



























































































































































































































































































































































































































































































Автор: Костюк А.Г.
Теги: тепловые двигатели в целом получение, распределение и использование пара паровые машины паровые котлы теплоэнергетика теплотехника механика двигатели энергомашиностроение газовые турбины
ISBN: 978-5-383-00130-1
Год: 2007



А.Г. К0СТЮК
ДИНАМИКА
И ПРОЧНОСТЬ
ТУРБОМАШИН
учебник для вузов
Допущено Учебно-методическим объединением
вузов России
в качестве учебника для студентов высших учебных заведений,
обучающихся по направлению подготовки
"Энергомашиностроение"
Москва Издательский дом МЭИ 2007
А.Г. К0СТЮК
ДИНАМИКА
И ПРОЧНОСТЬ
ТУРБОМАШИН
учебник для вузов
Допущено Учебно-методическим объединением
вузов России
в качестве учебника для студентов высших учебных заведений,
обучающихся по направлению подготовки
"Энергомашиностроение"
Москва Издательский дом МЭИ 2007
УДК 621.165.539.4(075.8)
ББК 31.363
К 727
Рецензенты: доктор технических наук, проф. Е.В. Урьев
(Уральский государственный технический университет),
зав. отделом АООТ «НПО ЦКТИ» И.А. Ковалев
Костюк А.Г.
К 727 Динамика и прочность турбомашин: учебник для вузов / А.Г.
Костюк. — 3-е изд., перераб. и доп. — М.: Издательский дом МЭИ,
2007. — 476 с: ил.
ISBN 978-5-383-00130-1
Рассмотрены деформационные и прочностные свойства материалов,
используемых при проектировании турбомашин, методы определения прочности и
вибрационной надежности их основных элементов. Изложены методы расчета элементов с
учетом ползучести, термоусталости, трещиностоикости. Рассмотрено совместное
воздействие стационарных и переходных режимов на прочность и надежность
турбомашин. Большое внимание уделено динамической надежности лопаточного
аппарата, валопровода и турбоагрегата в целом.
Первое издание вышло в свет в 1982 г., второе — в 2000 г. Третье издание
переработано и дополнено результатами новых теоретических и экспериментальных
разработок, выполненных под руководством автора.
Для студентов, обучающихся по специальности «Газотурбинные,
паротурбинные установки и двигатели» направления подготовки «Энергомашиностроение».
УДК 621.165:539.4(075.8)
ББК 31.363
© Костюк А.Г., 2007
ISBN 978-5-383-00130-1 © ЗАО «Издательский дом МЭИ», 2007
ПРЕДИСЛОВИЕ
При всем многообразии существующих и перспективных тепловых
электрических станций их неотъемлемой частью является турбоуста-
новка (паротурбинная или газотурбинная). Поэтому разработка,
создание и совершенствование основных элементов турбоустановок —
турбин и компрессоров для современных и перспективных тепловых
электрических станций является важной стороной развития энергетики.
Увеличение мощности и усложнение конструкции турбомашин
сопровождается повышением требований к их надежности. Повышение
ресурса турбомашин также является одной из основных задач
улучшения качества.
При разработке и освоении паровых и газовых турбин применяются
совершенные расчетные и экспериментальные методы определения
характеристик прочности и надежности.
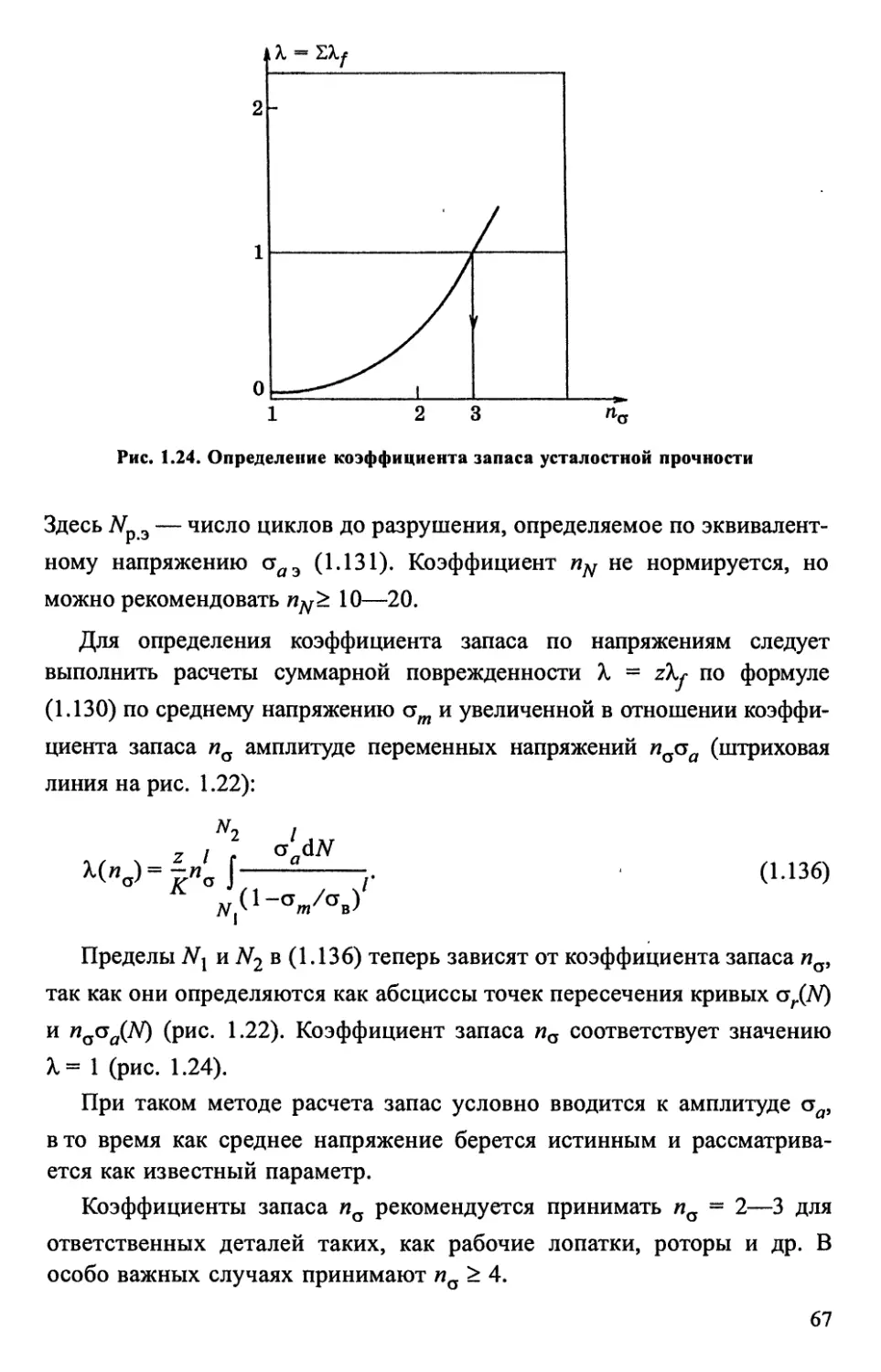
В данном учебнике рассматриваются основные вопросы статической,
динамической прочности и вибрационной надежности турбомашин.
Учебник написан по материалам лекционного курса «Динамика
и прочность турбомашин», читаемого для студентов специальности
«Газотурбинные, паротурбинные установки и двигатели» на
энергомашиностроительном факультете (в настоящее время Институт
энергомашиностроения и механики) Московского энергетического института
(технического университета).
Многие вопросы, излагаемые в учебнике, ранее не находили
отражение в учебной литературе (например, расчеты лопаток, дисков и
корпусов на долговечность при комбинированном действии ползучести
и малоцикловой усталости, а также при сложных программах изменения
режима работы турбины; применение линейной механики разрушения
к оценке хрупкой прочности деталей турбомашин; влияние коррози-
онно-активных сред на прочность; количественное определение
возмущающих сил, вызывающих колебания лопаток и валопроводов, и т.д.). В
учебнике отдается предпочтение сравнительно простым методам
расчета, если упрощение модели не ведет к потере точности получаемого
результата до неприемлемого уровня. Только при таком подходе можно
решить две задачи: изложить сущность явлений, определяющих
надежность турбомашин, и дать количественную их оценку с доведением до
численного результата.
3
В учебнике уделено также внимание вопросам выбора рациональных
решений, принципам проектирования, методам и средствам повышения
надежности турбомашин.
Первое издание учебника было опубликовано в 1982 г. в
издательстве «Машиностроение». Второе издание вышло в свет в 2000 г. в
Издательстве МЭИ.
Во втором издании изложен метод и дан пример расчета роторов
турбомашин на малоцикловую усталость. Особенностью и
оригинальностью метода является применение неизотермической теории
пластичности, что позволяет корректно решать задачи о неизотермических
процессах циклического деформирования и малоцикловой усталости.
Впервые в учебной литературе изложены основы прочности и
надежности элементов турбин в условиях коррозионно-активных сред.
Рассмотрены методы расчета долговечности этих элементов в зоне
фазового перехода при действии коррозионного растрескивания под
напряжением и коррозионной усталости как при раздельном, так и
совместном протекании обоих процессов.
Переработана и дополнена гл. 6, в которой изложены разработанные
автором теория и метод расчета системы турбоагрегат—фундамент
на вынужденные колебания и устойчивость.
Усовершенствован метод расчета напряженного состояния и
определения длительной прочности цельнокованых роторов, работающих в
условиях ползучести.
Третье издание переработано и дополнено результатами новых
теоретических и экспериментальных разработок, выполненных под
руководством автора. Дополнения представлены в гл. 1—3 и 6.
В гл. 1 дополнены сведения о материалах дисков и роторов, а также о
критериях длительной прочности. В гл. 2 усовершенствована методика
расчета рабочих лопаток на изгиб, а в гл. 3 развит метод расчета
переходных напряжений в роторах при ползучести, обновлены и выполнены
новые примеры расчета роторов на прочность в условиях ползучести.
Глава 6 дополнена сведениями о самовозбуждающихся колебаниях. В
этой главе приведены примеры расчета неконсервативных
аэродинамических сил, способствующих возникновению автоколебаний валопрово-
дов; переработан материал о вибрационной надежности турбоагрегатов.
Книга вновь отредактирована, устранены неточности, исправлены
обнаруженные в предыдущих изданиях опечатки.
Все замечания и пожелания читателей будут приняты автором с
благодарностью. Их следует направлять по адресу: 111250, Москва,
Красноказарменная ул., д. 14, Издательский дом МЭИ.
4
Автор
Глава первая
ДЕФОРМАЦИЯ, ПРОЧНОСТЬ И ИЗНОС
МАТЕРИАЛОВ
1.1. УСЛОВИЯ РАБОТЫ И СВОЙСТВА МАТЕРИАЛОВ,
ИСПОЛЬЗУЕМЫХ ПРИ ПРОЕКТИРОВАНИИ
ТУРБОМАШИН
Условия работы материалов и деталей турбомашин. Детали
турбин и компрессоров при работе подвержены силовым, тепловым
воздействиям и износу. Ответственные детали турбин: лопатки, ротора и
корпуса работают в условиях высоких температур в сочетании с
значительными нагрузками, обусловленными центробежными силами
инерции и разностями давлений. Неравномерность распределения
температур в деталях вызывает неоднородные температурные деформации
и связанные с ними напряжения.
Нагрузки от центробежных сил и разностей давлений называют
силовыми воздействиями в отличие от тепловых воздействий,
вызываемых температурными разностями. Силовые и тепловые воздействия
в турбомашинах по признаку их изменения во времени можно
подразделить на стационарные (постоянные во времени), медленно меняющиеся
и быстро меняющиеся.
Постоянные (не меняющиеся) воздействия вызывают напряжения
в деталях при установившейся работе турбомашины. При умеренных
температурах такие напряжения должны быть допустимы по условиям
кратковременной прочности. В сочетании с высокими температурами
в этих условиях появляется ползучесть и накапливается повреждение
материала во времени, что ограничивает время работы детали из-за
исчерпания запаса длительной прочности.
При умеренных температурах в условиях коррозионно-активной
среды (например, в среде влажного пара, содержащего примеси) в ряде
конструкционных элементов наблюдается трещинообразование.
Зарождение и развитие трещин может происходить в этих условиях и при
постоянных нагрузках. Время эксплуатации детали должно оцениваться
с учетом трещиностойкости.
Медленно меняющиеся воздействия характерны для переходных
режимов — пуска, нагружения, разгрузки и остановки турбомашины.
Повторные медленно меняющиеся режимы связаны с малоцикловой
усталостью. При этом возникают ограничения по допустимому числу
5
пусков турбомашины, так как при каждом пуске (и при каждом
изменении режима) в материале накапливаются повреждения, которые при
достаточном числе изменений режима приводят к разрушению детали
вследствие проявления малоцикловой усталости.
Чередование стационарных и переходных режимов вызывает
накопление повреждений от ползучести и малоцикловой усталости.
Взаимодействие повреждений таково, что чем больше число часов работы на
стационарном режиме, тем меньше возможное число пусков и наоборот.
Быстроменяющиеся воздействия обусловлены, в основном, двумя
причинами: неуравновешенностью и различными технологическими
отклонениями в изготовлении и сборке ротора (механические причины)
и взаимодействием потока пара или газа с элементами проточной части
турбомашины (аэродинамические причины).
Быстроменяющиеся воздействия вызывают колебания элементов
турбомашины. При определенной интенсивности воздействия
возможны повреждения (разрушение) деталей турбомашины вследствие
многоцикловой усталости.
Если в потоке пара или газа присутствуют жидкие или твердые
частицы, при столкновении с деталью вызывающие поверхностное ее
повреждение, то наблюдается эрозия элементов турбомашин. Наиболее
серьезной проблемой считается эрозия деталей в потоке влажного пара,
при которой повреждаются лопатки и другие элементы проточной части
паровых турбин.
Загрязнения (примеси в воде, паре, газе) оказывают многостороннее
действие на детали турбомашин: они могут вызывать коррозию
различного вида: общую, язвенную, коррозионно-эрозионный износ, они служат
причиной коррозионного растрескивания под напряжением и
коррозионной усталости.
Законы деформирования. Для расчетов напряжений и деформаций
в деталях турбомашин при заданных внешних условиях необходимо
иметь определенные соотношения (конечные, дифференциальные,
интегральные) между напряжениями и деформациями, т.е. знать физические
законы деформирования материала. Для материала, находящегося в
упругом состоянии, таким законом деформирования является закон
Гука; при напряжениях, превышающих предел упругости, необходим
закон пластического деформирования, а при повышенных температурах —
закон ползучести. В формулировку закона деформирования могут
входить не только напряжения и деформации, но и временные
(дифференциальные и интегральные) операторы этих величин, например
производные по времени от напряжений и деформаций.
В общем случае закон деформирования
L (а, б) = О,
где L — символ совокупности операций над составляющими напряжений
а и деформаций г.
6
Критерии прочности (надежности). Расчет деформаций и
напряжений в деталях турбомашин с учетом их изменения во времени еще
не дает возможности судить о прочности детали. Необходимо иметь
критерии прочности, устанавливающие соотношения между
параметрами прочности в виде неравенств, определяющих допустимую область
в пространстве параметров прочности. Характерными параметрами
прочности, например, являются напряжения в опасных точках, усилия,
деформации, а также и более сложные параметры, определяющие
влияние всей программы нагружения детали. В общем случае критерий
прочности должен отвечать на вопрос: разрушится или не разрушится
деталь при известных программах изменения во времени напряжений,
деформаций и температур.
Выход детали (или всей турбомашины) из строя — отказ, может
произойти не только вследствие нарушения ее прочности, но и по другим
причинам, например, из-за недопустимого изменения размеров и формы
детали и задевания вращающихся деталей о неподвижные, из-за
повышения вибраций и т.п. Поэтому в более общем случае следует говорить
о , критериях надежности, когда в число параметров, ограничивающих
область допустимых режимов работы, входят и такие параметры как
смещения, ускорения, амплитуды вибрации, температуры и др.
Параметры, от которых зависит отказ детали (машины), называются
параметрами надежности, и критерии надежности устанавливают
допустимую область в пространстве параметров надежности.
В простейшем случае одноосного растяжения при умеренных
температурах критерий прочности
где а — напряжение в детали; ав — временное сопротивление материала.
В общем случае критерии надежности детали (или любого объекта)
Qifad < о,
где Qk (k - 1, 2, ..., п) — символ совокупности операций, которые
проводятся над параметрами надежности qt (i = 1,2,..., /w). Число п операторов
Qk и число т параметров надежности qi — не ограничено и может
изменяться от единицы до десятков и сотен для сложных систем.
В вышеприведенном частном случае одноосного растяжения qx = ст,
Qi(#l) ^ а ~~ ав> те- имеется один оператор Q и один параметр
надежности. Условия Qj^q^ < 0, выделяют область допустимых значений
параметров qt, внутри которой не наблюдается отказ.
Способы решения задач прочности элементов турбомашин.
Существуют три способа решения задачи надежности деталей
турбомашины или изделия в целом.
7
1. Расчетное определение надежности — математическое
моделирование.
2. Испытание моделей — физическое моделирование.
3. Испытание натурных изделий в воспроизводимых реальных или
эксплуатационных условиях.
Эти способы не исключают, а дополняют один другой.
Наиболее экономичен первый способ, как правило, связанный с
наименьшими затратами средств и времени. Однако этот спосрб не всегда
дает достаточную точность и, кроме того, для его применения требуется
наибольшая информация о свойствах объекта: необходимо иметь его
математическую модель. В противоположность этому при
использовании третьего способа требуются минимальные сведения об объекте,
а достоверность результатов наибольшая, так как возможно
непосредственно установить ресурс работы объекта в реальных условиях его
эксплуатации. Однако третий способ, как правило, наиболее
дорогостоящий, трудоемкий, длительный и дает единичный результат.
Второй способ занимает промежуточное положение.
В реальных условиях при определении надежности деталей турбома-
шин и изделий в целом применяют все три способа. На стадии
проектирования используют преимущественно первый способ. Затем для
проверки некоторых решений используют физическое моделирование
отдельных «сомнительных» элементов. На заключительной третьей
стадии осуществляют натурные испытания отдельных узлов или всего
изделия в целом.
1.2. ЗАКОНЫ ОДНОКРАТНОГО ДЕФОРМИРОВАНИЯ
И КРИТЕРИИ ПРОЧНОСТИ ПРИ УМЕРЕННЫХ
ТЕМПЕРАТУРАХ
Диаграмма деформирования (растяжения) материала. При
одноосном растяжении—сжатии закон деформирования материала
определяется так называемой диаграммой растяжения (рис. 1.1), построенной в
истинных напряжениях—деформациях
е=/(а), (1.1)
где е = ln(F0/F); а = P/F; F — площадь поперечного сечения образца в
наиболее узком сечении шейки образца; F0 — первоначальная площадь
сечения образца; Р — растягивающая нагрузка, приложенная к образцу.
Известно, что до момента образования шейки на образце условная
диаграмма растяжения, построенная в координатах
ay = P/F0; £у = Д///0
(А/ — удлинение образца; /0 — первоначальная длина образца), мало
отличается от истинной диаграммы. Можно считать, что истинная и
8
условная диаграммы практически совпадают до деформации, примерно
3—4 %.
На диаграмме рис. 1.1 отмечены некоторые точки. Условный предел
упругости ае — напряжение, при котором остаточная деформация Asj
принимается 0, 001...О, 01 %. Предел упругости, следовательно, есть
условная характеристика, зависящая от значения принимаемой
остаточной деформации.
Обычно в справочниках приводятся значения предела текучести
Оу = а0 2, определяемого по остаточной деформации Ае2 = 0, 2 %.
Введем еще один условный предел ск, определив его как
напряжение, при котором остаточная деформация е£ после разгрузки равна
упругой деформации перед разгрузкой (рис. 1.2):
е£ = ак/Е, (1.2)
где Е — модуль упругости.
В произвольной точке С диаграммы растяжения (см. рис. 1.1)
определим секущий
Ер= а/г
и касательный
Е'= da/de
(1.3)
(1.4)
ст/
о
о'
Ся
<*s B^^/fl
Ge A f I
И 1 Ъл
lAsi
'Де2
г<—
*Щ
Е/
/ F
е
Рис. 1.1. Диаграмма растяжения
модули, характеризующие соответственно углы наклона секущей ОСЕ и
касательной CF линий к кривой деформирования в этой точке.
Использовав условие (1.2), найдем значения ск и е|? (см. рис. 1.2).
Полная деформация в точке К
гк = оЛ/£+е£ = 2ак/Е,
откуда секущий модуль
Из последнего равенства следует, что секущий модуль в искомой точке
К равен половине модуля упругости. Следовательно, для получения точки
К следует провести из начала координат О прямую с угловым
коэффициентом EI2 до пересечения с кривой растяжения. Координаты точки
пересечения (значения ък и е^) удовлетворяют условию (1.2).
Нагружение образца и последующая его разгрузка до с = 0 позволяет
выявить следующие особенности упругопластического деформирования
(см. рис. 1.1).
Если а < Ge9 то принимают, что закон деформирования выражается
законом Гука, как при нагружении, так и при разгрузке.
Если а > ае, то в условиях нагружения (Ла > 0) зависимость ст от е
становится нелинейной, т.е.
s = g/E + гр,
где ер — пластическая деформация, нелинейно зависящая от а.
(1.5)
Рис. 1.2. Графическое определение предела ак
10
Если при напряжении а > ае осуществляется разгрузка (Аа < 0), то
зависимость а от с линейна, т.е.
8 - 8' = (а - а')/Е,
где а', е' — значения напряжения и деформации в точке перехода от
нагружения к разгрузке (точка С).
Нагружением материала в пластической области называется процесс
с изменением значения пластической деформации. Разгрузкой
называется процесс, протекающий при неизменном значении пластической
деформации. В точке С, как и в произвольной точке в пластической
области, существует две возможности деформирования: нагружение и
разгрузка. При нагружении точка движется по кривой деформирования
вправо от точки С, при разгрузке — по прямой CD.
Аппроксимация диаграмм деформирования. Для проведения
практических расчетов удобно пользоваться аналитическими представлениями
диаграмм деформирования. Поэтому диаграммы аппроксимируют
некоторыми упрощенными зависимостями (моделями диаграмм).
Модель упруго-идеальнопластического материала характеризуется
диаграммой (рис. 1.3), состоящей из двух прямых
Ег (0<8<8^);
as (8>е,).
(1.6)
При разгрузке зависимость о ~f(e) определяется соотношением
а = £(е-е'). (1.7)
В большинстве случаев достаточно точное описание диаграммы
деформирования дается аппроксимирующей зависимостью:
8 = G/E + ePk(a/ak)
(1.8)
8S Е' 8
Рис. 1.3. Диаграмма деформирования упругоидеально пластического материала
11
Пластическая деформация связана с напряжением степенной
зависимостью, т.е.
т
гР = гРк(о/ак) . (1.9)
где е£ , Gk — пластическая деформация и напряжение произвольно
выбранной точки на диаграмме деформирования.
Удобно в качестве базовой точки выбрать такую, для которой
справедливо соотношение (1.2). Постоянная т может быть найдена из условия
прохождения кривой (1.8) еще через одну выбранную точку с
координатами е0, а0. Тогда
т = 1п(б^/е^у1п(о0/оЛ), (1.10)
где 6q = £0-о0/Е.
Второй опорной точкой может быть выбрана точка разрушения Т
(см. рис. 1.2), для которой а0 = ST, Eq = е£. Причем, ST — истинное
сопротивление разрушению, agj — истинная пластическая деформация
в момент разрушения.
При выполнении условия (1.2) соотношение (1.8) может быть
записано в виде следующей универсальной зависимости:
6 =а + от. (1.11)
При этом
е = Ег/ак\ g = cs/Gk. (1.12)
Приведенные параметры (1.12) позволяют обобщить диаграммы
деформирования для разных температур и даже для переменной
температуры в процессе деформирования, т.е. рассмотреть неизотермическое
деформирование. Для неизотермического случая должно выполняться
условие ElGk = const в рассматриваемой области изменения температур.
Это условие, как правило, выполняется с достаточной точностью для
всех сталей и сплавов [8].
Можно принять в качестве базовой точки на диаграмме растяжения
(см. рис. 1.1) точку В, соответствующую пределу текучести
грк = 0, 002, Gk = gs.
Тогда вместо (1.11) получим
е' = g' + a(a,)W. (1.13)
12
При этом
i'
Ez/gs;
(1.14)
g' = g/gs\
a = zsE/gs = 0, 002E/gs.
Приравнивая полные деформации по зависимостям (1.11) и (1.13),
находим соотношения между пределами Gk и gs
-l/(w-l)
аГ csa
(1.15)
По (1.15) легко определить Gk по известным параметрам диаграммы
деформирования. При расчетах можно пользоваться зависимостями
(1.11) и (1.13). Условия нагружения и разгрузки в пластической области
при использовании универсальной зависимости (1.11) в случае
неизотермического деформирования можно выразить в виде
dep> 0, если d(a/a^) > 0;
dzp= 0, если d(cj/Gk) < 0.
(i.i6)
(1.17)
Обобщенный закон пластического деформирования. Примем
следующие обозначения: xt (/ = 1, 2, 3) — оси декартовой системы
координат; Gt: (/ = 1, 2, 3;у = 1, 2, 3) — составляющие тензора напряжений;
efj— составляющие тензора деформаций. Соответствие индексных и
обычных обозначений тензоров устанавливается равенствами
аи-
Е<г
Га11 а12 а13"
а21 а22 а23
La31 а32 а33-
"811 812 813~
821 822 823
-831 832 833-
=
ГСУ Т Т "1
я: ху xz
Т G Т
>>* ^ >>z
It Т G
u ZJt zj> zJ
1
8 ~7
* Vxy
1
z yx *
1 1
~У ХУ
-L zx £ zy
>
l •
1
Z yz
ezY
(1.18)
Условия взаимности (парности) касательных напряжений и угловых
деформаций
а. = а . 8. = 8... (1.19)
В дальнейшем используем сокращенную запись операции
суммирования: если в некотором выражении встречается дважды повторяю-
13
щийся индекс, то по нему проводится суммирование от одного до трех,
например
Gkk= а11+а22 + а33
ИЛИ
а(/а(Г СИаП + а12а12+а13а13 + а21а21 + а22ст22 + а23а23+
2 2 2 2 2 2
+ cr310f3i + <*32ст32 + ст33°33 = ст11 + °22 + а33 + 2а12 + 2а21 + 2а31 •
В принятых обозначениях запишем основные инварианты
напряженного и деформированного состояний
ст0= (l/3)ott;e0= (1/3)8W; (1.20)
о,= (3/2) (*у*/у) ;
,-..Л/2, 1/2
£*= (2/3) (вув/у) ,
(1.21)
где а*, г*— интенсивность соответственно напряжений и деформаций; Sy,
ву — девиатор соответственно напряжений и деформаций. При этом
sij e °ij ~ tyty *(/ = zij ~ Vo-
Величина 5^. — единичный тензор, определяемый условиями
^ ГО при/*./;
/у [1 при I = у.
Из (1.21) можно получить значения интенсивностей а*, 8* для
некоторых частных случаев.
Для плоского напряженного состояния, при котором напряжения <Тц,
с22 и а12 отличны от нуля, а прочие напряжения a3i, о^2 и а3з равны
нулю, из (1.21) получим
2 2 2 1/2
ст*= (а11 "аПа22 + а22 + За12) • (\22)
Для случая, когда напряжения отнесены к главным осям, т.е. когда
отличны от нуля главные напряжения ац = а1? а22 ~ ст2, сгзз = с3»
а прочие напряжения а^, <^23 и а31 — равны нулю, из (1.21) следует
a.= y[(a, - a2)2 + (а2 - а3)2 + (а3 - а,)2]172. (1.23)
Обобщенный закон пластического деформирования материалов
наиболее обстоятельно исследован и подтвержден экспериментально для
частного случая нагружения, называемого пропорциональным нагруже-
14
нием. Пропорциональным нагружением материала называется такое
нагружение, при котором все составляющие тензора напряжений Оу
изменяются пропорционально одному параметру, т.е.
. max
оу= Xa.j ,
max „ Л
где а- — максимальные значения напряжении; А, — параметр,
изменяющийся в процессе нагружения от 0 до 1.
При пропорциональном нагружении обобщенный закон
пластического деформирования, называемый законом малых упругопластических
деформаций, имеет вид
eij ~ Vo = (3e*/2o»Xaiy - 5^). (1.24)
Между интенсивностями а* и е* при нагружении (т.е. при da* > 0)
существует следующая экспериментально подтвержденная зависимость
6* =/(а*) - ((1 - 2ц)/3£)а*
или, если принять аппроксимационную формулу (1.11), то будем иметь
8,= |(1 + ц)а# + а"; (1.25)
Функция/(aj) = Sj— есть диаграмма деформирования материала
при одноосном растяжении; ц — коэффициент Пуассона. Инварианты
а0 и е0 связаны законом объемной упругости
80 = ((1-2ц)/£)а0. (1.26)
Зависимости (1.24)—(1.26) определяют законы пластического
деформирования материала в случае неодноосного напряженного состояния.
Рассмотрим некоторые следствия.
Принимаем, что полные (силовые) деформации равны сумме
упругих ее.. и пластических е£ деформаций, т.е.
veW- <L27>
Упругие составляющие деформаций связаны с напряжениями
законом Гука, который запишем в форме
4 " V° = 2G(o</ " Vo)> (L28)
15
где G = £/(2(1 + \х)) упругий модуль сдвига. Интенсивность упругих
деформаций е* связана с а* зависимостью
г1 « a*/3G. (1.29)
Соотношения (1.28), (1.29) как частный случай следуют из (1.24), (1.25).
Пластические деформации в соответствии с (1.27) найдем как
разность полных (1.24) и упругих (1.28) деформаций в виде
р f3s* 1
*! = \2^-2ё)*У (L30)
Из последнего соотношения можно получить условие
4к = еИ + Е22 + 4 = °> о-31)
которое означает, что пластические деформации не вызывают изменения
объема. Объемная деформация считается чисто упругой и определяется
законом (1.26).
Определим интенсивность пластических деформаций sf по аналогии
с интенсивностью полных деформаций (1.21) в виде
sf=(2/3)1/2(s^)'/2. (1.32)
Заменяя ejj в правой части (1.32) на выражение (1.30), получаем
соотношение
е* = е* + е£ (1.33)
т.е. интенсивности деформаций подчиняются такому же правилу
суммирования, что и сами деформации (1.27). С учетом этого из (1.29) и (1.30)
пластические деформации и интенсивность пластических деформаций
можно представить в форме
Р Зг?
& = Да*)-ст»/£.
(1.34)
Для аппроксимационной зависимости (1.8) получим закон
пластического деформирования в виде
lfr (3/2)(а,Г~1(а/у-8/7ао), (1.35)
16
где использованы приведенные параметры типа (1.12):
-р
Еги _ а* _ а.
8/7 = —1\ а* = —; а/у = —*; а0 = —. (1.36)
а* а* аА а*
Аналогично для упругих составляющих получим в приведенных
параметрах:
ёу = (1 + И)(ау - 8/уа0) + 8уё0 (ео = £ео/ст*)- (L37)
Зависимости (1.35), (1.37) обобщают закон (1.24) на
неизотермическое деформирование. С учетом температурных деформаций, суммируя,
получаем закон малых упругопластических деформаций при
неизотермическом деформировании в виде
Zij = (^(О + 1 + ^J (<*у ~ Vo) + 8 J 80 + ~^-J , (1.38)
где ат—температурный коэффициент линейного расширения, 1/°С; Т—
температура, °С.
Необходимым условием справедливости уравнений (1.24) служит
выполнение на всем пути деформирования неравенства
d(a*/cg>0. (1.39)
Пропорциональность нагружения считается достаточным условием,
но не является необходимым.
Как показал Б. Будянский, необходимое и достаточное условие
справедливости уравнений (1.24) в пластической области является
выполнение неравенства
,2 -,1/2
,..d,..>(2/3)a,
a,
1
dy*;
dY% = (3/2)1/2(d^d^)1/2, (1.40)
здесь Sjj, a* — девиатор напряжений и интенсивность напряжений в
конечной точке пропорционального нагружения; dsy — приращение
девиатора напряжений при догрузке.
Пример 1.1. Тонкостенная, закрытая по торцам, труба подвергается
испытанию внутренним давлением /?0, повышаемым до значения, при котором
максимальное напряжение в трубе составляет атах = 1,2ак.
Требуется определить значения пластических деформаций в средней части
трубы, удаленной от торцов. Характеристики материала при температуре испыта-
17
ний: Е = 2,06 • 105 МПа, а*= 386 МПа, т = 9, 07 (сталь 15Х1М1Ф при Г= 20 °С).
Толщина трубы 8=16 мм, радиус по средней окружности R = 160 мм.
Ре ше ние.Напряженное состояние трубы считаем двухосным, ось хх —
параллельна оси трубы, ось х2 — направлена по касательной к средней
окружности сечения, ось #3 — нормальна к срединной поверхности (рис. 1.4, а).
Напряженное состояние трубы:
ап = tfj 0; а22 = ст2 0; а33 - <т12 = а23 = а31 = 0.
Находим максимальное напряжение в трубе
атах = а2 = 1,2а* = 1,2 • 368 = 441,6 МПа.
По формулам для напряжений в тонкостенной трубе с закрытыми торцами
имеем
R 0
ai ~ р025; а2~2ст1'
откуда
сх = (1/2)ст2 = ~ • 441, 6 = 220, 8 МПа.
Давление испытания
Среднее напряжение
а0 = (1/3)а^ = (1/3)(а1 + а2)-(1/2)а2 = 220,8МПа.
Интенсивность напряжений по зависимости (1.23)
Рис. 1.4. Непропорциональное деформирование тонкостенной трубы
18
а* = {а\-а{а2 + <522)П = ^а2 = 382,44 МПа.
Пластические деформации вычисляем по (1.35):
filler (<**) l,ai-2CT2J;
-р -р ,- \т~\(- 1- ^
ip - ip - ;^ х*
б3з - е3 ei - е2.
Третье соотношение получено из условия пластической несжимаемости
(1.31). Подставив значения напряжений, получим
i?=0;
-/> _ f382,44V»07 441,6-(220,8)/2 _ , огуй.
82 " Г3б8~7 368 " U 2278>
ёз = - <£ = ~ 1.2278.
Значения пластических деформаций
г? = 0; г£ = - «£ = %i£) = 368 _ • 1,2278 = 2,193 • 10"3 = 0,00219.
1 2 3 Еу и 2,06- 105
Отметим, что осевая пластическая деформация оказывается равной нулю.
Этот результат хорошо соответствует экспериментальным данным.
Пример 1.2. Труба (рис. 1.4, а) подвергается деформации при следующей
программе нагружения: на первом этапе труба растягивается осевой силой Р до
напряжения <Тц = 1,2аЛ, на втором этапе осуществляется догрузка ее
дополнительной осевой силой dP, вызывающей приращение напряжения dan, и
дополнительным крутящим моментом dAf, вызывающим касательные напряжения сЦ2.
Требуется определить отношение d<712/dan, при котором допустимо
применять уравнения малых упругопластических деформаций.
Ре ше ние. Находим составляющие девиатора напряжений и
интенсивность напряжений в конце первого этапа нагружения
sn = (2/3)au; s22 = -(1/3)ап; ^Зз ="(1/3)аи» **12 в*23 = 53i = °»
/а/оч1/2/ 2 л. 2 л. 2 ч!/2
а* = (3/2) (*ц +*22 + ,узз) ==а1Г
При догрузке имеем приращение девиатора напряжений
dsn= (2/3)dan; d^22= -(l/3)dcrn; d^33= -(l/3)dau; dsl2*0;
d^23 = ds3{ = 0.
19
Определим величины в правой и левой частях (1.40):
dy. = (3/2)1/2[(<Ц,)2 + (ds22)2 + (ds33)2 + 2(d*12)2]'/2=
= [(da„)2 + 3(d5l2)2]I/2;
^{,-(2/3)0,, do,,.
Подставляя полученные величины в (1.40), после преобразования, получаем
искомое условие в виде
dcru 73LVV J
Подставляя значение огц/a^ = 1,2 , получаем
|ds12|<0, 870 da,р
На рис. 1.4, б показан путь нагружения ОА на первом этапе в координатах а,,,
s]2- Прямые АВ и АВ' определяют предельные направления догрузки: внутри угла
ВАВ' догрузка допустима в смысле применимости уравнений малых упругопла-
стических деформаций. Это означает, что значения деформаций в точке С
одинаковы при двух различных путях нагружения: при пропорциональном нагружении
по пути ОС и сложном нагружении по пути О АС. Если же конец пути находится
вне угла ВАВ' (например, в точке D), то при пропорциональном нагружении по
пути OD справедливы законы (1.24)—(1.26), но при сложном пути OAD
деформации, вообще, будут иными и их нельзя найти из зависимостей (1.24)—(1.26).
Из рассмотренного примера видно, что уравнения малых упругопластических
деформаций можно применять для путей нагружения, существенно
отклоняющихся от пропорционального пути.
Критерии статической прочности при умеренных температурах.
Характеристиками статической (кратковременной) прочности является
предел текучести gs (a0 2) и временное сопротивление ав. Если
напряженное состояние в некотором конечном объеме однородно, то
условиями прочности служат неравенства
а*<а02/^ = Д,; (1.41)
а1<ав/«в = Лв, (1.42)
где а* — интенсивность напряжения; Gj — максимальное главное
напряжение; ns — коэффициент запаса прочности по пределу текучести; пв —
коэффициент запаса прочности по временному сопротивлению; Rs, RB —
допускаемые напряжения по пределу текучести и временному
сопротивлению.
В турбиностроении при оценке статической прочности при
напряженном состоянии, близком к однородному, преимущественно
используется критерий (1.41) — критерий интенсивности напряжений или
20
практически равноценный ему критерии максимального касательного
напряжения, записываемый в виде
2т13 = аг - а3 < o02/ns = Rs, (1.43)
где т13— максимальное касательное напряжение; а1} а3 — максимальное
и минимальное главные нормальные напряжения.
Условие (1.42) предполагает, что разрушение материала происходит
вследствие действия нормального напряжения (разрушение отрывом).
Наряду с разрушением отрывом существует разрушение под
действием касательных напряжений (разрушение срезом). Соответствующий
критерий прочности
а* < ат/лт = Rx; ат = 73тср, (1.44)
где пТ — коэффициент запаса по предельному напряжению среза; Rx —
допустимое напряжение при срезе; тср — предельное напряжение среза.
Предельное напряжение среза тс — касательное напряжение, при
котором наблюдается разрушение срезом, может быть определено
экспериментально при кручении тонкостенных образцов из данного материала
или получено пересчетом по значению тв — временного сопротивления
кручению сплошных образцов
где т — показатель упрочнения материала (1.10).
Коэффициенты запаса прочности ns, пъ, щ выбирают на основе
экспериментальных статистических данных по отказам и последствиям,
вызываемым отказом детали. Рекомендуемые значения имеют
тенденцию к снижению, обусловленную повышением точности расчетов,
точности изготовления деталей и качества применяемых материалов.
Критерии прочности в условиях концентрации напряжений.
В условиях неоднородного напряженного состояния прочность
оценивают сравнением действительных напряжений с локальными
характеристиками прочности: истинным сопротивлением отрыву ST и истинным
сопротивлением срезу <тт или эквивалентной характеристикой т (1.45).
Условия прочности в истинных напряжениях
a, <ST/nT = RT; (1.46)
а* < ат/ит = Rx, (1.47)
где пТ — коэффициент запаса прочности по истинному сопротивлению
отрыву; RT — допускаемое напряжение при отрыве.
21
Истинное сопротивление отрыву ST это истинное нормальное
напряжение, при котором происходит разрушение отрывом по сечению,
нормальному к направлению действия напряжения.
Для использования условий (1.46), (1.47) в расчетах на прочность
необходимо найти истинное наибольшее напряжение aj и величину а* в точке
концентрации напряжений. Для этого воспользуемся зависимостями
al = koG\w
где а1н— номинальное растягивающее напряжение; ка — коэффициент
концентрации напряжений в пластической области; а+н — интенсивность
номинальных напряжений; kG^ — коэффициент концентрации
интенсивности напряжений в пластической области.
Коэффициент kG^ можно определить, использовав приближенную
зависимость, предложенную Нейбером,
*.А. = «4.. о-48а)
где к = е*/£+н—коэффициент концентрации интенсивности
деформаций в пластической области; 8* — интенсивность деформаций с учетом
их концентрации; е+н — интенсивность номинальных деформаций
с учетом пластичности; aCTj|c — теоретический коэффициент
концентрации интенсивности напряжений, т.е. коэффициент концентрации в
упругом состоянии материала.
Заменяя в зависимости Нейбера величину ке* и используя формулу
(1.25), имеем соотношение
(2/3)(1 + И)*„. + (а.„)т" 'С+ '-^.((г/ЗХ! + Ц) + (О"1" '),
разрешая которое относительно а*н, получаем
сг*н
(2/3)(1 +ц)(а,.-*о«)'
,т + \ 2
Ка* ~ аа*
1
т-\
(1.49)
Это соотношение является общей зависимостью, позволяющей
найти коэффициент концентрации интенсивности напряжений в
пластической области по известным значениям аст+ и а*н. Для одноосного
22
напряженного состояния в исследуемой точке ст* = с^, а„н = а1н, Ла#=
к<з, «а» = аа> и формула (1.49) позволяет определить коэффициент ка.
Для оценки Sp тср, ат и от по справочным величинам а0 2> <*„ и V
можно применить приближенные полуэмпирические зависимости (\|/0=
= 0,1):
ST = ав(0,98 + l,48v|/ + 0,58у2); (1.50)
тср = ав(0,48 + 0,58ц/ - 0,27V2); (1.51)
от = 3,061 + lg(-lg(l-y)) ^ (1 52)
lg(a/a0j2)+lg(l+l,35vK)-lg|l+(3/4)[l-((l-v|/y(l-VK0)),/3]
где v|/ = (F0 - FK)/F0 — относительное поперечное сужение образца после
разрыва; F0 — начальная площадь поперечного сечения образца; FK —
площадь поперечного сечения в узком месте шейки после разрыва.
Зависимости (1.50), (1.51) получены на основе применения
приближенного решения о напряженно-деформированном состоянии
в шейке растягиваемого образца в момент разрыва (Н.Н. Давиденков и
Н.И. Спиридонова, 1945 г.), некоторых опытных зависимостей Брид-
жмена (1945 г.) и М.П. Марковца (1947 г.) и проверены на многих
материалах: сталях, алюминиевых и титановых сплавах (А.Г. Костюк, 1995
г.).
Формула (1.52) основана на зависимости (1.10), где за опорные точки
приняты точки В (см. рис. 1.1) с координатами gs> As2 и Г (см. рис. 1.2)
с координатами ST, sf.
Вероятную погрешность (1.50), (1.51) можно оценить как ± 10 %.
Коэффициент запаса прочности по истинным напряжениям определяют
по зависимостям
пт = St/gx; пх = gx/g+ или п\ = 2тСр/(а1 ~~ аз)*
Для локальной прочности критерий максимальных касательных
напряжений лучше соответствует экспериментальным данным, чем
критерий интенсивности напряжений.
В табл. 1.1 приведены характеристики некоторых сталей и сплавов,
применяемых в турбостроении. Значения ST, aT, m и Gk вычислены
по формулам (1.15), (1.50)—(1.52).
23
Таблица 1.1
Марка стали или сплава
34ХНЗМ
20ХЗМВФ (ЭИ415)
25Х2М1Ф(ЭИ10)
20X13
15X11МФ
Х15Н70В5М4Ю2ТР
(ЭИ765)
Х10Н60К13В6М5Ф4Т2
(ЭИ929)
Область
применения
Диски
Диски, роторы
Крепежные детали
Лопатки паровых
турбин
Лопатки паровых
турбин
Лопатки газовых
турбин
Лопатки газовых
турбин
ст0,2>
МПа
853
814
765
510
569
659
755
МПа
1010
912
873
706
726
1090
1045
v|/,%
51
49
69
65
66
32
12
Е,
104МПа
20,6
20,6
21,7
21,6
21,6
21,6
21,6
Окончание табл. 1.1
Марка стали или сплава
34ХНЗМ
20ХЗМВФ(ЭИ415)
25Х2М1Ф(ЭИ10)
20X13
15X11МФ
Х15Н70В5М4Ю2ТР
(ЭИ765)
Х10Н60К13В6М5Ф4Т2
(ЭИ929)
т
10,4
11,6
10,8
8,1
9,1
7,1
9,2
ch МПа
922
868
810
522
589
752
808
Sp МПа
1905
1682
1988
1544
1604
1649
1218
ат, МПа
1480
1310
1137
1187
937
1204
988
Примечание. Здесь и далее запись, подобная Е, 10 МПа, означает, что цифры в колонке
умножаются на 10 .
Диаграмма (схема) Давиденкова—Фридмана. Диаграмма Дави-
денкова—Фридмана (рис. 1.5) демонстрирует влияние вида
напряженного состояния на характер разрушения материала вследствие отрыва
или среза, а также характеризует степень пластической деформации,
предшествующей разрушению.
В левой части диаграммы изображена область напряженных
состояний, внутри которых материал не разрушается. Граница ЛВ
соответствует разрушению срезом при предельном значении а* = ат. При
достижении границы ВС материал разрушается отрывом при предельном
24
Рис. 1.5. Диаграмма Давиденкова—Фридмана
/ — чистый сдвиг при Gj > 0; а2 = 0; а3 = - а{; X = л/3 ; 2 — растяжение при сх > 0;
а2 = ст3 = 0; X = 1; 3 — плоская деформация при ах > 0; а2 = 0,5aj; a3 = 0; X = л/3/2;
4 — деформация при а2 = °з ~ 0»5cjj > 0; X = 1/2; 5 — всестороннее растяжение при
оТ| = с*2 = стз» ^ ~ 0
напряжении cjj = Sj.. Прямые 7—4 соответствуют пропорциональному
нагружению при различных видах напряженного состояния,
характеризуемого отношением
X = a*/aj.
При X > gt/St наблюдается разрушение вследствие среза (прямые /,
2, 3), которому предшествует значительная пластическая деформация
е£ (прямые 1, 2, 3 пересекают границу пластического течения a* = as).
Если as/ST < X < ax/ST, то наблюдается разрушение отрывом
с пластической деформацией перед разрушением 0,002 < ер* < б?. При
X < gs/St разрушение происходит после ничтожной пластической
деформации, не превышающей 0,2 %. В правой части рисунка изображена
диаграмма деформации, по которой можно найти остаточную пластическую
деформацию в момент разрушения. Например, при Л, = 1/2 происходит
разрушение отрывом при остаточной деформации е£ около 1 %.
Влияние концентраторов на прочность и пластичность. Для
пластических материалов (конструкционных сталей) снижение статической
прочности из-за действия концентраторов не наблюдается. Более того,
концентраторы повышают статическую прочность образца. Если ввести
коэффициент чувствительности к концентрации напряжений
К = ав.к/ав>
где <тв к — временное сопротивление образца с концентратором, а ав—
временное сопротивление гладкого образца, то для пластических
материалов кв > 1, т.е. концентратор упрочняет образец. На гладком образце
25
при разрыве образуется утонение (шейка), площадь сечения образца
уменьшается, а следовательно, предельная нагрузка на образец,
характеризуемая величиной ав, снижается. В образце с концентратором
(например, в виде кольцевой выточки) при его разрыве площадь узкого
поперечного сечения образца сокращается незначительно вследствие
стесненности образования пластических деформаций.
Для хрупких материалов (чугуна, высокопрочных сталей с низким
отпуском) кв < 1.
Однако из сказанного ни в коем случае нельзя сделать вывод, что
концентраторы напряжений для пластических материалов полезны,
напротив, конструктор должен всячески стремиться к тому, чтобы
концентрация напряжений в деталях была как можно меньше.
Концентраторы напряжений резко ухудшают пластические свойства материала и
провоцируют хрупкое разрушение детали. Это происходит вследствие
того, что в зоне концентратора напряженное состояние является двух-
или трехосным, что по диаграмме Давиденкова-Фридмана
соответствует меньшей остаточной пластической деформации. В зоне
концентраторов могут появиться трещины, обусловленные циклическим
изменением нагрузки (усталость и термоусталость). Постепенный рост
трещины до достижения критического размера сменяется внезапным
быстрым ее развитием и хрупким разрушением детали.
Пример 1.3. Полубесконечная тонкая пластинка с канавкой нагружена
напряжениями ан = 200 МПа (рис. 1.6). Размеры канавки г = 1,75 мм, / = 6 мм. Материал
пластины — сталь 20Х13 (см. табл. 1.1). Требуется
определить истинные коэффициенты запаса прочности.
Решение. Из табл. 1.1 имеем
ST= 1544 МПа;
ат= 1187 МПа.
Найдем коэффициент концентрации по формуле
аст = 1 + iJiTr = 1 + 2л/6/1, 75 = 4, 703.
Действительный коэффициент концентрации
определим из формулы (1.49), подставив значения
ап = 200/522 = 0,3831; т = 8,1; ц = 0,3; ас = 4,703.
Формулу (1.49) представим в виде
tmtmi!
*£
шили
Рис. 1.6.
Полубесконечная тонкая пластина
с канавкой
0,3909
22,12 -к
.2 л
,9,1
0,14085
22,12/
Методом подбора получим значение ка1 = ка+ = 2,796.
Истинное напряжение в точке А
aj = а* = 2,796 • 200 = 559,2 МПа.
26
Коэффициенты запаса прочности:
пт = St/g1 = 1544/559,2 == 2,76;
пх = ат /сг* = 1187/559,2 = 2,12,
т.е. коэффициент запаса прочности по сопротивлению отрыву примерно 2,8,
по сопротивлению срезу — 2, 12.
1.3. ПОЛЗУЧЕСТЬ И ДЛИТЕЛЬНАЯ ПРОЧНОСТЬ
МАТЕРИАЛОВ
Первичные кривые ползучести и их представление. Основные
характеристики ползучести для конструкционных материалов,
применяемых в турбиностроении, обычно получают при испытании
призматических (цилиндрических) образцов на растяжение при постоянной
нагрузке Р. При испытаниях измеряют удлинение образца на базе / в
зависимости от времени / от момента нагружения. Температуру Т при
испытании поддерживают постоянной. В результате испытаний партии
образцов при разных начальных напряжениях а = P/F0 и одинаковой
температуре получают серию первичных кривых ползучести (рис. 1.7).
Если испытание каждого образца удается довести до его разрушения,
то одновременно получают и характеристики длительной прочности
(звездочками отмечены моменты разрушения).
Как правило, кривые ползучести определяют для нескольких
значений температуры Т.
Силовой деформацией называется разность между полной и
температурной деформацией.
Относительную силовую деформацию е = А///0 можно записать
в виде
8(0 = S* + 6*4 £С,
где ге = g/E — упругая деформация, возникающая в момент нагружения;
гр— пластическая деформация (кратковременная), которая также
возникает в момент нагружения, если напряжение превышает предел
упругости материала; ес—деформация ползучести.
Первые две составляющие деформации рассмотрены ранее.
Зависимость третьей составляющей гс от времени имеет обычно три
характерных участка (рис. 1.8), соответствующие стадиям ползучести I, II и III.
На стадии I ползучесть происходит с уменьшающейся скоростью
ec=dec/d/, стремящейся к концу периода к некоторому предельному
значению гс-* и. Стадия II характеризуется постоянной скоростью
ползучести гс = v. Наконец, на стадии III скорость ползучести начинает
27
EC k
Рис. 1.7. Первичные кривые ползучести Рис. 1.8. Кривая ползучести
расти до момента разрушения /= /р (состояние разрушения отмечено
звездочкой). На стадиях I и II деформация образца — равномерна по его
длине, площадь поперечного сечения мало отличается от начального
значения.
На стадии ползучести III на образце обычно (но не всегда) образуется
местное утонение (шейка) аналогично кратковременному
деформированию. При образовании шейки ползучесть протекает при
увеличивающихся напряжениях, так как испытания проводятся при постоянной
нагрузке Р9 а площадь сечения образца уменьшается с развитием шейки.
Вторая причина увеличения скорости ползучести на стадии III —
появление микротрещин, их подрастание, слияние и распространение на все
сечение образца.
Для аналитического представления кривых ползучести пользуются
эмпирическими зависимостями, связывающими деформацию ползучести
с основными параметрами (временем, напряжением и температурой),
8с=/(/,а, Т).
(1.53)
Из многочисленных зависимостей вида (1.53) рассмотрим наиболее
распространенную
ес= 1*1(0; (1.54)
v=Ag"; (1.55)
Q(0 = я(1 - е ~р') + >, (1-56)
где v — скорость ползучести на стадии II; а — напряжение, при котором
проводятся испытания; А, п •
28
■ параметры, зависящие только от темпера-
туры Т; а, р — параметры, зависящие от а и Г. Иногда можно принять
параметры аир, зависящими только от температуры, а параметр п —
постоянным. Для зависимости А от температуры Т справедлива
полуэмпирическая формула
А = Л0ехр(- Д#/Г0), (1.57)
где А0, АН— постоянные; Т0 — абсолютная температура.
Когда аир зависят только от температуры и не зависят от
напряжения, функция Q.(t) — едина для всех кривых ползучести, полученных
при фиксированной температуре. При малой длительности испытаний
для Cl(t) применимы и иные, чем (1.56) зависимости, например Q.(t) = /Y.
В этом случае установившегося участка II не существует. Зависимости
(1.54) и (1.55) справедливы, однако v не определяет минимальную
скорость ползучести. Все постоянные при фиксированной температуре
величины А, п, а,р определяются обработкой первичных кривых
ползучести методом наименьших квадратов.
Аппроксимирующие зависимости типа (1.54)—(1.56) не описывают
стадии ползучести III. Они служат для экстраполяции деформационных
зависимостей на области изменения определяющих параметров
(напряжений, температур, времени), выходящих за пределы изменения этих
параметров при испытаниях. Подобная экстраполяция совершенно
необходима в тех случаях, когда испытываемый материал предназначен для
оборудования, рассчитанного на длительный срок эксплуатации.
Обычно длительность испытаний материала составляет от 2 до 10 тыс. ч.
Стационарные турбины должны быть рассчитаны на ресурс до 10 —
2*10 ч. Поэтому материалы обычно испытывают при напряжениях,
превышающих значения напряжений в деталях оборудования. Скорость
ползучести при испытаниях соответственно значительно больше, чем
при эксплуатации, а время до разрушения / значительно меньше, чем
ресурс деталей.
Прогнозирование деформаций ползучести и есть первое основное
назначение экстраполяционных формул (1.54)—(1.56). Второе их
назначение — использование в расчетах на ползучесть деталей турбин.
Аналитическое представление в этом случае имеет преимущества перед
табличным или графическим представлением.
Влияние напряжений и температуры на ползучесть
материалов. Напряжение и температура оказывают значительное влияние на
скорость ползучести. С ростом сг скорость ползучести увеличивается по
степенному закону (1.55), причем обычно 2 < п < 10. Иногда п выходит
за эти пределы.
При невысоких температурах и умеренных напряжениях ползучесть
не обнаруживается. Углеродистые стали обнаруживают ползучесть при
29
температуре Т > 300—350 °С, слаболегированные стали при Т > 400—
450 °С. Жаропрочные стали и сплавы обнаруживают ползучесть при
еще более высоких температурах. При повышенных температурах
скорость ползучести резко возрастает с ростом температуры — по
показательному закону (1.57). В табл. 1.2 представлены результаты обработки
первичных кривых ползучести для некоторых сталей и сплавов,
применяемых в турбостроении.
Сопротивление (предел) ползучести а
ап определяется как
напряжение, вызывающее некоторую деформацию ползучести 8 за
время / при температуре Т. Например, сг1/105 = 50 МПа при температуре
Т = 500 °С означает, что при напряжении 50 МПа и температуре 500 °С
материал в условиях испытаний при одноосном растяжении имеет
деформацию ползучести гс = 0,01 (1 %) через 10 ч испытаний.
Характеристика Gsc/t, по существу, есть деформационная зависимость (1.53),
которая приводится в справочниках для ограниченных значений /, гс.
На рис. 1.9 представлены для примера зависимости сг(Г,ес) = ап при / =
= 105 ч и / = 104 ч для стали 20X13.
Предел длительной прочности ад п — напряжение, вызывающее
разрушение материала при определенной постоянной температуре Т через
определенное время / .
адлт = ад.п('р> ТУ
стп,МПа
300
200
(1.58)
Обычно предел длительной
прочности обозначают в виде
100
Ш
4
450
500
*=104 ч
*=105 ч
550 Г, °С
длт 'р'
где / — время до разрушения.
Например, утверждение а105 =
= 160 МПа при Т = 500 °С
означает, что предел длительной
прочности при 500 °С за 10 ч
испытаний равен 160 МПа.
Предел длительной прочности
можно определить при испытании
образцов на ползучесть (см. рис. 1.7).
Каждое испытание проводят при
Рис. 1.9. Кривые сопротивления
ползучести стали 20X13, соответствующие постоянной нагрузке и температуре
разным значениям ес до разрушения образца. Зная время
1 — 0,5 %; 2 — 0,2 %; з — 1 %; 4 — 0,5% до разрушения / для каждого из
30
Т;
аблица 1.2
Марка стали или
сплава
34ХНЗМ
20ХЗМВФ
(ЭИ415)
25Х1М1Ф
(Р2М)
20X13
Х15Н70В5М4
Ю2ТР (ЭИ765)
Х10Н60К13В6
М5Ф4Т2 (ЭИ929)
Режим
термообработки
На твердость
НВ 293-311
Haa0i2>650MIIa
(ТУ II)
Двойная
нормализация и отпуск при
680—700 °С
Закалка при
1000—1020 °С на
воздухе и отпуск при
720—750 °С
Аустенизация при
1150 °С, охлаждение
в масле, старение
при 800 °С
1000°С —2ч +
+ 1200°С —4ч,
закалка на воздухе,
отпуск при 1050 °С —
4 ч + 950 °С — 2 ч
Температура
испытания, °С
450
500
550
500
525
550
500
525
550
450
500
700
750
810
850
А, 1<Г10
(МПа)~7ч
| 4,35x10"5
1 1,51
—
2,97x10"4
1,36х10"3
1,05хЮ"2
2,71 хЮ'2
2,31х Ю-4
2,94хЮ_3
3,94хЮ"2
1,21
9,28x10-9
1,48x10"7
4,78хЮ"14 !
l,19xl0"13
3^34
! 1,91
—
3,15
2,92
2,60
1,865
3,015
2,772
2,10
1,77
5,36
5,05
8,32
8,53
В, 1010
(МПа)*-ч
1,17х1010
7,31x10
3,99x10
7,36x1022
2,02х1017
1,48х1012
1,02х1016
2,81х1016
1,01х108
8,55x1045
3,43х1024
1,17хЮ9
3,35х108
1,23хЮ14
3,29x10й
ь
6\38
3,72
4,12
12
10
8 •
9,0
9,5
6,0
21,09
13,40
6,38
6,55
8,43
7,80
*р,Ю3ч
102
102
102
102
102
102
102
102
102
102
102
10
10
1
1
о„ „. МПа
Д.П* 1T*xxt*
230
70
40
210
170
140
216
181
147
260
160
230
165
318
236
сгдлрМПа
510
480
450
420
390
360
330
300
270
230
■vJ I 1 1
d Is
till д^
IflK'o
Ш
к Л
irk
г
p
44J
Щ А
lilies* 1 1 1
2 Хш\
IITKv0
VMI
ТгГ
> 1 1 1
гм
ш
■flu
>J
H
10 2
102 2
103 2 4 104
Рис. 1.10. Зависимость предела длительной прочности от времени до разрушения для
сплава Х10Н60К13В6М5Ф4Т2 (ЭИ929)
1 — Т = 810 °С; 2 — Т = 850 °С; А, О — экспериментальные точки;
— экстраполяция (испытания проведены в МЭИ аспирантом М. Хилялем)
испытываемых образцов и соответствующее напряжение а, при котором
проводилось испытание, можно построить зависимость t (а) (рис. 1.10),
Аппроксимирующая зависимость для характеристики длительной
прочности часто принимается в виде
/р = Яа
(1.59)
где В, Ъ — параметры, зависящие от температуры.
Для каждого фиксированного значения температуры параметры В и
Ъ определяются при обработке первичных данных с использованием
метода наименьших квадратов.
В табл. 1.2 приведены значения длительной прочности (1.59) для
некоторых материалов паровых и газовых турбин в диапазоне рабочих
температур.
Напряжение и температура оказывают значительное влияние на
длительную прочность материала: с ростом а и Г время до разрушения /
существенно уменьшается.
Гипотезы ползучести. Рассмотренные стандартные характеристики
ползучести и длительной прочности могут быть непосредственно
использованы в расчетах только для тех деталей, в которых реализовано
одноосное напряженное состояние при постоянных напряжении и
температуре, т.е. когда условия работы материала полностью
соответствуют условиям испытаний материалов. В большинстве практически
встречающихся случаев такое соответствие не наблюдается. Поэтому
возникает задача расчета деталей в условиях неодноосного и
переменного напряженного состояния при переменных температурах.
32
Изменение напряженного состояния и температуры во времени для
некоторого малого объема материала называют программой нагружения
материала в данном объеме. Для описания поведения материала при
произвольной программе нагружения применяют различные гипотезы
ползучести.
В случае одноосного напряженного состояния общая гипотеза
ползучести выражается соотношением, описывающим в дифференциальной
форме поведение материала при произвольной программе нагружения,
т.е. при заданном произвольном законе изменения напряжения а и
температуре Т во времени:
6С =Ла,Г,?р?2 qn)9 (1.60)
где qx, q2, ... , qn — структурные параметры.
Выбор структурных параметров определяется соответствием
предсказаний гипотезы (1.60) экспериментальным данным. Рассмотрим
некоторые частные гипотезы ползучести, вытекающие из (1.60).
Гипотеза старения. Она предполагает справедливость
конечного соотношения вида (1.53), например, в форме (1.54) не только при
а = const, но при произвольном а(/), т.е.
8е = AonO(t). (1.61)
При плавном и небольшом изменении а(/) гипотеза дает
достоверные результаты. Однако гипотеза противоречива и при некоторых
программах изменения o(t) приводит к недостоверным результатам.
Например, при постепенном снижении a(t) до нуля образец удлиняется из-за
ползучести. В образце накопится остаточная деформация ползучести, не
равная нулю, в то время как гипотеза (1.61) при любой программе, если
• с
только в конце процесса нагружения а = 0, предсказывает 8=0, что
невозможно.
Гипотеза течения. Она выражается соотношением
8С = Дет, Г,/),
или в частном случае
8С = AGnD.(t); (П(/) = dCl/dt). (1.62)
Она следует из (1.60) при qx = /, q2 = ... = qn = 0 (А и п зависят от Т).
Используя (1.56), получаем
П(0 = 1 + aPQ~pt. (1.63)
В соотношении (1.61) время / входит как параметр, т.е.
предполагается, что свойства материала меняются с течением времени, отсюда и
33
название «гипотеза старения». По существу гипотеза течения (1.62) по
этому признаку также является вариантом гипотезы старения.
Гипотеза упрочнения. Полагая в (1.60), что qx = ес, q2 - #3 =
= ... = qn = 0, получаем соотношение гипотезы упрочнения
г =/(а, Г, 8е). (1.64)
Наиболее простая форма соотношения гипотезы упрочнения
6 (е ) = МаР, (1.65)
где Л/, а, Р — параметры, зависящие от температуры.
Выбор структурного параметра гс означает допущение, что главным
фактором, влияющим на свойства материала при ползучести, является
накопленная к данному моменту деформация ползучести, упрочняющая
материал. Отсюда и название «гипотеза упрочнения».
Релаксация напряжений. Релаксацией напряжений называется
снижение напряжений, обусловленное ползучестью материала при
стесненной его деформации. В частном случае «чистой» релаксации образец
быстро деформируется до некоторой деформации е0, которая в
дальнейшем остается неизменной. В момент деформирования образца до е0
возникает начальное напряжение а0 = Ег0 (деформирование
осуществляется в пределах упругости материала).
Условия чистой релаксации
s = г .+ г = const (1.66)
или в дифференциальной форме
8* +8е = 0. (1.67)
Согласно (1.66) сумма упругой деформации и деформации
ползучести в процессе чистой релаксации постоянна, причем деформация
ползучести увеличивается от 0 до е0 с течением времени под действием
снижающегося напряжения ст. Одновременно упругая деформация а/Е
уменьшается от а0/Е до нуля.
Используя условие (1.67) и соотношение одной из гипотез
ползучести для е с, определяем закон изменения напряжений в образце во
времени — закон релаксации.
Определим закон релаксации по гипотезе течения. Используя (1.62)
и (1.67), получаем
a/E + AonCl(t) = 0.
34
Интегрируя это уравнение с разделяющимися переменными по / от
/ = 0 до / и по а от а0 до а, имеем
а(/) = а0[1 + (л- l)AEon0~An(t)}~W(n~'l\ (1.68)
Закон релаксации по гипотезе старения согласно (1.66) и (1.61) имеет
вид
g/E + Ao"Q(t) = а0/Я. (1.69)
Можно получить соответствующий закон релаксации и по гипотезе
упрочйения.
Для сравнения и проверки рассматриваемых трех гипотез ползучести
на рис. 1.11 показаны расчетные кривые релаксации в сопоставлении
с экспериментальными данными, полученными при испытании
образцов из жаропрочного сплава.
Для сталей со стабильной структурой к опытной кривой обычно ближе
расположена расчетная кривая, найденная по гипотезе упрочнения. Для
стареющих сталей более подходящей является гипотеза течения. При
использовании гипотезы старения получают существенно завышенные
значения напряжений в процессе релаксации, поэтому эту гипотезу
следует применять только для ориентировочных расчетов.
а, МПа | I I ~~] I I
goo i 1 1 1 1 1
0 0,2 0,4 0,6 0,8 *,ч
Рис. 1.11. Кривые релаксации для сплава Х15Н70В5М4Ю2ТР (ЭИ765) при Т » 750 °С
7—3 — расчетные соответственно по гипотезам старения, течения, упрочнения; 4 —
экспериментальная (испытания проведены Л.Б. Гецовым)
35
Обобщенный закон ползучести. В случае неодноосного
напряженного состояния используют обобщенные законы ползучести
деформационного типа или типа закона «течения». В первом случае применяют
гипотезу старения. Тогда обобщенный закон ползучести
гс. = (3/2)^е$; (1.70)
и а*
е . с
£.. = 8. + 8..
U V V
При аппроксимации первичных кривых ползучести по (1.54)—(1.56)
s* = Aa"Cl(t). (1.71)
Упругие составляющие деформации геу выражают через напряжения
по закону Гука.
Во втором случае может быть принята любая гипотеза типа (1.60).
Тогда обобщенный закон ползучести
ги = (3/2 А , (1.72)
причем
£* =/(сг*, Г, q{, q2, ..., qn\ (1.73)
гдеДа*, T9ql9q2,..., qn) — функция в правой части (1.60).
При использовании гипотезы течения (1.62) имеем
^ = Aa1n(t). (1.74)
Тогда обобщенный закон ползучести
еу = (3/2)Aa"~ln(t)sir (1.75)
Зависимость (1.71) основана на использовании гипотезы,
аналогичной гипотезе (1.25): секущий модуль ползучести, т.е. величина а*/ес*
есть функция интенсивности напряжений и времени и от вида
напряженного состояния не зависит.
Обобщенный закон ползучести деформационного типа (1.70)
аналогичен обобщенному закону пластичности (1.24). Время в (1.71) входит
как параметр. Решение любой задачи ползучести детали с
использованием закона (1.70) совпадает с решением соответствующей упругопла-
стической задачи. Это предопределяет широкое применение
обобщенного закона ползучести (1.70), несмотря на недостаток, отмеченный
выше при рассмотрении гипотез ползучести^ Условием использования
36
закона является умеренное изменение напряжений за рассматриваемый
период ползучести.
Соотношение (1.74) выражает предположение о существовании
универсальной зависимости между интенсивностью напряжений, временем
и интенсивностью скоростей деформаций.
Соотношение (1.75) свободно от противоречия, присущего
деформационным законам ползучести, и может быть использовано для
стареющих материалов. При этом точность расчета ползучести деталей при
использовании соотношения (1.75) взамен соотношения (1.70) обычно
повышается.
Длительная прочность материала при переменных напряжениях
и температуре. Штатные характеристики длительной прочности
экспериментально определяют при постоянной нагрузке Р и температуре Т за
весь период испытания каждого образца. Для определения длительной
прочности при произвольной программе нагружения а(/), T(t)
необходимо воспроизвести заданную программу нагружения, довести образец
до разрушения и получить характеристику прочности (например, время
до разрушения) для данного случая или выдвинуть гипотезу,
позволяющую установить длительную прочность при переменных а и Г по
известным характеристикам длительной прочности, полученных при
постоянных (но разных) а и Г. Первый способ более надежен и точен,
однако он позволяет получить единичный результат. Второй способ
более общий, но для его использования необходима предварительная
проверка выдвинутой гипотезы.
Рассмотрим второй способ, основанный на идее суммирования
повреждений. Согласно правилу суммирования повреждений для
одноосного напряженного состояния при произвольной программе
нагружения условие разрушения имеет вид
тр
К - If - 1, (1.76)
о р
где Хс — степень повреждения или суммарное повреждение; /р(а, Т) —
время до разрушения при постоянных о и Г; т — время работы
материала до разрушения.
При заданной программе нагружения a(t), T(t) подынтегральное
выражение в (1.76) есть известная функция времени. Элементарное
повреждение dXc - dtlt представляет собой отношение элементарного
времени dt к времени до разрушения при значениях а и Г в данный
рассматриваемый момент времени.
37
4
i
1
i_.-I._J
~~\л
Л
1 /
Г V
1 U
о*
1—---
Л*1
[•« =—а»
_____
/
/
уГ
У
у
Л*2
^—=_»
&t2
«* »i
A.=l
t
Рис. 1.12. Программа нагружения и кривая накопления повреждений
При ступенчатой (кусочно-постоянной) программе нагружения
условие разрушения принимают в форме
z А/,
К = Z ^ = 1- о-77)
/ - 1 Р'
На каждом из интервалов времени А^. напряжение и температура
имеют постоянные значения ai = const и7) = const (рис. 1.12). Правило
суммирования повреждений (1.76) и (1.77) многократно проверялось
экспериментально. В ряде случаев правило суммирования позволяет
получить данные, которые удовлетворительно совпадают с опытными,
наблюдаются однако и заметные расхождения.
Более точные модели, основанные на более сложных предпосылках,
всегда требуют дополнительной информации о свойствах материала
сверх штатных характеристик длительной прочности и ползучести.
Дополнительная информация часто отсутствует. Поэтому
использование более точных правил, чем правило суммирования повреждений
(1.76) и (1.77), затруднено. Принимая во внимание статистический
разброс свойств материалов, можно рекомендовать использовать правила
суммирования повреждений при расчетах на длительную прочность
деталей турбомашин с введением коэффициента запаса прочности.
Рекомендуются два способа введения коэффициента запаса прочности.
Первый способ основан на использовании условий длительной
прочности
К*К> О-78)
где Хс — фактическое повреждение к концу ресурса; А,н — нормотивное
значение степени повреждения.
Принимают Хн = 0,1 - 0,2.
38
Второй способ предполагает проведение расчета на
длительную прочность по увеличенному напряжению сУф = пао, где а(/) —
действительное напряжение; па = 1,6—1,7 — коэффициент запаса
прочности по напряжениям. При таком подходе условие длительной прочности
кс(оф, Т) < 1. (1.79)
Второй способ получил большее распространение.
При степенном законе длительной прочности иГ= const из (1.79)
получаем
—' аэ
1 f Ъл*
- а At
(1.80)
v о
где аэ — эквивалентное напряжение; т — срок службы (ресурс).
Эквивалентное напряжение аэ для заданной программы а(/) и срока
службы т — это такое постоянное напряжение, которое за время т при
температуре Т испытания, вызывает такое же повреждение, которое
происходит при заданной программе нагружения а(/).
Условие прочности при неодноосном, но постоянном напряженном
состоянии и постоянной температуре при хрупком характере разрушения
°1 <<**„• 0-81)
При произвольной программе нагружения в случае неодноосного
напряженного состояния можно использовать критерии прочности (1.78)
или (1.79) с заменой напряжений о на максимальное напряжение <jj.
В более общем случае критерий прочности при неодноосном
напряженном состоянии в условиях ползучести можно представить в виде
J?c1 + (l-jyo#<a№ (1.81а)
где для разных материалов и разных условий испытаний (температур,
длительности) 0 < R < 1.
Для критерия максимальных напряжений (1.81) R = 1. При R = 0
имеем критерий прочности по интенсивности напряжений: а* < адп.
В.П. Сдоборевым (1959) предложен критерий при R = 0,5
(1/2)(а1 + а*)<адп. ' (1.816)
Как правило, для реальных условий критерий (1.81) — наиболее
консервативный, его следует применять на стадии проектирования, если
конкретное значение R для проектируемой детали неизвестно (как это
чаще всего и бывает).
При переменных напряжениях используются критерии (1.81), (1.81а),
(1.816) с заменой напряжений на эквивалентные, вычисляемые по (1.80).
39
Длительная прочность материала при неодноосном нестационарном
напряженном состоянии (особенно при изменении главных осей тензора
напряжений в пространстве) не исследована, поэтому расчеты,
основанные на использовании многих допущений, недостаточно проверенных
экспериментально, оправданы как первое приближение. Введение
достаточно больших коэффициентов запаса является гарантией
неразрушения детали за срок службы.
В зоне концентрации напряжений необходимо найти местное
максимальное напряжение. Оно может быть найдено по зависимостям
а = *a<V
К = а Р(0 + Лст(1-Р(0),
(1.82)
где P(t) = <т/а0 — закон релаксации по одной из гипотез ползучести,
например, по гипотезам течения (1.68) или старения (1.69). В последнем
случае P(f) является не явной функцией, которая вычисляется по (1.69)
из соотношения
АЕояу-1П«) = -
Pit)
где ау = ааан — максимальное напряжение в начальный момент (упругое).
оо
Величина ка — коэффициент концентрации напряжений в
состоянии установившейся ползучести — может быть рассчитана с
применением гипотезы Нейбера (1.48а) для состояния установившейся
ползучести:
С = К)2/(*+1).
(1.82а)
Погрешность при расчете по формуле (1.82а) обычно идет в запас
надежности и не превышает +5 % (см. [8]).
1.4. ЗАКОНЫ ЗНАКОПЕРЕМЕННОГО (ЦИКЛИЧЕСКОГО)
ДЕФОРМИРОВАНИЯ И КРИТЕРИИ ПРОЧНОСТИ
ПРИ МАЛОЦИКЛОВОЙ УСТАЛОСТИ
Циклическое нагружение материала между заданными пределами
по деформации. Типичное поведение материала при циклическом нагру-
жении изображено в координатах сге на рис. 1.13. Здесь ОА — первичное
нагружение — растяжение; АВ — разгрузка; ВС — нагружение
противоположного знака — сжатие; CD — разгрузка; DE — повторное растяжение.
40
i
b
<
^
i i
Ъ
i
ъ
! \
l
f
\
i c/
D/
s"
cfj
О
^
E m
/К
/A
/в
1 f
л
i '
b
V
Ь
в'
Де
A
Ж
M
8
Рис. 1.13. Диаграмма деформирования при циклическом иагруженин
При деформации материала по линии ABC обнаруживается, что
предел упругости a'j при сжатии меньше предела упругости а'е при
первичном растяжении.
Г. Мазинг и затем Н.Н. Афанасьев из некоторых модельных
представлений пришли к выводу, что ветвь разгрузки ABC и ветвь CDE по
форме совпадают с ветвью первичного растяжения ОА в удвоенном
масштабе. При этом уравнение линии ABC по Мазингу—Афанасьеву может
быть представлено в виде
wm
(1.83)
где/(a) = г — уравнение диаграммы первичного растяжения (1 Л); а', е' —
значения напряжения и деформации в точке перехода от активного
деформирования (нагружения) к разгрузке. Функция /(a) — нечетная, т.е.
/(0) = Л-а).
Для ветви CDE имеем аналогичное уравнение
е - е
• г /т
(1.84)
где е", о" — координаты точки С.
Свойства (1.83) и (1.84) называют правилом Мазинга—Афанасьева.
Согласно этому правилу кривая деформирования материала в каждом
полуцикле может быть получена из кривой первичного растяжения
заменой напряжений а и деформаций е на полуразности (а - а')/2 и
(е - е')/2, где а', г' - значения напряжений и деформации в точке начала
41
рассматриваемого полуцикла деформирования (рис. 1.13). Материал,
подчиняющийся модели Мазинга—Афанасьева, называют циклически
стабильным материалом. Для циклически стабильного материала
повторное нагружение по линии CDE всегда приведет в точку Е,
совпадающую с точкой А. Дальнейшее нагружение после достижения точки
Е (А), согласно модели Мазинга—Афанасьева, идет не по зависимости
(1.84) (штриховая линия ЕМ' на рис. 1.13), а по первичной кривой
растяжения ОАМ.
Рассмотрим несимметричный цикл (рис. 1.14). Допустим что при
первичном деформировании по пути ОАМ достигается точка А при
е = е', и затем следует обратное деформирование по линии ABC до
значений напряжения а" и деформации е" в точке С, причем | с"| < е'.
Следующий полуцикл согласно модели Мазинга—Афанасьева идет по
линии CDE, при этом точка Е совпадает с точкой А.
Действительное поведение материалов при циклическом нагружении
значительно сложнее, чем предсказываемое моделью Мазинга—Афанасьева.
Первое отличие заключается в том, что при циклическом
нагружении материалов в условиях постоянного размаха деформаций Де может
наблюдаться как циклическое упрочнение, так и циклическое
разупрочнение материала (рис. 1.15).
Рис. 1.14. Диаграмма деформирования при несимметричном цикле
42
При As = const нагружение называется эюестким. Упрочнение и
разупрочнение сказывается в том, что значение условного предела
текучести (и как следствие значение Аа) соответственно возрастает или
убывает с ростом числа циклов деформирования. Циклически
упрочняющимися обычно бывают материалы достаточно мягкие в
исходном состоянии (стали и сплавы в незакаленном состоянии,
некоторые аустенитные стали и т.п.). Для высокопрочных в исходном
состоянии материалов характерно циклическое разупрочнение.
В реальных условиях для многих материалов можно отметить этапы
как циклического упрочнения, так и разупрочнения.
Весь период циклического нагружения материала до разрушения
можно разбить по числу циклов на три этапа (рис. 1.16). На этапе I мате-
а б
Рис. 1.15. Диаграмма деформирования материала при циклическом нагружен и и
а — упрочняющегося; б — разупрочняющегося
Асг.МПаГ
К
800 гс
t
400Г
IJ
£«
#Т
" д 1
г
4
ЕЖ
°гщ
i Ад
L
3
^7°~9
"£г-2^Ч
J ' "™
о—*
;ftV<
t Л *
5
2
Г
^д д
Ь
д д
1
II
л
ь——
•&-&£
—;—i
р""'""'-
J
1
4 д.
Р—
*
^
1
i
ш!
i
о
3
5 N•10-3
Рис. 1.16. Изменение размахов напряжений при жестком циклическом
деформировании для сталей ХН35ВТ и 12Х18Н9Т
/ _ д8/> = 0,0033; 2 — Аер = 0,0043; 3 — Агр = 0,0057; 4 — Агр = 0,0058; /—4 сталь
XH35BT; 5 — Де р = 0,0068, сталь 12Х18Н9Т (испытания проведены в МЭИ B.C.
Соколовым)
43
риал упрочняется или разупрочняется в соответствии с
первоначальными его свойствами, на этапе II обнаруживается некоторый участок
стабилизации, наконец, на этапе III материал разупрочняется. Этап III
заканчивается разрушением (отмечено звездочками на рис. 1.16).
Высокопрочная сталь ХН35ВТ на начальном участке до числа
циклов N » 200 интенсивно разупрочняется, а затем наступает участок
стабилизации, длящийся почти до разрушения материала.
Мягкая сталь 12Х18Н9Т обнаруживает вначале упрочнение, затем
стабилизацию и разупрочнение.
Второе отличие реальных материалов от идеального материала,
подчиняющегося модели Мазинга—Афанасьева, заключается в изменении
формы кривой деформирования. Это проявляется в изменении
показателя т в аппроксимационной формуле (1.8) в зависимости от числа
циклов. Типичным является уменьшение т на начальном участке. На
участке стабилизации показатель т остается практически постоянным. Это
значит, что модель Мазинга—Афанасьева для реальных материалов
может применяться на участке стабилизации. Для получения
характеристик материала на этом участке необходимо провести эксперимент с
измерением параметров петли деформирования, найти значения т и ак
для участка стабилизации, а затем воспользоваться зависимостями (1.8),
(1.83) для описания поведения материала при циклическом нагружении.
Обобщая закон циклического деформирования на неизотермический
случай подобно тому, как это было сделано ранее для однократного
нагружения, записываем его в виде
v = u + um. (1.85)
При этом
и = (а-а')/2; v = (е-е')/2; (1.86)
а = ^/сг*; £ = Ег/ак.
В (1.85) принимается, что (- и)т = - ит, так что правая часть (1.85) —
нечетная функция и. Штрихом, как и ранее, отмечены значения
параметров в точке перехода от нагружения к разгрузке.
Закон (1.85) определяет неизотермическое циклическое
деформирование при условии возрастания и и v по абсолютной величине. В
некоторой точке траектории активное нагружение определяется условием
А | и | > 0, а разгрузка - А | и | < 0. С этого момента разгрузка и
последующее обратное нагружение вновь описывается зависимостью (1.85), но
с заменой а' и е' на новые значения, которые определяются величинами
этих параметров в точке перехода от активного нагружения к разгрузке.
44
Полагая в (1.85), (1.86) и ст = ст" и е = е", получаем
, -Л/т
Ае = Ae' + Ja/J ; (1.87)
Аер = (Да)"1; (1.88)
Аб = Де£/(2ста); Дер = А^Е/(2аЛ;
Act = (ст"-ст')/2,
где Ае, Ае** — удвоенные амплитудные значения (размахи)
соответственно полной и пластической деформации; ст" - от' —размах
приведенных напряжений за цикл нагружения;
Ае = е"-б';Аер = (/)"-(/)';
Зависимости (1.87), (1.88) пригодны для неизотермического
нагружения и используются при расчете долговечности.
Расчет размахов напряжений и деформаций при циклическом
нагружении. Рассмотрим метод расчета параметров петли
циклического деформирования при заданных граничных нагрузках. Типовая
практическая задача сводится к следующему: известен процесс
изменения номинальных напряжений, требуется найти соответствующие
напряжения и деформации в точке максимального напряжения — в зоне
концентрации напряжений.
Предположим, что известно решение упругопластическои задачи о
концентрации напряжений при первичном (однократном) нагружении в
виде зависимости типа (1.48)
<* = <*н*0(1ан|> аа> ™)> С1-89)
где а = о/ок — приведенное напряжение в произвольной точке кривой
первичного нагружения ОАМ (см. рис. 1.14); ан = °н^аА:
—соответствующие этому напряжению приведенное номинальное напряжение; kG —
коэффициент концентрации; аа — коэффициент концентрации в
условиях упругости; ah т — параметры универсальной зависимости (1.11).
По существу, зависимости (1.48), (1.49) являются общим приближенным
решением задачи о концентрации напряжений в упругопластическои
области при законе деформирования (1.11).
45
I 1 1 I 1 I |m-14| 1 1 1
0 0,2 0,4 0,6 0,8 1,0 1,2 1,4 1,6 1,8 aH/ak
Рис. 1.17. Зависимость истинного коэффициента концентрации напряжений на контуре
кругового отверстия от сн /ск и т в условиях равноосного растяжения он1 = ан2 в а„
На рис. 1.17 представлена зависимость kG от ан и т на контуре
кругового отверстия в тонкой бесконечной пластине, нагруженной на
бесконечности осесимметричным номинальным радиальным
напряжением.
Результаты получены численным решением упругопластической
краевой задачи и являются примером решения (1.89) при аст = 2 для
закона деформирования (1.11). Сопоставление общего (приближенного)
решения (1.49), с «точным» (но частным: при аа ~ 2) решением
рис. 1.17 свидетельствует о приемлемой точности решения (1.49):
погрешность определения &ст по (1.49) не превышает 2—3 %.
Расчет параметров петли циклического деформирования
рекомендуется выполнять, используя следующую теорему, доказываемую в теории
пластичности.
Теорема о переменном нагружении В.В. Москвитина. Если закон
первичного нагружения (ОАМ на рис. 1.14) известен в виде (1.89), то
для разгрузки и последующего обратного нагружения (по ЛВС,
рис. 1.14) справедлива зависимость
-у- = (—Т~)к< 2 ' а-' "J' (L90)
где а — приведенное напряжение в любой точке кривой ЛВС с учетом
концентрации; сгн — соответствующее этому напряжению приведенное
46
номинальное напряжение; а' — приведенное напряжение в точке А;
а н — соответствующее ему приведенное номинальное напряжение.
Коэффициент концентрации к0 в (1.90) определяется как и для
первичного нагружения, например по общей зависимости (1.49) или (для
частного случая напряжений около кругового отверстия в пластине)
по рис. 1.17, но только величину ан следует заменить на полуразность
|о"н-о'н|/2.
Соотношение (1.90) есть частный случай теоремы о переменном
нагружении В.В. Москвитина.
Теорема о переменном нагружении дает возможность вычислить
параметры любого цикла деформирования, включая несимметричные
циклы, в любой точке детали по известным значениям номинальных
напряжений, если известна зависимость (1.89) для первичного
нагружения.
Рассмотрим применение теоремы для расчета процесса, состоящего
из первичного нагружения ОА9 обратного нагружения ABC и повторного
нагружения CDE (см. рис. 1.14). Деформирование проводится
посредством изменения номинальных напряжений от нуля до а'н (точка А),
затем от g'u до а"н (точка С) и затем от а"н до а'н (точка Е).
Полагая в (1.90) ан = а'^, чему соответствует а = <у" (точка Q,
получаем
а — с
Zr^tjfijziA^ (1.91)
2
Согласно (1.89) напряжение в точке А при первичном нагружении
<*' = а'цко(\е'н\,а0,т).
Применяя теорему к процессу от точки С до точки Е, получаем
а -
а" а'„ - а"н Ла'н - а"н| \
2
где за начало приняты параметры в точке С (величины а'„ и а" ), а
номинальное напряжение в конечной точке Е по условию равно а'н.
Сравнивая правые части (1.91) и (1.92), видим, что
а = а',
т.е. параметры в точках А и Е — совпадают, и, следовательно, петля АВСА —
замкнутая.
47
Полуразмах напряжений определяется по (1.91), а соответствующие
полуразмахи полной и пластической деформации следует рассчитать по
формулам (1.87)—(1.88).
Обобщенный закон знакопеременного упругопластического
деформирования. Закономерности знакопеременного деформирования
упругопластического материала при трехосном
напряженно-деформированном состоянии получены обобщением соотношений (1.85) для
одноосного случая и распространения уравнений малых упругопласти-
ческих деформаций (1.24)—(1.26) на циклическое пропорциональное
нагружение.
Первоначальное пропорциональное нагружение подчиняется закону
(1.24), при этом напряжения меняются пропорционально параметру X:
Су = Хо'у, где a(j— значение напряжений в конце процесса первичного
нагружения, когда параметр X достигает значения X' = 1.
Последующий процесс разгрузки и обратного нагружения
соответствует уменьшению параметра X до любого значения, меньшего единицы.
В частном случае описанного процесса может быть X" = -1 и
напряжение G"j = -с):.
Обобщая закон малых упругопластических деформаций (1.24) на
обратное нагружение от состояния при X = +1, до любого значения X < 1,
можно получить соотношения
itJ = (Зс*/2а*)5/у, (1.93)
где обозначено
е.. — е'-. s. — s'..
'и - -V^ h - -Vs (L94)
s* = (2/3)1/2(^/y)1/2;a* = (3/2)l/2(5jy^)l/2. (1.95)
Соотношения (1.93) являются обобщением на случай обратного
нагружения зависимостей (1.24).
По аналогии с (1.85) и (1.25) принимаем, что существует
однозначная зависимость
е* = /(a*)-lz|lia*. (1.96)
Для аппроксимации
v т
48
получим из (1.96)
-2 — -т
s* = -(1 + |д)а* + а*, (1.97)
где использованы приведенные величины
е* = (2/3) (ецеу) ; а* = (3/2) (^у) ;
i = 1/2(ё -*'.);$„ = 1/2(5..-*'..). (1.98)
В соотношениях (1.98) штрихом отмечены значения деформаций и
напряжений в точке конца первичного нагружения (при X = 1). Черта над
буквой означает приведенные параметры те же, что в зависимостях (1.36).
Закон (1.93) справедлив и при неизотермическом деформировании,
при котором параметры ак и Е зависят от температуры, но как и в (1.11),
Elak = const.
Его можно применить для описания любого полуцикла
деформирования, если заменить $'.., ё'.. на значения в точке изменения
направления нагружения.
Если деформирование по закону (1.93) производится до значений
a"ij - -a'ij ; е"у = -8у , то по (1.93)—(1.97) можно найти
полуразности напряжений и деформаций на пути от точки при X = 1 до X = -1 при
пропорциональном нагружении.
Для дальнейшего нагружения отЯ, = -1 до X— 1 вновь справедливы
соотношения (1.93)—(1.97) но с заменой ау, е у на а"у, е"у .
При несимметричных циклах определение параметров петли
аналогично рассмотренным подходам при одноосном напряженном состоянии.
Много- и малоцикловая усталость материалов. Усталостью
называется накопление повреждений в материале вследствие его
циклического нагружения, приводящее к разрушению через определенное
число циклов изменения нагрузок.
Различают многоцикловую и малоцикловую усталость. Четко
обозначенной границы между этими видами усталости нет. Можно условно
считать, что многоцикловая усталость определяется числом циклов
до разрушения N > 10 . Областью малоцикловой усталости считают
область, когда 1/4 < N < 10 .
Известно, что при циклическом деформировании имеется петля
пластического гистерезиса (см. рис. 1.13—1.15). Ширина петли Агр может
быть измерена только при напряжениях, больших некоторого предела,
при котором точность используемой аппаратуры достаточна для
обнаружения остаточной деформации образца. Обычная точность применяе-
49
мой аппаратуры позволяет обнаружить остаточную деформацию не
ниже 0,01 %.
При многоцикловой усталости ширина петли пластического
гистерезиса мала и ее трудно измерить. Поэтому разрушение при
многоцикловой усталости связывают с напряжениями. Расчет конструкций
проводят в условиях упругости. По упругим напряжениям, используя
критерии прочности при многоцикловой усталости, определяют
прочность (долговечность) конструкции.
В турбомашинах многоцикловая усталость обусловлена вибрацией
элементов: рабочих лопаток, вала, дисков под влиянием
быстроменяющихся воздействий (см. § 1.1). Область частот циклического нагружения
f<kn (где п — частота вращения ротора, к » 100). При непрерывном
циклическом нагружении в условиях таких частот критическое число
7 '
циклов 1 • 10 накапливается не более чем за несколько десятков часов
при п - 50 с~ . Детали турбомашин должны иметь циклические
напряжения, значения которых заведомо ниже предела усталости.
Расчет деталей на многоцикловую усталость, см. § 1.5.
Малоцикловая усталость связана с медленно меняющимися
воздействиями и обусловлена повторными переходными режимами — пуском,
изменением нагрузки турбомашины, остановкой ее. Частота таких
воздействий соответствует частоте изменения режима. В стационарных
турбинах большой мощности частота воздействия не превышает
нескольких сотен циклов в год (для установок полупикового и пикового
назначения). За весь срок службы, равный более 30—40 лет, при этом
накапливается число циклов, равное обычно не более 10 . Этим и
определяется с практической точки зрения предел числа циклов, ниже
которого усталость относится к малоцикловой.
При малоцикловой усталости ширина петли Асризмерима,
конструкции работают в условиях повторных пластических деформаций. Для
определения напряжений и деформаций в конструкциях при
малоцикловой усталости необходимо проводить расчеты по уравнениям
пластичности для повторного нагружения.
Область малоцикловой усталости устанавливают, используя
качественный критерий
Дау>2ае (Дау = сг1у-а2у), (1.99)
где cjjy, а2у — максимальное и минимальное значения напряжений в
некоторой рассматриваемой точке детали за период одного цикла,
рассчитанные в предположении упругости материала; ое — предел
упругости материала.
50
Если выполняется неравенство (1.99), то материал в
рассматриваемой точке испытывает повторное пластическое деформирование и,
следовательно, его прочность определяется закономерностями
малоцикловой усталости.
При выполнении противоположного неравенства
Аау<2ае (1.100)
материал после первого цикла нагружения перейдет в упругую область
(повторные пластические деформации не возникают). Расчет на
прочность в этом случае следует проводить по методам, применяемым для
многоцикловой усталости (см. § 1.5). Переход в упругую область
материала, подвергнутого на первых циклах пластической деформацией,
называется приспособляемостью. Поэтому условие (1.100) можно
назвать условием приспособляемости. Удобство критериев (1.99) и
(1.100) заключается в том, что для их использования необходим расчет
детали при переменных воздействиях только в упругих условиях для
определения максимального а1у и минимального а2у напряжений за цикл
изменения воздействия.
Долговечность при малоцикловой усталости устанавливается по
эмпирическим зависимостям. Наиболее распространенной является
следующая зависимость для одноосного напряженного состояния:
tfpCAeV-C, (1.101)
где С, к— постоянная материала; Аер— размах пластических
деформаций за цикл в направлении оси образца.
Для определения размахов в любой точке необходимо провести
расчет детали в условиях пластичности. Для ориентировочных расчетов
принимают
А£Р=(Аау-2ае)/Е. (1.102)
При этом возможно ограничиться упругим расчетом детали.
В табл. 1.3 приведены характеристики малоцикловой усталости для
некоторых материалов турбостроения, полученные в МЭИ А.Д. Трух-
нием и др.
Для низкотемпературной малоцикловой усталости, когда влияние
ползучести отсутствует, можно пользоваться формулой (1.101) при
* = 2; С =0,25 е*, (1.103)
где ев = - 1п(1 - \|/) — истинная пластическая деформация при разрыве.
51
Таблица 1.3
Марка стали или
сплава
20ХЗМВФ
(ЭИ415)
25Х1М1Ф(Р2М)
15Х12ВМФ
(ЭИ802)
15Х1М1ФЛ
20ХМЛ
Температура
испытания, °С
20
400
500
550
550
200
400
560
400
560
а0,2>
МПа
600
510
500
450
460
>650
380
280
350
260
МПа
750
560
530
480
485
>800
430
320
440
340
v|/,%
70
65
71
75
85
>45
35
60
77
МПа
490
396
342
326
335
455
344
258
322
245
т* '
7,67
10,56
9,59
12,18
13,54
7,23
9,47
10,85
12,00
14,40
С
2,118
0,572
0,507
0,339
20,1
2,28
4,25
12,56
0,853
0,687
к
1,151
1,353
1,351
1,490
0,630
1,233
1,047
0,740
0,463
1,317
Я, 104
МПа
20,6
19,0
18,0
17,0
17,5
20,2
19,0
17,0
19,0
17,0
* с*£,т — для участка стабилизации.
Когда размах Аер мал и ползучесть отсутствует, хорошие результаты
дает формула
Ае = eJ'6^p~0,6+(3'5aB/£)^p"0,12- (1Л04)
Преимущество формул (1.103) и (1.104) состоит в том, что для их
использования необходимы лишь данные, содержащиеся в любом
справочнике по материалам.
При неодноосном напряженном состоянии предложено несколько
критериев прочности при малоцикловой усталости. На основе
статистического анализа экспериментальных данных и сопоставления их с
предсказаниями на основе нескольких критериев можно рекомендовать
критерий размахов интенсивностей пластических деформаций
Wp(Ae£) = С; (1.105)
Ас? - (2/3)1/2(As;AeJ)l/2, (1.106)
где Aezy = е.. - е^. —размахи пластических деформаций в цикле.
В главных составляющих
А8^=(Л/3)[(А8[-А8^)2+(Аб^-Аг^)2+(Аб^А8^)2]1/2, (1.107)
где A8j, Ае2 и Ае3, — размахи главных пластических деформаций,
удовлетворяющие условию несжимаемости
Ae[+Aef + Ae£ = 0.
52
Малоцикловая усталость в турбомашинах обычно связана с
переменными температурными воздействиями, возникающими при переменных
режимах работы турбомашин, поэтому часто малоцикловую усталость
называют термической усталостью. Характерной особенностью
термической усталости является неизотермичность процесса нагружения
материала, так как сами напряжения возникают вследствие переменных
температур в деталях турбомашин.
Критерий прочности при малоцикловой усталости и
произвольной программе нагружения. Критерием прочности при малоцикловой
усталости является достижение суммарным повреждением предельного
значения, равного единице, т.е.
Хи = \dN/Np = 1, (1.108)
о
где N* — число циклов до разрушения при заданной программе нагружения.
Число циклов N до разрушения определяется по (1.101) или (1.105)
в зависимости от значения Агр или Аер*, которое должно быть
рассчитано по заданной программе нагружения материала. В качестве
программы обычно выступает размах полных деформаций Ас = Ае(Л/) или
размах номинальных напряжений для зоны концентрации. Учитывая
запас прочности, получаем
*7<A,Hf О-109)
гдеХн=1/«^ = 0,1-0,2,
или
Х/(Ааф)<1; (1.110)
Ааф = иаАа. (1.111)
Если температура не меняется (или если применяются средние
значения параметров в рабочем диапазоне температур), то между запасами
прочности по числу циклов и по напряжениям выполняется соотношение
т к
Если выбрать nN = 5—10, то при типичных значениях тк = 15—20
получим «ст = 1,08—1,17, т.е. большим запасом по числу циклов
соответствуют малые запасы по напряжениям.
Расчет долговечности при малоцикловой усталости в зоне
концентрации напряжений. Концентрация напряжений и деформаций
в зонах резких переходов поверхности оказывает существенное влияние
53
на малоцикловую усталость. Расчет долговечности при этом следует
проводить с учетом коэффициента концентрации кс.
При заданном изменении номинальных напряжений в цикле полу-,
размах напряжений в опасной точке (в концентраторе) определяется
по (1.91) в виде
Аа = Дан£ст(|Аан|, аа, т);
да = _ . дан =
(1.112)
2 ' " 2
Полуразмах приведенных пластических деформаций находят по (1.88)
А? = Аа™.
Полуразмах полных деформаций с учетом (1.87) составит сумму
Ас = Аа + Аа .
По зависимости (1.101) определяют число циклов до разрушения,
предварительно найдя Агр по (1.88) и (1.112).
При несимметричных циклах, (см. рис. 1.14), среднее напряжение не
равно нулю. Среднее напряжение цикла при многоцикловой усталости
влияет на величину предела усталости по зависимости (см. § 1.5)
oy=a_1(l-aw/aB)y, (1.113)
где Of—предел усталости при несимметричном цикле; a_j — предел
усталости при симметричном цикле; aw— среднее напряжение цикла; ав —
временное сопротивление материала; у — эмпирический коэффициент, при
отсутствии экспериментальных данных принимают у = 1.
Введем поправку на среднее напряжение при малоцикловой
усталости. По аналогии с многоцикловой усталостью принимаем, что для
учета среднего напряжения следует проводить расчет долговечности по
полуразмаху напряжений, увеличенному в отношении g_i/gs, т.е. вместо
Аа использовать величину
Aa° = Aa(l-a„/aB)~Y. (1.114)
Заменив в формуле (1.88) Аа на Аа (1.114), из (1.101) получим
расчетную зависимость в виде
Р
54
N. = С'(Дст) (1-a /ав)'\ (1.115)
где
С' = С(Щ2ак))к\ I = тк. (1.116)
Среднее напряжение Gm, подставляемое в (1.115), следует
рассчитывать без учета концентрации напряжений
°«= (°'„ + о"„)/2-
Если ат < 0 (сжимающее), то следует в (1.115) принимать ат = 0.
Пример 1.4. За одну неделю программа нагружения материала состоит из
пяти циклов с Де = 0,01 и одного цикла с Де = 0,02. Материал — сталь 20ХЗМВФ,
температура Т- 550 °С. Определить ресурс или полное допустимое время работы
в названном режиме, если Хн ~ 0,1.
Характеристики стали 20X3МВФ, необходимые для выполнения расчета,
следующие: Г= 550 °С; С = 0,339; к = 1,490; m = 12,18; ак=326 МПа; Е/2ак = 267;
пх = 9,67; ух = 0,825; Ах • 1027 = 5,016; Ъ = 18,77; В • Ю-48 = 1,643.
Постоянные материала соответствуют зависимостям
Эти данные получены при испытании материала в циклических условиях.
Поэтому величины пгиак cooTBef ствуют кривой циклического деформирования.
В данном примере влияние ползучести не учитываем.
Ре ше н ие. Повреждение за одну неделю составит
где ДАТ,, AN2 — число циклов соответственно при Де (= 0,01 и Ае2 = 0,02; AN, = 5;
AWj-1.
При нахождении долговечностей NpX и Np2 необходимо учитывать
пластическую деформацию, которую можно определить по (1.87).
Решая методом проб уравнение (1.87) относительно Де для двух значений
Агх = ЕАгх/2ак = 267 • 0,01 =2,67;
Де^ = 267 • 0,02 = 5,34,
— р — р
получаем Агх = 1,630; As2 = 4,215. Откуда
aJ> 2a*X77 U630 . 1Л- 1П-з
АеГ{ = -F*Afi/i = "267" = ' ;
Ле'= We 1 ,5787*10"2-
По формуле (1.101) определим долговечности
NpX = С(А^)~к = 0,339(6,105- 10"3)"М9° = 675,35;
Np2 = 0,339(1,5787 • 10"2)"1'490 = 163,96.
55
Суммарное повреждение за неделю
Х,7= 5/675,35 + 1/163,96 = 0,0135.
Если обозначить допустимое число недель z, то по (1.109)
zXj < Х,н.
Приняв Хн = 0,1, что соответствует коэффициенту запаса по числу циклов
nN = 1 /Хи - 10, получим
z< V^/^ 0,1/0,0135 = 7,406 недель = 1244 ч.
Ресурс детали составит 1244 ч при введении запаса по числу циклов или по
длительности работы. Соответствующий коэффициент запаса прочности по
напряжениям
„^^^Ю1702'18-1'49^ 1,135.
Пример 1.5. Бесконечная в плане тонкая пластина с круговым отверстием
подвергается циклическому двухосному нагружению по несимметричному циклу с
напряжением стн = 300 МПа, а н' = -100МПа(рис. 1.18) при температуре Т =200 °С.
Материал пластины — сталь 15Х12ВМФ, имеющая характеристики,
приведенные в табл. 1.3.
Определить число циклов до разрушения пластины (до появления
макротрещины).
Ре ше ние. Полуразмах приведенных напряжений определим по формуле
(1.112), для чего предварительно рассчитаем параметр
А^н = (5'„-5"п)/2 =
1{ЩШ . „,43«,
стн = - 100 ?± + 300 МПа
t t t t I t t t
1 I II 1 1 I I
Рис. 1.18. Неограниченная пластина с
круговым отверстием при равноосном
циклическом несимметричном нагружении
где ак = 455 МПа принято из табл. 1.3.
Поскольку для данного случая аа =
= 2, m = 7,23 (см. табл. 1.3), то
коэффициент концентрации kG
находим интерполяцией по графикам
рис. 1.17 по значениям Да,, = 0,44
и m = 7,2 :
*ст=1,75.
Рассчитаем Аа по (1.112):
Да = 0,4396- 1,75 = 0,7693.
Найдем: среднее растягивающее
напряжение (номинальное)
300-100
о„ =
100 МПа,
показатели степени в (1.115)
/ = Ь* = 1,233 -7,23 = 8,9146;
принимаем у = 1.
56
Число циклов до появления макротрещины по (1.115)
Р V 910 У
10(К 8.9146
~800
910 ) I 0,7693
|да V 800
5615 циклов.
В данном примере учет среднего напряжения приводит к снижению
долговечности до 30 % ее значения без учета влияния среднего растягивающего напряжения.
Решим эту же задачу, использовав приближенную зависимость (1.49) для
расчета коэффициента концентрации ка при циклическом нагружении. Для этого
вместо а„ в левую часть (1.49) подставим Да,, = 0,4396 (согласно теореме о
переменном нагружении (1.91)) и, приняв т = 7,23, аа = 2, jli = 0,3, получим уравнение
0,4498 =
л .2 \ 0,16051
,8,23
лЛ -
из которого подбором найдем ка = 1,789.
Повторяя дальнейший расчет аналогично предыдущему, находим число
циклов до появления макротрещины N' = 4616, что на 17,8 % меньше ранее
полученного значения Np9 т.е. расчет с использованием приближенной зависимости (1.49)
несущественно отличается от «точного» и является консервативным: идет в запас
надежности.
Прочность при взаимодействии малоцикловой усталости и
ползучести. При попеременном циклическом и статическом нагружении
в материале накапливаются повреждения, возникающие вследствие тех
и других воздействий. Физическая природа развития повреждений от
усталости и от ползучести различна. При совместном протекании этих
физических процессов происходит их взаимное влияние: один из
процессов, например повторное пластическое деформирование, изменяет
закономерности протекания другого процесса, например процесса
ползучести и длительного статического разрушения. Взаимодействие двух
названных процессов имеет сложный характер. В этих условиях
простым предположением является гипотеза суммирования повреждений,
вызываемых действием повторного пластического деформирования
и ползучести.
Гипотезу суммирования повреждений за период At принимаем
в форме предложенной в МЭИ (А.Г. Костюк, А.Д. Трухний, 1973 г.):
\/Np=VN0 + Xc, (1.117)
где N — число циклов до разрушения при совместном действии
малоцикловой усталости и ползучести. Обратная величина 1/N = X
представляет собой, очевидно, величину суммарного повреждения за один цикл;
N0 — число циклов до разрушения от действия повторных пластических
57
деформаций; Хс — повреждение вследствие ползучести за один цикл
(за период At).
Соответственно обратная величина 1 /N0 — есть повреждение,
вызываемое действием повторных пластических деформаций.
Допустимое число циклов нагружения обозначим N. Условие
прочности с учетом запаса по длительности работы
Nl<XH = 0,l-0,2 (1.118)
или, учитывая (1.117), получаем допустимое число циклов нагружения
N<N0XH/(\+N0Xc). (1.119)
Необходимо рассчитать N0 и Хс по заданной программе нагружения
материала. Для определения N0 рекомендуется использовать формулы
W0A/ = C; (1.120)
Ае = (1/2) £ |А8^.| = (1/2X^1+ |AeS2| + ... + |AeSj), (1.121)
/= 1
где Ае* . — приращение пластической деформации на некотором i'-m
участке цикла; Ае — полусумма абсолютных значений пластических
деформаций ца протяжении одного цикла.
Формула (1.120) является обобщением зависимости (1.101) на
попеременное циклическое и постоянное нагружение.
Рис. 1.19 иллюстрирует программу нагружения и соответствующий
цикл для одноосного напряженного состояния. Линия АВ соответствует
первому нагружению. Повторяющиеся циклы DBCD соответствуют
циклически стабильному материалу. На участке DB происходит разгрузка и
последующая деформация сжатия, а на участке ВС — разгрузка и
последующая деформация растяжения. На участке CD напряжение
уменьшается вследствие релаксации. В точке D начинается новый цикл
нагружения. Ае^ и Абз — пластические деформации на участках ВС и DB.
Вследствие релаксации напряжений АгР2 Ф АгР2 . Штриховая линия СВ
соответствует процессу, протекающему без релаксации, при котором
пластические деформации при прямом и обратном нагружении
совпадают и равны Ае^ (для циклически стабильного материала).
58
с, s
^2. ,..
/ /
В
а \
С
1 / \
1
if
'/.У
Н,
i
i
i
ъ
ъ
1
f
1 8
'
Рис. 1.19. Программа и цикл нагружения материалов
а — программа; б — цикл нагружения при чередовании повторной деформации и
ползучести
Рассмотренный цикл соответствует условиям нагружения на
поверхности лопаток, роторов, корпусов турбомашин при цикле
пуск—стационарный режим — медленная остановка.
Расчет повреждений от ползучести проводится по формуле
А/
К = \f- (1.122)
Для чистой релаксации, учитывая аппроксимационную зависимость
(1.59) и закон релаксации в соответствии с гипотезой течения (1.68),
получаем
Ъ Д/
X = ^ f- d/
(1.123)
о
[l+aCl(t)]
п-\
а = (и- \)АЕа0 ; s = А/(и-1).
В общем случае / = Bg~ находят как функцию времени, используя
зависимости (1.82), которые определяют напряжения в процессе
неустановившейся ползучести. Если процесс протекает при переменной
температуре, то учитывают также зависимость постоянных В и Ъ от
температуры и, следовательно, от времени.
При заданной программе нагружения по зависимостям (1.120),
(1.122) с привлечением закона циклического нагружения в виде (1.87) и
(1.88), можно рассчитать допустимое число циклов по формуле (1.119).
59
Методика расчета долговечности при циклах с частичной
релаксацией напряжений. В цикле без релаксации СВС (рис. 1.19) размах
пластических деформаций Ае£ определяется по зависимостям (1.112), (1.88):
Аех = Де£ = —(Ао) ;
Аа = Дсгн/:а(|Лан|, аа, т);
А^ = (а"-а')/2; А^н = (а"н-а'н)/2.
Рассмотрим цикл ABCDA с полной релаксацией (рис. 1.19),
предположив, что после выхода на стационарный режим (состояние С )
происходит длительная выдержка на этом режиме, при которой напряжения
в опасной точке полностью релаксируют до нулевого значения,
соответствующего точке А. Поскольку по предположению, последующая
остановка происходит настолько медленно, что при ней не появляются
температурные напряжения, способные вызывать пластическую
деформацию, то к моменту последующего пуска напряжения в
исследуемой точке остаются равными нулю. Следующий пуск и выход на
стационарный режим будет соответствовать полностью первому пуску —
по линии ABC. При полной релаксации при последующем стационарном
режиме напряжение будет изменяться по линии CDA и в пределе станет
нулевым. Следовательно, все последующие циклы в предположении
циклической стабильности материала и полной релаксации будут
соответствовать замкнутой кривой ABCDA.
При этом величина пластической деформации As^, накапливаемая
на участке АВ, составит
где
<*' = СГ'н*о(1ст'н|><*СТ' т)
— приведенное напряжение в точке В, рассчитываемое по формуле (1.89)
как для первичного (однократного) нагружения по линии АВ при первом
пуске. Приведенное значение Ае2 для цикла с полной релаксацией
найдем по (1.121) в виде
Ае2 = l/2(Aef+Ae£).
В действительности в любом цикле релаксация не полная: процесс
релаксации заканчивается в промежуточной точке D (рис. 1.19), после
чего совершается остановка турбины и затем осуществляется
последующий пуск. Для расчета приведенного размаха пластической дефор-
60
мации при частичной релаксации напряжении рекомендуется
интерполяционная формула
Ае = Аех— + Де2(1 - oD/oc),
аС
где aD — напряжение в состоянии D; ас — напряжение в состоянии С на
рис. 1.19; Ае, = Ле^ — размах пластических деформаций в цикле без
релаксации; Ае2 — приведенный размах пластических деформаций в
цикле с полной релаксацией.
Расчет od/gc проводится при использовании одной из гипотез
ползучести. Для повышения запаса надежности рекомендуется
использовать гипотезу старения, которая дает закон релаксации в виде
o(t)/ac = P(t), где P(J) определяется из соотношения
АЕос П(/)
Здесь / — время от начала работы турбины при стационарном режиме.
Для расчета oD/ac следует принять t = tD — времени работы на
стационарном режиме до начала остановки в каждом цикле и определить P(tD).
По значению Ае находят значение N0 по формуле (1.120), затем
рассчитывают повреждение от ползучести по (1.122) и, наконец,
долговечность (допустимое число циклов) — по (1.119).
1.5. МНОГОЦИКЛОВАЯ УСТАЛОСТЬ
И РАСЧЕТ ДОЛГОВЕЧНОСТИ
Закономерности многоцикловой усталости при переменной
амплитуде циклических напряжений. Циклическое напряжение в
некоторой точке детали состоит из постоянной составляющей ат и
переменной составляющей, амплитудное значение которой
обозначается аа. Основные обозначения для циклических напряжений
представлены на рис. 1.20.
Характеристика усталости при стационарном циклическом нагруже-
нии, для симметричного цикла (amin = - tfmax) изображается кривой
усталости (рис. 1.21), имеющей для большинства металлов и сплавов,
применяемых в турбостроении, два участка.
На первом участке зависимость предела усталости а г от числа
циклов до разрушения N обычно может быть аппроксимирована формулой
Npalf = К, (1.124)
61
где 1{иК — постоянные материала, зависящие от температуры. В
двойных логарифмических координатах зависимость (1.124) изображается
прямой линией.
На втором участке оу — постоянная величина, равная истинному
пределу усталости при симметричном цикле а_1} т.е. такому
напряжению, ниже которого материал может выдержать без разрушения
циклические напряжения неограниченно долгое время.
Точка перелома зависимости af от N обычно наблюдается при NM =
= 107—108 циклов.
Для определения влияния постоянной составляющей ат на пределы
усталости принимают зависимость вида
cfm = а/1 - Gjojt при Np < NM; (1.125)
аг = а.,(1 - ат/авУ при Np > NM. (1Л26)
Здесь Gsm — условный предел усталости для несимметричного цикла
(наклонный участок кривой, рис. 1.21); аг — истинный предел усталости
для несимметричного цикла (горизонтальный участок кривой, рис. 1.21);
ав — временное сопротивление материала (предел прочности); у —
экспериментальная постоянная, часто (в запас надежности) принимаемая
равной единице.
В табл. 1.4 представлены характеристики усталости для некоторых
материалов, применяемых в турбиностроении. Рассмотренные
зависимости (1.124)—(1.126), как известно из курса сопротивления
материалов, служат основой расчетов на усталость при стационарных
циклических напряжениях, т.е. когда от и аа —постоянные величины. В общем
случае, представляющем практический интерес для турбиностроения,
накопление усталостных повреждений происходит при ат и аа, меняю-
Y-ЛЛ —/--X
Й ^^—г—
4
I W У ¥ ^
t
Рис. 1.20. Изменения напряжений при
несимметричном цикле нагружения
62
Igor/
lgcr-1 ^1
I
I
i
Рис. 1.21. Кривая усталости при
симметричном цикле
Таблица!.4
Марка
15Х12МВФ*
(ЭП-428)
10X13*
(ЭЖ1)
Температура
испытания Г, °С
20
20
400
Предел
прочности
ав, МПа
721
736
Предел
текучести
ад„ МПа
486
491
Поперечное
сужение
при
разрыве
V.%
63
65
Предел
усталости
а_,,МПа
338
353
304
К, (МПа)'
4,458х1039
2,455x1029
1,407хЮ31
/
13,16
9,106
10,16
* Испытания проведены в МЭИ А.И. Лебедевой и А.И. Минашиным.
Рис. 1.22. Программа циклического нагружения материала в зависимости от числа
циклов
/ — амплитуда циклических напряжений; 2 — условная амплитуда; 3 — среднее
напряжение; 4 — предел усталости аг
щихся по некоторому закону, который можно назвать (как и ранее)
программой нагружения материала. На рис. 1.22 показан пример
программы нагружения материала в некоторой точке детали за некоторый
период, измеряемый числом циклов N0.
При заданной программе om(N) и aa(N) в некоторой точке детали
необходимо провести расчет на усталость, т.е. определить запас
надежности (прочности) по состоянию ее в выбранной точке, располагая
63
только характеристиками усталости для стационарного режима
(1.124)—(1.126).
Для решения поставленной задачи определим степень повреждения
материала при циклическом нагружении из правила суммирования
повреждений, которое по аналогии с соответствующим правилом для
малоцикловой усталости (1.108) запишем в виде
"о
где Хг— степень усталостного повреждения за N0 циклов нагружения;
N (ат, Ga) — число циклов до разрушения при стационарном действии
действительных напряжений ат и аа.
Смысл равенства (1.127) состоит в суммировании элементарных
повреждений dXy= dN/N за рассматриваемый период N0, а элементарное
повреждение dN/N определяется, как отношение числа циклов <Ш к тому
числу циклов N (ат, оа), которое материал может перенести до момента
разрушения при напряжениях ати аа — действующих стационарно.
Таким образом, dN/Np есть мера выработки ресурса прочности за
малое число циклов oW.
Условие усталостной прочности может быть записано в виде
Xf< 1 (1.128)
и означает: материал не разрушится вследствие усталости, если за
заданное число циклов Nq суммарная степень повреждения X, меньше
единицы. Интегрирование в (1.127) распространяется на область числа
циклов N2-Nl9B которой амплитуда аа > аг По смыслу истинного предела
усталости, если аа< ог — то накопление поврежденности не
наблюдается. На рис. 1.22 значения N2 и JVj определены как абсциссы пересечения
кривой or(N) с кривой Ga(N).
Зависимость cr(N) строится по формуле (1.125) по известным а_1? ав
и графику om(N), представленному на рис. 1.22.
Из (1.124) и (1.125) имеем
_/ (1 - ^„УсО
Wp = Ко/ = К т l в . (1.129)
64
Теперь, полагая в (1.129) а^ = оа, т.е. принимая, что действительная
амплитуда напряжений равна условному пределу усталости, находим
из (1.127)
N2 I
V = i J—~ /• <U30>
Подынтегральное выражение в (1.130) есть известная функция otNu
соответствии с программой нагружения, рис. 1.22. В свете сказанного
выше, пределы интегрирования заменены на N2vlN^. Теперь интеграл
в правой части (1.130) может быть вычислен и тем самым степень
повреждения Хг будет определена.
Введем эквивалентное напряжение ааэ как некоторое постоянное
напряжение, которое вызывает за интервал AN = N2 - N\ при ат - 0
такую же степень повреждения, как и истинное напряжение ати аа.
Воспользовавшись (1.130), установим, что
°аэ =
N2 t -,!//
1 Г °а<М
2 1Мх(1~ат/ав).
(1.131)
Влияние концентрации напряжений учитывается введением
эффективного коэффициента концентрации
^-l+rfaa-l); (1.132)
здесь aa — теоретический коэффициент концентрации, зависящий
от формы поверхности и от вида напряженного состояния в зоне
концентрации; q — коэффициент чувствительности, зависящий от материала
и радиуса скругления.
Коэффициент чувствительности можно определить по формуле
4=l/(l+a/r), (1.133)
где г — радиус выреза; а — постоянная материала, зависящая в основном
от предела прочности.
На рис. 1.23 приведена зависимость а от ав, представляющая осред-
ненные значения по многим исследованиям.
Справочные данные по ссст для различных форм концентраторов
и различных видов напряженного состояния приведены в справочниках.
65
а, мм I
0,4
0,3
0,2
ОД
ч
-Ne
0 250 500 750 1000 1250 1500 1750ав,МПа
Рис. 1.23. Постоянная а для разных материалов
Расчет на усталость при нестационарном нагружении с учетом
концентрации напряжения проводится по изложенной выше методике. При
этом расчетными напряжениями принимаются: номинальное
напряжение ат (без учета концентрации) и эффективное напряжение аа- ксаая,
где аш — номинальное значение амплитуды переменного напряжения;
kG — эффективный коэффициент концентрации.
Гипотеза суммирования повреждений при усталости (1.127)
неоднократно подвергалась экспериментальной проверке, показавшей ее
приемлемость как первого приближения для режимов циклического
нестационарного нагружения, не очень отличающихся от стационарного. В общем
случае накопление повреждений не является линейным процессом, его
закономерности описываются более сложными моделями [8].
Запасы прочности при многоцикловой усталости в условиях
нестационарного нагружения. Коэффициент запаса по числу циклов
до разрушения определим как отношение
nN = (1/ЕА.у), (1.134)
где YXr— степень повреждения за весь срок службы.
Предположим, что за весь срок службы материал претерпевает z
периодов нагружения, изображенных на рис. 1.22. Суммарная степень
повреждения за весь срок службы, очевидно, 2Ху= zXr, где Ау
определяется по (1.130). Тогда по (1.134) имеем:
1
К<*„
N.
р.э
zXf z(N2-Nx) z(N2-NxY
(1.135)
66
Рис. 1.24. Определение коэффициента запаса усталостной прочности
Здесь N э — число циклов до разрушения, определяемое по
эквивалентному напряжению ааэ (1.131). Коэффициент nN не нормируется, но
можно рекомендовать nN> 10—20.
Для определения коэффициента запаса по напряжениям следует
выполнить расчеты суммарной поврежденности X = zXr по формуле
(1.130) по среднему напряжению ат и увеличенной в отношении
коэффициента запаса па амплитуде переменных напряжений паоа (штриховая
линия на рис. 1.22):
N*
ЬК)=£Ла J r
(1.136)
Пределы N{ и N2 в (1.136) теперь зависят от коэффициента запаса па,
так как они определяются как абсциссы точек пересечения кривых or(N)
и nGaa(N) (рис. 1.22). Коэффициент запаса ист соответствует значению
А,= 1 (рис. 1.24).
При таком методе расчета запас условно вводится к амплитуде аа,
вто время как среднее напряжение берется истинным и
рассматривается как известный параметр.
Коэффициенты запаса nG рекомендуется принимать nG = 2—3 для
ответственных деталей таких, как рабочие лопатки, роторы и др. В
особо важных случаях принимают па > 4.
67
1.6. ТРЕЩИНООБРАЗОВАНИЕ И ТРЕЩИНОСТОЙКОСТЬ
Основные представления линейной механики разрушения.
Дефекты материала в виде трещин, включений с острыми углами, пор,
пустот, «непроваров» после сварки и другие дефекты оказывают
существенное влияние на статическую прочность деталей.
При растяжении пластины толщиной 8 со сквозной трещиной
длиной 2/ (рис. 1.25) ее разрушение происходит при напряжении а,
удовлетворяющем условию (формула Грифитса)
а^1 = Кс, (1.137)
где Кс — вязкость разрушения, не зависящая от а и /.
Зависимость (1.137) относится к бесконечно широкой пластине в
условиях растяжения в направлении, перпендикулярном трещине. Оно
устанавливает связь между размером дефекта (трещины) / и
разрушающим напряжением а.
Зависимости типа (1.137) являются основными в линейной механике
разрушения — науке о прочности при наличии дефектов.
Величина Кс определяется экспериментально при разрушении
образца с начальной трещиной. Для получения начальной трещины
длиной 2/0 образец с искусственным концентратором напряжения
(например, с овальным сквозным отверстием, рис. 1.26) подвергают
нагружению, что приводит к образованию усталостной трещины. Затем
образец испытывают на разрыв, определяют значение усилия Р и
величину трещины 2/ в момент начала нестабильного развития трещины.
По этим величинам, используя зависимости типа (1.137), определяют
вязкость разрушения Кс.
Зависимость (1.137) подтверждается экспериментально. Величина
Кс, найденная в серии описанных опытов с одинаковыми по форме
образцами, но с разными начальными трещинами, практически
оказывается постоянной, не зависящей от предельной нагрузки и размера
начальной трещины.
Однако величина Кс существенно зависит от толщины пластины 8 —
уменьшается с увеличением толщины. На рис. 1.27 показана
зависимость величины Gc = Кс IE от толщины пластины.
С ростом 8 и уменьшением Кс и Gc меняется характер разрушения.
При малых толщинах разрушение происходит в результате среза (при
нормальном к поверхности расположения начальной трещины). Чем
больше 8, тем больше толщина зоны отрыва х (рис. 1.27): разрушение
68
Ilttltll
Ар
llllllll
A-A
Vs
'A t
Рис. 1.25. Пластина со сквозной трещиной,
растягиваемая в направлении,
перпендикулярном плоскости трещины
Рис. 1.26. Образец с концентратором
напряжений и усталостной трещиной
1 — овальное отверстие; 2 — усталостная
трещина
L 26
2
/1
г^ *-Н
2*0
' 105,Н/м
10 15 20 5,мм
Рис. 1.27. Зависимость Gc от толщины плоских образцов (данные Дж. Строули
У. Браун, 1965 г.)
69
переходит постепенно к отрыву т.е. становится все более хрупким. При
этом Кс стремится к некоторому минимальному предельному значению
К1с, которое принимается за константу материала. Уменьшение
величины Кс объясняется тем, что в зоне устья трещины по мере увеличения
толщины пластины наблюдается изменение напряженного состояния
от плоского к объемному.
При больших толщинах в области, расположенной вблизи устья
трещины, напряженное состояние является трехосным, близким к
равномерному растяжению. При этих условиях развитие пластических
деформаций затруднено (при чисто объемном растяжении, когда 0| = &2~ а3
пластические деформации не могут возникнуть). Поэтому уровень
нормальных растягивающих напряжений высок, что приводит к хрупкому
разрушению детали.
Расчеты упругопластического состояния в зоне, расположенной
вблизи устья трещины, показывают, что при плоском напряженном
состоянии
X = gJg1^ 1;
при плоской деформации
X = a*/c>j « 1/3.
В последнем случае максимальное растягивающее напряжение в
устье трещины aj « 3a02, т.е. в 3 раза больше предела текучести
материала, что обусловливает меньшую прочность детали большей толщины
по сравнению с относительно тонкой пластиной.
Величина К1с является характеристикой материала, определяющей
его трещиностоикость. Для данного материала К1с существенно зависит
от температуры (рис. 1.28) и режима термообработки. С понижением
температуры вязкость разрушения К1с, как видно, резко падает в
некотором диапазоне температур, который соответствует переходной темпера-
туре хрупкости.
В табл. 1.5 приведены значения К1с и Tk для некоторых лопаточных,
корпусных и роторных сталей.
Основное соотношение прочности, принятое в линейной механике
разрушения
KY<KC, (1.138)
где К^ — коэффициент интенсивности напряжений, вызываемых
трещиной.
Коэффициент Кг определяется методами теории упругости для
различных форм деталей и различных форм и расположений трещин в
деталях. Например, для бесконечной полосы со сквозной трещиной
70
KIct МПа»мУ2 аоз.МПа
-200 -150 -100 -50 0 50 100 Т,°С
К1с, МН/м3/2 а0#2,МПа
1000
800
600
400
200
О
-200 -150 -100 -50 0 50 100 Г,°С
б
Рис. 1.28. Зависимости К1с и о02 от температуры для поковок из сталей
20 °С
а — NiCrMoV; б — CrMoV; 1 — для термообработки на о02 = 800 МПа; 2 — для
20 °С
термообработки на aQ2 =1100 МПа (данные Э. Вессела, У. Кларка и У. Прайла, 1972 г.)
(см. рис. 1.25) в соответствии с (1.137) К^ = g Jul. Для некоторых
характерных случаев формулы для Кх приведены в табл. 1.6.
Коэффициент интенсивности напряжений при растяжении детали с трещиной
произвольной формы
Кг =/(ц1,ц2,...,цл)а1^Г/, (1.139)
гдеДц19 ц2> • • •> Ця) — функция безразмерных геометрических параметров
ц,- — отношений размеров трещины и детали; cij — номинальное
растягивающее напряжение, перпендикулярное плоскости трещины; / —
характерный размер трещины.
Из табл. 1.6 видно, что первые три схемы нагружения отвечают
зависимости (1.139), причем |ij = //А, |л2 = ••• = Ци= 0-
При растяжении массивной детали с полуэллиптической трещиной
на поверхности щ = //2с. Кроме того, /зависит также и от отношения
71
to
Таблица 1.5
Марка стали
20X13
15Х12ВМФ (ЭИ802)
34ХНЗМ
25Х1М1Ф(Р2)
35ХНЗМФ
25ХНЗМФА
15Х1М1ФЛ
15Х2МФА
25ХГСНМЛ
(США,А216С)
20ХЗМВФ (ЭИ415)
Область применения
Лопатки паровых турбин
Лопатки паровых турбин
Диски
Роторы
Диски
Роторы
Диски
Роторы
Роторы
Корпусные элементы
паровых турбин
Корпуса реакторов,
трубопроводы
Сосуды давления
Роторы
Рабочие
температуры, °С
<450
<550
<400
£540
<400
<400
<565
<350
<300
<540
а0 2, МПа
510
735
590
590
853
549
740
700
820
700
502
500
276
676 j
ав, МПа
706
873
740
740
1010
700
910
900
915
795
687
690
483
804
У,%
65
58
35
35
51
52
59
40
65
70
55
(55)
35
48
К\с>
МПа • м1/2
96
57
141
212
136
47
288
169
155
223
68
(ПО)
155
48
С0, Ю-12
(МПа • м172)"* х
х м/цикл
1,16
1,16
(1,16)
(1,16)
—
(26)
(26)
30
6,0
346
26
272
(26)
Ч
3,5
3,5
(3,5)
(3,5)
—
(3,0)
(3,0)
2,8
3,25
2,27
2,63
3,0
(3,0)
Г,,°С
—
—
35
118
-55
40
—
—
—
35
118
Примечания: 1. Значения в скобках — для аналогичных материалов по композиции или усредненные по однотипным материалам.
2. Характеристики даны при температуре 20 °С.
Таблица 1.6
Схема
Расчетная формула
Растяжение пластины с боковой
трещиной
„ г-у1,П + 5(//Л04
Ki = °^1 i-(//*)
(О <l/h< 0,5)
Растяжение пластины с центральной
трещиной
<*1
К
1
1 '
7-
' |
В**
. /
f- =
В
г- \—
.ст1
£j = G{Jnl(cosn(l/h))
(0<2///*<1)
-1/2
Чистый изгиб пластины с боковой
трещиной
ML
t
\
1 **
1
7
1
1
1
71
Р
,м
#т = 4,2А"3/2[(1-///|)"3-
-(1-//А)3]"2
0 < l/h < 1
^ =|1,15-60(//Л)2 (0<///к0,05)
1 (//Л > 0,05)
Растяжение массивной детали с
полуэллиптической трещиной на
поверхности
А-А
2с
Кх = 1,1с1Л/я7[Ф
212(а1/о0|2)2:
(а,/а02<1)
ОД^Са/ао/Г172
/
2с
Ф2
0,1
1,09
0,2
1,28
0,25
1,42
0,3
1,59
0,4
1,97
0,5
2,47
73
а|/а02> которое отражает влияние пластической деформации в зоне
устья трещины. При <зх/а0 2 < 0,5 поправка, учитывающая пластическую
деформацию, составляет < 3 % и ее можно не вводить. С учетом (1.139)
условие прочности (1.138) детали с трещиной примет вид
Кс
<*1 < „ ' г. = Rk>
(1.140)
где пк — коэффициент запаса прочности по вязкости разрушения; Rk —
допустимое номинальное напряжение для данной детали с трещиной,
имеющей характерный размер /.
Для расчета прочности детали с трещиной необходимо знать
функцию f(\it) и иметь значение вязкости разрушения Кс. Напомним, что Кс
зависит от толщины детали, что является определенной сложностью
при решении, так как данных о влиянии толщины на Кс недостаточно.
Для консервативной оценки можно принимать Кс = К1с — минимальное
значение, соответствующее плоской деформации.
Оценка прочности деталей при наличии дефектов позволяет решать
следующие задачи.
1. Выбор материала. Из двух материалов, имеющих одинаковые
пределы текучести, следует выбрать материал, у которого критическая
длина трещины больше.
2. Установление пригодности детали к дальнейшей эксплуатации по
величине обнаруженного дефекта в детали.
Пример 1.6. В корневом сечении рабочей лопатки турбины в месте
концентрации напряжений в зоне перехода от рабочей части лопатки к хвостовику
обнаружена усталостная трещина (рис. 1.29). Требуется определить критическую
величину трещины / при которой произойдет разрушение лопатки по сечению
с усталостной трещиной.
Рис. 1.29. Рабочая лопатка с
усталостной трещиной в зоне
выходной кромки
1 — усталостная трещина
глубиной /; 2 — хвостовик лопатки; 3 —
корневое сечение лопатки
74
Известны следующие данные. Материал лопатки — сталь 15Х12ВНМФ при
1/2
а0,2 = 735 МПа» вязкость разрушения при Т = 20 °С К1с = 57 МПа • м
(см. табл. 1.5); хорда лопатки Ъ = 160 мм; растягивающее напряжение в корневом
сечении Gj = 386 МПа.
Ре ше ние. Принимаем в качестве схемы нагружения схему 1 (табл. 1.6).
Условие разрушения по (1.38)
к\= К\с
или
1,11+5(7 /Л)4
СТ1<МР !_/ /и ки-
кр'
Находим искомую величину /кр. В первом приближении полагаем, что
1,11а1А/Ч^ = К1с.Тогда
'* - =(nfe-J - ferW -5'588 •10_3 м-
При уточнении расчета принимаем h - Ъ - 0,160 м. Согласно условию разрушения
во втором приближении
/= 5,24-10~3 м.
кр
Следовательно, лопатка разрушится при развитии усталостной трещины до
длины / = /кр = 5,2 мм.
Полученное значение является нижней оценкой величины трещины, так как
минимальное значение вязкости разрушения принято Кс - К^с. Характер излома
лопаток с трещинами в рассматриваемом случае свидетельствует о хрупком
разрушении лопатки, что дает основание считать полученную оценку близкой к
действительному значению /кр.
Зарождение и развитие трещин при постоянных нагрузках и
умеренных температурах. В рассмотренном подходе предполагается, что в
материале детали имеется врожденный (пустоты, поры, включения,
усадочные трещины и прочее) или приобретенный (вследствие усталости
или ползучести) дефект, и требуется установить условия мгновенного
разрушения и запас прочности детали.
В общем случае процесс повреждения детали из материала,
не имеющего начальных дефектов, можно разделить на три этапа
(рис. 1.30). Первый этап — инкубационный период — это период от
первоначального нагружения детали до появления в наиболее напряженном
месте трещины малой (0,1—0,3 мм) величины, второй — постепенное
увеличение трещины до критического размера и третий — быстрое
(со скоростью звука в материале) развитие трещины, приводящее к
разрушению детали.
75
7
*кр
i
r I л
II
* *п
III
1*
Рис. 1.30. Процесс зарождения и
развития коррозионной трещины под
напряжением
I — инкубационный период: трещина
отсутствует; II — период постепенного
подрастания трещины при постоянной
нагрузке; III — быстрое
распространение трещины до разрушения детали
Если процесс зарождения и развития трещины протекает при
постоянных нагрузках и умеренных температурах (без ползучести), то он
называется коррозионным растрескиванием под напряжением.
Закономерности первого и второго этапов повреждения детали
нередко представляются существенными, так как установление
продолжительности инкубационного периода и скорости распространения
трещины позволяет определить действительную долговечность детали и
ее ресурс. Во многих практически важных случаях продолжительность
периода распространения появившейся трещины соизмерима с
длительностью инкубационного периода, а иногда существенно ее превосходит.
Главными факторами, определяющими зарождение и развитие
трещины являются: композиционный состав и термообработка материала,
температура эксплуатации, значения и характер напряжений (постоянные
или циклические) и агрессивность окружающей деталь среды.
Под агрессивностью среды понимается влияние среды на свойства
материала в широком смысле: на изменения поверхностного слоя как
обратимые (исчезающие после очищения поверхности), так и
необратимые (диффузия. атомов среды в поверхностный слой, коррозионное
и эрозионно-коррозионное) повреждения поверхности.
На прочность деталей паровых турбин оказывают влияние многие
коррозионно-активные примеси, содержащиеся в паре. К числу
основных относятся щелочи (NaOH, КОН), соли (NaCl и др.), кислоты
(угольная, кремниевая и др.). Концентрированные растворы этих веществ в
виде капель образуются при расширении пара в зоне фазового перехода:
несколько выше и ниже линии насыщения в h-s диаграмме чистого
водяного пара (рис. 1.31).
Вследствие подсушивания и испарения происходит дальнейшее
повышение концентрации коррозионно-активных веществ,
осаждающихся на поверхностях деталей паровых турбин в виде жидких или
твердых пленок.
76
2200» 1 1 1
6,5 7,0 7,5 s, кДж/(кг-К)
Рис. 1.31. Зона в h-s диаграмме образования коррозионно-активных растворов
высокой концентрации (заштрихована) и процессы расширения пара
1 — в турбинах без промежуточного перегрева пара; 2 — в турбинах с промежуточным
перегревом пара; 1,0; 0,95; 0,90 — линии постоянной сухости пара
Коррозионно-активные соединения воздействуют в первую очередь
на детали ротора (рабочие лопатки, диски), находящиеся в зоне
фазового перехода.
Из названных факторов, влияющих на процесс возникновения и
развития трещины, воздействие среды наименее изучено.
Главными определяемыми параметрами при конкретной обстановке
являются длительность инкубационного периода хшк> скорость
распространения трещины v — dl/dt при статических нагрузках, подрастание
трещины V = AI/AN при циклических нагрузках, где N — число циклов
от начала эксплуатации детали.
Рассмотрим закономерности первого и второго этапов повреждения
материала и изучим влияние ряда перечисленных факторов на
характеристики тинк и V.
Продолжительность инкубационного периода как в инертной среде
(чистый пар), так и в агрессивных средах существенно снижается с
ростом действующих напряжений. Для дисковых сталей усредненные
значения по данным фирмы ABB представлены на рис. 1.32
(заштрихованные области). При снижении напряжений вдвое продолжительность
77
хинк»4 Рис» 1-32. Инкубационный
период для дисковой стали
типа 20ХЗНМ
1 — в среде чистого пара; 2 —
в 28—35 %-ном растворе NaOH
(/ и 2 — по данным фирмы
ABB); 3— опытные точки по
эксплуатационным данным для
серии турбин
"" 0,3 0,4 0,5 0,6 0,8 1,0 1,2
а/а0,2
инкубационного периода увеличивается примерно на порядок при
испытаниях в агрессивной среде и на два порядка при чистом паре.
Сама агрессивность среды снижает длительность инкубационного
периода в 10—100 раз в зависимости от напряжений. Экспериментальные
точки на рис. 1.32 соответствуют реальным эксплуатационным условиям
для отечественных теплофикационных турбин без промежуточного
перегрева пара, имеющих роторы с насадными дисками. Точки располагаются
между лабораторными данными для нейтральной и агрессивной среды и
могут служить для ориентировочного определения инкубационного
периода деталей в реальных эксплуатационных условиях.
Механизм роста трещины в коррозионной среде связывают с двумя
одновременно протекающими процессами.
Один процесс — потеря металла вследствие электрохимического его
растворения около вершины трещины.
Другой — адсорбция у вершины трещины и диффузия молекул
среды впнапряженный объем впереди трещины. Проникновение молекул
среды в напряженный металл вызывает снижение сил сцепления атомов
металла между собой, и это ведет к подрастанию трещины.
Скорость развития трещины в коррозионной среде при постоянной
нагрузке характеризуется коэффициентом интенсивности напряжений
ATj (1.139), пределом текучести os материала и существенно возрастает
с увеличением концентрации агрессивных веществ.
Типовая зависимость v = dl/dt от К^ и gs представлена на рис. 1.33.
В инертной среде (например, в вакууме) при постепенном
повышении нагрузки реализуется процесс 1 на рис. 1.33: скорость роста
трещины остается равной нулю вплоть до достижения нагрузки, при
которой Кх = К1с. В этот момент скорость роста трещины достигает скорости
звука, и материал разрушается мгновенно.
78
dJ/df.Mc-1
104
Мо^МПа-м1/2
Klc
Рис. 1.33. Скорость распространения трещин в дисковой стали типа 20Х2Н1М (по
данным фирмы ABB)
/ — в инертной среде (воздух); 2 — в деаэрированной воде при 100 °С, а02 = 800 МПа;
3— в деаэрированной воде при 100 °С, а02 = 1200 МПа
В коррозионно-активной среде скорость роста трещины равна нулю
при выполнении условия
o<k1<k1scc.
Здесь Klscc — пороговое значение коэффициента интенсивности
напряжений.
При дальнейшем повышении нагрузки и соответствующем росте К^
свыше значения К^сс скорость v вначале интенсивно растет, а затем
устанавливается на примерно постоянном уровне, и в достаточно
широком диапазоне изменения ATj на так называемом участке «плато»
скорость роста трещины сохраняет примерно постоянное значение.
Дальнейшее увеличение К^ вызывает повышение скорости роста
трещины, и при достижении значения К\ = К1с скорость, как и в случае
инертной среды, быстро увеличивается до уровня скорости звука.
Скорость роста трещины коррозии под напряжением на участке плато
существенно зависит от предела текучести стали и агрессивности среды.
Зависимости ип = (d//d0n от а02 для роторной стали типа 20Х2Н1М
1/2
в диапазоне ATj = 30—60 МПа • м показаны на рис. 1.34 для двух сред,
различающихся агрессивностью (заштрихованные области — данные
ABB). Из рис. 1.34 следует, что оба фактора оказывают весьма сущест-
79
ип,м/с
10~5
10-6
10-7
10-8
10-9
10-ю
ю-и
10-12
^ = 30—60МПа-м1/2
г
2
'i
"3
Рис. 1.34. Скорость роста трещин при
коррозионном растрескивании под
напряжением стали типа 20Х2Н1М при
различном значении предела текучести
в двух средах
/ — испытания образцов в
деаэрированной воде при 100 °С; 2 — испытания в
28 % аэрированном растворе NaOH при
110 °С (7 и 2 — по данным фирмы
ABB); 3 — опытные точки по
эксплуатационным данным для серии турбин
400 800 1200 с0,2»МПа
венное влияние на скорость коррозионного растрескивания стали под
напряжением.
В зависимости от режима термообработки стали (температуры и
времени отпуска после закалки), предел текучести изменяется в широких
пределах, например от 600 до 1200 МПа. При этом скорость
коррозионного растрескивания под напряжением увеличивается примерно в 10 раз.
Обработка эксплуатационных данных по трещинообразованию
в турбинных дисках показывает качественное соответствие с
лабораторными исследованиями и косвенно дает оценку степени агрессивности
среды в реальных условиях эксплуатации.
Для ориентировочных расчетов скорости коррозионного
растрескивания на участке плато можно рекомендовать применение
аппроксимирующей формулы, учитывающей как лабораторные, так и
эксплуатационные исследования дисковых сталей,
уп = упо(°оУ ^оЛ
(1.141)
где vn0= 10 мс ; a0s = 800 МПа, qQ= 16. При этом участок плато, для
которого справедлива зависимость (1.141), определяется диапазоном
30<Ar!<80Mna-M1/2.
Полное время до разрушения тр при коррозионном растрескивании
под напряжением определяется суммой
(1.142)
где первый член есть инкубационный период, второй — время развития
трещины до критического размера.
80
тр тинк "*" *кр'уп>
Развитие трещин при циклических нагрузках. Циклическое
нагружение может быть причиной распространения имеющейся в
материале трещины до критической величины.
Процесс возникновения и подрастания усталостной трещины до
критической величины в агрессивной среде при циклической нагрузке
называется коррозионной усталостью.
Рост трещин при циклической нагрузке может происходить в
элементах ротора и корпусов турбин, находящихся в нейтральной или слабо
активной средах, таких как перегретый пар, продукты сгорания
природного газа.
Поскольку напряженное состояние около устья трещины
характеризуется коэффициентом интенсивности напряжений, то естественно
предположить, что распространение трещины при циклической
нагрузке определяется размахом коэффициента интенсивности
напряжений в цикле A#! = KlmSiX - Kimin. Это предположение подтверждается
опытными данными, из которых следует, что подрастание трещины за
один цикл V - AI/AN зависит от MTj и эта зависимость может быть
аппроксимирована формулой вида
д/ ГАК\\д а
где D0, q — опытные постоянные, зависящие от агрессивности среды.
Для 13 %-ных хромистых сталей, например 20X13 и ее модификаций,
а также для многих металлов от алюминия до вольфрама в воздушной
среде можно принять DQ = 5,1*10,^ = 3,5. Эти же значения постоянных
годятся для 13 %-ных хромистых сталей и для агрессивной среды до
3,5 %-ного раствора NaCl в воде при aw« 0 (М. Шпайдель, 1983 г.).
С увеличением от рост трещины за один цикл также увеличивается
при испытаниях в агрессивных средах. В общем случае зависимость V
от AATj, ат и среды может быть получена лишь экспериментально.
Отметим, что существует пороговое значение ААГпор, ниже которого
циклическое нагружение не вызывает подрастания трещины. Чем выше
aw и более агрессивна среда, тем меньше Л£пор. Величина АЛГпор
является аналогом предела усталости, который также зависит от
агрессивности среды. Аналогия усиливается тем, что ААГП0 также зависит от
среднего напряжения aw, уменьшаясь с ростом ат, и при некотором
значении ат величина АЛТ равна нулю.
81
IgVk
Диаграмма распространения
трещины усталости представлена на
рис. 1.35. Скорость подрастания
трещины V при АК{ < АКпор равна нулю,
на участке Д£пор < Щ < (1 - R)Klc
справедлив степенной закон (1.143).
Величина R — коэффициент
асимметрии цикла,
R ^Imin/j^Imax
&К,
пор
а-тк1с
АК,
= 1 -
*1
= !-■
Ла„
Imax
Рис. 1.35. Диаграмма
распространения трещины усталости
1 — аппроксимация степенной
функцией; 2 — действительная опытная
зависимость
откуда найдем
Разрушение произойдет при
условии, когда ATImax = Kic,
соответствующее значение А^с = (1 - К)К^тах является критическим размахом
коэффициента интенсивности напряжений, при котором произойдет
разрушение. На рис. 1.35 степенной закон изображен штриховой
линией, сплошная линия соответствует реальной экспериментальной
зависимости. Величины С0 и q — параметры степенной формулы
(1.143) для ряда материалов — приведены в табл. 1.5. Они относятся,
как правило, к испытаниям образцов на воздухе и при асимметрии R «
0. Как уже было сказано, для некоторых сталей эти данные могут быть
применены и для случаев слабо агрессивных сред, например чистого
пара, дистиллированной воды.
Если известны параметры диаграммы распространения трещины
усталости (рис. 1.35), а также размер, форма и расположение
начального дефекта (трещины) в детали, то можно по заданной программе
нагружения (номинальным напряжениям и температуре 7) рассчитать
число циклов до разрушения для конкретной детали. Размах АК1 можно
с учетом (1.139) представить в виде
А*1 - *lmax-*lmi„ " Аон/<Ц,)ЛГ/, (1.144)
где Аан — размах номинальных напряжений в цикле.
Если программа, т.е. изменение Аан и температуры, задана как
функция N, то в общем случае число циклов до разрушения трещины разме-
82
ром / можно найти интегрированием соотношения (1.143) в пределах от
/0 — начального значения дефекта (трещины) до / по / и от нуля до
текущего числа циклов N. Заменяя AATr по (1.144), разделяя переменные и
интегрируя, получаем
IN
|(Лц,)ЛГ/)~*<И = fDo(-^fdN. (1.145)
Для режима стационарного циклического нагружения Т, Дан —
постоянные величины. Принимая, что /(ц;) = f — также постоянная
величина, из (1.145) получаем число циклов до развития трещины
размером / в виде
N =
/л
V0q-2
(Т) 2
(1.146)
где обозначено / = ///0;
V0 = C0[AKl0f; (1.147)
Д*ю = fAowtfT0. (1.148)
При неизвестном начальном размере дефекта в (1.146)—(1.148)
следует принять АК10 = ДЛ:пор, /0 = (1/тс)(АА:пор//Аан)2.
На основе формулы (1.146) можно построить диаграмму
долговечности в зависимости от ряда параметров: начального дефекта /0, размаха
номинальных напряжений Аан и параметров материала Кс, С0, q.
Формула (1.145) применима для определения числа циклов до
разрушения при произвольной программе нагружения, заданной в виде
зависимостей Aau(N) и T(N).
В этом случае проводится численное интегрирование (1.145) и
определяется l(N), а по ней вычисляется
^lmax(^) = M^max^'
где \ii9 crmax, / — известные теперь функции от N.
Предельное число циклов N определяется как число циклов, при
котором K\max(NS) = Klc. Из последнего уравнения численно или
графически определяется N .
83
Для получения разрушающего числа циклов при стационарном
нагружении в формуле (1.146) следует положить / = /кр//0, где /кр
вычисляется по формуле
ir*IcP-*>f
я1 /Астн
/,
кр
(1.149)
Зависимость (1.149) получена из условия КЫак = К1с с учетом, что
Распространение трещин ползучести. Докритическое подрастание
трещины может при повышенных температурах происходить
вследствие ползучести. Этот процесс внешне аналогичен коррозионному
растрескиванию под напряжением, однако характер зависимости скорости
и от Kj при ползучести отличается тем, что на ней отсутствует участок
плато: скорость ползучести интенсивно растет с увеличением Кх и
температуры. Пороговое значение коэффициента интенсивности
напряжений не обнаруживается. Для примера диаграммы распространения
трещин для некоторых сталей и сплавов представлены на рис. 1.36.
Пример 1.7. Цилиндрический сосуд, внутри которого протекает химически
очищенная деаэрированная вода, изготовлен из стали 15Х2МФА и
эксплуатируется при температурах от 20 до 170 °С и внутренним давлением от 0,1
до 16,1 МПа. Наружное давление постоянно и равно 0,1 МПа. Толщина стенки
сосуда h = 20 мм, внутренний диаметр d= 0,7 м.
и, м/с
Ю-4
10~5
ю-6
10-7
10-8
10^
Ю-10
;
\
/
1
J
(
i/
1
/
/
/
/
3 L-4 -| И
1
10 20 40 80 200 500
^Mna-Ml/2
Рис. 1.36. Диаграмма скорости роста
трещин ползучести для некоторых
материалов
1 — СгМо сталь при 565 °С; -2 — сплав
на основе никеля Nimostat 713V при
850 °С; 3 — сплав на основе кобальта
HS 188 при 600 °С; 4 — сплав Inconel
718 при 540 °С (по зарубежным
литературным данным)
84
Рис. 1.37. Трещина в меридиональном сечении сосуда
При дефектоскопии стенок сосуда обнаружена трещина, плоскость которой
располагается в меридиональном сечении на внутренней поверхности сосуда
(рис. 1.37). Глубина трещины / = 5 мм, длина 2с = 50 мм.
Требуется определить предельное и допустимое число циклов нагружения
сосуда внутренним давлением.
Ре ше ние.По условию среда не является коррозионно-активной, поэтому
подрастание трещины до критического размера будет происходить вследствие
действия циклической нагрузки при пусках—остоновках оборудования. Размах
давления в цикле по условию Ар = 16,1 - 0,1 = 16 МПа. Рассчитаем размах
окружных напряжений Аа,, нормальных к плоскости трещины, по известной формуле
.0,35
Да, = ApR{/h = 16
0,02
280 МПа (Д. = d/2).
Рассчитаем критическую глубину трещины по формуле (1.149), где для
нашего случая R = 0.
Принимая в качестве расчетной схему 1 (см. табл. 1.6), получаем из (1.149)
уравнение
,_1,11 +5(/Kp//Q
Аа1л/Чф - ■ "■ = &
i-V*
1с»
решая которое методом подбора находим
/кр = 8,89- 10"3м.
Для расчета числа циклов до разрушения следует использовать формулу
(1.145), в которой при этом необходимо вычислять интеграл слева, где функция
А\*) =AUh) определяется формулой схемы 1 в табл. 1.6, т.е.
85
ш i,n+5(///,)4
Л"*) x_l/h
Определить интеграл можно лишь численно. Для приближенного решения
примем в формуле (1.145) среднее значение величины.Д/ср//*), взяв
>ср = ^;0 + /кр) = 5(5 + М9)' 10_3 = 6'945 ' 10~3 М*
Подставив /, найдем/(/ср//*) =1,8119. Число циклов до разрушения
определим по формуле (1.146), приняв в ней ///0 = /кр//0 = 8,89/5 = 1,778. Предварительно
найдем по (1.148)
ДЛГ10 = 1,8119-280^-0,005 = 63,58 МПа • м1/2 .
Вычисляем V0 по (1.147), используя данные табл. 1.5:
V0 = 26 • 10"12(63,58)2'63 = 1,4378 • 10"6 м/цикл.
Число циклов до разрушения
АГ 0,005 1 Г1 (Л —0.-0,315. 10<2Л
N = ' ^'?ГТи[1"(1'778) ] = 183°*
Р 1,4378-10 Ь °'315
При 10-кратном запасе по долговечности допустимое число циклов — около 180.
1.7. КОРРОЗИОННЫЙ И ЭРОЗИОННЫЙ износ
В ТУРБОМАШИНАХ
Коррозия представляет собой электрохимический процесс
растворения металла на его поверхности под воздействием содержащихся в
среде коррозионно-активных веществ. Коррозия вызывает износ
металла и деталей.
Коррозионные процессы, вызывающие износ в турбомашинах, в той
или иной степени взаимосвязаны с механическими воздействиями
на материал. К таким воздействиям относятся напряжения в материале,
ударное и абразивное действие высокоскоростных парокапельных
потоков и содержащихся в них твердых частиц в виде продуктов коррозии
и нерастворимых солей.
Разные виды износа в турбомашинах, по существу, есть коррози-
онно-эрозионный износ при различном сочетании электрохимических
и механических факторов.
Различают следующие виды износа, наблюдаемые в турбомашинах:
общая коррозия, язвенная коррозия, эрозионная коррозия, капельно-удар-
ная эрозия, электрохимическая эрозия, абразивная эрозия.
Общая коррозия представляет образование равномерного
слоя оксидов на поверхности деталей, состоящего преимущественно
из оксида железа Fe203. Общая коррозия возникает при воздействии
86
кислорода во влажной атмосфере, например во влажном воздухе
с влажностью более 60 %. Она типична в период остановки турбины
в резерв, если не приняты меры к ее предотвращению путем сушки
подогретым сухим воздухом или защиты (консервации) поверхностей
специальными пассивирующими веществами перед остановкой
оборудования в резерв.
Общей коррозии подвержены детали из углеродистых и
низколегированных сталей: элементы корпуса, диски и роторы турбин,
паропроводы и пр.
Во время работы оборудования твердые оксиды отделяются от
поверхности деталей, попадают в поток и приводят к механическому
истиранию (абразивной эрозии) поверхностей тракта турбины. Твердые
частицы вызывают эрозию сопловых и рабочих лопаток, клапанов
и других элементов паровых турбин.
При определенных условиях на поверхности деталей образуется
магнетит — плотный черный слой оксида железа Fe304, защищающий
поверхности корпуса и ротора от коррозии. Условия образования
защитного (пассивирующего) магнетитового слоя состоят в присутствии в
воде и паре кислорода, но при малом содержании в среде других корро-
зионно-активных веществ: щелочей, солей и прочее. Если последние
условия не выполняются, то защитный слой магнетита не образуется,
а избыточный кислород в среде вызывает интенсификацию как общей,
так и других видов коррозии.
Язвенная коррозия — повреждение поверхности металла
в виде язв: углублений, имеющих размеры от долей до миллиметра и
заполненных продуктами коррозии, а также соединениями
вызывающими коррозию.
Язвенная коррозия образуется при воздействии на металл коррози-
онно-активных веществ, таких как щелочи и соли натрия и калия в
присутствии кислорода и влаги (влажного воздуха, влажного пара).
К элементам турбины в наибольшей степени подверженным
воздействию язвенной коррозии, относятся — рабочие лопатки, диски, детали
корпуса, расположенные в зоне фазового перехода (см. § 1.6).
Для предотвращения язвенной коррозии необходимо поддержание
чистоты воды и пара на достаточно высоком уровне.
По существующим нормам содержание соединений натрия в паре
не должно превышать 5 мкг/кг, т.е. нескольких миллиардных долей
по массе. Нормируется также количество соединений меди и кремния
в паре и воде как при нормальной эксплуатации, так и при пусковых
режимах после простоя оборудования. В пусковой период и в начале
эксплуатации загрязнения воды и пара, как правило, особенно велики.
87
Язвенная коррозия может образовываться в период пребывания
оборудования в резерве, если не приняты меры по его защите от коррозии.
Как в эксплуатации, так и в резерве, язвенная коррозия может повредить
не только детали из слаболегированных сталей (корпуса, диски и др.),
но при значительном загрязнении воды и пара также и детали
из материала, содержащего значительное количество хрома и
относящегося к нержавеющим сталям. К таким материалам, в частности,
принадлежат лопаточные 13 %-ные хромистые стали с большим разнообразием
дополнительных элементов: никеля, молибдена, ванадия, вольфрама,
т.е. стали 20X13, 15Х11МФ, Х12ВНМФ и др.
Материалами, эффективно противостоящими язвенной коррозии,
являются сплавы на основе титана.
Язвенная коррозия оказывает существенное влияние на прочность
материала, особенно на предел усталости. Язвины на поверхности
детали являются прямым источником концентрации напряжений, и,
кроме того, наличие коррозионно-активных соединений в них вызывает
снижение сопротивления поверхностного слоя усталости и
коррозионному растрескиванию под напряжением.
Для материала, пораженного язвенной коррозией, предел усталости
оказывается близким к нулю: разрушение наступает при весьма малой
амплитуде переменных напряжений, если число циклов изменения
нагрузки достаточно велико (рис. 1.38). В этих условиях, если
обнаружена язвейная коррозия рабочих лопаток турбин, то это свидетельствует
о снижении усталостной прочности рабочих лопаток и становится
возможным их разрушение при достаточно низком уровне переменных
напряжений в них.
При язвенной коррозии активизируется также процесс
коррозионного растрескивания под напряжением как лопаток, так и дисков.
Следует однако отметить, что снижение сопротивления
коррозионному растрескиванию и коррозионной усталости может происходить
и происходит без видимых признаков язвенной коррозии, но лишь
вследствие адсорбции и диффузии коррозионно-активных примесей
в поверхностный слой детали.
Предотвращение язвенной коррозии достигается обеспечением
нормативной чистоты воды и пара следующими мерами: снижением присо-
сов сырой воды в конденсатор; сетевой воды в сетевых подогревателях
теплофикационных турбин; уменьшением присосов атмосферного
воздуха в вакуумную часть турбины, эффективной очисткой конденсата
и подпиточной воды.
При постановке турбин в резерв язвенная коррозия предотвращается
теми же средствами, что и общая коррозия: сушкой воздухом при влажно-
88
сти его менее 20—30 %, обработкой внутренних поверхностей турбины
растворами пассивирующих веществ. В частности при обработке
раствором октадециламина (ОДА) с концентрацией 5—10 мг на 1 кг воды на
поверхностях образуется защитная пленка ОДА, обеспечивающая
предотвращение коррозии в период остановки оборудования в резерв.
Эрозионная коррозия — коррозионный износ поверхности,
на которой защитный слой магнетита разрушен эрозией.
Темная поверхность металла свидетельствует о том, что она
защищена слоем магнетита, блестящая поверхность означает повреждение ее
эрозионной коррозией.
Образованию магнетита способствует присутствие в среде и
свободный доступ кислорода к поверхности. Содержание в металле хрома,
никеля, молибдена и некоторых других элементов придает особую
прочность защитному слою магнетита.
Повреждение и разрушение слоя обусловливается эрозионным
действием высокоскоростного парокапельного потока, присутствием в нем
твердых частиц: продуктов коррозии, нерастворимых солей.
Коррозия обнаженной поверхности металла происходит тем
интенсивнее, чем менее коррозионно-стойкий металл и чем более коррози-
онно-активна среда, т.е. чем больше коррозионно-агрессивных
примесей содержится в жидкой фазе и чем больше степень влажности среды.
В паровых турбинах эрозионная коррозия повреждает многие ста-
торные элементы пароводяного тракта, выполняемые из углеродистых и
низколегированных сталей и находящиеся в зонах влажного пара,
перепускные, дренажные, отборные трубопроводы и др.
а_х,МПа I | I I I I I
104 105 106 Ю7 108 109 JVp
Рис. 1.38. Влияние коррозии на характеристики усталости лопаточных сталей
1 — испытания на воздухе; 2 — на воздухе после повреждений общей коррозией; 3 —
на воздухе после повреждения язвенной коррозией
89
Основными способами борьбы с эрозионной коррозией является
применение коррозионно-стойких сталей, таких как 13 %-ные
хромистые стали (типа XI3 и ее модификации), стали 12Х18Н9Т и ее
варианты для элементов корпусов влажно-паровых турбин и трубопроводов
влажного пара. Для экономии дорогостоящих материалов
распространение получили защитные наплавляемые покрытия или листы из
нержавеющих сталей, покрывающие детали из углеродистых сталей в целях
предотвращения эрозионной коррозии.
Конструктивные меры для снижения повреждений от эрозионной
коррозии сводятся к устранению, по возможности, щелей, узких проходов,
где возникают высокоскоростные потоки влажного пара. Следует
стремиться к полной герметичности всевозможных стыковых соединений,
например разъемов корпусных элементов: обойм, сопловых диафрагм и
пр. Снижение скорости потока и влагоудаление также относятся к
конструктивным мерам, позволяющим уменьшить эрозионную коррозию.
Естественной мерой, снижающей эрозионную коррозию, является
поддержание чистоты воды и пара в эксплуатации на уровне принятых норм.
Капельно-уд арная эрозия обусловлена ударами капель
воды по поверхности рабочих лопаток, движущихся в потоке влажного
пара. При ударе капли, движущейся в потоке с большой скоростью,
о поверхность рабочей лопатки в месте контакта развивается давление
р = apawn (а > 1),
где а — скорость звука в воде; р — плотность воды; wn — составляющая
относительной скорости капли и лопатки, нормальная к поверхности
лопатки.
При умеренных скоростях wn, равных 100 м/с, развивается давление,
превышающее предел текучести материала. Многократное воздействие
капли на поверхность вызывает повторное деформирование
поверхностного слоя и его разрушение.
Интенсивность износа детали зависит от состава материала, формы и
состояния поверхности детали, механических характеристик материала
(прочности, твердости, пластичности), скорости wn, частоты ударов, размера
капель.
Количественной мерой эрозии может быть выбрана средняя толщина
слоя h материала, теряемого за счет эрозии.
Начальный участок кривой эрозии (рис. 1.39) соответствует
небольшой потере массы материала. Затем скорость эрозии h = dh/dt растет и
к концу периода /j достигает максимального значения. В течение
времени /п скорость эрозии примерно постоянна; на участке /ш скорость
90
эрозии снижается. Физические д
причины описанного процесса
изменения скорости эрозии
изучены недостаточно. Считают что,
характер процесса связан с
изменением шероховатости, формы и
твердости эродируемой
поверхности. Снижение скорости эрозии на
участке III объясняется тем, что к
этому моменту образуется так
называемая игольчатая структура
поверхности. Поверхность детали
имеет достаточно высокие и острые
выступы, которые дробят крупные
капли И тем самым снижают ИНТен- Рис< 1>39- Первичная кривая эрозии
сивность воздействия капель на
поверхность детали, а во впадинах скапливается вода, которая смягчает
удар капель о поверхность.
Принимаемые меры по повышению показателей прочности
материала ведут, как правило, к увеличению сопротивления эрозии.
Легированные (особенно нержавеющие) стали имеют значительно
большее сопротивление эрозии, чем углеродистые стали. Кобальтовые
сплавы типа стеллитов обладают высоким сопротивлением эрозии,
что предопределило их широкое применение в турбостроении.
Стеллитовые пластинки припаивают к рабочим лопаткам в области
входных кромок.
При оценке эрозионной надежности лопаток турбин, работающих во
влажном паре, используют понятие условного коэффициента эрозии,
зависящего от параметров потока влажного пара в ступени турбины:
Еу = [(3,28ц, - 800)/1000]2>; ?'8,
где Un — окружная скорость периферийных сечений рабочих лопаток, м/с;
у1 — степень влажности перед рабочими лопатками, %.
Величина Е сравнивается с нормативными величинами. При Еу<2
ожидается незначительная эрозия и обеспечена надежная работа
турбины; при 2 < Еу< 4 наблюдается допустимая эрозия, а если Еу > 4, то
следует ожидать значительную эрозию, при которой эксплуатация
турбины является недопустимой.
Кроме упомянутого способа упрочнения кромок рабочих лопаток
(напайка стеллитовых пластинок) для снижения эрозии применяются
поверхностная закалка кромок лопаток, нанесение твердых покрытий
электроискровым и другими способами.
91
1.8. ВЕРОЯТНОСТНАЯ (СТАТИСТИЧЕСКАЯ) ОЦЕНКА
ПРОЧНОСТИ
Как было указано общее условие прочности (надежности)
определяется серией неравенств
QM < о.
При этом предполагается, что параметры qi — детерминированные,
равно как и функции Qk — детерминированные функции своих
аргументов. В более общем случае qi — случайные параметры, a Qk —
случайные функции. Например, в условии прочности а - ав < 0 как величина
напряжения а, так и временное сопротивление ав — случайные
величины. Случайность а определяется случайностью нагрузок и разбросом
размеров и другими причинами; случайность ав — разбросом свойств
материала.
Рассмотрим критерий прочности (надежности) в виде
q-qn<0, (1.150)
где q — параметр надежности, характеризующий реальную нагру-
женность; qu — характеристика прочности (надежности) материала или
детали.
Многие критерии прочности материалов и деталей могут быть
представлены в форме (1.150). В случае кратковременной прочности имеем
условие неразрушения
а - ав < 0,
где а — действующее напряжение; ав — временное сопротивление.
В применении к многоцикловой усталости критерий прочности
afl-a/<0,
где аа— амплитуда циклических напряжений в опасной точке; а г—
предел усталости в этой точке.
Для малоцикловой усталости критерий прочности можно принять
в виде
lgW-lgWp<0,
где N — число циклов нагружения; Np — число циклов до разрушения
(появление макротрещины).
То же имеем для ползучести:
lgr-lg/p<0,
где / — время работы; / — время до разрушения.
92
Для критерия трещиностойкости
К{-Кс<0,
где К^ — коэффициент интенсивности напряжений; Кс — вязкость
разрушения.
Во всех отмеченных и во многих других случаях критерий
прочности имеет вид (1.150).
Условие (1.150) — детерминированное, в котором q и qu заданные
детерминированные величины для данной опасной точки, но оно,
очевидно, остается справедливым и в том случае, когда q и qn — случайные
величины. Примем, что q и qn— случайные величины, подчиняющиеся
нормальному распределению, и они имеют средние значения
{математические ожидания) т = qc и mqu = qn ср и среднеквадратичные
отклонения Sq и SgTl.
Всякому детерминированному критерию прочности соответствует
для случайных величин статистический аналог в виде условия:
Р>[Р], (1.151)
где Р — вероятность неразрушения (безотказной работы); [Р] —
выбираемая допустимая вероятность неразрушения.
Условие (1.151) означает, что надежность считается достаточной,
если вероятность неразрушения не меньше некоторого допустимого
значения.
Обозначая q - qn~ Хи учитывая, что разность нормальных
случайных величин также является случайной величиной с нормальным
распределением, имеем вероятность неразрушения
P = P(Z<0) = F(0), (1.152)
где
/ х - лг
F(x) = 0,5 + ф| —^*
X j
(1.153)
функция распределения случайной величины X = q - qn\ х — возможное
значение (реализация) случайной величины X; Ф(£) — функция Лапласа:
Ф(%) = -р=[с2" du, (1.154)
72^0
93
*ср = #ср ~ Чи ср — среднее значение случайной величины X; Sx —
среднеквадратичное отклонение случайной величины X от среднего значения,
определяемое соотношением
** = (^+4п>1/2-
Учитывая (1.153), (1.155), получаем вероятность неразрушения (1.152)
в виде
(1.155)
(
Р = 0,5 + Ф
л
^п.ср *?ср
Чй. + 4
(1.156)
Введем обозначения величин
V „ ' Vq q ■
Ч П.СП " С
(1.157)
I.Cp "» ср
которые называются коэффициентами вариации случайных величин qn
и q. Тогда, приняв, что Япср/<7ср - п — коэффициент запаса прочности
в обычном смысле, — получим из (1.156)
Р = 0,5 + Ф
\~Х
г«.
г г л 2
V + V
(1.158)
V
Зависимость (1.158) дает связь вероятностной характеристики
прочности Р с детерминированной характеристикой па. Важно подчеркнуть,
ч
что статистическая оценка требует дополнительной информации: кроме
средних значений qu и qc требуются сведения о значениях
среднеквадратичных отклонений S и и Sq.
Зависимости (1.156) и (1.158) можно представить в виде
^п.ср ^ср __
(S2 +S2)
^ qu uJ
1/2
или
n
£-
1
2 2 2 1/2
(n V + V }
\rtqvqn vq>
4p9
(1.159)
(1.160)
где Up — квантиль нормального распределения, соответствующий
вероятности неразрушения Р, т.е. величина, отвечающая условию
Р = 0,5 + Ф(ия). (1.161)
94
Таблица 1.7
р
ир
р
ир
0,5
0,000
0,95
1,645
0,6
0,253
0,96
1,751
0,7
0,524
0,97
1,881
0,75
0,674
0,98
2,054
0,8
0,842
0,99
2,326
0,85
1,036
0,999
3,090
0,9
1,282
0, 9999
3,719
Зависимость (1.161) представлена в табл. 1.7.
Соотношения (1.159), (1.160) с использованием табл. 1.7 позволяют
установить соответствие между статистической и детерминированной
оценками прочности и, в частности, между коэффициентом запаса
прочности и вероятностью неразрушения. Возможно и решение обратной
задачи: по заданному (принятому) значению вероятности неразрушения
Р = [Р] найти ему соответствующий запас прочности в классическом
детерминированном смысле: как отношение средних значений
соответствующих величин.
Пример 1.7. Для материала Х15Н35ВЗТ число циклов до разрушения при
Аер- 0,0033 составляет iVp ср = 6 • 10 . Разброс свойств характеризуется
среднеквадратичным отклонением S^ = 0,25, определить вероятность неразрушения
р з
при Ле = 0,0033 за N= 2 • 10 циклов деформирования.
Ре ше ние. Определяем по исходным данным:
^cp = lg^=lg(2-103) = 3,30103;
Яп.ср = tetfp.cp = lg(6 • Ю3) = 3,77815;
ЛДОв te^p.cp'1^ = 3,77815/3,30103 = 1,14454;
^p- V/^pxp) = 0'25/3>7?815 = 0,06617.
При заданном lgiV величина vlg#= 0. По формуле (1.160) имеем
0,14454
"Is*"1
1,14454-0,06617
= 1,9085.
"Igtf ¥Щ
Обращаясь к табл. 1.7, находим
Р « 0,972.
Решим обратную задачу: рассчитаем допустимое число циклов [Щ заданной
интенсивности АеР = 0,0033, если вероятность неразрушения должна быть
Р = 0,999. Разрешая соотношение (1.160) относительно n^„N, получаем
igw.
ME
1
lg" \g[N]
l~UPVWa
95
или
\g[N] = \gNpcp(\-uPvlgNp).
Для Р - 0,999 по табл. 1.7 имеем иР = 3,090, следовательно,
\%[Щ = 3,77815(1 - 3,090 • 0,00667) = 3,0056
или [Щ = ю3'0056 =1013 циклов.
При данном разбросе свойств материала и при определенном размахе
Аер- 0,0033 допустимое число циклов [N] « 1000, что соответствует
коэффициенту запаса по долговечности
К 6-ю3 ,
Пример 1.8. При оценке на стадии проектирования прочности рабочих
лопаток ступени осевого компрессора известны (по прототипу) среднее значение
<ТдСр= 10 МПа амплитуды динамических напряжений и квадратичное
отклонение Saa = 5 МПа этих напряжений для всех лопаток данной ступени.
Предел усталости для исследуемой точки лопаток имеет следующие
характеристики: среднее значение <Ууср = 35 МПа, среднеквадратичное отклонение
Saf = 5 МПа. Требуется определить вероятность неразрушения лопаток данной
ступени компрессора в эксплуатации. Число рабочих лопаток в ступени zn = 25.
Ре ш е ние. Находим квантиль по формуле (1.160); для чего вычисляем
„ = S£a> = 35 = з 5.
v- - ^ ■ S " °'14286;
Подставляя полученные значения в формулу (1.160), имеем
2 5
ир = ' = = 3,5355.
л/3,52-0,142862 + 0,52
По табл. 1.7 находим вероятность неразрушения
Р « 0,9998.
Это вероятность неразрушения каждой из лопаток на данном колесе.
Вероятность разрушения каждой отдельно взятой лопатки Q = 1 - Р = 0,0002.
Повреждение (отказ) наступает, если происходит разрушение одной, или другой, или
третьей, ..., или 25-й лопатки. Вероятность наступления одного из 25 событий
равно сумме вероятностей всех этих событий. И, следовательно, для всей ступени
96
вероятность отказа равна Q^ = Qzn = 0,0002 • 25 = 0,0050, откуда вероятность
безотказной работы ступени составляет
Ръ = 1 - 6s = 1 - 0,005 = 0,995,
т.е. вероятность безотказной работы ступени компрессора заметно меньше
вероятности неразрушения каждой из лопаток ступени.
1.9. ДЕМПФИРУЮЩАЯ СПОСОБНОСТЬ
КОНСТРУКЦИОННЫХ МАТЕРИАЛОВ
Изучение характеристик демпфирующей способности материалов
важно в связи с изучением проблемы снижения напряжений при
колебаниях и повышении вибрационной надежности турбомашин. Мерой
демпфирования в материале является декремент колебаний
ц = (1/п)1п(А0/Ап), (1.162)
где А0 — начальная амплитуда колебаний; Ап — амплитуда колебаний
через п периодов.
Формула (1.162) применима для определения декремента колебаний
любой конструкции и в общем случае характеризует суммарное
демпфирование, которое включает не только внутреннее демпфирование
в материале, но и так называемое конструкционное демпфирование,
обусловленное трением и скольжением на поверхностях сопрягаемых
деталей, а также внешнее демпфирование, возникающее в результате
взаимодействия детали с внешней средой. В данной главе, посвященной
изучению свойств материалов, используемых при конструировании
турбомашин, рассмотрено собственное или внутреннее демпфирование
в материале. Другие виды демпфирования рассматриваются в главах,
посвященных колебаниям лопаток и валов.
Внутреннее демпфирование в материале обусловлено несколькими
одновременно протекающими процессами, из которых главными
являются процесс повторного деформирования и связанное с ним рассеяние
энергии. Демпфирование проявляется также и при напряжениях,
меньших предела упругости, при которых измеримые пластические
деформации (макропластические) малы (при обычных расчетах материал
считают упругим). Однако при низких напряжениях имеются
микропластические деформации, которые и определяют
демпфирующую способность материала.
Логарифмический декремент колебаний как мера внутреннего
демпфирования определяется отношением
r\ = AU/2U, (1.163)
97
где At/ — энергия, рассеиваемая материалом в единице объема за один
период колебаний; U— максимальное значение удельной упругой
энергии в образце за цикл колебаний.
Величина At/ соответствует площади петли гистерезиса (см. рис. 1.13)
и может быть вычислена при заданном размахе напряжений Аа с учетом
(1.85). При этом по зависимости (1.163) можно получить
Л = 4—-—г( г—1 . (1.164)
т + 1^2а^/
Экспериментально установлено, что факторами, влияющими на
декремент колебаний, являются уровень напряжений (размах Аа), предел
текучести, химический состав и класс материала (перлитные и аусте-
нитные материалы), температура. Декремент колебаний возрастает
с увеличением размаха циклических напряжений Аа. Все структурные
изменения материала, приводящие к возрастанию предела текучести,
вызывают уменьшение демпфирования.
Термообработка стали оказывает существенное влияние на ее
демпфирующие свойства. Наибольшим демпфированием обладает сталь
в отожженном состоянии, а наименьшим — в состоянии закалки с
низким отпуском. Демпфирование в стали, одинаковой по химическому
составу, при указанных двух термообработках может отличаться в 10
раз и более.
Влияние напряжения и предела текучести качественно верно
отражает формула (1.164).
Вторым процессом по вкладу в демпфирование является магнито-
механический гистерезис, представляющий проявление магнитострик-
ции в ферромагнитных материалах, таких как мартенситные, мартен-
ситно-ферритные и некоторые другие стали.
Магнитострикция — это взаимосвязь поля механических
микронапряжений в теле с микронапряженностью магнитного поля в
элементарных объемах (кристаллитах) тела. Магнитомеханическое
демпфирование возникает вследствие рассеяния и превращения в тепло части
механической энергии при колебаниях, и при этом передаточным
механизмом в превращении энергии является магнитострикция.
Характерная особенность магнитомеханического демпфирования —
снижение логарифмического декремента колебаний при наложении
постоянного растягивающего напряжения ат на переменное
напряжение с амплитудой аа. Это обстоятельство необходимо принимать во
внимание при оценке внутреннего демпфирования в длинных лопатках
турбомашин, для которых велик уровень растягивающих напряжений от
центробежных сил вращения.
98
л
0,025
0,020
0,015
0,010
0,005
I
4/
zL
/
/
A
4
3
2
1
Влияние химического состава и
класса материала (перлитные, мартен-
ситные, аустенитные стали и сплавы)
оказывается весьма существенным.
Повышенным уровнем демпфирования
обладают 13 %-ные хромистые стали
(10X13, 20X13 и 30X13); следующую
группу составляют углеродистые и
низколегированные стали.
Аустенитные и
высоколегированные сплавы с никелевой и
кобальтовыми основами отличаются низким
уровнем декремента колебаний.
На рис. 1.40 представлены
зависимости декремента колебаний от уровня
напряжений а = Аа/2 для некоторых
материалов, применяемых в
турбостроении. Влияние температуры на т\
обычно проявляется в том, что при
повышенных температурах зависимость г| от а становится более пологой.
При низких напряжениях повышение температуры обычно вызывает
возрастание декремента колебаний, а при повышенных напряжениях —
наоборот (чем выше температура, тем ниже декремент колебаний). В
рамках гипотезы (1.164) это можно объяснить уменьшением ак и т с ростом
температуры. Наличие в деталях турбомашин областей концентрации
напряжений вызывает увеличение демпфирования.
Следует отметить, что значения т в зависимости (1.164) могут
существенно отличаться от значений т, найденных путем обработки
диаграмм деформирования, когда за базу принимаются опорные точки при
значительных деформациях и напряжениях. Поэтому формула (1.164)
должна корректироваться экспериментами по определению
демпфирования, из которых и следует определить т. Для материалов, декремент
которых представлен на рис. 1.40, значения т находятся в пределах
1,8—3, т.е. они существенно меньше значений, приведенных в табл. 1.1.
100 150 200а,МПа
Рис. 1.40. Декремент колебаний
сталей в условиях изгиба при
температуре испытаний 20—24 °С
/ — 2ХЗМВФ; 2 — 15Х12ВМФ; 3 —
10X13; 4— 15Х11МФ
Глава вторая
ПРОЧНОСТЬ ЛОПАТОК ТУРБОМАШИН
2.1. ОСОБЕННОСТИ КОНСТРУКЦИИ РАБОЧИХ
ЛОПАТОК ТУРБОМАШИН
Рабочие лопатки паровых турбин. В пределах одной
многоступенчатой турбины конструктивное выполнение лопаток разных ступеней
значительно отличается. Поэтому следует рассмотреть последовательно
конструкции лопаток регулирующих ступеней (PC), промежуточных ступеней
части высокого давления (ЧВД) и части среднего давления (ЧСД), а также
конструкции лопаток ступеней части низкого давления (ЧНД).
Рабочая лопатка PC изображена на рис. 2.1. Она выполнена из цельной
заготовки и состоит из профильной части 7, хвостовика 7 и бандажа 4.
Профильные части смежных лопаток образуют рабочие каналы. Профиль
Рис. 2.1. Рабочие лопатки регулирующих ступеней паровых турбин
a — меридиональная проекция; б — крепление замкового пакета в расширенном
входном пазе; в — пакет из трех лопаток; 1 — профильная часть; 2 — надбандажные
уплотнения; 3 — демпферные ленты; 4 — интегральный бандаж; 5 — заплечики; 6 — обод
диска; 7 — Т-образный хвостовик; 8 — заклепки замковых лопаток; 9 — сварные швы
100
коротких лопаток PC по высоте постоянный. Хвостовик Т-образного типа
служит для крепления лопаток к диску. Заплечики 5 предназначены для
предотвращения раскрытия «щек» обода диска б, которое может
произойти под действием центробежной силы, развиваемой лопатками при
вращении ротора.
Для придания конструкции болыцей жесткости и прочности лопатки
сварены по бандажам и хвостовикам при помощи электронного луча
и образуют пакеты, состоящие из двух или трех лопаток каждый.
Трапецеидальные в поперечном сечении ленты свободно вставлены
в пазы бандажей. При относительных тангенциальных смещениях
смежных пакетов на поверхностях соприкосновения ленты и бандажа
возникает трение, способствующее демпфированию колебаний.
Конструкция цельнофрезерованных лопаток с демпферной связью
этого типа имеет широкое распространение в мощных паровых
турбинах как классических, так и ядерных электростанций, а также и в
газовых турбинах.
Бандаж имеет тройное предназначение; образование периферийной
стенки канала (формирование канала рабочих лопаток), снижение
утечек пара и повышение прочности и вибрационной надежности
лопаточного аппарата.
Для заводки хвостовиков лопаток в кольцевой паз обода в нем
предусмотрены расположенные диаметрально противоположно расширенные
входные пазы, через которые лопатки (пакеты) заводят в паз радиально, а
затем подводят одну к другой в тангенциальном направлении. При
сборке лопатки плотно подгоняют по поверхностям D. В местах
расширенных входных пазов установлены так называемые замковые лопатки
(пакеты), которые имеют иное, чем Т-образный хвостовик, крепление.
Пример конструкции лопаток, применяемых в промежуточных
ступенях ЧВД и ЧСД, показан на рис. 2.2. Профильная часть лопатки и
вильчатый хвостовик выполнены заодно. Ленточный бандаж с уплотнительными
усиками приклепан (иногда с пропайкой) к вершинам лопаток.
Лопатки, объединенные бандажом, образуют пакет лопаток. Пакеты
могут содержать от 2 до 20 и более лопаток. В некоторых случаях
лопатки рабочего колеса турбины объединяются единым бандажом.
Число лопаток в пакете обусловлено обеспечением максимальной
вибрационной надежности (см. гл. 5).
Наряду с приклепанным бандажом в ступенях ЧВД и ЧСД
применяются лопатки с интегральным бандажом (см. рис. 2.1) и с вильчатым
хвостовиком (рис. 2.2). Лопатки свариваются по бандажам и хвостовикам в
пакеты. После сварки пакеты устанавливают на дисках. При ремонте
замену пакета производят без разборки всего рабочего колеса. Пакеты со
сваренными по бандажам лопатками обладают большей надежностью по
101
A-*| Jl? а-А
Рис. 2.2. Рабочие лопатки среднего давления паровых.турбин
I — вильчатый хвостовик; 2,— профильная часть; 3 — бандаж; 4 — проволока; 5 —
заклепки; 6 — обод диска; 7 — заклепки бандажа
сравнению с пакетами с приклепанными бандажами и применяются в ЧВД
и ЧСД мощных паровых турбин.
Другим вариантом выполнения рабочих лопаток промежуточных
ступеней является конструкция с двойным демпферным и клепаным
бандажом и с грибовидным хвостовиком с верхней посадкой (рис. 2.3).
Лопатки выполняют с интегральным бандажом, в котором сделаны пазы
8 и выступы 9. На поверхности соприкосновения пазов и выступов при
относительном смещении возникает трение, способствующее
демпфированию колебаний. Ленточный бандаж 6 способствует повышению
надежности при колебаниях. Описанная конструкция рабочих лопаток
применяется также и для регулирующих ступеней турбин.
В промежуточных ступенях при djl > 10 (dc — средний диаметр
ступени, / — длина рабочей лопатки) рабочие лопатки имеют
постоянный по высоте лопатки профиль; при djl < 10 — переменные профиль
и поперечное сечение.
102
а б
Рис. 2.3. Рабочие лопатки регулирующих и промежуточных ступеней МВД и ЧСД
с комбинированными интегральным и клепаным бандажом
а — меридиональная проекция; б — пакет из трех лопаток (без приклепанного
ленточного бандажа); / — профильная часть; 2 — хвостовик; 3 — заплечики хвостовика; 4 —
обод диска; 5 — интегральный бандаж; 6 — приклепанный бандаж; 7 — шипы; 8 — паз;
9 — выступы
Для повышения вибрационной надежности относительно длинных
лопаток промежуточных ступеней предусмотрена проволока 4 (см. рис. 2.2),
проходящая сквозь отверстия в профильной части лопатки.
Лопатки последних ступеней ЧНД имеют значительную длину и
малое отношение djl = 2...3 (рис. 2.4). Профильная часть 2 лопатки
последней ступени ЧНД представляет собой закрученный стержень
переменного поперечного сечения, утоняющийся от корня к периферии
и выполненный заодно с хвостовиком 1 и бандажом 4 из коррозионно-
стойкой хромистой стали или титанового сплава. Хвостовик лопатки —
елочного типа с криволинейной осью, выполненной по дуге
окружности. Все хвостовики лопаток заводят в соответствующие пазы дисков
одновременно, так чтобы периферийные бандажи 4 лопаток вошли в
зацепление по поверхностям 6. Выполнение хвостовика с
криволинейной осью позволяет обеспечить расположение корневого профиля
лопатки в пределах поверхности а хвостовика без свисающих кромок
профиля. Наличие свисающих кромок вызывает повышенную
концентрацию напряжений и снижает усталостную прочность лопаток.
Периферийный бандаж — демпферного типа. Под действием
центробежных сил периферийное сечение лопатки с бандажом стремится
повернуться в направлении, указанном на рис. 2.4. В результате на
поверхностях 6 возникает контактное давление, обеспечивающее трение
при относительном смещении смежных лопаток и соответствующее демп-
103
Рис. 2.4. Лопатка последней ступени ЧНД
/ — зубчиковый хвостовик; 2 — профильная часть; 3 — отверстие; 4 — интегральный
бандаж; 5 — утолщение профиля; б — поверхность контакта
фирование при колебаниях. Через отверстие 3 лопаток протянута
проволока, замкнутая на круг. Проволока предназначена для повышения
вибрационной надежности. Для снижения концентрации напряжений около
отверстий 3 в профильной части лопатки предусмотрено утолщение 5.
Переходы от профильной части к хвостовику и бандажу выполняют
с галтелями большого радиуса для снижения концентрации напряжений.
Рабочие лопатки газовых турбин, В ступенях турбин всегда djl < 10.
Рабочие лопатки имеют переменные профили и сечения по длине (рис. 2.5).
Профильная часть 1 выполнена заодно с хвостовиком елочного типа
с прямолинейной осью, наклоненной к оси турбины. На периферии
профиль имеет местное утонение для снижения повреждений при
задевании лопатки о корпус турбины. Лопатки газовых турбин обычно
выполняют без бандажей и проволок. При сборке каждую лопатку заводят
в паз диска индивидуально и фиксируют в осевом направлении
стопором 3. Посадка хвостовиков в пазах диска обычно свободная,
обеспечивающая возможность смещения вершин лопаток в тангенциальном
направлении в пределах, допускаемых в хвостовом соединении. В экс-
104
Рис. 2.5. Неохлаждаемая лопатка газовой турбины
1 — профильная часть с ребордой у вершины; 2 —
елочный хвостовик; 3 — стопорная пластина
Рис. 2.6. Рабочие лопатки осевого воздушного
компрессора
/ — профильная часть; 2 — хвостовик; 3 —
промежуточное тело; 4 — штифты
плуатационных условиях хвостовик лопатки плотно прижимается
центробежной силой по поверхности контакта к выступам обода диска.
В газовых турбинах применяются лопатки с внутренним воздушным
или жидкостным охлаждением. Конструкции охлаждаемых лопаток
рассматриваются в курсе газотурбинных установок.
Рабочие лопатки воздушных компрессоров. Лопатки осевых
компрессоров имеют переменные по высоте профили и выполняются без
бандажей и проволок (рис. 2.6). В зависимости от конструкции ротора
используются различные типы хвостовиков: хвостовики Т-образные
(см. рис. 2.1), зубчиковые и другие типы.
2.2. НАПРЯЖЕНИЯ И ДЕФОРМАЦИИ РАБОЧИХ
ЛОПАТОК В УСЛОВИЯХ УПРУГОСТИ
Профильная часть не очень коротких рабочих лопаток обычно
рассматривается как стержень переменного сечения, имеющий начальную
закрутку. Пакет лопаток, объединенный бандажом или проволокой,
образует статически неопределимую стержневую систему. Методы
расчета таких систем изучают в курсе сопротивления материалов.
105
Разработанные более точные методы расчета тел сложной
конфигурации, основанные на идее конечного элемента, успешно применяются
и при анализе деформаций и напряжений в элементах турбомашин и,
в частности, рабочих лопаток (см. гл. 7).
Координатные оси рабочих лопаток. Рассмотрим одну
изолированную (без связей) рабочую лопатку турбомашины, закрепленную
на диске (рис. 2.7, а). Начало координат помещено в геометрическом
центре корневого сечения лопатки; ось z направлена по радиусу от оси
вращения диска; ось * — по направлению окружной скорости центра
корневого сечения, а ось у — параллельно оси диска в сторону вектора
угловой скорости. При названных условиях оси х, у, z образуют правую
систему координат.
На рис. 2.8, а показано поперечное сечение лопатки плоскостью S,
перпендикулярной оси z. Начало осей х, у расположено в
геометрическом центре сечения. Оси £, ц — главные центральные оси сечения;
Ру — установочный угол. Главная ось г| примерно параллельна хорде
профиля. Поэтому приближенно р = 90° - ру (где р — угол между осями
^ и х). На рис. 2.7, б и 2.8, б аналогичные схемы даны для лопатки
осевого компрессора. Расположение лопаток и профиля на рис. 2.7 и
рис. 2.8 соответствует тому случаю, когда осевое движение рабочего
тела (пара или газа) по направлению совпадает с вектором угловой
скорости. При противоположном движении схемы профилей изображены
на рис. 2.9.
а б
Рис. 2.7. Лопатка и ее координатные оси
106
а
Рис. 2.8. Профили лопаток и их координатные оси (правое вращение)
а — турбины; б — компрессора
Рис. 2.9. Профили лопаток и их координатные оси (левое вращение)
а — турбины; б — компрессора
107
Усилия, действующие на рабочую лопатку. Лопатки турбомашин
испытывают действие центробежных сил вращения, аэродинамических
сил потока пара или газа. Эти усилия вызывают растяжение, изгиб
и кручение рабочей лопатки.
Центробежные силы относятся к стационарным или медленно
меняющимся силам и, следовательно, от них зависит статическая
кратковременная и длительная прочность лопаток. Эти силы вызывают
статическое растяжение, изгиб и кручение рабочих лопаток.
Аэродинамические силы имеют стационарные и переменные
составляющие. Первые вызывают статический изгиб и кручение и, как
центробежные силы, влияют на статическую прочность, вторые вызывают
колебания и определяют вибрационную надежность лопаточного
аппарата (см. гл. 5).
Рабочие лопатки испытывают также температурные воздействия.
При переходных режимах (пуск, нагружение, разгрузка, остановка)
в рабочих лопатках турбомашин вследствие неравномерного прогрева
или охлаждения возникают температурные напряжения. При повторных
переходных режимах температурные воздействия определяют
термоциклическую прочность рабочих лопаток.
Рассмотрим действие стационарных и медленно меняющихся
усилий, вызывающих упругие напряжения и деформации лопаток.
Растяжение рабочих лопаток. Растягивающее напряжение в
сечении z, вызываемое центробежными силами инерции,
a = N(z)/F(z); (2.1)
/
N(z) = pco2JF(z1)(rK + z1)dz1, (2.2)
z
где N(z) — растягивающее усилие в сечении с координатой z; F(z) —
площадь поперечного сечения лопатки в точке оси стержня с координатой z;
/ — длина рабочей лопатки; гк — радиус корневого сечения; Zj —
переменная интегрирования.
Усилие N(z) в сечении z равно центробежной силе инерции,
развиваемой частью рабочей лопатки, заключенной между сечением F(z)
и периферийным сечением F(l) = Fn. На элемент лопатки длиной dzj
(рис. 2.10) действует центробежная сила
dC = pco2(rK + z\)Hz) dzj. (2.3)
Для определения растягивающего усилия N следует
проинтегрировать правую часть равенства (2.3) в пределах от z до /, в результате чего
получается формула (2.2).
108
Для лопатки с постоянной
площадью поперечного сечения F(z) = F =
= const согласно (2.2) и (2.1) имеем
а = а0(1- 0(1+^/9), (2.4)
где о0 — растягивающее напряжение
в корневом сечении лопатки; £ = zll\
9 = djl — обратная веерность
рабочего венца; dc — средний диаметр
рабочего венца. Напряжение
а0 = рсо гс/,
(2.5)
где гс
средний радиус рабочего
Рис. 2.10. Схема для определения
растягивающих напряжений в рабочей
лопатке без связей
венца.
В корневом сечении лопатки
растягивающие напряжения, как правило,
достигают максимального значения.
Для снижения растягивающих
напряжений в корневом сечении лопатки при djl < 10 выполняют
переменного сечения с уменьшающейся от корня к периферии площадью.
Рассмотрим некоторые частные случаи законов изменения площади
сечения по высоте лопаток.
Для линейного закона
F(z) = FK[l-(l-a)Q, (2.6)
где a = Fn /FK; FK — площадь корневого сечения — распределение
напряжений характеризуется зависимостью, получаемой из (2.1), (2.2), т.е.
<*(0 = <*0
i-(i-«K
где
1-0-«) Т5Г'> Л, = г-0-а)
0 * v* "' 69
Для показательного закона
F(z) = FKa^
распределение напряжений
a(Q = a0(50 + 5^ + V"C).
69
(2.7)
А 2(1-а)
^2 39
(2.8)
(2.9)
109
где
_ 1 . 2+lna.
Л0 " -hTa + 7^T2>
Bl =
&lna'
B,
BQ-BX.
9(lna)
Коэффициент снижения напряжений или коэффициент разгрузки
определяют отношением
*-сттах'°0»
(2.10)
где атах — наибольшее напряжение в лопатке переменного сечения;
а0 — напряжение в корневом сечении лопатки постоянного сечения при
таких же величинах / и $, что и для лопатки переменного сечения.
Коэффициенты разгрузки для рассмотренных случаев могут быть
получены из формул (2.7) и (2.9), если принять в них £ = 0.
Коэффициент разгрузки для лопаток
с линейным законом изменения площади
3» + 1
к = l-(l-a)
63
с показательным законом
lna & Ljn ч2 21naJ
(2.11)
(2.12)
Лопатки с показательным законом изменения площадей имеют
большую разгрузку (меньшие значения к) при равных а и & по сравнению
с лопатками с линейным законом изменения площадей (рис. 2.11).
k
0,9
0,7
0,5
0,3
0,1
1
Wj
=10 ^
=2,5^
S*
о
0,2 0,4 0,6 0,8JPn/FK
Рис. 2.11. Зависимость коэффициента снижения напряжений от Fu I FK и $
1 и 2 — соответственно линейный и показательный законы изменения сечения лопаток;
3 — лопатка равной прочности
ПО
Лопатка равной прочности. Лопатка равной прочности имеет два
участка. На первом участке, от корневого сечения до некоторого
сечения с координатой z = z*, закон изменения площадей выбирают так,
чтобы растягивающее напряжение было постоянно по длине этого
участка. На втором участке при z* < z < I лопатка имеет постоянное
поперечное сечение.
На первом (профилированном) участке
а = cij = N(z)/F(z) = const
или
N(z) = gxF(z), (2.13)
где cij — постоянное напряжение на профилированном участке; F(z) —
искомая зависимость изменения площади поперечного сечения лопатки
от координаты.
Для лопатки равной прочности исходя из условия (2.13) можно
получить следующие основные характеристики:
закон изменения площади сечения
2
. F рсо , 2 2Ч/.^Ч
(2.14)
F = Fn, (r+<r<rn),
где r^Yy. + z — текущий радиус; г^^г^л- z* — радиус границы участков;
z* — координата границы участков;
коэффициент разгрузки
£=(1-1па)-1; (2.15)
граница раздела участков
Z* V* " Vk
l-b-jzf- (2Л6)
к
vk = |тт; v* = n-w-v] • (2Л7>
На рис. 2.11 показана зависимость (2.15). Лопатка равной прочности
имеет наибольшую разгрузку (наименьшее значение к) из всех
сравниваемых законов.
111
z/l г/1
1,0 1,0
Fu/fk °>8 0,6 0,4 0,2 0
а
VV1
*
Н!
1
i
V
JM
О 0,2 0,4 0,6 0,8 g/oq
б
Рис. 2.12. Распределение растягивающих напряжений по длине лопаток с
различными законами изменения площади сечения при а - 0,125, S = 3
а и б — изменение соответственно площади сечения и напряжений; / — постоянная
площадь сечения; 2 — линейный закон; 3 — показательный закон; 4 — лопатка равной
прочности
На рис. 2.12 показано изменение напряжений в лопатках с
различными законами изменения площади при значениях а = 1/8 и 9 = 3.
Согласно (2.10) и (2.5) максимальное растягивающее напряжение
в лопатке
CJmax = ^PC0 П/(2я),
откуда
Q = 2пгс1 = Фп-гк) = 2тсап
(2.18)
(2.19)
-тах/^РЮ )>
где Q. — выходная площадь венца рабочих лопаток.
Пропускная способность (расход пара и газа), а следовательно, и
мощность турбомашины в значительной степени зависит от С1. Для
повышения мощности турбомашины необходимо стремиться к
увеличению П. Максимальное напряжение атах выбирается равным
допускаемому ад, и поэтому оно зависит от материала лопатки и условий ее
работы. Выходная площадь на основании (2.19) и мощность могут быть
увеличены выбором материала с высокими допускаемыми
напряжениями на растяжение, а также снижением k, р и со.
Для повышения Q. наряду с выбором малого отношения FU/FK = а
(а= 0,1 и меньше) иногда применяют титановые сплавы, имеющие при
той же прочности (при том же примерно значении атах = ав) меньшую
плотность (плотность титановых сплавов составляет примерно 0,58
плотности сталей).
112
Одной из причин использования на атомных электрических станциях
(АЭС) тихоходных турбин, имеющих частоту вращения п = 25 с~ , а не
п = 50 с~ , является стремление увеличить пропускную способность
последних ступеней. Согласно (2.19) проходная площадь ступеней
тихоходных турбин увеличивается в 4 раза по сравнению с быстроходными
турбинами.
Влияние связей на растягивающие напряжения в рабочих
лопатках. Центробежные силы бандажа и проволоки вызывают
дополнительные напряжения в рабочих лопатках:
AG6 = p6<o2f6t6(rK + z6)/F(z);
Дсгп = рпсо2/п Фк + zu)/F(z),
где рб, рп — плотность материала соответственно бандажа и проволоки;
/б» fn — площади поперечного сечения бандажа или проволоки; /б, /п —
шаг лопаток по окружности бандажа или проволоки; z6, zn — координата
центра поперечного сечения бандажа или проволоки.
Напряжения Ааб действуют по всей длине лопатки, а Аап — только
между проволочной связью и корневым сечением лопатки. Эпюры
растягивающих напряжений в лопатке с учетом связей показаны
на рис. 2.13. Для снижения дополнительных напряжений, вызываемых
связями, иногда применяют проволоку из титановых сплавов.
Изгиб рабочих лопаток. Для определения внутренних силовых
факторов рассмотрим равновесие элемента лопатки под действием
аэродинамических сил и центробежных сил инерции. На рис. 2.14 даны
проекции оси лопатки в деформированном состоянии на координатные
Асгб Ддп
ст+Даб+Лап
Рис. 2.13. Растягивающие напряжения в лопатках со связями
113
dCz dC
а б
Рис. 2.14. Ось лопатки в деформированном состоянии
плоскости xOz (рис. 2.14, а) и yOz (рис. 2Л4, б) и показан элемент
лопатки, выделенный двумя сечениями на расстоянии z и z -ь dz от
начала; м, и — смещения (прогибы) в сечении соответственно в
направлении осей х и у.
Элемент лопатки в проекции на плоскость xOz изображен на
рис. 2.15 в большем масштабе. Угол наклона оси лопатки равен 8у
На поперечных сечениях элемента действуют силы N и Nu
перерывающие силы Qx и Qx{, изгибающие моменты Му и М v На элемент так же
действуют распределенные (объемные) центробежные силы инерции
и поверхностные аэродинамические силы.
Элементарная центробежная сила (см. рис. 2.14, а)
АС = рю2(гк + z)Fdz = vco2(rK + z) dz, (2.20)
где v = pF — линейная плотность.
Найдем проекции этой силы на оси z, х и у:
dCz = dCcoscp*dC;
dCx = dCsin<p«dCtgcp = dC
rK + z
= vco t/dz;
dCy = 0.
(2.21)
114
f ыг
Рис. 2.15. Схема нагружсния элемента лопатки
Нагрузка на единицу длины лопатки от центробежных сил инерции
вдоль оси х согласно (2.21)
(со) лг% /л 2
q = dC /dz = vco и.
(2.22)
Аэродинамическая нагрузка, приходящаяся на единицу длины оси
лопатки, определяется соотношениями
Яу^ = Р2™2а(™\а-™2а)*2 + (Р\-Р2)*2>
.<*)
(2.23)
где qx ' и q
(я)
— аэродинамические нагрузки по осям х и у\ р2 —
плотность рабочей среды за рабочими лопатками; Wja, wXu — осевая и
окружная составляющие относительной скорости перед рабочими лопатками;
w2a> w2u — осевая и окружная составляющие относительной скорости
за рабочими лопатками; t2 — шаг рабочих лопаток;Р\,Р2 — статическое
давление соответственно перед и за рабочими лопатками.
На рис. 2.16 показаны треугольники скоростей и соответствующие
обозначения скоростей потока для ступени турбины (рис. 2.16, а) и
ступени компрессора (2.16, б). За положительные направления при
определении знака скоростей приняты направление окружной скорости ис и
направление осевого движения рабочей среды.
115
Рис. 2.16. Треугольники скоростей
а — турбины; б — компрессора
Аэродинамические нагрузки известны из теплового расчета турбома-
шины.
Кроме нагрузок (2.23) на лопатку действует аэродинамический
крутящий момент, приходящийся на единицу длины лопатки, определение
которого требует расчета распределения давления по контуру профиля.
Для приближенной оценки аэродинамического момента предполагают,
что центр давления, т.е. точка приложения равнодействующей аэродина-
мических нагрузок qx и q , расположена на хорде профиля лопатки
на расстоянии а от входной кромки (точка D, см. рис. 2.9). Обычно а =
= (0,25...0,35)6. Аэродинамический крутящий момент оказывает, как
правило, незначительное влияние на напряжения и деформации рабочих
лопаток при статических нагрузках.
Составим три условия равновесия элемента лопатки (см. рис. 2.15).
Сумма проекций сил на ось z
dN/dz = - vw (rK + z).
Сумма проекций сил на ось х
- J°)mJ*)
»
dQx/dz = qx~'+ qx 7 = qx~' + vtsfu.
(2.24)
(2.25)
Сумма моментов относительно точки В
dMyldz=Qx + NVgby. (2.26)
Уравнение (2.24) определяет растягивающую силу N. После
интегрирования уравнения (2.24) в пределах от z до / получим формулу (2.2).
Соотношение (2.25) известно из курса сопротивления материалов,
а (2.26) отличается от известного соотношения присутствием члена
JVtg бу, характеризующего влияния продольной силы N на изгибающий
момент. Этот член является следствием рассмотрения равновесия
элемента лопатки в деформированном состоянии. Член этот может быть
116
существенным для длинных лопаток, у которых угол наклона 0^ * dw/dz
не очень мал, а сила N — достаточно велика.
Дифференцируя (2.26) по z и заменяя производную dQx/dz
выражением (2.25), получаем уравнение для изгибающего момента:
По аналогии можно написать уравнение для изгибающего момента
Мх, действующего в плоскости yOz:
dz2
-«?>+£(*£). ^
где и — прогиб (смещение оси лопатки) в направлении оси у.
В отличие от (2.27) в правой части (2.28) отсутствует горизонтальная
нагрузка q = ACy/dz от центробежной силы инерции (2.20), так
как согласно (2.21) dC = 0.
В соответствии с полученными соотношениями изгибающие
моменты в сечениях лопатки определяются аэродинамическими нагруз-
(*) (*)
ками qx , q , которые считаем известными, и дополнительными
нагрузками, зависящими от вращения лопатки и прогибов и и v.
Влияние вращения на изгиб может быть найдено только после определения
положения упругой оси лопатки. Напряжения изгиба лопатки от
аэродинамических сил могут быть найдены непосредственно из полученных
уравнений.
Изгиб лопаток аэродинамическими силами. Из соотношений
(2.27) и (2.28) найдем изгибающие моменты в сечении z от действия
аэродинамических нагрузок для свободной лопатки без связей:
/
z \ (2.29)
/
Мх - lq(ya\zx)(zx-z)dzv
Z
(я) (а)
Величины qx , q находим из теплового расчета ступени,
моменты М, Мх определяем численным интегрированием по (2.29).
117
Рассмотрим применение полученных соотношений к расчету
изгибающих моментов в рабочих лопатках идеальной ступени постоянной
циркуляции (без учета влияния аэродинамических потерь), для которой
справедливы следующие соотношения:
с* г = const; c0r = const; )
1м 2и \ (2.30)
w\a = С\а e COnSt' W2a = С2а = COnst J
Изменение степени реактивности © по радиусу в идеальной ступени
постоянной циркуляции принимаем по приближенной зависимости
1-0 = \__
1-0» -2'
(2.31)
где г = (rK + z)/rK; гк — корневой радиус; ©к — степень реактивности в
корневом сечении ступени — при г = гк.
Аэродинамические усилия q° постоянны по длине лопатки, так как
разница wlw - w2m = clw - с2м для ступени постоянной циркуляции
изменяется согласно (2.30) обратно пропорционально радиусу, а шаг /2 —
прямо пропорционально радиусу.
В выражении для q (2.23) первый член изменяется
пропорционально радиусу (как /2).
Разницу давлений в (2.23) представляем приближенно в виде
/^-/^«Рср^Ор* <2-32)
где рср — некоторая средняя плотность среды в канале рабочих лопаток
(между входом в канал и выходом из него); Я0 — изоэнтропийный
теплоперепад в канале рабочих лопаток.
Величина рср — переменная по радиусу г. Заменим ее приближенно
значением рср для среднего по высоте сечения лопатки.
Для изоэнтропийного течения в среднем сечении (при г = гс) можно
получить
Р
ср Р2^'
%- 1
(/>1с//>2)-1
УС , , (х-1)/х
(2.33)
где х — показатель изоэнтропы; р{с — статическое давление перед
рабочей решеткой в среднем сечении (при г = гс).
118
При изменении отношения давлений в пределах 1 ^P\jpi ^ 3
параметр % изменяется в пределах 1 < % < 1,7.
Из (2.23) для идеальной ступени постоянной циркуляции с учетом
(2.30)—(2.33) получаем следующие соотношения:
^ = P2w2a<wl.iK-w2i«)'2K = COnSt'
q(ya) = AT-B/7;
Я = XP2wk(w1mk-w2mk)(1-0k)/2k,
(2.34)
где индексом «к» отмечены значения величин в корневом сечении; ик —
окружная скорость корневого сечения лопатки.
Для идеальной ступени постоянной циркуляции, используя (2.34)
и (2.29), находим распределение моментов по длине лопатки:
М/Мук = (1-2//Г;
-3
Мх/Мук = a0 + axr + (a0/6)r -p0rlnr,
причем
<хп
2 л
(¥)
2< wla-w2a
wI«k~w2uk
+ %:
w.
ук ™Ъа
1 2
н = ^(ao-3PovK);
vK = (9-1)7(9 + 1),
(2.35)
(2.36)
где М,к = RJI2 — изгибающий момент Му в корневом сечении лопатки;
R = q" I— окружное рабочее усилие, действующее на лопатку.
119
Пример 2.1. Найти распределение изгибающих моментов по длине рабочей
лопатки газовой турбины для ступени постоянной циркуляции.
Заданы следующие величины:
Окружное рабочее усилие Ru = 970 Н; осевая скорость wla = w2a = 120 м/с;
окружная проекция выходной скорости с2и = 0; степень реактивности в корневом
сечении лопаток 0К = 0,10; обратная веерность 3 = 3: длина лопатки / = 0,6 м;
частота вращения л = 50 с"1 (со = 314,16 рад/с); плотность р2 = 0,5 кг/м ; принять % = 1.
Решение. Определим окружную скорость в корневом сечении лопаток:
ик = шгк = ю/(3 - 1) /2 = 314,16 • 0,6 • 1 = 188,496 м/с.
Согласно (2.36) а0 = uK/w2a = 188,496/120 = 1,5708; а0/6 = 0,2618; р0 =
= 0,9-1,5708 = 1,4137; vK = 0,500; а0 = | (1,5708 - 3-1,4137-0,25) = 1,3614;
а, =-2 • 1,5708 + 1,4137(1 + In 2) = -0,7480.
Максимальный момент в корневом сечении
мук = \RJ= |970-0,6=291Н-м.
По формулам (2.35) вычислим распределение моментов
My/MyK = (\-Q2;
МХ1М = 1,3614 - 0,7480(1 + Q + 0,2618(1 + Q3 - 1,4137(1 + Q ln(l + Q.
Полученные значения сведем в таблицу.
C = z//
MylM^
мх/мук
0
1
0,8752
0,1
0,81
0,7388
0,2
0,64
0,6069
0,4
0,36
0,3666
0,6
0,16
0,1738
0,8
0,04
0,0461
1,0
0
0
На рис. 2.17 изображены графики изгибающих моментов по длине лопатки
для ступени постоянной циркуляции.
Оценим влияние параметра % (см. (2.33)) на изгибающий момент Мх, для чего
необходимо дополнительно иметь значенияР2>Р\С и %-
Для данного примера принимаем: р2 = 10 Па (атмосферное давление); х =
= 1,344 (по оценке); оптимальный теплоперепад ступени Я0 = 64 кДж/кг,
следовательно, по Я0р = 0СЯО = 0,6 • 64 = 38,4 кДж/кг.
Отношение давлений находим из уравнения изоэнтропы для канала рабочей
решетки при г = гс:
ei- = [1+2LlI ГЗ*УР- Г1+о,25бЗЦ110!13-90625 = 1)20615.
Р2 I * KPiv2}\ L 105-2 J
Подставляя значения в (2.33), находим % = 1,0736.
120
Му/Му^ мх/мук
0,8
0,6
0,4
0,2
0 0,2 0,4 0,6 0,8 г/1
Рис. 2.17. Изменение изгибающих моментов но длине лопатки для ступени
постоянной циркуляции
В данном случае все постоянные я0, ах и Р0 пропорциональны %, поэтому
момент Мх при учете % возрастает примерно на 7 %. В корневом сечении
Мхк = 291 • 0,8752 • 1,0736 = 273 Н • м.
Напряжения в лопатках, вызываемые аэродинамическими
силами. По значениям изгибающих моментов найдем напряжения в
сечениях лопатки по формулам косого изгиба стержней
Л/ А/.
Мп = Мл cosB + Msin(};
М* = МySinp -il^cosp,
где М, М* — изгибающие моменты относительно центральных главных
осей г| и £ (см. рис. 2.8); 1Ц, L — моменты инерции профиля относительно
тех же осей; ^, г| — координаты точки профиля лопатки, для которой
вычисляем напряжения изгиба.
Положительные направления векторов-моментов (см. рис. 2.8, а)
соответствуют следующему правилу: изгибающий момент в сечении
лопатки (с внешним направлением оси z) считается положительным
тогда, когда он обусловлен положительной силой, действующей на
отсеченной части лопатки.
121
(2.37)
(2.38)
Наибольшие напряжения изгиба обычно возникают на кромках и
выпуклой поверхности профиля лопатки.
Напряжения изгиба накладываются на растягивающие напряжения
от центробежных сил. Суммарные наибольшие напряжения обычно
наблюдаются в точке 1 или точке 2 (рис. 2.8, а).
Геометрические характеристики применяемых профилей лопаток (/ , /*)
приведены в справочниках.
В сборнике задач [4] приведены программы для расчета на ЭВМ
геометрических характеристик профилей: площади, моментов инерции,
статических моментов, координат центра профиля, направления
главных осей — по заданным координатам профиля. Там же представлены
программы расчета изгибающих моментов (2.29), и растягивающих
(2.1), (2.2) и изгибающих (2.37) напряжений в лопатках.
Расчет хорды профиля рабочей лопатки. При расчете рабочих
лопаток на прочность напряжения статического изгиба в лопатках,
вызываемые аэродинамическими силами, выбирают небольшими,
учитывая требования вибрационной надежности.
Ограничения напряжений статического изгиба связано с тем, что при
резонансных колебаниях, возникающие в лопатках напряжения
примерно пропорциональны статическим аэродинамическим нагрузкам.
Подробнее этот вопрос рассмотрен в гл. 5, здесь рассматривается расчет
хорды профиля по данным аэродинамического расчета ступени и по
допускаемым напряжениям статического изгиба аи д.
Для произвольной точки профиля в рассматриваемом сечении
напряжение изгиба даны формулой (2.37), где Мц, М* — изгибающие
моменты, рассчитанные для одной лопатки. Из данных теплового
(аэродинамического) расчета ступени известны распределение параметров
потока по высоте лопатки и размеры гк, гп. По этим данным по (2.29) и
(2.38) можно рассчитать моменты М и А/t, приходящиеся на все
лопатки ступени. Для этого достаточно в зависимостях (2.23) заменить
неизвестную величину шага t2 на величину 2nr = znt2. При этом
Мц = K/z*; М% = M\/z^ zn = 2тгг//2, (2.39)
где zn — число лопаток на рабочем колесе; г — радиус сечения, для
которого проводится расчет хорды.
Допустим, что лопатка спрофилирована, т.е. найдены профили, углы
установки, относительный шаг в каждом сечении лопатки. Для
рассматриваемого сечения подобран модельный профиль, для которого
известны геометрические характеристики Ьм, tM, 1цм, /^м.
122
Для геометрически подобных профилей
Ъ = abM; t = oUM; £ = а$м; х\ = ат]м;
4 4
А] = а ^ПМ' h = а *?м»
(2.40)
где 6 — хорда профиля; а — масштабный коэффициент, подлежащий
определению; £, г| — координаты «опасной» точки.
Подставляя правые части (2.39) и (2.40) в равенство (2.37) и
разрешая его относительно масштабного коэффициента, получаем
м
I 2гсга.,
а
*л-{ i5E +^ Т
(2.41)
Если принять для аи допускаемое значение, то размеры профиля
лопатки можно определить по (2.40) после расчета а по (2.41). Для
относительно коротких лопаток наибольшие напряжения изгиба
наблюдаются в корневом сечении. Расчет а следует проводить для него.
В лопатках большой длины (& < 5) максимальные напряжения часто
возникают не в корневом сечении. В этом случае необходимо вычислить
а для наиболее напряженного сечения и по нему найти размеры всей
лопатки.
Влияние связей на изгиб рабочих лопаток под действием
аэродинамических сил. В случаях, когда связь (бандаж или проволока)
прикреплена к лопаткам жестко или упруго (припаяна или приварена)
напряжения, обусловленные аэродинамическим изгибом, снижаются.
Для пакета, состоящего из т лопаток постоянного профиля, влияние
связи характеризуется зависимостью
Мц = %Мц0>
где М0, Мц — изгибающие моменты относительно оси ц в корневом
сечении соответственно лопатки без учета связи и для лопатки в пакете;
х — коэффициент, учитывающий влияние связи (х < 1),
14-у2(1-у/3)*б
*б = Щ^1Л Яб —у cos2p ; у = al9 (2.42)
где j — число лопаток в пакете; /б — момент инерции сечения связи
(бандажа или проволоки); / — момент инерции сечения лопатки
относительно оси г|; Яб — коэффициент, учитывающий нежесткость крепления
123
связи к лопаткам; а — расстояние от места установки связи до корневого
сечения лопатки.
Для интегрального сваренного бандажа #б = 1; для приклепанного
и пропаянного бандажа Нб = 0,8—1,0; для приклепанного бандажа Яб =
= 0,2—0,3.
При к§ < 2 снижение напряжений изгиба, вызываемое бандажом,
составляет менее 23 %. При абсолютно жестком бандаже (предельный
случай) коэффициент % = 2/3 что соответствует снижению напряжений
аэродинамического изгиба на 33 %.
Чем ближе расположена связь к вершине, тем значительнее
снижение изгибных напряжений.
Влияние центробежных сил инерции на изгиб рабочих лопаток.
Центробежные силы инерции оказывают влияние на напряжения при
изгибе рабочих лопаток. Направление и величина этого воздействия
зависят от первоначальной изогнутости лопатки и ее установки.
В лопатке с прямолинейной осью, установленной радиально,
распределенная нагрузка от центробежных сил инерции вызывает изгиб,
противоположно направленный статическому изгибу, обусловленному
аэродинамической нагрузкой.
Для расчет статического изгиба лопатки под действием как
аэродинамических, так и центробежных сил необходимо в уравнениях (2.27),
(2.28) изгибающие моменты выразить через прогибы и и v по
уравнениям косого изгиба стержней, известным из курса сопротивления
материалов, т.е;
Му = Е1у(и - и0У + EIxy(v - v0)"; j
Мх = EIxy(u - и0)" + EIx(v - voy, J
где штрих означает производную по z: d( )/dz = ( )'; w0, u0 — исходные
смещения оси свободной от нагрузок лопатки; jL Ix — экваториальные
моменты инерции сечения относительно осей у их; I — центробежный
момент инерции относительно осей х, у.
Если в исходном состоянии ось лопатки совпадает с осью z, то
w0 == и0 ~ 0. Подставив (2.43) в уравнения равновесия (2.27) и (2.28),
получим уравнения статического изгиба лопатки в поле центробежных
сил, т.е.
{EIy(u-itQy+Elxy{v-vQyy-(Nu'y-v<»2u = q[a);
(EIxy(u-u0)" + EIx(v-voyy-(Nv'y = qya\
(2.44)
124
Соотношения (2.43) дают достаточную точность при расчете слабо
закрученных лопаток, для которых выполняется условие 9W < (0,l)//ft,
где вт — полный угол закрутки лопатки, или для лопаток с профилями,
удовлетворяющими условию
8/6 > 0,2,
где 8 — наибольшая толщина профиля.
Если названные условия не выполняются, используют более общую
теорию деформации лопаток, которая учитывает связанность
деформаций растяжения, изгиба и кручения (см. гл. 5).
Уравнения (2.44) образуют связанную систему двух линейных
дифференциальных уравнений относительно неизвестных смещений и и v.
Для полной постановки задачи необходимо добавить граничные
условия, которые для лопатки без связей и начального прогиба имеют вид:
«(0) = «'(0) = w(0) = и'(0) = 0; 1
QX(D = Qy(D = мх(1) = му(1) = o.J
Решение системы (2.44) с граничными условиями (2.45) в общем
случае осуществляется численными методами с применением ЭВМ.
1/2
Анализ показывает, что при выполнении условия fx > 2п& (где/j —
частота колебаний лопатки основного тона, п — частота вращения)
разгрузка центробежными силами не превышает 10 % аэродинамического
изгиба лопатки. Поэтому для лопаток первых и промежуточных ступеней
паровых турбин влиянием разгрузки можно пренебречь.
Для длинных лопаток последних ступеней паровых и газовых турбин
и первых ступеней компрессоров большой производительности влияние
центробежных сил на статический изгиб имеет практическое значение.
Безмоментная рабочая лопатка. Уравнения (2.44) позволяют
определить форму оси безмоментной лопатки — лопатки, у которой
суммарный изгибающий момент в каждом сечении равен нулю. Для
безмоментной лопатки смещения в нагруженном и ненагруженном состояниях
совпадают, т.е. и = w0, v = и0. При этом условии согласно (2.44) имеем:
(Nu'Y + vco2w = - q{^\
(Nvy = - q{ya\
(2.46)
125
Для активной лопатки постоянного профиля при q£ = const и
Чу = 0 решение первого из уравнений (2.46) ищем в виде
u = az9 (2.47)
где а — неизвестная постоянная.
Подставляя эту зависимость в (2.46), убеждаемся, что первое
уравнение системы (2.46) удовлетворяется при
а = ^/(vco2rK). (2.48)
Второе уравнение системы (2.46) удовлетворяется при v - 0.
Из (2.48) следует, что для полной компенсации аэродинамического
изгиба центробежными силами лопатку следует устанавливать
наклонно к оси z со смещением вершины лопатки (выносом) в сторону
вращения на величину
ит = al = ^a)//(vtt>2rK)-
Установка лопатки с выносом дает возможность компенсировать
лишь постоянную составляющую аэродинамической нагрузки.
Ограничения по величине напряжений статического изгиба остаются в силе, так
как переменная составляющая аэродинамического усилия, которая
вызывает колебания лопаток, не меняется при установке лопаток с выносом.
Кручение рабочих лопаток с первоначальной закруткой в поле
центробежных сил (рис. 2.18). Под действием крутящего момента М2
Рис. 2.18. Главные оси профилей закрученной лопатки
7 — корневое сечение; 2 — произвольное
126
и растягивающей силы N в поле центробежных сил происходит закрутка
рабочих лопаток:
9(Z) = f GI dz! K> = ~ T° f) ' (2"49)
О кр
где 0(z) — угол закрутки (поворот профиля вокруг оси в данном сечении
лопатки); /к — момент кручения сечения лопатки; т0 = d0o /dz —
начальная закрутки лопатки, приходящаяся на единицу длины; 60(z) — угол
начальной закрутки лопатки; / — полярный момент инерции сечения;
F— площадь поперечного сечения.
Для лопатки без связей крутящий момент в произвольном сечении
/
К = lim^ + m^dz, (2.50)
Z
(а) (со)
где mz , mz — моменты, приходящиеся на единицу длины лопатки
соответственно от аэродинамических и центробежных сил,
определяемые соотношениями
mz ~ ~Ях Ув + 9у XD>
(со) 2Т
(2.51)
XD> Ув — координаты центра давления (точки D на рис. 2.9).
Для длинных закрученных лопаток турбомашин силовая раскрутка
6(/) на периферии может составлять несколько градусов (5—10 °), что
необходимо принимать во внимание при аэродинамическом расчете
ступени. Основное влияние оказывает действие центробежных сил инер-
(со)
ции, при этом момент mz увеличивает первоначальную закрутку, а
растягивающая сила вызывает раскручивание лопатки. Действие этих
двух факторов приводит в итоге к уменьшению первоначальной
закрутки на указанное значение.
Температурные поля и напряжения в лопатках газовых турбин
при переходных режимах. Нестационарные температурные
напряжения в рабочих лопатках возникают при переходных режимах турбома-
шины. Эти напряжения, в основном, зависят от отношения времени
прогрева лопатки к длительности переходного режима и от разности
начальных и конечных температур лопатки при переходном режиме.
Чем больше значение этих величин, тем выше напряжения в лопатках.
127
Характерное время прогрева лопатки зависит от толщины профиля
лопатки: чем меньше толщина, тем меньше характерное время прогрева.
Для лопаток турбомашин характерное время прогрева составляет от
долей до нескольких минут.
Для лопаток паровых турбин длительность переходного режима
достаточно велика по сравнению с характерным временем прогрева
лопаток, а разности начальных и конечных температур периода прогрева
умеренные, поэтому нестационарные температурные напряжения в
лопатках паровых турбин незначительные.
Газовые турбины обычно имеют малую продолжительность
переходных режимов и большие разности начальных и конечных температур
газа во время переходного режима. Температурные напряжения в
рабочих (и сопловых) лопатках газовых турбин могут достигать больших
значений, лопатки должны быть рассчитаны на прочность при
повторных температурных воздействиях.
Обязательным этапом расчета лопаток газовых турбин на прочность
является определение температурных полей и упругих температурных
напряжений в лопатках.
Кроме переходных температурных напряжений, в охлаждаемых
рабочих и сопловых лопатках возникают стационарные температурные
напряжения. При определенных условиях эти напряжения также могут
быть причиной повреждения лопаток при повторных температурных
воздействиях.
За цикл работы газовой турбины (пуск и нагружение, стационарная
работа, остановка) температура газа, обтекающего лопатки, изменяется
в соответствии с графиком, представленным на рис. 2.19. В момент
зажигания топлива в камере сгорания температура торможения газа Тг
скачкообразно возрастает от Та до Тк примерно на 300 °С. В период
выхода на холостой ход и нагружения температура растет до значения
Гг0. В период стационарного режима работы Тг = Гг0, при разгрузке и
остановке турбины температура понижается и к моменту следующего
пуска достигает некоторого значения Та.
При описанном процессе температурное поле неохлаждаемой
рабочей или сопловой лопатки изменяется следующим образом. В исходном
состоянии лопатка имеет одинаковую по всему объему температуру,
равную температуре среды Та. В период пуска температура лопатки
повышается неравномерно: быстрее прогреваются тонкие части лопатки
в зоне выходной и входной кромок. Уже через несколько секунд кромки
приобретают температуру, близкую к температуре среды. Средняя часть
профиля, имеющая большую толщину, прогревается медленнее.
Разность температур кромок и средней части профиля лопатки вызывает
128
к
w>
\XLl
Iy&
A It
1 II
K k '
Ш
, >-
t
Рис. 2.19. Изменение температуры и напряжения в лопатке за время цикла работы
газовой турбины
/ — пуск и нагружение; // — стационарный режим работы; /// — разгружение и
остановка; а — температурные напряжения в выходной кромке рабочей лопатки
разницу температурных удлинений волокон на кромках и в средней
части профиля, что является причиной температурных напряжений,
неравномерно распределенных по профилю. В кромках развиваются
отрицательные (сжимающие) напряжения, а в средней части —
положительные (растягивающие). В определенный момент, различный для
каждой точки профиля, температурное напряжение достигает
максимального значения, а затем по мере прогрева средней части профиля и
уменьшения разности температур температурные напряжения
уменьшаются. Они полностью исчезают при прогреве всей лопатки, когда
температура по всему объему лопатки становится одинаковой и равной
температуре стационарного режима Гг0.
В период стационарного режима температурные напряжения равны
нулю. В период разгрузки и остановки турбины температура Тг
понижается. Температура кромок лопаток следует за температурой среды почти
без отставания. Температура средней части лопатки выше температуры
газа. В результате в кромках развиваются положительные напряжения, а
в средней части лопатки — отрицательные. По мере охлаждения
лопатки температуры ее в различных частях выравниваются,
температурные напряжения уменьшаются и стремятся к нулю.
Расчет нестационарного температурного поля неохлаждаемой
лопатки. Расчет температурных полей в твердых телах при
конвективных условиях теплообмена на границах рассматривается в курсе
теплопередачи, где излагаются общие методы расчета, требующие
значительного времени.
129
Для неохлаждаемых лопаток, имеющих профили небольшой
толщины, приближенный расчет нестационарного температурного поля
может быть проведен на основе следующих предположений (рис. 2.20).
1. Температура по толщине профиля постоянна и меняется вдоль
скелетной линии.
2. При прогреве профиля можно пренебречь тепловым потоком вдоль
скелетной линии профиля.
3. Потоком тепла вдоль оси лопатки можно пренебречь.
При этих предположениях задача сводится к определению
температуры призматического элемента, выделенного двумя поперечными
сечениями, нормальными к оси z на расстоянии dz, и двумя сечениями,
нормальными к скелетной линии профиля на расстоянии ds (рис. 2.20).
Условия теплообмена на вогнутой и выпуклой поверхностях элемента
характеризуются температурами газа Тх и Т2и соответствующими
коэффициентами теплоотдачи а! и а2. На поверхностях, полученных
сечениями, в соответствии с предположениями 2 и 3 теплообмен отсутствует.
Уравнение теплового баланса элемента может быть получено в виде
ах(Тх - Т) + а2(Т2 - Т) = рм8см ^, (2.52)
где T(t) — температура элемента (постоянная по толщине в соответствии
с предположением 1); Tx(t), T2(f) — температуры торможения газа около
вогнутой и выпуклой сторон элемента.
Можно принять Тх = Т2 = Тт\ рм — плотность материала; см —
объемная теплоемкость материала лопаток.
Рис. 2.20. К расчету температурного поля профиля
а — профиль лопатки; б — призматический элемент
130
Уравнение (2.52) запишем в виде:
0;
£+^>
Рм8см
а, + а2'
(2.53)
(2.54)
Здесь т0 — характерное время прогрева.
Предполагая, что коэффициенты теплообмена а} и а2 постоянны
в процессе прогрева, можно получить решение уравнения (2.53) при
начальном условии Г(0) = Та в виде
-//т,
о^ 1 -'/то
+ —е
'Г/то
T(t, s) = 7> v + f-e u |Гг(/,)е ' v d/,. (2.55)
0 о
При скачкообразном изменении температуры газа Тт = Тг0 из (2.55)
получим
T(t, s) = Ta + (Гг0 - Та) (1 - е- //т0). (2.56)
Изменение температуры во времени существенно зависит от
характерного времени т0. Чем меньше т0, тем быстрее прогревается (или
охлаждается) профиль в рассматриваемом месте (т0 = т0(^)). На рис. 2.21
представлено рассчитанное по (2.56) нестационарное температурное
поле рабочей лопатки газовой турбины. Коэффициенты теплоотдачи
определяются по методам, излагаемым в курсе теплопередачи и курсе
газотурбинных установок.
s0 8
Рис. 2.21. Нестационарное температурное поле лопатки
/—6 — через 1, 5, 10, 50, 100 и 200 с соответственно; 7 — после полного прогрева
131
ос,кВт/(м2.К)
3i
+ i i i I i i i *►
s2,mm 60 40 20 0 20 40 60 s^mm
Рис. 2.22. Распределения коэффициентов теплоотдачи по профилю рабочей лопатки
газовой турбины
На рис. 2.22 для примера представлено распределение коэффициентов
теплоотдачи по профилю рабочей лопатки газовой турбины. Как видно,
на кромках коэффициенты теплоотдачи имеют наибольшее значение.
Большие значения ctj + а2, как и малая толщина 8 в зоне кромок,
приводят к малому характерному времени прогрева т0.
Расчет нестационарных температурных напряжений в лопатках.
Для расчета используется гипотеза плоских сечений, согласно которой
полная осевая деформация (упругая плюс температурная) е по сечению
изменяется по закону плоскости:
8 = a IE + атТ~ £0 + Х|£ + х2г], (2.57)
где а(/, £,, г|) — упругие нормальные напряжения по оси z; Г(/, £, г|) —
температура в любой точке профиля, принимаемая известной функцией
координат и времени; е(/, £, г|) — полная деформация по оси z; е0 —
полная деформация на оси лопатки; Xj — кривизна термоупругой оси
лопатки в главной плоскости ljOz\ к2 — кривизна той же оси в главной
плоскости r\Oz; £, t| — координаты произвольной точки поперечного
сечения в главных осях (см. рис. 2.8).
Величины £$, К\ и %2 подлежат определению, после чего
термоупругие напряжения могут быть рассчитаны по (2.57). В упругих условиях
температурные напряжения можно рассматривать независимо от
«силовых», вызываемых аэродинамическими и центробежными силами.
Поэтому при расчете чисто температурных напряжений все внешние
силы, действующие на лопатку, принимаются равными нулю. Лопатки
газовых турбин обычно не имеют связей, поэтому ограничимся
рассмотрением свободной лопатки (без связей).
132
В этих условиях (при отсутствии внешних сил и связей) силовые
факторы: растягивающая сила N и изгибающие моменты М 9 М? в
любом сечении равны нулю, что приводит к соотношениям:
J*ct dF = 0 ; Ja£ dF = 0 ; Jar| dF = 0 .
F F F
(2.58)
Подставляя напряжение а, выраженное из (2.57), в уравнения
равновесия (2.58), получаем три соотношения для определения трех величин
80, Х| и х2 в следующем виде:
£0 = аЛ Jr('> ^ Ч) dF = aTTm(t);
F
xj = у lT(t, Ь Л)^ dF;
ou
(2.59)
*2 = T И'' *■ 4)4 dF.
Интегралы по площади сечения, стоящие в правых частях (2.59),
определяются численно с использованием ЭВМ по заданному (найденным
решениям задачи теплопроводности) температурному полю Г(/, %, г|).
Получаемые величины е0, Xj и х2 являются функциями времени. При
использовании приближенного решения (2.55) вместо кратных
интегралов требуется вычислить одномерные интегралы вида:
8о = aTf \T(t,s)8(s)ds;
*i = т ]п*,*ш*)ть-9
ч о
Х2 = Т \4t9s)r\(s)&(s)ds,
(2.60)
Ч о
где ^(s), v\(s) — координаты скелетной линии; 3(s) — толщина профиля по
нормали к скелетной линии.
После определения деформаций по (2.60) находят поле
температурных напряжений из (2.57) в виде
a = F(s0 + Xj£ + х2т| - атТ). (2.61)
133
ео»х1»х2
t
Рис. 2.23. Изменение деформации и кривизны лопатки в период пуска
Рис. 2.24. Изменение температурных напряжений в лопатке газовой турбины при
пуске
/ — выходная кромка; 2 — входная кромка
На рис. 2.23 показаны типичные изменения тепловой деформации £0
и кривизны Xj и х2 во времени, а на рис. 2.24 даны соответствующие
зависимости напряжений в передней и задней кромках лопатки газовой
турбины в период пуска.
2.3. ПОЛЗУЧЕСТЬ И ДЛИТЕЛЬНАЯ ПРОЧНОСТЬ
РАБОЧИХ ЛОПАТОК ТУРБОМАШИН
В условиях высоких температур следует рассчитать удлинение
лопаток А/(/), вызванное ползучестью, определить соответствующее
уменьшение радиальных зазоров на периферии лопаток и произвести расчет
лопаток на длительную прочность.
Удлинение лопатки при ползучести. Деформация ползучести
на оси лопатки при стационарном режиме согласно (1.54)
ec = AGnQ(t)9
где g(z) — растягивающее напряжение в поперечном сечении.
134
Удлинение лопатки — осевое смещение вершины лопатки
вследствие ползучести — получим в виде
/ /
А/ = \г &z = \а№П(/) dz. (2.62)
о о
Для произвольного распределения g(z) и переменной температуры
интеграл в выражении (2.62) определяется численно.
Для лопатки постоянного сечения и при постоянной температуре и
если п — целое число, используя закон распределения напряжений
(2.4), получаем следующую зависимость:
А/ = А/оХ(Э,«); (2.63)
А/0 = Аап0П«)1;
*<•>«) - ;ггт+ £ Л.-*ж.'+'*+1)|; (0!* °' <гб4)
к - 1
где а0 — напряжение в корневом сечении лопатки; & = djl — обратная
веерность.
Приближенно для любых п
х(9,и)я_1_(1 + ^). (2.65)
Для лопатки равной прочности согласно (2.62) и (2.63)
А/ = Аа"0П«)1пр; /^ = z* + Хп(/ - z*), (2.66)
где z* — длина профилированной части лопатки равной прочности
(см. рис. 2.12); / — приведенная длина лопатки.
Параметр %п в выражении (2.66) определяется согласно (2.64) или
(2.65) при О = $п для периферийного участка постоянного сечения, т.е.
»„-(» + W/(i-W; С-*//. (2.67)
где £* — относительная длина профилированной части лопатки,
определяемая по (2.16).
Расчет рабочих лопаток газовых турбин на длительную
прочность. Расчет на длительную прочность обычно проводят по
напряжению а0, а влияние изгибных напряжений учитывают коэффициентом
запаса па = 1,6—1,8. При работе турбин с переменной нагрузкой для
оценки длительной прочности используют метод, изложенный в § 1.3.
В паровых турбинах небольшой мощности вследствие относительно
невысоких температур среды и небольшой длины лопаток влияние ползу-
135
чести обычно не существенно. Однако в* лопатках и хвостовых
соединениях ЧВД и особенно ЧСД современных крупных турбин при
стандартных температурах (540—560 °С) и применяемых материалах (13 %-ные
хромистые стали) уровень напряжений оказывается достаточно высоким
и имеется необходимость учета явления ползучести и расчета длительной
прочности лопаток и хвостовых соединений таких турбин.
2.4. ТЕРМОУСТАЛОСТЬ РАБОЧИХ И НАПРАВЛЯЮЩИХ
ЛОПАТОК
Термоустапостью называют явление разрушения детали вследствие
повторных температурных циклов нагрева-охлаждения в условиях
стесненной деформации. Процесс термоусталостного разрушения
рассмотрим на модели трехстержневой системы (рис. 2.25), состоящей из
среднего стержня 1 и двух боковых стержней 2, соединенных в систему
абсолютно жесткими траверсами 3. Поперечное сечение стержней 2
значительно больше поперечного сечения стержня 1,
В начальном состоянии система смонтирована при температуре Та
без внутренних напряжений. Стержни 1 и 2 системы подвергаются
повторным чередующимся нагревам и охлаждениям между
температурами Та и Тс. Вследствие большей тепловой инерции стержней 2 по
сравнению с тонким стержнем 1 прогрев системы происходит
неравномерно: стержень 1 прогревается значительно быстрее, чем стержни 2.
На рис. 2.26 показаны изменения температурных деформаций стержня 1
еп = aTT{(t) и стержней 2 8^ - а^СО- В стержнях 2 напряжения малы
вследствие больших поперечных сечений. Считаем, что полная
деформация стержней 2 (а следовательно, и стержня 7, так как полные
деформации всех стержней одинаковы) равна температурной деформации
стержня 2, т.е.
Enl = Еп2 = гТ2-
Силовые деформации 8 в тонком
стержне в соответствии с выражением
(1.52)
2 е = 8е + е/7+8с=а/£+8р+ес,
2 где а — напряжение; гр, гс — пластическая
деформация и деформация ползучести в
тонком стержне.
В то же время силовая деформация рвана
разности полной деформации еп1 = е^ и
температурной деформации гтх тонкого
модель лопатки стержня, Т.е.
136
8 ~~ 8п1 ~ £П ~" ЕТ2 ~ гТ\ "~ аТ (?2 ~ Т\).
В трехстержневой системе силовая деформация в тонком стержне
равна разности температурных деформаций боковых и среднего
стержней и определяется законом изменения температур стержней T^(f) и T2(f).
На рис. 2.26, а заштрихованная эпюра представляет закон изменения
силовой деформации тонкого стержня за цикл изменения температуры
стержней Та +=* Тс. На рис. 2.26, б приведен соответствующий закон
изменения напряжений в тонком стержне. Процесс циклического
деформирования в координатах а-е показан на рис. 2.26, е. Соответственные
точки процесса на рис. 2.26, а—в обозначены одинаковыми буквами.
Рассмотрим процесс циклического деформирования без учета и
с учетом ползучести материала.
При нагреве (первый полуцикл) системы стержень 1 прогревается
быстрее стержней 2. В стержне 1 возникают сжимающие напряжения
и пластические деформации. Этому процессу соответствует линия АВ
диаграммы деформирования.
В точке В деформация достигает максимального (отрицательного)
значения 8j. Затем происходит упругая разгрузка и пластическое
деформирование обратного знака (линия ВС), В точке С система приобретает
максимальную температуру Гс. Если ползучесть отсутствует, то
пребывание системы в нагретом состоянии не приведет к изменениям в
напряженном или деформированном ее состоянии.
6(0
А
а
Ф)\
А
б
ЕГ1
/
Г/Г
I/ ZT2
%ЦГ"
^в
1
\у
в
I
1
II eT1^J
С 1
С I
qgaj». , 1
< 1
1 F\
1
1 \
w 6Г2
Жг^
п
-\ »
1 *
Е t
4 \
X
t Ш
t
Е
Рис. 2.26. Изменение деформации и напряжений в трехстержневой системе
а — изменение деформации; б — изменение напряжения; в — петли циклического
деформирования; / — нагрев; // — стационарный режим; /// — охлаждение
137
В результате первого полуцикла за период нагрева в тонком стержне
происходит знакопеременное пластическое деформирование: вначале на
величину е^ (сжатие), а затем на величину е Р2 (растяжение).
Во втором полуцикле (при охлаждении системы) происходит
деформирование тонкого стержня по линии CDE с знакопеременным
пластическим деформированием величиной 83 на растяжение и величиной е^ —
на сжатие. Для циклически стабильного материала при втором и всех
последующих циклах процесс деформирования происходит по
замкнутому контуру ЕВ CDE с размахом силовых деформаций Де = г2 - £j и
размахом пластических деформаций Агр.
Когда при температуре Тс осуществляется выдержка и материал
обнаруживает ползучесть, напряжение в тонком стержне релаксирует
(линия CF).
При охлаждении процесс идет по линии FDE. Все последующие
циклы соответствуют петле EBCFDE. За каждый цикл материал тонкого
стержня претерпевает знакопеременную пластическую деформацию Аер
на сжатие и Агр~ Аа/Е — на растяжение.
Расчет параметров цикла и долговечности в этом случае может быть
проведен методом, изложенным в § 1.4.
Процесс деформирования тонкого стержня в данной модели является
типичным для материала деталей турбомашины, подвергающихся
термоциклическим воздействиям.
Качественно рассмотренная трехстержневая система является
моделью рабочей или направляющей лопатки турбомашины,
подвергающейся циклу пуск — стационарный режим — остановка. В этой модели
тонкий стержень имитирует кромки лопатки, а толстые стержни —
среднюю часть лопатки. Первый этап — прогрев системы —
соответствует пуску турбины и выходу на стационарный режим, второй этап —
выдержка при температуре Тс — стационарному режиму работы, и
третий этап — охлаждение до температуры Та — остановке турбины и
остыванию до момента следующего пуска.
Детальный расчет напряженно-деформированного состояния
лопаток при термосиловых циклах излагается в специальной литературе. За
основу расчетов принимается как стержневая модель лопатки и
гипотеза плоских сечений, так и метод конечных элементов (МКЭ).
Для ориентировочных расчетов на термоусталость лопаток
применимы соотношения (1.102), (1.101). При этом предварительно требуется
выполнить лишь расчет переходных напряжений в лопатке в упругих
условиях, например по зависимостям (2.60), (2.61).
138
2.5. ПРОЧНОСТЬ ЗАМКОВЫХ СОЕДИНЕНИЙ РАБОЧИХ
ЛОПАТОК С РОТОРОМ
Примеры конструктивного выполнения замковых соединений
показаны на рис. 2.1—2.6.
Замковое (хвостовое) соединение рабочих лопаток является одним из
наиболее ответственных узлов турбомашины, определяющих в
значительной степени ее надежность. Как правило, в элементах замкового
соединения (в хвостовиках лопаток и в ободе диска) имеются области
значительных концентраций напряжений, что обусловливает снижение
статической длительной и особенно усталостной прочности замкового
соединения.
Прочность замковых соединений определяется расчетным путем или
экспериментально на моделях.
Из расчетных методов наиболее совершенным для определения
напряжений является метод конечных элементов (см. гл. 7). Метод
конечных элементов отличается достаточно высокой точностью. Его
практическое использование для расчета сложных деталей возможно
только с применением ЭВМ.
Менее совершенный, но более оперативный расчетный метод
основан на схематизации замкового соединения системой, состоящей
из стержней, для которых определяют опасные сечения и в них
рассчитываются напряжения растяжения, изгиба и среза. На поверхности
контакта определяют напряжение смятия. В местах резких переходов
поверхности определяют коэффициенты концентрации напряжений и
местные напряжения. При таком подходе возможен учет пластических
деформаций и ползучести, что позволяет произвести расчет замкового
соединения не только в упругих условиях, но и на длительную
прочность и малоцикловую усталость.
Для определения упругих напряжений в замковых соединениях
используют метод фотоупругости. Изготовляют модель соединения
из специального прозрачного материала, модель статически нагружают
в пределах упругости и просвечивают в поляризационной установке.
По картине интерференционных полос на экране (или фотографии)
можно рассчитать распределение напряжений в элементах замкового
соединения. В настоящее время поляризационно-оптический метод
нашел применение и для изучения напряжений в условиях ползучести
(метод фото ползу чести).
Экспериментальное определение прочности осуществляется путем
испытания всего соединения под нагрузкой, соответствующей натурным
условиям. Для умеренных температур проводят «холодные» испытания
плоской модели соединения в разрывной машине и определяют несу-
139
щую способность соединения — нагрузку Рв, при которой соединение
разрушается. Допускаемая нагрузка PR выбирается в 2—3 раза меньше:
где пР — коэффициент запаса прочности по нагрузке, пР = 2—3.
Условие статической прочности замкового соединения при
умеренных температурах
p<pR.
При высоких температурах соединение испытывают на ползучесть
и длительную прочность. Модель ставят под нагрузку Р п и доводят до
разрушения за время / при рабочей температуре Г. Величина Рдп есть
длительная прочность соединения, соответствующая времени / и
температуре Т.
Если / равна ресурсу (сроку службы) соединения, то допустимая
нагрузка принимается в 1,3—1,6 раз меньше, что обеспечивает
необходимый запас прочности.
Экспериментальная проверка усталостной прочности
осуществляется на моделях соединения, которые подвергают циклическим нагрузкам
на специальных установках (рис. 2.27). Сила Р0 создает постоянное
растяжение в сечении А—А, сила Q = Q0cos ®* создает циклический
изгибающий момент М = MqCOS со/ и изгибные напряжения в этом сечении.
В результате испытаний моделей при
постоянной нагрузке Р0 и различных значениях Q0 с
доведением соединения в каждом случае до
разрушения определяют предельное значение
Q0p при котором разрушение не наблюдается
7 8
через 10 —10 циклов (рис. 2.28). По значению
Qqs определяют соответствующий
изгибающий момент М0у, по которому рассчитывают
конструктивный предел усталости для
хвостовика лопатки
of=Mof/W,
Рис. 2.27. Схема нагружения замкового соединения при
испытаниях на усталость
где W— момент сопротивления сечения А—А.
Конструктивный предел усталости су- соединения (по сечению А—А)
существенно меньше предела усталости материала a_j вследствие
влияния концентрации напряжений и растягивающей силы Р0, т.е. ay< a_j.
Разрушение хвостовика (см. рис. 2.27) может происходить не по
сечению А—А, а по корню зуба (сечение В—В). В этом случае понятие
конструктивного предела усталости су — условное. Мерой несущей
способности хвостовика служит величина момента М0у при заданном
значении растягивающей силы Р0.
Чисто эмпирический подход к определению прочности замковых
соединений не позволяет заранее выбрать подходящую форму и
размеры хвостовика и обода диска. Поэтому на первом этапе необходимо
выбрать хвостовые соединения на основании расчета, а затем уже
изготовить модель и проверить прочность экспериментально.
Рассмотрим расчетный подход к оценке прочности замковых
соединений, основываясь на схематизации соединения системой стержней.
В качестве примера возьмем замковое соединение с Т-образным
хвостовиком (рис. 2.29), относящееся к статически определимым
системам. В хвостовике лопатки рассчитывают: сечение А—В — на растяжение
от центробежных сил и иногда на изгиб от парового или газового
усилия по моменту в корневом сечении лопатки; сечение А—Н — на срезе
и на изгиб; поверхность контакта СА и BD — на смятие.
IgQo
к
о-1
V
-2
N
\х
IgQo/
.х.*
IgN
Рис. 2.28. Кривая усталости хвостовика
рабочей лопатки
1 — точки соответствующие разрушению
хвостовика; 2 — точки без разрушения хвостовика
Рис. 2.29. Схема для определения прочности
Т-образного замкового соединения
№
М
пр
it
S
Соб/2
С/2
N
45
w
*-^
я
к
Соб/2
С/2
141
Как уже отмечалось, концентрация напряжений практически не
оказывает влияния на статическую прочность при умеренных
температурах. Высокий уровень упругих напряжений косвенно свидетельствует
о снижении усталостной прочности и статической длительной
прочности. Для расчета статической длительной прочности замкового
соединения следует определить коэффициенты концентрации напряжений
с учетом ползучести и по ним и номинальным напряжениям определить
местные напряжения в опасных точках и найти запасы прочности по
рекомендациям § 1.3.
Простые расчетные формулы и примеры расчета статически
определимых хвостовых соединений приведены в [4], там же дан расчет
хвостовика на длительную прочность с учетом влияния концентрации
напряжений.
Расчет статически неопределимого замкового соединения в
условиях упругости. Изображенное на рис. 2.30 замковое соединение
относится к типу статически неопределимых конструкций. Уступы на ободе
и на хвостовике служат для предотвращения раскрытия ножек
хвостовика и обеспечивают снижение изгибных напряжений в ножках.
Реакция Р, действующая на ножку со стороны уступа обода, должна
быть найдена из условия, что смещение А в точке приложения силы Р
в направлении ее действия равно нулю.
Схематизируя ножку как стержень,
защемленный в сечении АВ и
состоящий из двух участков: длиной А| с
j и длиной
жесткостью Е1^
с жесткостью Е12 записываем условие
совместности в виде
h
А =
tMM А Л
Рис. 2.30. Схема для определения
прочности статически
неопределимого замкового соединения
где М— изгибающий момент в
произвольном сечении; М — момент
от единичной силы приложенной в
точке О и в направлении действия силы
P;z — координата вдоль оси стержня.
На ножку действуют две силы:
сила С12 — равная половине
центробежной силы инерции (ЦБС) лопатки
с хвостовиком и сила реакции Р9
которую необходимо найти.
142
Изгибающий момент и единичный момент на первом участке
A/j =Pz; М = дМх/дР = z.
На втором участке
M2 = Pz-Ca/2; М2 = дМ2/дР = z.
Следовательно,
О 0 1 h{ 2
h\ h
= ТГ \* dz + FT f(pz ~ Ca/2>z dz =
3 i? _ /Л /,2 _ /i2
= pi^+a-*'
3£/, 3£/2 ,
A -A,
С а лт,т = 0.
4EI2
Разрешая последнее равенство относительно Р, находим
р = \Са з Н ~h} з> fp-7
4 A3-(l-P)//j V Л.
Изгибающий момент в сечении DE имеет максимальное значение
MDE = Мпах = Са12 ~ Ph\ = ^Ц>;
и2 I2
х = 1-г А *
2 * Л3 - (1 - р)А3
Здесь Mq — изгибающий момент без учета разгружающего действия
реакции Р; х — коэффициент разгрузки. Обычно можно получить х = 0,5—0,4
и меньше и тем самым существенно уменьшить изгибные напряжения
в хвостовике рабочей лопатки.
Расчет напряжений изгиба в бандажных лентах и скрепляющей
проволоке. При расчете напряжений в бандаже и проволоке пролет,
равный шагу между двумя смежными лопатками, рассматривается как
стержень, защемленный по концам и нагруженный равномерно
распределенной погонной нагрузкой от ЦБС (рис. 2.31). Максимальный
момент в защемленных сечениях равен
,2
qtCE 2
Mmax = "ТГ' ^==Рс°/свгсвХ
143
Рис. 2.31. Пакет лопаток
а — схема пакета со связями; б — эпюра изгибающих моментов на одном шаге
где q — погонная нагрузка от ЦБС; fCB — поперечное сечение связи:
бандажной ленты или проволоки; гсв — радиус расположения связи.
Изгибные напряжения в защемленном сечении
аи.св = Чтх/^св'
где WCB — момент сопротивления сечения связи.
Свисающий конец бандажа (или проволоки) на концах пакета
лопаток имеет такую длину, чтобы изгибающий момент в сечении около
2
крайней лопатки пакета был бы равен тому же значению qtCB/12. Из
условия равенства моментов
qt2CB/\2 = q(ytCB)2/2
получим у = 0,41, т.е. длина свисающего конца бандажа
составляет 0,41 /св.
Шипы рассчитываются на растяжение под действием ЦБС бандажа и
на изгиб от сил парового или газового потока.
Глава третья
ПРОЧНОСТЬ ДИСКОВ И РОТОРОВ
3.1- КЛАССИФИКАЦИЯ И ОСОБЕННОСТИ
ИСПОЛНЕНИЯ ДИСКОВ И РОТОРОВ ТУРБОМАШИН
Технологическое и конструктивное исполнение роторов турбомашин
определяется типом турбомашины, условиями ее работы
(температурой, давлением рабочей среды, окружными скоростями), а также
традициями и технологией, принятой на заводе-изготовителе.
По главному конструктивному признаку — форме основного
элемента ротора, несущего рабочие лопатки — роторы турбомашины
подразделяются на дисковые и барабанные.
По технологическому признаку роторы турбомашин подразделяются
на следующие типы: цельнокованые; с насадными дисками или
наборные; сварные; сболченные.
Название ротора часто содержит два признака: конструктивный
и технологический, например: цельнокованый дисковый ротор,
цельнокованый барабанный ротор и т.д. Рассмотрим основные типы роторов.
Цельнокованый ротор изготавливают из слитка, ось которого
совпадает с осью ротора. Заготовку ротора отковывают из слитка
цилиндрической формы. Ковка осуществляется в направлении диаметров с
вращением слитка вокруг оси для обеспечения равномерной осесимметричной
проковки. Качество проковки материала в центральной части слитка
зависит от диаметра слитка и мощности ковочного оборудования.
Цельнокованый ротор выполняют из заготовки (поковки) путем
механической обработки на токарном станке. Для выполнения расточек,
пазов и сверлений, предусмотренных конструктивными особенностями
ротора, применяются специальные металлорежущие станки (расточные,
сверлильные, фрезерные, станки для нарезания замковых пазов для
крепления рабочих лопаток).
В центральной части по оси цельнокованого ротора обычно
высверливают сквозное отверстие диаметром 100—120 мм для осуществления
контроля качества заготовки. При высверливании удаляют наименее
качественный материал, так как дефекты слитка обычно сосредоточены
около его оси. При совершенной технологии отливки и ковки получают
заготовки высокого качества. В этом случае ротор можно выполнить
145
без центрального сверления. Центральное сверление вызывает на
поверхности отверстия увеличение напряжений вдвое по сравнению
со сплошным ротором (без отверстия), что приводит к снижению
прочности ротора с центральным отверстием.
На рис. 3.1 изображен цельнокованый ротор дискового типа с
центральным сверлением 7 для ЧВД крупной паровой турбины. Вал 7,
диски 2, полумуфта 3 выполнены из единой заготовки. Упорные гребни
4, передающие осевое усилие на упорный подшипник, также выточены
заодно с валом. Рабочие лопатки б закреплены на дисках при помощи
замковых креплений. Для предотвращения повышения осевых усилий
при износе уплотнений в дисках выполнены разгрузочные отверстия 5.
Цельнокованые роторы применяются в ЧВД, ЧСД и ЧНД паровых
турбин. Достигнутое качество отливок и поковок для этих роторов
таково, что позволяет выполнять заготовки для цельнокованых роторов
диаметром до 2 м и длиной до 10 м без необходимости сверления
центрального канала.
Ротор с насадными дисками (наборный ротор) (рис. 3.2) состоит
из вала 4, дисков 2, посаженных на вал с натягом и несущих рабочие
лопатки 39 полумуфты 5, насаженной на конец вала с натягом. Для
передачи крутящего момента от дисков к валу между ними установлены
продольные шпонки 7. Подобные шпонки (обычно по две на каждое
соединение) установлены между полумуфтой и валом.
В дисках последних ступеней ЧНД вместо осевых ставят боковые
шпонки для предотвращения концентрации напряжений, вызываемых
осевой шпонкой в напряженной зоне расточки диска. Вал ротора с
насадными дисками обычно выполнен без центрального сверления, так как
диаметр вала значительно меньше диаметра заготовки цельнокованого ротора,
что позволяет получить как при изготовлении слитка, так и в результате
хорошей проковки высокое качество его материала и однородность
механических свойств по всему объему, включая центральную зону.
Диски наборного ротора могут быть получены более высокого
качества и с большой степенью однородности свойств материала по всему
объему по сравнению с дисками цельнокованого ротора. Диски
наборного ротора проковывают в осевом направлении, т.е. в направлении
малой толщины металла, что обеспечивает хорошую проковку всего
объема диска. Относительно небольшая толщина позволяет получить
высокую степень однородности свойств при термообработке. Этим
объясняются более высокие механические характеристики (предел
текучести, относительное поперечное сужение при разрыве) материала вала и
дисков наборного ротора по сравнению с механическими
характеристиками цельнокованого ротора.
146
а Ъ
а Ъ
Рис. 3.1. Цельнокованый ротор дисковой конструкции
4ь
4^
00
Рис. 3.2. Ротор с насадными дисками (наборный ротор)
При сборке ротора этого типа каждый диск нагревают до умеренной
температуры (100—300 °С) и свободно надевают на вал. При остывании
диск плотно «схватывает» вал. Диски надевают с обеих сторон. В
средней части диаметр вала наибольший, к концам вала диаметр ступенчато
понижается, что упрощает сборку ротора и приближает форму вала
к равнопрочному на изгиб брусу.
Роторы с насадными дисками применяются при невысоких
температурах рабочей среды (обычно не выше 300—350 °С). При более
высоких температурах возможно ослабление посадки диска на валу,
обусловленное ползучестью материала диска и релаксацией контактных
напряжений на посадочной расточке диска. При ослаблении посадки
диска наблюдается разбалансировка ротора, сопровождающаяся
интенсивной вибрацией, исключающей дальнейшую эксплуатацию турбин.
Поэтому роторы с насадными дисками не могут применяться в ЧВД и
ЧСД паровых турбин, где температура составляет 540—560 °С. Они
находят широкое применение в ЧНД крупных паровых турбин и в
других турбомашинах, работающих при умеренных температурах
(например, в воздушных компрессорах).
Преимуществами ротора с насадными дисками являются
возможность получения сравнительно больших диаметров дисков, высокие
механические характеристики материала и меньший расход металла.
К недостаткам ротора с насадными дисками относится
неравномерное распределение напряжений (пик окружных напряжений
наблюдается на поверхности расточки диска), а также невозможность их
применения в условиях повышенных температур.
Сварной ротор для ЧНД (рис. 3.3, а) состоит из дисков 1, несущих
рабочие лопатки 2, хвостовиков 3, оканчивающихся полумуфтами 4.
На рисунке показана половина симметричного двухпоточного ротора.
Диски и хвостовики сварены между собой по пояскам кольцевыми
сварными швами 5.
Сварные швы роторов имеют разные формы разделок (рис. 3.3, б).
Сварка роторов осуществляется на автоматических сварочных
станках при медленном вращении собранного ротора в условиях
непрерывного подогрева зоны сварных швов токами высокой частоты. После
сварки ротор проходит термообработку, а затем механически
обрабатывается по технологии, близкой к технологии обработки цельнокованого
ротора. Сборка ротора завершается установкой рабочих лопаток и их
связей.
Сварные роторы применяют в ЧВД и ЧСД паровых турбин наряду
с цельноковаными роторами, в ЧНД крупных турбин наряду с
наборными роторами, а также и в других турбомашинах.
149
Рис. 3.3. Сварной ротор низкого давления
При применении сварных роторов для ЧНД крупных турбин
получают следующие преимущества.
1. Малый осевой размер поковки отдельного диска сварного ротора
обеспечивает более высокое качество материала (по сравнению с
цельнокованым ротором);
2. Вязкость разрушения сварного ротора выше, чем цельнокованого
ротора;
3. Сварной ротор имеет меньшие напряжения в центре дисков,
обусловленные ЦБС, по сравнению с наборным и цельнокованым роторами, так
как в сварном роторе отсутствуют отверстия в центре.
Свариваемость прочных сталей с высоким пределом текучести обычно
неудовлетворительная. Для получения хорошей свариваемости необходима
термообработка дисков сварного ротора по режиму, обеспечивающему
умеренные значения предела текучести. Следовательно, материал сварного
ротора при прочих равных условиях имеет меньшие предел текучести
и временное сопротивление, чем диски наборного ротора.
Определенными недостатками сварных роторов являются большая
масса и более высокая стоимость изготовления по сравнению с
наборными и цельноковаными роторами.
Стяжной ротор (рис. 3.4) состоит из отдельных дисков 1 с лопатками
2 и хвостовиков 3 и 4, стянутых болтами 5. Хвостовик имеет фланцевое
соединение со смежным ротором. Диски ротора небольшого размера
и выполнены без центральных сверлений. Ограничений в выборе
материала и термообработки по обеспечению требований свариваемости нет.
150
Рис. 3.4. Стяжной ротор газовой турбины
Рис. 3.5. Стяжной ротор осевого воздушного компрессора
Поэтому диски стяжного ротора можно выполнять из высокопрочных
материалов, сварка которых невозможна или затруднительна.
Отверстия в дисках под стяжные болты являются источниками
концентрации напряжений. Широкое распространение получили
конструкции стяжных роторов с одним центральным стяжным болтом (рис. 3.5).
Стяжные роторы применяются преимущественно в турбомашинах
газотурбинных установок (ГТУ). Температура стяжных болтов не
должна превышать 300—350 °С для предотвращения ползучести мате-
151
риала с сопутствующей релаксацией напряжений в болтах и
уменьшением стяжного усилия до недопустимого уровня, что вызывает разба-
лансировку и высокую вибрацию ротора. В газовых турбинах, где
температура газа высока (до 1200 °С и более) умеренная температура
стяжных болтов достигается их воздушным охлаждением.
Сболченный ротор барабанного типа для ЧВД турбин с реактивным
облопачиванием (рис. 3.6) выполнен в виде среднего барабана 3 с двумя
хвостовиками. Хвостовик 4 изготовлен заодно с барабаном, а хвостовик
1 крепится к барабану при помощи горячей посадки и фланцевого
соединения 2. Полумуфта 5 предназначена для соединения с ротором
среднего давления (РСД).
Центральная расточка в барабане обусловливает снижение несущей
способности ротора. Роторы этого типа применяются при небольшой
нагрузке от центробежных сил рабочих лопаток, т.е. как роторы
высокого давления при реактивном облопачивании. В активных турбинах
роторы этого типа не применяются из-за повышенных утечек пара через
зазоры между ротором и направляющими лопатками.
Преимущество барабанного ротора перед цельнокованым состоит
в более быстром его прогреве при пусках турбины. Путем
соответствующего подбора толщины стенки барабана можно получить
одинаковые скорости прогрева ротора и корпуса турбины, что позволяет
уменьшить разности температурных осевых удлинений ротора и корпуса, а
также сократить необходимую длину концевых уплотнений вала и (или)
уменьшить утечки через них.
Сболченный ротор низкого давления (РНД) (рис. 3.7) состоит из
цельнокованой части 7, диска последней ступени 2 и хвостовика 3 с
полумуфтой 4, соединенных при помощи фланцев и болтов 5. На рисунке
показана половина (один поток) двухпоточного симметричного ротора. На
дисках расположены рабочие лопатки 6.
Сболченные РНД могут быть изготовлены из высокопрочных сталей
с высоким пределом текучести и приемлемы для ЧНД с предельно
длинными рабочими лопатками последних ступеней. По несущей спо-
Рис. 3.6. Сболченный ротор барабанного типа
152
собности дисков последних ступеней сболченный ротор превосходит
все рассмотренные типы РНД.
Главным недостатком сболченного ротора является возможное
ослабление натяга болтов.
Конструктивное исполнение дисков определяется типом роторе
с учетом технологических возможностей.
Диск наборного ротора (рис. 3.8) состоит из трех основных
элементов: полотна 7, обода 2, ступицы (втулки) 3. В ободе диска выполнены
пазы для крепления рабочих лопаток и (иногда) для крепления
балансировочных грузов. В полотне диска обычно предусмотрены разгрузочные
отверстия 5. На ступице диска имеются пазы 4 для крепления шпонок,
связывающих диск с валом или соседними дисками.
Диск цельнокованого ротора выполнен заодно с валом. Условно при
выборе расчетной схемы можно рассматривать диск цельнокованого
ротора с участком вала, выделяя его двумя плоскостями,
перпендикулярными оси ротора и делящими расстояние между смежными дисками
пополам (см. рис. 3.1).
Диски сварного ротора и (иногда) стяжного ротора не имеют
центрального отверстия.и ступицы. Они имеют пояски для сварки (сварной
ротор) или для стыковки (стяжной ротор) с соседними дисками.
Условия работы дисков и роторов. Ротор несет рабочие лопатки
и передает рабочий крутящий момент, развиваемый на лопатках,
генератору или другому приводимому устройству. Крутящий момент вызывает
напряжение в вале, но практически не увеличивает напряженность дис-
Рис. 3.7. Сболченный ротор низкого давления Рис. 3.8. Диск наборного ротора
153
ков. Основные^ напряжения в дисках и барабанах роторов возникают
вследствие ЦБС, обусловленных вращением ротора (так называемые
динамические напряжения) и неравномерного распределения
температуры по объему диска или барабана (температурные напряжения).
При умеренных температурах барабаны и диски работают в
условиях упругости. При повышенных температурах сказываются
ползучесть материала, поэтому элементы ротора должны быть рассчитаны на
такие условия. Если режимы эксплуатации турбомашины быстропере-
менные, то возможна опасность термоусталости. В общем случае
барабаны и диски роторов должны быть проверены на статическую
кратковременную, длительную и термоциклическую прочность.
Диски насадных роторов, находящиеся или временами попадающие
в зону фазового перехода от перегретого к влажному пару, при
определенных условиях подвергаются коррозионному растрескиванию под
напряжением. При этом возможен рост появившихся трещин вследствие
циклических нагрузок. Прочность при этих условиях также должна
быть проверена. Возможны колебания дисков. В некоторых случаях
необходимо оценивать вибрационную надежность дисков.
3.2. НАПРЯЖЕНИЯ И ДЕФОРМАЦИИ В ДИСКАХ
И РОТОРАХ В УСЛОВИЯХ УПРУГОСТИ
Расчет напряжений и деформаций в тонком вращающемся
неравномерно нагретом диске. Предположим, что выполняются
следующие условия:
а) диск (рис. 3.9) достаточно тонкий, поэтому распределение
напряжений по толщине h можно принять равномерным. Напряженное
состояние в диске двухосное, характеризуется радиальным
напряжением аг и окружным напряжением а0;
б) температурное поле диска — плоское осесимметричное;
температура диска Т(г) зависит только от радиуса г и постоянна по толщине
диска;
в) величины Е и \i постоянные для всего диска, их зависимостью от
температуры пренебрегаем.
Диск равномерно вращается с угловой скоростью со; на внешней
цилиндрической поверхности при г-гх действуют равномерно
распределенные по толщине напряжения сгг1, вызываемые центробежными
силами обода и рабочих лопаток,
где t{ — шаг лопаток по окружности радиуса гх\ С— центробежная сила
одной лопатки; Соб — центробежная сила обода диска, отнесенная к шагу
154
а б
Рис. 3.9. Тонкий диск
а — профиль; б — распределение температуры
/j (см. рис, 2.29, где сечение PL соответствует радиусу гх на рис. 3.9); х —
поправочный коэффициент (х = 0,7—1,0).
При названных условиях необходимо определить распределение
напряжений аг и а0 по радиусу диска.
Для решения задачи следует составить уравнения равновесия и
совместности деформаций и выбрать закон деформирования (закон
Гука).
На элемент диска, выделенный двумя цилиндрическими сечениями
на радиусах г и г + Аг и двумя меридиональными плоскостями с углом
d0 между ними (рис. 3.10), действуют поверхностные силы
Шг = a,Jir d0; <W; = dNr + d(dNr); dNQ - aeA dr,
обусловленные напряжениями ar и a0, а также объемная сила (центробеж-
2 2 2
ная сила инерции) d С = рсо hr d8 dr. Проектируя все названные силы на
направление радиуса, проходящего через центр элемента, получаем
j-(harr) - GQh + pcoVA = 0. (3.2)
155
Из курса сопротивления
материалов известны соотношения
гг = dw/dr; г0 = и/г, (3.3)
где г,, Sq — радиальное и окружное
относительные удлинения
(деформации) в диске; и — радиальное смещение
на произвольном радиусе (рис. ЗЛО).
Исключая смещение и из первого
соотношения (3.3) при помощи
второго соотношения, получаем
уравнение совместности деформаций
de9/dr + (ee-er)/r = 0. (3.4)
Уравнения равновесия (3.2) и
совместности (3.4) не зависят от
закона деформирования материала и
одинаково применимы как к
упругому диску, так и в условиях упру-
гопластических деформаций или ползучести.
Закон Гука при двухосном напряженном состоянии получим из
зависимости (1.18), предположив, что aJ2 = сг2з = су31 = стзз = ^
Обозначим au = ar; a22 = ae;en = er; s22 = ee; e33 = er
Тогда
Рис. ЗЛО. Схема нагружения
элемента диска
= (суг- цае)/£+ атТ; 1
(3.5)
ее = (oQ-\xar)/E + aTT;
ez = -H(ar + a0)/£+ar7\J
где ez — деформация вдоль оси диска.
Подставив деформации е^ с0 из системы уравнений (3.5) в уравнение
(3.4), получим уравнение совместности в виде
da9 Idr - \х dorr Idr + (1 + ц)(ае - ar) I г + EaT dT/dr = 0. (3.6)
Система уравнений (3.2) и (3.6) содержит две неизвестные величины
аг и ае.
Решение системы позволит определить искомые напряжения,
которые должны удовлетворить граничным условиям:
стДго)
аЛг0
V0
VI'
-^0'
(3.7)
156
где q0 — давление посадки диска на валу.
Таким образом, на границах (на расточке диска и на периферии)
радиальное напряжение должно иметь заданные значения.
В общем случае, когда диск имеет переменную толщину А(г),
необходимо применение численных методов для решения полученной
системы уравнений. Рассмотрим частный случай диска постоянной
толщины, для которого существует простое аналитическое решение.
Диск постоянной толщины. Полагая h = const, из (3.2) имеем
dar/dr + (аг - ае) /г + ра>2г = 0. (3.8)
Для получения общего решения уравнений (3.8) и (3.6) умножим
уравнение (3.8) на (1 + ц) и сложим с уравнением (3.6).
Тогда
-т-(аг+сг0) + (1 + \x)p(*2r + EaTdT/dr = 0.
Интегрируем последнее уравнение
аг + сге + —!^рсо V + ЕатТ = 2А , (3.9)
где 2А — постоянная интегрирования.
Умножим все члены уравнения (3.9) на г~ и сложим левые и правые
части с (3.8) для исключения а0. После преобразования получим
уравнение относительно одной переменной аг
-г\г аг) + 9 рсо г + ЕатТг = 2Аг.
В результате интегрирования последнего уравнения получаем
аг = А - Вт'2 - агг2 - ЕатТт; (ЗЛО)
яг=(3 + ц)ра>2/8; Tm = r~2\Trdry (3.11)
где В — вторая постоянная интегрирования.
Теперь из уравнения (3.9), учитывая (3.10), находим и а0:
ае = А + Вт'2 - а/ - ЕаТ(Т- Тт); (3.12)
а0 = (1 +Зц)рсо2/8. (ЗЛЗ)
Формулы (3.10) и (3.12) представляют собой общее решение для
напряжений в диске постоянной толщины. Постоянные интегрирования
А и В должны быть найдены из граничных условий (3.7) на периферии
и на расточке диска.
157
Рассмотрим отдельно динамические и температурные напряжения.
Вследствие линейности задачи суммарные напряжения в диске, очевидно,
равны алгебраической сумме динамических и температурных напряжений.
Динамические напряжения в диске постоянной толщины без
центрального отверстия (Г= Тт = 0). Граничные условия
аДО) = ае(0); ог(гх) = ог1. ' (3.14)
Первое граничное условие из (3.14) означает, что в центре диска без
центрального отверстия радиальное и окружное напряжения совпадают
вследствие того, что исчезает различие между окружным и радиальным
направлениями.
Применяя условия (3.14) к решению (3.10) и (3.12) (при Г= Тт = 0),
получаем
Л = аг1 + яг г ; В = 0.
Распределение напряжений по полотну диска теперь представляется
формулами
, ( 2 1 + Зц 2\
(3.15)
На рис. ЗЛ\ показаны эпюры напряжений, соответствующие
рассмотренному случаю.
Динамические напряжения в диске постоянной толщины с
центральным отверстием. Предполагая, что на периферии диска (г = г{) и
на расточке (г = г0) заданы радиальные напряжения, принимаем, что
граничные условия соответствуют условиям (3.7). Подчиняя
напряжения (3.10) (при Г=0) этим граничным условиям, получаем
Вго2 = Gr0 + arr0'> А
Br\ = °г\+а/\'
(3.16)
ar»CTet
О гг г
Рис. 3.11. Распределение напряжений в сплошном диске постоянной толщины
158
Определив постоянные А и В из (3.16) и подставив их выражения
в уравнения (3.10) и (3.12), получим
Г1СТН
,1--
2 2
'0
г0стг0
г У
ав =
Il^±[l+'-0
2 2 2
1
г0
rlGrO
l)+*r[rl+r0'
Г0Г1
Г У
*
г0
Г7ь
2 2Ч
, ,2^2 а8 2 ^ Г0Г\
г г J
(3.17)
Первые члены в правых частях уравнений (3.17) соответствуют
напряжениям, обусловленным периферийной нагрузкой, вторые члены
— нагрузкой на расточке диска, а третьи члены соответствуют
напряжениям в свободном вращающемся диске без краевых нагрузок.
Составляющие окружного напряжения возрастают вблизи расточки и на самой
расточке достигают максимального значения.
Суммарное напряжение а9тах на расточке найдем из (3.17), приняв
г = г0, т.е.
2а
6 max
г\ , 1 +а ,
V?* О + jrE"*) • <зл8)
1 - а 1 - а
1деа = г0/г,; ^0 = -аг0-
Из последнего соотношения видно, что размер отверстия оказывает
существенное влияние на максимальное напряжение — при увеличении
а все три составляющие напряжения растут. Первые два слагаемых
напряжения (3.18) неограниченно растут при стремлении радиуса
расточки г0 к гj (a -> 1). Третье слагаемое при увеличении а от 0 до 1
возрастает в отношении 1 + (1 - ц)/(3 + ц) = 1,212, т.е. на 21 %.
Сравним максимальное напряжение а"0тах в диске с малым
центральным отверстием при q0 = 0 с напряжением cr'0max в центре
сплошного диска. Примем а « 1. Из уравнений (3.18) и (3.15) при г = 0 следует
автах/0втах z'
т.е. центральное отверстие малого диаметра в сплошном диске приводит
к увеличению максимального напряжения в 2 раза. Малое отверстие
в диске является источником концентрации напряжений с
коэффициентом концентрации <хст = 2. По мере роста диаметра расточки наблюдается
дополнительное увеличение максимального напряжения на поверхности
отверстия согласно уравнению (3.18).
159
аг,а0,МПа
250
200
150
100
50
0
-50
/
/
^в
<
' 0,2 0,4 0,6 0,8r/rt
1 1 1 1
Рис. 3.12. Распределение напряжений в диске
с центральным отверстием при аг1 = 40 МПа,
ал = - 20 МПа; гх - 0,5 м; r0 - 0,05 м; со =
= 314,16 рад/с; \i±* 0,3
Очевидно, что распределение
динамических напряжений в диске
постоянной толщины с отверстием
носит неравномерный характер, и
окружные напряжения возрастают по
мере приближения к расточке,
достигая максимального значения на
поверхности центрального
отверстия. Типичные эпюры напряжений в
диске с отверстием представлены
на рис. 3.12,
Температурные напряжения в диске постоянной толщины. В
формулах (3.10) и (3.12) положим аг = ае = 0 (диск не вращается). Закон
изменения температуры по радиусу диска аппроксимируем функцией:
Г=АГ(г/г1)м1, (3.19)
где АГ — разность температур диска на периферии и в центре; тх —
постоянный показатель, обычно тх = 2—4.
Принимаем, что Г= 0 при г = 0, так как в рассматриваем случае
температурные напряжения не зависят от начала отсчета температур и
определяются разностью температур.
Найдем температурные функции в формулах (3.10) и (3.12):
m
\Тгйг
AT
mi + 2 vrr
(В ■•
m, + 1
m w, +2
® ■
Подставляя эти функции в уравнения (3.10) и (3.12), получаем
= A-Br 2-{тх +2) ХоТ(г/гх)т{\
-2 -1 п
= A+Br -(тх + l)(/w1 + 2) аТ(г/гх)
gt = Ea-jAT.
(3.20)
(3.21)
160
Для определения постоянных А и В имеем граничные условия
<*Дго) = ar(rl) = °-
Применяя эти граничные условия к первому соотношению системы
(3.20), находим уравнения для постоянных А и В. Решив эти уравнения
и подставив полученные выражения для А и В в формулы (3.20),
получим
т{ +2
'/Г„ч2
= стг 1-ос 1-а Y о У (г\\
вг"*1 + 4 1-а2 ~1-а2^ "V Г
9 ти, + 2
1-а
Wj + 2
(3.22)
1-а
L 1-а
1-а
е)2-к-'Ш'
2КГ
В частном случае сплошного диска при г0 = 0 из (3.22) имеем
аг
ае
=
=
®Т Г
Wj + 2[
<5j>
mx +2
(3.23)
Ha рис. 3.13 приведено распределение температурных напряжений
в сплошном диске. Максимальное по абсолютной величине значение
имеет окружное напряжение на периферии диска, т.е.
(3.24)
1 ' * аг,а0,МПа
В центре диска температурные
200
напряжения
G'eu= ^ = €^/(114+2), (3.25)
т.е. в тх раз меньше, чем на
периферии.
100
0
Рис. 3.13. Распределение температурных
напряжений в диске постоянной толщины -100
при Е = 2 • 105 МПа; аг= 12,5 • 10"6 1/°С; АГ
- 200 °С; т, - 3; -20°
/ — без центрального отверстия; 2 — с
центральным отверстием при r0/rj = 0,1
-300
—
°е
1
<*Г
К2
\\
LN
0 0,2 0,4 0,6 0,8 г/гг
161
Влияние центрального отверстия на температурные напряжения
в центре можно установить из зависимостей (3.22). Полагая, что г = г0,
из второй формулы (3.22) находим
Wj + 2 т,
2 + т,а - (тл + 2)а
а"6ц = оТ ? 4 . (3.26)
(ш1 + 2)(1-а )
Сравнивая правые части зависимостей (3.26) и (3.25), определяем
коэффициент концентрации температурных напряжений в центре диска,
обусловленный наличием центрального отверстия:
Wj + 2
т - jf ' . , • <3">
ствц 2 + m^a -(wj+2)a
увц 1 - a2
При a « 1 имеем ааТ = 2, т.е. при центральном отверстии малого
диаметра температурные напряжения а0 на поверхности центрального
отверстия диска в 2 раза больше, чем для сплошного диска.
На рис. 3.13 показано распределение температурных напряжений
в диске с центральным отверстием.
Температурные напряжения в центральной зоне диска —
растягивающие. При суммировании температурных напряжений с
динамическими увеличивается напряженность диска. В периферийной зоне
окружные температурные напряжения — сжимающие. Эти напряжения
в периферийной зоне достигают максимальной абсолютной величины.
По знаку они противоположны динамическим напряжениям.
Суммарные напряжения в периферийной зоне и их знак зависят от соотношения
максимальных температурных и динамических напряжений в диске.
Расчет напряжений в диске произвольного профиля на основе
решения для диска постоянной толщины. Для напряжений во
вращающемся неравномерно нагретом диске зависимости (3.10) и (3.12)
запишем в виде
Gr = As~Bsr 2-v2-/(r);
a6 в As + Bsr~ ~aer -(m\ + l)f(r),
(3.28)
где
f(r) = EaTAT(m{ + 2)~1(r/r1)wl.
Эти соотношения можно использовать для диска произвольного
профиля, заменяя его диском со ступенчатым профилем (рис. 3.14). Диск
ступенчатого профиля состоит из участков постоянной толщины. Для
162
Рис. 3.14. Схема разбивки диска
произвольного профиля
ttttttttt
I i ИНН1НШ
. о? Л" .
Рис. 3.15. Сопряжение двух
участков диска
каждого из участков справедливо решение (3.28) со значениями
постоянных As и Bs (s = 1, 2, ..., ri).
На каждом стыке двух смежных участков должны быть выполнены
условия сопряжения. Первым условием является условие равновесия
сил, приложенных к бесконечно тонкому слою, включающему стык
(рис. 3.15) т.е.
о'гЛ' = а"гй",
или
дст = c*(hL_\\ (да =а"_а')
(3.29)
где а'г, h' — радиальное напряжение и толщина диска до
скачкообразного изменения толщины; а" , h"—то же после скачкообразного
изменения толщины.
Вторым условием сопряжения двух участков на стыке является
условие равенства радиальных смещений в месте стыка
г/ = и", (3.30)
где и' — радиальное смещение до скачкообразного изменения толщины;
и" — радиальное смещение после скачкообразного изменения толщины.
Поделив обе части равенства (3.30) на радиус г стыка, получим
е'е = е Q (по обе стороны стыка). Выразим деформации через
напряжения согласно (3.5). Учитывая, что температурные деформации не могут
163
изменяться скачкообразно, условие равенства радиальных смещений
(3.30) представляем в виде
сг"е-сг'0 = Аае = цАаг. (3.31)
где ct'q, Gq — окружные напряжения в месте стыка соответственно
после и до скачкообразного изменения толщины.
Число условий сопряжения (3.29) и (3.30) равно 2{п - 1). Если диск
разбит на п участков, то всего стыков будет п - 1, и на каждом стыке
действительны два условия сопряжения. Кроме этих условий, следует
учитывать граничные условия (3.7). Всего, таким образом, имеется 2и
условий. Во всех условиях сопряжения и в граничных условиях (3.7)
заменяем аг ае их выражениями через постоянные As и Bs согласно
формулам (3.28). В результате получаем систему из 2п линейных уравнений
с 2л неизвестными величинами As и Bs. Решение этой системы позволит
получить все значения постоянных и по формулам (3.28) рассчитать
напряжения во всех точках диска и тем самым решить поставленную
задачу.
Рассчитать напряжения в диске произвольного профиля можно,
применив метод двух расчетов. Этот метод основан на отыскании по
зависимостям (3.28) двух фундаментальных систем напряжений,
удовлетворяющих условиям сопряжения (3.29) и (3.31). При наложении этих двух
систем с введением некоторого постоянного множителя имеем
действительное распределение напряжений, удовлетворяющее обоим
граничным условиям (3.7).
Для удобства дальнейшего изложения обозначим
2 (3.32)
pQ = aQ + aQr + (тпх + l)/(r),
где/?^/?0 — вспомогательные величины (условные напряжения).
Равенства (3.28) запишем в виде
pr = As-Bf2; pe = As + Bsr~2. (3.33)
Для первого из названных расчетов принимают действительное
(заданное) значение огХ и произвольное окружное напряжение на
периферии а01 Ф 0.
Составляем условия на периферии диска, исходя из (3.33), т.е. при
г= гх имеем:
prX=Ax-Bxrf\ pQX = Ax+Bxr~2, (3.34)
164
гдерг1,/?01 — известные числа, полученные из равенств (3.32) для г = гх.
Согласно (3.34) найдем постоянные Ах и Вх для первого участка
диска (нумерация идет от периферии к центру):
А\ = О>5(р01 +ргХ)\ В{ = О,5(р01 -ргХ)г\ . (3.35)
По найденным значениям Ах и Вх определим напряжения в любой
точке первого участка и, в частности, на его второй границе при г = г2, т.е.
ar2 = А\-в\г22-аА-Лг2У>
2 2 (336) <
а'02 = Ax+Bxr2 -aQr2-(mx + l)f(r2).
Верхним индексом обозначены значения напряжений до
скачкообразного изменения толщины в сечении, где г = г2.
Для определения напряжений после скачкообразного изменения
толщины используем формулы (3.29) и (3.31). Имеем
стг2 = <т'г2 + Даг; а в2 = ^е2 + Аае-
Эти напряжения являются начальными для второго участка. По
найденным значениям сг"2 и а 02 определим р"г2, р\2 по зависимостям
(3.32) и составим соотношения для второго участка, т.е.
р'л = ^2-V22; р%1 - ^ + ¥г2' (з-37)
Аналогично предыдущему определим постоянные А2 и В2 для
второго участка
А2 = 0,50>"в2+р"г2); Я2 = 0,5^2-/7';2)г2. (3.38)
По значениям у42 и 52 найдем напряжения в любой точке второго
участка и, в частности, на его второй границе при г = г3 и т.д. В
результате рекуррентного расчета по описанной методике определяют сис-
тему напряжении аДг), сте(г) в диске, доходят до расточки при г = г0
« I I 0
и для нее получают некоторые значения напряжении аг0, а0О. Верхний
индекс означает «напряжения первого расчета». Вообще аг0 ^ аг0, т.е.
полученные значения напряжений не удовлетворяют граничному
условию на расточке, так как при выполнении первого расчета произвольно
было принято значение окружного напряжения на периферии а0 = g0j.
165
Для удовлетворения второму граничному условию (на расточке)
выполняют второй расчет при аг1 = 0; а01 Ф 0 (любое число); со = 0; А Г
= 0.
Второй расчет выполняют по той же самой методике, как и первый,
но по уравнениям (3.28) без учета вращения и неравномерного нагрева.
В результате проведения второго расчета получим вторую систему
напряжении аг (г), а0 (г) и, в частности, напряжения на расточке, т.е.
и П _
CTr0' aG0 • Верхний индекс означает «напряжения второго расчета».
Составим систему напряжений
(3.39)
1 j_ / п
<зг = ar + каг
1 j_ / п
ае = сг0 + А:а0.
Система напряжений (3.39) удовлетворяет граничному условию
на периферии диска при произвольно выбранном значении постоянного
множителя к, который введен для того, чтобы можно было
удовлетворить второму граничному условию (на расточке диска). Подчиняя
первое уравнение системы (3.39) условию стг(г0) = сг^, получаем
аг0 + *стг0 = аг0- (3-4°)
Согласно (3.40) корректирующий множитель:
к = Ko-aro)/arO- (3-41)
Все величины правой части равенства (3.41) известны и теперь
соотношения (3.39) позволяют получить распределение напряжений в диске,
удовлетворяющее обоим граничным условиям.
Описанный метод двух расчетов запрограммирован для ЭВМ,
программа приведена в [4].
На основе двух найденных фундаментальных решений — первой ar,
I „пи „„
сте и второй ar , a0 систем напряжении — найдем решение двух
частных задач, необходимых для дальнейшего рассмотрения.
Первая задача: определение напряженного состояния свободно
вращающегося равномерно нагретого диска без контактного давления на
расточке при произвольной угловой скорости.
По граничному условию на расточке ar0 = 0 из (3.41) имеем
к == -<тг0/аг0. Предположим, что первый расчет выполнен при АГ=0.
166
Согласно (3.39) имеем напряжения:
I I
/ ч I Gr0 II , ч I аг0 II ,а .оч
*r(r) = аг - — аг ; je(r) = <*е ~ If а8 > (3-42)
где 5^ s0 — напряжения в свободно вращающемся диске при со = со0; со0 —
расчетная угловая скорость диска.
При изменении угловой скорости лопаточная нагрузка (напряжение
аг1) и напряжения в диске изменяются пропорционально ю . Поэтому
при любой угловой скорости
(°>) / / \2 (<°) / / \2 /О ЛОЛ
о; ' = (ш/ш0) *г; а£ ' = (со/со0) jre. (3.43)
Полученные соотношения (3.43) являются решением первой задачи.
Верхний индекс со означает, что напряжения вызваны вращением.
Вторая задача: определение напряжения в невращающемся диске
при АГ = О под действием произвольного контактного давления на
расточке, когда q = -а^. Решение получим из системы (3.39), где
аг = а0 = 0 ; величину к определим из условия (3.41):
Решение второй задачи имеет вид:
V = -(^/аго)аг» °е = ~(^/аго)ав' (3-44)
где верхний индекс q свидетельствует, что напряжения вызваны
контактным давлением.
Суммируя напряжения от вращения и контактного давления, из
соотношений (3.43) и (3.44) имеем
Gr = У *r ~ "п сг > ае - Ы *е " -1Гае ■ <3-45)
Зависимости (3.45) позволяют определить напряжения в диске при
произвольных юи^по результатам двух фундаментальных расчетов.
Расчет диска без центрального отверстия. Расчет производят
описанным способом. Для первого расчета полагают аг0 = а0О. Расчет
ведут от центра к периферии, последовательно переходя от участка
к участку в соответствии с описанной методикой. В результате опреде-
167
ляют первую систему напряжений ar, aQ и напряжения на периферии
I I
ог1 иов1.
Для проведения второго расчета полагают со = AT = 0, а аг0 = аео.
Расчет проводят по описанной методике. В результате определяют вто-
w И II II И ,
рую систему напряжении ог и ае и напряжения аг1 и ае1 на
периферии. Для удовлетворения граничному условию при г = г{ составляют
комбинацию напряжений и приравнивают ее заданному напряжению аг1:
1 . г п
ог1 + А:аг1 = аг1,
откуда корректирующий множитель
Действительную систему напряжений рассчитывают согласно (3.39),
по двум системам напряжений и значению к (3.46).
Расчет дисков, посаженных на вал с натягом. Разница радиусов
вала гв и расточки диска гд до посадки называется натягом (рис. 3.16):
После посадки радиус расточки возрастает на значение смещения мд, а
радиус вала уменьшается на значение смещения иъ. Из рис. 3.16 следует,
что
и0 = "д - wb- (3-47)
Поделим обе части равенства (3.47) на г0. При и0 « г0 имеем г0»гв« гд.
Используя зависимость окружной деформации ее от смещения (3.3),
получаем
*вд-гОвя*ио,го> (3-48)
где 86д — окружная деформация на расточке диска; евв — окружная
деформация на поверхности вала.
Выразим деформации через напряжения согласно (3.5). Так как
радиальные напряжения на контактной поверхности посадки для вала и
диска одинаковы (аг0 = аг0 ) и температурные деформации также
равны, то условие (3.48) примет вид
аео-аео = £"о/го> (3-49)
168
Рис. 3.16. Втулка диска перед посадкой его на вал
(в)
где Gqq — окружное напряжение на поверхности вала; аео — окружное
напряжение на расточке диска.
Окружное напряжение Gq0 выразим через радиальное напряжение
(в)
аг0 = аг0 по второй формуле системы (3.15). Участок вала
рассматриваем как вращающийся диск с наружным радиусом г0 при постоянной
температуре с напряжением в периферийной зоне аг0 , равным
контактному напряжению а^ на расточке диска. Влиянием малого
центрального отверстия в вале (если таковое имеется) можно пренебречь,
так как оно оказывает влияние только в малой зоне, расположенной
около центра вала. Согласно зависимости (3.15)
2 2
(в) , 1 -Ц
уео = аг0+ 4 рС° Г°'
Подставляя последнее выражение в (3.49), получаем
(3.50)
Соотношение (3.50) представляет собой граничное условие,
которому должны удовлетворять напряжения в диске, посаженном на вал с
натягом. Из него следует, что запас прочности диска по пределу
текучести (по так называемой третьей теории прочности) практически не
зависит от частоты вращения (угловой скорости) диска. Второй член правой
части равенства (3.50) мал по сравнению с первым членом, поэтому раз-
169
ность аео - аг0 = 2xmax практически имеет постоянное значение при
любой частоте вращения, и, следовательно, запас прочности
"а = а*/2ттах = V(a90 - аИ))
есть величина постоянная во всем диапазоне частот вращения от нуля
(невращающийся ротор) до частоты вращения, при которой контактное
давление (давление посадки) равно нулю.
Граничное условие (3.50) применим к напряжениям в диске в форме
зависимостей (3.45). Подставляя правые части равенств (3.45) при г= г0
в выражение (3.50), получаем
(со/со0) sfQ0 + q(\ + х) = Еи0/г0, (3.51)
лл,п v 2 2 II . II
где s'QQ = sQ0- 0,25(1 - ц)рсо0г0; х = -°ео/агО' ^80 — значение sQ
на расточке.
Соотношение (3.51) связывает между собой контактное давление,
частоту вращения и величину натяга при АГ = 0 и позволяет решать
основные задачи, связанные с посадкой дисков на вал.
Определение натяга по заданной освобождающей частоте
вращения. Освобождающей частотой вращения диска называется такая
частота, при достижении которой контактное давление q на поверхности
посадки исчезает. Полагая, что в выражении (3.51) q = 0, а п = иос, имеем
ио = гЛ^пос/пъ)2/Е- (3-52)
Обычно выбирают
иос/«0>1,15. (3.53)
По рекомендации Международной электротехнической комиссии
(МЭК) следует иметь пос/п0 > 1,2.
Изменение контактного давления в зависимости от частоты
вращения. Подставляя (3.52) в (3.51), получаем
q = (s'Q0/(\ + х))[(«ос/»0)2 - (п/п0)2]. (3.54)
Выражение (3.54) характеризует изменение контактного давления
при изменении частоты вращения в диапазоне 0 < п < пос. При рабочей
частоте, когда п - и0,
Зависимость (3.54) графически представлена на рис. 3.17.
170
аг,а0,МПа
д,МПа
100 U-
50
0 0,4 0,8 п/п0 Г 'I
Рис. 3.17. Зависимость контактного Рис. 3.18. Распределение напряжений
давления от частоты вращения в диске, посаженном на вал с натягом
при #1 = 50 с"1; Г= О
Распределения напряжений в диске при любой частоте вращения
могут быть рассчитаны по формулам (3.45), где q характеризуется
зависимостью (3.54). Пример распределения напряжений в диске,
посаженном на вал с натягом, приведен на рис. 3.18.
Напряжения в дисках с широкой ступицей. При определении
напряжений в дисках с широкой ступицей модель тонкого диска,
не учитывающая неравномерность распределения напряжений по
толщине и влияние осевых напряжений, оказывается недостаточной.
Необходимо применять более точные расчетные схемы или пользоваться
общими расчетными методами, например методом конечных элементов.
При г0/гвт < 0,8 (см. рис. 3.14) модель тонкого диска дает
достаточную точность в определении максимального напряжения на расточке
диска Gqq при выполнении неравенства
где Авт — ширина втулки диска; гвт — радиус втулки диска.
В дисках последних ступеней цилиндра низкого давления (ЦНД), где
ступица и обод диска имеют значительную ширину, распределение
напряжений по оси неравномерное. На рис. 3.19 показано
распределение интенсивности напряжений а* по толщине в сечениях диска ЦНД.
Интенсивность напряжений рассчитана по методу конечных элементов.
171
200
100
1 100 20(
Гл =
N?
°г
^—
Г
>J
1
У 300 г,мм|
ШР
485 мм
'ЯД
а^,МПат
Рис. 3.19. Распределение интенсивности напряжений по оси диска последней
ступени ЧНД в трех сечениях при п « 60 1/с
а — профиль; б—г — сечения соответственно /-/, s-s, 0-0
Неравномерность распределения напряжения а* на расточке по ширине
ступицы составляет примерно 15 % среднего значения напряжения
на расточке.
Напряжения в барабанном роторе. Расчет напряжений в роторе
барабанной конструкции (см. рис. 3.6) или в цилиндрических элементах
цельнокованых роторов может быть выполнен на основе модели
неравномерно нагретого цилиндра (рис. 3.20).
К наружной цилиндрической поверхности приложено равномерное
радиальное напряжение аг1 от ЦБС лопаток и замков. На внутренней
поверхности обычно а^ = 0. Температурное поле цилиндра —
одномерное: температура переменна по радиусу, но постоянна по оси. Закон
изменения температуры принимается в виде (3.19).
В отличие от напряженного состояния тонкого диска здесь осевое
напряжение g2 ф 0.
Распределение напряжений аг и а0 во многом аналогично
напряжениям в тонком вращающемся диске постоянной толщины.
Результаты решения задачи о напряжениях в цилиндре при
оговоренных условиях приведем без вывода. Они сводятся к следующему.
172
Динамические напряжения а^ а0
во вращающемся полом цилиндре
определяются формулами (3.17) с
2ц 2
г 8(1 -ц)
Отношение
^9 в 1 +3ц
аг 3 + ц
заменяется на
Рис. 3.20. Модель барабанного ротора
<е
1 +2ц
3-2ц'
Осевое динамическое напряжение определяется формулой
4- —
/ 2 2. 2(1 - Ц)
рсо
/ 2о. 2
(3.56)
где Р2 — растягивающая осевая сила.
Напряжения в роторах, вызываемые растягивающей силой, обычно
пренебрежимо малы.
(Т) (Т)
Температурные напряжения or , gq также определяются
формулами для диска постоянной толщины (3.22) с заменой аг на аг/(1 - ц),
т.е. просто введением множителя 1/(1 - ц).
Осевое температурное напряжение определяется формулой
m
ЕатАТ
(1-^(^+2)
L '1 1 - а
т{ +2.
(3.57)
Из сравнения формул (3.23) и (3.57) можно установить, что в
сплошном цилиндре на внешней поверхности (при г = г{) осевые и окружные
(Т)
(Т)
температурные напряжения совпадают: ае1 - vjz1 .
Максимальные динамические напряжения на внутренней
поверхности барабанного ротора близки к максимальным динамическим
напряжениям на расточке диска постоянной толщины при одинаковых
лопаточных нагрузках и частотах вращения.
173
При Pz = 0, ar0 = О для максимальных динамических напряжений
в цилиндре получаются следующие формулы:
6 max
- а
1аг1
+ а'/х2 (l + bL2M
3-2ц
а J;
2 2 /1 2Ч
рсо гх (1 - а ).
(3.58)
zmax 4(1 -ц)
Сравнивая окружные напряжения на внутренней поверхности
цилиндра (3.58) и диска (3.18), можно видеть, что они отличаются
несущественно при всех значениях а. Интенсивности напряжений о* для
сравниваемых случаев по величине также практически совпадают для
цилиндра и диска постоянной толщины.
AT)
(Т)
Температурные напряжения Gr и а0 в цилиндре при одинаковом
температурном поле выше, чем в диске постоянной толщины
в отношении 1 /(1 - \х), т.е. примерно на 43 %, однако сравнение интен-
сивностей температурных напряжений на поверхности малого отверстия
обнаруживает увеличение на 24 % в цилиндре по сравнению с диском
постоянной толщины вследствие влияния осевого напряжения.
Диск равной прочности. Диском равной прочности (рис. 3.21)
называется диск, у которого напряжения постоянны, т.е. Gr= gq = g = const.
Профиль диска равной прочности определяют из уравнения равновесия
(3.2), полагая, что аг = а0 = а. При этом из (3.2) имеем
h dr g
Интегрируя последнее уравнение при условии, что h = hx при r = rl9
получаем
v(l-
2/ 2^
г /гх)
h/hx =
(у = рсЛ;/(2а)).
Рис. 3.21. Профили дисков
равной прочности
(3.59)
Толщина диска на периферии из (3.1)
*!= (С+хСоб)/(а*!).
Толщина диска в центре из (3.59)
А0 = hxQV.
Диски, по форме близкие к диску равной
прочности, применяются в конструкциях
сварных, стяжных и сболченных роторов
(см. рис. 3.3, 3.4, 3.7).
174
3.3. ПОЛЗУЧЕСТЬ И ДЛИТЕЛЬНАЯ ПРОЧНОСТЬ
РОТОРОВ
Напряжения и деформации в дисках в условиях ползучести.
Ползучесть дисков и роторов, в основном, проявляется во время работы
в стационарном режиме (паровые турбины). Для газовых турбин
важным является режим перегрузки, которому соответствует повышение
температуры газа. Следует отметить, что диски и роторы газовых
турбин, обычно выполняют с охлаждением их воздухом до температур, при
которых ползучесть не происходит.
В дисках и роторах паровых турбин к моменту выхода их на
стационарный режим после первого пуска ползучесть еще отсутствует.
Напряжения в дисках и роторах соответствуют условиям упругости и могут
быть рассчитаны по методам, описанным в § 3.2.
В период работы турбины в стационарном режиме в разных участках
ротора развитие деформаций ползучести происходит с различной
скоростью. В более напряженных областях (зона центрального сверления в
цельнокованом роторе, зона разгрузочных отверстий) ползучесть
значительно выше, чем в остальных зонах. Из-за неравномерной ползучести
происходит перераспределение напряжений в роторах и дисках,
характерное тем, что в областях с высоким уровнем напряжений происходит
их снижение во времени, а в слабо напряженных областях напряжения,
как правило, возрастают. Период перераспределения напряжений
называется периодом неустановившейся ползучести.
Напряжения в процессе перераспределения стремятся к некоторому
предельному стационарному (не зависящему от времени) состоянию,
называемому состоянием установившейся ползучести.
Продолжительность периода перераспределения напряжений тем
меньше, чем выше температура и напряжения в деталях, и существенно
зависит от свойств стали. Для паровых турбин, рассчитанных на
большой ресурс работы, период неустановившейся ползучести обычно
составляет 3—10 % ресурса, иногда заметно больше.
При оценке прочности дисков и роторов паровых турбин необходимо
определить напряженное состояние при установившейся ползучести.
По известному напряженному состоянию можно рассчитать
деформации ползучести и изменение размеров (диаметра) дисков за ресурс
работы, а также определить коэффициент запаса длительной прочности.
При необходимости можно определить напряжения и при
неустановившейся ползучести, а также рассчитать деформацию и коэффициент
запаса прочности диска с учетом влияния неустановившегося периода
ползучести.
175
Расчет напряжений и деформаций в дисках в условиях
ползучести. Уравнения равновесия и совместности не зависят от
деформационных свойств материала. Для данной задачи эти уравнения полностью
совпадают с уравнениями (3.2) и (3.4).
Кроме уравнений равновесия и совместности, для решения задачи
необходим обобщенный закон ползучести. Выберем его в виде
деформационного закона с использованием гипотезы старения по зависимостям
(1.70) и (1.71).
В главных напряжениях а^ а0, az закон ползучести (1.70), (1.71)
можно представить в виде соотношений
\ с \ с
Е Е
(3.60)
ez = — Гстг"^С(аг+ств)]»
\/Ес = 1/Е + Ао" ln(t); цс = 0,5[1-(1-2ц)(£с/£)];
а, = (l/2)1/2[(ar-ae)2 + (ae-az)2 + (az-ar)2]1/2,
(3.61)
где Ес— модуль ползучести; \ic — коэффициент поперечного сжатия при
ползучести.
При переходе от (1.70), (1.71) к (3.60), (3.61) принято соответствие
обозначений: an = ar; a22 = a0; a33 = az; en = sr; e22 = £e; e33 = ez;
о у = Ey s 0 если \Ф]Ш
Уравнения (3.60) по форме совпадают с обобщенным законом Гука.
Существенным отличием является то, что модуль ползучести Ес и
коэффициент \ic зависят от напряжений и времени.
Для тонкого диска напряженное состояние плоское и для получения
необходимых соотношений достаточно в (3.60), (3.61) положить az = 0.
В качестве неизвестных величин, относительно которых ищется
решение, выбираем напряжения аг и а0. Одно из уравнений,
связывающих искомые величины, есть уравнение равновесия (3.2). Для
получения второго необходимого для решения задачи уравнения надо
выполнить следующую процедуру: в уравнение совместности (3.4) подставить
деформации гг и ее по (3.60) при az = 0; в полученном равенстве исклю-
176
чить производную dar/dr при помощи (3.2). После преобразований
получим второе необходимое уравнение в виде
(1ст9/<1г=Ф(г)а^ав>/); (3.62)
Ф
1 - S сте
1 + Т
аг цс + S (
1 + Т V
2 1 d/i
,);
3 стга1
2 2
сг,
х; Т =
!-5i
*;
х = (п - 1)^4£а*
1П(/)/(1+Л£сь lCl{t)).
Уравнение равновесия (3.2) и уравнение совместности (3.62)
составляют систему двух дифференциальных уравнений относительно двух
неизвестных напряжений аг а0, решение которой при граничных
условиях (3.7) позволит определить искомое распределение напряжений
в диске в условиях ползучести. Время t входит в (3.62) как параметр.
Задаваясь несколькими значениями / и определяя для каждого
момента распределение напряжений, получаем перераспределение
напряжений во времени.
Решение системы можно
получить, использовав один из численных аг,ав,МПа
методов, например метод Рунге-Кутта.
Для решения задач с известными
начальными условиями (например,
при заданных а^, а0о) можно
использовать стандартные программы. Для
решения необходимо составить только
программу для вычисления правых
частей уравнения равновесия (3.2) и
уравнения совместности (3.62).
Удовлетворение граничному условию в
периферийной зоне достигается
методом проб: на внутреннем радиусе
принимаем ar = GyQ и проводим расчеты
при нескольких значениях а0о до
получения необходимого (заданного)
1 Рис. 3.22. Распределение напряже-
значения а„ = аи в периферийной зоне w F r
г п г т г нии в д„ске ПрИ ползучести и про-
ДИСка. филь диска
60
40
20
,ь
<*г
У
\
к
■\
"•J
^N
Ч
<*г
S,
VJ
177
На рис. 3.22 представлены результаты расчета напряжений в диске
в условиях ползучести через 10 ч эксплуатации. Материал диска —
сталь 25ХМФ, температура Т = 500 °С.
Влияние давления пара на напряженное состояние и
деформацию диска и вала в условиях ползучести. Если весь диск находится
под всесторонним давлением пара р0, то действительные напряжения в
диске меньше напряжений, рассчитанных по изложенному методу на
величину р0, т.е.
vr = ar~/V ae = GQ~Po-
Здесь и далее черта над буквой обозначает величину, рассчитанную
без учета давления пара.
Всестороннее сжатие р0 приводит, таким образом, к повышению
длительной прочности, так как прочность оценивается по
максимальному нормальному напряжению.
На деформацию ползучести давление р0 не оказывает влияния, так
как оно вызывает только объемную упругую деформацию.
Все изложенное относится к диску, подверженному всестороннему
сжатию давлением р0.
Вал ротора подвержен действию давления р0 только в радиальном
направлении. Осевые напряжения в вале значительно меньше и равны
1—3 МН/м . Радиальное сжатие вала под действием р0 уменьшает и
радиальную ползучесть вала.
Напряжения и деформации в цельнокованом роторе без
центрального отверстия. Расчет напряжений в таком роторе можно
произвести, использовав распределение напряжений в длинном
вращающемся цилиндре, нагруженном осевой растягивающей силой Р2 и
радиальными напряжениями ara, равномерно распределенными по
поверхности цилиндра радиуса га. В предположении несжимаемости
материала (ц = 1/2) напряжения в таком цилиндре выражаются при
любом законе ползучести простыми формулами (А.Г. Костюк, 1954 г.):
(3.63)
аг
аг
=
=
°е
2
=
+
а
1
4
га+2р(й
2, 2
рю (га-
2, 2
2г ).
г У,
178
,1 2 2
°™ + 4РС0 Га~
2
nra\
По напряжениям (3.63) следует определить деформации г^ г0, ег
Предварительно найдем интенсивность а* по (3.61). Подставляя
напряжения (3.63) в (3.61), получаем, что интенсивность напряжений
(3.64)
— величина постоянная во всем объеме цилиндра. По зависимостям
(3.60) при \хс = 1/2 найдем деформации е^ е0, sz и интенсивность
деформации в*
2ег = 2е0 = -ez - s* = а*/£ + Ла*О(0, (3.65)
которые из-за постоянства а* оказываются также постоянными во всем
объеме цилиндра. Следовательно, при оговоренных условиях цилиндр
является телом равного сопротивления или телом равной прочности.
Напряжения (3.63) и им соответствующие деформации
удовлетворяют уравнению равновесия (3.2), (при h = const), уравнению
совместности деформаций (3.4), что предлагается проверить самостоятельно.
Напряжения az удовлетворяют условиям на торцах цилиндра
интегрально, т.е. равнодействующая напряжений oz равна растягивающей
силе Pz, в чем также рекомендуется убедиться самостоятельно.
Поскольку все условия: равновесия, совместности и граничные —
выполняются, то это значит, что напряжения (3.63) и деформации (3.65),
действительно, определяют напряженно-деформированное состояние
вращающегося цилиндра в условиях ползучести при оговоренных
предположениях.
Для барабанного ротора без центрального отверстия радиальные
напряжения ara = arl можно рассчитать по формуле (3.1), где за Aj
следует принять осевой размер одной ступени.
При рассмотрении напряженно-деформированного состояния
фрагмента цельнокованого ротора дисковой конструкции (рис. 3.23) осевой
размер участка вала Л0 выбирается из условия, чтобы рассчитанные
напряжения на (и вблизи) поверхности центрального канала были бы
равны максимальным напряжениям в действительном роторе, в котором
они переменны по оси вала.
Для упругого ротора решение этой задачи приводит к зависимости
h0 = ha\-\ (3.65а)
где X = 1 - 0,9(1 - 5)2 - 0,1(1 - 5)4; 5 = ha/(2ra).
179
Зависимость (3.65а) получена на основе исследований Е.Я. Герцберга
(1953).
Близкие результаты дает выбор размера А0 как расстояния между
сечениями, проведенными между соседними дисками (штриховые
линии на рис. 3.23).
Оба подхода, по-видимому, равноприменимы для ротора как в
упругом состоянии, так и в состоянии ползучести. В последнем случае их
надо рассматривать как логически оправданное допущение.
Для расчета напряжений установившейся ползучести в фрагменте
цельнокованого ротора дисковой конструкции (рис. 3.23) применяется
следующая процедура. По уравнениям (3.62), записанным для случая
установившейся ползучести (т.е. полагая \хс = 1/2, % - п - 1) численным
интегрированием от периферии к центру производят расчет напряжений
при известном ог(г{) = аг1 и произвольном сг0(г1) = а01. В результате
решения задачи Коши для системы (3.2), (3.62) получим значения а'га,
а9я на радиусе г = га — радиусе сочленения диска с валом. На этом
радиусе должны выполняться условие равновесия
(°ra +P<>)h0 = «а+РоЖ (3-66)
и условие совместности деформаций
(3.67)
^а
= 8
6а >
где с0а, г^а — окружные деформации вала и диска при г = га\ ога, а'га
радиальные напряжения при г - га в вале и диске соответственно.
ho
_
Jf\
k i
1
1
i |
1
1
l 1
А
i | i
1 !—1 1
1 | 1 i
irurur
Рис. 3.23. Схема цельнокованого дискового ротора
180
Используя уравнения ползучести (3.60) для диска и (3.65) для вала
применительно к состоянию установившейся ползучести, условие (3.67)
с учетом (3.66) записываем в виде
Л-1 1
Й~«а + 4 2П (2а'вв-а'гв)'
а —
(3.68)
Решая уравнения (3.2), (3.62) при разных значениях а01, добиваемся
выполнения условия (3.68), после чего по полученным значениям аш,
рассчитываем напряжения в вале (3.63) и при найденном а01
определяем и напряженное состояние в диске.
Приняв дополнительное предположение о постоянстве окружного
напряжения в диске, т.е. положив а0 = const, получим следующую
простую методику расчета напряжений в цельнокованом роторе в
состоянии установившейся ползучести. Первоначально определяем величины
Vl
2/
1 I 1
* = — "п + р«р; *- -^ршг, — -^
2 2
а , а а
hQ ~тс>
(3.69)
где F — площадь меридионального сечения диска, заштрихованная
на рис. 3.23; /—момент инерции этого сечения относительно беи ротора.
Далее определяем величину х = (сг'^+ро)/(сг0а+р0) из уравнения
п-\
2Ч 2п
(1-jc + jc ) (2-х)
ах + с
(3.70)
или по номограмме на рис. 3.24, на котором показан пример определения
х при найденных по (3.69) значениях awe для случая п = 5. После
определения х находим:
hQ i/ hara \
'0
a'ra = (ara+Po)j^-Po'> aQa = (<*га+Ро>/х ~Pq-
(3.71)
Напряжение в вале определяют по (3.63) при найденном значении ага.
181
О 0,5 1,0 1,5 х
Рис. 3.24. Номограмма для расчета напряжений цельнокованого ротора
Максимальные напряжения и деформации ползучести в
цельнокованом роторе с центральным сверлением и разгрузочными
отверстиями в дисках. На поверхности центрального сверления
максимальными являются окружные напряжения аЭтах. Величина а6тах при Р2 = О
а9тах "*" koQG0>
, 1 22|
а0 = °ra+2 РС° ^'J
(3.72)
где а0 — окружное напряжение в центре сплошного ротора (без
отверстия); kQQ — коэффициент концентрации окружного напряжения в
условиях установившейся ползучести.
На рис. 3.25 приведена зависимость &G0 от параметров п и у, с
помощью которой определяют £ст0. Параметр у определяют по зависимости
аГЛ + (1/2)рсо2^
а*о ст,.а + (1/4)рсЛ2'
(3.73)
где а*0 — интенсивность напряжений в центре сплошного ротора,
определяемая по формуле (3.64) при Pz = 0.
Максимальная окружная деформация е9тах в роторе наблюдается на
поверхности центрального отверстия. Ее величина
Чты = иты1г0 = киЧ> (3-74)
80 = Aa0Cl(t).
(3.75)
182
О 0>2 0,6 1/п о,2 0,4 0,6 0,8 1/п
Рис. 3.25. Зависимость коэффициента Рис. 3.26. Зависимость коэффициента кон-
концентрации напряжений на поверх- центрации деформации на поверхности
ности центрального отверстия в цель- центрального отверстия в цельнокованом
нокованом роторе от параметров у и п роторе от параметров уил
Здесь wmax — радиальное смещение на поверхности центрального
отверстия в роторе; ки — коэффициент концентрации деформаций,
отнесенный к условной деформации г0, определяемой по (3.75); г0 — радиус
центрального отверстия.
Коэффициент ки определяют по графикам рис. 3.26 в зависимости
от параметров «иу.
Расчет смещений wmax по (3.74), в частности дает возможность
сопоставить после проведения инспекции ротора действительную
ползучесть на поверхности отверстия с проектной и тем самым судить о
степени исчерпания ресурса ротора к моменту проведения инспекции.
Графики (рис. 3.25 и 3.26) построены на основании точного решения
задачи о концентрации напряжений в зоне отверстия в неограниченном
теле, нагруженном радиальными напряжениями аг = а0 и осевыми
напряжениями
1 2 2
az0 = 4р0) Г°'
Запас прочности диска и цельнокованого ротора в условиях
ползучести рассчитывают по уравнениям (1.78) и (1.80).
183
Концентрация напряжений возникает также в зоне разгрузочных
отверстий в дисках. Максимальные напряжения наблюдаются на
поверхности разгрузочного отверстия
= 1+и ' + 1X1(1+3» '),]
ст 2 1/2
(1 + ЗХ )
X =
CTrp + авр
(3.76)
где о+р — интенсивность напряжений в диске без разгрузочных отверстий
в точке, в которой расположен центр разгрузочного отверстия (при г = г );
а , а6р — радиальное и окружное напряжения в диске без разгрузочных
отверстий при г = гр; &а — коэффициент концентрации напряжений.
Пример 3.1. Рассчитать напряжения и скорости деформации в фрагменте
цельнокованого ротора высокого давления в состоянии установившейся
ползучести.
Оценить запасы длительной прочности по условиям на поверхности
центрального канала. Скорость ползучести и длительную прочность сравнить для двух
вариантов: без учета влияния давления пара и с учетом его.
Заданы: толщина диска (постоянная) ha = 162 мм; периферийный радиус диска
гх = 455 мм; радиус вала га = 270 мм; радиус центрального канала г0 = 60 мм;
угловая скорость ротора ю = 314,16 рад/с; напряжения на периферии диска (без учета
влияния давления пара) аг1 = 38 МПа; давление пара в камере диска р0 =
= 15,7 МПа; температура пара Г= 525 °С; осевая сила Р2 = 0; необходимый ресурс
т = 10 ч; материал диска — сталь 25Х1М1Ф (Р2М).
В соответствии с табл. 1.2 необходимые характеристики ползучести и
длительной прочности стали Р2М при 525 °С следующие: п = 3,015; А = 2,3\- 10"14;
525 3
ал тт = G 5 = 181 МПа. Плотность стали р = 7820 кг/м .
д.п 10э г
Решение. Рассчитываем эффективную длину участка вала для фрагмента
ротора высокого давления по формуле (3.65а):
5 = ^ = ^62, .0,3;
2га 2-270 ' '
X = 1 - 0,9(1 - 5)2 - 0,1(1 - 5)4 = 1 - 0,9 ■ 0,72 - 0,1 • 0,74 = 0,535;
h0 = V-"1 = 162/0,535 = 302,8 « 303 мм.
184
Для определения ага находим q, с и а, используя формулы (3.69) и учитывая,
что а = rjrx = 270/455 = 0,5934:
q = аг1/(1-а) + (1/3)Р(Л2(1+а + а2) = ] ,^934 +
+ 1у- . 7 820(314,16 • 0,455)2(1 + 0,5934 + 0,59342 ) = 197,08 МПа;
с = p(d2r]/(4q)-p0/q = 10"6-7820(314,16-0,27)2/(4-197,08)-
- 15,7/197,08 = 0,07137-0,07963;
а = -2 + -S-. с = — + °»5934 [0,07137-(0,07963)] =
h0 1-а 303 1-0,59341' v ' л
= 0,6388-(0,1162).
Значения в скобках учитывают влияние давления пара.
Для определения х решаем (любым способом) уравнение (3.70) при п = 3,015
для двух случаев: без учета влияния давления пара (а = 0,6388, с = 0,07137) и с
учетом влияния давления пара (а = 0,5226, с = -0,00826).
Получаем без учета влияния давления х = 1,417, с учетом влияния давления
х= 1,693.
Напряжения на поверхности вала по (3.71):
без учета влияния р0
-га " «•. = 197,08 || • Mi7/(l +2gLMg) = 48,67 МПа;
с учетом влияния р0
°га = СТ9а = 197>08 jig ' 1>693/(1 + Ш ' Ь693) " l5,? = 35,7° МШ-
Соответствующие напряжения в диске при г = га\
без учета влияния /?0
а™ = 48'67 Ш = 91'03 МПа'
сг^ = 91,03/1,417 = 64,24 МПа;
с учетом влияния р0
а' = (35,70+15,7) т~- 15,7 = 80,44 МПа,
162
<*'еа = (80>44 + 15,7)/1,693 - 15,7 = 56,79 МПа.
Напряжения в диске при г~ГуС5гХ~ 38 МПа, а01 = а$а = 64,24 МПа — без
учета влиянияр0;сгХ = 38,0- 15,7 = 22,3 МПа, ае1 = Oqq =56,79 — с учетом
влияния р0.
185
Для определения напряжений на поверхности центрального канала следует
воспользоваться графиками, представленными на рис. 3.25. Находим по
зависимости (3.73) параметр у:
без учета влияния р0
.■■■■ qQ 48,67 + 28,13,
Y о.0 48,67+14,07
с учетом влияния р0
_ 35,7 + 28,13 _ . ,„
У~ 35,7+14,07 ~1,282-
По графику (рис. 3.25) находим коэффициент концентрации при я = 3,015 без
учета влияния р0 (кс$ = 1,32) и с учетом р0 (£ст0 = 1,29).
Напряжения в центре сплошного вала
агц = а0ц = а0 = ara + (1/2)ро2га2;
без учета р0: а0 = 48,67 4-28,13 = 76,8 МПа;
с учетом Pq. g0 - 35,7 + 28,13 = 63,83 МПа.
Напряжения на поверхности центрального канала
a6max = *ава0-
После подстановки значений имеем:
без учета р0
ст8тах = 1,32 • 76,8 = 101,38 МПа;
с учетом р0
a6max = 1.29 • 63,83 = 82.34 МПа.
Коэффициент запаса по длительной прочности оцениваем приближенно по
значениям напряжений в состоянии установившейся ползучести (это будет
верхняя оценка коэффициентов запаса):
"ст = ад.п/а8тах-
Без учета р0
па= 181/101,38 = 1,78;
с учетом р0
«ст= 181/82,34 = 2,20.
Для опасной точки — поверхности центрального канала — запас достаточен:
требуемые значения, по разным источникам, составляют па = 1,3 —. 1,6. Влияние
р0 приводит к заметному снижению максимальных напряжений и увеличению
запаса длительной прочности.
Оцениваем деформацию ползучести и изменение размера центрального
отверстия в роторе вследствие ползучести. Для этого по графику (см. рис. 3.26) найдем
коэффициент концентрации деформации ки:
без учета давления ки = 1,74;
с учетом давления ки = 1,59.
186
Скорость установившейся ползучести на поверхности центрального канала по
(3.74) и (3.75) приближенно составит
ь0 max = "" ~ " а*~
Без учета р0
МввМао-
°Gmax
с учетом р0
= 1,74-2,31
10"14 • 76,83'015 = 1,94 • 10~8 1/ч « 2 • 10~6 %/ч;
&Gmax
-1,59-2,31
10~14 • 63,833'015 = 1,02 • 10~8 1/ч я 1
10"6 %/ч.
Учет влияния давления пара приводит к снижению скорости ползучести
вдвое.
Увеличение диаметра центрального канала за время 10 ч по оценке составит
2ип
2r089 max1;
max
без учета влияния /?0
2нтах= 120-2-1<Г8-
с учетом влияния р0
10= 0,24 мм;
2i/w
= 0,12 мм,
аг, ад, МПа
что составляет деформацию ползучести 0,2 и 0,1 % соответственно без учета
влияния давления р0 и учетом его.
В данном примере как по длительной прочности, так и по величине
деформации ползучести ротор соответствует требованиям надежности на ресурс 10 ч.
На рис. 3.27 представлены напряжения в фрагменте цельнокованого
ротора без центрального канала, вычисленные по приближенной
методике в предположении а0 = const (штриховые линии) и по уточненному
расчету с использованием уравнений ползучести диска (3.62)
(сплошные линии). Из сопоставления можно
судить о степени точности
приближенной методики.
Как отмечалось, для более точного
определения деформаций ползучести и
коэффициентов запаса длительной
прочности необходимо учитывать
перераспределение напряжений в процессе
переходной (неустановившейся) ползучести
и находить деформации ползучести при
Рис. 3.27. Распределение напряжений в
фрагменте цельнокованого ротора при
установившейся ползучести
187
Рис. 3.28. Фрагмент цельнокованого ротора
-I с указанием опасных зон:
| ] — поверхность центрального канала ротора
вблизи срединной плоскости первого диска
цилиндра; 2—4 — зоны соответственно придиско-
вой галтели, обода диска на внутренней галтели
паза для крепления рабочих лопаток,
разгрузочных отверстий
переменных напряжениях, используя
гипотезы ползучести (см. § 1.3).
Коэффициенты запаса длительной прочности
следует определять по (1.80), используя
величины эквивалентных напряжений оэ.
Опасные зоны в цельнокованом
роторе (ЦКР) в условиях ползучести
показаны на рис. 3.28. Если принять,
Ц ^о J что центральный канал является
концентратором напряжений в сплошном
роторе, то все опасные зоны
представляют области концентрации напряжений.
Для определения запасов длительной прочности в опасных зонах
ЦКР предлагается методика, имеющая следующий алгоритм.
1. Рассчитываются номинальные напряжения в фрагменте ЦКР, т.е.
значения напряжений аг, ае и g2 для а) упругого состояния и б)
состояния установившейся ползучести. Под номинальными подразумеваются
напряжения в предположении их постоянства вдоль оси фрагмента и без
учета концентрации напряжений в зонах 2—4 (рис. 3.28).
Расчет номинальных упругих напряжений может быть выполнен в
соответствии с § 3.2, приближенный расчет напряжений в состоянии
установившейся ползучести изложен в § 3.3.
2. Коэффициенты концентрации в упругодеформируемом роторе в
опасных зонах 2, 3 определяются по имеющимся справочным данным
[1], в зоне 4 — по формуле (3.76) при п = 1.
3. Коэффициенты концентрации для состояния установившейся
ползучести находятся по гипотезе Нейбера (см. (1.82а)), дополненной
условием совместности деформаций [8].
4. По найденным номинальным напряжениям и коэффициентам
концентрации напряжений определяются все необходимые напряжения в
опасных зонах для начального состояния и состояния установившейся
ползучести.
188
у 1
2
1
5. Расчет действительных напряжений в процессе их
перераспределения производятся по зависимости (по типу (1.82))
°у(0 = aupW + °"(1 - рО) > (3-77)
где Gjj(t) — напряжения в любой опасной точке в любой момент процесса
ползучести; а?. — упругие (начальные) напряжения в соответствующей
оо
точке; о.. — напряжения в соответствующей точке в состоянии
установившейся ползучести. Функция времени P(t) зависит от
принимаемой гипотезы ползучести.
При использовании гипотезы течения принято
„_1 -1/(/7-1)
P(t) = [1+(и- l)AEa?Q lQ(t)] . (3.78)
По гипотезе старения P(f) определяется неявно из (1.82а) с заменой
ау на а*0.
6. Эквивалентные напряжения вычисляются по зависимости (типа
(1.80))
-\\/Ъ
1 г Ь
Т1°
о
где Ъ — постоянная в законе длительной прочности (1.59); а = a{(t) —
максимальное нормальное напряжение в опасной точке.
7. Коэффициенты запаса длительной прочности в опасных точках
рассчитываются по зависимости
"с = ад.п/стэ-
По изложенному алгоритму составлена программа ZKR1 (МЭИ,
кафедра ПГТ), с использованием которой можно найти значения па для
двух опасных точек: центрального канала (зона 1) и придисковой
галтели (зона 2). В программе реализованы расчет номинальных
напряжений установившейся ползучести по «точному» решению для вала с
центральным каналом (А.Г. Костюк, 1995 г.) и численному решению
уравнений для напряжений в диске в упругих условиях и для состояния
установившейся ползучести (см. (3.62)).
В качестве примера на рис. 3.29 представлены номинальные
напряжения в фрагменте ротора высокого давления (РВД) в зоне регулирующей
ступени, найденные по программе ZKR1. В отличие от примера 3.1, в
данном случае в расчете учитываются реальный размер канала (г0 = 0,06 м)
и радиус придисковой галтели рг = 12 мм. Для расчета упругого коэффи-
189
а, МПа
ял
ои
40
0
40
\
\
\
/
*4.^J
/
4
л
ль
1
Тг
3
4v.
\
\
а, МПа
80
40
0
~40
\
\
/
»^ У
<s^l
/
z'
4
Л
>^,.^fn
>v
i
•«^.
\
0 0,1 0,2 0,3 0,4 г,м
a
0 0,1 0,2 0,3 0,4 г,м
б
Рис. 3.29. Распределение номинальных напряжений в фрагменте цельнокованого
ротора
а — упругие напряжения; б — напряжения при установившейся ползучести; 1 —
радиальные напряжения стг; 2 — окружные напряжения а0; 3 — осевые напряжения ctz;
4 — интенсивность напряжений а*
циента концентрации в придисковои галтели использована
приближенная формула
ааф= 1+0,25ехр(-0,5г«Х;;) •
Остальные условия соответствуют исходным данным примера 3.1.
Для расчета переходных напряжений на поверхностях центрального
канала и придисковои галтели приняты характеристики ползучести
роторной стали Р2М по данным ЦКТИ (А.А. Чижик и др.),
обработанные в МЭИ и приведенные в табл. 3.1 (обозначения см. (1.54)—(1.56)).
ТаблицаЗ.1
Константы ползучести стали Р2М
Константа ползучести
А
п
а
Р
Температура испытаний,
500
2,71 • 10~12
1,865
36 433
0,00018
525
2,31 • 10~14
3,015
47 605
0,00010
°С
550
2,94-10~13
2,772
29 949
0,00014
190
По программе ZKR1 можно найти значения эквивалентных
напряжений аэ на поверхностях канала и придисковой галтели по двум
гипотезам: старения и течения.
Результаты расчета следующие:
на поверхности центрального канала
асэ = 103,5 МПа; и* = 181/103,5 = 1,75;
о] = 99,2 МПа; пта = 181/99,2 = 1,82;
на поверхности придисковой галтели
org = 125,8 МПа; пса = 181/125,8 = 1,44;
<?з = 118,0 МПа; па = 181/118 = 1,53.
Сравнивая результаты расчета по программе ZKR1 с результатами
приближенного расчета того же фрагмента в примере 3.1, видим, что
максимальные напряжения на поверхности центрального канала при.
установившейся ползучести имеют достаточно близкие значения: приближенно
оо оо
ст8тах ~ 82,34 МПа; точно по программе ZKR1 ствтах = 85,2 МПа
(см. рис. 3.29, б).
Эквивалентные напряжения на поверхности канала превышают
напряжения при установившейся ползучести в отношении 99,2/85,2 =
= 1,164, т.е. примерно на 16 %. Соответственно в таком же отношении
приближенный расчет (см. пример 3.1) дает завышенное значение
коэффициента запаса длительной прочности. Если приближенный расчет
дополнить расчетом упругих напряжений (по рекомендациям § 3.2) и
затем использовать процедуру расчета стэ по (3.77), (3.78), то получится
результат, весьма близкий к определенному по программе ZKR1.
В переходном процессе от упругого к конечному состоянию по
времени службы существенно меняются не только напряжения, но и
скорости деформации.
Скорости ползучести определяются по соотношениям (1.72) или,
в частности, по теории течения (1.75).
Полные деформации за время / получаются интегрированием
скоростей, например
4 = Jeed/. (3.79)
о
191
Увеличение диаметра центрального канала
2ис = 2r0J£e(/,r0)d/, (3.80)
о
где 2г0 — диаметр канала.
Пример 3.2. Требуется определить деформацию ползучести на поверхности
центрального канала в зоне регулирующей ступени РВД на основании расчета
напряженного состояния в этой зоне по программе ZKR1.
Решение. Скорость ползучести г0 (/) определяем по гипотезе течения (см.
(1.75)):
еес = AG"~{Q.(t)[GQ- ycr2J;
П(/) = Г + ареГр*.
Напряжения а0(/) и a2(t) рассчитьгоаем по (3.77), (3.78); параметры А, и, а,р
находим по табл. 3.1 для температуры 525 °С.
В соответствии с результатами на рис. 3.29 имеем:
в начальном (упругом) состоянии
о% = 116,7 МПа; суг = 5,73 МПа; а*0 =113,9 МПа;
в состоянии установившейся ползучести
со оо сю
ае = 85,2 МПа; а2 = 17,5 МПа; а* = 77,9 МПа.
Рассчитываем напряжения а0(/), а2(/), а*(/) по (3.77) и скорость деформации
ее и сводим результаты в табл. 3.2. Значения накопленной деформации ползу-
Таблица3.2
К расчету изменения напряжений и деформации на поверхности
центрального канала во времени
Показатель
П(0
0(0, ч
Р«)
а0, МПа
аг МПа
а*, МПа
б0С,1О~71/ч
<v">-2
/,ч
0
5,760
0
1,0
116,7
5,7
113,9
2,1097
0
1000
5,307
5330
0,7853
109,9
8,3
106,1
1,5645
0,0184
2000
4,898
10 629
0,6753
106,5
9,6
102,0
1,2881
0,0326
5000
3,88 7
23 731
0,5229
101,7
11,4
96,6
0,8607
0,0649
10 000
2,751
40 092
0,4273
98,7
12,5
93,1
0,5481
1,1001
20 000
1,644
61 162
0,3577
96,5
13,3
90,6
0,2993
0,1425
50 000
1,032
97 284
0,2909
94,4
14,1
88,2
0,1731
0,2133
100 000
1,000
147 603
0,2399
92,8
14,7
86,4
0,1574
0,2959
192
а, МПа
есе. ю-2
0,2
80
40
0
Л(\
v
/
/
/
/
1
•
1
-4-
2
.--
,<*'
■^
<**>
-*И
-^^
** 1
од
7 8 9 М04ч
Рис. 3.30. Изменение напряжения и деформации при ползучести на поверхности
центрального канала во времени
1 — окружное напряжение а9; 2 — окружная деформация ползучести sQ
чести к моменту / определяем по (3.79), увеличение диаметра центрального
канала — по (3.80).
Результаты расчета (некоторые) графически изображены на рис. 3.30.
Суммарная деформация ползучести за 10 ч работы составляет в£(10 ) =
= 0,296 '10 « 0,3 %. По некоторым представлениям суммарная деформация
ползучести, накопленная за срок службы в опасной точке, является критерием
надежности детали в условиях ползучести, по рекомендациям считается предельно
допустимой деформация 1 %.
В рассматриваемом примере ротор по состоянию на поверхности централь-
с 5
ного канала отвечает и этому критерию, так как ее(10 ) < 1 %.
Рассчитаем увеличение диаметра центрального канала за 10 ч по (3.80):
Ad0 =120- 0,296 • 1 О*2 = 0,3 55 мм.
Увеличение, в принципе, может быть измерено при инспекции ротора после
10 ч его эксплуатации. В ряде случаев такие измерения были выполнены для
серии турбин в целях выявления возможности продления их ресурса. Сравнивая
полученные значения деформаций и увеличения диаметра канала, видим, что
расчет по напряжениям в состоянии установившейся ползучести (см. пример 3.1)
дает существенно заниженное значение деформации (примерно втрое). Поэтому
при необходимости определения деформации ползучести следует обязательно
учитывать влияние переходной ползучести.
Возвращаясь к примеру 3.1, отметим, что при замене срока службы т на
величину П(т), что соответствует применению к расчету деформаций гипотезы старе-
193
ния (3.60), (3.61), получим увеличение диаметра центрального канала с учетом
влияния давления р0:
2wmax = Ad0 = 120 • 1 • 10"8П(т) = 120 • 1 • 10"8 • 147603 = 0,177 мм,
где значение Q(t) взято из табл. 3.2.
Полученный результат вдвое меньше найденного по гипотезе течения (Ad0 =
= 0,355 мм), отличие определяется неучетом при использовании гипотезы
старения перераспределения напряжений в процессе переходной ползучести. В этом
заключается «врожденный» недостаток гипотезы старения, о чем было упомянуто
ранее (см. § 1.3).
3.4. ТЕРМОУСТАЛОСТЬ РОТОРОВ
Повторные переходные режимы турбины обусловливают циклическое
деформирование материала и могут быть причиной появления
термоусталостных трещин в роторах. Опасными зонами роторов являются зоны,
расположенные около пазов для крепления лопаток, около разгрузочных
(«тепловых») канавок на поверхности вала в местах расположения
лабиринтных уплотнений; зоны перехода от диска к валу в цельнокованых
роторах дисковой конструкции: зоны, расположенные около центрального
сверления в цельнокованом роторе. В перечисленных зонах при
переходных режимах турбины возникают местные напряжения и деформации,
обусловленные температурными воздействиями. При достаточно высоких
температурах в переходных режимах возникают повторные пластические
деформации, сопровождающиеся ползучестью. Величина повторных
пластических деформаций зависит от длительности переходного режима: чем
быстрее меняется режим турбины, тем выше температурные напряжения
и тем вероятней возникновение циклических пластических деформаций и
появление трещин термоусталости.
Влияние времени пуска /0 и интенсивности теплообмена а на
упругие напряжения в цельнокованом сплошном роторе барабанного типа
(цилиндре) показано на рис. 3.31. Обозначенные на рисунке величины
определены следующими зависимостями:
sx=(l-\i)azl/(EaTA7)i
а=агх/Х\ &Т=Т0-Та;
х = Xt/(rxpc); т0 = Ц/Crjpc),
где cfz0, azl — осевые напряжения в центре ротора и на его
цилиндрической поверхности; a — коэффициент теплоотдачи на поверхности
194
а=оо
/Л
VK1
h
Ш
\v.
l
^=oo
x I
a=oo
5 -
""^1 1
у xl
_ и ■■■■ 1 A» 1
o=oo
"sl
T
C— 1
<
sl
/"
\L_
-4
0,2 0,4 x
0,2 0,4 T
б
0,2 0,4 x
Рис. 3.31. Изменение упругих температурных напряжений в сплошном роторе при
различных условиях пуска
а — х0 = 0; б — х0 = 0,1; в — т0 = 0,5
ротора; X — коэффициент теплопроводности материала; Г0 —
температура среды (пара) около поверхности ротора; Та — начальная
температура ротора; с — массовая теплоемкость материала; /0 — время пуска
(подъема температуры среды); р — плотность материала.
Ползучесть на стационарном режиме способствует увеличению
размаха пластических деформаций, возникающих при рабочих циклах:
пуск — стационарная работа — остановка, и вызывает дополнительное
повреждение материала в зонах перегрузки.
Процесс деформирования в зонах перегрузки ротора аналогичен
процессу циклической деформации трехстержневой модели,
рассмотренному в § 2.4.
195
Для уменьшения повреждения при каждом рабочем цикле и
повышения термоциклической прочности роторов предусмотрены следующие
мероприятия:
снижение скорости изменения режима, т.е. удлинение времени пуска,
нагружения и остановки турбины;
уменьшение концентрации напряжений в наиболее опасных зонах,
например отказ от разгрузочных канавок на поверхности вала,
применение галтелей максимально возможного радиуса во всех зонах перегрузки;
применение в конструкции роторов тонкостенных элементов для
снижения температурных разностей;
использование материалов, отличающихся большим сопротивлением
малоцикловой усталости, большей длительной прочностью, пределом
текучести, большей теплопроводностью и меньшим температурным
удлинением.
Первое из названных мероприятий ведет к снижению
маневренности — важного показателя работы турбины, особенно, для пиковых
и полупиковых турбин. Конструктор должен стремиться использовать
все возможности и выбирать материалы, обеспечивающие высокую
термопрочность ротора и других деталей турбомашин при
одновременном стремлении получить высокую маневренность турбины.
Для количественного определения долговечности роторов следует
использовать общую методику (см. § 1.4), где изложен расчет по
известным параметрам установившегося цикла деформирования: по Aef —
приращению интенсивности пластических деформаций на всех участках
цикла деформирования и по известному закону изменения напряжений
aJt) на участках, где наблюдается ползучесть.
Если названные величины известны, то долговечность рассчитывают
по формуле (1.119), где входящие величины должны быть вычислены по
формулам (1.120) и (1.122).
Определение деформаций Aef и напряжений о у в деталях
турбомашин для всего рабочего цикла, таким образом, представляет главную
трудность в решении задачи долговечности.
Применение общей методики § 1.4 рассмотрим на примере.
Расчет долговечности цельнокованого ротора при концентрации
напряжений на поверхности вала. Роторы часто имеют на
поверхности в зоне диафрагменных и концевых уплотнений так называемые
разгрузочные канавки (рис. 3.32).
Назначение канавок состоит в том, что они предотвращают прогиб
ротора при задеваниях в уплотнении и местном нагреве ротора в зоне
196
Рис. 3.32. Схема участка вала с разгрузочными канавками
/ — вал; 2 — разгрузочные канавки; 3 — сегмент уплотнения; 4 — обойма
уплотнения; г — радиус скругления дна канавки
задевания вследствие выделения тепла при трении гребней уплотнения
о поверхность ротора.
В то же время канавки являются концентраторами напряжений
и местом, где в первую очередь зарождаются и развиваются трещины
термоусталости.
Рассмотрим расчет долговечности цельнокованого ротора при рабочем
цикле пуск — стационарная работа — остановка по условиям
деформирования материала в зоне разгрузочной канавки на поверхности вала.
Канавка имеет глубину А; радиус кривизны у дна канавки
(минимальный) р; расстояние между смежными канавками (шаг) /.
Максимальные упругие температурные напряжения a2j и ав1 на
поверхности дна канавки определяют по зависимостям
a2l s aGZ°zn> a9l = aaeaeH- (3-81)
Остальные составляющие тензора напряжений в рассматриваемой
точке равны нулю вследствие осевой симметрии и граничных условий.
Здесь aG2, aaQ — коэффициенты концентрации упругих
температурных напряжений; cj2H = a0H = ан — номинальные температурные
напряжения гладкого вала определяемые, например по рис. 3.31 в
зависимости от условий пуска и теплообмена на поверхности вала.
197
Для коэффициентов концентрации (учитывая исследования ВТИ
и МЭИ) принимаем следующие зависимости:
аог = [
ЛУ/2
1 + 2
аае = l + ^ааг - О,
(1-е
-//(4А)
>]
Ml*2 h
(3.82)
где тх — показатель степени в законе изменения температуры по радиусу
вала (3.19). Он зависит от параметров а и т0 и может приниматься
поданной ранее оценке Wj = 2—4. Большим а и меньшим т0
соответствуют большие значения тх.
Интенсивность напряжений у дна канавки
а* = Кг
2 1/2
+ aei)
аа,ан>
где
2 2 1/2
аа, = Кб - acQaoz + acz)
(3.83)
— коэффициент концентрации интенсивности упругих напряжений.
Далее предполагаем, что ползучесть мала и ею можно пренебречь
(что соответствует действительным условиям во многих случаях) и что
остановка происходит при малых температурных напряжениях, так что
можно принять а д = 0.
Дальнейший ход расчета аналогичен изложенному в § 1.4
применительно к одноосному случаю. В данном примере процедура расчета
следующая.
Определяем коэффициент концентрации напряжений из зависимости
2 _Л у/С-1)
21СТ*н
;0+Ц)
о*
а
(3.84)
а«/
получаемой из (1.49) путем применения теоремы о переменном нагруже-
нии(1.90).
Рассчитываем полуразмах приведенных интенсивностей напряжений
в цикле по зависимости, аналогичной (1.112)
Ла* =
a*- g <
(3.85)
198
Число циклов пуск—остановка до появления макротрещины
находим по формуле (1.115), где от = - ан.
Пример 3.2. После двухсуточного простоя турбины в резерве температура
ротора в сечении по разгрузочной канавке постоянная и равна Та = 400 °С. При
пуске в уплотнение подается пар с температурой Г0 = 500 °С, которая остается
затем постоянной.
Требуется определить число подобных пусков турбины до появления
макротрещины на дне разгрузочной канавки.
Размеры канавки: h = 8 мм, р = 1,5 мм, / = 50 мм; радиус вала гх = 250 мм.
Коэффициент теплоотдачи от пара к поверхности вала в уплотнениях принять
(по оценке) а = 2400 Вт/(м2 • К).
Материал ротора — сталь 25 Х1М1Ф (Р2М), характеристики которой
приведены в табл. 1.3.
Физические характеристики стали следующие. Коэффициент
теплопроводности X = 30 Вт/(м • К); теплоемкость с = 470 Дж/(кг • К); коэффициент расширения
ат= 13,7 • 10~6 (1/К); плотность р = 7820 кг/м3.
Решение. Для определения номинального температурного напряжения при
пуске следует воспользоваться графиками на рис. 3.31, для чего предварительно
находим:
<*>*1 2400 - 0,25 0Л.
а = —= 30 =20'
т0 = 0.
По графикам рис. 3.31 находим для этих значений безразмерное
температурное напряжение на поверхности вала.^ = -0,61 и затем вычисляем
o^s^f^ = -0,61 ■ 17'5 ' Ю4' 13J- Ю-6(500-400) = _208)9 ^
Рассчитываем коэффициенты концентрации напряжений по формулам (3.82),
(3.83):
.„-[.♦2-(#,Я(.-.-~-)Х'-'-я)-«*
аст0 - 1 + 0,3 • (4,204- 1) = 1,961;
aCTj|e = (1,9612 - 1,961 • 4,204 + 4,2042)1/2 = 3,6435.
По зависимости (3.84) для ccas|t = 3,644, m = 13,54; ak = 335 МПа имеем
уравнение
0,3154 =
( 13,275-*2 ^°'0797448
vC;54-i3,275j
решая которое методом подбора, находим каф = 2,993.
199
Полуразность Дог* получаем из (3.85):
Аа*Ч
к = 0,3118-2,993 = 0,9332.
Находим число пусков до появления макротрещины термоусталости по
формуле (1.105)
N„
-0,630
С (-— Aaf 1 = 20,1 • f 2'335. • 0,9332l3'54Y ' = 1208 пусков,
v Е J v17,5 • 104 J
что является недостаточным для полупикового режима работы турбины за
срок ее службы. Для увеличения числа Np следует подавать в уплотнение пар
первоначально с пониженной температурой Та = 400 °С с постепенным повышением
ее до Г0 = 500 °С.
Рассмотрим, как увеличивается число циклов Np9 если температура
подаваемого в уплотнения пара линейно поднимается от Та = 400 °С до Г0 = 500 °С
за 25 мин. Рассчитаем безразмерное время:
Xt* 30 • 25 • 60
т0 = "Г1 = , ZD °U = 0,1959«0,2.
r2pc (0,25)2 • 7820 • 470
Безразмерное напряжение найдем по зависимостям рис. 4.15, применимым
для напряжений на поверхности ротора, если вместо толщины плиты h, величины
а и т0 определять по размеру гх. Находим для а - 20 и т0 = 0,2: s = 0,42.
По формуле (4.24) найдем
_ ЕатАТ 17,5-13,7 4500-400)- 10~2
Коэффициент концентрации к^ найдем из уравнения
Г 13,287-*2„ Г'07'7448
0,42=-143,85 МПа.
0,2172 =
C;54-13,287j
Методом подбора получим: £CTs(t = 3,5632; полуразмах приведенной
интенсивности напряжений:
Лаг*
1
ка = 0,2147 • 3,5632 = 0,7650 .
Число пусков до появления макротрещины
( 2 • 335 13 54V°>63
ND = 20,1 • L ^D . • 0,76501J,M = 6579
v17,5-104 J
пусков.
При подъеме температуры в течение 25 мин долговечность ротора
увеличивается в 5,4 раза по сравнению с прогревом при температуре 500 °С.
200
3.5. ТРЕЩИНООБРАЗОВАНИЕ И ТРЕЩИНОСТОИКОСТЬ
ДИСКОВ В УСЛОВИЯХ КОРРОЗИОННОЙ СРЕДЫ
Прочность дисков с учетом влияния трещин может быть рассмотрена
по двум концепциям.
Первая концепция основана на рассмотрении двухстадийного развития
поврежденности: стадии инкубационной и стадии развития трещины.
Вторая концепция базируется на предположении о существовании
изначального дефекта в напряженной области детали и рассматривается
распространение трещины от этого дефекта.
Общие закономерности зарождения и распространения трещин
рассмотрены в § 1.6. В настоящем параграфе общие закономерности
использованы для оценки трещиностойкости дисков паровых турбин.
Как уже отмечалось, для коррозионного растрескивания под
напряжением определяющим является сочетание трех факторов: уровень
напряжений, свойства материала и воздействие среды.
Коррозионное растрескивание под напряжением (КРН) роторов
паровых турбин проявляется в эксплуатации, как правило, в случае
роторов с насадными дисками (см. § 3.1), находящимися в зоне
фазового перехода, где образуются и концентрируются растворы коррози-
онно-активных веществ в каплях влаги (§ 1.6 и 1.7).
Причинами преимущественной подверженности КРН роторов с
насадными дисками являются, во-первых, высокий уровень напряжений
в дисках в таких местах как зоны посадочной поверхности и особенно
шпоночного паза, разгрузочных отверстий
в дисках, и замковых соединений (рис. 3.33);
во-вторых, конструктивные особенности
роторов, проявляющихся в том, что в них
имеются проходы, в которых движение пара
происходит с малыми и переменными
скоростями при переменном режиме работы
турбины. При переменном режиме зона
фазового перехода мигрирует по проточной
части, что приводит к тому, что некоторые
ступени попеременно попадают то в область
перегретого, то в область влажного пара.
При этом в проходах шпоночных пазов,
разгрузочных отверстий происходит
попеременное подсушивание и увлажнение
Рис. 3.33. Зоны преимущественного трещинообра-
зования в дисках (по приоритету)
1 — шпоночный паз; 2 — разгрузочные отверстия; 3
— обод диска около отверстий под заклепки; 4 —
поверхность полотна и ступицы
Ж
201
поверхностей, что приводит к концентрированию коррозионно-активных
растворов и образованию на поверхности жидких и твердых пленок,
содержащих коррозионно-агрессивные вещества высокой концентрации,
вызывающие при высоких напряжениях интенсивный процесс
коррозионного растрескивания.
Повышение температуры среды вызывает снижение стойкости
против коррозионного растрескивания. Поэтому КРН в дисках наблюдается
преимущественно в турбинах без промежуточного перегрева пара.
В этих турбинах при расширении пара область фазового перехода
располагается обычно в диапазоне температур 120—140 °С, в то время как
в турбинах с промежуточным перегревом эта область лежит в диапазоне
70—80 °С (рис. 1.31).
Для повышения трещи но стой кости дисков существуют
следующие меры:
снижение концентрации напряжений, в частности отказ от осевых
шпонок и применение торцевых шпонок;
применение материалов с пониженным пределом текучести;
поддержание чистоты пара на нормативном уровне;
ввод добавок пленкообразующих веществ, например октадецила-
мина (ОДА), для отмыва поверхностей и их защиты от коррозионно-
активных отложений;
подача перегретого пара в камеры перед и за дисками в целях
предотвращения контакта поверхностей дисков с коррозионно-активными
растворами в зоне фазового перехода.
Определение ресурса диска. Первая концепция. Критический размер
трещины в диске рассчитьшают, применяя условие прочности (1.138) в виде
Кх = КХс. (3.86)
Коэффициент интенсивности напряжений при растрескивании в зоне
шпоночного паза можно выразить в виде
Кх = К%ху2у3. (3.87)
Здесь К^ — определяется по формуле в табл. 1.6 для схемы 4 по
значению номинального напряжения а0о на поверхности расточки диска; vj/j,
vj/2 и \|/3 — поправочные множители. Величина v|/j отражает влияние
неоднородности поля напряжений около посадочной поверхности диска
и рассчитывается по формуле
¥1 = 0,967 д [41+/+/)(! W72, (3.88)
1,11 + 5(1 -х)4 L 6х J
где х = 1 - llh (0,05 <llh< 0,5).
202
Приведенный размер h — условная толщина изгибаемой полосы
рассчитывается по зависимостям:
2а
80/
da,
Аг
da.
dr
aeo ~ °r0
+ ^P<° ro-
(3.89)
Здесь а0о, ar0 — номинальные (окружное и радиальное) напряжения
по поверхности расточки диска; г0 — радиус расточки.
Множитель \j/2 учитывает снижение номинального напряжения
на поверхности шпоночного паза а0п по сравнению с напряжением а0О
(рис. 3.34) и выражается соотношением
Ida/
у2 = 1- —
'ео
'е
Аг
Л>
(3.90)
где Ап — глубина шпоночного паза (см. рис. 3.34).
Параметр \|/3 для угловой трещины принимают равным 1,1 для
краевой трещины vj/3 = 1.
Критический размер трещины вычисляется путем решения
уравнения (3.86) методом подбора.
Рис. 3.34. Распределение напряжений в диске и установление номинального
напряжения в зоне шпоночного паза
203
Расчет ресурса и остаточного ресурса диска в условиях
коррозионного растрескивания под напряжением при чередовании
циклического и статического нагружения. Вторая концепция.
Полное приращение глубины трещины за некоторый характерный
период работы турбины (например, за неделю) может быть записано в
виде
А/ = vAt+ VAN = (Vrr+ V)AN, (3.91)
v AN J
где A/ — приращение глубины трещины; At — время работы турбины
в неделю на номинальной частоте вращения (номинальный режим);
AN— число циклов пуск — остановка за неделю; v — скорость роста
трещины при постоянных напряжениях; V — подрастания трещины за
один цикл нагружения (1.6).
Предположим, что материал диска находится в зоне «плато», так что
v не зависит от К{ и, следовательно, не зависит от а0О и от текущего
значения /. Принимаем также, что At/AN— величина постоянная, т.е. все
недели одинаковые по соотношению числа часов работы и числа
пусков. Тогда, обозначая v = v(At/AN) + V и переходя в (3.87) к
дифференциалам, получаем уравнение
й= ""• (392)
интегрируя которое, получаем соотношение между числом пусков и
размером трещины в виде
/
МО
'о
Учитывая закономерности подрастания трещины при циклическом
нагружении (1.143), получаем, что
5(/) = v(At/AN) + CQ(fAaeoJiU)g. (3.94)
Из (3.93) можно получить число циклов нагружения и длительность
работы турбины до разрушения диска, положив / = / :
'■Ф
На рис. 3.35 изображена величина v(l) в условиях, типичных для
дисков теплофикационных турбин, находящихся в зоне фазового
перехода, при условии еженедельной остановки.
204
Для расчета остаточного числа
циклов до разрушения необходимо знать
исходную глубину трещины /нач. Расчет
остаточного числа циклов до
разрушения производится по (3.95), где следует
принять /0 = /нач и вычислить
N =7V •
р ОСТ'
>ост = ^остА'/А^
Когда циклическое подрастание
трещины пренебрежимо мало, получаем
простую зависимость (1.142). При
использовании второй концепции, очевидно,
инкубационный период тинк = 0.
h_
Рис. З.Э5. Развитие трещины при
чередовании циклического и
статического нагружения
Глава четвертая
ПРОЧНОСТЬ ЭЛЕМЕНТОВ СТАТОРА
4.1. КЛАССИФИКАЦИЯ И ОСОБЕННОСТИ
ИСПОЛНЕНИЯ КОРПУСОВ ТУРБОМАШИН
В корпусе турбомашины установлены неподвижные элементы
проточной части — сопловые (направляющие) лопатки и уплотнения.
В некоторых конструкциях корпус является несущим элементом для
подшипников (в этом случае подшипники называются встроенными)
и регулирующих органов (клапанов, регулирующих диафрагм и других
элементов турбомашины).
К корпусу турбомашины подсоединяются трубопроводы для
подвода и отвода рабочей среды. Корпус опирается на фундамент через
промежуточные элементы — фундаментные плиты (рамы) или стулья
(корпуса) подшипников (в этом случае подшипники называются
выносными).
Корпуса выносных подшипников установлены на фундаменте.
Конструкции корпусов отличаются большим многообразием. Их
особенности определяются как назначением корпуса и его принадлежностью, так
и возможностями заводов-изготовителей.
Корпуса ЧВД, ЧСД и ЧНД паровых турбин имеют различные
конструкции.
По конструктивным особенностям корпуса делятся на следующие
типы: а) одностенные; б) двустенные; в) обойменные —
промежуточный тип между названными выше типами; г) бесфланцевые, которые в
свою очередь делятся на ствольные и стяжные.
По технологическому признаку корпуса подразделяются на литые,
сварные и сварно-литые (комбинированные). Ниже рассматриваются
примеры конструктивного выполнения корпусов паровых, газовых
турбин и компрессоров.
Односменный корпус литой конструкции (рис. 4.1) выполнен как
одно целое с паровой и сопловой коробками. В средней части корпуса
установлены диафрагмы с сопловыми решетками. Корпус имеет
горизонтальный разъем с фланцами, стягиваемыми болтами или шпильками.
На рисунке показан фланец нижней части корпуса. Продолжения
нижних фланцев образуют лапы, при помощи которых корпус опирается
206
Рис. 4.1. Одностенный корпус паровой турбины (ПО КТЗ)
/ — регулирующие клапаны; 2 — паровая (клапанная) коробка; 3 — сопловая коробка;
4 — средняя часть корпуса; 5 — диафрагмы; б — уплотнения вала; 7 — лапы; 8 —
вертикальные шпонки; 9 — поперечные горизонтальные шпонки; 10 — выходной патрубок;
11 — нижний фланец
на стулья подшипников. Между лапами и опорными поверхностями
стульев размещены поперечные горизонтальные шпонки, оси которых
перпендикулярны вертикальной плоскости симметрии турбины.
Для центровки корпуса относительно стульев и обеспечения
перемещений при тепловых расширениях служат вертикальные направляющие
шпонки. Система вертикальных и горизонтальных шпонок
обеспечивает сохранение центровки оси корпуса относительно осей
подшипников. Таким образом, обеспечивается совпадение осей корпуса и ротора
на всех режимах работы турбины при перемещениях, вызванных
тепловыми расширениями корпуса.
Одностенные корпуса применяются в паровых турбинах небольшой
мощности при умеренных начальных давлениях и температурах пара
и отсутствии отборов на регенерацию (например, в турбинах
питательных насосов). В крупных турбинах одностенные корпуса практически
не применяются. Крупные энергетические турбины имеют высокие
207
параметры: давление и температуру в ЧВД и ЧСД, большие размеры,
обусловленные большими расходами пара. Для обеспечения высокой
прочности и жесткости в этих условиях необходимо применять одно-
стенные корпуса со значительной толщиной стенки.
В толстостенном корпусе наблюдаются значительные
температурные разности по толщине в стационарных и, особенно, при переходных
режимах турбины и, как следствие, значительные температурные
деформации (относительные удлинения) и напряжения. При большом
внутреннем давлении одностенный корпус имеет чрезмерно большую
толщину стенок фланцев, что неблагоприятно по уровню
температурных напряжений в самом фланце, а также в болтах и шпильках,
стягивающих фланцы разъемов корпуса.
Толстостенный цилиндр имеет значительно большее время прогрева.
Время прогрева стенки цилиндра пропорционально квадрату толщины
стенки. Аналогично на время прогрева фланца влияет его ширина.
Следовательно, применение одностенных корпусов при высоких
параметрах и мощностях приводит к повышенным напряжениям (снижению
прочности), температурным деформациям и короблению корпуса, а
также к увеличению времени прогрева корпуса, т.е. к ухудшению
характеристик маневренности турбин. Поэтому для ЧВД и ЧСД турбин
большой мощности применяются двустенные корпуса, в которых толщины
стенок каждого корпуса значительно меньше, что обеспечивает
хорошие условия прогрева, сокращает время пуска и нагружения, а также
уменьшает температурные напряжения в корпусах.
Двустенный корпус ЧВД крупной паровой турбины (рис. 4.2) состоит
из внутреннего корпуса 1 и наружного 2. Внутренний корпус имеет
сварные сопловые коробки 5, что улучшает температурные условия
работы внутреннего корпуса. Внутренний корпус опирается лапами
в плоскости горизонтального разъема на выступы, расположенные
на внутренней поверхности внешнего корпуса. Горизонтальные 8 и
вертикальные шпонки б фиксируют оба корпуса в поперечном
направлении, обеспечивая одновременно свободу тепловых расширений
внутреннего корпуса относительно наружного. Наружный корпус опирается
при помощи лап 7 на стулья подшипников (лапы 7 вынесены из
горизонтальной плоскости в плоскость чертежа).
Пар подается через четыре штуцера с подвижными соединениями
в сопловые коробки. Фиксация внутреннего корпуса относительно
наружного в осевом направлении обеспечивается при помощи шпонок,
размещенных в вертикальной плоскости паровпуска около
горизонтального разъема.
208
Рис. 4.2. Двустенный корпус ЧВД полупиковой турбины (ПО ЛМЗ)
1 — внутренний корпус; 2 — наружный корпус; 3 — диафрагмы; 4 — впускные
патрубки; 5— сопловые коробки; 6 — вертикальные шпонки; 7 — опорные лапы; 8 —
горизонтальные продольные шпонки; 9 — выходные патрубки
Односменный корпус с обоймами показан на рис. 4.3. В этом случае
пар поступает в сопловые коробки 1 (приваренные или прикрепленные
болтами к корпусу 2). Диафрагмы 4 вставлены в обоймы 3, которые
установлены в пазы корпуса.
В многоступенчатых турбинах предусмотрено несколько обойм,
в каждой из которых размещено несколько диафрагм. Такая
конструкция позволяет выполнить необходимое количество отборов пара на
регенеративный подогрев питательной воды. Обойменная конструкция
улучшает температурные условия корпуса, позволяет уменьшить
толщины стенок корпуса и тем самым способствует повышению
маневренных качеств турбины.
Бесфланцевые корпуса применяют некоторые зарубежные фирмы
в ЧВД для повышения маневренности турбин.
На рис. 4.4 показана конструкция двустенного корпуса ЧВД турбины
мощности 1300 МВт фирмы ABB.
Внутренний корпус 2 имеет горизонтальный разъем без фланцев. Обе
его половины стянуты кольцами 3, которые надеты на внутренний
корпус в нагретом состоянии. После остывания кольца стягивают обе
половины корпуса, обеспечивая необходимую плотность горизонтального
разъема. Наружный корпус 1 имеет горизонтальный разъем с фланцами.
209
to
о
Рис. 4.3. Одностенный корпус с обоймами для установки диафрагм (ПО ЛМЗ)
/ — сопловая коробка; 2 — корпус; 3 — обоймы; 4 — диафрагмы; 5 — камеры отборов
Рис. 4.4. Двустенный корпус ЧВД с безфланцевым разъемом внутреннего цилиндра (ABB)
1 — наружный корпус; 2 — внутренний корпус; 3 — стяжные кольца; 4 — обоймы
с горизонтальным фланцевым разъемом
Однако это не снижает маневренности, так как фланцы имеют
небольшую ширину, и толщина стенок наружного корпуса невелика.
В других конструкциях бесфланцевых корпусов взамен отдельных
колец предусмотрен цилиндр, который.надевают на внутренний корпус.
Цилиндр позволяет обеспечить плотность горизонтального разъема
внутреннего корпуса. Такая конструкция корпуса относится к
ствольному типу.
Улучшение маневренных качеств турбины с бесфланцевыми
корпусами сопряжено однако с усложнением технологии сборки и разборки
таких цилиндров.
Двустенные конструкции корпусов распространены, как правило, и
в ЧСД крупных турбин. Несмотря на то, что давление пара перед ЧСД
в турбинах на органическом топливе значительно ниже начального,
температура пара высока, строительные размеры больше, чем в ЧВД.
Двустенные корпуса получили распространение и в ЧВД влажнопа-
ровых турбин, а также в ЧНД крупных паровых турбин. Значительные
строительные размеры корпусов названных типов предопределяют их
двустенную (иногда трехстенную) конструкцию для уменьшения
сечений несущих элементов, снижения коробления корпусов и повышения
маневренных качеств этих турбин.
Внешний корпус двустенного корпуса ЦНД турбины К-1200-240
ПОЛМЗ (рис. 4.5) образуется двумя выходными патрубками 3 и сред-
211
to
К)
Рис. 4.5. Двустенный корпус ЧНД (ПО ЛМЗ)
/ — средняя часть -наружного корпуса; 2 —
/ — средняя часть -наружного корпуса; 2 — несущие полукольца; 3 — выходные патрубки; 4 —
фрагмы; 5 -— листовые элементы
диа-
ней частью 7, которые соединены при помощи вертикальных фланцев.
Внутренний корпус состоит из нескольких полуколец 2, соединенных
при помощи листовых элементов 5 и несущих диафрагмы 4.
Пространства между листовыми элементами образуют камеры, из которых
отбирается пар на регенеративный подогрев питательной воды. Для
обеспечения жесткости корпуса предусмотрена система внутренних и внешних
ребер. Внешний и внутренний корпуса и обечайки выполнены из
листового материала (углеродистая сталь) при помощи сварки. Несущие
кольца для установки диафрагм изготовлены из поковок (углеродистой
стали). Корпус опирается на фундамент лапами, расположенными
на боковых и торцевых участках выходных патрубков. Пар в цилиндр
попадает по двум паропроводам, подходящим по обеим сторонам
к средней части цилиндра в нижнюю его половину.
Иногда (при меньших размерах) корпуса ЦНД выполняют литыми
из чугуна.
Корпуса газовых турбин имеют в основе конструкции тонкостенные
элементы и выполняются из легированных сталей вследствие
относительно невысоких давлений и высоких температур рабочей среды
внутри корпуса. Обычно корпус газовой турбины выполнен
двустенным. Пространство между внутренним и наружным корпусами иногда
заполняют тепловой изоляцией или продувают воздухом для
охлаждения стенок корпусов.
Впускной патрубок 1 корпуса газовой турбины ГТ-35-770 (рис. 4.6) при
помощи вертикального фланца соединен со средней частью корпуса 3, в
которой крепятся полукольцевые секции, необходимые для крепления
диафрагм 5. Эти полукольца вместе с внешними ободьями диафрагм
образуют внутреннюю стенку корпуса. Пространство между внутренней
стенкой и наружным корпусом заполнено изоляционным материалом.
Изоляцией выложена также внутренняя поверхность входного патрубка. На
наружной поверхности внешнего корпуса и патрубка уложен с зазором
тонкий стальной лист. В щель между корпусом и листом подается
охлаждающий воздух, обеспечивающий (вместе с изоляцией) эффективное
охлаждение наружного корпуса, выполненного из низколегированной
стали. Воздух подается также на охлаждение крепления сопловых
лопаток первой ступени. Внутренний входной патрубок 2 выполнен из
листовой жаропрочной стали. Форма патрубка обеспечивает аэродинамически
совершенный вход газа в турбину. Внутренний патрубок не испытывает
разности давлений, поэтому толщина листа небольшая. Разность
давлений воспринимается наружным патрубком, который имеет большую
толщину стенок. Применение воздушного охлаждения позволяет выполнить
наружный патрубок из низколегированных сталей.
213
to
4^
Рис. 4.6. Корпус газовой турбины (ПО «Турбоатом»)
1 — впускной патрубок; 2 — внутренний тонкостенный патрубок; 3 — средняя часть корпуса; 4 — полукольцевые секции; 5 •
диафрагмы; стрелки а—г — подача воздуха на охлаждение корпуса
Изложенный принцип двустенных конструкций широко применяется
в корпусах газовых турбин и других элементах, например по такому же
принципу могут быть выполнены двустенные трубопроводы для
передачи газа высокой температуры на значительные расстояния.
Корпус воздушного компрессора одностенный, литой из
углеродистой стали представлен на рис. 4,7. Корпус имеет горизонтальный
разъем, а также технологический вертикальный разъем, облегчающий
расточку внутренних пазов под крепления направляющих лопаток.
Внешние и внутренние ребра служат для увеличения жесткости
корпуса. Стул подшипника со стороны выходного патрубка отлит заодно с
нижней половиной корпуса.
Условия работы корпусов турбомашин. Корпус турбомашины
подвергается силовому и температурному воздействию. В процессе цикла
пуск — стационарная работа — остановка чередуются медленно
меняющиеся и стационарные воздействия. В стационарном режиме
работы турбомашины при умеренных температурах (корпуса ЧНД,
корпуса воздушных компрессоров) материал детали находится в условиях
упругости, и прочность обусловлена действующими напряжениями Ц
критериями кратковременного разрушения.
В переходных режимах пуска, нагружения или остановки в
элементах корпуса температурные поля неравномерны, разности температур
и температурные напряжения достигают обычно максимальных
значений. Наличие концентраторов напряжений в стенках корпуса в виде
пазов для крепления диафрагм или обойм может привести к появлению
повторных пластических деформаций при пусках и остановках
турбомашины. В стационарном режиме при повышенной температуре
наблюдается ползучесть.
В этих условиях прочность корпуса должна оцениваться с учетом
характеристик термоусталости и ползучести. Неравномерные
температурные поля, как уже отмечалось, вызывают коробление корпуса.
Вследствие разности температур верхних и нижних частей корпуса
(температура верхних частей обычно выше температуры нижних)
происходит искривление оси корпуса и его выпучивание, что приводит к
изменению радиальных зазоров между статором и ротором и
возможным задеваниям и износу уплотнений. При значительных задеваниях в
уплотнениях возможно прогрессирующее тепловое искривление ротора
с весьма серьезными последствиями.
Тщательная изоляция поверхности корпуса и обеспечение
симметричной его формы относительно плоскости горизонтального разъема
позволяют уменьшить выпучивание корпуса. Однако это выполнить
трудно из-за необходимости размещения патрубков регенеративных
отборов в нижней части цилиндра.
215
to
Рис. 4.7. Корпус осевого воздушного компрессора
/ — входной патрубок; 2 — корпус компрессора; 3 — выходной патрубок; 4 — вертикальный разъем; 5 — стул подшипника
Отвод тепла от корпуса через патрубки отборов, а также более
интенсивное конвективное охлаждение нижней части цилиндра
приводит к появлению разности температур между верхней и нижней частями
корпуса.
Деформация корпуса под действием давления и температурного поля
может привести к нарушению плотности фланцевых соединений.
Конструкция корпуса и его сборка (сболчевание, нанесение
изоляции) должны отвечать требованиям прочности, жесткости, плотности
корпуса и маневренности турбины.
Некоторые принципы конструирования корпусов. Корпуса турбо-
машин имеют сложную форму тонкостенной или толстостенной оболочки
с довольно резкими изменениями поверхности, с фланцами и патрубками.
В местах сочленения (переходных зонах) элементов разной формы —
от стенки корпуса к фланцам, от стенки к патрубкам (входным, выходным,
отборным) или от торцевой стенки к цилиндрической части концевых
уплотнений, наблюдается концентрация напряжений. Увеличенные изгиб-
ные напряжения и прогибы наблюдаются также в плоских стенках
(торцевые стенки цилиндров и другие зоны сварных ЦНД).
Учитывая эти особенности, а также рассмотренные ранее условия
работы корпусов, при конструировании корпусов (рис. 4.8) необходимо
учитывать следующее.
1. Толщина стенки корпуса должна меняться плавно, сопрягаемые
элементы должны быть по возможности близкими по толщине (рис. 4.8, а и б).
2. В местах сочленений очертание контура должно быть плавным,
радиус кривизны в зоне перехода должен в несколько раз превышать
толщины стенок сопрягаемых элементов.
3. Следует избегать элементов типа плоской стенки. Торцевые стенки
целесообразно выполнять в виде конических оболочек (рис. 4.8, в).
4. Температура детали должна плавно меняться по поверхности
и толщине элемента. Горячие паропроводы нужно вводить в корпус через
патрубки, имеющие воротники.
Рис. 4.8. Элементы корпуса
а — патрубок; б — фланец; в — торцевая стенка; г — паз в стенке корпуса
217
5. Фланцы разъемов должны иметь минимально возможную ширину
(рис. 4.8, б).
6. В стенках корпуса следует избегать пазов с острыми входными
углами (рис. 4.8, г).
4.2. ТЕПЛОВЫЕ РАСШИРЕНИЯ ПАРОВОЙ ТУРБИНЫ
Удлинение всей турбины в осевом направлении вследствие тепловых
расширений корпусов при ее полном прогреве по сравнению с
холодным состоянием для крупных машин достигает 40—50 мм и более.
Значительны также тепловые расширения цилиндров в поперечных
направлениях. Фундамент расширяется значительно меньше. Поэтому
возникает необходимость конструктивно обеспечить свободу тепловых
расширений корпусов турбины во всех трех направлениях таким
образом, чтобы не возникли в системе турбоагрегат — фундамент (ТФ)
недопустимо большие тепловые усилия и не нарушалась бы взаимная
центровка корпусов между собой и по отношению к роторам при
изменении режима работы турбоустановки.
Конструктивные особенности взаимного соединения элементов
турбины (корпусов, стульев подшипников) между собой и установки их
на фундаменте образуют систему организации тепловых расширений.
Примеры организации тепловых расширений корпусов были
рассмотрены в § 4.1. Рассмотрим основные системы организации тепловых
расширений в целом.
Первая из рассматриваемых систем,* получившая в основных чертах
широкое распространение в отечественном турбостроении, схематично
изображена на рис. 4.9. Особенностью системы является передача
сдвигающих усилий при расширении корпусов ВД и СД через лапы и
поперечные шпонки 2. Вертикальная плоскость симметрии турбины
сохраняет неизменное положение благодаря установки осевых шпонок 1
между корпусами подшипников (опор) и фундаментными плитами и
вертикальных шпонок 3 между корпусами цилиндров и опорами.
Поперечные шпонки 4 в пересечении их оси с вертикальной
плоскостью симметрии образуют фикспункт системы ЦВД и ЦСД. Корпуса СД
и ВД расширяясь, двигают корпуса первого и второго подшипников
влево, при этом происходит скольжение корпусов подшипников по
опорным поверхностям фундаментных плит, забетонированных в фундаменте.
Нормальное функционирование системы расширений данного типа
требует выполнения нескольких условий: малое трение на поверхностях
скольжения стульев по опорным плитам, отсутствие асимметрии при
тепловом расширении корпусов, отсутствие перекосов при осевом
скольжении стульев.
218
Рис. 4.9. Система обеспечения тепловых расширений паровой турбины (тип I)
I—IV — поперечные балки; / — осевые шпонки между стульями подшипников и
фундаментными плитами; 2 — поперечные шпонки между стульями подшипников и лапами
ЦВД и ЦСД; 3 — вертикальные шпонки; 4 — поперечные шпонки, образующие
неподвижную точку (фикспункт) системы ЦВД—ЦСД; 5 — поперечные шпонки, образующие
неподвижную точку (фикспункт) ЦНД; 6 — вертикальные шпонки ЦИД
219
На практике возможны нарушения этих условий.
Увеличенное трение на опорных поверхностях стульев подшипников
обусловлено загрязнением, коррозией, короблением опорных
поверхностей, увеличенными вертикальными усилиями, что связано с тепловыми
расширениями присоединенных паропроводов.
Увеличенное сопротивление расширению возникают также
вследствие «закусывания» в осевых шпонках V. Причина этого явления
заключается в том, что вследствие некоторого различия в температурах левой
и правой частей корпуса происходит неодинаковое удлинение левой
и правой лап. Это вызывает через шпонки 2 поворот корпусов
подшипников относительно вертикальной оси, выбирание боковых зазоров
в шпонках 1 и «закусывание» в них.
Увеличенное сопротивление движению корпусов подшипников
по шпонкам вызывают также поперечные горизонтальные усилия,
действующие со стороны несимметрично подсоединенных паропроводов.
При этом сопротивление тепловому расширению существенно
возрастает, возникающие продольные усилия на корпуса подшипников
вызывают деформации прогиба и кручения ригелей /, II и III (поперечных
балок) фундамента. При кручении ригелей происходит наклон стульев
подшипников. Так, при пуске и нагружении турбины ригели 1т II
закручиваются против часовой стрелки, опоры I и II наклоняются влево, что
вызывает расцентровку и перераспределение реакций двух опорных
подшипников, размещенных в корпусе опоры II, изменяется также, но
в меньшей степени, реакция в опоре /.
Кроме того, вследствие большого плеча h (рис. 4.9) образуется
опрокидывающий момент, действующий на стулья / и II, что может привести
к отставанию стула от плиты.
Расцентровка (наклон) подшипников, отставание стульев вызывает
резкое возрастание вибрации, что делает дальнейшую эксплуатацию
машины невозможной.
Для снижения усилий, возникающих вследствие увеличенного
сопротивления движению, применяются следующие меры: на опорные
поверхности плит накладываются антифрикционные пластины фто-
рлона, применяются специальные мастики, возможна установка
пружинных опор, подпирающих лапы и снижающих поверхностное трение.
Для уменьшения эффекта «закусывания» в осевых шпонках 1,
требуется снизить асимметрию температурных полей цилиндров и
уменьшить боковые усилия на корпуса цилиндров со стороны
подсоединенных паропроводов. Первое достигается путем равномерного нанесения
изоляции на корпуса, второе — применением симметричной
компоновки подсоединенных паропроводов. Эффект «закусывания» в шпон-
220
Вид Б
1 ' "^ ' ^
1 J V ^
mvI
jji\
v I
Рис. 4.10. Модифицированная система обеспечения тепловых расширений паровой
турбины (тип //, фрагмент)
1 — корпус подшипника (стул); 2 — лапа цилиндра; 3 — износостойкие твердые
подкладки; 4 — корпус цилиндра; 5 — осевые шпонки; А — узел соединения корпуса
цилиндра со стулом
ках может быть частично снижен увеличением боковых зазоров, однако
применимость этого способа, естественно, является ограниченной.
Вторая из рассматриваемых нами систем тепловых расширений
применяется в некоторых последних проектах турбин. Отличительные
особенности второй системы состоят в следующем (рис. 4.10).
Лапы на стулья подшипников опираются свободно без поперечных
шпонок. Взаимные опорные поверхности лап и стульев образуются
высокотвердыми подкладками 3 из стеллита или другого
высокотвердого и неистираемого материала (например, вольфрама).
Вместо вертикальных шпонок применяются элементы,
обеспечивающие жесткую и шарнирную в продольном направлении связь между
корпусом и стулом в зоне около плоскости скольжения стула по плите
(узел А на рис. 4.10). Преимущества второй системы состоят в том, что
221
практически исключается «закусывание» в шпонках, вызываемое
асимметрией температур цилиндров; уменьшается момент,
опрокидывающий стулья и обусловливающий кручение ригелей вследствие того, что
расстояние h между линией передачи усилия и плоскостью скольжения
уменьшается в несколько (5—8) раз (сравните рис. 4.9 и 4.10). При этом
упрощается конструкция и технология изготовления элементов опор лап
на корпуса подшипников.
Для обеспечения оптимальных осевых зазоров в проточной части
между роторами и корпусами цилиндров упорный подшипник, как
правило, располагается в стуле /Л Это обеспечивает возможность
поддерживать зазоры в ЧВД и ЧСД на минимальном уровне и иметь малое
их изменение при различных режимах эксплуатации.
Третья рассматриваемая система схематично изображена на рис. 4.11.
Все стулья подшипников закреплены на фундаменте жестко и
зафиксированы в продольном направлении поперечными шпонками 2, а в
поперечном направлении — осевыми шпонками 1. Фикспункт системы
корпусов ВД и СД расположен на опоре III в пересечении оси шпонок 4
с вертикальной плоскостью симметрии. Корпуса СД и ВД опираются на
стулья I и II при помощи лап свободно без шпонок через износостойкие
подкладки (стеллит, вольфрам). Фиксация цилиндров ВД и СД в
вертикальной плоскости симметрии обеспечивается вертикальными
шпонками 3. Цилиндры ВД и СД жестко связаны между собой продольными
штангами 8, проходящими сквозь стул II.
При тепловых расширениях цилиндры ВД и СД от фикспункта 4
смещаются вперед при скольжении лап по опорным поверхностям
на стульях подшипников.
Упорный подшипник расположен в стуле II для оптимальности
зазоров в проточной части. Существенным отличием в рассматриваемой
системе по сравнению с первой и второй системами является то, что
упорный подшипник при помощи штанг, проходящих сквозь стенки
стула //, жестко связан с корпусами ВД и СД, и при тепловых
расширениях смещается в осевом направлении вместе с системой корпусов ВД и
СД. Тем самым обеспечивается сохранность (малые изменения) осевых
зазоров в проточных частях ВД и СД.
Цилиндр НД в данной системе, как и в ранее рассмотренных, имеет
собственный фикспункт, образованный вертикальными 7 и
поперечными 6 шпонками.
Третья система имеет следующие преимущества перед первыми
двумя системами.
Существенное снижение весовых нагрузок на скользящих
поверхностях, на которые передаются только веса корпусов ВД и СД, в то время
как в первых двух системах на поверхности скольжения передаются
222
Рис. 4.11. Система обеспечения тепловых расширений паровой турбины (тип III)
1 — осевые шпонки; 2 — поперечные шпонки стульев / и //; 3 — вертикальные шпонки
ЦВД и ЦСД; 4 — поперечные шпонки, образующие фикспункт системы ЦВД—ЦСД; 5 —
поперечные шпонки стула ДО; 6 — поперечные шпонки ЦНД; 7 — вертикальные шпонки
ЦНД; 8 — продольные штанги, связывающие жестко корпуса ЦВД и ЦСД; 9 — упорный
подшипник, жестко связанный со штангами
дополнительно нагрузки от веса роторов ВД и СД и веса стульев со всем
их содержимым.
Поскольку сдвигающие усилия (силы трения) при данном
коэффициенте трения пропорциональны нормальной нагрузке, то при этом
существенно уменьшаются силы трения на опорных поверхностях скольжения.
Нет опасности «закусывания» в осевых шпонках и это устраняет
важный источник возникновения осевых усилий на стулья и элементы
фундамента при тепловых расширениях корпусов.
223
Исключается отставание стульев от поверхности плит.
Существенно упрощается технология изготовления и монтажа узлов
скольжения.
Улучшается стабильность вибрационных характеристик
турбоагрегатов (см. гл. 6) вследствие устранения (уменьшения) силовых расцентро-
вок подшипников.
Улучшается маневренность турбоагрегата.
4.3. НАПРЯЖЕНИЯ И ДЕФОРМАЦИИ КОРПУСОВ
В УСЛОВИЯХ УПРУГОСТИ
Для оценки упругих напряжений в корпусах турбомашин
применяются расчетные методы, методы моделирования и натурные испытания
корпусов. Выбор расчетного метода определяется формой корпуса и
необходимой точностью расчета.
Метод расчета по схеме конечных элементов. Наиболее общим
из применяющихся методов является метод конечных элементов.
Однако даже при использовании совершенных ЭВМ расчет всего
корпуса турбомашины оказывается не всегда возможным, так как системы
линейных уравнений, которые необходимо решить, имеют очень
высокий порядок, что объясняется сложной конфигурацией корпуса.
Поэтому метод конечных элементов целесообразнее применять для
расчета ограниченного участка корпуса, например в зоне вероятной
концентрации напряжений. При этом возникает трудность с установлением
условий на границе выделяемой для расчета зоны. Обычный подход
заключается в применении принципа Сен-Венана: предполагается, что
в некотором удалении от рассматриваемой зоны напряженное и
деформированное состояния не зависят от конфигурации корпуса в этой зоне,
нагрузок в ней, если нагрузки самоуравновешены.
Метод моделирования. Распространенным методом определения
упругих напряжений в корпусах и вообще в сосудах под давлением
сложной формы является метод моделирования, состоящий в
следующем.
Изготавливают геометрически подобную модель корпуса в масштабе
т ~ /м//н из упругого материала с известным модулем упругости Ем
и коэффициентом Пуассона цм (индекс «м» относится к модельному
корпусу). Коэффициенты Пуассона для модели и натурного корпуса
должны быть равны
^м = Ин> (4Л)
где цн — коэффициент Пуассона для материала натурного корпуса.
224
Точность выполнения условия (4.1) не обязательно должна быть
высокой. Допустимо, чтобы условие (4.1) выполнялось только
приближенно. Эта возможность вытекает из того, что напряжения и
деформации в упругих деталях типа корпуса (оболочки) незначительно зависят
от ц. Изменения ц в пределах 0,3—0,4 приводят обычно к изменению
напряжений и деформаций на несколько процентов (4—5 % и менее).
Модель корпуса оснащают тензодатчиками (например, резисторного
типа), которые размещают на поверхностях (внутренней и внешней)
в точках, где предполагается определить напряжения.
Модель корпуса (рис. 4.12) нагружают в отсеках давлениями/?^ (/ —
номер отсека), пропорциональными давлениям в сходственных отсеках
натурного корпуса.
Рш = *Рйр (4-2)
где X — произвольное, но постоянное для всех отсеков число,
выбираемое из соображений надежных измерений на модели; piu — давление
в /-м отсеке натурного корпуса.
Сосредоточенные нагрузки Рн на модели выбирают по соотношению
'ум
Хт Рун,
где Р-я — сосредоточенная сила ву'-й точке натурного корпуса; Рм —
сосредоточенная сила, прикладываемая в сходственной точке модели.
Рис. 4.12. Модель корпуса для определения напряжений и деформаций
/ — корпус; 2 — заглушки; 3 — переборка
225
После нагружения модели измеряют деформации ем на ее
поверхностях и (если необходимо) смещения им точек поверхности. По см в
соответствии с методикой тензометрирования определяют напряжения ам на
поверхности модели в точках измерения деформации ем.
По данным измерений на модели в соответствии с теорией подобия
рассчитывают напряжения, деформации и смещения натурного корпуса
ан = ам/Х; £н = (1/\)гм(Ем/ЕнУ,
wH = (1/(;Ы))мм(£м/£н),
где ан, ен, мн — напряжения, деформации и смещения в точках натурного
корпуса, сходственных точкам модели, где производились
соответствующие измерения ом, ем и им; Ен — модуль упругости материала натурного
корпуса.
По указанному методу можно производить измерение напряжений
не только в модели (что делается на стадии проектирования), но и на
натурном корпусе после его изготовления.
Ответственные корпуса (каждый образец) проходят гидравлические
испытания, при которых давление в отсеках корпуса поднимается
до 1,5—2-кратного от рабочего давления. Корпус подвергают такому
испытанию дважды (после предварительной и чистовой обработок).
Гидравлические испытания являются контролем качества изготовления
корпуса.
Расчет напряжений в элементах корпуса с использованием
простых расчетных схем. Метод моделирования весьма эффективен для
определения напряжений и деформаций при силовом воздействии,
но непригоден для определения температурных напряжений в корпусе.
Это объясняется тем, что на модели реализация необходимого
температурного поля (в особенности при переходных режимах с
одновременным выполнением программы повышения давления в отсеках)
практически встречает непреодолимые трудности. Возможности более
совершенного метода конечного элемента как было отмечено выше,
также не безграничны. Кроме того, подготовительная работа для
расчета этим методом весьма трудоемка.
Поэтому большое распространение в практике расчетов корпусов
получили методы, основанные на схематизации корпуса или его частей
простыми элементами в виде оболочек, плит или брусьев. Несмотря
на условность и подчас интуитивность этих расчетных схем они, как
правило, точно отражают влияние основных факторов, от которых
зависят напряжение, деформация и прочность корпусов. Преимущества этих
методов, кроме их простоты и достаточной точности, заключается также
226
(4.3)
втом, что они сравнительно легко распространяются на случаи учета
пластических деформаций и деформаций ползучести, что позволяет
оценить термоусталость и длительную прочность корпусов, получить
конечные, легко обозримые результаты в виде простых расчетных
формул.
Напряжения в стенке корпуса в первом приближении могут быть
рассчитаны как в безмоментной оболочке по известным формулам, т.е.
CTj = ApR2/(2h);
( ( R2) И (4,4)
где dj — меридиональное напряжение; а2 — окружное напряжение
в стенке корпуса; Ар — разность давлений с двух сторон стенки корпуса;
Д1? R2 — радиусы кривизны срединной поверхности стенки корпуса
(см. рис. 4.8, в); h — толщина оболочки.
Эти формулы дают значение растягивающих напряжений (средних
по толщине) вдали от переходных зон: от фланцев, патрубков, переходов
от стенки корпуса к стенке камер уплотнений и т.д.
Вторая ступень схематизации — применение теории осесимметрич-
ных оболочек — учитывает влияние меридионального обвода корпуса
и позволяет учесть влияние сочленения корпуса с камерами уплотнений
(изгибные напряжения), но не учитывает влияние фланцев и патрубков.
Методы расчета, основанные на теории осесимметричных оболочек,
разработаны обстоятельно и произведено их сравнение с
экспериментальными данными.
При использовании ЭВМ эти методы позволяют оперативно
выполнить расчеты напряжений в корпусе турбомашины с необходимой для
практики точностью, за исключением зон, расположенных около
фланцев. Однако в зоне фланцев напряжения меньше, чем в вертикальной
плоскости симметрии корпуса, что исключает необходимость
проведения расчетов в зоне фланцев. Наибольшего внимания заслуживает
расчет тороидальных частей корпуса, расположенных около торцевых
стенок. В этих зонах наблюдаются наибольшие напряжения и осевые
смещения стенок. Как было отмечено ранее, целесообразно выполнять
торцовые участки корпуса в виде конических оболочек (см. рис. 4.8, в).
Расчет фланцев горизонтального разъема. Фланцевое соединение
горизонтального разъема корпуса должно быть рассчитано на
плотность, т.е. должна быть определена сила затяжки болтов,
обеспечивающая отсутствие утечек пара через фланцевые соединения. Кроме того,
227
фланцы подвергаются изгибу. Необходимо рассчитать изгибные
напряжения во фланцах для того, чтобы можно было проверить их прочность.
При шаге t (t — расстояние между осями соседних болтов или
шпилек) сила затяжки, приходящаяся на единицу длины фланца, равна P/t,
где Р — сила затяжки одного болта или шпильки, которая реально
действует на фланец через гайку или головку болта (см. рис. 4.8, б).
На расчетной схеме (рис. 4.13, а) сила Pit приложена вдоль оси
болта (шпильки). Распределения контактного давления на внутренней
и внешней сторонах фланца (#j и q2) подлежат определению, также как
и сила затяжки болта Р.
Всестороннее сжатие или растяжение выделенной части корпуса
не нарушает ее равновесия. Поэтому, наложив всестороннее напряжение
Рис. 4.13. Схема нагружения фланцевого соединения
228
рн (где рн — давление на внешней поверхности корпуса), рассмотрим
равновесие выделенной части под действием сил P/t, F и давлений:
*P=P*-Pw Л?1 = 01 - Pw А?2 = ^2 ~ Ри> (4-5)
где/?в — давление внутри корпуса.
Суммы проекций всех сил, действующих на выделенную часть
корпуса, на горизонтальное и вертикальное направления и сумму моментов
относительно точки А, запишем в виде соотношений
F=ApR\ (4.6)
Р = t[{Aqx + Aq2)(m + л)/2 + F\; (4.7)
Mq + Mp- F(R + 8/2) = 0, (4.8)
где М — момент контактной нагрузки относительно точки А; М —
момент сил от давления Ар относительно той же точки.
Действие давления Ар сводится к двум силам, равным F = ApR,
приложенным горизонтально и вертикально.
Из расчетной схемы, рис 4.13:
Мр = F(R + л). (4.9)
Момент от контактного давления равен сумме моментов от двух
нагрузок: равномерной с интенсивностью (Aqx + Л<72)/2 и двойной
треугольной, образующей пару (рис. 4.13, б), т.е.
-- (Aq2-Aq{) -у- j 3 (w + w) • (4Л0)
Подставляя выражения (4.9) и (4.10) в уравнение моментов (4.8),
получаем соотношение между Aqx и Aq2
А 3F(2k-8) , А 2п-т „1П
А<Ь = —г ^—- + Aq* - , (4.11)
где F— «отрывающая» сила, подсчитываемая по (4.6).
Для обеспечения плотности фланцевого соединения следует выбрать
контактное давление на внутреннем контуре qx = Aqx + ри >ръ, т.е.
следует принять
Aqx > Ар (4.12)
и по формуле (4.11) определить Aq2. Затем по формуле (4.7) можно найти
требуемую силу затяжки болтов Р.
229
Минимально допустимым значением считается Aq{ = 0. В этом
случае сила затяжки болтов должна удовлетворять условию
Цт + п)-3* (413)
2(2т-п)
Сравним необходимую силу затяжки в двух случаях: при т = п (8 » 0)
и при т = 2п (8 « 0). По формуле (4.13) в первом случае имеем
Р > 4/F,
а во втором
Р > 2tF.
Для уменьшения силы затяжки Р следует выбирать п<т, приближая
ось болтов к внутреннему краю фланца (см. рис. 4.8, б).
Зависимость (4.13) не учитывает влияние овальности внутренней
поверхности корпуса и переменной толщины стенки в поперечном
сечении на силу Р затяжки болтов. Оба фактора, как правило, влияют в
сторону повышения плотности корпуса.
В процессе эксплуатации с течением времени напряжения в болтах
снижаются вследствие релаксации. Первоначальную затяжку следует
выбирать с учетом релаксации напряжений. Значение усилия Р,
удовлетворяющее условию (4.13), должно обеспечиваться к концу
межремонтного периода перед вскрытием цилиндра. Первоначальное усилие
затяжки должно быть больше Р с учетом релаксации, т.е. Р0 > Р.
Изменение напряжения при релаксации во времени характеризуется
зависимостью (1.68). Разрешим зависимость (1.68) относительно
начального напряжения а0:
а0 = Gu[l-(n-l)AEanM-XCl(tu))~W{n~]\ (4.14)
где а0 — напряжение первоначальной затяжки; ам — напряжение в
болтах перед вскрытием цилиндра, т.е. после работы турбины за время
межремонтного периода /м.
Напряжение в болтах в конце межремонтного периода
ам = 4Р/(я«ф. (4-15)
где с1б — диаметр болта.
Для сохранения плотности фланца усилие Р в момент /м должно
удовлетворять условию (4.13). Выбрав усилие Р, удовлетворяющее
условию (4.13), по формуле (4.15) определим напряжение в болтах, а по
формуле (4.14) — необходимое напряжение первоначальной затяжки
2
а0. Затем найдем PQ = 7iJ6ctq/4.
230
Формула (1.68) и ее следствие (4.14)
получены в предположении, что фланцы
абсолютно жесткие. В действительности
фланцы при затяжки болтов
деформируются на сжатие. Рассмотрение
релаксации напряжений в болтах, учитывающее
упругую податливость фланцев,
приводит к той же формуле (4.14), но с
заменой в ней модуля упругости Е на модуль:
Еэф = Е/(1+к); k = F6/F^9 (4.16)
где F^ — эффективная площадь фланца,
условно подвергнутая сжатию; F6 —
площадь сечения болта.
Коэффициент к определяют по
формуле:
к =
1
4v0tga
0i0+l)teo-l+2v0tga)t
4^0-l)(^0+l+2v0tga)!
Ho = a/</6; v0 = A/rf6,
Рис. 4.14. Конус давления
х In
(4.17)
где a — угол конуса давления (рис. 4.14); а — диаметр поверхности гайки и
фланца. По опытным данным можно принять tg a = = 0,4—0,5.
Изгибные напряжения во фланцах. Максимальные изгибные
напряжения наблюдаются в сечении а'—а\ ослабленном отверстиями под
болты (см. рис. 4.13, в):
a„ = 6M/[(t-d0)hl].
(4.18)
Изгибающий момент Мв сечении а'—а' рассчитываем как момент от
контактного давления Aq, распределенного по закону трапеции
на участке т (рис. 4.13, а). Момент относительно точки А:
2
M/t = -&q2m-m + -Aqxm-m = — (2Aq2 + Aqx).
(4.19)
Величина
A(lx
т
т + п
Д<?! +
п
т + п
Aq2
(4.20)
231
Слагаемые определяются из рассмотрения пропорций для
треугольников abd и adc (см. рис. 4.13, а). После подстановки (4.20) в (4.19) имеем
2
М = ™1 . [(2т + 3n)Aq2 + mAqx]. (4.21)
6(W + И) zi
Согласно (4.18) изгибные напряжения позволяют судить о прочности
фланцев на изгиб после сравнения их с допускаемыми напряжениями.
Условие прочности фланцев
°и * аи.д-
Для стальных корпусов аи д = а5/я,; ns = 2—2,5. Для чугунных
корпусов аи д «30 МПа.
Напряжения в болтах рассчитывают в соответствии с требованиями
плотности фланцевого соединения, как указано выше. Проверка болтов
на прочность с учетом повторных затяжек может быть выполнена по
общему методу расчета на прочность при нестационарных напряжениях
[см. (1.78) и (1.79)].
Температурные напряжения в элементах корпуса. В паровых
турбинах стенки корпуса, фланцы, сопловые и клапанные коробки, корпуса
стопорных клапанов являются элементами, в которых при переходных
режимах возникают нестационарные температурные напряжения. В
газовых турбинах элементы корпуса обычно имеют тонкостенную
конструкцию и температурные напряжения в них оказывают меньшее
влияние, чем в толстостенных корпусах паровых турбин несмотря на более
высокий уровень температур в газовых турбинах.
При выполнении требований рационального проектирования
корпусов можно снизить значения переходных температурных напряжений,
но исключить влияние температурных напряжений невозможно.
Проверку прочности корпуса необходимо проводить с учетом влияния
температурных напряжений.
Стенки корпуса, фланцы и другие элементы при оценке
температурных напряжений можно схематизировать плоской плитой, обогреваемой
на одной поверхности и изолированной на другой. Считаем, что
температурное поле одномерное: температура переменная по толщине плиты,
но постоянная в направлениях х и у. Оси х, у лежат в плоскости
изолированной поверхности плиты. Предполагается также, что при прогреве
или охлаждении плиты ее поверхности остаются плоскими. При таких
условиях температурные напряжения сх ~ а зависят только
от координаты z. Обозначим ах- оу = а. Остальные составляющие
тензора напряжений равны нулю.
232
При произвольном температурном поле T(z, f) температурные
напряжения
a(z, 0 = Еат (Т - Г)/(1 - ц); (4.22)
h
(4.23)
Т = i Jr(z,/)dz,
О
где Г — средняя по толщине плиты температура; h — толщина плиты.
Обогрев плиты происходит вследствие теплообмена со средой.
Вначале температура среды меняется по линейному закону от Та до Г0, а
затем температура постоянна (рис. 4.15).
При этих условиях температурные напряжения на обогреваемой
поверхности во времени меняются аналогично случаю прогрева
сплошного цилиндра (см. рис. 3.27): напряжения в процессе переходного
режима достигают максимального значения сгтах, а затем постепенно
снижаются до нуля. Максимальные по абсолютной величине значения
напряжений на поверхности определяются соотношениями:
ЕатАТ
1-U
s(a, т0);
(4.24)
АГ= Тп-Т;
ah/X; т0 = XtQ/(h рс),
(4.25)
S
0,8
0,6
0,4
0,2
2
т*
4
AT
i
1
i
/
to
< >|
х 1
о
0,2
0,6
1,0
ч
Рис. 4.15. Зависимости максимального безразмерного температурного напряжения
при прогреве плоской плиты от параметров а и т0
1 — а~\\2 — a = 5; J — a = 20; 4 — я = 00
233
где а — коэффициент теплоотдачи на поверхности плиты; с — массовая
теплоемкость материала.
Безразмерное напряжение s(a, т0) представлено на графике рис. 4.15.
Температурные напряжения на поверхности плиты тем выше, чем
интенсивнее теплообмен, характеризуемый критерием а, и чем меньше
безразмерное время повышения температуры т0.
Из главных факторов, влияющих на а и т0, следует отметить
толщину плиты h. Из (4.25) следует, что чем толще плита, тем больше а
и меньше т0, т.е. температурные напряжения увеличиваются с ростом
толщины стенки. Этим, в частности, определяются преимущества
двустенных цилиндров перед одностенными — температурные напряжения
в последних значительно выше.
Зависимость (4.24) может быть использована и для приближенного
определения напряжений в фланцах. При расчете необогреваемых
фланцев следует в зависимостях (4.24), (4.25) принять \х = 0, h = В, где В —
ширина фланца (см. рис. 4.13, а).
Для снижения температурных напряжений фланцы, шпильки или
болты обогреваются с помощью специальных коробов, установленных
на наружной поверхности фланцев. При пуске турбины в короба
подается пар, фланец прогревается с двух сторон. По уровню температурных
напряжений двусторонний обогрев фланцев эквивалентен уменьшению
ширины фланца вдвое (в предположении, что интенсивность обогрева
и температура среды по обеим сторонам фланцы одинаковы).
Температурные напряжения в фланцах с наружным обогревом рассчитывают по
формуле (4.22), приняв h = В12.
Пример 4.1. Рассчитать фланец горизонтального разъема внутреннего корпуса
ЦВД на плотность при следующих условиях (рис. 4.16): межремонтный период или
время между перезатяжками шпилек /м = 13000 ч; внутреннее давление рв =
= 17 МПа; внешнее давление/^ = 11 МПа; температура шпильки Г= 450 °С;
размеры: т - 175 м; п - 110 мм; толщина стенки корпуса 8 = 80 мм; диаметр шпильки
d6 = 100 мм; диаметр опорной поверхности гайки а = 140 мм; шаг по осям шпилек
/i = 150 мм; высота фланца h = 250 мм; внутренний радиус корпуса R = 0,7 м;
Материал шпилек — сталь 25 ХМФ, имеющая в состоянии нормализации с
последующим отпуском следующие параметры при Т = 450 °С: модуль
упругости Е- 1,85'10 МПа; постоянные ползучести в формуле (1.55): А =
= 6 • 57 • 10~14 (МПа)~Л/ч, п = 2,61.
Принимаем, что функция ползучести при / > 200 ч Q(/) = 1000 + /.
234
Решение.
1. По формуле (4.13) определяем нижний
предел Рм необходимого усилия затяжки
3 • 0,08
р _4-(0,175 + 0,11)-
•0,150-4,2 =
2-(2-0,175-0,11)
- 1,1812 МН.
Раскрывающее усилие определяем по
формуле (4.6)
F = ApR = (17 - 11) • 0,70 = 4,2 МН/м.
2. Необходимое минимальное напряжение в
шпильке согласно (4.15)
ам = 4'1,18!2 = 150>40 МПа-
я-0,Г
3. Необходимое напряжение в шпильке при
затяжке определяем по формуле (4.14)
а0 = 150,40-[1 - 1,61-6,57-10~14-1,4270 х
х 105 • 150,401,61 • 14000]_1/1'61 =
= 150,40 • 0,32343"Ш'61 = 303,20 МПа,
где £эф определено согласно (4.16) и (4.17)
i а i
г Н
1 i if
*2
/ гч
/ г-Н
/ do
I If | frl i
1 f—*j PvJ
i\ II ' II R
Mr
m |Ч n
k >|<\ >|
Рис. 4.16. Фланцевое
соединение
F - l'85
10"
1+0,29641
1,4270- 10 МПа;
к =
1
, 2,4 - (0,4+ 2-2,5-0,4) =
п Л . /Ч Л А-Ч . Ъ С . ft л\ U»^7WI »
4 • 2,5 • 0,4 0,4 • (2,4 + 2 • 2,5 • 0,4)
ц0= 140/100= 1,4; v0 = 250/100 = 2,5.
Для обеспечения плотности фланца в течение межремонтного периода
напряжение начальной затяжки в шпильках должно быть а0 = 303,20 МПа.
Для облегчения затяжки шпилек и контроля напряжений в них шпильки при
завертывании гаек подогревают и обеспечивают необходимое усилие затяжки
по заданной разности температур шпильки и фланца.
4.4. ПОЛЗУЧЕСТЬ И ДЛИТЕЛЬНАЯ ПРОЧНОСТЬ
ЭЛЕМЕНТОВ КОРПУСА
Ползучесть корпусов обусловлена разностью давлений Ар и
соответствующими напряжениями gx и а2, которые в первом приближении
рассчитываются по формулам для безмоментной оболочки.
Соответствующие деформации ползучести могут быть рассчитаны по зависимостям
(1.114). В реальных условиях корпус турбины имеет переменную
температуру как по длине, так и по толщине стенки. Применяя формулу (4.4)
для области корпуса с высокой температурой, следует иметь в виду, что
смежные участки корпуса с более низкой температурой оказывают
упрочняющее действие на рассматриваемый участок корпуса. Упроч-
235
няющее влияние оказывают также фланцы горизонтального разъема.
Поэтому расчет напряжений по (4.4) и деформаций ползучести по
формуле (1.70) дает значения, повышающие запас надежности, т.е. запас по
длительной прочности в действительности будет больше, а деформация
ползучести корпуса (увеличение диаметра) меньше, чем рассчитанные
величины по приближенным значениям напряжений (4.4).
При неравномерной температуре по толщине стенки может
возникнуть коробление корпуса. Под короблением корпуса понимают
остаточную деформацию корпуса, обнаруживаемую после стационарной
работы турбины в течение длительного периода (около 1000 ч) и порле
разборки фланцев горизонтального разъема. На рис. 4.17, а показано
сечение корпуса перед закрытием его, а на рис. 4.17, б — по истечении
периода стационарной работы после разборки фланцев горизонтального
разъема.
Коробление объясняется следующим.
При неравномерном по толщине стенки температурном поле
внутренние волокна имеют более высокую температуру, чем внешние. После
пуска турбины в стенке корпуса напряжения (упругие) распределяются
по кривой 1 (рис. 4.18, а): на внутренней поверхности напряжения сжи-
а б
Рис. 4.17. Коробление корпуса турбины вследствие ползучести
а — перед сборкой корпуса; б — после разборки по истечении периода стационарной
работы турбины
а б
Рис. 4.18. Эпюра напряжений 0 по толщине стенки корпуса
1 — после пуска; 2 — перед остановкой; 3 — после остывания цилиндра перед его
разборкой
236
мающие, а на внешней — растягивающие. После установления
стационарного режима вследствие ползучести начинается перераспределение
напряжений: на внутренней поверхности, где температура более
высокая, напряжения уменьшаются. На наружной поверхности температура
ниже, но напряжения выше: здесь напряжения также будут снижаться.
Эпюра напряжений к моменту остановки (после длительной работы
турбины на стационарном режиме) имеет вид кривой 2 на рис. 4.18, а.
После остановки турбины и остывания цилиндра первоначальные
упругие напряжения исчезают. Остаются напряжения, определяемые
разностью эпюр 2 и 7. Эта разность — остаточные напряжения в стенке —
показаны на рис. 4.18, б.
Остаточные напряжения — растягивающие на внутренней
поверхности и сжимающие — на внешней. После разборки фланцев
горизонтального разъема остаточные напряжения вызывают коробления корпуса
(см. рис. 4.17, б). Итак, коробление цилиндра обусловлено остаточными
напряжениями, которые возникают в стенке цилиндра вследствие
неравномерной ползучести по толщине стенки. Для уменьшения коробления
следует стремиться снизить неравномерность напряжений по толщине
корпуса. При постоянной температуре по толщине стенки корпуса
неравномерность напряжений мала и коробление отсутствует.
4.5. ДИАФРАГМЫ ТУРБОМАШИН
Особенности конструкции диафрагм. Диафрагма служит для
установки сопловой решетки и представляет собой перегородку,
испытывающую разность давлений, приходящуюся на сопловую решетку
(рис. 4.19). Диафрагма состоит из двух половин (верхней и нижней).
Каждая половина имеет тело (полотно) диафрагмы 7, сопловую решетку
2, обод 3, в котором выполнены отверстия 4 для установочных штифтов.
В теле диафрагмы предусмотрен кольцевой паз для установки
сегментов уплотнений 5. Обычно по окружности паза расположены шесть
сегментов (по три в каждой половине), прижимаемых к пояскам
пластинчатыми пружинами 6 и давлением пара, поступающего в паз через
отверстие 7. На разъеме сегменты уплотнений фиксируются
стопорными пластинами. Разъем диафрагмы выполнен косым, что
предотвращает разрезку профилей сопловой решетки.
При разрезке профилей на две части (рис. 4.19, в) в каналах
неизбежно появляются уступы, возникновение которых обусловлено
несовпадением обеих частей разрезного профиля при стыковке половин
диафрагмы. Уступы в каналах не только снижают экономичность ступени,
но (что более важно) являются причиной появления возмущающих сил,
237
А-А
Рис. 4.19. Диафрагма паровой турбины и типы разъема
а — с косой плоскостью; б — угловой; в — с разрезанным профилем (не
рекомендуемый); г — с выступающей выходной кромкой (не рекомендуемый)
действующих на рабочие лопатки, что приводит к снижению
вибрационной надежности рабочих лопаток. Диафрагмы с разъемом и
выступающей выходной кромкой (рис. 4.19, г) не имеют указанного
недостатка. Однако тонкая выступающая часть профиля обладает малой
жесткостью и легко может быть повреждена как при монтаже и
ремонте, так и во время работы. Поврежденный профиль является
источником возмущения и снижения вибрационной надежности,
В паровых турбинах применяются преимущественно диафрагмы
двух типов — литые чугунные и сварные стальные. В литых
диафрагмах тело и обод выполнены из чугуна, а сопловые лопатки — из
нержавеющей стали. На концах заготовок сопловых лопаток предусмотрены
пазы для крепления сопловых лопаток в теле и ободе при заливке
диафрагмы (штриховые линии на рис. 4.19).
Литые диафрагмы применяются для ступеней низкого давления
паровых турбин при температурах пара не выше 200—250 °С. При
более высоких температурах наблюдается увеличение объема чугунной
детали с течением времени.
238
Недостатком литых диафрагм является невысокая точность
выполнения каналов в сопловой решетке при литье, а также значительная
шероховатость на внутренней и внешней поверхностях сопловых каналов.
В ступенях ЦНД иногда предусматривается внутриканальное влаго-
удаление. В этом случае диафрагма имеет каналы в ободе и теле, as
сопловые лопатки выполняют с щелями на поверхности и с внутренней
полостью для отвода влаги. Пример сварной диафрагмы ЦНД с внутри-
канальным влагоудалением представлен на рис. 4.20.
Конструкция сварной диафрагмы ступени высокого давления
паровой турбины предоставлена на рис. 4.21. Сопловой венец (решетка)
образуется лопатками 2, вставленными в просеченные отверстия двух
полукольцевых бандажей 5. С наружной стороны лопатки и бандажи
обварены по контуру каждого профиля. Получающуюся таким образом
сопловую решетку приваривают к телу 1 диафрагмы и ободу 3
сварными швами 6. К ободу приваривают козырек 4, на котором размещают
периферийные (надбандажные) уплотнения. На внутренней расточке
Рис. 4.20. Диафрагма с полыми лопатками
1 — влагозаборные щели; 2 — влагоотводящие каналы; 3 — влагоприемиый паз
239
Рис. 4.21. Сварная диафрагма высокого дав- Рис. 4.22. Крепление сопловых
ления лопаток газовой турбины
тела диафрагмы предусмотрен кольцевой паз для размещения в нем
сегментов диафрагменных уплотнений.
В газовых турбинйх и воздушных компрессорах при относительно
малых разностях давлений Ар =р0 -рх диафрагмы не имеют массивного
тела и обода. Обычно эти элементы отсутствуют или имеют
облегченную конструкцию. На рис. 4.22 показана типичная конструкция
крепления сопловых лопаток в газовых турбинах. В корпусе 1 турбины
установлены сегменты 2, в каждом из которых размещено несколько
сопловых лопаток 3. Между сегментами предусмотрен зазор для
возможных удлинений при тепловых расширениях.
Диафрагмы паровых турбин и сопловые или (и) направляющие венцы
газовых турбин и воздушных компрессоров испытывают действие
разности давлений Ар, вызывающее изгиб этих элементов. В газовых турбинах
при быстрых изменениях режима работы в сопловых лопатках и других
элементах возникают температурные напряжения. Для снижения
температурных напряжений применяют тонкостенные конструкции корпусов,
обойм. Для этой же цели часто сопловые лопатки выполняют
пустотелыми. В газовых турбинах широко применяются сопловые лопатки с
внутренним воздушным охлаждением. Конструкции охлаждаемых
сопловых лопаток рассматриваются в курсе газотурбинных установок.
Расчет прогиба и напряжений в диафрагмах паровых турбин.
Для оценки надежности диафрагмы производят расчет прогиба
диафрагмы и максимальных напряжений, обусловленных разностью
давлений Ар. Диафрагма в общем случае рассматривается как конструкция,
240
СА
D/2
Рис. 4.23. Схема диафрагмы
состоящая из двух полукольцевых пластин (тела и обода), соединенных
стержнями (лопатками). По наружному контуру диафрагма опирается на
корпус (или промежуточную обойму). Расчетная схема диафрагмы
изображена на рис. 4.23. Максимальный прогиб диафрагмы наблюдается в
точках Л, А\ максимальное напряжение изгиба — в сечении В—В.
Соответствующие значения напряжения атах и прогиба wmax определяют по
формулам:
_ Ка Ар(0,1Р)
10
(4.26)
ср
wn
_ Ар(0,1РУ
~ А 3
Et
ср
(4.27)
максимальная толщина
где tcp — средняя толщина диафрагмы; tm2C
тела диафрагмы; Кф КА — коэффициенты, зависящие от параметров d/D
и t ID и определяемые по графикам рис. 4.24.
Кроме напряжения в теле диафрагмы, определяют изгибающие
напряжения в крайних сопловых лопатках по методу, разработанному ЦКТИ
<*и.л = МЛ> (4-28>
241
^А^а
1000
800
600
400
200
4^J
5 —
1 2
V 3
качщ
k\
ш
•кА\
0,2
0,4
0,6
d/D
Рис. 4.24. Зависимости Ка и КА от конструктивных параметров диафрагмы
У — tcpID - 0,2; 2 — tcpID = 0,15; 3 — tcp/D = 0,1; 4 — tcp/D = 0,05; 5 — tcpID = 0,01
192Мл/АрЛ3
Рис. 4.25. Зависимость безразмерного изгибающего момента в крайних сопловых
лопатках от конструктивных параметров диафрагмы
242
где Мл — изгибающий момент, приходящийся на крайнюю лопатку,
определяется по графикам рис. 4.25; Wn — момент сопротивления сечения
сопловой лопатки относительно оси I—I, рис. 4.19, а; Аф = 2к /zH —
угловой размер сектора, соответствующего одной сопловой лопатке; zH —
число сопловых лопаток, расположенных по всей диафрагме; R-DI2\
re = dell.
4.6. ПОДШИПНИКИ ТУРБОМАШИН
Конструкции подшипников скольжения. В турбомашинах с
длительным ресурсом применяются преимущественно опорные и упорные
подшипники скольжения.
Опорные подшипники фиксируют положение ротора относительно
статора, воспринимают статическую нагрузку от веса ротора и паровые
(аэродинамические) усилия, действующие на ротор в ступенях с
парциальным подводом пара.
При поперечных колебаниях ротора на подшипники действуют
дополнительные переменные усилия.
Паровые статические усилия состоят из двух составляющих:
неуравновешенных сил в парциальных ступенях и поперечных сил,
возникающих в надбандажных уплотнениях вала при статическом смещении вала
или колеса по отношению к центру расточки уплотнения. Усилия в
парциальной ступени при сопловом регулировании зависят по величине
и направлению от последовательности открытия клапанов и режима
работы (мощности) турбины. Усилия в уплотнениях пропорциальны
смещению центра вала по отношению к центру расточки уплотнения.
При центральном расположении вала (колеса) эти усилия равны нулю.
Основная составляющая нагрузки подшипника определяется, как
правило, весом ротора, приходящимся на подшипник. Для
многоопорных роторов на многих подшипниках реакции в опорах являются
статически неопределимыми величинами и их значения в процессе
эксплуатации меняются вследствие взаимных смещений стульев подшипников,
вызываемых тепловыми удлинениями элементов корпуса и фундамента
машины. При монтаже машины стремятся обеспечить такие условия
работы, при которых каждый подшипник воспринимает усилие лишь
от веса ротора, отсоединенного от других роторов, т.е. при опоре
каждого ротора на собственные два подшипника.
Упорные подшипники воспринимают статические обусловленные
давлением рабочей среды осевые усилия, приходящиеся на диски,
рабочие венцы и уступы ротора.
Расчет осевых усилий рассматривается в курсе паровых и газовых
турбин.
243
Подшипники скольжения подразделяются на: подшипники с
неподвижными опорными поверхностями; подшипники с подвижными
поверхностями.
В пределах каждого класса имеются многочисленные
конструктивные исполнения, отличающиеся формой расточки вкладыша, местом
подвода смазки и т.д.
На рис. 4.26 представлены наиболее распространенные схемы
опорных подшипников.
«Половинный» подшипник (рис. 4.26, а) имеет нижний вкладыш,
расточенный по цилиндрической поверхности радиуса R. Масло поступает
в зазор между нижними вкладышем 1 и шипом i. Зазор между валом
(шипом) 3 и верхним вкладышем 2 настолько велик, что избыточное
давление масла в верхней части зазора между шипом и верхним
вкладышем равно нулю, поэтому верхний вкладыш на работу подшипника не
оказывает влияния. Масло, протекающее в верхнем зазоре, служит лишь
для охлаждения вкладыша и шейки (в первую очередь вкладыша).
Опорная поверхность вкладышей залита баббитом для предупреждения
повреждения шейки при задевании вала о поверхность вкладыша и
появления сухого трения.
где
Рис. 4.26. Основные схемы опорных подшипников
а — половинный; б — эллиптический; в — сегментный; г—е — эллиптический
соответственно с канавкой в верхней половине, без канавок (двухклиновой подшипник),
с канавкой в нижней половине
244
Эллиптический подшипник (рис. 4.26, б) имеет форму расточки,
близкую к эллиптической. Коэффициент формы эллиптического
подшипника
m=l-(2AB/2Ar), (4.29)
где 2АВ — удвоенный вертикальный зазор; 2АГ — удвоенный
горизонтальный зазор между шипом и вкладышем подшипника.
Обычно принимают т = 0,5—0,8.
Форма расточки определяется обработкой внутренней поверхности
вкладышей на расточном станке при установке в горизонтальном
разъеме (между верхним и нижним вкладышами) прокладок, толщина
которых h = 2(АГ - Ав) = 2Arm.
После расточки вкладышей прокладки удаляют и получающаяся при
этом форма расточки, называемая «лимонной» расточкой, соответствует
зазорам 2АВ и 2АГ.
Подвод масла в эллиптических подшипниках осуществляется
обычно в двух точках по окружности. Нижний и верхний зазоры имеют
индивидуальную подачу масла. В отличие от половинного подшипника
в верхнем зазоре имеется избыточное давление масла.
В эллиптических подшипниках применяются различно
расположенные канавки во вкладышах (рис. 4.26, г—е). Их применение и
местоположение влияет на статические и динамические характеристики
подшипников. Эллиптические подшипники способствуют повышению
динамической устойчивости ротора вследствие увеличенной
анизотропии — значительной разницы динамической податливости масляной
пленки в горизонтальном и вертикальном направлениях.
Сегментный подшипник (рис. 4.26, в) имеет опорные поверхности,
выполненные в форме колодок (сегментов) 4, шарнирно опирающихся
на корпус 5. Подвод масла для каждой колодки может быть
индивидуальный.
Сегментные подшипники имеют цилиндрическую или «лимонную»
расточку. В последнем случае форма расточки характеризуется
коэффициентом w, который определяется по формуле (4.29). Сегментные
подшипники также способствуют повышению динамической устойчивости
ротора: они не создают так называемых позиционных
неконсервативных сил (реакций), способствующих возникновению автоколебаний
ротора. Кроме того, сегментные подшипники с индивидуальной
подачей масла в колодки имеет меньшие потери на трение.
Опорный подшипник показан на рис. 4.27. Вкладыш 1 опорного
подшипника состоит из нижней и верхней половин, стягиваемых болтами 3.
Внутренняя поверхность вкладыша имеет баббитовую заливку
(баббитовый слой). Наружная поверхность вкладыша обработана по сфере для
245
Рис. 4.27. Опорный подшипник
возможности поворота вкладыша при его монтажа. Вкладыш
устанавливают на нижнее полукольцо 4, к которому его притягивают крышкой 2,
прикрепленной при помощи шпилек к корпусу подшипника. В верхней
половине вкладыша предусмотрена канавка для подачи масла, в нижней
половине — подвод масла высокого давления для гидростатического
подъема ротора и обеспечения жидкостного трения при трогании и
прокручивании ротора валоповоротом. Гидростатический подъем ротора
обеспечивает сохранность баббитового слоя при толчке ротора и малых
частотах вращения (при отсутствии гидростатического подъема
возможно полусухое трение шейки во вкладыше и износ баббитового слоя).
Масло на смазку поступает от масляного насоса через одну из
опорных колодок 5. Часть масла попадает на смазку нижней половины
вкладыша у разъема справа, другая — на смазку верхней половины вкладыша.
Сегментный подшипник с индивидуальным подводом масла к
каждой колодке изображен на рис. 4.28. Нижние рабочие сегменты 1
выполнены составными с внутренними каналами для охлаждения колодок
маслом, верхние (установочные) сегменты 6 — цельными. Сегменты
расположены в установочном полукольце 3 и крышке 5, Сегменты
крепятся установочными штифтами 4 и специальными зацепами. Устано-
246
Рис. 4.28. Сегментный опорный подшипник
вочное полукольцо 3 через колодки 2 опирается на расточку корпуса
подшипника и притягивается к корпусу верхней крышкой 5 при помощи
шпилек.
Упорный подшипник скольжения сегментного типа с
самоустанавливающимися несущими колодками обычно применяют в комбинации
с опорным подшипником. На рис. 4.29, а представлена конструкция
упорно-опорного подшипника, имеющего два ряда сегментов
(самоустанавливающихся колодок, рис. 4.29, б). Такой подшипник воспринимает
осевую нагрузку в обоих направлениях. Упорные колодки 2 подшипника
при помощи установочных штифтов свободно подвешены к обойме 5,
которая опирается на полукольца 4, установленные на вкладыше 7.
На валу турбины выполнены упорные гребни 5. При вращении между
торцовой поверхностью гребня и поверхностями колодок образуется
масляный клин, давление в котором и определяет несущую способность
упорного подшипника.
На рис. 4.30 представлена схема опорного подшипника скольжения.
Точка О — центр расточки вкладыша подшипника; R — радиус
расточки; точка Ох — центр шипа; г — радиус шипа. Положение шипа в
расточке определяется полярными координатами е и ср. Величина е —
смещение центра шипа по отношению к центру расточки вкладыша; ф
— угол между направлением смещения и вертикалью — угловая коор-
247
Рис. 4.29. Упорно-опорный подшипник
дината точки О^ При вращении шипа во вкладыше подшипника шип
захватывает масло, и между шипом и опорной поверхностью вкладыша
образуется масляный клиновидный слой. Шип всплывает на масляной
пленке. Началом масляного слоя можно считать место подачи масла
к подшипнику (точка А). Экспериментальные исследования показывают,
что масляный слой обрывается в расширяющейся части слоя (точка В)
за местом (сечением) с наименьшей толщиной масляного слоя /?mjn.
Угол 8 отсчитывается от направления вектора е в сторону вращения
шипа. В месте обрыва масляного слоя справедливы следующие условия:
/? = 0, ф/сЮ = 0, т.е. давление и его производная по угловой координате
248
Рис. 4.30. Схема нагружен и я шейки вала
равны нулю. Эти гипотезы подтверждаются экспериментальными
данными. После обрыва в точке В пленка распадается и превращается
в масляную эмульсию.
Распределение давления в слое по окружности шипа показано
на рис. 4.30. Считают, что по толщине слоя давление масла постоянно.
В осевом направлении давление масла в слое изменяется по
параболической зависимости. На торцах подшипника избыточное давление равно
нулю, а абсолютное — давлению в картере подшипника.
Течение масла в масляном слое происходит в окружном направлении
и вдоль оси подшипника по направлению к торцевым сечениям, через
которые происходит слив масла в камеру (картер) подшипника.
Важным геометрическим параметром вкладыша является угол
охвата а (см. рис. 4.26, а), под которым понимают угловой размер
расточки вкладыша постоянного радиуса R. Вне угла охвата вкладыш
имеет выборку, поэтому зазор, между шипом и вкладышем
увеличенный, вследствие чего избыточное давление масла вне угла охвата мало и
его можно считать равным нулю.
Используя гидродинамическую теорию, получаем возможность
рассчитать давление в масляном слое подшипника как функцию координат
0 и z. Разработанные методики позволяют находить р(0, z), учитывая
тепловыделения в масляном слое и зависимость вязкости масла от
температуры. По /?(0, z) можно определить гидродинамические реакции
масляного слоя (равнодействующие сил давления). В проекциях на
249
направление смещения en на перпендикулярное направление
равнодействующие сил давления
1/2 92
Ре = J dz |р(6, z)cos0rd9;
-L/2 -^G,
1/2 92
Рф = - J dz J^(e,z)sin9rde.
-l/2 -e,
(4.30)
'I
Силы Pe, P приложены к шипу (цапфе) и уравновешивают внешние
силы, действующие на шип (доля веса ротора, паровые усилия).
В общем случае (например, при колебаниях шипа в подшипнике)
силы Ре и Рф зависят от положения центра шипа в расточке (от
координат еиф)и скорости движения шипа (от производных е и ф ). По
гидродинамической теории при ламинарном режиме течения масла
^^[(-3'»(*S>-2'.(*3)]'
\|/ = А/г; х = е/А; ср = dy/dt; % = d%/dt,
где ц — динамическая вязкость масла; и — окружная скорость на
поверхности шипа; со — угловая скорость; \|/ — относительный зазор; L —
осевая длина подшипника; d — диаметр шипа, d-2r\A — номинальный
зазор в подшипнике, A-R-r;R — радиус расточки опорной поверхности
вкладыша; х — относительное смещение (относительный
эксцентриситет шипа).
Приближенно функции Ft (i = 1, 2, 3, 4)
где F. (х) — функции, зависящие от х-
Функции РДх) представлены на рис. 4.31 для подшипника, у
которого нижняя граница масляного слоя определяется углом д{ = -л/2, а
верхняя соответствует условию /?(92) = (ф/сЮ)в = 0. Подшипник с
такими границами получил название половинного подшипника.
250
т.0 v0
''Nil
F$J\
E.0 r.0
100
60
20
IN
0 0,2 0,6
a
0,4 0,8 x
б
Рис. 4.31. Зависимости Ft от % для половинного подшипника
а — для поперечного направления; б — для окружного
Множитель с(%, L Id) определяется выражением
5 г /Л 2,-1
= ЫГ] ■
где а = 0,12 + 2,31(1 -х).
Статические характеристики опорного подшипника. При
стационарном режиме вращения шипа центр 01 неподвижен и <р = е = 0. При этом
Ре = 6\iuLFx I v|/2; Рф = 6\iuLF3 /\|/2.
Если на шип действует внешняя сила Р, то в состоянии равновесия
V
или
«-£fe-•.<*•"«•>■
(4.31)
где £ — параметр нагруженности.
В формулах отмечен угол охвата а как параметр, от которого зависит
нагруженность подшипника.
251
Рис. 4.32. Траектория всплытия
центра шейки вала на масляном слое
при увеличении угловой скорости
вала
/ — полойинного; 2 — эллиптического
(двухклинового); 3 — сегментного;
О— центр подшипника; Oj —
положение центра шейки при со = О
Рис. 4.33. Статические
характеристики цилиндрического
подшипника при а — 150°
1 —Lld= 0,5; 2 — Lid = 0,8; 3 ~
Lld = 1,0
1,0
X
0,6
0,2
0
0,5
ф2
0,3
0,1
ф3
20
Y
fc£*
Р
l\
з\
г
п
7\2
ski
?|SxS
Y\
н
с
А
wT\
1,5
Ф
0,9
0,3
10-1 о,5 2 10 С
Для заданного подшипника {Lid, а — постоянные величины)
эксцентриситет х и угол ф (рис. 4.30) определяется критерием нагруженно-
сти £. С уменьшением £ (например, при развороте ротора в процессе
пуска Р « const, и растет) эксцентриситет % уменьшается, стремясь к
нулю при С, —> 0. Для подшипника с цилиндрической расточкой без
верхнего масляного клина траектория всплытия шипа на масляной
пленке (рис. 4.32) близка к полуокружности. Для сегментного
подшипника траектория близка к прямой.
На рис. 4.33 графически представлены зависимости % и ф от
нагруженное™ С, для половинного цилиндрического подшипника с углом
охвата а = 150 °С. С ростом % несущая способность подшипника
увеличивается. Однако при выборе % следует учитывать ограничения по раз-
252
меру минимального зазора /*min. Из рис. 4.30 следует, что для
цилиндрического подшипника, а также и для сегментного подшипника с
цилиндрической расточкой колодок
Лт;„ = А(1-%).
Для эллиптического подшипника и сегментного подшипника с
«лимонной» расточкой
hmia = Аг(1 - (т1 + х2 + 1тг cos <р)1/2), (4.32)
где %-е / Аг; т = 1 - (2АВ) /(2АГ); ср — угол между вектором е и вертикалью.
При этом для сегментного подшипника с «лимонной» расточкой ф « 0.
Минимальный зазор Amin должен превышать сумму параметров
шероховатостей цапфы и вкладыша. Обозначая 8' и 5" максимальную
высоту выступов шероховатости цапфы и вкладыша, получаем условие
Ami„>8' + 5''.
Учитывая эксплуатационные отклонения, расчетный минимальный
зазор выбирают не меньше 40—50 мкм.
Из (4.31) следует, что грузоподъемность подшипника увеличивается
в ростом ц, w, Z, х и уменьшается при увеличении у.
При расчете подшипников следует определить необходимый расход
масла по критериальной зависимости
^ = Ф2&,Ь/*а)9 (4.33)
где gj — объемный расход масла; Ф2 — функция своих аргументов.
Зависимость (4.33) не учитывает расхода масла, протекающего
в верхней части зазора. Приближенно расход масла Q2 в верхней части
зазора можно рассчитать по параметрам верхней половины вкладыша
как для ненагруженного подшипника, т.е. при % = 0.
Полный расход масла Q = Qx + Q2 на подшипник рассчитывают по
допустимому нагреву масла, проходящего через подшипник. Потери на
трение в подшипнике определяются мощностью трения N, которую
необходимо затратить на вращение шейки во вкладыше.
Из гидродинамической теории смазки следует зависимость
М|/ l{\m2L) = Ф3(С L Id, а). (4.34)
Формула (4.34) учитывает лишь потери трения в активной части
подшипника, но не учитывает потери в верхней части подшипника, куда
также поступает масло. Потери в верхней половине вкладыша N2
приближенно можно рассчитать согласно (4.34), положив % = 0. Суммарные
потери JV = Nx + N2. Характеристики половинного подшипника
представлены на рис. 4.33.
253
Нагрев масла в подшипнике за счет потерь трения
AT=N/cpQ,
(4.35)
где с — теплоемкость масла; р — плотность масла; Q — полный расход
масла на подшипник.
Нагрев масла обусловлен выделением тепла за счет потерь трения
в масле и теплообменом с шейкой вала. При охлаждении вала (паром
или воздухом) в зоне уплотнений поток тепла к шейке вала невелик.
Оценка теплового потока может быть выполнена по распределению
температур по оси вала.
На рис. 4.34 представлены статические характеристики для расчета
эллиптических и сегментных подшипников.
0,4
X
0,3
0,2
Ф2
0,6
0,5
ф3
100
50
20
10
2
1
В
\1
ш
4 3
\ \ 1
2
n^v—г
1,5
Ф
0,9
0,3
Рис. 4.34. Статические характеристики
подшипников
а — эллиптического (двухклинового) с углами
охвата а = 150°, т = 2/3, А = Дг; 1 — Lid =
= 0,5; 2 — L/^/= 0,8; 3 — Lid- 1; б —
сегментного шестиколодочного (см. рис. 4.26, в)
с «лимонной» расточкой при т = 0,5, Lid =
= 0,6, угол колодок а = 52°, А = Дв
10
8
6
4
2
Ф2 Ф3
\ \
\>
1^
г/
г/
1
X 1
?*^\
X
1,0
0,8
0,6
0,4
0,2
12 10 20 100 С О
а
1
б
С 2
254
Динамические характеристики подшипников. Подшипники
оказывают существенное влияние на динамические характеристики ротора
турбомашины. Масляная пленка обладает упругостью и вязкостью. Эти
свойства масляной пленки должны учитываться при анализе динамики
роторных систем турбомашин. Влияние подшипников на динамические
характеристики роторов рассматривается в гл. 6. Здесь же рассмотрим
динамические характеристики масляной пленки.
Зависимости (4.30) для реакции масляного слоя показывают, что
реакция масляного слоя зависит не только от положения шипа в расточке
(т.е. от координат х и ф), но также и от скорости движения шипа,
определяемой в полярных координатах производными % и ф. При малых
отклонениях шипа от положения статического равновесия, возникающие
дополнительные динамические реакции масляного слоя могут быть
представлены как линейные функции дополнительных смещений и скоростей.
-Рх = спиг + спи2 + Ьпйх + Ьпй2; |
-Р2 = с21их +с22и2 + Ь21йх +Ь22й2,)
где Рх, Р2 — динамические составляющие сил реакции масляного слоя,
действующих на шип при отклонении положения шипа из точки
статического равновесия Ох в положение 02 (рис. 4.35); их, и2 — динамические
смещения шипа из точки статического равновесия; йх, й2 — скорости
смещений; с у (i,j = 1, 2) — коэффициенты жесткости масляного слоя;
Ьц (i,j =1,2) — коэффициенты демпфирования.
Рис. 435. Схема нагружения шейки опорного подшипника и кинематические параметры
255
В совокупности с7у и by называются динамическими
коэффициентами масляного слоя подшипников. Для подшипников любого типа
Су = ^f c,y(C,£/rf, а);
bij = ^hjibL/ta).
(4.37)
Безразмерные величины с у, by являются функциями своих
аргументов в зависимостях (4.37), т.е. величины с у, by зависят от тех же
параметров, что и статические характеристики %, ср, Ф2 и Ф3.
На рис. 4.36 представлены динамические характеристики
подшипников, имеющих статические характеристики, показанные на рис. 4.34.
104
102
_1
hi
104
102
с2
р
с21
FnA
П\ч
Ь22
]
i
7
4
Ми
\-ь12=-
А
Л
7^21
1 2
10 20
а
100 ^
30
9П
1U
*У
20
1ft
Ь22
Х~с22
^Оёц J
к >/]
р^°^11
С 2
Рис. 4.36. Динамические характеристики подшипников
л — эллиптического (двухклинового) при а = 150°, т = 2/3, Lid = 0,8, А = Дг; б —
сегментного шестиколодочного с «лимонной» расточкой при т = 0,5, Lid = 0,6, а = 52°, А = А
256
Пример 4.2. Определить минимальную толщину масляного слоя /*min и
температуру нагрева масла в эллиптическом подшипнике при следующих условиях:
нагрузка на подшипник Р = 4 • 10 Н; длина L = 300 мм; диаметр <Л~ 300 мм;
горизонтальный зазор Аг = 0,6 мм; коэффициент формы т = 2/3; угловая скорость ротора
со = 314,16 рад/с; динамическая вязкость масла при Т - 50 °С \х = 1,8 • 10 Па • с;.
плотность масла р = 900 кг/м ; удельная теплоемкость масла с = 1700 Дж/(кг • К).
Решение.
1. Определяем необходимые величины:
и = Ы/2 = 314,16 • 0,15 = 47,12 м/с; \|/ = 0,60/150 = 4 • 10~3; LId= 1.
2. Находим параметр нагруженности по (4.31):
g, 4 ЧО4-(4 40-У =1Д58
2- 1,8-10 -47,12-0,3
3. По кривым рис. 4.34 находим
Х = 0,19; Ф2«0,52; Ф3 » 10; ср 2 1,46.
4. Вычисляем статическое смещение цапфы
е = хАг = 0,19 • 0,6 = 0,114 мм,
и минимальную толщину масляного слоя по (4.32)
//min = 0,6 • (1 - (0,6672 + 0,192 + 2 • 0,667 • 0,19 • cos 1,46)1/2) = 0,172 мм > 0,05 мм.
5. Определяем расход масла на подшипник (по 4.33):
Q = 0,52 • 47,12 • 0,3 • 0,6 • 10~3 = 4,410 • 10"3 м3/с.
6. Находим мощность трения по (4.34):
N ш 10-1,8-10-2-(47,12)2-0,3 ш 2997 . Ш4 Вт ш 2997 кВт
4- 10 J
7. Определяем нагрев масла по (4.35):
АГ = 2'997 ' 10 = 4,44 °С.
1700-900-4,410-10
Полученные значения /jmin и АГ являются допустимыми.
Глава пятая
КОЛЕБАНИЯ ЛОПАТОК
5.1. ПРИЧИНЫ КОЛЕБАНИЙ ЛОПАТОК
Рабочие лопатки турбомашин подвергаются как постоянным,
медленно меняющимся, так и быстро меняющимся воздействиям.
Быстро меняющиеся воздействия — это возмущающие
(возбуждающие) силы в турбомашине, вызывающие колебания лопаток.
Возбуждение колебаний лопаток связано с неравномерностью
потока пара или газа по окружности сопловых аппаратов турбомашин.
Неравномерность потока приводит к тому, что усилие на рабочую
лопатку при ее перемещении (вращении) перед сопловой
(направляющей) решеткой оказывается переменным во времени и, следовательно,
представляет собой быстро меняющееся воздействие.
На рис. 5.1, а изображена одна лопатка (другие лопатки не
показаны), положение которой определяется углом ф = Ш, где со — угловая
скорость колеса. На рис. 5.1,6 показано возможное изменение
окружного усилия q a на эту лопатку за период одного оборота колеса.
Л*)
i
ф=Ш*
L/RTI^
#
2% Ф
Рис. 5.1. Измерение окружного аэродинамического усилия за время одного оборота ротора
258
^ - (я)
По той же причине две другие составляющие: осевое усилие q и
~ (а) ~
аэродинамический момент mz — также переменные величины.
Очевидно, для каждой лопатки все три силовые фактора являются
периодическими функциями от ф с периодом 2тс и, следовательно, (поскольку ср
= со/) — периодическими функциями времени с периодом равным
времени одного оборота ротора, т.е. с периодом х = 2я/со.
В общем случае усилие, действующее на рабочую лопатку можно
представить в виде суммы
q - qQ +Aq (/), (5.1)
где #q — постоянная составляющая, не зависящая от времени; Л# (/) —
переменная составляющая аэродинамического усилия или момента.
Постоянные составляющие усилия не возбуждают колебаний, но
лишь вызывают статические (постоянные во времени) деформации и
напряжения в рабочих лопатках; вторая составляющая Л#^(/)
обусловливает колебания рабочих лопаток.
Отметим, что при вращении рабочего венца возникают также
возбуждающие силы, действующие на сопловые (направляющие) лопатки,
однако по ряду причин колебания сопловых (направляющих) лопаток
в турбинах имеют малую интенсивность и за редкими исключениями
не представляют опасности поломок.
В осевых компрессорах направляющие лопатки некоторых
конструкций (со свободными вершинами, например) могут быть чувствительны
к возбуждению колебаний и, следовательно, их также необходимо
конструировать с учетом влияния на них переменных аэродинамических сил.
Главная задача — изучение причин и последствий колебаний
рабочих лопаток турбомашин.
Неравномерность потока и, как следствие, переменность усилий,
действующих на рабочие лопатки, обусловлены несколькими причинами.
Первая причина — неоднородность сопловой (направляющей)
решетки, т.е. неодинаковость размеров шага tx, горла ах, высоты 1Х
сопловой решетки, более обще — неодинаковость каналов сопловой или
направляющей решетки по окружности.
Эффективный угол выхода потока из сопловой решетки
Г а
а1э = arcsin
v '1
m-1 , (5.2)
259
где т = 1,0—1,1 (для дозвуковых сопловых решеток), также величина
переменная по окружности.
Отмеченная неоднородность решетки — следствие технологических
отклонений от размеров, задаваемых в чертежах. Такую неоднородность
называют технологической неоднородностью сопловой решетки.
Значения неоднородностеи и их распределение по окружности решетки носят
случайный характер и для каждой диафрагмы имеют свою конкретную
реализацию. На рис. 5.2 представлена реализация распределения
геометрических параметров сопловой решетки для одной из диафрагм,
полученная прямым их измерением.
С увеличением разброса размеров qx, t{, lx и, как следствие, угла а1э
растут переменные составляющие усилии Aqx , Aq и момент Дmz .
Неравномерность потока пара? как правило, наблюдается также в
сопловых каналах, расположенных вблизи горизонтального разъема
диафрагмы (см. рис. 4.19). При изготовлении диафрагм в этих каналах
появляются уступы вследствие несовпадения частей разрезанной
лопатки на стыке половин диафрагмы.
£i,mm
50
49
a j, мм
14
12
0 7С 2тс Ф
б
Рис. 5.2. Распределение геометрических параметров сопловых каналов по
окружности диафрагмы в среднем сечении
а — сопловой канал и его геометрические параметры; б — распределение параметров
по окружности
260
кл
■■^Члч^ргщ^
K/^ynJ1^
Это технологическое отклонение вызывает нарушение потока
(отрывы потока) и возникновение импульса, действующего на лопатку
при прохождении ее мимо стыка. За каждый оборот лопатка испытывает
два импульса от возмущений потока на стыке диафрагмы.
Вторая группа причин неравномерности потока по окружности
связана с особенностями конструкции турбомашин (конструктивные
причины). К этим причинам относятся следующие:
а) парциальный подвод пара, при котором рабочие лопатки
испытывают резко меняющиеся усилия за период одного оборота (рис. 5.3);
0 12
3 4 5
Рис. 5.3. Изменение усилия на лопатку в ступени с парциальным подводом пара
а — эпюра усилия д£ (<р); б — рабочая решетка и положение рабочей лопатки во
время прохождения ее перед соплами; в — сопловая решетка (сегмент сопл); г —
идеализированная эпюра скорости Cj(<p);
схематизация эпюры qf (<р)
реальная зависимость ^ (ф),
261
б) наличие элементов, расположенных в проточной части турбома-
шины: стойки, связывающие тело и обод диафрагмы (рис. 5.4, а), стойки
для крепления корпуса подшипника к наружному корпусу компрессора
или газовой турбины (рис. 5.4, б), секционные камеры в газовых
турбинах (рис. 5.4, в) — все это вызывает переменность по окружности
усилий, действующих на рабочие лопатки. Любая стационарная
неравномерность потока по окружности вызывает появление действующих на
лопатку возбуждающих сил;
в) неравномерный по окружности подвод или отвод (отбор) пара или
газа (воздуха) вызывает переменное по окружности поле давлений
перед и за ступенью, что приводит к возникновению переменного
усилия на рабочих лопатках. Так, неравномерность давления/?^ за рабочим
венцом предотборной ступени (рис. 5.4, г) сопряжено с неодинаково-
а — диафрагма со стойками; б — входной участок компрессора; в — секционные камеры
сгорания с патрубками подвода газа; г — отбор пара из проточной части через отборную
камеру; / — стойка диафрагмы; 2 — сопловые лопатки; 3 — стойки подшипника; 4 —
корпус подшипника; 5 — камера сгорания; 6 — впускной патрубок газовой турбины; 7 —
сопловой венец газовой турбины; 8 — отборная камера; 9 — выпускные патрубки
262
JJJ
Рис. 5.5. Эпюра скорости за решеткой и параметры кромочного следа
стью давления по окружности в отборной камере (улитке).
Соответственно для послеотборной ступени начальное давление р"ц - р'2 также
будет неравномерным, что вызовет переменное усилие на лопатки
послеотборной ступени;
г) неравномерность потока вдоль шага сопловой решетки (рис. 5.5)
является причиной возбуждения колебаний, вызываемых кромочными
следами за сопловой решеткой.
Кромочный след за каждой лопаткой характеризуется шириной А и
максимальным значением «дефекта» скорости v0. Очевидно,
возмущающие кромочные силы растут с увеличением названных параметров
кромочного следа.
В турбомашинах существуют также возмущающие силы,
действующие на сопловые (направляющие) лопатки. Эти силы обусловлены в
основном двумя причинами: неоднородностью рабочей решетки и
возмущениями от входных кромок последующей рабочей решетки.
Все рассмотренные источники возбуждающих сил вызывают
вынужденные колебания венцов рабочих лопаток. Количественная оценка
возмущающих сил достаточно сложна. Более подробно характеристики
возмущающих сил рассмотрены в § 5.6.
В турбомашинах наблюдаются также самовозбуждающыеся колебания
рабочих лопаток и лопаточных венцов, причины которых заключаются в
особенностях характеристик обтекания решетки потоком при переменных
углах атаки. Более подробно этот вопрос рассмотрен в § 5.10.
5.2. ОСНОВЫ ТЕОРИИ КОЛЕБАНИЙ ЕСТЕСТВЕННО
ЗАКРУЧЕННОЙ ЛОПАТКИ
Связь динамических и кинематических параметров. Главной
особенностью естественно закрученной лопатки является взаимная
связанность растяжения и изгиба с кручением: растягивающая сила и
изгибающие моменты в сечениях лопатки вызывают не только изгиб,
263
но и кручение. Соответственно крутящий момент вызывает не только
закручивание лопатки, но и растяжение — сжатие и изгиб.
Для тонких закрученных стержней выведены следующие основные
соотношения между динамическими (силы, моменты) и
кинематическими (смещения, закрутка) факторами:
= Е(1 и" + I v" -I тп0');
v ху х рх 0 '»
I
м„ = E(ivu" + ixvv"-ipyx0W);
м„
У
(5.3)
ху
+ Gllw + E4(-Iu»
■V1)'
-z - -кр ~-кр~ "^О^-'ру" ~лрхи >> (5*4)
где угол 0 — угол поворота сечения вокруг оси z при колебаниях,
отсчитываемый от корневого сечения. .
Соотношение (5.3), (5.4) — упрощенные, но они учитывают главные
связи.
Наряду с величинами, входящими в выражения (2.39) и (2.45),
уравнения (5.3) и (5.4) содержат дополнительные параметры сечения:
рх
i
rydF;
'ру-
r4dF;
7кР = V1+*«P);
(5.5)
(5.6)
Кр/
2 2 1/2
где г — радиус-вектор точки в плоскости сечения; г = (х + у ) .
Третьи члены в соотношении (5.3), зависящие от 6' = d0/dz и
начальной закрутки xo = d0o/dz, определяют связь изгибающих моментов
с кручением. В соотношении (5.4) первый член отражает влияние
растягивающей силы N, а третьи — влияние изгиба на кручение лопатки. Для
незакрученной лопатки (т0 = 0) соотношения (5.3) преобразуются
в (2.39), а (5.4) — в обычное соотношение кручения: Mz= GIK 0'.
Для приближенных расчетов можно использовать зависимости для
геометрических характеристик профилей лопатки (рис. 5.6) в виде
(по данным И.А. Биргера и др., ЦИАМ):
F = 0,69Z>8; /кр = 0,16268 ;
1Ц = 0,04168(А2 + 52); / * /^ = 0,038Z>38;
12р = 0,0044Z>58; 1рц = -0,009638й;
1р% = 0,002Z>48; qKp = 0,0370(т062/8)2.
(5.7)
264
Пересчет характеристик (5.7), данных в
главных осях профиля, к осям х9 у
производится на основе преобразования координат
при повороте сечения на угол р, т.е. для
любой точки профиля с координатами ^, г|,
имеем: ,
х = £ cos р - tj sin р;
у = % sin р + г| cos р.
Заменяя х9 у по этим формулам в
зависимостях (5.5), (5.6), а также в выражениях
величин Ix, Iy, Ixyt входящих в эти
соотношения, получаем связь геометрических
характеристик в системе осей х, у с
соответствующими характеристиками в
главных осях %, г|. Естественно, характеристики, зависящие от радиуса век-
повороту профиля вокруг оси z. При этом моменты инерции профиля 1Х,
1у I пересчитываются по известным из курса сопротивления
материалов формулам [см. (5.24), где эти формулы даны с учетом влияния
первоначальной закрутки т0]. Для дополнительных величин / , / (5.5)
получаем формулы преобразования
Рис. 5.6. Профиль лопатки
тора г, т.е. ID, 12р9 /кр, /" , акр (2.45), инвариантны по отношению к
рх
= JV2(£sinp + Ticosp)dF = /pT]sinp + /^cosP;
РУ
i
г (£cosp-
T]sinP)dF = / cosp
/p?sinp.
Теперь по величинам 1ц, I *, приведенным в (5.7), или найденным
более точно для конкретного профиля, найдем эти величины в осях х, у.
Уравнения движения лопатки. Уравнениями равновесия (2.28)
и (2.29) можно воспользоваться как для получения уравнений
статистического изгиба рабочей лопатки, так и для получения уравнений
движения (изгибных колебаний), если по принципу Даламбера в число
внешних поперечных нагрузок включить инерционные нагрузки, а также
нагрузку от сил сопротивления. Тогда уравнения (2.28) и (2.29) можно
записать в виде:
265
д2М„
.(«) -L J0 ^ »
-й(* £>♦*'♦«;-♦»;
(5.8)
JO
поперечные инерционные нагрузки (силы инерции)
нагрузки сил сопротивления.
dz
*Ч
dz2
(О
где ^ ,
И (г)
в проекциях на оси х и у; qx , q
Отличие уравнений (5.8) от уравнений равновесия (2.28) и (2.29)
состоит в том, что введено обозначение частных производных по
координате z. Это необходимо потому, что для случая движения лопатки
искомые перемещения u, v, 0 зависят не только от z, но и от времени /:
и = u(z, 0; v = v(z, /); 9 - 6(z, /). (5.9)
Для рассмотрения угловых смещений (крутильных колебаний
лопатки) необходимо наряду с соотношениями (5.8) составить
уравнение моментов относительно любой продольной оси, перпендикулярной
осям х и у; при этом следует принять во внимание моменты,
вызываемые силами инерции и сопротивления.
Уравнения моментов относительно точки О (рис. 5.7)
дМг/дг
т
(*) -» .J0 -»
т
т„
т*
(5.10)
Рис. 5.7. Схема нагружения лопатки
266
где M2 — крутящий момент в сечении; тг — момент аэродинамиче-
(<о) ~ (О
ских сил; т2 — момент центробежных сил; тг — момент сил инер-
ции (по Даламберу); т2 — момент сил сопротивления.
Согласно правилу Даламбера силы инерции следует вводить в
уравнение равновесия в виде произведения массы на ускорение со знаком минус.
п (О (О
При этом инерционные нагрузки q\ , q' можно представить в виде
(О 77 О U
9х = -pF—• = -vw;
dt2
ч2
(О Jy
дГ
(5.11)
где v = pF — масса единицы длины стержня; и, v — ускорение центра
единичной массы в направлениях хну.
Нагрузки, соответствующие уравнениям (5.11), приложены в центре
сечения (рис. 5.7).
Силы сопротивления qx и q запишем в виде следующих
линейных соотношений:
JM = _2Av ^ = -2Avw;
* dt
ql = -2hv — = -2Avu.
^ dt
(5.12)
Соотношения (5.12) представляют собой гипотезу, согласно которой
все поперечные силы сопротивления пропорциональны скорости
движения центра масс и направлены навстречу скорости.
Коэффициент пропорциональности обозначен 2А. Множитель v
введен для удобства последующего рассмотрения/
Силы сопротивления, действующие на лопатку при ее движении,
обусловлены внутренним трением в материале лопатки, трением в
местах сочленения лопаток с диском и с бандажом и проволоками, а также
трением на поверхности лопатки при ее движении в вязкой среде (паре
или газе). Законы сопротивления всех трех типов изучены
недостаточно, зависимости (5.12) представляют собой простейшую модель
явления, которая может быть оправдана при условии, что коэффициент
сопротивления для конструкции определяется экспериментально.
267
Перейдем к рассмотрению правой части уравнения моментов (5.10).
Момент т® может быть получен аналогично случаю статического
действия центробежных сил (2.47), но с учетом поворота сечения
на угол 0:
т™ = -Р<й2[1ху - (1Х ~ /рв]. (5.13)
Момент силы инерции относительно начала координат
«i° = -vp6 (vp = p/p. (5.14)
Момент сил сопротивления
«£г) = -2vA (5Л5)
где 2h — коэффициент сопротивления при крутильных колебаниях.
Для получения уравнений движения лопатки следует подставить
в левые части уравнений равновесия (5.8) и (5.10) выражения моментов
Мх, Му, М2 (5.3) и (5.4) через смещения и, у, 0, а в правые части —
выражения для сил и моментов (2.47), (5.11)—(5.15). В результате
получим уравнения движения лопатки:
@1и"+Е1 v"-t0EI ву-(Ыи')'-vcd2w+2/*vw+vw = q[a\z, t);
(EIxyu"+EIxv"-T0EIpxey'-(Nvy+2hvv+vv = q(ya\z, /);
[^кр6' + To(- EIpyu" ~ V""' " p(°4 " 7*)0 ~
~ 2hpvpe " vp§ = <^«p)f + pC°2/^ " m^'
Система (5.16) состоит из трех дифференциальных уравнений в
частных производных (штрих означает дифференцирование по z, точка —
дифференцирование по времени /) относительно трех составляющих
смещения: и, v и 9 [см. (5.9)].
Система является основой для расчета на прочность и колебания
длинных лопаток турбомашин.
Начальные и граничные условия. Для замыкания задачи нужно
сформулировать начальные и граничные условия. Начальные условия
необходимы для рассмотрения переходных колебаний, когда
рассматривается движение лопатки после некоторого возмущения ее в начальный
момент времени, например после короткого замыкания в линии
электрического генератора.
268
(5.16)
Граничные условия зависят от способа закрепления лопатки на
колесе и способа соединения ее с соседними лопатками при помощи
бандажа или проволок.
В дальнейшем граничные условия будут рассматриваться
применительно к конкретным задачам теории колебаний лопаток.
Классификация колебаний лопатки. Правые части уравнении
(5.16) представляют собой силы, воздействующие на лопатку
(центробежные и внешние аэродинамические), причем нагрузки от
центробежных сил являются стационарными.
При изучении колебаний лопатки достаточно в правых частях
уравнений (5.16) сохранить лишь величины, зависящие от времени. При
этом смещения и, v и 6 соответствуют лишь переменным (зависящим
от времени) составляющим полных смещений, т.е.
w* = w0 + w; и* = У0 + у; 0* = 0О + 0, (5.17)
где параметры, имеющие индекс *, — полные смещения, а параметры,
имеющие индекс 0, — стационарные смещения; слагаемые, не имеющие
индекса, — переменные (зависящие от времени) составляющие, которые
представляют собой колебательное движение лопатки.
Подставляя полные смещения (5.17) в левые части системы
уравнений (5.16), приравнивая порознь члены* зависящие от стационарных
смещений, стационарным составляющим правых частей, а члены,
зависящие от w, v и 0, — переменным составляющим правых частей,
получаем для стационарных и переменных смещений две системы
уравнений. Для переменных составляющих и, v и 0 система имеет тот же вид,
что и система (5.16), с той лишь разницей, что под q£ , q а , т^
подразумеваются нестационарные составляющие аэродинамических сил
и момента, и первые два стационарных члена в правой части третьего
уравнения можно не учитывать.
Колебания лопаток могут быть свободные, вынужденные и
самовозбуждаю щиеся.
Свободные колебания возникают при условиях, когда в начальной
момент лопатка получает возбуждение от постороннего источника в
виде начального смещения из положения статического равновесия или
начального импульса. Все последующее движение лопатки происходит
без каких-либо внешних возмущающих сил, независимых от колебания
лопатки.
Свободные колебания могут быть незатухающими и затухающими.
Незатухающие свободные колебания происходят с постоянной
интенсивностью (постоянными амплитудами), а затухающие колебания —
с уменьшением амплитуд до полного исчезновения колебаний.
269
Затухание (демпфирование) свободных колебаний происходит
вследствие рассеяния энергии колебательного движения и превращения ее в
тепловую энергию вследствие трения в материале и креплениях лопатки
и внешнего трения при колебаниях лопатки в паровой и газовой среде.
Акустическое излучение колеблющейся лопатки и нестационарная
теплопроводность материала лопатки при переменных деформациях также
вызывают демпфирование свободных колебаний лопаток.
Процесс затухания первоначально возбужденной лопатки в турбома-
шинах не представляет практического интереса. Однако изучение
свободных колебаний лопаток имеет весьма важное значение, так как при
этом определяют важнейшие динамические характеристики лопаток —
собственные частоты колебаний и главные формы колебаний. Знание
этих характеристик позволяет судить о динамической надежности
лопаток без детальных сведений (часто отсутствующих), о значениях
возмущающих сил, действующих на лопатку.
Вынужденные колебания лопаток происходят под воздействием
внешних возмущающих сил, краткий обзор которых дан в § 5.1. Для
определения колебаний расчетным путем необходимо знать переменные
правые части уравнений (5.16), т.е. возмущающие силы.
В турбомашинах наибольший интерес представляют вынужденные
колебания. Однако их расчетное определение представляет практически
значительную трудность вследствие недостаточной изученности
природы возмущающих сил, демпфирующих свойств рабочих лопаток и
венцов. Сведения о возмущающих силах в турбомашинах приведены в § 5.6.
Самовозбуждающиеся колебания (автоколебания) рабочих лопаток
обусловлены энергетическим взаимодействием системы (лопатка, венец
и т.п.) с внешним источником энергии — паровым или газовым потоком,
обтекающим лопатки. При автоколебаниях колеблющаяся система
(лопатка и венец) отбирает энергию от постоянного источника (потока)
периодически, в унисон с колебаниями. В этом случае правые части
уравнений (5.16) являются функциями (нелинейными) смещений и, v и 8
и их производных по z и /, т.е.
9х ~ ЛД '» w> у' 9> "> *>> ®> •••);
^ = />>(*> *> щ у' 0' "' "> ®> •'•)'
тг = fz(z» *> U> У> 9> "> V> ^ —) '
Эти функциональные зависимости отражают влияние колебаний
лопатки (венца) на возмущающие силы, т.е. сама колеблющаяся система
«управляет» возмущающими силами и периодически вызывает
передачу энергии от потока к лопатке (венцу). Более детально природа
автоколебаний в турбомашинах рассмотрена в § 5.10.
270
Частные случаи системы уравнений движения лопатки
Случай 1. Лопатка незакрученная (т0 = 0), невращающаяся (со = 0),
главные оси профилей совпадают с осями х, у (1ху = 0). При этих
условиях система уравнений (5.16) распадается на три независимых
уравнения
(Byuuy + 2hvu + vu = q^\z9t);
(Bv")" + 2hvv + vv = q[a)(z,ty,
л у
(5.18)
(Вгв'У - 2hpvpB - vpQ = -т[а). (5.19)
В уравнениях (5.18) и (5.19) приняты следующие обозначения:
Ву = Е1у; BX = EIX; B^GI^, (5.20)
где В , Вх — жесткости сечения при изгибе; Bz — жесткость при кручении;
v — линейная плотность; v — линейный полярный момент инерции.
Случай 2. Лопатка слабозакрученная невращающаяся (со = 0). Слабо-
закрученной лопаткой называется такая лопатка, для которой
деформационной связанностью изгиба и кручением можно пренебречь и
принять соотношения (2.39).
В системе уравнений (5.16) следует отбросить члены,
пропорциональные т0, предположив их влияние малым. При названных условиях и
обозначении В = Е1ху из (5.16) получаем:
(Вуип + Bxyv")" + Ihvii + v5 = qxa\z, t); (5.21)
(Brvu" + Brv")n + 2hvu + vu = q[a\z, t); (5.22)
л у л ^ у
(Bzey - 2hpvpQ - vp6 = -m[a\Z, t). (5.23)
Для рассматриваемого случая жесткости Вх, В' В и В2 меняются
подлине лопатки вследствие изменения формы и размеров профилей
подлине и закрутки лопатки. Следует отметить, что жесткости
закрученного стержня отличаются от жестокостей незакрученного стержня.
Соответствующие поправки могут быть найдены из соотношений (5.3) и
(5.4), если их применить к изгибу без кручения. В результате имеем
Вх = Вт + A#jCOs2p + A£2siri2p;]
Ву = Вт- ABxcos2$ - AB2sin2$;
Вху = -A£1sin2p + A£2cos2p;
(5.24)
271
я„ =
= 0,5(^ + V; АВ1 = °>5(54~V;
АВ2 =
Е1%Чп>
(5.25)
где р — угол между осями % и х (см. рис. 2.8).
Для лопаточных профилей (см. рис. 5.4) можно принять, по данным
И.А. Биргера и др. (ЦИАМ):
q% = 0,001689x^/(1 +0,037то);
q4 = 0,03171 tJ/[(1+82/A2)(1 + 0,037т J)];
q%xx = 0,007602то(А/6)/(1 + 0,037т2,) (т0 = t0Z>2/5). J
(5.26)
Поправки к жесткостям с учетом закрутки лопаток имеют
практическое значение при т0 > 1.
5.3. СВОБОДНЫЕ КОЛЕБАЙИЯ НЕЗАКРУЧЕННОЙ
НЕВРАЩАЮЩЕЙСЯ ЛОПАТКИ И ПАКЕТА ЛОПАТОК
Дифференциальное уравнение движения лопатки выводим из (5.18)
при условии, что возмущающие силы отсутствуют:
(Ви")" + 2hvu + vu = 0. (5.27)
Здесь и ниже в данном параграфе индекс у опущен.
Частное решение этого уравнения ищем в виде произведения двух
функций
w = X(z)#(/). (5.28)
Функция Хзависит только от координаты z, а функция Н— только от
времени /. Предполагаемое решение (5.28) представляет собой
синхронно-синфазные колебания, т.е. все точки лопатки колеблются по
одному закону, который определяется функцией #(/). В то же время
движение, описываемое формулой (5.28), соответствует неизменной форме
колебаний. Действительно, в любой момент времени / фо{ша упругой
линии лопатки остается неизменной и определяется функцией X(z).
Изменяются во времени только смещения, что определяется
изменением функции #(/). Таким образом, функция X(z) определяет форму
272
упругой линии лопатки и называется формой колебаний, функция #(/)
определяет закон изменения прогибов во времени и их величину.
Для проверки допустимости предположения (5.28) подставим прогиб и
из (5.28) в уравнение движения (5.27) и найдем условия, при которых оно
может быть удовлетворено:
(ВХ")"Н + 2hvXH + vXH = 0 . (5.29)
Разделив все члены (5.29) на произведение vXH и перенеся члены,
зависящие от времени, вправо, получим
(BX")"/(vX) = -(Я+2йЯ)/#.
В этом равенстве левая часть представляет собой функцию,
зависящую только от z, а правая часть — функцию, зависящую только от /.
Однако это возможно только в том случае, когда обе части равны посто-
янной, которую обозначим р . Тогда
(BX")"/(vX) = -H/H-2hH/H = р2.
Откуда
H+2hH + p2H = 0; (5.30)
(BX")"-vp2X = 0. (5.31)
Уравнение (5.30) по структуре совпадает с уравнением свободных
затухающих колебаний системы с одной степенью свободы, известным
из курсов физики и теоретической механики, и имеет общее решение
#(/) = tfe~A'cos(pf + e), (5.32)
где Nn е — постоянные; р — частота свободных затухающих колебаний,
2 2 1/2
Р = (Р -Л ) • (5.33)
Период колебаний т = 2л/р .
Ввиду малости h(h <<р) р « р,
Из зависимости (5.32) можно видеть, что частное решение (частная
функция движения лопатки) в виде (5.28) соответствует движению, при
котором каждый элемент лопатки совершает простое гармоническое
затухающее колебание с частотой р\ Из уравнения (5.32) следует
также, что все элементы лопатки колеблются в одной и той же фазе, так
как начальная фаза 8 — постоянная для всей лопатки величина.
273
Согласно (5.28) и (5.32) динамический прогиб при свободных
колебаниях рассматриваемого вида
w(z, /) - X(z)Ne~htcos(pt + е) .
Изменение прогиба в точке z во времени изображено на рис. 5.8.
Найдем отношение амплитуд
Ai/Ai+\ в e~A/cos(^/-f e)/[Q~Ht+x)cos(pt + px + е)]. (5.34)
Так как интервал времени между моментами двух смежных
максимумов прогиба равен периоду т , то р т = 2тс . Следовательно,
cos(p% + р/ + е) = cos(/?/ + e).
Откуда
Логарифмический декремент колебаний
Л = ЩА/А(+1) = Ах. (5.35)
Логарифмический декремент колебаний определяет степень
затухания свободных колебаний лопатки.
Для определения частоты колебаний р необходимо, очевидно, решить
второе из полученных уравнений — уравнение форм колебаний (5.31).
Для конкретизации задачи об определении форм колебаний из
уравнения (5.31) необходимо для функции X(z) сформулировать граничные
условия, которые определены способом закрепления концов лопатки.
Рис. 5.8. Затухающие колебания лопатки
274
Рассмотрим три способа
закрепления конца стержня (лопатки): шар-
нирно-опертый конец (рис. 5.9, а);
защемленный конец (рис. 5.9, б);
свободный конец (рис. 5.9, в).
Для первого случая прогиб на
опоре и изгибающий момент в
шарнире равны нулю в любой момент
времени, т.е. на шарнирной опоре
должны быть выполнены условия
w = Z#=0;
Му = Ви" = ВХ"Н=0,
X"'
Ш
й
б
Х"=0
(ВХ'У - о
Е
3h
Рис. 5.9. Схемы закрепления конца
стержня
откуда граничные условия для формы
колебаний Хна шарнирной опоре
X=0;Z"=0. (5.36)
На защемленном конце прогиб
лопатки и угол наклона касательной
к упругой линии равны нулю в
любой момент колебаний, т.е. должны быть выполнены условия
X=0;JT = 0. (5.37)
На свободном конце лопатки изгибающий момент и перерезывающая
сила в любой момент колебаний равны нулю. Откуда
X" = 0; (ВХ'У = 0. (5.38)
Определение формы колебаний X(z) (динамического прогиба)
сводится к решению уравнения (5.31) и подчинению найденного решения
граничным условиям в соответствии со способами закрепления концов
лопатки. При решении этой задачи должна быть найдена также частота
собственных колебаний.
Определение форм и частот колебаний, как отмечалось ранее,
является основной целью изучения свободных колебаний лопаток.
Задачу о свободных колебаниях решают расчетными или
экспериментальными методами.
Расчет свободных колебаний незакрученной невращающейся
лопатки постоянного профиля. Для постоянного профиля лопатки
В и v — постоянные величины. Тогда уравнение динамического прогиба
(формы колебаний) (5.31)
ЛУ
а4Х-
0,
(5.39)
275
причем
a4 = vp2/B. (5.40)
Частными решениями уравнения (5.39) являются ch az, sh az, cos az,
sinaz, в этом легко убедиться подстановкой этих функций в (5.39).
Любая линейная комбинация частных решений также является частным
решением.
В качестве частных решений выберем линейные комбинации
S = 0,5 (ch£ + cos 4);
Т = 0,5(sh4 + sin£);
U = 0,5(ch^-cos£);
V = 0,5(sh£-sin£), J
(5.41)
где £ = az.
Функции (5.41) называются функциями А.Н. Крылова. Общее решение
уравнения (5.39) есть сумма частных решений, каждое из которых должно
быть умножено на произвольную постоянную. Следовательно, используя
функции Крылова, общее решение (5.39) можно представить в виде
X(z) = AxS{az) + A2T(az) + A3U(az) + A4V(az\ (5.42)
где A j—A4 — постоянные интегрирования.
Выбор функции Крылова в качестве частных решений определяется
следующими двумя свойствами этих функций.
Первое свойство: каждая предыдущая функция (5.41) есть
производная (по аргументу £) последующей, а четвертая производная любой
функции равна самой этой функции. Правило превращения функций
при дифференцировании можно представить в виде схемы:
/^
V Г> (5.43)
где стрелками показано, в какую функцию превращается каждая из них
при дифференцировании.
Второе свойство функций Крылова состоит в том, что в начале
координат, т.е. при z = 0,
S(0) = 1; Г(0) = /7(0) = V(0) = 0. (5.44)
Эти свойства функций Крылова оказываются полезными при
подчинении решения (5.42) граничным условиям. Оказывается, что по
условиям вида (5.36)—(5.38) на одном конце лопатки две из четырех
постоянных A j—А4 всегда равны нулю, что существенно упрощает
решение задачи.
276
Рассмотрим применение полученных результатов для расчета
колебаний лопатки при некоторых частных случаях закрепления концов
лопатки.
1. Лопатка жестко закреплена на одном конце и свободна на другом.
При использовании граничных условий на защемленном конце для
формы колебаний X(z) в виде (5.42) с учетом свойств функций Крылова
Ах=А2 = 0.
Следовательно, уравнение упругой линии
X(z) = Аъи{аг) + A4V(az). (5.45)
Применение граничных условий на свободном конце, т.е. JC'(f) = 0;
X"'(l) = 0 при использовании (5.45) и свойств (5.43), (5.44), позволяет
получить уравнения
A,S(al) + AdT(al) = 0;1
(5.46)
A3V(al) + A4S(al) = O.J
Полученная система двух линейных уравнений относительно двух
неизвестных А$ и А4 однородна (правые части равны нулю). Поэтому
нетривиальное решение возможно только при условии, что
определитель системы (5.46) равен нулю, т.е.
S(al) T(al)
V(al) S(al)
S2(al)-T(al)V(al) = 0. (5.47)
Уравнение (5.47) называется уравнением частот, так как его корни
определяют значения частот р.
Заменяя функции Крылова по (5.41), получаем уравнение частот
(5.47) в виде:
ch a/ cos а/ + 1 = 0. (5.48)
Уравнение (5.48) трансцендентное. Первые три корня имеют
следующие значения: ах1 = 1,875; а2/ = 4,694; а3/ = 7,855. Частоты собственных
колебаний вычисляем по формуле, получаемой из (5.40):
** = 7© ' (5-49)
где 8^ = а^/ — корни уравнения частот, &=1,2, 3,..,°°.
Частоты колебаний (в герцах)
fk=pk/2n = (mk/l2)(B/v)m,
277
или
fk=(mk/l2)(EIn/(pF))m.
При этом
т
к - 82/(2,0..
(5.50)
(5.51)
/ — момент инерции относительно главной оси г|.
Для первых трех собственных частот имеем т1 = 0,560; т2 = 3,51;
тъ = 9,82.
Частотное уравнение (5.48) имеет бесконечное множество корней
(к= 1, 2, 3, ..., °°). Следовательно, лопатка имеет бесконечное
множество собственных частот колебаний. Совокупность частот называется
спектром частот. Частоты обычно нумеруются в порядке их
возрастания, т.е.
Р\ <Р2<Ръ< ••• <Рк< •••
Каждой собственной частоте рк соответствует главная форма
колебаний Xk(z), которую найдем из соотношений (5.45) и (5.46). Подставляя
в (5.46) любое из найденных значений р = рк, (а = о^), замечаем, что
одно из уравнений (5.46) является лишним, так как оно совпадает с
другим. Это является следствием того, что при подстановке любого
значения/? - рк в (5.46) определитель системы равен нулю.
Выразим А4 из любого (например, первого) уравнения (5.46) и
подставим в (5.45). Получим главную форму колебаний в виде
Хк(г) = Ак
S(akl)
(5.52)
Постоянная А имеет индекс к для того, чтобы отразить
принадлежность ее к к-й главной форме колебаний.
Для каждой частоты (для каждого значения а^/ = 5Л) по зависимости
(5.52) определяют главную форму колебаний.
На рис. 5.10 представлены первые три главные формы колебаний.
Главные формы колебаний определяются с точностью до произвольного
множителя Ак.
Х2 Хг
Рис. 5.10. Формы колебаний лопатки со свободной вершиной
278
2. Лопатка жестко закрепляется на одном конце и шарнирно
опирается на другой. Применение граничных условий на защемленном конце,
как и в первом случае, позволяет получить Ах = А2 = 0. Упругая линия
лопатки определяется соотношением (5.45).
Применение граничных условий на шарнирно-опертом конце Х(1) = 0;
X"(J) позволяет получить систему двух уравнений
A,U(al) + AAV(al) = 0;1
\ (5.53)
A3S(al)+A4T(al) = 0. J
В уравнении частот
T(al)U(al) - V(al)S(al) = 0,
заменяя функции Крылова по (5.41) и преобразуя, получаем
tg а/ = th а/. (5.54)
Первые два корня имеют значения
8! = ах1 = 3,927; 82 = а2/ = 7,069.
Собственные частоты определяются по формуле (5.49) или (5.50)
при этом тх = 2,45; т2 = 7,96.
Главные формы колебаний определяем по (5.45), заменяя
постоянную А4 из зависимости (5.53) (например, из первого уравнения).
Следовательно,
W в лк
Щак1)
U(akz) ~ yj—fi V(akz)
Для колебаний лопатки в плоскости максимальной жесткости
(в плоскости %Oz) все результаты сохраняются: главные формы и
значения корней уравнения частот совершенно совпадают с тем случаем,
когда лопатка колеблется в плоскости минимальной жесткости
(плоскости r\Oz), но, конечно, частоты определяются по формуле (5.48), в
которой минимальный момент инерции профиля / должен быть заменен на
максимальный момент А.
Влияние жесткости закрепления, поперечных сил и инерции
поворота на частоты собственных колебаний невращающейся
лопатки. При применении формулы (5.50) для расчета относительно
коротких лопаток турбомашин возникает погрешность из-за допущения
при ее выводе.
Первая причина погрешности объясняется тем, что в действительности
закрепление лопатки на диске не является абсолютно жестким. Вследст-
279
вие упругости защемления снижаются значения собственных частот
по сравнению со значениями, рассчитываемыми по формуле (5.50).
Вторая причина связана с тем, что для относительно коротких
лопаток прогиб при колебаниях (и при любых поперечных деформациях)
определяется не только деформацией изгиба, но и деформацией сдвига
под воздействием перерезывающих сил.
Третья причина отклонения экспериментальных значений частоты от
расчетных по формуле (5.50) заключается в том, что для коротких
лопаток сказывается влияние инерции поворота каждого элемента вокруг
оси г| при поперечных колебаниях лопатки в направлении оси %.
Последние две причины учитываются более точными
зависимостями, в то время как влияние неидеальности защемления на частотные
характеристики лопаток не поддается анализу без проведения
специальных экспериментов. Для практических расчетов используют
^экспериментально полученный поправочный коэффициент, изменение которого
для первого тона колебаний в зависимости от гибкости лопатки X = ///
показано на рис. 5.11.
Радиус инерции
/ = (/n/F),/2.
Коэффициент vj/ одновременно учитывает влияние всех
перечисленных факторов. Действительная частота колебаний первого тона
одиночной невращающейся лопатки постоянного профиля определяется
по формуле
/, = v|/(0,560//2) (B/v)m = v|/(0,560//2) (£y(pF>)1/2. (5.55)
Коэффициент v|/ зависит от типа замкового соединения лопатки и
формы колебаний. Для высших тонов \|/ имеет меньшее значение, чем
для первого (основного) тона колебаний.
0,8
0,6
0,4
20 40 X
Рис. 5.11. Зависимость множителя \j/ от гибкости лопатки
280
Колебания невращающегося пакета лопаток постоянного
профиля. Рассмотрим колебания пакета лопаток, связанных бандажом.
Предположим, что все лопатки пакета при колебаниях деформируются
по одинаковой форме в плоскости минимальной жесткости Ifiz. Пакет
считаем плоским (пренебрегаем веерностью) и бесконечным. Тогда все
лопатки находятся в совершенно одинаковых условиях, и достаточно
рассмотреть одну отдельно взятую лопатку с примыкающим участком
бандажа (длиной /б), заменив связи с соседними лопатками действием
пары сил Q (рис. 5.12).
При колебаниях на периферийное сечение лопатки действует
изгибающий момент от сил Q и перерезывающая сила, вызванная
колебаниями бандажа как массы на конце лопатки. Изгибающий момент
(ВХ") 2 e i в сечении NN
пропорционален углу поворота Х'(1) в
сечении NN; перерезывающая сила
(ВХ") г = J пропорциональна силе
инерции бандажа, т.е. величине
2
р т$Х(1), где тб— масса участка
бандажа длиной /б.
Исходя из этого, установим два
граничных условия в сечении NN:
X'(l) + -fX'(l) = 0;
Х*"(1) +
v68
Г
Х(1) = о
(5.56)
&4 = vp2l4/B),
(v6 = w6/(v/);
где /cq — коэффициент жесткости
бандажа (2.38); v6 — коэффициент
массы бандажа.
Уравнение упругой линии
лопатки следует принять в виде
(5.45), подчинив ее граничным
условиям (5.56). При дальнейшем
решении необходимо получить
уравнение частот и уравнение
главных форм аналогично ранее
рассмотренным случаям лопаток со
Z i
Q
f
777!
вп
/ Qt
1 4 N
7ГГ
h
>
Рис. 5.12.
в пакете
Расчетная схема лопатки
281
свободной и шарнирно опертой вершиной. После преобразований
имеем уравнение частот пакета лопаток в виде
г,2
S -TV+v68(SV-UT)
кб = 8 ,
UV-ST+v6b(ir -TV)
где аргумент функций Крылова есть 8.
Формы колебаний пакета для А:-го тона
(5.57)
XAz)
<8*D
8kS(8k) + k6A8k)
8кЦ5к) + кби(8к)
Khl)
(5.58)
Решение уравнений частот (5.57) представлено в виде кривых, дан-
ных на рис. 5.13, где ф = (8^/1,875) .
Расчетная формула для собственных частот пакета лопаток
fm = <ру(0,560II2) (EIn/(pF))m, (5.59)
где \|/ определяется по графику на рис. 5.11.
Первые две главные формы колебаний пакета показаны на рис. 5.14.
Рассмотренные формы колебаний пакета в целом называются
колебаниями типа А. Первый тон колебаний называется колебанием типа Aq,
второй тон — типом Ах и т.д. (индекс равен числу узлов на
динамической упругой линии лопатки).
О 1 2 k6
Рис. 5.13. Зависимость ф от параметров к6 и v6
282
Кроме рассмотренных форм колебаний пакета, при колебаниях всех
лопаток в одной фазе существуют так называемые внутрипакетные
колебания, которые характерны тем, что вершины лопаток не
перемещаются при колебаниях или перемещения вершины малы, а максимальный
прогиб наблюдается в некоторой средней части лопатки, ближе к ее
вершине. Различные лопатки колеблются в разных фазах. Формы внутрипа-
кетных колебаний называются колебаниями типа В. Существуют
колебания типа В0, типа Вх и т.д. При колебаниях типа В0 упругая линия
лопатки не имеет узлов в промежутке между корнем и вершиной
лопатки, при колебаниях типа Вх имеется один узел и т.д.
В отличие от колебаний типа Л внутрипакетные колебания имеют
большее многообразие форм. Строгий анализ показывает, что для
пакета, состоящего из т лопаток, существует т - 1 форм колебаний
типа В0, т - 1 форм колебаний типа Вх и т.д.
На рис. 5.15 изображены формы колебаний типа В0 для пакета из
четырех лопаток. Частоты собственных колебаний всех т - 1 форм типа
BQ разнятся между собой незначительно.
///////////У//?//// 7777.
а б
Рис. 5.14. Формы колебаний пакета лопаток
а — тип А0, б — тип А,
Рис. 5.15. Внутрипакетные формы колебаний лопаток типа В0
283
Для колебаний типа В0 (см. рис. 5.13) изображены две
ограничительные линии, между которыми расположены все частоты колебаний типа
В0. Обе линии начинаются от значения ф = 4,39, соответствующего
частоте первого тона колебаний лопатки со свободно опертой вершиной.
Относительная масса бандажа v6 не оказывает влияния на частоту
колебаний типа В0, так как вершины лопаток неподвижны или совершают
малые колебания.
Изгибно-крутильные колебания пакетов лопаток. В турбомаши-
нах существуют формы колебаний пакетов, которые получили название
изгибно-крутильных колебаний пакетов (рис. 5.16). Деформация
лопаток приближается к чисто изгибной в осевом направлении. При жестком
присоединении бандажа к лопаткам происходит некоторое
закручивание каждой лопатки в пакете. Формы изгибно-крутильных колебаний
различаются формой лопаток и формой бандажа. Первая форма колеба-1
ний (форма 1) соответствует преимущественно осевым (в плоскости
3 (А02) 4 (Aos) 5 (Ап)
Рис. 5.16. Изгибно-крутильные колебания пакета лопаток
а — пакет лопаток; /—5 — формы колебаний
284
максимальной жесткости) колебаниям лопаток в одной фазе и
поступательному колебательному смещению бандажа.
Вторая форма (форма 2) образуется при изгибной деформации
лопаток почти в осевом направлении и при крутильном колебательном
движении бандажа.
В первых двух формах колебаний бандаж не деформируется, а
оказывает влияние на частоту и форму колебаний как дополнительное
твердое тело, расположенное на концах лопаток.
Третья форма колебаний (форма 3) отличается изгибом бандажа
по форме с двумя узлами, в четвертой форме (форма 4) имеются три
узла и т.д. Последняя из форм (форма 5) соответствует форме типа Ах
колебаний лопаток с одним узлом в плоскости их максимальной
жесткости и крутильным колебаниям бандажа как твердого тела. Формы могут
быть классифицированы по числу узлов на лопатке и на бандаже и
обозначены символом Атп (где индекс т указывает число узлов на
лопатках; индекс п — число узлов на бандаже).
Для лопаток постоянного сечения можно решить задачу о свободных
изгибно-крутильных колебаниях пакета и представить результат в
следующем виде:
, 0,56 (EW/2
'и= ^ т" да ■ ,
где h — момент инерции сечения лопатки относительно оси £; \у(Х) —
коэффициент, учитывающий влияние закрепления (и другие факторы)
при X = //i£, i£ = (J^IF)m.
По данным Е.Б. Карпина и Д.А. Аркадьева (КТЗ), коэффициент <рп
представлен на рис. 5.17 в зависимости от двух параметров v6 и е:
= ^б = Рб/б'б
Уб тп pFl '
з
^бтах 1 *б *4
где v6 — относительная масса бандажа; е — относительная жесткость
бандажа при изгибно-крутильных колебаниях; /gmax — момент инерции
сечения бандажа относительно оси максимальной жесткости; /б — длина
бандажной ленты (см. рис. 5.16, а); /б — шаг бандажа; f$ — площадь
сечения бандажа; рб — плотность материала бандажа.
285
О 4 8 12 е
Рис. 5.17. Зависимость фп от параметров v6 и е для изгибно-крутильных колебаний
пакета
Для бандажа, имеющего поперечное сечение в виде прямоугольника со
сторонами йб, Аб (см. рис. 5.16, а)
/б = йбЛб» /6max = A666/12-
Параметры 8^ (к = 1, 2, 3, ..., п) — корни уравнения частот отдельно
колеблющегося бандажа как свободного незакрепленного стержня.
Ниже в таблице приведены значения четырех корней уравнения.
Корни уравнения
Число узлов при колебании бандажа
8*6
Первый
0
0
Второй
1
0
Третий
2
4,73
Четвертый
3
7,85
При двух первых формах колебаний е = 0. Частота колебаний
зависит только от массы бандажа v6. Значения фп в этом случае те же, что
и на рис. 5.13 при А:б = 0.
286
Ортогональность главных форм колебаний. Главные формы
колебаний лопаток и пакетов обладают свойством ортогональности при пфт
I
\v(z)Xm(z)Xn(z)dZ + m6Xm(l)Xn(l) = 0. (5.60)
о
Ортогональность главных форм колебаний отражает
энергетическую независимость любых двух простых колебаний ит и ип по
главным формам:
ит в Xm(z) cos Pnfi ип = Хп& cos Pj>
т.е. энергия колебаний по форме т не может переходить в энергию
колебаний по форме п и обратно. Разумеется, что это относится к
консервативной системе без сил сопротивления и других неконсервативных сил.
В системе с неконсервативными силами возможен переход энергии
от одной формы колебаний к другой. Главные формы колебаний
определяются с точностью до постоянного множителя, который удобно
выбирать так, чтобы для любой формы колебаний выполнялось условие
/
lv(z)X2mdz + m6X2m(l) = 1. (5.61)
о
Соотношение (5.61) называется условием нормирования главных
форм. Главные формы, у которых множители найдены из условия
нормирования, называются нормированными главными формами.
5.4. СОБСТВЕННЫЕ ЧАСТОТЫ И ГЛАВНЫЕ ФОРМЫ
КОЛЕБАНИЙ ЗАКРУЧЕННЫХ ЛОПАТОК ПЕРЕМЕННОГО
ПРОФИЛЯ
Уравнения свободных незатухающих колебаний (уравнения форм)
можно определить из (5.16), если положить, что
и = Ucospt; v = Vco$pt; 6 = 0 cos/?/,
и принять h = h_ = 0 и правые части равными нулю.
В результате имеем следующую систему уравнений:
(El U" + El V" - х0Е1 ®')" - (NU'Y - vco2U-vp2U = 0;
ху и ру
(EIxyU' + EIXV" - x0EIpx®')" - (NV'Y - vpV = 0;
lGI°Kp®'+T0(-EIpyU" -EIpxV")V-p<o\ly -/х)в+v^20= O.J
(5.62)
При соответствующих граничных условиях решение системы (5.62)
определяет главные формы колебаний и собственные частоты.
287
Каждая форма колебаний номера к представляется функциями Uk, Vk
и 0£, которые являются амплитудами свободных незатухающих
колебаний с соответствующей частотой рк. Изложение методов численного
решения системы (5.62) выходит за рамки учебника.
Для примера на рис. 5.18 представлены первые четыре главные
формы колебаний свободной (без связей) лопатки длиной / = 1400 мм
при среднем диаметре dc = 3,89 м. Лопатка выполнена из титанового
сплава, хорда корневого сечения ЬК = 400 мм.
Расчет форм колебаний и собственных частот произведен методом
численного интегрирования системы уравнений типа (5.62) с помощью
ЭВМ. Разработку программ и расчеты выполнила Т.В. Даскал в МЭИ.
Значения частот даны для невращающейся лопатки. С учетом
вращения частота, например на первой главной форме составляет fx = 128 Гц.
Из рис. 5.18 следует, что главные формы 7 и 2 преимущественно
изгибные формы с малой крутильной составляющей: амплитуды U, V—
существенно превышают значения ©Ь/2. Последняя величина по
смыслу является мерой линейного смещения точек профиля, располо-
г к
U, V, 06/21 U, V, вЬ/2
< 1 <-
U,У, вЬ/2| U,V, Qb/2]
&4b/2
У
V2y
i
&2
r \
X
е2ь/2
Рис. 5.18. Формы колебаний лопатки большой длины
1—4 — первая — четвертая формы колебаний; частоты невращающейся лопатки /J = 97 Гц,
/2 = 148 Тп, /3 = 208 Гц; /4 = 273 Гц
288
женных на расстоянии Ь/2 от его центра, при повороте профиля на угол
0. Третья главная форма колебаний — преимущественно крутильная,
для которой крутильная деформация 06/2 существенно превышает
амплитуды U и V. Четвертая форма колебаний — преимущественно
изгибная, но с большим влиянием крутильной составляющей и с
узловыми линиями на лопатке. Данные свидетельствуют о слабой
связанности изгиба с кручением при низших формах, т.е. малом влиянии закру-
ченности т0 на динамические характеристики лопатки.
Для расчета собственных частот и главных форм колебаний лопаток
переменного сечения и пакетов применяются: МКЭ, метод Рейли, метод
Ритца, комбинированный метод. Основы этих методов и примеры их
применения даны в гл. 7.
На рис. 5.19 представлены первые три главные формы колебаний
и соответствующие собственные частоты рабочей лопатки, полученные
а б в
Рис. 5.19. Формы колебаний лопатки без связей, полученные при помощи МКЭ
а — первая изгибная форма,/! = 530,8 Гц; б — вторая изгибная форма, f2 = 1347,8 Гц;
в — крутильная форма, /3 = 2334,5 Гц; недеформированное состояние;
деформированное состояние
289
при помощи МКЭ. Программа для ЭВМ и расчеты по ней выполнены
в МЭИ В.В. Орловым. Модель профильной части лопатки
сформирована на основе элементов типа оболочки переменной толщины.
По хорде лопатки размещено по три конечных элемента, по длине
лопатки — четыре элемента этого типа. Первая и вторая формы
колебаний — изгибные третья — изгибно-крутильная.
Сопоставление расчетных значений частот с экспериментальными
данными указывает на их удовлетворительное соответствие. МКЭ
позволяет проводить расчеты таких сложных систем, как полный рабочий
венец, закрепленный на ди^ке. В этом случае выделенный сектор
рабочего колеса, включающий рабочую лопатку, хвостовик, сектор диска,
а также участки демпферной проволоки и бандажа, рассматривается как
суперэлемент (см. гл. 7), а все колесо в целом — как система, состоящая
из таких суперэлементов. Условия совместности напряжений и
деформаций на общей границе двух смежных суперэлементов и условие
круговой замкнутости системы позволяют составить уравнения главных
форм колебаний и частотное уравнение всей системы. На рис. 5.20
показан сектор рабочего колеса и разбиение его на конечные элементы.
5.5, ВЛИЯНИЕ ВРАЩЕНИЯ НА СОБСТВЕННЫЕ
ЧАСТОТЫ КОЛЕБАНИЙ ЛОПАТОК И ПАКЕТОВ
Если отдельная лопатка или лопатка в пакете имеет прямолинейную
ось, совпадающую по направлению с радиусом, проведенным из центра
вращения, то при вращении лопатки центробежные силы инерции
вызывают снижение поперечной деформации лопатки, вызываемой
аэродинамическим изгибом (см. § 2.2) или какими-то иными причинами,
например колебаниями. Это означает, что центробежные силы как бы
увеличивают поперечную жесткость лопатки и поэтому следует
ожидать, что в условиях вращения частоты рабочих лопаток будут выше,
чем у невращающейся лопатки.
Учет влияния вращения на частоту можно учесть при любом методе
расчета собственных частот. Так, влияние вращения на частоты и
формы колебаний учитывается в уравнениях движения (5.16) или (5.62)
с членами, зависящими от со и от растягивающей силы N (пропорцио-
2 *
нальной со ) так, что при численном интегрировании системы (5.16) или
(5.62) при сохранении указанных членов влияние вращения будет само
собой учтено и значения собственных частот будут найдены с учетом
влияния вращения.
В гл. 7 рассмотрен метод Рейли, который применен, в частности,
к расчету собственных частот вращающейся лопатки. Согласно зависи-
290
Рис. 5.20. Схема разбивки на конечные
элементы сектора колеса, включающего
лопатку, хвостовик, связи и сектор диска
мости (7.31) влияние вращения по
методу Рейли учитывается в виде
2 - 2 1/2
/= (/ст+Я")
где /С1
(5.63)
собственная частота
колебаний невращающейся лопатки, В —
безразмерный коэффициент,
определяется по общей формуле (7.33).
Для незакрученной лопатки
постоянного профиля при колебании
в плоскости минимальной жесткости
в качестве динамической линии
прогиба принимают главную форму
колебаний невращающейся лопатки
(5.52) и принимают
U = Xk(z) cos р; V = Xk(z) sin p.
Для первой формы колебаний Ux
= Хх cos р, Vx = Хх sin р (рис. 5.21).
Подставляя эти выражения в общую
формулу (7.33), после соответствующих вычислений при 8 = Ъх = 1,875
получаем
В = 0,786(</ //) +0,407- cos2p .
Коэффициент В для пакета лопаток, связанных бандажом на
периферии, можно определить по полуэмпирической формуле А.Е. Шнейдмана:
В
-«(?-■)
l/2 + v6 . ,
+ sin р.
/3 + w
Частоту вращающегося пакета лопаток по первому тону
рассчитывают по формуле (5.63). Частоту невращающегося пакета лопаток
определяют по данным, приведенным в § 5.3.
291
Рис, 5.21. Схема перемещений профиля при колебаниях незакрученной лопатки
в главных плоскостях жесткости
При колебании в плоскости максимальной жесткости лопатки или
пакета следует положить U2 = ~ХХ sin р; V2 = Хх cos р (рис. 5.21). Для
незакрученной лопатки постоянного сечения главные формы в главных
плоскостях колебаний совпадают и определяются общей зависимостью
(5.52), хотя при этом собственные частоты в главных плоскостях для нев-
1/2
ращающейся лопатки отличаются в отношении/?max//?min = (/?//„) •
Для коэффициентов В при колебаниях в плоскости максимальной
жесткости по общей формуле (7.33) получим
В = 0,786(rfc//) +0,407-sin2p.
Для пакета лопаток
В
п-(ас Л1/2 + уб , 2а
Полезно отметить, что коэффициенты В как для отдельной лопатки,
так и для пакета сравнительно слабо зависят от утонения лопатки к
периферии. Поэтому формулы, выведенные для лопаток и пакетов
постоянного профиля, приближенно могут быть использованы и для
лопаток переменного профиля, если отношение а = FU/FK > 0,5.
5.6. КОЛИЧЕСТВЕННАЯ ОЦЕНКА ВОЗМУЩАЮЩИХ
СИЛ В СТУПЕНЯХ ТУРБОМАШИНЫ
Для определения вибрационной надежности лопаток важно знать как
амплитуды, так и частоты возмущающих сил. В общем случае
возмущающие силы любого происхождения, действующие на лопатку,
зависят от положений этой лопатки (угла ф) по периодическому закону
292
(см. рис. 5.1). Следовательно, силу qx° , q а или момент mf , как
всякую периодическую функцию, можно представить в виде бесконечной
суммы членов тригонометрического ряда (ряда Фурье), т.е.
#(ф) = Qq + Q\ coscp + Q2cos2y + ... + Qkcosk($ + ... + Px втф +
oo
+ P2sin2(p +...+ Pksink(p +...= Q0+ X (Qkcosk(P + ^тЛф), (5.64)
k= 1
где индексы x, у, а опущены.
Коэффициенты ряда Q0, Qk, Pk можно определить как коэффициенты
ряда Фурье, если известен закон изменения силы #(ф) вдоль окружности
диафрагмы или направляющего аппарата. Для коротких лопаток полные
усилия, действующие на лопатку,
Я„(Ф) = *<*),. Я» - q\a)l
можно представить в виде зависимости (5.64). Согласно формулам
теории рядов Фурье
1 -
Qo = 5Z И(ф)<*ф;
2тс
(5.65)
о
Qk = ~ \q(<p)cosk(pdq>;
%
?k = ~ f ^(ф)втЛ:ф (1ф.
(5.66)
Зависимости, аналогичные (5.65) и (5.66), могут быть составлены
(а) (а) (а)
для qx , qy или т\ .
При угловой скорости ротора со угол, определяющий положение
лопатки ф = Ш . Тогда формула (5.64) имеет вид
оо
#(ф) = б0 + X (Qkcosk®f + рк*{пкш>> • (5-67)
к= 1
Постоянный член QQ в разложении (5.67) есть среднее значение
усилия (q* , q^ или aw^ ), которое вызывает статический изгиб или
кручение рабочей лопатки и не может вызвать ее колебания. Остальные
члены разложения представляют собой возмущающую (переменную
293
во времени) силу в виде суммы бесконечного числа гармонических сил
с амплитудами Qk и Рк и частотами сов = £со или
Л = кп>
(5.68)
где £=1,2, ...,оо.
Следовательно, частоты возмущающих сил в турбомашине кратны
частоте вращения и заранее известны. Амплитуды Qk, Pk могут быть
определены лишь в частных случаях. Рассмотрим некоторые из них.
Возмущающие силы при парциальном подводе пара. Эти силы
приближенно определяем исходя из схемы воздействия потока на*
рабочую лопатку, изображенной на рис. 5.22. Эта схема есть приближенное
с1 *
{
i
о
м± м2
< II111111111 III 1
г IIIIIIII1111II1
2*
М3
б 1
J
м4
Ф
Рис. 5.22. Схематизация усилий, действующих на лопатку ступени с парциальным
подводом пара
а — эпюра усилия <? * (ер); б — положения рабочей лопатки во время прохождения
ее перед соплами; в — эпюра скорости Cj(cp)
294
представление истинной картины воздействия потока на рабочие
лопатки, которая дана на рис. 5.3. Допустим, что скорость Cj может быть
представлена в виде прямоугольной эпюры (рис. 5.22, в). Лопатка в
положении Мх (рис. 5.22, б) входит в зону парциального подвода пара,
и за время, соответствующее перемещению ее на величину, примерно
равную шагу t2 (до положения М2), происходит увеличение
действующего на нее усилия от нуля до максимального значения Aq0 на участке
АВ (рис. 5.22, а). На участке ВС усилие остается постоянным и равным
Д<70. В точке М3 начинается разгрузка лопатки, в точке М4 лопатка
полностью разгружается. В период разгрузки усилие уменьшается (участок
CD). Для приближенного расчета можно принять протяженность зон
нагружения и разгрузки равным шагу рабочей решетки t2, а законы
нагружения и разгрузки — линейными.
Поместив начало отсчета угла <р в точку, делящую отрезок AD
пополам, получим симметричную эпюру нагрузки. При этом имеем
следующее представление усилия q(<p) на участке 0 < ср < к:
?(ф) = А?о (0<<р<а0);
( Ф"ао1
?(ф)Ч 1-а _а JAg0 (а0<ф<а1);
q(q>) = 0 (ctj < ф < к).
(5.69)
По формулам (5.66) вычислим амплитуды гармоник разложения
трапецеидальной нагрузки (5.69), т.е. нагрузки, закон изменения которой
имеет трапецеидальную форму, и найдем Рк = 0 и
*к =
л7о = Tt . 4*T-J Sinlk-T- ' (5Л0)
^0 %к (ах - а0)
где кк = Qk/Aq0 — относительная амплитуда гармоники возмущения.
Формула (5.70) применима к любой трапецеидальной нагрузке. Для
частного случая парциальной ступени (рис. 5.22, а) необходимо принять
Подставив эти величины в (5.70), получим
Qk 2 . , , ч 8т(те*/ял)
—■ = — sm(7t*e)
Aq0 пк (пк/гл)
295
х£ = ГГ" = II sin(7rfo?) ~7ГГ7ГТ~ • (5-71)
В предельном случае, принимая, что нагружение лопатки происходит
скачкообразно (/2 -» 0), имеем
пк = {2 Ink) sin (пке).
Например, полагая е = 0,5, получаем следующие значения гармоник:
к
**=|е*|/д$о
1
0,6367
3
0,2122
5
0,1273
7
0,09095
15
0,04244
25
0,02546
Амплитуды четных гармоник равны нулю. Из этих данных видно,
что амплитуды возмущающих сил убывают с ростом их номера
(частоты): чем выше частота гармоники, тем меньше ее амплитуда.
Для парциального подвода, состоящего из т равномерно отстоящих
и одинаковых дуг, формула для интенсивностей возбуждающих сил
имеет вид
2т . fnke\sinnk/zn п оач /< ™
%к = ~Т sm —Г) (к = т, 2т, Зт, ...), (5.72)
К пк \ т J nk/zn
где т — число дуг подвода пара; е — общая степень парциальности;
k = im; г — любое число (/ = 1, 2, 3, ...).
Номер гармоники приобретает значения, кратные т. Гармоники, для
которых к Ф im, отсутствуют. Из последней формулы следует, что при т
равноотстоящих дугах с парциальностью elm каждая интенсивность
возбуждающих сил возрастает в т раз по сравнению с одной дугой
подвода с той же парциальностью elm.
Отсюда можно показать, что общепринятое утверждение, что
наиболее опасным режимом работы регулирующей ступени является режим
полностью открытого одного клапана оказывается справедливым только
при условии, что дуги подвода двух последовательно открываемых
клапанов расположены рядом. Если дуги подвода первого и второго
клапанов расположены напротив друг друга (например, при четырех
клапанах с одинаковым количеством сопл в каждой сопловой камере), то
более опасным является режим полностью открытых двух клапанов
вследствие того, что интенсивность гармоник возрастает вдвое по
сравнению с одним полностью открытым клапаном.
Возмущающие силы от кромочных следов. За время одного
оборота каждая лопатка испытывает nzH импульсов от кромочных следов,
где zH — число сопловых лопаток при полной парциальности; п —
частота вращения. При разложении кромочной силы в ряд Фурье
обнаруживается спектр возмущающих сил с частотами возмущения, кратными
основной частоте nzn.
296
В общем случае частоты гармоник возмущения кромочными
следами определяются соотношением
/B = bzH, (5.73)
где к— кратность (номер) гармоники кромочного возбуждения, к = 1,2,3,
..., °о. Практическое значение имеет первая гармоника, когда к = 1, и, воз-:
можно, вторая и третья гармоники с частотами 2nzH и 3nzK. При
парциальном подводе пара zH в формуле (5.73) следует заменить на z'H = z4^e-
Рассмотрим полуэмпирический расчет возмущающих сил,
вызываемых кромочными следами. Предположим, что в некотором месте
сопловой решетки скорость истечения потока меняется скачкообразно на
величину vQ (рис. 5.23). Каждая рабочая лопатка при ее прохождении
около места скачкообразного изменения скорости претерпевает
изменение действующего на нее усилия (усилий q£ , я , mf ). Изменение
усилия не будет скачкообразным, оно будет продолжаться до тех пор,
пока рабочая лопатка не переместится на расстояние, примерно равное
шагу /2. Затем усилие стабилизируется. Полное изменение усилия
обозначим Л<70 (Aqx, Aq или Awz). Данный случай аналогичен ранее
рассмотренному случаю вхождения лопатки в зону парциального подвода
пара (см. рис. 5.22).
Предположим, как и в предыдущем случае, что усилие изменяется
по линейному закону на протяжении шага рабочей решетки t2. В
действительности усилие, действующее на лопатку Mj (рис. 5.23), начинает
изменяться несколько раньше, а именно после того, как расположенная
справа лопатка М2 проходит место скачка. Однако только после
достижения места скачка BqCq лопаткой М\ усилие, действующее на нее,
меняется достаточно интенсивно по линии ВС на величину А#0.
Следовательно, при изменении скорости потока скачком по A0B0C0D0 усилие
на лопатку меняется по ABCD (рис. 5.23).
Два последовательные, равные по величине и противоположные
по знаку скачкообразные изменения скорости, расположенные на
расстоянии А по оси сопловой решетки, соответствуют прямоугольному
закону изменения скорости (рис. 5.24).
Скачок изменения скорости В0С0 (рис. 5.24, а) вызывает изменение
усилия по линии BCD' (рис. 5.24, б), скачок EQF0 обусловливает
изменение усилия по EFF\ Наложение графиков BCD' и EFF' приводит к
трапецеидальной эпюре усилия BCDE' (заштрихованной на рисунке).
Предположим, что следы за кромками сопл имеют прямоугольную форму
(рис. 5.25, а). Обозначим: А — ширина следа; и0 — дефект скорости в
297
Рис. 5.23. Изменение усилия на
лопатку при скачкообразном
изменении скорости
Со I
в0
Ч-°о
1^0
1*0
ft
3D D'
^1 шш*
В
б
у **
1*2 ^
Рис. 5.24. Эпюры скоростей и усилий
при прямоугольном кромочном следе
*А*
О
<
т
§
А
с Ч >
* Ч^
\
-А
ь\
Рис. 5.25. Эпюры скоростей и усилий от кромочных следов
следе; tx — шаг сопловой решетки. Применяя принцип наложения
(суперпозиции), получаем аналогично предыдущему возбуждающее
усилие от кромок в виде последовательности трапецеидальных
импульсов (рис. 5.25, б).
Кромочные следы вызывают периодическое воздействие на рабочие
лопатки с периодом, соответствующим шагу сопловой решетки /j.
298
Следовательно, кромочную силу можно разложить в ряд Фурье на
отрезке шага /|.
Для определения коэффициентов ряда (амплитуд гармоник) можно
воспользоваться формулой (5.70), пригодной для любой
трапецеидальной нагрузки. Применяя (5.70) к случаю кромочных импульсов, имеем
где
sin(Ar7c/2/^i)
/C2"i) =
(knt2/t{)
(5.74)
(5.75)
Функция /характеризует влияние отношения шагов рабочей и
сопловой решеток. Зависимость (5.75) при к = 1 представлена на рис. 5.26
(крестиками показаны экспериментальные данные Г.С. Самойловича и др.,
МЭИ).
Для расчета гармоник Qk необходимо определить Aq0 —
дополнительную нагрузку, которую испытывает лопатка после пересечения
скачка скорости и0 и наступления стационарного режима. Рассмотрим
решение этой задачи для окружной составляющей усилия q
жаемой формулой (2.23), которую запишем в виде
(«)
qY = pi с, sinou/- \сл cosa, + с, —- и
х [ l i^li 1 1p2sinp2
\
выра-
(5.76)
Зависимость (5.76) справедлива как для области, расположенной
левее скачка скорости В0С0 (см. рис. 5.23), так и в зоне стабилизации,
расположенной за скачком.
Стабилизация наступает после перемещения
лопатки правее точки М2. Для
определения разности усилий Aqx следует,
использовав формулу (5.76), найти
(я)
приращение величины qx при изме-
Рис. 5.26. Зависимость кромочных
возмущающих сил от соотношения шагов рабочей
и сопловой решеток
расчетная кривая; х —
экспериментальные точки
/
0,8
0,4
X
X \
0,2
0,6
t2/h
299
нении скорости на величину Асх = - v0 (знак минус означает, что
скорость в скачке уменьшается).
Предположим, что давление перед лопатками и за ступенью не
меняется и что ott = const и р2 = const. Тогда, дифференцируя правую часть
соотношения (5.76), получаем s
Aqx = AqQ « 2AcjPj sinctj^ f Cjcosotj + w2cosfi2 ~ ~u) • (5.77)
Разделим правую часть зависимости (5.77) на правую часть
уравнения (5.76). Принимая Асх = - v0, после преобразований имеем
Яо
1+-*- , (5.78)
V Лол
где л:ф = и / JIh0; цол = и(сх cos a j + w2cos p2 - и) /h0, q0 = #0jc —
стационарное (постоянное) значение окружного усилия, действующего на
рабочие лопатки; г|ол — КПД ступени на ободе рабочих лопаток; А0 — изоэн-
тропийный перепад ступени.
С учетом (5.78) получаем формулу для гармоник возмущающей
кромочной силы
кр 2кр »о (л м xl] 2t\ . ( М . ( ,А\ ,„оч
кк = —- = -В— 1 + -^Ч . . sin nk—\ sin Ink—] . (5.79)
ЯО CX { T, J n2k2h У /J V tx)
Зависимость (5.79) выражает гармоники кромочных сил через
параметры следов у0 и А. Согласно данным Г.Ю. Степанова при А < txll
до смыкания следов имеем
U°- ^ А ^1(£)1/2, (5.80)
la, \tJ '
сх 2(A//t)' tx 2^sinc
1 v*r
после смыкания следов при условии
(s/tx) > (sCM/tx) = A2 sin2 ttl /Сп.к (5.81)
получаем
v0/cx = Л2 sin2 ах l(sltx)\ A/tx = 0,5, (5.82)
где С,пк — сумма профильных и кромочных потерь сопловой решетки;
s — осевое расстояние между сопловой и рабочей решетками (рис. 5.27);
А и В — постоянные, полученные экспериментально, А = 0,66; 2? = 3.
300
Рис. 5.27. Эпюра скорости потока в зоне кромочного следа за сопловой решеткой
В формулах (5.79), (5.80) и (5.82) под А подразумевается
эффективная ширина следа, которая равна половине полной ширины следа, т.е.
А' = 2А (рис. 5.27). Выбор эффективной ширины следа определяется из
условия равенства площадей эпюры «дефекта» скорости для
действительного следа и его прямоугольной модели. Площадь следа
пропорциональна «дефекту» импульса. Поэтому при введении эффективной
ширины следа А упрощаются расчеты, но появляется дополнительная
погрешность при вычислении гармоник кромочных следов по формуле
(5.79). При определении расчетным путем В = 2. Однако
экспериментальные данные хорошо согласуются с формулой (5.79) при В = 3.
Из анализа зависимостей (5.79), (5.80) и (5.82) следует, что для
уменьшения кромочного возбуждения необходимо:
а) уменьшить шаг сопловых решеток, стремясь получить tx = /2;
б) увеличить осевой зазор до slt^ » 1;
в) применять сопловые решетки с малыми профильными и
кромочными потерями.
В близи концов решетки увеличивается интенсивность кромочных
импульсов вследствие влияния концевых потерь сопловой решетки,
которые существенно увеличивают дефект скорости в следах.
Для приближенной оценки сил можно пользоваться формулой (5.79),
подставляя взамен £пк полные потери решетки £с (с учетом концевых
эффектов).
Пример 5.1. Рассчитать зависимость интенсивности первой гармоники
кромочной силы от осевого расстояния между сопловой и рабочей решетками при
следующих условиях: t2 ltx = 1/3; С,пк = 0,05; ctj = 13°; х^ = 0,5; г|ол = 0,90; А = 0,66;
В = 3.
301
Решение.
1. Место смыкания слоев согласно (5.81)
scJtx = 0,662 • sin2 13°/0,05 = 0,4409.
2. Параметры следа по (5.80)
у0/с1=0,025/(А//1);
А, (ОД*)'72 f£V/2 = о,75зо (£]
и 2 • 0,66 -sin 13° V/ J ' KtJ
i/2
(5.83)
3. Относительная интенсивность первой гармоники следа по (5.79) до
смыкания следов (Д/*1 ^ 0,5)
sin(7tA//l)
■.(5.84)
( 0 5^2«3 /V\sin(rcA//i)
х, = -3 • 0,025(1 + РА^у sin(|)___i_ _ _0>05045 ^
4. Относительная интенсивность первой гармоники следа после смыкания
следов
х, = -3 • 0,662sin213°(l + |fj^si^f)(j) = -0.04449(/,Л). (5.85)
Вычисленные по формулам (5.83)—(5.85) величины заносим в таблицу.
s/tx
А//,
*\ = й\1Чъ
0
—
0,1585
0,05
0,1684
0,1512
0,10
0,2381
0,1441
0,20
0,3368
0,1306
0,40
0,4763
0,1056
0,4409
0,5000
0,1009
0,60
0,5863
0,07414
0,80
0,6736
0,05561
1,00
0,7530
0,0444
Из данных таблицы видно, что возмущающее действие кромок заметно
снижается с ростом осевого зазора.
Возмущающие силы, вызываемые неоднородностью сопловой
решетки и неравномерным давлением за ступенью. Неоднородность
сопловой решетки определяется переменными по окружности
значениями угла ctj и высоты решетки 1Х. Неравномерность давления за
ступенью р2 обусловлена, как правило, неосесимметричным отводом пара
в отборы или выходные патрубки. Для конкретной реализации ступени
эти неоднородности решетки и неравномерное давление в отборе
представляют определенные функции угла ср, т.е.
ах = а10 + Аа^ф); 1Х = /10 + А/^ф); р2 = р20 + Ар2(ф),
где а10, /10, p2Q — номинальные (расчетные) значения величин; Аа^ф),
А/^ф), А/?2(ф) — отклонения от расчетных значений, зависящие от угла ф.
В квазистационарном приближении любое аэродинамическое усилие
Ч (чх > Чу * mz ) есть линейная функция относительных отклонений,
т.е. справедлива зависимость:
Atf/tfo = (ai^P2^Pi) + (а2^а\ /SU1 ai) + (a3&h ^i)> (5.86)
302
где aj, а2, аъ — коэффициенты, зависящие от номинальных значений
конструктивных и режимных параметров данной ступени; Aq — переменная
составляющая аэродинамического усилия; qQ — номинальное значение
аэродинамического усилия.
Например, для тангенциальной нагрузки Aqx/qx0 в случае активной
ступени малой веерности квазистационарный расчет дает следующие
значения коэффициентов:
ал =
! (5-М*)(2-М*)
к м'о-м?)
2
а2 ~ аз ~ 2/(3 - Mj),
(5.87)
где Mj — число Маха на выходе из сопловой решетки, Mj = cXtla^(\ си —
изоэнтропийная скорость выхода из каналов сопловой решетки; аи —
скорость звука в сечении выхода из сопловой решетки; к — показатель
изоэнтропы.
Аналогично для осевой нагрузки
Aq Ар2 Act, AL
9x0 Pi smal 1\
Оценка коэффициентов в (5.88) дает следующие зависимости:
(sina,)" (sina,)-
bx = - ; b2 = Ъъ = x—. (5.89)
кМ\(Ъ - Mj) 3 - M,
2
Например, при Mj = 0,5, к - 1,3, ах = 15° по (5.87), (5.89) получаем
значения коэффициентов: ах = -4,1538; а2 - а^ = 0,8; Ьх = -2,3777;
Z)2 = b3= 1, 5455, т.е.
Ая Ар>> Аа, А/,
—- = -4,1538—- + 0,8-т—L + 0,8—-;
qx0 р2 sinc^ /t
Aq.. Ap~ Act, AL
—* = - 2,3777 — + 1,5455-r—i- + 1,5455—± .
qx0 p2 smai /j
Из последних зависимостей следует, что неоднородности сопловой
решетки значительнее влияют на осевое усилие, чем на тангенциальное.
Из трех факторов наиболее существенным является неравномерное
давление за ступенью.
303
Величины Доц/sin оц; All/ll могут быть определены при обмере
готовой диафрагмы; величина А/?21р2 — расчетным путем,
моделированием или измерением на натурной ступени.
Если известны зависимости членов правой части (5.86) от угла <р, то
неравномерность А#(ф) можно разложить в ряд Фурье и найти
гармоники Qk, Рк по формулам (5.66); после чего найдем характеристики
возмущающей силы в зависимости от неоднородности решетки и
неравномерности давления за ступенью
Kk=Qk/qQ; Ч = рк!%- (5-9°)
Полная интенсивность к-и гармоники возмущающей силы
2 2 I/2
Н = (** + v*) •
Оценка величин %к, vk на стадии проектирования затруднительна, так
как их значения зависят не только от максимальных значений Аа1тах/
sin ctj; A/jmax//j, но и от распределения неоднородности по
окружности диафрагмы. Например, при одном и том же значении Aajmax/sin
ctj, если принять Ар2 = 0 и A/j з 0, величина кк может меняться в
пределах
0<хк< a2Aalmax/sin av (5.91)
В этом состоит главная трудность оценки возмущающих сил
стохастической природы на стадии проектирования, поэтому обычно
приходится оценивать возмущающие силы по верхнему пределу согласно
(5.91). Это приводит к необходимости нормировать максимальные
отклонения Aalmax/sin а1? A/lmax//j так, чтобы в наиболее
неблагоприятном случае динамические напряжения в рабочих лопатках не
превышали допустимых по условиям прочности значений. Обычно при
высококачественном выполнении дифрагм %к < 0,05.
При заданных допусках на размеры сопл диафрагмы можно найти
вероятную оценку интенсивности гармоник стохастического
происхождения по зависимостям
0<х*<хАта
Аа, Л2 ( АЛ _Л21
lmax
smctj j
lmax
1/2
где Aalmax, A/lmax — максимальные отклонения величин от
номинальных (расчетных) значений, определяемые допусками.
304
Если принять допуски (Aalmax/sin о^) = (А/|тах//1) = 0,05, получим
оценку интенсивности стохастического возбуждения
%к < [(0,8 • 0,05)2 + (0,8 • 0,05)2]1/2 = 0,0566.
Интенсивность возбуждения от неоднородности сопловых
решеток пропорциональна допуску на технологические отклонения размеров
сопл от их номинальных значений.
5.7. ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ ЛОПАТОК
Уравнение (5.18) примем за основное при расчете вынужденных
колебаний лопаток в плоскости их минимальной жесткости.
Возмущающая нагрузка в виде гармонической составляющей ряда (5.67) будет
q(z, t) = Q(z) cos Qt (где Q(z) = Qp/<z) — амплитуда, Cl = Ы — частота
гармоники возбуждения).
Тогда уравнение колебаний лопатки (5.18) имеет вид
(Ви")" + Ihvii + vii = gcosQ/.
Решение уравнения ищем в виде ряда
оо
W(Z, 0 = X HsXs == Н\Х\ + Я2*2 + Н3Х3 + '•• ' (5'92)
s = 1
где Xs(z) — главные формы колебаний (считаем их найденными при
решении задачи о свободных колебаниях лопатки или пакета); Hs(t) —
коэффициенты, зависящие только от времени и подлежащие
определению; s~ 1, 2, 3, ..., оо.
Подставляя (5.92) в уравнение колебаний и учитывая, что согласно
(5.31) (BX"SY = vp)xs, имеем
£ (Hs + 2hH + p2sHs)v(z)Xs(z) = e(z)cosQ/. (5.93)
s = 1
Умножим все члены (5.93) на Xm(z) dz и проинтегрируем по z все
члены ряда слева и правую часть в пределах от z ~ 0 до z = /1} где 1Х = 1 +
8, 8 — толщина бандажа. При этом получим слева члены вида
/+б /
J vJfAi dz = \vXsXm dz + ^Xs{l)Xm{l) . (5.94)
о 0
Согласно свойствам ортогональности главных форм (5.60)
выражение (5.94) равно нулю при всех s за исключением s = w, поэтому из всех
членов ряда слева (5.93) останется только один член с номером т9 т.е.
Пт + 2ИНт + р2тНт = qm созШ, (5.95)
305
причем
(5.96)
qM - $Q(z)Xm(z) dz / Jv^(z) dz + «/„(О
Частное решение уравнения (5.95), соответствующее правой части:
Хи = [(1-а2)2 + а2р2ГШ;
tgYm = ар/(1-а );
а = П/рт; р = 2h/pm,
(5.97)
(5.98)
(5.99)
где Хт —динамический коэффициент; ут — начальная фаза колебаний.
На рис. 5.28 и 5.29 показаны зависимости Хт и ут от а и р.
Хщ
5,0
4,0
3,0
2,0
1,0
0 0,5 1,0 1,5 2,0 а
Рис. 5.28. Зависимость динамического коэффициента Хт от частоты возбуждающей
силы и коэффициента демпфирования
306
0,10 -Ч
Щ>Р = о
1га °'15
шЬ- 0,20
l|Lo,30
\VJLo,40
\Щ Р = 0,50
Рис. 5.29. Зависимость начальной фазы ут от частоты возмущающей силы и
коэффициента демпфирования
Подставив решение (5.97) в выражение для динамического прогиба
(5.92) и заменив индекс (s на т), получим решение рассматриваемой
задачи, т.е.
00 а
u(z,t) = £ ^m^(z)cos(Q/-YJ. (5.100)
т = \Рт
Наряду с прогибом представляют интерес изменения изгибающего
момента и напряжения в лопатке при вынужденных колебаниях. Если
известен прогиб согласно (5.100), то
оо q
M(z) = Ви" = В £ -^\mX"m(z)cos(m-ym); (5.101)
т= \Рт
с = М/Щ (5.102)
где W— момент сопротивления сечения лопатки.
Полученные зависимости (5.100)—(5.102) дают полное решение
задачи о вынужденных колебаниях лопатки и пакета, они позволяют
рассчитать динамический прогиб и динамические напряжения при
вынужденных колебаниях под действием гармонической нагрузки вида
q(z, t) = Q(z)cos D.t.
307
Анализ вынужденных колебаний лопатки под действием
гармонической нагрузки. Резонанс. Если частота Q. = кы возмущающей
нагрузки совпадает с одной из собственных частот лопатки (или
пакета), например с частотой рт, т.е. если выполняется условие
резонанса
к(о=рт; а=1, (5.103)
то все члены ряда (5.100) и ряда (5.101) значительно меньше члена с
номером т, так как для этого члена динамический коэффициент
приобретает наибольшее (почти наибольшее) значение Хт = 1 /р = п /ц при малых
значениях логарифмического декремента ц в лопаточных венцах турбо-
машин. Поэтому при резонансе динамический прогиб, момент и
напряжение с достаточной точностью можно представить одним членом с
номером т ряда (5.100) для прогиба или одним членом ряда (5.101) для
изгибающего момента и напряжений, т.е.
и * -т-Хт{г)оо&(ш - fj; (5.104)
М» —-X" (z)cos[Ш- ^ . (5.105)
Рт$
Из формулы (5.104) следует, что в условиях резонанса форма дина-
мического прогиба лопатки (пакета) совпадает с резонирующей глав-
ной формой колебаний Xm(z).
Иными словами, если к лопатке приложить любую гармоническую
нагрузку (при которой qm Ф 0), частота которой равна собственной
частоте рт лопатки (пакета), то динамический прогиб лопатки по форме
практически будет совпадать с соответствующей главной формой
колебаний Xm(z), По фазе прогиб при резонансе отстает от возмущающей
нагрузки на фазовый угол я/2, т.е. по времени на 1/4 часть периода
колебаний. Рассмотрим изменение прогиба при постепенном увеличении
частоты возмущений Q. На рис. 5.30 по оси абсцисс отложена частота
возмущающей силы, а по оси ординат — амплитуда колебаний А в
некоторой точке лопатки. В данном случае лопатка проходит
последовательно ряд резонансных состояний, при которых частота Q становится
равной собственным частотамР\,Р2>Ръ> ••• Около каждого резонансного
пика показана форма колебаний, которую имеет лопатка в
околорезонансной зоне.
308
Ак
Pi Р2 Рз И
Рис. 5.30. Амплитудно-частотная зависимость лопатки без связей
Рассмотрим условия резонанса (5.103). Поделив обе части равенства
(5.103) на 2к, получим
Ь=/д, (5.106)
где п — частота вращения; /д — собственная частота колебаний
вращающейся лопатки или пакета любого тона (индекс т — номер частоты —
опущен), зависящая от частоты вращения.
Приближенно эта зависимость (5.63) имеет вид
2 - 2 1/2
(5.107)
где В — коэффициент, учитывающий влияние частоты вращения и
зависящий от тона (главной формы) колебаний.
Предполагается, что fcv В не зависят от частоты вращения.
Уточненная зависимость fR(n) может быть получена при использовании
более совершенных методов расчета, изложенных в гл. 7. Как правило,
формула (5.107) дает приемлемую для практических расчетов точность.
Подставив правую часть (5.107) в (5.106), получим
2 - 2 1/2
(5.108)
Решив это уравнение относительно и, найдем те частоты вращения
ирез, при которых рабочая лопатка (или пакет) попадает в резонанс
с возмущающей гармоникой Л-й кратности:
2 - 1/2
(5.109)
309
Коэффициент В всегда больше единицы даже для предельно малых
djl = 2,5. Из формулы (5.109) следует, что для рабочих лопаток тур-
бомашин резонанс с возмущающей гармоникой первой кратности (при
к = 1) невозможен, так как резонансная частота при к = 1 отсутствует.
Подставляя в формулу (5.109) значения к = 2, 3, 4, ..., находим ряд
резонансных частот вращения. Для надежной работы лопаточного венца
необходимо иметь достаточный запас между рабочей частотой
вращения турбомашины п и резонансными частотами вращения л ,
определяемыми по формуле (5.109).
Вибрационная диаграмма рабочих лопаток и отстройка от
резонанса. Условие резонанса в форме (5.108) наглядно анализируется при
помощи вибрационной диаграммы рабочего венца (рис. 5.31). На
диаграмме изображены графики зависимости частоты колебаний некоторого
тона/^ от частоты вращения п [правая часть равенства (5.108)]. Верхняя
кривая^ тах относится к лопатке (пакету), имеющей наивысшее значение
частоты на колесе. Нижняя кривая /д min относится к лопатке (пакету),
имеющей наинизшее значение частоты. Разница частот А/ = /max - /min
определяет разброс, обусловленный технологическими отклонениями —
невозможностью выполнить все лопатки (пакеты) строго одинаковыми по
частотным характеристикам. Кривые динамических частот прочих лопа-
/д,А;71,Гц 12 11 10 9 8 7
6
5
4
3
2
&=1
0 R6 Rb zip Д4 n,c-l
Рис. 5.31. Вибрационная диаграмма рабочего венца
310
ток (пакетов) данной ступени располагаются в промежутке между этими
предельными кривыми.
Лучи, выходящие из начала координат, представляют собой
зависимости частот возмущающих сил от частоты вращения для гармоник
разной кратности к [левая часть равенства (5.108)]. Абсциссы точек
пересечения лучей с кривыми предельных, динамических частот определяют
границы зон резонансных частот вращения данной ступени.
Опыт эксплуатации турбин позволил установить нормы
необходимого запаса An = \п - п | между рабочей ир и резонансной п
частотами вращения для обеспечения надежной работы лопаток при
различной кратности к:
Кратность к
(Дя/лр)-100,%
2
10
3
7
4
6
5
5
6
4
Снижение необходимого запаса по мере кратности (номера гармоник
возмущающей силы) объясняется тем, что амплитуда гармонических
возмущающих сил Qk и Рк обычно имеют тем меньшее значение, чем
выше кратность (номер) гармоники к. При к > 6 эти амплитуды, как
правило, настолько малы, что даже в условиях резонанса не вызывают
опасных колебаний лопаток при нормированном качестве изготовления
диафрагмы, т.е. при установленном предельном разбросе размеров
сопловых каналов (см. § 5.6).
В нормах некоторых зарубежных фирм предусмотрена отстройка
лопаток до восьмой кратности (до к = 8) на рабочей частоте вращения
п = 50 с~ в зоне от п = 47 с~ до п = 51 с" .
При увеличенном допуске на разброс размеров сопловых каналов
возможны вибрационные поломки и при к > 6.
Отстройка от резонансов при к > 6 является необходимой, если
в проточной части турбомашины имеются конструктивные элементы,
вызывающие возмущение высшей кратности (см. § 5.1). Нормы
отстройки относятся к стохастическим возмущающим силам,
обусловленным технологическими отклонениями, но не к возмущениям
конструктивного происхождения.
На рис. 5.31 зоны резонансных частот вращения, расширенные с
учетом необходимого запаса (R4, R5, R6), заштрихованы. Для надежной
работы лопаток рабочая частота вращения не должна попадать в эти
зоны. Для турбомашин с переменной частотой вращения желательно,
чтобы рабочий диапазон находился в одном из промежутков между
двумя смежными резонансными зонами. Однако вследствие малости
311
этих промежутков такое требование обычно невыполнимо, поэтому
необходимо выбирать жесткость лопаток такой, чтобы
/д>Чшах» (5-110)
где и тах — максимальное значение частоты вращения в рабочем
диапазоне, т.е. лр min < ир < ир тах.
При выполнении условия (5.110) резонансы кратности меньше
шестой — невозможны, а резонансы кратности выше шестой возможны, но
неопасны вследствие низкого уровня амплитуд возмущающих сил.
Условие (5.110) не всегда выполнимо по конструктивным причинам, поэтому в
турбомашинах с переменной частотой вращения применяют также и
гибкие лопатки, когда
/д<Ч«пах- (5.111)
Для обеспечения вибрационной надежности таких лопаток
применяют специальные меры (см. § 5.11).
На рис. 5.32 показана вибрационная диаграмма лопаточного венца
большой всерности для турбины с постоянной частотой вращения.
Низшая частота колебаний лопаток на рабочей частоте вращения находится
между возмущениями второй и третьей кратности, т.е. между частотами
100 и 150 Гц. В отстраиваемом диапазоне частот (до 400 Гц) находятся
Л Aw, Гц
О 25 50 с-1
Рис. 5.32. Вибрационная диаграмма рабочих лопаток без связей
312
частоты f\>fi>fz первых трех форм колебаний. На рисунке показан
случай оптимальной отстройки, при которой запасы A/*lmin, A/^min, A^min
между собственными частотами и соответствующими частотами
гармоник возбуждения достигают значения А/« 15-^20 Гц. Заштрихованные
полосы соответствуют разбросу частот отдельных лопаток. Ширина их
составляет примерно 5-8 % при высокой технологической культуре
на производстве.
Возмущающие силы второго рода (кромочные возбуждающие силы)
могут вызвать резонансные колебания относительно коротких лопаток,
а также колебания длинных лопаток по высшим формам, имеющим
высокие значения собственных частот.
В случае коротких лопаток для надежной их работы при колебаниях
первого тона (типа А0) относительная разница частоты колебаний и
частоты импульсов должна быть не менее 15 %, т.е. опасная зона
определяется условием
nz'
0,85 < т^< 1,15, (5.112)
где zH — число сопловых лопаток; е — степень парциальности; z'H = zH / е;
nz'H — частота первой гармоники кромочной неравномерности.
Иногда считают, что отстраиваться следует также от второй
гармоники кромочной неравномерности, которая имеет частоту 2nz'H, и даже
от третьей гармоники, имеющей частоту 3«z^.
В эксплуатационной практике турбин известны случаи
вибрационных поломок, вызванных возмущающими силами второго рода при
колебаниях типа В0 и Ах (см. рис. 5.14 и 5.15). Частоты этих форм
укладываются в зону (4,4 - 7,2) /0 (см. рис. 5.13), где/0 — частота первого
тона единичной лопатки без бандажа.
Опасность резонансных колебаний возникает в том случае, когда
частота кромочных импульсов попадает в зону частот собственных
колебаний типа В0 и А^, т.е. при условии, когда
4,4/0<hz;<7,2/0. (5.113)
Поделив все члены двойного неравенства (5.13) на^ и несколько
расширив (для гарантии) опасную зону, получим условие
4<(^//0)<8, (5.114)
при котором возможны резонансные колебания лопаток или пакетов
по формам BQ иАх.
313
При проверке надежности относительно коротких лопаток (и
пакетов) проверяют условия (5.112) и (5.114). При попадании в опасные
зоны необходима отстройка лопаток. При отстройке лопаток следует
изменить частоту f0 (изменив размеры лопатки) или числа сопл zH.
Следует также избегать резонансов при изгибно-крутильных формах
колебаний (см. рис. 5.16) по формам А0п (п = 0, 1,2, 3), для которых
требуется отстройка от кромочных импульсов на 10—15 %, т.е. для этих
форм должно применяться условие (5.112), где /л~ fn — частота
собственных колебаний пакета по этим формам.
Напряжения при вынужденных колебаниях. Отстройка лопаток
от резонанса с частотами возмущающих гармоник является
эффективной мерой повышения вибрационной надежности венцов. Однако
не всегда это возможно: во многих случаях рабочие венцы работают
в условиях резонанса. При развороте турбомашины или при выбеге
ротора лопаточные венцы проходят множество резонансов (см. рис. 5.31
и 5.32). Из-за разброса частот отдельных лопаток или пакетов при
высоких кратностях возмущающих гармоник резонансные зоны различной
кратности могут перекрываться. Высокочастотные лопатки вследствие
разброса частот работают в условиях резонанса.
Не все резонансные состояния представляют одинаковую опасность,
поэтому необходимо рассмотреть напряжения при вынужденных
колебаниях (особенно при резонансах) для того, чтобы по их уровню судить
об опасности резонанса.
Для определения напряжений при вынужденных колебаниях
воспользуемся зависимостями (5.101) и (5.102). Как уже было сказано, для
условий околорезонансной зоны из всего ряда, описываемого формулой
(5.101), можно принять в расчет только один член, для которого при а » 1
Ва
Mm(Z> 0 « -f ^»С08(П/-уя). (5.115)
Рт
Согласно (5.115) и (5.102) можно найти амплитуду динамического-
напряжения. В корневом сечении пакетированной лопатки постоянного
профиля при резонансе имеем амплитуду напряжения
а = (2тг/Л) Cm4acv (5.116)
где аст — статическое напряжение изгиба в корневом сечении свободной
лопатки (без бандажа) под действием аэродинамической рабочей
нагрузки q0: аст = qQl /(2W); к^ = Q^lq^ — отношение амплитуды к-й
гармоники возмущения к рабочей нагрузке; г\ — логарифмический
декремент колебаний.
314
Таблица 5.1
Тип колебаний
Л0
А\
8»
1,875
4,694
ст
0,444
0,0395
Тип колебаний
Во
s«
7,855
3,927
ст
0,00823
0,112
Постоянная Ст зависит от £б и v6 и определяется зависимостями
Ст =
т
4[V-\i(S-l)]
sli^-iST+U^ + ^US-^iTU+VS)]
(5.117)
\i = (V+6mv6U)/(S+8mv6V),
где функции S, Т, Vвычисляются по формуле (5.41) при £ = Ьт = 1,875 */ф;
Ф определяется по рис. 5.13.
Для свободной лопатки (без бандажа) Ст зависит только от 5т.
В табл. 5.1 приведены значения Sm и Ст при различных типах колебаний.
Напряжения при вынужденных колебаниях в парциальной
ступени. Рассмотрим возбуждение пакета, состоящего из у лопаток. Различие
нагружения пакета при вхождении его в зону парциального подвода пара
по сравнению с одиночной лопаткой состоит в том, что среднее
арифметическое усилие на лопатку в пакете растет от нуля до максимального
значения за время вхождения пакета в зону подвода пара. На рис."5.33
Рис. 5.33. Изменение среднего усилия на лопатку в пакете при парциальном
подводе пара
315
штриховыми линиями показано положение пакета в момент, когда
ведущая его лопатка достигла зоны подвода пара (эпюра с10). Сплошной
линией показаны лопатки при полном вхождении пакета в зону подвода
пара. Угловой размер переходной зоны, очевидно, равен 2nj/zn. При
выходе пакета средняя нагрузка на лопатку в пакете также меняется на
протяжении углового расстояния 2njlzn. Следовательно, за время одного
оборота средняя нагрузка на лопатку в пакете изменяется по
трапецеидальной эпюре, но в отличие от одиночной лопатки (см. рис. 5.22)
переходная зона соответствует угловому размеру пакета 2njlzR.
По формуле (5.71), полагая sin пке = 1 и заменяя 1 lzn mj/z^ для
пакета лопаток при парциальном подводе пара получаем:
парц 2 sm(nk/Zjl)
**=ХХ* = Тк (nk/z») Х; (5Л18)
X = sin (тф7*л)/[у sminklz^l (5.119)
где х — пакетный множитель.
Для снижения динамических напряжений следует выбирать число
лопаток в пакете из условия
kjlz^i, (5.120)
где / — целое число.
Вследствие технологического разброса частот отдельных пакетов
на колесе резонансные кратности к ~f%ln различны для разных пакетов,
поэтому и при условии (5.120) пакетные множители также имеют
рассеяние (дисперсию) около среднего значения, равного нулю. Дисперсия
значений % пропорциональна разбросу собственных частот пакетов
рассматриваемого колеса, поэтому динамические напряжения при
резонансе пропорциональны технологическому разбросу частот пакетов на
данном колесе.
Условие sin (пке) = 1 принято также по причине технологического
разброса частот как верхнее значение множителя.
Следует подчеркнуть, что соединение лопаток в пакет позволяет
существенно уменьшить динамические напряжения только при
колебаниях типа А (А0, Ах, ...). При колебаниях типа В влияние бандажирова-
ния значительно слабее, так как лопатки в пакете могут возбуждаться и
в тех случаях, когда % = 0.
Напряжения в условиях резонанса в лопатках ступени с
парциальным подводом пара могут быть рассчитаны по формуле (5.116), где
Кк ~ Кк ^ [см- (5.118)]. Для регулирующей ступени величину аст
316
следует определить для режима полного открытия первого
регулирующего клапана: при этих условиях напряжения достигают максимального
значения.
Если первый и второй регулирующие клапаны питают паром
напротив расположенные сопловые коробки, то интенсивность возмущающих
гармоник следует рассчитать по (5.72), или проще — удвоить значение,
получаемое по (5.118), а статическое напряжение изгиба аст рассчитать
для режима полностью открытых первых двух клапанов.
Напряжения в лопатках, вызываемые кромочными следами.
Кромочное возбуждение имеет значение преимущественно для
коротких лопаток. При этом можно принять гармонику Qk постоянной
по всей высоте лопатки. Примем также профиль лопаток постоянным
по высоте. С учетом названных условий напряжения, вызываемые
кромочными следами в корневом сечении лопатки при резонансе к-й
кратности, рассчитываем по формуле (5.116), принимая
кр
Пакетный множитель % находим по формуле (5.119) по к = zH; х£р —
интенсивность гармоник кромочного возбуждения по (5.79). При
колебаниях типа В пакетный множитель следует принимать равным единице.
Напряжения, вызываемые технологическими отклонениями. Их
определяют по формулам (5.96), (5.101) и (5.102). Интенсивности
гармоник возбуждения nk могут быть определены по рекомендациям,
изложенным в § 5.6. Для расчета напряжений в коротких лопатках и пакетах
в условиях резонанса применяют ту же формулу (5.116), где
интенсивность гармоник %к = х%£. Значения величины х£ могут быть
вычислены для конкретного случая по реализации разброса размеров в
конкретной диафрагме или приняты по оценке. Для коротких лопаток
принимают %£ = 0,03—0,06. Для больших кратностей следует брать
р
меньшие значения %к.
Для лопаток большей веерности ориентировочные значения %£ =
= 0,05—0,1 при кратности к = 2—4 и х£ = 0,03—0,06 при кратности
Л:= 5—8.
Демпфирование при вынужденных колебаниях. При выводе
уравнений колебаний лопатки была принята постоянная h как мера
демпфирования, которая по смыслу рассуждений не зависит от частоты колеба-
317
ний стержня. Однако более строгий анализ, основанный на
экспериментальных исследованиях демпфирования колебаний,
показывает, что лучшее совпадение с экспериментальными данными дает
предположение, что коэффициент р = г|/тс (а не И) не зависит от частоты
колебаний и может служить мерой демпфирования конструкции.
В общем случае можно считать, что логарифмический декремент
колебаний
Л = Лм + Лк + Ла>
где г|м — декремент, обусловленный внутренними процессами в
материале; г|к — конструкционный декремент; г|а — аэродинамический
декремент колебаний.
Для турбинных лопаток и пакетов основную роль в демпфировании
играют г|м и т]к. В компрессорных лопатках значительная доля
принадлежит аэродинамическому декременту г]а.
Основные сведения о внутреннем демпфировании в материале
приведены в § 1.5. Конструкционное демпфирование обусловлено
повышенными напряжениями в местах концентрации напряжений в лопатках
и поверхностным трением в местах сочленения лопаток с диском в
замковых соединениях, с проволочными или бандажными связями в местах
крепления последних к лопаткам. Конструкционное демпфирование
зависит от многих факторов — марки материала (и в первую очередь
от значения г|м); уровня напряжений при колебаниях; контактных
давлений на поверхностях замковых соединений и способов присоединения
бандажей и проволок к лопаткам (свободная проволока, припаянная
проволока или бандаж, приклепанный бандаж, сварной бандаж и так далее),
а также от типа и размеров замкового соединения. Несмотря на
многочисленные исследования процесса демпфирования обобщенные данные
о влиянии большинства из перечисленных факторов отсутствуют.
На рис. 5.34 приведены некоторые характеристики демпфирования
лопаток (и моделей лопаток) паровых турбин. Эти характеристики
позволяют ориентировочно выбрать т\ на стадии проектирования, а —
амплитуда изгибных напряжений в корневом сечении. Кривые 1
относятся к лопаткам с приклепанным бандажом. Разброс определяется
неповторяемостью свойств заклепочного соединения. Уровень
демпфирования весьма высокий. Кривая 2 соответствует припаянному бандажу,
а кривая 4 относится к индивидуальным лопаткам. Во всех
рассмотренных случаях влияние хвостового крепления, очевидно, незначительное,
поэтому эти данные соответствуют нижней оценке демпфирования.
Кривая 3 относится к лопаткам с замковым соединением зубчикового
типа (см. рис. 2.5).
318
л
0,08
0,04
i/
7 *
3
У
2
0
>4
50
150
а.МПа
Рис. 5.34. Механический декремент колебаний лопаток
1 — приклепанный бандаж; 2 — припаянный бандаж; 3 — лопатка без связей с
елочным хвостовиком; 4 — лопатки без связей
Хвостовое соединение
Елочное
Вильчатое
Торцевое елочное
F, 104Н
4
9
12
12
25
СПм + Лк)Ч,
1,76
2,24
2,93
1,98
2,97
Таблица 5.2
Лм +Лк
0,04
0,045
0,024
0,026
0,025
В табл. 5.2 приведены значения номинальной центробежной силы F,
механического декремента г\ы + цк и отношения (г»м + Лк)^Пм*
Возникает вопрос в какой степени формулы типа (5.116),
полученные в предположении постоянного ц, могут быть применены при
переменном л, зависящим от напряжений в материале и от смещений
(скольжений) в демпферных узлах типа демпферной проволоки или
хвостовиках елочного типа. Анализ этого на основе энергетического
баланса лопатки или пакета показывает, что в том случае, когда
зависимость г](а) определяется экспериментально при условиях, близких к
натурным, допустимо определить резонансные напряжения из
соотношения (5.116), представив его в виде уравнения
ол(а) = 2кСтЧаст, (5.122)
из которого находят а.
319
Так, из рис. 5.33 видно, что во многих примерах зависимость г|(а)
можно аппроксимировать степенной функцией
Л = г]0(а/а0/, (5.123)
где s — опытная постоянная; г|0 — значение г| при а = а0; а0 —
произвольное значение напряжения в интересующем диапазоне.
Подставляя правую часть (5.123) в (5.122), получаем значение
номинальных изгибных напряжений в корневом сечении лопатки при
резонансных колебаниях
а = а,
2кп аст
~ т%ка
Ло
1 +5
(5.124)
В общем случае произвольной аппроксимирующей зависимости г](а)
всегда можно найти напряжение а из (5.122) численным методом.
5.8. СОВМЕСТНЫЕ КОЛЕБАНИЯ ЛОПАТОК И ДИСКА
Колебания отдельных лопаток или пакетов лопаток не являются,
строго говоря, независимыми. В действительности лопатки или пакеты
связаны в единую систему через диск, на котором они закреплены.
Независимые колебания лопаток и пакетов приближенно реализуются
при довольно жестком ободе диска, деформацией которого при
колебаниях лопаток и пакетов можно пренебречь.
Формы и собственные частоты колебаний диска с лопатками. Для
изучения форм колебаний и определения собственных частот невращаю-
щегося диска с венцом рабочих лопаток (диск с лопатками будем
называть системой ДЛ) предположим, что диск 1 (рис. 5.35) с лопатками 2
установлен на постаменте 3 и закреплен на нем, например фланцем 4
Рис. 5.35. Схема установки для возбуждения колебаний диска с лопатками
320
и шпильками 5. Лопатки в общем случае имеют связи в виде бандажа 7 и
проволок 6. В некоторой точке лопатки прикреплена тяга 8 вибратора 9,
который создает переменную силу в осевом направлении, изменяющуюся
по гармоническому закону
P(t) = P0cosnt9 (5.125)
где Pq — амплитуда возбуждающей силы; Q — круговая частота
возбуждения; /в — частота [/в = П/(2я)].
Частота возбуждающей силы вибратора может произвольно
изменяться в достаточно широких пределах. Постепенно увеличивая частоту
возмущения Q, можно обнаружить ряд резонансных состояний
рабочего колеса в исследуемом диапазоне изменения П.
Соответствующая амплитудно-частотная характеристика диска с
лопатками изображена на рис. 5.36.
Пикам амплитуды А осевых колебаний в некоторой точке венца,
например в точке крепления вибратора, соответствуют частоты П,
численно равные собственным частотам осевых колебаний рь р2, р$9 ...
системы ДЛ. Следовательно, при реализации рассматриваемого опыта
можно экспериментально определить спектр собственных частот
системы ДЛ.
Каждому резонансному состоянию соответствует своя форма
колебаний, которую также можно определить экспериментально, если
измерить амплитуды и фазы колебаний лопаток и дисков в множестве точек.
Экспериментальные и теоретические исследования обнаруживают
существование главных форм осевых колебаний, имеющих узловые
линии в форме узловых диаметров и узловых окружностей. Эти
исследования показывают, что осевое смещение w в любой точке А/, имею-
АА
Pi Р2 Рв Ра П
Рис. 5.36. Амплитудно-частотная зависимость колеса с лопатками
321
щей координаты г и 9, при колебаниях системы ДЛ по одной из главных
форм
w=JVms cos pt; х (5.126)
Wms=fs(r) sin тв, (5.127)
где Wms — главная форма осевых колебаний; р — частота собственных
колебаний диска с лопатками; fs(f) — функция, определяющая
изменение динамического прогиба диска и лопаток по радиусу r\ т — число
узловых диаметров диска с лопатками.
На рис. 5.37 показаны формы осевых колебаний диска с лопатками.
Каждая из форм определяется числом узловых диаметров т и числом
узловых окружностей s. Формы колебаний, имеющие только узловые
диаметры, называются веерными формами, а формы с узловыми
окружностями — зонтичными. Форма W^ (т = О, S = 0) соответствует
колебаниям без узловых линий на венце или диске. Формы от Ж10 до W40
веерные с различным числом узловых диаметров т = 1—4. Возможны и
имеют практическое значение веерные формы и с большим числом
узловых диаметров (иногда до т = 12—13). Последняя из числа
изображенных на рис. 5.37 — смешанная форма — имеет два узловых
диаметра и одну узловую окружность.
Осевые колебания дисков с лопатками обусловлены теми же
причинами, что и колебания собственно лопаток. В каждой точке М(г, 9)
на диск действует бесконечная сумма гармонических возмущающих
Рис. 5.37. Формы осевых колебаний системы диск—лопатки
322
давлений с частотами Ахо, где к — кратность гармоники. Если рд —
некоторая собственная частота осевых колебаний диска с лопатками, то
условие резонанса для системы ДЛ
рд = kw или /^ = кп. (5.128)
Из формулы (5.128) очевидно, что условие резонанса для системы
ДЛ совпадает с условием для отдельных лопаток или пакетов.
Влияние вращения на собственные частоты системы ДЛ. Для
учета влияния вращения применима приближенная формула,
основанная на методе Рэйли:
/д = (/Jr + V2)1/2> <5Л29)
где^т — собственная частота осевых колебаний невращающегося диска
с лопатками; #д — коэффициент, учитывающий влияние вращения.
Величины/ст и 2?д зависят от размеров диска и лопаток, а для данной
конструкции и от формы колебаний системы ДЛ, т.е. в первую очередь
от числа узловых диаметров т.
Методы расчетного определения собственных частот осевых
колебаний основаны на тех же предпосылках, что и рассмотренные в гл. 7.
Вибрационная диаграмма системы ДЛ и отстройка системы
от резонансов. Условие резонанса (5.128) с учетом формулы (5.129)
Ь = (/eT + V2)1/2- (5ЛЗ°)
Из (5.130) можно найти резонансные частоты вращения
»^=fjtf-Bf\ (5.131)
где£= 1,2,3,4, ...
Резонанс первой кратности (при к = 1) неосуществим, так как 2?д
всегда больше единицы. Условие резонанса (5.130) удобно анализировать
при помощи вибрационной диаграммы осевых колебаний системы ДЛ
(рис. 5.38), во многом схожей с вибрационной диаграммой лопаток
и пакетов. На диаграмме представлены величины собственных частот
системы ДЛ с различным числом узловых диаметров и частоты
гармоник возмущающих сил при различных кратностях в зависимости от
частоты вращения п.
Абсциссы точек пересечения этих двух семейств линий дают значения
резонансных частот вращения, т.е. таких частот вращения, при которых
возможны резонансные осевые колебания системы ДЛ.
Не все резонансные частоты вращения одинаково опасны. Анализ
аварий, происходивших с рабочими колесами, вызванных их вибрацией,
323
/д,Гц
250
200
150
100
50
0 40 80 120 160 /1,0-!
Рис. 5.38. Вибрационная диаграмма осевых колебаний системы диск—лопатки
о — критические частоты вращения; □ — нижние резонансные частоты вращения;
Л — верхние резонансные частоты вращения
позволяет установить наиболее опасные резонансы. При таких резонансах
кратность гармоники к равна числу узловых диаметров т.
Соответствующие резонансные частоты вращения, называемые критическими
частотами вращения,
n.-f„/(m2-BJm. (5.132)
При критической частоте вращения п = п* на колесе (венце и диске)
образуется назад бегущая волна. Узловые диаметры и пучности этой
волны перемещаются по колесу с относительной частотой вращения и*
в направлении, противоположном вращению колеса. Эта волна
оказывается неподвижной относительно корпуса турбомашины. Колебания с
неподвижной относительно корпуса волной легко возбуждаются любой
неподвижной поперечной силой Р0, действующей в осевом направлении
на вращающееся колесо, именно поэтому резонансы при k = т
оказываются наиболее опасными.
Подвод энергии к системе ДЛ при критической частоте вращения
п = я* иллюстрирует рис. 5.39, где изображена развертка колеса вдоль
окружности с постоянной поперечной силой Р0. При вращении колеса
с неподвижной в пространстве волной в точку А, где действует сила Р0,
последовательно попадают точки системы ДЛ, имеющие скорости коле-
324
U^"**""^^
dw/dt
Вращение
колеса
I р0 Движение
волны
Рис. 5.39. Форма колебаний вращающегося диска
бательного движения wmax. Направление скорости wmax совпадает
с линией действия силы Р0. При этих условиях сила Р0 развивает
мощность ^о^тах' КОТОРая непрерывно подается в систему и поддерживает
вынужденные ее колебания значительной интенсивности при тех нерав-
номерностях давления на колесо, которые существуют в турбомашинах.
5.9. КОЛЕБАНИЯ ВЕНЦОВ С ЛОПАТКАМИ БОЛЬШОЙ
ДЛИНЫ
Концепции проектирования лопаток большой длины. В практике
конструирования длинных лопаток (в особенности лопаток последних
ступеней ЧНД крупных паровых турбин) имеет несколько концепций,
в которых по-разному решаются проблемы вибрационной надежности
таких лопаток. Одна из концепций основана на применении свободных
лопаток без связей.
Преимущество свободных лопаток состоит в том, что на стадии
проектирования можно произвести надежную отстройку таких лопаток
от резонансных состояний в зоне рабочей частоты вращения с
необходимым запасом. При этом размер хорд профилей выбирают таким
образом, чтобы частота колебаний первого тона находилась выше частоты
возмущений второй кратности, т.е.
/д1>2ир. (5.133)
При таком выборе приходится применять хорды значительного
размера (иногда Ьк > 300 мм). Условие (5.133) обеспечивает, как правило,
число форм колебаний в отстраиваемом диапазоне не более 3—4.
На рис. 5.32 показана типичная вибрационная диаграмма для
лопаточного венца без связей. В отстраиваемом диапазоне частот (до 400 Гц)
325
находится всего три формы колебаний, которые только и должны быть
отстроены. На рисунке показан пример хорошей отстройки лопаток
(с учетом разброса частот имеются достаточные запасы A/imin, A^min»
A/3mjn между собственными частотами /1? /2, /3 и соответствующими
частотами гармоник 2п , An , 6лр).
Недостатком применения первой концепции является малое
демпфирование (г| = 0,001—0,005) лопаток вследствие отсутствия связей, а
также большая возбудимость автоколебаний.
Несмотря на надежную отстройку на рабочей частоте вращения
демпфирование остается важным фактором для снижения вибрации при
многочисленных резонансах на проходных частотах вращения. При
развороте турбины или выбеге ротора в период останова турбины лопатки
попадают в резонансные состояния, опасность которых зависит
от демпфирующей способности и времени задержки ротора на
резонансных частотах вращения. При низкой демпфирующей способности
лопаток недопустима длительная задержка ротора на резонансной
частоте вращения во избежание усталостного повреждения лопаток.
Накопление усталостных повреждений от пуска к пуску приведет к обрыву
лопаток и тяжелым последствиям.
Применение лопаток с демпферными связями — второй подход
к обеспечению вибрационной надежности лопаток большой длины.
Связанность лопаток бандажом и (или) проволоками приводит к
образованию динамической системы лопатки — связи — диск, имеющей более
плотный спектр собственных частот. Демпферная проволока протянута
через отверстия в лопатках (см. рис. 2.4) и замкнута на круг. Число
рядов проволок может быть от одного до трех. Проволока в отверстия
вставлена свободно. Действием центробежных сил при вращении
проволока прижимается к поверхности отверстий, так что
проскальзывание, как правило, отсутствует. Одновременно при возникновении
колебаний венца в месте контакта проволоки и лопаток возникает
демпфирование, вызванное угловыми смещениями лопаток (поворотом
сечений) относительно проволоки, — явление типа трения при качении
одного тела по другому.
Особенности колебаний лопаток со связями. Формы колебаний
венца с одной периферийной демпферной проволокой приведены
на рис. 5.40, где изображены составляющие U(z) смещения лопаток
в окружном направлении.
На рис. 5.40, а показана серия форм колебаний, при которых на
длине каждой лопатки нет узлов; это колебание типа А0
преимущественно с тангенциальным направлением смещений. На рис. 5.40, б пред-
326
т = О т= 1 7?i = 2
А/00 А/01 А*02
а
Ало ^«11 Аи12
б
Рис. 5.40. Формы колебаний рабочего венца с круговой проволочной связью,
расположенной на концах лопаток
ставлена серия форм колебаний с одним узлом на лопатке — колебания
типа A j. Далее можно было бы рассматривать колебания типа А2 и т.д.
Серия форм А0 (рис. 5.40, а) состоит из форм с различным числом
узловых диаметров.
Анализ показывает, что в каждой серии форм всего существует (zn/2) +
+ 1 форм.колебаний при гл четном и (zn + 1)/2 форм при zn нечетном.
Число узловых диаметров меняется в пределах:
ет = 0;1;2;....(2л/2);
ю = 0;1;2;....(2л-1)/2.
Форма колебаний А0 при т = 0 (рис. 5.40) такова, что все лопатки
венца деформируются совершенно одинаково, и форма каждой лопатки
вполне аналогична форме колебаний одиночной несвязанной лопатки.
Применение проволоки ведет к некоторому снижению собственной
частоты колебаний этой формы вследствие увеличенной массы на
периферии лопаток.
327
При таких синфазных колебаниях лопаток усилия
растяжения-сжатия в проволоке отсутствуют.
Все последующие формы этой серии с различными значениями
т = 1; т = 2; ... отличаются тем, что смещения вершин лопаток
ограничены проволокой.
При абсолютно жестких на растяжение-сжатие проволок вершины
лопаток в окружном направлении не смещаются (£/= 0) или смещаются
(при некоторых формах колебаний) незначительно. Деформации
лопаток при абсолютно жестких проволоках показаны на рис. 5.40
сплошными линиями.
В реальных условиях податливостью проволоки на растяжение-сжатие
пренебречь нельзя. Вследствие этой податливости вершины лопаток
смещаются. Соответствующие деформации лопаток показаны на рис. 5.40
штриховыми линиями. При т = 1 вершины лопаток нижнего сектора
колеса (относительно узлового диаметра 7-5) смещаются по часовой
стрелке, вершины верхнего сектора — против часовой стрелки. При этом
проволока, расположенная по полуокружности 3-4-5-6-7, испытывает
растяжение, участок 7-8-1-2-3 — сжатие. Через полпериода колебаний
знак деформации на каждом участке, естественно, изменится на
обратный. При т - 2 лопатки, расположенные на узловых диаметрах (1-5 и 3-
7), не деформируются, пучности волны (наибольшие смещения)
наблюдаются у лопаток, расположенных посередине между узловыми линиями
(лопатки 2, 4, б, 8). Для изображенной конфигурации при т = 2 участки 6-
4, 2-8 испытывают сжатие, участки 2-4 и 6-8 — растяжение.
Распределение окружных смещений по окружности, так же как
и других параметров (углов, моментов, перерывающих сил),
приближенно подчиняется гармоническому (синусоидально-косинусоидаль-
ному) закону. Так, окружное смещение лопаток приближенно можно
определить из соотношения Uu = £/п0 sin mQ, где Un — окружное
смещение концов лопаток; С/п0 — максимальное окружное смещение в
пучностях волны.
При увеличении числа узловых диаметров длина участка проволоки,
заключенного между двумя смежными узловыми радиусами,
уменьшается, что приводит к увеличению жесткости этого участка проволоки на
растяжение-сжатие. Следовательно, чем больше т, тем большее
влияние оказывает проволока на форму колебаний лопаток на венце, тем
меньшее смещение возникает на вершине лопатки. При тонкой
проволоке и малых т колебания лопаток в венце по форме и частотам близки
к колебаниям свободной лопатки. С возрастанием жесткости проволоки
и числа т колебания приближаются к форме с неподвижной вершиной.
В венцах с закрученными лопатками колебания имеют три
составляющие деформации U, V и @, поэтому наряду с изображенными тан-
328
генциальными колебаниями лопатки испытывают осевые смещения V
и кручение 0.
Для классификации всех форм колебаний введем следующую
терминологию. Будем считать, что венец совершает колебания типа Аипт,
Атт или А§пт. Первый индекс и, v или 0 указывает на
преимущественное значение окружных, осевых или крутильных колебаний лопаток
(сравним с формами одиночной лопатки — см. рис. 5.18); второй индекс
п определяет число узлов на длине лопатки; третий индекс т — число
узловых диаметров. Например обозначение А„04 означает, что речь идет
о колебаниях преимущественно тангенциального направления без узлов
на лопатках и при четырех узловых диаметрах.
Вместо демпферной проволоки на периферии часто применяется
периферийный «интегральный» бандаж, выполненный заодно с
лопаткой (см. рис. 2.4). Для длинных лопаток нередко применяются две или
даже три связи: периферийная связь в виде проволоки или бандажа и,
кроме того, одна или две демпферные проволоки на протяжении длины
лопатки. Одну промежуточную проволоку ставят для устранения
колебаний тяпгАи0т на расстоянии (0,6 - 0,7)/ от корня лопатки (рис. 5.40, а
при т = 1 и т = 2). При такой постановке проволока связывает лопатки
в месте максимального их прогиба при колебаниях по этим формам
и тем самым устраняет или существенно снижает эти колебания.
Для гибких лопаток опасными могут оказаться и колебания типа
Аи1т (рис. 5.40, б). В этих случаях применяют две проволоки. Для
устранения колебаний форм АиХт проволоки располагаются в местах
максимального прогиба по этим формам.
Следует подчеркнуть, что установка демпферных проволок
оказывает существенное влияние на такие формы, которые имеют
значительную окружную составляющую прогиба. На формы колебаний со
значительным преобладанием осевых или крутильных деформаций лопаток
установка проволок оказывает небольшое влияние. Так, установка
проволок в венце с лопатками, формы колебаний которых показаны на
рис. 5.18 существенно влияет на колебания первой формы {fx = 97 Гц,
U&V), меньше влияние на колебания по второй форме (f2 = 148 Гц,
U « У),и совсем незначительное изменение частоты и формы колебаний
произойдет для третьей (крутильной) формы (f^ = 208 Гц, U « 06/2).
Как следует из проведенного анализа, спектр частот и форм
колебаний лопаток со связями значительно более плотный, чем спектр
одиночной лопатки: каждой форме колебаний лопатки соответствует zn/2 + 1
или (zn +1)/2 частот и форм колебаний венца. При этом в отстраиваемом
диапазоне, как правило, находится множество частот колебаний венца.
329
На рис. 5.41 изображена типичная вибрационная диаграмма
лопаточного венца со связями. Каждой форме колебаний лопатки соответствует
серия частотных зависимостей с различными числами т. Здесь имеется
полная аналогия с чисто осевыми колебаниями системы ДЛ,
рассмотренными ранее. Из множества резонансов наибольшее значение имеют
критические резонансы при к = т (на рисунке отмечены кружками).
Большая опасность критических резонансов обусловлена тем, что для
идеально однородного венца (венца из строго одинаковых лопаток) на
некритических резонансах (при к Ф т) колебания не могут быть
вызваны неподвижной относительно статора нагрузкой типа
неравномерного давления или неравномерного потока по окружности соплового
венца.
Неоднородность рабочего венца (разброс размеров, частот
колебаний отдельных лопаток комплекта) приводит к тому, что не все лопатки
одновременно входят в резонанс, т.е. резонансная зона расширяется,
fdt kn, Гц
О 25 п,с-1
Рис. 5.41. Вибрационная диаграмма рабочего венца с круговыми проволочными
связями
330
и что на одной кратности к возбуждаются формы с разным числом
узловых диаметров (появляются некритические резонансы при к Ф т), как
правило, со значительно меньшими напряжениями в лопатках по
сравнению с критическими резонансами.
Отметим, что критические резонансы при формах с т = 0 или т = 1
невозможны, что следует из формулы (5.132), которая качественно
справедлива и для рассматриваемых сложных форм колебаний венцов
с закрученными лопатками.
Применение замкнутых на круг демпферных связей обеспечивает
высокий уровень механического демпфирования (на порядок выше, чем
в лопатках без связей) и, следовательно, может обеспечить
вибрационную надежность при большей неравномерности потока, вызванной как
технологическими, так и конструкционными причинами. В этом состоит
главное преимущество венцов с демпферными связями.
Недостатками этого решения являются трудность и небольшая
точность априорного (на стадии проектирования) определения
собственных частот, что вызывает затруднения в отстройке венцов от резонан-
сов. Кроме того, применение проволок в проточной части снижает
экономичность ступени на 1,5—2,5 % в зависимости от места
расположения и других особенностей ступени и связи. Применение
периферийного бандажа, напротив, повышает экономичность по сравнению с
одиночными лопатками и тем более по сравнению с венцами с
периферийной демпферной проволокой.
Наряду с рассмотренными типами венцов широкое распространение
имеет конструкция венца, состоящего из пакетов лопаток. Каждый пакет
включает несколько (5—7 и более) лопаток, соединенных одной или
несколькими связями (проволоками, бандажом) с припайкой связей
к лопаткам. Такая конструкция во многом аналогична венцам с
свободными лопатками, отличается малым числом форм колебаний в
отстраиваемом диапазоне (3—4 формы), простотой отстройки, но низким
уровнем демпфирования.
5.10. САМОВОЗБУЖДАЮЩИЕСЯ КОЛЕБАНИЯ
ЛОПАТОК ТУРБОМАШИН
При определенных условиях обтекания решеток возникают
самовозбуждающиеся колебания лопаток, появляющиеся, как правило, при
значительном отклонении углов натекания потока на решетки от
расчетных. Типичная зависимость аэродинамической силы от угла натекания
имеет вид, изображенный на рис. 5.42. При увеличении отрицательного
угла атаки а0 сила Ra вначале растет и при а0 = а01 достигает макси-
331
Rn *
Рис. 5.42. Зависимость аэродинамического усилия от угла атаки
мального значения, на участке от <х01 до а02 наблюдается уменьшение
силы Ra при увеличении угла атаки а0.
Ниспадающая зависимость силы от угла натекания есть основной
признак возможного возникновения самовозбуждающихся колебаний,
называемых срывным флаттером.
Анализ показывает, что при углах атаки в зоне а01 < а0 < а02
возможно появление самовозбуждающихся колебаний лопаток. Колебания
лопаток происходят обычно по формам с преобладанием крутильных
деформаций. Возникновению автоколебаний способствует увеличение
отношения Wj Ipb {wx — скорость набегающего потока; р — частота
колебаний лопатки; Ъ — хорда лопатки), отношения плотностей Pj/pM
(Pi — плотность среды; рм — плотность материала лопаток);
относительного шага t2lb (/2 — шаг лопаток), а также отношения alb {а —
расстояние от центра кручения до передней кромки).
Угол атаки зависит от объемного расхода пара. Чем меньше объемный
расход, тем больше отрицательный угол атаки, поэтому возникновение
колебаний срывного флаттера может наблюдаться при малых объемных
расходах пара через последнюю ступень конденсационной турбины.
Повышение противодавления (ухудшение вакуума) при неизменной
мощности также ведет к снижению объемного пропуска пара через
последнюю ступень и тем способствует возникновению автоколебаний.
332
Pk
Pup
0 0,5 1,0 G
Рис. 5.43. Режимы работы последней ступени ЧНД
1 — область допустимой работы; 2 — область возникновения самовозбуждающихся
колебаний; 3 — область высоких вибрационных напряжений
Для снижения опасности автоколебаний последних ступеней ЧНД
следует обеспечить повышенное механическое демпфирование венцов,
уменьшенный относительный шаг решеток, значительный радиус
входных кромок.
Влияние режимов работы на вибрационную надежность лопаток
последних ступеней ЧНД приведено на рис. 5.43. Область высоких
вибрационных напряжений при противодавлении рк > /?пр определяется
повышенными возбуждающими силами, вызывающими вынужденные
колебания лопаток. Предельные значения ри задаются
заводами-изготовителями и обычно равны 12,0—25,0 кПа. Зона самовозбуждающихся
колебаний расположена левее наклонной линии при малых массовых
расходах G и повышенных противодавлениях. Область допустимых
режимов заштрихована. Вне заштрихованной зоны работа ступени
недопустима по условиям вибрационной надежности.
5.11. ВИБРАЦИОННАЯ НАДЕЖНОСТЬ ЛОПАТОЧНОГО
АППАРАТА ТУРБОМАШИНЫ
Количественное определение вибрационной надежности лопаток
на стадии проектирования затруднено вследствие недостатка
информации о рассчитываемом объекте — на стадии проектирования часто
неизвестны или известны лишь ориентировочно значения возмущающих сил
(амплитуды гармоник х^), особенно сил стохастической природы,
конструкционное демпфирование лопаток. Частотные характеристики лопа-
333
точных венцов известны как средние, без учета их разброса. Отсутствие
или малая достоверность этих данных делают расчет напряжений при
вынужденных колебаниях ориентировочным, что приводит
к необходимости вводить большие коэффициенты запаса и, кроме того,
предусмотреть обязательную экспериментальную проверку
вибрационной надежности лопаток. Так, при разработке ступеней относительно
длинных лопаток применяется многостадийная процедура, состоящая
обычно из следующих этапов:
а) расчетное определение собственных частот с отстройкой от резо-
нансов на рабочей частоте вращения до шестой—восьмой кратности;
б) экспериментальное определение собственных частот натурной
невращающейся лопатки;
в) экспериментальное определение собственных частот и форм
колебаний и вибрационных напряжений в условиях вращения на
специальном динамическом стенде. Возбуждение лопаток осуществляется,
как правило, от одного парового сопла, имеющего в спектре гармоники
всех кратностей примерно одинаковой амплитуды. Испытания проводят
на вращающемся облопаченном колесе при переменной частоте
вращения. Лойатки снабжены датчиками деформации (резисторными
тензометрами), что позволяет определять динамические напряжения в них
при различных частотах вращения и значение резонансных и
критических частот вращения, фиксируемых по максимумам амплитуд
динамических напряжений;
г) исследование динамических (вибрационных) напряжений в
лопатках на натурном стенде в условиях, близких к эксплуатационным.
На этой стадии испытывают обычно отсек, состоящий' из нескольких
ступеней, выполненный в натурную величину. В процессе испытаний
проводят тензометрирование рабочих лопаток (т.е. определяют амплитуду
вибрационных напряжений в них) при различных режимах, включающих
возможные в эксплуатации нерасчетные режимы Частичных пропусков
пара и повышенного противодавления. По данным этих испытаний может
быть построена диаграмма допустимых режимов ЧНД.
Для повышения вибрационной надежности предусмотрены
различные способы, частично рассмотренные в этой главе. Качественные меры
повышения виброустойчивости приведены в § 5.10. Многие меры
непосредственно вытекают из анализа формул для динамических напряжений
в рабочих лопатках при вынужденных колебаниях [например, (5.116)].
В итоге основными способами.повышения вибрационной
надежности лопаток при вынужденных колебаниях являются следующие.
1. Отстройка лопаток, пакетов или венцов от резонанса. Эта мера
используется при низких частотах колебаний лопаток (до 300—400 Гц)
до кратностей к = 6—8, а также при кромочном возбуждении с часто-
334
тами wzH и 2wzH. Повышение точности изготовления лопаток и пакетов,
ведущее к снижению разброса частот комплекта лопаток (пакетов),
улучшает отстройку, т.е. позволяет увеличить интервалы между рабочей
и резонансными частотами вращения.
2. Пакетирование. Применение бандажей и проволок снижает
уровень динамических напряжений вследствие эффекта пакетного
множителя. Снижение технологического разброса частот имеет
положительный результат: ведет к снижению величины пакетного множителя.
3. Выбор малых допускаемых и рабочих напряжений на статический
изгиб. Обычно принимают следующие значения допускаемых
напряжений на статический изгиб аи д для ступеней: активных с полным
подводом пара аи д < 30—35 МПа; реактивных с полным подводом пара аи д <
< 70—100 МПа; с парциальным подводом пара аи д < 10—15 МПа. Ббль-
шие допускаемые напряжения на изгиб в реактивной ступени
объясняются, в частности, меньшим, чем в активной ступени, влиянием
технологических отклонений на гармоники возбуждающих сил, а также
малым кромочным возбуждением.
4. Использование демпферных связей. Оно повышает механическое
демпфирование и суммарный логарифмический декремент г|, от
которого зависят динамические напряжения. Применение специальных
демпферных бандажей, демпферных проволок (см. рис. 2.2—2.4)
позволяет существенно (в несколько раз) увеличить т| и тем самым снизить
динамические напряжения.
5. Уменьшение уровня возмущающих сил, интенсивность которых
определяется величиной %к (5.116), достигаемое повышением точности
изготовления деталей и в первую очередь сопловых венцов,
усовершенствованием стыков диафрагм, отработкой в аэродинамическом
отношении отборных патрубков, выходных патрубков и пр.
6. Введение дроссельного парораспределения или (и) использование
«скользящего» давления для изменения пропуска пара, что позволяет
повысить вибрационную надежность путём снижения возмущающих
сил, которые в парциальной ступени выше, чем в ступени с полным
подводом пара.
7. Применение жестких (высокочастотных) рабочих лопаток,
пакетов, снижающих динамические напряжения. Чем выше низшая
собственная частота, тем выше кратность гармоники, способной вызвать
резонансные колебания:
335
Если к > 6—8, то, как было выяснено, интенсивность гармоник
возмущающих сил мала и обычно не вызывает опасных колебаний,
поэтому, выбрав минимальную частоту из условия
/д>(6-8)«,
можно повысить вибрационную надежность.
8. Повышение конструкционного предела усталости, что достигается
проектированием лопаток и замковых соединений с возможно
меньшими концентраторами напряжений в областях повышенной
напряженности. Вибрационная надежность повышается вследствие возрастания
коэффициента запаса пс = сгу/ад путем увеличения су при заданных
динамических напряжениях ад.
9. Установка диафрагм с разными шагами сопловой решетки по
окружности. Это позволяет снизить напряжения от кромочного
возбуждения на 20—30 %. Эффект объясняется тем, что исключается «чистый»
резонанс вследствие того, что частота импульсов, действующих на
лопатки, меняется при прохождении лопатки мимо сопл с различным
шагом решетки.
10. Применение диафрагм с «навалом» сопловых лопаток. При этом
снижается интенсивность кромочного импульса вследствие
неодновременности пересечения кромочного следа передней кромкой рабочей
лопатки для колебаний типа А0 и В0.
Перечисленные способы позволяют при проектировании турбома-
шин снизить опасность колебаний и обеспечить необходимую
вибрационную надежность облопачивания.
Пример 5.3. Рассчитать вибрационные напряжения и коэффициент запаса
усталостной прочности лопатки регулирующей ступени паровой турбины при
следующих исходных данных: средняя собственная частота колебаний пакетов
лопаток по тону AQfa = 3300 Гц; разброс частот пакетов на колесе А/= ± 0,15/д*,
параметры пакета к$ = 0,05, v6 = 0,3; статические номинальные изгибные
напряжения в корневом сечении у выходной кромки аст = 15 МПа; коэффициент
концентрации напряжений у выходной свисающей кромки ка - 6; предел усталости
материала а_{ = 240 МПа (сталь 20X13 при температуре 500 °С); число лопаток
на колесе zn = 110, число лопаток в пакете./ = 5; частота вращения 3000 об/мин.
Логарифмический декремент колебаний принять согласно рис. 5.34 (кривая 2)
по аппроксимирующей зависимости ц = 0,01 • сг/50.
Решение. Для расчета напряжений по (5.116) найдем необходимые
величины. Кратности кх и к2 для пакетов на колесе с наинизшей и наивысшей
частотами по (5.106):
кх = (/д + Д/)/я = 3300 • 1,15/50 = 76;
к2 = (/я- A/) In = 3300 • 0,85/50 = 56.
336
Значения пакетных множителей по (5.119):
= sin(7I-5-76/110) =
Xl 5sin(7i-76/110) U,/Jy '
sin(7t • 5 • 56/110) „.„„,
Ъ = 5sin(K-56/110) = °'1981 •
По (5.118) найдем относительную интенсивность возмущающих гармоник:
2 Sin(П • 76/110) , noino\ п сл(\ in"4
М« = ^76 (я-76/110)' (-°'2398) = -7'640 ' Ш ;
*и ■ ЛУД • °'1981 - ^ •10_3 •
*z те • 56 (я • 56/110)
Для пакета с наинизшей собственной частотой возмущающая гармоника
имеет наибольшую интенсивность.
По значениям кб и v6, использовав графики на рис. 5.13, найдем <р « 0,62,
а затем 5W = 1,8757ф = 1,875 75^2 = 1,4764.
Постоянную Ст вычислим по (5.117), определив предварительно значения
функций Крылова по (5.41) при % = Ът = 1,4764. В результате получим Ст = 0,401.
По формуле (5.116)
сц = 2п • 0,401 • 1,407 • 10~3 • 15 = 5,318 • 10~2 МПа.
Использовав аппроксимирующую зависимость для т], из последнего
уравнения [или из (5.124) при а0 = 50 МПа, s - 1, щ = 0,01] найдем номинальное
напряжение изгиба в выходной кромке:
ст = 50-(5,318/50)1/2= 16,31 МПа.
С учетом концентрации напряжений
amax = ^ad = 6 • 16,31 = 97,9 МПа.
Коэффициент запаса прочности по пределу усталости
na = G_x/Gm^ 240/97,9 = 2,45.
Полученное значение является допустимым.
Глава шестая
КОЛЕБАНИЯ РОТОРОВ ТУРБОМАШИН
И ТУРБОАГРЕГАТОВ
6.1. ПРИЧИНЫ КОЛЕБАНИЙ РОТОРОВ
Ротор турбомашины имеет две опоры или более. Многоопорный
ротор обычно собирают из нескольких роторов, соединенных муфтами.
Такой ротор называют валопроводом. На рис. 6.1 показана схема вало-
провода турбины большой мощности, состоящего из нескольких
отдельных роторов: ротора высокого давления (РВД), ротора среднего
давления (РСД), одного—трех роторов низкого давления (РНД), ротора
электрического генератора (РГ). Роторы соединены муфтами.
Применяются жесткие, зубчатые, пружинные муфты. В мощных паровых и
газовых турбинах преимущественно используют жесткие муфты (см. § 3.1).
Валопровод опирается на несколько подшипников.
, Корпуса подшипников установлены на фундаментных ригелях
(выносные опоры) или размещены на корпусе ЧНД (встроенные опоры).
Вращающийся ротор (валопровод) является источником колебаний
и одновременно элементом, который подвержен колебаниям. При
вращении возникают колебания как самого валопровода, так и других
элементов системы турбоагрегат-фундамент (системы ТФ): корпусов
подшипников, статорных частей турбины и генератора, элементов
фундамента. Возможны изгибные (поперечные) и крутильные колебания
валопровода.
Рис. 6.1. Валопровод мощной паровой турбины
1 — РВД; 2 — РСД; 3 — РНД; 4 — РГ; 5 — шейки роторов; 6 — ригели; /-
номера опор (подшипников)
338
Колебания валопровода и всей системы ТФ могут быть вызваны
различными причинами. Рассмотрим наиболее важные из них.
1. Неуравновешенность ротора. Это главная причина поперечных
колебаний. Неуравновешенность обусловлена несовпадением центра
масс в поперечных сечениях валопровода с геометрическим центром
сечений.
Под действием собственного веса невращающийся ротор
прогибается так, что его упругая линия становится плоской кривой, лежащей
в вертикальной плоскости. Если ротор идеально уравновешен, т.е. центр
масс в каждом сечбнии совпадает с геометрическим центром (просто
центром) сечения, то при вращении ротора плоскость упругой линии
останется практически прежней. Такая форма движения может быть
названа идеальной: колебания отсутствуют, прогибы постоянны во
времени, реакции опор также постоянны. В случае неуравновешенного
ротора смещение центра масс в данном сечении по отношению к центру
сечения обозначим е. Вектор е называется эксцентриситетом в сечении.
Эксцентриситет есть функция координаты z, отсчитываемой вдоль оси
ротора: е = e(z).
При вращении неуравновешенного ротора в каждом сечении (где
е Ф 0) возникает поперечная центробежная сила, пропорциональная е.
Эта сила и является основной причиной поперечных колебаний
неуравновешенного ротора. Практически ротор не может быть выполнен
идеально уравновешенным. Причинами первичной неуравновешенности
являются неизбежные технологические отклонения и конструктивные
особенности ротора, нарушающие его осевую симметрию, поэтому
после изготовления ротора его подвергают уравновешиванию —
балансировке. Балансировку роторов выполняют на специальных
балансировочных станках на заводе или на станции после монтажа валопровода.
Она сводится к подбору добавочных грузов и.мест их расположения на
роторе. Грузы закрепляют на роторе в предусмотренных местах,
компенсируя первоначальную неуравновешенность ротора. Уровень
колебаний ротора с частотой, равной частоте егоГ вращения, в эксплуатации
зависит в первую очередь от качества (точности) его балансировки.
2. Неточность ^сборки и соединения роторов между собой.
Неуравновешенность ротора и неточность сборки вызывают возмущения с
частотой, равной частоте вращения ротора. Возникающие при этом
вынужденные колебания также имеют частоту, равную частоте вращения.
3. Неравножесткость сечений вала относительно взаимно
перпендикулярных осей. Это является причиной колебаний ротора с двойной
частотой по сравнению с частотой его вращения. Источником возмущения
при этом является собственный весротора. Если вал имеет такое сечение,
что жесткость вала относительно взаимно перпендикулярных осей раз-
339
лична (рис. 6.2), то прогиб ротора от собственного веса зависит
от углового положения ротора: когда ротор повернут в положение /
(рис. 6.2), его прогиб ох собственного веса и меньше, чем прогиб и' в
положении II. При вращении ротора с частотой п вследствие этого
появляется возмущающее воздействие с частотой 2п и возникают колебания
ротора также с частотой 2и.
Роторы двухполюсных электрических генераторов имеют неравно-
жесткие сечения в связи с тем, что на бочке ротора выполнены
продольные пазы для размещения обмотки.
4. Овальность шеек роторов. Вследствие неточности обработки
шейки ротора имеют отклонения от круговой формы — овальность. При
вращении в подшипнике овальной шейки возникает колебательное
движение центра шейки, что вызывает колебания всего ротора. За один
оборот ротора центр шейки совершает два полных колебаний.
Следовательно, овальность шеек вызывает возбуждающие воздействия с
частотой 2гг. Овальность нормируется допусками на отклонение сечения
шейки от кругового.
5. Неконсервативные силы, действующие на ротор. Они являются
причиной самовозбуждающихся колебаний (автоколебаний) ротора.
Основные неконсервативные возмущающие силы возникают в масляном
Рис. 6.2. Неравножесткий ротор с прогибом под действием собственного веса (в двух
положениях):
/ — диск; 2 — вал; /, // — сечение вала при горизонтальном и вертикальном
расположении пазов
340
слое подшипников скольжения («масляное» возбуждение), а также на
венцах рабочих лопаток и в лабиринтных уплотнениях («паровое», или
аэродинамическое возбуждение). Природа этих сил и вызываемая ими
динамическая неустойчивость валопровода рассмотрены в § 6.6.
6. Внезапные динамические воздействия на ротор, вызывающие
переходные колебания ротора. К таким воздействиям относятся:
а) внезапная разбалансировка ротора при поломке и вылете рабочих
лопаток;
б) короткое замыкание в цепи электрического генератора и
несинфазное включение генератора;
в) сейсмическое воздействие.
При внезапном вылете лопаток (в особенности последних лопаток
ЧНД) на ротор ударно прикладывается большая поперечная
вращающаяся сила, например при отделении у корня одной лопатки создается
сила 1—2,5 МН. Эта сила вызывает поперечные изгибные колебания
валопровода.
Важнейшими характеристиками ротора являются его критические
частоты вращения.
Критические частоты вращения ротора обнаруживаются при снятии
амплитудно-частотной характеристики ротора (рис. 6.3). Если
неуравновешенный ротор привести во вращение с переменной частотой
и измерить амплитуды А колебаний в некоторой точке (точка а или Ь
на рис. 6.3), то получим характерную кривую, имеющую несколько
максимумов. Критическими частотами вращения ротора и*,- называются
частоты вращения ротора, при которых амплитуды колебаний
достигают максимальных значений /Ц-. Для консервативной системы, т.е. для
системы без демпфирования, амплитуды A*t неограниченно велики.
Демпфирование существенно влияет на амплитуды A*i9 но сравнительно
АА
n*i п*2 п*3 ^*4 п
Рис. 6.3. Амплитудно-частотная зависимость колебаний ротора
341
мало влияет на критические частоты вращения л*,-. Критические частоты
консервативной системы можно называть идеальными критическими час-
тотами в отличие от реальных критических частот, соответствующих
максимумам амплитуд в реальной системе с демпфированием.
Наряду с критическими частотами вращения существуют
собственные частоты колебаний вращающегося ротора, которые могут быть
обнаружены при неизменной частоте вращения (например,
номинальной) и при возбуждении вращающегося с частотой лраб ротора
возбуждающей силой, изменяющейся с частотой лв = €11(2%), т.е. силы
Р = P0cos Л/ = PQCOs(2nnBt),
где Р0 — амплитуда возбуждающей силы.
Практически собственные частоты ротора можно определить, если
установить вибратор в некоторой точке системы (например, на крышке
корпуса подшипника) и, постепенно меняя частоту возбуждающей силы,
снять амплитудно-частотную характеристику. Частоты возбуждающей
силы, при которых амплитуды колебаний имеют максимум, численно
равны собственным частотам колебаний ротора (валопровода).
Собственные частоты валопровода обозначаем^., причем
/1</2</з 5-..</„,
где fn — наивысшая собственная частота в исследованном диапазоне
изменения частоты возбуждающей силы.
Полученная при такой процедуре амплитудно-частотная
характеристика будет отличаться от приведенной на рис. 6.3 тем, что значения
максимумов амплитуд будут иными, а их положения будут смещены
по оси лв по отношению к соответствующим значениям л*,-.
Различие между л*,- nft определяется тем, что при критических
частотах вращения свойства ротора отличаются от его свойств при
номинальной частоте вращения за счет различия в жесткости и
демпфирования в масляном слое подшипников при критических и рабочей частотах,
а также вследствие различного влияния гироскопических моментов,
которые зависят от частоты вращения. Иными словами: свойства
системы ротор — опоры на рабочей частоте и на любой из критических
частотах — различны, что и определяет различие между ft и л*,-. Можно
сказать, что критические частоты вращения суть собственные
частоты колебаний системы ротор — опоры на критических частотах
вращения валопровода.
При критической частоте вращения ротора наблюдается резонанс,
т.е. совпадение частоты возмущающей силы с частотой собственных
колебаний вращающегося ротора.
342
Рабочая частота вращения может быть ниже или выше наименьшей
критической частоты л*1# При лраб < w*j ротор называется жестким.
Жесткие роторы при повышении частоты вращения до ее номинального
значения не проходят через критическую зону (зону высоких амплитуд).
Если п б > п*х, то ротор называется гибким. Гибкие роторы при пуске
проходят через критическую зону.
6.2. КОЛЕБАНИЯ ОДНОМАССОВОГО РОТОРА.
УРАВНЕНИЯ ДВИЖЕНИЯ
Основные закономерности движения ротора рассмотрим вначале
на простой модели одномассового ротора, представляющего собой
жесткий диск, закрепленный на безынерционном валу (рис. 6.4). Диск
размещен строго посередине пролета. Ротор опирается по концам вала
на две анизотропные опоры, обладающие различной податливостью!
в горизонтальном 8ц и вертикальном 822 направлениях. Ротор отнесен
к системе осей jclf jc2, z, причем ось z проходит через центры опор
в исходном (недеформированном) их состоянии; оси хх и х2 направлены
перпендикулярно оси z в горизонтальном хх и вертикальном х2 направле-
*2 А
Рис. 6.4. Модель одномассового ротора
а — ротор; б — анизотропная опора
343
*2'
f02
U2
i
o2 N
( «//
/V
ujf
r
—>•
W! WQl
*1
ниях и вместе с осью z образуют
правую систему осей. Ротор вращается с
постоянной угловой скоростью со
(частота вращения п).
На рис. 6.5 изображена плоскость
сечения вала в том месте, где
расположен диск в произвольный момент
движения. Начало координат О — это
след оси z; точка Ох —
геометрический центр сечения вала; точка 02 —
центр массы диска. Расстояние Ох02 —
эксцентриситет диска е, расстояние
00 j — смещение центра вала и.
Вектор-эксцентриситет е вращается со скоростью со, и при
соответствующем выборе начала отсчета времени можно считать, что угол
между положительным направлением оси х^ и вектором е равен со*.
Координаты центра сечения Ох в выбранной системе осей обозначим их
и и2, так что и = (Wj + и2)
Координаты центра массы м01 и щ2 связаны с координатами Wj и и2
следующими соотношениями (рис. 6.5):
Рис. 6.5. Диаграмма динамических
смещений центра диска
ио\ = wi + ecosoo/;
w02 = и2 + esmG}t-
сел)
Уравнения движения однодискового ротора. Отметим
разнообразные формы движения ротора. Кроме собственного вращения ротора с
угловой скоростью со, диск и ротор могут совершать прецессионное
движение. Прецессионным движением ротора называется движение
упругой линии вала, которое может быть независимым от собственного
вращения. На рис. 6.5 показано прецессионное движение — вращение
вектора и. Угловая скорость вектора и называется скоростью прецессии
и обозначается <р. Если вращение упругой линии (вектора и) по
направлению совпадает с вращением вала, то такое движение ротора называется
прямой прецессией; если направления вращений противоположны —
обратной прецессией.
Прямой синхронной прецессией называется такое движение, при
котором угловые скорости упругой линии (вектора и) и вала (вектора ё)
совпадают не только по направлению, но и по величине, т.е. при прямой
синхронной прецессии выполняется условие
Ф
со.
(6.2)
344
Возможна также обратная синхронная прецессия, при которой
плоскость упругой линии (вектор и) вращается в направлении,
противоположном вращению вала (вектора е), но с такой же угловой скоростью.
При обратной синхронной прецессии выполняется условие
<р = - со. (6.3)
Для вывода уравнений движения ротора воспользуемся принципом,
Даламбера: прогибы Mj и и2 определим как статические, но в число
действующих сил включим также силы инерции. В проекциях на оси х^ и х2
получим уравнения деформации
«1 = «„PV и2 = 822£Р2, (6.4)
где 8и — статическое смещение по оси хх от единичной силы,
приложенной в центре сечения (в точке 0{) в направлении оси хх (единичное
смещение по оси х{); 522 — то же для направления по оси х2> У\Р\ — сумма
всех сил, действующих на диск по направлению оси хх; V р2 — то же для
направления оси х2.
Рассмотрим силы, действующие на диск при колебаниях ротора.
1. Сила инерции /*'' приложена в центре масс. Ее проекции на оси
определяются соотношениями
р\° = -тй01; р£° = -тй02.
Заменив и01 и и02 из (6.1), получим
(6.5)
Р\ = -/wwj + mco ecoscot;
Р2 = -тй2 + тоь esinco/.
(г)
2. Примем, что составляющие силы внешнего сопротивления Р^ ,
(г)
Р2 пропорциональны скоростям их,и2 перемещения центра сечения и
направлены навстречу им. При таких предположениях проекции силы
сопротивления Р*г' на оси
PV = ~С\й\> Р2] = "С2*2> (6'6)
где СХ,С2 — коэффициенты пропорциональности, различные для
вертикального и горизонтального направлений; знак минус означает, что силы
внешнего сопротивления направлены навстречу скоростям Mj, й2.
345
3. При колебаниях ротора проявляются также неупругие силы,
обусловленные внутренним трением и микропластическими деформациями
материала вала (см. § 1.8). Действие этих сил при вращении вала
существенно отличается от их действия при колебаниях, например рабочих
лопаток. Силы внутреннего неупругого сопротивления возникают только
при условии, что скорость деформации волокон вала не равна нулю.
В линейном приближении силы внутреннего сопротивления
пропорциональны скорости деформирования вала.
При вращении вала скорость деформации волокон вала
пропорциональна относительной скорости v0 движения центра вала во
вращающейся системе осей £j, £2 (рис. 6.6). Принимая эти положения и
проектируя вектор силы внутреннего сопротивления F^' = C0u0 на оси хх, х2,
получаем соотношения
Э(Л
э(Л _
С0У01 = ~ Со(^1 + ЮМ2) = ~ Со"\ +F\>[
-C0*i2 + F2.
(6.7)
2 - -С0Ь02 = -C0(U2-(UUX)
При этом
Fx = - C0cow2; F2 = CqCOW!. (6.8)
Силы внутреннего сопротивления (6.7) состоят из двух
составляющих. Первые составляющие аналогичны силам внешнего
сопротивления (6.6) и всегда оказывают демпфирующее действие на ротор.
Составит
Рис. 6.6. Диаграмма скоростей центра диска
уп — вектор переносной скорости; v — вектор
полной скорости; и0 — вектор относительной
скорости
*2|
к
и^"*
\f '
7i\
>i
*.
О xx
Рис. 6.7. Диаграмма
неконсервативных сил внутреннего трения
346
ляющие Fj и F2 образуют позиционную неконсервативную силу
F = C0cow, пропорциональную смещению и и направленную
перпендикулярно ему (рис. 6.7). При прямой прецессии сила F является
дестабилизирующей.
4. Указанные выше неконсервативные силы, возникающие в
масляном слое подшипников, на венцах рабочих лопаток и в лабиринтных
уплотнениях хотя и имеют совершенно иную природу, чем силы
внутреннего трения, однако внешне описываются (в линейном приближении) той
же зависимостью, что и сила F, поэтому к числу действующих на ротор
сил отнесем названные неконсервативные силы. Сумму всех
неконсервативных позиционных сил представим в виде составляющих
р\е) = -Du2; Р{2е) = Dux (6.9)
и их равнодействующей
P{e) = Du, (6.10)
где D — суммарная жесткость всех неконсервативных позиционных сил,
приведенных к центру диска.
Подставим сумму всех рассмотренных сил [(6.5), (6.8) и (6.9)] в
уравнения (6.4). После преобразований получим уравнения движения одно-
массового ротора в следующем виде:
2 2
й1 + 2/^Wj h-/7jWj + аи2 = о) ecosoo/;
2 2
и2 + 2А2«2 + Р2и2 ~аи\ = ю esinw/;
(6.П)
р\ = (тЬпТХ; (6.12)
2 -1
р2 = {тЪ22) ; (6.13)
2Aj = (С0 + Cj)/w; 2А2 = (С0 + С2)/ю; (6.14)
a = D/m, (6.15)
где/?!, jp2 — частоты собственных колебаний ротора в горизонтальном и
вертикальном направлениях; h^h2 — коэффициенты демпфирования для
горизонтального и вертикального направлений; а — коэффициент
возбуждения, определяемый суммарной жесткостью неконсервативных
позиционных сил.
347
6.3. ФОРМЫ ДВИЖЕНИЯ ОДНОМАССОВОГО РОТОРА
1. Простейший случай движения соответствует идеально
уравновешенному ротору при отсутствии неконсервативных сил е = 2hx = 2h2 = а = 0.
Уравнения движения (6.11) приобретают вид
2 2
их+Р\и\ = о; u2+Piu2 = о*
Решая эти уравнения, получаем
их = y4ldcos (pt/ + 8j); а2 = ^2ccos0?2/ + 82)» (6.16)
где А1с, А2с — амплитуды колебаний; е^ е2 — начальные фазы колебаний.
Центр диска совершает гармонические колебания в двух взаимно
перпендикулярных направлениях. Частоты колебания равны
собственным частотам ротора для двух направлений. Колебания совершаются
с разными амплитудами и начальными фазами. Постоянные АХс, е1?
А2с, е2 могут быть найдены, если задать начальные условия: значения
перемещений Mj(0), и2(0) и скоростей Wj(0), w2(0) в начальный момент
времени (рис. 6.8). В общем случае центр диска описывает траекторию
сложного вида (фигуру Лиссажу).
2. При неуравновешенном диске (е * 0) без неконсервативных сил
уравнения движения содержат правые части. Решая уравнения движения с
правыми частями, но без учета неконсервативных сил (т.е. при hx = h2 = а = 0),
получаем
*2 k
f i
( °
^
"2(0) '
u2(0) ^
i
[7
V
| ' 'Ж
«1(0)
Уиг(0) хг
348
Рис. 6.8. Начальные условия и траектория движения центра диска
и{ = Alccos(pxt + гх) + -
ею
и2 = ^2cCOS0!72^ + гт) +
2 2
2
2 2
р2-со
cos со/;
sin CD/.
(6.17)
Вторые члены правых частей равенств (6.17) описывают
вынужденные колебания, вызванные неуравновешенностью:
2 2 2
w1b = е(0 cos(»//(/?j-ш ) = Axcos(ot;
2 2 2
W2b = е0) sin(D//(p2-G> ) в ^2S*nC0'>
(6.18)
где ^41? у42 — амплитуды вынужденных колебаний по горизонтальному и
вертикальному направлениям.
При этом
2 2 2
Ах = ею /(рх - со );
2 2 2
А2 = есь /(р2- <° ).
(6.19)
Для получения траектории при вынужденных колебаниях следует
2
исключить время из уравнений движения (6.18). Учитывая, что cos Ш +
2
sin cot - 1, из (6.18) находим траекторию в виде
(и1в/Л,)2 + («2в/Л2)2=1> (6-2°)
т.е. траектория центра диска при вынужденных колебаниях есть эллипс
с полуосями A i и А2, направленными по осям хх и х2,
В случае изотропных onoppj = р2 =/>, Ах =*А2 =А9 и траектория
движения есть окружность
2 л. 2 Л1
w1b + w2b = А
ИЛИ
ип =
ею
2 2
р - (D
(6.21)
На рис. 6.9 показана амплитудно-частотная диаграмма в виде
зависимости смещения \иъ\ от угловой скорости.
349
. . I При со = р амплитуда вынужденных
в I колебаний неуравновешенного ротора
I \ становится неограниченно большой,
I \ откуда следует, что критическая угловая
i V скорость ротора равна частоте собствен-
/ ^. ных его колебаний
ег~п
L^ I ^ со* = р или п* =/
О Р ш
Рис. 6.9. Амплитудно-частотная где/-частота колебаний ротора, Гц.
зависимость для одномассового С возрастанием угловой скорости
ротора на изотропных опорах (при со > р) прогиб мв уменьшается, стре-
мясь к предельному значению ив -> - е.
Угловую скорость прецессии найдем из соотношения (см. рис. 6.5)
tg ф = w2b/w1b-
Заменив в нем и1в и и2в по (6.18), получим
tg<p = (A2/Ax)tgat. (6.22)
При изотропных опорах Ах = А2, и, следовательно,
tg ф = tg со/,
откуда
ф = со/ + 2кк; ф = со,
где к — любое целое число.
Таким образом, при вынужденных колебаниях ротора на изотропных
опорах диск совершает прямую синхронную прецессию при круговой
траектории его центра: вектор и (см. рис. 6.7), постоянный по величине
(6.21), вращается с угловой скоростью прецессии ф, равной угловой
скорости ротора со.
Рассмотрим вынужденные колебания ротора на анизотропных
опорах. Амплитуды колебаний по осям хх и х2 представлены формулами
(6.19) и изображены на рис. 6.10 в зависимости от угловой скорости со
в виде амплитудно-частотной диаграммы. Диаграмма имеет два пика
при двух значениях угловой скорости, равных значениям собственных
частот ротора для горизонтального и вертикального направлений.
Следовательно, ротор на анизотропных опорах имеет две критические
угловые скорости
СО*j — р\\ G>*2 ~Р2
350
I A! I
\A2\
i
I-Alll
l< I >
\>
pi
i
L л--.
iu2i
\p2
CO
ш
Рис. 6.10. Амплитудно-частотная зависимость для одномассового ротора на
анизотропных опорах
/, III — прямые прецессии; II — обратная прецессия
ИЛИ
"*1 =f\\ n*2=f2-
Траектория движения центра диска представляет собой эллипс
(6.20). Для определения направления движения по траектории найдем
угловую скорость прецессии. Дифференцируя (6.22), получаем
Ф = (A2/A^)(cos(p/cosco/) со.
(6.23)
Из (6.23) видно, что направление прецессионного движения (знак ф )
зависит от знака отношения
2 2 2 2
Л2/Ах = (р] -СО )/(р2-а> ).
(6.24)
Из (6.23) следует, что прямая прецессия (ср > 0) наблюдается в
диапазоне угловых скоростей 0 < со < рх и при со > р2; обратная прецессия
(ф < 0) — в интервале между двумя критическими скоростями рх < со <р2
2 2 1 2 2
при со = ооа = ~ Cpj +Р2) наблюдается обратная синхронная
круговая прецессия, при которой А2 = - Av В закритической зоне, т.е. при
(£>>р2 с ростом со прогиб ив начинает убывать, стремясь к предельному
значению ив=- е. Это явление называется самоцентрированием
вращающегося ротора.
351
3. Рассмотрим движение неуравновешенного ротора с учетом
влияния демпфирующих сил, но без учета возбуждающих сил (а = 0). При
этом, как и ранее, система (6.15) распадается на два независимых
уравнения
2 2
t/j + 2/jjWj +PiU} = со ecosco/;
„, . 2 2 .
(6.25)
Они по структуре совпадают с уравнением (5.95). Смещения t/j и w2
представляют собой сумму смещений при свободных и вынужденных
колебаниях
м1 = и\с + и\в* w2 ^ w2c + w2b- (6-26)
При этом
wlc = ^lce cosO^Z + Ej);
-Л2/ -
w2c = ^2с* cos(/?2/ + e2);J
(6.27)
со
w1b = е^\~ cosfcoZ-Yj);
/>1
со
2в " ^2~sin(Cu/-Y2)'
^2
(6.28)
где Pi> р2 — частоты собственных колебаний ротора в горизонтальном
и вертикальном направлениях с учетом демпфирования; A,j, Х2 —
динамические коэффициенты для двух направлений; Yi> Уг — начальные фазы
для двух направлений [(5.98), (5.99)]. Ввиду аналогии уравнений (6.25)
и (5.95) величины А,1? Х2 и Yi» Y2 определяются по формулам (5.98), (5.99)
в зависимости от соответствующих значений: cxj = co//?j; pj = 2h\lpx\
§2 = 2h2lp2.
Свободное движение диска (6.27) представляет собой совокупность
двух затухающих колебаний. По истечении некоторого времени
свободные колебания исчезают, и движение диска будет определяться только
вынужденными колебаниями (6.28).
352
Траектория вынужденного движения центра диска представляют
собой эллипс, оси которого не совпадают с направлениями х^ и дг2. Она
может быть получена из уравнений (6.28) путем исключения времени.
Рассмотрим частный случай ротора на изотропных опорах. Полагая
^1 ~ ^2 = ^' Р\ = Рг ~ Р> из (6-28) при Yj = у2 = у, X,j = Х2 = X получаем,
2^2 2.2 4
W1b + W2b = е Х а •
(6.29)
причем из (5.98), (5.99)
X = [(1 - а2)2 + а2р2Г1/2; tgy = ар /(1 - а2);
а = со//?; р = 2А/р.
Из (6.29) видно, что траектория вынужденного движения является
окружностью радиуса
мв = аа2 = еа2[(1 - а2)2 + а2р2]"1/2. (6.30)
Угол наклона вектора мв к оси хх найдем из условия
tg ф = и2в/ии = tg (со/ - у), (6.31)
откуда получим ф = со/ - у.
Следовательно, радиус-вектор иъ вращается с угловой скоростью со
в ту же сторону, что и диск, и отстает от вектора-эксцентриситета е
на постоянный (во времени) угол, равный у (рис. 6.11). Очевидно,
вынужденное движение ротора есть прямая синхронная круговая прецессия.
Изменение прогиба в зависимости от угловой скорости ротора
изображено на рис. 6.12. Резонансное (критическое) состояние наступает
при а = 1.
Критическая угловая скорость, при которой прогиб достигает
максимального значения, приближенно равна частоте собственных колебаний
ротора: со* « р.
Рис. 6.11. Диаграмма динамических смещений центра диска при вынужденных
колебаниях
353
Угол у между wB и е меняется в зависимости от угловой скорости, как
показано на рис. 5.29. Взаимное расположение векторов при различных
угловых скоростях показано на рис. 6.13. При со «р угол у (5.99) мал
(близок к нулю), и оба вектора вытянуты по одной прямой (рис. 6.13, а). При
резонансе, когда <» = со* -р9 угол у = п /2 (см. рис. 5.29), вектор е, опережает
вектор мв на угол у = тс/2 (рис. 6.13, б). Прогиб при этом максимален:
"втах^/р^тсе/т!, (6.32)
где т] — логарифмический декремент колебаний ротора без учета
внутреннего трения в материале.
О 1 2 а = со/р
Рис. 6.12. Амплитудно-частотная зависимость для одномассового ротора на
изотропных опорах с учетом демпфирования
О xi 0 х2 О х1
а б в
Рис. 6.13. Векторная диаграмма смещений центра диска при различных угловых
скоростях
354
С возрастанием со » р прогиб ив уменьшаясь, стремится к
предельному значению | мв| = е, а угол у — к я (рис. 6.13, в).
4. Рассмотрим вращение ротора с учетом влияния неконсервативных
позиционных сил, действие которых зависит от параметра а - Dim
в уравнениях движения (6.11).
Главное влияние неконсервативные позиционные силы оказывают на
динамическую устойчивость.
Динамически неустойчивый ротор при любых случайных сколь
угодно малых возмущениях переходит в режим автоколебаний, который
обычно характеризуется значительными амплитудами.
Расчет амплитуд при установившихся автоколебаниях может быть
выполнен только при учете нелинейных характеристик демпфирования
и позиционного возбуждения. В рамках линейной модели, описываемой
уравнениями (6.11), можно определить только область устойчивости
ротора, для чего следует рассмотреть однородную систему (6.11) в виде
(6.33)
2
#! + 2AjWj +/?iMj + аи2 = 0;
2
и2 + 2A2w2 + р2и2 - flWj = 0.
Частное решение системы (6.3) ищем в виде
их=>Ахъ ; и2 = А2е . (6.34)
Подставляя в уравнения движения (6.33) и сокращая все члены на
общий множитель е \ получаем систему двух линейных алгебраических
однородных уравнений относительно неизвестных постоянных А^ и А2
(6.35)
(X2 + 2hl\+p2l)Al +аА2 = 0;
-аАх + (X2 + 2h2X + р22)А2 = 0.
В нетривиальном случае определитель этой системы должен
равняться нулю, т.е.
(X2 + 2hlX+p2l)(X2 + 2h2X+p22) + a2 = 0. (6.36)
Решение этого характеристического уравнения четвертой степени
относительно X доставит четыре, вообще говоря, комплексных значения
X. Для каждого значения X из уравнений (6.35) определяется
соотношение между постоянными амплитудами Ах и А2. В результате будет
получено по четыре частных решения для их и и2 и, следовательно, легко
может быть построено и общее решение.
355
Комплексный корень X запишем в виде
X = |! + IV,
где ц и v — действительные числа; / = */-1 — мнимая единица.
Частные решения (6.34) можно представить в виде:
Wj = A^^cos vt + i sin v/);
u2 = i42e*A/(cos v/ + / sin v/).
Из написанных выражений видно, что изменение амплитуд колебаний
ротора зависит от знака \х — действительной части корня
характеристического уравнения. Если для всех четырех корней ц < 0, то движение
ротора представляет затухающие колебания, если хотя бы одно (из
четырех) значение \х > О, то амплитуда колебаний во времени неограниченно
растет. В последнем случае ротор является динамически неустойчивой
системой, так как достаточно малейшего побуждения, чтобы в системе
возникли колебания с неограниченно нарастающей амплитудой.
Для определения знака \х нет необходимости решать уравнение
(6.36), достаточно воспользоваться теоремой Гурвица, которая
позволяет судить об устойчивости системы, не прибегая к решению
характеристического уравнения.
Теорема Гурвица формулируется следующим образом.
Все корни уравнения
а0Х" + ахХп~Х + а2Хп~2 + ... + ап = 0 (6.37)
при а0 > 0 имеют отрицательные действительные части, если все
определители Гурвица
Ai*5*,; А9 =
и так далее до Ап больше нуля.
Если хотя бы один из определителей меньше нуля, то, по крайней
мере, один корень имеет положительную действительную часть, что
означает неограниченное увеличение амплитуды колебаний во времени.
356
о, а3
а0 а2
; А3 =
а, а? ас
а0 а2 а4
0 ах аъ
; А4 =
а, а3 а5 а7
а0 а2 а4 аб\
0 ах аъ а5\
0 а0 а2 а4
Применим критерий устойчивости Гурвица к уравнению (6.36),
развертывая левую часть которого, получаем соответствия коэффициентов
уравнений (6.36) и (6.37):
2 2
а0=1; ax=2(hx + h2); а2 = рх + р2 + 4hxh2;
аъ = 2(hlp2 + h2pl); а4 = рхр2 + а ; а5 = я6...=0.
Составим определители Гурвица и проверим их знаки, предположив
hx > О, h2 > 0:
Ах = aj = 2(/*! + А2) > 0;
А2 =
2(А1 + А2) 2(A^ + V?)
2 2
1 рх + р2 + 4hxh2
= 2(Aj + A2)(pJ +/72 + 4Л1Л2) - 2(AlP2 + h2p\)
= 8(At + h2)hxh2 + 2(А^ + A2p2) > 0,
т.е. первые два определителя всегда положительны;
Аз -
а\ аЪ а5
а0 а2 а4
0 ах «з
ах аъ
а0 а2
аг-
ах 0
а0 а4
а\ =
= A22(hxp2 + h2px)-axa4.
После подстановки величин А2, ах, а4 и преобразований получим
ч2
А3 = 4(hx + А2)
'4hxh2 2 2
7—7-(hxp2 + h2Px) +
*1+/*2 (*j+*2)
*1*2 , 2 22 2
jOl ~P2) ~a
Третий определитель может быть как положительным, так и
отрицательным. Для устойчивости требуется, чтобы было А3 > 0, или, вводя
обозначение
В = т
4*1*2
*1*2
j-~r{hxp2 + h2p]) + {р] -р\)
1/2
(6.38)
357
условие А3 > 0, записываем в виде
2?>|JD|. (6.39)
Полученное соотношение есть условие динамической устойчивости
ротора, В — параметр стабилизации; \D\ — абсолютное значение
суммарной жесткости неконсервативных позиционных сил (6.10).
6.4. ИНЕРЦИЯ ПОВОРОТА И ГИРОСКОПИЧЕСКОЕ
ДЕЙСТВИЕ ДИСКОВ
При деформации вала происходит не только смещение центра дисков,
но также и поворот дисков относительно диаметра — угловое
перемещение дисков. На рис. 6.14 показаны как линейные их, и2, так и угловые ctj,
а2 смещения диска. Угол otj — поворот диска вокруг оси хх, ос2 — вокруг
оси х2. Положительными принимаются повороты против часовой
стрелки, если смотреть с конца соответствующей оси. На рис. 6.14 угол
otj — отрицательный, угол <х2 — положительный.
В общем случае движения со стороны диска на вал действуют
моменты сил инерции. В проекциях на оси х^ и х2 моменты представ-
Рис. 6.14. Кинематические параметры одномассового ротора
Рис. 6.15. Диаграмма силовых факторов, действующих на прецессирующий ротор
ляются в виде сумм проекции инерционного и гироскопического
моментов:
м2 = ii4°+ii4g\
где
-@псоа2; = @пооа. .
(6.40)
(6.41)
(6.42)
Здесь 0П — полярный (относительно оси вращения) момент инерции
диска; 0Э — экваториальный (относительно диаметра) момент инерции
диска; ctj, а2 — угловые скорости поворота диска вокруг диаметра;
al' a2 — соответствующие угловые ускорения; щ , м^ —
составляющие инерционного момента; Aff , mf — составляющие
гироскопического момента.
Влияние угловой инерционности диска на собственные частоты
колебаний невращающегося одномассового ротора. Колебания ротора
в двух главных плоскостях — независимы, поэтому можно рассмотреть
движение в одной из плоскостей (вертикальной или горизонтальной).
Уравнение движения по Даламберу для любой из двух плоскостей
запишем без учета неконсервативных сил (hx = h2 = а = 0) и при е = 0
в виде (рис. 6.15)
11 12 I (6.43)
a = 521Р + 822^, J
359
где и — смещение центра диска; а — угол поворота диска; Р = - тй —
сила инерции; М = -0эа — инерционный момент, 5,у — смещения
(линейные и угловые) в центре диска под действием единичной силы и
единичного момента, приложенных в той же точке: 8ц — линейное
смещение под действием единичной силы; 812 = 82j — линейное смещение
под действием единичного момента (равное угловому смещению под
действием единичной силы); 822 — угловое смещение под действием
единичного момента.
Конфигурация на рис. 6.15 относится к любой из главных
координатных плоскостей: zOxx или zOx2, индексы, определяющие направление
оси Xj и х2 — опущены.
При собственных свободных колебаниях ротора принимаем
и = w0cos/7/;
(6.44)
а = a0cospt, '
где w0, а0 — амплитудные значения и и а; р — частота собственных
свободных колебаний ротора.
Учитывая, что
2
Р = — ти = р muncospt;
: (6.45)
2
М = -0эа = р 03aQcos/?/,
и подставляя (6.44) и (6.45) в (6.43) после сокращения на общий
множитель cos pt, получаем систему линейных уравнений относительно
амплитуд и0 и <х0 в виде
-2
О -8nw)wo-8120Hao = 0;
2 (6.46)
52lmuQ-(p -822еэ)а0 = 0.
Ненулевое решение (6.46) возможно только при определителе
системы (6.46) равном нулю. Приравнивая определитель нулю, получаем
частотное уравнение
р~4 -(8пт + 8220э)^"2 + (81 ^-б^/яОз = 0. (6.47)
Решение уравнения (6.47) можно получить в форме:
р/р0 = ^[1+р±((1-р)2 + у)1/2]"1/2; (6.48)
р\ = ОибцГ1; р = 0э822/(т8п); у = 4®эЬ2п/(т82п),
360
а о
Рис. 6.16. Формы колебаний одномассового ротора с учетом угловых смещений диска
а — первая форма; б — вторая форма; 1 — диск; 2 — вал
где р0 — частота колебаний одномассового ротора без учета угловой
инерционности диска.
Отметим, что смещения 87у — различны для двух главных
плоскостей, если опоры — анизотропны.
В рассматриваемом случае ротор имеет две собственные частоты
колебаний в каждой из главных плоскостей и соответственно две
главные формы колебаний. Для получения главных форм следует из (6.46)
найти соотношения
_2
оо = р -8„1И = 821т (б49)
«о 812©э ;Г2-822©Э
для каждого из двух значений собственных частот по (6.48). Формы
колебаний ротора с учетом угловой инерционности диска представлены
на рис. 6.16.
Низшая собственная частотарх и первая форма колебаний
соответствуют синфазным линейным и угловым колебаниям диска, высшая
частота и вторая форма соответствуют противофазным линейным и
угловым колебаниям диска, когда сила инерции вызывает угловую
деформацию вала противоположного знака по отношению к угловой
деформации, вызываемой инерционным моментом.
В частном случае линейное и угловое движения являются
независимыми. Это наблюдается при симметричном опирании вала и при
расположении диска посредине пролета. В этом случае 812 = 821 = 0, и
собственная частота ротора определяется непосредственно из (6.46) по
зависимостям:
рх = (т8и)~ ; р2 = (€>э522)" .
Обычнор2 >Р\-
Критические скорости ротора с учетом гироскопического
действия дисков. Действие гироскопического момента на вращающийся
ротор рассмотрим для двух наиболее важных случаев — прямой и
361
обратной синхронной прецессии в предположении, что й| = h2- е- а
О, опоры
?° ?° т-г
изотропны, т.е. оп = о22. При прямой синхронной
прецессии упругая линия вала расположена в плоскости, которая вращается
в том же направлении что и диск и с той же самой угловой скоростью со.
Угол наклона оси диска к оси z в плоскости вала обозначим а.
Очевидно, что углы наклона а2 и ctj являются проекциями угла а на
координатные плоскости z0Xj и zOx2 соответственно, а так как плоскость
вала наклонена к плоскости координат под углами со/ и - - со/
соответственно, то мы имеем равенства
а2 - ос cos со/; ах = - a sin со/. (6.50)
По формулам (6.40)—(6.42) с учетом (6.50) получим суммарные
моменты сил инерции
М{ = (0п-0э)со asinco/;
2
М2 = -(0п-0э)со acosco/.
(6.51)
х2 А
Равнодействующий момент,
очевидно, равен
М = (М\ + М*2) = (0П - 0э)со2а
На рис. 6.17, а можно видеть, что
суммарный момент М
перпендикулярен плоскости вала и стремится
деформировать вал в его плоскости
таким образом, чтобы угол наклона
оси диска (угол а) уменьшился (если
0П > 0Э, а > 0). Учитывая различие
знаков а и Л/, при прямой
синхронной прецессии
М=-(0п-0э)сосх
(6.52)
Рис. 6.17. Диаграмма моментов при прямой
и обратной синхронной прецессии ротора
^. • а — прямая синхронная прецессия; б —
Х\ обратная синхронная прецессия
362
направлен в сторону уменьшения угла а, т.е. оказывает ужесточающее
действие на вал.
Аналогично рассмотрим действие моментов сил инерции на вал при
обратной синхронной прецессии, при которой плоскость упругой линии
вращается в направлении противоположном собственному вращению
диска, но с такой же угловой скоростью. Из этого следует, что момент
сил инерции можно получить из тех же зависимостей (6.40)—(6.42),
если в них заменить со на - со и учесть соотношения (6.50). В результате
мы получим составляющие момента инерционных сил в виде:
м\ = ~ (еп + ®3Wu sin со/; М2 = (0П + 0э)со2а cos со/. (6.53)
На рис. 6.17, б показаны моменты Mj и М2 и равнодействующий момент
М = (Л^ + Лф1/2 = (0п + 0э)со2а, (6.54)
который всегда действует в направлении увеличения абсолютной
величины а, т.е. способствует снижению низшей критической скорости
ротора.
Обобщим три рассмотренных частных случая влияния угловой
инерционности диска, представив инерционный момент в виде
М= 0со2а. (6.55)
При этом все различие определяется величиной 0, которая
принимает следующие значения:
для невращающегося ротора
0 = 0Э. (6.56)
Для прямой синхронной прецессии
® = -(0п-0э), (6.57)
для обратной синхронной прецессии
© = ©п + 0Э. (6.58)
При этих обозначениях из общей формулы (6.55) получаются все три
частные случаи. Так для первого случая из (6.45) следует, что
амплитудное значение инерционного момента при колебаниях
2
М= 0Э/? <х0
соответствуют (6.55) при со =/?, 0 = 0Э, а = а0, для прямой синхронной
прецессии при обозначении (6.57) имеем формулу (6.52), при обратной
синхронной прецессии при обозначении (6.58) имеем формулу (6.54).
Из этих соображений ясно, что действие моментов при прямой и
обратной прецессиях можно получать, не повторяя рассуждений,
проведенных при рассмотрении невращающегося ротора, а просто в уравне-
363
ниях главных форм (6.46) достаточно заменить величину 0Э на
соответствующие величины 0 = - (0П - 0Э) для прямой синхронной и на
0 = 0П + 0Э для обратной синхронной прецессий, а собственную
частоту колебаний р — на критическую скорость со*.
В результате для критических скоростей получим ту же формулу
(6.48), где слева имеем величину со*/;?0, а справа параметры р и у
должны быть вычислены с соответствующей заменой ©э на указанные
величины (6.57) или (6.58). Формы колебаний определяются по формуле
(6.49) с соответствующей заменой 0Э. Для дисков, как правило, 0П > ©э,
а для тонких дисков ©э « 0п/2, поэтому для прямой синхронной
прецессии 0 = 0Э - 0П = - 0Э, и, следовательно,
р = 0822/(m8n) = - 0э822/(т8п) < 0;
у = 408^/(т8^) = -©35j2/(w8n) <0.
Из (6.48) следует, что в этом случае реально существует только одна
критическая угловая скорость co*j, соответствующая знаку плюс в
(6.48), и она больше частоты колебаний pQ: co*j >/?0. Таким образом, для
прямой синхронной прецессии инерционный момент диска приводит
к увеличению критической угловой скорости.
Для обратной синхронной прецессии 0 « 30э > 0; следовательно
р >0, у > 0. В этом случае существуют две критические скорости со*!
и ю*2 и со* j < р0, т.е. инерционный момент при обратной синхронной
прецессии снижает первую критическую скорость. Вторая критическая
скорость обычно выше р0. Двум критическим угловым скоростям
соответствуют две главные формы колебаний ротора (см. рис. 6.16),
аналогичные случаю невращающегося ротора.
Необходимо отметить, что распространение выводов, полученных
для колебаний невращающегося ротора в главных плоскостях, на случай
движения при прямой и обратной синхронных прецессиях — относится
только к ротору на изотропных опорах. Для анизотропных опор
уравнения движения для двух плоскостей при наличии гироскопического
момента являются связанными и образуют систему четырех уравнений.
Критические скорости роторов на анизотропных опорах могут быть
определены путем применения общих методов теории колебаний,
рассмотренных в частности, в § 6.5 и гл. 7.
Качественные выводы о влиянии инерционного и
гироскопического моментов на критические скорости ротора на анизотропных
опорах совпадают с рассмотренными результатами для ротора на
изотропных опорах.
364
Влияние гироскопического момента на критические угловые
скорости наиболее заметно для роторов с консольно расположенным диском.
При расположении диска между опорами гироскопический момент мало
меняет низшую критическую скорость как при прямой, так и при
обратной синхронной прецессии. При расчете критических угловых
скоростей роторов мощных турбин гироскопический момент, как правило,
можно не принимать во внимание. В газотурбинных установках часто
применяются роторы с консольно расположенными дисками. В этих
случаях учет гироскопического момента является необходимым.
Пример 6.1. Определить частоты собственных колебаний и критические
скорости однодискового ротора на подшипниках качения, схема которого
изображена на рис. 6.18. Задано: длина консоли 1Х = 0,25 м, расстояние между
подшипниками /2 = 0,5 м, масса диска т = 200 кг, полярный момент диска @п = 5,886
2 2
кг • м , экваториальный момент диска 0Э = 2,943 кг • м , диаметр вала d = 80 мм;
модуль упругости материала вала Е = 1,962 • 10П Па. Опоры считать
шарнирными.
Решение.
1. По формулам изгиба балок находим единичные перемещения
ВЪ
1,2,
1
и " jWi + У = 5'0>25А'(°>25 + 0>50) = 0,015625 mj;
въп e \1\{}\ +1/2) = \ * °'25 ' (°>25 +\ • °>50) = 0,072917 м2;
ВЬ.
22
/. + 5'»
0,25 + ~ • 0,50
0,41667 м.
Ш
щ
ш
щ
Рис. 6.18. Схема одномассового ротора с консольно расположенным диском
365
Жесткость вала при изгибе
В = Е1 = Е?£= 1,962 • 10П *Щ& = 0,39448 • 106 Н-м2.
64 64
2. Определим частоту колебаний р0 для невращающегося ротора без учета
угловой инерционности диска
/ * х-1/2 1^ 0,015625 V1/2 ,„- ,
р0 = (|я5и) =200 ^ -1 = 355,3 рад/с.
V 0,39448 • 106У
3. Найдем частоты собственных колебаний невращающегося ротора с учетом
угловой инерционности диска. По формулам (6.48)
®А? 2 943*0 41667
Р тЬп 200-0,015625 '^ '
?2
v _ 40э512 ,4-2,943 _(0,(П29П\2 _
У""^2 200~" lo^5625J -^28185.
Ml
По формуле (6.48) рассчитаем обе собственные частоты колебаний
невращающегося ротора:
Pi,2 = /^л/2[1+0,39240±((1-0,39240)24^,28185)1/2]~ =
= р0Л/5[1,39240± 1,28492]"1/2;
рх = 0,8643/?0 = 307,1 рад/с;
р2 = 4,3137р0 = 1532,7 рад/с.
4. Рассчитаем критические скорости ротора при прямой синхронной
прецессии. По формулам (6.48) при замене 0Э на - (0П - 0Э) найдем:
(0-0э)822
р, = v п э/ 22 в _р = _0)39240;
тЬи
4(0-©э)822
Y = - п 2Э' 22 = -у = -1,28185 .
По формуле (6.48) при подстановке Р' и у' находим одну критическую
скорость о*! (вторая отсутствует, так как при знаке минус в (6.48) получается под
радикалом отрицательное число):
со*! =/?0лД[1-0,39240+ ((1+0,39240)2-l,28185)1/2f
= 1,1876/?0 = 421,9 рад/с.
366
5. Критические скорости ротора при обратной синхронной прецессии
определяем по значениям р" и у ":
р" = 3р= 1,17720;
у" =3у = 3,8486.
После подстановки в (6.48) р" и у" получаем критические скорости
со*1>2 =р072[1 + 1,1772 ± ((1-1,1772)2 + 3,8486)1/2]~ * =
= /70л/2[2,1772±1,9698]~1/2;
©♦J = 0,694р0 = 246,7 рад/с;
ю*2 = 3,1051/?0 = 1103,3 рад/с.
В данном случае моменты сил инерции диска существенно влияют на частоту
колебаний и критические скорости, так что пренебрегать этими факторами нельзя.
Особенно существенным является снижение критической скорости при
обратной синхронной прецессии. Рабочая частота ротора не должна находиться около
критических частот как прямой, так и обратной круговой прецессии.
6.5. КОЛЕБАНИЯ МНОГОМАССОВЫХ РОТОРНЫХ
СИСТЕМ
Вращающийся валопровод опирается через масляную пленку на
вкладыши, расположенные в корпусах (стульях) подшипников.
Масляный слой, вкладыши и корпуса подшипников, а также элементы, на
которых они установлены, не являются абсолютно жесткими. Поэтому
валопровод имеет податливые опоры. Податливость опоры
определяется суммарной деформируемостью масляной пленки, вкладыша,
корпуса подшипников и элементов, на которых они установлены, а также
корпуса турбины и ригелей фундамента. В общем случае при наличии
возбуждения происходят колебания всей системы турбоагрегат —
фундамент (системы ТФ).
Когда жесткость элементов статора существенно выше жесткости
масляной пленки, можно упростить модель системы ТФ. На рис. 6.19
показана модель системы ТФ в предположении недеформируемого фун-
Рис. 6.19. Расчетная модель валопровода
367
дамента. Валопровод опирается на масляную пленку, динамические
свойства которой в общем случае определяются жесткостью и
демпфированием (см. § 4.6).
Кроме опирания на масляную пленку валопровод взаимодействует
со статором через паровую или газовую среду. В рассматриваемой
модели принимаем, что это взаимодействие определяется
квазиупругими и квазивязкими силами
~й1 = с\\и\+ с\2и2 + Ь\\й\+ Ь\2й2'>
-R2 = с2Хих +с22и2 + Ъ1Хйх +Ь22й2,
где их, и2 — смещения оси валопровода в горизонтальном и
вертикальном направлениях в рассматриваемом месте; Rx, R2 — горизонтальная
и вертикальная составляющие силы, действующей на валопровод со
стороны паровой и газовой среды.
Силы (6.59) по структуре совпадают с силами реакции масляного
слоя (4.38), но имеют иные значения коэффициентов жесткости и
демпфирования.
Валопровод может быть представлен в виде стержня переменного
сечения с распределенной массой v и жесткостью В или системой
сосредоточенных масс т, связанных безынерционными упругими стержнями.
Первая из названных схематизации применяется, в частности,
в приложении МКЭ к задачам динамики валопровода (см. гл. 7). При
второй схематизации применима теория колебаний систем с
несколькими степенями свободы.
Таким образом, модель системы ТФ принимают в виде упругого
валопровода (с непрерывным или дискретным распределением массы),
связанного с недеформируемым основанием через элементы, имеющие
упруговязкие характеристики вида (6.59). На валопровод действуют
внешние возбуждающие силы /. , например силы
неуравновешенности. Отметим, что неконсервативные силы в (6.59) — это силы вязкости,
а также неконсервативные составляющие позиционных (квазиупругих)
сил. Последние имеют вид
RXh = -Du2; R2u = Dux; (6.60)
Z) = 0,5(c12-c21). (6.61)
Консервативные квазиупругие составляющие (см. § 6.6)
~ Лк = с\\и\ + °>5(с12 + c2l)w2» ~ Р2к = °>5(с12 + с2\)и\ + C22U2.(6.62)
По аналогии с одномассовой системой в данном случае можно
получить выражение для силы, действующей на массу т, в виде
/iB) = w2me., (6.63)
(6.59)
368
$2
Л2)
Рис. 6.20. Проекции вектора-эксцентриситета на оси вращающейся системы координат
(0)
где ei — проекция вектора-эксцентриситета ei на направление
смещения ut.
Для горизонтального направления из рис. 6.20 имеем
ei = ei cos со/
для вертикального
ei
sin со/,
(2)
sin со/ + е) cos со/,
(6.64)
(6.65)
-О) „ J2)
Л°)
где е^. ' и е: ' — проекции вектора-эксцентриситета е: ' массы ю на оси
вращающейся системы ^, %2-
Уравнения движения системы ТФ. Принятая схематизация
системы приводит к уравнениям движения, аналогичным по форме
рассматриваемым в гл. 7 применительно к использованию МКЭ, т.е.
уравнения движения можно записать в форме (суммирование по
повторяющимся индексам от у' = 1 до у = N, где N— число степеней
свободы системы)
Мий. + B^j + (С.. + />„)«, = /<в), (6.66)
где при данной схематизации и.- — смещения (линейные и угловые)
центра масс; i,j — номер степени свободы; My — сосредоточенные массы
или моменты инерции системы; By — параметры демпфирования
системы и множители в выражениях для гироскопических моментов
элементов ротора (6.42); Су — консервативные параметры жесткости системы,
369
такие что Су = C-f, Dy = - D7 — неконсервативные параметры жесткости
системы; f* — внешние силы, относящиеся к степени свободы i (6.63).
Из общего уравнения (6.66) получают частные случаи: уравнения
движения при свободных незатухающих колебаниях консервативной
(в)
системы соответствуют нулевым значениям By, Dy и f. ; при
свободных колебаниях неконсервативной системы f. = 0. При переходных
и вынужденных колебаниях должны быть заданы внешние силы /\ и
начальные условия, т.е. значения и(0) и и(0). Когда интересуют только
вынужденные стационарные колебания, начальные условия задавать нет
необходимости.1
Свободные колебания консервативной системы ТФ.
Консервативная система ТФ получается из реальной модели ТФ при условиях
исключения неконсервативных членов в уравнении (6.66). При
свободных колебаниях полагаем правые части равными нулю, в результате
получаем уравнение колебаний соответствующей консервативной
системы ТФ (СК-системы) в виде
М^+С^ = 0. (6.67)
Решение уравнения (6.67) ищем в виде
U: = ф,- cos pt. - (6.68)
Здесь ф. — амплитуда колебаний; р — частота колебаний. Подставляя в
(6.67) и сокращая множитель cos pt, получаем уравнения амплитуд
(Су-р2М^ = 0, (6.69)
или в развернутом виде (учитывая, что My = 0, если / *j)
2
(Сп -р Д/11)ф1 + С12ф2 + ... + CHN)q>(N) = 0;
2
С21ф1 + (С22 -р М22)ф2 + ... + С2(А0ф(Л0 = 0;
(6.70)
СЛПФ1 + CN2<f>2 + - + (C(NN) -Р M(NN))4>W = °'
здесь суммирование по повторяющимся индексам N не производится.
Полученная однородная система линейных уравнений относительно
неизвестных ф,- имеет ненулевое решение только при нулевом определи-
370
теле. Приравнивая нулю определитель системы (6.69), получаем
уравнение частот
1^.-/^.1=0,
или в развернутом виде
(6.71)
'11
-р ми
'21
'N\
'22
'12
рМ,
22
'IN
'2N
'N2
yNN'
-р2мш
0.
(6.72)
Решая уравнение (6.71), находим собственные частоты колебаний
СК-системы ТФ. Как известно для консервативной системы все корни
уравнения частот — действительные и положительные числа.
Располагая их в порядке возрастания, получаем спектр частот СК-системы
Р\ <Р2<Ръ< — <Pn- (6-73)
Среди корней могут быть кратные (повторяющиеся по значению).
Для каждого значения частоты рк из уравнения амплитуд (6.69)
может быть найдена соответствующая совокупность амплитуд ф^,
которая образует к-ю главную форму колебаний СК-системы ТФ:
<Pi*> Ф2*> Фз*> •••>Фм-
Как известно из теории колебаний систем со многими степенями
свободы, значения амплитуд при решении системы (6.69) могут быть
найдены с точностью до постоянного произвольного множителя. Это
связано с тем, что при подстановке любого значения частоты р = рк
в коэффициенты системы (6.69), по крайней мере, одно из уравнений
становится лишним, так как определитель системы равен нулю.
Поэтому отбрасывая лишнее уравнение и решая систему, мы принимаем
одно из значений амплитуд произвольным и все остальные амплитуды
будут содержать эту амплитуду в качестве произвольного множителя.
Иными словами решение уравнения амплитуд при любом р = рк будет
иметь структуру
Ф/* = "(*)Ф/(*)>
(6.74)
где ак — произвольный (неопределенный) множитель; ф/л — вполне
определенные числа, полученные путем решения системы (6.69) после
371
отбрасывания «лишнего» уравнения. Для удобства расчетов и анализа
множитель ак выбирают из условия нормирования
(по индексам в скобках суммирование не производится). Подставляя
(6.74) в (6.75), получаем
ак = (^уФ/(*)Фл*)>~ ' (6'76)
Главные формы колебаний (6.74), у которых множитель ак выбран
из условия нормирования и определен по (6.76), называются
нормированными главными формами колебаний. В дальнейшем будем считать
главные формы нормированными и применять прежнее обозначение.
Итак, нормированные главные формы определяются по формуле
Ф/* = *(*)Ф* = Г-^ Г75' (6/77)
(М//Ф/(*)ФЛ*))
где ф7£ — ненормированные главные формы колебаний.
После определения частоту и главных форм <pik задача о свободных
колебаниях СК-системы ТФ решена.
Главные формы колебаний <pik обладают свойством ортогональности
I 1, если к = s.
Здесь 8ks — тензор Кронекера.
Для доказательства условия (6.78) рассмотрим уравнения амплитуд
для двух главных форм колебаний: формы <pik и формы ф/г В
соответствии с (6.69) для этих двух форм имеем:
(Cij-p2(k)Mi№jW = °'
(с(/-^(/)фу« = °'
(6.79)
Здесь по индексам в скобках суммирование не производится; pknps —
соответствующие собственные частоты двух форм к и s: <Pjrky ф,(л —
нормированные амплитуды главных форм номера к и номера s.
372
Умножим почленно первое уравнение (6.79) на ф,^, а второе на ф^,
и просуммировав по /, получим
(6.80)
В правой части второго равенства обозначения индексов
суммирования изменено: г на j, и у — на /, отчего, естественно результат не
изменился. Поскольку Си - Cji по условию консервативности матрицы
жесткости Ctp то правые части обоих равенств (6.80) равны, следовательно,
равны и левые части. Приравнивая левые части (6.80) и учитывая, что
My = Mji (симметричная матрица), получаем
Вообще pk ф ps (если к Ф s, т.е. если формы к и s — разные), откуда
следует условие ортогональности (6.78), дополненное условием
нормирования (6.75).
Из (6.80) и (6.75) следует, что
Cij%k<Vis = ° ПРИ s ф к>
С//ФДФ* = Рк ПРИ * = *•
(6.81)
Второе из равенств (6.81) есть формула Рэйли для системы с
многими степенями свободы.
Оба написанных равенства можно объединить в одно, введя
величину Clks, обладающую свойствами
"*, = <
0, если s Ф к;
2 1
рк> если s = к.
(6.82)
При этом получим второе соотношение, которому должны
удовлетворять главные формы колебаний [первое — условие ортогональности
(6.78)],
CijWjs = Qks
0, если s Ф к;
2 г
р^9 если s = к.
(6.83)
373
Уравнения частот (6.72) и амплитуд (6.69) после их решения
доставят значения собственных частот и главных форм колебаний СК-сис-
темы ТФ на номинальной частоте вращения.
При расчете критических частот вращений валопровода
характеристики опор и другие характеристики, зависящие от частоты вращения
(например, гироскопические моменты дисков), должны быть приняты
при частотах вращения, равных соответствующим (искомым)
критическим частотам вращения.
Для системы типа рис. 6.19 число степеней свободы (если не
учитывать гироскопические моменты) равно 2я, число масс — и, число
критических частот вращения равно 2п. Критические частоты нумеруют в
порядке их возрастания
Для примера на рис. 6.21 представлено несколько главных форм
и приведены значения критических частот вращения многопролетного
РВД РСД РНД РГ
Рис. 6.21. Формы колебаний многоопорного валопровода
1—6 — формы колебаний
374
валопровода турбоагрегата (СК-системы ТФ). На каждой критической
частоте п*к динамическая линия прогиба (форма колебаний) отражает
преимущественное влияние обычно одного или двух роторов из всей
системы валопровода. Например, при и* = «*j колебания валопровода
в основном определяются ротором электрического генератора, на второй
критической частоте п*2 — колебаниями системы РВД—РСД, на третьей
критической частоте и*3 — колебаниями РНД и т.д. В диапазоне
изменения частоты вращения от нуля до п = 50—60 с~ обычно расположено
несколько (пять—семь и более) критических частот. При высших
формах колебаний отдельные роторы системы иногда имеют один или два
узла на длине пролета. Формы колебаний с двумя промежуточными
узлами наблюдаются у гибких роторов электрических генераторов.
Полученные путем расчета идеальные критические частоты обычно
мало отличаются от реальных. Последние могут быть определены при
рассмотрении вынужденных колебаний реальной системы ТФ с учетом
неконсервативных демпфирующих и квазиупругих сил.
Преобразование уравнений движения к главным координатам.
Смещение ui можно представить в виде суммы смещений, каждый из
членов которой пропорционален амплитуде главной формы
Щ = Фл?1 + Фй?2 + Фй?3 +'••• + Ф/(Л0?(Л0>
или в свернутом виде
Щ = Ф*А- (6.84)
Здесь qs(t) — неизвестные (искомые) функции времени; <pis — известные
(найденные в результате решения задачи о свободных колебаниях СК-
системы) нормированные амплитуды главных форм колебаний. Согласно
(6.84) колебание в любой точке ui представляется в виде суммы
колебаний, каждое из которых (ф^, Ф##2> •••> УцщЧ^щ) изображает колебание
типа главной формы. Например колебание ф^^изображает движение,
при котором все точки системы колеблются по первой главной форме фд
и т.д., поэтому соотношение (6.84) есть разложение смещения по
главным формам колебаний. Формально вместо неизвестных ui (числом N),
вводятся новые неизвестные qs (также числом N), которые называются
главными или нормальными координатами системы.
Подставляя правую часть (6.84) в уравнения движения (6.66),
заменяя индекс i на у, получаем
М№,9, + B,j<fJgqs + Cubsq, + D^q, = /<в)(0 . (6.85)
375
Здесь суммирование производится по двум индексам: по у и s.
Умножим все члены (6.85) на ф^ с последующим суммированием по
третьему индексу i
Mijbk<Pj'*s + BijWjs4s + CijWjS4s + Dij^ik%s(is"=J(ih)^ik'(6M)
Заменим величины, входящие в последнее равенство согласно (6.78)
и (6.83) и введем дополнительные обозначения
tffa = V«*V <6-87)
Eks-Dlj%k%s; (6.88)
¥* = А\к- <6-89)
Тогда система уравнений движения (6.86) приобретает вид
як + аЪч,+ Hksb + Eks% = v*C) • (6.90)
Величины Hks называются обобщенными параметрами
демпфирования системы ТФ; величины Е^ — обобщенными параметрами
возбуждения; \\гк — обобщенными внешними силами.
Для расчета названных величин, кроме главных форм <р/Л:,
принимаемых известными, необходимо знать коэффициенты By демпфирования
системы ТФ и коэффициенты Dy жесткости неконсервативных
квазиупругих (позиционных) сил, действующих на ротор. Величины By для
модели типа, показанной на рис. 6.19, представляют собой
пронумерованные в определенном порядке значения квазивязких коэффициентов
в формулах (6.59) для всех элементов системы ТФ. Индекс /(/) означает
порядковый номер степени свободы или номер смещения ui (и).
Например, Dy — жесткость неконсервативной квазиупругой силы в
направлении смещения uv вызываемой смещением и.-.
Обобщенные коэффициенты Н^ и Е^ имеют ясный энергетический
смысл: они являются мерой работы сил демпфирования и
возбуждающих сил, возникающих в системе при ее колебаниях по форме ф^,
на перемещениях, соответствующих колебаниям по форме ф/г Обоб-
щенная сила \\гк пропорциональна работе всех сил /: на
перемещениях, соответствующих форме <pifc.
Расчет вынужденных колебаний системы ТФ в
околорезонансных зонах. Преимущество использования системы уравнений движения
в нормальной форме (6.90) заключается в том, что в ряде случаев могут
быть получены приближенные простые решения. В частности, в около-
376
резонансной зоне (т.е. при значениях со, близких к значению некоторой
собственной частоты р£) можно считать, что значения нормальных
координат для всех прочих форм и частот будут существенно меньшими,
чем нормальная координата qk. Это дает основание в левой части (6.90)
оставить только один член, зависящий от координаты qk, отбросив всё
члены, содержащие координаты qs Ф qk. Тогда система (6.90)
распадается на систему независимых уравнений второго порядка, каждое из
которых может быть решено независимо от других:
^ + ^да + я(^да = V*(0. (6.91)
Предположим, что главная форма q>ik плоская, т.е. имеет
составляющие только в вертикальном направлении, но не имеет горизонтальных
составляющих. Допустим также, что векторы-эксцентриситеты
расположены в одной плоскости zO%2> так что е\ 0 • Тогда
(в) 2
У к = fi Vik ** ш **C°S<0/, (6.92)
где
(2) (2) (2) (2)
%k=mlel <Pu + ffl2e2 Ф2*+-+и,(И)в(|.)Ф(«)* = miei Ф/*(693)
Уравнение (6.91) при подстановке в правую часть (6.92) имеет
известное решение:
2
Р{к)
/ч 1 /О
* = [(!-<*?*)) + <*?*$*)] ;tgyw = awpw/(l-a^),(6.95)
где а(к) = со /р(к); рда = Н(кк) /р(ку
Амплитуды колебаний любой точки ТФ в околорезонансной зоне
определяются по формуле
AJ = %'(к)%(к)^2/Р2(к))\к)' (6-96>
Амплитуды колебаний при резонансе со = рк
Aj = ^Ккр(к)1Н(кк^%{ку
Если неуравновешенность имеется только в одной точке /, то
Aj = (р{к) /Я(Л))фу№)ф(№у|1 (0в(0. (6.97)
Последняя формула дает возможность рассчитать резонансные
амплитуды в любой точке системы ТФ, если определены, кроме частот
и форм колебаний, обобщенные главные коэффициенты демпфирования
% = V#W(*v (6-98)
377
Нетрудно видеть, что в предположении наличия колебаний в одной
плоскости, для некоторой резонирующей формы q>ik имеем
Нкк = ВП<Нк + В22<?1к + - +В(пп)<?1)к> (6-")
где Вц, В22, • ••» В(пп) — коэффициенты демпфирования подшипников от
первого до и-го для направления в этой плоскости; <р^, ср2£,..., Ф^—
значения амплитуд главной формы номера к на шейках подшипников.
Расчет резонансных амплитуд изложен в предположении, что
критические скорости со*£ равны соответствующим собственным частотам
рк колебаний ротора при номинальной частоте вращения: со*^ = рк. Это
соответствие выполняется строго только для ротора на, опорах,
у которых параметры жесткости и демпфирования не зависят от
частоты вращения. Для подшипников скольжения существует
зависимость жесткости и демпфирования масляной пленки от частоты
вращения, поэтому для роторов, опирающихся на подшипники
скольжения, критические скорости отличаются от собственных частот
колебаний при номинальной частоте вращения.
Зависимости для резонансных амплитуд (6.97) остаются
справедливыми, но в них надо заменить значения рк на значения со*^, т.е. для их
использования необходимо предварительно определить значения
критических скоростей а>*£ и главные формы колебаний ротора при
скоростях вращения равных соответствующим критическим скоростям.
Задачу следует решать итерациями: по значениям (й'*к = р'к,
найденным для номинадьной частоты вращения (первая
итерация), определить консервативные жесткости с'^ масляной пленки, по
ним решить задачу о свободных колебаниях ротора, т.е. найти
ю** = Р"к и Ф"нс (втоРая итерация) и так далее до получения
повторяемости значений рк при определенной точности расчета (скажем, 1 %).
Проведя несколько итераций, получим значения критических скоростей:
(й*к = ру и (pik , где s — номер итерации. Обычно для получения
указанной точности достаточно выполнить две-три итерации.
(s) (s)
По значениям pik и <$ik из (6.97) с предварительным расчетом Нкк по
(s)
(6.99) определяем резонансные амплитуды. При этом ф^ — главные
формы колебаний СК-системы при критических скоростях ротора
(валопровода).
378
Пример 6.2. Ротор (рис. 6.22) опирается на два одинаковых подшипника с
эллиптической расточкой вкладышей. Рассчитать амплитуды колебаний ротора
на низших критических частотах вращения, если неуравновешенность
сосредоточена в среднем сечении ротора и соответствует центробежной силе, равной 0,1
веса ротора Mg.
Заданы следующие параметры ротора: масса М = 9600 кг; длина / = 5,5 м;
8 2
жесткость сечения вала £7=5,15*10 Н • м ; коэффициенты жесткости и
демпфирования подшипников принять постоянными (независящими от частоты враще-
9 9 9
ния) и равными: Сц =0,11 • 10 Н/м;с22= 1,16 е 10 Н/м; c12 = -C2i =0,33 • 10 ^м>
Ьи = 0,45 • 106 кг • с"1; Ьп = Ъ1Х = 0,60 • 106 кг • с"1; Ь22 = 4,7 • 106 кг • с"1; рабочая
угловая скорость со = 314, 16 рад/с. Заданы также низшие нормированные формы
колебаний и соответствующие им собственные частоты СК-системы,
представленные в таблице.
Нумерация смещений по индексу i и главные формы <$ik показаны на
рис. 6.22.
Фхо,2
Рис. 6.22. Модель ротора высокого давления
379
Горизонтальная плоскость (к = 1)
р, = 110,84 рад/с , 1
л/Мф,,
0,5297
л/Мф21
0,8337
Л//бгф31
1,1423
Jm<p41
0,8337
л/Л?ф5,
0,5297
Вертикальная плоскость (к = 2)
р2= 151,25 рад/с
7л/ф62
0,09049
л/МР72
0,6620
7л/Ф82
1,2497
7Мф92
0,6620
7л?ф10>2
0,09049
Решение.
Главные коэффициенты демпфирования рассчитываем по (6.99), где следует
положить: для горизонтального направления (к = 1) В j j = 2?22 = ^i i >Для
вертикального направления (к - 2) Ви = 2?22 = ^22- Подставляя эти значения, получаем
Яп = 6пф^, + Ьиф5, = 2^пф1! - 2 • 0,45 • 106 • 0,52972/9600 = 26,305 с"1;
Н22 - Ь22<р262 + Ь22<р]02 = 2622Фб2 = 2 • 4,7 • 106 • 0,090492/9600 = 8,018 с"1;
Я12 = ^^ФцФбг^^Фб^юд = 2^12ФцФб2 =
= 2 • 0,6 • 106 • 0,5297 • 0,09049/9600 = 5,992 с"1.
Амплитуды колебаний найдем по (6.97), где
m{lf{l)= °»1Л^/б)2 = 0,1 • 9600 • 9,81 /(ЮОтс)2 = 0,09542 кг • м,
где g — ускорение силы тяжести; т^ = w3 — масса средней части ротора; et = е3 —
эксцентриситет этой массы.
По (6.97) в середине пролета
л < /г* \ 110,84 1,1423 ЛЛ0-,0 сс
^з в (Р1/^и)Фз1Фз1^зез = 26^05* ~9600~'0,09542й55 МКМ;
151 25 1 24972
^8 = (Р2/Я22)ф82Ф82тЗеЗ = УоиГ ' 9600 'в'09542*293 МКМ«
Рассчитав все прочие амплитуды по (6.97), сведем данные в таблицу.
Горизонтальная плоскость, п = /?*j, мкм
Л,
25,35
А2
39,89
^3
54,66
^4
39,89
А$
25,35
Вертикальная плоскость, п = /?*2, мкм
1 ^6
21,20
^7
155,1
^8
292,8
А9
155,1
А\0
21,25
6.6. САМОВОЗБУЖДАЮЩИЕСЯ КОЛЕБАНИЯ РОТОРА
Самовозбуждающиеся колебания ротора (валопровода) связаны
с действием неконсервативных позиционных сил различного
происхождения, появляющихся при линейном или угловом смещении оси ротора
по отношению к оси корпуса. Наиболее важное значение имеют
следующие неконсервативные силы.
380
1. Силы масляного слоя в опорных подшипниках скольжения — силы
масляного возбуждения.
2. Переменные по окружности усилия на рабочих лопатках,
вызываемые неравномерностью протечек пара по окружности в периферийных
и диафрагменных уплотнениях ступени, — венцовые силы.
3. Неравномерное распределение давлений по окружности бандажа
рабочих лопаток, вызываемое нарушением осесимметричного течения
пара (газа) через уплотнения ступени, — надбандажные силы.
4. Неравномерное распределение давления по окружности вала в
зонах средних, концевых и диафрагменных лабиринтных уплотнений,
вызываемое также нарушением осесимметричности течения пара (газа)
через уплотнения, —лабиринтные силы.
Рассмотрим происхождение и количественную оценку названных сил.
Силы масляного возбуждения. Происхождение масляного
возбуждения можно понять из рассмотрения схемы цилиндрического
подшипника (рис. 6.23). Шип радиуса г вращается с угловой скоростью со в
расточке вкладыша радиуса R. Зазор между шипом и вкладышем заполнен
маслом. Предположим, что скорость масла в зазоре меняется по
линейному закону. На рис. 6.23 показаны эпюры скорости масла в сечениях аа
и ЪЪ. При этом скорость масла на поверхности шипа вследствие
прилипания равна окружной скорости cor поверхности шипа.
Рассмотрим условие неразрывности течения масла в нижней
половине зазора между сечением аа9 куда масло втекает, и сечением ЬЬ —
Рис. 6.23. Прецессия шипа на масляном слое подшипника
381
откуда оно вытекает, при условии, когда центр шипа Ох сместился на
величину и по отношению к центру вкладыша О.
При треугольных эпюрах скорости очевидно, что количество
втекающего масла через зазор аа превышает количество вытекающего масла
через зазор ЪЪ на величину (на единицу длины подшипника)
Д£> = i(A + w)cor~~(A-w)cor, (6.100)
которая равна разности площадей эпюр скорости в сечениях аа и ЪЪ,
Здесь А = R - г — номинальный зазор в подшипнике.
Для выполнения условия неразрывности необходимо восходящее
движение шипа со скоростью v, при котором в единицу времени
увеличивается объем нижней половины зазора на величину
AQ{=2rv. (6.101)
По условию неразрывности
AQ = AQV (6.102)
Восходящее движение шипа есть круговое прецессионное его
движение по окружности радиуса и, т.е.
u = wQ, (6.103)
где Q — угловая скорость прецессии.
На рис. 6.23 траектория движения шипа показана штриховой линией.
Из условия (6.102) с учетом (6.100), (6.101) и (6.103) имеем
wcor = 2rv = 2ruQ.,
откуда получаем соотношение
П = (1/2)со. (6.104)
При смещении шипа из центрального положения условие
неразрывности слоя смазки обеспечивается только при возникновении
прецессионного движения шипа с угловой скоростью прецессии, равной
половине угловой скорости ротора. Причиной этого движения является
несколько большее давление масла на нижней половине окружности
шипа acb, чем на верхней половине bda. Это избыточное давление
масла и создает неконсервативную силу направленную под прямым
углом к смещению и и провоцирующую прямую прецессию ротора, т.е.
вызывающую прецессионное движение того же знака, что и угловая
скорость ротора. Количественно эти силы можно определить по
динамическим коэффициентам жесткости подшипников (см. § 4.6). Позици-
382
онные силы (т.е. составляющие, зависящие от положения, но не от
скорости)
Л-Лк + Лн; ^2 = ^2к + ^2н; (6.Ю5)
- Р1к = сПи\ + °>5(с12 + с2\)иЬ -Р2к = °ДС12 + с2\)и\ + с22и2'Л^Щ
~ р\п = °>5(с{2 ~ c2i)w2; - Р2ц = - 0,5(с12 - c21)f#!. (6.107)
Составляющие (6.106) являются консервативными силами, работа
которых на замкнутой траектории равна нулю. Это свойство является
следствием симметричности матрицы жесткости сил (6.106).
Составляющие (6.107) образуют неконсервативную позиционную силу
Л, = (P\u + plJn - 0,5(С,2-с21)и,
которая пропорциональна и и по направлению перпендикулярна вектору
смещения и. В этом смысле сила Рп формально аналогична силе F,
возникающей вследствие трения в материале вала (см. § 6.2, рис. 6.7), хотя
имеет иную природу.
Итак, позиционные неконсервативные силы в подшипниках
скольжения вызывают прямую прецессию ротора. Жесткость сил масляного
возбуждения рассчитывают по формуле
DM = PH/t/ = 0,5(c12-c21), (6.108)
где сп, с2\ — побочные жесткости, определяемые по таблицам или
графикам (см. § 4.6). Отметим, что параметр 2ЭМ зависит от конструкции,
геометрических параметров подшипников и частоты вращения шейки. Для
сегментных подшипников (§ 4.6) с12 = с21, и масляное возбуждение
отсутствует (DM = 0).
Венцовые силы. Природа венцовых сил может быть выяснена на
основе следующей модели течения в ступени. При смещении оси диска
из центрального положения на величину и (рис. 6.24) зазор по
окружности надбандажных и диафрагменных' уплотнений становится
неравномерным. На той полуокружности, где зазор уменьшается, приходящаяся
на единицу длины окружности утечка G''через надбандажные
уплотнения снижается, в результате чего расход пара через каналы рабочих
лопаток возрастает на некоторое значение AG'
На противоположной полуокружности, где зазор увеличивается,
соответственно возрастает утечка и снижается^ расход пара через каналы
рабочих лопаток. Вследствие этого аэродинамическое усилие,
действующее на лопатки, также становится неравномерным. В той части
383
окружности, где зазор уменьшается, усилия, действующие на лопатки,
возрастают, а в части окружности с увеличенными зазорами —
уменьшаются. Равнодействующая всех дополнительных усилий на лопатках
образует поперечную силу SBl, действующую на рабочее колесо.
К аналогичному эффекту ведет изменение зазоров в диафрагменных
уплотнениях. При уменьшении зазора в диафрагменных уплотнениях
местная утечка G" понижается на AG" в результате больший расход
пара наблюдается через сопла и каналы рабочих лопаток, что
увеличивает усилие, действующее на рабочие лопатки, расположенные по
полуокружности с уменьшенными зазорами. Для полуокружности с
увеличенными зазорами эффект будет противоположный, и усилия там
уменьшатся. Таким образом, влияние изменения зазора в диафрагмен-
ном и надбандажных уплотнениях аналогично, и неравномерность
утечки по окружности диафрагменных уплотнений приводит к
возникновению поперечной силы Sb2.
В результате равнодействующая всех дополнительных действующих
на рабочие лопатки усилий, вызванных изменением зазоров по
окружности, дает поперечное усилие SB (рис. 6.24), направленное
перпендикулярно смещению w. Это усилие способствует возникновению прямой
прецессии ротора. В линейном приближении
где Db1 и Db2 — жесткости венцовых сил из-за утечек соответственно
через бандажные и диафрагменные уплотнения; DB — суммарная
жесткость этих сил.
384
Рис. 6.24. Схема возникновения венцовых сил в ступени турбины
Для расчета этих жесткостей можно пользоваться следующими
зависимостями:
DbX = \^y^RTliPx/vx)X/\\-^2)/\cXu^c2u)zx/zY2^ (6.109)
Db2 = 0,5хСд0(с1и + с2„)/8д0, (6.110)
где цу1 — коэффициент расхода пара через щели для гребней группы 1;
Rn — периферийный радиус уплотнений (рис. 6.25); рх ир2 — давление
пара соответственно перед уплотнением и за ним; vx — удельный объем
пара перед уплотнением; 8 -р21рх; сХи и с2и — окружные составляющие
скорости пара соответственно на выходе из сопл и за ступенью; zx —
число гребней, образующих радиальные зазоры; Gfl0 — расход пара через
диафрагменное уплотнение; zi — число гребней в группе /; 8,- — зазор для
группы /; 8д0 — зазор в уплотнении диафрагмы; х < 1 — поправочный
коэффициент, учитывающий влияние растекания пара в окружном
направлении в камере между диском предыдущей ступени и диафрагмой
п 2
данной ступени; z* = ^Г zf[\i l8l/(k\i yfij)] >п — число групп.
/ = 1
Каждая из групп имеет постоянные для всех гребней данной группы
значения ц • и 8,-. Все радиальные гребни имеют одинаковые значения
цу1 и Sj. Группа может содержать любое число гребней.
Сведения о величине х в настоящее время недостаточные. Для
получения запаса надежности по устойчивости валопровода следует в
расчетах принимать х = 1.
Коэффициенты расхода \iyi зависят от конструкции и геометрических
параметров уплотнений.
Рис. 6.25. Надбандажные уплотнения паровых турбин высокого давления
385
На рис. 6.25, а, б показаны некоторые
типы надбандажных уплотнений,
применяемых в паровых турбинах высокого
давления. Уплотнения типа Б (рис. 6.25, б)
отличаются существенно меньшим
уровнем венцовых сил 5Bt по сравнению с
уплотнениями типа А (рис, 6.25, а).
Формально это следует из выражения
(6.109): при отсутствии радиальных
Рис. 6.26. Зависимость жесткости щелей Zj = 0 и жесткость Db1 = 0.
Dsl от отношения зазоров Поэтому венцовые силы в уплотнении Б
равны нулю, если радиальные зазоры
существенно больше осевых, т.е.. при условии 84 » 83 и 85 » 83.
Причина заключается в том, что при больших радиальных щелях местная
утечка через уплотнение не зависит от поперечного смещения колеса на
величину w, так как утечка определяется только осевыми уплотнениями,
зазоры в которых при радиальных смещениях не меняются.
Следовательно, для осевых уплотнений утечка по окружности бандажа остается
равномерной при радиальных смещениях колеса, и поперечная венцовая
сила не появляется. С этой точки зрения целесообразно было бы
применять чисто осевые уплотнения и в диафрагмах, однако конструктивно их
выполнить трудно. Из (6.109), (6.110) следует, что венцовые силы не
зависят (в первом линейном приближении) от зазоров, но зависят от их
отношения. На рис. 6.26 показана зависимость жесткости jD^i от
отношения 8j /82 радиального и осевого зазоров для уплотнения типа А (см.
рис. 6.25, а).
Другими величинами, существенно влияющими на венцовые силы,
являются давление пара рх и реактивность ступени. Венцовые силы
примерно пропорциональны давлению пара в ступени. Частично по
этой причине их влияние оказывается особенно существенным в
турбинах сверхкритического давления.
1/2
Вецовые силы примерно пропорциональны ©п , где ©п — степень
реактивности на периферии рабочего венца.
Для снижения уровня венцового возбуждения можно рекомендовать
следующее:
1) применять уплотнения преимущественно с осевыми зазорами;
2) уменьшать степень реактивности на периферии.
Надбандажные и лабиринтные силы. При смещении оси ротора из
центрального положения зазор по окружности между ротором и
статором перестает быть одинаковым, т.е. щель переменна по окружности.
^Bl
386
Кроме того при этом меняется также площадь сечения / кольцевого
канала между двумя смежными гребнями (рис. 6.27, а).
Вследствие этих двух причин: переменных по окружности зазоров
8(0) и площади поперечного сечения канала /(G) давление в канале
также переменное по окружности (рис. 6.27, б). Поэтому при смещении
ротора из центрального положения на него действует поперечная сила —
равнодействующая сил неравномерного давления — с составляющими
Se и 5ф.
На рис. 6.27, в равнодействующая сила представлена в проекциях на
направление смещения (составляющая Se) и на перпендикулярное
направление (составляющая 5ф).
Распределение давления в канале, вообще, несимметричное
относительно направления смещения и. Так, на рис. 6.27, б максимальное давле-
3
ние в канале находится в пределах ~ я < 6 < 2л;, а минимальное — в
пределах — к < б < к. Именно вследствие этого появляется поперечная
составляющая SL.
Рассмотрим движение ротора типа прямой круговой прецессии, при
котором в данном сечении вектор смещения и — постоянный по
величине — вращается с угловой скоростью Q, в сторону вращения ротора.
в
Рис. 6.27. Схема канала надбандажного уплотнения и происхождение надбандажных сил
387
Очевидно, что при указанных условиях силы Se и £ф будут
неизменны по значению и также будут вращаться с частотой прецессии Q.
В этом случае сила Se является консервативной, так как она не
совершает работы, поскольку скорость прецессионного движения ротора v =
= Q.u (равная скорости перемещения точки приложения силы Se)
перпендикулярна силе Se и работа этой силы равна нулю.
Сила £ф — неконсервативная, так как ее направление в любой
момент совпадает с направлением скорости v. За время одного оборота
т = 2тсЮ сила SL совершает работу А = S^vx = S^lnu Ф О, т.е.,
действительно, сила £ф — неконсервативная. Напомним, что по определению
консервативных и неконсервативных сил первые не совершают работы
за период колебаний, а вторые — совершают. В случае, показанном на
рис. 6.27, б, сила 5ф способствует возникновению колебаний типа
прямой прецессии, но вообще эта сила может быть как положительной, так
и отрицательной. При круговой прецессии ротора и малых смещениях и
силы Se и £ф оказываются зависящими от смещения линейно. В первом
приближении
Se = DKu; Sy = DHu, (6.111)
где DK, Z)H — жесткости соответственно консервативной и
неконсервативной надбандажных сил.
Для уплотнений, показанных на рис. 6.25, я,
DH =Pl(l - б)Лп(//81К(51 /6; Vfy с0/иб; aju6; Шо>), (6.112)
где / — ширина камеры; 8j — радиальный зазор; Ь — высота камеры;
82 — осевой зазор; с0 — окружная скорость потока при входе в
уплотнение; щ = <uRu — окружная скорость на периферии колеса; а* — расходная
скорость через уплотнение; £2 — угловая скорость прецессии ротора
(частота собственных колебаний при круговой прецессии); С, — безразмерная
жесткость надбандажной силы, являющаяся функцией указанных в
(6.112) параметров.
Надбандажные силы прямо пропорциональны давлению пара перед
уплотнением рх и степени реактивности 0П. Влияние радиального
и осевого зазоров отличается от их влияния в случае венцовых сил тем,
что при пропорциональном увеличении зазоров значение £>н интенсивно
падает. Характер зависимости жесткости надбандажных сил от
абсолютной величины зазоров и их отношения показан на рис. 6.28. Существенно
влияет на надбандажную силу и ее направление закрутка потока перед
388
А. *
, Si/52 — const
б2 я const
(Si/b)p
Si/Ь
Рис. 6.28. Зависимость жесткости надбандажной силы от величины и отношения зазоров
(8,/Ь)р — расчетное значение
Ян,МН/м
4
2
-3 -2 -1 О
2 с0/м8
-2
-4
Рис. 6.29. Зависимость надбандажной силы от начальной закрутки
уплотнением, характеризуемая параметром с0/и6 (рис. 6.29).
Надбандажная сила оказывается равной нулю при с0 = с* (где с* — характерная
скорость, обычно с* « 0,5мб).
При с0 > с* жесткость DH — величина положительная, и
надбандажная сила способствует возникновению прямой прецессии ротора.
В области с0 < с*, надбандажная сила отрицательна, при этом она может
компенсировать действие других положительных неконсервативных сил
таких, как венцовые силы и силы масляного возбуждения.
389
В обычных условиях поток пара, идущий через надбандажные
уплотнения, имеет начальную закрутку с0 » clu (clw — окружная
составляющая скорости пара при выходе из сопл), т.е. закрутка положительная
и значение ее большое: с0/и$ « 1 при степени реактивности на
периферии 0П = 0,5; с0/иб «2 — при ©п, близкой к нулю.
Параметр Шсо в (6.112) характеризует влияние частоты прецессии
(частоты собственных колебаний) на уровень возбуждения. Обычно
сростом Q надбандажные силы уменьшаются. Для двухгребенчатого
уплотнения типа уплотнения, показанного на рис. 6.25, а, при 82 » Sj
величину С, можно приближенно рассчитать по формуле
; =
2(а» + п0иб)
А(с0
с^+т\1 +
n«ut
0"б
д* J
(с,
:-«*->].
(6.113)
где
А =
1 +
ск-ПЛп-0,5(с0-скУ
а* + иомб
2-1-1
1/2
а* — параметр (скорость), характеризующий расход пара через
уплотнение; ск — скорость потока в камере в окружном направлении.
Скорость потока
ск = с0 ~ Ф"б>
где при ск > «б
Ф =
(с0/мб) -(со/мб) + 0>5
(6.114)
(6.115)
в*/(и6и0) + 2(с0/ив-0,5)'
при ск < ыб
(С(/»б)-0>5
а*/(мби0)+ Г
и0 — приведенный коэффициент трения в камере уплотнения,
п0 = 4 • 10~2(ДП lb + Rn /ORe"0,135, (6.116)
где Re — число Рейнольдса, Re = cKb /(2vK); 10 < Re < 10 ; vK —
коэффициент кинематической вязкости среды по состоянию ее в камере
уплотнения.
390
В (6.113) первый член в квадратных скобках определяет так
называемый щелевой эффект возбуждения, второй член — канальный эффект, т.е.
влияние переменности сечения/канала, вызываемой радиальным
смещением колеса. Чем меньше 8j /6, тем больше относительное влияние
щелевого возбуждения. Чаще всего канальные и щелевые силы имеют
одинаковый порядок, и оба эффекта должны быть оценены и приняты во
внимание.
Уплотнения типа показанных на рис. 6.25, б, называемые осерадиаль-
ными уплотнениями, отличаются не только отсутствием венцовых сил,
что было отмечено ранее, но и практически отсутствием щелевой
составляющей поперечной силы. Причина — та же, что и для венцовых
сил Z)b1: постоянство погонного расхода утечки по окружности
уплотнения при поперечном смещении оси вала на величину м.
В результате в осерадиальных уплотнениях остается только
поперечная неконсервативная сила, определяемая канальным эффектом, т.е.
изменением площади поперечного сечения/(0) по окружности
уплотнения при смещении оси вала из центрального положения.
Для определения надбандажной силы в осерадиальном уплотнении
(см. рис. 6.25, б) рекомендуется следующая приближенная формула:
^,0 = ^1(1-^^-^^, (6Л16а)
, J/2Mnn 2 1/2
где а* = (p{vx) -j^ (1-е ) .
Скорость в камере ск определяется по той же методике, что и для
уплотнения, показанного на 6.25, а.
Формула (6.116а) по структуре соответствует канальной
составляющей в (6.113). Формула для параметра а* — меры расходной скорости
через уплотнение — содержит эффективный зазор 8Э, определяемый по
общей формуле, применяемой для осерадиальных уплотнений
(рис. 6.25, б) в виде
8Э - [*2(^282)~2 + *з(Мз)~2 + *5(^585)~2Г1/2> (6Л166)
где цу2, Цуз, Цу5 — коэффициенты расхода для соответствующих зазоров
82, 83, 85; z2 = 1, z3 = 4, z5 = 2 — число щелей, имеющих зазор 82, 83, 85
соответственно.
Для снижения уровня надбандажных сил можно рекомендовать
следующее.
1. Применять «виброустойчивые» уплотнения, например уплотнения,
показанные на рис. 6.25, б.
391
2. Снижать степень реактивности на периферии и использовать одно-
гребешковые уплотнения.
3. Уменьшать начальную закрутку с0.
Радикальным средством снижения надбандажного возбуждения
является снижение степени реактивности на периферии и
использование одногребешкового уплотнения. При этом надбандажные силы
исчезают. Однако существенно снижается экономичность ступени.
Лабиринтные силы имеют ту же природу, что и надбандажные,
поэтому их зависимость от определяющих параметров во многом
аналогична. В частности, закрутка потока перед уплотнением влияет на
жесткость этих сил. В реальных условиях закрутка перед концевыми,
средними уплотнениями или уплотнениями диафрагм является трудно
определимым параметром, что затрудняет количественную оценку
лабиринтных сил и их влияние на динамическую устойчивость валопровода.
При значительной закрутке потока перед средним, диафрагменным
или концевым уплотнениями лабиринтные силы могут оказывать
существенное влияние на устойчивость.
Оценку жесткости лабиринтных сил можно приближенно выполнить
по формуле
GAc
Dn.c ш -^- (Дс = с0-*/в/2),
где Gy — расход среды через многогребенчатое уплотнение; с0 —
закрутка потока перед уплотнением; мв — окружная скорость на
поверхности вала вблизи уплотнения; 8j — радиальный зазор в уплотнении.
Следует стремиться к тому, чтобы закрутка потока перед
лабиринтным уплотнением была бы близка к значению с0 = мв/2, при этом
жесткость лабиринтных сил будет близка к нулю.
Для получения необходимой закрутки потока перед диафрагменными
(а также средним и концевыми) уплотнениями целесообразно применять
так называемые стабилизирующие устройства. Пример такого
устройства показан на рис. 6.30, где в сегментах 1 диафрагменных уплотнений
со стороны входа пара выполнены радиальные сверления 2, через
которые поступает часть расхода утечки Gy2. Число и диаметр сверлений
подбираются таким образом, чтобы после смешения расхода Gyj,
поступающего в уплотнение с первоначальной закруткой с0, и расхода Gy2,
подмешивающегося с нулевой закруткой к потоку Gyl, в итоге закрутка
суммарного потока Gy^ Gyl + Gy2 была бы близка к желаемому
значению wB/2, а значение лабиринтных сил в уплотнениях становилось бы
близким к нулю.
392
Практика применения стабилизирующих устройств на нескольких
первых диафрагмах ЧВД показала их достаточную эффективность в
повышении виброустойчивости валопровода,
Оценку уровня некоторых возбуждающих неконсервативных сил
рассмотрим на примере регулирующей ступени турбины сверхкритического
давления.
Пример 6.3. Для регулирующей ступени турбины мощностью 300 МВт типа
К-300-23,5 определить возбуждающие аэродинамические силы для уплотнений
двух типов, изображенных на рис. 6.25. Мерами уровней возбуждающих сил
являются жесткости венцовых и надбандажных сил. Провести сравнение жесткостей
этих сил для ступеней с уплотнениями типа А (см. рис. 6.25, а) и типа Б
(см. рис. 6.25, б).
Заданы следующие величины: давление перед уплотнением рх = 17,0 МПа;
давление за уплотнением р2 = 16,6 МПа; плотность пара перед уплотнением pj =
- 54,0 кг/м ; коэффициент кинематической вязкости пара по состоянию его в
—7 2
камере уплотнения vK = 5,68 • 10 м/с (найден по параметрам пара); окружная
скорость потока пара на выходе из сопл с0 = с!м = 440 м/с; окружная составляющая
скорости на выходе из ступени с2и = 30 м/с; угловая скорость прецессии ротора
(частота собственных колебаний) D, = 178 рад/с. Размеры уплотнений:
периферийный радиус Rn - 0,562 м; высота камеры уплотнения Ъ~1 мм; ширина камеры / =
= 30 мм; радиальный зазор в уплотнении типа A 8j = 1,2 мм; ему соответствующий
Рис. 6.30. Стабилизирующее устройство
7 — сегмент диафрагменного (промежуточного, концевого) уплотнения; 2 —
радиальное сверление; 3 — диафрагма (обойма промежуточного или концевого уплотнения)
393
коэффициент расхода \ху{ = 0,73; осевой зазор в уплотнении типа А 52 = 3 мм; ему
соответствующий коэффициент расхода |iy2 = 0,5.
Размеры зазоров уплотнения типа Б: осевой зазор 52 = 3 мм; коэффициент
расхода |лу2 = 0,5; осевые зазоры 53 = 3 мм; коэффициенты расхода цу3 = 0,7;
радиальные зазоры 55 = 6 мм; коэффициент расхода \ху5 = 0,7.
Расчет венцовой силы для уплотнения типа А. Для определения Db1 по
(6.109) находим приведенное число гребней (zx = 2, z2 - 1):
Далее по (6.109) имеем
DBl = 0,73 к • 0,562(17,0 • 106 • 54)1/2 • 0,21565 • 470 • 2/2,34111'5 =
= 2,2099-106 Н/м.
Расчет надбандажной силы для варианта А. Для расчета воспользуемся
зависимостями (6.112), (6.113), которые приближенно применимы для двухгре-
бенчатого уплотнения в предположении, что осевой зазор 52 » 5j. Влияние
осевого гребня — положительное, так как при нём уменьшаются давление перед
первым радиальным гребнем и давление в камере, что ведет к снижению реальных
надбандажных сил. Таким образом, оценка их по приведенным формулам
является верхней, идущей в запас надежности.
Приведем последовательность расчета жесткости надбандажной силы.
Рассчитываем число Re при условиях в камере уплотнения:
Re . fs* _ 340-0,007 = 2,0951 • 106; Re"0'135 = 0,14016.
2vk 2 • 5,68 • 10
Здесь окружная скорость ск в камере неизвестна и в первом приближении
принята по оценке: ск = 340 м/с.
Рассчитываем приведенный коэффициент трения по (6.116):
Находим а* по (6.113):
а* = 0,73 (17,0- 106/54,0)1/2- Ц- ^|~ -0,15249 = 200,58 м/с.
Определяем коэффициент «скольжения» ф по (6.115), найдя предварительно
иб = coRn = 314,16*0,562 = 176,56 м/с (© = 314,16 рад/с — угловая скорость
ротора), Cq/u6 = 440/176,56 = 2,4921 и иб п0 = 176,56 • 0,55516 = 98,019 м/с:
m = 2,49212-2,4921+0,5 = n,g,?9
ф 200,58/98,019 + 2 • 1,9921 u'°*0/z •
Находим ск по (6.114):
ск = 440 - 0,69672 • 176,56 = 316,99 «317 м/с.
394
Используем полученный результат вместо принятого по оценке для расчета Re
значения ск = 340 м/с. Повторный расчет при значении 317 м/с дает: п'0 = 0,56043,
с'к = 316,6 м/с. Принимаем значение с'к за окончательную скорость закрутки
в камере уплотнения.
Определяем коэффициент А по (6.113):
Л U ^316,6-100-0,5(440-316,6)^]-' =0789
L I 200,58 + 98,95 )\ '
Рассчитываем безразмерную жесткость надбандажной силы по (6.113):
« = 2^53 [0^9(440-316,6)^ (^f)(316,6- 100)] -
= 0,51059 + 0,29079,
где первое число относится к щелевой силе, второе — к канальной.
Определяем жесткость надбандажной силы по (6.112):
Du = 17,0 • 106(l - Щ) • 0,562 • ||(0,51059 + 0,29079) =
= 2,8695 • 106+ 1,6342 • 106 = 4,5037 • 106 Н/м,
здесь первое число—жесткость щелевой силы, второе—жесткость канальной силы.
Суммарная жесткость надбандажных сил более чем в 2 раза превышает
жесткость венцовых сил.
Общая жесткость возбуждающих сил регулирующей ступени для уплотнения
типа А составляет сумму
DcyM = DBl+DH = 6,6.106H/M.
Расчеты, подобные выполненному, проведенные для иных радиальных
зазоров, показывают существенную зависимость возбуждающих аэродинамических
сил от радиального зазора. Результаты расчетов представлены в табл. 6.1.
В конкретном случае жесткость возбуждающей силы изменяется обратно
пропорционально радиальному зазору.
Таблицаб.1
Значения жесткости возбуждающих аэродинамических сил, 10 Н/м,
в зависимости от номинального радиального зазора 8j
Жесткость возбуждающих
аэродинамических сил
л.|
А..щ
А..К
D«
Дсум
Номинальный радиальный зазор 5j, мм
0,6
2,629
6,816
3,268
10,084
12,713
1,2
2,210
2,870
1,634
4,504
6,714
2,4
1,284
0,994
0,817
1,811
3,095
395
Расчет надбандажной силы для уплотнения типа Б. Расчет выполняем по
формулам (6.116а):
/п ЛЛ6 ,еА^П 0,8262 - 10" 3 - 0,562 fi П6,6^21 1/2 _ ., ,
а. = (17 • 10 /54) о,007-0,03 L' 'Ы) J = 26?'54 ^
D„ - 5 • 17,0 • 106(l - {|D ^^ • JT^;rV - Ь225 • 10° Н/м.
'н.о 2 ' V 17,0J 0,007 267,54
Величину 8Э, входящую в формулу для определения а*, предварительно
вычисляем по (6.1166):
5Э = [(0,5 • З)"2 + 4(0,7 • З)"2 + 2(0,7 • 6)"2]~1/2 = 0,8262 мм.
Как уже отмечалось, в уплотнениях типа Б венцовые и щелевые силы
вследствие больших радиальных зазоров пренебрежимо малы. Поэтому полученное
значение Z)H0 = 1,225' 10 Н/м есть полная аэродинамическая возбуждающая
сила в осерадиальном уплотнении. Ее надо сопоставить с полной силой
уплотнения типа А, представленной в табл. 6.1. При номинальных зазорах в уплотнении А
DcyM/D„0 = 6,714/\,225 = 5,4S,
т.е. возбуждение снижается более чем в 5 раз.
В начале 70-х годов прошлого столетия при освоении новых мощных
турбин Т-250/300-23,5 инженеры столкнулись с проблемой
возникновения автоколебаний валопровода этих турбин при подъеме мощности до
номинального значения. Проблема была решена в основном
применением в ЧВД осерадиальных уплотнений (типа Б), при использовании
которых вследствие снижения уровня аэродинамического возбуждения
возникновение автоколебаний удалось предотвратить. Конструкция
уплотнений предложена инженерами ТМЗ по идеям сотрудников
кафедры ПГТ МЭИ. В дальнейшем подобная конструкция применена и
на турбинах сверхкритического давления конструкторами ЛМЗ.
Устойчивость роторной системы. В условиях работы
турбоагрегата меняются некоторые основные параметры, влияющие на
возбуждающие и демпфирующие неконсервативные силы. В процессе пуска
при увеличении частоты вращения увеличиваются силы масляного
возбуждения, а силы аэродинамического возбуждения (венцовые, надбан-
дажные) практически равны нулю. При нагружении турбины силы
масляного возбуждения остаются постоянными (поскольку постоянна
частота вращения), а силы аэродинамического возбуждения возрастают
вследствие подъема давления по ступеням турбины.
Для конденсационных паровых турбин давление по ступеням
увеличивается примерно пропорционально расходу пара или мощности
турбины, поэтому силы аэродинамического возбуждения в
конденсационных турбинах пропорциональны мощности турбины или (что то же)
пропорциональны расходу пара через стопорный клапан.
396
Турбоагрегат, обладающий недостаточной виброустойчивостью,
в процессе нагружения вследствие роста аэродинамических
неконсервативных сил попадает в режим автоколебаний при некотором значении
мощности, называемой пороговой Nnop. Соответственно расход пара,
при котором в процессе нагружения турбины наступает режим
автоколебаний, называется пороговым Gno . Пороговый расход пара как
характеристика границы устойчивой работы применяется для турбин с
регулируемыми отборами пара, так как для таких турбин мощность при
данном расходе пара может быть различной из-за того, что в
регулируемые отборы поступает различное количество пара.
Аэродинамические неконсервативные силы в основном значительны
в ЧВД и ЧСД, поэтому именно режимами работы этих частей, а не ЧНД,
определяется уровень аэродинамического возбуждения.
Для конденсационных турбин обе характеристики, пороговая
мощность и пороговый расход, равноценны. Пороговые параметры часто
оценивают по отношению к их номинальному значению:
Nr
= ^пор/^о;
G,
= Gnop/G0>
пор пор О» пор
где N0 — номинальная мощность; G0 — номинальный расход пара.
На рис. 6.31 показано измененце размахов колебаний 2А на конце
РВД (низкочастотной составляющей) при нагружении турбины закрити-
ческого давления в зависимости от относительного расхода пара G =
= G/G0. При нагрузке до G = 0,8 амплитуда низкочастотной состав-
2А,мкм
400
300
200
100
nlar&rrtg 1--
0,2 0,4 0,6 0,8 G
Рис. 6.31. Зависимость амплитуды низкочастотных самовозбуждающихся
колебаний от относительного расхода пара
1 — вертикальные колебания; 2 — горизонтальные
397
ляющей мала. Такие колебания вызываются силами масляного
возбуждения. При достижении значения G = 0,8 начинается интенсивный
рост амплитуды колебаний. Считают, что рассматриваемый
турбоагрегат имеет относительный пороговый расход G = 0,8. Колебания
ротора после потери устойчивости происходят с частотой, близкой к
низшей собственной частоте его колебаний, которая, как правило,
меньше частоты вращения. Поэтому автоколебания при потере
устойчивости часто называют низкочастотной вибрацией, в отличие от
колебаний, вызванных неуравновешенностью ротора, которые происходят с
частотой, равной частоте вращения.
Эксплуатация турбины при потере устойчивости невозможна из-за
интенсивной вибрации ротора, подшипников и всего турбоагрегата.
Расчет пороговой мощности (порогового расхода пара). Решая
задачу об устойчивости валопровода в линейной постановке, находим
пороговые параметры как такое значение мощности (или расхода), при
достижении которого валопровод становится динамически неустойчивым.
Для определения границы устойчивости необходимо
проанализировать систему уравнений (6.90) на устойчивость. Для этого можно
воспользоваться одним из критериев устойчивости, в частности критерием
Гурвица.
Рассмотрим приближенное решение задачи об устойчивости ротора
на основе уравнений (6.90), ограничившись двумя главными формами
колебаний ротора; из них первая форма определяет колебания в
горизонтальной плоскости, вторая — в вертикальной. При этом условии из
системы (6.90) получим:
ql+p{ql+Huql^Hnq2 + Enq2 = 0;
2 (6Л17)
q2+ p2q2 + H22q2 + H2Xqx+ E2Xqx = 0,
где E2X = - EX2, H2X = #12.
Для системы (6.117) по Гурвицу получим критерий устойчивости
В> \Е\; (6.118)
-,1/2
в=
Н\\Н22~Н\2,ТТ 2^„ 2Ч^ Я11Я22 / 2 2.2
———— (Нир2+Н22рх)+ 2(р2-Р\)
; (6.П9)
■ит"22 (ни + н22Г
E = En = DipiXi9j2; (6.120)
398
ЯИ e fyP/l<P/P H22 = BijVi2<Pj2>\ (6Ш)
где ZX. — жесткости неконсервативных позиционных сил; Я,у—
коэффициенты демпфирования в подшипниках и других элементах системы ТФ.
Суммирование в (6.120) и (6.121) производится по всем точкам / и у,
где приложены соответствующие силы. При этом по предположению
для любой точки с вертикальным направлением неконсервативной
силы фд = 0, а для любой точки с горизонтальным приложением этой
силы ф2 = 0.
Параметр возбуждения Е (6.120) представим в виде
Е = Е' + ХЕ", (6.122)
где Е' — параметр возбуждения, рассчитанный по жесткостям сил
масляного возбуждения; X = N = N/N0 или X = G = G/G0;E"—
параметр аэродинамического возбуждения, рассчитанный по жесткостям
аэродинамических консервативных сил для номинального режима
работы турбины.
Подставляя (6.122) в (6.118) и заменяя в нем неравенство на
равенство, получаем пороговое значение параметра X на границе
устойчивости, т.е. X = Хпор = Nnop/N0 или Хпор = GU0V/GQ в виде
Хпор = (В-Е')/Е", (6.123)
где предполагаем, что Е' + ХЕ" > 0.
Устойчивость возрастает с увеличением следующих параметров:
I 2 2|
массы ротора, собственных частот рх и р2, модуля разности \р2 -р±I,
коэффициентов демпфирования подшипников, внешнего
демпфирования и с уменьшением сил масляного и аэродинамического возбуждения.
Для работы без опасности возникновения автоколебаний величина
А,пор, рассчитанная по (6.123), должна удовлетворять условию
^пор> 1,5-1,7. (6.124)
Запас по устойчивости необходим вследствие нескольких причин,
из которых главными являются следующие: погрешность расчетного
метода определения пороговой мощности и ее зависимость от случайных
причин, таких, например, как некоторое изменение формы расточки
подшипников, уровня балансировки ротора и др. Это приводит к тому,
что турбоагрегаты одного типа имеют разную фактическую пороговую
мощность. Для компенсации разброса значений пороговой мощности
необходим запас устойчивости, выражаемый неравенством (6.124).
399
Пример 6.4. Для турбины, ротор ВД которой рассмотрен в примере 6.2
рассчитать относительную пороговую мощность, положив, что приведенная к середине
пролета циркуляционная аэродинамическая сила имеет жесткость D = D38 =
= 1-107Н/м.
Решение.
Параметры масляного возбуждения Е' и аэродинамического возбуждения Е"
о
найдем по формуле (6.120), приняв Dl6 = £5.10 ~ ®>$(с\2 " c2l) = с12 = 0»33 • 10 Н/м;
D38 = D= 107Н/м:
= 2.0,ЗЗЧ09.^2^М2049 = 3295,4 с^2;
УоОО
Е" = ^38Ф31Ф82 = 10? ' 1,14223 • 1,2497/9600 = 1487 с"2.
Параметр демпфирования
и пи i л* 1Л6 0,5297 • 0,09049 - OQO -1
Я12 = 2Л|2фпФб2 = 2-0,6-10 • -« 5в00 = ' С *
Параметр стабилизации В рассчитываем по (6.119) с учетом параметров
ротора, приведенных в примере 6.2:
В = [^^-|^|^^(26,3 • 110,842 +8,018 • 151,252) +
+ 2^(151,252-110,842)Т - 4761 с"1.
(34,318)2 J
Относительная пороговая мощность (расход) по (6.123)
\,оР = ^пор/^о = 0,986.
Турбоагрегат находится вблизи границы устойчивости, требуется принять
меры для увеличения параметра Хпо до значения 1,5—1,7. Для этого необходимо
и достаточно снизить уровень аэродинамического возбуждения применением,
например, осерадиальных уплотнений и (или) стабилизирующих устройств. Так,
п
уменьшая приведенную циркуляционную силу до значения D = 0,6 • 10 Н/м (что
вполне возможно), получим увеличение относительной пороговой мощности до
приемлемого уровня А,пор « 1,64.
6.7. КРУТИЛЬНЫЕ КОЛЕБАНИЯ РОТОРА
Как уже отмечалось, крутильные колебания ротора (валопровода)
с большой амплитудой возникают вследствие короткого замыкания или
несинфазного включения генератора в сеть. Особенно серьезным
является двухфазное короткое замыкание, при котором на ротор
электрического генератора действует переменный электродинамический крутя-
400
Мк.3,107 н-м
п
НИ И й а
ШМ
П г
111| f к«
А П п
Уди
доИ Под
и
5 1 1 /t,c 1
Рис. 6.32. Изменение крутящего момента после короткого замыкания (запись Л/,
10 Н • м означает, что все цифры по оси ординат умножаются на 10 )
щий момент, достигающий 10—12-кратного значения по сравнению
с номинальным. Изменение момента после короткого замыкания
показано на рис. 6.32. В частотном спектре момента преобладает
составляющая с частотой со. Вторая гармоника с частотой 2со обычно имеет
существенно меньшую интенсивность, однако и ее следует принимать
во внимание при обеспечении надежности валопровода.
Амплитуды крутильных колебаний и крутящих моментов в сечениях
ротора существенно зависят от частот собственных крутильных
колебаний валопровода. Если в спектре собственных частот имеются частоты,
близкие по значению к частотам изменения электродинамического
момента, т.е. к со и 2ео, то при коротком замыкании наступает явление типа
резонанса, при котором амплитуды крутящих моментов и
соответствующих им напряжений в болтах соединительных муфт и в шейках
валопровода достигают больших значений. Поэтому для обеспечения надежности
работы валопровода при коротком замыкании, он должен быть отстроен
от резонансов с частотами со и 2со, т.е. в спектре его частот не должны
находиться частоты крутильных колебаний, близкие к частотам со и 2со.
Для этого нужно рассчитать первые несколько собственных частот
валопровода и в случае необходимости изменить размеры (сечения)
валопровода в некоторых его частях для отстройки от резонанса.
Для отстроенного валопровода при действии на него момента
короткого замыкания крутящие моменты в шейках могут достигать
А—6-кратного значения по сравнению с номинальным значением крутящего
момента. Шейки валопровода должны быть рассчитаны так, чтобы они
401
могли выдержать эту перегрузку без появления пластических
деформаций в шейках или в болтах муфт. Наиболее напряженным сечением при
коротком замыкании является сечение шеек между электрическим
генератором и турбиной. Для него допустимым считается увеличение
касательных напряжений при коротком замыкании до значений, близких
к пределу текучести при срезе тг Это означает, что в рабочих условиях
касательные напряжения в шейках между турбиной и генератором
не должны, как правило, превышать (0,20—0,25)т5.
Для более точного определения напряжений в шейках и стяжных
болтах муфт следует выполнить динамический расчет валопровода
на действие короткого замыкания.
Для расчета крутильных колебаний валопровод обычно
рассматривают как стержень с непрерывным распределением массы по его длине,
или принимают модель в виде совокупности дискретно расположенных
твердых тел, соединенных безынерционными упругими стержнями.
В последнем случае теоретические положения крутильных колебаний
являются частным случаем общих положений, рассмотренных в § 6.5.
На базе общих зависимостей могут быть рассчитаны как
собственные частоты и формы крутильных колебаний, так и изменения
напряжений в шейках вала и рабочих лопатках при коротком замыкании. Для
Рис. 6.33. Изменение крутящего момента в шейке ротора электрического генератора
и изгибных напряжений с1 в рабочих лопатках последней ступени ЧНД после
короткого замыкания (запись Af, 10 Н *м означает, что все цифры по оси ординат
умножаются на 106)
402
примера на рис. 6.33 представлены результаты расчета крутящего
момента в шейке между турбиной и генератором для турбоагрегата
мощностью 300 МВт. Момент короткого замыкания при этом меняется
так, как показано на рис. 6.32. В данном случае максимальный
крутящий момент только в 4 раза больше номинального, что свидетельствует
о хорошей отстройке валопровода от крутильных резонансов.
Кривая Gj представляет собой изменение изгибных напряжений,
вызванных коротким замыканием, в лопатках последней ступени ЧНД.
6.8. ВИБРАЦИОННАЯ НАДЕЖНОСТЬ ТУРБОАГРЕГАТОВ
Нормы вибрации турбоагрегатов. Для контроля состояния
турбоагрегата и условий его нормальной эксплуатации устанавливают так
называемые нормы вибрации. Для определения соответствия
вибрационного состояния турбоагрегата нормам вибрации измеряют параметры
вибрации — амплитуды или скорости — на корпусах подшипников
в трех направлениях: вертикальном, поперечном горизонтальном,
продольном (осевом). При контроле вибрации по амплитуде максимальное
значение размаха 2А, полученное путем измерения на всех подшипниках
по всем трем направлениям, сравнивают с значениями, приведенными в
таблице и устанавливают вибрационное состояние турбоагрегата.
Вибрационное состояние
турбоагрегата
Отличное
Хорошее
Размах вибрации 2А, мкм
я =
= 3000 об/мин
<20
<30
= 1500 об/мин
£30
£50
Вибрационное состояние
турбоагрегата
Удовлетворительное
Неудовлетворительное
Недопустимое
Размах вибрации 2А, мкм
= 3000 об/мин
<40
>40
>65
= 1500 об/мин
<70
>70
> 130
Турбоагрегаты мощностью 150 МВт и выше при вводе в
эксплуатацию после монтажа или ремонта должны иметь вибрационное
состояние не ниже хорошего. При «недопустимом» вибрационном состоянии
турбоагрегат должен быть немедленно остановлен.
В качестве параметра, определяющего вибрационное состояние
турбоагрегата используют также среднеквадратичную виброскорость опор
(стульев подшипников) турбоагрегата, определяемую соотношением
ve = (I \v2 d/J , (6.125)
403
где v = v(t) — мгновенное значение скорости колебания в момент t\ х —
некоторый период изменения скорости, не меньший, чем период
составляющей колебаний в спектре, имеющей наинизшую частоту.
Если в спектре колебаний присутствуют только колебания, по
частотам кратные основной (оборотной) частоте, и если известны амплитуды
нескольких первых гармоник вибрации Sl9 S2, ..., S„9 с частотами
coj, cg2> •••> °V где ш1 — основная (оборотная) частота, то величина ve
выражается через них соотношением
Ve =
л
1+|^
2£>*2 Ле\ Г» с \ 2-i 1/2
Щ)
5, J
+ .
. +
(nS")2]
U.J 1
+ \-7Г\ + -+\1г\ • (6.126)
В Правилах технической эксплуатации приняты следующие нормы
вибрации опор турбоагрегата по значениям ve:
ve < 4,5 мм • с~ — без ограничений по времени;
4,5 < ve < 7,1 мм • с~ — не более 30 сут;
7,1 <ve< 11,2 мм • с" — не более 7 сут;
ve > 11,2 мм • с~ — не допускается.
Следует отметить, что оценка вибрационного состояния турбоагрегата
по вибрации опор не является вполне представительной, а иногда и
просто недостаточной. Более информативным диагностическим
параметром является амплитуда (или скорость) колебаний ротора относительно
статора в местах около опор или посредине пролетов отдельных роторов.
Так, многие зарубежные турбостроительные фирмы придерживаются
рекомендации ИСО (Международной ассоциации стандартов), согласно
которой допустимые значения амплитуд вибрации вала около опор для
турбоагрегатов при п = 3000 об/мин составляют: А < 91 мкм
(ve = 20 мм • с~ ) — для длительной эксплуатации; А < 53 мкм (ре =
= 12 мм • с~ ) — для новых турбоагрегатов, вводимых в эксплуатацию.
По последним (1999 г.) отечественным нормам также установлены
допустимые значения относительной вибрации вала около опор: 2А <
< 165/200 мкм — для длительной эксплуатации; 2А < 80/100 мкм — для
вновь вводимых турбоагрегатов (над чертой даны значения для
турбоагрегатов при п = 3000 об/мин, под чертой — при п = 1500 об/мин).
Амплитуда колебаний вала около опор является более
представительным параметром, характеризующим вибрационное состояние
турбоагрегата, так как она непосредственно обусловлена качеством
балансировки ротора и валопровода и степенью отстройки валопровода от
резонансов.
Необходимость нормирования уровня вибрации турбоагрегата
связана с несколькими причинами.
404
1. С ростом вибрации в роторе увеличиваются циклические
напряжения: к циклическим напряжениям, обусловленным собственным весом
ротора, добавляются циклические напряжения от вибрации в валах,
муфтах, стяжных болтах жестких муфт. Повышенные циклические
напряжения снижают надежность, увеличивают вероятность усталостных
поломок вала.
2. С ростом вибрации увеличиваются динамические нагрузки на
подшипники и возникает опасность их повреждения, связанного с
задеванием шеек о поверхности вкладыша, с усталостным (или силовым)
повреждением болтов, стягивающих обоймы подшипников, с
ослаблением затяжки различных болтовых соединений.
3. С ростом вибрации увеличивается опасность задевания ротора
о статор в лабиринтных уплотнениях: концевых, диафрагменных и
периферийных (надбандажных). Это в свою очередь может вызвать тепловой
прогиб ротора, нарастающие вибрации и серьезную аварию.
4. Вибрация турбоагрегата передается на его строительную часть —
фундамент и может вызвать его повреждение.
5. Вибрация оказывает воздействие на человека и вызывает в
зависимости от ее интенсивности: снижение комфорта, снижение
производительности труда, представляет опасность для здоровья.
Обеспечение достаточно низкого уровня вибрации достигается как
конструктивными мерами, так и надлежащей эксплуатацией.
Отстройка валопровода от резонансов. Одна из главных
конструктивных задач состоит в том, чтобы на стадии проектирования
обеспечить отстройку валопровода от резонансов. Для этого собственные
частоты колебаний валопровода на номинальной частоте вращения должны
находиться в допустимых диапазонах.
При расчете собственных частот на стадии проектирования
набольшая трудность возникает вследствие того, что трудно оценить с
достаточной точностью податливость опор (стульев подшипников). В случае
соизмеримости податливостей стульев и масляной пленки подшипников
недостаточная достоверность значений податливости стульев ведет
к некоторой неопределенности значений собственных частот валопровода.
Поэтому следует оценить возможный диапазон податливости стульев и
рассчитать частоты по верхней и нижней оценкам податливости.
Допустимые собственные частоты валопровода определяем,
используя диаграмму (рис. 6.34).
Пусть вероятный диапазон значений податливостей для некоторого /-го
номера стула 8; тах - 8,- min, тогда для стула /
8/ = 5/ min + Щ max ~ 8/ min)'
Придавая X значения в диапазоне О < X < 1, получаем все вероятные
значения податливости /-го стула.
405
Произведем расчет собственных частот колебаний валопровода
/1? f2,... для нескольких значений параметра X и нанесем эти значения
на диаграмму (рис. 6.34) в виде серии кривых.
Собственные частоты снижаются с увеличением податливостей.
Мерой податливостей является параметр X. На диаграмме,
представленной для турбоагрегата с частотой вращения w = 50 с~ , заштрихованы
области около частот вращения 25, 50 и 100 с~ , в которых не должны
находиться собственные частоты валопровода, т.е. кривые fk(X) не
должны пересекать границ заштрихованных областей. На диаграмме
показан случай отстроенного валопровода, у которого собственные
частоты не попадают в заштрихованные области. Ширина этих областей не
нормирована. Следует считать, что при ширине ±(10—15) %
вибрационная надежность валопровода будет достаточной.
Зона около частоты вращения 25 с~ соответствует возможности
появления «масляной» вибрации, которая вызывает прецессию с
частотой nil. Кроме того, в этой зоне возможен так называемый
субгармонический резонанс, связанный с нелинейностью системы ТФ.
Субгармонический резонанс возможен в нелинейных системах, при частотах
колебаний, дробных по отношению к частоте возбуждения, т.е. при
частотах л/2, п1Ъ и т.д. (где п — частота возбуждения).
100
75
50
25
О 0,5 1,0 %
Рис. 6.34. Диаграмма допустимых собственных частот колебаний системы валопро
вод опоры на рабочей частоте вращения
У//////////Л
Y/////////77.
2ZZ22ZZZZZZA
tbtdzti
///////////Л
\,W,WS*Sj^A
406
Попадание значения fk в зону около частоты вращения 50 с
означает резонанс с рабочей частотой: fk » пр. Наконец, попадание в третью
зону около п = 100 с" , чревато опасностью колебаний, вызванных нерав-
ножесткостью сечений валопровода. Частота импульсов составляет 2и ,
и, следовательно, в третьей зоне выдерживается условие fk = 2я , т.е.
наблюдается резонанс с импульсами, вызванными неравножесткостью.
Для построения диаграммы допустимых частот вращения требуется
минимальная информация о системе ТФ. Объем расчетов минимален:
достаточно рассчитать только собственные частоты колебаний
валопровода. Если удается обеспечить нужную отстройку, как указано выше,
то для обеспечения вибрационной надежности валопровода требуется
только проверить его устойчивость (пороговую мощность) по
рассмотренной выше методике. В тех случаях, когда вследствие
многочисленности собственных частот валопровода отстройка его невозможна или
затруднительна, нужно использовать более детальные методы расчета,
предусматривающие определение амплитуд вибрации (см. § 6.5).
Следует отметить, что главным препятствием использованию точных и
детальных методов расчета является, как правило, недостаточная
информация о свойствах объекта — исходных данных. При их
накоплении детальные методы расчета имеют преимущество.
Наряду с частотами изгибных колебаний должны быть рассчитаны
и отстроены частоты крутильных колебаний валопровода (см. § 6.7).
Частоты крутильных колебаний не должны попадать в зону около п
и 2я с запасом ± (10—15) %. В отличие от изгибных колебаний
собственные частоты и главные формы крутильных колебаний практически
не зависят от податливости масляной пленки подшипников или их
стульев, что существенно повышает достоверность расчетного
определения собственных крутильных частот валопровода.
Виброустойчивость валопровода. На стадии проектирования
необходимо определить параметры виброустойчивости валопровода и
оценить имеющиеся запасы по устойчивости. В качестве параметров,
характеризующих виброустойчивость, могут быть приняты два:
относительная пороговая мощность N (или пороговый расход пара G )
и относительная пороговая частота вращения п = «пор/ир, где
п — частота вращения валопровода, при которой достигается
граница динамической неустойчивости; ир — рабочая (номинальная)
частота вращения.
Наглядное представление о запасах динамической устойчивости
системы валопровод—опоры дает диаграмма на рис. 6.35, которая может
407
^пор Область неустойчивости
4
3
2
1
^
/
/
^
^f
2
/
/
<&А /
1 Н^
1 > t
1 \j—]
в
pj
L
X 0,68 0,84 1,0 1,16 йпор
Область устойчивости
Рис. 6.35. Границы устойчивой работы системы валопровод—опоры
/ — номинальные условия; 2 — расцентровка по вертикали второй и третьей опор,
А = 0,2 мм; 1—-VI — номера опор; а — диаграмма границ устойчивости; б — схема
роторной системы
быть построена на основе расчетов динамической устойчивости на
стадии проектирования (см. § 6.6). Данные, представленные на рис. 6.35,
получены по методу, основанному на непосредственном расчете корней
характеристического полинома для системы валопровод—опоры*.
Верхняя граница (7 и 2) обусловлена, в первую очередь, аэродинамическими
возбуждающими силами в проточной части ЦВД и ЦСД, правая
вертикальная граница определена масляным возбуждением в подшипниках.
Весьма существенным фактором, снижающим устойчивость, является
расцентровка смежных подшипников (опор II и III). Вследствие
значительной расцентровки пороговая частота вращения становиться ниже
рабочей, что означает неработоспособность турбоагрегата.
Следует считать, что запасы по устойчивости для нормальной
эксплуатации турбоагрегата должны составлять G > 1,5—1,7; и > 1,5.
Конструктивные меры повышения устойчивости валопровода
рассмотрены в § 6.6. На стадии монтажа повышение устойчивости
достигается выбором оптимального раскрытия полумуфт (рис. 6.36). Увеличе-
* Программу для ЭВМ и расчеты выполнил в МЭИ А.П. Ручное.
408
Рис. 6.36. Трехопорная система РВД-РСД с монтажным раскрытием полумуфт:
I—III — номера подшипников; линия вала до стягивания полумуфт;
линия после стягивания
ние раскрытия 8 приводит к увеличению реакции на подшипник /
и уменьшает реакцию на подшипник II. С увеличением реакции на
подшипник, устойчивость, как правило, увеличивается. Поэтому в трех-
опорной системе РВД-РСД существует оптимальное раскрытие
полумуфты, придающее валопроводу наибольшую устойчивость.
Влияние балансировки роторов на вибрацию валопровода. Как
уже отмечалось, для снижения уровня вибрации отдельные роторы
проходят динамическую балансировку на заводе-изготовителе. Мерой
качества балансировки может служить динамическая реакция в опорах
балансировочного станка на рабочей частоте вращения по отношению
к статической реакции от веса ротора. Балансировка может считаться
удовлетворительной, если для каждой опоры выполняется условие
AR<kR,
где AR — амплитуда динамической реакции; R — статическая реакция
опоры; х = 0,05—0,1.
После ремонта ротора с заменой поврежденных или изношенных
лопаток при невозможности или нежелательности транспортирования
ротора для балансировки на завод-изготовитель часто проводится
динамическая балансировка всего валопровода в собственных подшипниках
на электростанции. Процедура балансировки сводится к подбору по
определенной методике массы балансировочных (уравновешивающих)
грузов и места их расположения. Балансировочные грузы размещаются
в специальных кольцевых пазах на некоторых дисках роторов.
При этом, как правило, оказывается необходимым произвести
несколько пробных пусков турбины с разворотом валопровода до
номинальной частоты вращения. Разработанные методики балансировки в
собственных подшипниках позволяют свести необходимое число
пробных пусков турбины к минимуму. Иногда оказывается необходимым
409
всего один пробный пуск, в течение которого измеряется вибрация в
различных точках турбоагрегата и по этим данным (по значениям амплитуд и
фаз измеренной вибрации) оказывается возможным установить массу и
расположение необходимых уравновешивающих грузов.
Качество балансировки роторов является одним из главных факторов,
определяющих нормальное вибрационное состояние турбоагрегата
в эксплуатации.
Нестабильность свойств ротора. Причинами повышенной
вибрации турбоагрегата могут быть тепловая, механическая нестабильность
роторов, а также так называемый блуждающий небаланс.
Тепловая нестабильность проявляется в том, что прогиб ротора
обратимо меняется с изменение температуры. Она является следствием
неоднородности свойств материала заготовки ротора по значениям
температурного коэффициента удлинения. Допустимым считается обратимый
тепловой прогиб посредине пролета не более 20 мкм при изменении
температуры ротора от комнатной до рабочей. Тепловая нестабильность
заготовки цельнокованого ротора должна проверяться на металлургическом
предприятии, производящем заготовки ротора. Тепловая нестабильность
сварного ротора должна проверяться на турбинном заводе после сварки
ротора и его последующей термообработки.
Уменьшение вибрации, вызываемой
тепловой нестабильностью ротора,
может быть достигнута путем
динамической балансировки всего валопро-
вода в собственных подшипниках в
турбине при рабочей температуре.
У роторов с насадными дисками
может возникнуть механическая
нестабильность, вызываемая трением
на поверхности контакта дисков и вала
(рис. 6.37). Механическая
нестабильность проявляется в необратимости
поперечной деформации (прогиба)
ротора: при нагружении ротора
поперечными силами и последующей
разгрузке ротор не возвращается в перво-
Рис. 6.37. Схема происхождения меха- начальное состояние. Остаточный
нической нестабильности ротора прогиб является причиной вибрации,
с насадными дисками Для уменьшения эффекта механиче-
; — силы трения на поверхности ской нестабильности следует приме-
ступицы; 2 - силы трения на нять даски с й ступицей и не
поверхности вала
допускать значительных поперечных
410
деформаций, например, значительной изгибной вибрации ротора в
процессе эксплуатации.
Снижение эффекта механической нестабильности достигается при
разгоне ротора в вакуумной камере (где производится предварительно
балансировка ротора) до частоты вращения п = (1,15—1,20)и . При этом
вследствие уменьшения контактного давления на посадочных
поверхностях дисков и вала силы трения на этих поверхностях снижаются до
минимума, вал приобретает естественную форму («распрямляется») и
остаточный прогиб из-за действия сил трения на контактных
поверхностях оказывается существенно меньше допустимого.
Блуждающий небаланс ротора появляется при попадании жидкости
(воды или масла) во внутренние полости ротора вследствие
недостаточной герметичности полостей.
При этом возникает неуравновешенность и может появиться
значительная вибрация ротора, которую невозможно устранить никакими
мерами, кроме удаления жидкости из полостей и их полной
герметизации.
Неточность изготовления полумуфт и неточность их соединения.
Как уже отмечалось в § 6.1 неточность изготовления и соединения
роторов жесткими полумуфтами является одной из причин колебаний
роторов с оборотной частотой. Для снижения уровня вибрации валопровода
неточность изготовления и сборки регламентируется допусками.
На заводах-изготовителях производится проверка соединения двух
роторов на соответствие их допускам. На электростанции при монтаже
повторно проводится подобная проверка. Допуск на несоосность (колен-
чатость) \ и излом оси вала Аи, как правило, составляет 20—30 мкм
(рис. 6.38). Удовлетворительность сборки проверяется путем
проведения специальных технологических операций.
Влияние эксплуатационных тепловых и силовых расцентровок
на вибрационные качества турбоагрегата. Нестабильность
деформации (положений) стульев подшипников при тепловых расширениях
турбоагрегата и тепловых расцентровках опор по вертикали и в
поперечном горизонтальном направлении вызывает изменение таких
существенно важных динамических параметров системы валопровод—
опоры, как собственные частоты колебаний и параметры динамической
устойчивости. Так, расцентровка опор II и III (см. рис. 6.35), при
которой опора II снижается по вертикали на величину А по отношению к
опоре III, приводит к перераспределению опорных реакций на всех
опорах, но существенней всего на самих этих опорах //, III и ближайших к
ним опорах 1и IV. Изменение реакций означает изменение
коэффициентов жесткости и демпфирования масляной пленки, а следовательно, это
ведет к изменению собственных частот системы валопровод — опоры.
При ограниченных запасах по отстройке резонансных скоростей от
411
1 Ft Л
1 t
1
t
i
а
Аи
Рис. 6.38. Неточности изготовления и соединения полумуфт роторов
а — коленчатость; б — излом оси; Ак — величина несоосности; Аи — мера излома оси
в соединении роторов
рабочей частоты вращения возможно попадание системы в резонанс и
существенное увеличение вибрации турбоагрегата.
Как указано на диаграмме рис. 6.35, расцентровка опор II и III может
привести к существенному снижению критерия виброустойчивости п
(а в иных случаях и G ) и попаданию системы в режим автоколебаний.
Правильно спроектированный турбоагрегат должен иметь столь
малые расцентровки в эксплуатации или столь малую к ним
чувствительность, чтобы при всех эксплуатационных режимах не ухудшались
динамические характеристики системы валопровод — опоры и было
обеспечено нормальное вибрационное состояние турбоагрегата.
Прогрессивные конструкторские решения по системе обеспечения
тепловых расширений рассмотрены в § 4.2.
Таким образом, вибрационная надежность турбоагрегата может быть
обеспечена комплексом конструктивных, технологических и
эксплуатационных мер. Опыт передовых заводов-изготовителей и
электростанций свидетельствует о возможности обеспечить нормальное
вибрационное поведение турбоагрегата в эксплуатации.
Глава седьмая
ПРИМЕНЕНИЕ ОБЩИХ МЕТОДОВ МЕХАНИКИ
К ЗАДАЧАМ ПРОЧНОСТИ И ВИБРАЦИИ
ТУРБОМАШИН
7.1. РАСЧЕТ СОБСТВЕННЫХ ЧАСТОТ КОЛЕБАНИЙ
ЛОПАТОК И РОТОРОВ ПО МЕТОДУ РЭЙЛИ
Метод Рэйли. Метод позволяет рассчитать первую собственную
частоту колебаний консервативной системы, если известна
предположительно (по оценке) первая главная форма колебаний. Метод
основывается на формуле Рэйли
2 П(Рк)
Рк щ-у (7Л)
щерк—к-я. собственная частота консервативной системы; Fk—к-я
главная форма колебаний, т.е. амплитудные значения смещений
(обобщенных) при к-и форме колебаний; #(/*#) — потенциальная энергия
конструкции, рассчитанная для к-й формы колебаний; K(Fj) — кинетическая
функция, составляемая как кинетическая энергия конструкции, в которой
скорости заменены на смещения Fk, соответствующие к-й главной форме
колебаний.
Символ Fk в общем случае обозначает деформацию конструкции
(амплитуды колебаний) при к-й главной форме колебаний, а в частных
случаях может быть функцией координаты (Fk - Xk(z) — динамический
прогиб лопатки), совокупностью нескольких функций координат (Uk(z)9
Vk(z)9 ©#(z) — линейные и угловые смещения при изгибно-крутильных
колебаниях лопаток) или совокупностью амплитуд в дискретной
системе (Fk = ф^ — амплитуды колебаний в точках i при форме колебаний
номера к).
Для доказательства формулы Рэйли (7.1) применим закон
сохранения механической энергии в консервативной системе в виде
Щи) + T(u) - const, (7.2)
413
где П(и) — потенциальная энергия; Т(й) — кинетическая энергия; u(t) —
смещения в системе; u(t) — скорости в системе.
Для собственных колебаний консервативной системы по одной
из главных ее форм номера к имеем
ukO)ssFkcosP(kit (7-3)
и, следовательно,
**(') = -Р(к/(к)*™Р(к)*- <7-4)
Здесь Fk — амплитуды при колебаниях системы по главной форме
номера к. (Индекс в скобках означает, что по нему не производится
суммирование.)
Подставим (7.3) и (7.4) в (7.2). При этом учтем, что потенциальная
энергия консервативной системы есть однородная квадратичная
функция смещений и, а кинетическая энергия — однородная квадратичная
функция скоростей и. Поэтому из (7.2) получим
2 2 2
17(Fk)cos P(k)t + K(F^)p^sm pkt = const, (7.5)
n(Ff) — потенциальная энергия, вычисленная по к-й главной форме Fk,
K(F^) — кинетическая функция, подсчитанная как кинетическая энергия,
но вместо скоростей в нее подставлены амплитуды главной формы
колебаний.
Левая часть (7.5) может быть постоянной (не зависящей от времени)
величиной только при условии
Тогда, вынося любую из величин (7.6) за скобку в (7.5), получаем
2 2
n(F(k))(cospkt + sin Р(*)0 = Щ^к) = const,
и условие сохранения механической энергии (7.2) выполняется.
Из (7.6) следует формула Рэйли (7.1).
Формы колебаний системы заранее, как правило, неизвестны,
поэтому непосредственное использование формулы Рэйли невозможно,
лучше сказать ограничено теми случаями, когда формы колебаний
системы заранее известны, или при приближенном расчете в тех случаях,
когда из каких-либо соображений можно принять вместо истинных
значений амплитуд Fk некоторые значения Fk приближенно соответствую-
414
щие какой-либо главной форме колебаний. Задаваясь значениями Fk, по
формуле Рэйли получаем приближенные значения собственных частот
А.У&. (7.7)
Таким путем, как правило, удается с приемлемой точностью
определить первую собственную частоту. Погрешность в определении высших
частот бывает чаще всего большей, однако в ряде случаев возможно
получить по формуле Рэйли и высшие частоты колебаний (см. пример 7.1).
Теорема Рэйли. Предположим, что вместо амплитуд главных
форм Fk мы в правую часть формулы Рэйли (7.1) подставим
произвольные смещения F и пожелаем выяснить, как изменится правая часть
равенства, т.е. расчетное значение частоты. Оказывается, что при любом
выборе смещений F при расчете частоты по формуле Рэйли (7Л) мы
получим значение, превышающее первую собственную частоту
системы. И лишь в том случае, когда выбранные смещения F образуют
первую главную форму колебаний, т.е. когда F = Fj, формула (7.1) в
точности дает значение первой собственной частоты. Коротко это
условие записывается в виде
K(F)
Сформулированное утверждение составляет теорему Рэйли об
экстремальном свойстве первой собственной частоты консервативной
системы. Доказательство теоремы Рэйли приводится в курсах теории
колебаний. Теорема Рэйли является весьма полезной: она указывает
направление поиска при использовании различных приближенных
методов расчета собственной частоты, а также далее (§ 7.2) будет
использована при формулировке метода Ритца.
Применение метода Рэйли к расчетам собственных частот
дискретной системы. Пусть система схематизирована дискретной моделью
в виде совокупности масс, соединенных упругими связями. В качестве
модели рассмотрим невесомую балку (стержень) с сосредоточенными
массами (рис. 7.1). Такая модель применяется при рассмотрении
колебаний отдельных роторов или системы роторов. В последнем случае может
быть несколько опор (больше двух). Для расчета первой собственной
частоты системы (рис. 7.1) следует выбрать совокупность сил Pi и
нагрузить ими рассматриваемую систему. Можно, например взять силы,
пропорциональные массам, т.е. загрузить систему собственными весами гру-
415
Рис. 7.1. Расчетная схема ротора с сосредоточенными массами
зов. Можно брать иную произвольную систему сил, стремясь к тому,
чтобы деформация системы под действием этой совокупности сил
соответствовала бы предполагаемой форме колебаний. Если бы удалось
подобрать совокупность сил таким образом, чтобы система после
деформации приобрела бы конфигурацию какой-то, например первой главной
формы колебаний, то тогда по формуле Рэйли (7.1) мы получили бы
точное значение собственной частоты колебаний (например, первой).
Допустим, что для данной системы (рис. 7.1) определена
(вычислена) матрица податливо стей
[8] -
811 812 - 8l/i
821 822 ... Ъ2п
Ъп\ Ъп2
.. 8И
(7.9)
где 8у
это смещение в точке г под действием силы равной единице,
приложенной в точке у.
Тогда можно вычислить и обратную матрицу — матрицу жесткостей
М = [6Г1- (7.10)
Если к системе приложена совокупность сил Pi9 то смещение
(прогибы) в любой точке системы суть
«, = V> (7Л1>
Если воспользоваться коэффициентами жесткости Су9 то разрешая
систему уравнений относительно Pi9 получаем
Pi-cyaj. (7.12)
Потенциальная энергия системы может быть выражена как работа
сил Pt на соответствующих перемещениях, т.е.
П(Р) = \af% = \tyPjP,,
(7.13)
416
или, заменяя силы по (7.12), получаем потенциальную энергию,
выраженную через смещения в виде
П(а) = \ctffly (7.14)
Кинетическая функция системы
К(Р) = \т£ = \т{8ир/, (7.15)
следовательно, приближенное значение частоты по формуле Рэйли
~2 aiPi
Р\ = -^, (7.16)
miai
где ai = SjjPj, или в зависимости от смещений
с-а-а-
ij г j
р\ - -^. (7Л7)
miai
Напомним, что по повторяющимся индексам производится
суммирование от 1 до я.
Если силы Pi выбраны независимо от точек расположения масс, то
вместо (7.16) имеем
~2 а1Р1
Р\ " -Ц, (7Л8)
где щ — смещения в точках приложения сил Pf, ai — смещения в точках
расположения масс mi под воздействием сил Р/, приложенных в точках /.
Для рационального выбора совокупности сил Pi таким образом,
чтобы деформация конструкции под действием этой системы сил
соответствовала некоторой форме колебаний, следует учесть, что в точке
расположения массы /и,., совершающей колебания по закону ui =
= ai cos pt9 на систему действует сила инерции
Pi = -™(/)й(0 = p2™{i)a(i)cospt ,
т.е. реально проложенная сила имеет амплитудное значение,
пропорциональное произведению массы и амплитуды ее колебаний. Следовательно,
при использовании метода Рэйли для расчета собственных частот
следует приложить к конструкции силы, пропорциональные массам
(которые заданы) и предполагаемым амплитудам динамического прогиба или,
что то же, формам колебаний.
417
Пример 7.1. Для иллюстрации эффективности метода Рэйли рассмотрим
приближенные расчеты собственных частот вала турбомашины с тремя рабочими
колесами. Опоры ротора можно считать шарнирными.
Систему схематизируем безынерционным валом постоянного диаметра с
тремя равными сосредоточенными массами т, расположенными на одинаковых
расстояниях //4 друг от друга и от опор (рис. 7.2). Расстояние между опорами
равно /. Величины d, /, т, материал вала не будем конкретизировать, так как наша
задача состоит в том, чтобы провести сравнение частот колебаний данной
конструкции по методу Рэйли с точным решением для данной конструкции, которое
получено путем применения метода расчета дискретной системы с несколькими
степенями свободы.
Матрица коэффициентов податливости находится любым методом сопротивления
материалов и имеет следующий вид:
[5]
611 512 613
521 522 523
531 532 633
9
11
1
И 7
16 И
11 9_
г
7685'
(7.19)
Рис. 7.2. Схема трехмассового ротора на шарнирных опорах
418
где смысл записи таков, что произведение общего множителя на любое число,
стоящее в матрице, дает соответствующий коэффициент податливости, например
5П = 9/ /(7685); В = EI — жесткость вала; Е — модуль упругости; / — момент
инерции сечения вала.
Точное решение задачи о свободных колебаниях рассматриваемой
конструкции дает следующие результаты.
Собственные частоты колебаний определяются соотношением
( В V/2
Рк = *Л—г\ (*= 1,2,3),
ml
где
( 768 У * ,огм
a2 = (Z|8y/2 = 19,5959;
( 768 у/2 И1/:п„
a = _ =: 41,6063.
3 Ч6-11л/2;
Применим метод Рэйли к расчету первой собственной частоты колебаний, для
чего приложим в средней точке всего одну силу, равную единице: Р2 = 1.
Пользуясь матрицей (7.19), находим смещения во всех трех точках
Потенциальная энергия
Я(а) = ЬР' = Ь/>2 = 2^8©-
Кинетическая функция
^(a)=i(m1^ + m2^ + mJ^)=im(^)(ll2+162+ll2) = 249(^)
3 ч2
т.
Частота по (7.18)
2<~2 = Щ*) = JL 2Ш
Р*~Р* К(а) 249 w/3
/>,<£, =4,9674(-^)1
или
_B_V/2
Приближенное значение частоты отличается от точного (в сторону
увеличения) всего на 0,69 %, т.е. приближенное значение вполне приемлемо.
419
Рх = Р2 = Р3 = 1. Найдем смещения
Второй вариант нагрузки: приложим в трех точках три одинаковые силы
27/3
«1!) = 5пЛ+§12^2 + §13^3
«11+8,2 + 6,3 -^gj,
(1) о ,о ,о 38/ .
я2 = о21+522 + 523 = ^g,
JO
27/
з =53i+532 + S33 = 768B-
(7.20)
Определим потенциальную энергию и кинетическую функцию
Ща) 2а, ^ 21а, + а2 +д3 ) ?685,
2"'<L~< J 2
По формуле Рэйли определим частоту первого тона
Р\йР\
1/2
46.7685l/2 = 4(9343(5V/2
1451
ml
Сравнивая полученное значение с точным, видим, что приближенное
значение совпадает с ним до третьего знака, погрешность составляет 0,02 %.
Высокая точность приближенного расчета объясняется тем, что при
выбранной нагрузке форма прогиба вала очень близка к линии динамического прогиба
по первой главной форме.
В данном примере вследствие симметрии конструкции можно рассчитать
по формуле Рэйли и вторую собственную частоту колебаний. Очевидно, что
вторая форма колебаний соответствует следующим соотношениям между
амплитудами в точках 1,2иЗ (рис. 7.2):
„(2) _ (2). (2) _ п
а{ - -аъ ; а2 - 0.
Воспользовавшись этим, приложим к конструкции следующую систему сил:
Р, = 1; Р2 = 0; Р3 = -1.
Очевидно, что прогибы под действием такой системы сил будут вполне
соответствовать второй форме колебаний, а следовательно, и расчет частоты по
формуле Рэйли доставит точное ее значение. Проверим это утверждение. Найдем
прогибы
"? = ЗиЛ +S12/>2 + 513/>з = 5П
8 -J-L
"°13 ~" ПСО D »
J2)
„(2)
13 768 В !
521Л+822Р2 + 523Р3 = 521-523 = 0;
531Л + 532^2 + аззР3 = 531-833
2/J
7685'
420
■ Найдем потенциальную энергию и кинетическую функцию
„, . 1 р \( 2/3 2/3 . .Л 2/3 .
Ща) = 2аЛ - 1Шв-ШВ{-Х)) ~ 7685'
Да) = \тр) = ^(4 + 4)(^) = 4™(^) .
Вычислим собственную частоту второго тона по (7.1)
\K{a)J к1т?) \mlv
совпадающую с точным значением.
Пример 7.2. Попробуем вычислить и третью собственную частоту ротора
(пример 7.1) по методу Рэйли. Из общих соображений ясно, что
предположительно третья форма имеет вид, изображенный на рис. 7.2.
Выберем систему сил Р таким образом, чтобы она создавала прогиб типа
третьей главной формы. В силу симметрии ясно, что Pj = Р3, а соотношение
между Р2 и Pj, Р3 — заранее неизвестно, но очевидно, что сила Р2 должна иметь
направление, противоположное направлению сил Р| и Р3.
Для определения силы Р2 используем условие ортогональности главных форм
колебаний. Форма третья должна быть ортогональна к первым двум формам, т.е.
должны выполняться соотношения
miai ai =0; тр^ ai — \), (7.21)
где производится суммирование по индексу i по всем точкам (прогибам) системы.
Верхний индекс в скобках означает номер главной формы. В силу того, что третья
форма симметрична, а вторая — антисимметрична при любом выборе Р2 третья
форма будет ортогональна ко второй, и второе соотношение (7.21) тождественно
выполняется, а из первого соотношения, подставляя значения смещений по
первой форме, получаем
Находим смещения по третьей форме, считая что Pj = Р3 = 1, а Р2 — величина
неизвестная:
ах = 5H+S13 + 512P2»
43> = 521 + 523 + 522Р2 »
аъ = б31+833 + 532Р2.
Подставляя полученные выражения в предыдущее соотношение, получаем
уравнение для определения Р2, решая его, имеем
^п+^ + ^^+^ + ^з'^З!4-^)
2 (Ос , (Ос . (Ос
421
Подставляя значения в выражение для Р2 и сокращая всюду общий
множитель /3 /(7685), получаем
= 27-164-38-22 + 27-16 = _ 1700 в _1 ди-
2 27-11+38-16 + 27-И 1202
Теперь для определения собственной частоты третьего тона приложим
совокупность сил: Рх = Р2 = 1; Р2 = - 1,4143, вычислим прогибы
(3) _ 9-1,4143-11+7ГЛ ш JL
1 768 \в) ' тв'
J3) в 11 -1,4143- 16+ llfA = _Л^С0_/3
8 \В1
-0,6288;
2 768 \Bl '7685'
(3) ш 7-1,4143-11+9(<Д = 04427jL
"3 768 Ы 0,4427768Я*
Вычисляем потенциальную энергию и кинетическую функцию
3 3
Я = Ы3>р* = ^(0,4427 + 0,6288- 1,4143 + 0,4427 )~г^ = 0,88736-^-
2» ' 2V ' ' ' у768# ' 7685'
3 2
К = 5«,[e{3)]2 = |т[(0,4427)2 + (0,6288)2 + (0,4427)^](^) =
= 0,39368т(^)2.
Собственная частота третьего тона
70,88?36^„У/УД у/2 Л.,ПА(ВУ^
^ = lo3368.'768J У "41>б0бУ •
Значение частоты третьего тона оказалось точным. Это получилось
вследствие того, что третья форма колебаний выбрана нами ортогональной к первой, а ко
второй форме она также ортогональна в силу симметрии системы. Подобрать
умозрительно совокупности сил для реализации третьей формы колебаний без
применения условия ортогональности было бы невозможно.
Применение метода Рэйли к расчетам собственных частот
распределенной системы. Конструкция схематизируется модельно с
распределенными параметрами. Примером конструкции может служить
одиночная лопатка или лопатка со связями (рис. 7.3) или ротор на
жестких или упругих опорах (рис. 7.9).
В качестве объекта рассмотрим одиночную закрученную лопатку
с переменными по оси параметрами жесткости В (z), Bxy(z) и Bx(z) и
линейной плотностью v(z), жестко или упруго закрепленную на роторе,
вращающуюся с угловой скоростью со.
На рис. 7.3 лопатка (ось ее) изображена в деформированном
состоянии. Требуется, считая функции U(z) и V(z) — заданными (известными),
422
W(z)
U(z)
A V®2(rK+z)dz 2 A A
W(z)
V(z)
VG)2(rK+2)d2
Рис. 7.3. Схема действия центробежных сил инерции на вращающуюся лопатку
найти потенциальную энергию и кинетическую функцию системы
в деформированном состоянии и затем по общей формуле (7.7)
определить
р] = n(U9V)/K(U,V), (7.22)
где р\ — приближенное значение первой собственной частоты.
Закрепление лопатки считаем упругим, причем главное вщяние
оказывают изгибающие моменты в корневом сечении, вызывающие наклон
оси лопатки в этом сечении в соответствии с зависимостями
^(0) = 8^,(0) + 8ухМх(0); U(0) = 0;
^(0) = 5,МД0) + 5^(0); V(0) = 0,
(7.23)
где 8Х, Бу, 5^ — угловые податливости; Мх(0), Му(0) — изгибающие
моменты в корневом сечении.
423
2
Полная потенциальная энергия лопатки Я = П0 + П\+ со П2 состоит:
из потенциальной энергии упругого изгиба /70 рабочей части лопатки,
потенциальной энергии, накопленной в упругой заделке Пх и потенци-
альной энергии со П2, обусловленной центробежными силами инерции.
Все составляющие потенциальной энергии можно выразить как
работу обобщенных сил на соответствующих им обобщенных
перемещениях.
Потенциальная энергия изгиба рабочей части лопатки
/
Щ = U(U"My+V"Mx)dz (7.24)
О
получается как работа изгибающих моментов на соответствующих
смещениях U" dz, V"dz.
Учитывая, что моменты связаны с кривизнами U" и V"
соотношениями косого изгиба, а именно
My-ByW' + B^V";
M^B^w + Bjr;
подставляем их выражения в (7.24) и получаем
/
По = \ PyW*)1 + 2ВхУи"v" + вх(У*)*] Az• (7.25)
о
Вторая составляющая потенциальной энергии получается как работа
моментов Мх(0)9 Му(0) на соответствующих угловых смещениях
*У'(0), Г(0):
Щ = \{ V'MX + 1ГМу\ = \(ЪУХ + 2ЪхуМхМу + 5yM2y)Q. (7.26)
Здесь приняты условия (7.23) с учетом симметрии матрицы податли-
вости:5^ = 5^.
Учитывая исследования ЛМЗ для податливости 5 , принимаем
соотношение
/ 2
8д, = %^-cos р (%= 1,3—1,6),
л
1/2
где /^ = (1Ц IF) — радиус инерции корневого сечения лопатки
относительно главной оси т).
Податливость в осевом направлении Ъх определяется, в основном,
податливостью диска и зависит, вообще, от формы колебаний (числа
424
узловых диаметров, см. § 5.8). Для ориентировочных расчетов можно
принять
12(1 - ц)гк
где гк — радиус корневого сечения; /к — шаг лопаток на этом радиусе;
h — толщина диска на периферии.
2
Третья составляющая — потенциальная энергия со П2 обусловленная
центробежными силами инерции — также может быть найдена как
работа с обратным знаком этих сил на перемещениях U(z)9 V(z)9 W{z)9
где W(z) — это перемещения сечений по оси z при деформации лопатки
из исходного состояния до смещений U(z\ V{z) (рис. 7.3). Итак,
/ /
со2#2 = - i Jt/(z) dCx + \W(z) dCz,
0 0
или, учитывая, что
dCx = vco2£/(z) dz;
dC2 = va>\rK + z)dz9
получаем
/ /
п2 в ~ \ Jv ^OO dz + fvw(z)(rK + 2) dz. (7.27)
2o о
Смещение W(z) найдем как разность
/
W(z) = j-z = jf|p-l) dz, (7.28)
где s — длина дуги упругой линии лопатки, отмеряемая от корневого до
рассматриваемого сечения.
Учитывая, что
ds 2 2^/2 12 2
f = [1+ (£/') 2 + (Г')] *1 + Н(С/') +(П 1
dz 2
2 2
(поскольку (£/') , (F') малы по сравнению с единицей), и подставляя dsl
dz в (7.28), имеем формулу для определения смещения W(z) в виде
Z
W~ l[[(U')2 + (V')2]dz. (7.29)
zo
425
Кинетическая функция — по общему правилу имеет вид
/
К = \\v[U2+ V2]dz. (7.30)
26
Частота колебаний по формуле Рэйли
-2 П ,~г , т: 2J/2
К
Р = i = (Рст + *<0 > С7-31)
где
Р2ст ■ (Л0 + Лг)/К; (7.32)
В = П2/К. (7.33)
По смыслу /?ст — это частота колебаний невращающейся лопатки;
член 2? со учитывает влияние вращения на частоту собственных
колебаний.
Прямое использование формулы (7.31) требует задаться прогибами
U(z), V(z). Однако поскольку последующие величины вычисляются
через первые и вторые производные от U и К то результат (7.31) будет
очень сильно зависеть от выбранных функций, и таким путем не
достигается необходимая точность.
Для получения достаточной точности следует задаваться не
прогибами U(z), V(z)y а нагрузкой qx(z)9 q (z) и находить U(z)9 V(z) как
статические прогибы под действием этой нагрузки (рис. 7.4). Саму нагрузку
целесообразно выбирать в виде
1x(z) = axvU0(z);
(7.34)
qy(z) = a2vV0(z)9
где a1? a2 — неопределенные постоянные множители; U0(z), F0(z) —
формы предполагаемого динамического прогиба.
Структура зависимостей (7.34) соответствует силам инерции,
действующим на колеблющуюся лопатку: они пропорциональны массе
(линейной плотности v) и динамическому прогибу. Масштаб величин
U0(z), V0(z) может быть естественно, любым, так как aj, a2 не
определены. В дальнейшем в § 7.2 устанавливается соотношение между
множителями ctj и а2, что необходимо при вычислении частот закрученных
лопаток. Для незакрученных лопаток колебания в двух главных
плоскостях являются независимыми и поэтому не требуется устанавливать
соотношения между aj и а2 — обе величины могут быть приняты
совершенно произвольно.
426
Рис. 7.4. Схема нагружения закрученной лопатки при расчете частот по методу Рэйли
Применим общий метод Рэйли к расчету первой собственной
частоты вращающейся незакрученной лопатки постоянного по высоте
профиля, упруго закрепленной на диске. Лопатка совершает
колебания в плоскости iflz.
Для определения упругой линии выберем нагрузку в виде
сосредоточенной поперечной силы Р, приложенной на вершине лопатки в
направлении оси % (рис. 7.5, а). Прогиб в плоскости iflz обозначим X(z),
проекции его на оси хну есть U(z) и V{z) соответственно
U(z) = X(z) cos Р; V(z) = X(z) sin p. (7.35)
Податливость закрепления в плоскости колебаний принимаем по
зависимости
5 =%#.
где*г
В„
■ радиус инерции сечения; В = £7 •
(7.36)
• жесткость сечения лопатки
на изгиб в плоскости колебаний (рис. 7.5, б); % — постоянная, зависящая
от формы профиля и находящаяся обычно в пределах 1,3—1,6. Прогиб
лопатки под действием силы Р можно получить в виде зависимости
X(z)
Ф
(7.37)
которую предлагается получить самостоятельно, использовав сведения
из сопротивления материалов. В формуле (7.37) X = 1/L — гибкость
лопатки в плоскости колебаний; Х0 — прогиб на вершине лопатки,
жестко закрепленной у корня. Первые два члена в (7.37) определяют
прогиб лопатки, жестко закрепленной у корня, третий член
представляет прогиб, обусловленный податливостью закрепления.
427
Рис. 7.5. Схема упругого закрепления лопатки у корня, действующие силовые
факторы и угловые смещения оси лопатки у корня
Для получения зависимости вида (7.31) необходимо найти #0, Я1? П2
и К по формулам (7.25)—(7.27) и (7.30). В данном случае можно
упростить вычисления, найдя суммарную потенциальную энергию Я0 + Пх
как работу силы Р на смещении Х(1) = Х0(\ + Зх/Л,). Это дает
38)
770 + Я, = \РХЦ) = 1РЛГ0(1 + 3$ = l^1 + 'J) ■ (?
По формуле (7.29) вычисляем радиальное смещение, используя
(7.35), (7.37):
Z
2о
и затем по (7.27) находим после преобразований (9 = dc/l)
^2 = -wP+|v/4{[4VI©4©>+
1680 120W 12W
(7.40)
428
Кинетическая функция по (7.30)
/ /
К = \\v{U2 + V2) dz = \\vX2Az -
о о
Подставляя полученные выражения в общие зависимости (7.31)—
(7.33), получаем формулу для первой частоты в виде
2 - 2 1/2
р = (рст + В(й ) ,
где
• -[•♦«'♦'©♦TrGfr ™
В = 0,796 ц! 9 + 0,432 ц2-cos2 р; (7.44)
. 1+6(х/Х)+12(х/А,)2
1+ 7(х/Л.) + (140/11)(х/Х)2'
= 1 + (98/ 19)(х/А.) + (140/ 19)(х/Х)2
1 + 7(х/Х) + (140/11)(х/Х)2
(7.45)
Сопоставим приближенную формулу (7.42) с точной, полученной
в § 5.3 методом решения уравнения движения лопатки. Для условий
жесткого защемления \|/ = 1 погрешность составляет
IzJL юоо/о - 3,567-18752 в Ш46 ш 15%
* 1,8752
Множитель у (см. (7.43)) характеризует влияние упругости
защемления на собственную частоту первого тона колебаний. На рис. 7.6
представлено сопоставление трех способов определения влияния
закрепления: «точного» решения, приближенного решения (7.43) и
экспериментальных данных. Как видно, метод Рэйли дает результаты,
совпадающие с «точным» решением, однако имеется расхождение
теоретических и экспериментальных результатов, что обусловлено
несовершенством математической модели узла закрепления лопатки,
основанной на предположениях (7.23).
429
1,0
0,8
0,6
0,5
20 40 60 l/t^
Рис. 7.6. Сравнения расчетного и экспериментального коэффициентов \\f(X)
1 — эксперимент; 2 — по методу Рэйли; 3 — точное решение
Зависимости (7.44), (7.45) в предельном случае шарнирного
закрепления лопатки (когда к -» оо) дают «точное» значение частоты. В этом
случае лопатка представляет физический маятник, находящийся в поле
центробежных сил, частота которого легко может быть найдена в виде
р2 = [|(»-l) + sin2p]o)2. (7.46)
Рассматривая предельное значение В по соотношениям (7.44), (7.45)
при х -» со, находим
В = 0,75(9 - 1) + sin2p.
Очевидно, что первая собственная частота шарнирно закрепленной
невращающеися лопатки равна нулю, поэтому решение по методу
Рэйли полностью совпадает с точным, что и должно быть, так как
форма колебаний, принятая при использовании метода Рэйли в данном
случае, полностью совпадает с истинной формой колебаний лопатки как
физического маятника.
Пример 7.3. Рассчитаем приближенно методом Рэйли частоту собственных
колебаний лопатки постоянного профиля, выбрав различную нагрузку q(z),
и сравним с точным решением, которое дается формулой (см. § 5.3)
\{В\х/г
*. = 3>5160;К9 •
Вариант первый — нагрузка в виде сосредоточенной силы — рассмотрен
ранее и дает погрешность примерно 1,5 % по сравнению с точным.
Вариант второй — выбирается нагрузка q0, равномерно распределенная
по длине. Упругая линия под действием такой нагрузки, как известно, имеет вид
430
1 ^^
г^2
О-З
К
Вычислим потенциальную энергию как работу нагрузки q0 на смещениях U
Я=^9оС/ёг = ^0С/0/|(2;2-|;3 + |с4)<1С = ^01/0/(|-|+1У=0,200д01/0/.
Вычислим кинетическую функцию
= ^4(1^^-^-^^) = °^^.
Частота колебаний первого тона
~2 П 0,200g0t/0/ 0,200 •%( В\ ., .,. J?_
" ~ * = 0,128W0/ " 0,1284 lv/4J = 12'461v/4;
£, =3,530(^)'/2.
Погрешность по отношению к точному значению
Р^£ = 0,0040 = 0,4 %,
Р
т.е. получен более точный результат.
Для демонстрации возможности дальнейшего уточнения предлагается
самостоятельно рассмотреть вариант третий — загрузки: q{z) = #0£, так что для
упругой линии получается выражение
tf = ?0(С5/120-С3/12 + С2/6);
*о = (*</)/*.
Ответ:
р- 3.5171(A) .
Погрешность составляет
^-^ = 0,00031 = 0,03%,
/>
т.е. погрешность пренебрежимо мала.
Уточнение решения наблюдается вследствие того, что в каждом
последующем варианте принимаемая нагрузка приближается к реальной нагрузке от сил
инерции, действующей на лопатку при колебаниях первого тона. Эта реальная
нагрузка q(z) ~ vX(z) — пропорциональна линейной плотности и динамическому
прогибу.
431
7.2. РАСЧЕТ СОБСТВЕННЫХ ЧАСТОТ
И ФОРМ КОЛЕБАНИЙ ЛОПАТОК И РОТОРОВ
ПО МЕТОДУ РИТЦА
Метод Ритца. Согласно теореме Рэйли (применительно к рабочим
лопаткам) частота, подсчитанная по формуле (7.22) при любом выборе
линии динамического прогиба U(z), V(z) не меньше истинного значения
первой собственной частоты/?j. Наиболее близкой к истинной первой
форме колебаний Ufa), Vx(z) является такая линия прогиба U(z), V(z),
для которой частота (7.22) имеет минимальное значение.
Это свойство указывает путь уточненного расчета первой
собственной частоты. Упругую линию лопатки £/(z), V(z) следует принять в виде
соотношений, содержащих неизвестные параметры, которые затем сле-
дует подобрать так, чтобы значение р^, подсчитанное по формуле
(7.22), было минимальным.
Примем упругую линию динамического прогиба в следующем виде:
U(z) = e191(z) + a292(z)+...+ a(||)9(||)(z) = tf/p/z); 1
V{z) = bl\|/1(z) + 62v|/*2(z)4-...+6(w)v|/(w)(z) = bjyj(z),}
где Д|, a2, ..., an; bx, b2, ..., bm — неизвестные параметры, подлежащие
определению; cp^z), 92(z), ..., yn(z); vj/^z), \|/2(z), ..., \\>m(z) —
определенные выбранные функции.
Функции (p.(z), \|/(z) (каждая в отдельности) должны удовлетворять
кинематическим граничным условиям рассматриваемого стержня
(лопатки). Напомним, что кинематическими граничными условиями
называются условия, накладываемые на прогиб и угол наклона
касательной упругой линии.
При решении методом Ритца задачи о колебании лопатки,
защемленной у корня, функции 9,(z), v|/(z) следует выбрать таким образом, чтобы
в месте защемления <р, = 0; ср'. = 0; у. = 0; у'. = 0.
Граничные условия, накладываемые на изгибающие моменты и
перерезывающие силы, называются динамическими или естественными.
Динамическим граничным условиям функции 9y(z), у (z) могут и
не удовлетворять. Так, для лопатки, свободной у вершины, на
свободном конце не является обязательным обращение вторых и третьих
производных ср"., ф'" и \|/"., vj/'" в нуль.
432
Функции cpXz), v|/(z), называемые часто координатными функциями,
выбирают в виде нескольких первых членов последовательности
степенных или тригонометрических функций
Ф! = 1; ф2 = г; Ф3=*2, ..., <pn = z" \
(7.48)
или
Ф1 = 1; ф2 = sin (nz/l); ф3 = sin (2nz/[); ...; ц>п = sin [(и - l)nz/f]. (7.49)
Аналогичные последовательности выбирают и для \|/.. Можно
принимать ф, = у,, т.е. обе последовательности одинаковыми, если
одинаковы кинематические граничные условия для обеих составляющих
прогиба: UuV.
Для удовлетворения граничным условиям можно выбирать ф, и у,
в виде линейных комбинаций нескольких членов последовательностей
(7.48) или (7.49).
Приняв упругую линию в виде (7.47), можно по формулам (7.25),
(7.27) и (7.30) определить П и К как функции параметров а- и Ьр
U = П(ах, аь ..., ап; Ьи Ъь ..., Ьт) = П(а]9 bp,
К = К(Р\9 а2, ..., an; Ьх, Ь2, ..., bm) = K(aj9 bj).
Частота р по формуле (7.31) также определяется как функция
параметров ар Ьр т.е.
р2 = n(apbj)/K(apbj). (7.50)
Согласно теореме Рэйли наиболее близким к действительному будет
минимальное значение р . Необходимые условия минимума
да. da\KJ
$L. =.А.(П\
при / = 1, 2, .... и;
db:
дЬ
;©■
0 при I - 1, 2, ..», т.
(7.51)
-2
Дифференцируя отношения в (7.51) и заменяя П/К = р ., получаем
основные уравнения метода Ритца
~2
дП/да. = р дК/да. при i = 1, 2, ..., п;
~2
ЭЯ/дб. = р дК/дЪ{ при i = 1, 2,
т.
(7.52)
433
Принимая уравнение упругой линии лопатки по (7.47), потенциаль-
ную энергию как сумму Я0 + со Я2 (при Пх = 0), в которой П0
рассчитывается по (7.25), Л2 — по (7.27) при определении W(z) по (7.29),
кинетическую функцию — по (7.30), из соотношений (7.52) получаем
систему уравнений для искомых коэффициентов а- и bj\
(«,
(ч)
~2„(11)ч , (12), .
■р pj, ')aj + a)j 'Ъ. = 0;
(21) , , (22) ~2Q(22),, .
где коэффициенты системы определяются зависимостями
(7.53)
4 } = f(V> у + *¥>} - ш уч»,Ф/) <k;
о
4 = K/p>'} ^ 4 - K^>'}dz;
(21) _
(22)
а-- =
у
f(i»,V",V"y + ^v>})dz;
,00
Ру" = lvVi%dz> 4 = W'Y/dz-
(7.54)
Система (7.53) состоит из п + т уравнений и содержит n + т
неизвестных: число неизвестных я,- равно п, число неизвестных Ь, равно т. В
соотношениях (7.53), как договорено, суммирование производится по
повторяющимся индексам, при этом индексы суммирования при а-
изменяются при суммировании от 1 до п, индексы при Ъу изменяются от 1 до
т.
Соответственно в выражениях (7.54) индексы при ф, ср' и ф"
принимают значения от 1 до и, индексы при \|/, \|/' и \|/" — от 1 до т.
Для нетривиальности решения необходимо, чтобы определитель
системы (7.53) равнялся нулю. Приравнивая определитель системы
нулю, получаем уравнение частот
А(Р2) = 0. (7.55)
Определитель (7.55) после его развертывания образует многочлен
степени п + т относительно р ; уравнение частот (7.55) представляет
434
~2
алгебраическое уравнение степени п + т относительно р . Решив это
~ ~2 ' ~
уравнение, найдем и + /и значении ;? и соответствующие значения р:
Pi <Р2<£з <-<£,! + «• ' ' '
Наименьшее значение р^ является приближенной величиной первой
собственной частоты: рх »pj.
Детальный анализ показывает, что прочие значения рк, полученные
из уравнения частот (7.55), являются приближенными величинами
собственных частот стержня от второй до (и + т)-й включительно.
Точность определения всех частот при использовании метода Ритца
обычно неодинакова. С наибольшей точностью, как правило,
определяется частота основного тона/?]. Последующие частоты определяются
с тем большей погрешностью, чем выше номер частоты (т.е. чем выше
тон колебаний).
После определения частот рк (к-1,2,3, ..., и + т) для каждого зна-
(к) (к)
чения рк из системы (7.53) можно найти коэффициенты af , 6.
с точностью до произвольного множителя [в системе (7.53) после
подстановки в нее р = рк по крайней мере одно из уравнений окажется
«лишним»]. Затем по формулам (7.47) построим главные формы колебаний.
Более детально рассмотрим случай п-т = 2, для которого систему
(7.53) представим в матричной записи
Aq = 0; (7.56)
А =
а
а
(П) ~2 (11)
11 Р НЦ
(21)
"и
(11) -2 (И)
21 Р Р21
<х(21)
"21
(12) 1„(") -2В(11)
а11 |а12 Р П2
(22) ~2„(22)| (21)
«11 -Р Pll J а12
(12) ' а(»)_-2в(П)
"21 "22 Р "22
(22) ~2Q(22) (21)
а21 -Р Р21 а22
а(,2) 1
"12
(22) ~2П(22)
а12 -Р Pl2 1
а(12)
"22
(22) ~2 (22
а22 " ^22
(7.57)
435
Уравнение частот (7.55) запишется в виде
М|=0, (7.58)
где символ \А | означает определитель матрицы А. Собственные частоты
колебаний определяем, находя корни уравнения частот (7.58)
Р\ <Р2<Ръ<Ра-
Главные формы колебаний определяем, решая систему (7.56) для
каждого значения р = рк, к = 1, 2, 3, 4, находя параметры а. , bi
(с точностью до множителя) и подставляя их в (7.47). Таким путем
найдем все формы колебаний 1г \z), V^ \z), (к = 1, 2, 3, 4) также с
точностью до постоянного множителя.
Пример 7.4. Рассчитать методом Ритца первые две частоты колебаний невра-
щающейся закрученной лопатки постоянного профиля, считая, что при повороте
профиля жесткости изменяются в соответствии с соотношениями (5.24). Закрутка
лопатки равномерная 90 = TqZ = 0W£, где Gm = т0/ — полная закрутка лопатки —
поворот периферийного сечения относительно корневого; С, = zll —
относительная координата.
В качестве координатных функций принимаем приближенное выражение для
первой главной формы колебаний незакрученной лопатки в виде 9j(z) = vj/^z) =
2 3
= С, + YiC • Задачу решаем в первом приближении, т.е. ограничиваемся
написанными первыми координатными функциями. Постоянная у\=- 0,3837
соответствует решению задачи о колебаниях незакрученной лопатки по методу Ритца.
Матрица Л для нашей задачи выделена в (7.57) штриховыми прямыми.
Система (7.56) в данном случае
Aq =
„С") -2а<п)
Ml
Л»
.(21)
11
а
(12)
11
а
(22) ~2„(22)
11
-рР
И
= 0.
(7.59)
Найдем выражения для коэффициентов, в нее входящих:
/
К
s„
АВ,
ДЯ,
«Г = iK<2+6^2^=f ('o-tV-j^);
(12)
а„ = а
(21) _
11 ~
В м В v
В„( АВХ АВ,
J22)
1 г 2 **mf АВХ АЛ 7 \
Го I т т
1 1г 1 йт( Д^1 Д#? Л
кЗч2
о
(7.60)
436
Здесь обозначены величины:
/0= J(2 + 6y,02 d^ = 4+ 12у, + 12yt;
о
\ (2 + 6у,)2
/, = J(2 + 6YlQcos(2emQd^ = " sin28m +
О LX)m
Зу.(2 + 6у.) 6yt 9у[
0„, 0.*, 0„
ffl mm
i
(2 + 6Y,r
26„
/2= J(2 + 6YlCrsin(20fflQdC
о
2 3y,(2 + 6y.) 9y?
+г+ n2 sin2e" - тг^1 - cos2e*>;
Jo = J^ + Y^Vd; = l/5 + y,/3+T?/7.-
cos29m +
(7.61)
Определитель матрицы Л в (7.59) приравниваем нулю:
,,, , (11) ~20(22)ч/ (22) ~(22)п(22)ч , (12) 2
После подстановки коэффициентов по (7.60) и преобразования частотное
уравнение можно представить в виде
-2 2 /ДЯ, ДД2 4 2 /ДЯ. &В2 \2
Л -2 v/4 ~2
где обозначено р = — р .
/и
Разрешая его относительно р, находим значения частот /j и /*2 :
*-&-^'-««и»Г'
1/2
g = 0|2^(1+pw)]-;j
Р =
ДЯЛ2 ГАВМ
в„
'11 +|«."2
5
mJ
1/2
(7.62)
(7.63)
где /, — низшая частота лопатки по типу А0; /2 — частота по типу А0, но в
плоскости большей жесткости.
Жесткости Вт, АВ1г АВ2 должны быть вычислены по зависимостям (5.25).
437
Значения функции
представлены в таблице.
°«
WJ
0
1,0000
0,25
0,9954
0,5
0,9849
0,75
0,9668
1,0
0,9420
1,25
0,9113
я/2
0,8646
Для численного примера принимаем: &т - 1; h II= 10; Ъ /(5/) = \\hlb- 1/2;
5/Л = 1. Согласно (5.26) имеем ^ = 0,001629; qn = 0,01529; q^ = 0,003665.
С учетом этих поправок к жесткостям найдем по зависимостям (5.25) АВ} /Вт =
= 0,8159; АВ2/Вт = 0,006656. Используя эти значения, по уравнению (7.63) находим
Р = 0,8159. По формулам (7.62): 7,//,0 = 1,1213, /2//20 = 0,9849, /10, /20 —
частоты незакрученной лопатки того же профиля соответственно в плоскости
минимальной и максимальной жесткости:
Л
10
^ 0,562 (Л
0ч 1/2
/а
0,562 fo
1/2
(7.64)
/2 VVJ ' /2
Вследствие закрутки низшая частота увеличилась на 12,1 %, а высшая
снизилась на 1,5 %. Влияние закрутки на жесткости В^ В» в данном случае
незначительно, что легко проверить, проведя расчет без поправок q*9 qn и q*n.
Расчет собственных частот и форм колебаний закрученных
лопаток гибридным методом Рэйли—Ритца. Расчет частот и форм
колебаний закрученных лопаток методом Рэйли—Ритца основан на
выборе нагрузки в форме (7.34)
**(*)
Чу(*)
(7.65)
axvU0(z);'
a2vV0(z).
Динамический прогиб U(z), V(z) рассчитывают в первом
приближении как статический под действием указанной нагрузки, в которой
множители а! и а2 остаются неопределенными, а исходные прогибы U0(z),
V0(z) выбираются как определенные функции, предположительно
изображающие динамические прогибы в исходном (нулевом)
приближении. Найденные прогибы в первом приближении, подчиненные
граничным условиям, выбираются в качестве координатных функций в методе
Ритца, применение которого позволяет определить две первые частоты
закрученной лопатки и соответствующие им формы колебаний.
По найденным формам колебаний невращающейся лопатки по общим
зависимостям (7.31)—(7.33) находят частоты вращающейся лопатки.
Рассмотрим применение этого варианта метода Рэйли—Ритца к
расчету частот и форм колебаний вращающейся закрученной лопатки
переменного по длине профиля. Взаимным влиянием кручения и изгиба во
438
(7.66)
многих случаях можно пренебречь, о чем свидетельствует оценка этого
влияния в примере расчета закрученной лопатки постоянного профиля
(см. пример 7.4).
Алгоритм решения следующий.
1. Систему уравнений косого изгиба
{ByU" + BxyV»y = axvUQ;
(BxyU" + BxV'>)" - a2vVQ
решают относительно U, V с учетом граничных условий (7(0) = V(0) =
= U'(0) = V'(0) и находят первое приближение
U(z) = alyu(z) + a2<pl2(zy/
V(z) = a1(p21(z) + a2922(z).
2. Для определения параметров ах и а2 применяют метод Ритца, т.е.
определяют потенциальную энергию и кинетическую функцию П(ах, а2),
К(ах, а2) по обычному способу, т.е.
/
17 = Uv(c*{U0U+a2V0r)dz;
zo
/
(7.67)
К = \\v(U2+ V2)dz.
На основании общих уравнений (7.52) получают соотношение
метода Ритца в виде
<*\(а<п-р $п) + а2(ап-р р12) = 0;
ах(а2х-р P2i) + ^2(a22-^ Р22) = °>
где
(7.68)
i i
all== iv^lldz> a12==a21=2lV(Lr0(Pl2"f *Vj>2l)dz;
0 0
/
a22= \vV^22Az>
0
/ /
Рц = Jv(9u+921)dz; р12= р21- jv(<pn<p12 + (p21<p22)dz;
Р22= Jv(cpJ2 + ф22) dz.
о
(7.69)
439
3. Определитель системы (7.68) приравнивают нулю и, разрешая
полученное уравнение относительно частоты, получают
2 1/2 1/2 . , 1/2 1/2
рх = (Л1-(А]-А2) ) ; p2 = (Al+(AZl-A2) ) ,(7.70)
где
allP22 + a22Pll~2a12Pl2,
2(PiiP22-P«)
*2 =
aua22-a12
2 *
PllP22~ Pl2
(7.71)
4. Главные формы колебаний определяют по (7.67), заменяя
отношение а21ах из любого уравнения (7.68). В результате получают первую
форму колебаний в виде:
Ux(z) = а\Х)\
( ~2а >
~2П
a12-^lPl2
(
Vx{z) = ^
(1)
4>2l(z) Гг" 4>22(z)
a12-/>lPl2
(7.72)
и вторую главную форму аналогично, но с заменой рх на р2 '■
U2(z)
- Л2>
<Рц(г)
a
и
РгР
и
a12-^2Pl2
4>12<z)
W
,(2)1
(
Ф21(2>-
a
И
~2а
/>2Р
11
a12 ~"^2Pl2
<p22(z)
(7.73)
Постоянные aj , а\ остаются неопределенными и могут быть
выбраны произвольными или подчинены условию нормирования.
5. Влияние вращения для каждой из форм колебаний учитывают
по методу Рэйли, применяя формулу (7.31), где В рассчитывают по
формуле (7.33) с учетом (7.27), (7.29) и (7.30).
440
а б в
Рис. 7.7. Формы колебаний закрученной лопатки
а — геометрические характеристики лопатки; б — формы колебаний лопатки со
свободной вершиной; в — с периферийным демпферным бандажом
По изложенному алгоритму разработана программа для расчета
частот и форм колебаний с помощью ЭВМ.
Программа, инструкция к ее использованию и пример расчета
приведены в [4]. Указанная программа позволяет рассчитывать как свободную
лопатку, так и венец лопаток с цельнофрезерованным интегральным
бандажом на периферии.
Для свободной лопатки система (7.66) интегрируется при граничных
условиях на периферии
My(l) = Mx(l) = Qx(l) = Qy(l) = 0.
Для венца лопаток с периферийным цельнофрезерованным бандажом
принимаются граничные условия на периферии в виде
My(l) = Mx(l) = Qx(l) = Щ1) = 0.
В последнем случае предполагается, что смещение лопатки на
периферии в окружном направлении равно нулю.
На рис. 7.7, а, б и в изображены рассчитанные по вышеназванной
программе главные формы колебаний для двух вариантов ступени: со
свободными лопатками и с лопатками, имеющими демпферный бандаж
на периферии. Изменение основных характеристик лопатки: В , В*, v, р
по ее длине представлено на рис. 7.7, а. Величины Вц, В^ отнесены
к значению В^0 — у корня, v — отнесено к значению v0.
Применение метода Ритца к расчету частот и форм колебаний
ротора на двух упругих опорах. Рассмотрим ротор на двух упругих
опорах в каждой плоскости колебаний. Принимаем следующие условия:
ротор переменной жесткости и с переменной линейной плотностью,
опоры — анизотропные, т.е. податливости опоры различны для двух глав-
441
r—It—I
Рис. 7.8. Модель одномассового ротора на податливых анизотропных опорах
ных направлений; главные направления податливости обеих опор —
совпадают (рис. 7.8).
При этих условиях колебания в двух главных плоскостях не связаны, и
можно рассматривать колебания в каждой главной плоскости независимо.
Следовательно, для каждой из плоскостей имеется независимый спектр
собственных частот и им соответствующие главные формы колебаний.
Упругую линию динамического прогиба ротора принимаем в виде
U(z) = ах{\ - Q + а2С> + tf3sin п^>+ a4s*n ^С + • •• + a(n)s*n(n ~ 2)я£, (7-74)
т.е. координатные функции определены соотношениями
9l(z) = i-С; ф2(*) -С; 1
ср.(г) = sin(i-2)7c£, i = 3,4, ..., w.J
В (7.74) al9 а2 — смещения на опорах; а3 ... ап — параметры,
характеризующие деформацию вала при колебаниях и так же как ах и а2,
подлежащие определению.
Найдем потенциальную энергию системы ротор—опоры как сумму
/
П = Па + Л0 - icie; + ic2ej + ifj»(ir)2dz. (7.76)
О
Здесь Па — потенциальная энергия в упругих опорах; Я0 — потенциальная
энергия изгиба вала; Cj, с2 — жесткости первой и второй опор; В- El —
жесткость сечения вала на изгиб; /— момент инерции сечения вала.
Кинетическая функция системы ротор—опоры
/
К = ijy(/2dz, (7:77)
Интеграл (7.77) надо понимать в обобщенном смысле — «в смысле
Стильтьеса», т.е. считать, что в точках расположения сосредоточенных
масс v -> со, но произведение v dz -> т — равно сосредоточенной массе.
442
Уравнения главных форм по Ритцу получают из общей системы
(7.52) для одной из главных плоскостей колебаний:
~2,
(дП/dcij) -р (дК/да.) = О (i = 1, 2, 3, ..., и). (7.78)
Используя (7.76), (7.77), из (7.78) получаем систему уравнений главных
форм колебаний, которую запишем для п = 4 в матричной форме: Аа = 0, или
[0].(7.79)
С\-Р Эц
-Р Р21
-P2h\
-р\х
-Р2$\г
сг~Р Р22
-Р Р32
--Р2Р42
~2п
-Р Рп
-Р Р23
~2Q
а33-\р Рзз
<*43 -Р Р43
"Л|4
~^2Р24
«34 "Лм
0-44-Р Р44
X
а1
а2\
аъ\
.%
Здесь введены следующие обозначения коэффициентов:
/
аи = J2»9>wydz (/,у = 3, ...,«);
о
Ру = 1уФ/Ф/ dz (U = Ь 2, 3, ..., и).
(7.80)
Координатные функции приняты в соответствии с определением
(7.75).
Если на роторе имеются диски, которые желательно рассматривать
как сосредоточенные массы, то интегралы $(- в (7.80) следует вычислять
«в смысле Стильтьеса», т.е. считать, что в точках расположения дисков
v^ dz = mk — масса диска, и тогда
/
Ру = Jv9/9ydz + 5Wl9'(Zl^/Zl) + 2W29'(Z2)9/Z2) +
+ ..- + 2т(5)Ф|(2(5))фУ(2(*))'
(7.81)
При этом первый член (интеграл) вычисляют в обычном смысле
(«в смысле Римана») без учета сосредоточенных масс, а только
учитывая распределенную массу вала. Символ Ф/(^) означает величину
координатной функции ер, в точке, где расположена масса тк. Всего на валу
имеется s сосредоточенных масс Wj, w2, ..., ms, имеющих координаты
Zj,z2, ...,zr
443
Для нетривиального (ненулевого) решения системы (7.79) следует
определитель первой матрицы произведения (7.79) приравнять нулю,
в результате получим уравнение частот
~2 ~2
С\~Р Pi! -Р Pl2
-р2р
13
-Р hi
-~P%i
р2р
22
-Р Р23
-P2Pl4
-/Р24
-Р2Р
-Л.
32 а33
42 а43
-Р2Рзз а34-/рз4
-2 ~2
-Р Р43 а44~Р Р44
- 0.
(7.82)
В результате решения уравнения частот найдены будут частоты
(всего в количестве и, а в данном случае п = 4), которые расположим в
порядке возрастания
р1<р2<р3<р4<.-.<рп.
Для определения главных форм колебаний следует для каждого
значения рк (к = 1, 2, 3, 4, ..., п) решить систему уравнений форм (7.79)
и найти значения
„<*) (к) (к) (к)
а по зависимости (7.74) получить к-ю главную форму колебаний системы
ротор—опоры.
Рассмотрим приложение общего метода к частному случаю: ротор
в виде вала постоянного сечения с одной сосредоточенной массой
посередине пролета, опирающийся по концам на одинаковые по жесткости
опоры: сх = с2 = с. Ограничимся рассмотрением первых двух форм
колебаний в каждой из главных плоскостей жесткости опор. При этом
следует принять
U=a{ + a2smnCi, (7.83)
где ах — равные по значению смещения на опорах.
Потенциальная энергия по (7.76)
/
П = ca2x + l~lB(U")2dz9
zo
где первый член в правой части представляет потенциальную энергию
двух опор.
444
Для получения уравнений главных форм следует принять cpj = 1,
Ф2 = sin кС, и обратиться к общим соотношениям (7.78). С учетом
обозначений (7.80) получим уравнения главных форм колебаний в
виде
= [0].
~2 ~2
2с-р Рц -/? р12 | ^ |Uj
-Р h\ а22~Р P22J
Коэффициент а22 вычислим в соответствии с (7.80):
(7.84)
1
а22 =
4
W'2dz = к -г Ism 7t<;d<; = —г.
0 /о 21
(7.85)
Коэффициенты Рц, Р^ и р22 вычислим «в смысле Стильтьеса»:
/
Рп = jv dz = v/ + т;
о
/ /
Р12 = fvsin^dz = v/fsin7t£ d£ + v dzsin-=
0 0
2 я 2
= -v/ + msin- = -v/ + /w;
П 2 я
I
P22 = fvsin nC, dC, = -v/+wsin - = -v/ +
0
m.
(7.86)
Систему (7.84) приведем к безразмерному виду, умножив первую
строку матрицы на Ргг^ггРц)' а вторую поделим на а22 и введем
безразмерную частоту
-2 -2 Р22 -2 (v/ + 2w)/3
Р - /> — - ^ * J— ■
а22 я В
С учетом предшествующего умножения получим
(7.87)
- -2 -2 Р12
~2 021 , "2
Р22
= [0],
(7.88)
445
где
- = c2(vl + 2m)l\ (?89)
к (vl + m)B
Определитель системы (7.88) приравняем нулю, получим уравнение
частот
(1-Д)р4-(1 + с)р2+ с = 0, (7.90)
где
А = Р?2/(РцР22)-
В частном случае абсолютно жестких опор (с —> °о)
р = 1 ; р* = к\ ^ -I . (7.91)
\vl + 2m)r
Для податливых опор имеем из (7.90) низшую собственную частоту
-2 1 + с Г 1 + с
,1/2
Г 1 + с £_1 (7 92)
2(1 -Д) L2(l-A) 1-aJ ' К }
Соответствующую первую форму колебаний находим, как обычно,
-2
из системы (7.88), подставляя значения р х.
Для частного случая ротора постоянного поперечного сечения (В —
постоянная, v — постоянная) без сосредоточенной массы (т = 0)
из (7.92) для безразмерной собственной частоты получаем значение
г\ -1 Г -1 2 32 -Ц1/2]"1/2
рх = Л\ 1 + с + [(1 - с !) + -2Ъ !J , (7.93)
после чего рассчитываем и саму частоту
Р\ = Р\&*> (7.94)
где Q* — частота ротора на жестких опорах,
о. - %Т- <™5>
Найдем главную форму колебаний, взяв любое из двух (например,
второе) уравнение главных форм (7.88):
-2Р21 (1) , ,- -2 (1)
-Р\ЪГа\ +0-/>iK2 = °>
Р22
446
откуда
Здесь индекс «1» соответствует первой частоте и форме.
Подставляя последнее соотношение в (7.83), получаем выражение
для главной формы колебаний
Щ = a^O + pjsinTcO, (7.96)
где
-2
Pi = J-^1!- (7-9?)
Параметр ах представляет масштаб главной формы, который
остается неопределенным и может быть принят произвольным.
Во многих случаях удобно выбирать множитель а\ из условия
нормирования
2К= 1
или
/
\vu\dz = 1. (7.98)
о
Условие нормирования (7.98) применяется не только в
рассматриваемом частном, но и самом общем случае. При этом интеграл (7.98)
следует понимать в «смысле Стильтьеса».
В данном частном случае, подставляя выражение для главной формы
(7.96) в (7.98), производя вычисления, получаем
(a(/yjv(l+piSin*02dz - («iVA^l+^+ipJ) = ly
О
откуда
а(11) = [Ч1 + ^1 + ^)]_,/2- (7'99)
447
Подставляя выражение (7.99) в (7.96), получаем нормированную
главную форму колебаний
Ux(z) =
1 + Р, siting
М' +:».♦&)]
1/2'
(7.100)
где М= v/ — масса ротора.
Пример 7.5. Ротор (рис. 7.9), состоящий из вала постоянного сечения с
равномерно распределенной массой по его длине, опирается на два одинаковых
подшипника с эллиптической расточкой вкладышей.
Известны следующие параметры ротора (см. пример 6.2): масса Л/= 9600 кг,
о 7
длина / = 5,5 м, жесткость сечения вала 2? = £7 = 5,15 • 10 Н • м , коэффициенты
о о
жесткости масляного слоя подшипников Сц = 0,11 • 10 Н/м; с22 = 1,16 • 10 Н/м;
с12 = -с21=0,33- 109Н/м.
Требуется рассчитать собственные частоты колебаний СК-системы
(соответствующей консервативной системы) ротор—опоры и им соответствующие
нормированные главные формы колебаний.
Рис. 7.9. Модель и формы колебаний ротора на податливых анизотропных опорах
448
Решение.
Поскольку неконсервативные коэффициенты жесткости с12 = - с21, то это
означает, что сп и с22 — главные коэффициенты жесткости, относящиеся к плоскостям
минимальной (сц) и максимальной (с22) жесткости масляного слоя. На рис. 7.9, а
изображена модель ротора и указаны главные плоскости жесткости (zOx \ и zOx2),
повернутые на некоторый угол а вокруг оси z.
По формуле (7.89) при т = 0 для плоскости zOx\
Г1 . 2ЕЦ в *-'5'15;1()8 , = 1,37055.
2сГ 2-0,11-10 -(5,5)
Собственная частота ротора на жестких опорах по (7.95)
2f5V/2 af 5,15-10*1 ,_00 ,
* = л I—-I = п —* г = 177,22 рад/с.
КМГ V9600 • 5.5V
КМГ V9600 • 5,5J
Собственная частота безразмерная по (7.93)
р { = лД| 1 + 1,37055 + Го,370552 + Ц • 1,37055]1/21 = 0,66586 .
Собственная частота по (7.94)
рх = 177,22-0,66586 = 118,0 рад/с.
Найдем pt по (7.97):
р 4-0,665862 =1>0142
тс(1-0,665862)
Нормированная главная форма для плоскости zOx\ по (7.100)
ГГ / \ 1 1 + 1,0142 " SinTlC 1 /ЛСП^Л.Л/ГЛСС • >-\
^•(г) = ^ 1,67497 ^ = ^(0,5970 + 0,6055smnQ.
Проведем подобным способом расчеты для плоскости zOx2 (максимальная
жесткость опор) и получим:
с"1 = 0,12997; р2 = 0,95012; р2 - 168,38 рад/с;
£/2(z) = -р (0,10792+1,2752 sin tiQ.
Главные формы колебаний изображены на рис. 7.9, б.
449
7.3. ОСНОВЫ МЕТОДА КОНЕЧНЫХ ЭЛЕМЕНТОВ
Особенности метода. Метод конечных элементов (МКЭ) основан
на следующих положениях.
1. Деталь (рис. 7.10) разбивают на конечные элементы произвольной
(как правило, простой) формы: призмы, тетраэдры, шестигранники или
другие многогранники; на элементы в виде стержней, пластин и т.д.
(рис. 7.11).
2. Смещения ат в некоторых точках элемента, называемых узлами,
принимают в качестве неизвестных искомых величин. Смещения могут
быть линейными или угловыми, т.е. ат — это обобщенные смещения
в узловых точках. Число смещений ат для каждого конечного элемента
равно количеству степеней свободы z, оставляемых в конечном элементе
(т — номер степени свободы, т.е. т - 1, 2, 3, ..., z). Так, призматический
треугольный элемент типа, показанного на рис. 7.11, а для плоской
детали, представленной на рис. 7.10, имеет шесть независимых
смещений в плоскости чертежа: по два смещения в каждом из трех узлов.
Элемент (рис. 7.11, б) пространственный, имеет 12 степеней свободы: по три
смещения в каждом из четырех узлов.
3. Смещения ик (£= 1,2,3) в пределах конечного элемента принимают
в виде соотношений типа применяемых в методе Ритца (7.47):
Рис. 7.10. Разбивка плоской детали Рис. 7.11. Формы конечных элементов
на элементы треугольной призмати- а _ призма; б — тетраэдр; в — стержень;
ческой формы г _ пластина
450
где <pw(xl5 х2, *з) — функции текущих координат хк (координатные
функции), которые должны удовлетворять условиям непрерывности
смещений (иногда и их производных) на границах смежных элементов.
Из выражения (7.101) вычисляют деформации в конечном элементе
по формулам Коши
гк1 = Ъ,5(дик1дх1 + dutldx^ (7.102)
Для определения деформации в конечных элементах в форме
стержня или пластины используют известные зависимости теории
изгиба стержней или пластин. В любом случае из (7.101) простым
дифференцированием можно найти деформации в конечном элементе. Эти
деформации будут линейными функциями смещений ат\
ЧГАк1тат> (7Л03)
где Akim — известные величины или функции координат.
4. По деформированному состоянию конечного элемента, используя
законы деформирования (см. гл. 1), находят его напряженное состояние.
Для упругих задач напряжения определяют по обобщенному закону Гука.
В дальнейшем ограничимся только упругими задачами. В этих случаях
напряжения в конечном элементе также будут линейными функциями
смещений ап (п = 1, 2, ..., z) вида
<*kl = Bklnan, (7.104)
где Вк1п — известные величины или функции координат хк.
5. По выражениям для смещений (7.101), деформаций (7.103) и
напряжений (7.104) можно найти функционалы: потенциальную энергию Пг
кинетическую энергию Тг кинетическую функцию Кг для каждого
конечного элемента (суммирование йо £, /, равным 1, 2, 3):
2Дг= \oklskldV; 2Tr= jpukukdV; 2Kr = f рики. dV. (7.105)
г г г
Интегралы вычисляют по объему Vr конечного элемента, которому
присвоен номер г (г = 1, 2, 3, ..., R; R — общее число конечных
элементов в детали).
Смещения ик, деформации е^/ и напряжения Оц согласно (7.101),
(7.103) и (7.104) являются однородными линейными функциями узловых
смещений ат. При этом условии потенциальная энергия Пг и
кинетическая функция Кг согласно (7.105) являются однородными функциями
второй степени (квадратичными формами) от смещений ат, а кинетическая
энергия Тг — квадратичная форма от скоростей ат в узловых точках.
451
Потенциальную энергию 77, кинетическую энергию Т и
кинетическую функцию К для всей детали определяют суммированием
соответствующих количеств (7.105) по всем конечным элементам:
Я = £ Пг; Т = £ Г,; К = £ *г. (7.106)
г = 1 г = 1 г = 1
Затем производят сквозную нумерацию смещения в узловых точках
конечных элементов по всем степеням свободы для всей детали. Пусть
ai есть смещение в некоторой узловой точке некоторого элемента,
индекс i означает номер степени свободы, изменяющийся от / = 1 до i =
#(где N— полное число степеней свободы всей детали). Теперь
функционалы (7.106) можно представить в виде квадратичных форм
смещений at или скоростей ai в следующем виде:
Я = 0,5Суару9 Т = 0,5 Мца^; ЛГ=0,5М^ау, (7.107)
где Сц — коэффициент жесткости системы (детали); Мц — коэффициент
инерции (приведенные массы) системы.
Определение функционалов в виде (7.107) позволяет для решения
различных задач динамики конструкций применять методы, основанные
на вариационных принципах.
Для нахождения статических напряжений и деформаций в
конструкции (см. рис. 7.10) можно применить принцип Лагранжа, т.е. принцип
минимума полной энергии системы.
Расчет собственных колебаний (частот и форм) производят
непосредственно по уравнениям (7.52) метода Ритца.
На основе уравнений Лагранжа второго рода можно получить общие
уравнения движения рассматриваемой конструкции. Во всех случаях
система уравнений относительно смещений ai в узловых точках и их
производных по времени линейная. Решая эту систему, получают
значения ai9 после чего по формулам (7.101), (7.103) и (7.104) находят все
необходимые величины.
В изложенной постановке МКЭ является разновидностью метода
Ритца. Отличие МКЭ от классического метода Ритца заключено только
в способе выбора координатных функций фш в представлении (7.101).
В МКЭ применяют универсальные координатные функции для детали
любой формы, их выбор зависит только от типа (формы) конечного
элемента, а в классическом методе Ритца их выбирают отдельно для
каждой конкретной детали, причем они должны удовлетворять граничным
условиям, что, как правило, сопряжено с большими трудностями
определения координатных функций.
452
Это является первым важным преимуществом МКЭ. Второе
преимущество МКЭ состоит в том, что смещения ик в пределах каждого
конечного элемента зависят от смещений ai в близко расположенных узлах
и не зависят от смещений в удаленных точках. В результате матрицы
коэффициентов Су, My содержат много нулевых членов, что
существенно упрощает решения соответствующих систем линейных
уравнений. Во многих случаях матрицы коэффициентов Су, My являются
ленточными, т.е. такими, у которых только члены на главной диагонали и
около нее отличны от нуля, а остальные члены (большинство) равны
нулю. Операции с ленточными матрицами, в частности обращение
матриц, как правило, выполнить проще, а расчет получается точнее, чем
при операциях с полными матрицами.
Третьим преимуществом МКЭ является простота учета условий
закрепления детали — граничных условий. Если при использовании
классического метода Ритца с изменением граничных условий
меняются координатные функции cpw, так как каждая из них в соответствии с
требованиями метода должна удовлетворять кинематическим
граничным условиям, то в МКЭ граничные условия не влияют на выбор
координатных функций и их реализация определяется заданием смещений
или их комбинаций в узлах, расположенных на границе детали. Это
существеннр упрощает применение МКЭ.
Указанные преимущества, а также возможность решения на ЭВМ
систем уравнений высокого порядка (несколько сотен) предопределяют
широкое использование МКЭ в расчетной практике, в частности в
расчетах деталей турбомашин. г ,
Применение МКЭ для расчета напряжений и деформаций
деталей в статических условиях. Согласно принципу Лагранжа, в
состоянии равновесия системы работа всех сил (внутренних и внешних) на
возможных перемещениях равна нулю. Для конструкции (см. рис. 7.10)
принимаем, что поверхностные Ft и объемные Xi силы приложены в
узлах. Придадим смещениям ai всех узлов возможные приращения
(вариации 8at), составим приращение 5Э полной энергии Э системы и
приравняем его нулю. В результате получим
83 = 8П - F^at - Х{Ъа{ = 0. (7.108)
Вычислим приращение потенциальной энергии П при вариациях 8а,
смещений в виде
ЪП = дП ш |Я + Ш + + Ж.Ьат. (7.109)
453
Подставляя (7.109) в (7.108), имеем
(дЛ/да; - Ft - Х$Щ = 0. (7.110)
Вариации 8at произвольны, поэтому из (7.110) следует, что
выражения, стоящие в скобках, должны обращаться в нуль, т.е.
дП/da^Fi + Xi. (7.111)
Вычислим дП/dcij, использовав (7.107):
Для упругих консервативных конструкций, как известно,
коэффициенты жесткости обладают симметрией, поэтому Ctj = Cji9 что учтено при
выводе (7.112).
Подставляя (7.112) в (7.111), получаем систему уравнений для
определения смещений ai в виде
Cft-Ft + Xp (7.113)
где /=1,2,3, ...,N.
Порядок системы равен числу степеней свободы рассматриваемой
конструкции. Решение системы (7.113) дает значения узловых
смещений а.-, после чего можно найти значения uk, zki и а# по зависимостям
(7.101), (7.103) и (7.104), т.е. решить поставленную задачу.
Расчет собственных частот и главных форм колебаний при
помощи МКЭ. Приняв в качестве искомых параметров узловые
смещения ар уравнение метода Ритца (7.52) можно записать так:
dIlldai = p2dKldai. (7.114)
После вычисления дП/daj и dKldai по (7.107) и подстановкой
в (7.114) обеих производных получим систему уравнений в виде
(Су-р2Му)а] = 0. (7.115)
Матрица инерции также обладает симметрией, поэтому My = М7.
Определитель системы (7.115) приравниваем нулю и получаем
уравнение
\CiJ-p2Mij\=0, (7.116)
решение которого даст значения собственных частот колебаний
рассматриваемой конструкции, а формы колебаний получаются при
последующем решении системы (7.115) для каждого из найденных значений;? =рк.
454
Уравнения движения конструкции с использованием конечных
элементов. Для вывода уравнений движения по МКЭ следует
воспользоваться непосредственно уравнениями Лагранжа второго рода, приняв
в качестве обобщенных координат узловые смещения av Обозначив
L — П - Т, получим систему уравнений Лагранжа второго рода в виде
dai dt\da/ ^l v '
где Qi — обобщенная сила. В данном случае это внешняя сила,
приложенная в узле и соответствующая /-й степени свободы.
Подобно предыдущему случаю находим
dLlda^Cifip dL/dai = -А/^.
Подставляя в (7.117) последние выражения, имеем искомое
уравнение движения конструкции в виде
Vy + Vy- Qt' С7Л18)
При заданных внешних силах Qi = 6/(0» зависящих от времени
и приложенных в направлении /-й степени свободы, система образует
уравнения вынужденного движения консервативной конструкции.
Однако уравнение движения легко обобщить на случай
неконсервативной конструкции, если принять, что неконсервативные силы действуют
в узлах, и отнести их к правой части. Например можно принять, что
демпфирующие силы (силы сопротивления) Pi9 действующие в узлах,
линейно зависят от скоростей и определяются соотношением
Р,--Вцар
где By — коэффициенты неупругого сопротивления конструкции.
Введя силы Pi в правую часть (7.118) в качестве внешних сил наряду
с силами Qi9 получим уравнение движения
Myaj + B.jhj + Cijaj = 6,(0 • (7-П9)
Нетрудно учесть и неконсервативные позиционные силы и получить
уравнение движения по МКЭ. Для этого достаточно вычислить
жесткости неконсервативных сил Dfj = - D7, приведенных к узловым точкам
конструкции, разбитой на конечные элементы, и добавить эти
составляющие в уравнение движения (7.119), которое приобретет вид
M.fa. + Bf/ij + (С,у + Dy)aj = Q,(t). (7.120)
Проведенный анализ показывает, что применение МКЭ позволяет
единообразно и просто ставить и решать основные задачи динамики
конструкций.
455
Координатные функции для треугольного конечного элемента.
Для элемента, показанного на рис. 7.11, а принимают закон смещений
в виде
ик = аЦфт (* = lj 2; т = lj 2' 3^
где а. — смещение в т-и узле треугольника в направлении к-и оси
координат; фт — координатные функции, которые выбирают в виде линейных
функций координат,
Фет = bm0 + bm\x\ + Ьт1хЪ
bms-^ms'^ (^ = 0,1,2);
(7.121)
(7.122)
А =
1 /» 4°
i ,« 45)
= 2F,
(7.123)
где Аш — алгебраическое дополнение в определителе к элементу,
находящемуся на пересечении т-и строки и (s + 1)-го столбца (s = 0 соответ-
(т\
ствует первому столбцу, s = 2 — третьему столбцу); х^. — координата
w-ro узла треугольника по к-н координатной оси (рис. 7.12); F— площадь
треугольника.
Координатные функции (pw удовлетворяют следующим условиям:
/ (") ("К
Фт(*1 >*2 ) =
1, если л - т\
0, если пФ т.
(7.124)
Таким образом, функция ф7И обращается в единицу в узле номера т и
равна нулю в остальных двух узлах треугольного элемента. Это
свойство непосредственно следует из (7.121) при подстановке в правую
часть координат узловых точек хк = хк .
Вследствие линейности функций фш смещения ик удовлетворяют
условиям непрерывности смещений на границе двух смежных
элементов. Это следует из того, что вдоль любой границы элемента г, например
на границе 1—2 (рис. 7.12), смещения изменяются по линейному закону,
456
>
чг
у
х2 >
<
^
f \
f
i
3
*(3)
^ - ■■-"- -'■-'- ■-' -^
2
Г4
/
^^-
*(2>
*1 .
ч, »-
\
И
*1
7
^i
Рис. 7.12. Конечный элемент треугольной призматической формы
а на концах границы, т.е. в узлах 7 и 2, они равны узловым смещениям
О) (2) тт . i
ак и ак . Для смежного элемента г + I справедливы те же
рассуждения, следовательно, на их общей границе смещения одинаковы,
т.е. удовлетворяют условиям непрерывности на границе смежных
элементов.
Деформации в треугольном конечном элементе. По формуле
(7.102) найдем деформации в конечном элементе
4l = 0,5(а^дфда/дх/+а7^Фда/^) = °>5(аГкЬт1 + а7Ьтк) =
= 0,5(akbu + akb2l + акЪЪ1 +albu + al b2k + а{ Ьък) . (7.125)
В развернутом виде
12 3
811 = a\b\\ +a\b2\ +alfe31'
12 3 12 3
2812 = 2821 =а1^12+а1622 + а1632 + а2й11+а2^21 + а26ЗР
822 ^ fl2612 + а2^22 + а2632*
(7.126)
457
Зависимости (7.126) представим в матричной записи
г = [f?]ar,
(7.127)
здесь и далее черта под греческой буквой обозначает матрицу-столбец.
В (7.127) обозначено
Ml
2е
12
ь22
; [В] =
ьп о ъгх о ь31 о
ъп ъп ь22 ъгх ъЪ1 ъъх
о ъп о &22 о ъъг
(7.128)
аг =
1
р
1
а2
2
Р
2
Г2
Р
з
Г2.
al
a2
a3
a\
«5
_аб!
(7.129)
Матрица-столбец аг составлена из узловых смещений конечного
элемента, расположенных в определенной последовательности. Можно
перенумеровать их сквозным счетом от первого до шестого (7.129).
Из (7.127) следует, что в пределах каждого конечного элемента
деформации постоянны.
Напряжения в треугольном конечном элементе. Для плоского
напряженного состояния закон Гука также представим в матричной
форме
a = [D]e;
(7.130)
a =
г -]
Г"
Г12
L°22j
; [D] =
i-ц
1 0 ц
ОЬ^О
2
[ц 0 1
(7.131)
458
Для плоского деформированного состояния (833 = 0) справедливо
соотношение (7.130), но матрица [D] имеет следующий вид:
[D] =
0-Ц)Я
(1+ц)(1-2ц)
1
0
0
1-2ц
2(1-ц)
0
(7.132)
.1-И
Подставляя (7.127) в (7.130), получаем
о = [D][B]zr. (7.133)
Напряжения в конечном элементе постоянны по всему его объему.
Потенциальная энергия треугольного конечного элемента.
По первой формуле (7.105) имеем
пг- \^ki4i*v= \)°*dv-
(7.134)
где а —матрица-строка, а = [стп, а12, а22].
Подставляя напряжения (7.133) и деформации (7.127) в соотношение
(7.134), после преобразований получаем
2Пг - V)[C](r)*(r); (7.135)
[С]г = ГГ[Я] [D][2?],
(7.136)
где [В] — транспонированная матрица [В] (7.128); Vr = F8 — объем
конечного элемента; 5 — толщина детали.
Напомним, что по повторяющемуся индексу, данному в скобках,
суммирование не производится.
Матрицу (7.136) запишем в развернутом виде
С21 С 22
"16
'26
^61 С62
'66
=vm
*11
0
ъг\
0
ъг\
0
Ъ\2
*11
622
621
632
й31
0
612
0
Ь11
0
632
459
x[D]
ьп о ь21 0 b3l 0
ьп ьи ь22 b2l b32 63,
0 bn 0 b22 0 bn
(7.137)
где [C]r есть матрица жесткости r-го конечного элемента, рассчитываемая
по (7.136) или (7.137).
Потенциальная энергия всей конструкции. Определяется она
путем суммирования потенциальных энергий всех конечных элементов.
Согласно (7.106) и (7.135) имеем
217 = »ДС]ëà = МС^а^а^С^+.-. + а^ЕС^а^, (7.138)
где аг — матрица-столбец смещений в узлах элемента номера г.
Соотношение (7.138) можно представить так
2# = а [Ф]а,
(7.139)
где а — матрица-столбец из узловых смещений всех элементов детали;
[Ф] — квазидиагональная матрица, составленная из матриц жесткости
всех элементов.
Матрица-столбец и квазидиагональная матрица имеют вид
а =
; [Ф] =
[С]!
[С],
[С],
(7.140)
Юл
Введем матрицу-столбец а, составленную из смещений в узлах всей
конструкции. Число элементов этой матрицы равно числу степеней
свободы N всей конструкции.
Очевидно, матрица а не тождественна матрице а: в последнюю
некоторые смещения входят по нескольку раз, так как большинство
460
узлов относится не к одному, а к нескольким элементам. Для каждой
конструкции можно установить связь между матрицами а и а в виде
а = [Щл,
(7.141)
где [Н] — некоторая булева матрица.
Построение матрицы [Н] легко уяснить на примере. На рис. 7.13
представлена конструкция, состоящая из трех конечных элементов
с указанными узловыми смещениями. Для этой конструкции
соотношение (7.141) имеет следующий вид:
а
МО
Г "1
г1
г2
г3
г4
г5
г6
г7
г8
\а9\
[а10_
(7.142)
1
В матрице-столбце а представлены последовательно смещения в
узлах всех конечных элементов, а в столбце а — те же смещения, но
пересчитанные по сквозной нумерации по всем степеням свободы всей
461
Рис. 7.13. Схема конструкции из трех конечных элементов
конструкции. Все незаполненные клетки таблицы [Щ имеют нулевые
значения составляющих. Подставляя правую часть (7.141) в (7.139),
имеем
2П = a [Qa;
[С\ - [Щ*[Ф][Щ,
(7.143)
(7.144)
где [С] — матрица жесткости всей системы, имеющая размер NxN.
Компоненты этой матрицы Су и есть искомые коэффициенты жесткости всей
системы, входящие в выражение потенциальной энергии (7.106) и
используемые в уравнениях движения и равновесия.
Кинетическая функция треугольного конечного элемента. По
третьей формуле (7.105) с учетом (7.120) получаем
2КГ =
тп
jpukukdV = JpafcCpOTa™(pndF = Mmnamka"k; (7.145)
Г Г
jP9m9niv (w, и-1,2,3). (7.146)
Подставляя функции фт, ф„ из (7.121) в (7.146) и выполняя
интегрирование по площади треугольника, после преобразований получаем
Мтп = 9Уг\Ъ^Ъп^{\/\1)ЪтХЪпХ{/х^^
+ (1/12)(г>т2йи1 + 6от16„2)(^) + (1/12)6от26„2(^)Ь (7.147)
где хк — координатар-то узла треугольника по к-й координатной оси (р =
= 1, 2, 3; к = 1,2) в местной системе осей, для которой за начало принят
462
центр треугольника. Параметры bms [см. (7.122), (7.123)] в данном случае
также должны быть определены в местной системе осей конечного
элемента. Зависимость (7.145) представим в матричной форме
2К„ = а
(r)[^(r)ar'
(7.148)
где аг — матрица-столбец (7.129) конечного элемента; [М]г — матрица
инерции конечного элемента, имеющая вид
[М]г =
млл о м10 о д/,
'11
12
£13
м,
и
о м10 о м,
42
м„ о м
13
"22
23
м„ о м.
'22
Симметрично
23
мъъ О
м
33
(7.149)
Элементы матрицы (7.149) рассчитывают по (7.147).
Кинетическая функция всей конструкции. Суммируя правые
части (7.148) по всем конечным элементам, получаем кинетическую
функцию всей конструкции. Вводя вектор а всей конструкции и булеву
матрицу [Н] аналогично (7.141), получаем
2К = 2 £ Кг = аДМ]гаг = а [М]а;
г= 1
(7.150)
(7.151)
m =
[Щ{
[М]7
[Щг
М*
(7.152)
где [Л/|г — матрица инерции (7.149) r-го конечного элемента; [Ч*] —
квазидиагональная матрица, составленная из матриц инерции всех конечных
элементов.
463
Коэффициенты инерции My (7.107) всей системы, используемые
в уравнениях движения (7.119) и в уравнении частот (7.116),
рассчитывают по формуле (7.151).
Граничные условия. В точках жесткого закрепления конструкции
смещения равны нулю. Учесть граничные условия можно на
заключительном этапе после вычисления матриц [С] и [М\, для чего в
выражениях для П и К (7.107) следует соответствующие значения смещений
положить равными нулю. Соответствующие им коэффициенты
жесткости и инерции будут исключены и при расчете не понадобятся. Это
равнозначно вычеркиванию в матрицах [С] (7.144) и [М] (7.151) строк
и столбцов, связанных с элементами, обращающимися в нуль
вследствие применения граничных условий. Например, для конструкции
(см. рис. 7.13) по условиям ее закрепления а^ = а2 = а5 = а6 = 0. В
матрицах [С] и [М] следует вычеркнуть строки и столбцы соответствующих
номеров, в результате получатся матрицы меньшего порядка — шестого
вместо десятого. Удобнее в некоторых случаях заранее положить
равными нулю смещения в закрепленных узлах и вычеркнуть
соответствующие строки и столбцы в матрицах [Ф], [*Р], а также в столбцах а и а.
При этом уменьшится также порядок булевой матрицы [Н].
Конечный элемент в виде стержня. Для расчета колебаний
стержней (балок) целесообразно выбрать конечный элемент в виде стержня
(см. рис. 7.11, в) длиной /. При деформации конечного элемента в
плоскости форму прогиба представим в виде (7.101), тогда
и = ахц>х + а2ф2 + а3ф3 + а4ф4 = ат<рт, (7.153)
где фт — координатные функции; ат — параметры в узлах элемента.
В качестве узлов выберем концевые сечения элемента, а в качестве
параметров ат — смещения и углы поворота концевых сечений;
например, flfj, а2 — смещение и угол поворота на левом конце; а3, я4 —
смещение и угол поворота на правом конце. Положительные направления
этих величин показаны на рис. 7.14, а.
Зависимости (pm(z) выберем в виде одномерных функций Эрмита (£ =
= z//):
ф1 = 1 -з<;2 + 2С3; ф2 = itt-if + c?);}
> (7.154)
Ф3 = 3^-2^; Ф4 = 1{-<? + £).
464
аг А а а3
б
Рис. 7.14. Координатные функции стержневого конечного элемента
Выбранные координатные функции удовлетворяют условиям
непрерывности смещения и и угла наклона dw /dz = и' на стыке двух смежных
конечных элементов. Поэтому для любого стержня, составленного
из конечных элементов рассматриваемого типа, упругая линия и ее
наклон будут непрерывны по всей длине стержня. По смыслу функции
(7.154) есть упругие линии конечного элемента при единичных
деформациях на его концах (рис. 7.14, б).
Для стержневого конечного элемента можно вычислить
потенциальную энергию и кинетическую функцию, использовав зависимости
/ /
2ПГ = \EI(u")2 dz; 2Kr = jvw2dz, (7.155)
О О
где EI — жесткость; v = pF — линейная плотность стержня.
465
Подставляя смещения (7.153) с учетом (7.154) в (7.155), после
преобразований 2ПГ и 2КГ представляем в виде (7.135) и (7.148):
2ПГ = а(г)[С](г)а(г); 2Kr = a(r)[Jfl(r)a(r);
(7.156)
к
Г2
а3
[а4_
; [С]г
v/
420
156
22/
54
-13/
2EI
~ /3
6 3/ -6 3/
3/ 2/2 -3/ /2
-6 -3/ 6 -3/
3/ /2 -3/ 2/2
22/ 54 -13/
4/2 13/ -З/2
13/ 156 -22/
-З/2 -22/ 4/2
(7.157)
W = 7^
Для расчета колебаний стержня по МКЭ следует стержень
представить ступенчатым (рис. 7.15). Коэффициенты жесткости Су всего
стержня должны быть рассчитаны по формуле (7.144), где матрица [Ф]
выражается через матрицы жесткости [С]г (7.157) по зависимости
(7.140). Аналогично коэффициенты инерции My всего стержня должны
быть определены по формулам (7.151), (7.152), где матрица инерции
[М]г стержневого элемента определяется зависимостью (7.157).
Пример 7.6. Рассмотрим применение МКЭ к расчету частот колебаний бруса
постоянного сечения, опирающегося по концам на шарнирные опоры (рис. 7.15).
Брус принимаем в виде совокупности двух одинаковых стержневых конечных
элементов (рис. 7.16). С учетом условий опирания конструкция имеет четыре
степени свободы и четыре независимых смещения: поворот ах сечения на левой опоре,
смещение а2, поворот а3 посередине стержня и поворот а4 сечения на правой опоре.
77777
/77777
V
TTfmh
V
а2
21
Рис. 7.15. Ступенчатый вал из стержневых Рис. 7.16. Расчетная схема вала на
конечных элементов шарнирных опорах
466
Решение.
1. Выпишем матрицы [Ф] и [Ч?]9 вычеркнув в матрицах первого элемента
первую строку и первый столбец, а в матрицах второго элемента третью строку и
третий столбец. Получим
[Ф] = —
Г
v/
420
"4/2
13/
-з/2
2Г -3/ Г
-3/ 6 -3/
/2 -3/ 2/2
6 3/ 3/
3/ 2/2 /2
3/ /2 2/2
13/ -з/2
156 -22/
-22/ 4/2
156 22/ -13/
22/ 4/2 -З/2
-13/-З/2 4/2
т-
2. Составим булеву матрицу [Н]
(7.158)
а =
1
1
[Я]-
(7.159)
1
3. Вычислим матрицы жесткости и инерции по (7.144) и (7.151)
[С] = [Я] [Ф][Н] =
2£:/
[Afl = [#]>][#] - ^~
2Г
-3/
/2
_0
"4/2
13/
-з/2
0
-3/
12
0
3/
13/
312
0
-13/
Г
0
4/2
/2
-з/2
0
8/2
-з/2
0
3/
/2
2/2J
0
-13/
-з/2
4/2
(7.160)
(7.161)
467
4. Составим уравнение частот
|Су-р2Му\ = | [С] -Р\Щ| = 0. (7.162)
Введем обозначение
Х=р\/*/(ШЕ1). (7.163)
Уравнение (7.162) с учетом (7.160), (7.161) и обозначения (7.163) представим
в виде
2/2-Ы/2
-3/-Ш/
12 + Х312
0
-3/-Л.13/
12-Л.312
0
3/+Ш/
12 + Х312
0
4/2-Ш2
l2 + Ml2
0
3/ + Ш/
/2 + хз/2
212-ХА12
0.
(7.164)
Пользуясь правилом, согласно которому в определителе, равном нулю, можно
сокращать общий множитель в любом столбце и в любой строке, получаем
уравнение (7.164) в виде
А =
2-АХ -3-13Х 1+ЗА, 0 |
-3 - 13Л. 12-312Л, 0 3+13Я,
1+ЗЬ 0 4-8А, 1 -4- ЗЛ,
0 Ъ + \Ъ\ 1 + ЗА, 2-4Х
0.
(7.165)
Упрощаем определитель А, пользуясь свойствами определителей. Вначале
к элементам первой строки прибавим элементы четвертой строки, затем в
полученном определителе из элементов первого столбца вычтем элементы четвертого
столбца. Этот последний определитель разложим по элементам первой строки
(в которой в результате предшествующих преобразований два из четырех
элементов станут равными нулю). Действуя указанным способом, получаем уравнение
частот в виде
(455А,2 - 414А, + 3)[(2 - 4А,)2 - (1 + ЗА,)2] = 0.
Вычислив корни этого уравнения и расположив их, как всегда, в порядке
возрастания, получим
\х = 7,3050-10"3; А,2=1/7; А,3 = 0,90258; Х4 = 3.
Из (7.163) найдем выражение для первых собственных частот (в безразмерной
форме)
рк = PkL2[W(EI)]W2 = (840- 16^)1/2.
Известное точное решение дает значения
(7.166)
(7.167)
468
В таблице приведены приближенные (7.166) и точные (7.167) значения
безразмерных собственных частот бруса и относительная погрешность их расчета
по МКЭ.
к
Рк
Ркт
(Ьр/Ркт) '
100, %
1
9,9086
9,8696
0,39
2
43,818
39,478
10,99
3
110,14
88,826
23,99
4
200,80
157,91
27,16
В рассматриваемом примере точность расчета первой частоты достаточна при
делении системы всего на два конечных элемента. Для расчета следующих частот
требуется увеличить число конечных элементов.
Метод суперэлементов. При расчете сложных систем с большим
числом степеней свободы находит успешное применение метод
суперэлементов, основанный на следующих предпосылках.
1. Конструкция расчленяется на относительно крупные блоки
(суперэлементы), состоящие из большого числа конечных элементов. Число
степеней свободы суперэлемента п существенно больше, чем в конечном
элементе.
2. Обобщенные смещения (вектор а) в суперэлементе заменяются
через новые неизвестные параметры (вектор Ь) по зависимости
а = АЪ, (7.168)
где А — прямоугольная матрица с числом строк равным п, числом
столбцов, равным т, причем т « и, т.е. порядок вектора b существенно
меньше порядка вектора а.
Выбор матрицы А и вектора b осуществляется так, чтобы
соотношение (7.168) достаточно представительно описывало деформацию
суперэлемента.
3. Уравнение движения суперэлемента (7.119) в матричной форме
Ma + £a + (C + D)a = q, (7.169)
где q — вектор внешних сил Qif приводится к уравнению, выраженному
через параметры b путем подстановки правой части (7.168) в (7.169) и
*
последующего умножения получающегося равенства на матрицу А
слева, в результате чего получают уравнение движения суперэлемента в
форме
M> + £b + (C + Z))b = q, (7.170)
469
где обозначено
М = АМА; В = А*ВА; C + D = A*(C + D)A; (7.171)
q = Л\; (7.172)
А — транспонированная матрица Л, т.е. матрица, получающаяся из А
путем замены строк на столбцы (и обратно: столбцов на строки).
Порядок всех матриц в (7.170) равен т — числу составляющих
вектора Ь.
Формальная операция умножения уравнений (7.169) на А слева, как
легко видеть, эквивалентна применению принципа возможных
перемещений к уравнению движения (7.169) при замене переменных по
зависимости (7.168).
Действительно, уравнения (7.170) можно получить из (7.169) путем
приравнивания работы сил, стоящих в левой и правой частях (7.169),
на возможных перемещениях
8а = АЪЬ. (7.173)
Указанная работа
(8a)*(Ma + £a + (C + D)a) = (Sa)*q.
Заменяя а и 8а в соответствии с (7.168) и (7.173), получаем
{АЬЪ) (МАЪ + ВАЪ + (С + D)Ah) = ЦЬЪ)\.
* * *
Учитывая, что (А8Ъ) = 8b А , имеем
(Sb)*(M) + i?b + (C + i3)b-q) = 0.
Поскольку 8Ь — произвольная вариация, то из последнего равенства
следует уравнение движения в форме (7.170).
Уравнение (7.170) имеем существенно меньший порядок, чем
уравнение в форме (7.169), что значительно упрощает его решение.
4. В правой части как (7.169), так, следовательно, и (7.170) наряду
с известными (заданными) внешними силами, присутствуют силы,
приложенные к выделенному суперэлементу после его отсечения от
системы. Эти силы, так же, как и параметры вектора Ь, являются
неизвестными и подлежат определению. На стыках смежных суперэлементов
должны выполняться условия сопряжения: условия совместности
деформаций, и условия равенства обобщенных усилий, т.е. уравнения
470
движения каждого суперэлемента должны быть дополнены условиями
сопряжения на общих границах в виде
а(г+1) = а(г)-
а1 а2 >
(г+1) (г)
Здесь aj — обобщенные смещения (линейные и угловые) на левой
(г)
границе (г + 1)-го супер элемента; а^ — обобщенные смещения на
правой границе r-го суперэлемента; qj — обобщенные силы на левой
(г)
границе (г + 1)-го суперэлемента; q^ — обобщенные силы на правой
границе r-го суперэлемента.
При решении задачи должны быть также сформулированы и
выполнены граничные условия: заданы смещения или усилия на границах
концевых суперэлементов.
СПИСОК ЛИТЕРАТУРЫ
1. Биргер И.А., Мавлютов P.P. Сопротивление материалов. М.: Наука, 1986.
560 с.
2. Вибрация в технике: Справочник. Т.З. Колебания машин, конструкций и их
элементов / Под ред. Ф.М. Диментберга и К.С. Колесникова. М.:
Машиностроение, 1980. С. 229—322.
3. Жирицкий Г.С., Струн кип В. А. Конструкция и расчет на прочность
деталей паровых и газовых турбин. М.: Машиностроение, 1968. 520 с.
4. Костюк А.Г., Трухний А.Д., Куменко А.И. Сборник задач по динамике
и прочности турбомашин. М.: Машиностроение, 1990. 336с.
5. Левин А.В., Боришанский К.Н., Консон Е.Д. Прочность и вибрация
лопаток и дисков паровых турбин. Л.: Машиностроение, 1981. 710 с.
6. Прочность паровых турбин / Под ред. Л.А. Шубенко-Шубина. М.:
Машиностроение, 1973. 456 с.
7. Манушин Э.А., Суровцев И.Г. Конструирование и расчет на прочность
турбомашин газотурбинных и комбинированных установок. М.:
Машиностроение, 1990. 399 с.
8. Костюк А.Г. Пластичность и разрушение кристаллического материала при
сложном нагружении. М.: Издательство МЭИ, 2000. 178 с.
9. ОСТ 108.021.07-84. Турбины паровые стационарные. Нормы расчета на
прочность хвостовых соединений рабочих лопаток. Л.: ЦКТИ, 1986.
472
ОГЛАВЛЕНИЕ
Предисловие 3
Глава первая
Деформация, прочность и износ материалов 5
1.1. Условия работы и свойства материалов, используемых
при проектировании турбомашин 5
1.2. Законы однократного деформирования и критерии прочности
при умеренных температурах 8
1.3. Ползучесть и длительная прочность материалов 27
1.4. Законы знакопеременного (циклического) деформирования
и критерии прочности при малоцикловой усталости 40
1.5. Многоцикловая усталость и расчет долговечности 61
1.6. Трещинообразование и трещиностойкость 68
1.7. Коррозионный и эрозионный износ в турбомашинах 86
1.8. Вероятностная (статистическая) оценка прочности 92
1.9. Демпфирующая способность конструкционных материалов 97
Глава вторая
Прочность лопаток турбомашин 100
2.1. Особенности конструкции рабочих лопаток турбомашин 100
2.2. Напряжения и деформации рабочих лопаток в условиях упругости 105
2.3. Ползучесть и длительная прочность рабочих лопаток турбомашин 134
2.4. Термоусталость рабочих и направляющих лопаток 136
2.5. Прочность замковых соединений рабочих лопаток с ротором 139
Глава третья
Прочность дисков и роторов 143
3.1. Классификация и особенности исполнения дисков и роторов
турбомашин 145
3.2. Напряжения и деформации в дисках и роторах в условиях
упругости 154
3.3. Ползучесть и длительная прочность роторов 175
3.4. Термоусталость роторов 194
3.5. Трещинообразование и трещиностойкость дисков в условиях
коррозионной среды 201
473
Глава четвертая
Прочность элементов статора 206
4.1. Классификация и особенности исполнения корпусов турбомашин 206
4.2. Тепловые расширения паровой турбины 218
4.3. Напряжения и деформации корпусов в условиях упругости 224
4.4. Ползучесть и длительная прочность элементов корпуса 235
4.5. Диафрагмы турбомашин 237
4.6. Подшипники турбомашин 243
Глава пятая
Колебания лопаток 258
5.1. Причины колебаний лопаток 258
5.2. Основы теории колебаний естественно-закрученной лопатки 263
5.3. Свободные колебания незакрученной невращающейся лопатки
и пакета лопаток 272
5.4. Собственные частоты и главные формы колебаний закрученных
лопаток переменного профиля 287
5.5. Влияние вращения на собственные частоты колебаний лопаток
и пакетов 290
5.6. Количественная оценка возмущающих сил в ступенях
турбомашины 292
5.7. Вынужденные колебания лопаток 305
5.8. Совместные колебания лопаток и диска 320
5.9. Колебания венцов с лопатками большой длины 325
5.10. Самовозбуждающиеся колебания лопаток турбомашин 331
5.11. Вибрационная надежность лопаточного аппарата турбомашины 333
Глава шестая
Колебания роторов турбомашин и турбоагрегатов 338
6.1. Причины колебаний роторов 338
6.2. Колебания одномассового ротора. Уравнения движения 343
6.3. Формы движения одномассового ротора 348
6.4. Инерция поворота и гироскопическое действие дисков 358
6.5. Колебания многомассовых роторных систем 367
6.6. Самовозбуждающиеся колебания ротора 380
6.7. Крутильные колебания ротора 400
6.8. Вибрационная надежность турбоагрегатов 403
474
Глава седьмая
Применение общих методов механики к задачам
прочности и вибрации турбомашин 413
7.1. Расчет собственных частот колебаний лопаток и роторов
по методу Рэйли 413
7.2. Расчет собственных частот и форм колебаний лопаток и роторов
по методу Ритца 432
7.3. Основы метода конечных элементов 450
Список литературы 472
Учебное издание
КОСТЮК Аскольд Глебович
ДИНАМИКА И ПРОЧНОСТЬ ТУРБОМАШИН
Учебник для вузов
Редактор Л.А. Решмина
Художественный редактор А.Ю. Землеруб
Технический редактор З.Н. Ратникова
Корректор В. В. Сомова
Компьютерная верстка Н.В. Пустошиовой
Подписано в печать с оригинала-макета 09.10.2007 г. Формат 60x90/16
Бумага офсетная Гарнитура Times Печать офсетная
Усл. печ. л. 29,75 Усл. кр.-отт. 30,75 Уч.-изд. л. 28,0
Тираж 1000 экз. (2-й завод 301—1000 экз.) Заказ № 4501 С-026
ЗАО «Издательский дом МЭИ», 111250, Москва, ул. Красноказарменная, д. 14
Типография НИИ «Геодезия», Московская обл., г. Красноармейск,
проспект Испытателей, д. 16