/









































































































































































































































































































































































































































































































































































































Автор: Горшков А.Г. Морозов В.И. Пономарев А.Т. Шклярчук Ф.Н.
Теги: аэродинамика теория полёта механика физика эвм
ISBN: 5-9221-0062-9
Год: 2000



Текст
А.Г. ГОРШКОВ, В.И. МОРОЗОВ
А.Т. ПОНОМАРЕВ, Ф.Н. ШКЛЯРЧУК
АЭРОГИДРОУПРУГОСТЬ
КОНСТРУКЦИЙ
МОСКВА
ФИЗИКО-МАТЕМАТИЧЕСКАЯ ЛИТЕРАТУРА
2000
УДК 533 6 013 42 Г Г Издание осуществлено при поддержке
г- оу т>с44ы>Т Российского фонда фундаментальных
ББК ?? 9Я1+99 9Я? — II исследований по проекту 00-01-14093
ГОРШКОВ А.Г., МОРОЗОВ В.И., ПОНОМАРЕВ А.Т., ШКЛЯРЧУК Ф.Н.
Аэрогидроупругость конструкций. — М.: ФИЗМАТ ЛИТ, 2000. — 592 с. —
15ВК 5-9221-0062-9.
Излагаются постановки и методы решения широкого спектра самых разнообраз-
разнообразных задач из области аэрогидроупругости в приложении к летательным и подводным
аппаратам различного назначения. В основу исследований положены современные
методы математического моделирования на ЭВМ, а также аналитические и численные
методы. Приводится общая характеристика проблемы аэрогидроупругости и ее со-
составных частей. Обсуждаются модели динамики движения упругого самолета и дается
их приложение. Развиваются подходы для решения задач о колебаниях оболочек с
жидкостью и динамической реакции элементов конструкций на ударные воздействия.
Для научных работников, инженеров, аспирантов и студентов старших курсов
университетов и втузов, занимающихся проблемами аэрогидроупругости конструк-
конструкций.
Табл. 26. Ил. 356. Библиогр. 449 назв.
© ФИЗМАТЛИТ, 2000
© А.Г. Горшков, В.И. Морозов,
18ВК 5-9221 -0062-9 А.Т. Пономарев, Ф.Н. Шклярчук, 2000
ОГЛАВЛЕНИЕ
ПРЕДИСЛОВИЕ 9
Часть первая
АЭРОУПРУГОСТЬ АВИАЦИОННЫХ КОНСТРУКЦИЙ 11
Глава 1
Характеристика проблемы аэроупругости и классификация аэроупру-
аэроупругих явлений
1.1. Аэроупругость как комплексная научно-техническая проблема 18
1.2. Изучаемые аэроупругие объекты и их особенности 21
1.3. Основные задачи аэроупругости 24
1.4. Диаграммы аэроупругости 27
1.5. Состояние исследований в области аэроупругости 29
1.6. Современные проблемы аэроупругости 31
1.7. Достижения базовых наук аэроупругости 37
1.7.1. Аэродинамика как составная часть аэроупругости C7). 1.7.2. Уп-
Упругость как составная часть аэроупругости C9). 1.7.3. Динамика полета
как составная часть аэроупругости D4). 1.7.4. Синтез составных частей
проблемы аэроупругости D4).
1.8. Перспективы развития структурных математических моделей функ-
функционирования летательных аппаратов 45
Глава 2
Нелинейные модели динамики упругого летательного аппарата
2.1. Системы координат. Матрицы направляющих косинусов 48
2.2. Кинематические параметры и соотношения 51
2.3. Абсолютное и относительные движения точек упругой конструкции
летательного аппарата 55
2.4. Уравнения поступательного и вращательного движений жесткого лета-
летательного аппарата 57
2.5. Уравнения движения летательного аппарата с подвижными массами ... 59
2.6. Уравнения относительного движения подвижных масс 63
2.7. Уравнения поступательного и вращательного движений упругого лета-
летательного аппарата 64
2.8. Уравнения деформирования летательного аппарата 66
2.9. Представления внешних сил и моментов 68
2.10. Полная система уравнений движения и деформирования летательного
аппарата 70
Глава 3
Линейные модели динамики упругого летательного аппарата
3.1. Линеаризация уравнений движения и деформирования летательного
аппарата 72
3.2. Безразмерные уравнения возмущенного движения упругого летатель-
летательного аппарата 75
3.3. Уравнения продольного и бокового возмущенного движений упругого
летательного аппарата 77
3.4. Матрично-векторные уравнения возмущенного движения жесткого ле-
летательного аппарата 79
3.5. Матрично-векторные уравнения возмущенного движения упругого ле-
летательного аппарата 81
3.6. Уравнения возмущенного движения упругого летательного аппарата с
жесткими грузами 84
3.7. Уравнения возмущенного движения упругого летательного аппарата с
жидкими и вращающимися массами 87
3.8. Уравнения возмущенного движения упругого летательного аппарата
при пробеге по неровному аэродрому 90
Глава 4
Расчетные модели аэродинамики упругого летательного аппарата
4.1. Основные соотношения 92
4.2. Некоторые особенности численных методов линейной нестационарной
аэродинамики 95
4.3. Интегральные представления обобщенных нестационарных аэродина-
аэродинамических характеристик 100
4.4. Точные интегральные и приближенные представления обобщенных
нестационарных аэродинамических характеристик 101
4.5. Приближенные соотношения для вычисления аэро- и гидродинамиче-
гидродинамических нагрузок 103
4.5.1. Приближенные формулы для определения аэро- и гидродинами-
гидродинамических сил при расчете объекта на дивергенцию A04). 4.5.2. Прибли-
Приближенные зависимости для определения аэро- и гидродинамических сил
при расчете объекта на флаттер A05).
4.6. Основные линейные обобщенные аэродинамические характеристики
упругого летательного аппарата 107
4.7. Определение линейных обобщенных аэродинамических характеристик
упругого летательного аппарата с переменными динамическими свой-
свойствами 109
4.8. Аэродинамические коэффициенты 111
4.9. Некоторые особенности суммарных обобщенных линейных аэродина-
аэродинамических характеристик 113
4.10. Формирование матриц коэффициентов аэродинамических производных. 114
Глава 5
Расчетная система для решения линейных задач аэроупругости и аэ-
роавтоупругости летательных аппаратов
5.1. Общие сведения 120
5.2. Унифицированные линейные интегродифференциальные уравнения
нестационарной аэроупругости летательного аппарата 123
5.3. Уравнения аэроупругости летательного аппарата в частотной форме ... 126
5.4. Упрощенные линейные интегродифференциальные уравнения неста-
нестационарной аэроупругости 128
5.4.1. Уравнения движения статически деформируемого летательного
аппарата с грузами A29). 5.4.2. Уравнения движения жесткого лета-
летательного аппарата с грузами A30).
5.5. Основные прикладные линейные математические модели аэроупруго-
аэроупругости летательного аппарата 134
5.6. Линейные уравнения аэроавтоупругости летательного аппарата .... 137
5.6.1. Общие сведения A37). 5.6.2. Уравнения летательного аппарата
как объекта управления A39). 5.6.3. Уравнения контролируемых
параметров и наблюдений A41). 5.6.4. Каноническая форма уравне-
уравнений аэроавтоупругости A42).
5.7. К созданию системы автоматизированного решения линейных задач аэ-
аэроупругости летательного аппарата 146
5.8. К организации контроля и проверки достоверности результатов вычис-
вычислений 150
5.8.1. К обоснованию численных методов и контролю за результатами
вычислений на их основе A51). 5.8.2. Проверка достоверности матема-
математических моделей и их расчетных схем A52).
5.9. Пример разработки типовой базовой линейной структурной математи-
математической модели функционирования упругого летательного аппарата . . 153
4
Глава 6
Линейные задачи аэроупругости и аэроавтоупругости летательных
аппаратов
6.1. Влияние нестационарности обтекания на аэродинамические характери-
характеристики летательных аппаратов 158
6.1.1. К физической природе нестационарности обтекания A59). 6.1.2.
Особенность нестационарного обтекания самолета при отклонении за-
закрылка A60). 6.1.3, Влияние нестационарности обтекания и упругости
конструкции на характеристики устойчивости и управляемости само-
самолета A61). 6.1.4. К оценке динамической управляемости самолета с ор-
органами управления подъемной и боковой силами A64).
6.2. Исследование аэроупругих характеристик самолета с учетом статиче-
статических деформаций 165
6.2.1. К оценке влияния статического деформирования конструкции
самолета на его стационарные и нестационарные аэродинамические
характеристики A66). 6.2.2. К определению статических деформаций
конструкции самолета на стоянке и в установившемся полете A69).
6.3. Влияние грузов на аэроупругие характеристики самолета 172
6.3.1. Метод базовых форм A73). 6.3.2. Некоторые результаты иссле-
исследований по методу базовых форм A75).
6.4. Реакция самолета на порывы 177
6.4.1. Действие порыва в рамках одномерного приближения A78).
6.4.2. Действие на самолет плоских порывов A80). 6.4.3. Воздействие
порыва в рамках двухмерного приближения A88). 6.4.4. Воздействие
атмосферной турбулентности и спутного следа A89). 6.4.5. К оценке
усталостной повреждаемости конструкции самолета при полете в
турбулентной атмосфере A92).
6.5. Определение флаттерных характеристик летательных аппаратов .... 196
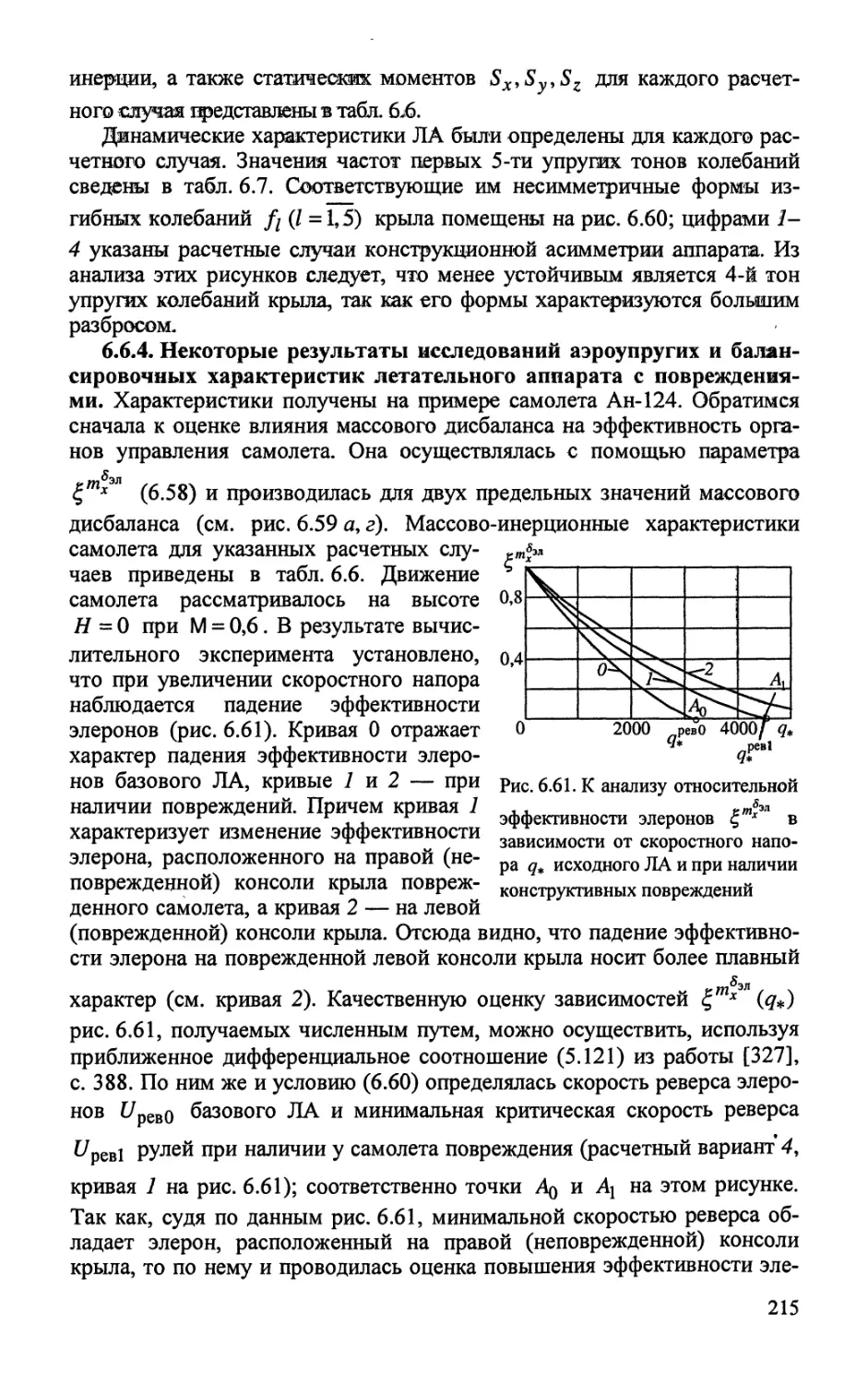
6.6. Влияние повреждений на -аэроупругие и балансировочные характери-
характеристики летательного аппарата 205
6.6.1. Особенности балансировки летательного аппарата с поврежде-
повреждениями B05). 6.6.2. К оценке эффективности рулевых поверхностей ле-
летательного аппарата с повреждениями и определению скорости ревер-
реверса элеронов B08). 6.6.3. К достоверности структурных математических
моделей летательных аппаратов с повреждениями B10). 6.6.4. Некото-
Некоторые результаты исследований аэроупругих и балансировочных харак-
характеристик летательного аппарата с повреждениями B15).
6.7. Влияние подвижности топлива в баках на аэроупругие характеристики
крупногабаритных летательных аппаратов 219
6.7.1. К определению гидродинамических сил, действующих на конст-
конструкцию летательного аппарата со стороны топлива B20). 6.7.2. К рас-
расчетной схематизации крыла и встроенных в него топливных баков
B23). 6.7.3. Упрощенный способ расчета гидродинамических коэффи-
коэффициентов бака-отсека B26). 6.7.4. Моделирование подвижности топлива
в баках с помощью механических аналогов B30). 6.7.5. Некоторые ре-
результаты математического моделирования влияния подвижности топ-
топлива на аэроупругие характеристики самолетов B33).
6.8. Летательный аппарат с активной противофлаттерной системой 236
6.9. Летательный аппарат с адаптивной противофлаттерной системой . . . 244
Глава 7
Нелинейные задачи аэроупругости летательных аппаратов
7.1. Математическое моделирование движения упругого летательного ап-
аппарата при маневрировании 254
7.1.1. К реализации нелинейной математической модели функциони-
функционирования летательного аппарата при маневрировании B54). 7.1.2. Осо-
Особенности математического моделирования маневров летательного ап-
аппарата, оценки его аэроупругой устойчивости и расчета траекторных
параметров B62). 7.1.3. Аэроупругие характеристики летательного ап-
аппарата при выполнении маневра в вертикальной плоскости B65).
7.2. Моделирование динамики высокоскоростной вращающейся упру-
упругой ракеты 270
7.3. Моделирование бафтинга хвостового оперения летательного аппарата . 276
7.3.1. Математическая модель бафтинга хвостового оперения летатель-
летательного аппарата B77). 7.3.2. Бафтинг хвостового оперения самолета от
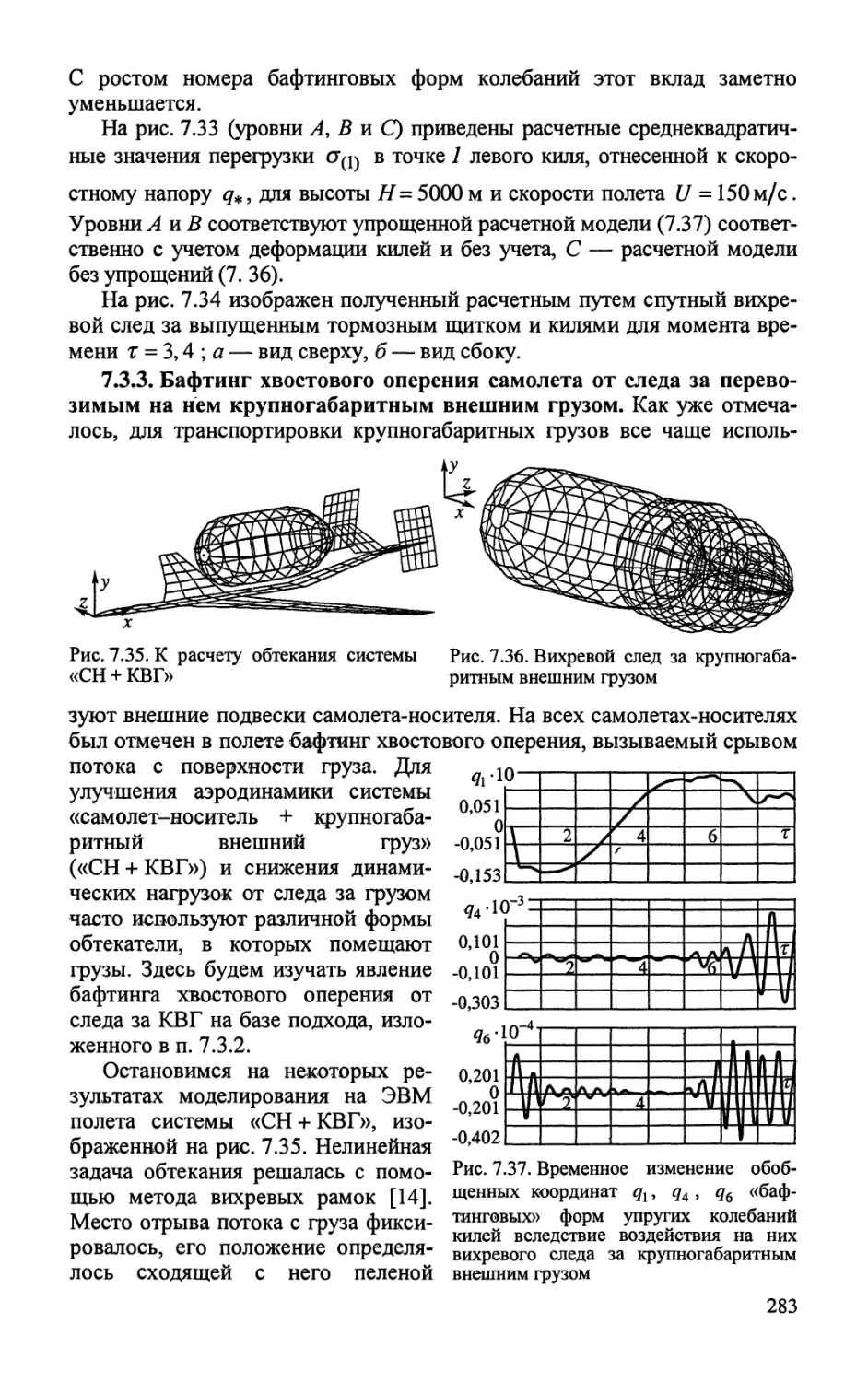
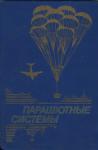
следа за тормозным щитком B80). 7.3.3. Бафтинг хвостового оперения
самолета от следа за перевозимым на нем крупногабаритным внешним
грузом B83). 7.3.4. Способы борьбы с бафтингом хвостового оперения
летательного аппарата B84).
Глава 8
Исследование нагружения, деформирования авиационных компоно-
компоновок на особых полетных и наземных режимах движения
8.1. Транспортировка на летательном аппарате крупногабаритных грузов . 287
8.2. Реакция летательного аппарата на десантирование из него грузов ... 298
8.3. К учету влияния траекторной нестабильности и упругих колебаний
конструкции летательного аппарата на работу радиолокационной стан-
станции 306
8.4. К определению посадочных характеристик летательного аппарата с
выпущенной тормозной парашютной системой 312
8.4.1. Особенности посадки маневренных летательных аппаратов C13).
8.4.2. Математическое моделирование посадки компоновки «летатель-
«летательный аппарат + тормозной парашют» C13). 8.4.3. Влияние тормозной
парашютной системы на посадочные характеристики летательного ап-
аппарата C16). 8.4.4. Моделирование посадки летательного аппарата в
случае нештатного срабатывания тормозной парашютной системы
C21).
8.5. Моделирование посадки беспилотного летательного аппарата на одно-
оболочковом парашюте-крыле 325
8.6. Моделирование нагружения, деформирования летательного аппарата
корабельного базирования при взлете и посадке 328
8.6.1. Структурная ММЛА корабельного базирования и ее особенности
C28). 8.6.2. Конструкционные особенности корабельных взлетно-
посадочных устройств и их математические модели C30). 8.6.3. Мо-
Модель шасси C37). 8.6.4. Некоторые результаты исследований C42).
8.7. Моделирование процессов нагружения и деформирования тяжелых
транспортных летательных аппаратов на наземных режимах 353
8.7.1. К формированию структурной ММЛА для наземных режимов
C53). 8.7.2. Модель амортизационной системы с учетом податливости
грунта ВПП C55). 8.7.3. Модель грунтовой ВПП C57). 8.7.4. Упро-
Упрощенная структурная ММЛА для наземных режимов C60). 8.7.5. К
оценке усталостной повреждаемости конструкции летательного аппа-
аппарата при движении по ВПП C62). 8.7.6. Некоторые результаты вычисле-
вычислений C64).
Часть вторая
КОЛЕБАНИЯ ТОНКОСТЕННЫХ КОНСТРУКЦИЙ, ЧАСТИЧНО ЗА-
ЗАПОЛНЕННЫХ ЖИДКОСТЬЮ 378
Глава 9
Уравнения колебаний упругой оболочки с жидкостью в обобщенных
координатах
9.1. Формулировка задачи 380
9.2. Принцип возможных перемещений 383
9.3. Смешанный вариационный принцип 386
9.4. Возможные пути упрощения задач 389
9.5. Собственные колебания 391
9.6. Уравнение колебаний бака с жидкостью в обобщенных координатах . . 392
9.6.1. Произвольный бак C92). 9.6.2. Бак в форме оболочки вращения
C94). 9.6.3. Продольные колебания упругого цилиндрического бака с
жидкостью C96).
6
Глава 10
Некоторые точные решения задач о колебаниях упругих оболочек с
жидкостью
10.1. Цилиндрическая оболочка с недеформируемым плоским днищем . . . 398
10.2. Цилиндрический бак с днищем в виде пологой сферической оболочки 404
10.3. Полусферическая оболочка с жидкостью 407
10.4. Поперечные колебания цилиндрической оболочки с жидкостью . . . 410
10.4.1. Упругодинамическая задача D10). 10.4.2. Гидродинамическая за-
задача для цилиндрического бака с плоским подвижным днищем D12).
10.4.3. Цилиндрическая оболочка с отсеками, частично заполненными
жидкостью D17). 10.4.4. Сравнение различных расчетных моделей D17).
Глава 11
Сведение гидродинамической задачи для оболочки вращения к обык-
обыкновенным дифференциальным уравнениям
11.1. Описание метода 420
11.2. Осесимметричные колебания жидкости в оболочке вращения 422
11.3. Неосесимметричные колебания жидкости в оболочке вращения .... 425
11.4. Сведение задачи гидродинамики к обыкновенным дифференциаль-
дифференциальным уравнениям первого порядка 430
11.4.1. Неосесимметричные колебания жидкости D30). 11.4.2. Осе-
Осесимметричные колебания жидкости D31).
11.5. Колебания упругой оболочки вращения с жидкостью 433
11.5.1. Неосесимметричные колебания D33). 11.5.2. Осесимметрич-
Осесимметричные колебания D36).
11.6. Поперечные колебания жидкости в подвижной недеформируемой по-
полости вращения 437
11.7. Поперечные колебания цилиндрического бака, частично заполненно-
заполненного жидкостью, с днищем в форме полости вращения 444
Глава 12
Приближенные и численные методы расчета колебаний оболочек с
жидкостью
12.1. Применение метода Ритца 448
12.1.1. Собственные колебания D48). 12.1.2. Определение потенциа-
потенциалов переносного движения жидкости D52). 12.1.3. Раздельные реше-
решения гидродинамической и упругодинамической задач D52). 12.1.4.
Приближенный способ учета сжимаемости жидкости D54). 12.1.5.
Осесимметричные колебания оболочек вращения с жидкостью D55).
12.2. Интегрирование обыкновенных дифференциальных уравнений .... 459
12.3. Применение метода итераций для расчета собственных осесиммет-
ричных колебаний оболочек вращения с жидкостью 461
12.3.1. Сведение задачи к интегральным уравнениям D62). 12.3.2.
Алгоритм последовательных приближений D64).
12.4. Применение метода конечных элементов 466
12.4.1. Система степенных гармонических функций D68). 12.4.2.
Оболочка вращения с жидкостью D69).
12.5. Применение метода граничных элементов 473
12.5.1. Фундаментальные решения гидродинамической задачи для
полости вращения D73). 12.5.2. Уравнения метода граничных эле-
элементов D75).
12.6. Колебания жидкости в горизонтальных и наклонных упругих полостях . 477
12.6.1. Интегральное уравнение неразрывности жидкости D77).
12.6.2. Аппроксимация перемещений жидкости и составление урав-
уравнений колебаний D79). 12.6.3. Примеры расчета собственных коле-
колебаний жидкости в разных полостях D82).
Глава 13
Колебания оболочки с жидкостью, внутри которой находится малый
деформируемый элемент
13.1. Уравнения колебаний системы в обобщенных координатах 485
7
13.2. Собственные колебания оболочки, содержащей жидкость с источником 483
13.3. Определение потенциала перемещений жидкости, вызванных ис-
источником 483
13.4. Продольные колебания оболочки вращения с жидкостью, содержащей
деформируемый элемент 490
13.5. Цилиндрическая оболочка с плоским днищем, в центре которого име-
имеется источник 491
13.6. Полусферическая оболочка, содержащая жидкость с газовым пузырем . 496
Глава 14
Нелинейные колебания цилиндрического бака с жидкостью при про-
продольном возбуждении
14.1. Нелинейные уравнения связанных осесимметричных и неосесиммет-
ричных колебаний 501
14.1.1. Постановка задачи E01). 14.1.2. Перемещения оболочки и по-
потенциал перемещений жидкости E04). 14.1.3. Функция усилий в сре-
срединной поверхности оболочки E06). 14.1.4. Уравнения колебаний в
обобщенных координатах E07).
14.2. Определение границ области динамической неустойчивости и ампли-
амплитуд нелинейных параметрических колебаний 510
14.3. Результаты расчетов 514
14.3.1. Сравнение с экспериментом E14). 14.3.2. Оценки точности
E16). 14.3.3. Цилиндрический бак с полусферическим днищем E21).
14.3.4. Выводы E22).
14.4. Упрощенные нелинейные уравнения колебаний бака с жидкостью для
общего случая 523
14.5. Нелинейные продольные колебания корпуса с цилиндрическим ба-
баком, содержащим жидкость 525
14.5.1. Постановка задачи E25). 14.5.2. Решение задачи E26). 14.5.3.
Результаты расчетов E27).
14.6. Влияние геометрической нелинейности пологой сферической оболоч-
оболочки днища на продольные колебания жидкости в цилиндрическом баке . 529
14.6.1. Уравнения колебаний в обобщенных координатах E30).
14.6.2. Результаты расчета E33).
Часть третья
АКУСТИЧЕСКИЕ УДАРНЫЕ ВОЛНЫ. УДАР И ПОГРУЖЕНИЕ 535
Глава 15
Действие акустических волн на элементы тонкостенных конструкций
15.1. Постановка задачи 535
15.2. Определение гидродинамических нагрузок 538
15.3. Действие ударных волн на тонкостенные конструкции и их элементы . 541
15.4. Определение эхо-сигналов от деформируемых тонкостенных конст-
конструкций в жидкости 544
15.5. Устойчивость упругих систем и конструкций при действии ударных
волн и импульсных нагрузок 545
Глава 16
Удар и погружение элементов тонкостенных конструкций в жидкость
16.1. Определение гидродинамических нагрузок при погружении в несжи-
несжимаемую жидкость элементов тонкостенных конструкций 551
16.2. Удар и погружение деформируемых тел и оболочек в несжимаемую
жидкость 556
16.3. Удар и погружение деформируемых тел и оболочек в сжимаемую
жидкость 558
16.4. Экспериментальные исследования 561
16.5. Динамическое поведение экраноплана при посадке на воду 562
Список литературы 573
ПРЕДИСЛОВИЕ
Аэрогидроупругость — относительно молодая наука, предметом ис-
исследования которой является поведение деформируемых тел и конструк-
конструкций (их элементов), взаимодействующих с газом или жидкостью. Суще-
Существенным моментом в аэрогидроупругости является учет обратного
влияния деформаций тела и конструкций на движение газа или жидкости.
Поэтому в общем случае внешние нагрузки, действующие на конструк-
конструкции, неизвестны до тех пор, пока не решена задача. При решении кон-
конкретных задач из области аэрогидроупругости приходится пользоваться
методами теории упругости, строительной механики, аэрогидромеханики
и теории колебаний.
Наибольшие успехи в развитии теории аэрогидроупругости связаны с
прогрессом в области авиастроения (задачи аэроупругости).
Явления аэрогидроупругости весьма важны также для различных ин-
инженерных и технических сооружений: мачты, башни, дымовые трубы,
градирни, мосты, высотные здания, трубопроводы, гидроплатформы,
гидрозатворы. Круг задач, при решении которых необходимо учитывать
влияние среды на поведение конструкций, сооружений и систем, непре-
непрерывно расширяется: задачи биомеханики, трубный транспорт, дефекто-
дефектоскопия, расчет элементов ядерных реакторов, расчет сооружений в при-
прибрежной зоне и открытом море, взаимодействие жидкости и газа с мяг-
мягкими и проницаемыми поверхностями и т. д. Результаты исследований по
различным аспектам теории аэрогидроупругости изложены в монографи-
монографиях и обзорах [31, 37, 51, 53, 61, 65, 67, 82, 85, 86, 93, 94, 98, 119, 123, 124,
128, 129, 130, 132, 133, 142, 155, 160, 166, 167, 168, 175, 177,206,207,232,
235, 236, 249, 258, 290, 291, 298, 310, 311, 327, 329, 375].
Данная книга состоит из трех частей.
Первая часть (главы 1-8) посвящена современным проблемам аэроуп-
аэроупругости летательных аппаратов (ЛА). В ней дается общая классификация
и характеристика аэроупругих явлений. Данная классификация имеет
место и для гидроупругих явлений. При этом следует отметить, что в за-
задачах гидроупругости для среды характерны относительно низкие скоро-
скорости, высокая плотность и малая сжимаемость. Для такой среды (жидко^
сти) важное значение имеют задачи об определении присоединенных
масс жидкости, о собственных и вынужденных колебаниях упругих кон-
конструкций в жидкости (и заполненных жидкостью) и об излучении дефор-
деформируемых тел.
Далее рассматриваются синтезируемые модели динамики движения
упругого самолета и дается их приложение. Излагаются результаты по
созданию системы автоматизированного расчета и комплексной обработки
всей необходимой информации на ЭВМ, начиная с ввода исходных дан-
данных, касающихся геометрии, инерционных и упругомассовых характери-
характеристик ЛА, нахождения частот и форм собственных колебаний его конст-
конструкции, определения по ним методом базовых форм обобщенных аэро-
аэродинамических и аэроупругих характеристик в широком диапазоне высот
и скоростей полета и кончая формированием систем линейных интегро-
дифференциальных уравнений аэроупругости и аэроавтоупругости и их
параметрическим исследованием — решением задач статической и дина-
динамической аэроупругости. Основой системы автоматизированного расчета
является упругая модель «базового» варианта загрузки ЛА. Переход на
другие варианты загрузки и конфигурации ЛА осуществляется путем
пересчета его аэроупругих и массовых характеристик по единому алго-
алгоритму, заложенному в расчетную схему.
Дается применение структурных математических моделей ЛА для
решения линейных и нелинейных задач аэроупругости на полетных и
наземных режимах.
Вторая и третья части книги относятся к области гидроупругости. Во
второй части (главы 9-14) приводятся постановки и методы решения за-
задач о колебаниях оболочек с жидкостью. Получены уравнения собствен-
собственных колебаний, с помощью которых рассмотрен ряд конкретных задач,
касающихся колебаний оболочек различного очертания без жидкости и с
жидкостью.
В третьей части (главы 15, 16) в обзорном плане излагаются результа-
результаты исследований по проблеме нестационарного взаимодействия тонко-
тонкостенных конструкций, являющихся элементами ЛА, с акустическими
средами. Основное внимание уделяется задачам дифракции и излучения
при действии на оболочки вращения слабых ударных волн, а также зада-
задачам об ударе и погружении деформируемых тел и элементов тонкостен-
тонкостенных конструкций в жидкость.
В монографии используются и развиваются оригинальные результа-
результаты, полученные авторами, а также результаты других исследователей,
опубликованные в периодической печати. Изложение материала ведется
с той степенью строгости, которая обычно принята в работах прикладно-
прикладного направления.
Большой труд по редактированию рукописи книги и эстетике оформ-
оформления ее к изданию выполнен редактором Д.А. Миртовой. Качественная
подготовка оригинала-макета монографии к изданию стала возможной
благодаря глубокому пониманию материала книги и высокому оператор-
операторному искусству В.А. Зорина. Художественное оформление обложки кни-
книги осуществил А.А. Логунов. Всем этим лицам авторы выражают искрен-
искреннюю признательность.
Работа между авторами распределена следующим образом: часть I
написана А. Т. Пономаревым (главы 1, 4-8) и В. И. Морозовым (главы 2 и
3), часть II — Ф.М. Шклярчуком, часть III — А.Г. Горшковым.
Часть первая
АЭРОУПРУГОСТЬ
АВИАЦИОННЫХ КОНСТРУКЦИЙ
Научно-технический прогресс сопровождается разработкой невидан-
невиданных доселе по сложности проектов в различных областях человеческой
деятельности. Создаются новые образцы авиационной, ракетной и кос-
космической техники, подводных и надводных судов, вооружения, строятся
навесные мосты, высотные телебашни и небоскребы, прокладываются
гигантские магистральные трубопроводы для транспортировки нефти и
газа и т.д. Особенность перечисленных инженерных сооружений состоит
в том, что главным источником их нагружения является взаимодействие
конструкций с газовой или жидкой средами внешним (самолеты, ракеты,
космические аппараты, дирижабли, парашюты, подводные и надводные
суда и т. д.) либо внутренним (авиационные и ракетные двигатели, про-
протекание газа или жидкости по трубопроводам) способами.
Особо следует остановиться на авиационной технике (АТ). В настоя-
настоящее время круг задач, решаемых ею, продолжает расширяться, что вызы-
вызывает ее интенсивное развитие, дальнейшее совершенствование и услож-
усложнение. Создаются сверхтяжелые самолеты («Мр1я») и сверхлегкие обыч-
обычной схемы, с мягкими и надувными крыльями. Проектируются многоре-
многорежимные машины. Появляются новые типы ЛА: беспилотные (БПЛА) и
их разновидность — дистанционно-пилотируемые (ДПЛА), экранопланы
и термопланы. Возвращается интерес к дирижаблям; проектируются ди-
дирижабли традиционных и гибридных схем. Многие ЛА для выполнения
комплексных задач оснащаются парашютами. В конструкциях ЛА начи-
начинают широко применяться новые перспективные материалы: алюмино-
литиевые и композиционные материалы. По прогнозам к 2010 г. доля
последних в конструкции планера самолета в процентах общей массы
конструкции возрастет примерно до 38 и 25 % соответственно, доля же
традиционных алюминиевых сплавов снизится от 80 до 25 %, а стали и
титановых сплавов вместе взятых сохранится на прежнем уровне и соста-
составит около 18 %. В практику входит аэроупругое проектирование [248].
Стремление к достижению предельных параметров системы приводит к
уменьшению ее жесткостных свойств, т. е. изделия становятся более гиб-
гибкими, для них характерны значительные деформации в полете.
Трудность создания новых образцов АТ дополняется непрерывно ус-
усложняющимися условиями ее эксплуатации: полеты совершаются днем и
ночью; при разных условиях взлета и посадки (используются грунтовые
взлетно-посадочные полосы и с бетонным покрытием, а также палубы
авианесущих кораблей); в любую погоду; с разнообразными вариантами
11
грузов, внешних подвесок (ВВС стран НАТО в настоящее время распола-
располагают 100 различными типами авиационных грузов, размещаемых на
внешних узлах подвески) и органов управления; расширяется диапазон
высот и скоростей полета и рабочих углов атаки; осваиваются гиперзву-
гиперзвуковые области полета; отрывные режимы обтекания становятся обычным
явлением; часто используются предельно низкие высоты, на которых су-
существенно влияние турбулентной атмосферы.
Современные ЛА имеют разветвленную систему управления, регули-
регулируемую не только летчиком; в последнее время для этих целей широко
привлекают бортовые цифровые вычислительные машины (БЦВМ). Речь
идет уже о создании беспилотного боевого самолета, управление кото-
которым будет осуществлять летчик, находящийся в информационном центре
на земле [430]. Аппараты насыщаются самыми разнообразными прибо-
приборами и оборудованием, эффективная работа которых в той или иной сте-
степени зависит от условий нагружения и деформирования конструкции.
Так как в полете аппараты заметно меняют свои упругомассовые и аэро-
аэродинамические характеристики, то по сути дела в каждый момент времени
приходится иметь дело с новым объектом, имеющим существенно воз-
возросшую вероятность появления опасных аэроупругих колебаний, кото-
которые могут оказывать значительное влияние на его эксплуатационную
прочность и надежность, на работу приборов и бортового оборудования,
нарушать комфорт экипажа и пассажиров. Наличие развитой механиза-
механизации, многообразие внешней атрибуции, полеты на предельных и запре-
запредельных режимах приводят к увеличению времени нахождения ЛА в ус-
условиях срывного обтекания, а значит, интенсивных вибраций.
Таким образом, современные ЛА можно классифицировать как слож-
сложные аэроупругие объекты, для которых в целях проектирования и изуче-
изучения процессов нагружения, деформирования и движения в реальных ус-
условиях их полета необходим совместный расчет аэродинамики и конст-
конструкции на прочность.
Здесь особо следует отметить, что существование любого ЛА зависит
от жестких ограничений на относительную массу конструкции. Так, на-
например, по статистическим данным все самолеты имеют относительную
массу конструкции по отношению к взлетной массе порядка 20 -5- 32 %.
Поэтому формирование реальных критериев и ограничений к существо-
существованию авиационной конструкции является одной из важнейших задач
проектирования при нахождении компромисса между ее массой и проч-
прочностью. В итоге задача оптимального проектирования конструкции, осо-
особенно авиационной, сводится к отысканию экстремума целевого функ-
функционала — минимальной массы конструкции в пространстве проекти-
проектируемых параметров, отвечающего следующим требованиям:
1) статической прочности при действии на нее экстремальных нагрузок;
2) усталостной долговечности; 3) живучести (остаточной прочности), т. е.
способности конструкции сохранять прочность при эксплуатационных
нагрузках в условиях тех или иных нормируемых повреждений;
4) аэроупругости — жесткостных характеристик, обеспечивающих при
эксплуатации предельно допустимые деформации, а также безопасность
ЛА от явлений аэроупругой неустойчивости — флаттера, реверса, дивер-
12
генции и т. д.; 5) конструктивно-технологическим возможностям проек-
проектирования и изготовления изделия.
Основное внимание в первой части уделяется задачам аэроупругости,
так как их решение занимает центральное место в проблеме проектиро-
проектирования ЛА, оптимального по массе, и напрямую связано с обеспечением
безопасности его полета, изысканием путей продления усталостного ре-
ресурса конструкции, созданием необходимых условий для работы экипа-
экипажа, приборов и бортового оборудования и комфорта для пассажиров. Ак-
Актуальность проблемы аэроупругости вызвана не только опасными (зачас-
(зачастую катастрофическими) последствиями возникновения аэроупругих ко-
колебаний и явлений аэроупругой неустойчивости типа флаттера, дивер-
дивергенции, реверса и т. д., но и невозможностью из-за отсутствия надежных
методов расчета заранее в ходе проектирования предсказать их с доста-
достаточной точностью. Так, например, как отмечается в работе [332], из ис-
исследованных более чем 150 Л А, созданных в 40-60-е гг., на практике
лишь незначительной части из них удалось избежать последующей тех-
технической доработки конструкции в ходе проектирования и постройки ЛА
по условию обеспечения безопасности от проявления явлений аэроупру-
аэроупругости. Следует сказать, что несмотря на значительное усложнение конст-
конструкции современных ЛА и условий их эксплуатации за последнее время
не обнаружены какие-то новые неизвестные ранее явления аэроупруго-
аэроупругости; некоторые из них просто видоизменились, стали проявляться в более
сложных комбинациях. Если для самолетов предыдущих поколений ха-
характерными были явления аэроупругой неустойчивости собственно кры-
крыла, хвостового оперения и органов управления, то современные ЛА могут
обладать также неустойчивостью систем «крыло + центроплан + фюзе-
фюзеляж», «фюзеляж + киль + органы управления», «крыло + фюзеляж + хво-
хвостовое управление», «ЛА + САУ» и т. д.
Необходимо отметить, что из всех явлений аэроупругости флаттер,
хотя и наиболее изученный вид аэроупругих колебаний самолетов и дру-
других типов ЛА, является наиболее опасным. Фронт исследований по безо-
безопасности ЛА от флаттера непрерывно расширяется. Так, по данным рабо-
работы [332] за 1968-1993 гг. таким исследованиям были подвергнуты 200
самолетов, вертолетов, планеров и ракет. Причем из-за усложнения и
повышения гибкости конструкции при анализе аэроупругости для неко-
некоторых самолетов приходится удерживать очень большое число тонов
собственных колебаний; на самолетах типа Ил-86, Ил-96-300 это число
доходит до 110-120, а на самолете «Мр1я» — до 300. Отсюда видно, что
для создания надежных расчетных методов решения задач аэроупругости
повышенное внимание надо уделять не только теоретическому развитию
математических моделей составных частей проблемы аэроупругости —
упругой и аэродинамической, но и совершенствованию эксперименталь-
экспериментальной базы для определения динамических характеристик конструкции —
собственных частот, форм и коэффициентов демпфирования упругих
колебаний.
Стоит подчеркнуть, что время разработки новых ЛА постоянно воз-
возрастает. Основные причины обусловлены непрерывным усложнением
конструкции, сложностью разработки радиоэлектронного оборудования
13
и двигателя. Если весь жизненный цикл ЛА может достигать 27-40 лет,
то из них стадия его создания — 7-10 лет. Отсюда ясно, что стадия созда-
создания ЛА играет особую роль в процессе разработки АТ, поскольку ошиб-
ошибки, допущенные на этой стадии, практически непоправимы в будущем.
Следует отметить, что обычный способ улучшения летно-технических
характеристик ЛА на основе традиционных подходов, ориентированных
наряду с расчетами в основном на дорогостоящие и длительные по вре-
времени трубный и летный эксперименты, практически исчерпал себя. Ста-
Становится очевидным, что для уменьшения технического риска проектов
вновь создаваемой авиационной и другой техники этот процесс должен
сопровождаться опережающим накоплением знаний об их прочностных и
эксплуатационных возможностях, растущим пониманием того, каким
образом необходимо распорядиться этими знаниями в целях проектиро-
проектирования конструкции и обеспечения ее надежной эксплуатации.
В силу ограниченных возможностей наземных экспериментальных
установок и летного эксперимента, их дороговизны и длительности в
авиации и других областях техники интенсивно развивается направление,
ориентированное на создание и опережающее функционирование струк-
структурных математических моделей (ММ) объектов («их математических
дублеров») на основе новой методологии научных исследований, бази-
базирующейся на широком применении и синтезе современных численных
методов механики сплошной среды и ЭВМ. По существу в дополнение к
аналитическим и экспериментальным методам исследования формирует-
формируется новый с широкими возможностями синтезирования данных смежных
наук с помощью ЭВМ метод вычислительного эксперимента. Сущность
метода математического моделирования на ЭВМ и его главное преиму-
преимущество состоят в замене исходного объекта соответствующим математи-
математическим аналогом и дальнейшим экспериментированием над ним с помо-
помощью вычислительно-логических алгоритмов. Происходит переход от ре-
решения отдельных (локальных) задач с применением проблемно-
ориентированных ММ (ПОММ) различного уровня в зависимости от це-
цели исследования к созданию интегрированных систем переработки ин-
информации в виде проблемно-ориентированного пакета прикладных про-
программ на ЭВМ, позволяющего адекватно воспроизводить функциониро-
функционирование сложной технической системы в реальных и прогнозируемых усло-
условиях эксплуатации. Такой путь позволит переломить затратную техноло-
технологию проектирования, сократить сроки создания техники и удешевить са-
сами проекты.
Под структурной ММЛА (или любого другого объекта) понимается
совокупность исходных данных, гипотез, допущений, логико-математи-
логико-математических соотношений, алгоритмов и программ их решения, средств «об-
«общения», обработки и отражения информации, обеспечивающая опера-
оперативное воспроизведение и исследование на ЭВМ явлений и процессов
функционирования аппарата в полете (или любого другого объекта в ре-
реальных условиях эксплуатации) с требуемой для принятия правильных
решений точностью.
В последнее время математическое моделирование и вычислительный
эксперимент на ЭВМ начинают широко использовать при летных испы-
14
таниях. Это облегчит расследование авиационных происшествий, выра-
выработку мероприятий для их устранения, а также сыграет заметную роль
при модернизации АТ.
Таким образом, на любом этапе жизненного цикла ЛА — проектиро-
проектирование, испытание, эксплуатация и модернизация, его структурная ММ
будет занимать центральное место.
Теоретической базой разработки структурных ММ аэроупругости ЛА
является научно-техническая проблема комплексного изучения процесса
функционирования аппарата в реальных условиях эксплуатации. Для
разрешения этой проблемы в полном объеме необходимо привлечь не-
нестационарную аэродинамику, строительную механику, теории упругости
и колебаний, динамику полета. В отсутствие же высокопроизводитель-
высокопроизводительных вычислительных средств проблема аэроупругости решалась при-
приближенно. Такой путь не позволял проводить предварительную глубокую
комплексную научную проработку ЛА в целом, поэтому он был ориенти-
ориентирован главным образом на последующую экспериментальную доводку
изделия и не мог больше служить основой научной базы в разрешении
проблемы ускорения создания новой АТ и удешевления самих проектов.
Новая же методология научных исследований, связанная с созданием и
опережающим функционированием структурных ММ объектов, ориен-
ориентирована на развитие и широкое применение современных численных
методов аэродинамики, теории упругости и их синтез и вычислительной
техники направлена как раз на то, чтобы отойти от старой затратной тех-
технологии.
В связи с тем, что основным источником конкретной научной инфор-
информации становятся численные методы, особая ответственность ложится на
организацию проведения систематических расчетов и их достоверность.
При этом значительно повышаются требования как к постановке пробле-
проблемы аэроупругости в целом, так и к уровню ММ ее составных частей, спо-
способам увязки данных смежных областей механики. При этом необходимо
отметить возросшую роль лабораторных и натурных экспериментов, точ-
точных решений и общих теорем в обосновании достоверности и установле-
установлении пределов применимости закладываемых в структурные ММ
теоретических схем.
Структурные ММ объектов могут быть созданы двумя путями. Со-
Согласно одному из них такая модель может быть построена по известной
априорной информации об объекте: его геометрических размеров, упру-
гомассовых, инерционных и динамических характеристик. Ее будем на-
называть структурной ММ сопровождения объекта. Что касается второго
пути формирования структурной ММ объекта, то она создается парал-
параллельно вместе с объектом в процессе его проектирования и называется
структурной ММ проектирования объекта. Основное назначение послед-
последней — реализация концепции опережающего применения ее при проек-
проектировании, например, ЛА в качестве основного интегрирующего инстру-
инструмента для решения «общесистемных» вопросов и исследований процес-
процессов его нагружения, деформирования и движения в реальных или прогно-
прогнозируемых условиях эксплуатации. При этом фактически обеспечивается
возможность создания ЛА по методу «реальных нагрузок» [320]. Струк-
15
турная ММ проектирования ЛА должна сдаваться заказчику вместе с
готовым изделием. В дальнейшем обе модели могут быть использованы
при летных испытаниях, эксплуатации и модернизации ЛА для решения
самого широкого круга прикладных задач, включая следующие:
1) предварительное углубленное изучение особенностей и летно-
технических возможностей АТ, расследование авиационных происшест-
происшествий и выработка мероприятий и рекомендаций для их устранения;
2) идентификация параметров структурной ММЛА и в случае необхо-
необходимости принятия мер по их уточнению;
3) нахождение статистических характеристик внешних нагрузок для
расчета надежности проектируемой АТ;
4) осуществление концепции эксплуатации АТ по техническому со-
состоянию, а также решение вопросов технической диагностики и контроля
повреждений;
5) алгоритмическое обеспечение БЦВМ для синтеза активного и адап-
адаптивного законов управления ЛА парирования его аэроупругих колебаний.
6) алгоритмическое обеспечение БЦВМ для создания условий устой-
устойчивой работы синтезируемой системы «ЛА + бортовое оборудование по-
повышенной чувствительности»;
7) прогнозирование ситуаций для заблаговременной выработки опера-
оперативного принятия решений в экстремальных случаях, например, оценки
безопасности полета и выдачи рекомендаций экипажу соответствующих
инструкций на выполнение полета или посадки при непредвиденных об-
обстоятельствах — повреждении конструкции планера, отказе в системе
управления, несанкционированном срабатывании парашютной системы,
попадании в сложные метеорологические условия и т. д.
В настоящее время на пути реализации структурных ММ объектов
различного уровня имеются трудности. Во-первых, повседневная практи-
практика предъявляет высокие требования к адекватности модели функциони-
функционированию реальных объектов, а значит, и к уровню синтезируемых ею
ММ составных частей. Во-вторых, помимо взаимного влияния аэродина-
аэродинамических, упругих и инерционных сил дополнительно возникает прин-
принципиальная особенность, обусловленная нестационарностью обтекания
деформируемой системы. Нестационарные аэродинамические силы опре-
определяются не только мгновенными значениями параметров движения и
деформирования объекта, но и всей предысторией их изменения во вре-
времени; хранителем данной информации является вихревой след, образуе-
образуемый за телом при его обтекании. Решение задачи аэроупругости при на-
наличии этой особенности сводится, строго говоря, к исследованию дина-
динамических систем с памятью. В-третьих, при постановке и решении «свя-
«связанных» задач аэроупругости имеются большие сложности математиче-
математического плана. Они возникают вследствие физической разнородности син-
тезной системы «газ + упругое тело» и отсутствия унифицированного
математического аппарата для комплексного описания ее поведения.
Следует отметить, что сейчас намечается сближение численных методов
теории упругости и газовой динамики на основе методов конечных и
граничных элементов. Здесь не приводятся подобные унифицированные
алгоритмы решения разных по характеру задач, так как накоплено еще
слишком мало материала.
16
Важное значение в проблеме формирования структурных ММ функ-
функционирования объектов на основе синтеза численных методов механики
сплошной среды приобретает разработка способов увязки различных час-
частей задачи аэроупругости, не связанных физической общностью, ввиду
отсутствия унифицированного математического аппарата. В линейных
задачах аэроупругости, линеаризованных по аэродинамике и упругости,
синтез аэродинамической и упругой частей задачи осуществляется с по-
помощью интеграла свертки, а в нелинейных — на основе метода «времен-
«временных слоев».
Первая часть монографии посвящена целенаправленному практиче-
практическому приложению методологии математического моделирования и вы-
вычислительного эксперимента на ЭВМ к решению широкого спектра са-
самых разнообразных задач аэроупругости, в частности, в области авиации.
Именно в области авиации наиболее остро встали проблемы сокращения
стоимости и времени разработки новых типов ЛА. На создание новой АТ
с использованием сложившейся технологии проектирования стали ухо-
уходить десятилетия, так что к моменту выхода образец успевал морально
устареть. Что касается самой методологии математического моделирова-
моделирования на ЭВМ, то она здесь не излагается; вопросы методологии освещены
в книге [249]. Все приведенные исследования по аэроупругости выпол-
выполнены с помощью структурных ММ применительно к таким объектам, как
самолеты, ракеты, комплексы «самолет-носитель + крупногабаритный
внешний груз», «самолет + парашют» и др. на полетных и наземных ре-
режимах. Для этого были использованы хорошо зарекомендовавшие себя в
расчетной практике такие численные методы, как метод дискретных вих-
вихрей (МДВ) и другие приближенные методы аэродинамики; метод задан-
заданных форм для представления упругих свойств конструкции в уравнениях
аэроупругости с использованием в основном собственных функций (час-
(частоты и формы собственных колебаний упругой конструкции, которые
могут быть найдены в зависимости от сложности конструкции тем или
иным методом). Изучаются случаи до- и сверхзвукового обтеканий кон-
конструкций; трансзвуковая область обтекания не рассматривается.
Как уже отмечалось, метод математического моделирования на ЭВМ
сформировался в дополнение к традиционным методам исследования —
аналитическим и экспериментальным и предназначен главным образом
для решения «общесистемных» вопросов поведения объекта в целом в
реальных условиях эксплуатации, в частности, задач аэроупругости и
аэроавтоупругости. Вместе с тем такие сложные аэроупругие системы,
как ЛА и др., в конструктивном оформлении содержат тонкостенные
элементы — пластинки и оболочки, описание поведения которых также
сводится к рассмотрению «связанных» задач аэроупругости. Решения
этих «локальных» задач аэроупругости с помощью аналитических и чис-
численных методов изложены в книгах [65, 67, 85, 93, 142, 177].
При написании данной части были использованы расчетные и экспе-
экспериментальные материалы, полученные авторами совместно с коллегами
по работе и учениками: В.А. Апариновым, Б.О. Качаловым, Ю.В. Петро-
Петровым, И.И. Бухтояровым, С.С. Граськиным, В.В. Давиденко, В.Д. Демиденко,
М.И. Зайчуком, С.Н. Беликовым, В.А. Зориным, В.А. Калеником, В.И. Крелем,
А.В. Куликовым, Г.К. Непомнящим, В.М. Онищенко, СИ. Овчаренко, А.В.
Пожогиным, Я.Я. Ранцаном, К.А. Ранцаном, В.В. Трухиным, А.И. Чистяко-
Чистяковым. Всем им авторы приносят искреннюю благодарность.
17
Глава 1
ХАРАКТЕРИСТИКА ПРОБЛЕМЫ АЭРОУПРУГОСТИ
И КЛАССИФИКАЦИЯ АЭРОУПРУГИХ ЯВЛЕНИЙ
§ 1.1. Аэроупругость как комплексная
научно-техническая проблема
Аэроупругость — относительно молодая наука, и предметом ее ис-
исследования является поведение деформируемых тел при их взаимодейст-
взаимодействии с газом (жидкостью). Наибольшие достижения в области аэроупруго-
аэроупругости связаны с развитием авиастроения. Следует отметить, что для ЛА
газовая среда служит не только основным источником нагружения, но и
оказывает существенное влияние на их аэродинамическую компоновку.
Мягкие тормозные (парашюты) и несущие поверхности (парашюты-
крылья) среда, кроме всего прочего, формирует в полете.
Стремление ко все более высоким скоростям полета ЛА, постоянное
их совершенствование и использование в них новых конструкционных
материалов (алюминиево-литиевых сплавов, композиционных материа-
материалов), систем активного и адаптивного управлений способствуют умень-
уменьшению жесткости конструкций. Тенденция создания наземных объектов
относительно жестких и мягких (воздухоопорных) конструктивных форм
оптимального веса также связана с понижением их жесткостных свойств.
Эти процессы сопровождаются повышением уровня аэроупругих колеба-
колебаний конструкций, возросшей вероятностью проявления различных аэро-
аэроупругих явлений.
Кроме того, многие наземные сооружения и парашюты представляют
собой плохообтекаемые тела. Для современных ЛА обычными являются
также отрывные режимы обтекания (кроме новых форм движения ЛА за
счет непосредственного управления аэродинамическими силами, широко
применяются тормозные и аэроуправляющие поверхности).
Следует также сказать об открывающихся новых возможностях по
созданию более легких конструкций ЛА за счет широкого использования
систем автоматического управления (САУ) совместно с БЦВМ и ЭВМ.
Это дает возможность осуществлять адаптацию ЛА к меняющимся усло-
условиям полета, полнее и точнее управлять ими, тем самым подавляя упру-
упругие колебания их частей.
За сложным характером взаимодействия между упругой конструкцией
и внешней средой, упругой конструкцией и бортовыми системами, нахо-
находящимися на ЛА, можно проследить на примере структурной схемы
рис. 1.1. Из схемы видно, что амплитуды возбуждаемых упругих колеба-
колебаний конструкции ЛА в полете зависят главным образом от ее жесткост-
жесткостных свойств и интенсивности внешних возмущений. Вибрационный фон
18
ЛА определяется также работой силовой установки. Заметное влияние на
нагружение и деформирование аппарата на режиме посадки
осуществляет парашютная система. В свою очередь аэроупругие дефор-
Внешние условия
Упругомассовые
характеристики
Парашютная
система
Силовая установка
Летательный
аппарат
1
1?
Влияют на
работу бортового
оборудования
работу систем
управления
работу РЛС
условия стрельбы
условия транспор-
тировки груза
комфорт экипажа
работу парашютной
системы
десантирование груза
Рис. 1.1. Летательный аппарат как объект взаимодействующих и взаимосвязанных
подсистем
мации конструкции ЛА оказывают существенное влияние на работу все-
всего бортового оборудования и т. д. Аэродинамический след от ЛА и газо-
газодинамическая струя от двигателей в свою очередь заметно влияют на
работу парашютной системы при посадке аппарата и при десантировании
груза, особенно низковысотном.
На примере ЛА видно, что все вопросы обеспечения функционирова-
функционирования инженерного сооружения на земле и в полете, рассматриваются в
теории аэроупругости — научно-технической проблеме комплексного
исследования упругого объекта, совершающего перемещение в газовой
или жидкой средах либо испытывающего воздействие со стороны этих
сред, находясь в стационарных наземных (надводных или подводных)
условиях. На новом этапе развитие аэроупругости (или аэроавтоупруго-
сти) носит комплексный характер и предъявляет высокие требования не
только к решению данной проблемы в целом путем создания структур-
структурных ММ функционирования объектов, но и к исследованию их состав-
составных частей и систем. Например, в авиации аэроупругость базируется на
таких смежных науках, как нестационарная аэродинамика, теория упру-
упругости, строительная механика, теория мягких оболочек, теория колеба-
колебаний, динамика полета и теория систем управления. Структурная схема
синтезирования базовых наук, участвующих в решении проблем аэроуп-
аэроупругости и аэроавтоупругости, изображена на рис. 1.2.
19
Сложность постановки и решения задач аэроупругости с учетом со-
современных достижений в области аэродинамики и теории упругости
связаны с большими математическими трудностями. Они возникают при
Аэродинамика Упругость
1 I
Динамика полета
1 11
Аэроупругость
Турбулентная
атмосфера
Датчики
Руль + привод
II
Аэроавтоупругость
БЦВМ
Законы управления
Рис. 1.2. Основные научные направления, участвующие в решении проблем аэроуп-
ругсти и аэроавтоупругости
определении динамических свойств реальной упругой конструкции —
частот и форм собственных колебаний (в расчетах используются различ-
различные упругие схематизации ЛА: балочная (а), балочно-пластинчатая (б),
пространственная (в) — см. рис. 1.3) и при нахождении аэродинамиче-
аэродинамических нагрузок.
Рис. 1.3. Расчетные упругие схемы ЛА: а — балочная, б — пластинчатая, в — про-
пространственная
При учете взаимного влияния аэродинамических, упругих и инерци-
инерционных сил появляется принципиальная трудность, обусловленная неста-
нестационарностью обтекания относительно гибкого тела, так как аэродина-
аэродинамические силы определяются не только мгновенными значениями пара-
20
метров его движения и деформирования, но и всей предысторией их из-
изменения. В этом случае даже линейные ММ обтекания и аэроупругости
оказываются не марковскими из-за наличия «аэродинамической памяти»
в вихревом следе за телом.
Возникает также проблема увязки методов решения и данных различ-
различных частей задачи аэроупругости, построенных на разных физических
предпосылках и описываемых разными уравнениями.
§ 1.2. Изучаемые аэроупругие объекты и их особенности
Летательные аппараты и их двигатели. Самолеты представляют
собой сложные многофункциональные системы, характеризующиеся не-
непрерывно меняющимися в полете динамическими характеристиками (за
счет выработки топлива, сброса различных грузов, изменения полетной
конфигурации и т. д.) и нестационарностью обтекания. Летают на до- и
сверхзвуковых скоростях, малых и больших углах атаки. В последнее
время интенсивно разрабатывается новый класс ЛА — гиперзвуковые.
Широко используют для перераспределения действующих на ЛА аэроди-
аэродинамических сил тормозные и управляющие поверхности. Совершают
полеты в условиях безотрывных и отрывных режимов обтекания. Транс-
Транспортные и маневренные самолеты являются объектами длительного ис-
использования. Поэтому, как правило, статическая и динамическая дефор-
деформация точек конструкции самолета в целом и отдельных его элементов в
полете и на стоянке рассчитывается, исходя из линейных соотношений
теории упругости. Что касается поведения обшивки крыла и фюзеляжа в
нестационарном потоке, а также тонкостенных элементов типа пластинок
и оболочек, являющихся составными частями других конструкций, то
иногда в задачах аэроупругости для них привлекают аппарат нелинейной
теории упругости.
Двигатели современных ЛА работают в сложных вибрационных
условиях; наиболее нагруженными являются лопатки компрессора и тур-
турбины. Характер вибраций лопаток определяется действием на них неста-
нестационарных аэродинамических сил. Причины *нестационарности обтека-
обтекания самые разные: вращение лопаток относительно неподвижного на-
направляющего аппарата, наличие возмущений (окружной неравномерно-
неравномерности потока, ударных волн и т. д.) в потоке на входе в двигатель, наличие
развитого вращающегося срыва потока на одной или нескольких ступе-
ступенях рабочего колеса. Зачастую деформация лопаток в задачах статиче-
статической и динамической аэроупругости представляется с помощью линей-
линейных соотношений теории упругости. Применение в лопатках двигателей
новых конструкционных материалов, включая композиционные, способ-
способствует проявлению нелинейных эффектов и требует использование нели-
нелинейной теории упругости. Аэродинамическая часть задачи аэроупругости
лопаток, как и для самолета, является многоплановой. Скорость газа в
проточной части двигателя изменяется от дозвуковой до сверхзвуковой.
На лопатках авиационных двигателей реализуются как безотрывные, так
и отрывные режимы течения. Кроме того, действие повышенных темпе-
температур приводит к задачам аэротермоупругости; особенно актуальна эта
проблема для рабочих лопаток турбин.
21
Вертолеты по сравнению с самолетами и ракетами обладают по-
повышенной нерегулярностью конструкции — резким изменением жестко-
стных параметров. Они имеют мощный источник вибраций — несущий
винт. Обычно для описания упругих перемещений точек конструкции
фюзеляжа используют линейные соотношения теории упругости. Самым
напряженным элементом конструкции вертолета является лопасть несу-
несущего винта. На нее, кроме аэродинамических сил, действуют центробеж-
центробежные силы инерции. Несмотря на то, что вертолеты эксплуатируются в
дозвуковой области, скорость обтекания вдоль размаха лопасти колеб-
колеблется от дозвуковой до сверхзвуковой. На лопасти практически всегда
реализуются отрывные режимы обтекания. С позиции безопасности по-
полета вертолета важное значение имеет учет влияния поверхности Земли.
Сверхлегкие ЛА (СЛА) обычных самолетных схем, дельтапла-
дельтапланы с двигателем и без него, дистанционно пилотируемые ЛА (ДПЛА)
эксплуатируются на малых дозвуковых скоростях. Крыло дельтаплана
совмещает в себе функции несущей и стабилизирующей поверхностей
при отсутствии на нем специальных органов управления. Управление
дельтапланом осуществляется путем изменения положения пилота (так
называемое балансирное управление) за счет смещения центра масс сис-
системы «дельтаплан + летчик».
Главная особенность СЛА — повышенная гибкость элементов конст-
конструкции в полете, приводящая к существенному изменению его аэродина-
аэродинамических свойств. Форма, которую принимает СЛА в полете, неразрывно
связана с режимом полета, с характером и уровнем нагружения. Поэтому
СЛА является более аэроупругим объектом, чем традиционная АТ. Так
как скорости СЛА невелики, то для них более опасны всякого рода нис-
нисходящие и восходящие потоки, порывы ветра, воздействие турбулентной
атмосферы. Проблема обеспечения безопасности полетов СЛА имеет
важное значение. Дельтапланы и близкие к ним аппараты на разных ре-
режимах полета ведут себя различным образом: при больших углах атаки
— как парашют; на средних углах атаки — как планер с относительно
небольшим аэродинамическим качеством; при малых углах атаки — как
ЛА с продольной неустойчивостью и тенденцией к «флаттерному пики-
пикированию».
Дирижабли изготавливаются либо цельнометаллическими (жест-
(жесткая схема), либо в виде относительно жесткого каркаса, обтянутого мяг-
мягкой оболочкой (полужесткая схема), либо в виде мягкой оболочки, карка-
сированной тканевыми лентами (мягкая схема). Окончательные формы
двух последних конструкций дирижаблей формируются за счет избыточ-
избыточного внутреннего давления. Скорости современных дирижаблей заметно
выросли по сравнению с довоенным периодом, повысилась и их безопас-
безопасность. В последнее время рассматриваются концептуально новые реше-
решения воздушных кораблей легче воздуха, позволяющие изменять их ком-
компоновку и переходить от одной формы (типа дирижабля) к другим фор-
формам (самолетного типа) [432].
По-прежнему актуальными для дирижаблей являются вопросы безо-
безопасности полета при действии турбулентной атмосферы, порывов ветра,
ударных волн и т. д. Сложности имеются в выборе аэродинамической
модели из-за реализации на дирижаблях многорежимности обтекания,
22
включая отрывные. Имеются трудности также в реализации расчетной
упругой схемы и в решении связанной задачи аэроупругости из-за ма-
шинноемкости алгоритмов применяемых численных методов; обычно
используются метод дискретных вихрей, метод конечных элементов
(МКЭ) и другие.
Ракеты. В конструктивном плане ракеты, в отличие от самолетов,
представляют собой вытянутые тонкостенные тела вращения, основной
объем которых заполнен топливом. Сложность создания и исследования
ракетной техники состоит в том, что ракеты на активном участке (в плот-
плотных слоях атмосферы) подвергаются воздействию широкополосного
спектра интенсивных вибрационных нагрузок. На разных участках ак-
активной траектории ракета как упругая система с непрерывно меняющи-
меняющимися динамическими характеристиками (из-за выработки топлива, сброса
отработанных ступеней и т. д.) ведет себя по-разному: при низкочастот-
низкочастотном нагружении — как балка переменной массы и жесткости, а при вы-
высокочастотном — как система слабо связанных между собой оболочко-
оболочковых подконструкций. Скорость движения ракет в плотных слоях атмо-
атмосферы меняется от дозвуковой до гиперзвуковой. Здесь важным стано-
становится аэродинамический нагрев, а значит проблема аэротермоупругости.
На ракетах реализуются также безотрывные и отрывные режимы обтека-
обтекания. В последнее время, кроме крупногабаритных ракет, широко стали
применяться малогабаритные высокоскоростные невращающиеся и вра-
вращающиеся ракеты [317,400].
Парашюты. Парашют представляет собой устройство для торможе-
торможения и перемещения спускаемого объекта (груза). Область применения
парашютов непрерывно расширяется [298]. Широкое использование мяг-
мягких тормозных и несущих систем в авиакосмической технике объясняет-
объясняется их способностью создавать необходимые аэродинамические силы при
незначительной массе конструкции и небольшом объеме в уложенном
состоянии. Кроме того, стоимость их сравнительно невелика. Благодаря
повышенной податливости (парашюты изготавливаются из проницаемых
и непроницаемых технических тканей; у них отсутствует изгибная жест-
жесткость; они воспринимают только растягивающие усилия) парашютные
системы (ПС) могут быть компактно упакованы и быстро приведены в
рабочее состояние. Площади куполов современных парашютов колеб-
колеблются от сотых и десятых долей квадратного метра до тысяч квадратных
метров. Работают они в широком диапазоне скоростей: от малых дозву-
дозвуковых до сверхзвуковых; применяются для спасения экипажей ЛА,
уменьшения длины пробега ЛА при посадке и выводе его из штопора,
для низковысотного десантирования многотонных грузов с самолетов,
для стабилизации, торможения, перемещения в пространстве и призем-
приземления различных объектов и т. д.
Кроме парашютов традиционной конструкции (круглой, квадратной,
крестообразной раскройных форм), начинают широко использоваться раз-
развертывающиеся в полете мягкие несущие ПС: одно- и двухоболочковые
парашюты-крылья. Им присущи свойства как обычных парашютов, так и
крыльев (обладают качеством); это позволяет маневрировать и управлять
движением системы «объект + парашют» по траектории снижения.
23
Общая особенность ПС различного назначения заключается в том, что
их конфигурация формируется под воздействием потока и поддерживает-
поддерживается им в процессе движения ПС с грузом. Как правило, на тормозных па-
парашютах реализуются отрывные режимы обтекания; парашюты-крылья в
зависимости от режима полета могут обтекаться и безотрывно. Здесь в
плане постановки и решения приходится иметь дело с проблемой нели-
нелинейной нестационарной аэроупругости.
Сооружения и промышленные объекты. Сюда относятся высотные
сооружения, мосты, дымовые трубы, башенные устройства, телевизион-
телевизионные антенны, подвесные кабели, крупногабаритные памятники и т. д. Как
правило, все эти объекты являются плохообтекаемыми телами. Скорости
ветра при обдуве таких наземных сооружений могут достигать очень
больших значений. Несмотря на то, что перечисленные строительные
конструкции в сравнении с ЛА являются более жесткими, наблюдающие-
наблюдающиеся на них срывные режимы обтекания могут явиться причиной их разру-
разрушения за счет аэроупругих колебаний. В последнее время автомобили
[17] и поезда начинают также проектироваться с учетом обтекания. Ак-
Актуальными здесь становятся вопросы снижения аэродинамического со-
сопротивления, устойчивости и управляемости движения. Получили широ-
широкое применение пневматические конструкции: надувные ангары и резер-
резервуары, хранилища и укрытия [153]. Они состоят из относительно жестко-
жесткого каркаса, являющегося опорой системы надувных мягких оболочек,
форма которых поддерживается за счет избыточного давления.
§ 1.3. Основные задачи аэроупругости
Выше были рассмотрены основные инженерные объекты, которые
существенно различаются как по своим конструктивным особенностям,
так и по характеру взаимодействия с газовой (жидкой) средой. Обратимся
теперь к аэроупругим явлениям, которые могут сопровождать такое
взаимодействие. Эти явления характеризуются большим многообразием.
Каждое из явлений аэроупругости может стать причиной возникновения
в конструкции опасных аэроупругих колебаний. Широкий диапазон аэ-
аэроупругих процессов, которому подвергается конструкция при взаимо-
взаимодействии с потоком газа (жидкости), в одних Случаях может вызвать раз-
развитие усталостных трещин, приводящих к преждевременному исчерпа-
исчерпанию ресурса конструкции. В других случаях при интенсивных переход-
переходных режимах может привести к исчерпанию несущей способности сис-
системы из-за хрупкого разрушения материала или малоцикловой усталости.
Известны многочисленные примеры, когда аэроупругие деформации
приводили к летным происшествиям ЛА, катастрофам крупных наземных
сооружений, мостов и т. д.
Особенность актуальности задач аэроупругости, например, состоит в
том, что решение их связано не только с обеспечением безопасности по-
полета ЛА и надежной работы всего его бортового оборудования, но и с
созданием условий комфорта для экипажа и пассажиров.
Подчеркнем один важный аспект проблемы аэроупругости. В основ-
основном темп изменения во времени аэродинамических нагрузок, действую-
24
щих на упругую конструкцию со стороны потока в реальных условиях
эксплуатации таков, что за редким исключением волновыми процессами
в самом объекте можно пренебречь. Подобные режимы нагружения при-
присущи практически всем вышеупомянутым конструкциям.
Для 30-60-х гг. главной задачей аэроупругости являлся флаттер не-
несущих поверхностей самолетов и ракет. История данного вопроса изло-
изложена в [102,327]. Исследования флаттера в России были начаты
М.В. Келдышем, Е.П. Гроссманом и др. [137, 138].
За последние 30 лет круг задач аэроупругости значительно расширил-
расширился. В первую очередь изучаются аэроупругие деформации и колебания:
— крыла, фюзеляжа, оперения, органов управления, обшивки, замк-
замкнутого контура «конструкция + система управления» на самолетах;
— лопаток компрессоров и турбин, оболочек статора и соплового ап-
аппарата в двигателях;
— лопастей несущего винта и фюзеляжа, замкнутого контура «конст-
«конструкция + система управления» у вертолетов;
— силового каркаса и обшивки у СЛА, включая дельтапланы;
— корпуса, обшивки, аэродинамических рулей несущих поверхностей
и органов управления, контура «конструкция + система управления» у
ракет;
— купола парашютов, систем «самолет + груз + парашют», «груз +
парашют», «самолет + парашют».
Аэроупругие явления классифицируются по числу степеней свободы
упругого объекта, характеру его деформации, виду установившихся аэ-
аэроупругих колебаний, характеру отклика деформируемой системы на
внешние возмущения, виду внешних воздействий и скорости потока.
Задачи аэроупругости подразделяются на статические и динамиче-
динамические.
Задачи статической аэроупругости. К ним относятся нагружение и
деформирование конструкции ЛА и его подвесных элементов при уста-
установившемся маневре; крутильная дивергенция крыла (потеря статиче-
статической устойчивости самолета); реверс (потеря эффективности органов
управления — элеронов, рулей высоты и направления); статическая
прочность; стапельная форма. Кроме того, важной задачей является ис-
исследование влияния статической деформации конструкции на перерас-
перераспределение действующей на нее аэродинамической нагрузки (например,
подъемной силы крыла), влияющей на ее статическую устойчивость. По-
Последняя задача также решается путем совместного рассмотрения уравне-
уравнений теории упругости или строительной механики и уравнений стацио-
стационарного течения газа (жидкости).
Задачи динамической аэроупругости. Динамическая аэроупругость
рассматривает задачи аэроупругой устойчивости (автоколебаний) и ди-
динамических реакций. К первым относится флаттер — наиболее важное
явление аэроупругой неустойчивости системы, по своим результатам
имеющее катастрофические последствия. Наиболее значащие виды флат-
флаттера для самолета: изгибно-крутильный флаттер крыла, изгибно-
элеронный, крутильно-элеронный, изгибно-крутильный флаттер хвосто-
хвостового оперения, панельный флаттер обшивки; аэроупругая устойчивость
25
Аэроупругость ЛА
Задачи статической
аэроупругости
Задачи динамической
аэроупругости
Нагружение и деформи-
деформирование ЛА при маневре
Нагружение подвесных
элементов
Реверс, дивергенция |
Статическая прочность |
Стапельная форма |
Аэроупругаяусп
вость ЛА
стойчи-
Флаттео
К"
Аэроупругая устой-
устойчивость ЛА
Автоколебания в
трансзвуковой
области
ЛА с САУ; для вертолета флаттер лопасти несущего винта, аэроупругая
устойчивость его с САУ и т. д. Для самолетов и вертолетов опасным так-
также является срывной флаттер, который связан, главным образом, с де-
деформацией кручения. Сюда относятся: изгибно-крутильные колебания
крыла и оперения самолета при больших и средних углах атаки, изгибно-
крутильные колебания лопаток двигателя и лопастей несущего винта.
Этот тип флаттера представляет опасность также для высотных со-
сооружений и мостов с длинными пролетами.
К динамическим задачам первого типа относятся также эоловы коле-
колебания, галопирование и полоскание в потоке ветра и флаттерное пикиро-
пикирование, последние два типа автоколебаний наблюдаются у парашютов и
дельтапланов. Автоколебания такого типа присущи плохообтекаемым
конструкциям и возникают под влиянием срывных течений. Галопирова-
Галопирование имеет место для проводов линий электропередач и трубопроводов
при их обледенении, для различных высотных зданий и сооружений,
многоступенчатых ракет, находящихся в стартовом положении, и т. д.
К динамическим
задачам второго типа
относятся вопросы
изучения реакции уп-
упругой конструкции на
действие дискретных
порывов ветра, удар-
ударных волн и непрерыв-
непрерывной турбулентности.
Задачи о динамических
реакциях имеют боль-
большое практическое зна-
значение для АТ, высот-
высотных сооружений и т. д.
при расчете прежде
всего их на прочность.
Задачи о реакции делят
в свою очередь на ста-
статические и динамиче-
динамические. Между задачами
реакции и задачами
устойчивости сущест-
существует тесная связь. По-
Поэтому на практике за-
задачи реакции и задачи
УСТОЙЧИВОСТИ обычно
Объединяют.
Динамическая реакция |
Воздействие турбу-
турбулентности атмосферы,
порывов ветра, удар-
ударных волн
Неровности
ВППиРД
Нагружение и дефор-
деформирование ЛА при
маневре
Срывное обтекание
(бафтинг)
Большие углы
атаки
Срыв потока с
-Н плохообтекаемых
частей ЛА
Трансзвуковое
обтекание
->| Действие двигателей |
Усталостная проч-
прочность
Рис- 1-4- Основные задачи аэроупругости для современ-
ных летательных аппаратов
Иногда при динамических воздействиях можно не учитывать обрат-
обратного влияния упругих деформаций на поведение газовой среды, тогда
приходим к решению «несвязанной» задачи аэроупругости. В жидкости
при динамическом нагружении упругой системы, особенно тонкостен-
тонкостенной, обратное влияние всегда значительно.
26
Следующая группа аэроупругих явлений объединена обобщенным
понятием бафтинг (тряска) — нерегулярные вынужденные колебания
упругой конструкции и ее отдельных частей под действием срывных те-
течений, порожденных обтеканием самой конструкции либо рядом стоя-
стоящими с ней плохообтекаемыми телами. Бафтингу подвергаются хвосто-
хвостовое оперение самолета срывающимся потоком с крыла либо с тормозного
щитка, либо само крыло при срыве потока с его носовой части. Проблема
бафтинга существует для ракет и высотных сооружений. Бафтинг высот-
высотных сооружений может возникнуть при омывании ветровым потоком,
срывающимся не только с самого сооружения, но и с сооружений, близко
стоящих от него.
Выше были перечислены важнейшие аэроупругие явления, возникно-
возникновение которых может привести конструкцию к катастрофическим по-
последствиям. Существуют множество других типов колебаний, которые не
опасны для конструкции, но могут оказать существенное влияние на на-
накопление усталостных повреждений в отдельных ее элементах. Здесь
следует назвать параметрические колебания элементов в ветровом пото-
потоке, колебания конструкций под действием дискретной (мгновенный охват
порывом или постепенный вход в него) и непрерывной турбулентности,
колебания при действии волны слабого или сильного разрыва, колебания
под действием пульсаций в турбулентном пограничном слое, смешанные
колебания (например, комбинация срывного флаттера и бафтинга и т. д.).
На рис. 1.4 перечислены основные задачи аэроупругости современных
ЛА. Отсюда видно, насколько они стали сложными и разнообразными.
§ 1.4. Диаграммы аэроупругости
Перечисленные выше основные задачи аэроупругости можно класси-
классифицировать с помощью диаграмм, отражающих сочетание тех или иных
сил, участвующих в соответствующих аэроупругих явлениях.
Аэроупругость. Прежде чем приступить к описанию диаграммы
рис. 1.5, отметим, что термин аэроупругость надо понимать в более ши-
широком смысле, так как многие явления аэроупругости могут включать
наряду с аэродинамическими и упругими силами и силы инерции. И еще
об одном обстоятельстве надо сказать. Обычно при рассмотрении явле-
явлений аэроупругости обращаются к треугольнику сил [61]. В связи с тем,
что деформация в уравнениях динамики полета, например, авиационной
конструкции, как правило, представляется по отношению к перемещени-
перемещениям объекта как жесткого скелета, относительно которого совершаются
аэроупругие колебания, традиционную диаграмму аэроупругости не-
несколько видоизменим. Для этого силы инерции / разделим на состав-
составляющие /у и /т, соответствующие упругим колебаниям конструкции и ее
движению как абсолютно твердого тела. При таком дополнительном раз-
разделении сил инерции можно охарактеризовать все основные явления аэ-
аэроупругости, сопровождающие конструкцию в полете либо в стационар-
стационарных условиях на земле. Так, при рассмотрении таких аэроупругих явле-
явлений, как флаттер ЛА, бафтинг, галопирование, приходится объединять
все силы: аэродинамические (А), упругие (Е) и силы инерции GУ и /т).
27
Через К на диаграмме рис. 1.5 обозначена кинематическая характеристи-
характеристика, отражающая движение «жесткого» скелета аэроупругой системы как
абсолютно твердого тела. Например, такие явления задач статической
аэроупругости ЛА, как реверс и дивергенция, изучаются без учета
Аэроупругость
«жестких» систем
Колебания
свободной
упругой
системы
Колебания сис-
системы как жест-
жесткого тела
Рис. 1.5. Диаграмма аэроупругости ЛА: А — аэродинамические силы; Р — силы упру-
упругости; /у — силы инерции упругих колебаний; /т и К — соответственно силы инерции
и кинематическая составляющая движения объекта как абсолютно твердого тела
составляющей сил инерции /у в поле действующих сил «Л + Р + /т». Па-
Панельный флаттер требует рассмотрения сил «Л + Р + /у», флаттер объекта
в целом в условиях полета — сил «Л + Р + /у + /т», а свободные упругие
колебания — сил «Р + /у». Все другие виды аэроупругих колебаний могут
быть представлены аналогично путем объединения соответствующих
сил.
В связи с освоением авиацией больших сверхзвуковых и гиперзвуко-
гиперзвуковых скоростей полета в задачах аэроупругости стала необходимость учи-
учитывать и температурный фактор. Поэтому появилось новое понятие аэро-
термоу пру гость. В этом случае силы упругости надо находить с учетом
дополнительных сил температурного происхождения. Отметим, что ис-
исследование явлений аэротермоупругости следует вести с учетом измене-
изменения физико-механических характеристик материалов конструкции, так
как на них температура оказывает существенное влияние.
Аэроавтоупругость. Так как аэроупругие колебания непосредственно
влияют на безопасность полета ЛА и на условия комфорта экипажа и
пассажиров, то для их устранения или смягчения в авиации используют:
— пассивные аэродинамические средства: турбулизаторы, отсос и
сдув пограничного слоя и т. д.;
— механические методы: демпферы, гасители колебаний.
В последнее время разрабатывается наиболее перспективный актив-
активный способ подавления аэроупругих колебаний авиационных конструк-
конструкций. Он состоит в перераспределении аэродинамических нагрузок, дей-
действующих на ЛА и его элементы, с помощью САУ. Здесь мы приходим к
задачам аэроавтоупругости — научной проблеме комплексного исследо-
исследования системы «упругий ЛА + САУ», совершающей движение в сплош-
28
Аэроупругость
Задачи управления
для жесткой конст-
конструкции
ной среде. Задачи аэроавтоупругости также, как и задачи аэроупругости,
могут быть представлены в виде диаграммы (рис. 1.6). Они объединяют
зависимости, включающие аэроди-
аэродинамические силы (А), силы упруго-
упругости (Е), силы инерции (/у + /т), ки-
кинематические характеристики дви-
движения объекта как твердого тела
(К) и автоматическое управление
(Л У). В случае движения упругой
конструкции необходимо прини-
принимать во внимание все четыре фак-
фактора. Если не учитывать влияние
Рис. 1.6. Диаграмма аэроавтоупругости ЛА
сил упругости, то приходим к задачам управления полетом «жесткого»
ЛА (правая часть тетраэдра, отделенная от левой штриховой линией).
§ 1.5. Состояние исследований в области аэроупругости
Проблема проектирования и расчета современных конструкций на
статическую и динамическую прочность, жесткость и устойчивость при
сложном нагружении, особенно в условиях взаимодействия с газовой и
жидкой средами, без ЭВМ становится трудноразрешимой задачей.
Развитие различных областей механики в отсутствие высокопроизво-
высокопроизводительных ЭВМ шло по пути создания относительно «простых» моделей,
базирующихся в основном на достаточно глубоких аналитических мето-
методах. Но последние не позволяют комплексно изучать сложные техниче-
технические системы в целом даже в стационарных условиях обтекания, тем бо-
более в полете. Аналитические методы имеют ограниченную примени-
применимость, так как пригодны лишь для проведения автономных исследований
поведения отдельных элементов конструкций. Что касается методов про-
проектирования конструкций в целом, то традиционный путь их создания
был ориентирован главным образом на экспериментальную доводку из-
изделий. Вместе с тем, надо отметить, что тот качественный скачок в раз-
развитии методологии решения проблемы аэроупругости, который произо-
произошел благодаря ЭВМ, во многом опирается на научный задел, заложенный
в 20-60-е гг. В те годы основное внимание уделялось изучению физиче-
физических явлений в области аэродинамики и теории упругости, развитию тео-
теории колебаний и динамики полета, формированию различных гипотез и
разработке аналитических методов исследования. Развивалась экспери-
экспериментальная база, отрабатывалась техника проведения испытаний и изме-
измерений.
В этот период большой вклад в различные разделы механики, повли-
повлиявший на становление и развитие науки аэроупругости, внесли
Н.Е. Жуковский, С.А. Чаплыгин, Т. Карман, Л. Прандтль, Е. Рейсснер,
Г.Г. Кюсснер, В.Дж. Дункан, Р.А. Фрезер, М.В. Келдыш, М.А. Лавренть-
Лаврентьев, Е.П. Гроссман, Б.Н. Юрьев, Л.И. Седов, В.В. Голубев, А.И. Макарев-
ский, А.М. Некрасов, СП. Тимошенко, И.Г. Бубнов, Т. Теодорсен,
29
Г. Глауэрт, Ц.Н.Г. Локк, Я.Ц. Фын, Р.Л. Бисплингхофф, X. Эшли, Р.Л.
Халфмен, Г.С. Бюшгенс и др.
Много работ публикуется по панельному флаттеру. Здесь важную
роль сыграли статьи А.А. Ильюшина и Лайтхилла [169, 404] по разработ-
разработке поршневой теории и ее приложению к решению задач панельного
флаттера [65, 67, 131]. На эту тему имеются обзоры [128, 258, 389].
Систематическое изложение результатов решения различных задач
аэроупругости для элементов тонкостенных конструкций изложены в
работах [64, 67, 85, 93, 94, 98, 99, 122, 177].
Наметившийся интерес в конце 50-х и начале 60-х гг. к развитию
комплексных и специальных разделов механики связан с появлением
первых ЭВМ. Начинают интенсивно разрабатываться и ускоренно вне-
внедряться в исследования и расчетную практику проектирования числен-
численные методы аэродинамики и теории упругости.
В аэродинамике для решения линейных задач обтекания ЛА в целом
находят применение метод дискретных вихрей и метод источников, по-
позволяющие в рамках модели идеальной жидкости рассчитывать стацио-
стационарные и нестационарные аэродинамические характеристики самолетов в
широком диапазоне чисел Маха [48-50]. Другие численные методы для
расчета аэродинамических характеристик крыльев конечной длины из-
изложены в работе [21]. Для обтекания более простых во внешнем конст-
конструктивном оформлении тел (ракет, парашютов и т. д.) используют разно-
разностные методы [110, 301], метод крупных частиц [45], лагранжево-эйлеров
метод [104, 260].
Для решения широкого класса задач прикладной теории упругости и
строительной механики разрабатываются вариационно-разностный метод
(разновидность метода конечных элементов — МКЭ) [304], метод поли-
полиномов [74, 75], МКЭ [165, 314] и др.
Ведущую роль в нашей стране в разработке расчетных упругих схем
для решения задач статической и динамической прочности авиационных
конструкций в целом на ЭВМ сыграли работы [74, 75, 293, 237].
Выход на новый уровень математических моделей изучения вопросов
динамики полета ЛА [220, 266, 79] потребовал также ряда новых аэроди-
аэродинамических характеристик, которые можно получить только с помощью
современных численных методов аэродинамики.
Заметную роль в переходе на методологию комплексного изучения
ЛА как сложной аэроупругой системы сыграл выход книги [61].
Таким образом, предпосылки наблюдающегося в настоящее время
научно-технического прогресса в области создания сложных технических
систем были созданы работами большого отряда ученых предыдущего
поколения. Выполненные ими в 30-60-е гг. исследования, хотя и опира-
опирались, как правило, на «упрощенные» модели, вместе с тем позволили
глубоко изучить такие основные аэроупругие явления, как флаттер, ди-
дивергенция, реверс и подготовить в 70-е гг. переход к новой методологии
научных исследований, который был бы невозможен без развитой базы
вычислительной техники, без адекватных ЭВМ численных методов аэро-
аэродинамики и теории упругости, нового мышления и формирования нового
уровня информационной базы.
30
§ 1,6. Современные проблемы аэроупругости
Анализ потребностей современной расчетной инженерной практики в
области аэроупругости и возможностей теоретических разработок пока-
показывает, что ранее используемые классические расчетные схемы, опи-
опирающиеся на аналитические методы исследования и экспериментальную
доводку изделия, уже не могут служить основой научной базы вследст-
вследствие затратности такой технологии проектирования.
Сегодня состояние науки «механика» и вычислительной техники та-
таково, что проблема аэроупругости сложных техническим схем может
ставиться и решаться не фрагментарно, а комплексно, рассматривая
функционирование объекта в целом в реальных условиях эксплуатации
на базе системного анализа и синтеза. Для этого необходимо использо-
использовать новую методологию научных исследований, в основу которой поло-
положено глубокое проникновение в повседневную расчетную практику ма-
математического моделирования и вычислительного эксперимента на ЭВМ
[300, 249]. Это, с одной стороны, существенно расширяет возможности
решения задач как составных частей аэроупругости — аэродинамики,
теории упругости и динамики полета, так и проблемы аэроупругости в
целом. По существу к традиционным методам исследования — аналити-
аналитическому и экспериментальному добавился новый метод с широкими воз-
возможностями синтезирования данных смежных наук — математическое
моделирование и вычислительный эксперимент на ЭВМ. Он позволяет
тесно увязать физические явления, возможности и особенности ЭВМ и
сами численные методы. Каждый из названных выше методов имеет свои
преимущества и недостатки. Задача исследователя состоит в том, чтобы,
используя их во взаимной связи, построить наиболее рациональную схе-
схему решения конкретной задачи. Ни один из указанных методов не может
полностью заменить другие. Попытки противопоставить их друг другу
только сужают возможности науки. В связи с тем, что основным источ-
источником конкретной научной информации становятся численные методы,
особая ответственность накладывается на организацию расчетов и их
достоверность. При этом с учетом открывающихся новых возможностей
в получении научной информации значительно повышаются требования
как к постановке проблемы аэроупругости в целом — формированию
структурных ММ функционирования объектов, так и к уровню ММ ее
составных частей. Кроме того, для отладки задачи, организации система-
систематического контроля за результатами расчетов и сокращения их объема
требуются набор тестовых задач, знание точных соотношений, общих
закономерностей протекания рассматриваемых процессов, асимптотиче-
асимптотических решений и т. д. Как видно, роль точных решений и общих теорем не
уменьшается, а возрастает. Точные решения и общие теоремы теперь
имеют не только принципиальное значение, но и практическое.
Математическое обеспечение корректности проведения вычислитель-
вычислительного эксперимента должно быть предметом особого внимания. Весь на-
набор средств, с помощью которых решается эта важная проблема, показан
на рис. 1.7. Здесь необходимо подчеркнуть общий принцип: математика
должна проверяться математическими методами; назначение физических
экспериментов — проверка физических схем и допущений.
31
Несмотря на непрерывный прогресс в развитии вычислительных
средств, вопросы выбора экономных расчетных схем приобретают также
важное значение. Поэтому в зависимости от целей и сложности решае-
Доказательства
корректности общих
и частных задач
Математи
Доказательства
корректности чис-
численных методов
Логические обос-
обоснования схем и
моделей
ческое обоснование и контроль досто-
достоверности ММ аэроупругости
Решение тестовых
задач
Анализ практиче-
практической сходимости
^—
Проверка алгорит-
алгоритмов и программ
Разработка методов
регуляризации
^
Численный экспе-
эксперимент по обосно-
обоснованию упрощений
-—
Контроль по вы-
выполнению точных
соотношений
Рис. 1.7. К математическому обеспечению вычислительного эксперимента
мой задачи должна существовать целая иерархия ММ, позволяющая, с
одной стороны, глубоко изучать выявленные или закладываемые в мо-
модель физические явления, а с другой, оперативно решать насущные науч-
научно-прикладные вопросы проектирования, создания, эксплуатации и мо-
модернизации техники. Следует отметить возросшую роль лабораторных и
натурных экспериментов в обосновании достоверности и установлении
пределов применимости как закладываемых теоретических схем состав-
составных частей проблемы аэроупругости, так и структурных ММ функцио-
функционирования объекта в целом.
Особое место занимает проблема проверки достоверности и иденти-
идентификации структурных ММЛА. В разрешении этой проблемы важным
является применение системного подхода. Возникают трудности, вы-
вызванные физической разнородностью задачи, отсутствием унифициро-
унифицированного математического аппарата и некорректностью задач идентифи-
идентификации. Поэтому в основу качественного синтеза структурной ММЛА
должны быть положены результаты предварительного логического и
аналитического изучения сторон проблемы, ее составных частей. На их
основе должна быть установлена структура ММ аппарата, несколько ее
вариантов, которые могут включать и экспериментальные данные. При
этом проверять нужно не только структурную ММ объекта, но и отдель-
отдельные ее составляющие путем частных исследований в рамках каждой нау-
науки. Проверка схематизации явления осуществляется, как правило, сопос-
сопоставлением теоретических результатов с опытными, в простейшем случае
прямым сравнением данных от двух независимых источников информа-
информации. Однако сравнение теоретических результатов с экспериментом не
всегда можно рассматривать в качестве эталонных; более глубоким явля-
является их статистическое сопоставление (рис. 1.8).
Потребности практики, развитие современных измерительных средств
и ЭВМ оказывают все возрастающее воздействие на создание научно-
материальной базы испытаний. Интенсивно ведется поиск новых методик
проведения экспериментальных исследований [230]. Объем снимаемой
информации в трубном и летном экспериментах настолько увеличился,
32
что и здесь без широкого применения ЭВМ не обойтись [188, 189, 370].
Математическое моделирование на ЭВМ начинает широко использовать-
использоваться в сопровождении летных испытаний. Основная цель их состоит не
Сравнение с прямыми
измерениями
Статистическое срав-
сравнение с прямыми
измерениями
Статистическая
обработка рассогла-
рассогласований в косвенных
измерениях
Проверка возможности
моделирования каче-
качественных эффектов
Обоснование схем трубным и
летным экспериментом
Установление иерархии
разных схем и моделей
4
Области применимости
расчетных схем и моделей
*
Паспорта схем и моделей
Рис. 1.8. К экспериментальной проверке достоверности структурной ММЛА
только в проверке соответствия летных характеристик ЛА требованиям
технического задания, но и в выявлении скрытых дефектов и резервов
аппарата и установлении границы их реализации.
Новая методология планирования и проведения испытаний требует
организации системного подхода на основе рационального сочетания
всех видов испытаний с математическим моделированием на ЭВМ. При
таком подходе возникает проблема получения носителя информации,
обладающего необходимой точностью и достоверностью. И здесь ими
становятся структурные ММ функционирования аппарата и ММ его бор-
бортового оборудования. Подобные ММ должны опираться на всю априор-
априорную информацию, приобретенную на основе предварительных теорети-
теоретических и экспериментальных исследований, натурного и полунатурного
моделирования [43].
Использование структурной ММ функционирования объекта в авто-
автоматизированной системе обработки информации упрощает процесс ее
идентификации по результатам летных испытаний. При этом идентифи-
идентификация заключается в построении компенсационной модели, сводящей к
минимуму неувязки между данными исходной априорной модели и экс-
эксперимента, и определением ее параметров. В дальнейшем таким образом
созданная структурная ММЛА будет играть важнейшую роль при модер-
модернизации, расследовании летных происшествий и выработке мероприятий
для их устранения, эксплуатации по техническому состоянию.
При рассмотрении задачи аэроупругости возникает еще одна принци-
принципиальная трудность: аэродинамические характеристики при неустано-
неустановившемся движении упругой системы зависят от всей предыстории ее
обтекания и деформирования. Памятью, в которой хранится вся инфор-
информация об этой предыстории, является аэродинамический след, образую-
33
2-983
щийся за телом. В случае дозвукового обтекания влияние следа проявля-
проявляется во всей временной области, а переходный процесс носит асимптоти-
асимптотический характер. В свою очередь движение тела и его деформация зави-
зависят от нагрузок, действующих со стороны потока. Здесь имеем дело со
связанной задачей нестационарной аэроупругости, составные части кото-
которой надо решать совместно, последовательно, шаг за шагом по времени,
определяя аэродинамические характеристики, затем упругие перемеще-
перемещения и траекторные параметры. Такой путь решения проблемы аэроупру-
аэроупругости для некоторых прикладных задач из-за их многомерности и отсут-
отсутствия унифицированного математического аппарата является трудно раз-
разрешимым, хотя для мягких тормозных и несущих поверхностей этот под-
подход единственно возможный.
Следует отметить, что для решения проблемы аэроупругости на каче-
качественно новом уровне потребовалось развитие новых подходов в области
аэродинамики. Во-первых, это вызвано существенным расширением кру-
круга задач аэроупругости (см. рис. 1.4); во-вторых, необходимостью учиты-
учитывать развитие процессов взаимодействия упругой конструкции с потоком
газа во времени, что привело к бурному прогрессу методов нестационар-
нестационарной аэродинамики. В-третьих, переход к массовому использованию ЭВМ
в расчетной практике вызвал новые подходы в численных методах аэро-
аэродинамики.
Практика показывает, что одними данными линейной аэродинамики
уже не может обойтись не только авиация, промышленное строительство
и т. д. Область применения данных нелинейной аэродинамики становится
весьма обширной. Быстрое развитие вычислительной техники и здесь
открывает широкие возможности для исследований как теоретического,
так и прикладного характера.
Наибольшее развитие получили численные методы нестационарной
аэродинамики (линейной и нелинейной) в рамках схемы идеальной среды
и метода дискретных вихрей [14, 22, 48-50]. За рубежом широко исполь-
используется и совершенствуется панельный метод [437, 439].
Целый ряд схем в рамках идеальной среды проанализирован в [211].
Для решения ряда нелинейных задач аэродинамики в рамках схемы
идеальной среды для тел «простых» внешних конструктивных форм
весьма эффективными оказались метод установления [110], метод круп-
крупных частиц [46], разностные методы [302] и лагранжево-эйлеровый метод
[104,260].
Одно из важных современных научных направлений в изучении от-
отрывных течений связано с учетом вязкости среды. Состояние вопроса в
этой области аэродинамики отражено в обзоре [108] и монографиях [109,
340].
Отметим, что численная реализация подходов, использующих урав-
уравнения Навье-Стокса при больших числах Рейнольдса, наталкивается на
ряд трудностей, имеющих не только вычислительный, но и принципи-
принципиальный характер [109, 340]. Работы этого направления пока носят поис-
поисковый характер и имеют прежде всего научное значение.
Второе направление связано с сохранением схемы идеальной среды
ддя всей области течения или ее большей части и использованием урав-
34
нений движения жидкости в переменных Эйлера при более полном учете
особенностей реальных течений — введении промежуточного погранич-
пограничного слоя [49]. Такой путь к настоящему времени оказался наиболее при-
приспособленным к решению прикладных задач нелинейной аэродинамики
для реальных тел с учетом их пространственной компоновки.
В проблеме аэроупругости относительно «жестких» объектов (само-
(самолетов, ракет и др.) один из самых экономных способов учета упругости
конструкции — ее представление в уравнениях движения в свернутом
виде путем аппроксимации перемещений точек конструкции собствен-
собственными формами упругих колебаний. При этом для их нахождения, исходя
из конструктивных особенностей изделия, может быть использована та
или иная упругая схематизация. На сегодняшний день самым универ-
универсальным и адаптивным численным методом теории упругости является
метод конечных элементов (МКЭ). С его помощью можно адекватно ото-
отображать упругие свойства объекта не только с внешней, но и с внутрен-
внутренней произвольной пространственной конфигурацией; при этом размер-
размерность задачи может достигать десятков тысяч неизвестных.
Упругие свойства мягких конструкций (парашютов и др.), в отличие
от «жестких», в задачах аэроупругости не могут быть отображены в
свернутом виде. В связи с этим в проблеме аэроупругости таких конст-
конструкций упругую часть задачи, как и аэродинамическую, приходится ре-
решать одним из численных методов последовательно, шаг за шагом по
времени. Отсюда следует высокая размерность задачи аэроупругости в
целом, а значит, большие затраты машинного времени. Уже существуют
методы уменьшения размерности упругой задачи без потери точности
для относительно «жестких» и мягких конструкций. Для «жестких» кон-
конструкций — это метод подконструкций на базе МКЭ и асимтотический
метод [205]; для мягких и относительно простых очертаний «жестких»
систем — метод граничных элементов (МГЭ) [72]. МГЭ позволяет умень-
уменьшить размерность упругой задачи на порядок.
Как и в аэродинамике, в зависимости от поставленной цели и вычис-
вычислительных возможностей при формировании структурной ММ функцио-
функционирования упругого объекта должна существовать целая иерархия упру-
упругих моделей, с той или иной точностью отображающих его реальные
свойства.
В зависимости от типа структурной ММ функционирования объекта
(линейной или нелинейной) в настоящее время сформировались два ме-
метода синтеза данных от различных частей задачи аэроупругости. В пол-
полностью линеаризованной проблеме аэроупругости синтез основан на
представлении обобщенных аэродинамических сил в уравнениях движе-
движения через интеграл свертки [51]. При этом суммарные обобщенные аэро-
аэродинамические силы находятся в виде переходных функций численными
методами аэродинамики на единичное возмущение. Для нелинейной аэ-
аэроупругости широкое применение получил так называемый метод вре-
временных слоев [93] или принцип « Дг » [77].
Новым для современного этапа развития авиакосмической техники
является широкое применение средств механизации и автоматизации,
наличие на борту ЛА мощных БЦВМ. В связи с этим возникла и быстро
35
завоевывает твердые позиции концепция активного управления полетом
ЛА, включая управление аэроупругими колебаниями и их подавление.
Теперь в аэродинамике стало необходимым учитывать требования, свя-
связанные не только с динамикой полета и упругими колебаниями конст-
конструкции аппарата, но и с системами активного [202] и адаптивного управ-
управлений [73, 203]. Ждет своего решения на новом научном уровне концеп-
концепция «упругий ЛА + САУ + СУ» (СУ — силовая установка) с заложенны-
заложенными в ней новыми физическими принципами (использование
аэродинамических эффектов от газовых струй, крыла обратной
стреловидности и т. д.), применением БЦВМ для активного управления и
ЭВМ для совместного проектирования. Укажем еще на одну концепцию
«упругий Л А + бортовые системы».
Современные ЛА оснащены весьма совершенными системами актив-
активного управления, пилотажно-навигационным оборудованием, приборами,
радиолокационными станциями (РЛС). Названные системы, будучи уста-
установленными на борту ЛА, работают в специфических условиях. На их
работу влияют упругость конструкции, различные виды вибраций, ма-
маневры самолета, траекторная нестабильность и т. д. Все это недостаточно
учитывается в исследованиях работы бортовых систем, а зачастую не
рассматривается вообще. Для снижения ошибок навигационного обору-
оборудования и других бортовых систем с самого начала их проектирования
необходимо рассматривать ЛА как упругую платформу, на которой раз-
размещаются и используются эти системы, т. е. в исследованиях необходимо
представлять ЛА и его бортовое оборудование в виде единой интеграль-
интегральной системы.
Таким образом, трудностей, с которыми приходится сталкиваться ис-
исследователю при формировании структурной ММ функционирования
объекта, много, и они весьма разнообразны. Это отсутствие унифициро-
унифицированного математического аппарата для решения проблемы аэроупругости
в целом: используются алгебраические уравнения, обыкновенные диффе-
дифференциальные уравнения и дифференциальные уравнения в частных про-
производных, интегродифференциальные уравнения, эмпирические форму-
формулы и логические условия и т. д. Трудности не всегда связаны с математи-
математикой. Чем сложнее применяемые системные ММ в задачах аэроупругости,
тем труднее насытить их непротиворечивой информацией, обеспечить
организацию устойчивого вычислительного процесса. Отсюда ясно, что
существуют чисто математические и вычислительные трудности.
Мощности современных ЭВМ и их традиционная архитектура (после-
(последовательное действие) высветили центральную проблему в аэроупруго-
аэроупругости — большие затраты машинного времени. Они вызваны высокой раз-
размерностью задачи, сложностью операторов, описывающих изучаемые
физические процессы, тем, что аэроупругие системы являются системами
с аэродинамической памятью и т. д.
По предварительным оценкам, требуемые память и объем вычислений
для полномасштабного решения задач связанной аэроупругости, особен-
особенно нелинейных, таковы, что можно с уверенностью сказать, что ЭВМ
традиционной архитектуры это не под силу. Проблема аэроупругости,
особенно нелинейная, для своего разрешения требует проблемно-ориен-
36
тированных высокопроизводительных ЭВМ, так называемых многопро-
многопроцессорных вычислительных комплексов с распараллеливанием и конвей-
конвейеризацией, разработки по возможности унифицированного математиче-
математического аппарата и альтернативных численных методов.
§ 1.7. Достижения базовых наук аэроупругости
Здесь будут отражены работы за последние 20 лет в области развития
численных методов аэродинамики, теории упругости и методов синтеза
данных, получаемых с их помощью, которые позволили не только под-
поднять рассмотрение проблемы аэроупругости на новый научный уровень,
но и уже сегодня решать практически важные задачи не только из облас-
области авиации.
1.7.1. Аэродинамика как составная часть аэроупругости. Совре-
Современный период развития теоретической и прикладной аэродинамики ха-
характеризуется прежде всего глубоким проникновением в нее новой мето-
методологии научных исследований, связанной с численными методами и
широким применением ЭВМ. По мере развития и совершенствования
авиакосмической и другой техники, для которых вопросы аэроупругости
имеют первостепенное значение, требуется более строго учитывать воз-
воздействие среды на конструкцию. Значительно расширяется круг задач,
для которых необходимы данные нестационарной аэродинамики. Боль-
Большое разнообразие режимов обтекания конструкции (безотрывные и от-
отрывные, стационарные и нестационарные) заставляет исследователя вес-
вести поиск рациональных расчетных схем и под них разрабатывать соот-
соответствующие численные методы.
Линейные модели. Они получили наибольшее продвижение в
решении проблемы обтекания реальных самолетных компоновок. В пер-
первую очередь отметим работы в рамках модели идеальной среды и мето-
методов дискретных вихрей и возмущенных давлений [14,48, 56,57,52,96,158,
171,217,281]. Создана целая серия пакетов прикладных программ по рас-
расчету на ЭВМ линейных стационарных и нестационарных аэродинамиче-
аэродинамических характеристик самолетов, схематизируемых тонкими базовыми про-
пространственно-расположенными несущими поверхностями, в широком диа-
диапазоне чисел Маха. Используются также панельные методы [125,438,439].
Практическая значимость определения линейных аэродинамических
характеристик объясняется тем, что формы ЛА стремятся делать такими,
чтобы на основных режимах полета имели место линейные зависимости
от его основных кинематических параметров (траекторных и упругих
перемещений точек конструкции, отклонения органов управления и дей-
действия порывов ветра) подъемной и боковой сил, моментов и аэродинами-
аэродинамических нагрузок на основных несущих поверхностях. Набор линейных
аэродинамических характеристик настолько широк, а их эксперимен-
экспериментальное определение настолько затруднено, что единственно реальный
путь их получения — численные методы. Это не означает, что расчетные
методы могут полностью заменить эксперимент; его контрольная роль в
аэродинамических исследованиях остается весьма существенной. В по-
последнее время для решения линейных стационарных задач аэродинамики
37
нашла применение и телесная расчетная схема на базе метода дискрет-
дискретных вихрей [217],
Нелинейные модели. Этапы взлета и посадки ЛА, полет с
большими перегрузками и с выпущенной механизацией, маневрирование
и т. д. сопровождаются отрывными режимами обтекания. Все большее
применение находят крылья треугольной и близких к ней форм в плане с
острыми передними кромками, отрывы на которых начинаются уже при
малых углах атаки. При этом возникающие вихревые пелены носят ус-
устойчивый характер, что приводит к значительному росту несущих
свойств крыльев. Для таких систем, как парашют, отрывные режимы об-
обтекания являются нормальными условиями работы. В общем случае от-
отрывные течения нестационарны.
В результате отрывного обтекания тела (поверхности) за ним образу-
образуется вихревой след, представляющий опасность не только для самой кон-
конструкции, породившей его (бафтинг, срывной флаттер и т. д.), но и для
других объектов, попадающих в этот след. В последнее время численные
методы и ЭВМ и здесь открывают совершенно новые возможности для
исследований как принципиального характера, так и прикладного.
Эксперименты показывают, что при больших числах Рейнольдса в
следе за телом при отрывном обтекании обычно превалирует крупно-
крупномасштабное движение жидкости, которое слабо зависит от вязкости; это
в полной мере относится и к отрывному обтеканию ЛА. Отсюда следует,
что расчетная модель отрывного обтекания ЛА по-прежнему может быть
построена на использовании схемы идеальной среды [46].
Здесь остановимся на тех работах, которые в научном плане получи-
получили, с одной стороны, наибольшее продвижение благодаря ориентации на
ЭВМ, а с другой, позволяют определять нелинейные аэродинамические
характеристики объекта в целом с учетом его пространственной компо-
компоновки. Большинство из них выполнено на базе схемы идеальной несжи-
несжимаемой среды и представления несущих поверхностей тонкими базовыми
элементами, так как это снимает проблему нахождения мест отрыва вих-
вихревых пелен.
Широко используемые в аэроупругости ЛА расчетные схемы нели-
нелинейной аэродинамики можно разбить на следующие группы:
1. Безотрывное обтекание без носовой пелены. Ста-
Стационарные задачи. Укажем в первую очередь на метод дискретных вих-
вихрей [54], с помощью которого удается получать не только суммарные и
распределенные аэродинамические характеристики тонкого крыла про-
произвольной формы в плане и самолета в целом на больших углах атаки, но
и изучать сворачивание и разрушение вихревой пелены, определять поля
скоростей и давлений в следе. Состояние исследований отрывных тече-
течений рассмотрено в монографиях [109, 335] и обзорах [55, 108].
Нестационарные задачи. Для их решения разработаны методы па-
панельных особенностей [5], дискретных вихрей [54] и вихревых рамок
[14]. В реализации первого имеются трудности в построении вихревых
пелен.
2. Отрывное обтекание с носовой пеленой. Стацио-
Стационарные задачи. Соответствующие им расчетные вихревые схемы позво-
38
ляют изучать отрывное обтекание тонких крыльев небольшого удлине-
удлинения, форма в плане которых близка к треугольной. Развитие данной рас-
расчетной теории крыла происходит в основном двумя путями — в прибли-
приближении теории крыла весьма малого удлинения и на основе полного ре-
решения задачи численными методами.
Нестационарные задачи. Пока нестационарные нелинейные аэроди-
аэродинамические характеристики тонких крыльев конечного размаха получают
с помощью методов дискретных вихрей [54] и вихревых рамок [14]. Этот
подход находит применение и для расчета телесных крыльев, нелиней-
нелинейных стационарных и нестационарных аэродинамических характеристик
самолетов с учетом работы силовой установки [22]. В последнее время
наметились успехи в решении такого важного вопроса нелинейной тео-
теории крыла, как учет сжимаемости газа [50].
В рамках уравнений Эйлера развиваются и другие численные методы
решения нелинейных задач аэродинамики с учетом сжимаемости газа:
метод крупных частиц [47], разностные методы [302], лагранжево-
эйлеровый метод [104, 260]. Заслуживают внимания книги [40, 41]. Име-
Имеются достижения в теоретической разработке нелинейной нестационар-
нестационарной теории телесного крыла в рамках гибридной схемы «идеальная сре-
среда + пограничный слой» [49].
Следует отметить, что современный этап развития численных методов
аэродинамики характеризуется перенесением центра тяжести работы с
решения отдельных задач к созданию проблемно-ориентированных паке-
пакетов прикладных программ, содержащих целую иерархию ММ аэродина-
аэродинамики различного уровня точности, а следовательно, и трудоемкости вы-
вычислений. Особенно эффективен подход, опирающийся на единый чис-
численный метод. Это позволяет не только создавать универсальное для па-
пакета прикладных программ математическое обеспечение, но и оптимизи-
оптимизировать архитектуру специализированных ЭВМ, ориентированную на со-
соответствующий численный метод. На таком уровне развития и примене-
применения в нашей стране находятся методы дискретных вихрей [54] и вихре-
вихревых рамок [14], а за рубежом — панельный метод [438, 439].
1.7.2. Упругость как составная часть аэроупругости. Многообразие
аэроупругих систем, сложность их конструктивных форм, нестационар-
нестационарность взаимодействия с окружающей средой и широкий спектр нагруже-
ния, а в последнее время применение композиционных материалов вно-
вносят большие трудности в сложившуюся расчетную практику определения
напряженно-деформированного состояния (НДС) таких конструкций. Это
вызвано малой эффективностью, более того, практически неприспособ-
неприспособленностью классических расчетных упругих схем, основанных на стерж-
стержне, пластинке и оболочке, для анализа НДС объекта в целом, особенно
нерегулярной структуры.
Как уже отмечалось, любое инженерное сооружение в современном
представлении должно удовлетворять не только условиям безопасности
эксплуатации, но и быть оптимальным по массе. Разрешение этого про-
противоречия является центральной проблемой для вновь создаваемой тех-
техники, особенно авиакосмической. Данная проблема представляет собой
комплексную задачу, успешное решение которой зависит от степени
39
полноты и достоверности информации, получаемой от взаимосвязи меж-
между геометрическими параметрами и уровнем нагружения конструкции,
свойствами материала. Эта взаимосвязь, ее качественная и количествен-
количественная стороны, устанавливается уровнем адекватности аэродинамических и
упругих расчетных схем, закладываемым в ММ аэроупругости объекта,
тем реальным процессам, которые происходят при эксплуатации послед-
последнего. С учетом таких требований к знанию информации об аэроупругом
объекте проблема исследования и ускоренного его проектирования была
бы трудноразрешимой без широкого применения математического моде-
моделирования на ЭВМ для определения НДС и динамических свойств (час-
(частот и форм собственных колебаний) конструкции в целом с привлечени-
привлечением современных численных методов теории упругости. Выбор той или
иной расчетной упругой схемы конструкции и метода ее исследования
диктуется тем, какая характеристика изделия подлежит анализу (проч-
(прочность, жесткость, устойчивость, аэроупругость и т. д.), и является ответ-
ответственнейшим этапом.
Чаще всего реальные объекты (особенно самолеты, ракеты и т. д.)
представляют собой тонкостенную конструкцию с пространственно-
разнесенными элементами в виде стержней, балок, пластинок и оболочек,
для автономного определения НДС и динамических свойств которых
имеется целый набор хорошо апробированных континуальных и дис-
дискретных упругих схем на базе аналитических и численных методов.
С точки зрения строительной механики основные части, например,
самолета (крыло, фюзеляж, вертикальное и горизонтальное оперения)
представляют собой тонкостенные оболочки с открытыми и многозамк-
многозамкнутыми контурами, подкрепленными относительно жесткими элемента-
элементами (силовыми нервюрами, лонжеронами, шпангоутами), чтобы по воз-
возможности обеспечить неизменные аэродинамические формы аппарата в
полете, и стрингерами. Удлиненные подкрепленные оболочки, линейные
размеры поперечных сечений которых малы по сравнению с их длиной и
у которых отсутствуют вырезы, резкое изменение жесткости обшивки и
подкрепляющих элементов, узлы складывания вдоль линий жесткости,
могут рассматриваться как тонкостенные балки. Современная балочная
теория оболочек, построенная на основных допущениях теории изгиба и
кручения балок, позволяет весьма точно рассчитывать низший спектр
динамических свойств подобных пространственных конструкций. Со-
Согласно этой теории простейшие динамические упругие модели конструк-
конструкций самолетов и ракет могут быть представлены в виде системы про-
пространственно расположенных перекрестных балок. Скелетом таких упру-
упругих моделей изделий служат осевые линии балок (геометрические места
центров тяжести поперечных сечений). Деформация каждого плоского
сечения такой модели характеризуется двумя линейными перемещения-
перемещениями и одним угловым вокруг центра тяжести. Подобную схематизацию
объекта условно называют одномерной упругой моделью, или просто
балочной; расчетные балочные упругие схемы освещены в [194, 237,
315].
Для крыльев малого удлинения допущение о недеформируемости
контура поперечного сечения не выполняется; приходится учитывать
40
деформацию крыла как по размаху, так и в направлении хорды. В про-
простейшем случае крыло малого удлинения рассматривается как тонкая
приведенная пластинка. Деформация и перемещения отдельных точек
крыла представляются через поперечные прогибы относительно средин-
срединной поверхности приведенной пластинки. В итоге самолет с крылом ма-
малого удлинения в расчетах НДС и динамических характеристик заменя-
заменяется балочно-пластинчатым аналогом. Иногда крыло малого удлинения
схематизируют системой балок, за основу которых берутся основные
силовые элементы крыла — лонжероны с добавлением жесткости об-
обшивки и несиловых элементов к жесткости их полок. При этом деформа-
деформация и перемещения точек крыла находят через прогибы воображаемой
срединной поверхности, в плоскости которой располагаются осевые ли-
линии лонжеронов. Это направление изложено в [74, 75]. Дальнейшее раз-
развитие балочно-пластинчатая расчетная упругая схема получила соответ-
соответственно на базе многочленов [9, 74, 75] и МКЭ [165].
Балочная и балочно-пластинчатая расчетные упругие схемы нашли
широкое применение в прикладных задачах аэроупругости и аэроавтоуп-
ругости ЛА [194, 311]. Эти работы выполнены с привлечением прибли-
приближенных теорий обтекания крыла.
Большой цикл исследований по аэроупругости и аэроавтоупругости
самолетов и вертолетов на базе балочных и балочно-пластинчатых упру-
упругих схем с привлечением численных методов линейной нестационарной и
стационарной аэродинамики осуществлен в работах [43, 51, 184, 240, 61,
53, 327, 70, 146, 249].
Все усложняющаяся инженерная практика требует создания развитой
базы пространственно-дискретных расчетных упругих структур. Несмот-
Несмотря на то, что идея дискретизации сложной пространственной конструк-
конструкции разбиением ее на элементы более простых форм и свойств известна
давно, потребовалось дополнительное развитие основных обобщающих
принципов линейной теории пространственных структур. Представлен-
Представленные в этих работах матричные алгоритмы оказались хорошо приспособ-
приспособленными для реализации на ЭВМ.
Развитию и применению МКЭ посвящены монографии [279, 304] и
др.
В принципе сегодня на базе МКЭ могут быть решены задачи о НДС и
определения динамических характеристик (частот и форм собственных
колебаний) конструкции произвольной геометрической формы. Создан-
Созданные в нашей стране на базе МКЭ системы АРГОН, МАРС [139] приме-
применимы для более поздних этапов проектирования и главным образом для
расчета и оптимизации конструктивно-силовой схемы с учетом аэроуп-
аэроупругих свойств конструкции ЛА. Вместе с тем следует отметить, что уве-
увеличение числа конечных элементов влечет за собой повышение трудоем-
трудоемкости вычислительного процесса, возникает сложность в его организации
и контроле. Могут появиться ошибки, для исправления которых иногда
требуется перестройка всего информационного массива. Поэтому разра-
разрабатываются специальные методы для понижения порядка системы алгеб-
алгебраических уравнений для сохранения точности. Одним из таких подходов
является декомпозиция системы — метод суперэлементов (подконструк-
41
ций). Развитие метода декомпозиции идет по двум направлениям. Одно
из них базируется на сквозном применении МКЭ.
Для эффективной реализации метода подконструкций необходимо:
1. Размеры и структуры подконструкций выбирать такими, чтобы для
них можно было организовать автоматическую подготовку исходных
данных. Для этого в конструкции перед ее расчленением для уменьшения
числа разнотипных подконструкций выделяют регулярные отсеки.
2. Стремиться к максимально возможному понижению порядка раз-
разрешающей системы уравнений на самом верхнем уровне расчетной мо-
модели.
Как показывает практика, в целом метод суперэлементов оказывается
более выгодным (обеспечивает общее снижение временных затрат на
решение задачи), чем непосредственное решение задачи по методу МКЭ.
Проиллюстрируем примерную схему процедуры декомпозиции кон-
конструкции на базе МКЭ для расчета динамических свойств ЛА. Конструк-
Конструкцию планера разделим на подконструкций в соответствии с конструктив-
конструктивно-технологическими признаками (рис. 1.9). Как видим, схема членения
является многоуровневой. Планер (уровень III) расчленяется на агрегаты
— крыло (подструктуры 10-16), фюзеляж {1-4), оперение E, 6, 5, 9), гон-
гондолы двигателей G) и т. д. Агрегат делится на отсеки (уровень II). На-
Например, для крыла на этом уровне выделяются следующие подконструк-
подконструкций: центроплан G6), средняя A4) и концевая G2) части крыла, органы
механизации и управления (закрылки G0), подкрылки G5), элероны G7)
и др.). Отсеки агрегата подразделяются на элементы (уровень I) — стрин-
стрингеры, стенки, балки, подкрепленные панели и т. д.
Процедура сборки расчлененной таким образом реальной конструк-
конструкции согласно технологии метода подконструкций осуществляется в об-
обратном порядке. Элементарному КЭ, из которого собираются типовые
подконструкций первого уровня (I), присвоим нулевой уровень @). Из
типовых подконструкций формируются укрупненные композиции G-76)
уровня II, имеющие законченные конструктивно-технологические фор-
формы. Из композиций (подструктур) уровня II формируется уровень III —
сборка конструкции в целом. В процессе сборки расчетной упругой ММ
объекта все повторяющиеся подструктуры описываются один раз и затем
используются многократно. Такая технология сборки модели при необ-
необходимости внесения изменений в конструкцию узла либо в одну из его
частей не требует пересчета всей системы. Переопределения проводятся
только для подконструкций, составным элементом которой является из-
изменяемый узел.
Второе направление — численно-аналитическое — сочетает МКЭ для
формирования расчетной упругой схемы объекта в целом и аналитиче-
аналитические методы для анализа НДС его составных частей (подконструкций).
Такой подход используется преимущественно для объектов с относи-
относительно регулярной структурой (ракет) [205].
В заключение надо сказать, что в зависимости от сложности и точно-
точности решения задач аэроупругости на разных стадиях проектирования ЛА
его упругие схемы могут трансформироваться. Например, на стадии
предварительного проектирования для быстрого проведения различных
42
исследований и оценок могут быть использованы одномерная упругая
модель для ЛА с крылом большого удлинения и двухмерная (пластин-
Рис. 1.9. К применению метода подконструкций для расчета динамических
характеристик ЛА
чатая) — для ЛА с крылом малого удлинения. При уточнении проекта и
более углубленном его анализе необходимо использовать трехмерную
модель. Упрощенные упругие модели обязательно должны тестироваться
при помощи полной — трехмерной модели. При этом желательно, чтобы
43
все упругие модели были объединены по возможности унифицирован-
унифицированным численным методом реализации.
1.7.3. Динамика полета как составная часть аэроупругости. Дина-
Динамика полета ЛА существенно зависит от характера действующих на него
внешних сил, которые в свою очередь определяются его аэродинамиче-
аэродинамическими и упругими свойствами и особенностями системы управления.
Переход от модели ЛА как абсолютно твердого тела к механической мо-
модели в виде системы соединенных между собой упругими связями твер-
твердых тел необходим не только для более полного учета сил инерции, по-
порождаемых перемещениями частей аппарата. Информация об этих пере-
перемещениях используется также для выработки управляющих воздействий
на вектор состояния системы. Кроме того, динамика полета объекта как
управляемой упругой системы с распределенными инерционно-
массовыми и жесткостными параметрами обусловливает новые механиз-
механизмы аэроупругой неустойчивости, отличающиеся от тех, которые харак-
характерны для динамики абсолютно твердых тел.
Таким образом, проблема аэроупругости и аэроавтоупругости для
своего решения на современном этапе требует не только более точных
данных по аэродинамике, статическому и динамическому деформирова-
деформированию конструкции, но и нового уровня моделей динамики полета. Совре-
Современные модели динамики полета ЛА имеются в [79, 266]. Из зарубежных
публикаций отметим работу [367].
В названных работах изучаются траекторные флуктуации ЛА, оцени-
оцениваются его характеристики устойчивости и управляемости, при этом уп-
упругость конструкции либо совсем не учитывается, либо приближенно
путем введения поправок в значения аэродинамических коэффициентов
на статические деформации. Вместе с тем на ЛА имеют место динамиче-
динамические процессы, обусловленные действием порывов ветра, слабых удар-
ударных волн, непрерывной турбулентности, маневрированием и т. д., кото-
которые носят колебательный характер и влияют на прочность конструкции,
ее ресурс и т. д. При определенных скоростях полета возможно проявле-
проявление аэроупругой неустойчивости ЛА, приводящее к катастрофическим
последствиям. Для правильного понимания таких процессов, выработки
мероприятий для уменьшения вредных последствий этого явления или
его предотвращения необходимо как можно точнее отразить в уравнени-
уравнениях динамики полета ЛА его упругие свойства. Большую информацию об
этих явлениях можно получить, решая полностью линеаризованные со-
соотношения динамики возмущенного движения упругого ЛА [43, 51, 194,
284, 249]. Расширение диапазона эксплуатационных режимов полета,
особенно маневренных ЛА, требует создания нелинейных моделей по
динамике полета с учетом деформируемости его конструкции. Эксплуа-
Эксплуатационные ограничения позволяют и здесь упругость конструкции в
структурной ММ функционирования аппарата учитывать в линейном
приближении. Успехи в этом направлении отражены в книгах [151, 249].
1.7.4. Синтез составных частей проблемы аэроупругости. Главная
задача синтеза — объединение (интеграция) наук, являющихся состав-
составными частями проблемы аэроупругости — нестационарной аэродинами-
аэродинамики, теорий упругости и колебаний, динамики полета. Такое объединение
44
стало возможным благодаря современным ЭВМ, разработанным методам
синтеза и использованию системного анализа, существованию целой ие-
иерархии физических и математических моделей аэродинамики и теории
упругости и наличию современных численных методов их решения.
Наиболее разработан к настоящему времени синтез данных линейной
нестационарной аэродинамики с остальными частями проблем аэроупру-
аэроупругости и аэроавтоупругости с помощью интеграла свертки [51]; при этом
упругая часть задачи (деформирование объекта) и его динамика полета
могут описываться как линейными, так и нелинейными соотношениями.
Здесь важно, чтобы изменение траекторных параметров в пространст-
пространстве и времени осуществлялось в рамках линейных соотношений аэроди-
аэродинамики.
Упругие перемещения точек конструкции относительно «жесткого
скелета» аппарата в целом и его элементов при таком способе формиро-
формирования структурной ММ функционирования объекта обычно представля-
представляются в ней в свернутом виде — путем их аппроксимации собственными
функциями. При этом обобщенные аэродинамические переходные функ-
функции вычисляются предварительно благодаря решению канонических за-
задач аэродинамики соответствующими численными методами как реакции
на ступенчатое изменение обобщенных кинематических параметров (уг-
(углов атаки и скольжения, угловых скоростей, обобщенных координат,
учитывающих упругие перемещения, отклонения рулей, действия дис-
дискретных порывов и т. д.).
Разрешающая система полностью линеаризованных либо нелинейных
по траекторным параметрам интегродифференциальных уравнений не-
нестационарной аэроупругости формируется на основе принципа Даламбе-
ра в сочетании с методом Бубнова и интеграла свертки. Технология фор-
формирования таких интегродифференциальных уравнений и методы их ис-
исследования описаны в монографиях [43, 51, 249].
§ 1.8. Перспективы развития структурных математических
моделей функционирования летательных аппаратов
При решении задач аэроупругости требуются структурные ММ функ-
функционирования объектов в полете различного уровня сложности. Уровни
сложности таких моделей и их научное обеспечение зависят от вида изу-
изучаемого движения, наличия разного рода нелинейностей, от типа аппара-
аппарата, его целевого назначения и т. д. В соответствии с этим и осуществляет-
осуществляется классификация структурных ММ функционирования аппаратов в ре-
реальных условиях полета, устанавливаются связи и соотношения между
ними. Такая классификация необходима для обеспечения планомерного
развития структурных ММЛА, их систематизации и унификации.
Так, например, многие задачи аэроупругости ЛА можно рассматри-
рассматривать в предположении постоянства исходной (основной) скорости полета.
При этом отпадает необходимость учитывать в структурной ММЛА аэ-
аэродинамическое сопротивление и тягу двигателей, что существенно уп-
упрощает модель. Данные модели называют короткопериодическими (К-
модели) в отличие от длиннопериодических моделей (^-модели), где это
все надо учитывать.
45
В зависимости от изменения траекторных параметров движения аппа-
аппарата, уровня деформирования его конструкции в целом и отдельных час-
частей, характера обтеканий структурные ММЛА могут быть полностью
линейными, либо нелинейными, либо нелинейными отдельно по состав-
составным частям — по аэродинамике, упругости и кинематике движения, либо
представлять комбинацию линейных и нелинейных соотношений отдель-
отдельных частей задачи аэроупругости (например, флаттер обшивки — линей-
линейная аэродинамика, нелинейная упругость и т. д.). Обычно упругие пере-
перемещения точек конструкции ЛА считаются малыми по сравнению с их
характерными линейными размерами (размахом крыла, длиной фюзеля-
фюзеляжа и т. д.). Это позволяет практически во всех случаях определять стати-
статические и динамические деформации точек конструкции ЛА на основе
линейных соотношений теории упругости. При этом упругие свойства
конструкции аппарата в уравнениях аэроупругости удобно представлять
в свернутом виде — путем аппроксимации перемещений точек конструк-
конструкции собственными функциями. Что касается локальных деформаций
(обшивки крыла и фюзеляжа), то они могут быть описаны с использова-
использованием либо линейных, либо нелинейных уравнений теории оболочек. Вы-
Выбор той или иной теории оболочек определяется значениями нормальных
перемещений точек обшивки по отношению к ее толщине. В отличие от
теории оболочек в аэродинамике условия линеаризации выполняются по
отношению перемещений точек конструкции, которые являются малыми
по сравнению с ее линейными размерами (например, размахом крыла,
длиной фюзеляжа и т. д.).
В эксплуатационном диапазоне скоростей и высот полет ЛА происхо-
происходит, как правило, при малых изменениях значений кинематических пара-
параметров (углов атаки и скольжения, скоростей внешних возмущений и
т. д.). В этих случаях предварительные расчеты аэродинамических харак-
характеристик (стационарных и нестационарных) могут проводиться в рамках
линейной теории крыла [56, 57].
Нелинейные аэродинамические характеристики нужны главным обра-
образом для изучения предельных режимов полета ЛА (штопор, сваливание,
бафтинг, маневрирование на больших углах атаки и т. д.). Численные
методы нелинейной аэродинамики значительно сложнее по организации
вычислительного процесса в сравнении с линейной аэродинамикой и
требуют существенно больших затрат машинного времени и дальнейше-
дальнейшего наращивания мощности ЭВМ.
С точки зрения унификации линейные структурные ММЛА (самоле-
(самолетов, ракет и т. д.) целесообразно разбить на три варианта: 1) базовый ЛА
(без внутренних грузов и внешних подвесок); 2) ЛА с внутренними гру-
грузами; 3) ЛА с внешними подвесками.
В первом и во втором случаях для расчета аэродинамических и обоб-
обобщенных аэроупругих характеристик могут использоваться сравнительно
простые аэродинамические схематизации, согласно которым ЛА пред-
представляется как совокупность пространственно-расположенных базовых
тонких плоских несущих поверхностей. Третий расчетный случай во
многих задачах аэроупругости требует усовершенствования методики
вычисления аэродинамических характеристик ЛА, вызванного наличием
46
Возмущенное движение
Базовая траектория
Пространственное движение
Орцеврирование)
Критические режимы
внешних подвесок; в частности, необходимо учитывать телесность под-
подвесок и их интерференцию с основными несущими элементами аппарата.
Уравнения динамики полета в структурной ММЛА могут быть как
линейные, так и нелинейные — рассматриваются соответственно малые
линейные и угловые смещения ЛА как твердого тела и большие. На ос-
основе линейных уравнений динамики
изучается возмущенное движение ЛА
относительно установившегося базово-
базового режима полета. Нелинейные уравне-
уравнения необходимы для рассмотрения про-
пространственного движения ЛА (напри-
(например, маневрирование самолета, балли-
баллистика ракет и т.д.) [79, 151, 249]. Ха-
Характерные режимы движения ЛА, ис-
исследуемые на основе линейных и нели-
нелинейных уравнений динамики полета,
показаны на рис. 1.10.
В заключение этой главы отметим,
что развитие структурных ММЛА всех
уровней содействует общему прогрессу
аэродинамики, теории упругости,
строительной механики, теории коле-
колебаний и динамики полета, что важно
для решения аналогичных проблем в
других областях техники. Прогресс в
решении проблемы аэроупругости бу-
будет связан с дальнейшим проникнове-
проникновением в вопросы комплексирования
применяемых основных численных ме-
методов аэродинамики и теории упруго-
упругости и в проблему создания специализи-
специализированных высокопроизводительных вычислительных средств, ориенти-
ориентированных на ее нужды. При этом очень важна тесная увязка математиче-
математических особенностей задач аэроупругости и численных методов механики
сплошной среды с организацией вычислительного процесса и архитекту-
архитектурой создаваемых ЭВМ.
Щто]
VI;
Сваливание
Десантирование груза
Посадка ЛА с парашютом
Рис. 1.10. Характерные режимы дви-
движения ЛА
Глава 2
НЕЛИНЕЙНЫЕ МОДЕЛИ ДИНАМИКИ
УПРУГОГО ЛЕТАТЕЛЬНОГО АППАРАТА
§ 2.1. Системы координат. Матрицы направляющих конусов
Движение любого тела характеризуется изменением положения его
точек относительно некоторой системы отсчета (системы координат),
определенным образом ориентированной в пространстве. Обычно ис-
используются неподвижные (инерциальные) и подвижные относительно их
системы координат [220, 233]. В авиационной науке в качестве непод-
неподвижной системы отсчета используют земную систему координат
б^о^О^О 9 ее оси и ее начало связывают с Землей, а направления выби-
выбирают в соответствии с условиями задачи. Чаще всего применяется нор-
нормальная земная система координат
, у которой в отличие от системы
ось всегда направлена по местной
вертикали вверх (рис. 2.1). В качестве под-
подвижных используются нормальная
Ох8у8г8 и связанная Охуг системы коор-
динат с общим началом, лежащим на ЛА,
например в центре масс. Оси нормальной
системы координат Ох8у8г8 имеют те же
Рис. 2.1. Системы координат: направления, что и оси системы О$х8у818 .
нормальная земная О0х8у818, Оси связаНной системы координат Охуг
нормальная Ох8у8г8 и свя- располагаются следующим образом. Про-
занная Охуг; / — поверхность дольная ось Ох лежит в плоскости симмёт-
Земли, 2 — местная горизон- рии ЛА и направлена вперед, нормальная
тальная плоскость ось Оу лежит также в плоскости симмет-
симметрии аппарата и направлена вверх. Поперечная ось От, направлена по пра-
правому борту от плоскости симметрии. Оси связанной системы координат
Охуг чаще всего совпадают с главными центральными осями инерции
аппарата (рис. 2.1).
Положение подвижной (индекс «п») системы отсчета Охуг относи-
относительно «неподвижной» (индекс «н») О$х8у818 задается радиус-вектором
Ко (рис. 2.1) ее полюса и матрицей направляющих косинусов углов ме-
между этими осями:
48
«11 «12 «13
«21 «22 «23
«31 «32 «33 „
Для девяти направляющих косинусов справедливо шесть соотношении.
B.1)
«П + «П + «П = 1
«21 + «22 + «23 =
«31 + «32 + «33 =
B.2)
от
«11«21+«12«22+«13«23=0
«21«31+«22«32+«23«33 =
«31«11 "^ «32«12 "*" «33«13 = '
При переходе от одной системы координат к другой, например, о*
подвижной к неподвижной, и наоборот, координаты радиус-вектора
произвольной точки будут пересчитываться с помощью матрицы направ-
направляющих косинусов B.1) по формулам
п н н п т B.3)
Здесь векторы Кп иКн соответствуют вектору К соответственно в под-
подвижных ц неподвижных осях; индекс «т» означает операцию транслон
рования матрицы.
В дальнейшем рассмотрим случай ис-
исходного положения твердого тела, в кото- 5^
ром начало подвижных осей нормальной у
Ох8у8г8 (неизменного направления) и
связанной Охуг совпадают. Перевод осей
Охуг из начального положения в конечное
можно осуществить с помощью трех неза-
независимых параметров — углов Эйлера, че-
через которые могут быть выражены девять
компонент матрицы косинусов А„ B.1),
связанных шестью соотношениями B.2).
С помощью углов Эйлера система Рис. 2.2. Нормальная и с
системы коослинат И
Л
Охуг переводится в новое положение ох- ™сиГемГв'р^ с по-
носительно Ох8у§18 путем трех поворо- мощью углов Эйлера
тов, выполняемых в строгой последовательности (рис. 2.2). Первый л
ворот системы Охуг на угол \\г (угол рыскания) совершается вокруг ос
Оу8 переводом ее в положение Ох1у1?}. После второго поворота
угол в (угол тангажа) относительно ^
Матрица направляющих косинусов между осями нормально
оси Ог система отсчета Ох1у1т, займет положение Ох у г -И, наК
нец, после третьего поворота вокруг оси Ох1 на угол у (угол крена) п
лучим окончательное новое положение системы Охуг -
Ох8у8г8 и связанной Охуг системами координат для пересчета коорди-
координат радиус-вектора К произвольной точки тела имеет вид [220]:
49
АН°Р -
со^Эсову/
-&т0СО81/^08 7 +
-совО&ту/
созвсову
+ вту/вту
вт6сову/вту +
+ В1Пу/С0Ву -81П0 81П1/А81П7
В динамике ЛА рассматривают также траекторную
стную Охауага системы координат.
Начало траекторной системы координат
(рис. 2.3) располагают в центре масс ЛА.
Ось Охк направляют по вектору абсолют-
абсолютной скорости 110 аппарата относительно
Земли. Ось Оуь помещают в вертикальной
плоскости, содержащей ось Охк, и на-
направляют вверх от поверхности Земли. Ось
перпендикулярна плоскости осей
B.4)
и скоро-
скорои Оук и направлена вправо от нее (парал- Рис 2>3. нормальная и траектор-
лельно горизонту). Направления траектор- ная системы координат и пере-
ных осей по отношению к нормальным вод одной *истемы в другую с
помощью углов пути *Р и накло-
осям задаются углами наклона траектории на траектории &
0 и пути Ч* .
Связь между нормальной и траекторной системами координат осуще-
осуществляется с помощью матрицы направляющих косинусов вида
со80со8*Р -втОсов^ вту/ II
81110 СО80 О I . B.5)
81П08тУ
Скоростная система координат Охауага используется в основном для
определения аэродинамических сил, действующих на ЛА. В скоростной
системе координат в отличие от траектор-
траекторной ось Оха направлена по вектору 11В
воздушной (относительно воздуха) скоро-
скорости, равной
11В=11О-\У. B.6)
Здесь \У — вектор скорости ветра. Ось Оуа ,
лежащая в плоскости симметрии аппарата, на-
направлена вверх, а ось От,а — вправо от плоско-
плоскости Охауа. Для определения углового поло-
система жения скоростной системы координат относи-
Рис. 2.4. Скоростная
координат ОхаУа1а и ее поло- теяш) связанной используются углы атаки а
жение относительно связанной о , ~ л,
Охуг, определяемое углами и скольжения /3 (рис. 2.4).
атаки а и скольжения /3
50
Переход от связанной системы коорди-
нат Охуг к скоростной Охауага осуществляется в соответствии с матри-
матрицей направляющих косинусов, формируемой углами атаки а и скольже-
скольжения /3 :
8111 а СО8СК 0 . B.7)
- СО8 а 8111 Р 8111 а 8111 /3 СО8 /3||
Матрицы направляющих косинусов B.1), B.4), B.5), B.7) при обрат-
обратном переходе определяются с помощью операции транспонирования.
По отношению к нормальной системе координат Охёу§%8 скоростная
система Охауага задается скоростными углами рыскания у/а, тангажа
ва и крена уа, близкими по смыслу углам Эйлера у,у/,в (см. рис. 2.2).
Направление вектора ^ скорости ветра в нормальных осях характеризу-
характеризуется углом ветра !Р^ и углом наклона ветра &„ , задаваемыми аналогич-
аналогично углам пути У и наклона траектории 0 (см. рис. 2.3).
§ 2.2. Кинематические параметры и соотношения
Движение подвижной системы координат относительно неподвижной
характеризуется вектором скорости II0 ее начала с радиус-вектором Ко
(см. рис. 2.1):
Щ=^- B-8)
и вектором мгновенной угловой скорости й ее вращения относительно
полюса О: И = пх\ + пу$ + пгк , где пх,пу,п1 —проекции вектора П
на связанные оси с ортами 1 ^,к, определяемые через углы Эйлера с
помощью соотношений:
пу =1^СО80СО8у +08ШУ , B.9)
у
(точка в этих равенствах обозначает производную по времени /). В век-
торно-матричной записи будем иметь
$ B.10)
II 8И10 0 ||
0 СО80СО8/ 8Шу , Ф = |у ЦТ
0 -СО808И1У СО8у
Обратные зависимости имеют вид
у = Ох - ЩдF2у созу - О,г $ту),
у/ = (йу созу-Йг8шу)/со80 , B.11)
0 = пу 8ШУ + О,г СО8У ,
51
или
о 2т. _^Е1 . B.12)
СО80 СО80
О 8Ш7 СО8/
При использовании соотношений B.11), B.12) в случае в ->п/2 воз-
возникает особенность «деление на нуль». Эта особенность в кинематиче-
кинематических уравнениях может быть устранена, если определять ориентацию ЛА
с использованием, например, параметров Родрига-Гамильтона
Ао, &\, А2, Аз [220], связанных условием
22 л. 22 л. 22 _1_ З2 _1 П 1Т>
Л>Г\ т Ал "г /12 г Ло — 1 . \^" хи I
Применение этих параметров в кинематических соотношениях дает
Л0Лф + А^А^ + Аук^ *Ь А3А3 = 0 . \^* ^^"/
Проекции вектора угловой скорости & в связанной системе коорди-
координат через его проекции в инерциальной системе координат с помощью
параметров Родрига-Гамильтона определяются по формулам
пх =2(-
пу = 2(-
B.15)
В векторно-матричной записи с учетом связи B.14) будем иметь
1ф Л| л2 л
где
— А2 —">
-я2
я,
А2
B.16)
Зависимости, обратные B.16), имеют вид
B.17)
Я2 = |
, Я3 = \(.-
или
11, где Ад =
л2 лз ХЧ)
Аз — А2 л^ Л0
Нетрудно проверить, что Ад = (Аф)т и АдАф = Е , где Е — единичная
матрица.
52
Вычислительная устойчивость при интегрировании соотношений
B.17) обеспечивается проверкой условия B.13). При необходимости про-
проводится следующая коррекция результатов:
B.18)
где А0Д1Д2Д3 —скорректированные параметры Родрига-Гамильтона.
Матрица направляющих косинусов между связанной и нормальной
системами координат, выраженных через параметры Родрига-
Гамильтона с учетом связи B.13), имеет вид
А"ор=2
— А0А3 +
¦ А|Л2 -*
а 2
—
B.19)
С углами Эйлера параметры А;0 = 0,3) соотносятся следующим образом:
- в у у/ в . у . у/
Ял =СО8 — СО8 — СО8- СО8 — 81П —81П—,
2 2 2 2 2 2
- .в у у/ . в . у . у/
Хл =81П —СО8 — СОЗ—+ 81П —81П —81П—,
2 2 2 2 2 2
, . в . у у/ . в у . у/
Я? =81П — 81П — СО8-1 81П — СО8 —81П—,
1 2 2 2 2 2 2
B.20)
в . у
=СО8 — 81П —
2 2
XI/
2
в У . у/
— СО8 — ЗШ-2- .
2 2 2
Из сопоставления матриц B.4) и B.19) можно получить обратные со-
соотношения для определения углов Эйлера:
со80=д/1-4(АоА3+А1А2J ,
СО80
СО80
2(А0А1-А2А3)
81П7 = У Х ^-^-
СО80
СО80
B.21)
у-агоц2^"^, 0=агс5т[2(ЯоДз
При вычислении угла у/ учитывается, что при со81^>0,
его значения лежат в первом квадранте углов; при созу^ < 0 , зту^ > 0 —
во втором; при соз^<0, зшу<0 — в третьем и при созу/^0,
зту/' < 0 — в четвертом. Это же справедливо и при нахождении угла у.
Угол в меняется от -7г/2 до + я/2 ; при в=±п/2 (соз0 = 0) в равенст-
53
вах B.21) имеем особенность «деление на нуль», что необходимо учиты-
учитывать в вычислительном алгоритме.
Для определения координат х8 , у8 , г8 точки О ЛА в земных осях
из выражения B.7) с учетом формул B.2) и B.3) имеем
х§ = 110хсо$6со&у/ + 170у(-$твсо&у/ со$у + вт у/$ту) +
+ VОг (8111 0 СО8 у/ 81П у + 8Ш ^ СО8 у ),
У8 = ^0* 5Ш 0 + 17Оу СО8 0 СО8 у - ^/02 СО5 в 31П У , B.22)
СО80 8111^ + G0у (СО8!/^ ^ПУ + 8Ш0 8Ш1^ СО8 У ) +
Величины ^Ох^Оу^Ог являются компонентами вектора скорости
110 ЛА в связанных осях. В векторно-матричной записи соотношения
B.22) будут
B.23)
где матрица перехода А"вР определяется выражением B.4).
Проекции вектора скорости ветра УУ (см. формулу B.6)) на связанные
оси будут равны
У?х = 1УХ СО80СО8^ + ТУу $тв -
(-зтвсоз^созу + зт^зту)^-^ созбсозун-
0 ), B.24)
г (соз^созу
или в векторно-матричной форме
B.25)
Компоненты вектора скорости ветра VI8 в земных осях в свою оче-
очередь находятся через углы ветра !Р^ и наклона ветра ©у/
у B.26)
Щ =-^СО8%8Ш^,
где У/— абсолютное значение скорости ветра.
Проекции вектора 11В воздушной скорости на связанные оси опреде-
определяются через углы атаки а и скольжения /3
Уъх = их "И* = ^всозасоз/3 ,
$ , B.27)
54
где GВ — абсолютное значение вектора II в .
Из равенств B.27) можно получить формулы
а = -
' ву
-^- = -аГС81П
B.28)
2
В2
Формулы B.28) справедливы для IIш > О; при 1/ш <0 имеем
а = <
/8 =
п - агсзт
- 7Г + агсзт
— /г + агсзт
B.29)
п - агсзт—52-, ^/вг > О
Последние формулы используются при описании параметров движе-
движения ЛА с углами атаки и скольжения, превышающими по абсолютной
величине л/2.
Иногда вместо углов атаки а и скольжения /3, характеризующих
направление вектора воздушной скорости 11В, вводятся путевые углы
атаки ссп и скольжения /Зп для задания вектора скорости 11В полета ЛА
в подвижных осях. Положив в B.27) \У = 0, из B.28) получим
B-30)
§ 2.3. Абсолютное и относительное движения точек
упругой конструкции летательного аппарата
Упругий аппарат будем рассматривать как систему N материальных
точек с массами щ (г = 1,Ы), соединенных между собой идеальными
упругими связями. Для абсолютно твердого тела эти связи представляют-
представляются в виде нерастяжимых невесомых стержней, а для деформируемого — в
виде невесомых (безынерционных) пружин, работающих на растяже-
растяжение — сжатие. Вместе с пружинами могут быть введены и демпферы для
учета рассеивания энергии при упругих колебаниях тела.
Абсолютное движение точек деформируемого тела в инерциальной
системе отсчета О$х8у818 (см. рис. 2.1) складывается из переносного
55
движения аппарата вместе со связанной с ним системой координат и
движения точек относительно связанных осей Охуг. С учетом этого ра-
радиус-вектор К; точки г в инерциальной системе будет
К* = Ко+4+1^ «К^+и,. B.31)
В B.31) Ко — радиус-вектор начала О связанных осей относительно
неподвижной системы координат, Г; — радиус-вектор точки / в связан-
связанных осях при рассмотрении аппарата в виде абсолютно твердого тела,
щ — вектор относительного упругого перемещения точки г в связанных
осях, К.О/ = Ко + гг- — вектор жестких пе-
перемещений 1-й точки (рис. 2.5). Фактически
движение упругого ЛА рассматривается как
суммарный результат смещения его как
твердого тела (обрисованно штриховой
линией на рис. 2.5) и упругих перемещений
точек его конструкции (сплошной).
Для вектора абсолютной скорости г-й
точки упругого ЛА будем иметь
- ^.=^- = 1H+^- + ^-, B.32)
'гя где 110 — вектор скорости начала О свя-
Рис. 2.5. Перемещение 1-й точки занных осей, X — время,
деформируемой конструкции Производная по времени любого векто-
ЛА (положение 2) в нормальной д пптмжт1ТУ пг$гу ялятттяютттшгг^г г
земной системе координат Ра А в подвижных осях, вращающихся с
О0хяУггя относительно его угловой скоростью 12 , равна
недеформируемой формы (по- -—= А + 12хА, B.33)
ложение 1) &
где А — локальная производная вектора А по времени, описывающая
относительную скорость движения.
Тогда для второго и третьего членов соотношений B.32) можно запи-
записать
Л
B.34)
Здесь учтено, что для абсолютно твердого тела
г,=0. B.35)
В итоге имеем
II,- = 110 + Пхг,- +й; +12X11,-. B.36)
В B.36) величина A10 +!2хг;) — переносная скорость точки /, вклю-
включающая скорость 110 начала связанных осей и вращательную скорость
12 х гг-; через щ обозначена относительная скорость точки /, обусловлен-
обусловленная упругими колебаниями конструкции, через 12 хи^ — вращательная
составляющая скорости, порожденная упругими деформациями конст-
конструкции ЛА.
56
При рассмотрении кинематики ЛА относительно жесткой конструк-
конструкции вращательная составляющая Их и,- обычно мала и поэтому ее можно
не учитывать. Принимаем, что
B.37)
Абсолютное ускорение точки / с учетом правила B.33) и представле-
представления B.37) будет равно
B.38)
Уравнение абсолютного движения 1-й точки
/и,*,. =Й|-+Р/ B.39)
в подвижных осях с учетом соотношения B.38) принимает вид
/111-|11о + Лх11о+Пхг|-+Пх(Пхг|') + й1-] = К1-+Р,-. B.40)
Здесь Й; — вектор внешней нагрузки, приведенный к /-й точке, Б1,- —
вектор внутренних (упругих) сил, приложенных к 1-й точке через связи со
стороны всех остальных взаимодействующих с ней точек конструкции.
При и,- = 0 приходим к уравнению движения 1-й точки абсолютно
твердого тела:
ш1-|110 + Пх110+Пхг/+Пх(Пхг1-)] = К1-+Р/. B.41)
В B.41) в отличие от B.40) Р,- — вектор внутренних сил, приложен-
приложенных к 1-й точке со стороны жестких связей ее с остальными точками не-
деформируемой конструкции.
§ 2.4. Уравнения поступательного и вращательного движений
жесткого летательного аппарата
Выпишем уравнение абсолютного движения 1-й точки жесткого тела
B.39) с учетом представления B.32) при и; = 0 в виде
/^
щЦк^+Я B.42)
2
Главный вектор и главный момент внутренних сил Р,- по определе-
определению равны нулю, т. е.
Хр;=°> 3>,хР,=о. B.43)
1=1 1=1
Уравнение поступательного движения жесткого ЛА в инерциальной
системе отсчета получается путем суммирования соотношения B.42) с
учетом выражений B.43) по всем 1-м точкам объекта:
+ М^?- = К, B-44)
или
^^=К, B.45)
57
где М =^т( —масса аппарата, гцм
1=1
радиус-вектор центра масс в связан-
ных осях, К = ^К/ — главный вектор внешних сил, 8 = ^т^ = Мгцм —
1=1 1=1
вектор статического момента.
Аналогично, только после предварительного умножения равенств
B.42) векторно слева на Г; с учетом B.43), формируется уравнение вра-
вращательного движения жесткого ЛА
8х^ + ^>=М. B.46)
дх Л
Здесь М — главный момент внешних сил, величина (Л1) с учетом вы-
выражения B.35) определяется следующим образом:
N
Л1 = 2ш1-[г1.
1=1
Тензор инерции
B.47)
"' •*ху хг\\
N
1=1
- у л
' гу %/г
включает осевые ]х,]у,Зг и центробежные 7^,=/
] уг — 5гу моменты инерции.
Его можно вычислить по формуле
~т
B.48)
ух*
гх'
B.49)
^ =-тгг = тгг
где введена вращательная матрица
10 г -у
-10 х . B.50)
у -х 0
Величину т следует рассматривать здесь как диагональную матрицу
масс точек аппарата, а х,у,г — координаты этих точек.
В связанных осях с учетом правила B.33) и равенств 1 = 0, 8 = 0
вместо уравнений B.45) и B.46) получим
B.51)
Эти уравнения можно также получить непосредственно из соотношений
B.41) с учетом свойств B.43).
Уравнение вращательного движения B.51) может быть преобразовано
к виду
1ТТМ ^ + Пх1пмП = Мим . B.52)
Ц.М Ц.М Ц.М V /
В B.52) массово-инерционные и моментные характеристики приведе-
58
ны к центру масс ЛА (¦Хц.
связанных осях Охуг) и равны
— координаты центра масс ЛА в
•* ц.м — •*
''Ц.М '
З'ц.м
Мц.м=М-гцмхК,
хи,мУц.м ¦^ц.м^ц.м
"^Ц-М "*" ^Ц.М "~ З'ц.М^Ц.М
^цмУцм хцм + Уцм
Если начало связанных осей помещено в центре масс (гц м = 0 и
8 = 0), то уравнения B.51) поступательного и вращательного движений
жесткого ЛА упрощаются:
B.53)
Если связанные оси, кроме того, совпадают с главными осями инер-
инерции, то тензор инерции 5 в уравнениях B.53) становится диагональным,
так как центробежные моменты инерции принимают нулевые значения.
§ 2.5. Уравнения движения летательного аппарата
с подвижными массами
Во многих задачах динамики ЛА необходимо учитывать наличие на
нем перемещающихся и вращающихся масс. Соответствующие уравне-
уравнения получаются методами аналити-
аналитической механики [220].
Введем в рассмотрение собствен-
собственно ЛА как несущее тело, относи-
относительно которого движутся несомые
тела (подвижные массы). С несущим
телом свяжем систему координат
^1Х\У\Ч с полюсом в точке О\, не
совпадающим в общем случае с цен-
центром масс аппарата. С несомым те-
телом свяжем систему координат
^2х2Уг^2 с полюсом С2 в его цен-
центре масс.
В соответствии с обозначениями
Ух
х2
Рис. 2.6. Системы
ншземная о^
щего о^у^ и несомого Сгхгуг1г тел
координат: нормаль-
^ и связанные несу-
на рис. 2.6 определим радиус-векторы Кг1 и КB точек несущего (индекс
1) и несомого (индекс 2) тел соответственно в виде
На рис. 2.6 через гс1 и тс2 обозначены радиус-векторы (с началом в
полюсе О\) центров инерции несущего и несомого тел. Запишем урав-
уравнения движения точек ц и 12 соответственно несущего и несомого тел в
неподвижных осях О0х8у818 :
59
B-55)
где Р/12 - "%1 — результирующий вектор внутренних снл взаимодей-
взаимодействия между точками первого и второго тел.
В проекциях на подвижные оси Охх^ухц будем иметь
й фх(П,хгп)] = Й
B.30)
ХГс2 + «! X(«! ХГс2) + ГС2 + 2^1 ХГс2] +
Суммируя уравнения B.56) по всем точкам /| и /2 несущего и несо-
несомого тел, получаем
Ф = &! +Р12,
B.57)
В соотношениях B.56), B.57) введены обозначения: 11о| — вектор
скорости точки <| несущего тела, С1[ — вектор угловой скорости враще-
вращения связанных осей О\Х\ухц, 5| = ^тпга — вектор статического мо-
мента инерции первого тела относительно связанной, с ним системы от-
отсчета, А/| = ^т,1, М2 = ^Щг — массы первого и второго тел,
А52 = М2тС2 — вектор статического момента несомого тела относитель-
относительно связанных осей О^ум, 1^ = 5)КП , К2 = ^К^2 — главные векто-
п и
ры внешних сил первого и второго тела, Р12 = -Р2) = ^Р/12 — главный
Л2
вектор внутренних сил взаимодействия между первым и вторым телами.
Складывая левые и правые части уравнений B.57), получаем
М[11о1 +Й1 х110| +«1 хге +$*!х(пххгс)+гс +2^!хгс] = К. B.58)
Здесь учтено, что
гс1=гс, =0, ЛГггА/г МгМ
где гс — радиус-вектор общего центра масс системы двух тел в связан-
связанных осях 01*1 Л *1'
Если центр масс несомого тела относительно осей О\ххуХ1\ будет не-
неподвижным, то гС2 = *С2 = 0 > т. е. фактически мы приходим к верхнему
уравнению системы B.51) поступательного движения жесткого тела.
60
При составлении уравнения вращательного движения будем учиты-
учитывать, что
1? = 0, B.60)
где А^,^ — тензоры инерции относительно полюса Ох системы в
целом и ее отдельных составляющих (первого и второго тела). Если до-
дополнительно ввести в рассмотрение тензор инерции 1^2 несомого тела
относительно его центра масс С2, то в соответствии с теоремой Гюйген-
Гюйгенса и равенством B.49) будем иметь
^^\ B.61)
10 *сг -
У а -*сг О
Тогда с учетом правила дифференцирования произвольного тензора I в
подвижных осях [220], аналогичного по смыслу правилу B.33),
1+«х11хй B.62)
ш
устанавливаем
15=^2 +1^х# -#хП12 + М2гс2тс2т + М2гс2гс2т. B.63)
Здесь в качестве подвижной выступает система координат С2х2у2г2у
связанная с несомым телом, вращающимся с угловой скоростью п2 от-
относительно осей О\Х1У\1\; оси О\ххуХ1Х связанны с первым телом и рас-
рассматриваются как неподвижные. В связи с этим «точка» над индексом в
B.63) соответствует операции взятия абсолютной производной по време-
времени, а знак « ' »—локальной, причем
1%*=0. B.64)
Так как в B.63) через 122 обозначен вектор угловой скорости несомо-
несомого тела в системе координат несущего тела, то
Л2=О2+Л!2, а12=П!2+п1хП2- B65)
В B.65) Й!,Й2 — веооры угловых скоростей вращения тел 7 и 2 отно-
относительно нормальной земной системы координат.
В связанных с несомым телом осях имеем
Д?я=Д?12=0. B.66)
На этом основании
Дг|2 » ах2 х&г12, Дг/2 = Й!2хДг/2 + П!2х(п^ хДг|2)=
^Ц) B.67)
61
Для получения уравнения вращения умножим векторно слева первое
соотношение системы B.56) на Гц, а второе на гB и просуммируем по
всем точкам /1 и /2 соответственно несущего и несомого тел; проделаем
эти операции по частям:
]Ггй хта(й01 +Лг хЪ01) =Мгтс1 х(й01
п
5) ХГд + в! ХОД ХГд)] = 1?
а
Хг*2 Хт/2(^01 +Й1 х1101) = М2гс2 хA101
и
ЕГ/2 Х^/2^1 ХГс2 +»! ХОД ХГс2) + Гс2 +2а2 ХГс2] =
/2
= М2гс2 хОД хгс2 + аг хОД хгс2) + тс2 + 2Й! хгс2], B.68)
]Гг/2хт/2Дг/2 = 5}г/2хщ2[(П2 -°1 х^2)хДгй +
/2 1*2
+ П^ X (а!2 X Дгй)] = 122«2 - Т22 № Х°2) + П2 Х*22°2 •
г/2 Х|Я/2Bа1 ХД*/2) = 2р/2 Х1Я12[2П1 х(»
/2
^ х Аг/2 + П! ХОД х Аг/2)] =
/2
/2
Суммируя составляющие B.68), получаем
х 1^! + М!Гс1 х а0 + М2гс2 х а2 +
+;г22 од+а\) + од+п2)х 122 од+п12)=м. B.69)
В представлениях B.68) и уравнении B.69) введены векторные вели-
величины: М15М2 — главные моменты внешних сил, приложенных соответ-
соответственно к несущему и несомому телам, М = М1+М2 — суммарный
главный момент внешних сил, действующий на объект в целом, М12 —
главный момент внутренних сил взаимодействия между двумя телами;
а0 , а2 — векторы ускорений соответственно полюса (\ несущего тела и
центра инерции несомого тела, равные
а2=а0+О1хгс2+П1хОДхгс2) + г + 2Пхг
В ряде случаев последнее слагаемое левой части уравнения B.69) вра-
вращения несомого тела с несущим целесообразно представлять в виде [220]:
62
\^2
12 У^^
Здесь
7С2=/^+/С2+/С21 B?2)
С С С С
где /д.2, /^2, 7г 2 — диагональные члены тензора инерции 122.
Если несомое тело не вращается, то
^=0. B.73)
С учетом выраженийB.61), B.70) и B.73) уравнение B.69) перепи-
перепишется в виде
+ гс2хМ2гс2 + 2гс2 х (&! хМ2гс2) = М. B.74)
Последнее слагаемое в левой части уравнения B.74) можно представить так
2гс2 х(пх хМ2гс2) = гс2 х(пг хМ2гс2) + «! х(гс2хМ2гс2) -
, -М2гС2Х(гС2ХП1) = ^П1+П1х(гС2ХМ2гС2). B.75)
Здесь учтено, что в соответствии с равенствами B.63) и B.64) при усло-
условии B.73) имеем
т\ B.76)
гс2)]. B.77)
Теперь уравнение B.74) с учетом обозначений B.60) и равенства
B.75) примет вид
Фактически это уравнение вращательного движения тела с подвижными
точечными массами. При отсутствии подвижных тел, т. е. при
гс2 = гс2 = 1° = 0, уравнения B.58) и B.78) примут вид B.51).
§ 2.6. Уравнение относительного движения подвижных масс
Уравнение относительного поступательного движения несомого тела
находится из второго соотношения B.57). Его будем формировать с уче-
учетом положения B.66) для производных радиус-вектора в связанной с не-
несомым телом системе координат. Тогда получим
^2^01 + °1 х^1 + ^1 Хгс2 + °1 х (а1 Хгс2)+ ^2 +^2X112 +
+ 2П1х112] = К2+Р21. B.79)
где 112 = гс2 — вектор относительной скорости центра масс несомого
тела.
Уравнение относительного вращательного движения несомого тела
можно получить суммированием составляющих соотношений B.68), ис-
63
ключив из них первые три для несущего тела. При этом для несомого
тела векторное умножение слева на величину гг-2 следует заменить ум-
умножением на радиус-вектор АтB = гB - гс2 точек /2 относительно свя-
связанных с несомым телом осей. Кроме того, необходимо использовать
угловые ускорения в проекциях на эти же оси в соответствии с формула-
формулами B.65):
аг = а1. B.80)
В итоге будем иметь
2 ^^^^ B.81)
или
. B.82)
Учитывая равенство [2.71], преобразованное к виду
2 У^ех^х^) B.83)
окончательно получим
! =М22 +М212. B.84)
В B.84) индексом «С2» отмечены величины, вычисляемые относи-
относительно связанных с несомым телом осей; величина 1Сг по-прежнему
определяется формулой B.72).
§ 2.7. Уравнения поступательного и вращательного движений
упругого летательного аппарата
При получении уравнений динамики движения упругого ЛА исполь-
используются условия самоуравновешенности внутренних сил упругого взаи-
взаимодействия между точками его конструкции
2^=0, Е(г*+и*>хВ1=0- B.85)
1=1 ( 1-1
Последнее уравнение для аппаратов с достаточно жесткой конструк-
конструкцией в соответствии с принципом неизменности начальных размеров
принимается в более простой форме
N
2>;ХБ;=0. B.86)
1=1
Уравнения поступательного и вращательного движений упругого ЛА
можно получить из соотношения B.40). Первое уравнение формируется
64
д1утем суммирования выражения B.40) по всем г-м точкам системы
мфо+Пхио)+&х8 + &х(Ях8)+Мпцм=К, B.87)
где М — масса аппарата, 8 = Мгц м — вектор статического момента,
Гц м — радиус-вектор центра масс на жестком аппарате, иц м — вектор
упругого смещения центра масс при деформировании конструкции,
К — главный вектор внешних сил, действующих на конструкцию.
Далее умножим соотношение B.40) слева векторно на вектор г, и
опять проведем суммирование по всем г-м точкам. В итоге получаем
N
B.88)
1=1
Здесь М — главный момент внешних сил, 1 — тензор инерции жесткого
аппарата (см. B.48)).
В отличие от твердого тела вид уравнений поступательного B.87) и
вращательного B.88) движений упругого ЛА существенно зависит от
способа задания связанной системы координат [151]. Так, при произ-
произвольном размещении связанных осей на деформи-
руемом теле на упругие перемещения его точек
накладываются шесть ограничений. Например,
если начало локально связанной системы отсчета
увязать с произвольной точкой 1 тела, ось О'х
направить вдоль прямой, соединяющей точки 7 и
2 тела, ось О'/ провести перпендикулярно плос-
плоскости точек 7,2, 3 тела, а ось О'г — в плоскости
точек 1,2, 3 перпендикулярно оси <9У (рис. 2.7),
то дополнительно получим для упругих переме-
щений этих точек связи вида
= 0, и у1 = 0, ип = 0,
х1 у1 г1
В задачах аэроупругости ряд вычислительных
преимуществ имеет так называемая «средняя»
система координат [249]. Ее оси проводят так,
чтобы минимизировать сумму квадратов упругих перемещений точек.
Это обеспечивается соблюдением условий
N N
2>/и, = Мицм = 0, 2>/(г/хи/) = ° • B-9°)
1=1 1=1
С учетом равенств B.90) получаются следующие уравнения поступа-
поступательного и вращательного движений упругого ЛА:
По форме эти равенства полностью совпадают с уравнениями B.50)
поступательного и вращательного движений жесткого тела. Отличия свя-
65
Рис. 2.7. Локально свя-
занная система коорди-
нат О'/уУ деформи-
руемого тела; направле-
ния 7-2, 2-3, 3-7 —
упругие связи между
точками 7,2,3
B.89)
заны лишь с представлениями сил К и моментов М . Для гибких конст-
конструкций допущение B.37) о малости вращательных скоростей, порожден-
порожденных упругими деформациями, является неприемлемым; при этом различ-
различными оказываются не только правые, но и левые части уравнений B.91)
[151].
§ 2.8. Уравнения деформирования летательного аппарата
Так как уравнение колебаний B.40) составлено с учетом малости уп-
упругих деформаций, то упругие силы I? в нем могут быть представлены в
виде
N
Ц=-2*1уи7' и = 1>#, B.92)
где ку — коэффициенты жесткости системы, рассчитываемые теорети-
теоретически или определяемые экспериментально [61], N — число упругих свя-
связей взаимодействующих сосредоточенных масс.
Подставляя выражение B.92) в правую часть соотношения B.40), по-
получаем дифференциальное уравнение колебаний точек деформируемой
конструкции:
^к^^и^ =К,-. B.93)
1=1
Ввиду бесконечно большого числа N точек, схематизирующих реаль-
реальную конструкцию, непосредственное использование системы N уравне-
уравнений B.93) для описания процесса ее колебаний не представляется воз-
возможным. На практике в основном используют два упрощенных метода —
сосредоточенных масс и заданных форм [61].
В методе сосредоточенных масс (параметров) деформируемый объект
изображается в виде совокупности конечного числа упруго связанных
между собой подвижных тел (масс). Для каждой из этих масс с учетом
малости их упругих перемещений составляется по два векторных уравне-
уравнения относительного движения и вращения типа B.79) и B.84):
A94)
Уравнения B.94) совместно с равенствами B.90) служат для опреде-
определения неизвестных 110, П , ис2/» &\(. Угловые скорости П^/ с линей-
линейной точностью выражаются через угловые упругие перемещения (малые
углы у/, у//, 0;, образующие вектор в,-)
&\{=Ъ{. B.95)
При этом упругие силы и моменты вычисляются по формулам, анало-
аналогичным B.92):
* 5!
'+ к1§§)
66
Эти зависимости совместно с формулами B.95) позволяют замкнуть
уравнения B.94).
Более предпочтительным и апробированным в задачах динамики и
аэроупругости ЛА [61] является метод заданных форм, представляющий
по существу реализацию принципа Даламбера в сочетании с методом
Бубнова-Галёркина. В соответствии с последним поперечные упругие
перемещения точек конструкции аппроксимируются рядом известных
(заданных) векторных функций (форм) $.ц координат
B.97)
1=1
где ^^ @ — искомые обобщенные параметры упругих перемещений (ам-
(амплитуды соответствующих форм колебаний), зависящие только от вре-
времени и Ыд — число удерживаемых форм в разложении B.97), Г/,- — зна-
значение формы с номером / в 1-й точке.
Подставляя разложение B.97) в уравнение B.93) и умножая последнее
скалярно на векторную функцию Гш- с последующим суммированием по
всем /-м точкам, получаем
1=1 1=1
л = 1, Л^.B.98)
Здесь введены следующие величины:
N _ N N
1=1 /=1 /=1
Кщ = Е Ъ*к№' шт = Ъщ*ш*и . B.99)
1=17=1 1=1
N
]п =
где /пхг 1/пуг >/п& — координаты векторной функции Гш- в связанных
осях.
В задачах аэроупругости ЛА в качестве заданных функций целесооб-
целесообразно выбирать собственные функции (формы свободных колебаний уп-
упругой конструкции), обладающие полнотой и свойством ортогонально-
ортогональности:
1-1 B.100а)
= V г г = I ° при *ф п'
- 2^ I т и - |дд/л при / = п,
67
B.1006)
где 62п — частота собственных колебаний упругой системы по форме п.
Реальные конструкции обладают свойством демпфирования упругих
колебаний за счет потерь энергии на внутреннее трение, трение в сочле-
сочленениях и т. д. Для учета этого явления обычно в правую часть уравнений
B.98) вводят так называемые демпфирующие силы
Рпа=-2кпАМпппдп, B.101)
где кп — коэффициенты демпфирования.
С учетом зависимостей B.100) и B.101) перепишем равенства B.98)
окончательно в виде
= Р„, п = Щ. B.102)
Как видно из уравнений B.102), на упругие колебания конструкции
влияют не только внешние аэродинамические возмущения Рп , но и
вращательные движения аппарата как жесткого тела с угловой ско-
скоростью О..
§ 2.9. Представления внешних сил и моментов
Для получения замкнутых соотношений, описывающих динамику
упругого ЛА в полете, необходимо выразить действующие на него внеш-
внешние силы и моменты через параметры его движения и деформирования.
Эти силы условно можно разделить на объемные тг§ (массовые), по-
поверхностные Кш (аэродинамические) и сосредоточенные Т, (тяги двига-
двигателей, сила сопротивления тормозного парашюта и т. п.), т. е.
B.103)
Главный вектор К и главный момент М этих сил равны
N
« B.104)
1=1
Обобщенные силы, входящие в уравнения упругих колебаний, будут
^=Е^-^=Рйа+Рлт. B.105)
1=1
Здесь учтено, что в силу ортогональности собственных форм B.100),
обобщенные характеристики, зависящие от массовых сил, равны нулю.
Проекции вектора М% силы тяжести ЛА в нормальной земной систе-
системе координат равны
М$х =0, Мву =-М§, М&г =0. B.106)
68
В связанных осях с использованием матрицы перехода B.4) зависи-
зависимости для определения этих проекций принимают форму:
М§х = -М$ 8111 в,
B.107)
Для составляющих главного момента массовых сил в связанных осях бу-
будем иметь
(Мгц м х %)х = М# (уяи соз в 8Ш у + гцм соз в соз у),
(Мгц.м ><§)>;= "^ (*ц.м 5Ш в + *ц.м с08 # МП У), B.108)
(МГЦ м X 8)г = -М^ (ДСЦ м СО8 19 СО8 У - Уц_м 8111 (9).
Положение вектора сосредоточенной силы Т,- в связанной системе
координат можно определить углами ат( и /?т;, аналогичными углам
атаки и скольжения, так что
Тх1 = 7} со8 ат( соз )8Т/, Ту( = -7} вш ат/ соз у9т/, Гг/ = 7} 81п /?т/.
Тогда для составляющих векторов Т, Мт и обобщенных сил Рпт бу-
будем иметь
ЛГТ Мт Мт
Тх = X7/ С08 ат/ С08 ^т/» ^у = "X7/ 81п ат/ С08 Дп ' Гг = Х7^' 81п Рт( '
1=1 1=1 1=1
^Т/ ^П Рч1 + 2Т/ 81П «Т1 С08 ^Т/№ .
1=1
МТУ = Х^Т! С08 «Т! С08 ^Т1 ~ ХТ/ 81П ^Т/O} • B.109)
1=1
т/ т1 С08 ^т/ + Ут/ СО8 ат/ СО8
1=1
рпт = Х(/«™ сова^- соз у
Здесь /ЙТЛ,-, /лту/» /ит21 —составляющие вектора Гпт собственных ко-
колебаний по форме п в точках приложения сосредоточенных сил 7} в
связанных осях, Мт — число сосредоточенных сил.
В общем случае необходимо учесть следящий характер сосредоточен-
сосредоточенных сил. При этом следует представить
ат1 = аот/ + Дой , ртг = Л™ + Дубт/, B.110)
где аот/, рот1 — значения углов ат1 и /Зт( для ЛА как твердого тела;
Дат/, Ду9тг- — их приращения за счет упругих деформаций его конст-
конструкции.
69
Аэродинамические силы и моменты принято представлять через соот-
соответствующие безразмерные коэффициенты
B.111)
где сх,су,сг,тх,ту,тг — коэффициенты сил X, У, 2 и моментов
Мх,Му,Мг, сп —коэффициенты обобщенных сил Рп, 50 иЬ — ха-
характерные площадь и линейный размер аппарата, ^* = р(У в/2 — скоро-
скоростной напор набегающего потока.
§ 2.10. Полная система уравнений движения и деформирования
летательного аппарата
Движение деформируемого ЛА в общем случае описывается совмест-
совместными уравнениями поступательного и вращательного движений B.91) и
колебаний B.102). Объединяя их и учитывая равенства B.104), получаем
B.112)
В скалярной форме записи соотношения B.112) принимают вид
м@0х**
} соз ат
1=1
МфОу
п&5 = су0 р^/§
+ а
у
'=1 B.113л)
В/2 + М§ СО80 8111 У + 5^7} 8Ш /Зт/ ,
1=1
хпг = тх50Ь р1/в/2 + Я(^ созб зшу
+ 5г СО80 СО87) + 2^ (уТ; 8Ш Д^ + гт/ 8Ш ССт{
1=1
70
+ зухйх - ^(д* - ^2) + (у, -
^ + 1гуОуах = т>;50Ь р^/в/2 ~
+ 5Х СО8 в 81П у) + 2) (*Т1 СО8 ат1 с°
^^ ^ ^ у
у1П1пх + ]хгПгау = тг50Ь Р^в/2 - #C* СО80 сову -
8Ш в) - 2) (л:т/ 81п ат1 С08 Дт/ + Ут/ С08 ат1 С08 )8т/ O/. B.1136)
1=1
С08 ат/ С08 Ръ - /птУ1 81п «XI С08
птУ1
/=1
Для определения углового положения ЛА относительно нормальной
земной системы координат, описываемого углами Эйлера у,у/,9, систе-
систему уравнений B.113) необходимо дополнить кинематическими соотно-
соотношениями B.11). При необходимости соотношения B.11) могут быть за-
заменены представлениями B.17), B.21).
Для вычисления координат х8, у§, 18 подвижного начала связанной
системы отсчета О, характеризующих движение аппарата как жесткого
тела относительно неподвижных осей Ох8у818 (см. рис. 2.2), исполь-
используются равенства B.22).
Для определения вектора воздушной скорости 11В B.6) надо восполь-
воспользоваться зависимостями B.24), B.26), B.27).
Положение вектора воздушной скорости 11В в связанной системе ко-
координат задается значениями углов атаки а и скольжения /3 , вычисляе-
вычисляемых по формулам B.28).
В ряде случаев используют понятие путевых углов атаки ап и сколь-
скольжения /Зп ; они характеризуют положение вектора путевой скорости IIо
и находятся по формулам B.30).
Таким образом, имеем A4 + Л^) уравнений B.113), B.11), B.22),
B.30) для определения такого же числа неизвестных Иох^Оу^О^
йЛ,Ду,Дг,^1э...,^ ; у, у/, в, х8, у8, 18, а, /3 при условии, что си-
силы, действующие на деформируемый аппарат, и скорости возмущенной
среды известны.
71
Глава 3
ЛИНЕЙНЫЕ МОДЕЛИ ДИНАМИКИ
УПРУГОГО ЛЕТАТЕЛЬНОГО АППАРАТА
§ 3.1. Линеаризация уравнений движения и деформирования
летательного аппарата
В задачах устойчивости и управляемости динамики полета, во многих
задачах аэроупругости в большинстве исследований используются урав-
уравнения возмущенного движения аппарата. Эти уравнения описывают с
линейной точностью перемещения точек конструкции ЛА относительно
их положения в некотором исходном (базовом) установившемся режиме
полета. В качестве базового режима обычно выбирается прямолинейный
горизонтальный полет с установившейся скоростью С/о без крена и
скольжения. При этом все параметры движения представляются в виде
C.1)
где нулевым индексом отмечены значения параметров в исходном невоз-
невозмущенном полете, а буквой Д — приращения этих параметров в процессе
возмущенного движения. Аналогично представляются силы и моменты:
К = К0 + ДК, М = М0+ДМ, Рл=Рл0+ДРя. C.2)
Приращения всех этих величин считаются малыми и их произведения
не учитываются.
В приращениях соотношения B.112) принимают вид
т C.3)
Мп(Адп + 2кпПпАдп + Я*Адп) = АРп+ АРтп.
При записи уравнений C.3) учтено, что в исходном режиме полета
П0=0.
Для приращений сил и моментов в соответствии с равенствами
B.107М2.111) получаем
(8 хА8)у = -#EгД0 + 8хАу), (8 хД8)г = 85уАв, (ЗЛа)
АХ = Асх
72
А У = Асу80 рС/во/2 + су080 АрС/в
А2 = Асг80р^/во/2, АМ^ = Атх80ЬрЦ%0/2, Шу =
АРп = Асп50Ьр1/*0/2 + сп050ЬАрЦ^0/2 + сп080ЫГъ0А17ъ .
При составлении формул C.4) учтено, что в исходном установившем-
установившемся прямолинейном режиме полета ЛА сг0 = тхъ = ту0 = 0 • Изменения
плотности воздуха Ар и продольной составляющей скорости полета
А Vх в процессе возмущенного движения ЛА, как правило, можно не
учитывать, а скорости ветра считать малыми по сравнению со скоростью
полета, т. е. можно положить
Ар = А[/Ох=О, С/во~С/о- C-5)
При этом приращения всех аэродинамических характеристик будут
определяться только приращениями соответствующих безразмерных ко-
коэффициентов по формулам
Шх =Атх80Ьр11$/29 АМу =Ату80Ьр11$/2 , C.6)
, АРп = Асп
Изменения сил и моментов от тяги двигателя также, как правило, не
учитываются, т. е. полагается
АГ=АМТ=АРТП=О. C.7)
Кинематические соотношения B.11) с линейной точностью представ-
представляются в виде
Ау=Апх, Ацг = Аау, А0=А^. C.8)
Линеаризация соотношений B.22) для приращений координат под-
подвижного начала связанных осей дает
Д^Д/Уя, Ду^С/оДе + ДС/у, Дг^=Ч/оДу + ДС/г. C.9)
Для приращений скоростей B.6) и B.24) будем иметь
. C.10)
В, =аш , диг =дш ,
И, наконец, для приращений углов атаки и скольжения B.28), B.30) и
C.1) получим
^°" "« ' "» "« C.11,
или
Аа=Аап+Ау, АР=А/Зи+Аг. C.12)
73
Здесь
АИ' ДИ
У7Г Аг7Г (ЗЛЗ)
— безразмерные скорости вертикальных и боковых порывов ветра.
С учетом полученных зависимостей запишем уравнения возмущенно-
возмущенного движения C.3) в развернутом виде
МА1/Х + 8гА^2у - 8уАпг = Асх
мАйу +
МАйг -
- ^X^А^^ = Атхзф риЦг+^5уАу, (з.щ
- 8уЫ)х
С учетом равенств C.8), C.9) соотношения C.14) перепишем в виде
МАХг+5.
МАу§+5
МАг8+5
8уАг8-5
Лу/ - 5уАв = Асх50 р1/о/2 - М§Ав ,
хАв - 5гАу = Асу50 р11$/2,
уАу - 8хАуг = Асг50 рГ/о /2 + М$Ау ,
чгАу8 + УлДу - ^xуА\^^ - 1хгАв = Атх5фрЩ
C.15)
\/2 + §8уАу,
При использовании в качестве связанных главных центральных осей
инерции ЛА система уравнений C.15) упрощается и принимает вид
МАх8 = Асх80 р\]Цг - М8Ав , МАу8 = Асу
МАг8=Асг80р1/$/2 + М8Ау, 1хАу =Атх80Ьр(;У29
^уА\^/ = Ату8фр11о/2 , /гД0 = АЦ
74
Первые три уравнения в системах C.15) и C.16) описывают поступа-
поступательное, а вторые три — возмущенное вращательное движение ЛА как
твердого тела. Последние Л^ уравнений отражают упругие колебания
ЛА в процессе его возмущенного движения.
§ 3.2. Безразмерные уравнения возмущенного движения
упругого летательного аппарата
Введем безразмерные величины
( }
Щ
Далее используем безразмерные параметры возмущенного движения
ЛА как твердого тела:
А0.
С учетом обозначений C.17) и C.18) уравнения C.14) в безразмерной
форме принимают вид
й ^ = сх - ^
= су»
Здесь и далее знак А у приращений параметров движения и аэродинами-
аэродинамических коэффициентов опускается. Точкой в безразмерных уравнениях
движения обозначается операция дифференцирования по безразмерному
времени т.
Аналогично перепишем равенства C.16):
= сх " Но8ЯО5 » /^01 = с ^
у »
тг> C-20)
75
Запишем уравнения C.19) в более компактной форме:
#я=1
C.21)
Величины /%,т являются элементами безразмерной квадратной мат-
матрицы масс ЛА вида
О 0 0 *г
о ^0 о -^ о
о о ^ ,„ -,, (з_22)
0-5 5 / -I -I
г о _ о __; ; —;
4. л у л у
-5 5 О -I* -I I.
а величины ^^т и с0^ — элементами векторов
= 1 %т II =
400
401
401
404
405
> со = II со* | =
X г^\)о^1\)э
Су_
тх
ту
C.23)
Уравнения C.20) в свернутой форме также примут вид C.21), однако
матрица масс |х0 в них будет диагональной
C.24)
При цп =0 из системы уравнений C.24) получим уравнения возму-
возмущенного движения жесткого самолета:
сОк, к = Щ, #0=а5. C.25)
Если ввести диагональные матрицы обобщенных масс щ , коэффици-
коэффициентов демпфирования Кх, собственных частот щ:
СО„
C.26)
и векторы параметров упругих колебаний ^^ и коэффициентов обобщен-
обобщенных сил С]:
76
41 =
д}
Яп
C.27)
ч ч
то безразмерная матрично-векторная форма записи уравнений возмущен-
возмущенного движения упругого ЛА примет вид
ЦоЯо =со> М-1 (Я1 +2к1со1с[1 +00^) = С!. C.28)
Далее, вводя блочные матрицы
О
и векторы
И40
к =
с=С°|
|0
|0
со =
C.29)
C.30)
получаем еще более простую форму записи матрично-векторного урав-
уравнения C.28):
|х(с1 + 2ксоц + со2я) = с . C.31)
Последнее матрично-векторное уравнение описывает движение ЛА
как твердого тела с учетом упругих колебаний его конструкции.
§ 3.3. Уравнения продольного и бокового возмущенного движений
упругого летательного аппарата
При наличии конструктивной симметрии собственные упругие коле-
колебания конструкции ЛА разделяются на симметричные и антисимметрич-
антисимметричные. При этом пропадает ряд перекрестных инерционных связей между
различными степенями свободы. С учетом этого исходная система урав-
уравнений C.19) с линейной точностью распадается на две независимые сис-
системы:
уравнения продольного возмущенного движения
= сх -
= су
= тг
C-32)
п=
уравнения бокового возмущенного движения
C.33)
Индексы «+» и «-» относятся соответственно к симметричным и анти-
антисимметричным частотам и формам упругих колебаний конструкции ЛА.
77
Уравнения продольного движения C.32) описывают поступательное
перемещение ЛА в вертикальной плоскости вдоль осей Ох и Оу и враща-
вращательное движение относительно поперечной оси Ог с учетом симметрич-
симметричных упругих колебаний его конструкции.
Уравнения бокового движения C.33) характеризуют поступательное
движение ЛА в горизонтальной плоскости Охг вдоль оси Ог и вращение
его относительно продольной оси Ох и вертикальной Оу при наличии
антисимметричных упругих колебаний аппарата.
В задачах динамики полета уравнения C.32) и C.33) записываются в
несколько иной форме. Используя второе и третье соотношения C.9) и
последние две зависимости C.11), находим
C.34)
С учетом кинематических соотношений C.8) и обозначений C.17),
C.18) выражения C.34) принимают вид
А%г = -Да + Д0 , А%2 = Д/3 - А V,
или, опуская А, имеем
^О1=-а+0, яог^Р-у, %1 = -а+сог,
%г = $-®у, %ъ=сох, %4=соу, %5=о)г.
Продольное движение рассматривается как короткопериодическое,
т. е. изменение продольной составляющей скорости полета не учитывает-
учитывается (<7оо =0). С учетом этого и выражений C.35) соотношения C.32) пе-
перепишутся в виде
г) + 5хсог = су ,
(-а + со1) + *'гйг = /пг , C.36)
Уравнения C.33) бокового возмущенного движения ЛА с учетом вы-
выражений C.35) принимают форму
/хо(/3 -(Оу) + 5усох -5хсоу = с,
^ (Р-соу) + 1ха)х-1ху<ду=тх + 3у
^ + 1у<°у =ту-
C.37)
\х-пСсГп +2к~О)-д-+со;2д-) = с" , л = 1,^" .
В главных центральных осях инерции будем иметь более простые
уравнения:
продольного возмущенного движения ЛА
78
С0пЧ) = с+п, п = 1,М+д C.38)
бокового возмущенного движений ЛА
&п2Яп) = с~, п = 1,Л^~ . C.39)
Последние соотношения можно рассматривать как частный случай
уравнений C.28) и C.31).
§ 3.4. Матрично-векторные уравнения возмущенного движения
жесткого летательного аппарата
Применение матричных методов в задачах динамики полета и аэроуп-
аэроупругости ЛА позволяет существенно упростить математическую форму-
формулировку и разработку эффективных алгоритмов их решения на ЭВМ.
Сначала рассмотрим абсолютно жесткий ЛА, совершающий малые
линейные /?о^,^оу^Ог и угловые у, у/,в перемещения относительно
некоторого установившегося режима полета, описываемые векторами
ДК0=||ДЬ* к0у %||. АЭ = || г V в\\. C.40)
С учетом малости этих величин для возмущенного перемещения про-
произвольной 1-й точки конструкции аппарата будем иметь
ДК^ДКо + Дехг,., C.41)
где г,- — радиус-вектор выделенной точки 1-й в связанной системе коор-
координат.
Введем в рассмотрение векторные формы смещений ЛА как жесткого
тела (жесткие формы):
^оо =!!ь о о||, ГоН|оьо||, 1о2=||оо*||, C42)
1<L=кО-Ъ||. «05=1-^ *3с 0|.
где Ъ — характерный линейный размер.
По существу векторы C.42) описывают перемещения точек конструк-
конструкции жесткого аппарата при единичных линейных и угловых смещениях
связанных с ними осей.
Представления C.41) с помощью жестких форм C.42) переписывают-
переписываются в виде
где величины док вводятся по формулам C.18), а А у вектора К,- опу-
опущено.
Вводя в рассмотрение матрицы
79
*оо о
ъ-=||060-гг/
о
ГХ1
о
40 = I
\00Ь гу1 -
запишем C.43) в матричной форме
%\ %2 %3 %А #05
и далее
К=ГоЯо. C.46)
В последнем выражении используются блочные матрицы
*0= 11*01 -%-%1Г. К0=||К01-КОГ-КОЛ,|Г. C.47)
Уравнение возмущенного движения произвольной *'-й точки конст-
конструкции ЛА имеет вид (см.B.39))
щ-К^К^+Р,, C.48)
где щ — масса точки, К^ — результирующий вектор внешней силы,
действующей на точку, Рг- — результирующий вектор внутренней силы
взаимодействия 1-й точки со всеми другими точками аппарата, для кото-
которого выполняется условие самоуравновешенности B.43):
N N
ХР/=0, ]>>;хБ;.) = 0. C.49)
1=0 ,-=0
В матрично-векторной форме записи уравнение C.48) для ЛА в целом
примет вид
тК = К + Р, C.50)
где т — диагональная матрица масс.
Условия самоуравновешенности C.49) будут
ГОТР = О, C.51)
где индекс «т» означает операцию транспонирования.
С учетом равенства C.46) матрично-векторное уравнение C.50) пре-
преобразуется к виду
тЗДо= К + Р, C.52)
и далее
МоЧо=Ро. C.53)
В этом матрично-векторном уравнении возмущенного движения же-
жесткого аппарата матрица масс Мо и вектор обобщенных сил Ро имеют вид
Мо =
0
0
о
О
МЪ2
О
0 0 Ъ8г -Ъ8у
0 -Ъ87 0 Ь8Г
МЪ1 Ь8Л) -
— Ъ8% Ъ8у 3
О -Ъ8Х -,
Ъ8У 0 -.
C.54)
""*•'
У*
' гу
80
Ро =\\ЬХ ЪУ ЬТ Мх Му Мг ||Т. C.55)
Вводя безразмерную квадратную матрицу ц0 и вектор обобщенных
сил % (см. C.22) и C.23)):
2 2
М р
, получаем вместо C.53)
и переходя к безразмерному времени т = {
соотношение
сО- C-56)
Это и есть не что иное, как матрично-векторная форма записи безраз-
безразмерных уравнений C.25) возмущенного движения жесткого ЛА.
При рассмотрении короткопериодического возмущенного движения
(%о = 0) введем вектор кинематических параметров динамики полета
жесткого ЛА
бО=||а Р сох соу
Тогда на основе равенств C.35) устанавливаем, что
ЯО = А180 + А280 ' 80 =
Здесь
-10 0 0 0
0 10 0 0
0 0 10 0
0 0 0 10
0 0 0 0 1
В C.58) вектор ^^ не содержит элемента #Оо •
Теперь уравнение C.56) можно переписать в виде
М =
А2 =
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
-1
0
0
0
1
0
0
0
0
,А3 =
0000 1
0 0 0 10
0 0 0 0 0
0000 0
0 0000
C.57)
C.58)
C.59)
) = с0. C.60)
§ 3.5. Матрично-векторные уравнения возмущенного движения
упругого летательного аппарата
Вектор перемещения точек упругого ЛА в соответствии с формулой
B.31) имеет вид
= 1Э +1] Т? =Тч 4-Г C 61)
где и — вектор упругих перемещений.
С учетом представления C.46), справедливого для вектора жестких
перемещений Ко, запишем
К = ^оЯо "*"и • C.62)
В соответствии с формулой B.97) представим
и = ^1, C.63)
где ^ — вектор заданных упругих форм.
81
При использовании в качестве заданных собственные формы упругих
колебаний конструкции ЛА справедливыми будут свойства их ортого-
ортогональности (см. B.100)):
г^т?! = 0, 17т?! = Мг, г/к^ = П%Мг , C.64)
где М! — диагональная матрица обобщенных масс, к — матрица коэф-
коэффициентов влияния жесткости (см. B.92)), 0% — диагональная матрица
квадратов частот собственных колебаний упругой конструкции.
Вектор внутренних сил будет равен
Р = -ки . C.65)
Условия C.49) самоуравновешенности этих сил будут
1^Р = -г*0тки=0 C.66)
или с учетом представления C.63)
1*ок1*1=О. C.67)
С учетом последних равенств уравнение возмущенного движения то-
точек упругой системы примет вид
тК = т?0% + т^сц = К + Р . C.68)
Умножая уравнение C.68) слева на матрицу $$ и на матрицу т*^, по-
получаем систему матрично-векторных уравнений возмущенного движения
упругого ЛА
МоС1о=Ро, М1(ч1+П12Ч1) = Р1. C.69)
Первое уравнение C.69) описывает в основном движение аппарата
как жесткого тела, а второе — упругие колебания его конструкции. По
сути система уравнений C.69) представляет матрично-векторную запись
уравнений возмущенного движения C.15).
Если ввести в рассмотрение силы демпфирования упругих колебаний
(см. B.101))
то вместо системы C.69) будем иметь
Здесь К! — диагональная матрица коэффициентов демпфирования.
Вводя безразмерные матрицы по аналогии с безразмерными величи-
величинами C.17)
о о тт +
— лд — л/г — о
, , C-72>
С0=-——ГТР0' С1=-
приходим к выведенным ранее соотношениям C.28):
Шо = со» Н1Й1 + 2*1®&\ + ®?Я1) = сх C.73)
и далее к C.31)
\1(ц + 2ксоя + со2я) = с . C.74)
82
Аналогичные по виду матрично-векторные уравнения движения упру-
упругого ЛА формируются и в случае представления его конструкции набо-
набором сосредоточенных масс с известными массовыми и инерционными
характеристиками (см. C.54)):
т А8II
II
т =
. II
В этом случае в равенстве C.61) имеем
АКХ
АКу
АКг
Ау
Ав
__ | АК0
"II А®
Н<
о-
АДОу
АКОг
Ау0
Ав0
дко|
део|
и =
Аих
Аиу
А(рх
Асру
C.75)
Аио|
Аф ||'
C.76)
Здесь элементами вектора-столбца К являются векторы линейных
АК = || АКХ АКу А#г | и угловых А8 = || Ау А^ Ав || перемещений каж-
каждой рассматриваемой сосредоточенной массы; элементами вектора-
столбца Ко — векторы линейных АК0 = | АК$Х АК$у А#Ог || и угловых
А90 = || Ауо А^о Або II смещений аппарата как жесткого тела; элемента-
элементами вектора-столбца и — векторы линейных Аи = | Аих Аиу Аиг || и угло-
угловых Аф = |Афд: А(ру Афг| упругих перемещений сосредоточенных масс.
Тогда в разложении C.61) с учетом C.46) имеем
элементами матрицы {$ будут величины
00 0 ъ* ~г0у1
0Н-г0г/ 0 гОх1
0 0 Ь гОу( -гы О
000 1 О О
0 0 0 0 1 О
000 О О 1
ГО& — координаты радиус-векторов %, определяющих
начало осей местных систем координат, связанных с 1-й сосредоточенной
массой.
С учетом C.77) и выражений B.99) получим
"ьт О III т Л8IIIIЬ го|_
Т Е А8Т ДШ0 В Г
где гОх(
Мо =
II г0
тоЬ
т0Ь2 8ЪI
8тЬ I
C.78)
Здесь для упрощения выкладок полагается, что оси, связанные с ЛА и
с каждой из масс, коллинеарны, а матричные величины включают: 10,
83
8* — моменты инерции (осевые и статические) аппарата, найденные в
предположении, что каждая масса сосредоточена в начале связанной с
ней системы отсчета; А], А8 — дополнительные моменты инерции со-
сосредоточенных масс относительно связанных с ними осей координат;
т0, 8 , I — суммарные массовые и инерционные характеристики ЛА.
Обычно местные связанные оси совпадают с главными центральными
осями инерции сосредоточенных масс. В этом случае
C.79)
где А] — диагональная матрица инерции сосредоточенных масс.
Для обобщенных сил и масс будем иметь
0|
Е
ФГ|
АК
М
АК
М
т
А8Т
Ъ* I
|готАК + М||
А8|
C.80)
+
где ^о, ^ и ф0, Ф1 — векторы жестких и упругих линейных и угловых
форм перемещений сосредоточенных масс, причем
?О=Ьго, Фо=||О Е||. C.81)
Величины АК и М в C.80) описывают внешние силы и моменты, при-
приложенные к сосредоточенным массам.
§ 3.6. Уравнения возмущенного движения упругого летательного
аппарата с жесткими грузами
Представляя деформируемую конструкцию ЛА в виде системы сосре-
сосредоточенных масс, примем, что к каждой из них дополнительно присоеди-
присоединена недеформируемая масса (груз) с помощью статически определимых
упругих связей. Введем матрицы масс п^, т2, векторы К-!, К2, К.^,
К02» Их > и2 абсолютных, жестких и упругих перемещений и векторы
внешней нагрузки К2и К2 для незагруженной конструкции и грузов
соответственно. Запишем матричные уравнения вынужденных колебаний
системы с грузами
.. ^ — (З.о2)
т2К.2 = т2К02 + т2й2 = К2 + Р21.
Здесь введены векторы взаимодействия упругих сил несущей конструк-
конструкции и грузов
84
Примем
Т\=-кгиг, 112=-к12(и1-и2), Р21 =-к21(и2 -и^ ,
где к[ — матрица жесткости упругой конструкции, к12 = к21 — матрицы
жесткости связей грузов с упругой конструкцией.
С учетом выражений C.84) будем иметь
& (к1 + к12) и1 ~ к12и2 = ^1»
— C.85)
- к21и! + к21и2 = К2
или
т^о + тй + ки = К. C.86)
В C.86)
тп-ЦШ1 ° II К _ 1 ^01 II п-|и1 I
0 т2 к* и2
., и- ¦ C-87)
к!+к12-к12 ~I К.ж ¦
I -к21 0 |' К-|к2|-
Будем искать решение матрично-векторной системы уравнений C.86)
в виде разложения по собственным формам упругих колебаний конст-
конструкции ЛА с грузами (метод собственных форм)
К = Ко + и = ?оЧО + ?1Ч1 C.88)
или с учетом формул C.87) в развернутом виде
C>89)
Здесь учтено, что в соответствии с принятой постановкой задачи каж-
каждый из грузов соединен с соответствующей сосредоточенной массой ап-
аппарата и поэтому
- ^02 - ^0 ' *0 -
10
- ? ? я -
" " I
II ^21 Г22 II " " II 42
Тогда умножая C.86) на ?0Т, ?^, ^, получаем уравнения возмущен-
возмущенного движения упругого ЛА с грузами:
М(#о = Ро> М11(я1+^12Я1) = Р1, М22й2+а^2) = Р2. C.91)
В уравнениях C.91) учтены свойства ортогональности собственных
форм ЛА с грузами и введены обозначения
Мо = 1*0 т^0 + ?о т2г*0, Мп
Мг А2 =
М22 =
85
В обобщенной форме записи вместо равенства C.91) получим
Мос1о = Ро, М1E1+а12Ч1) = Р1, C.93)
что соответствует уравнению C.86) и разложению C.88).
Далее применим несколько иной подход, в основу которого положим
разложение в ряд по собственным формам колебаний базовой конструк-
конструкции ЛА, т. е. при отсутствии грузов (метод базовых форм). Представим
уравнения C.85) в виде
к21Аи21 = К2, C.94)
Аи21 = и2 - и].
В соответствии с методом базовых форм и с учетом того, что
^01 = ^02 = ^0 ' запишем
Во1=Во2=*(ЙО. *1=*А1> C.95)
где ^ — собственные формы упругих колебаний базовой (незагружен-
(незагруженной) системы, для которых выполняются условия ортогональности C.64):
^ =М1э {?Щ =М^,
1 1 111 11» ^ ^
=0, ^т^о =0, $Щ = 0.
Относительные упругие перемещения грузов Аи21=и2-и15 вклю-
включающие в общем случае три линейных и три угловых смещения, можно
представить в виде
Аи21=АГ2я2, C.97)
где АГ2 — матрица форм смещения грузов, определяемая только геомет-
геометрическими характеристиками их связей с конструкцией, а ц2 — вектор
безразмерных параметров линейных и угловых перемещений грузов.
Умножая первое уравнение C.94) слева на матрицы ?о и Г/, а второе
на матрицу АГ2 , с учетом C.95), C.96) получаем
М11Й1 + П?Я!> - Ак12Я2 = Рг, C.98)
ЛМ20С10 + АМ21Я! + АМ22я2 + Ак22я2 = АР2.
Система матрично-векторных уравнений C.98) характеризует возму-
возмущенное движение упругого ЛА с упругоприкрепленными грузами. Пер-
Первое уравнение отражает, в основном, движение аппарата как жесткого
тела, второе — упругие колебания его конструкции, третье — упругие
перемещения грузов. Перепишем систему C.98) в виде
= Р! + Ак12я2, C.99)
АМ22(я2 + Я2Я2) = АР2 - АМ2ОЯо ~
86
Здесь введено обозначение
Ак22 = Д*2 к21А*2 = АМ22^2 • C.100)
где С12 — матрица квадратов собственных частот колебаний грузов.
Остальные величины в C.99) определяются по формулам
М00 = *0 т1*0» М11=*1Т
АМ21 = ЛГ2 т2^ , АМ22 =
Ак02 = Г0Тк12АГ2, Ак12 =^Тк12АГ2, (ЗЛ01)
Ро=№, ?!=№, АР2=А^ТК2.
Сравнение двух рассматриваемых подходов, основанных на примене-
применении собственных форм упругих колебаний конструкции с грузами в це-
целом (метод собственных форм) и без них (метод базовых форм), позволя-
позволяет установить следующее.
Метод собственных форм обеспечивает получение наиболее простых
по структуре уравнений возмущенного движения ЛА C.93). Однако при
его использовании для моделирования на ЭВМ процессов движения, де-
деформирования и нагружения ЛА, связанных с изменением в полете его
массовых характеристик (выработка топлива, десантирование крупнога-
крупногабаритных грузов, бомбометание и т. д.) возникает ряд существенных
трудностей. Для каждого варианта загрузки самолета требуется заново
построение соответствующей структурной математической модели,
включая расчеты упругих и аэродинамических характеристик. При боль-
большом количестве вариантов загрузки и непрерывном их изменении (пере-
(перемещение груза внутри фюзеляжа) необходимо, строго говоря, строить
бесконечно большое число моделей. Члены, учитывающие влияние гру-
грузов в системе уравнений C.93) не выделяются в явном виде. Это затруд-
затрудняет моделирование на ЭВМ процессов аэроупругих колебаний ЛА и
отделения грузов. Использование линейных зависимостей C.84) для сил
взаимодействия не позволяет учитывать нелинейности в узлах крепления
грузов.
Применение метода базовых форм дает возможность существенно
смягчить отмеченные трудности. При этом, несмотря на его недостатки,
связанные с усложнением уравнений движения C.99) по отношению к
соотношениям C.93) и необходимостью удержания большого числа форм
в разложении C.95) по сравнению с методом собственных форм, удается
построить эффективные математические модели аэроупругости для про-
проведения параметрических исследований процессов динамики движения
упругого ЛА с грузами.
§ 3.7. Уравнения возмущенного движения упругого летательного
аппарата с жидкими и вращающимися массами
В конструкции ЛА имеются особенности — емкости (топливные ба-
баки), частично или полностью заполненные жидкостью, и различного рода
вращающиеся элементы (гироскопы, роторы двигателя и т. д.), обладаю-
обладающие специфическими свойствами, которые могут быть соединены с кон-
конструкцией при пбмощи упругих связей.
87
Для учета этих особенностей представим упругий аппарат как систе-
систему сосредоточенных масс т\, с каждой из которых упруго соединены
дополнительные массы (первичные грузы). С каждой из этих дополни-
дополнительных масс в свою очередь упруго связана система масс т2 (вторич-
(вторичные грузы).
Обозначим через К.}, К2 , К3 — векторы абсолютных перемещений,
через Ко — вектор жестких перемещений, через щ, и2 , и3 — векторы
упругих перемещений грузов массой тх, т2, т3. Тогда можно записать
К^Ко + их, К2=К0 + и2, &з = &о + и3 C.102)
ИЛИ
= Ко + их + ^и21 + АЦ32 •
Здесь
Ди21 = 1^-11!, Ди32 = и3-и2. C.104)
В соответствии с методом базовых форм представим выражения
C.103) в виде
Ди21=ДГ2я2,
где ^о» ^1 — соответственно жесткие и упругие формы собственных ко-
колебаний аппарата базового варианта загрузки, АB и ДГ3 — формы
перемещений грузов массой т2 относительно конструкции ЛА и грузов
массой га3 относительно грузов массой т2 соответственно.
Запишем уравнения возмущенного движения такой составной систе-
системы:
т^! = &! - к^! + к12Ди21,
т2К2 = К2 -к12Ди21 + к23Ди32, C.106)
т3К3 = К3 - к23Ди32.
Применяя к системе уравнений C.106) разложения C.105) и процедуру
Бубнова-Галёркина, получаем
М00Ч0=Р0+Ак02Ч2>
? Р! + Дк12Ч2 , C.107)
= ДР2 - ДМ2оЯо
ДМ33я3 + Ак33я3 = ДР3 - ДМзояо -
Нетрудно видеть, что эти уравнения обобщают соотношения C.99). Все
исходные матрицы по-прежнему определяются по формулам типа C.101).
Для учета влияния смещений и вращений масс т3, находящихся в
грузах массой т2, введем векторы сил ДК3 и моментов ДМ3, прило-
приложенных к этим массам. Тогда соответствующие обобщенные силы с уче-
учетом C.80) будут равны
88
ДР3 = Д*з АК32 = А?3ТАК
А?3т = |АГз Аф3||, Да31=|^3|, C.108)
II ^М II
где Д?3Т, Афз — формы линейных и угловых перемещений масс т3 со-
соответственно.
При рассмотрении подвижного топлива в баках силы ДК3е в общем
случае представляются в виде [274]
ДК31 = -тт3К3 -ттКт, C.109)
где тт3 — матрица масс «затвердевшего» топлива и баков; тт — мат-
матрица масс топлива; К3, Кт — векторы смещений баков и волновых дви-
движений топлива.
С учетом разложения
К3 =К0 + их + Ди21 + Аи32 =
КТ=ГТЯТ C.111)
получим
АР3 = -ДМ^Яо - ДМтй! - АМт2я2 - ДМт3я3 - ДМтят . C.112)
Здесь
АМ^ = АГ3 тт3Г0, АМт1 = А^т^,
АМт2 = ДГ3 тт3ДГ2 , АМт3 = АГ3тт3АГ3, C.113)
АМТ = ДГ3ттт1[т.
Обобщенные параметры ^т волновых движений топлива в свою оче-
очередь находятся из уравнения [274]
Мтят + Бтят + ктят = -М^яо - Мт1Я! - Мт2я2 - Мт3я3 . C.114)
В итоге имеем следующую систему уравнений возмущенного движения
упругого ЛА с прикрепленными грузами и учетом подвижности топлива:
АМ22я2 + Ак22я2 = АР2 - АМ2ОЯо "* ^^21Я1 + Ак23я3, C.115)
АМ33 я3 + Ак33 я 3=-(Мт0+ АМ30) я 0-(Мт1+АМ31)я 1-
-(Мт2+АМ32)я2-АМтят,
Мтят + ОТЯТ + ктят = -М^яо - мт1Я1 - мт2Я2 - Мт3я3.
В случае модели условно затвердевшего топлива (ят = 0) система
уравнений C.115) приобретает вид
= р0 + Ак02Я2 >
C.116а)
89
АМ22Ч2 + Ак22Ч2 = ЛР2 - АМ20Я0 - АМ21Я1 + Дк23Яз > C.1166)
АМззЯз + АкззЯз = - (Мто + М30) Чо - (Мт1 + М31> Я1 "
-(Мт2+М32)я2.
Эти уравнения полностью совпадают с системой C.98) при условии,
что масса топлива включается в массу вторичных грузов, т. е. при Яз = 0.
Вращающиеся массы (роторы) на борту ЛА создают возмущающие
моменты [235, 236, 273]:
АМ3=е3х1рар, C.117)
где 1р — тензор моментов инерции ротора, Пр — вектор угловой ско-
скорости его вращения, 93 — вектор абсолютных угловых перемещений
вторичных грузов тз, в которых вращаются роторы.
В соответствии с методом заданных форм имеем
в3 = ФзоЯо + Ф31Я1 + АФз2<Ь + АФззЯз, C.118)
где матрицы форм соответствуют: ф3о — поворотам аппарата как твер-
твердого тела, ф31 — упругим угловым перемещениям, Дфз2, АФзз —
относительным поворотам грузов массой п^ и т3 соответственно.
Тогда с учетом выражения C.108)
Р33 = Аф?АМ3 = Аф?(93 х 1рПр) = (Аф? х03Iрар =
= [(Аф| Хфзо)Яо + (дФз ><Ф31)Я1 + (Афз х Аф32)я2 + C-119)
+ (Аф| X Афзз)Яз^р«р = РзрОЯО + РзР1Ч1 + РзР2Ч2 + ^ЗрЗЧЗ •
С учетом равенства C.119) уравнения C.107) принимают вид
моо4о = ро + Ак02Ч2» МцЙ! +П?Я!) = Р! + Ак12д2 ,
АМ22я2 + Ак22я2 = АР2 - АМ2040 - АМ21Я1 + Ак23я3, C.120)
АМ33Чз + Р3рзЧз + ^ЗЗЯЗ = АРЗр0Я0 + АРЗр1<31 +
+ АРЗр2Я2 - АМ30Я0 - АМ31Я1 - АМ32Я2 •
Из анализа последних уравнений видно, что наличие роторов может
быть использовано для изменения демпфирующих свойств системы (за
счет демпфирующих сил, пропорциональных скоростям перемещений
точек).
§ 3.8. Уравнения возмущенного движения упругого летательного
аппарата при пробеге по неровному аэродрому
При наземных режимах движения на ЛА действуют возмущения со
стороны неровностей взлетно-посадочной полосы (ВПП) аэродрома. Ис-
Исследования реакции аппарата на эти воздействия могут быть сведены к
задаче динамики упругого ЛА с упругоприкрепленными к нему грузами.
Для этого представим шасси ЛА как упругое звено, состоящее из двух
90
последовательно соединенных масс с заданными законами для сил взаи-
взаимодействия
ДР12=ДР12(с1,Аи21,Ай21),
Ди21= 112-11!,
ДР23=ДР23(с2,Ди32,Дй32), '
Ди32=и3-и2,
где с1? с2 — параметры шасси [249].
В случае линейных упругодиссипативных связей
АР12 = Ак12Аи21 + АО12Ай21,
АР32 = Акз2Аи32 + ДВ32Ай32 •
При этом за основу могут быть приняты уравнения C.107). В данном
случае величина я3 в них может быть исключена из рассмотрения; дей-
действительно
Аи32 = и3 -и2 = К3 -К2 C.123)
или с учетом C.105)
ДГ3Я3 = Кз -*<Й0 -*Й1 ~ А^2 • C.124)
Величина К3 может рассматриваться как заданная функция времени,
определяемая законом распределения неровностей ВПП и скоростью
движения аппарата по ней. Из равенства C.124) можно найти
^*тк - Д*т*Ч д*
Я3 =
= А3К3 + АоЯо + А^! + А2я2. C.125)
Как видим, в итоге обобщенный параметр я3 в явной форме также
является функцией времени и параметров я0, Яь 42 •
С учетом выражения C.125) последнее уравнение в системе C.107) из
рассмотрения исключается, и она переписывается в виде
C.126)
АМ22я2 + Ак22я2 = АР2 - М20Я2 " М21Я1 + Ак23А3К3(() +
+ Ак23(А0я0 + АХЯ1 + А2я2).
В C.126) коэффициенты матриц АД*' = 0,3) определяются формула-
формулами:
Ао = т
C.127)
А2 ДМ^А^ тд^
А3 = ^2
Коэффициенты матрицы Ак23 вычисляются через характеристики шасси.
91
Глава 4
РАСЧЕТНЫЕ МОДЕЛИ АЭРОДИНАМИКИ
УПРУГОГО ЛЕТАТЕЛЬНОГО АППАРАТА
§ 4.1. Основные соотношения
Рассмотрим неустановившееся движение упругого ЛА в идеальной
сжимаемой среде относительно базового установившегося режима полета
со скоростью #о (см. рис. 1.10 а). В линейных задачах аэродинамики
принято считать возмущенные упругие перемещения точек конструкции
в потоке малыми по сравнению с характерными линейными размерами
(например, хордой крыла) ЛА. Возмущенные скорости потока, вызван-
вызванные аппаратом и неоднородностью среды, предполагаются также малыми
по сравнению со скоростью полета {Уо. При обтекании ЛА около него и
за ним образуется поле возмущенных скоростей потока (след). При уста-
установившемся обтекании аппарата, когда параметры его движения и де-
деформирования не меняются во времени, след является стационарным.
При изменении режима обтекания след становится нестационарным. Ин-
Интенсивность возмущенных скоростей в следе зависит от законов движе-
движения и деформирования ЛА. След в свою очередь влияет на обтекание ЛА,
дополнительно изменяя его местные углы атаки, а следовательно, и аэро-
аэродинамические нагрузки. Таким образом, отличительная особенность ста-
стационарных аэродинамических нагрузок от нестационарных состоит в
том, что последние зависят не только от мгновенных значений кинемати-
кинематических параметров, но и от всей предыстории движения и деформирова-
деформирования объекта.
Для нахождения параметров среды, в первую очередь стационарных и
нестационарных аэродинамических нагрузок, действующих на аппарат,
используют граничное условие о непротекании потока сквозь его по-
поверхность (нормальная составляющая относительной скорости потока
11п=0 [57]. В общем случае это условие выглядит так
#0 ^0 ^0 ^0
где Vап — нормальные составляющие абсолютных скоростей потока,
вызываемые ЛА при его возмущенном движении; V^ — нормальные
составляющие переносных скоростей точек конструкции аппарата, вклю-
включающие нормальные скорости его движения как твердого тела и дефор-
деформирования; 1/дл — нормальные составляющие скоростей порывов ветра,
которые считаются заданными.
92
Для линейных задач аэродинамики справедливы условия
^«1, ^.«1. ^.«1, D.2)
ио "о "о
выражающие требования о малости изменения местных углов атаки
вследствие движения и деформирования ЛА и воздействия на него поры-
порывов ветра.
Абсолютные скорости потока Vап связаны с нестационарным давле-
давлением р на поверхности аппарата с помощью линейного оператора
. D.3)
1/0 Щ Цо
При использовании численных методов нестационарной аэродинами-
аэродинамики [57] для нахождения возмущенных давлений аэродинамический опе-
оператор Цг) представляется в виде системы алгебраических уравнений.
Выражение D.3) в этом случае следует рассматривать как матричную
запись этих уравнений.
Вектор абсолютных перемещений К точек поверхности упругого ЛА в
соответствии с методом заданных форм можно записать в виде
К = Гояо + {гцх + Г2Я2 + *85 . D-4)
где векторы обобщенных параметров ^^ и Ч! характеризуют соответст-
соответственно движение аппарата как твердого тела и упругие перемещения то-
точек поверхности относительно «жесткого скелета» его конструкции, а
векторы Я2 и 5 — соответственно колебания внешних упругоприкреп-
ленных грузов и углы отклонения рулей.
Обобщая D.4), получаем
К^Ч+ф, *=Ко.*1.Ъ|Г. Я = || Чо
Функции форм $ в D.5) зависят от координат, а обобщенные параметры ^,
8 от времени г.
Нормальные составляющие Gдп переносных скоростей точек аппара-
аппарата равны:
1 акп = 1 дкп 1 цх
Цдп = 1 акп = 1 дкп 1 цх дкп | Цу дкп | уг дкп
1 | |
Подставляя D.5) в D.6) и учитывая, что для линейных задач аэродинами-
аэродинамики |#|«1, \8\«1, АЦХ9у г\«1, с линейной точностью будем иметь
D.7)
1/0 11$ дх По дх
здесь /п — нормальные составляющие значений форм {.
Скорости порывов ветра в общем случае также могут быть представ-
представлены в виде разложения в ряд
93
Л D.8)
где Гдп — матрица форм, аппроксимирующих результирующее распро-
распространение скорости порывов ветра; Д(г) — вектор обобщенных парамет-
параметров безразмерных скоростей, зависящий от времени.
С учетом D.7) и D.8) операторное уравнение D.3) принимает вид
^0
дх
D.9)
Уравнение D.9) связывает не-
нестационарные аэродинамические
нагрузки /?(*), действующие на
ЛА, с законами его движения и
деформирования, углами откло-
отклонения рулей и скоростями поры-
порывов ветра.
Для решения различных задач
аэроупругости ЛА, линеаризован-
линеаризованных по аэродинамике и упруго-
упругости, требуется знание распреде-
ленных, суммарных и суммарных
обобщенных аэродинамических
характеристик
^ дд ^ематазируемого в
соответствии с [57] С помощью
плоских базовых поверхностей
(рис. 4.1), распределенная аэродинамическая нагрузка Ар (перепад дав-
давлений) определяется как разность давлений сверху (рв) и снизу (рн)
этих поверхностей
Др = рв-Рн- DЛ°)
Векторы внешних возмущающих сил К,-0" = 1,2) в уравнении C.82), дей-
действующие соответственно на конструкцию ЛА и его внешние подвески,
будут
DЛ1>
Рис. 4.1. К построению расчетной аэроди-
намической схемы ЛА при представлении
его в виде пространственно расположенных
базовых тонких элементов^ - гори-
зонтальные поверхности, \ША — верти-
кальные поверхности
где §1, §2 — диагональные матрицы площадей тонких базовых несущих
поверхностей, которыми представляются ЛА и подвески и на которых
вычисляются Ар.
Суммарные обобщенные аэродинамические силы рОх, Р02» соответ-
соответствующие движению ЛА с подвесками как твердого тела, и
Рп ' Р12» Р21' Р22 > связанные с упругими колебаниями его конструкции
и грузов, с учетом B.105) и D.11) определяются по формулам
D.12)
94
§ 4.2. Некоторые особенности численных методов
линейной нестационарной аэродинамики
Рассмотрим некоторые особенности взаимодействия ЛА со средой и
численные методы линейной аэродинамики, с помощью которых опреде-
определяются последствия этого взаимодействия. Каждая точка поверхности
аппарата является источником возмущений, причинами которых могут
быть изменения местных углов атаки, в результате этого поток в каждой
точке поверхности объекта меняет свое направление и скорость, вызывая
тем самым появление дополнительных, а следовательно, возмущенных
давлений и т. п.
Особенности эти можно разделить на три группы:
1) соответствующие нормальной составляющей переносной скорости:
из-за изменения углов атаки а и скольжения /3 и угловых скоростей
®х,у,19 из-за изменения кривизны поверхности, аппроксимируемой функ-
функциями /]л , /2п и обобщенными параметрами цп и 8У ;
2) связанные с нормальной составляющей скорости перемещения
(скорости изменения обобщенных параметров с{п и 8У );
3) вызванные скоростями порывов ветра (параметры А^г).
При дозвуковых скоростях потока (М < 1) в сжимаемой среде возму-
возмущения от точки А распространяются во все стороны пространства и дос-
достигают всех его точек пе-
передним фронтом волны
(рис. 4.2 а). В несжимаемой
среде (М = 0) возмущения в
любую точку пространства М///ШАЛ \\\\\\ \ , А>
доходят мгновенно. При
сверхзвуковых скоростях
потока (рис. 4.2 б) возму-
возмущения от точки А будут
достигать только части
пространства, которая рас-
располагается вниз по потоку
от нее, внутри так назы-
Рис. 4.2. Передача сигналов в случаях дозвукового
(а) и сверхзвукового (б) потоков
ваемого конуса возмущений с вершиной в точке А и углом полураствора
у, для которого 8ш у = 1/М, причем задним и передним фронтами волны.
Изложим основные идеи линейной модели обтекания ЛА, реализуе-
реализуемой в рамках схемы идеальной жидкости и численных методов: дискрет-
дискретных вихрей (МДВ) при дозвуковом обтекании объекта и возмущенных
давлений при сверхзвуковом [57].
При определении аэродинамических нагрузок в случае дозвукового
обтекания ЛА представляется в виде системы пространственно располо-
расположенных базовых тонких несущих поверхностей, которые в свою очередь
заменяются системами так называемых присоединенных и свободных
вихрей; последние располагаются на базовых поверхностях и их продол-
продолжениях. Присоединенные вихри жестко связывают с несущими плоско-
95
стями; они моделируют разрыв касательных скоростей на его верхней и
нижней поверхностях. Появление свободных вихрей описывается извест-
известной теоремой о постоянстве циркуляции вдоль замкнутого контура, т. е.
согласно этой теореме вихри не могут обрываться внутри жидкости или
газа. На рис. 4.3 а изображена схема дискретных вихрей постоянной
вдоль их длины циркуляции Гу , аппроксимирующая участок (панель) V
базовой плоскости аппарата площадью 5У в стационарном случае обте-
обтекания; здесь выполнение теоремы о постоянстве циркуляции вдоль замк-
замкнутого контура обеспечивается наличием продольных вихрей 2 и 2',
уходящих в бесконечность. Рисунок 4.3 б отражает механизм изменения
Рис. 4.3. К образованию вихревого следа на части V базовой поверхности ЛА при
дозвуковом обтекании для установившегося (а) и неустановившегося (б) движений:
1 — присоединенный вихрь, 2 и 3 — свободные вихри, 4 — контрольная точка
циркуляции присоединенного вихря на некоторую величину АГУ . Это
происходит за счет отделения и сноса поперечного вихря 3 равнопроти-
воположной циркуляции. В результате образуется замкнутая вихревая
система (вихревая рамка), показанная на рисунке б штриховой линией,
которая также удовлетворяет требованиям указанной теоремы. При этом
ось присоединенного вихря 1 должна располагаться на расстоянии в 1/4
длины боковой стороны панели V от ее передней кромки, а контрольная
точка, где выполняется условие непротекания поверхности, — между
присоединенным и свободным вихрями на расстоянии в 3/4 длины боко-
боковой стороны панели от передней кромки [217]. С точностью, принятой в
линейной теории обтекания крыла, считается, что плоскость схода сво-
свободных вихрей является продолжением базовой плоскости, в которой
лежат присоединенные вихри. При этом скорость сноса поперечных вих-
вихрей принимается равной {/0; движение продольных свободных вихрей
направляется параллельно продольной оси ЛА Ох.
Задача сводится к определению интенсивностей дискретных присое-
присоединенных вихрей для последовательных моментов времени путем реше-
решения системы линейных алгебраических уравнений; число этих уравнений
отвечает числу контрольных точек.
Полученная таким образом система единообразных — канонических —
уравнений решается с учетом предыстории процесса обтекания аппарата,
96
т. е. через интенсивности вихрей в предыдущие моменты времени. При
установившемся обтекании ЛА, которое реализуется при неизменных во
времени кинематических параметрах движения, за ним образуется аэро-
аэродинамический след, состоящий только из продольных вихрей.
Обратимся к другому численному методу — методу возмущенных
давлений, используемому для определения аэродинамических нагрузок,
действующих на ЛА при сверхзвуковом обтекании [57]. Согласно этому
методу ЛА также заменяется базовыми тонкими несущими поверхностя-
поверхностями, которые в отличие от МДВ, покрываются источниками. Здесь возму-
возмущения в газе распространяются в пределах области, ограниченной кону-
конусом Маха с углом полураствора у (рис. 4.4). Суммирование возмущений
проводится по части базовой плоскости, область которой ограничена
прямым и обратным конусами Маха, исходящи-
исходящими, например, из точки А {х, г), в которой ищется
потенциал скорости, вверх по потоку. Из облас-
области, заключенной внутри окружности, сигналы в
точку А будут приходить одним передним фрон-
фронтом волны, а из области АВС, расположенной
ниже окружности (двойная штриховка), обоими
фронтами.
Основанный на этом методе численный путь
решения задачи обтекания ЛА состоит в сле-
следующем. Исследуемая область, включающая ба-
базовые поверхности и свободные вихревые пеле-
пелены, делится на конечное число ячеек — источни-
источников возмущений. Полные значения индуцирован- Рис*4*4-Механизм пеРе"
ных скоростей в выделенной зоне определяются
суммированием эффектов от различных ячеек,
расположенных в пределах области, ограниченной прямым и обратным
конусами Маха. Далее, используя основные зависимости [57], можно
найти для этой зоны давление, вызванное прохождением волны и т. д.
При переменной интенсивности источника надо учитывать сигналы, за-
зависящие от предыстории обтекания и деформирования ЛА.
Здесь следует особо сказать о важном шаге в развитии МДВ — обоб-
обобщении его на случай решения стационарных и нестационарных задач
сверхзвукового обтекания ЛА [50, 126]. При этом порядок формирования
расчетной вихревой схемы сохраняется, как и в случае дозвукового обте-
обтекания (см. рис. 4.3), но вычисляемый потенциал возмущенных скоростей
Ф(х,у,т) в случае отсутствия массовых сил и теплообмена по [127]
удовлетворяет волновому уравнению вида
- Эф Эф Эф
М2=-
1 +
э2ф/э*2|
D.14)
ЭФ Э2Ф , ЭФ Э2Ф"
дх2 ду дхду
где М — число Маха невозмущенного потока, у — отношение удельных
теплоемкостей при постоянном давлении и объеме. Алгоритм определе-
97
ния возмущенной скорости ^(Мд) в произвольной точке поверхности
опишем на примере рассмотрения стационарной задачи
(рис. 4.5 а). В соответствии с
принятой методикой [57] ЛА и
в этом случае аппроксимиру-
аппроксимируется базовыми вертикальными
и горизонтальными тонкими
несущими поверхностями, ко-
которые затем моделируются
в
а б
Рис. 4.5. К учету особенностей при определе- семейством поперечных и
нии возмущенной скорости в точке Мо несу- продольных вихревых отрез-
щей поверхности по методу дискретных вихрей ков, а свободная вихревая пе-
при сверхзвуковом обтекании лена, сходящая с боковых и
задних кромок — семейством свободных вихревых линий постоянной
интенсивности, совпадающих с линиями тока. Скачки уплотнения на
сверхзвуковых скоростях считаются слабыми, размещение их по поверх-
поверхности аппарата постулируется. Аэродинамическая нагрузка по-прежнему
определяется с помощью теоремы Жуковского «в малом» через нахожде-
нахождение неизвестных циркуляции присоединенных вихрей при выполнении
граничных условий непротекания в соответствующим образом располо-
расположенных на несущих поверхностях контрольных точках и условия
Чаплыгина-Жуковского о конечности
скоростей на кромках схода пелен. Если
при дозвуковых скоростях при использо-
использовании МДВ в рассмотрение вводятся вих-
вихревая поверхность 5 с элементарными
вихревыми ячейками 8У и вихревые пе-
пелены а,- (рис. 4.6), то при сверхзвуковых
скоростях к ним добавляются поверхно-
поверхности скачков уплотнения У,, характери- Рис4.б.к вычислению возму-
стических конусов Кг и пространство щенной скорости по методу дис-
_^, кретных вихрей при сверхзвуко-
7} = 2Х/1 (объема газа) вокруг рассмат- вом обтекании ЛА
риваемой точки М; (рис. 4.6). На скачках уплотнения У( при сверхзву-
сверхзвуковых передних кромках элемента 5У функция Ф/(М) терпит разрыв, а
на характеристических конусах Кг обращается в нуль фундаментальное
решение уравнения D.14).
По МДВ основой построения стационарных вихревых схем являются
вихревые отрезки конечной [А1,А2] и полубесконечной [ + ©0,^] и
[ А2, + °°] длин, которые в произвольной точке М0(х09у0,^) простран-
пространства индуцируют возмущенную скорость ^(Мд) (см. рис. 4.5 а). Воз-
Возмущенная скорость Щ в точке Мо от вихревого отрезка находится по
формуле [126]
2а+Ъ
98
D.15)
а = (*2 " *1>2 - к\уг - ЛJ + B2 - гО2],
^ = (^-^0X^2-^1)-/
где е — множитель, равный четырем при М < 1 и двум при М > 1, Г —
циркуляция вихревого отрезка [ А1? А2 ].
При М> 1 вихревой отрезок [А1,А2] может пересекаться с линией
Маха слева (рис. 4.5 б) или справа (рис. 4.5 в). В этом случае интегриро-
интегрирование ведется лишь по той части вихревого отрезка [ А^ А2 ], которая на-
находится внутри обратного конуса Маха с вершиной в точке Мо. Тогда в
соответствии с понятием конечной части интеграла по Адамару [264] для
случая пересечения вихревым отрезком линии Маха слева и справа соот-
соответственно будем иметь
2я Аас-Ь2 4с
± DЛ6)
2п ъ2 у/а + Ь
Особенности на скачках уплотнения при пересечении вихревого отрезка
с линией Маха учитываются с помощью сингулярной составляющей воз-
возмущенной скорости VI [7]:
~^—Уь2-'82в, , D.17)
Ах( 2
где Ах,- — средняя хорда вихревой панели, в — угол стреловидности
вихревого отрезка.
В итоге, на дозвуковых скоростях обтекания возмущенная скорость
1/1 вычисляется по формуле D.15), а на сверхзвуковых — в дополнение к
D.15) используются соотношения D.16), D.17).
Необходимо отметить ряд особенностей при применении формул
D.15), D.16). Во-первых, зависимость D.15) для определения регулярной
составляющей возмущенной скорости при дозвуковом обтекании имеет
особенность при А = 4ас -Ъ = 0, что соответствует положению кон-
контрольной точки на вихревом отрезке или его продолжении. Кроме того,
при сверхзвуковом обтекании составляющие возмущенной скорости
(см. D.16)) стремятся к бесконечности при пересечении вихревых отрез-
отрезков характеристическим конусом с вершиной в контрольной точке. В
таких случаях в соответствии с понятием конечной части интеграла по
Адамару [264] слагаемые возмущенной скорости по формулам D.16) по-
полагаются равными нулю. Во-вторых, добавка D.17), соответствующая
сингулярной составляющей возмущенной скорости, имеет смысл лишь
при сверхзвуковом обтекании и только для тех вихревых ячеек, для кото-
которых передняя кромка сверхзвуковая.
99
Введем полную совокупность определяющих кинематических пара-
параметров, влияющих на стационарные и нестационарные линейные аэроди-
аэродинамические характеристики ЛА при до- и сверхзвуковом обтекании:
D.18)
Она состоит из четырех групп возмущающих параметров, разделенных
между собой точкой с запятой. Первая группа характеризует возмущения,
вносимые в среду движением ЛА как твердого тела; вторая — от упругих
перемещений точек аппарата и подвесок; третья — от отклонений рулей и,
наконец, четвертая — возмущения, вызванные скоростями порывов ветра.
Согласно D.18) общая линейная нестационарная (или стационарная)
задача обтекания ЛА сводится к ряду частных, так называемых канони-
канонических е^ -задач аэродинамики. Каждая из этих задач решается незави-
независимо от других тем или иным численным методом в зависимости от ско-
скорости обтекания либо унифицированным МДВ независимо от скорости
обтекания. После решения указанных основных канонических задач
суммарные линейные аэродинамические характеристики получаются
простым сложением частных.
§ 4.3. Интегральные представления обобщенных нестационарных
аэродинамических характеристик
Учитывая линейность оператора Ь(() в D.9), в общем случае задача
нестационарного обтекания ЛА сводится к решению ряда более простых
канонических задач по определению переходных функций временных
или частотных обобщенных аэродинамических характеристик. Переход-
Переходные функции являются следствием реакции линейной системы на вход-
входные сигналы, меняющиеся по ступенчатому закону, а частотные
характеристики — по гармоническому закону.
Пусть произвольному кинематическому параметру Е} соответствует
функция координат Р^ правой части уравнения D.9). Тогда переходную
функцию Н^(г), характеризующую изменение действующей на систему
аэродинамической нагрузки Ар({) при возмущении гу(г) = 1(О> можно
определить из уравнения
Ш#^@ = ^. ' D.19)
Обычно переходная функция представляется в виде
Я^@ = Дре'+/^@, Дре'=Я^(оо), D.20)
где Ар6', /д!@ — стационарная и нестационарная части переходной
функции соответственно. Коэффициент аэродинамической производной
Ар ; обычно определяется из независимого решения стационарной зада-
задачи аэродинамики
Ь(оо)Дре-/ = р.. D.21)
100
Нахождение частотных аэродинамических характеристик строится на
входном сигнале е^г), меняющимся по гармоническому закону с часто-
частотой п*
еу@ = ехрA'Д*0, ; = лЛ. D.22)
Операторное уравнение D.9) в частотной области принимает вид
*Ф^(Ш*) = /?,-. D.23)
Функция ФА(Ш*) представляет собой комплексную амплитудно-
фазовую частотную аэродинамическую характеристику; запишем ее в виде
А 2; -,6; ^.*. 8, -.6: D.24)
Ар ' =Фд^, п Ар^ = Ф^,
где ФА(&*)9 ФЛ(&*) — вещественная и мнимая составляющие соот-
соответственно.
Аналогичным образом можно записать комплексный аэродинамиче-
аэродинамический оператор Ъ(г&*) :
Ь(Ш*) = Ь1(Л*) + Й2*Ь2(Д*) • D-25)
С учетом D.24) и D.25) операторное уравнение D.23) для определе-
определения частотных аэродинамических характеристик принимает вид
и(п*)Арез (д *) - а*2ъ2(п*)АРё] (д *) = р> ,
7 D.26)
Ь2(Д *)Арв^ (Д*) + Ьх(Д *)Дре' (Л*) = 0.
Временные и частотные характеристики связаны между собой зави-
зависимостями [57]
D.27)
о
(Д*) = |^ *
D.28)
О
и наоборот,
§ 4.4. Точные интегральные и приближенные представления
обобщенных нестационарных аэродинамических характеристик
Произвольный закон изменения кинематических параметров
можно представить в виде комбинации ступенчатых функций. Тогда и
соответствующее ему изменение линейной нестационарной нагрузки
101
Аре. (() можно выразить через переходные функции. Связь эта устанав-
устанавливается на основе интеграла свёртки и имеет вид
Н^ (^ )Е] {I - *! )Л!. D.29)
О О
С учетом D.20) зависимость D.29) запишется так:
1 I
д;;. D.30)
о
Интегральные представления D.30) с линейной точностью описывают
поведение нестационарных аэродинамических характеристик при произ-
произвольных законах изменения во времени входных параметров е^). Пер-
Первое слагаемое в правой части D.30) соответствует стационарным значе-
значениям нагрузок, пропорциональным мгновенным значениям параметра
Су (г). Второе и третье слагаемые учитывают эффекты нестационарности
обтекания аппарата и отражают зависимость аэродинамической нагрузки
Аре. (г) от предыстории изменения параметра е^{г).
Наряду с точными соотношениями D.30) в рамках линейной теории в
задачах аэроупругости для нахождения внешних воздействий широко
используют приближенные представления [57].
Гипотеза квазистационарности не учитывает эффекты
нестационарности. Полагая в D.30) 1ЛA) = 0, получаем
А/7е.@ = А/^;@. D.31)
Аэродинамические производные Ар 1 находятся из решения стационар-
стационарной задачи D.21).
Расширенная гипотеза гармоничности обычно приме-
применяется в тех случаях, когда входной параметр е^г) изменяется по пе-
периодическому и почти периодическому негармоническому закону с ха-
характерной частотой 62% . При этом для нахождения функций Аре.A)
используются соотношения, строго справедливые только для гармониче-
гармонических законов изменения кинематических параметров в^):
102
АРе. (О = Арез (п*е. )е]@ + Д/Л (п*е. )ё]@ . D.32)
Расчет аэродинамических производных Ар '(&%•) и Ар^(п^) осу-
осуществляется либо на основе уравнений D.26), либо с помощью зависимо-
. стей D.27). Основная неточность при применении расширенной гипотезы
гармоничности связана с отличием реальных периодических законов из-
изменения Е]A) от гармонических. Чем больше это отличие, тем выше
погрешность в описании эффектов нестационарности обтекания на осно-
основе представлений D.32).
Дальнейшее упрощение — гипотеза гармоничности — по
сравнению с расширенной гипотезой гармоничности связано с неучетом
зависимости аэродинамических коэффициентов в D.32) от чисел Струха-
ля; здесь принимается, что
АРе. (О = Аре< е] @ + АР1> е] @ ,
Достоинство представлений D.31)-D.33) заключается в том, что они по-
позволяют, с одной стороны, приближенно учитывать нестационарность
обтекания, а с другой — существенно упростить решение канонических
задач аэродинамики по определению коэффициентов АЕ1
;.)пРи д;.>о.
Положив в D.26) 42* = 0, получим следующую систему операторных
Е 8
уравнений для определения величин Ар у@) и Др*^@):
и@)Аре* @) = /?; , Ь2@)Д/' @) + Ь1@)Др^ @) = 0. D.34)
Отсюда следует, что определение стационарных Ар * @) и нестацио-
нестационарных Др*у@) обобщенных аэродинамических характеристик сводит-
сводится к решению одной и той же канонической задачи аэродинамики (обра-
(обращению оператора Ь^О)) при различных правых частях.
Далее из D.27) соответственно получим
^ D.35)
о
Второе равенство в D.35) представляет математическое выражение
теоремы об импульсе [57]. Эффективные численные методы решения
уравнений D.34) изложены в [57].
§ 4.5. Приближенные соотношения для вычисления
аэро- и гидродинамических нагрузок
Приведем здесь широко используемые в повседневной расчетной ин-
инженерной практике при решении задач аэрогидроупругости приближен-
103
ные выражения для определения аэро- и гидродинамических сил (нагру-
(нагрузок) Ар(<зО , прикладываемых к поверхности упругих тел перпендикуляр-
перпендикулярно потоку, для различных схем обтекания и при различных числах Маха
(д — обобщенное перемещение). Геометрические характеристики тонких
профилей (несущих поверхностей) могут быть заданы при помощи урав-
уравнений средней линии м/ = \у(х,1) и толщины с\ = с\(х) или срединной
поверхности ч? = м?{х,1,г) и толщины с\ ^с^х.г). При этом предпола-
предполагают, что поток ориентирован в направлении оси Ох (см. рис. 4.1). Через
^ = а(х,г) = -дм?/дх обозначают местный угол атаки профиля или несу-
несущей поверхности, а через 50 — максимальную толщину профиля или*
несущей поверхности 50 = тах с^х.т) . Прикладываемую к профилю или
к поверхности в положительном направлении оси Оу безразмерную
обобщенную силу Ар (коэффициент перепада давлений) выражают че-
через перепад давлений АрОс,г,0 между нижней и верхней поверхностями
тела (Ар = рв - ри) и относят к скоростному напору д* = р[/2/2
(Ар = Ар/#*). В качестве обобщенной координаты примем в случае ста-
- д\у(х, г)
ционарного обтекания д = —-—- = -а, а в случае неустановившегося
ох
(
потока 4= 3" + 773"
4.5.1. Приближенные формулы для определения аэро- и гидроди-
гидродинамических сил при расчете объекта на дивергенцию. Силы на про-
профиле в плоском дозвуковом (М < 1) установившемся потоке сжимаемой
жидкости (газа) распределяются по зависимости [327]
\ (ЦТ^*^ D.36)
где Д = A~М2) —коэффициент Прандтля, Зс, ^ —безразмерные
координаты, отсчитываемые вдоль хорды по потоку (х = х/Ь, %
где 2Ъ — хорда крыла). Дальше черточки у безразмерных величин будем
опускать. Интеграл в D.36) понимается в смысле главного значения по
Коши. Случай C = 1 соответствует идеальной несжимаемой жидкости.
При установившемся сверхзвуковом обтекании тонких профилей
(М »1, М<5 «1) потоком сжимаемого газа для расчета приращения
давления используют формулу Аккерета:
^-тгг- D37)
/} ах
основанную на предположении, что местное приращение давления про-
пропорционально местному углу атаки профиля.
При гиперзвуковых скоростях обтекания в диапазоне М2»1,
М « 8$1 на распределение коэффициента перепада давлений вдоль хор-
104
ды крыла и на положение центра давления начинает существенное влия-
влияние оказывать распределение толщины профиля ^(л:). В этом случае
распределение приращений коэффициента перепада давлений можно
находить по так называемой поршневой теории:
гГ!И1м^-1—. D.38)
Согласно поршневой теории влияние возмущений носит локальный харак-
характер, и каждая частица газа движется практически лишь вдоль хорды крыла.
В диапазоне М2 »1, М<5о = 0 A) для расчета прикладываемых к
профилю сил можно воспользоваться следующим выражением [61]:
д_ . дел л 1 (дс\ \ дм
др = -4—1 1 + 7 —Ч —• D.39)
дх 4\ дх ) дх
Для несущих поверхностей (крылья малых удлинений) в трехмерных
установившихся дозвуковом и сверхзвуковом потоках в предположении,
что возмущенная скорость в направлении потока А1!х много меньше
АС/г и АНу, распределение давления вдоль хорды крыла можно нахо-
находить по формуле [61, 327]
П д' /()|??| дх
где функция Лх) описывает форму несущей поверхности в плане (в плос-
плоскости XI). Если упругие деформации вдоль размаха крыла пренебрежимо
малы (Эн/Эд: зависит только от х), то выражение D.40) упрощается и
принимает вид
D.41)
р
стей для вычисления аэродинамических сил применяют соотношение
При гиперзвуковых скоростях (М2»1) обтекания несущих поверхно
м14D + 4
4 дх\дх ыъ[дх2 Ъг2)х[Е
где х,1;,г —безразмерные переменные, хЬЕ(г) —безразмерная коор-
координата передней кромки крыла. Если <50 »A/М2), то вторым членом в
формуле D.42) можно пренебречь и получить выражение для аэродина-
аэродинамической силы, определяемой по поршневой теории.
4.5.2. Приближенные зависимости для определения аэро- и гидро-
гидродинамических сил при расчете объекта на флаттер. Так как методы
расчета флаттерных характеристик основаны на гармоническом анализе,
то ниже приводимые соотношения для аэро- и гидродинамических сил
получены в предположении о гармоническом характере колебаний, со-
совершаемых конструкцией в потоке непосредственно перед возникнове-
возникновением флаттера.
105
При гармонических колебаниях профиля в плоском дозвуковом пото-
AУ12 «1) несжимаемого газа или идеал]
сил по нему можно определять по формуле
ке AУ12 «1) несжимаемого газа или идеальной жидкости распределение
2
где р* =П Ь/П — приведенная частота (число Струхаля); О, — частота;
х9 I; — безразмерные координаты; с(р*) — функция Теодорсена,
где Нп(р ) —цилиндрические функции второго рода л-го порядка.
При трансзвуковом обтекании (М ~ 1, /?* »11 - М |) колеблющегося
профиля для определения коэффициента перепада давлений может быть
использовано следующее соотношение:
А_ /Э . АХГехр[Чр*(х-О/2]( д .«Л,*.,* ,ААЛ.
Ар = -4 — + 1р —г. ^ ^ — + гр \м?(д)A<; . D.44)
1Эл: Я <АЪ1т*(х-2\ \Ъх )
В случае сверхзвукового обтекания (М>1, М50«1) профиля для
Др применима следующая зависимость [61, 327]:
^ ^. D.45)
где /0 — функция Бесселя нулевого порядка.
При сверхзвуковых скоростях обтекания и малых значениях приве-
приведенной частоты р* (квазистационарное приближение) можно пользовать-
пользоваться формулой
4 Г2 Л
В случае гиперзвукового обтекания, т. е. при М2 »1, М<50 = 0 A),
выражение для Ар может быть представлено в виде
106
4Г
= 7 1
4 *&] (& (/
Если предположить, что \Aс\/с1х\»\(д/дх + Ш/1/)\у\9тов этом случае
можно использовать представления для 4р по поршневой теории. Ли-
Линеаризованная формула поршневой теории, применяемая при расчете на
флаттер плоских и цилиндрических панелей, имеет вид [65, 327]
т)- D-48)
дх )
Для слабоискривленной (почти плоской) несущей поверхности, со-
совершающей низкочастотные колебания в дозвуковом (М< 1, М50 «1)
потоке газа, для нахождения Ар можно использовать следующее выра-
выражение:
л[дх V
| 1п;
Соотношение для определения распределения аэрЬдинамических сил,
действующих на колеблющуюся несущую поверхность в гиперзвуковом
потоке (М2 »1), будет
4 Г У + и.А^уЭ .
х
х | (х-5)схр[-ф*(*-«)][^- + >[рФ]^,гК. D.50)
Соотношение D.50) выписано при условии удержания членов порядка
50/М, <5О/М3, 502-
§ 4.6. Основные линейные обобщенные аэродинамические
характеристики упругого летательного аппарата
Для изучения возмущенного движения ЛА с единых позиций (вклю-
(включая продольное, боковое и пространственное движения) необходимо, во-
первых, перейти к обобщенной форме записи уравнений C.31), во-
вторых, унифицировать расчет аэродинамических характеристик. В связи
с этим требуется ввести полную совокупность кинематических парамет-
параметров Е](г), характеризующих всю совокупность нестационарных аэроди-
аэродинамических характеристик упругого ЛА.
Исходя из D.5) и D.7), имеем
»%к\ЯиЧ1\ Ягтп»Ягтп\ 8у,8у; Ац},
107
Здесь ^^к — параметры, характеризующие движение ЛА как твердого
тела; #/ — параметры упругих перемещений конструкции; # 2тп — па-
параметры относительных смещений (линейных и угловых) упругоприкре-
пленных грузов на внешних подвесках; <5У — углы отклонения рулей;
Ад — безразмерные скорости вертикальных и боковых порывов ветра;
#0 — число степеней свободы ЛА как твердого тела; Л^ — число учи-
учитываемых тонов упругих колебаний конструкции; А^2 — число внешних
подвесок; Итп — число упругих степеней свободы подвески с номером
п\ Му — число рулей; Л^ — число рассматриваемых видов внешних
возмущений.
Общее число параметров г^г) в D.51) будет
N. = 2(ЛГО + Ыд + N2Nтп + #у )+ V D-52)
В векторном обозначении D.52) примет вид
Я = ||Яо Яо Я/ Я/ Я2 Я2 5у 5у лГ=|я Я § 5А|Т. D.53)
Суммарная линейная нестационарная обобщенная аэродинамическая на-
нагрузка Ар(*), действующая на упругий ЛА, равна
7=0
Учитывая D.53), перепишем интегральные представления D.30) в
матричной форме
о о
^рD.55)
0 0 0
Аналогично запишем гипотезу квазистационарности D.31):
Др@ = Дре8 = Др9я + Др«С[ + Др58 + Др^8 + ДрАД. D.56)
В матричной форме расширенная гипотеза гармоничности D.32) по-
получит вид
Др@=Дре Ш*е) г + Др! (Ф ё = Ар9(^2е*) ^ + [Ар*(Д *) +
Р
!(й|)8 + ДрА(Д2)Д + Др.СЙд)А. D.57)
108
При стремлении характерных частот IIП*, О*§, п*А II -» 0 приходим к
гипотезе гармоничности:
Ар(О = Арее + Ар^Е = Др*я + (Ар* + Ар?) я
Члены правых частей D.57), D.58), зависящие от ускорений я и 5, изме-
изменяются пропорционально квадратам частот процесса и при низких часто-
частотах становятся пренебрежимо малыми величинами. Тогда выражения для
расширенной гипотезы гармоничности D.57) и гипотезы гармоничности
окончательно примут вид
Ар(О = Ар^я + (Ар* + Ар*) Я + Ар 5 + (Ар + Ар*) 8 +
§ 4.7, Определение линейных обобщенных аэродинамических
характеристик упругого летательного аппарата
с переменными динамическими свойствами
Для унификации расчета линейных обобщенных аэродинамических
характеристик упругого ЛА как системы с переменными динамическими
свойствами (за счет выработки топлива, изменения геометрии в полете,
десантирования груза, применения вооружения и т. д.) надо выбрать за
основу его базовый вариант загрузки. Аэродинамические характеристики
для других вариантов загрузки ЛА определяются путем пересчета через
аэродинамические характеристики его базового варианта загрузки.
Между собственными формами Ц, ^ базового ЛА и его формами
?0, ?1 с заданным вариантом загрузки существует связь
?0=*0> ?1 = &-Г0А)В> D.60)
где матрицы А и В находятся согласно [43].
При этом суммарные Ро, Ро и обобщенные Р1? Р[ аэродинамические
силы, действующие на ЛА при обоих вариантах загрузки — базовом и
текущем — связаны между собой следующим образом:
Р0=Р0, Р^В^-АЧРо)- D.61)
Для определенности приведем формулы пересчета коэффициентов
аэродинамических производных [43]:
р|о=^т§?о} р|1=?отк^, Р1?о=?1тК5о, рй^К*,
Р^1 = ^К*1.
Распределенные аэродинамические характеристики в D.62), согласно
D.21), находятся путем решения следующих задач аэродинамики:
109
D-63)
где Ь^ — линейный аэродинамический оператор, соответствующий на-
нагрузке К.
Из D.63) с учетом D.61) имеем
К?о =К«°, К?1 =(К^ -К90А)В. D.64)
Вывод равенств D.64) осуществлен в предположении постоянства аэро-
аэродинамических операторов с заданным вариантом загрузки Ь^(°°) и базо-
базовым Ь^(оо)? т.е. Ь^(<») = Ь^(оо). Данное предположение считается
справедливым при сохранении внешней конфигурации ЛА, например при
размещении грузов внутри фюзеляжа или крыла. При изменении же ва-
вариантов внешних подвесок равенства D.64) выполняются приближенно.
Подставляя D.64) в D.62), имеем
D.65)
Р*1 = ВТ(Р*1 -АЧ^1 -Р1^А + АтРо9оА)В.
Аналогичные формулы пересчета можно получить для других сум-
суммарных и обобщенных линейных аэродинамических характеристик, в
том числе для переходных функций и коэффициентов аэродинамических
производных, зависящих от чисел Струхаля, для аэродинамических ха-
характеристик, связанных с отклонением рулей и воздействием порывов
ветра, и т. д.
Для коэффициентов аэродинамических производных с точками имеем
л . D.66)
Р/1 =ВТ(Р1*1 -АТРО^ -Р1^А + АТРО^°А)В.
Для коэффициентов аэродинамических производных, связанных с откло-
отклонением рулей и воздействием порывов, формулы пересчета будут
Приведенные формулы пересчета справедливы для нестационарных и
частотных аэродинамических характеристик.
Зависимости D.65)-D.67) позволяют через аэродинамические харак-
характеристики базового варианта загрузки ЛА находить параметры его на-
гружения при различных вариантах загрузки путем простого пересчета.
Это дает возможность, с одной стороны, унифицировать систему расчета
коэффициентов аэродинамических производных, а с другой — по ним
организовать проведение широких параметрических исследований про-
процессов движения упругого ЛА в реальных условиях полета.
ПО
§ 4.8. Аэродинамические коэффициенты
В расчетной практике при решении задач аэродинамики, аэроупруго-
аэроупругости и динамики полета ЛА, как правило, используют безразмерные аэро-
аэродинамические коэффициенты. Они вводятся прежде всего по отношению
к нормальной У и боковой 2 силам и моментам Мх, Му, Мг, дейст-
действующим на ЛА относительно связанной системы координат Охуг
(см. рис. 2.1). В задачах линейной аэроупругости большую роль играют
так называемые обобщенные аэродинамические силы Р/. При изучении
рулевых приводов важное значение имеют шарнирные моменты Мшу.
Силы и моменты, действующие на отдельные части базовой плоскости
ЛА, будем обозначать г'-м индексом.
Основные аэродинамические коэффициенты ЛА обычно относят к
площади $о и хорде крыла Ь, а шарнирные — к площади 8У и хорде \
руля:
У 2 _ Мх%ул рг
СУ ~~ „ с ' °г ~~ „ е ' тх,у,г ~" „аи' С^ " л с «, ' т™
Суммарные силы и моменты, действующие на аппарат в целом, нахо-
находятся суммированием по г-м базовым несущим плоскостям:
Су = Е4 • сг = Есг ' тх,ул = Ет^,г ' С1 = Ес/ * D*69)
I / 1 I
С учетом линейности задачи обтекания ЛА его любая аэродинамическая
характеристика с(т) является итогом изменения всех кинематических
параметров €у(т) по произвольному закону:
Ф) = ^сЕ](т). D.70)
Индекс е^ в правой части выражения D.70) означает, что соответст-
соответствующее значение аэродинамического коэффициента получено путем ре-
решения частной 6] задачи аэродинамики, в которой все кинематические
параметры, кроме рассматриваемого е;, равны нулю.
Дополнительно к D.68) введем безразмерные величины:
D.71)
где 5, — площадь базового элемента.
С учетом правила знаков, указанного на рис. 2.1, безразмерные аэро-
аэродинамические коэффициенты сил и моментов и обобщенных сил, дейст-
действующие на 1-ю часть аппарата, будут
111
с1 = сов(пу
тхе ¦ = со8("г
5( ' 5, ' D.72)
Суммарные аэродинамические коэффициенты для ЛА в целом согласно
D.69) находятся путем суммирования выражений D.72) по всем г-м базо-
базовым несущим плоскостям. Переход к общему случаю, описываемому
всей совокупностью кинематических параметров е^, также осуществля-
осуществляется суммированием одноименных коэффициентов по формуле D.70).
При изменении кинематических параметров е^ по гармоническому
закону
е;(т) = е}со8(р*т + 0,) D.73)
любую безразмерную линейную аэродинамическую характеристику
можно записать в виде
е.(т) сф)е;(т)+с^ (р)ё,(т) . D.74)
Отсюда видно, что коэффициенты аэродинамических производных
с у \р*) и с**\р*]) не зависят от времени, но являются функциями числа
Струхаля р^. Вместе с тем они зависят от чисел Маха и конструкции ЛА.
Аэродинамические производные без точек и с точками в D.74) для 1-й
части аппарата по-прежнему могут быть определены через нагрузки и
направляющие косинусы нормалей к базовым плоскостям по формулам
типа D.72).
При расчете на прочность конструкции аппарата по предельным на-
нагрузкам используют силы, действующие в его сечениях х = соп&1,
у = соп81, г = соп81. Пусть на фюзеляже в сечениях х = сопз* на ширине
Лх действуют аэродинамические силы с1Ух , 67.х, в сечениях вертикаль-
вертикального оперения у = сопз* шириной йу — силы йТу, в сечениях крыла и
горизонтального оперения г = СОП81 шириной йг — силы с1Уг. Перейдем
к коэффициентам этих сил по отношению к элементарным площадям
проекций выделенных сечений. Согласовывая направление проекций
сечений с направлением рассматриваемой силы, имеем
Здесь Ьх, Ну, 1[ — текущие размеры проекций сечений крыла (горизон-
(горизонтального и вертикального оперений) и фюзеляжа в направлении осей Ох,
Оу, Ог связанной системы координат Охут..
112
§ 4.9. Некоторые особенности суммарных обобщенных линейных
аэродинамических характеристик
Как правило, ЛА конструктивно оформляется таким образом, что при
неотклоненных рулях и недеформированном состоянии у него имеется
вертикальная плоскость симметрии. Поэтому базовые несущие плоско-
плоскости, схематизирующие аппарат, располагаются также симметрично отно-
относительно этой плоскости (см. рис. 4.1). Отсюда ясно, что целый ряд сум-
суммарных обобщенных аэродинамических характеристик обращаются в
нуль. Кроме того, для таких аэроупругих объектов направляющие коси-
косинусы нормалей к 1-м базовым несущим плоскостям обладают следующи-
следующими свойствами симметрии:
Для базовой плоскости г = 0 имеем
со8(п;у)^,Г7,0) = 0, со8(т%(^г],0) = 1. D.76)
Исходя из кинематических параметров е^ D.51) задачи аэродинамики
(за исключением случая косого постепенного входа ЛА в порыв) можно
разбить на две группы: симметричные и антисимметричные.
К первой группе относятся кинематические параметры, вызывающие
симметричное нагружение аппарата:
Ар'е^,Г1,С) = Ар1еМ,Г1-С), Др^,Т7,О) = О. D.77)
Этому способствует симметричное расположение граничных условий
на базовых несущих плоскостях, т. е. кинематических параметров
е) (т)е {а, со,, ^^, <$, <5+, <5У+, А + }. D.78)
В D.78) индекс «+» обозначает соответственно симметричное деформиро-
деформирование базовых несущих плоскостей ЛА, отклонение рулей и симметрич-
симметричный мгновенный либо постепенный охват его вертикальным порывом.
Вторую группу составляют кинематические параметры е^, вызы-
вызывающие антисимметричное нагружение несущих плоскостей ЛА
Ар^(|,»7,С) = -^.A^-С), Д^.Й,г?,О)*О. D.79)
Таким законам соответствуют кинематические параметры
еу(т)е {/3,а)я,ау,<37\ щ,5^,5^, Ау,А~ }. D.80)
В D.80) индексом «-» обозначены кинематические параметры, способст-
способствующие антисимметричному распределению граничных условий по ба-
базовым несущим плоскостям ЛА.
Из анализа соотношений D.69), D.72) с учетом выражений D.75)-
D.78) можно сказать, что для симметричных кинематических параметров
е^ (т), характеризующих движение ЛА как жесткого тела, отличными от
нуля будут только симметричные силы и моменты:
суе.Ф0, гпге.Ф0, ^=0, ^^=0. D.81)
113
Для антисимметричных кинематических параметров г^ (т) отличны-
отличными от нуля будут несимметричные силы и моменты:
*0 ^. =0, тге.=0. D.82)
Аналогичные соотношения справедливы и для коэффициентов аэродина-
аэродинамических производных без точек и с точками.
Обобщенные аэродинамические силы отличны от нуля только тогда,
когда аэродинамические нагрузки и формы поверхности деформируемой
конструкции ЛА либо симметричны, либо несимметричны. Поэтому при
обобщенных кинематических параметрах ^^ , характеризующих симмет-
симметричное деформирование ЛА, для кинематических параметров е^ = г у,
относящимся к его антисимметричному деформированию, имеем
с1е. = 0, <Л=0, с^=0, 7*>=0,
а при ц[ для Е) - е^
Здесь следует отметить соотношения, установленные между коэффи-
коэффициентами аэродинамических производных для ЛА как жесткого тела
выраженными соответственно через кинематические параметры ^, ^0^
и Е) (табл. 4.1):
Таблица4.1
с%к>Ш
с?
0
-с?
сГ
0
с?03
0
с?03
с/04
сЛ
сш
с?>
с?
с?03
§ 4.10. Формирование матриц коэффициентов
аэродинамических производных /
На этапах проектирования, испытаний, эксплуатации и модернизации
современных ЛА требуется знание линейных стационарных и нестацио-
нестационарных аэродинамических характеристик в полном объеме. Это связано с
тем, что линеаризация проблемы аэроупругости ЛА в целом и использо-
использование интеграла свертки для представления в ней суммарных обобщен-
обобщенных аэроупругих характеристик позволяют разделить задачу аэроупруго-
аэроупругости на две, одна из которых сводится к предварительному нахождению
коэффициентов аэродинамических производных, а другая — непосредст-
непосредственно к интегрированию системы линейных интегродифференциальных
уравнений аэроупругости. Причем следует указать на то обстоятельство,
что в решении проблемы линейной аэроупругости ЛА основную часть
времени занимает именно предварительный расчет и формирование бан-
банка аэродинамических и аэроупругих коэффициентов в широком диапазо-
диапазоне чисел Маха. Поэтому созданию автономной системы автоматизиро-
114
ванного расчета аэродинамических характеристик ЛА базового варианта
загрузки для решения задач линейной аэроупругости должно быть уделе-
уделено повышенное внимание.
Как уже отмечалось, в настоящее время существуют эффективные
численные методы линейной аэродинамики для расчета переходных аэ-
аэродинамических функций 1с](т), коэффициентов аэродинамических
в в
производных с 7(т) и с у(т) в широком диапазоне скоростей полета
[57]. На базе этих методов создаются унифицированные системы по ав-
автоматизированному расчету на ЭВМ «точных» и приближенных значе-
значений коэффициентов аэродинамических производных. Причем программы
расчета аэродинамических характеристик, использующие гипотезу гар-
гармоничности, могут быть приспособлены для проверки в комплексе с дан-
данными, полученными другими методами.
Принятие единого входного сигнала
приг>0 D'83)
для всех канонических 6] -задач аэродинамики расчета аэродинамиче-
аэродинамических характеристик на ЭВМ позволяет добиться однотипной структуры
получаемых переходных функций /су(т). В итоге все это дает возмож-
возможность разработать достаточно простой способ стыковки программ расче-
расчета аэродинамических и аэроупругих характеристик ЛА с программами
решения задач аэроупругости и динамики полета ЛА.
Наличие предварительно рассчитанной аэродинамической информа-
информации существенно упрощает задачу формирования системы уравнений
возмущенного движения упругого ЛА и позволяет решать одновременно
большинство задач линейной аэроупругости. При этом обеспечивается
возможность составления универсального алгоритма расчета параметров
возмущенного движения упругого ЛА, его нагружения и деформирова-
деформирования в полете в реальном масштабе времени с учетом нестационарности
обтекания и без учета, который может быть настроен на решение любой
частной задачи, касающейся его продольного и бокового движений путем
правильной организации выборки соответствующих исходных аэродина-
аэродинамических данных. А то, что подобная информационная проблема суще-
существует, можно судить по такому примеру. Например, при расчете аэроди-
аэродинамических характеристик для продольного и бокового движений упру-
упругого ЛА с аппроксимацией его упругих перемещений шестью низшими
собственными формами число переходных функций для одного числа
Маха составляет 250; в диапазоне чисел Маха ОД < М < 2,5 с интервалом
АМ = 0,1 это число составит 6250. Поскольку каждую переходную функ-
функцию приходится описывать 50 дискретными значениями в точках, объем
аэродинамической информации для ЛА уже составит несколько сотен
тысяч чисел. Поэтому актуальность разработки способов, позволяющих
идентифицировать каждый массив данных, становится очевидной. Для
этого в комплексе программ для ЭВМ необходимо предусмотреть разра-
разработку специальных системных средств.
115
Для возмущенного движения ЛА без учета нестационарности обтека-
обтекания в интегральных представлениях D.55) нестационарные добавки
1Я} (т) и /^/ (т) равны нулю. Тогда вектор аэродинамических сил будет
D.84)
Для продольного движения упругого ЛА с учетом / форм собственных
5У, §у, А*: - матрица
коэффициентов аэродинамических производных с( ] принимает вид
II II
а || я у (т) | — вектор-столбец этих параметров.
Аналогичным образом определяются в задании аэродинамические
характеристики для бокового движения ЛА.
Указанный способ организации предварительных вычислений аэро-
аэродинамических характеристик значительно упрощает этап формирования
и отладки соответствующих программ расчета на ЭВМ. Что касается
дальнейшего использования аэродинамической информации для решения
практических задач аэроупругости, описываемых системой матрично-
векторных уравнений C.31), то надо по отношению к последней подгото-
подготовить внешнюю управляющую программу. Ее функции — выборка соот-
соответствующих аэродинамических данных под конкретную задачу и ввод
их в систему уравнений C.31), а также определение вида обработки ре-
результатов счета.
Обратимся теперь к формированию и хранению информации по аэро-
аэродинамике, учитывающей нестационарность обтекания ЛА. Эту задачу
можно значительно упростить, если использовать метод групповой ап-
аппроксимации переходных функций [51], который позволяет перейти от
системы интегродифференциальных уравнений к решению системы
обыкновенных дифференциальных уравнений и уменьшить информаци-
информационный объем памяти переходных функций.
В основу такого приближенного метода решения системы интегро-
интегродифференциальных уравнений положена аппроксимация интегралов (пе-
(переходных функций 1^(т-Т\)) линейной комбинацией показательных
функций. Представим
^/(^-Т1)=Е5иехР^и^-^)] . D.86)
к
где к — удерживаемое число экспонент; 8^, а^ — коэффициенты ап-
аппроксимации, способ нахождения которых описан в [43, 51]. Отметим
здесь, что представление подынтегральных выражений в D.30) через
D.86) делает ядро каждого интеграла вырожденным.
116
Интеграл свертки при дДО) = О обладает таким свойством:
/ ^ С^Г - 1Г2 )^гу (^ )^/1Г1 = //^ С^ - ^1 )^у С^1 )^^1 + ^У <0)^^ (^). D.87)
О О
Дифференцируя выражение D.86) по т , получаем
?иии D.88)
Вводя D.88) в правую часть выражения D.87), имеем
^М^Ъ . D.89)
О к
где
т
7и = / &иАз ехР [аи (т " Т1)] ^ ^ ^ • <4-90>
о
Отсюда
о
Дифференцируя D.90) по т, приходим к выражению
о
В итоге подстановка D.91) в D.92) сводит вычисление каждого инте-
интегрального члена в системе D.92) к решению дополнительной системы
обыкновенных дифференциальных уравнений первого порядка:
Отсюда следует, что для нахождения нестационарных аэродинамических
добавок приходится дополнительно решать ]хк дифференциальных
уравнений D.93).
Порядок системы уравнений D.93) можно существенно понизить с
]хк до к, если использовать метод групповой аппроксимации переход-
переходных функций. Его суть состоит в том, что осуществляется аппроксимация
не по отдельности каждой переходной функции 1^ (т -тх), а по всей их
совокупности суммой экспонент, имеющих одинаковые показатели аг- ,
но разные коэффициенты 5у при экспонентах. В итоге определение
нестационарных аэродинамических добавок (последние два члена в
D.30)) с учетом D.68) в безразмерном виде при использовании групповой
аппроксимации окончательно сводится к совместному решению следую-
следующих соотношений:
^д]^1^ , D.94а)
к
117
D.946)
Как видим, в этом случае интегральные соотношения D.30) заменяются
линейными дифференциальными уравнениями с постоянными коэффи-
коэффициентами. Расчеты показывают, что достаточно высокое качество ап-
аппроксимации достигается при к = 2 -*- 5.
Качество аппроксимации вычисляется градиентным методом из усло-
условия минимума величины
к =
5 ехр (а,. ут
D.95)
Система дифференциальных уравнений D.94) решается при началь-
начальных условиях
/^@) = 0. D.96)
Члены, определяющие в верхнем соотношении D.94) нулевые значе-
значения переходной функции /^ @), могут быть заменены, исходя из D.86),
выражениями
к
Так как расчет аэродинамических характеристик численными метода-
методами ведется в параметрах не ^^, а г^, то в программах, реализующих ме-
метод групповой аппроксимации переходных функций, необходимо преду-
предусмотреть перевод коэффициентов аппроксимации 5,-4 в 8^к.
Между коэффициентами аппроксимации 5*у, зависящими от кинема-
кинематических параметров <?у и г^, существует связь, отраженная в табл. 4.2.
Таблица4.2
0
«а?
0
0
К?
С «г
Таким образом, применение групповой аппроксимации приводит к
тому, что вместо переходных функций /^(т-Т!) в банке данных надо
хранить набор коэффициентов 5у для каждого кинематического па-
параметра ^^ . В этом случае дополнительно к матрице стационарных аэро-
аэродинамических коэффициентов с)Ч D.85) надо подготовить и хранить
II II
матрицу нестационарных аэродинамических коэффициентов 8*^ . В
программе автоматизированного расчета на ЭВМ коэффициентов аэро-
аэродинамических производных это выполняется автоматически. Выборка же
118
их из общей структуры матриц с?7 и З*/ под соответствующую
задачу должна осуществляться специальной управляющей программой.
Для примера приведем вид матриц с?7' и 18* Л|, необходимых для
изучения возмущенного движения упругого самолета, движущегося со
скоростью #о на высоте Н. Пусть разрешающая модель движения вклю-
включает четыре уравнения: два уравнения движения как жесткого тела (дви-
(движение вдоль вертикальной оси и колебания относительно поперечной оси
самолета) и два уравнения упругих колебаний относительно жесткого
скелета самолета. Матрица с,- * D.85) с учетом связей табл. 4.1 примет вид
, СУ
О -т? т? т?«
г?1
О -
Г1г
с2
т
,*1
т
Яг
42
D.98)
-С2 с-2 с-2' с2- су с2- с2"
Матрица нестационарных аэродинамических коэффициентов 5^1
строится так же, как и матрица стационарных аэродинамических коэф-
коэффициентов с^и. Отличие заключается в том, что каждой строке матри-
матрицы ср соответствует к строк матриц 8у|. Для нашего примера для
к = 2 с учетом данных табл. 4.2 имеем
О -8™
О -8уа 8у
о — ^2а 92(
О —01 о^
п е2а «2
I) — О1 1>2
I) —о? о?
о -г
*°*
87тг
8ыг
3*°*
З\
\а
?*
D.99)
Из анализа матриц D.98), D.99) видно, что при аппроксимации пере-
переходных функций двумя экспонентами (к = 2) каждой строке матрицы
8* Л .
с? отвечают две строки матрицы
II
Напомним, что ЛА является динамически меняющейся упругой сис-
системой в полете. В связи с этим при решении задач аэроупругости возни-
возникает проблема определения аэродинамических характеристик для такой
системы. Она решается путем разработки специальной подпрограммы
пересчета аэродинамических коэффициентов ЛА базового варианта за-
загрузки по формулам, приведенным в § 4.7.
119
Глава 5
РАСЧЕТНАЯ СИСТЕМА ДЛЯ РЕШЕНИЯ
ЛИНЕЙНЫХ ЗАДАЧ АЭРОУПРУГОСТИ
И АЭРОАВТОУПРУГОСТИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ
§ 5.1. Общие сведения
Как уже отмечалось, аэроупругость ЛА объединяет три науки: неста-
нестационарную аэродинамику, теорию упругости и динамику полета. Основ-
Основные трудности совместного рассмотрения указанных смежных областей
механики состоят в следующем.
Во-первых, это учет нестационарности обтекания деформируемого в
полете аппарата, так как действующие на него со стороны потока возму-
возмущения определяются не только мгновенными значениями кинематиче-
кинематических параметров, характеризующих положение его в пространстве, но и
зависят от предыстории его обтекания и деформирования. Особенно
сложно решать задачу обтекания ЛА численными методами при дозвуко-
дозвуковых скоростях полета, так как переходные процессы здесь, в отличие от
сверхзвуковых скоростей, носят асимтотический характер и описание их
сводится к решению непрерывно разрастающейся во времени системы
линейных алгебраических уравнений большой размерности.
Во-вторых, улругая часть проблемы аэроупругости по нахождению
собственных частот и форм упругих колебаний конструкции ЛА при ре-
решении ее современными методами теории упругости, например МКЭ,
также характеризуется повышенной размерностью, исчисляемой десят-
десятками тысяч уравнений.
В-третьих, не тривиален вопрос синтеза данных от обеих частей зада-
задачи аэроупругости на ЭВМ.
Одним из возможных общих подходов к решению рассматриваемой
проблемы — совместное последовательное интегрирование уравнений
аэродинамики, теории упругости и динамики полета. Однако для такого
сложного объекта, как самолет, подобный путь даже при наличии мате-
материальных условий его осуществления — специализированных вычисли-
вычислительных комплексов на базе супер ЭВМ — вряд ли будет оправданным.
Выбор того или иного способа решения задачи определяется временными
затратами и экономическими издержками.
Сегодня пока именно постановка задачи аэроупругости ЛА в линеари-
линеаризованном виде в целом позволяет глубоко решать отдельные вопросы из
этой области и проблему взаимодействия различных специалистов. Глав-
Главное достоинство такого подхода состоит в том, что здесь каждая из базо-
базовых наук должна выдать лишь свои исходные данные в строго опреде-
определенном виде. Сами же исследования по аэроупругости ведутся на основе
120
этих данных в свернутом виде (со стороны аэродинамики — это предва-
предварительно насчитанные с заданным шагом по числу Маха обобщенные
линейные аэродинамические коэффициенты, а со стороны упругости —
частоты и формы собственных упругих колебаний конструкции, обоб-
обобщенные массы), без обращения к тем методам, которыми они были полу-
получены. Синтез всех исходных данных — аэродинамической и упругой час-
частей задачи аэроупругости — и формирование разрешающей системы ин-
тегродифференциальных уравнений динамики движения ЛА выполняют-
выполняются для базового варианта его загрузки с помощью интеграла свертки.
Входными данными расчетной системы линейной аэроупругости со
стороны упругой конструкции служат безразмерные инерционно-
массовые характеристики:
*4 ^
Щ
где # — ускорение свободного падения, Мо — масса ЛА, ^Xщу9^ — мо-
моменты инерции жесткого аппарата относительно связанных главных осей
инерции, М; — обобщенная масса:
E.2)
{т\(х,у,1) — распределенная масса ЛА, приведенная к /-м базовым
плоскостям, 5/ —площади/-х базовых плоскостей).
В связи с заменой реального ЛА базовыми плоскими тонкими несу-
несущими поверхностями (см. рис. 4.1) с линейной точностью можно считать,
что упругие перемещения точек конструкции аппарата происходят по
нормалям п1 к *-м базовым плоскостям, т. е. по направлению оси Оу.
Представляя эти перемещения через формы свободных упругих колеба-
колебаний аппарата //(^>*7) и выражая в такой же форме отклонения рулей,
безразмерное суммарное перемещение вдоль нормали п* можно записать
в виде
+ ХД(^Mу(*), E-3)
В дальнейшем дополнительно к E.1) и E.3) будем использовать безраз-
безразмерные параметры вида
со=-^—, С/=—3—, ©/=—Д/> E.4)
где Ъ и 50 — характерные линейный размер и площадь несущей по-
121
верхности, 42/ — собственная частота упругих колебаний конструкции,
<7* — скоростной напор.
Одна из главных задач при изучении аэроупругих свойств ЛА в ре-
реальных условиях полета состоит в предварительном получении досто-
достоверной исходной информации о нем — в определении частот 42/ и форм
//(^,Г]) собственных колебаний упругой конструкции аппарата, а также
коэффициентов конструкционного демпфирования К\. Если речь идет о
создании структурной ММ функционирования уже готового ЛА, то для
него достоверность информации о динамических свойствах обеспечива-
обеспечивается путем взаимного уточнения данных расчетной упругой схемы и экс-
эксперимента на динамически подобных физических моделях. Для вновь
создаваемого ЛА процесс формирования его структурной ММ носит ите-
итерационный характер [248]; в качестве начальной информации для упру-
упругой части задачи аэроупругости могут служить динамические характери-
характеристики прототипа либо эскизного проекта с гипотетически заданным рас-
распределением массовых и жесткостных показателей. Уровень привлекае-
привлекаемой для окончательного расчета динамических свойств аппарата упругой
модели определяется типом ЛА, хотя на стадии эскизного проектирова-
проектирования она может быть «простейшей» — балочной (см. рис. 1.3 а). Для рас-
расчета коэффициентов аэродинамических производных требуется также
знание производных Э//Э<^, которые желательно определять непосред-
непосредственно, чтобы избежать погрешностей при численном дифференцирова-
дифференцировании.
В соответствии с данными гл. 3 выпишем уравнения динамики про-
пространственного возмущенного движения упругого ЛА в безразмерной
скалярной форме:
У=сох, 1хсдх=тх, 1у@у=ту9 11а>1=т19 E.5)
Вся трудность решения задач линейной аэроупругости ЛА заключает-
заключается в формировании правых частей системы уравнений E.5). Процедура
расчета на ЭВМ аэродинамических коэффициентов численными метода-
методами описана в гл. 4; она является автономной. Напомним здесь, что со-
согласно [57] линейная задача обтекания ЛА сводится к решению частных
канонических задач для кинематических параметров в;(т). Затем из ре-
решения еДт)-задач аэродинамики в соответствии с гипотезой гармонич-
гармоничности [249] находятся два вида линейных характеристик — коэффициен-
коэффициенты аэродинамических производных с у@), с*-7 @) при весьма малых
числах Струхаля (при р^ —>0) и переходные функции Нс](т). Любая
аэродинамическая характеристика се. (т) при произвольном законе из-
изменения во времени кинематического параметра в^т) определяется ра-
равенством (см. [51])
122
с6] (*) = с* (О)е/т) + 1р
о E.6)
с(т) = 2>е,(т).
Первое слагаемое в правой части E.6) соответствует гипотезе квази-
квазистационарности, а второе и третье отражают влияние нестационарности
обтекания при непрерывном изменении параметра е^(т). Нестационар-
Нестационарная составляющая /су (т) в представлении E.6) находится по формуле
/^(т) = Я^(т)-сеЧ0). E.7)
При гармонических зависимостях кинематических параметров от
времени €у(т) (см. D.73)) в соответствии с D.74) имеем
се, <*) = с*' О?*)е,(т) + & (р))ё}(т). E.8)
Формулы E.6)-E.8) являются основным связующим звеном между
аэродинамикой и упругостью конструкции ЛА для представления урав-
уравнений аэроупругости в развернутом виде.
Практически все современные ЛА в недеформированном состоянии
обладают симметрией относительно вертикальной плоскости Оху. По-
Поэтому принимая во внимание свойства аэродинамических коэффициен-
коэффициентов, вытекающие из соображений симметрии (см. § 4.9), уравнения E.5)
можно разбить на две группы.
Первая группа будет содержать члены, зависящие от симметричных
кинематических параметров в|(т) (продольное движение):
E.9)
4 ^
Вторую группу уравнений составят члены, зависящие от несиммет-
несимметричных кинематических параметров ^у(т) (боковое движение):
, 1хсдх=тх, 1у(Ьу=ту, У=сох,
{Щ + Ъщщщ + а)/"V) = с,~, 1 = 1 И~
Ниже рассмотрим основные формы представления линейных уравне-
уравнений аэроупругости ЛА.
§ 5.2. Унифицированные линейные интегродифференциальные
уравнения нестационарной аэроупругости летательного аппарата
При некоторых исследованиях более удобной является не независи-
независимая, а обобщенная форма представления уравнений E.9) и E.10), особен-
особенно при создании системы автоматизированного решения задач линейной
аэроупругости ЛА.
123
Для объединения уравнений E.9) и E.10) воспользуемся зависимо-
зависимостями между кинематическими параметрами е^(т)е|а Ро)хсоу (Ог | и
Яо € II %к 1Г (* = 1*5) • Компоненты ^^к определяются по формулам
л™ Ь ™* Ь
С линейной точностью имеем
%Ъ =
сох=у,
E.11)
E.12)
Ъ г Ъ
С учетом E.11) выражения E.12) примут вид
а = 405 " 401» Р = 404 + 402 » <°х = 403 » ^у = 404 » ^г = 405 • E.13)
Соотношения E.9) и E.10) с помощью зависимостей E.13) и E.6)
принимают следующую объединенную форму (полагаем ^-@) = 0):
} I
E.14)
= Ц 4< + /"; (^@) + }/< (т^т -
0 ]
бу- = || а р сох соу со, Чх щ ||т * 1
Дополнительно к E.14) из E.13) имеем
й>1=Юг-Й, 402 = ^-^' 403=^» ?04=йу» 405=йг-
Безразмерная система уравнений E.14) описывает изменение обобщенных
кинематических параметров возмущенного пространственного движения
ЛА как жесткого тела #о& и упругих колебаний #/ его конструкции.
Далее представим кинематические параметры
матрицы-столбца
е =
ч
41
41
Е*
_
а
Р
(оу
II5 II
е*= 5 .
А
и г*(т) в виде
E.15)
Перепишем соотношения E.13) с помощью матриц
124
а
Р
0)х
со,
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
1
0
0
0
0
002
003
004
005
+
-1
0
0
0
0
0
1
0
0
0
0
0
1
0
0
0
0
0
1
0
0
0
0
0
1
001
002
003
004
005
или
Тогда матрицу 8 E.15) можно представить в виде
•-
E.16)
E.17)
Выражения для аэродинамических характеристик, соответствующие
обобщенным кинематическим параметрам Чо и с[0, по аналогии с E.16),
запишутся так:
с% = Ас*о э. с*> = Все° , 1<?о = А1^°, 1*> = В1*0 . E.18)
Используя интегральные представления для се. E.6) и матричные
для 8 E.17) и вводя дополнительно члены, обусловленные действием от
грузов, представим E.14) в более компактной матрично-векторной фор-
форме:
>4 + со я) + Ац <\ - с^ - сч<\ -1
~ГВЗ, E.19)
где
2Р
-
2 '
к =
|о о II
О к/1'
10 О II
\ощ II'
2АМ
; ДМ — дополнительная матрица масс, связанная с нали-
чием грузов; Рвз — вектор сил взаимодействия грузов с конструкцией.
Уравнения E.19) описывают общий случай пространственного воз-
возмущенного движения упругого ЛА с грузами при произвольно меняю-
меняющихся во времени управляющих и возмущающих воздействиях.
Уравнения пространственного возмущенного движения ЛА как жест-
жесткого тела получаются из E Л 9), полагая в них
Ц = |Ц0°|' к = 1|0||, «-|0|. с = |с0°||, Чо|Яо|. E.20)
Уравнения продольного и бокового возмущенного движений упругого
ЛА формируются из E.19) соответственно при
Яо = II 001 О°°0О5 1Г и Яо = II ^002 003 004 005 Г •
125
В итоге интегродифференциальные уравнения E.19) можно рассмат-
рассматривать как унифицированные (канонические) уравнения линейной неста-
нестационарной аэроупругости ЛА; они выписаны во временной форме. В них
переменные ^ характеризуют положение объекта в пространстве состоя-
состояний, а аэродинамические характеристики 1?^), 1<?(Т1)> 1с (Т1) — не"
стационарность обтекания. Пренебрегая последними, приходим к упро-
упрощенной модели линейной аэроупругости на основе гипотезы квазиста-
квазистационарности:
ц(Я + 2ксоя + ©2я) + Аця-с^ц-с^ = се е*-?ю. E.21)
По расширенной гипотезе гармоничности D.57) уравнения E.19) с
учетом E.15) получат вид
ц(Я + 2ксос[ + ю2я) + Ац я - с*(ю*)я -[сд(со*) + 4(ш*)]я =
= с5(йMM + [с5(йM) + 4(^)]5 + сА(^)А + с^(Шд)А-Гвз. E.22)
В соответствии с гипотезой гармоничности уравнение E.22) примет
еще более упрощенную форму:
ц(Я + 2ксоя + ю2Я) + Ац я ~ С<ЭЯ ~" (с^ + с?)я =
= с65 + (с^+с^M + сдА + сАА~^вз. E.23)
Как видим, упрощеные модели E.21)—E.23) являются частными слу-
случаями «точной» (унифицированной) интегродифференциальной модели
линейной аэроупругости ЛА E.19).
§ 5.3. Уравнения аэроупругости летательного аппарата
в частотной форме
Для получения частотных характеристик как динамической реакции
упругого ЛА на внешние возмущения требуются уравнения линейной
аэроупругости ЛА в частотной форме. Рассмотрим канонические уравне-
уравнения аэроупругости в частотной форме, соответствующие случаю измене-
изменения одного из входных возмущающих сигналов е* по гармоническому
закону с безразмерной частотой со * :
г}(т) = еехр(т>*т), 1 = 4^1. E.24)
При этом нестационарные линейные аэродинамические характеристи-
характеристики ЛА при установившихся гармонических колебаниях трактуются как
частотные характеристики (частотно-передаточные функции) линейной
системы, в частности описываемой уравнениями аэродинамики. В каж-
каждой канонической задаче аэродинамики входным сигналом служит кине-
кинематический параметр возмущения 2у(т), выходным — аэродинамиче-
аэродинамическая характеристика се. (т); при этом соответствующая частотно-
передаточная функция будет
<1>У =-2-^~- E-25)
гешх
126
В соответствии с D.74) выражение E.25) с учетом E.24) можно запи-
записать так:
Ф^ (гсо*) = се> {со)) + гсо*4] (со*). E.26)
Отсюда видно, что частотная характеристика не зависит от времени и
является комплексным числом.
Для линейной матричной системы уравнений E.19) при установив-
установившихся гармонических колебаниях также существует связь между внеш-
внешними возмущениями:
4(*) = г>хР(шЛ) E.27)
и кинематическими параметрами г^ (т).
По аналогии с E.25) введем здесь то же частотные характеристики,
положив их равными
е^)/^е(й}г . E.28)
Выходные сигналы системы E.19) в общем случае при этом условии
будут описываться комплексной величиной
Ч»|* {1@*) = 4е* (о)*) + &** (со*), E.29)
Р* *
где Уд (гсо ) — комплексная амплитудно-фазовая частотная аэроупру-
аэроупругая характеристика (матрица передаточных функций).
При определении частотных аэроупругих характеристик ЛА с грузами
уравнение E.19) преобразуется к виду [43, 51]:
ц(-со*2 +2лссосо* +@2)^*(/су*)
+ Ю*[
[с*(СО*) + с|(Ю*)]}у|* (I©*) - ДЦСО*2^* (I©*) = Ф^* ((СО*) ,
В E.30) с^(й)*), сНсо*), с|(ш*), с|@)*) — матрицы частотных аэро-
аэродинамических характеристик ЛА, определяемые в зависимости от без-
безразмерной частоты со* с помощью численных методов аэродинамики
[57]. Представив ^| (гсо*), Ф^ (гсо*) в виде суммы вещественной и
мнимой частей согласно E.26) и E.29), вместо матричного уравнения
E.30) получим систему из двух матричных уравнений для нахождения
я* * р* *
соответственно вещественной Ч^ (гсо ) и мнимой Ч^ (гсо ) состав-
составляющих частотных характеристик:
+ {- 2ксош*ц + ш*[с*(ю*) + 4(со*)]}^ёд* (со*) = с6* (со*)
*2
(со*) + {-
+ цсо2 ~[сд(со*)-со*2с|(ш*)]}^^ (со*) = со*сГ (со*).
127
Для произвольного порыва ветра Д^ в уравнениях E.30), E.31) следует
положить с учетом D.27)
С6' (©*) = СД" (СО*) = СД" + @*|1Д"(Т)8Ш(й)*Г) йХ ,
° E-32)
с( (СО*) = С^ (СО*) = |1А" (Т) СО&@)*Х) ЛТ .
о
В случае изучения реакции ЛА на отклонение руля <5У входными сигна-
сигналами в E.30), E.31) будут
/ (а,*) = <А (©*) = «А (©*) -ш*2с^ (о»*),.
И* (ю*) = 4" (ю*) = <А (со*) + 4* ((о*),
с6* (со*) = с6* +со*1 ф (т)8т(о*т) йт, E.33)
с*" =
К С08(С0*Т) их , С*у = \ ф СО$(С0*Т) их ,
о о
<А (со*) = с^ +со*$ ф (т) 8ш(ю*т) ах .
о
Для суммарных аэродинамических характеристик можно записать
равенства
с^(со*) = с^ +со*
0 E.34)
оо
С*У (СО*) = |/^ (Т) СО8((»*Т) С/Т ,
О
аналогичные D.27).
Частотное представление линейных уравнений аэроупругости в форме
E.31) обычно используется при исследовании областей аэроупругой неус-
неустойчивости ЛА при нестационарном обтекании. Они могут быть задейст-
задействованы также для оценки различных упрощенных моделей аэроупругости.
§ 5.4. Упрощенные линейные интегродифференциальные
уравнения нестационарной аэроупругости
Часто в задачах динамики полета ЛА его кинематические параметры
движения рассматриваются как параметры твердого тела, ограничиваясь
в уравнениях учетом только статических деформаций конструкции [8]. В
связи с этим линейные задачи аэроупругости несколько упрощаются, так
как в них не приходится учитывать изменение упругих перемещений во
времени. Кроме того, задачи статической аэроупругости ЛА в общей
проблеме аэроупругости представляют самостоятельный интерес. К ним
относятся задачи о распределении аэродинамической нагрузки по аппа-
128
рату, дивергенции, об эффективности органов управления, реверса и
влияния статических деформаций на устойчивость движения и управляе-
управляемость ЛА. Важнейшими также являются вопросы определения деформи-
деформированного состояния конструкции ЛА на стоянке и в установившемся
полете с различными вариантами его загрузки.
5.4.1. Уравнения движения статически деформируемого летатель-
летательного аппарата с грузами. Разделим систему E.19) в соответствии с
C.91, 3.93) на три матричных уравнения для параметров движения ЛА
как жесткого тела ^^, упругих колебаний конструкции Я!, и колебаний
грузов ц2. Полагаем в них скорости и ускорения обобщенных упругих
параметров Я1 и грузов я2 равными нулю, т.е. ^=^=0 и
Я2 ==: 42 = 0 • Переходя далее к безразмерной форме записи с учетом E.1),
E.4), используя интегральные представления D.30) и принимая во вни-
внимание E.19), получаем матрично-векторные соотношения:
E.35)
о
где
" ~2 О
чг II 'Но •• -2
Исключая из первого уравнения системы E.35) с^, имеем
т
о д о
Интегродифференциальная матрично-векторная система уравнений
E.36) по своей структуре совпадает с уравнениями движения жесткого
ЛА. Однако в отличие от них в E.36) аэродинамические характеристики,
отмеченные индексом «д», находятся с учетом статической деформации
конструкции. Связь между аэродинамическими характеристиками соот-
соответственно абсолютно жесткого и статически деформируемого аппарата
будет
с0д""с0 с0 ^К1 С1 > С1 ' с0д""с0 с0 ^К1 1 ' С1 ' \
129
Од ~" О О ^ 1 1 ' 1 * ""* П V 1 1 / ¦*• »
Од О ^1
* Я 4 ~ ~ -1 ' г* г* а* ~ ~ -1 е* E37б)
Здесь необходимо отметить, что при рассмотрении динамики полета
ЛА с учетом статического деформирования его конструкции можно поль-
пользоваться уравнениями движения жесткого самолета при аэродинамиче-
аэродинамических характеристиках, вычисленных по E.37).
При использовании гипотезы гармоничности D.33) для случая
&е ¦ ~~> 0 уравнение E.36) преобразуется к виду
(ц0 + А^о) Чо"" содAо - (сод + с*од) Чо "* с*од^о = с0де*» E.38)
где
С*0д = С*0 ~ С0 ^ 1 ~ С1 ^ С*1 ' С*0д = С*0 "" С0 ^1 ~~ С1 ^ С*1 '
Иногда уравнение E.38) удобно представлять так:
+ с*од) Чо =
4°ДУ14У, E.39)
или
(ц0 + Ац0)Яо - с$яо - с^яо = с^в*, E.40)
где коэффициенты
оказываются зависящими от распределения масс по конструкции
(|10 + Ацо) [8], что связано с зависимостью аэродинамических коэффи-
коэффициентов от ускорения ^0 ЛА как твердого тела. При использовании ги-
гипотезы квазистационарности D.31) с^=0, и тогда Сд^=с^,
^д = с0д» ^Од = с0д ут- е- названная выше зависимость пропадает.
5.4.2. Уравнения движения жесткого летательного аппарата с гру-
грузами. Безразмерные линейные интегродифференциальные уравнения для
короткопериодического (^/0 = сопз!) возмущенного движения абсолютно
жесткого ЛА с жестко прикрепленными к нему грузами в развернутом
виде будут
для продольного движения:
т
0
130
г + ^Ю #05
0
т
для бокового движения:
— //лсГ/7гч« —С С
т
0 О
т т
О
о
- ту х <7оз "" ту %4 '
1!
9 У
6 = || 5Э 5Э 5р н 5р н А2 | .
Уравнения E.41) и E.42) получаются как частный случай общих
уравнений E.19) при ^ = ^ = 0. В них рассматриваются в качестве ор-
131
ганов управления и возмущений рули высоты <5р в; вертикальный и бо-
боковой порыв ветра Ау , Аг ; элероны <5Э; рули направления <5р н. Без-
Безразмерные масса /*о, статические 5Х ¦>,л, осевые 1х,ул и центробежный
|ду моменты инерции ЛА вводятся по формулам типа E.1). Размерные
величины М, 3Х9у9г, 1 х,ул» ^гу = ^у*» ^*г = ^гх» *^;уг = ^ ту ПРИ наличии
жестко прикрепленных грузов находятся по формулам
I
1
7° + Е
г + Х^^п' + Ун) + 2Eхпап- + 8уНун
1
*ху ~ **ху "*" 2ы/^тпхпУп * ^хпУп * Ъупхп *" **хугО
**ху ~ **ху "*" 2ы/^тпхпУп "*~ ^хпУп "*" Ъупхп "*" **хугО »
I
Величины с нулевыми индексами относятся к ЛА базового варианта
загрузки без грузов; параметры грузов отмечены индексом г ; хн, уг},
гГ1 — координаты начала местных систем отсчета, связанных с каждым
грузом. В этих системах определяются инерционные характеристики гру-
грузов $>хг(, $.уП', 5гп-. Согласно гипотезе квазистационарности выражения
E.41) и E.42) для приближенного описания динамики возмущенного по-
полета жесткого ЛА принимают вид
при продольном движении:
# ~ су %5 + с<у%\ " суг %5 = су €*+ »
%\ ~ т<?г %5 = тГ 8*+ • E«43)
*+т I
8 =
при боковом движении:
_ я д. о) . E.44а)
1ху%4 - *у8%3 ~ тх%4 ~ тх%2 ~тхх%3~
*
132
1ух%3 + 1уШ + ^ЯЯОЗ " ту%Ь - М%2 ~ МХ
уУ%4 = ту е*~» E.446)
* —X
8 =
Уравнения E.41), E.42) на основе гипотезы гармоничности D.59)
преобразуются к виду
для продольного движения:
суг + с") %5 = 4 + 8*+
E.45)
для бокового движения:
сСОу
-тх%А ~™х %2 ~™хХ
е*"
оп- - т^04 ~ ту %2 ~ т®д
^^ <=теу*~Е*-
8* Т =\
В заключение необходимо сказать, что интегродифференциальные
уравнения E.41), E.42) дают возможность проводить параметрические
исследования собственных динамических свойств, характеристик устой-
устойчивости и управляемости жесткого ЛА с учетом нестационарности обте-
обтекании и осуществлять оценку точности различных математических моде-
моделей, широко используемых в исследованиях по динамике полета [79, 266].
Линеаризованные уравнения динамики движения упругого ЛА, в том
числе и жесткого, описывают его возмущенное движение относительно
инерциальной системы отсчета Оох8у§1§, перемещающейся вместе с
аппаратом с постоянной скоростью Vо без вращения (см. рис. 2.1). Аэ-
Аэродинамические силы в этих уравнениях должны быть определены отно-
относительно инерциальных осей. В расчетах же численными методами аэро-
аэродинамические коэффициенты, как правило, находятся относительно свя-
связанной системы координат Охуг (см. рис. 2.1). Их пересчет с линейной
точностью, например, для жесткого ЛА осуществляется по формулам
г?Ь х8ху8У> 4?
где индексом « § » отмечены параметры в инерциальной системе координат.
=ту+ 5
133
При создании унифицированной системы линейных интегродиффе-
ренциальных уравнений аэроупругости ЛА удобно пользоваться векто-
вектором обобщенных кинематических параметров ^ . В обычной практике ]
применения уравнений динамики полета вместо кинематических пара- |
метров движения ЛА как жесткого тела ^^ и 40 часто используются
следующие величины: I
Напомним связь между параметрами ^о и е0 :
|ог)($-соу)сахсоу со
Легко показать, что для любой аэродинамической характеристики
справедливы соотношения
- СУ - О
E.48)
С учетом E.5) квадратные матрицы
, се° и векторы со , со°
коэффициентов аэродинамических производных записываются в виде
Ло _|
0 ~|
"II У 1 х У 1 I
1сР са
** V ^ V I
уо у
т =
т
р«.«
т\, т
, г1=\\арю
Г
.^от -II _ са с® сю* с^у сс
ьл — II 1^ \^ \^ ^ \;
с8т~8т
с0 -с ,
ст=\\сусгтхтутг
\Т.
Аналогичную структуру имеют матрицы нестационарных частей пе-
переходных аэродинамических функций 1^°, 1^° , I5 , I* , 1А . Отметим,
с0 с0 с0 с0 с0
что коэффициенты аэродинамических производных здесь приведены для
общего случая, когда аппарат не имеет плоскости симметрии.
§ 5.5. Основные прикладные линейные математические модели
аэроупругости летательного аппарата
Построение структурной ММ функционирования упругого ЛА пред-
представляет собой неформальную процедуру и требует привлечения различ-
различных специалистов высокой квалификации. Требования, предъявляемые к
134
таким моделям, противоречивы. С одной стороны, они должны достаточ-
достаточно точно отражать процессы, происходящие с объектом в полете, а с дру-
другой — быть удобными и простыми для практического использования.
Отсюда следует, что должна существовать целая иерархия ММ аэроупру-
аэроупругости для изучения как наиболее полного отражения взаимодействия ЛА
с потоком в реальных условиях эксплуатации, так и для описания тех или
иных сторон его поведения. Поэтому весьма важным является разработка
«точных» (эталонных) структурных ММЛА, позволяющих, во-первых, на
основе рассмотрения частных вопросов выстроить иерархию упрощен-
упрощенных структурных ММЛА, во-вторых, осуществить их оценку с учетом
специфики изучаемых объектов и решаемых частных задач.
Следует отметить, что современная авиационная наука и практика
проектирования ЛА все больше ориентируются на современные числен-
численные методы механики сплошной среды и их синтез. Отсюда вытекает
возможность создания единого информационного банка аэродинамиче-
аэродинамических данных для пользователей, имеющего свои преимущества. Во-
первых, это позволяет концентрировать материальные средства для его
создания. Во-вторых, дает возможность автоматизировать расчет аэроди-
аэродинамических характеристик для всей иерархии структурных ММЛА на
единой технологически отработанной расчетной основе и избежать оши-
ошибок. В-третьих, наличие такого общего банка данных по аэродинамике
позволяет оперативно формировать различные варианты структурных
ММЛА и успешно их решать.
В качестве «точных» здесь принимаются интегродифференциальные
уравнения E.19), E.30), E.31), описывающие пространственное возму-
возмущенное движение ЛА с учетом упругости конструкции и нестационарно-
нестационарности обтекания. Построение приближенных моделей ЛА по данным «точ-
«точной» модели базируется в первую очередь на применении гипотез квази-
квазистационарности D.31) и гармоничности D.32), D.33). В ряде задач дина-
динамики ЛА можно ограничиться учетом статической деформации его кон-
конструкции E.36) и т. д. Отметим, что степень упрощения полных уравне-
уравнений E.19), E.30), E.31) определяется заданной точностью решения зада-
задачи и в сильной мере зависит от целей исследований, компоновки ЛА, ре-
режимов полета, характера управляющих и возмущающих воздействий.
Обратим внимание на некоторые обобщающие рекомендации и выво-
выводы, следующие из решения широкого круга прикладных задач аэроупру-
аэроупругости ЛА с применением «точных» и приближенных структурных моде-
моделей. Представим уравнение E.19) с заданным «базовым» вариантом за-
загрузки в виде
ц(Я + 2ксо я + со2я) - с (я, 4, я, т) = с (е*, е\ т),
*Т Нес* а "'"
8 = 5 5 А
где с(я,Я,Я>т) — вектор безразмерных обобщенных аэродинамических
нагрузок, вызванных изменением кинематических параметров я, характе-
характеризующих одновременно движение ЛА как жесткого тела с накладывае-
накладываемыми на него упругими колебаниями его конструкции, с(е*,8*,т) —
135
вектор управляющих и возмущающих сил, вызванных отклонением
лей 8У и воздействием на ЛА порывов ветра А. Для «точной» стру]
ной модели ЛА аэродинамические характеристики определяются с п<
мощью интегральных представлений E.6). «Точные» модели типа E.19'
достаточно сложны по структуре, требуют весьма трудоемких предвар]
тельных вычислений нестационарных обобщенных аэродинамических3
характеристик (переходных функций). Поэтому их следует использовать^]
для выявления весьма тонких эффектов, например, связанных с нестар
ционарностью обтекания, для контроля точности упрощенных моделей и
т. д.
При изменении кинематических параметров во времени по гармони-
гармоническим законам матрично-векторное уравнение E.19) из временной фор-
формы преобразуется в частотную форму E.30), E.31). Эти уравнения также
учитывают аэродинамические эффекты, связанные с нестационарностью
обтекания ЛА. Последняя форма представления уравнений аэроупруго-
аэроупругости используется при исследовании задач аэроупругой устойчивости ЛА
в целом либо его отдельных частей.
В большинстве случаев для рассмотрения практических задач аэроуп-
аэроупругости ЛА можно пользоваться его упрощенными структурными ММ,
если они обеспечивают решение с погрешностью, не превышающей
3-5 %. В качестве одной из рекомендуемых может быть следующая
структурная ММЛА:
= се"б*+|1^(т1)ё*(т-т1)^т1, 8*т=|5 5 Д||т. E.50)
о
В этой модели вектор управляющих и возмущающих воздействий на ЛА
с(е*,ё*,т) определяется «точно» с помощью интегральных представле-
представлений типа E.6), а вектор аэродинамических сил с(я,4,ц,т) — на основе
расширенной гипотезы гармоничности D.32).
В качестве характерных частот со* выбираются частоты собственных
колебаний ЛА как жесткого тела при продольном и боковом движениях,
вычисляемые на основе методов решения уравнений динамики полета
[266, 367], и частоты удерживаемых собственных упругих колебаний
конструкции.
Дальнейшее упрощение уравнений E.50) может быть осуществлено за
счет приближенного учета деформирования конструкции ЛА, принимая
во внимание лишь статическую ее часть. Тогда будем иметь
^д 8*т=||5 5 А|т.E.51)
о
В уравнении E.51) не учитываются инерционные, демпфирующие и
аэродинамические силы, обусловленные скоростями щ и ускорениями
136
'сц упругих деформаций. Входящие в него коэффициенты аэродинамиче-
аэродинамических производных, учитывающие влияние статических деформаций, вы-
вычисляются по формулам
1 = 4° + 41 Й*/®/2 ~ 41 + ИюФо + НооГЧ11
+ 41 Й*/®/2 ~ 41 + ИюФо + НооГЧ11
сод =со + с*<[Ц/<о/2+с/' +Ц/(цо + ^о)~ЧТ1х E.52)
СО = СО + С? [Ц/®/2 + Ср + |Х/ (|10 + НОоГ^ОГ* Х
Для проведения оценочных расчетов могут быть использованы еще
более грубые модели, являющиеся частным случаем упрощенных моде-
моделей E.50) и E.51). Для них аэродинамические характеристики определя-
определяются на основе гипотезы квазистационарности, за исключением демпфи-
демпфирующих составляющих сЮг , с у, вычисляемых на основе гипотезы гар-
гармоничности в виде (сШг +са) и (с у+с^).В этом случае уравнения
E.50) и E.51) для оценочных расчетов соответственно по аэроупругости
и динамике полета ЛА принимают форму
цЙ + 2ксоя + со2я) -с^я -(с* + с|)я = се V,
Мо - с^дЧо - D1 + с0д*)Яо = ^дб* .
Аналогичным способом можно легко построить и другие приближен-
приближенные линейные структурные ММ функционирования ЛА, например, для
описания динамики полета ЛА с различными вариантами подвижных и
отделяемых грузов и т. д.
§ 5.6. Линейные уравнения аэроавтоупругости
летательного аппарата
5.6.1. Общие сведения. В настоящее время наряду с аэроупругостью
и на ее основе быстро развивается научная проблема — аэроавтоупру-
гость, возникшая на синтезе таких наук, как аэродинамика, теория упру-
упругости, динамика полета и теория автоматического управления. По аэро-
аэроавтоупругости следует выделить два основных направления [43, 51, 73,
203, 282]. Одно из них связано с изучением влияния связки «ЛА + систе-
система управления» как управляемой упругой платформы на эффективность
и точностные характеристики бортового оборудования, а также с разра-
разработкой способов и алгоритмов компенсации вредного влияния деформа-
деформации платформы на его работу. Второе направление характеризуется раз-
разработкой концепции активного управления и обеспечения адаптивности
как самого ЛА, так и его систем к изменяющимся условиям полета, а
также законов управления ими.
137
В связи с этим при решении проблемы аэроавтоупругости повышен-
повышенные требования выставляются не только к структурной ММЛА, но и к
учету динамических свойств рулевых приводов, датчиков, статистиче-
статистических характеристик возмущений, погрешности измерений и т. д.
Надо отметить, что не только ЛА, но и сам привод и датчики в мате-
математическом плане представляют собой сложные системы. Однако в пол-
полной ММ аэроавтоупругости ЛА ММ последних рассматриваются на
уровне «вход-выход».
Задачи аэроавтоупругости условно разбивают на два класса: задачи
синтеза и задачи анализа. К первым относятся задачи определения зако-
законов управления, оптимизации размещения бортового оборудования и
элементов систем активного управления на платформе, синтеза алгорит-
алгоритмов управления, оценивания и идентификации для бортовых систем ак-
активного управления и т.д. Задачи анализа включают идентификацию па-
параметров и проверку достоверности используемой структурной ММЛА и
составных его элементов (подсистем), турбулентной атмосферы, ошибок
датчиков, оценку эффективности синтезированных систем управления
при моделировании движения ЛА совместно с подсистемами бортового
оборудования с целью анализа его эффективности и точностных характе-
характеристик, проведение параметрических исследований по изучению влияния
различных факторов на работу систем активного управления и т. д.
Решение перечисленных выше задач из-за их большой размерности и
сложности структуры ММ ЛА и его подсистем невозможно осуществить
без широкого использования ЭВМ. Заметим, что для получения замкну-
замкнутой системы уравнений аэроавтоупругости существенное значение имеет
линеаризация проблемы в целом, хотя при этом законы управления, ММ
приводов и датчиков могут быть и нелинейными. При таком подходе
расчетная система линейной ММ аэроупругости ЛА становится базовой
для формирования его ММ аэроавтоупругости. Отсюда следует, что рас-
расчетные системы упругости, аэродинамики, аэроупругости и аэроавтоуп-
, -^ ругости, особенно в линейном
варианте, технологически связа-
УММ
датчиков
ММ аэроупру-
аэроупругости лА
Уравнения
наблюдений
УММ
приводов
Уравнения ЛА как объекта
управления
Уравнения кон-
контролируемых
параметров
Блок уравн
^А ний ММ
аэроупругости
I Критерии качества |
Рис. 5.1. Структурная схема ММ аэроавто-
аэроавтоупругости ЛА
ны друг с другом, что позволяет
не только унифицировать про-
процесс формирования ММ аэроуп-
аэроупругости и аэроавтоупругости
ЛА, но значительно расширить
сферу их приложения.
Основные структурные ком-
компоненты расчетной системы аэ-
аэроавтоупругости ЛА схематиче-
схематически представлены на рис. 5.1.
Она включает совокупность уп-
упрощенных структурных ММЛА,
приводов, рулей, датчиков сис-
систем управления и обработки ин-
информации, турбулентной атмосферы и алгоритмов систем управления.
Использование в расчетной системе главным образом упрощенных ММ
138
( вызвано стремлением уменьшить размерность задачи. Само уп-
упрощение осуществляется на базе соответствующих полных ММ. В каче-
качестве критерия отбора УММ служит их адекватность в отражении реаль-
реальных явлений или процессов.
Кроме уравнений ЛА как объекта управления для решения задач син-
синтеза и анализа систем управления, необходимо составить так называемые
уравнения наблюдений. Эти уравнения связывают выходные сигналы
приборов, регистрирующих состояние объекта, с его фазовыми коорди-
координатами.
Для решения некоторых задач аэроавтоупругости приходится вводить
специальные уравнения для контролируемых параметров. Обычно в ка-
качестве контролируемых параметров используются внутренние усилия в
конструкции, перемещения различных точек поверхности конструкции,
их скорости и ускорения, траекторные параметры движения ЛА как твер-
твердого тела и т. д.
В итоге можно считать, что по своей структуре уравнения аэроавто-
аэроавтоупругости состоят из совокупности трех взаимосвязанных систем урав-
уравнений — объекта, наблюдений и контролируемых параметров, как это
обозначено на структурной схеме рис. 5.1.
5.6.2. Уравнения летательного аппарата как объекта управления.
Для получения полной системы уравнений упругого ЛА как объекта
управления необходимо систему E.19) дополнить уравнениями приво-
приводов, датчиков и фильтров, формирующих случайные процессы состав-
составляющих вектора скорости турбулентного ветра.
Для описания приводов рулей используем системы линейных диффе-
дифференциальных уравнений вида [51, 113]:
8=^8 + 811, E.54)
где и — вектор входных сигналов привода; 8Т = 18 8 81 — вектор уг-
углов отклонения рулей; Р$, 8 — матрицы коэффициентов.
В качестве измерителей, дающих информацию о движении ЛА и о
деформации отдельных точек его поверхности, часто используют датчи-
датчики линейных ускорений и угловых скоростей. Общая линейная ММ дат-
датчиков с учетом их динамических свойств, фильтров, формирующих слу-
случайные процессы, и постоянных ошибок представляется стохастическим
дифференциальным уравнением типа [51, 171, 198,210]
г = Ргг + г + \у2 , г = К^ + К^ + КАА + К58,ъ{ = Нгг(т,-) + V/. E.55)
Здесь г — вектор состояния датчиков, й2 — вектор случайных процес-
процессов типа белого шума с выбранной матрицей интенсивности К2;
2; = 2(т/) — вектор выходных сигналов датчиков в дискретный момент
времени т,-; \( — векторный случайный процесс типа белого шума дис-
дискретных ошибок измерений с заданной дисперсионной матрицей К.,-; Рг,
К9, К^, КА, К5 , Нг — числовые матрицы.
Внешние возмущения, действующие на ЛА, могут быть случайными в
виде непрерывной турбулентности и детерминированными в виде под-
139
вижных и неподвижных вертикальных и боковых градиентных порывов
ударных волн и т. д. Детерминированные воздействия обычно задаются %
форме известных временных функций. Уравнения, описывающие
чайные воздействия, составляются исходя из представления спектраль*
ных плотностей турбулентной атмосферы эмпирическими формулам^
(например, по Драйдену, Карману и др.) и в общем случае имеют вид
А = РдА + ш1, E.56^
где А — вектор состояния формирующих фильтров, \\^ — вектор неза4
висимых случайных процессов типа белого шума с заданной матрицей
интенсивности Б^.
Линейные уравнения аэроупругости E.19) совместно с линейными^
уравнениями соответственно приводов рулей E.54), датчиков E.55) Ц
турбулентной атмосферы E.56) характеризуют ЛА как объект управле^
ния. Причем временные подходы к моделированию явлений аэроавтоуп-
аэроавтоупругости на базе уравнений типа E.19) позволяют использовать также
линейные модели САУ и внешних воздействий.
Для объединенной системы уравнений E.19) и E.54)-E.56) векторн
фазовых координат будет
У= Г . E.57),
А
Здесь Ят =|| ЯЯ ||т, 8, г, А— фазовые координаты ММ аэроупругости, ||
приводов, датчиков и турбулентной атмосферы. ]
Входными сигналами для ЛА как объекта управления, описываемого
уравнением E.19) совместно с уравнениями E.54)-E.56), являются ком-
компоненты вектора управления и и случайных векторов ч/г. В рамках ли-
линейной теории ММ аэроавтоупругости ЛА можно представить в виде
системы интегродифференциальных уравнений первого порядка:
т
у = Ру + |м(т-тг)у(тх)Лтх + Си + \у , E.58)
О
где \у — вектор белых шумов, ненулевые компоненты которого являют-
являются входными сигналами фильтров, формирующих стационарные случай-
случайные процессы ошибок измерений и турбулентной атмосферы, М —
функциональная квадратная матрица.
Форма представления ЛА как объекта управления в виде уравнения
E.58) пригодна для решения задач анализа и синтеза систем активного
управления. Для непосредственного применения классических методов
синтеза и использования единой методологической базы для решения
проблемы аэроупругости и аэроавтоупругости вектор фазовых координат
у E.57) в этом случае необходимо расширить подвектором уа дополни-
дополнительных переменных, а интегральные члены в E.58), учитывающие не-
нестационарность обтекания ЛА, заменить дифференциальными уравне-
140
ниями. Расширенный вектор фазовых координат будет
1 • Н
\Уа
у= I ~*
V И
Уа У* =14 |. E.59)
г
А
В этом случае линейная форма уравнений ЛА как объекта управления
приобретает вид
у = Ау + Ви + ё. E.60)
При этом вектор у входных сигналов моделей датчиков линейных
ускорений и угловых скоростей линейно связан с фазовыми координата-
координатами ММ аэроавтоупругости E.60) зависимостью
E.61)
5.6.3. Уравнения контролируемых параметров и наблюдений.
Цель построения уравнений контролируемых параметров—установление
связи между фазовыми координатами и физическими величинами, харак-
характеризующими поведение компоновки «упругий ЛА + система управле-
управления». Это вызвано тем, что зачастую в число фазовых координат ЛА вхо-
входят величины, не представляющие непосредственного интереса для ис-
исследователя, так как формирование управляющих сигналов и критериев
качества осуществляется на основе совсем других физических величин.
Введем вектор ^ безразмерных контролируемых параметров. Обычно
его компонентами являются углы атаки а и скольжения /3 , углы Эйлера
у,у/\в и угловые скорости &х,пу^г ЛА как жесткого тела; прираще-
приращения перегрузки Алу,ц.м в центре масс ЛА; возмущенные полные
АК, АК, АК и упругие Аг, Аг, Аг соответственно перемещения, скорости
и ускорения точек поверхности конструкции, приращения перегрузок
Апу1 в отдельных точках объекта, внутренние усилия (изгибающие, кру-
крутящие моменты, перерезывающие силы) Ь§ в сечениях конструкции и др.
^т = | а р у у/ в пх пу пг Апуцм АК АК АК Аг Аг Аг Ь3 ||т.
Вектор фазовых координат включает обобщенные параметры Яо>Яо
движения ЛА как жесткого тела и Ч;,4/, характеризующие упругие пе-
перемещения его конструкции:
Чо
E.62)
Ч/
Выпишем безразмерные соотношения связи между составляющими
векторов § и я (см. B.97), C.34), C.35), C.43)):
141
E.63)
к о
При аппроксимации переходных аэродинамических функций экспо-
экспонентами последнее соотношение в E.63) примет вид
3 к I
В этом случае вектор фазовых координат расширяется за счет вклю-
включения в него дополнительных переменных, появляющихся за счет ап-
аппроксимации переходных функций. Вектор контролируемых параметров
в линейных задачах аэроавтоупругости E.60) связан с компонентами век-
вектора фазовых координат зависимостью
^ = О2У- E-65)
Уравнения наблюдений, связывающие известные выходные сигналы
датчиков объекта управления с его фазовыми координатами и с учетом
моделей самих датчиков, имеют форму [51, 249]
2 = Нг, E.66)
где ж — вектор выходных сигналов датчиков.
Идеализируя реальные ошибки измерений, уравнения наблюдений
через фазовые координаты можно записать в виде
2 = Ну + у, E.67)
где V — вектор независимых случайных процессов типа белого шума.
5.6.4. Каноническая форма уравнений аэроавтоупругости. При
создании расчетной системы уравнения аэроавтоупругости приводят к
каноническому виду. Для этого их записывают в виде системы диффе-
дифференциальных уравнений первого порядка, разрешенных относительно
первых производных фазовых координат.
Введем обозначения
E-б8)
С учетом E.68) уравнение E.19) можно записать так:
У1 = У2» т
у2 =-2ксоу2 -ю2У1 +\1~\сдуг + /^(тОу^т-тОйхх + E.69а)
142
E.696)
или с учетом E.68) в форме:
О
, E.70)
где вектор А = : .
Методы решения канонического уравнения E.70) изложены в [51].
В E.70) с^, 1-? — квадратные матрицы размерности Bя, 2л):
5-1
С " I ч
- о
2 цч
II
- 2ксо ||'
с , 1° — прямоугольные матрицы размерности Bи, 2Л^У ):
С =
сл,
0
0
Г1с8 *-1с5
Я 0
II,-11
0
—прямоугольные матрицы размерности Bп,
С Ц-
о
1
о
о
При гармоническом законе изменения аэродинамических нагрузок от
рулевых поверхностей и воздействий порывов ветра уравнение E.70)
преобразуется в частотную форму:
5 + сАА + сАА,
E.71)
где
, счс\
чс\ —
квадратные матрицы размерности (п, п)\ с 5, с 8 —
прямоугольные матрицы размерности (п, Ыу); сЛА, слА — прямо-
прямоугольные матрицы размерности (я, М^).
С учетом обозначений E.68) уравнение E.71) можно записать в виде
двух уравнений:
У1 = У2 '
у2 = -2ксоу2 - со2уг + \Г1[сяУ1 + с^у2 + с5& + с55 + сАА + сАА]. E.72)
Частотное уравнение аэроавтоупругости в нормальной форме Коши
принимает вид
А. E.73)
143
- /
В E.73) квадратная матрица Р* = сд используется для исследования
ЛА на флаттер при зажатых рулях и отсутствии внешних возмущений/
Каноническая форма уравнений аэроупругости при групповой аппрок-
аппроксимации аэродинамических переходных функций приобретает вид [51]
- Н« @) я - Н^ @) я + 5уа =
уа = -
уАА .
Здесь Н^@), Н^@) — квадратные матрицы начальных значений пере-
переходных функций размерности (п, п)\ Н @), Н @) и Нл@) — прямо-
прямоугольные матрицы начальных значений переходных функций размерно-
размерности соответственно (и, Му) и (и, Л/^ ); а — прямоугольная матрица раз-
размерности (и, пЕп), состоящая из матриц-строк
щ={аи,...,ИПЕ1), E.75)
где щ — матрица-строка показателей экспонент аппроксимации пере-
переходных функций обобщенной силы с номером /, причем
В E.74) уа — вектор дополнительных переменных размерности пЕп.
Структура подвектора вектора уа, соответствующая группе переходных
функций с номером /, имеет вид
1Уа\ |
E.76)
Уап II
Размерность каждого подвектора уа/(/=1,и) равна пЕ .
Далее, в E.74) А — диагональная матрица размерности (пЕп, пЕп),
элементы которой являются показателями экспонент всех групп переход-
переходных функций:
1ап ••• 0 II
4
1
4
0
а
E.78)
пЕп\\
прямоугольные блочные матрицы размерности ( пЕп9 п):
УГ
|У2
У?
E.79)
матрицы у , у и у имеют аналогичную блочную структуру размер-
размерности соответственно ( пЕп, Ыу)и( пЕп, ЛГ^).
144
Причем матрицы у^ и у^ размерности (пЕ,Му), матрицы у/, у^ и
у^ размерности (пЕ,п) и (пЕ,Яц) весовых коэффициентов аппрокси-
аппроксимации переходных функций обобщенной силы с номером / соответст-
соответственно от обобщенных координат и их производных, от углов отклонений
рулей и их производных и порывов &етра имеют типовую структуру:
- У1Г
УпЕ1
E.80)
где г = д,с[,6,8,Д ; /3 = и, ЛГУ,^.
Перепишем E.74) в виде матричного уравнения первого порядка:
У1 = У2 •
у2 = -2кюу2 - со2У1
-5уа + Я8@M
, E.81)
Уа = "Ауа + У*У1 + УЬ2 + У55 + у^5 + уДА.
Нормальная форма Коши для системы E.81) с учетом E.68) имеет вид
E.82)
В E.82) Р — блочная квадратная матрица размерности {2п + пЕп>
2п + пЕп):
10 Е 0
у* у* -А
Сд — блочная матрица размерности Bп + пЕп9
"а
Сд — блочная матрица размерности ( 2п + пЕп, 2Ы^):
вектор у* фазовых координат при групповой аппроксимации аэродина-
аэродинамических переходных функций имеет размерность Bп + пЕп):
У = Я
\\Уа
У1
= У2
II Уа
E.83)
145
Для использования уравнений аэроупругости в форме E.82) в расчет- '
ной системе аэроавтоупругости надо количество столбцов матриц с^ и |
са расширить нулевыми столбцами до размерности моделей приводов и |
турбулентной атмосферы соответственно:
у*=Ру*+Вп5
0 , В12=|с*о|
E.84)
>12=|Св л"
II и
Согласно E.60), E.61), E.65) канонические уравнения ЛА как объекта
управления, наблюдений и контролируемых параметров выпишем в форме
у = Ау + Ви + ё, 2 = Ну + \^, ^ = О2у, E.85)
где
*
у-
А
Структура матриц А, В, Н приведена в [51].
В заключение необходимо сказать следующее. Расчетные системы
определения динамических характеристик ЛА, его аэродинамики, аэро-
аэроупругости и аэроавтоупругости логично увязаны между собой. Главное
преимущество методологии их формирования состоит в том, что они ба-
базируются на единой информационной аэродинамической базе данных.
Это позволяет максимально автоматизировать решение проблем аэроуп-
аэроупругости и аэроавтоупругости ЛА, если не в целом, то большую их часть.
Кроме того, модульный принцип построения подобных систем предпола-
предполагает их внутреннее развитие и совершенствование.
§ 5.7. К созданию системы автоматизированного решения
линейных задач аэроупругости летательного аппарата
Для создания новых образцов авиационной техники и ее совершенст-
совершенствования требуется проведение большого количества исследований аэро-
аэродинамических, динамических и аэроупругих характеристик повышенной
точности на основе системного подхода. Эффективное решение этой за-
задачи в полном объеме возможно только в рамках линеаризованной ком-
комплексной научной проблемы аэроупругости или аэроавтоупругости. В
аэроупругости (аэроавтоупругости) существует структурная связь, соот-
соответствующая определенному порядку взаимодействия между ее состав-
составными частями. В рамках линейной аэроупругости, базирующейся на син-
синтезе данных от ее составных частей, получаемых численными методами
механики сплошной среды, эта связь проявляется логической траектори-
траекторией последовательного счета по программам, реализующим цепочку упру-
упругость-аэродинамика-аэроупругость-динамика полета ЛА. Однако прак-
практическая организация счета по указанной цепочке сопряжена с рядом
принципиальных трудностей, связанных, во-первых, с отсутствием уни-
унифицированного математического аппарата. Каждая наука, используемая
146
для описания составных частей проблемы аэроупругости, располагает
большим разнообразием методов для решения своих задач. Поэтому для
неспециалиста в соответствующей области науки изучение, выбор и ос-
освоение нужного метода и программы расчета на ЭВМ представляет не-
нелегкую задачу. Во-вторых, каждая программа названной выше цепочки
оперирует с большим объемом данных (от нескольких сотен до сотен
тысяч чисел), достоверная подготовка которых и передача от одного ра-
рабочего звена цепочки к другому вызывает также определенные сложно-
сложности. Указанные трудности делают процесс решения даже одной частной
задачи аэроупругости узким специалистом очень трудоемким, с больши-
большими временными затратами. Поэтому для эффективного решения широко-
широкого круга линейных задач аэроупругости в едином ключе необходимо пе-
переходить от традиционных методов организации счета на ЭВМ (по
имеющимся программам) к новым, более современным расчетным тех-
технологиям, позволяющим автоматизировать промежуточные этапы счета
[405, 407, 412, 421, 249]. Переход к такой технологии решения задач аэ-
аэроупругости ЛА означает создание системы автоматизированного расче-
расчета с организацией непрерывного счета по всей цепочке проблемы. Созда-
Создание подобной системы автоматизированного расчета возможно при ис-
использовании программ, построенных по модульному принципу (модули
аэродинамики, упругости и т. д.), и наличии также автоматизированной
подсистемы передачи и увязки данных при переходе счета от одного мо-
модуля к другому. Процесс создания такого вычислительного комплекса
является довольно сложной задачей, требующей для своего разрешения
не только использования имеющихся стандартных, но и разработки спе-
специальных программных средств ЭВМ. Если в период создания подобного
комплекса автоматизированного расчета привлекаются специалисты вы-
высокого класса по всем аспектам проблемы, то в дальнейшем технологию
его эксплуатации необходимо максимально упростить — довести до
уровня пользователя.
Базой же вычислительного комплекса могут служить канонические
интегродифференциальные уравнения E.41), E.42), преобразованные в
систему обыкновенных дифференциальных уравнений:
E.87)
147
где Ич — число удерживаемых форм упругих колебаний, И$ и ЛГД -Л
число рулей и порывов ветра соответственно, Ык — число экспонент,
аппроксимирующих переходные функции.
В E.87) неизвестными являются кинематические параметры ^, ха-1
рактеризующие движение ЛА с учетом упругости конструкции, и функ«>!
о 0,4 о,8 1,2 1,6 2,0 2,4 т ции 1 гк, учитывающие нестационар-:
ность обтекания. В качестве возмущаю-
возмущающих параметров служат углы 6У и угло-
угловые скорости 8У отклонения рулей, а
также безразмерные скорости порывов
ветра А^. Параметр щ учитывает до-
дополнительные возмущающие воздейст-
воздействия на ЛА, например, при сбросе груза.
Следует отметить, что достаточная
точность решения дифференциальных
уравнений E.87) обеспечивается уже при
групповой аппроксимации переходных
аэродинамических функций тремя-
четырьмя экспонентами. Об этом можно
судить по рис. 5.2, отражающему данные
Рис. 5.2. Примеры аппроксимации аппроксимаций переходных функций
самолета типа МиГ-21 при изменениях
угла атаки а и угловой скорости танга-
Г
Нсу
м
= 0,7
переходных функций Я" (т)
Я^(т) самолета МиГ-21
жа сог соответственно для двух чисел
Маха: 0,7 и 1,2 (сплошная линия — расчет; ©их — аппроксимация со-
соответственно двумя и четырьмя экспонентами).
На рис. 5.3 показана примерная блок-схема формирования и решения
канонических дифференциальных уравнений аэроупругости ЛА типа
E.87), включающая в себя несколько взаимосвязанных циклов. Так, цикл
II упруго-массовых характеристик снабжает цикл V формирования кано-
канонических уравнений аэроупругости безразмерными массовыми коэффи-
коэффициентами , куда входят масса ЛА, его моменты инерции, а также обоб-
обобщенные массы, соответствующие собственным формам упругих колеба-
колебаний конструкции || $ ||. Кроме того, цикл II передает циклу V матрицы
коэффициентов конструкционного демпфирования || к || и частот собст-
собственных колебаний || со ||. Автономный цикл III расчета аэродинамических
характеристик снабжает цикл V всеми стационарными значениями аэро-
аэродинамических коэффициентов || с ||. Цикл IV аппроксимации переходных
функций выдает коэффициенты нестационарных аэродинамических ха-
характеристик || 51| и коэффициенты аппроксимации || а ||. Кроме того, для
решения уравнений аэроупругости в цикле V надо задать начальные ус-
условия: векторы яДО), 1;д@) и вектор внешних возмущений ||5Аи||т
(цикл VI).
148
Геометрия ЛА
(три проекции)
Упругомассовые
характеристики ЛА
Ш
ТЕГ
Система расчета аэродинамических
характеристик упругого ЛА
и
IV
ТОГ
Метод групповой
аппроксимации
Ц
Банк аэродинамических данных
II м N
Отметим, что упрощение технологии решения задач линейной аэро-
аэроупругости ЛА на ЭВМ может быть осуществлено двумя путями. С одной
стороны, выбором по возможности наиболее общих методов, а с дру-
другой — организацией автоматизированной передачи информации в про-
процессе счета от одного рас-
расчетного цикла к другому.
Здесь вопрос об организации
автсТматизированной переда-
передачи информации от одного
расчетного цикла к другому
ставится несколько шире,
чем просто выбор необходи-
необходимых данных. Автоматизиро-
Автоматизированная система должна осу-
осуществлять не только выбор
нужных исходных данных,
но и формировать их в виде,
удобном для решения по-
поставленной задачи. Для этого
при разработке общей схемы
работы автоматизированной
системы создаются буфер-
буферные программы, обеспечи-
обеспечивающие необходимую струк-
структуру исходных данных в за-
Система формирования и решения канониче-
канонических уравнений аэроупругости
VI
Внешние
возмущения
18IIА И и |
Рис. 5.3. Структурная схема формирования и ре-
решения уравнений аэроупругости ЛА
висимости от решаемой частной задачи. Наличие буферных программ
позволяет сохранить выполнение основных принципов, заложенных в
организацию работы автоматизированного расчетного комплекса: мо-
модульности и сочетаемости. Формируемый на указанных принципах и
технологических упрощениях автоматизированный расчетный комплекс
согласно классификации системных средств определяется как пакет при-
прикладных программ, структура которого характеризуется двумя компо-
компонентами: функциональным и системным наполнением. Функциональное
наполнение представляет собой совокупность программных средств (мо-
(модулей). В проблеме аэроупругости ЛА — это набор автономных про-
программ (модулей) по упругости, аэродинамике и динамике полета. Сис-
Системное наполнение включает программы, обеспечивающие автоматиза-
автоматизацию вычислительного процесса и взаимодействие пользователя с паке-
пакетом. Сюда относятся программы для управления счетом, организации
хранения исходных данных и результатов вычислительного эксперимен-
эксперимента, формирование межмодульных связей и т. д.
Накопленный уже опыт в практике создания и эксплуатации пакетов при-
прикладных программ позволяет сформулировать к ним ряд требований [249].
Программы функционального наполнения библиотеки пакета при-
прикладных программ должны:
1) охватывать целую иерархию структурных ММ функционирования
ЛА, отражающих физическую и математическую полноту решаемых с их
помощью задач аэроупругости;
149
2) обеспечивать эффективность реализуемых алгоритмов, в первом
приближении определяемых затратами машинного времени;
3) отвечать простоте и удобству эксплуатации: оперативности про-
пропуска соответствующих задач на ЭВМ, наглядности представления ис-
исходной информации и результатов вычислений;
4) гарантировать надежность алгоритмов и программ: высокую сте-
степень отлаженности, безотказность и обеспечение требуемой точности,
наличие разнообразных тестовых задач;
5) предусматривать расширяемость состава алгоритмов и программ,
возможность оперативного изменения структурной ММЛА без сущест-
существенной модернизации программного обеспечения;
6) осуществлять адаптируемость программного обеспечения к изме-
изменению конфигурации вычислительной машины.
Работа комплекса автоматизированного расчета должна строиться
таким образом, чтобы вычисления не каждый раз начинались с расчета
аэродинамических характеристик ЛА. Для этого надо предусмотреть два
режима работы системы. На первом режиме осуществляется формирова-
формирование базовой структурной ММЛА, а на втором — на ее основе непосред-
непосредственно решение прикладных задач аэроупругости.
Этап формирования базовой структурной ММЛА, предусматриваю-
предусматривающий расчет всей совокупности инерционно-массовых, упругих и аэроди-
аэродинамических характеристик для его «базового» варианта загрузки, являет-
является наиболее ответственным и трудоемким, для решения которого привле-
привлекаются высококвалифицированные специалисты.
Выходными параметрами системы автоматизированного расчета по
аэроупругости ЛА являются характеристики его динамической реакции
на заданные виды возмущений (порывы ветра, отклонения рулей) в виде
переходных и передаточных функций. Эта информация в полной мере
характеризует ЛА как объект управления и в дальнейшем будет являться
исходной при решении задач аэроавтоупругости. Далее она может быть
использована для решения таких самостоятельных задач, как изучение
характеристик устойчивости и управляемости ЛА, его нагружения и де-
деформирования в полете, влияния на полет турбулентности атмосферы,
эксплуатация авиационной техники по техническому состоянию, анализ
летных происшествий и т. д.
§ 5.8. К организации контроля и проверки достоверности
результатов вычислений
Решение линейных задач аэроупругости ЛА с помощью пакета при-
прикладных программ на ЭВМ предполагает разработку и внедрение надеж-
надежных методов контроля промежуточных (с помощью модулей по аэроди-
аэродинамике и упругости) и окончательных результатов математического мо-
моделирования. Надо отметить, что повседневная инженерная практика по-
показала эффективность и надежность упругих моделей на основе балочной
и пластинчатой схематизации [43, 51, 61, 74, 194, 223, 249, 315] для ре-
решения широкого круга задач аэроупругости ЛА. Это в полной мере отно-
относится и к численным методам аэродинамики [56, 57].
Рассматриваемые методы контроля предлагается разбить на две группы.
150
5,8.1. К обоснованию численных методов и контролю за результа-
результатами вычислений на их основе. Математические обоснования числен-
численных методов и контроль за результатами вычислений на их основе вы-
выполняются с использованием целого ряда приемов, рассмотренных ниже.
1. Решение тестовых задач. Проводится решение задач ранее рас-
рассмотренных аналитическими либо другими численными методами. Изу-
Изучаются частные случаи использования структурной ММЛА, например,
моделируется динамика полета жесткого ЛА и т. д.
Эффективной тестовой проверкой правильности алгоритма расчета
аэродинамических характеристик упругого ЛА является условие, при
котором формы его движения как твердого тела _*0 представляются в
качестве частного случая собственных форм упругих колебаний. При
таком условии при расчете аэродинамических коэффициентов сЧг ,с*1
должны выполняться равенства
E.88)
= с
= с у
м-
\
= 1,2
1 ^ 2
ш
*-«—
Равенства E.88) справедливы и для переходных аэродинамических
функций.
2. Проверка выполнения теорем точ- су\
ных соотношений, предельных значений.
Проверяются теорема обратимости и тео-
теорема об импульсе [57]. Первая устанавли-
устанавливает точные соотношения между аэроди-
аэродинамическими характеристиками ЛА в
прямом G, сплошная линия) и обращен-
обращенном B, крестики) движениях (рис. 5.4).
Вторая дает связь между нестационарной "о 2,5 5,0 7,5 10,0 *
частью 1р переходной аэродинамической Рис5Л К методам кош?оля за
- тт результатами вычислений (про-
функции ЛА и соответствующей аэроди- верка теоремы обратимости)
намической производной с* (пример на рис. 5.5
для случая Е} е {а }) и определяется зависимо-
зависимостью D.35).
Эффективным средством проверки правиль-
правильности расчета аэроупругих характеристик ЛА
Рис. 5.5. К методам кон- численными методами аэродинамики является
троля за правильностью сопоставление с помощью формул пересчета
расчета переходных аэро- D.27), D.28) временных и частотных характери-
динамических Функций по
/*•> ^_Пч стик, получаемых независимо на основе уравне-
пределшьГ(приИг I» 4 «^ DЛ9> и D-26) соответственно, а также с их
значениям, найденным точными при Т = 0 и предельными при т -> оо
независимо значениями, также определяемых независимо.
151
3. Анализ практической сходимости результатов расчета. Сходи-
Сходимость аэродинамических характеристик проверяется варьированием чис-
числами газодинамических особенностей, покрывающих несущие поверхно-
поверхности ЛА, и удерживаемых собственных функций, аппроксимирующих пе-
перемещения точек конструкции аппарата.
4. Машинная проверка алгоритмов и программ решения задач на
ЭВМ. Она осуществляется решением специальных тестовых задач, не
связанных с физическим содержанием проблемы. Например, интегриру-
интегрируются системы одинаковых интегродифференциальных уравнений и, как
частный их случай, системы обыкновенных дифференциальных уравне-
уравнений с известными решениями. Исследуется практическая сходимость
результатов вычислений в зависимости от шага интегрирования.
5. Контроль физического смысла решения задачи включает проверку
и анализ физического содержания промежуточных и окончательных ре-
результатов. Так, например, при изучении постепенного симметричного
входа ЛА в порыв из физического содержания задачи ясно, что в началь-
начальный момент у него должна быть тенденция к кабрированию, а при сим-
симметричном действии слабой ударной волны сзади снизу — к пикирова-
пикированию. Контроль за физическим смыслом задачи является одним из эффек-
эффективных методов анализа нестационарных
аэродинамических характеристик (пере-
(переходных функций) ЛА. На рис. 5.6 пред-
представлены результаты расчета переходной
функции Я закр, описывающей изменение
0,4
0,2
1
м
у
= 0,5
\
ч
Закрылок
2
1,0
2,0
Рис. 5.6. Изменение переходной
функции Ясзакр(т)при ступен-
ступенчатом отклонении закрылка на
угол 8
подъемной силы су гипотетического ЛА
при ступенчатом отклонении закрылка на
угол 8 при наличии оперения (кривая 1) и
без него B) при М = 0,5. Как видим, эффек-
эффективность закрылка по су в конце переход-
переходного процесса для ЛА с оперением при-
примерно в два раза меньше, чем для ЛА без
оперения. Это объясняется уменьшением интенсивности скосов потока
на оперении из-за влияния вихревых пелен, сходящих с закрылка и кры-
крыла. Из анализа расчетных данных и поведения кривой 1 следует, что рез-
резкое уменьшение су при т = 0,75 начинается в момент подхода пелены к
оперению.
5.8.2. Проверка достоверности математических моделей и их рас-
расчетных схем. Обоснование выбранных упругих и аэродинамических ММ
и их расчетных схем, а также структурных ММЛА на их основе осуще-
осуществляется, как правило, по данным лабораторных, трубных и летных экс-
экспериментов и включает следующие положения.
1. Непосредственное сопоставление результатов математического мо-
моделирования на ЭВМ с прямыми измерениями в физическом эксперименте.
2. Статистический анализ результатов расчетов и экспериментальных
измерений. В этом случае оцениваются результаты математического мо-
моделирования на ЭВМ и данные эксперимента различных объектов в ши-
широком диапазоне измерений параметров, условий и режимов полета.
152
3. Моделирование на ЭВМ таких известных аэроупругих явлений, как
флаттер, дивергенция, реверс элеронов и т. д. Проверка пригодности ММ
аэроупругости ЛА для описания названных аэроупругих явлений дает
возможность судить о ее корректности.
Надо заметить, что необходимость оценки достоверности и точности
как составных частей структурной ММЛА — упругой и аэродинамичес-
аэродинамической, так и модели в целом возникают сразу же после начала ее разработ-
разработки. Целью контроля является проверка правильности гипотез и физичес-
физических явлений, закладываемых в ММ, сводящая в конечном счете этот ите-
итерационный процесс к обоснованию выбора структуры ММ и значений ее
коэффициентов; он состоит из двух этапов. На первом этапе определяют-
определяются общая структура ММЛА до летных испытаний, основные свойства ее
параметров. Значения части ее коэффициентов вычисляются численными
методами, а недостающие — с помощью трубного эксперимента и час-
частотных испытаний на динамически подобных моделях. Полученная та-
таким образом структурная ММ функционирования упругого ЛА в полете
рассматривается в качестве априорной. Проверка ее достоверности осу-
осуществляется всеми доступными средствами.
Окончательное заключение о достоверности априорной структурной
ММЛА может быть сделано только на основе натурных наземных и лет-
летных экспериментов. Второй этап (заключительный) разработки струк-
структурной ММЛА как раз связан с проведением натурного эксперимента,
обработкой и использованием его результатов. Здесь по данным физиче-
физического эксперимента на основе методов идентификации производится
уточнение априорных значений коэффициентов структурной ММЛА. В
процессе идентификации проверяется также достоверность идентифици-
идентифицируемой модели и дается оценка точности ее коэффициентов и т. д.
§ 5.9. Пример разработки типовой базовой линейной структурной
математической модели функционирования упругого
летательного аппарата
Определим структуру и содержание базовой структурной ММ аэро-
аэроупругости ЛА на примере самолета Ту-134 [18]. По определению подоб-
подобная модель должна отражать совокупность геометрических, инерционно-
массовых, аэродинамических и упругих характеристик ЛА конкретного и
"базового" варианта загрузки.
Геометрия самолета Ту-134: виды спереди (рис. 5.7 а), в плане
(рис. 5.7 б) и сбоку (рис. 5.7 в); характерный линейный размер (хорда
крыла) Ъ = 4,319 м и площадь 5д =115 м2.
Инерционно-массовые характеристики включают: массу аппарата
М= 32000 кг, моменты инерции ]х>ул = 630000,2460000,1950000кг • м2.
Динамические характеристики самолета Ту-134 (частоты и формы
собственных колебаний) рассчитывались, исходя из балочной схематиза-
схематизации (рис. 5.8) [315]. На рис. 5.9 и 5.10 показаны первые шесть изгибных
форм симметричных /^ и антисимметричных /к~^ собственных колеба-
колебаний крыла. При этом симметричные частоты колебаний: Д/+= 14,71;
153
11890
24,76; 34,29; 41,8; 48,41; 57,9 Гц; антисимметричные — О1 =15,3;
21,9; 25,4; 27,0; 30,7; 31,1 Гц (/ =Гб).
Обобщенные массы М^ и коэффициен-
коэффициенты демпфирования кх для симметричных и
антисимметричных тонов упругих колеба-
колебаний принимались равными М\ -М~[ -
10000 кг/м2 ; к\ = щ = 0,05 A=16).
В дальнейшем геометрия (три проекции
ЛА) и собственные формы используются
для предварительного расчета нестационар-
нестационарных аэродинамических характеристик ЛА
путем решения канонических еу--задач аэ-
аэродинамики методом дискретных вихрей.
35000
этого ЛА схематизировался простран-
ственно расположенными плоскими несу-
щими поверхностями, аппроксимируемыми
Рис. 5.7. Геометрия самолета Д И С кр е т -
Ту-134; 7 и 2 — закрылки, 3 и НЫМИ При-
7 — элероны, 4 — стабилиза- соединен-
тор, 5 — руль, высоты, 6 - шшь вих.
рульнаправления и
Въмисления на ЭВМ временных и
частотных аэродинамических характе-
характеристик проводилось, к диапазоне чисел
Маха М = 0,1 + 0,9 с шагом ДМ = 0,1.
Полная совокупность составляющих
аэродинамической нагрузки, действующей на ЛА, и внутренних усилий в
сечениях конструкции с, с+ и с~ соответственно для пространственно-
пространственного, продольного и бокового движений будет
||
Рис 5.8. К расчету динамических
характеристик самолета Ту-134 на
основе балочной схематизации
где Ар , Ар+ , Ар — распределенная аэродинамическая нагрузка (пе-
(перепад давлений); су,сг,тх,ту,тг —коэффициенты суммарных аэроди-
аэродинамических сил и моментов; с\, с/+, с\ — коэффициенты обобщенных
аэродинамических сил; см , см , со, с* , сТ, , сА, ей , с^л ,
изг кр >ь ^^юг АУ1кр ^ изг КР
с^ — коэффициенты внутренних усилий в сечениях соответственно от
изгибающего Мизг и крутящего Мкр моментов, перерезывающей силы
<2у. Рассматривались продольное и боковое движения самолета Ту-134
154
7-й тон ч
с учетом шести симметричных и шести антисимметричных тонов упру-
упругих колебаний, учитывалась работа семи рулевых поверхностей (см.
рис. 5.7): закрылков (углы отклонения 8г, <52), /+,м
элеронов (<53Х стабилизатора (<54), руля высоты
(#5 )> Руля направления (<56) и элеронов ( 81). °
Совокупность всех вычисленных на ЭВМ
аэродинамических коэффициентов, обобщенных -2
масс, частот и форм собственных колебаний кон-
конструкции ЛА вместе с алгоритмами формирова- -4
ния и решения уравнений аэроупругости, обра- ^+
ботки и выдачи результа-
результатов и составляет базовую
структурную ММ функ-
функционирования самолета
Ту-134 в полете.
\
10
/к
кр
-1
-2
-3
,м
йтон^-
¦7
м
/
А
/
0,4
0,2
0
-ОД
Проверка достоверно- _о,4
сти этой модели осуще- ° 5 Ю гкр,м
ствлялась следующим Рис. 5.9. Шесть низших
образом. Первоначально симметричных тонов из-
правильность расчетных гибных колебаний крыла
аэродинамических дан- самолета Ту-134
ных оценивалась путем сопоставления с резуль-
0 5 10 гкр^
Рис. 5.10. Шесть низших
антисимметричных тонов татами продувок в трубах. На рис. 5.11. представ-
изгибных колебаний лены данные вычисле-
крыла самолета Ту-134 ний (СПЛошная линия)
и опытов (точки) коэффициентов подъемной
силы су , момента тг и их производных с у и
т® в зависимости от угла атаки а и числа
Маха. Видно хорошее соответствие между ни-
ними.
Достоверность структурной ММЛА в целом
проверялась путем сопоставления реакций ре-
реального самолета и его ММ на одно и то же
управляющее
воздействие.
В продоль-
продольном канале в
качестве управ-
СУ
1,0
0,5
-0,02
т7
-0 09
5
У
10
а, г
<^
рад
-0,01
-0,03
т7
,3
0,5
-' —
в в
0,7
М
ляющего
Рис. 5.12. Схема размещения дат- действия
чиков измерительной системы на
самолете Ту-134: 1 — МП-47
(„х); 2 — ДУА (а); 3 — ПВО
МП-47 (пу)\б — МП-47 (пу)
Рис. 5.11. Зависимость аэро-
аэродинамических коэффициен-
коэффициентов подъемной силы су и
ВОЗ-
ис-
пользовалось
отклонение ру-
рулей высоты. Во
(^пр); 4 — Дгв Ф)> МП-18 (лх), время лолета на самолете измерялись нор-
МП-614 (пу)\ 5 — МП-18 (пх), мальная перегрузка пуцм в центре масс,
угловая скорость тангажа О,г, угол атаки
момента тг и их производ-
производных с" и т" от угла атаки
а и числа Маха М
155
а и перегрузка пу>кр на конце крыла. Схема размещения датчиков изме-
измерительной системы на самолете показана на рис. 5.12. Запись показаний
датчиков производилась на бортовой магнитный накопитель К-60-42 с
дискретностью 1/23 с . Полет выполнялся на высоте Я= 1000 м со скоро-
скоростью V = 360 км/ч в условиях умеренной турбулентности. Возбуждение
продольных колебаний осуществлялось путем отклонения руля высоты
на углы #5 по закону, изображенному на рис. 5.13. Здесь же нанесены
изменения функций пэуцм , пэу кр, записанных в летном эксперименте.
На рис. 5.14 приведены расчетные данные этих же величин п^ цм , п
? кр,
полученные на основе структурной ММЛА.
При этом турбулентность атмосферы принималась по модели Драйде-
на с масштабом Ьц? = 300 м при среднеквадратичной скорости верти-
да
_1 ^^ ^р 1 1
1М л\т\ М. и'Щ
пу,цм
4 ^
/ ;
' п 11 /
1
ц
20
1
ч II
28
1,
ч 1"
1
\т
Ж
111
7, С
Рис. 5.13. Временная зависимость пере- Рис. 5.14. Временная зависимость рас-
грузки п^)Кр (на крыле) и п9уми (в центре четной перегрузки л$>ч, (на крыле) и
масс) в летном эксперименте при откло- п*мм (в центре масс) при отклонении
нении руля высоты д5 по изображенному руля высоты <55 по изображенному на
на рисунке закону рисунке закону
кального порыва ветра с% = 0,9 м/с. Средние значения и математиче-
математическое ожидание для перегрузки тг^кр составили в летном эксперименте
о1 = 0,431 и М [п1 ш] = 1,121; эти же величины, найденные расчетным
пу,кр •г' *
путем с учетом нестационарности обтекания, равны ар =0,412 и
пу,ч>
М[п^,ф] = 1,121. Без учета нестационарности обтекания указанные оцен-
оценки составили ар =0,346 и М[л^кр] = 1,119. Рассогласование между
расчетными и экспериментальными данными при учете нестационарно-
нестационарности обтекания для а равно 8 %, а с использованием гипотезы квази-
у,кр
стационарности — 20 %.
Кривые 12г@, ^,ц.м@» #@ на рисунках 5.15-5.17 отражают изме-
изменение во времени г угловой скорости тангажа, перегрузки в центре масс и
угла атаки самолета в летном (д) и вычислительном ( о ) экспериментах.
Сравнение свидетельствует о достоверности созданной структурной ММ
самолета Ту-134.
156
Проверка достоверности модели в случае бокового неустановившего-
неустановившегося движения самолета Ту-134 осуществлялась по реакции его боковой
пг, град/с
8 Ц
1 1
|
11м
\РЩ 1,0
а, град
8
А.
8 ^
м
и
1/1
/
1/32
№
1
ъ
Рис. 5.15. Временное изме- Рис. 5.16. Временное изме- Рис. 5.17. Временное изме-
изменение угловой скорости нение перегрузки пуцы(г) нение угла атаки а($)
тангажа д22(г) вцентремасссамолета
перегрузки пг (рис. 5.18) на заданные одновременные отклонения элеро-
элеронов и руля направления на углы <56 и <57 соответственно.
о, •
у \\/
^\ /
10
0
-10
10
г, с
Рис. 5.18. Изменение боковой перегрузки пг (а) самолета Ту-134 при одновременном
отклонении элеронов 86 (б), руля направления <57 (в) по заданному закону; сплошная
линия — регистрация в полете, штриховая — расчет
Таким образом, сформированную базовую структурную ММ функ-
функционирования упругого самолета Ту-134 можно рассматривать в качестве
типовой. Предъявляемые требования к структуре и содержанию этой мо-
модели в ходе ее формирования являются общими и могут с успехом быть
использованы при построении структурных ММ для других типов само-
самолетов.
На основе созданного пакета прикладных программ по аэроупругости
выполнен широкий круг прикладных исследований, некоторые результа-
результаты этих исследований демонстрируются в главах 6-8.
Глава 6
ЛИНЕЙНЫЕ ЗАДАЧИ АЭРОУПРУГОСТИ
И АЭРОАВТОУПРУГОСТИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ
§ 6.1. Влияние нестационарности обтекания на аэродинамические!
характеристики летательных аппаратов
До последнего времени основные динамические характеристики ЛА
получали из установившегося и неустановившегося движений путем спе-
специальных испытательных маневров с имитацией особых случаев полет?
(критических ситуаций) [269]. Так, например, для оценки динамическо:
устойчивости самолета обычно в летном эксперименте выполняются:
— энергичные отклонения (импульсы) рулей для регистрации прибо
рами последующего возмущенного движения самолета вплоть до его
полного затухания (по этому виду возмущений определяются собствен-
собственные динамические свойства самолета); >
— отклонения рулей по определенному закону; <
— поступательно-возвратные отклонения поочередно каждого из ру-;
лей с постоянной амплитудой и заданными частотами при зажатых ос- -
тальных рулях. (Такими движениями вызывают вынужденные колебания
самолета с заданной частотой.)
Затем для заданной конфигурации самолета подобные маневры по-
повторяются по высотам при разных скоростях полета.
Для определения характеристик статической устойчивости и управ-
управляемости самолета применяются два принципиально разных метода, ба-
базирующихся на различных видах маневров.
1. Самолет совершает неустановившееся движение с регистрацией
параметров измерительной аппаратурой, в процессе которого летчик
плавно меняет один из исследуемых параметров.
2. Самолет находится в установившемся полете. Измерительная аппа-
аппаратура на борту непосредственно регистрирует усилия летчика, положе-
положения ручки управления и педалей, а также балансировочных углов откло-
отклонения рулей при различных, но постоянных в момент записи значениях
параметра, определяющего тот или иной вид пространственного движе-
движения самолета.
Такой летный эксперимент также проводится по высотам при полном
охвате всего диапазона эксплуатационных скоростей полета, углов атаки
и скольжения, а также всевозможных вариантов конфигурации самолета
для нескольких значений его центровки.
Для качественного (достоверного) проведения летных испытаний са-
самолета необходимо строго регламентировать условия полета и методы
проведения летного эксперимента и иметь набор структурных ММЛА,
158
характеризующих как особенности внешней среды, так и особенности
летной эксплуатации такого самолета. Необходим тщательный отбор из-
измерительной аппаратуры и специального экспериментального оборудо-
оборудования, обеспечивающих нужную полноту и точность измерений, а также
летного экипажа повышенной квалификации. Кроме того, выполнение
летного эксперимента на предельных режимах полета самолета зачастую
требует предварительного изучения отдельных вопросов динамики и
управляемости на его летном аналоге или самолете-имитаторе.
Следует особо отметить, что по условиям безопасности полета от-
отдельные виды маневров ЛА в летном эксперименте проверить просто
невозможно, что вынуждает вводить ограничения на области эксплуата-
эксплуатации и применения самолета. Судя по объему испытаний только для опре-
определения динамических характеристик ЛА, задача получения основных
летно-технических характеристик (ЛТХ) в летном эксперименте является
сложной и небезопасной и вследствие ее многомерности очень дорого-
дорогостоящей, а ее решение — длительным по времени.
Известно, что на летные испытания выходят, как правило, самолеты,
не отвечающие исходным требованиям заказчика из-за недостаточной* а
порой и невозможной оценки всех их ЛТХ до реализации в металле. По-
Поэтому во время летных испытаний начинается длительная по времени и
дорогостоящая «доводка» конструкции [243, 244]. В то время как по идее
испытания ЛА в первую очередь должны быть проверкой адекватности
его характеристик тактико-техническому заданию заказчика, а не средст-
средством усовершенствования. Именно переводу испытаний в разряд контро-
контролирующих функций и способствует новая методология научных иссле-
исследований — математическое моделирование и вычислительный экспери-
эксперимент на ЭВМ. Это доказывает мировая практика создания новых образ-
образцов авиационной техники по технологии «Стеле» [431].
Здесь будет показано, как с помощью математического моделирова-
моделирования [249], используя иерархию отработанных структурных ММ, можно
получать с опережением доселе невиданный объем научной информа-
информации, умелое использование которого в практике проектирования, созда-
создания и испытаний ЛА позволит удешевить сами проекты и сократить сро-
сроки ввода в строй новой авиационной техники.
6.1.1. К физической природе нестационарности обтекания. Объяс-
Объяснение физической природы явления нестационарности обтекания тел
ввиду сложности его обнаружения в эксперименте обычно проводится с
помощью весьма упрощенных подходов. Так, при определении коэффи-
коэффициента продольного демпфирующего момента ЛА используется понятие
«запаздывание скоса» [266, 367], и эффект нестационарности обтекания
объясняется запаздыванием реагирования скоса потока у горизонтально-
горизонтального оперения ЛА по отношению к изменению угла атаки а крыла. Как
показывает уже накопленный опыт, это явление позволяет более глубоко
изучить систематическое применение численных методов нестационар-
нестационарной аэродинамики [57]. Неустановившееся обтекание сопровождается
образованием вихревой пелены (следа) за ЛА, сносимой с его поверхно-
поверхности и развивающейся в пространстве и во времени. Ее влияние проявля-
проявляется в появлении на поверхности ЛА дополнительных нестационарных
159
Г
У//Л
скосов и связанных с ними нестационарных аэродинамических нагрузок,!
в итоге зависящих от предыстории процесса обтекания и деформирован
ния объекта. При дозвуковых скоростях обтекания ЛА влияние предыс-1
тории проявляется, строго говоря, на бесконечном интервале времени, т
при сверхзвуковых — на конечном [57]. Развитие во времени аэродина-!
мического следа в пространстве и переменность поля возмущенных ско-
скоростей в нем приводят к тому, что на нестационарные аэродинамические'
характеристики ЛА существенное влияние оказывают как отдельные его'
части (крыло, оперение), так и их взаимная интерференция. Это обстоя-
обстоятельство поясним на конкретном примере.
Рассмотрим нестационарное дозвуковое обтекание при числе Маха
М = 0,5 пары расположенных друг за другом на расстоянии двух хорд
0 2 4 т прямоугольных крыльев удлинением Я = 2,5 ,
каждое (рис. 6.1). Пусть до момента времени
т = 0 крылья, находящиеся под нулевым уг-
углом атаки, обтекаются установившимся пото-
Н>1 / ^-^ | /,,,.. | 1 ком. В тот же момент времени угол атаки пе-
переднего крыла мгновенно изменяется на Г. С
крыла начинает сходить вихревой (аэродина-
20 И 1 1 1 мический) след. Задача в этом случае решает-
решается методом дискретных вихрей [57]. Этот схо-
сходящий аэродинамический след начинает
оказывать влияние на распределение перепада
давлений как на переднем, так и на заднем
крыльях. За счет этого переменные давления
„а , ч на несущих поверхностях приходят к своим
Нщ(т) для прямоугольного установившимся (стационарным) значениям
крыла при М - 0,5 при мгно- не скачкообразно, как принято считать в соот-
соответствии с гипотезой квазистационарности, а
в результате переходного процесса в возму-
возмущенной газовой среде. Характер переходного
процесса, описывающего изменение аэроди-
аэродинамического коэффициента тг момента тангажа для одного (изолиро-
(изолированного) крыла (кривая 1) и для системы из двух крыльев B), располо-
расположенных друг за другом, показан на рис. 6.1. Штриховыми линиями на
этом рисунке обозначены стационарные значения переходной аэродина-
аэродинамической фуНКЦИИ Н% При Т -» оо .
тг
6.1.2. Особенность нестационарного обтекания самолета при от-
отклонении закрылка. Рассмотрим некоторые особенности нестационар-
нестационарных аэродинамических характеристик, вызванных взаимодействием
вихревой пелены, сбегающей с крыла при отклонении закрылка, распо-
расположенного около фюзеляжа, с горизонтальным оперением (ГО) на при-
примере ЛА с крылом малого удлинения. На рис. 6.2 представлены переход-
переходные аэродинамические функции # зак (т), описывающие изменение ко-
эффициента т1 во времени т при ступенчатом отклонении закрылка
я:
Рис. 6.1. Вид переходной аэ-
аэродинамической функции
венном изменении угла атаки
первого крыла на Г: 1 — для
изолированного крыла, 2 —
для системы из двух крыльев
160
5зак на единичный угол, при числе Маха М = 0,5 для двух схем: кривая
1 — для ЛА с горизонтальным оперением и 2 — без него; штриховыми
линиями C) нанесены стационарные значения переходных функций.
Анализ этих кривых показывает, что при наличии горизонтального опе-
оперения эффективность закрылка существенно уменьшается. Так, стацио-
стационарное значение коэффициента т^зак, обусловленное отклонением за-
закрылка, при наличии горизонтального опе-
оперения уменьшается почти вдвое. За физи-
физикой этого явления можно легко проследить
по характеру изменения функций Я зак (т)
на рис. 6.2. Отсюда видно, что до т = 0,8,
когда вихревой след от закрылка дошел до
оперения, кривые Я зак (т) для ЛА с гори-
0,1
0
-0,1
-0,2
-0,3
1
У
А
Рис. 6.2. Влияние горизонталь-
горизонтального оперения на переходную
аэродинамическую функцию
ЛА при ступенчатом
отклонении закрылка 5з
зонтальным оперением и без него практи-
практически совпадают. Вместе с тем, начиная с
т>0,8, эти характеристики начинают су-
существенно расходиться. Такие же особен-
особенности в поведении соответствующих аэро-
аэродинамических характеристик проявляются при отклонении других орга-
органов управления, попадающих в области интерференции различных час-
частей ЛА.
6.1.3. Влияние нестационарности обтекания и упругости конст-
конструкции на характеристики устойчивости и управляемости самолета.
Характеристики динамической устойчивости и управляемости ЛА [269]
обычно оцениваются по параметрам переходных процессов, отражающих
его реакцию на ступенчатые возмущающие и управляющие воздействия
[194, 266]. До последнего времени исследования этих характеристик про-
проводились весьма приближенно с использованием эмпирических или по-
полуэмпирических данных аэродинамики, например путем введения попра-
поправок на «запаздывание скосов». В этом случае не удается ответить на ос-
основной вопрос: какое влияние оказывает нестационарность обтекания на
характеристики динамической устойчивости и управляемости ЛА? Ис-
Использование же иерархии структурных ММЛА, описанных в главах 3 и 5,
позволяет дать ответ на поставленный вопрос. Данные рис. 6.3 иллюст-
иллюстрируют пример расчета переходной функции Я^ изменения при-
приращения нормальной перегрузки Апу в центре масс жесткого самолета
со стреловидным крылом при начальном изменении угла атаки а с ис-
использованием иерархии структурных ММЛА, с различной степенью точ-
точности учитывающих нестационарность обтекания (кривые 7 и 2 — ММ
движения деформируемого ЛА с полным учетом нестационарности обте-
обтекания по расширенной гипотезе гармоничности соответственно; 3 — ММ
движения ЛА с учетом его статического деформирования и расширенной
гипотезы гармоничности, а также без ее учета; 4 — по гипотезе квазиста-
161
ционарности). Характеристики нормированы по отношению к макси-
максимальному значению модуля их «квазистационарных» значений. Ошибки
в расчетах по различным
моделям приводят к соот-
соответствующим погрешно-
погрешностям при оценке характе-
характеристик устойчивости. Так,
при нахождении относи-
относительного коэффициента
демпфирования к [43,
266, 367] по структурной
ММ функционирования
ЛА в полете с использова-
использованием гипотезы квазиста-
ционарности различие по
НАпу
0,5
0
-0,5
-1,0
V
\\
2
а
МАпу
0,5 -
0 -
-0,5-
-1,0
Ф
2
У
б
сравнению с ММ движе-
Рис. 6.3. Влияние нестационарности обтекания на
характеристики устойчивости ЛА при дозвуковых
(а) и сверхзвуковых (б) скоростях полета с исполь-
использованием структурных ММЛА, учитывающих ее с
различной степенью точности
ния ЛА с полным учетом нестационарности обтекания составляет 22
для М = 0,7 и 49 % для М = 1,2. При использовании приближенной струк-
структурной ММЛА (нестационарность обтекания учитывается путем ввода
дополнительного демпфирующего коэффициента т^) указанные по-
погрешности уменьшаются до 6 и 13 % соответственно. Данные, получае-
получаемые по рекомендуемой для широкого применения структурной ММЛА с
учетом его статического деформирования и расширенной гипотезы гар-
гармоничности и по полной структурной ММЛА, практически совпадают.
На основе обобщения аналогичных исследований для широкого клас-
класса ЛА и различных режимов полета установлено следующее. Нестацио-
Нестационарность обтекания оказывает заметное влияние на динамические ха-
характеристики устойчивости самолета как при продольном, так и при бо-
боковом движении. Как показывает анализ результатов вычислений в слу-
случае продольного движения, неучет нестационарности обтекания приводит
к существенным ошибкам при определении коэффициентов относительно-
относительного демпфирования к и заброса перегрузки Ал3аб на больших дозвуковых
@,7 < М < 1) и малых сверхзвуковых A < М < 1,3) скоростях полета. Влия-
Влияние нестационарности при М < 1 сильнее сказывается на величине
Ди3аб(д%1б = ехр[-7Яс/A-к2I/2]),априМ> 1—на коэффициенте к .
В итоге можно сказать, что на дозвуковых режимах полета ЛА неста-
нестационарность обтекания вызывает уменьшение заброса перегрузки, а на
сверхзвуковых — увеличение. Это, в свою очередь, приводит к повыше-
повышению демпфирующих свойств ЛА при М < 1 и к их уменьшению при М > 1.
Аналогичные эффекты в менее выраженной форме наблюдаются и
при расчете характеристик боковой устойчивости ЛА.
Такие же выводы можно сделать и относительно характеристик дина-
динамической управляемости ЛА. Для примера на рис. 6.4 изображен пере-
переходный процесс, отражающий временное изменение приращения нор-
нормальной перегрузки Апу самолета при ступенчатом отклонении руля
высоты <5р в для случая М = 0,5. Отметим, что применение структурной
162
ММЛА на основе гипотезы гармоничности (кривая 3) не улучшает ре-
результаты расчетов по сравнению с моделью на базе гипотезы квазиста-
квазистационарности {4)\ кривые 1 и 2 — структур- н$
ные ММЛА при нестационарном обтекании
по расширенной гипотезе гармоничности с
учетом динамического и статического де-
деформирования его конструкции соответст-
соответственно.
Обсудим теперь результаты вычислений,
связанные с изучением влияния упругости
конструкции на характеристики динамиче-
динамической устойчивости и управляемости самоле-
самолета (рис. 6.5). Кривые этого рисунка иллюст-
иллюстрируют характер развития переходного про-
процесса, связанного с изменением приращения
перегрузки Апу в центре масс «тяжелого»
гипотетического самолета при ступенчатом
отклонении руля высоты: кривая 1 — пол-
ч
1
\
2
V
4
1
с
лАпуЬ
О
-0,5
-1,0
Рис. 6.4. Влияние точности уче-
учета нестационарности обтекания
на характеристики управляемо-
управляемости ЛА при дозвуковых скоро-
скоростях полета (М = 0,5) и ступен-
ступенчатом отклонении руля высоты
V
¦\
2
:1
Г, С
и
-0,5
-0,8
Рис. 6.5. Влияние различной сте-
степени учета упругости конструк-
конструкции в структурной ММЛА на его
характеристики управляемости
при дозвуковой скорости полета
и ступенчатом отклонении руля
высоты 8рв
На рис. 6.6 нанесены результаты рас-
расчета изменения коэффициента (упругого
— кривая 1 и жесткого — 2) статической
устойчивости самолета т^ [266] в зави-
зависимости от скоростного напора ^*.
Видно, что с ростом значения д* коэф-
коэффициент т§ уменьшается, что приводит
к снижению путевой устойчивости аппа-
аппарата.
Исследования по учету влияния не-
нестационарности обтекания на динамиче-
динамические характеристики ЛА при боковом
ная структурная ММЛА, кривые 2 и 3 — мо-
модели ЛА соответственно с учетом статиче-
статических деформаций и без учета. Анализ дан-
данных вычислений показывает, что неучет
упругости конструкции приводит к ошиб-
ошибкам в определении амплитудного значения
величины перегрузки Апу порядка 10-
15 %; эта тенденция существенно возраста-
возрастает с ростом скорости полета. Вместе с тем
зачастую с достаточной для практики точ-
точностью анализ характеристик динамической
устойчивости и управляемости самолета
можно проводить с помощью структурной
ММЛА, аэродинамические коэффициенты
для которой вычисляются с учетом попра-
поправок на его статическую деформацию.
_ ¦
1
"°>63
-0,66
-0,69 (^
Рис. 6.6. Изменение коэффициента
путевой статической устойчивости
ЛА щР в зависимости от скорост-
скоростного напора ^*: 1 — упругий само-
самолет, 2 — жесткий
163
возмущенном движении выполнялись аналогичным образом с исполь-
использованием различных конструктивных форм ЛА и разного уровня его
структурных ММ функционирования в полете [249]. Анализ результатов
вычислений для случая мгновенного охвата аппарата боковым порывом
показал, что неучет нестационарности обтекания при расчете основных
его боковых динамических характеристик приводит к определению
большинства из них с заметной ошибкой. Причем, как и в случае про-
продольного движения, учет нестационарности обтекания увеличивает
демпфирующие свойства ЛА при дозвуковых (М < 1) скоростях полета и
уменьшает их при сверхзвуковых (М > 1). Кроме того, параметры боко-
боковой динамической устойчивости ЛА с достаточной для практики точно-
точностью могут быть оценены с помощью приближенных структурных
ММЛА на основе гипотезы гармоничности при учете статического де-
деформирования конструкции аппарата.
6.1.4. К оценке динамической управляемости самолета с органами
управления подъемной и боковой силами. В настоящее время для
улучшения пилотажных характеристик самолетов, расширения области
режимов полета, включая вертикальные и боковые перемещения без
вращений, маневрирование при неизменных угловых положениях и пр.,
широко применяются органы непосредственного управления подъемной
(НУПС) и боковой (НУБС) силами. Математическое моделирование по-
позволяет и здесь уже на стадии проектирования выполнить большой ком-
комплекс исследований и получить в обобщенном виде достаточный объем
научной информации для оценки возможностей применения органов
ПУПС и НУБС. При этом, как будет показа-
показано ниже, весьма важным оказывается анализ
аэродинамических характеристик рулевых
поверхностей с учетом эффектов их неста-
нестационарного обтекания.
На рис. 6.7 для примера помещены пере-
переходные функции, характеризующие измене-
изменения аэродинамических коэффициентов мо-
моментов тангажа
0,4
0,2
о
/V
/
/
2
—
¦——
4
г
-0,2
-0,4
Рис. 6.7. Переходные функции
ЛА, характеризующие измене-
изменения аэродинамических коэффи-
коэффициентов момента тангажа тг и
рыскания ту как реакцию на
ступенчатое отклонение орга-
органов НУПС и НУБС (М = 0,8)
тг и рыскания ту как ре-
реакцию на ступенчатое отклонение органов
НУПС A — дополнительное горизонтальное
оперение, 2 — закрылок, 3 — горизонталь-
горизонтальное оперение) и НУБС D — дополни-
дополнительный руль направления, 5 — руль на-
направления); штриховой линией отмечены
стационарные значения аэродинамических
характеристик. Сложный характер кривых
рис. 6.7 на переходных участках, особенно
для рулевых поверхностей, объясняется су-
существенным влиянием аэродинамической
интерференции между взаимодействующи-
ми частями ЛА. Как видим, дополнительные рулевые поверхности 1 и 4
создают моменты, обратные по знаку моментам от основных рулей 2, 3 и
5. Это позволяет осуществлять вертикальные и боковые перемещения ЛА
с помощью органов НУПС и НУБС без вращения.
164
Соответствующие законы отклонения рулей могут быть сформирова-
сформированы из условия равенства нулю дополнительных аэродинамических коэф-
коэффициентов моментов тангажа т1 и рыскания ту . Согласно гипотезе
квазистационарности эти характеристики можно представить в виде
= 0,
I + т®*а>х + т
'
+ т*
+ тр85 = 0,
где а,Р,сох,соу,со1 — дополнительные углы атаки, скольжения и угло-
угловые скорости ЛА при возмущенном движении.
Далее в качестве органов НУПС рассмотрим основное (кривая 3) и
дополнительное G) горизонтальные оперения. Выпишем связь между
углами отклонения органов НУПС и НУБС, обеспечивающую вертикаль-
вертикальное и боковое смещения самолета без изменения его углов ориентации
относительно исходного режима полета:
53 = уха + у2о)г + уъ8х, 85 = у4р + у5сох + у6соу + уп84,
о,2
ОД
0
Приведенные выше законы управления органами НУПС и НУБС обеспе-
обеспечивают смещение ЛА без изменения углов тангажа в и рыскания у/ в
случае использования приближенной
структурной ММЛА с аэродинамически-
аэродинамическими силами, определяемыми по гипотезе
квазистационарности без учета эффектов
нестационарности обтекания рулевых
поверхностей (рис. 6.8, штриховая линия
3 — структурная ММЛА на основе гипо- _о,5
тезы квазистационарности). Если же учи-
учитывать эффект нестационарности их об- -1,0
текания, то при маневрировании появля- Рис 6>8> Влияние различной сте-
ются угловые смещения аппарата (кривая
1 — полная структурная ММЛА (ММ1);
точки 2 на кривой 1 — структурная
ММЛА, составленная с учетом статиче-
\
2
ч
N
>
-о—"°—
6,у/
и ъ.
4
о
/,с
пени учета нестационарности об-
обтекания в структурной ММЛА с
рулевыми НУПС и НУБС на его
динамику
ского деформирования аппарата и нахождения аэродинамических коэф-
коэффициентов по расширенной гипотезе гармоничности (ММ2)). Следова-
Следовательно, при синтезе законов управления самолета с помощью органов
НУПС и НУБС необходимо использовать структурную ММ возмущенно-
возмущенного движения ЛА (в данном случае можно ограничиться ММ2), учиты-
учитывающую нестационарную природу обтекания рулевых поверхностей.
§ 6.2. Исследование аэроупругих характеристик
самолета с учетом статических деформаций
Как уже отмечалось, деформируемость конструкции является одним
из основных факторов, влияющих не только на безопасность полетов са-
165
молетов, но и непосредственно на их эффективность. В связи с этим осо-
особо следует отметить, что с уменьшением жесткостных свойств современ?
ных ЛА деформация конструкции, особенно ее статическая часть, стала
оказывать заметное влияние и на работу бортового оборудования. По-
Поэтому для определения компенсационных ошибок, вносимых в работу
бортового оборудования за счет деформирования конструкции самолета,
последний должен рассматриваться как упругая платформа. Важное зна-
значение для начальной выставки (компенсации ошибки) прицельно-
навигационного комплекса и для учета систематической ошибки при ра-
работе всего бортового оборудования, включая РЛС, имеет значение вели-
величина статической деформации в стояночном положении самолета и в ус-
установившемся полете. Кроме того, на работу бортового оборудования
деформация конструкции аппарата оказывает влияние и через изменение
его аэродинамических и летных характеристик. Как видим, задачу опре-
определения компенсационных ошибок нельзя выделить из общей проблемы
движения упругого ЛА; она должна рассматриваться комплексно с ис-
использованием описанных выше различного уровня структурных ММЛА.
6.2.1. К оценке влияния статического деформирования конструк-
конструкции самолета на его стационарные и нестационарные аэродинамиче-
аэродинамические характеристики. Для этого были использованы уравнения E.51).
Обратимся к анализу некоторых результатов, которые были получены
для неманевренных самолетов Ту-134, Як-42, Ил-7*6, Ан-124 «Руслан» и
гипотетического маневренного ЛА переменной стреловидности
(табл. 6.1).
Таблица 6.1
Характеристики
ЛА
Маневр. ЛА
Ту-134
Як-42
Ил-76
Ан-124
Л/о, кг
Тип шасси*)
11000
34,2
4,97
2
32000
115
4,318
1
34070
157,2
4,93
1
95000
300
6,44
2
336000
628
9,9
2
*) 1,2—основные стойки расположены соответственно на крыле и фюзеляже
На рисунках В.9-6.11 для примера приведены некоторые кривые, показы-
показывающие характер поведения переходных функций Я/(т), Нт](т)
су тг
(в/ =а;о)г), Н * , Н ' самолета Як-42 при изменении его параметров
движения и отклонении рулевых поверхностей 8г (/ = 1,4, см. рис. 6.9)
по ступенчатому закону; кривая 1 — жесткий ЛА, 2 — упругий. Здесь же
нанесены стационарные значения (линия 3) этих функций при т—»°°.
Расчет изменения стационарных значений с^у и нестационарных доба-
166
вок / ' за счет упругости конструкции осуществляйся с помощью за-
висимостей E.37).
Следует отметить, что упругость конструкции «смягчает» характер
переходного процесса — значения- типовых нагрузок, действующих на
I
3
-5
-10
Рис. 6.9. Переходные фун-
функции самолета Як-42 для
коэффициентов подъем-
подъемной силы Я" (т) и про-
продольного момента Н% (г)
при изменении угла атаки
а по ступенчатому закону
с учетом статического
деформирования конст-
конструкции
Су
6
о
к:
-25
-45
а
о
г2
1
*-
3
я
-0,2
щ
-1Д
-2,0
А0
\
Г\б
2
1
1
1
3
3
Рис. 6.10. Переходные фун-
функции самолета Як-42 для
Рис. 6.11. Переходные фу-
функции самолета Як-42 для
коэффициентов подъемной коэффициентов продоль-
силы Н®1 (т) и продольно- ных моментов Я^3 (т) и
го момента Н®г(т) при
изменении угловой скоро-
скорости тангажа сог по ступен-
ступенчатому закону с учетом
при отклонении
статического
вания конструкции
элевона и руля высоты по
ступенчатому закону с
учетом статического де-
деформиро- формирования конструк-
конструкции (М = 0,5„Я= 0)
аппарат, несколько уменьшаются (см. рисунки 6.9 и 6.10) при ступенча-
ступенчатом изменении возмущающих воздействий.
Сопоставляя данные рисунка 6.11 а и б, видим, что эффективность
органов управления, оцениваемая коэффициентами т1' за счет упруго-
упругости конструкции, падает, причем влияние ее проявляется существеннее
для тех рулевых поверхностей, которые расположены ближе к концу
крыла либо более удалены от центра масс самолета. Так, например, эф-
эффективность элерона E) (см. рис. 6.9) в качестве органов продольного
управления и руля высоты D) по отношению к жесткому самолету Як-42
для режима полета М = 0,5 и Н = 0 упала соответственно на 34 и 9 %.
В результате проведенных широких параметрических исследований и
их анализа установлено, что снижение свойств неманевренных самолетов
Ту-134, Як-42 и Ил-76 вследствие влияния статической деформации на
стандартных режимах полета составляет в среднем 8-12 %, а при пре-
предельных значениях скоростного напора может достигать 16-18 %.
Для этих же самолетов определялись условия наступления реверса и
дивергенции. Оказалось, что для них при реально возможных режимах
полета дивергенция крыла и реверс органов управления не наступают,
что согласуется с выводом, сделанным для такого типа ЛА в [61].
167
Рисунок 6.12 иллюстрирует характер изменения коэффициентов аэр
динамических производных с^ и т® в зависимости от скоростного на
пора ^* (М = 0,6) для статически деформируемого самолета Ту-134
различными варв
1
0,9
0,8
N
/
2У
1
0,9
0,8
\
2
1
3
0 5 10 15 ^,кПа 0 5 10 15 ^,кПа
Рис. 6.12. Изменение коэффициентов аэродинамических
производных с" и т" статически деформируемого са-
самолета Ту-134 при различных вариантах загрузки в зави-
зависимости от скоростного напора д*
тами загрузки (крв
вая 1 — с топливом^
2 — с топливом
пассажирами, 3 — (
загрузки). Видно, что!
влияние последнего]
варианта загрузки ]
невелико. Объяснить!
это можно слабым \
изменением массово-]
инерционных харак-1
теристик конструк-
конструкции ЛА в целом.
Анализ расчетных данных показал, что подобная тенденция в изменении
коэффициентов аэродинамических производных в зависимости от скоро-
скоростного напора с учетом деформируемости конструкции наблюдается и
при боковом движении неманевренных самолетов. Аналогичные резуль-
результаты были получены и для остальных неманевренных самолетов.
Большое влияние на изменение аэродинамических характеристик ЛА
оказывает расположение грузов на крыле. Использование структурной
ММ функционирования упругого ЛА позволяет решать и такую оптими-
оптимизационную задачу, как рациональное с точки зрения аэродинамики раз-
размещение грузов на самолете.
Такие же исследования были проведены для гипотетического манев-
маневренного самолета (случай сверхзвукового полета М > 1). Отметим здесь
ряд особенностей. Во-первых, учет статической деформации конструк-
конструкции аппарата приводит к более заметному росту нагруженности стабили-
стабилизатора по сравнению с крылом. Во-вторых, выявлено, что расчет процес-
процессов движения, нагружения маневренных самолетов при возмущенном
движении даже в предположении статического деформирования конст-
конструкции при малых сверхзвуковых скоростях и малых высотах полета не-
необходимо вести с учетом нестационарности обтекания; но, начиная с
М > 1,5, нестационарность обтекания на нагруженность конструкции ока-
оказывает слабое влияние. В-третьих, при решении задач статической аэро-
аэроупругости ЛА деформацию его конструкции необходимо аппроксимиро-
аппроксимировать большим числом собственных функций по сравнению с динамиче-
динамическими задачами. Это можно объяснить тем, что в динамике силы инерции
способствуют значительному росту амплитуд колебаний первых низших
форм с последующим их резким убыванием, а в статике из-за их отсутст-
отсутствия происходит более равномерное перераспределение амплитуд между
формами, и они меньше по величине. Поэтому в задачах статической аэ-
аэроупругости собственных функций для аппроксимации упругих переме-
перемещений требуется больше, примерно на две-три функции.
168
6.2.2. К определению статических деформаций конструкции само-
самолета на стоянке и в установившемся полете. Насыщение ЛА совре-
современным бортовым оборудованием повышенной чувствительности требу-
требует «точного» знания выставочных поправок в местах их установки —
осредненных величин перемещений точек поверхности конструкции ЛА
по отношению к его стапельной форме.
Рассмотрим алгоритм определения перемещений точек поверхности
самолета в полете. Казалось бы, удобнее всего за исходное состояние
принять теоретическую (стапельную) форму «невесомого» ЛА, но ее оп-
определение связано с большими трудностями. Поэтому примем здесь за
исходное состояние форму реальной конструкции аппарата при стоянке
на земле.
Будем считать известными геометрические, аэродинамические и уп-
упруго-массовые характеристики конструкции ЛА и его грузов (внешних
подвесок, топлива, экипажа и грузов, раз-
размещенных в фюзеляже). Будем предпола-
предполагать крепления всех грузов жесткими и
характеризовать положение каждого груза
относительно связанной системы коорди-
координат Охуг незагруженного самолета векто-
векторами К(л:г,^г,гг) и г(хг,уг,гт)
(рис. 6.13). Для упрощения вывода урав-
уравнений равновесия реальную конструкцию
ЛА представим в виде набора сосредото- рИс. 6.13. Системы координат к
ченных масс /и,-, соединенных между со- расчету статических деформаций
г „ конструкции ЛА
бои невесомыми упругими связями, к ка- ^
ждой из которых могут быть жестко прикреплены грузы массой тп-.
Уравнение равновесия самолета на стоянке в матрично-векторной форме
будет иметь вид
§ + %, F.1)
где (т + тг)§ — матрица действующих массовых сил на конструкцию
самолета на стоянке, т и тг —матрицы масс незагруженного самолета
и грузов соответственно, Р^ — вектор, характеризующий силы реакции
опор, Р = КОКСТ — упругие силы (Ко — матрица коэффициентов жест-
жесткости несвободной системы), Кст — вектор упругих перемещений точек
аппарата в стояночном положении.
Представим вектор Кст в виде разложения по собственным формам
?0 и $* колебаний самолета К-ст=^оЯо+^*Ч1-
Из условия самоуравновешенности внутренних сил и свойств ортого-
ортогональности найдем
Го*тР=*о*тКоКст=О, ^тКо^=М^;2Ч1ст, *?ттф0,
где М* — матрица обобщенных масс, Ф * — матрица собственных час-
частот, я1ст — вектор обобщенных параметров упругих перемещений ЛА
169
на стоянке. С учетом этого соотношение F.1) преобразуем к виду
Здесь матрицы ?ок и 1*^ содержат только ненулевые компоненты
деляемые в точках приложения реакции опор. Элементы матриц ^ и
находятся из условий равновесия сил и моментов аппарата на стоянке.
Так как реакции опор удовлетворяют условиям статической опреде-
определимости, то матрица ^ок является обратимой. Тогда из первого и второго
уравнений системы F.2) соответственно имеем
)
/ У-1 1 F3)
1гё + ^ГкТи0кИ08(т + тг)Е]-
Вектор я1ст описывает упругие перемещения точек самолета относи-
относительно связанной системы координат Охуг (относительно стапельной
формы), положение которой в общем случае неизвестно. Считается, что
эти оси совпадают с главными центральными осями инерции деформиро-
деформированного аппарата. В связи с этим дополнительно введем известным обра-
образом систему координат Охуг, относительно которой будем определять
положение связанных осей Охуг. Начало системы Охуг можно распо-
расположить в любой точке конструкции. Взаимное положение систем
О х у I и Охуг будем характеризовать вектором Дя0. Перемещения то-
точек К,- относительно новой системы О х у г в местах ее связей с само-
самолетом равны нулю. Тогда можно записать
К,- = ?о;ЛЯо + Г 1/ 41 = 0 . F.4)
В F.4) индекс / означает, что элементы матриц {$ и г\* вычисляются
для точек конструкции, в которые помещается система координат
О х у г . При отсутствии смещения ЛА как твердого тела относительно
осей Охуг матрица (^ будет обратимой, и тогда из F.4) получим
(иЧг. F.5)
Зная F.5), найдем
Эта зависимость позволяет по кинематическим параметрам упругих пе-
перемещений Я! определить деформацию точек поверхности ЛА относи-
относительно системы координат Охуг.
Вектор упругих перемещений точек поверхности самолета на стоянке
КСТ1- можно вычислить, предварительно определив вектор обобщенных
170
координат я1ст по выражению F.3) и подставив его значение в F.6); в
результате получим
4
-*а(йГй]я1сг
Упругие перемещения точек аппарата относительно осей будут
F.7)
При необходимости из F.5) и F.7) можно найти абсолютные перемеще-
перемещения относительно стапельной формы самолета.
В установившемся полете упругий ЛА подвергается воздействию ста-
стационарной аэродинамической нагрузки Ар. Так как по отношению к са-
самолету она является внешней, то для определения вектора статических
перемещений точек поверхности аппарата воспользуемся соотношениями
F.2). Заменяя в них реакции опор Р^ внешней нагрузкой Ар, имеем
^ (т + тг) § = Рд, М*П* ^^ = -Г*^тг§+Р!. F.8)
Обобщенные аэродинамические силы, вызванные соответственно
движением ЛА как жесткого тела и деформированием его конструкции,
равны
F.9)
F.10)
Используя F.7) и F.10), найдем перемещения этих точек в устано-
установившемся полете относительно их положения на земле по формуле
F.11)
Соотношения F.11) позволяют решать и обратную задачу: путем под-
подбора массово-инерционных и жесткостных характеристик конструкции
найти такую форму самолета на стоянке, которая при заданном режиме
полета и загрузке была бы
оптимальной.
С помощью приведенных
соотношений изучались ста-
статические деформации на зем-
земле и в полете самолетов Ту-
134 и Ил-76 с различным
прикреплением стоек шасси к
крылу и к фюзеляжу соответ-
соответственно. На рис. 6.14 а пока-
показаны изменения осредненных
вертикальных перемещений
иу точек оси жесткости и
углов закручивания сечений
в крыла самолета Ту-134
с
-0,5
-1,0
0
1
>
град
0,5
у
1,0 *к
1 ^
\
0,3
.0,5 1,0 7
•кр
град
вдоль размаха (относительная
Рис. 6.14. Изменение статических деформации
вдоль размаха крыла самолетов Ту-134 (а) и Ил-
76 (б) на земле G) и в полете B)
171
координата гкр). Аналогичные данные для самолета Ил-76 представлен^
на рис. 6.14 б. Кривые 1 соответствуют деформациям аппаратов на земле|
и
о,з
0,2
0,1
0
а 2 — в полете на высоте Н = 5000 м с
Маха М = 0,5. Видно, что различие в крепле-
креплении стоек шасси самолетов (см. табл. 6.1)
качественно изменяет распределение упругщ
перемещений вдоль размаха их крыльев нг
земле, а в полете же можно отметить лишь
°'5 1>0 *кр количественные расхождения, обусловлен-
Рис. 6.15. Изменение верти- ™е Розницей геометрических размеров аппа,
кальных упругих перемеще- Ратов-
ний иу точек оси жесткости Среди факторов, определяющих режим \
крыла самолета Ту-134 в полета ЛА, наиболее существенна вертикаль-
зависимости от перегрузки ная перегрузка пу. На рис. 6.15 показаны
пу A — пу = 1; 2 — пу = 2)
у у у значения упругих перемещении иу вдоль
размаха крыла самолета Ту-134 при перегрузке пу = 1 (кривая 1) и пу = 2
B). Увеличение перегрузки в два раза приводит примерно к такому же
увеличению перемещений.
§ 6.3. Влияние грузов на аэроупругие характеристики самолета
На современных самолетах значительно увеличилось количество и
разнообразие перевозимых грузов, для транспортировки которых исполь-
используются различные способы их размещения: внутрифюзеляжный, кон-
фортный и внешний. Большое число вариантов, особенно внешних под-
подвесок грузов, имеющих разные инерционно-массовые, геометрические и
аэродинамические параметры, вызывает изменение динамических (частот
и форм собственных колебаний, обобщенных масс) и аэродинамических
характеристик самолета-носителя. При этом аэродинамические характе-
характеристики самолета меняются, во-первых, из-за образования дополнитель-
дополнительных аэродинамических сил на самих подвесках, во-вторых, вследствие
аэродинамической интерференции между частями системы «ЛА + пи-
пилон + подвеска» и, в-третьих, благодаря изменению динамических
свойств аппарата за счет выработки топлива, сброса груза и т. д.
Заметим, что число расчетных конфигураций современных маневрен-
маневренных самолетов за последнее время резко возросло (до нескольких сотен).
Значительно увеличился типаж грузов, размещаемых на внешних узлах
подвески. Естественно, возникают трудности в формировании унифици-
унифицированных структурных ММ функционирования таких ЛА в полете, воз-
возрастают масштабы дорогостоящих трубных и летных испытаний. Приме-
Применение же метода заданных форм на базе собственных функций позволяет
провести предварительное эффективное исследование аэроупругих ха-
характеристик ЛА с различными вариантами его загрузки, в том числе при
наличии перемещающихся и отделяющихся грузов, по единой методике.
На основе этого метода путем простого пересчета, исходя из базовых
динамических характеристик аппарата, определяются собственные фор-
формы и частоты, а также весь набор линейных аэродинамических и аэроуп-
172
ругих характеристик самолета при изменении упругих параметров креп-
крепления грузов и мест их расположения. Все это существенно расширяет
возможности математического моделирования на ЭВМ процессов функ-
функционирования ЛА в реальных условиях полета.
6.3.1. Метод базовых форм. Пусть для одного из вариантов «базо-
«базовой» загрузки известны собственные характеристики самолета — формы
^0 , ?Г, частоты П*, обобщенные массы М*. При изменении загрузки
получим новые значения этих величин, которые обозначим через ^о> ^1*»
П*, М^. Представим матрично-векторное уравнение линейных колеба-
колебаний системы с упруго прикрепленными грузами в виде
тК + КК = К. F.12)
Здесь в общем случае используются блочные матрицы
Ш II 0 тг|' ""I -кг кг I'
где величины с индексом «г» описывают грузы, а остальные — ЛА «ба-
«базового» варианта загрузки. Решение уравнения F.12) в соответствии с
методом собственных форм представим в виде
К = ^оЯо "*" ^1^1 • F.13)
В F.13) параметры смещений ЛА как твердого тела ^^ и упругих пере-
перемещений точек его конструкции с\1 соответствуют заданному варианту
загрузки. Уравнения для определения этих величин с учетом F.13) при-
принимают вид
(Мо+Моо)яо=Ро+РОо, мДй+П^^Р!. F.14)
Здесь матрицы коэффициентов и векторы внешних сил вычисляются по
формулам
= ^0
В методе базовых форм разложение искомого вектора перемещений
К ведется не по собственным формам ЛА с текущей загрузкой F.13), а
по базовым формам, описывающим собственные формы аппарата с «ба-
«базовым» вариантом загрузки, т. е.
Параметры <з^ и ц* определяются из решения уравнений
F.16)
Чо = Ро + Роо " моо4о - м^
в которых
Мо = 10 т10 , Моо = г0 тг10 , М01 = 1Х ттц ,
173
л
Л"*
х = ^ тщ[1 , М10 = ^ тгГ0 , Мп = ^ ТтгГ1 ,
=Г0 К, Гоо-^О Кг> Г1 =11 К, М^Ц =
Г0
При необходимости в уравнения F.14) и F.16) могут быть введены1
демпфирующие силы.
Установим связь между характеристиками базовой упругой системы и*
системы с заданным вариантом загрузки. Так как любая совокупность
собственных функций обладает свойством полноты, то при удержании
всех элементов в разложениях F.13) и F.15) будем иметь
При этом формы движения ЛА как жесткого тела при любых вариантах
загрузки не меняются, т. е. ^0 = ^о •
С учетом этого из последнего соотношения находим
ЫЧо -Чо) = **Ч* -*1Ч1 • F.17)
Далее получаем
мЧ* F18)
Здесь учтено, что Мо = Мо, МОо = Моо; в силу ортогональности форм
Го и ^ относительно матрицы масс (т + тг) имеем ^(т + Шр)^ =0.
Исключая из F.17) с помощью выражения F.18) параметры движения
ЛА как твердого тела, устанавливаем
. F.19)
Преобразуем второе уравнение F.16) с помощью первого к виду
М?я?+К?я*=Р|Г. F.20)
В F.20) введены следующие матричные величины:
м? = м? + м*, - М1О(мо+м^Гмо!, к?=кфГ2,
РГ = Ра* - М1о(м^ + М;оГ(Ро + Рад).
Если для динамически меняющейся системы, описываемой уравнением
F.20), определить ее собственные формы В, то его решение можно
представить следующим образом:
Ч?=ВЧ1. F.21)
С учетом F.21) уравнение F.20) преобразуется к виду
. F.22)
Обобщенные массы М^ и частоты Г2] представляются диагональными
матрицами
Й! = втм*в, а\ = (м^в^в = Ц^в^п^в, F.23)
174
а обобщенные силы Р^ в виде
Р^В7!?. F.24)
Зависимости F.22)-F.24) связывают между собой базовые характери-
характеристики упругого аппарата ^, Мх, Рх с соответствующими его характе-
характеристиками &1, М^, Р* различных вариантов загрузки, причем степень
приближения последних к «точным» значениям зависит от числа удер-
удерживаемых собственных функций.
Для пересчета собственных форм колебаний с учетом F.19) и F.21)
найдем
п-к-1
F.25)
6.3.2. Некоторые результаты исследований по методу базовых
форм. Приведем динамические характеристики гипотетического самоле-
самолета с грузами на концах крыла (рис. 6.16 а), найденные путем пересчета
через собственные функции самолета без груза, принятыми в качестве
базовых.
Масса каждого груза
располагалась на оси жест-
жесткости крыла и составила
тг = 0,4М0, где Мо —
масса самолета без груза.
На рис. 6.16 а, б показаны
изменения изгибных коле-
-2
-3
б
/
Лкр
0
—+~
Акр
,5
^
и/
Г"
баний крыла соответствен- -0,5
но по первой и второй соб- Рис# 6 16 к определению первой (а) и второй (б)
ственным формам; сплош- собственных форм изгибных колебаний крыла
ные линии — собственные гипотетического ЛА с грузами путем пересчета
формы, вычисленные «точ- чеРез его собственные формы в отсутствие груза
но» согласно балочной схематизации самолета соответственно без грузов
(Лкр'/2кр) и с грузами (/1кр,/2
)> штриховая линия — пересчет с
шести; расчеты
кр'/2кр) и с грузами (/1кр,/2кр
удержанием трех базовых форм и штрихпунктирная
выполнялись по формулам F.23), F.25).
Отсюда следует, что, во-первых, наличие дополнительного груза, в
особенности при размещении его на конце крыла, приводит к существен-
существенному изменению динамических характеристик аппарата. Во-вторых, на-
начиная с Л^ = 6, данные, полученные на основе метода базовых собствен-
собственных форм, становятся близкими к «точным» значениям, вычисленным
непосредственно для выбранного варианта загрузки аппарата.
В табл. 6.2 приведены погрешности в определении собственных час-
частот пх (/ = 1,6) упругих колебаний ЛА на основе метода базовых форм с
применением формул F.23). При использовании в качестве базовых пер-
первых шести низших собственных форм и частот колебаний погрешность
не превышает 4 %. На рис. 6.17 и в табл. 6.3 помещены результаты ис-
исследований динамических и обобщенных массовых характеристик гипо-
175
тетического самолета по четвертому тону колебаний для трех вариантов
загрузки. Масса каждого из дополнительных грузов составила
тг = 0,2М0. Здесь же наряду с базовой (четвертой) собственной формой
упругих колебаний конструкции ЛА (без дополнительного груза) нанесе-
нанесены пересчитанные формы колебаний для вариантов загрузки, указанных
цифрами 1,2, 3 в соответствии с нумерацией табл. 6.3.
Таблица 6.2
Число удерживаемых
базовых форм Мд
2
3
4
5
6
5
5
5
2
2
0,1
0,1
0,1
0,1
0,1
—
0,5
0,5
0,5
0,5
—
—
7
4
3
—
—
—
8
4
—
—
—
—
0,6
Параметр
&4, Гц
М4,кг м2
Базовый
135
39
Варианты грузов
1
132
139
2
130
75
Таблица
3
129
308
6.3
Из анализа данных рис. 6.17 следует, что изменение загрузки самолета
приводит к значительным различиям собственных форм /; и частот ^^
упругих колебаний аппарата, а также обобщенных масс М/. Это нашло
свое отражение в существенном изменении суммарных и обобщенных
аэродинамических характеристик деформируемого самолета. Общий вы-
вывод здесь сделать сложно, так как
каждый ЛА требует проведения спе-
специальных расчетов, но на тенденцию
изменения аэроупругих коэффициен-
коэффициентов в зависимости от вариантов рас-
расположения подвесок указать можно.
Анализ результатов вычислений по-
показывает, что места расположения
подвесок оказывают незначительное
влияние на аэродинамические харак-
характеристики с$° и с%° жесткого и
Рис. 6.17. Изменение четвертой собст-
собственной формы колебаний самолета в
зависимости от положения размещае-
размещаемых грузов
сильное на аэроупругие коэффициенты с{°, с
С1 •¦
3 ГЧ1
с?
де-
деформируемого самолета, так как последние напрямую зависят от измене-
изменения форм собственных колебаний его конструкции. Кроме того, для ЛА с
разветвленной внешней атрибуцией надо дополнительно учитывать ин-
интерференцию между подвеской и остальными частями ЛА.
В качестве обобщения необходимо сказать следующее. При проведе-
проведении расчетов динамических характеристик упругой конструкции ЛА с
176
грузом путем пересчета по методу базовых форм для обеспечения точно-
точности результатов в пределах 5-7 % необходимо удерживать на две-три
формы больше номера восстанавливаемой собственной формы.
§ 6.4. Реакция самолета на порывы
Изучение процессов нагружения, деформирования и движения само-
самолета при полете в неспокойной атмосфере является одной из основных
задач динамической аэроупругости. В летной практике зафиксированы
многочисленные случаи летных происшествий ЛА, обусловленные дей-
действием на них порывов ветра и турбулентной атмосферы, приводящих к
разрушению конструкции за счет перегрузки или выходу аппарата на
неустойчивые режимы движения, либо в результате усталостного разру-
разрушения конструкции. В ряде случаев из-за деформирования конструкции
ЛА могут возникать нарушения в нормальной работе различных систем и
оборудования, находящихся на его борту. При таком взаимодействии ЛА
с окружающей средой наиболее сильно могут проявиться эффекты, свя-
связанные с нестационарностью обтекания аппарата.
Существуют два способа математического описания неспокойной ат-
атмосферы: в форме дискретных порывов и непрерывной турбулентности
[89,149].
Имеются различные формы приближенного представления верти-
вертикальных порывов ветра (рис. 6.18). Наиболее употребительными в расче-
расчетах из них являются: порыв неограниченной
протяженности (а), порыв трапециевидной
формы с варьируемой протяженностью (б),
треугольный порыв (в), порыв типа «ротора»
(г) и др.
Форма порыва характеризуется макси-
максимальной скоростью М'шах и градиентом ее
нарастания. Градиент порыва при моделиро-
моделировании задается либо постоянным на выбран-
1
а 1
к
У/, б 1
А
Рис. 6.18. Формы порывов
А
и
ном временном интервале (рис. 6.19 а), либо изменяющимся по опреде-
определенному закону (рис. 6.19 б). Для порыва с постоянным градиентом вер-
вертикальная скорость Щ = И^х 1/к ,
где / — текущая координата, к —
длина рассматриваемого градиент-
градиентного участка. Такая модель широко
используется при расчетной оценке
нагрузок для неманевренных само-
самолетов от воздействия вертикальных
порывов со скоростью, близкой к
*-.
б
Рис. 6.19. Типы градиентов порыва: а —
постоянный; б — меняющийся по закону
«единица минус косинус»
максимально возможной 1^^ =10-5-12 м/с [284].
Распространение также получило представление порыва в форме не-
нелинейного закона изменения его скорости под названием «единица минус
косинус»: Щ = 0,5 И^ [1 - со8(тг / /Ь)] при 0 < / < 2/г, Щ = 0 при
0>1>2к.
177
Длина участка нарастания порыва к обычно выбирается из условия,
что ветер подстраивается к каждой из собственных частот самолета
(включая движение его как твердого тела) и систем управления [184] ли-
либо задается к, равной (8-12,5)^ [149].
Помимо вертикальных порывов на самолет могут действовать гради-
градиентные порывы в продольном и боковом направлениях. Характер нагру-
жения самолета продольными порывами менее интенсивен по сравнению
с вертикальными порывами. Действие же боковых порывов вызывает в
основном значительное нагружение вертикального оперения. Структура
бокового порыва не отличается от вертикального, поэтому моделирова-
моделирование обоих видов порывов осуществляется по одной и той же методике.
При «дискретном» представлении атмосферы предполагается, что
порывы имеют одинаковую форму и располагаются вдоль траектории на
значительном расстоянии друг от друга; при этом форма порыва задается.
При описании непрерывной турбулентности пульсации скорости вет-
ветра рассматриваются как непрерывный случайный процесс. Интенсив-
Интенсивность турбулентности определяется среднеквадратичной величиной
пульсации скорости ветра.
Создание же унифицированного пакета прикладных программ на базе
линейных интегродифференциальных соотношений аэроупругости и со-
современных численных методов аэродинамики позволяет детально изу-
изучать поведение ЛА как под воздействием дискретных одно- и двухмер-
двухмерных порывов, подвижных порывов, ударных волн, так и непрерывной
турбулентной атмосферы.
6.4.1. Действие порыва в рамках одномерного приближения. Счи-
Считается, что наиболее интенсивное воздействие на самолет с точки зрения
прочности его конструкции оказывают порывы, вызванные конвекцией
слоев атмосферы, грозовые и восходящие порывы, обусловленные гори-
гористым рельефом местности. Интенсивность последних в грозовом фронте
может достигать 20-50 м/с.
При рассмотрении воздействия на ЛА одномерного порыва ветра
принимается, что его скорости изменяются вдоль одного фиксированного
в пространстве направления, например, вдоль траектории установивше-
установившегося режима полета самолета. Предполагается, что порыв резко ограни-
ограничен в пространстве. При этом граница, отделяющая возмущенную поры-
порывом область от невозмущенной, принимается плоской и может быть не-
неподвижной и подвижной в пространстве. Оба эти случая имеют важное
практическое приложение.
1ЩЩ При изучении воздействия на ЛА
\цЩ 7ц0 Щ%^ неподвижного порыва возможны две
а б в ^ схемы: мгновенный охват порывом
аппарата в целом (рис. 6.20 а) и посте-
Рис. 6.20. Виды воздействия на ЛА пенный вход в него (рис. 6.20 б). При
^^^^~^^ мгновенном охвате ЛА порывом все
порыв типа слабой ударной волны точки его поверхности одновременно
приобретают одинаковый дополни-
дополнительный угол атаки. При постепенном входе ЛА в порыв необходимо
учитывать его относительное перемещение и границы порыва и индуци-
178
рованные дополнительные возмущенные скорости на части ЛА, охвачен-
охваченной порывом.
Случай подвижного порыва связывают с воздействием на ЛА слабой
ударной волны (рис. 6.20 в). При этом допускается, что граница порыва
(фронт волны) движется со скоростью \Уф
с проекциями \Уфх , УУфу , ДОфг. на оси свя-
связанной с аппаратом системы координат
Охуг, равной или больше скорости звука
(рис. 6.21). Направление подходящего
фронта волны к ЛА может быть произволь-
произвольным и характеризоваться углами (р и у/ .
Угол ср располагается между плоскостью
0x1 связанной системы координат и на-
направлением вектора скорости \Уф фронта
волны, угол у/ — между отрицательным Рис. 6.21. К воздействию на ЛА
подвижного порыва с произ-
направлением вектора скорости \Уф на вольного направления
плоскость Охт, и осью Ох. Положительные значения угла
(р @ < (р < л/2) соответствуют подходам фронта волны к самолету с
верхней полусферы, отрицательные (-л/2<ср<0) — с нижней полу-
полусферы. Угол у/ меняется в пределах 0 < у/ < л при подходе фронта к ап-
аппарату справа и в пределах л < у/ < 2л при подходе слева. Проекции век-
вектора скорости фронта волны \Уф на оси связанной системы координат
Охут. ЛА выражаются через углы (р и у/ следующим образом:
В линейных задачах аэроупругости на скорость потока Щу за фрон-
фронтом ударной волны накладываются ограничения. Это связано с тем, что
скорость потока И^у должна вызывать малые дополнительные углы ата-
и/+ ч у иг- ки точек, принадлежащих
^ ч\ /,. % дд Этим усл(),
малых углах под-
подхода ударной волны могут
удовлетворять и значитель-
значительные по модулю скорости
потока за ее фронтом.
Несимметрично Симметрично Антисимметрично Так как задача возму-
возмущенного движения упругого
ЛА разделяется на продоль-
продольное (см. C.32), C.36), E.9)) и
боковое (см. C.33), C.37), E.10)) движения, то воздействие произвольно-
произвольного подвижного порыва с учетом симметрии самолета можно разделить на
две составляющие: симметричную и антисимметричную (рис. 6.22),
представив их в виде:
179
у ш+ ч у ш- ки точек>
V XV поверхности
'х/ "^чг4 б 'ч/ виям при ма
_|_
Рис.6. 22. К моделированию произвольного внеш-
внешнего порыва
1Уф (х,у,т) = [\Уф(х,у,т) + ДОф(х,у-г)Ш, '
При этом легко показать, что составляющие У/2 и ТУф" обладают сле?|
дующими свойствами симметрии и антисимметрии:
Щ (х, У* I) = -Щ (X, у-1) .
Данный подход позволяет при решении задач линейной аэродинамик!|
о воздействии на ЛА плоского порыва ветра произвольной формы, щ]
пользуя симметрию аппарата, ограничиться его половиной. Это дает вещ!
можность существенно сократить временные затраты при расчете аэрфг]
динамических характеристик ЛА.
6.4.2. Действие на самолет плоских порывов. Задача динамики в
мущенного движения, нагружения и деформирования ЛА при воздейстй
вии на него различных видов плоских порывов сводится к решению сй$
темы интегродифференциальных уравнений E.9), E.10) — задачи Кошйу
Для этого требуется знание начальных условий задачи — парам»
характеризующих положение и конфигурацию аппарата в пространс
так называемых балансировочных параметров движения. Начальные
ловия будем определять, исходя из установившегося движения аппарат^]
путем решения статической задачи аэроупругости и полагая равнЫ^й!|
нулю скорости и ускорения обобщенных координат в уравнениях E.14):; ^
Ш = 41 = Ш = 41 = 0 ; к = 1,5 , / = ЪЫд .
Тогда будем иметь
для продольного движения (
^
тг =0, /л^со^д^ =с/+
для бокового движения
= 0, тх=ту =0, /г/"^^/" = с\ , Г =19
сг ^
где р = р/ро, с7 =
В этих уравнениях аэродинамические коэффициенты в соответствии с
гипотезой квазистационарности будут равны
р.н Т 2-л г
180
тх =
•у °эл + ту °р.н
?,*>
1=1
где с^ , тг — аэродинамические коэффициенты подъемной силы и
момента при нулевом угле атаки самолета.
Для решения данной задачи задаются параметры установившегося
движения самолета: скорость V и высота Н полета, углы тангажа в и
крена у. Из решения уравнений находятся параметры его балансировки:
углы атаки а и скольжения /3 , углы отклонений рулей высоты <5р в и
направления <5р н, элерона <5эл, величины обобщенных параметров упру-
упругих перемещений: симметричных ^^{^+ =1,^ ) и антисимметричных
сог
-0,4
^/~(/~ =1,Л^~), по которым уточняются аэродинамические характери-
характеристики ЛА при установившемся полете.
1. Действие на самолет различных
видов дискретных порывов. Приведем
здесь некоторые результаты решения
подобной задачи на примере самолета
типа Ил-76 [249]. На рис. 6.23 приведе-
приведены зависимости относительной угловой
скорости ыг тангажа самолета от вре-
времени г при воздействии различных ви- .0,8
дов дискретных порывов; 1 — мгновен-
мгновенный охват порывом, 2 — постепенный
вход в порыв, 3 — воздействие слабой
ударной волны при подходе к объекту ~1>2
сзади снизу симметрично; М = 0,5,
Н = 1000 м. На рис. 6.24 для этих же
порывов даны кривые гк @, характер*- Рис. 6.23. Изменение относительной
к угловой скорости сог тангажа само-
зующие изменение во времени I отно- лета шт во времени , при дейст.
сительных упругих перемещений гк вии различных дискретных порывов
181
конца крыла; они отнесены к максимальным по модулю значениям пере-
перемещений конца крыла при мгновенном охвате ЛА порывом. Из рисунка
видно, что в зависимости от вида дейст-
действующего порыва существенно меняются
как аэродинамические, так и аэроупру-
аэроупругие характеристики самолета [81].
Интенсивные дискретные порывы
наиболее часто встречаются при полете
самолета на относительно малых высо-
высотах над горной местностью. Над нагре-
нагретыми крутыми склонами гор возника-
возникают восходящие потоки со скоростями
8-10 м/с, образуя так называемые тер-
термические порывы. При обтекании воз-
воздушным потоком горных хребтов обра-
образуются порывы типа роторов
Рис. 6.24. Изменение относительно- (см. рис. 6.18 г). Дискретные порывы с
го перемещения гк конца крыла профилем скоростей, близким к тре-
самолета Ил-76 во времени ( при угольному, появляются также при взаи-
воздействии различных дискретных модействии ветра с невысокими возвы-
порывов шенностями. Учет этих воздействий
является важным фактором обеспечения безопасности полетов ЛА над
горами. На рис. 6.25 приведен пример расчета воздействия на самолет
дискретного порыва типа ротора. Показано изменение максимальных
упругих перемещений гктах конца крыла в зави-
зависимости от радиуса К ротора. Направление дви-
движения самолета указано на рисунке стрелкой.
Здесь следует отметить наличие критических раз-
размеров ротора 10 < К < 100 м, для которых упругие
перемещения крыла являются наибольшими.
Удержание в структурной ММЛА сравнитель-
сравнительно большого числа низших тонов упругих колеба-
колебаний его конструкции позволяет достоверно опре-
определять перегрузки в различных точках аппарата.
На рис. 6.26 приведены графики, характеризую-
характеризующие изменение перегрузки пу во времени I в
различных точках по размаху крыла и длине фю-
фюзеляжа самолета Ан-124 при входе его в порыв.
Как видим, перегрузка на конце крыла почти в три раза превышает пере-
перегрузку в центре масс ЛА. Это обстоятельство имеет важное значение при
расчете и выборе места расположения различных подвесок, узлов крепления
рулей, проводки управления, усталостных повреждений и т. д.
Далее надо отметить, что на прочность некоторых элементов конст-
конструкции, особенно большегрузных и сверхлегких ЛА, существенное воз-
воздействие оказывают не вертикальные, а боковые порывы ветра. Они при-
приводят к появлению значительных изгибающих моментов и перерезываю-
перерезывающих сил в вертикальном оперении, крутящих моментов в фюзеляже. На
рис. 6.27 показано, как меняются во времени I изгибающие моменты в
182
100 200 д,м
Рис. 6.25. Изменение амп-
амплитудного значения пе-
перемещений гктах конца
крыла самолета в зави-
зависимости от радиуса 7?
действующего на него
дискретного порыва ти-
типа ротора
корневой части соответственно крыла
^изг и крутящий момент фюзеляжа
Ан-124 бокового порыва,
форма которого изображена
на этом же рисунке. Как ви-
видим, несмотря на кратковре-
кратковременность действия порыва, в
силу большой инерщюнно-
сти конструкции процесс ее
нагружения сильно растянут
во времени, особенно крыла
и фюзеляжа. Что касается
хвостового оперения, то его
нагруженность, несмотря на
быстрое затухание, по на-
нарастанию амплитуды М^р
приближается к М^г кры-
крыла.
2. Воздействие на упру-
упругий самолет подвижных
порывов с произвольного
направления [246а]. Фронт
порыва типа слабой ударной
волны задается плоским,
распространяющимся со
звуковой скоростью, а мест-
местные углы атаки от его дейст-
действия на аппарат считаются
малыми. Приведем данные
г и вертикального оперения
при воздействии на самолет
о
г, с
Рис. 6.26. Изменение перегрузки пу в различных
точках конструкции самолета Ан-124 при входе
его в порыв
таких расчетов для транспортного самолета Ан-124, находящегося в
крейсерском режиме полета на высоте Н = 8 км при числе Маха М = 0,6, с
учетом нестационар-
нестационарности обтекания. На
рис. 6.28 помещены
переходные аэроди-
Л/кфр,т-м
1000-
намические
функции
(т) от порыва сту-
пенчатой формы, на-
набегающего на само-
самолет с различных на-
направлений, задавае-
задаваемых углами (р и у/
Рис. 6.27. Изменение изгибающих моментов крыла М^Г, (см. рис. 6.21). Функ-
вертикального оперения М°3? и крутящего момента фю- ции Н (т) получены
зеляжа М*, во времени ( самолета Ан-124 при воздейст- ПрИ следующих углах
вии на него бокового порыва ветра подхода порыва к са-
183
молету: кривые / — Я (т), 3 —
су
при ср = -45°, у/ = 90°; кривые 2 —
Яд (г)
-Я* (т),6-ЯА(т),
8 —
при (р = 45°, у/' = 90°. Из анализа этих функций видно,
что переходные процессы при действии порывов с идентичных углов
-3
Рис. 6.28. Переходные функции самолета Ан-124 для аэродинамических коэффициен-
коэффициентов Н* (т) при действии ступенчатого порыва А с произвольного направления
подхода сверху и снизу к аппарату близки между собой. Поэтому самолет
может рассматриваться как симметричный относительно своей горизон-
горизонтальной плоскости Охг при таком воздействии на него ударных волн.
Это позволяет расчет воздействия ударных волн на ЛА ограничить под-
подходом их с одной полусферы — верхней или нижней.
С помощью уравнений E.9) и E.10) и предварительно найденных не-
нестационарных аэродинамических функций Н^ (т) определялась динами-
динамическая реакция упругого самолета
Ан-124 на действие ступенчатых
порывов с разных направлений.
Данные рис. 6.29 отражают харак-
характер изменения переходной функции
Я#(т) для угла атаки а как ре-
результат действия на ЛА ступенча-
ступенчатых порывов с направлений
Ф = -15° , -30°, -60° и -75°
^л гт л- ПРИ подходе к аппарату спереди
Рис. 6.29. Переходные функции самолета
Ан-124 для угла атаки Я^(т) придейст- (^=0°) (сплошные кривые соот-
вии ступенчатого порыва А с произволь- ветственно 7, 2, 3, 4) и сзади
ногонаправления (у/ = 180<>} (штриховь1е линии _ 5,
б, 7, 8). Как видим, имеет место некоторое различие между соответст-
соответствующими переходными функциями в промежутке времени 0,5 < I < 2 с
184
при подходе порыва спереди к ЛА и сзади. Это объясняется различием
времени контакта самолета с порывом в том и другом случае; оно больше
для порыва, догоняющего ЛА.
Для оценки динамической реак-
реакции и прочностных характеристик
ЛА при возмущенном движении от
воздействия на него порывов из все-
всего переходного процесса наиболее
важными являются максимальные
забросы параметров (величины их
амплитуд), характеризующих его
кинематику и конфигурацию в про-
пространстве. Так, например, на
рис. 6.30, представлена номограмма
максимальных забросов (величин
амплитуд переходных функций
Я^(т) — см. рис. 6.29) прираще-
приращений углов атаки Аа ЛА в зависи-
зависимости от угла подхода ср ступенча-
ступенчатого порыва. На номограмме каж-
-а, град
-90°
-75°
Рис. 6.30. Номограмма максимальных
амплитуд переходных функций для при-
приращения углов атаки Да в зависимости
от угла подхода (р симметричного сту-
ступенчатого порыва
дый луч (штриховая линия) соответствует определенному углу подхода
ср симметричного ступенчатого порыва к аппарату (при ^ = 0°, 180° ).
На этих лучах отложены расчетные значения
максимальных забросов приращений углов
атаки Аа переходных функций Н^ (т).
Сплошной линией соединены точки макси-
максимальных забросов Аа((р) при набегании по-
порыва на самолет спереди, полученные в соот-
соответствии с гипотезой квазистационарности,
штриховой — при подходе порыва к самолету
сзади — догоняющий порыв. Как видим, при
учете аэродинамических сил по гипотезе ква-
квазистационарности различие между амплитуд-
амплитудными значениями приращений углов атаки
Аа для обоих случаев подхода порыва к ЛА
(спереди и сзади) незначительно. Аналогичная
номограмма показана на рис. 6.31 для величи-
Рис. 6.31. Номограмма ам-
амплитудных значений пе-
перемещений гк концевой
точки крыла при боковом
воздействии ступенчатого
порыва на ЛА
ны упругого приращения конца крыла гк при
антисимметричном (боковом) воздействии
ступенчатого порыва на ЛА; вектор скорости
перемещающегося фронта порыва ТУф нахо-
находится в плоскости 0x1.
При помощи подобных номограмм можно наглядно представить
влияние различных факторов на параметры и конфигурацию возмущен-
возмущенного движения упругого ЛА, а также значительно упростить изучение его
185
поведения при действии порывов ветра более сложной плоской структут
ры. Переход от плоских ступенчатых порывов к плоским порывам слож-
сложного профиля по-прежнему может быть осуществлен с помощью инте-
интеграла свертки
F.26)
о
где Я
V
\
\
2
\
>
г, с
40
30
20
10
0
-10
— набор динамических характеристик ЛА, характеризующих
изменение его параметров движения и конфигурации в пространстве, как
реакцию на действие ступенчатого плоского порыва с /х -го направления,
(?д (т) — изменение динамических характеристик ЛА по безразмерно-
безразмерному времени т при действии плоского, порыва сложного профиля.
ш ^/г С помощью? соотношения F.26) изучалась ре-
реакция самолета? на действие реальных порывов
(рис. 6.32) со сложной зависимостью V/ за фрон-
фронтом волны от времени г, распространяющихся в
пространстве со звуковой скоростью. По резуль-
результатам вычислений, как в случае действия ступен-
ступенчатого порыва, построены номограммы, характе-
характеризующие изменение амплитудных значений ди-
Рис. 6.32. К изучению намичеежих параметров ЛА в зависимости от на-
реакцииЛА на действие правления действия* порыва. На рис. 6.33 поме-
веаяьного поныв а
г * щена номограмма изменения упругого переме-
перемещения ± г~ конца крыла, самолета при ан-
антисимметричном воздействии на. него по-
порыва ветра; штриховая линия соединяет
точки амшштудных значений, полученных
с учетом нестационарности! обтекания ЛА,
сплошная — аэродинамическая нагрузка*
определяется по гипотезе квазистационар-
квазистационарности. Отсюда видно существенное разли-
различие в амплитудах отклонений концевой
точки крыла, найденных с учетом неста-
нестационарности обтекания ЛА и неодновре-
неодновременности охвата его порывом (эффект за-
запаздывания) и приближенно по гипотезе
квазистационарности. Следует отметить,
что нестационарность обтекания, не, на все
динамические характеристики ЛА оказыва- Рис 633 номограмма ампли-
ет сильное влияние. Анализ результатов тудных значений перемещений
вычислений показывает, что ошибка по не /^ конца крыла при воздействии
учету нестационарности обтекания по па- на ЛА антисимметричного поры-
раметрам г$ за исключением параметра ваветРа
порыва Ар не превышает 3-5 %. Основной вклад в различие амплитуд-
амплитудных значений параметров, характеризующих кинематику движения и
186
+ гк ,м
деформированное состояние ЛА в полете, вносит его неодновременный
охват порывом. Так, при продольном движении ЛА в случае воздействия
на него симметричного порыва этот эффект слабо сказывается на прира-
приращении угла атаки а и оказывает сильное влияние на изменение парамет-
параметров (дг, в и перемещения концевой точки крыла г*. При антисиммет-
антисимметричном (боковом) воздействии порыва на ЛА эффект неодновременности
охвата его порывом оказывает слабое влияние на изменение параметров
/3 , соу и сильное — на у, сох и перемещение концевой точки крыла г~.
Упругость конструкции заметно влияет на изменение параметров со1,
ох , у, слабо — на иг и почти не влияет на а, пу , /3 , соу. Причем в
это влияние существенный вклад вносят симметричные упругие тона
колебаний //+. На рис. 634 а
показаны номограммы изме-
изменения максимальных значе-
значений амплитуд параметров ох
и у в зависимости от угла
подхода волны у/; сплошная
линия — расчет жесткого са-
самолета, штриховая — с уче- +сох, град/с
том четырех антисимметрич-
антисимметричных тонов упругих колеба- Рис. 634. Номограммы изменения максималь-
«, у __ п < ных значений амплитуд параметров сох (а) и /
"* в зависимости от угла подхода у/ ударной
— жесткий самолет,
. штриховая -
строенных номограмм (см.
рис. 6.31 и 6.33). Эти номограммы подобны, несмотря на то, что они по-
получены соответственно при действии ступенчатого порыва произвольной
формы. Отсюда ясно, что по амплитудной номограмме на действие сту-
ступенчатого порыва (см. рис. 631), используя соотношение F.26), можно
найти амплитудное значение параметра по одному из выбранному на-
направлению действия плоского порыва произвольной формы. Затем опре-
определить коэффициент усиления Кд как отношение амплитуд, отвечаю-
отвечающих действию порывов соответственно произвольной формы г~ и сту-
ступенчатой гс~ . В итоге окончательная номограмма при действии на ЛА
произвольного порыва может быть построена путем умножения на Кд
амплитудных значений номограммы для ступенчатого порыва остальных
направлений. Штрихпунктирной линией на рис. 633, как раз, и показана
номограмма, построенная таким образом, коэффициент усиления оказал-
оказался равным Кд = 1,18; ошибка при пересчете не превысила 5 %,
Предлагаемая упрощенная методика построения амплитудных номо-
номограмм позволяет оперативно с достаточной для практики точностью осу-
187
внимание на одну
р у
характерную особенность по- волны; с™ошнм Г
г г 1 штриховая — упругий
(
ществлять исследования по оценке динамической реакции и прочности
самолета на воздействие воздушных порывов.
6.4.3. Воздействие порыва в рамках двухмерного приближения.
Допущение об одномерности порывов является приближенным (см.
п. 6.4.1). Оно может быть обоснованным для случаев, когда масштаб тур-
турбулентности велик по сравнению с размахом крыла самолета. Однако для
больших самолетов (Ил-76, Ан-124, Ан-225) при полете на малых высо-
высотах такое упрощение может привести к значительным ошибкам при изу-
изучении процессов их нагружения,
деформирования и динамики дви-
движения [383]. В этих случаях тре-
требуется учитывать изменения по-
полей скоростей порывов не только
в направлении полета самолета, но
и вдоль размаха крыла (для верти-
вертикальных порывов) и по его высоте
(для боковых порывов), т. е. необ-
необходимо рассматривать воздейст-
Рис. 6.35. Временная зависимость прира- вие ш аппарат двухмерных поры-
щения перегрузки Апу в центре масс са- вов д0 последнего времени учет
молета Як-42 при действии различных неравномерности скоростей поры-
порывов вов по размаху КрЬ1ла носил оце-
оценочный характер [149]. Наличие же полных структурных ММЛА
(см. гл. 4) позволяет исследовать эти эффекты «точно».
Методика расчета воздействия двухмерных порывов на упругий ЛА
подробно изложена в [249]; на ней останавливаться не будем. Здесь при-
приведем лишь некоторые результаты вычислений.
Данные рисунков 6.35-6.37 иллюстрируют динамическую реакцию само-
самолета Як-42 на порывы с различными законами изменения скоростей
вдоль размаха крыла: 1 — постоянного по форме, 2 — по закону « со8 г »
и 3 — по закону «1 — соз г » при
средней скорости порыва
У/у ср = 4,9 м/с, Н = 1000 м и
М = 0,5.
На этих рисунках показаны
законы изменения во времени 0
г соответственно перегрузки в
центре масс самолета Апу и
-0,25
0,25
щ
ч' ч/
тптп
\ / \/
обобщенных параметров ^^ и
^5, характеризующих упругие
перемещения конца крыла по
первой и пятой формам. Как
видим, закон распределения
вертикальных скоростей двухмерных порывов вдоль размаха крыла ока-
оказывает существенное влияние на динамическую реакцию самолета. При
этом его влияние на изменение кинематических параметров ^ и д$ не-
0 0,5 1,0 1,5 Г, с
Рис. 6.36. Временная зависимость обобщенной
координаты ^x упругого перемещения конца
крыла самолета Як-42 при действии различных
порывов
188
одинаково. В приведенном примере распределение скоростей по закону
«со8г» вызывает увеличение амплитуд перегрузки в центре масс
аппарата и упругих перемещений по первой форме. Особенно заметное
-0,0015
-0,0030
-0,0045
Рис. 6.37. Временная зависимость обобщенной координаты ^5 упругого перемещения
конца крыла самолета Як-42 при действии различных порывов
влияние закона изменения скорости двухмерного порыва прослеживается
на данных рис. 6.37, отражающих изменение обобщенного параметра #5
во времени г по пятому тону симметричных собственных упругих коле-
колебаний (изгибная форма упругих колебаний хвостового оперения). Слабое
возбуждение пятой формы можно объяснить расположением оперения в
зоне малых скоростей порыва, меняющихся согласно закона «1 - соз г ».
6.4.4. Воздействие атмосферной турбулентности и спутного следа.
С полетом ЛА в турбулентной атмосфере связаны две группы задач: пря-
прямые и обратные. В первой группе задач изучается воздействие неспокой-
неспокойной внешней среды на аппарат, во второй — определяются характери-
характеристики турбулентной атмосферы, прежде всего поля скоростей.
В прямых задачах, когда исследуются передаточные функции от по-
порывов и определяются характеристики самолета, атмосферная турбу-
турбулентность считается известной. Обычно задаются изменения вертикаль-
вертикальной составляющей скорости ветра, рассматриваемой в виде характери-
характеристики случайного стационарного процесса с заданной корреляционной
функцией, зачастую описываемой моделью Драйдена [149]. При этом
выходные характеристики реакции самолета представляются также в
форме корреляционных функций. В прямых задачах расчет внешних воз-
возмущений осуществляется по формулам
т
сА'А/(т) + /сЛЧг)А/@) + //;
о
,, тг, с/ , сг, тх, Шу, с/
Все нестационарные составляющие переходных функций 1С ' (т) на-
находятся при постепенном входе ЛА в порыв. При решении обратных за-
189
I = X, у .
дач требуется по выходным характеристикам, используя структурную
ММ функционирования ЛА, определить возмущающие воздействия (ха-
(характеристики турбулентной атмосферы).
Обратимся к решению прямых задач. В общем случае воздействие на
ЛА атмосферной турбулентности носит несимметричный характер. В
линейной постановке задача аэроупругости пространственного возму-
возмущенного движения ЛА несколько упрощается из-за разложения движения
на два независимых: продольное и боковое. Таким же образом можно
поступить и с несимметричным порывом ветра, разделив его на симмет-
симметричную и антисимметричную составляющие. В силу линейности задачи
вертикальные и боковые порывы антисимметричной составляющей так-
также можно рассмотреть раздельно. Таким образом, используя уравнения
E.9) и E.10), можно описать движение упругого ЛА при полете в турбу-
турбулентной атмосфере, моделируемой порывами, не симметричными вдоль
размаха (см. рис. 6.35-6.37).
Данные рис. 6.38 иллюстрируют влияние упругости конструкции на
дискомфорт экипажа при полете гипотетического самолета в турбулент-
пу
0,02
0,01
0
м
25
50
Рис.6.38. Спектральная плотность приращения перегрузки 5п у D2) гипотетического
самолета при полете в турбулентной атмосфере
ной атмосфере. Приведены спектральные плотности приращения пере-
перегрузки 8„ у в центре масс и в кабине экипажа самолета при центровке,
Пу
близкой к крайней задней (Зсц = 30 % Ьсах, где Ьсях — средняя аэроди-
аэродинамическая хорда). В расчетах использовалась модель Драйдена со сред-
среднеквадратичным отклонением скорости порыва
= 1 м/с и масштабом
турбулентности 1^=150 м [149]; они вычислялись при М = 0,8,
Н = 500 м. Приращение перегрузки в кабине экипажа определялось по
формуле
, <*&1 *каб ,
Г"
ш
190
где Апушб, Апу —нормальная составляющая перегрузки соответствен-
соответственно в кабине и центре масс ЛА; ^^ — угловая скорость тангажа; хш$ —
расстояние от центра масс до кабины, # — ускорение свободного паде-
падения; /йсабО^каб'Укаб'^каб) — значение амплитуды 1-й формы упругих
колебаний в зоне кабины экипажа; ^^ — обобщенная координата сим-
симметричных упругих колебаний конструкции самолета. Анализ результа-
результатов рис. 6.38 показывает, что упругость конструкции рассмотренного
самолета оказывает сильное влияние на дискомфорт в кабине экипажа.
Среднеквадратичное отклонение приращения перегрузки в кабине (кри-
(кривая 7) превышает сп в центре масс B) на 25-30 %.
Важным практическим приложением методики расчета воздействия
на ЛА двухмерных порывов ветра является решение с ее помощью задачи
о попадании самолета в спутный след.
Наличие спутного следа за самолетом — существенный фактор,
влияющий на безопасность летящих за ним ЛА при полетах строем и в
районе аэродрома, при дозаправке самолета в воздухе и т. д. При этом
особенно опасными становятся полеты на малой и предельно малой вы-
высотах, на высотах, близких к статическому потолку, и т. д. Поэтому край-
крайне важно иметь методику для оценки поведения самолета, попавшего в
спутный след. Она включает две части. Первая из них служит для опре-
определения параметров спут-
спутного следа за впереди ле-
летящим ЛА, а вторая —
непосредственно для рас-
расчета реакции ЛА на его
воздействие.
Поле скоростей в спу-
спутном следе может быть
рассчитано независимо по
методикам [186, 22].
На рис. 6.39 показаны
характерные эпюры рас-
распределения вертикальной
составляющей У/у поля
возмущенных скоростей в
ближнем спутном следе за
гипотетическим самоле-
самолетом, удаленном от него
примерно на 2-3 км, для
трех сечений следа плос-
плоскостями, одна из которых
Рис. 6.39. Эпюры распределения вертикальной со-
составляющей У/у поля возмущенных скоростей в
спутном следе за ЛА при различном удалении от
эпицентра вихревых жгутов
содержит ось у = 0, а две другие оси сдвинуты по отношению к ней со-
соответственно на 12 и 24 м. При этом самолет совершает прямолинейный
горизонтальный полет при М = 0,75. Случай у = 0 соответствует прохо-
прохождению оси г через центры поперечных сечений вихревых жгутов (за-
191
штрихованные области на рисунке). Отсюда видно, что по мере удаления
от вихревых жгутов интенсивность вертикальной составляющей поля
возмущенных скоростей падает.
Рисунки 6.40 и 6.41 иллюстрируют законы изменения стационарных
значений коэффициентов моментных аэродинамических характеристик
соответственно тангажа тг и крена тх в зависимости от положения са-
-40
/
У
'у
-20
\
\ \
" \
1-0,4
1
•
ч.
•103
•/
о/
у
• 20
\г,м
ч
Рис. 6.40. Изменение коэффициента аэро- Рис. 6.41. Изменение коэффициента аэро-
аэродинамического момента тангажа тг в динамического момента крена тх в зави-
зависимости от положения ЛА по отно- симости от положения ЛА по отношению
шению к середине расстояния между к середине расстояния между вихревыми
вихревыми жгутами спутного следа жгутами спутного следа
молета относительно вихревых жгутов спутного следа; координата г
определяет положение строительной оси самолета Ох в спутном следе
по отношению к середине расстояния между вихревыми жгутами. Как
видим, коэффициенты т1 и тх сильно зависят от относительного рас-
расстояния по оси I между самолетом, образующим след, и самолетом, по-
попавшим в него. При этом максимальные по модулю значения достигают-
достигаются при различных значениях координаты г ; так, например, т1Шах соот-
соответствует случаю 1 = 0, тхтгх — случаю г-10 м. Функции тг{1) и
тх(т) на рис. 6.40 и 6.41 получены для жесткого самолета (штрихпунк-
тирная линия 2) и с учетом его статических деформаций (сплошная линия
1) для случая ;у = 0.
6.4.5. К оценке усталостной повреждаемости конструкции самоле-
самолета при полете в турбулентной атмосфере. Одним из важнейших момен-
моментов, связанных с полетом самолета в турбулентной атмосфере, является
оценка его остаточного прочностного ресурса. Доля выработки ресурса
обычно характеризуется величиной относительной повреждаемости
% = п1 N, где N — число циклов нагружения, выдерживаемых конструк-
конструкцией, п — число циклов, которому конструкция подвергается в течение
определенного промежутка времени. Условием разрушения является
Для оценки суммарной повреждаемости конструкции ^ от всего
действующего спектра переменных нагрузок 1-х уровней широко ис-
192
пользуется гипотеза линейного суммирования усталостных повреждений
[140,196]:
1
где #,- — число циклов нагрузок г -го уровня, необходимых для разру-
разрушения конструкции, п; — число циклов (повторяемость) нагрузок I -го
уровня за определенный срок эксплуатации.
Расчет усталостной повреждаемости осуществляется с помощью раз-
различных методов: спектрального суммирования, полных циклов и др.
[188, 189, 191, 240, 287-289]. Использование гипотезы спектрального
суммирования требует линеаризации параметров исследуемого объекта.
В то же время на наземных режимах эксплуатации всех типов ЛА имеют
место нелинейности, в основном обусловленные работой амортизацион-
амортизационной системы, различные нелинейности сопровождают также маневрен-
маневренные ЛА в полете. В связи с этим в расчетной практике летных испытаний
наибольшее распространение получил машинно-ориентированный метод
полных циклов [191].
Оценка усталостной повреждаемости наиболее просто осуществляет-
осуществляется при представлении кривой выносливости в виде
N0% = А,
где сто — амплитудное значение напряжений отнулевого цикла нагру-
жения; А и т — постоянные, определяемые экспериментально; N — чис-
число циклов до разрушения.
Чтобы воспользоваться соотношением F.27), необходимо реальную
нагрузку привести к эквивалентному по повреждаемости отнулевому
циклу. Тогда выражение кривой выносливости для оценки повреждаемо-
повреждаемости можно принять в виде [289].
#эсг™=А, F.28)
где А^э — число циклов нагрузки с напряжением аэ, которое конструк-
конструкция может выдержать до разрушения; <тэ — приведенное напряжение
отнулевого цикла [265].
Подставляя F.28) в F.27), получаем
Исходными данными для расчета повреждаемости ЛА по методу полных
циклов служат реализации нагрузок, действующих на него, определяе-
определяемые в летном эксперименте или с помощью математического моделиро-
моделирования [249].
Для примера на рис. 6.42 приведены оценки спектральных характери-
характеристик нагружения крыла самолета Ан-124. Зависимости 8^ 1а^ от
частоты О, отражают распределения нормированных спектральных
плотностей изгибающих моментов в корневом сечении крыла, получен-
полученных путем математического моделирования на ЭВМ движения самолета
в турбулентной атмосфере со среднеквадратичным значением скорости
193
7- 983
вертикальных порывов ветра сг^? = 2,25 м/с при разных скоростях га
та
103
¦ т2-с7,
рад
101
10°
\
\
\
|\
\
V
Л
1
1
1
Ч 1
гх4
1 ^
о
Штриховыми линиями на рисунке отмечены значения ч;
собственных колебаний ко»
ции ЛА, по которым наиболее
метен отклик системы; они
ют 7, б и 9-й формам колебаний:
обведены кружками. Отсюда в:
но, что реакция самолета типа Ан-
124 как упругого тела на
полосный спектр нагружения
ражена слабо.
Графики корреляционных фун-
функций Км , соответствующие
смотренным спектральным плотно^*
стям изгибающих моментов, пред-,*
ставлены на рис. 6.43. п
Срок службы планера самолета
определяется суммарной поврежу
даемостью, накапливаемой конст-
конструкцией при движении его по земле
и в полете. Основной вклад в по-|
вреждаемость конструкции, напри-;
мер неманевренных самолетов,
вносят болтаночные и маневренные
нагрузки, величина и повторяв-,
мость которых зависят от турбу-^
лентности атмосферы, высоты и-,
скорости полета, их загруженности
12 16
42, Гц
Рис. 6.42. Спектральная плотность изги-
изгибающих моментов $мтт °у/ в корне-
корневом сечении крыла самолета Ан-124 с
учетом упругости конструкции, получен-
полученная с помощью математического модели-
модели=2,2 м/с и
рования при
скоростях полета V^ : 1 — 100, 2 — 140,
3 — 200,4 — 230 м/с
разных и тренированности экипажей.
Приведем некоторые оценки
накопления усталостной повреж-
повреждаемости на примере самолета Ан-
405
124, полученные с помощью математиче-
математического моделирования на ЭВМ. Рассматри-
Рассматривалось его возмущенное движение с зажа-
зажатыми рулями в турбулентной атмосфере,
при этом учитывались вертикальные и бо-
боковые порывы ветра. Исходными данными
в расчетах служили: масса самолета М =
270 -390 т, скорость полета II 0= 100-
-230 м/с и высота Н = 3600 м, среднеквад- Рис. 6.43. Корреляционные фун-
ратичная скорость порывов ветра с% =
= 0,25-2,5 м/с, число точек реализации
~ 3000.
_ кции Км изгибающих моме-
моментов в корневом сечении крыла,
вычисленные по реакции упру-
упругой конструкции самолета Ан-
124 на атмосферную турбулент-
На рис. 6.44 даны графики, характеризую- Ность при тех же скоростях по-
щие изменение относительной повреждаемости лета, что и на рис. 6.42.
194
= 1гт 1^а =0 25) в зависимости от Сш для пяти характерных
™у I Ъ ' у
сечений крыла, обозначенных на рисунке цифрами 7-5, и трех значений
скорости полета G0 (штриховая линия -
(Уо = 100, сплошная — 170, штрих-
пунктирная — 230 м/с). Видно, что с
увеличением (% резко (параболиче- 20
ски) растет величина I; , причем для
сечения 5 рост параметра § происхо- 15
дит интенсивнее, чем для остальных
четырех сечений, расположенных
ближе к корневой части крыла, т. е.
чувствительность сечений упругой
конструкции к атмосферной турбу-
турбулентности по такому параметру, как
усталостная повреждаемость, зависит
от их места расположения на крыле.
На рис. 6.45 представлены зависи- 1
мости относительной повреждаемости 0'
Е различных сечений крыла A-5) , лл тт
* _ г Рис. 6.44. Изменение относительной
^ЛА =^ла ^^ла=270т усталостной повреждаемости |" ха-
от изменения массы СлА самолета
Ан-124 при Оу/ =1 м/с. Данные рис. мосфере с разными скоростями
6.46 характеризуют чувствительность конструкции по повреждаемости
Кс =^0 /%0 =270 т вдоль размаха крыла гкр к изменению массы
1,0
0,8
0,6
0,4
0
1-С
?ЛА=
300 т
390
V1
270 300
0,3 0,6 гкр
Рис. 6.45. Изменение относительной уста- Рис. 6.46. Изменение коэффициента чувст-
лостнойповревдаемости |"СлА различных вительности конструкции по повревдае-
сечений G-5) крыла самолета Ан-124 в
моста
вдоль
зависимости от массы С
турбулентной атмосфере
при полете в зависимости от массы ОЛА самолета Ан-
124 при полете в турбулентной атмосфере
самолета при <Уц? = 1 м/с. Из анализа рис. 6.46 следует, что чувст-
чувствительность сечений крыла уменьшается с ростом массы Сдд и тем
больше, чем дальше рассматриваемое сечение удалено от корневого.
195
§ 6.5. Определение флаттерных характеристик
летательных аппаратов
Определение областей аэроупругой неустойчивости ЛА типа флаттер^
или дивергенции является одной из важнейших задач аэроупругости [4
51, 61, 194, 223, 249, 311, 327, 329, 360]. Обычно задача рассматривается
в линейной постановке, и ее решение сводится к нахождению критиче-
критического значения скорости полета, при которой движение упругого самоле-
самолета становится неустойчивым с последующим нарастанием незатухающих
гармонических колебаний. Линейность постановки подобной задачи аэ-
аэроупругости позволяет рассматривать устойчивость неуправляемого са-
самолета независимо при продольном (симметричный флаттер) и боковом
(антисимметричный) возмущенном движениях, предварительно исклю-
исключив из них кинематические параметры, характеризующие отклонения
рулевых поверхностей и внешние возмущения (порывы), и положив рав-
равными нулю аэродинамические коэффициенты от них. При этом принима-
принимается, что на границе области аэроупругой неустойчивости объект совер-
совершает гармонические колебания с постоянной амплитудой.
В итоге, например, задача об аэроупругой устойчивости самолета ти-
типа симметричного флаттера сводится в отличие от уравнений E.19) к
исследованию решения безразмерного однородного матричного интегро-
дифференциального уравнения в форме
|х(с} + 2кщ + ш я)-с^~ 11)?(т1)с|(т-/з
т
0. F.29)
о
На базе уравнений F.29) рассмотрим случай короткопериодического
продольного движения самолета при коэффициентах аэродинамических
производных, найденных по гипотезе квазистационарности ( р* —> 0).
Преобразуем эти уравнения в следующую скалярную форму:
F.30)
Разрешая эту систему уравнений относительно вторых производных
по времени от обобщенных координат и учитывая, что %\=сог-а,
#05 = ®т.»получаем
196
| = ц 1сее, ет = II а а сог сог
F.31)
Як
где ц 1 — обратная матрица обобщенных масс; се — матрица обоб-
обобщенных коэффициентов аэродинамических производных, имеющая вид
„е
4
F.32)
В F.32) с^ , с**1 , т\1 , т11 — компоненты векторов-строк размер-
размерностью Ыд ; с®, с®, с^г, с^г — компоненты векторов-столбцов раз-
размерностью Ыд ; с|' , с|7 — квадратные матрицы размерностью
хЫ , которые при к = I представляются в виде
Обозначим результирующую матрицу правой части системы уравнений
F.31) как
се =
че
F.33)
Тогда с учетом F.31) и F.33) систему уравнений F.30) можно преоб-
преобразовать к виду
F.34)
В общем случае в F.29) элементы матрицы обобщенных масс \1 и собст-
собственных частот со зависят от варианта загрузки самолета С/дд и угла
стреловидности % крыла (для самолетов с изменяемой геометрией):
ц = ц(GЛА,#), С0 = Сд(с:ЛА'^)" Матрицы сй и с^, содержащие компо-
компоненты стационарных значений аэродинамических производных, зависят
197
еще и от числа Маха: сд = сд (Одд, %, М), сд = сд (ОлА, #, М), а матрицы
I •?, I •?, элементы которых характеризуют нестационарные аэродинами-
аэродинамические нагрузки, кроме того, являются функциями времени:
Уравнения F.29) и зависимости F.34) с учетом нестационарности
обтекания и без нее пригодны для изучения безрулевых форм флаттера I
самолета. При этом считается, что жесткости проводки управления и ^
крепления привода достаточно велики, а рулевые поверхности хорошо
сбалансированны.
Задача о нахождении критической скорости {/кр флаттера решается
итерационным путем до выполнения условия, что число М, для которого
вычислены коэффициенты матриц сд, сд, и функциональные элементы
матриц I ¦?, I ¦? с необходимой точностью соответствуют этой скорости,
т. е. М = {Укр /#о, где а0 — скорость звука на высоте полета ЛА.
Иногда из-за конструктивных особенностей самолета (например,
складывающееся крыло) трудно теоретически определить частоты и
формы собственных колебаний его конструкции. Тогда при создании
структурной ММ функционирования такого ЛА используют данные час-
частотных испытаний [426], резонансные формы колебаний которых не от-
отвечают условиям ортогональности. В этом случае получаем уравнение
аэроупругости в виде
2У/а*ш+2У-0 4,+ЕШ*//*^ -т* ° • F35)
* 1 ] V
Перепишем его таким образом:
( ] ) V
где функция Аф(х, у, г) характеризует аппроксимационную погрешность.
Разрешающая система уравнений в этом случае может быть составле-
составлена либо через предварительную ортогонализацию резонансных форм ме-
методом последовательных приближений, либо добиваясь выполнения ор-
ортогональности функции погрешности Аф(х,у,х) аппроксимирующим
функциям /о,- и /у по выделенному объему V:
Ц\А(р(х,у,1)А/01(х,у,1)с1У = 0, $А<р(х,у,1)А/1(х,у,1)с1У = 0. F.37)
V V
Существуют разные методы определения критической скорости ^/кр
флаттера [43]. Однако для систем уравнений большой размерности наи-
наиболее удобным и простым в вычислительном плане является итерацион-
итерационный метод. Его суть заключается в непосредственном анализе поведения
корней матрицы Р*, определяемых численным способом с помощью ме-
метода Фадеева последовательно при каждом изменении скорости полета
198
ЛА. Матрица Р* формируется путем представления уравнений F.34) в
нормальней форме К©ши:
у+=р*у+, Р*=Р*(му/?*,^о), F.38)
где у+ — вектор фазовых координат:
й |т, 1=ТЖ, F39)
= ||а, сог,
F.40)
-Су"
-пг?
0
-С*1а
0
су
0
-с*9'
Су
Е
р -
2
Ч1г
О
у
О
-сх
О О
О О
Е О
О Е
где Е — единичная матрица.
Компоненты матрицы Р* в F;38) являются функциями чисел Маха М,
Струхаля р*, а следовательно,- функциями нескольких величин (/кр,
42кр, которые находятся в результате итерационного процесса относи-
относительно чисел Мир* для матрицы Р*.
После формирования матрицы Р*, задаваясь начальными значениями
параметров Ми/?*, находим в первом приближении величины С/кр и
йкр. Затем, изменяя скорость ^/0 с некоторым шагом А^/о» исследуем
систему F.38) на устойчивость. Собственные значения матрицы
Р* = р*({/о + 1А17ц) (г = 1,2,3,..•) описывают на комплексной плоскости
траектории (годографы). Считается, что точка первого пе-
пересечения одного из годографов собственных значений матриц Р* с
мнимой осью соответствует началу незатухающих гармонических коле-
колебаний с критическими значениями (Укр1-, йкрг-. При нахождении первой
точки на границе устойчивости значение критической скорости уточня-
уточняется интерполяционным способом [43]:
7 — F.41)
Здесь X} —собственные значения матрицы Р*, КеЛ]A!о1) —по-
—последнее отрицательное значение действительной части Ау-;
К^А^(^о^+А^о) — первое положительное значение действительной
части; С/0/ — значение текущей скорости.
199
Флаттерные характеристики уточняются последующими приближе-
приближениями по значениям аэродинамических коэффициентов, соответствую-
соответствующим уточненным значениям чисел Мир*:
F.42)
Итерационный процесс заканчивается при выполнении условий
С/,
1<е15
F.43)
где Е\ и е2 — заданные точности.
При рассмотрении симметричного флаттера жестко защемленного в
центре масс самолета матрица Р* приобретает вид
° Е" F.44)
с* ст*"'
с* =
4'
^22 Щ
Ми
ст* =
ъ
Й22
Схема определения флаттерных характеристик в этом случае сохраняется.
Остановимся на анализе флаттерных характеристик, которые были
получены на примере свободного от внешних связей самолета Як-42. Ко-
Коэффициенты аэродинамических производных с шагом ДМ = 0,1 рассчи-
рассчитывались предварительно методом дискретных вихрей [57]. Структурная
ММ функционирования самолета составлялась с удержанием первых
девяти упругих тонов собственных колебаний конструкции. Коэффици-
Коэффициенты аэродинамических производных первоначально определялись для
числа М; =0,1. В дальнейшем вычисление критической скорости (Укр/ и
200
уточнение коэффициентов аэродинамических производных для М,-+1,
определяемых по F.42), велось параллельно. Окончание итерационного
процесса осуществлялось по выполнению условий F.43); для этого ока-
оказалось достаточным проведение четырех итераций.
На рис. 6.47 представлены годографы собственных значений матрицы
Р*, построенные с шагом дискретности по скорости Д#о = 10 м/с. Фор-
5
Л
8
5
3
4
VII
4 3
8
876
8—,
8~
6
V
3 2
2
IV
IX
5 4
7
7654
VIII
к^
3 2
Ш
? ->
2 7
1т
А
-
321
/
-* V
I
-11,0
10,9 -
10,8
10,7 -
10,6
36
30
24
18
12
6
3
А. <
0 ^
4
1
¦^^^
5
4
VI
5
8
_2
V
I
3 2
2 1
>
1
VII
765
7бТТ^
I
5Т
\
7654.
]••• •]
4^
3 2
II
— ^
3 2
1т>
-
-
?2?^
'7
-7
10,9-
-10,8
10,7-
- 10,6
10,5-
10,4
10,3-
-12 -8-4 0
-12 -8 ~4
0
О
36
30
24
18
12
Ке(Я3)-10~7>Ке(Я7Lр -6 ~3 О
5,^,/^) -1,8 -1,2 -0,6 О
Ке(Я3)-10,Ке(Я7)-10^ -3 0
КеСЯгАЛЛ) -1,8 -1,2 -0,6 0
Рис. 6.47. Годографы собственных значе- Рис. 6.48. Годографы собственных значе-
значений низших девяти тонов упругих коле- ний низших девяти тонов упругих коле-
колебаний свободного от внешних связей баний защемленного в центре масс само-
самосамолета Як-42 лета Як-42
мирование матрицы р* проводилось согласно F.40). Нумерация годо-
годографов римскими цифрами соответствует порядковому номеру тона уп-
упругих колебаний; 0-й тон отвечает перемещению аппарата как жесткого
тела. Арабскими цифрами 1-8 обозначены значения корней, полученных
соответственно при Цо =60, 100, 140, 180, 200, 230, 250 м/с. Судя по
данным рис. 6.47, аэроупругая неустойчивость аппарата имеет место
(точка А на мнимой оси 1т Х$) по пятому тону упругих колебаний с кри-
критическими параметрами: С/кр = 233,8 м/с , йкр=10,8Гц при М = 0,691,
р*->0, ^=0.
Изучались флаттерные характеристики этого же самолета при его же-
жестком защемлении в центре масс. По-прежнему удерживалось девять то-
тонов упругих колебаний; аэродинамические коэффициенты вычислялись
по гипотезе квазистационарности. Матрица Р* формировалась согласно
F.44) при М = 0,691, р* -> 0 , к{ = 0.
201
На рис. 6.48 показаны годографы собственных значений матрицы р*,
вычисленные с шагом дискретности по скорости А1/о = 10 м/с. Точкам
/ = 1,8 на этом рисунке соответствуют прежние значения скорости и§.
Как видим, здесь неустойчивым(точка А) также оказался пятый тон упру-
упругих колебаний. Скорость и частота флаттера составили {Укр = 248,5 м/с и
42кр =10,39Гц. При этом М несколько увеличилось по сравнению со
случаем свободного полета самолета Як-42 и составило М = 0,73 ; крити-
критическая скорость флаттера Gкр возросла на - 6,3 %.
Остановимся на влиянии нестационарности обтекания на флаттерные
характеристики самолета Як-42. При этом использовались матричные
уравнения F.29). Переходные аэродинамические функции вычислялись
для М = 0,691; нестационарные добавки определялись по [16] с аппрок-
аппроксимацией подынтегральных выражений кубическими сплайнами. За
исходное было принято число Струхаля р* = 0,03. В дальнейшем число
Струхаля, аэродинамические и флаттерные характеристики при проведе-
проведении итерационного процесса взаимно уточнялись. Критическая скорость
и частота флаттера для ЛА, жестко защемленного в центре масс, с учетом
нестационарности обтекания составили: {Укр = 248,7 м/с, Х2кр= 10,39 Гц
и {Укр = 256,6 м/с, 42кр = 7,14 Гц. Приращения [/кр для обоих случаев по
сравнению с квазистационарным обтеканием ЛА составили соответст-
соответственно 6,4 и 3,3 %.
Я,м
6000
4000
2000
0
///
ш
ж
У
320
240
280 #,м/
Рис. 6.49. Кривые ограни-
ограничения скорости полета
самолета Як-42 в зависи-
зависимости от высоты полета,
условий закрепления и
обтекания
Я,м
6000
4000
2000
280 ,/
Рис. 6.50. Кривые ограниче-
ограничения скорости полета самоле-
самолета Як-42 в зависимости от
высоты, условий закрепле-
закрепления и обтекания; т. А —
эксперимент
(
/,
У1
/
//
{ 320
/
Кривые ограни-
ограничений скорости по-
полета самолета Як-42
в зависимости от вы-
высоты для всех опи-
описанных выше случа-
случаев (условий закреп-
закрепления и обтекания)
приведены на свод-
сводном рисунке 6.49;
кривые 7 и 2 — со-
соответственно свобо-
свободный от внешних
связей самолет и за-
защемленный в центре
масс без учета нестационарности обтекания при М = 0,691; 0,73 , р* —> 0 ,
К} = 0; кривые 3 и 4 — те же случаи, но только с учетом нестационарно-
нестационарности обтекания при р* = 0,931, к( = 0.
На рис. 6.50 для сопоставления приведены кривые ограничения ско-
скорости полета самолета Як-42 в зависимости от высоты; кривая 1 — само-
самолет защемлен в центре масс, аэродинамические коэффициенты рассчита-
рассчитаны приближенно по методу полос [194, 311] при М = 0, р* —> 0 , к( = 0,
202
2 — самолет свободный от внешних связей, нестационарные аэродина-
аэродинамические функции рассчитаны по методу дискретных вихрей [57]: при
р* =0,931, кг = 0. Точка Л на оси абцисс соответствует данным экспе-
эксперимента. Отсюда видно, что /7К[1 для самолета Як-42, найденные по при-
приближенным значениям аэродинамических коэффициентов (кривая 7) и их
«точным» значениям B), отличаются от продувочной величины
соответственно на 24,2 и 15,6 %.
Были изучены флаттерные характеристики самолета Як-42 при пол-
полной его загрузке топливом и коммерческими грузами, масса которых до-
доводилась до 45 % взлетной. Его структурная ММ с учетом упругости
конструкции строилась на использовании собственных функций базового
варианта самолета — незагруженного, т. е. при отсутствии на его борту
топлива и груза. Пересчет обобщенных масс, частот и форм собственных
колебаний упругой конструкции, суммарных и обобщенных коэффици-
коэффициентов аэродинамических производных осуществлялся согласно соотно-
соотношениям F.23)-F.25). Достоверность полученной таким путем информа-
информации проверялась сопоставлением с данными расчетов работ [194, 315].
Сводные результаты сравнения частот собственных колебании, найден-
найденные по обеим методикам, помещены в табл. 6.4. В ней &тх — собствен-
собственная частота базового варианта самолета (незагруженного); Х2Т0Ч и & —
собственные частоты, полученные по методике работы [315] и путем пе-
пересчета; А& — относительная погрешность (АП =(\&точ -Щшточ)х
х100%).
Таблица 6.4
Частота
Яисх
Яточ
п
АП
Тон упругих колебаний
1
18,89
18,92
18,54
2,00
2
39,09
34,01
34,01
0
3
39,52
39,53
39,50
0,08
4
59,94
56,34
58,93
0,73
5
68,02
64,02
60,40
5,70
6
86,15
84,67
83,01
2,00
7
91,63
91,40
91,35
0,05
8
116,1
98,42
102,1
3,80
9
141,80
147,30
127,50
13,40
Из анализа данных табл. 6.4 видно, что погрешность в вычислении
собственных частот по обоим методикам не превышает 6 %, за исключе-
исключением девятого тона, для которого она составляет -13%. Как показывают
расчеты, для снижения погрешности при определении собственных час-
частот высших тонов упругих колебаний путем пересчета базовых форм,
например девятого тона, надо в расчетах дополнительно удерживать две-
три формы [43].
На рис. 6.51 нанесены годографы собственных значений матрицы Р*
для полностью загруженного свободного от внешних связей самолета Як-
42 без учета нестационарности обтекания; сплошные линии — вся ис-
исходная информация об упругих колебаниях получена по методике работ
203
[194, 315], штриховые — путем пересчета через базовые динамические
характеристики незагруженного самолета. При этом удерживались пер-^
вые девять тонов упругих колебаний. Точкам 1 = 1,7 на кривых годогра-
IV
7+
VII
VIII
Т
5 4
16 54
"б ?
5 4 3
32
Ш
13,2
О-тон
-5
-20
I
-15
-3
-10
I
-5
-12
I
-10
I
-2
I
12,7
12,2
11,7 4 31
А
10,7
1т Я,-
36
Ке(А1),Ке(Я7,Д9)-10,Ке(Л8)-10
Рис. 6.51. Годографы собственных значений низших девяти тонов упругих колеоанш:
свободного от внешних связей самолета Як-42 при загрузке топливом, масса которого
составляла 45 % взлетной
фа отвечают соответственно скорости 11$= 60, 100, 130, 160, 190, 22С
250 м/с. Аэроупругая неустойчивость типа флаттера имеет место по шес-
шестому тону упругих колебаний (точки А и А' на мнимой оси 1т А;).
Скорость и частота флаттера для загруженного самолета, когда еп
упругомассовые и аэродинамические характеристики были получены
путем пересчета через базовый вариант незагруженного самолета, равны
204
^кр =245,7м/с, ^2кр=10,9Гц, по стандартной методике [194, 315] —
[/кр =237,4 м/с , 12кр=10,8Гц. Относительные погрешности в опреде-
определении флаттерных характеристик по обеим методикам для (Укр и п^
составили соответственно 4 и 1 %.
§ 6.6. Влияние повреждений на аэроупругие и балансировочные
характеристики летательного аппарата
В случае отсутствия повреждений уравнения пространственного воз-
возмущенного движения упругого ЛА E.5) вследствие его симметрии и сов-
совпадения главных центральных осей самолета с осями связанной системы
координат распадаются на две более простые системы: на уравнения
продольного E.9) и бокового E.10) движений. Наличие же повреждений
вызывает нарушение массово-инерционной, жесткостной и аэродинами-
аэродинамической симметрии ЛА, что приводит к инерционному (из-за появления
статических ях, дг моментов и центробежных 1хг = (^, \уг = 1^ момен-
моментов инерции), аэродинамическому (повреждение несущих поверхностей
характеризуется возникновением неуравновешанных аэродинамических
сил Ра и, следовательно, появлением таких «перекрестных» коэффици-
коэффициентов аэродинамических производных, как с^ , с%, тх и т. п.) и упру-
упругому (из-за жесткостной асимметрии конструктивно-силовой схемы)
взаимодействию продольного и бокового движений. Присутствие хотя
бы одного из выше перечисленных факторов исключает возможность
разделения уравнений пространственного возмущенного движения на
продольное и боковое. Значит, для решения задач динамики упругого ЛА
с повреждениями необходимо использовать уравнения в форме E.5).
6.6.1. Особенности балансировки летательного аппарата с повре-
повреждениями. Возникновение конструкционной асимметрии ЛА, связанной
с повреждением конструкции, накладывает ряд особенностей на его ба-
балансировку на различных режимах полета. Необходимые для этого ба-
балансировочные углы отклонения рулевых поверхностей определяются из
условия установившегося прямолинейного движения ЛА: - 1/х = 0,
О у = йг = 0, -сох = сох = 0, со у = со у = 0, сог = сог = 0. В этом случае
силы и моменты, действующие на ЛА, будут взаимноуравновешенны.
Главный вектор и главный момент этих сил равны:
=0, '
где Ра,М0§,Рт и Ма,8х§,Мт — векторы и моменты соответственно
аэродинамических, массовых сил и тяги двигателей. Используя C.6),
C.17) представим выражения F.45) в безразмерной форме
са +^0§ + ст =0, та+$х§ + тт=0 F.46)
или в скалярном виде
205
+Ио8у+сту=О, пгу+ з^х -5х&г + шту = О, F.47)
Все характеристики, входящие в эти зависимости, соответствуют сба-
сбалансированному режиму полета ЛА. Обычно первое уравнение рассмат-
рассматривается независимо и сводится к определению потребной тяги стх дви-
двигателя при заданной скорости полета.
Для аэродинамических характеристик «жесткого» ЛА можно записать
§Р + ^Суу8у = 0,
+ ^ т^у <5У = 0, F.48)
у=1
#у
+ ^т^5у =0,
у=1
г г0 % ^ + ^т^5у = 0,
у=1
где^а, /?,<5У — балансировочные углы соответственно атаки, скольжения
и отклонения рулей.
Величины коэффициентов аэродинамических производных в правых
частях соотношений F.48) определяются с учетом статического дефор-
деформирования конструкции аппарата по формулам E.37). В общем случае
«нулевые» характеристики суо, сг0» Що, туо» и*го такж^ должны на-
находиться с поправками на статическую деформацию. Представим по-
последние для ЛА с повреждениями в виде
су0 = СуО + &су0 » сг0 = Асг0 »
~ F.49)
тх0 = Атх0, ту0 = Ату0, тг0 = тг0 -I- Дтг0.
В F.49) тильдой отмечены «нулевые» характеристики для симмет-
симметричного ЛА, при этом для него сг0 = Що = ™уо = 0 • Характеристики же
суо, тго в основном ищутся экспериментально. Дополнительные «нуле-
«нулевые» характеристики Асу$, Асг0 > А^^о» Д^^о > А^О вызваны наруше-
нарушением симметрии ЛА за счет повреждений его конструкции; в настоящее
время они могут быть определены теоретическим путем. Но, учитывая
сложность методики нахождения «нулевых» коэффициентов теоретиче-
теоретическим способом и относительно слабое влияние их на балансировочные
характеристики ЛА по сравнению с перекрестными аэродинамическими
и инерционными силами и моментами, будем находить их приближенно.
При этом будем полагать, что значения «нулевых» аэродинамических
206
коэффициентов зависят только от изменения давления на поврежденном
участке поверхности ЛА; на остальной поверхности эпюры перепада дав-
давлений не меняются и соответствуют базовому варианту ЛА. Тогда можно
записать
Асг0=
F.50)
РУ№
Асу0=
Ату0 =
Атг0 =
где 5к=8к /5*0 — безразмерная площадь поврежденного участка,
** = ч/ь » ^ = Ук1ъ > ^ = ^/^ —
безразмерные координаты поврежден-
поврежденного участка и А/?^ =Арк/д* — без-
безразмерное давление, действующее на
нем (рис. 6.52), (^* — скоростной на-
напор, 50 и Ъ — характерные площадь и
линейный размер.
Полагая участки повреждений аэро-
аэродинамической поверхности крыла ма-
малыми и осредняя на них перепад давле-
ний Ар =соп81, безразмерные выра-
Рис. 6.52. К расчету коэффициентов
балансировки ЛА с повреждениями
жения для определения моментов крена, рысканья и тангажа примут вид
F.51)
Величины «нулевых» сил поврежденных участков вычисляются с по-
помощью известных эмпирических и полуэмпирических зависимостей [21,
214] с учетом изменения местных углов атаки за счет геометрической
крутки и других конструктивных особенностей ЛА.
Моментные характеристики от двигателей равны
1=1
F.52)
207
где хТ}, уТ}, гтг- — безразмерные координаты точки приложения тяги *'-
го двигателя по отношению к характерному линейному размеру 6, Ыд —
число двигателей. При асимметричном выходе из строя двигателей мо-
ментные характеристики от них становятся значительными по величине.
С учетом полученных зависимостей уравнения балансировки ЛА
F.47) перепишем в виде
су0
Ну
^т/8у = $г# со80осозуо + ^эд
+ ^Я соз0о 8Шу0 -тх0 + тТХ,
-ту0
)С08У0-/
Из этих уравнений может быть определен любой набор пяти характе-
характеристик из общего числа C + Му) неизвестных: а = 0О, /3 , 8У (V = 1, Ыу),
Уо. Остальные недостающие параметры для решения системы алгебраи-
алгебраических соотношений F.53) задаются в виде зависимостей от балансиро-
балансировочного режима полета, например, из условия горизонтального полета,
т. е. при Уо = 0.
6.6.2. К оценке эффективности рулевых поверхностей летательно-
летательного аппарата с повреждениями и определению скорости реверса эле-
элеронов. При оценке эффективности рулевых поверхностей также, как и
при рассмотрении флаттера, принимается, что жесткость проводки
управления, крепления приводов и рулей достаточно велика по сравне-
сравнению с жесткостными характеристиками конструкции ЛА в целом. При
этом условии управляемость ЛА и эффективность его рулевых поверхно-
поверхностей в полете будут зависеть только от влияния упругости конструкции
на коэффициенты производных аэродинамических сил и моментов по
кинематическим параметрам е | = 18У 5У|Т (у = 1, #у).
В соответствии с E.37), E.52) аэродинамические характеристики уп-
упругого ЛА можно представить в виде суммы коэффициентов аэродина-
аэродинамических производных соответственно для «жесткого» ЛА и связанных с
его статическим деформированием
се* =% +се>. F.54)
208
При установившемся полете ЛА без грузов (незагруженном) второе
уравнение E.35) примет вид
По формулам E.52) будем иметь
6' в ^2 с?1)^ , F.56)
где е| = 18У 8У | — вектор-столбец параметров отклонения рулевых
поверхностей.
Эффективность рулевых поверхностей V характеризуется отношением
F.57)
где с * и соу — коэффициенты аэродинамических производных соот-
соответственно для упругого и жесткого ЛА.
Обычно мерой эффективности элеронов принято считать величину
%т* , равную
Здесь т^эл и тх^л — коэффициенты моментов крена ЛА, создаваемого
отклонением элероном соответственно на упругом крыле и жестком.
Критическая скорость реверса элеронов определяется как скорость
установившегося полета, при которой отклонение элеронов на угол 5ЭЛ
не приводит к изменению угловой скорости вращения сох ЛА относи-
относительно продольной оси. Уравнения статической аэроупругости ЛА с по-
повреждениями исходя из соотношения E.57), с учетом зависимостей F.56)
запишутся в виде
-зусоу = тах
= ту а + т^р + т®х(Ох + т®усоу + т®шг + т5уъл <5ЭЛ -
- 8х(Оу = ту а + т^р + т®х(Ох + т®усоу
у
|
ЭЛ
^эл 5эл •
Здесь тильдой «~» отмечены коэффициенты аэродинамических произ-
производных, вычисленные с поправками на статическое деформирование кон-
конструкции ЛА по формуле E.52).
Из F.59) при сох=0 и у = 0 получаем условие для определения кри-
критической скорости реверса рулей ЛА с повреждениями:
209
су су
"у
X X X У
шл, га
иУ - ,
с
гаЛ)
т8/-
га:
т,
= 0.
F.60)
Для приближенной оценки критической скорости реверса можно при-
принять, что Суэл =сг5эл =туэл =га^эл =0. Из F.60) получаем га^эл =0.
Тогда по F.58) имеем
%т*эл =0. F.61)
Согласно условию F.61) значение скорости реверса может быть най-
найдено из равенства:
т
где
хО
F.62)
и т^1 — коэффициенты аэродинамических производных мо-
момента крена по углу отклонения элерона 5ЭЛ на жестком крыле и по
обобщенной координате Ц!.
6,6.3. К достоверности структурных математических моделей ле-
летательных аппаратов с повреждениями. Приведем некоторые данные,
касающиеся проверки достоверности формируемых структурных ММЛА,
имеющих повреждения, на примере самоле-
самолетов Ту-204 и Ан-124. Динамические харак-
характеристики этих самолетов находились ис-
исходя из их балочной схематизации по мето-
методике, описанной в работах [315, 33]. Пер-
Первый самолет схематизировался 15-ю балка-
балками (рис. 6.53): балки7, 2 (носовая и хвосто-
хвостовая) — моделируют фюзеляж; 3-6 — кры-
крыло; 7-8 — крылья Уиткомба; 9-72 — гори-
горизонтальное оперение; 13 — вертикальное
оперение; 14, 15 — пилоны двигателей.
Двигатели представлялись в виде сосредо-
сосредоРис. 6.53. Балочная упругая схе-
схематизация крупногабаритного
ЛА типа Ту-204
точенных масс Мд с соответствующими моментами инерции.
На рис. 6.54 для сопоставления представлены данные собственных
частот 12р и 12э упругих колебаний самолета типа Ту-204, полученные
соответственно расчетным путем (крестики) и в эксперименте (точки,
данные ОКБ). Как видим, расчетные частоты располагаются внутри до-
доверительного 10 % интервала и хорошо согласуются с результатами час-
частотных испытаний. Цифрами 7-5 на этом рисунке обозначены тона упру-
упругих колебаний: 7 — симметричный вертикальный изгиб крыла (СВИК1),
2 — антисимметричные боковые колебания двигателей (АБКД1), 3 —
210
п
3
2
1
р,Гц
-10%
4$/У
$'
симметричные боковые колебания двигателей (СБКД1), 4 — антисим-
антисимметричные вертикальные колебания двигателей (АВКД1), 5 — симмет-
симметричные вертикальные колебания двигателей (СВКД1), 6 — антисиммет-
антисимметричный горизонтальный изгиб фюзеляжа (АГИФ1), 7 — антисимметрич-
антисимметричный вертикальный изгиб крыла (АВИК1),
8 — симметричный вертикальный изгиб
фюзеляжа (СВИФ1).
О достоверности аэродинамической
модели в соответствии с методикой рабо-
работы [56} можно судить из сравнения кри-
кривых Су (М) и т%(Щ (рис. 6.55), получен-
полученных соответственно расчетом (сплошные
линии 7 и 5) и в трубном эксперименте
(штриховые линии 2 и 4, данные ОКБ);
погрешность для Су не превышает 5,4 %,
ос о - Рис. 6.54. Сопоставление расчет-
а для т^ у,5. ных и экспериментальных значе-
Были изучены также флаттерные ха- ний собственных частот упругих
рактеристики самолета Ту-204. В базовой ^баний крупногабаритного
структурной ММ самолета учитывалось типа у~
первых 8 тонов упругих колебаний. Расчеты, проведенные по методикам
[249] и независимо ОКБ для высоты Н = 0 при М = 0, дали значения
#кр = 685,7км/ч, йКр=2,64Гц и 700км/ч, 2,68Гц; расхождения со-
составили соответственно 2,04 и 1,49 %.
Расчетным путем обнаружены незатухающие гармонические упругие
колебания крыла (с частотой йкр = 2,75 Гц) самолета на высоте
Н = 9000м при приборной скорости полета {Упр =583км/ч. В летном
эксперименте это явление было зафиксиро-
зафиксировано при приборной скорости полета
Vпр « 580 км/ч. Было установлено, что при
этом взаимодействуют два тона упругих
колебаний: симметричные вертикальные
изгибные колебания крыла (СВИК1) и сим-
симметричные вертикальные колебания двига-
двигателей (СВКД1). Выявлено, что основную
роль в возникновении аэроупругой неус-
с" -
0,10
0,06
0,02
-<
-0,06
-0,04
4-
4
—Л—-
0,2 0,4
0,6 М
Рис. 6.55. Изменение коэффици- тойчивости конструкции играет тон СВКД1.
ентов аэродинамических произ- Вычисления на основе базовой структурной
водных с" и т" в зависимо- ММЛА для высоты Я = 0 дали
ста от числа Маха для ЛА типа ^Кр = 593 км/ч, ХЗкр = 2,74 Гц, а по мето-
у'2 дике ОКБ с удержанием двух означенных
тонов — С/кр = 603 км/ч, .ЙКр = 2,67 Гц. Расхождение составило соот-
соответственно 1,6 и 2,6 %.
Вычислительный эксперимент показал также, что аэроупругие крити-
критические характеристики этого самолета можно повысить за счет конструк-
211
тивной асимметрии расположения пилонов двигателей. Так, изменение
асимметрии изгибной жесткости в вертикальной плоскости пилонов 14
(см. рис. 6.53) на 14 % (повышение) и 75 на 3 % (уменьшение) привело к
тому, что тон, определяющий вертикальные упругие колебания двигате-
двигателей (ВКД1) стал более устойчивым; при этом флаттер самолета на высоте
Я = 0 до скорости полета ~ 500 м/с перестал наблюдаться.
Обратимся к данным, касающимся достоверности базовой структур-
структурной ММ самолета Ан-124.
На рис. 6.56 тонкими линиями изображены контуры плоских тонких
несущих поверхностей ЛА, аппроксимирующие аэродинамические по-
поверхности, а жирными — балочная упру-
упругая схематизация его конструкции. Дви-
Двигатели моделировались сосредоточенны-
сосредоточенными массами М,- (/ = 1,4) с соответствую-
соответствующими моментами инерции.
О достоверности базовой структурной
ММ этого упругого самолета (топливо и
полезная нагрузка отсутствуют) можно
судить по данным табл. 6.5. Здесь для
сравнения помещены частоты собствен-
собственных упругих колебаний конструкции ЛА,
полученные расчетным путем и в эксперименте. Как видим, расхождение
между теоретическими и экспериментальными результатами находится в
приемлемых пределах.
Таблица 6.5
М4
Рис. 6.56. Балочная упругая схема-
схематизация крупногабаритного ЛА
типа Ан-124
Частота колебаний
Форма колебаний
Симметричный изгиб крыла по первой
форме
Симметричное кручение крыла по первой
форме
Симметричное кручение крыла по второй
форме
Вертикальный изгиб фюзеляжа по первой
форме
Симметричный изгиб крыла по второй
форме
Симметричный изгиб стабилизатора по
первой форме
Расчет,
Гц
1,4
2,45
3,37
3,53
4,38
5,45
Эксперимент,
Гц
1,48
2,9-3,06
3,58
3,75-3,91
4,61-4,66
5,43-5,58
Погрешность,
Д,%
0,14
18,3-25,0
6,2
6,15-10,7
5,25-6,4
0,3-2,4
Кривые су(а), /пг(а) и с^(М), т^(М) рисунков6.57 и 6.58 характери-
характеризуют изменение коэффициентов аэродинамических сил су и моментов тг
в зависимости от угла атаки а при М = 0,6 и коэффициентов производ-
производных аэродинамических сил с® и моментов т% от числа М; сплошные
линии — расчет, кружки — эксперимент (данные ОКБ). Анализ этих гра-
212
фиков указывает также на хорошую адекватность используемой расчет-
расчетной модели аэродинамики реальной картине обтекания самолета Ан-124.
Изучение влияния конструкцион-
конструкционной асимметрии самолета Ан-124 на
0,61 1 1 1 У* [ его динамические характеристики
осуществлялось при следующих мас-
0L1§ч~" "^ сово-инерционных характеристиках:
0,2
о
-0,2
Рис. 6.58. Изменение коэффициентов аэро-
Рис. 6.57. Изменение аэродинамических динамических производных су и таг в
коэффициентов су и тг в зависимости зависимости от угла атаки а для ЛА
от угла атаки а для ЛА типа Ан-124 типа Ан-124 *
Мо = 0,3364-105 кгс2/м, 5Х = 0,3283-107кгм-с2, ]у =0,7797-107кгм-с2 ,
= 0,4808-10 кгм-с . Рассматривались четыре расчетных варианта
тг
0,1
О.О^4
У*
-5,05
2
с,
4 ч
У'
X
*,град
Рис. 6.59. Расчетные варианты конструкционной асимметрии ЛА типа Ан-124
Таблица 6.6
Вариант
М0-10~5,кгс2/м
АМ-10,кгс2/м
5г-10,кгс2
5у-10,кгс2
5л-10,кгс2
7л-10, кгм-с2
7у-10, кгм-с2
У2-10~7, кгм-с2
/^•Ю, кгм-с2
^•Ю^.кгм-с2
У^-10, кгм-с2
1
0,3364
0
0
0
0
0,3283
0,7797
0,4808
0
0
0
2
0,3284
0,0080
0,1927
0,2081
0,1563
0,3115
0,7638
0,4804
0,6301
0,4871
0,3559
3
0,3276
0,0088
0,2373
0,2403
0,1403
0,2993
0,7498
0,4785
0,6813
0,6328
0,2995
4
0,3196
0,0168
0,2706
0,2635
0,1163
0,2975
0,7465
0,4769
0,5549
0,7401
0,2033
213
конструкционной асимметрии аппарата, которые достигались путем изме-
изменения массовой загрузки на левом крыле самолета (рис. 6.59: а — базовый
ЛА, б, в, г — отсутствуют соответственно груз МЗ, М4 и грузы МЗ и М4).
Таблица 6.7
Варианты
1
2
3
4
Частота колебаний, Гц
Тона упругих колебаний
1
1,030
1,031
1,035
1,036
2
1,721
1,806
1,831
1,843
3
2,235
2,230
2,250
2,258
4
2,625
2,623
2,648
2,658
5
2,788
2,720
2,990
3,018
Числовые значения масс Мо, массового дисбаланса ДМ, осевых
и центробежных
0,5
/з
0,81
7
0,8
0,6
0.4
0,2
-0,4
-0,8
0,5 \
** XI"~ •'г
моментов
г
г
\
\
0,5 0
05^
к
0,6
0,2
0,5
-0,2
-0,6
-1,0
и
30
20
10
-10
1
/
/
Г
д
1
Рис. 6.60. Влияние конструкцион-
конструкционной асимметрии крупногабарит-
крупногабаритного ЛА на 1-й тон (а), 2-й (б) и
3-й (в) несимметричных, 4-й (г) и
5-й (д) симметричных изгибных
колебаний
214
инерции, а также статических моментов 8х,8у98г для каждого расчет-
расчетного случая представлены в табл. 6Л
Динамические характеристики ЛА были определены для каждого рас-
расчетного случая. Значения частот первых 5-ти упругих тонов колебаний
сведены в табл. 6.7. Соответствующие им несимметричные формы из-
гибных колебаний // (/ = 1,5) крыла помещены на рис. 6.60; цифрами 1-
4 указаны расчетные случаи конструкционной асимметрии аппарата. Из
анализа этих рисунков следует, что менее устойчивым является 4-й тон
упругих колебаний крыла, так как его формы характеризуются большим
разбросом.
6.6.4. Некоторые результаты исследований аэроупругих и балан-
балансировочных характеристик летательного аппарата с повреждения-
повреждениями. Характеристики получены на примере самолета Ан-124. Обратимся
сначала к оценке влияния массового дисбаланса на эффективность орга-
органов управления самолета. Она осуществлялась с помощью параметра
5ЭЛ
^ х F.58) и производилась для двух предельных значений массового
дисбаланса (см. рис. 6.59 а, г). Массово-инерционные характеристики
самолета для указанных расчетных слу- ~т
чаев приведены в табл. 6.6. Движение
самолета рассматривалось на высоте 0,8
Н = 0 при М = 0,6. В результате вычис-
вычислительного эксперимента установлено, о,4
что при увеличении скоростного напора
наблюдается падение эффективности
элеронов (рис. 6.61). Кривая 0 отражает 0 2000 рево 4000/
характер падения эффективности элеро- * #*ев1
нов базового ЛА, кривые 1 и 2 — при Рис> 6.б1. К анализу относительной
наличии повреждений. Причем кривая 1 эффе1СГИВН0СТИ э в ^ в
характеризует изменение эффективности зависимости от скоростного напо-
элерона, расположенного на правой (не- ра ^ исходного ЛА и при наличии
поврежденной) консоли крыла повреж- К0Нстру1сгивных повреждений
денного самолета, а кривая 2 — на левой
(поврежденной) консоли крыла. Отсюда видно, что падение эффективно-
эффективности элерона на поврежденной левой консоли крыла носит более плавный
характер (см. кривая 2). Качественную оценку зависимостей %т* (#*)
рис. 6.61, получаемых численным путем, можно осуществить, используя
приближенное дифференциальное соотношение E.121) из работы [327],
с. 388. По ним же и условию F.60) определялась скорость реверса элеро-
элеронов {Урево базового ЛА и минимальная критическая скорость реверса
С/рев1 рулей при наличии у самолета повреждения (расчетный вариант 4,
кривая 1 на рис. 6.61); соответственно точки А$ и А^ на этом рисунке.
Так как, судя по данным рис. 6.61, минимальной скоростью реверса об-
обладает элерон, расположенный на правой (неповрежденной) консоли
крыла, то по нему и проводилась оценка повышения эффективности эле-
215
ронов ЛА с повреждениями. Расчеты показали, что минимальное увели-
увеличение критической скорости дивергенции для данного вида повреждения,
в сравнении с базовым ЛА, составило 40 %, т. е. ^/рев1 = 1,4[/рев0 .
Одной из задач статической аэроупругости ЛА (с повреждениями и
без них) является определение статического прогиба крыла в установив-
установившемся полете. На рис. 6.62 помещено перемещение концевой точки кры-
крыла гк самолета Ан-124 в зависимости от скоро-
скоростного напора ^*\ кривая 1 — прогиб конца
правого крыла (без повреждения), 2 — левого
крыла (с повреждением). Как видим, одним из
преимуществ расположения двигателей на пи-
пилонах под крылом является то, что это способ-
способствует разгрузке крыла в полете. Введение
массового дисбаланса приводит к увеличению
суммарных нагрузок на поврежденном крыле
и, следовательно, к росту его деформируемости
в сравнении с правой консолью. Анализ ре-
результатов вычислений показывает, что в облас-
области эксплуатационных высот и скоростей поле-
полета прогибы и внутренние усилия поврежденно-
1,5
1,0
05
м
)
//
/
0 500 1000 1500 4*
Рис. 6.62. Перемещение гк
конца крыла в зависимости
от скоростного напора ^^
го крыла могут возрастать примерно на 14 %.
Как известно, наличие повреждения на ЛА может существенно влиять
на характеристики его аэроупругой устойчивости. На рис. 6.63 представ-
представлены расчетные данные, характеризующие изменение скорости флаттера
С/кр самолета Ан-124 в зависимости от
высоты полета Я; рассмотрены четыре
расчетные случая (см. рис. 6.59). Отсюда
видно, что, например, отсутствие одного
из внутренних двигателей (расчетный слу-
случай 2) приводит существенно к снижению
скорости флаттера (примерно на 38 %) по
сравнению с базовым ЛА (расчетный слу-
случай 1). Результаты расчетов, помещенных
на рис. 6.63, хорошо согласуются с данны-
данными, приведенными в книге [31]. Вычисли-
Вычислительным экспериментом установлено, что
частота флаттера йкр для 2-го расчетного
случая приближается к частоте наименее
6,0
4,0
2,0
о
км
/
/
/
<2
/
//г3
//
Г
У
6 8 10 12 П1 о2 км/ч
кр»
Рис. 6.63. Сравнение расчетных
кривых ограничения скорости
V^ полета самолета Ан-124 без
повреждения и при его наличии в
зависимости от высоты Н
устойчивого 4-го тона колебаний (см. рис. 6.60 г). Значения флаттерных
частот 5-го и 4-то расчетных вариантов смещены в сторону частоты 5-го
тона упругих колебаний (см. рис. 6.60 д). Данное смещение частоты
флаттера обусловлено увеличением обобщенной массы и более высокими
частотными характеристиками самой конструкции (см. табл. 6.7). Поэто-
Поэтому смещение центра масс к задней кромке крыла для 3-то и 4-го расчет-
расчетных случаев в сочетании с возросшими динамическими характеристика-
характеристиками конструкции приводит к менее заметному уменьшению скорости
флаттера (около 4 %).
216
стей балансировки крупногабаритного ЛА с
повреждениями
Теперь остановимся на результатах исследования балансировочных
характеристик самолета с повреждениями. Повреждения ЛА сопровож-
сопровождаются, как правило, не только разрушением или ослаблением его конст-
конструктивно-силовой схемы, но и нарушением целостности аэродинамиче-
аэродинамических контуров.
Резервные возможности ба-
балансировки ЛА с повреждения-
повреждениями рассмотрим на примере са-
самолета Ан-124. Примем, что
произошло разрушение двига-
двигателя М4 с частичным поврежде-
повреждением консоли крыла (рис. 6.64;
на этом рисунке: эл — элерон, м
зк — закрылок, р.в и р.н — рули
высоты и направления). Такое
повреждение приведет к появ-
появлению на ЛА неуравновешен- Рис. 6.64. К изучению резервных возможно-
ных аэродинамических и массо-
массовых сил, что вызовет боковое
движение ЛА. Аэродинамическая асимметрия даст отрицательный мо-
момент крена (Мх < 0), а массовый дисбаланс — положительный момент
крена (Мх > 0 ), причем Мх > Мх .
Анализ авиационных происшествий показывает, что одной из особен-
особенностей поврежденного ЛА является возможность его балансировки толь-
только на режимах, близких к крейсерскому полету. В связи с этим представ-
представляется интересным рассмотрение вопроса об изменении балансировоч-
балансировочных характеристик самолета Ан-124, имеющего повреждения, при его
эксплуатации на режиме полета с М = 0,6 и при заходе на посадку при
М = 0,2. Рулевые поверхности, участвующие в балансировке ЛА (элеро-
(элероны, закрылки, рули высоты и направления), выделены на рис. 6.64 за-
заштрихованными областями. Там же знаком «+» показаны положительные
углы отклонения рулей.
Режим установившегося полета. При задании начальных значений
кинематических параметров использовались данные балансировки полета
базового ЛА при М = 0,6, а также результаты предварительной оценки
влияния повреждения на изменение его балансировочных характеристик.
В соответствии с этим были выбраны: угол атаки а = 5°, углы отклоне-
отклонения элерона 8$ = -25° и руля высоты 8^1 = -4°, угол крена у = 0 . Ос-
Остальные кинематические параметры: угол скольжения /3 , углы отклоне-
отклонения закрылков 8$, 8$, рулей высоты 8^2 и направления 5р н
определялись с помощью соотношений F.53). Цифры «1» и «2» при
углах рулевьрс поверхностей обозначают принадлежность их соответст-
соответственно к правой и левой половинам самолета.
В расчетах учитывались асимметрия тяги Г двигателей и ее изменение
от высоты полета. Расчеты потребной тяги двигателей показали, что для
217
установившегося полета поврежденного ЛА на скорости, соответствую-
соответствующей числу М = 0,6, необходимо задавать взлетный режим работы остав-
оставшихся трех двигателей.
Потребные балансировочные углы отклонения рулевых поверхностей
определялись в диапазоне изменения высоты 0<Я<8км. Анализ ре-
<5,град
20-
10-
-10
-20-
Т"
*расп
-—о)
Л
¦
3,3 5,3
/ х* \
-
т
8 Я, км
зультатов вычислений показал, что они
не превышают своих предельно допус-
допустимых величин (см. рис. 6.65). Здесь не-
необходимо отметить, что при заданных
начальных значениях а.9 /3, 8$, 8^1
балансировка ЛА возможна только при
значениях угла скольжения /3 и углов
отклонения остальных, рулевых поверх-
поверхностей <5^ , 8$ , 8^1, <5р н, указанных
на рисунке. Причем изменение хотя бы
одного из указанных, параметров приво-
приводит к нарушению балансировки ЛА и
необходимости изменения всех осталь-
Рис. 6.65. К определению баланси- ных величин для достижения сбаланси-
ровочных параметров при устано- рованного полета.
вившемся полете поврежденного Из анализа данных рис. 6.65 видно,
самолета чта ^щы, дШЛОЯ&аия закрылков и рулей
высоты правой 5^ , 8^2 и левой 8$ , 8^1 половины самолета не рав-
равны. Область А (Грасп > Гпотр), в которой возможен установившийся полет
при строго заданных значениях углов а, /5, у и углов отклонения 5
рулевых поверхностей, устанавливается путем наложения кривых по-
потребных ТпоТр(Н) и располагаемых Грасп(Я) тяг двигателей; она огра-
ограничена высотами Н= 3,3; 5,3 км и выделена на рисунке двойными ли-
линиями. Обратим внимание на следующее обстоятельство. Так как экс-
эксплуатация двигателей на взлетном, режиме ограничена по времени, то "при
переходе их на новый режим работы меняются условия полета ЛА, т. е.
требуется пересчет балансировочных параметров и т. д.
Режим захода на посадку. Исследования показали, что в этом случае
движения уравновесить поврежденный самолет при заданных углах
скольжения /3 и крена у, равных нулю, не удается. В то же время экс-
эксплуатация ЛА допускает наличие небольшого угла скольжения при захо-
заходе на посадку при условии, чта в момент касания колес о взлетно-
посадочную полосу скольжение будет устранено. Вместе с тем наличие
крена ЛА здесь недопустимо, так как при у Ф 0 возникает скольжение
самолета в сторону опущенного крыла с потерей высоты. Поэтому в рас-
расчет закладывалось движение ЛА с углом крена у = 0 при располагаемой
тяге двигателей Грасл = 0. В расчете также учитывалось влияние экрана
Земли.
218
Предварительно проведенные исследования показали, что боковое
движение ЛА начинает интенсивно развиваться на больших углах атаки,
характерных для режима захода самолета на посадку. Для его парирова-
парирования требуются большие расходы рулей, чем при крейсерском полете.
Рассмотрим изменение балансировочных характеристик ЛА в зависимо-
зависимости от роста угла атаки а. В качестве начальных условий при решении
уравнений F.53) были приняты следующие значения предварительных
углов отклонения рулевых поверхностей: 8^ = 8^1 = -25°. Значения
р.в
остальных балансировочных кинематических параметров
<?,град
16
О
-16
5$,
р.в
и 5р н находились в зависимости от
изменения угла атаки; результаты расче-
расчета представлены на рис. 6.66. Вертикаль-
Вертикальная двойная линия на этом рисунке огра-
ограничивает область, находящуюся слева от
нее, в которой балансировка ЛА возмож- -32
на за счет предельных углов атаки #пред 48
<53пкред. Как ви-
и отклонения закрылка
дим, при заданных начальных условиях
установившийся прямолинейный полет
ЛА возможен при дифференциальном
отклонении остальных органов управле-
управления. Но даже при выполнении этого тре-
-64
-80
II ¦¦
/
12,5
^*
1ред
15
°зк
17,5
>*^
^
20 а
°рн
Чре;
у'
<5B)-
"рв
град
=====
Рис. 6.66. К определению баланси-
балансировочных параметров при заходе
поврежденного ЛА на посадку
бования осуществить горизонтальный полет ЛА с повреждением не
представляется возможным, так как необходимый для этого балансиро-
балансировочный угол отклонения левого закрылка 5$ значительно превосходит
свою максимальную величину (8$ »<5"^ед).
В рассмотренных случаях балансировочные характеристики опреде-
определялись, исходя из условия существования на ЛА систем дифференциаль-
дифференциально отклоняемых поверхностей и передачи функций от одних рулевых
поверхностей к другим.
Приведенные здесь примеры иллюстрируют широкие возможности
математического моделирования на ЭВМ в изучении даже таких акту-
актуальных вопросов авиационной техники, как аэроупругая устойчивость и
балансировка ЛА с повреждениями, имеющих различную массово-
инерционную (конструкционную) и аэродинамическую асимметрию.
Предварительное знание этой информации особо важно при выработке
рекомендаций для летчиков по пилотированию поврежденных ЛА и тре-
требований к разрабатываемым системам автоматического управления.
§ 6.7. Влияние подвижности топлива в баках на аэроупругие
характеристики крупногабаритных летательных аппаратов
Создание крупногабаритных транспортных самолетов типа Ил-76, Ан-
124 и Ан-225 вызвало появление ряда нерешенных задач проблемы аэро-
219
упругости, обусловленных спецификой их конструктивной компоновки.
В отличие от других типов ЛА данные самолеты имеют крылья большого
удлинения, гибкие не только в вертикальной плоскости, но и в горизон-
горизонтальной. Двигатели на них установлены на упругих пилонах под крылом,
топливо размещается во встроенных крыльевых баках-отсеках со слож-
сложным порядком его выработки. Суммарная масса двигателей составляет
50-80 % массы крыла, а масса топлива в 4-5 раз превышает эту массу.
Указанные особенности конструкции таких ЛА приводят к значитель-
значительному снижению собственных частот крутильных и горизонтально-
изгибных упругих колебаний крыла, существенному изменению значе-
значений частот при выработке топлива, высокой плотности частотного спек-
спектра, опасному сближению частот собственных колебаний крыла и упруго
подвешенных грузов, волновому движению топлива в баках и т. д.
Отметим еще одну особенность крупногабаритных транспортных са-
самолетов. Их двигатели отличаются высокой тяговооруженностью и обла-
обладают большим кинетическим моментом. Это приводит к гироскопиче-
гироскопической связанности продольного и бокового возмущенного движений ЛА,
значительному повышению чувствительности его аэроупругих и прочно-
прочностных характеристик к таким параметрам динамической системы «кры-
«крыло + пилон + двигатель», как тяга и кинетический момент двигателя, его
схема крепления и ее упруго-диссипативные свойства. Вопросы влияния
кинетического момента роторов, тяги и упругодиссипативных парамет-
параметров блоков крепления двигателей на аэроупругие колебания крыла круп-
крупногабаритного самолета рассмотрены в [273].
Необходимо отметить, что и колебания топлива во встроенных баках-
отсеках в значительной степени определяют динамические и диссипатив-
ные свойства конструкции ЛА, причем эти свойства зависят также от
размещения топлива и программы его выработки. Появляются новые
формы флаттера, обусловленные взаимодействием упругих колебаний
крыла, включая горизонтально-изгибные (данная форма колебаний крыла
вызывает интенсивное волновое движение топлива во встроенных баках-
отсеках), двигателей на пилонах и волнового движения топлива. В свою
очередь, рассматривающийся круг аэроупругих явлений, с которыми
приходится сталкиваться и учитывать разработчикам при создании по-
подобных авиационных объектов, требует глубокой теоретической прора-
проработки и тщательно поставленных экспериментов. Отсюда очевидно, что
решение такой многопараметрической задачи аэроупругости может быть
осуществлено только с привлечением математического моделирования и
вычислительного эксперимента на ЭВМ и сводится к интегрированию
системы матрично-векторных уравнений C.115). Для этого необходимо
предварительно вычислить значения гидродинамических коэффициентов,
частоты и формы собственных колебаний жидкости при ее волновом
движении в условиях неподвижности бака той же формы и размеров.
6.7.1. К определению гидродинамических сил, действующих на
конструкцию летательного аппарата со стороны топлива. Подвиж-
Подвижность топлива при движении ЛА связана с появлением дополнительных
воздействий на его конструкцию в виде главного вектора Р3 и главного
момента АМ3 гидродинамических сил относительно точки <93 (см. рис.
220
где
8
6.67), точки начала системы координат О3х3у3г3, связанной с отсеком
встроенного топливного бака и расположенной в центре тяжести свобод-
свободной поверхности топлива Е ось О3у3 в исходном состоянии колли-
неарна вектору ускорения свободного
падения §, направление оси О3х3 сов-
совпадает с линией жесткости недеформи-
рованного крыла, ось О3г3 образует с
осями О3у3 и #3*3 правую систему
координат. Положение точки О3 отно-
относительно неподвижной земной системы
координат О$х§у818 определяется сум- Рис. 6.67.К определению действую-
^ ~ щих на конструкцию ЛА гидродина-
мои векторов линейных Ко и К} и уг- мических сил вследствие подвижно-
ЛОВЫХ 90 И вг перемещений, которые с™ топлива в баках. Системы коор-
координат
характеризуют соответственно положе-
положения центров масс самолета и груза (бака с топливом). На рис. 6.67 через
5* и V обозначены смоченная внутренняя поверхность отсека бака и
часть его объема, занимаемая топливом. При заданных геометрических
параметрах оболочки (бака) и известной массе топлива в ней главный
вектор Р3 и главный момент АМ3 гидродинамических сил, действую-
действующих со стороны подвижного топлива на конструкцию ЛА, будут равны
[235,236]:
х
г=1
F.61)
где ^1 —тензор статических моментов, 12 = —1х —сопряженный тензор,
^ — тензор инерции, тензор 14 вида
О $оз 02
$02 ~
и ] =
О ^
0
0 -/32
» $02 =
0 7 7
F.62)
221
рт — плотность топлива; 50/(/ = 1,3) — статические моменты условно
затвердевшего топлива в системе координат
соответственно эквивалентные и центробежные моменты инерции пло-
площади свободной поверхности Е затвердевшего топлива; п — орт внеш-
внешней нормали к поверхности 5*; Хг, Х.Ог — векторы присоединенных
масс, соответствующие г-й форме колебаний топлива; /^ — компоненты
тензора 13 моментов инерции присоединенной массы топлива при вра-
вращении оболочки вокруг осей системы координат С^зУз^З с исчезающе
малым угловым ускорением; Гтг — нормированная форма г-го тона вол-
волновых движений топлива в неподвижной оболочке (отсеке) соответст-
соответствующей формы и размера; Ф(д:3,^з»^з) = 1фь^2'фз1|Т' ^(^З'УЗ'^з) =
= ||1Р1,гР2'^/з1|Т — гармонические векторные функции, компоненты кото-
которых являются потенциальным смещением частиц жидкости при квазиу-
становившихся линейных и угловых смещениях оболочки.
Задача по определению гидродинамических параметров решается при
следующих допущениях. Топливо представляется в виде однородной
несжимаемой жидкости. Поле массовых сил считается потенциальным и
стационарным. Топливо движется под действием массовых сил при ки-
кинематическом возбуждении возмущенным движением самолета; началь-
начальное его движение безвихревое. Принимается, что свободный объем обо-
оболочки заполнен газом, находящимся под постоянным давлением. Кине-
Кинематическая картина движения жидкости (топлива) описывается с помо-
помощью потенциала смещения ее частиц х > в общем случае представляемого
в виде [267]
% = Ху+%в> F.63)
где ху =(К2,Ф) + (в1,^) и Хв = ^,/тгЯтг — потенциалы смещений
г=1
соответственно при квазиустановившемся (волны на поверхности жидко-
жидкости не образуются) и колебательном движениях оболочки (с образовани-
образованием волн на поверхности жидкости). Функции /тг ортогональны на по-
поверхности Е. Имеются аналитические решения краевой задачи для на-
нахождения всех составляющих потенциала смещений х -гармонических
функций Ф, *Р и форм Гтг собственных колебаний жидкости, если обо-
оболочка имеет простые геометрические формы, например, форму прямо-
прямоугольного параллелепипеда и т. д. [235, 236].
Для замыкания системы F.61) надо присоединить к ней уравнение
волнового движения жидкости [235, 236]:
222
= 0,
СО.
F.64)
'тг I
где |1ТГ, ктг, (отг — соответственно присоединенная масса жидкости,
коэффициент демпфирования, собственная частота колебаний частично
заполненной жидкости.
Таким образом, если известны кинематические параметры возмущен-
возмущенного движения отсека с топливом К2 и 0! и его геометрия, то, исполь-
используя F.62), F.64), по F.61) можно определить гидродинамические силы,
действующие со стороны подвижного топлива на оболочку, а затем, ре-
решая систему уравнений C.115), найти новое возмущенное положение
бака-отсека и т. д.
6.7.2. К расчетной схематизации крыла и встроенных в него топ-
топливных баков. Как уже отмечалось, не существует аналитических ре-
решений при общей постановке задачи гидроупругости в случае полости
сложной формы с гибкими подкрепленными стенками, заполненной вяз-
вязкой жидкостью. Поэтому для упрощения задачи нахождения гидродина-
гидродинамических сил вводят ряд допущений. Например, при вычислении гидро-
гидродинамических коэффициентов стенки баков принимают гладкими и абсо-
абсолютно жесткими, а сами баки схематизируют полостями простой геомет-
геометрической формы, для которых уже имеются аналитические зависимости
для расчета этих коэффициентов. В частности, представление отсеков
топливных баков в виде прямоугольного параллелепипеда оказалось осо-
особенно удачным для таких современных крупногабаритных ЛА, как Ил-
76,Ан-124,Ан-225.
Формирование структурной ММЛА с учетом подвижности топлива
(см. C.115)) по-прежнему осуществляется по методу заданных форм, в
качестве ее базовых параметров исполь-
используются данные динамических характери-
характеристик ЛА без топлива. Вследствие того,
что стенки баков-отсеков, как правило,
включаются в силовую часть конструк-
конструкции ЛА, то считается, что топливо раз-
размещается в невесомом баке, причем
стенками каждого бака-отсека служат
верхняя и нижняя панели крыла и стенки
соответствующих лонжеронов и нервюр.
При этом перетеканием топлива из отсе-
отсека в отсек, как показано в [30], можно
пренебречь, считая стенки лонжеронов и
нервюр сплошными. Это позволяет баки-
отсеки рассматривать изолированно. В связи с тем, что длина бака-отсека
(расстояние между соседними нервюрами) мала по сравнению с разма-
размахом крыла, примем, что каждый отсек бака жестко закрепляется на балке-
крыле в одной условной точке — точке пересечения продольной плоско-
плоскости симметрии бака и линии жесткости крыла. На рис. 6.68 изображен
223
Панель
Рис. 6.68. К схематизации бака-кес-
бака-кессона крыла крупногабаритного ЛА
бак-кессон крыла одной очереди выработки, состоящий из Л^от баков-
отсеков, разделенных друг от друга нервюрами. На этом рисунке через
ак и Ък обозначены соответственно толщина профиля и расстояние ме-
между стенками лонжеронов в месте установки к-п нервюры; через 1к -
длина к -го бака отсека.
Объем топлива на ЛА в каждом баке-отсеке Ут в любой момент вре-
времени при заданной программе его выработки считается известным. Есте-
Естественно, что объемы топлива схематизированного и реального баков-
отсеков должны быть равными. С учетом принятых обозначений имеем
где
Нк=-^ —;
; Нк=НкН1\ а0, щ — соответственно толщина
ао+аг
профиля в месте установки корневой и первой нервюр; Н\ — высота
первого от корневого сечения крыла бака-отсека; Нк — высота к-то
бака-отсека. Следовательно,
тт К
»1=-
F.66)
я
\
Определяющим параметром при решений задачи гидродинамики в
подвижном баке будет его уровень заправки к (рис. 6.69). Поэтому обра-
обратимся к порядку расчета уровня топ-
топлива в баках-отсеках при деформиро-
деформировании крыла. Очевидно, что плос-
плоскость невозмущенной поверхности
жидкости (топлива) бака-отсека пер-
перпендикулярна вектору ускорения
Рис. 6.69. К порядку расчета уровня то- свободного падения §. Причем, за
плива в баках-отсеках
счет перетекания топлива через пер-
перфорацию в стенках нервюр образуется единая невозмущенная поверх-
поверхность X (рис. 6.69}. В этом случае уровень заправки к-то бака отсека в
момент времени г будет
Ут - АУт
к=2
F.67)
где АУТ(О—объем топлива, израсходованный к моменту времени V,
При квазистатическом деформировании крыла под действием внеш-
внешних сил (подъемная сила в горизонтальном установившемся полете, вес
крыла при рулении ЛА по ВПП) топливо будет перетекать из отсека в
отсек, как показано, например, на рис 6.70. Если известно положение оси
224
жесткости крыла в момент времени /, то смещения баков-отсеков за счет
упругого деформирования крыла будут равны
А/и=/"-/1СТ- F-68)
Для примера определим уровень заправки к-го бака-отсека при уста-
установившемся горизонтальном полете ЛА, когда взаимные смещения ба-
баков-отсеков за счет кинематики
I8
превышают смещения за счет уп-
упругого деформирования крыла,
т. е. Д#1Лг > 4/^ . Здесь воз-
Ось жесткости
Рис*тк Рас^ту уровня топлива в баках-
отсеках при деформировании крыла
можны три варианта размещения
топлива в баке-кессоне за счет его
перетекания через перфорацию
нервюр: 1) часть баков-отсеков в корневой части кессона частично за-
заполнена топливом, а остальные — полностью; 2) все баки-отсеки частич-
частично заполнены топливом; 3) часть баков-отсеков в концевой части кессона
не содержит топлива, а часть баков-отсеков его корневой части частично
заполнена топливом. Отсюда ясно, что порядок расчета уровня заправки
каждого из трех возможных вариантов перераспределения топлива будет
различным.
Пусть к моменту времени г из бака-кессона выработано топлива объе-
. мом А Ут, в баках осталось топлива объемом Ут' = Ут - А Ут. Примем, что
р баков-отсеков корневой части кессона частично заполнены топливом, а
оставшаяся часть у=М0Т-р, баков — полностью. Определим дискретный
ряд возможных освобожденных объемов топлива к моменту времени V.
УР = ЪЪкк№к{р+1)-Цк1Р+\)), р=1,#от-1. F.69)
к=\
Если теперь сравнить реальную выработку топлива к моменту времени г
(А Ут ) с членами ряда Ур, то можно найти число частично заполненных
топливом баков р и число V — полностью заполненных. В этом случае
уровень заправки ^-го бака будет определяться по формуле
**(') =
Если АУТ>УМ -1 =
)> то реализуется вто-
второй вариант, когда все Ыот баков-отсеков частично заполнены топливом.
Тогда будем иметь
К О = к' -
]
и
Fл1)
225
8-983
Третий вариант заправки бака-кессона реализуется тогда, когда нач-
начнут опорожняться его концевые отсеки, что возможно при
F.72)
Пусть в момент времени ^ г баков-отсеков в концевой части кессона
пусты, а остальные р баков (р = М0Т-г) — частично заполнены топливом.
Число пустых баков г к моменту времени Х\ по аналогии с F.68) будет
Уг =
F.73)
Оно определяется из сравнения объема реального остатка топлива
V?1 к моменту времени ^ с вычисленным объемом Уг . Так, если
Уг < У^1 ^ Уг-\ •> то это значит, что г баков-отсеков пусты, а р баков час-
частично заполнены топливом. В этом случае уровень заправки А;-го бака
кк , начиная с момента времени ^, будет определяться зависимостью
F.74)
где АЯ11=А/17=0.
Аналогично можно определить уровни топлива в баках-отсеках в лю-
любой момент времени для других режимов полета ЛА (пробеге, рулении по
ВПП, наборе высоты и т. д.)
6.7.3. Упрощенный способ расчета гидродинамических коэффици-
коэффициентов бака-отсека. Приведенные в п. 6.7.1 соотношения для расчета
гидродинамических коэффициентов справедливы для баков произволь-
произвольной формы и при произвольном выборе местоположения связанной с ба-
баками системы координат. Однако
в такой общей постановке задачи
гидродинамики не существует
аналитических решений краевой
задачи для составляющих потен-
потенциала смещений частиц жидкости
Ф;, Ч?] , $тг . Это обстоятельство
затрудняет моделирование под-
подвижности топлива при решении
задач аэроупругости ЛА. Вместе с
тем для баков относительно простой формы (сферы, цилиндра, прямо-
прямоугольного параллелепипеда) такие аналитические решения имеются для
всех составляющих потенциала смещений [235, 236]. Воспользуемся од-
одним из них. Рассмотрим встроенный бак-отсек крыла (рис. 6.71 а), час-
частично заполненный топливом; здесь на него нанесена связанная с ним
226
Рис. 6.71. Реальный бак-отсек (а) и схемати-
схематизированный (б)
система координат Оз^зУз^З» расположенная в центре тяжести свобод-
свободной поверхности условно затвердевшего топлива. Габаритные размеры
реального бака-отсека (ширина Ъ и высота Н) ЛА изменяются незначи-
незначительно вдоль размаха крыла в пределах < 5 %, что позволяет его схема-
схематизировать прямоугольным параллелепипедом (рис. 6.71 б). Методика
расчета гидродинамических коэффициентов такого схематизированного
бака описана в [235, 236]. При этом структуру уравнений возмущенного
движения ЛА с учетом подвижности топлива в баках C.115) можно су-
существенно упростить за счет рационального расположения системы ко-
координат 03*3Уз^З- Совместим точку О3 с центром нижнего днища
схематизированного бака-отсека, ось <93;уз направим через центр
условно затвердевшего в исходном состоянии топлива и коллинеарно
вектору §. Пусть оси <Э3Х3 и <93гЗ являются главными осями инерции
бака с затвердевшим топливом, причем ось <93^з коллинеарна оси
жесткости недеформированного крыла. Тогда в F.62)
хт = 1т = 802 = 503=0, 723=^32=0, /0=0A*./). F.75)
Введем обозначения:
F.76)
где хм, гм — метоцентры топлива.
С учетом F.75), F.76) соотношения F.62) примут вид
'0 0 0 ^
О 0 ^З^м р ^2 = ~~^1'
О -тъхи О I
(]п О О Л /п п п \ 1Р-'О
О 722 °
О О 5ЪЪ)
В силу симметрии бака-отсека компоненты гармонических функций Ф2
и *Рз оказываются симметричными и антисимметричными относительно
соответственно плоскостей О3х3у3 и ОзУз^з' а составляюЩие ^2 и ^3
наоборот. Составляющая ^ антисимметрична относительно обеих этих
плоскостей. Система собственных функций /тг (г = 1,А^г) волновых
движений топлива распадается на три взаимно ортогональных на свобод-
свободной поверхности Е подсистемы функций /Т5, /Тр, /тп. При этом вол-
волновое движение жидкости описывается обобщенными координатами ^5,
Яр> Чп-> которым соответствуют коэффициенты демпфирования к^,
к2р, к3п и собственные частоты п^ , П2р , п3п; ^ =1,Л^г1 , р=1,Мг2 ,
п = 1, Л^з 5 где Л^г1, Ыг2 , Л^г3 — числа учитываемых тонов волнового
движения топлива в соответствующих плоскостях. В дальнейшем будем
полагать Л^п- = Л^г (г = 1,3).
227
С учетом принятых допущений выпишем формулы для вычисления
присоединенных масс топлива при его волновом движении в соответст-
соответствующих плоскостях. Для этого в соотношения F.62) надо подставить
полученные выражения для составляющих гармонических функций Фк
(А: = 2,3) и ^-(/ = 1,3), а в зависимость ^тг=/(/тг) соответственно
функции /та, /тр , /тп.
При волновом движении топлива вдоль оси О3У3 и вращения вокруг
нее имеем
F.78)
При волновом движении топлива в плоскости #3*3 Уз
F.79)
Для волнового движения топлива в плоскости
= РТ
будет
*Ъп\
F.80)
п=цгг
Для бака-отсека в форме прямоугольного параллелепипеда с исполь-
использованием в качестве характерного размера ширины схематизированного
бака Ь (рис. 6.71 б) и соотношений F.78)-F.80) формулы для нахождения
безразмерных гидродинамических коэффициентов приобретают вид [235,
236]
= РтЬ4
F.81а)
228
;2 +/'2с2
13=Ь41/12, 1 =
1 _ „ 1.5
^-(А2- 0,25) + 8/
_-2РтьЧ
С1
_ 2РтЬ4Г
- ^~
?Р
/г +
F.816)
12
"» ^22 =
73
В итоге исследование возмущенного движения ЛА с учетом подвиж-
подвижности топлива в баках, описываемого матричновекторной системой
уравнений C.115), включает два этапа. На первом этапе по формулам
F.81) вычисляются гидродинамические коэффициенты, а на втором —
путем интегрирования системы C.115) решается комплексная динамиче-
динамическая задача возмущенного поведения ЛА с учетом влияния подвижности
топлива в баках.
Необходимо отметить ряд существенных недостатков, ограничиваю-
ограничивающих возможность непосредственного использования системы уравнений
C.115) для решения прикладных задач аэроупругости ЛА с учетом под-
подвижности топлива в баках. Так, значения коэффициентов присоединен-
присоединенных масс, определяемые по формулам F.78)-F.8О), зависят от коэффи-
коэффициентов собственных форм волнового движения частиц жидкости /Т5,
/тр» /та • Гидродинамические коэффициенты 1Ли , 1Л2р , А^Зп» ^ОЗр »
^02л > ^22 > ^33 > вычисляемые по зависимостям F.81), стремятся к бес-
бесконечности при уровне заправки /*-»(), что характерно для емкостей с
плоскими днищами. Вместе с тем для топливных баков-отсеков ЛА прак-
практический интерес представляет как раз случай малых к. Кроме того, для
баков с внутренним силовым набором достаточно точно гидродинамиче-
гидродинамические коэффициенты могут быть получены лишь экспериментальным пу-
путем. При этом точность нахождения присоединенных масс является наи-
наиболее низкой [235, 236]. Следует также отметить, что при испытаниях
229
динамически подобных моделей ЛА ввиду конструктивных проблем и
сложности удовлетворения критериям гидродинамического подобия
практически невозможно использовать жидкий наполнитель для модели-
моделирования подвижности топлива в баках.
В то же время общий анализ структуры матрично-векторного уравне-
уравнения C.115) показывает, что оно может быть приведено к некоторой экви-
эквивалентной системе, когда подвижность топлива моделируется системой
механических аналогов [192, 235, 236, 371, 274]. Подобный подход ши-
широко используется в ракетостроении и в принципе может быть эффектив-
эффективно использован и в самолетостроении для учета подвижности топлива в
крыльевых баках при создании унифицированных структурных ММ
функционирования тяжелых транспортных ЛА.
6.7.4. Моделирование подвижности топлива в баках с помощью
механических аналогов. Используя принцип суперпозиции, выпишем
волновые движения топлива в соответствующих плоскостях связанной с
центром тяжести днища бака системы координат О^х^у^ъ •
Заметим, что для баков-отсеков крыла крупногабаритного ЛА безраз-
безразмерная длина I ~ 1, а гидродинамический коэффициент Ло^ —> 0 при
•*! ~32 (см- F.81)). Это означает, что колебания топлива в направлении
оси О^уз отсутствуют (не возбуждаются при любом движении бака и не
влияют на это его движение). Следовательно, при колебаниях бака-отсека
вдоль оси О3У3 топливо можно считать условно затвердевшим. При этом
момент инерции /п необходимо вычислять посредством потенциалов
Жуковского как для полностью заправленного бака [157]. Отсюда следу-
следует, что волновые колебания топлива возбуждаются только при движении
бака в двух главных плоскостях О^х^у^ и О^у^ъ -
Для примера рассмотрим методику замены движения реального бака
(рис. 6.72 а) с подвижным топливом в плоскости Оз^зУз эквивалентным
механическим аналогом (рис. 6.72 б). На рис. 6.72 б 1 —р-й маятниковый
осциллятор массой т, моде-
моделирующий волновое движе-
движение топлива по р-у тону;
2— условно затвердевшая
часть топлива массой т^ с
моментом инерции относи-
относительно оси 0^2 равным
703 *> 3 — невесомый бак;
. Ь
Уъ
°ъ
к
С2Р
х>
'1
\
}
з/
Уъ
1
Л\\\\\>
б
Рис. 6.72. К учету колебаний топлива в баках с
помощью механического аналога Т^* » 0у (рис. 6.72 а) —
обобщенные координаты, описывающие движение невесомого бака соот-
соответственно вдоль оси лг3 и поворот вокруг оси О^уз в плоскости
ОзхзУз > УсЗ — координата центра масс затвердевшей части топлива;
12р — длина маятника; С2р — расстояние от нижнего днища до точки
подвеса р-го маятника; др — обобщенная координата, описывающая
смещение маятника.
230
Уравнения движения изолированного невесомого бшеа с подвижным
топливом относительно инерциальной системы коорданат в плоскости
ОзхзУз П°Д действием внешних обобщенных сшп Ру и ЖОг (без учета
вязкости среды) будут [235, 236]
р=1
р=1
Соответствующие системе F.82) уравнения колебаний бака с
механическим аналогом (см. рис. 6.72 6) имеют вид [235,236]
, F.83)
т2р12рЧр+8т2р12р<1р +т2р12рК2у3
Из сравнения видно, что системы уравнений F.82) и F.83) полностью
эквивалентны, если выполняются соотношения
(Я2рJ &
р=1
Как показано в [235, 236], параметры
т02р = т2рс2р '
являются инвариантами возмущенного движения топлива, независящими
от нормировки форм, и с достаточно высокой степенью точности опреде-
определяются в эксперименте.
В ряде случаев изменением потенциальной энергии системы за счет
движения топлива в поле массовых сил можно пренебречь (составляю-
(составляющая 8тзхм3^31 во ВТ0Р0М уравнении системы F.82)). В механическом
аналоге составляющая смещения маятникового осциллятора в направле-
направлении оси О^Уз также не учитывается. В этом случае используемый меха-
231
нический аналог будет включать Мг линейных осцилляторов с жестко-
жесткостью упругих элементов D) К2р (рис. 6.73).
,3
^
Ко
\\\\\\\\\\\\\\\^
03 ^2
Рис. 6.73. Упрощенный вариант механического аналога учета колебаний топлива в баках
Уравнения возмущенного движения бака с системой линейных осцил-
осцилляторов запишутся так
т02
I
V.
Уравнения F.85) и F.82) при
выполнении условий
2р
т02>'с2 =
г = ^ будут эквивалентными при
- Ёт2р^2р
р=1
F.86)
Выражая из третьего уравнения системы F.83) величины ё[р и под-
подставляя их в первое и второе уравнения этой системы, получаем
= Ру3 .
р=\
р=1
12р=и, р=1,1У/г.
Используя формулы F.81) и F.84), можно показать ,что при заправке
топлива к -» 0 все коэффициенты системы уравнений F.87) стремятся к
232
нулю или к константе. Такая особенность уравнений F.87) позволяет их
применять при описании возмущенного движения топлива без ограниче-
ограничений, которые возникли бы в случае использования соотношений F.81)
для определения гидродинамических коэффициентов. Правда, здесь при
заправке топлива /г—»0 не выполняется допущение о независимости
экваториального момента инерции свободной поверхности топлива У3 от
малого угла поворота в3у^ . Вместе с тем без больших потерь в точности
моделирования можно принять У3 = 0 пРи к - ^стр •> гДе ^стр — высота
стрингеров нижней панели крыла самолета, проходящей через данный
бак-отсек.
По аналогии выпишем уравнения колебаний бака в механических
аналогах в плоскости
г
-§т3хм2в3хз + в ^тЪпсъ^п = Мщ , F.88)
Яп + СОЗпЯп + ^2г3 /1Зп + сЪгРзхъ /Чп = °' п = Щ ,
где
= » 1Зп=-^Г> С3/1=Т^» т02 = тЗ - Е
СО3п Азп й=1
п=1 п=1
Первые два уравнения систем F.87) и F.88) определяют силы гидро-
гидродинамического взаимодействия топлива с невесомым абсолютно жестким
баком, совершающим возмущенное движение, а третье — описывает
волновое движение топлива. Эти соотношения не представляет труда
распространить на встроенный топливный бак-отсек крыла крупногаба-
крупногабаритного самолета, совершающего возмущенное движение. Позволяют
унифицировать процесс формирования уравнений возмущенного движе-
движения крупногабаритных ЛА с учетом влияния подвижности топлива без
ограничений на уровень заправки им бака. Заметим, что при наличии
систем встроенных баков-отсеков матрицы инерции и жесткости базовой
структурной ММЛА C.115) составляются с учетом вкладов всех баков;
матрично-векторная система уравнений C.115) дополняется также урав-
уравнениями волнового движения топлива каждого бака.
6.7.5. Некоторые результаты математического моделирования
влияния подвижности топлива на аэроупругие характеристики са-
самолетов. Приведенные ниже данные расчетов получены на примере
крупногабаритного самолета типа Ан-124. Топливо на нем размещается в
96 встроенных топливных баках-отсеках на каждой консоли крыла. Вы-
Выработка топлива из баков осуществляется последовательно по очередям,
233
I, II, III — от корневой к концевой частям крыла. Переход от реального
крыла к его схематизированной форме как некоторой совокупности вза-
имносообщаюпдахся в рамках одного бака-кессона прямоугольных па-
параллелепипедов я определение уровня их заправки при заданной суммар-
суммарной массе топлива в баках осуществлялся по формулам п. 6.7.2. Парамет-
Параметры механических аналогов уравнений колебаний каждого бака-отсека
вычислялись по зависимостям п. 6.7.4. Баки-отсеки, заполненные полно-
полностью топливом, при заданной массе топлива От и известной программе
его выработки учитываются на этапе формирования базовой структурной
ММЛА .Моменты инерции топлива в полностью заправленных баках
вычисляются с помощью потенциалов Жуковского [157].
Прежде чем перейти к анализу влияния подвижности топлива на аэ-
аэроупругие характеристики ЛА в целом, остановимся на ряде особенно-
особенностей крыльевых баков-отсеков, которые необходимо учитывать в расче-
расчетах. Во-первых, на нижней и верхней панелях крыла имеются подкреп-
подкрепляющие элементы (стрингеры), что позволяет при заправке баков топли-
топливом, для которого к</г^р и к>Н -к^ (к^ — соответственно высо-
высота стенок стрингеров нижней и верхней панелей), рассматривать топливо
при линейных смещениях бака условно
затвердевшим. Во-вторых, формулы
расчета гидродинамических коэффици-
коэффициентов схематизированного бака с топ-
топливом (см. п. 6.7.1) получены для так
называемых открытых баков. На под-
подвижность топлива в реальных баках-
отсеках влияние оказывает и верхняя
панель (крышка), которое может быть
учтено по методике, описанной в [274].
Рисунок 6.74 иллюстрирует измене-
изменение относительных масс маятниковых
Щ
0,75
0,50
0,25
о
— 1—
-Л;
— 1
~~ ^ * а.
у
А
\
0,2 0,4 0,6 0,8
Рис. 6.74. Изменение относительных
масс маятниковых осцилляторов
щ (/ = 1,3)» моделирующих низшие
тона волнового движения топлива, и
относительной массы затвердевшей
части топлива т0 в зависимости от
относительного уровня заправки
бака От
осцилляторов /й^(* = 1,3) для трех низ-
низших тонов волнового движения топлива
и относительной массы условно затвер-
затвердевшей части топлива т0 от относи-
относительного уровня заправки им бака Ст,
где щ - Ш1 /тт, то=то/тт, От=тт/т™х , щ — текущее значение
массы топлива в баке, т™ах — масса топлива в полностью заполненном
баке. Из анализов графиков щ = /(От) следует, что при заправках
От > 0,2 (именно этот случай заправки способствует интенсивному гид-
гидродинамическому взаимодействию в системе «бак-топливо») можно ог-
ограничиться учетом лишь основного тона волнового движения топлива.
Кроме того, видно, что рост заправки, с одной стороны, приводит к зату-
затуханию колебаний топлива, а с другой — вызывает резкое увеличение
присоединенной массы т0.
234
0,75
Данные рис. 6.75 отражают изменение относительной массы маятни-
маятникового осциллятора т\, моделирующего волновое движение топлива по
основному тону его колебаний, от щ
уровня заправки бака Ст при учете
влияния верхней крышки (закрытый
бак, сплошная линия) и для открытого 0 50
бака (штриховая). Отсюда ясно, что
при заправках Ст > 0,7 расчет гидро- о,25
динамических коэффициентов необхо-
необходимо вести с учетом влияния верхней о
панели крыла.
Теперь обратимся к результатам Рис. 6.75. Изменение относительной
расчетов динамических и аэроупругих ™сш маятникового осциллятора
характеристик самолета Ан-124, кото- т^ моделирующего волновое дви-
рые получены с учетом подвижности жение топлива по основному тону
топлива в баках, моделируемой систе- колебаний> в зависимости от ур_овня
мой механических аналогов, и по мо- относительной заправки бака ОТ с
дели условно затвердевшего топлива, учетом влияния верхней крышки
Анализ результатов вычислений пока-
показал, что подвижность топлива оказывает
0,15] 1 1 У\ К 1 существенное влияние на динамические
характеристики(частоты и формы собст-
0,101 |—т*Ч 1 1—\Ч венных колебаний) и диссипативные
свойства крупногабаритного ЛА при
0,051—-/{—^^ |" ^К \ | относительной заправке баков топливом
в диапазоне 0,2 < От{ < 0,9 . При этом в
большей степени это влияние сказывает-
сказывает0
у
/
/
II
\
0,2 0,4 0,6 0,8 0 .
Рис. 6.76. Изменение относительной ся на изменении параметров горизон-
собственной частоты Д&гизг пер- тально-изгибных форм собственных
вого тона симметричных горизон- упругих колебаний, которое прослежи-
тально-изгибных колебаний крыла вается на рис. 6.76. Здесь показано из-
самолета Ан-124 в зависимости от меНение относительной собственной
заправки топливом С/т/ частоты
первого тона симметричных горизон-
тально-изгибных колебаний крыла само-
самолета Ан-124
гизг
где
— симметричные
горизонтально-изгибные собственные ча-
частоты крыла, вычисленные соответст-
соответственно по модели затвердевшего топлива
и с учетом его подвижности. Из анализа
рис. 6.77 следует, что относительное
влияние подвижности топлива при выра-
ботке его из баков I и II очереди, разме-
щенных ближе к корневой части крыла,
ся
Рис. 6.77. Изменение относитель-
относительного декремента затухания АЗГ изг
колеба-
Ан-124 в зави-
зависимости от заправки топливом Су1
235
существенно ниже ( < 7 %), чем при выработке топлива из баков III оче-
очереди (~ 17 %). Аналогичные зависимости для относительных
логарифмических декрементов затуха-
~ч ния колебаний А<5Г1Г,Г помещены на
ГИЗГ
рис. 6.77. Видно, что волновое движение
топлива в баках вызывает значительный
рост (>50%) диссипативных свойств
конструкции, в первую очередь, при го-
ризонтально-изгибных колебаниях кры-
крыла. Выявлен заметный демпфирующий
эффект и на других упругих тонах.
Данные рисунков 6.78 и 6.79 отра-
отражают влияние подвижности топлива на
1(ГК1
7
/
У
\
\
1
/
1-сикФ+сувне
2-СИКФ + СУвну
— Затвердевшее топливо
— Подвижное топливо
о
10 15
20 ОТ9%
Рис. 6.78. Влияние подвижности то-
топлива на критическую скорость
{/кр пиленного флаттера самолета флатгерные характеристики самолета
Ан-124 в зависимости от заправки Дн-124. Первый из них иллюстрирует
изменение критической скорости пилот-
/
/
\\
1 \
1 \
1 \
1 \
\
\
1
11
II
II
/ 1
/ 1
/ V
/ 1
\
\
—1 1—
"ч
\
— —
о
10 15 20
топливом Ст
ного флаттера [/кр самолета в зависимости от уровня его заправки топ-
топливом Ст (сплошная линия — топливо ик ,102 км/ч
считается затвердевшим, штриховая —
влияние подвижности топлива учитывается
с помощью механического аналога) и рас-
расположения двигателей на ЛА (внешнее или
внутреннее). Кривые 1 отражают изменение
зависимости {Укр от уровня заправки баков
при учете колебаний внешнего двигателя;
кривые 2 — в случае учета колебаний внут-
внутреннего двигателя. Как видим, влияние
подвижности топлива на 17кр носит слож- топлива
ный характер и выражается как в измене- рость *
нии ее абсолютных значений, так и в фазо-
фазовых сдвигах флаттерующих тонов. При
этом критическая скорость (/кр симмет-
симметричного изгибно-крутильного флаттера (рис. 6.79) имеет устойчивую
тенденцию к повышению во всем рассматриваемом диапазоне заправок,
что можно объяснить ростом диссипативных свойств конструкции.
§ 6.8. Летательный аппарат с активной противофлаттерной
системой.
С помощью систем управления (САУ) наряду с увеличением критиче-
критической скорости флаттера С/кр ЛА решаются такие задачи, как демпфиро-
демпфирование упругих колебаний конструкций и снижение внутренних усилий в
ее опасных сечениях, уменьшение темпов расходования ресурса планера
и его массы. При этом они должны иметь полосы пропускания, охваты-
охватывающие собственные частоты тех тонов упругих колебаний, вредное
236
От9%
Рис. 6.79. Влияние подвижности
на критическую ско-
кр симметричного из-
габно-кругильного флаттера кры-
крыла самолета Ан-124 в зависимо-
зависимости от заправки топливом Ст
влияние которых компенсируют. В таких системах применяют менее
мощные, но более высокочастотные приводы рулей, площади которых
меньше площадей обычных рулевых поверхностей. Это связано с тем,
что в области рабочих режимов углы отклонения этих рулей должны су-
существенно превышать люфты проводки управления и зоны нечувстви-
нечувствительности приводов.
Структурная ММ функционирования упругого ЛА в полете с проти-
вофлаттерной системой в линейном варианте с частотным уравнением
возмущенного движения аппарата, включающим векторы отклонения
рулевых поверхностей и их производных E,5), а также вектор А ком-
компонент скорости ветра, содержит законы управления — уравнения дина-
динамики приводов рулевых поверхностей и датчиков:
= Куиу , V = 1,Ыу ,
F.89)
Для удобства применения уравнений аэроавтоупругости в расчетной
системе на ЭВМ приведем каждую группу зависимостей F.89) к
канонической форме. Для этого введем обозначения:
я =
5 =
1 -F.90)
3|= 51 -=|'У| = ||Т1'
Первое уравнение F.89) в нормальной форме Коши примет вид
41=12. 5 Д~ F'91)
или в матричной форме
^ = РЯ + В8 + с А , F.92)
-—2ксо II *
0
0
гЯ~\ Л
¦^^+А1
— собственная частота турбулентно-
турбулентности, 1^. — масштаб турбулентности.
Линейная ММ рулевого привода в нормальной форме Коши будет
1 ОР- V
F.93)
или в матричном виде
. 0 =
F.94)
237
Размерность матричного уравнения F.94) 2МУ .
Аналогичным образом преобразуются к каноническому виду ММ из-
измерительной системы (датчиков) и турбулентной атмосферы:
6\, F.95)
А=раА+е^
о
F.96)
О
о
где М = _
У~ * 17?"II " И"^ ~<
\ 11 II
Необходимо отметить, что вектор входных сигналов ММ измеритель-
измерительной системы линейно связан с фазовыми координатами уравнением
Х|? = Сц5 + С128 + С13А. F.97)
Размерности соотношений F.95) и F.96) равны соответственно 2Иу
и 2.
Совокупность матричных уравнений F.92), F.94)-F.96). дополненная
уравнениями измерений, образует систему линейных уравнений аэроав-
тоупругости, которая в эквивалентном безразмерном матричном виде
записывается так:
Я = Рс[ + В5 + с8 + с А, 8 = О 8 + 32 и,
7 = М*у + §!% +6,-, А = РдА + 02.
Введем для системы F.98) вектор фазовых координат
F.98)
F.99)
Тогда с учетом F.99) систему F.98) можно преобразовать к виду
F.100)
р=
где
Р В О С*
О 6* О О
С11 С12 М* С13
0 0 0
ё — случайный процесс типа белого шума с нулевым средним и матри-
матрицей интенсивности
00 0 0
0 0 0 0
0 0 ^ 0
00 0 5ш
Здесь 5ш =
У
— среднеквадратичное значение вертикаль-
ной составляющей скорости ветра
238
Общая размерность системы F.100) равна
#Е = 2№д + 2) + 2Му + 2А^Г + 2. F.101)
Числовые матрицы Ри С в F.100) — постоянные для заданного ре-
режима полета.
Матрично-векторная система уравнений в форме F.100) является ли-
линейной ММ аэроавтоупругости ЛА как объекта управления с учетом
приводов рулевых поверхностей и датчиков измерительной системы.
Синтез закона управления — основной этап в разработке противо-
флаттерной системы. Обычно при созданий такой системы закон управ-
управления в классе стационарных задач выбирается в виде линейной комби-
комбинации измеряемых фазовых координат уи:
и=Ьуи, F.102)
где Ь — матрица коэффициентов обратной связи.
Величины коэффициентов обратной связи матрицы Ь находятся из
решения задачи синтеза стационарного управления, оптимального отно-
относительно вспомогательного квадратичного функционала, имеющего вид
[197,202,216,295,312,325]
1 = Ё/(утC1У + итB2и)Лт , F.103)
Ч
где (^1 и (^2 — диагональные матрицы, составленные из весовых коэф-
коэффициентов ку( 0' = 1, Л^,), соответствующих элементам векторов фазо-
фазовых координат и закона управления; Е — знак математического ожида-
ожидания. Коэффициенты ^,- обычно выбирают эвристически или методом
проб таким образом, чтобы, например, обеспечить увеличение критиче-
критической скорости флаттера {Укр для обобщенной координаты неустойчивого
тона (в случае одной неустойчивой формы) или равенство ^7кр для по-
подавляемых нескольких неустойчивых упругих форм. Исходя из этого,
квадратичный функционал выбирают в виде
F.104)
ч
т. е. штраф накладывают не на весь вектор фазовых координат, а нач
обобщенные координаты дкр; взаимодействующих неустойчивых тонов
упругих колебаний и управляющий сигнал и.
Для стационарного управления при (т# -т0)—>°° аналитическое ре-
решение оптимального закона управления имеет вид
и = -д21От5уи, F.105)
где 8 — установившееся решение матричного уравнения Риккати
- з = ртз+зр+B! - зскйЧгЧз (блоб)
с граничным условием З(т^) = 0.
239
Синтез оптимального закона управления, как и решение задачи нели/
нейной фильтрации, осуществляется на основе выбранной для этой цели
линейной ММ аэроавтоупругости ЛА. Общий вид закона управлен^,
минимизирующего квадратичный функционал системы F.104), имеет
вид
)^(|У/+*ЛУ/). F-107)
В [43] показано, что поведение Икр определяют коэффициенты к*3 и
к?3, зависящие от обобщенных упругих кинематических параметров #.
Остальные же коэффициенты, входящие в F.107), оказывают несущест-
несущественное влияние на Икр и поэтому могут быть исключены из рассмотре-
рассмотрения.
В итоге реализуемый субоптимальный закон управления квадратич-
квадратичного функционала F.104) для замкнутой противофлаттерной системы
принимает вид
Этот закон управления получен для системы F.100) в предположении
неизменности параметров матрицы Р. При изменении условий функцио-
функционирования объекта управления в общем случае осуществляется под-
подстройка (по результатам текущей идентификации) коэффициентов мат-
матрицы Р. Оптимальный закон управления для нового режима полета дол-
должен синтезироваться на основе уточненных коэффициентов последней и
т.д.
Однако такой путь при создании активной противофлаттерной систе-
системы значительно усложняет решение задачи. Здесь будут приведены ре-
результаты исследования противофлаттерной системы, использующей за-
закон управления, базирующийся на матрице Р с постоянными коэффици-
коэффициентами, формирующейся при скорости полета ЛА, близкой к критиче-
критической С/0~^кр [51].
Для рассмотрения устойчивости системы «самолет + САУ» необхо-
необходимо составить уравнение ее замкнутого контура с учетом принятого
выше закона управления
Уи=Р*Уи> Р*=(Р + СЬ), у1=\\у„ 6,5Г, F.109)
где уи—вектор состояния модели.
Оптимальный закон управления, используемый в F.109), составлен в
предположении о точном измерении всех фазовых координат. Это пред-
предположение на практике не выполняется. Получение информации о реаль-
реальном текущем значении всех фазовых координат возможно только путем
240
оценивания последних. Несмещенные оценки могут быть определены
путем применения оптимальных алгоритмов фильтрации типа алгоритма
Калмана. Существуют и другие подходы [197, 202, 208,216, 295, 325].
Учитывая, что оценка вектора состояния
Уи = Уи + Уи F.110)
удовлетворяет условиям
Е(уи) = 0, Е(уи,уи) = р(т), уи=Е(у/2т),
где уи, 2Т, р(т) — соответственно погрешность оценивания, вектор
измерений, корреляционная матрица погрешностей оценивания в момент
времени т.
Преобразуем систему уравнений F.109) к виду
уи=(Р + СЬ)уи+СЬуи+ё. F.111)
Вторым слагаемым в правой части выражения F.111) можно пренебречь,
так как оно характеризует помехи в контуре управления из-за погрешно-
погрешности оценивания и не оказывает влияния на устойчивость системы
«ЛА + САУ». В этом случае решение задачи об устойчивости этой замк-
замкнутой системы сводится к анализу собственных значений матрицы
Р* = Р + СЬ путем варьирования скорости полета ЛА.
Рассмотрим задачу синтеза управления противофлаттерной системы
для подавления симметричного изгибно-крутильного флаттера крыла на
примере гипотетического ограниченно-маневренного самолета при доз-
дозвуковом полете (рис. 6.80). Задействованные для этого аэродинамические
рулевые поверхности противофлаттерной системы показаны на этом ри-
рисунке; ими являются секции элеронов площадью, составляющей 2 %
площади крыла, и удлинением, равным шести. Элерон поворачивается
вокруг оси О'О", которая с осью О^ составляет угол (я/2 +в) и отсе-
отсекает на ней отрезок длиной *0. Структурная
ММ функционирования данного самолета
строилась с удержанием двух форм колеба-
колебаний его как твердого тела и четырех низших
резонансных форм упругих колебаний его
конструкции (изгиба крыла, вертикального
Рис. 6.80. К использованию ру- изгиба Фюзеляжа, кручения крыла и изгиба
левых аэродинамических по- стабилизатора) и гипотезы квазистационар-
верхностей в задачах синтеза ности при определении аэродинамических
закона управления противо- коэффициентов в соответствии с [56].
флаттерной системы Предварительные результаты исследова-
исследования этого самолета без САУ (с зажатыми рулями) показали, что неустой-
неустойчивым является сочетание 3-го и 4-го тонов упругих колебаний, т. е. име-
имеет место изгибно-крутильный флаттер крыла. В этом случае для синтеза
закона управления противофлаттерной системы квадратичный функцио-
функционал в форме F.104) может быть записан в виде
(тк -т0)->оо . F.112)
241
Чъ
0,016
0,008
/
/
/
К,
\
\
ч
ч
При синтезе этого квадратичного функционала в случае назначен
штрафа на обобщенную упругую координату #з используем субощй-
мальный закон управления в форме '
и=к^ь ц^Л-к 3#з- F.113)
Коэффициенты к^ъ и И3 находятся по F.105) при получении устано-
установившихся решений уравнения F.106).
Оценка угла отклонения рулевых поверхностей проводилась при за-
законе внешних воздействий, соответствующим постепенному входу само-
самолета в порыв при 1^ = 30 м и
^у шах = ^ м/с. Скорость полета
ЛА с САУ выбиралась равной
0,9 [/кр и 1,Шкр неуправляемого
ЛА (без САУ). Угол отклонения
рулей подбирался в процессе мо-
моделирования полета ЛА с САУ на
ЭВМ.
0 0,2 0,4 0,6 г, с На рисунках 6.81 и 6.82 пред-
Рис. 6.81. Временное изменение обобщен- ставлены временные изменения
ной координаты крутильного тона упругих соответственно обобщенной ко-
колебаний #3 крыла при постепенном входе ординаты д3 и перегрузки в нос-
самолета в порыв со скоростью 0,9^ ке фюзеляжа Апф при скорости
полета ЛА, равной 0,9 {Укр неуправляемого ЛА; сплошная линия — кон-
контур противофлаттерной системы замкнут, штриховая — разомкнут. Кри-
Кривые Дпкр@ рис. 6.83 отражают характер изменения перегрузки во вре-
времени { в концевой точке крыла;
сплошная линия — ЛА с управлени-
управлением, штриховая — без управления.
Анализ данных этих рисунков пока-
показывает, что применение противо-
противофлаттерной системы ведет к более о,75
плавному изменению параметров
движения ЛА и снижению уровня
аэроупругих колебаний его конст-
конструкции, т. е. к их демпфированию.
Так, при максимальном отклонении
1»50
о
г
[_
1 1
/
— 0,2—'
Ч
— од—1
Рис. 6.82. Временное изменение пере-
перегрузки
в носке фюзеляжа при по-
постепенном входе самолета в порыв со
рулевых поверхностей в ОД ^пере-
^перегрузка на конце крыла при включен-
включенной САУ уменьшилась примерно на ™р0^ 0,9<У~'
25 % по отношению к исходному
режиму полета ЛА с выключенной САУ. При этом характер изменения
обобщенных координат д± и д4 > Угла атаки а и угловой скорости вра-
вращения О,г для выбранного режима полета самолета с включенной САУ и
выключенной не меняются.
242
На рисунках 6.84-6.86 помещены временные изменения параметров
Длкр(О при полете самолета с включенной противофлат-
Рис. 6.83. Временное изменение перегрузки Дпкр в концевой точке крыла при посте-
постепенном входе, самолета в порыв со скоростью 0,9С/кр
терной системой со скоростью 1,Шкр по отношению к его полету без
управления. Анализ результатов вычислений (это подтверждают данные
рисунков 6.85 и 6.86) показывает, что
противофлаттерная система эффективно
демпфирует аэроупругие колебания при °>24-
максимальном отклонении рулевых по- одб-
верхностей на угол 0,3° .
На рис. 6.87 нанесены годографы соб-
собственных значений неустойчивого кру-
крутильного тона упругих колебаний крыла
при полете ЛА с включенной противо- Рис. 6.84. Временное изменение
флаттерной системой (кривая II) и вы- обобщенной координаты крутиль-
ключенной (I), полученные при А[/ =20 ного тона упругих колебаний д3
м/с и отсутствии демпфирования К( = 0.
0,8
(Г
/
У
/
/
о,
6
\
ч
0,32
1
^.
Точкам I = 1,8 на кривых I и II годографа М^кр
соответствуют скорости Ио =10, 30, 50, 70, 90, ПО, 130, 150 м/с; точке
1=9 на кривой I — 110 = 153,5 м/с; точ-
точкам 1 = 9, 10 на кривой II — [/0 = 170,
174 м/с. Как видим, применение проти-
вофлаттерной системы (кривая II) при-
приводит к значительному смещению соб-
собственных значений в сторону их отрица-
отрицательных действительных частей. Мни-
2,4
1,6
0,8
'Л-
0,16
0,32
и с
Рис. 6.85. Временное изменение пе- мая же их часть смещается не так замет-
регрузки Длф в носке фюзеляжа но. Кривая II годографа неустойчивого
при постепенном входе самолета в крутильного тона упругих колебаний
порыв со скоростью 1,Ш,ф для ЛА с активной САУ пересекает
243
мнимую ось 1тЯз в точке А при скорости 17кр =174 м/с и частоте/
42кр = 36 Гц; для неуправляемого ЛА кривая I пересекает мнимую ос^>
^
О
Рис. 6.86. Временное изменение перегруз-
ки &пкр в концевой точке крыла при по- ?ис 6 8? Годографы неустойчивого кру-
степенном входе самолета в порыв со тильного тона упругих колебаний крыла
скоростью 1,1^ самолета
в точке А; ей соответствует Gкр =153,5 м/с, ХЗкр =38,6Гц. Ана-
Анализ показывает, что скорость флаттера IIкр ЛА с САУ увеличилась при-
примерно на 11 %.
§ 6.9. Летательный аппарат с адаптивной
противофлаттерной системой
Несомненным преимуществом адаптивной противофлаттерной систе-
системы по сравнению с активной (см. § 6.8) является возможность адаптации
закона управления к меняющимся условиям полета и обеспечения его
оптимальности при изменении характеристик ЛА. Для изучения динами-
динамической устойчивости аппарата с адаптивной противофлаттерной систе-
системой по-прежнему используется линейное матричное уравнение аэроавто-
упругости F.100), дополненное уравнением измерений вида
, F.114)
где ъг = г(т;) — вектор выходных сигналов датчиков в дискретный мо-
момент времени тг-; иг- — векторный случайный процесс типа белого шума
дискретных погрешностей измерений с заданной дисперсионной матри-
цей Кг-; у(Т;) — вектор состояния линейных ММ датчиков; Ну — по-
постоянная для данного режима полета ЛА числовая матрица.
Укажем на то, что структура алгоритмического обеспечения работы
адаптивной противофлаттерной системы содержит модули идентифика-
идентификации, оценивания и управления. Вместе с тем, судя по F.101), система
F.100) имеет большую размерность, которую можно понизить за счет
упрощения ММ аэроупругости ЛА, ММ рулевых приводов и датчиков,
минимизации числа управляющих аэродинамических поверхностей и
датчиков информации. Целесообразно в алгоритмических модулях ис-
использовать несколько упрощенную ММ аэроупругости (первое уравне-
уравнение системы F.89)), формируемую путем удержания только взаимодей-
244
ствующих форм упругих колебаний при известной ближайшей области
аэроупругой неустойчивости ЛА. К упрощенной ММ аэроупругости и
априорным значениям ее коэффициентов предъявляются требования со-
сохранения физической картины изучаемого флаттера, а также удовлетво-
удовлетворительного воспроизведения временных зависимостей сигналов датчиков
при отклонении рулей и при воздействии на аппарат порывов ветра.
Алгоритмический модуль идентификации предназначается для уточ-
уточнения коэффициентов настраиваемой модели. Он строится на основе уп-
упрощенной частотной ММ аэроупругости ЛА F.89) с вектором обобщен-
обобщенных координат с[ меньшей размерности по сравнению с вектором с[ ис-
исходной более полной ММ аэроупругости ЛА, а также моделей турбу-
турбулентного ветра и датчиков (см. F.98)), причем уравнения датчиков стро-
строятся с учетом замены более полного вектора обобщенных координат ц
на сокращенный вектор 5 . Интенсивность шума измерений ^ при этом
увеличивается, так как отбрасываемые формы упругих колебаний приво-
приводят к дополнительным ошибкам измерений. При этом уравнения приво-
приводов в модуле идентификации не учитываются при измерении б, пренеб-
регается также влиянием 8 .
Упрощенная ММ аэроупругости ЛА в модуле идентификации теперь
будет иметь сокращенный вектор фазовых координат у и запишется в
форме
у=Ру + Си + 9, 2,-= Н^у,-+ и,-. F.115)
Ненулевые компоненты вектора возмущений в F.114) — случайные
процессы типа белого шума 6^, Э2. Несмотря на упрощение, модель
F.115) продолжает содержать достаточно большое число коэффициен-
коэффициентов. Поэтому в дальнейшем для настройки модели необходимо сделать
оценку чувствительности ее коэффициентов и выбрать наиболее чувстви-
чувствительные из них, подлежащие идентификации. Остальные коэффициенты
упрощенной ММ аэроупругости ЛА полагаются постоянными и равными
своим априорным значениям на всех режимах полета аппарата.
Выбор вектора настраиваемых коэффициентов а осуществляется пу-
путем проверки чувствительности критической скорости (Укр и частоты
12кр флаттера к изменению коэффициентов модели F.111) с учетом диа-
диапазонов их изменения, например, при выработке топлива и т. д. Вектор а
принимается постоянным в течение времени решения задачи идентифи-
идентификации. В итоге задачи совместной идентификации вектора а и оценива-
оценивания вектора у сводятся к задаче адаптивного оценивания. Для этого сис-
система F.107) дополняется уравнением
а = 0, F.116)
и рассматривается расширенная динамическая система с вектором со-
состояния хт = || у а ||т, модель которой является нелинейной и имеет вид
,-) + у|-. F.117)
245
Для получения надежной информации о динамических свойствах ЛА
перед началом решения задачи на рулевые поверхности подаются тесто-
тестовые сигналы управления импульсного типа. Получаемые при этом после-
последовательности откликов датчиков для временного отрезка [тд,т^] запо-
запоминаются в оперативной памяти бортового вычислителя. При этом алго-
алгоритмическому модулю идентификации предъявляются жесткие требова-
требования. Он должен обеспечивать идентификацию при упрощенной структу-
структуре модели и отсутствии прямых измерений вектора у. Поэтому в по-
последнее время для повышения устойчивости идентификации применяется
робастный алгоритм [180, 181], являющийся развитием алгоритма, рас-
рассматриваемого в [209]. Данный алгоритм основан на использовании
скользящего временного отрезка наблюдений [т,-, Т; +Г] (Г «т# -То),
содержащего N векторов измерений гт( ={г>/-}(./=:м + #-1) и усред-
усреднений частных апостериорных плотностей /?(хг/2у) на этом отрезке.
Для начала работы алгоритма полагается хг = т0 , и задается априорное
гауссово распределение Л^{3со,ро} вектора х0. Затем на каждом шаге
алгоритма осуществляются две вычислительные процедуры, первая из
которых направлена на определение средней апостериорной плотности
для левого конца отрезка наблюдений
)РМР^'''\ F.П8,
Вторая процедура включает сдвиг отрезка наблюдений вправо и вычис-
вычисление априорной для следующего шага плотности вектора х на левом
конце сдвинутого отрезка наблюдений путем прогноза плотности
р(*//гт/) на число шагов сдвига [43]. Обе вычислительные процедуры
выполняются приближенно с помощью линеаризации уравнений F.117)
и гауссовой аппроксимации всех плотностей в F.118). При этом первое
соотношение F.118) выполняется с точностью, линейной относительно
показателей экспонент гауссовых плотностей, что соответствует линей-
линейной точности решения задачи в целом. Процедура вычисления средней
гауссовой апостериорной плотности р(х(/1т() = М{х;,р;} использует
априорную для I -го шага гауссову плотность р(х,-) = #{хг-,р;} и с уче-
учетом возможности сдвига скользящего отрезка наблюдений на т шагов
(т = 1, Л0 строится в соответствии с выводами [184]. Здесь х,- — оценка
вектора х,-, р,- — дисперсионная матрица погрешностей оценивания. В
процедуру вычисления средней гауссовой апостериорной плотности
р(х(/1Т}) входят а,]=тШ — весовые коэффициенты, зависящие от
сдвига и длины скользящего отрезка наблюдений за один шаг работы
алгоритма. При т = N скользящий отрезок сдвигается на длину отрезка,
т. е. скользящие отрезки не перекрываются. Этот случай соответствует
обработке групп векторов наблюдений внутри отрезков наблюдений при
допущении о их независимости по методу наименьших квадратов. При
246
этом гауссова апостериорная плотность вектора х,- приближенно опре-
определяется в виде произведения частных апостериорных плотностей:
7=1
В этом случае усреднения частных плотностей не происходит и рас-
расчетные свойства алгоритма снижаются. Наиболее устойчивая работа ал-
алгоритма обеспечивается при т = 1, т. е. при сдвиге скользящего отрезка
на один шаг дискретных наблюдений. Решение модуля идентификации
выполняется периодически, по мере изменения режима полета ЛА.
Алгоритмический модуль управления предназначается для синтеза
оптимального закона управления применительно к модели FЛ15) и вы-
вычисления текущего вектора управления и(Т;). Закон управления по-
прежнему синтезируется в классе стационарных управлений при реше-
решении задачи стабилизации неустойчивых обобщенных координат с приме-
применением квадратичного функционала вида F.103). Закон управления сис-
системы формируется в виде и(тх) = ку(Т;), где к — матричный коэффици-
коэффициент усиления обратной связи; у(т,-) — текущая оценка вектора состояния
модели F.115). Расчет коэффициентов усиления обратной связи матрицы
к выполняется в два приема. Сначала с помощью решения уравнения
Риккати F.106), соответствующего функционалу F.105), и модели
F.115) вычисляется матрица к оптимальной непрерывной обратной свя-
связи, а затем по ней находится матрица к оптимальной дискретной обрат-
обратной связи, определяемая с учетом кусочно-постоянного вида сигналов
цифрового управления [182]. Вычисление матрицы к выполняется с пе-
периодичностью решения модуля идентификации. Вычисление вектора
управления и(тг) осуществляется с дискретностью регистрации сигналов
датчиков, при этом используется оценка у(т,-), вытекающая от модуля
оценивания, алгоритм которого представляется фильтром Калмана для
дискретной модели, получаемой из F.115).
Обратимся к конкретному примеру. Рассмотрим синтезированную
ММ адаптивной противофлаттерной системы, предназначенную для по-
подавления симметричного флаттера самолета Як-42. К системе предъяв-
предъявляются требования обеспечения адаптивных свойств при выработке топ-
топлива из крыльевых баков. Для управления используются рули, имеющие ^
площадь, равную 25 % площади штатных элеронов. Датчики включают
четыре акселерометра, размещенных симметрично на крыльях, датчики
угловой скорости сог и перегрузки пу в центре масс ЛА. В «полной»
структурной ММ аэроупругости ЛА учитывались продольное движение
аппарата как твердого тела и первые девять собственных форм симмет-
симметричных упругих колебаний его конструкции.
Выбор упрощенной модели F.115) осуществлялся путем исследова-
исследования влияния различных сочетаний учитываемых форм упругих колеба-
колебаний на аэроупругую устойчивость по критерию близости годографов не-
неустойчивого собственного значения Л$ • Данная процедура выполнялась
247
0,98
0,98^
ЬпА6
0,85 0,98
13
12
10
перебором различных вариантов взаимодействий пятой формы (неустой-1
чивой) упругих колебаний с разным числом других упругих форм коле- ]
баний. Сформированная таким обра- |
зом упрощенная ММ аэроупругости |
ЛА включает в себя его продольное ]
движение как твердого тела и три |
формы упругих колебаний, соответ- I
ствующих первой (изгибной), пятой
и шестой (крутильным) формам.
Корневые годографы упрощенной
ММ аэроупругости ЛА F.115) пред-
представлены на рис. 6.88 сплошными
линиями; годографы проградуирова-
ны по скорости, отнесенной к крити-
критической скорости флаттера свободно-
свободного самолета. Точке А (критической
точке) соответствует С/кр = 2331,94 м/с,
Йкр = 11,049 Гц. Критические значе-
значения скорости и частоты упрощенной
модели F.115) отличаются от опре-
определенных по «полной» модели F.89)
на 0,5 и 2,5 % соответственно.
Правомерность использования уп-
упрощенной модели оценивалась также
по временным реализациям изменения обобщенных координат, по вы-
выходным сигналам датчиков измерительной системы.
-3
I
0
-9
0
свободного от внешних связей самолета
Як-42, проградуированные по скорости,
Й К критической скорости
-0,08
-0,16
Рис. 6.89. Временная реализация изменения обобщенной координаты ^5 упругих ко-
колебаний при полете самолета в турбулентной атмосфере
На рис. 6.89 нанесена временная реализация изменения обобщенной
координаты *75 (неустойчивой) при полете самолета в неспокойной ат-
атмосфере (сплошная линия — «полная» модель, штриховая — упрощен-
248
а
А ,
Г3
О
1,0
0,5
б
—1
\\
2
3
4
5
50 100 200
ная). Отсюда видно, что максимальное различие по амплитуде координа-
координаты #5 9 найденной по обеим моделям, не превышает 15 %, а характер из-
изменения кривых #5(т) практически идентичен.
На рис. 6.90 для примера представлены зависимости нормированных
значений среднеквадратичных отклонений (СКО) а выходных сигналов
датчиков ДУС-П и ДУС- _
IV как функции масштаба
турбулентности Ь^ при
<7^ = 0,5 м/с и времени 0 5
наблюдения Гн = 20 с.
За точные принима- о! 1 1*11 о
лись сигналы, получен- 50 10° 200
ные на основе «ПОЛНОЙ» Рис. 6.90. Зависимость нормированных значений сре-
ММ аэроупругости ЛА. днеквадратичных отклонений а выходных сигналов
Рассматривались модели датчиков соответственно ДУС-П и ДУС-1У в функ-
с разным сочетанием то- ции масштаба турбулентности ц,
нов колебаний: 1 — жесткий тон + 1-е (/ = 1,9 ) упругие тона; 2 — жест-
жесткий тон + 1-е (I = 1,6) упругие тона; 3 — жесткий тон + 1-е (I = 1,3) упру-
упругие тона; 4 — жесткий самолет; 5 — жесткий тон + г-е (/ = 1,5,6) упругие
тона (выбранная упрощенная ММ аэроупругости ЛА). Как видим, хоро-
хорошее соответствие по а датчиков наблюдается между «полной» 1 и уп-
упрощенной 2 моделями аэроупругости. Следующей по точности по отно-
отношению к «полной» модели 1 является выбранная упрощенная модель 5.
Анализ вычислений показывает, что сигналы датчиков отличаются от
точных: для конца крыла не более чем на 17 %; для носовой и хвостовой
частей фюзеляжа соответственно на 6 и 9 %; для центра масс до 2 %.
Была осуществлена оценка чувствительности упрощенной модели к
изменению ее коэффициентов, которые подлежат уточнению в процессе
функционирования системы «упругий ЛА + адаптивная САУ» через их
влияние на величину 1/кр. Анализ результатов вычислений показал, что
наибольшее влияние на приращение погрешности АЦ в определении
С/кр по упрощенной ММ аэроупругости самолета Як-42 оказывают ко-
коэффициенты с^6, с%6, с%6, которые и были выбраны в качестве иденти-
идентифицируемых параметров.
Алгоритмическое обеспечение работы адаптивной противофлаттер-
ной системы по модульному принципу включает: модули оценивания
вектора состояния динамической системы и синтеза управления и, мо-
модуль идентификации параметров динамической системы, модуль вычис-
вычисления коэффициентов обратной связи для выработки оптимального зако-
закона управления. Цикличность работы алгоритмических модулей определя-
определяется назначением системы управления, режимом полета и динамически-
динамическими свойствами ЛА. Так, например, для адаптивной противофлаттерной
системы алгоритмический модуль оценивания должен функционировать
постоянно, так как на основе его выходной информации (вектора состоя-
249
ния) формируются управляющие сигналы приводов рулевых поверхно-
поверхностей. Модули же идентификации и синтеза оптимального закона управ-
управления могут работать со значительными интервалами дискретности по
времени, величина которых определяется интенсивностью изменения
динамических параметров ЛА. Например, на крейсерском режиме полета
динамические характеристики самолета изменяются мало (в основном
вследствие выработки топлива), и уточнение коэффициентов структур-
структурной ММЛА, на основе которых работают перечисленные выше модули,
может проводиться один раз в несколько минут или десятков минут. При
резком изменении динамических свойств самолета (сброс грузов, изме-
изменение полетной конфигурации и т. д.) в задачу модуля идентификации
входит выдача необходимой информации о параметрах объекта в макси-
максимально сжатые сроки, на основе которой производится уточнение коэф-
коэффициентов ММ всех модулей и определяются коэффициенты обратной
связи для выработки оптимального закона управления. Применительно к
рассматриваемой здесь задаче цикличность функционирования модулей
идентификации и синтеза оп-
оптимального закона управления
строилась относительно изме-
изменения скорости полета само-
самолета на 5 %.
Некоторые данные пара-
параметрических исследований ал-
алгоритмических модулей оце-
оценивания и идентификации на
примере самолета Як-42 при-
приведены ниже. Моделировался
полет, близкий к горизонталь-
горизонтальному, с постоянной скоростью
Vо = О,81УКр при параметрах
турбулентности: Ь^ = 300 м,
о^ - 0,5 м; при этом в качест-
качестве подыгрывающей использо-
использовалась «точная» ММ аэроав-
тоупругости ЛА.
Данные рис. 6.91 характе-
характеризуют работу модуля оценит
вания, т. е. процесс подстрой-
подстройки оценок фазовых координат упрощенной ММ к их истинным значени-
значениям при включении фильтра; сплошные линии соответствуют истинным
значениям параметров д5 и Яъ •> штриховые — их оценкам. Отсюда вид-
видно, что процесс настройки оцениваемых координат по упрощенной ММ
достаточно эффективен.
Проверке подвергалась работа нелинейного фильтра оценивания (мо-
(модуля идентификации). Упругие колебания самолета помимо турбулент-
турбулентного ветра возбуждались отклонением руля высоты; при этом режим по-
полета ЛА и параметры турбулентной атмосферы оставались прежними.
250
-0,08
Рис. 6.91. Временная реализация обобщенных
координат д5 и д5 при полете самолета в
турбулентной атмосфере со скоростью *У0 =
Для определения идентифицируемости выбранных коэффициентов
упрощенной структурной ММЛА и изучения работы нелинейного фильт-
фильтра имитировались погрешности расчета априорных значений вектора
идентифицируемых параметров путем искажения исходных значений
элементов вектора а . Величины погрешностей варьировались, а их знак
выбирался случайным образом; «искаженные» величины коэффициентов
вводились в алгоритм идентификации.
Интегральная оценка качества иденти-
идентификации осуществлялась через определение
флаттерных характеристик самолета Як-42
по упрощенной модели F.115) в случае ее
использования в структуре оценок иденти-
идентифицируемых параметров, полученных в
результате функционирования алгоритми- ^ ^м тг
\_ , Рис. 6.92. Изменение элементов
ческого модуля идентификации (штриховые матрицы обратной „ в зави.
линии на рис. 6.89). Относительные по- симости от скорости полета ЛА
грешности в определении флаттерных ха-
характеристик составили для 11^ « 0,4 % и ^
там, точность идентификации наиболее чувствительных коэффициентов
при выработке топлива в алгоритмическом модуле идентификации адап-
адаптивной противофлаттерной системы оказалось достаточной.
Элементы обратной матрицы к закона управления F.108), обеспечи-
обеспечивающего аэроупругую устойчивость самолета Як-42 с противофлаттер-
противофлаттерной системой, зависят от скорости полета. На рис. 6.92 приведены зави-
, кд° (кривые 7 и 2 соответственно) матри-
матрицы к от скорости полета в диапазоне
A,05 -*¦ 1,2) 1/Кп, отнесенные к значе-
;1%. Судя по результа-
симости двух элементов
1т Я5
11,0
10,5
10,0
9,5
0
0,*
060
0,60
2 \
0,98*
0,25
ч
А
А'
КеЯ5 -3 -2 -1
ниям этих элементов при
\] - 1Д5[/кр. Как видим, применение
синтезированного закона управления
обеспечивает устойчивость аэроупру-
аэроупругих колебаний, а также запас самоле-
самолета по скорости.
Результаты исследования эффек-
эффективности использования адаптивной
САУ для борьбы с флаттером ото-
отображены на рис. 6.93. Здесь показаны
Рис. 6.93. Годографы собственных зна- ™Д°графы неустойчивого собствен-
чений неустойчивого 5-го тона упругих ного значения Я5 для свободного от
связе^ °Т ВНешНИХ внешних связей самолета Як-42 (кри-
(кривая 7) и для самолета с адаптивной
САУ B) для случая применения закона управления, синтезированного
для режима полета {Уо = 1Д5[/кр. Шаг дискретности скорости А(/о = Ю
м/с. Точка потери аэроупругой устойчивости самолета с адаптивной САУ
А1 (точка А — без нее) соответствует (Укр = 303,1 м/с, «Окр = 9,75 Гц.
251
Таким образом, за счет применения адаптивного закона управления
удалось {Укр увеличить на -30 % по сравнению с самолетом без САУ.
0,08
0
-0,08
-1,60
\
Л
и
и
1
1: ' !
Л
11 1 1 '.! 1
|[ I1 1Г Ь 1
ЛЛ
; »
1 1
1
/\л
ЛЛ
.Л/4
48
0 16 24
Рис. 6.94. Временное изменение обобщенной координаты #5 при полете самолета Як-42
со скоростью и0 = 1,06 С/^ в случае охвата его вертикальным порывом ветра II у = 10 м/с
Эффективность функционирования синтезированной адаптивной про-
тивофлаттерной системы была рассмотрена на примере полета самолета
со скоростью 1,06 С/,ф при охвате его порывом вертикального ветра
№у = 10 м/с. На рис. 6.94 изображена переходная функция обобщенной
координаты #5(т) (неустойчивого тона упругих колебаний) при полете
самолета Як-42 с отключенной адаптивной САУ (штриховая линия) и с
включенной (сплошная). Видно, что в случае полета ЛА с включенной
-0,08
0 32 64 96 Т
Рис. 6.95. Временная реализация обобщенной координаты ^^ при полете самолета Як-
42 со скоростью Vо = 1,06 IIкр в турбулентной атмосфере
системой управления с течением времени переходные процессы затухают.
Аналогичная картина наблюдается и при полете самолета со скоро-
скоростью [/о =1,06{Укр в турбулентной атмосфере с параметрами о^ = 1м/с,
Ь„ = 300 м (рис. 6.95). Неустойчивое движение аппарата, которое имеет
место при полете с отключенной адаптивной САУ (сплошная кривая),
приобретает устойчивый характер при ее включении (штриховая).
252
Глава 7
НЕЛИНЕЙНЫЕ ЗАДАЧИ АЭРОУПРУГОСТИ
ЛЕТАТЕЛЬНЫХ АППАРАТОВ
К настоящему времени можно сказать, что этап формирования линей-
линейных структурных ММ функционирования ЛА на полетных и наземных
режимах с привлечением современных численных методов аэродинами-
аэродинамики, теории упругости, динамики полета и ЭВМ в основном закончен, раз-
разработана методология и решены практически все важные задачи [43, 51,
61, 79, 194, 223, 249, 266, 311, 327, 329, 361]. Повышение качества и эф-
эффективности этих моделей может идти по пути дальнейшего совершенст-
совершенствования и отработки составных модулей аэродинамики, упругости и ди-
динамики полета. Линейные ММ аэроупругости ЛА оказались весьма эф-
эффективными при изучении поведения неманевренных и ограниченно ма-
маневренных самолетов. Однако применение их к анализу поведения осо-
особенно современных маневренных самолетов при выполнении ими слож-
сложных пилотажных фигур и сверхлегких ЛА не представляется возможным.
В последнее время в литературе большое внимание уделяется разра-
разработке нелинейных структурных ММ функционирования ЛА [16, 151, 173,
174, 249, 276]. Эти работы имеют важное практическое значение, но пока
носят разрозненный характер; их непосредственное применение вызыва-
вызывает значительные трудности, требует решения ряда дополнительных задач.
Отсюда очевидна необходимость дальнейших разработок и совершенст-
совершенствования методологии формирования нелинейных ММ аэроупругости ЛА
на основе синтеза современных численных методов механики сплошной
среды и ЭВМ для изучения процессов их нагружения, деформирования и
движения при пространственном маневрировании.
При решении нелинейных задач аэроупругости возникают трудности
при увязке нелинейных моделей с линейными. Например, при определе-
определении начальных условий маневрирования, при решении задачи о бафтинге
и т. д. Кроме того, нелинейная модель в отличие от линейной должна
быть дополнена характеристиками работающей силовой установки, сис-
системы управления, тормозной системы (парашюта или тормозного щитка)
и т. д. Без решения этих дополнительных задач не могут быть «точно»
изучены вопросы влияния упругих деформаций ЛА, особенно маневрен-
маневренных, на точность применения вооружения, оценены условия работы бор-
бортового оборудования, определены траекторные параметры, нагружение и
деформирование конструкции в условиях маневрирования.
Приведенные в этой главе некоторые результаты исследований полу-
получены на основе решения нелинейных интегродифференциальных уравне-
уравнений аэроупругости ЛА [16]. В связи с тем, что эти уравнения линеаризо-
линеаризованы по аэродинамике и упругости и нелинейны лишь по кинематике,
253
они методологически могут быть объединены с линейными уравнениями
аэроупругости ЛА [43, 51, 249], так как используют единую информаци-
информационную базу аэродинамических и аэроупругих характеристик. Это позво-
позволяет унифицировать решение проблем нелинейной и линейной аэроупру-
аэроупругости и практически с единых позиций рассматривать режимы возму-
возмущенного движения и маневрирования ЛА. Эти же уравнения используют-
используются в задачах, когда линеаризуется только упругость, например, в приво-
приводимых в этой главе примерах, связанных с изучением такого явления, как
бафтинг хвостового оперения.
§ 7.1. Математическое моделирование движения
упругого летательного аппарата при маневрировании
При рассмотрении многих видов маневров ЛА в эксплуатационном
диапазоне скоростей и высот полета можно ограничиться линейным при-
приближением для аэродинамических характеристик. Упругие характери-
характеристики современных и перспективных ЛА также остаются в рамках ли-
линейных соотношений теории упругости. Все это позволяет рассчитывать
аэродинамические и аэроупругие характеристики в прежнем виде, т. е.
сняв ограничения, накладываемые на значения линейных и угловых ско-
скоростей при движении ЛА как твердого тела. Этим условиям отвечают
нелинейные интегродифференциальные уравнения работы [16].
7.1.1. К реализации нелинейной математической модели функ-
функционирования летательного аппарата при маневрировании. Нели-
Нелинейные по динамике уравнения [16, 163] являются исходными при фор-
формировании модуля нелинейной аэроупругости ЛА, который затем струк-
структурно объединяется с модулями, имитирующими работу силовой уста-
установки и САУ, деятельность летчика при пилотировании, воздействие
внешних возмущений и т. д. Эти уравнения для численного решения
удобно привести к безразмерному виду.
Запишем уравнения B.113) в безразмерной форме (по отношению к
некоторому исходному режиму полета ЛА, совершаемого со скоростью
V0 в атмосфере плотностью р0), дополнительно введя безразмерные
параметры [163]:
= 2м/A/2р50Ь) = м/(дЛ2р*$0Ь),
9 ст1=Рт1/(д*50Ь), G.1)
сх = 2/}/«/2р5о*) = Р//(^2р*50Ь), Шт = Мт/(д*50Ъ), <?* = р0С/2/2>
где р — текущая плотность среды; V — скорость самолета при манев-
маневрировании; К и М — равнодействующие аэродинамических сил и мо-
моментов; Г, Мт — равнодействующие силы тяги и момента силы тяги
двигателей ЛА; М — масса аппарата. Обобщенная сила от тяги двигате-
двигателей для /-и точки его подвески по /-му тону упругих колебаний
р* =
1=1
254
где Т; — тяга двигателя, приложенная к /-й точке ЛА.
Уравнения B.113), спроецированные на «средние» оси, в безразмер-
безразмерной скалярной форме предстанут в виде [163]
&у + <ог11х - сох!1г = -8СС22 + су п2р*111 + 7у ,
^ V +Л4
G-2)
Ы1
*=1
-D
А:=1
255
+ B4
4
=с1172р* +ст/, / =1,
В G.2) а12, «22» #32 — направляющие косинусы связанной системы
координат относительно инерциальной, тензор инерции для недеформи-
рованного состояние ЛА 1 и тензоры инерции при его деформировании
по к-му тону 1к являются симметричными матрицами:
•* х ^ ху ^ ху |
"^ху 1х "~*уг
"^гх ~'•'ту ^ г
]к -]к ]к
0 X ** Ху щ1 XI
-1к Зк -]к
** ух %/ у ° ут.
-У
•'
ту
где
Ч / ч
N.
'•кх-+Г-кг-)
1ХЛ1 т ^«^1/»
1=1
*=1
1=1
¦I
1=1
1=1
'У9
1=1
Тензоры инерции % A,к = 1,Мд), отражающие изменение обобщен-
обобщенных масс /-го тона упругих колебаний конструкции, деформирующейся
по &-му тону, в общем случае не являются симметричными; асимметрию
тензоров % характеризуют векторы 3% :
У
~*ту
4
У1
и ТХ %/ XI
]Хк -]Ш
Здесь
7л:
1=1
''У
/М=5 М -
1=1
1=1
1=1
256
1к -X*™ ?1 ;к т1к
1=1 1=1 1=1
где 8% —символ Кронекера.
При решении на ЭВМ система уравнений G.2) дополняется соотно-
соотношениями для определения перемещений и ориентации связанной систе-
системы координат относительно инерциальной с использованием безразмер-
безразмерных координат
Кинематические уравнения для переменных ^, г), ^ благодаря на-
направляющим косинусам (Ху (/, у = 1,3) будут
Ц =
С = ^
Ориентацию ЛА в пространстве находим через параметры Родрига-
Гамильтона Яг- (г = 0,3), кинематические уравнения и уравнения связи
для которых имеют вид
2Я0 = -сохХх - соуЛ2 - (огХъ, 2ХХ = ^Ао + (огХг - (оу?^,
2Я2 = со^Яо + со^Яз - @гХх, 2Я3 = со^ + ш^Я! - а}д.Я2, G.4)
Однозначное соответствие между параметрами Родрига-Гамильтона,
направляющими косинусами и углами Эйлера устанавливается с помо-
помощью соотношений [220].
Для замыкания систему уравнений G.2)-G.4) необходимо дополнить
законами изменения аэродинамических сил и моментов, тяги двигателей
и начальными условиями.
Нелинейные уравнения G.2) в ряде частных случаев могут быть су-
существенно упрощены. Выпишем некоторые из них.
Для упругого самолета, совершающего маневрирование в вертикаль-
вертикальной плоскости, уравнения движения G.2) принимают вид
G.5а)
257
9-983
"я
4
"D + X44Х*>1 =су2р*+стЬ 1=ЪМд. G.56)
Уравнения G.5) справедливы при наличии конструкционной симмет-
симметрии у ЛА относительно плоскости Оху; в этом случае параметры его
продольного и бокового движений представляются независимо.
Уравнения при квазистатическом учете деформирования конструкции
аппарата можно получить из G.2), полагая #/ = сц = 0.
Многие пространственные маневры ЛА совершаются с малыми угло-
угловыми скоростями сог , 0)у. С точностью до малых второго порядка отно-
относительно этих величин и их производных уравнения G.2) можно предста-
представить в форме
+СУ и2р*/и + *у.
+0)х0)у)
N
G.6)
к=\
Nа
+ И^ю^ = с,У V + ^т
Пренебрегая в G.2) членами, учитывающими упругость конструкции
ЛА, получаем нелинейные уравнения движения жесткого самолета в свя-
связанной системе координат:
258
у + сог1/х - соД, = -§а22 + су 172р*/1л + Ту,
+ сохсоу) + /^(со2 -со2) = тхп2р* + ттл;,
(^ - 1г )СОхСОг -1^ (О)х + СОуСОг ) -
" 1уг(&г, -®х
Aу -1х)сохсоу -1уг(со
1Х1{(О2Х -со]) = туТ12р* + т
Если в уравнениях G.6) положить скорость Vх = сош!, угловую ско-
скорость сох малой и линеаризовать их относительно базовой прямолиней-
прямолинейной траектории, то можно получить линейные уравнения аэроупругости
[43,51].
Особенностью расчета аэродинамических характеристик здесь явля-
является то, что при их определении вместо безразмерного времени т ис-
используется безразмерное время т , вычисляемое не по базовой Vо ско-
скорости полета ЛА, а по текущей I/:
г = ЩЪ . G.8)
Производные от кинематических параметров е^ по времени т и т
взаимосвязаны соотношениями
Тогда, например, выражение для определения аэродинамических ко-
коэффициентов по гипотезе гармоничности с учетом G.9) перепишется в
виде
/ =Ле/т), ]=ТЖБ- G.10)
Упрощенные ММ силовой установки, системы управления и внешних
воздействий формируются в соответствии с рекомендациями работы
[249], гл. 8.
В итоге моделирование процессов нагружения, деформирования и
движения самолета при маневрировании сводится к совместному реше-
решению системы дифференциальных уравнений, описывающих движение
упругого самолета G.2)-G.4), и уравнений, характеризующих закон из-
изменения тяги двигателя и действия летчика в контуре управления ЛА. К
ним надо добавить модель внешних возмущений и сформулировать на-
начальные условия маневрирования.
Остановимся здесь на модели внешних возмущений. Положим, что в
каждой точке пространства в произвольный момент времени полный век-
259
тор скорости ветра У/% состоит из детерминированной >У0 и турбулент-
турбулентной \У частей:
\^=\У0 + \У. G.11)
Задание поля детерминированной составляющей скорости ветра \У0 в
земной системе координат в виде дискретного порыва или в виде сдвига
ветра произвольной пространственной структуры, переменной во време-
времени, не вызывает сложности. В практических задачах динамики движения
ЛА турбулентную составляющую скорости ветра М^ принято определять
по модели Драйдена [149]. Согласно этой модели компонентам турбу-
турбулентной составляющей скорости ветра ]№у , №г в связанной системе ко-
координат соответствует спектральная плотность
2)
, л = у.г, G.12)
а компоненте \№х — спектральная плотность вида
2
х^ 2Т> G.13)
п 1 + П214
где 1^ — масштаб турбулентности, а^ — среднеквадратичное значение
скорости порыва.
Методом формирующих фильтров соотношения G.12) и G.13) сводятся
к системе пяти стохастических дифференциальных уравнений первого по-
порядка для нахождения компонент скорости ветра И^, ]№у , Щ [249]:
G.14)
6,1 \ па <1г а а а \ на
где а = 1^/11 ; т]ху1{1) — компоненты вектора белого шума
аг — компоненты ускорения ветра по осям соответственно Оу и От,
связанной системы координат.
Система G.14) решается совместно с вышеназванными уравнениями.
При этом необходимо обеспечить правильное моделирование белого шу-
шума на ЭВМ и учет стохастичности уравнений G.14) при численном ин-
интегрировании.
Компоненты скорости ветра относительно осей связанной системы
координат в соответствии с G.11) будут равны
Щу = Уу + Щх& «21 + Щ8 «22 + Щ СС
260
где #(/ 0'» ] = 1» 3) — направляющие косинусы подвижной системы коор-
координат относительно земной.
Для решения поставленной задачи необходимо еще знание начальных
значений кинематических параметров, характеризующих движение само-
самолета как твердого тела, параметров деформирования его конструкции в
потоке, отклонения рулевых поверхностей и выходных параметров дви-
двигателя. Если принять, что перед выполнением заданного маневра самолет
находится в установившемся режиме полета, то определение начальных
условий сводится к предварительному решению задачи статической
аэроупругости.
Пусть самолет перед осуществлением маневра совершает установив-
установившийся прямолинейный полет со скоростью V на высоте Н с углами тан-
тангажа в и крена у. Необходимо определить его балансировочные значе-
значения углов атаки а, скольжения /3, отклонения стабилизатора <5СТ, эле-
элеронов <5ЭЛ, руля направления <5р н, статические деформации по симмет-
симметричным д/+ (/ = 1, Л^+ ) и антисимметричным ^^ (/ = 1, N1" ) тонам упру-
упругих колебаний конструкции аппарата и потребную тягу двигателей Гд .
Для данного режима полета уравнения статической аэроупругости ЛА
получаются из G.2), полагая в них щ = щ = 0 :
- # 5Ш в + Сх Т12р* 1}Л + 7Х = 0 , - I"СО8У СО80 + Су ^р*/^ = 0 ,
^5тусо50+сг^2р*//* = (), тД2р*=^Д2Р*=0, G.16)
тД2р*=0, ^со?2д?=с{1Т2Р\ щ V'яТ = ^Р* •
Входящие в G. 16) коэффициенты аэродинамических сил и моментов
равны
с7=с:
G.17а)
261
^
При выводе уравнений G.16) предполагалось, что вектор тяги
теля Тд направлен вдоль оси Ох связанной системы координат, при:
Мт =0. Как видим, система G.16), в отличие от G.2), имеет дов
простой вид и удобна для интегрирования на ЭВМ. Потребная тяга ,
гателя 7Х находится из первого уравнения системы G.16).
Описанная выше нелинейная по кинематике структурная ММ ф>
ционирования упругого ЛА содержит дифференциальные и алгебра*
ские уравнения большой размерности. В математическом плане пробл
сводится к решению задачи Коши для системы нелинейных дифферент
альных уравнений, неразрешенных относительно старшей производи
вида
Вектор кинематических параметров у зависит от безразмерных коор
динат центра масс самолета ^ , г], ^ , параметров Родрига-Гамильтот|
Я/(/ = 0,3)., компонент линейной IIх, IIу , 11 г и угловой скорости (охл
соу, (ог самолета как жесткого тела, обобщенных параметров д^
с{1 (/ = 1,Л^), характеризующих деформированное состояние ЛА, а также ]
кинематических параметров ММ системы управления, силовой установ-
установки и внешних возмущений. Вектор начальных условий задачи у0 фор-
формируется на основе соотношений G.16). В G.18) член Ф(т,у)Э(т) описы-
описывает турбулентность атмосферы G.14), где 0(т) — вектор белого гауссо-
гауссова шума. Из структуры системы уравнений G.18) видно, что они могут
быть отнесены к различным типам — детерминированным или стохасти-
стохастическим в зависимости от учета или неучета турбулентности атмосферы.
7.1.2. Особенности математического моделирования маневров
летательного аппарата, оценки его аэроупругой устойчивости и рас-
расчета траекторных параметров. Одной из основных задач математиче-
математического моделирования движения самолета при маневрировании является
формирование законов управления аэродинамическими рулями и ручкой
управления двигателя (РУД). Важное место при этом занимает формали-
формализация этапа мысленного принятия решения на управление ММ; реализа-
реализация принятого решения путем отклонения аэродинамических рулей и
РУД изложена в работе [249], см. § 8.5.
Согласно [63, 114, 184, 194, 308] весь сложный пространственный
маневр самолета предлагается условно последовательно разбивать на
262
уяа таким образом, чтобы на каждом из них была возможность осу-
осуществить простой закон управления. Так, например, процесс выполнения
петли Нестерова представляется как последовательность участков, на
которых выдерживается темп нарастания перегрузки, заданная перегруз-
перегрузка, максимально допустимый угол атаки^ заданный закон изменения угла
тангажа с переходом в горизонтальный полет. Режим работы двигателей
выбирается из условия, чтобы скорость полета самолета изменялась в
допустимых пределах. Такой подход требует при минимуме информации
о структуре САУ реального самолета лишь знания максимальных откло-
отклонений рулей и максимальных скоростей, перекладки рулей. При этом же-
желательно иметь закон изменения кинематического параметра в виде
функции времени. Например, темп нарастания перегрузки пу и характер
ее изменения задаются функцией
4ад=4ад(т). G.19)
Выдерживание функций типа G.19) при реальном изменении перегрузки
в полете можно осуществить с учетом закона отклонения соответствую-
соответствующего руля. Например, при использовании для этой цели стабилизатора
его отклонение <5СТ можно задать с помощью известного закона из тео-
теории управления [63]:
где пу , со1 — текущие значения перегрузки и угловой скорости; Пут
задается G.19); Т\ — характерное время привода; кю и кп — коэффи-
коэффициенты, соответствующие рассматриваемому самолету.
Ограничение максимально допустимого угла атаки можно выполнить
по [144]. При переходе на участок выдерживания заданного закона изме-
изменения угла тангажа 0зад =0зад(т) закон отклонения стабилизатора под-
подбирается. ^
На этапе стабилизации заданной барометрической высоты можно
применить закон автопилота вида [63, 144]
Р + 1
Изодромное звено с передаточной функцией Тир/(Тир + 1) служит
для компенсации статистической погрешности при действии на самолет
вертикальных порывов ветра большой протяженности.
При моделировании пространственных маневров самолетов можно
рекомендовать в качестве управляющих переменных законы изменения
угла крена узад =узад(т) и нормальной перегрузки лзад =лзад(т). Вы-
Выдерживание закона изменения угла крена можно выполнить, задавая от-
отклонения элеронов на основе соотношения
<5ЭЛ =
263
При этом отклонение руля направления 5р н используется для компенса- *
ции скольжения самолета. Следует отметить, что непрерывность пере-*
мещения рулей при всевозможных сочетаниях законов G.19)-G-22I'
обеспечивает дифференциальная форма записи ММ систем управления. '
В связи с тем, что при маневрировании упругого самолета реализуют-
реализуются нелинейные связи между обобщенными параметрами его кинематики
движения и деформирования конструкции самолета, очень важными яв-
являются вопросы аэроупругой устойчивости при горизонтальном полете
[173, 174, 385]. В [172] предложена методика расчета запасов аэроупру-
аэроупругой устойчивости самолета. Суть ее в следующем. При заданных законах
отклонения органов управления и начальном режиме полета ищется век-
вектор параметров, характеризующих начальное состояние самолета перед
выполнением маневра у0 = у? («5 = 1, ЛО и удовлетворяющий нели-
нелинейной системе дифференциальных уравнений G.18). Данное частное
решение принимается в качестве номинальной траектории ЛА. Линеари-,
зация системы G.18) относительно номинальной траектории сводит зада-
задачу аэроупругой устойчивости нелинейной системы к исследованию рас-
расположения на комплексной плоскости собственных чисел матрицы, ком-
компонентами которой являются коэффициенты, стоящие при переменных
возмущенного движения.
Однако коэффициенты полученной таким образом матрицы могут
осциллировать с частотой упругих колебаний, что существенно усложня-
усложняет анализ аэроупругой устойчивости ЛА при маневрировании. Для упро-
упрощения задачи в [172] в качестве номинальной предлагается рассматри-
рассматривать траекторию ЛА, параметры которой ищутся, исходя из условия ква-
квазистатического деформирования конструкции ЛА при маневре. Несмотря
на это, составленная таким способом система линейных дифференциаль-
дифференциальных уравнений имеет переменные коэффициенты.
Для оценки аэроупругой устойчивости самолета при маневрировании
С.Н. Зеликовым был предложен принцип «замораживания коэффициен-
коэффициентов». Согласно этому принципу анализ аэроупругой устойчивости систе-
системы выполняется в заданные моменты времени при ее фиксированных
коэффициентах. Для численного определения спектра собственных зна-
значений матрицы можно применить хорошо развитые математические ме-
методы [227].
Обратимся к особенностям расчета траекторных параметров ЛА при
маневрировании. Основными из них являются: координаты центра масс
ЛА в земной (неподвижной) системе координат О$х8у818, его угловая
ориентация, перегрузки по осям траекторной системы координат. Поло-
Положение центра масс самолета в земной системе координат определяется по
G.3) по компонентам скорости ЛА относительно связанной системы
координат Vх, V у, Vг и матрицы направляющих косинусов а^
(/, ] = 1,3). Для расчета угловой ориентации самолета применяются па-
параметры Родрига-Гамильтона B.13). Это удобно с точки зрения про-
программной реализации структурной ММЛА, однако сами они не дают ясного
264
представления о положении самолета в пространстве. Более наглядным
является использование углов Эйлера, связанных с параметрами Родри-
га-Гамильтона Л(A = 0,3) зависимостями B.20).
При численном решении уравнений G.2) на выходе имеем проекции
перегрузки на оси связанной системы координат. Используя матрицы
направляющих косинусов перехода от связанной системы координат к
траекторной, можно найти величины перегрузок вдоль осей последней.
Это позволяет получить все основные траекторные характеристики само-
самолета при маневрировании.
7.1.3. Аэроупругие характеристики летательного аппарата при
выполнении маневра в вертикальной плоскости. Приведем некоторые
результаты исследований процессов движения, нагружеиия и деформи-
деформирования гипотетического маневренного самолета при выполнении им
маневра в вертикальной плоскости.
На рис. 7.1 приведены зависимости сст(д*) (сст = с/с, где с* и с —
значения аэродинамических коэффициентов соответственно для ЛА с
учетом и без учета статического де- сст
формирования его конструкции), ха- 1,о
растеризующие изменения коэффици-
коэффициентов аэродинамических производных
гаг
тг г в зависимости от
0,9
0,8
скоростного напора <дг* при учете 10 " А * #*'10 н/м
тонов упругих колебаний Рис- 7Л- Изменение относительного ко-
Отсюда видно, что от скоростного эФФи*ие?та аэродинамических произ-
, , водных сст в зависимости от скорости
напора д* коэффициенты аэродина-
напора #* для М = О,9
мических производных с® и т® зави-
зависят слабо, а с®1 и ш^г — сильно. Так,
например, при скоростном напоре
#* = 4,5 • 104 н/м2 значение коэффи-
коэффициента т®г уменьшается примерно на
4 20 %. Анализ результатов вычислений
1,2
0,8
0,4
3
г
Л)
6
о
11^ что т правильного учета
изводных сст в зависимости от числа влияния упругости конструкции на
удерживаемых тонов упругих кояеба- коэффициенты аэродинамических
ний N. конструкции ЛА для М = 0,9 производных необходимо удерживать
шесть-семь первых низших тонов уп-
упругих колебаний конструкции. Это обстоятельство отражено на рис. 7.2.
Отсюда следует, что наиболее чувствителен к числу удерживаемых тонов
упругих колебаний Мд коэффициент аэродинамической производной т® .
При малых А^ погрешность в оценке производной т® может достигать
около 10 %; стабилизация ее величины наблюдается, начиная с Мд=6.
265
Аналогичные исследования были проведены по оценке эффектив
ста рулевых поверхностей на маневренном упругом самолете при
дольном движении. Оказалось, что при д* - 4,5 • 104 Н/м2 эффе
ность стабилизатора по коэффициенту подъемной силы Су™ падает
~ 40 %. Выявлено, что эффективность закрылка Су3*** на упругом само«
лете больше, чем на жестком, и практически не зависит от #*. Уровещ^
статического деформирования конструкции ЛА существенно сказывается
на значение коэффициента производной гагзакр. Так, при
= 4,5-104Н/м2 отклонение закрылка вызывает противоположное по мо-
моменту тг действие по сравнению с жестким ЛА. Отметим еще одну осек
бенность: эффективность закрылка по су3йкр , тгзакр на упругом самолете
сильно зависит от числа Маха. Коэффициенты тгэл и суэл при
ц^ = 4,5 • 104 Н/м2 уменьшаются соответственно на - 60 и 40 % по отно-
отношению к жесткому самолету. Упругая деформация ЛА вызывает значи-
значительный рост, примерно в 2-3 раза, эффективности отклоняемого носка
крыла.
Разработанная структурная ММЛА для описания маневров позволяет
также оценивать влияние упругости конструкции на изменение его тра-
траекторных параметров. Оценка выполнялась следующим образом. Зада-
Задавался закон отклонения стабилизатора по времени от начального поло-
положения, соответствующего сбалансирован-1
ному горизонтальному полету, и произво-
производился расчет траекторных параметров для
упругого и жесткого самолетов при про-
прочих равных условиях. Анализ исследова-
исследований траекторных характеристик гипотети-
-3,м
1Г —
V
Г
0 0,4 0,8 1,2^.10,м
6,4 9,6 Г, с
б
ческого самолета при выполнении им
энергичного маневра в вертикальной
плоскости из состояния горизонтального
полета на высоте Я = 3300 м и числе Ма-
Маха М = 0,85 показывает, что влияние упру-
упругости на них может быть существенным
(рис. 7.3). Моделировалось Юс полета с
Рис. 7.3. Изменение траекторных удержанием 10 тонов упругих колебаний;
параметров (а) гипотетического турбулентность атмосферы не учитыва-
самолета при энергичном манев- н рИС. 7.3 а нанесены траектории
рировании в вертикальной плос- ^ у г
кости из положения горизонталь- поле7а самолета в земной системе коорди-
ного полета на высоте Я= 3300 м нат (сплошная линия — с учетом упруго-
при отклонении стабилизатора сти конструкции; штриховая — без учета)
<5СТ во времени г по закону, при отклонении стабилизатора 5СТ во
представленному на рисунке б
266
времени I по закону, представленному на
N
ч,^
3,2
6,4 9,6 Г, с
рис. 7.3 б. Как видим, учет упругости конструкции вызывает более плав-
плавное изменение траектории самолета. Поведение перегрузки пу во
времени I при выполнении данного маневра Пу
отражено на рис. 7.4. Для жесткого ЛА пере- 8
грузка (штриховая линия) нарастает быстрее,
что связано с большой эффективностью ста-
стабилизатора, но интенсивнее падает вследст-
вследствие более значительного уменьшения
скоростного напора. Об этом можно судить Рис. 7.4. Изменение перегру-
по изменению скорости Vх (рис. 7.5). Кривая зки пу в центре масс самоле-
/?кр@ (рис. 7.6) характеризует отклонение та во времени г при отклоне-
отклонении стабилизатора: сплошная
концевой точки крыла во времени г при вы- _, _ упругий самолеТ5
полнении данного режима полета. Сущест- штриховая — жесткий
венное влияние упругости конструкции само-
самолета на его траекторные параметры проявляется комплексно: через изме-
изменение в процессе выполнения маневра эффективности аэродинамических
рулей, характеристик устойчивости и аэродинамического демпфи-
240
160
м/с
1 ¦ ч>
N
^Ч,
Ч^
0,4
0,2
,м
ч^"
/
л
4
V в,
0
3,2 6,4 *,с О0
О 3,2 6,4 Г, с
Рис. 7.5. Временная зависимость ?ис ? 6 п щение кон.
скорости самолета Их при от- цевой точш
клонении стабилизатора; сплош- та
ная линия — упругий самолет,
штриховая — жесткий
самоле-
во времени г при
отклонении стабилизатора
Рис. 7.7. Траектория
самолета при выпол-
выполнении петли
рова
4
0
-4
48 1,0,
рования. Судя по характеру изменения во времени г приведенных здесь
некоторых траекторных параметров, при решении подобных задач можно
ограничиться учетом «квазистатического» деформирование конструкции
самолета.
Осветим некоторые особенности аэ-
аэроупругой устойчивости самолета при
маневре. Сначала обратимся к данным
моделирования петли Нестерова, выпол-
выполняемой при различных начальных усло-
условиях и технике пилотирования. На ри-
рисунках 7.7 и 7.8 представлены соответст-
соответственно траектория выполнения петли Не-
Нестерова и изменения при этом обобщен-
обобщенных координат д2 @ и <7§ @ в течение
48 и с 60 с. Как видим, аэроупругие характери-
Рис. 7.8. Временная зависимость обо- стики самолета таковы, что при выпол-
бщенных координат д2 и ?8 при нении данного маневра на участке АВ
выполнении самолетом петли Не- траектории (рис. 7.7) в результате взаи-
стерова модействия 2-го и 8-го тонов упругих
о
267
колебаний (изгиба и кручения стабилизатора) на движение самолета ка|
твердого тела (с угловой скоростью тангажа О.г) накладываются автокод
лебания с незначительной амплитудой. Причина появления этих автокс^
лебаний анализировалась с помощью годографов комплексных частот
которые строились при выполнении маневров в различных условиях
ЬпЯ,Гц Обнаружено, что на характер перемещение
комплексных частот на плоскости КеЯ
1т Я в значительной степени влияют ъщ
выполняемого маневра и особенности опи
сания работы САУ. На рис. 7.9 нанесены
годографы комплексных частот самолета *
без САУ по скорости V для двух режимов;
полета: сплошная линия — перегрузка пу *
меняется от 0 до -5 единиц; штриховая —^
ч
\
"ее
(
160
80
КеЯ,Гц -80 -40
Рис. 7.9. Годографы собствен- от 0 до +5 единиц; оба случая получены ирщ
ных значений упругого самоле- увеличении V от 100 до 500 м/с. л
та без САУ по скорости и для Практический интерес вызывает иссле- >
двух режимов полета дование влияния параметров полета, в ча-
частности, отклонения стабилизатора <5СТ по закону 3 на величину упругих
деформаций конструкции самолета (кривая 7) и перегрузку B) (рис. 7.10).
Изучалось также влияние турбулентности атмосферы на характер дефор-
деформирования конструкции самолета. На рис. 7.11 показаны значения откло-
отклонений конца крыла #кр на участке выхода самолета из петли Нестерова в
горизонтальный полет в турбулентной атмосфере. Амплитуда перемеще-
град
Якр,м
0,080
0,064
0,048
0
12
Г, с
Рис. 7.10. Временная зависимость пере-
перемещения конца крыла Ккр (кривая 1) и
перегрузки пу B) при отклонении ста-
стабилизатора 5СТ в случае выполнения
самолетом петли Нестерова в течение 60 с
Рис. 7.11. Характер отклонения концевой
точки крыла Ккр во времени г на участке
выхода самолета из петли Нестерова в
горизонтальный полет в турбулентной
атмосфере
ния конца крыла /?кр здесь значительно меньше по сравнению со случаем
маневрирования (кривая 1 на рис. 7.10).
На рисунках 7.12, 7.13 нанесены результаты моделирования энергич-
энергичной «змейки» с выдерживанием траектории в горизонтальной плоскости.
Управление ЛА осуществлялось рулем высоты и элеронами. Тяга двига-
двигателей самолета увеличивалась до режима «Максимал» с началом выпол-
выполнения маневра. Данные этих рисунков отражают изменения соответст-
соответственно угла крена у и перегрузки пу за 100 с полета при выполнении
«змейки» из режима прямолинейного установившегося полета. Такую
268
1/
л/
необычную картину поведения функции пу({) можно объяснить взаим-
взаимным влиянием продольного и бокового движений самолета и отклонени-
пу
1,12
0,96
0 32 64 /Те" ° 32 64
Рис. 7.12. Характер изменения угла крена Рис. 7.13. Временное изменение перегрузки
у самолета во времени г за 100 с полета пу в центре масс самолета за 100 с полета
при выполнении «змейки» из режима при выполнении «змейки» из режима пря-
прямолинейного установившегося полета молинейного установившегося полета
ем руля высоты при кренении для выдерживания постоянной высоты
полета. Функция д^) (рис. 7.14) отражает изменение обобщенной коор-
координаты #! во времени г при выполнении маневра «змейка». Из сопостав-
л/
1Л
«V
V
Л
/II
ш
0,04
0" 32 64
Рис. 7.14. Траектория обобщенной коор-
координаты ^^ во времени г за 100 с полета
при выполнении «змейки» из режима
прямолинейного установившегося полета
Рис. 7.15. К выполнению пространст-
пространственного маневра самолетом
ления данных рисунков 7.12 и 7.14 видно, что частота изменения упругих
колебаний конструкции по первому тону практически отслеживает час-
частоту крена аппарата как твердого тела.
На рис. 7.15 изображена траектория пространственного маневра само-
самолета. Он включает следующие этапы: пикирование с отрицательной пере-
перегрузкой пу , энергичный выход из пикирования с перегрузкой пу до 7-8
и переход к выполнению восходящей спирали с креном у = 60° и углом
тангажа в = 30°. Кривые рисунков 7.16 и 7.17 описывают изменения со-
соответственно перегрузки пу и обобщенной координаты ^ во времени г. ,
(
-0,04
-0,14
— '—
^—
¦л
1
У
20
40
{у с
0 20 40 Г, с
Рис. 7.16. Временное изменение перегру- Рис. 7.17. Временное изменение обобщен-
зки пу при выполнении самолетом про- ной координаты ^^^ при выполнении са-
странственного маневра молетом пространственного маневра
269
§ 7.2. Моделирование динамики высокоскоростной вращающейся
упругой ракеты
В настоящее время большие сверхзвуковые скорости осваиваются не
только ЛА, но и обычным вооружением — малогабаритными ракетами
[317, 400]. Исследованию последних сопутствует ряд дополнительных
трудностей. Во-первых, в отличие от самолетов ракеты в период разгона
подвергаются интенсивному нагружению, что требует более тщательного
подхода к определению их ди-
намических свойств (частот и
форм собственных колебаний
конструкций) и более полному
отображению их в структурной
ММ аппарата. Во-вторых, в
уравнениях пространственного
движения таких объектов прихо-
приходится учитывать силы, связан-
<г ные с наличием больших про-
Ц4 дольных ускорений и иногда
значительных скоростей враще-
вращения вокруг их центров масс.
Движение упругой ракеты
Рис. 7.18. Системы координат. Внешние си- по-прежнему будем рассматри-
лы, действующие на ракету вать относительно земной сис-
системы координат Оох§у818, а в качестве связанных осей Охуг выберем
«средние» оси, совпадающие с главными центральными осями инерции
(рис. 7.18). Радиус-вектор произвольной точки деформируемого аппарата
К^Ко+Ч+и/- G-23)
Смысл составляющих радиус-вектора К/ ясен из рис. 7.18. На этом же
рисунке изображены силы и моменты, действующие на ракету, где Ха,
Уа , Ха — соответственно нормальная, продольная и поперечная состав-
составляющие главного вектора аэродинамической силы; Мх, Му, Мг —
моменты крена, рыскания и тангажа; Тд — тяга двигателя; С — вес ра-
ракеты.
Структурную ММ пространственного движения высокоскоростной
вращающейся упругой ракеты сформируем на базе уравнений динамики
типа [16], нелинейных по кинематике и линеаризованных по аэродина-
аэродинамике и упругости, дополненных членами, учитывающими ее вращение и
переменность во времени массы.
При составлении уравнений движения используем принцип затверде-
затвердевания, согласно которому ракета рассматривается как тело постоянной
массы, если в качестве внешних сил учитываются реактивные силы и
силы Кориолиса.
Разрешающая система уравнений для ракеты в векторно-матричной
форме имеет вид [249,192])
270
G.24)
В G.24) в дополнение к обозначениям глав 2, 3 введены Ра, Ма —
главный вектор и главный момент аэродинамических сил; Тд — тяга
двигателя, вектор которой считается направленным вдоль строительной
оси корпуса ракеты; Мд — момент тяги двигателя; Гг — силы, обу-
обусловленные перемещением центра масс ракеты относительно ее корпуса.
В общем случае силы Рг равны
Рг = тац м + 2тЛх\]яы. G.25)
Здесь 11Ц м, ац м — соответственно скорость и ускорение перемещения
центра масс относительно корпуса. Обычно первым слагаемым в G.25) в
силу его малости пренебрегают; тогда приближенно Ег~2тПх11цм;
*К» Мк — соответственно главный вектор и главный момент сил
Кориолиса, возникающих в результате вращения ракеты вокруг центра
масс и движения частиц топлива и газа относительно ее корпуса; они
определяются по формулам
Рк = |акЖп, Мк = |гхакд?т, G.26)
V I
где г' — вектор-радиус рассматриваемой частицы фиктивного твердого
топлива объемом V; а^ — кориолисово ускорение, определяемое век-
векторным произведением 2&х11г,где \]г —вектор относительной скоро-
скорости движения частиц фиктивного твердого тела для момента времени г.
В G.24) РуПр , Мупр — главный вектор и главный момент управляю-
управляющих сил, возникающих при отклонении рулевых поверхностей для изме-
изменения условий нагружения и ориентации ракеты в пространстве; //сек —
секундный расход топлива через сечение сопла двигателя; О,х / — угло-
вая скорость по крену; Е/ — квадратная матрица, элементами которой
являются коэффициенты демпфирования, обусловленные силами Корио-
Кориолиса и определяемые по формуле ([194])
г / = 1,А^, G.27)
где 1х(х) — массовый расход топлива через произвольное поперечное
сечение по отношению к продольной оси ракеты х\ /( — форма /-го тона
собственных колебаний упругой конструкции ракеты; Ь — длина ракеты;
С} х — квадратная матрица, элементы которой характеризуют влияние
сжимающих и растягивающих сил в поперечных сечениях корпуса на
271
вынужденные колебания конструкции. Элементы матрицы с^ вычисля-
вычисляются по зависимости (см. [194])
^^т <7.28)
В G.28) И(х) — продольные сжимающие силы, действующие в по-
поперечных сечениях корпуса:
X X
ВД = Цт{х)<1х+\хаШх. G.29)
О О
Здесь т(х) — погонная масса ракеты; Ха (х) — погонная сила аэродина-
аэродинамического сопротивления; )т — интенсивность массовых сил, направ-
направленных против движения ракеты: ]т =Тэ/т, где Тэ=Тд-Ха — эффек-
эффективная тяга.
Ориентация подвижной системы координат Охуг относительно не-
неподвижной устанавливается с помощью параметров Родрига-Гамильтона
Я; (I = 0,3), которые ищутся по известным кинематическим соотношени-
соотношениям (см. гл. 2).
Кинематические уравнения, связывающие производные по времени от
координат земной системы О$х8у8г8 и проекции скорости полета IIх,
Цу,11г соответственно на связанные оси Ох, Оу, 01, имеют вид
где элементами матрицы || а || служат коэффициенты осу (/, у = 1,3) —
направляющие косинусы, определяемые через параметры Я,- с помощью
известных зависимостей [71,220].
В итоге решение задачи динамики движения высокоскоростной вра-
вращающейся упругой ракеты при разгоне сводится к совместному интегри-
интегрированию уравнений G.24) и G.30).
Аэродинамическая часть задачи аэроупругости ракеты решается в
рамках модели идеальной сжимаемой «холодной» среды и модифициро-
модифицированного метода дискретных вихрей, позволяющего унифицировать рас-
расчет аэродинамических и аэроупругих характеристик в широком диапазо-
диапазоне скоростей полета [126, 127]. Согласно [57, 127] аппарат заменяется
базовыми вертикальными и горизонтальными тонкими плоскими несу-
несущими поверхностями (рис. 7.19), которые покрываются семейством про-
продольных и поперечных вихревых отрезков. Перемещения точек конст-
конструкции ракеты в уравнениях движения по-прежнему в соответствии с
методом заданных форм аппроксимируются собственными функциями.
Ввиду того, что конструкция ракеты характеризуется значительным раз-
разбросом частотных параметров ее составных элементов, упругая модель
272
всего объекта строится на основе принципа декомпозиции в сочетании с
МКЭ [205]. При этом материал конструкции ракеты при нагружении
подчиняется законам идеального упругого тела, а сама конструкция рас-
расчленяется на отдельные подконструкции (рис. 7.20), для каждой из кото-
которых соответствующая расчетная упругая схематизация выбирается в за-
зависимости от ее конструктивного оформления.
Как правило, корпус G) ракеты представляет собой удлиненную регу-
регулярную структуру и с достаточной для практики точностью может моде-
Рис. 7.19. К аэродинамической
схематизации ракеты базовыми
тонкими плоскими несущими
горизонтальными и вертикаль-
вертикальными (заштрихованными) по-
поверхностями
'5.Т
Рис. 7.20. К построению упругой модели ракеты на
основе принципа декомпозиции в сочетании с МКЭ:
а — стержневой КЭ, б — оболочковый КЭ, 1 — кор-
корпус ракеты, 2-4 — аэродинамические поверхности
лироваться упругой балкой с произвольно распределенными по длине
массой, моментами инерции и жесткостями, которая согласно МКЭ ап-
аппроксимируется стержневыми конечными элементами (СКЭ) (рис.
7.20 а). Каждый из узлов стержня имеет шесть степеней свободы, сопро-
сопровождаемых перемещениями м, V, м> по направлениям глобальных (связан-
(связанных) осей Ох, Оу, Ог и углами поворота а, /3 , у относительно тех же
осей соответственно.
Управляющие поверхности B-4) ракеты заменяются оболочковыми
конечными элементами (ОКЭ). Поле перемещений ОКЭ характеризуется
тремя линейными смещениями и, V, м? и двумя углами поворота а, /3
вектора-нормали к поверхности ОКЭ, совпадающего с направлением оси
От! (рис. 7.20 б).
Проблема нахождения собственных частот и форм упругих колебаний
конструкции ракеты при совместном использовании принципа декомпо-
декомпозиции и МКЭ решается модифицированным методом одновременных
итераций [41а].
Обратимся к конкретному примеру. Изучался процесс нагружения,
деформирования и движения гипотетической вращающейся крестокры-
273
лой ракеты при разгоне. При формировании ее структурной ММ учиты-
учитывались три низших тона свободных упругих колебаний конструкции, рас-
рассчитанные по методу декомпозиции.
Тяга двигателя Гд раскладывалась на две составляющие, одна из ко-
которых прикладывалась к его донной части и по модулю составляла 80 %
УЯ,КЬА
О
0,2
0,1
О
-ОД
пу
-40
О
-40
-80
О
а,
15
О
-15
О
г„,км
б
л
\
1 У
в
Л
А\
V
и
0,02
О
-0,02
в
/ \
V
/
г, с
О
Г, С
Рис. 7.22. Временное изменение при разгоне
Рис. 7.21. Изменение во времени I ракеты угла крена у , относительной угловой
соответственно траекторных пара- СКорости вращения ^х, отклонения рулевых
метров в земной системе координат, „с ~ г
„ поверхностей о и прогиба / точки корневого
нормальной перегрузки пу и угла ^^ ^^^ 0^ерения% связанной сие-
атаки а при разгоне ракеты теме координат
полной тяги, а другая, равная 0,2Гд, — в центре среза сопла. Причем при
недеформированном состоянии корпуса принималось, что вектор резуль-
результирующей силы от этих двух составляющих проходит через центр масс
ракеты. Для упрощения расчетов в уравнениях движения не учитывались
силы Кориолиса и силы, возникающие при перемещении центра масс
аппарата вдоль корпуса. Уравнения упругих колебаний составлялись без
учета продольных сжимающих и растягивающих сил.
Суммарные коэффициенты аэродинамических производных рассчи-
рассчитывались с помощью модифицированного МДВ на основе гипотезы ква-
квазистационарности [127]. Коэффициент лобового сопротивления сх опре-
определялся по экспериментальной поляре ракеты, т. е. по зависимости сх от
су, числа М и высоты полета Я.
Некоторые результаты вычислений представлены на рисунках 7.21-
7.23. На рис. 7.21 нанесено соответственно изменение во времени I теку-
текущих координат аппарата х8 , у8 , 1§ относительно земной системы ко-
274
ординат О$х8у818 (рис. 7.21 а), нормальной перегрузки пу в центре
масс (рис. 7. 21 б) и угла атаки а (рис. 7.21 в) при движении аппарата как
твердого тела (штриховые линии) и с учетом упругости конструкции
(сплошные) при разгоне от М = 0 до М = 6.
Рисунок 7.22 а иллюстрирует изменение во времени г в процессе раз-
разгона ракеты угла крена у (сплошная линия — моделирование ракеты с
учетом упругости конструкции, штриховая — без учета) и угловой ско-
скорости ^x (штрихпунктирная). Первоначальное положение и законы от-
отклонения рулевых поверхностей в процессе полета ракеты демонстрирует
рис. 7.22 б; сплошная линия относится к рулям тангажа, штрихпунктир-
штрихпунктирная — к рулям корпуса. Изменение во времени I упругого прогиба/точки
корневого сечения хвостового оперения ракеты относительно связанной
системы координат отражает рис. 7.22 в.
Из рисунков 7.21 и 7.22 видно, что упругость конструкции оказывает
значительное влияние на параметры движения (рис. 7.21 а, в), нагруже-
ния (рис. 7.21 б) и деформирования (рис. 7.22 в) ракеты в процессе разгона.
Колебательный характер изменения рассматриваемых параметров
объясняется вращением объекта по крену (рис. 7.22 а) и отклонением
аэродинамических рулей (рис. 7.22 б), играющих роль возмущающего
фактора. Анализ графиков рисунков 7.21 и 7.22 в показывает, что упру-
упругость конструкции, с одной стороны, демпфирует амплитуды колебаний
-0,05
-0,03
-0,01
0,003
0,002
0,001
Рис. 7.23. Изменение собственного значения нулевого тона Яо колебаний ракеты при
разгоне с учетом ее вращения; 1 — сох = 0,281; 2—0,842; 3—0,952; 4 —1,13
параметров нагружения и движения ракеты, что благоприятно сказывает-
сказывается на устойчивости ее движения, а с другой — ухудшает ее управляе-
управляемость (рис. 7.21 а). Это свидетельствует о том, что из-за деформируемо-
деформируемости конструкции вращающаяся ракета крестокрылои компоновки во вре-
время разгона становится более устойчивой и менее управляемой.
На рис. 7.23 приведены результаты расчетов, характеризующие влия-
влияние вращения ракеты относительно продольной оси на устойчивость ее
движения при разгоне. Годографы 1тЯо -КеЛо рис. 7.23 отражают из-
275
менение собственного значения нулевого тона Ло колебаний ракеты как
жесткого тела при разгоне @<М<6)и влияние на него скорости враще-
вращения аппарата: годографы 1 — (дх = 0,281; 2 — 0,842; 3 — 0,952; 4—1,13
(сох = ^x/^^ , где^ — собственная частота первого тона упругих ко-
колебаний конструкции ракеты). Как видим, с ростом частоты вращения
ракеты это влияние становится все более заметным. При частоте враще-
вращения сох, близкой к единице и выше, ракета с самого начала разгона явля-
является неустойчивой при возмущенном короткопериодическом движении
(годограф 4 на рис. 7.23). Так продолжается до М = 1,2. Затем в диапазоне
A,2 < М < 3,6) она становится устойчивой; при М > 3,6 снова неустойчи-
неустойчивой. Отсюда возникает необходимость в ограничении частоты вращения
пх ракеты по условиям устойчивости ее движения.
§ 7.3. Моделирование бафтинга хвостового оперения
летательного аппарата
Благодаря использованию различных тормозных средств [283, 427] в
настоящее время широко применяется пилотирование маневренных са-
самолетов с максимальными перегрузками и торможением. Значительно
увеличилось в авиации количество внешних типов грузов и подвесок. Все
это вызывает нарушение безотрывности обтекания самолета — срывные
режимы течения, которые, взаимодействуя с отдельными частями ЛА,
приводят к появлению в конструкции вибраций типа бафтинга [253, 283,
394,424,427].
Изучение в полном объеме явления бафтинга в силу нелинейности
задачи, в первую очередь со стороны аэродинамики, даже при использо-
использовании математического моделирования представляет трудность вследст-
вследствие сложности описания и большой размерности задачи. Зачастую при
возмущенном движении ЛА отрывным обтеканием охватывается не весь
аппарат, а часть его поверхности либо отдельные элементы. При этом
воздействующие на объект дополнительные аэродинамические силы но-
носят локальный характер и такого порядка, что позволяют его траектор-
ным параметрам оставаться в рамках возмущенного движения. Это по-
позволяет несколько упростить задачу. Здесь будет освещен один из воз-
возможных путей построения структурной ММЛА, в основном обтекаемого
безотрывно, при наличии на нем локальных зон отрывного течения. Не-
Необходимым условием для реализации этого пути является предваритель-
предварительное построение линейной структурной ММЛА (см. главы 2 и 3). Нели-
Нелинейные внешние воздействия на отдельные части ЛА, находящиеся в
спутном следе, образуемым отрывом потока с его впереди расположен-
расположенных несущих либо тормозных или управляющих аэродинамических по-
поверхностей, в отличие от линейных возмущений вычисляются путем по-
последовательного интегрирования уравнений нелинейной аэродинамики и
линейной аэроупругости. В основу построения картины отрывного обте1-
кания положены модель идеальной несжимаемой жидкости и моди-
модифицированный метод дискретных вихрей в форме вихревых рамок [14,
57]. Местами отрыва потока считаются острые кромки отклоняемой тор-
276
1
Рис. 7.24. К бафтингу хвостового опере-
оперения маневренного самолета; 1 — тормоз-
тормозной щиток
мозной поверхности либо миделево сечение внешнего перевозимого гру-
груза. Дополнительная нелинейная нестационарная аэродинамическая на-
нагрузка, действующая на саму тормозную поверхность и отдельные эле-
элементы ЛА, попадающие в спутный след от нее, определяется с помощью
интеграла Коши-Лагранжа с учетом предыстории обтекания и деформи-
деформирования аппарата в целом и отдельных его частей.
7.3.1. Математическая модель бафтинга хвостового оперения ле-
летательного аппарата. Пусть ЛА с момента времени I — 0 совершает
возмущенное движение относительно некоторого базового установивше-
установившегося режима полета с постоянной скоростью G0. Примем, что местные
углы атаки а и скольжения C для ЛА в целом малы и деформация его
конструкции находится в рамках
линейных соотношений теории
упругости. Считаем, что тормозная
поверхность, например щиток на
ЛА, вводится в рабочее состояние
в момент времени ^ (рис. 7.24),
что способствует появлению за ней
отрывной области течения. Сфор-
Сформировавшийся через определенный
промежуток времени за плохооб-
текаемой поверхностью (щитком)
вихревой след является главным
источником локальной нестацио-
нестационарной аэродинамической силы, действующей со стороны потока как на
саму поверхность, так и на поверхности, попадающие в спутный след или
располагающиеся в непосредственной близости от него. Предположим,
что основные линейные и дополнительные нелинейные аэродинамиче-
аэродинамические источники возмущений действуют на ЛА независимо друг от друга.
Так как методика формирования линейных структурных ММЛА опи-
описана в гл. 3 и является основной в поставленной задаче,лго здесь обратим
внимание лишь на некоторые особенности «бафтинговой» модели. Одна
из них состоит в том, что конструкция современного маневренного ЛА
представляет собой свободную сложным образом сочлененную про-
пространственную колебательную систему, отдельные части которой имеют
различные упругомассовые характеристики и широкий спектр собствен-
собственных частот колебаний, верхняя часть которого отражает динамические
свойства малоразмерных частей ЛА (тормозного щитка, хвостового опе-
оперения и т. д.). Пульсация аэродинамического давления при бафтинге име-
имеет также относительно высокий частотный спектр и носит локальный
характер [106, 107, 188, 216]. В то же время в условиях безотрывного об-
обтекания (малые углы атаки) возбуждаются главным образом низкочас-
низкочастотные упругие колебания конструкции аппарата [106, 107, 138, 140].
Поэтому для создания адекватной структурной ММЛА, правильно отра-
отражающей деформирование его конструкции в целом в полете и отдельных
частей, особенно при бафтинге, необходимо удерживать большое число
членов ряда собственных функций. Это не всегда оправданно, так как
277
часть удерживаемых (промежуточных) кинематических параметров
практически не будет оказывать влияния на результирующее колебатель-
колебательное движение ЛА и может быть для упрощения задачи исключена из рас-
рассмотрения. В связи с этим для описания «бафтинговой» ММ ЛА в допол-
дополнение к основному вектору низкочастотных форм колебаний ^ исполь-
используем дополнительный вектор «бафтинговых» (высокочастотных) форм
колебаний 1*2, который может быть получен экспериментальным спосо-
способом либо на специальным образом подобранной упругой модели. Тогда
вектор упругих перемещений К представим в виде
Техника получения безразмерных разрешающих уравнений аэроупруго-
аэроупругости описана в главах 2 и 3. Здесь приведем их окончательный вид для
различных способов задания координатных функций.
1. В качестве заданных функций ^ берутся формы собственных коле-
колебаний упругой конструкции; при этом матрица г*2 является составной
частью матрицы ^. С учетом свойств ортогональности собственных
функций имеем безразмерную систему матрично-векторных уравнений
вида:
= со >
^ G.35)
= С2 •
Здесь |д,00> М-и» 1*22 —матрицы обобщенных масс; к1э к2 —матрицы
демпфирования; щ, со2 — матрицы собственных частот; с0, о\, с2 —
матрецы коэффициентов обобщенных аэродинамических сил; ^^, я15
^2 — векторы обобщенных кинематических параметров.
2. Матрица 1*1 — первые низшие собственные формы упругих коле-
колебаний конструкции, матрица 1*2 — «бафтинговые» формы колебаний.
Разрешающая безразмерная матрично-векторная система уравнений
принимает форму:
Й! +2к1ю1я1 +со12ч1) = с1 -И2Я2 -к12Ч2> G.36)
2К2ОJЯ2 + @^2) = С2 - Ц20Я0 - Ц21Чо " ^ПЧ\ •
В G.36) дополнительно к G.35) вошли «переменные» матрицы обоб-
обобщенных масс ц12, |120, |121 и жесткостей к12, к21.
3. Иногда бафтинг хвостового оперения ЛА рассматривается в пред-
предположении его неподвижности — «жесткой заделки» в центре масс [311],
удерживая в уравнении аэроупругости только «бафтинговые» формы г*2.
В случае их ортогональности разрешающая безразмерная матрично-
векторная система уравнений G.35) переходит в следующую:
278
= С2 • G*37)
Матрица коэффициентов обобщенных аэродинамических сил е2 в {737)
вычисляется на основе решения нелинейной задачи аэродинамики для
малоразмерной части ЛА (хвостового оперения) с учетом предыстории ее
обтекания и деформирования.
Представим составляющие векторов обобщенных аэродинамических
сил Со , С!, с2 в виде двух слагаемых:
С1=С1Я+<Ъ1. | = О2. • G.38)
Линейные части суммарной обобщенной аэродинамической нагрузки
сш 0 = 02) в G.35), G.36) определяются согласно [57]. Что касается не-
нелинейных составляющих с,-н (г =0,2), то они ищутся на основе работ [14,
54], а соответствующие им обобщенные аэродинамические добавки на
несущих поверхностях 5^' (у = 1,2,3,...), на которых они появляются, —
по формулам
X !ь ^ G.39)
где / = //& , 5^ = ЯнУ^о » ^о и ^ — характерные площадь и хорда.
Остановимся на особенности определения нелинейных составляющих
обобщенных аэродинамических возмущений. Построение следа за пло-
хообтекаемой поверхностью осуществляется на концепции крупномас-
крупномасштабного движения жидкости в спутном следе в рамках модели идеаль-
идеальной несжимаемой жидкости и метода вихревых рамок [14, 54].
Отрывное обтекание рассматриваемой части ЛА по времени строится
с учетом интерференции несущих и тормозных поверхностей, предысто-
предыстории их обтекания и деформирования. Кроме того, для уменьшения ам-
амплитуды пульсации давлений иногда используют перфорацию, т. е. пло-
хообтекаемую поверхность делают проницаемой [408]. Основные поло-
положения математической формулировки нелинейной задачи аэродинамики
в этом случае сохраняются [54]; при этом условие непротекания поверх-
поверхности заменяется условием ее протекания. Учет проницаемости обтекае-
обтекаемой поверхности представляет собой весьма сложную гидродинамиче-
гидродинамическую задачу, которая может быть решена тем или иным приближенный
способом [298].
Возможности изложенного здесь подхода проиллюстрируем на реше-
решении некоторых задач.
279
7.3.2. Бафтинг хвостового оперения самолета от следа за тормоз-
тормозным щитком. Пусть гипотетический маневренный самолет (см. рис. 7.24)
совершает возмущенное движение с убранным тормозным щитком отно-
относительно полета в горизонтальной плоскости. Ограничимся случаем ко-
роткопериодического движения, т. е. не будем учитывать работу двигате-
двигателя. В момент времени г - г0 выпускается тормозная поверхность, которая
вызывает срыв потока с ее острых кромок с образованием турбулентного
следа за ней. Это приводит к тому, что со стороны отрывного течения
(спутного следа) на щиток и несущие
поверхности, попадающие в спутный
след, начинают дополнительно действо-
действовать нестационарные аэродинамические
силы.
Динамику движения ЛА при таком
сложном обтекании опишем системой
уравнений G.36). Упругую деформацию
конструкции ЛА в целом и отдельных
его частей в потоке будем аппроксими-
аппроксимировать собственными функциями сим-
симметричных колебаний, включая и «баф-
тинговые» формы, удерживая всего
17 тонов. Расчет нагрузки Ар^, дейст-
действующей на раскрытую тормозную по-
поверхность (щиток) 4 и кили 7 и 2, прово-
1
Рис. 7.25. К формированию расчет-
расчетной вихревой схемы хвостового
оперения маневренного самолета
при бафтинге
дился согласно аэродинамической компоновке рис. 7.25 и изображенной
на ней расчетной вихревой схеме C — часть фюзеляжа, вошедшая в рас-
расчетную вихревую схему решения задачи отрывного обтекания). Штрихо-
Штриховыми линиями на рисунке отображены вихревые пелены, сходящие в
поток с торца и с задних кромок обоих килей, а также со всех острых бо-
боковых граней щитка 4. Расчет же линейных аэродинамических коэффи-
коэффициентов осуществлялся по методике, описанной в гл. 4.
Обратимся к анализу некоторых данных вычислений, представленных
на рисунках 7.26-7.34.
На рис. 7.26 приведена зависимость сп(т), характеризующая измене-
изменение коэффициента нормальной силы сп по безразмерному времени т на
первом киле, найденная с учетом деформирования ЛА в целом (сплошная
линия). Здесь же для сравнения нанесена эта функция для жесткого киля
0,4
0,2
г
V
Л
V
Л
1,5
1,0
0,5
1
(\
V
Чг
1
0 0,4 1,2 2,0 2,8 3,6 г
Рис. 7.26. Изменение коэффициента нор-
нормальной силы сп по безразмерному вре-
времени т на первом киле самолета
0 0,4 1,2 2,0 2,8 3,6 т
Рис. 7.27. Изменение коэффициента со-
сопротивления сх тормозного щитка 4 по
безразмерному времени г
280
(штриховая). Отсюда видно, что пульсация нагрузки на киле начинает
появляться после образования пелены за щитком т = 1,8 4-2,0. Очевидно,
это вызывается периодическим отхо-
отходом в поток вихревых сгустков, обра-
образующихся за тормозным щитком.
Кроме того, деформация килей не-
несколько демпфирует эту пульсацию.
Расчеты выполнялись при
С/=150м/с, а = 5°, /3 = 1°.
Графики сх(т) и сг(т) рисунков
7.27 и 7.28 иллюстрируют изменение
по безразмерному времени т коэф-
коэффициентов соответственно сопротив-
0,8
0,4
0
-0,4
-0,8
42
Щ
0,4
1
/V
Г
/
У
1,2
\
2,0\
1л/
г
/
/1
/2,8
/
I
\
V
V
3,6
А
\
ления сх и боковой силы сг
Рис. 7.28. Изменение коэффициента бо-
новой силы сг тормозного щитка 4 по
ного щитка при его раскрытии. Вид безразмерному времени т
этих функций носит сложный харак-
характер, причем боковая нагрузка сг меняется во времени т не только по
величине, но и по направлению.
На рисунках 7.29-7.31 показаны изменения по безразмерному време-
времени т некоторых обобщенных координат упругих колебаний #/ (/ =
= 1,5,4,13), их скоростей щ (/ = 1,5) и ускорений щ A = 4). Сплошные
линии отвечают следующему режиму полета: установившийся полет ЛА
при угле атаки а = 2°, затем резкое изменение полетной конфигурации
— выпуск тормозного щитка; штриховые — убранному щитку. На этих
ЧхЩ
0,2
/
\
1
\
4
6
10
12
т
44
0,1
•КГ4
1 _К
кг
П 2
4
6
1
10
У
12
Т
0,1
1/
/
\
1
\
\
3
У
V
5
ч
9
ч
-*-
13
т
Рис. 7.29. Изменение обобщенных ко-
координат ^^, их скоростей дг (I = 1,5)
по безразмерному времени т
Рис. 7.30. Изменение обобщенной «баф-
тинговой» координаты ^4 и ее ускорения
по безразмерному времени т
013
0
-0,2
-0,4
-0,6
Рис. 7.31. Изменение обобщенной «баф-
тинговой» координаты #13 (килей) по
безразмерному времени т
281
V
Т
2
/1
1
Л
1
6
Л/
1
&
4/1
Л.
1
0
т
рисунках дх соответствует колебанию ЛА в целом по 1-му тону с преоб-
преобладанием изгиба крыла; #4 — колебанию ЛА по 4-му тону, в котором
доминирует перемещение килей; #5 —
по 5-му тону, в котором упругие пере-
перемещения точек крыла, фюзеляжа и
горизонтального оперения одного по-
порядка, а перемещения вертикального
оперения малы в сравнении с ними;
Ч\ъ — доминируют колебания килей.
Как видим, оба случая возбуждения
ЛА приводят к быстрому затуханию
крыльевых, фюзеляжных (^, #5 на
рис. 7.29) форм упругих колебаний
ЛА. В то же время «бафтинговые»
формы колебаний ЛА (д4> Ч\ъ на ри-
рисунках 7.30 и 7.31) при выпушенном
тормозном щитке (сплошная линия)
затухают значительно медленнее.
На рис. 7.32 изображены изменения
суммарного ускорения п^8 точки 1
Рис. 7.32. Изменение суммарного- ус-
корения п^8 точки киля, отнесенное киля (см. рис. 13% отнесенного ксус-
к уекоцгснш©» свободнопгпадения* §, и коргапш» свободного падения #, а также
сохшшшгащш я^ A = 1,3) «бафтин- составляющих ускорений п^0'=СЗ)
говьш»> тонов, упругих колебаний по - , , ~ * „
безразмерному времени т «бафтинговых» форм колебании в по-
порядке возрастания их номера по^ без-
$®т&ртщ времени т. Судя по, данным рис. 7.22, вклады «бафтинго-
«бафтинговых» тож0В; в суммарное ускорение точкш1 на киле неравнозначны.
Расчетные модели
Рис. 7.33. Среднеквадратичные значения пе- рйс> 7.34. Вихревой след за выпущенным
регрузки сгA) в точке 1 левого киля, огне- тормозным щитком и килями для момента
сенные к скоростному напору д* > Для Рас- времени, т = 3,4: а — вид сверху, б — вид
четных моделей бафтинга Ау В, С сбоку
282
С ростом номера бафтинговых форм колебаний этот вклад заметно
уменьшается.
На рис. 7.33 (уровни А, В и С) приведены расчетные среднеквадратич-
среднеквадратичные значения перегрузки а^ в точке 1 левого киля, отнесенной к скоро-
скоростному напору ^*, для высоты Я= 5000 м и скорости полета I] -150 м/с.
Уровни А и В соответствуют упрощенной расчетной модели G.37) соответ-
соответственно с учетом деформации килей и без учета, С — расчетной модели
без упрощений G. 36).
На рис. 7.34 изображен полученный расчетным путем спутный вихре-
вихревой след за выпущенным тормозным щитком и килями для момента вре-
времени т = 3,4 ; а — вид сверху, б — вид сбоку.
7.3.3. Бафтинг хвостового оперения самолета от следа за перево-
перевозимым на нем крупногабаритным внешним грузом. Как уже отмеча-
отмечалось, для транспортировки крупногабаритных грузов все чаще исполь-
Рис. 7.35. К расчету обтекания системы
«СН + КВГ»
Рис. 7.36. Вихревой след за крупногаба-
крупногабаритным внешним грузом
0,051
0
-0,051
-0,153
«4-Ю
0,101
0
-0,101
-0,303
зуют внешние подвески самолета-носителя. На всех самолетах-носителях
был отмечен в полете бафтинг хвостового оперения, вызываемый срывом
потока с поверхности груза. Для
улучшения аэродинамики системы
«самолет-носитель + крупногаба-
крупногабаритный внешний груз»
(«СН + КВГ») и снижения динами-
динамических нагрузок от следа за грузом
часто используют различной формы
обтекатели, в которых помещают
грузы. Здесь будем изучать явление
бафтинга хвостового оперения от
следа за КВГ на базе подхода, изло-
изложенного в п. 7.3.2.
Остановимся на некоторых ре-
результатах моделирования на ЭВМ
полета системы «СН + КВГ», изо-
изображенной на рис. 7.35. Нелинейная
задача обтекания решалась с помо-
помощью метода вихревых рамок [14].
Место отрыва потока с груза фикси-
фиксировалось, его положение определя-
определялось сходящей с него пеленой
0,201
0
-0,201
-0,402
Рис. 7.37. Временное изменение обоб-
обобщенных координат дг, #4> #6 «баф-
«бафтинговых» форм упругих колебаний
килей вследствие воздействия на них
вихревого следа за крупногабаритным
внешним грузом
283
(рис. 7.36). Поверхность обтекателя покрывалась 162 вихревыми рамка-
рамками, а киль — 25-ю. Расчеты выполнялись при углах атаки а = 0 и
скольжения /3 - О и скорости набегающего потока \]§ - 45 м/с .
Данные рис. 7.37 иллюстрируют изменение обобщенных кинематиче-
кинематических параметров ^^, #4> % «бафтинговых» форм колебаний килей по
безразмерному времени г Отсюда видно, что в суммарную амплитуду
упругих колебаний килей основной вклад вносит составляющая дг,
вклад д4 и ^ь незначителен при их общем неустойчивом колебательном
характере.
7.3.4. Способы борьбы с бафтингом хвостового оперения лета-
летательного аппарата. Снижение уровня вибрации конструкций ЛА в поле-
полете является одним из важнейших направлений улучшения их летно-
технических характеристик. Проанализируем здесь некоторые способы
борьбы с бафтингом хвостового оперения на примере гипотетического
маневренного самолета благодаря
изменению: 1) аэродинамической
компоновки; 2) характера обтека-
обтекания тормозной поверхности (за
счет равномерной перфорации
щитка, создания разрезного щит-
щитка при сохранении суммарной
площади торможения, организа-
организации безотрывного обтекания ни-
жней кромки щитка с помощью
дефлектора); 3) конструктивно-си-
ловой схемы вертикального опе-
рения
Данные рис. 7.38 отражают
влияние на суммарные аэродина-
Рис. 7.38. Влияние расположения тормозно- мические характеристики тормо-
го щитка соответственно на коэффициенты Зного щитка сх(т) и вертикаль-
сопротивления щитка сЛа) и нормальной
ного оперения сп{т) аэродинами-
силыкиля сЛб) г л г
ческой компоновки: А — исход-
исходное положение щитка относите-льно вертикального оперения; В — щиток
смещен из состояния Л назад в направлении продольной оси самолета.
Согласно данным рис. 7.38 а общий уровень аэродинамического сопро-
сопротивления щитка сх для положения В падает незначительно с уменьшени-
уменьшением составляющей крупномасштабной пульсации. Происходит также сни-
снижение уровня аэродинамических нагрузок, действующих на кили
(рис. 7.38 б), с устранением составляющих крупномасштабных пульсаций
коэффициента нормальной силы сп. Отсюда ясно, что существует такое
положение щитка относительно килей, при котором при сохранении ве-
величины сх щитка можно существенно снизить аэродинамическую на-
нагрузку на кили. Однако зачастую возможности конструктивных способов
борьбы с бафтингом хвостового оперения ограничены.
284
Рассмотрим влияние перфорации тормозного щитка на пульсацию аэ-
аэродинамической нагрузки, действующей на щиток и кили. Учет прони-
проницаемости будем учитывать приближенно. Для этого воспользуемся моде-
моделью равномерно проницаемой поверхности, в которой скорость АУп
проницания является функцией перепада давлений Ар [291а]:
АУп=/(Ар). G.40)
Этот закон аппроксимировался соотношением
где а и Л — размерные коэффициенты, значения которых зависят от сте-
степени проницаемости поверхности [298]. Расчеты выполнялись при полете
ЛА с а = -2°, /3 = 0 и выпущен-
выпущенном щитке.
Данные рис. 7.39 отражают
влияние перфорации тормозного 0
щитка на уровень аэродинамиче-
аэродинамического воздействия на него и вихре- -о, 16
вого следа за ним на кили; сплош- сп
ная линия — щиток без перфора-
перфорации, штриховая — с перфорацией.
Как видим, перфорация щитка су-
существенно демпфирует аэродина-
аэродинамическое воздействие со стороны
спутного следа не только на сам
щиток, но и на кили при общем
уровне падения его коэффициента
сопротивления (рис. 7.39 в).
Далее приведем расчетные дан-
данные о нагруженности тормозного
щитка при наличии в нем продоль-
продольной щели в случае сохранения его
суммарной тормозной площади по
0,16 ¦=¦
о
-0,2
сх
1.3
1,1
0,9
0,7
4
л
с®
3,2
3,2
V *
Ох *"
Л I
У,
а!
л
'6,4
бл\/
«9,6
л.
^
ЧУ
а
б
т
/-'
в
\
\
0 3,2 Д4 9,6 Т
Рис. 7.39. Влияние перфорации тормозно-
тормозного щитка на уровни аэродинамического
отношению к щитку без щели. На воздействия на сам щиток (в) и спутного
рис. 7.40 показано изменение ко- следа за ним на кили (а, б)
во времени т в зависимости от
щиток без щели, Аг = 0; 2 — щель
Ах =0,1м; 3 — Ах =0,2м
при длине дуги щитка 1 м.
Расчеты проводились для
полета ЛА при а = 5°,
/3 = 1°. Отсюда следует, что
введение щели существенно
снижает пульсацию дейст-
действующей на него аэродина-
аэродинамической нагрузки. Судя по
рис. 7.40, для выбранной
285
эффициента сопротивления щитка сх
ширины щели А!: кривая 1 —
1,6
0,8
А
и'
9ч^
/V
о
0,8
1,6
2,4
3,2
Рис. 7.40. Изменение коэффициента аэродинами-
ческого сопротивления сх разрезного тормозного
щитка при различной ширине щели в зависимости
от безразмерного времени т
аэродинамической компоновки хвостового оперения существует опти-
оптимальная ширина щели щитка, при которой достигается подавление пуль-
пульсаций давлений при минимальном уменьшении коэффициента сопротив-
сопротивления щитка сх.
Сопоставляя данные рис. 7.39 в и рис. 7.40, можно видеть, что равно-
равномерная перфорация в отличие от щели наряду с уменьшением амплитуды
пульсаций, действующей на щиток аэродинамической нагрузки, заметно
снижает ее средний уровень по отношению к щитку без щели.
Анализ результатов вычислений показал, что смягчение пульсации
аэродинамической нагрузки на щитке и килях при наличии перфорации
либо щели можно объяснить упорядочением структуры следа за щитком.
Кроме того, было выявлено, что конструктивные способы борьбы с баф-
тингом хвостового опере-
оперения за счет изменения по-
положения щитка либо кон-
конструктивно-силовой схемы
килей являются менее эф-
эффективными по сравнению
с перфорированным щит-
щитком либо разрезным.
Исследования показали
также, что снижение уров-
уровня пульсации нагрузки при
одновременном увеличе-
увеличении коэффициента сопро-
сопротивления щитка сх можно
добиться путем организа-
организации безотрывного обтека-
обтекания его нижней кромки,
1,6
},-—
а
0,16 —
-0,16
Рис. 7.41. Влияние различных динамических средств прилегающей К фюзеляжу,
на коэффициенты сопротивления щитка сх(а)и нор- Т. е. за счет установки де-
мальной силы сп , действующей на кили E) флектора.
На рис. 7.41 сопостав-
сопоставляются результаты вычислений, полученные с использованием предла-
предлагаемых различных аэродинамических средств борьбы с бафтингом хво-
хвостового оперения маневренного самолета. Рисунок 7.41 а иллюстрирует
зависимости сх(т), полученные для щитка без щели (кривая 7), перфори-
перфорированного щитка B) и при наличии дефлектора E). Изменение коэффи-
коэффициента нормальной силы сп во времени т на правом киле для этих же
случаев изображено на рис. 7.41 б. Отсюда видно, что наиболее эффек-
эффективным средством снижения пульсаций давлений в спутном следе за
щитком с одновременным увеличением его коэффициента сопротивления
является установка дефлектора. Следует отметить, что средства борьбы с
бафтингом хвостового оперения ЛА, связанные с изменением его аэро-
аэродинамической компоновки или конструктивно-силовой схемы, требуют
более тщательной увязки проводимых мероприятий с вопросами прочно-
прочности самолета, его устойчивости и управляемости, балансировки и др.
286
Глава 8
ИССЛЕДОВАНИЕ НАГРУЖЕНИЯ, ДЕФОРМИРОВАНИЯ
АВИАЦИОННЫХ КОМПОНОВОК НА ОСОБЫХ
ПОЛЕТНЫХ И НАЗЕМНЫХ РЕЖИМАХ ДВИЖЕНИЯ
§ 8.1. Транспортировка на летательном аппарате
крупногабаритных грузов
В последнее время внешнему способу транспортировки (т. е. не внут-
внутри грузовых отсеков) крупногабаритных грузов уделяется повышенное
внимание, так как при этом может быть обеспечена транспортировка та-
таких грузов, которые по своим размерам сравнимы с самолетом-носителем
(СН). Несмотря на имеющиеся недостатки внешнего способа тряжиор*
тировки такие, как повышенное аэродинамическое сопротивление ш>?
сравнению с сопротивлением при внутрифюзеляжной и конформной
транспортировке, ограничения по скорости и маневренности, изменение
характеристик устойчивости и управляемости и др., перевозка крупнога-
крупногабаритных внешних грузов (КВГ) на СН при дозвуковых режимах полета
является перспективным транспортным средством [379,, 410]. Иллюстра-
Иллюстрацией подобных перевозок может служить транспортировка «Шаттла» на
самолетах «Боинг-747» и «Бурана» на Ан-225, а также перевоз;ка на Ан-
22 «Антей» полуплоскости крыла самолета Ан-124 «Руслан»,, масса
которого составляет 25 т, высота 2м, ширина Шми длима 40 м, и др.
видов грузов.
Транспортировка КВГ на СН относится к числу сложных научно^
технических задач, для решения которых требуется комплексный подход.
Размещение КВГ на СН вызывает заметное {вменение аэродинамических
и инерционно-массовых характеристик компоновки «СН + КВГ»; усили-
усиливается влияние аэродинамической интерференции на ее аэроуиругие ха-
характеристики, меняются характеристики устойчивости и управляемости.
Большие габаритные размеры носителя и груза и их взаимное влияние
приводят к появлению дополнительных аэроупругих эффектов и связан-
связанных с ними ограничений по скорости и т. д.
Создание структурной ММ функционирования системы «СН + КВГ»
представляет собой на первый взгляд исключительные физические и ма-
математические трудности со стороны как аэродинамики, так и теории уп-
упругости — обтекание и деформирование такой сложной технической сис-
системы необходимо вести с учетом телесности ее составных частей и их
пространственного расположения. Вместе с тем, как показывает расчет-
расчетная практика, исследование процессов нагружения, деформирования и
движения связки «СН + КВГ» в рамках интегральных характеристик воз-
возмущенного движения (обобщенных координат и обобщенных аэродина-
287
мических параметров) по-прежнему можно проводить на базе линеаризо-
линеаризованных соотношений теории аэроупругости в целом, исходя из простран-
пространственного балочного представления компоновки «СН + КВГ» и аппрок-
аппроксимации такой конструкции пространственно расположенными тонкими
несущими поверхностями с позиций аэродинамики.
Процедура формирования линейных структурных ММЛА изложена в
главах 3 и 5. Остановимся здесь только на некоторых особенностях. Все
параметры, относящиеся либо к СН, либо к КВГ, будем отмечать соот-
соответственно нижними индексами 1 и 2, а связанные параметры компонов-
компоновки «СН + КВГ» — ком-
У2* *^ бинацией этих индексов.
Введем связанные с СН и
КВГ подвижные системы
КООрДИНат О\Х1У1%1 И
относительно
Рис. 8.1. Системы координат к решению задач о
транспортировке на ЛА крупногабаритного внешнего
груза
которых упругие переме-
перемещения точек конструкции
будем определять векто-
векторами Г! и г2 (рис. 8.1).
Считаем, что связь
между СН и КВГ жесткая,
статически определимая.
Перемещения точек кон-
конструкции СН и КВГ как
жестких тел относительно
инерциальной системы
отсчета О$х8у81в будем
характеризовать векторами К01 и К02. Абсолютные возмущенные упру-
упругие перемещения точек СН и КВГ запишем в виде
Разрешающая система линейных уравнений аэроупругости формиру-
формируется на основе метода заданных форм. В качестве аппроксимирующих
функций используются собственные формы упругих колебаний СН без
груза и изолированного КВГ. Другие варианты компоновок СН и КВГ
при изменении их упруго-массовых и аэродинамических характеристик
составляются путем пересчета (см. главы 3 и 4).
Матричные уравнения возмущенного движения упругой компоновки
«СН + КВГ» имеют вид
дляСН:
М01Ч01 = Р01 + АР01 - *оЛ2 ' /о оч
для КВГ:
М02Ч02 = Р02 + ЛР02
= Р2 + АР2 -
(8.3)
288
Уг
где Р], Р2 — обобщенные аэродинамические нагрузки изолированных
СН и КВГ, АР! и АР2 — дополнительные аэродинамические нагрузки,
вызванные интерференцией между СН и КВГ; к12 и к21 — векторы сил
внутреннего взаимодействия СН и КВГ через узлы механической связи;
остальные обозначения известны.
Обратимся к определению векторов к12 и к2!. В связи с тем, что
связь между СН и КВГ принята абсолютно жесткой, перемещения точек
конструкции, с одной стороны,
можно описать вектором Кс, У в
который представляется в виде
разложения
КС=ГСЧС, (8.4)
где $с — матрица форм пере-
перемещений механической связи
при движении компоновки как
твердого тела; <\с — вектор
безразмерных обобщенных ки-
кинематических параметров, оп-
определяющих положение со-
соединенной с механической
связью системы координат
Деформированный КВГ
Жесткая
механическая
часть
Деформированный СН
Гис.^. К расчету реакции механической свя^
зи к I и кп междУ составными элементами
компоновки «СН + КВГ»
Осхсус1с по отношению к инерциальной системе отсчета
(рис. 8.2). Перемещения точек узлов стыковки механической связи С\ с
СН и Сц с КВГ находятся аналогично (8.4):
С другой стороны, точки С! и Сп одновременно принадлежат конст-
конструкциям соответственно СН и КВГ; их перемещения можно найти через
векторы абсолютных перемещений вида (8.1)
11 С, = ^01СЧ01 + *1СЯ1. КСП
Приравнивая равенства (8.5) и (8.6), имеем
Отсюда устанавливается соотношение между векторами обобщенных
кинематических параметров д02 и дО1, Я1» 42'•
Я02 = ^С„^ЮС(^О1СЧО1 + ^141 " *С^2СЧ2> • (8-8)
У векторов сил внутреннего взаимодействия к12 и к2\ отличными от
нуля будут только те компоненты, которые соответствуют точкам сты-
стыковки С] и Сц . Это обстоятельство позволяет перейти от векторов к12,
к21 к векторам сил реакции Б^ и Кп в узлах стыковки СН и КВГ. Этот
переход осуществляется через тождественные равенства вида
289
^01к12 ^01^1> ^02к21 ^02С^П » ^ ~
^12 = *1С^1> ^2к21 = ^2С^П •
Уравнение равновесия жесткой механической связи, нагруженной
векторами Б^ и Кп, записывается в виде
^К1+^пКп=0. (8.10)
Отсюда имеем
(8Л1)
В случае, когда механическая связь не разнесена (точки С\ и Сц совпа-
совпадают), соотношение (8.8) переходит в
402 = ^О2С(^О1СЯО1 +^1СЯ1 "^2СЧ2) • (8-12)
Из (8.11) следует, что
Кп=-К,. (8.13)
Преобразуем соотношения (8.2) и (8.3) к каноническому виду линейных
уравнений аэроупругости, которые с учетом (8.9) и (8.13) примут форму
М01<101 = ^ ^
~ - (8.14)
М01Я02 = Р02 + ЛР02 " ^К
В (8.14) тильда над векторами обобщенных аэродинамических сил
означает, что они найдены с учетом (8.12), т. е. в функции векторов ^^^,
Принимая во внимание (8.12) и (8.13), из третьего уравнения системы
(8.14) вектор сил реакции в узлах стыковки СН и КВГ записываем в виде
+АР02)]. (8.15)
Как видим, Кх становится функцией только обобщенных кинемати-
кинематических параметров цО1, Ц\, я2. С учетом (8.15) оставшиеся уравнения
системы (8.14) приводятся к замкнутой форме:
М01Я01+ = Р ^
= Р! +АР! +Р12 + АР! -АМ1ОЧо1 -АМ^ -АМ12с}2 , (8.16)
= Р2 + АР2 + Р2^ + АР21 - АМ2ОЯо2 ~ АМ21Я1 -1
где
290
АМ0 = ?01СМ02*01С , АМ01 = ?01СМ02*1С > ЛМ1 =
АМ10 = ^1СМ02^01С > АМ2 = ^2СМ02^2С > АМ02 =
АМ12 = ^1СМ02^2С > АМ20 = ^2СМ02^01С > ЛМ21 =
Р12 + АР12 = & (^Т2С Г(Р02 + АР02) ,
Р21 + АР21 = Ц
Система уравнений (8.16) служит для исследования динамики про-
пространственного возмущенного движения упругой компоновки «СН +
КВГ». Первое из них описывает движение СН как жесткого тела, второе
и третье — упругие колебания конструкций соответственно СН и КВГ.
Особенность этих уравнений состоит в том, что все величины в них,
стоящие перед параметрами ^^^, я1? д2, находятся по соотношениям
(8.17) в явном виде.
Возможности линейной структурной ММ (8.16) проиллюстрируем на
примере продольного возмущенного движения гипотетической связки
«СН + КВГ». С учетом G.1) преобразуем соотношения (8.16) к безраз-
безразмерному виду:
+ С02 + Ас02 - А|Л0Я01 - ДЦ.О1Я1 -
+ с12 + Ас12 - АЦЮЧ01 -&№1 - Ац12я2 , (8.18)
ц2(Я2 + 2к2со2с[2 + со2я2) =
= с2 + Ас2 + с21 + Ас21 -
Хотя при короткопериодическом движении принимается 17х=110,
продольными составляющими ускорений и скоростей Х]х и IIХг можно
пренебречь только при определении аэродинамических сил и моментов.
Вместе с тем инерционные силы надо определять с учетом ускорений по
этим направлениям, поскольку в уравнениях (8.18) перемещения компо-
компоновки «СН + КВГ» как жесткого тела описывает параметр о^\ -
1||Т
^01* ^(Иу ^ • Размерность векторов Я1 и д2, описывающих упругие
перемещения точек конструкции соответственно СН и КВГ, определяется
числом удерживаемых форм собственных колебаний Л^ для СН и Ыд2
доя КВГ.
При нахождении аэродинамических коэффициентов в (8.18) в соот-
соответствии с (8.17) используются матрицы форм Г01с , ^02С » ^\С» ^2С > кон"
кретное содержание которых определяется геометрией и видом механи-
механической связи между СН и КВГ. На рис. 8.3 представлен наиболее распро-
распространенный вид механической связи между СН и КВГ; здесь же нанесены
характеризующие ее основные геометрические параметры. Отсюда вид-
291
но, что связь состоит из двух узлов, каждый из которых исключает вза-
взаимное перемещение точек СН и КВГ по соответствующим направлениям:
узел I перемещается вдоль осей хпу, узел II — вдоль оси у. Положение
Рис. 8.3. Расчет реакции механической связи между составными элементами компо-
компоновки «СН + КВГ»
узла относительно центров масс СН и КВГ будем характеризовать коор-
коорх\у\ X1 и х\у\ Х . Возникающие в этих узлах состав-
составц^ и К
у\ , X]1 и х\,
у\
динатами х\
ляющие сил реакций щ у ^
соответственно к СН и КВГ.
Для механической связи рис. 8.3 матрицы
Чгс ~
0
ъ
ъ
-А
4
• *02С =
ъ
0
0
0
ъ
ъ
-у\
А
К\у2» Яп-у2 приложены
С и ^02С имеют вид
(8.19)
Они характеризуют перемещения узлов I и II при возмущенных пере-
перемещениях СН и КВГ как твердых тел. Очевидность такого утверждения
вытекает из равенства
ь
0
0
0
ъ
ъ
-А
4
II Я01*Л
К01у/Ь
1 01
=
-у\вх
+ х\вх
=
к0\у
К01у
Аналогичное равенство можно записать для ^02СЯ02- В отличие от
матриц Г01с и ?02С матрицы ^с и 12С характеризуют перемещения
узлов I и II при возмущенных упругих колебаниях конструкции.
Для решения уравнений аэроупругости компоновки «СН + КВН» в
форме (8.18) наряду с упругомассовыми характеристиками необходимо
предварительно вычислить аэродинамические коэффициенты, используя
технологию [57].
Расчет аэродинамических характеристик компоновки «СН + КВГ» в
сравнении с обычными ЛА сопряжен с некоторыми особенностями. Во-
292
первых, связка «СН + КВГ» рассматривается как составной ЛА и по-
прежнему схематизируется системой пространственно расположенных
тонких плоских несущих элементов. При этом аэродинамические харак-
характеристики для СН и КВГ вычисляются в связанных с ними системах ко-
координат ОхХху^ц и О2х2у 2%2- Обобщенные аэродинамические нагрузки
?!, Р2 представляются в виде линейной суперпозиции по кинематиче-
кинематическим параметрам ег и е2:
с учетом аэродинамической
24 12 86420
Выражения для соотношений ^ и с2 запишем в виде
II С2
где с^1 и с22 — матрицы «прямых» безразмерных коэффициентов аэро-
аэродинамических производных, вычисленных
интерференции между СН и КВГ
для их фиксированного взаимного
положения; Ас^2, Ас^1 — матри-
матрицы «перекрестных» коэффициентов
аэродинамических производных.
Изучение аэродинамической
интерференции компоновки «СН +
+ КВГ» представляет интерес не о]
только при транспортировке КВГ,
но и при возможном отделении его
от СН. Это обусловлено прежде
всего тем, что интерференция вы-
вызывает перераспределение аэроди-
аэродинамической нагрузки, а это приво-
приводит к изменению напряженно-
деформированного состояния эле-
элементов конструкции компоновки и
характеристик ее устойчивости и
управляемости.
12
СН
12
КВГ
И
II
Апробирование методики фор- °\
мирования структурной ММ ком-
компоновки «СН + КВГ» осуществля-
осуществлялось на примере самолета Ту-134 с
прикрепленным на нем крупнога-
крупногабаритным «оперенным» грузом,
аэродинамическая схематизация
которых в трех проекциях представлена на рис. 8.4. Здесь нанесены рас-
расчетные точки взаимного расположения центров масс СН и КВГ и связан-
связанных с ними систем координат. Варьируемые точки крепления располага-
располагались в плоскости симметрии компоновки «СН + КВГ». Задача обтекания
293
Рис. 8.4. Аэродинамическая схематизация
компоновки «СН + КВГ» в трех проекци-
проекциях: Ох центр масс СН; О2 — центр масс
КВГ, О— расчетные точки расположения
центра масс КВГ
для каждого взаимного расположения СН и КВГ решалась отдельно. Щ1
рис. 8.5 помещены графики изменения нормированных добавок коэффи-1
0,05
0,10
0,15
0,20
V
\
Ч
\
V
-¦'/<'
/ /
* /
/
/
о
1
-0,1
-0,2
-0,3
-0,4
-0,5
-0,6
чч^ _„
/
//
//
/
/
у
о
1
Дг?
Рис. 8.5. Изменение добавок Ас"с и Ас"г относительных коэффициентов аэродина-
аэродинамических производных вследствие интерференции соответственно для СН и КВГ в
зависимости от расстояния между их центрами масс вдоль оси у при трех фиксиро-
фиксированных взаимных положениях центров масс по оси х
циентов аэродинамических производных &дуС и Ас^г соответственно
для СН и КВГ
вызванных интерференцией между СН и КВГ, в зависимости от расстоя-
расстояния между их центрами масс вдоль оси у при трех фиксированных взаим-
взаимных положениях центров масс по оси х, характеризуемых соответственно
величинами Ат](Ат] = Ау/Ь) и
А<^(А^ = Ах/Ь); сплошная линия —
А% = 0 , штриховая — А^=-0,75,
штрихпунктирная — А% =0,75; М = 0,6;
-0,2
-0,1
0
ОД
0,2
Д*Гг
-0,1
0
-0,1
а
/7
'Г
/I
-. _!7— ...,
0
10
20
30 Ат]
ч
/
?^=г:—
сус(°°)> суг(°°) — аэродинамиче-
аэродинамические характеристики изолированных
соответственно СН и КВГ.
Графики АхРс(г]) и АхРт(г))
рис. 8.6 отражают влияние интерфе-
интерференции на положение аэродинамиче-
аэродинамического фокуса соответственно на СН и
КВГ при изменении взаимного поло-
положения их центров масс: АхРс(г]) =
*0 10
Рис. 8.6. Изменение
20 30 Аг)
положения фоку-
фокусов АхРс{Аг]) и АхРг(Ат]) соответст-
соответственно для СН (а) и КВГ (б) в зависимо-
зависимости от взаимного положения их цен-
центров масс вдоль оси у
~хРг(Г]) ; сплошная линия — А^ =0 ;
штриховая — А^ = -0,75 ; штрихпу-
нктирная Ад = 0,75 .
294
Анализ представленных зависимостей на рисунках 8.5 и 8.6 показыва-
показывает, что наибольшее взаимное влияние между СН и КВГ наблюдается при
удалении их друг от друга примерно на расстояние хорды ( Аг\ = 1). Это
можно объяснить интерференцией между стабилизатором СН и крылом
КВГ, находящимися в этом случае примерно в одной плоскости. Значи-
Значительное же влияние величины А<^ на характеристики АсуС, АёуГ, Ахр>с,
АхРг можно объяснить интерференцией между несущими плоскостями
(крыльями) СН и КВГ. При этом несущие свойства компоновки
«СН + КВГ» варьированием А^ а
можно уменьшить у СН до 20 %, а
у груза до 50 %. Согласно данным
этих рисунков при Ах\ > 3,5 роль
интерференции заметно ослабева-
ет. Желательно при проектирова-
нии таких компоновок варьирова- б п
нием параметра А^ добиваться
такого положения, чтобы измене-
изменение коэффициента АсуТ и поло-
положения фокуса АхРг на КВГ при
меняющейся величине Аг/ носило
монотонный характер. Это важно
при рассмотрении
управляемости самолетом,
бенно в случае отделения груза.
вопросов ^ис# ^ Аэродинамическая схематизация
^ компоновки «СН + КВГ» в трех проекци-
осо" ях: а — вид сверху; б — вид спереди; в —
вид сбоку; 8Х — руль высоты, 52 — эле-
Теоретические возможности ои ^ ^„^
у „ _ _ _ рон-закрылок на СН, <э3 — элевон на КВГ
структурной ММ в изучении связ-
связки «СН + КВГ» проиллюстрируем на конкретном примере. Объектом
исследования выберем компоновку, по своим геометрическим парамет-
параметрам близкую к сочетанию типа «Боинг В-747 + Шаттл» [3]. На рис. 8.7
изображены три проекции аэродинамической схематизации этой системы
с рулевыми поверхностями. Аэроупругая модель компоновки составля-
составлялась с удержанием десяти форм симметричных собственных упругих
колебаний конструкции СН ^/(/,= 1,10) и двух форм КВГ д21 A=1,2)
при заданных двух формах движения СН и КВГ как жестких тел, описы-
описываемых параметрами соответственно <701Д» #01,5 и #02,1» #02,5 • Собст-
Собственные формы упругих колебаний составляющих связки «СН + КВГ»
получены на основе балочной схематизации конструкций раздельно.
Анализ результатов вычислений показывает, что для данной компо-
компоновки аэродинамические коэффициенты с учетом влияния на них стати-
статических деформаций конструкций можно определить, удерживая шесть-
восемь тонов упругих колебаний.
На рис. 8.8 нанесено изменение изгибающего момента от аэродина-
аэродинамических сил в сечениях крыла СН с учетом статических деформаций
295
конструкции (Мизг)упр и без их учета М^зг, нормированного по от*
ношению к скоростному напору ^*, в зависимости от су при горизон-?
тальном полете; сплошная линия —*
без учета статических деформаций
конструкции; штриховая — с учетом,
кружками отмечены данные летного
эксперимента. Как видим, результаты
летного эксперимента и расчетов с
учетом статических деформаций хо^
рошо согласуются по всем сечениям,
за исключением сечения 1-1. Расхо-
Расхождение здесь обусловлено использо-
использованием слишком упрощенной упру-
упругой модели СН (применяется балоч-
балочная схематизация). Для описания)
напряженно-деформированного со-
состояния места стыковки крыла с фю- \
зеляжем необходимо привлекать уп-
упругие модели более высокого поряд-
порядка, например, на базе МКЭ.
Кривые Мизг(с-у) рис. 8.9 харак-
характеризуют изменение относительного
изгибающего момента от аэродина-
аэродинамических сил в зависимости от ко-
коэффициента подъемной силы су для
0,25 0,50 0,75 1,00 су
Рис. 8.8. Изменение изгибающего мо-
момента от аэродинамических сил М^зг в
сечениях крыла СН в зависимости от
коэффициента подъемной силы су при
горизонтальном полете компоновки
«СН + КВГ»; 1 — 1 — сечения крыла;
0,9
0,8
различных сечений крыла (М%зг =
= С^изг)упр/^изг) • Отсюда видно, что статическая деформация конст-
конструкции вызывает уменьшение изгибающего момента на 20-30 % по всем
сечениям крыла по сравнению со слу-
случаем обтекания жесткой системы.
На рис. 8.10 приведены данные,
отражающие реакцию компоновки
«СН + КВГ» при полете с включен-
включенным автопилотом на высоте
Н = 5400 м со скоростью 11$ = 134 м/с
при входе в градиентный вертикаль-
вертикальный порыв ветра, имеющего верти-
вертикальную скорость У/у = 10 м/с и гра-
градиентный участок длиной 1^ =30м ;
сплошная линия — жесткая компо-
компоновка, штриховая — упругая. Из ана-
анализа рис. 8.10 следует, что деформа-
деформация компоновки вызывает уменыпе-
0,7
0
г
1-1 ^^
зз'/7
0,25
0,50
0,75
1,0 су
Рис. 8.9. Изменение относительного из-
изгибающего момента М„зг от аэроди-
аэродинамических сил в зависимости от ко-
коэффициента подъемной силы су ; г-г
— сечения крыла, г = 1,5
296
ние величин заброса приращения нормальной перегрузки Апу на — 4 %
на ~ 13 % по отношению к жесткой
Апу1
0,4
0,2 |? Чч 1 1 -25
-50
и угловой скорости тангажа
компоновке. Значительное влия-
влияние упругость конструкции ока-
оказывает на приращения сил реак-
реакции в узлах механической связи
СН с КВГ ДД ^ , АД ° , М^ ;
они уменьшаются соответствен-
соответственно на 30,46 и 10 %. Кроме того,
существенно меняются законы
изменения величин А/?1 и
Д/?п ; они носят характер зна-
знакопеременных периодических
затухающих колебаний. Основ-
Основной причиной, уменьшающей
уровень нагружения узлов меха-
механической связи, служит положи-
положительный прирост угла атаки КВГ
вследствие изгиба фюзеляжа
СН. Последнее обстоятельство
приводит к росту изгибающего
момента в корневом сечении
горизонтального оперения в
2,8 раза. Что касается влияния
деформации конструкций на из-
\
[
2 Г, С
1
г г, с
-2
Д<5п,град
0
-2 _
0
11
/
-10
1
2 /,с
-20
//
//
1
11
о
1
2 /,с
Рис. 8.10 Динамическая реакция компоновки
«СН + КВГ» при входе в градиентный верти-
вертикальный порыв
гибающие моменты в сечениях крыла СН, то оно неоднозначно. Так, на-
например, в корневом сечении изгибающий момент вследствие деформации
уменьшается, а в концевом сечении увеличивается. Это ь^ожно объяснить
различием в соотношении инерционных и аэродинамических сил.
При проектировании таких сложных аэроупругих систем, как компо-
компоновка «СН + КВГ», очень важное значение приобретает задача о рацио-
рациональном размещении КВГ на СН. Она возникает как при проектировании
новых транспортных средств, так и при модернизации существующих,
например, в случае, когда на имеющемся СН требуется разместить некий
КВГ.
Решение такой задачи зависит, главным образом, от выбора критерия
рациональности. С одной стороны, выбор критерия рациональности дол-
должен быть направлен на реализацию максимально возможных несущих
свойств компоновки «СН + КВГ» в целом при изменении в заданном
диапазоне характеристик устойчивости и управляемости в пределах до-
допустимых интегральных внутренних усилий (или напряжений) в выбран-
выбранных сечениях элементов конструкции и в узлах механической связи. С
другой стороны, в критерий рациональности должны быть включены
такие варьируемые параметры, как координаты, определяющие располо-
297
жение КВГ относительно СН, так и геометрические характеристики
нической связи между ними.
Таким образом, задача о рациональном размещении КВГ на СН явля-
является многопараметрической. Эффективное ее решение может быть осу»
ществлено при заданном временном интервале и материальных затратах
в рамках разумного сочетания математического моделирования на ЭВМ щ
трубным и летным экспериментами.
§ 8.2. Реакция летательного аппарата на десантирование
из него грузов
В современной авиационной практике широко применяется такой вид
доставки транспортируемого внутри фюзеляжа самолета груза, как его
вытягивание и десантирование с помощью парашютной системы (ПС)
(рис. 8.11). На рисунке нанесены инерциальная О^х8у8г§ и связанная
Охуг системы координат. Здесь х(() — текущая координата груза в про-
процессе его вытягивания из фюзеляжа; х$ — расстояние от центра масс ЛА
без груза до центра масс груза;
хк — расстояние от центра масс
груза до обреза рампы грузолюка;
А*@ = = (х(г) -хо) — смещение
груза от точки крепления его по
направлению к грузолюку под
действием силы сопротивления
вытяжного парашюта РП(РШ = РП
— проекция силы сопротивления
вытяжного парашюта на ось Ох
связанной системы координат
Охут).
Десантироваться может как
одиночный груз, так и партия
грузов. Партия грузов десантиру-
Рис. 8.11. К постановке задачи о десантиро-
десантировании груза. Системы координат и силы,
действующие на ЛА
ется последовательно (каждый груз десантируется с помощью ПС авто-
автономно) и «цугом», когда каждый выходящий из фюзеляжа самолета груз
раскрывает вытяжной парашют следующего за ним груза.
Обычно процесс десантирования груза разбивается на два этапа. Пер-
Первый этап включает движение груза от точки его крепления до обреза рам-
рампы грузолюка под действием силы сопротивления вытяжного парашюта. -
Второй этап соответствует мгновенному отделению груза от самолета.
Векторы действующих на самолет дополнительных возмущающей
силы Гв и момента Мв равны
. мв =
дм^
дм*
дм*
=
0
0
-тг8Ах
ар; =| о , мв= дм; = о , (8.20)
д^г*
где в, у — приращения углов тангажа и крена, тг — масса груза.
298
На втором этапе десантирования в результате отделения груза от са-
самолета на него, кроме возмущений (8.20), дополнительно будут действо-
действовать возмущающая сила Гв и несбалансированный момент Мв :
ар:
а?;
ар;
о
мв =
о
о
о
(8.21)
Рассмотренные в главах 3 и 5 структурные ММЛА позволяют описы-
описывать процессы, происходящие с самолетом при десантировании груза
(одиночного или партии), включая оба этапа.
Рассмотрим продольное возмущенное движение на примере транс-
транспортного самолета Ил-76, учитывая при этом две степени свободы его
как жесткого тела (вертикальное смещение дО1 = Ку и Угол поворота от-
относительно поперечной оси дО2 =0) и три упругие степени свободы
д1 (/ = 1,3) (эти параметры отвечают первым трем низшим симметричным
формам свободных упругих колебаний конструкции ЛА без груза). За-
Запишем выражения для составляющих векторов РВ,ГВ иМ
(8.20) и (8.21)) при продольном движении ЛА:
К^-^Ц II о || II о II | о
0 |,МВ=| 0 ,Рв=|||де|,М.=| 0
0 ->«гКЛх 0
в, Мв (см.
(8.22)
Соответствующие уравнения движения ЛА с учетом нестационарного
обтекания в развернутом безразмерном виде имеют следующий вид [43]:
/=1
/=1
299
г1"А| [1-5E -5к)]-Лг*&5 E -5«).(8.24)
[1-5E -5К)
3 г т . т . -,]
1[41Я1 +{1? (Ъ) сц(т-4)^+441 +\1* (ц) д[(т-т1)с1т\\ =
/=1 0 " О " 1
^=1 о "
в=а1, 8*=|5в5вАу|т, /,п = п- (8.26)
Здесь дополнительно использованы следующие безразмерные пара-
метры:
В (8.23)-(8.25) введена дельта-функция
в ч_/О при 5-5* <О, ГЯ97,
^)-11 при 54^0. (8-27)
Система уравнений (8.23)-(8.26) является незамкнутой, так как закон
смещения груза А^(т) в процессе его вытягивания из фюзеляжа неизвес-
неизвестен. Исходя из условия относительного движения груза по фюзеляжу под
действием приложенных к нему сил, составим замыкающее уравнение:
А5(т) = -?(?пх-^Тр+0о+в)[1««Й-&)]. (8.28)
где
Мрр — сила трения при движении груза по полу фюзеляжа.
При последовательном десантировании из самолета, в случае его про-
продольного движения, партии из п грузов общая структура уравнений
(8.23)-(8.26) сохранится. Отличие в уравнениях будет в членах, содер-
содержащих 1ЛТ и координаты груза ^ и ^к ; у них появится знак ^ , а вме-
сто
300
, <*к будет
= 1, л)
Теперь система интегродифференциальных уравнений (8.23)-(8.26)
совместно с (8.28) стала полностью замкнутой. Это позволяет в рамках
расчетной системы линейной аэроупругости (см. гл. 5) изучать продоль-
продольное движение ЛА при десантировании грузов в условиях различных воз-
возмущений — отклонения рулей, воздействия порывов ветра и т. д., как с
учетом нестационарности обтекания, так и с использованием различных
аэродинамических гипотез. Если положить А^(т) = 0, то с помощью этих
уравнений можно изучать динамику упругого ЛА на этапе транспорти-
транспортировки груза к месту его десантирования.
Приведем некоторые результаты параметрических исследований,
включив проверку достоверности структурной ММЛА на примере само-
самолета Ил-76. Неизвестными величинами в системе уравнений (8.23)-(8.26)
и (8.28) являются параметры, характеризующие движение самолета как
жесткого тела, упругие перемещения точек его конструкции, а также по-
положение десантируемого груза при движении по фюзеляжу. Исходные
данные задачи: масса самолета без грузов М =11-103 кг, момент инер-
инерции ]г = 1 • 107 кг • м2, обобщенные массы Мх = 4,72 • 103; 1,12 • 105 ;
1,39 кг-м , частоты собственных упругих колебаний Х2;= 7,068;
14,346; 16,022 Гц (/ = 1,3); коэффициент конструкционного демпфиро-
демпфирования щ = 0,05 (/ = 1,3); площадь купола вытяжного парашюта при
тг > 20 т $„ = 14 м2, при тг < 20 т 5п = 8 м2 и коэффициенте сопро-
сопротивления сх ~ 0,8 ; коэффициент трения при движении десантируемого
груза по полу фюзеляжа N^=0,018. Д0
Аэродинамические характеристики пред-
предварительно рассчитывались для диапазо-
диапазона чисел Маха 0,26 < М < 0,33 при
Н >5000м.
Напомним, что после построения
структурной ММЛА обязательно должны
осуществляться проверка достоверности и
устанавливаться пределы ее применимо-
применимости на базе тщательно спланированных
физических и вычислительных экспери-
экспериментов. При необходимости проводится
уточнение модели методами идентифика-
идентификации [43]. рис § 12. К проверке достоверно-
На рис. 8.12 представлены некоторые Сти структурной ММ самолета
результаты такой проверки, рассчитанные Ил-76 по выходным параметрам:
методом математического моделирования углам тангажа Д0 и атаки Да и
на ЭВМ с использованием полной струк- перегрузке пу в центре масс ЛА
турной ММ самолета (сплошная линия) в
сравнении с летным экспериментом (крестики) [43]. Они отражают ха-
характер соответственно изменения углов тангажа в и атаки а и перегруз-
301
0
Да
2
0
-2
Апу
0,2
0"
1рОД
1
у И X X
1 н
2 *! 4 6 *,с
град ' &
1! 4
6
1, С
8!
***
6 г, с
ки Пу в центре масс самолета во времени I при десантировании одиноч-
одиночного груза. Сопоставление данных рис. 8.12 показывает, что максималь-
максимальная погрешность не превышает 11%. При этом полет самолета, пилоти-
пилотируемого летчиком, совершался в спокойной среде. Таким образом, осу-
осуществляется проверка по отдельным реализациям исследуемых парамет-
параметров для конкретных вариантов загрузки и режима полета самолета. Более
полной является статистическая проверка достоверности модели, когда
оцениваются результаты моделирования эксперимента в широком диапа-
диапазоне изменения параметров и условий полета ЛА. Здесь эта информация
сознательно не приводится, так как авторы ставили перед собой цель
проиллюстрировать возможности новой методологии научных исследо-
исследований — математического моделирования и вычислительного экспери-
эксперимента на ЭВМ.
После проверки достоверности структурной ММЛА и установления
пределов ее применимости осуществляется решение различных приклад-
прикладных задач и получение конкретной информации. Ниже приведены неко-
некоторые данные таких исследований. До
недавнего времени решение задач, свя-
связанных с транспортировкой и десантиро-
десантированием грузов, строилось без учета упру-
упругости конструкции и нестационарности
обтекания. Это делалось не всегда обос-
обоснованно. Структурная ММЛА в форме
(8.23)-(8.26) совместно с (8.28) (назовем
ее условно «точной») позволяет детально
проанализировать эти вопросы и сделать
соответствующие оценки приближенным
моделям.
На рисунках 8.13 и 8.14 представлены
данные математического моделирования
на ЭВМ с использованием различных
гипотез аэродинамики, характеризующие
соответственно изменения приращения
траекторных параметров Да,
Аи,
1,0
0,5
0
я*
1
V
6 г, с
Рис. 8.13. Влияние упругости кон-
конструкции и нестационарности об-
обтекания на траекторные параметры
самолета Ил-76 при десантирова-
десантировании груза
Апу и изгибающего момента Мизг в
корневом сечении крыла самолета Ил-76
при полете его в неспокойной среде с
зажатыми рулями при десантировании из
него груза (кривая 1 — «точно», 2 — без
учета упругости конструкции, 3 — с уче-
учетом упругости и без учета нестационар-
нестационарности обтекания, 4 — без учета упругости и нестационарности обтека-
обтекания). Как видим, упругость конструкции и нестационарность ее обтека-
обтекания влияют слабо на параметры возмущенного движения такого самолета
(см. рис. 8.13); расхождение составляет ~ 4 %. Максимальное влияние оба
эти фактора оказывают на величину приращения изгибающего момента
Мизг (см. рис. 8.14); различие около 30 %.
302
Заметим, что оценки такого рода в летном эксперименте сделать нель-
нельзя — их можно получить только с помощью математического моделиро-
моделирования на ЭВМ.
При десантировании грузов в условиях полета самолета с зажатыми
рулями и воздействии на него дискретных порывов (^утлх = 10м/с)
АМизг,кНм
1200
-400
Рис. 8.14. Влияние упругости конструкции и нестационарности обтекания на прира-
приращение изгибающего момента АМИЗГ в корневом сечении крыла самолета Ил-76 при
десантировании груза
суммарное влияние упругости конструкции и нестационарности обтека-
обтекания сказывается в уменьшении приращения Мтг примерно на 20 % по
сравнению со случаем 4. Влияние этих факторов на приращение угла
атаки а заметно (в данном случае величина прироста составляет около
15 %), а на параметры О.г и пу мало.
При десантировании партии из трех грузов (полет в спокойной атмо-
атмосфере) упругость и нестационарность обтекания оказывают большее
(около 25 %) влияние на приращение Мшг (рис. 8.15), чем (около 8 %)
на параметры возмущенного движения а, пг, пу. На рис. 8.16 для
примера нанесено изменение Апг во времени I.
На рисунках 8.17-8.19 приведены графики изменения соответственно
одного из параметров: возмущенного движения О,г, нагружения Мизг и
деформирования ^^ во времени I при десантировании трех грузов из са-
самолета Ил-76 с зажатыми рулями в спокойной атмосфере обычным спо-
способом (штриховая линия) с интервалом А* = 4 с и «цугом» (сплошная), с
303
интервалом А{ = 0,3 с . Расчеты выполнены с использованием «точной»
модели.
Анализ полученных результатов показывает, что при десантировании
«цугом» максимальные разбросы исследуемых параметров несколько
АМизг,кН-м
-400
-800 —
-1200
Рис. 8.15. Влияние упругости конструкции и нестационарности обтекания на прира-
приращение изгибающего момента АМИЗГ в корневом сечении крыла самолета Ил-76 при
десантировании партии из трех грузов A-4 то же, что на рис. 8.13)
меньше, чем при десантировании этих же грузов обычным способом.
Время же десантирования трех грузов «цугом» почти в 2 раза меньше
Рис. 8.16. Влияние упругости конструк-
конструкции и стационарности обтекания на из-
изменение угловой скорости О,г самолета
Ил-76 при десантировании партии из
трех грузов A-4 то же, что на рис. 8.13)
304
Рис. 8.17. Временное изменение угловой
скорости О,г самолета Ил-76 при десан-
десантировании партии из трех грузов
времени их десантирования обычным способом. Это приводит к сниже-
снижению зоны разброса десантируемых грузов, а значит, к уменьшению
размеров площади десантирования.
-1200
Рис. 8.18. Временное изменение изгибаю- Рис. 8.19. Временное изменение обоб-
щего момента АМИЗГ в корневом сечении щенного параметра ^ конца крыла са-
крыла самолета Ил-76 при десантировании молета Ил-76 при десантировании пар-
партии из трех грузов тии из трех грузов
Далее обратимся к такому факту. До последнего времени задача полу-
получения информации, связанной с нагружением самолета при десантирова-
десантировании грузов, выявлением особенностей этого нагружения, определением
условий и предельно допустимых масс десантирования решалась в ос-
основном в летном эксперименте. Все это требует значительных матери-
материальных и временных затрат. Не всегда представляется возможным осу-
осуществить летный эксперимент по условиям безопасности. И здесь основ-
основной путь ускоренного решения проблемы — применение математическо-
математического моделирования и вычислительного эксперимента на ЭВМ в сочетании
с летным экспериментом, с переводом последнего в контрольную функ-
функцию.
На рисунках 8.20 и 8.21 по данным расчетов построены зависимости
относительной величины разрушающего изгибающего момента
тг,т
60
Граница безопасности по массе
десантируемого Щ&„,Л
тг,т-
60
Граница безопасности по массе
десантируемого груза
Рис. 8.20. Влияние массы груза, десан-
десантируемого из самолета Ил-76, на отно-
относительную величину разрушающего
изгибающего момента М^г в корневом
сечении крыла при полете в спокойной
атмосфере
20
Рис. 8.21. Влияние массы груза, десанти-
десантируемого из самолета Ил-76, на относи-
относительную величину М*зг разрушающего
изгибающего момента в корневом сече-
сечении крыла при воздействии на него дис-
дискретных порывов
305
мизг (мизг =мизг/мизг » гДе мизг и мизг — разрушающий и экс-
эксплуатационный изгибающие моменты в корневом сечении крыла;
^изг = 13900кН-м) от массы десантируемого груза с самолета Ил-76
при полете с зажатыми рулями соответственно в спокойной атмосфере и
в условиях воздействия дискретных порывов.
Из анализа данных рис. 8.20 видно, что при десантировании грузов в
спокойной атмосфере (Я = 1000м; М = 0,312; МСдА=132т; ^=0)
значение М^зг даже в случае тг = 60 т не меньше коэффициента безо-
безопасности иу=1,5 (кривая 1 — «точно»). Использование структурной
ММЛА без учета упругости конструкции и нестационарности обтекания
D) вызывает сдвиг зависимости М|зг = ?(щ) вниз> т. е к уменьшению
максимально допустимой массы десантируемого груза на 13,3 %
(тг < 52 т). Применение других приближенных структурных ММЛА
B — без учета упругости, 3 — без учета нестационарности обтекания)
приводит к промежуточным результатам по массе сбрасываемого груза.
При десантировании грузов в условиях воздействия дискретных по-
порывов (рис. 8.21; кривые 1,2,3,4 — ]№у =0; 6; 10; 15 м/с ; сплошная ли-
линия— Я = 1000 м, штриховая — Я = 0) увеличение их интенсивности и
уменьшение высоты десантирования вызывает резкий сдвиг зависимо-
зависимостей М§зг = /(тг) вниз. Так, например, М$зг>1,5 при ]Уу =15м/с
обеспечивается всего лишь для десантируемой массы соответственно
гаг < 25,6 т при Я= 1000 ми тг < 22 т при Я= 0, что по сравнению со
случаем \Уу =0 меньше в 2,35 раза. Вычисления для рис. 8.21 были вы-
выполнены с использованием «точной» структурной ММЛА при числе
М = 0,312.
§ 8.3. К учету влияния траекторией нестабильности и
упругих колебаний конструкции летательного аппарата
на работу радиолокационной станции
В настоящее время идет интенсивное насыщение ЛА настолько высо-
высокочувствительными бортовыми системами (системы управления, навига-
навигации и т. д.), что учет их взаимного влияния друг на друга становится про-
просто необходимым. Причем игнорирование взаимным влиянием приводит
к ухудшению работы как бортового оборудования, так и самого ЛА. В
последнее время к бортовому оборудованию повышенной чувствитель-
чувствительности стали относить и радиотехнические системы, в частности радиоло-
радиолокационные станции (РЛС) обзора земной поверхности. Это вызвано тем,
что ужесточение требований к характеристикам бортовых РЛС землеоб-
зора заставляет конструкторов для увеличения размеров антенны РЛС
использовать свойства и конструкционные особенности самого ЛА. При-
Причем, чем выше качество изображения, тем сильнее взаимная связь между
ЛА и РЛС, особенно это заметно проявляется при работе РЛС с синтези-
306
рованной апертурой антенны (РСА). Такие РЛС обладают высокой раз-
разрешающей способностью не только по дальности, но и по азимуту [152].
При наличии взаимного влияния между ЛА и его бортовым оборудовани-
оборудованием приходится иметь дело со сложной технической системой «упругий
ЛА + РСА», для исследования которой необходимо использовать систем-
системный подход [58, 59]. Реализация такого подхода может быть осуществле-
осуществлена на основе синтеза ММ различного уровня.
Задача по созданию синтезируемой системы «упругий ЛА + РСА»,
обеспечивающей ее устойчивую работу, решается в два этапа. На первом
этапе на базе синтеза подсистем (ЛА и бортового оборудования) форми-
формируется структурная ММ«ЛА + РСА» для определения статистических
характеристик ЛА как упругой платформы, несущей оборудование. Вто-
Второй этап включает оценку потенциальных и реальных характеристик та-
такой сложной системы, проверку ее устойчивости.
Полная структурная ММ системы «ЛА + РСА» часто оказывается
очень громоздкой и сложной. Она нужна для оценки функционирования
подобной системы в ряде важных, но частных случаев. Как правило, на
практике для постоянного пользования требуются более простые модели.
Поэтому здесь тоже должна существовать целая иерархия структурных
ММ «ЛА + РСА», построенная путем разумного упрощения полных ММ.
Значительно понизить порядок системы уравнений этих ММ можно, от-
отказавшись от учета нестационарности обтекания ЛА и уменьшив число
удерживаемых собственных форм упругих колебаний его конструкции
при формировании уравнений аэроупругости. Для использования в зада-
задачах радиолокации уравнения аэроупругости ЛА должны быть дополнены
соотношениями, связывающими кинематические параметры его полета с
основными параметрами сигнала РСА (фазой, амплитудой, частотой и т. д).
Под отклонениями фазового центра антенны (ФЦА) от расчетной тра-
траектории будем понимать приращение кинематических параметров, полу-
получаемых при воздействии на носитель РСА атмосферной турбулентности,
по отношению к их значениям при полете в спокойной атмосфере. Для
определения отклонений ФЦА в дополнение к неподвижной земной сис-
системе координат О$х8У818 (НЗСК) и подвижной Охуг , связанной с цен-
центром масс ЛА (ССК), вводится вспомогательная система координат
О\ХхУх1\, начало которой определяется радиус-вектором К^ = \х8 у8 %Л
в осях НЗСК и соответствует положению центра масс ЛА на заданной
траектории для спокойной атмосферы, а направление ее осей совпадает с
ориентацией осей Охуг в этой же точке (рис. 8.22).
Для решения задачи на каждом шаге интегрирования должны быть
известны следующие составляющие выходного вектора кинематических
параметров:
1П ' (8-29)
где х8 , у8 , г8 — координаты центра масс ЛА в НЗСК в реальных усло-
условиях полета; в, у/ , у — углы Эйлера ориентации осей ССК относитель-
307
но осей НЗСК; д?, д/ — обобщенные параметры учитываемых тонов
соответственно симметричных и антисимметричных упругих колебаний
конструкции самолета-носителя.
Кроме того, должны быть из-
известны координаты места уста-
установки реальной антенны РСА на
ЛА в осях ССК ОхХху^ц. Вхо-
У\
дящие в уравнения возмущенно-
Истинное положение го движения ЛА векторы могут
быть представлены следующим
образом:
Положение центра масс ЛА
в точке расчетной траектории
** = |
х§ У§ *-$
цт ~ \\ р цт
|| » " = II " V У II '
/0о
= II Х1 У\
Аг =
г^й^^г^*"" где вектор Аг -р^р-^
результирующее смещение фа-
фазового центра антенны вследствие упругого деформирования конструкции
аппарата.
Векторное смещение точки расположения антенны РСА в проекциях
на оси НЗСК будет
(8.30)
Соответствующие относительные отклонения фазового центра антен-
антенны от расчетной траектории, характеризуемые вектором АК0 (см.
рис. 8.22), равны разности заданных (для спокойной атмосферы) и истин-
истинных (для турбулентной атмосферы) кинематических параметров (8.29).
В случае учета лишь траекторной нестабильности (ТН) соотношения,
связывающие некоторые параметры, приобретают вид
тт2 тТ2
(8.31)
Ь
4УГ|
где А§? — приращение фазы; Я — длина волны РСА.
308
Дополняя структурную ММЛА выражением (8.30) либо (8.31), прихо-
приходим к ММ, которая может быть использована при решении задач радио-
радиолокации методом математического моделирования на ЭВМ.
Примеры использования «точных» и упрощенных структурных
ММЛА в исследованиях РСА имеются в [58]. Получение и анализ стати-
статистических характеристик ФЦА осуществляется на базе аппарата мате-
математической статистики [200].
Следует отметить, что высокое
разрешение по дальности в РСА обе-
обеспечивается использованием широ-
широкополосных зондирующих импуль-
импульсов.
Повышение разрешающей спо-
способности по азимуту в РСА осущест-
осуществляется благодаря запоминанию и
последующей обработке отраженных
сигналов на отрезке пути самолета,
который можно интерпретировать
как искусственную (синтезирован-
(синтезированную) антенну [58]. Рис. 8.2з. К особенностям работы РСА
Особенности работы РСА боково- бокового обзора. Схема радиолокаци-
го обзора при заданном равномерном онного наблюдения точечного объекта
прямолинейном движении самолета в *« <"Работки отраженных сигналов
турбулентной атмосфере обсуждаются в [58, 59, 62]. При этом процесс
обработки отраженных сигналов у@ по азимуту (вдоль линии пути) мо-
может быть описан соотношением (см. [324])
Тс/2
(8.32)
-Тс/2
где ^(Лг) —сигнал радиолокационного изображения фЛИ); Аг = Ах/17
— временной сдвиг; Ах — координата РЛИ вдоль линии пути (рис.
8.23); II — путевая скорость самолета; Тс — временной интервал синте-
синтезирования апертуры антенны; рA) — опорная функция; г — текущее
время.
В качестве опорной обычно выбирается взвешенная функция, ком-
комплексно-сопряженная с сигналом уо(О> отраженным от единичной то-
точечной цели:
Р(О = *О(ОЖО, (8.33)
где р({) — весовая функция. При этом отраженный от точечной цели
М@,18,0) сигнал 1>оО) рассчитывается для заданного равномерного
прямолинейного полета и описывается зависимостью (см. [324])
=ехр 1-
(8.34)
309
Фазовый центр
антенны
Упругие колебания
конструкции
где /^о=д/^+Я —расстояние от цели; 18 —координата цели, Я —
высота полета самолета; х-\]1 — текущая координата ФЦА в земной
системе координат (рис. 8.23); Я — длина волны РСА.
О потенциальных характеристиках РСА и о влиянии различных дес-
дестабилизирующих факторов на них обычно судят по виду и параметрам
сигнальной функции 50(Л0 [76, 292,
326], по реакции РСА на одиночную
точечную цель:
тс/2
. (8.35)
В общем случае отраженный сиг-
сигнал сопровождается амплитудными и
фазовыми искажениями. Фазовые ис-
искажения отраженного сигнала связаны
с отклонениями движения фазового
центра реальной антенны РСА от за-
Рис. 8.24. Траектория движения фазо- данЩ)й в (8 34) траектории (рис. 8.24).
Основными источниками фазовых
искажений являются траекторные не-
нестабильности (ТН) и упругие колебания конструкции (УКК) самолета
[62, 292, 326]. С учетом фазовых искажений ф{г) отраженный от точечной
цели сигнал изменяется по закону
Заданная
линия пути
вого центра антенны при равномер-
равномерном прямолинейном полете ЛА
-Л
(8.36)
С учетом (8.36) сигнальная функция описывается интегральным пре-
преобразованием по форме, соответствующим преобразованию Фурье [136]:
-Тс/2
Ап
\Л
)
(8.37)
(8.38)
Фазовые искажения отраженного сигнала ф({) связаны с отклоне-
отклонениями движения фазового центра реальной антенны РСА следующей
зависимостью:
Ап л~,
~т
где Аг(О — вектор случайного отклонения ФЦА, который складывается
из ТН (движение ЛА как жесткого тела) и УКК. Статистические характе-
характеристики случайного процесса ф{1) могут быть получены эксперимен-
экспериментальным способом либо с помощью математического моделирования на
ЭВМ [51, 58, 59]. Влияние ТН на работу РСА было оценено в [62]. Во-
Вопросы воздействия УКК на устойчивость работы РСА в прямолинейном
установившемся полете рассматриваются в [324]. Исследованием влия-
310
ния упругих деформаций самолета на работу РЛС на режимах маневри-
маневрирования на примере голографической РЛС, сочетающей вдолькрыльевую
фазированную антенную решетку с синтезированием апертуры по линии
пути, занимались А.В. Шаповалов и А.В. Корнеев [286а].
Здесь приведем некоторые данные, полученные при изучении ком-
комплекса «упругий ЛА + голографическая РЛС» С.Н. Зеликовым и М.П.
Титовым. Был рассмотрен вариант сорокапятиэлементной фазированной
антенной решетки, расположенной вдоль оси жесткости крыла гипотети-
гипотетического маневренного самолета с интервалом между элементами 0,1 м.
Одиночная точечная цель располагалась в плоскости маневрирования ЛА.
Изучалось влияние только упругих деформаций антенны, жестко свя-
связанной с крылом, на сигнальную функцию 50(А0 в один из моментов
времени полета. Сигнальная функция определялась по (8.35) для сле-
следующих расчетных случаев: 1) горизонтальный полет ЛА, антенна не
деформируется; 2) горизонтальный полет ЛА в турбулентной атмосфере,
деформация антенны не превышает нескольких сантиметров; 3) маневр
ЛА с перегрузкой пу =3, упругие перемещения антенны достигают 0,1-
0,15 м на конце крыла; 4) маневр ЛА с перегрузкой пу = 6, упругие пе-
перемещения антенны достигают 0,3-0,35 м на конце крыла. Первый рас-
расчетный случай является идеальным. Сигнальные функции для случаев
2), 3) и 4) изображены на рис. 8.25
сплошными линиями (кривые 1,2,3 соот-
соответственно); штриховая линия соответст-
соответствует данным первого расчетного (идеаль-
(идеального) случая. Анализ зависимостей на
рис. 8.25 показывает, что при отсутствии
упругих деформаций сигнальная функция
(штриховая линия) имеет вид модуля
функции ($тх)/х с максимумом, соот- Рис. 8.25. Искажение сигнальной
ветствующим истинному положению це- Функции РСА при полете ЛА в
ли. По мере увеличения деформации ан- ЧФбулешной атмосфере вследст-
т.-пЛ, / 1\^чо\\ вие упругой деформации антенны
тенны РЛС (расчетные случаи 1), 2), 3)) * *' * у
максимум сигнальной функции относительно истинного положения цели
сдвигается влево и уменьшается, ухудшается разрешающая способность
антенны. При маневрировании ЛА с пу = 3 и пу = 6 можно говорить о
полном разрушении радиолокационного изображения.
Таким образом, становится ясным, что без применения специальных
мер учета и компенсации деформации антенны голографической РЛС
нельзя получить радиолокационного изображения в сантиметровом диа-
диапазоне волн по причине полного разрушения фазовой структуры сигнала.
Влияние дестабилизирующих факторов на качество радиолокацион-
радиолокационного изображения можно уменьшить путем ввода фазовых искажений в
опорную функцию (8.33) [324]. Одним из возможных подходов к реше-
решению этой задачи является аппроксимация апертуры детерминированной
функцией. Будем аппроксимировать упругие перемещения точек крыла
квадратичной параболой вида [286а]
311
Рис. 8.26. Улучшение качества
сигнальной функции РСА при
полете ЛА в турбулентной атмо-
атмосфере благодаря компенсации
упругой деформации антенны
(параметры и условия те же, что и
на рис. 8.25)
= а0 + ахг + а2г , (8.39)
где и> — прогиб оси жесткости крыла по направлению оси у вдоль коор-
координаты г ; «о и а\ — коэффициенты, определяемые ТН; а2 — параметр
изгиба оси жесткости крыла. Коэффициенты а0» а\» а2 находятся с по-
помощью адаптивных алгоритмов оценивания системы. Оценка возможно-
возможности компенсации влияния упругих деформаций антенны на работу голо-
графической РЛС при маневрировании самолета-носителя была осущест-
осуществлена согласно методике, разработанной в работе [286а]. Упругие пере-
перемещения оценивались по (8.39) и учитывались при формировании сигна-
сигнала радиолокационного изображения в
ММ системы обработки голографической
РЛС. Определялись сигнальные функции
от одинарной точечной цели для расчет-
расчетных случаев 2), 3), 4) с компенсацией
оцениваемых упругих деформаций. Ре-
Результаты расчета нанесены на рис. 8.26
сплошными линиями и обозначены циф-
цифрами соответственно 1,2,3; штриховая
линия — расчетный случай 1. Из анализа
рисунка следует, что применение специ-
специальных мер учета и компенсации УКК
позволяет практически полностью вос-
восстановить структуру радиолокационного
изображения при маневрировании само-
самолета-носителя с РЛС даже в том случае, когда уровень дестабилизирую-
дестабилизирующих факторов настолько велик, что без их компенсации можно говорить
о полном разрушении фазовой структуры сигнала.
§ 8.4. К определению посадочных характеристик летательного
аппарата с выпущенной тормозной парашютной системой
В связи с расширением круга задач, решаемых современной АТ, зна-
значительно ужесточились требования к взлетно-посадочным характеристи-
характеристикам ЛА, особенно маневренных. Это приводит к необходимости повы-
повышения требований к эффективности средств торможения при посадке и
маневрировании ЛА, выработке надежных рекомендаций летчику по
взлету и посадке в обычных условиях эксплуатации и в случае летного
происшествия. В летной практике также встречаются случаи нештатного
срабатывания тормозных посадочных парашютных систем (ТППС) в по-
полете, нераскрытия при выпуске, нестабильного функционирования и т. д.
Могут возникнуть особые случаи, затрудняющие или исключающие вы-
выполнение взлета, посадки обычным способом из-за длины взлетно-
посадочной полосы (ВПП) — поврежденная полоса, невыход механиза-
механизации крыла, отсутствие ТППС, повышенная вероятность «грубой» посад-
посадки с последующим «козлением», невыход одной или нескольких опор
шасси и т. д. Особого внимания заслуживает проблема работы парашю-
парашютов в высокотемпературной зоне струй двигателей. Так, недостаточно
312
точная оценка теплового воздействия струй на штатную ТППС самолета
может привести к тому, что система будет надежно функционировать,
например, в северных и умеренных широтах и разрушаться в широтах с
жарким климатом. Все эти вопросы требуют детального изучения.
Проведение же экспериментальных исследований в этом направле-
направлении, как правило, затруднено технически и небезопасно. Как будет пока-
показано ниже, современная технология научных исследований, базирующая-
базирующаяся на численных методах и ЭВМ, позволяет успешно решать данную
комплексную проблему.
8.4.1. Особенности посадки маневренных летательных аппаратов.
Одна из особенностей посадки современных маневренных ЛА — отсут-
отсутствие ярко выраженного участка выдерживания. Посадка состоит из сле-
следующих этапов: пролет торца ВПП на высоте Я < 15 м (начало посадки),
снижение до начала выравнивания, выравнивание с практически незна-
незначительным выдерживанием с последующим касанием ВПП и пробег по
ней. При этом выравнивание должно производиться с таким расчетом,
чтобы к его концу уменьшить скорость до посадочной и плавно коснуть-
коснуться ВПП.
Такая техника посадки вызвана необходимостью повысить точность
приземления самолета в нормируемой зоне для предотвращения значи-
значительных перелетов. Однако если темп выравнивания (увеличения угла
атаки) будет недостаточным, то вертикальная скорость не будет погаше-
погашена, и в связи с этим возможна «грубая» посадка самолета. При увеличе-
увеличении темпа выравнивания самолет выйдет на посадочный угол без замет-
заметного гашения скорости и будет некоторое время лететь над ВПП. Посад-
Посадка произойдет только после его выдерживания до момента гашения ско-
скорости. Поэтому на практике, как правило, летчики стремятся избегать
«грубой» посадки, в результате чего в конце участка выравнивания на-
наблюдается небольшой участок выдерживания, вдоль которого самолет
летит под некоторым углом к ВПП @ - 0,8°).
Таким образом, в силу психологической особенности летчика необхо-
необходимость в небольшом выдерживании оказывается неизбежной, а это для
современных маневренных ЛА является фактором, существенно увели-
увеличивающим длину воздушного участка, а в итоге и всю посадочную дис-
дистанцию. Кроме того, длина воздушного участка в значительной степени
зависит от квалификации летчика.
8.4.2. Математическое моделирование посадки компоновки «лета-
«летательный аппарат + тормозной парашют». Для моделирования таких
сложных режимов полета самолета, как взлет, посадка с ТППС, движение
по ВПП, нештатное срабатывание ТППС, его структурная ММ в зависи-
зависимости от решаемых задач дополняется ММ силовой установки (СУ),
шасси, парашюта, управления и т. д.
Пусть самолет движется относительно земли (ВПП). Его движение
будем описывать в следующих системах координат (рис. 8.27): инерци-
альной Оох8у8х8, подвижной Ох^ц, плоской ОкхкуК9 связав их соот-
соответственно с ВПП, центром масс ЛА и осью вращения колеса. Будем счи-
считать, что самолет по ВПП движется прямолинейно, т. е. совершает плос-
плоскопараллельное движение с малыми угловыми перемещениями по крену
313
и тангажу. На него действуют: подъемная сила У, сила лобового сопро-
сопротивления X, сила тяжести С (вес самолета), реакции опор Рш, передавае-
передаваемые через кинематику шасси,
сила трения качения 7^ (при
качении по ВПП), сила сопро-
сопротивления ТППС Рп и тяга сило-
вой установки Т^ .
^ Задача решается с помощью
Рис. 8.27. Системы координат и силы, дей- структурной ММЛА для назем-
ствующие на самолет при посадке с тормоз- ных режимов с учетом силы со-
ной парашютной системой противления ТППС Рп. Отметим
некоторые ее особенности. Математическое моделирование работы амор-
амортизационной системы (шасси и тормозов колес) совместно с упругим ЛА
осуществляется в рамках следующих допущений.
1. Рассматривается только плоское движение каждого колеса шасси;
по отношению к вертикальному перемещению стойка колеса считается
абсолютно жесткой. Таким образом, считается, что перемещение оси ко-
колеса в вертикальном направлении происходит за счет обжатия амортиза-
амортизатора, а в горизонтальном направлении — и за счет упругого деформиро-
деформирования стойки.
2. Предполагается, что центры масс подвижных частей конструкции
стойки и планера самолета движутся раздельно. Их взаимная связь осу-
осуществляется через силы взаимодействия колеса с ВПП и шасси с плане-
планером ЛА.
3. Силы трения качения и торможения колес шасси принимаются по-
постоянными и равными по модулю
п
тр = 2и *трмш »
1=1
гДе /тр — коэффициент трения (качения или торможения) колес; РШ1- —
сила взаимодействия /-го колеса с ВПП; п — количество колес шасси.
Тяга СУ Гдв рассчитывается заранее и представляется в виде функ-
функции Гда = /(М,#) при заданном положении ручки управления Двигате-
Двигателем (РУД). Принимается, что равнодействующая вектора тяги СУ при-
приложена к центру масс ЛА и направлена вдоль оси 6Ц.
Коэффициент сопротивления ТППС сх (сх = 2РП/ р^Ц^) определяет-
определяется также заранее по приближенной методике с учетом влияния на него
спутного следа за ЛА и газовых струй двигателей, описанной в [249]. За-
Задача решается при следующих допущениях: ТППС шарнирно крепится в
точке подцепки к ЛА и располагается по направлению вектора скорости
набегающего потока II0; ТППС считается устойчивой в потоке и ее ку-
купол наполненным; взаимодействие спутного следа за ЛА с поверхностью
земли не учитывается.
Управление аппаратом осуществляется путем отклонения стабилиза-
стабилизатора. При этом закон управления может задаваться либо априори, либо из
условия принятого закона изменения управляемого параметра.
314
Таким образом, для формирования структурной ММ функционирова-
функционирования системы «упругий ЛА + ТППС» дополнительно к аэроупругой моде-
модели самолета необходимы параметры СУ на заданном режиме полета (тя-
(тяга, параметры газовой струи на срезе сопла), характеристики ТППС, шас-
шасси и системы управления и законы управления.
Имитация управления была реализована одним из приближенных
приемов [63, 144, 184, 308], позволяющих моделировать режим автомати-
автоматизированного ручного управления самолетом. В этом случае демпфирую-
демпфирующий и стабилизирующий сигналы подаются в систему управления поми-
помимо оператора, а сигналы, пропорциональные управляемым параметрам,
передаются через оператора.
Для учета физиологических особенностей летчика в контуре управле-
управления использовалась простейшая передаточная функция, представляющая
собой усилительное звено с запаздыванием:
(8.40)
где кл — коэффициент усиления оператора, т — время запаздывания
ответной реакции летчика.
В рамках рассматриваемой задачи основной функцией управления
является имитация управления самолетом летчиком при совместной ра-
работе с демпфером колебаний и автоматом повышения устойчивости
(АПУС) в канале тангажа при заданном законе изменения угла тангажа
Для выполнения условия (8.40) закон отклонения стабилизатора дол-
должен быть реализован в виде
д^^у^к^Ав-п^ + к^а^ -<5ст-*ваа). (8.42)
В (8.42) к\ =&в/св , где кв — передаточное число системы управления
самолетом; св — жесткость загрузки; А0 = в - 0зад — отклонение теку-
текущего параметра (угла тангажа) от заданного; к® — передаточный коэф-
коэффициент автомата повышения устойчивости; а — текущий угол атаки;
&в 2 — передаточный коэффициент, учитывающий особенности привода
системы управления самолетом и демпфера колебаний; О,г^ — угловая
скорость вращения ЛА.
В итоге моделирование процессов нагружения, деформирования уп-
упругого самолета с ТППС при движении по ВПП сводится к совместному
интегрированию системы уравнений движения ЛА, функционирования
ТППС и управления. Для ее решения необходимо знать начальные значе-
значения параметров траекторного движения аппарата и деформирования его
конструкции без ТППС, отклонения рулевых поверхностей, кинематиче-
кинематических параметров амортизационной системы перед его касанием ВПП.
Эти параметры (начальные условия) находятся из решения задачи уста-
установившегося движения ЛА со скоростями II х и II у (посадочные гори-
горизонтальная и вертикальная скорости) в земной системе координат на за-
заданной высоте.
315
Остановимся на некоторых интегральных данных апробирования
структурной ММ функционирования системы упругий «ЛА + ТППС»,
полученных на примере посадки гипотетического маневренного самолета
^ ю3м интегральной схемы.
На рис. 8.28 представлены графики,
характеризующие изменение длины
1,496 | 1—-^^- 1—| пробега самолета Ь при посадке с
ТППС (кривая 7) и без нее B) в зави-
зависимости от посадочной массы самолета
1,164
0,832
0,500
11
12
кг
Рис. 8.28. Изменение длины пробега
Ь самолета по ВПП в зависимости от
его посадочной массы тСлА при
посадке с ТППС A) и без нее B)
Моделирование посадки выполня-
выполнялось с момента парашютирования са-
самолета при следующих начальных ус-
условиях: Н = 0,5 м, продольная состав-
составляющая скорости IIх равнялась поса-
посадочной 72 м/с, а вертикальная —
II у =-0,5 м/с.
При этом при посадке ЛА с ТППС
принималось, что торможение колесами шасси с одновременным введе-
введением в действие ТППС начинается сразу же после опускания носового
колеса; при посадке ЛА без ТППС начало торможения колесами шасси
при опущенном носовом колесе осуществляется после снижения скоро-
скорости движения аппарата до 11$ -59 м/с .
Из рис. 8.28 хорошо видна эффективность применения ТППС на ре-
режиме посадки самолета, причем она растет с увеличением посадочной
массы аппарата, а следовательно, и посадочной скорости.
8.4.3. Влияние тормозной парашютной системы на посадочные
характеристики летательного аппарата. С помощью разработанной
структурной ММ функционирования системы «упругий ЛА + ТППС»
была произведена оценка влияния ТППС на изменение параметров на-
гружения, деформирования и движения на примере посадки гипотетиче-
гипотетического маневренного самолета. Сначала рассмотрим его штатную, посадку,
выполняемую обычно в соответствии с требованиями инструкции летчи-
летчику. Это означает, что после касания са-
самолетом ВПП основными колесами про-
производится опускание его носа, затем
включаются тормоза колес и выпускает- „ 06
ся ТППС. Стабилизатор при этом уста- ' а
навливается в нейтральное положение. -0,10
На рисунках 8.29 и 8.30 представлены
результаты, характеризующие изменения -ОЛ 4
продольной перегрузки пх и скорости
движения II аппарата во времени г при
посадке и движении его с ТППС по ВПП
(кривая 7) и без нее B). Проанализируем
графики этих рисунков, разбив их на
316
-0,02
с\
Л
1/"
Г
«У
-—
0 8 16 г, с
Рис. 8.29. Временное изменение про-
продольной перегрузки пх при посад-
посадке самолета с ТППС G) и без нее B)
участки: аЬ — воздушный участок, соответствует парашютированию са-
самолета до касания его основными колесами ВПП; Ьс — участок, соответ-
соответствующий движению самолета от момен-
момента касания ВПП основными колесами до
опускания носовой стойки.
Для случая 1 (посадка с ТППС) уча-
участок Ы\ — торможение колесами шасси
(точка с — включение тормозов); участок
Л\к\е\ — торможение колесами шасси и
ТППС (точка кг — выпуск ТППС). Для
случая 2 (посадка без ТППС) участок
ск2 — пробег на трех точках с выклю-
выключенными тормозами колес; участок
64
48
32
16
м/с-
к
с
1 1
с = д,х = кх
\
ч
\
2
О
16
Рис. 8.30. Временное изменение ско-
скорости движения V самолета при
посадке с ТППС A) и без нее B)
к2Л2е2 — пробег с выключенными тормозами колес (точка к2 — вы-
выключение тормозов).
Из анализа данных рисунков 8.29 и 8.30 следует, что благодаря ис-
использованию ТППС (кривая 7) перегрузка торможения ЛА значительно
возрастает и достигает наибольшего значения на первой стадии пробега,
когда эффективность ТППС наивысшая. Здесь влияние ТППС сказывает-
сказывается не только на возрастании лобового сопротивления системы
«ЛА + ТППС», но и на возможности более раннего включения тормозов
колес, так как скорость начала торможения в этом случае не ограничива-
ограничивается. Скачок продольной перегрузки в начале участка й$.\е\ отвечает
процессу раскрытия ТППС, при котором происходит заброс ее сопротив-
сопротивления. После раскрытия парашюта в процессе пробега самолета по ВПП
по мере уменьшения скорости его пробега эффективность ТППС посте-
постепенно снижается, что сказывается на уменьшении продольной перегруз-
перегрузки. В конце пробега кривые пхA) для обоих случаев посадки практиче-
практически сливаются. За аналогичными особенностями можно проследить по
кривым 1/@ рис. 8.30. Так, на воздушном участке аЪ кривые 1 и 2 сов-
совпадают. Здесь до момента касания ВПП (участок аЪ) самолет достаточно
эффективно тормозится в результате обтекания. После касания ВПП
(участок Ьс), несмотря на появление дополнительной тормозной силы за
счет трения качения колес шасси, темп снижения скорости ЛА уменьша-
уменьшается. Это обусловлено опусканием носа самолета, что вызывает значи-
значительное снижение его лобового сопротивления. В конце участка Ьс кри-
кривые 1 2 расходятся. Это вызвано тем, что в случае 1 в точке с торможение
начинает осуществляться комбинированно, благодаря включению тормо-
тормозов и выпуску ТППС, а в случае 2 (участок ск2) самолет продолжает ка-
катиться без торможения. Из сравнения участков к\в\ и к2е2 видно, что
ТППС существенно улучшает характеристики торможения. Особенно
эффективна ТППС на первой фазе пробега самолета, когда его скорость
достаточно велика.
Данные рисунков 8.31 и 8.32 иллюстрируют особенности нагружения
шасси самолета при посадке с ТППС A) и без нее B). Как видим, относи-
317
тельное нагружение Рк1 (рис. 8.31) передних колес шасси в момент
первого касания ВПП в обоих случаях одинаково, но после выпуска
640
480
320
160
г
1
- ¦—
""*2
16
г, с
0
16
Г, С
Рис. 8.32. Временное изменение нагруже-
ния стойки основного колеса Рк2 шасси
самолета при посадке с ТППС G) и без
нее B)
Рис. 8.31. Временное изменение нагру-
жения стойки переднего колеса Рк1 шас-
шасси самолета при посадке с ТППС A) и
без нее B)
ТППС, начиная с момента времени г - 4 с, нагружение передних колес
оказывается меньшим, чем в случае посадки без ТППС. Далее по мере
торможения ЛА обе кривые сближаются. Такая особенность нагружения
переднего колеса обусловлена наличием кабрирующего момента от
ТППС, действующего на самолет при пробеге на трех опорах. Таким об-
образом, ТППС как бы разгружает передние колеса. При нагружении ос-
основных колес (рис. 8.32) роль ТППС проявляется в более быстром нарас-
нарастании нагрузки Р& во времени до ее стояночного значения.
Рисунок 8.33 характеризует особенность деформирования самолета
при посадке на примере изменения суммарного обобщенного отклонения
^ъ^ во времени I концевой точки крыла. Здесь, как и на рисунках 8.31 и
8.32, до момента выпуска ТППС (/ = 4 с)
кривые 1 и 2 совпадают. После выпуска
ТППС 0>4с, кривая 7) крыло более
интенсивно возвращается в равновесное
стояночное положение.
Приведенные выше некоторые дан-
данные относятся к случаю штатной посад-
посадки самолета с ТППС и без нее. Вместе с
тем, необходимо отметить, что данный
способ посадки не позволяет использо-
использовать ТППС с максимальной эффектив-
эффективностью, так как самолет от момента ка-
касания основными колесами шасси до
выпуска ТППС успевает пробежать по
ВПП значительное расстояние. Матема-
Математическое моделирование на ЭВМ по-
0,48
0,32
0,16
0
-0,16
\
\
1 "
^2
-
о
16
г, с
Рис. 8.33. Временное изменение су-
суммарного обобщенного параметра
перемещения ^ концевой точки
крыла при посадке с ТППС G) и без
нее B)
зволяет изучать и другие режимы посадки самолета с ТППС и оценивать
их с точки зрения эффективности последней и безопасности.
Рассмотрим случай посадки самолета с ТППС при более раннем его
выпуске — до момента касания самолетом ВПП (после окончания вы-
318
держивания). Для этого проанализируем движение самолета с ТППС и
без нее с момента начала его парашютирования на высоте 1 м над ВПП.
Выпуск ТППС осуществим в самом начале движения. Кривые пх(г),
(/(О на рисунках 8.34 и 8.35 описывают изменение соответственно про-
пх
-0,02
-0,06
-0,10
-0,14
-0,18
У
г-
'г*
—Г
68
60
52
44
36
1-у
—-—.
1
2
—
- -
о
1,6
3,2
Г, С
0
1,6
3,2
и с
Рис. 8.34. Временное изменение продоль- рИс. 8.35. Временное изменение скорости
ной перегрузки пх при посадке самолета движения V самолета при посадке с ТППС
с ТППС с выпуском ее до момента каса- с выпуском ее до момента касания ВПП
ния колесами ВПП G) и без нее B) A) и без нее B)
дольной перегрузки и скорости движения ЛА при данном режиме посад-
посадки с ТППС (кривые 1) и без нее B). Отсюда видно, что ТППС позволяет
осуществить эффективное торможение самолета еще на воздушном уча-
участке. При этом наблюдается более значительный, чем в случае штатной
посадки (см. рис. 8.29), прирост продольной перегрузки в момент выпус-
выпуска ТППС (см. рис. 8.34, точка к{), что позволяет раньше приземлить са-
самолет на ВПП и с меньшей скоростью касания (рис. 8.35, точки Ъ± и Ь2).
В результате к началу включения торможения колес (точка с\) ско-
скорость движения ЛА в случае 1 п
оказывается ниже, чем в слу-
случае 2 на - 10 м/с (см. рис. 8.35). 1,08
Вместе с тем наряду с улучше-
улучшением характеристик торможе- 1,оо
ния ЛА применение ТППС до
момента его касания ВПП при- о,92
водит к увеличению вертикаль-
вертикальной перегрузки пу (кривая 1 на о,84
рис. 8.36), что делает приземле- 0 ?6
ние ЛА с ТППС на данном ре- ' 0 16 3 2 г с
жиме посадки более «грубым». Рис. 8.36. Временное изменение вертикальной
При этом степень «грубости» „ посадке самолета с тппс с
посадки определяется высотой *
и вертикальной составляющей вштиб?знТеB)°^™ КаСаЮМ ^^^
скорости движения начала па-
парашютирования ЛА и т. д. Анализ результатов вычислений показал, что в
случае парашютирования самолета с высоты 1 м при начальном значении
вертикальной составляющей скорости 1/у =0 в момент приземления ее
значение в случае 1 оказалось на ~ 4 м/с выше, чем в случае 2. Это в свою
V
<
319
очередь несколько повышает вертикальную перегрузку в центре масс
самолета с пу ~ 1,06 (случай 2) до пу ~ 1,08 (случай 7). Вместе с тем, как
видно из рис. 8.36, колебания пу при посадке ЛА с ТППС затухают бы-
быстрее, чем без нее.
На рисунках 8.37 и 8.38 помещены результаты исследования нагру-
женности колес соответственно основной Рк и передней Рк стоек шас-
шасси при посадке ЛА с ТППС (кривые 7) и без нее B). Максимальная на-
320
240
160
80
0,8 2,4 4,0 Г, с
Рис. 8.37. Временное изменение нагру- Рис. 8.38. Временное изменение нагруже-
жения стойки основного колеса шасси ния стойки переднего колеса шасси само-
самосамолета при посадке с ТППС с выпус- лета при посадке с ТППС с выпуском ее до
ком ее до момента касания колесами момента касания колесами ВПП G) и без
80
60
40
20
4 ш!
11 Л
1//
V/1
V
-Л"
о
1,6
3,2
1(ГН
/к2
//
А
>
ВПП G) и без нее B)
нее B)
грузка на основные колеса шасси (рис. 8.37) в случае 7 оказалась на
24 кН выше, чем в случае 2. При этом в процессе пробега самолета с
ТППС рост нагрузки быстро стабилизируется, в то время как при его
пробеге без нее процесс установления нагрузки что ТППС обеспечивает в
этом режиме посадки самолету более раннее (на 3 с) касание ВПП по
сравнению с посадкой без нее. Что касается нагружения на колеса не-
несколько затягивается по времени. Следует отметить, передних колес шас-
шасси (рис. 8.38), то здесь, наоборот, более мягкое нагружение сопутствует
посадке самолета с ТППС (кривая 7). Из-за действующего кабрирующего
момента от ТППС более плавное нагружение колес наблюдается и во
время пробега его по ВПП.
Анализ результатов вычислений показал, что, если в случае штатной
посадки самолета ТППС способствовала «подбрасыванию» носа самоле-
самолета после первого удара колес о ВПП, что в рассмотренном режиме посад-
посадки — выпуск ТППС до касания ВПП — ТППС уменьшает силу самого
удара. ТППС также способствует более раннему по времени (I ~ 2,3 с на
рис. 8.38) опусканию носовых колес по сравнению с посадкой самолета
без ТППС, что способствует более раннему включению тормозов шасси.
Итак, можно сделать вывод о том, что применение ТППС на воздушном
участке (при парашютировании на ВПП) позволяет существенно улуч-
улучшить посадочные характеристики ЛА, но приводит к более «грубой» его
посадке с последующим «демпфированием» параметров движения при
пробеге. Это позволяет сделать вывод о возможности использования
ТППС при посадке ЛА до касания колес ВПП.
320
8.4.4. Моделирование посадки летательного аппарата в случае
нештатного срабатывания тормозной парашютной системы. При ре-
решении различных задач авиацией, а также в ходе боевой подготовки лет-
летного состава могут возникать особые случаи, затрудняющие или исклю-
исключающие выполнение взлета, посадки и т. д. самолета обычным способом.
При посадке особыми случаями могут оказаться: недостаток длины ВПП
(поврежденная полоса, невыход механизации крыла, отсутствие ТППС),
повышенная вероятность «грубой» посадки с последующим «козлением»
(неисправности или боевые повреждения, в том числе в системе управле-
управления и др.), невыход одной или нескольких опор шасси и т. д. Опасность
также представляет собой нештатное срабатывание ТППС в процессе
взлета (особенно после отрыва от ВПП), при заходе на посадку, полете на
малой высоте со скоростью, близкой к минимальной. Структурная ММ
функционирования системы «ЛА + ТППС» позволяет моделировать на
ЭВМ и эти нештатные ситуации, получать обширную информацию, ко-
которая может быть успешно использована при решении вытекающих от-
отсюда практически важных задач. Приведем некоторые данные, касаю-
касающиеся исследований полета, взлета и посадки ЛА в особых случаях с ис-
использованием бортовых средств торможения.
Рассмотрим сначала возможность более эффективного применения
ТППС при посадке самолета на ВПП. Как уже отмечалось, в реальных
условиях посадки современных маневренных ЛА, как правило, имеется
режим выдерживания. Это приводит к значительному увеличению длины
воздушного участка и пробега ЛА по ВПП в целом. Использование же
ТППС на режиме выдерживания позволяет в значительной степени повы-
повысить эффективность торможения и улу- у у г
чшить посадочные характеристики ЛА.
На рис. 8.39 приведены результаты
исследований длины пробега Ь самолета 1,00
с ТППС по ВПП, отнесенной к длине его
пробега 1о в стандартных условиях, в
зависимости от высоты выдерживания
его над ВПП. Расчеты проводились в 0,76 Ь
0,92
0,84
<:
— -.
2
—. —•
3
5В——
—¦—'
II.
—--—
— ¦—
¦
1
диапазоне высот парашютирования
Н = 0 + 3 М при нормальной посадочной Рис. 8.39. Изменение
массе самолета твтгА =12200 кг; движе- ной длины пробега
#,м
относитель-
относительсамолета
с ТППС по ВПП в зависимости от
высоты выдерживания над ней
ние рассматривалось с момента начала
парашютирования. Кривая 1 — выпуск
ТППС после касания ЛА ВПП и опускания носовых колес, 2 — в момент
касания; 3 — на этапе парашютирования (до касания ВПП). Как видим,
при посадке в случае 1 прирост длины пробега с увеличением высоты
парашютирования повышается, достигая на высоте #=3 м примерно 9 %
(~ 60 м). Из данных рис. 8.39 следует, что уменьшить пробег можно за
счет более раннего выпуска ТППС. ТППС, выпущенная в момент касания
самолетом ВПП (случай 2), позволяет сократить длину пробега по срав-
сравнению со стандартной длиной Ь§ на ~ 16 % (-110 м). Ввод ТППС на
этапе парашютирования ЛА приводит не только к прекращению роста
321
длины пробега по сравнению с Ь$, но с увеличением высоты парашюти-
парашютирования даже к его сокращению. Так, пилотирование с применением
ТППС с высот Н = 1 и 2 м позволяет уменьшить пробег ЛА по ВПП соот-
соответственно на ~ 22 % от 1о (~ 154 м) и ~ 26 % (~ 177 м).
Высота парашютирования ЛА при посадке ограничена прочностью
шасси при приземлении. Расчеты показывают что в пределах эксплуата-
эксплуатационных ограничений по прочности шасси максимальная высота пара-
парашютирования самолета без ТППС составляет 2,5 м, а с ней — около
1,5 м.
Таким образом, из анализа полученной научной информации следует,
что случаи посадки 2 и 3 с учетом эксплуатационных ограничений по
прочности шасси могут быть использованы как в штатных, так и нештат-
нештатных условиях посадки ЛА. Естественно, что в особых случаях можно
допустить выход нагрузки на шасси за пределы эксплуатационных огра-
ограничений.
Недостатками способов посадки 2 и 3 являются усложнения пилоти-
пилотирования самолетом, повышение нагрузки на шасси, а также наличие
пусть и укороченного воздушного участка при его приземлении;
Полностью * исключить воздушный участок парашютирования ЛА
можно путем его выравнивания до пролета торца ВПП. При этом пробег,
как показывают расчеты, может быть сокращен в пределах от 210 до
245 м по отношению к Ь§.
Был рассмотрен случай посадки ЛА с повышенной посадочной скоро-
скоростью (при невыпущенной механизации крыла). Здесь за Ь$ принималась
длина пробега ЛА с ТППС в стандартных условиях при убранной меха-
механизации крыла. Выигрыш в пробеге на высотах Я=1,5ми2м составил
соответственно ~ 350 и 380 м. В нештатных случаях посадки ЛА может
быть использовано и выключение двигателей на пробеге. Это позволяет
дополнительно добиться сокращения длины пробега ЛА в среднем на
-4%от Ьц.
На рис. 8.40 даны зависимости угла тангажа в и продольной пере-
перегрузки пх от времени х при срабатывании ТППС в процессе разгона са-
самолета. Самопроизвольный выпуск ТППС произошел на высоте
Я = 900 м при скорости полета
110 = 100 м/с. Режим работы СУ
соответствовал «максималу»; спло-
сплошные линии — результаты модели-
моделирования на ЭВМ, штриховые —
данные реального полета, получен-
полученные с помощью средств объективно-
объективного контроля. В полете летчик почув-
почувствовал продольный толчок и тор-
торможение, уменьшил угол тангажа и
0,45
0,30
0,15
0
-0,15
0,град
42
-9
-6
-3
о
I -
Г\
Г, с
Рис. 8.40. Временное изменение угла тан-
тангажа в и продольной перегрузки пх
сбросил ТППС. На кривой пх{1)
самолета в процессе разгона при само- срабатывание ТППС отражается в
произвольном выпуске ТППС виде ступенчатого уменьшения про-
322
80
76
м/с
а
——•
———
*——
——-
У
2
•
у
-
0
8
г, с
1,8
ьной перегрузки, а сброс — в виде ступенчатого ее возрастания. От-
видно, что несанкционированное срабатывание ТППС существенно
повлияло на движение ЛА, вызвав лишь кратковременное замедление
) разгона.
На рис. 8.41 представлены некоторые результаты математического
эделирования на ЭВМ особого случая нештатного срабатывания ТППС
та взлете ЛА (после отрыва от ВПП). Они характеризуют изменение ско-
скорости II и высоты полета Н во времени г для трех случаев: нормальный
|взлет G), взлет при срабатывании ТППС с площадью купола соответст-
соответственно 5П = 13 м2 B) и 30 м2 C). Как видно, в случае 2 тяги СУ оказыва-
Ьртся достаточно для предотвращения сни- с/, м/с
[ скорости и высоты полета самолета. 92
пияние срабатывания ТППС здесь сказы-
ся лишь в уменьшении интенсивности
уразгона и набора высоты самолетом. В 84
^лучае 3 самолет начинает тормозиться и
гь высоту более энергично. В такой
уации летчику целесообразно как мож-
быстрее отцепить ТППС или выклю-
. режим «форсаж».
^Исследования показали также, что су- 2'2
Явственного влияния на параметры на-
гружения и деформирования ЛА (за не-
невключением крюка подцепки ТППС) не- 1>4
Ьггатное срабатывание ТППС в полете не 1»0' ' '—' '—'—'-^
оказывает. *'с
" Практический интерес может пред- Рис. 8.41. Временное изменение
етавлять использование ТППС в случае скорости V (а) и высоты полета
посадки самолета с невыпущенной или не
ётавшей на замок носовой стойки шасси.
Летчик при этом стремится как можно дольше удержать самолет в поса-
Йочном положении на основных колесах. Однако при скорости движения
Самолета 50 м/с эффективность рулей оказывается недостаточной и про-
происходит самопроизвольное опускание носа самолета. Вместе с тем ос-
оставшаяся еще достаточно высокая скорость движения самолета с повре-
повреждением по ВПП представляет серьезную опасность для экипажа и ЛА.
Использование ТППС, имеющего подцепку к ЛА с моментом на каб-
кабрирование, позволяет несколько «затянуть» по времени опускание носа
самолета до более низких (безопасных) значений скорости. На рис. 8.42
представлены сравнительные результаты изменения угла тангажа в и
скорости II по времени г при пробеге ЛА по ВПП без ТППС (кривые 7), с
рей при штатной подцепке B) и с ТППС при подцепке к ЛА с моментом
на кабрирование C). В случае 3 точка подцепки ТППС к самолету сме-
смещена вверх относительно его центра масс на 2 м. Это позволяет обеспе-
обеспечить снижение скорости, при которой происходит самопроизвольное
опускание носа самолета, примерно на 13,5 %. Достижение нулевых зна-
значений тангажа достигается в этих случаях при скоростях II ~ 42 и 28 м/с.
1(Гм
б
11 —
¦— —
У
н (б> самоле™ на ^Р
нештатном срабатывании ТППС
323
чение вертикальной перегрузки. Выпуск ТППС после касания ап-
атом ВПП опасен тем, что в результате ошибочных действий летчик
Цржет выпустить ТППС, будучи уже в воздухе (на вершине «козла»), а
> может привести к еще более «грубому» приземлению самолета.
В заключение отметим, что использование структурной ММ функ-
аонирования системы «ЛА + ТППС» позволяет решить ряд других во-
эсов, касающихся выбора ее рациональной компоновки.
§ 8.5. Моделирование посадки беспилотного летательного
аппарата на однооболочковом парашюте-крыле
Пусть после завершения процесса раскрытия однооболочкового па-
а-крыла (ОПК) система «БПЛА + ОПК» (рис. 8.45) совершает
яемый спуск в спокойной атмосфере. Управление может осущест-
ться путем изменения тяги СУ или положения центра давления купо-
|йа парашюта относительно центра масс системы и т. д.
Щь Процесс обтекания такой компоновки в целом будем строить в рамках
Додели идеальной несжимаемой среды и метода вихревых рамок [14, 54],
предполагая, что ее движение происходит под некоторым углом атаки а
%ез скольжения с дозвуковой скоростью 11$ • Примем, что на передних
кромках парашюта и БПЛА реализуется безотрывное обтекание; вихре-
вихревые пелены сходят с боковых и задних кромок.
4 Алгоритм решения задачи статической аэроупругости для нахождения
зрродинамических характеристик однооболочкового парашюта-крыла
(ОПК) описан в [249].
Аэроупругие характеристики системы
«БПЛА + ОПК» при заданных угле атаки и
скоростном напоре определялись в два этапа.
На первом этапе изолированно вычисляются
аэроупругие характеристики ОПК и БПЛА.
(Суммарные характеристики компоновки
«БПЛА + ОПК» в целом находятся на втором
этапе методом суперпозиций.
Исследования были проведены на примере
гипотетического БПЛА с трапециевидным
крылом с удлинением Я = 2,8, углом стрело-
стреловидности по передней кромке крыла # = 35°
чечевицеобразного профиля с относительной
толщиной с = 5 % . Условно было принято,
что крыло имеет максимальную толщину на
расстоянии 35 % длины хорды от носика кры-
крыла. Параметры движения: \] = 82 м/с,
#=300м, а = 25°, 0 = 0.
На рис. 8.46 показано изменение коэффи-
Рис. 8.45. К моделированию
посадки беспилотного ЛА на
однооболочковом парашюте-
крыле; 1 — БПЛА, 2 — ОПК,
3 — соединительное звено
циентов подъемной силы су (сплошная линия) и момента тангажа тг
(штрихпунктирная) БПЛА в зависимости от угла атаки а; 7,2 — жест-
жесткое крыло; 3,4 — деформируемое крыло. Как видим, аэродинамические
325
В случае 2 опускание носа самолета начинается, * как и в случае 7, при
I] ~ 53 м/с. Однако момент, когда 0=0, наступает при скорости дви-
движения самолета С/« 33 м/с, т. е. на ~ 8 м/с меньше, чем в случае 7. Это
" 0'гРад __г__г__,__^_^_1 б {/'м/с
¦^Г I I I I I
60
50
4
2
0
V
V
>
V
Л
г
У
\
V
40
30
20
\
-•—
¦
1—^
*.
-
16
Г, С
0
8
16
Г, с
Рис. 8.42. Сравнительные результаты изменения угла тангажа в (а) и скорости полета
V (б) самолета во времени {при пробеге его по ВПП без ТППС A) и с ней при разных
штатных вариантах подцепки B), C)
обстоятельство говорит о целесообразности использования штатной
ТППС при посадке с невыпущенной передней стойкой шасси.
На рисунках 8.43 и 8.44 помещены некоторые результаты исследова-
исследований влияния ТППС и параметров амортизатора передней стойки шасси
на тенденцию самолета к «козлению»; цифрами 7 и 2 на этих рисунках
2,08
1,92
1,76
1,60
1,44
,М |
Л,..
У
/1
3
\\
\\
И
Г, с
0 1,6 3,2 Г, с
Рис. 8.44. Временное изменение траекто-
траектории центра масс самолета вследствие «гру-
«грубой» посадки при разных посадочных ус-
условиях
0 1,6
Рис. 8.43. Временное изменение угла
тангажа в самолета вследствие «гру-
«грубой» посадки при разных посадочных
условиях
обозначены изменения параметров движения ЛА по ВПП без ТППС со-
соответственно с нормальной зарядкой амортизатора и при пониженном
давлении зарядки в амортизаторе передней стойки шасси с одновремен-
одновременным увеличением его коэффициента гидравлического сопротивления на
обратном ходе; 3 — посадка с нормально заряженными амортизаторами
при срабатывании ТППС в момент касания ВПП. Анализ результатов
вычислений подтверждает предположение о том, что тенденцию самоле-
самолета к подпрыгиванию при «грубой» посадке можно значительно умень-
уменьшить путем регулировки параметров амортизации. Однако наибольший
эффект достигается при использовании ТППС C). Выпуск ТППС в мо-
момент касания ВПП «демпфирует» траекторные параметры движения ЛА.
При этом практически исключается повторный отрыв самолета от ВПП
(его взмывание). Применение ТППС до касания самолетом ВПП нежела-
нежелательно, так как при «грубой» посадке может вызвать еще большее
324
характеристики БПЛА с жестким и деформируемым крыльями несколько
различаются между собой; причем эта разница растет с увеличением угла
атаки. Отсюда следует, что при
2 нахождении суммарных аэродина-
-0,25 мических характеристик системы
«БПЛА + ОПК» деформацию аппа-
-0,50 рата необходимо учитывать. Отме-
Отметим, однако, что жесткостные па-
параметры некоторых БПЛА таковы,
что в условиях предполагаемых
скоростей снижения влиянием де-
деформации конструкции аппарата на
суммарные аэродинамические хара-
*-у
1,2
0,6
0
/
ч#
2;
ч'ч.
ч >
ч
*ч
••ч. 'ч.
*ч
10
20
, град
-0,75
-1,00
-1,25
емной силы су и момента тангажа т
БПЛА в зависимости от угла атаки а
Рис. 8.46. Изменение коэффициентов подъ- ктеристики компоновки «БПЛА +
+ ОПК» можно пренебречь.
В качестве примера рассмотрим
плоскопараллельное снижение сис-
системы «БПЛА + ОПК + ТППС». Примем, что векторы полных аэродина-
аэродинамических сил, действующих на парашюты, лежат в плоскости симметрии
БПЛА и их линии действия проходят через середину расстояния между
коушами для ОПК и через коуш ТППС (рис. 8.47).
Введем две системы координат: неподвижную земную 0§х8у818 и
подвижные Ому;!,} (г = 1,2), связанные с БПЛА и ОПК соответственно.
С учетом принятых допущений уравнения продольного движения
системы «БПЛА + ОПК + ТППС» в скалярной форме будут:
{Мх +М2HХ1 =
(Мг +М2)ФУ
+ с
х3 <
- С\ 81П в -
- °\С08 в ~
+ сУгЧ*82
п) + сх2 ^^
СО8 ф
дв
+ <Рп
+ <Руа)
' (8.43)
г 8 у у8 =Пх§тв +11 усо&в ,
где М{ — масса составных элементов системы «БПЛА + ОПК» (/ = 1,2);
Гдв — тяга двигателя; <рдв — угол установки двигателя; сх, су — аэро-
аэродинамические коэффициенты составных элементов компоновки
«БПЛА + ОПК»; (рп — угол положения ОПК; 5/ — площади несущей
или тормозной поверхностей (/ = 1, 2) соответственно БПЛА и ОПК; С,-
— сила тяжести; кп — расстояние между осью т-т и центром масс
ОПК; кК — плечо, на котором действует нормальная составляющая си-
силы /?2, относительно оси Ог\ хш, ут — координаты точки крепления
ТППС к БПЛА.
326
Величины с индексом 1 относятся к БПЛА, а с индексами 2 и 3 —
соответственно к ОПК и ТППС.
Угол фп определяется из решения дополнительной системы диффе-
дифференциальных уравнений, описывающей вращение ОПК относительно оси
т-т.
Для сравнения рассмот-
рассмотрим три варианта посадки
гипотетического БПЛА
массой 160 кг (рис. 8.48). В
первом варианте посадки
БПЛА совершает спуск при
совместном использовании
ОПК и ТППС соответст-
соответственно площадью 54 и 6 м2
(случай А), в другом — с
применением осесиммет-
ричного парашюта площа-
площадью 60 м2 (случай В), в
третьем — при использова-
использовании ОПК в отсутствие ветра
(случай С). Будем считать,
что при первом и втором
вариантах посадки на сис-
систему действует ветер с со-
составляющими скорости: го-
горизонтальной \УХ =10 м/с Рис. 8.47. Системы координат и силы, действую-
* щие на компоновку «БПЛА + ОПК + ТППС» при
и вертикальной У/у^ =0. посадки; 1 — БПЛА, 2 — ОПК, 3 — ТППС
Примем, что при снижении по схеме А компоновка «БОТА + ОПК +
+ ТППС» движется навстречу ветру.
Пусть в случае А система начинает движение на зарифленном куполе
ОПК при полностью раскрытом
тормозном парашюте и задроссели-
рованном двигателе (Гда = 0) из
точки О\ (рис. 8.48), расположенной
на высоте 500 м и удаленной от цен-
центра площадки приземления (точка Р
на оси абцисс) на расстояние
- 1400 м. На 10-й секунде снижения
осуществляется разрифление ОПК и
сброс ТППС. Это вызывает подбра-
Рис. 8.48. Траектории снижения систе- сывание системы вверх с последую-
мы «БПЛА + ОПК» при различных ва- затуханием колебаний траек-
риантах посадки ' г
торных параметров: высоты полета
Я (см. рис. 8.48) и составляющих скорости снижения 1/х и 1/у
(рис. 8.49).
327
400
200
0
I
\
V,
*
V
NN
л
= 10 м/с I
*
->
-250 0
500
1000
40
В процессе дальнейшего установившегося снижения продвижение
системы «БПЛА + ОПК» в точку Р производится с помощью увеличения
ц м/с тяги двигателя. На 55-й секунде
реализуется так называемый «дина-
«динамический подрыв» ОПК, который
вызывает резкое торможение систе-
системы и ее переход на более пологую
траекторию снижения с последую-
последующим касанием площадки приземле-
приземления.
Из сказанного выше можно сде-
сделать вывод о том, что компоновка
«БПЛА + ОПК» способна двигаться
-8--
20
ч
\
1
ь
г
у
г-
1—,
\
0 20 40 Г, с
Рис. 8.49. Временное изменение состав-
составляющих скорости снижения V у и V х
при посадке системы «БПЛА+ ОПК +
+ ТППС»
против ветра (Ь = 1800 м).
Иначе обстоит дело при посадке
БПЛА на тормозном парашюте по
схеме В. В этом случае, несмотря на
то, что парашют раскрывается над центром площадки приземления на
высоте 450 м (точка 02 на Рис- 8.48), из-за отсутствия у тормозного па-
парашюта аэродинамического качества и невозможности в связи с этим
использовать тягу двигателя БПЛА при предпосадочном маневрирова-
маневрировании, при наличии горизонтальной составляющей скорости ветра по высо-
высоте спуска система «БПЛА + тормозной парашют» совершает приземление
на расстоянии 190 м от точки Р.
§ 8.6. Моделирование нагружения и деформирования
летательного аппарата корабельного базирования
при взлете и посадке
Взлет и посадка ЛА на палубе авианесущего корабля (АНК) сущест-
существенно отличаются от условий их взлета и посадки на обычные аэродромы
[161, 268]. Для этого применяются специальные взлетно-посадочные уст-
устройства (ВПУ): трамплин, катапульта, гаковый финишер и т. д. Ограни-
Ограниченные размеры палубы и качка при морском волнении резко повышают
требования к точности пилотирования ЛА при заходе на посадку, осо-
особенно при использовании гакового финишера. Отсюда ясно, насколько
реализация боевых возможностей ЛА корабельного базирования зависит
от их взлетно-посадочных характеристик (ВПХ). Отметим, что для об-
облегчения работы летчика на корабле имеются светосигнальная и радио-
радиотехническая системы управления заходом на посадку. Достоверное опре-
определение действующих нагрузок на конструкцию ЛА в целом и отдельные
его элементы на указанных режимах позволит не только выявить экс-
эксплуатационные ограничения, но и наметить пути их расширения. Обозна-
Обозначенный круг задач для ЛА корабельного базирования эффективно может
быть решен также с помощью математического моделирования на ЭВМ.
8.6.1 Структурная ММЛА корабельного базирования и ее особен-
особенности. Структурная ММЛА корабельного базирования по отношению к
структурной ММЛА возмущенного движения (блок I) для полетных
328
(блок II) и наземных (блок III) режимов сухопутных аэродромов
(рис. 8.50) вместо модели рельефа ВПП (парашют отсутствует) должна
быть дополнена ММ палубных ВПУ (трамплина, катапульты и гакового
[Линейная динамика
Нелинейная
амортизация
Линейная Линейная Линейная
(нелинейная) теория (нелинейная)
аэродинамика II упругости || динамика
Модель амортиза-
амортизационной системы
Обобщенная
модель кине-
кинематики стойки
Модель
рельефа ВПП
бетонная
грунтовая
Базовая структурная ММ
аэроупругости ЛА
Модель
управления
Линейная динамика
Схема кре-
крепления
ММ груза (грузы
внутренние и внеш-
ние, топливо)
Модель
внешних
возмущений
Модель
двигателя
Модель
парашюта
Структурная ММЛА для полетных режимов
Структурная ММЛА для наземных режимов
Рис. 8.50. К формированию структурной ММЛА корабельного базирования
финишера). Несколько отличной будет и ММ шасси. Для формирования
такой модели используются следующие системы координат [68]: земная
Оо^8у818, инерциальная Оихиуиги, связанная с ЛА Охух, связанная с
колесом Окхкукгк и стартовая Осхсус%с связанная с гаковым финише-
финишером или другими палубными ВПУ (рис. 8.51). Оси инерциальной систе-
системы координат параллельны осям земной системы, ее начало Ои распола-
располагается в центре масс ко-
корабля и перемещается с
постоянной скоростью у
!7кор хода корабля. Нача-
Начало системы координат
колеса Ок помещается в
центре масс подвижной
части стойки шасси (на
оси вращения колеса), ось
ОкУк параллельна ОСИ 0}> рис. 8.51. Системы координат, используемые при
связанной системы, ось формировании структурной ММЛА корабельного
Ок*к лежит в плоскости базирования
вращения колеса и направлена по ходу его движения, ось Окгк распола-
располагается перпендикулярно плоскости вращения колеса и дополняет первые
оси до правой тройки. Начало стартовой системы координат Ос для га-
гакового финишера лежит на пересечении приемного троса плоскостью
симметрии установки (положение приемного троса до зацепления его
329
гаком); ось Осхс помещается в плоскости установки параллельно осевой
линии посадочной палубы корабля, ось ОС1С перпендикулярна ей и на-
направлена перпендикулярно осевой линии посадочной палубы к правой
половине гакового финишера, ось Осус соответствует местной вертика-
вертикали корабля.
При использовании метода собственных форм нелинейные уравнения
динамики движения упругого ЛА по-прежнему имеют вид B.112). При
их формировании в рассмотренном здесь примере использовалось балоч-
балочное представление конструкции ЛА для расчета ее частот и форм собст-
собственных упругих колебаний. Коэффициенты аэродинамических производ-
производных рассчитывались методом дискретных вихрей с учетом влияния бли-
близости поверхности экрана (палубы). В случае взлета и посадки самолета,
оснащенного турбовинтовыми двигателями, влияние обдувки крыла
струями винтов может быть учтено приближенно по импульсной теории
[266] в соответствии с известной величиной тяги двигателей. При этом
оно представляется в виде сосредоточенной силы, приложенной к гондо-
гондолам двигателей, что позволяет приближенно учесть ее вклад и в суммар-
суммарные аэродинамические силы, и в эпюру интегральных аэродинамических
усилий на крыле. При моделировании воздушного потока над палубой
его возмущениями от трамплина, надстроек и других надпалубных объ-
объектов корабля пренебрегается, учитывается только его равномерная со-
составляющая, вызванная ходом корабля. Возмущения воздушного потока
над палубой и в спутном следе за кораблем на точность выполнения за-
захода ЛА на посадку также не учитываются, хотя современные численные
методы аэродинамики позволяют их учесть.
Необходимо отметить, что в зависимости от выполняемой задачи ЛА
корабельного базирования при формировании соответствующей его
структурной ММ уравнения B.112) дополняются дифференциальными и
алгебраическими соотношениями, описывающими функционирование
таких важных составных частей авиационного комплекса, как силовая
установка, система управления, амортизационная система, палубные
ВПУ и др., а также зависимостями, учитывающими внешние возмущения
(турбулентность атмосферы [149], качку корабля [68], и т. д. Технология
формирования структурных ММЛА и численная реализация их в полет-
полетном варианте описаны в [249].
8.6.2. Конструкционные особенности корабельных взлетно-
посадочных устройств и их математические модели. А. Трамплин.
Взлет с трамплина включает разбег по горизонтальному участку АВ па-
палубы (рис. 8.52), движение по трамплину (участок ВС) и воздушный уча-
участок С/). На участке СО самолет приобретает положительную вертикаль-
вертикальную скорость IIу, угол тангажа 9 и некоторый запас по высоте, позво-
позволяющие затем осуществить его разгон до скорости, обеспечивающей
взлет с набором высоты. Здесь за счет трамплина удается существенно
уменьшить длину разбега ЛА по палубе. Однако при этом его амортиза-
амортизационная система и конструкция планера подвергаются действию значи-
значительных нагрузок как при движении по трамплину, так и в момент схода
с него. Основными параметрами трамплина являются: форма образующей
330
и радиус скругления его верхней кромки /?0, длина х^, максимальная
высота /^гр, угол вылета 6^ . Форма верхней оконечности трамплина в
значительной степени определяет
уровень нагрузок на стойки шасси
при сходе ЛА с трамплина и ока-
оказывает влияние на точность захо-
захода его на посадку.
Округление верхней кромки
Рис. 8.52. Этапы взлета самолета корабель-
корабельного базирования с трамплина
трамплина можно осуществлять
дугой окружности заданного радиуса #0. Начальный угол дуги опреде-
определяется из условия плавного сопряжения с основной частью трамплина,
т. е. равенства высоты и ее первой производной.
ММ трамплина задается в виде изменения высоты палубы к(х) и по-
положения нормали п к ней (рис. 8.53) в стартовой системе координат
Осхсус. Наиболее простая форма представления трамплина в виде дуги
окружности
Уе
Рис. 8.53. К формированию
ММ трамплина
(8.44)
^Дя Где #—радиус кривизны трамплина. Здесь
используется трамплин в форме «полукубиче-
«полукубической параболы»
к(х) = Ъх2+сх3. (8.45)
В (8.45) Ъ и с — характеристики, связанные с параметрами трамплина
р» ^тр и ^тр зависимостями
Ъ =
с =
Компоненты нормали к трамплину равны
(8.47)
где к'^
Б. Катапульта. Современные авианосцы [268, 425] оснащены ка-
катапультами, способными при длине разбега 100 м разгонять самолет при
взлете массой 33 т до скорости \] = 260-300 км/ч за 2-2,5 с. Катапульта
(рис. 8.54) представляет устройство, состоящее из двух параллельно рас-'
положенных цилиндров F) с поршнями C), находящимися под полетной
палубой. Поршни скреплены между собой через соединительные элемен-
элементы с челноком B). Под действием пара D) давлением до 8000 кПа оба
поршня перемещаются внутри цилиндров. Цилиндры закрыты двумя
съемными секциями настила палубы, имеющими прорезь, в которой
движется челнок B). Верхняя часть челнока находится над полетной па-
палубой, к ней крепится буксирный трос (поводок) G) или непосредственно
носовая стойка шасси самолета. Челнок B) свободно перемещается по
катапультному треку под действием пара и в конце его на участке в 1,5 м
он тормозится до полной остановки гидротормозным устройством, пред-
331
ставляющим собой конусообразный плунжер (8), который входит в спе-
специальный цилиндр, заполненный водой G). Перед взлетом самолет стоит
на катапульте, центриру-
центрируется на ней и крепится к
челноку бриделем, изго-
изготовленным из стального
троса. Для предотвраще-
предотвращения преждевременного
движения самолета под
действием тяги собствен-
собственных двигателей он кре-
крепится к так называемому
задержнику E) на полет-
полетной палубе с помощью
комбинированного коль-
кольца, разрываемого с нача-
начаш!
-г
^—
яг_->
% \?
| ~
_1 -
- -1
"¦1
5
Рис. 8.54. Катапультный взлет: а — стартовое поло-
положение самолета; б — разгон; в — сход с катапульты
лом движения челнока B). Энергия катапульты регулируются в зависи-
зависимости от взлетной массы самолета, ограничений по прочности конструк-
конструкций ЛА и допустимых перегрузок для летного состава. После взлета са-
самолета с помощью катапульты челнок возвращается в исходное положе-
положение. Для этого используется устройство, состоящее из захвата, приводи-
приводимого в движение посредством полиспастной системы.
Таким образом, величина и характер изменения во времени разгонной
силы могут варьироваться в широких пределах путем изменения на-
настройки клапанов, регулирующих подачу пара, и окончательно опреде-
определяются только в процессе натурных испытаний. Поэтому здесь для уп-
упрощения задачи разгонная сила Ршт пред-
представляется в виде фиксированной зависимо-
зависимости во времени, параметрами которой явля-
являются масса и скорость отрыва самолета
(рис. 8.55, /к — длина трека катапульты,
хс — координата текущего положения ЛА
на палубе) [425].
Разгонная сила передается от челнока
катапульты на самолет через поводок, кото-
который крепится к носовой стойке или к фюзе-
фюзеляжу в районе зацепки носовой стойки дос-
достаточно высоко от поверхности палубы.
В связи с этим на самолет действуют не только горизонтальная, но и вер-
вертикальная сила, сжимающая амортизатор носовой стойки при выполне-
выполнении взлета ЛА с помощью катапульты. Поэтому очень важным является
наличие в конце трека некоторой длины участка палубы, необходимой
для разжатия амортизатора основной стойки, что позволяет значительно
уменьшить просадку самолета при сходе с палубы.
При взлете корабельного самолета заметную роль в нагружении кон-
конструкции играет также взаимодействие самолета с задержниками на па-
палубе. Они моделируются в виде пружин большой жесткости, связываю-
0 0,1
0,6
Рис. 8.55. Диаграмма измене-
изменения разгонного усилия по дли-
длине катапульты
332
щих стойку щасси с определенной точкой палубы. При взлете с трампли-
трамплина перед стартом фиксируются колеса основных стоек. При взлете с по-
помощью катапульты узел заделки носовой стойки на самолете фиксирует-
фиксируется относительно челнока.
В.Раковый финишер. Наибольший интерес и сложность при
моделировании представляет палубный гаковый финишер (ГФ)
(рис. 8.56) [331]. Здесь в момент посадки на палубу авианосца самолет
зацепляется хвостовым гаком 1 за приемный трос 2, который через тор-
Рис. 8.56. Схема гакового финишера при центральном входе ЛА
мозные барабаны с помощью специальных втулок соединяется с тормоз-
тормозными тросами. Более детальное конструкционное оформление ГФ приве-
приведено в [331]. Как правило, над палубой устанавливается от 4 до 8 ниток
приемных тросов. В исходном положении приемный трос располагается
на тросоподъемниках и вывешивается над палубой на высоте 100 —
150 мм при минимальном предварительном усилии натяжения. В ком-
комплексе ГФ в конце тормозной дистанции на посадочной палубе устанав-
устанавливается сетевой барьер для спасения самолета в случаях аварийной по-
посадки. Этот барьер состоит из двух горизонтальных металлических тро-
тросов — верхнего и нижнего, соединенных между собой вертикальными
синтетическими канатами. Вертикальные канаты устанавливают с опре-
определенным шагом, образуя ячеистую сеть. Подъем сети в рабочее положе-
положение осуществляется с помощью двух подъемных стоек, расположенных
по краям палубы. Высота сети в поднятом состоянии превышает макси-
максимальные поперечные размеры самолета.
Верхний и нижний горизонтальные тросы через специальные устрой-
устройства связаны с тормозным тросом полиспаста, который в свою очередь
соединен с гидротормозом. При аварийном попадании самолета в сетевой
барьер происходит разрушение срезных пальцев, соединяющих стойки и
верхний горизонтальный трос через поддерживающий трос. Горизон-
Горизонтальные и вертикальные тросы начинают охватывать фюзеляж и крыло
самолета и приводят в движение тормозные тросы. Далее работа аварий-
аварийной установки (сети) происходит аналогично работе палубного ГФ.
333
В общем случае формализация работы ГФ представляет несомненную
сложность. Изложим здесь ММГФ в варианте так называемой «инженер-
«инженерной теории» [331], суть которой состоит в следующем. При реальных
скоростях входа ЛА в ГФ скорость распространения продольной волны в
приемном тросе значительно больше (примерно на порядок) скорости
поперечной волны. Это справедливо для всех конструкционных материа-
материалов, используемых для изготовления приемного троса. Как показано в
[331], изломом приемного троса (точка К на рис. 8.56), вызванного взаи-
взаимодействием продольной и поперечной упругих волн, можно пренебречь.
Кроме того, перемещаясь с большой скоростью и отражаясь от тормоз-
тормозных устройств и самолета, продольная волна будет взаимодействовать с
волной разгрузки. Из-за наличия последней через небольшой промежуток
времени происходит выравнивание натяжения во всех точках троса. Со-
Согласно «инженерной теории» считается, что возмущения от входа ЛА в
ГФ по длине приемного троса распространяются мгновенно.
Рис. 8.57. Схема гакового финишера с амортизаторами при центральном входе ЛА
Например, работа ГФ барабанного типа (рис. 8.57) с амортизаторами
описывается следующей системой уравнений при центральном входе ЛА
вГФ[331]:
(8.48)
1-
ё =
С0СО82у
— хс
х{
ХС
8Ш у С08 у
,СО8У + ^
Ю8У
при
-8ту)-2^
4
~2ш:5
г~
0
Г
0
1Х5
(8.49)
при
< 10 ,
334
(8.51)
Усилие Мсам, передаваемое на самолет, равно
#сам=-2#(г)со8у. (8.52)
Здесь введены обозначения: у — угол отклонения приемного троса;
г— время, прошедшее с момента зацепления гаком троса; с0 и с0 —
скорость соответственно продольной и поперечной волны в приемном
тросе; хс — перемещение точки контакта троса с гаком в направлении
движения самолета (вдоль оси посадочной палубы); /0 — расстояние от
середины приемного троса до отклоняющего блока; Ь$, Ь[ — соответст-
соответственно общая полудлина нити (приемного троса) и ее полудлина на бара-
барабане; п — кратность полиспаста амортизатора; т§ — масса подвижного
блока амортизатора D — на рис. 8.57, для упрощения задачи полагаем,
что массы т§ всех блоков одинаковы); х§ — перемещение полиспаст-
ного блока амортизатора; г — относительное удлинение приемного тро-
троса; еА —относительное удлинение ленты амортизатора; NF), №д(еА)
— кривые (уравнения) состояния соответственно троса и ленты аморти-
амортизатора в рамках закона Гука; г, / — радиус и момент инерции тормозного
барабана вместе с намотанным на него тросом; <2б — тормозная сила на
барабане, приведенная к радиусу намотки троса на барабан (ее значение
меняется в зависимости от вытяжки троса и скорости ее изменения); Г и
р — площадь поперечного сечения и плотность материала приемного
троса; М,11 — масса и скорость самолета.
Обратимся к выбору начальных условий задачи. Точка хс = 0 в мо-
момент зацепления ЛА с тросом {г = 0) является особой. Поэтому за началь-
начальное время г0 принимается время прихода продольной волны к барабану
(время, соответствующее выравниванию натяжения в тросе):
. (8.53)
Несмотря на то, что за этот промежуток времени натяжение в нити не
успеет стать одинаковым по всей ее длине, в качестве начальных условий
можно взять условно значения параметров, соответствующие случаю
поперечного удара по нити бесконечной длины [2916]:
(8-54)
^щ
^0A + ^)-(*()-%))
335
где воо — предварительное относительное удлинение нити, 11ц — ско-
скорость гака в момент зацепления.
Процесс торможения ЛА с помощью ГФ по времени условно можно
разбить на три периода. Продолжительность первого периода определя-
определяется временем прохождения продольной упругой волны по полудлине
приемного троса к барабану. Второй период характеризуется временем
прихода поперечной волны к отклоняющему блоку. Третий период за-
заканчивается остановкой ЛА. Всем этим периодам соответствует условие
е > 0, т. е. наличие только растягивающих натяжений в приемном тросе.
Для пренебрежения вторичными эффектами волновых процессов в тросе
принимается, что скорость самолета меняется достаточно медленно.
Значительное отличие имеет ММГФГ при нецентральном входе в него
ЛА, т. е. когда плоскость симметрии ЛА или его вектор скорости II не
лежат в плоскости симметрии установки (рис. 8.58). При этом возможны
три разновидности ММГФ [331]:
1. Трение между гаком и приемным тросом отсутствует, т. е. гак мо-
может свободно перемещаться по тросу; при этом натяжение в обеих частях
троса (по разные стороны от точки зацепления) будет одинаковым.
Рис. 8.58. Схема гакового финишера при нецентральном входе ЛА
2. Трос защемлен на гаке, т. е. точка крепления троса на гаке переме-
перемещается вместе с гаком.
3. В точке захвата (защемления) существует трение между гаком и
тросом.
В первом случае, по сравнению с предыдущей ММГФ, системы урав-
уравнений типа (8.48)-(8.54) решаются самостоятельно для углов отклонения
левой у\ и правой у2 (см. рис. 8.58) частей приемного троса с учетом
взаимной связи. Во втором случае уравнения типа (8.48)-(8.54) решаются
независимо для каждой части приемного троса, точкой раздела которых
является гак, т. е. Е\ ф е2 . В третьем, наиболее сложном, случае каждый шаг
336
интегрирования системы уравнений (8.48)-(8.54) разбивается на две фа-
фазы. В первой фазе считается, что частица приемного троса, координаты
которой совпадают с координатами гака, движется вместе с ним. В ре-
результате этой фазы находятся изменения натяжений в обеих частях троса
независимо друг от друга путем решения системы уравнений типа (8.48)-
(8.54), как и в случае 2. Во второй фазе описывается движение приемного
троса относительно гака, причем через гак должна перейти такая его
часть, чтобы разность между натяжениями в обеих частях троса была
равна силе трения между гаком и тросом. Третий расчетный случай за-
захвата троса гаком является общим и естественно наиболее сложным; оба
предыдущих случая получаются из него путем предельного перехода.
Все разновидности ММГФ при нецентральном входе ЛА в него име-
имеются в [331]. Здесь будут приведены результаты исследований взаимо-
взаимодействия ЛА с ГФ при нецентральном входе, касающиеся первых двух
случаев. Для этого сначала приведем ММ амортизационной системы ЛА
корабельного базирования.
8.6.3. Модель шасси. Для эксплуатации ЛА корабельного базирова-
базирования на режимах взлета и посадки аппараты снабжаются шасси [162].
Схема шасси определяется количеством опор (главных) и их расположе-
расположением относительно центра масс самолета. Наиболее широкое распро-
распространение для маневренной авиации наземного и корабельного базирова-
базирования получила трехопорная схема шасси с вынесенной вперед носовой
опорой. Полные ММ шасси с разными типами стоек имеются в [42, 148].
Однако их применение в наиболее полном виде в структурной ММЛА
затруднительно. Обычно в структурных ММЛА используется несколько
упрощенный вариант ММ шасси, предложенный В.Д. Бариновым,
Г.К. Непомнящим и описанный подробно в [249]; он получен при сле-
следующих предположениях: каждое колесо шасси совершает плоское дви-
движение; в цепи «колесо + рычажная система + силовая стойка + планер»
силовая стойка считается абсолютно жесткой в вертикальном и упруго-
деформируемой в горизонтальном направлениях; центр масс подвижных
частей стойки шасси, включающих колеса, часть рычага и некоторые
другие элементы, располагается на оси вращения колеса; центры масс
подвижных частей стойки и планера самолета движутся раздельно, их
взаимные перемещения происходят под действием сил взаимодействия
колеса с взлетно-посадочной полосой корабельной палубы (ВППл) и
подвижной массы планера со стойкой. В используемой здесь ММ шасси
дополнительно учитывается упругость стойки в боковом направлении и
принимается, что происходит только поворот подвижной части управ-
управляемой и самоориентирующейся стойки, причем на ограниченные углы.
Схема сил, действующих на ось движущегося колеса, представлена на
рис. 8.59 а.
Уравнения движения подвижной части стойки в инерциальной систе-
системе координат в скалярной форме записываются в виде
~ру ~Тг -тк8 , (8.55)
ру
337
где хи, уи, ги — текущие координаты центра масс подвижной части
стойки в инерциальной системе координат; Рх,Ру ,Рг — составляющие
Заделка
стойки
Направление
тк>\с движения
Верхняя
букса
Нижняя
букса
N
^ Шток амор-
амортизатора
Рис. 8.59. Силы, действующие на колесо (а) и шток амортизатора (б) самолета
корабельного базирования
силы взаимодействия между планером и шасси в связанной системе ко-
координат; Тх, Тг — составляющие силы трения пневматика при движе-
движении колеса по ВППл в связанной системе координат, пересчитанные из
системы координат колеса; Их, й^ — составляющие силы конструкци-
конструкционного демпфирования при упругих деформациях стойки; тк — масса
подвижной части стойки; Рпн — сила взаимодействия колеса с поверх-
поверхностью ВППл; аи , ссц, а13, #33 — направляющие косинусы связанной
системы координат относительно инерциальной; а2\п, сс2зп — направ-
направляющие косинусы нормали к ВППл (палубе) в инерциальной системе
координат.
Здесь отклонение вертикальной оси связанной системы координат и
нормали к ВППл от вертикальной оси инерциальной системы координат
считаются малыми, поэтому часть направляющих косинусов с линейной
точностью опускается, а часть принимается равными единице.
Сила Рш задается на основе данных эксперимента, аппроксимируе-
аппроксимируемых зависимостью
*пн ~'
при<5пн<5пнтах,
при5пн>5пнтах,
(8.56)
где щ (г = 1,3) — коэффициенты аппроксимации, 5ПН — текущее значе-
значение обжатия пневматики; <5пнтах, ^пнтах — максимально допустимые
обжатие и нагрузка на пневматик по каталогу колес. Зависимость (8.56)
может задаваться в виде табличных данных.
Текущее значение обжатия пневматика 5ПН , согласно рис. 8.59, нахо-
находится по формуле
где #к — радиус колеса, Янер — высота неровностей ВППл (например,
338
трамплина) или вертикальное перемещение качающейся палубы в инер-
циальной системе координат.
Сила трения Тх при повороте колеса равна
(8-58)
где ЗГф х, Т^л — силы трения в плоскости качения колеса по ВППл и
поперек ее; а^\, а*\ — направляющие косинусы системы координат
колеса в связанной системе.
Сила трения 7^ х в плоскости качения колеса равна
гДе /тр = /ск + /кач — суммарный коэффициент трения; /ск, /кач —
коэффициенты трения соответственно скольжения и качения. Коэффици-
Коэффициент трения скольжения /ск определяется по относительной скорости
проскальзывания пневматика по ВППл
V = -^^ ^, (8.60)
гДе &к.х — скорость движения оси колеса в проекции на оси системы
координат колеса, 11пал х — скорость движения палубы корабля за счет
качки в точке контакта с колесом в проекции на оси системы координат
колеса, {/окр =пк(Кк -<5ПН/3) — окружная скорость деформирования
поверхности пневматика в зоне контакта его с ВППл.
Угловая скорость пк вращения колеса определяется из дифференци-
дифференциального уравнения его раскрутки
ЛА = /сЛн(Як -<5ПН) - /кач^пнЯда&к . * (8.61)
Коэффициент трения качения /кач принимается постоянным. Зави-
Зависимость /СКFО строится на основе предварительной обработки экспе-
экспериментального материала и представляется либо в виде табличных дан-
данных, либо аппроксимационных выражений (см. [249]).
Сила трения скольжения 7^ г (поперек плоскости качения колеса)
находится аналогично Т^ х, при этом относительная скорость проскаль-
проскальзывания колеса считается постоянной.
Для управляемого колеса в простейшем случае его угол поворота (р
равен
<Р = -кф8Я9 (8.62)
где <5Л — сигнал летчика перемещением педалей на отклонение руля
направления, к^ —передаточный коэффициент.
339
Усилия Рх и Ру, действующие на ось колеса, связаны с продольной
<2 и поперечной N силами, приложенными к штоку амортизатора
(рис. 8.59 б) зависимостями
<2=Ч'хРх+Ч'уРу9 М=(рхРх+(руРу, (8.63)
Выражения (8.63) составлены в предположении, что плоскость стойки
нормальна плоскости симметрии ЛА и силы BкМпе дают составляющих
на поперечную ось г. В них коэффициенты у/х, у/у, срх, (ру зависят от
типа и геометрии стойки [42], там же приведены соотношения для опре-
определения <2 и N. Формулы для нахождения вертикальной нагрузки Ру,
действующей на планер и стойку шасси на прямом и обратном ходе, по-
получаются из выражений (8.63) путем подстановки в них соотношений для
сил B и N. В итоге величина вертикальной нагрузки Ру =
= /(B^,(рх,<рум/х,\1/у,Рх) определяется типом силовой стойки, ее сило-
силовыми и геометрическими характеристиками.
Лобовая сила Рх связана с упругой деформацией стойки следующим
образом:
Р^к^Ах*, (8.64)
где к^ = 5" — матрица жесткости стойки; 5 — матрица податливости
стойки; Ахк — смещение оси колеса в направлении действия силы Рх,
которое может быть найдено как разность между фактическим положе-
положением центра масс подвижной части стойки с учетом ее деформации в
связанной системе координат хупрA) и без учета хжA):
(8.65)
Координата хж (О соответствует положению жесткой стойки и зави-
зависит от величины обжатия штока, типа стойки и перемещения заделки из-
за упругих деформаций ЛА (точки крепления стойки к планеру ЛА).
Жесткость стойки в лобовом направлении к^ в общем случае явля-
является функцией обжатия амортизатора стойки и находится эксперимен-
экспериментально.
Силу конструкционного демпфирования упругих колебаний стойки
определяют по зависимости
(8.66)
где Ад:к — скорость изменения поперечных упругих колебаний стойки,
7]х — логарифмический декремент затухания; обычно Т]х ~ 0,3.
Силы Р1 и Ог рассчитываются аналогичным образом.
Величины обжатия и скорости обжатия амортизатора вычисляют, ис-
исходя из взаимного положения и относительной скорости оси колеса и
точки крепления стойки на планере.
340
Гтр0
рО
Д'ам
е
при
- при
А/ам
А/ам
Начальные условия для интегрирования дифференциальных уравне-
уравнений, описывающих движение амортизационной системы самолета при
посадке, соответствуют необжатым пневматику и амортизатору и невра-
щающимся колесам. Для описания взлета ЛА необходимо предваритель-
предварительно сбалансировать амортизационную систему самолета, стоящего на па-
палубе. Перед началом движения ЛА при взлете с трамплина силы тяги
двигателей уравновешиваются силами упругости основных стоек шасси,
колеса которых зафиксированы на задержниках. Начальные условия за-
задачи могут быть определены двумя способами. Первый из них заключа-
заключается в решении системы нелинейных алгебраических уравнений или «ди-
«динамическая балансировка» путем интегрирования дифференциальных
уравнений движения при условии посадки без вертикальной скорости.
Этот способ трудоемкий, так как связан с интегрированием сложной сис-
системы нелинейных дифференциальных уравнений. Второй способ нахож-
нахождения начальных условий является более простым и для ускорения про-
процесса сходимости сводится к сглаживанию зависимости силы трения
^тр = ^тр(О от времени I амортизатора при его циклической работе по
малому параметру е , для которого
(8.67)
где 7^р о — значение силы трения амортизатора до сглаживания, А/ам —
скорость обжатия амортизатора. Этот прием при меньшем значении е
применяется и для ускорения процесса интегрирования уравнений дви-
движения после балансировки.
Как показали исследования, для предварительных расчетов, а также
рассмотрения вопросов поведения ЛА без глубокого знания нагрузок,
приходящихся на конструкцию шасси, может быть применена упрощен-
упрощенная ММ амортизационной системы. В этом случае стойка с амортизато-
амортизатором и колесами может заменяться пружиной с нелинейной жесткостью и
соответствующими ограничениями и демпфером с переменным коэффи-
коэффициентом демпфирования, а продольная и боковая силы трения вычислены
по величине реакции опоры при помощи постоянных коэффициентов
трения. При этом пренебрегают инерцией подвижной части стойки и ее
упругостью в лобовом и боковом направлениях. Вследствие этого можно
существенно уменьшить количество интегрируемых дифференциальных
уравнений амортизационной системы и увеличить шаг их интегрирова-
интегрирования. Такой упрощенный подход к формированию ММ амортизационной
системы позволяет значительно сократить время решения задачи на
ЭВМ. Балансировка ее осуществляется методом последовательных при-
приближений.
Моделирование задержников колес основных стоек шасси, фиксации
ЛА на челноке катапульты и предварительного обжатия амортизации для
взлета с подскоком происходит в процессе динамической балансировки.
Последнее может осуществляться тремя способами: в районе центра масс
ЛА прикладывается сила, прижимающая его к ВППл, обжимаются амор-
341
тизаторы и пневматики; соответствующие силы прикладываются в задел-
заделке каждой стойки; у каждой стойки дополнительно обжимаются только
амортизаторы.
8.6.4. Некоторые результаты исследований. Возможности матема-
математического моделирования проиллюстрируем на примере взлета с помо-
помощью катапульты и трамплина и посадки на ГФ гипотетического кора-
корабельного самолета дальнего радиолокационного обнаружения типа Е-2С
«Хокай».
Посадка на гаковый финишер. Обратимся к анализу результатов вы-
вычислений, касающихся посадки самолета массой 30 т на ГФ. Величины
нагрузок на конструкцию ЛА при посадке на ГФ во многом зависят от
его пространственного углового положения и скорости перед началом
взаимодействия с палубой и приемным тросом. Начальные условия по-
посадки: центр масс самолета находится над палубой на высоте
#цм = 3,3 м (колеса носовой и основных стоек шасси палубы не касают-
касаются), горизонтальная скорость ЛА относительно палубы соответственно
Vх = 45 м/с. При этом корабль движется прямолинейно и равномерно,
обеспечивая скорость встречного воздушного потока над палубой при
посадке 15 м/с. Угол отклонения закрылков составляет 45°.
Основными варьируемыми начальными параметрами движения само-
самолета на заданной высоте Нбыли: координаты центра масс ЛА хцм и гцм
относительно середины приемного троса (в стартовой системе коорди-
координат), вертикальная скорость снижения 1}у, углы тангажа в и курса (р
при угле крена у = 0. При сим-
симметричном зацеплении гака с
приемным тросом менялись па-
параметры [/г 0 и хцм, при не-
несимметричном — гц м и (р. Бо-
Боковая скорость V'г самолета в
системе координат ГФ определя-
определялась по (р из условия равенства
нулю начального угла скольже-
скольжения /3. Область варьируемых
1,2 1,6 ^ с параметров выбиралась, исходя
Рис. 8.60. Временное изменение величины из расчетных условий нагруже-
нагрузки Ру на носовую (кривая 7) и основ- ния самолетов корабельного ба-
ную B) стойки колес при посадке ЛА на зирования.
гаковый финишер при несимметричном Сплошные линии рис. 8.60
входе в приемный трос отражают законы нагружения
РуA) во времени г соответственно носовой G) и основных B) стоек шас-
шасси при посадке самолета на ГФ с центральным входом при начальном
угле тангажа 0=4°, вертикальной скорости снижения V'у = 3 м/с, поло-
положении его центра масс по отношению к приемному тросу лгц м = -1 м и
342
0
высоте крепления шарнира штанги гака относительно центра масс аппа-
аппарата Яш = -2,2 м перед касанием палубы. Как видим, более нагружен-
нагруженной оказалась носовая стойка. Это связано с тем, что низкое расположе-
расположение штанги крюка (на 2,2 м ниже центра масс ЛА) приводит к возникно-
возникновению большого отрицательного момента тангажа при росте натяжения в
приемном тросе. Под действием данного момента хвостовая часть само-
самолета поднимается, вследствие этого нагрузка перераспределяется с ос-
основных стоек на носовую. Анализ параметрических исследований пока-
показывает, что нагрузку на носовую стойку можно уменьшить за счет увели-
увеличения высоты Яш положения шарнира штанги гака и длины носовой
стойки. Штриховые линии на рис. 8.60 показывают изменение характера
нагружения стоек при одновременном использовании обоих конструк-
конструктивных мероприятий (Яш = -1,2 м, длина носовой стойки увеличена на
0,8 м). В этом случае максимальная нагрузка на носовую стойку снизи-
снизилась примерно в 1,9 раза при сохранении уровня нагруженности основ-
основной стойки; при этом практически демпфируется переходный процесс и
несколько сокращаются длины участков отрыва колес от палубы для
обеих стоек.
На рис. 8.61 для тех же начальных условий нанесено изменение лобо-
лобовой нагрузки Рх во времени г на основную A) и носовую B) стойки шас-
шасси при посадке ЛА на ГФ. Как видим, из-за влияния упругости стоек из-
Рис. 8.61. Временное изменение лобовой нагрузки Рх на носовую (кривая 1) и основ-
основную B) стойки колес при посадке ЛА на гаковый финишер с центральным входом
менение нагрузок при ударе колес о палубу носит колебательный харак-
характер, причем более нагруженной является основная стойка. Это объясня-
объясняется тем, что в момент касания палубы колесами стоек самолет имеет
больший угол тангажа, чем в момент касания носовым колесом. Поэтому
сила реакции палубы для основных стоек имеет существенно большую
лобовую составляющую в системе координат ЛА. Большие лобовые на-
нагрузки опасны тем, что могут вызвать заклинивание амортизатора.
343
На рис. 8.62 нанесены максимальные вертикальные нагрузки
действующие на стойки шасси за время движения ЛА по палубе, в зави-
N
0=0°
ч
1/
0 = 4°
0=8°
_—-—"
-7
-6
-5
-3
-2
-1 Ц у, м/с
б
о
±
0 = 4'
-Г-
H=8°
.1.
-2
О
Рис. 8.62. Изменение максимальных вертикальных нагрузок Рупш на носовую
(сплошные линии) и основные (штриховые) стойки шасси при движении ЛА по палу-
палубе при разных значениях начального угла тангажа 0 в зависимости от вертикальной
скорости посадки IIу (а) и от расположения его центра масс *ц м (б)
симости от начальных значений вертикальной скорости посадки 1]у (при
хпм = -1м) (а) и положения центра масс лгцм (при IIу = -2м/с) (б) по
отношению к приемному тросу при разных начальных значениях угла
тангажа в ; сплошные линии — для носовой стойки, штриховые линии —
для основной стойки. Анализ данных рис. 8.62 а показывает, что увели-
увеличение Vу (по абсолютной величине) при относительно малых углах
тангажа 0 < в < 8 приводит к резкому возрастанию нагрузки на основ-
основные стойки (за счет увеличения кинетической энергии самолета в це-
целом). При этом нагрузка на носовую стойку сначала снижается при
344
О < II у < -3 м/с, а начиная с 1/у > -3 м/с несколько возрастает, но не так
резко, как для основной стойки. Как показывают дополнительные пара-
параметрические исследования, при больших углах тангажа приемный трос
ГФ «подсекает» опущенную хвостовую часть самолета. В результате это-
этого у самолета начинает развиваться вращательное движение по углу тан-
тангажа с последующим сильным ударом колеса носовой стойки о палубу
(свыше 700 кН при (/у=0 и зацеплении в воздухе). Увеличение же на-
начальной вертикальной скорости при больших углах тангажа приводит к
тому, что самолет перед касанием троса успевает уже значительно опус-
опустить нос, возможность для развития вращательного движения самолета
уменьшается и сила удара снижается. Следует отметить, что хотя увели-
увеличение начального угла тангажа при малых Vу вызывает рост нагрузки на
новую стойку при посадке на ГФ, вместе с тем при малых углах тангажа
диапазон вертикальных скоростей, допустимых по условиям зацепления
приемного троса, значительно сужается.
Из рис. 8.62 б видно, что начальное положение центра масс ЛА по
отношению к приемному тросу хц м оказывает слабое влияние на нагру-
жение носовой стойки (сплошные линии) и практически никакого влия-
влияния на нагружение основной стой- м 105 Нм -
ки (штриховые линии). изг'
О динамике нагружения заделки
пилона антенны можно судить по
кривым рис. 8.63, характеризую-
характеризующим изменение изгибающего мо-
момента Мтт во времени I с учетом
упругости конструкции (кривая 7) -801.
и без учета B). Эти данные полу- Рис. 8.63 Временное изменение изгибаю-
чены при начальных условиях за- щего момента Мизг в заделке пилона
хода ЛА на посадку с центральным антенны с учетом упругости конструкции
зацеплением приемного троса ГФ: СО и без учета B) при посадке ЛА с цен-
о тральным входом в приемный трос гако-
•*ц.м = ~1 м , а = 8 , Vу — —Ъ м/с . вого финишера.
Как и следовало ожидать, изгибающий момент достигает
максимальной величины при ударе носовым колесом о палубу. Причем
касание палубы колесами основной и носовой стоек, зацепление прием-
приемного троса гаком сопровождаются сильным возбуждением поперечных
упругих колебаний фюзеляжа, что отражается на резком росте
максимальной нагрузки в заделке пилона антенны (более чем в 2,5 раза)
по сравнению с расчетом «жесткого» самолета. Рисунок 8.64
иллюстрирует изменения продольной пх и нормальной пу перегрузок во
времени г в районе кабины при посадке самолета на ГФ с прежними
начальными условиями; сплошные линии — без учета упругости
конструкции, штриховые — с учетом. Видно, что упругость конструкции
слабо влияет на продольную перегрузку пх и значительно на
нормальную пу , увеличивая ее примерно в 3,5 раза.
-40
345
Обратимся к результатам вычислений, касающихся посадки самолета
на палубу при нецентральном его входе в ГФ. За основные параметры
нецентрального входа в ГФ принимались начальные значения бокового
пх,пу "XI 1 1 I 1 смещения центра масс ЛА
гцм и его курсового угла
(р относительно оси по-
посадочной палубы при ос-
остальных начальных пара-
параметрах, равных: 0 = 8°,
-2
1 '
п и V
0,8
1,2
1,6 ', с
лсц м = -1 м , V у - -3 м/с.
Анализ результатов моде-
моделирования на ЭВМ пока-
показал, что максимальные
нагрузки на стойки, уси-
усилия в сечениях конструк-
конструкции и перегрузки при не-
нецентральном входе ЛА в
ГФ не претерпевают зна-
Рис. 8.64. Временное изменение продольной пх и чительных изменений.
нормальной пу перегрузок в районе кабины при Однако при этом проис-
посадке ЛА с центральным входом в приемный трос ходит различное нагруже-
гакового финишера ние правой и левой ос-
основных стоек при движении ЛА по палубе после зацепления гаком при-
приемного троса. Может возникнуть опасное движение самолета по крену,
оно особенно заметно при нецентральном входе самолета по курсу. На
рис. 8.65 нанесено изменение
вертикальной нагрузки Ру во
времени г на основные стойки
при посадке самолета с парамет-
параметрами гцм = 0, ср = 5°; случай
скользящего приемного троса.
Кривая 1 характеризует нагру-
жение основных стоек в первый
момент одновременного касания
Р 1П4И
я -
л .
I
\
\
\
2
\^-
3
0,4
0,8
1,2
1,6
ими палубы. В дальнейшем по- Рис- 865- Временное изменение вертикаль-
сле отрыва колес обеих стоек за ной нагРУзки Ру на стойки шасси при не
счет действия на самолет отри- центральном входе ЛА в приемный трос
цательного момента крена от гакового финишера по курсу
положительной боковой силы ГФ первой касается палубы левая стойка
(кривая 2), а затем с некоторым запаздыванием во времени и правая
стойка C) с отличающимся уровнем ее нагружения. Исследования пока-
показали, что исправить это положение можно с помощью конструктивных
изменений, расположив шарнир штанги крюка на высоте Нш =-1,2м
относительно центра масс ЛА, увеличив высоту носовой стойки на 0,8 м,
а длину штанги до 1,5 м и начальный угол ее установки до 70°.
346
Влияние конструктивных изменений на характер нагружения основ-
основных стоек отражают данные рис. 8.66. В отличие от предыдущего случая
после отрыва колес обеих основ- р
ных стоек практически обеспе- у
чивается их одновременность 16
повторного касания палубы и ц
одинаковая нагрузка; 2 и 3 —
левая и правая стойки. 8
Далее проанализируем ре- 4
зультаты вычислений, касаю-
касающиеся боковой перегрузки пг,
достигающей при нецентраль-
нецентральном входе ЛА в ГФ в связанной
системе координат достаточно
умеренных значений; в основном
ее рост обусловлен поворотом
10" Н"
А
V
у
\
3 ш
у/
о
0,4 0,8
1,2
1,6
Г, с
Рис. 8.66. Влияние конструктивных измене-
изменений на характер вертикального нагружения
стоек шасси во времени при посадке ЛА с
нецентральным входом в приемный трос
гакового финишера
самолета по углу рыскания относительно основного направления дейст-
действующей со стороны ГФ силы. На рис. 8.67 показано изменение боковой
перегрузки пг во времени г в центре масс самолета при гц#м = 4 м , <р = 0
(кривые 1) и гпм = 0, (р = 5° B). Представленные на этом рисунке ре-
результаты получены для случаев свободно скользящего приемного троса
(сплошные линии) и его защемления в месте контакта крюка с ним в мо-
момент зацепления (штриховые). Третий случай (наличие трения между
крюком и приемным тросом) из-за сложности его ММ здесь не рассмат-
рассматривается. Предполагается, что его результаты будут занимать промежу-
промежуточные значения. Из анализа данных рис. 8.67 следует, что в обоих слу-
случаях боковые перегрузки не достигают больших величин. Отсюда видно
также, что при нецентральном входе ЛА в ГФ при гц м = 4 м, ср = 0
(кривые 1) в случая защемлен-
защемленного троса (штриховая линия) в
начальный момент происходит
резкое увеличение , боковой
силы (острый пик при
г = 0,24 с), которое зависит от
коэффициента трения троса о
крюк и других факторов. После
прохождения продольных волн
1
_
—
/
' 1
2
Л
¦
1, С
0,4
-0,4
Рис. 8.67. Временное изменение боковой пере-
перегрузки пг в центре масс ЛА при посадке его
по тросу боковая сила значи-
значительно уменьшается и дальше
на ГФ с нецентральным входом и разными
условиями взаимодействия крюка и приемного
троса
изменяется под действием разности натяжений и разности углов откло-
отклонений в разделенных крюком частях троса. Разность натяжений стремит-
стремится отклонить самолет в сторону короткой, а разность углов отклоне-
отклонений — в сторону длинной части приемного троса. Этим обстоятельством
объясняются противоположные знаки боковых перегрузок по моделям
скользящего и защемленного тросов в промежутке времени
0,3<Г<0,5с. В дальнейшем при повороте самолета по углу рыска-
347
ния боковая перегрузка пг в связанной с ЛА системе координат начинает
в основном определяться боковой проекцией продольной силы ГФ, кото-
которая не лежит в плоскости симметрии аппарата.
Анализ результатов вычислений показывает также, что при расчетном
случае и (защемлении приемного троса на гаке) в первый момент зацеп-
О
-0,2
-0,4
-0,6
-0,8
Рис. 8.68. Влияние длины свободного участка
троса на величину боковой перегрузки пг при
посадке ЛА на ГФ с нецентральным входом в
приемный трос
0
1
0
2 И
г
1
1
0
Ч2
,3
и с
ления троса гаком существен-
существенное влияние на величину боко-
боковой силы, действующей со сто-
стороны троса на крюке, оказыва-
оказывает длина свободного участка
троса от отклоняющего блока
до барабана тормозной маши-
машины (см. рис. 8.58). Это объяс-
объясняется тем, что в промежуток
времени до прихода продоль-
продольной волны к барабану на крюк
со стороны половины прием-
приемного троса действует сила, существенно превышающая силу его предва-
предварительного натяжения. При нецентральном по гцм положении крюка по
отношению к приемному тросу интервалы
времени прохождения продольной волны
левой и правой частей приемного троса,
разделенного гаком, будут разные.
В результате этого в течение некоторо-
некоторого промежутка времени на крюк со сторо-
стороны одной из частей приемного троса будет
действовать нескомпенсированная значи-
значительная сила. Причем при большой длине
свободного участка троса в результате
рывка со стороны крюка может возник-
возникнуть значительное падение силы натяже-
натяжения на короткой части приемного троса
вплоть до его полного ослабления. Это
явление и вызывает значительный рост
амплитуды боковой силы в начальный
момент зацепления гаком приемного троса
(рис. 8.68, гцм = 4м , (р = 0°, расстояние
от блока до барабана 15 м (кривая 1) и
35 м B)). Отсюда ВИДНО, ЧТО на дальней- Рис. 8.69. Временное изменение бо-
шее изменение боковой перегрузки, а так- кового смещения центра масс гц м
же на траекторию движения самолета по (а) и угла рыскания у/ при посад-
-10
ке ЛА на ГФ с нецентральным
входом при разных начальных
условиях и различном взаимодей-
взаимодействии крюка и приемного троса
палубе расстояние до барабана оказывает
слабое влияние.
В связи с ограниченными размерами
палубы важное значение приобретает за-
задача определения параметров траектории при движении ЛА по ней. Дан-
Данные рис. 8.69 иллюстрируют характер изменения во времени г бокового
348
смещения центра масс гц м (а) и угла рыскания у/ (б) самолета при по-
посадке с нецентральным входом в ГФ с использованием ММ скользящего
(сплошные линии) и защемленного (штриховые) приемных тросов при
начальных условиях: 1ЦМ = 4 м , (р = 0° (кривые 1) и гц м = 0, (р = 5° B).
Из анализа этих рисунков видно, что при посадке ЛА на ГФ с начальны-
начальными условиями гцм = 4м , ф = 0° (кривые 7) и дальнейшем движении по
палубе его начальная смещенность по гцм мало меняется при защемлен-
защемленном тросе (штриховая линия) и несколько уменьшается в случае сколь-
скользящего троса. Поворот самолета по углу рыскания у/ также не несет
серьезной угрозы, так как у него центр масс расположен близко к середи-
середине фюзеляжа, длина которого не превышает размаха крыльев. Поэтому
при повороте вокруг центра масс самолета относительно оси посадочной
палубы охват ее полезной площади не будет сильно увеличенным.
Анализ случая посадки ЛА при нецентральном входе в приемный трос
ГФ с начальными параметрами гцм = 0, ср = 5° (кривая 2 на рис. 8.69)
показывает, что здесь боковой увод центра масс аппарата может дости-
достигать около 6 м для обоих расчетных случаев (скользящий трос — сплош-
сплошная линия, защемленный — штриховая) и может нарастать с увеличением
вытяжки приемного троса ГФ.
Необходимо отметить, что при посадке ЛА на ГФ с нецентральным
входом в приемный трос по курсу основной причиной его бокового увода
является начальная боковая скорость самолета I]г в системе координат
тормозной установки. Поэтому величина бокового смещения при одном и
том же начальном угле курса (р во многом определяется общей скоро-
скоростью самолета и временем его торможения.
Укажем еще на то, что представленные на рис. 8.65-8.69 результаты
вычислений получены при «зажа- 4
том» носовом колесе, т. е. оно не у'
может поворачиваться вокруг 25
своей вертикальной оси. Прове- 20
денные исследования показали,
что действующие на самолет си- 15
лы и его боковой увод при посад- 10
ке на ГФ с самоориентирующим-
самоориентирующимся носовым колесом качественно 5
ведут себя так же, как при «зажа-
, 1У И •
р=
,
~гг-
2'
л!
г
том» колесе.
о
8 Г, с
Взлет с трамплина. На рис. Рис. 8.70. Временное изменение вертикаль-
8.70 показано изменение верти- ной нагрузки Ру на основную G) и носо-
кальной нагрузки на стойки шас- вую у) стойки шасси при взлете ЛА с трам-
си Ру во времени г при взлете плина
самолета массой 40 т с трамплина при скорости встречного воздушного
потока 15 м/с и угле отклонения закрылков 25°. Длина дорожки разбега
349
перед трамплином равна 180 м. Из рисунка видно, что максимальная на-
нагрузка на носовую стойку (кривая 2) существенно ниже, чем при посадке
на ГФ, а нагрузка на основную стойку (/) всего в 2,8 раза превышает
стояночную. Начальное резкое изменение нагрузки на носовую стойку
происходит при опускании задержников у колес основных стоек. Макси-
Максимальная нагрузка на основные стойки наблюдается сразу после схода с
трамплина носового колеса в момент времени г = 9,2с. Рисунки8.71 и
8.72 иллюстрируют соответственно изменения во времени I изгибающего
момента Мтг в заделке пилона радиолокационной антенны, нормальной
в кабине и про-
г, Ю3Н-м
перегрузки пу
Рис. 8.71. Временное изменение изгибаю-
изгибающего момента Мюг в заделке пилона
радиолокационной антенны при взлете ЛА
с трамплина с острой кромкой
дольной пх в обтекателе антенны;
трамплин с острой кромкой при
радиусе кривизны Яо = 0. Колеба-
Колебательный характер изменения во
времени изгибающего момента
МШТ и перегрузок пу, пх при
сходе ЛА с трамплина вызван
главным образом возбуждением
упругих колебаний конструкции за
счет резкой смены ритма нагруже-
ния планера самолета. Такие коле-
колебания из-за повышенной жестко-
жесткости конструкции аппарата сопровождаются появлением больших
ускорений деформации, что при- п п
водит к появлению значительных 4Г
инерционных усилий. Параметри-
Параметрические исследования показали, что 2
величину инерционных усилий 0
можно несколько уменьшить с _2
помощью конструкционных дора- _^
боток трамплина. Так, например,
за счет скругления верхней кром- Рис. 8.72. Временное изменение нормальной
ки трамплина радиусом кривизны пу и продольной пх перегрузок в обтека-
/?0 = 100 м максимальный изги- теле антенны при взлете ЛА с трамплина с
- „ острой кромкой
бающий момент при сходе с него
ЛА уменьшается на 10 %, а при #0 = 400 м — на 25 % по сравнению с
трамплином с острой кромкой.
Кроме того, анализ результатов вычислений показывает, что нагрузки
на ЛА при взлете с трамплина снижаются с уменьшением длины разбега
перед ним. Так, например, при длине разбега перед трамплином
Ь^ =105м амплитуды нормальной пу и продольной пх перегрузок со-
соответственно в кабине и в обтекателе радиолокационной антенны
уменьшаются примерно на 14% по сравнению со случаем 1р =180м
(см. рис. 8.72). Однако с уменьшением длины разбега перед трамплином
350
8
10
12
г, с
уц м центра масс ЛА при сходе с трам-
трамплина в зависимости от длины разбега
перед ним: 1 — Ьр = 105 м , 2 — 145 м,
3 —18Ом
быстро увеличивается величина просадки самолета у1ХМ (высота центра
масс ЛА относительно палубы) после схода с трамплина (рис. 8.73, кри-
кривые 1,2, 3 — Ьр = 105 , 145, 180 м). Отсюда видно, что просадка ЛА при
длине разбега перед трамплином у
Ьр = 105 м является неприемлемой.
В целом анализ результатов вы- 15
числений показывает, что уровень
нагруженности ЛА при взлете его с
трамплина существенно ниже, чем
при посадке на ГФ. Для снижения
нагруженности ЛА при взлете с
трамплина целесообразно приме- Рис. 8.73. Временное изменение просадки
нять скругленную верхнюю кромку
трамплина с радиусом кривизны не
менее 400 м.
На рис. 8.74 дано изменение ко-
координаты 1ЦМ центра масс и угла рыскания у/ самолета во времени г
при непарированном отказе двигателя во время взлета с трамплина. Оче-
Очевидно, что за 5 с самолет успевает развернуться почти на 300°, при этом
величина смещения центра масс
*ц.м становится опасной из-за ог-
ограниченных размеров палубы.
Взлет с катапульты. Взлет
ЛА с катапульты, как и посадка его
на ГФ, является достаточно серь-
серьезным случаем нагружения его
конструкции при расчете на проч-
прочность. Оценивая результаты мате-
математического моделирования на
ЭВМ режима взлета ЛА с помо-
помощью катапульты в целом, можно
сказать, что, за исключением про-
продольных усилий в носовой части
фюзеляжа, нагрузки и перегрузки
12
-Ж-
-60-
-100-
-140-
-180-
-220-
-260-
—-—
Ч
/
/\
/
-V
\
\
4,0 и с
о 1,0 2,0 3,0
Рис. 8.74 Временное изменение координа-
координаты гцм положения центра масс и угла ры-
рыскания у/ ЛА при непарированном отказе
двигателя во время взлета с трамплина
здесь ниже, чем при посадке на ГФ. Тем не менее необходимо отметить
некоторые интересные особенности в нагружении отдельных частей ЛА
при данном режиме взлета.
Наибольшие изгибающие моменты Мизг хвостовой части фюзеляжа,
в том числе и в узле крепления антенны, возникают при переезде носо-
носовым колесом края палубы; это соответствует моменту времени г ~ 3,5 с
на рис. 8.75. При этом резко изменяется вертикальная нагрузка Ру , дей-
действующая на носовую стойку шасси. Данное явление сопровождается
возникновением значительных ускорений упругих деформаций, внося-
вносящих заметный вклад в величину продольной силы хвостовой части фюзе-
фюзеляжа. Вместе с тем, следует сказать, что здесь приведены данные, отно-
351
сящиеся к наиболее неблагоприятному варианту взлета ЛА с помощью
катапульты при минимальной длине участка палубы на разжатие аморти-
Мизг,104Я-м -
2,0
41° Г, с
Рис. 8.75. Временное изменение изгибающего момента Мизг в узле крепления антен-
антенны при взлете ЛА с помощью катапульты
затора носовой стойки. С увеличением длины этого участка просадка
носового колеса несколько уменьшится, а значит снизится уровень на-
груженности отдельных частей ЛА и узла крепления антенны.
-2
1,0
2,0
Рис. 8.76. Временное изменение продольной перегрузки пх в обтекателе антенны при
взлете ЛА с помощью катапульты с учетом упругости конструкции (штриховая линия)
и без учета ее (сплошная)
При страгивании самолета с места всплеск нагрузок вопреки ожида-
ожиданиям оказался не настолько велик. Это связано с тем, что для рассматри-
рассматриваемого ЛА не требуется максимальных продольных ускорений при взле-
взлете с катапульты из-за относительно небольшой скорости его отрыва.
На рис. 8.76 показано изменение продольной перегрузки пх во вре-
времени I в обтекателе антенны с учетом упругости конструкции (штриховая
линия) и без учета ее (сплошная) при взлете ЛА с катапульты. Следует
352
обратить внимание на то, что из-за влияния упругости конструкции мак-
максимальные значения продольной перегрузки пх при сходе ЛА с палубы
(см. на рис. 8.76 изменение пх в диапазоне 3,3 < / < 3,7 с ) примерно в
2 раза превышают соответствующие значения на основном участке его
разгона.
§ 8.7. Моделирование процессов нагружения и деформирования
тяжелых транспортных летательных аппаратов
на наземных режимах
В последнее время идет качественное обновление не только манев-
маневренной, но и транспортной авиации. Появление таких самолетов-
гигантов, как Ан-124, «Руслан», Ан-225 и «Мр1я», позволило резко рас-
расширить номенклатуру перевозимых грузов и сократить себестоимость
перевозок. Их особенность: существенное увеличение взлетного веса
(например, максимальный взлетный вес самолета Ан-225 составляет
560 т), повышенная гибкость конструкции, многостоечные шасси (само-
(самолет Ан-124 имеет 12, а Ан-225 — 16 стоек), возможность использования
аэродромов как с бетонным, так и грунтовым покрытиями.
Следует отметить, что жизненный цикл ЛА включает наземные
(взлет, посадка и руление по ВПП) и воздушные режимы. Причем за это
время он пробегает по земле значительное расстояние. Кроме того, на-
наземные режимы являются определяющими в нагружении верхних пане-
панелей крыла тяжелых транспортных самолетов и основными для элементов
амортизационной системы. Поэтому очень важное значение имеет пра-
правильное определение уровня нагруженности самолета не только в полете,
при взлете и посадке, но и при движении по аэродрому. Так, например,
по оценкам специалистов [440] самолет С-130 при отработке многократ-
многократных циклов «посадка» накапливает до ~ 30 % усталостной повреждаемо-
повреждаемости. А нагрузки, действующие на самолет с крыльями малого удлинения
при движении его по аэродрому, являются расчетными практически для
всех элементов конструкции [323].
Исследование наземных режимов ЛА, особенно тяжелых транспорт-
транспортных, практически базируется на физическом эксперименте, а это трудо-
трудоемкий, дорогостоящий и продолжительный по времени процесс. Пока-
Покажем и здесь возможность математического моделирования и вычисли-
вычислительного эксперимента на ЭВМ в решении подобных практически важ-
важных задач самолетостроения.
8.7.1. К формированию структурной ММЛА для наземных режи-
режимов. Формирование подобной модели осуществляется с использованием
следующих систем координат (рис. 8.77). Движение ЛА рассматривается
в земной Оох§у818 и связанной Охуг системах координат, при этом
последняя располагается в центре масс ЛА и совмещается с главными
центральными осями инерции аппарата. Сила взаимодействия ЛА с
амортизационной системой ищется в системе координат Окхкукгк, свя-
связанной с осью вращения колеса. На этом же рисунке представлены силы,
действующие на конструкцию аппарата, где У — нормальная составляю-
353
щая вектора аэродинамической силы; Рх ,Ру ,Рг — составляющие
силы, действующей на колесо со стороны стойки; Рпн — сила взаимо-
взаимодействия колеса с поверхностью ВПП; Рх, Ру , Рг — составляющие силы,
действующей на ЛА со стороны стойки; Тх — суммарная сила трения,
возникающая при движении колеса по ВПП. Самая общая схема струк-
* чь
Рис. 8.77. Системы координат и действующие на ЛА силы при наземных режимах
движения
турной ММЛА для наземных режимов представлена на рис. 8.50. Приме-
Применительно к тяжелым транспортным самолетам структурная схема ММЛА
рис. 8.50 будет отличаться отсутствием тормозной посадочной парашют-
парашютной системы; ее использование для торможения тяжелых ЛА при посадке
в отличие от маневренных не предусмотрено. Кроме того, посадка такого
самолета может осуществляться как на бетонную ВПП, так и на грунто-
грунтовую. При формировании структурной ММ функционирования тяжелых
транспортных ЛА для наземных режимов по-прежнему центральное ме-
место занимает базовая ММ аэроупругости, которая дополняется ММ амор-
амортизационной системы с учетом неровностей поверхности аэродромов и
неоднородности грунтовой ВПП.
Технология формирования уравнений движения упругого ЛА, нели-
нелинейных по кинематике и линеаризованных по упругости и аэродинамике,
для полетных режимов на основе метода заданных форм, в качестве ко-
которых принимаются собственные функции, подробно описана в [43, 51,
249]. Матрично-векторная форма этих уравнений имеет вид B.112).
Собственные функции и обобщенные массы упругого ЛА предвари-
предварительно находятся по [315]. При этом конструкция аппарата представляется
354
в виде пространственно расположенных балок с идеальными упругими
свойствами. Расчетная схема обтекания строится из представления ЛА, в
отличие от упругой схематизации, в виде пространственно расположен-
расположенных тонких плоских несущих поверхностей, имеющих возможность уп-
упруго деформироваться в соответствии с законом, определяемым набором
собственных функций. При определении аэродинамических характери-
характеристик рассматривается безотрывное стационарное дозвуковое обтекание
ЛА в рамках модели идеальной сжимаемой жидкости и метода дискрет-
дискретных вихрей [57, 56].
8.7.2. Модель амортизационной системы с учетом податливости
грунта ВПП. На современных тяжелых транспортных самолетах исполь-
используют схемы многоколесных шасси. Причем их крепление к планеру осу-
осуществляют либо через независимые стойки, либо через «обобщенные»
стойки, вокруг которых группируется несколько колес. Группировка ко-
колес вокруг «обобщенной» стойки может осуществляться по-разному: ко-
колеса могут разносится в направлении качения или в перпендикулярном
направлении. В первом случае для
объединения колес широко применя-
применяется тележка (двух- или многоколес-
многоколесная), а во втором случае колеса (по
одному или по два) устанавливаются
на двух полуосях, которые непосред-
непосредственно крепятся к силовой стойке
(например, самолеты Ан-124 и Ан-225
имеют соответственно 12 и 16 стоек
шасси). В таких многоопорных схе-
схемах шасси, если опоры располагаются
отдельными компактными группами,
каждую группу опор при характери-
характеристике схемы шасси рассматривают в
качестве одной «обобщенной» опоры.
Поэтому схемы шасси названных вы-
У к"'
Рис. 8.78. Схема сил, действующая на
колесо при движении самолета по
грунтовой ВПП
ше самолетов по-прежнему считают трехопорными. Обо всем этом под-
подробно изложено в [249].Там же приводятся типы силовых стоей и расчет-
расчетные схемы динамики шасси в варианте, предложенном В.Д. Бариновым и
Г.К. Непомнящим. Полные ММ шасси имеются в [148].
Уравнения движения каждого колеса здесь в отличие от уравнений
(8.55) выписываются относительно земной системы координат
(рис 8.78), в скалярной форме они будут иметь вид
(8.68)
= *г ~"
н. г
где тк — масса колеса; хк, ук , гк — координаты положения оси колеса;
РШгу , РПн. г — вертикальная и боковая составляющие силы взаимодей-
взаимодействия колеса с поверхностью ВПП; ОХ,О? — составляющие силы демп-
355
фирования упругих колебаний конструкции стойки; Рх, Ру, Рг — со-
составляющие силы взаимодействия со стороны стойки шасси в земной
системе координат; Тх — суммарная горизонтальная сила трения при
движении колеса по ВПП.
Боковая сила Рпн г возникает при движении колеса в горизонтальной
плоскости под углом к вектору скорости и зависит от величины нормаль-
нормальной силы Ру и угла скольжения колеса <рск
г кук
<Рск = агс1§ —1 <рупр,
их
где <рск — угол скольжения колеса; V х>\] г — компоненты вектора ско-
скорости самолета II; пку — угловая скорость вращения колеса вокруг оси
Окук, (рупр—угол отклонения управляемого колеса; зависимость
Рпн.у = /(^у'Фск) находится экспериментальным путем.
Величина текущего обжатия пневматика <5ПН при взаимодействии
колеса с грунтовой ВПП в отличие от (8.57) вычисляется в земной систе-
системе координат по формуле
<*пн = Як - Ук - #кол + #нер > (8.69)
где Як — радиус необжатого колеса, Якол — глубина колеи после про-
прохода колеса самолета, Янер — высота неровностей ВПП, ук — положе-
положение колеса над ВПП.
Сила взаимодействия Рт пневматика с ВПП на основе эксперимен-
экспериментальной диаграммы обжатия пневматика может представляться таблично,
либо по-прежнему аппроксимационной зависимостью (8.56).
Суммарная горизонтальная сила трения Тх будет равна
*х = ^тр "*" мр = Мкачм1н.}; "*" /грмш.у » (8-70)
где Т^ — сила трения, обусловленная раскруткой колеса, 7^ — сила
сопротивления грунта движению колеса, /икая — коэффициент трения
качения, /^ — коэффициент сопротивления грунта качению колеса за-
зависит от глубины колеи.
Коэффициент трения качения /икач связан с относительной скоростью
проскальзывания колеса, равной
(8-71)
где 1/х — поступательная скорость движения колеса по ВПП, {Уокр —
окружная скорость поверхности колеса, принимаемая равной
^окр=-адк-<5пн/3)-
Угловая скорость п,к вращения колеса определяется из уравнения его
раскрутки
356
к , (8.72)
где М^ = /^кач^пн^к — момент силы трения качения. Зависимость
^кач = /(^О строится на основе предварительной обработки экспери-
экспериментального материала и представляется либо в виде табличных данных,
либо аппроксимационных выражений (см. работу [249], § 8.2).
Алгоритмы определения составляющих Рх и Ру силы взаимодейст-
взаимодействия между планером и амортизационной системой в зависимости от типа
силовой стойки имеются в [249]. Поэтому здесь на них останавливаться
не будем, а опишем методики расчета высоты неровностей Янер ВПП и
глубины колеи Якол после прохода колеса самолета. Для этого обратим-
обратимся к ММ грунтовой ВПП.
8.7.3. Модель грунтовой ВПП. Для определения нагружения и де-
деформирования конструкции ЛА при движении по рулевой дорожке (РД)
и ВПП необходимо иметь ММ их рельефа. Способы представления не-
неровностей аэродрома с бетонным покрытием описаны в [323]. Статисти-
Статистические подходы к определению спектральной плотности неровностей
аэродромов ED2) (п=2п/Ь —пространственная частота неровностей;
Ь — протяженность неровности), аппроксимируемых зависимостями ти-
типа б(п) = С/О,п (Сип — параметры измерений, зависящие от состоя-
состояния аэродрома), изложены в [78, 188, 252, 323, 393]; их удобно применять
при использовании спектрального метода нахождения нагруженности и
повреждаемости конструкции ЛА. Данный способ представления неров-
неровностей является основным при пространственном моделировании профи-
профиля ВПП (РД). Способы моделирования неровностей с помощью спек-
спектральной функции приведены в [252,417].
Заслуживает внимания способ, предложенный в [371а], который по-
позволяет моделировать на ЭВМ неровности непосредственно по функции
спектральной плотности вида 5D2) = С/&п . Алгоритм нахождения вы-
высот неровностей по данному способу базируется на методе скользящего
суммирования [87]. Получаемые по нему реализации достаточной длины
с самого начала обладают свойством стационарности [376].
Что касается ММ грунтовой ВПП, то здесь будем следовать работам
[23, 39]. По своей структуре ММ грунтовой ВПП состоит из двух незави-
независимых модулей, которые строятся по принципу «вход-выход». Один из
них формирует характеристики грунтового аэродрома, включая неровно-
неровности его поверхности и прочность грунта, а второй дает возможность оп-
определять глубину колеи Якол и коэффициент сопротивления качения
1ЛШЧ колеса при движении ЛА по реализациям грунтовой ВПП.
Моделирование рельефа и прочности грунтовой ВПП. При пробеге
ЛА по грунтовому аэродрому источником действующих на него внешних
переменных нагрузок являются неровности поверхности ВПП и неодно-
неоднородности грунта [23, 252].
357
Действие неоднородности грунта проявляется в изменении лобов]
сил сопротивления грунта качению опор самолета, в возникновении
более слабых участках дополнительных неровностей поверхности за сч«
образования колеи из-за разрушения поверхностного слоя грунта колес;
ми.
Для оценки прочности и долговечности конструкции ЛА при пробе
по грунтовой ВПП необходимо знать характеристики поверхности эк<
плуатируемых летных грунтовых полос. Для получения этих характерна
#нер,м а стик также применяется метод стан
тистического моделирования, как и:
для аэродромов с бетонным покры-
покрытием. Но в отличие от аэродромов с
бетонным покрытием здесь преду-
предусматривается определение как
спектральной плотности неровно-
неровностей, так и спектральной плотности
прочности поверхности грунтовых^
ВПП. Для получения реализаций
неровностей и прочности грунтовой
ВПП, как показывает расчетная
практика, удобно использовать ал-
0,08
о
-0,08
р
12
10
г
1
0 20
/1 л
и1
л
Т/ 1
\^
•V
А
40
у
и/
А /\ \
60 ^м
б
ъ
0 20 40 60 ^м
Рис. 8.79. Расчетные профили неровно-
стей Янер (а) и прочности грунта а^ (б)
грунтовых ВПП вдоль длины полосы Ь
Д«
горитм? основанный на методе
СКОЛЬЗЯщего суммирования [30, 87].
На рис. 8.79 приведены примеры
профилей, рассчитанные с использованием указанного алгоритма, в виде
изменения неровностей Янер грунтовых ВПП (а) и прочности грунта
СГрр (б) ВДОЛЬ ДЛИНЫ ПОЛОСЫ Ь.
Определение сопротивления грунта качению колеса и глубины об-
образующейся за ним колеи. Эти величины могут быть определены на ос-
основе следующих предположений [23].
1. При качении пневматических колес
по грунту площадь контакта пневматика
с ним возрастает по мере углубления
образующейся за ним колеи. При этом
считается, что при качении колеса пло-
площадь контакта пневматика с грунтом
увеличивается до тех пор, пока реактив-
реактивное сопротивление грунта качению /?кач
не уравновесит действующую на колесо
нагрузку. Оно принимается постоянным
(Кшч = соп81) при распределении напря-
напряжений сг^ по поверхности грунта в зоне Рис. 8.80. Силы, действующие на
контакта вида, показанного на рис. 8.80. колесо в зоне контакта с Ч*™*
Величина а^ зависит от типа грунта, степени его влажности и уплотне-
уплотнения. Окончательные формулы получаются на основе экспериментальных
гр
358
данных по измерению деформаций пневматиков при прокатке по грунту
разной прочности* и следующих допущениях: 1) пневматик колеса при
качении по грунту деформируется меньше, чем при качении по поверх-
поверхности с твердым покрытием; вертикальное обжатие пневматика <5ПН за^
висит от прочности грунта а^; 2) упругий пневматик испытывает
меньшее сопротивление- грунта его качению и образует меньшую глуби-
глубину колеи на поверхности грунта в сравнении с абсолютно «жестким»
пневматиком при одинаковых габаритах и нагрузке; 3) поверхность кон-
контакта деформированного пневматика с грунтом имеет образующую с ра-
радиусом (#к + А#к ) и ширину (В + АВ ), где В — ширина не деформиро-
деформированного пневматика (рис. 8.81). ф и. ^
В результате решения уравнения
равномерного движения колеса с
учетом изложенных выше допуще-
допущений и обработки эксперименталь-
экспериментальных данных по измерению дефор-
деформаций пневматиков при качении по
грунтам разной прочности установ-
установлено, что глубина колеи Якол =
= ЯРт*°гр>о*В,Лъ>& зависит от #нер
нагрузки на колесо Рпн, прочности
грунта (Трр, наружного диаметра Г>
и ширины В пневматика в недефор-
\
\
I
мированном состоянии, коэффици-
коэффициентов Ао и ^, учитывающих соответственно деформацию пневматика
при качении по грунту и повышенное (или пониженное) его обжатие
против нормируемого C2-35 % от его высоты).
Опытным путем выявлено, что коэффициент До в диапазоне значений
1 < Яо < 2,5 зависит от прочности грунта; А$ = /(о>р).
Коэффициент ^ зависит (^ = /(стГр,/>пн,А')) от прочности грунта
нагруженности колеса Рпн (Рпн =
, где
— стояночная
нагрузка на колесо по каталогу авиационных колес, Рпн — фактическая
А ~ 1>СТ
•, пока-
нагрузка на колесо), безразмерного коэффициента К = -
*пн
А/7,
пн
зывающего, на сколько надо увеличить давление в пневматике (в долях
от исходного давления), чтобы при нагружении колеса силой, в два раза
превышающей Р^, сохранилось «нормальное» обжатие пневматика,
равное 32 %. Здесь Ар = (ртах — р) — разность между максимальным
давлением в пневматике, для которого имеются результаты испытаний, и
исходным; АРПН — разность между нагрузками, вызывающими обжатие
пневматика, равное 32 % его высоты соответственно при максимальном
359
давлении ршхх, и исходном р. Причем вид функциональной зависимости |
% = /(<тГр,Рпн, К) зависит от величины Рпн. Характер зависимостей'\
% = /(сггр,^1Н,^) для случаев ^н>1 и Рш<1 несколько отличается
друг от друга.
В результате обобщения экспериментальных данных обнаружено, что
коэффициент сопротивления грунта качению колеса /^ = /(#кол, А ^о)
зависит от глубины Якол, наружного диаметра пневматика И и коэффи-
коэффициента Яо, учитывающего деформацию пневматика при качении по
грунту.
Анализ опытных данных показывает, что на величины Якол и /^
при увеличении скорости движения самолета по грунтовой ВПП также
влияют: замедленность протекания во времени деформации грунтов,
уменьшение нагрузки на колесо вследствие влияния подъемной силы
крыла, характер динамического взаимодействия колеса с неровностями
поверхности ВПП. Указанные факторы в функциях
могут быть учтены с помощью коэффициента Ку , учитывающего ско-
скорость движения колеса, отличную от скорости, равной 1/х = 1 м/с. Зави-
Зависимость Кц = /(*/*) устанавливается на основе статистической обра-
обработки экспериментальных данных; ее аппроксимационная форма опреде-
определяется прочностью грунта о^.
В случае многоопорной схемы шасси необходимо дополнительно
учитывать многократный проход колес опоры по одному следу (в связи с
этим последующее колесо несмотря на то, что увеличивает глубину ко-
колеи, подвергается меньшему сопротивлению грунта его качению),
уменьшение глубины колеи за счет меньших горизонтальных сдвигов
грунта в зоне между колесами при близком их расположении на одной
оси. Эти эффекты в функциональных зависимостях для
учитываются коэффициентами соответственно К^, К2, получаемых
также на основе обработки данных эксперимента.
8.7.4. Упрощенная структурная ММЛА для наземных режимов.
Исследования показывают, что вклад «упругих» тензоров ]к , ]% и век-
вектора 1^, характеризующего асимметрию тензора ]%, в ускорения щ
обобщенных координат упругих колебаний даже в случаях, наиболее
опасных по уровню нагружения и деформирования конструкции ЛА, на-*
пример, в случае посадки самолета на ГФ, не превышает 1,5-2 % (по ка-<
ждому учитываемому тону упругих колебаний). Поскольку точность ото-
отображения упругих свойств конструкции при его балочной схематизации вГ
структурной ММЛА значительно ниже величины их вклада в ускорения щ ,
360
то в дальнейшем влиянием «упругих» тензоров будем пренебрегать. То-
Тогда упрощенная структурная ММЛА для наземных режимов примет вид
(8.73)
где г — вектор положения оси колеса в связанной системе координат
Охуг.
Правые части первых трех уравнений системы (8.73) равны
<8-74)
к=11=1
Положение ЛА в земной системе координат, связанной с ВПП,
определяется соотношениями:
х§ = II х соз у соз0 + II у (~со8^ зт в соз у + зт у/ зт у) +
+ IIг (соз у/ зт в зт у + 81П ^ соз у),
1§ = 47^ созб зтуА + ^/^(соз^зту + зтб зт^созу +
+ V\ (созу/ зт у - зт 0 зт 1/а §т у), (8.75)
у = йд. ~(&у соз у -йг зтуI§0 ,
0 = Х2у 8111 у + {2гСО8у ,
у/ = (й^ соз у -О,г зту)зес0 .
В итоге решение задачи о динамике движения тяжелого транспортно-
транспортного ЛА на взлетно-посадочных режимах сводится к совместному интегри-
интегрированию систем уравнений (8.73), (8.75) при соответствующих началь-
начальных условиях. В качестве начальных условий принимается состояние ЛА
и его амортизационной системы перед касанием ВПП. Они определяются
из решения задачи установившегося полета ЛА с посадочными горизон-
горизонтальной IIх и вертикальной II у скоростями в земной системе коорди-
координат, описываемой линейными алгебраическими уравнениями вида
^Ч = 0,
1=1 У=1
+ %т$д? +%т$6+ =0, (8.76)
1=1 у=1
361
где 5р в — положение руля высоты, знак «+» означает, что используют-
используются симметричные формы собственных упругих колебаний конструкции
ЛА и симметричное отклонение рулей; С = &/д*50 — безразмерный вес
ЛА; #*=Ро(# +1/ )/2 — скоростной напор, 50 — характерная^
** ?* /
площадь.
Из решения системы (8.76) находятся балансировочные значения угла
атаки а, руля высоты <5р в и величины обобщенных координат ц\.
Угол тангажа ЛА вычисляется по формуле
в = а + агс1§«7^ /#^). (8.77)
Положение каждого колеса шасси находится в связанной системе ?
координат по уравнениям '
хк=хс-нХК9 ук=иУ8> *к = #*,. (8.78),
где }^с, хс — координаты точки крепления стойки к ЛА, Нук, Нж — .
размеры стойки в необжатом состоянии (см. работу [249], § 8.2).
Таким образом, при заданном положении центра масс самолета зави-
зависимости (8.76)-(8.78) позволяют определить начальное положение и ста-
статическую деформацию ЛА перед касанием ВПП.
8.7.5. К оценке усталостной повреждаемости конструкции лета-
летательного аппарата при движении по ВПП. Для оценки усталостной
повреждаемости конструкции ЛА используем традиционные подходы
[191, 196]. Известно, что при расчете долговечности по номинальным
напряжениям наиболее широко используется линейное суммирование
повреждений в соответствии с правилом Пальмгрена-Майнера [307]. В
качестве меры повреждения от цикла уровня г принимается величина
&=*!•/*,•. (8.79) }
где щ — число циклов уровня /, Л^- — число циклов уровня I, приводя-
приводящих к разрушению элемента. Величина ДО,- определяется по |
экспериментальной кривой усталости, аппроксимируемой выражением ]
ДО1.ст/11=Л. (8.80) [
Величины А и т — экспериментальные параметры кривой усталости, •
о*; — амплитуда номинальных напряжений уровня г. 1
Итоговое повреждение от всей последовательности к нагружений вы- !
числяется как сумма повреждений от каждого уровня независимо от по- ]
рядка расположения циклов: \
к
1=1
362
Считается, что разрушение происходит при условии
&=!• (8-82)
Выделение циклов нагружения щ в рассмотренном ниже примере
производится по методу «дождя» [191, 196].
По постоянным А и т в (8.79) в настоящее время накоплена большая
информация. Вместо (8.80) можно использовать более современные вы-
выражения [288, 289]. Для этого нагрузку реального полета надо привести к
эквивалентному по повреждаемости отнулевого цикла и выражение
(8.80) заменить следующим
#эсгэт=А, (8.83)
где Мэ — число циклов нагрузки с напряжением съ, которое выдержи-
выдерживает конструкция до разрушения, сгэ — приведенное напряжение отну-
отнулевого цикла, определяемое по формулам [265]:
рса+ст) пристт>0,
42(аа + 0,2сгт) приат < 0 и (аа + ат) > 0, (8.84)
0 при (сга+сгт)<0.
С учетом (8.83) выражение (8.81) для определения усталостной по-
повреждаемости принимает вид
В качестве исходных данных для оценки усталостной повреждаемо-
повреждаемости используются внутренние силовые факторы, определяемые по мето-
методике, описанной в работах [43, 51]. Так, например, изгибающий момент
М^зг в сечении крыла от аэродинамических сил находится по формуле
г
1 ' ~1
+-тизА
и -1
1-1
77тизг^/
и -1
(8.86)
При линейной связи между нормальным напряжением о и силовым
фактором Мизг виДа
п. — К Ма . К ъ-0
I Н> ИЗГ/ » // '
где // — номер рассматриваемой точки в сечении крыла, выражение
(8.85) примет вид
(8.87)
363
Для сопоставления повреждаемостей ^ и %% в одной и той же точке!
конструкции при движении ЛА соответственно по бетонной и грунтовой]
ВПП можно использовать соотношение вида: |
• (8.88)]
8.7.6. Некоторые результаты вычислений. Они были получены на^
примере тяжелого транспортного самолета типа Ан-225 массой^
ш^ла = ^® Т# ^^ Расчета Ф°РМ и частот собственных колебаний само-1
лета использовалась балочная схематизация его конструкции. Предвари-)
тельный расчет аэродинамических и аэроупругих характеристик ЛА про- 3
изводился МДВ с учетом экранного эффекта при удержании 10 тонов 4
упругих колебаний конструкции. Шасси самолета выполнено по много- *
опорной схеме. Амортизационная система включает 16 независимых сто-;
ек шасси, каждая из которых оснащена амортизатором и двумя пневма-1
тиками. Носовая опора состоит из двух управляемых стоек телескопиче- 1
ского типа, расположенных в один ряд. Основная опора состоит из 14
неуправляемых стоек полурычажного типа, расположенных по две стой-
стойки в одном ряду. Стойки основной опоры 4, 5, 6 и 7 рядов являются сво- ,
бодно-ориентируемыми. Начальные условия для решения задачи находи- ,
лись из условия, что самолет совершает продольный установившийся
полет с выпущенной механизацией в сбалансированном состоянии на^
режиме, близком к посадочному. Рассматривался случай штатной посад-
посадки самолета без управления при заданных скоростях Их =77м/с, :
1/Уя =-2,7 м/с.
Задачу по созданию ММ аэроупругости аппарата, занимающей цен-
тральное место в структурной ММЛА для наземных режимов, условно^
можно разбить на два этапа. На первом этапе расчетным путем опреде-'!
ляются динамические свойства ЛА (частоты и формы собственных коле- •
баний конструкции) и по ним аэродинамические и аэроупругие характе-
характеристики в широком диапазоне скоростей полета 0<М<0,9 с шагом
АМ = ОД. На втором этапе проверяется достоверность полученных рас-
расчетным способом динамических и аэродинамических характеристик са-
самолета, а также работы его амортизационной системы путем сравнения с
данными летных, трубных и копровых испытаний, которые здесь не при-
приводятся.
С помощью сформированной структурной ММЛА для полетных и
наземных режимов было всесторонне изучено влияние упругости конст- >
рукции на его суммарные аэроупругие характеристики. Изменение их из-
за влияния статических деформаций оценивалось по относительной ве-
величине ^Гст = СуПр/с^, где СуПр, с^ — значения аэродинамических ха-,
рактеристик, найденные соответственно с учетом статического деформи-))
рования конструкции и без учета (на жесткой конструкции). Рисунок 8.82 1
отражает изменение параметра К^ для коэффициентов аэродинамичес-
364
ких производных подъемной силы Су (кривая 7) и момента тангажа т%
B) в зависимости от величины скоростного напора д* • Анализ результа-
результатов вычислений показывает (рис. 8.83), к
что для адекватного отражения влия- "
ния упругости конструкции на коэф-
коэффициенты аэродинамических произ- 0,6
водных при продольном движении ЛА о,4
необходимо учитывать не менее 9 то-
тонов симметричных упругих колебаний
0 7,5 15 22,5^-10н/м2
а Рис. 8.82. Изменение параметра К„
конструкции; кривая 1 Су , 2 ддд коэффициентов аэродинамиче-
па 3 с эл
Су
Изменение параметра #ст для ко-
эффициентов аэродинамических про-
проских производных Су (кривая 7) и
т% B) в зависимости от величины
скоростного напора дш
0,8
0,6
0,4
0,2
V
<\
з'
О
6
изводных суэл (кривая 7), тхъл B), т®* C) в зависимости от скорост-
скоростного напора ^* иллюстрирует рис. 8.84; здесь надо удерживать не менее
8 тонов антисимметричных упругих ко-
колебаний.
Обратимся теперь к данным, касаю-
касающимся посадки тяжелого ЛА на бетон-
бетонную ВПП. Основными расчетными слу-
случаями являются: посадка на три точки,
взлет, посадка на основание опоры, пе-
Рис. 8.83. Изменение параметра редний удар в носовое колесо, посадка с
К^ для коэффициентов аэродина- нераскрученными колесами и др. Рас-
мических производных с" (кри- СМ0ТРим случай посадки на основные
у стойки. Считаем, что посадка ЛА осуще-
вая 7), т" B), суэл C) в зависи- ствляется на неровный аэродром. Рельеф
мости от числа удерживаемых то- аэродрома задается в виде случайных
нов упругих колебаний Ид неровностей с заданной спектральной
плотностью. При посадке самолет после-
последовательно касается ВПП колесами шасси, начиная с последнего восьмо-
восьмого ряда основных стоек и заканчивая к
первой носовой стойкой.
Величины углов тангажа в и атаки °>8
а, отклонения руля высоты <5рв, °>6
обобщенных параметров симметрич- '4
ных упругих колебаний ^^ (I = 1, #+), ' 5 иГ" 20 ^до3 н/м2
используемые в качестве начальных Рис. 8.84. Изменение параметра К„
условии при посадке ЛА, находятся из ^ коэффициентов аэродинамиче-
решения системы уравнений (8.76). Из ских производных <А. (кривая7),
анализа результатов вычислении еле- у
дует, что балансировочное значение тгм B)> тТ C) в зависимости от
угла тангажа в самолета типа Ан-225 величины скоростного напора ^1,
365
\
— —
\
<2
\
— —
Л—
"з
увеличивается за счет деформации конструкции на ~ 17 %. При этом
вклад упругих тонов колебаний в изменение тангажной характеристики
неоднозначен. Наибольшие поправки вносят первый A1 %) и восьмой
F %) тона. Угол атаки а подрастает за счет упругости конструкции
на - 16 %. Доминирующими по вкладу здесь являются также первый и
восьмой тона. Угол отклонения руля высоты <5р в увеличивается за счет
деформации конструкции до - 23 % по сравнению с абсолютно «жест-
«жестким» аппаратом. Наибольший вклад вносит четвертый тон, доля осталь-
остальных тонов не превышает 3 %. Величина отклонения конца крыла укр
снижается до ~ 15 %, наибольший вклад в это изменение вносят первый и
девятый тона.
Наиболее характерные зависимости, показывающие изменение вели-
величины вертикальной нагрузки Ру (г = 1, 2, 5, 8) на стойки во времени г
при посадке тяжелого транспортного ЛА на бетонную ВПП, даны на ри-
рисунках 8.85 и 8.86; кривая 1 — Ру1A), 2 — Ру20), 3 — Ру5({), 4 —
50
40
зо
20
10
0
Рис. 8.85. Временное изменение вер-
вертикальной нагрузки Ру(, действую-
действующей на носовую стойку I* = 1 G) и
стойку второго ряда / = 2 B) при по-
посадке тяжелого транспортного ЛА на
бетонную ВПП
V
/VI
V
.3
5 г,с
Рис. 8.86. Временное изменение верти-
вертикальной нагрузки Ру1, действующей на
стойки пятого г = 5 C) и восьмого г = 8
D) рядов, при посадке тяжелого транс-
транспортного ЛА на бетонную ВПП
). Отсюда хорошо видна последовательность нагружения и разгру-
жения отдельных стоек по времени. Нагружение стоек Ру. (/ = 1,2,5,8)
носит переменный характер, на который влияют изменение угла тангажа
0, динамические характеристики подвижных частей амортизационной
системы, рельеф ВПП. Особенностью многостоечной конструкции шасси
является то, что максимальные нагрузки при первом посадочном ударе
возникают в восьмом ряду стоек Р^ах = 56,4 т (кривая 4 рис. 8.86). Зна-
Значения же максимальных нагрузок в стойках от 7 до 2 ряда убывают. При
этом величина вертикальной нагрузки Ру1, приходящая на носовую
стойку, зависит от момента касания ВПП, центровки ЛА, управления ру-
рулем высоты. Из анализа данных рисунков 8.85 и 8.86 следует также, что
вертикальная нагрузка, приходящаяся на носовую стойку, не является
определяющим условием с точки зрения ее ограничений для случая по-
посадки на основные стойки.
На рис. 8.87 представлен график приращения вертикальной перегруз-
перегрузки Апу в центре масс самолета; максимальная величина приращения пе-
366
регрузки Дга™ах = 0,98 достигается примерно в момент касания ВПП
стойками второго ряда при г = 0,5 с.
Рисунок 8.88 иллюстрирует соответственно изменение суммарного
изгибающего момента М^ЗГ (кривая 1) и его инерционной ™
ляющей B) в корневом сечении
Инерционная
(кривая 2 на
состав-
крыла во времени,
составляющая М^31
рис. 8.88) хорошо коррелирует с
изменением приращения перегрузки
0,70
0,35
0
-0,35
А
р
\
1 \2"^~:
\ 4 ^ 5 *,с
Дп/0 (рис. 8.87). Свои макси- Рис. 8.87. Временное изменение прира-
приращения вертикальной перегрузки Апу в
мальные значения параметры М^зг
и Апу достигают одновременно
при касании ВПП всеми основными стойками шасси (г ~ 0,6 с). Следует
отметить, что аэродинамическая составляющая М^ЗГ суммарного изги-
центре масс при посадке тяжелого транс-
транспортного ЛА на бетонную ВПП
Мизг,Ю2т.м
20
16
12
0
-4
Л
г, с
бающего момента М^зг при качении
самолета по аэродрому в отличие от
нормального полета несколько раз-
разгружает верхнюю панель крыла, зна-
значение ее зависит от углового положе-
положения ЛА.
Оценивалось влияние упругости
конструкции на параметры движения и
нагружения самолета при посадке в
сравнении с посадкой «жесткого» ап-
аппарата. Это осуществлялось на приме-
примере «грубой» посадки самолета Ан-225
без управления с фиксированным по-
положением руля высоты, соответст-
соответствующим его сбалансированному по-
положению перед касанием ВПП, при
Пх = 77 м/с, I/у = -2,7 м/с . Посад-
Посадка производилась на ровный аэродром.
Влияние упругости на вертикальные нагрузки ру1 G = 1,8), действующие
на ЛА со стороны стоек шасси, оказалось неодинаковым, с нарастанием
их от носовой стойки к заднему ряду основных стоек. Причем неучет
упругости конструкции приводит к завышению максимальных верти-
вертикальных нагрузок. Это различие в амплитудных значениях нагрузок,
приходящихся на стойки шасси и определяемых с учетом упругости кон-
конструкции и без учета, может достигать ~ 50 %. Что касается приращений
вертикальной перегрузки Апу и суммарного изгибающего момента М^зт
в корневом сечении крыла, то здесь их амплитуда за счет упругих
свойств конструкции аппарата соответственно уменьшается на ~ 17 % и
367
Рис. 8.88. Временное изменение сум-
суммарного изгибающего момента М^г
G) и его инерционной составляющей
^изг B) ПРИ посадке тяжелого
транспортного ЛА на бетонную ВПП
увеличивается на ~ 6 % за счет перераспределения между инерционной
М"зг и аэродинамической М%зг составляющими суммарного изгибаю-
изгибающего момента М^зг.
При изучении особенностей поведения конструкции тяжелого транс-
транспортного самолета при посадке на грунтовую ВПП рассматривался также
случай «штатной» посадки с пара-
параметрами и условиями, описанными
выше. Приведем здесь лишь некото-
некоторые обобщающие сравнительные
результаты, касающиеся посадки ЛА
на бетонную и грунтовую ВПП.
На рис. 8.89 дано для сравнения
изменение перемещения концевой
точки крыла уКр во времени ( при
посадке самолета соответственно на
0,7
0
>
"А.
ь
У,
1
5 *,с
Рис. 8.89. Временное изменение пере- бетонную (кривая 1) и грунтовую B)
мещения концевой точки крыла укр ВПП. Как видим, этот самолет имеет
при посадке тяжелого транспортного достаточно гибкое крыло. Причем,
ЛА на бетонную A) и грунтовую B) если амплитуды перемещений конце-
впп вой точки крыла при посадке самоле-
самолета на обе полосы в момент касания примерно равны, то в дальнейшем их
траектории сильно различаются. Это объясняется значительными демп-
демпфирующими свойствами грунтовой ВПП.
Кривая Якол@ рис. 8.90 иллюстрирует закон изменения глубины
колеи Якол во времени %\ он носит сложный характер. Имеется низкочас-
низкочастотная и высокочастотная составляющие; первая хорошо коррелирует с
0 1 2 3 4 5 ''с
Рис. 8.90. Временное изменение глубины Якол при посадке тяжелого транспортного
ЛА на грунтовую ВПП
изменением угла атаки, а вторая зависит от собственных частот подвиж-
подвижных частей амортизационной системы и прочности грунта ВПП. Выявле-
Выявлено слабое влияние упругости конструкции на максимальные значения
вертикальной нагрузки в самой нагруженной восьмой стойке шасси
(уменьшает до ~ 4 %). Этот факт не является характерным для большин-
большинства тяжелых транспортных самолетов и объясняется конструктивными
368
особенностями рассматриваемого самолета типа Ан-225, так как его ос-
основные стойки расположены в районе центральной части достаточно же-
жесткого фюзеляжа. В то же время на нагрузку носовой стойки Ру1 упру-
^ гость конструкции оказывает существенное влияние. Так, например, если
нагрузку Ру1, при удержании 10 тонов принять за ~ 100 %, то при посад-
посадке «жесткого» ЛА на грунтовую ВПП величина Ру\ уменьшается на
~ 14 %, а с учетом упругости при удержании трех низших тонов — на
21 %. При этом основной вклад вносит первый изгибный тон упругих
колебаний.
Влияние эксплуатационных факторов на погружение самолета
типа Ан-225 при посадке на бетонную и грунтовую ВПП и рулении.
Здесь наиболее важным параметром является вертикальная скорость ЛА
при приземлении. Рассматривалась посадка на бетонную ВПП и грунто-
грунтовую двух типов. На рис. 8.91 пред-
представлен график, характеризующий
изменение максимальной нагрузки в
восьмом ряду основных стоек Р1^
при посадке самолета на разные ВПП
в зависимости от величины верти-
вертикальной скорости посадки Иу; кри-
кривая 1 — бетонная ВПП; 2 и 3 —
грунтовая ВПП соответственно с пе-
переменной прочностью грунта
<7т = УаГ И ПОСТОЯННОЙ СГт = СОП81 .
ртах
РУ*
550
450
350
250
150
»т
0,5 1,0 1,5 2,0 #гм/с
Рис. 8.91. Изменение максимальной вер-
тикальной нагрузки Ру8 на основную
стойку восьмого ряда при посадке тя-
Расчеты проводились для одного желого транспортного ЛА на разные
профиля аэродрома; брались неров- ВПП в зависимости от величины верти-
ности, характерные для бетонной кальной посадочной скорости Иу
ВПП. Отсюда видно, что с увеличе-
увеличением V'у резко растет нагрузка на ЛА. Аналогичная картина наблюдает-
наблюдается в росте приращения максимальной
перегрузки Ап™х в центре масс ЛА
в зависимости от Vу (рис. 8.92), при-
приразличия прочности
здесь сказывается в
Д<
0,9
0,6
0,3
-5
чем влияние
грунта (Трр
меньшей степени. Но при эксплуата-
эксплуатации самолета на грунтовых ВПП,
имеющих некачественное состояние
поверхности (неровности и неодно-
неоднородность грунта не соответствует
в центре масс при по- техническим условиям), максималь-
0,5 1,0 1,5 2,0 С/гм/с
Рис. 8.92. Изменение вертикальной пе-
регрузки А
садке тяжелого транспортного ЛА на
разные ВПП в зависимости от величины
вертикальной посадочной скорости Vу
ные нагрузки на ЛА могут значи-
тельно увеличиваться по сравнению с
бетонной ВПП.
369
Для определения нагружения ЛА при рулении необходимо знать про-
профиль ВПП и время, в течение которого происходит его рулежка при раз-
различных скоростях движения. Действующие на ЛА перегрузки при руле-
рулении будут определяться его массово-инерционными характеристиками и
видом спектральной плотности рельефа аэродрома. На рис. 8.93 приведе-
приведено сравнение среднеквадратичного
значения приращения перегрузок
ап в центре масс самолета, полу-
0,10
0,08
0,06
0,04
_-—-
,1
,3
10
20
30 *У,м/с
Рис. 8.93. Изменение среднеквадратич-
среднеквадратичного значения приращения вертикаль-
вертикальной перегрузки ап в центре масс при
рулении тяжелого транспортного ЛА
по ВПП с разным покрытием
ченных расчетным путем, при руле-
рулении его по бетонной ВПП и по не-
нескольким типам грунтовых ВПП с
разными скоростями; кривая 1 —
бетонная ВПП, 2 и 3 — грунтовые
ВПП соответственно с сТрр = соп§1 и
(Трр = уаг прочностью грунта. Для
качественного сравнения результатов
расчета неровности Их принимались
одинаковыми и характерными для
бетонных аэродромов. Из сравнения
видно, что большие значения вели-
величины ап соответствуют рулению
самолета по бетонной ВПП. Однако
при рассмотрении реальных неровностей Я2 (#2 > Н{) грунтовых ВПП и
сохранении прежней прочности грунта величина ап увеличивается во всем
диапазоне скоростей движения на ~ 60 % (кривая 4). Анализ результатов
вычислений показывает также, что для одной и той же ВПП влияние ско-
скорости руления на перегрузку в центре масс самолета незначительно.
Кроме того, при эксплуатации самолета на грунтовой ВПП действующую
на него максимальную нагрузку можно снизить на ~ 3,5 % за счет сниже-
снижения давления в пневматиках до минимально возможного уровня.
Как известно, одной из основных задач транспортной авиации являет-
является перевозка тяжелых грузов. Для самолета типа Ан-225 максимальная
масса перевозимого груза может составить - 170 т. Поэтому интерес
представляет изучение влияния массы транспортируемого груза на на-
гружение конструкции ЛА при посадке на грунтовую ВПП. Для этого
рассмотрим поведение самолета при следующих условиях «штатной»
посадки: I]х = 77 м/с, 1/у = -0,5 м/с. Будем считать, что груз находит-
находится в центре масс аппарата.
На рис. 8.94 представлена зависимость коэффициента относительной
перегрузки Кп (АКп = МуО /Ап^=з40т) от величины относительной
массы самолета О = G/340 ; Ал ^=340 — максимальное значение при-
приращения вертикальной перегрузки при посадочном весе самолета
370
С = 340 т, О — текущее значение посадочного веса ЛА. Нижняя граница
возможных значений коэффициента Кп определялась расчетным пу-
>тем, исходя из посадки ЛА на идеальную гладкую бетонную (кривая 1) и
> грунтовую ВПП B) с постоянной ха- к
рактеристикой прочности грунта ^
\ сТрр = соп81. Из анализа кривых .
Кп =/(С) видно, что величина ко- 1,4
эффициента Кп увеличивается с
[
!>о
1,1
1,2
1,3
[ростом относительного посадочного
[веса самолета О; нижняя граница Рис. 8.94. Изменение относительного
Соответствует посадке ЛА на идеаль- эффициента вертикальной перегру-
[ный грунтовой аэродром (высота не- зки Кь в центре масс в зависимости
[ровностей Янер=0) с характеристи- от величины относительной массы ЛА
Ё кой прочности грунта а^ = сопз( (кривая 7). При моделировании посад-
|ки ЛА на грунтовой аэродром с неровностями Янер ^0 и переменной
прочностью грунта а^ = уаг нагрузки, действующие на конструкцию,
I носят случайный характер и их значение несколько выше C) в сравнении
| с аналогичными величинами для идеально гладких аэродромов. Верхняя
* граница D) значений коэффициента Кп находилась также расчетным
путем при различных реализациях неровностей (Я2 >Н\) и прочности
»грунта (Трр = уаг. Это позволило установить область изменения возмож-
? ных значений коэффициента Кп при посадке ЛА на грунтовый аэро-
\ дром, ограниченную линиями 1 и 4.
На рис. 8.95 для сравнения нанесены изменения среднеквадратичных
значений приращений перегрузки ап в центре масс ЛА в зависимости
от скорости его движения \] по
грунтовой ВПП с массой 300 (кри-
(кривая 1) и 460 т B). Как видим, уве-
увеличение загрузки самолета благо-
благоприятно сказывается на темпе на-
нарастания величины ап , он значи-
"у
0,115
0,105
0,095
¦
10
20
30 С/, м/с
тельно медленнее вследствие
уменьшения амплитуды колебаний
центра масс ЛА при движении по
грунтовой ВПП.
Изменение относительного веса
Рис. 8.95. Изменение среднеквадратичного самолета оказывает влияние и на
; приращения перегрузки а^ в центре масс распределение вертикальных на-
в зависимости от скорости движения ЛА грузок, действующих на стойки
по, грунтовой ВПП V с разными массами амортизационной системы.
371
На рис. 8.96 представлены результаты вычислений коэффициента от-
относительного нагружения стоек
V (V — г>тах / ртах . _ л п
КРУ1 (КРу1 ~ Гуиэ I ^уЮ=340 > 1 ~ Х> о >
где Р™^х , /^/§=340 — вертикальная нагрузка на г-ю стойку шасси соот-
соответственно при текущем значении веса самолета С и при весе С = 340 т) в
зависимости от О . Из анализа
этих результатов видно, что с
ростом О наблюдается замет-
заметное увеличение величины ко-
коэффициента КР . для основ-
основных стоек / = 2,...,6 (соответ-
(соответственно кривые 2-6) и незна-
незначительное для стойки I = 8
(кривая 8). Изменение значе-
значения коэффициента КР для
1,0 1,1 1,2 1,3 С
Рис. 8.96. Изменение относительного коэффи-
коэффициента вертикальной нагрузки стоек КР.
A=п) в зависимости от относительного веса седьмой стойки (кривая 7) но-
рт сит совсем другой характер и
практически во всем рассмот-
рассмотренном диапазоне значений О < 1, т. е. вертикальная нагрузка
Рууах ,приходящаяся на седьмую стойку, уменьшается с ростом относи-
относительного посадочного веса самолета О .
На нагружение конструкции планера при посадке ЛА оказывают
влияние не только вес перевозимого груза, но и его место расположения
в грузовой кабине. Тяжелый транспортный самолет типа Ан-225 имеет
ограничение по возможному изменению центровки хц в диапазоне @,3-
0,43) ЬСЛХ . Была рассмотрена «штатная»
посадка самолета с весом О = 460 т с
изменением центровки в диапазоне
0,25 <*ц <0,4, (Зсц = хц/Ьсях ), что
полностью перекрывает указанный выше
эксплуатационный диапазон при сохра-
г1ТГ* Л 9 / И'ЧЛ/ГСТ-ГбТ-ТТ'Тб ОТНОСИТЕ ТТТ"»ТТО~
нении момента инерции самолета посто- го • коэффициента верТикальной
янным по величине, соответствующему перегрузки Кщ в центре масс в
центровке хи = 0,35. В качестве иссле- "
зависимости от центровки х„ при
дуемого динамического параметра был посадке тяжеЛого транспортного ЛА
принят относительный коэффициент
вертикальной перегрузки КПу (КПу =«^ацХ/^Х=0,25 > где п^цХ=0,25 ~"
максимальное значение коэффициента перегрузки при моделировании
режима посадки ЛА с центровкой Зсц = 0,25). Из анализа кри-
кривой Кп =/(Зсц) рис. 8.97 видно, что максимальная вертикальная пере-
перегрузка при посадке ЛА уменьшается при смещении его центра масс назад.
372
0,8
06
^—
0,25 0,30 0,35 0,40 хп
КР
1,1
1,0
0,9
0,8
6
,
Было изучено также влияние центровки хц на изменение максималь-
максимальных вертикальных нагрузок Ру; (г = 2,8), действующих на основные
стойки шасси, при тех же усло-
условиях посадки; это отражают
зависимости Яр.=/(хц) (/=2,8),
представленные на рис. 8.98
соответственно кривыми 2-8,
где КРу. = Р™х^ /^Х=о,25 ' , , ,
Видно, что во всем диапазоне °'25 °>30 °»35 °'40
изменения центровки ЛА на- Рис. 8.98. Изменение относительного коэффи-
грузки в стойках шасси меня- диента вертикальной нагрузки основных стоек
ются в пределах -10%. Ис- КР (/ = 2,8) в зависимости от центровки хц
ключение составляют стойки при посадке тяжелого транспортного ЛА
второго, третьего и седьмого
рядов, нагрузки в которых при предельной задней центровке изменяются
до 20 %.
Влияние раскрутки колес на нагружение амортизационной сис-
системы. При посадке самолета с нераскрученными колесами в начальный
момент времени имеет место скольжение колес о грунт. Зависимость ко-
коэффициента трения 1Лкт от относительной скорости проскальзывания
I/ приведена в работе [249]. Продолжительность раскручивания колес на
бетонной и грунтовой ВПП составляет примерно 0,2 с. Характерная зави-
зависимость изменения коэффициента //кач во времени г показана на
рис. 8.99. В начальный момент
времени в интервале Дг = 0,2 с
коэффициент /лкт достигает ма-
максимального значения 0цсач=Ц8).
В дальнейшем по мере раскрутки
колес значение коэффициента
А*кач уменьшается, принимая
затем установившееся значение.
Большая сила трения Тх, дей-
действующая в начале раскрутки
1 2 3 г, с колеса, вызывает нагружение
Рис. 8.99. Временное изменение коэффици- стойки в направлении против
ента трения /итч с учетом раскрутки колес движения. Когда окружная ско-
скорость колеса становится равной
скорости движения самолета относительно земли, сила трения Тх резко
падает. На рис. 8.100 помещены функции Тх =/({), характеризующие
изменение силы трения Тх во времени г для носовой (а) и основной (б)
стоек шасси при посадке ЛА на гладкий грунтовой аэродром с прочно-
прочностью грунта <7рр = 9 кг/см2 при /^кач = 0,05; кривая 1 получена без учета
373
Чсач
0,6
0,4
0,2
раскрутки колес, 2 — с учетом. Отсюда видно, что в начальный момент
посадки ЛА при раскрутке колеса происходит значительный заброс
7;,103н
40
30
20
10
0
Г, С
40
30
20
10
0
Ш 11
I
1
1
и
/
г
б
Рис. 8.100. Временное изменение силы трения Тх для носовой (а) и основной (б) стоек
шасси при посадке ЛА соответственно на гладкий и реальный грунтовой аэродром без
учета раскрутки колеса A) и с учетом B)
значения силы трения Тх. В дальнейшем существенных различий в пове-
поведении зависимости Тх{г) не наблюдается. Рисунок 8.101 иллюстрирует
характер изменения силы трения
Тх во времени г для основной
40
30
20
10
до3
н-
Г1,
/V
/"к
У
*, С
Рис. 8.101. Временное изменение силы тре-
трения Тх для основной стойки шасси при
стойки шасси при посадке на ре-
реальный грунтовой аэродром. Как
видно, в этом случае функция
Тх(г) приобретает высокочастот-
высокочастотную составляющую, зависящую от
рельефа аэродрома.
Нагружение конструкции ле-
летательного аппарата при руле-
рулении по грунтовой ВПП. В качест-
качестве примера рассматривается дви-
движение самолета типа Ан-225 по
посадке тяжелого транспортного ЛА на грунтовой ВПП с постоянной ско-
реальный грунтовой аэродром ростью. Вычисление значений пра-
правых частей уравнений (8.73) осу-
осуществляется с учетом возмущений, вносимых неровностями поверхности
и податливости грунтовой ВПП. Реализация неровностей и прочности
грунтовой ВПП выполниется по алгоритму, описанному в [249], и пред-
представляется в виде спектральных плотностей. Самолет «прокатывался» по
смоделированным реализациям.
Демонстрация возможностей разработанной структурной ММЛА
осуществлялась на примере моделирования движения самолета массой
С!лд=300т по грунтовой ВПП со скоростью 1^.= 10м/с. При этом
анализировалось изменение следующих параметров: уцм — вертикаль-
вертикальное перемещение центра масс самолета; в — изменение угла тангажа,
374
Апу — приращение вертикальной перегрузки в центре масс ЛА; Якол —
глубина колеи при рулении по грунтовой ВПП; М^зг — суммарный из-
изгибающий момент в корневом сечении крыла, Руг — вертикальная на-
нагрузка, приходящаяся на стойки
шасси, 5Ш1 — перемещение што-
штоков амортизаторов стоек.
Рисунок 8.102 иллюстрирует
характер изменений угла тангажа
в (а) и отклонения концевой точки
крыла уКр (б) во времени X при
рулении ЛА по грунтовому аэро-
аэродрому, качество подготовки по-
поверхности которого отвечает тре-
требованиям для грунтовых летных
полос (кривые 1), и с плохим каче-
качеством подготовки поверхности
(кривые 2). Сравнение результатов
расчетов параметров движения и
нагружения ЛА при рулении по
рассматриваемым грунтовым ВПП
наглядно показывает на сущест-
Рис. 8.102. Временные изменения угла тан-
тангажа в (а) и отклонения концевой точки
крыла укр (б) при посадке ЛА на грунто-
грунтовую ВПП с хорошим качеством подготов-
подготовки G) и с плохим B)
венное различие в нагружении са-
самолета. При движении ЛА по грун-
грунтовой ВПП с более качественной подготовкой поверхности нагружен-
ность его конструкции ниже — амплитуды колебаний кинематических
параметров и изгибающих моментов значительно меньше. Отсюда ясно,
что для снижения усталостной повреждаемости элементов планера само-
самолета и амортизационной системы надо проводить систематическое нор-
нормирование и контроль «ровности» и прочности грунтовой ВПП.
К оценке относительной усталостной повреждаемости конст-
конструкции летательного аппарата на наземных режимах. При вырули-
выруливании и заруливании самолет совершает маневрирование по аэродрому,
сопровождающееся разгонами и торможениями. В зависимости от скоро-
скорости движения ЛА его конструкция будет нагружаться по разному, и мо-
могут возникнуть высокие пиковые нагрузки, существенно влияющие на
повреждаемость ее элементов. При проведении летных испытаний само-
самолетов исследование действующих на него нагрузок при посадке, взлете и
рулении ориентировано главным образом на эксперимент. Программа
летных испытаний самолета включает серию взлетов, посадок и рулений,
выполняемых, как правило, на одной или в лучшем случае на двух аэро-
аэродромах, во время которых производится запись необходимых парамет-
параметров. Весь этот процесс в целом очень трудоемкий, длительный по време-
времени, требует больших материальных средств и, к сожалению, не дает пол-
полной картины нагруженности испытуемого самолета, поскольку экспери-
эксперимент не охватывает всех аэродромов, на которых может эксплуатиро-
эксплуатироваться данный тип ЛА. Создание же структурной ММЛА для наземных
375
0,12
0,10
0,08
0,06
0,04
У
, р
V
/
/V
\
V /
/
7
(V
о
10 15
V,м/с
режимов позволяет осуществить опережающее накопление информации
о нагрузках, действующих на конструкцию ЛА при эксплуатации его на
различных аэродромах, выдать рекомендации для проведения летных
испытаний и тем самым уменьшить объем экспериментальных работ. Это
позволит сократить время и сэкономить материальные средства, связан-
связанные с разработкой и испытаниями АТ.
Оценку относительной повреждаемости конструкции на наземных
режимах будем осуществлять по-прежнему на примере тяжелого транс-
транспортного самолета типа Ан-225. Ее бу-
будем проводить по номинальному на-
напряжению, которое считается пропор-
пропорциональным изгибающему моменту
крыла в рассматриваемом сечении кон-
конструкции. В приведенных ниже данных
расчета оценка относительной усталост-
усталостной повреждаемости ^ осуществлялась
по изгибающему моменту корневого
сечения крыла.
В полете под действием аэродинами-
аэродинамической нагрузки крыло самолета откло-
отклоняется в основном вверх от нейтрально-
нейтрального положения. При этом усталостную
повреждаемость накапливает в основном нижняя панель крыла, испыты-
испытывающая растягивающее напряжение. При движении самолета по аэро-
аэродрому, наоборот, усталостную повреждаемость накапливает его верхняя
панель, так как теперь она становится растянутой.
Приведем некоторые результаты вычислений оценки относительной
усталостной повреждаемости, полученной для корневого сечения крыла,
при моделировании движения самолета по неровному аэродрому с посто-
постоянной скоростью за промежуток =-
времени г = 50 с. ^
Рисунок 8.103 иллюстрирует
изменение относительной повре- 1
ждаемости |* (|~ = <*/<*п , где § и
%п — повреждаемости соответст- о Л
венно за 50 с движения самолета
по бетонной ВПП и накопленная
Рис. 8.103. Изменение величины от-
относительной повреждаемости ^
упругого самолета в зависимости от
скорости руления
ВПП
V по бетонной
0,01
о
за одну «штатную» посадку) в
зависимости от скорости руления
I/.
Судя по данным рисунка,
можно выделить наиболее благо-
благоприятные диапазоны скоростей
руления ЛА по рассматриваемой
полосе ВПП с позиций минимального
10
15
20
Рис. 8.104. Изменение величины относите-
относительной повреждаемости ^ в зависимости от
скорости руления V по грунтовой ВПП с
учетом деформирования конструкции G) и
без учета B)
накопления повреждаемости:
5 -г 10 м/с и 17-21 м/с. В окрестности 17= 15 м/с наблюдается локаль-
локальный всплеск параметра ^ . Исследования причин роста величины % при
376
0,8
0,4
0
АЛ
Л*
/
/
У
Ц =15 м/с показали, что при этой скорости руления конструкция данного
ЛА входит в резонанс по первому тону изгибных колебаний крыла, кото-
который и вносит основной вклад в увеличение его повреждаемости по срав-
сравнению с другими тонами упругих колебаний. Напомним, в структурной
ММЛА удерживаются 10 тонов упругих колебаний.
На рис. 8.104 представлены результаты оценки параметра ^ для кры-
крыла с учетом (кривая 1) и без учета B) деформирования аппарата в зави-
зависимости от скорости руления \] по бетонной ВПП. Анализ показывает,
что величина ^ для абсолютно жесткой
конструкции самолета оказалась завы-
завышенной на порядок по сравнению с де-
деформируемой. При этом величина % для
жесткой конструкции монотонно возрас-
возрастает с ростом скорости движения ЛА, а
для деформируемой — практически не
меняется за исключением окрестности
V = 15 м/с, где наблюдается резонанс.
Данные рис. 8.105 отражают сопостав-
сопоставление функций I; (*У) при движении само-
самолета соответственно по грунтовой ВПП с
неоднородностью прочности грунта (II = уаг) (кривая 2) и бетонной G);
в расчетах неровности для обеих полос принимались одинаковыми и ха-
характерными для бетонных ВПП. Повреждаемость на грунтовой ВПП ока-
оказалась значительно больше из-за дополнительных возмущающих воздей-
воздействий на конструкцию за счет неоднородности грунта даже при одинако-
одинаковых неровностях рельефа местности обеих полос. Отсюда следует, что
при эксплуатации тяжелых транспортных самолетов с грунтовых аэро-
аэродромов качеству их поверхности надо уделять повышенное внимание.
10
20
Рис. 8.105. Изменение величины
относительной повреждаемости
% в зависимости от скорости
руления V при движении ЛА по
бетонной ВПП A) и грунтовой B)
Часть вторая
КОЛЕБАНИЯ ТОНКОСТЕННЫХ КОНСТРУКЦИЙ,
ЧАСТИЧНО ЗАПОЛНЕННЫХ ЖИДКОСТЬЮ
Подвижные емкости и тонкостенные оболочки, частично заполненные
жидкостью, встречаются в различных технических системах, например
самолетах, ракетах и др. Жидкость может оказывать большое влияние на
их динамические характеристики и динамическое нагружение при сило-
силовых и кинематических воздействиях. Наличие жидкости в некоторых
случаях может послужить причиной возникновения в системе парамет-
параметрических колебаний и динамической неустойчивости.
Бурное развитие динамики твердых тел и упругих конструкций с по-
полостями, содержащими жидкость, было вызвано в основном проблемами
ракетно-космической техники. Жидкостные ракеты-носители имеют со-
составные тонкостенные конструкции, в отсеках (баках) которых может
находиться* большое количество, жидкого топлива (до 90 % общей массы)
с© свободными поверхностями: Широкий спектр внешних и внутренних
динамических нагрузок т наличие весьма чувствительной системы
управления* с обратными; связями создают много различных проблем ди-
динамики»- связанных с взаимодействием упругой конструкции, подвижной
жидкости № системы управления. При: жестких ограничениях по массе,
уровню динамического нагружения (вибрации) и при минимальных запа-
запасах прочности эш проблемы становятся весьма острыми и требуют ре-
решения с высокой достоверностью и точностью.
При разработке математических моделей динамики сложных состав-
составных конструкций, частично заполненных жидкостью, в заданном, частот-
частотном диапазоне обычно используется метод подконструкции. Согласно
этого метода конструкция делится на части (подконструкции, отсеки,
баки с жидкостью, подвески и пр.). Для каждой такой подконструкции
составляются уравнения* колебаний в обобщенных координатах, которые
выбираются так, чтобы одна часть из них представляла переносное дви-
движение подконструкции в составе системы в целом и обеспечивала кине-
кинематические условия соединений, другая же^ — относительное движение
закрепленной по границам раздела подконструкции за счет ее упругости
и подвижности жидкости; при этом для второй части используются нор-
нормальные координаты, представляющие некоторое число низших собст-
собственных форм; колебаний закрепленной подконструкции. Затем эти урав-
уравнения; используются для составления уравнений колебаний конструкции
в ц&пом, которые далее могут быть преобразованы к нормальным коор-
координатам путем разложения по ее собственным формам колебаний и про-
проверены путем сравнения с данными частотных испытаний, полученными
на натурной конструкции или ее конструктивно-подобной модели.
378
Сформированные и проверенные таким образом уравнения движенш
конструкции в нормальных координатах в рассматриваемом частотном
диапазоне (удерживая собственные формы колебаний, частоты которых
попадают в этот диапазон) можно считать достоверными и далее их мож-
можно использовать для решения различных задач динамической реакции и
динамической устойчивости системы. В задачах аэроупругости в эти
уравнения включаются обобщенные аэродинамические силы, а в задачах
аэроавтоупругости к ним добавляются еще управляющие силы и уравне-
уравнения системы автоматического управления.
Таким образом, следуя описанному выше алгоритму составления
уравнений колебаний, основными задачами для упругих баков с жидко-
жидкостью, которые рассматриваются как подконструкции, являются расчет
собственных частот и форм колебаний каждого закрепленного бака с
жидкостью и определение перемещений жидкости в переносном движе-
движении бака.
Этим и другим задачам гидроупругости оболочек и конструкций та-
таким, как, например, нелинейные и параметрические колебания, динамика
вязкой жидкости в сосудах и пр., в настоящее время посвящена обширная
литература.
Большой вклад в разработку методов расчета и экспериментальных
исследований колебаний жидкости в подвижных полостях и упругих
конструкциях, а также в решение многих практически важных задач вне-
внесли Л.И. Балабух, Ю.Г. Балакирев, КБ. Богоряд, В.В. Болотин, М.С. Гал-
Галкин, Э.К Григолюк, Л.В. Докучаев, НЕ. Жуковский, М.И. Илъгамов, К. С.
Колесников, Р.Е. Лампер, И.А. Луковскип, Г.К Микишев, КН. Моисеев,
Г. С. Нариманов, Б. К Рабинович, И.М. Рапопорт, В. В. Румянцев,
В.А. Троценко, Ф.Л. Черноусъко, В.П. Шмаков, Н.Ы. АЪгагпзоп, Н.Р.
Ваиег, И.О. Капа, 1Ж Мйез и др.
Во второй части данной книги приведены результаты исследований,
выполненные одним из авторов.
Глава 9 посвящена общим уравнениям и вариационным принципам
для задачи о малых колебаниях упругой оболочки, частично заполненной
идеальной сжимаемой жидкостью. Здесь же получены уравнения гидро-
гидроупругих колебаний оболочки в обобщенных и нормальных координатах.
Некоторые точные решения задач о собственных колебаниях упругих
цилиндрических и сферических оболочек с жидкостью получены в главе 10.
В главе 11 представлен метод сведения гидродинамической задачи
для произвольной оболочки вращения к обыкновенным дифференциаль-
дифференциальным уравнениям.
В главе 12 изложены вариационные и численные методы расчета ко-
колебаний оболочек с жидкостью (метод Ритца; метод численного интегри-
интегрирования обыкновенных дифференциальных уравнений; метод последова-
последовательных приближений; методы конечных и граничных элементов).
Колебания оболочки с жидкостью, внутри которой находится малый
деформируемый элемент, рассмотрены в главе 13.
Нелинейные и параметрические колебания цилиндрического бака с
жидкостью при продольном возбуждении изучаются в главе 14.
379
Глава 9
УРАВНЕНИЯ КОЛЕБАНИЙ УПРУГОЙ ОБОЛОЧКИ
С ЖИДКОСТЬЮ В ОБОБЩЕННЫХ КООРДИНАТАХ
Задачам динамики твердых тел с полостями, содержащими идеальную
или вязкую жидкости, посвящено большое число публикаций, основопо-
основополагающими из которых можно считать работы [157, 235, 245, 267].
Строгая формулировка задач колебаний упругих тел и оболочек, час-
частично заполненных несжимаемой и сжимаемой жидкостью, в виде урав-
уравнений и вариационных принципов и методы составления уравнений гид-
гидроупругих колебаний в обобщенных координатах содержатся в работах
[134, 166, 236, 242, 290, 291, 358] и др. Эти вопросы также рассматрива-
рассматриваются в данной главе.
§ 9.1. Формулировка задачи
Рассмотрим бак в виде тонкой упругой оболочки, частично заполнен-
заполненной идеальной сжимаемой жидкостью (рис. 9.1). На контуре Г (линии
или краях) могут быть заданы перемещения и угол поворота относитель-
относительно касательной к Г или соответствую-
соответствующие погонные силы и момент. Считаем,
что невозмущенное состояние бака с
жидкостью является покоем или прямо-
прямолинейным равноускоренным движени-
движением; вектор поля массовых сил (гравита-
(гравитационных и инерционных) в этом со-
состоянии обозначим через §. Ось Ох
системы координат Охуг, связанной с
баком в его невозмущенном состоянии,
направим в сторону, противоположную
направлению вектора § . Тогда § = -#1,
Рис. 9.1. Тонкая оболочка, частично где #— ускорение поля массовых сил,
заполненная жидкостью 1 _ единичный орт оси х.
Гидростатическое давление в жидкости в невозмущенном состоянии
при условии, что §НЖ 1с «1 и р = сопз!, равно
где рн — давление наддува, р — плотность жидкости, х-Н — коор-
координата невозмущенной свободной поверхности жидкости а , Яж — вы-
высота столба жидкости в баке, с — скорость звука в жидкости.
380
Колебания оболочки и жидкости относительно невозмущенного со-
состояния считаем малыми и безотрывными. Они описываются вектором
перемещений срединной поверхности оболочки и и вектором перемеще-
перемещений жидкости V. Приращение давления в жидкости в возмущенном дви-
движении обозначим через р*, тогда полное давление будет р = /?0 + р*.
Линеаризованное уравнение колебаний жидкости:
§гас!/?*+ру = 0. (9.2)
Объемная деформация жидкости равна е = <И\ у . Если жидкость счи-
считать несжимаемой, то следует положить
сИуу = О. (9.3)
В случае сжимаемой жидкости ее деформация при колебаниях выра-
выражается через приращение давления на основании физического соотноше-
соотношения, аналогичного закону Гука: -р* = Ке , где К = рс2 — модуль объ-
объемного адиабатического сжатия жидкости. Это соотношение записывает-
записывается в виде
*=0. (9.4)
Кинематическое граничное условие безотрывного движения жидкости
на смоченной поверхности оболочки 50:
УУ = 11У = И> , (9.5)
где у — внешняя единичная нормаль к смоченной поверхности оболоч-
оболочки; и> — нормальное перемещение оболочки (рис. 9.1).
Динамическое граничное условие /?о + р* = рц на возмущенной сво-
свободной поверхности жидкости д при 5с = Н +ух\х=н после линеариза-
линеаризации принимает вид
Р*- Р 8ух = 0 на а при х - Н . (9.6)
Уравнение колебаний срединной поверхности 5 тонкой оболочки с
учетом приращения давления жидкости запишем в векторном виде
Ьи = я~тои + Г]ур9И, . (9.7)
где ^ — вектор внешней поверхностной нагрузки, т0 — удельная масса
оболочки; Г] = 1 на 50 и г\ = 0 на несмоченной поверхности оболочки
5 - $о ; Ь — линейный дифференциальный оператор в виде матрицы 3-
го порядка. Вектор Ьи в общем случае удобно представить в виде трех
составляющих [134]:
Ьи = ЬA)и + ЬB)и + ЬC)и . (9.8)
Здесь Ь^и представляет упругие силы деформации оболочки [259], а
ьРи учитывает приведенные нагрузки за счет усилий в срединной по-
поверхности оболочки в ее невозмущенном состоянии (эти приведенные
нагрузки вводятся в уравнения оболочки так же, как в задачах устойчиво-
устойчивости [91]). Член 1Я^и учитывает изменение гидростатического давления
381
на оболочку в возмущенном движении за счет ее перемещений их = щ в
направлении градиента поля массовых сил при неподвижной свободной
поверхности и за счет поворота нормали к оболочке на углы ^, ^2,а
также за счет изменения площади деформированной срединной поверх-
поверхности оболочки на величину (81+е2)с15. В большинстве исследований
по колебаниям упругих оболочек с жидкостью член Ь^и не учитывает-
учитывается, так как влияние его мало. Однако в некоторых специальных случаях
его необходимо учитывать; например, в случае гравитационных колеба-
колебаний мягкой нерастяжимой оболочки с жидкостью, для которой Ь^и = 0.
Член Ь^и также необходимо учитывать в тех случаях, когда из уравне-
уравнений колебаний упругой оболочки, частично заполненной жидкостью,
предполагается получить в качестве частного случая точные уравнения
колебаний недеформируемой подвижной полости с жидкостью. Заметим,
что в случае несжимаемой жидкости в выражении Ь^и также можно
было бы учесть изменение гидростатического давления за счет вытесне-
вытеснения свободной поверхности (осредненного перемещения в направлении
оси х в виде интеграла от м> по поверхности 50, записанного на основа-
основании сохранения объема жидкости) при соответствующем изменении гра-
граничного условия (9.6). Однако в общем случае сжимаемой жидкости это
делать нецелесообразно и удобнее считать, что изменение гидростатиче-
гидростатического давления за счет вытеснения свободной поверхности, представ-
представляющего собой функцию времени, входит в выражение возмущенного
давления р* наряду с гидродинамическим давлением.
Гидродинамическую задачу можно свести к одной неизвестной функ-
функции Ф(х, у, 1,1), представляющей потенциал перемещений жидкости:
V = §гас1Ф = УФ . (9.9)
Тогда из уравнения (9.2) следует
р*=-рФ. (9.10)
Уравнения и граничные условия (9.4)-(9.7) записываются в виде
в V : с2ДФ-Ф=0, (9.11)
ЭФ
на 50: —- = иу = м/, (9.12)
ЭФ
на а: ф + 8^— = 0, (9.13)
Эл:
на 5: Ьи + тои+77рФу = я, (9.14)
где V —объем жидкости; Д = сИу§гаA.
Для уравнения (9.14) необходимо записать соответствующие кинема-
кинематические и динамические граничные условия на краях оболочки и линиях
подвески бака (на контуре Г).
382
В случае несжимаемой жидкости ( с —> °° ) уравнение неразрывности
(9.11) заменяется уравнением несжимаемости (см. (9.3), в V)
АФ=0. (9.15)
§ 9.2. Принцип возможных перемещений
Уравнение принципа возможных перемещений записывается в виде
дП^ЗАр+дАш, (9.16)
где П — потенциальная энергия оболочки бака и жидкости;
8А2=1^8и<15 + \(Ши + Мп8»п)AГ (9.17)
5 Г
— вариация работы поверхностной нагрузки и сил на линиях подвески
бака и его краях (N — вектор сил, Мп и &п — момент и угол поворота
относительно касательной к контуру Г);
8Аш=-^той8ис18-р$УФ8ЧФс1У (9.18)
5 V
— вариация работы инерционных сил оболочки с жидкостью.
К уравнению (9.16) необходимо добавить кинематическое граничное
условие на смоченной поверхности оболочки (9.12) и заданные кинема-
кинематические граничные условия на контуре Г. В случае несжимаемой жид-
жидкости уравнение несжимаемости (9.15) является дополнительным; кине-
кинематическим условием, которое должно быть удовлетворено заранее при
использовании принципа возможных перемещений. Принцип? возможных
перемещений удобно использовать при построении различных, прибли-
приближенных методов решения задач гидроупругости. В случае,, когда задача
записывается в обобщенных координатах^ вместо пржнциоа возможных
перемещений можно непосредственно пользоваться! уравнениямм Ла-
гранжа в обобщенных координатах. При этом вместо вариации работы
инерционных сил (9Л &) используется кинетическая энергия
Т = I Нтпй2с15 + %-|Д (УФJ^У . . (9.1»
2 5 2 V
Потенциальная энергия при колебаниях оболочки^ частично> запол-
заполненной жидкостью, записывается в виде [134]
Л =Я0 +М^^^+^/Я(АФ)^У . (9.20)
где П$(и) —потенциальная энергия деформации оболочки, начальных
усилий в срединной поверхности и сил гравитации при неподвижной
свободной поверхности жидкости; второе и третье слагаемые — потен-
потенциальная энергия волновых движений свободной поверхности жидкости
и потенциальная энергия сжатия жидкости. Потенциальная энергия П$
связана с оператором Ь и ее также (см. (9.8)) можно представить в виде
трех составляющих:
383
(9.21I;'
'
где 11цху, 11^, П^)—потенциальные энергии деформации оболочки
[259], усилий невозмущенного состояния в срединной поверхности обо-
оболочки [91] и гравитации жидкости при неподвижной свободной поверх-
поверхности [134]. При этом составляющие операторов Ь^ и потенциальных
энергий П^ (I = 1,3), входящие в (9.8) и (9.21), связаны друг с другом;
так, если оболочка неподвижно закреплена на граничном контуре Г по
перемещениям и углу поворота (в этом случае работа реакций закрепле-
закрепления равна нулю), то
Здесь вектор и рассматривается как столбец, а оператор Ь как матрица;
верхний индекс «т» обозначает транспонирование.
В силу (9.22) как оператор Ь, так и его составляющие Ь^ являются
самосопряженными.
Выражения потенциальных энергий П^ и П^ ^ широко известны и
их здесь для общего случая приводить не будем. Способ вычисления по-
потенциальной энергии равномерного гидростатического давления в воз-
возмущенном движении Пц' [65]
обобщим на случай тяжелой жид-
жидкости с неподвижной свободной
поверхностью, заполняющей обо-
оболочку вращения, ось которой па-
параллельна направлению поля мас-
массовых сил § [134]. Вектор переме-
перемещений срединной поверхности
оболочки вращения представим в
виде составляющих проекций на
направления касательных к коор-
координатным линиям ф и в и на
внешнюю нормаль V к поверхно-
поверхности в рассматриваемой точке
(рис. 9.2)
Рис. 9.2. Оболочка вращения, частично за- и = ие^ + VЪ^ + м/у , (9.23)
полненная жидкостью
где еф, ев — единичные орты ко-
координатных линий (р и в . Деформации срединной поверхности оболоч-
оболочки и углы поворота нормали к ней в направлении координатных линий (р
и в определяются по формулам [259]
1 Эи " 1 Эу и Л , (9.24а)
384
дм?
(9-24б)
где /?ф и К0 — главные радиусы кривизны срединной поверхности обо-
оболочки, К =
Гидростатическое давление на оболочку в возмущенном движении в
сечении х =х + и$тф-м?со5(р при неподвижной свободной поверхно-
поверхности жидкости равно
Ро = Ро ~ Р8(и81пV ~ ^соз<р), (9.25)
где ро определяется по формуле (9.1).
Вариация работы гидростатического давления в возмущенном движе-
движении с учетом изменения площади срединной поверхности оболочки в
процессе деформации записывается в виде
Подставляя сюда выражения (9.24), (9.25) и удерживая только линейные
члены при вариациях перемещений, получаем
(9.26)
где
Ро ( Эи>
ыпср
(9.27)
Г к дв
1
Здесь р^, р^ , ру — компоненты приведенной нагрузки на оболочку
от гидростатического давления в возмущенном движении (см. рис. 9.2).
Выражение (9.26) преобразуется к виду
, (9.28)
где
и2 V2 ( 1 И 2 о
+ + + ИГ+2
2 Э
\A5. (9.29)
Второй член в выражении (9.28) для оболочек, замкнутых внизу при
х — хо, всегда равен нулю и поэтому
385
(9.30)
На основании (9.22) и (9.30) следует, что
ЬC)и = -*?(рфеф + реее + руу). (9.31)
Выражение П^ ' (9.29) в сумме с 77^ в частном случае для под-
подвижной недеформируемой полости вращения, частично заполненной не-
несжимаемой жидкостью, переходит в точное выражение потенциальной
энергии массовых сил /То,которое в этом случае может быть получено
другим более простым способом (см. (9.45)). Следует отметить, что вы-
выражения для П^ , полученные, например в работах [381, 418], являются
неточными и этому свойству не удовлетворяют. Аналогично может быть
получена потенциальная энергия массовых сил жидкости П^ и в слу-
случае произвольных оболочек.
§ 9.3. Смешанный вариационный принцип
При использовании принципа возможных перемещений (9.16) или
уравнений Лагранжа в обобщенных координатах необходимо заранее
удовлетворить все кинематические уравнения и условия. Во многих слу-
случаях это представляет определенные трудности. При приближенном ре-
решении гидродинамической задачи для сложных форм баков с жидкостью
эти трудности можно преодолеть, используя смешанный вариационный
принцип, из которого наряду с динамическими следуют и кинематиче-
кинематические уравнения (условия) и поэтому отпадает необходимость удовлетво-
удовлетворять их заранее. Вариант смешанного вариационного принципа для упру-
упругого тела с полостями, содержащими несжимаемую жидкость, использо-
использовался в работе [290]. Другие варианты смешанного вариационного прин-
принципа были предложены в работах [128, 134] для упругой оболочки, час-
частично заполненной тяжелой сжимаемой жидкостью.
При формулировке различных вариантов смешанного вариационного
принципа удобно исходить из принципа Лагранжа с неопределенными
множителями. Неопределенными множителями Лагранжа при уравнении
неразрывности жидкости и кинематическом граничном условии на смо-
смоченной поверхности оболочки служит возмущенное давление, которое в
случае потенциального движения жидкости при гармонических колеба-
колебаниях с частотой со равно роJФ . Если жидкость считается сжимаемой,
то волновое уравнение в форме (9.11) непосредственно следует из прин-
принципа Лагранжа (9.16). В этом случае в уравнение (9.16) необходимо до-
добавить только работу реакций удержания кинематических связей на смо-
смоченной поверхности оболочки (9.12) и на краях оболочки ^(и) = 0, где
ГДи) — линейный алгебраический или дифференциальный оператор,
(9.32)
386
Здесь Яг- — реакции на закрепленных краях оболочки (контур Г ); они
могут быть представлены в виде линейных дифференциальных выраже-
выражений от и на основании соотношений, связывающих внутренние усилия с
деформациями, или могут рассматриваться как независимые неизвестные
функции.
С учетом потенциальной энергии (9.20) и выражений для работ (9.18)
и (9.32) уравнение принципа возможных перемещений (9.16) в случае
гармонических колебаний может быть преобразовано к виду
Вариационное уравнение (9.33) неприменимо, если жидкость считает-
считается несжимаемой (с -> <*>) и при этом от функции Ф заранее не требует-
требуется, чтобы она была гармонической. Поэтому основной областью приме-
применения уравнения (9.33) являются колебания сжимаемой жидкости в упру-
упругой оболочке. При расчете колебаний несжимаемой жидкости, используя
(9.33), необходимо заранее удовлетворить уравнение АФ = 0 в V.
Другой вариант смешанного вариационного принципа, из которого
вытекает уравнение неразрывности жидкости (как для несжимаемой, так
и для сжимаемой жидкости), можно получить, если потенциальную энер-
энергию сжатия жидкости записать через давление:
а в выражение работы (9.32) добавить еще работу давления при удержа-
удержании кинематической связи — уравнения неразрывности жидкости:
А = роJ \\Ф{*>-^-) Ж + (Х02\\\Ф (АФ + \
. (9.35)
1 Г
Тогда (9.16) с учетом (9.18), (9.34) и (9.35) можно привести к виду
2 2
\\2^
Запишем еще один вариант смешанного вариационного принципа.
Для этого потенциальную энергию гравитации жидкости запишем через
давление рсо2Ф и вместо (9.34) будем иметь
П=П0+Х— ф^ст+Л— Ф^У; (9.37)
* О 1С V
соответственно в выражение работы (9.35) добавим еще работу давления
при удержании кинематической связи на свободной поверхности жидко-
жидкости:
л2 ^/г\
8 "V
2
+ рйJГГГф(АФ+^г)йГУ-Т [Я^(и)^Г. (9.38)
V С I Г
Тогда с учетом (9.18), (9.37) и (9.38) уравнение (9.16) приводится к виду
\ = 0. (9.39)
V (Г \
В случае если влияние гравитации не учитывается (# = 0), то при исполь-
использовании (9.39) необходимо заранее удовлетворить динамическое условие
Ф = 0 на а .
В вариационных уравнениях (9.33), (9.36) и (9.39) вектор перемеще-
перемещений оболочки и и потенциал перемещений жидкости Ф (а также реакции
А}, если они заранее не выражены через и) варьируются независимо, и
из них следуют все уравнения и граничные условия задачи о связанных
гармонических колебаниях упругой оболочки и частично заполняющей
ее сжимаемой жидкости.
В частных случаях при расчете гравитационных (#>0, с —»°° , ст>0)
и акустических (#—>0, с<°о, <7>0) колебаний жидкости в неподвиж-
неподвижной полости в вариационных уравнениях (9.33), (9.36) и (9.39) надо по-
положить и = 0.
Если решается только гидродинамическая задача о движении жидко-
жидкости в деформируемой полости, перемещение стенки которой и (или толь-
только нормальное перемещение м> = и • V -» щ) задано и не варьируется, то
при использовании уравнений (9.33), (9.36), (9.39) необходимо считать
770[и] = 0, 5и = 0, 5м/= 0 и А^(и) = 0. С учетом этого при # = 0,
с—>оо из уравнения (9.36) вытекает (общий множитель рсо2 опускаем)
— Ж7!* (9.40)
V 50 а Х \
388
На основании (9.40) функция Ф удовлетворяет уравнениям
ЭФ
Дф = 0— в У, —- = и>0 — на 50, ф = 0— наст. (9.41)
С/У
Если требуется, чтобы функция Ф удовлетворяла на а кинематиче-
кинематическому граничному условию дФ/дх = ^, где ^0 — заданное нормальное
перемещение свободной поверхности жидкости, то в уравнении (9.40)
интеграл по <т заменяется интегралом, аналогичным интегралу по 50,
где также задано кинематическое граничное условие. Тогда будем иметь
^ \\ \\\ = Ъ. (9.42)
ГУ 50 (т ]
Отсюда следует, что
ЭФ ЭФ
дф = о — в V , —- = щ — на 50, —- = <*0 — на а . (9.43)
оу ах
Для разрешимости этой задачи при с -» ©о необходимо, чтобы заданные
функции щ и <^0 удовлетворяли условию сохранения объема несжи-
несжимаемой жидкости
о=0. (9.44)
§ 9.4. Возможные пути упрощения задач
Сформулированная выше задача о колебаниях оболочки с жидкостью
является достаточно общей и может применяться в широком диапазоне
изменения параметров системы, включая различные крайние случаи:
низкочастотные гравитационные и высокочастотные акустические коле-
колебания, колебания жидкости в абсолютно жестких полостях и в мягких
оболочках.
При решении практических задач в различных частных случаях в за-
зависимости от параметров системы, рассматриваемых форм колебаний и
диапазона частот можно использовать те или иные упрощающие допу-
допущения, которые принимаются на основе опыта расчетов, решений мо-
модельных задач или оценок.
Например, вопрос о необходимости учета ускорения поля массовых
сил (гравитации), упругости оболочки и сжимаемости жидкости в опре-
определенном диапазоне частот может быть решен на основании оценок низ-
низших собственных частот колебаний таких парциальных систем, как:
1) абсолютно жесткая неподвижная оболочка, частично заполненная
несжимаемой жидкостью (колебания обусловлены гравитационными вол-
волновыми движениями свободной поверхности жидкости);
2) упругая оболочка, частично заполненная несжимаемой жидкостью
без учета гравитации (упругие оболочковые колебания);
3) абсолютно жесткая неподвижная оболочка; частично заполненная
сжимаемой жидкостью без учета гравитации (акустические колебания
жидкости).
389
Обычно, исключая случай мягких оболочек, низшая частота грави
ционных колебаний свободной поверхности жидкости значит
меньше низших частот упругих и акустических колебаний. Тогда пра|
низкочастотных колебаниях бака его оболочку можно считать недефор-
мируемой, учитывая ее перемещения как твердого тела, а жидкость —- \
несжимаемой. При таких допущениях потенциальная энергия деформа-^
ции оболочки и сжатия жидкости равна нулю, а потенциальная энергия";
массовых сил (усилий в срединной поверхности оболочки и гидростати-
гидростатического давления) приводится к виду
Яо = -ф)М§Хц.м0?2 + &1)-ф)Р2[Ри1 + 25уих#у -
- 25Л1?г + 3у&1 +/ г0? - ^у7ру¦&г ], (9.45)
где их, Фх, Л, — перемещение бака в начале координат вдоль оси х и
углы поворота его относительно осей>- и г (см. рис. 9.1); М, хцм — масса
бака с жидкостью и координата его центра масс;
а, 5у=\\Ыа, 8г=\\уЛо,
о о (9.46)
представляют геометрические характеристики свободной поверхности
жидкости; с1а = Лус1г.
При расчете упругих колебаний по оболочковым формам влиянием
гравитации можно пренебречь, если низшая частота гравитационных ко-
колебаний значительно меньше частот рассматриваемых упругих форм ко-
колебаний. При этом влияние сжимаемости тяжелой жидкости может быть
существенным только в тех случаях, когда низшая парциальная частота
акустических колебаний имеет такой же порядок, как и частоты рассмат-
рассматриваемых оболочковых форм колебаний бака с жидкостью. Это условие
выполняется только при высокочастотных упругих колебаниях или при
колебаниях по таким упругим формам, при которых происходит вытес-
вытеснение жидкости, сопровождаемое значительным изменением гидродина-
гидродинамического давления в большей части объема жидкости, как, например,
при осесимметричных формах колебаний не слишком тонких оболочек
вращения при больших глубинах заполнения.
Что касается оболочек топливных баков, то для них могут быть ис-
использованы различные приближенные теории в зависимости от рассмат-
рассматриваемых форм колебаний. Так, для форм колебаний, сопровождающих-
сопровождающихся в основном растяжением-сжатием срединной поверхности, может быть
использована безмоментная теория, а для форм с большим числом волн
на поверхности оболочки — теория пологих оболочек. Допущения могут
также относиться к виду граничных условий на краях оболочки или на
контуре сопряжения. Если характер закрепления оказывает несуществен-
несущественное влияние на интегральные динамические характеристики системы
(такие, как собственные частоты), то при решении задачи могут быть
приняты простые граничные условия, например, условия типа свободно-
390
го опирания, позволяющие упростить решение или без затруднений вы-
выбрать систему координатных функций для получения приближенного
решения по методу Ритца или Бубнова-Галеркина.
§ 9.5. Собственные колебания
Если внешняя нагрузка отсутствует (д = 0), то задача (9.11)—(9.14)
становится однородной, и при однородных граничных условиях на краю
оболочки она имеет решение вида
и(х,у,г) = ип(х,у,г)$тсоп1, Ф(х,у,г) = Фп(х,у,1)$тсоп{, (9.47)
где ип , Фп представляют собственные формы колебаний, а соп — соот-
соответствующие им собственные частоты, п = 1,оо.
В общем случае система в виде упругой тонкой оболочки, частично
заполненной тяжелой сжимаемой жидкостью, в поле массовых сил имеет
несколько перекрывающихся бесконечных спектров собственных частот
колебаний, каждой из которых соответствует определенная форма коле-
колебаний. Один из этих спектров относится к гравитационным волновым
колебаниям свободной поверхности жидкости, другой — к упругим ко-
колебаниям оболочки, третий — к акустическим колебаниям жидкости.
Гравитационные, упругие и акустические колебания в рассматриваемой
системе в общем случае являются связанными. В частных случаях неко-
некоторые из этих типов колебаний могут отсутствовать. Так, в случае абсо-
абсолютно жесткой оболочки, частично заполненной несжимаемой жидко-
жидкостью, спектры собственных частот, относящиеся к оболочковым формам
и формам акустических колебаний жидкости, сдвигаются в бесконеч-
бесконечность, и остается только один спектр чисто гравитационных колебаний. В
другом частном случае, когда не учитывается поле массовых сил (§ = 0),
спектр гравитационных колебаний свободной поверхности вырождается
в нулевой спектр; в этом случае нулевым собственным частотам соответ-
соответствуют собственные формы колебаний Фп для несжимаемой жидкости в
неподвижной недеформируемой полости.
Пусть собственные формы колебаний ил, Фп вместе с соответству-
соответствующими частотами соп найдены как решения уравнений (9.11)—(9.14) или
соответствующих вариационных уравнений при я = 0. Различные собст-
собственные формы колебаний являются ортогональными между собой, как и
в случае любой консервативной системы, так что работы инерционных и
упругих (позиционных) сил одной формы на перемещениях другой фор-
формы равны нулю. Эти условия для к-й и т-й форм записываются в виде
[134, 358]:
тоиппк АЗ + р11]ЧФпЧФкЖ = 0 , п Ф к ,
2> ЭФ (948)
——-д,о + ос1 {\{АФпАФкЖ = 0, /г ^ к .
391
Оператор Ь в силу (9.22) является самосопряженным и
]
5 5
Вместо (9.48) можно записать ряд других эквивалентных им условийД
если в первом условии (9.48) преобразовать объемный интеграл по фор*1
муле Грина и учесть уравнения, которым удовлетворяют функции ил,|
Фп. Тогда
у 2 (9.49)
рс2 Г | Г АФьАФ„ (IV = рсо1 Г |ГфьАФ„ йУ=-г
у Vе
При этом дФп/ду = м>п =пп\ на 5о и дФп/Эу = дФп1дх на <т . В слу- ]
чае если жидкость считается несжимаемой, АФЛ = 0; а если не учитывав
ется гравитация, то Фп = 0 на а . Для недеформируемой неподвижно^
полости ип = 0. ?
Введем обозначения >*
р[ГГ(УФлJй?У, 1
3 у (9.50У
5 о V
Коэффициенты тп, кп представляют обобщенные массу и жесткость п-й
формы колебаний; причем коэффициент кп равен удвоенной потенци-
потенциальной энергии п-й формы, при этом выполняется условие кп = тпсо2.
§ 9.6. Уравнение колебаний бака с жидкостью
в обобщенных координатах
9.6.1. Произвольный бак. Пусть упругий подвесной или несущий ;
бак, частично заполненный жидкостью, является составным элементом
упругой конструкции ЛА и крепится к ней по контуру Г, это может
быть одна или несколько линий или узловых точек (см. рис. 9.2). Вместе
с конструкцией при ее колебаниях бак совершает переносное движение, а
за счет упругости оболочки бака и подвижности жидкости — относи- ;
тельное движение. Переносное движение будем характеризовать обоб- :
щенными координатами д^), представляющими колебания несущей ;
конструкции по некоторым заданным формам г\((х,у,г.), а относитель- ]
ное движение — обобщенными координатами /пA), представляющими
собственные формы колебаний бака с жидкостью ил, Фп, неподвижно
закрепленного по контуру Г . В результате перемещения оболочки бака
и потенциал перемещений жидкости представляются в виде [357]
392
При этом потенциалы перемещений жидкости в переносном движении
подчиним условиям
ДУ,=0вУ, -^-и^.у на 50, (9-52)
ОУ
считая их в общем случае произвольными на свободной поверхности а
(граничные условия для У^- на а выбираются из удобства вычислений
или упрощения уравнений).
С учетом условий ортогональности собственных форм колебаний
(9.48) и обозначений (9.50) выражения кинетической (9.19) и потенци-
потенциальной (9.20) энергий и вариации работы внешней поверхностной на-
нагрузки (9.17) записываются в виде [358]
т =^
1 I }
где
Щ =
п
5 5
Выражения для коэффициентов Мц , т^ с помощью формулы Грина и
с учетом (9.52) преобразуются к виду
5 50 а 0Х
они упрощаются, если функции 9х,- подчинить условию !Р; = 0 на а .
393
Потенциальная и кинетическая энергии и вариация работы для сисщ
мы в целом составляются путем суммирования по всем отсекам (частящ
конструкции и по всем бакам с жидкостью. Уравнения колебаний систе
мы получаются как уравнения Лагранжа в обобщенных координата!
Возможен также иной подход. Сначала записываются уравнения ко-
колебаний для каждого изолированного бака с учетом неизвестных реакци!
взаимодействия с конструкцией по контуру Г. Часть этих уравнений
(уравнения для ^^) определяет обобщенные реакции Рх, соответствую*
щие д;, в зависимости от д{ и /п. Затем записываются уравнения колеи?
баний конструкции в обобщенных координатах с учетом реакций Р(, к
которым добавляются уравнения колебаний баков (уравнения для /п)!
Чтобы составить уравнения колебаний изолированного бака, необходимо
в выражении 5Ар наряду с поверхностной нагрузкой ^ учесть вариацию
работы реакций закрепления на перемещениях х контура Г :
I П
Тогда с учетом выражений (9.53) уравнения Лагранжа для обобщен-
обобщенных координат ф и /п запишутся в виде
(9.56)
/п + кп/п = Рп .
9.6.2. Бак в форме оболочки вращения. Рассмотрим бак в виде про-
произвольной оболочки вращения, заполненной на глубину Н (см. рис. 9.2.)
Считаем, что оболочка прикрепляется к несущему телу по контуру Г,
который совпадает с параллелью оболочки и является недеформируемым
при колебаниях несущей конструкции (контур Г перемещается и пово-
поворачивается как твердое тело). В силу осевой симметрии системы ее коле-
колебания разделяются на несвязанные между собой осесимметричные (про-
(продольно-радиальные и крутильные) колебания (т = 0), антисимметричные
(поперечные) колебания (ш = 1) и асимметричные колебания
(т = 2, 3 ...); здесь т — число волн в окружном направлении, характери-
характеризующее распределение нормальных перемещений оболочки пропорцио-
пропорционально созтв или ьттв . При крутильных колебаниях отличны от нуля
только окружные перемещения оболочки, и поэтому оболочка не взаимо-
взаимодействует с идеальной жидкостью.
При продольно-радиальных колебаниях перемещение недеформируе-
мого контура Г вдоль оси х обозначим через С/о(/) (см. рис. 9.2). Тогда
в качестве переносного движения можно рассматривать перемещение
системы как твердого тела, для которого д0 = Ы§, т|0 = 1, ^о = х ~~ Н • В
этом случае кОо = 0, кОп = 0, и уравнения (9.52) приводятся к виду
394
Е тОп/п = <2о + ^0 >
(9.57)
Здесь МОо=М —масса оболочки с жидкостью, <2о(*) и ^о(*)—ПР°"
дольные силы — равнодействующие поверхностных нагрузок и реакций
подвески; /п(г) — нормальные координаты, представляющие собствен-
собственные осесимметричные формы колебаний.
Продольное перемещение центра масс бака с жидкостью за счет упру-
упругих деформаций по п-й форме, как следует из первого уравнения (9.57) на
основании теоремы о движении центра масс системы, равно /пщп /Моо •
Поэтому если формы колебаний пронормировать так, чтобы гаОп = МОо >
то обобщенные координаты /п будут обозначать продольное смещение
центра масс бака с жидкостью относительно плоскости подвески за счет
упругих деформаций оболочки и жидкости по п-и форме. При нормиров-
нормировке тОп = тп уравнения (9.57) представляют механический аналог бака
при продольных колебаниях в виде масс тп, присоединенных к подвеске
(контуру Г ) на пружинах жесткости кп = тп0)^ [192].
С учетом условий ортогональности собственных форм колебаний
(9.48) можно получить разложения
л п
тп
с помощью которых можно показать, что коэффициенты уравнений (9.57)
удовлетворяют условию [192]
При поперечных колебаниях (т=1) в плоскости Оху перемещение в
направлении оси у и угол поворота относительно оси г недеформируемо-
го контура подвески Г обозначим через У0@ и А)@ (см- рис. 9.2).
Здесь в качестве переносного движения примем перемещение (/= 1) и
угол поворота (г = 2) оболочки как твердого тела. Тогда ^\=У^•> Ц\ = } ,
В случае «медленных» движений бака в диапазоне низших собствен-
собственных гравитационных колебаний можно считать оболочку недеформируе-
мой (ип =0), жидкость несжимаемой (ЛФ„ =0), а потенциалы 9^ и Ч*2
удобно подчинить условиям Э1Р1/Эх = 0, дЧ/2/дх = О (при этом Ч*\ = у)
[235]. Тогда уравнения (9.56) для случая поперечных колебаний полости
вращения с жидкостью упрощаются (кп = щ2 = Щп = щп = 0 ) и записы-
записываются в виде [235, 134]:
395
= 02
Мп = М,М12 = М21 =5,...КГ22 = -#5, 5 = Мл:ц
где М и хц м — масса и координата центра масс оболочки с жидкое
#н — радиус свободной поверхности; /п — собственные формы волне
вых колебаний свободной поверхности жидкости, отсчитываемые от
возмущенной поверхности а.
В случае «быстрых» движений бака в диапазоне низших оболочковь
форм колебаний, а также при ударных воздействиях можно пренебрег
гравитацией, положив # = 0; потенциалы ^ и Ч*2 на а при этом следуе
подчинить условиям: ^ = 0, Ч*2 = 0. В этом случае уравнения коле
ний упругого бака с жидкостью будут иметь вид (9.58) при
(/п здесь будут представлять только формы собственных упругих коле-|!
баний бака). ;
На основании уравнений (9.58) бак в виде упругой оболочки враще- ч
ния или подвижной недеформируемой полости с жидкостью может быть
заменен эквивалентной механической моделью в виде системы упругое
массовых осцилляторов или маятников, подвешенных к несущему телу
[192,371,374].
При асимметричных формах колебаний (т = 2, 3 ...) взаимодействие с
перемещениями недеформируемого контура подвески отсутствует, и та-
такие колебания возможны только при действии на оболочку поверхност-
поверхностных нагрузок. При этом уравнения (9.56) принимают форму обычных
уравнений в нормальных координатах
тп/„ + кп/п=Рп, (п = 1,2,...). (9.59)
9.6.3. Продольные колебания упругого цилиндрического бака с
жидкостью. Рассмотрим цилиндрический бак, частично заполненный
жидкостью, с днищем в виде произвольной упругой оболочки вращения
(рис. 9.3). Торцевые шпангоуты здесь будем считать абсолютно жестки-
жесткими. При продольных колебаниях такого бака в составе несущей констг
рукции, например, корпуса ракеты, с которой он соединен на торцах, пе-
переносное движение бака будет характеризоваться продольными переме-
перемещениями нижнего и верхнего торцов 1!^) и {У^О . При этом продоль-
продольные и нормальные перемещения ортотропной цилиндрической оболочки
постоянной толщины при ее квазистатическом растяжении на величину
1/1-1/0 будут равны иц =1/0[ 1-~) + Щ^, ">ц = -(Щ -1/0)/^7"» где
/лх — коэффициент Пуассона; влиянием краевых эффектов изгиба обо-
оболочки вблизи торцов на функцию м>ц пренебрегаем. Оболочка днища в
переносном движении перемещается в продольном направлении как
твердое тело:
396
Для рассматриваемого бака в общих выражениях (9.51) полагаем: / = 0,1,
#0 = ^0 » Я\ = У\» Для оболочки днища — щ = 1, т^ = 0; для ЦИЛИНДРИ-
ЧРГКПЙ П^ППОЧКИ _. к кг
ческой оболочки —
ДЛЯ ЖИДКОСТИ
где функция Ф$(х,г) является решением
задачи
АФ0 =0вУ,
дФ{
- = 1 на 5ц, Фп = 0 на а ;
(9.60) Ро|
О
Н
ОУ Рис. 9.3. Несущий цилиндриче-
1,} — единичные орты координатных осей х ский бак с жидкостью
и г\ 5Д, 5Ц — поверхности днища и цилиндра.
Относительное движение бака характеризуется обобщенными коор-
координатами /п, представляющими собственные формы пп, Фп осесим-
метричных упругих колебаний закрепленного на торцах (при
11$ = 111=Ъ) бака, частично заполненного сжимаемой жидкостью; влия-
влиянием гравитации в данном случае можно пренебречь, полагая § = 0.
Кинетическая и потенциальная энергии и вариация работы продоль-
продольных сил (реакций связей) на торцах оболочки (9.53) записываются в виде
[346]
(9.61)
Здесь К"Оо = 2яЕхНцК/Ь; Ех, Нц — модуль упругости в осевом направ-
направлении и толщина цилиндрической оболочки бака; остальные коэффици-
коэффициенты определяются по общим формулам (9.50), (9.54).
Уравнения продольных колебаний цилиндрического бака, выделенно-
выделенного из составной конструкции [346]:
М0000 +М011/г ^
М0100
-Щ) = Рг,
(9.62)
П+ К!п =0 (и = 1,2...) .
397
Глава 1 О
НЕКОТОРЫЕ ТОЧНЫЕ РЕШЕНИЯ ЗАДАЧ
О КОЛЕБАНИЯХ УПРУГИХ ОБОЛОЧЕК С ЖИДКОСТЬЮ
Точные решения задач о собственных колебаниях упругих оболочек,
частично заполненных жидкостью, можно получить только в тех случаях,
когда поверхность оболочки совпадает с координатной поверхностью, а
форма заключенного в ней объема жидкости допускает решение гидро-
гидродинамической задачи методом разделения переменных. Ортогональные
функции метода разделения переменных обычно являются также собст-
собственными функциями дифференциальных уравнений оболочки постоян-
постоянной толщины. При этом трудности, возникающие в случаях, когда ис-
используемые ортогональные функции не удовлетворяют граничным усло-
условиям на краях оболочки, могут быть преодолены с помощью модифици-
модифицированного метода Бубнова-Галеркина [365] или с помощью метода неоп-
неопределенных множителей Лагранжа [349]. Точные решения некоторых
частных задач о собственных колебаниях упругих оболочек с жидкостью
получены в работах [27, 28, 190, 349, 351] и ряде других.
Точные решения могут быть использованы для оценки влияния раз-
различных параметров системы с целью последующих упрощений более
сложных задач, а также для оценки точности приближенных и численных
решений.
§ 10.1. Цилиндрическая оболочка с недеформируемым
плоским днищем
Рассмотрим осесимметричные колебания упругой круговой цилинд-
цилиндрической оболочки с недеформируемым плоским днищем, заполненной
сжимаемой жидкостью (рис. 10.1). Грави-
Гравитацию сначала учитывать не будем (# = 0).
Осевыми силами инерции оболочки пре-
пренебрегаем. В этом случае потенциал пере-
перемещений жидкости для гармонических ко-
колебаний можно определить методом разде-
разделения переменных как решение задачи
л>2 дф\
с2 ' ~дх\х=о
дФ\ ^
н
О
I/
A0.1)
Рис. 10.1. Цилиндрическая
лочка с жидкостью
398
обо-
В итоге получим
Н
= Я B*-1)
/I = , Аь = =
Аь —
к
где /0(...M А(-) —бесселевы функции мнимого аргумента.
Потенциальная энергия осесимметричной деформации изотропной
цилиндрической оболочки постоянной толщины к со свободным в осе-
осевом направлении верхним краем равна
пЕН
К2Н2
12A -
A0.3)
Рассмотрим сначала цилиндрическую оболочку, нижний край которой
при х = 0 защемлен по углу поворота и свободен в радиальном направле-
направлении ( м/ = у\Г = и = 0), а верхний край при х = Ь свободно оперт
(м^ = м;# = м/ = 0) [347]. В случае полностью заполненной оболочки
(Я = Ь) собственными формами колебаний оболочки являются функции
Щ(х) = со$(Лкх/К), к = 1,2,..., каждой из которых соответствует беско-
бесконечное множество функций, представляющих потенциалы перемещений
для свободных форм колебаний сжимаемой жидкости,
г ( 7 Г
V К
A0.4)
Безразмерные собственные частоты пкп=щп(рК IЕН) , к = 1,2,...,
п = 0,1,... определяются из частотного уравнения
где
A0.5)
A0.6)
Уравнение A0.5) при каждом значении к =1,2,... имеет бесчисленное
множество корней пкп (п = ОД,...). Низшим частотам колебаний & при
п = 0 соответствуют параметры Я|о > 0, а высшим (п = 1, 2,...), принад-
принадлежащим высокочастотному акустическому спектру колебаний сжимае-
399
мой жидкости, — параметры Я^о < 0 . Поэтому при определении высших
частот ( п > 1)
A0.7)
где /о(-)' Л(—) — бесселевы функции 1-го рода. В случае несжимае-
несжимаемой жидкости пкп —» оо при и > 1.
Собственные частоты и формы колебаний сжимаемой жидкости со
свободной поверхностью в абсолютно жестком цилиндре определяются
формулами
^42 ^(\ A0.8)
где кп —корни уравнения 71(/:) = 0, л = 1,2,..., &0 = 0. Зная значения
частот для несжимаемой жидкости в упругой оболочке (уЗ —>0) и для
сжимаемой жидкости в абсолютно жесткой оболочке A0.8) при я = 0,
можно оценить частоты колебаний сок$ сжимаемой жидкости в упругой
оболочке, используя, например, формулу Донкерлея.
Коэффициенты присоединенных масс щп и тп уравнений (9.57), где
{Уо — продольное перемещение основания бака, равны ( индексу п здесь
соответствует двойной индекс кп)
ткп =
-1
(Ю.9)
Основной интерес представляют низшие частоты сок$. Степени сво-
свободы (/&и, п>1), соответствующие частотам со^ из акустического
спектра, в большинстве практических случаев можно не учитывать.
Обратимся к оценке влияния сжимаемости жидкости на частоты сок$
для двух низших форм колебаний. На рис. 10.2 показано влияние сжи-
сжимаемости жидкости (В — вода, С — этиловый спирт) на относительное
изменение квадратов двух низших собственных частот Аш и коэффици-
коэффициентов присоединенных масс Ам,
-100%, Ам = ~ т°*°/т*° 7т°*/т* -100% , A0.10)
сок Щк/Щ
алюминиевой оболочки (щ , щк и тк — собственные частоты и коэф-
коэффициенты присоединенных масс для несжимаемой жидкости (/3 = 0,
к = 1,2,...). Собственные частоты определялись из уравнения A0.5) с уче-
учетом A0.6) по методу последовательных приближений. При этом в качест-
качестве первого приближения использовалось значение пк при /3=0, т. е. для
400
несжимаемой жидкости. В случае стальной оболочки такой же толщины
значения Аш примерно в два раза выше, чем для алюминиевой оболочки.
Результаты, приведенные на рис.
10.2, показывают, что в некоторых
случаях сжимаемость жидкости суще-
существенно снижает собственные частоты
осесимметричных колебаний цилинд-
цилиндрической оболочки. Причем наиболь-
наибольшее влияние она оказывает на низшую
частоту. Влияние сжимаемости жид-
жидкости характеризуется параметром
Р = Ек/(рсК), который может ме-
меняться в широких пределах. Для неко-
некоторых комбинаций материала оболоч-
оболочки и жидкости величина /3 может
быть достаточно большой. Например,
для алюминиевой оболочки с водой
Е/ рс2 = 31,2, а для стальной оболочки
с жидким пропаном Е/ рс2 = 2400.
Приведем результаты приближенно-
приближенного способа оценки сжимаемости жидко-
жидкости, сравнивая частоты колебаний сжи-
сжимаемой жидкости в упругой оболочке с
частотами колебаний сжимаемой жид-
жидкости в абсолютно жесткой оболочке.
Для алюминиевой оболочки с этиловым
спиртом при К/к = 100 (/? = 0,682) и
Я =4 точные значения квадратов без- алюминиевой цилиндрической обо-
размерных частот колебаний сжимае- лочки с плоским днищем (кривые 7 и
2 2 2) т относительное изменение квад-
мой &к0 и несжимаемой пк жидкости раТов собственных частот Д^ и
в упругой оболочке, а также сжимаемой коэффициентов присоединенных
жидкости в абсолютно жестком цилин- масс Ам в зависимости от глубины
дре &кож для двух низших тонов рав- жидкости
ны: п20 = 0,05640, п2 = 0,07946, &20ж = 0,226 и п$0 = 0,4638,
О.\ = 0,5842, ^2|ож = 2,038. Используя формулу Донкерлея
1/42&О = 1/&2 + 1/^ож > получаем приближенные оценки частот
О,^ = 0,0566 и О,2$ = 0,4540, которые близки к точным значениям.
Ниже в табл. 10.1 для сравнения приведены результаты расчетов без-
безразмерной собственной частоты &2\ и коэффициентов обобщенных масс
Ш1/(рК3) и тО1/(рЯ3) низшей формы колебаний цилиндрической обо-
оболочки из дюраля, заполненной водой. Параметры системы: К1 к = 100;
401
Н/К
Рис. 10.2. Влияние сжимаемости жи-
(в — в°Да> с — этиловый
ро I р = 2,7 ; \х = 0,3 ; /3 = 0,312. В первых строках приведены результа-
результаты, полученные для несжимаемой жидкости (/3 = 0), во вторых стро-
строках — точные значения с учетом сжимаемости жидкости.
Таблица 10.1
Я
А2
щ
~Р*3
1
0,9388
0,8576
3,347
4,018
2,546
2,856
2
0,2846
0,2509
22,07
28,44
10,19
11,67
4
0,07550
0,06565
166,4
220,2
40,74
46,99
6
0,03395
0,02943
555,2
738,7
91,67
105,9
Рассмотрим теперь собственные колебания цилиндрической оболочки
с абсолютно жестким плоским днищем, нижний край которой при х = О
жестко защемлен ( м> = м/ = м = 0), а верхний — при х = Ь свободно
оперт (и; = у/ = и = 0) [349].
Перемещения полностью заполненной оболочки (Я = Ь ) ищем в виде
и>(л;,г) = > ад.@со5—^^- . (Ю.П)
Ь-1 ^
При этом не удовлетворяется кинематическое граничное условие при
х = 0. Оно может быть удовлетворено путем введения его в вариацион-
вариационное уравнение (9.36) при $(м?) —> м>@) с неопределенным множителем Я,
представляющим погонную поперечную силу в заделке.
Подставим A0.2), A0.3) и A0.11) в уравнение (9.36). Учитывая, что
вариации 8ак (к = 1,°° ) и 5Я произвольны и независимы, имеем
ЕНН ^
Исключая коэффициенты ак из системы A0.12), получаем частотное
уравнение
^[кк-п2]ик(п)] =0, A0.13)
к=\
где ЦкШ) определяются по формулам A0.6) при /Ш2 <Я| и A0.7) при
/Ш2>Я|. Уравнение A0.13) имеет бесконечный спектр собственных
частот О,п. Соответствующие коэффициенты разложения A0.11) для п-й
собственной формы на основании A0.12) равны
_ _ 2К2Л/(ЕШ) ^ (Ш14)
где значение Я может быть выбрано, исходя из условия нормировки
форм. Коэффициенты присоединенных масс, входящие в уравнения
(9.57), для п-й формы собственных колебаний равны
402
тОп=-2ярК
ч1/2
к=\
A0.15)
На рис. 10.3 показано влияние абсолютно жесткого1 закрепления ниж-
нижнего края алюминиевой оболочки с водой по сравнению со свободным в
радиальном направлении при /3 = 0 на отно- д
сительное изменение квадратов собственных
частот Лф (а) и коэффициентов присоеди-
присоединенных масс Ам (б) для двух низших форм
(п = 1,2) (кривые 7 и 2) в зависимости от глу-
глубины жидкости Н/К
А,„ = п „ "и-100%,
ип0
Ам="
•100%
и т/г0 — определяются по фор-
формулам A0.5) и A0.9) при /3 = 0. При этом
формы колебаний оболочки (со$(Лпх/К)) с
защемленным и со свободным в радиальном
направлении нижним краем отличаются толь-
только краевым эффектом, который близок к ста-
статическому краевому эффекту.
Используя разложение A0.11) и в случае
необходимости добавляя к нему еще две
функции с неизвестными коэффициентами,
представляющими недостающие степени сво-
свободы по углу поворота нижнего края оболоч-
оболочки и по нормальному перемещению ее верх-
верхнего края, на основе уравнения (9.36) можно
получить точное решение для цилиндриче-
цилиндрической оболочки, полностью заполненной жид-
жидкостью, при любых граничных условиях на ее
краях. Например, в случае шарнирного опи-
рания верхнего и нижнего краев решение
можно представить в виде
Рис. 10.3. Влияние жесткого
закрепления нижнего края
алюминиевой цилиндричес-
цилиндрической оболочки с водой на от-
относительное изменение квад-
квадратов собственных частот
До, (а) и и коэффициентов
присоединенных масс Дм (б)
для двух низших собствен-
собственных форм осесимметричных
колебаний (кривые 1 и 2) в
зависимости от глубины
жидкости Н/К
и<*, 0 = \\ @<?1 (л) + 2) я* @ С08 &кх/ К) >
к=\
где ф^лг) —любая гладкая функция, удовлетворяющая граничным усло-
условиям ср{ @) * 0, ф1 (Ь) = ф{(Ь) = 0. При этом граничное условие м> = 0 при
х = 0 удовлетворяется с неопределенным множителем Я .
403
Приведем оценку влияния гравитации на собственные частоты коле-
колебаний несжимаемой жидкости в упругой безмоментной цилиндрической
оболочке с неподвижным плоским днищем. К потенциалу Ф A0.2) при
с -» ©о добавим потенциал
A0.16)
описывающий волновые движения жидкости в неподвижном цилиндре;
кп — корни уравнения ^^(к)-0. В этом случае, исходя из (9.36), при
§ Ф 0 получаем совместную систему алгебраических уравнений относи-
относительно неизвестных коэффициентов ак,
к,п = 1,°°). Уравнения для
Ай),%;Аа,%
0,8
0,6
0,4
0,2
0
1
ак и гп связаны между собой малым
параметром г = р §НК I Ек, поэтому
для решения бесконечной слабо свя-
связанной системы уравнений будем ис-
использовать метод возмущений [245].
Так как здесь параметр в равен ок-
окружной деформации оболочки от гид-
гидростатического давления в районе
днища, очевидно, максимально воз-
возможные значения в ограничены вели-
5 Н/К чиной предельной упругой деформа-
деформации материала оболочки.
На рис. 10.4 показано влияние
на увеличение относи-
изменения квадратов час-
Рис. 10.4. Влияние гравитации и упру-
упругости цилиндрической оболочки с
жидкостью при е = 0,02 на относи-
относительное изменение квадратов двух
низших собственных частот осесим- тот упругих колебании: Аш =
метричных упругих Аа и гравитаци- = (~2 _ш2)/йJ ? к = 12 и упругости
онных колебаний Аа в зависимости оболочки на уменьшение относитель-
от глубины жидкости Н1К ного изменения квадратов частот грат
витационных колебаний: Аа = (&п -опI оп, (и = 1,2) в зависимости от
глубины жидкости Н/К; тильдой отмечены частоты, вычисленные с
учетом взаимного влияния гравитации и упругости безмоментной обо-
оболочки при е = 0,02 . При расчете связанных колебаний по методу возму-
возмущений удерживались только линейные члены разложения квадратов час-
частот по степеням в . Как видно из графиков рис. 10.4, влияние гравитации
при осесимметричных колебаниях упругой оболочки с жидкостью мало и
в большинстве практических случаев им можно пренебречь. Следует от-
отметить, что основная часть влияния гравитации на частоты упругих форм
колебаний происходит не за счет взаимодействия упругих форм с грави-
гравитационными волнами, а за счет изменения гидростатического давления
на поверхность деформированной оболочки.
§ 10.2. Цилиндрический бак с днищем в виде пологой
сферической оболочки
Рассмотрим осесимметричные колебания сжимаемой жидкости в аб-
абсолютно жестком цилиндрическом баке с упругим днищем в виде поло-
404
гой (<ро «1) сферической оболочки (рис. 10.5) [349]. Оболочка на краю
жестко соединена с упругим шпангоутом, который закреплен по верти-
вертикальному смещению и углу поворота.
При решении гидродинамической зада-
задачи граничное условие с пологого сфери-
сферического днища приближенно сносится
на плоскость х = 0, которая выбирается
таким образом, чтобы объем жидкости в
баке с пологим днищем при $тср0 ~ <р0 >
со8<Ро = 1 равнялся объему жидкости в
баке с эквивалентным плоским днищем.
При этом эквивалентная глубина запол-
заполнения равна Н*=Н + Кщ/4 (рис. 10.5).
Точное решение для потенциала пе-
перемещений сжимаемой жидкости при ее
гармонических колебаниях в цилиндре с
упругим днищем без учета гравитации
(^ = 0) записывается в виде
Л/ ч_о 8ш[а>(Я#-*)/с] Л
Рис. 10.5. Цилиндрическая полость с
днищем в виде пологой сферической
оболочки и упругим шпангоутом на
(со/с)со&(соН*/с)
о
л=10
«=4,
со2К2
К
Л/2
A0.17)
{_ )
где кп — корни уравнения ^^(к) = 0, Я* = Я*//?.
Потенциальная энергия пологой сферической оболочки со шпанго-
шпангоутом на краю без учета инерции оболочки в тангенциальном направлении
и массы шпангоута записывается в виде [349]
пЕН
4- /Л
' 2
. Т [Л) 1 ГУ 1А141А
0
1
0
12
1
гу IX СИЛ 1 •^у'(
пЕН3
1
\(\ + /
) V1 ^ А
.0
0
1 / 1 / ч'
а а
4
1о
лЕР
2
\а=1J, A0.18)
К р0
Здесь щ — тангенциальное перемещение на краю оболочки, Л^, =сопз1 —
тангенциальное усилие в оболочке в невозмущенном состоянии, ЕЕ —
жесткость шпангоута.
405
Кинематические граничные условия для вертикального перемещения
и угла поворота на краю оболочки при а = 1:
<р0и0-и> = 0 , и>' = 0. A0.19)
Нормальные перемещения оболочки представим в виде
,0 = со(О + %ск (О^Т- • A0-20)
При этом удовлетворяется второе кинематическое условие A0.19). Чтобы
удовлетворить первое условие A0.19), введем его в уравнение (9.36) с
неопределенным множителем Я при операторах $(\у,и) = фои$-м\ ,.
Тогда, считая вариации <5мо> <5с0, 8ск , <5Я произвольными и независи-
независимыми, из (9.36) с учетом A.7), A0.18), A0.20) получаем систему уравне-
уравнений, из которой при нормировке 2КХ1ЕН--Х следует [349]:
\ а0О\ (Ш21)
со= ^ , с,» Ц- D=1.2....).
ар кУ рк к
A0.22)
2\1/2 Й Е^ П2 '-1
) , /3=——, п =со
2 К ,2 4
?^+2кё+^
Подставляя м0, с0, ск в первое условие A0.19), имеем частотное
уравнение
^ а+Р»?J 10. A0<23)
Из уравнения A0.23) определяются собственные частоты пп. Затем,
подставляя их вместо & в формулы A0.21), можно определить коэффи-
коэффициенты щп, сои, скп, характеризующие п-ю форму колебаний оболочки.
Коэффициенты обобщенных масс тп и щп, входящие в уравнения про-
продольных колебаний бака (см. (9.57)), равны
Я*
406
4 РК 24Н 4 сЪ2(к*кпН*)
A0.24)
где
Л. ( Ъ- КО \ Ъ П /1л о^\
кп ~~ \ к г п) > 0 — * \х\}*л*Э)
На рис. 10.6 показаны зависимости двух низших безразмерных частот
пп (л = 1,2) колебаний жидкости в абсолютно жестком цилиндре с
днищем в виде пологой сферической 4
оболочки при следующих параметрах:
* = 500, ро/р = 2,7, 0=0, 04
, = 0,25, к: = с
N^=0. Сплошными
линиями показаны точные значения
частот, полученные из уравнения
A0.23), штриховыми — решения на ос-
основе уравнений:
2
A0.26)
соответствующих безмоментной обо-
обо0,2
0 1 2 3 4 Н/К
Рис. 10.6. Зависимости двух низших
безразмерных частот собственных
осесимметричных колебаний от глу-
глубины жидкости в цилиндрической
полости с днищем в виде пологой
сферической оболочки, полученные
по моментной (сплошные линии) и
безмоментной (штриховые) теориям
лочке (при ох=(рЪ). Для тонких и не
очень пологих сферических оболочек по
крайней мере две низшие формы колебаний близки к функциям Щ = 1,
щ = /0(/:1г//?), представляющим
низшие собственные формы колеба-
колебаний безмоментной оболочки с жидко-
жидкостью, и отличаются от них только
краевым эффектом.
На рис. 10.7 показано влияние уп-
упругости шпангоута (к = Р/НК) на две
низшие частоты колебаний, при сле-
следующих значениях параметров:
°=О, /3 = 0,
0,4
0,2
а,—|
^100
500
К/к
= 100
=====
2
===
о
1
Я*=2, <ро=О,25, ЛГ°=О
Ро/р = 2,7 . Как видно, упругость
Рис. 10.7. Влияние упругости опорного
шпангоута (к = РIКН) на низшие без-
безразмерные частоты осесимметричных
колебаний жидкости в цилиндрической
полости с пологим сферическим дни- шпаНгоута оказывает большое влия-
щем I- / г»
ние на низшую частоту при Р <пк,
что также было показано в [28]. При малой жесткости шпангоута (к < 1),
кроме того, оказывается более существенным влияние моментности обо-
оболочки (для безмоментной оболочки пх —» 0 при к —> 0).
§ 10.3, Полусферическая оболочка с жидкостью
Рассмотрим осесиметричные колебания полусферической оболочки,
полностью заполненной несжимаемой жидкостью (рис. 10.8). Воспользу-
Воспользуемся уравнениями общей технической теории В.З. Власова [89а], которые
407
для осесимметричных колебаний сферической оболочки с учетом гидро-
гидродинамического давления записываются в виде
Рис. 10.8. Полусферическая
оболочка, полностью запол
ненная жидкостью
Аи=-—^-(
= 0,A0.27)
Для случая свободного опирания полусферической оболочки на краю
(р = я/2 (\у = Мф= Мф = 0) без учета гравитации (# = О) нетрудно по-
получить точное решение задачи о собственных колебаниях оболочки с
жидкостью [351]:
д
%=
г = 1,2,
-1 + И) + 2A + А<) + с^А (кк - 2),
A0.28)
ук=(кк-2)[1-ц2+ сго
2,...,
где Щ^ф), 11]а(<р), Ф^/(г,ф) — собственные формы нормальных и тан-
тангенциальных перемещений оболочки и потенциала перемещений жидко-
жидкости; (Оы — собственные частоты колебаний; I = 1 относится к формам
преимущественно нормальных перемещений, а / = 2 — к формам пре-
преимущественно тангенциальных перемещений оболочки; Р2к+1(со$ф) —
полиномы Лежандра.
Рассмотрим далее случай, когда оболочка на краю ф = п/2 шарнирно
закреплена (м(тг/2) = 0 вместо предыдущего случая Л^,(;г/2) = 0). Точ-
Точное решение для этого случая получим, используя решение для свободно
опертой оболочки A0.28) и вариационное уравнение (9.36) при #=0,
408
с—>оо с неопределенным множителем А, представляющим реакцию
удержания связи ?(и) = и(л/2) = 0 [351]. Перемещения оболочки и по-
потенциал перемещений жидкости представим в виде
/=и=о 1=и=о *=и=о
где аы - неизвестные коэффициенты.
Потенциальная энергия оболочки будет
2 оо
Я0 = 1Е ЪткРкЛг> (Ю.30)
1=1 *=0
где
Из вариационного уравнения (9.36) с учетом A0.29) и A0.30) получим
тк1(со1-со2)аш=Аик1(я/2), к=0^>; / = 1,2,
ЕЕ^ЛД^/2)=0. A0.32)
1=1 *=0
Отсюда следует частотное уравнение
Ц "»«'2\ -0. A0.33)
Из этого уравнения определяются собственные частоты колебаний
оп. Затем вычисляются коэффициенты разложений A0.29) для собст-
собственных форм колебаний (У/п, Ип, Ф„ ) шарнирно закрепленной оболоч-
оболочки с жидкостью
щ = Д^(я/2) (Ш34)
Множители ЛЛ выбираются из условия нормировки собственных
форм колебаний. Коэффициенты обобщенных масс уравнений продоль-
продольных колебаний бака (9.57) для шарнирно опертой полусферической обо-
оболочки с жидкостью, перемещение опорного контура которой равно
{70@ > записываются в виде
тп = Ь 2D/ >ты • топ = --—у~г—Г- A035)
1=1 *=0 1-^ ^о СОЙ
Определим квадраты безразмерных собственных частот колебаний
&% =со„рКо</Ек и инвариантные относительно нормировки собствен-
собственных форм коэффициенты присоединенных масс г\п =т^п/{тпМ^), где
Моо — масса оболочки с жидкостью. Для полусферической оболочки с
жидкостью при параметрах Кс/Н = 200, /г = 0,3, ро/р = 2,7 для трех
409
низших собственных форм находим: ,Ц2= 1,418, Х2| =3,241,
&32= 4,929 и ?]!= 0,7202, г\2= 0,1558, ?73 = 0,0577 . Следует отметить,
что в рассматриваемом случае, когда оболочка нагружается тангенциаль-
тангенциальными реакциями на краю, учет собственных форм преимущественно тан-
тангенциальных колебаний оболочки необходим. Без них система собствен-
собственных форм является неполной, что приводит к ошибочным результатам
(например, без учета тангенциальных форм имеем п? = 2,031, &\ = 4,076,
1232= 5,937).
§ 10.4. Поперечные колебания цилиндрической
оболочки с жидкостью
10.4.1. Упругодинамическая задача. Рассмотрим поперечные коле-
колебания цилиндрического бака, частично заполненного несжимаемой жид-
жидкостью (рис. 10.9). Перемещения цилиндрической оболочки бака, нерас-
нерастяжимой в окружном направлении
F0 = 0), при изгибе-сдвиге в
плоскости Оху равны:
н
A0.36)
где У(х,1)п #(лс,/) —поперечное
перемещение оси и угол поворота
поперечного сечения оболочки.
Рис. 10.9. Упругий цилиндрически бак, чае- Последние представляются в виде
тично заполненный жидкостью, при попе- точного решения однородной за-
заречных колебаниях: с плоским днищем (а) и дачи квазистатического изгиба-
с днищем в виде полости вращения (б) сдвига цилиндрической оболочки:
A0.37)
где <* = д:/^, у = ЕН^/СН \Е,С — модуль нормальной упругости и сдви-
сдвига; к — толщина оболочки; А* — приведенная толщина ортотропной
оболочки в осевом направлении; а,- (/ = 1,4) — неизвестные коэффици-
коэффициенты. Днище бака в виде пластины или произвольной оболочки вращения
при поперечных колебаниях будем считать недеформируемым. Считает-
Считается, что днище перемещается и поворачивается в плоскости Оху как ниж-
нижний край цилиндрической оболочки, к которому оно крепится через аб-
абсолютно жесткий шпангоут. В качестве основных обобщенных коорди-
координат, характеризующих переносное движение бака при изгибе-сдвиге, бу-
будем рассматривать перемещения нижнего (^ =0) и верхнего (^ = /) тор-
торцов цилиндрической оболочки бака У$ = У(О,г), G0 =
410
У\ = У A,1), 1/\ = 1/\A^)', где / = Ь/К. На основании этих соотношений с
учетом A0.37) можно получить следующее матричное преобразование:
а = АУ, ъ = \аха2аъа$, У =\\У0 1/0 Ух 1/ЛГ,
А =
1
1-к:
1к
I2
2к
0
1 + к
2
1 + Зк:
2/
к
0
1-к
/
Зк
/2
2к
0
1-к:
2
1-Зк:
2/
/3
7
к: =
^| . A0.38)
Если пренебречь сдвигом оболочки, т. е. положить С —> «>, то будем
иметь: у = 0, к:=1 и II =дУ/д^ . Перемещения A0.37) записываются
через основные обобщенные координаты как
У = УТАТ
A0.39)
Отсюда могут быть получены соответствующие обобщенным координа-
координатам Уо » ^о' ^1» ^1 координатные функции для перемещений У и G.
Кинетическая энергия цилиндрической оболочки бака в обобщенных
координатах равна
1 / 1
=~Ут
ац
о
МО1]=тоилК2АтСА, С =
ХО.Ц ~ "^О.Ц4
= -У1Мп„У
3x3'
-1,7-1 + («У J А А
A0.40)
._
где т0 ц — приведенная масса единицы поверхности цилиндрической
оболочки; 8A — символ Кронекера C^ = 1 при I = у и 0 при / Ф у).
Потенциальная энергия цилиндрической оболочки бака при изгибе-
сдвиге с учетом продольной сжимающей силы Мо = сопз! (сила Л^ оп-
определяется без учета внутреннего давления в баке):
=^ [т*17'2+0Рс(у/ -
12кг
+С(УО -
_^±1 + ^| с =
К 1\ 5
вк
л/ 2
A0.41а)
411
Рс=пКН). A0.416)
В частном случае абсолютно жесткого отсека оболочки, который может
перемещаться и поворачиваться как твердое тело, следует положить
\]х = Цо = К$о , ^ = Уо + Ь&0 ; тогда из A0.41) получим По ц = -#о^0о/2 •
10.4.2. Гидродинамическая задача для цилиндрического бака с
плоским подвижным днищем. При решении гидродинамической задачи
будем считать, что полость цилиндрической части бака имеет днище в
виде плоской плавающей перегородки, которая считается невесомой и
абсолютно жесткой; при колебаниях бака она свободно поворачивается
на угол я0A)/К, где а§A), наряду с а, (г = 1,4), рассматривается в каче-
качестве обобщенной координаты (см. рис. 10.9а). Движение несжимаемой
жидкости в цилиндрической части бака описывается следующим уравне-
уравнением и граничными условиями:
Э2Ф Э2Ф 1 ЭФ 1 Э2Ф
¦ + —- + +
2 да1 а да а2 д&:
1 ЭФ
A0.42)
Точное решение этой задачи получим по методу разделения переменных:
Ф =
(Ю.43)
л=1
где Уп — корни уравнения У{(у) = 0: Ух =1,8412, у2 =5,3315,
у3 = 8,5363, у4 = 11,706 , У5 = 14,864,...; Хп (<^,г) — неизвестные функции.
Здесь ортогональные функции (рп(а) нормированы так, что К~1Х'П{!;)
представляет эквивалентный в среднеквадратичном приближении угол
поворота слоя жидкости. Подставим выражения A0.43) в уравнение
A0.42), затем умножим каждое из них на срп(сс)а и проинтегрируем по
а в пределах от 0 до 1. В результате с учетом условий ортогональности
системы функций (рп(сс) получим несвязанные уравнения и граничные
условия для функций Х'п(!;), п = 1,2,...:
Х"п -У%ХП = Ак,у", A0.44)
Х'п = 4кп(а0 + V) при ^ = 0 , A0.45)
= Я, A0.46)
Хп+^Хп4кп(У ^
К К
412
Общее решение уравнения A0.44) с учетом A0.37) записывается в виде
Ак
1)Ъ(%)*B
Из граничного условия A0.45) получаем
. 4кг„Г 6 1
A0.47)
A0.48)
Функцию Вп в A0.47) можно рассматривать как независимую обобщен-
обобщенную координату. Однако удобнее ее представить в виде
Вп =
п
Ю п
4к„
УпЛ(упН)
а2+2а3Н+За4 Я2+-Д-
A0.49)
Обобщенная координата зп($) в A0.49) описывает волновые движения
свободной поверхности жидкости по форме <рп(г)со5#, вызванные под-
подвижностью стенок бака и гравитацией и отсчитываемые от невозмущен-
невозмущенной свободной поверхности <^=Я. Если зп=0 (л = 1,2,...), то
-1^.-0 п и^-Я
х К д%
Константу Вп можно выбрать и в таком виде:
А\С
п а ,1 гт . ~'*-и . .
аг+а2Н+а3\ Я2 +-|-
Я3
, A0.50)
где обобщенная координата гп({) описывает волновые движения свобод-
свободной поверхности жидкости, вызванные влиянием гравитации. Если
§ = 0, то при гп = 0 (и = 1,2,...) точно выполняется динамическое усло-
условие Ф = 0 при ^ = Я .
Кинетическая и потенциальная энергии жидкости в цилиндрической
части бака определяются по формулам
Т —
-'-'ж.ц "~
A0.51)
413
где 5Ц и Р — боковая поверхность цилиндра и поверхность плоского
днища; щ =а0асо5#. Последние два слагаемых в формуле для Пж
получены из выражения (9.29) для П
A0.43), A0.47НЮ.49) получим [347]:
' 4 4 4
4 4
С учетом A0.36), A0.37),
" ' A0.52)
V*0;
где
/3!-K6> т03 = -
, ти=Н,т12=Н2/2,
^
Я4
4
Я5
~5
Я6
6
Я7
" "/7
4
Я3 —
4
^1 + 4Я
ЗЯ4 -
8
9Я5 , п5
Н2
-12Н2Р2 +12Н(Р3-Р1),
A0.53а)
Н2
-36Н2Р4+12(Р5-Р8),
ту = т.II при и ] = 0,4;
_ С1Ь(У„Я) _ 1
1Г- сФ(улЯ) 1
" ЧН~^Г ^^Ж)
я ^я
414
^(„), /}2=|; ^- = 0,07291, Ръ = ЪЦ
п=Г" п=1уп п=\уп
=Е% = 0,02148, & = ]Г^-с1Ь(у„Я), A0.536)
Р6 ' Йу 5Ь(уЯ)' Р7 ~
При Я>2 сЛ(у„Я) = 1, 1/зЬ(у„Я) = 0, ^ =0.1346, /33 = 0,03955,
&=0,01167, ^ = ^=^=0; *„ =т^—. ^00=' %=0 ПРИ
9 Я2
при 1,]>0, г + ;<3, А:,у=FуJ—<5,-45^-
Запишем, кроме того, выражения кинетической и потенциальной
энергии A0.51) в обобщенных координатах аг, гп, используя в этом слу-
случае вместо формулы A0.49) формулу A0.50) [354]:
1 Г 4 4
~ ;_п 4—г.
A0.54)
4 4. 4 А
^ (^ /=0у=0 1=0 л п
где
Я2
ЙГ3
772
"з У1
я4 — зя2 —
—-+Я3У1 +—: 6Яу2 +6(у3 -у7), A0.55а)
4 4
т22 = "~^ ~Н ух
174
-У7).
«24 = -^— «П + й[|" Гб 1 + 6Я 2У2 + 6Я (Уз - 2у7 ) + 6у4,
415
Я 5 /¦)
:~5 н п+1н ~4Н у
тз4 = ~6— Я5У1 + |я4 -8Я3у2 + 6Я2Bу3 -]
+ 12(у5-у8),
Н1 — 21 _ _ —
т*и= — -Н6Гх+ — Я5-12Я4у2+12Я3Bу3-у7)-
-36Я2у4 + 36Я(у5-2у8),
т,у = т^, т&- = т^ - 2^ —, A0.556)
/1=1 "л
оо оо оо
71 = ^кпУп *(^ЛЯ) , у2 = Х"*Ул** ' ^3 = Х"^" = 0»07291»
к
При Я>2 й1(улД)«1, 1/сЬ(уЛЯ) = 0 и ^ = 0,4744, у2=0Д34б,
у4 =0,03955, у6 =у7 =у8 = 0; ^ = кг]
Пусть плоское днище (см. рис. 10.9а) жестко соединено с цилиндри-
цилиндрической оболочкой бака. В этом случае угол поворота днища равен углу
поворота поперечного сечения оболочки при х = 0. Следовательно
4
*=1 A0.56)
а\ = 0, а2 = 1» аз = 0» а4 = ^У •
Тогда, например, выражения A0.26) приводятся к виду
4 4
^ Aа57)
V 1=17=1 1=1 п п )
где
0 * * * *
0 * * о A0.58)
Аналогичным образом преобразуются выражения A0.52).
416
Использование выражений A0.54), A0.57), в которых волновые дви-
движения жидкости описываются обобщенными координатами гп, является
более удобным при расчете «быстрых» упругих колебаний, частоты ко-
которых значительно превышают низшую частоту гравитационных колеба-
колебаний свободной поверхности жидкости сог = (^11//?//1I/2, или при им-
импульсных воздействиях, поскольку в этих случаях влияние гп несущест-
несущественно (если #->0, то гл->0). И, наоборот, выражения A0.52) более
удобны при расчете весьма «медленных» колебаний бака с жидкостью,
частоты которых значительно меньше (О\ (если со —»0, то зп —> 0).
Если цилиндрический бак, частично заполненный жидкостью, счита-
считается абсолютно жестким, то следует положить
у=0, а!=У0, а2=К$о> а3=а4=0. A0.59)
10.4.3. Цилиндрическая оболочка с отсеками, частично заполнен-
заполненными жидкостью. Для упругого цилиндрического бака выражения ки-
кинетической и потенциальной энергий A0.57) с учетом A0.40), A0.41) при
помощи матричного преобразования A0.38) запишем в обобщенных ко-
координатах Уо, II0, Ух, Щ, гп:
+ Яж.ц = Пц +\
Мц = ярД3Ат
рК *
Кл ~\К1п К2п кЪп КЩ •
На основании полученных выражений кинетической и потенциальной
энергий отдельного отсека нетрудно получить уравнения колебаний со-
составной системы последовательно соединенных между собой отсеков как
уравнений Лагранжа в обобщенных координатах. Обобщенные коорди-
координаты здесь представляют перемещения Ук и углы поворота &к (или пе-
перемещения IIк = Кк$к) в сечениях, где соединяются отсеки, а также па-
параметры г^, характеризующие гравитационные волновые движения
свободных поверхностей жидкости в баках (к — номер отсека и его ниж-
нижнего торца). При составлении уравнений поперечных колебаний состав-
составной системы могут быть также учтены сосредоточенные в расчетных се-
сечениях массы (днища, шпангоутов, присоединенных грузов) и внешние
силы и моменты. Если цилиндрический бак достаточно длинный и за-
заполнен жидкостью частично, то для увеличения точности он может быть
разделен на два отсека в сечении, совпадающем с невозмущенной сво-
свободной поверхностью жидкости.
10.4.4. Сравнение различных расчетных моделей. Рассмотрим соб-
собственные упругие колебания цилиндрической оболочки с четырьмя оди-
417
У*\
1
наковыми отсеками, частично заполненными жидкостью и имеющими
плоские днища (рис. 10.10а) [354]. Параметры системы: /=5, Я =4,
ро/р = 2,7, К/к = 200, Я/С = 2,6,
Л* / /г = 1;2, гравитацией пренебрегаем
(# =0). Здесь р0 — плотность материа-
материала цилиндрической оболочки и днища
(толщина недеформируемой оболочки
днища равна к)\ тоц = р0Л* . Общая
длина цилиндрической оболочки равна
Оценим влияние сдвига в срединной
поверхности оболочки, характеризуемого
параметром у = Ек* Юк\ у = 0 соответ-
соответствует отсутствию сдвига (О—>°°),
у = 2,6 — изотропной оболочке (к* = к),
коэффициент Пуассона которой равен
0,3, и у =5,2 — подкрепленной стринге-
стрингерами оболочке при Л* = 2А.
В табл. 10.2 приведены безразмерные
значения квадратов трех низших частот
Л, =а>1РКг1ЕК (V =п) ДЛЯ свободной рис ш.Ю. Цилиндрическая о^юч-
оболочки и для оболочки, консольно- га с отсеками, частично заполнен-
закрепленной по нижнему краю. Эти ре- ^^^^ЦГ М "
зультаты показывают, что сдвиг сущест-
существенно снижает собственные частоты поперечных колебаний тонкостен-
тонкостенной цилиндрической оболочки (особенно в случае, когда она подкрепле-
подкреплена стрингерами).
Таблица 10.2
У
0
2,6
5,2
Свободная оболочка
Я,104
48,35
45,23
40,70
Я2-104
413,5
342,7
273,1
Я3104
2339
1554
1143
Консольно-закрепленная оболочка
Я,104
1,214
1,176
1,129
Я2104
50,11
41,47
34,15
Я3Ю4
422,6
305,6
226,9
В табл. 10.3 для случая у = 2,6 (изотропная цилиндрическая оболоч-
оболочка) представлены значения Х^ (V = 1,3), полученные при использовании
как точного, так и различных упрощенных способов определения гидро-
гидродинамических коэффициентов для упругого цилиндрического бака при
8=0:
1) точное решение гидродинамической задачи;
2) точное решение при плоской, неповорачивающейся свободной по-
поверхности жидкости ( зп = 0);
418
3) точное решение с учетом только одной низшей формы волновых
движений жидкости, характеризуемой обобщенной координатой 51;
Таблица 10.3
Вари-
Варианты
1
2
3
4
5
6
Свободная оболочка
Яг104
45,23
39,21
44,51
43,20
48,95
38,08
Я2-104
342,7
288,7
328,8
314,4
444,1
275,5
Я3-104
1554
1119
1346
1233
1894
1038
Консольно-закрепленная оболочка
Яг104
1,176
1,001
1,173
1,177
1,167
1,011
Я2104
41,47
35,09
41,15
40,74
44,77
34,97
Я3-Ю4
305,6
254,0
299,5
291,8
377,1
250,0
4) приближенный способ Б.И. Рабиновича [286] — жидкость заменя-
заменяется распределенной вдоль упругой линии бака присоединенной массой,
и при этом учитывается одна низшая форма волновых движений, харак-
характеризуемая обобщенной координатой ^, гидродинамические коэффици-
коэффициенты которой определяются так, как если бы бак был недеформируемым
и его перемещение и угол поворота в районе свободной поверхности
жидкости были такими же, как у деформируемого бака;
5) приближенный способ Гладкого [106] — гидродинамические ко-
коэффициенты определяются так же, как для недеформируемого бака, пе-
перемещение и угол поворота которого выражаются через поперечные пе-
перемещения деформируемого бака в плоскостях днища и свободной по-
поверхности жидкости (при этом учитывается только одна низшая форма
волновых движений, характеризуемая обобщенной координатой ^);
6) жидкость считается «замороженной» и заменяется распределенной
вдоль упругой линии бака присоединенной массой.
Глава 11
СВЕДЕНИЕ ГИДРОДИНАМИЧЕСКОЙ ЗАДАЧИ
ДЛЯ ОБОЛОЧКИ ВРАЩЕНИЯ К ОБЫКНОВЕННЫМ
ДИФФЕРЕНЦИАЛЬНЫМ УРАВНЕНИЯМ
плоским днищем радиуса
х
§ 11.1. Описание метода
Рассмотрим произвольную упругую оболочку вращения с упругим
частично заполненную несжимаемой жид-
жидкостью (рис. 11.1). При решении гидро-
гидродинамической задачи будем считать, что
нормальные перемещения оболочки м/ и
днища и>о заданы в виде одного из чле-
членов разложений их в ряд Фурье по ок-
окружной координате в:
(ИЛ)
где т = 0,1,2,...
Гидродинамическую задачу для обо-
оболочки, частично заполненной жидко-
жидкостью, и решаемую с помощью уравне-
уравнений (9.2), (9.3), (9.5), (9.6), выпишем в
Рис. 11.1.Упругая оболочка враще- проекциях ух, уг , Ув вектора переме-
ния с плоским днищем, частично щений жидкости V в цилиндрической
заполненная жидкостью системе координат:
Эр*
дх
+ рух=0, ^
" 0 ^
' Эх
уг
г
г дв
гдв г * дх дг
Уг 8Ш ф-Ух СО$ф = И> ПрИ Г = К ,
ух = -и>о при х = х0,
Р* "~ Р^д; = 0 ПРИ Х = Н .
Введем новые неизвестные функции 11{х,г,1) и у/(х,г,():
ух=11со8тд, /?* = -ру/со$тО .
Из второго и третьего уравнений движения A1.2) найдем
Эш" т
уг——— соз тЭ, Уф =
Эг г
420
A1.2)
(П.З)
(П.4)
С учетом A1.1), A1.3), A1.4) гидродинамическую задачу A1.2) запи-
запишем через функции I/ и у/ :
^-0. A1.5)
Эх
дг2 г дг г2 дх
-^- = Ш1' + - при г = Д, . A1.7)
ОГ 81П (р
,=0 при х = х0, A1.8)
= 0 при х = Я, A1.9)
где Кг = йК1 их-сХ.%(р .
Далее функцию {У(х,г,0 будем рассматривать в качестве основной
неизвестной и искать ее в виде разложения [132, 344]
I
где <рДг/#) — некоторые заданные функции, представляющие осевые
перемещения слоев жидкости. Уравнение несжимаемости A1.6) является
дифференциальным уравнением с переменными коэффициентами типа
Эйлера; нетрудно получить точное решение этого уравнения и затем точ-
точно удовлетворить кинематическое граничное условие A1.7). В результате
у/ выражается в зависимости от!У и неизвестных функций [/,•. В соот-
соответствии с разложением A1.10) уравнение движения жидкости в осевом
направлении A1.5), кинематическое граничное условие на плоском дни-
днище A1.8) и динамическое граничное условие на свободной поверхности
A1.9) удовлетворяют приближенно по методу Бубнова-Галеркина на
совокупности заданных функций ф,-:
к
1(Ц+Щ)<Р(гаг^0 прилгу, A1.11)
0
К
| (^ + ##)<р/г</г = О при х = н 0 = 0,1,2,...).
0
В результате гидродинамическая задача сводится к системе обыкно-
обыкновенных дифференциальных уравнений для функций I/,- с граничными
условиями A1.11). Этот метод сведения трехмерной гидродинамической
задачи к одномерной аналогичен вариационному методу в перемещениях
В.З. Власова [89а], используемому в строительной механике тонкостен-
тонкостенных пространственных конструкций. Он, как и метод В.З. Власова, по-
позволяет получить простые приближенные решения на основе гипотезы
421
плоских поперечных сечений, а также уточненные решения с учетом де-
планаций сечений по заданным функциям. Заметим, что при таком спо-
способе приближенного решения движение жидкости не будет потенциаль-
потенциальным, так как одно из условий потенциальности A1.5) выполняется при-
приближенно (два других условия A1.4) выполняются точно). Поэтому
функцию у/ здесь можно рассматривать в качестве потенциала переме-
перемещений только приближенно.
Если оболочка вместо плоского днища имеет внизу при х = лс0 полюс,
то его при численном решении можно заменить плоским недеформируе-
мым днищем достаточно малого радиуса /?о (при аналитическом реше-
решении До —> 0).
§ 1Ь2* Осесимметричньге колебания жидкости
в оболочке вращения
При осешмметричных колебаниях (т = 0) интегрирование уравнения
несжимаемости A1.6) с учетом кинематического граничного условия
A1.7) приводит к интегральному уравнению для расхода жидкости через
сечение х = сопя!:
Щ&г3г. A1.12)
В разложении A1.10) при осесимметричных колебаниях берем
I = 0, к , полагая <р0 = 1 и подчиняя все остальные функции ^ условиям
я
|<рДг/#)г</г = О, 1=1,*. A1.13)
0
Тогда из уравнения A1.12) с учетом A1.13) получаем
уо(х,Г)= 2 |вИ«_л_ 2 ^ ^ (П14)
К2 I 81Пф К2 *
Если оболочка не имеет плоского днища (/?о = 0 ), то в полюсе будет
выполняться условие 4У0 =-4У/со5<р при х-ьх^. Функция 1/ц(х4$
представляет осевое перемещение жидкости за счет вытеснения при ус-
условии, что ее поперечные сечения остаются плоскими. При этом все ос-
остальные функции /7Дл:,0 при 1=1,2,... учитывают деппанации попереч-
поперечных сечений жидкости по формам ср^г/к).
Интегрируя уравнение A1.6) при т = 0 с учетом граничного условия
A1.7), разложения A1.10) и уравнений A1.11) при л = 0, получаем [344]
к
1=1
422
х
1
"и A1.15)
— дх + (я2#;) [ -^ + 0,- ((Ж) 14- Ш!И]; Шп,- + 2
О 0 а
Уравнения и граничные условия A1.11) при г=1,/:, записываются в
виде [344]
7=1
к 1
2^; = "/»оФ^а при *=*о,
7=1 О
2^(Л2^)'-^с^-^^}=(^/4)^г[ при х=
7=1
где
1 1
;
о о
Если оболочка: не имеет плоского днища и замкнута снизу (До =0),
то при* х = *0 граничные условия^! 1.16) принимают вид (// = 0..
Нетрудно показать, что краевая задача A1.16) является самосопря-
самосопряженной. В случае цилиндрического бака (К = /?0 = сопз!) с помощью
уравнений A1.16) можно получить точное решение, гидродинамической
задачи, если в качестве функций ср^а) взять полную систему ортого-
ортогональных функций Бесселя ^^(к^а), где к; — корни уравнения У^/:) = 0,
1. = 1,°°. В этом случае коэффициенты уравнений A1.16) при
равны:
пц = 0, Ьуг = 0 при 1^7. В результате система уравнений и граничных
условий A1.16) для цилиндра распадается на отдельные уравнения.
423
Простое приближенное решение гидродинамической задачи в виде
формул получается в случае, если для жидкости принять гипотезу пло-
плоских сечений [342, 343] и пренебречь депланациями слоев жидкости:
17{ = 0 при 1 = 1,*. Тогда I] = 1/о(х,г) и р* = -рщ.
При учете только одной функции депланации поперечных сечений
жидкости по форме (р\(сс) = 2а2 -1 коэффициенты A1.17) будут равны
1,4,2 _ , 2
Задача A1.16) в этом случае (/ = 1) записывается в виде
1
щ =-б1щ(а,1)Bа2-1)ас1а при х = х0, A1.18)
о
{К2Щ У +16^ = 2Д2#о при х = Я .
Осевое перемещение и возмущенное давление в жидкости представляют-
представляются как
V = <у = 1/0(*,0 + 1/1(дс,ОBа2 -1), Р* = -
я , 2
где ^/0 и ^о определяются по формулам A1.14) и A1.15).
Для оценки приближенного решения A1.18), A1.19) сравним его с
точным решением при § = 0 для безмоментной цилиндрической оболоч-
оболочки с неподвижным плоским днищем (И^=0) по коэффициенту обоб-
обобщенной массы жидкости тп для п-й собственной формы колебаний
№п(х) = сов (Лпх/К), \ = Bп -\)пК12Н . В соответствии с точным ре-
решением A0.9), полагая для несжимаемой жидкости /3 = 0 и пренебрегая
массой оболочки, имеем
На основе гипотезы плоских сечений для жидкости (II = 11^, у/ = у/о)
и с учетом одной функции депланации по форме (р\(а)-2а -1
(ц = и0 + и^ , ^=^0+^1) значения этого коэффициента соответст-
соответственно равны
' \ / 2 Л
1и+т = ¦
Ниже приведены значения этих коэффициентов для трех низших
форм колебаний (п = 1,2,3 ) при глубине заполнения Н - пЕ :
424
п
тп/лрК Н
т„/лрК2Н
гпп1прК2Н
1
8,250000
8,247436
8,247436
1
1
1
2
,138889
,118341
,118318
3
0,570000
0,523183
0,522878
Эти результаты показывают, что для одной или двух низших форм
осесимметричных упругих колебаний оболочек вращения с жидкостью
простое решение, основанное на гипотезе плоских сечений жидкости
(первая строка), обладает вполне приемлемой точностью; при учете од-
одной функции депланаций сечений жидкости по форме щ (а) = 2а -1
решение (вторая строка) практически совпадает с точным (третья строка).
Запишем кинетическую энергию осесимметричных колебаний жидко-
жидкости внутри упругой оболочки вращения при приближенном представле-
представлении продольных перемещений жидкости в виде A1.19). С учетом A1.4) и
выражений у/ц и щ получим
я
тж=пР\ {{к21г)й%+(к*/щй'о2 - фцй'^Оо'+
*° + A/12)B + К'2)К2й? + (Х/96)[(Я2йгу]}2(!х. A1.20)
Выражение A1.20) может быть использовано при приближенном ре-
решении по методу Ритца или методу конечных элементов гидродинамиче-
гидродинамической части задачи гидроупругости (если 1Уи И^о считаются известными),
или связанной задачи гидроупругости (в этом случае неизвестными яв-
являются 1У, Щ и Щ9 поэтому в этом случае необходимо учесть также
потенциальную и кинетическую энергии оболочки По и То ; 7^=7^+7^).
При этом функция П\(х,0 представляется в виде разложения по задан-
заданным функциям от л: с учетом кинематического условия A1.18) при
х = *о. Коэффициенты этого разложения рассматриваются как обобщен-
обобщенные координаты. Поскольку потенциальная энергия По от этих обоб-
обобщенных координат не зависит, то их, как циклические координаты, не-
нетрудно исключить при составлении уравнений колебаний системы. По-
Потенциальной энергией волновых движений свободной поверхности жид-
жидкости при осесимметричных колебаниях можно пренебречь. При исполь-
использовании метода конечных элементов здесь в качестве элементов можно
рассматривать пояса оболочки с заключенными в них слоями жидкости.
При этом в пределах слоя малой толщины неизвестная функция II\ (или
функция Д2^!) может быть аппроксимирована линейной функцией от х
через ее значения на торцах слоя.
§ 11.3. Неосесимметричные колебания жидкости
в оболочке вращения
В случае неосесимметричных колебаний жидкости (т = 1,2,...) в раз-
разложении A1.10) удерживаем 1 = 1,* членов ряда. Решая уравнение A1.6)
425
при т >0 с учетом граничного условия A1.7) и условия огранмчеяйосщ
^ при /• —»0, имеем
я
A1.21)
а
I о о
Подставляя (НЛО) и A1.21) в A1.11), получаем обыкновенные диф-
дифференциальные уравнения и граничные условия для неизвестных функ-
функций С/,-(л,0 [132]:
7=1
81Пф
при л: =
A1.22)
где
кц = а1
A1.23)
; о
В случае когда плоское днище отсутствует и оболочка замкнута снизу
(/?0 = 0), кинематическое граничное условие при х = х§ принимает вид
Краевая задача A1.22) является самосопряженной. Если в качестве
заданных функций (Р((ос) взять полную систему ортогональных функций
Бесселя ^т(у\т^а), где у\т^ — корни уравнения ]'т(V) = 0, *' = 1,«>, то в
случае цилиндра ( К = #о = сопз!) уравнения и граничные условия A1.22)
426
распадаются. Применение комбинированного метода (см. §11.1) приво-
приводит к точному решению гидродинамической задачи для цилиндра.
Для расчета упругих неосесимметричных форм колебаний произволь-
произвольных оболочек вращения с жидкостью приближенное решение с высокой
точностью можно получить, ограничиваясь одной функцией (#=1) в
виде фг(а)=ат. Эта функция с точностью до множителя правильно
описывает входящие в точное решение гидродинамической задачи в ци-
цилиндрической системе координат функции Бесселя при малых значениях
аргументов: /те(г)~ гт/Bтт\), /т(г)~ гт/Bтт!) при г«4(т + 1).В
этом случае
гддA1.24)
11 1 2(т + 1) И 2(т + 2) п 4(т
и из системы A1.22) при / = 1 и замене неизвестной Щ = КтУ получаем
(Я2)'"
1 —
2т
У = —
2(т
К0
т
т+1
тК"
при д: =
:8у_ Р1 V
A1.25)
при д; = Я ,
4т(т + 1)(т + 2)
т Зт + 4
Осевые перемещения и давление в жидкости в одночленном прибли-
приближении определяются по формулам:
[со8т0 = :
Т17О
A1.26)
->т+1
-тат+2\+2К'Уап
2т [2(т + :
Для оболочек, радиус которых К(х) и форма нормальных перемеще-
перемещений \У(х,1)со&тв слабо меняются в направлении оси х, при расчете их
упругих колебаний можно пренебречь осевыми перемещениями жидко-
жидкости (ух=1! со8 тв = 0 ); тогда
р* = -ру/о со8 т0 = -/с
Ш (г
7П8П1<р1 Я
со& тб .
A1.27)
427
Это приближение соответствует гипотезе плоских поперечных сече-
сечений жидкости. Использование приближенного решения A1.27) для ба-1
лочных форм поперечных колебаний ( т = 1) удлиненных оболочек вра-
вращения с жидкостью эквивалентно замене жидкости ее присоединенной
массой, распределенной вдоль оси оболочки. Если при т = 1, кроме это-
этого, еще учесть осевые перемещения жидкости ух = Уг совв (при
(Р\(а) = а ), где У является решением задачи A1.25) при т = 1, то такое
решение также будет соответствовать гипотезе плоских поперечных се-
сечений жидкости, но уже с учетом их поворотов на углы У(х9().
При расчете неосесимметричных колебаний в двучленном приближе-
приближении (т = 1,2,3,... \к = 2) удобно использовать функции
A1.28)
а а\
Ъ(т + 1)(т + 2)
которые удовлетворяют условию &12 = к2\ = 0.
Дифференциальное уравнение A1.25) при т = 1,2,3,... в некоторых
случаях (например, для цилиндрической и конической оболочек) может
быть решено точно. Для произвольной оболочки вращения его решение
может быть получено численным методом отдельно или совместно с ре-
решением дифференциальных уравнений оболочки, в которых учитывается
гидродинамическое давление на оболочку /?* = -ру/ созтв при а = 1.
Для оценки точности решения гидродинамической задачи в одно-
одночленном приближении (к = 1) на основе дифференциального уравнения
A1.25) рассмотрим неосесимметричные упругие колебания цилиндриче-
цилиндрической оболочки (Л = сопз!, ср = л/2), свободно опертой на краях и полно-
полностью заполненной жидкостью, считая, что в торцевых сечениях х = 0 и
х = Н жидкость имеет свободные поверхности (гравитацию не учитыва-
учитываем, полагая § = 0). В этом случае на основании точного решения задачи
для потенциального движения жидкости при граничных условиях
Ф| _0 = Ф| =н = 0 формы собственных упругих колебаний оболочки и
соответствующие им коэффициенты обобщенных масс определяются по
формулам
• акх п * прК2Н 1т(ак)
Щт =81П—^— со$тв , ткт =— т К ,
к тУ к)
ак=клК/Н9 А: = 1,2,....
При использовании дифференциального уравнения A1.26) с динами-
динамическими граничными условиями У*\ _0 = У*\ _ „ = 0 (они следуют из по-
последнего условия A1.25) при К' = 0, § = 0, Щх=0 = Щх=н = ° ) ПРИ тех
же формах собственных колебаний оболочки \У = Щ т вместо ткт
получаем
428
[т
A1.30)
Если для жидкости использовать гипотезу плоских поперечных сече-
сечений (II = 0, у/ = щ), то коэффициент обобщенной массы жидкости для
формы
получается равным тк т = прЯН /Bт).
Ниже приведены значения безразмерных коэффициентов обобщенных
масс жидкости 2гпкт1(прЯ2Н) и
2т\т1{прК2Н)
при
2т1т/(ттрК2Н)
2тКт1(прК2Н)
2тКт/(прК2Н)
2тКт1(прК2Н)
/и = 1
0,806325
0,806452
0,535832
0,538461
т = 2
0,462258
0,462264
0,382032
0,382353
т = 3
0,320157
0,320158
0,287612
0,287671
т = 4
0,243951
0,243951
0,227926
0,227941
Эти результаты указывают на высокую точность аппроксимации осе-
осевых перемещений жидкости в поперечном сечении по закону ат при
неосесимметричных колебаниях оболочки. Сравнение коэффициентов
т^т с A1.29) и A1.30) показывает, что гипотеза плоских сечений для
жидкости ( ух = 0, у/ = щ) при больших т и больших глубинах заполне-
заполнения (Н/К > 1) оболочки жидкостью также дает удовлетворительные ре-
результаты для низших форм колебаний.
Для расчета неосесимметричных колебаний произвольной оболочки
вращения с жидкостью (или жидкости в подвижной полости) наряду с
численным решением дифференциального уравнения A1.25) может быть
использован метод Ритца или метод конечных элементов. Для-этого за-
запишем кинетическую энергию жидкости и потенциальную энергию вол-
волновых движений ее свободной поверхности в зависимости от Щл,0 и
с учетом A1.3L11.7):
н
Тж =
+ 2К2т+3К'УУ'
429
Если функция У (л;, 0 удовлетворяет дифференциальному уравнению
A1.25), то с учетом у/ = щ + щ и выражений A1.27) кинетическая энер- /
гия жидкости может быть записана в более простом виде
тж=—
Я
„т+1
Лес
О
х=х0
A1.32)
Решение гидродинамической задачи для полости с подвижными стен-
стенками (при заданных V/ и Щ) или связанной задачи гидоупругости при
применении метода Ритца или метода конечных элементов строится так-
также, как и в случае осесимметричных колебаний. В качестве конечных
элементов рассматриваются пояса оболочки с заключенными в них слоя-
слоями жидкости; в пределах толщины слоя функция У{х,1) (или осевое пе-
перемещение 1/1 = КтУ ) при использовании выражений A1.31) может быть
аппроксимирована линейной функцией от х через ее значения на торцах
слоя.
§ 11.4. Сведение задачи гидродинамики к обыкновенным
дифференциальным уравнениям первого порядка
При расчете гармонических колебаний оболочек вращения произ-
произвольной формы в настоящее время широко используется метод числен-
численного интегрирования дифференциальных уравнений с ортогонализацией
решений в дискретных точках. Для этого уравнения оболочки приводятся
к обыкновенным дифференциальным уравнениям первого порядка. В
работах [366, 115] этот метод применен также для расчета собственных
колебаний оболочек вращения с жидкостью; при этом гидродинамиче-
гидродинамическая задача сводится к системе линейных алгебраических уравнений, ко-
которые решаются совместно с дифференциальными уравнениями оболоч-
оболочки. Здесь гидродинамическую задачу для полости вращения представим в
виде обыкновенных дифференциальных уравнений первого порядка в
канонической форме (разрешенных относительно первых производных)
на основе полученных выше дифференциальных уравнений второго по-
порядка [356, 359, 362]. Для этого в качестве неизвестных наряду с 1//(*»0 ,
входящими в разложение A1.10), будем также рассматривать функции
1
*;.(*, О = К21у/(х,а,1)(р{(а)ссЛсс. A1.33)
о
11.4.1. Неосесимметричные колебания жидкости. Для неосесим-
метричных колебаний ( т = 1,2,3,...) с учетом A1.21), A1.22) находим
2т
A1.34)
При этом прр1 является обобщенной гидродинамической силой, со-
соответствующей обобщенному перемещению 17(. Далее функции <Р((а)
430
выбираются так, чтобы выполнялись условия кц = 0 при г Ф у . При этом
из уравнения A1.34) находим \]\ и путем дифференцирования — 1]\.
Затем, исключая их из дифференциального уравнения A1.22), получаем
систему дифференциальных уравнений первого порядка, разрешенных
относительно \]\ и Р(:
где
Л 7=1
к
7=1
A1.35)
к
I
Р=\
A1.36)
1
2т
Кинематическое граничное условие на днище полости при х = л:0 ос-
остается таким же, как в A1.22). Граничное условие на свободной поверх-
поверхности жидкости A1.22) записывается в виде
к
^•+#/г]Г^|7/=0 прил: = Я. A1.37)
7=1
Значение функции A1.21) на боковой поверхности полости при а = 1
выражается через С/,-, Р( как
к 1 к тт^
A1.38)
1=1
где
1
A1.39)
8Ш3 ф) !,
Уравнения A1.35) в отличие от A1.22) не содержат К" = ^
где ^ — радиус кривизны меридиана, и поэтому могут быть использо-
использованы без привлечения дополнительных условий «склейки» также для
полостей, образующая (меридиан) которых имеет изломы. Уравнения
A1.35) обладают характерными свойствами самосопряженных систем
обыкновенных дифференциальных уравнений первого порядка, записан-
записанных относительно обобщенных перемещений и соответствующих им
обобщенных сил [60а].
11.4.2. Осесимметричные колебания жидкости. В случае осесим-
метричных колебаний жидкости (т = 0; 1 = 0, к) обобщенному
431
перемещению [/,• соответствует обобщенная гидродинамическая сила
2прРг. Принимая Щ{а) = 1 и используя A1.15), находим
К2 Ч Я2 К л
* °
\ A1.40)
Далее, подчиняя функции <р,-(оО наряду с A1.13) условиям #//=0
при I * ], так же как и для неосесимметричных колебаний, сводим сис-
систему дифференциальных уравнений второго порядка A1.16) с учетом
A1.14) к дифференциальным уравнениям первого порядка, аналогичным
уравнениям A1.35):
A1.41)
0=п).
Здесь обозначения постоянных коэффициентов для удобства такие же,
как и в уравнениях A1.35), однако в отличие от A1.36) они вычисляются
по формулам
- ?Я - Су — * € - ^о* и - а ~ V сфсЗр
аи аи ^>ан п=1 арр
* ап {ПЛ2)
^ * - "" " ' ' ' >«=1 при !' = ./.
Кинематические граничные условия на днище при х = д:о остаются
такими, как и в A1.16), а динамические граничные условия на свободной
поверхности жидкости A1.16) принимают такой же вид, как A1.37), т. е.
к
Е^=0 прил: = #. A1.43)
Значение функции A1.15) при а = 1 с учетом A1.40), A1.41) записыва-
записывается так
к 2 * к
2/Л +**(*^ +^Аф) , A1.44)
1=1 ^ ^ 1=1
где в отличие от A1.39) коэффициент А:о определяется по формуле
4*о=1-2//о./«а1-
7=1
432
При решении задачи об осесимметричных колебаниях жидкости в
деформируемой полости вращения при заданных нормальных перемеще-
перемещениях ее стенки сначала определяются функции 1/0(х,{) и Р'о(х^) в виде
интегралов A1.14), A1.40), а затем интегрируются дифференциальные
уравнения A1.41) с граничными условиями при х = лг0 и х = Я . Однако
для удобства решения по унифицированному алгоритму (особенно свя-
связанной задачи гидроупругости) интегралы A1.14), A1.40) можно заме-
заменить соответствующими дифференциальными уравнениями:
и' --—и 2 ^
К К 8И10 '
A1.46)
ыпср
с граничными условиями
1 Я2
Цо = -2)Щас1а при х = *0, ^0 + 8—^о = ° при д: = Я . A1.47)
0 2
Они добавляются соответственно к уравнениям A1.41) и граничным
условиям A1.16) при х = л:0 и х = Я .
§ 11.5. Колебания упругой оболочки вращения с жидкостью
11.5.1. Неосесимметричные колебания. Рассмотрим вынужденные
гармонические колебания упругой оболочки вращения, частично запол-
заполненной жидкостью, под действием поверхностных нагрузок
Перемещения и внутренние погонные усилия в оболочке (см.
рис. 11.1) определяются в виде
{у, 5} = {ут, 5т}8т/п08Шй>;.
Далее в качестве неизвестных функций будем рассматривать функции
%тE), Г)тE),...у 8т(з), индекс т при которых будем опускать.
Для неосесимметричных колебаний (т = 1,2,...) осевые перемещения
жидкости и гидродинамическое давление в одночленном приближении
при к =1, д>1 (а) =ап, согласно A1.3), A1.10), будут
ух = 111E)апсо5тв&тсо I, р* = рю2^(^а)СО8т^^пй)^ • A1.50)
В качестве неизвестной наряду с 1]\E) будем рассматривать 1\(з) =
2, где Т7! определяется по формуле A1.34). Учитывая, что
433
=г]-К'!; , К' =
уравнения движения жидкости A1.35) при к = 1 запишем в виде
2л а
К 9 9 О К
— 7*1 - рсо кК Г] + рсо —
аз с?" К О
В рассматриваемом случае D=1, <Р1(а)=ат) функция уг(^а)9
представляющая распределение гидродинамического давления A1.50), на
основании A1.22), A1.23) и с учетом первого уравнения A1.52) приво-
приводится к виду
к
'7' ¦ а
-(рш2)~1/1^~2#т[1 + (^/2)A-а2)]Р1. A1.53)
Введем для т-й гармоники (т = 1,2,.«.) векторы обобщенных пере-
перемещений и соответствующих им с точностью до множителя я обобщен-
обобщенных сил, оболочку при этом будем считать ортотропной:
2 = ||<|; ц № V 11$, 2 = ||/Ж КУ М КЗ /\||х. A1,54)
Дифференциальные уравнения колебаний ортотропной оболочки
вращения с учетом ее предварительного осесимметричного напряженно-
напряженного состояния и действующего на нее гидродинамического давления, ко-
которое определяется по формулам A1.50) и A1.53) при а = 1, объединя-
объединяются с дифференциальными уравнениями колебаний жидкости A1.52) и
записываются в матричном виде следующим образом [362]:
|а в и« 1Ю1, A1_55)
Г -Ат
и и II
где
А = |а,у|) В = Вт=||Ау||, Г = Гт=|у1у
<7™ 0
Уравнения ортотропной оболочки, симметричной относительно сре-
срединной поверхности композиционной структуры, здесь получены по ана-
аналогии с уравнениями В.Л. Бидермана [60а] для изотропной оболочки
вращения без учета ее предварительного напряженного состояния. Урав-
Уравнения A1.55) имеют характерную для самосопряженных систем форму.
Коэффициенты уравнений A1.55) для неосесимметричных колебаний
определяются по следующим формулам:
С^з! = —1^2^ ^ » #32= ~"М2^ ® » #33 = ( —
434
1
аи =а15 = а21 = <*25 =а35 =а4з =«45 =«53 =«54 = 0.
Ргг = A -
АЗ = А4 = А5 =/?23 =^24 =/?25 =^34 =^35 =^45 =0, Ду =
-к0рсо2К2к2а'1 -р0со2НК,
714 = -(гп2ВгК~ъ +тК~1^)ш , у15 = Кхрсо2К2к2о~х,
722 =В2К~1 +(т4^27?¦'3 +т2/?~1Л/г5)ст2 -к0рсо2К2а-р0со2кК ,
/25 =-И
734 = тО2К~ък
Г35=Г45=0»
- р0со2НК ,
где А(^), р$, Е, С, /л — толщина, плотность, модули упругости и сдви-
сдвига, коэффициент Пуассона материала оболочки; ЛГ]Р(^), М2 (^) — погон-
погонные усилия в срединной поверхности оболочки при предварительном
напряженном состоянии; индексы 1 и 2 при Е, /а и N (з) указывают на
меридиональное и окружное направления (Ех\х2 = Е2/^).
Коэффициенты #и, #1э /ь *и» Ап, Нг, к0 при *=1 т
т = 1,2,..., определяются по формулам
2:т, Д = 4(т + \)кт,
, 7
°
7 ,
т 1 = Щ
т Зт + 4 ^Х 2(т + 1) ° Зт + 4
Уравнения A1.55) пригодны также для составных оболочек, когда
толщина/1E), угол ф(з), усилия Л^х0^), N$,E) и характеристики мате-
материала могут изменяться скачкообразно.
Граничные условия на краях оболочки 5 = 50 и з = 1 записываются дня
вектора ъ или вектора 2, или же как условия ее сопряжения с кольцом.
435
Граничные условия для жидкости на днище A1.24) и на свободной
поверхности A1.37) в рассматриваемом случае имеют вид
1
*!ХЩ = -$Щ(а)ат+1Аа при з = з0,
0 A1.58)
Р\ + РйЪцВрЩ = О при з = ^н.
При частичном заполнении оболочки для ее несмоченной части
(зн<з<1) в системе A1.55) следует опустить уравнения A1.52) для
III (з), Р± (з) и члены, представляющие гидродинамические нагрузки.
11.5.2. Осесимметричные колебания. Для этого случая (т = 0), ог-
ограничившись двумя функциями Фо(а) = 1 и щ(а) = 2а2 -1, вместо раз-
разложения A1.20) будем иметь:
ух =[11ц(з) + II 1(з)Bа -1)]$тШ. A1.59)
Рассматривая в качестве неизвестных, наряду с Ио(з) и 11\(з), функ-
функции Р0(з) = -рсо2Ро(з) и 7^E) = -рсо2р1(з), запишем уравнения A1.41),
A1.46) с учетом A1.51) в следующем виде [362]:
2 ТТ 2, СЧ
= --^0--(от7-^),
р(О К
A1.60)
—Щ-кхраJК2—/7!+А
Аз о" к а
Соответственно представлению A1.59) при пг = 0, к = 1 и
<р1(а) = 2а2-1 функция A1.15) с учетом A1.16) A1.51) и первых двух
уравнений A1.60) приводится к виду
у/ = _——Р§ -—-
р(й*1С рсо^Тс
A1.61)
Для осесимметричных колебаний (т = 0) векторы обобщенных пере-
перемещений и соответствующих им с точностью до множителя 2л обоб-
обобщенных сил будут
2 = |§ Т] М #0 ^Ц7, 2 = || КХ КУ М Ро /\ ||т. A1.62)
В дифференциальных уравнениях оболочки в этом случае необходимо
положить га = 0, а при вычислении гидродинамического давления
436
р* = рса угA9а)&таI на поверхности оболочки использовать выражение
A1.61) при а = 1. К уравнениям оболочки добавляются уравнения осе-
симметричных колебаний жидкости A1.60). В результате получается
система типа A1.55), где в данном случае B = К \\ цх§ цг§ 0 0 0 ||т .
Для осесимметричных колебаний в уравнениях A1.55) необходимо
заменить следующие из коэффициентов A1.56), вычислив их как
2 2 2Л
к к к к
/344=0, Уи=к0рсо2К2 —, у2А = -к0рсо2К2к, A1.63)
G
В выражениях для остальных коэффициентов A1.56), кроме заменен-
замененных на A1.63), необходимо положить т = 0. Параметры #ц, ^, ^,
Ьц , Нц , /*2, &о Д1^ осесимметричных колебаний в выражениях A1.56) с
учетом замен A1.63) берутся в виде
ап=1/96, Ьи=1/6, </и=Л01=1/12, сп=0,
8п=2, ^=96, Л=4, /111=^=^=1/12. A1'б4)
Граничные условия на днище оболочки и на свободной поверхности
жидкости A1.17), A1.43) и A1.47) в рассматриваемом случае (&=1,
ф0(а) = 1, ф] (а) = 2а2 -1) для уравнений A1.60) будут
при я = ^0,
A1.65)
§ 11.6. Поперечные колебания жидкости в подвижной
недеформируемой полости вращения
При расчете колебаний конструкций ЛА в диапазоне частот низших
форм часто оболочку подвесного бака можно считать недеформируемой,
полагая, что она вместе с упругой несущей конструкцией перемещается и
поворачивается как твердое тело (переносное движение). Относительное
движение жидкости, частично заполняющей бак, при этом можно опи-
описать приближенно с учетом только одной низшей формы гравитационных
колебаний свободной поверхности жидкости. Для расчета гидродинами-
гидродинамических коэффициентов уравнений возмущенного движения недеформи-
недеформируемой полости, частично заполненной жидкостью, широко используется
метод Ритца, с помощью которого получаются многочисленные резуль-
результаты для различных полостей [242, 285, 235, 328, 219].
Рассмотрим применение к расчету поперечных колебаний жидкости
(га = 1) в подвижной недеформируемой полости вращения обыкновен-
437
ных дифференциальных уравнений A1.25). Пусть перемещение неде-
формируемой полости вращения в плоскости Оху характеризуется попе- /
речным перемещением У0@ в начале координат и углом поворота #0@,'
(см. рис. 11.1). В этом случае I
\У = -[У0+(х + КК')&0]&т(р, ^о=-^ог = -^Оа- A1.66)
Приближенное решение гидродинамической задачи получим с помо-
помощью уравнения A1.25) при /и = 1. Так как (\У/$тф)'= -[1 + (К2)"/2Щ,
то общее решение этого уравнения, удовлетворяющее кинематическому
граничному условию У = #0 при х = х0, представим в виде
Здесь У\{х) и Уо(х) —решения следующих задач:
К2У{+ 3(К2)'У{- Д2 A - (К2у/2)Уг = 0,
1, A1.68)
' }
При этом удовлетворяется уравнение A1.25) и кинематическое граничное
условие У = #о при х = л:0. При заданных граничных условиях
У1(Я) = 1, У0(Я) = 1 функция /^0 представляет угол поворота свобод-
свободной поверхности жидкости, отсчитываемый от ее невозмущенного со-
состояния в направлении угла #0- Уравнение для функции /х(г) получает-
получается из динамического граничного условия A1.25) при х = Я или из урав-
уравнения Лагранжа как для обобщенной координаты.
Запишем кинетическую Т = ТО+ТЖ и потенциальную П = По + Пж
энергии бака с жидкостью в обобщенных координатах Уо, #о» /ь У411"
тывая A1.31), A0.36) и A1.67):
Т = ~(
! A1.70)
^2
где
я
тп = -(яр/4I?й, т21 = -
438
^ ®12=*1/т1,
М , %м — масса бака с жидкостью ж координата его центра масс,
^I^ — момент инерции оболочки бака; % = К(Н), /?2 = 24/7 . Уравне-
Уравнения поперечных колебаний бака с жидкостью в обобщенных координатах
У®, &0, /| записываются в виде (Ш.49) при л = 1, где Мп=М ,
М|2 =М21 = 5 , М22 = / , К2 =-*5 *
Если даижение полети характеризуется поперечным перемещением
У\ и углом поворота ^ в некоторой точке О\, лежащей на оси на рас-
расстоянии х = 1^ от начала координат, то в выражениях A1.70) следует
выполнить преобразования у§=ух- Ьфц, Ф& = #1 и к потенциальной
энергии добавить член #М^#2/2, учитывающий вертикальное смеще-
смещение точки О\ относительно начала координат. Это эквивалентно тому,
что в выражениях A1.70) заменяются обобщенные координаты У^-^У\,
#о —> &1 и коэффициенты
5-К5-М/4), /-»(./-251!+АЯ^), т21 -Кт21-тп^). A1.72)
При этом 5, / и т2! вычисляются относительно начала координат; его
положение выбирается из удобства вычислений.
При колебаниях упругой конструкции ЛА с частотами, значительно
превышающими низшие частоты гравитационных колебаний жидкости в
баках (со2 »0I ; (о\ имеет порядок #/#н )> и ПРИ ударных воздействи-
воздействиях для начальных моментов времени гравитацией можно пренебречь.
Обобщенную координату /^ нетрудно исключить: в третьем уравне-
уравнении (9.58) при п = 1 полагаем ^=0и^= т^2 ~ 0 . Тогда получим
С учетом этого при § = 0 потенциальная энергия недеформируемого
бака с несжимаемой жидкостью П ~ 0, а кинетическая энергия записы-
записывается в виде
Г = 1/2(МУ02 + 25У0А) + Щ).
2 / / 2 / A1-74)
М -М -т\\1т\, 5 = 5-Щ\Мг\1т\ » «^ =«/ ~"шг\1т\ •
Таким образом, в этом случае (# «й;2/?н ) полость, частично заполнен-
заполненная жидкостью, приводится к динамически эквивалентному твердому телу.
Для определения коэффициентов A1.71) необходимо решить обыкно-
обыкновенные дифференциальные уравнения A1.68), A1.69) для функций У^х)
и Уо(х). Точные решения этих уравнений с переменными коэффициен-
коэффициентами могут быть получены доя таких полостей вращения, как цилиндр,
конус, параболоид, эллипсоид (сфера) и их комбинации. Приведем неко-
некоторые точные решения задач A1.68), A1.69) без учета массы оболочки [350].
439
1. Цилиндрическая полость: К = В$=сош1, л<) =0. Решение имеет вид
у _
1
^=лрк5
3 4+а14(
1
8Ъ@,Я) ]
1
Сравнение показывает, что /, (о\ и инвариантные относительно нор-
нормировки собственной формы коэффициенты т^/т^, т2\1т\ близки к
их точным значениям для низшей формы колебаний (например, в форму-
формуле для со* в точном решении стоит у^ = 1,8412 вместо
Д=-724/7 =1,8516).
2.Конус: К = х1%а, х$ = К0=0, а — угол полураствора конуса.
Общее решение уравнений A1.68), A1.69) запишется так:
A1.76)
Для перевернутого конуса (с вершиной внизу) С2 = С4 = 0; коэффи-
коэффициенты С\ и С3 находим из условий 11=1, Уд = 1 при х = Я . По фор-
формулам A1.71) получаем
1 —
4(^+5)
Я1+4 «2
A1.77)
48тасо8а Я! +5
На рис. 11.2 показаны зависимости от угла полураствора конуса а
квадрата безразмерной частоты щКц/^ (кривая 7), инвариантных без-
безразмерных коэффициентов присоединенных масс т^/ (рКцт{) B) и
т2\/(РКнт\) C)\ сплошные линии — результаты, полученные по при-
приведенным формулам, штриховые и штрихпунктирные — по методу Ритца
в работах [150, 328], когда в качестве координатных функций выбирались
гармонические конические и цилиндрические функции соответственно,
светлые точки — эксперимент [234, 235].
440
Отметим также, что приведенное здесь решение совпадает с точным
решением, полученным в работе [403] для низшей формы собственных
колебаний жидкости в конусе при а = 45°. Кроме того, при с!§2 а = 11/4
(Я1=1, а = 31°05') решение A1.76)
совпадает с точным решением неодно-
родной задачи [328] и формула A1.77)
для / при этом угле а дает точное зна-
чение.
Определим основную частоту коле-
колебаний жидкости в конической полости с о 20 40 60 а, град
вершиной наверху (в этом случае в об- РисЛ1.2. изменения квадрата без-
ласти жидкости координата х имеет ра3мерной частоты (кривые 7) и без-
безотрицательные значения). Для «глубо- размерных коэффициентов присоеди-
кой жидкости», пренебрегая влиянием ненных масс B, 3) в зависимости от
днища (Сх«0), по формулам A1.71) Угла полураствора конуса а; сплош-
сплошные линии — аналитические решения
находим A1.77); штриховые и штрихпунктир-
Рр-г\аа ные — решения по методу Ритца
#2=—|_Р1 С1%а [150,328], о — экспериментальные
%Я2 + K12 точки [234,235]
Эта формула дает результаты, близкие к приведенным в [328].
3. Параболоид; К2 = 2рх, 2р = К# IН , х$ = 0. Решения уравнений
A1.68), A1.69), ограниченные в полюсе при х = 0, записываются в виде
Константы С\ и Со определяются из граничных условий У[ = 1, Уо = 1
при л: = Я. Для частоты колебаний получаем формулу
• — — -1-1
12 Ян
Она дает результаты, близкие к приведенным в [328] для всех глубин
заполнения.
4. Эллипсоид: К2 = е2Bал: - л:2), *0 = 0, е = Ь/а, где а и Ь — верти-
вертикальная и горизонтальная полуоси образующего эллипса. Уравнения
A1.68), A1.69) приведем к виду
ЛУ
A1.79)
Решения этих уравнений, ограниченные в нижнем полюсе при ^ = 0, за-
запишем в виде степенных рядов [350]:
ОО ОО гу
^ V* гк т> ^ V4* *>к . **
к=0
к=0
2 '
A1.80а)
441
а0 =
ак = ак^
A1.8в§)
В A1.80) константы С^ и. Со по-прежнему находятся из граничных
условий У] = 1, Уо = 1 при д: = Н . Гидродинамические коэффициенты
вычисляются без учета массы оболочки по формулам A1.71). После чего
для удобства дальнейшего использования выражений для 5, / и т^ пре*-
образуем их по формулам A1.72) при Ц = Н . При этом считаем, что по-
поперечное перемещение полости Уо отсчитывается в плоскости свободной
поверхности жидкости [354]:
МаA-ко)-1-яра*Ъ$е2A-е2)B-коJ,
4
A1.81)
4 /% а
*=0
1 Но
]¦
В епртае сферическ0г® бака в этих формр[ах следует положить е = 1.
Значение квадрата безразмерной частоты; поперечных колебаний жид-
жидкости в сфе|ш?5еекой полости по низшей форме (О\а1$ , полученные по
формулам (ИМ)? пшжостью совпадают с результатами численного ре-
решения этой задачи в ©даочленшм приближении (к = 1, <Р1(а) = а).
Ддя элдиисовда шрш е =4/3 получаем ак = к +1, к = 0,1,2,..., и ре-
решение A1.80) записывается в замкнутом* виде
442
В этом случае в формулах A1.81) Рх =A-ко/2)~2, Ръ =2A-ко/2)~3.
Так же, в замкнутом виде, записывается решение для сплюснутого эл-
эллипсоида при Е2 = 6 (ак = к/3 +1,к = 0,1,2,...):
у_г
3-2^
3-2^
з
Далее определим присоединенный момент инерции жидкости, полно-
полностью заполняющей эллипсоид. На основании ограниченности Уо в верх-
верхнем полюсе ^=1, полагая С0=0 в выражении A1.80), получаем
Уо =2/A + е ). Момент инерции жидкости относительно оси, проходя-
проходящей через нижний полюс, будет;
1 A-е2J
A1.84)
Точное решение [245] также приводит к этой формуле.
5. Составная полость. Пусть две части бака в виде полости враще-
вращения (например — днище и обечайка) стыкуются в некотором сечении
х = с. Условия сопряжения решений гидродинамических задач A1.26)
при поперечных колебаниях (т = 1) записываются в виде
К $т<р
A1.85)
Пусть решена задача о собственных колебаниях жидкости в баке, за-
заполняющей его до плоскости стыка, и найдена низшая частота Щ\. Тогда
КУ'+РгК'У-^
=0.
A1.86)
С учетом этого соотношения, условий сопряжения A1.85) и граничного
условия на свободной поверхности гидродинамические коэффициенты
для составного бака определяются через гидродинамические коэффици-
коэффициенты нижней части (жидкости в днище) и через решение для верхней
части бака. Например, для цилиндрического бака с днищем в виде произ-
произвольной полости вращения низшая частота колебаний жидкости опреде-
определяется по формуле
2.
443
где Я = Я//?о ; #о» Н — радиус цилиндра и глубина жидкости в цилинд-
цилиндре. В работе [328] аналогичный результат был получен другим методом.
Приведенные здесь результаты показывают, что приближенное реше-
решение гидродинамической задачи, соответствующее гипотезе плоских сече-
сечений для жидкости, при колебаниях по низшей форме имеет достаточно
высокую точность для различных односвязных полостей вращения.
§ 11.7. Поперечные колебания цилиндрического бака, частично
заполненного жидкостью, с днищем в форме полости вращения
Рассмотрим поперечные колебания (т = 1) упругого цилиндрическо-
цилиндрического бака, частично заполненного жидкостью, который имеет днище в фор-
форме полости вращения (см. рис. 10.9 б [354]). Оболочку днища будем счи-
считать недеформируемой, а движение жидкости внутри полости днища —
подчиняющемся гипотезе плоских сечений. Тогда кинетическая и потен-
потенциальная энергии оболочки днища и жидкости, заполняющей его полость
до плоскости стыка с цилиндрической частью, записываются в виде
A1.70), где обобщенная координата ^ заменяется на а^/К и коэффици-
коэффициенты обозначаются индексом «д»,
• 2
\2 $^ ^ ^^
2 A1-88)
Для цилиндрической полости также будем использовать решение,
основанное на гипотезе плоских сечений жидкости (т = 1, к = 1 и
(Р1(а) = а). В этом случае выражения A1.10) и A1.21) записываются в
виде
±а3)]К, A1.89)
где функция #1(^,0 определяется как решение задачи A1.22) при к =1,
1=А2^, (А2 =24/7),
при<*=0, A1.90)
К
Если же для разложения A1.10) использовать полную систему орто-
ортогональных функций фп(сс), которые использовались в A0.43) для полу-
получения точного решения, то выражения A1.21) и уравнения A1.22) при-
принимают форму
п=1
444
Цп=4кпа0 при<*=0,
A1.916)
На основании A1.91) получается точное решение гидродинамической
задачи для цилиндрической полости, которое совпадает с полученным в
другой форме точным решением A0.43), A0.47)—A0.50), если учесть со-
соотношения \]'п =у„Хп 1]п = Х'п -4кпУ\ которые следуют из сравнения
уравнений A0.44) и A1.91).
Выражения для кинетической и потенциальной энергий жидкости,
полученные при использовании гипотезы плоских сечений жидкости
(уравнений A1.89), A1.90)), имеют такой же вид, как и для точного ре-
решения A0.52), A0.54) с той лишь разницей, что в данном случае следует
считать и = 1 и заменить у± =1,8412 на Д = ^24/7 =1,8516 и
4*^=0,9874 на 1. Поскольку У\-Р\ и 4кг1=1 с точностью -1% и
влияние членов при п = 2,3,... в выражениях A0.52), A0.54) незначи-
незначительно, то ясно, что приближенное решение, соответствующее гипотезе
плоских сечений жидкости, обладает достаточной для практических рас-
расчетов точностью.
Кинетическую и потенциальную энергии жидкости в цилиндрической
части бака Тжц, Пж ц удобно записать в обобщенных координатах а0,
ЛГ» #2> аЪ-> а4* 5\9 т-е* в виДе (Ю-52), полагая при этом п = 1 и
У1 ~"* А = 1»8516, 4К1 -> 1. Потенциальная энергия системы П = Ло ц +
+ Пж ц + Пд не зависит от обобщенной координаты я0 ? так как
12 =0 и %=0 при / = 1,2,3,4, на основании чего а0
оказывается циклической координатой и легко исключается с помощью
уравнения дТ/да0 = 0, где Т = Го ц + Тж ц + Гд. Заменяя в выражениях
A1.88) для Гд, Пд обобщенные координаты на
4 4
У0=а{= ^8иа( , Кдо = а2 + 6уа4 = ]^аЛ- A1.92)
1=1 1=1
и исключая циклическую координату а0» с учетом A0.15), A0.52),
A1.88) будем иметь
A1.93)
445
где
^
4
яр/Г
яр/Г
A1.94)
Здесь потенциальная энергия изгиба-сдвига цилиндрической оболочки
/70Ц записывается в обобщенных координатах У^, #о, У], ^ как A0.41).
При расчете упругих колебаний, частоты которых значительно превы-
превышают низшую частоту гравитационных колебаний жидкости в баке
\ > вместо $! удобно ввести обобщенную координату
A1.95)
1=1
Тогда выражения A1.93) преобразуются к виду
^ .Г 4 4
где
A1.96)
A1.97)
Из A1.96) следует, что гх —> 0 при # -> 0.
Далее с помощью матричного преобразования A0.38) выражения
A1.96) запишем в обобщенных координатах Уо, ^/0» ^1 > ^0:
A1.98)
Я = П0>ц +^
ГЧ).Ц
' — II V || ' *^1 ^|| ^11 ^21 ^31
4x4 Х
Для оценки точности решения гидродинамической задачи на основе
гипотезы плоских сечений жидкости рассмотрим цилиндрическую обо-
446
лочку с четырьмя одинаковыми отсеками, имеющими плоские днища
частично заполненными жидкостью (см. рис. 10.10 а); параметры этой
системы приведены в п. 10.4.4. В табл. 11.1 для сравнения приведены
значения квадратов безразмерных собственных частот поперечных коле-
Таблица 11.1
Свободная оболочка
Яг104
45,23
43,24
Яз-Ю4
342,7
310,6
ЯгЮ4
1554
1320
Консольно-закрепленная оболочка
1,176
1,167
Яз-104
41,47
40,50
Яз-Ю4
305,6
390,8
баний Ау =С0у(Ек/р#3) У V =1,3 . Результаты получены на основе точ-
точного решения гидродинамической задачи (верхняя строка) и на основе
гипотезы плоских сечений жидкости (нижняя).
Таблица 11.2
; <Ро
0
30°
60е
90°
Яг104
43,24
41,27
37,87
35,08
Я^Ю4
310,6
294,2
259,4
241,5
. Яз-104
1320
1201
986$'
865,1
В табл. 11.2. приведены значения Ху (у=1,3) для свободной ишь
тропной цилиндрической оболочки (у =2,6), отсеки которой имеют оди-
одинаковые сферические днища с углами исшураствора ф$ = 0 г 30) г 60, 90р
(рис. 10.10 б); при этом удельная масса ведеформируемсш обшютки дн^-
ща считается такой же, как и у цилиндрической оболочки. Движение
жидкости при поперечных колебаниях системы как в полости дкшца, так
и в цилиндрической части каждого бака, определялось на основе гшшоте-
зы плоских сечений жидкости.
Глава 1 2
ПРИБЛИЖЕННЫЕ И ЧИСЛЕННЫЕ МЕТОДЫ
РАСЧЕТА КОЛЕБАНИЙ ОБОЛОЧЕК С ЖИДКОСТЬЮ
Для получения выражений кинетической и потенциальной
упругих оболочек с жидкостью (9.53) и уравнений (9.56) в нормалью^
координатах необходимо определить некоторое число низших собствен-
собственных форм колебаний ип, Фп закрепленной оболочки с жидкостью и по-
потенциалы переносного движения ^. Для этого могут быть использованы
различные варианты приближенных, вариационных и численных методов.
§ 12.1. Применение метода Ритца
При применении метода Ритца к расчету колебаний произвольных
упругих оболочек, частично заполненных жидкостью, основную труд-
трудность представляет определение совместных координатных функций для
перемещений оболочки и жидкости. Некоторые подходы, реализующие
метод Ритца, рассмотрены в [6, 342-344, 363] и ряде других работ. п
12.1.1. Собственные колебания. При использовании смешанного
вариационного принципа (9.36) для расчета собственных колебаний уп:
ругой оболочки, частично заполненной сжимаемой жидкостью, вектор'
перемещений срединной поверхности оболочки и и потенциал переме-
перемещений жидкости Ф можно представить в виде независимых разложении ч
<12Л>
где ц^х,у9г) и (р^{х,у,1) — заданные на поверхности 5ив объеме V
функции. Здесь будем считать, что функции ц- являются возможными
перемещениями оболочки, т.е. удовлетворяют необходимым условиям
непрерывности и кинематическим граничным условиям ^(и) = 0. По
методу Ритца на основании (9.36) при ^(и) = 0 для неизвестных коэф-
коэффициентов а,-, Ъъ получаем систему уравнений [363]:
=0 (/ = 1,2,...),
A2'2>
2>ДУ Хи К =0 (* =1.2,...).
где
448
дх дх
A2.3)
Для улучшения сходимости решения гидроупругой задачи при выборе
координатных функций желательно удовлетворить как можно больше
уравнений и граничных условий. Например, если жидкость считается
несжимаемой (с -» ©о), то функции <% можно выбирать в классе гармо-
гармонических функций (Афк = 0). Если, далее, не учитывается гравитация
(8 —>0), то их, кроме того, следует подчинить условиям фк = 0 на по-
поверхности а . При таком выборе функций <% также упрощается вычис-
вычисление коэффициентов А#/. Если из второй группы уравнений A2.2) оп-
определить коэффициенты Ь/ и подставить их в первую группу A2.2), то
при с —> <*> и # -» 0 будем иметь уравнения
2(*?-ю2л10)^=О A = 1,2,...), A2.4)
2
где т,у = ту + т*; ту — коэффициенты обобщенных масс оболочки и
пОу — коэффициенты присоединенных масс жидкости для заданных
форм перемещений оболочки (ту = т*).
В случае, когда функции ф; подчиняются кинематическому условию
д(р(/ду = Щ на 50 и вместо A2.1) используются разложения
уравнения метода Ритца на основании (9.36) вместо A2.2) принимают
вид
к% + ёРу)-со2(т% +т$)]а1 =0 (/ = 1,2,...), A2.6)
где
со
A2.7)
Для оценки численной сходимости решений по методу Ритца в виде
разложений A2.1) и A2.5) рассмотрим осесимметричные колебания пе-
перевернутой вершиной вниз конической оболочки постоянной толщины К
закрепленной на верхнем краю и частично заполненной несжимаемой
449
жидкостью (с—>°о) на глубину Я (рис. 12.1) [363]. Оболочку <
безмоментной, гравитацией пренебрегаем (# -> 0).
Нормальное м; и меридиональное |
^ перемещения оболочки представляются
щ
-1
-1
1
Рис. 12.1. Коническая оболочка,
частично заполненная жидкостью
При этом удовлетворяются уравне
равновесия оболочки в меридионалы
направлении без учета инерционных
(щи ~ 0) и граничные условия и
коэффициент Пуассона.
при 5 = 0 и и = 0 при 8 = Ь\ ц
Для разложений A2.1) система функций <% выбирается в виде гармо§
нических шаровых функций ,^п ^
A2.9I
где г и а — радиус и угол, отсчитываемые соответственно от полюса и
оси х (рис. 12.1); Рк (соза) — полиномы Лежандра.
Для разложений A2.5) система функций щ будет ^
A2.10)
Эти функции удовлетворяют условиям
Вычислим квадраты безразмерных частот й^ = (ркЦЕН)со^ собст-
собственных форм осесимметричных колебаний конической оболочки с жид-
жидкостью при относительных глубинах заполнения Н =Н1Н\ =1,0; 0,75;
0,5; 0,25. Параметры оболочки: то/рКг = 0,0135; /л = 0,3; ао=ЗО°;
с -» ©о; ^ = 0; /?1 = Ьзта0, #1 = ^О5а0 • В табл. 12.1 приведены значе-
значения О% и й|, полученные при N =7 и N = 8 в двух вариантах: А —
использовались разложения A2.1) с учетом A2.8), A2.9) и уравнения
A2.2); Б — разложения A2.5) с учетом A2.8), A2.10) и уравнения A2.6).
В варианте А собственные частоты могут сходиться к точным значе-
значениям как сверху, так и снизу в силу используемого смешанного вариаци-
вариационного принципа, который является минимаксным. В данном случае при
450
# = О также получаются «нулевые» собственные частоты, представляю-
представляющие «внутренние» движения жидкости по формам, образованным из
функций A2.9).
Таблица 12.1
Я
1
0,75
0,5
0,25
а1
а1
д?
а\
а\
п1
п\
N
1
8
7
8
7
8
7
8
7
8
7
8
7
8
7
8
1,5137
1,5125
-
-
2,7006
2,7212
9,5962
-
6,6656
6,6865
39,053
36,423
33,684
33,671
117,57
116,00
Б
1,5346
1,5338
4,114
4,148
2,7247
2,7084
10,845
-
-
6,6791
-
-
43,838
33,823
118,68
117,07
В
1,5297
1,5297
4,090
4,089
2,7112
2,7112
10,219
10,020
6,6692
6,6632
39,100
37,536
33,750
33,542
117,58
116,00
Г
1,4449
1,4449
2,830
2,756
2,6603
2,6598
9,1541
8,7247
6,6241
6,6141
35,637
32,967
33,707
33,482
117,57
115,97
В варианте Б собственные частоты сходятся сверху, так как все кине-
кинематические условия удовлетворяются при выборе координатных функ-
функций и смешанный вариационный принцип при этом переходит в принцип
Лагранжа. Так как в данном случае функции A2.10) не удовлетворяют
динамическому граничному условию на а, а все степени свободы (ко-
(коэффициенты а{) обусловлены упругими перемещениями оболочки, то
при расчете появляются близкие к нулю «паразитные» частоты (вместо
«нулевых»), представляющие преимущественно внутренние движения
жидкости. Прочерки в табл. 12.1 означают, что для этих случаев резуль-
результаты получились ошибочными из-за численной неустойчивости решения,
хотя вычисления выполнялись на компьютере с удвоенной точностью.
Это вызвано тем, что в качестве координатных функций использовались
степенные A2.8) и гармонические шаровые функции A2.9) и A2.10), ко-
которые также являются степенными по координате г, в результате чего
при больших N матрицы коэффициентов уравнений A2.2), A2.6) стано-
становятся слабообусловленными. Очевидно такая «опасность» может возник-
возникнуть и в других вариантах решения гидродинамических и гидроупругих
задач, когда потенциал перемещений несжимаемой жидкости представ-
представляется в виде разложений по гармоническим шаровым или цилиндриче-
цилиндрическим функциям. В таких случаях для получения достоверного решения
необходимо в каждой конкретной задаче исследовать сходимость реше-
решений при различном числе координатных функций или использовать раз-
различные системы координатных функций. Варианты В и Г обсуждаются в
п. 12.1.3.
451
12,1.2. Определение потенциалов переносного движения жидко-
жидкости. На основании вариационных принципов (9.40), (9.42) могут быть,
определены потенциалы переносного движения жидкости щ, входящие^
в разложения (9.51); при этом следует положить Ф —>\\?{, щ —>Щ? = г\;\ .
Функция щ ищется в виде разл<}жения по заданным функциям
к
По методу Ритца при использовании (9.40) задача сводится к системе
линейных алгебраических уравнений относительно коэффициентов Ь/:
где коэффициенты Лу, ц% определяются, как и для уравнений A2.2), по
формулам A2.3) при с —> °° . Если использовать вариационный принцип
(9.42), где перемещение <^0 свободной поверхности жидкости а счита-
считается заданным (при определении потенциала ^- следует положить
Ф ->у/;, м>0 —> Щ , ^о ""* &1 )> то тогДа с учетом условия (9.44) коэффици-
коэффициенты уравнений A2.12) будут
Лк1 = Р^ФкУ^У • А^ = -рЯ^Ф^5 + \\2г(ркс1е . A2.13)
V 50 с
12.1.3. Раздельные решения гидродинамической и упругодинами-
ческой задач. В некоторых случаях (например, при с—»«>, #=0;
ДФ=0 в У, Ф = 0 наст, дФ/ду = м; на 50) гидродинамическая задача
может быть решена отдельно от упругодинамической в предположении,
что нормальные перемещения оболочки м> заданы. Это решение может
быть точным или приближенным, полученным любым методом. При
этом потенциал перемещений жидкости выражается в виде линейной
(обычно интегральной) зависимости от и> как Ф|>]. В этих случаях урав-
уравнения колебаний оболочки с жидкостью в обобщенных координатах, ха-
характеризующие движение оболочки, могут быть составлены по методу
Ритца на основе принципа возможных перемещений или уравнений Ла-
гранжа.
При использовании уравнений Лагранжа в обобщенных координатах
записываются потенциальная энергия 770[и], кинетическая энергия обо-
оболочки Го и вариация работы гидродинамического давления р = -рФ на
перемещениях оболочки:
Го = -^щй2с18 , 8 АР = -р^Ф8 пОЗ . A2.14)
2
Вектор перемещений оболочки и представляется в виде разложения
по заданным функциям г};, удовлетворяющим кинематическим гранич-
граничным условиям:
452
Уравнения колебаний оболочки в обобщенных координатах а^
вид
%(тр]+к$а]) = B* A = 1,2,...),
3
где т§ и $ — коэффициенты обобщенных масс и обобщенных
- •- »№>"> |
стей оболочки. , „ ,^й;'^
Обобщенные силы гидродинамического давления приводятся к в.$1%
С учетом формулы Грина и условий, которым удовлетворяют ¦
ции Ф] (ЛФу =0 в V , Фу =0 на а, дФ]/ду =УУ] на
казать, что коэффициенты присоединенных масс жидкости пщ симм "
ричны, т. е. т™ =т* . В результате с учетом A2.17) уравнения A2.1<
свободных гармонических колебаний оболочки записываются в виде A^2.4).
В качестве примера рассмотрим осесимметричные колебания
ментной конической оболочки, частично заполненной н
жидкостью (рис. 12.1); данные для нее приведены в п. 12.1.1.
Гидродинамическая задача решается приближенно путем сведения |
к одномерной задаче A1.18), A1.19) при использовании одной фуйцй
депланации поперечных сечений жидкости по форме иардббйй
<Р\(сс) = 1-2а2. Для конуса при К = х1%ао> х$=0 дифференциально
г' * I
уравнение A1.18) решается точно с учетом условия Щч^оо при х = 0
Запишем полученное выражение для потенциала перемещений!
в двучленном приближении (Ф~у/'о+1//'1) на смоченной по
оболочки 50 ПРИ ао =3°° и § =0 [363]:
о о ;
Если для жидкости использовать гипотезу плоских сеченй
')' ф ~ ^о )>то ПРИ ао = 30° будем иметь , ,., »
45
= Щж А* Л 196^ й +182^ + 7м> I
Ф5о-42[1821 ^^ 19б^^+182|^+7^|. A2.19)
Результаты решения задачи по методу Ритца при использовании раз-
разложений A2.8) приведены в табл. 12.1 (варианты В и Г)наряду с полу-
полученными в п. 12.1.1 результатами (варианты А и Б). В варианте 5 обоб-
обобщенные силы гидродинамического давления определялись при использо-
использовании выражения A2.8), а в варианте Г— выражения A2.19). Так как в
вариантах В и /"при решении гидродинамической задачи одно из условий
потенциальности движения жидкости удовлетворяется приближенно, то
на основании теоремы Томсона [199] это приводит к увеличению кине-
кинетической энергии жидкости по сравнению с потенциальным движением
(при тех же нормальных перемещениях на границе) и, следовательно, к
уменьшению собственных частот. Особенно заметное снижение собст-
собственных частот за счет этого проявляется в варианте Г, в котором исполь-
используется гипотеза плоских сечений жидкости (эта гипотеза для второго тона
колебаний, как правило, неприменима). Значения низших частот очень
быстро сходятся при увеличении N. Так, например, в варианте В при
Я=1 и N = 5;6;7;8 значения безразмерных квадратов частот О% соот-
соответственно равны 1,529927; 1,529682; 1,539669; 1,529669; для них все
четыре варианта А, Б, В и /"дают близкие результаты.
12.1.4. Приближенный способ учета сжимаемости жидкости. Как
отмечалось выше, в некоторых случаях, например при осесимметричных
упругих колебаниях оболочек вращения с жидкостью, необходимо учи-
учитывать сжимаемость жидкости. Для оценки влияния сжимаемости жид-
жидкости на собственные частоты соп колебаний оболочки с жидкостью ко-
коэффициенты обобщенных масс тп, т;п и жесткости кп, входящие в
уравнения колебаний в обобщенных координатах (9.53), (9.56), использу-
используем смешанный вариационный принцип (9.36) [357].
Пусть каким-либо методом определены собственные частоты со® и
формы колебаний щ, Ф„ оболочки с несжимаемой жидкостью. Верх-
Верхним индексом «О» здесь обозначены величины, полученные в предполо-
предположении, что жидкость несжимаема. Будем считать, что сжимаемость жид-
жидкости оказывает незначительное влияние на формы упругих колебаний, и
примем в одночленном приближении
и = али„, Ф = апФ„, A2.20)
где ап — неизвестные коэффициенты.
Из вариационного уравнения (9.36) с учетом A2.20) и условий, кото-
которым удовлетворяют формы и„, Ф^, получим
4
7 О , ¦*. 2 0 ^^ Л# С\ /1Л 11 \
кп—СО ТПп т-О?л=и, A2.21)
С
где пг„ и к® = гп^со^ — коэффициенты обобщенной массы и обобщен-
обобщенной жесткости и-й формы колебаний оболочки с несжимаемой жидкостью,
454
A2.22)
Квадрат частоты колебаний соп оболочки с сжимаемой жидкостью
определяется как наименьший из двух корней уравнения A2.21).
Коэффициенты обобщенной массы тп и жесткости кп для оболочки
с сжимаемой жидкостью определяются с помощью соотношений (9.50) и
уравнения A2.21):
2 4
тп=т°п+2^-ап, кп=тпсо% =к% + ^ап. A2.23)
С С
Коэффициент обобщенной массы тп с учетом сжимаемости жидко-
жидкости запишем на основании (9.54), используя преобразования по формуле
Грина:
Щп=гп1+^а1п, а(п = р111х1/(Ф^У. A2.24)
С у
Дда оценки точности этого способа приведем результаты для низшей
формы осесимметричных колебаний рассмотренной ранее в § 10.1 ци-
цилиндрической оболочки из дюраля, заполненной водой (К/к = 100,
ро/р = 2,7, Е/рс2 =31,2, Я/Я = 4); в этом случае л = 1, 1 = 0,
Щ = со&(ях/2Н), щ = х-Н . Были рассмотрены следующие варианты:
а) несжимаемая жидкость (Е/рс2 =0); б) точное решение A0.5), A0.9)
для сжимаемой жидкости; в) приближенный способ учета сжимаемости
жидкости по формулам A2.21)—A2.24).
Вариант
а
б
в
(о1(рКъ1ЕЮ
0,07550
0,06565
0,06660
щ/рк3
166,4
220,2
210,4
-тО1/рК3
40,74
46,99
46,24
Если для оболочки вращения с несжимаемой жидкостью, решение
гидродинамической задачи получается методом сведения ее к одномер-
одномерной задаче, то в формулах A2.22), A2.24) вместо потенциала перемеще-
перемещений Ф следует использовать функцию возмущенного давления в жидко-
жидкости у/со&тО.
12.1.5. Осесимметричные колебания оболочек вращения с жидко-
жидкостью. Сравнение точного решения для цилиндрической оболочки § 11.2 с
приближенным, полученным по методу Ритца в п. 11.1.1, показывает, что
при определении частоты и коэффициентов присоединенных масс низ-
низшей формы осесимметричных колебаний оболочек вращения при доста-
достаточно больших глубинах их заполнения можно использовать гипотезу
плоских сечений жидкости (ух =11^(х,{)9 р*=~РЩ)- Кинетическая
энергии жидкости в этом случае определяется по формуле A1.20) при
{/1=0; с учетом A1.14) она непосредственно выражается через нор-
нормальное перемещение оболочки ж
455
Низшая форма осесимметричных колебаний закрепленной оболочки
вращения с жидкостью близка к форме ее перемещений от гидростатиче-
гидростатического давления (массой тонкой оболочки в этом случае можно пренеб-
пренебречь). Аппроксимируя низшую форму колебаний Щ формой прогиба
оболочки от гидростатического давления Щ, можно достаточно просто
получить приближенные значения коэффициентов обобщенных масс
гаО1 и Ш1 и низшую частоту колебаний щ. Для формы прогиба оболоч^
ки от гидростатического давления р0 - р # (Я - х), где # может быть
произвольным числом, коэффициент жесткости к\ на основании теоремы
Клапейрона можно определить как
A2-25)
Тогда частота колебаний определяется по формуле Релея в виде
аХ^&^-хШт. A226)
Чтобы показать возможность применения такого приближенного под-
подхода в практических расчетах и оценить его погрешности, рассмотрим,
несколько примеров [346].
1. Коническая оболочка. Нормальное перемещение безмоментной
конической оболочки, полностью заполненной жидкостью и закреплен-
закрепленной на краю от тангенциальных смещений (см. рис. 12.1), под действием
гидростатического давления р0 = Р 1И(Н ~х) иРИ /*= 0,3 и
# = (ЕН/рК^ыпссоСОШо равно
Щ = 0,0889 + 0,75E/ЬJ - 0,8889(у/^K . A2.27)
Для формы перемещений без учета инерции оболочки в виде A2.27)
получаем
ты = -1прК\ • 0,02278иГ2 сс0 со$а0,
-г 9 _^ A2.28)
тх =2прЩ@,0031 + 0,000411^ссо)$т *а0со$а0.
По формуле A2.26) при а0 = 3^° находим п? = а>\ (рК^/ЕН) = 1,524.
Полученное в п. 12.1.1 решение по методу Ритца в восьмичленном при-
приближении (N = 8) без учета инерции оболочки в вариантах расчета А, Б,
В, Г соответственно дает О% =1,512; 1,534; 1,530; 1,445. Отметим, что в
варианте Г также используется гипотеза плоских сечений жидкости.
2. Цилиндрическая оболочка с полусферическим днищем. Формы
прогиба безмоментных сферической оболочки И^01 и цилиндрической
оболочки с неподвижно закрепленными торцами Щ2 от гидростатиче-
гидростатического давления ро = р]>(Н-х) при ]> =Ек11 рЩ равны:
0 A2.29а)
456
Щ2=У(Н-х/К-уН) при 0<*<Я,
при Я <х<Ь\ Я = —,
A2.296)
Здесь Яд, Ь, Я — радиус, длина и глубина заполнения цилиндриче-
цилиндрической оболочки; \, Н2 — толщины сферической и цилиндрической обо-
оболочек; координата х отсчитывается вдоль оси от нижнего торца цилинд-
цилиндрической оболочки. Для цилиндрической оболочки со свободным верх-
верхним краем следует считать V = 0. Пренебрегая массой оболочки, при
\х = 0,3 находим
т01 = -
ЯA + Я) + уЯ3
Я) + уЯ3@,3333 - 0,5у)] ,
= 2яр/${0,1343 + 0,2406Я + 0,3466Я 2 + 0,2450Я3 +
+ уЯ3A + 2Я)@,2333 - 0,35у) + у2Я3[Я 2@,2667 -
A2.30)
0,8
у?
«1
-0,8333у+0,6667у2) +0,0833-0,25уA + у)]}.
На рис. 12.2 штриховыми линиями показаны изменения безразмерной
частоты &1 = сох^рК$/Екх колебаний бака со свободным верхним краем
(у=0), вычисленной по формуле
A2.26), и коэффициента обобщенной
массы ссх—т§х(<&ирК§тх)~' при у = 1
(кривые 7) и при у = 0 (кривые 2) в за-
зависимости от глубины заполнения обо-
оболочки жидкостью Я ; сплошными ли-
линиями показаны результаты, получен- 0,4
ные методом Ритца при использовании
гипотезы плоских сечений жидкости
[343].
Для сравнения приведем также неко- ° 2 4 я
торые данные точного решения [29а], Рис. 12.2. Зависимость безразмерной
полученного при условии сечения жид- частоты &х и коэффициента обоб-
кости, отделяющей цилиндрическую щенной массы ах для низшей фор-
часть бака от полусферической (в скоб- мы осесимметричных колебаний
ках даны результаты расчета по форму- цилиндрического бака с днищем в
лам A2.26), A2.30)): Я=1, у=1, виде полусферической_оболочки от
глубины заполнения Н ; сплошные
12^=0,9552 @,9629); Я=3, 7 = 0, линии — расчет по методу Ритца
^ ъглеъ /Л/^лч 77 о г* [343]; штриховые — одночленное
О,х = 0,6459 @,6443); Я = 3, у = 2, приближение (см. A2, 26)): 1 — ци-
ах =0,2420 @,2470). В скобках приве- линдрическая оболочка абсолютно
1 \ > / г жесткая (у = 0), 2 — упругая (у = 1)
дены результаты полученного здесь ре-
решения по формулам A2.26), A2.30). На рис. 12.3 сплошной линией пока-
показана низшая форма колебаний Щ безмоментной полусферической обо-
оболочки, полностью заполненной жидкостью (Я = 0), полученная по мето-
методу Ритца [343], штриховой — форма прогиба оболочки от действия гид-
457
ростатического давления И^ъ а точками — результаты эксперимента;
[303] с частотой О,^ -1,256; по формуле A2.26) с учетом A2.30) частота
О.\ = 1,209. Точные решения в рядах по
полиномам Лежандра для полусфериче*
ской оболочки, полностью заполненной
жидкостью: а) по безмоментной теории
без учета инерции оболочки [27] —
{^1 = 1,162 ; б) по моментной теории дли"
защемленной на краю оболочки при
плоской поверхности жидкости
Рис. 12.3. Низшая форма собствен- (#//,=200, ро/р = 2,75, /X = 0,3125)
ных осесимметричных колебаний ' 1 г-и/г-
безмоментной полусферической [190] — ^=1,172; в) по моментной
оболочки с жидкостью: сплошная теории для шарнирно закрепленной
линшг - расчет по методу Ритца обшючки (см § ш 3); ^/^=200,
[343]; точки — результаты экспе- ч и ' А
римента [303]; штриховая линия — Ро/Р = 2>7 » А* = 0,3 ) — &\ = 1,191.
форма прогиба оболочки от гидро- Расчеты показывают, что при осе-
статического давления симметричных упругих колебаниях обо-
оболочек вращения с жидкостью по низшим формам влияние гравитации,
сжимаемости жидкости и инерции оболочки мало; деформации оболочки
являются преимущественно безмоментными, и только вблизи закреплен-
закрепленных краев и шпангоутов оболочка подвергается сильному изгибу. Ука-
Указанные особенности следует учитывать при расчете колебаний оболочек
с жидкостью по методу Ритца. Меридиональные и нормальные переме-
перемещения непологой оболочки вращения целесообразно представлять в виде
и = мБ, м> = м?Б + м?И , где «безмоментные» перемещения иБ , м>ъ описы-
описываются медленно изменяющимися координатными функциями, а изгиб-
ное перемещение м>и вблизи края оболочки описывается функциями зату-
затухающего краевого изгиба [259]
где 5% — расстояние, отсчитываемое от &-го края вдоль меридиана
внутрь оболочки; Щ, &к — обобщенные координаты (нормальное пе-
перемещение и угол поворота), характеризующие краевой изгиб оболочки;
индекс «Ь> обозначает, что все величины относятся к к-у краю.
Потенциальная энергия оболочки вычисляется для безмоментной
деформации и краевого изгиба в виде П = 77Б + ПИ, где для к-го края
A2.32)
коэффициент Щ2 берется со знаком «-» на нижнем (левом) краю и со
знаком «+» на верхнем (правом) краю оболочки.
458
Кинематические граничные условия для функций мин' удовлетворя-
удовлетворяются заранее или на основании вариационного принципа с неопределен-
неопределенными множителями Лагранжа.
В качестве примера рассмотрим цилиндрическую оболочку с непод-
неподвижным плоским днищем, полностью заполненную несжимаемой жидко-
жидкостью. На нижнем краю при х = 0 оболочка неподвижно закреплена по
перемещению и углу поворота, а на верхнем краю х = Ь = Н свободно
оперта. Для этого случая в § 10.1 было получено точное решение задачи о
собственных осесимметричных колебаниях в рядах A0.11). Оценим
влияние закрепления нижнего края оболочки на низшую частоту колеба-
колебаний по методу Ритца с учетом краевого изгиба. Для низшей формы коле-
колебаний защемленной оболочки примем
IV = ах со$(Лгх/К) + Ще^[со$A3х) + 8т(
где со&^х/К) при \ = пК/2Н является низшей собственной формой
колебаний оболочки, нижний край которой может свободно перемещать-
перемещаться в радиальном направлении. Чтобы удовлетворить кинематическим
граничным условиям м> = 0, дм/Ах = 0 при х = 0, полагаем Щ = -щ . В
результате получается одночленное приближение для низшей формы
колебаний с неизвестным коэффициентом ах.
Таблица 12.2
н
1
2
6
Я//* = 100
а
0,9387
0,2846
0,033948
б
1,0886
0,3070
0,034843
в
1,0905
0,3070
0,034843
К/ГН = 500
а
0,95815
0,2864
0,033973
б
1,0249
0,2965
0,034373
в
1,0253
0,2965
0,034370
В табл. 12.2 приведены значения квадрата безразмерной частоты
А2 = С0\(Ек/рК3) для оболочки с параметрами: Ро/р = 2,7 ; с -» «>;
IX = о,3 ; К/к = 100, 500; Н = к/Я = 1,2, 6: а — точное решение A0.5) для
оболочки, нижний край которой свободен по радиальному перемещению;
б — точное решение для оболочки с жестко защемленным нижнем краем
на основе уравнения A0.13); в — приближенное решение для оболочки с
жестко защемленным нижним краем по методу Ритца с учетом краевого
изгиба.
Анализ данных табл. 12.2 указывает на высокую точность простого
приближенного способа учета краевого изгиба оболочек с жидкостью
при осесимметричных колебаниях. Этот способ удобно использовать при
расчете осесимметричных колебаний составных оболочек вращения с
жидкостью, в местах сопряжения которых возникают краевые изгибы.
§ 12.2. Интегрирование обыкновенных дифференциальных
уравнений
Общее решение полученных в гл. 11 обыкновенных дифференциальных
уравнений колебаний жидкости в подвижной полости вращения A1.35),
459
A1.41) и упругой оболочки вращения с жидкостью A1.55) строится пу-
путем их численного интегрирования, как в задаче Коши, в виде суммы ре-
решения неоднородных уравнений и линейно независимых решений одно-
однородных уравнений, удовлетворяя при этом начальные граничные условия
при х = *о (^ = 0). Константы для линейно независимых решений одно-
однородных уравнений определяются из граничных условий при х=Н E=$а).
Для замкнутой снизу оболочки (полости) можно считать, что вместо
полюса она имеет при х = х$ жестко связанное с оболочкой недеформи-
руемое плоское днище достаточно малого радиуса К^,. Решение гидро-
гидродинамической задачи о колебаниях жидкости в подвижной полости мож-
можно получить путем численного интегрирования уравнений по методу
Рунге — Кутта.
При поперечных колебаниях (и = 1) в плоскости Оху (см. рис. 11.1)
недеформируемой полости вращения, частично заполненной жидкостью,
апроксимирующую функцию У/ представим в виде
Коэффициенты уравнений A1.35) в одночленном приближении
(к = 1, (р\(а) = а) берутся в виде A1.36) при т = 1: ^п=17/7,
81 =96/7 , Л =24/7 , 2>п =1/4, кп =НХ =к0 =1/7.
В двучленном приближении (к = 2, эд(а)=а, (Р2(сс) = а-A4/9)а^ ),
которое соответствует A1.28) при т = 1, эти коэффициенты будут равны
17
* 24 *
Л =у > /2=<
1080
#22=
10
306
1
' ^2
_ 100
508
243
119
1
108'
96 116640
11
324
119
17'
В табл. 12.3 для сравнения приведены значения квадрата безразмер-
безразмерной низшей частоты гравитационных колебаний жидкости &2х = со^а/з
в неподвижной сферической полости радиуса а при некоторых глубинах
Таблица 12.3
Н1а
(А2I
(А2J
(А2)*
0,1
1,03471
1,03466
1,04
0,5
1,20935
1,20772
1,208
1,0
1,56682
1,56014
1,560
1,4
2,12076
2,12290
2,12
1,8
3,55542
3,93717
3,97
заполнения Я, отсчитываемых от нижнего полюса. Значения (О,\)\ и
(п\J получены на основе численного решения уравнений A1.35) для
одночленного (к = 1) и двучленного (к = 2) приближений при
хо/а = 5 • 10~4 , а (Я?)* — по методу Ригца [328].
460
Большим удобством использования обыкновенных дифференциаль-
дифференциальных уравнений для решения гидродинамической задачи при заданных
нормальных перемещениях м? стенки полости является то, что решение
получается сразу же для всех глубин заполнения: при интегрировании
уравнений граничные условия при х = Н мржно задать на любом шаге,
последовательно увеличивая Я.
При численном интегрировании уравнений колебаний тонких упругих
оболочек с жидкостью A1.55) используется метод ортогонализации Го-
Годунова [60а].
В качестве примера рассмотрим собственные неосесимметричные
колебания усеченной изотропной конической оболочки (Е = 6,9 • 1 & ° Е/ м2 ,
Ро=2,7-1О3кг/м3, /* = 0,29, <р = 105°, /1 = 5,3-10м, Д0=0,Зм,
^ = 0,58 м ; Ь — длина образующей усеченного конуса), которая на тор-
торцах жестко приварена к толстым плитам и полностью заполнена жидко-
жидкостью (р = 103 кг/м3 , зн=Ь).
Таблица 12.4
/и, Гц
соэ
со*
@1
3
100,0
101,0
101,76
4
76,0
78,7
79,29
5
-
63,6
63,99
6
-
54,4
54,64
7
51,0
50,8
51,02
8
54,0
52,8
52,87
10
69,8
, 67,3
67,51
В табл. 12.4 в первой строке даны значения т, во второй и третьей
строках соответственно представлены экспериментальные соэи расчет-
расчетные сор значения низших собственных частот в герцах, полученные в
[115], а в четвертой строке со$ — результаты численного интегрирования
уравнений A1.55) с граничными условиями A1.58) при Щ = 0 и § = 0.
§ 12.3. Применение метода итераций для расчета собственных
осесимметричных колебаний оболочек вращения с жидкостью
При плавном изменении толщины и радиусов кривизны низшие фор-
формы собственных осесимметричных колебаний тонкой оболочки вращения
как с жидкостью, так и без жидкости, в основном определяются решени-
решением безмоментной теории оболочек. В узких зонах вблизи линий резкого
изменения параметров оболочки, вблизи шпангоутов и креплений осе-
симметричный изгиб оболочки имеет характер краевого эффекта. Решение
для низших форм колебаний тонких оболочек вращения с жидкостью мо-
может быть построено на основании асимптотического метода склеивания
безмоментного решения с моментным решением типа краевого эффекта
подобно тому, как это делается в статике оболочек вращения [259]. С
помощью асимптотического метода упругодинамическая задача сводится
к интегральным уравнениям [352], которые затем с учетом гидродинами-
гидродинамического давления решаются методом последовательных приближений.
461
12.3.1. Сведение задачи к интегральным уравнениям. Рассмотрим
собственные осесимметричные колебания тонкой непологой оболочки
вращения, частично заполненной иде-
идеальной жидкостью (рис. 12.4). Обо-
Оболочку считаем замкнутой в нижне-
полюсе при »у = 0 и упруго закреп-
закрепленной на краю при ^ = /. Пусть ра-
радиусы кривизны и толщина оболочки
меняются вдоль меридиана достаточ-
достаточно плавно, тогда несколько низших
форм колебаний могут быть описаны
решениями безмоментной теории с
учетом краевого эффекта вблизи за-
Рис. 12.4. Упруго закрепленная оболоч- крепленного края з = I. Все размеры
ка вращения с жидкостью оболочки (радиус меридиана, радиу-
радиусы главных кривизн К^ и Кд , длина дуги ,у, толщина К) и ее перемеще-
перемещения м, и> будем считать в долях радиуса опорного контура Щ .
Удельные осесимметричные нагрузки, действующие на оболочку,
представим в виде
р = Ер{$), Я = Щ(*), A2.33)
где Е — модуль упругости.
По безмоментной теории определяем последовательно усилия,
деформации и перемещения в оболочке [352]:
П&тт) Р
Кьтср
{И А1#
A2.34)
= (О)
где Со — произвольная константа.
Изгиб оболочки в районе края ^ = / описываем асимптотическим ре-
решением для динамического краевого эффекта, которое можно получить
подобно решению для статического краевого изгиба [259]:
A2.35)
где С\, С2 — произвольные константы; Я — безразмерный параметр
частоты гармонических колебаний со ; Ро — плотность оболочки. При
462
этом необходимо, чтобы в зоне краевого эффекта @ < /3 < л ) функции
Щ , к менялись незначительно и чтобы ширина этой зоны была мала по
сравнению с длиной меридиана /; кроме того, должно выполняться усло-
условие 1 - ХЩ > О, чтобы динамический краевой эффект был невырожден-
невырожденным. Суммарные перемещения оболочки равны
и = иъ + иК = (Со
= -(Со + Р)со$(р + евКв + е~®(С1!соз/3 + С2зт/3).
Запишем граничные условия для радиального перемещения, угла по-
поворота и осевого перемещения оболочки на упруго закрепленном краю
5 = 1. Получим следующие уравнения для определения неизвестных кон-
констант Со, Сх, С2:
О - С\ С08ф = €0С1§ф - К"з——81П(р , A2.37)
Я ЕЙ1 ^/г?Л2 ЕЬл
Здесь значения всех функций берутся при л1 = /, ^ = (р{1), /?! = Щ); ^,
^2» ^3 — погонные коэффициенты жесткости упругого закрепления по
радиальному перемещению, углу поворота и осевому перемещению.
Примем, что к^&О. В случае если оболочка считается безмоментной и
на краю 5 = 1 закрепленной от тангенциального смещения (иA) = 0), то
Со = С1=С2=О.
Гидродинамическое давление на оболочку будем определять на осно-
основе приближенного решения A1.18), A1.19). При этом будем полагать, что
внизу при х = х$ = 0 оболочка имеет полюс, где К = 0 и Щ = 0; грави-
гравитацией будем пренебрегать (# = 0). Переходя к меридиональной коорди-
координате .у, задачу A1.18) сведем к интегральному уравнению вида:
= 0, A2.38а)
463
= Г #0 8Ц1ф<Ь + 2х Г—СО8фй$ + 2 \х—
0 * У
. A2.386)
Далее по формулам A1.15), A1.19) определяем функцию гидроди-
гидродинамического давления при а = 1:
Гк/A + 2) + ^]Л^2-, A2.39)
16
Безразмерные (отнесенные к Е) инерционные нагрузки, действующие
на оболочку при гармонических колебаниях с частотой со с учетом гид-
гидродинамического давления рж = рш2/?2^ > равны
УСД)]. A2.40)
Ро
где 17 = 1 при 5 < .ун и т\ = 0 при ^ > зн < I.
12.3.2. Алгоритм последовательных приближений. Связанная ди-
динамическая задача гидроупругости в рассматриваемом случае сводится к
трем однородным интегральным уравнениям для функций и{8), м?(з) и
III {з) с неизвестным параметром Я . Для решения этой задачи восполь-
воспользуемся методом последовательных приближений. Пусть после ( к -1 )-го
приближения (к = 1,2,...) найдены перемещения м^~^, м/*^, 1][ " ^ и
функция гидродинамического давления ^^"^. Вычисляем нагрузки
(А: -1 )-го приближения при Я = 1:
#к-\) = ки(к-1) г -(к-1) = ш(к-1) +7?_Р_у(*-1)(,> 1} , A2.41)
Ро
и затем их нормируем
^-1)=а№-1)^(*-1)> р№-1)=а<*-1>?<*-1)> A2.42)
где а^^ — нормировочный множитель.
Используя последовательно формулы A2.36)-( 12.42) при G=<7н »
р = Рнк~1^, находим в к-м приближении г№ , м;^^, 1[[ \ у/^ , а затем
464
по ним — нагрузки в к-м приближении д^, р^ и т. д. Параметр часто-
частоты Я в к-м приближении определяем по формуле Релея, которую здесь
удобно использовать в виде
^ | , A2.43)
о [о ]
где числитель и знаменатель с точностью до множителей представляют
работу упругих и инерционных сил на перемещениях оболочки в к-м
приближении. Решение при к —> «> сходится к первой форме колебаний:
и(*) _> цг 9 у^к) _> щ ^ у/(к) _> ф{ 9 я(/:) -> Хх. В нулевом приближении
для первой формы колебаний удобно взять нагрузку от действия веса
оболочки и гидростатического давления, т.е. положить
^"@) =-/18ш<р, р@) =ксо8(р+Г]-?-(Н-х). A2.44)
Ро
Коэффициенты обобщенных масс первой формы колебаний равны
Щ =
1^ 2)? ] A2.45)
ОI- Ро
о I-
Чтобы процесс последовательных приближений сходился ко второй
форме колебаний, нагрузки в (к-1)-м приближении вместо A2.41) не-
необходимо вычислять по формулам
Ро - " A2.46)
При этом параметр $\~* в A2.46) определяется из условия ортого-
ортогональности этих нагрузок первой форме колебаний.
Приведем полученные методом последовательных приближений зна-
значения квадратов безразмерных низших частот колебаний
Ц? =й)/?(р#13/я/0=А„(р#1/ро/0 шарнирно опертой по опорному краю
полусферической оболочки с жидкостью (Н/Щ = 0,005, /а = 0,3 ,
Ро/р = 2,7, /^=0, К2=Ю4, Кз=О). ПРИ глубинах заполнения
5п/1 - 0,5; 0,75; 1,0 соответственно для первой и второй форм колебаний
имеем О% =3,149 ; 1,925; 1,427 и п\ = 5,457; 4,020; 3,234. Точные зна-
значения для полностью заполненной полусферической оболочки
= 1 ),полученные в § 10.3, равны п? = 1,418 , О,\ = 3,241.
465
При расчетах по методу последовательных приближений, когда в ну-
нулевом приближении (к = 0) низшая форма колебаний аппроксимируется
формой прогиба оболочки под действием собственного веса и гидроста-
гидростатического давления, квадраты низших частот определяются с относи-
относительной точностью 10~4 за 3-5 итераций.
§ 12.4. Применение метода конечных элементов
В настоящее время имеется обширная литература по применению
различных вариантов метода конечных элементов (МКЭ) в задачах гид-
гидроупругости (см. [135, 155, 415, 416]) и др. В соответствии с традицион-
традиционным подходом МКЭ срединная поверхность оболочки 5 и объем жидко-
жидкости V делятся на малые конечные элементы 5/, У# . В простейшем вари-
варианте МКЭ предполагается, что условия совместности перемещений ко-
конечных элементов жидкости по всем направлениям точно выполняются
только в общих узловых точках. При этом для конечных элементов обо-
оболочки и жидкости, имеющих общие узловые точки, требуется, чтобы ки-
кинематическое условие безотрывности в этих точках выполнялось только
в направлении нормали к оболочке, а в тангенциальных направлениях
допускалось проскальзывание.
В случае сжимаемой жидкости уравнения движения оболочки и жид-
жидкости при использовании МКЭ получаются как уравнения Лагранжа в
обобщенных координатах. В качестве обобщенных координат для жид-
жидкости рассматриваются перемещения в узловых точках в направлении
координатных осей; например, для узла V :
е ЭФ дФ у дФ /л- ._ч
<ру=Т"~> ?7у=Т~' ьу =-^~ "Р11 х = х» > У = Уу> * = *у A2.47)
ох ду ог
Потенциал перемещений жидкости в пределах А>го КЭ представляется
в виде аппроксимирующего ряда
Ф = ^ап(рп(х,ул), A2.48)
п
где <рп(х,у,1) — заданные линейно-независимые функции (в их число
константа не входит); ап — неизвестные коэффициенты, число которых
равно числу степеней свободы (числу перемещений в узлах) данного КЭ.
Эти коэффициенты выражаются в виде линейного преобразования через
перемещения узлов КЭ с помощью соотношений A2.47).
Выражения для кинетической (9.18) и потенциальной (9.19) энергий и
вариации работы внешних нагрузок (9.17) для оболочки с жидкостью
после дискретизации (замены объемных и поверхностных интегралов
суммами интегралов по КЭ), подстановки в них разложений A2.48), пре-
преобразований к узловым перемещениям и учета кинематических условий
сопряжения элементов оболочки и элементов жидкости записываются в
основных обобщенных координатах. Обозначим через ^ —вектор пе-
перемещений (и углов поворота) узловых точек конечно-элементной моде-
модели оболочки, а через ^2 — вектор перемещений узловых точек жидко-
466
сти. Уравнения МКЭ для упругой оболочки, частично заполненной сжи-
сжимаемой жидкостью, в поле сил тяжести запишутся в виде
° >
где М21 = М|2> К21=К[2; матрицы К12 и К22 линейно зависят от § и с2 .
Уравнения A2.49) могут быть использованы для численного решения
задачи о динамической реакции оболочки с жидкостью при кратковре-
кратковременных воздействиях. Для решения задачи о собственных колебаниях
упругой оболочки, частично заполненной сжимаемой жидкостью, урав-
уравнения A2.49) крайне неудобны и требуют определенных упрощений по
следующим причинам: 1) система имеет высокий порядок; 2) матрица
жесткости К имеет одновременно «весьма мягкие» и «весьма жесткие»
элементы; 3) низкочастотные, преимущественно гравитационные, коле-
колебания жидкости практически не зависят от ее сжимаемости и, часто, от
упругости оболочки; 4) высокочастотные колебания (преимущественно
акустические колебания жидкости и упругие колебания оболочки) слабо
зависят от гравитации.
Если принять жидкость несжимаемой (с —> <*>) и заданные функции
Фп(х>У>%) в разложении A2.48) гармоническими (А(рп =0, с2ДФ=0),
то, пренебрегая гравитацией (#-»0), будем иметь К12=0, К22=0,
Кц = Ко. В этом случае из второго уравнения найдем
Я2=-М21М21Я1. A2.50)
С учетом A2.50) первое уравнение A2.49) примет вид
^' A2.51)
М = Мц -М12М22М21 =Мо +МЖ .
Таким образом, несжимаемая жидкость в колеблющейся оболочке без
учета гравитации приводится к матрице присоединенных масс Мж, ко-
которая добавляется к матрице масс Мо конечно-элементной модели обо-
оболочки.
Для расчета свободных гравитационных колебаний несжимаемой
жидкости в неподвижной полости используются заданные гармонические
функции (рп (*, у, г), и уравнения МКЭ получаются в виде
М22я2 + К22я2 = 0, A2.52)
что является частным случаем системы A2.49) при Я1 = 0.
При построении потенциалов переносного движения жидкости при
заданных нормальных перемещениях стенки полости для случая, когда
Ф = 0 на с , уравнения МКЭ принимают форму
М21(|1+М22(]2 = 0 , A2.53)
где Я! — вектор заданных перемещений полости, представленных в виде
конечно-элементной аппроксимации; ^2 — вектор узловых перемеще-
467
ний жидкости, потенциал Ф для которых в пределах каждого КЭ записы-
записывается в виде A2.48), а (рп(х,у, г) являются гармоническими функциями.
Заметим, что уравнения МКЭ для расчета собственных колебаний
оболочки с жидкостью и вычисления потенциалов переносного движения
жидкости можно также получить в несколько иной форме, используя
приведенные в § 9.3 различные варианты смешанного вариационного
принципа. ч'
12.4.1. Система степенных гармонических функций. В декартовой
системе координат система степенных гармонических функций строитсй
следующим образом. Берется полный полином по степеням х, у, г с неоп-
неопределенными коэффициентами. Подставляя его в уравнение Лапласа к
приравнивая нулю коэффициенты при одинаковых степенях, находим рё-
курентные соотношения между неопределенными коэффициентами. В ре-
результате получаем систему линейно-независимых гармонических функций:
1, х, у, г, ху, хг, уг, х2 - г2, у2 -
A2.54)
&=0
где коэффициенты а^, 1с\, С], а2» ^2> С2 являются произвольными и
независимыми, а остальные определяются как
ак+2 || , , || «Л
с*+2
«о|
(* + !)(*+ 2)
1*л-2
при к = 1, п - 3,
A2.55)
, I С2 II II *л-2
Таким образом, при каждом значении п > 3 имеется шесть линейно-
независимых гармонических функций Фп.
Гармонические функции для плоской задачи в декартовых координа-
координатах х9 у получаются в качестве частного случая функций A2.54), если по-
положить г - 0. Для других систем координат гармонические функции по-
получаются из A2.54) путем преобразования координат, например, для ци-
цилиндрической системы координат х, г, в в A2.54) следует положить
У = ГСО80 , 1 = Г51П0 .
Решения уравнения
д2Фт
дФп
т
дх2 дг2 г дг у2
для гармонических функций Ф =Фт(х,г)со$тв в цилиндрической сис-
системе координат записываются в виде степенных рядов:
у<к
кт ~ 2^ V ' ^А^-Эоа;
V=0,2,4,...
468
-Су_2, V = 2,4,6,...**, A2.566)
* = 0,1,2,... — заданные числа; Со = 1 •
Полученные здесь степенные гармонические функции могут быть
использованы при решении гидродинамической задачи для несжимаемой
жидкости методом Ритца и методом конечных элементов.
12.4.2. Оболочка вращения с жидкостью. Оболочка вращения де-
делится на кольцевые полоски (пояса), которые рассматриваются в качестве
КЭ (рис. 12.5). Нормальное переме-
перемещение оболочки в пределах к-то
пояса представляется в виде
п
(=1
где т = 0,1,2,...; хЖ5) —заданные
(обычно степенные) функции;
ъ\ ^ — неизвестные коэффициенты.
В качестве КЭ жидкости рас-
рассматриваются слои жидкости, за-
заключенные в поясах оболочки. Ки-
Кинетическую энергию ЖИДКОСТИ в Рис. 12.5. Оболочка вращения с жидко-
каждом слое при заданных в виде стью (к расчету колебаний методом ко-
A2.57) перемещениях пояса оболоч- нечных элементов — слоев)
ки будем вычислять приближенным способом (см. гл. 11) путем сведения
гидродинамической задачи к одномерной.
Для осесимметричных колебаний (т = 0) кинетическая энергия жид-
жидкости определяется по формуле A1.21) с учетом одной функции депла-
нации слоев жидкости по форме параболы щ(а) = 2а -1. Здесь будем
обозначать С/о чеРез и » ^1 через и . Продольное перемещение слоя
жидкости в к-м поясе за счет вытеснения на основе формулы A1.14) оп-
определяется как
= -А Г
па ^
A2.58)
где ик_1 — продольное перемещение в плоскости нижнего торца к-го
пояса при ^ = 0.
Функцию и (з,1), представляющую депланацию поперечных сечений
жидкости в пределах толщины &-го слоя, будем аппроксимировать по
линейному закону:
A2.59)
469
Здесь функции й^_1@» 2^@ представляют депланации слоев жидкости
в плоскостях нижнего С? = 0) и верхнего (^ = 1к) торцов &-го пояса; в
дальнейшем эти функции будем рассматривать как обобщенные коорди-
координаты.
В итоге выражение для кинетической энергии осесимметричных ко-
колебаний жидкости A1.20) в к-ы слое при замене 170 на и и \]х на и запи-
записывается в обобщенных координатах Щ-\, ъ\ ^ 0" = 1,2,...), Щ-\, щ в
виде:
где
. A2.61)
у = А:-1Д; \х = к-\Л , I, у =1,2,...л.
Обобщенные координаты м^. являются зависимыми — на основании
формулы A2.58) они выражаются через Ь^ ^ как
4^(" 4Е^Ё^Ч""
1=1
1=1
470
1Р
4
КР О
A2.626)
Будем считать, что в нижней части оболочки имеется недеформируе-
мое плоское днище радиуса #0> которое жестко соединено с нижним
торцом первого пояса (к = 1). На основании этого перемещение днища
по выражается через перемещения нижнего (левого) края первого пояса,
амо=О.
Коэффициенты ъ\ ' для моментной оболочки при п = 4 выражаются
через перемещения и углы поворота на краях пояса, которые рассматри-
рассматриваются в качестве основных обобщенных координат для оболочки. Для
осесимметричных колебаний жидкости независимыми обобщенными
координатами также являются продольные перемещения йк (к = 1, ЛГ),
представляющие депланации поперечных сечений жидкости. Эти обоб-
обобщенные координаты при # = 0 являются циклическими и при составле-
составлении уравнений МКЭ исключаются с помощью условий дТж/дпк =0. В
результате для осесимметричных колебаний конечно-элементной модели
оболочки вращения получается матрица коэффициентов присоединенных
масс жидкости Мж.
В случае неосесимметричных колебаний оболочки вращения
(га = 1,2,3,...) кинетическую энергию жидкости в к-и слое будем опреде-
определять по формуле A1.31). При этом в пределах толщины к-то слоя функ-
функцию 11Eу() = КтУE,{), представляющую продольные перемещения жид-
жидкости в виде ух = 1/ат созтв , аппроксимируем по линейному закону
V = ^4-1^) + М^(*) • A2-63>
С учетом A2.57), A2.63) кинетическая энергия жидкости A1.31) в к-м
слое записывается в виде
A2.64)
A2.65а)
471
2.656)
В нижней части (к = 1) оболочка имеет недеформируемое плоское
днище радиуса 7?о. Тогда ^/0 = 0 при и* = 2,3,..., а при т = 1 {/0 выра-
зится через угол поворота днища, т. е. через перемещения нижнего торца
первого пояса. Коэффициенты Ь> ' определяются через перемещения и
углы поворота на краях к-то пояса оболочки. При неосесимметричных
колебаниях обобщенными координатами жидкости являются 1]^
(к = 1, АО , представляющие продольные перемещения жидкости в узло-
узловых поперечных сечениях по форме (г//?^)т со& тб .
Потенциальная энергия волновых движений свободной поверхности
жидкости записывается в виде
=! °2
ж- 2-
A2.66)
Если влиянием гравитации пренебречь, то все обобщенные координа-
координаты 1/к (& = 1,Л0 исключаются с помощью условий дт/дй^ =0. Тогда
для неосесимметричных колебаний конечно-элементной модели оболоч-
оболочки вращения также можно получить матрицы коэффициентов
присоединенных масс жидкости Мж.
Оценку точности данного варианта МКЭ осуществим на примере рас-
расчета неосесимметричных колебаний свободно опертой цилиндрической
оболочки, полностью заполненной жидкостью. Пренебрегая гравитацией
(# = 0), будем считать, что в торцевых сечениях оболочки х = 0 и
х = Ь поверхности жидкости являются свободными. В этом случае не-
нетрудно получить простое точное решение задачи о собственных колеба-
колебаниях. Параметры системы: Ь/К = 2, К/к = 200, т = 2 , /л = 0,3 ,
Р/Ро = 0>36 • Оболочку считаем безмоментной, а аппроксимирующие
функции для перемещений поясов выберем в виде точных решений од-
однородной статической задачи.
Ниже приведены значения квадратов трех безразмерных низших соб-
собственных частот колебаний оболочки с жидкостью (со^р^К2 /Е)Л02
при /7 = 1,2,3,..., т = 2 , полученных МКЭ при делении оболочки на че-
четыре (М = 4) и восемь (N=8) элементов (отсеков), которые сравниваются
с результатами точного решения:
р
точное
1
0,4796
0,4694
0,4660
2
3,879
3,717
3,625
3
9,553
11,61
11,65
472
§ 12.5. Применение метода граничных элементов
Для решения гидродинамической задачи о колебаниях идеальной не-
несжимаемой жидкости, частично заполняющей подвижную полость или
упругую оболочку, можно использовать метод граничных элементов [72].
В прямой формулировке этот метод базируется на основной интеграль-
интегральной формуле Грина, которая для трехмерной задачи имеет вид
пФ(М)= || |_^_гр--ф(Р)_^_|_1_||^, A2.б7)
где КМР =у(х-!;J +(у-Г}J +(г-%J — расстояние между точкой
Р(^,?7,С) на поверхности 5+ = $о + а, ограничивающей объем жидкости
V, и некоторой точкой М(х,уУг), расположенной в этом объеме или на
5+ ; Ф — потенциал перемещений жидкости; уР — внешняя нормаль к
5+ в точке Р; О, = Ал при М е V и п =* 2л при М е 8+ \
Э ( 1
КМР
СО8(КМР,Ур).
Функция Ф на основании A2.67) удовлетворяет уравнению Лапласа
АФ =0 в V . На смоченной поверхности оболочки $о и на свободной
поверхности жидкости а должны быть выполнены условия
ЭФ „ « ЭФ
на
Эу
= 0 на а,
A2.68)
где м? — заданное нормальное перемещение оболочки.
12.5.1. Фундаментальные решения гидродинамической задачи для
полости вращения. Рассмотрим полость в форме оболочки вращения
(см. рис. 9.2), нормальные перемещения которой заданы в виде
ю = ЩпE,{)со&ту/, где ^ и у/ —
длина и угол, отсчитываемые соответ-
соответственно в меридиональном и окруж-
окружном направлениях; т = 0,1,2,... Пусть
свободная поверхность жидкости о
перпендикулярна оси х, которую со-
совместим с осью оболочки. Тогда в ци-
цилиндрической системе координат по-
потенциал перемещений можно предста-
представить в виде
Ф(х9г,уг,1) =Фт(х,г,1)со$ту/. A2.69)
В этой системе координат (рис. 12.6):
у = гсозу/, I = гъту/ ,
A2.70а) Рис. 12.6. Оболочка вращения с жидко-
жидкостью (к расчету колебаний методом
граничных элементов)
473
Л8 = рйвйз,
Уравнение A2.67) с учетом A2.69) и A2.70) после упрощения и от-
отбрасывания общего множителя со8ту/ приводится к виду
где
A272)
Здесь /+ — контур, вращением которого относительно оси образована
поверхность 5+ ; % = %{$); р = р{з).
Функция Ст(х,г,%,р) является фундаментальным решением уравне-
уравнения
которому она удовлетворяет всюду, кроме точки Р(%,р), где она имеет
логарифмическую особенность. Производная этой функции по нормали в
точке Р(%,р):
Функция Гтф) может быть также записана в виде
Гтф) = (-!)»/ Т
На основании A2.75) функция Гт($) при любом т = 0,1,2,3,... мо-
может быть выражена через полные эллиптические интегралы К(к) и
Для этого удобно использовать следующие формулы (т > 4) [361]:
4л2 . 2 4л2Dл2-22) . 4
со$Bт<р) = 1 8Ш ср + ^ -8\п ср -
о!
474
я/2 я/2 я/2 . 2
} 2 }} ^
ВД, }АсКр Е(*), }
А •* •* А
00 A2.766)
2Я{22 т-Ъ 1 ^Лш^ф .
Ла>т йт
I А * т-\ & [ А * т-1к2
Приведем выражения для функций Гт при т = 0,5 :
-к2)К(к) - 2Е(к)],
Г2 = -л/2B-А:2)^~4[C^4 -16^2 + ЩК(к) +
3 A2.77)
Г3 = ^2B-к2)к~6[A5к6 -158^4 +384А:2 ~
Г4 =— ^2B-к2)к~\(Ю5к* -1856*6 + 8000Л;4 -12288/с2 +
105
+ 6144)ВД-C52Л;6 + 3776&4 -92Ш2 +6144)Е(^)],
Г5 =^-:Л12B-к2)к~10\(-945к10+2565474к* -\1Ъ6544к6 ¦
945
+ 5520384&4 -491520^2 +196608)/^(А:)~E083698А:8 +
+ 4386144/^6 +5336064/:4 -393216А:2 +196608^)].
Функция Со для осесимметричной задачи (т = 0) была получена
ранее в некоторых других работах и приведена в [72].
Производную, входящую в A2.74), можно найти как
агт B-к2J
0 2 <Цк2)
используя формулы
A2.78)
2к2\\-к2 \ с1(к2) 2к
12.5.2. Уравнения метода граничных элементов. Рассмотрим сна-
сначала общий случай колебаний произвольной оболочки (полости), частич-
частично заполненной жидкостью. Будем пренебрегать гравитацией (#-»0).
Тогда
ЭФ
— = и>на$0, Ф = 0на<7. A2.79)
Эу
Поверхности $о и а будем аппроксимировать наборами малых плоских
элементов. Значения функций Ф и ее производной дФ/ду в пределах
каждого элемента будем приближенно считать постоянными и равными
475
их значениям в центре тяжести площади элемента. Индексы * и у будем
вносить к элементам 5,- и 5^ поверхности «^, а индексы к и / — к эле-
элементам Оь и <Т/ поверхности а; нумерация и У и к, I произвольная
(сквозная или раздельная).
Интегральное уравнение A2.67) для точек, расположенных на по-
1ерхностях $0 и а , с учетом A2.79) может быть приближенно заменено
системой алгебраических уравнений для граничных элементов 5/ и ак „
которые после деления на п = 2я можно записать в виде
Ф/ = X а(/^ ~ X *«/*/ + X *й5/ на ^о э
3 1 1 A2.80)
= ° на а'
аз 1 сЫо_ =_]_
3] ] A2.81)
2п
где /?,у — расстояние между центрами тяжести элементов 5,- и 5^ ;
!(/ — Угол между вектором Кгу, направленным от точки г к точке у, и
внешней нормалью к элементу 5;; 8ь=
В уравнениях A2.80) неизвестными являются значения Ф; и 5/. Ин-
шгралы A2.81) могут быть вычислены численно или в некоторых случа-
случаям аналитически. Полагая Фк = 0 на а, из второй группы уравнений
A2.80) выразим 5/ через \V^, Ф^ и затем подставим их в первую группу
уравнений A2.80). Далее можно определить значения Фг- на 50в зависи-
зависимости от перемещений \V^. Таким образом получается численное реше-
решение гидродинамической задачи в матричной форме (вектор || Фг || запи-
записывается в виде произведения квадратной матрицы на вектор \ч^ ).
Кинетическая энергия жидкости в данном случае представляется в
вще
Подставляя сюда зависимость Фг- от \V^, получаем выражение Тж в
вще квадратичной формы перемещений и>г- с матрицей коэффициентов
присоединенных масс жидкости Мж.
416
В случае полости вращения уравнения колебаний жидкости по методу
граничных элементов составляются на основе интегрального уравнения
A2.71) аналогичным образом. Меридиан оболочки /0 и радиус свобод-
свободной поверхности жидкости 1а представляются наборами малых прямо-
прямолинейных элементов 5,- и^.В пределах этих элементов функции Фт и
дФт/ду считаются постоянными и равными их значениям в серединах
элементов: Фт -> Ф(, дФт/ду=УУт-+ Щ на 5,- и Фт -» Фк,
дФт/дх->8к наст*.
Уравнения для граничных элементов при т = 0,1,2,... имеют вид
A2.80), коэффициенты которых в данном случае вычисляются по форму-
формулам:
A2.83)
При вычислении коэффициентов A2.83) можно использовать извест-
известные аппроксимации и асимптотические выражения для функций К(к), Е(к).
§ 12.6. Колебания жидкости в горизонтальных и наклонных
упругих полостях
12.6.1. Интегральное уравнение неразрывности жидкости. Рас-
Рассмотрим оболочку с произвольным, однозамкнутым контуром перемен-
переменного поперечного сечения, час-
частично заполненную идеальной
несжимаемой жидкостью (рис.
12.7 а). Будем считать, что обо-
оболочка симметрична относительно
плоскости ху, а свободная по-
поверхность жидкости у = Н(х)
перпендикулярна этой плоскости
(рис. 12.7 б). В общем случае обо-
оболочка имеет днище у
Рис. 12.7. Произвольная симметричная обо-
оболочка или подвижная полость, частично
с
упругие боковые стенки г = ±Ъ(х,у) и крышку у-уК(х), нормальные
перемещения которых обозначаются через щ{х,г), м(х9у,1) и м>к(;с,0»
Если оболочка замкнута при у = у$ и у = ук , то ширину днища и крыш-
крышки следует считать стремящимися к нулю. При симметричных колебание
ях будем рассматривать только половину полости при г>0. Перемеще-
Перемещения жидкости в направлении осей х, у, г обозначим через ух , уу , Уг .
Уравнение неразрывности (несжимаемости) жидкости и кинематиче-
кинематические условия ее безотрывного движения в плоскости симметрии на боко-
боковой стенке и на днище записываются в виде
ох оу от.
Уг=0 приг=0, A2.85)
Уг=^+Э^У*+"Э~У}; ПРИ г = й(л:'^' A2*86)
V =Ж. + ^±Ух при у = уо(х), A2.87)
где
(Ь )
На плоских торцевых стенках, нормальные перемещения которых
считаются заданными, кинематические граничные условия имеют вид
Уд. = и0 (у, т.,1) прил; = 0, ух =и1(у,г91) при* = /. A2.88)
При решении задачи в перемещениях по методу Ритца или методу
конечных элементов уравнение A2.84) и граничные условия A2.85) -
A2.87) должны быть удовлетворены точно. Для этого сведем их к одному
интегральному уравнению. Интегрируя уравнение неразрывности A2.84)
по 1 и удовлетворяя граничному условию A2.86), получаем
дхЬ дУЬ
Подставляя A2.89) в условие A2.86) и затем интегрируя его и удовле-
удовлетворяя условие A2.87), после преобразований имеем интегральное урав-
уравнение неразрывности жидкости с учетом кинематических граничных ус-
условий:
Ш A2.90)
A2.91)
Рассмотрим далее поперечное сечение х = сопз1, в котором оболочка
заполнена жидкостью полностью под крышку у = ук(х).
На крышке необходимо удовлетворить кинематическое граничное
условие
*у = н'кДк.у + Укух при у = ук(х), A2.92)
где
478
Уравнение A2.90) при у = ук с учетом A2.92) приводится к виду
— И Г\Х<Ь \с1у + Е(х9ук) + -^-Ьк=0', Ьк=Ь(х,ук). A2.93)
10 1 Ук>У
Если это уравнение проинтегрировать по х, то получим уравнение для
расхода жидкости через поперечное сечение х = соп81:
У*(Ъ ^
>, A2.94)
где <2(х,1) представляет объем жидкости, вытесненной за счет нормаль-
нормальных перемещений стенок полости. Если жидкость заполняет оболочку у
края х = 0, то
Ук Ъ
л:=0
а если — у края х = /, как показано на рис. 12.7 а, то
I
Ух(Ь
Щ
Таким образом, в полностью заполненной части оболочки перемещение
ух должно удовлетворять условию A2.93) или A2.94).
12.6.2. Аппроксимация перемещений жидкости и составление
уравнений колебаний. Компоненты перемещений жидкости ух и уу
при симметричных колебаниях будем искать в виде
A2.95)
Подставляя A2.95) в A2.89) и интегрируя полученное выражение,
имеем
Интегральное уравнение A2.90) при представлении перемещений
уу в виде A2.95) удовлетворяется при условиях
Уо
у
' Уо
Уо
A2.97)
479
В полностью заполненной части оболочки граничное условие A2.92)
на поверхности крышки будет удовлетворяться точно, если, согласно
A2.93), функции Ио, \]\, 1/2 подчинить следующим условиям:
э*
Уо
Ук
A2.98)
-?- \ЩЪъау = 0, — Ш2ЪЪЛу = О ,
а* * ох *
Уо Уо
Таким образом, в частично и в полностью заполненных частях обо-
оболочки основными неизвестными функциями гидродинамической задачи
являются только функции 17о(*,)>,0 > ^1(*>;у>0> ^г^х->У^)-> представ-
представляющие продольное перемещение жидкости ух. Эти функции можно
искать в виде полинома по степеням у:
(* = 0,1,2,...),
A2.99)
где Д,,-(*»0 — неизвестные функции к =0,1,2,... при этом наибольшая
степень у должна быть не ниже наибольшей степени г удерживаемых
членов в рядах A2.95).
При использовании разложения ух в ряды A2.95), A2.99) по степеням
г иу граничные условия A2.88) на торцах х = 0, х = / могут быть удов-
удовлетворены точно, если эти торцы недеформируемые (т.е. если они могут
только перемещаться и поворачиваться в плоскости ху). Если на этих
торцах имеются упругие пластины, то граничные условия A2.88) могут
быть удовлетворены приближенно по методу наименьших квадратов пу-
путем минимизации функционалов
"я ь
х=0
; (н<уК),
н ь
Таким образом, функции /^(*,0 для A2.99) должны определяться с
учетом кинематических граничных условий на торцах, а в случае полного
заполнения части полости — также условий A2.98).
Для решения гидродинамической задачи (при заданных перемещени-
перемещениях стенок полости) или связанной задачи гидроупругости (когда упругие
перемещения оболочки, днища, крышки и торцов неизвестны) может
быть использован метод Ритца или метод конечных элементов. Для об-
общего случая последний является более удобным для расчета. При этом в
качестве конечных элементов рассматриваются слои жидкости между
поперечными сечениями х = хп (п = 0, ЛГ), ограниченные днищем, обо-
оболочкой и свободной поверхностью жидкости (или крышкой). Основной
480
неизвестной является перемещение ух , которое записывается в виде ря-
рядов по степеням г и у, согласно A2.95) и A2.99), с линейной аппроксима-
аппроксимацией по х в пределах толщины слоя.
Для слоя жидкости со свободной поверхностью, ограниченного попе-
поперечными сечениями х = хп_1 и х = хп, функции !/<)(*,у»О и У\(Х>У>*)
представляются в виде
го«
_К*)+(г3^+^+г5^/)/Ш;
*-*._, A2.100)
хп хп-\ хп хп-1
Таким образом, удерживая в A2.95) только по два члена с II §, Щ и
Уо, У\, конечный элемент в виде слоя жидкости со свободной поверхно-
поверхностью имеет 12 степеней свободы — по 6 на каждом торце, которые пред-
представляются обобщенными координатами г^п~1\{) и г^@» # = 0,5.
Для слоя жидкости в полностью зайолненной части полости необхо-
необходимо удовлетворить условиям A2.98). На осйовании этих условий функ-
функции 11$ (х, у,г) и III (х, у, г) на левом (х = хп^) и правом (х = хп) торцах
слоя связаны между собой как
[у*
1Уо
*п-\
Ьо
A2.101)
Подставляя A2.100) в A2.101), получим два линейных уравнения,
связывающих обобщенные координаты г^1"^ с г^ при к = 0,1,2, и
при к = 3,4,5 . С помощью этих уравнений связи можно исключить /цл' и
г3(л). В результате при квадратичной аппроксимации ух по координатам
г и у слой жидкости в полностью заполненной части оболочки будет
иметь 10 степеней свободы — 6 на левом торце и 4 на правом.
Если в рассматриваемом варианте МКЭ для ух , уу использовать ап-
аппроксимацию A2.95), где II§, 11\, 112 являются полными полиномами по
у до четвертой степени включительно и линейную аппроксимацию ух по
х в пределах толщины слоя, то слой жидкости со свободной поверхно-
поверхностью будет иметь 30 степеней свободы — по 15 на каждом торце, а слой
жидкости в полностью заполненной части оболочки — 27 степеней сво-
свободы — 15 на левом торце и 12 на правом торце.
481
Если геометрические параметры удлиненной оболочки (канала) и ее
нормальные перемещения достаточно медленно изменяются вдоль кон-
контура и по длине, то для расчета вместо A2.95), A2.96) можно использо-
использовать одночленное приближение с линейной аппроксимацией ух по у:
A2.102)
Это приближение соответствует гипотезе плоских поперечных сече-
сечений жидкости: при преимущественно продольных колебаниях жидкости
в симметричной полости ее поперечные сечения х = соп$( перемещаются
в продольном направлении и поворачиваются, оставаясь плоскими. При
этом они деформируются в своей плоскости в соответствии с перемеще-
перемещениями уу =У0(х,у91) и V., =-(Э#0/Э* + (ЭУ0/Э)>)г), где Уо определяется
по формуле A2.97), так что уравнение неразрывности жидкости и кине-
кинематические граничные условия на смоченной поверхности оболочки вы-
выполняются точно.
В этом случае при использовании МКЭ слой жидкости со свободной
поверхностью имеет 4 степени свободы с обобщенными координатами
г0(Л~1)> г1(/1~1}' г0(/°' Г\П) (см. выражение A2.100)). Слой жидкости в пол-
полностью заполненной части оболочки в этом случае имеет только
3 степени свободы, характеризуемых обобщенными координатами г$*~ ',
Лп-\) (л)
При составлении уравнений колебаний жидкости в неподвижной или
подвижной полости или в упругой оболочке в обобщенных координатах
по методу Ритца или МКЭ используются выражения для кинетической и
потенциальной энергии жидкости, которые в данном случае записывают-
записываются в виде
/ нъ
Оу°° A2.103)
Г ГЬ
Пж27
2 0 0
Здесь Н (х) < ук(х), Ън (х) = Ъ(х, Н); если Я = ук, то оболочка заполне-
заполнена полностью, и потенциальная энергия гравитационных волн жидкости
в этой части равна нулю.
12.6.3. Примеры расчета собственных колебаний жидкости в раз-
разных полостях. 1. Полость в виде прямоугольного канала. В данном слу-
случае задача о продольных колебаниях жидкости является плоской.
Продольное перемещение жидкости для низшей формы колебаний,
согласно, A2.99) с учетом граничных условий ух =0 при д = 0и х = 1
представляется в виде
482
у* = ^0 = (г0 + Г\У + Г2У2 + • • •K1П(ЛЛ://)8111 йЯ ,
где *о, ц , г2 — неизвестные коэффициенты.
Значения квадрата безразмерной низшей частоты О% = со^н/^ , по-
полученные по методу Ритца в одночленном, двучленном и трехчленном
приближениях при глубине # = B/я)/, соответственно равны 1,7143;
1,9091; 1,92776; точное решение для потенциального движения жидкости
дает значение 1,92805. Заметим, что одночленное приближение здесь
соответствует теории длинных волн [199], а двучленное — гипотезе пло-
плоских сечений жидкости.
2. Полость3!? виде горизонтально расположенного кругового цилиндра
(рис. 12.8). Решение, соответствующее гипотезе плоских сечений жидко-
жидкости A2.102), для низшей формы
колебаний ищется по методу Рит-
Ритца в виде
Это решение для данной модели
является точным. Наряду с этим
строится решение по методу ко-
Рис»12-8- Горизонтально расположенная ци-
полость, частично заполнен-
нечных элементов ГслоевГш
нечных элементов (слоев). 1Ю- дорическая
лость разбивается на N одинако- нал жидкостью
вых слоев, перпендикулярных оси
х. В пределах каждого слоя решение строится в виде A2.102) с использо-
использованием линейных аппроксимаций по х для функций /о(*,0 и/!(*,*). В
этом случае в качестве обобщенных координат рассматриваются про-
продольные перемещения и углы поворота плоских сечений жидкости, раз-
разделяющих слои.
Таблица 12.5
Н1К
1
2
3
4
5
-0,5
0,808
0,781
0,774
0,762
0,763
0
1,335
1,300
1,291
1,287
1,288
0,5
1,658
1,625
1,617
1,604
1,635
В табл. 12.5 приведены результаты вычислений квадрата безразмер-
безразмерной низшей частоты Сй^К/^ при / = 2/? и разных глубинах заполнения;
строки 1, 2, 3 — МКЭ на основе гипотезы плоских сечений жидкости при
#= 4, 8,16 соответственно; строка 4 — точное решение в перемещениях
при использовании гипотезы плоских сечений жидкости; 5 — решение по
методу Ритца для потенциального движения жидкости [219].
3. Круговая цилиндрическая полость с наклонной свободной поверхно-
поверхностью жидкости. В данном случае левая часть полости заполнена полно-
полностью, а правая — частично (рис. 12.9). Глубина заполнения в случае, ко-
когда свободная поверхность перпендикулярна оси, равна а = 2К.
483
В табл. 12.6 приведены значения квадрата безразмерной низшей час-
частоты колебаний жидкости в полости
У
—
—-
— _
а
г-
-
1
Рис. 12.9. Круговая цилиндрическая полость,
частично заполненная жидкостью с наклон-
наклонной свободной поверхностью
\ К/% для различных углов накло-
наклона свободной поверхности /5.
Строки 1,2 — результаты, полу-
полученные по методу конечных эле-
элементов (слоев) на основе гипоте-
гипотезы плоских сечений жидкости
при N,= 6 и N = 12 соответст-
соответственно; строка 3 — решение по
методу Ритца для потенциального
движения жидкости [219].
Таблица 12.6
0,град
1
2
3
10
1,718
1,735
1,787
20
1,557
1,600
1,639
30
1,233
1,384
1,408
40
1,092
1,102
1,118
50
0,780
0,793
0,800
60
0,472
0,486
0,492
4. Круговая коническая полость с наклонной свободной поверхностью
жидкости (рис. 12.10). Глубина заполнения в случае, когда свободная
поверхность перпендикулярна
оси полости, равна а.
В табл. 12.7 приведены ре-
результаты расчета квадрата без-
безразмерной низшей частоты
колебаний жидкости ща I %
при различных углах наклона
ее свободной поверхности /3:
строки 1,2 — решение по ме-
методу конечных элементов (сло-
(слоев) на основе гипотезы плоских сечений жидкости при N = 8 и N =
строка 3 — решение по методу Ритца [219].
Таблица 12.7
Рис. 12.10. Круговая коническая полость, час-
частично заполненная жидкостью с наклонной
свободной поверхностью
0,град
1
2
3
10
2,057
2,077
2,127
20
1,722
1,745
1,767
30
1,238
1,255
1,265
40
0,703
0,713
0,725
Полученные результаты расчета колебаний жидкости в симметричных
полостях показывают, что простейшая аппроксимация продольных пере-
перемещений жидкости, соответствующая гипотезе плоских сечений A2.102),
дает вполне приемлемую трчность вычисления низшей частоты. Очевид-
Очевидно, использование для продольных перемещений жидкости квадратичной
аппроксимации по г и у значительно повысит точность вычисления.
484
Глава 13
КОЛЕБАНИЯ ОБОЛОЧКИ С ЖИДКОСТЬЮ,
ВНУТРИ КОТОРОЙ НАХОДИТСЯ МАЛЫЙ
ДЕФОРМИРУЕМЫЙ ЭЛЕМЕНТ
Способ динамической настройки упругих баков с жидким топливом
путем введения в жидкость газового пузыря или некоторого малого де-
деформируемого элемента (гасителя колебаний) рассматривался в работе
[193а]. С помощью этого элемента могут быть изменены собственные
частоты и коэффициенты присоединенных масс бака. Для выбора пара-
параметров гасителя колебаний необходимо получить теоретическое решение
задачи. Для этого здесь рассмотрим колебания произвольной оболочки с
жидкостью, внутри которой или на смоченной поверхности оболочки
имеется источник - сток сравнительно малых размеров (газовый пузырь в
эластичной оболочке, отверстие в стенке, расходный трубопровод, де-
деформируемый элемент типа сильфона и пр.).
§ 13.1. Уравнения колебаний системы в обобщенных координатах
Рассмотрим тонкую упругую оболочку, частично заполненную тяже-
тяжелой идеальной сжимаемой жидкостью [351]. Внутри жидкости или на
смоченной поверхности оболочки
имеется источник — сток, ограничен-
ограниченный поверхностью 2, размеры кото-
которой считаются малыми (рис. 13.1)
[351]. Обозначим через ц^ переме-
перемещения частиц жидкости, протекающей
через поверхность X вдоль ее норма-
нормали внутрь объема жидкости V, где
^{^) — расход жидкости (приращение
объема V), ^ — заданная на X
функция, характеризующая форму
истечения, не зависящую от времени и
нормированную так, что
A3.1)
Рис. 13.1. Упругая оболочка, частично
заполненная жидкостью, внутри кото-
которой находится источник или малый
Е деформируемый элемент
Движение системы описывается потенциалом малых перемещений
жидкости Ф и вектором перемещений срединной поверхности оболочки
и. При этом должны выполняться кинематические граничные условия
485
^ -*С наХ. A3.2)
Расход жвдкости ф) в общем случае будем считать неизвестным.
Пусть изнутри источника на поверхность Е действует приращение дав-
давления /7*, тогда
\\ A3.3)
2
Потенциал перемещений жидкости и перемещение оболочки в воз-
возмущенном движении представим в виде разложений
2> Х
Здесь щпЩ — обобщенные координаты, характеризующие движения
по собственным формам колебаний оболочки с жидкостью без источника
В сщу малости размеров поверхности X условие дФп0V = п на
можно же удовлешорята», а фумювщо 1^ при этом подчинить условиям
считая ее произвольной на ст.
Подстав1ш разложения {13.4) в уравнение прищипа возможных пере-
перемещений (9.16) с учетом <(9Д7), (9.Ш), (9.2©), нолучим уравнения колеба-
колебаний системы «оболочка + жидкость с источником» в обобщенных коор-
координатах
1 + т*пЯ +**пЯ =© (я =
где
A3.7)
Если функцию уг на свободной поверхности подчинить условиям
^ Т. Г1^а=0 на а ф-ГГАг), A3*)
1 а а
что возможно на основании A3.5), то уравнения A3.6) приводятся к виду
^ 9) + ||«?§ = 0 (^ = 1,2,...),
486
где
I 2
Если, оболачка не деформируема (и/г=©>, а жидаоеть шсшшша
то си = 0. Кроме того, сп = Ш) п$т ^ =в. В эшжх страт урав-
3.9^ укрощаются.
Длж вшшкочастотных колебаний (преимущественно упругих колёба-
шй о€етотки шли акустических колебанш! жидкости) шштшш гравита-
ции-МОЖН0'пренебречь. При этом высшие собственные формы кошбаний
жидаости удовлетворяют условию Фп = 0 на а . В этом случае функцию
цр также удобно подчинить условию цг = 0 на а. Тогда уравнения
ри ^ —>0 пр1шимаютвид
й (« = 1,2,...),
использовании уравнений A3.11) в разложениях A3.4) можно не
учитывать обобщенные координаты #п, соответствующие преимущест-
преимущественно гравитационным колебаниям свободной поверхности жидкости,
поскольку для таких форм ип » 0 и т*п ~ 0, если Фп = 0 на а . Уравне-
Уравнения A3.9) при # = 0 также приводятся к виду A3.11), однако в этом слу-
случае необходимо учесть формы гравитационных колебаний, чтобы снять
связь, наложенную кинематическим условием A3.8), и удовлетворить
естественное динамическое граничное условие на а : Ф = 0 при § = 0.
Если расход жидкости #(/) задан, то в системах A3.6), A3.9), A3.11)
следует опустить последнее уравнение. Из оставшихся уравнений не-
нетрудно определить обобщенные координаты ^п{^)^ характеризующие
реакцию оболочки и давление в жидкости, например, при гидравличе-
гидравлическом ударе в результате внезапного прекращения истечения из источника
(стока) или схлопывания кавитационного пузыря. Первое уравнение
A3.9) в этом случае удобно использовать в виде
Если пузырь является сферическим и совершает сферически симмет-
симметричные радиальные колебания (^ =1/Dяе2)) , а жидкость считается не-
несжимаемой ( с —> °° ), то на основании теоремы «о среднем» для гармони-
гармонической функции получим
п$п =-рФл(д:*,^,^), A3.13)
где х*, у* ¦ 2* — координаты центра сферического пузыря.
487
Как следует из уравнений A3.12) с учетом выражения A3.10) для ко-
коэффициента т®п, при решении задачи о вынужденных колебаниях обо-
оболочки с жидкостью, возбуждаемых переменным расходом источника,
находящегося в жидкости, нет необходимости определять потенциал у/ .
§ 13.2. Собственные колебания оболочки, содержащей
жидкость с источником
Если источник является линейной консервативной системой, то при
свободных гармонических колебаниях с частотой со обобщенная сила
давления B на поверхность источника связана с расходом жидкости со-
соотношением , ч
йг-К(р)Ч, A3.14)
где К(со) — действительная мероморфная функция, представляющая
частотную характеристику источника (коэффициент динамической жест-
жесткости), нули которой являются собственными частотами свободного ис-
источника, невзаимодействующего с окружающей жидкостью @ = 0), а
полюсы — собственными частотами «закрытого» источника (# = 0).
Исключая обобщенные координаты цп и обобщенную силу О и счи-
считая # * 0, получаем частотное уравнение связанной системы «оболочка +
жидкость + источник», которое при использовании, например зависимо-
зависимостей A3.11), будет иметь вид
п СОп-СО СО*
§ 13.3. Определение потенциала перемещений жидкости,
вызванных источником
Потенциал у/, удовлетворяющий условиям A3.5), будем искать в форме
^О— в V, -^- = -< —на 2, ^о=° при*0->оо, A3.16)
ОвУ, ова!, ^на5о,
Эу Эу Эу
где *о — расстояние от центра источника до рассматриваемой точки;
у/о — потенциал перемещений, возбуждаемых источником в безгранич-
безграничной несжимаемой жидкости; щ — потенциал перемещений частиц жид-
жидкости, отраженных от поверхности недеформируемой оболочки. В силу
малости размеров поверхности X граничному условию 3^/^ = 0 на X
можно не удовлетворять так же, как и для потенциалов Фп.
Потенциал щ вблизи источника зависит от формы поверхности X и
формы истечения С, . В случае произвольной поверхности X потенциал
488
щ в ближнем поле источника может быть определен вариационными
методами или методом источников неизвестной интенсивности, распре-
распределенных на X. На достаточном удалении от Е потенциал у/ц может
быть заменен его асимптотическим разложением по обратным степеням
расстояния г0 до центра источника (аналогично разложению ньютонов-
ньютоновского потенциала); например, для источника, находящегося внутри жид-
жидкости, имеем
Щ
Для точек поверхностей $о и а, достаточно удаленных от такого
источника, получим
] %) -на 80 + су. A3.18)
Потенциал щ находится любым из ранее рассмотренных методов.
Для упрощения расчета коэффициентов A3.7) далее будем требовать,
чтобы потенциал у^1 удовлетворял на свободной поверхности а жидко-
жидкости граничным условиям A3.8):
1 ст а
или условию
щ+щ=0. A3.20)
В соответствии с A3.16) и граничным условиям A3.19) или A3.20)
коэффициент обобщенной массы т* запишем в виде
A3.21)
При малых размерах источника и небольших глубинах его погруже-
погружения т® может значительно превосходить т\. Поэтому в таких случаях
нет необходимости вычислять потенциал щ с большой точностью.
Для произвольной оболочки вращения, заполненной жидкостью на
глубину Я, внутри которой на оси в точке х = х* находится источник,
потенциал щ можно определить приближенно на основе гипотезы пло-
плоских сечений для жидкости:
я
1 аи* _ \. 1 аип /_ о _о
A3'22)
489
К2{Н)
(Н) + (Н-х*J-(Н-х*)
§ 13А Продольные колебания оболочки вращения е жидкостью,
содержащей деформируемый элемент
Составим уравнения продольных колебаний подвесного бака в виде
оболочки вращения, содержащей сжимаемую жидкость, внутри которой
на оси симметрии находится упруго деформируемый осесимметричный
элемент [355]. Будем считать, что колебания возбуждаются за счет про-
продольного перемещения опорного контура 11^({). Используя частотное'
уравнение A3.15) и разложения A3.4), определим собственные частоты
щ формы колебаний Ф\ и и^ закрепленной оболочки с жидкостью при
наличии в ней деформируемого элемента:
п=1 и=1
*2 о A3.23)
к ~*<>* * = 012
где #о# — произвольные нормирующие коэффициенты.
Потенциал перемещений жидкости, содержащей деформируемый
элемент, и перемещения оболочки при продольных колебаниях предста-
представим в виде
Ф* = 1/0(х - Н) + X &*к . «* =
где Д@ — обобщенные координаты, характеризующие движения по
собственным формам осесимметричных колебаний закрепленной обо-
оболочки (С/о =0), содержащей жидкость с пузырем; 1 — единичный орт
оси Ох.
На основании принципа возможных перемещений для упругой обо-
оболочки, частично заполненной сжимаемой жидкостью, с учетом условий
ортогональности собственных форм колебаний получим [355]
^Ок^О "^ ™к$к ~^~ ^к^к/к = ^ > & = 0,1,3,...,
где
Щк
Л=1 A3.26)
тк ^УОк™* "*" ^^пк^'ЯОк'^п ~^Япктп^ »
л=1
Мщ —масса оболочки с жидкостью, Р$(г) — реакция подвески, ** —
координата центра пузыря; коэффициенты ц^ определяются по формуле
A3.23), а док выбираются из условия нормировки. Если коэффициенты
док выбрать так, чтобы выполнялись условия нормировки щ = Мод, то
490
каждая из обобщенных координат /к будет представлять продольное
перемещение центра масс бака с жидкостью относительно плоскости
подвески за счет соответствующей формы колебаний.
Уравнения A3.25) по виду совпадают с уравнениями продольных ко-
колебаний оболочки без пузыря. Наличие малого деформируемого элемента
в жидкости приводит к тому, что изменяются коэффициенты этих урав-
уравнений (коэффициенты щп, щ, соп при л = 0,2,... заменяются на
т|, щ при к = 0,1,2,...); и, кроме того, появляется степень свободы
при& = 0, представляющая собственную форму колебаний элемента в
жидкости. За счет выбора параметров деформируемого элемента (гасите-
(гасителя колебаний) и глубины его погружения можно изменять заданным об-
образом коэффициенты уравнений A3.25), т. е. динамические характери-
характеристики бака при продольных колебаниях.
§ 13.5. Цилиндрическая оболочка с плоским днищем,
в центре которого имеется источник
Рассмотрим осесимметричные колебания сжимаемой жидкости в ци-
цилиндрической оболочке с плоским днищем, в центре которого (х = г = 0)
расположен источник (рис. 13.2). Нижний край оболочки х = 0 считаем
защемленным по углу поворота и свободным по радиальному смещению,
а верхний край х = Я — свободно опертым. Параметры для дюралевой
н
г-/ /0/ / / //\ т ^
Рис. 13.2. Цилиндрическая оболочка, полностью заполненная жидкостью, с источником
в центре плоского днища в виде газового пузыря (я), отверстия (б) и трубопровода (в)
оболочки, заполненной водой: #0/й = 100, ^ = 0,3, ро/р = 2,7,
Е/рс2 = 31,2, #/#о = 4. Влиянием гравитации (# = 0) и тангенциаль-
тангенциальными силами инерции оболочки будем пренебрегать. Для этого случая
имеем точное решение задачи о собственных колебаниях оболочки без
источника (см. § 10.1).
При достаточно малых размерах поверхности источника 2 функции
Фп для некоторого числа низших форм можно считать постоянными на
2. Коэффициенты тп1п для них можно приближенно представить в виде
491
°л = -рФ„ @,0) = -
АС^)
A3.27)
Потенциал щ в безграничном полупространстве на достаточном
удалении от источника равен
^0 = ~— = ~<1328>
2л г0 2п
Поэтому на поверхности оболочки при г =
ние жидкости будет
нормальное перемеще-
перемещеA3.29)
на поверхности днища Щ = 0 (х = 0).
Для цилиндра нетрудно получить точное решение для потенциала щ
методом разделения переменных. Здесь приведем точное решение в иной
форме, которое получено методом сведения гидродинамической задачи к
одномерной задаче при использовании функций Бесселя:
т.
_ A3.30)
корни уравнения 1\{к) = 0.
Коэффициенты зт выбираются так, чтобы удовлетворить заданному
граничному условию A3.19) или A3.20) на свободной поверхности при
^ = Н ; при зт = 0, т = 0,1,... выполняется условие щ{Н,а) = 0 . Удов-
Удовлетворяя граничное условие A3.20), найдем
1 = 0,1,2,...). A3.31)
В выражении A3.30) первые три члена, описывают движение жидко-
жидкости, подчиняющееся гипотезе плоских сечений. Они дают хорошее при-
приближение для щ при больших глубинах заполнения (Я > 1). Остальные
члены, стоящие под знаком суммы при т = 0,1,2,... дают незначитель-
незначительные поправки, быстро затухающие при возрастании т.
Решение A3.30) можно преобразовать и представить в другом виде,
считая #о —> 0 и <Ро = 1:
492
т=0
и
<Рт(а),
ктоЪ(ктН)
A3.32)
ктсЦктН)
Сходимость рядов здесь ухудшается по сравнению с разложением
A3.30).
На основании A3.30) с учетом A3.29) приближенное значение потен-
потенциала щ в центре источника (х = г = 0) равно
A3.33)
По формуле A3.21) с учетом малости размеров источника получаем
8
A3.34)
Рассмотрим три типа источников в днище оболочки [351].
1. Источник в виде полусферического пузыря (см. рис. 13.2 а). При
колебаниях пузыря по форме ^ = 1/2пе2 найдем
" - - 1 -°- Р е = Р*=-^4, A3.35)
где е — радиус пузыря, р* — изменение давления газа в пузыре при
увеличении его объема на величину #, р0 — равновесное давление в пу-
пузыре при , объеме V^ = B/3)яе3 , у — показатель адиабаты газа;
#Ло «1 • В этом случае К(со) = РоУ/^о •
Разделим обе части частотного уравнения A3.15) на рН/лЩ и за-
запишем его в виде
к0(со) = кх((О), ч A3.36)
где
1 " 1 -А-. A337)
и 2Я е со2 I Н\2 е вЦ рг2
Здесь ©оо — частота колебаний полусферического пузыря в полупро-
полупространстве, заполненном жидкостью. Частота колебаний пузыря внутри
абсолютно жесткой цилиндрической оболочки, заполненной жидкостью,
щ определяется из уравнения к(й)) = 0. При #о/г=1О И глубине за-
заполнения 7] = 4 найдем щ = 0,1969@^.
493
Функция ко(&) показана на рис. 13.3 (& =соурКц/Ек — безраз-
безразмерная частота). Три низшие безразмерные собственные частоты колеба-
колеба0,8
-0,8
-1,6
0,4
1
А
/К*
0,8
А
1
ний оболочки с жидкостью без
пузыря (полюсы функции
ко(&)) равны: Ог = 0,2562,
622 = 0,7255, 423 = 1,1027. Если
жидкость считать несжимаемой
(/3 = 0), то &!= 0,2748,
Х22= 0,7659, Х23= 1,1447.
Пусть давление в пузыре р0
таково, что его частота в случае
абсолютно жесткой оболочки
при #0/е=10 равна четверти
низшей частоты колебаний обо-
оболочки с жидкостью без пузыря,
т. е. — Йо = ф/4 = 0,0640. Час-
Частоты колебаний оболочки с пу-
пузырем определяются как точки
пересечения кривых к$(&) и
(см. рис. 13.3). Две низ-
] =0,0632;
частоты равны:
Рис. 13.3. Частогаыехаракгеришики;
цилиндрической оболочки с жидкостью без
источника при осесимметричных колебаниях;
кх(Л) — полусферического газового пузыря,
находящегося в центре днища; к2(п) — Д* =0,3355.
отверстия в центре днища; къ(П) —упруго- Как видно, упругость обо-
го трубопровода (к определению собствен- дочки весьма незначительно
ных частот системы «оболочка + жидкость + снижает чаСтоту колебаний пу-
источник») ,_ Л 'ЛЧ
зыря (Х2^= 0,0640), в то время
как пузырь существенно увеличивает низшую частоту колебаний обо-
оболочки (Д = 0,2562). При уменьшении размеров пузыря и глубины запол-
заполнения это взаимное влияние быстро снижается.
2. Источник в виде отверстия в днище оболочки (см. рис. 13.2 б).
Форму истечения из круглого отверстия радиуса в зададим в виде
пе
при г<е\
A3.39)
где а — некоторый коэффициент.
Потенциал ^о ЯП* полупространства х>0, занятого жидкостью,
можно определить с помощью интегрального преобразования Ханкеля:
A3.40)
о Ь
Обобщенная масса будет
494
^{^^ A3.41)
О Ъп^е 15 105 )
Запишем, кроме того, асимптотическое представление потенциала на
некотором удалении от центра источника при го = Vх2 + г2 > е :
Л.[1+4[ГСгД:1. A3.42)
В случае малого отверстия (е1К§«\) второй член в квадратных
скобках выражения A3.42) на поверхности оболочки при г = /?о дает
незначительную поправку, что подтверждает возможность использования
приближенных формул A3.28) и A3.29).
Коэффициент а можно определить как циклическую координату из
условия минимума кинетической энергии жидкости —— « —— = 0
I да да \
Тогда получим
177' "* ъп2е
Для отверстия со свободной поверхностью X К(со) = 0 и частотное
уравнение A3.15) по аналогии с A3.36) запишем в виде (исключая «нуле-
«нулевую» частоту щ = 0)
ко(Й) = к2, ^2=-Г1 + 4Го^77-^-|11. A3.43)
Безразмерные частоты &* бака с центральным отверстием в днище
при #0/е = 1О показаны на рис. 13.3 как точки пересечения кривых
к$№) и к*2 =-2,164. Низшая частота колебаний бака с центральным
отверстием в днище равна О, * = 0,3217, а без отверстия —12! = 0,2562.
3. Источник в виде трубопровода (см. рис. 13.2 в). Форму течения
при входе в упругий трубопровод примем в виде A3.39). Однако в этой
задаче влияние второго члена мало, поэтому будем считать а = 0 и
^ = ]/яб2. Тогда т2 = 8р/Cя2е). Коэффициент обобщенной массы
т*=т2 +т1 запишем в виде
Коэффициент */0 как функция от е/К^ хорошо согласуется с точным
решением, полученным в рядах по функциям Бесселя (см. рис. 13.5 а в
работе [236]). Для заданной формы течения ^=1/яе величина обоб-
обобщенной силы давления О представляет собой среднее давление на входе
в трубопровод. Считая нижний конец упругого трубопровода закрытым и
неподвижным, получаем
495
0I
рс\ рс
где / — длина трубопровода, ст — эффективная скорость звука в упру-
упругом трубопроводе со сжимаемой жидкостью, Ат — толщина стенки тру-
трубопровода.
Частотное уравнение A3.15) для этого случая запишем в виде
A3.45)
Примем следующие параметры дюралевого трубопровода с водой:
е/йт = 100, К0/е = 10, 1/К0 = 6, е/рс2 = 31,2. Безразмерная низшая
частота продольных колебаний жидкости в упругом трубопроводе со
свободным верхним краем (О = 0) при заданных значениях параметров
равна 42$ =0,1722. Если цилиндрическую оболочку считать абсолютно
жесткой, то частоты определяются из уравнения к^Щ) = 0, которое дает
низшую частоту &$ = 0,1697. В случае упругой оболочки частоты опре-
определяются как точки пересечения кривых к:0(Х2) и к^Щ) (см. рис. 13.3).
В этом случае низшая частота равна &2$ =0,1643 (эта частота относится
к низшей форме преимущественно продольных колебаний жидкости в
трубопроводе). Вторая частота &* = 0,2578 относится к низшей форме
колебаний оболочки с жидкостью при наличии трубопровода, а без тру-
трубопровода — &1 = 0,2562.
Эти результаты показывают, что частотное взаимодействие между
оболочкой и трубопроводом слабое. То же самое относится и к случаю,
когда на нижнем конце трубопровода имеется упругий поршень.
§ 13.6, Полусферическая оболочка, содержащая жидкость
с газовым пузырем
Рассмотрим осесимметричные колебания полусферической оболочки,
полностью заполненной несжимаемой жидкостью (с -> °° ), внутри кото-
которой имеется сферический газовый пузырь (рис. 13.4). Влиянием гравита-
гравитации пренебрегаем (§ = 0). Верхний край оболочки считается шарнирно
закрепленным. В невозмущенном равновесном состоянии газовый пу-
пузырь в мягкой упругой оболочки радиуса е при помощи тонкой нити
удерживается на глубине /, е<1<Кс-е\ Кс — радиус полусферы. Счи-
Считаем, что эластичная безынерционная оболочка пузыря сопротивляется
только изменению его объема и не сопротивляется изменению его объема
и не сопротивляется изменению формы. Нить, удерживающую пузырь,
считаем весьма податливой. В этом случае кинематическое граничное
условие на поверхности пузыря X будет иметь вид
496
Aз-4б)
Чтобы это условие выполнялось при использовании разложения потен-
потенциала в виде A3.4) в случае несжимаемой жидкости, функцию у/ необ-
необходимо подчинить условию
Эу
Потенциал
Эу
; = 0.A3.47)
представим в виде
хР2„+1(со80), A3.48)
где ^о — расстояние от рассматри-
рассматриваемой точки до центра пузыря, ц — Рис-13Л- Полусферическая оболочка с
жидкостью, в которую погружен малый
расстояние до точки, лежащей вне пузырь в эластичной оболочке
жидкости и являющейся зеркальным
отражением центра пузыря относительно свободной поверхности а
(рис. 13.4); ап —неизвестные коэффициенты.
Потенциал A3.48) удовлетворяет уравнению Ау = 0 в объеме жидко-
жидкости V , условию A3.47) на X и условию у/ = 0 на а . Коэффициенты ап
зависимости A3.48) находятся путем удовлетворения кинематическому
граничному условию на неподвижной полусфере дуг/дг = 0 при г = Кс.
Используя разложение
1 1
получаем
2л+1
\2п+1
Приращение давления в пузыре рп при его малых колебаниях и
обобщенная сила 0, A3.3) при нормировке A3.1) равны
A3.50)
где К—коэффициент жесткости пузыря; р0 и У —равновесное давле-
давление и показатель адиабаты газа в пузыре; Е$, /^, Но — модуль упруго-
упругости, толщина и коэффициент Пуассона упругой (эластичной) оболочки
пузыря.
После определения собственных частот и форм колебаний полусфе-
полусферической оболочки с жидкостью без пузыря A0.29)—A0.35) записываем
уравнения колебаний A3.11) оболочки с пузырем, погруженным в жид-
жидкость, коэффициент жесткости которого определяется по формуле A3.50):
497
A3.51)
Коэффициенты обобщенных масс пц и т^ вычисляются по форму-
формулам A3.10) с учетом A3АШ\ A3.49), (Ш1М% полагая ори этой
^ =Э^г/Эго при щ = е. При вычишении коэффициента т* для удобст-
удобства интегрирования по поверхности пузыря X потенциал цг выразим че-
через шаровые функции щщя шара, дешр которого совпадает с центром пу-
пузыря. Для этого используем разложения
где #0 — угол между осью ободочки, направленной вверх, и радиусом
г$ (см* рис. 13.4).
В результате с учетом A0.34) будем иметь
4)
/Я*
Яду/ _. р Г 1 Г <? 1, 1+^
0]
A3.52)
— + -=—г + ]П
1+82
е 25 1-54 1-52
Bт-к)...2т§2Bт-1) $__!_ & = ——
2т-1 ' К' 25 К, '
•2)/2 для четного к,
где Рк=(к +1)/2 для нечетного к и р^=
4 = 1,2,...
При малых размерах пузыря (е «/?с) в сумме по А: в выражении для
/п* достаточно удержать только первый член при к =1, поскольку
последующие члены близки к нулю. В этом случае получим
/и»
*** пЯс[1б5 {1-#2 2 П1-0
25'
^1 =
A-54J
. A3.53)
498
Оценки, выполненные с использованием формулы A3.53), показыва-
показывают, что при е«Кс и при любых глубинах погружения пузыря
(е/Кс<8<1-е/Кс) с достаточной точностью можно считать га* « /г*,
при этом га* < /г*. Наибольшая разница между /л* и га* возникает, ко-
когда пузырь находится вблизи днища (<5=1-г/Дс) и вблизи свободной
поверхности E =е/Кс). Например, для е/Кс =0,1 разница между ц* и
га* равна 1,9 % при 5 = 0,9; 6,4 % при 5 = 0,1 и 0,08 % при 5 = 0,5.
Если рассматривать радиальные колебания пузыря по форме
С =1/4яе при условии, что центр его остается неподвижным, то при
е « Кс также получим га* « /**. Однако в этом случае га* > /**, и раз-
различие между //* и га* становится меньшим, чем в случае свободного
пузыря в мягкой оболочке. Коэффициенты га*п в этих двух случаях
одинаковы.
Величина щ = ^]К/т* представляет частоту колебаний пузыря в
жидкости, заполняющей неподвижную полусферическую полость. При
погружении пузыря на глубину / = 0,493/?с свободная поверхность жид-
жидкости и неподвижная полусферическая стенка компенсируют влияние
друг друга на присоединенную массу пузыря (т* «^* =р/4да при
5 =0,493), и его частота щ равна частоте колебаний пузыря в безгра-
безграничной жидкости С0оо = у/ЛпеК/ р .
Используя частотное уравнение A3.15) с учетом выражений A3.50),
A3.52) для коэффициентов К, т®п , га*, уравнения A0.33) для определе-
определения частот соп и формулы A0.35) для тп, найдем собственные частоты
колебаний щ оболочки с жидкостью, в которую погружен пузырь [355].
В работе [351] использовался другой способ вычисления частот щ без
предварительного определения частот (оп. Собственные формы колеба-
колебаний и коэффициенты присоединенных масс га^, щ% для уравнений про-
продольных колебаний бака с жидкостью, в которую погружен пузырь, оп-
определяются по формулам A3.23), A3.26).
Определим квадраты безразмерных собственных частот колебаний
Л*к = 0I2рКс IЕН и коэффициенты присоединенных масс
Чк = (ЩкJ/ШооЩ) ^ля неподвижно опертой полусферической обо-
оболочки с несжимаемой жидкостью, в которую погружен пузырь, при сле-
следующих значениях параметров: Кс/к = 200, // = 0,3, Ро/р = 2,7,
Кс I е = 10. При этом для квадрата собственной частоты пузыря в безгра-
499
ничной жидкости 0)^ примем Я^ = 0,5. Для трех низших частот колеба-
колебаний оболочки без пузыря в § 10.3 получены следующие значения:
Хх = 1,418, 771 = °>7202; ^ = 3,241, 7]2 = 0,1558; Я3 = 4,929, Т]3 = 0,0577.
В табл. 13.1 приведены результаты расчетов квадратов безразмерных
собственных частот колебаний и коэффициентов присоединенных масс
для недеформируемой полусферической полости (Яф) и для упругой
оболочки (Я#, щ, к = 0,3), содержащих жидкость с пузырем, при неко-
некоторых глубинах его погружения.
Таблица 13.1
8
К>
щ
*
ъ
0,2
0,654
0,641
1,479
3,260
4,940
0,0787
0,6359
0,1584
0,0594
0,3
0,575
0,557
1,535
3,271
4,950
0,1285
0,5807
0,1610
0,0610
0,5
0,498
0,466
1,736
3,273
4,993
0,2486
0,4463
0,1673
0,0653
0,7
0,430
0,389
2,105
3,242
5,212
0,3519
0,3476
0,1580
0,0712
0,8
0,384
0,344
2,276
3,302
5,676
0,3774
0,3583
0,1204
0,0739
0,9
0,311
0,280
2,210
3,431
5,967
0,3566
0,4113
0,1080
0,0654
Сравнение Я^ с Хк при к = 0,3 показывает, что упругость оболочки
незначительно снижает частоту колебаний пузыря, в то время как введе-
введение пузыря в жидкость может существенно увеличить частоты колеба-
колебаний оболочки, особенно при больших глубинах его погружения.
Как йидим, путем введения в жидкость малого пузыря можно в зна-
значительной степени менять динамические характеристики упругой обо-
оболочки с жидкостью при продольных колебаниях.
Глава 14
НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ
ЦИЛИНДРИЧЕСКОГО БАКА С ЖИДКОСТЬЮ
ПРИ ПРОДОЛЬНОМ ВОЗБУЖДЕНИИ
Экспериментальные исследования [399, 2, 225], а также теоретические
решения в линеаризованной постановке [345, 348] показывают, что при
гармонических осесимметричных колебаниях жидкости в тонких цилин-
цилиндрических оболочках, не подкрепленных кольцевыми ребрами жестко-
жесткости, в диапазоне низших собственных частот упругих колебаний легко
возбуждаются различные субгармонические неосесимметричные формы
колебаний с большими амплитудами. Доминирующими из них являются
формы главного параметрического резонанса, близкие к формам собст-
собственных неосесимметричных колебаний оболочки с жидкостью и возни-
возникающие при частотах возбуждения, примерно равных удвоенным собст-
собственным частотам.
Основной причиной возникновения параметрических колебаний яв-
являются периодические во времени окружные усилия в срединной по-
поверхности цилиндрической оболочки, вызванные изменением гидроди-
гидродинамического давления при продольных колебаниях бака. При этом опре-
определенную роль играют и осевые усилия, которыми несущая цилиндриче-
цилиндрическая оболочка нагружается по торцам при продольных колебаниях сис-
системы. Эти усилия, с одной стороны, непосредственно сами представляют
параметрическую нагрузку, а с другой стороны, за счет эффекта Пуассо-
Пуассона вызывают дополнительные нормальные перемещения оболочки, что
приводит к изменению гидродинамического давления и окружных усилий.
§ 14.1. Нелинейные уравнения связанных осесимметричных
и неосесимметричных колебаний
14.1.1. Постановка задачи. Рассмотрим тонкостенный цилиндриче-
цилиндрический бак с упругим днищем в виде произвольной оболочки вращения,
который частично заполнен идеальной сжимаемой жидкостью (рис. 14.1).
Примем, что на нижнем и верхнем торцах ортотропная (конструктивно
подкрепленная) цилиндрическая оболочка бака нагружается продольны-
продольными реакциями Р$({) и Р^г) со стороны несущего тела, совершающего
вместе с баком продольные колебания. Продольные перемещения нижне-
нижнего и верхнего торцов бака обозначим соответственно через 11§{1) и 11\{1).
В случае динамической неустойчивости цилиндрической оболочки
бака при осесимметричных колебаниях может появиться неосесиммет-
ричная форма колебаний, амплитуда которой быстро возрастает и затем
501
н
вследствие нелинейности системы устанавливается на режиме предель-
предельного цикла. При этом основную роль играет геометрическая нелиней-
нелинейность тонкой оболочки, которая проявляется при
амплитудах нормальных перемещений по неосе-
симметричной форме, имеющих порядок толщины
оболочки. Для жидкости такие перемещения яв-
являются малыми, и поэтому гидродинамическую
задачу можно рассматривать в линейной поста-
постановке.
Будем считать, что нижний и верхний шпанго-
шпангоуты являются абсолютно жесткими и цилиндриче-
цилиндрическая оболочка соединена с ними шарнирно. При
этих условиях взаимодействие между цилиндри-
цилиндрической оболочкой и днищем осуществляется толь-
У1 ко за счет жидкости, и для неосесимметричных
Рис. 14.1. Несущий ци- форм прй т>2 оно мало (т — число волн в ок*
л^рическии^^^шс^ рушюм наПравлении). Вследствие этого неосЬ-
жидкостью симметричные формы колебаний при т>2 раз-
разделяются на формы преимущественных колебаний
цилиндрической оболочки и формы преимущественных колебаний дни-
днища с прилегающей к нему жидкостью.
Рассматривая колебания в диапазоне низших собственных частот осе-
осесимметричных и неосесимметричных форм упругих колебаний, будем
пренебрегать влиянием гравитации и инерцией цилиндрической оболоч-
оболочки в тангенциальных направлениях. Будем полагать, что при параметри-
параметрических колебаниях бака возбуждается только одна из неосесимметрич*-
ных форм колебаний его цилиндрической оболочки. В результате цилин-
цилиндрическая оболочка бака будет совершать нелинейно связанные осесий^
метричные и неосесимметричные колебания, а оболочка днища —
осесимметричные колебания. При этом амплитуду осесимметричных
колебаний будем считать малой, а амплитуду неосесимметричных коле-
колебаний — конечной. ]
Уравнения малых осесимметричных колебаний упругого днища в ви-
виде произвольной тонкой оболочки вращения запишем в векторной форме
= 0, A4.1)
где Ь] — линейный самосопряженный дифференциальный оператор
уравнений оболочки днища; р0, Н\ — плотность и толщина днища; р —
плотность жидкости; 8\ ъ \\ — поверхность днища и внешняя единич-
единичная нормаль к нему.
Нелинейные уравнения теории пологой ортотропной цилиндрической
оболочки [91, 93] с учетом гидродинамического давления можно пред-
представить в виде
= °' A4.2а)
\82
1
а*4
- + 2<5
'ху
дх2ду2
Э/
1Э2
Кдх2 дх2ду2 [дхду]
Т-..
502
а*2
„
С Ех
Ех Еу С Ех Ех Еу
Здесь и<дс,у,/)и Р{х,у4) —нормальное перемещение щшиадрической
оболочки и функция усшшй в ее срединной поверхности; Ех, Еу, О,
Од., Од,, О^ и /4д., /гу — приведенные модули, изгибные жесткости и
коэффициенты Пуассона дня ортотропной оболочки; р$,к — плотность
и толщина цилиндрической оболочки; М®(х)9 Му(х) — статические
усилия в срединной поверхности оболочки; ц = 1 при х < Н и ц = О
при х > Н (см. рис. 14.1).
Граничные условия шарнирного опирания на краях цилиндрической
оболочки и кинематическая связь продольных перемещений ее торцов
записываются в виде
Ауйх.
Если верхний край оболочки свободен в продольном направлении, то
вместо второго условия A4.3) следует использовать динамическое гра-
граничное условие
A4.4)
Кроме того, должно выполняться условие непрерывности (периодич-
(периодичности) окружных перемещений оболочки [91]
.
К этим уравнениям необходимо добавить уравнение для потенциала
перемещений идеальной сжимаемой жидкости в цилиндрической системе
координат с граничными условиями
эф
эф
на 51, —- = IV на 52, Ф = 0 при х = Я .
дг
A4'6)
503
14.1.2. Перемещения оболочки и потенциал перемещений жидко-
жидкости. В случае когда бак заполнен жидкостью более чем на три четверти
(Н/Ь > 0,75), неосесимметричные собственные формы колебаний вд!
линдрической оболочки при шарнирном закреплении ее на краях доещт
точно хорошо описываются функциями &т(кях/ Ь)со$т6 при
к = 1,2,..., т = 2,3,.... Будем считать, что при динамической неустойч%,
вости цилиндрической оболочки бака возникает неосесимметричная
форма &т(кях/ Ь)со&тв колебаний и она не меняет свой вид даже в слу-
случае возникновения нелинейных колебаний. При конечных перемещенщ^
по этой форме появляется дополнительная осесимметричная погибь щ|
линдрической оболочки по форме $т(кт1 Ц), направленная внутрь ее [91].
Перемещения днища и цилиндрической оболочки бака при нелиней-
нелинейных колебаниях представим в виде разложений по заданным функциям «
A4.7)
т(а**/Д)со8#я0 + /о $т2(акх/К), ак = кя\Ь ^
п
где 1 — единичный орт оси х, ип и \Уп — собственные формы осесго^
метричных колебаний закрепленного бака с жидкостью при {Уо = 1^ =0
(или при 11^=0, если верхний край свободен); дпA) при к = 1,2,..., Дг)
и /0@ наряду с С/о и Цу рассматриваются как обобщенные координаты.
Следует заметить, что в силу полноты системы функций У/п послед-
последний член в выражении для м> можно было бы не учитывать. Однако здесь
есть смысл его учесть, поскольку он хорошо отражает нелинейное взаи-
взаимодействие осесимметридаых и неосесимметричных колебаний [91,93,399].
Соответственно разложению перемещений оболочки A4.7) потенциал
перемещений жидкости представим в виде
Ф=1/0(х-Н) + %дпФп + /срт + /Офо • A4.8)
п
В A4.8) Фп(х,г) — потенциалы перемещений сжимаемой жидкости для
собственных форм осесимметричных колебаний закрепленного бака
(п = 1,2,...), удовлетворяющие волновому уравнению и граничным усло-
условиям:
с
где У — объем жидкости, соп — собственные частоты осесимметрич-
осесимметричных колебаний.
Сжимаемость тяжелой жидкости типа воды, спирта может оказывать
существенное влияние на низшие собственные частоты осесимметрчных
колебаний не слишком тонких металлических оболочек (К/к < 200) при
больших уровнях заполнения (Н/К > 2). Влияние сжимаемости тяжелой
жидкости на низшие частоты неосесимметричных колебаний цилиндри-
цилиндрической оболочки весьма мало, и при их определении жидкость можно
504
считать несжимаемой. На основании этого потенциал перемещений для
рассматриваемой неосесимметричной формы определяется из уравнений
Д<рт=О— вУ,
5 A4.9)
=ып(акх/К)со8тв , (рт\и=0.
Потенциал перемещений жидкости Фо(х,г) является решением сле-
следующей задачи:
Д(р0=0-вУ, Ы = 0,
A4.10)
При глубине заполнения Н>2К потенциал <рт для цилиндрической
части бака можно определить приближенно, удовлетворяя граничным
условиям на поверхности днища и на свободной поверхности жидкости
только «в среднем». Тогда при х > 0
&п(акх/К)са&тв . A4.11)
™ сск1'т{сск)
Если при определении потенциала фт воспользоваться гипотезой
плоских сечений для жидкости, в соответствии с которой дфт/дх = 0, то
получим
К гт
тКт к " A4.12)
О при х<0.
Оценку точности потенциала по формуле A4.12) можно получить,
сравнивая его с потенциалом по формуле A4.11) при г = К и используя
асимптотическую формулу
п2 1
ак1'т(ак) т
2т(т
При а| « 2т(т + 1) выражения A4.11) и A4.12) для (рт дают близ-
близкие результаты, на основании чего следует, что при этом условии влия-
влияние днища и свободной поверхности жидкости на значение потенциала
фт на поверхности цилиндрической оболочки несущественно.
Нетрудно доказать, что в случае цилиндрического бака (а также в
случае произвольного упругого бака) с произвольным неподвижным
днищем (рис. 14.2 а) при заданном нормальном перемещении боковой
стенки и> для кинетической энергии Т несжимаемой жидкости в баке вы-
выполняются неравенства
505
Т<Т<Т <Т
В A4.13)
свободной
1
. |, ^
И''
1
1
: !
1
\ 1
Т ш Т по^чшотея щш замет дашца
(рис. 14.2 6) и ттшж неноджшжной стешшй (
(рис. 14.2 ё)- соотаетсшетшо, а :
ние 7^, — при испошзовшши
ю тезы гаюс&шж сечений жидкости.
Рис.. 142..Ж сщш^^шшяния днища ншне--
бодаой.поверхности.в— ншешедишце
венств следует^ что значение
фициента присоединенной массм ^
жидкости ддм неосесимметричнЩ
мы колебаяшй бака с жидкостью,
при использовании; точь
решения гидродинамической
A4.9), %д€яг лежать
значениями коэффициентов
решений A4.11) иA4.12>.
14.1.3. Футащт усшшй в с]рещши®й поаеркнасти
ставляя разложение щж прогиба цилиндрической оболочки в
A4.7) в ура^шежиег с<шм©атшои деформащщй A4.2) и
найдем фуншамш усилий; в средмнной поверхности оболочки
При этом считаем^ что осесимметричные перемещения оболочки,
представленные собственными формами \УП, малы,, В связи с этим в? вы-
ражешш A4.14) будем сохранять только лмиейные члены с обобщенны-
обобщенными координатами щ^.
Общее решение однородного бигармонического уравнения для функ-
щш усилий в выражении A4114} представленху^ последними двумя чяена-
мй с пром箈шышми функциями €х(р) и С2A). Остшшная часть общего
решения однородного уравнения^ иредставляющш' неосесимметричное
напряженное состояние оболочки, обуеловлениое стеснением деформаций
на ее краях в имеющее характер* краевого эффекта, здесь не учитывается
(также, как ш ш задачах; устойчивости оболочки в нелинейной постановке).
Произвсшмше ф^шшрш С\ и С2 найдем, удовлетворяя кинемашиче-
скому граничному условию для продольных перемещений A4.3) ж усло-
условию периодичности окружных перемещежй* Р4.5);:
506
A4.15)
Если верхний край оболочки свободен, то вместо кинематического
условия A4.3) следует использовать динамическое условие A4.4). Тогда
получим
Выражение для функции усилий A4Л4) и, как следствие этого, урав-
уравнение равновесия A4.2) существенно упрощаются, если обобщенную
координату /о {$) считать зависимой отД*) и положить
Это условие соответствует тому, что осесимметричная погйбь обо-
оболочки при конечных перемещениях по неосесимметричной форме опре-
определяется так, как если бы оболочка была нерастяжимой в окружном на-
направлении.
14,1А. Уравнения колебаний в обобщенных координатах. С учетом
зависимости A4Л 7) нелинейные колебания цилиндрического бака с жид-
жидкостью описываются обобщенными координатами *У0, Щ, / и #п,
п = 1,2 Дж составления уравнений колебаний тонкостенной упругой
оболочки, частично заполненной сжимаемой жидкостью, в обобщенных
координатах воспользуемся вариационным принципом Лагранжа. Учтем
все принятые ранее допущения и условия, которым подчиняются заданные
координатные функщш для перемещений оболочки бака, функция усилий
и потендаал перемещений жидкости. Уравнения принципа возможных
перемещений дня рассматриваемой системы можно привести к виду [262]: -
^
A4.18)
2^а2*^
507
Здесь Мо иМ! — масса нижнего и верхнего шпангоутов с учетом при-
приведенных масс цилиндрической оболочки (поскольку инерция последней
в тангенциальном направлении ранее не учитывалась). Второе уравнение
системы A4.18) упрощено, поскольку в силу первого уравнения A4.18) и
полноты системы собственных функций ип, №п, Фп при и = 1,°° для
осесимметричного поля перемещений работа всех сил на возможном пе-
перемещении, соответствующем осесимметричной составляющей при ва-
вариации 5/ , равна нулю. ч Ч
Будем одновременно рассматривать два случая граничных условий на
верхнем краю цилиндрической оболочки — A4.3) и A4.4); для них функ-
функции С\(г) и Сз(О определяются по формулам A4.15) и A4.16). В даль-
дальнейшем эти два случая граничных условий будем различать признаком
а , полагая а = 1 в первом случае, когда продольное перемещение верх-
верхнего края х = ^ равно Щ , и а = 0 во втором случае, когда верхний край
свободен в продольном направлении иМ^О.
Условия ортогональности собственных форм осесимметричных коле-
колебаний закрепленного бака, содержащего сжимаемую жидкость, без учета
гравитации на основании (9.48), (9.49) записываются в виде
A4.19)
52
Здесь тп, кп= тпсо^ — коэффициенты обобщенных массы и жесткости
л-й собственной формы; ЬгС..) —линеаризованный оператор Ь2(...)•
На основании A4.14) с учетом A4.15), A4.16) найдем функцию уси-
усилий Р] для формы колебаний VV^. Затем, подставляя \V = №^ и ^ = ^ в
выражение A4.2) для Ь2(н^,/Г) и линеаризуя его, получаем
] } л4 ах2 к2 ] к2Ш-№
Далее подставим выражения для перемещений оболочки A4.7), по-
потенциала перемещений жидкости A4.8) и функции усилий A4.14) с уче-
учетом A4.15), A4.16), A4.17) и условия ортогональности A4.19) в уравне-
уравнения A4.18). При этом будем пренебрегать в уравнениях для ^п нелиней-
нелинейными членами выше второго порядка и в уравнении для/— нелинейны-
нелинейными членами выше третьего порядка. Такое упрощение основано на том,
что исходные нелинейные уравнения теории пологой цилиндрической
оболочки A4.2) записаны в квадратичном приближении и справедливы
508
при амплитудах прогиба, не превышающего порядок толщины оболочки.
При таких ограничениях на амплитуду (как показывают оценки, отбро-
отброшенные нелинейные члены высокого порядка весьма малы по сравнению
с оставленными нелинейными членами) и упрощениях нелинейные урав-
уравнения колебаний принимают вид [262,263]
д2(С2)
2
Ч = 0 ,
- Щ)
A4.21)
1 *ч2/>*2\
-Р0=к'0(и0 -и^ + ^! -ек;2 + ти + ]?т4 -е2^2 1Ь
¦1 /»! =
п
Здесь введены безразмерные обобщенные координаты и малый параметр е :
Д (в = 1,2,...).
Коэффициенты уравнений A4.21) определяются по формулам
кп =
т2п =
'"Ол =
Гя
2акЬ К )\'
A4-23а)
П 2
К *
Ркт =
К-
2К
+ 8хт4
509
пк
= а- 2тг
КН
= -а -2я
A4.236)
— масса бака с жидкостью.
При вычислении коэффициента //0 была использована формула Гри-
Грина для преобразования интеграла от гармонической функции фц с учетов
граничных условий для нее A4.11):
2 т2
р — 11(х
Отсюда следует, что при вычислении гидродинамических коэффициен-
коэффициентов нет необходимости определять потенциал ср0.
Если цилиндрическая оболочка бака динамически устойчива, то не-
осесимметричная форма колебаний отсутствует (^=0), и уравнения
A4.21) становятся линейными. В этом случае они совпадают с уравне-
уравнениями продольных колебаний несущего цилиндрического бака с жидко-
жидкостью (9.62).
§ 14.2. Определение границ области динамической неустойчивости
и амплитуд нелинейных параметрических колебаний
На основании уравнений A4.21) можно рассматривать различные за-
задачи, связанные с нелинейным взаимодействием осесимметричных и не-
осесимметричных колебаний бака с жидкостью. Наибольший практиче-
практический интерес представляет задача о нелинейных параметрических коле-
колебаниях бака при продольном возбуждении. Получим решение для этого
случая, полагая, что продольные колебания бака возбуждаются кинема-
кинематически за счет продольных перемещений его торцов:
«0 @ = м0 СО8й# > и\ @ = и\ созйЯ, A4.24)
где ио, м? и со — заданные безразмерные амплитуды и частота возбуж-
возбуждения (см. A4.22)).
Дифференциальные уравнения A4.21) содержат в качестве мйожителя
при нелинейных членах малый параметр е = к/К, поэтому их решение
можно получить по методу возмущений в виде разложений по степеням
е. При этом в качестве порождающего решения системы A4.21) при
510
е —> О будем рассматривать решение, представляющее свободные
бания оболочки по неосесимметрмчной форме. Для этого юобходимо,
чтобы продольные перемещения торщш бшса^ возбуждающее ©сесзшмет-
ричные колебания и создающие шраметрическую нагружу щм иешсе-
симметричной форды колебаний^ были достаточно малыми. Выражение
A4.24) запишем в виде
^и = еи1 и$^ещ A425)
где мо, И} —конечные величины. Согласно структуре уравнений A4.21!)
с малым параметром е решение в области главного парамеггршескоге
резонанса можно представить в виде [262]
где 5и,о(О» ^д@, — и Со(О» С1@, Сг(О. ••• — неизвеепше
а ^?1» %» • - — неизвестные числа. Последнее сояшшшение A4.26) заш-
сано на основании того, чгго в области гдавиого параметрического резо-
резонанса частота возбуждения считается достаточно близкой к удвоенной
собственной частоте неосесимметричной формы колебаний, которая шрш
малых колебаниях равна с&кт =^к//л.
Подставим A4.26) для ^д, % у к и A4.25) в систему A4.21). Сгруп-
Сгруппируем все члены, содержащие в качестве множителя одинаковые оеиег-
ни параметра е, и каждую из полученных групп приравняем нулю. Та*
ким образом, система нелинейных уравнений A42;!) сводится к «зацеп-
«зацепляющейся» системе линейных дифференциальных уравнений:
= О, п = 1,2,...^
п
Последующие уравнения здесь не выписываем, ограничиваясь первым
приближением метода возмущений. Следует заметить, что если в уравне-
уравнениях A4.21) сохранить нелинейные члены более высокого порядка (кото-
(которые были отброшены как малые по сравнению с оставленными нелиней-
нелинейными членами), то они бы не вошли в уравнения первого приближения
метода возмущений A4.27).
Запишем решения уравнений A4.27) для установившихся периодиче-
периодических колебаний на режиме предельного цикла с периодом Т = 2п/ау для
обобщенных координат <^п, п =1,2,... и с периодом 2Т для обобщенной
координаты ^ . При этом значения амплитуды колебаний ^(/) в момент
времени / = 0 и г = Г/2 обозначим через 6ио,т. е.
5П
A4.28)
Первое уравнение A4.27) с учетом A4.28) дает порождающее решение
Со = а 8т(сог /2) + Ъ со$(йя / 2). A4.29)
Установившееся решение второго уравнения A4.27) с учетом A4.29) за-
записывается в виде '
* 2 2
а +Ъ к2п
К -
2 к„
к2п-0) т2п
кп-со2тп
Ъ2 -а2
созюО. A4.30)!
Подставив выражения A4.29) и A4.30) в третье уравнение A4.27),
получим
%2 22^
+ [(ЗЬ2 -а2
где
кп ~
A4.32)
^^ т2п
Чтобы решение уравнения A4.31) не имело «вековых» членов и было
периодическим, выражение, стоящее в фигурных скобках уравнения,
должно равняться нулю. Для этого должно выполняться одно из следую-
следующих условий:
A4.33)
Решение уравнения A4.31) с учетом условий A4.25), A4.33) записы-
записывается в виде
. сог . ЗсоЛ
81П + 81П +
2 2 )
сох ЗсоЛ /лл _ .ч
- соз— + соз . A4.34)
512
311@
+ -^[(*2-Зд2)# + D
Первое условие A4.33) является тривиальным. Из двух других усло-
условий A4.33) поочередно определим параметр цщ и подставим его в по-
последнее уравнение A4.26). Тогда с учетом обозначений A4.25) ещ = и®,
ей* = щ в первом приближении получим уравнения для определения
амплитуд а и Ь:
к-е(„~ъ+„. Ч) = 0, Ь = 0; A435)
Из уравнений A4.35) следует два решения: а * 0, & = О и а = 0, Ь * 0,
одно из которых описывает устойчивые нелинейные колебания на режи-
режиме предельного цикла, а другое — неустойчивые колебания. Из двух ам-
амплитуд а и Ь, отличных от нуля, та амплитуда относится к устойчивым
колебаниям, которая больше по величине [64].
Если для решения нелинейных уравнений A4.21) использовать метод
гармонического баланса и в первом приближении принять С = Со» гДе Со
определяется выражением A4.29), то в этом случае решения для осесим-
метричных форм %п и для амплитуд а, Ъ неосесимметричной формы
полностью совпадают с решениями A4.30) для !;п - е^п 0 и A4.35) для а
и Ь, полученными в первом Приближении по методу возмущений.
Границы области динамической неустойчивости определяются из
уравненийA4.35)при а=Ь = 0:
0. A4.36)
Если в уравнениях A4.35) положить при а = 1 и^=и\ =0 или при
а = 0 «о = 0 у то получим уравнения для амплитудно-частотной характе-
характеристики неосесимметричной формы при свободных нелинейных колеба-
колебаниях закрепленного бака с жидкостью:
к-(со12J1Л + е2А2Е(со) = 0, A4.37)
где А = а или А = Ь, со 12 —частота колебаний неосесимметричной
формы и со — частота сопровождающих осесимметричных колебаний.
Продольные реакции Ро и Л > действующие по краям бака при пара-
параметрическом резонансе, определим по формулам A4.21) с учетом A4.26),
A4.29), A4.30), сохраняя в первом приближении члены, содержащие е в
степени не выше первой:
{14.386)
Из этих формул следует, что при динамической неустойчивости ци-
цилиндрической оболочки бака, эозникают дополнительные нелинейные
реакции, пропорциональные квадрату амплитуды неосесимметричной
формы. Эти нелинейные реакции могут действовать как в фазе, так и в
противофазе с линейными составляющими реакций, в зависимости от
того, какая из амплитуд ( а Ф 0, Ъ = 0 или а = 0, Ъ * 0 ) реализуется при
установившихся колебаниях на режиме устойчивого предельного цикла.
§ 14.3. Результаты расчетов
14.3.1. Сравнение с экспериментом. Для проверки точности нели-
нелинейных уравнений колебаний цилиндрической оболочки бака A4.21) и
полученных на их основе приближенных решений рассмотрим сначала
такие оболочки, для которых имеются экспериментальные данные.
Для пустой оболочки с параметрами ЦК = 1,92, /?/Л = 1820, /г=0,3 экс-
были получены амплитудно-частотные характеристики
нелинейных колебаний по неосесим-
неосесимметричной форме И^до (к = 1, га = 10)
при разных уровнях возбуждения
[414а]. Эти характеристики показаны на
рис. 14.3 штриховыми линиями (/, 2,3);
сплошной линией на этом рисунке на-
нанесена зависимость A4.37) частоты сво-
свободных колебаний со по неосесиммет-
неосесимметричной форме Щ1$=$т(ях/Цсо&A06)
от ее амплитуды. Как видим, она совпа-
совпадает со «скелетной» линией экспери-
экспериментальных резонансных кривых. Это
указывает на точность как самих нели-
нелинейных уравнений A4.21), так и их
приближенного решения A4.37). Это
решение лучше согласуется с результа-
результатами эксперимента, чем приближенное
периментально
а
2,4
1,6
0,8
0,99 1,00 <т/<тио
Рис. 14.3. Амплитудно-частотная ха-
характеристика нелинейных колебаний
пустой цилиндрической оболочки по
неосесимметричной форме; штрихо-
штриховые линии — эксперимент, сплош-
сплош\
-Ж:
\
ная — расчет
решение, полученное для пустой оболочки в работе [93а].
В работе [399] представлены результаты экспериментального иссле-
исследования нелинейных параметрических колебаний стальной цилиндриче-
цилиндрической оболочки, полностью заполненной водой и имеющей плоское неде-
формируемое днище; размеры оболочки: Ь = 4,01м, К = 0,381м,
к = 0,254 • 10~2м . Параметрические колебания оболочки по неосесиммет-
514
ричной форме возбуждаются за счет продольных колебаний основания
(днища) по гармоническому закону при заданных значениях амплитуды
перемещения 1У0 и частоты со . Верхний край оболочки свободен в про-
продольном направлении(^ = 0, а = 0).
Безразмерные значения собственных частот малых колебаний по не-
осесимметричной форме Щ^ (А:=1,т = 4)и низшей форме осесиммет-
ричных колебаний Щ, полученные экспериментально, равны
1Ек = 0,0923 . Теоретиче-
Теоретиче0,03
а\А = й>1,4д/РЯ31Ек = 0»0613 и пх =
ские значения частот для этого случая
(К/к = 150, ЦК = 10,67, /л = 0,3 ,
ро/р =7,8, со/с = 3,4) <714 = 0,0607,
^ =0,0912, и, как видно, хорошо
согласуются с экспериментальными 002
значениями.
На рис. 14.4 представлена граница
области главного параметрического 0,01
резонанса по неосесимметричной фор-
форме колебаний Щ4 =$т(ях/Ь)со$D6),
а на рис. 14.5 приведены безразмерные
о
0,7 0,8 0,9 1,0^/2^ 4
амплитуды этой формы на режиме Рис. 14.4. Граница области главного
предельного цикла в области неустой- параметрического резонанса цилинд-
чивости при продольных колебаниях с Р™*0й оболочки с жидкостью по
^ * м неосесимметричной форме колебаний
частотой (О~2(о 14 . Параметр возбу- При продольном возбуждении
ждения щ = II^ /к = 0,00142. Это значение соответствует продольной
вибрационной перегрузке (О211§ I § =0,5 , которой подвергалась стальная
0,6
0,4
0,2
//
//
V
¦/С,
оболочка, заполненная водой, в экс-
эксперименте [399].
На рис. 14.5 кривые 1 рассчитаны
по формулам A4.35); 2 — результаты
приближенного решения [399]; точ-
точки — эксперимент [399]. При этом
сплошные линии относятся к устой-
устойчивым колебаниям на режиме пре-
предельного цикла, а штриховые — к
неустойчивым колебаниям, штрих-
пунктирная кривая А$ — скелетная
о
1,00 1,02 1,04 О)/2со14
Рис. 14.5. Безразмерные амплитуды кривая.
колебаний цилиндрической оболочки с На рис. 14.6 показаны безразмер-
жидкостью по неосесимметричной фор- 77 ~
ме на режиме предельного цикла при НЬ1е компоненты Ао и Хц, характе-
продольном возбуждении ризующие продольную реакцию
Ро =-яЕк К~ (Хо -Х0)со&(О1, действующую на нижний торец бака
(верхний край оболочки считался свободным в продольном направлении,
515
т. е. Рг = 0). Кривая 1 получена по формуле A4.38); 2 — теоретическое?
решение [399];точки — эксперимент [399]. Компонента Хо представляет
реакцию, действующую при невозму-4
щенных продольных колебаниях (без
учета неосесимметричной формы), ^ак
видно, дополнительная реакция ХОу
которая появляется при параметриче-
параметрическом резонансе, действует в противофа-
зе с основной реакцией Хо и по вели-
величине ее значительно превосходит.
Результаты, приведенные на рисун-
рисунках 14.5 и 14.6, показывают, что реше-
1,00
1,02
Рис. 14.6. Безразмерные амплитуды ния A4 35) и A4.36) лучше согласуется
гидродинамической силы, действую- ч ' ч ' ' - у
щей на плоское днище цилиндриче- с экспериментом, чем приближенное
ского бака с жидкостью при продоль- решение, полученное в работе [399].
ном возбуждении без учета потери 14.3.2. Оценки точности. Для
устойчивости (Хо) и при нелиней- оценки точности решения рассмотрим
ных параметрических колебаниях по изотропную цилиндрическую оболочку
неосесимметричной форме с жестким плоским днищем, полностью
заполненную жидкостью. Параметры системы: К/к = 165 , Ь/К = 6,215,
В табл. 14.1 для сравнения приведены безразмерные собственные
частоты 0к,т=(Ок,тт1рК3/ЕН для двух низших тонов неосесимметрич-
ных колебаний ( к = 1,2 ; т = 2,6) оболочки с жидкостью, вычисленные
на основании различных вариантов теории цилиндрической оболочки
при использовании точного решения гидродинамической задачи без уче-
учета гравитации, сжимаемости жидкости и инерции оболочки втангенци-
Таблица 14.1
°2,т
т
1
2
3
4
5
1
2
3
4
5
2
0,08228
0,08260
0,08744
0,08102
0,08282
0,2845
0,2846
0,3570
0,2768
0,2871
3
0,05140
0,05297
0,05219
0,05077
0,05314
0,1703
0,1709
0,1884
0,1659
0,1733
4
0,05935
0,06238
0,05887
0,05858
0,06253
0,1239
0,1256
0,1277
0,1196
0,1270
5
0,09235
0,09600
0,09151
0,09144
0,09664
0,1226
0,1255
0,1193
0,1165
0,1265
6
0,1413
0,1453
0,1403
0,1403
0,1458
0,1559
0,1597
0,1493
0,1484
0,1611
альных направлениях [348]. Оболочка считалась свободно опертой на
краях. Нормальное перемещение оболочки представлялось в виде
ад. $т(акх/К).
516
Приведенные результаты соответствуют: 1) общей теории В.З. Власова;
2) теории пологой оболочки; 3) полубезмоментной теории без учета
сдвига; 4) полубезмоментной теории с учетом сдвига [348]. При этом
использовалась двучленная аппроксимация при к = 1,2. В пятой строке
приведены результаты, полученные по теории пологой оболочки при
использовании одночленной аппроксимации для прогиба при к = 1 и при
к = 2 раздельно.
Результаты табл. 14.1 показывают, что использованная при получе-
получении нелинейных уравнений A4.21) теория пологой оболочки при одно-
одночленной аппроксимации для неосесимметричной формы колебаний об-
обладает вполне приемлемой точностью при всех значениях т.
В табл. 14.2 приведены значения коэффициентов присоединенных
масс жидкости (Я = Ь = 6,215/?) для неосесимметричных форм колеба-
колебаний оболочки Щт = &т(акх/Ь)со$тв при *=1, т = 2,3,4,5,6, вы-
вычисленные при использовании упрощенных решений для потенциала
перемещений жидкости A4.11) и A4.12) соответственно.
Таблица 14.2
т
< 2Д/(ярД2Я)
2рпл/(прК2Н)
2
0,4890
0,5000
3
0,3302
0,3333
4
0,2485
0,2500
5
0,1992
0,2000
6
0,1664
0,1667
Точные значения коэффициентов присоединенных масс, с помощью
которых были получены результаты табл. 14.1, в силу неравенств A4.13)
лежат между значениями, приведенными в табл. 14.2. Эти оценки пока-
показывают, что при использовании упрощенных решений для потенциала
срт A4.11) или A4.12) сохраняется достаточно высокая точность для
коэффициента присоединенной массы /л .
Две низшие безразмерные частоты пп=соп\рК IЕН осесиммет-
ричных колебаний рассматриваемой стальной оболочки с водой равны
&1 = 0,1579 и п2 = 0,4631. Если не учитывать сжимаемость жидкости и
положить со/с = О, (с—>°°), то получим ,©! =0,1779 и .02 = 0,5150.
Отсюда видно, что влияние сжимаемости жидкости на низшие частоты
йеосесимметричных колебаний пренебрежимо мало. Например, для не-
неосесимметричной формы Щ>т при к = 1,2 и т = 4 по теории пологой
оболочки получаем соответственно (Гц - 0,062384 , <72L = 0,125557 с уче-
учетом сжимаемости воды (со/с = 3,4) и сг14 = 0,062385, 0*2,4=0,125568
без учета ее сжимаемости.
Влияние закрепления нижнего края оболочки при осесимметричных
колебаниях невелико и им можно пренебречь (квадраты собственных
частот за счет закрепления нижнего края по сравнению со свободным по
радиальному перемещению краем увеличиваются не более, чем на 0,2 %).
Таким образом, при вычислении коэффициентов уравнений нелинейных
517
колебаний бака A4.23) осесимметричные формы можно брать в виде ре-
решений по безмоментной теории оболочек, пренебрегая краевым эффектом,
т. е. в виде функций У/п =со$(Лпх/К) при Лп=Bп-1)яК/BН), А:=1,2,....
На рис. 14.7 показаны границы области главного параметрического
резонанса цилиндрического бака (К/к = 165 , Ь/К = 6,215) с жидкостью
при продольных колебаниях его
0,15
основания по закону 1/^
Цифрами на кривых, представляю-
представляющих границы неустойчивости, обо-
обозначены число полуволн в осевом
направлении к и число волн в ок-
окружном направлении т для соот-
соответствующих неосесимметричных
параметрически возбуждаемых
форм. Расчеты выполнены при ис-
использовании двучленной аппрок-
аппроксимации для неосесимметричных
форм колебаний, общей моментной
теории цилиндрической оболочки и
точного решения гидродинамиче-
гидродинамической задачи на основании уравне-
уравнения для границы области динами-
0,05 0,10
Рис. 14.7. Границы области главного пара- ческой неустойчивости, получен-
метрического резонанса цилиндрической ной в работе [345] методом Боло-
оболочки с жидкостью при продольном тина Г641. Решение этой задачи в
возбуждении для различных неосесиммет- «
ричных форм колебаний (первая цифра упрощенной постановке с помо-
указывает число полуволн в продольном щью уравнения A4.36) при а = 0
направлении, а вторая — число волн в дает результаты, которые практи-
окружном чёски совпадают с результатами,
приведенными на рис. 14.7, т. е. находятся в пределах точности построе-
построения графиков. Различие при этом обусловлено в основном различием
собственных частот неосесимметричных форм колебаний, вычисленных
в разных приближениях, которое, как уже отмечалось (при сравнении
первого и пятого вариантов решения в табл. 14.1), достаточно мало.
Результаты, приведенные на рис. 14.7 показывают, что цилиндриче-
цилиндрическая оболочка бака является динамически неустойчивой при весьма ма-
малых амплитудах продольных колебаний основания A1^/Н = щ <0,05) в
широком диапазоне частот возбуждения, начиная с частоты, которая рав-
равна удвоенной низшей частоты неосесимметричной формы или низшей
частоте осесимметрич;ной формы колебаний в зависимости от того, какая
из этих частоте меньше.
При резонансе осесимметричных колебаний по низшей форме
щ =д®со$Л1х/К возбуждаются субгармоники с половинной частотой
по неосесимметричным формам Щт. Критические амплитуды, осесим-
метричной формы, при которых появляются низшие неосесимметричные
формы для рассматриваемой оболочки равны
518
т
2
0,06967
3
0,09525
4
0,02842
5
0,01165
6
0,03658
0 2
Эти результаты подтверждают известный экспериментальный факт
[2], что у неподкрепленных кольцевыми ребрами жесткости тонких ци-
цилиндрических оболочек с жидкостью практически невозможно в чистом
виде возбудить резонансные осесимметричные формы колебаний. При
амплитудах, составляющих всего несколько 0,4
сотых от толщины оболочки, эти формы
становятся динамически неустойчивыми и
на них накладываются неосесимметричн&е
формы колебаний, амплитуды которых ста-
становятся доминирующими, а колебания —
нелинейными. При этом может одновре-
одновременно появиться несколько различных не-
осесимметричных форм, колеблющихся с
частотой, равной половине частоты осе-
симметричной формы.
На рисунках 14.8 и 14.9 показаны ам-
амплитуды неосесимметричной формы
Щ^ для устойчивых (а; Ь = 0) и неустой-
неустойчивых (Ъ\ а = 0;) колебаний на режиме
предельного цикла при резонансе низшей
А/
//
/ /
/
/б;а = 0
1
1
1
ампли-
1,26 1,30
г. 14.8. Безразмерные
нелинейных
колебаний
ричной формы при резонансе
низшей формы осесимметрич-
колебаний цилиндрической
0,4
0,2
оболочки с жидкостью
осесимметричной формы Щ (рис. 14.8) и при главном параметрическом
резонансе (рис. 14.9), которые возникают при продольных колебаниях
основания рассматриваемого бака (Н = Ь = 6,2157?) с амплитудой
°'6 ' ^ ' ' 1 м$ =0,005 и безразмерной частотой О. .
Штрихпунктирными линиями на этих ри-
рисунках изображены «скелетные» кривые
А^, представляющие частотную характе-
характеристику нелинейных свободных колебаний
по неосесимметричной форме Щ^.
На рис. 14.10 показана гидродинамиче-
гидродинамическая сила Ро 9 действующая на днище бака
при главном параметрическом резонансе
(верхний край цилиндрической оболочки
бака свободен в осевом направлении, а=0).
Также, как для рассмотренной ранее длин-
ском резонансе цилиндрической ной Цилиндрической оболочки с жидко-
оболочки с жидкостью при про- стью ( Ь/К = 10,67, К/к = 150; см. рис. 14.6),
дольном возбуждении нелинейная составляющая гидродинами-
гидродинамической силы, обусловленная появлением неосесимметричной формы с
конечной амплитудой, превосходит линейную составляющую. В обоих
случаях нелинейная составляющая действует в противофазе с линейной
составляющей. Однако для этих двух оболочек соответствующие друг
другу кривые на рис. 14.6 и 14.9 наклонены в разные стороны по отноше-
519
*ч
N \
V *^
N
N
\
\
\>
\ \
\ \
\
\
0,96 0,98 1,00(о/2вI4
Рис. 14.9. Безразмерные амплиту-
нию к критической частоте главного параметрического резонанса Х2кр =
= 2ог14. Это обусловлено тем, что для первой оболочки (Ь/К = 10,67,
0,8
),005
0,95 0,97 0,99 о)/2со14
К/Ъ = 150) выполняется условие
а для второй оболочки ( Ь/К = 6,215, К/к -
= 165)— пх>2ах4.
На рис. 14.11 для оболочки р Ь/К =
= 6,215, К/к = 165 приведены амплитуд-
амплитудно-частотные характеристики нелинейных
Рис. 14.10. Безразмерные ампли- колебаний по неосесимметричной форме
туды гидродинамической силы, Т17 , . _ о
действующей на днище цилинд- ,4 с жидкостью (ро/р =7,8, сг1>4 =
рического бака при главном пара- = 0 0625 ) и без ЖИдКОсти ( Ох 4 = 0,1515 ).
метрическом резонансе неосесим- у V 1,4 » /
метричной формы колебаний при Сравнение этих кривых показывает,
продольном возбуждении (анало- что наличие жидкости внутри оболочки
гично рис. 14.6) вызывает значительное увеличение нели-
нелинейности. Отсюда можно сделать вывод о том, что в системе «оболоч-
«оболочка + жидкость» преобладающей является инерционная нелинейность.
Оценим влияние инерционной нелинейности, а
представленной в уравнениях A4.21) членом
ет2п %— > на амплитудно-частотную характе- 2 о
дг
ристику. В табл. 14.3 для некоторых значений
безразмерной частоты нелинейных колебаний
а = (со/ 2)урК31 Ек по неосесимметричной фор-
форме Щд приведены значения амплитуды А$; ре-
результаты верхней строки получены по формуле
) ()
\
\
092
096
зультаты верхней строки получе по форуле 092 096 с\а
A4.37) на основании полных уравнений A4.21), а рис/14.ц. Сравнение ам4-
результаты второй строки —на основании упро- шштудно-частотных ха-
щенных уравнений, в которых полагается к>$ = 0, рактеристик нелинейных
, л колебаний по неосесим-
*2„=0, т.е. учитывается только инерционная метричной форме для ци-
нелинейность. Сравнение результатов вычисле- линдрической оболочки
ний показывает, что во всем диапазоне частот, в без жидкости A) и с
котором могут возбудиться низшие (к = 1) неосе- жит0СТЬЮ ( )
симметричные формы колебаний, инерционная нелинейность оказы-
оказывает основное влияние на нелинейные колебания оболочки с жидкостью.
Таблица 14.3
а/а1А
Ао(ст)
0,8
1,683
1,693
0,85
1,337
1,343
0,9
0,997
1,001
0,95
0,640
0,643
1,3
0,262
0,262
1,35
0,626
0,626
1,4
0,887
0,887
Д,45
1,118
1,117
1,5
1,333
1,332
520
14.3.3. Цилиндрический бак с полусферическим днищем. Рассмот-
Рассмотрим цилиндрический бак с полусферическим днищем, полностью запол-
заполненный несжимаемой жидкостью (рис. 14.12), со сле-
Ь/К = 6, Я/1 = 1,
3,ро/р = 2,7,
дующими параметрами:
Ых=Муш0; верхний край цилиндрической оболоч-
оболочки считаем свободным в продольном направлении
(а = 0).
Собственные формы осесимметричных колебаний
закрепленного бака при 17$ =0 определялись по ме-
методу Ритца; при этом оболочка бака считалась безмо-
ментной, а движение жидкости рассматривалось на
основе гипотезы плоских сечений. Нормальные пере-
мещения цилиндрической оболочки и сферической
оболочки днища для трех низших форм колебаний
(л = 1,3) показаны на рис. 14.12.( Три безразмерные
рис. 14.12. Низшие
формы собственных
низшие собственные частоты пп = СОп^рКЪ IЕк при осесимметричных ко-
(п =п) равны 0,1742; 0,5075; 0,8015. Й™^!^^
Рассмотрим параметрический резонанс бака по ской и полусфери-
неосесимметричной форме колебаний цилиндриче-
ской оболочки
т
= 81П (клх IЬ) СО8 тв при к = 1,
уф
ческой оболочек ба-
бака с жидкостью
т = 4 . Собственная частота малых колебаний по этой форме равна
ог14 = а>194У рЯ? / Ек =0,0580. В уравнениях нелинейных колебаний
A4.21) будем учитывать три низшие формы осесимметричных колебаний
бака (п = 1,2,3).
На рис. 14.13 изображена граница области динамической неустойчи-
неустойчивости (заштрихована) при главном параметрическом резонансе, вычис-
вычисленная по формуле A4.36).
0,10
0,05
1
\
\
Неус
ГОЙЧИЕ
ость
V
/
у
0,6
0,4
Ь:а = 0
Ч N
\
\
\
\
N
\^
\
\
^
0,8
1,2
Рис. 14.13. Граница области главного
параметрического резонанса оболоч-
оболочки по неосесимметричной форме
колебаний при продольном возбуж-
возбуждении бака с днищем в виде полусфе-
полусферической оболочки
На рис. 14.14 при и® =0,01 приведены: амплитуда а (Ь = 0) устойчи-
устойчивых параметрических колебаний по неосесимметричной форме Щ^ на
521
0
0,95 0,97 0,99 О)/2со14
Рис. 14.14. Амплитуды устойчивых
и неустойчивых параметрических
колебаний цилиндрической оболоч-
оболочки по неосесимметричной форме
для бака с днищем в виде полусфе-
полусферической оболочки
режиме предельного цикла (сплошная линия); амплитуда Ъ {а = 0) неус-
неустойчивых параметрических колебаний (штриховая); амплитудно-
частотная характеристика
1,0
0,6
0,4
о
0,95 0,97 0,99 (о/2со14
Рис. 14.15. Амплитуды безраз-
безразмерной продольной реакции при
продольном кинематическом
Хо
Хо
\
[о для свободных нелинейных колебаний по
неосесимметричной форме (штрихпунктир-
ная).
На рис. 14.15 показаны безразмерные
компоненты Хо и Хо, характеризующие
продольную реакцию
Ро = -яЕк3К~1(Х$ - Хц)со$со1,
где Хо(со) и Хо(со) представляют линей-
линейную и нелинейную составляющие; послед-
последняя появляется за счет динамической неус-
неустойчивости оболочки бака и по величине
значительно превышает линейную состав-
и действует в противофазе с ней.
упругим полусферическим дни- Качественно результаты для бака с упругим
щем: Хо—без учета динамиче-
ской неустойчивости;
при главном
Хо —
днищем (Ь/К = 6) не отличаются от ре-
зультатов для рассмотренного ранее бака с
параметрическом жестким плоским днищем (Ь/К = 6,215,
Й обоих сл^ выполняется
Ф°Рме условие пх > 2о14.
14.3.4. Выводы. На основании приведенных в этом параграфе резуль-
результатов, а также оценок коэффициентов нелинейных уравнений A4.21) при
различных параметрах баков с жидкостью, можно сделать следующие
выводы.
Наибольший практический интерес представляют исследования нели-
нелинейных параметрических колебаний в случае сравнительно длинных несу-
несущих баков с тонкой неподкрепленной шпангоутами цилиндрической обо-
оболочкой, полностью или почти полностью заполненных жидкостью, когда
неосесимметричная форма колебаний цилиндрической оболочки имеет
одну полуволну в продольном направлении (к = 1). В этом случае основ-
основное влияние оказывает нелинейная инерционность жидкости; влияние не-
нелинейной упругости оболочки, характеризуемой коэффициентами к:3 и
к2п , мало и при упрощенной постановке задачи ею можно пренебречь.
Количественные результаты показывают, что в довольно широких
диапазонах частот и при весьма малых амплитудах продольных колеба-
колебаний, составляющих десятые или даже сотые доли толщины оболочки,
могут возникнуть параметрические колебания цилиндрической оболочки
бака по неосесимметричным формам.
При нелинейных параметрических колебаниях на режиме предельно-
предельного цикла появляются дополнительные продольные реакции на торцах
бака. Дополнительная (обусловленная нелинейными колебаниями) реак-
реакция на нижнем торце, возникающая за счет дополнительной продольной
гидродинамической силы на днище бака, по величине может в несколько
раз превосходить основную реакцию для линейных продольных колебаний
522
бака. Поэтому задача о параметрических колебаниях несущего цилиндри-
цилиндрического бака с жидкостью представляет большой практический интерес как
для оценки прочности оболочки бака, так и для оценки динамических
характеристик жидкостной ракеты с такими баками при продольных ко-
колебаниях.
Приведенные сравнения с экспериментальными данными показывают,
что полученное приближенное решение нелинейных уравнений A4.21)
дает достоверные результаты в случае, когда возбуждается только одна
какая-либо неосесимметричная форма колебаний. Для этого, как следует
из рис. 14.7, необходимо, чтобы амплитуда продольного возбуждения
была достаточно малой, а частота возбуждения близкой к удвоенной соб-
собственной частоте данной неосесимметричной формы колебаний. Этим
также следует руководствоваться при выборе неосесимметричных форм
Щ,т (т* е- числа волн т в окружном направлении) при исследовании
параметрических колебаний цилиндрической оболочки бака: т при к = 1
выбирается так, чтобы собственная частота сокт была близка к половине
частоты продольных колебаний, сок ш ~(о12.
§ 14.4. Упрощенные нелинейные уравнения колебаний бака
с жидкостью для общего случая
В общем случае будем считать, что граничные условия на краях ци-
цилиндрической оболочки бака являются произвольными. Для этого случая
нелинейные уравнения получим в упрощенном виде, пренебрегая нели-
нелинейной упругостью, характеризуемой в уравнениях A4.21) коэффициен-
коэффициентами к*з и к2п (в предыдущем параграфе было показано, что влияние
этих коэффициентов мало). При таком подходе сначала решаются задачи
о собственных осесимметричных и неосесимметричных малых колебани-
колебаниях закрепленного бака с жидкостью (при С/о = ^1 = 0 )> определяются
формы колебаний цилиндрической оболочки 1Уп(х)9
Щ,т(х>6) = Хк(х)со*тв> частоты соп, сокт, коэффициенты обобщен-
обобщенных масс тп, гп^т = [X и коэффициенты обобщенных жесткостей к0,
*0и > К = Щ/»1. кКт = К = /Ш>1,т бака в Челом-
Далее принимается, что при нелинейных колебаниях наряду с осе-
симметричными формами возбуждается какая-либо одна неосесиммет-
неосесимметричная форма колебаний цилиндрической оболочки
гДе Хк(х) —известная функция, нормированная так, чтобы
тах Хк (*) -1 • Наибольший интерес представляет низшая форма колеба-
колебаний при к = 1; для главного параметрического резонанса т выбирается
так, чтобы 2щ,т ~ со , где со — заданная частота продольных колебаний
бака.
В отличие от A4.7) нормальное перемещение цилиндрической обо-
оболочки бака представляется в виде
523
A4.39)
Здесь последний член учитывает дополнительную погибь цилиндриче-
цилиндрической оболочки, направленную внутрь, которая возникает при конечных
перемещениях по неосесимметричной форме. Потенциал перемещений
жидкости определяется в виде A4.8) при условии, что в этом случае, со-
согласно A4.17), /0 = -/2(т2/4Д), и в выражениях A4.9), A4.10) функ-
функции 8ш(а^х/К) заменятся на ХкМ • Как отмечалось в § 14.1, для вычис-
вычисления коэффициентов присоединенных масс жидкости т2п и //0 нет
необходимости определять потенциал <р0 (на основании формулы Грина
они вычисляются непосредственно через функцию Хк (х ))•
Потенциал (рт при решении задачи о неосесимметричных собствен-
собственных колебаниях бака с упругой цилиндрической оболочкой и недефор-
мируемым (для неосесимметричных форм) днищем можно определить,
перенося граничное условие с поверхности днища 8\ в плоскость нижне-
нижнего края цилиндрической и записывая его в виде
= 0 или (рп\ п = 0.
1*=0
Для получения уравнений нелинейных колебаний бака используем
принцип возможных перемещений в форме A4.18), где в соответствии с
A4.39) функция &т(акх/К) заменяется на Хк(х) • При приведении урав-
уравнений к форме A4.21) будем учитывать, что часть функции усилий, соот-
соответствующая неосесимметричной форме ^(х)со8т0, известна; кроме
того будем пренебрегать нелинейными членами, содержащими коэффи-
коэффициенты к:3 и к2п. В результате для общего случая граничных условий на
краях цилиндрической оболочки получаются уравнения в виде A4.21)
при кг3=О и к2п =0. В отличие от A4.23) часть коэффициентов этих
упрощенных уравнений определяется по формулам:
A4.40а)
524
23М-1
A4.406)
Параметрический резонанс цилиндрической оболочки несущего ци-
цилиндрического бака может быть легко устранен на этапе проектирования
путем выбора необходимых параметров вафельной оболочки или путем
подкрепления оболочки шпангоутами, используя полученные формулы.
Для этого параметры подкреплений цилиндрической оболочки несущего
бака необходимо выбрать так, чтобы удвоенные собственные частоты
низших неосесимметричных форм колебаний бака превышали частоты
вынужденных продольных колебаний системы.
§ 14.5. Нелинейные продольные колебания корпуса
с цилиндрическим баком, содержащим жидкость
14.5.1. Постановка задачи. Рассмотрим
ных гармонических продольных колебаниях
носителя (рис. 14.16 а) вследствие дина-
динамической неустойчивости цилиндрической
оболочки несущего бака возникают пара-
параметрические колебания бака по неосесим-
метричной форме с частотой, близкой к
собственной частоте этой формы и равной
половине частоты возбуждения. Как было
показано в § 14.3, при параметрических
колебаниях бака по низшим неосесиммет-
ричным формам (к = 1) возникают значи-
значительные нелинейные реакции на его тор-
торцах. Поэтому продольные колебания кор-
корпуса при частотах возбуждения, близких к
удвоенным частотам низших неосесим-
неосесимметричных форм колебаний несущего ба-
бака, будут нелинейными. Такой нелинейный
«вторичный» резонанс продольных коле-
колебаний корпуса (продольные колебания
вызывают параметрический резонанс не-
неосесимметричных колебаний, который в
свою очередь оказывает обратное влияние
на продольные колебания) ранее не иссле-
исследовался и поэтому представляет большой
интерес. Ниже приводится решение этой
задачи, которое позволяет определить ам-
амплитуды нелинейных продольных колеба-
колебаний системы, неосесимметричных колеба-
колебаний оболочки бака и колебаний гидроди-
гидродинамического давления в баке [353].
Для получения решения корпус разби-
разбивается на три части (рис. 14.16 б): нижнюю
случай, когда при вынужден-
корпуса жидкостной ракетьь
с,
"\/%ЛЛ/\/>^
.т
б
Рис. 14.16. Система с несущим
цилиндрическим баком, содер-
содержащим жидкость, (а) и разделе-
разделение ее на подсистемы (б) для
расчета нелинейных продольных
колебаний при динамической
неустойчивости цилиндрической
оболочки бака
часть (система Со ), на кото-
525
рую действует заданная продольная сила Х$A) = Х$со$0I; несущий
цилиндрический бак и верхнюю часть (система С\), на которую действу-
действует заданная продольная сила Хг({) = X®созсот. Системы Со и С± счи-
считаются линейными и консервативными.
Будем предполагать, что при динамической неустойчивости бака при
малых продольных колебаниях параметрически возбуждается только од-
одна из неосесимметричных форм колебаний его цилиндрической оболочки
Щт = Хк(х)со$т9 с конечной амплитудой, характеризуемой обобщен-
обобщенной координатой ДО-
Уравнения нелинейных связанных осесимметричных и неосесиммет-
неосесимметричных колебаний бака и продольные реакции на его торцах записыва-
записываются в виде A4.21) с учетом A4.22), A4.23) и A4.40).
14.5.2, Решение задачи. В первом приближении метода гармониче-
гармонического баланса (он приводит к такому же решению, как и первое прибли-
приближение использованного в § 14.2 метода возмущений) на режиме предель-
предельного цикла при главном параметрическом резонансе решение уравнений
A4.21) ищется в виде
и0 = и0 + и0 созйЯ , щ = и{ + их созоя, •
^ = а 8т(йЯ / 2) + Ъ со8(й)г 12).
Установившееся решение первого уравнения A4.21) будет
&, = -(*Оп/*1|)(ио - "Г) + <.,0 > A4-42)
где %п о определяется по формуле A4.30) с учетом и® = ещ, щ = ещ .
Из второго уравнения A4.21) получим формулы для амплитуд а и Ь
A4.35); из двух амплитуд а и Ь, отличных от нуля, реализуется та, кото-
которая больше — она и представляет устойчивые нелинейные колебания на
режиме предельного цикла [64].
При установившихся вынужденных колебаниях линейных систем Со
и С\ реакции можно представить в виде
Р0/к = (уои() +Vа/Г1;фсо8<Ш , Рх /к = (у^!0 +У1/Г1Х1°)со8йЯ , A4.43)
где коэффициенты у0 > уо» У\» У1 в общем случае зависят от со . При
этом считается, что по крайней мере одна из двух систем Со и С\ не за-
закреплена в продольном направлении; в силу этого статические состав-
составляющие реакций, соответствующие перемещениям щ и щ , равны ну-
нулю.
Исключая с помощью соотношений A4.43) реакции из последних
двух уравнений A4.21) с учетом выражений A4.41), A4.42) и формул для
амплитуд A4.35) и приравнивая нулю сумму членов этих уравнений, со-
содержащих множитель совсм, получаем уравнения для амплитуд и® и и® :
A4.44)
где
526
В1=к0-1 _ _
п п
^ 1 Г ^ 1
A4.45)
В выражениях для ^0 и ^1 верхние знаки берутся для амплитуды а
при Ь = 0, а нижние — для амплитуды Ь при а = 0; о* = 1, если цилинд-
цилиндрическая оболочка динамически неустойчива, и а = 0, если оболочка
устойчива. Границы области динамической неустойчивости определяют-
определяются из уравнения A4.36). Однако возможны «затянутые» нелинейные па-
параметрические колебания вблизи этих границ вне области неустойчиво-
неустойчивости [64].
Из последних двух уравнений A4.21) с учетом A4.35), A4.41) —
A4.43), приравнивая нулю сумму членов, не зависящих от времени, по-
получаем также уравнение для определения стационарного сближения тор-
торцов оболочки, возникающего при нелинейных колебаниях
A4.46)
(к1/кп) = 2жЕхНКЬ,
П »
где верхний знак берется для амплитуды а, а нижний — для амплитуды Ь.
Интересно, что уравнения продольных колебаний системы при нели-
нелинейном параметрическом резонансе цилиндрической оболочки бака
(сг = 1) являются линейными и отличаются от уравнений продольных
колебаний той же системы, но с динамически устойчивой цилиндриче-
цилиндрической оболочкой {а = 0), только коэффициентами динамической жестко-
жесткости сц и коэффициентами возбуждения $1; *', у = 0,1. При возникновении
параметрических колебаний (а = 1) коэффициенты сц становятся не-
несимметричными (как у неконсервативной системы), т. е. сО1 * сщ.
14.5.3; Результаты расчетов. Для оценки влияния параметрического
резонанса неосесимметричной формы на продольные колебания системы
рассмотрим цилиндрический бак с плоским недеформируемым днищем,
полностью заполненный несжимаемой жидкостью (рис. 14.17). Примем,
527
что верхний торец бака неподвижно закреплен, а к нижнему свободному
торцу прикреплена масса Мо, к которой приложена продольная сила
Хо = Хо созсот. Параметры системы: Ь/К = 6, !
= /яоо, где /поо — !
Л#=Л7$=О, Х$/ЕХН2 =0,01,
масса цилиндрической оболочки с жидкостью. В
рассматриваемом случае система Со является неде-
формируемой подвижной массой, а система С\ — ь
абсолютно жесткой опорой; поэтому у0 = со2М§,
уо=1, у^с», ^=0.
При условиях шарнирного соединения на краях
оболочки рассмотрим параметрический резонанс по
неосесимметричной форме Щ,т = &т(кях/Ь)со$т6
при к = 1, т = 4 . Собственная частота малых коле-
колебаний по этой форме равна ^
ЛЛСОО /„. . Гз^ т., „ Рис. 14.17. К расчету
= 0,05%ЫЕк/рК . При заданной амплитуде воз- нелинейных Т%отп^
мущающей силы (Х0°/Як2 =0,01) область динами- Гп^^ичТс^й
ческой неустойчивости лежит в диапазоне частот неустойчивости ци-
0,986 < СО/B0I 4) < 1,014 . линдрической обо-
оболочки бака с жидко-
На рис. 14.18 показаны зависимости безразмер- стью по неосесиммет-
ных амплитуд а и и® от частоты колебаний при ричной форме
главном параметрическом резонансе цилиндрической оболочки. При
и$,10~2\а,10~
увеличении частоты амплитуда и$ изменяется
вдоль кривых 1-2-2'-3, а при уменьшении
частоты — вдоль кривых 3-2' -1'-1. Уча-
Участок 2' - 3 лежит в области неустойчивости, а
участок 1'-2' — в области затянутых нели-
нелинейных колебаний, частота срыва которых оп-
определяется демпфирующими свойствами сис-
системы. Если бы параметрический резонанс не
возникал (а = 0), то амплитуда и§ менялась бы
вдоль кривой 1-2-3.
0,94 0,96 0,98 (о/2(о 1А Рассмотренный пример показывает, что па-
Рис. 14.18. Зависимости без- раметрический резонанс неосесимметричной
размерных амплитуд от формы колебаний цилиндрической оболочки
частоты продольных коле- несущего бака может оказать существенное
баний системы при главном нелинейное влияние на продольные колебания
параметрическом резонансе всей системы. Однако такой «вторичный» ре-
цилиндрическои оболочки с ~
бака с жидкостью по неосе- зонанс продольных колебании при частотах,
симмеричной форме близких к удвоенным собственным частотам
528
8\ +
\
\
6
4 !
2 1
Ч
<
\
- Я '
\
V"
\&
\\
т
неосесимметричных форм колебаний оболочки несущего бака, хотя и ис-
искажает картину обычных линейных продольных колебаний, тем не менее
особой опасности не представляет, поскольку амплитуды продольных ко-
колебаний при резонансе даже без учета демпфирования остаются ограни-
ограниченными.
Оценки показывают, что для типовых корпусов жидкостных ракет-
носителей, общая масса которых значительно превышает массу жидкости
в несущем цилиндрическом баке, при динамической неустойчивости
оболочки бака уровень амплитуд продольных колебаний корпуса изменя-
изменяется несущественно, несмотря на то, что гидродинамическое давление в
несущем баке за счет параметрических колебаний может возрасти в не-
несколько раз. Таким образом, продольные колебания корпуса могут возбу-
возбудить интенсивный параметрический резонанс несущего бака, однако об-
обратное влияние последнего на продольные колебания невелико и им
можно пренебречь. В этом случае при определении границ областей ди-
динамической неустойчивости A4.36) и амплитуд неосесимметричных
форм колебаний оболочки несущего цилиндрического бака ракеты
A4.35) амплитуды продольных колебаний торцов бака и^=и^Н,
V® = и\к могут быть найдены из решения линейной задачи о продоль-
продольных колебаниях корпуса.
Поскольку при параметрическом резонансе оболочки несущего ци-
цилиндрического бака гидродинамическое давление в нем может возрасти в
несколько раз, то исследование таких колебаний представляет интерес с
точки зрения прочности оболочки бака и с точки зрения взаимодействия
этих колебаний с колебаниями топливоподающрй магистрали и двигате-
двигателя. В последнем случае в результате указанного взаимодействия могут
возникнуть продольные автоколебания корпуса при частотах, близких к
удвоенным собственным частотам неосесимметричных форм колебаний
оболочки несущего бака. Такие автоколебания здесь не рассматриваются.
§ 14.6. Влияние геометрической нелинейности пологой
сферической оболочки днища на продольные колебания
жидкости в цилиндрическом баке
При осесимметричных колебаниях цилиндрического бака с жидко-
жидкостью по низшей форме оболочка днища испытывает значительные уси-
усилия в своей срединной поверхности и резкое
изгибание типа краевого эффекта вблизи со-
соединительного шпангоута. Наличие усилий в
срединной поверхности тонкой оболочки при
ее изгибании приводит к геометрической не-
нелинейности оболочки. Перемещения оболочки
и жидкости при этом остаются малыми. Для
того чтобы оценить роль геометрической не-
нелинейности оболочки днища с учетом измене-
изменения формы прогиба при колебаниях, рассмот-
рим нелинейную задачу в несколько упрощен-
ной постановке, что позволит получить реше- СТЬКM с днищем в виде поло-
ние с помощью как минимум двухстепенной гой сферической оболочки
529
аппроксимации для формы прогиба оболочки [261]. Боковую стенку ци-
цилиндрического бака будем считать абсолютно жесткой, а в качестве дни-
днища будем рассматривать тонкую пологую сферическую оболочку, имею-
имеющую на краю упругий шпангоут (рис. 14.19); жидкость при этом считаем
несжимаемой, а гравитацией пренебрегаем.
14.6.1. Уравнения колебаний в обобщенных координатах. Потен-
Потенциальная энергия осесимметричной деформации тонкой пологой сфери-
сферической оболочки с упругим шпангоутом на краю (см. рис. 14.19) при ко-
конечных перемещениях записывается в виде [261]
П = П0+Л1+П2, A4.47)
Яп =
пЕН
1
¦49оИо/^Ой/а + 2A-
г
-Ц)к(ио+(роЩа==1У +
+ A + 1л)(р0 \ у^айа • Г м/
о о
A4.48)
_ ПЕН
8A -АО До
к9 а § V*
12A +/О V ^о <Ро
Здесь Е,Н, 1Л — модуль упругости, толщина и коэффициент Пуассона
оболочки, Р - площадь шпангоута; штрихом обозначена производная по
а. Тангенциальное перемещение оболочки и(а,г) выражается через
нормальное перемещение м/(а,г) на основании уравнения равновесия
оболочки в тангенциальном направлении без учета ее инерции:
1
A4.49)
айа,
— тангенциальное перемещение оболочки на краю а = 1.
530
Кинетическую энергию продольных колебаний столба жидкости по
низшей форме при глубине заполнения бака Н > К$ можно вычислить
приближенно:
(х ^
Тж =2прк1нЛ \у»а<1а . A4.50)
и )
При этом пренебрегается перетеканием частиц жидкости вблизи обо-
оболочки днища вследствие неравномерности ее перемещений и, кроме того,
1
инерцией тонкой оболочки. В A4.50) выражение 2^\ч(а,1)айа представ-
о
ляет продольное перемещение центра масс жидкости; Я* =Н + Ксро/4 —
эквивалентная глубина жидкости в баке с пологим днищем.
Нормальное перемещение оболочки ищем в виде
"Ш) A4.51)
о
где ^(г) — безразмерная обобщенная координата, представляющая про-
продольное перемещение центра масс жидкости, направленное вверх и отне-
отнесенное к толщине оболочки; х(а>п) — заданная функция от а аппрок-
аппроксимирует низшую форму колебаний оболочки. Введение варьируемого
параметра п{г), который рассматривается в качестве обобщенной коорди-
координаты, позволяет учесть изменение формы колебаний оболочки при ко-
конечных перемещениях (при малых колебаниях можно считать п = сопз!).
Далее считаем, что на краю оболочки прогиб равен нулю (м>A,0 = 0);
поэтому # = 0 при а = 1.
Используя выражения для потенциальной A4.47) и кинетической
A4.49) энергий с учетом представления A4.51) для прогиба!, составим
уравнения Лагранжа в обобщенных координатах м0, ^ , п. После исклю-
исключения мо уравнения свободных нелинейных колебаний можно записать в
виде
^| п)%2 + е2а2(п)!;ъ =0,
A4.52)
а'0(п) + |ва{(^ +и2а'2{п)!;2 = 0,
A4.53а)
531
A4.536)
М = АА {1-ц)\х'
A + ц{ \Хаайа ] + 2A - ц)) А
и ) о и
При этом
A4.54)
В случае малых колебаний в уравнениях A4.52) следует опустить не-
нелинейные члены (они содержат в качестве множителя малый пара-
параметр е). Тогда получим
A4.55)
При малых колебаниях п = и0 = сопз1 определяется как корень урав-
уравнения #о(Ло) = 0' что> как видно из уравнений A4.55), соответствует ус-
условию минимума безразмерной частоты До • Круговая частота со опре-
определяется через безразмерную частоту п по формуле о2 =
Приближенное решение нелинейных уравнений A4.52) было получе-
получено методом возмущений [260а]. Безразмерная частота нелинейных коле-
колебаний во втором приближении при разложении по степеням малого па-
параметра е определяется по формуле
A4.56)
а =
где а — амплитуда колебаний для координаты
Более точное решение уравнений A4.52) можно получить путем
численного интегрирования [261]. Начальные условия возьмем в виде
= 0 при т = 0.
A4.57)
532
Первое уравнение A4.52) при начальных условиях A4.57) интегриру-
интегрируем численно по методу Рунге-Кутта с постоянным шагом Ат . Шаг опре-
определяем делением безразмерного периода малых колебаний То =2я/й0
на определенное число интервалов &>40, Ат = Т0/к. После каждого
шага определяем параметр пA) как корень второго уравнения A4.52). При
этом используем метод Ньютона, и в качестве начального приближения
берем значение п на предыдущем шаге. При мелком шаге (к >40) для
вычисления корня п с погрешностью 10~4 достаточно одно или два при-
приближения.
Период нелинейных колебаний Гн определяется из условий
их
« а при т = 7ц
при т = Гн/2.
A4.58)
Точность решения проверяется по величине |^тах -а\ и определяется
тем, насколько она близка к нулю.
Частота нелинейных колебаний равна
0 = 2я/Гн. A4.59)
14.6.2. Результаты расчета. В качестве примера рассмотрим пологую
сферическую оболочку с параметрами Н1 К$ = 0,01, (р$ = 0,25 , /л = 0,3 . В
случае, когда шпангоут является абсолютно податливым на выворачива-
выворачивание (или, когда оболочка крепится Е,
к шпангоуту шарнирно), будем 2
) = 1-аЛ. Для это-
этополагать
го случая
находим
=5,84,
откуда
=0,1904 при к-*°° и
-2
п
10
0,2
й1 =0,0854 при к: = 1. 6
На рис. 14.20 приведены гра-
графики изменения в течение периода 2
нелинейных колебаний Гн функ-
функций
>
л \
У
1
^«0=^84 1
! ! (
1
1
0,2
0,6
1,0
и л(т) , полученные чис- Рис-14.20. Изменение амплитуды § и па-
параметра формы л в течение периода нели-
ленным интегрированием при ^^ ^ольных колебаний ^а с поло.
^*""^ °° • кривые 1, 2, 3 соответст- гим сферичесюш днищем: кривая 1 при
вуют безразмерным амплитудам { = 1; 2 при ^ = 2 ; 3 при <* = 3; <* — ам-
колебанийа = 1,2,3. плитуда продольных колебаний центра
На рис. 14.21 показана зависи- масс, отнесенная к толщине оболочки
мость относительного квадрата частоты нелинейных колебаний п / п^
от амплитуды а при к —> ©о (кривые 7) и к = 1 B); сплошные линии по-
получены численным интегрированием; штриховые — по формуле A4.10).
533
В случае, когда упругий шпангоут закреплен от выворачивания и обо-
оболочка соединена с ним жестко, так что ее край не поворачивается, можно
принять %(а; п) = A - ссп J. Тогда
по=6,28, &о =0,2041 при к-+°о и
.©о = 0,0990 при к = 1. Для сравне-
сравнео
0,5
0,8
ния приведем результаты точного ре-
решения: О$ = 0,1925 при
к —> о© и
= 0,1925
,©0 = 0,0979 при к: = 1.
На рис. 14.22 показаны зависимо-
зависимости О /пц от а при К"—»©о (кри-
(кривая 7) и к = 1 B). Влияние нелинейно-
нелинейности в случае, когда край оболочки за-
закреплен по углу поворота, несколько
снижается по сравнению со случаем
0,6 0,7
Рис. 14.21. Зависимости квадрата час-
частоты нелинейных продольных колеба-
колебаний бака от амплитуда для упругого A)
и абсолютно жесткого B) шпангоутов,
полученные путем численного интег-
интегрирования (сплошные линии) и по
формуле приближенного решения
(штриховые линии)
шарнирного соединения. В обоих случаях с увеличением радиальной же-
жесткости шпангоута влияние нелинейности увеличивается.
Результаты вычислений показывают, что геометрическая нелиней-
нелинейность оболочки оказывает большое влияние на низшую частоту и форму
колебаний при амплитудах прогиба,
превышающих толщину оболочки. При
этом основное влияние оказывают не-
нелинейные члены, обусловленные уси-
усилиями в срединной поверхности обо-
оболочки, которые возникают за счет ма-
малых деформаций (их энергия равна
Щ). При конечных амплитудах по-
порядка толщины оболочки за счет дей-
действия усилий в срединной поверхности
при изгибе форма колебаний (здесь она
характеризуется параметром п) суще-
существенно зависит от амплитуды; изме-
1
о
0,8
0,9
Рис. 14.22. Зависимости квадрата час-
частоты нелинейных продольных колеба-
колебаний бака от амплитуды для упругого
A) и абсолютно жесткого B) шпанго-
шпангоутов при закреплении их по углу по-
поворота
нение формы колебаний в свою очередь оказывает большое влияние на
частоту. На основании этого следует, что при приближенном решении
нелинейной задачи для осесимметричных колебаний оболочки вращения
с жидкостью по методу Ритца или методу Бубнова-Галеркина необходи-
необходимо использовать как минимум двухпараметрическое представление для
формы прогиба оболочки.
Линейная теория при расчете низшей формы и частоты осесиммет-
осесимметричных колебаний жидкости в баке с пологим сферическим днищем
справедлива только при весьма малых амплитудах колебаний, при кото-
которых прогиб днища не превышает его толщину.
Часть третья
АКУСТИЧЕСКИЕ УДАРНЫЕ ВОЛНЫ.
УДАР И ПОГРУЖЕНИЕ
Глава 1 5
ДЕЙСТВИЕ АКУСТИЧЕСКИХ ВОЛН НА ЭЛЕМЕНТЫ
ТОНКОСТЕННЫХ КОНСТРУКЦИЙ
Рассматриваются задачи гидроупругости для слабых ударных (аку-
(акустических) волн давления, распространяющихся в идеальной (невязкой и
нетеплопроводной) сжимаемой жидкости. В этом случае движение среды
описывается одним волновым уравнением акустического приближения.
Общие закономерности распространения ударных волн в свободной жид-
жидкости, а также вопросы, связанные с установлением пределов примени-
применимости акустической теории при решении задач дифракции и излучения,
изложены в [129, 160].
Теория взаимодействия ударных волн с различными погруженными в
жидкость объектами (твердые тела, пластины, оболочки) интенсивно на-
начала развиваться в начале 50-х гг. (см. библиографию в [119, 123, 129]).
К настоящему времени в этой области получено достаточно много
результатов, но они относятся в основном к идеализированным объектам.
Это связано с тем, что задачи взаимодействия нестационарных волн дав-
давления с деформируемыми телами относятся к числу одних из наиболее
сложных задач механики. Быстрое изменение параметров процесса во
времени, наличие волновых фронтов, перемещающихся во времени, и
кавитационных явлений, возникновение пластических зон в материале
преграды, а также отраженных и излученных волн — все это существен-
существенно затрудняет исследование и вынуждает прибегать к ряду упрощающих
предположений и гипотез. Значительные трудности возникают при ди-
дифракции ударных волн на сложных составных оболочковых конструкци-
конструкциях, состоящих из однослойных (перфорированных) или мнЬгослойных
оболочек вращения различной формы (или системы оболочек), подкреп-
подкрепленных продольно-поперечным силовым набором и связанных с жестки-
жесткими массами. Обычно форма таких конструкций содержит геометрические
особенности (типа вершины, ребра, линии пересечения поверхностей и
т.д.), которые вносят дополнительное возмущение в дифракционное поле.
Основные достижения, полученные в области взаимодействия удар-
ударных волн с преградами, погруженными в жидкость, отмечены в работах
[24,116,117,119].
§ 15.1. Постановка задачи
Так как теория акуЬтического приближения применима на достаточно
больших расстояниях от центра взрыва, то во многих случаях кривизну
поверхности волнового фронта можно не учитывать (т. е. волну будем
535
считать плоской). Для определенности рассмотрим взаимодействие замк-
замкнутой упругой тонкостенной оболочки вращения общего вида, заполнен-
заполненной идеальной сжимаемой жидкостью и погруженной в акустическую
среду, с плоской волной давления. Возмущенное движение жидкости
внутри и вне оболочки считается потенциальным и подчиняется соответ-
соответствующим волновым уравнениям. Пусть движение оболочки описывает-
описывается линейными уравнениями теории упругих тонких оболочек в переме-
перемещениях. Тогда контактная задача гидроупругости сведется к решению
следующей системы уравнений:
з д2и, -
^Ци,- = рок —±-(рх + рг-р2)<5;з 0" = 1,3) ,
М ' A5.1)
1 д фъ ~ д(рк г1 о
Афк = г— , Рк = ~~Рк (к = 1,2) .
ск дх2 дх
Здесь щ — перемещения срединной поверхности оболочки (г = 1,2);
перемещение щ направлено в сторону внешней нормали; Ъу — извест-
известные дифференциальные операторы на поверхности; р0 , к — плотность
и толщина оболочки; р± — давление в падающей волне; р± — гидроди-
гидродинамическое давление отраженных и излученных волн во внешнюю среду;
р2 — давление на поверхности оболочки, обусловленное излучением во
внутреннюю область; щ — потенциальная функция дополнительных
скоростей, вызванных возмущенным движением внешней жидкости; <р2
— потенциал скоростей для внутренней жидкости; А — оператор Лапла-
Лапласа в пространстве, занятом жидкостью; ск , рк — скорость звука и
плотность для внешней и внутренней жидкостей; X — время; 8у — сим-
символ Кронекера.
Из условия совместного движения оболочки и прилегающих к ней
частиц среды получим условия непроницаемости оболочки:
диъ дщ дщ диъ дф2 п- .
дх дп дп дХ дп
где щ — потенциал скорости падающей на оболочку волны
(р1 != -р^дщ/дх), п — внешняя нормаль.
Для определения потенциалов срк необходимо, чтобы потенциальная
функция (р\ удовлетворяла условию на бесконечности (обычно прини-
принимают (рх —> 0 при п ~> °° ), а ф2 — условию ограниченности внутри об-
области. Если на оболочке имеются геометрические особенности, то в этих
точках потенциалы <рк должны удовлетворять некоторым дополнитель-
дополнительным условиям [278].
К дифференциальным уравнениям A5.1) в общем случае необходимо
присоединить граничные условия, зависящие от формы оболочки и ее
закрепления в пространстве,
536
П%(иьи2,и3) = 0 (т = 1,2,...) . A5.3)
Здесь N1* — некоторые дифференциальные операторы на граничных
линиях ^ срединной поверхности. Вид этих операторов и их число опре-
определяется в каждом конкретном случае формой оболочки и характером ее
закрепления.
За начальный момент времени г = О принимается момент соприкос-
соприкосновения оболочки и падающей волны. При этом
A5.4)
Таким образом, поставленная задача сводится к совместному реше-
решению системы A5.1) при указанных выше граничных и начальных услови-
условиях. Эта задача очень сложна. Основная трудность заключается в опреде-
определении гидродинамических сил взаимодействия оболочки с жидкостью.
Поэтому для получения предварительной информации о напряженно-
деформированном состоянии оболочки используются те или иные упро-
упрощения при оценке гидродинамических сил: гипотеза о несжимаемости
жидкости [160], гипотеза плоского отражения (излучения), гипотеза ци-
цилиндрического (сферического и сфероидального) отражения (см. библио-
библиографию в [119, 129]).
В силу линейности внешней гидродинамической задачи давление рх
можно представить, как алгебраическую сумму давлений р2 + Рз, гДе
р2 — давление в волне, отраженной от жесткой и неподвижной оболоч-
оболочки (давление в отраженной и дифракционной волнах), р3 — давление
излученных волн. В этом случае потенциал (Р\=у/2+Уз, причем потен-
потенциал у/2 — соответствует давлению р2, а щ — давлению р3 •
Неизвестные потенциалы у/2 , Щ и (р2 можно выразить через так
называемые переходные функции [129].
Обзор методов решения системы уравнений A5.1) дан в [119].,Отме-
[119].,Отметим одно обстоятельство, которое обычно подразумевается при исследо-
исследовании задач нестационарной гидроупругости. Уравнения движения жид-
жидкости обычно рассматривается в эйлеровых координатах и граничные
условия задаются на поверхности, которая считается неподвижной (в
действительности эта поверхность может смещаться и деформироваться).
Это несоответствие, вызванное тем, что граничные условия сносятся на
неподвижную поверхность, в задачах линейной гидроупругости несуще-
несущественно, так как истинное смещение границ мало по сравнению с харак-
характерными геометрическими размерами объекта. В случае нелинейного
взаимодействия ударных волн с тонкостенными конструкциями, когда
проявляются (вместе или отдельно) нелинейные свойства (геометриче-
(геометрические или физические) взаимодействующих сред, вопросы корректной
постановки граничных условий на поверхности контакта приобретают
особую важность.
Различные подходы (с использованием лагранжевых, смешанных и
деформируемых координат) к изучению больших смещений деформи-
537
руемых тел в идеальной жидкости, а также варианты записи кинематиче-
кинематических и динамических условий на поверхности контакта приводятся в
[167].
В ряде случаев при взаимодействии ударных волн с упругими конст-
конструкциями в жидкости могут образовываться разрывы сплошности (кави-
тационные каверны). Эти вопросы очень сложны и требуют проведения
серьезных экспериментально-теоретических исследований. В прибли-
приближенной постановке решения некоторых задач гидроупругости с учетом
кавитационных явлений при взаимодействии ударных волн с пластинами
и оболочками изложены в [98].
§ 15.2. Определение гидродинамических нагрузок
Погружение цилиндрической оболочки. В случае бесконечно длин-
длинной цилиндрической оболочки, погруженной в идеальную жидкость, за-
задача определения гидродинамических нагрузок (точнее переходных
функций) формально не представляет больших математических трудно-
трудностей. Раскладывая искомые величины по собственным формам и исполь-
используя преобразование Лапласа по времени, нетрудно получить выражение
для потенциала ср\ на поверхности оболочки:
^ 1р]пAI A5.5)
„=0 I дГ ' дТ1 I
2Ш ^К'п{в) К К
A5.6)
где 5 — параметр преобразования Лапласа по безразмерному времени
т , /? — радиус оболочки, п — номер формы, ^л(у) — модифициро-
модифицированные функции Бесселя второго рода (функции Макдональда); г , 9 —
координатные ось и угол полярной системы координат.
Несмотря на то, что выражение A5.5) в рамках линейной теории дает
точное решение, непосредственное использование его для вычисления
давления оказывается весьма затруднительным из-за наличия полюсов и
точек ветвления в A5.6).
Некоторые свойства функции Рп(р) и ее предельные значения для
цилиндра описываются в [129, 423]. Эта функция имеет быстро затухаю-
затухающий осциллирующий вид, причем в начальные моменты времени убыва-
убывание происходит по экспоненциальному закону. Точное значение функции
^п(т) имеет вид [423]
; [пКп(х)+ хКп_г(х)Г +П2[п1п{х)-х1п_1{х)]1
к ^
538
Здесь 1п(х) и Кп\х) — модифицированные функции Бесселя первого и вто-
второго рода соответственно; 31 — комплексно-сопряженные корни уравнения
<,(*)= 0. A5.8)
До п = 10 функция A5.7) табулирована в работе [423].
Наиболее естественный путь упрощения структуры функций /^(т)
заключается в использовании асимптотических разложений для функций
Макдональда при .у —» ©о 9 а также в замене исходного изображения более
простыми функциями с учетом особых точек и предельных соотношений
при ^ —»©о и ^ —> 0. Таким образом, можно достаточно просто получить
те или иные приближенные соотношения для гидродинамических сил,
которые предлагались различными авторами.
Приближенные выражения для переходных функций, которые спра-
справедливы на любом этапе взаимодействия цилиндрической оболочки с
жидкостью при погружении приводятся в [120, 129].
Погружение сферической оболочки. При действии плоской волны
давления на замкнутую сферическую оболочку радиуса К переходная
функция Рп(т) определяется выражением (потенциалы щ, щ и пере-
перемещения оболочки щ, м3 представляются в виде разложений по поли-
полиномам Лежандра)
Тяг
где Кп±У2E) — функции Макдональда полуцелого порядка
(п = 0,1,2,...). Оригиналы функций A5.9) находятся на основании теории
вычетов. Для п = 0,1,2,... функция Рп{р) имеет вид
Р0(т)= е~*, Гг= е~т СО8Т ,
Р3(т) = 0Д94в"и8Эг + [0,805 созA,954т) + 0,123 8та954т)]<Г1Д08т.
Как и в случае цилиндрической оболочки, рядом авторов предлага-
предлагались различные упрощенные зависимости, справедливые для1 различных
этапов взаимодействия сферической оболочки с жидкостью при погру-
погружении (см. [129, 160] и библиографию в [119]).
Излучение звука различными препятствиями. Для определения со-
составляющих суммарного давления р3 и Рг необходимо решить задачу
об излучении при произвольном законе движения препятствия. В случае
гармонических колебаний задача излучения получила большое развитие,
библиография по этому вопросу огромная. Между задачами излучения и
дифракции много общего. Эта общность состоит в том, что как в первом,
так и во втором случае, требуется найти решение волнового уравнения
при сходных граничных условиях, что осуществляется одними и теми же
математическими методами.
Простейшей задачей излучения является движение с заданной скоро-
скоростью у(г) плоского безграничного экрана. В этом случае решение волно-
волнового уравнения для давления в плоской волне имеет вид
539
где г — отстояние точки наблюдения от экрана, г — время отсчитывае-
отсчитываемое от момента начала движения экрана, с\ — скорость звука в жидко-
жидкости, Яо(...) —функция Хевисайда.
При г = 0 эта формула определяет давление излучения на поверхно-
поверхности экрана.
В случае цилиндрических и сферических оболочек наиболее важными
формами движения является нулевая и первая. Для этих форм можно ре-
рекомендовать следующие зависимости:
для цилиндрической оболочки (приближенные)
Р0{т)= е'^% (*0 = 0,363), ^(т) = <Гт/2 со8 @,5т) ,
для сферической оболочки (точные)
Распределение давления среды на цилиндр радиуса К, поверхность
которого в начальный момент времени была неподвижна, а затем начи-
начинала двигаться по некоторому закону (в окружном и осевом направлени-
направлениях), рассматривалось рядом авторов (см. библиографию в [119, 129,206]).
Раскладывая перемещения оболочки в ряды Фурье, для переходной
функции получаем следующее выражение (%т — волновое число вдоль
оси оболочки):
рпт(
Кп\ ^5
V
A5.10)
Различные пути упрощения структуры функции A5.10) отмечены в
[119,129].
Л.В. Фремке (см. библиографию в [119]) в развитии теории тонкого
слоя было найдено следующее выражение для переходной функции:
которое справедливо для любых этапов взаимодействия.
Если внутренняя полость оболочки заполнена идеальной жидкостью,
то необходимо решать задачу по определению давления р2 (т. е. возни-
возникает нестационарная задача излучения для внутренней области). В случае
неустановившегося движения цилиндрической оболочки, содержащей
акустическую среду (плоская задача), переходная функция характеризу-
характеризуется зависимостью
г / \
где 1п{з) — модифицированные функции Бесселя первого рода.
540
Для вычисления интеграла в A5.11) на практике используют различ-
различные приближенные приемы (асимптотические разложения, степенные
ряды и т. д.).
При движении оболочки по форме п = О функцию Рп(р) можно пред-
представить в виде
*=1 4
Ряд сходится при т < 4.
Анализ результатов по определению давления излучения для различ-
различных оболочек и полостей дан в [119, 129].
§ 15.3. Действие ударных волн на тонкостенные
конструкции и их элементы
Бесконечно длинная цилиндрическая оболочка. Реакция гладкой
цилиндрической оболочки (плоская задача) на плоскую волну давления
(рис. 15.1) наиболее подробно изучена на основании метода разложения
по собственным формам. Неизвестные функции времени могут быть най-
найдены численно с помощью интегральных
преобразований по времени или путем све-
сведения задачи к интегральным уравнениям
Вольтерра второго рода.
В качестве примера на рис. 15.2 приво-
приводятся кривые изменения радиальной ско--
рости (и> = из)
. _ рс дм? _ _ __
Ро д*
стальной оболочки, погруженной в воду, Рис. 15.1. Действие плоской вол-
при действии на нее ступенчатой волны ^ давЛения С-С на упругую
давления цилиндрическую оболочку; Н и
р = ппН(\(т — 1+Г1 СО80) К— толщина и средний радиус
оболочки, м> — прогиб оболочки
где /?о — давление на фронте волны. в нормальном направлении
Расчеты проводились при следующих значениях параметров системы:
/3 = рК/Bр0к) = 5, Я = с/с0 = 0,3 , где с0 =
- 1Л2)
скорость
распространения волн растяжения - сжатия в срединной поверхности
оболочки, р0 — плотность материала оболочки, Е — модуль упругости,
ц —коэффициент Пуассона.
Характер изменения гидродинамического давления р = рх + рг - р2
на поверхности оболочки в точке 0=0 (кривые 1 и 3) показан на
рис. 15.3; кривые 1 и 3 соответствуют пустой и заполненной водой обо-
оболочкам. Для сравнения на этом же рисунке приводятся результаты при-
приближенного расчета гидродинамического давления B) на основе гипоте-
гипотезы плоского отражения в точке оболочки при отсутствии внутри ее жид-
541
кости; Р(т) = 1. Наличие жидкости внутри оболочки приводит к более
интенсивному падению давления на оболочке и снижению максимальных
значений характеристик реакции.
Обзор применения численных мето-
методов для решения задач дифракции на
цилиндрических оболочках представлен
в [24, 25, 85,119].
Из анализа полученных результатов
следует, что асимптотические формулы
для определения давления применимы
для начальных моментов соударения и
наиболее эффективны при оценке уско-
ускорений и скоростей движения оболочки,
которые за этот период времени дости-
1,5
1,0
0,5
0
1
г
/
1
/
0,2
0,4
Рис. 15.2. Изменение скорости дви- гают максимальных значений (в общем
жения оболочки д по безразмерно- случае максимальное значение скорости
му времени т в радиальном на- может оказаться при больших т).
Метод разделения переменных (пе-
(перемещения представляются в виде рядов
правлении в точках 0 = 0 (кривые 7
и 2) и 0 = 45° C); кривая 1 — обо-
оболочка без жидкости, 2 и 3 обо- по собственным формам колебаний), по-
лочка, заполненная водой видимому, целесообразно использовать
только при оценке напряженного состояния, так как время развития мак-
максимальных напряжений достаточно большое и соизмеримо с периодом
обтекания оболочки волной давления, основную роль именно в это время
играют низшие формы колебаний (кото- р
рыми обычно на практике и ограничива- ~
)
.
При действии ударной волны число и
расположение вмятин сильно зависит от
интенсивности давления в волне и от гео-
геометрических параметров оболочки. В слу-
случае малых давлений деформация оболочки
происходит по низшим формам и можно о,5
пользоваться результатами безмоментной
теории оболочек. При больших перепадах
давлений на фронте волны необходимо
0,4
0,6
учитывать моментное состояние оболочки РисЛ53. изменение относительною
и конечность прогибов, но при этом надо ГИдрОдинамического давления р/д,
принимать во внимание пределы приме- ш ^р^рному времени т на
нимости акустической теории. поверхности цилиндрической обо-
Для описания явлений на фронте вол- лочки в точке 0 = 0: кривые 1 и
ны необходимо удерживать большое чис- 2 — пустая оболочка; 2 — расчет
ло форм колебаний, если задача решается гидродинамического давления по
^ г г гипотезе плоского отражения (из-
методом разделения переменных. лучения); 3 — оболочка заполнена
Формирование эпюр напряжений про- водой
исходит путем наложения циркулирующих по оболочке, как по замкну-
замкнутому волноводу, волн напряжений, что придает эпюрам колебательный
характер. Скорость циркуляции соответствует скорости распространения
упругих возмущений в материале оболочки.
542
Максимальные величины кольцевых мембранных напряжений по пе-
периметру оболочки распределены примерно равномерно. Наибольшее
увеличение напряжений в точке в = п по сравнению с остальными точ-
точками, объясняется наложением дифрагирующих по оболочке волн на-
напряжений. Этот вывод относится к случаю малых давлений на фронте
волны. В практических расчетах инерцией вращения можно пренебречь.
Сферическая оболочка. Для решения задач дифракции на объектах
сферической формы в основном применяются те же методы, что и при
решении задач дифракции на преградах цилиндрической формы [85,
119]. При использовании метода разделения переменных перемещения
(/ и и3@/) раскладываются в ряды по полиномам Лежандра Рп(...):
1 оз0) . A5.12)
Для нахождения неизвестных обобщенных координат в разложениях
A5.12) можно воспользоваться интегральными преобразованиями Фурье
или Лапласа по времени г, а также численными методами. Различные
аспекты этой проблемы обсуждаются в [119,129].
Толстостенная упругая сфера. Точное решение задачи дифракции
плоской (сферической) акустической волны давления на полой толсто-
толстостенной сфере получено в работе [123]. Движение оболочки удовлетворя-
удовлетворяет линейным уравнениям динамической теории упругости
с]
Здесь г, в, & — координатные оси и углы сферической системы
координат; Ф, 4*$ — скалярный потенциал и единственная ненулевая
компонента (в силу осевой симметрии) векторного потенциала *Р; с0,
су —скорости распространения упругих волн расширения-сжатия и
сдвига.
Потенциал возмущенного движения жидкости (рх(г,в,() находится
из решения волнового уравнения акустического приближений. На внеш-
внешней поверхности сферы ( г = К ) должны выполнятся условия
.оо. ,,
дг дх
где агг, агв — компоненты тензора напряжений; и — радиальное пе-
перемещение сферы; р — давление в жидкости на внешней поверхности
сферы.
Внутренняя поверхность сферы (г = Ь) считается свободной от на-
напряжений, т.е. 0гг(Ь,69() = сггв(Ь,е,1) = О. Вне возмущенной области
жидкости потенциал (рх = 0. Начальные условия считаются нулевыми.
Используя разложения искомых функций (для упругой и жидкой
сред) в ряды по полиномам Лежандра, решение строится в виде конечных
сумм по элементарным упругим волнам (при разложении по времени
543
применяется интегральное преобразование Лапласа). Для п-к компонен-
компоненты разложения потенциала щ решение имеет вид
{п-к)\к\гк
к=0
0<к<п,
Апк = 0, п < к < 0 ,
где /(х) и $ (у) —произвольные функции; г =г/К9 т = сх1/К.
Коническая оболочка. При изучении взаимодействия упругих кони-
конических оболочек с ударными волнами возникают математические труд-
трудности из-за наличия у оболочки геометрической особенности (вершины).
Поэтому эта задача остается менее всего исследованной.
В [129] рассмотрен простейший случай дифракции плоской ступенча-
ступенчатой акустической волны давления на тонкой упругой усеченной кониче-
конической оболочке. Оболочка закреплена в абсолютно жестком неподвижном
коническом экране, а волна распространяется вдоль оси оболочки (осе-
симметричная задача). Выражение для суммарного давления р принима-
принимается в виде
Р = РоЛ*>г$о)Н(с* ~~ гсо$90)+ рс2к—,
К
, к __ м>
1с =— м? =— .
К к
Здесь / — функция, аппроксимирующая точное решение [278] для со-
составляющих давлений р\ + р2 (на жестком конусе), г — радиус-вектор
сферической системы координат с началом в вершине конуса, 0О — угол
полураствора конуса, К — средний радиус оболочки. При таком пред-
представлении давление излучения /?3 определяется приближенно по гипоте-
гипотезе плоского излучения. Обзор результатов, полученных приближенными
методами, о действии дифракции акустических ударных волн на прегра-
преграды различной формы (пластины, панели, параболические оболочки, обо-
оболочки в виде эллиптического цилиндра, сфероидальные оболочки, слои-
слоистые оболочки и т. д.) приводится в [119].
§ 15.4. Определение эхо-сигналов от деформируемых
тонкостенных конструкций в жидкости
Исследованию акустических эхо-сигналов (импульсов) от оболочек
цилиндрической и сферической форм посвященьг работы [82, 83, 232].
Как известно, в этой области наиболее важной и трудной проблемой яв-
является создание эффективного алгоритма решения обратной задачи ма-
математической физики, в которой параметры упругого объекта могут быть
определены по параметрам отраженного эхо-сигнала.
544
Разработанные к настоящему времени в указанных выше работах ал-
алгоритмы для идеализированных объектов простой формы в ряде случаев
дают возможность определить некоторые параметры преграды по отра-
отраженному эхо-сигналу. Так, в [232] предложена следующая приближенная
методика определения параметров тонких упругих оболочек по эхо-
сигналу. Считается, что объект описан с точностью до некоторого числа
постоянных (параметров), которые подлежат определению. В качестве
таковых выбраны: Ь, Д, к , /3 = со/с , у = ро/р , ц , /30 = с*/с , у0 =
= р*/р, где Ь —расстояние от точки наблюдения (центр источника
зондирующего импульса) до оси (центра) цилиндрической (сферической)
оболочки; # — радиус оболочки; к — толщина оболочки; р , с —
плотность и скорость звука в среде, окружающей оболочку; р*, с* —
плотность и скорость звука в заполнителе; р0, /л , с0 — плотность, ко-
коэффициент Пуассона материала оболочки и скорость распространения
продольных волн в нем.
Далее решается серия прямых задач о дифракции плоского (сфериче-
(сферического) импульса давления на упругой оболочке. Выясняется структура
эхо-сигнала и информативность его отдельных структурных элементов
(эхо-импульсов). На основании полученных численных результатов стро-
строятся приближенные (эмпирические) зависимости между параметрами
объекта и параметрами отдельных эхо-импульсов. В качестве основных
параметров эхо-сигнала выбираются следующие величины: амплитуда и
время прихода отраженного импульса; константы, описывающие поведе-
поведение модуля передаточной функции первого излученного импульса без-
моментной моды; частоты, соответствующие максимумам модулей пере-
передаточных функций первого излученного импульса изгибной моды и пер-
первого рефракционного эхо-импульса, а также некоторые другие параметры.
Построенные зависимости используются в качестве системы уравне-
уравнений для определения параметров оболочки и заполнителя. По имеюще-
имеющемуся эхо-сигналу от неизвестного объекта производится его расшифров-
расшифровка: определяются параметры эхо-импульсов. Затем эти параметры вво-
вводятся в систему уравнений, из которой находятся параметры неизвестно-
неизвестного объекта. Таким образом, удается найти все отмеченные выше парамет-
параметры сферических и цилиндрических оболочек (с заполнителем), кроме
коэффициента Пуассона материала оболочки, поскольку параметры эхо-
сигнала зависят от него весьма слабо.
Предложенные универсальные признаки эхо-сигнала могут быть ис-
использованы на практике при разработке комплекса различных приборов,
предназначенных для определения параметров сложных объектов.
§ 15.5, Устойчивость упругих систем и конструкций при
действии ударных волн и импульсных нагрузок
Рассмотрим задачи об устойчивости упругих систем при действии на
них ударных (импульсных) нагрузок, которые «мгновенно» возрастают
до некоторой величины, а затем убывают по некоторому закону
(рис. 15.4). Вопросы о критериях устойчивости упругих систем при удар-
545
ных нагрузках до сих пор остаются дискуссионными. Наибольшее рас-
распространение получили «практические» критерии, отражающие конкрет-
конкретные требования к условиям эксплуатации конструкции различных клас-
классов [93, 120].
р
Ртах
Р <
Ртах
Р
Ртах
о
0
Рис. 15.4. Возможные виды ударных нагрузок: а — ступенчатый импульс конечной дли-
длительности; б, в — ударные нагрузки с линейным и экспоненциальным законом падения
нагрузок за фронтом; г — ступенчатая нагрузка бесконечной длительности
Рассмотрим упругую систему, движение которой описывается урав-
уравнением в безразмерной форме [177]
ЬТГ + р =тй + сп1, A5.13)
где Ь — дифференциальный оператор, и — вектор перемещений; а —
коэффициент линейного депфирования, р — вектор внешних сил.
Будем искать решения, удовлетворяющие некоторым граничным и
начальным условиям:
Г (и) = 0 , ЩО) = и0, Н@) = П°. A5.14)
Под воздействием внешних факторов, учесть которые по тем или
иным причинам не представляется возможным, система совершает дви-
движение, определяемое вектором и = и + и*, где и* — вектор возмущений,
изучение характера которых и составляет задачу об устойчивости невоз-
невозмущенного решения и.
Для широкого класса операторов с помощью A5.13) и A5.14) можно
показать, что при внешних нагрузках, исчезающих с течением времени,
невозмущенное движение асимптотически устойчиво, т.е. возмущения
при X —» ©о стремятся к нулю. Это, однако, не означает, что возмущения
остаются произвольно малыми в любой момент времени. При некоторых
условиях амплитуды возмущений на этапе переходного процесса могут
стать достаточно большими. Таким образом, на практике критерий ус-
устойчивости должен заключаться в принятии верхней границы для тех или
иных параметров напряженно-деформированного состояния упругой сис-
системы. Этот подход идентичен концепции устойчивости на конечном ин-
интервале времени.
В качестве критерия динамической «потери устойчивости» для тон-
тонких упругих оболочек обычно принимают величину прогиба в характер-
характерной точке, равную толщине оболочки. В этом случае нагружение при
заданном давлении на оболочку р(г) характеризуется двумя параметра-
параметрами: максимальным давлением ртах и импульсом
/ = |/?(*)^, A5.15)
О
546
где и — время, при котором прогиб оболочки становится равным неко-
некоторому заданному критическому значению.
Другой возможный критерий связан с ограничением на некоторый
параметр напряженного состояния.
Рассмотрим далее устойчивость тонкостенных оболочек при действии
на них ударных волн различной интенсивности. Как показано выше, в
случае действия на деформируемые преграды акустической ударной вол-
волны суммарное давление р, действующее на преграду, можно предста-
представить в виде:
/>3> A5.16)
где рх — давление в падающей волне, р2 — давление в отраженной
волне от жесткого тела, /?3 — давление излучения.
Для воздуха теория акустического приближения допустима, если пе-
перепад давлений в падающей волне не превышает 7 кПа. Поскольку дав-
давлением рз в воздухе можно пренебречь, то задача определения внешних
нагрузок в этом случае является чисто аэродинамической, и сумму
Ро - Р\ + Рг обычно называют дифракционным давлением.
В жидкости же давление /?3 играет существенную роль. Составляю-
Составляющие Р1 (/ = 1,3) суммарного давления связаны с соответствующими по-
потенциалами У1 известными соотношениями (см. § 15.1).
Для оболочек вращения потенциалы уг2 и щ можно представить
через «переходные функции» РA) в форме
о
где м> — прогиб по нормали к срединной поверхности оболочки. К на-
настоящему времени получен ряд приближенных выражений для функций
РA), которые с практической точки зрения достаточно хорошо согласу-
согласуются с их точными представлениями в случае дифракции акустических
ударных волн на сферических (,Р(т) = ехр(-т)со8Т) и цилиндрических
(/7(т) = ехр(-т/2)со8(г/2)) оболочках (рис. 15.1). Некоторые из них
представлены в табл. 15.1. Точность этих аппроксимаций и пределы их
применимости подробно обсуждаются в [129, 270]. В случае цилиндра
расчеты давления по этим соотношениям подтверждаются эксперимен-
экспериментальными данными.
Полученные соотношения для гидродинамических нагрузок становят-
становятся неприменимыми в следующих случаях: возникающие давления в жид-
жидкости больше 100 МПа; перемещения контактных поверхностей стано-
становятся очень большими (для оболочек соизмеримыми с радиусами кри-
кривизны); в жидкости возникает кавитация.
Поскольку в динамике (с учетом среды) картина потери устойчивости
оболочек значительно сложнее, чем в статике, то обычно в задачах по-
подобного рода вводят гипотетические критерии динамической устойчиво-
547
ста, о которых говорилось выше: нагрузку считают критической, если
амплитуда изгибных прогибов достигает толщин оболочки. При этом
нагрузка характеризуется двумя параметрами: максимальным давлением
и импульсом. В такой постановке решены задачи об устойчивости ци-
цилиндрических панелей в газе и в жидкости при действии на них плоских
акустических ударных волн [93,129].
Таблица 15.1
Переходные функции Г для определения нагрузок при действии
нестационарных акустических волн на сферические и цилиндрические оболочки
Оболочки
Сферическая
Гладкая ци-
цилиндрическая
Подкреплен-
Подкрепленная цилинд-
цилиндрическая
Переходные функции
Рп(!)=еМ-(п + 1)т],
Рп(т) = [1-(п+\)ф]х
х{1-Я[т-2/(и+1)]},
^(т)=ехр(-гУ0{[(«+1J-1]1/2т}
Пт)=B/я)ехр(-т/2)(т2-02)'/2х
хсь[(г2 -в2)**2/2 ],
Рл(т)=ехр(-г/2)У0^(п2-1/4I/2]>
Р-„(т) = A-лт/2)[1-Я(т-2/п)]
Рпш(г) = Ь-г/2Мпт]х
х[1-Я(т-2Мли)],
Мпт = (п2 +т2)" 2 ; т,=тпК/1,
/?пт(т)=ехр(-т/2)/0[(п2 +пё -У4)*т]
Представление функции
нормального прогиба
>ф,т)
*<6>,т)=|>и(г)Рл(соз6>)
/1=0
и>@,т)= ]5Г м>й(т)со$л0
п=0
хсо5пвсо$т#х
Приняты обозначения: т = а/К — безразмерное время; К — радиус оболочки;
Рп(соз0) —полиномы Лежандра, /0(...) —функция Бесселя первого рода нулево-
нулевого порядка; / — расстояние между периодически расположенными шпангоутами.
Акустическая модель сжимаемого газа позволяет описать распростра-
распространение волн лишь сравнительно слабой интенсивности. Для описания бо-
более интенсивных волн следует привлекать нелинейные уравнения газовой
динамики. В этом случае при решении задач о поведении и динамической
устойчивости тонкостенных конструкций, взаимодействующих с удар-
ударными волнами в воздухе, можно пренебречь влиянием деформации кон-
конструкции на величину давления на ее поверхности. Это предположение
позволяет разделить задачу взаимодействия среды и конструкции на два
этапа.
На первом этапе решают задачу о дифракции волны сильного разрыва
на жестких поверхностях [93, 177]. Тогда аэродинамическая нагрузка,
возникающая при действии волны давления, может быть приближенно
аппроксимирована подвижной нагрузкой. Так, при дифракции плоской
548
ударной волны на цилиндрической оболочке (рис. 15.5) распределение
давления на ее поверхности аппроксимируется выражением
Здесь у0 — скорость движения фронта волны; р0 — давление в точках
встречи волны вдоль образующей цилиндра (на линии встречи с фрон-
фронтом) в момент ее прихода, его определя-
определяют через параметры газа в невозмущен-
невозмущенной области и число Маха фронта. Для
бесконечно длинной цилиндрической
оболочки установлены пределы измене-
изменения параметров подобия, когда изменение
давления вследствие деформации не пре-
превышает 10 % [177].
На втором этапе одним из численных
методов интегрируют уравнения движе-
движения деформируемой конструкции с уче-
учетом начальной погиби при заданной
внешней подвижной нагрузке. Многочис-
Многочисленные результаты решений и экспери-
экспериментальных исследований несущей спо-
способности и динамической устойчивости
замкнутых цилиндрических и конических
оболочек, а также пластин и панелей при
действии на них ударных волн с различной ориентацией фронта волны
приведены в работах [93, 177]. В ряде случаев граница устойчивости дос-
достаточно хорошо описывается выражением вида [177]
(Ртах - Р*)/(/ - ^*) = С0П8* . A5-18)
где р* — значение статической критической нагрузки, выражения для
Ртах и 3 соответствуют формуле A5.15).
Формула A5.18) получена для цилиндрической оболочки при дейст-
действии ступенчатого импульса конечной длительности У* = Ршах^о» (см-
рис. 15.4 а).
Например, при действии волны давления на коническую оболочку
(фронт волны перемещается параллельно центральной оси конуса) одна
из асимптот гиперболы согласно формуле A5.18) соответствует статиче-
статическому критическому внешнему давлению р*, найденному для цилинд-
цилиндрической оболочки с радиусом, равным среднему радиусу усеченной ко-
конической оболочки, и длиной, равной длине образующей конуса. Другая
асимптота принята в форме
У* = 5рс0К0(к/КJ соьа,
где с0 — скорость звука в материале; Ко, а — средний радиус и угол
полураствора конуса.
Рис. 15.5. Схема взаимодействия
плоской волны С-С с цилиндри-
цилиндрической (сферической) оболочкой
Глава 16
УДАР И ПОГРУЖЕНИЕ ЭЛЕМЕНТОВ ТОНКОСТЕННЫХ
КОНСТРУКЦИЙ В ЖИДКОСТЬ
Представлен аналитический обзор исследований по проблеме удара и
погружения деформируемых тел и тонкостенных конструкций в полу-
полупространство, занятое идеальной жидкостью. К данной проблеме отно-
относится широкий круг задач, связанный с анализом динамического поведе-
поведения различных объектов авиационно-космической техники: посадка на
воду возвращаемых космических аппаратов, спасение отработанных сту-
ступеней больших ракет-носителей, посадка и удар о воду гидросамолетов,
экранопланов и самолетов палубной авиации. Так как задачи подобного
рода в математическом плане достаточно сложны из-за существенно не-
нелинейного характера взаимодействия объекта с жидкостью, то для их
решения, как правило, используются численные методы.
Рассматриваются задачи об ударе й погружении деформируемых тел и
тонких оболочек в идеальную жидкость, занимающую нижнее полупро-
полупространство. Погружение происходит через плоскую свободную поверх-
поверхность жидкости, давление на которой считается постоянным. Скорость
движения тела (оболочки) в момент контакта с жидкостью предполагает-
предполагается малой в сравнении со скоростью распространения звука в жидкости.
В случае сжимаемой жидкости ее движение описывается одним вол-
волновым уравнением акустического приближения, а в случае несжимаемой
жидкости — уравнением Лапласа.
Процесс погружения произвольного тела в жидкость через ее свобод-
свободную поверхность условно можно разбить на три стадии: от первого каса-
касания до отрыва области поворота свободной поверхности от поверхности
тела, от отрыва области поворота от поверхности тела до формирования
каверны, движение с развитой кавитацией. Ниже рассматривается только
первая стадия погружения, на которой, как правило, возникают макси-
максимальные гидродинамические давления и которая представляет интерес с
точки зрения расчета на прочность погружающейся в жидкость конст-
конструкции.
При погружении произвольного тела в жидкость характер распреде-
распределения гидродинамического давления по смоченной поверхности тела, а
также его величина определяются многими факторами: начальной скоро-
скоростью удара, углом входа тела и его массой, условиями сжатия водовоз-
душной среды в момент контакта поверхности тела с водой, сжимаемо-
сжимаемостью жидкости, упругостью тела и другими факторами. Во многих случа-
случаях, когда скорость движения жидкости существенно меньше скорости
550
звука в ней и различные точки поверхности тела не вступают одновре-
одновременно в контакт с жидкостью, сжимаемостью и весомостью жидкости
можно пренебречь.
Решение задачи даже при оговоренных упрощениях представляет
большие математические трудности, которые обусловлены существенно
неустановившимся характером движения жидкости при погружении тела,
нелинейностью условий на ее свободной поверхности, а также наличием
струйных явлений и брызгообразования, приводящих к разрывным дви-
движениям.
Простейшей схемой для решения гидродинамической задачи о погру-
погружении тела в воду является задача об ударе твердого тела, плавающего на
поверхности жидкости.
К настоящему времени получено большое количество конкретных
результатов как для плоских, так и для пространственных течений в слу-
случае жестких тел, если задача ставится как задача об ударе плавающего
тела.
Вообще говоря, явления непрерывного погружения и удара плаваю-
плавающих тел существенно различны и их нельзя отождествлять. Основное
различие заключается в том, что в теории удара плавающих тел игнори-
игнорируется перемещение свободных границ за время удара. Но строгое реше-
решение задачи о погружении тела даже простейшей формы не удается дове-
довести до конца. Поэтому в большинстве практически важных задач эти
трудности обходят путем построения приближенных решений, основан-
основанных для начальных этапов погружения на аналогиях с ударом плавающих
тел (с соответствующими модификациями) и других аналогиях .
Подробный обзор исследований по проблеме погружения деформи-
деформируемых тел и конструкций в жидкость дан в [122, 124, 130, 131, 207,299].
§ 16.1. Определение гидродинамических нагрузок при погружении
в несжимаемую жидкость элементов тонкостенных конструкций
На величину и характер распределения гидродинамических давлений
существенное влияние оказывает упругость погружающегося тела. Учет
взаимодействия между упругой конструкцией и жидкостью изменяет
ускорение центра масс всей системы и характеристики реакций.
Погружение упругого клина. Рассмотрим погружение бесконечно
длинного осесимметричного клина, имеющего килеватость, в полупро-
полупространство, занятое идеальной несжимаемой жидкостью. Боковые поверх-
поверхности клина состоят из тонких упругих пластин, опертых на неподвиж-
неподвижные опоры (рис. 16.1). Предполагает-
Предполагается, что у0 « с, а угол килеватости /3
является малой величиной (у0 — на-
начальная скорость контакта клина с
жидкостью, с — скорость звука в ней,
т0 — масса двух упругих пластин,
Мх — масса жесткого тела). На Рис. 16.1. Схема поФужения упругого
1 тела с килеватостью в несжимаемую
рис. 16.1 Оху —прямоугольная сие- жидкость
551
тема координат (ось у направлена вверх), 2Ъ и 2Ь0 — ширина смочен-
смоченной поверхности с учетом и без учета подъема жидкости. Для определе-
определения гидродинамических сил воспользуемся гипотезой Вагнера [437], на
основании которой действительная картина обтекания клина заменяется
обтеканием непрерывно расширяющейся плоской пластины, скорость
расширения которой равна скорости увеличения смоченной поверхности
тела, а скорость обтекания — скорости погружения. После замены по-
погружающегося клина плоской упругой расширяющейся пластиной гид-
гидродинамическую задачу можно сформулировать следующим образом.
Требуется найти решение уравнения Лапласа в полупространстве с соот-
соответствующими граничными условиями:
|, A6.1)
дх2 ду2
ф = О при | х | > Ъ, у = О,
= 0,
A6.2)
A6.3)
A6.4)
В A6.1)—A6.4) ф —потенциал скоростей возмущенного движения
жидкости, м> — нормальный прогиб пластины, V — текущая скорость
контакта клина с жидкостью. Для решения задачи продолжим функцию
ф в верхнюю часть плоскости хОу . В результате продолжения получим
функцию <р(х,у,1)9 аналитическую во всей плоскости за исключением
отрезка |*|<&, ;у = 0, причем ф(х,у,1) = -ф(х,~-у,т). После введения
эллиптической системы координат и перехода от потенциала ф к давле-
давлению р на основании линеаризированного соотношения Коши-Лагранжа
дф
где р — плотность жидкости, будем иметь
A6.6)
п
т-0
Здесь м/ = н/А , к = к/1, т = с///, Ь =Ь/1, V = у/с ,
552
. A6.7)
, х = х/1 ,
Т2т+\ &/Ь) = соз [Bт +1) агссоз (х/Ь)],
где Т2т+1(х/Ъ) и С/2т+1(*/^) —полиномы Чебышева первого и второго
рода, точка означает дифференцирование по безразмерному времени т.
Полученные формулы для давления справедливы только при неболь-
небольших глубинах погружения. Выражение для рх соответствует давлению,
действующему на жесткую пластину, движущуюся поступательно со
скоростью V, а выражение для р2 связано с упругими. колебаниями
пластины.
При погружении в жидкость упругих тел функция к не имеет уни-
универсального значения, как при ударе жестких тел. Для жестких тел функ-
функция к(Ь) зависит только от конфигурации ударяющегося тела и может
быть определена предварительно до решения основной задачи. Здесь она
представляет лишь вспомогательную величину, с помощью которой ин-
интегральное уравнение для определения ширины смоченной поверхности
клина можно записать в форме
X
А(х,*)= Н+\(уу/у)к4Ъ, A6.8)
О
где Л(х,{) —уравнение, описывающее процесс охвата деформацией по-
поверхности клина, уу = йф/йу — вертикальная скорость на свободной
(плоской) поверхности жидкости (у = 0), Н — глубина погружения.
Уравнение A6.8) необходимо интегрировать параллельно с уравне-
уравнениями, описывающими движение всей упругой системы. Существует
несколько способов приближенного определения функции к без реше-
решения интегрального уравнения A6.8). Один из них состоит в использова-
использовании формулы для к, полученной в случае жесткого криволинейного
клина, для упругого клина [275]
* ¦ A6-9)
где штрихом обозначена производная по координате х.
Такой «квазистационарный» подход для оценки гидродинамического
давления дает удовлетворительные результаты только в том случае, когда
погонная масса конструкции велика по сравнению с присоединенной
массой жидкости.
Другой способ приближенного определения функции к (г) при по-
погружении упругого клина в воду состоит в использовании механического
аналога. В этом случае вместо погружения в жидкость конструкции, по-
показанной на рис. 16.1, рассматривается вход в воду системы (рис. 16.2),
состоящей из двух жестких тел, связанных между собой упругой пружи-
пружиной с жесткостью С\. В контакт с жидкостью входит тело массой т0,
имеющее форму клина. Жесткость пружины С\ определяется теоретиче-
553
"У//////Л
ски (через основную частоту колебаний пластин днища) или эксперимен-
экспериментальным путем.
Для системы, представленной на рис. 16.2, функция к будет опреде-
определяться по формуле: к = B/лI$р. Тогда ширина 2Ь смоченной части
погружающейся конструкции будет рав-
равна 2Ь = л/1%рн , где И —глубина по-
погружения жесткого клина в системе-
заменителе (рис. 16.2).
Аналогичная модель (система масс,
соединенных между собой пружинами)
использовалась рядом авторов для учета
в первом приближении упругости конст-
пофуженйй Г не^маемукГжид- рукции в задачах о посадочном ударе
кость упругого тела с килеватостыо; гидросамолетов и об ударе днищем судна
5-свободная граница жидкости 0 волну (см библиографию в [131]).
Погружение цилиндрической оболочки. Рассматривается вертикаль-
вертикальный вход в жидкость бесконечно длинной упругой цилнндри-ческой обо-
оболочки ( панели), связанной с жестким телом массой Мх. Образующая
оболочки параллельна свободной поверхности жидкости (плоская зада-
задача). В этом случае при аппроксимации смоченной поверхности оболочки
плоской упругой расширяющейся пластиной давление р будет опреде-
определяться по формулам A6.5Н16-Л где х=х/К, 6=4/Я, *=А/Л,
т = а/Я (К — радиус оболочки).
Погружение оболочки вращения. Ограничимся рассмотрением вер-
вертикального погружения в идеальную жидкость пологой оболочки враще-
вращения, связанной с абсолютно жестким телом массой М}. До момента со-
соприкосновения с поверхностью жидкости вся система движется верти-
вертикально вниз с постоянной скоростью у0 (у0 « с). Влияние сжимаемости
жидкости сказывается только в самый начальный момент времени, пока
волна сжатия не вышла за пределы тела. Для тел вращения, которые не
имеют плоских границ, этот период очень мал. Поэтому сжимаемостью
жидкости будем пренебрегать.
В случае быстрого вертикального погружения упругих оболочек в
жидкость гидродинамические нагрузки достигают своего максимального
значения при небольших глубинах по-
погружения, поэтому можно воспользо-
воспользоваться теми же вагнеровскими сообра-
соображениями, что и для жестких тел. Будем
считать, что при сделанных предполо-
жениях течение жидкости около упру-^ «Г" К~.Т I ^ _1?1-Г"—'
гой оболочки вращения аналогично _ ,,~ г, т
тению вперед/упру™ диска Ра- ^П^^^
диуса * = *('), который движется по- лотки, связанной с жестким телом
* массой А/,; 26, Ж — величина
ступательно со скоростью у + >уэ где Ш0Ченных поверхн^гей тела с уче-
V — скорость движения всей системы том подъема жидкости
554
как твердого тела, IV — нормальный прогиб оболочки (случай погруже-
погружения сферической оболочки показан на рис. 16.3). Аппроксимация смо-
смоченной поверхности оболочки плоским диском тем точнее, чем меньше
глубина погружения. Постановка задачи в этом случае будет аналогична
той, что рассматривалась для упругого клина.
Введем далее координаты сжатого эллипсоида вращения (сжатого
сфероида) %х % %2> в. Поверхности ^ = согш образуют конфокальное
семейство сжатых эллипсоидов вращения, поверхности %2 = соп$( —
конфокальное семейство однополостных гиперболоидов и поверхности
в = соп51 — семейство меридиональных плоскостей. Поверхность ^2=0
соответствует свободной плоской поверхности жидкости, а поверхность
^1=0 совпадает с диском.
Раскладывая нормальный прогиб оболочки м<€2»0'') в ряд Фурье по
угловой координате в:
т-0
Можно представить решение уравнения Лапласа в форме
A6.10)
A6.11)
где Р™(%г) и б^О'^) — присоединенные функции Лежандра первого и
второго рода. При осссимметричном характере деформирования оболоч-
оболочки 01=0.
Гидродинамическое давление ру действующее на оболочку, можно,
как и в случае упругого клина, представить в виде суммы двух слагаемых
Р\ + Рг • ПРИ этом составляющие р\ и р2 будут определяться выраже-
выражениями
A6.12)
со$тв. A6.13)
555
, к а чх2 + 12
к= —, т = —, г=
К К К ~ Ь Ь
где к — толщина оболочки, /? — характерный линейный размер оболочки,
Охуг — прямоугольная система координат, начало которой располагает-
располагается в начальной точке удара (см. рис. 16.3); ось у направлена вниз, а две
другие оси лежат на свободной поверхности жидкости.
Функция к (г) здесь, как и в случае погружения упругого клина, вве-
введена формально по аналогии с ударом жестких тел. Предполагая, что
везде при г > Ъ в каждый момент времени распределение вертикальных
скоростей на свободной поверхности такое же, как и при вертикальном
ударе плавающего на поверхности жидкости диска радиуса Ь, можно (как
и в случае упругого клина) составить интегральное уравнение для опре-
определения функции кA), а, следовательно, и Ь(т):
A6.14)
Л) П ЛЯ
о
где Я — уравнение контура деформируемого тела, Н — глубина погру-
погружения.
При выводе формул для давления в интеграле Коши - Лагранжа были
опущены некоторые слагаемые, пропорциональные квадрату полной ско-
скорости движения жидкости. Роль этих слагаемых увеличивается с ростом
глубины погружения.
Эти формулы дают распределение давления по упругому диску, спра-
справедливое везде, за исключением небольшой области у самих границ по-
поверхности удара, где возникает «брызговая струя» жидкости. В местах
возникновения этой струи течение жидкости ( относительное) не будет
сходно с обтеканием диска и применение полученных формул для давле-
давления незаконно.
Чтобы исследовать явления, происходящие в месте возникновения
брызговой струи, следует рассмотреть течение жидкости в этом месте и
определить характеристическую функцию этого течения.
Указанные выше особенности при г = Ъ являются устранимыми, так
как результирующая сила сопротивления N{1) является конечной вели-
величиной.
§ 16.2. Удар и погружение деформируемых тел и оболочек
в несжимаемую жидкость
Большинство теоретических исследований, относящихся к проблеме
входа упругих конструкций в жидкость (воду), относятся к случаю вер-
вертикального погружения в несжимаемую жидкость плоских клиновидных
тел и оболочек вращения (при этом рассматривается осесимметричная
деформация оболочки).
В случае быстрого вертикального погружения тел с килеватостью, ци-
цилиндрических, конических и сферических оболочек в несжимаемую жид-
556
крсть гидродинамические нагрузки достигают своего максимального значе-
значения при небольших глубинах погружения, поэтому при определении давле-
давления/? можно воспользоваться формулами A6.5)—A6.7), A6.12), A6.13).
Задача в этом случае сводится к интегрированию системы связанных
групп уравнений, описывающих приближенно процесс погружения упру-
упругой оболочки вместе с жестким телом, на которое она опирается, в иде-
идеальную несжимаемую жидкость. Первая группа уравнений описывает
движение всей системы как твердого тела (в случае вертикального входа
она состоит из одного уравнения относительно скорости погружения у).
Вторая группа уравнений служит для определения границы смоченной
поверхности оболочки (функций Ъ(г) или к({)). Из третьей группы
уравнений можно найти закон распределения гидродинамического дав-
давления р по смоченной поверхности оболочки. Последняя группа уравне-
уравнений включает в себя уравнения вынужденных колебаний самой оболочки
относительно жесткого тела. Полная система уравнений интегрируется
далее какими-либо известными методами.
На основании данного подхода решен большой класс задач о верти-
вертикальном и наклонном входе в жидкость: тел, имеющих килеватость, од-
однослойных и слоистых цилиндрических, конических и сферических обо-
оболочек (подробная библиография по рассматриваемой проблеме приво-
приводится в обзорах [122, 131]).
Приведем определяющую систему уравнений для задачи о вертикаль-
вертикальном погружении в полупространство тонкой бесконечно длинной цилин-
цилиндрической оболочки (плоская задача). Оболочка состоит из двух внешних
несущих изотропных слоев, заполнителя и упруго оперта (винклерово
основание) на абсолютно жесткое массивное цилиндрическое ядро
( у0 « с). Для несущих слоев считаются справедливыми гипотеза Кирх-
Кирхгофа, а для заполнителя — гипотеза о несжимаемости материала в попе-
поперечном направлении.
Тогда при аппроксимации смоченной поверхности оболочки плоской
расширяющейся пластиной движение системы будет описываться сле-
следующими уравнениями:
Здесь
у, А^ _§К_ „_у_
557
=^ (
где 2^-, А/ — модуль упругости и толщина /-го слоя (г = 3 соответствует
заполнителю); К — радиус оболочки; в—полярный угол; н> — переме-
перемещение оболочки в направлении нормали к исходной поверхности приве-
приведения; С — модуль сдвига заполнителя; С\ —коэффициент жесткости
упругого основания; р — плотность жидкости; # — ускорение свободного
падения; рг- — плотность материала /-го слоя; V — скорость вертикального
смещения жесткого ядра; М\ — масса ядра на единицу длины; р — внеш-
внешнее гидродинамическое давление, действующее на оболочку (см. § 16.1).
Детали расчета на основании метода Бубнова представлены в [118].
Из анализа результатов, полученных для оболочек вращения, следует,
что в зависимости от жесткостных параметров конструкции характери-
характеристики реакции оболочки при учете гидроупругого взаимодействия могут
существенно отличаться от характеристик, найденных без учета взаимо-
взаимодействия.
Различие в эпюрах реакций заключается в характере их изменения во
времени и в величине максимальных значений. При учете взаимодейст-
взаимодействия максимумы реакций наблюдаются позднее, и они могут для отдель-
отдельных величин намного превосходить значения, полученные в случае жест-
жесткого удара. Так, например, ускорения центра масс системы (или пере-
перегрузки) при учете гидроупругого взаимодействия (в практическом диапа-
диапазоне изменения параметров конструкции) оказываются выше, чем в слу-
случае, когда взаимодействие не учитывается (р2 = 0). Этот вывод под-
подтверждается также экспериментальными данными [372].
§ 16.3 Удар и погружение деформируемых тел и оболочек
в сжимаемую жидкость
В силу сложности построения аналитических решений в задачах о
погружении деформируемых конструкций в сжимаемую жидкость (это
связано, в основном, с существенным формоизменением контактных и
свободных поверхностей, возникновением и развитием зон кавитации в
жидкости и упругопластических деформаций в материале конструкции)
наиболее перспективными методами решения следует считать численные
и, в частности, методы конечных разностей, конечных и граничных элемен-
элементов [85, 122, 155,204].
Приведем формулировку задачи о вертикальном входе тонкостенных
упругих сферических и конических оболочек, связанных с жестким телом,
в полупространство, занятое идеальной сжимаемой жидкостью (рис. 16.4).
До момента касания с жидкостью система оболочка-тело движется
равномерно со скоростью у0, направление которой совпадает с осью
558
симметрии оболочки и нормалью к невозмущенной свободной поверхно-
поверхности жидкости. Движение жидкости, вызванное таким погружением обо-
оболочки, будет осесимметричным. Вязко-
Вязкостью, весомостью и изменением внут-
внутренней энергии частиц жидкости пре-
пренебрегаем.
Для описания поведения жидкости
используются переменные Лагранжа,
которые позволяют непосредственно в
процессе решения задачи определить
перемещения свободной поверхности
жидкости и точно поставить граничное Рис. 16.4. Погружение в сжимаемую
условие на смоченной поверхности жидкость сферической и конической
оболочки упругих оболочек, связанных с жест-
В неподвижной и цилиндрической *им телом массой Мо
системе координат гОу (рис. 16.4) уравнения в форме Лагранжа, описы-
описывающие осесимметричное движение жидкости, будут иметь вид
V
0
У
ос
Шш
\
ди
др
дг _ 5у _ _ - Р -1
дт 5т I
где введены следующие безразмерные переменные:
__М1 -_М2 - _ V -_У0 __Г
с с с ' с К'
Здесь «!, м2 — составляющие скорости частиц жидкости в направлениях
г, у —соответственно; р, р* —давление и плотность жидкости; с,
р — скорость звука и плотность невозмущенной жидкости; г0, Уо —
начальные координаты частиц жидкости; ^ = (г,у)/(г^,у^) —якобиан;
К — радиус кривизны срединной поверхности оболочки (радиус основа-
основания для конической оболочки); V — скорость погружения тела в момент
времени г; I = 7Д5 — константа уравнения состояния воды; Мо — масса
тела, соединенного с оболочкой.
Для описания нестационарных колебаний оболочки используются
геометрически нелинейные уравнения, учитывающие сдвиг и инерцию
вращения поперечного сечения.
Заменяя воздействие оболочки на тело эквивалентной системой уси-
усилий, приложенных в точках закрепления, получаем следующее уравнение
для определения скорости движения тела:
2 / \ ^
Л/п— = г—171 8Ш]Зп"~Оь« ~ созвп/» С = » к =—,A6.16)
559
где /?о — угол полураствора оболочки; Ь = 1 — для конической оболоч-
оболочки; Ь = 8т/30 — для сферической оболочки; а0 — координата точки
закрепления (для сферической оболочки /3 = а); 7} , B — усилия в сре-
срединной поверхности оболочки.
Начальные условия имеют вид
4=0 =уо> ЧмГЫ^0' Н,=о =0' Н,=о = г0' Ч=о = И>.
0()
Граничные условия ставятся следующим образом:
Я, = 0. <. = Ч. = 0, п\а=ао = н^|а=ао = Иа=ао = 0,
] усо8/3+—-А;,
|>У2 а?
где $1 — свободная поверхность жидкости, $2 — поверхность сопри-
соприкосновения оболочки и жидкости, Яоо —невозмущенная поверхность
жидкости; и, м> — перемещения срединной поверхности оболочки, (р —
угол поворота нормали.
В полюсе оболочки а = 0 воспользуемся условиями симметрии, ко-
которые для сферической и конической оболочек будут определяться соот-
соотношениями
Н =0'
+ ЙБ1П0О]а=О = ° •
Решение системы уравнений гидроупругого взаимодействия прово-
проводится конечно-разностным методом.
Расчетная область жидкости покрывается сеткой, ячейки которой
представляют собой четырехугольные лагранжевые элементы, движу-
движущиеся вместе с жидкостью. Положение в пространстве и скорости опре-
определяются в вершинах четырехугольников, а давление и плотность счита-
считаются постоянными по ячейке. Конечно-разностные уравнения для скоро-
скорости получаются путем интегрирования обеих частей уравнений A6.15) по
некоторому малому объему и преобразования соответствующих интегра-
интегралов по объему к интегралам вдоль линии. Контур интегрирования для
данной вершины ячейки образуется отрезками, проведенными через цен-
центры соседних ячеек. Плотность для данной ячейки вычисляется из усло-
условия сохранения массы жидкости в ней, а давление — из уравнения со-
состояния.
При численном исследовании движения жидкости в лагранжевых пе-
переменных наблюдается появление нефизичных передвижений вершин
сетки, которые вызываются коротковолновыми возмущениями и приво-
560
#ят к значительному искажению расчетных ячеек. Для сглаживания этих
возмущений используется регуляризация расчетной сетки.
На основании данного подхода изучены характеристики реакций при
внедрении в сжимаемую жидкость сферических, конических, а также
цилиндрических (наклонный вход) оболочек [122].
Численные и аналитические исследования, проведенные для цилинд-
цилиндрических и сферических оболочек (тел) при г0 < 50 м/с, показывают, что
расчеты с использованием теорий сжимаемой и несжимаемой жидкости в
данном диапазоне скоростей погружения дают близкие между собой ре-
результаты.
Методика, основанная на синтезе двух явных схем: схемы сквозного
счета С.К. Годунова на подвижной сетке для жидкости и схемы типа
«крест» для интегрирования нелинейных уравнений движения тонких
оболочек, использовалась в [204] при скоростях удара порядка сотен мет-
метров в секунду. Анализ кавитационных явлений (в рамках простейшей
модели) при погружении оболочек в жидкость показал, что они носят
локальный характер по времени и пространству и приводят к заметному
увеличению прогибов лишь для очень тонких оболочек (К/к > 200).
В настоящее время на практике широкое распространение получили
конструкции, выполненные из трехслойных и многослойных пластин и
оболочек. В [130] в качестве простей-
простейшего примера приведена задача об уда-
ударе трехслойной круглой пластины
(рис. 16.5) о поверхность идеальной
сжимаемой жидкости. В принятой при-
приближенной постановке решение стро-
строится с использованием метода Бубнова _
и интегрального преобразования Лап- ри^Тб.5ТУда^Гувдт^й т^хсжгёной
ласа. Пластина является днищем неко- круговой пластины о поверхность
торого цилиндрического сосуда. Пер- идеальной сжимаемой жидкости
воначальная скорость удара у0 считается малой в сравнении со скоро-
скоростью звука в жидкости. Гидродинамическое давление на начальной ста-
стадии погружения определяется приближенно на основании известного
решения для жесткого диска [277] и гипотезы плоского излучения.
Полученные результаты позволяют выявить качественную картину
взаимодействия простейших трехслойных конструкций при их ударе о
поверхность жидкости.
§ 16.4. Экспериментальные исследования
Ввиду исключительной аналитической сложности решения задач об
ударе и погружении в жидкость упругих конструкций большое значение
приобретают методы экспериментального исследования этих задач [69,
15*, 372, 380, 390, 397].
В [372, 390, 397, 413] экспериментальным путем было изучено влия-
влияние различных параметров на характер гидроупругого взаимодействия
пологой сферической оболочки с жидкостью при вертикальном ударе о
ее поверхность.
561
В задачах подобного рода полное моделирование осуществить исклю-
исключительно трудно (практически невозможно), поэтому весьма важно знать
значимость различных параметров системы. Проведенный в [413] анализ
подобия позволил при постановке эксперимента сгруппировать парамет-
параметры в следующие безразмерные группы:
т Vор у0/ к р Уд
^1=—Т> ^2=-^> *3=-7. ^4=77' п5~> ^6=-7>
рг $ V С р0 §1
где т — масса системы; р — плотность жидкости; р0 — плотность мате-
материала оболочки; / — параметр, который характеризует геометрию систе-
системы (в данном случае толщина сегмента к); С — параметр жесткости сис-
системы; у0—начальная скорость соударения; V— вязкость среды; к —
параметр сжимаемости жидкости (модуль объемной упругости); § — ус-
ускорение свободного падения.
Параметры подобия щ и %2 оставались идентичными для всех экс-
экспериментов. Параметр щ имел порядок ЫО6, а П2 — 1,4-10 .
Эксперименты проводились на тонких пологих сферических сегмен-
сегментах, выполненных из листового алюминия ( к = 0,2 •*- 0,25 мм ). По конту-
контуру сегменты закреплялись посредством болтов между двумя массивными
кольцами, которые перемещались по направляющим тросам.
В процессе эксперимента регистрировались только остаточные де-
деформации оболочки (число, форма и расположение вмятин, а также их
геометрические размеры). Начальная скорость удара варьировалась в
пределах от 2,75 до 4,88 м/с. Для экспериментов было взято три типа
жидкостей: вода, касторовое масло и метилацетат.
На основании полученных результатов была дана оценка степени
важности различных параметров (вязкости жидкости я3, удельного веса
оболочки я4, сжимаемости жидкости тг5, влияния силы тяжести тг6)
при исследовании осесимметричного входа в жидкость упругой сфериче-
сферической оболочки. Определены приближенно области, где параметрами тг3,
тг4, тгз и тг6 можно пренебречь по сравнению с другими критериями
подобия.
§ 16.5. Динамическое поведение экраноплана при посадке на воду
Рассматривается летательный аппарат (экраноплан), предназначенный
для перевозки небольшого количества пассажиров и садящийся на воду
(рис. 16.6). Аппарат имеет два фюзеляжа, у-образное заднее оперение,
двигатель и компрессор для организации воздушной подушки. Посадоч-
Посадочные устройства крепятся к раме, на которой закреплены все агрегаты ап-
аппарата, и представляют собой оболочки цилиндрической формы, которые
могут выполняться из различных материалов (металл, композит и т. д.).
Как уже отмечалось ранее, наиболее интересен случай вертикального
удара, поэтому расчетную модель представим в следующем виде
(рис. 16.7): две полуцилиндрические оболочки B), связанные с жесткими
562
телами E) и соединенные между собой брусом D), движутся вертикально
вниз с постоянной скоростью Уд ив момент времени х = О касаются по-
поверхности воды G); вода считается идеальной сжимаемой жидкостью
(вязкостью, весомостью и изменением внутренней энергии частиц жид-
жидкости пренебрегаем), занимающей нижнее полупространство; в момент
X = О свободная поверхность является плоской.
V/,
ч
-°±,
~-
\*о
3
0
"" X
/уу,
ч
—~
от
У\
*
Рис. 16.6. Конструктивная схема экраноплана: а, б,
в — виды соответственно сбоку, сверху и спереди
Рис. 16.7. Расчетная модель экра-
экраноплана
В процессе удара и погружения образующие оболочек параллельны
первоначально невозмущенной свободной поверхности. Воздух, запол-
заполняющий воздушную подушку C), считается идеальным газом. Движение
жидкости, вызванное таким погружением системы, будет плоским и
симметричным относительно геометрической оси симметрии рассматри-
рассматриваемой модели. Как будет показано ниже, деформации бруса (балки) ока-
оказывают малое влияние на процесс погружения системы в воду. Поэтому
брус будем считать твердым телом.
Таким образом, расчеты будут проводиться для одной половины систе-
системы. Вся масса аппарата распределяется по элементам 4 и 5 (см. рисунок).
Задача в общем случае сводится к совместному интегрированию сис-
систем уравнений, описывающих движение твердого тела (элементы систе-
системы 4, 5), цилиндрической оболочки, жидкости и газа в воздушной по-
подушке с соответствующими начальными и граничными условиями на
свободных и контактных поверхностях.
Поскольку поплавки часто выполняются из композиционных мате-
материалов, то для описания их движения воспользуемся уравнениями при-
прикладной теории композиционных оболочек [80].
Рассмотрим слоистую цилиндрическую оболочку радиуса Я, нагру-
нагруженную внутренним Р1 и внешним р2 давлениями. В этом случае урав-
563
нения движения такой оболочки можно представить в виде
д в
<м\+Оа_-в —-С д в<х -О
—-П д в(Х -О
да
Здесь координата а направлена вдоль оси оболочки, а координата /3 —
по дуге; записанные соотношения можно получить заменой а на $ , /3
на а, 1 на 2, 2 на 1, и на V и V нам; и,у —перемещения точек на-
начальной поверхности в направлениях а и /3 ; и> — нормальный прогиб;
ва VI вр — углы поворота нормали к начальной поверхности; остальные
обозначения имеют обычный смысл ( Щ , К2 — главные радиусы кривиз-
кривизны оболочки).
Поскольку в дальнейшем рассматривается плоская задача (оболочка
считается бесконечно длинной), приведем уравнения движения для этого
случая (р! =0).
Напряженно-деформированное состояние оболочки в этом случае не
зависит от осевой координаты а и определяется усилиями Nр =Ы,
Bр = B, изгибающим моментом М р = МИЗГ, обобщенными деформа-
деформациями ер = е , хр = X > Фр - V > перемещениями у и IV и углом пово-
поворота вр =0 , являющимися функциями переменной /3 и времени *. То-
Тогда уравнения движения A6.17) для данного частного случая нагружения
оболочки (действует внешнее давление р2) примут вид
2 д2в
д2в_
Р1? ' ( }
дИ
ЭР
О М.
им
с) О
дВ
-вр
с
р
р
д
1 д
д
1 д
д
1 д
I2
2и
2*
1,2
Усилия и перемещения в A6.18) находятся по соотношениям
ди у» дв . и д IV <16Л9>
эр к' Л др * к др
564
Подробно способы вычисления обобщенных жесткостей слоистого
материала Я, С, А К изложены в [80].
Для описания поведения жидкости воспользуемся переменными Ла-
гранжа, которые позволяют определить перемещения свободной поверх-
поверхности жидкости и точно поставить граничные условия непосредственно
на смоченной поверхности оболочки.
Далее введем неподвижную декартову систему координат Оху (см.
рис. 16.7). Начало координат расположим на оси симметрии. Ось х на-
направлена по первоначально невозмущенной горизонтальной поверхности
жидкости; а ось у — вертикально вниз нормально к свободной поверхно-
поверхности жидкости.
В переменных Лагранжа уравнения, описывающие плоское движение
жидкости, будут иметь следующий вид:
дщ __ 1 др
дт рдх* дт рду' A620)
дх _ ду _ _т
5т дт
где
~ ~^1 - -^ -_^. -_2!.
^ ' рс2' Р ' (^О'^о)
Здесь «!, и2 — составляющие скорости частиц жидкости в направлении
осей х, у соответственно; р — давление в жидкости; р* —плотность
возмущенной жидкости; У—якобиан преобразования; ^о^о — началь-
начальные координаты частиц жидкости; р — плотность невозмущенной жид-
жидкости; с — скорость звука в жидкости.
Для составлений уравнений движения цилиндрической оболочки при
ее погружении в жидкость воспользуемся уравнениями A6.18), записав
из в системе координат, которая движется вместе с твердым телом. По-
Положение точки оболочки определяется дуговой координатой E поверх-
поверхности приведения и координатой у, направленной в сторону внешней
нормали. Таким образом, координата C — это длина дуги окружности я
от рассматриваемой точки до точки, лежащей на плоскости симметрии
(точка первоначального касания оболочки с жидкостью). Тогда уравне-
уравнения движения цилиндрической оболочки в безразмерном виде можно
записать в форме
- д2и .- д2в Ау . а л
дм а д2п- э2в_
Ж~^~ ~д^ р~д? '
565
A6-21б)
В A6.21) применены следующие безразмерные параметры:
_м_и> к о 5 — N — О.
II ЛА) —• 1С /-1 , Д/ (/ ^
И И К К /?ЛГ_
Срс20 Вр' О ВрК р СрК
где VI —скорость движения твердого тела, связанного с оболочкой, в
вертикальном направлении вдоль оси у; остальные обозначения имеют ,
прежний смысл.
Давление р, действующее на оболочку, состоит из двух частей: гид-
гидродинамического давления, распределенного по поверхности соприкос-
соприкосновения оболочки с жидкостью, и давления в воздушной подушке, рас-
распределенного по поверхности соприкосновения оболочки с газовой поло-
полостью.
Заменяя воздействие оболочек (поплавков) на тело эквивалентной
системой усилий, приложенных в точках закрепления, и учитывая давле-
давление р8 в воздушной подушке, получаем
A6-22>
Здесь /Зо=я/2—угол * полураствора цилиндрической оболочки;
Мо —масса, приходящаяся на единицу длины тела, соединенного с ^
оболочками; Ь[ —длина бруса (балки). *
При учете воздушной подушки уравнения газовой динамики относи- *
тельно составляющих скоростей частиц газа и^х, и82 в направлении \
осей х*, у принимаются в обычной форме [260]; при этом уравнение со- ^
стояния будет иметь вид р§ =кр^ , где Р8,р8 —давление и плотность
воздуха; у —показатель адиабаты (для воздуха у = 1,4); к — постоян- •
ная, зависящая от начальных значений р8 и р8. Воздушная подушка ,
(полость) образуется в момент касания поплавками поверхности жидко-
жидкости. Давление и плотность воздуха связаны с местной скоростью звука
с8 соотношением с^ -УР8/р8 •
Перейдем к формулировке начальных условий задачи (при г = 0):
для жидкости
^=«2=0, р = 0, х = х0, у = уо, A6.23)
для оболочки
п = ^ = 9=0, A6.24а)
566
|1 = 4^ = 0, A6.246)
Эт дт дт
для твердого тела
у=у0, уо=-^, A6.25)
с0
для газа в воздушной подушке
При формулировке граничных условий на поверхностях соприкосно-
соприкосновения деформируемой оболочки и твердого тела с жидкостью и газом
ставится условие непроницаемости, т.е. равенство скоростей движения
по нормали к поверхности оболочки и тела взаимодействующих сред.
Тогда граничные условия можно записать в следующей форме:
на свободной поверхности жидкости
р=0, A6.27)
на свободной поверхности жидкости, соприкасающейся с воздушной
подушкой,
, A6.28)
где р^о — плотность газа в невозмущенном состоянии;
на поверхности соприкосновения оболочки и жидкости
щ зт Д + и2 соз Д = V соз Д + -т—, A6.29)
дт
на поверхности соприкосновения оболочки и воздушной подушки
+^-^-К Х\= — > A6.30)
на поверхности соприкосновения настила с воздушной подушкой
и82=Х\У, . A6.31)
на бесконечности для жидкости {на $«,)
щ=п2=0. A6.32)
Для оболочки на кромках Д = /Зо = ±я/2 примем условия жесткого
защемления
Й = ^ = 0=О. A6.33)
Итак, задача свелась к совместному интегрированию уравнений гид-
гидроупругого взаимодействия рассматриваемой системы с принятыми гра-
граничными и начальными условиями.
Основные расчеты проводились без учета влияния воздушной подуш-
подушки на характеристики реакции. Система уравнений гидроупругого взаи-
взаимодействия решалась конечно-разностными методами.
567
Расчетная область жидкости покрывается сеткой, ячейки которой
представляют собой четырехугольные лагранжевы элементы, движущие-
движущиеся вместе с жидкостью. Положение в пространстве и скорости определя-
определяются в вершинах четырехугольников, а давление и плотность — в цен-
центрах ячеек. Конечно-разностные уравнения для скоростей получаются
путем интегрирования обеих частей уравнений A6.30) по некоторому
малому объему и преобразования соответствующих интегралов по объе-
объему к интегралам вдоль линии. Контур интегрирования для данной вер-
вершины ячейки образуется отрезками, проведенными через центры сосед-
соседних ячеек. Плотность для данной ячейки определяется из условий сохране-
сохранения массы жидкости в ней, а давление — из уравнения состояний [36,260].
Для нахождения поверхности соприкосновения оболочки и жидкости
используется следующий способ. В схему численного расчета вводятся
по две дополнительные узловые точки на левой и правой границах кон-
контакта, в которых вычисляются координаты и скорости. Первый узел со-
соответствует границе смоченной поверхности тела, при этом составляю-
составляющая его скорости, нормальная к поверхности оболочки, находится из гра-
граничного условия A3.29), касательная составляющая скорости определя-
определяется при помощи линейной интерполяции между двумя соседними узла-
узлами ячейки. Второй узел находится на свободной поверхности жидкости
на расстоянии 5 < й*Ат от первого (где и* — скорость расширения смо-
смоченной поверхности оболочки, Ат — величина шага по времени), а ско-
скорость его равна скорости движения ближайшего узла ячейки, лежащего
на смоченной поверхности оболочки, на последнем шаге по времени,
когда он еще находится на свободной поверхности жидкости.
Ширина смоченной поверхности оболочки вычисляется на каждом
шаге по времени при помощи нахождения точки пересечения (касания)
поверхности оболочки со свободной поверхностью жидкости, которая
аппроксимируется ломаной, проходящей через узлы сетки, находящиеся
на этой поверхности, и два дополнительных узла. При таком способе ап-
аппроксимации поверхности жидкости вычисляемая на каждом шаге по
времени скорость расширения смоченной поверхности оболочки доста-
достаточно точно соответствует реальной скорости расширения, что приводит
почти к полному устранению нефизичных колебаний в величинах давле-
давления, распределенного на поверхности тела, возникающих при захвате
телом новой ячейки жидкости.
При определении гидродинамического давления, распределенного по
смоченной поверхности оболочки, необходимо учесть дополнительную
силу, обусловленную дискретностью захвата в схеме расчета телом но-
новых частиц жидкости. Необходимость введения в расчет этой силы свя-
связана с тем, что в ячейке, в которой происходит захват телом свободной
поверхности жидкости, не выполняется закон сохранения импульса. Рас-
Расширение на п-м шаге по времени смоченной поверхности оболочки при-
приводит к изменению нормальных к ней скоростей частиц жидкости, нахо-
находящихся под поверхностью захвата (т. е. той части жидкости ячейки, ко-
которая на данном шаге по времени попала под смоченную поверхность
оболочки). Следовательно, изменение количества движения ячейки с
учетом принятых разностных аппроксимаций, обусловленное захватом на
568
п-м шаге по времени свободной поверхности жидкости, дает искомую
величину дополнительной силы. При задании гидродинамического дав-
давления, действующего на оболочку, эта сила равномерно распределяется
по ширине захвата на данном шаге по времени.„
При математическом моделировании движения жидкости в лагранже-
вых переменных наблюдается появление нефизических передвижений
вершин ячеек, которые вызываются коротковолновыми возмущениями и
приводят к значительному искажению расчетных ячеек. Для сглаживания
этих возмущений используется регуляризация расчетной сетки.
В [36] был предложен достаточно эффективный механизм регуляри-
регуляризации расчетной сетки. К уравнениям движения A6.20) добавляется до-
дополнительное ускорение, которое стремится удержать узел сетки в цен-
центре масс восьми соседних узлов. Модификация регуляризации, предло-
предложенной в [36] , для случая неравномерной сетки дана в [121]. Здесь ис-
используется подход, развитый в [121]. Действие этой регуляризации сво-
сводится к добавлению дополнительного ускорения, которое стремится со-
сохранить первоначальную форму ячеек. При использовании регуляриза-
регуляризации расчетная сетка сохраняет целостность, а динамика процесса сущест-
существенно не изменяется.
Сведение дифференциальных уравнений колебаний оболочки A6.21)
к разностным проводится интегроинтерполяционным методом [227,296].
Отметим, что, заменив усилия #, B и момент Мтг через перемеще-
перемещения A6.10), уравнения A6.21) можно представить в форме
дт1
—^ = Ь2(н^) + К2(и,0) + Р'2, , A6.34)
дт2 3 3'
где Ь/»К/ G = 1,2,3) — дифференциальные операторы уравнений
A3.21); Р] —внешняя нагрузка.
Проинтегрировав обе части уравнений A6.21) на отрезке
[(/-1/2)ДД,(/ + 1/2)ДД] (АД — шаг равномерной сетки, которой по-
покрывается срединная поверхность оболочки) и предполагая, что величи-
величины, находящиеся под знаком интеграла, за исключением гидродинамиче-
гидродинамической нагрузки, постоянны по длине отрезка, получим следующую систе-
систему уравнений:
й ф/й?т +А1ф + А2ф=Р, A6.35)
где ф = ||ио,...Д1,п7о,...,Т1^,0о,...,01||т — вектор обобщенных узловых пе-
перемещений срединной поверхности оболочки; А1? А2 — матрицы, в
которые преобразуются дифференциальные операторы A6.21) (соответ-
(соответственно операторы Ьу-, К^) при замене их разностными соотношения-
соотношениями. Аппроксимация усилий и момента A6.19) проводится с помощью
центральных разностей с сохранением второго порядка аппроксимации.
569
Заменяя вторую производную по времени центральными разностями
и задавая разностный оператор А^ в неявном виде, получаем следующую
конечно-разйостную систему уравнений с весом %:
=Рт, A6.36)
где Д^ — шаг по времени интегрирования уравнения оболочки,
А = А!+А2 — матрица дифференциальных операторов A3.21), Ех —
единичная матрица, Р — вектор внешней нагрузки, т — номер шага по
времени.
В случае неподвижного жесткого защемления кромок оболочки гра-
граничное условие A6.33) сводится к следующему разностному соотноше-
соотношению:
ио=пг=щ =щ =во=вг=О. A6.37)
Из построения матрицы Ах следует, что она является трехдиагональ-
ной, следовательно, для решения системы линейных уравнений A6.36)
можно применять метод прогонки, описанный в [227].
Уравнение A6.22), используемое для определения скорости погруже-
погружения тела, аналогичным образом сводится к конечно-разностным соотно-
соотношениям.
Общая схема расчета сводится к ряду переходов от состояния на мо-
момент времени тп к состоянию на момент времени тп+1 = тп + Дт, при
этом на каждом этапе перехода последовательно решаются уравнения
движения жидкости, оболочки и тела.
Ограничения, накладываемые устойчивостью расчетных конечно-
разностных схем, могут привести к тому, что максимальный допустимый
шаг по времени для разностных уравнений динамики оболочки будет
существенно меньше, чем для жидкости, поэтому зачастую за один вре-
временной шаг расчета по жидкости Ат приходится выполнять несколько
временных шагов для оболочки Дт^Ат/Ат"! =п). При этом предполага-
предполагается, что гидродинамическая нагрузка постоянна для всех шагов перехо-
перехода от фй кфп+1.
При решении конкретной задачи выбор необходимого количества уз-
узлов конечно-разностных сеток и величин шагов по времени интегрирова-
интегрирования уравнений движения осуществлялся путем численного эксперимента.
Полупространство, занятое жидкостью, в начальный момент времени
покрывается четырехугольной неравномерной сеткой, квадратичной
вблизи оболочки и далее расширяющейся. В расчетах число ячеек (эле-
(элементов) колебалось от 2300 до 2500. Область жидкости, находящаяся у
той части свободной поверхности, которая в течение рассматриваемого
интервала времени попадает на поверхность оболочки, должна разби-
разбиваться равномерной сеткой с постоянным шагом (наличие в этой области
в нулевой момент времени неравномерных ячеек приводит к значитель-
значительным нефизическим осцилляциям результирующей гидродинамической
нагрузки). Выход в течение рассматриваемого интервала времени 10-15
570
узлов сетки на поверхность оболочки °^спечивает достаточную точ-
точность в определении распределенного ГВД|)ОдИнамического давления и,
как показали сравнения, дальнейшее уменьшение шага сетки (увеличение
количества узлов) незначительно сказывае*1^ на получаемых результатах.
Поверхность оболочки (поверхность ^Ркведения) разбивалась на 80-
100 интервалов; дальнейшее увеличение числа интервалов незначительно
сказывается на результатах. Использование в конечно-разностных урав-
уравнениях движения оболочки оператора М \ неявном виде позволяет для
большей части рассматриваемых вариантов расчета применять один и тот
же шаг по времени интегрирования как: Уравнений движения жидкости,
так и оболочки.
В качестве примера рассмотрим удар ° воду модели одного типа эк-
ранрплана. Посадочные устройства (оболо\ки) выполнялись из компози-
композиционного материала, который приводился к эквивалентному однородно-
однородному материалу с приведенными характеристиками: Е, // , р Начальная
скорость удара принималась равной Уо =^ ^м/с.
В этом случае параметры систем^ имели следующие значения:
к = и,о м , р — идло м , к — \}^\)\I * А, = 4 м ; .с = 4 • 10 МПа *,
ро=1350кг/м3 ; /* = 0,299.
Размеры расчетной области для жиЯкссти соответствовали квадрату
со стороной Юм. Проведенные числейВД& расчеты с варьируемой глу-
глубиной жидкости показали, что при такД** размерах области влияние на
характеристики реакции дна и стенок, оканчивающих жидкость, незна-
незначительно.
На рис. 16.8 показан характер деформ^рОвания свободной поверхно-
поверхности жидкости при глубине погружения об^„ ^ ^
лочки Н = Н/К = 0,269 (Я — глубин^ По-
Погружения оболочки в жидкость, отсчиты-
отсчитываемая от первоначально невозмущенн^
свободной поверхности).
Изменение во времени нормальный %-
пряжений а в характерных точках обсрлс^.
ки показано на рис. 16.9. Время измеряе*тЦ в
секундах. Кривая 1 соответствует напряже-
напряжениям в крайнем волокне на внешней* %- рИс. 16.8. Характер деформиро-
верхности оболочки, 2 — напряжением в Вания свободной поверхности
крайнем волокне на внутренней поверх^ос^ жидкости при ударе экранопла-
оболочки, 3 — напряжениям в сред*#ВД)й на ° ее пов1Рхность; глубина
поверхности. Как видно, напряженной ^0. погружения Н = 0,269; Д = 0
стояние, в основном, носит изгибный я*аР№стер. Наибольшие по модулю
напряжения возникают в точке перво на1ального контакта оболочки с
жидкостью ( рх = 0, сг^х = 209 МПа, . ^ = -218 МПа ). Напряжения в
других точках оболочки по модулю ме'Щ^ чем в точке с координатой
Д = 0. Эта точка является расчетной пФианализе прочности оболочки и
при выборе рациональных параметров к^о%рукции.
571
V
/
/
/
/
А/
Л/
к,
\У\
а,102МПа
/ч
Характер изменения во времени! скорости у-^ (рис. 16.10), по сущест-
существу, характеризует скорость центра масс всей системы (массы оболочек
мальм в сравнении с общей массой аппара-
аппарата).
у^чет воздушной подушки при данных
парамметрак системы не оказывает сущест-
венноо влияния на характеристики реак-
реакции. В этом случае своего максимального
значеэения напряжения достигают в более
позднний момент времени в сравнении со
случшаем, когда воздушная подушка не
учитывается.
В { рамках развитой методики расчета
нетрхудно )гчесть и изгиб бруса D), соеди-
няюшцего две массы (см. рис, 16.7). Дви-
жениме отдельных точек бруса можно рас-
рассматривать как сложное движение: пере-
носноюе со скоростью V](^) масс корпусов
экранношша и относительное со скоро-
скоростью© щ(х*,1), направленной вверх.
1
о
-1
-2
1 2 3 МО с
Рис. 16.9. Временное измерение
нормальных напряжений о в
характерных точках поплавка
(оболочки) экраноплана; кривые
1-3 соответствуют напряжениям в
волокнах на внешней, внутренн-
ней и срединной поверхностях
оболочки
Здесь под и^р (**,*) понимается фуннкцшпро-
фуннкцшпрогиба бруса по отношению к опорам.
Дифференциальное уравнение движения
бруса как балки будет иметь вид
"'БР _ п .
БР
где йг — изгибная жесткость поюперечного
сечения бруса единичной шириныи, т1} —
погонная масса бруса.
Поскольку расчеты с учетом ; упругости
бруса мало отличаются от расчетов * без учета
упругости, они здесь не приводятся... Придру-
О
2
4/,1Ос
Рис. 16.10. Временная зави-
зависимость скорости центра масс
экраногаана \м при его
погружении в жидкость
гих соотношениях жесткостей системы воздушная подушка и упругая
связь (брус) могут оказывать значительное влияние на характеристики
реакции.
СПИСОК ЛИТЕРАТУРЫ
1. Абрамович Г.Н., Крашенников С.Ю., Секундов А.Н. Турбулентные течения при
воздействии объемных сил и неавтомодельности. - М.: Машиностроение, 1975. -
94 с.
2. Абрамсон Х.Н., Кана ДД. Некоторые экспериментальные исследования динами-
динамической устойчивости тонких оболочек, содержащих жидкость // Пробл. мех. тв.
деформируемого тела. - Л.: Судостроение, 1970.
3. Авиастроение. Т. 2. Современные самолеты США и стран Западной Европы. - М.:
Изд. ВИНИТИ, 1976. - 192 с.
4. Акимов А.И., Берестов Л.М., Михеев Р.А. Летные испытания вертолетов. - М.:
Машиностроение, 1980. - 399 с.
5. Алгазин В.А. Современное состояние исследований по гидродинамике крыльевого
движителя. / Препринт ВЦСО АН СССР. № 761. - М.: 1987. - 33 с.
6. Александрович Л.И.> Лампер Р.Е. Собственные колебания упругого осесиммет-
ричного сосуда произвольного контура // Тр. 6-й Всес. конф. по теории оболочек
и пластинок, Баку, 1966. - М.: Наука, 1967. - С. 27-29.
7. Алексеев Г.Ю., Еремин В.Ю. Дискретный вихрь в сверхзвуковом потоке // Тр.
ЦАГИ. - 1987. - Вып. 2321. - С. 39-48.
8. Амирьянц Г.А. Теоретическое определение влияния упругости и распределения
масс конструкции на некоторые аэродинамические характеристики самолета в
квазиустановившемся движении // Уч. записки ЦАГИ. - 1979. - Т. 10, № 1. -
С. 55-63.
9. Амирьянц Г.А., Буньков ВТ. Применение метода многочленов к расчету парамет-
параметров установившегося маневра упругого самолета // Уч. записки ЦАГИ. - 1976. -
Т. 7, № 4. - С. 88-94.
10. Амирьянц Г.А.Ь Пархомовский ЯМ. О влиянии упругости конструкции на стацио-
стационарные аэродинамические характеристики самолетов // Тр. совещания советско-
французкой подгруппы по аэродинамике, авиационной акустике и прочности. -
Париж, 1980.-22 с.
11. Амирьянц Г.А., Сирота С.Я., Транович В.А. О влиянии упругости самолета с не-
несущим фюзеляжем на его аэродинамические характеристики при установившемся
движении // Исследования по аэроупругости. Тр. ЦАГИ. - 1980. - Вып. 2088. -
С. 21-30.
12. Аникин В.А. К вихревой теории несущего винта // Изв. АН СССР: МЖГ. - 1982. -
№5.-С. 169-172.
13. Антропов В. Ф., Буранов Г.Б., Дьяченко А.С. и др. Экспериментальные исследова-
исследования по аэродинамике вертолета. - М.: Машиностроение, 1980. - 240 с.
14. Апаринов В.А., Дворак А.В. Метод дискретных вихрей с замкнутыми вихревыми
рамками // Математическое моделирование авиационных комплексов. Тр. ВВИА
1989. - Вып. 1315. - С. 424-432.
15. Апаринов В.А., Дмитриев А.И., Табачников ВТ. Анализ теоретических и экспери-
экспериментальных характеристик треугольных крыльев в широком диапазоне углов
атаки // Тр. ЦАГИ. - 1978. - Вып. 1915. - С. 77-85.
16. Астапов И.С., Белоцерковский А.С., Морозов В.И. Нелинейные интегродиффе-
ренциальные уравнения аэроупругости // Изв. АН СССР: МТТ. - 1985. - № 6. -
С. 61-70.
17. Аэродинамика автомобиля / Под ред. ВТ. Гухо. - М.: Машиностроение, 1987. - 424 с.
573
18. Аэродинамика самолета Ту-134А // Под ред. Т.Н. Лигум. - М.: Транспорт, 1975. -
253 с.
19. Аэроупругость и применение активных систем управления. - М.: ЦАГИ, ОНТИ,
1975.-71 с.
20. Аэроупругость летательных аппаратов (самолетов). - М.: ЦАГИ, ОНТИ, 1982. -
64 с.
21. Аэродинамика, устойчивость и управляемость сверхзвуковых самолетов / Под
ред. ГС. Бюшгенса. - М.: Наука. Физматлит, 1998. - 816 с.
22. Бабкин В.И.у Белоцерковский СМ., Гуляев В.В. и др. Струи и несущие поверхно-
поверхности. Моделирование на ЭВМ. - М.: Наука, 1989. - 208 с.
23. Бабков В.Ф., Констанди Ф.Ф.У Смирнов А.С. Полеты самолетов с грунта. - М.:
Воениздат, 1960.
24. Баженов В.Г., Кочетков А.В., Михайлов Г.С. Численное решение плоских и осе-
симметричных задач взаимодействия упругопластических оболочек с ударными
волнами // Прикладные проблемы прочности и пластичности. - Горький: Изд-во
ГТУ, 1978.-№7.-С. 55-68.
25. Баженов ВТ., Михайлов ГС. Нелинейное динамическое взаимодействие тонко-
тонкостенных конструкций с идеальными сжимаемыми средами // Прикладные про-
; блемы прочности и пластичности. - Горький: Изд-во ГТУ, 1979. - № 10. - С. 41-
55.
26. Базилевский А.Н., Переверзев А.Н. Расчет поляр самолета. - Киев: КНИГА, 1973.
27. Балабух ЛИ, Молчанов А.Г. Осесимметричные колебания сферической оболочки,
частично заполненной жидкостью // Инж. ж.: МТТ. - 1967. - № 5.
28. Балакирев Ю.Г. Осесимметричные колебания пологой сферической оболочки с
жидкостью // Инж. ж.: МТТ. - 1967. - № 5.
29. Балакирев Ю.Г, Григорьев В.Г, Шмаков В.П. Нелинейные автоколебания регу-
регулируемых систем, содержащих оболочки с жидкостью // Теория и расчет элемен-
элементов тонкостенных конструкций. - М.: Изд-во МГУ, 1986. - С. 6-19.
29а. Балакирев Ю.Г, Шмаков В.П. Осесимметричные колебания цилиндрической
оболочки с полусферическим днищем // Колебания упругих конструкций с жид-
жидкостью. - Новосибирск: Изд. НЭТИ, 1984. - С. 28-32.
30. Балгеймер В.В., Ефимкин В.П., Лампер Р.Е. Динамика жидкости в длинном баке-
кессоне с нервюрами // Колебания упругих конструкций с жидкостью. - М.:
ЦНТИ «Волна», 1984. - С. 12-17.
31. Баничук Н.В. Устойчивость аэро- и гидроупругих систем // Динамика и прочность
машин: Машиностроение. Энциклопедия. - Т. 1-3. - М.: Машиностроение, 1994.
-Т. 1.-С. 516-524.
32. Баничук Н.В., Бирюк В.И., Сейранян АЛ. и др. Методы оптимизации авиационных
конструкций. - М.: Машиностроение, 1989. - 296 с.
33. Баничук Н.В., Иванова СМ., Шаранюк А.В. Динамика конструкций. Анализ и
оптимизация. - М.: Наука, 1989.
34. Баранов А.Н., Белозеров Л.Г, Ильин Ю.С. и др. Статические испытания на проч-
прочность сверхзвуковых самолетов. - М.: Машиностроение, 1974. - 296 с.
35. Баскин В.Э., Вильдгрубе Л.С, Вождаев Е.С. и др. Теория несущего винта. - М.:
Машиностроение, 1973. - 363 с.
36. Батлер Т.Д. Развитие метода ЫЖ // Численные методы в механике жидкости. -
М.:Мир, 1973.-С. 146-155.
37. Бахов О.П. Аэроупругость и динамика конструкции вертолета. - М.: Машино-
строние, 1985.-175 с.
38. Башта Т.М. Гидравлические приводы летательных аппаратов. - М.: Машино-
Машиностроение, 1967. - 497 с; Объемные гидравлические приводы. - М.: Машино-
Машиностроение, 1968. -475 с.
39. Беккер М.Г. Введение в теорию систем местность - машина. - М.: Машинострое-
Машиностроение, 1973.
40. Белов И.А. Взаимодействие неравномерных потоков с преградами. - М.: Маши-
Машиностроение, 1983. - 144 с.
574
41. Белов И.А., Исаев С А., Коробков В.А. Задачи и методы расчета отрывных течений
несжимаемой жидкости. - Л.: Судостроение, 1989. - 256 с.
41а. Белостоцкий А.М. Модификация и применение численных методов к расчету
плитно-оболочковых систем на сейсмические воздействия // Динамические ха-
характеристики и колебания элементов энергетического оборудования. - М.: Наука,
1980.-С. 41-58.
42. Белоус А.А., Дмитриева М.В. Амортизация полурычажного шасси самолета // Тр.
ЦАГИ, 1972. - Вып. 1177. - 43 с.
43. Белоцерковский А. С, Качанов Б. О., Кулифеев Ю.Б. и др. Создание и применение
математических моделей самолетов. - М.: Наука, 1984. - 143 с.
44. Белоцерковский О.М. Вычислительный эксперимент: прямое численное модели-
моделирование сложных течений газовой динамики на основе уравнений Эйлера, Навье-
Стокса и Больцмана // Численные методы в динамике жидкости. - М.: Мир, 1981.
- С. 348-398.
45. Белоцерковский О.М. Численное моделирование в механике сплошных сред. - М.:
Наука, 1984.-520 с.
46. Белоцерковский О.М., Белоцерковский СМ., Давыдов Ю.М. и др. Моделирование
отрывных течений на ЭВМ. - М.: Наука, 1984. - 122 с.
47. Белоцерковский О.М., Давыдов Ю.М. Метод крупных частиц в газовой динамике.
-М.: Наука, 1982.-392 с.
48. Белоцерковский СМ. Тонкая несущая поверхность в дозвуковом потоке газа. -
М.: Наука, 1965.-242 с.
49. Белоцерковский СМ., Котовский В.И., Ништ М.И. и др. Математическое модели-
моделирование плоскопараллельного отрывного обтекания тел. - М.: Наука, 1988. -
232 с.
50. Белоцерковский СМ., Коржнев В.Н., Шипилов СД. Метод расчета отрывного
обтекания крыльев дозвуковым потоком газа // Изв. АН СССР: МЖГ. - 1984. -
№4.-С. 141-147.
51. Белоцерковский СМ., Кочетков Ю.А., Красовский А.А. и др. Введение в аэроавто-
упругость. - М.: Наука, 1980. - 384 с.
52. Белоцерковский СМ., Лифанов И.К. Численные методы в сингулярных инте-
интегральных уравнениях. - М.: Наука, 1985. - 256 с.
53. Белоцерковский СМ., Локтев Б.Е., Ништ М.И. Исследование на ЭВМ аэродина-
аэродинамических и аэроупругих характеристик винтов. - М.: Машиностроение, 1992. -
220 с.
54. Белоцерковский СМ., Ништ М.И. Отрывное и безотрывное обтекание тонких
крыльев идеальной жидкостью. - М.: Наука, 1978.-351 с.
55. Белоцерковский СМ., Ништ М.И. Отрывные течения и нелинейные характери-
характеристики тонких несущих поверхностей в несжимаемой жидкости // Итоги науки.
Т. 11. Механика жидкости и газа. - М.: Изд. ВИНИТИ, 1978. - С. 305-372.
56. Белоцерковский СМ., Скрипач Б.К. Аэродинамические производные летательного
аппарата и крыла при дозвуковых скоростях. - М.: Наука, 1975. - 424 с.
57. Белоцерковский СМ., Скрипач Б.К., Табачников ВТ. Крыло в нестационарном
потоке газа. -М.: Наука, 1971. - 767 с.
58. Белоцерковский СМ., Титов МЛ., Толстое Е. Ф. Летательный аппарат и радиоло-
радиолокационная станция как единая система // Математическое моделирование авиаци-
авиационных комплексов. - М.: Изд. ВВИА, 1989. - Вып. 1315. - С. 193-201.
59. Белоцерковский СМ., Толстое Е.Ф. Системный подход к исследованиям РЛС с
синтезированной апертурой антенны // Радиотехника. - 1982. - № 6. - С. 49-52.
60. Беспрозванная ИМ., Соколов А.Г., Фомин Г.М. Воздействие ветра на высокие
сплошноступенчатые сооружения. - М.: Стройиздат, 1976. - 183 с.
61. Бисплингхофф Р.Л., Эшли X., Халфмэн Р.Л. Аэроупругость. - М.: ИЛ, 1958. -
799 с.
62. Богачев А.С., Толстое Е.Ф. Цифровое синтезирование искусственной апертуры
антенны при маневре // Заруб, радиоэлектроника. - 1975. - № 6. - С. 64-79.
63. Боднер В.А. Теория автоматического управления полетом. - М.: Наука, 1964. -
700 с.
575
64. Болотин В.В. Динамическая устойчивость упругих систем. - М.: Гостехиздат,
1956.-600 с.
65. Болотин В.В. Неконсервативные задачи теории упругой устойчивости. - М.: Физ-
матгиз, 1961.-399 с.
66. Болотин В.В. Статистические методы в строительной механике. - М.: Стройиз-
дат, 1965.-279 с.
67. Болотин В.В., Новичков Ю.Н., Швейко Ю.Ю. Теория аэроупругости // Прочность,
устойчивость, колебания. Справочник. - М.: Машиностроение, 1968. - Т.З. -
С. 468-512.
68. Бородай А.М., Нецветаев Ю.А. Качка судов на морском волнении. - Л.: Судо-
Судостроение, 1969.
69. Бортовой В.В., Горшков А.Г., Смелянский В.А. Экспериментальное исследование
напряженного состояния цилиндрической оболочки при взаимодействии с жид-
жидкостью // - Томск: Из-во ТГУ, 1981. - С. 47-50.
70. Брамвел А.Р.С. Динамика вертолетов. - М: Машиностроение, 1982. - 368 с.
71. Бранец В.Н.У Шмыглевский К Г. Применение кватернионов в задачах ориентации
твердого тела. — М.: Наука, 1973. - 320 с.
72. Бреббия К., Теллес Э., Вроубел Л. Методы граничных элементов. - М.: Мир, 1987.
-524с. '
73. Буков В.Н. Адаптивные прогнозирующие системы управления полетом. - М.:
Наука, 1987.-232 с.
74. Буньков ВТ. Расчет на флаттер крыла малого удлинения с помощью метода мно-
многочленов // Тр. ЦАГИ. - 1969. - Вып. 1166. - С. 33-47.
75. Буньков ВТ. Учет деформации сдвига при расчете колебаний крыла малого удли-
удлинения методом многочленов.// Уч. записки ЦАГИ. 1972. - Т. 3, № 4. - С.111-119.
76. Буренин Н.И. Радиолокационные станции с снтезированной антенной. - М.: Сов.
радио, 1972.-160 с.
77. Бусленко ЕЛ. Моделирование сложных систем. - М.: Наука, 1978. - 399 с.
78. Быков В.В. Цифровое моделирование в статистической радиотехнике. - М.: Сов.
радио, 1971.-326 с.
79. Бюшгенс Г.С., Студнев Р.В. Динамика самолета. Пространственное движение. -
М.: Машиностроение, 1987. - 226 с.
80. Васильев В.В. Механика конструкций из композиционных материалов. - М.: Ма-
Машиностроение, 1988.-272 с.
81. Васин КС, Егоров В.И., Муравьев ГТ. Аэродинамика самолета ИЛ-76Т. - М.:
Транспорт, 1983. - 165 с.
82. Векслер Н.Д. Информационные проблемы гидроупругости. - Таллин: Валгус,
1982.-248 с.
83. Векслер Н.Д. Акустическая спектроскопия. - Таллин: Валгус, 1989. - 324 с.
84. Верлань А.Ф., Москалюк С.С. Математическое моделирование непрерывных ма-
математических систем. - Киев: Наукова думка, 1988. - 288 с.
85. Взаимодействие пластин и оболочек с жидкостью и газом / Под ред. А.Г. Горшко-
Горшкова. - М.: Изд-во МГУ, 1984. - 168 с.
86. Вестяк А.В., Горшков А.Г., Тарлаковский Д.В. Нестационарное взаимодействие
деформируемых тел с окружающей средой // Итоги науки и техники. Механика
деформируемого твердого тела. - М.: Изд. ВИНИТИ, 1983. - Т. 15. - С. 69-148.
87. Вибрации в технике. Справочник. Т. 1. - М.: Машиностроение, 1977. - 352 с.
88. Вилъдгрубе Л.С. Вертолеты. Расчет интегральных аэродинамических характери-
характеристик и летно-технических данных. - М.: Машиностроение, 1977. - 151 с.
89. Винниченко Н.К.У Пинус Н.Э., Шметтер СМ. и др. Турбулентность в свободной
атмосфере. - М.: Гидрометеоиздат, 1968. - 336 с. *
89а. Власов В.З. Избранные труды. - М.: Изд-во АН СССР, 1962. - Т. 1. - 528 с.
90. Воеводин А. В. Определение аэродинамических характеристик отрывного обтека-
обтекания крыла с учетом слабой нестационарности, вызванной изменением угла атаки
// Уч. записки ЦАГИ. - 1985. - Т. 16, № 4. - С. 89-93.
91. Вольмир А.С. Устойчивость деформируемых систем. - М.: Наука, 1967. - 984 с.
576
92. Волъмир А.С., Гуляев В.В., Пономарев А.Т. Поведение упругих систем при отрыв-
отрывном обтекании// ДАН СССР. - 1978. -Т. 243, № 4. - С.886-888.
93а. Волъмир А.С. Нелинейная динамика пластинок и оболочек. - М.: Наука, 1972. -
432 с.
93. Волъмир А.С. Оболочки в потоке жидкости и газа. Задачи аэроупругости. - М.:
Наука, 1976.-416 с.
94. Волъмир А.С. Оболочки в потоке жидкости и газа. Задачи гидроупругости. - М.:
Наука, 1979.-256 с.
95. Воробьев А.З., Олькин Б.И., Стебелев В.М. и др. Сопротивление усталости эле-
элементов конструкций. - М.: Машиностроение, 1990. - 239 с.
96. Воробьев Н. Ф. Аэродинамика несущих поверхностей в установившемся потоке. -
Новосибирск: Наука, СО, 1985. - 240 с.
97. Воробьев Й.Ф., Ковеня В.М., Латыпов А.Ф. и др. Численные методы в аэрогазо-
аэрогазодинамике // Моделирование в механике. - 1987. - № 4. - С. 46-61.
98. Галиев Ш.У. Динамика взаимодействия элементов конструкции с волной давле-
давления в жидкости. - Киев: Наукова думка, 1977. - 172 с.
99. Галкин М.С., Жмурин ИП. Определение форм колебаний жидкости в сосудах
произвольной формы методом коллокаций // Колебания упругих конструкций с
жидкостью. - Новосибирск: Изд. НЭТИ, 1974. - С. 63-64.
100. Гамынин Н.С. Гидравлический привод систем управления. - М.: Машинострое-
Машиностроение, 1972.-371 с.
101. Гаррик ИЗ. Аэроупругость: состояние и перспективы. 13-я Кармановская лекция
// Ракетная техника и космонавтика. - 1978. - Т. 16, № 1. - С. 120-143.
102. Гаррик И.Э., Рид У.Х. Исторический обзор исследований флаттера самолетов //
Аэрокосмическая техника. - 1983. - Т. 1, № 4. - С. 139-161.
103. Гийон М. Исследование и расчет гидравлических систем. - М.: Машиностроение,
1964.-387 с.
104. Гильманов А.Н.У Сахабутдинов Ж.М. Произвольный лагранжево-эйлеров метод в
нелинейных задачах взаимодействия упругого тела с потоком газа // Взаимодей-
Взаимодействие оболочек с жидкостью. - Изд. Казанск. физ.-техн. ин-та. Тр. семинара. Ка-
Казань: 1981.-№ 14.-С. 127-145.
105. Гиневский А.С. Теория турбулентных струй и следов. - М.: Машиностроение,
1969.-400 с.
106. Гладкий В.Ф. Динамика конструкции летательного аппарата. - М.: Наука, 1969. -
496 с.
107. Гладкий В.Ф. Прочность, вибрация и надежность конструкции летательного аппа-
аппарата. - М.: Наука, 1975. - 456 с.
108. Гогиш Л.В., Нейланд В.Я., Степанов Г.Ю. Теория двухмерных отрывных течений
// Гидромеханика. Итоги науки и техники. - М.: Изд. ВИНИТИ, 1975.- Т. 8. -
С. 5-7.
109. Гогиш Л.В., Степанов Г.Ю. Турбулентные отрывные течения. - М.: Наука, 1979.
-368 с.
110. Годунов С.К., Забродин А.В., Иванов М.Я. и др. Численное решение многомерных
задач газовой динамики / Под ред. С.К. Годунова. - М.: Наука, 1976. - 400 с.
111. Голубев В.В. Труды по аэродинамике. - М.; Л.: Гостехиздат, 1957. - 979 с.
112. Гомон М.Г., Захаров СБ., Храброе А.Н. Аэродинамический гистерезис при ста-
стационарном отрывном обтекании удлиненных тел // ДАН СССР. - 1985. - Т. 282,
№1.-С. 28-31.
113. Гониодский В.И., Силянский Ф.И., Шумилов И.С. Привод рулевых поверхностей
самолетов. - М.: Машиностроение, 1974. - 320 с.
114. Горбатенко С.А., Макашов Э.М.У Полушкин Ю.Ф. и др. Механика полета. - М.:
Машиностроение, 1969. - 420 с.
115. Горбунов Ю.А., Новохатская Л.М., Шмаков В.П. Теоретическое и эксперимен-
экспериментальное исследование спектра собственных неосесимметричных колебаний кони-
конической оболочки с жидкостью при наличии внутреннего давления // Динамика
упругих и твердых тел, взаимодействующих с жидкостью. - Томск: Из-во ТГУ,
1975.-С. 47-52.
.577
116. Горшков А.Г. Динамическое взаимодействие оболочек и пластин с окружающей
средой // Изв. АН СССР: МТТ. - 1976. - № 2. - С. 165-178.
117. Горшков А.Г. Нестационарное взаимодействие пластин и оболочек со сплошными
средами // Изв. АН СССР: МТТ. - 1981. - № 4. - С. 177-189.
118. Горшков А.Г. Плоская задача о погружении в жидкость цилиндрической трех-
трехслойной оболочки // Избранные вопросы современной механики. - М.: Изд-во
МГУ, 1981.-Ч. 1.-С. 137-141.
119.Горшков А.Г. Взаимодействие ударных волн с деформируемыми преградами//
Итоги науки и техники. Механика деформируемого твердого тела. - М.: Изд.
ВИНИТИ, 1989. - Т. 13. - С. 105-186.
120. Горшков А.Г. Устойчивость при ударных нагрузках // Динамика и прочность ма-
машин. Теория механизмов и машин: Машиностроение. Энциклопедия. - М.: Ма-
Машиностроение, 1994. - Т. 1. - С. 510-516.
121. Горшков А.Г, Дробышевский Н.И. Наклонный вход цилиндрических оболочек в
жидкость // Изв. АН СССР: МТТ. - 1987. - № 2. - С. 164-170.
122. Горшков А.Г., Тарлаковскш Д.В. Динамические контактные задачи для деформи-
деформируемого полупространства // Итоги науки и техники. Механика деформируемого
твердого тела. - М.: Изд. ВИНИТИ, 1?90,-Т. 21. - С. 76-131.
123. Горшков А.Г., Тарлаковскш Д.В. Нестационарная аэрогидроупругость тел сфери-
сферической формы. - М.: Наука, 1990. - 264 с.
124. Горшков А.Г., Тарлаковскш Д.В. Динамические контактные задачи с подвижными
границами. - М.: Наука, 1995. - 351 с.
125. Гостев П.М.Г Кутин А.С> Мозжилкин В.В. Панельный метод расчета нагрузок,
действующих на крыло, совершающее гармонические колебания в дозвуковом
потоке // Уч. записки ЦАГИ. - 1978. - Т. 9, № 2. - С. 27-35.
126. Граськин С.С. Математическое моделирование отрывного обтекания тонких не-
несущих поверхностей сжимаемым потоком газа // Изв. вузов: Авиационная техни-
техника. -?1991. -№ 2. - С. 31-36.
127. Граськин С.С., Ништ М.И. Математическая модель отрывного обтекания несу-
несущих поверхностей сжимаемым потоком // ДАН, 1994. - Т. 339, № 3. - С. 335-341.
128. Григолюк Э.И. Проблемы взаимодействия оболочек с жидкостью // Тр. 7-й Всес.
конф. по теории оболочек и пластинок. - М.: Наука, 1970. - С. 755-778.
129. Григолюк Э.И., Горшков А.Г. Нестационарная гидроупругость оболочек. - Л.:
Судостроение, 1974. - 208 с.
130. Григолюк Э.И., Горшков А.Г. Взаимодействие упругих конструкций с жидкостью.
Удар и погружение. - Л.: Судостроение, 1976. - 200 с.
131. Григолюк Э.И., Горшков А.Г. Погружение упругих оболочек вращения в жидкость
// Итоги науки и техники. Механика деформируемого твердого,тела. - М.: Изд.
ВИНИТИ, 1977. - Т. 10. - С. 65-113.
132. Григолюк Э.И., Горшков А.Г., Шклярчук Ф.Н. Об одном методе расчета колебаний
жидкости, частично заполняющей упругую оболочку вращения // Изв. АН СССР:
4 МЖГ. - 1968. - № 3. - С. 74-80.
133. Григолюк Э.И., Лампер Р.Е., Шандаров Л.Г. Флаттер панелей и оболочек // Итоги
науки. Механика. - М.: Изд. ВИНИТИ, 1963. - С. 34-90.
134. Григолюк Э.И., Шклярчук Ф.Н. Уравнения возмущенного движения тела с тонко-
тонкостенной упругой оболочкой, частично заполненной жидкостью // ПММ. - 1970. -
Т. 34, вып. 3.-С. 401-411.
135. Григорьев ВТ. Применение метода конечных элементов к расчету колебаний
упругих оболочечных конструкций, содержащих жидкость // Динамика упругих и
твердых тел, взаимодействующих с жидкостью. - Томск: Изд-во ТГУ, 1977.
136. Грин С.А., Моллер Р.Т. Влияние нормально распределенных фазовых ошибок на
диаграммы направленности антенных решеток с синтезированным раскрывом //
Заруб, радиоэлектроника. -1963. - № 2. - С. 21-23.
137. Гроссман ЕЛ. Флаттер. - М.: Оборонгиз, 1937. - 248 с; Курс вибраций частей
самолета. - М.: Оборонгиз, 1940. - 312 с.
578
138. Гроссман ЕЛ., Келдыш М.В., Пархомовский ЯМ. Вибрация крыла с элероном //
Тр. ЦАГИ. - 1937. - Вып. 337. - С. 1-98.
139. ГудилинА.В., Евсеев Д.Д., Ишмуратов Ф.З. и др. Комплекс программ аэропрочно-
аэропрочностного проектирования самолета «АРГОН» // Тр. ЦАГИ. - 1979. - Вып. 2021.
140. Гудков А.И., Лешаков П. С. Внешние нагрузки и прочность летательных аппара-
аппаратов. - М.: Машиностроение, 1968. - 480 с.
141. Гузь А.Н., Заруцкий В.А., Амиро И.Я. и др. Экспериментальные исследования
тонкостенных конструкций. - Киев: Наукова думка, 1984. - 240 с.
142. Гузь А.Н., Кубенко В.Д. Теория нестационарной аэроупругости оболочек. - Киев:
Наукова думка, 1982. - 399 с.
143. Гузь А.Н., Кубенко В.Д., Бабаев АЗ. Гидроупругость систем оболочек. - Киев:
Вища школа, 1984. - 208с.
144. Гуськов ЮЛ., Загайнов Г.И. Управление полетом самолетов. - М.: Машино-
Машиностроение, 1980. - 215 с.
145. Джылмер Т.П. Проектирование современного корабля. - Л.: Судостроение, 1974.
Ыв. Джонсон У. Теория вертолета. - М.: Мир, 1983. - Т. 1, 2. - 1021 с.
147. Дитрих Я. Проектирование и конструирование. Системный подход. - М.: Мир,
1981.-454 с.
148. Дмитриева М.В. Расчет амортизации шасси с рычажной подвеской колес// Тр.
ЦАГИ. - 1972. - Вып. 1394. - 33с.
149. Доброленский Ю. П. Динамика полета в неспокойной атмосфере. - М.: Машино-
Машиностроение, 1969. -254 с.
150. Докучаев Л.В. К решению краевой задачи о колебаниях жидкости в конических
полостях // ПММ. - 1964. - Т. 28. - №1.
151. Докучаев Л. В. Нелинейная динамика летательных аппаратов с деформируемыми
элементами. - М.: Машиностроение, 1987. - 232 с.
152. Дудник П.И., Чересов Ю.И. Авиационные радиолокационные устройства. - М.:
Изд.ВВИА, 1986.-533 с.
153. Ермолов В.В. Воздухоопорные здания и сооружения. - М.: Строййздат, 1980. -
304 с.
154. Ерошин В.А. Проникание упругого цилиндра в воду с большой скоростью. - Пре-
принт/Ин-тМеханики МГУ. № 5 -91. -М., 1991. - 84 с.
155. Ершов Н.Ф., Шахверди ГГ. Метод конечных элементов в задачах гидродинамики
и гидроупругости. - Л.: Судостроение, 1984. - 240 с.
156. Жуковский Н.Е. Собрание сочинений. - Т. 1-7. - М.: Гостехиздат, 1948. - 1950.
157. Жуковский Н.Е. О движении твердого тела, имеющего полости, наполненные
однородной капельной жидкостью // Изб. сочинения. - М.: Гостехиздат, 1948. -
Т. 1.-С. 31-153.
158. Задачи аэродинамики тел пространственной конфигурации. Сб. науч. тр. АН
СССР. СО. Ин-т теоретич. и приклад, механики / Под ред. Н.Ф. Воробьева. - Но-
Новосибирск: Изд. ИЛЕЙ, 1982. - 136 с.
159. Зайцев А.А., Тюрев В.В. Расчет обтекания несущей поверхности при больших
деформациях // Изв. АН СССР: МЖГ. - 1980. - № 4. - С. 72-79.
160. Замышляев Б.В., Яковлев Ю.С. Динамические нагрузки при подводном взрыве. -
Л.: Судостроение, 1967. - 387 с.
161. Зарубежные исследования динамики взлета и посадки палубных самолетов //
Обзор ЦАГИ. - М.: Изд. ЦАГИ, 1975. - № 460.
162. Зверев И.И., Коконин С.С. Проектирование авиационных колес и тормозных сис-
систем. - М.: Машиностроение, 1973.
163. Зеликов С.Н., Морозов В.И. Математическое моделирование процессов движения
и деформирования самолета // Математическое моделирование авиационных
комплексов. - М.: Изд. ВВИА, 1988. - Вып. 1315. - С. 149-156.
164. Зобнин А.И. О модели идеальной несжимаемой жидкости в теории отрывных
течений. - Препринт /. № 770. ВЦ СО АН СССР. - Новосибирск, 1987. - 22 с.
165. Иванов Ю.И.У Мазур В.В. Специализированная система программирования расче-
расчетов прочности методом конечных элементов (ССП МКЭ), версия 2 // Применение
численных методов в строительной механике корабля. - Л.: Судостроение,
1976. -С. 46-51.
579
166. Ильгамов М.А. Колебания упругих оболочек, содержащих жидкость и газ. - М.:
Наука, 1969. -184 с.
161. Ильгамов М.А. Введение в нелинейную гидроупругость. - М.: Наука, 1991. -
200 с.
168. Ильгамов М.А. Статические задачи гидроупругости. - Казань: ИММ РАН, 1994. -
208 с.
169. Ильюшин А.А. Закон плоских течений в аэродинамике больших сверхзвуковых
скоростей // ПММ. - 1956. - Т. 20, № 6. - С. 733-755.
170. Исследование по аэроавтоупругости / Под ред. СМ. Белоцерковского II Тр.
ВВИА. - 1971. - Вып. 1302; - 1973. - Вып. 1303; - 1974. - Вып. 1304; -1975. -
Вып. 1305; - 1978. - Вып. 1308.
171. Исследование авиационной техники с помощью ЭВМ / Под ред. СМ. Белоцерков-
Белоцерковского II Тр. ВВИА. - 1983. - Вып. 1310.
172. Ишмуратов Ф.З., Минаев А.Ф.У Поповский В.Н. Метод расчета частотных харак-
характеристик упругого самолета в продольном маневре // Исследование динамиче-
динамических характеристик конструкций летательных аппаратов. Тр. ЦАГИ. - 1984. -
Вып. 2226. - С. 28-37.
173. Ишмуратов Ф.З., Поповский В.Н. Построение закона управления для снижения
маневренных нагрузок на упругом самолете // Уч. записки ЦАГИ. - 1981. - Т. 12,
№4.-С. 156-161.
НА. Ишмуратов Ф.З., Поповский В.Н. Построение системы активного управления
маневренными нагрузками на упругом самолете // Проблемы аналитической ме-
механики и управления движением. - М.: 1985. - С. 126-130.
115. Казакевич МИ. Аэродинамическая устойчивость надземных и висячих трубо-
трубопроводов. - М.: Недра, 1977. - 200 с. ^
176. Каленик В.А., Морозов В.И. Математическое моделирование процессов движения
и деформирования самолета с крупногабаритным внешним грузом // Математи-
Математическое моделирование авиационных комплексов. - М.: Изд. ВВИА, 1989. - Вып.
1315.-С. 157-166.
177. Кармишш А.В., Скурлатов Э.Д., Старцев В.Г., Фельдштейн В.А. Нестационарная
аэроупругость тонкостенных конструкций. - М.: Машиностроение, 1982. - 240 с.
178. Картамышев А.И. Исследование колебаний упругой конструкции летательного
аппарата с учетом изменения по времени параметров полета // Тр. ЦАГИ. -
1974.-Вып. 1587.
179. Мастерский СМ. Математические модели электрогидравлических приводов са-
самолетных рулей // Исследования по аэроупругости. - М.: Изд. ВВИА, 1978. -
Вып. 1308.-С. 85-97.
180. КаЧанов Б.О. Оценивание и идентификация методом максимума средней апосте-
апостериорной вероятности на скользящем интервале наблюдений // Изв. АН СССР:
Техн. кибернетика. - 1989. - № 1. - С. 105-111.
181. Канонов Б.О. Многорежимное оценивание и идентификация методом максимума
средней апостериорной вероятности // Изв. АН СССР: Техн. кибернетика. -
1990.-№3.-С. 72-77.
182. Канонов Б.О.., Конетков Ю.А. Оптимальное гибридное управление непрерывными
стохастическими системами // Изв. АН СССР: Техн. кибернетика. - 1984. -№ 6. -
С.126-132.
183. Кананов Б.О., Овнаренко СИ., Пономарев А.Т. К формированию математической
модели адаптивной противофлаттерной системы // Прикладная механика. -
1990. -Т. 26, № 1. - С. 113-119.
184. Кашин Г.М., Федоренко Г.И. Автоматическое управление продольным движением
упругого самолета. - М.: Машиностроение, 1974. - 312 с.
185. Келдыш М.В., Гроссман Е.П., Марин НИ. Вибрации на самолете. - М.: Изд. БНТ
НКАП ЦАГИ, 1942. - 56 с.
186. Кибардин Ю.А., Киселев А.М. Физика спутного следа // Авиация и космонавти-
космонавтика. - 1978. - № 3. - С. 26-28; В спутном следе // Авиация и космонавтика. - 1978.
- № 4. - С. 26-28; Спутный след на взлете и посадке // Авиация и космонавтика. -
1978.-№5.-С. 26-28.
580
187. Кирсанов АЛ., Харьков В.П. Упрощенная математическая модель силовой уста-
установки // Исследования по аэроавтоупругости. - М.: Изд. ВВИА, 1978. - Вып.
1308.-С. 129-134.
188. Клячко М.Д., Арнаутов Е.В. Летные прочностные испытания самолетов. Динами-
Динамические нагрузки. - М.: Машиностроение, 1984. - 120 с.
189. Клячко М.Д., Арнаутов Е.В. Летные прочностные испытания самолетов. Статиче-
Статические нагрузки. - М.: Машиностроение, 1995. - 126 с.
190. Кобычкин В.С., Шмаков В.П.У Яблоков В.А. Осесимметричные колебания полу-
полусферической оболочки, частично заполненной жидкостью // Инж. ж.: МТТ. -
1967. -№3.- С
191. Когаев В.П., Махутов И.А., Гусенков А.П. Расчет деталей машин и конструкций
на прочность и долговечность. - М.:Машиностроение, 1985. - 223 с.
192. Колесников КС. Динамика ракет. - М.: Машиностроение, 1980. - 376 с.
193. Колесников КС, Минаев А.Ф. Колебания летательных аппаратов // Вибрация в
технике. - М.: Машиностроение, 1980. - Т. 3. - С. 477-510.
193&.Колесников КС, Самоплов Е.А., Рыбак С.А. Динамика топливных систем ЖРД. -
М.: Машиностроение, 1975. - 172 с.
194. Колесников КС., Сухов В.Н. Упругий летательный аппарат как объект автомати-
автоматического управления. - М.: Машиностроение, 1974. - 267 с.
195. Коллакот Р. Диагностика повреждений. - М.: Мир, 1989. - 516 с.
196. Коллинз Дж. Повреждение материалов в конструкциях/ Под ред. Э.И. Григолю-
ка. - М.: Мир, 1984. - 624 с.
191. Кочетков Ю.А. Основы автоматики авиационного оборудования. - М.: Изд.
ВВИА, 1975.-455 с.
198. Кочетков Ю.А., Кулифеев Ю.Б., Подобедов В А. Математические модели датчи-
датчиков // Исследование по аэроавтоупругости. - М.: Изд. ВВИА, 1978. - Вып. 1308. -
С. 69-84.
199. Кочин П.Е., Кабель И.А., Розе КВ. Теоретическая гидромеханика. - М.: Физмат-
гиз, 1963. - Ч. 1. - 583 с; - Ч. 2. - 728 с.
200. Крамер X. Математические методы статистики. - М.: Мир, 1975. - 548 с.
201. Красилъщикова Е.А. Тонкое крыло в сжимаемом потоке. - М.: Наука, 1986. -
288 с.
202. Красовский А.А. Системы автоматического управления полетом и их аналитиче-
аналитическое конструирование. - М.: Наука, 1973. - 560 с.
203. Красовский А.А., Буков В.Н., Шендрик В.С. Универсальные алгоритмы оптималь-
оптимального управления непрерывными процессами. - М.: Наука, 1977. - 270 с.
204. Крылов СВ., Михайлов Г.С. Численное решение двумерных задач удара упруго-
пластических оболочек о свободную поверхность жидкости // Прикладные про-
проблемы прочности и пластичности. - Горький: Изд-во ГГУ. -1979. - № 3. - С. 83-89.
205. Кузнецов О.В. Модели для расчета частотного спектра неоднородных оболочеч-
ных конструкций // Изв. АН СССР: МТТ. - 1987. - № 3. - С. 185-189.
206. Кубенко В.Д. Нестационарное взаимодействие элементов конструкций со сре-
средой. - Киев: Наукова думка, 1979. - 184 с.
207. Кубенко В.Д. Проникание упругих оболочек в сжимающую жидкость. - Киев:
Наукова думка, 1981. -160 с.
208. Кузовков Н.Т., Карабанов СВ., Салычев О.С. Непрерывные и дискретные системы
управления и методы идентификации. - М.: Машиностроение, 1978. - 222 с.
209. Кулифеев Ю.Б. Дискретно-непрерывный метод идентификации непрерывных
систем // Изв. АН СССР: МТТ. - 1981. - № 5. - С. 47-55.
210. Кулифеев Ю.Б. Идентификация датчиков // Исследование авиационной техники с
помощью ЭВМ. - М.: Изд. ВВИА, 1981. - С. 143-149; Идентификация ЛА в поле-
полете с использованием полной априорной информации // Исследование авиацион-
авиационной техники с помощью ЭВМ. - М.: Изд. ВВИА, 1981. - С. 100-112.
211. Лаврентьев М.А., Шабат Б.В. Проблемы гидродинамики и их математические
модели. - М.: Наука, 1973. - 416 с.
212. Лампер Р<Е. Введение в теорию нелинейных колебаний авиаконструкций. - М.:
Машиностроение, 1985. - 88 с; Введение в теорию флаттера. - М.: Машино-
Машиностроение, 1990. -144 с.
581
213. Лебедев А.А., Бобронников В.Т., Красильщиков М.Н. и др. Статистическая дина-
динамика и оптимизация управления летательных аппаратов. — М.: Машиностроение,
1985. -279 с.
214. Лебедев А.А., Чернобровкин Л.С. Динамика полета. - М.: Оборонгиз, 1962. -
616 с.
215. Левин М.А., Фуфаев К А. Теория качения деформируемого колеса. - М.: Наука,
1989.
216. Ли Э.Б., Маркус Л. Основы теории оптимального управления. - М.: Наука,'
1972.-574 с.
217. Лифанов И.К. Метод сингулярных интегральных уравнений и численный экспе-
эксперимент. - М.: ТОО «Янус», 1995. - 520 с.
218. Лойцянскш Л.Г. Механика жидкости и газа. - М.: Наука, 1973. - 848 с.
219. Луковский И.А., Барняк М.Я., Комаренко А.Н. Приближенные методы решения
задач динамики ограниченного объема жидкости. - Киев: Наукова думка, 1984. -
232 с.
220. Лурье А.И. Аналитическая механика. - М.: Физматгиз, 1961. - 824 с.
221. Любимов А.Н., Сорокин Ю.С. Метод расчета обтекания летательного аппарата
дозвуковым потоком идеального газа // Уч. записки ЦАГИ. - 1985. - Т. 16, № 4. -
С. 8-14. '
222. Майлс Д. У. Потенциальная теория неустановившихся сверхзвуковых течений. -
М.: Физматгиз, 1963. - 272 с.
223. Макаревский А.И., Чижов В.М. Основы прочности и аэроупругости летательных
аппаратов. - М.; Машиностроение, 1982. - 238 с.
224. Максимей КВ. Имитационное моделирование на ЭВМ. - М.: Радио и связь,
1988.-230 с.
225. Маневич Л.И., Прокопало Е.Ф., Шукуров А.Х. Исследование параметрических
колебаний оболочки, заполненной жидкостью // Колебания упругих конструкций
с жидкостью. - М.: ЦБНТИ «Волна», 1976.
226. Мартынов А.К., Новоселов П.М., Степанов А.В. и др. Экспериментальные иссле-
исследования по аэродинамике вертолета. - М.: Машиностроение, 1<Ш. - 240 с.
227. Марчук Г.И, Методы вычислительной математики. - М.: Наука, 1977. - 456 с.
228. Математическое моделирование авиационных комплексов / Под ред. М.И. Ништа.
- М.: Изд. ВВИА, 1989. - Вып. 1315. - 250 с. •
229. Математическое моделирование прочности авиаконструкций // Авиационная
промышленность. - 1985. - № 9. - С. 3-8.
230. Математическое обеспечение сложного эксперимента. В 5-ти т. Т. 2. Математиче-
Математические модели при измерениях / Ю.А.Белову В.П. Диденко, Н.Н.Козлов и др. - Киев:
Наукова думка, 1983. - 263 с.
231. Мейстер Д., Рабидо Дж. Инженерно-психологическая оценка при разработке
систем управления. - М.: Сов. радио, 1970. - 432 с.
232. Метсавээр Я.А., Векслер Н.Д., Стулов А.С. Дифракция акустических импульсов
на упругих телах. - М.: Наука, 1979. - 239 с.
233. Микеладзе ВТ., Титов В.М. Основные геометрические и аэродинамические ха-
характеристики самолетов и ракет. - М.: Машиностроение, 1990. - 144 с.
234. Микишев Г.Н., Дорожкин Н.Я.Г Экспериментальные исследования свободных
колебаний жидкости в сосуде // Изв. АН СССР: ОТН. Механика и машинострое-
машиностроение.- 1961.- №4.
235. Микишев Г.Н., Рабинович Б.И. Динамика твердого тела с полостями, частично
заполненными жидкостью. - М.: Машиностроение, 1968. - 532 с.
236. Микишев Г.Н.У Рабинович Б.И. Динамика тонкостенных конструкций с отсеками,
содержащими жидкость. - М.: Машиностроение, 1971. - 564 с.
237. Минаев А.Ф. Расчет свободных колебаний летательных аппаратов методом сосре-
сосредоточенных масс // Тр. ЦАГИ. - 1965. - Вып. 466. - С. 37-43.
238. Миронов АД., Лапин А.А., Меерович Г.Ш. и др. Задачи и структура летных испы-
испытаний самолетов и вертолетов. - М.: Машиностроение, 1982. - 144 с. ,
239. Митрушенков В.Л. Метод учета влияния деформаций самолета на его нагружение
// Уч. записки ЦАГИ. - 1981. - Т. 12, № 6. - С. 124-130.
582
240. Михеев РЛ.У Лосев В.С, Бубнов А.В. Летные прочностные испытания вертолетов.
-М.: Машиностроение, 1987. - 126 с.
241. Мнев ЕЖ, Перцев А.К. Гидроупругость оболочек. - Л.: Судостроение, 1970. -
365 с.
242. Моисеев Н.Н. Вариационные задачи теории колебаний жидкости и тела с жидко-
жидкостью // Вариационные методы в задачах о колебаниях жидкости и тела с жидко-
жидкостью. - М.: Изд. ВЦ АН СССР, 1962. - С. 7-115.
243. Моисеев Н.Н. Математика ставит эксперимент. - М.: Наука, 1979. - 223 с.
244. Моисеев Н.Н. Математические задачи системного анализа. - М.: Наука, 1981. -
488 с.
245. Моисеев Н.Н^ Румянцев В.В. Динамика тела с полостями, содержащими жид-
жидкость. - М.: Нарса, 1965. - 440 с.
246. Молчанов В.Ф. Аналитическое исследование нелинейных характеристик прямо-
прямоугольного крыла малого удлинения // Уч. записки ЦАГИ. -1978. - Т. 9, № 5. -
С. 1-10.
246а,.Морозо® В.К, Пирожник А.С. Амплитудные диаграммы упругого летательного
аппарата при воздействии подвижных порывов // Изв. вузов: Авиационная техни-
техника - 1998. - № 3,- С 27-32.
247. Морозов В.И., Пожогин А.В. Математическая модель движения и нагружения
упругой конструкции самолета корабельного базирования при взлете с трамплина
и катапульты и посадке на аэрофинишер // Математическое моделирование авиа-
авиационных комплексов / Под ред. М.К Ништа. - М.: Изд. ВВИА, 1997. - Вып.
1318.-С 333-351.
248. Морозов В.И., Пономарев А.Т., Зудилов А.Г. Современная технология проектиро-
проектирования самолетов с применением ЭВМ // Полет. - 1998. - № 1. - С. 9-16.
249. Морозов В.К, Пономарев А.Т., Рысев О.В. Математическое моделирование слож-
сложных аэроупругих систем. - М.: Наука, 1995. - 736 с.
250. Набиуллин Э.Н. Метод расчета нестационарных аэродинамических нагрузок на
тонкое крыло конечного удлинения, совершающее упругие гармонические коле-
колебания в дозвуковом потоке // Уч. записки ЦАГИ. - 1972. - Т. 3, № 6. - С. 94-100.
251. Набиуллин Э.Н., Рыбаков А.А. Расчетное исследование влияния нестационарных
аэродинамических нагрузок на флаттер консоли крыла большого удлинения в не-
несжимаемом потоке // Тр. ЦАГИ. - 1977. - Вып. 1822. - С. 16-21.
252. Нагружение самолета при наземных режимах эксплуатации // Обзор ЦАГИ. -
1979.-№559.
253. Назаренко В.В., Фомин Г.М. Колебания упругих конструкций при срыве потока //
VI Всес. съезд по теоретической и прикладной механике. Тезисы доклада. - Таш-
Ташкент, 1986. - С. 476.
254. Нашиф А., Джоунс Д., Хендерсои Дж. Демпфирование колебаний. - М.: Мир,
1988.-448 с. :>
255. Нейланд В.Я., Сычев В.В. К теории течений в стационарных срывных зонах // Уч.
записки ЦАГИ. - 1970. - Т. 1, № 1. - С. 14-23.
256. Некрасов А.И. Теория крыла в нестационарном потоке. - М.: Изд. АН СССР,
1947.-258 с.
257. Никольский А.А., Бетяев С.К., Малышев ИЛ. О предельной форме отрывного
автоматизированного течения идеальной жидкости // Проблемы прикладной ма-
математики и механики. - М.: Наука, 1971. - 282 с,
258. Новичков Ю.Н. Флаттер пластин и оболочек // Итоги науки и техники. Механика
деформируемого твердого тела. - М.: Изд. ВИНИТИ, 1978. - Т. 11. - С. 67-122.
259. Новожилов В.В. Теория тонких оболочек. - Л.: Судпромгиз, 1962. - 431 с.
260. Нох В.Ф. СЭЛ — совместный эйлерово-лагранжев метод для расчета нестацио-
нестационарных двумерных задач // Вычислительные методы в гидродинамике. - М.: Мир,
1967.-С. 128-184.
260а.Образцова Е.И. Нелинейные осесимметричные колебания пологой сферической
оболочки с жидкостью // Изв. АН СССР: МТТ. - 1977. - № 4. - С. 171-175.
261. Образцова Е.И., Шклярчук Ф.Н. Влияние геометрической нелинейности пологой
сферической оболочки днища на продольные колебания жидкости в цилиндриче-
цилиндрическом баке // Изв. вузов: Авиационная техника. - 1979. - № 4. - С. 41-46.
262. Образцова Е.И., Шклярчук Ф.Н. Нелинейные параметрические колебания цилин-
цилиндрического бака с жидкостью // Изв. АН СССР: МТТ. - 1979. - № 4. - С. 133-145.
263. Образцова Е.И., Шклярчук Ф.Н. Нелинейные параметрические колебания орто-
тропного цилиндрического бака, частично заполненного жидкостью. - М.: ЦНТИ
«Волна», 1980. - С. 216-224.
264. Общая теория аэродинамики больших скоростей / Под ред. У. Сирса. - М.: Воен-
издат, 1962.-667 с.
265. Одинг И. А. Допускаемые напряжения в машиностроении и циклическая проч-
прочность металлов. - М.: Машгиз, 1962.
266. Остославский КВ., Стражева И. В. Динамика полета. Траектории летательных
аппаратов. - М.: Машиностроение, 1969. - 499 с.
267. Охоцимский Д.Е. К теории движения тела с полостями, частично заполненными
жидкостью // Изв. АН СССР: ПММ, - 1956. - Т. 20. - Вып. 1. - С. 3-20.
268. Павленко В.Ф. Корабельные самолеты. - М.: Воениздат, 1990. - 320 с.
269. Пашковский И.М., Леонов В.А., Поплавский Б.К. Летные испытания самолетов и
обработка результатов испытаний. - М.: Машиностроение, 1985, - 416 с.
270. Перцев А.К., Платонов Э.Г. Динамика пластин и оболочек. Нестационарные зада-
задачи. - Л.: Судостроение, 1987. - 316 с.
271. Петров Ю.В. Использование инерционных свойств топлива для демпфирования
колебаний самолета // Изв. вузов: Авиационная техника. - 1995. - № 3. - С. 88-90.
272. Петров Ю.В. Методы демпфирования аэроупругих колебаний самолета с двига-
двигателями на пилонах под крылом // Тр. 29 Чтений К.Э. Циолковского. - М.: ИИЕТ
РАН, 1995.-С. 30-35.
273. Петров Ю.В. Моделирование и исследование параметров^пилонных силовых
установок на аэроупругие колебания крыла самолета // Изв.'вузов: Авиационная
техника. - 1995. - № 1. - С. 20-22.
274. Петров Ю.В. Синтез математической модели аэроупругости самолета с учетом
подвижности топлива в баках // Изв. РАН: МТТ. - 1996. - № 3. - С. 25-31.
275. Повицкий А.С. Посадка гидросамолетов // Тр. ЦАГИ. - 1939. - Вып. 423. - С. 1-83.
276. Поповский В.Н., Ишмуратов Ф.З. Математическая модель продольного маневра
упругого самолета // Тр. ЦАГИ. - 1982. - Вып. 2135. - С. 21-35.
277. Поручиков В. В. Удар диска по поверхности идеальной сжимаемой жидкости //
ПММ. - 1964. - Вып. 4. - С. 797-800.
278. Поручиков В.В. Методы динамической теории упругости. - М.: Наука, 1986. -
328 с.
279. Постное В.А.У Хархурим И.Я, Метод конечных элементов в расчетах судовых
конструкций. - Л.: Судостроение, 1974. - 341 с.
280. Привен Д.Л., Максимова Т.Н., Кирьянов В.К и др. Анализ нагружения самолета
многостояночным шасси // Теория и практика проектирования пассажирских са-
самолетов. - М.: Наука, 1976.
281. Применение ЭВМ для исследования аэродинамических характеристик летатель-
летательных аппаратов / Под ред. СМ. Белоцерковского. - М.: Изд. ВВИА, 1979. - Вып.
1309; 1983.-Вып. 1311; 1986. гВып. 1313.
282. Проблемы создания и применения математических моделей в авиации / Под ред.
СМ. Белоцерковского И Вопросы кибернетики. - М.: Наука, 1983. - 167 с.
283. Проблема срыва и бафтинга// Техн. инф. ЦАГИ. - 1977. - № 19.
284. Прочность самолета (Методы нормирования расчетных условий прочности само-
самолета) / Под ред. А.И. Макаревского. - М.: Машиностроение, 1975. - 280 с.
285. Рабинович Б.И., Докучаев Л.В., Полякова ЗЖ О расчете коэффициентов уравне-
уравнений возмущенного движения твердого тела с полостями, частично заполненными
жидкостью // Косм, исследования. - 1965. - Вып. 2 - № 3.
286. Рабинович Б.И. Введение в динамику ракет-носителей космических аппаратов. -
М.: Машиностроение. - 1975. - 416 с.
286а.Радиолокационные станции с цифровым синтезированием апертуры антенны /
Под ред. В.Т. Горяинова. - М.: Радио и связь, 1988. - 387 с.
287. Райхер В.Л. Гипотеза спектрального суммирования и ее применение для опреде-
определения усталостной долговечности при действии случайных нагрузок // Тр. ЦА-
ЦАГИ. - 1969. - Вып. 1134. - С. 9-38.
584
288. Райхер В.Л., Богданов Б.Ф., Ушаков И.Е. К методике построения диаграмм вы-
выносливости // Зав. лаб. - 1978. - № 4. - С. 465-466.
289. Райхер В.Л., Цымбалюк В.И. Расчетный метод определения эквивалентных режи-
режимов испытаний на выносливость крыла и фюзеляжа самолета // Тр. ЦАРИ. -
1971.-Вып. 1336.
290. Рапопорт ИМ. Динамика упругого тела, частично заполненного жидкостью, -г
М.: Машиностроение, 1966. - 394 с.
291. Рапопорт ИМ. Колебания упругой оболочки, частично заполненной жидкостью.
- М.: Машиностроение, 1967. - 360 с.
291а. Рахматулин Х.А. Обтекание проницаемого тела // Вести. Моск. ун-та: Сер. физ.-
мат. и естеств. наук. - 1950. - № 3, вып. 2. - С. 41-55.
29\б.Рахматулин Х.А., Демьянов ДА. Прочность при интенсивных кратковремнных
нагрузках. - М.: Физматгиз, 1961. - 390 с.
292. Реутов АЛ, Михайлов Б.А., Кондратенков Г.С. и др. Радиолокационные станции
бокового обзора. - М.: Сов. радио, 1970. - 360 с.
293. Ривкин А.С., Денисов А.И., Курьянов С.Д. Исследование динамики корабельного
аэрофинищера с тормозной машиной полиспастно-гидравлического типа // Во-
Вопросы кораблестроения. - 1983. - Вып. 4.
294. Родден В.И Метод определения коэффициентов влияния конструкции путем
стендовых частотных испытаний // Ракетная техника и космонавтика. - 1967. -
Т. 5, № 5.- С Д98-209.
295. Ройтенберг Я.Н. Автоматическое управление. - М.: Наука, 1978. - 395 с.
296. Роуч П. Вычислительная гидродинамика. - М.: Мир, 1980, -.616 с.
297. Рыбаков А.А. Расчет на флаттер самолетных конструкций сложных схем // Тр.
ЦАГИ. - 1977. - Вып. 1822. - С. 3-15.
298. Рысев О.В., Пономарев А.Т., Васильев М.В. и др. Парашютные системы. - М.:
Наука, 1996.-288 с.
299. Сагомонян А.Я. Удар и проникание тел в жидкость. - М.: Изд-во МГУ, 1986. -
172 с.
300. Самарский А.А. Математическое моделирование и вычислительный эксперимент
// Вест. АН СССР. - 1979.,- № 5. - С. 38-49.
301. Самарский А.А., Курдюмов СП., Ахромеева Т.С и др. Моделирование нелиней-
нелинейных явлений в современной науке // Информатика и- научно-технич. прогресс. -
М.: Наука, 1987.-С. 69-91.
302. Самарский А.А., Попов Ю.П. Разностные методы решения задач газовой динами-
динамики. - М.: Наука, 1980. - 352 с.
303. Самойлов Е.А., Павлов Б.С. Колебания сферической оболочки, заполненной жид-
жидкостью // Изв. вузов: Авиационная техника. - 1966. - № 1. - С. 38-46.
304. Сахаров А.С., Кислоокий В.Н., Киричевский В.В. и др. Метод конечных элементов
в механике твердых тел. - Киев: Вища школа; Лейпциг: ФЕБ Фахбухферлаг,
1982.-479 с.
305. Сеищев ГЛ., Новожилов Г.В., Тищенко М.Н. и др. Исследование воздушной
транспортировки крупногабаритных тяжеловесных грузов // Доклад на ежегодной
конф. А1АА, 1980. - Балтимор, А1АА, рарег № 80-0943.
306. Седов Л.И. Механика сплошной среды. - М.: Наука, 1976. - Т. 1. - 536 с; 1976. -
Т. 2.-576 с.
307. Селихов А.Ф., Чижов В.М. Вероятностные методы в расчетах прочности самоле-
самолета. -М.: Машиностроение, 1987. - 240 с.
308. Сильверстов М.М., Козиоров Л.М., Пономаренко В.А. Автоматизация управления
летательными аппаратами с учетом человеческого фактора. - М.: Машинострое-
Машиностроение, 1986. - 184 с.
309. Скурихин В.И., Шифрин В.Б., Дубровский В.В. и др. Математическое моделирова-
моделирование. - Киев: Техника, 1983. - 270 с.
310. Слепян Л.И. Нестационарные упругие волны. - Л.: Судостроение, 1972. - 374 с.
311. Смирнов А.И. Аэроупругая устойчивость летательных аппаратов. - М.: Машино-
Машиностроение, 1980.-231 с.
585
312. Смирнов Б.И. Построение оптимальной системы управления упругим самолетом с
заранее заданной степенью устойчивости // Тр. ЦАГИ. - 1977. - Вып.1878. - 16 с.
313. Смирнов КН., Ицкович А.А. Обслуживание и ремонт авиационной техники по
состоянию. - М.: Транспорт, 1987.
314. Снисаренко ТВ. Применение метода конечных элементов к расчету форм и час-
частот собственных колебаний авиационных конструкций // Уч. записки ЦАГИ. -
1981.-Т. 12, №2.-С. 137-140.
315. Соболев Е.И. Применение цифровых вычислительных машин для определения
критической скорости, флаттера систем со многими степенями свободы // Тр.
ЦАГИ. - 1965. - Вып. 949. - 85 с.
316. Соболь ИМ. Метод Монте-Карло. - М.: Наука, 1985. - 76 с.
317. Соколовский Г.А. Основные типы российских ракет класса «воздух - воздух» //
Авиац. техника и технология. - 1997. - № 3. - С. 6-12.
318. Сгпебенев В.Н. Проектирование соединений элементов конструкции с учетом
усталости // Сопротивление усталости элементов конструкций. Тр. ЦАГИ. - 1981.
-Вып. 2309.-С. 62-68.
319. Стражева ИВ., Мелкумов В.С. Векторно-матричные методы в механике поле-
полета. - М.: Машиностроение, 1973. - 260 с.
320. Стучалкий Ю.А. Проблемы прочности авиационных конструкций // Авиац. про-
промышленность. - 1994. - № 1-2. - С. 7-15.
321. Судаков Г.Г. Расчет отрывного обтекания механизированного крыла конечного
удлинения потоком идеальной жидкости // Уч. записки ЦАГИ. - 1984. - Т. 15,
№4.-С. 1-6.
322. Сычев В.В., Рубан А.И., Сычев В.В. и др. Асимптотическая теория отрывных тече-
течений. - М.: Наука, 1987. - 254 с. ^
323. Тейлор Док. Нагрузки, действующие на самолет. -М.: Машиностроение, 1971. -
372 с.
324. Титов М.П., Толстое Е.Ф., Фомкин Б.А. Синтезирование апертуры антенны при
полете самолета в турбулентной атмосфере // Проблемы создания и применения
математических моделей в авиации. Вопросы кибернетики. - М.: Наука, 1983. -
С.139-149.
325. ТракселД. Синтез систем автоматического регулирования. - М.: Машгиз, 1959. -
614 с.
326. Томиясу К. РЛС с синтезированием апертуры и их применение для отображения
поверхности океана // - ТИИЭР, 1978. - Т. 66.
327. Фершинг Г. Основы аэроупругости. - М.: Машиностроение, 1984. - 600 с.
328. Фещенко С.Ф., Луковский И.А., Рабинович Б.И. и др. Методы определения при-
присоединенных масс жидкости в подвижных полостях. - Киев: Наукова думка,
1969.-250 с.
329. ФынЯ.Ц. Введение в аэроупругость. - М.: Физматгиз, 1959. - 524 с.
330. Харти У.С. Динамический анализ конструкций, основанный на исследовании
форм колебаний отдельных элементов // Ракетная техника и космонавтика. -
1965. - Т. 3,№ 4.-С. 130-138.
331.Хачатуров Г.А., МатвеенкоЦМ, Копьев Д.Е. и др. Аэродромные системы тор-
торможения самолетов. - М.: Машиностроение, 1984. - 200 с.
332. ЦАГИ — основные этапы научной деятельности. 1918 - 1968 гг. - М.: Машино-
Машиностроение, 1976. - 352 с; ЦАГИ — основные этапы научной деятельности. 1968 -
1993гг. - М.: Наука, 1996. - 576 с.
333. Цибулевский И.Е. Человек как звено следящей системы. - М.: Наука, 1981. -
288 с.
334. Чаплыгин С.А. Собрание сочинений. Т. 1-4. - М.: Гостехиздат, 1948 - 1949.
335. Чжен П. Отрывные течения. -М.: Мир, 1972. - Т. 1. - 299 с; 1973. - Т. 2. - 280 с;
1973. - Т. 3.-333 с.
336. Численные методы исследования течений вязкой несжимаемой жидкости /
А.Д Госмену В.М. Пан, А.К. Ранчел и др. - М.: Мир, 1972. - 324 с.
337. Численный эксперимент в прикладной аэрогидродинамике / Под. ред. СМ. Бело-
церковского II Вопросы кибернетики. - М.: Наука, 1986. -184 с.
586
338. Шаракшанэ А.С., Железное И.Г., Ивнщкий В.А. Сложные системы. - М: Высшая
школа, 1977.-247 с.
339. Швец А.И. Сверхзвуковые летательные аппараты. - М.: Изд-во МГУ, 1989. -
240 с.
340. Швец А.И., Швец И.Т. Газодинамика ближнего следа. - Киев: Наукова думка,
1976. - 382 с.
341. Шевелев Ю.Д. Пространственные задачи вычислительной аэрогидродинамики. -
М.: Наука, 1986.-368 с.
342. Шклярчук Ф.Н. Осесимметричные колебания жидкости внутри упругой цилинд-
цилиндрической оболочки с упругим днищем // Изв. вузов: Авиационная техника. -
1965.-№4. -С. 75-83.
343. Шклярчук Ф.Н О приближенном методе расчета осесимметричных колебаний
оболочек вращения с жидким заполнением // Изв. АН СССР: Механика. - 1965. -
№6. -С. 123-129.
344. Шклярчук, Ф.Н. О вариационных методах расчета осесимметричных колебаний
оболочек вращения, частично заполненных жидкостью // Тр. 6-й Всес. конф. по
теории оболочек и пластин. - М.: Наука, 1966. -г С. 835-840.
345. Шклярчук Ф.Н Динамическая устойчивость, цилиндрической оболочки, частично
заполненной жидкостью, при продольных колебаниях // Тр. 7-й Всес. конф. по
теории оболочек и пластин. - М.: Наука, 1970. - С. 619-624.
346. Шклярчук Ф.Н Динамические характеристики упругих тонкостенных баков с
жидкостью при продольных колебаниях // Изв. АН СССР: МТТ. - 1971. - № 5. -
С. 131-141.
347. Шклярчук Ф.Н О влиянии сжимаемости жидкости при продольных колебаниях
цилиндрического бака // Колебания упругих конструкций с жидкостью. - Ново-
Новосибирск: НЭТИ, 1973. - С. 291-313.
348. Шклярчук Ф.Н О параметрических колебаниях цилиндрической оболочки, час-
частично заполненной жидкостью, при продольном возбуждении // Колебания упру-
упругих конструкций с жидкостью. - Новосибирск: НЭТИ, 1973. - С. 314-329.
349. Шклярчук Ф.Н. Колебания упругой оболочки, содержащей тяжелую сжимаемую
жидкость // Колебания упругих конструкций с жидкостью. - М.: ЦНТИ «Волна»,
1976.-С. 386-397.
350. Шклярчук Ф.Н Приближенный метод расчета колебаний жидкости в полостях
вращения // Колебания упругих конструкций с жидкостью. - М.: ЦНТИ «Волна»,
-1976.-С. 397-404.
351. Шклярчук Ф.Н Колебания упругой оболочки, содержащей жидкость с источни-
источником // Изв. АН СССР: МТТ. - 1977. -№ 6. - С. 153-166.
352. Шклярчук Ф.Н, Иденбаум В.М. Итерационный метод расчета собственных осе-
осесимметричных колебаний оболочек вращения с жидкостью // Нелинейные про-
проблемы аэрогидроупругости. - Казань. - 1979. - Вып. 11. - С. 115-125.
353. Шклярчук Ф.Н Нелинейный резонанс продольных колебаний системы, имеющей
динамически неустойчивую цилиндрическую оболочку с жидкостью // Тр. 7-й
Всес. конф. по теории оболочек и пластин. - Ереван. -1980. - Т. 3. - С. 281-286.
354. Шклярчук Ф.Н Поперечные колебания цилиндрической оболочки с отсеками,
частично заполненными жидкостью // Изв. АН СССР: МТТ. - 1980. - № 6. - С.
153-165.
355. Шклярчук Ф.Н. Осесимметричные колебания оболочки вращения, содержащей
жидкость с малым пузырем // Изв. вузов: Авиационная техника. - 1981. - № 2. -
С. 60-65.
356. Шклярчук Ф.Н Сведение задачи о колебаниях оболочки вращения с жидкостью к
обыкновенным дифференциальным уравнениям // Расчет тонкостенных элемен-
элементов конструкции на прочность, устойчивость, колебания и долговечность. - М.:
Изд. МАИ, 1983.-С. 81-86.
357. Шклярчук Ф.Н Динамика конструкций летательных аппаратов. - М.: Изд. МАИ,
1983. - 80 с.
587
358. Шклярчук Ф.Н. Применение метода конечных элементов к расчету неосесиммет-
ричных колебаний оболочек вращения с жидкостью // Колебания упругих конст-
конструкций с жидкостью. - М.: ЦНТИ «Волна», 1984. - С. 284-289.
359. Шклярчук Ф.Н., Шишканов В.М. Численное решение задачи о колебаниях обо-
оболочки вращения с жидкостью // Вопросы строительной механики и прочности ле-
летательных аппаратов. - М.: Изд. МАИ, 1985. - С. 109-114.
360.*Шклярчук Ф.Н. Аэроупругость самолета. - М.: Изд. МАИ, 1985. - 77 с.
361. Шклярчук Ф.Н., Исаев ММ. Фундаментальное решение гидродинамической зада-
задачи для полости вращения // Расчет тонкостенных элементов конструкции на
прочность, устойчивость, колебания и долговечность. - М.: Изд. МАИ, 1988. - С.
54-57.
362. Шклярчук Ф.Н. Обыкновенные дифференциальные уравнения в канонической
форме для задач о малых колебаниях жидкости внутри упругой оболочки враще-
вращения // Изв. РАН: МТТ. - 1994. - № 2. - С. 138-150.
363. Шклярчук Ф.Н. Применение метода Ритца к расчету колебаний упругих оболочек
с жидкостью // Тр. 17-й межд. конф. по теории оболочек и пластин. - Казань: Из-
воКГУ, 1996.-С. 67-71.
364. Шлихтинг Г. Теория пограничного слоя. - М.: Наука, 1974. - 712 с.
365. Шмаков «5.77. Об одном приеме, упрощающем применение метода Бубнова-
Галеркина к решению краевых задач // Изв. АН СССР: МТТ. -1967. - № 5.
366. Шмаков В.П.у Мельникова Л.М., Яблоков В.А. Применение численных методов к
задачам о колебаниях упругих оболочек вращения, заполненных идеальной не-
несжимаемой жидкостью // Колебания упругих конструкций с жидкостью. - Ново-
Новосибирск: Изд-во НЭТИ, 1973. - С. 271-290.
367. Эткин Б. Динамика полета, устойчивость и управляемость. - М.: Машинострое-
Машиностроение, 1964, -494 с.
368. Юрьев Б.Н. Аэродинамический расчет вертолетов. - М.: Оборонгиз, 1956. - 560 с.
369. Яненко Н.Н. Численное решение задач механики жидкости// Тр. 3-го Всес. семи-
семинара по моделям механики сплошной среды. - Новосибирск, 1976. - С. 177-199.
370. Ярмарков Р.Г. Летные испытания первых опытных образцов самолетов. - М.:
Машиностроение, 1987. - 144 с.
371. Abramson H.N., Chu W.H., Ransleben G.E. Representation of fuel sloshing in cylindri-
cylindrical tanks by an equivalent mechanical model // ARS J. - 1961. - V. 31. - № 12. - P.
1697-1705.
31 la.Adrov V.M. Statistical model to investigate the influence of maintenance condition on
aircraft fatigue damage on taxi. Proc. in the Sixth intern, fatigue congress'96, 6-10
may, Berlin, Germany Pergamon, 1996. - P. 1837-1842.
372. Baker W.E., Westine P.S. Model tests for structural response of Apollo Command mod-
module to water impact // J. Spacecraft a. Rockets. - 1967. - V. 4, № 2. - P. 201-208.
373. Bathe KJ.y Hahn W. On Transient Analysis of Fluid - Structure Systems // Computers
a. Structures. - 1981. - V. 10. - P. 383-391.
374. Bauer H.F. Nonlinear mechanical model for the description of propellan sloshing //
AIAA J. - 1966. - V. 4, № 9. - P. 1662-1668.
375. BisplinghoffRX., Ashley H. Principles of aeroelasticity. - N.Y.: Dover, 1975. - 527.p.
376. Buch A. Verification of fatigue crack initiation life prediction results. Techn. Israel Inst.
of Techn. Haifa: TAE, 1980. - № 400.
377. Buffrill C.S., Zeiler Т.Д., Arbuckle P.D. Nonlinear simulation of a flexible aircraft in
' maneuvering flight // AIAA flight Simul. Technol. Conf., Mon rey, 1987. Collect.
Technol. Pap. N.Y.: 1987. -P. 122-133.
378. Calmon J. From Sir Frank Whittle to the year 2000-what is new in propulsion? // Aero-
Aeronautical J. - 1988. - V. 92, № 920. - P. 397-408.
379. Canovin J.R., Likens P.W. Floating reference frames for flexible spacecraft // J. Space-
Spacecraft a. Rockets. - 1977. - V. 14, № 12. - P. 724-732.
380. Chuang Sheng-Lun. Experiments on slamming of wedge-shaped bodies // J. Ship-Res. -
1967. - V. 11, № 3. - P. 190-198.
381. Coale C. W. Axisymmetric vibration of a cylindrical - hemispherical tank partially filled
with a liquid // AIAA J. - 1969. - V. 7, № 2. - P. 235-243.
588
382. Collar A.R. The first fifty years of aeroelasticity // Aerospace. - 1978. - V. 5, № 545. -
P. 12-20.
383. Coupry G. Aeroelasticity today and tomorrow // ICAS Proa, 1986: 15 th Congr. Int.
Aeronat. Sci., - N.Y; 1986. - V. 1. - P. 16-24,; Critical analisis of the Methods used for
predicting the response of large flexible aircraft to continuous atmospheric turbulence.
AIAA // ASME 12th Structures, structural dynamics and materials conf., 1*9,71.
384. Craggs J.W. Wave Motion in Plastic-Elastic Strings // J. Mech. a. Phys. Solids. - 1954.
-№4.
385. Cutching M.A.y Purvis J.W., Bunton R.W. Aeroservoelasticity in the, time domain // J.
Aircraft. - 1983. - V. 200, № 9. - P. 753-761.
386. Development of airframe structural desing loads prediction techniques for flexible mili-
military aircraft: theoretical development // AIAA Paper. - 1981. - № 81 - 1696. - 17 p.
387. Diamantides N.D. Man as a link in a control loop // Electro-Technology. - 1962. -
V. 69A). -P. 40-46.
388. DoddA.J., Kadrinka К. Е., Loikkanen M.J. et al.t Aeroelastic design optimization pro-
program // J. Aircraft. - 1990. - V. 27, № 12. - P. 1028-1036.
389. Dowell EH. Panel Flutter: a review of the aeroelastic stability of plates and shells //
AIAA J. - 1970. - V. 8, № 3. - P. 385-399.
390. Dumesnil C.E., Nevill G.E. Deformation of spherical caps impacted into water // AIAA
J. - 1967. - V. 5, № 5. - P. 1043-1045.
391. Graham W. Metals ride a cyclical ordering pattern II Metal. Bull. Mon. - 1987. -
№202.-P. 85-87.
392. Frazer R.A., Duncan W.J. The flutter of airplane wings. Rand M 1155,1929.
393. Hall H. A survey of ground load problems // ARC CP. - 1968. - № 1003.
394. Heller H.H., Blis D.B., Widnall S.E. Incipient Stale detection through unsteady pres-
pressure monitoring on aircraft wings // J. Aircraft. - 1972. - V. 9, № 2.
395. Hess J,L. Review of historical development of surfase source methods. Computer.
Meth. Potential Aerodyn. - Berlin et a/., 1985. P. 21-37.
396. Hess J.L. Panel methods in computational fluid dynamics // Annu. Rev. Fluid Mech. -
1990. -№ 22. - P. 255-274.
397. Hirano Y. Hydrodynamic impact of flexible spherical shells // J. Jap. Soc. Aeronaut, a.
Spase. - 1973. - V. 21, № 228. - P. 14-31.
398. Jankovic J. Reduced nonlinear flightdynamic model of elastic structure aircraft // ICAS
Prog., 1982: 13th Congr. Int. Counc. Aeron. Sci. - 1982. - V. 2. - P. 1321-1329.
399. Капа D.D.y Graig R.R. Parametric oscillations, of a longitudinally excited cylindrical
shell containing liquid // J. Spacecraft a. Rockets. - 1968. - V. 5, № 1.
400. Krieger R.J., Williams J.E. High Performance Missiles of the Future // Missile Aero-
Aerodyn.: NEAR Conf. Missiles Aerodyn. Monterey. Calif., 1988: Proc. Mountain View
Calif., 1989.
401. Kruger W.t Besselink /., Cowling D. et al. Aircraft landing gear dynamics: simulation
and control// Vehicle Sys. Dyn. - 1997. - V. 28, № 2-3. - С 119-158.
402. Kutler P., Steger J.L., Bailey F.R. Status of computational fluid dynamics in the United
States // AIAA 8th computational fluid dynamics conference. A collection of technical
paper. - Honolulu, Hawaii: 1987. -P. 375-396.
403. Levin E. Oscillations of a Fluid in a Restilinear Conical Container // AIAA J. - 1963. -
V.I, №6.
404. Lighthill M.J. Oscillating airfoils at high Mach number // J. Aeronautical sciences. -
1953. - V. 20, № 6. - P. 402-406.
405. Lui Gue-Guangy Li Sun-Sic. HALE-11 a program system for the dynamic analysis of
aeronautical structures // ICAS Proc, 1982, 13th Congr. Jnt. Counc. Aeron. Sci.AIAA
Aircraft Syst. and Technol. Conf. Seattle. Wash. - 1982. - P. 22-27.
406. Lwaim R.L^ Wen-Yo-Yen Effects of dynamic aeroelasticity on aircraft handling guali-
ties // J. Aircraft. - 1979. - V. 16, № 9. - P. 635-637.
407. Lyons P.F., Hoser J.J., Schmid C.J. Development of airframe structural desing loads
prediction technigues for flexible military aircraft: applications // AIAA Paper. - 1981.
-№81-1697.-10 p.
589
408. Mabey D.G. Beyond the buffet boundary // Aeronaut J. - 1973. - V. 77, № 748; Elimi-
Elimination of buffeting on the rear fuselage of the Hercules Tanker // Aeronaut J. - 1985. -
V. 89, № 889.
409. Maricic N.L. Calculation of critical flutter speeds of an aircraft in Subsonic flow // Int.
J. Computer a. Structures. - 1980. - X. V. 12. - P. 475-482.
410. Martin A.A. Arms emphasized for new aircraft // Aviation Week a. Space Technology.
- 1969.-V. 91, №25.
411. Menenhall M.R., Perkins S.C., Lesieutre D.J. Prediction of the aerodynamic characteris-
characteristic of flight vehicles in large unsteady maneuvers // ICAS Proc, 1986: 15th Congr. Int.
Counc. Aeronaut. Sci. - N.Y.; 1986. - V. 1. - P. 662-675.
412. Miranda L.R, A perspective of computational aerodynamics from the viewpoint of
airplane design application // AIAA Paper. - 1982. - № 18. - 17 p.
413. Nevill G.E., Morales W.J., Horowitz J.M. Studies of parameter significance in shell -
liquid impact // AIAA J. - 1968. - V. 6, № 8 - P. 1511-1514.
414. North D.M. Sail cracks curb F/A-18 performance // Aviation Week a. Space Technol-
Technology. - 1984. - V. 121, № 5. - P. 24-25.
414a.0Z.j0w M.D. Some experimental observations on the non-linear vibration of cylindrical
shells // AIAA J. - 1965. - V 3. - № 9.
415. Olson L.G., Bathe K.J. A study of Displacement Based Fluid Finite Elements for calcu-
calculating Frequencies of Fluid and Fluid - Structure Systems // Nuclear Engineering a. De-
Design. - 1983. -V. 76. -P. 137-151.
416. Olson LG.y Bathe K.J. Analysis of Fluid — Structure Interactions. A Direct Symmetric
Coupled Formulation Based on the Fluid Velocity Potential // Computers a. Structures.
- 1985.-V. 21.-P. 21-32.
417. Ortasse R. Evaluation of a method to determine airplan taxi loads using a generated
random profile // AIAA Paper. - 1966. - № 66-469.
418. Palmer I.H., Asher Q.W. Calculation of axisymmetric longitidunal modes for fluid-
elastic tank-ullage gas systems and comparison with model test results. AIAA Simpo-
sium on Structural Dynamics and Aeroelasticity, Boston, Massachusetts. - 1965.
419. Passmore M.A., Jenkins E.G. A comparison of the coastdown and steady state torgue
methods of estimating vehicle drag forces // SAE Techn. Pap. Ser. - 1988. - № 880475.
-P. 1-9.
420. Perkin B.R., Ericson L.L. ELEXTAB - a computer program for the prediction of loads
and stability and control of flexible aircraft // In. Proc. the SCAR Conference, Part I. -
1977. - P. 249-280 (NASA cp - 001).
421. Perry B.y Kroll R.I., Miller R.D. et. al. DYLOFLEX: A computer program for flexible
aircraft flight dynamic loads and lyses with active controls // J. Aircraft. - 1980. -
V. 17, №4.-P. 275-282.
422. PiW.S., Yamane J.R., Smith M.J.C. Generic aircraft ground operation simulation //
AIAA/ACME/ASCE/AHS - 27th struct, Dyn. and Mater. Conf., San Antonio Tex.:
1986.-P. 606-619.
423. Randall D.C. Supersonic flow past quasi-cylindrical bodies of almost circular cross -
section // Aeronautical research council, Reports and Memoranda. - 1958. - № 3067. -
17 p.
424. Ray E., Me. Kinney L. Maneuver an buffet characteristics of fighter aircraft // AGARD
Cp - 102. - 1972.
425. Roberto W. Performance of C13 and С13-1 with receiver constant pressure catapults.
NAEC. USA. 1969.
426. Rodden W.P., Love J.R. Equations of motion of a quasisteady flight vehicle unilising
restrained static aeroelastic characteristics // J. Aircraft. -1985. - V. 22, № 9. - P. 802-
809.
427. Rose A.J. Flying aeroplanes in buffet // Aeronaut J. - 1977. - V. 81, № 802.
428. Schmidt W. Computational fluid dynamics in West Germany // AIAA 8th computational
fluid dynamics conference. A collection of technical paper. - Honolulu, Hawaii: 1987.
-P. 322-335.
429. Shirk M.H.y Hertz T.J., Wesshaar T.A. Aeroelastic taileringtheory, practice and promise
// J. Aircraft. - 1986. - V. 23, № 1. - P. 6-18.
590
430. Stacey E. Unmanned fighters: flight without limits // Jane's Def. Weekly.- 1996. - 25.
-№15.-P. 28-29.
431. Sweetman B. Wobbly Goblin not perfect butfirst // Interavia. - 1989. - V. 44, № 1. -
P. 28-30.
432. Taylor J.D. The variable geometry airship: a challenge in lighter-than-air systems de-
design // AIAA Pap. - 1989. - № 3165. - P. 1-68.
433. Thiriet Y. New airborne armanent systems // AIAA Paper - № 79-0697.
434. Thomas D.W. Vehicle modeling and service loads analysis // SAE Techn. Pap. Ser. -
1987. - № 871940. - P. 1-23.
435. Turner CD. A Study of the effect of aerodynamics on wing/store flutter //
AIAA/ASME/ASCE/AHS 22nd Structures, Structural Dynamics and Material Confer-
Conference. - 1981.-P. 343-351.
436. Waczak M.R., Schmight D.K. On the flight dynamics of aeroelastics vehicle // AIAA
Atmosph. Flight Mech. Conf. «Williamsburg. 1986. Collect. Techn. Pap.» - N.Y.,
1986.-P. 120-133.
437. Wagner H. Uber die landing Seeflugzeugen // Z. fus Hugteshnic und Motorluftschif-
fahrt. - 1931. Jahrg 22. Heft 1. S. 1-8.
438. Wagner S.N. The panel method - a unique tool for the aerodynamic analysis of complex
configurations in subsonic and supersonic flow // Boundary Elem. IX: 9th Int. Conf.,
Stuttgart. 1987. - V. 3. - P. 519-538.
439. Woodward F.A. An improved method for the aerodynamic analysis of wing-bodytail
configurations in subsonic and supersonic flow // 1973. Part I. Theory and application.
NASACR-2228. - 126 p.; Part II. Computer Program description. NASACR-2228. -
313 p.
440. Yost J.D. Correction factors for miner's fatiguepamage equation perived from C-130
fleet aircraft fatigue cracks // J. AIAA Paper. - 1984. - № 2684.