/
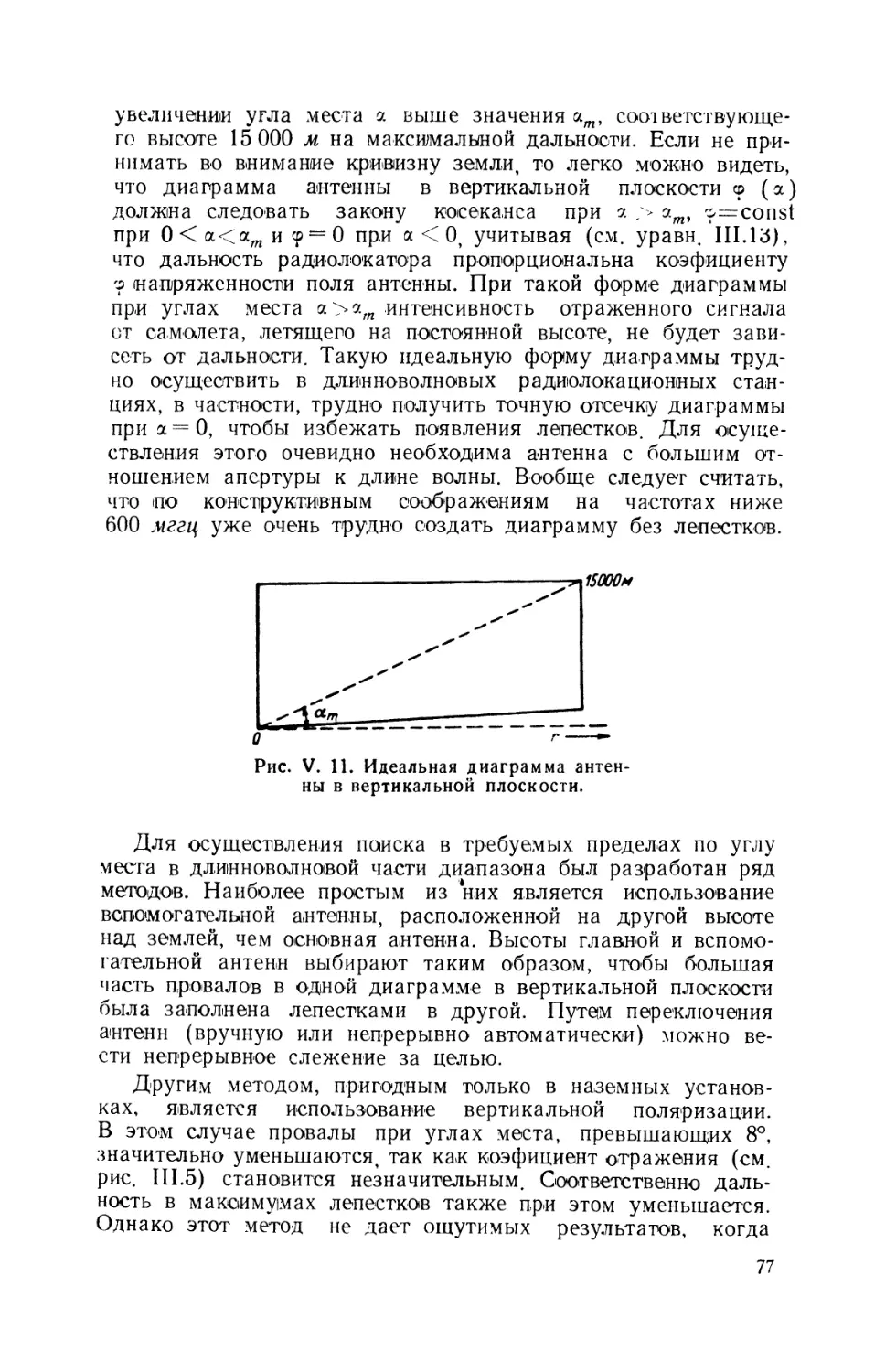
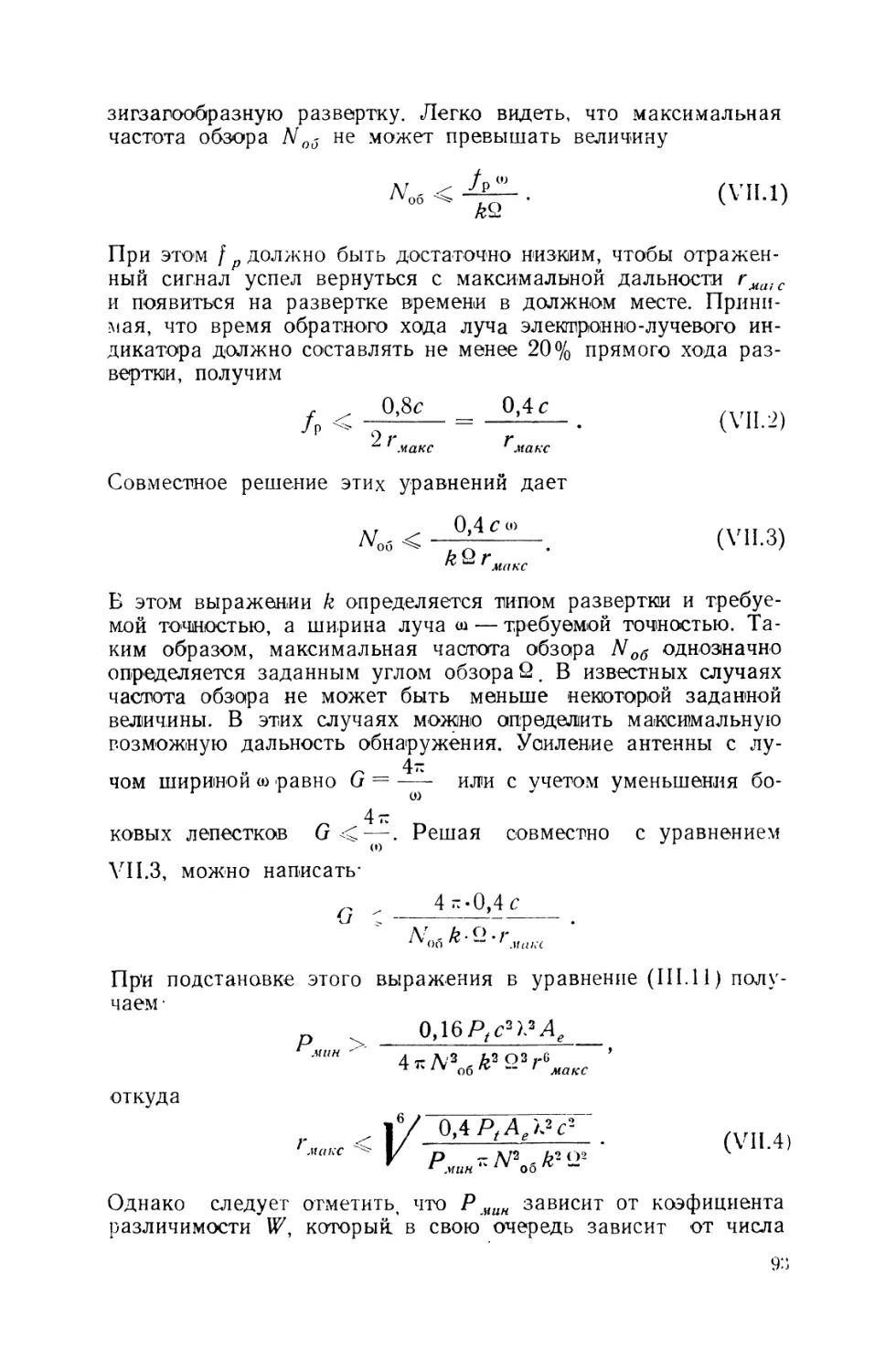
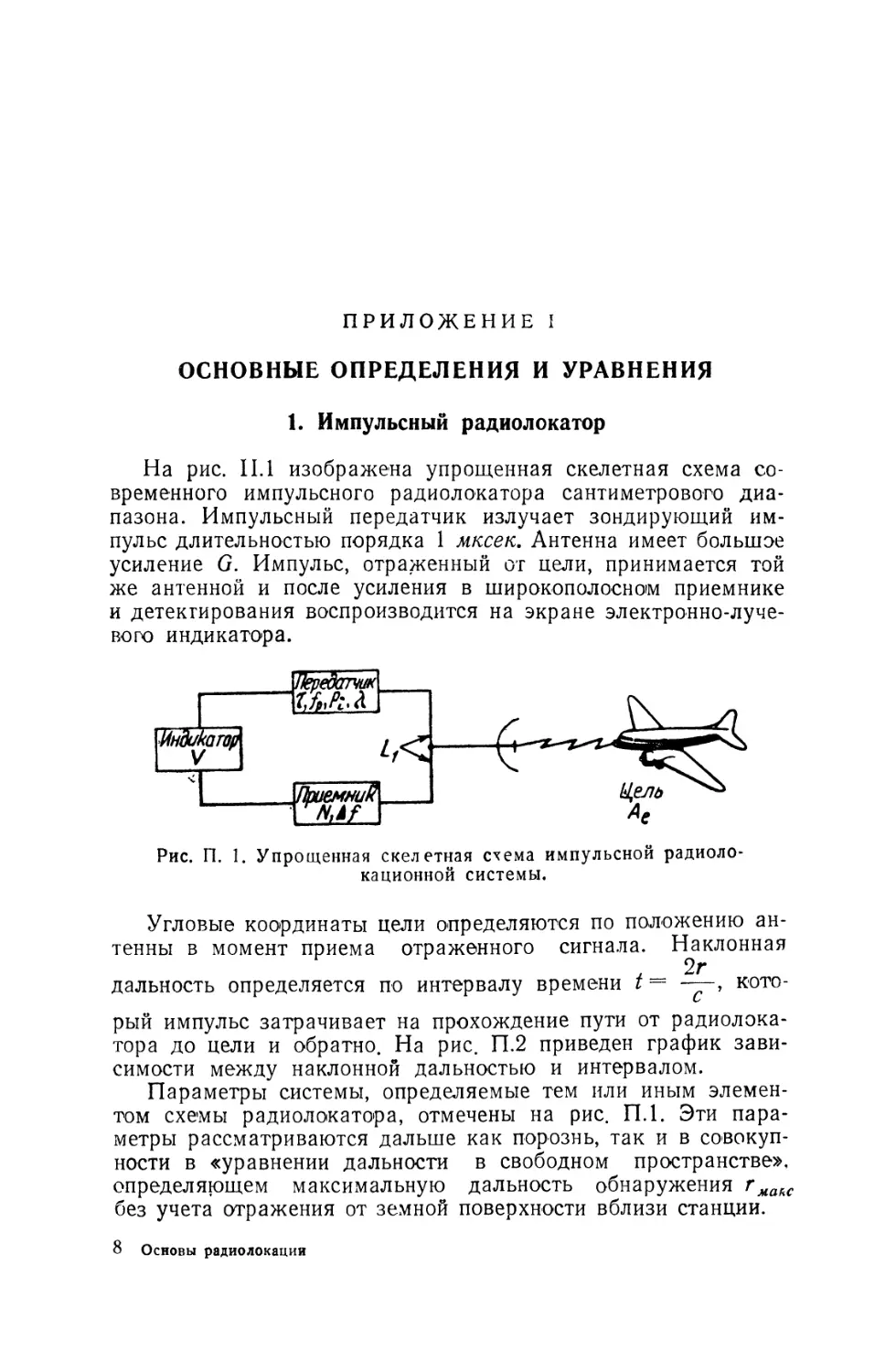
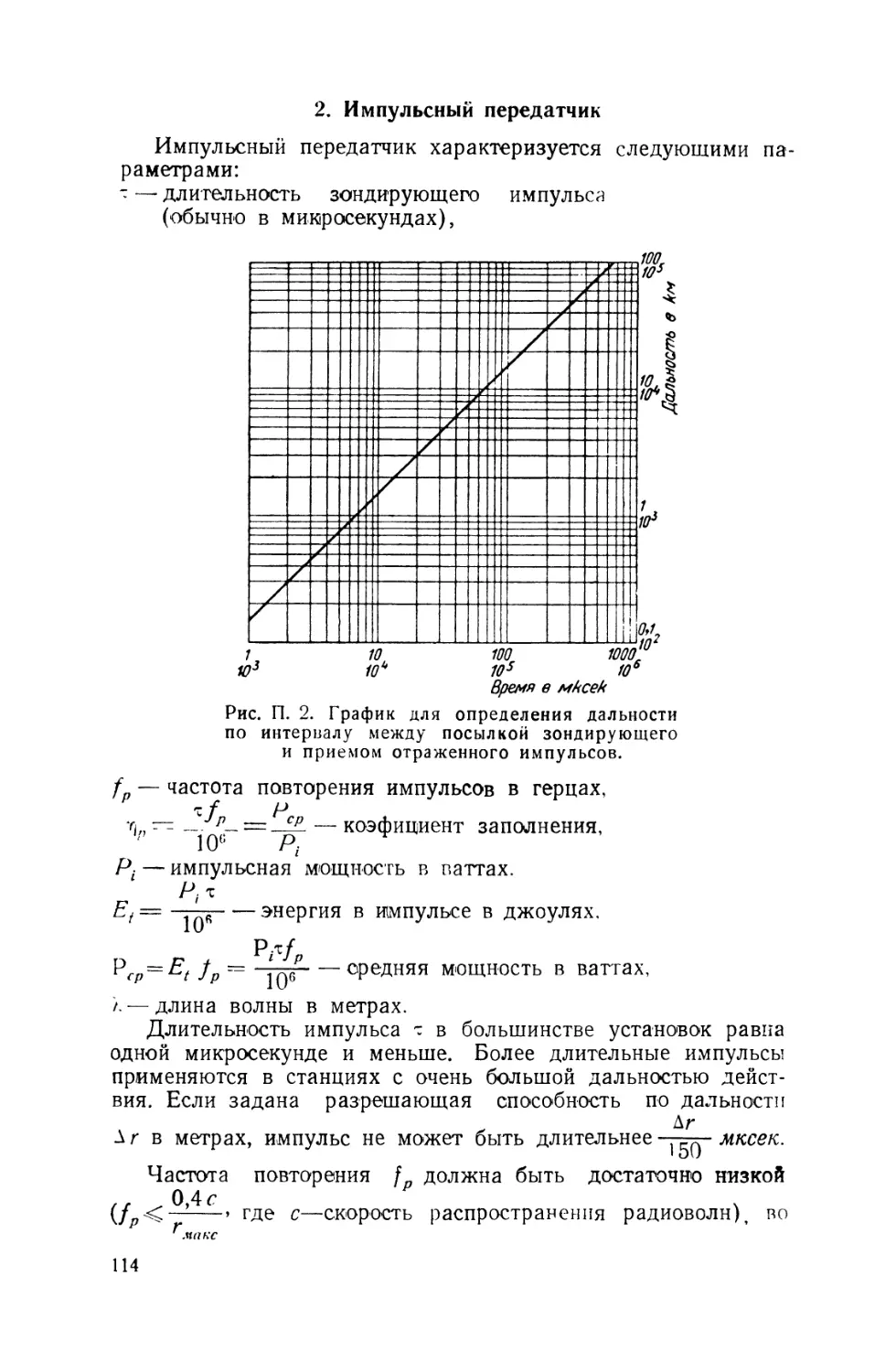
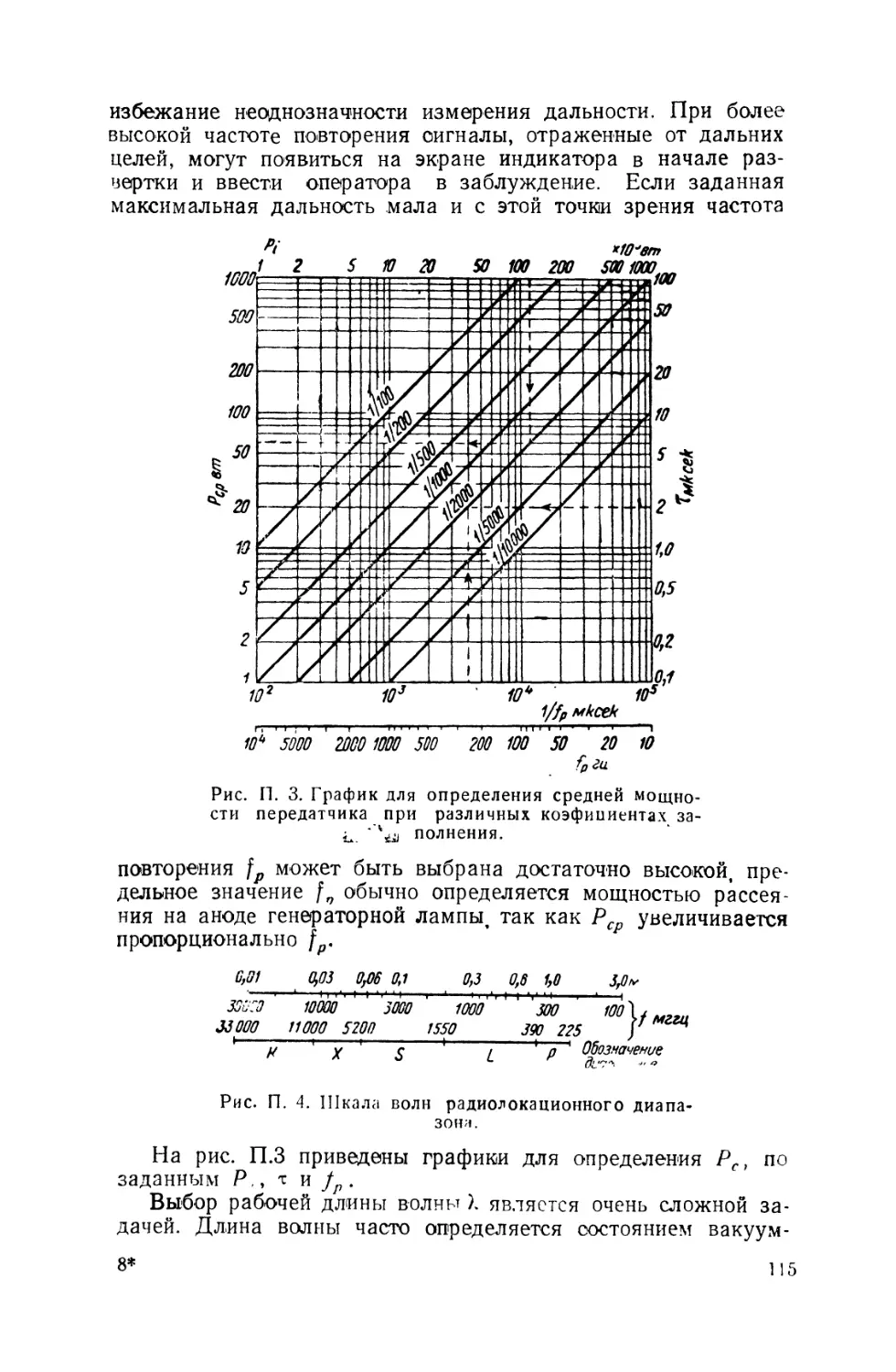
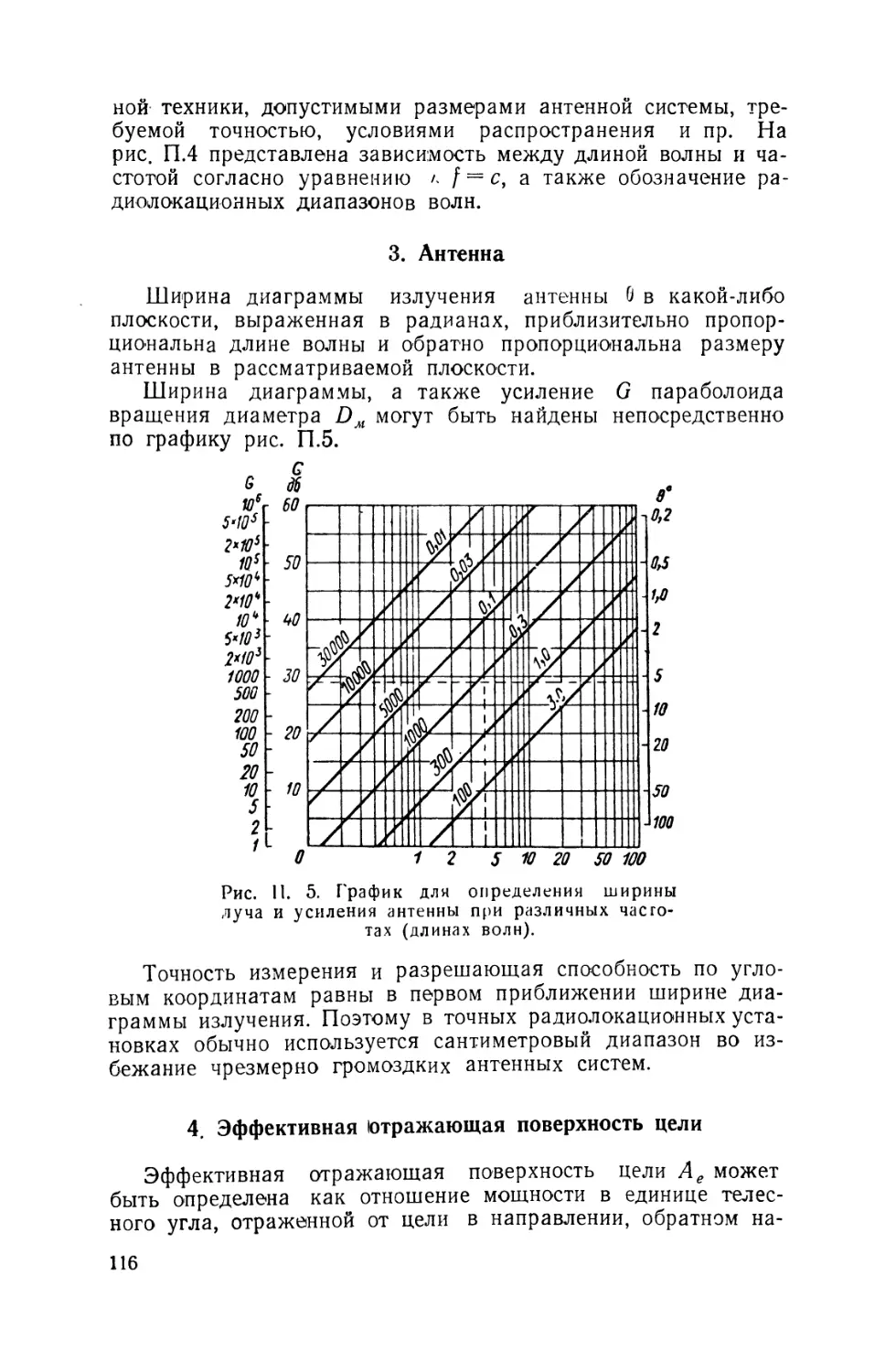



Текст
КРАТКИЕ
ОСНОВЫ
РАДИОЛОКАЦИИ
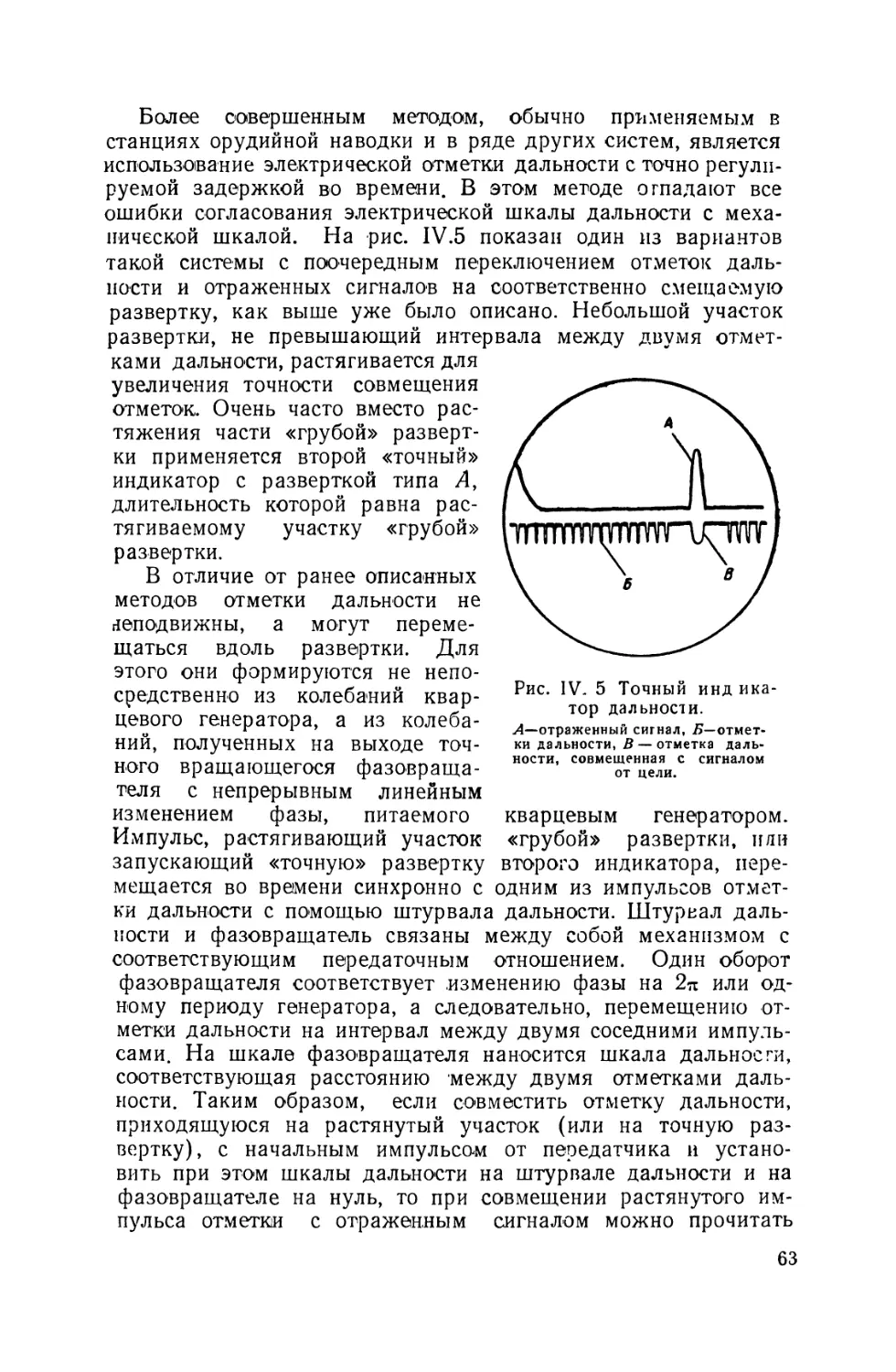
'СОВЕТСКОЕ РАДИО'
КРАТКИЕ ОСНОВЫ
РАДИОЛОКАЦИИ
ПОД РЕДАКЦИЕЙ
А. Я. БРЕЙТБАРТА
ИЗДАТЕЛЬСТВО „СОВЕТСКОЕ РАДИО“
МОСКВА — 1951
ПРЕДИСЛОВИЕ
Основной принцип радиолокации —явление отражения ра-
диоволн от больших объектов—впервые был открыт в 1897 г.
и описан нашим великим соотечественником, изобретателем
радио Александром Степановичем Поповым. Во время опытов
по радиосвязи между двумя судами А. С. Попов наблюдал
нарушение связи при прохождении третьего корабля и дал
правильное объяснение этому явлению.
Практическое применение этого открытия стало возмож-
ным лишь в результате развития техники ультракоротких волн,
а также усовершенствования вакуумных приборов, антенных
систем и пр.
Советские инженеры и ученые сыграли ведущую роль в
развитии как основных принципов радиолокации, так и в раз-
работке элементов радиолокационной аппаратуры, обеспечив-
ших возможность ее практического применения.
Пионером в области изучения распространения ультра-
коротких волн является академик Борис Алексеевич Введен-
ский. Работы акад. Б. А. Введенского на несколько лет опе-
редили аналогичные работы заграницей и легли в основу всех
современных представлений о распространении волн радио-
локационного диапазона. Работы акад. Б. А. Введенского в
области дифракции ультракоротких волн были блестяще под-
тверждены теоретически акад. В. А. Фоком.
Большую роль в развитии радиолокации сыграл член-кор-
респондент АН СССР М. А. Бонч-Бруевич. По его идее ин-
женеры Н. Ф. Алексеев и Д. Е. Маляров разработали в
1936—37 гг. многокамерный магнетрон, являющийся основным
прибором в современных радиолокационных передатчиках
сантиметрового диапазона. М. А. Бонч-Бруевич руководил так-
же работами по волноводам, рупорным и щелевым антеннам,
детально разработанным затем членом-корреспондентом АН
СССР А. А. Пистолькорсом и доктором технических наук
Я. Н. Фельдом. М. А. Бонч-Бруевич впервые применил точное
определение угловых координат цели методом вращающейся
антенны с узкой диаграммой излучения.
Основным элементом колебательной цепи в диапазоне сан-
3
тиметровых волн является объемный резонатор. Выдающаяся
роль в развитии теории объемных резонаторов и в применении
их в качестве колебательных контуров принадлежит М. С. Ней-
ману, предложившему в 1937—38 гг. ряд современных типов
резонаторов.
Благодаря работам Н. Д. Девяткова, М. Д. Гуревича,
В. К. Хохлова и Е. Н. Данильцева были созданы в 1938—
39 гг. образцы сантиметровых триодов, конструкция которых
является прототипом современных ламп, появившихся загра-
ницей лишь после их описания в советской литературе. Осно-
вой теоретического исследования триодов сантиметрового диа-
пазона являются работы Г. А. Гринберга (1936 г.) и В. Е. Ни-
кольского (1939 г.). Следует отметить также ряд более ранних
работ по генерированию ультракоротких и дециметровых волн
В. В. Татаринова, Н. Никитина, С. Я. Турлыгина, В. В. Шир-
кова, А. В. Астафьева, А. Г. Аренберга, Н. А. Петрова,
Е. С. Анцелиовича, М. М. Пружанского, А. М. Кугушева,
Г. А. Зейтленка.
Принцип группирования электронов, применяющихся в
клистронах, был предложен в 1932 г. проф. Д. А. Рожанским.
Теоретические обоснования этого принципа были даны в
1935 г. в работе А. Арсеньевой. Эта работа легла в основу
американских разработок в этой области. Современный отра-
жательный клистрон был предложен в 1940 г. В. Ф. Коваленко
и экспериментально осуществлен в 1940—41 гг. В. И. Кали-
ниным. Теория отражательного клистрона дана в работах
Я. П. Терлецкого и С. Д. Гвоздовера раньше, чем она была
опубликована заграницей.
Советские ученые Ю. Б. Кобзарев, П. А. Погорелко и
Н. Я. Чернецов уже в 1941 г. были удостоены Сталинской
премии за «изобретение прибора для обнаружения самолетов».
*
* *
При выпуске настоящей книги преследовалась цель изло-
жить читателю, знакомому с общей радиотехникой, основы и
современное состояние радиолокационной техники в сжатом
виде. Ввиду ограниченного объема издания описание отдель-
ных радиолокационных установок приведено лишь в той мере,
в которой это необходимо для иллюстрации основных принци-
пов. Однако материал, приведенный в настоящей книге, надо
надеяться, значительно облегчит читателю изучение литера-
туры по отдельным разделам радиолокационной техники.
При составлении «Кратких основ радиолокации» были ис-
пользованы книги: «Principles of Radar» D. Taylor and С. H.
Westcott, «Принципы радиолокации» и «Радиолокационная
техника», а приложение (справочные сведения и графики)
составлено по «Reference data radio engineers», 1949, 3-е изд.
Редакция
ГЛАВА I
ВВЕДЕНИЕ
Радиолокацией называется область радиотехники, которая
занимается определением координат какого-либо объекта, на-
пример, самолета, судна или наземного предмета, без актив-
ного участия в этом самого объекта. Радиолокация отличается
этим от радионавигации, где в процессе определения координат
участвует сам объект. Следует, однако, отметить, что в радио-
навигационной системе могут быть применены и чисто радио-
локационные методы. Например, можно определять координа-
ты самолета при его приближении к аэродрому с помощью
радиолокационной станции, расположенной на аэродроме, и
передавать эти координаты на самолет по обычной линии
радиосвязи.
Для определения координат объекта обычно используется
«эхо-сигнал»—энергия, отраженная от объекта в результате
его облучения передающей антенной радиолокационной стан-
ции. Кроме того, в некоторых специальных случаях на объек-
те может быть установлена специальная приемо-передающая
установка (так называемый «ответчик»), посылающая некото-
рый ответный сигнал в результате приема сигнала радиолока-
ционной станции.
Радиолокация, использующая отраженный от объекта сиг-
нал, может быть названа «первичной», а радиолокация, ис-
пользующая ответчик,—«вторичной» радиолокацией.
Количество измеряемых координат определяется назначе-
нием радиолокационной станции и может изменяться от одной
(например, наклонная дальность или азимут) до трех (напри-
мер, наклонная дальность, азимут и угол места или горизон-
тальная дальность, высота и азимут).
В соответствии с областью применения радиолокационные
станции можно разделить на наземные, авиационные и мор-
ские. Кроме того обычно производится классификация по на-
значению, например, станции обнаружения, орудийной навод-
ки, бомбометания и пр.
5
Все радиолокационные методы можно разделить на два
основных класса—на импульсные системы и системы с непре-
рывным излучением. Системы с непрерывным излучением мо-
гут работать чисто незатухающими колебаниями (допплеров-
ские системы) или колебаниями, модулированными по ампли-
туде, частоте или фазе.
Импульсные системы можно было бы рассматривать, как
частный случай незатухающих колебаний, модулированных по
амплитуде. Однако обычно длительность импульса чрезвычай-
но мала по сравнению с интервалом повторения, вследствие
чего технические методы генерирования и приема сигналов, и,
в особенности, индикации, качественно отличаются от систем
с непрерывным излучением. Поэтому импульсные системы вы-
деляются в особый класс. Современные радиолокационные
станции в основном являются импульсными установками.
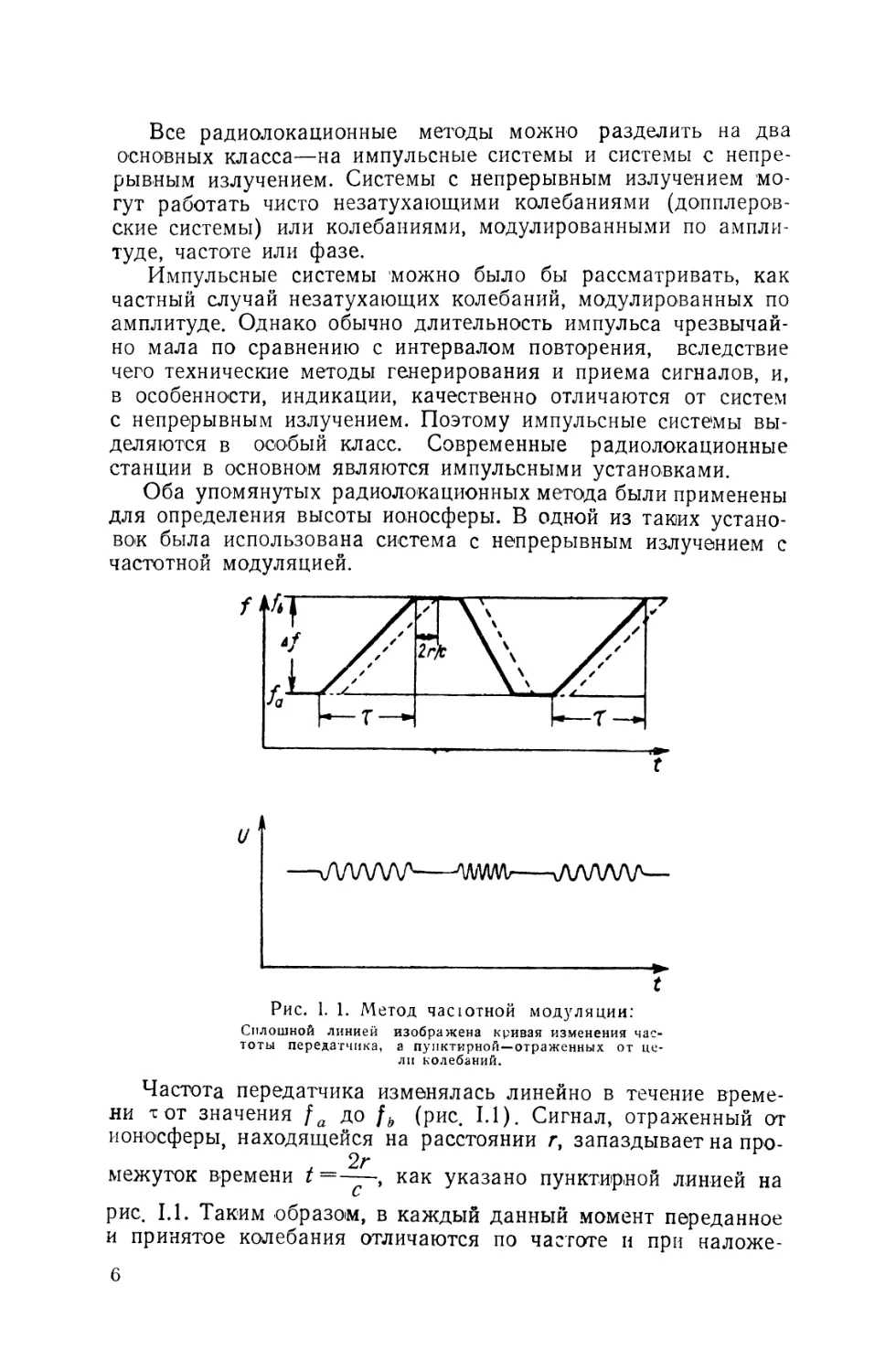
Оба упомянутых радиолокационных метода были применены
для определения высоты ионосферы. В одной из таких устано-
вок была использована система с непрерывным излучением с
частотной модуляцией.
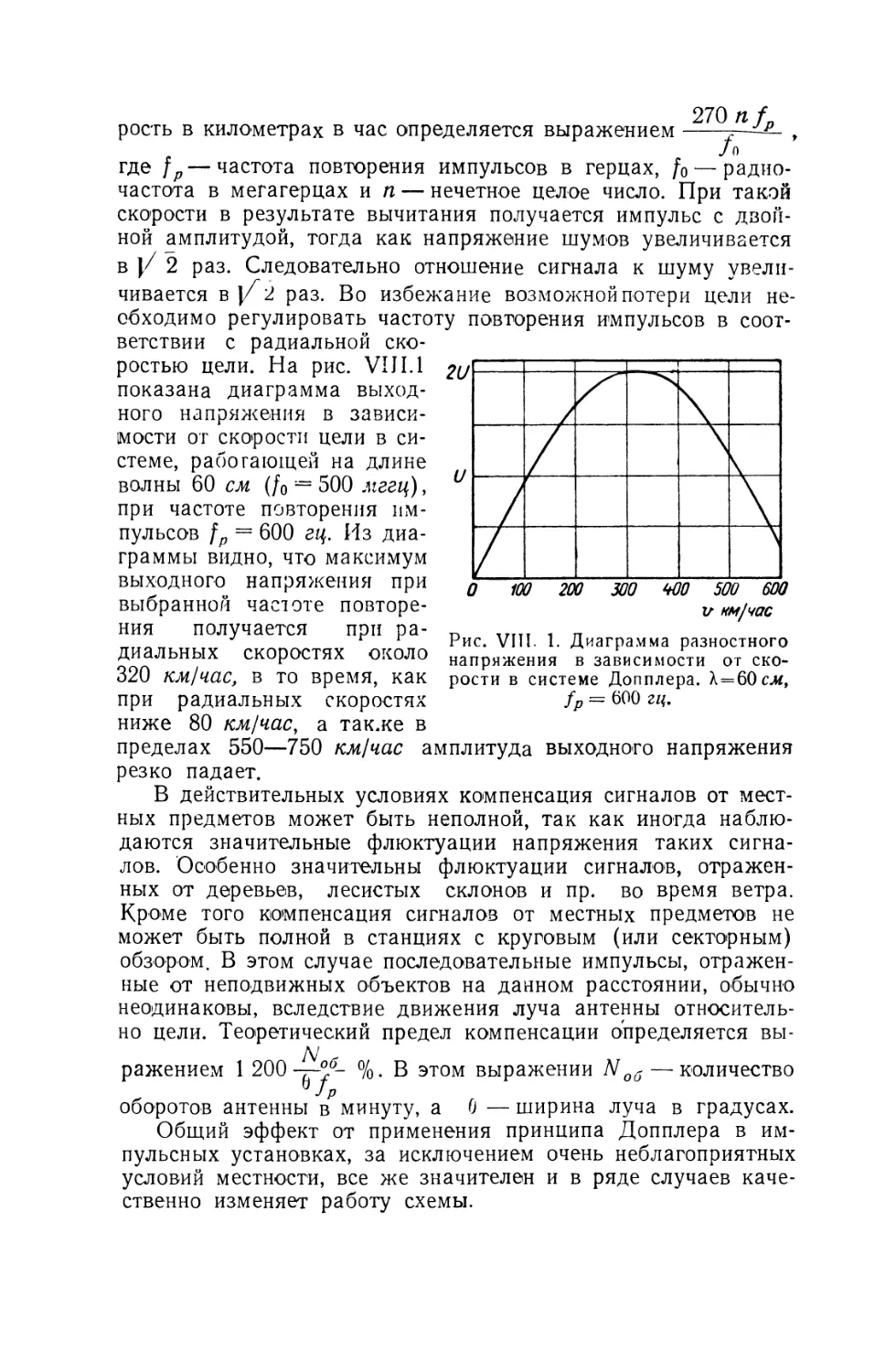
U
t
Рис. I. 1. Метод часютной модуляции:
Сплошной линией изображена кривая изменения час-
тоты передатчика, а пуиктирной—отраженных от це-
ли колебаний.
Частота передатчика изменялась линейно в течение време-
ни тот значения fa до fb (рис. 1.1). Сигнал, отраженный от
ионосферы, находящейся на расстоянии г, запаздывает на про-
, 2г
межуток времени t как указано пунктирной линией на
рис. 1.1. Таким образом, в каждый данный момент переданное
и принятое колебания отличаются по частоте и при наложе-
6
нии дают биения. Если обозначить через bf = fb—^частотное
отклонение в течение времени т, то разность между двумя
частотами (частота биений) будет равна
'-4/i=Wr
т т С
и, следовательно, пропорциональна дальности г до отражаю-
щего слоя ионосферы. Общее число периодов за одно полное
частотное отклонение равно этой частоте, умноженной на т.
2М/
т. е. —, так что дальность можно определять просто путем
подсчета количества периодов частоты биений за одно полное
частотное отклонение. При этом необходимо, чтобы частота
передатчика оставалась постоянной в конце каждой развертки
2г
по меньшей мере в течение времени-у- , как это следует из
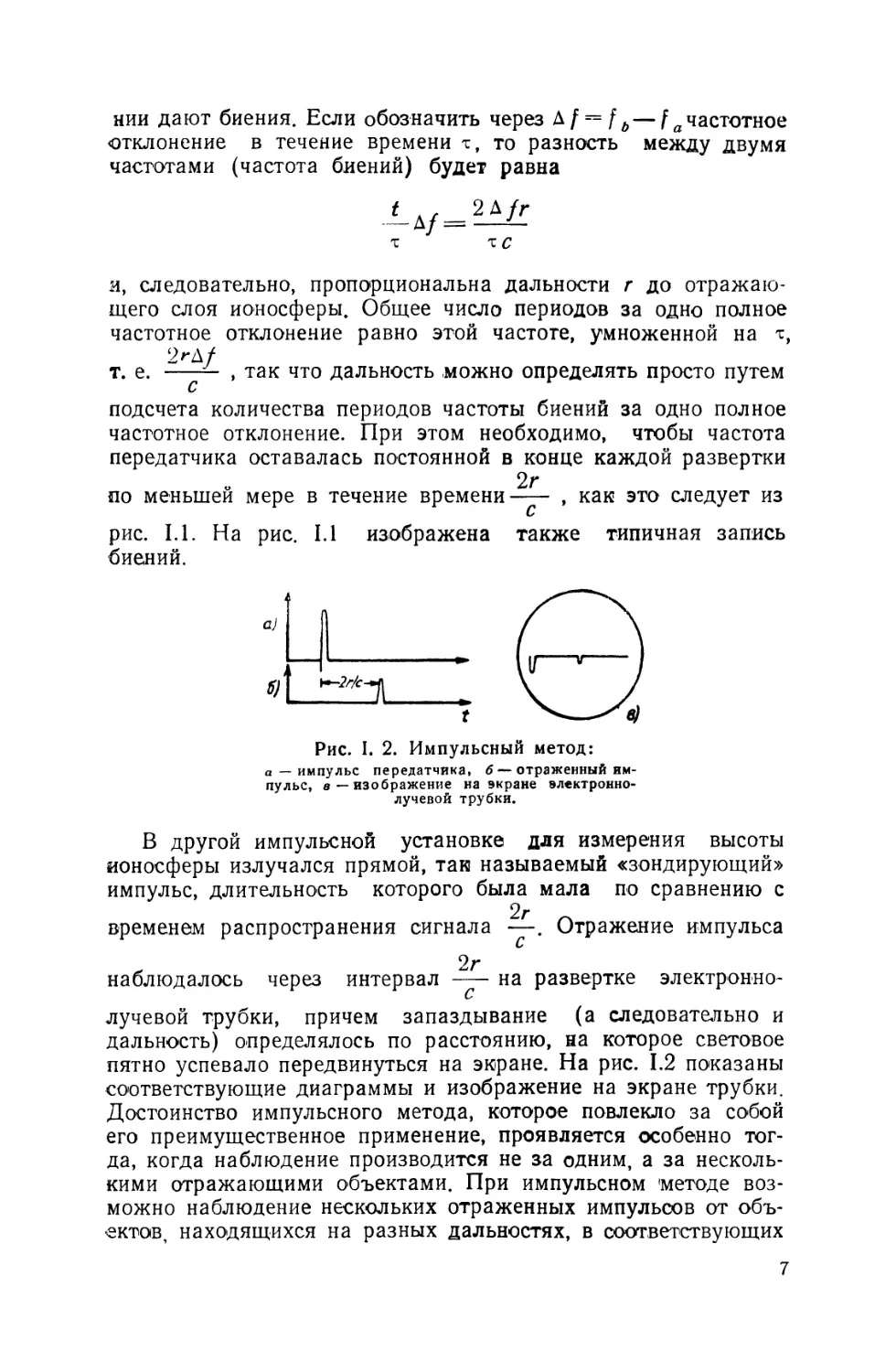
рис. 1.1. На рис. 1.1 изображена также типичная запись
биений.
Рис. I. 2. Импульсный метод:
а — импульс передатчика, б — отраженный им-
пульс, «—изображение на экране электронно-
лучевой трубки.
В другой импульсной установке для измерения высоты
ионосферы излучался прямой, таи называемый «зондирующий»
импульс, длительность которого была мала по сравнению с
2г
временем распространения сигнала —. Отражение импульса
. 2г
наблюдалось через интервал на развертке электронно-
лучевой трубки, причем запаздывание (а следовательно и
дальность) определялось по расстоянию, на которое световое
пятно успевало передвинуться на экране. На рис. 1.2 показаны
соответствующие диаграммы и изображение на экране трубки.
Достоинство импульсного метода, которое повлекло за собой
его преимущественное применение, проявляется особенно тог-
да, когда наблюдение производится не за одним, а за несколь-
кими отражающими объектами. При импульсном методе воз-
можно наблюдение нескольких отраженных импульсов от объ-
ектов, находящихся на разных дальностях, в соответствующих
7
точках на линии временной развертки, тогда как метод с при-
менением частотной модуляции дает в этом случае только
сложное напряжение биений, для разделения которого на ог-
дельные составляющие необходимо разложение в ряд Фурье.
Радиолокационные установки, применяющиеся для опреде-
ления координат объектов, отражение от которых значительно
меньше, чем от ионосферы, например, самолетов, надводных
судов и подводных лодок и пр., принципиально не отличаются
от станций для определения высоты ионосферы. Отличие за-
ключается лишь в мощности передатчика и чувствительности
приемника.
Радиолокационные методы базируются на явлении запазды-
2г о
вания отраженного сигнала на время —одесь с — скорость
распространения электромагнитных колебаний, равная, как
известно, 2,9977. 108 м/сек в свободном пространстве. Когда
требуется большая точность, необходимо ввести коррекцию на
показатель преломления атмосферы. Ниже будет показано, как
изменяется показатель преломления в зависимости от метеоро-
логических условий. Обычно требуется небольшая коррекция
порядка 1/10 000, однако в некоторых случаях искривление
лучей, обусловленное градиентом показателя преломления^
может оказаться очень значительным.
Для измерения запаздывания сигнала можно, как уже бы-
ло отмечено выше, применять частотную модуляцию или им-
пульсный метод. Частотная модуляция применяется реже, так
как такие системы могут определять без значительного услож-
нения схемы расстояние
только до одной цели, одна-
ко они могут оказаться очень
полезными, например, в слу-
чае радиовысотомера для
точного измерения высоты
самолета.
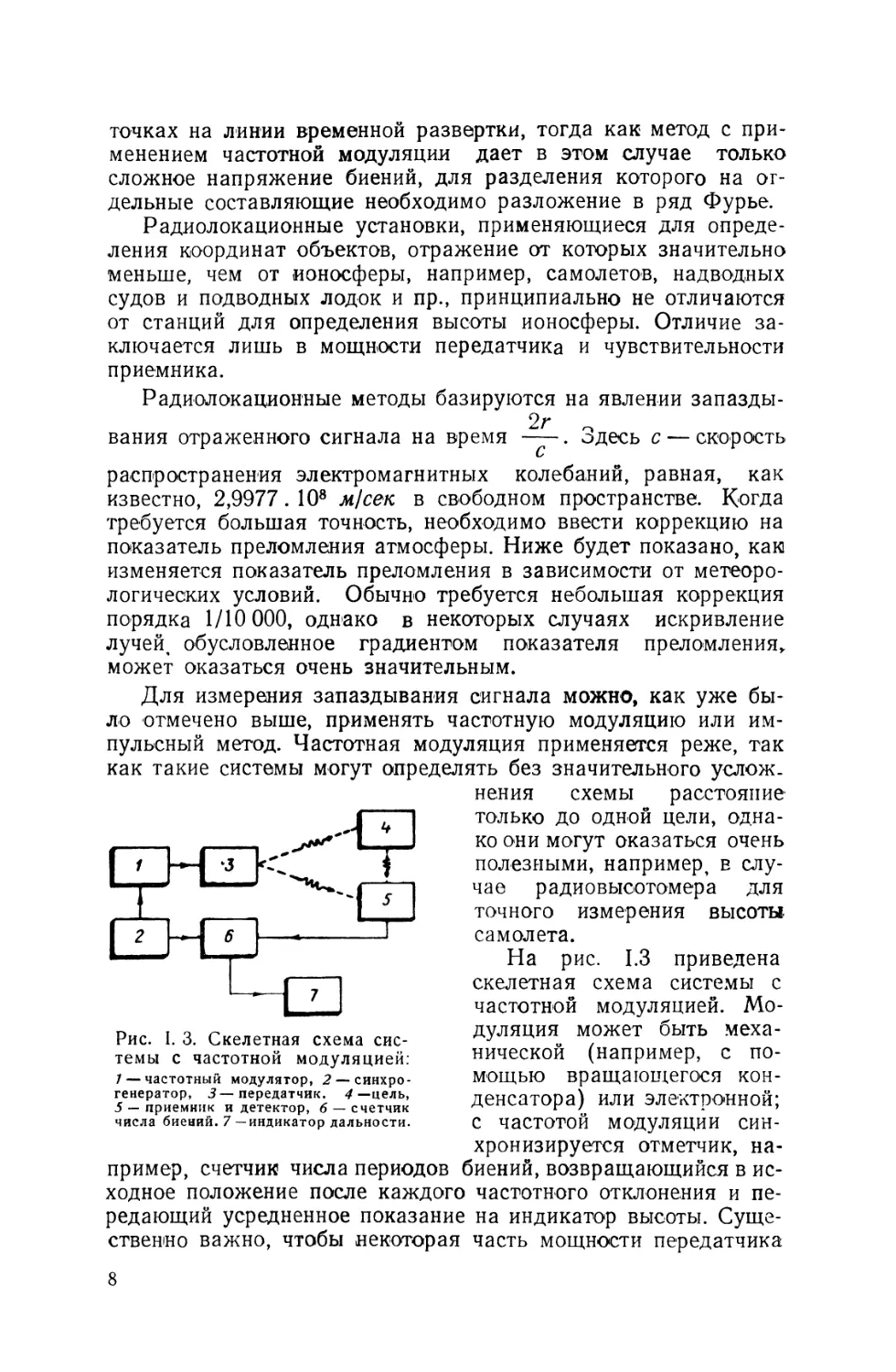
На рис. 1.3 приведена
скелетная схема системы с
частотной модуляцией. Мо-
дуляция может быть меха-
нической (например, с по-
мощью вращающегося кон-
денсатора) или электронной;
с частотой модуляции син-
хронизируется отметчик, на-
биений, возвращающийся в ис-
ходное положение после каждого частотного отклонения и пе-
редающий усредненное показание на индикатор высоты. Суще-
ственно важно, чтобы некоторая часть мощности передатчика
Рис. I. 3. Скелетная схема сис-
темы с частотной модуляцией:
7— частотный модулятор, 2 — синхро-
генератор, 3—передатчик, «/—цель,
5 — приемник и детектор, 6 — счетчик
числа биений. 7 —индикатор дальности.
пример, счетчик числа периодов
8
попадала непосредственно в приемник, но без перегрузки по-
следнего. В радиовысотомере применяются остро направленные
передающая и приемная антенны, расположенные под разны-
ми крыльями самолета, так что оба сигнала, переданный и
отраженный, сравнимы по величине на входе приемника. Точ-
ность системы с частотной модуляцией обычно определяется
одним периодом биений, т е.. ошибка в дальности составляет
с
rkf
Таким образом, если требуется точность в 1 м,
должно быть 150 мггц. Такое большое отклонение частоты
можно получить только в сантиметровом диапазоне волн, на-
пример, на волне 10 см (частоте 3 000 мггц).
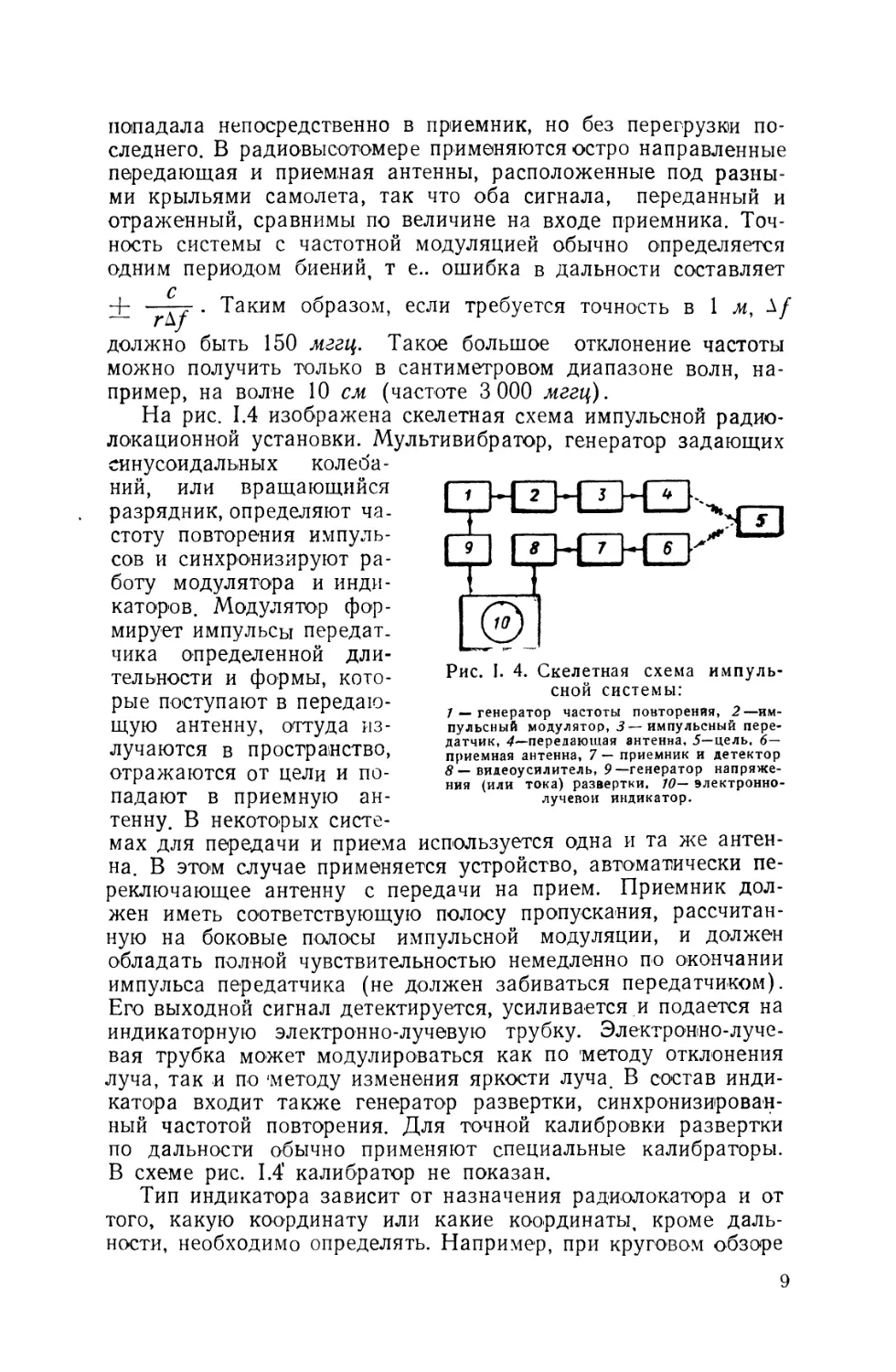
На рис. 1.4 изображена скелетная схема импульсной радио-
локационной установки. Мультивибратор, генератор задающих
синусоидальных колеба-
нии, или вращающийся
разрядник, определяют ча-
стоту повторения импуль-
сов и синхронизируют ра-
боту модулятора и инди-
каторов. Модулятор фор-
мирует импульсы передат-
чика определенной дли-
тельности и формы, кото-
рые поступают в передаю-
щую антенну, оттуда из-
лучаются в пространство,
отражаются от цели и по-
падают в приемную ан-
тенну. В некоторых систе-
7 «_ генератор частоты повторения, 2—им-
пульсный модулятор, 3—импульсный пере-
датчик, 4—передающая антенна, 5—цель. 6—
приемная антенна, 7 — приемник и детектор
8 — видеоусилитель, 9—генератор напряже-
ния (или тока) развертки. 10— электронно-
лучевой индикатор.
мах для передачи и приема используется одна и та же антен-
на. В этом случае применяется устройство, автоматически пе-
реключающее антенну с передачи на прием. Приемник дол-
жен иметь соответствующую полосу пропускания, рассчитан-
ную на боковые полосы импульсной модуляции, и должен
обладать полной чувствительностью немедленно по окончании
импульса передатчика (не должен забиваться передатчиком).
Его выходной сигнал детектируется, усиливается и подается на
индикаторную электронно-лучевую трубку. Электронно-луче-
вая трубка может модулироваться как по методу отклонения
луча, так и по ‘методу изменения яркости луча. В состав инди-
катора входит также генератор развертки, синхронизирован-
ный частотой повторения. Для точной калибровки развертки
по дальности обычно применяют специальные калибраторы.
В схеме рис. 1.4’ калибратор не показан.
Тип индикатора зависит от назначения радиолокатора и от
того, какую координату или какие координаты, кроме даль-
ности, необходимо определять. Например, при круговом обзоре
9
антенна радиолокатора непрерывно вращается, осматривая
все пространство вокруг радиолокатора. В соответствии с этим
синхронно с антенной вращается развертка дальности вокруг
центра экрана трубки. Отраженный от цели сигнал модули-
рует трубку по яркости, оставляя светящуюся дужку, расстоя-
ние которой от центра трубки пропорционально дальности
цели, а угол относительно начального (условно выбранного)
положения развертки дальности равен азимуту цели.
Необходимо отметить, что при импульсном методе прин-
ципиально ограничена минимальная, подающаяся измерению,
дальность, Если отбросить все причины второго порядка, об-
условленные, например, забиванием приемника, то наименьшая
дальность определяется длительностью зондирующего импуль-
са, так как отраженный сигнал не может быть виден раньше,
чем кончится импульс передатчика. Таким образом, если дли-
тельность зондирующего импульса равна т, то минимальная
дальность при импульсном методе никогда не может быть
меньше, чем что соответствует 150 м для обычно при-
меняемого импульса длительностью в 1 мксек. В то же время
при частотной модуляции минимальная дальность теоретиче-
ски равна ошибке
, хотя на практике она обычно не-
сколько больше. У описанного выше радиовысотомера мини-
мальная дальность, например, теоретически равняется 1 м,
практически же она порядка 2—3 м.
Первые радиолокационные установки работали в основном
в диапазоне метровых волн. Они не давали высокой точности
определения координат цели и имели довольно низкую разре-
шающую способность, но обеспечивали при сравнительно не-
больших мощностях передатчиков и несовершенных приемни-
ках значительную дальность обнаружения таких целей, как
самолеты. Основной особенностью станций метрового диапа-
зона, определяемой выбором этого диапазона, являлись значи-
тельные размеры антенной системы. Повышение требований
к точности и разрешающей способности с одной стороны и
развитие вакуумных средств с другой стороны, ^обусловили
переход в дециметровый и сантиметровый диапазоны волн.
Основной особенностью станций сантиметрового диапазона
является большая концентрация энергии излучения при срав-
нительно небольших размерах антенных систем и, в соответст-
вии с этим, высокая разрешающая способность по угловым
координатам, приближающаяся к разрешающей способности
по дальности.
Одной из основных трудностей в радиолокации является
различение сигнала от цели на фоне мешающих сигналов, на-
пример, от наземных предметов, строений, деревьев (так
называемых «местных предметов») или от морских волн.
ГЛАВА II
ГЕНЕРИРОВАНИЕ И ПРИЕМ ИМПУЛЬСНЫХ СИГНАЛОВ
В этой главе рассматриваются принципы генерирования и
приема импульсных радиолокационных сигналов. При этом
будет принято, что частота передатчика fQ так же, как частота
повторения fp и длительность импульса т, уже выбраны. Забе-
гая несколько вперед, следует заметить, что максимальную
частоту повторения импульсов можно определить по допусти-
мому рассеянию на аноде генераторной лампы, однако прин-
ципиально ее предел определяется максимальной дальностью
действия радиолокатора. При этом промежутки между по-сле-
довательными импульсами должны быть хотя чы несколько
Jр
больше, чем самое большое запаздывание отраженного сигна-
2г
ла —Длительность импульса также может быть выбра-
на по допустимому рассеянию. Однако основным соображе-
нием является то, что разрешающая способность системы по
дальности, как было показано выше, равна а точносгь
определения дальности примерно 0,1 ст.
Основным требованием, предъявляемым к генераторной
лампе, является возможно большая мощность в импульсе.
К приемнику предъявляются требования максимально высокой
чувствительности, при удовлетворительном воспроизведении
импульсных сигналов. Для выполнения последнего требования
необходима значительная полоса пропускания. Чувствитель-
ность обычно ограничивается уровнем шумов во входных кас-
кадах приемника, а не достижимым усилением. Следует иметь
в виду, что при широкой полосе пропускания повышается уро-
вень шумов. Следует также отметить, что в радиолокационном
диапазоне частот шумы антенн обычно меньше шумов прием-
ника, вследствие чего особенно важно снизить шумы приемни-
ка до возможного минимума. Подобное соображение совершен-
но не возникает на более длинных волнах.
11
1. Импульсные генераторы для частот ниже 1 000 мггц
На частотах примерно до 1 000 мггц обычно пользуются
генераторами обычного типа, главным образом триодами. По
мере повышения частоты становится все труднее генерировать
значительные мощности вследствие инерции электронов.
Конструкция импульсных генераторных ламп несколько отли-
чается от генераторных ламп для непрерывного излучения.
В частности то обстоятельство, что среднее рассеяние энергии
на аноде при заданном анодном напряжении обычно меньше,
даст возможность применять лампы меньших размеров, вслед-
ствие чего уменьшается время пролета электронов и несколько
повышается предельная частота. С другой стороны, необходи-
ма очень высокая эмиссия катода, так что обычно значение
эмиссии катода непропорционально велико с точки зрения
обычной техники генерирования незатухающих колебаний по
сравнению с устройствами для охлаждения анода.
Мощные генераторные лампы для длинноволновой части
метрового диапазона, применявшиеся в более ранних конструк-
циях радиолокаторов, изготовлялись в кварцевых колбах с
нитью накала из чистого вольфрама, мощностью 800 вт при
мощности рассеяния анода в 1 кет, и давали мощность в им-
пульсе 20—30 кет. В более поздних конструкциях применя-
лись медные аноды с воздушным охлаждением и тарирован-
ные нити накала. Эти лампы при двухтактном включении да-
вали мощность примерно 100 кет на частоте 200 мггц.
На длине волны 1,5 м применялись два триода в двухтакт-
ной схеме с самовозбуждением. На более длинных волнах
применялись кроме того тетроды, а также генератор колебаний
с последующим каскадом усиления мощности. Все эти лампы
были достаточно больших размеров подобно обычным лампам
для незатухающих колебаний, и предельной частотой для этой
конструкции являлось примерно 200 мггц. Настроенные кон-
туры были сведены к небольшим отрезкам линий.
Значительным усовершенствованием явилась разработка
серии ламп малых размеров, применявшихся с контурами с
распределенными постоянными. Первая из этих ламп имела
анод диаметром порядка 25мм, снабженный ребристым радиа-
тором для воздушного охлаждения, и торированную нить на-
кала, потреблявшую мощность около 60 вт. Лампа могла ра-
ботать на длине волны до 1 м. Впоследствии была выпущена
модифицированная конструкция этой лампы с оксидным като-
дом, потреблявшим около 36 вт. Две таких лампы в двухтакт-
ном включении давали около 100 кет мощности в импульсе на
волне 50 см. Впоследствии эти лампы были приняты в каче-
стве типовых для установок, работавших на частоте мггц
12
и позволили создать более легкие и менее громоздкие пере-
датчики.
Электроды этой серии ламп были расположены коаксиаль-
но и являлись частью коаксиального колебательного контура.
Соединения с контурами выполнялись таким образом, чтобы
характеристики линии (колебательного контура) были воз-
можно более однородны. При этом высшая рабочая частота
часто получалась при сокращении одного из наружных кон-
туров до таких размеров, что фактически использовалась лишь
часть контура, находившаяся в стеклянной оболочке лампы.
2. Генераторы сантиметрового диапазона
При переходе на сантиметровый диапазон (3 000 мггц и
выше) необходимо было применить совершенно новую технику.
Так, например, для маломощных генераторов, применяемых
в качестве гетеродинов, были предложены клистрон с двумя
объемными резонаторами и отражательный клистрон, в которых
использован принцип модуляции электронов по скорости. Один
из электродов служит для модулирования скоростей электро-
нов так, чтобы часть из них
пролетала быстрее, чем другая.
Затем им предоставляют лететь
некоторое время в простран-
стве «дрейфа», в котором бы-
стро летящие электроны дого-
няют более медленные, в ре-
зультате чего образуются груп-
пы электронов. При попадании
этих групп на анод происходят
периодические увеличения тока,
которые можно распределить
по фазе таким образом, чтобы
они поддерживали колебания в
резонаторе (обычно объемном
контуре), являющемся состав-
ной частью лампы.
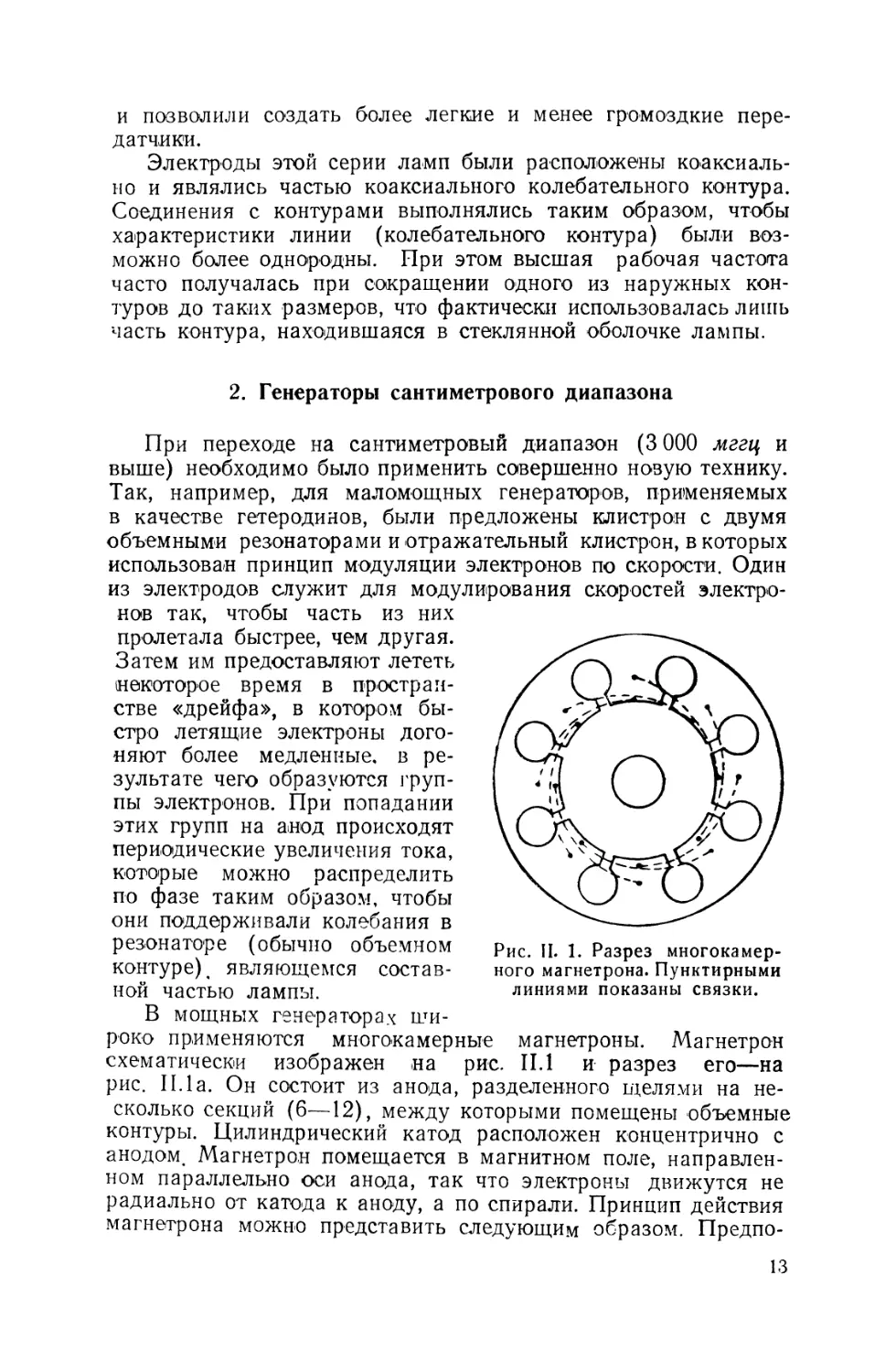
Рис. II. 1. Разрез многокамер-
ного магнетрона. Пунктирными
линиями показаны связки.
В мощных генераторах ши-
роко применяются многокамерные магнетроны. Магнетрон
схематически изображен на рис. II.1 и разрез его—на
рис. II. 1а. Он состоит из анода, разделенного щелями на не-
сколько секций (6—12), между которыми помещены объемные
контуры. Цилиндрический катод расположен концентрично с
анодом. Магнетрон помещается в магнитном поле, направлен-
ном параллельно оси анода, так что электроны движутся не
радиально от катода к аноду, а по спирали. Принцип действия
магнетрона можно представить следующим образом. Предпо-
13
ложим, что на объемных контурах уже имеется колебатель-
ное напряжение. Электроны, пролетающие -мимо щелей полых
резонаторов, будут модулироваться по скорости и, вследствие
этого, при дальнейшем движении группироваться. Кривизна
траекторий электронов в магнитном поле определяется их
энергией. Магнитное поле выбирается так, чтобы группы
электронов попадали на анод в фазе, поддерживающей
колебания в объемных резонаторах.
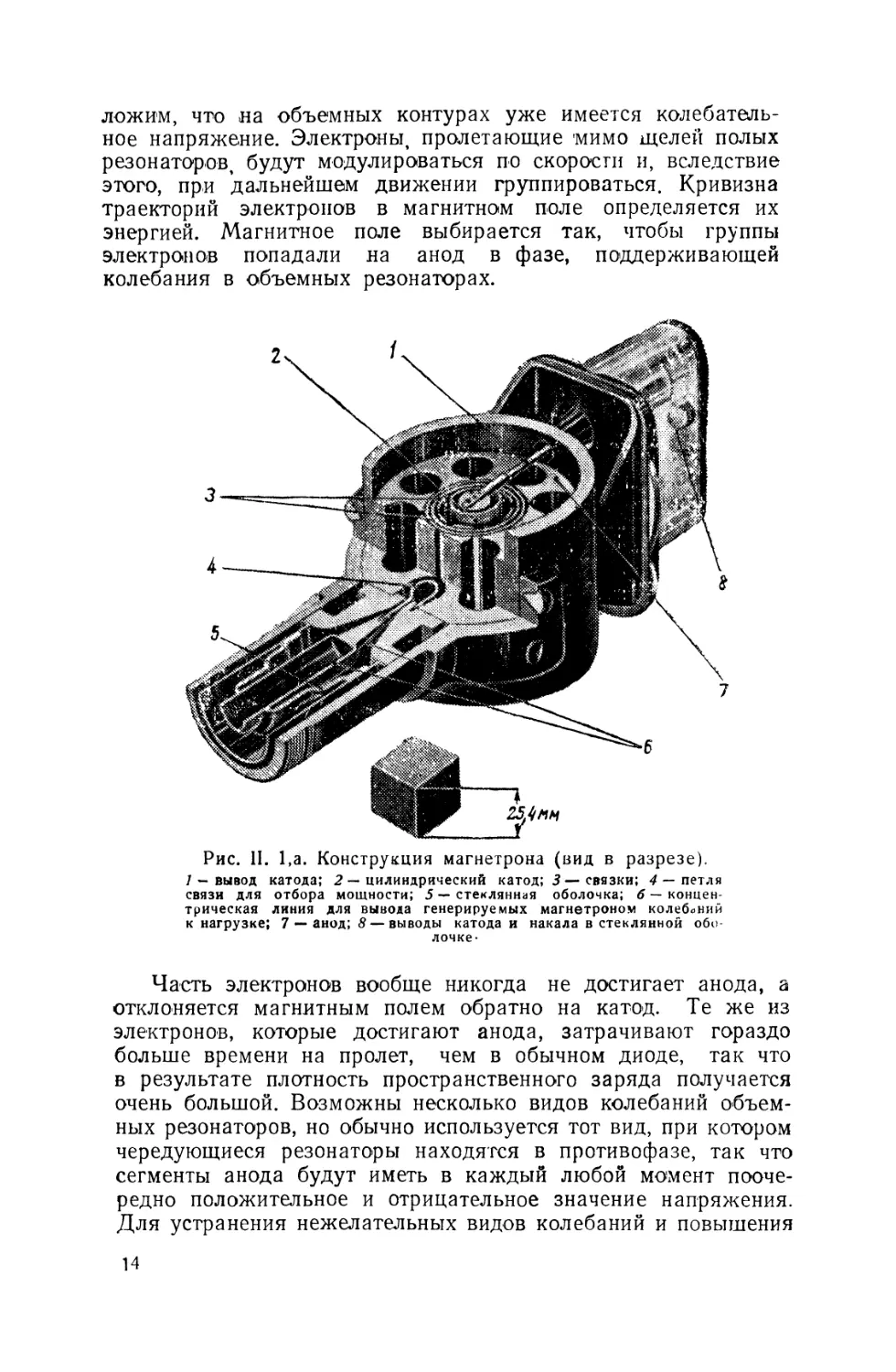
Рис. II. 1,а. Конструкция магнетрона (вид в разрезе).
/ — вывод катода; 2 — цилиндрический катод; 3—связки; 4 — петля
связи для отбора мощности; 5 — стеклянная оболочка; б — концен-
трическая линия для вывода генерируемых магнетроном колебаний
к нагрузке; 7 — анод; 8 — выводы катода и накала в стеклянной обо-
лочке-
Часть электронов вообще никогда не достигает анода, а
отклоняется магнитным полем обратно на катод. Те же из
электронов, которые достигают анода, затрачивают гораздо
больше времени на пролет, чем в обычном диоде, так что
в результате плотность пространственного заряда получается
очень большой. Возможны несколько видов колебаний объем-
ных резонаторов, но обычно используется тот вид, при котором
чередующиеся резонаторы находятся в противофазе, так что
сегменты анода будут иметь в каждый любой момент пооче-
редно положительное и отрицательное значение напряжения.
Для устранения нежелательных видов колебаний и повышения
14
коэфициента полезного действия применяются связки, пока-
занные на рис. II. 1 пунктирными линиями. Мощность может
быть отобрана при помощи зонда или петли связи, соответст-
вующим образом подсоединенных к одному из объемных резо-
наторов.
Первые образцы таких магнетронов давали мощность по-
рядка 5—10 кет. Затем она была повышена для магнетронов,
применяемых в самолетной аппаратуре, до 50—100 кет, а для
наземных станций, где вес и размеры не так ограничены, до
1 мгет. Увеличение мощности было получено в результате
улучшения конструкции, а не введения каких-либо новых
принципов. Одновременно была проведена работа по повыше-
нию рабочей частоты, так что в настоящее время частота
10 000 мггц является такой же обычной, как и 3 000 мггц.
Кроме того, были разработаны 'магнетроны для еще более вы-
соких частот. Рабочая частота может меняться в очень узких
пределах, так как объемные резонаторы образуют часть ва-
куумной системы. Частота может изменяться не более, чем на
72% при изменении режима, а в специально сконструирован-
ных настраиваемых магнетронах до 5%. Следует также отме-
тить, что использование объемных резонаторов с сравнительно
высоким Q ограничивает скорость модуляции. Например, на
частоте 3 000 мггц и при Q, равном 1 000, постоянная времени
модуляции не может быть меньше 0,1 мксек, тогда как Q та-
кой же величины дает на частоте 250 мггц постоянную вре-
мени, равную 1,3 мксек. Таким образом, передача очень корот-
ких импульсов с магнетронным генератором возможна только
в сантиметровом диапазоне.
Модулятор
Модулятор является очень важным звеном в современной
импульсной радиолокационной станции, так как должен комму-
тировать очень большие токи в импульсе. Модулятор часто
бывает более громоздким сооружением, чем генератор, кото-
рый им обслуживается. В более ранних системах, работавших
на длинных волнах, применялась сеточная модуляция, причем
напряжение смещения было порядка 1 кв. Благодаря этому
модуляторные лампы должны были быть довольно больших
размеров. В станциях орудийной наводки, работавших на
волнах 4 м и 1,5 м, высокочастотный импульс возникал в мо*
мент подачи от модулятора положительного напряжения на
сетку. Однако длительность высокочастотного импульса не
определялась длительностью импульса от модулятора. Колеба-
ния генератора прекращались за счет большого отрицатель-
ного напряжения, возникавшего в процессе генерации на
сопротивлении в сеточной цепи генератора. Для более надеж-
15
ного запирания лампы обычно использовалось также смеще-
ние за счет анодного тока. Таким образом длительность им-
пульса определялась постоянной времени сеточной цепи гене-
ратора. При появлении генераторных ламп с оксидными като-
дами оказалось необходимым применять анодную модуляцию,
чтобы избежать непрерывной подачи высокого потенциала на
аноды. Это было необходимо во избежание пробоя в лампе,
что особенно опасно при очень малых междуэлектродных рас-
стояниях в лампах метрового диапазона. При подаче напряже-
ния только в течение импульса оказалось возможным безопас-
но применять значительно более высокие анодные напряжения.
В качестве модуляторных ламп при анодной модуляции
сначала применялись тиратроны. Позже они были заменены
искровыми разрядниками и вакуумными лампами. Искровые
разрядники можно сконструировать так, чтобы пробой проис-
ходил в момент подачи импульса дополнительного напряжения
возбуждения. Можно также применять вращающиеся искровые
разрядники, в которых искра проскакивает, когда вращающий-
ся электрод приближается к неподвижному электроду. Во всех
этих случаях необходима искусственная линия для формирова-
ния импульса. Имеются схемы искровых модуляторов, в кото-
рых искусственная линия удваивает напряжение источника
питания.
Для магнетронов сантиметрового диапазона также приме-
няется анодная модуляция, причем анод поддерживается под
потенциалом земли, а отрицательный импульс подводится к
катоду. В виду того, что работа магнетрона зависит от вели-
чины анодного напряжения, очень важно, чтобы модулирую-
щий импульс был прямоугольным, т. е. чтобы подводимое на-
пряжение было постоянно в течение всей длительности им-
пульса. В качестве модуляторов применялся ряд устройств,
включая тиратрон и искровой разрядник с искусственной ли-
нией, формирующей импульсы.
3. Разложение импульсных сигналов в ряд Фурье
Для изучения процесса приема импульсных сигналов очень
важно знать их спектры. Так как модулирующее напряжение
периодическое с основной частотой fp (рис. II.2), его спектр
должен состоять из некоторого числа гармоник этой частоты.
Ввиду того, что длительность импульса т гораздо меньше, чем
1
интервал между импульсами , большое количество энер-
гии будет находится в ооласти очень высоких гармоник с
частотами порядка . Например, если f р = 500 гц и
16
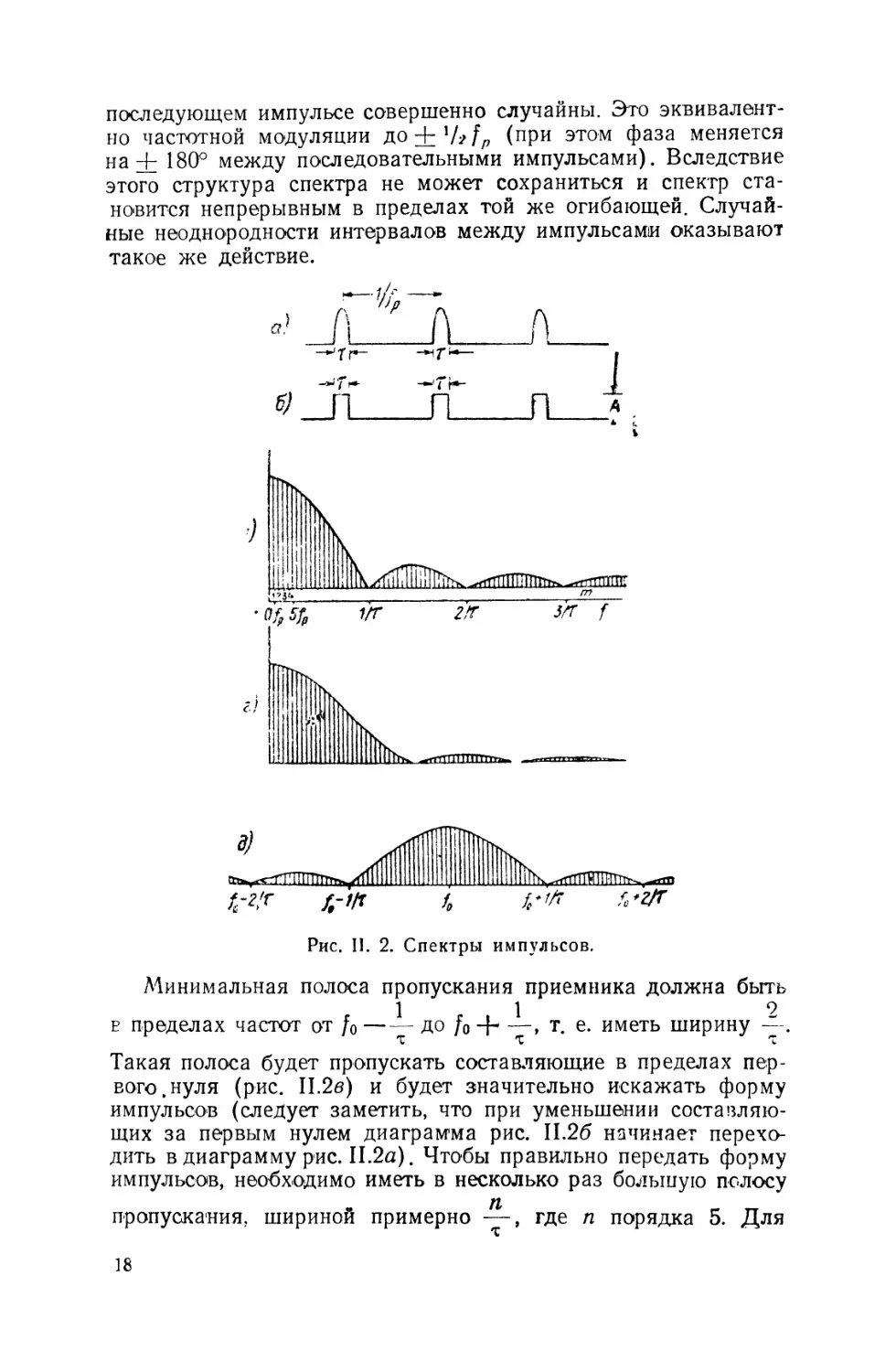
т=2 мксек, значительная часть энергии будет распределена в
области 1 000-ой гармоники. Амплитуды составляющих ряда
Фурье легко вычисляются в случае, когда модулирующий сиг-
нал состоит из прямоугольных импульсов, как на рис. 11.26.
Амплитуда постоянной составляющей равна Ат/ а амплиту-
2А
да /и-ой гармоники-^.— sin лп Результаты вычислений
приведены на рис. II.2в *. Огибающая этих гармоник является
в действительности интегралом Фурье для одиночного импуль-
са, зависящим только от длительности и формы импульса, но
не зависящим от f ; это обстоятельство будет использовано
впоследствии. Если верхушки импульсов округлены, как на
рис. 11.2(2, то спектр будет подобен изображенному на
рис. П.2г—причем первый нуль (или минимум) будет иметь
место на более высокой частоте, чем раньше, и в гармониках
выше этого нуля будет содержаться меньше энергии **. Для
читателей, знакомых с теорией направленных антенн, можно
указать, что огибающие спектров напоминают по форме диа-
граммы главного и боковых лепестков многовибраторной ан-
тенны; если заполнение площади антенны неравномерно и
уменьшается к краям, то главный лепесток слегка расширяет-
ся, но интенсивность боковых лепестков уменьшается.
При модуляции таким сигналом несущей частоты f0 состав-
ляющая модулирующего спектра частоты /обусловливает
возникновение двух боковых частот / -г /\. Результирующий
спектр приведен на рис. 11.26. Большая часть энергии лежит
в пределах диапазона fQ +—, причем спектр состоит из от-
дельных составляющих, разделенных .интервалами, равными
fp . Так как частота значительно ниже несущей частоты /0,
отдельные составляющие располагаются очень близко друг к
другу и образуют почти непрерывный спектр. Для получения
диаграммы рис. 11.26 нужно допустить, что модуляция чисто
амплитудная и что фазы последовательных высокочастотных
импульсов когерентны (т. е. все время находятся в фазе с не-
модулированными незатухающими колебаниями). В действи-
тельности это обычно не имеет места и фазы при каждом
* Можно видеть, что большая часть энергии находится на частотах
1 f 1 \ 1
ниже -\^п=- J. На частоте — амплитуда равна нулю так же, как
2 7/3
на частотах —, — и т. д.
т т
* * Если импульсы имеют форму полусинусоиды, как на рис. II. 2 а,
4 А /р т пк
то уравнение огибающей будет иметь виду cos , где п== 2т/.
Эта функция изображена графически на рис. II. 2г и равна нулю при
п — 3; 5; 7 и т. д.; на рис Н.2в функция равна нулю при п — 2;4; 6 ит.д.
2 Основы радиолокации 17
последующем импульсе совершенно случайны. Это эквивалент-
но частотной модуляции до Ч~ '/? fp (при этом фаза меняется
на + 180° между последовательными импульсами). Вследствие
этого структура спектра не может сохраниться и спектр ста-
новится непрерывным в пределах той же огибающей. Случай-
ные неоднородности интервалов между импульсами оказывают
такое же действие.
£-г/г /,->/? 4
Рис. II. 2. Спектры импульсов.
ЛАинимальная полоса пропускания приемника должна быть
f 1 - . 1 2
в пределах частот от fQ —— до /о + —, т. е. иметь ширину —
Такая полоса будет пропускать составляющие в пределах пер-
вого, нуля (рис. П.2в) и будет значительно искажать форму
импульсов (следует заметить, что при уменьшении составляю-
щих за первым нулем диаграмма рис. 11.26 начинает перехо-
дить в диаграмму рис. П.2а). Чтобы правильно передать форму
импульсов, необходимо иметь в несколько раз большую полосу
- Л ~ тт
пропускания, шириной примерно —, где п порядка 5. Для
18
передачи импульса с очень крутым фронтом может потребо-
ваться п, равное 10, или даже больше. Это обстоятельство мо-
жет иметь существенное значение при точных измерениях, так
1
как точность измерения дальности в среднем равна— шири.
л
т *
ны импульса или — .
Величину п можно рассматривать, как номер гармоники та-
кого спектра импульса, в котором «основной» составляющей
является частота с полупериодом, равным длительности им-
пульса ,г. Хотя спектр непрерывен, такое определение п очень
удобно, так как импульсы диаграммы рис. 11.2а можно пред-
ставить, как полупериоды «основной» частоты такого спектра
(71=1).
Таким образом при т = 2,5 мксек и п = 5 (точность по
дальности не очень высока) необходимо иметь полосу пропус-
кания шириной 2 мггц, тогда как в случае очень большой точ-
ности при импульсах длительностью в 1 мксек и п=10, не-
обходима полоса частот шириной в 10 мггц. Точность по даль-
ности в этом случае будет + 15 м (максимальная ошибка).
4. Характеристики приемника. Шумы входной цепи
Основной характеристикой приемника импульсного радио-
локатора является полоса пропускания. Обычно амплитудная
характеристика приемников плавно спадает на концах полосы
пропускания, причем в этих областях появляются фазовые
искажения. Попытки повысить крутизну спадания амплитудной
характеристики приводят к увеличению фазовых искажений.
Этого следует избегать, так как фазовые искажения в области
высокочастотных составляющих импульсного напряжения при-
водят к появлению выбросов (перенапряжений) как на верши-
не импульса, так и непосредственно вслед за импульсом. Вви-
ду этого обычно применяются характеристики с пологим спа-
дом [уменьшение примерно на 3 дб при п = 5 (т. е. при
2 5
fо + -’—) или при п= 10 в случае, когда требуется особо точ-
т
ное определение дальности].
* Следует отметить, что соотношение между максимальной ошибкой
по дальности (Sr) и полосой частот (Д/) такое же, как у системы с час-
тотной модуляцией (см. главу 1), а именно:
сЪ1 с т с
Ъг== '2 =“2 • п = 2V’
так как
п
V--.
19
Очень удобно следующее определение полосы пропускания
kf приемника с пологими спадами амплитудной характеристи-
ки. Если G—усиление приемника по мощности на любой час-
тоте f, a Go—усиление приемника на средней частоте диапазо-
на /о, то можно принять, что:
оо
(П.1)
° о
Величина п ь=Л/т обычно колеблется в пределах 5—10.
Другим важным параметром приемника является его чув-
ствительность. Для получения большой чувствительности необ-
ходимо не только большое усиление, но и низкий уровень
входных шумов. Получение большого усиления на частотах до
500 мггц не представляет особых затруднений. В первых об-
разцах приемников применялись лампы типа жолудь, а затем
безцокольные лампы миниатюрной серии. Значительным усо-
вершенствованием явилось использование усилителей на лам-
пах с заземленными сетками. Однако на частоте 3 000 мггц
и выше осуществление усиления по высокой частоте встречает
значительные трудности. Обычно принятый сигнал от антенны
подается непосредственно на кристаллический смеситель, а
усиление осуществляется на промежуточной частоте. Для всех
диапазонов частот принята супергетеродинная схема. Промежу-
точная частота обычно лежит в пределах 30—60 мггц, так что
полосы пропускания в 2—5 мггц можно получать без особых
затруднений. Для радиолокационных станций дальнего обна-
ружения самолетов иногда применялась промежуточная часто-
та 2 мггц. Для специальных целей были сконструированы уси-
лители промежуточной частоты с полосами частот в 10—
20 мггц.
Во всех случаях предел чувствительности определяется не
возможностью получения большого усиления, а уровнем шу-
мов, причем почти исключительно уровнем шумов первого
каскада усилителя высокой частоты, или, в сантиметровом
диапазоне, смесителя и первого каскада усилителя промежу-
точной частоты. Шумы антенны значительны только на самых
длинных волнах, так что снижение шумов приемника до воз-
можного минимума является очень важной задачей. Наимень-
шее значение шумов на любом сопротивлении определяется
тепловым движением электронов в сопротивлении. Квадрат
напряжения этих шумов равен
TRkf. (И.2)
Здесь k—постоянная Больцмана, Т—абсолютная температура,
R—величина соответствующего сопротивления, причем рас-
20
сматриваются только составляющие напряжения шума в пре-
делах полосы частот шириной if. В любом приемнике или
усилителе к шумам теплового движения добавляются также
шумы электронных ламп. Дробовым эффектом называются
флюктуационные шумы анодного тока лампы. Его величина
зависит в большой степени от величины пространственного
заряда. В тетродах и пентодах добавляются кроме того шумы
из-за флюктуации распределения катодного тока между от-
дельными электродами.
Шумовой фактор
Величина, называемая шумовым фактором или, сокращен-
но, шумфактором (2V), определяется как мера того, насколь-
ко приемник хуже теоретического минимума, определяемого
тепловыми шумами. Величина N может быть выражена, как
Л,_
Мвх
(М.З)
где — мощность шумов, которую можно получить на вы-
ходе приемника,
So — мощность сигнала, которую можно получить на вы-
ходе приемника,
S6X— мощность сигнала, которую можно получить от источ-
ника на входе и
N ех— мощность шумов в пределах полосы пропускания
приемника, которую можно получить на сопротивле-
нии или линейной цепи с таким же полным сопротив-
лением, как у источника сигнала на входе, при тем-
пературе То = 290° К.
Выражение «которую можно получить» применяется ввиду то-
го, что вход приемника может быть не согласован с полным
сопротивлением источника на входе (например, фидером ан-
тенны); в этих выражениях необходимо брать мощность, кото-
рую можно получить при оптимальной нагрузке. Шумфактор
является отвлеченным числом, но иногда его выражают в де-
цибелах. Если полоса пропускания приемника достаточна, что-
бы усилить сигнал в основном без искажений, то отноше-
но
ние —а равно коэфициенту усиления по мощности (не
вх
считая потерь, обусловленных рассогласованным входом) иМ
как это понятно само собой, будет зависеть только от уровня
шумов. Можно определить величину Nе как эффективную
мощность шума на входе приемника, так что также бу-
'' е
дет являться коэфициентом усиления по мощности и тогда
21
очевидно, что Ne = NNex. Так как в хорошо спроектирован-
ном усилителе каскады, следующие за первым, создают лишь
незначительную часть всего шума в целом, величина Ne, опре-
деляющая шумы в ватгах на входных клеммах, будет равна
шумам первого каскада.
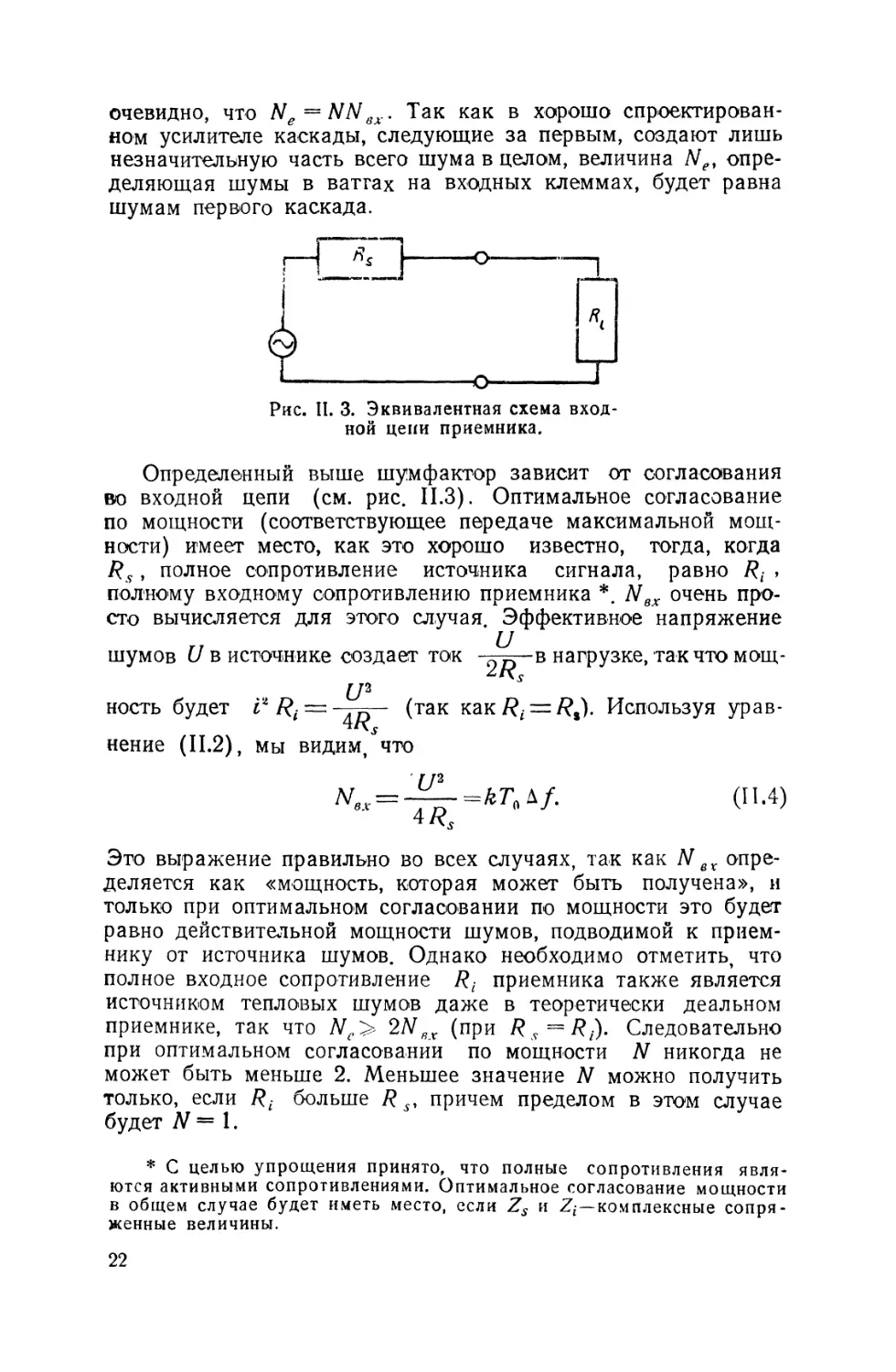
Рис. II. 3. Эквивалентная схема вход-
ной цени приемника.
Определенный выше шумфактор зависит от согласования
во входной цепи (см. рис. П.З). Оптимальное согласование
по мощности (соответствующее передаче максимальной мощ-
ности) имеет место, как это хорошо известно, тогда, когда
Rs, полное сопротивление источника сигнала, равно /?, ,
полному входному сопротивлению приемника *. Nex очень про-
сто вычисляется для этого случая. Эффективное напряжение
г, и
шумов и в источнике создает ток ор -в нагрузке, так что мощ-
и2
ность будет Ri = ~ad~ (так как Ri = /?,)• Используя урав-
некие (II.2), мы видим, что
7/2
--w ,tT'^
(П.4)
Это выражение правильно во всех случаях, так как Af бГ опре-
деляется как «мощность, которая может быть получена», и
только при оптимальном согласовании по мощности это будет
равно действительной мощности шумов, подводимой к прием-
нику от источника шумов. Однако необходимо отметить, что
полное входное сопротивление /?z приемника также является
источником тепловых шумов даже в теоретически деальном
приемнике, так что Nc> 2Nвх (при /?v=/?z). Следовательно
при оптимальном согласовании по мощности N никогда не
может быть меньше 2. Меньшее значение N можно получить
только, если Ri больше R s, причем пределом в этом случае
будет N = 1.
* С целью упрощения принято, что полные сопротивления явля-
ются активными сопротивлениями. Оптимальное согласование мощности
в общем случае будет иметь место, если Zs и ^—комплексные сопря-
женные величины.
22
Может случиться, что оптимальное согласование для получе-
ния максимального отношения сигнала к шуму не будет со-
ответствовать оптимальному согласованию по мощности. Если,
как например в диапазоне длинных волн, антенные шумы
больше шумов приемника, оптимальное согласование по мощ-
ности будет одновременно оптимальным для отношения сигна-
ла к шумам, хотя максимум не резко выражен. Точно так же,
если шумфактор приемника высок, как например, в санти-
метровом диапазоне, то шумы внутреннего сопротивления /? 5
источника сигнала будут ничтожно малы и нужно стремиться
к оптимальному согласованию по мощности для получения
наибольшей полезной мощности при заданной мощности шу-
мов приемника. Но когда шумы антенны так же, как и шумы
приемника, примерно одинаково малы, целесообразно отойти
от оптимального согласования по мощности, чтобы улучшить
шумфактор; при этом любое снижение интенсивности сигнала
легко может быть восполнено повышением усиления. Каждую
такую регулировку лучше всего производить опытным путем,
но очень важно отдавать себе отчет, что шумфактор может
изменяться в зависимости от согласования на входе. Опреде-
ление шумфактора усложняется тем, что эквивалентная темпе-
ратура антенны может не быть равна 290° К. Этот вопрос рас-
сматривается подробнее в главе III, но вообще можно сказать,
что в диапазоне волн выше 3 м шумы антенны, как правило,
преобладают над шумами приемника, тогда как на более ко-
ротких волнах име-
ет место обратное
соотношение. Для
длинных волн выра-
жение для шумфак-
тора должнобыть из-
менено. Можно раз-
делить Ne=NkT(}^f
на составляющую
(М— источ-
ником которой яв-
ляется приемник, и
на составляющую
kT'bf, получаемую
из антенны, причем
Т — эффективная
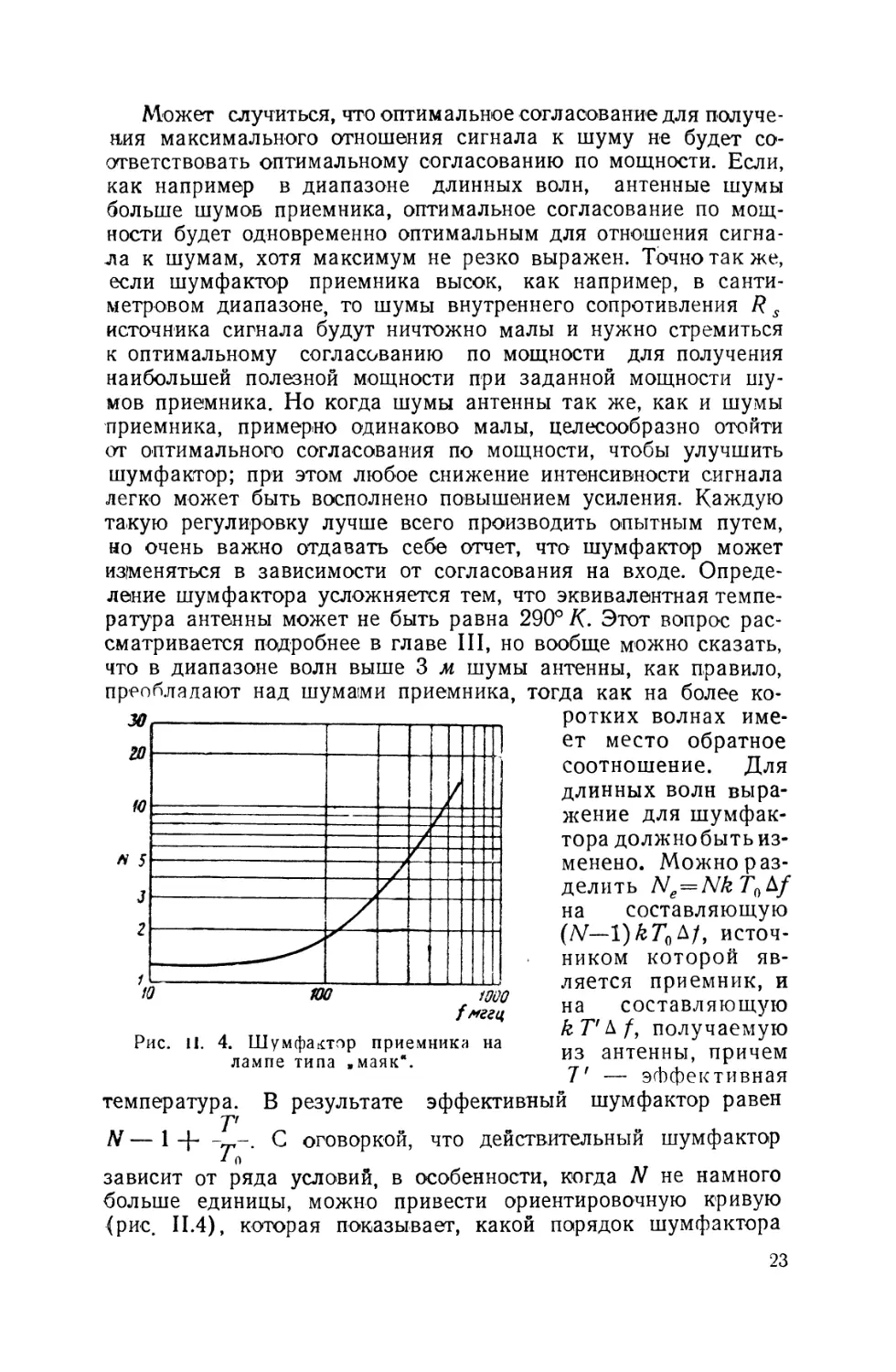
Рис. II. 4. Шумфактор приемника на
лампе типа »маяк“.
температура. В результате эффективный шумфактор равен
Т1
N — 1 -]— С оговоркой, что действительный шумфактор
* о
зависит от ряда условий, в особенности, когда N не намного
больше единицы, можно привести ориентировочную кривую
(рис. II.4), которая показывает, какой порядок шумфактора
23
можно получить на различных длинах волн на лампе типа
«маяк». Для кристаллических смесителей, применяемых в сан-
тиметровом диапазоне, еще труднее указать надежные значе-
ния шумфактора. Можно принять для общего шумфактора вы-
/V 4- -A1L— 1
к v пр У' 1
ражение N =------5------, где N пр — шумфактор усилителя
промежуточной частоты, Ткг)—температура шумов кристалла и
GCM — коэфициент преобразования смесителя. Т кр колеблется
в пределах от TQ до 47\ так что 2Те можно принять в каче-
стве среднего значения. G .,, изменяется на частоте 3000 мггц
от—6 дб до—9 дб, Следовательно общий шумфактор на ча-
стоте 3 000 мггц должен быть примерно равен 29 (13 дб).
5. Коэфициент различимости и предельная чувствительность
приемника
При определении минимального различимого сигнала не-
обходимо учесть еще один коэфициент, который обусловли-
вается не собственно приемником, а усилителем низкой часто-
ты и индикатором. Этот коэфициент называется коэфициентом
различимости (W) сигнала. Он определяется как отношение
импульсной мощности сигнала к мощности шумов после вто-
рого детектора, соответствующее минимальному сигналу, кото-
рый можно еще заметить на экране индикатора. Значение
этого коэфициента при среднем значении частоты повторения
для приемника с «оптимальной» полосой пропускания (п по-
рядка 2) колеблется обычно в пределах от 1 до 4. Если коэ-
фициент различимости больше 4, это обычно указывает на
плохое выполнение усилителя - низкой частоты или на плохую
регулировку индикатора. Можно получить коэфициент разли-
чимости меньше единицы. В приемниках с «оптимальной» по-
лосой для этого должно быть применено интегрирование на-
пряжения от нескольких последовательных разверток, что при-
водит к сглаживанию шумов и, соответственно, лучшей разли-
чимости сигнала. В приемниках с «оптимальной» полосой сред-
нее значение коэфициента различимости W можно принять
равным 1.5.
«Предельной чувствительностью» Р„ии приемника назы-
вается наименьшая мощность, которую необходимо подать на
вход приемника, чтобы сигнал был еще заметен на фоне шу-
мов. Как W, так и Р в значительной степени зависят от
типа индикатора, от формы и длительности импульса. Соглас-
но определению коэфициента различимости
Р„„и= WNNex--=WNkT^f-
24
6. Числовые примеры
Рассмотрим два численных расчета предельной чувстви-
тельности приемника. В одном случае сделан расчет для
приемника на волне 10 см с кристаллическим смесителем с
шумфактором Л/, равным 20 (13 дб). Будем считать, что
требуется большая точность измерения и поэтому <= 1 мксек,
a&f= 10 мггц. Коэфициент W принят равным 1,5. Ввиду то-
го, что k = 1,37. 10 ~2бдЖ1 tak
рмин = 1,5 • 20 4,37 • 10-23 • 290 • 107 = 1,19 • 10~12 em.
U2
Так как Р = - D- , то напряжение в согласованном 75-ом-
ном кабеле равно 75-1,19• 10~12 = 9,4- 1О-6/з
Для хорошего приемника на частоте 200 мггц, с входным
триодом с заземленной сеткой N = 3,4’. Если ширину полосы
пропускания взять равной 4 мггц, а коэфициент W равным
1,5, то
Рмин = 1 >5 • 3,4 • 1,37 • 10"23 • 290 • 4 • 106 = 8,1 • 10“14 вт
или, соответственно, 2,46 мкв в кабеле сопротивлением 75 ом.
Таким образом порядок величины Рмин в реальных радиоло-
кационных установках колеблется в пределах от 1 до
0,1 мкмквт, что соответствует примерно 2—10 мкв в кабеле
сопротивлением 75 ом.
ГЛАВА III
ФАКТОРЫ, ОПРЕДЕЛЯЮЩИЕ ЭФФЕКТИВНОСТЬ
РАДИОЛОКАЦИОННОЙ АППАРАТУРЫ
В предыдущей главе были рассмотрены два наиболее оче-
видных фактора, определяющих свойства радиолокационной
аппаратуры, а именно мощность Pt импульсного передатчика
и минимальная мощность Рмин, на которую реагирует прием-
ник. Эта величина была названа предельной чувствительно-
стью. В этой главе рассмотрены другие факторы, определяю-
щие эффективность радиолокационной станции прежде всего
с точки зрения максимальной дальности действия. Будет так-
же рассмотрено влияние изменения направления излучения на
максимальную дальность (например, в зависимости от угла
места для наземной станции). Рассмотрены также в основном
отражающие свойства цели, усиление и направленность антен-
ных систем и условия распространения. В заключение приве-
дено несколько примеров выбора параметров радиолока-
ционных станций с точки зрения всех этих факторов.
При определении отношения мощности передатчика и чуб-
p.
ствительности приемника р-2— следует иметь в виду, что
обычно Pt является мощностью в импульсе. Однако, если
принять среднюю мощность за период повторения, необходимо
только, чтобы Рмин было выражено соответствующим обра-
зом. Так как Рмин (и коэфициент различимости W) можно
определить только, зная длительность и форму импульса, мож-
Р,
но всегда правильно определить отношение -- .
*мин
1. Усиление направленных антенн
Для получения заданной максимальной дальности сущест-
венную роль играют, практически, для всех типов радиолока-
торов, направленные антенны, концентрирующие излучение в
заданном направлении. Это особенно важно на более коротких
26
волнах, где, как правило, применяются антенны очень высокой
направленности, тогда как в диапазоне метровых волн часто
достаточно нескольких вибраторов, питаемых в соответствую-
щей фазе, чтобы получить требуемую направленность. Следо-
вательно важным параметром является «усиление» антенны,
т. е. такой коэфициент, который выражает увеличение излучае-
мой мощности в заданном направлении по сравнению с мощ-
ностью, которая излучалась бы ненаправленной или «изотроп-
ной» антенной. Следует отметить, что усиление представляет
собой функцию направления и должно по необходимости быть
меньше единицы в некоторых направлениях, чтобы компенси-
ровать концентрацию энергии в других направлениях. Обычно
усилением антенны называют усиление, измеренное в направ-
лении максимального излучения.
Очень часто усиление относят к полуволновому вибратору
(к излучению в экваториальной плоскости). Это очень удобно
в практической работе, так как полуволновую антенну очень
легко воспроизвести, чего нельзя сказать об изотропном излу-
чателе. Действительно, несложная антенна не может быть изо-
тропной; электромагнитные волны не могут иметь продольную
поляризацию и все антенны несложного типа имеют направле-
ние, вдоль которого излучение отсутствует. Однако в расчетах
удобнее относить усиление к изотропной антенне. В дальней-
шем усиление, отнесенное к изотропной антенне, будет обозна-
чено символом G, а к полуволновому вибратору—символом G'-
Так как усиление G полуволновой антенны равняется 1,64,
пересчет с одного значения усиления на другое производится
с помощью выражения G = 1,64 G'. Третья возможная единица
измерения усиления—это усиление диполя Герца в экватори-
альной плоскости (в полтора раза больше применяемой здесь
единицы измерения), но этим исчислением мы в дальнейшем
изложении не будем пользоваться.
Усиление антенны было определено применительно к пере-
дающей антенне, но из теоремы взаимности следует, что уси-
ление приемной антенны будет иметь такое же значение при
условии, что волна падает в том же направлении и с той же
поляризацией. Усиление при приеме определяется относитель-
ным количеством энергии, поглощенным антенной из плоской
волны, падающей в заданном направлении. Удобно также
ввести понятие эффективной площади поглощения (Л„) ан-
тенны. Эта площадь может быть определена таким образом,
чтобы мощность, которая может быть получена из антенны,
точно соответствовала потоку энергии через площадь Л,,, по-
мещенную перпендикулярно к падающему излучению. Соглас-
но выражению «мощность, которая может быть получена»,
предполагается, что антенна и нагрузка согласованы таким
образом, чтобы в нагрузке выделялась максимально возмож-
27
ная мощность. Усиление приемной антенны по определению
пропорционально Аа и, так как эффективная площадь погло-
щения изотропной антенны (с усилением, равным единице)
z 2 *
равно --
эффективная площадь
антенны может быть вы-
ражена, как
Аа= . (III.la)
В тех случаях, когда усиление относится к полуволновой ан-
тенне, ввиду того, что G=1,64G', Аа будет приблизительно
равно
= <1Ч1>
о
В дальнейшем будет часто применяться понятие «поток энер-
гии», поэтому необходимо дать ему определение. В электро-
магнитной теории он представлен вектором Умова—Пойнтинга
с [Е //], так как напряженность электрического поля Е в элек-
тростатических единицах и магнитного поля Н в электромаг-
нитных единицах свободно распространяющейся волны числен-
но равны. Н связано с током смещения, который можно себе
представить как ток, текущий по листу, параллельному Е.
При переходе на другие единицы измерения напряженность
Е в вольтах на метр и находящийся с ней в фазе ток смеще-
ния z в амперах на метр связаны постоянным отношением,
равным
4 7гг 10"9 = 120^ = 377 ом.
Эту величину можно рассматривать, как полное сопротивление
свободного пространства. Если бы мы могли удалить часть
пространства, то все излучение было бы поглощено тонкой
пленкой, обладающей удельным активным сопротивлением
120тг ом на квадрат (квадрат любого размера, обладающий
одинаковым сопротивлением между противоположными сторо-
нами). Такую пленку можно было бы назвать согласованной
оконечной нагрузкой свободного пространства. Отсюда непо-
средственно следует, что поток энергии в поле излучения с на-
Е2
пряженностью Е в/м равен вт!м2. Эту величину можно
обозначить символом F и написать
120 к ~ 377
(Ш.2)
Следовательно можно вывести уравнение для мощности, кото-
* См. приложение II.
28
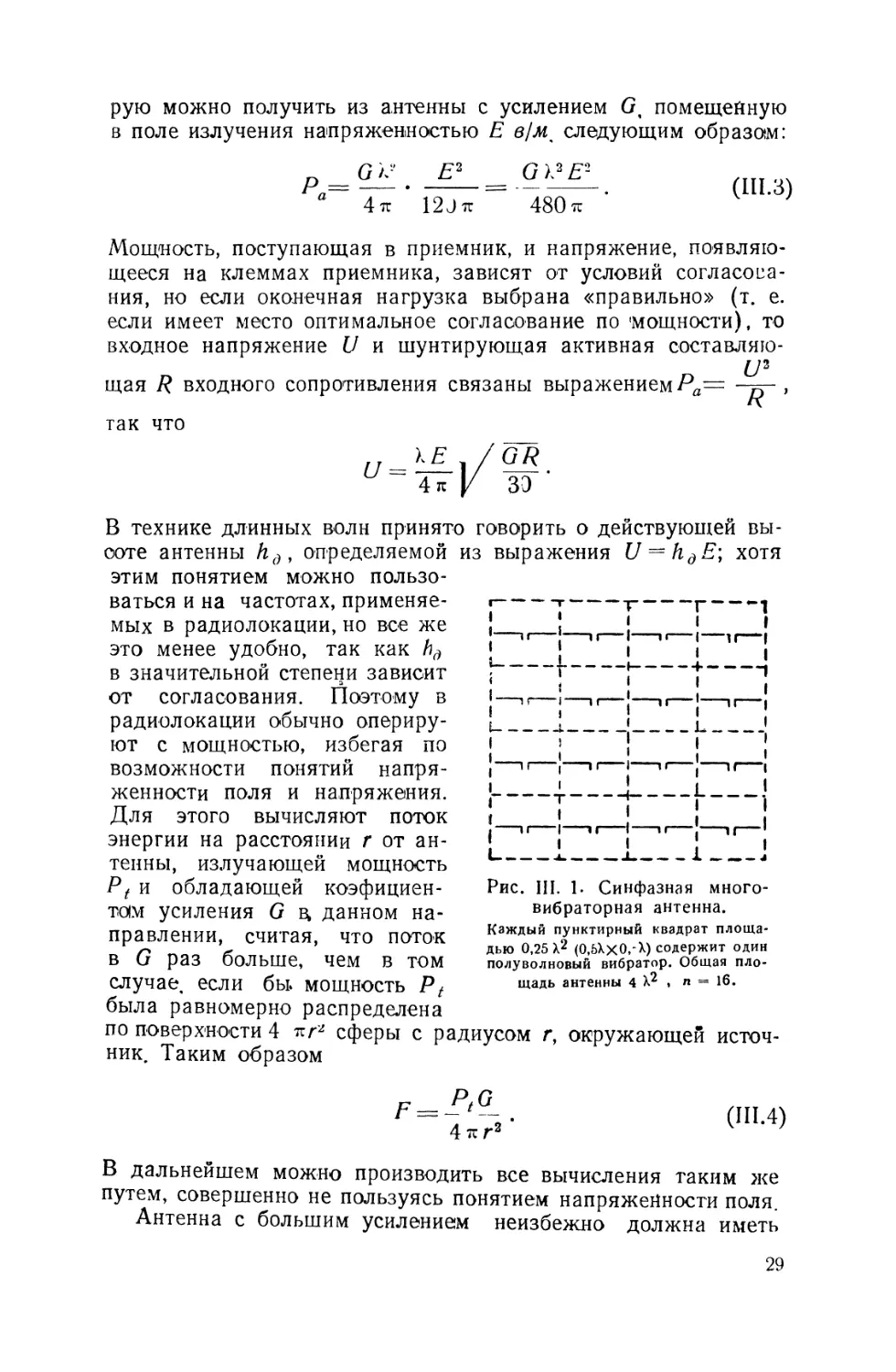
рую можно получить из антенны с усилением G, помещенную
в поле излучения напряженностью Е в/м* следующим образом:
р . £2 ___
а~ 77 * 12Jtt ~ 780тс
Мощность, поступающая в приемник, и напряжение, появляю-
щееся на клеммах приемника, зависят от условий согласова-
ния, но если оконечная нагрузка выбрана «правильно» (т. е.
если имеет место оптимальное согласование по мощности), то
входное напряжение U и шунтирующая активная составляю-
сь
щая R входного сопротивления связаны выражением Ра= ~п~ >
г\
так что
KE /OS
4« V зэ
В технике длинных волн принято говорить о действующей вы-
соте антенны hd, определяемой из выражения U = hdE\ хотя
этим понятием можно пользо-
ваться и на частотах, применяе-
мых в радиолокации,но все же
это менее удобно, так как hd
в значительной степени зависит
от согласования. Поэтому в
радиолокации обычно опериру-
ют с мощностью, избегая по
возможности понятий напря-
женности поля и напряжения.
Для этого вычисляют поток
энергии на расстоянии г от ан-
тенны, излучающей мощность
Р t и обладающей коэфициен-
то1м усиления G ц данном на-
правлении, считая, что поток
в G раз больше, чем в том
случае, если бы» мощность Рt
была равномерно распределена
по поверхности 4 тс г2
ник. Таким образом
-----1
I
—к—।
I
-----!
I
--и--1
____J
I
I
—н—|
I
------
—к—i
Рис. III. 1. Синфазная много-
вибраторная антенна.
Каждый пунктирный квадрат площа-
дью 0,25 X2 (0,5Хх0,Л) содержит один
полуволновый вибратор. Общая пло-
щадь антенны 4 X2 , п = 16.
сферы с радиусом г, окружающей источ
4 тс г2
(Ш.4)
В дальнейшем можно производить все вычисления таким же
путем, совершенно не пользуясь понятием напряженности поля.
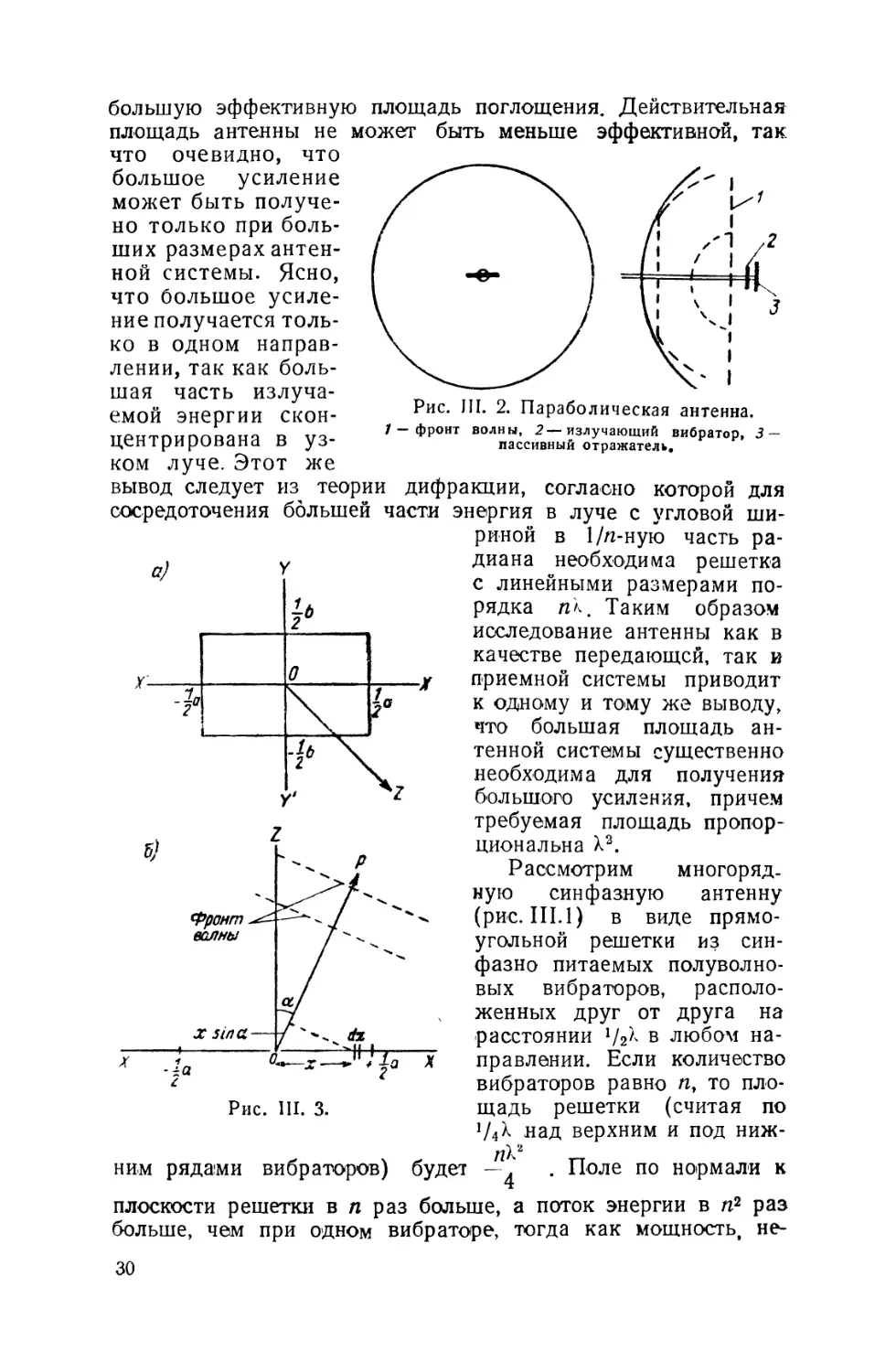
Антенна с большим усилением неизбежно должна иметь
29
большую эффективную площадь поглощения. Действительная
площадь антенны не может быть меньше эффективной, так
что очевидно, что
большое усиление
может быть получе-
но только при боль-
ших размерах антен-
ной системы. Ясно,
что большое усиле-
ние получается толь-
ко в одном направ-
лении, так как боль-
шая часть излуча-
емой энергии скон-
центрирована в уз-
ком луче. Этот же
Рис. III. 2. Параболическая антенна.
1 — фронт волны, 2—излучающий вибратор, 3 —
пассивный отражатель.
вывод следует из теории дифракции, согласно которой для
сосредоточения большей части
энергия в луче с угловой ши-
риной в 1/и-ную часть ра-
диана необходима решетка
с линейными размерами по-
рядка пХ. Таким образом
исследование антенны как в
качестве передающей, так и
приемной системы приводит
к одному и тому же выводу,
что большая площадь ан-
тенной системы существенно
необходима для получения
большого усиления, причем
требуемая площадь пропор-
циональна X2.
Рассмотрим многоряд.
ную синфазную антенну
(рис. III.1) в виде прямо-
угольной решетки из син-
фазно питаемых полуволно-
вых вибраторов, располо-
женных друг от друга на
расстоянии V2X в любом на-
правлении. Если количество
вибраторов равно л, то пло-
щадь решетки (считая по
!ДХ над верхним и под ниж-
ним рядами вибраторов) будет
лХ2
-4 . Поле по нормали к
плоскости решетки в л раз больше, а поток энергии в п2 раз
больше, чем при одном вибраторе, тогда как мощность, не-
30
обходимая для возбуждения антенной решетки, только в п
раз больше мощности, необходимой для одиночного вибратора.
Следовательно усиление подобной антенной решетки будет
приблизительно в п раз больше усиления полуволнового виб-
ратора, иными словами G' = п. Эффективная площадь Аа рав-
G'V nV
на—— = - — или половине действительной площади решет -
о о
ки. Если же воспользоваться соответствующими пассивными
отражателями позади вибраторов для подавления излучения
назад, усиление решетки удвоится и ее эффективная площадь
поглощения окажется почти равной действительной площади.
На волнах ниже 1 м синфазные многовибраторные антенны
редко применяются главным образом потому, что фазирование
большого количества вибраторов представляет значительные
трудности. В этом диапазоне широко распространены парабо-
лические антенны (рис. III.2). В такой квазиоптической антен-
не параболический отражатель преобразует расходящееся из-
лучение, создаваемое вибратором, в плоскую волну. Как и у
синфазной решетки, луч имеет конечную ширину вследствие
дифракции. Обычно интенсивность плоской волны максималь-
на в центре апертуры и снижается по направлению к краям.
Это в известной степени уменьшает усиление, так что эффек-
тивная площадь Аа антенны с круглой апертурой равна при-
мерно трем четвертям действительной площади.
Полярные диаграммы направленных антенн
Очевидно, что для получения больших дальностей действия
радиолокаторов нужно пользоваться антеннами с большим
усилением. Однако усиление не может быть увеличено беспре-
дельно. Одним из ограничений является увеличение размеров
антенны, а другим—трудности работы при очень узком луче.
Во многих случаях применяется луч «карандашного» или «си-
гарообразного» типа с одинаковым усилением по обеим коор-
динатам, однако иногда удобнее оказывается «веерный» луч,
сжатый только по одной координате. Можно, например, сжать
луч только в азимутальной плоскости, и в то же время облу-
чать цели при всех углах места. Усиление такой антенны обыч-
но не столь велико, как при «карандашном» луче. Антенна
конечных размеров не может сформировать луча с равномер-
ным распределением энергии по всему сечению луча. Интен-
сивность всегда максимальна вдоль оси луча и снижается по-
степенно по направлению к краям. Кроме того, обычно наблю-
даются боковые лепестки. Такие лепестки всегда вредны, даже
если потеря энергии из-за них невелика, так как они являются
причиной ложных отраженных сигналов.
3J
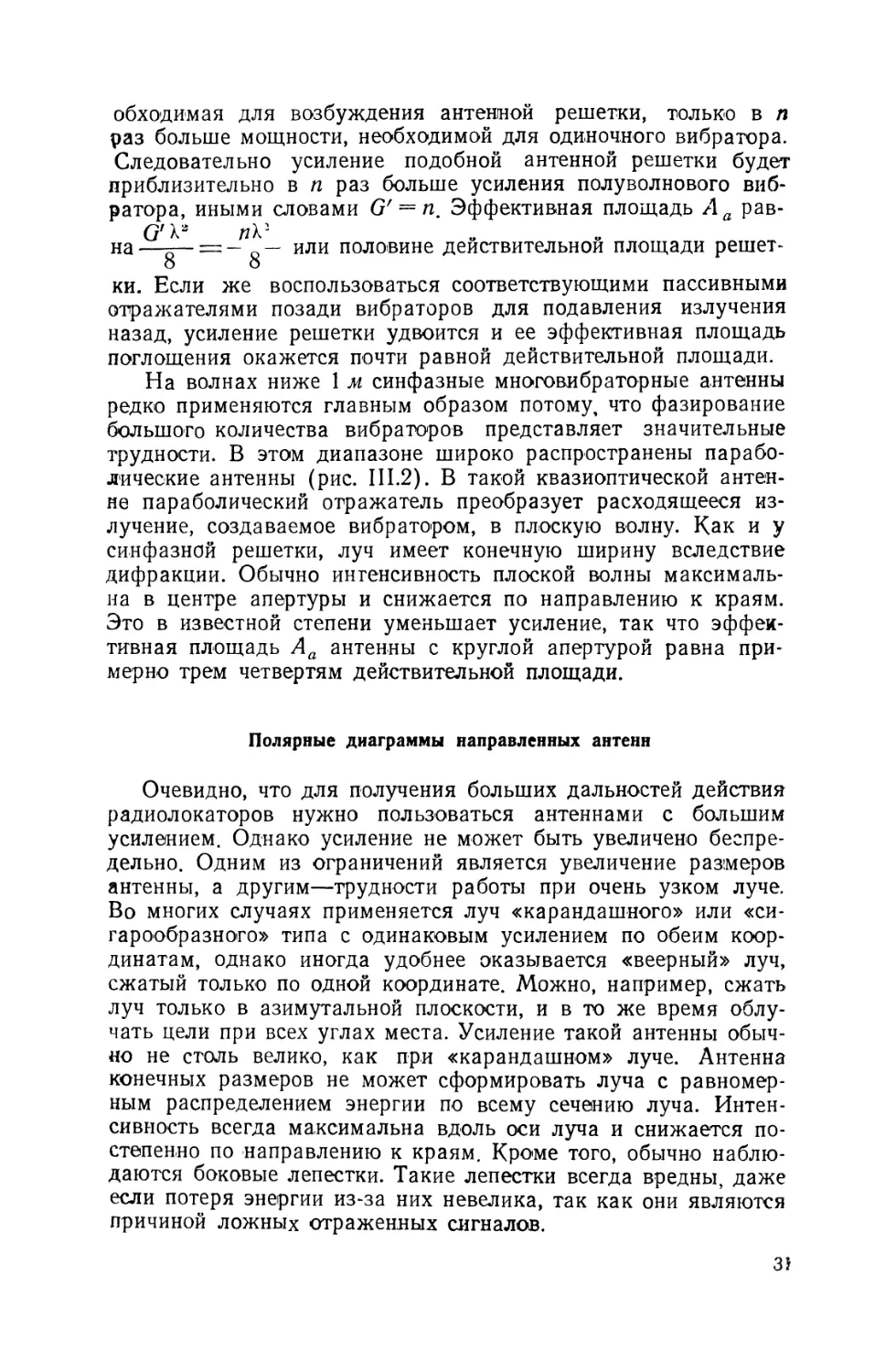
Рассмотрим прямоугольную апертуру в плоскости ХУ, за-
, а а , b
ключенную между координатами х = + —, х = —— , у = у-
£ £ —
у = —, равномерно заполненную синфазными излучателя-
£
ми (рис. III.За). Такая антенна излучает вдоль осей ОХ и
OZ'. Ширина луча может быть легко
законам оптики для прямоугольной
Примем для удобства, что k =
к
. тс
направлении, образующем угол ~а
ОУ, будет пропорциональна
подсчитана по известным
дифракционной решетки.
, тогда интенсивность в
с ОХ и угол ~------р с
sin sin а sin sin Р
к a sin а • кЬ sin р
Та часть этого выражения, которая является функцией а, мо-
жет быть легко выведена из рис. III.36, являющегося сечением
в плоскости XOZ, Интенсивность излучения элемента dx, за-
ключенного между х и х 4- dx, пропорциональна dx. Длина
пути от этого элемента до фронта волны, распространяющейся
вдоль ОР. на отрезок х sin а короче, чем из точки О С обыч-
ными допущениями мы можем следовательно считать интен-
сивность равной e^ASln а dx. Следовательно, вектор излучения
будет равен
а
Т
С j kxs\n а
Г
а '
У
dx =---------
у я: sin а
ka
— sina
2
k sin а
что и является искомым выражением за исключением постоян-
ного коэфициента 2а. Следует отметить, что это выражение
является действительной величиной, т. е. фаза результирующей
равна фазе элементарной волны, распространяющейся из цент-
ра решетки О (кроме возможного множителя—1). Это свой-
ство является общим для всех симметричных решеток, неза-
висимо от степени однородности распределения излучателей
по апертуре.
32
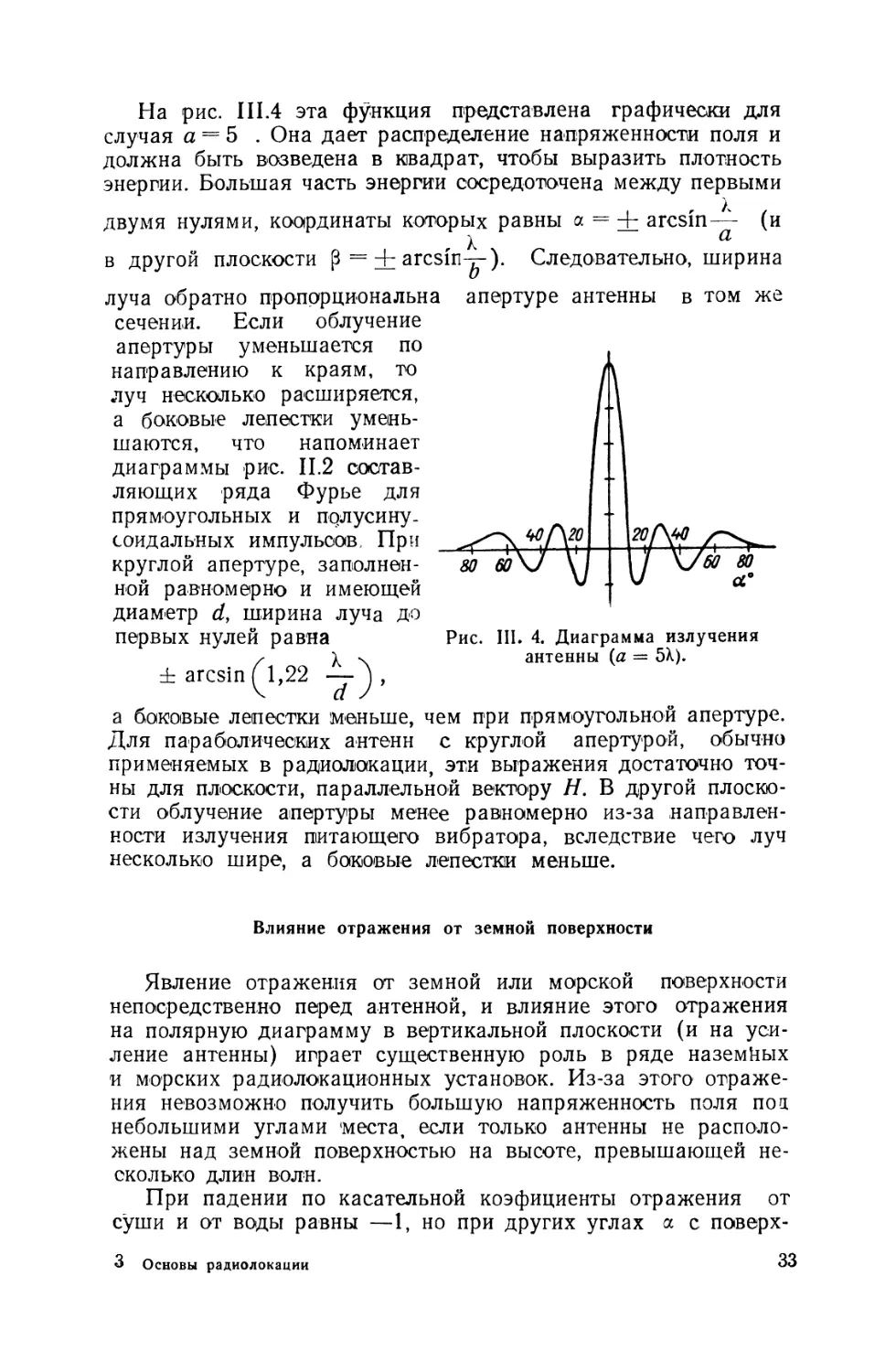
На рис. III.4 эта функция представлена графически для
случая а = 5 . Она дает распределение напряженности поля и
должна быть возведена в квадрат, чтобы выразить плотность
энергии. Большая часть энергии сосредоточена между первыми
двумя нулями, координаты которых равны а = + arcsin— (и
к
в другой плоскости р = + arcsin-y). Следовательно, ширина
луча обратно пропорциональна апертуре антенны в том же
сечении. Если облучение
апертуры уменьшается по
направлению к краям, то
луч несколько расширяется,
а боковые лепестки умень-
шаются, что напоминает
диаграммы рис. II.2 состав-
ляющих ряда Фурье для
прямоугольных и полусину.
соидальных импульсов. При
круглой апертуре, заполнен-
ной равномерно и имеющей
диаметр rf, ширина луча до
первых нулей равна
± arcsin 0,22 ^”0
Рис. III. 4. Диаграмма излучения
антенны (а = 5Х).
а боковые лепестки меньше, чем при прямоугольной апертуре.
Для параболических антенн с круглой апертурой, обычно
применяемых в радиолокации, эти выражения достаточно точ-
ны для плоскости, параллельной вектору Н. В другой плоско-
сти облучение апертуры менее равномерно из-за направлен-
ности излучения питающего вибратора, вследствие чего луч
несколько шире, а боковые лепестки меньше.
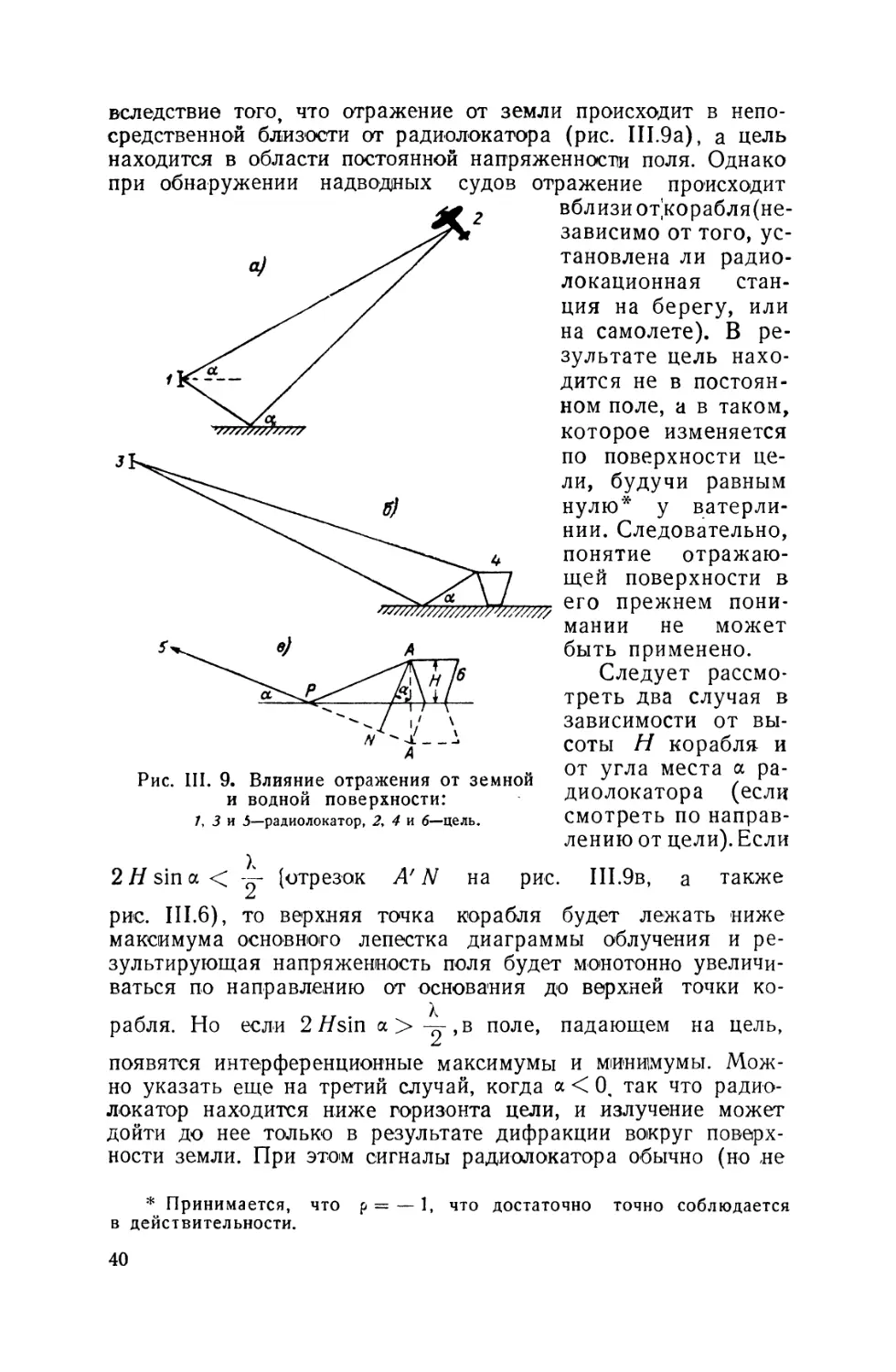
Влияние отражения от земной поверхности
Явление отражения от земной или морской поверхности
непосредственно перед антенной, и влияние этого отражения
на полярную диаграмму в вертикальной плоскости (и на уси-
ление антенны) играет существенную роль в ряде наземных
и морских радиолокационных установок. Из-за этого отраже-
ния невозможно получить большую напряженность поля пот
небольшими углами места, если только антенны не располо-
жены над земной поверхностью на высоте, превышающей не-
сколько длин волн.
При падении по касательной коэфициенты отражения от
суши и от воды равны —1, но при других углах а с поверх-
3 Основы
радиолокации
33
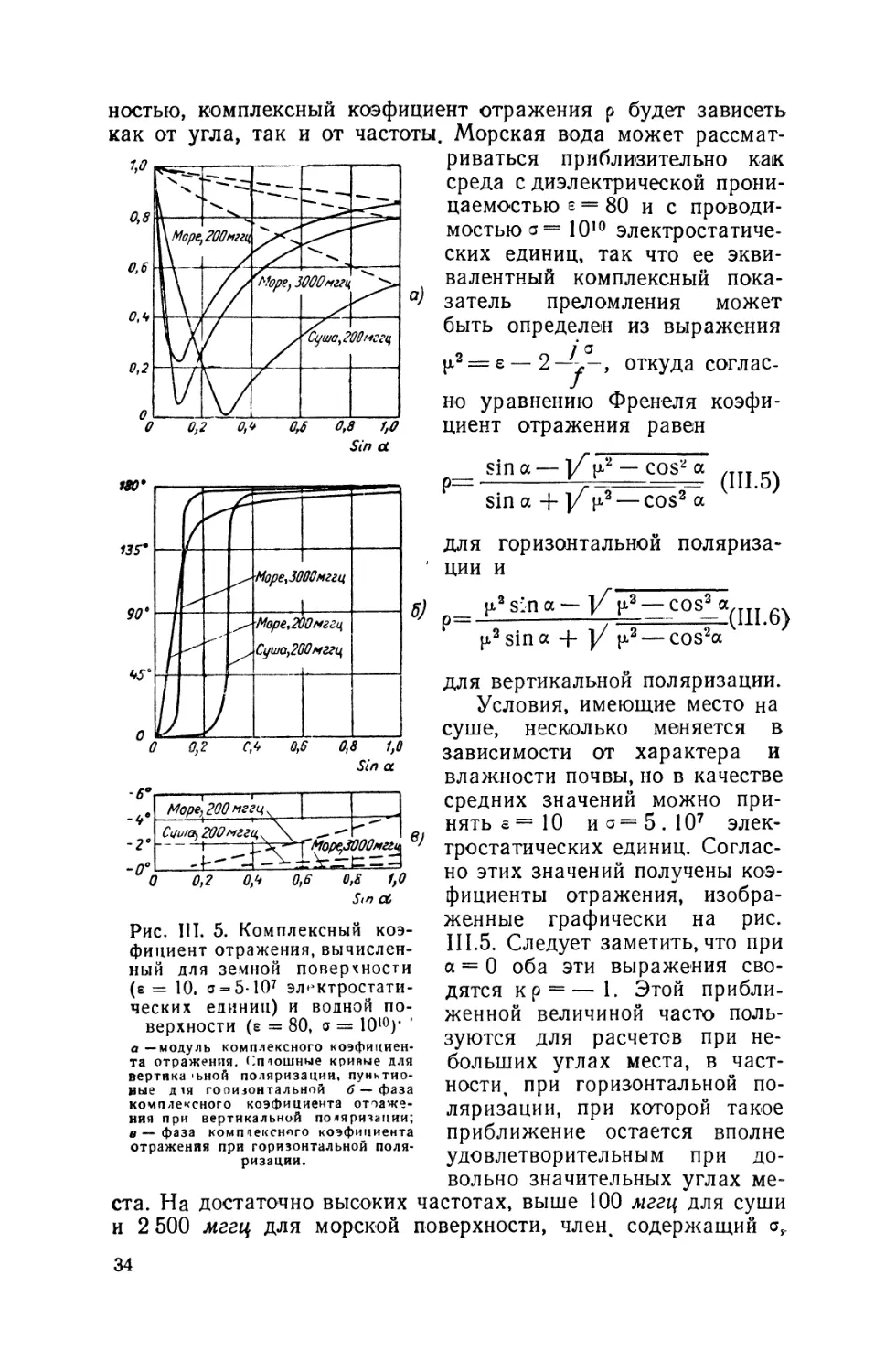
ностью, комплексный коэфициент отражения р будет зависеть
как от угла, так и от частоты. Морская вода может рассмат-
Sin а
-6*
~2*
-О1
б)
риваться приблизительно как
среда с диэлектрической прони-
цаемостью £ = 80 и с проводи-
мостью а == 1010 электростатиче-
ских единиц, так что ее экви-
валентный комплексный пока-
затель преломления может
быть определен из выражения
2 о 7а
у*2 = е — 2 откуда соглас-
но уравнению Френеля коэфи-
циент отражения равен
__ sin а — j/"|i2 — cos2 а
sin а + j/y.2 — cos2 а
для горизонтальной поляриза-
' ции и
(III.5)
р.2 sin а —- у рь2 — cos2 а
Р=-т-------Г-(11Е6>
Pysina + у рь3 — cos^a
для вертикальной поляризации.
Условия, имеющие место на
суше, несколько меняется в
зависимости от характера и
влажности почвы, но в качестве
средних значений можно при-
нять г =10 и а=5.107 элек-
тростатических единиц. Соглас-
но этих значений получены коэ-
фициенты отражения, изобра-
»1 = 3
О 0,2 0,4 0,6 0,8 1,0
8т а,
Рис. Ш. 5. Комплексный коэ-
фициент отражения, вычислен-
ный для земной поверхности
(е = 10. а = 5-107 электростати-
ческих единиц) и водной по-
верхности (е =80, a = 1010)’ '
а —модуль комплексного коэфициен-
та отражения. Сплошные кривые для
вертика >ьной поляризации, пунктио-
иые для гооизонтальной б — фаза
комплексного коэфициента отэаже-
ния при вертикальной поляризации;
в—фаза комплексного коэфициента
отражения при горизонтальной поля-
ризации.
женные графически на рис.
III.5. Следует заметить, что при
а = 0 оба эти выражения сво-
дятся кр = —1. Этой прибли-
женной величиной часто поль-
зуются для расчетов при не-
больших углах места, в част-
ности, при горизонтальной по-
ляризации, при которой такое
приближение остается вполне
удовлетворительным при до-
вольно значительных углах ме-
ста. На достаточно высоких частотах, выше 100 мггц для суши
и 2 500 мггц для морской поверхности, член, содержащий
34
известным приближением
с
Л
h
А'
становится очень малым, так что можно пользоваться простой
формулой у. = }/э.Для суши это выражение можно применять
почти для всех частот радиолокационного диапазона, а для
морской поверхности—для всего сантиметрового диапазона.
В этой области коэфициент отражения не зависит от частоты
и является действительной величиной, т. е. при отражении не
наблюдается изменения фазы (кроме сдвига в 180°).
Важным частным случаем является плоская поверхность
перед антенной. Это имеет место на море, или для береговой
станции. На суше также часто
можно считать площадку во-
круг станции плоской. Можно
считать плоской любую поверх-
ность, имеющую отдельные не-
ровности, не превышающие по
глубине или высоте + $ а~
при длине волны а и угле па-
дения (относительно горизонта)
а . Площади таких неровно-
стей должны быть малы по
сравнению с полуволновой зо-
ной Френеля.
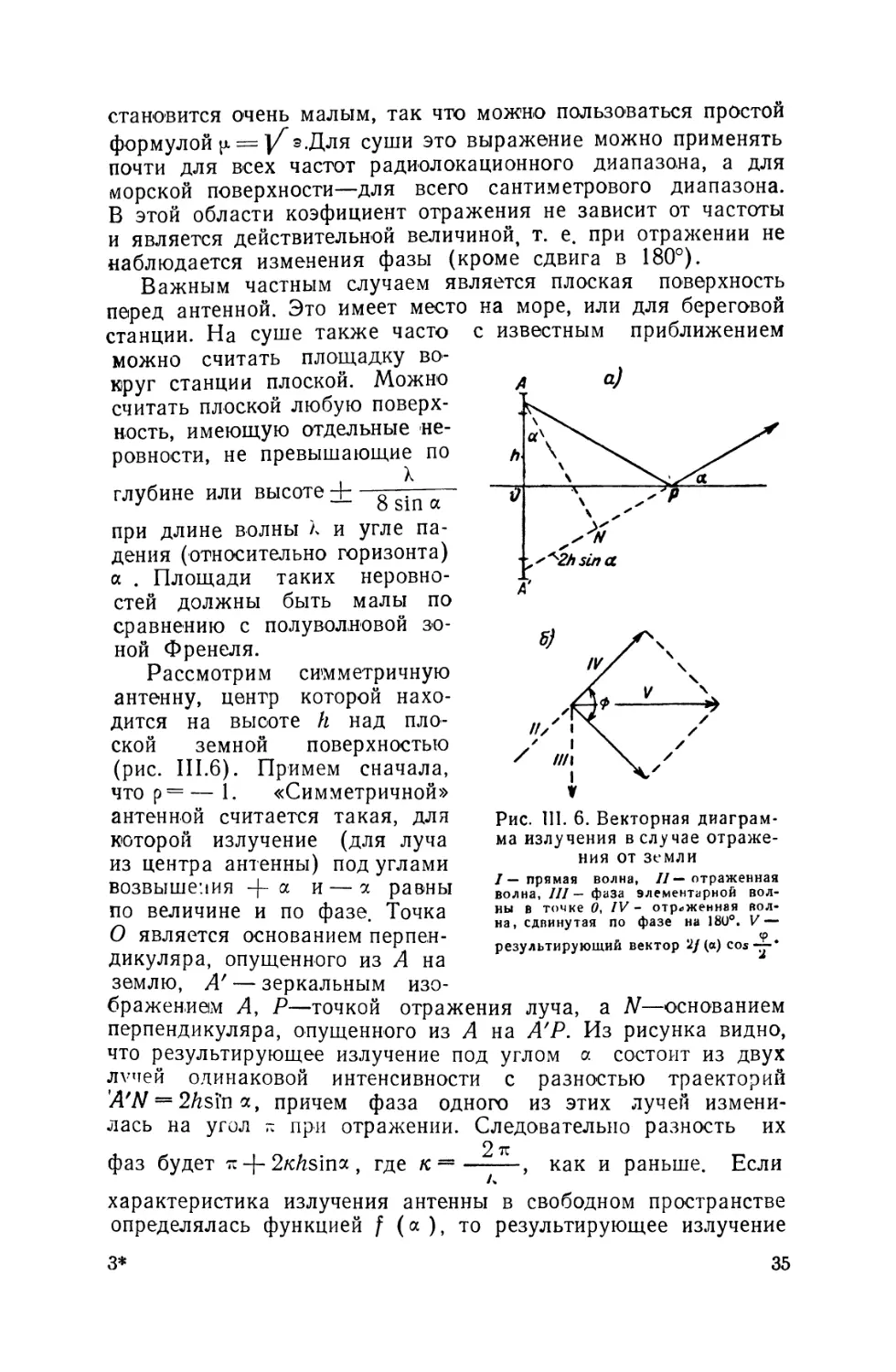
Рассмотрим симметричную
антенну, центр которой нахо-
дится на высоте h над пло-
ской земной поверхностью
(рис. III.6). Примем сначала,
что р= — 1. «Симметричной»
антенной считается такая, для
которой излучение (для луча
из центра антенны) под углами
возвышения -|- а и — а равны
по величине и по фазе. Точка
О является основанием перпен-
дикуляра, опущенного из А на
землю, А' — зеркальным изо-
бражением А, Р—точкой отражения луча, a N—основанием
перпендикуляра, опущенного из А на А'Р. Из рисунка видно,
что результирующее излучение под углом а состоит из двух
лучей одинаковой интенсивности с разностью траекторий
'ДW = 2/zsi’n а, причем фаза одного из этих лучей измени-
лась на угол тг при отражении. Следовательно разность их
2 тс
фаз будет Tt-J-S/cAsina, где к =—-—, как и раньше. Если
характеристика излучения антенны в свободном пространстве
определялась функцией f (а ), то результирующее излучение
Рис. 111. 6. Векторная диаграм-
ма излучения в случае отраже-
ния от земли
7— прямая волна, 77—отраженная
волна, III — фаза элементарной вол-
ны в точке О, IV - отраженная вол-
на, сдвинутая по фазе на J80°. V —
<р
результирующий вектор 2/ (a) cos—*
3*
35
будет равно 2f( a) sin, (я Л since), как это можно видеть из
векторной диаграммы, рис. II 1.66. Фаза результирующего из-
лучения сдвинута на 90° относительно начальной фазы (фазы
элементарной волны, излученной из точки О). Выражение
а
Рис. III. 7. Диаграммы антенны ’в верти-
кальной плоскости с вертикальной апер-
турой 2Х для двух высот h = 2Л. и h = 5Х.
Р-----1.
для результирующего
излучения представле-
но графически на рис.
III.7 для двух значе-
ний h. Из рисунка вид-
но, что в вертикальной
диаграмме излучения
лепестки чередуются с
провалами и что мак-
симальная напряжен-
ность поля в два раза
больше напряженности
в свободном простран-
стве (при отсутствии
отражения от земли), что соответствует увеличению усиления
в четыре раза. Провалы в диаграмме излучения, наблю-
дающиеся при некоторых углах места, являются серьезным
недостатком. Из рисунка можно видеть, что при большой вы-
соте антенны лепестки и провалы находятся близко друг к
Другу, тогда как при низко расположенной антенне они от-
стоят на больших расстояниях, причем для небольших углов
напряженность поля резко падает.
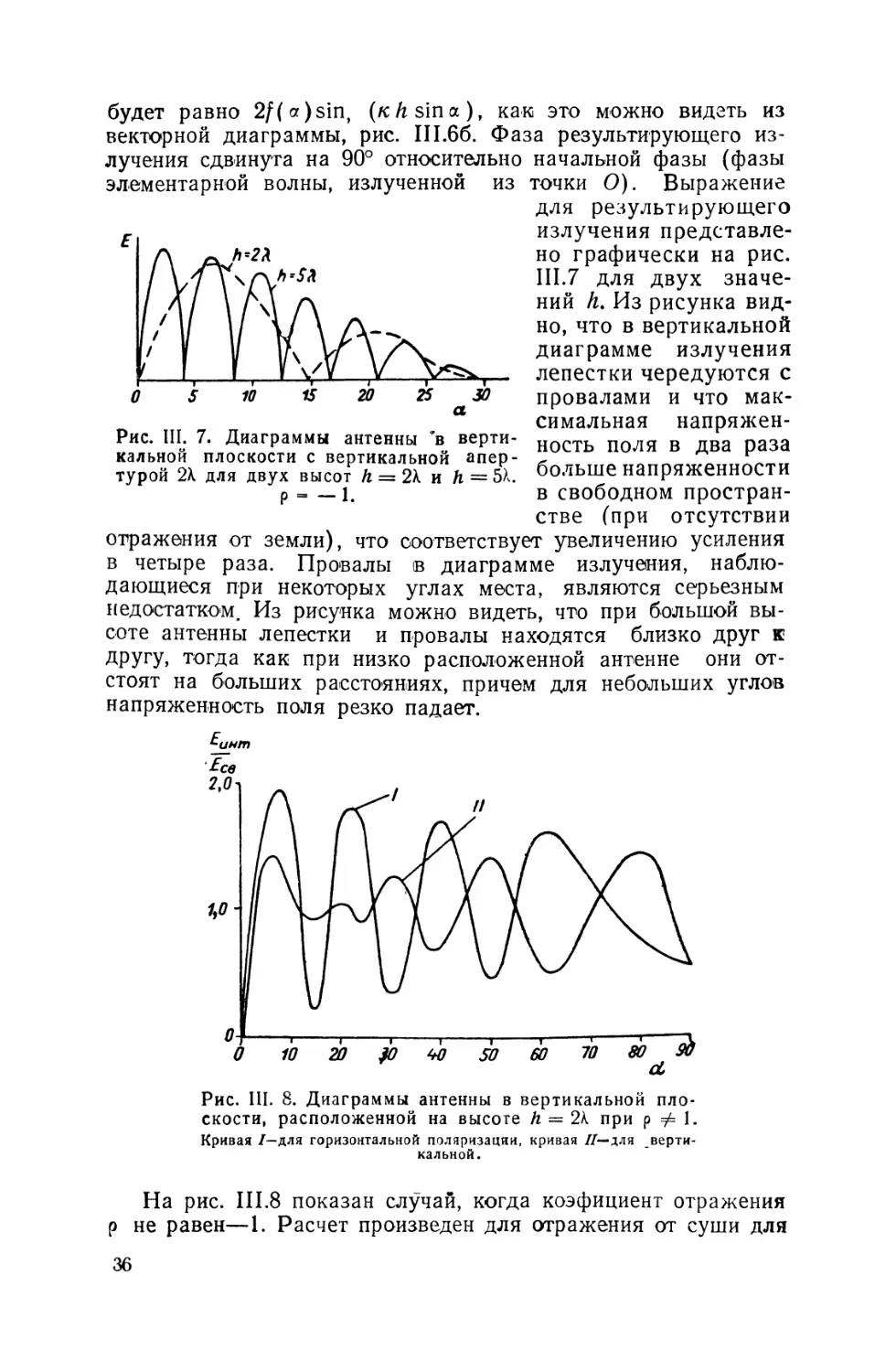
Рис. III. 8. Диаграммы антенны в вертикальной пло-
скости, расположенной на высоте h = 2\ при р =/= 1
Кривая I— для горизонтальной поляризации, кривая ZZ—для верти-
кальной.
На рис. III.8 показан случай, когда коэфициент отражения
р не равен—1. Расчет произведен для отражения от суши для
36
двух поляризаций при г = 10 и такой высокой частоте, чтобы
можно было пренебречь членом, содержащим а. Из рисунка
можно видеть, что при неполном отражении несколько запол-
няются провалы за счет ослабления усиления в максимуме ле-
пестка. Если бы член, содержащий о, был достаточно большим
для получения ощутимого сдвига фазы при отражении, то по-
ложение минимумов сместилось бы. Имеется ряд методов для
заполнения провалов, например, путем наклона антенны для
снижения интенсивности отраженного луча. В случае приме-
нения карандашного луча и таком наклоне антенны, чтобы луч
не касался горизонта, влияние отражения от земли становится
малозаметным.
2. Эффективная поверхность отражения цели
Одним из основных факторов, определяющих эффектив-
ность радиолокационной системы, является отражающая по-
верхность цели. Отражающие свойства цели могут быть вы-
ражены с помощью «эквивалентной рассеивающей поверхно-
сти» As, определенной подобно площади антенны А а таким
образом, что вся рассеянная целью энергия равна энергии,
падающей на поверхность А , расположенную перпендикуляр,
но к падающему лучу. Однако для нас представляет интерес
не вся рассеиваемая энергия, а энергия, отраженная обратно
по направлению падения луча. Отражение от цели может не
быть изотропным, и если усиление цели, как излучателя, рав-
но G в направлении падения луча, то мы можем определить
новую площадь называемую «эффективной поверхностью
отражения», как Ае =ASG. Значение А е должно быть таким,
как если бы вся энергия, падающая на поверхность Ае, излу-
чалась обратно изотропным излучателем, расположенным
у цели.
Имеется еще другое определение цели, как отражателя, ко-
торое также используется для измерения отраженной мощно-
сти. Оно имеет размерность длины L и определяется с-тноше-
Ее
нием = — -, где Ei —напряженность поля падающего луча
у цели, а Ер —напряженность отраженного назад поля на рас-
стоянии г вдоль направления падения луча. Можно легко по-
казать, что обе величины связаны между ссбой соотношением
4 = (III.7)
В некоторых простых случаях можно непосредственно вы-
числить поверхности отражения. К таким примерам относится
полуволновый вибратор, сфера и т. д. Некоторые расчеты при-
ведены в приложении II. В случае цели сложной конфигура-
37
ции, подобно самолету, поверхность отражения можно опреде-
лить опытным путем. В следующем разделе приведены дан-
ные по отражающим поверхностям самолетов, а также некото-
рые соображения об отражающих поверхностях сухопутных и
морских целей (кораблей, подводных лодок и т. д.), измерение
которых значительно усложняется вследствие дополнительного
отражения от морской или земной поверхности.
Эффективная поверхность отражения самолета
Во время войны было проведено много полетов для испы-
тания различных радиолокационных станций, в результате
чего было собрано много данных относительно порядка вели-
чин Ае и L для различных типов самолетов в диапазоне волн
от 12 м до 3 см. В большинстве случаев эти полеты были ра-
диальными, от станции и на станцию,, так что большая часть
данных относится к самолету, облучаемому с носовой части
или с хвоста, причем обычно приводится среднее значение из
этих двух величин. Отражающая поверхность изменяется по
сложному закону в зависимости от положения (ракурса) само-
лета, но, как правило, если длина волны значительно короче
удвоенного размаха крыльев самолета, среднее значение отра-
жения в основном не зависит от длины волны, по крайней
мере, при горизонтальной поляризации. При вертикальной по-
ляризации независимость от длины волны начинает, повиди-
мому, наблюдаться в диапазоне волн менее, чем в два раза
превышающих размеры самолета , по вертикали, но для этого
случая имеется меньше данных на длинных волнах. Это соот-
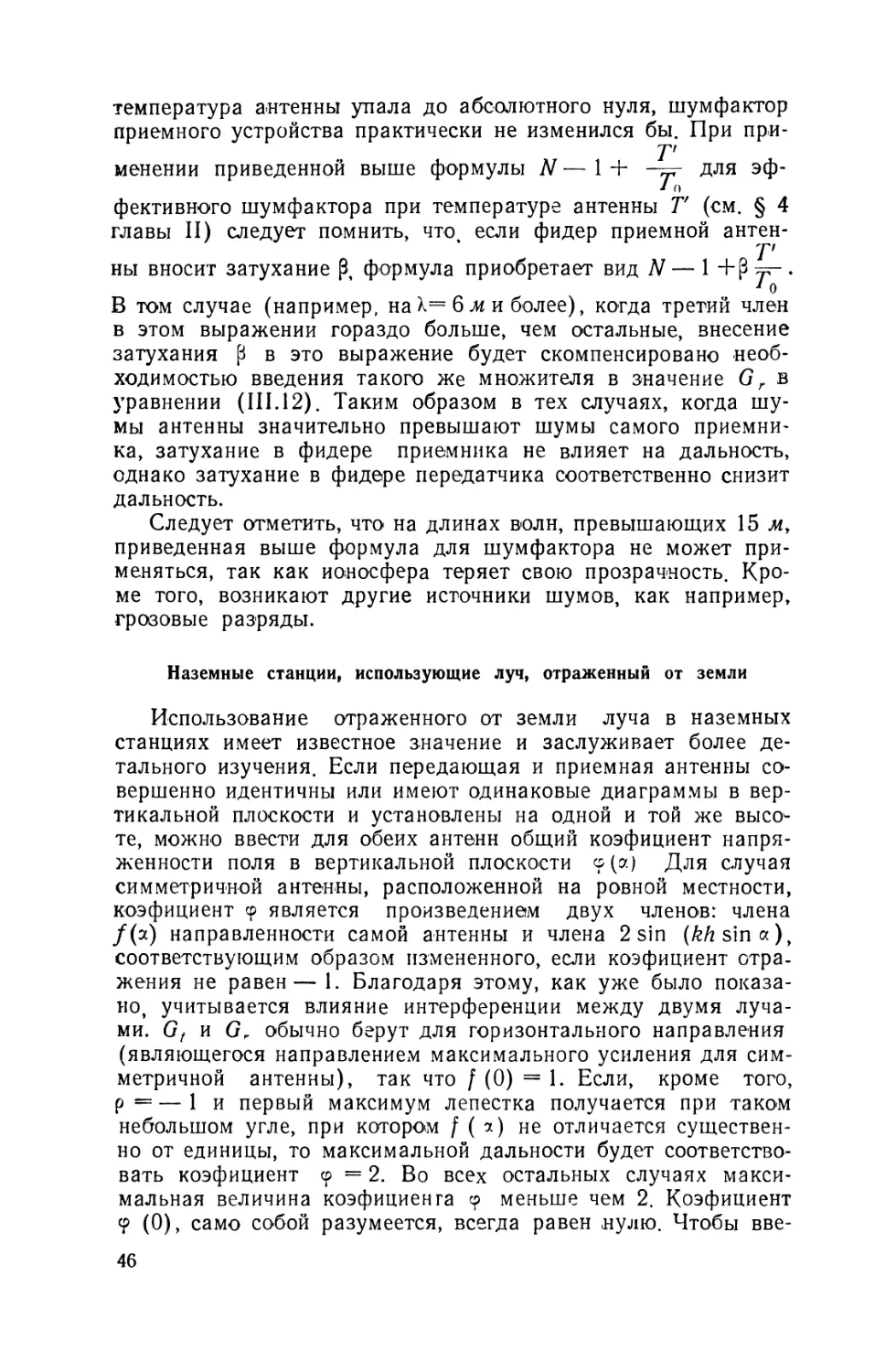
ветствует тому, что можно ожидать при отражении от объекта
сложной формы. В таблице II 1.1 приведены некоторые значе-
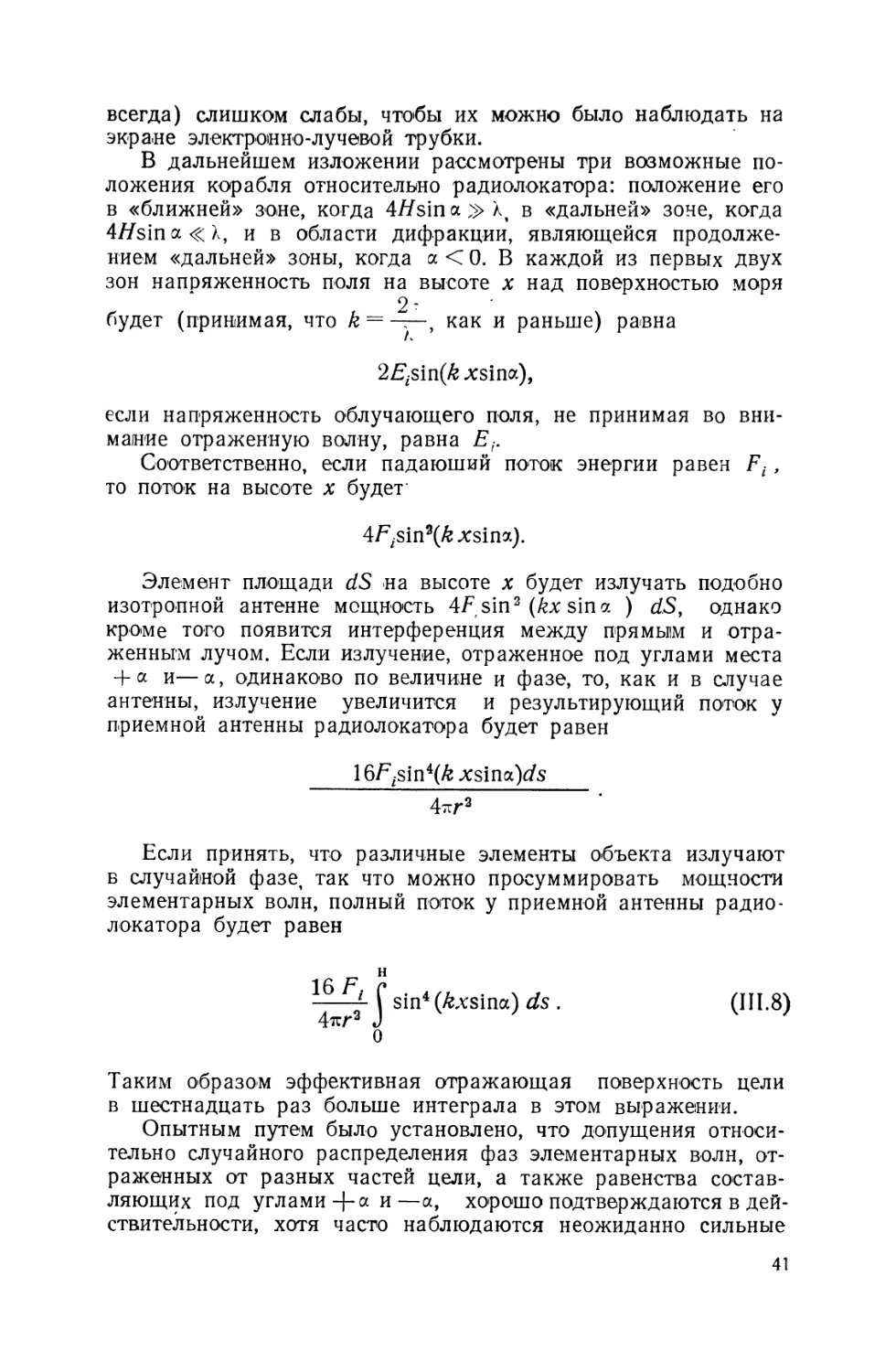
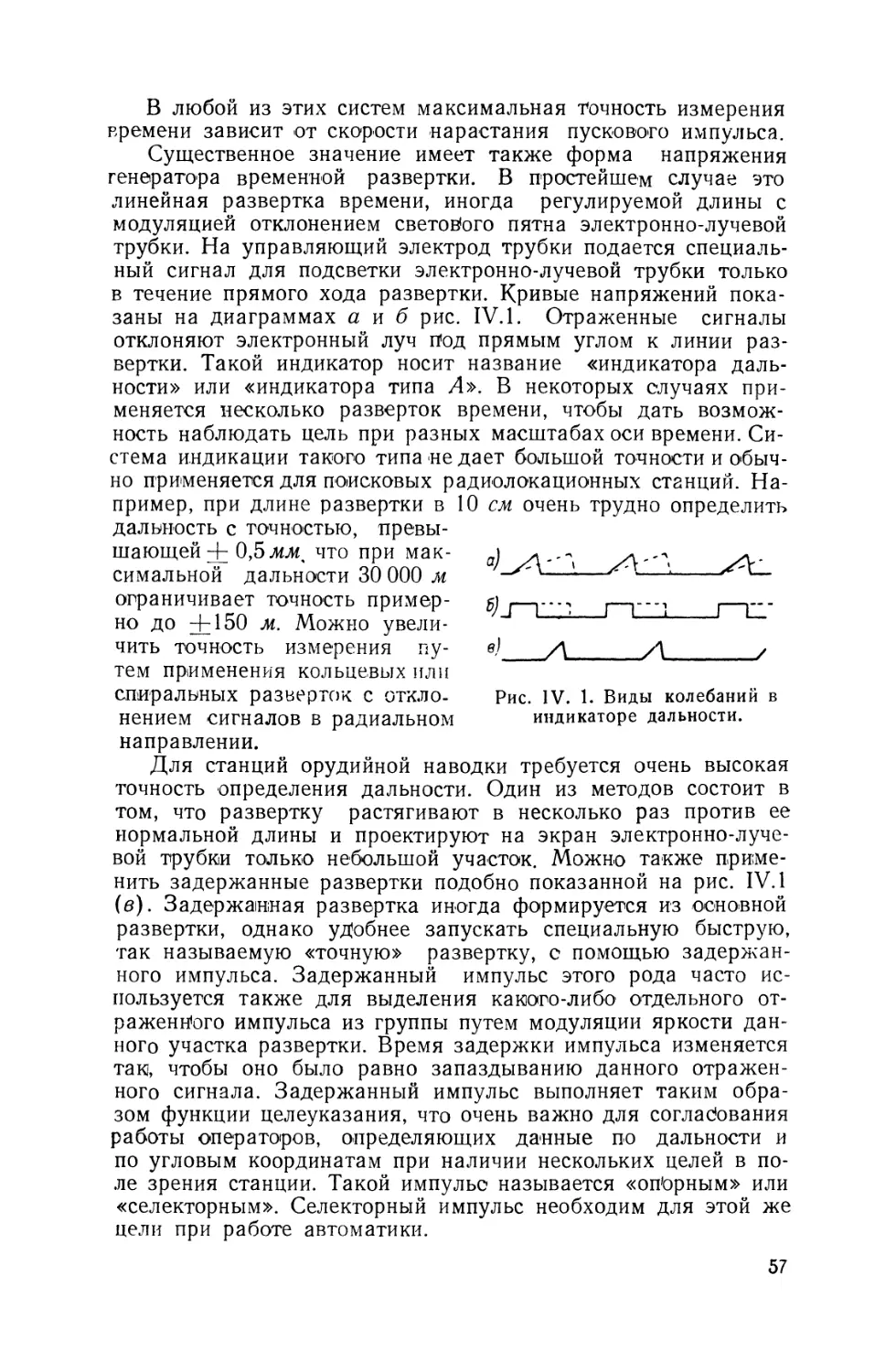
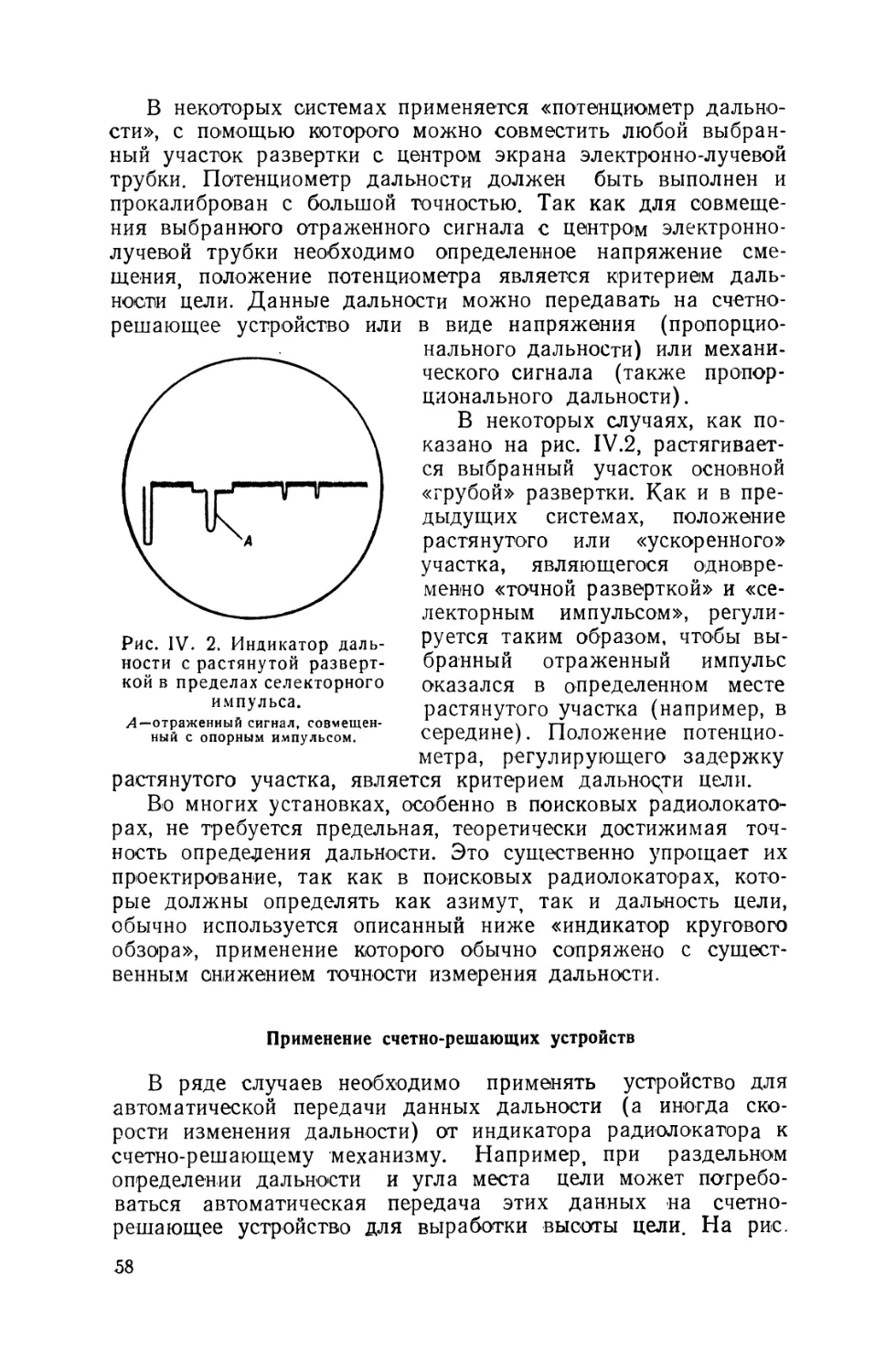
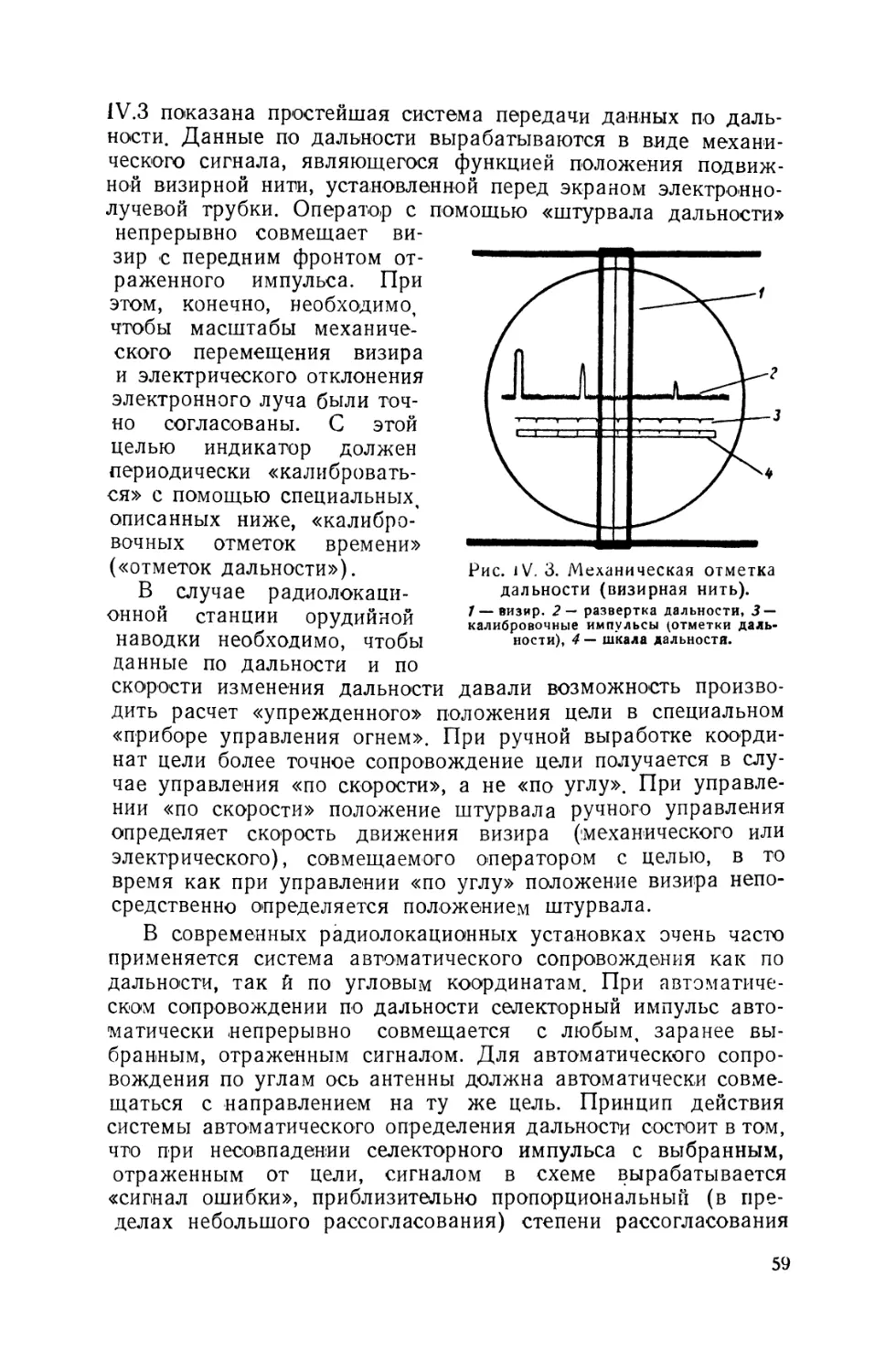
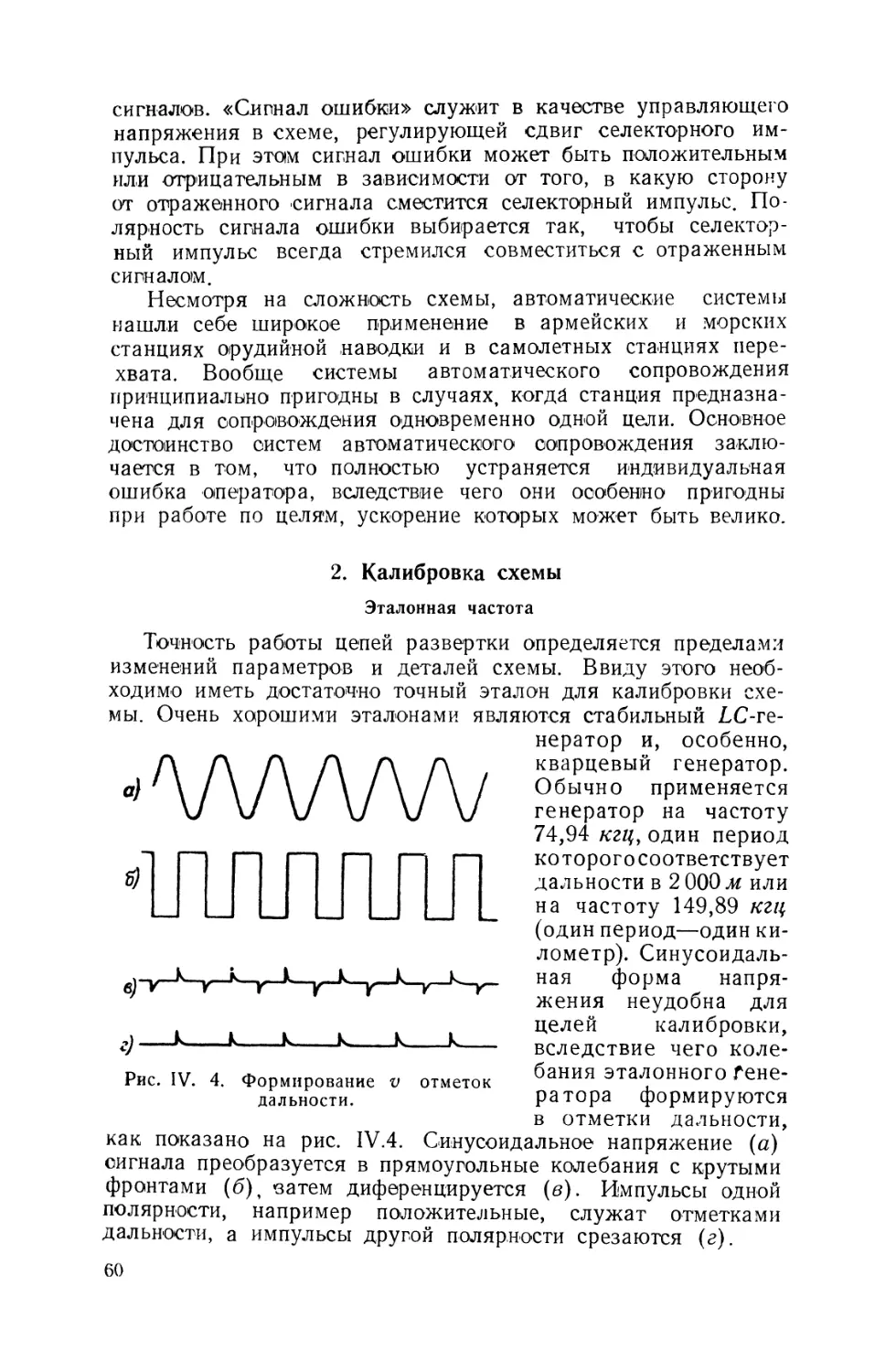
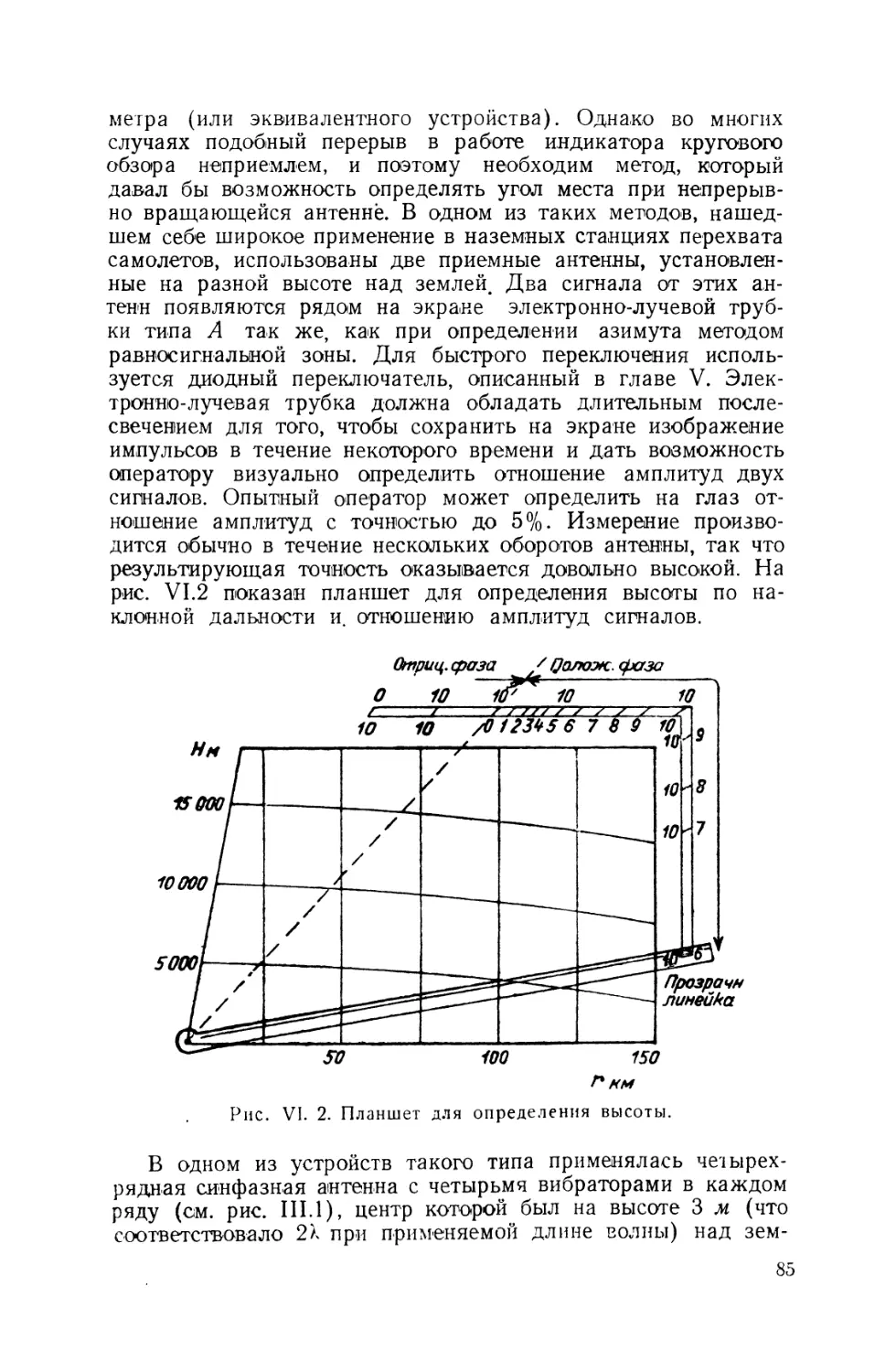
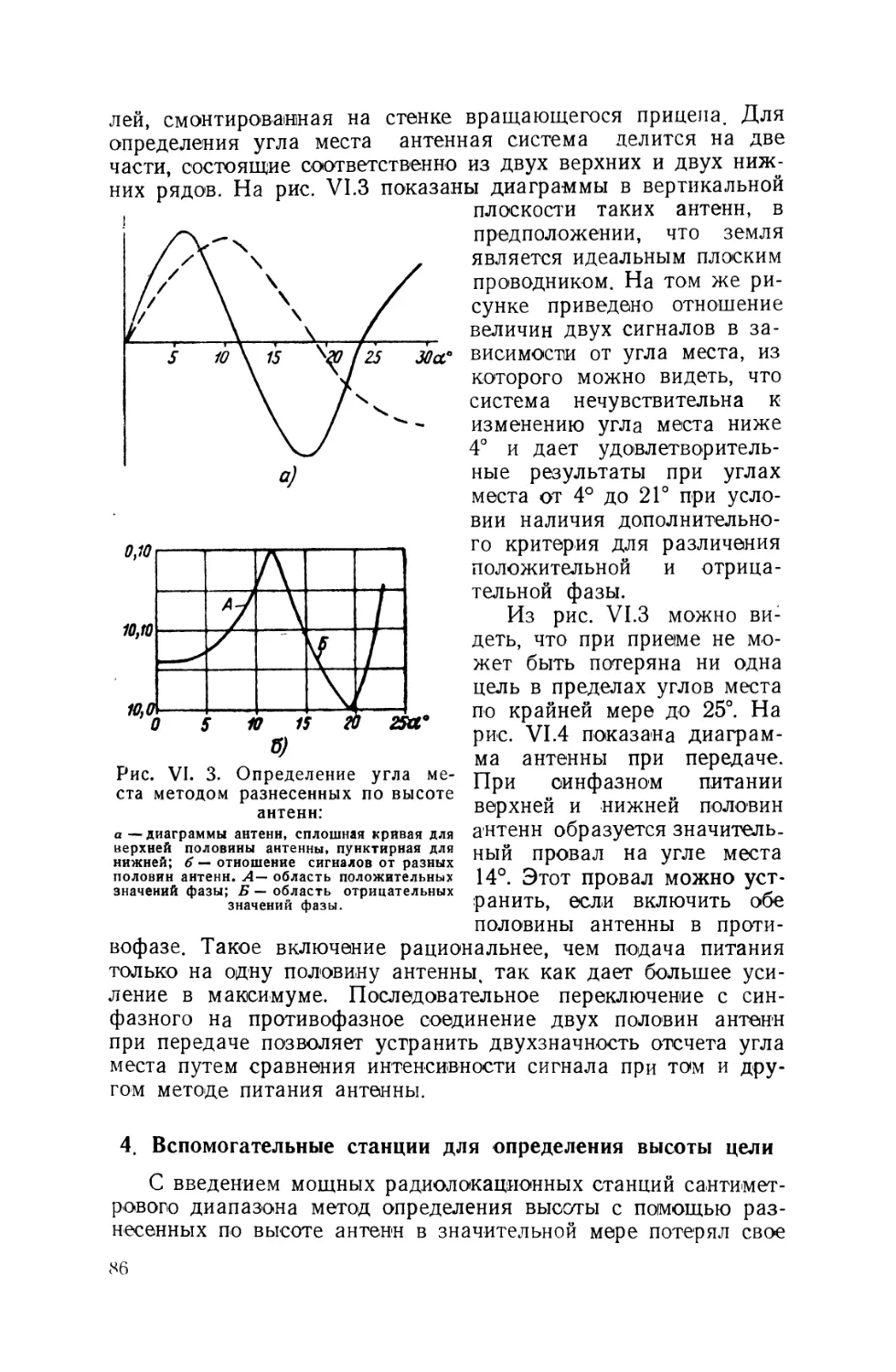
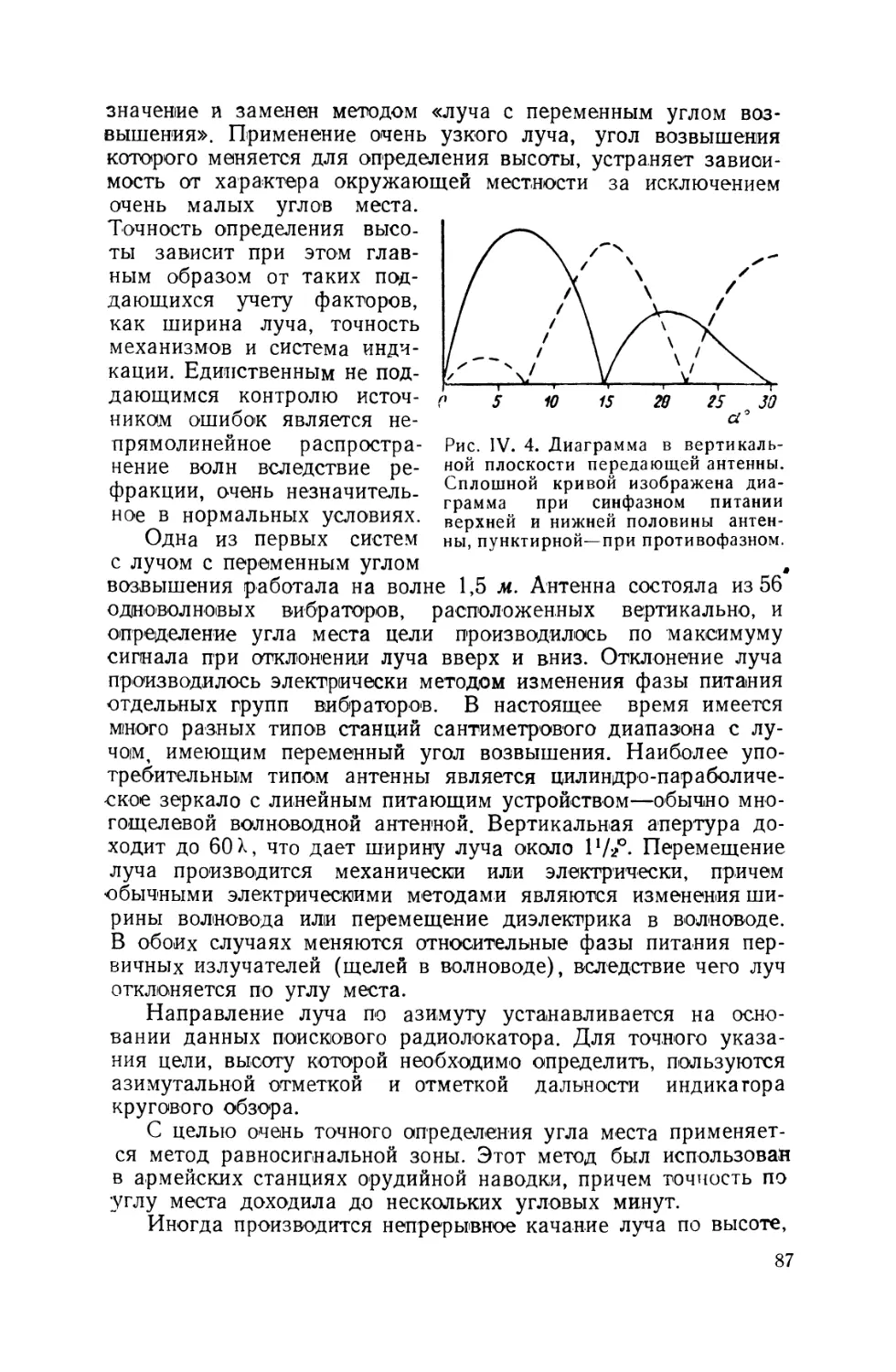
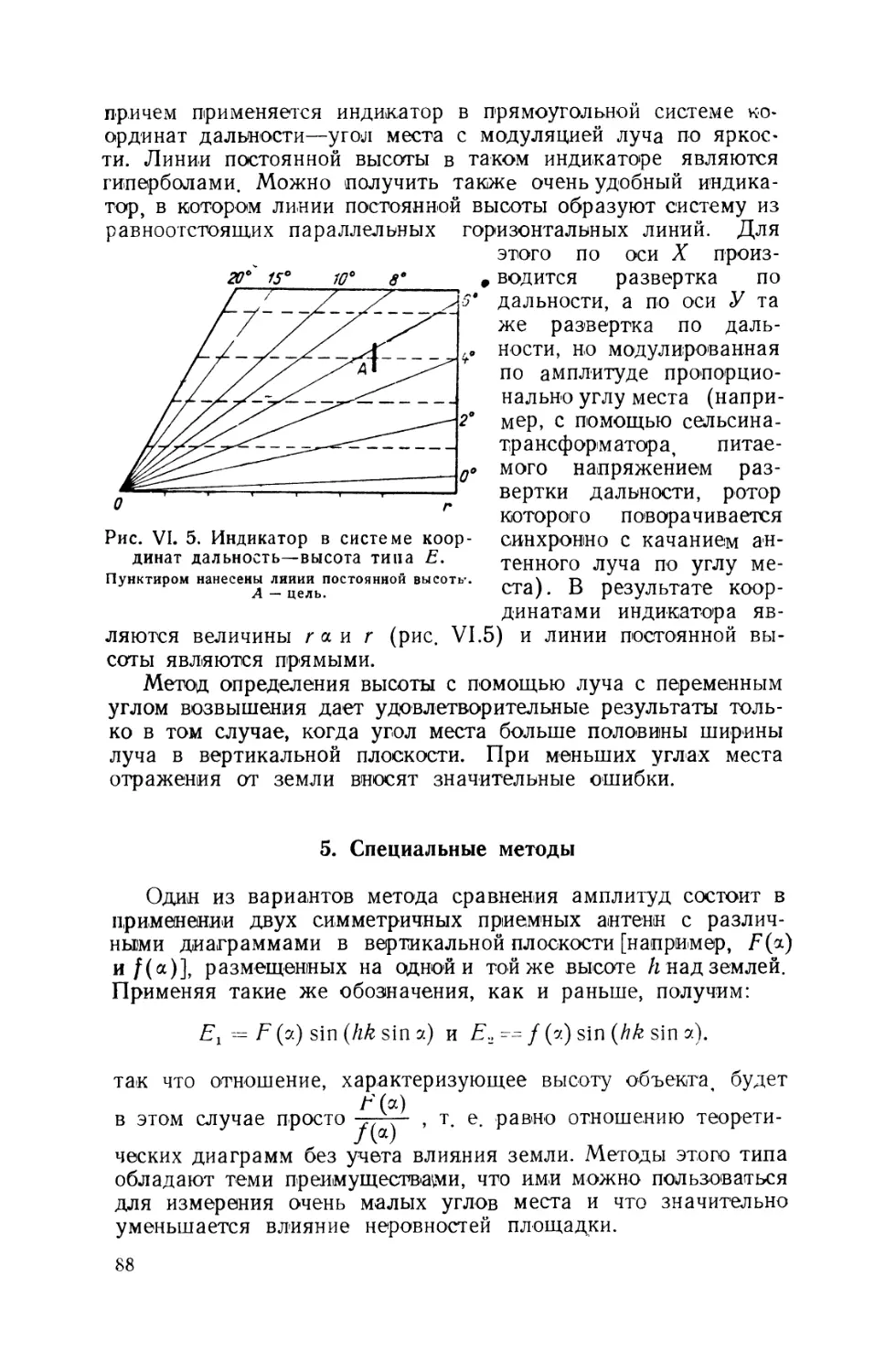
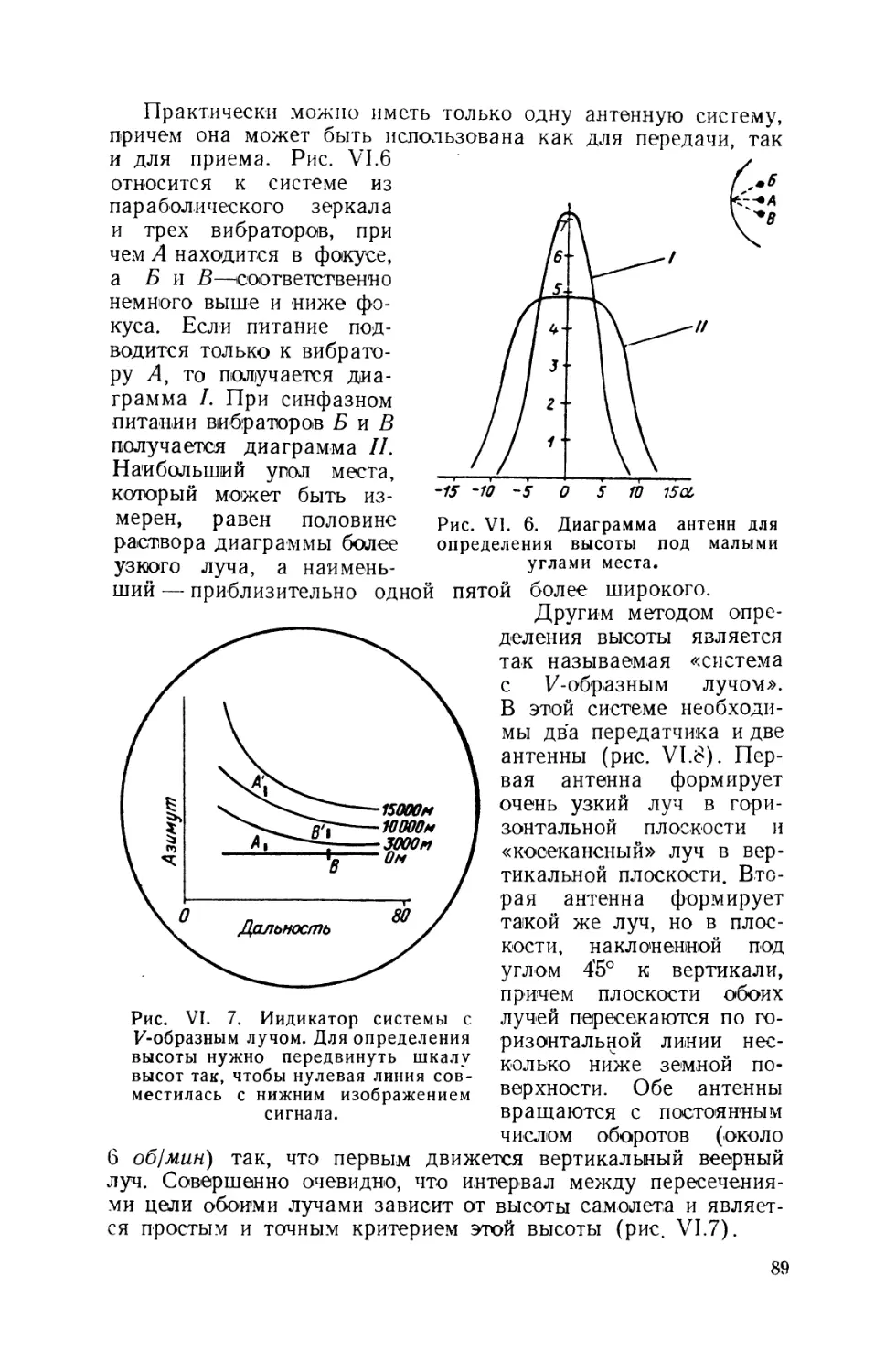
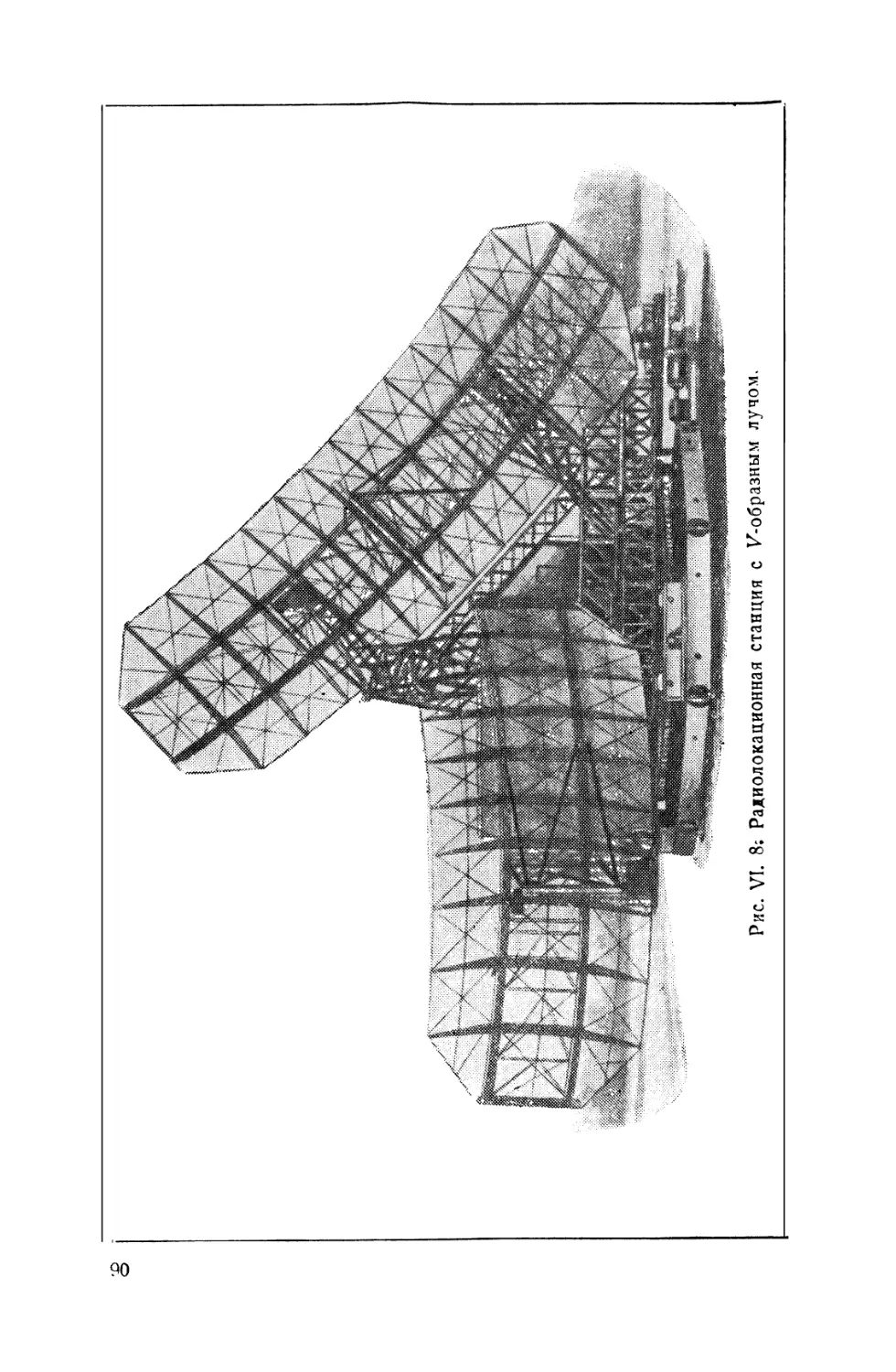
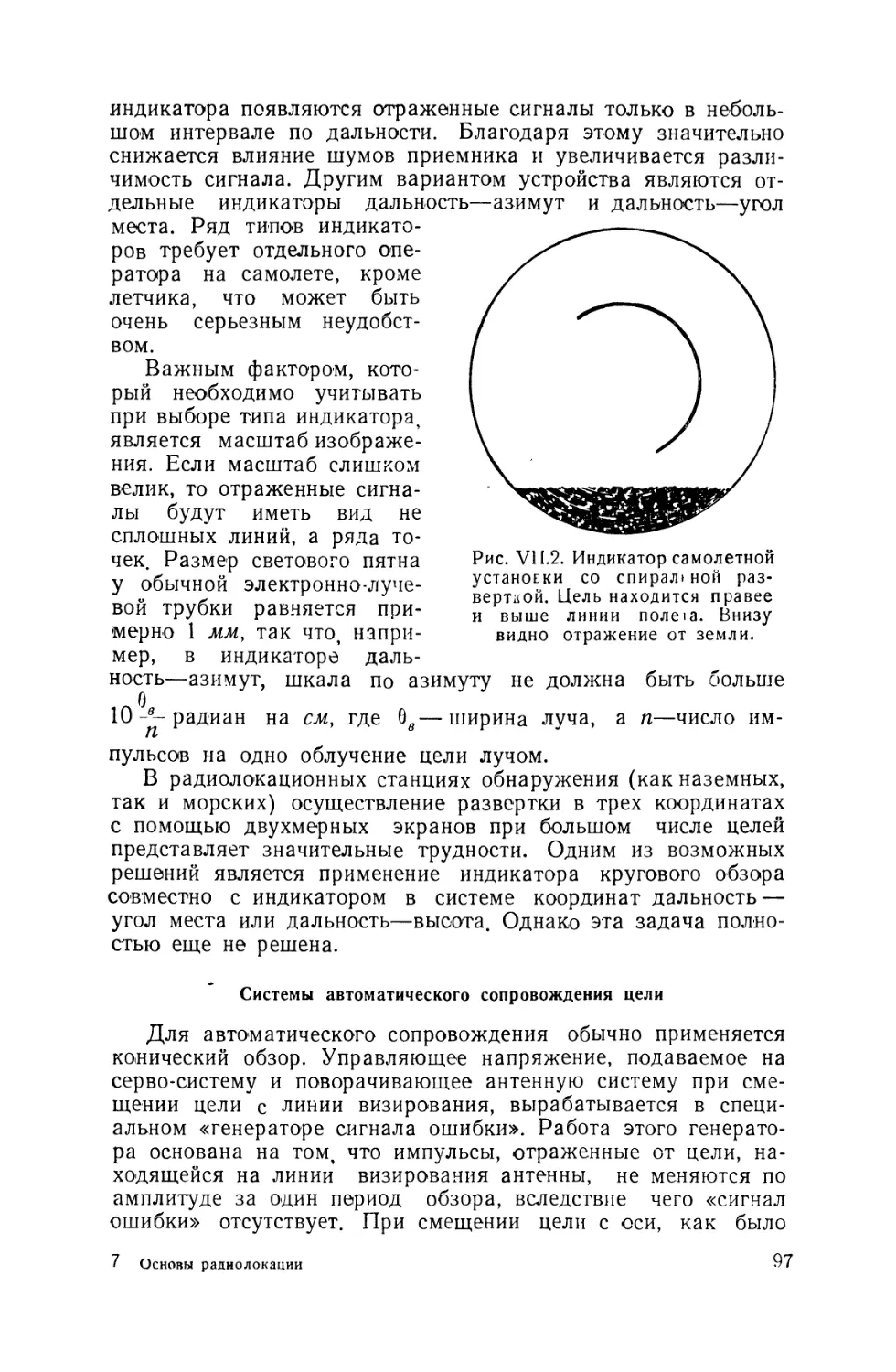
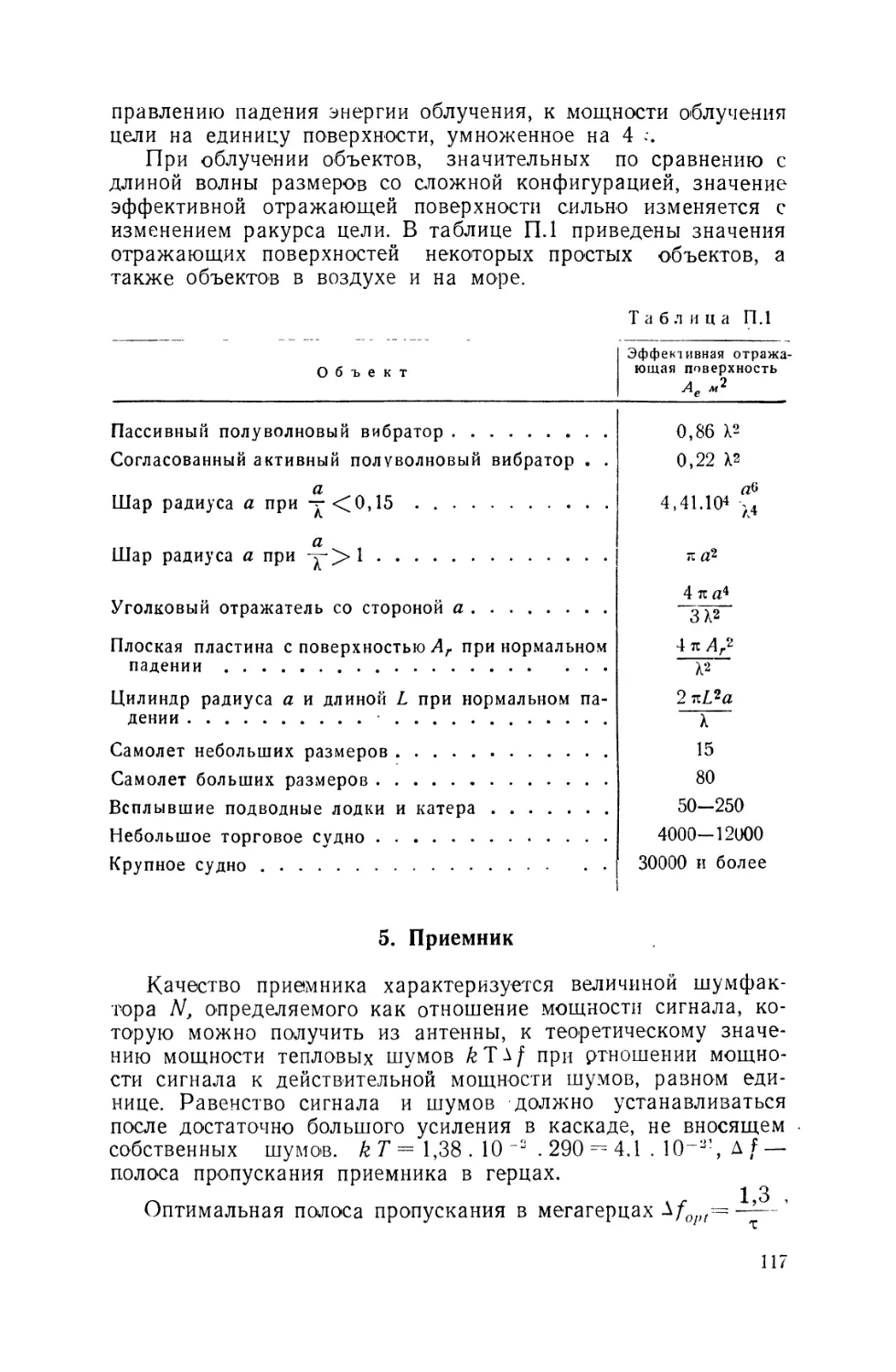
ния эффективных отражающих поверхностей самолетов, изме-
ренные при так называемой 50 %-ной видимости, т. е. при об-
наружении самолета в течение половины времени наблюдения.
Эти данные сильно из-
меняются при измене-
нии ракурса самолета.
Очень часто наблюда-
лись сильные сигналы
при вираже самолета,
находящегося на такой
дальности, на которой
вообще нельзя было видеть его ни с носовой части, ни с хвоста.
В полевых условиях не удалось получить достаточно одно-
Таблица III.1
Тип самолета Ае 8 л<2
Самолет малых размеров . . 15
Самолет больших размеров . 80
родных данных относительно зависимости между изменением
ракурса самолета и его отражающей поверхностью. Такие
зависимости были сняты на моделях, но они слишком сложны
для сколько-нибудь простых обобщений. На более коротких
38
волнах наблюдаются сильные быстрые изменения отражаемого
сигнала. Их следует приписать вибрации самолета, вследствие
которой непрерывно изменяются фазы волн, рассеиваемых
различными частями самолета. Дальнейшие усложнения воз-
никают вследствие вращения винта, вызывающего модуляцию
сигнала, отражаемого всем самолетом. Такой сигнал содержит
значительное количество составляющих ряда Фурье на часто-
тах, кратных частоте вращения винта. Обычно возникает не-
сколько гармоник, причем некоторые из них находятся в це-
лочисленном соотношении с числом лопастей винта, так что
у многомоторных самолетов может получиться очень сложная
картина. «Модуляцию винтом» можно наблюдать путем после-
довательного фотографирования импульсов, отраженных от
самолета, и в некоторых случаях использовать для распозна-
вания реактивных самолетов. Однако при некоторых ракурсах
самолета модуляция винтом не наблюдается, что может явить-
ся причиной ошибок при определении типа самолета. Следует
отметить, что иногда применяется разная поляризация антенн,
например, передающая антенна с горизонтальной поляриза-
цией, а приемник с вертикальной, или наоборот. Эффективные
поверхности отражения самолетов при разной поляризации
антенн несколько меньше, в среднем приблизительно в четыре
раза, но все же они достаточно велики. Уменьшение эффек-
тивной поверхности отражения наблюдается обычно в случае
симметричного расположения самолета относительно станции,
например при отражении с носовой части и с хвоста, как этого
и 'можно было ожидать, но при некоторых других ракурсах
эффективная поверхность отражения может быть даже боль-
ше, чем при одинаковой поляризации антенн.
Эффективные отражающие поверхности надводных и наземных целей
При обнаружении кораблей, подводных лодок и т. д. на
море, или танков и т. д. на суше, дело несколько усложняет-
ся вследствие интерференции между падающими и отраженны-
ми волнами. Имеется очень мало данных относительно отра-
жающих поверхностей наземных объектов. На суше обычно
бывает так много помех в виде отражений от неровностей
почвы, что этот вопрос не подвергался еще серьезному изуче-
нию. В дальнейшем будут рассмотрены только надводные це-
ли, причем будет принято, что море достаточно спокойно, в
соответствии с ранее установленным критерием, и дает зер-
кальное отражение. При обнаружении самолетов, как было по-
казано, имеют место два случая в соответствии с тем значи-
тельны ли отражения от земли, или нет. В первом случае
вопрос сводится к изменению усиления антенны радиолокатора
в зависимости от угла возвышения. Такая трактовка возможна
39
вследствие того, что отражение от земли происходит в непо-
средственной близости от радиолокатора (рис. Ш.9а), а цель
находится в области постоянной напряженности поля. Однако
судов отражение происходит
при обнаружении надводных
Рис. III. 9. Влияние отражения от земной
и водной поверхности:
7, 3 и 5—радиолокатор, 2, 4 и б—цель.
вблизи от корабля(не-
зависимо от того, ус-
тановлена ли радио-
локационная стан-
ция на берегу, или
на самолете). В ре-
зультате цель нахо-
дится не в постоян-
ном поле, а в таком,
которое изменяется
по поверхности це-
ли, будучи равным
нулю* у ватерли-
нии. Следовательно,
понятие отражаю-
щей поверхности в
его прежнем пони-
мании не может
быть применено.
Следует рассмо-
треть два случая в
зависимости от вы-
соты Н корабля и
от угла места а ра-
диолокатора (если
смотреть по направ-
лению от цели). Если
2 Н sin а < (отрезок A' N на
рис. Ш.9в, а также
рис. III.6), то верхняя точка корабля будет лежать ниже
максимума основного лепестка диаграммы облучения и ре-
зультирующая напряженность поля будет монотонно увеличи-
ваться по направлению от основания до верхней точки ко-
рабля. Но если 2//sin а>-^-,в поле, падающем на цель,
появятся интерференционные максимумы и минимумы. Мож-
но указать еще на третий случай, когда а < 0, так что радио-
локатор находится ниже горизонта цели, и излучение может
дойти до нее только в результате дифракции вокруг поверх-
ности земли. При этом сигналы радиолокатора обычно (но не
* Принимается, что р = — 1, что достаточно точно соблюдается
в действительности.
40
всегда) слишком слабы, чтобы их можно было наблюдать на
экране электронно-лучевой трубки.
В дальнейшем изложении рассмотрены три возможные по-
ложения корабля относительно радиолокатора: положение его
в «ближней» зоне, когда 4/fsina>\ в «дальней» зоне, когда
4#sina«;X, и в области дифракции, являющейся продолже-
нием «дальней» зоны, когда a < 0. В каждой из первых двух
зон напряженность поля на высоте х над поверхностью моря
2-
будет (принимая, что k = как и раньше) равна
2£zsin(& xsina),
если напряженность облучающего поля, не принимая во вни-
мание отраженную волну, равна Ег
Соответственно, если падаюший поток энергии равен Ft,
то поток на высоте х будет
4Fzsin\&xsina).
Элемент площади dS на высоте х будет излучать подобно
изотропной антенне мощность AFtsin3 (kx sin a ) dS, однако
кроме того появится интерференция между прямым и отра-
женным лучом. Если излучение, отраженное под углами места
4-а и—а, одинаково по величине и фазе, то, как и в случае
антенны, излучение увеличится и результирующий поток у
приемной антенны радиолокатора будет равен
16Fzsin4(& xsina)rfs
4zr3
Если принять, что различные элементы объекта излучают
в случайной фазе, так что можно просуммировать мощности
элементарных волн, полный поток у приемной антенны радио-
локатора будет равен
16 Fz
4тгг3
о
Таким образом эффективная отражающая поверхность цели
в шестнадцать раз больше интеграла в этом выражении.
Опытным путем было установлено, что допущения относи-
тельно случайного распределения фаз элементарных волн, от-
раженных от разных частей цели, а также равенства состав-
ляющих под углами+аи—а> хорошо подтверждаются в дей-
ствительности, хотя часто наблюдаются неожиданно сильные
J sin4 (Ursina) ds . (III.8)
41
сигналы при отражении от бортов, что, повидимому, объяс-
няется синфазностью части элементарных волн. В то же время
при отражении от носа корабля сигналы обычно значительно
слабее, вследствие рассеивания энергии в стороны от направ-
ления падения луча. Элемент поверхности корабля может быть
приближенно вычислен по уравнению dS = 2bdx, где b — ши-
рина корабля, постоянная до высоты Н верхней палубы и рез-
ко уменьшающаяся над палубой. Коэфициент 2—эмпириче-
ский и соответствует изотропному рассеянию в пределах полу-
сферы.
В случае «ближней» зоны в пределах высоты И появляется
много лепестков и провалов. Средним значением si’n4 (kx sin а)
является 3/8, так что эффективная поверхность отражения
3 Р
равна — 16 I dS или 12 ЬН согласно приведенных выше опре-
делений, т. е. в двенадцать раз больше видимой поверхности
корабля. Обозначим эффективную поверхность отражения для
«ближней» зоны, через Абз, тогда Абз*= 12 ЬН. Очевидно, что
в этом случае эффективная поверхность отражения постоянна,
так что максимальная дальность следует тому же закону, что
и в свободном пространстве, согласно которому, как это будет
видно дальше, отношение импульсной мощности передатчика
Pt
к предельной чувствительности приемника р—— пропорцио-
нально максимальной дальности гмакс в четвертой степени —
Л
. Для случая «дальней» зоны kx sin а невелико,
4-Ч-Г4
' макс
л млн
и мы можем
sin4 (&xsina) равен (fcrsi'na)4.
поверхность отражения для дальней зоны
н
16 (&sina)4j x^dS, Пренебрегая кривизной
о
тая, что где R—радиус земли,
Л.
высота радиолокационной
заменить синус его аргументом, полагая, что
Следовательно эффективная
Адз будет равна
земли, т. е. счм-
полагая попрежнему, что
Л. .
sina= - , где h—
г
уровнем моря, а также,
и что
станции над
k == -г - , МЫ
получаем, что
л _______________
дз \ 4 г4
256 тс4 Л4 f 4
\ х4 dS.
о
Исходной постоянной является уже не площадь, а интеграл
от выражения с размерностью длины в шестой степени. Чтобы
42
выразить это, вводится понятие «отражающего объема» И.
квадрат которого численно равен
н
V2 = J л4 dS.
О
причем необходимо отметить, что пропорционален плотности
потока отраженной энергии квадрат величины V, а не сама ве-
личина V. Таким образом в случае «дальней» зоны отражаю-
щая поверхность заменяется выражением
л 256 тт4 Л4 TZ2
(Щ.9)
Следует отметить, что при этом в уравнение дальности входит
р
дополнительный член, содержащий г4, вследствие чегОр-: г8.
В виду этого «дальнюю» зону называют иногда «областью
восьмой степени». Если принять, что dS = 2bdx, V2 будет рав-
но 0,4 ЬН‘ или , так что -j- =
Таким образом эффективная отражающая поверхность над-
водных целей, находящихся достаточно близко к радиолока-
тору, имеет определенное конечное значение и интенсивность
сигнала уменьшается с увеличением расстояния согласно обыч-
ному уравнению дальности (принимаемая мощность обратно
пропорциональна четвертой степени дальности). На более зна-
чительных дальностях имеется переходная область, где закон
изменения мощности на входе приемника может быть получен
только путем численного интегрирования уравнения (III.8), а
затем уже следует «зона восьмой степени». Эта зона оканчи-
вается при приближении к горизонту радиолокационной стан-
ции, после чего начинается зона дифракции, где показатель
степени еще выше. В тех случаях, когда нельзя пренебречь
поправкой на кривизну земной поверхности, резкие границы
«зоны восьмой степени» исчезают.
Таблица III.2
Тип корабля Тоннаж ^бз <«**2) И*3)
Очень небольшой . 20-50 2,5-4 50-250 6-40
Небольшой 50-200 4-6 250-750 40—200
Траулер 200-600 6-10 750-4000 200—1000
Каботажное судно . 600-1000 9-13 4000-12000 1000—3000
Торговое судно: среднего тоннажа . 1000-3000 12 — 16 12000—3000° 3000-10000
Большого тоннажа . 3000-10000 16-20 30000—50000 10000—20000
43
В таблице Ш.2 приведены средние значения Абз и V, для
некоторых типов судов при отражении под некоторым углом
или с кормы.
Всплывшие на поверхность подводные лодки обычно отно-
сят к одному из первых двух классов, линейные корабли—к
последнему классу.
3. Расчет максимальной дальности
Можно вычислить интенсивность отраженных сигналов и
максимальную дальность любой заданной радиолокационной
системы за исключением только таких случаев, в которых
имеют место аномальные условия распространения радиоволн.
Эти условия будут рассмотрены в следующем разделе, а пока
следует отметить, что в условиях «нормального» распростра-
нения имеет место некоторое искривление лучей по направ-
лению к земле («нормальная рефракция»), которое легко мо-
жет быть учтено, если принять для радиуса земли R значение
8 000 км вместо действительных 6 400 км (см. §4 этой главы).
Вывод уравнения дальности может быть выполнен следующим
образом. Плотность падающего
Р G
= —2'-- (уравнение III.4).
потока Fi у цели равна
Плотность отраженного от
цели с эффективной отражающей поверхностью Ае потока у
приемной антенны соответственно равна
AeFt
4 кг8
Ае Fj
16 К2 Г4
(III.10)
Мощность Рг, которая может быть получена в антенне прием-
ника, равна AaF Следовательно, с учетом уравнения
(III.1),
. (III. 11
4 ~ 64 тг3 г4
Предельная дальность будет иметь место тогда, ' когда
мощность в приемной антенне будет равна чувствительности
приемника. Рмин . Следовательно
г
макс
*/ PtGtGrPA
/
к М-Г I мин
(111.12)
При применении этой формулы необходимо учитывать не-
сколько моментов. Прежде всего, при определении Gt и G г
нужно принять во внимание возможные потери в передающем
или приемном фидере питания антенны. В тех случаях, когда
нельзя пренебречь отражением от земли у радиолокатора, это
44
также необходимо учитывать при определении Gz и Gr • Pt
и Р мин должны быть определены одинаковым образом для
данной формы импульса. Должны быть учтены шумы антен-
ны, если они значительны на выбранной длине волны. Кроме
того, для надводной цели следует руководствоваться все-
ми приведенными выше соображениями. Длительность импуль-
са, форма импульса, и т. д. явно в уравнении (III.12) не вы-
ражены. Однако Рмин при прочих равных условиях пропор-
ционально полосе пропускания А/, так что, если уменьшить
полосу частот вдвое, и увеличить при этом длительность им-
пульса вдвое, можно было бы уменьшить мощность в импуль-
се также вдвое без уменьшения максимальной дальности. Од-
нако это не всегда возможно по соображениям необходимой
точности измерения дальности.
Шумы антенны
Как уже указывалось выше, шумы антенны имеют ощути-
мую величину только для длин волн, превышающих 3 м.
Для большей части диапазона волн ионосфера в основном
прозрачна и можно ожидать, что эффективная температура
антенны приближается к температуре междузвездного про-
странства. В самом деле, установлено, что очень большое ко-
личество радиошумов в диапазоне 2—20 м достигает земли
из плоскости Млечного пути, причем излучение особенно вели-
ко из центра нашей Галактики (из созвездия Стрельца). Пред-
полагают, что это излучение возникает из междузвездного ве-
щества при очень высокой температуре, но облачко газа не
достаточно плотно для того, чтобы его можно было считать
«черным телом». В пределах любой достаточно узкой полосы
частот можно считать (приблизительно), что средняя шумо-
вая температура неба Р равна Т' = 14л ° К (например, 3 000
на волне 6 м и 24 000° на 12 м). Температура шумов антенны
зависит от ее направленности, причем даже при ненаправлен-
ной антенне «затемнение» землей будет обусловливать некото-
рое дневное колебание шумов (в пределах ±2 дб). Шумовая
температура антенны с высокой направленностью может быть
вдвое меньше, и в то же время, при ее ориентировке в соот-
ветствующие участки неба, может оказаться больше в четы-
ре — пять раз. На волне несколько ниже 3 м средняя шумо-
вая температура неба падает до 290°К, причем на более ко-
ротких волнах уровень шумов по всей вероятности продол-
жает падать, хотя в этой области было произведено очень ма-
ло измерений. Шумфактор приемника на более коротких вол-
нах всегда значительно больше единицы (см. рис. II.4), так
что шумы антенны трудно измерить. Даже если бы шумовая
45
температура антенны упала до абсолютного нуля, шумфактор
приемного устройства практически не изменился бы. При при-
Т'
менении приведенной выше формулы N — 1 + для эф-
/ п
фективного шумфактора при температуре антенны Г (см. § 4
главы II) следует помнить, что если фидер приемной антен-
р
ны вносит затухание (3, формула приобретает вид AZ— 1 +р
* о
В том случае (например, на 6м и более), когда третий член
в этом выражении гораздо больше, чем остальные, внесение
затухания р в это выражение будет скомпенсировано необ-
ходимостью введения такого же множителя в значение G г в
уравнении (III.12). Таким образом в тех случаях, когда шу-
мы антенны значительно превышают шумы самого приемни-
ка, затухание в фидере приемника не влияет на дальность,
однако затухание в фидере передатчика соответственно снизит
дальность.
Следует отметить, что на длинах волн, превышающих 15 му
приведенная выше формула для шумфактора не может при-
меняться, так как ионосфера теряет свою прозрачность. Кро-
ме того, возникают другие источники шумов, как например,
грозовые разряды.
Наземные станции, использующие луч, отраженный от земли
Использование отраженного от земли луча в наземных
станциях имеет известное значение и заслуживает более де-
тального изучения. Если передающая и приемная антенны со-
вершенно идентичны или имеют одинаковые диаграммы в вер-
тикальной плоскости и установлены на одной и той же высо-
те, можно ввести для обеих антенн общий коэфициент напря-
женности поля в вертикальной плоскости ср (я) Для случая
симметричной антенны, расположенной на ровной местности,
коэфициент ср является произведением двух членов: члена
/(а) направленности самой антенны и члена 2 sin (kh sin а),
соответствующим образом измененного, если коэфициент отра-
жения не равен— 1. Благодаря этому, как уже было показа-
но, учитывается влияние интерференции между двумя луча-
ми. Gt и Gr обычно берут для горизонтального направления
(являющегося направление^^ максимального усиления для сим-
метричной антенны), так что f (0) = 1. Если, кроме того,
р=—1 и первый максимум лепестка получается при таком
небольшом угле, при котором f ( а) не отличается существен-
но от единицы, то максимальной дальности будет соответство-
вать коэфициент ср = 2. Во всех остальных случаях макси-
мальная величина коэфициента ср меньше чем 2. Коэфициент
ср (0), само собой разумеется, всегда равен нулю. Чтобы вве-
46
сти этот множитель в уравнение (III.12), следует иметь в ви-
ду, что всякое усиление имеет размерность мощности и поэто-
му должно быть умножено на квадрат коэфициента напря-
женности поля. Следовательно, вместо Gt надо подставить
<p2(a)Gz и вместо Gr — (a) Gr. Таким образом в результате
(Гмак^инт = (ГмаксЪв ? (а) , (111.13)
где индексом «св» обозначены условия в свободном простран-
стве, а индексом «инт» наличие интерференции с отраженным
лучом. В наиболее благоприятных условиях дальность при
интерференции точно в два раза превышает дальность в сво-
бодном пространстве, вычисленную согласно уравнения
(III.12). Выводы можно распространить и на неодинаковые
антенны, если в качестве <р(а) взять среднее геометрическое
значение коэфициентов напряженности поля в вертикальной
плоскости обоих антенн. При расчетах величину а следует
определять, принимая
во внимание кривизну
земли (для/? = 8 000 юи).
Обычно применяется
, • л
формула sina = —-----
г
Кроме,
того,
можно применять диа-
грамму в криволиней-
ных координатах, как
показано на рис. Ш.10,
Рис. III. 10. Пример зоны видимости
в криволинейных координа1ах.
Такой тип диаграммы очень удобен
которая представляет
собою „зону видимо-
сти", построенную для
вертикальной плоскости.
для определения возможностей и недостатков наземных ра-
диолокационных станций. Кривая является геометрическим
местом постоянной напряженности поля, соответствующей
минимальной различимости сигнала от цели с заданной по-
верхностью отражения (например, самолета среднего разме-
ра). В области ниже максимума первого лепестка приведен-
ные выше выводы менее точны, так как не учитывают влия-
ния дифракции волны вокруг криволинейной поверхности
земли. Дальность обнаружения целей, находящихся значи-
тельно ниже максимума первого лепестка, обычно несколько
выше расчетной, но это увеличение дальности трудно учесть.
Кроме того, у большей части станций оно при нормальных
условиях незначительно, в особенности у станций с неболь-
шой дальностью. Если пренебречь кривизной земной поверх-
ности, то в пределах плоского участка при малых значениях
47
?. синус может быть заменен его аргументом и, следователь-
но, ? (а) -т-г- а . Подставляя это в уравнение (III.11),
получаем
r 64 я3 г8
Таким образом в случае самолета, летящего значительно ниже
максимума первого лепестка, мощность в приемной антенне и
дальность связаны законом восьмой степени, как и в случае
«дальней» зоны для надводных целей.
Примеры расчета
1) Определить максимальную дальность по самолету сред-
него размера (примерно Ае = 13 м2) станции, работающей на
волне 1,5 му с передатчиком мощностью 100 кет, шумфакто-
ром 3,4, полосой частот 4 мггц и коэфициентом различимости
1,5. Синфазная приемо-передающая антенна состоит из 32 ви-
браторов с пассивными рефлекторами. Затухание в фидерах
как при передаче, так и при приеме равно 1 дб. Станция
установлена на высоком берегу ( р = —1), причем использо-
вана область максимума основного лепестка антенной
граммы. Так как Р мин =8,1 . 10~14 вт (см. § 6, гл. II,
мер 2), Pf=105, G' = 64, то следовательно
Gt=Gr = 1,64-64-0,8 = 83,5.
Из уравнения (III.12)
_ ,7 83,5-. 1,53 - 13- Ю14 , 06 . |№
диа-
при-
64 тс3 • 8,1
м
или 106 км.
Так как при указанных выше условиях имеет максималь-
ную величину 2
(гмакс)инт = 2 • 106 = 212 км.
la) Интересно сравнить с этим расчетную дальность этой
же установки в случае прямой радиосвязи. Даже если прием-
ная
и в
где
антенна является простым полуволновым вибратором, то
этом случае получится:
pMUh = a-f,
4 0 z MUrl I* *
т. г
1 64 k2 X2
= —--------- или-5- [уравн. (III.la)], откуда
4 тс о
8,1 . Ю-* = —•J _
32 я (г маК($* cs
Да
48
что дает (гмакс)ср = 1,5.109 м или полтора миллиона километ-
ров. Таким образом для радиолокации необходимо иметь со-
всем другой порядок величин мощности передатчика и чувст-
вительности приемника, чем для большинства обычных устано-
вок связи.
2) Самолетный радиолокатор на волне 10 см оборудован
передатчиком мощностью 50 кет и приемником с чувствитель-
ностью 10~1J6T (см. § 6, гл. II, пример 1). Антенна представ-
ляет собой параболоид диаметром 0,45 м, причем эффектив-
ная апертура равняется трем четвертям действительной
апертуры. В установке применен при передаче и приеме ко-
нический обзор (см. гл. V), так что усиление антенны в ра-
бочей точке составляет 60% от максимального. Определить
максимальную дальность по среднему бомбардировщику
(Л,=20 м‘).
Здесь = 104; Римл-101а
~ „ 0,6 • 3 • тс2 • 4 • 0,45s ол
(т. = Ст — -----------------= 94
так что согласно уравнению (III. 12)
_ V 5- 104 • 943 • 10~а - 20 _
гмакс — 1/ 64 • к3 • 10-12 ~
1,45 • (14,5 км}.
3) Береговая станция дальнего обнаружения самолетов
имеет передатчик мощностью 200 кет на волне 12 м и антенну с
усилением, в 12 раз превышающим усиление полуволнового
вибратора. Усиление приемной антенны в два раза больше
усиления полуволнового вибратора, причем центры обеих ан-
тенн находятся на высоте 48 м над совершенно ровной отра-
жающей местностью. Самолет с отражающей поверхностью
Ае = 10 м2 на дальности 100 км и на высоте 4 500 м дает
сигнал с амплитудой, в 2,5 раза превышающей амплитуду ми-
нимального различимого сигнала, Г5л=р-£-=6,25Упри полосе
*мин '
пропускания 0,5 мггц и при коэфициенте различимости 1,5.
Вычислить эквивалентную температуру шумов антенны, при-
нимая, что шумы приемника ничтожно малы.
Сначала находим
h г 4,5 • 103 105 1
sin а — —--------------------------------------
г 2R 105 2 • 8 • 106 24
, 2к z
к = -— = —
12 6
4 Основы радиолокации
49
Следовательно
48 тс •—
ср = 2sin(£/zsina) = 2 sin = У 3
Gt= 1,64 • 12 = 19,7; Gr = 3,28.
Отсюда
Р = —8 4 • 10~13.
г 64 тс3 г4
С другой стороны
Pr^S2WK Г Д/=6,17- 10-17 Г,
откуда
8 4
T' = -^L. Ю4= 14 000° К.
6,17
Если бы источником шумов был сам приемник, его шум-
л. 14000 AQ ~ .
фактор должен был быть равен -^gg" = 48. Таким образом
шумами приемника можйо пренебречь.
4а) Какова будет напряженность поля у самолета для
данных предыдущего примера и 4’6) какая потребуется мощ-
ность источника помех с ненаправленной антенной, располо-
женного на этом же самолете, со 100 %-ой модуляцией шумом
на полосе частот 2 мггц, чтобы снизить дальность обнаруже-
ния этого самолета до 65 км.
Е2 Р G
а) F= Т20~гё= 4zr»~’ слеД°вательН0
Е = / 30^0^ = 0,192 в/м.
б) Максимальная дальность станции равна 100 2,5 при
. 1 2
угле места arc sin— и в ~у~= Раза больше в максимуме ле-
z 2 5
пестка (ср =2), т. е. 200 |/ =180 км. Для уменьшения
дальности до 65 км мощность шумов должна быть увеличена
обратно пропорционально дальности в четвертой степени, т. е.
в = 59 раз. Следовательно необходима шумовая по-
меха мощностью 59.9,8.10-13 вт. Обозначим мощность источ-
ника помех через Рш, тогда 0,25 Рш будет находиться в преде-
лах полосы пропускания приемника. Приемная антенна имеет
50
усиление G' = 2, так что Аа = =36 м2 [уравн. (III.1а)],
следовательно
0,25 • 36 • у2 Рш _ 5д 8 10_13
;4я- 1010
и, принимая, что <р2 = 3, как и выше, получим Рш = 0,27 вт.
4. Распространение радиоволн в атмосфере
Показатель преломления атмосферы зависит от ее плотно-
сти и влажности. Можно принять, что для любой частоты, в
пределах радиолокационного диапазона, показатель прелом-
ления р- определяется уравнением
И —1
80 / , 4 800? \
10-6,
где р—атмосферное давление в миллибарах, q—парциальное
давление водяного пара в миллибарах и Т—абсолютная тем-
пература. Абсолютную величину показателя преломления не-
обходимо знать только тогда, когда требуется очень точное
определение дальности. Обычно достаточно знать искривление
лучей, обусловленное градиентом показателя преломления.
В средних или нормальных условиях показатель преломления
уменьшается с увеличением
высоты, вследствие чего ско-
рость радиосигналов возра-
стает с высотой и лучи из-
гибаются вниз по направле-
нию к земле (рис. III.! 1).
Кривизна лучей в нормаль-
ных условиях равняется,
приблизительно, одной пятой
кривизны земли. Если мы
изменим систему координат
таким ь образом, чтобы лучи
изображались прямыми ли-
Рис. III. 11. Искривление луча у
земной поверхности. Пунктиром
показаны последовательные по-
ложения фронта волны.
ниями, кривизна земли
уменьшится примерно до четырех пятых ее действительной
величины, что соответствует эффективному радиусу 1,25 R или
примерно 8 000 км. Как было выше упомянуто, этим значе-
нием часто пользуются в радиолокации при вычислении угла
места дальних целей. Конечно такой расчет является очень
приближенным, так как условия могут очень значительно от-
клоняться от среднего значения в зависимости от состояния
51
погоды. Распространение в средних атмосферных условиях
называют «нормальным» распространением. При некоторых
метеорологических условиях может получиться совершенно
противоположная картина, известная под названием «аномаль-
ного» распространения, и заключающаяся в том, что кривизна
лучей вблизи поверхности земли становится больше кривизны
земли. Метеорологические условия, при которых это происхо-
дит, связаны обычно с инверсией температуры и наблюдаются
главным образом в хорошую погоду летними вечерами. •
Аномальное распространение характеризуется образовани-
ем «атмосферного волновода» в непосредственной близости от
земной поверхности, в котором
волны распространяются, как
в металлическом волноводе.
Отражение от верхней поверх-
ности в металлическом волно-
воде заменяется в атмосферном
волноводе явлением рефрак-
ции, вследствие чего волны на-
правляются обратно в атмос-
ферный волновод (рис. III.12).
Совершенно так же, как в ме-
таллическом волноводе, имеет-
ся некоторая критическая длина волны, выше которой волны
не могут распространяться вдоль волновода, так что атмосфер-
ный волновод может образоваться только на достаточно ко-
ротких волнах. Высота атмосферного волновода равна рас-
стоянию от земли до луча, кривизна которого равна кривизне
земли (рис. III. 12). Значения критических длин волн для раз-
ных высот атмосфер-
ного волновода при-
ведены в таблице III.3.
Соотношения получа-
ются не такими про-
стыми, как в метал-
лическом волноводе,
так как верхняя по-
верхность может из-
гибать лучи назад пос-
тепенно, вследствие
чего критическая дли-
на волны относитель-
но гораздо меньше, чем
• R
Рис. III. 12. Образование атмо-
сферного волновода.
Таблица III 3
Длина волны, м Минимальная высота ат- мосферного волновода, м
1,5 230
0,5 ПО
0,1 36
0,03 1Г
0,01 8
В
металлическом волноводе.
Было установлено, что очень узкие атмосферные волново-
ды встречаются очень часто, так что при длинах волн порядка
одного сантиметра аномальные условия распространения яв-
ляются скорее правилом, чем исключением. Однако, чем выше
52
атмосферный волновод, тем реже он образуется, так что
«аномальное» распространение на к = 5—10 метров может
иметь место, например, не чаще, чем один раз в течение года,
тогда как на 50 см оно может наблюдаться в среднем несколь-
ко раз в течение года, по несколько часов в течение дня.
Результатом образования атмосферного волновода являет-
ся то, что напряженность поля вблизи от земной поверхности
уменьшается значительно медленнее, чем в условиях нормаль-
ного распространения, ^горизонт перестает ’ограничивать даль-
ность распространения. Явление атмосферного волновода бы-
вает наиболее заметно при низко расположенной антенне
радиолокатора, когда она легко попадает в зону волновода.
Напряженность поля над атмосферным волноводом до неко-
торой степени снижается, но в атмосферный волновод попа-
дает только та часть излучения, которая направлена под ма-
лыми углами, так что вне атмосферного волновода можно
получить вполне достаточные напряженности поля и цели,
расположенные под большими углами, также могут быть об-
наружены. При образовании атмосферного волновода в огром-
ной степени увеличивается дальность обнаружения низко рас-
положенных объектов. В тропиках были установлены случаи,
когда отраженные сигналы радиолокационных станций при-
нимались с расстояний, превышающих 1 000 км.
5. Выбор параметров радиолокационных станций
На основании всех приведенных соображений ниже дан
краткий обзор факторов, определяющих выбор частоты и дру-
гих параметров радиолокатора в зависимости от его назначе-
ния.
В настоящее время можно получать мощности в импульсе
порядка 1 мгвт в диапазоне частот от 30 до 3 000 мггц и по-
рядка 200 кет до частоты 10 000 мггц. Чувствительность при-
емника несколько ухудшается с повышением частоты (§ 6
гл. II). Из уравнения (III.12) можно видеть, что решающими
факторами, кроме Рмин> является произведение Gt Gr к-.
Если, как например в самолетных установках, размеры ан-
тенны ограничены, это определяет произведение Gk2 [уравн.
(II 1.1)]. Следовательно при уменьшении длины волны усиле-
ние приемной антенны G увеличивается обратно пропор-
ционально квадрату длины волны, так что дальность увели-
чивается обратно пропорционально квадратному корню из
длины волны. Если задан коэфициент усиления антенны, на-
пример, если антенный луч должен иметь заданную угловую
ширину, выгодно увеличивать длину волны до тех пор, пока
размеры антенны не окажутся чрезмерно большими. Таким
53
образом в зависимости от назначения радиолокатора обычно
можно ориентировочно найти оптимальную длину волны.
В случаях, когда отражением от земли нельзя пренебречь,
или при обнаружении надводных судов в «дальней» зоне, не-
обходимо принимать во внимание ряд дополнительных сообра-
жений. Так например, для береговой станции обнаружения
частота 100—200 мггц могла бы быть достаточно удовлетвори-
тельной, если бы не большое число лепестков и провалов в
диаграмме излучения, вызванных явлением отражения от мор-
ской поверхности. В то же время использование более корот-
ких волн дает возможность создать антенну с лучшей направ-
ленностью в вертикальной плоскости и получить зону види-
мости без провалов. В наземных станциях выбор длины вол-
ны также может иногда определяться условиями распростра-
нения. Например, в некоторых тропических местностях часто
наблюдаются атмосферные волноводы, что может при некото-
рых обстоятельствах ограничить применение сантиметровых
волн.
Очень большое значение имеет вопрос выбора ширины
антенного луча. При применении очень узкого луча могут
возникнуть серьезные затруднения при поиске цели. В систе-
мах такого типа, где необходимо просматривать пространство
в двух угловых координатах, возникает другое затруднение.
Чтобы различимость отраженного сигнала от цели, находя-
щейся на предельной дальности, была достаточной, существен-
но важно обеспечить облучение данной цели по меньшей мере
несколькими импульсами. Эти соображения рассматриваются
подробнее в главе VII.
Сантиметровый диапазон волн нашел себе преимуществен-
ное применение там, где размеры антенны приходится строго
ограничивать, как, например, в самолетных станциях. В на-
земных станциях более значительной дальности аппаратуры
метрового диапазона противопоставляется более высокая точ-
ность аппаратуры сантиметрового диапазона.
ГЛАВА IV
ИЗМЕРЕНИЕ ДАЛЬНОСТИ
Рассмотрим методы измерения запаздывания отраженных
импульсов и получаемые точности.
о
Запаздывание импульсов равно —, где г — дальность
радиолокационной цели, а с — скорость распространения элек-
тромагнитных волн. Первым важным вопросом, таким обра-
зом, является точность определения скорости распространения.
Опытное определение скорости распространения электромаг-
нитных волн оптическими методами дало значение для с, рав-
ное 299,774 ±11 км/сек. Таким образом можно принять, что
величина с известна с точностью до 3,6.10 5. Согласно клас-
сической электромагнитной теории скорость в свободном про-
странстве не зависит от частоты. Согласно специальной теории
относительности эта скорость не зависит от скорости переме-
щения наблюдателя. Таким образом можно сделать вывод,
что скорость распространения волн радиолокатора в свобод-
ном пространстве будет такой же, как скорость распростране-
ния света в свободном пространстве.
Однако обычно приходится иметь дело не столько со ско-
ростью распространения в свободном пространстве, сколько со
скоростью распространения в земной атмосфере. Эта скорость
меньше скорости в свободном пространстве в р. раз, где р —
показатель преломления земной атмосферы для радиоволн.
Если выразить температуру воздуха в градусах Кельвина (Г),
полное атмосферное давление в миллибарах (р) и парциаль-
ное давление водяных паров в атмосфере также в миллиба-
рах (q), то показатель преломления может быть вычислен
из выражения
- 80 z , 4800^ х б
р- - 1 = у( Р + —Ю-6. (IV. 1)
В значениях р, Т и q наблюдаются, само собой разумеется,
суточные колебания, но для средних условий можно опреде-
лить изменение скорости распространения с высотой. Резуль-
55
таты вычислений приведены в таблице IV. 1, из которой мож-
но видеть, что средняя скорость распространения радиоволн
на уровне земли отличается от скорости распространения в
свободном пространстве примерно на 3.10 4. Подстановка
измеренных значений суточных колебаний р, Т и q в уравне-
ние (IV. 1) показывает, что максимальные колебания не пре-
вышают 10~4 на малых высотах и 2,5. 10 выше 1 500 м.
Таблица IV.1
Высота, м 0 3000 6 000 10000
Средняя скорость в км)сек ...... 299680 299710 299725 299740
Скорость распространения радиоволн в земной атмосфере бы-
ла также непосредственно определена методом измерения вре-
мени распространения импульса между двумя радиолокацион-
ными станциями с точно известными координатами. Измерения
производились на частотах от 20 до 60 мггц и дали среднее
значение 299705 4-50 км/сек с точностью 1,7. 10 4 . Очевид-
но, что точность определения дальности с помощью радио-
локации ограничивается точностью определения величины с.
Так как можно считать, что с известно с точностью до
1,7. 10 ’4 , измерения дальности можно довести до этой сте-
пени точности, если инструментальные ошибки достаточно'
малы.
1. Метод измерения дальности
Задачу определения дальности можно коротко определить,
как задачу измерения интервала времени между передним
фронтом импульса передатчика и передним фронтом принято-
го отраженного импульса. Обычная длительность интервала
не превосходит 2 000 мксек. Радиолокационная станция, опре-
деляющая дальность, должна следовательно, состоять из
устройства для развертки по оси времени импульса передат-
чика и отраженного импульса и эталона времени (или часто-
ты) для сравнения с измеряемым интервалом. Система инди-
кации должна быть синхронизирована с передатчиком. Для
осуществления этого обычно применяется синхронизирующий
(пусковой) импульс с крутыми фронтами, один из которых
служит началом отсчета времени. В некоторых установках
этот импульс формируется в отдельном устройстве и запускает
генератор временной развертки и модулятор (рис. 1.4). В дру-
гих системах временная развертка и все остальные связанные
с ней цепи синхронизируются пусковым импульсом от радио-
передатчика.
56
В любой из этих систем максимальная точность измерения
рфемени зависит от скорости нарастания пускового импульса.
Существенное значение имеет также форма напряжения
генератора временной развертки. В простейшем случае это
линейная развертка времени, иногда регулируемой длины с
модуляцией отклонением светового пятна электронно-лучевой
трубки. На управляющий электрод трубки подается специаль-
ный сигнал для подсветки электронно-лучевой трубки только
в течение прямого хода развертки. Кривые напряжений пока-
заны на диаграммах а и б рис. IV. 1. Отраженные сигналы
отклоняют электронный луч Под прямым углом к линии раз-
вертки. Такой индикатор носит название «индикатора даль-
ности» или «индикатора типа А». В некоторых случаях при-
меняется несколько разверток времени, чтобы дать возмож-
ность наблюдать цель при разных масштабах оси времени. Си-
стема индикации такого типа не дает большой точности и обыч-
но применяется для поисковых радиолокационных станций. На-
пример, при длине развертки в 10
дальность с точностью, превы-
шающей + 0,5мм. что при мак-
симальной дальности 30 000 м
ограничивает точность пример-
но до +150 м. Можно увели-
чить точность измерения пу-
тем применения кольцевых или
спиральных разверток с откло-
нением сигналов в радиальном
направлении.
Для станций орудийной наводки требуется очень высокая
точность определения дальности. Один из методов состоит в
том, что развертку растягивают в несколько раз против ее
нормальной длины и проектируют на экран электронно-луче-
вой трубки только небольшой участок. Можно также приме-
нить задержанные развертки подобно показанной на рис. IV. 1
(в). Задержанная развертка иногда формируется из основной
развертки, однако удобнее запускать специальную быструю,
так называемую «точную» развертку, с помощью задержан-
ного импульса. Задержанный импульс этого рода часто ис-
пользуется также для выделения какого-либо отдельного от-
раженного импульса из группы путем модуляции яркости дан-
ного участка развертки. Время задержки импульса изменяется
так, чтобы оно было равно запаздыванию данного отражен-
ного сигнала. Задержанный импульс выполняет таким обра-
зом функции целеуказания, что очень важно для согласования
работы операторов, определяющих данные по дальности и
по угловым координатам при наличии нескольких целей в по-
ле зрения станции. Такой импульс называется «опорным» или
«селекторным». Селекторный импульс необходим для этой же
цели при работе автоматики.
см очень трудно определить
°) Л" У а\"\
^_Г"Ш_____Г"Г~"1 ГТ"
е) А__________А_________г
Рис. IV. 1. Виды колебаний в
индикаторе дальности.
57
В некоторых системах применяется «потенциометр дально-
сти», с помощью которого можно совместить любой выбран-
ный участок развертки с центром экрана электронно-лучевой
трубки. Потенциометр дальности должен быть выполнен и
прокалиброван с большой точностью. Так как для совмеще-
ния выбранного отраженного сигнала с центром электронно-
лучевой трубки необходимо определенное напряжение сме-
щения, положение потенциометра является критерием даль-
ности цели. Данные дальности можно передавать на счетно-
решающее устройство или
Рис. IV. 2. Индикатор даль-
ности с растянутой разверт-
кой в пределах селекторного
импульса.
Л—отраженный сигнал, совмещен-
ный с опорным импульсом.
в виде напряжения (пропорцио-
нального дальности) или механи-
ческого сигнала (также пропор-
ционального дальности).
В некоторых случаях, как по-
казано на рис. IV.2, растягивает-
ся выбранный участок основной
«грубой» развертки. Как и в пре-
дыдущих системах, положение
растянутого или «ускоренного»
участка, являющегося одновре-
менно «точной разверткой» и «се-
лекторным импульсом», регули-
руется таким образом, чтобы вы-
бранный отраженный импульс
оказался в определенном месте
растянутого участка (например, в
середине). Положение потенцио-
метра, регулирующего задержку
растянутого участка, является критерием дальности цели.
Во многих установках, особенно в поисковых радиолокато-
рах, не требуется предельная, теоретически достижимая точ-
ность определения дальности. Это существенно упрощает их
проектирование, так как в поисковых радиолокаторах, кото-
рые должны определять как азимут, так и дальность цели,
обычно используется описанный ниже «индикатор кругового
обзора», применение которого обычно сопряжено с сущест-
венным снижением точности измерения дальности.
Применение счетно-решающих устройств
В ряде случаев необходимо применять устройство для
автоматической передачи данных дальности (а иногда ско-
рости изменения дальности) от индикатора радиолокатора к
счетно-решающему механизму. Например, при раздельном
определении дальности и угла места цели может потребо-
ваться автоматическая передача этих данных на счетно-
решающее устройство для выработки высоты цели. На рис.
58
1V.3 показана простейшая система передачи данных по даль-
ности. Данные по дальности вырабатываются в виде механи-
ческого сигнала, являющегося функцией положения подвиж-
ной визирной нити, установленной перед экраном электронно-
лучевой трубки. Оператор с помощью «штурвала дальности»
непрерывно совмещает ви-
зир с передним фронтом от-
раженного импульса. При
этом, конечно, необходимо,
чтобы масштабы механиче-
ского перемещения визира
и электрического отклонения
электронного луча были точ-
но согласованы. С этой
целью индикатор должен
периодически «калибровать-
ся» с помощью специальных,
описанных ниже, «калибро-
вочных отметок времени»
(«отметок дальности»).
В случае радиолокаци-
онной станции орудийной
наводки необходимо, чтобы
данные по дальности и по
скорости изменения дальности
Рис. 1V. 3. Механическая отметка
дальности (визирная нить).
7 — визир. 2— развертка дальности, 3 —
калибровочные импульсы (отметки даль-
ности), 4 — шкала дальности.
давали возможность произво-
дить расчет «упрежденного» положения цели в специальном
«приборе управления огнем». При ручной выработке коорди-
нат цели более точное сопровождение цели получается в слу-
чае управления «по скорости», а не «по углу». При управле-
нии «по скорости» положение штурвала ручного управления
определяет скорость движения визира ('механического или
электрического), совмещаемого оператором с целью, в то
время как при управлении «по углу» положение визира непо-
средственно определяется положением штурвала.
В современных радиолокационных установках очень часто
применяется система автоматического сопровождения как по
дальности, так й по угловым координатам. При автоматиче-
ском сопровождении по дальности селекторный импульс авто-
матически непрерывно совмещается с любым, заранее вы-
бранным, отраженным сигналом. Для автоматического сопро-
вождения по углам ось антенны должна автоматически совме-
щаться с направлением на ту же цель. Принцип действия
системы автоматического определения дальности состоит в том,
что при несовпадении селекторного импульса с выбранным,
отраженным от цели, сигналом в схеме вырабатывается
«сигнал ошибки», приблизительно пропорциональный (в пре-
делах небольшого рассогласования) степени рассогласования
59
сигналов. «Сигнал ошибки» служит в качестве управляющего
напряжения в схеме, регулирующей сдвиг селекторного им-
пульса. При этом сигнал ошибки может быть положительным
или отрицательным в зависимости от того, в какую сторону
от отраженного сигнала сместится селекторный импульс. По-
лярность сигнала ошибки выбирается так, чтобы селектор-
ный импульс всегда стремился совместиться с отраженным
сигналом.
Несмотря на сложность схемы, автоматические системы
нашли себе широкое применение в армейских и морских
станциях орудийной наводки и в самолетных станциях пере-
хвата. Вообще системы автоматического сопровождения
принципиально пригодны в случаях, когда станция предназна-
чена для сопровождения одновременно одной цели. Основное
достоинство систем автоматического сопровождения заклю-
чается в том, что полностью устраняется индивидуальная
ошибка оператора, вследствие чего они особенно пригодны
при работе по целям, ускорение которых может быть велико.
2. Калибровка схемы
Эталонная частота
Точность работы цепей развертки определяется пределами
изменений параметров и деталей схемы. Ввиду этого необ-
ходимо иметь достаточно точный эталон для калибровки схе-
мы. Очень хорошими эталонами являются стабильный £С-ге-
нератор и, особенно,
кварцевый генератор.
Обычно применяется
генератор на частоту
74,94 кгц, один период
-WWW
в)
к
Л____К____к
Рис. IV. 4. Формирование v отметок
дальности.
которого соответствует
дальности в 2 000 м или
на частоту 149,89 кгц
(один период—один ки-
лометр). Синусоидаль-
ная форма напря-
жения неудобна для
целей калибровки,
вследствие чего коле-
бания эталонного Гене-
ратора формируются
в отметки дальности,
как показано на рис. IV.4. Синусоидальное напряжение (а)
сигнала преобразуется в прямоугольные колебания с крутыми
фронтами (б), затем диференцируется (в). Импульсы одной
полярности, например положительные, служат отметками
дальности, а импульсы другой полярности срезаются (г).
60
Для воспроизведения калибровочных отметок дальности
на экране электронно-лучевой трубки может быть использова-
на каждая вторая развертка дальности, в течение которой
на отклоняющие пластины трубки подается не выходное на-
пряжение приемника, а калибровочные импульсы. При этом
развертка несколько смещается по вертикали относительно ос-
новной (рис. IV.3), так что отметки дальности видны непре-
рывно, не мешая в то же время основному изображению. Если
потеря каждой второй развертки дальности нежелательна, ка-
либровочные отметки могут подаваться с помощью специ-
ального переключателя на основную развертку перед нача-
лом работы.
Пусковые импульсы передатчика и генератора развертки
времени могут быть сформированы из колебаний калибрато-
ра, например, путем деления частоты. Однако недостатком
такой системы является то, что пусковые импульсы различ-
ных установок повторяются при этом через совершенно оди-
наковые или кратные промежутки времени, вследствие чего
уменьшается помехозащищенность системы. Одним из мето-
дов устранения помех, будь то искусственные импульсные
помехи или помехи при одновременной работе нескольких
соседних установок, является изменение частоты повторения
импульсов по тому или иному закону («качание» частоты по-
вторения) .
В тех случаях, когда частота повторения не находится в
целочисленном отношении с частотой эталонного генератора,
для генерирования отметок дальности можно применять ста-
бильные калибровочные LC-генераторы с ударным возбужде-
нием, колебания которых возникают синхронно и синфазно с
пусковым импульсом. Частота калибровочного генератора с
ударным возбуждением может устанавливаться по кварцевому
эталону. Существуют также системы, в которых в процессе
работы передатчик и генератор развертки запускаются от ге-
нератора пусковых импульсов, а в процессе калибровки гене-
ратор развертки запускается импульсом, сформированным
путем деления частоты из колебаний кварцевого калибро-
вочного генератора. Передатчик может быть выключен в про-
цессе калибровки схемы измерения дальности. Однако по-
следняя система может быть применена лишь в том случае,
если скорость развертки не зависит от метода подачи пуско-
вого импульса.
Ультразвуковые эталоны времени
Другой метод измерения дальности состоит в использова-
нии ультразвуковой линии. Принцип этого метода заключает-
ся в том, что применяются два импульса, ультразвуковой и ра-
61
диоимпульс. Запуск импульсов синхронизируется и фазируегся
во времени. Ультразвуковой импульс проходит через столб
жидкости, длина которого может изменяться и выбирается
такой, чтобы время прохождения ультразвукового импульса
было равно времени, затрачиваемому радиоимпульсом па путь
от передатчика до цели и обратно к приемнику. Оба импульса
воспроизводятся на одном и том же электронно-лучевом инди-
каторе, причем быстрая развертка дает возможность совмещать
импульсы с большой точностью. При совмещении импульсов
дальность радиолокационной цели будет равна половине рас-
стояния, пройденного ультразвуковой волной, умноженной на
масштабный множитель k, равный отношению скоростей рас-
пространения света и ультразвука.
Скорость распространения ультразвуковых волн в воде
равна примерно 1 500 м/сек, так что ультразвуковая линия
может быть незначительных размеров (например, для цели,
находящейся на расстоянии 30 км, необходима длина водяного
столба в 30 см). Для возбуждения и приема ультразвуковых
колебаний применяются кварцевые пластинки. Иногда вместо
кварцевой пластинки помещается плунжер с плоским дном в
качестве отражателя. В этом случае одна и та же кварцевая
пластинка может быть использована как для передачи, так и
для приема, причем линия вдвое укорачивается, так как вол-
на проходит через столб жидкости дважды.
Главным преимуществом ультразвуковой системы измере-
ния дальности является ее высокая точность, обусловленная
тем, что измерение дальности сводится к измерению длины,
которое может быть очень точно произведено с помощью
микрометрического винта. Недостатком является то, что ско-
рость ультразвуковых волн сильно зависит от температуры,
ввиду чего ультразвуковая линия должна быть помещена в
термостат, без применения которого точность системы суще-
ственно снижается.
Электрические отметки дальности
Выше было отмечено, что в установках, в которых не
требуется большая точность, дальность цели определяется
обычно непосредственно по положению импульса на развертке
электронно-лучевой трубки. В некоторых случаях применяется
штурвал, соединенный с механическим визиром, положение
которого регулируется таким образом, чтобы оз совпадал с
передним фронтом сигнала, отраженного от цели. Применение
растянутой развертки дает возможность повысить точность
совмещения, однако необходимость производить интерполяцию
между отметками дальности не позволяет получить очень вы-
сокую точность измерения.
62
Более совершенным методом, обычно применяемым в
станциях орудийной наводки и в ряде других систем, является
использование электрической отметки дальности с точно регули-
руемой задержкой во времени. В этом методе отпадают все
ошибки согласования электрической шкалы дальности с меха-
нической шкалой. На рис. IV.5 показан один из вариантов
такой системы с поочередным переключением отметок даль-
ности и отраженных сигналов на соответственно смещаемую
развертку, как выше уже было описано. Небольшой участок
развертки, не превышающий интервала между двумя отмет-
ками дальности, растягивается для
увеличения точности совмещения
отметок. Очень часто вместо рас-
тяжения части «грубой» разверт-
ки применяется второй «точный»
индикатор с разверткой типа Л,
длительность которой равна рас-
тягиваемому участку «грубой»
развертки.
В отличие от ранее описанных
методов отметки дальности не
неподвижны, а могут переме-
щаться вдоль развертки. Для
этого они формируются не непо-
средственно из колебаний квар-
цевого генератора, а из колеба-
ний, полученных на выходе точ-
ного вращающегося фазовраща-
теля с непрерывным линейным
изменением фазы, питаемого
Импульс, растягивающий участок
запускающий «точную» развертку
Рис. IV. 5 Точный инд ика-
тор дальности.
Л—отраженный сигнал, Б—отмет-
ки дальности, В — отметка даль-
ности, совмещенная с сигналом
от цели.
кварцевым генератором,
«грубой» развертки, или
второго индикатора, пере-
мещается во времени синхронно с одним из импульсов отмет-
ки дальности с помощью штурвала дальности. Штурвал даль-
ности и фазовращатель связаны между собой механизмом с
соответствующим передаточным отношением. Один оборот
фазовращателя соответствует изменению фазы на 2л или од-
ному периоду генератора, а следовательно, перемещению от-
метки дальности на интервал между двумя соседними импуль-
сами. На шкале фазовращателя наносится шкала дальности,
соответствующая расстоянию между двумя отметками даль-
ности. Таким образом, если совместить отметку дальности,
приходящуюся на растянутый участок (или на точную раз-
вертку), с начальным импульсом от передатчика и устано-
вить при этом шкалы дальности на штурвале дальности и на
фазовращателе на нуль, то при совмещении растянутого им-
пульса отметки с отраженным сигналом можно прочитать
63
на шкале штурвала дальности дальность с точностью до одной
отметки дальности, а на шкале фазовращателя соответствую-
щую часть этого интервала.
В некоторых системах на развертке видна только та от-
метка дальности, которая совмещена с растянутым участком
или с точной разверткой. Могут быть также применены не
две, а одна развертка, причем отметка дальности получается
методом модуляции яркости, а не отклонением. Системы та-
кого типа называются «двухшкальными» и могу? обеспечить
точность отсчета до 5—10 м.
Точность измерения закого же порядка дают системы с
кольцевой разверткой в «точном» индикаторе. В этой системе
кварцевый генератор дает два колебания, сдвинутых одно от-
носительно другого на 90°. При подаче двух таких напряже-
ний на взаимно перпендикулярные пластины электронно-луче-
вой трубки электронный луч описывает на экране окружность.
Селекторный импульс, использовавшийся в предыдущей си-
стеме для растяжения участка «грубой» развертки, в этой
системе подсвечивает трубку точного индикатора и служит
для выбора одной из окружностей точной развертки. Роль
фазовращателя играет радиальная визирная нить, помещен-
ная у экрана точного индикатора и вращающаяся вокруг
центра экрана с помощью такого же передаточного механизма,
как и в предыдущей системе. Развертка индикатора грубого
отсчета может быть при этом как кольцевого типа, так и ти-
па А, Селекторный импульс подсветки точной развертки по-
дается одновременно на трубку грубого отсчета для облегче-
ния процесса выбора цели. Разница в питании подсвечиваю-
щим импульсом- трубок грубого и тонного отсчетов заключает-
ся в том, что трубка точного отсчета светится только в момент
подачи подсвечивающего импульса, в то время как на раз-
вертке грубого отсчета подсвечивающий импульс создает уча-
сток несколько повышенной яркости.
ГЛАВА V
ОПРЕДЕЛЕНИЕ АЗИМУТА
Почти все радиолокационные станции, кроме дальности,
должны определять также азимут цели. Например, все поис-
ковые радиолокационные станции, наземные, корабельные и
самолетные, должны определять как дальность, так и азимут
цели. В некоторых случаях требуется, кроме того, определение
угла места цели. Методы, используемые для определения
угловых координат, изменяются в соответствии с назначением.
В некоторых случаях, например, когда радиолокатор служит
для управления огнем, необходима большая точность опреде-
ления угловых координат, но при этом обычно только по од-
ной цели одновременно. В случае поисковых радиолокацион-
ных станций необходимо иметь полную картину сложившей-
ся в данный момент обстановки и производить сопровожде-
ние нескольких целей одновременно, но при этом требования
в отношении точности обычно снижаются.
Многие из методов, применяемых для определения азиму-
та, особенно в станциях метрового диапазона, заимствованы
из пеленгационной техники.
На самых длинных волнах радиолокационного диапазона
для передачи и приема применяли отдельные антенны. При
этом передающая антенна служила для облучения некоторой
области перед станцией, а приемная антенна—для определе-
ния направления на цель. В случае станций орудийной на-
водки ( л =^= 3,5—5,5 м) для этой цели применялась обычно
модифицированная антенная система Эдкока, тогда как в
случае станций дальнего обнаружения использовались систе-
мы взаимно перпендикулярных вибраторов и гониометр. Эти
методы далее описаны подробнее. Следует отметить, что на
метровых волнах из-за требующихся больших размеров антенн
невозможно применение остронаправленных диаграмм излу-
чения. Поэтому определение азимута может быть произведе-
но только нулевым методом, а не по максимуму сигнала.
С переходом на более короткие волны оказалось возмож-
ным создать остронаправленные антенны и перейти на так
') Основы радиолокации
65
называемый «прожекторный» поиск, при котором непрерыв-
но вращающийся узкий луч облучает в каждый данный мо-
мент небольшой участок пространства. При этом азимут каж-
дой цели может быть определен по мгновенному положению
антенны. При таком поиске существенные преимущества дает
использование для передачи и приема одной и той же
антенны.
С введением систем с вращающимся антенным лучом бы-
ла создана новая система индикации—индикатор кругового
обзора, в котором применяется вращающаяся радиальная
развертка дальности, направление которой в любой данный
момент параллельно направлению луча антенны (пли отли-
чается от него на любой заданный угол). Принятые импуль-
сы модулируют яркость светового пятна электронно-лучевой
трубки и вызывают появление коротких дужек, расположение
которых на экране электронно-лучевой трубки относительно
его центра соответствует расположению целей относительно
антенной системы. При этом на экран электронно-лучевой
трубки может быть наложена прозрачная карта местности в
соответствующем масштабе. Точность по азимуту индикатора
кругового обзора не очень велика, тем не менее он широко
применяется ввиду того, что дает непрерывное изображение
всей обстановки при возможности одновременного сопровож-
дения нескольких целей. В § 2 этой главы описаны принципы
работы некоторых цепей такого индикатора.
Рис. V. 1. Метод равносигнальной
зоны.
В тех случаях, как, например, в станциях орудийной на-
водки, когда требуется максимально достижимая точность
при определении азимута, применяется метод равносигналь-
ной зоны. Равносигнальная зона получается за счет того, что
диаграмма излучения антенны с большой скоростью откло-
няется в горизонтальной плоскости на равные небольшие
углы в обе стороны от геометрической оси антенной системы.
Индикатор устроен таким образом, что указывает величину
сигнала в каждом из крайних положений отклоненной диа-
граммы. В том случае, когда величины сигналов одинаковы,
цель находится точно на геометрической оси антенны
(рис. V.l). С помощью этого метода достигается гораздо
большая точность, чем при работе по максимуму сигнала, во
66
первых потому, что здесь работа ведется на крутом участке
диаграммы, где скорость изменения интенсивности сигнала в
зависимости от угла значительно больше, чем в максимуме
и, во-вторых, потому, что система индикации показывает знак
неравенства сигналов и поэтому известно, в какую сторону
следует передвинуть антенну, чтобы получить равенство сиг-
налов. Некоторые методы получения равносигнальной зоны
описаны в § 3 этой главы.
Хотя в этой главе рассматривается главным образом фор-
ма диаграммы антенны в горизонтальной плоскости, не сле-
дует забывать, что форма диаграммы в вертикальной плоско-
сти имеет очень большое значение при определении азимута.
Так, например, в более ранних радиолокационных станциях
метрового диапазона всегда было очень трудно получить
удовлетворительную дальность при небольших углах места.
Станции обнаружения самолетов должны иметь возможность
просматривать пространство в вертикальной плоскости в пре-
делах от 0° до 90°. В то же время для обнаружения подвод-
ных лодок следует отдать предпочтение лучу, сконцентриро-
ванному под нулевым углом в вертикальной плоскости. Для
корабельной установки такого типа величина раствора диа-
граммы в вертикальной плоскости будет зависеть в значи-
тельной степени от того, установлена ли антенна на стабили-
зированной платформе или нет. Эти вопросы, а также и дру-
гие, относящиеся к форме диаграммы в вертикальной1 плоско-
сти, рассматриваются в § 4.
1. Системы круговой направленности
Система «скрещенных» вибраторов
Система взаимноперпендикулярных («скрещенных») вибра-
торов применяется в метровом диапазоне волн. Она показана
схематически на рис. V.2. Вибраторы установлены точно под
прямым углом друг к другу в горизонтальной плоскости (в
плоскости X, У), причем ось Х-вибратора параллельна оси
передающей антенны. Если цель находится в направлении
ОТ от станции и взяты полуволновые вибраторы, то отражен-
ная волна будет индуктировать э. д. с. с амплитудами
£0 cos sin О
cos 6
EQ cos cos 6
соответственно в Х-вибраторах и У-вибраторах. Следователь-
но, по величине этих двух амплитуд можно найти 6. Для
5*
67
т
Рис. V. 2. Определение азимута
методом скрещенных вибрато-
ров.
определения отношения амплитуд используется гониометр. Он
состоит из двух катушек, установленных под прямыми угла-
ми, причем одна катушка сое-
диняется с помощью фидера с
Х-вибратором, а другая с У-виб-
ратором. Третья катушка, из-
вестная под названием «инди-
каторной», может вращаться
между двумя неподвижными
катушками. Из рис. V.3, видно,
что нуль напряжения на инди-
каторной катушке будет при
угле ср, определяемом из урав-
нения
Д sin ср — /2 cos ср — О, (V.1)
где Ц и /2—токи в неподвиж-
ных катушках (считается, что
токи находятся в фазе). Если
линии передачи и катушкам электрически эквивалентны, то:
cos — sin 6 Л
2 2
cos cos 9
sin 9
и следовательно, ctgO^ctgcp, гак что положение индикаторной
Рис. V. 3. Схематическое изо
бражение гониометра.
катушки при нулевом напряже-
нии является мерой азимуталь-
ного угла о.
Этот метод дает двухзначные
показания, так как, если сигнал
придет с направления Т'О, отли-
чающегося от направления ТО
на 180°, установка индикаторной
катушки не изменится. Чтобы
устранить эту двухзначность, за
вибраторами устанавливается от-
ражатель из двух четвертьволно-
вых вибраторов, которые могут
быть замкнуты контактами реле.
Если отраженный сигнал прихо-
дит от самолета, находящегося
впереди станции, амплитуда отраженного сигнала при замы-
кании реле увеличивается, тогда как при отражении от само-
68
лета, находящегося позади станции, амплитуда уменьшается.
Основным недостатком описанной системы является излу-
чение назад, вследствие чего сильно возрастают помехи от
местных предметов.
Если линии электрически не эквивалентны, то оба тока
(/1 и Л) не будут в фазе и установка индикаторной катушки
на нуль невозможна. Соотношение y~ = ctg v все же прибли-
женно продолжает соблюдаться, однако точность определения
азимута снижается. При наличии рассогласования между ан-
тенной и линиями передачи появляются значительные ошибки.
Ввиду больших размеров антенных систем в метровом
диапазоне длина линий передачи может доходить до 300 м,
вследствие чего электрически линии значительно отличаются
между собой. Поэтому в каждую линию обычно включают со-
ответствующее фазирующее устройство.
Рис. V. 4. Диаграмма моди-
фицированной антенны
Эдкока.
Модифицированная антенная система Эдкока
Антенна Эдкока применяется также в метровом диапазоне
и состоит из двух горизонтальных вибраторов, разнесенных
на расстояние одной длины волны
и питаемых в противофазе. Вся си-
стема может вращаться. Подобная
антенна имеет острый нуль диа-
граммы (см. рис. V.4), так что опре-
деление направления по нулевому
сигналу возможно путем непосред-
ственного поворота антенны. Недо-
статок этого метода так же, как и
метода скрещенных вибраторов, за-
ключается в том, что в момент, ког-
да производится отсчет, сигнал ис-
чезает. Это неудобство устраняется
в других системах путем добавления
постоянного сигнала от ненаправленной приемной антенны.
2. Системы кругового обзора
Применение одной антенны для передачи и приема
Применение одной антенны для передачи и приема поз-
воляет уменьшить размеры и устранить трудности, связанные
с синхронным вращением двух антенн. В метровом диапазоне
волн (приблизительно до частоты 600 мггц) применяется ме-
тод совмещения передающей и приемной систем, показанный
69
схематически на рис. V.5. Принцип работы системы состоит
в следующем. В процессе передачи импульса в обоих искро-
вых разрядниках (X и У) проскакивает искра, и эти точки
замыкаются по высокой частоте накоротко. В точках А и В
сопротивления при этом равны бесконечности (так как длина
отрезков ХА и YB равна 1/4 ), так что мощность передат-
чика поступает непосредственно в антенну, сопротивление
которой мало, а не в приемник. По окончании импульса пе-
редатчика искровые разрядники размыкаются, в точке А соз-
дается короткое замыкание, а в точке В—бесконечно большое
сопротивление. Следовательно вся энергия из антенны посту-
пает через точку У в приемник. Такой же принцип применяет-
ся при использовании одной антенны для передачи и приема
в сантиметровом диапазоне. Однако конструктивно в этом
случае вся система выполняется иначе. Искровые разрядники
являются неотъемлемым элементом объемных резонаторов.
Рис. V. 5. Переключатель с приема на передачу.
X и У — газозые разрядники.
Для увеличения скорости ионизации и деионизации искро-
вой разрядник должен работать при пониженном давлении.
Индикаторы кругового обзора
В индикаторе кругового обзора, применяемом вместе с
вращающейся направленной антенной, сигнал появляется в
результате модуляции яркости светового пятна на экране
электронно-лучевой трубки. Развертка дальности обычно осу-
ществляется с помощью отклоняющих катушек, расположенных
вокруг горловины трубки. Ток, питающий катушки, имеет ли-
нейную пилообразную форму. Так как очень важно, чтобы
в начале развертки ток был равен нулю, обычно применяется
напряжение с равными площадями положительного и отри-
цательного полупериодов, причем положительный полупериод
используется для развертки, а в течение отрицательного по-
лупериода трубка запирается специальным сигналом. В на-
70
земных станциях отклоняющая катушка часто вращается с
помощью следящей системы синхронно с вращением антенны.
В другой системе применяются две неподвижные катушки,
установленные под прямыми углами у горловины электрон-
но-лучевой трубки. Катушки питаются при помощи устрой-
ства, подобного гониометру, действующему как трансформа-
тор тока. Ток пилообразной формы подается на обмотку ро-
тора гониометра, а отклоняющие катушки электронно-луче-
вой трубки питаются от двух катушек статора, установлен-
ных под прямыми углами. Таким образом азимут развертки
дальности на экране электронно-лучевой трубки будет вос-
производить азимут гониометра, связанного с валом антенны
и точно воспроизводящего в свою очередь азимут антенны.
Отраженные сигналы после детектирования подаются на
управляющий электрод электронно-лучевой трубки для мо-
дуляции яркости светового пятна. Ввиду того, что слишком
большое напряжение на сетке может вызывать дефокусиров-
ку, обычно применяется ограничитель уровня сигнала. Огра-
ничение устанавливается на уровне, превышающем пример-
но в два раза уровень шумов, так что сигналы любой вели-
чины дают полную модуляцию яркости пятна без дефокуси-
ровки, тогда как пиковые напряжения шумов имеют вид ед-
ва заметных «вспышек».
Электронно-лучевая трубка должна иметь большое после-
свечение, чтобы изображение частично сохранялось к началу
следующего оборота антенны. Продолжительность послесвече-
ния выбирают таким образом, чтобы оно было немного боль-
ше одного периода вращения антенны. Сигналы, отраженные
от цели, появляются в виде ярких дужек, середина которых
дает азимут цели, а расстояние от центра трубки — даль-
ность. На рис. V.6 приведена фотография экрана индикатора
кругового обзора.
Во многих случаях для индикатора применяется полярная
система координат) (г, 0). В этом случае очень удобно вос-
производить калибровочные отметки азимута и дальности в
виде слабо светящейся сетки из радиальных линий и концен-
трических окружностей. Сетка осуществляется электрическим
путем, причем соответствующие импульсы генерируются во
вспомогательных цепях (отметки азимута получаются обычно
с помощью коммутатора, механически связанного с поворот-
ным механизмом антенны) и смешиваются с сигналами радио-
локатора.
В ряде случаев необходимо иметь увеличенное изображе-
ние какого-либо сектора. Это достигается с помощью допол-
йительной системы отклоняющих катушек, отклоняющих
центр вращения светового пятна электронно-лучевой трубки
в любом направлении за пределы экрана трубки. Развертка
71
при этом «.растягивается» так, что любой выбранный сектор
развертки может быть соответствующим образом увеличен.
Рис. V. 6. Экран индикатора кругового обзора. Сигналы
в пределах первых двух масштабных окружностей в основ-
ном являются отражениями ог местных предметов, а ра-
диальные светлые линии представляют собой линии раз-
вертки дальности, подсвеченные сигналами помех. Отдель-
ные светлые дужки являются сигналами, отраженными от
самолетов.
В большинстве случаев применяется линейная развертка
дальности, хотя иногда может быть использована такая раз-
вертка, скорость которой несколько уменьшается по мере
увеличения дальности. Такой тип развертки проще получить,
так как она является начальным участком экспоненциальной
кривой. Наблюдающееся при этом небольшое искажение мас-
штаба в ряде случаев может быть терпимо. В немногих слу-
чаях специально применяются нелинейные развертки времени.
Например, в случае применения самолетной станции слепого
бомбометания (рассматриваемой подробнее в § 4) наклонные
дальности должны быть преобразованы в горизонтальные
72
дальности с тем, чтобы
но было воспроизвести
самолет, в правильном
что развертка должна
на индикаторе кругового обзора мож-
карту местности, над которой летит
масштабе. Из рис. V.7 можно видеть,
2/z
начинаться через интервал-^— после
Рис. V. 7. Определение дальности в
самолетной станции слепого бомбоме-
тания.
импульса передатчика, так как этот интервал представляет со-
бой время запаздывания первого отражения от земли. Начи-
ная с этого момента, развертка должна сначала итти быстро,
1 /f ct \2
а затем медленнее, следуя закону г — I/ — А2-
Индикатор дальность — азимут типа В
Видоизменением индикатора кругового обзора является
индикатор секторного обзора в прямоугольной системе коор-
динат (дальности и азимута) типа В. Сигналы модулируют
электронный луч методом изменения яркости, как и в индика-
торе кругового обзора, но развертка дальности представляет
собой вертикальную линию, перемещающуюся по экрану в
соответствии с изменениями азимута антенны. Таким образом
сигналы, отраженные от целей, появляются на экране (с соот-
ветствующим послесвечением) в виде горизонтальных линий,
середина которых соответствует азимуту отраженного сигнала
и длина которых зависит от ширины луча радиолокатора.
Индикатор дальность—азимут типа В широко применяется в
современных радиолокационных установках.
3. Методы образования равносигнальной зоны
Система коммутации луча с целью получения равносиг-
нальной зоны широко применяется для точного определения
направления на цель. Коммутация луча может применяться
только при передаче, или только при приеме, либо при пере-
73
даче и приеме одновременно. На рис. V.8 показана система,
применяемая на волне порядка 1,5 м. Коммутация осуществ-
ляется с частотой около 20 гц с помощью вращающегося пе-
реключателя, поочередно меняющего
Фидер
Рис. V. 8.’- Вращающийся коммутатор
равносигнальной зоны.
длину линий от антен-
ны, состоящей из четы-
рех вибраторов, до при-
емника. При замыкании
контактов А и В длины
линий от вибраторов
равны соответственно
/, 14- %, I + 2х и I + Зх,
тогда как при замыка-
нии контактов С и Д
длины линий нара-
стают в обратном по-
рядке.
Дефазировка пита-
ния вибраторов вызы-
вает отклонение луча
от геометрической оси
антенны. Изменением
величины х можно ре-
гулировать степень отклонения луча. В силу симметрии ком-
мутатора луч отклоняется в обе стороны на один и тот же
Рис. V. 9. Ламповый коммутатор равносигнальной зоны.
угол. Более совершенным методом является применение элек-
тронных переключателей. Принцип изменения распределения
фаз по апертуре антенны тот же самый, но переключение осу-
ществляется с помощью поочередно замыкаемых диодов
(рис. V.9).
В индикаторе применяется развертка дальности с модуля-
цией отклонением электронного луча, несколько смещаемая
74
вправо и влево синхронно с отклонением луча антенны (ин-
дикатор типа /С). Сигналы, соответствующие двум положениям
луча антенны, видны при этом рядом, и их величины регули-
руют поворотом всей антенной системы. Момент равенства
величин сигналов соответствует точному направлению оси
антенны на цель. Применяется также развертка (в частности
в самолетной аппаратуре),
при которой оба сигнала об-
ращены в противоположные
стороны (индикатор типа L,
см. рис. V.10). Смещение
цели относительно геометри-
ческой оси антенны при этом
вызывает смещение цели со-
ставного сигнала вправо или
влево, в том же направле-
нии, что и цель.
Так как измерение углов
методом равносигнальной зо-
ны основано на сравнении
амплитуд двух сигналов, бы-
Рис. V. 10. Индикатор дальности
и азимута типа L.
[Л*—сигналы, отраженные от цели в
разных положениях луча, Б— 'отра-
жения от земной поверхности.
строе замирание отраженно-
го сигнала может явиться
источником ошибок в гораз-
до большей степени, чем при
измерении дальности. Это
особенно существенно в том случае, если по какой либо при-
чине замирание отраженного сигнала происходит с частотой,
близкой к частоте коммутации луча. Боковые лепестки в диа-
грамме излучения антенны могут явиться причиной так назы-
ваемого «ложного пеленга» (равенство сигналов не в направ-
лении геометрической оси антенны). Для уменьшения боковых
-лепестков иногда уменьшают ток питания периферийных виб-
раторов антенны (рис. V.8) относительно центральных вибра-
торов, что несколько увеличивает ширину главного лепестка.
Метод равносигнальной зоны широко применяется также
в радиолокационных станциях сантиметрового диапазона.
В тех случаях, когда определение направления на цель
должно быть произведено как по углу места, так и по ази-
муту, удобно пользоваться антенной системой с параболиче-
ским зеркалом, питаемым одним вибратором. Если вибратор
несколько сместить относительно центра зеркала, то и ось
луча сместится на эквивалентную величину в противополож-
ном направлении. Если вибратор при этом вращается вокруг
оси зеркала, то ось луча будет описывать конус, или произ-
водить так называемый «конический обзор» пространства.
При использовании электронно-лучевых трубок с разверт-
75
кой типа А в качестве индикаторов можно осуществить по-
сылку передатчиком одиночных импульсов в каждом из мгно-
венных положений вибратора слева, оправа, снизу и сверху
относительно геометрической оси антенны. При этом синхрон-
но вращающийся с вибратором коммутатор распределяет
верхний и нижний импульсы на соответственно смещенные
последовательные развертки индикатора угла места, а левый
и правый импульсы—на смещенные развертки индикатора
азимута. Следовательно, операторы азимута и угла места мо-
гут независимо один от другого производить выравнивание
сигналов и наведение антенны на цель.
В несколько более сложных визуальных индикаторах и
при автоматическом сопровождении цели по угловым коорди-
натам число импульсов на один оборот вибратора может
быть больше четырех и не быть кратным числу оборотов
вибратора.
При вращении вибратора вращается также соответственно
плоскость поляризации луча. Поэтому при применении от-
дельных параболических антенн для передачи и приема наи-
лучшие результаты получаются при синхронном вращении
передающего и приемного вибраторов. При этом один из виб-
раторов может и не смещаться относительно оси антенны, так
что конический обзор производит только один из лучей. Си-
стема упрощается механически, если вращать только один из
вибраторов. При этом второй вибратор устанавливают обыч-
но под углом в 45° к горизонтали, так что плоскости поляри-
зации приемного и передающего лучей оказываются как по
азимуту, так и по углу места под углом в 45°. Такое решение
является достаточно удовлетворительным компромиссом.
Для осуществления равносигнальной зоны по одной угло-
вой координате вибратору параболической антенны может
быть придано не вращательное, а колебательное движение.
Методы создания равносигнальной зоны с другими типами
антенн сантиметрового диапазона обычно тесно связаны с
кон структи вн ы м и особен ностями поел ед них.
4. Значение формы диаграммы в вертикальной плоскости
Выше было отмечено, что как для наземных, так и мор-
ских радиолокационных станций обнаружения необходимо
иметь возможность производить поиск во всем пространстве
под углами места от 0 до 90°. При обнаружении самолетов
можно ограничиться высотой порядка 15 000 м, так что иде-
альная зона поиска станции по углу места должна быть при-
близительно'такой, как показано на рис. V.11. Из рисунка
можно видеть, что усиление антенны должно снижаться при
76
увеличении угла места а выше значения а^, соответствующе-
го высоте 15 000 м на максимальной дальности. Если не при-
нимать во внимание кривизну земли, то легко можно видеть,
что диаграмма антенны в вертикальной плоскости ф (а)
должна следовать закону косеканса при а , > ат, ">—const
при 0<а<а/7ги = 0 при а < 0, учитывая (см. уравн. III.13),
что дальность радиолокатора пропорциональна коэффициенту
ъ напряженности поля антенны. При такой форме диаграммы
при углах места интенсивность отраженного сигнала
ст самолета, летящего на постоянной высоте, не будет зави-
сеть от дальности. Такую идеальную форму диаграммы труд-
но осуществить в длинноволновых радиолокационных стан-
циях, в частности, трудно получить точную отсечку диаграммы
при а = 0, чтобы избежать появления лепестков. Для осуще-
ствления этого очевидно необходима антенна с большим от-
ношением апертуры к длине волны. Вообще следует считать,
что по конструктивным соображениям на частотах ниже
600 мггц уже очень трудно создать диаграмму без лепестков.
Рис. V. 11. Идеальная диаграмма антен-
ны в вертикальной плоскости.
Для осуществления поиска в требуемых пределах по углу
места в длинноволновой части диапазона был разработан ряд
методов. Наиболее простым из них является использование
вспомогательной антенны, расположенной на другой высоте
над землей, чем основная антенна. Высоты главной и вспомо-
гательной антенн выбирают таким образом, чтобы большая
часть провалов в одной диаграмме в вертикальной плоскости
была заполнена лепестками в другой. Путем переключения
антенн (вручную или непрерывно автоматически) можно ве-
сти непрерывное слежение за целью.
Другим методом, пригодным только в наземных установ-
ках, является использование вертикальной поляризации.
В этом случае провалы при углах места, превышающих 8°,
значительно уменьшаются, так как коэфициент отражения (см.
рис. II 1.5) становится незначительным. Соответственно даль-
ность в максимумах лепестков также при этом уменьшается.
Однако этот метод не дает ощутимых результатов, когда
77
имеется много провалов на небольших углах места при при-
менении антенн, расположенных на большой высоте.
Для заполнения провалов применяются также асимметрич-
ные антенны или же симметричные, но направленные вверх
с целью уменьшения интенсивности отраженного луча. Запол-
нение провалов изменяется при этом с углом места, однако,
первый провал обычно сохраняется.
В сантиметровом диапазоне можно получить направлен-
ность достаточную для того, чтобы диаграмма в вертикальной
плоскости в основном не зависела от отражений от земли.
Кроме того значительно легче придавать диаграмме желаемую
форму. Так, например, если излучателем является волновод с
рупором, то диаграмму по закону cosec2 а можно получить при
соответствующей форме отражающего зеркала. Точный про-
филь зеркала зависит от требуемой величины э.т, но в боль-
шинстве случаев вертикальное сечение зеркала приближается
к четверти окружности, соединенной с дугой параболы, тогда
как сечение, перпендикулярное к плоскости «веерного» луча,
является параболой. Изготовление требуемого отражателя
обычно связано с известными трудностями, вследствие чего в
современных станциях нужную форму луча обычно получают
в два этапа. Первичный излучатель, представляющий собой
линейную антенну или усеченный параболоид, служит для
создания необходимой формы диаграммы в азимутальной
плоскости и облучает отражатель, который создает требуе-
мую форму диаграммы в вертикальной плоскости. Антенны
с диаграммой по закону cosec2 а применяются также в некото-
рых самолетных станциях, как например, в. станции слепого
бомбометания и самолетной станции обнаружения надводных
объектов.
Работа станции слепого бомбометания основана на том,
что сигналы, отраженные от земной поверхности, изменяются
по величине в соответствии • с особенностями почвы. В част-
ности было найдено, что сигналы, отраженные от водной
поверхности, значительно слабее сигналов, отраженных от
земли и особенно сигналов от застроенной территории. В упо-
мянутой станции применен индикатор кругового обзора с не-
линейной разверткой дальности, о которой уже упоминалось
выше. На экране трубки появляется контурная карта местно-
сти, над которой пролетает самолет. На рисунке V.12 изобра-
жена фотография экрана индикатора кругового обзора стан-
ции слепого бомбометания.
Для станции слепого бомбометания и в меньшей степени
для самолетной станции обнаружения надводных объектов
степень приближения к закону cosec2 а имеет большое значение
в там отношении, чтобы интенсивность сигнала зависела
только от характера местности и от высоты полета самолета^
но не от дальности. Для получения хорошей разрешающей
78
б
Рис. V. 12. Вид индикатора кругового обзора
станции слепого бомбометания при высоте по-
лета 530 м\
а — фотография экрана, б — карта местности.
79
способности антенны этих станций должны иметь большое
усиление и, соответственно, значительные размеры в горизон-
тальной плоскости. Кроме того их необходимо стабилизировать
во избежание влияния качки самолета. Стабилизация антенны
имеет большое значение также в случае морских радиолокато-
ров. В современных корабельных радиолокационных станциях
обычно стабилизируется сама антенна радиолокатора так, что
ее оси координат всегда неподвижны в пространстве.
5. Ошибки вследствие неровностей почвы и неоднородности
атмосферы
При определении азимута цели, кроме инструментальных,
могут быть ошибки в результате непрямолинейного распро-
странения радиоволн вследствие тех или иных атмосферных
условий и в результате отражений от окружающей местности.
Ошибки, обусловленные атмосферой, обычно очень незначи-
тельны и, как показали измерения, редко превышают несколь-
ко угловых минут. В редких случаях, например, когда волна
проходит вдоль края теплого фронта, встречаются более зна-
чительные ошибки. Ошибки, обусловленные влиянием мест-
ности, обычно гораздо серьезнее, но их можно заранее пред-
сказать теоретически на основании учета характера местности
в пределах нескольких сот метров от радиолокационной стан-
ции. Ошибки наиболее серьезны, когда работа производится
близ провала диаграммы в вертикальной плоскости. Следует
различать влияние, обусловливаемое отражениями от земной
поверхности, и влияние дифракции при наличии препятствий
на пути распространения луча. При условии достаточно ров-
ной местности и отсутствии близ антенны препятствий сколь-
ко-нибудь значительных размеров, абсолютные ошибки на
метровых волнах при определении направления редко пре-
вышают 1 или 2°. Часть этих ошибок может быть устранена
путем калибровки станции. При остронаправленных систе-
мах такие ошибки значительно меньше. На сантиметровых
волнах ошибки, обусловливаемые земной поверхностью с по-
перечным уклоном, обычно очень малы, в то время как
ошибки вследствие дифракции могут доходить до 1—2°, если
вблизи антенны расположены крупные экранирующие местные
предметы. Во избежание ошибок, обусловленных характером
местности вокруг радиолокационной станции, следует как
правило, выбирать участок с оптической видимостью предпо-
лагаемых целей, и избегать участков с значительным попереч-
ным уклоном или с близкорасположенными экранирующими
местными предметами.
ГЛАВА VI
ОПРЕДЕЛЕНИЕ УГЛА МЕСТА
Из предыдущей главы можно видеть, что в большинстве
случаев радиолокационные станции должны определять, кро-
ме дальности, также азимут цели. Третьей координатой яв-
ляется угол места. В некоторых случаях определение обеих
угловых координат тесно связано друг с другом. Совместное
определение обеих координат с помощью одного индикатора
(«двухмерного» индикатора угловых координат) рассматри-
вается в главе VII.
При обнаружении цели с помощью, например, станции
слепого бомбометания или самолетной станции обнаружения
надводных объектов угол места цели не остается постоянным,
но измерение его не необходимо, так как он может быть вы-
числен по известным наклонной дальности цели и высоте по-
лета самолета. Методы, рассматриваемые в этой главе, при-
меняются в наземных и корабельных станциях, которые опре-
деляют угол места цели с помощью самостоятельного («одно-
мерного») индикатора угла места.
1. Наземные и корабельные радиолокационные станции
обнаружения самолетов
Наземные и корабельные радиолокационные станции,
предназначенные для обнаружения и определения координат
самолетов, можно разделить на три класса, а именно на стан-
ции, определяющие только наклонную дальность и азимут, на
станции, определяющие только наклонную дальность и угол
места, и на станции, определяющие все три координаты.
К первому классу относятся обычно станции кругового обзо-
ра или станции с широкой диаграммой излучения, устройство
которых не предусматривает определения угла места. Такие
станции в дальнейшем не будут рассматриваться. Станции
второго класса являются вспомогательными установками,
применяемыми вместе с какой-либо станцией, определяющей
цельность и азимут. Третий класс содержит наиболее много-
6
Основы радиолокации
81
численный и разнообразный ряд типов станций, как напри-
мер, станции с широкой диаграммой излучения, станции с
диаграммами «карандашного» типа или станции с диаграм-
мами «веерного» типа.
2. Станции с широкой диаграммой излучения
Определение угла места в станциях этого типа основано
на использовании интерференции между прямой волной, от-
раженной от цели, и волной, поступающей в приемник после
отражения от земли. Если отражение происходит в основном
от ровной поверхности, то диаграмму интерференции можно
вычислить (см. гл. III) теоретически, и она является наиболее
простым методом определения угла места. При этом не тре-
буется какой-либо специальной аппаратуры. Метод состоит в
регистрации первого отраженного импульса на той дальности,
на которой впервые обнаружена цель, и изменений интенсив-
ности импульса от этой цели по мере приближения ее к стан-
ции. Сравнение результатов измерения с известной диаграм-
мой излучения станции дает возможность судить об угле ме-
ста цели. Однако во многих случаях расшифровка результа-
тов подобных измерений достаточно затруднительна. Если к
тому же самолет изменит высоту или ракурс, наблюдатель
может быть введен в заблуждение.
Метод разнесенных по высоте антенн
Более совершенным методом является так называемый ме-
тод «разнесенных по высоте антенн», в котором производится
сравнение электродвижущих сил, наведенных в двух антен-
нах, расположенных на разной высоте над землей. Этот ме-
тод, подобно предыдущему, применяется только в станциях
метрового диапазона волн.
В соответствии с явлением интерференции, рассмотренным
в гл. III, следует отметить, что прямая волна, попадающая в
приемную антенну, установленную на высоте h над землей
(при ровной местности с коэфициентом отражения о =—1),
будет опережать элементарную волну в точке О (рис. II 1.6)
2 Tv
на угол с = hk sin где & = , а отраженная волна будет
запаздывать по фазе на такую же величину, не считая сдвига
фазы на 180°. Следовательно амплитуду и фазу принятого
прямого сигнала можно представить выражением f(a) i ,
а сигнала, отраженного от земли, выражением — f (а) е
где f ( а)—функция, соответствующая диаграмме антенны в
82
«свободном пространстве» в вертикальной плоскости. Следо-
вательно, получающийся в результате сигнал будет равен
£’ = 2//(а) sin(AA sina), (VI.1)
Его фаза сдвинута на 90° относительно элементарной волны
в точке 0.
Если взять две приемные антенны на высоте hx и h2 над
землей, то отношение амплитуд двух сигналов будет:
sin (Л2£ sin a)
sin (h}k sin a)
Следовательно, если hi и h2 известны, то по отношению
амплитуд можно определить угол а. Для примера рассмотрим
антенную систему, при-
меняющуюся в станци-
ях дальнего обнаруже-
ния. На рис. VI.I,а по-
казана зависимость
э. д. с. от угла места
цели в каждой антенне
при небольших углах
места для h\ = 2л и
/i2 == 6 а . Отношение
обеих э. д. с. показано
на рис. VI. 1,6. Из при-
веденной кривой вид-
но, что при таком со-
отношении высот ан-
тенн можно определить
угол места только до
7,5°. В системах даль-
Рис. VI, 1. Определение угла места мето- него
обнаружения так
дом разнесенных по высоте антенн.
же. как и в станциях
Л-диаграмма верхней антенны, Б—диаграмма ниж- ОРУДИИНОИ НЗВОДКИ, ДЛЯ
ней антенны.
сравнения амплитуд
сигналов обычно пользуются гониометром. Это возможно по-
тому, что обе э. д. с., индуктируемые в антеннах, сдвинуты по
фазе на 90° по сравнению с фазой элементарной волны в точ-
ке О (рис. III.6) и, следовательно, находятся в фазе (или в
противофазе) друг с другом. Если обе антенны присоединены
к статорным обмоткам гониометра при помощи линий оди-
наковой электрической длины, то токи в этих обмотках также
будут находиться в фазе. Если индикаторная катушка гонио-
метра установлена под углом к статорной обмотке, соеди-
ненной с верхней антенной, то нуль напряжения будет при
условии, что
2 sin (h2 k sin a)
tgcp =----------------:-------
sin (/zx k sin a)
(VL2)
83
На практике полученные результаты измерений должны быть
несколько скорректированы в зависимости от характера мест-
ности. Поправки обычно незначительны и могут быть полу-
чены в результате калибровки станции по испытательному
полету самолета. Неустранимым недостатком этого метода
является многозначность измерения, так как на заданной
дальности может быть несколько значений высоты самолета,
соответствующих одному и тому же отношению э. д. с. Эти
значения высот обычно значительно отличаются друг от дру-
га. Истинное значение высоты может быть легко найдено
благодаря тому, что ложные значения высот имеют тенден-
цию к быстрому изменению по мере приближения цели, тогда
как истинное значение высоты остается почти постоянным.
Одной из возможностей устранения многозначности является
применение третьей антенны.
Влияние характера окружающей местности
Основным недостатком метода с разнесенными по высоте
антеннами является то, что участок, на котором установлена
антенна, должен быть ровным или иметь лишь весьма незна-
чительный уклон. Любые значительные неровности почвы
близ станции могут ограничить точность или даже сделать
систему негодной к эксплоатации. На многих станциях даль-
него обнаружения, применяющих описанный выше метод,
определение угла места приходится ограничивать определен-
ными областями по тем азимутальным направлениям, где
почва достаточно ровная. Учитывая недостатки этого метода,
можно однако указать, что за немногимй исключениями стан-
ции дают точность порядка + 4° по самолетам, летящим
выше 1 500 м. Таким образом неустранимым недостатком ме-
тода определения угла места с помощью разнесенных по вы-
соте антенн является то, что он становится неточным на не-
больших углах места, и для каждой площадки станции при-
ходится устана(вливать нижний предел по углу места. Для
средних площадок в станциях дальнего обнаружения этот
угол составляет около 172°. Калибровка станций произво-
дится обычно также по испытательным полетам самолетов.
3. Станции кругового обзора с ^одновременным определением
угла места
Метод определения угла места с помощью разнесенных по
высоте антенн можно применить к поисковым радиолокаци-
онным станциям с круговым обзором при условии, что луч
антенны можно останавливать и направлять на цель в про-
цессе определения нулевого напряжения с помощью гонио-
84
метра (или эквивалентного устройства). Однако во многих
случаях подобный перерыв в работе индикатора кругового
обзора неприемлем, и поэтому необходим метод, который
давал бы возможность определять угол места при непрерыв-
но вращающейся антенне. В одном из таких методов, нашед-
шем себе широкое применение в наземных станциях перехвата
самолетов, использованы две приемные антенны, установлен-
ные на разной высоте над землей. Два сигнала от этих ан-
тенн появляются рядом на экране электронно-лучевой труб-
ки типа А так же, как при определении азимута методом
равносигнальной зоны. Для быстрого переключения исполь-
зуется диодный переключатель, описанный в главе V. Элек-
тронно-лучевая трубка должна обладать длительным после-
свечением для того, чтобы сохранить на экране изображение
импульсов в течение некоторого времени и дать возможность
оператору визуально определить отношение амплитуд двух
сигналов. Опытный оператор может определить на глаз от-
ношение амплитуд с точностью до 5%. Измерение произво-
дится обычно в течение нескольких оборотов антенны, так что
результирующая точность оказывается довольно высокой. На
рис. VI.2 показан планшет для определения высоты по на-
клонной дальности и. отношению амплитуд сигналов.
Рис. VI. 2. Планшет для определения высоты.
В одном из устройств такого типа применялась четырех-
рядная синфазная антенна с четырьмя вибраторами в каждом
ряду (см. рис. III.1), центр которой был на высоте 3 м (что
соответствовало 2а при применяемой длине волны) над зем-
85
лей, смонтированная на стенке вращающегося прицепа. Для
определения угла места антенная система делится на две
части, состоящие соответственно из двух верхних и двух ниж-
них рядов. На рис. VI.3 показаны диаграммы в вертикальной
плоскости таких антенн, в
предположении, что земля
является идеальным плоским
проводником. На том же ри-
сунке приведено отношение
величин двух сигналов в за-
висимости от угла места, из
которого можно видеть, что
система нечувствительна к
изменению угла места ниже
4° и дает удовлетворитель-
ные результаты при углах
места от 4° до 21° при усло-
вии наличия дополнительно-
Рис. VI. 3. Определение угла ме-
ста методом разнесенных по высоте
антенн:
а — диаграммы антенн, сплошная кривая для
верхней половины антенны, пунктирная для
нижней; б — отношение сигналов от разных
половин антенн. А— область положительных
значений фазы; Б — область отрицательных
значений фазы.
го критерия для различения
положительной и отрица-
тельной фазы.
Из рис. VI.3 можно ви:
деть, что при приеме не мо-
жет быть потеряна ни одна
цель в пределах углов места
по крайней мере до 25°. На
рис. VI.4 показана диаграм-
ма антенны при передаче.
При синфазном питании
верхней и нижней половин
антенн образуется значитель-
ный провал на угле места
14°. Этот провал можно уст-
ранить, если включить обе
половины антенны в проти-
вофазе. Такое включение рациональнее, чем подача питания
только на одну половину антенны, так как дает большее уси-
ление в максимуме. Последовательное переключение с син-
фазного на противофазное соединение двух половин антенн
при передаче позволяет устранить двухзначность отсчета угла
места путем сравнения интенсивности сигнала при том и дру-
гом методе питания антенны.
4. Вспомогательные станции для определения высоты цели
С введением мощных радиолокационных станций сантимет-
рового диапазона метод определения высоты с помощью раз-
несенных по высоте антенн в значительной мере потерял свое
86
значение и заменен методом «луча с переменным углом воз-
вышения». Применение очень узкого луча, угол возвышения
которого меняется для определения высоты, устраняет зависи-
мость от характера окружающей местности за исключением
очень малых углов места.
Точность определения высо-
ты зависит при этом глав-
ным образом от таких под-
дающихся учету факторов,
как ширина луча, точность
механизмов и система инди-
кации. Единственным не под-
дающимся контролю источ-
ником ошибок является не-
Рис. IV. 4. Диаграмма в вертикаль-
ной плоскости передающей антенны.
Сплошной кривой изображена диа-
грамма при синфазном питании
верхней и нижней половины антен-
ны, пунктирной—при противофазном.
прямолинейное распростра-
нение волн вследствие ре-
фракции, очень незначитель-
ное в нормальных условиях.
Одна из первых систем
с лучом с переменным углом л
возвышения работала на волне 1,5 м. Антенна состояла из 56
одноволновых вибраторов, расположенных вертикально, и
определение угла места цели производилось по максимуму
сигнала при отклонении луча вверх и вниз. Отклонение луча
производилось электрически методом изменения фазы питания
отдельных групп вибраторов. В настоящее время имеется
много разных типов станций сантиметрового диапазона с лу-
чом, имеющим переменный угол возвышения. Наиболее упо-
требительным типом антенны является цилиндро-параболиче-
ское зеркало с линейным питающим устройством—обычно мно-
гощелевой волноводной антенной. Вертикальная апертура до-
ходит до 60 X, что дает ширину луча около Р/20. Перемещение
луча производится механически или электрически, причем
обычными электрическими методами являются изменения ши-
рины волновода или перемещение диэлектрика в волноводе.
В обоих случаях меняются относительные фазы питания пер-
вичных излучателей (щелей в волноводе), вследствие чего луч
отклоняется по углу места.
Направление луча по азимуту устанавливается на осно-
вании данных поискового радиолокатора. Для точного указа-
ния цели, высоту которой необходимо определить, пользуются
азимутальной отметкой и отметкой дальности индикатора
кругового обзора.
С целью очень точного определения угла места применяет-
ся метод равносигнальной зоны. Этот метод был использован
в армейских станциях орудийной наводки, причем точность по
углу места доходила до нескольких угловых минут.
Иногда производится непрерывное качание луча по высоте,
87
Рис. VI. 5. Индикатор в системе коор-
динат дальность—высота типа Е.
Пунктиром нанесены линии постоянной высота.
А — цель.
причвхМ применяется индикатор в прямоугольной системе ко-
ординат дальности—угол места с модуляцией луча по яркое•
ти. Линии постоянной высоты в таком индикаторе являются
гиперболами. Можно получить также очень удобный индика-
тор, в котором линии постоянной высоты образуют систему из
равноотстоящих параллельных горизонтальных линий. Для
этого по оси X произ-
водится развертка по
дальности, а по оси У та
же развертка по даль-
ности, но модулированная
по амплитуде пропорцио-
нально углу места (напри-
мер, с помощью сельсина-
тр а неф ор м атор а, п итае -
мого напряжением раз-
вертки дальности, ротор
которого поворачивается
синхронно с качанием ан-
тенного луча по углу ме-
ста). В результате коор-
динатами индикатора яв-
ляются величины гаи г (рис. VI.5) и линии постоянной вы-
соты являются прямыми.
Метод определения высоты с помощью луча с переменным
углом возвышения дает удовлетворительные результаты толь-
ко в том случае, когда угол места больше половины ширины
луча в вертикальной плоскости. При меньших углах места
отражения от земли вносят значительные ошибки.
5. Специальные методы
Один из вариантов метода сравнения амплитуд состоит в
применении двух симметричных приемных антенн с различ-
ными диаграммами в вертикальной плоскости [например, F(a)
и/(а)], размещенных на одной и той же высоте /гнад землей.
Применяя такие же обозначения, как и раньше, получим:
F (a) sin (hk sin а) и Е.. / (а) sin (hk sin а).
так что отношение, характеризующее высоту объекта, будет
Л (а)
в этом случае просто — , т. е. равно отношению теорети-
ческих диаграмм без учета влияния земли. Методы этого типа
обладают теми преимуществами, что ими можно пользоваться
для измерения очень малых углов места и что значительно
уменьшается влияние неровностей площадки.
88
Практически можно иметь только одну антенную систему,
причем она может быть использована как для передачи, так
и для приема. Рис. VI.6
относится к системе из
параболического зеркала
и трех вибраторов, при
чем А находится в фокусе,
а Б и В—соответственно
немного выше и ниже фо-
куса. Если питание под-
водится только к вибрато-
ру Д, то получается диа-
грамма /. При синфазном
питании вибраторов Б и В
получается диаграмма //.
Наибольший угол места,
который может быть из-
мерен, равен половине
раствора диаграммы более
узкого луча, а наимень-
ший — приблизительно одной
Рис. VI. 7. Индикатор системы с
V-образным лучом. Для определения
высоты нужно передвинуть шкалу
высот так, чтобы нулевая линия сов-
местилась с нижним изображением
сигнала.
'10 -5 О 5 Я 150b
Рис. VL 6. Диаграмма антенн для
определения высоты под малыми
углами места,
пятой более широкого.
Другим методом опре-
деления высоты является
так называемая «система
с V-образным лучом».
В этой системе необходи-
мы два передатчика и две
антенны (рис. VI.8). Пер-
вая антенна формирует
очень узкий луч в гори-
зонтальной плоскости и
«косекансный» луч в вер-
тикальной плоскости. Вто-
рая антенна формирует
такой же луч, но в плос-
кости, наклоненной под
углом 4'5° к вертикали,
причем плоскости обоих
лучей пересекаются по го-
ризонтальной линии нес-
колько ниже земной по-
верхности. Обе антенны
вращаются с постоянным
числом оборотов (около
6 об!мин) так, что первым движется вертикальный веерный
луч. Совершенно очевидно, что интервал между пересечения-
ми цели обоими лучами зависит от высоты самолета и являет-
ся простым и точным критерием этой высоты (рис. VI.7).
89
Рис. VI. 8; Радиолокационная станция с V-образным лучом.
ГЛАВА VII
СИСТЕМЫ ОДНОВРЕМЕННОГО ОПРЕДЕЛЕНИЯ
АЗИМУТА И УГЛА МЕСТА. ДВУХМЕРНЫЙ ОБЗОР
ПРОСТРАНСТВА
Для решения ряда задач, стоящих перед радиолокацией,
необходимо иметь возможность определять все три коорди-
наты цели (азимут, угол места и дальность) с помощью од-
ной и той же аппаратуры. Станции с широкой диаграммой
излучения дают возможность измерять вторую угловую коор-
динату только для одной цели. Станции кругового поиска с
веерным лучом могут определять вторую угловую координа-
ту, но этот метод обладает рядом специфических недостатков.
Одним из важных методов является использование луча ка-
рандашного типа, облучающего пространство в . двух измере-
ниях, в особенности потому, что при применении узких лучей
достигается большая дальность обнаружения й высокая точ-
ность определения угловых координат. Однако и такой метод
имеет ряд специфических особенностей, ограничивающих, как
будет показано в этой главе, его возможности.
Прежде всего следует отметить, что скорость обзора огра-
ничена даже в случае станции с веерным лучом. Во-первых,
существенно важно, чтобы цель оставалась в пределах об-
2г
лучения в течение времени (превышающего интервал —
достаточного, чтобы отраженный импульс успел возвратить-
ся к станции. Во-вторых, существенно необходимо получить
за время «освещения» цели лучом несколько отраженных
импульсов. Это нужно не только для того, чтобы обеспечить
хорошую различимость при слабых сигналах, но так же и
для того, чтобы обеспечить необходимую точность при опре-
делении угловых координат. Обычно считают, что количест-
во импульсов должно быть не менее пяти, что дает угловую
точность примерно в одну пятую ширины луча. При луче
шириной 0б*, и при частоте повторения импульсов f угловая
Счиоя по точкам половинного значения по мощности.
91
скорость обзора - не должна превышать 0,2 fp Ьв, что на-
пример, при 6б = 4ъ и 7Р = 4ОО гц дает 320° в секунду или
53,3 об/мин. Для станций с веерным лучом это не является
серьезным ограничением, так как число оборотов антенны
редко должно превышать 10 об/мин. Но в станциям, произво-
дящих обзор пространства в двух измерениях, необходимо
серьезно считаться с этим обстоятельством.
1. Общие соображения о двухмерном обзоре пространства
В случае обзора пространства в двух измерениях приведен-
ное выше условие приложимо к скорости развертки по коор-
динате 6, параллельной направлению обзора. Для точного
определения перпендикулярной направлению обзора координа-
ты а необходимо, чтобы каждый последующий обзор по коор-
динате производился через интервалы 0,2 ав, где ав — ширина
луча в направлении а. Следовательно очевидно, что необхо-
димо получить около 25 импульсов в пределах телесного угла
о , стягиваемого лучом так что для обзора заданного телес-
2
ного угла 2 необходимо по меньшей мере 25 — импульсов,
2
что соответствует времени обзора, равному 25 у —. В p$fee
типов обзора время обзора заданного угла 2 не можег быть
полностью использовано, так как некоторое время по необхо-
димости затрачивается на обзор пространства вне заданной
области. Следовательно можно ввести коэфициент k таким
образом, чтобы на каждый обзор приходилось, по крайней
^2
мере —— импульсов, причем k зависит от типа обзора, но не
может быть меньше 25. Если координату а не требуется опре-
делять с максимально возможной точностью, то это требова-
ние можно до некоторой степени смягчить. Например, можно
увеличить угол между двумя последовательными линиями об-
зора до 0,5 ав, причем в этом случае значение k при полно-
стью использованной развертке снижается до 10. Следует
отметить, что для обзора любого значительного телесного угла
крайне трудно разместить линии обзора на постоянном угло-
вом расстоянии друг от друга, по той же причине, по которой
невозможно осуществить идеальную проекцию карты на пло-
скую поверхность. Ввиду этого необходимо по возможности
избегать механических развертывающих устройств, за исклю-
чением кругового обзора, так как они дают малоэффективную
92
зигзагообразную развертку. Легко видеть, что максимальная
частота обзора Nоб не может превышать величину
Л',. < . (VII.1)
При этом / должно быть достаточно низким, чтобы отражен-
ный сигнал успел вернуться с максимальной дальности гма}С
и появиться на развертке времени в должном месте. Прини-
мая, что время обратного хода луча электронно-лучевого ин-
дикатора должно составлять не менее 20% прямого хода раз-
вертки, получим
0,8г _ 0,4 г
2 г г
' макс ' макс
Совместное решение этих уравнений дает
0,4 г о)
b О г
' макс
(VII.2)
(VII.3)
Б этом выражении k определяется типом развертки и требуе-
мой точностью, а ширина луча ш— требуемой точностью. Та-
ким образом, максимальная частота обзора Nоб однозначно
определяется заданным углом обзора 2. В известных случаях
частота обзора не может быть меньше некоторой заданной
величины. В этих случаях можно определить максимальную
возможную дальность обнаружения. Усиление антенны с лу-
г 4~ .
чом шириной <0 равно Ст = —- или с учетом уменьшения бо-
4~
ковых лепестков G< —. Решая совместно с уравнением
VI 1.3, можно написать*
г ' 4~-0,4г
При подстановке этого выражения в уравнение (III.11) полу-
чаем-
р > 0,16Р,г2ХМе
4 К А/'2 Ь2О2Г6 ’
Ч к об гс - г макс
откуда
Однако следует отметить, что Рмин зависит от коэфициента
различимости W, который в свою очередь зависит от числа
9:;
импульсов, приходящихся на цель при одном обзоре. Таким
образом, при малом k потребуется более мощный отраженный
сигнал. Как показал опыт, при модуляции яркости для отчет-
ливой различимости сигнала его яркость должна быть выше
при однократной развертке, чем при многократной. Точно так-
же при модуляции отклонением луча при многократной раз-
вертке изображения шумовых сигналов беспорядочно наклады-
ваются и усредняются, вследствие чего различимость слабого
сигнала повышается. По достижении достаточно большого
числа разверток дальнейшее их увеличение менее эффективно.
Таким образом при двухмерной развертке по угловым ко-
ординатам основное ограничение обусловлено в конечном сче-
те значением скорости распространения света. Если заданы
определенная точность измерения (а, следовательно, ширина
луча) и дальность обнаружения, то частота обзора ;может сни-
зиться до неприемлемого значения, тогда как при достаточно
высокой частоте обзора ограничена максимальная дальность
обнаружения.
2. Системы обзора
В радиолокации применяется несколько различных типов
обзора. Наиболее широко распространены: 1) конический,
2) винтовой, 3) спирально-конический и 4) поступательно-
конический (круговой или возвратный). Эти типы разверток
показаны на рис. VII.1. В первом типе хотя и производится
обзор в двух измерениях, но в действительности обзор являет-
ся функцией одной переменной. Он был уже рассмотрен в
связи с методом равносигнальной зоны. Винтовой обзор мож-
но осуществить двумя путями: производя быстрый обзор по
азимуту и медленное качание по углу места, либо наоборот.
Первый метод более распространен. Качание по углу места
может производиться как по зубчатым уступам, так и по рав-
нобедренному треугольнику. Этот обзор соответствует обычной
телевизионной развертке, хотя может производиться в преде-
лах 360° по азимуту. Обычный круговой обзор является част-
ным случаем винтового. Спирально-конический обзор симме-
тричен относительно линии визирования.
Спирально-конический обзор был применен в одной из ран-
них сантиметровых станций перехвата самолетов. Луч фор-
мировался при помощи параболического зеркала, о:ь которого
вращалась со скоростью 1 000 об/мин относительно линии по-
лета самолета и одновременно совершала колебание с часто-
той примерно 1 гц в пределах от Р/г0 до ЗР/2° относительно
линии полета. Вибратор и рефлектор для питания зеркала
были неподвижны, так что луч начинал описывать окружность
с радиусом в 3°, затем увеличивал радиус описываемой окруж-
ности до 45°, после чего окружность снова уменьшалась. Ши-
94
рина луча равнялась примерно 6° при диаметре зеркала 0,6 м
и длине волны 10 см.
Рис. Vll. 1. Различные типы обзора:
а — конический обзор. О и — постоянны, б — винто-
dt
d^
вой обзор, —t постоянно, о медленно меняется в
dt
заданных пределах, в—спирально-конический обзор,
tfcP Л
— постоянно. 0 медленно меняется в заданных
dt
пределах; г—поступательно-конический обзор, р пос-
dO
тоянно — постоянно, ср меняется в заданных пре-
dt
делах.
Винтовой обзор также применялся в станциях самолетного
перехвата. Линии обзора были горизонтальны. Обзор в пре-
делах 180° по азимуту производился при помощи двух зеркал,
обращенных в противоположные стороны для повышения
эффективности развертки. Вся система совершала периодиче-
95
ское медленное колебательное движение в заданном диапа-
зоне углов места. Винтовой обзор применяется в ряде типов
наземных станций, причем нижний предел по углу места со-
ставляет некоторую долю ширины луча.
Поступательно-конический обзор целесообразно применять
в качестве замены винтового обзора только при небольшом
угле обзора по азимуту. Половина угла р конуса обзора долж-
на быть равна половине требуемого диапазона углов места.
Эта система обладает тем преимуществом по сравнению с
винтовым обзором с вертикальными линиями (или с зигзаго-
образным обзором с почти вертикальными линиями), что угол
обзора по азимуту на величину 2 3 больше механических пре-
делов обзора (см. рис. VII. 1(3).
Винтовой обзор наиболее эффективен в тех случаях, когда
требуется перекрыть 360° по азимуту при ограниченном диа-
пазоне углов места. В других случаях выбор типа обзора
определяется эксплоатационными требованиями. Можно отме-
тить, что для самолетных станций перехвата, являющихся
станциями ближнего действия, эффективность развертки не
имеет первостепенного значения.
Системы индикаторов
Индикатор для спирально-конического обзора представляет
большой интерес. На рис. VII.2 показан экран с послесвече-
нием в системе координат гиф (рис. VII.1в). Координата 6
явно не вводится. Дальность г увеличивается ог центра по
направлению к краю экрана. Цель, находящаяся на линии
полета, создает полный круговой отраженный сигнал, так как
отражение получается при всех значениях«ф, когда угол 6
очень мал. При смещении цели с линии полета окружность
разрывается в одном месте и по мере того, как смещение
цели увеличивается, длина дуги уменьшается, так как луч
облучает цель в течение меньшей доли одного оборота антен-
ны. Направление смещения цели с линии полета (влево,
вправо, вверх или вниз) указывается непосредственно по по-
ложению центра дуги.
Для. винтового или поступательно-конического обзора воз-
можно применение индикатора телевизионного типа в системе
координат азимут—угол места, но при этом дальность необ-
ходимо определять при помощи отдельного индикатора. При-
менение автоматического сопровождения по дальности (см.
§ 1 гл. IV) целесообразно в тех случаях, когда возможна
только одна цель (как это обычно и имеет место в самолет-
ных станциях перехвата). При этом индикатор угловых коор-
динат включается только в течение опорного импульса даль-
ности, автоматически следящего за целью, так что на экране
индикатора появляются отраженные сигналы только в неболь-
шом интервале по дальности. Благодаря этому значительно
снижается влияние шумов приемника и увеличивается разли-
чимость сигнала. Другим вариантом устройства являются от-
дельные индикаторы дальность—азимут и дальность—угол
места. Ряд типов индикато-
ров требует отдельного опе-
ратора на самолете, кроме
летчика, что может быть
очень серьезным неудобст-
вом.
Важным фактором, кото-
рый необходимо учитывать
при выборе типа индикатора,
является масштаб изображе-
ния. Если масштаб слишком
велик, то отраженные сигна-
лы будут иметь вид не
сплошных линий, а ряда то-
чек. Размер светового пятна
у обычной электронно-луче-
вой трубки равняется при-
мерно 1 мм, так что, напри-
Рис. VI 1.2. Индикатор самолетной
устаноЕки со спирал»ной раз-
верткой. Цель находится правее
и выше линии поле»а. Внизу
видно отражение от земли.
мер, в индикаторе даль-
ность—азимут, шкала по азимуту не должна быть больше
10 -- радиан на см, где 0в—ширина луча, а п—число им-
пульсов на одно облучение цели лучом.
В радиолокационных станциях обнаружения (как наземных,
так и морских) осуществление развертки в трех координатах
с помощью двухмерных экранов при большом числе целей
представляет значительные трудности. Одним из возможных
решений является применение индикатора кругового обзора
совместно с индикатором в системе координат дальность —
угол места или дальность—высота. Однако эта задача полно-
стью еще не решена.
Системы автоматического сопровождения цели
Для автоматического сопровождения обычно применяется
конический обзор. Управляющее напряжение, подаваемое на
серво-систему и поворачивающее антенную систему при сме-
щении цели с линии визирования, вырабатывается в специ-
альном «генераторе сигнала ошибки». Работа этого генерато-
ра основана на том, что импульсы, отраженные от цели, на-
ходящейся на линии визирования антенны, не меняются по
амплитуде за один период обзора, вследствие чего «сигнал
ошибки» отсутствует. При смещении цели с оси, как было
97
7 Основы радиолокации
показано выше, импульсы оказываются модулированными с
частотой обзора. Огибающая может быть использована в ка-
честве «сигнала ошибки».
3. Радиолокационные станции дальнего обнаружения с двух-
мерным обзором по угловым координатам
В качестве примера рассмотрим расчет радиолокационной
станции дальнего обнаружения. Пусть задано гмакс, равное
250 км9 при частоте обзора, соответствующей 10 об/мин и при
телесном угле обзора тс (т. е. четверти сферы или 180° по
азимуту при диапазоне углов места от 0° до 90°).
Из уравнения (VII.2) можно видеть, что fp не должно
превышать 500 гц, следовательно согласно уравнению (VII.1)
при L2 = 77, о) не может быть меньше 0,01 стерадиана, даже
если k взято равным 10. Таким образом лучи, уже 6°, или
коэфициенты усиления, превышающие 1 000—1 500, исключа-
ются. Обычно требуется значительно большая точность, чем
можно получить при луче 6°, и, как правило, требуется усиле-
ние антенны, превышающее 1 500, чтобы получить максималь-
ную дальность в 250 км, принимая во внимание, что нельзя
использовать отражение от земли для увеличения дальности.
В самом деле, если принять, что Pt = Ю6 вт, 10~12 вт
(см. § 6 гл. II), X = 10 см, Ае = 10 м2, то согласно уравнению
(VII.4), принимая значения N, k и 2, указанные выше, полу-
чим'
Гмакс =185 км.
Так как Pt-^-r\laKC , то очевидно, что для получения макси-
мальной дальности 250 км потребовалась бы мощность пере-
датчика 6,1 мгвт, и даже такую дальность можно получить
лишь при минимуме перекрытия строк обзора и при полном
использовании всех отраженных импульсов (&=10). При
k = 40 (принимая во внимание некоторую неэффективность
обзора при перекрытии строчек, обеспечивающем достаточ-
ную точность) гмакс снижается до 115 км (при передатчике
мощностью 1 мгвт).
4. Самолетная станция перехвата
В качестве примера системы с обзором в двух измерениях
приведем расчет самолетной станции перехвата, устанавливае-
мой на истребителях. Она является станцией сравнительно
близкого действия, вырабатывающей дальность, азимут и угол
места цели. Сектор обзора обычно ограничивается той частью
неба, которая находится перед самолетом. Максимальная
дальность обнаружения такой станции ограничена отражения-
98
ми от земли. Например, когда луч направлен горизонтально,
отражение от земли наблюдается с расстояния, равного при-
h
мерно 60 —, где ав —ширина луча в вертикальной плоско-
R I-
сти в градусах, a h—высота самолета. При <=15°, напри-
мер, и при высоте полета самолета 300 м предельная даль-
ность немного больше 1 км, тогда как при высоте 3 000 м она
равна 12 000 м. Этот предел увеличивается при более узком
луче, кроме того, он изменяется с наклоном зеркала, умень-
шаясь в течение той части периода обзора, когда луч накло-
нен вниз.
Предположим, что максимальная дальность станции пере-
хвата должна быть 12 км. В этом случае нельзя подставлять
это значение в уравнение (VII.2) для выбора fp , так как
отражения от наземных объектов могут быть приняты с го-
раздо больших расстояний (до 150 км) и создадут ложные
цели на экране трубки. Следовательно, частота повторения
должна быть выбрана в соответствии с дальностью обнаруже-
ния наземных объектов. Если принять дальность 150 км, то
fp = 800 ими,/сек.
Допустим, что частота обзора должна быть равна 30 в ми-
нуту и что ав = Од=Ю°, так что ю —0,03. Если производить
обзор при малом перекрытии строчек (А =10), тогда соглас-
но уравнению (VII.1) £2 <4,8. Это значит, что сектор обзора
должен быть меньше полусферы (£2 = 2г). Расчет был сделан
без всякого запаса, следовательно ширина луча в 10—12°
едва допустима. Остается проверить осуществимость принятой
скорости обзора и дальности обнаружения.
Скорость в направлении «быстрого» обзора определяется
тем, что на ширину луча (примерно 10°) приходится пять им-
пульсов, т. е. 2° на импульс или 1 600° в секунду. Это состав-
ляет 267 об/мин* что вполне осуществимо. Для заданной мак-
симальной дальности согласно уравнению (III. 12), при X—
4г
-10 см, Gt = Gr-~= - - = 420, Р лтн - 10-13, гмакс = 12 000 м
и Ае = 10 м2 соответственно Pt =2,35 кет. В действительно-
сти потребуется гораздо большая мощность, если учесть по-
тери в линиях передачи, низкий коэфициент различимости на
экране в условиях дневного света и т. д. Однако, очевидно,
получить требуемую дальность несложно, даже если умень-
шить размеры зеркала и увеличить ширину луча до 15°. При
более широком луче снизилась бы точность определения угло-
вых координат, но существенно облегчилась бы задача обзора
пространства.
у*
99
ГЛАВА VIII
ПОМЕХИ ОТ МЕСТНЫХ ПРЕДМЕТОВ
Уже упоминалось, что радиолокационное обнаружение
большинства объектов, как например, кораблей, танков и са-
молетов, усложняется одновременным появлением на экране
индикатора сигналов, отраженных от морской поверхности,
неровностей почвы, различных строений и пр. Рассмотрим
подробнее природу, мешающих отраженных сигналов, а также
методы борьбы с ними.
Интересным примером являются сверхдальние отражения
от местных предметов, наблюдавшиеся на станциях дальнего
обнаружения самолетов на волне 12 м. Эти станции работали
на длине волны, превышающей критическую, при которой ко-
сые лучи проникают через ионосферный слой Е, Таким обра-
зом при благоприятных условиях могут наблюдаться сильные
отражения от земной поверхности, расположенной за преде-
лами «мертвой зоны». Так как отражение происходит на зна-
чительном расстоянии, достаточно понизить частоту повторе-
ния импульсов, чтобы оно не мешало слежению за самоле-
тами на более коротких дистанциях. Подобные отражения
наблюдались с расстояний до 6 000 км, поэтому достаточно
выбрать частоту повторения, равную 25 имп/сек, а в случае
аномальных условий, когда отражение происходит от еще бо-
лее удаленных участков земли, снизить частоту до 12,5 имп/сек.
Отражения этого типа не наблюдаются при работе на более
коротких волнах.
В сантиметровом диапазоне заметные отражения получа-
ются от облаков, особенно грозовых. В настоящее время это
явление используется для предупреждения летчика о близости
такого опасного для полета штормового центра, а также в
метеорологических исследованиях. Однако, когда целью яв-
ляется определение местоположения кораблей или самолетов,
отражения от облаков мешают работе радиолокатора, вслед-
ствие чего было уделено много внимания задаче борьбы с
этой помехой. Одним из возможных методов является приме-
нение перекрестной поляризации. Принцип этого метода со-
стоит в том, что для передачи и приема применяются две раз-
100
ных антенны с взаимноперпендикулярной поляризацией. С по-
мощью подобной системы получают слабые, но тем не менее
различимые, сигналы от целей, имеющих большие и сложные
контуры, подобно кораблям и самолетам, а от облаков, со-
стоящих из небольших рассеивающих частиц, практически от-
ражений не получается.
1. Отражение от морской поверхности
Если море не слишком бурное, то большая часть энергии
волн радиолокационной станции, падающих на морскую по-
верхность под небольшим углом, зеркально отражается от нее,
и только небольшое количество энергии отражается диффуз-
но. Все же диффузное отражение обычно достаточно велико,
чтобы создать различимый сигнал на экране индикатора на
расстоянии в несколько километров. Дальность естественно
зависит от типа радиолокационной станции и от состояния
морской поверхности. Кроме того она зависит от направления
поляризации излучения. В диапазоне от 10 см и выше, отра-
жение от морской поверхности гораздо сильнее при вертикаль-
ной поляризации, на более же коротких волнах разница почти
незаметна. Вертикальная поляризация не применяется на бе-
реговых станциях метрового диапазона главным образом по
этим соображениям.
Отражение от морской поверхности может оказаться основ-
ным ограничивающим фактором при обнаружении небольших
целей, и значительно снизить различимость сигналов даже
более интенсивных, чем отражение от морской поверхности, в
случае применения индикатора кругового обзора с ограниче-
нием сигналов на небольшом уровне над шумами. Для борь-
бы с этим разработано много специальных схем, снижающих
усиление приемника при данном значении дальности так, что-
бы амплитуда отражения от морской поверхности была мень-
ше уровня насыщения приемника. В одной из таких схем
усиление приемника изменяется по дальности согласно сред-
нему закону изменения интенсивности отражения от морской
поверхности в зависимости от дальности. Однако при круговом
обзоре, в особенности при больших скоростях вращения, этот
метод не дает удовлетворительных результатов, так <как он
не может компенсировать изменения интенсивности отраже-
ния от морской поверхности в зависимости от меняющегося
направления антенны относительно ветра.
Более удовлетворительные результаты в этом случае дает
быстродействующая автоматическая регулировка усиления,
реагирующая на отражение от морской поверхности, а не на
сильный одиночный отраженный сигнал. Это устройство было
применено в ряде типов морских установок, причем оказалось,
что наиболее благоприятное время нарастания сигнала авто-
101
матичесиои регулировки усиления равно учетверенной дли-
тельности зондирующего импульса, а время его спадания—
25 мксек. Такая система автоматически компенсирует измене-
ние напряжения отраженного от морской поверхности сигнала
при вращении антенны. Следует отметить, что оба метода
дают частное, а не полноценное решение задачи.
2. Отражение от наземных объектов (местных предметов)
Помехи от местных предметов бывают настолько велики,
что в некоторых случаях, например, при размещении назем-
ных станций наведения и перехвата самолетов, необходимо
очень тщательно выбирать место для установки станций. Наи-
более удобным местоположением считается центральная часть
небольшой впадины диаметром 5—8 км. В этих условиях
отражения от местных предметов ограничиваются сравнитель-
но небольшой дальностью. Однако подобные участки не всег-
да имеются в наличии и поэтому в ряде случаев, например,
в гористой местности, приходится прибегать к специальным
методам устранения помех от местных предметов.
Одним из наилучших решений является применение очень
узкой диаграммы с минимальными боковыми лепестками. Зна-
чительное уменьшение помех от местных предметов наблю-
дается при применении компенсационной схемы. Принцип дей-
ствия ее, например, в применении к индикатору кругового об-
зора, состоит в том, что сопоставляются два последователь-
ных изображения экрана индикатора (соответствующих двум
смежным оборотам антенны). То обстоятельство, что изобра-
жения местных предметов совершенно подобны на таких двух
изображениях, а изображения движущихся объектов несколь-
ко отличаются друг от друга, позволяет распознать движу-
щиеся объекты на фоне неподвижных. Сопоставление произ-
водится непрерывно либо путем оптического наложения изо-
бражений двух индикаторов, либо наложения быстро прояв-
ленных и зафиксированных фотографий экрана индикатора
и т. д. Эти методы отличаются значительной сложностью и
не имеют еще законченного технического решения.
Одним из наиболее эффективных методов уменьшения по-
мех от местных предметов является использование эффекта
Допплера.
3. Система Допплера
Известно, что частота колебаний, отраженных от движу-
щейся цели, изменяется в результате эффекта Допплера. Ча-
стота отраженная от приближающейся цели, равна
f'=f с + г>.- , (VIII 1)
с — v
102
где f — частота излучения, с — скорость распространения волн
и v — радиальная скорость цели. Разность частот f и f' или
«частота Допплера» соответственно равна
fd= . (VIII.2)
{С-V. с
Таким образом частота Допплера fd пропорциональна ради-
альной составляющей скорости цели относительно радиолока-
ционной станции и частоте, излучаемой этой станцией.
Применение эффекта Допплера к станциям, излучающим
незатухающие колебания постоянной амплитуды и частоты,
является наиболее простым. В таких системах обычно имеют-
ся отдельные антенны для передачи и приема. Колебания,
отраженные от цели, поступают в приемное устройство вме-
сте с некоторой долей излучения передатчика. Когда цель
движется, отраженная волна отличается по частоте от излу-
чения передатчика на величину, равную частоте Допплера.
Оба принятых сигнала взаимодействуют между собой, созда-
вая биения, так что результирующий сигнал оказывается мо-
дулированным по амплитуде на частоте Допплера *. Приемник
может быть узкополосным, а простейшим индикатором явля-
ются телефонные наушники. Если частота Допплера нахо-
дится в звуковом диапазоне, то в телефоне она слышна, как
непрерывный тон. В простейшем случае измерение дальности,
кроме грубой оценки амплитуды отраженного сигнала, не мо-
жет быть произведено, и подобная установка может служить
лишь для определения наличия движущейся цели и измере-
ния ее радиальной скорости. Кроме того, конечно, могут быть
измерены угловые координаты цели. Тем не менее в ряде
случаев подобные системы представляют значительный ин-
терес, (например, для измерения скорости одиночной цели—
снаряда, мины и пр.).
Принцип Допплера не может быть применен непосредст-
венно к импульсным системам, так как импульс передатчика
и отраженный импульс сдвинуты во времени и не могут дать
биений. Однако, если ввести в схему специальный маломощ-
ный генератор, так называемый «когерентный гетеродин»,
колебания которого возникают при каждом импульсе точно в
фазе с излученным импульсом, то колебания такого гетеро-
* Если максимальная радиальная скорость цели 600 км/час и ча-
стота 3 000 мггц, то максимальная частота Допплера равна 3 300 гц.
Следовательно полоса пропускания приемника должна быть примерно
4 кгц по сравнению с 2 мггц при импульсной системе Таким образом
чувствительность приемника может быть в 500 раз больше, а мощность
передатчика в 500 раз меньше пиковой мощности импульсной системы
при той же дальности. Однако средние мощности должны быть одного
порядка, так как коэфициент заполнения в системе Допплера равен еди-
нице, а в импульсной системе в 500—1 000 раз меньше.
103
дина являются как бы продолжением импульса передатчика.
Частота когерентного гетеродина должна быть точно равна
частоте импульсного передатчика и достаточно стабильна.
При наложении колебаний отраженных сигналов на колебания
когерентного гетеродина появляется резкое различие между
неподвижными местными предметами и движущимися объек-
тами. Частота колебаний, отраженных от местных предметов,
будет равна частоте когерентного гетеродина, а фазовые со-
отношения между ними будут зависеть от дальности, так что
часть местных предметов усилится, а часть пропадет, но сиг-
нал будет стабильным. В случае движущихся объектов часто-
ты неравны, появится допплеровская частота биений, вслед-
ствие чего сигнал будет пульсировать и его различимость на
фоне местных предметов резко увеличится.
Существуют импульсные системы с использованием эффек-
та Допплера без когерентного гетеродина. В этих системах
использованы биения между колебаниями, отраженными от
местных предметов, частота которых равна частоте передат-
чика, и отраженными от движущихся объектов, частота кото-
рых отличается от частоты передатчика. При этом, конечно,
дальность местных предметов должна быть равна дальности
движущихся объектов. еТакой метод значительно проще, так
как введение когерентного гетеродина чрезвычайно услож-
няет все устройство, однако он может быть применен в исклю-
чительных случаях в местности, изобилующей местными пред-
метами в большом диапазоне дальностей, например, в гори-
стой местности и представляет ограниченный интерес.
Дальнейшим развитием схемы с когерентным гетеродином
является такая система, в которой на экране индикатора вид-
ны только сигналы, отраженные от движущихся целей. Это
осуществляется путем задержки видеосигналов на время, рав-
ное периоду повторения и путем вычитания задержанных ви-
деосигналов из незадержанных. Для создания задержки мо-
жет быть использована, например, описанная выше в главе
IV ультразвуковая линия.
Выходное напряжение такой системы зависит от разности
амплитуд видеосигналов в смежных периодах повторения.
Если принять, что изменения амплитуды от периода к перио-
ду обусловливаются только радиальной скоростью цели, го
сигналы, отраженные от неподвижных предметов, должны
быть в точности равны и поэтому полностью компенсированы
на выходе. Амплитуды же сигналов, отраженных от движу-
щихся целей, будут меняться по закону синусоиды, определяе-
мой частотой Допплера.
Амплитуда разностного напряжения зависит от радиальной
скорости цели и имеет максимальное значение для цели, пе-
ремещающейся на нечетное число четвертей длины волны пе-
редатчика за один период повторения. Соответствующая ско-
104
270 n fD
рость в километрах в час определяется выражением-----
где fp— частота повторения импульсов в герцах, fQ — радио-
частота в мегагерцах и п — нечетное целое число. При такой
скорости в результате вычитания получается импульс с двой-
ной амплитудой, тогда как напряжение шумов увеличивается
в )/ 2 раз. Следовательно отношение сигнала к шуму увели-
чивается в 2 раз. Во избежание возможной потери цели не-
обходимо регулировать частоту повторения импульсов в соот-
ветствии с радиальной ско-
ростью цели. На рис. VIJ 1.1
показана диаграмма выход-
ного напряжения в зависи-
мости от скорости цели в си-
стеме, работающей на длине
волны 60 см (fo ’= 500 мггц),
при частоте повторения им-
пульсов fp = 600 гц. Из диа-
граммы видно, что максимум
выходного напряжения при
выбранной частоте повторе-
ния получается при ра-
диальных скоростях около
320 км/час, в то время, как
при радиальных скоростях
ниже 80 км/час, а также в
и км/час
Рис. VITE 1. Диаграмма разностного
напряжения в зависимости от ско-
рости в системе Допплера. Х=60сж,
fp = 600 гц.
пределах 550—750 км/час амплитуда выходного напряжения
резко падает.
В действительных условиях компенсация сигналов от мест-
ных предметов может быть неполной, так как иногда наблю-
даются значительные флюктуации напряжения таких сигна-
лов. Особенно значительны флюктуации сигналов, отражен-
ных от деревьев, лесистых склонов и пр. во время ветра.
Кроме того компенсация сигналов от местных предметов не
может быть полной в станциях с круговым (или секторным)
обзором. В этом случае последовательные импульсы, отражен-
ные от неподвижных объектов на данном расстоянии, обычно
неодинаковы, вследствие движения луча антенны относитель-
но цели. Теоретический предел компенсации определяется вы-
ражением 1 200%. В этом выражении Nоб — количество
° J р
оборотов антенны в минуту, а 0 — ширина луча в градусах.
Общий эффект от применения принципа Допплера в им-
пульсных установках, за исключением очень неблагоприятных
условий местности, все же значителен и в ряде случаев каче-
ственно изменяет работу схемы.
ГЛАВА IX
ВТОРИЧНАЯ РАДИОЛОКАЦИЯ
Так называемая вторичная радиолокация характеризуется
установкой аппаратуры ответчика на объекте, местоположе-
ние которого требуется определить. После возбуждения сиг-
налом запроса (зондирующим импульсом), посланным пере-
датчиком радиолокационной станции, ответчик генерирует от-
ветный импульс, наблюдаемый на индикаторе радиолокацион-
ного приемника. Подобный ответчик может генерировать
гораздо больше энергии, чем создается при непосредственнохМ
отражении от цели. Соответственно одним из назначений вто-
ричной радиолокации является генерирование более мощного
ответного сигнала в тех случаях, когда возможно применение
ответчика. Кроме того, вторичная радиолокация применяется
для опознавания своих самолетов среди самолетов противника
и для выделения какого-либо отдельного самолета из группы
путем кодирования ответных сигналов.
Таким образом вторичная радиолокация тесно связана с
опознаванием объекта и применялась до настоящего времени
главным образом в этой области техники. Кодирование сиг-
налов, применяемое в качестве меры борьбы против примене-
ния противником таких же устройств, может быть осуществле-
но изменением количества импульсов, их длительностей и ин-
тервалов между ними. Кроме того, с целью кодирования мож-
но изменять радиочастоту ответных сигналов. Следует отме-
тить, что в общем случае частоты сигнала запроса (Д) и от-
ветного (fr ) могут быть разными, хотя в ряде случаев они
одинаковы. Системы опознавания, как правило, бывают под-
чинены обычной радиолокационной станции (ведущей обна-
ружение неприятельских самолетов и др. по отраженному
сигналу).
В тех случаях, когда возможно использование вторичной
радиолокации для увеличения интенсивности отраженного
сигнала, эффективность ее применения особенно велика в
условиях сильных noiMex от местных предметов. В этом слу-
106
чае при разных частотах сигналов запроса и ответа не только
увеличивается интенсивность ответного сигнала, но и полно-
стью устраняются помехи от местных предметов.
1. Ответчик
Ответчик состоит принципиально из приемника, кодирую-
щего устройства (формирующего ответный сигнал) и передат-
чика. Приемник настроен на частоту fL , тогда как передатчик
излучает частоту Очень важно, чтобы цепи, формирую-
щие ответный сигнал, создавали минимальную задержку меж-
ду приемом запроса и излучением ответного сигналов, так как
система обычно используется для измерения дальности подоб-
но всякому другому радиолокатору.•
Допускается постоянная, одинаковая для всех ответчиков,
задержка, на которую вносится поправка при измерениях.
Чувствительность приемника не должна быть слишком боль-
шой. В противном случае ответчик может реагировать на
случайные сигналы, что явится очень серьезным дефектом при
частом повторении, так как экран радиолокатора будет запол-
няться беспорядочными импульсами. Ответчик не должен
повторно запускаться своими собственными сигналами. Это
обычно достигается тем, что система теряет чувствительность
на определенное время после приема каждого импульса (на-
ступает так называемое «насыщение» системы). Время запи-
рания не должно быть слишком велико во избежание пропус-
ка нужных импульсов. Насыщение ответчика является серьез-
ным недостатком вторичных радиолокационных систем осо-
бенно при сигналах запроса, посылаемых большим числом
станций одновременно. По этой причине частота повторения
сигналов запроса должна быть настолько низкой, насколько
это возможно для наблюдения на экране индикатора.
Ответчик обычного типа состоит из суперрегенеративного
приемника с автоматической регулировкой усиления и им-
пульсного передатчика. Применение суперрегенератора объяс-
няется стремлением по возможности уменьшить количество
ламп. Задержка импульса в суперрегенераторе может не пре-
вышать ~ 1 мксек, так что поправка на дальность составляет
приблизительно 150 метров (задержка в остальных цепях
ничтожно мала). Мощность передатчика, как показывают при-
веденные ниже численные примеры, обычно очень мала,
вследствие чего размеры аппаратуры очень невелики. Как
правило, прием и передача производится на одну антенну за
исключением тех случаев, когда t, и fr существенно различны.
Тип антенны меняется в зависимости от места установки, но
обычно чаще применяется вертикальная поляризация. Это не
только дает возможность упростить антенну с круговой на-
107
правленностью *, но и в значительной степени уменьшить
провалы в диаграмме наземной станции, так как коэфициент
отражения от земли при вертикальной поляризации меньше,
чем при горизонтальной (см. рис. III.5 и III.8).
Основной недостаток вертикальной поляризации, заключа-
ющийся в более значительной помехе от местных предметов
и водной поверхности, не имеет такого большого значения во
вторичной радиолокации, вследствие более значительной на-
пряженности ответного сигнала, а при различных /,• и fr во-
обще не имеет значения.
2. Вторичная радиолокационная система
Для расчета системы можно применить уравнения для
односторонней связи, приведенные в главе III. Обозначив че-
рез Pt и PVUH мощность и чувствительность наземного радио-
локационного передатчика и приемника, а через Р/ и Р'лтн
те же величины для ответчика, можно написагь два выраже-
ния, одно для сигнала запроса, устанавливающее зависимость
между Рt и Р’ Л,11Н и другое для ответного сигнала (зависи-
мость между Р/ и Р ли,н). Если длина волны одна и та же
для обоих каналов и если передача и прием производятся на
одну антенну (или две одинаковых), то уравнения для обоих
каналов будут одинаковы и, в случае отсутствия отражения
от земли, соответственно равны
Рг
мин
pto} ал2
(4 кг)2
, (IX. 1)
(4 кг)-
где Gj и G2— усиления антенн радиолокатора и ответчика.
Следовательно можно спроектировать систему, у которой
р р р' р’
t1 мин 1 t * мин'
(IX.2)
В этом случае дальность, на которой сигналы запроса пере-
станут запускать ответчик, будет той, на которой ответный
сигнал будет едва различим. Такая «сбалансированная» си-
стема, разумеется, очень выгодна. Типичными значениями
Риин и Р'л/им являются соответственно 2,5 ХЮ-12 и 5Х
X 10 У1вт, так что для осуществления сбалансированной си-
стемы мощность передатчика сигналов запроса должна быть
примерно в 20 раз больше мощности передатчика ответных
сигналов.
* Вертикальная полуволновая антенна имеет круговую диаграмму в
горизонтальной плоскости, тогда как горизонтальная полуволновая ан-
тенна имеет диаграмму излучения в виде восьмерки
108
Разумеется, на практике необходимо принимать во внима-
ние отражения от земли путем введения коэфициента ср.
В этом случае формула для односторонней связи получит вид
0х-3)
(4тгг)2
но ф уже не будет определяться простым выражением
2si’n (hk since), так как р—1. Если Д- и /„ не одинаковы, то
значения ср для обоих каналов будут, как правило, различны.
В этом случае нельзя получить действительно сбалансирован-
ную систему и следует помнить, что дальность системы будет
дальностью худшего канала при данном угле места, ввиду
чего мощности должны быть выбраны соответствующим об-
разом. Те же соображения действительны в случае передачи
и приема на разные антенны.
Из примера 1(a) § 3 гл. III видно, что при односторонней
передаче очень легко получить достаточную дальность. Прак-
тически достаточно интенсивный сигнал получается от любой
цели, находящейся выше радиолокационного горизонта *. При
этом, благодаря дифракции, цели могут быть видны на неко-
тором расстоянии за горизонтом. Это объясняется тем, что при
вертикальной поляризации величина коэфициента 9 редко
снижается ниже 0,1 или 0,2 (кроме горизонтального направ-
ления). Использование излишне большой мощности передат-
чика сигналов запроса нецелесообразно, так как при этом от-
ветчик может насыщаться в результате возбуждения сигна-
лами других радиолокационных станций, находящихся даже
на больших расстояниях.
Наземная система управления посадкой самолетов
Радиолокация оказывается весьма полезной при определе-
нии местоположения самолетов в зонах интенсивного движе-
ния, например, близ аэродромов. Для устранения помехи от
близкорасположенных местных предметов целесообразно при-
менение вторичной радиолокации тем более, что при этом
можно, в случае необходимости, осуществить опознавание
какого-либо определенного самолета. В настоящее время раз-
работаны методы, позволяющие передавать по ответному ка-
* Удобной формулой для расчета дальности прямой видимости яв-
ляется
г = 3,55 h yrIf),
где h и И — высота передающей и приемной антенн над землей в мет-
рах, а г — дальность прямой видимости в километрах.
109
налу не только отдельные опознавательные сигналы, но также
высоту самолета и другие данные, автоматически согласован-
ные с данными радиолокатора.
Ниже приведены расчетные параметры одной из систем
управления посадкой:
Кан ал запросчика: а = 10 см, Pt = 2 X 105 вт, Gi =
= 2 000, G2 = 2, P’MllH 10"G вт (эта величина может изме-
няться), fp = 1 000 гц, т = 1 мксек, гMllhC = 225 км (без учета
отражения от земли).
Канал ответчика: к = 1,5 м, Р/ =5 вт, Рлшн —
*= 2Х Ю-12 вт, 01 = 1,6, G? = 25, г = 1 200 км (без учета
отражения от земли).
Основной направленностью излучения эта система обладает
в канале запроса. Антенна запросчика имеет диаграмму излу-
чения в вертикальной плоскости по закону cosec2 а. Боковые
лепестки в азимутальной плоскости чрезвычайно малы. Это
последнее требование необходимо во избежание многократного
срабатывания ответчика при круговом обзоре. Диаграмма из-
лучения запросчика по закону cosec2 а обеспечивает независи-
мость интенсивности сигнала от дальности при работе по са-
молету, летящему на постоянной высоте. Это не соблюдается
в ответном канале, но последний имеет большой запас по
дальности, обеспечивающий достаточную интенсивность сигна-
ла даже в провалах диаграммы.
3. Опознавание целей
Первые системы были предназначены для опознавания
своих самолетов при наличии в воздухе неприятельских. На-
земная станция была обычной станцией дальнего обнаружения
метрового диапазона и обе частоты f f и fr были равны несу-
щей частоте /0 основного радиолокатора. Рабочие частоты
станций дальнего обнаружения были распределены в значи-
тельном диапазоне с целью устранения взаимных помех. Что-
бы ответчик мог перекрывать весь диапазон частот, его рабо-
чая частота все время изменялась при помощи вращающего-
ся конденсатора. На каждой станции сигнал опознавания
появлялся через определенные паузы в моменты, когда часто-
та ответчика оказывалась равной частоте данной станции.
Метод качания частоты ответчика применяется во многих
случаях, когда ответчик должен работать в большом диапа-
зоне частот. Однако он мало пригоден в системах кругового
обзора, так как луч может попасть на цель в момент, когда
частоты запросчика и ответчика не совпадают. Основной от-
ветный сигнал может оказаться слишком слабым, чтобы быть
видимым на экране, в то время как боковые лепестки могут
110
вызвать сильный ответный сигнал *. При этом, очевидно, мож-
но определить только дальность цели, но не азимут. По этим
соображениям системы опознавания своих самолетов не наш-
ли себе широкого применения со станциями кругового обзора,
с которыми, как правило, применялся описываемый ниже со-
вершенно отдельный канал опознавания.
Согласование системы опознавания с работой радиолокационной
станции
При отдельном канале опознавания индикаторы должны
быть устроены таким образом, чтобы ответный сигнал системы
опознавания и отраженный от той же цели сигнал могли быть
надежно отождествлены. В не-
сложных случаях, когда наблю-
дение ведется только за одной
целью, как например, в неко-
торых типах самолетных уста-
новок, может оказаться доста-
точным только отождествление
по дальности. В подобном слу-
чае в канале опознавания мож-
но пользоваться вертикальной
стержневой антенной неслож-
ной конструкции, а индикатор
может быть с нормальной раз-
верткой дальности с модуляци-
ей отклонением луча (типа Д).
Ответный и отраженный от це-
ли сигналы могут быть видны
на экране одновременно или
подаваться поочередно с по-
мощью переключателя.
Для наземных установок
опознавания можно обычно
применять антенны большего
размера и специальные инди-
каторы. В этом случае гораздо
легче получить необходимую
Рис. IX.1. Комбинированный
индикатор дальности и сис-
темы опознавания. На верх-
ней развертке видны зонди-
рующий импульс передатчи-
ка и два импульса, отражен-
ные от двух целей. На ниж-
ней развертке виден сигнал
опознавания. Этот сигнал
двойной благодаря тому, что
в системе опознавания при-
менен метод равносигнальной
зоЯы для отождествления сиг-
налов по угловым координа-
там.
дальность, хорошую разрешаю-
щую способность по азимуту и дальности и надежное отожде-
ствление с отраженным сигналом. Для приема сигналов опо-
знавания можно пользоваться направленной антенной с кони-
* Следует отметить, что боковой лепесток с уровнем на 10 дб ниже
главного лепестка дает снижение отраженного сигнала на 20 дб и толь-
ко на 10 дб при сигналах вторичного радиолокатора при условии, ко-
нечно, что сигнал достаточен для запуска ответчика на боковых лепест-
ках.
Ill
ческой разверткой и отдельным индикатором типа К. Преиму-
ществом такой системы является возможность создания двой-
ной развертки, на одной из которых развернуты отраженные
сигналы радиолокационной станции, а на другой—сигналы
опознавания (см. рис. IX. 1). Отождествление сигналов по
дальности производится визуально. Попытки воспроизвести
сигналы опознавания непосредственно на экране индикатора
кругового обзора оказались неудачными.
Радиолокационные станции, работающие в сантиметровом
диапазоне, имеют обычно очень узкие диаграммы, тогда как в
установках опознавания, работающих в метровом диапазоне,
потребовались бы для создания подобной диаграммы чрез-
мерно большие размеры антенной системы. Это является од-
ним из основных недостатков системы опознавания метрового
диапазона, применявшейся в прошлом. Будущие системы опо-
знавания будут, повидимому, работать в диапазоне более вы-
соких частот, что даст возможность применять направленные
антенны даже в самолетных установках. В наземных станциях
сигналы опознавания можно было бы в этом случае подавать
непосредственно на экран индикатора кругового обзора, в
особенности в системах, в которых отсутствует качание ча-
стоты ответчика.
Пример расчета системы опознавания
В качестве примера можно взять систему опознавания,
предназначенную для работы в диапазоне частот 157 —
187 мггц. Столь большой диапазон частот необходим для того,
чтобы можно было значительно разнести рабочие частоты
запросчиков и избежать таким образом насыщения системы
при большом количестве запросчиков. Ответчик проходит этот
диапазон один раз в течение 2,5 сек. Антенна ответчика имеет
усиление порядка единицы. Антенна запросчика состоит из
двух вертикальных синфазных полуволновых вибраторов (уси-
ление в горизонтальной плоскости около трех). Усиление
приемной антенны с коническим обзором равно двум в на-
правлении равносигнальной зоны. Рассмотрим случай, когда
103 вт, Рмин = 10~l3jm, P'f = 5 etn, P'MtJH = 1,25 X Ю~10 ent
(или 100 мкв на сопротивлении 80 ом) и К= 1,7 м. При этих
значениях согласно уравнению (IX.1) получается дальность в
свободном пространстве, равная 670 км для запросчика
и 425 км для ответчика. В системе имеется некоторый запас
по дальности в запросном канале, так как вследствие разных
антенн нельзя создать полностью «сбалансированную» систему.
С учетом влияния отражения от земли можно получить даль-
ность порядка 85 км при = 0,2 (такое значение ф при очень
малых углах места можно получить только при вертикальной
поляризации).
112
ПРИЛОЖЕНИЕ I
ОСНОВНЫЕ ОПРЕДЕЛЕНИЯ И УРАВНЕНИЯ
1. Импульсный радиолокатор
На рис. II.1 изображена упрощенная скелетная схема со-
временного импульсного радиолокатора сантиметрового диа-
пазона. Импульсный передатчик излучает зондирующий им-
пульс длительностью порядка 1 мксек. Антенна имеет большое
усиление G. Импульс, отраженный от цели, принимается той
же антенной и после усиления в широкополосном приемнике
и детектирования воспроизводится на экране электронно-луче-
вого индикатора.
Рис. П. 1. Упрощенная скелетная схема импульсной радиоле
кационной системы.
Угловые координаты цели определяются по положению ан-
тенны в момент приема отраженного сигнала. Наклонная
дальность определяется по интервалу времени t = -у, кото-
рый импульс затрачивает на прохождение пути от радиолока-
тора до цели и обратно. На рис. П.2 приведен график зави-
симости между наклонной дальностью и интервалом.
Параметры системы, определяемые тем или иным элемен-
том схемы радиолокатора, отмечены на рис. П.1. Эти пара-
метры рассматриваются дальше как порознь, так и в совокуп-
ности в «уравнении дальности в свободном пространстве»,
определяющем максимальную дальность обнаружения rMaRC
без учета отражения от земной поверхности вблизи станции.
8 Основы радиолокации
2. Импульсный передатчик
Импульсный передатчик характеризуется следующими па-
раметрами:
~ — длительность зондирующего импульса
(обычно в микросекундах),
Рис. П. 2. График для определения дальности
по интервалу между посылкой зондирующего
и приемом отраженного импульсов.
f — частота повторения импульсов в герцах,
т / Р
= __^£ — коэфициент заполнения,
Pt — импульсная мощность в ваттах.
Р, т
^/== Ло*----энергия в импульсе в джоулях,
р.т/
Pcp = Et fp = ---средняя мощность в ваттах,
/.— длина волны в метрах.
Длительность импульса т в большинстве установок равна
одной микросекунде и меньше. Более длительные импульсы
применяются в станциях с очень большой дальностью дейст-
вия. Если задана разрешающая способность по дальности
Дг
Д г в метрах, импульс не может быть длительнее мксек.
Частота повторения f должна быть достаточно низкой
0,4 с ч
(/р< ——> где с—скорость распространения радиоволн), во
Г макс
114
избежание неоднозначности измерения дальности. При более
высокой частоте повторения сигналы, отраженные от дальних
целей, могут появиться на экране индикатора в начале раз-
вертки и ввести оператора в заблуждение. Если заданная
максимальная дальность мала и с этой точки зрения частота
Рис. П. 3. График для определения средней мощно-
сти передатчика при различных коэфипиентах за-
L. ' полнения.
повторения fp может быть выбрана достаточно высокой, пре-
дельное значение обычно определяется мощностью рассея-
ния на аноде генераторной лампы, так как Рс увеличивается
пропорционально fp.
0,01 0,03 0,06 0,1 0,3 0,6 1,0 3,0»
300С0 10000 3000 1000 300 юо\х
33000 11000 5200 1550____390 225 У
Н X S L Р Обозначение
Рис. П. 4. Шкала волн радиолокационного диапа-
зона.
На рис. П.З приведены графики для определения Рс, по
заданным Р., т и J .
Выбор рабочей длины волны X является очень сложной за-
дачей. Длина волны часто определяется состоянием вакуум-
8* 115
ной техники, допустимыми размерами антенной системы, тре-
буемой точностью, условиями распространения и пр. На
рис. П.4 представлена зависимость между длиной волны и ча-
стотой согласно уравнению л f = с9 а также обозначение ра-
диолокационных диапазонов волн.
3. Антенна
Ширина диаграммы излучения антенны 0 в какой-либо
плоскости, выраженная в радианах, приблизительно пропор-
циональна длине волны и обратно пропорциональна размеру
антенны в рассматриваемой плоскости.
Ширина диаграммы, а также усиление G параболоида
вращения диаметра DM могут быть найдены непосредственно
по графику рис. П.5.
луча и усиления антенны при различных часто-
тах (длинах волн).
Точность измерения и разрешающая способность по угло-
вым координатам равны в первом приближении ширине диа-
граммы излучения. Поэтому в точных радиолокационных уста-
новках обычно используется сантиметровый диапазон во из-
бежание чрезмерно громоздких антенных систем.
4. Эффективная Отражающая поверхность цели
Эффективная отражающая поверхность цели Ае может
быть определена как отношение мощности в единице телес-
ного угла, отраженной от цели в направлении, обратном на-
116
правлению падения энергии облучения, к мощности облучения
цели на единицу поверхности, умноженное на 4
При облучении объектов, значительных по сравнению с
длиной волны размеров со сложной конфигурацией, значение
эффективной отражающей поверхности сильно изменяется с
изменением ракурса цели. В таблице П.1 приведены значения
отражающих поверхностей некоторых простых объектов, а
также объектов в воздухе и на море.
Таблица П. 1
Объект
Эффективная отража-
ющая поверхность
Ае м2
Пассивный полуволновый вибратор ...............
Согласованный активный полуволновый вибратор . .
а
Шар радиуса а при у <0,15......................
а
Шар радиуса а при у->1.........................
Уголковый отражатель со стороной а.............
Плоская пластина с поверхностью Аг при нормальном
падении .......................................
Цилиндр радиуса а и длиной L при нормальном па-
дении ................. .......................
Самолет небольших размеров ....................
Самолет больших размеров ......................
Всплывшие подводные лодки и катера ............
Небольшое торговое судно.......................
Крупное судно .................................
0,86
0,22 Х2
4,41.104 ?4
тс а2
4 тс а4
”3X2“
4 тс Дг2
Х2
2тс£2а
X
15
80
50—250
4000-12000
30000 и более
5. Приемник
Качество приемника характеризуется величиной шумфак-
тора N, определяемого как отношение мощности сигнала, ко-
торую можно получить из антенны, к теоретическому значе-
нию мощности тепловых шумов &ТА/ при отношении мощно-
сти сигнала к действительной мощности шумов, равном еди-
нице. Равенство сигнала и шумов должно устанавливаться
после достаточно большого усиления в каскаде, не вносящем
собственных шумов, k Т = 1,38 . 10 2 . 290 ="=4.1 . 10_2-, Д f —
полоса пропускания приемника в герцах.
1 3
Оптимальная полоса пропускания в мегагерцах Д7^—-2—’
117
а с учетом нестабильности частоты передатчика и гетеродина
, г
приемника ^jopt .
По графикам рис. П.6 можно определить шумфактор при-
емника, включенного на источник сигнала с внутренним со-
противлением Zg . Напряжение Е является половиной ампли-
туды ненагруженного источника сигнала с внутренним сопро-
тивлением 50 ом. Напряжение Е при измерении устанавли-
вается таким образом, чтобы сумма сигнала и шумов была
на 3 дб выше уровня шумов.
Рис. П. 6. График для определения шумфактора.
Если источник сигнала проградуирован в микровольтах при
внешней нагрузке, равной Z s, напряжение Е графика должно
быть умножено на Если источник сигнала проградуиро-
й 50
ван без нагрузки, надо умножить напряжение Е на 0,5 У -~-
а при измерениях включить такое последовательное сопротив-
ление, чтобы общее сопротивление источника было равно
входному сопротивлению приемника.
6. Индикатор
На рис. П.7 изображены наиболее употребительные типы
разверток электронно-лучевых индикаторов.
Индикатор типа А является хронологически первым и од-
118
Рис. П. 7. Наиболее употребительные типы
разверток электронно-лучевых индикаторов.
119
ним из наиболее употребительных индикаторов с модуляцией
отклонением луча. Индикатор кругового обзора является наи-
более распространенным индикатором с модуляцией по
яркости.
Качество индикатора характеризуется «коэфициентокм раз-
личимости» Wy определяемым следующим образом:
р Р
W __ мин __ 1 мин
Рш ~ NkTbf ’
где Рмин — мощность входного сигнала приемника, соответст-
вующая едва различимому сигналу, a Ptu— мощность шумов.
Иногда удобнее характеризовать качество индикатора так
называемым «коэфициентом видимости» V, определяемым со-
отношением
р т Р
— MUH мин
Еш NkT\W'
приемника, соответ-
где Емин—энергия в импульсе на входе
Рис. П. 8. График для определения коэфи-
циента видимости.
ствующая едва раз-
личимому импульсу,
а Еш — энергия шу-
мов.
Таким образом
У^ IFtA/.K)-*
(т — в микросекун-
дах, а А/ в герцах).
Величина коэфи-
циента видимости У
может быть опреде-
лена для индикато-
ра типа А при раз-
ных частотах повто-
рения f и разных
полосах пропуска-
ния А/ по графикам рис. П.8 (А/ на графиках в мегагерцах).
Приведенные на графиках значения V являются средними
величинами и могут в зависимости от прочих условий испыта-
ний колебаться в довольно значительных пределах.
7. Уравнение дальности в свободном пространстве
Теоретическая максимальная дальность обнаружения ра
диолокатора с общей (или одинаковой) изотропной антенной
для передачи и приема, антенно-фидерной системой без потерь
120
и с идеальным приемником может быть определена следую
щи’м образом:
энергия в импульсе передатчика равна
энергия, приходящаяся на единицу поверхности
Pt-
цели----- -? ,
4 л: г2 ’
энергия на единицу поверхности в месте
Pi '
приема - ,
Л т Л X2
энергия на входе приемника------(4^у г~' *
Здесь мощность в ваттах, длительность импульса в секун-
дах, Ае,\ и г в одних и тех же единицах.
Допустим, что предельной различимости сигнала соответ-
ствует равенство энергий сигнала и шумов на входе прием-
ника и чго шумы приемника определяются только входной
цепью приемника. Так как энергия шумов Elu -kl\ то
kT_ Р^АеК
откуда
макс (4k)s kT
Для получения максимальной дальности в реальных усло-
виях необходимо ввести в уравнение дальности следующие
безразмерные коэфициенты:
G — усиление антенны,
М — шумфактор приемника,
V — коэфициент видимости,
— коэфициент, учитывающий потери на пути от передат-
чика до цели, включая поглощение в атмосфере,
vir — коэфициент, учитывающий потери при приеме.
Тогда
г _ |4/ Ae\*G'1TitVh
яакс у (4 к)3 VN k
или, таи как согласно определению
мин
с
NV .k. Т
. '/Pj Ае р G2 Ч ч
макс
О)3 Рмин
121
Обычно потери в линии связи выражают не безразмерным
коэфициентом эффективности ?), а затуханием в децибелах.
Точно law же усиление антенны, коэфициент видимости и шум-
фактор часто выражают в децибелах. В этом случае очень
удобно пользоваться для быстрого вычисления максимальной
дальности обнаружения графиком рис. П.9.
Рис. П. 9. График для определения максималь-
ной дальности в свободном пространстве.
Для этого следует:
а) найти по графику значения в децибелах, соответствую-
щие Рт,, Ае и к2 и сложить их;
б) прибавить к этому числу усиление антенны G в деци-
белах, умноженное на два;
в) вычесть из этого (—+ — + V-J-W) в децибелах;
г) по разности найти по графику гмакс в километрах.
8. Влияние отражения от земли на форму диаграммы
в вертикальной плоскости
Максимальная дальность радиолокатора, особенно рабо-
тающего в метровом диапазоне волн, часто значительно отли-
чается от вычисленной по уравнению дальности в свободном
пространстве вследствие отражения от земли. Коэфициент на-
122
пряженности поля ср (а) для плоского участка земли вокруг
станции равен
? (а) = 2 sin (hxk sin а),
где я = —, a h\ и а в соответствии с рис. П.10.
Для малых углов а и больших г sin а а и а .
Соответственно
ср (а) = 2 sin
2 hr fi2
Типичная диаграмма в вертикальной плоскости показана
на рис. П.11. Углы, соответствующие максимумам и миниму-
мам лепестков диаграммы, могут быть найдены из уравнения
а
т
П К
причем нужно брать
Рис. П. И. Типичная диаграмма излучения
антенны в вертикальной плоскости.
п = 1, з, 5 и т. д. для максимумов лепестков,
п = 0, 2, 4’ и т. д. для минимумов лепестков.
123
9. Зона отражения
Отражение от земли происходит в пределах эллиптической
зоны (первой зоны Френеля).
Положение центра эллипса и его размеры определяются
выражениями (см. рис. П.10).
х0 = dx (1 + 2а)
хх — 2dx У а (1 -|-а)
ух = 2hx -/а (1 + а) ,
где
, h,d hx
d^ —-------—-------
Л2 sin а
X
а —--------.
4 A, sin а
Для максимума первого лепестка а = 1 и соответственно
х ___х — 0 7
Л о — — и, / ,
23,3 /г,2
- 1
Л
у ^2 V 21Ц.
Эти значения определяют размеры площадки, необходимые
для увеличения дальности в свободном пространстве в два
раза. Неровности на площадке не должны превосходить — .
При расположении станции на наклонной площадке мак-
симальная дальность удвоится для цели, находящейся на го-
ризонте. Если угол наклона площадки равен ф, то
1,46 а
Л"° 1 sin2 Ф
10. Поглощение электромагнитных колебаний в атмосфере
При распространении электромагнитных колебаний во
влажной атмосфере поглощение L в децибелах приблизитель-
но равно
г 0,3 Q
где Q—скорость выпадения осадков в мм/час.
124
11. Рефракция электромагнитных колебаний
Наличие влажности в атмосфере, кроме поглощения, яв-
ляется причиной искривления лучей. В так называемой «нор-
мальной атмосфере» влажность постепенно убывает с высо-
той, вследствие чего лучи несколько искривляются по направ-
лению к земле. Это искривление может быть учтено, если
считать, что колебания распространяются прямолинейно над
земной поверхностью, радиус которой равен 1,25 (/?—истин-
ный радиус земли). Распространение называется в этом случае
«нормальным».
При чрезвычайно быстром убывании влажности (связан-
ном обычно с инверсией температуры), наблюдается «аномаль-
ное распространение», характеризующееся тем, что кривизна
лучей превышает кривизну земной поверхности. Образуются
так называемые «атмосферные волноводы» и дальность радио-
локатора может значительно превысить максимальную даль-
ность в свободном пространстве.
Это явление особенно часто наблюдается над водной по-
верхностью в сантиметровом диапазоне волн.
ПРИЛОЖЕНИЕ II
РАСЧЕТ ПОГЛОЩАЮЩИХ, РАССЕИВАЮЩИХ И
ОТРАЖАЮЩИХ ПОВЕРХНОСТЕЙ
ОПРЕДЕЛЕНИЯ
Если обозначить плотность падающего потока через Fz, а
поглощающую, рассеивающую и отражающую поверхности,
находящиеся в этом потоке, через Aai As и ле соответствен-
но, то
Аа Fi—мощность, которую можно получить на входе
приемника (согласно определению, приведенному в § 4 гл. II),
Ft— мощность, рассеиваемая целью,
Ае Ft—мощность в изотропном излучателе, интенсивность
излучения которого в направлении, обратном направлению па-
дения прямого луча, точно эквивалентно интенсивности отра-
женного от объекта сигнала в этом же направлении. Если
усиление отражающей системы равно G в этом направлении,
то Ае = GAS. Точно также Ае=4^ L2 (уравн. III.7).
1. Рассеивание и отражение настроенного полуволнового
пассивного вибратора
Пассивным называется короткозамкнутый вибратор. При-
нято, что вибратор расположен параллельно электрическому
вектору Е поля с напряженностью Е, в/м, что его длина равна
X
и что полное сопротивление в центре вибратора активно
и равно сопротивлению излучения Rr. Следовательно поле
будет индуктировать в вибраторе ток, находящийся в фазе с
полем. Допустим, что величина тока в центре равна / и что
его распределение синусоидально, так что на расстоянии х от
т 2к X
центра его величина будет / cos —-—. Энергия, извлекаемая
из поля этим током, будет равна интегралу У Et Icosv dx
вдоль вибратора, причем©—сдвиг фазы тока, в рассматривае-
те
мом случае равный нулю. Эта энергия должна быть равна
энергии, излученной вибратором и равной I2Rr. Следова-
тельно
+тх
Р 2 тг jc
Г1 R = I Е: I cos © cos-- dx
J *
P . )• C ... IEJ
-Ed----1 cos ©cos 6a 9 =—— cos © .
2k. к
2
л Е
Так как cos 1, то / = -' J .
к Rr
X2 Е?
следовательно — Л , откуда
n Rr
. К2 £•’ 120к
д,=-----L .-----=
* К3 R Е?
Рассеиваемая энергия будет
120 — = 0,52 V,
к R,
если вместо Rr подставить его значение Rr =73 ома. Чтобы
получить отражающую поверхность, следует учесть, что уси-
ление по мощности полуволнового вибратора относительно
изотропного излучателя в экваториальной плоскости равно
1,64. Отражающая поверхность А„ будет следовательно
1,64- 0,52 = 0,86 и, соответственно, L = 0,26 к. Тот же
д. 601
результат может быть получен из формулы—— для напряжен-
ности поля на расстоянии г от вибратора с током I. Если виб-
ратор наклонен под углом 0 к электрическому вектору, то L
необходимо умножить на cos2 0 . Если вибратор расстроен, то
в его полном сопротивлении появляется реактивная состав-
ляющая, величина которой зависит от поперечного сечения
вибратора. Например, для вибратора диаметром 1 см и при
\ = 5 м реактивное сопротивление равно приблизительно
10 ом на 1% изменения длины вибратора. Таким образом,
если вибратор на 12% больше или меньше резонансной длины
L будет примерно вдвое меньше.
2. Рассеивание и отражение полуволновой антенны, согласо-
ванной со входом приемника
Хорошо известно, что максимальная мощность в нагрузке
соответствует равенству нагрузки и полного сопротивления
источника. Чтобы получить максимальный сигнал в приемнике,
127
его входное полное сопротивление Ra должно быть равно Rr.
В этом случае энергия, поглощенная из падающего поля,
определяется энергетическим уравнением
/ F I
(/?г+ cos®,
ТС
г Е1 1
так что I —---------— , если cos? — 1
4Rr+Ra)
и 1 = если Ra = Rr,
г. е. ток равен половине тока в пассивном вибраторе. Таким
образом половина энергии, поглощенной из падающего поля
(/2/?,) будет рассеиваться, тогда как другая половина (/2 Ra)
будет поглощена и использована в приемнике. В результате
этого эквивалентная рассеивающая поверхность и эквивалент-
ная поглощающая поверхность будут соответственно:
120Р^_и л Д20^
<Ra + RrY 4Ra+Rry
30 л2 Z2
Если /? = /? , то А =Л„ =----— или приближенно— . Та-
а r s а к Rr 8
ким образом Аа зависит от мощности, которую можно полу-
чить в приемнике, тогда как As зависит от условий согласо-
вания. Эквивалентная отражающая поверхность Ае будет в
1,64' раза больше As, или 0,22а2 и L = 0,13 к.
3. Поглощающая поверхность любой антенны
Выше было показано, что эквивалентная поглощающая
А2
поверхность полуволнового виоратора равна примерно —.
Из теоремы взаимности непосредственно следует, что погло-
щающая поверхность любой антенны пропорциональна ее
усилению в данном направлении. Так как усиление полувол-
новой антенны в экваториальной плоскости 6=1,64, то для
G л3 G I2
любой другой антенны Л —т—, или Ап-= —л—/
а 8-1,64 4г.
Этот вывод получен приближенным методом, но можно дока-
зать, что последнее выражение является точным, следующим
образом. Расамотрим прямоугольную излучаюшую поверх-
ность Л, с равномерным распределением поля Еп по поверх-
ности. Полный поток энергии через эту поверхность равен
р = А'Е‘"
s 120 к
128
Согласно закону Кирхгофа поле на расстоянии г на линии,
перпендикулярной к центру площади, будет.
V ds-
J J А Г
Это выражение при больших г численно равно Ег~
Следовательно поток энергии будет
Ер А
Е/ А\ Е30 PSG
12Э я 120 г. },3 р 4 кг3
(согласно определению), откуда подставляя приведенное вы-
4- А
ше значение Рs, G = —уа-~ . Выше было принято, что по-
верхность Аг излучает всю энергию в пространство по на-
правлению к наблюдателю, следовательно такая антенна бу-
дет поглощать всю энергию, поступающую с того же направ-
ления. Поэтому Аа'.— Аг и соогвегственьо
0 = 1^
или Аа=-------
4~
По принципу взаимности этот вывод может быть распростра-
нен на все антенны с усилением G.
4. Расчет отражающих поверхностей идеально проводящих
объектов
Шар
Если радиус шара а мал по сравнению с длиной волны, то
, 6 я3 а' . п 2 ( 2к а \4
L — —, в результате чего 4в = 9п с2 ( —:— ) =»
а*
= 4,41. 104 yj-, так что Ле обратно пропорционально X4
Это хорошо известный закон отражения Релея для объектов
небольшого размера. Когда величина а значительна по срав-
нению с X, то L = (или Ае=~а2). Последнее выражение
можно вывести из законов геометрической оптики следующим
образом.
Рассмотрим луч (рис. П.12), падающий на шар на рас-
стоянии h параллельно лучу, проходящему через центр шара.
Этот луч отразится под углом к — 2а w где sin а — Если
единица энергии пересечет единицу поверхности за единицу
9 Основы радиолокации 129
времени, то энергия, заключенная между углами к—2а и
к—2(o.-\-do) будет равна 2^hdh или ~а2 sin 2а rfa. В при-
нятых обозначениях это будет 4~ L2 sin 2а r/а, откуда можно
г а
видеть, что рассеяние не зависит от угла падения, и L = -у.
Рис. 11.12. Зеркальное отражение oi
сферической поверхности.
Рис. 11.13. Отражение от проводящего шара.
Наибольшие трудности представляет вычисление, когда радиус
шара такого же порядка, как и длина волны. На рис. П.13
графически представлены результаты вычисления.
13э
Поверхность любой несложной формы
Обратное отражение от цели, размеры которой превышают
длину волны, можно определить приближенно, пользуясь за-
коном Гюйгенса. Предположим, что излучает точка Р
(рис. П.14), а отражает поверхность S. Тогда очевидно, если
амплитуда прямого поля в dS равна Et , то амплитуда Es от-
раженного поля в точке Р будет равна
_ / 1Г_Г
~ 1 С Е- е х cos 6
X J г
где dS — любой элемент поверхности, а 6—угол между на-
правлением луча и нормалью к dS.
Круглый
Если, как обычно, г очень велико по сравнению с размера-
ми отражателя, можно считать EL и г постоянными.
Следовательно
Е. = -—l- I е cos 0 dS
131
и таким обравом численно
L- —
к
J 4gr
е Х cos 0 dS .
Обычно относят фазу элементарной волны, отраженной от ка-
кого-либо элемента dS* к фазе какого-либо (например цен-
трального) элемента dS0, расположенного на расстоянии при-
мерно Го от Р. В случае круглого диска с радиусом а, накло-
ненного под углом о к направлению луча (рис. П.15),
+« -J±?xsln_0
cos_& ( 2 у/а2 — х1 'е dx.
'к J и
—а
Следовательно,
__ a ctg & j z 4-a sin 6 \
“ 2 71 V к )'
При нормальном угле падения
L =- —
к
. 4~s а* 4 я А?
А, --------=---------г—
к2 к2
где Аг — видимая площадь диска.
ОГЛАВЛЕНИЕ
Глава I. Введение.........................................- 5
Глава II. Генерирование и прием импульсных сигналов ... 11
1. Импульсные генераторы для частот ниже 1 С00 мггц..... 12
2. Генераторы сантиметрового диапазона................... 13
Модулятор............................................ 15
3. Разложение импульсных сигналов в ряд Фурье ....... 16
4. Характеристики приемника. Шумы входной цепи........... 19
Шумовой фактор....................................... 21
5. Коэфициент различимости и предельная чувствительность
приемника ............................................... 24
6. Числовые примеры.................................... 25
Глава III. Факторы, определяющие эффективность радиолока-
ционной аппаратуры..................................... 26
I. Усиление направленных антенн.................• . . . 26
Полярные диаграммы направленных антенн . ............ 31
Влияние отражения от земной поверхности ............. 33
2. Эффективная поверхность отражения цели................ 37
Эффективная поверхность отражения самолета........... 38
Эффективные отражающие поверхности надводных и назем-
ных целей..................................... 39
3. Расчет максимальной дальности................• . . . . 44
Шумы антенны......................................... 45
Наземные станции, использующие луч, отраженный от земли 46
Примеры расчета.................................... 48
4. Распространение радиоволн в атмосфере............. . 51
5. Выбор параметров радиолокационных станций............. 53
Глава IV. Измерение дальности............................... 55
1. Метод измерения дальности......................... 56
Применение счетно-решающих устройств................... 58
2. Калибровка схемы...................................... 60
Эталонная частота......................•............... 60
Ультразвуковые эталоны времени......................... 61
Электрические отметки дальности........................ 62
Глава V. Определение азимута................................ 65
1. Системы круговой направленности....................... 67
Система „скрещенных" вибраторов"....................... 67
Модифицированная антенная сисгема Эдкока............... 69
2. Системы кругового обзора............................. 69
Применение одной антенны для передачи и приема. ... 69
Индикаторы кругового обзора ......................... 70
Индикатор дальность - азимут типа В ................. 73
3. Методы образования равносигнальной зоны............... 73
4. Значение формы диаграммы в вертикальной плоскости ... 76
5. Ошибки вследствие неровностей почвы и неоднородности
атмосферы................................................. 80
Глава VI. Определение угла места............................ 81
1. Наземные и корабельные радиолокационные станции обнару-
жения самолеюв.............................................81
2. Станции с широкой диаграммой излучения................ 82
Метод разнесенных по высоте антенн................... 82
Влияние характера окружающей местности............... 84
3. Станции кругового обзора с одновременным определением
угла места............ ............................... 84
4. Bciiomoiательные станции для определения высоты цели ... 86
5. Специальные методы................................... 88
Глава VII. Системы одновременного определения азимута и
угла места. Двухмерньй обзор пространства .... 91
1. Общие соображения о двухмерном обзоре пространства ... 92
2. Системы обзора..................................... . 94
Системы индикаторов.................................. 96
Системы авгома!ического сопровождения цели........... 97
3. Радиолокационные станции дальнего обнаружения с двухмер-
ным обзором по угловым координатам........................ 98
4. Самолетная станция перехвата.......................... 98
Глава VIII. Помехи от местных предметов.....................109
1. Отражение от морской поверхности.......................101
2. Отражение от наземных объектов (местных предметов) ... 102
3. Система Допплера.......................................102
Глава IX. Вторичная радиолокация . ..........................106
1. Ответчик...............................................107
2. Вторичная радиолокационная система .................... 108
Наземная система управления посадкой самолетов ... 109
3. Опознавание целей......................................110
Согласование системы опознавания с работой радиолокацион-
ной станции..........................*...............111
Пример расчета системы опознавания.................112
Приложение I. Основные определения и уравнения .... 113
1. Импульсный радиолокатор...............................113
2. Импульсный передатчик.................................114
3 Антенна................................................116
4. Эффективная отражающая поверхность цели ..............116
5. Приемник..............................................117
6. Индик it >р..............................118
7. Уравнение дальности в свободном пространстве ........ 120
8, Влияние отражения от земли на форму диаграммы в верти-
кальной плоскости ........................................122
9. Зона отражения....................................... 124
10. Поглощ.ние электромагнитных колебаний в атмосфере . . . 124
11. Рефралция электромагнитных колебаний................ 125
134
Приложение II. Расчет поглощающих, рассеивающих и отра-
жающих поверхностей .................................. 126
Определения...............................................126
1. Рассеивание и отражение настроенного полуволнового пас-
сивного вибратора.....................................126
2. Рассеивание и отражение полуволновой антенны, согласо-
ванной со входом приемника.......................... 127
3. Поглощающая поверхность любой антенны..............128
4. Расчет отражающих поверхностей идеально проводящих объ-
ектов ................................................129
Шар............................................. 129
Поверхность любой несложной формы................ 131
Редактор В. И. ГПамшур
Техн, редактор А. Н. Уразова
*
Т70О77 Подп. к печ. ЦП 1951 г.
Бумага 60x92х !х% 4,2э бгм. лист,
печ. лист. 7,75 уч.-изд. листов.
Цена 5 р. 50 к. Заказ 956.
*
Набрано в типографии издательства
„Советское радио*
Отпечатано во 2-й типографии
Изд ва Академии Наук СССР
Москва, Шубине кий пер., д. 10.
Новая цена
Ь Ы.
Мне всегда нравились старые, сильно потрёпанные книжки. Потрёпанность книги говорит о
её высокой востребованности, а старость о вечно ценном содержании. Всё сказанное в
большей степени касается именно технической литературы. Только техническая литература
содержит в себе ту великую и полезную информацию, которая не подвластна ни
политическим веяниям, ни моде, ни настроениям! Только техническая литература требует от
своего автора по истине великих усилий и знаний. Порой требуется опыт целой жизни,
чтобы написать небольшую и внешне невзрачную книгу.
К сожалению ни что не вечно в этом мире, книги треплются, разваливаются на отдельные
листы, которые затем рвутся в клочья и уходят в никуда. Плюс ко всему орды варваров,
которым без разницы, что бросить в костёр или чем вытереть свой зад. Именно их мы можем
благодарить за сожженные и растоптанные библиотеки.
Если у Вас есть старая книга или журнал, то не дайте им умереть, отсканируйте их и
пришлите мне. Совместными усилиями мы можем создать по истине уникальное и ценное
собрание старых технических книг и журналов.
Сайт старой технической литературы:
http: //retro li b. naro d. ru