12)
в которой qii - размерные коэффициенты, определяющие важность того
или иного коэффициента для достоверной идентификации. Та из экст-
раполируемых траекторий, для которой функционал (14.12) будет наи-
меньшим, и считается наиболее достоверно соответствующей получен-
ным результатам измерений.
14.4. АЛГОРИТМЫ АСЦРО С ИДЕНТИФИКАЦИЕЙ
ИЗМЕРЕНИЙ В СТРОБАХ ОТОЖДЕСТВЛЕНИЯ
И -ФИЛЬТРАЦИЕЙ
Рассмотрим один из самых простых алгоритмов функционирова-
ния РЭСУ при АСЦРО, в котором траектории экстраполируются по ги-
потезе изменения фазовых координат с постоянной скоростью, а ре-
зультаты измерений идентифицируются в стробах отождествления с
последующей а-, Р-фильтрацией. При этом будет полагаться, что в этом
режиме РЭСУ обеспечивает наведение самолета на геометрический
центр группы целей по закону (7.22), (7.23) и выдачу команд целеуказа-
ний нескольким ракетам по дальности (j = 1,NU ), скорости сближе-
ния Vuyj и бортовым пеленгам целей <pruyj, <pBuyj в горизонтальной и вер-
тикальной плоскостях.
АСЦРО обеспечивается в процессе совместного функционирова-
ния импульсно-доплеровской БРЛС, автономных датчиков и БВС. Им-
пульсно-доплеровская БРЛС формирует измерения дальности Ди до
Рис. 14.5
цели, скорости сближения УСбИ=-Ди с ней и бор-
товых пеленгов фги, фви. При этом контроли-
руемая зона пространства просматривается одно-
лепестковым лучом путем последовательного
механического сканирования антенны по закону,
показанному на рис. 14.5, где окружность пред-
ставляет сечение главного лепестка ДН в плоско-
сти, перпендикулярной оси антенны. В такой си-
туации фги измеряется по центру пачки импульсов, отраженных от цели,
а скорость Ди - по доплеровскому сдвигу частоты. Автономные датчи-
ки измеряют углы атаки аи, крена уи, рыскания \|/и и тангажа а также
производные фи и . ВВС осуществляет завязку траекторий и их экс-
траполяцию, формирует стробы отождествления и идентифицирует в
них результаты измерений, а также выполняет а-, Р-фильтрацию и ран-
жирование целей по степени их опасности.
Для решения поставленных задач в процессе СНП должны фор-
мироваться оценки дальности Д, скорости Д, углов фг и фв и угло-
вых скоростей сог и 0)в линии визирования. Эти величины оцениваются
в результате выполнения следующих операций.
Результаты Ди(1), Ди(1), фП1(1)и фви (1) первого измерения для
первой обнаруженной цели заносятся в виде массива чисел в память
ВВС, после чего начинается формирование стробов отождествления по
дальности, скорости и углам по правилу (14.5)
ДД = кдаА/одиТ2+2Оди;
Афг = Kpra-JlApiT +2D(|)ni;
АД=киМт2+2о„;
△фв “ + 2Офви,
<14.13)
предусмотренному для завязки траекторий. Здесь Эдн, D;U1 и Пфги,
D(pBH - дисперсии погрешности измерения дальности, скорости и борто-
вых пеленгов; Эд - дисперсия априорного разброса ускорения Д ; D^.
и Эфв - дисперсии априорного разброса угловых скоростей; кдз, кдз,
кфГз и кфвз - коэффициенты, удовлетворяющие условию (14.6) с учетом
требуемой вероятности завязки траектории. Одновременно с вычисле-
нием стробов (14.13) экстраполируются дальность и скорость по закону:
Д , (2) = Д и (1) + Д и (1)Т; Дэ (2) = Д и (1). (14.14)
Если полученные на втором цикле измерения Ди(2) и Ди (2)
удовлетворяют условиям
Дэ(2) —ДД<Д (2)<Д (2) + ДД,
. . . (14.15)
Дэ(2)-ДД < Ди(2) < Дэ(2) +ДД,
то вычисляются значения угловых скоростей
фги(2) = ФпХ2ЬЫ1)) <рви(2) = <Рви(2) ~^ви(1) (14.16)
и ускорения
Д(2) = Д-И-<2)~ Ди(В , (14.17)
на основе которых формируются результаты прогноза для третьего цикла
Фгэ(З) = Фги(2) + фги(2)Т, Фвэ(3) = <рви(2) + фви(2)Т,
(14.18)
Д, (3) = Ди (2)+Д(2)Т, Дэ (3) = Ди (2) + Д и (2)Т.
Если на третьем цикле результаты измерений Ди(3), Ди (3) и
фги(З), фви(З) попадут внутрь стробов (14.13), то принимается оконча-
тельное решение о наличии цели, результаты измерений поступают в
качестве начальных условий в алгоритмы экстраполяции и фильтрации
и начинается отсчет времени tu для обнаруженной цели.
Если условия (14.15) не выполняются, то принимается предвари-
тельное решение о наличии еще одной цели и для нее повторяется вся
процедура завязки траектории.
В ситуации, когда полученные измерения Ди(1) и Ди(1) свиде-
тельствуют о том, что обнаруженная цель удалена от истребителя на
небольшое расстояние и приближается к нему с большой скоростью,
процедуру завязки траектории можно упростить до выполнения лишь
условий (14.15). После этого начинаются экстраполяция и фильтрация
данной траектории.
В промежутках между измерениями в простейшем случае экстра-
полируются завязанные траектории на основе гипотезы изменения фа-
зовых координат с постоянной скоростью:
Д(0) = Ди;
Д(О)=ДИ;
(14.19)
Фг(0) = ФгИ;
Фгэ(О) = Фги;
(14.20)
Фв(0)=ФвИ;
Фв,(0)=ФвИ;
(14.21)
(14.22)
Д,(‘ц) = Д(к) + Д(к)1ц,
Дэ(1ц) = Д(к) + Д(кДц,
ФпСц) = Фг(к) + Фг(кДц,
ФюОц) = Ф.(к);
Фвэ(1ц) = Фв(к) + Фв(кДц,
Фвэ(‘ц)=Фв(к);
“гэОц) = Фгэ(к + 1) + ФОц
ЧэОц) = Фвэ(к + О + ^(‘ц
В (14.19) - (14.22) Д, Д, Д и ф,., фв- оценки, формируемые в соот-
ветствующих фильтрах после измерений на к-м цикле; tu - текущее
время между измерениями, удовлетворяющее условию 0<tu<T; con, совэ -
экстраполированные текущие оценки угловых скоростей ЛВ в горизон-
тальной и вертикальной плоскостях; у и О - текущие оценки скоро-
стей изменения курса и тангажа, формируемые на основе измерений \|/и
и Ои; Ди, Ди, фП1 и фви - результаты последних измерений на момент
завязки экстраполируемой траектории. Текущие экстраполированные
значения Дэ, Дэ, фГ}, фвэ и С0гЭ, co,,., поступают к потребителям информа-
ции для реализации закона наведения (7.22), (7.23) и к ракетам в качест-
ве команд ЦУ.
Одновременно с решением уравнений экстраполяции для каждой
сопровождаемой цели на основе соотношений (14.11) и (14.19)—(14.22)
формируются стробы отождествления:
I---------Г"------- I , 2DtT4
ДД = кд-\|2Пдэ+ ОдТ4/4+2Оди = k^2D- + 2D:T2 * +-+ 2ПДИ =
= кд^2О-+2,5D:T2+ 2ОДИ;
ДД = кд72°д,+2Од„ =kl^,2D.+2D,ll; (14.23)
Афг ~ + D^T4 /4+ЗОф™ — кф,.^2D^_+2,5D^T 4- 20^;
Афв = k<pB^2D-B+2,5D: Т2+2Офви ,
где было учтено, что
Дк+1) = Дк+1)-Дк) /Т,
D- = 2D? /Т2,
д д
ф,.(к+1)= ф,.(к)-ф,(к) /Т,
Фв(к+1)=[фв(к)-фв(к)]/Т, Оф1. = 2D:_ /Т2,
D(: =2D: /Т2, а к„, к- и кфг, к«,в удовлетворяют условию (14.6).
Ж» фВ Д V V
Необходимо отметить, что в общем случае размеры стробов
(14.23) меньше размеров аналогичных стробов завязки (14.13). Это обу-
словлено тем, что в (14.23) используются дисперсии D- , D- , D^.,
Dab и D: , D? более точных процессов оценивания Д, Д, фг, фв и
фг, фв по сравнению с аналогичными дисперсиями измерений и априорных
сведений в (14.13).
Если на момент времени (к+1)-х измерений условия
Дэ(к + 1)-ДД<Ди(к + 1)<Дэ(к + 1) + ДД,
Дэ(к + 1)-ДД<Ди(к + 1)<Дэ(к + 1) + ДД,
(14.24)
Фгэ (к +1) - Афг < Фгн (к +1) < Фгэ (к +1) + Дф,.
Фвэ(к +1) - Дфв < фвн(к +1) < фвэ(к +1) + Дфв
выполняются только для одной экстраполируемой траектории, то она и
считается соответствующей полученным результатам и используется
для последующей коррекции в алгоритмах а-, Р-фильтрации. Если ус-
ловиям (14.24) удовлетворяют несколько траекторий, то вычисляется
функционал (14.8)
Ij = (u,j(k+1) - Ди(к +1)) 2Чд + (дэ/к+1) - Ди(к+1)) 2Чд +
+ (фга)(к +1) - Фги (к+1)) + (фвэ/к +1) -фви(к+1)) 2q<fB
для каждой j-й из этих трасс. Траектория, для которой Ij будет мини-
мальным, и считается идентифицированной.
Коррекция результатов прогноза идентифицированной траекто-
рии по полученным измерениям проще всего выполняется по алгорит-
мам а-, Р-фильтрации [27]:
Д(к) = Дэ(к) + ад(Ди(к)-Д,(к));
• • Вл , ч (14'26)
ДДк) = Дэ(к) + ^(Ди(к)-Дэ(к));
ДР(к) = Дэ(к) + аР{ци(к)-Дэ(к));
В \ (14‘27>
Д(к) = ^(ди(к)-Дэ(к));
Фг (к) = Фгэ (к) + афг (фги (к) - фГ) (к));
В (14.28)
фг(к) =-^(<рги(к)-фгэ(к));
Фв(к) — фвэ(к) + а<рв (фви(к) -фвэ(к)) ,
В <14-29)
Фв(к)=-5р-(фви(к)-фвЭ(к)) •
Здесь Дэ, Дэ, фо и фвэ определяются законом экстраполяции
(14.19)-( 14.21) на момент времени tu=T; Дг и Др- оценки скорости по
результатам измерения времени запаздывания (дальности ) и доплеров-
ской частоты (скорости сближения); аь Pi - соответствующие постоян-
ные коэффициенты усиления невязок измерений. После вычисления
оценок (14.26)-( 14.29) начинается новый этап экстраполяции
(14.19)-(14.22).
Траектории, для которых условие (14.24) не выполняется подряд
в 3-4 циклах, сбрасываются с сопровождения.
По степени опасности цели ранжируются по критерию мини-
мального времени
tBj=fl3j(k + l)/A3j(k + l), (14.30)
оставшегося до встречи с сопровождаемой целью. Приоритет пораже-
ния целей определяется в порядке возрастания времени (14.30). Упро-
щенная схема логических связей основных этапов рассмотренного алго-
ритма АСЦРО приведена на рис. 14.1.
Рассмотренный алгоритм АСЦРО, являясь одним из самых про-
стых, не обладает высокой точностью сопровождения целей и требует
достаточно большого времени (2-3)Т на достоверную завязку траекто-
рии. Если при использовании этого алгоритма истребитель наводится на
геометрический центр целей, то низкая точность оценивания требуемых
фазовых координат не препятствует его реализации. Однако при наве-
дении самолета на наиболее опасную маневрирующую цель показатели
точности сопровождения могут оказаться недостаточными. Кроме того,
точность АСЦРО может оказаться недостаточной для эффективного
целеуказания ракетам, что приводит к необходимости перехода к режи-
му СОЦ. Низкая точность оценивания фазовых координат при исполь-
зовании рассмотренного алгоритма АСЦРО объясняется следующими
причинами: использованием антенн с механическим сканированием;
применением примитивных моделей состояния для прогноза; низкой
достоверностью идентификации целей в широких стробах отождествле-
ния; неоптимальностью формирования оценок по алгоритмам а-, [3-фи-
льтрации и низкой точностью измерений в режиме обзора.
Для антенн с механическим сканированием луча характерно боль-
шое время обзора Т, что обусловливает низкую точность экстраполя-
ции, необходимость в больших стробах отождествления и невозмож-
ность использования алгоритмов оптимальной фильтрации. Применение
простых моделей (14.19)—(14.21) обеспечивают низкую точность экст-
раполяции маневрирующих целей, а корреляционные стробы больших
размеров определяют низкую достоверность идентификации результа-
тов измерения и возможность использования для коррекции сопровож-
даемой траектории не соответствующих ей измерений. Алгоритмы а-,
[3-фильтрации, в которых постоянные коэффициенты ai} Р, выбираются
из условий компромисса между требованиями точности и устойчивости
сопровождения, по точности оценивания уступают оптимальным филь-
трам с переменными коэффициентами усиления невязок.
14.5. АЛГОРИТМЫ АСЦРО С БЕССТРОБОВОЙ
ИДЕНТИФИКАЦИЕЙ ИЗМЕРЕНИЙ ПО МОДЕЛИ СОСТОЯНИЯ
И АНАЛОГО-ДИСКРЕТНОЙ ФИЛЬТРАЦИЕЙ
Анализ недостатков алгоритмов АСЦРО с идентификацией изме-
рений в стробах отождествления и последующей а-, р-фильтрацией,
выполненный в §14.4, позволяет сделать следующие выводы. Для по-
вышения точности АСЦРО в БРЛС с механически сканирующей антен-
ной необходимо:
увеличивать скорость сканирования антенны;
уменьшать время, затрачиваемое на завязку траекторий;
использовать более точные модели для экстраполяции маневри-
рующих целей;
применять более современные приемы идентификации результа-
тов измерений, не связанные с использованием широких стробов ото-
ждествления;
оценивать требуемые фазовые координаты по алгоритмам опти-
мальной аналого-дискретной фильтрации.
Рассмотрим алгоритмы АСЦРО, в которых в той или иной степе-
ни учтены эти рекомендации.
Используя гидравлические приводы, можно в полтора-два раза
увеличить скорость сканирования антенны по сравнению с электроме-
ханическим способом. Это позволяет в полтора-два раза уменьшить
интервал поступления измерений и тем самым: снизить ошибки экстра-
поляции, уменьшить размеры стробов отождествления для завязки тра-
екторий (14.5), повысить достоверность этой операции и уменьшить
время завязки траекторий. Кроме того, при уменьшении периода обзора
БРЛС хотя бы до 2...2,5с становятся употребительными более совер-
шенные алгоритмы оптимальной аналого-дискретной фильтрации фазо-
вых координат относительного движения и оптимального оценивания
параметров используемых моделей. При этом улучшается точность те-
кущей экстраполяции и фильтрации всех сопровождаемых траекторий,
а также существенно повышается достоверность идентификации ре-
зультатов измерений.
В дальнейшем будем полагать, что сохраняют силу все сделан-
ные в §14.4 допущения: об используемых методах наведения, импульс-
но-доплеровском типе БРЛС, виде и числе измеряемых ею фазовых ко-
ординат, способе обзора пространства (рис. 14.5) и процедуре завязки
траекторий. Кроме того, будем считать, что механический обзор про-
странства обеспечивается гидравлическим приводом, реализующим
время обзора Т<2,5с.
Получение оптимальных по минимуму СКО алгоритмов оценивания
состояния и параметров используемых моделей включает следующие эта-
пы: выбор и обоснование исходных моделей состояния и измерителей; син-
тез алгоритма оценивания фазовых координат относительного движения
истребителя и сопровождаемых целей, а также алгоритма идентификации
параметров моделей состояния по результатам измерений.
14.5.1. Выбор и обоснование исходных моделей
Под исходными моделями будем понимать математические зави-
симости, аппроксимирующие эволюции фазовых координат относи-
тельного движения целей и истребителя в полярной системе коорди-
наш, изменение параметров исходных моделей во времени и процессов
наблюдений.
Исходные модели состояния и измерителей выбираются с учетом
задач, решаемых РЭСУ при АСЦРО, и возможностей современных БВС
по быстродействию и объему памяти. Модель состояния каждой траек-
тории должна обеспечивать оптимальное оценивание всех фазовых ко-
ординат, необходимых для современных и перспективных методов на-
ведения и выдачи команд ЦУ ракетам. Для решения этих задач при со-
провождении маневрирующих целей модели состояния должны учиты-
вать эволюции дальности, скорости и ускорения сближения, а также
бортовых пеленгов <рг и <рв, скорости и ускорения их изменения. Исполь-
зование ускорений обусловлено необходимостью учета маневров цели и
истребителя в процессе экстраполяции.
Алгоритмы оптимального оценивания параметров модели со-
стояния для идентификации результатов измерений требуют сущест-
венных вычислительных затрат, особенно в условиях сопровождения
большого числа целей. Поэтому целесообразны линейные стационарные
модели состояния, позволяющие существенно упростить процедуры
оценивания фазовых координат и параметров модели состояния. Синтез
алгоритмов оценивания на основе нестационарных и нелинейных моде-
лей требует вычисления на каждом шаге высокоразмерных матриц дис-
персий ошибок фильтрации (3.71), (3.72) и (3.94). А это из-за влияния
проклятия размерности (§3.2) оказывается весьма сложным. С учетом
сделанных замечаний о фазовых координатах и типе их эволюций для
каждой цели достаточно использовать модели состояния
Д(к) = Д(к -1) + V(k - 1)т + 0,5 j(k - 1)т2, Д (0) = Д и;
V(k) = V(k-l) + j(k-l)T, V(0) = VH; (14.31)
j(k) = (1 - ajT) j(k -1) + (k -1), j(0) = j0
для оценивания дальности Д, скорости V и ускорения сближения] и
Фг,в(Ю=Фг.в(к-0+^гв(к-1)т+О,5]фгв(к-1)т2, Фг,в(0)=фг<ви;
^Црг,в(к) — {Црг,в(к — 1) + j(pr,B(k“ 1)^’ £Црг,в(О) — СОГ вО ’
(14.32)
j(pr,B (к) 0 ^Г,В^)ЗфГ,в(к !) +^рг,в(к ЗфГ,в(Р) jo
для бортовых пеленгов <рг,в, скоростей софг>в и ускорений ]фг>в их измене-
ний. В (14.31) и (14.32): т=Т/п (п»1 - целое число) - шаг дискретиза-
ции, используемый для прогноза состояния траекторий; Дн, VH, (ргли -
результаты первых измерений дальности, скорости сближения и борто-
вых пеленгов; индексы «г» и «в» обозначают принадлежность пеленга
либо к горизонтальной, либо к вертикальной плоскостям; £г>в - цен-
трированные гауссовские шумы с известными дисперсиями Dj, Dr>B; и
ar>B - коэффициенты маневренности цели.
Сравнение (14.31) и (14.32) с общим представлением (2.20) по-
зволяет сделать вывод, что
(14.33)
Фд(к,к-1)= о
т 0,5т2
1 т
0 1 —0CjT
(14.34)
Необходимо отметить, что переходные матрицы (14.34) и (14.36)
одинаковы по своей структуре и имеют постоянные коэффициенты.
Первая особенность позволяет использовать для экстраполяции (14.31)
и (14.32) одну и ту же процедуру, тем самым снижая требования к объ-
ему памяти и быстродействию вычислителей. Вторая особенность дает
возможность использовать для идентификации процессов (14.31) и
(14.32) модели неизменного состояния параметров:
ад(к) = ад(к-1), ал(0) = адО; (14.37)
ад = [1 т 0,5т 0 1 т 0 0 1 — aj т]т; (14.38)
аг,в(к) = аг,в(к-1), агв(О) = агвО; (14.39)
агв=[1 т °>5т О 1 т О О 1-агвт]т, (14.40)
где адо и аг<во - векторы априорно известных значений параметров.
Состав и вид измерителей, используемых для формирования оце-
нок фазовых координат (14.31) и (14.32), определяются исходя из необ-
ходимости выполнения условий наблюдаемости и идентифицируемости
(п. 2.1.2), обеспечения максимально высокой устойчивости формирова-
ния оценок с учетом вида используемых радиосигналов. Для выполне-
ния условий наблюдаемости (2.25) должны как минимум измеряться
дальность Ди и пеленги сргви. Сигналы с ВЧП и СЧП в импульсно-
доплеровских РЛС дают возможность измерять скорость Уи, что позволя-
ет повысить устойчивость формирования оценок (14.31). С учетом этих
особенностей модель наблюдений можно представить в виде уравнений:
Ди(к) = Д(к) + ^ (к);
„ (14.41)
v„(k) = v(k)+U(k);
Фиг.в (к) = Фг.в (к) + £„г,в (к), (14.42)
где £ди, £уи и £иг,в - дискретные центрированные белые шумы с извест-
ными дисперсиями Эди, DVII и D„r3. Следует подчеркнуть, что выбран-
ные модели состояния, параметров и наблюдений дают возможность
применять для оценивания фазовых координат и параметрической иден-
тификации наиболее простые алгоритмы.
14.5.2. Алгоритмы оптимального оценивания
СОПРОВОЖДАЕМЫХ ТРАЕКТОРИЙ
Для непрерывного оценивания фазовых координат (14.31) и
(14.32) для каждой траектории на основе измерений (14.41) и (14.42)
целесообразен аналого-дискретный вариант алгоритма линейной фильт-
рации (3.129)-(3.137). Особенностью этого варианта является то, что в
промежутках между измерениями, поступающими с интервалом Т, со-
провождаемые траектории прогнозируются с очень малым шагом т=Т/п,
где п»1 - целое число. Такой прием позволяет реализовать практиче-
ски такую же точность экстраполяции, что и в аналоговых системах. В
то же время результаты прогноза по результатам измерений корректи-
руются с большим интервалом Т.
Для уменьшения вычислительных затрат на формирование оце-
нок воспользуемся принципом декомпозиции, выделив в общей модели
состояния группы функционально независимых друг от друга фазовых
координат и соответствующие им измерители. Это позволяет отдельно
синтезировать фильтр дальномерного канала на основе моделей (14.31),
(14.41) и фильтры угломерных каналов на основе представлений (14.32),
(14.42).
Сопоставляя (14.41) и (14.42) с (3.128), получим
гд
Ди
,4
Фиг,в»
1 о о
о 1 о
Нг,в=[1 о 01
(14.43)
(14.44)
Подставляя (14.33), (14.34) и (14.43) в (3.130)-(3.132), приходим к
алгоритму фильтрации в канале дальности:
Д(к) = Д,(к)+кд11(к)ДЦ+кд|2(к)ДУ, Д(0)=Ди1;
V(k) = Уэ(к)+кд21(к)ДД+кд22(к)ДУ, У(0) = Уи1; (14.45)
j(k) = )э(к) + кд3|(к)ДД+кд32(к)ДУ, j(0) = 0;
Д,(к)=Д(к -1)+У(к- 1)т+0,5j(k - 1)т2;
V3(k)=V(k-l)+j(k-l)T; (14.46)
j3(k-l)=(l-ajT)j(k-l), k = l,n;
дд =
Ди(п)-Дэ(п), п=Т/т,
О, п*Т/т;
Уи(п)-Уэ(п), п=Т/т,
0, п Ф Т / т.
(14.47)
Из (14.45)—(14.47) следует, что в промежутках между измерения-
ми, когда кт^Т, к потребителям информации в качестве оценок посту-
пают результаты прогноза (14.46). При этом в качестве первоначальных
значений Д и V используются результаты измерений ДИ| и VHh соответ-
ствующие времени завязки траекторий. В моменты измерений, когда
кт=Т, прогноз (14.46) корректируется невязками (14.47) и к потребите-
лям поступают уточненные значения оценок. После этого процедура
экстраполяции (14.46) вновь повторится с малым шагом вплоть до сле-
дующего измерения.
Алгоритм (14.45)-( 14.47) используется для каждой сопровождае-
мой траектории. При этом коэффициенты кД1] (i=l,2,3; j=l,2) вычисляют-
ся по правилу (3.134)-(3.137) один раз для всех целей и хранятся в па-
мяти БВС в виде последовательности значений, отстоящих друг от дру-
га на интервалы т. Из этой последовательности для коррекции прогноза
каждой сопровождаемой траектории используются лишь те значения,
которые соответствуют моментам времени mT (т=0,1,2...) от начала
завязки траектории.
Аналогично можно получить алгоритмы аналого-дискретной
фильтрации и для угломерных каналов:
Фг,в(к) = Фэг,в(к) + кф1Дфг>в, фг,в(0) = фиг в0;
^(рг,в (к) “ ^э<рг,в (к) Кф2 Афг.в > ^фг,в (0) “ ^\рг,вО ’
jфг,в (к) ЗэфГ,В (к) КфЗ Афг,В ’ ЗфГ,В (0) “ 0»
Фэг.в (к) = Фг.в (к -1)+%г,в (к - 1)Т+0,5 j фгв (к - 1)т2;
^эфг,в (к) “ ^фг,в (к 1) 4" j(pr,B (к —
Зэфг.в 0 ^Г,В ).1фГ,В (к
А |фиг,в(п)-Фэг.в (П), П=т/Т,
Дф-=|о, п*Т/т.
Начальные условия в (14.48) вычисляются на этапе завязки тра-
ектории. В остальном для (14.48)—(14.50) имеют смысл все выводы, по-
лученные для (14.45)-( 14.47).
Следует отметить, что угловые скорости ЛВ, необходимые для
наведения истребителя в НУТВ, оцениваются по правилу:
шг =а)фг+о> •
/ / (14.51)
сов =софв+сое,
где (Ьф1. и сЬфв вычисляются в алгоритме (14.48), а оценки (Ьф и
угловых скоростей рыскания и тангажа вырабатываются автономными
датчиками.
14.5.3. Идентификация измерений по модели состояния
Параметры исходных моделей (14.31) и (14.32), используемые
для идентификации принадлежности результатов измерений к той или
(14.48)
(14.49)
(14.50)
иной экстраполируемой траектории, целесообразно оценивать по моди-
фицированному алгоритму Мейна (см. п. 3.6.3). В этой модификации
для формирования невязок в (3.92) используются измерения (3.95), а в
алгоритме (3.92)-(3.94) матрица Мр заменяется матрицей Мр1 (3.97).
Классический алгоритм Мейна (3.92) оказывается нецелесообразным
из-за низкой точности оценивания хр по результатам экстраполяции
(14.46) и (14.49). Используя представления (14.38), (14.40) и результаты
измерений (14.41), (14.43), получаем на основе (3.92)-(3.94) алгоритм
идентификации параметров модели дальномерного канала:
аД1 (n) = 1 + к,, (п)ДДа (п) + к|2ДУа (п), ад1 (0) = 1;
ад2 (п) = т + к21 (п)АДа (п) + к22 Д Va (п), ад2 (0) = т;
ад3(п) = 0,5т2 +к31(п)ДДа(п) + к32ДУа(п), ад3 (0) = 0,5т2;
а д4 (п) = к4, (п)ДДа (п) + к42 Д Va (п), а д4 (0) = 0;
а д5 (n) = 1 + к5! (п)ДДа (п) + к52 ДУ, (п), ад5 (0) = 1;
(14.52)
ад6 (п) = т + к6| (п)ДДа (п) + к62ДУа (п), ад6 (0) = т;
ад7 (п) = к71 (п)ДДа (п) + к72 ДУа (п), а д7 (0) = 0;
ад8 (п) = к81 (п)ДДа (п) + к82 ДУа (п), а д8 (0) = 0;
а д9 (n) = 1 - a jT+к91 (п)Д Да (п)+к92 ДУ, (п), а д9 (0) = 1 - a jT;
где
ДДа = Ди(п)-Д3(п),
ДУа =Уи(п)-Уэ(п),
Дэ, Уэ и jD экстраполируются по правилу (14.46), а коэффициенты Ку (i= 1,9 ;
j=l,2) вычисляются по (3.93), (3.94) при замене Мр на Мр) и Dx на D„.
Аналогично для модели (14.39), (14.40) и измерений (14.42),
(14.44) может быть получен алгоритм параметрической идентификации:
аг,В1 (n) = 1 + кг В1 Д(р(п), аг в1 (0) = 1;
аг,в2 (П) = Т + Кг,в2Д<Р(п), а1-,вз(п) = °’5т2 + *г,вЗДФ(П)> аг,в2(0) = *; агв2(0) = 0,5т2;
а, ,в4 (п) = Кгв4Дф(п), аг,в4(0)= 0;
а,,в5 (п) = 1 + кгв5Дф(п), агв2(0) = 1; (10.54)
аг,вб(п) = т + кг,вбД<Р(п)> аг,вб(0) = т;
аг.в7(п) = кг.в7Д<р(п), а,.,В7(0)-0;
а,-,в8 (п) = кгв8Дф(п), a^OW;
аг,в9 (П) = 1 - аг,вТ + Кг.в9 ДФ(П)> а,.в9(0) = 1-аг,в^
где △ф(п) = Ф1Н,в(п)-фэ,.в(п), (14.55)
в котором фжв определяются прогнозом (14.49).
После измерений (14.41) и (14.42) алгоритмы (14.52) - (14.55)
реализуются для каждой сопровождаемой траектории. Та из них, для
которой функционал (14.12)
9 9 9
I ~ 51 ^д1 )**Ч д! Т 51 (a ri a ri ) Чп + 51 (^Bi “ aBj ) Ч Bi (14.56)
i=l i = l i=l
минимален, и будет наиболее достоверно соответствовать полученным
измерениям. Для этой траектории и корректируются прогнозы (14.46) и
(14.49) по правилам (14.45) и (14.48). Кроме того, в (14.46) и (14.49) для
дальнейшего прогноза ускорений j3(k) и j3(pr в будут использоваться
уточненные значения весовых коэффициентов (l-0CjT) и (1-ос1ит),
более достоверно соответствующие типу сопровождаемой цели и ее
конкретному маневру.
Возможный характер изменения относительных ошибок Ах/Ах0
оценивания произвольной координаты х, при использовании рассмот-
ренных выше алгоритмов бесстробовой идентификации с аналого-
дискретной фильтрацией для различных периодов обращения к цели
(T3>T2>Tj) показан на рис. 14.6.
Анализ алгоритмов (14.52)—(14.56) позволяет сделать следующие
выводы.
Идентификация измерений по модели состояния оказывается бо-
лее точной и достоверной по сравнению с идентификацией измерений в
стробах отождествления (14.23)—(14.25). Это объясняется следующими
причинами. Решающий функционал (14.56) вычисляется в процессе
сравнения оптимально оцененных коэффициентов адBi с их достовер-
но известными значениями адл ui, в то время как в функционале (14.25)
сравниваются между собой вычисленные с ошибками экстраполирован-
ные значения Д„ Дэ и фэг, фэг с содержащими погрешности результата-
ми измерений Д,„ Дн и фпг, ф11И. Кроме того, в функционале (14.56) для
сравнения используются существенно большее число параметров, чем в
(14.25). При этом в (14.56) более полно учитываются взаимные детер-
минированные связи исходных моделей, чем в (14.25). Совокупность
всех этих достоинств позволяет более достоверно и точно идентифици-
ровать результаты измерений при сопровождении близко расположен-
ных маневрирующих целей.
Несомненным преимуществом алгоритма (14.52)—(14.56) являет-
ся возможность корректировать коэффициенты (1-djT) и (1-ос,.вт) в
моделях прогноза (14.46) и (14.49). Это позволяет более точно оцени-
вать фазовые координаты маневрирующих целей как в промежутках
между поступлениями измерений, так и в моменты их получения.
К недостаткам рассмотренного алгоритма можно отнести: сущест-
венно более высокие требования к быстродействию и объему памяти БВС;
низкую точность первичных измерений (14.41), (14.42) в режиме обзора, не
позволяющую реализовать все потенциальные возможности алгоритмов
(14.45)-( 14.51) оптимального оценивания фазовых координат и оптималь-
ной идентификации результатов измерений (14.52)- (14.56).
14.6. АВТОМАТИЧЕСКОЕ СОПРОВОЖДЕНИЕ ЦЕЛЕЙ
ПРИ ИСПОЛЬЗОВАНИИ ПРОГРАММИРУЕМОГО ОБЗОРА
Программируемый обзор реализуется в БРЛС с ФАР. Использо-
вание ФАР позволяет перейти от СНП, при которой период обзора для
всех целей одинаков, к управляемому (программируемому) интервалу
получения результатов измерений. Гибкость формирования луча в
БРЛС с ФАР позволяет адаптировать обзор пространства к конкретным
условиям применения. Адаптивное управление периодом обзора подра-
зумевает увеличение темпа поступления информации (измерений) от
наиболее важных целей, к которым прежде всего относятся вновь поя-
вившиеся цели, наиболее опасные по критерию минимума времени, ос-
тавшегося до встречи ЛА и цели, и маневрирующие объекты.
Более частое направление луча ФАР на вновь появившиеся цели
существенно уменьшает время и повышает достоверность завязки но-
вых траекторий. Последнее достигается за счет уменьшения размеров
стробов отождествления (14.5) при уменьшении периода обзора Т. Не-
обходимость более частого контроля опасных целей обусловлена требо-
ваниями обеспечения собственной безопасности. Уменьшение интерва-
ла поступления измерений от маневрирующих объектов вызвано требо-
ванием повышения точности их сопровождения. Увеличение точности
сопровождения предопределяется снижением ошибок экстраполяции
(см. рис. 14.6) и уменьшением размеров стробов отождествления
(14.11). Последнее обусловливает снижение вероятности попадания в
них результатов измерений от соседних целей, что повышает точность
коррекции (фильтрации) результатов экстраполяции сопровождаемых
траекторий.
- Суть одного из наиболее простых алгоритмов определения адап-
тивного темпа поступления измерений состоит в следующем. Пусть
известны дисперсии Dxj, D -, D- оценок произвольной j-й сопровож-
даемой координаты Xj и ее производных Xj и Xj на k-й момент време-
ни. Тогда дисперсия результатов экстраполяции Xj на к+1 момент сле-
дующего измерения определяется соотношением
Dxj(k+ 1,к) = Dxj(k) + Dxj(k)Tf + DxjTf /4,
где Tj - временной интервал между к+1-м и к-м измерениями. В резуль-
тате при известной дисперсии Dxj(k+l,k) допустимой ошибки экстра-
поляции
| - DXJ (k) ± JB^k) + Dxj(k)(Dxj (к +1, к) - DXJ (к))
Т: =.----------*--------------------------------. (14.57)
V °>5Dxi
I AJ
Соотношение (14.57) вычисляется для каждой j-й сопровождае-
мой координаты. При этом для управления лучом ФАР используется
период Ти =Tjmin, наименьший из вычисленных Tj.
При ограничениях объема памяти и быстродействия БВС, делаю-
щих невозможным вычисление на каждом шаге соотношения (14.57)
для каждой сопровождаемой координаты, используется всего два воз-
можных значения То и Ти периодов обзора. Первый период ТО<ТП ис-
пользуется при сопровождении важных целей, а второй - при сопрово-
ждении неманеврирующих целей.
Функциональные связи составных частей и алгоритмов БРЛС и
БВС в режиме автоматического сопровождения цели с программируе-
мым обзором показаны на рис. 14.7.
Рис. 14.7
По результатам идентифицированных измерений БРЛС в фильтре
сопровождения оцениваются необходимые фазовые координаты, что
позволяет определить в анализаторе типа цели наличие новой, маневри-
рующей и опасной целей. По результатам этого анализа устройство про-
граммирования СПЦ вычисляет период повторения Tnj импульсов,
обеспечивающий попадание отраженного сигнала в зону прозрачности
(см. рис. 10.3,а,б) и определяет требуемый период Тв обзора для этой
цели. В качестве Тв может быть выбрано наименьшее из значений, вы-
численных по формуле (14.57). Если принимается решение о наличии
неманеврирующей, неопасной и уже сопровождаемой цели, то устрой-
ство программирования СПЦ формирует значение ТН>ТВ периода обзора
этой цели. Кроме того, в этом устройстве по вычисленным значениям Тв
и Тн и сог, сов экстраполируются значения углов сргв(к+1 ,к), опреде-
ляющие направление оси лепестка ДН ФАР на следующем цикле изме-
рений. По этому значению угла ЦВМ управления лучом формирует тре-
буемое распределение по ФАР амплитуд и фаз, обеспечивающее излу-
чение электромагнитной энергии в направлении сргв(к+1 ,к).
Процедура завязки траектории в БРЛС с ФАР может выполняться
в виде испытания гипотез Hi истинности и Но ложности траекторий.
Для экстраполяции целесообразны алгоритмы, основанные на гипотезе
изменения фазовых координат с постоянным ускорением. Экстраполи-
рованные оценки можно скорректировать по алгоритмам а-, р-, у-филь-
трации либо по алгоритмам калмановской фильтрации. В последнем
случае периоды обзора (14.57) определяются по уменьшающимся во
времени значениям дисперсий (3.136), (3.137), что приводит к соответ-
ствующему изменению вычисленных периодов повторений. В зависи-
мости от возможностей БВС для идентификации измерений использу-
ются как простые алгоритмы с сопоставлением в стробах отождествле-
ния (п. 14.3.1), так и более сложные бесстробовые процедуры с оцени-
ванием параметров исходных моделей (п. 14.3.2). Начало маневра цели
можно определить по одному из алгоритмов, рассмотренных в 12 главе.
Существенное уменьшение интервала Т между результатами из-
мерений в сочетании с оптимальными алгоритмами фильтрации и иден-
тификации позволяет БРЛС с ФАР обеспечить в режиме автоматическо-
го сопровождения целей точность, большую, чем в режиме СНП в БРЛС
с механически сканируемыми антеннами. Однако даже в БРЛС с ФАР
точность АСЦРО все же уступает точности СОЦ, реализуемого следя-
щими измерителями. Причиной этого является достаточно низкая точ-
ность первичных измерений в режиме обзора.
Отмеченный недостаток можно устранить, используя специфиче-
ский комбинированный следяще-обзорный режим сопровождения, на-
зываемый также режимом боевой работы, и основанный по-прежнему
на программируемом обзоре. Четырехлепестковая ДН (см. рис. 11.8),
формируемая ФАР, обеспечивает моноимпульсную пространственную
пеленгацию целей. При этом лучи ФАР направляются на пеленгуемую
цель на более длительное, чем в обычном программируемом обзоре,
время. Время облучения должно быть достаточным для 3-5 измерений
одного объекта, чтобы использовать оптимальные алгоритмы слежения
за одной целью, рассмотренные в §10.6 и §11.5. В этих алгоритмах пер-
воначальные ошибки захвата цели устраняются в фильтрах сопровож-
дения за 3 - 4 такта измерений. В итоге результаты экстраполяции бу-
дут корректироваться высокоточными измерениями, имеющими место в
режиме СОЦ. После этого лучи ФАР перебрасываются на следующий
объект, а траектория предыдущей цели будет экстраполироваться до
следующей серии измерений. Примерный закон изменения текущих
ошибок Axj оценивания произвольной сопровождаемой координаты Xj с
интервалом измерений Тн показан на рис. 14.8.
Вполне естественно, что такой сложный следяще-обзорный ре-
жим употребителен при сопровождении наиболее опасных целей, по
которым готовится применение оружия. Очевидно, что число таких це-
лей ограничивается числом имеющихся на борту ракет. В остальном
алгоритмы автоматического сопровождения целей остаются такими же,
что и в рассмотренном ранее режиме программируемого обзора.
ГЛАВА 15. ДИНАМИЧЕСКИЕ СТРУКТУРНЫЕ
СХЕМЫ РАДИОЭЛЕКТРОННЫХ СИСТЕМ
САМОНАВЕДЕНИЯ
Динамические структурные схемы позволяют достаточно просто
провести анализ ССН, направленный на исследование зависимости ее ус-
тойчивости и точности от условий применения, параметров системы наве-
дения и ее составных частей. Методика таких исследований рассмотрена в
§5.5. В приложении к ССН для получения структурных схем необходимо
знать кинематические уравнения, уравнения ИВС, УС (САУ, СУР), ОУ и
промахов (ошибок управления). Следует отметить, что в зависимости от
требуемой детальности исследований уравнения составных частей конту-
ров самонаведения могут иметь различные размерности и вид.
Опыт анализа РЭССН показывает, что в качестве кинематических
уравнений, устанавливающих связь между абсолютными и относитель-
ными фазовыми координатами цели и ОУ, удобно использовать соот-
ношение (7.44). Уравнения ИВС, включающие в свой состав датчики
информации и вычислители параметров рассогласования, могут быть
получены на основе алгоритмов траекторного управления, приведенных
в гл. 7, и конкретных алгоритмов функционирования измерителей, рас-
смотренных в гл. 10-12. Уравнения ошибок наведения зависят от типа
ССН. Так, для ССН самолетов удобны формулы для ошибок наведения
по курсу и тангажу, в то время как для ССН ракет целесообразны выра-
жения (7.52), (7.53) для промахов. Поскольку уравнения для САУ (СУР)
и ОУ в значительной мере обусловлены типом ССН, то они будут рас-
смотрены отдельно. При этом будет полагаться, что каналы управления
продольным и боковым движением не влияют друг на друга.
Уравнения ОУ устанавливают связь между отклонениями органов
управления и фазовыми координатами собственного движения летательных
аппаратов. В зависимости от вида ЛА и расположения органов управления
можно выделить ОУ с плоскостной симметрией и осесимметричные. К
первым относят самолеты и крылатые ракеты «в-п», для которых законы
пространственных эволюций в плоскостях продольного и бокового движе-
ния различны. Ко вторым относят ракеты «в-в» и некоторые типы ракет
«в-п», для которых характерны одинаковые законы изменения пространст-
венного положения в обеих плоскостях управления.
15.1. УРАВНЕНИЯ ОБЪЕКТОВ УПРАВЛЕНИЯ
Самолет как объект управления представляет сложную систему,
способную изменять в полете свою конфигурацию, а соответственно и
аэродинамические характеристики. Конфигурация изменяется за счет
выпуска и уборки шасси, предкрылков, закрылков и интерцепторов
(спойлеров), пуска ракет, сбрасывания бомб и т. д. В связи с этим про-
странственные эволюции самолетов, определяемые перемещениями в
трехмерном декартовом пространстве и вра-
щениями вокруг продольной ОХ, поперечной
OZ и вертикальной OY осей (рис. 15.1), опи-
сываются достаточно сложной системой не-
линейных дифференциальных уравнений с
переменными коэффициентами. Такие слож-
ные уравнения используются в процессе точ-
ного имитационного моделирования РЭСУ на
ЭВМ, однако они слишком сложны для анали-
тических исследований ССН и выяснения
влияния ее отдельных составных частей на показатели ее эффективно-
сти. При аналитических исследованиях используют существенно более
простые модели, дающие хотя и грубое, но верное представление о
динамических свойствах ЛА. Как правило, эти модели получают путем
упрощения и линеаризации более точных исходных уравнений.
В связи с тем, что в самолетных ССН используется управление
по курсу и тангажу, различают продольное и боковое пространственное
движение ЛА. Продольное движение складывается из перемещений
вдоль продольной ОХ (рис. 15.1) и вертикальной OY осей и вращатель-
ного движения вокруг оси OZ. Боковое движение самолета определяет-
ся поступательным движением вдоль оси OZ и вращательным движени-
ем вокруг осей ОХ и OY.
Пространственное положе-
ние и вид траектории самолета в
продольном движении определя-
ются совокупным воздействием
силы тяги двигателя Рт, подъемной
силы Fy, силы лобового сопротив-
ления Fx и веса G. Взаимосвязи
между этими силами показаны на
рис. 15.2. На этом рисунке в нев-
ращающейся системе координат
OcX0Y0, связанной с центром масс
Ос самолета, показаны: направле-
ние силы тяги Рт, примерно совпадающее с продольной осью самолета ОСХ;
направление вектора Fy подъёмной силы, нормального к вектору Vc воз-
душной скорости; направление вектора Fx силы лобового сопротивления,
коллинеарного вектору Vc, и направление вектора G силы тяжести.
Управление тягой двигателя, приводящее к перемещению само-
лета вдоль оси ОсХ0, осуществляется с помощью ручки управления
двигателем (РУД) либо автоматом тяги. В простейшем случае связь
между управляющим воздействием 8Т РУД (автомата тяги) и продоль-
ным ускорением jx, появляющимся вследствие изменения тяги, можно
аппроксимировать инерционным звеном
jx+^jx=Y^sT. (i5.i)
1дв А дв
где Тдв и адв - постоянная времени и коэффициент передачи двигателя.
Перемещение вдоль оси ОсУо может выполняться за счет опосре-
дованного или непосредственного управления подъемной силой
(НУПС). При традиционном опосредованном способе подъемной силой
управляют рули высоты или управляемые стабилизаторы, расположен-
ные в хвостовой части ЛА, либо элевоны, размещенные на крыльях
самолетов. Особенности такого управления подъемной силой рассмот-
рены в п. 5.2.1. При анализе ошибок наведения наиболее интересны
перемещения ЛА по нормали к траектории полета и изменения его уг-
лового положения относительно поперечной оси. Если в качестве
управляющих сигналов используются углы 8рв отклонения руля высоты
(стабилизатора, элевонов), то зависимость между фазовыми координа-
тами собственного движения самолета в продольном движении можно
описать системой линеаризованных уравнений [48]:
a+2d(0oa+(0oa = a58pB; (15.2)
ea=a/Tv; (15.3)
jB=VA; (15.4)
$ = a+a/Tv. (15.5)
Здесь d - декремент затухания; со0 - частота собственных колебаний
угла атаки а; а§ - коэффициент эффективности руля высоты; Tv - аэро-
динамическая постоянная времени.
При использовании в качестве органов НУПС спойлеров, разме-
щенных вблизи центра массы самолета, можно считать, что выполняет-
ся приближенное равенство
Н = -асп5сп, (15.6)
где Н - скорость изменения высоты Н; 5СП и асп - угол отклонения
спойлера и коэффициент его эффективности.
Курсом ЛА с плоскостной симметрией стремятся управлять ме-
тодом координированного разворота, при котором органами управле-
ния, изменяющими угол крена, являются элероны (элевоны), а руль
направления поддерживает угол скольжения равным нулю. Упрощен-
ную модель бокового движения самолета в процессе координированно-
го разворота можно представить в виде системы уравнений [48]:
Т7у+у = а7бэ; (15.7)
V = -(g/Vc)y; (15.8)
jr=VcV, (15.9)
в которой у - угол крена; 8Э и 0Су - угол отклонения элеронов (элевонов)
и коэффициент их эффективности; у - курс; jr - боковое (поперечное)
ускорение в горизонтальной плоскости. При использовании органов
непосредственного управления боковыми силами перемещение лета-
тельного аппарата вдоль оси OZ (см. рис. 15.1) описывается соотноше-
нием, аналогичным уравнению (15.6).
Для крылатых ракет «в-п» в плоскостях продольного и бокового
движения также справедливы уравнения (15.2)-(15.5) и (15.7)-(15.9).
Для осесимметричных ЛА, к которым относятся прежде всего ра-
кеты «в-в» (см. рис. 7.9), законы управления в различных плоскостях
одинаковы. Следует отметить, что в таких ЛА вращение ОУ вокруг
продольной оси не изменяет вектор полной аэродинамической силы при
фиксации рулей в нейтральном положении. Эволюции осесимметрич-
ных ОУ в плоскостях управления 1-1 и 2-2 (см. рис. 7.9) так же описы-
ваются уравнения вида (15.2)—(15.5).
В ракетах «в-в», как правило, используется стартовый двигатель,
работающий непродолжительное время, после чего ракета летит с по-
стоянно убывающей скоростью. В первом приближении скорость поле-
та ракеты можно считать постоянной.
Для исследования контуров самонаведения с помощью уравне-
ний (15.1)—(15.9) необходимо иметь в виду следующие факторы. Все
они не учитывают упругих свойств ЛА и полагается, что самолеты и
ракеты - абсолютно жесткие тела. Для большинства ССН такое допу-
щение правомочно. Если же в качестве датчика информации использу-
ется БРЛС (РГС) с синтезированной апертурой антенны [64], то упругие
свойства ЛА необходимо принимать во внимание.
Большинство коэффициентов в (15.2)-(15.9) являются перемен-
ными, поскольку сложным образом зависят от высоты и скорости поле-
та, конфигурации ЛА и ряда других причин. Однако скорость их изме-
нения существенно меньше скорости изменения входных и выходных
фазовых координат. Поэтому правомерно использовать принцип замо-
роженных коэффициентов (§ 4.1).
Поскольку уравнения (15.1)-(15.9) получены путем упрощения и
линеаризации более сложных исходных уравнений, то они обеспечива-
ют приемлемую точность лишь в достаточно ограниченном диапазоне
отклонения рулевых органов. В зависимости от цели анализа и вида
исследуемой ССН в качестве уравнений ОУ могут употребляться лишь
отдельные соотношения из их состава.
15.2. УРАВНЕНИЯ УПРАВЛЯЮЩИХ СИСТЕМ
Уравнения управляющих систем (УС), к которым относятся
САУ и СУР (см. рис. 1.1, 1.2), устанавливают связь между параметра-
ми рассогласования, формируемыми в ИВС, и отклонениями рулей.
Функции, выполняемые САУ и СУР, существенно зависят от типа ЛА и
режимов его полета. Однако в последнее время наметились тенденции к
унификации их алгоритмов, которые позволят получить уравнения УС в
достаточно общем виде.
Современные САУ не только обеспечивают различные режимы
управления ЛА (§1.3), но и улучшают устойчивость и управляемость
ОУ, а также повышают безопасность его полета. В составе таких САУ
можно выделить: системы сигналов ручного, директорного и автомати-
ческого управления самолетом; систему улучшения управляемости и
устойчивости; систему стабилизации угла тангажа; систему ограниче-
ния перегрузок и силовой контур (рис. 15.3). На силовой контур, кото-
рый является общим для всех режимов управления и обеспечивает от-
клонения руля высоты (управляемого стабилизатора), поступают сигна-
лы от всех систем.
В режиме ручного управления, когда переключатели ГП и П2 на-
ходятся в положении Р, летчик ручкой управления воздействует на ру-
левой агрегат (РА) и датчик положения ручки управления (ДПРУ) (на
схеме не показан). На РА можно воздействовать либо механической
тягой, либо электродистанционным способом [38]. Перемещение ручки
управления летчиком в соответствии с визуально снимаемым им пара-
метром рассогласования приводит к перемещению штока РА. В свою
очередь, РА воздействует на бустер, отклоняющий руль высоты (стаби-
лизатор). Датчик положения ручки управления вырабатывает сигнал иру,
пропорциональный перемещению хру ручки управления. Сигнал иру
на СОИ
Рис. 15.3
складывается в сумматоре Xi с сигналом u(OZ=K(Ozcoz системы улучшения
управляемости и устойчивости (СУУУ) и в сумматоре Х2 с сигналом
иПу=КПуПу системы ограничения перегрузок (СОП). Первичные датчики
информации, измеряющие coz и пу - датчик угловой скорости и акселе-
рометр, размещаются в СУУУ. Коэффициенты передачи КШ2 и Кпу зави-
сят от режима полета и используемых средств механизации крыла.
Результирующий сигнал поступает на РА в качестве корректи-
рующего, улучшая управляемость и устойчивость ОУ. Указанное улуч-
шение достигается за счет гашения угловых колебаний вокруг оси OZ
(см. рис. 15.1) корректирующим сигналом utaz, пропорциональным угло-
вой скорости coz. Колебания центра масс ОУ в вертикальной плоскости
гасятся сигналом uny, пропорциональным нормальной перегрузке. Если
в процессе функционирования РЭСУ необходимы перегрузки, превы-
шающие предельно допустимые, то сигналы uny ограничиваются в сис-
теме ограничения перегрузок, повышая тем самым безопасность поле-
тов и увеличивая срок службы ЛА.
Следует отметить, что при изменении режима полета (высоты,
скорости, конфигурации ЛА) на ручке управления создается адекватная
механическая нагрузка, позволяющая летчику лучше чувствовать реак-
цию самолета на управляющие воздействия.
При ручном управлении закон функционирования САУ в общем
случае определяется уравнением
$рв ^бСКруХру — — K.nyiiny + Fn(5M,xpy,coz,ny)), (15.10)
где Кб и Кру - коэффициенты передачи бустера и системы сигналов руч-
ного управления. Первое слагаемое в (15.10) отображает вклад системы
сигналов ручного управления, второе - системы улучшения управляе-
мости и устойчивости, третье - результат совместного функционирова-
ния СУУУ и СОП; Fn( ) - учитывает дополнительные отклонения руля,
автоматически компенсирующие разбалансировку ЛА при воздействиях
8М - средств механизации крыла, а также более сложные законы форми-
рования корректирующих сигналов и^.
Процедура формирования летчиком конкретных управляющих
воздействий хру может быть различной. Она зависит не только от типа
ЛА, вида индикатора, с которого летчик визуально снимает параметр
рассогласования А, но и от опыта летчика. В первом приближении мож-
но считать хру=\Ул(р)А, где А определяется используемым методом на-
ведения, а \¥л(р) - передаточная функция летчика как элемента управ-
ляющей системы, зависящая от опыта летчика, а также его физических
и психических особенностей. В настоящее время при анализе ССН ис-
пользуют различные математические модели летчика. Наиболее извест-
на функция [38]
Wa(p) = .b^.P+l)e^
(Тл2р + 1)(Тл3р + 1)
(15.11)
Здесь Кл=40...100 - коэффициент передачи летчика; тл=0,12...0,2 с -
время запаздывания зрительной реакции летчика на изменение сигнала
траекторного управления; Тл1=0,2...2 с - постоянная упреждения, кото-
рая характеризует способность летчика предугадывать изменение об-
становки и последствия управления самолетом с учетом всех видов
запаздывания ССН; Тл2=0,1...0,2 с - нервно-мышечная постоянная, оп-
ределяемая скоростью прохождения сигнала от головного мозга до на-
чала перемещения ручки управления; Тл3=0,6...2 с - постоянная времени
анализа (фильтрации) летчиком обстановки до принятия решения.
В канале бокового движения закон функционирования САУ при
ручном управлении в наиболее простой форме отображается соотношением
$э ^бС^руб^руб ^(ОХ^Х (8М ’ Хруб, ^х )) » (15.12)
где 8, - угол отклонения элеронов (элевонов); хруб - перемещение ручки
(педали) управления боковым движением; Круб - коэффициент передачи
системы сигналов ручного управления в боковом движении; сох - угло-
вая скорость относительно продольной оси ОХ (см. рис. 15.1); Кшх -
коэффициент передачи СУУУ; F6( ) по своему смыслу аналогично сла-
гаемому Fr, в (15.10).
Функциональные связи продольного канала САУ в автоматиче-
ском режиме отображается структурной схемой на рис. 15.3 при поста-
новке переключателей Ш и П2 в положение А. В этом режиме, рас-
смотренном в §1.3, законы функционирования САУ могут быть различ-
ными. В достаточно общем виде они могут быть аппроксимированы
выражением
5рв =МЧ(Р)Дав -К-пуПу +Ко(О3 -д) + Рп(8м,Дав,Ч>пуЗ),
(15.13)
где Аав- параметр рассогласования, формируемый по правилу (7.29); Wa
- передаточная функция системы сигналов автоматического управле-
ния; О3 и О - сигналы заданного и текущего тангажа; К$ - коэффициент
передачи системы стабилизации угла тангажа. Смысл остальных обо-
значений ясен из соотношения (15.10).
В автоматическом режиме параметр рассогласования может фор-
мироваться либо в САУ, либо в ИВС. При этом инерционные свойства
САУ и ЛА учитываются не только в процессе формирования Дав (7.29),
но и в передаточной функции Wa(p) или слагаемом Fn( ). Кроме того,
для этого режима специфично подключение системы стабилизации
углового положения ОУ, работу которой учитывает в (15.13) слагаемое
Ко(Оз-тЗ).
Функционирование САУ в автоматическом режиме при боковом
движении в общем виде может быть описано соотношением
5Э = K6(War(p)Aar-K(1)xC0x +F6(8M,Aar,<ox)). (15.14)
Здесь Ааг - параметр рассогласования в горизонтальной плоско-
сти, формируемый по закону (7.26)-(7.28); War - передаточная функция
системы формирования сигналов автоматического управления. Суть
остальных обозначений ясна из (15.13).
Функциональные связи САУ в директорном режиме, смысл кото-
рого был изложен в §1.3, показаны на рис. 15.3 при условии, что пере-
ключатели П1 и П2 стоят в положении Д. Следует отметить, что законы
338
функционирования САУ в этом режиме аналогичны соответствующим
законам (15.13) и (15.14) автоматического режима и могут отличаться от
них лишь значениями коэффициентов передаточных функций и пара-
метров рассогласования (7.24), (7.25).
Законы функционирования СУР с плоскостной аэродинамиче-
ской симметрией аналогичны законам работы САУ самолетов в автома-
тическом режиме. У ракет с осевой симметрией СУР содержат два
идентичных канала управления в плоскостях управления 1-1 и 2-2 (см.
рис. 7.9). При этом алгоритмы их работы определяются различными
модификациями уравнения (15.13).
15.3. УРАВНЕНИЯ
ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНЫХ СИСТЕМ
Уравнения ИВС устанавливают связь между фазовыми коорди-
натами относительного и абсолютного движения цели и ОУ, с одной
стороны, и формируемыми параметрами рассогласования - с другой. В
состав этих уравнений входят соотношения, отображающие собственно
процедуру вычисления (оценивания) параметров рассогласования, и
соотношения, аппроксимирующие процесс функционирования измери-
телей (формирователей оценок) требуемых фазовых координат. Набор
этих координат определяется используемым методом наведения, а
уравнения измерителей - конкретными алгоритмами их работы.
В системах наведения все измеренные (оцененные) значения х{
(i = l,n) фазовых координат и самих параметров рассогласования Aj
(j = 1, г) представляют собой либо напряжения, либо цифровые коды. Для
упрощения дальнейшего анализа РЭССН на устойчивость и точность будем
полагать, что все оценки - постоянные напряжения. Тогда в общем виде
уравнения ИВС представляются совокупностью соотношений:
их|=Ф1(р)Х1 (i = i,n); (15.15)
UAj=fj(Uxl>ux2 >-,Uxn) (j = U). (15.16)
Для ручного управления с прямым наведением (7.4) соотношения
(15.15) и (15.16) заменяются уравнениями:
ч<рг = Ф«р(р)Фг> ифв=Фф(р)фв, (15.17)
Чдг ^-фг^фГ’ ^Дв К-фо^фв» (15.18)
где Фф(р) - передаточная функция угломера БРЛС, а Кфг и Кфв - коэф-
фициенты пропорциональности.
При наведении в НУТВ на основе алгоритма траекторного управ-
ления (7.22), (7.23) уравнения ИВС имеют вид:
^Дг ““ К„1 KayUaUsy “^д(о^д^(ог )’ (15.19)
Чдв “ КН1 (КдуПфв + KayUaUcy “ КдодЦдЦфв )• (15.20)
В этих формулах Кн1=Кн/Кду, где Кду определяется равенством
(7.16); ифг и ифв - оценки, формируемые угломером (15.17);
иа = Фа(Р)О; Usy = Фу1 (Р) Sin У, Uc7 = Фу1 (р) COSy
(15.21)
ид = фд (р) Д иаг = ф(о(рМ ; и а* = Ф(о(р)ч;
Фа(р), Фа7|(р), Фд(р) и Фсо(р) - передаточные функции измерителей уг-
лов атаки и крена, дальности и угловой скорости; Кау, Кд(1)- размерные
коэффициенты, выбираемые из условия однозначного соответствия
(15.19), (15.20) и (7.22), (7.23).
При директорном и автоматическом управлении по закону (7.24),
(7.25) и (7.28) (7.29) в качестве уравнений ИВС используются соотношения:
Пддг ““ Кдп (Пур Пу), идпв — К_дв 1 (unT un), (15.22)
Пдаг ““ К-arl (Пур Ну), Пдав — К-ав1 (Пцу Un). (15.23)
Здесь
Uy—Фу(р)у, Uyj, — Kyfr (Анг),
г (15.24)
un — Фп(р)Пу, unT — KnfB(AHB),
Ф/р) и Фп(р) - передаточные функции измерителей (формирователей оце-
нок) угла крена и нормальной перегрузки; Кд-i, К,агЬ Кд^, КаВ| и Ку, Кп- ко-
эффициенты пропорциональности; смысл fr и fB ясен из формулы (7.27).
При наведении ракет методом пропорционального наведения (7.32)
напряжение, пропорциональное параметру рассогласования, фор-
мируется по закону
иД1,2 = ^l,2^ouvu(oi,2 “ Ujl,2 ’ (15.25)
где
иУ=фу(р)Чб; u<oi,2 =ф<о(р)°ъ; uji,2 =<i>j(p)ji,2; о5-26)
К|,2 - коэффициент передачи умножителя uv и иШ1т2; ФУ(р) и Ф/р) - пе-
редаточные функции автоселектора скорости и акселерометра.
Аналогично можно получить уравнения и для ИВС, реализующих
законы наведения (7.67), (7.68) и (7.74), (7.75).
15.4. ДИНАМИЧЕСКАЯ СТРУКТУРНАЯ СХЕМА КОНТУРА
САМОНАВЕДЕНИЯ САМОЛЁТА ПО КУРСУ
В НАИВЫГОДНЕЙШУЮ УПРЕЖДЁННУЮ ТОЧКУ ВСТРЕЧИ
Для формирования структурной схемы контура самонаведения
самолета по закону (7.22) необходимы кинематические уравнения, уравне-
ния ИВС, САУ, ОУ и уравнение ошибок наведения. Будем полагать, что
наведение осуществляется в автоматическом режиме, причем параметр
рассогласования для этого режима формируется в ИВС. Принимая во вни-
мание удобство построения динамической структурной схемы, системати-
зируем все исходные уравнения, используя их представления в оператор-
ной форме. Для определенности будем считать, что фазовые координаты
собственного (абсолютного) и относительного движения самолета и цели в
горизонтальной плоскости связаны уравнениями:
«V =[KK3/(TK3p-l)]Gur-jr} ег=Ч/р; Фг=ег_'И, (15.27)
полученными при замене в соот-
ношениях (7.44)-(7.46) индекса
«1» индексом «г», который ука-
зывает на принадлежность фазо-
вых координат к горизонтальной
плоскости. Геометрические связи
между фазовыми координатами
уравнений (15.27) иллюстриру-
ются рис. 15.4. Точкой Оц пока-
зано текущее расположение цели
в невращающейся системе коор-
динат OoyXoZo, связанной с цен-
тром масс ОУ; £г и \|/ - соответ-
ственно угол визирования цели и
курс (угол рысканья) самолета; (рг и фг - бортовой пеленг цели и его
оценка, определяемая как угол между продольной осью Хс самолета и
равносигнальным направлением Хрен.
При составлении уравнений ИВС будем полагать, что параметр
рассогласования в горизонтальной плоскости формируется по правилу
(15.19), полет совершается с углом атаки а=0, дальность и скорость
сближения оцениваются с высокой точностью безинерционными изме-
рителями, угол фг и угловая скорость ЛВ оцениваются радиолокацион-
ным следящим угломером с передаточными функциями Ффг(р) по углу и
Фйг(р) по угловой скорости. С учетом этих допущений и формул (15.17)
и (15.21) уравнения ИВС имеют вид:
и(рг “Ф(рг(Р)Фг» исог = Ф(ог(Р)£г’
(15.2о)
ид=КдД, uv=KvV, ua=0,
Чдг Кд1 (К-дуUфг ^-д(О^дU(or) • (15.29)
Допущение о высокой точности оценивания Д и V правомочно, по-
скольку эти фазовые координаты весьма незначительно влияют на точ-
ность формирования параметра рассогласования (см. §8.6).
Кроме того, будем считать, что сигнал траекторного управления
иДаг =Каг1(иуг-иу)’ (15.30)
следующий из (15.23), вычисляется в процессе сравнения требуемого
напряжения
uTT=WI14(p)udr, (15.31)
образуемого путем фильтрации сигнала и (15.29) в низкочастотном
фильтре с передаточной функцией
WH4(p)=KYr/(TYrp+l) (15.32)
и напряжения
uY = KYy, (15.33)
пропорционального текущему крену у. В (15.32) и (15.33) Куг и -
коэффициент передачи и постоянная времени фильтра, а К7 - коэффи-
циент передачи безинерционного измерителя крена.
При выводе уравнений САУ предположим, что в автоматическом
режиме элероны отклоняются по закону (15.14) при отсутствии компен-
сации разбаланса ЛА (F6( )=0). Следует отметить, что в состав War в
(15.14) для компенсации инерционности САУ и ОУ обычно включают
форсирующее звено. С учетом сделанных замечаний САУ можно опи-
сать уравнением
5Э =Кб[У/аг(р)иДаг-ишх], (15.34)
где
uwx “ ^сох^х ’ (15.35)
а Пдаг - напряжение, отображающее в (15.14) параметр рассогласования Даг.
342
В качестве уравнений динамики ОУ в боковом движении можно
использовать операторные представления выражений (15.7)-(15.9):
aY о 1 1
7=^—8,, сох=у, у=-у, jr=-gy, V=—jr. (15.36)
Тр+1 р Vcp
Точность наведения самолета в горизонтальной плоскости обычно
оценивается мгновенной ошибкой Д(рк управления по курсу. Из рис. 7.8
и формул (7.16), (7.18), (7.20) видно, что при ос=0
△<Рк=Чг-Чгг=Фг
Д<0г
К-ду
(15.37)
Структурная схема контура самонаведения по курсу в НУТВ, со-
ответствующая уравнениям (15.27)-(15.37), приведена на рис. 15.5.
Аналогично можно составить структурную схему и для вертикальной
плоскости, а также структурные схемы контура самонаведения в полу-
автоматическом и ручном режимах управления. Анализ структурной
схемы на рис. 15.5 позволяет сделать следующие выводы.
Рис. 15.5
Схема отображает функционирование многомерной нестационар-
ной сложной иерархической системы автоматического управления.
Многомерность ее определяется наличием нескольких входных и вы-
ходных параметров. К входным, в частности, относятся jur и результаты
измерений; к выходным - собственное поперечное ускорение jr, курс
крен у и ошибка управления А(рк.
Нестационарность обусловлена переменными параметрами (7.46)
кинематического звена и ОУ (15.36) при изменениях скоростей Д и Vc
и дальности Д до цели. Эти переменные параметры усложняют проце-
дуры обеспечения устойчивости и требуемой точности наведения. Кро-
ме того, в состав контура самонаведения входит неустойчивое квазиста-
тическое звено (7.45). Поскольку это звено не реализуется аппаратурно,
то для нейтрализации его неустойчивости приходится варьировать па-
раметрами измерителей ИВС и САУ.
Сложность системы характеризуется изменением ее структуры
при смене режима управления и типа датчиков, используемых для из-
мерения (оценивания) ит ифг, ид, и7 и ишх. Следует подчеркнуть, что при
о#0 в (7.22) и (7.23) появляются взаимные связи между каналами про-
дольного и бокового движения, что существенно усложняет анализ ССН
на устойчивость и точность.
Иерархия построения ССН предопределяет наличие в них боль-
шого числа ООС, характерных как для системы в целом, так и для ее
более низких уровней. К первому уровню относятся связи через jr и \|/,
замыкающие в кинематическом звене контур в целом. Ко второму уро-
вню относятся ООС в ИВС, замыкающиеся через сигнал иу в процессе
формирования сигнала траекторного управления (15.30) и через сигнал
Кд(1)иди0) в процессе вычисления параметра рассогласования (15.29).
Связь такого типа имеет место и в САУ за счет сигнала ишх системы
улучшения управляемости и устойчивости. К третьему уровню относят-
ся ООС внутри самих составных частей ССН. Такие связи, в частности,
характерны для следящих измерителей ИВС в процессе формирования
ошибки сопровождения цели по направлению, дальности и скорости (на
схеме не показаны).
Следует отметить, что в рассматриваемом контуре самонаведения
аппаратурно реализуются лишь ИВС, САУ и ОУ. Кинематическое звено
отображает лишь модель преобразования фазовых координат абсолютного
движения цели и ОУ в фазовые координаты их относительного движения.
15.5. ДИНАМИЧЕСКАЯ СТРУКТУРНАЯ СХЕМА КОНТУРА
САМОНАВЕДЕНИЯ РАКЕТЫ ПРИ ИСПОЛЬЗОВАНИИ
МЕТОДА ПРОПОРЦИОНАЛЬНОГО НАВЕДЕНИЯ
Кинематические уравнения ИВС, СУР, ОУ и промахов ракеты,
описывающие динамическую структурную схему контура управления
ракетой, будут получены при условии, что самонаведение выполняется
344
по закону (7.32), а каналы управления в различных плоскостях не влия-
ют друг на друга. В связи с этим для определенности систематизируем
все исходные уравнения для плоскости 1-1 (см. рис. 7.9).
Взаимосвязи фазовых координат абсолютного и относительного
движения цели и ракеты в этой плоскости можно описать кинематиче-
ским уравнением
СО, = [Ккз/(Ткз p-l)](jul - jj), (15.38)
в котором Ккз и Тк, определяются формулами (7.46).
При получении уравнений ИВС будем считать, что метод про-
порционального наведения используется в форме (15.25):
иД! = KiNoUyU^ - Uj,; (15.39)
скорость Vc6 и ускорение ji измеряются безинерционными измерителями:
uv=KvVc6; (15.40)
uj = Kjj1, (15.41)
а угловая скорость ЛВ оценивается инерционным угломером по правилу
иш1 = [Кш/(Тшр + 1)]со,, (15.42)
где IQ и Тш - коэффициент передачи и постоянная времени следящей
системы.
В качестве уравнения СУР будем использовать соотношение
Spl^MCp^A.-UoJ, (15.43)
вытекающее из общего выражения (15.13) при условиях, что отсутству-
ет компенсация разбаланса (Fn( )=0), не используются сигналы систем
ограничения перегрузок и стабилизации углового положения, а угловая
скорость coz измеряется безинерционным скоростным гироскопом,
формирующим сигнал
uwz “ K^coz^z • (15.44)
Уравнения динамики ракеты в плоскости 1-1 (см. рис. 7.9) можно
представить в операторной форме
«1 = 2 “5---3-Spi> ji=“’ai> (15.45)
р +2dco0p+or0 Tv Tv
следующей из общих моделей (15.2)-(15.5).
Геометрические связи между углами, используемыми в (15.45),
показаны на рис. 15.2 при замене в нем скорости самолета Vc скоростью
ракеты Vp .
Точность наведения ракеты в плоскости управления 1-1 можно
оценить по текущему промаху
htl =Д2(0|/Уо, (15.46)
полученному на основе общего соотношения (7.52).
Структурная схема контура самонаведения ракеты методом про-
порциональной навигации в плоскости 1-1, соответствующая уравнени-
ям (15.38)-(15.46), приведена на рис. 15.6.
Анализ этой схемы позволяет сделать следующие выводы.
Схема отображает функционирование линеаризованной многомер-
ной, нестационарной, иерархической системы управления. В качестве
входных сигналов в ней рассматриваются поперечное ускорение цели
jui и результаты всех измерений. Выходными сигналами являются угол
атаки 0С|, угловая скорость o>z, поперечное ускорение ракеты ji и промах
ht. Нестационарность контура предопределена переменными коэффици-
ентами (7.46) кинематического звена. В отношении влияния этого звена
на контур самонаведения в целом имеют смысл все замечания, сделан-
ные в §15.4. Иерархический принцип построения четко прослеживается
по наличию цепей ООС как на уровне всего контура через jh так и на
уровне подсистем через Uji в ИВС и через u(Ilz в СУР.
В заключение отметим, что структурная схема контура самонаве-
дения ракеты в плоскости 2-2 идентична рассмотренной. Структурные
схемы для контуров самонаведения ракет, использующих другие мето-
ды наведения, могут быть получены аналогичным образом.
ГЛАВА 16. ТАКТИКО-ТЕХНИЧЕСКИЕ ПОКАЗАТЕЛИ
РАДИОЭЛЕКТРОННЫХ СИСТЕМ
САМОНАВЕДЕНИЯ
Тактико-технические показатели являются одними из самых
употребительных локальных показателей эффективности РЭССН (см.
§1.4). В общем случае они зависят от аналогичных показателей ИВС,
УС и ОУ. При этом показатели подсистем РЭССН нельзя выбирать
произвольно, а необходимо учитывать их взаимное влияние друг на
друга. Ниже будут более подробно рассмотрены наиболее важные для
РЭССН показатели: дальность действия, разрешающая способность,
устойчивость и точность. Вопросы помехозащищенности РЭССН будут
рассматриваться в отдельной монографии.
16Л. ДАЛЬНОСТЬ ДЕЙСТВИЯ
Дальность действия РЭССН самолетов определяется интерва-
лом дальностей Дстах-Дсты между целью и ОУ, в пределах которого
используются алгоритмы траекторного управления, обеспечивающие
самонаведение с требуемой точностью. Максимальная дальность Дс,пах
соответствует началу использования алгоритмов траекторного
управления (самонаведения), в то время как ДСПйП - его окончанию. Для
самолетов за начало самонаведения принимается момент захвата цели
на автосопровождение. При этом дальность захвата должна удовлетво-
рять соотношению
Д-ДстахЭДпр+Дпотах? (16.1)
где Дпр - расстояние, пролетаемое самолетом за время анализа обста-
новки и принятия решения экипажем, а ДПОтах ~ максимальная даль-
ность применения оружия из всего набора бортовых средств поражения.
Минимальная дальность действия Дст1П соответствует дистанции
гарантированно безопасного выхода из атаки (отворота) и зависит от
типа применяемого оружия.
Если в качестве средства поражения используются ракеты с
АРГС и ПРГС, реализующие принцип «пустил-забыл», то самолет вы-
ходит из атаки сразу после пуска ракеты. При ракетах с ПАРГС необхо-
димо продолжать облучение поражаемого объекта СПЦ. При этом Дстт
может значительно уменьшиться. Следует отметить, что исходя из тре-
бований безопасности самолета-носителя целесообразны как можно
большие значения Дстах и Дстт-
Дальность действия РЭССН ракет определяется интервалом
Дстах-Дспип разрешенных дальностей пуска, в пределах которого алго-
ритмы траекторного управления обеспечивают самонаведение с точ-
ностью не хуже заданной. Максимальная разрешенная дальность пуска
ракет «в-п» с РЭССН зависит от типа системы управления. Если РГС
захватывает цель на дальности Дзг до старта ракеты, то
Дртах = Дзг — Дпс > (16.2)
где Дпс - расстояние, пролетаемое самолетом-носителем от момента захва-
та цели до пуска ракеты. Обычно ДПС«ДЗГ, поэтому можно полагать
Дртах =Дзг. ( 1 6.3)
Соотношение (16.3) определяет и максимальную дальность само-
наведения ракеты «в-п» с комбинированной системой управления, в
которой РГС вырабатывает сигналы траекторного управления процес-
сом самонаведения после захвата цели на траектории.
Минимальная разрешенная дальность пуска Дрт1П ракет «в-п» с
РЭССН обусловливается минимальным расстоянием до цели, на кото-
ром ракета еще способна устранить ошибки прицеливания. Эта даль-
ность является сложной функцией ошибок и высоты пуска, располагае-
мых поперечных перегрузок ракеты и траектории полета в вертикаль-
ной плоскости (см. рис. 7.15).
Для ракет «в-в» максимальная дальность действия Дртах зависит
от множества факторов. Главными из них являются: тип системы управ-
ления; баллистическая дальность Дб полета ракеты; ошибки прицелива-
ния в плоскостях управления; скорость и угол атаки истребителя в
момент пуска и располагаемые поперечные перегрузки ракеты.
Тип системы управления предопределяет момент захвата цели
РГС ракеты. В ракете с АРГС цель можно захватить при нахождении
ракеты еще на подвеске. В такой ситуации дальность самонаведения
обусловлена либо дальностью Дзг захвата цели АРГС при пуске ракеты
на больших высотах, либо баллистической дальностью полета ракеты
при ее пуске на малых высотах. При комбинированной системе управ-
ления ракетами с ПАРГС захват цели выполняется на траектории. Это
связано с тем, что в ракетах с комбинированными системами на началь-
ных участках траектории применяется автономное или командное наве-
дение, а самонаведение осуществляется лишь на конечном участке.
В такой ситуации дальность самонаведения определяется дальностью
захвата цели РГС. В ракетах с ПАРГС самонаведение начинается лишь
после удаления ракеты на некоторое расстояние от самолета-носителя.
Тем самым снижается влияние СПЦ, формируемого на истребителе, на
аппаратуру ПАРГС. Поскольку это расстояние обычно невелико, можно
считать, что максимальная дальность действия РЭССН обусловлена
дальностью Д, захвата поражаемой цели БРЛС истребителя. Однако
такое утверждение справедливо лишь при пуске ракет с ПАРГС на
больших высотах. На малых высотах максимальная дальность действия
ракеты по-прежнему будет ограничиваться значением Дб.
Под баллистической дальностью понимается расстояние, которое
способна пролететь ракета от старта до того момента, когда ее скорость
сближения с целью станет равна минимальной скорости Vpmin, при кото-
рой еще срабатывает радиовзрыватель. Уменьшение скорости обуслов-
лено использованием в ракетах «в-в» двигателей стартового или им-
пульсного типа. Ограничение скорости снизу значением Vpmin объясня-
ется тем, что радиовзрыватели селектируют цель по доплеровской час-
тоте, которая однозначно связана со скоростью сближения [47]. В об-
щем случае Дб увеличивается с возрастанием высоты, так как при этом
уменьшается плотность воздуха, и с увеличением скорости сближения,
приводящей к повышению доплеровской частоты и тем самым Дб на
встречных курсовых углах цели. Рост угла атаки самолета-носителя в
момент пуска ракеты приводит к увеличению ее лобового сопротивле-
ния, а соответственно, и к уменьшению Дб. Увеличение ошибок прице-
ливания вызывает уменьшение Дб, так как часть времени полета и кине-
тической энергии ракеты затрачивается на вывод ее на требуемую
опорную траекторию. На малых высотах, как правило, Дб<Дзг, поэтому
ДРтах=Дб- В то же время на больших высотах Дб>Дзг, поэтому Дртах=Дзг.
Минимально разрешенная дальность Др1П1П пуска ракет «в-в» оп-
ределяется наименьшим временем вывода ракеты на требуемую траек-
торию при заданных ошибках прицеливания. Значения Дртт качествен-
но зависят от ошибок прицеливания, высоты и скорости сближения
ракеты с целью, так же как и Дб. Наименьшие значения Дрп11П ограниче-
ны снизу минимальной дальностью Дс1дд!п вывода истребителя из атаки.
В первом приближении можно рассчитать требуемое значение
Дртт, используя рис. 16.1, на котором показано взаимное расположение
в горизонтальной плоскости ракеты Р, движущейся со скоростью Vp и
цели Ц, перемещающейся со скоростью Vu. При этом будем полагать,
что выполняются следующие условия:
ракета наводится в упрежденную точку встречи В с небольшой
первоначальной ошибкой прицеливания qro;
Рис. 16.1
скорости ракеты и цели за время
наведения tH не изменяются;
траектория полета ракеты в про-
цессе устранения ошибки qro представляет
дугу РВ окружности с радиусом R;
в процессе наведения ракета раз-
вивает максимально возможные боковые
ускорения jnnax.
Рассматривая треугольник РЦВ,
можно получить равенство
Др min =РВ2+ЦВ2-2(РВ)(ЦВ)созцв. (16.4)
При малой ошибке qro длина дуги РВ мало отличается от длины
отрезка РВ, поэтому время полета ракеты будет определяться интерва-
лом tH=PB/Vp. Поскольку время полета ракеты и цели до точки встречи
В одинаково, то
UB=tHVu=PB Vu/Vp.
Кроме того, можно считать, что
PB=2Rqro.
Подставляя (16.5) и (16.6) в (16.4), получаем
V2
Др,,,,,, = 2—
Jr max
(16.5)
(16.6)
(16.7)
-2-^-cosqB
vp
где учтено соотношение (5.6). Анализ (16.7) показывает, что наиболь-
шие значения Дртш будут иметь место при перехвате целей на встреч-
ном курсе, когда qB=180. Тогда
V2
Дртж«2^-
Jr max
Что
(16.8)
Зависимость Дртах и ДрП^п от высоты полета и курсового угла цели
1|/к при прочих постоянных параметрах называют зонами возможных пус-
ков (ЗВП). Примерный вид ЗВП для вертикальной и горизонтальной плос-
костей показан на рис. 16.2 а,б. На этом рисунке в ЗВП, показанных в нев-
ращающейся системе координат, связанной с центром масс Ос самолета,
можно выделить две характерных области. Для одной из них, соответст-
вующей высотам Н<Н|, значения ДрПт определяются Дб. Во второй облас-
ти при Н>Н| выполняется условие Дртах=Д«-
Как было сказано ранее,
ДзГ зависит от типа используемой
РГС. В ракетах с АРГС даль-
ность захвата определяется соот-
ношением [47]
Р
Дзга=«з^у££
V *niin
4лХ2
,(16.9)
в котором Рпрд - мощность пере-
датчика РГС; Pniin - реальная
чувствительность ее приемника,
Оц - ЭОП цели, sa - эффективная
площадь антенны, ка - коэффи-
циент, учитывающий потери в
антенне за счет приема сигналов
с РСН и потери в обтекателе,
Рис. 16.2
X - длина волны, ал - коэффициент, учитывающий затухание радиоволн
в атмосфере.
Для ракет с ПАРГС дальность захвата
П — ГУ |Рпрд1 ^u^al^a^al^a
ЗГПа ’ 1 Рпйп Д?4^2
(16.10)
где.Рпрд! - мощность передатчика СПЦ; sa] и sa - эффективные площади
передающей и приемной антенн; ка1 и ка - потери в антеннах за счет
обтекателей и приема сигналов с РСН; Д1 - дальность между БРЛС
(источником СПЦ) и целью на момент ее захвата. При использовании
(16.10) необходимо учитывать две особенности: коэффициент затухания
Оз следует рассчитывать с учетом распространения радиоволн от БРЛС
до цели и от цели до ракеты; при захвате цели на подвеске Д|=ДЗГпа-
Для ракет с ПРГС
JP„ G..saka
Du (16.11)
Pmin 16я
где Рц и Сц - мощность излучения и коэффициент направленного дейст-
вия антенны цели по боковым лепесткам.
В соотношениях (16.9)—(16.11) используются либо импульсная
мощность при импульсном СПЦ, либо средняя мощность при непре-
рывном сигнале. Значения РП1|П выбираются в 3-10 раз большими поро-
говой чувствительности. Это гарантирует реализацию характерной для
режима СОЦ высокой вероятности правильного обнаружения. Для при-
ближенных расчетов можно воспользоваться соотношением
Дзг==(0,6...0,8)хДобнтах, где Добш™х - максимальная дальность обнаруже-
ния целей с вероятностью правильного обнаружения РПО=0,5...0,6.
16.2. РАЗРЕШАЮЩАЯ СПОСОБНОСТЬ
Разрешающая способность РЭССН характеризует ее возмож-
ность выполнять наведение на отдельную цель в составе группы. При
этом принимаемые от отдельной цели сигналы будут искажаться сигна-
лами, отраженными от других, близко расположенных целей. В резуль-
тате воздействия этих мешающих отражений оценки фазовых коорди-
нат, используемые в алгоритме траекторного управления, будут форми-
роваться с ошибками, приводящими к увеличению промахов и ухудше-
нию других показателей эффективности РЭССН.
Наиболее полным количественным показателем разрешающей
способности является коэффициент Ур^Ргт/Рпц снижения вероятности
Ргпц поражения цели в составе группы по отношению к вероятности
Рпц (1.1) поражения одиночной цели. Поскольку значение ур зависит не
только от показателей РЭССН, но и от состава и геометрии группы
целей, то вычислить его весьма трудно. В связи с этим на практике ис-
пользуют более простые частные показатели в виде разрешающих спо-
собностей по всем фазовым координатам, которые используются при
формировании параметра рассогласования.
Под разрешающей способностью 8, по i-й координате (i = l,n)
понимается минимальное различие б-хц-^х^ координат Хц и x2i двух
целей, при котором радиосигналы, приходящие от одной цели, еще не
влияют на процесс наведения на вторую цель. При этом полагается,
что все остальные п-1 координат этих целей имеют одинаковые зна-
чения. Анализ методов наведения, рассмотренных в гл. 7, позволяет
говорить о разрешающих способностях по дальности, скорости сближе-
ния, углам, угловым скоростям и поперечным ускорениям целей.
Если в n-мерный элемент разрешения попадают несколько целей, то
результат самонаведения будет зависеть от соотношения интенсивностей
сигналов, поступающих от этих целей. В ситуации, когда интенсивность
одного сигнала значительно превосходит интенсивность остальных, само-
наведение будет осуществляться на цель - источник наиболее мощного
сигнала, поскольку мешающие действия слабых сигналов будут незначи-
тельными. При примерно одинаковой интенсивности отраженных сигна-
лов ОУ будет наводиться на «энергетический центр тяжести» группы..
Для ССН самолетов с АСЦРО такая ситуация может привести к
значительным ошибкам только при наведении на одиночную, например,
наиболее опасную цель. Если самолет наводится на геометрический или
энергетический центр группы, то недостаточная разрешающая способ-
ность БРЛС мало влияет на точность самонаведения. В этом случае
влияние плохой разрешающей способности самолетных РЭСУ проявля-
ется лишь в ухудшении точности ЦУ ракетам. Если при этом цели раз-
решаются РГС, то низкая точность ЦУ приводит к уменьшению дально-
сти полета ракеты за счет необходимости устранения больших первона-
чальных ошибок пуска. Кроме того, низкая точность ЦУ может привести к
перераспределению поражаемых объектов в результате захвата РГС других
близко расположенных целей. В ситуации, когда РГС не разрешает цели,
ракета также будет наводиться на энергетический центр тяжести группы
целей, находящихся в n-мерном элементе разрешения РГС. При этом веро-
ятность поражения цели будет резко уменьшаться для ССН, у которых
линейная разрешающая способность по угловым координатам существенно
превышает эффективный радиус поражения (п. 1.4.5).
Анализ, проведенный в §§ 8.6-8.10, показывает, что ИВС ОУ
наиболее чувствительны к ошибкам угломерного канала. В связи с этим
обоснуем требования к разрешающей способности РГС по угловым
координатам в процессе наведе-
ния ракеты на энергетический
центр тяжести двух целей. При
этом будем полагать, что выпол-
няются следующие условия:
ракета наводится в гори-
зонтальной плоскости XoOpZo
(рис. 16.3);
отрезок Ц1Ц2, характери-
зующий расстояние Az между
двумя целями, перпендикулярен
вектору Vp скорости ракеты;
ССН должна обеспечивать
поражение хотя бы одной из двух рис 3
целей с вероятностью Рпц=0,8
при эффективном радиусе поражения ЯЭф.
Из (1.20) следует, что для обеспечения РП11=0,8 необходимо, что-
бы д/о~ = 0,5Яэф . Если Az»R^, то вероятность того, что ракета проле-
тит вблизи одной из целей на расстоянии, не превышающем 2^DZ ,
будет мала, а соответственно будет мала и вероятность поражения цели.
Из рис. 16.3 видно, что для поражения хотя бы одной цели необ-
ходимо, чтобы разрешающая способность 8z=Azmin была того же поряд-
ка, что и ошибка наведения
5z = 2R3(1,=47d7. (16.12)
Отсюда следует, что разрешающая способность по углу
8фг = / Д (16.13)
Тогда при ТБ; =10 м, Д=40 км, 8ф,=0,06°. Обеспечить такую вы-
сокую разрешающую способность по углу в современных РГС практи-
чески невозможно.
Однако по мере приближения ракеты к целям угол
между ними будет возрастать и при некоторой дальности станет больше
угла 8фг. Начиная с этого момента, РГС перейдет на автоматическое сопро-
вождение одной из целей. В [17] показано, что этот угол определяется зна-
чением 8фг=(О,8...О,9)0, где 0 - ширина диаграммы направленности антенны
ракеты по уровню половинной мощности. Если разрешение целей по на-
правлению произошло на достаточном удалении, то ССН успевает устра-
нить ошибки управления по угловым координатам и одна из целей будет
поражена. В связи с этим при обосновании требований к разрешающей
способности РЭССН ракеты вместо (16.13) используют формулу
5(рг=475;/Дт1п> (16.14)
где ДП1(П - минимальное расстояние, на котором ракета способна устра-
нить ошибку наведения с дисперсией Dz.
Разрешающая способность РГС по дальности и скорости сближе-
ния определяется соответственно шириной спектра СПЦ и полосой
пропускания узкополосного фильтра автоселектора скорости.
Следует подчеркнуть, что существенного улучшения разрешаю-
щей способности по углам можно получить за счет траекторного управ-
ления наблюдением, дающего возможность, наряду с решением основ-
ной задачи - наведения, реализовать, так называемое доплеровское
обострение луча. Суть этого приема состоит в выборе такой траектории
полета, при которой близкорасположенные цели разрешаются не за счет
диаграммы направленности антенны, а за счет различия доплеровских
частот, отраженных от этих целей сигналов [29].
16.3. УСТОЙЧИВОСТЬ СИСТЕМ САМОНАВЕДЕНИЯ
Проводимый далее анализ позволяет оценить влияние условий
применения и параметров составных частей РЭССН - в основном ИВС
и СУР - на их устойчивость. Такой анализ необходим как для грамотно-
го выбора параметров и показателей эффективности ИВС и СУР, так и
для разработки предложений и рекомендаций летному составу по наи-
лучшим вариантам применения авиационной техники.
Необходимо отметить, что при использовании импульсных БРЛС
и РГС первичные измерения дальности, скорости и угловых координат
формируются дискретно, после накопления принятых радиолокацион-
ных сигналов. Однако, обычно, интервалы времени между поступле-
ниями принимаемых сигналов существенно меньше постоянных време-
ни следящих измерителей. Это дает возможность считать РЭССН ана-
логовыми с использованием соответствующего математического аппа-
рата, основанного на применении преобразований Лапласа, аналоговых
передаточных функций и критерия устойчивости Рауса-Гурвица.
Вместе с тем, в последнее время стали получать широкое распро-
странение РЭСУ с прерывистыми сигналами подсвета цели (рис. 8.2),
период поступления которых может быть сравним с постоянными вре-
мени следящих измерителей. В такой ситуации РЭССН считаются дис-
кретными и для их анализа используется математический аппарат Z-
преобразований. Ниже будут рассмотрены оба подхода.
Общей спецификой всех типов РЭССН является их нестационар-
ность. Поэтому будем анализировать устойчивость всех типов этих
систем методом замороженных коэффициентов, суть которого была
рассмотрена в § 4.1. Анализ аналоговых систем будет проводиться по
критерию Рауса-Гурвица в процессе исследования характеристического
полинома передаточной функции замкнутых контуров наведения,
структурные схемы которых приведены на рис. 15.5 и 15.6. Дискретный
вариант структурной схемы РЭССН ракеты с ПАРГС при использова-
нии прерывистого сигнала подсвета цели будет получен на основе рис.
15.6. Принимая во внимание большую сложность указанных схем, целе-
сообразно в начале упростить их до уровня, позволяющего получить
достаточно простые соотношения, которые связывают условия приме-
нения и параметры ИВС и СУР с показателями устойчивости.
16.3.1. УСТОЙЧИВОСТЬ СИСТЕМЫ САМОНАВЕДЕНИЯ САМОЛЕТА
ПО КУРСУ В НАИВЫГОДНЕЙШУЮ УПРЕЖДЕННУЮ ТОЧКУ ВСТРЕЧИ
Проанализируем устойчивость контура самонаведения самолета
по курсу в НУТВ на основе линеаризованной структурной схемы, при-
веденной на рис. 15.5. При этом сделаем следующие допущения.
Весь временной интервал функционирования РЭССН разбит на дос-
таточно малые промежутки времени, в пределах которых все переменные
параметры кинематического звена и ОУ можно считать постоянными. Ко-
нечный вывод об устойчивости будет сделан в том случае, если критерий
Рауса-Гурвица выполняется для каждого исследуемого промежутка.
Угол и угловая скорость ЛВ в ИВС ССН оцениваются безынер-
ционным радиолокационным угломером со скоростной коррекцией и
индикаторной стабилизацией (п. 11.1.2) с идеальной развязкой антенны
от угловых колебаний самолета. Тогда передаточные функции угломе-
ра, приведенного на рис. 15.5, определяются соотношениями
Ффг(р) = Кф, Фшг(р) = рКдус, (16.15)
где Кф и Кдус - соответственно коэффициенты передачи угломера и
датчика угловой скорости.
Формирователь сигнала (15.31), (15.32) - безынерционный (Т7г=0)
с коэффициентом передачи К^, САУ и ОУ также считаются безынерцион-
ными. В связи с этим передаточная функция звеньев, расположенных на
рис. 15.5 между точками А и С, определяется соотношением
Wac(p)=Kac.
С учетом сделанных упрощений структурная схема, приведенная
на рис. 15.5, преобразуется к виду, показанному на рис. 16.4, где
Рис. 16.4
Рис. 16.5
Ку КфКду,
Д’
кх=кн1кугкас,
а Кд определяется из (15.28), причем
кд(Лд=1.
(16.16)
(16.17)
Для удобства получения передаточной функции замкнутой системы,
в которой входным сигналом является ускорение цели jur, а выходным -
ускорение самолета jr, выполним структурные преобразования за счет пе-
реноса звена 1/Vcp через усилительное звено угломера Ку. После этого объ-
единим параллельные ветви ЕрК^Д и ЕгКу в одну цепь. Тогда структурная
схема, показанная на рис. 16.4, без учета цепей формирования ошибки Д(рк,
преобразуется к виду, показанному на рис. 16.5, где
\Уэу(р)=Ку-рКэшД. (16.18)
В таких условиях передаточная функция замкнутой системы оп-
ределяется соотношением
[KK3W3y(p)Wz(p)]/(TK3p-l)p
Ф(р) =--------—7~\---z-\---------->
l + KK3W3y(p)W£(p)/(TK3 р-1)р
в котором
z ч Kv (l/Ky)Vcp
W (р) =--------------= ----
2 l + K£Ky/Vcp Tvcp + 1
Tvc=Vc/KzKy.
(16.19)
(16.20)
(16.21)
Следует отметить, что Tvc - величина положительная, так как
Kz<0 и Ку<0.
Используя (16.18) и (16.20) в (16.19), получаем:
ккз(К7-кэ<Др)Уср/(ткзр-1)р(туср+1)ку
р) i+K^CKy-K^pWCT^p-W^+OKy
3 Тдр + КкзУс_____________
TK3TvcP2 +(ТЮ +ТД -Tvc)p + KK3Vc -1
При получении (16.22) было учтено, что
Тд=-ТкзКэюУс/Ку,
(16.22)
(16.23)
Ткз=КкзД, а Ку, определяемый соотношениями (16.16) и (7.16), - отрица-
тельная величина.
Для устойчивости контура самонаведения с передаточной функ-
цией (16.22) необходимо и достаточно, чтобы
ТкзТУС>0,
Ткз+Тд—Tvc>0,
(16.24)
(16.25)
КкзУс-1>0.
(16.26)
Условие (16.24) выполняется автоматически. Из (16.25) после
подстановки в него (16.21), (16.23) и (7.46) получим
Д С к^уД vc .
2^ ку J к£ку ’
f 2Vfi \
Kv> —— 4-К^ Vc.
(16.27)
Поскольку Ку<0, то для удовлетворения (16.27) должно еще вы-
полняться условие
Кэю<|2Усб/ДК1|. (16.28)
Из неравенства (16.26) следует, что
Vc>2Vc6.
(16.29)
Принимая во внимание соотношение (16.16), после анализа (16.27) -
(16.29) можно прийти к следующим выводам.
Коэффициенты передачи угломера по углу Кф и по угловой ско-
рости Кдус, дальномера Кд и вычислителя параметра рассогласования
К„|, К7 не могут выбираться произвольно. Они должны находиться в
строго определенных соотношениях между собой и с коэффициентом
Кас передачи САУ и самолета, зависящих от скоростей самолета и
сближения и текущей дальности до цели.
Выполнение условий (16.27) и (16.28) для каждого момента вре-
мени требует использования сугубо нестационарных каналов оценива-
ния дальности и угловых координат, что неудобно. Во избежание этого
достаточно выполнить неравенства (16.27) и (16.28) для наиболее жест-
ких условий, когда скорости Vc и Vc6 соответственно равны своим ми-
нимальным и максимальным значениям Vc=Vcmin, Vc6=Vc6niax, а даль-
ность равна минимальной дальности Дт|П выхода из атаки. Тогда требо-
вания (16.27) и (16.28) трансформируются к виду
(16.30)
К
.□со
2V г
Y со шах
Д|П1П^1
(16.31)
При этом следует учесть, что минимальные значения Vcmin долж-
ны одновременно удовлетворять условию (16.29). Кроме того, из (16.29)
следует вывод о том, что при сделанных допущениях устойчивое само-
наведение по курсу в НУТВ возможно лишь в ЗПС на догонных курсах.
Более детальный анализ с учетом реальных динамических
свойств САУ и самолета свидетельствует о возможности устойчивого
самонаведения до расстояния в несколько километров до цели и в ППС
на встречно-пересекающихся курсах [46]. При самонаведении в ручном
и директорном режимах оно устойчиво при любых ракурсах перехвата,
поскольку летчик способен выполнять функции корректирующего звена.
Все выводы, полученные для горизонтального канала, справедли-
вы и для канала наведения самолета в вертикальной плоскости.
16.3.2. УСТОЙЧИВОСТЬ КОНТУРА САМОНАВЕДЕНИЯ РАКЕТЫ
ПРИ ИСПОЛЬЗОВАНИИ МЕТОДА ПРОПОРЦИОНАЛЬНОГО НАВЕДЕНИЯ
Проанализируем устойчивость контура управления ракетой в
плоскости 1-1 (рис. 7.9) при ее пропорциональном самонаведении, ос-
новываясь на линеаризованной структурной схеме рис. 15.6. Эту схему
будем исследовать методом замороженных коэффициентов (§ 4.1) при
следующих допущениях:
угловая скорость ЛВ оценивается инерционным радиолокацион-
ным следящим угломером по правилу (15.42);
скорость сближения оценивается безынерционным автоселекто-
ром скорости по закону (15.40);
собственное ускорение ji измеряется безынерционным акселеро-
метром (15.41) с коэффициентом передачи Kj =1;
СУР и ракета - безынерционные звенья с эквивалентным коэф-
фициентом передачи КсР.
На основе этих допущений структурная схема, приведенная на
рис. 15.6, упрощается до вида, показанного на рис. 16.6. Тогда переда-
точная функция замкнутой системы, в которой входным сигналом явля-
ется поперечное ускорение цели jub а выходным - промах ракеты h,
определяется формулой
- ф1(р)=___________Ккз д2_/(т^^о____________
11 н 1+Ккз Кивс Кср Vc6 /(Ткз р - 1)(Тшр+1)
=__________[Ккз Д2/Уо](Т(Ор + 1)________
ТкзТ<оР2 +(ТКЗ -Tw)p + Kk:j Кивс Kcpvc6 -1
При получении (16.32) считалось, что
Кивс =K|K(1)NOKV.
(16.32)
(16.33)
Рис. 16.6
Анализ характеристического полинома (16.32) свидетельствует о
том, что для обеспечения устойчивости рассматриваемого контура са-
монаведения необходимо и достаточно, чтобы в каждый момент време-
ни выполнялись условия:
ТкзТш>0; (16.34)
TK3-Tw>0; (16.35)
Ккэ Кивс KcpVc6-l>0. (16.36)
Соотношение (16.34) выполняется автоматически. Для выполне-
ния условия (16.35) необходимо, чтобы постоянная времени угломера
не превышала постоянную времени кинематического звена (7.46):
Тш<Д/2Усб. (16.37)
Ограничение (16.37) будет заведомо выполняться для любого
момента времени, если
Тш < Дк/2Vc6max, (16.38)
где Дк - дальность окончания самонаведения.
Из (16.36) следует условие
Кивс>2/Кср. (16.39)
Анализ (16.38) и (16.39) с учетом (16.33) свидетельствует о том,
что технические показатели ИВС (Т0), К(0, Kv, Кь No) нельзя выбирать
произвольно. Они должны находиться в строго определенных соотно-
шениях с показателями СУР и ракеты (Кср) и всего контура самонаведе-
ния (Д,™п и Vc6max). Следует отметить, что при выполнении условий
(16.38) и (16.39) никаких ограничений на ракурсы перехвата не накла-
дывается. При этом соотношение (16.39) уточняет ограничение (7.47),
полученное при качественном рассмотрении структурной схемы конту-
ра самонаведения на рис. 7.11.
Следует отметить, что все выводы, сделанные в результате ана-
лиза устойчивости канала управления ракет в плоскости 1—1, имеют
смысл и для плоскости 2-2.
16.3.3. УСТОЙЧИВОСТЬ КОНТУРА САМОНАВЕДЕНИЯ РАКЕТ «В-В»
С ПОЛУАКТИВНОЙ РГС И ПРЕРЫВИСТЫМ СИГНАЛОМ ПОДСВЕТА ЦЕЛИ
Весьма распространенным видом РЭСУ ракет «в-в» являются
системы самонаведения с полуактивными РГС §8.3 [26] при дискретном
(прерывистом) сигнале подсвета цели (рис. 8.2). Использование дис-
кретного режима работы измерителей предопределяет зависимость
показателей устойчивости и точности контура наведения с ПАРГС не
только от параметров системы и условий применения, но и от периода
поступления отраженных сигналов.
Проанализируем устойчивость контура наведения с ПАРГС при
условии, что соблюдаются следующие предположения:
для наведения ракеты используется метод пропорционального
наведения (7.32);
угломер РГС аппроксимируется усилительным звеном с коэффи-
циентом передачи ку=1;
кинематические уравнения, определяющие связь параметров аб-
солютного и относительного движения целей, определяются соотноше-
ниями (7.45), (7.46);
текущий промах определяется соотношениями (7.52), (7.53);
бортовая РЛС самолета-носителя работает в режиме дискретного
сопровождения целей с периодом Т обращения к ним, при этом время
облучения каждой из них tH«T;
за время tH подсвета цели РГС осуществляет ее автоматическое
сопровождение по углам и скорости сближения, а в остальное время
T-tH происходит запоминание измеренных величин.
В рассматриваемых условиях применения угломер РГС с учетом
его безынерционное™ можно отобразить совокупностью 5-ключа и
фиксатора, называемого также экстраполятором нулевого порядка. Та-
кой фиксатор обеспечивает неизменность выходного сигнала угломера в
течение периода T-tH и имеет передаточную функцию
l-e-sT
W(1,(s) = ——, (16.40)
где s здесь и в последующем - оператор преобразования Лапласа.
С учетом введенных допущений получается показанная на рис.
16.7 динамическая структурная схема линеаризованного контура само-
наведения ракеты по методу пропорционального наведения в плоскости
1-1 при использовании дискретного сигнала подсвета цели, создаваемо-
го БРЛС истребителя.
Входным воздействием рассматриваемого контура является уско-
рение цели в плоскости 1-1, а его выходным параметром - текущий
промах Ьц. 8-ключ символизирует ту часть РГС, где непрерывные вели-
чины преобразуются в дискретные. Контур самонаведения замыкается в
те моменты времени, когда БРЛС истребителя подсвечивает поражае-
мую цель.
При анализе дискретных систем существенное значение имеет
место расположения 8-ключа. Из рис. 16.7 следует, что импульсный
элемент находится в цепи обратной связи. Математическим аппаратом,
используемым для исследования дискретных следящих систем, является
теория Z-преобразований.
Кинематическое
звено
Рис. 16.7
Для дискретных моментов времени немодифицированное (обыч-
ное) Z-преобразование угловой скорости (O|(z) получается на основании
формулы [40, 75]
Z{j,u(s)WK3 (s)}
l+Z{WK.,(s)W,(s)}’
(16.41)
где z=esl - комплексная переменная в системе Z-преобразований;
jlu(s) - преобразование Лапласа нормального ускорения jhl(t) цели;
WK3(s) =——------передаточная функция кинематического звена;
TK3s-l
l-e"Ts
W|(s) = N0Vc6--------передаточная функция последовательно соеди-
s
ненных фиксатора и пропорционального звена, отображающих динами-
ческие свойства РГС, СУР и ракеты.
Отметим, что обычное понятие передаточной функции в виде от-
ношения изображения выходного сигнала к изображению входного, как
это имеет место в радиоэлектронных следящих измерителях с импульс-
ным элементом в цепи сигнала рассогласования, в данном случае не
существует. Полученное выражение для Z-преобразования выходного
сигнала, будучи разложенным тем или иным способом в ряд по степе-
ням z, дает выходной сигнал в дискретные моменты времени пТ. При
оценке устойчивости контура самонаведения необязательно выполнять
процедуру обратного Z-преобразования. Достаточно, чтобы корни зна-
менателя в выражении (16.41) были расположены внутри круга единич-
ного радиуса (4.6). Таким образом, для определения условий устойчиво-
сти следует найти знаменатель выражения (16.41).
Запишем дискретную передаточную функцию для соединения
фиксатора, пропорционального и квазистатического звеньев
7__1 iz
W(z) = Z{WK3 (s)W,(s)}=-----Z 10
z [s(TK3s-l)
z-1 a
> =---Z< Ki -----
z s(s+a)
N0Vc6
гдеа = — l/Ткз, K| = — O,5No.
.-г all
Приняв во внимание, что ---------------=-----------, определим Z-преоб-
s(s + a) s s + a
разование от каждого слагаемого, пользуясь табл. 1.8 в [13]:
a I z z
s(s + a)J z-1 z-e“aT
(16.42)
Следовательно,
1-е-аТ
1 + W(z) = 1 + k,-
Z —с
z-e aT + к, (1 - с аТ
л-аТ .
z —е
(16.43)
Для нахождения Z-преобразования числителя в
выражении
(16.41) зададимся условием постоянства ускорения, развиваемого целью
jiu=jiuo=const. Преобразование Лапласа для постоянной величины имеет
вид jiuo/s. Отсюда следует, что Z-преобразование числителя выражения
(16.41) с учетом (16.42):
2. -but)ккз
s TK3s-l
j 1 цО
2Vc6 s(s + a)
_ k2z 1-е “т
z-1 z-e-aT ’
(16.44)
где к2=—jmo/2Vc6.
Разделив выражение (16.44) на (16.43), окончательно получим
, , _______K2z(l-e аТ)______
°31 Z ~ (z-l)[z-e-aT+к((1-е_аТ)] ’
(16.45)
из которого видно, что знаменатель имеет два корня: Z]=l и
z2=e-aT — Kj(l -е-<хТ). Согласно [67] к условиям устойчивости имеет
отношение лишь корень z2. ССН будет устойчива, если |z2|<l. Посколь-
ку корень z2 вещественный, то условие устойчивости запишется в виде
-1<е“аТ-к1(1-е“аТ)<1. (16.46)
Следовательно, ССН будет устойчива, если ее параметры будут выбра-
ны так, чтобы корень z2 удовлетворял двум условиям: z2<l и z2>-l.
Корень z2<l при любых значениях Т/Ткз, если N0>2. Действительно, из
условия е-аГ-KjO-e"011) < 1 следует (l + Kje-®1 < 1 + Kj . Подставив
значение Kj=—O,5No, получим
(l-O,5No)e~aT <l-O,5No.
При N0>2 величина 1-0,5N0 является отрицательной, поэтому по-
следнее неравенство можно записать в виде
e"aT > 1,
откуда вытекает неравенство
ет/т“ >1,
справедливое при любых значениях Т и Ткз. При N0<2 контур наведения
становится неустойчивым.
Из условия z2>—1 следует, что при No>2 должно выполняться не-
равенство
Т/Т^, S 0’5^0 +1
е м <------------------
O,5No-l
(16.47)
В частности, для N0=6 должно удовлетворяться соотношение
ег/ткз<2 рсли условие (16.47) не выполняется, то контур ССН становит-
ся неустойчивым. На малых расстояниях до цели выполнение условия
(16.47) может оказаться невозможным. Поэтому задача выбора периода
подсвета Т заключается в подборе такого его значения, при котором
нарушение условия устойчивости происходит в момент времени, когда
управление ракетой в процессе самонаведения практически закончено.
Устойчивость ССН можно оценить также по виду ее переходной
характеристики, т.е. по реакции ССН на единичное входное воздейст-
вие. Если для расчета дискретной переходной характеристики Wi(nT)
воспользоваться формулой ([32], 10.46), а для нахождения вычета в
простом полюсе формулой ([32], 10.47), то получим
C01(nT) = -^-[l-(-z2)n]. (16.48)
1 + К|
Отсюда следует, что при |z2|>l переходный процесс становится расхо-
дящимся. 4
Полученные результаты по выбору параметров, обеспечивающих
устойчивость ССН, можно пояснить с помощью рис. 16.8, на котором
кинематическое звено смоделировано в виде интегратора, охваченного
положительной обратной связью. Наличие положительной обратной
связи делает кинематическое звено неустойчивым: при постоянной
величине входного воздействия Aj выходной сигнал (Di будет непре-
рывно возрастать. Чтобы нейтрализовать положительную обратную
связь в кинематическом звене, в системе самонаведения с непрерыв-
ным сигналом подсвета цели создается постоянно существующая цепь
отрицательной обратной связи. Эта цепь содержит РГС^ СУР и дина-
мику ракеты. При методе пропорционального наведения вне зависимо-
сти от ракурса атаки цели непрерывная ССН при N0>2 остается устой-
чивой (см. §7.4). В дискретном контуре самонаведения также требуется
выполнение условия N0>2, но, кроме этого, необходимо соблюдение
условия (16.47). Нарушение последнего условия может привести к
неустойчивости контура самонаведения на конечном участке.
Рис. 16.8
Ранее был рассмотрен случай, когда в РГС производится запоми-
нание измеренного значения О)| на время отсутствия сигнала подсвета
цели. Возможны и другие варианты построения РГС. Так, в современ-
ных системах наведения радиолокационные измерители комплексиру-
ются с автономными измерителями, в качестве которых используются
датчики линейных ускорений [46]. Если полагать, что датчики линей-
ных ускорений работают без ошибок, а параметры модели кинематиче-
ского звена идентичны его действительным параметрам, то структур-
ную динамическую схему контура самонаведения ракеты можно пред-
ставить в виде, показанном на рис. 16.9.
Рис. 16.9
Для оценки устойчивости такой системы необходимо повторить
вычисления, которые были проделаны выше. В этом случае выражение
для переда-
точной функции W|(s) будет иметь вид
w N0Vc6 (TK3s-l)(l-e~sT)
117 (TK.jS-l + O,5No)s
(16.49)
а в неравенстве (16.46) под а и K| следует понимать выражения
(O,5No-l)/TK3 и O,5No/(O,5N()-l) соответственно. Корень z2<l для всех
значений Т при прежнем условии No>2, а из условия z2>-l вытекает
требование
eO,5(No-l)T/Tk, <No_1(
из которого следует, что выбор периода Т зависит как от постоянной
времени TKJ, так и от навигационной постоянной No.
16.4. ТОЧНОСТЬ СИСТЕМ САМОНАВЕДЕНИЯ
Проанализируем точность систем самонаведения самолета по
курсу в НУТВ и ракеты с пропорциональным наведением. Иначе гово-
ря, получим аналитические зависимости ошибок управления и промахов
от условий применения и параметров ССН и радиоэлектронных измери-
телей. Исследования, проводимые на основе метода замороженных
коэффициентов, будут выполняться в два этапа. На первом этапе будут
рассмотрены динамические ошибки, а на втором - флуктуационные.
Поскольку анализ точности дискретных ССН имеет ряд особенностей,
то в рамках данного параграфа в качестве примера будет приведен ана-
лиз контура самонаведения ракеты «в-в» с полуактивной РГС при пре-
рывистом сигнале подсвета цели.
16.4.1. Динамические ошибки системы самонаведения
САМОЛЕТА ПО КУРСУ В НАИВЫГОДНЕЙШУЮ УПРЕЖДЕННУЮ
ТОЧКУ ВСТРЕЧИ
При анализе ССН по курсу в НУТВ используем методику, рас-
смотренную в п. 5.5.1. В соответствии с этой методикой для получения
аналитического выражения динамической составляющей ошибки управ-
ления (15.37) необходимо: получить передаточную функцию по
ошибке; разложить ее в ряд по степеням р (5.46); задаться моделью
входного воздействия в форме (5.48) и найти ошибку управления, ис-
пользуя выражение (5.49).
Все эти задачи будут решаться при следующих предположениях:
период поступления отраженных от цели сигналов существенно
меньше постоянных времени следящих измерителей и систему наведе-
ния можно считать аналоговой;
упрощенная структура ССН по курсу в НУТВ соответствует схе-
ме, приведенной на рис. 16.4;
К(р=Кдус; (16.50)
цель движется с постоянным боковым ускорением
jm~jixro* (16.51)
Равенство (16.50) следует из допущения, что при \|/=const
ucor = Pu<pr = РФгФфг(Р) = РФрК-ф = “Лф •
Условие (16.51) предопределяет трансформацию общего
соотношения (5.49) к виду
△Фк=Со]цг0, (16.52)
где в соответствии с (5.47)
Co=Wo(p)|p=0,
(16.53)
a Wo(p)|p=0 - передаточная функция по ошибке в установившемся
режиме.
Из рис. 16.4 следует, что ошибка управления (15.37)
Афк = Фг - “| Д1 Кду = jr 1 К£Ку = Зцгф(р)1 К2Ку • (16.54)
Тогда
wo(p)|p.»=-^Mp-»^
(16.55)
Используя (16.22) и (16.55), находим
W0(p) =
КкзУс
К£Ку(КкзУс-1)'
(16.56)
Подставив (7.46), (16.16), (16.51) и (16.56) в (16.52), получим аналитиче-
ское выражение
△Фк ^ок^К(рКдЛУс_2усб)>
(16.57)
которое определяет зависимость ошибки управления от параметров
ССН (Кх, К<р) и условий применения (Vc, Vc6).
Анализ (16.57) свидетельствует:
если цель не маневрирует (jIiro=O), то динамическая составляющая
ошибки управления отсутствует;
для уменьшения ошибки управления по маневрирующей цели
целесообразно увеличивать коэффициенты передачи Кф и угломера и
системы САУ-самолет. При этом наведение нужно выполнять в ЗПС с
максимально возможной скоростью Vcmax>2VC6.
16.4.2. Флуктуационные ошибки системы самонаведения
САМОЛЕТА ПО КУРСУ В НАИВЫГОДНЕЙШУЮ УПРЕЖДЕННУЮ
ТОЧКУ ВСТРЕЧИ
При анализе флуктуационных ошибок ССН самолета используем
методику, рассмотренную в п. 5.5.2. При этом необходимо определить:
источники случайных возмущений и точки их приложения на структур-
ной схеме; передаточные функции от входных возмущений к выходной
ошибке при замороженных коэффициентах; мгновенные значения флук-
туационной составляющей ошибки управления и ее статистические харак-
теристики. Все эти задачи будут решаться при следующих допущениях:
упрощенная структура ССН самолета соответствует схеме на рис.
16.4 при условии, что полезное входное воздействие отсутствует (]цг=0);
угломер БРЛС имеет моноимпульсный пеленгатор и идеальную
развязку антенны от угловых колебаний летательного аппарата;
первичными источниками случайных возмущений являются угло-
вые и амплитудные шумы принимаемых радиосигналов в виде центриро-
ванных гауссовских процессов с известными спектральными плотностями.
Напомним, что амплитудные шумы практически не влияют на
моноимпульсные пеленгаторы [22, 45]. Поэтому в качестве входного
возмущения будем рассматривать только угловые шумы, воздействие
которых на угломер проявляется в виде флуктуационных ошибок Дфф и
ДсОф оценивания угла и угловой скорости линии визирования. Для удоб-
ства будем считать, что эти ошибки обусловлены флуктуационной со-
ставляющей ЛЕущ угла визирования цели (рис. 16.4) со спектральной
плотностью Сущ.
Тогда мгновенное значение случайной ошибки управления может
быть определено по формуле
ДФкф = Д£ушфф(р) > (16-58)
где Фф(р) - передаточная функция от ЛЕущ к Дфкф. Поскольку исследуется
линеаризованная ССН с замороженными коэффициентами, то при гауссов-
ском законе распределения возмущения ЛЕущ закон распределения ошибки
Афкф также будет гауссовским. При этом центрированный характер процес-
са ДЕущ предопределяет равенство нулю математического ожидания ошибки
Дфкф. Таким образом, для характеристики процесса Дфкф достаточно знать
его дисперсию ВДф. В соответствии с (5.51) и (5.52)
Од<р =7-]буш(»|Фф(»|2 do. (16.59)
27Г 0
Примем во внимание тот факт, что ширина спектра углового шу-
ма существенно превышает полосу пропускания ССН, поэтому в преде-
лах этой полосы можно считать Gyui(j(o)=const. Тогда (16.59) можно
преобразовать к виду
G К2 ~
°Дф =vbmaX Ифф(»|2 ^^ушКтахАРэф. (16.60)
27ГК. |Пах о
где Kmax - максимальное значение коэффициента передачи функции
Фф(р), зависающее от коэффициентов передачи ИВС, САУ и ЛА;
дрэф=ттз_^|фф(>)|2 d0J"
2яКтах О
эффективная полоса пропускания системы самонаведения по угловому
шуму (см. рис. 5.11). Анализ (16.60) позволяет сделать следующие вы-
воды.
При замороженных коэффициентах контура самонаведения са-
молета значения DA(p увеличиваются с уменьшением дальности, по-
скольку при уменьшении дальности возрастает коэффициент Кду (7.16),
входящий в состав Ку (16.16). Кроме того, при этом уменьшается посто-
янная времени кинематического звена Ткз (7.46) и увеличивается спек-
тральная плотность углового шума Gyiu.
Для уменьшения дисперсии ошибки управления необходимо
уменьшать полосу пропускания ССН и коэффициенты передачи всех ее
звеньев. Однако последнее противоречит требованиям снижения дина-
мической ошибки управления (16.57), поэтому на практике значения
коэффициентов передачи звеньев контура самонаведения выбирают
исходя из компромисса между динамическими и флуктуационными
ошибками.
16.4.3. Динамические ошибки системы управления ракетой
ПРИ ЕЕ ПРОПОРЦИОНАЛЬНОМ САМОНАВЕДЕНИИ
Динамическую составляющую Ьд промаха ракеты при пропор-
циональном самонаведении проанализируем по методике, изложенной в
п. 5.5.1, при условии, что выполняются следующие допущения:
упрощенная структура ССН соответствует схеме на рис. 16.6;
цель движется с постоянным ускорением
Jul Jul о ’ (16.61)
скорость сближения ракеты с целью равна относительной скорости
Vc6=Vo; (16.62)
промах определяется по состоянию ССН на момент окончания
управления, когда
Д=ДК. (16.63)
Условие (16.61) позволяет преобразовать общее соотношение
(5.49) к виду
р=0 >
(16.64)
где передаточная функция по ошибке в установившемся режиме, сле-
дующая из (16.32):
фь(Р)|Р=о =
Ккз Д2/Ур
K-КЗ ^ивс^-ср^сб I
(16.65)
Подставляя (7.46) и (16.61)—(16.63), (16.65) в (16.64) получаем
Ьд = jmoflK /Чб (КивЛср -2) (16.66)
Анализ (16.66) позволяет сделать следующие выводы.
Динамическая составляющая промаха зависит как от параметров
ССН (Дк, Кнвс, Кер), так и от условий применения (]ц10, Vc6).
Если цель не маневрирует (]цю=0), то промах равен нулю. Это об-
стоятельство еще раз подчеркивает тот факт, что МПН является опти-
мальным при наведении на неманеврирующие цели. При jU]0^0 для
уменьшения промаха необходимо увеличивать коэффициенты Кнвс, К^,
передачи ИВС и системы СУР-ракета. В соответствии с условием
(16.39) ситуация, когда Ьд—при КивсКсР=2 соответствует потере ус-
тойчивости системы самонаведения.
Эффективным средством уменьшения промахов при наведении
на маневрирующие цели является уменьшение значений Дк дальности
окончания самонаведения. Смысл этого явления поясняется рис. 5.6, а
возможные пути уменьшения Дк рассмотрены в § 5.2.
Из тактических приемов, позволяющих при прочих равных усло-
виях уменьшить промах Ьд, можно рекомендовать перехват целей в
ППС, при котором увеличивается УСб-
16.4.4. Флуктуационные ошибки
СИСТЕМЫ УПРАВЛЕНИЯ РАКЕТОЙ ПРИ ЕЕ ПРОПОРЦИОНАЛЬНОМ
САМОНАВЕДЕНИИ
Для приближенного анализа флуктуационной составляющей Ьф
промаха ракеты используем методику, рассмотренную в п. 5.5.2, при
следующих допущениях:
каналы управления ракетой в плоскостях управления 1-1 и 2—2
(рис. 7.9) независимы и не влияют друг на друга, поэтому будем рас-
сматривать канал управления только в плоскости 1-1;
упрощенная структура ССН соответствует схеме на рис. 16.6 при
условиях, что полезное входное воздействие отсутствует (]ц1=0) и пара-
метры динамических звеньев «заморожены»;
выполняются ограничения (16.62) и (16.63);
Рис. 16.10
в РГС используется угломер с моноимпульсным пеленгатором и
идеальной развязкой антенны от угловых колебаний ЛА;
источником возмущений являются угловые шумы, которые прояв-
ляются в виде флуктуаций Аи^ф оценки угловой скорости на выходе уг-
ломера (см. рис. 16.6), представляющих центрированный гауссовский
процесс с известной спектральной плотностью G^. С учетом сделанных
допущений структурная схема ССН, представленная на рис. 16.6, пре-
образуется к виду, показанному на рис. 16.10. На основании этой схемы
можно получить
Иф =Ди(ОфФф(р), (16.67)
где
ф ( _ -к,к0КуУсбксрккзд2/[Усб(Ткз р-1)]
Ф Р 1 + K.IN0KvVc6KcpKIO /[(Ткз р - 1)(Тшр +1)]
К1К0К.уУсбКсрКкзД2(Т(0р + 1)
----------------------------------------------. (16.68)
ТкзТюр2 +(ТКЗ -T(0)p + KlNoKvVc6KcpKK3 Кш-1
Из (16.68) следует, что максимальный коэффициент передачи
ССН по угловому шуму, имеющий место при р=0, определяется соот-
ношением
к -К,К0КуКсрД2
max Vc6(K.lNoKvK.cpK(0-2)
(16.69)
Анализ в рамках гипотезы линеаризованной ССН с заморожен-
ными параметрами позволяет прийти к заключению, что процесс Ьф
также является центрированным и гауссовским. В соответствии с (5.52)
и (5.53) дисперсию этого процесса в каждый момент времени можно
вычислить по формуле
i 00 G К2 00
о„ = 4-/<•„,. ФфОа>)I2 <to = -^2= JI Фф(jo>)I2 <to=
2K о 2kK max o
G^KjNXjKj^aE,,,
=—Z----------------r , (16.70)
V^(KiN0KvKwKcp-2)2
где Kmax определяется соотношением (16.69), a
де»ф = J2 ?1фф0®)12 dco -
2яКтах о
эффективная полоса пропускания (см. рис. 5.11). Кроме того, при полу-
чении (16.70) было учтено, что в пределах ЛРЭф спектральную плотность
О^ф углового шума можно считать постоянной. Тогда дисперсия DhK
промаха Ьфк на момент окончания самонаведения, когда Д=ДК, опреде-
ляется выражением
_ с^кЖХерДХф ПА7П
Г-'Ьк 9 , (1О./1)
у^к^ЛуКчЛср-З)2
в котором индекс «к» обозначает состояние параметра на момент окон-
чания самонаведения. Исследовав (16.71), можно сделать следующие
выводы.
Величина D|lK определяется как параметрами ССН (Кь No, Kv, К^р,
Кш, Дк, ЛРЭф), так и условиями применения (G(1>l)K, Vc6k). Для уменьшения
дисперсии DhK необходимо уменьшать дальность Дк неуправляемого
полета (см. рис. 5.6), уменьшать эффективную полосу пропускания АРЭф
и снижать значения коэффициентов Кь No, Kv, Кср ИВС, СУР и ракеты.
Последнее объясняется уменьшением весовых коэффициентов, с кото-
рыми погрешности Uoj преобразуются в ошибки формирования парамет-
ра рассогласования (15.39) и промах ракеты.
В качестве тактического приема, позволяющего уменьшить Ьфк,
можно рекомендовать перехват целей в ППС, во время которого при про-
чих равных условиях достигаются наибольшие значения V^. Увеличение
DhK, при KiNoKyK^Kcp—>2 обусловлено снижением запаса устойчивости,
потеря которой имеет место тогда, когда K|NoKvKwKcp=2 (16.39).
Необходимо отметить, что требование снижения коэффициентов пе-
редачи ИВС, СУР и ракеты, позволяющее уменьшить значение дисперсии
DhK, противоречит требованию уменьшения динамической ошибки (16.66).
В связи с этим значения этих коэффициентов выбирают исходя из ком-
промисса, обеспечивающего минимум суммарной ошибки.
В то же время уменьшение Дк и увеличение Vc6 вызывают уменьше-
ние как динамической, так и флуктуационной составляющих промахов.
В заключение отметим, что динамические и флуктуационные ошиб-
ки ССН самолетов и ракет с учетом влияния большего числа ограничений и
параметров систем управления более детально исследованы в [46].
16.4.5. Динамические ошибки системы самонаведения
РАКЕТЫ «В-В» С ПОЛУАКТИВНОЙ РГС ПРИ ПРЕРЫВИСТОМ СПЦ
Расчет динамической составляющей промаха ракеты в плоскости
1-1 при пропорциональном самонаведении будет осуществлен при сле-
дующих допущениях:
каналы управления ракетой являются независимыми;
упрощенная структура ССН соответствует схеме, показанной на
рис. 16.7;
цель движется с постоянным ускорением jiu=jiuo;
скорость сближения ракеты с целью равна относительной скоро-
сти Vc6=V0;
промах определяется по состоянию ССН на момент окончания
управления, когда Д=ДК.
Так как ускорение цели постоянно, то для нахождения динамиче-
ской ошибки воспользуемся знанием переходной характеристики кон-
тура самонаведения. Поскольку Дк и V0K считаются известными, то в
качестве переходной характеристики можно использовать переходную
характеристику угловой скорости линии визирования, описываемую
уравнением (16.48). Это уравнение позволяет получить формулу для
динамической ошибки в конце наведения пкТ в виде
2 2 Г 1
Иду = 7Г (пкТ) = L1 - (-Z2 )"К I (1672)
* сб V сб 1'^1
Обычно пк»1. Тогда при I z2| <1 из (16.72) при учете равенств
К|= —O,5No, к2= —j що/2Усб следует
h
= Д1
ДУ У?б
JluO
N0-2
(16.73)
Отметим, что при I z2| >1 динамическая ошибка с ростом пк уве-
личивается, поскольку при этом нарушается условие устойчивости.
Результат (16.73) можно получить также и из выражения для ус-
тановившегося значения динамической ошибки
z — 1
h =lim-----------hlt(z),
z-»l Z
(16.74)
при условии, что дальность Д=ДК и относительная скорость VO=VOK счи-
таются известными.
С учетом формул (7.52) и (16.48)
h — lirrZ~1 K2z(l-e-aT) Дк _ Дк ко
дуст z (z-l)[z-e-aT+K|(l-e-aT)]Vc26 V^N0-2'
(16.75)
Анализ (16.73), (16.75) позволяет сделать следующие выводы.
Как и в непрерывных ССН, динамическая составляющая промаха
зависит не только от параметров ССН (Дк, No), но и от условий приме-
нения (jlll0, Vc6). Если цель не маневрирует (jiuo=O), то промах равен
нулю. При ji^O для уменьшения промаха необходимо увеличивать
коэффициент No передачи РГС. В соответствии с выражением (16.75)
ситуация, когда при N0=2 Ьдуст—соответствует потере устойчивости
системы самонаведения.
В формулах (16.73), (16.75) отсутствует значение периода под-
света Т. Однако это вовсе не означает, что динамическая ошибка не
зависит от Т. Действительно, если период Т выбран так, что условие
устойчивости нарушается при Д>ДК, то динамическая ошибка, как это
следует из (16.75), увеличивается с ростом Т, так как при этом I z2l >1.
Формулы (16.73), (16.75) справедливы для ошибок ССН в такто-
вых точках, кратных Т, когда происходит замыкание контура наведения.
Ошибки в промежуточных точках интервала Т нарастают и могут суще-
ственно отличаться от ошибок в тактовых точках. Для вычисления ди-
намических ошибок в промежуточных точках необходимо воспользо-
ваться аппаратом Z-преобразований для смещенных выборочных функ-
ций, т.е. так называемым модифицированным Z-преобразованием, что в
определенной степени усложняет исследования.
Выше для простоты при анализе учитывалась лишь инерцион-
ность кинематического звена, с помощью которого замыкается контур
самонаведения. Перейдем к оценке влияния инерционности элементов
самой ССН на динамические ошибки наведения. Будем считать, что
ИВС, по-прежнему, описывается безынерционным звеном с коэффици-
ентом передачи N0Vc6, а динамические свойства СУР и ракеты характе-
ризуются инерционным звеном
'М”=т^й- ‘|6'76)
где Тср - постоянная времени звена. Остальные допущения остаются
прежними. Тогда структурная схема контура самонаведения приобретет
вид, показанный на рис. 16.11.
Кинематическое
звено
Рис. 16.11
Воспользуемся методикой вычислений динамической ошибки,
основанной на формуле (16.74), согласно которой необходимо для при-
нятых условий найти новое значение угловой скорости (D|(z). В отличие
от предыдущего случая в формуле (16.41) изменится передаточная
функция Wj(s), определяемая теперь передаточными функциями после-
довательно соединенных фиксатора, пропорционального и инерционно-
го звеньев
(Tips + l)s
Для получения дискретной передаточной функции
z — 1
W(z) = Z{WK3 (s)Wt(s)} =------Z-
z
-----------------N0Vt
s(TK3s-l)(Tcps + l)
(16.78)
воспользуемся известной формулой [13]
aP I _ z Pz az
s(s+a)(s+P)J z-1 (a-P)(z-e"“T) (a-P)(z-e-pT)
(16.77)
(16.79)
Выражения в фигурных скобках в (16.78) и (16.79) совпадают,
если в (16.78) ввести следующие обозначения ос=— 1/Тк„ р=1/Тср,
К[=—No/2. Вычислив по формуле (16.41) O)|(z) и подставив ее значение в
выражение (16.74), получим формулу для динамической ошибки, сов-
падающую с (16.75). Таким образом, инерционные свойства СУР и ра-
кеты в установившемся режиме не влияют на динамическую ошибку
наведения. Последняя, как и раньше, зависит от эквивалентного коэф-
фициента передачи ССН, обозначаемого через No.
16.4.6. Флуктуационные ошибки системы самонаведения
РАКЕТЫ «В-В» С ПОЛУАКТИВНОЙ РГС ПРИ ПРЕРЫВИСТОМ СПЦ
При оценивании флуктуационных ошибок наведения считаем, что
источником возмущений, как и в непрерывных ССН, являются угловые
шумы. В непрерывных ССН они проявляются в виде флуктуаций оценки *
угловой скорости на выходе угломера. В дискретных ССН для использова-
ния стандартной процедуры нахождения статистических характеристик
флуктуационных ошибок наведения возмущения необходимо вводить на
вход 5-ключа. В противном случае не удается найти дискретную переда-
точную функцию контура наведения, и, следовательно, невозможно приме-
нить описанную выше методику оценки флуктуационных ошибок.
Если в качестве входного воздействия принять помеховую состав-
ляющую А(Оф угловой скорости линии визирования, обусловленную угло-
выми шумами, то на основе рис. 16.7 можно получить представленную на
рис. 16.12 динамическую структурную схему рассматриваемого контура
радиоуправления ракеты «в-в» с ПАРГС при прерывистом СПЦ.
Рис. 16.12
Сравнение этой схемы со схемой, приведенной на рис. 16.10 по-
казывает, что она структурно отличается лишь наличием 5-ключа и
l-e"Ts
фиксатора с передаточной функцией W(jJ(s) =-------. Выходом рас-
сматриваемого контура является промах Иц ракеты. Ускорение цели при
определении флуктуационных ошибок наведения не принимается во
внимание, так как анализируется линейный контур радиоуправления.
При отсутствии преднамеренных помех математическое ожида-
ние помеховой составляющей А(Оф угловой скорости линии визирования
равно нулю. Поэтому для ошибки Ьц математическое ожидание прома-
ха mh=0 и нужно определять лишь дисперсию промаха Dh.
Наличие 5-ключа в схеме на рис. 16.12 и условие, что контур радио-
управления в целом является узкополосным, позволяют представить поме-
ховое воздействие Асоф как дискретный белый шум с дисперсией Doxy.
В этом случае [13]
= 2Рм,д4 1 j- ФфСрФфС-р
11 2яЦ (1 + 0(1-о
(16.80)
где Фф(0 - преобразование дискретной передаточной функции Фф(г)
контура с входным Л(Оф и выходным со(|, воздействиями.
Функция Фф(0 получается как результат замены z в формуле для
z — 1
Фф(г) на мнимую переменную £ =--.
z + 1
Передаточную функцию Фф(г) находим на основе рис. 16.15
-w(z)
ф Z 1 + W(z)’
где W(z) = K]-----2“- передаточная функция последовательного
z —е а
соединения фиксатора, пропорционального и квазистатического звень-
ев, найденная ранее в п. 16.3.3. Отсюда следует, что
Фф(2) =
а0
b|Z + b0
(16.81)
Здесь: а0=К|(1-е’аТ); bt=l; bo^^l-e’"1)-^'"1.
Используя соотношение (16.81) после введения в него перемен-
z — 1
ной £ =-----, а также формулу (16.80), будем иметь
_2РМ>Д4 1 1рс(^)с(-0
” V* 2nj_]Md(0d(4)
где с(£)=С1£+со; d(Q=d2^2+d1^+d0; с0=а0; с,=^а0; do=l+bo; d,=2; d2=l-b0.
1 *” c(C)c(-t)
Интеграл I2 =---- f ——-^-d£ является табличным [13]. Ec-
2n:j _jc» d(Qd(-Q
ли вычислить I2 с учетом введенных выше обозначений, то можно полу-
чить, что
0,5О„|,Д4 М*(1-ет'Ч
v2 г / \ з2
Vc6 1- O,5No(l-eT/T") +ет/т"
(16.82)
Для определения дисперсии DhK промаха h(|)K на момент оконча-
ния самонаведения в формулу (16.82) необходимо подставить значения
Д=ДК, Vc6=VC6k и Тю=Ткзк, где «к» обозначает состояние параметра на
момент окончания процесса самонаведения.
Как и для непрерывных ССН величина DhK определяется пара-
метрами ССН и условиями применения. Дополнительно в дискретных
ССН появляется зависимость DhK от периода подсвета Т. Формула
(16.82) дает возможность так подобрать параметры системы радио-
управления, чтобы дисперсия DhK не превышала заданного значения.
Следует иметь ввиду, что параметры дискретной ССН должны
быть такими, чтобы обеспечивалась минимальная суммарная (динами-
ческая и флуктуационная) среднеквадратическая ошибка наведения
ракеты.
Перечень сокращений
АД - амплитудный детектор
АЛУ - арифметико-логическое устройство
АнС - антенная система
АРГС - активная радиолокационная головка самонаведения
АП - антенный переключатель
АС - автономная система
АСН - автоматическое сопровождение по направлению
АСП - авиационный стрелковый прицел
АСЦРО - автоматическое сопровождение целей в режиме обзора
АЦП - аналого-цифровой преобразователь
УЦПУ - аналого-цифровой преобразователь углов
БВС - бортовая вычислительная система
БИНС - бесплатформенная инерциальная навигационная система
БП - боевое применение
БПФ - быстрое преобразование Фурье
БРЛС - бортовая радиолокационная система
БРЭО - бортовое радиоэлектронное оборудование
«в-в» - «воздух-воздух»
вкс - вычислитель корректирующих сигналов
ВМ - вычислительный модуль
воле - волоконно-оптическая линия связи
«в-п» - «воздух-поверхность»
ВПР - вычислитель параметра рассогласования
ВР - временной различитель
ВТО - высокоточное оружие
ВЦ - воздушная цель
ВЧП - высокая частота повторения
вш - высокоскоростная шина
ГС - гиростабилизатор
ДВ - двигатель
две - датчик воздушной скорости
дисс - доплеровский измеритель скорости и угла сноса
ДКС - датчик корректирующих сигналов
дм - двигатель модуляции
ДН - диаграмма направленности
ДОЛ - доплеровское обострения луча
дос - датчик обратной связи
ДПРУ - датчик положения ручки управления
ДПСД - датчик параметров собственного движения
ДРЛО - дальнее радиолокационное обнаружение
ДУП — датчик углового положения
ДУС — датчик угловой скорости
ЖЦ — жизненный цикл
звп — зона возможных пусков
ЗПС — задняя полусфера
ЗРП — зона разрешенных пусков
зек — земная система координат
ЗУ — запоминающее устройство
ИВС — информационно-вычислительная система
ИК - информационный канал
икс — интегратор корректирующих сигналов
иоп — интегратор отслеживаемого процесса
ИУ — интегратор управителя
ИУП — интегратор управляющего процесса
КЗ — корректирующее звено
кии — квазинепрерывное излучение
КРУ — командная радиолиния управления
КРЭБ — комплекс радиоэлектронной борьбы
ЛА — летательный аппарат
ЛВ — линия визирования
ЛВС — локальная вычислительная сеть
лге — лазерная головка самонаведения
ЛУ - логарифмический усилитель
м — модулятор
мнц — малоразмерная наземная цель
мос — модуль обработки сигналов
МП — микропроцессор
МПВС — мультипроцессорная вычислительная система
МПН — метод пропорционального наведения
МЦ — морская цель
НВУ — нашлемное визирное устройство
нзек — неподвижная земная система координат
НСЦУ — нашлемная система целеуказаний
НУПС — непосредственное управление подъемной силой
НУТВ — наивыгоднейшая упрежденная точка встречи
НЦУ — нашлемное целеуказание
нчп — низкая частота повторения
нш — низкоскоростная шина
ОБЧ — обычная боевая часть
овпц — область возможного положения цели
ог — опорный генератор
ОГР - ограничитель
ОЛС - оптико-локационная станция
он - оперативное назначение
ООС - отрицательная обратная связь
оп - оперативная память
ОПУ - область повышенной уязвимости
ОС - операционная система
ОС РВ - операционная система реального времени
ОУ - объект управления
отн - оперативно-тактическое назначение
ОЭС - опто-электронная система
ПА - привод (двигатель) антенны
ПАРГС - полуактивная радиолокационная головка самонаведения
ПВО - противовоздушная оборона
пг - позиционный гироскоп
пдп - прямой доступ в память
пз - полетное задание
ПК - персональный компьютер
ПКР - противокорабельная крылатая ракета
пм - признак маневра
по - программное обеспечение
ПО РВ - программное обеспечение реального времени
пос - положительная обратная связь
пп - признак помехи
ппоц - признак приоритета опасной цели
ппп - переключение приемо-передачи
ппс - передняя полусфера
ппц - признак поражаемой цели
ПРД - передатчик
ПРМ - приемник
ПРМОС - приемник отраженных сигналов
ПРМСС - приемник сигнала синхронизации
ПРР - противорадиолокационная ракета
птц - признак типа цели
ПЭ - процессорный элемент
РА - рулевой агрегат
РВ - радиовысотомер
РГС - радиолокационная головка самонаведения
РНП - режим непрерывной пеленгации
РСИ - расширяемый связный интерфейс
РСН - равносигнальное направление
РУД - ручка управления двигателем
РЭП - радиоэлектронное подавление
РЭССН — радиоэлектронная система самонаведения
РЭСУ — радиоэлектронная система управления
СА — синтезирование апертуры
САД — система автономных датчиков
САП — станция активных помех
САПР — система автоматического проектирования
САУ — система автоматического управления
СБИС — сверхбольшая интегральная схема
СВС — система воздушных сигналов
сд — селектор дальности
СЕИ — система единой индикации
СК — система координат
СКВ — система курсовертикали
СКО — средняя квадратичная ошибка
СМ — смеситель
СНП — сопровождение на проходе
СНС — спутниковая навигационная система
соп — система ограничения перегрузок
соц — сопровождение одиночной цели
СПО — системное программное обеспечение
СПЦ — сигнал подсвета цели
СРТР — станция радиотехнической разведки
СРУ — суммарно-разностное устройство
ССН — система самонаведения
СТОУ — статистическая теория оптимального управления
СУА — система управления антенной
СУБД — система управления базами данных
СУР — система управления ракетой
СУУУ — система улучшения управляемости и устойчивости
счп — средняя частота повторения
сшп — сверхширокополосный
твгс — телевизионная головка самонаведения
твд — театр военных действий
тгс — тепловая головка самонаведения
тн — тактическое назначение
тп — теплопеленгатор
ттп — тактико-технические показатели
УМ — усилитель мощности
УНКС — усилитель невязок корректирующих сигналов
УНОП — усилитель невязок отслеживаемого процесса
УНУ — усилитель невязок ускорений
УНУП - усилитель невязок управляемого процесса
УНУС - устройство нормировки и уплотнения сигналов
УО - устройство сопряжения
УПЧ - усилитель промежуточной частоты
УР - управляемая ракета
УРС - устройство расстановки стробов
УС - управляющая система
УСРО - устройство суммарно-разностной обработки
УУ - устройство управления
УУПЧ узкополосный усилитель-ограничитель промежуточной
- частоты
УФ - узкополосный фильтр
ЦАП - цифро-аналоговый преобразователь
ЦМ - центр масс
ЦП - центральный процессор
ЦПУ - центральное процессорное устройство
ЦОС - цифровая обработка сигналов
цу - целеуказание
ЧД - частотный детектор
ФАР - фазированная антенная решетка
ФД - фазовый детектор
ФО - фильтр оценивания
ФПО _ функциональное программное обеспечение
ФУ _ функциональное устройство
ША _ широкодиапазонная антенна
ШПРМ _ широкополосный приемник
ШУПЧ _ широкополосный усилитель промежуточной частоты
шчд _ широкополосный частотный детектор
экс экстраполятор корректирующих сигналов
эоп ~ экстраполятор отслеживаемого процесса
эпо “ эффективная площадь отражения
ЭУП экстраполятор управляемого процесса
Литература
1. Аюпипов В.Н., Исаев С.А., Лавров А.А., Меркулов В.И. Многофунк-
циональные радиолокационные комплексы истребителей. -М.:
Воениздат, 1994.
2. Антонов Г.Н., Апанасенко В.М. Противокорабельные ракеты ВМФ:
«Национальное оружие России в обеспечении безопасности госу-
дарства. Уроки XX века и перспективы развития. -СПб.: Тр. 5 НПК
«Защита и безопасность», 2002.
3. Анцев Г.В. Формирование параметрического ряда систем управле-
ния высокоточного оружия ВМФ. - Труды IV Всероссийской науч-
но-практической конференции «Актуальные проблемы защиты и
безопасности ВМФ России», 2001.
4. Анцев Г.В., Сарычев В.А., Тупиков В.А., Турнецкий Л.С. Бортовые
информационно-управляющие системы высокоточного оружия.
-Морская радиоэлектроника, 2002, №1.
5. Анцев Г.В., Сарычев В.А., Тупиков В.А., Турнецкий Л.С. Единое ин-
формационное поле сенсоров РУК. - Тезисы доклада 1-й Всерос-
сийской научно-технической коференции по проблемам создания
перспективной авионики, 2002.
6. Анцев Г.В., Сарычев В.А. Тупиков В.А., Турнецкий Л.С. Особенности
интеллектуальных военных радиоэлектронных систем. - Морская
радиоэлектроника, 2003, №4.
7. Анцев Г.В., Сарычев В.А., Тупиков В.А., Турнецкий Л.С. Принципы
построения бортовых информационно-управляющих систем высо-
коточного оружия нового поколения. - Радиотехника, 2001, №8.
8. Анцев Г.В., Сарычев В.А., Тупиков В.А., Турнецкий Л.С. Системы
управления летающими роботами. - Гироскопия и навигация, 2002,
№4.
9. Бабич В. Сверхманевренность истребителя. - Зарубежное военное
обозрение, 1994, №2.
10. Багет. Семейство ЭВМ для специальных применений. -М., КБ «Ко-
рунд-М», 2000.
11. Баранов Н., Ивенин И., Каневский М. и др. Сверхманевренность -
средство побеждать. - Авиапанорама, 1999, №1.
12. Боевая авиационная техника: Авиационное вооружение. /Под ред.
Д.И. Гладкова. -М.: Воениздат, 1987.
13. Волошин И.А., Быков В.В., Васин В.В. и др. Справочник по радиоло-
кационным системам, т. 2. /Под ред. Б.Х. Кривицкого. -М.: Сов. ра-
дио, 1978.
14. Боэм Б. У. Инженерное проектирование программного обеспечения:
Пер. с англ. - М.: Радио и связь, 1985.
15. Буков В.Н. Адаптивные прогнозирующие системы управления поле-
том. -М.: Наука, 1987.
16. Бутенин Н.В., Лунц Я.Л., Маркин Д.Р. Курс теоретической механи-
ки. В двух томах. Т.1: Статика и динамика, 4-е изд., испр. -М.: Нау-
ка, Гл. ред. физ.-мат. лит, 1985.
17. Вакин С.А., Шустов Л.Н. Основы радиопротиводействия и радио-
технической разведки. -М.: Советское радио, 1968.
18. Вергес ПЛ., Лайфер Р.К. Моделирование ускорения цели для наве-
дения тактических ракет. - Аэрокосмическая техника, 1985, т.3, №3.
19. Гапионок А.В., Калинов М.И., Селезнев И.А., Шинков В.Д. Влияние
состава орбитальной группировки системы ГЛ ОН АС на точность
определения координат. - Морская радиоэлектроника, 2002, №2.
20. Гарнакерьян А.А., Захаревич В.Г., Лобач В.Т. и др. Радиоокеаногра-
фическое, навигационное и информационное обеспечение гидро-
авиации.-Таганрог: ТГРУ, 1997.
21. Григорьев В.Г. Авиационные управляемые ракеты, ч.1. -М.: ВВИА,
1984.
22. Дудник П.И., Чересов Ю.И. Авиационные радиолокационные уст-
ройства. -М.: ВВИА, 1986.
23. Защита от радиопомех. /Под ред. М. В. Максимова. Сов.радио, 1976.
24. Зингер Р.А. Оценка характеристик оптимального фильтра для слежения
за пилотируемой целью. - Зарубежная радиоэлектроника, 1971, №8.
25. Зубарев Ю.Б., Витязев В.В., Дворкович В.П. Цифровая обработка
сигналов - информатика реального времени. - Цифровая обработка
сигналов, 1998, №1.
26. Зуенко Ю., Коростелев С. Боевые самолеты России. -М.: Элакос,
1994.
27. Ильчук А.Р., Канащенков А.И., Меркулов В.И. и др. Алгоритмы ав-
томатичсеского радиолокационного сопровождения целей в режиме
обзора. - Радиотехника, 1999, №11.
28. Ильчук А.Р., Меркулов В.И., Самарин О.Ф., Юрчик И.А. Влияние
интенсивного маневрирования целей на показатели эффективности
системы первичной обработки сигналов в бортовой РЛС. - Радио-
техника, 2003, №6.
29. Канащенков А.И., Меркулов В.И., Самарин О.Ф. Облик перспектив-
ных бортовых радиолокационных систем. Возможности и ограни-
чения. -М.: ИПРЖР, 2002.
30. Кириллов В. Современный воздушный бой. - Зарубежное военное
обозрение, 1988, №3.
31. Корнеев В.В., Киселев А.В. Современные микропроцессоры.
-М. НОЛИДЖ, 1997.
32. Коновалов Г. Ф. Радиоавтоматика: Учеб, для ВУЗов по спец. «Радио-
техника». -М.: Высшая школа, 1990.
33. Костылев А.А. Идентификация радиолокационных целей при ис-
пользовании сверхширокополосных сигналов; методы и приложе-
ния. - Зарубежная радиоэлектроника, 1984, №4.
34. Костылев А.А., Калинин Ю.Н. Методы экспериментального определе-
ния признаков распознавания целей при использовании сверхшироко-
полосных сигналов. - Зарубежная радиоэлектроника, 1992, №10.
35. Кошелев В.И., Шипилов С.Э., Якубов В.П. Восстановление формы
объектов при малоракурсной сверхширокополосной радиолокации.
- Радиотехника и электроника, 1999, т. 44, № 3.
36. Кошелев В.И., Шипилов С.Э., Якубов В.П. Использование метода
генетических функций для восстановления формы объектов в мало-
ракурсной сверхширокополосной радиолокации. - Радиотехника и
электроника, 2000, т.45, №12.
37. Красовский А.А., Белоглазов А.А., Чигин Г.П. Теория корреляцион-
но-экстремальных систем. -М.: Наука, 1979.
38. Красовский А.А., Вавилов Ю.А., Сучков А.И. Системы автоматиче-
ского управления летательных аппаратов. -М.: ВВИА, 1986.
39. Красовский А.А., Лебедев А.В., Невструев В.В. Теоритические осно-
вы пилотажно-навинационных комплексов. -М.: ВВИА, 1981.
40. Кузин Л. Т. Расчет и проектирование дискретных систем управления.
-М.: Машиностроение, 1962.
41. Кузьмин С.З. Цифровая обработка радиолокационной информации.
-М.: Сов. радио, 1967.
42. Кузьмин С.З. Основы проектирования систем цифровой обработки
радиолокационной информации. -М.: Радио и связь, 1986.
43. Курилкин В.В., Меркулов В.И., Викулов О.В., Шуклин А.И. Способ
пропорционального наведения на наземные объекты. - Патент на
изобретение №2148235.
44. Курилкин В.В., Меркулов В.И., Шуклин А.И. Способ наведения лета-
тельных аппаратов на наземные объекты. - Патент на изобретение
№2164654.
45. Леонов А.И., Фомичев К.И. Моноимпульсная радиолокация. -М.:
Радио и связь, 1984.
46. Максимов М.В., Горгонов Г.И. Радиоэлектронные системы самона-
ведения. -М.: Радио и связь, 1982.
47. Максимов М.В., Горгонов Г.И., Чернов В.С. Авиационные системы
радиоуправления. -М.: ВВИА, 1984.
48. Максимов М.В., Меркулов В.И. Радиоэлектронные следящие систе-
мы. Синтез методами теории оптимального управления. -М.: Радио
и связь, 1990.
49. Меркулов В.И. Радиоэлектронные системы самонаведения.
-М.: ВВИА, 1995.
50. Меркулов В.И., Дрогалин В.В. Устранение расходности процедур
линейного дискретного оценивания методом оптимальной коррекции
прогноза. -М.: ИПРЖР, Научно-технические серии. Радиолокацион-
ное сопровождение интенсивно маневрирующих объектов, 1999,
вып.1.
51. Меркулов В.И., Забелин И.В. Устранение расходности процедур ли-
нейной фильтрации путем оптимальной коррекции прогноза со-
стояния. - Радиотехника и электроника, 1999, т. 42, №2.
52. Меркулов В.И., Лепин В.Н. Авиационные системы радиоуправления,
ч.1, ч.2. -М.: Радио и связь, 1997.
53. Меркулов В.И., Курилкин В.В., Саблин В.Н. и др. Алгоритм пропор-
ционального самонаведения ракет «воздух-поверхность» с синтези-
рованием апертуры антенны. - Радиотехника. 2000, №7.
54. Меркулов В.И., Курилкин В.В., Шуклин А.И. Алгоритм траекторного
управления ракетой «воздух-поверхность», использующей синтези-
рование апертуры антенны. - Радиотехника. 2000, №3.
55. Меркулов В,И., Харьков В.П. Оптимизация радиоэлектронных сис-
тем управления. Методы и алгоритмы оптимального управления.
- Радиотехника, 1998, №9.
56. Многофункциональные импульсно-доплеровские радиолокацион-
ные станции управления оружием истребителей. Обзор по материа-
лам иностранной печати. /Под ред. П.В. Познякова -М.: НИЦ
ГосНИИАС, 1987.
57. Мураховский В.И. Сборка, настройка, апгрейд современного компь-
ютера. -М.: ДЕСС, Информ-Пресс, 1999.
58. Облик алгоритмического и индикационного обеспечения самолета
F-22. - Новости зарубежной науки и техники. Серия: Авиационные
системы. Научно-техническая информация, 2000, №4.
59. Первачев С.В. Радиоавтоматика. -М.: Радио и связь, 1982.
60. Программа JSF и ее влияние на авионику боевых самолетов
5-го поколения (аналитический обзор по материалам зарубежных
информационных источников). /Под ред. Е.А. Федосеева. -М.: НИЦ
Гос. НИИАС, 2000.
61. Радзиевский В.Г., Караваев М.А. Получение радиолокационных
изображений объектов на основе томографической обработки
сверхширокополосных сигналов. - Радиотехника, 1998, №6.
62. Радиоавтоматика. /Под ред. В.А. Бисекерского. -М.: Высшая школа,
1985.
63. Радиолокационные станции воздушной разведки. /Под ред. ГС.
Кондратенкова. -М.: Воениздат, 1983.
64. Радиолокационные станции с цифровым синтезированием апертуры
антенны. /Под ред. В. Т. Горяйнова. -М.: Радио и связь, 1988.
65. Рыбаков А.Н. Открытые компьютерные COTS-технологии в воен-
ных приложениях. -М.: МКА, 1999, №4.
66. Сверхбольшие интегральные схемы и современная обработка сиг-
налов. Пер. с англ. /Под ред. С.Гуна, Х.Уайтхауса, Т.Кайлата. -М.:
Радио и связь, 1989.
67. Сигалов В.В., Мадорский Л.С. Основы теории дискретных систем
управления. -Минск: Вышейная школа, 1973.
68. Симагин А.К. Математическое моделирование процесса наведения
авиационных управляемых ракет в модульной структуре. -М.:
ВВИА, 1989.
69. Сосулин Ю.Г. Теоретические основы радиолокации и радионавига-
ции. -М.: Радио и связь, 1992.
70. Степанов О.А. Особенности построения и перспективы развития
навигационных интегрированных инерциально-спутниковых сис-
тем. В книге «Интегрированные инерциально-спутниковые системы
навигации» -СПб.: ГНЦ РФ-ЦНИИ «Электроприбор», 2001.
71. Столлингс У. Структурная организация и архитектура компьютер-
ных систем. -М.-СПб.-Киев, 2002.
72. Таненбаум Э. Архитектура компьютера. -СПБ.: Питер, 2002.
73. Тарасов В.Г. Межсамолетная навигация. -М.: Машиностроение,
1980.
74. Тихонов В.И., Харисов В.Н. Статистический анализ и синтез радио-
технических устройств и систем. -М.: Радио и связь, 1991.
75. Ту Ю.Т. Цифровые и импульсные системы автоматического управ-
ления. -М.: Машиностроение, 1984.
76. Фарина А., Студер Ф. Цифровая обработка радиолокационной ин-
формации. Сопровождение целей. Пер. с англ. -М.: Радио и связь,
1993.
77. Фокс Дж. Программное обеспечение и его разработка. Пер. с англ. -
М.: Мир, 1985.
78. Хваженко В. Крылатые ракеты в локальных конфликтах. - Мир
авионики, 2002, №2.
79. Штрик А.А., Осовецкий Л.Г., Мессиг И.Г. Структурное проектиро-
вание падежных программ встроенных ЭВМ. -Л.: Машиностроение,
Ленингр. отд-ние, 1989.
80. Эрглис К.Э. Интерфейсы открытых систем. -М.: Горячая линия -
телеком, 2000.
81. Ярлыков М.С., Богачев А.С. Авиационнные радиоэлектронные ком-
плексы. -М.: ВАТУ им. Н.Е. Жуковского, 2000.
§2. Ярлыков М.С., Миронов М.А. Марковская теория оценивания слу-
чайных процессов. -М.: Радио и связь, 1993.
83. Winrf-Brosk R.J., Wilkerson В. Object-oriented design: a responsibility -
driven approach, In Proceeding of OOPSLA’89, 1989.
Серия
«Авиационные системы радиоуправления»
в 3-х томах
Том 2
Радиоэлектронные системы самонаведения
Под редакцией
А. И. Капащснкова и В. И. Меркулова
Авторы
Владимир Иванович Меркулов
Валерий Васильевич Дрогалин
Анатолий Иванович Канащенков
Александр Семенович Богачев
Игорь Владимирович Забелин
Владимир Николаевич Лепин
Олег Федорович Самарин
Валентин Александрович Сарычев
Алексей Алексеевич Соловьев
Леонид Сергеевич Турнецкий
Вадим Саматович Чернов
Александр Иванович Шуклин
Изд. № 110. Сдано в набор 30.09.2003.
Подписано в печать 20.11.2003. Формат 60x90 1/16.
Бумага офсетная. Гарнитура Таймс.
Печать офсетная
Печ. л. 24,5. Тираж 1000 экз. Зак. № 3806
Издательство «Радиотехника».
107031, Москва, К-31, Кузнецкий мост, д. 20/6.
Тел./факс: 921-48-37; 925- 78-72, 925-92-41.
E-mail: inrzhr@online.ru
www.webcenter.ru /~iprzhr /
Отпечатано в ООО ПФ “Полиграфист”.
160001, г. Вологда, ул. Челюскинцев, д. 3.
ВНИМАНИЕ !
Вышли в свет
в серии «Авиационные системы радиоуправления»
монографии:
1. Меркулов В.И., Лепин В.Н. Ч. 1. Теоретические основы синтеза и анализа
авиационных систем радиоуправления. 4.2. Радиоэлектронные системы
самонаведения. — М.: Радио и связь, 1997.
2. Системы командного радиоуправления. 4.4. Автономные и комбиниро-
ванные системы наведения /Под ред. В.И. Меркулова. — М.: Радио и
связь, 1998.
3. Радиолокационные измерители дальности скорости. Том.1 / Под ред.
В.Н.Саблина. —М.: Радио и связь, 1999.
4. Канащенков А.И., Меркулов В.И., Самарин О.Ф. Облик перспективных
бортовых радиолокационных систем. Возможности и ограничения. —М.:
ИПРЖР, 2002.
5. Защита радиолокационных систем от помех. Состояние и тенденции
развития / Под ред. А.И. Канащенкова и В.И. Меркулова. — М.: Ра-
диотехника, 2003.
6. Авиационные системы радиоуправления. В 3-х томах. Т. 1. Принципы
построения систем радиоуправления. Основы синтеза и анализа.
Изд. 2-е, перераб. и доп. / Под ред. А.И. Канащенкова и В.И. Меркулова
— М.: Радиотехника, 2003.
7. Авиационные системы радиоуправления. В 3-х томах. Т. 2. Радиоэлек-
тронные системы самонаведения. Изд. 2-е, перераб. и доп. / Под ред.
А.И. Канащенкова и В.И. Меркулова — М.: Радиотехника, 2003.
ВНИМАНИЕ !
Планируется выпустить
в серии «Авиационные системы радиоуправления»
в 2003 г. монографии:
2. Авиационные системы радиоуправления. В 3-х томах. Т. 3. Системы
командного радиоуправления. Автономные и комбинированные
системы наведения . Изд. 2-е, доп. и перераб.
в 2004-2005 гг.
1. Радиолокационные системы многофункциональных самолетов.
В 2-х томах.
2. Радиолокационные измерители дальности и скорости. В 2-х томах.
3. Радиолокационные угломеры. В 2-х томах.
4. Помехозащищенность авиационных систем радиоуправления.
В 2-х томах.
5. Многопозиционные системы радиоуправления.
6. Автоматическое сопровождение воздушных объектов в режиме обзора.