


























































































































































































































































































































Автор: Виницкий А.С. Бакитько Р.В. Васильев М.Б.
Теги: электротехника авиация и космонавтика летательные аппараты ракетная техника космическая техника радиоэлектроника космонавтика
ISBN: 5-256-01054-9
Год: 1993




f РАДИОЛ
СИСТЕМЫ
МЕЖПЛАНЕТНЫХ
КОСМИЧЕСКИХ
V Аппаратов у
РАДИО¬
СИСТЕМЫ
МЕЖПЛАНЕТНЫХ
КОСМИЧЕСКИХ
АППАРАТОВ
Под общей редакцией
А. С. ВИНИЦКОГО
Москва
«Радио и связь»
1993
УДК 621.396:629.788
Федеральная целевая программа книгоиздания России
Радиосистемы межпланетных космических аппаратов / Р. В. Бакитько,
М. Б. Васильев, А. С. Виницкий и др.; Под ред. А. С. Виницкого.— М.:
Радио и связь, 1993.— 328 стр.: ил.— ISBN 5-256-01054-9.
Впервые с единых позиций излагаются теоретические и инженерные ос¬
новы построения многофункциональных радиосистем, обеспечивающих реа¬
лизацию перспективных программ исследования дальнего космоса.
После ретроспективного обзора отечественных и американских программ
исследования Луны, планет, комет, астероидов и межпланетной плазмы ис¬
следуются особенности радиотехнических подсистем, измеряющих параметры
движения КА, передающих командно-программную и телеметрическую ин¬
формацию, их структура, точностные и энергетические характеристики, прин¬
ципы квазиоптимального проектирования, а также основы построения, функ¬
ционирования и испытания бортовых и наземных аппаратурных и антенных
комплексов. Особое внимание уделяется автономным бортовым радиосрсд-
ствам навигации космических аппаратов (стыковка, прицельная посадка на
планету и другие задачи, которые наземный комплекс не может решать),
а также радио- и телевизионным системам картографирования планет и на¬
земным системам радиолокации планет. В заключение рассматриваются осо¬
бенности американской и японской наземной сети управления дальними
космическими аппаратами и перспективы международного сотрудничества
в исследовании дальнего космоса.
Для широкого круга специалистов в области космической радиоэлект¬
роники.
Табл. 47. Ил. 154. Библ. 97 назв.
Авторы: Р. В. БАКИТЬКО, М. Б. ВАСИЛЬЕВ, А. С. ВИНИЦКИЙ,
В. А. ГРИШМАНОВСКИЙ, А. Л. ЗАЙЦЕВ, В. В. КЕРЖАНОВИЧ, Е. П. МО¬
ЛОТОВ, В. П. ОРЕШКИН, Г. М. ПЕТРОВ, О. Н. РЖИГА, В. И. РОГАЛЬ-
СКИЙ, А. С. СЕЛИВАНОВ
Редакция литературы по радиотехнике и электросвязи
2302040000-096
046(01)-93
ISBN 5-256-01054-9
КБ-29-5-93
© Бакитько Р. В., Васильев М. Б.:
Виницкий А. С. и др.; 1993
ПРЕДИСЛОВИЕ
Среди основных направлений мирного использования кос¬
мической техники особое место занимает перспективная про¬
грамма исследований Луны и планет Солнечной системы. В от¬
личие от задач, решаемых в околоземном пространстве, выпол¬
нение этой программы связано с обеспечением надежной
радиосвязи с космическими аппаратами и прецизионного радио¬
контроля их траектории на дальностях в сотни миллионов—мил¬
лиарды километров. В таких условиях и наземные, и борто¬
вые средства космического радиокомплекса должны работать
на пределе, а подчас и за пределами их традиционных возмож¬
ностей, что привело к созданию потенциально нового поколе¬
ния радиосистем дальней космической связи, вобравшего в се¬
бя наиболее прогрессивные достижения современной радио¬
электроники.
Для решения перспективных задач дальней космической'
связи необходима координированная работа разнесенных на
большие расстояния весьма сложных и дорогих наземных ра¬
диокомплексов со сверхбольшими полноповоротными антенна¬
ми, что до последнего времени было под силу только таким
сверхдержавам, как США и Советский Союз. Это, а также на¬
растающая сложность таких перспективных программ исследо¬
ваний дальнего космоса, как пилотируемый полет к Марсу, сти¬
мулировали стремление космических агентств России, США,
Европы и Японии к сотрудничеству при использовании нацио¬
нальных средств наземных радиокомплексов.
Основная специфика бортовых радиокомплексов дальних
космических аппаратов связана с большим временем распрост¬
ранения радиоволн на межпланетные расстояния, что исклю¬
чает возможность оперативного управления космическим аппа¬
ратом с Земли, особенно в аварийных ситуациях. В результате
начали интенсивно развиваться новый класс автономных борто¬
вых радиосистем, способных решать навигационные и научные
задачи в дальнем космосе без помощи наземных радиосредств,
в также характерные методы и средства запоминания и пере¬
дачи на Землю по цифровой бинарной радиолинии больших
массивов научной информации, связанных с радио- и оптиче¬
ским картографированием планет.
1*
з
К созданию и эксплуатации радиокомплексов дальней кос¬
мической связи, а также к использованию и интерпретации по¬
ступающей от них научной информации подключаются все
более крупные коллективы академических, научно-исследова¬
тельских и промышленных предприятий. Однако до настояще¬
го времени отсутствуют труды, обобщающие теоретические
основы и богатый опыт создания и использования этого гло¬
бального радиокомплекса.
Предлагаемая читателям первая в отечественной литературе
книга на данную тему, написанная коллективом ведущих отече¬
ственных специалистов, весьма своевременно восполняет дан¬
ный пробел. Важно, что она в доступной форме на хорошем
научно-техническом уровне освещает не только теоретические и
инженерные основы построения, испытания и эксплуатации ра¬
диокомплексов дальней космической связи, но и содержание оте¬
чественных и зарубежных программ исследования дальнего
космоса, вопросы международного сотрудничества и интерпре¬
тации ряда полученных научных результатов. Можно надеяться,
что приобщенные к космическим исследованиям специалисты в
самых различных областях науки и техники смогут найти здесь
интересующую их информацию. Кроме того, многие из реализо¬
ванных в дальнем радиокомплексе решений представляют
более общий интерес и могут быть эффективно использованы
в радиокомплексах иного назначения.
Академик А. Г АЛЕЕВ,
Директор Института
космических исследований РАН
ВВЕДЕНИЕ
Впечатляющие успехи ракетной техники, кибернетики и
особенно космической радиотехники в последние десятилетия
резко расширили возможности исследований Луны и планет
Солнечной системы, проводившихся главным образом в России
и США. Известен весомый вклад нашей страны в эти исследо¬
вания: получены первые в мире черно-белые и цветные панора¬
мы поверхности Луны и Венеры, тепловая и радиолокационная
карты Марса и Венеры, характеристики их атмосфер, фотогра¬
фии Фобоса, доставка на Землю образцов лунного грунта, ис¬
следование кометы Галлея. Из достижений США следует в
первую очередь отметить высадку астронавтов на Луну и полу¬
чение обширной информации о Луне, Марсе, Венере и о боль¬
ших планетах с долгоживущих автоматов, способных достигнуть
границ Солнечной системы. Становятся реальными такие перс¬
пективные комплексные программы, как создание постоянно
действующих лунных баз, пилотируемый полет к Марсу, запуск
автоматов-разведчиков за пределы Солнечной системы.
Ясно, что без средств космической радиотехники ни одна из
этих задач не могла быть решена. Потребовалось создание но¬
вого поколения радиосистем, существенно отличающихся от
приземных и спутниковых радиосредств.
Основными являются следующие отличия:
переход от дальностей порядка десятков тысяч километров
к дальностям, достигающим миллиардов километров, что тре¬
бует качественного увеличения энергопотенциала радиолиний и
исключает возможность оперативного диалога с космическим
аппаратом (КА) (время распространения радиоволн в радиоли¬
нии Земля — КА достигает нескольких часов);
повышение требований к точности измерения параметров
движения КА (до 1 мм/с по скорости и до 5 м по дальности на
расстояниях до миллиарда километров);
более жесткие ограничения массы и энергопотребления бор¬
товой аппаратуры, а также числа и размеров нераскрывающих-
ся антенн, которые должны быть уложены под обтекатель
ракеты-носителя;
особенности распространения радиоволн в атмосферах пла¬
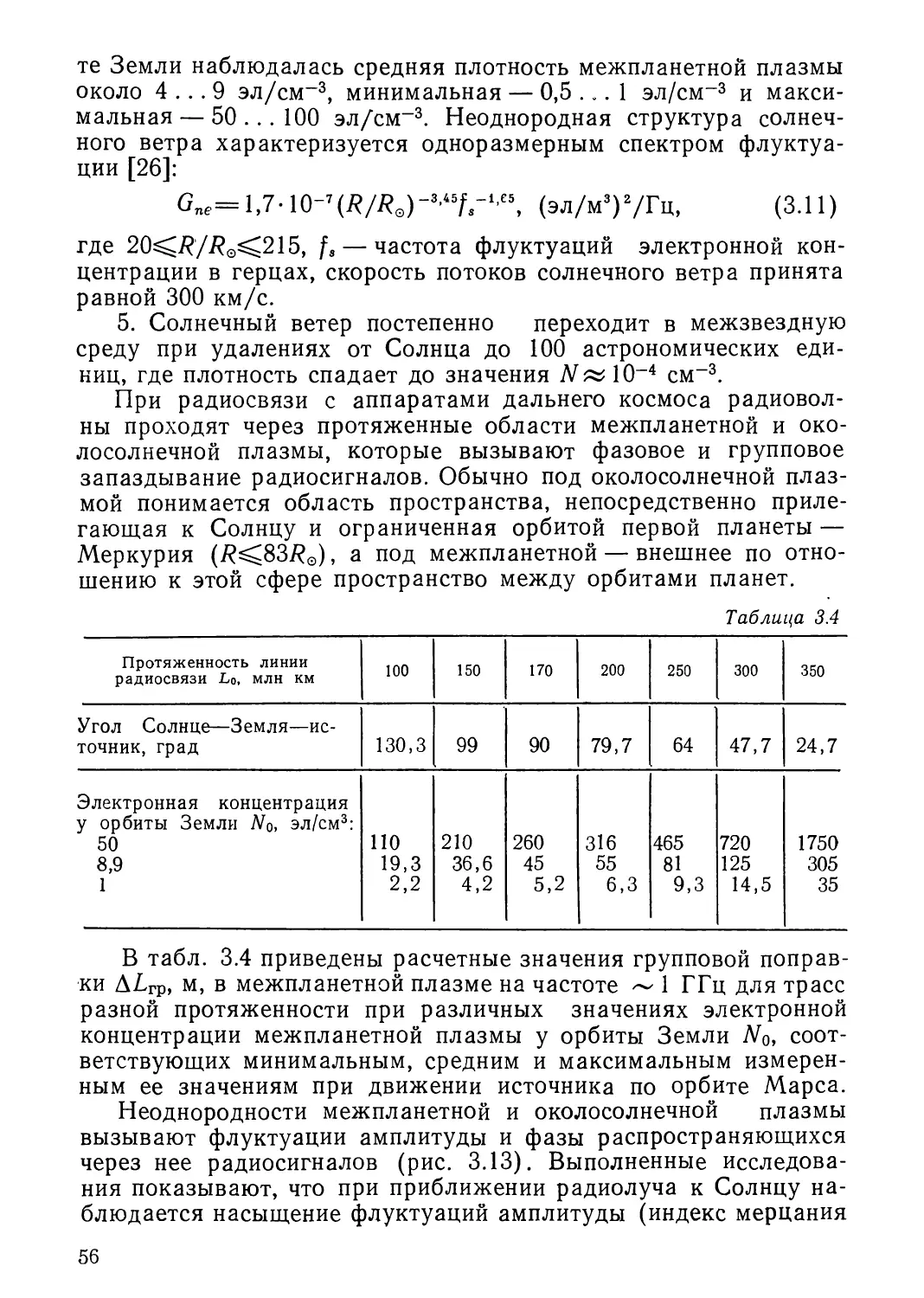
нет, околосолнечной и межпланетной плазме;
5
повышенные требования к надежности и долговечности ап¬
паратуры в жестких условиях открытого космоса ввиду большой
стоимости, уникальности и сложности объекта.
В связи с этими отличиями для радиосистем, устанавливае¬
мых на межпланетных КА, характерно минимальное энерго¬
потребление, а для наземных радиосистем дальнего космоса —
максимальное. При этом используемые в них методы извлече¬
ния и передачи информации близки к теоретически предельным.
Все эти особенности определили становление и быстрое раз¬
витие у нас и за рубежом радиокомплексов дальней космиче¬
ской связи как нового высокоэффективного класса радиосистем.
Известны монографии, а также большое число журнальных
статей и докладов на конференциях, где освещались отдельные
вопросы, имеющие отношение к радиосистемам дальнего кос¬
моса. Однако до настоящего времени отсутствовали труды, в
которых с единых позиций обобщаются задачи, теоретические
основы, особенности методов построения, расчета, испытаний и
эксплуатации радиосистем, обеспечивающих полет дальних
КА. Данная монография представляет собой первую попытку
решения этой задачи.
Основное рассмотрение ведется применительно к современ¬
ному многофункциональному радиокомплексу дальней космиче¬
ской связи, который разработан в Российском НИИ космиче¬
ского приборостроения и имеет в своем составе большие полно¬
поворотные приемопередающие наземные антенны диаметром
около 70 м, передатчики, отдающие в режиме непрерывного
излучения мощность порядка 200 кВт, генераторы колебаний
со стабильностью 10"12... 10'13, мазеры с чувствительностью
до 10 К.
Магистральный комплекс дальней космической связи вклю¬
чает в себя три основные системы:
измерения параметров движения КА,
передачи на КА командно-программной информации с
Земли,
передачи телеметрической информации от бортовых научных
приборов и служебных подсистем КА на Землю.
Особое место занимают автономные бортовые радиосистемы
[59], решающие навигационные и научные задачи без помощи
наземных радиосистем, а также планетные радиолокаторы
[89].
Важным условием прогресса в исследованиях дальнего кос¬
моса является развитие международного сотрудничества. На¬
земные радиокомплексы всех стран представляют собой слож¬
ные, дорогие при разработке и в процессе эксплуатации радио¬
технические средства. Так, во всем мире в настоящее время
имеются пять приемопередающих полноповоротных антенн диа¬
6
метром 70 м, две антенны диаметром 64 м и шесть антенн диа¬
метром 32 м. Поэтому при планировании перспективных прог¬
рамм исследования дальнего космоса космические агентства
России, США, Европы и Японии рассчитывают на совместное
использование всех наземных радиосредств, что позволит по¬
высить суммарную эффективность наземного радиокомплекса и
таким путем увеличить объем принимаемой от КА информации.
Кроме того, использование всего парка наземных антенн увели¬
чит возможности радиоинтерферометрии с большой базой.
Все это определило структуру книги, которая ясна из ее
оглавления.
Книга обобщает и систематизирует результаты многолетних
исследований больших коллективов специалистов, в которых
работали авторы, а также материалы, имеющиеся в отечествен¬
ной и зарубежной литературе.
Труд авторов распределился следующим образом: гл. 1 и
§ 12.5 написал В. В. Кержанович, гл. 2, 4, § 12.1 —12.4 —
В. И. Рогальский, гл. 3 — М. Б. Васильев, гл. 5 (кроме
§ 5.5) — В. П. Орешкин, гл. 6 — Р. В. Бакитько, гл. 7 и § 5.5 —
Е. П. Молотов, гл. 8—В. А. Гришмановский, введение и гл. 9—
А. С. Виницкий, гл. 10 (кроме § 10.10) —О. Н. Ржига, § 10.10—
А. С. Селиванов, гл. 11 —А. Л. Зайцев и Г. М. Петров.
Не имея возможности упомянуть всех участников работ, ав¬
торы считают необходимым выразить благодарность В. А. Ар¬
хангельскому, Ю. И. Бехтереву, Н. Н. Бирюкову, А. Л. Гинз¬
бургу, И. В. Калининской, А. Н. Козлову, В. Е. Колчинскому,
Д. Я- Корнееву, В. И. Куркину, В. Д. Кустодиеву, В. Б. Тара¬
сову, И. Я- Тарнорудеру и Б. П. Трусову. Особо признательны
авторы А. Ф. Токареву, бескорыстное содействие которого сде¬
лало возможным выход этой книги в свет.
Глава 1
ОБЗОР ПРОГРАММ ИССЛЕДОВАНИЯ
ДАЛЬНЕГО КОСМОСА
Изучение дальнего космического пространства — Луны, планет Солнеч¬
ной системы, околосолнечного пространства — было одним из программных
стремлений пионеров космонавтики, возбуждало умы и фантазию многих лю¬
дей в течение веков. С возникновением практической космонавтики—с 4 ок¬
тября 1957 г. — это стало одним из приоритетных направлений советских
космических программ. Сейчас можно спорить о необходимости и целесооб¬
разности таких исследований, затрат дополнительных ресурсов и т. п., однако
в то время — менее чем через 15 лет после самой разрушительной войны —
запуск дальних космических аппаратов несомненно являлся символом дости¬
жений науки и техники и служил мощным стимулирующим фактором их
дальнейшего развития.
Следует подчеркнуть, что и раньше, и особенно сейчас, исследования
дальнего космоса поглощают лишь небольшую часть (доли процента) от
расходов на космос в целом, являясь в тоже время одним из самых замет¬
ных элементов космической программы и привлекая такое же, пожалуй, вни¬
мание, что и пилотируемые полеты.
Требования к радиотехническим средствам (РТС) определяются научны¬
ми задачами и общим обликом проекта, которые в свою очередь зависят от
текущего уровня развития техники. Поэтому история развития РТС для
дальнего космоса была теснейшим образом увязана как с развитием косми¬
ческой техники, так и с уровнем знаний о Луне, планетах и межпланетной
среде.
Радиотехнические средства получили широкое применение и в качестве
инструмента для научных исследований дальнего космоса — атмосфер и по¬
верхностей планет, гравитационных полей, межпланетной плазмы. Они позво¬
лили уточнить законы движения планет, осуществить построение координат¬
ных систем с точностями, значительно превышающими те, которые были до¬
стигнуты оптическими средствами, позволили создать практически новую
метрику Солнечной системы.
8
1.1. ОТЕЧЕСТВЕННЫЕ ПРОГРАММЫ ИССЛЕДОВАНИЙ
1.1.1. ПРОГРАММА ИССЛЕДОВАНИЯ ЛУНЫ
Первый аппарат—станция «Луна-1» — был запущен в сто¬
рону Луны уже в январе 1959 г. Он «не попал» в цель, проле¬
тев от нее на расстоянии около 5000 км. Аппарат «Луна-2»
14 сентября 1959 года достиг поверхности Луны, а «Луна-3» в
октябре того же года совершил облет и фотографирование об¬
ратной поверхности Луны, передав на Землю полученные изо¬
бражения. Эти станции запускались по траектории прямого
перелета Земля—Луна; они не имели систем для коррекции
орбиты. На станции была установлена РТС метрового диапазо¬
на для приема команд, проведения траекторных измерений и
передачи на Землю телеметрической информации. Точности из¬
мерений и скорость передачи информации были относительно
невысокими.
Станции второго поколения (аппараты «Луна-4» —
«Луна-14») запускались с промежуточной круговой орбиты
искусственного спутника Земли в 1963—1966 гг. Они могли
корректировать траекторию и были оснащены тормозной дви¬
гательной установкой, которая создавала импульс для перевода
на орбиту искусственного спутника Луны (ИСЛ) или для «по¬
лумягкой» посадки. Их запуски начались в 1963 г., а 3 февраля
1966 г. произведена первая успешная посадка на Луну (стан¬
ция «Луна-9») и переданы на Землю первые панорамы Лунной
поверхности. Система посадки реализовала по команде радио¬
высотомера однократное включение тормозного двигателя, сооб¬
щившего станции вблизи поверхности импульс в соответствии
с заложенным по командной радиолинии значением; неточность
исполнения гасилась пневматическими амортизаторами. Вторая
посадка аналогичного аппарата — «Луна-13» — была соверше¬
на в декабре 1966 г.
Станции «Луна-10, 11, 12, 14» были выведены на орбиты
искусственного спутника Луны (ИСЛ); с их помощью были
исследованы лунная поверхность, гравитационное поле, выпол¬
нена юстировка РТС. Максимальный период активного сущест¬
вования этих ИСЛ составил 85 суток («Луна-12»).
Станции третьего поколения «Луна-15»—«Луна-24» были
разработаны в ОКБ им. С. А. Лавочника под руководством
Г. Н. Бабакина. Масса станций составляла около 6 т, их запуск
осуществлялся ракетой-носителем «Протон». Станции предназ¬
начались для доставки на поверхность Луны различных моду¬
лей. Они имели в своем составе систему мягкой посадки, снаб¬
женную многолучевым доплеровским измерителем скорости,
радиовысотомером и новой двигательной установкой. Первый
9
запуск был частично удачным — станция вышла на орбиту
ИСЛ, но разбилась при посадке.
Станции «Луна-16, 18, 20, 23, 24» несли грунтозаборное
устройство и возвратную ступень для доставки грунта на Зем¬
лю. Первый образец лунного грунта (105 г) был доставлен
24 сентября 1970 г. станцией «Луна-16»; успешная доставка
грунта была произведена также «Луной-20» (55 грамм)
25.02.1972 и «Луной-24» (170 грамм) 22.08.1976.
Станции «Луна-17» и «Луна-21» 17.11.1970 и 16.01.1973 до¬
ставили на поверхность Луны автоматические самоходные аппа¬
раты «Луноход-1» и «Луноход-2», причем первый из них актив¬
но существовал более 300 суток.
Станции «Луна-19» и «Луна-21» были выведены на орбиты
ИСЛ и использовались для изучения гравитационного поля
Луны на основе точных траекторных измерений РТС и иссле¬
дования поверхности планеты по телевизионным изображениям,
1.1.2. ПРОГРАММА ИССЛЕДОВАНИЯ ВЕНЕРЫ
Венера и Марс — ближайшие к нам планеты Солнечной си¬
стемы— явились, естественно, и первыми планетами, изучение
которых было реализовано с помощью космических аппаратов.
Первые попытки были осуществлены уже в 1961 г. запуском
аппарата «Венера-1» и в 1962 г. запуском «Марса-1». Хотя цели
запусков оказались недостигнутыми — связь с обоими аппарата¬
ми прекратилась задолго до подлета к планетам, — тем не ме¬
нее эти проекты сыграли очень важную роль, так как для обес¬
печения этих полетов в кратчайшие сроки была разработана и
создана система дальней космической связи «Плутон», исполь¬
зовавшаяся затем на протяжении более 20 лет в дальних ко¬
смических проектах. В течение нескольких месяцев был создан
Центр дальней космической связи под Евпаторией в Крыму с
крупнейшими в то время антеннами.
Следует отметить, что в те годы Венера вызывала особый
интерес. Поверхность Венеры покрыта слоем облаков и недо¬
ступна для оптического изучения. Если кое-какие данные о
надоблачной атмосфере и имелись, то параметры подоблачной
атмосферы были практически неизвестны. Неизвестен был даже
ее состав; разброс оценок давления у поверхности составлял
около трех порядков. Недавно было обнаружено интенсивное
радиоизлучение планеты, о природе которого строились самые
разные гипотезы.
В ноябре 1965 г. были запущены аппараты «Венера-2» и
«Венера-3», причем в состав последнего входил и спускаемый
аппарат для исследований непосредственно в атмосфере Вене¬
ры. Обе станции почти достигли цели, однако связь с ними
10
была потеряна всего за несколько суток до подлета к Венере.
Успешные зондирования атмосферы Венеры были выполнены
в 1967—1969 гг. спускаемыми аппаратами станций
«Венера-4, 5, 6»; информация с них передавалась непосредствен¬
но на Землю. С их помощью были измерены профили атмос¬
ферных параметров вплоть до высоты около 20 км над поверх¬
ностью, где спускаемые аппараты (СА) были раздавлены
давлением, превышающим 25 атм. Было установлено, что атмо¬
сфера состоит почти целиком из углекислого газа. В то же
время стало ясно, что давление у поверхности существенно
превышает ожидаемое.
Следующий эксперимент — на станции «Венера-7» — был,
пожалуй, одним из наиболее драматических. Примерно на пят¬
надцатой минуте спуска произошел, видимо, разрыв парашюта
и СА перешел в режим нерегулярного снижения; кроме того,
оказалось, что в течение всего спуска передавались результаты
измерений лишь одного параметра (на СА использовался ме¬
ханический коммутатор), которым, к счастью, оказалась темпе¬
ратура атмосферы. Станция достигла поверхности Венеры и
при последующей цифровой обработке сигнала на планетном'
радиолокаторе ИРЭ АН был обнаружен сигнал, передаваемый
в течение около 30 минут с поверхности. Одновременно с прие¬
мом информации проводились измерения частоты принимаемого
сигнала, по которым впоследствии доплеровским методом уда¬
лось определить лучевую компоненту скорости СА. Совместный
анализ результатов измерений температуры и скорости позволил
впервые восстановить распределения атмосферных параметров
вплоть до поверхности планеты.
Было установлено, что давление у поверхности составляет
около 100 атм, а температура — около 500° С.
Эти данные были подтверждены в эксперименте со станцией
«Венера-8» (1972 г.), совершившей посадку на освещенной сто¬
роне планеты. Было доказано, что несколько процентов солнеч¬
ного излучения достигают поверхности Венеры; этого оказы¬
вается достаточно для парникового разогрева атмосферы.
На участке перелета к РТС этих станций особых требова¬
ний не предъявлялось: на орбитальных аппаратах выполнялись
лишь трассовые эксперименты, не требовавшие большого объе¬
ма передачи информации, основную долю занимала служебная
телеметрия о работе бортовых систем, траекторные измерения
должны были обеспечить попадание в достаточно широкий
диапазон углов входа.
Радиосистемы станций «Венера-4—8» стали использоваться
для получения и научной информации: по измерениям амплиту¬
ды сигналов проводились оценки характеристик распростране¬
ния радиосигнала в атмосфере Венеры. Мощным методом изу¬
11
чения динамики и структуры атмосфер планет явился анализ
результатов измерений частоты принимаемого сигнала, по ко¬
торым определялась доплеровская скорость, позволявшая, в
свою очередь, анализировать траектории движения СА и опре¬
делять скорость ветра, плотность и другие параметры.
Этим методом была открыта фундаментальная особенность
динамики атмосферы: так называемая «суперротация» — враще¬
ние атмосферы со скоростью, во много раз превышающей ско¬
рость собственного вращения Венеры [42]. Удовлетворитель¬
ного объяснения этого явления не получено и до настоящего
времени.
«Венерой-8» завершился первый «рекогносцировочный» этап
изучения Венеры.
В 1975 г. запуском станций нового поколения — «Венеры-9»
и «Венеры-10» — начался этап глобального изучения планеты.
Аналогичные по типу станции «Венера-11 —14» были запущены
в 1978 и 1981 гг. В состав их входили спускаемые аппараты,
оснащенные большим комплексом научных приборов, включав¬
ших масс-спектрометры и газовые хроматографы для измерения
состава атмосферы, спектрофотометры для исследования радиа¬
ционных процессов, приемники электрического излучения атмо¬
сферы, метеорологические приборы, гамма-спектрометры для
изучения состава поверхности и, наконец, телевизионные каме¬
ры.
Объем научных данных существенно превышал возможно¬
сти, которые можно было реализовать при прямой передаче
информации с СА на Землю. Поэтому для передачи информа¬
ции использовалась радиолиния метрового диапазона, передат¬
чик которой был установлен на СА, а приемник — на орбиталь¬
ном аппарате (ОА). Информация записывалась в запоминающие
устройства на орбитальном аппарате, параллельно производи¬
лась прямая ретрансляция на Землю принимаемого на ОА сиг¬
нала. Применение ретрансляции позволило повысить скорость
передачи информации до 3072 бит/с.
Орбитальные аппараты станций «Венера-9» и «Венера-10»
были выведены на орбиты искусственных спутников Венеры.
Были проведены длительные исследования поля излучения Ве¬
неры в видимой и инфракрасной областях спектра, телевизион¬
ная съемка в видимом и ультрафиолетовом диапазонах, измере¬
ны характеристики магнитного поля и ионизованных компонент
вблизи планеты. Информация с научных приборов записывалась
в запоминающее устройство вблизи перицентра и передавалась
на Землю в сеансах связи на других участках орбиты.
С помощью РТС ОА были проведены неоднократные зонди¬
рования атмосферы и ионосферы планеты методом радиопро¬
свечивания [42]. При этом методе измеряются параметры при¬
12
нимаемого на Земле радиосигнала во время захода в радиотень
(или выхода из нее). Затем определяется рефракционное воз¬
действие атмосферы, зависящее от показателя преломления на
пути распространения; показатель преломления, в свою очередь,
обусловлен плотностью нейтральной атмосферы или концентра¬
цией электронов в ионосфере. Располагая точными данными о
траектории аппарата (требуемая точность составляет доли ки¬
лометра по положению и сантиметры в секунду по скорости),
по результатам измерений параметров сигнала можно восста¬
новить распределение показателя преломления, а затем темпе¬
ратуры и давления по высоте*.
В 1978 г. в Центре дальней космической связи была введе¬
на в действие крупнейшая приемопередающая антенна диамет¬
ром 70 м, что позволило существенно увеличить информацион¬
ный потенциал РТС и в значительной мере расширить програм¬
му изучения дальнего космоса.
Четыре панорамы, полученные станциями «Венера», и ра¬
диолокационные изображения поверхности Венеры с Земли не
давали хорошего представления о поверхности планеты. Для
глобальной съемки поверхности в 1983 г. были запущены стан¬
ции «Венера-15» и «Венера-16» с радиолокаторами бокового
обзора и радиовысотометрами. На этих станциях был установ¬
лен также еще один информативный прибор — фурье-спектро-
метр, предназначенный для изучения поля теплового излучения
Венеры с высоким пространственным спектральным разреше¬
нием. В течение года станции «отсняли» около 30% поверхно¬
сти Венеры с разрешением до 1 км. Передача этого объема ин¬
формации предъявляла особые требования к РТС и наземному
комплексу.
В ходе эксперимента были получены обширные геолого¬
морфологические данные о строении поверхности Венеры, по¬
строены гипсометрические карты высокого разрешения, обна¬
ружено большое число неизвестных ранее образований (см.
гл. 10). По спектрам инфракрасного излучения получены дан¬
ные о структуре и составе атмосферы, облачному слою и рас¬
пределению частиц, динамике атмосферы.
1.1.3. ПРОЕКТ «Вега»
До 80-х гг. советская программа изучения дальнего косми¬
ческого пространства была в значительной мере автономной и
не учитывала практических возможностей международного со¬
* Метод радиопросвечивания впервые был успешно применен для зон¬
дирования атмосфер Марса и Венеры в 1965 и 1967 гг. на американских
аппаратах «Маринер-4» и «Маринер-5».
13
трудничества. На ОА иногда устанавливались зарубежные
приборы, однако не для наиболее важных экспериментов. Об¬
мен происходил в основном на уровне полученных результатов.
Советская и американская программы во многом конкурирова¬
ли друг с другом.
С 1973 г. СССР и Францией стал разрабатываться совмест¬
ный проект создания большой станции, плавающей в атмосфе¬
ре Венеры. В 1981 г. в результате исследований было показа¬
но, что существует реальная возможность создать на базе
станций «Венера» аппарат, который позволит с близкого рас¬
стояния изучить комету Галлея при ее пролете в 1986 г.—
возможность, которая в следующий раз может представиться
только через 76 лет. При этом сохранялась возможность до¬
ставки на Венеру спускаемого аппарата и небольшого аэро¬
статного зонда (АЗ). Так родился проект «Венера—комета
Галлея» (проект «Вега»).
В отличие от предыдущих проектов практически все наибо¬
лее важные научные эксперименты и даже часть служебных
систем создавались в рамках широкой международной коопе¬
рации. Основными научными задачами проекта являлись уточ¬
нение вертикальных разрезов атмосферы Венеры на спускае¬
мых аппаратах (СА), длительные исследования динамики • и
структуры атмосферы в главном облачном слое с помощью
аэростатного зонда (АЗ) и дистанционное изучение ядра коме¬
ты Галлея, включая получение телевизионных изображений с
пролетных аппаратов.
Если обеспечение передачи информации и траекторных из¬
мерений СА не имело принципиальных трудностей, то научный
эксперимент с АЗ ставил новую задачу перед разработчиками
радиотехнических средств. Необходимо было обеспечить круг¬
лосуточный прием информации и измерение вектора скорости и
координат АЗ в течение всего дрейфа. Только прослеживанием
дрейфа АЗ можно было определить особенности циркуляции
атмосферы Венеры в районе облачного слоя. Эта задача была
решена с использованием измерений углового положения АЗ
методом радиоинтерферометрии со сверхдлинной базой
(см. § 5.5).
Станции, расположенные на территории СНГ, не могли обе¬
спечить круглосуточного наблюдения, поэтому к проведению
эксперимента было решено привлечь зарубежные радиоастро¬
номические станции и сеть слежения за дальним космосом
НАСА (США). На АЗ был установлен передатчик, работавший
в диапазоне волн 18 см, используемом на многих радиотеле¬
скопах за рубежом; отечественные станции и станции НАСА
пришлось оснащать заново. К эксперименту было привлечено
6 отечественных и 14 самых крупных зарубежных радиотеле-
14
Рис. 1.1. Сеть наземных станций мира, участвовавших в проекте «ВЕГА», и
диаметр их антенн:
/ — Евпатория; 70 м; 2 — Уссурийск; 70 м; 3 — Голдстоун; 64 м; 4 — Мадрид; 64 м;
5—Канберра; 64 м; 6 — Атибая; 14 м; 7 — Аресибо; 305 м; 8 — Айова; 18 м; 9 —
Бонн; 100 м; 10 — Джодрелл-Бэнк; 76 м; // — Медвежьи озера; 64 м; 12 — Онсала;
26; 13 — Оуэнс Велли; 40 м; 14 — Пенктикон; 26 м; 15 — Пущино; 22 м; 16 — Симеиз;
22 м; 17 — Улан-Удэ; 25 м; 18 — Форт-Дэвис; 26 м; 19 — Харт Рао; 26 м; 20 — Хайстэк;
37 м.
скопов (рис. 1.1). За несколько недель до начала эксперимента
была введена вторая 70-метровая приемопередающая антенна
в г. Уссурийске.
Так как энергетический потенциал радиолинии АЗ—Земля
был невелик, выделение телеметрической информации и доп-
леровские измерения проводились цифровой обработкой заре¬
гистрированного сигнала.
Аэростатные зонды были введены в атмосферу Венеры 11
и 15 июня 1985 г. и после всплытия дрейфовали на высоте око¬
ло 54 км более 46 ч каждый. Передача информации и измере¬
ния траектории осуществлялись в сеансах радиосвязи длитель¬
ностью около 5,5 мин каждые 30—60 мин. В качестве калибро¬
вочных источников использовались соответствующие пролет¬
ные аппараты «Вега».
Если телеметрическая информация и доплеровские измере¬
ния обрабатывались в течение 1 месяца (в ИРЭ АН и на мад¬
ридской станции НАСА), то обработка интерферометрических
записей в Институте космических исследований АН, ИРЭ АН
и в Лаборатории реактивного движения НАСА заняла несколь¬
ко лет.
В результате аэростатного эксперимента была окончатель¬
но установлена суперротация атмосферы Венеры, обнаружены
15
воздушные массы с существенно различными параметрами, по¬
лучены новые данные о микроструктуре облачного слоя.
С помощью двух аппаратов «Вега» были изучены ядро ко¬
меты, джеты, распределение заряженных частиц и магнитного
поля; были получены фотографии ядра, определен химический
состав основных газовых и пылевых компонентов.
В проекте «Вега» радиотехническими средствами была ре¬
шена и задача оперативной навигации европейского КА «Джот¬
то», позволившая выполнить близкий (около 1000 км) пролет
его мимо ядра кометы. Для этого сочетанием радиоинтерферо¬
метрии и траекторных измерений дальности и радиальной ско¬
рости была точно определена траектория аппарата «Вега», а
по телевизионным данным во время пролета — координаты
ядра относительно ОА. В течение нескольких часов были уточ¬
нены абсолютные координаты ядра кометы, рассчитаны значе¬
ния импульса двигателя и переданы на КА «Джотто» для кор¬
рекции его орбиты.
1.1.4. ПЕРВАЯ ПРОГРАММА ИССЛЕДОВАНИЯ МАРСА
После запуска отечественной станции «Марс-1» было пред¬
принято еще несколько попыток исследований Марса. В 1969 г.
были осуществлены запуски трех аппаратов «Марс-69» новой
в то время ракетой «Протон»; все три по разным причинам ока¬
зались неудачными. В 1971 г. были запущены аппараты
«Марс-2» и «Марс-3», имевшие в составе спускаемые аппараты
для посадки на поверхность Марса. Обе станции вышли на ор¬
биты искусственных спутников Марса (ИСМ), причем «Марс-2»
активно просуществовал, проводя исследования, около 9 меся¬
цев. Схема посадки аппаратов была аналогичной «Луне-9» и
«Луне-13», но для гашения скорости вместо двигателя исполь¬
зовалось аэродинамическое торможение и последующий спуск
на парашюте. Остаточная скорость при ударе могла составлять
20 м/с и более. Сигнал со спускаемого аппарата «Марс-2» после
его отделения не был принят — СА, возможно, разбился при
посадке; сигнал СА «Марс-3» принимался около 40 с, однако
полезной информации выделить не удалось.
В 1973 г. к Марсу были запущены еще четыре станции —
«Марс-4—7». Станции «Марс-6, 7» имели в составе СА, две дру¬
гие предназначались для исследований с орбиты ИСМ. «Марс-4»
и «Марс-7» пролетели мимо Марса, «Марс-5» вышел на орбиту
ИСМ, а СА «Марс-6» совершил успешный спуск в атмосфере
Марса, передав результаты первых прямых измерений его атмо¬
сферы. Сигнал после посадки не принимался.
Следующий полет в сторону Марса отечественных аппаратов
был совершен лишь в 1988—1989 гг. в проекте «Фобос».
16
1.1.5. ПРОЕКТ «Фобос»
В год пролета кометы Галлея были развернуты работы по
проекту изучения другого малого тела Солнечной системы —
спутника Марса Фобоса. Интерес к Фобосу объясняется тем,
что он мог оказаться телом, захваченным из космического
пространства, и мог раскрыть историю образования планет из
протопланетного облака; кроме того, с орбиты вблизи Фобоса
было удобно продолжать исследования Марса. Поэтому КА
нового типа «Фобос» проектировался как универсальный для
последующих этапов исследования Марса.
Комплекс высокоинформативных научных приборов, уста¬
новленных на «Фобосе», — телевизионные камеры высокого
разрешения, сканирующий ИК спектрометр, сканер видимого и
ИК диапазонов, лазерный масс-спектрометр и др. — требовал
передачи информации со скоростью не менее 32 кбит/с, что су¬
щественно превышало возможности существовавшей РТС. Кро¬
ме того, программа полета предусматривала оперативное про¬
ведение сложных маневров: выход на.орбиту, близкую к орбите
Фобоса, сближение с Фобосом, пролет над ним на малой высо¬
те около 20 м.
В состав «Фобоса» входили еще два малых аппарата, пред¬
назначенных для посадки на Фобос, — «ДАС» и «ПРОП». Ап¬
парат с небольшим временем жизни «ПРОП» должен был
совершить несколько «прыжков» длиной 10—20 м каждый
(сила тяжести на Фобосе примерно в 700 раз меньше, чем на
Земле). После каждого «приземления» предусматривался ком¬
плекс исследований грунта: изотопного состава методом гамма-
спектрометрии, механических, электрических и магнитных ха¬
рактеристик. Информация должна была передаваться на КА
«Фобос» в пределах прямой видимости по автономной радио¬
линии дециметрового диапазона.
Аппарат «ДАС» (долговременная автономная станция) был
предназначен для проведения многомесячных (более года) ис¬
следований проблем небесной механики и теории относитель¬
ности (уточнение орбит Фобоса и Марса, привязка координат¬
ных систем, уточнение гравитационной постоянной), измерения
собственных либраций Фобоса, изучения поверхности по стерео¬
телевизионным изображениям и определения состава грунта
альфа/рентгеновским спектрометром. Передача информации
должна была осуществляться непосредственно на Землю.
Так как измерения параметров сигналов в радиолинии
«ДАС—Земля» использовались для решения задач небесной
механики и теории относительности, это требовало измерять
с Земли дальность с точностью до единиц метров и угловое по¬
ложение с точностью до миллионных долей угловой секунды.
2—4229
17
Специальная РТС «ДАС» обеспечивала аппаратурную точность
измерений дальности до 1 м; для интерферометрических изме¬
рений углового положения с ДАС излучался сигнал в виде двух
несущих, разнесенных на 14,5 МГц.
Такую программу невозможно было выполнить траекторны-
ми измерениями РТС «Плутон».
Для обеспечения полетов к Фобосу и последующих полетов
к Марсу в НИИ космического приборостроения была создана
новая РТС «Квант-Д», работающая в диапазоне 5/6 ГГц. Си¬
стема «Квант-Д» при полете «Фобоса» обеспечивала проведение
траекторных измерений на порядок точнее системы «Плутон».
Эксперимент проводился совместно СССР, США и Фран¬
цией. Чтобы обеспечить совместимость наземных средств, РТС
работала в диапазоне 6 см (линия Земля—ДАС) и 18 см (ли¬
ния ДАС—Земля). Большебазовые радиоинтерферометрические
измерения проводились в основном станциями НАСА в США
(Калифорния), Австралии и Испании, а измерения дальности —
как отечественными станциями в Евпатории и Уссурийске, так
и американской станцией в Калифорнии.
Ограниченные энергетические возможности ДАС допускали
передачу информации лишь со скоростями от 32 до 4 бит/с
сеансами по 30 мин на каждом обороте Фобоса (т. е. каждые
7 ч 40 мин). Поэтому для передачи всего объема данных при¬
менялось сжатие информации в бортовом процессоре. Во вре¬
мя полета КА было проведено несколько сеансов измерений
дальности и углового положения, результаты обработки кото¬
рых показали, что реальные параметры РТС соответствуют
проектным.
Как известно, из-за случайной ошибки в программе, зало¬
женной с Земли в бортовой компьютер, аппарат «Фобос-1»
прекратил существование на участке межпланетного перелета.
Аппарат «Фобос-2» был выведен на исходную орбиту искусст¬
венного спутника Марса, совершил несколько маневров, затем
был переведен на орбиту, близкую к орбите Фобоса, и совер¬
шил несколько пролетов мимо него на расстоянии до несколь¬
ких десятков километров. Были выполнены эксперименты по
изучению Марса и наблюдению Фобоса. За две недели до сеан¬
са сближения с Фобосом и посадки аппаратов «ПРОП» и
«ДАС» связь с «Фобосом-2» была потеряна. Последующий ана¬
лиз показал, что вероятной причиной аварии мог быть сбой в
компьютере системы управления КА, приведший к потере ори¬
ентации аппарата, прекращению заряда от солнечных батарей
и разряду химических аккумуляторов КА.
В то же время не следует считать полет «Фобосов» пол¬
ностью неудачным, так как практически все эксперименты по
изучению Марса были выполнены, в том числе впервые были
18
получены тепловые карты высокого разрешения для обширных
районов поверхности, уточнены фигура и орбита Фобоса, а так*
же была проведена реальная отработка систем нового косми¬
ческого аппарата и радиосистемы «Квант-Д». Для последующе¬
го использования этого аппарата в марсианской программе
были предприняты меры для существенного увеличения его на¬
дежности.
1.2. АМЕРИКАНСКИЕ ПРОГРАММЫ ИССЛЕДОВАНИЙ
Запуск первого американского спутника на четыре месяца
позже советского и существовавший тогда дух соревнователь¬
ности наложили отпечаток и на американскую программу изу¬
чения Луны и планет. Лишь к 80-м гг. принцип соревнователь¬
ности уступил место взаимной дополнительности программ двух
крупнейших космических держав в интересах мировой науки.
1.2.1. ЛУННАЯ ПРОГРАММА
Американская лунная программа последовательно прошла
через три фазы — жесткая посадка, мягкая посадка, лунный
спутник — и завершилась пилотируемой экспедицией с высад¬
кой астронавтов на поверхность Луны. Это была, видимо, са¬
мая дорогая космическая программа в истории.
Первым в этой программе был запущен аппарат «Рейнд¬
жер-1» в 1959 г. Всего было запущено девять таких аппаратов*
из них только три последних были успешными. Задачей явля¬
лось изучение окололунного пространства и Луны с попадаю¬
щей траектории; мягкая посадка не предусматривалась. Аппа¬
раты «Рейнджер-6—9» оснащались комплектом из шести теле¬
камер для съемки поверхности Луны в течение последних
25 мин полета с высоты от нескольких тысяч километров до
километра.
На аппаратах «Рейнджер-7—9» было получено всего око¬
ло 17 000 снимков; самые близкие имели разрешение до 25 см,
что дало важные сведения о местном рельефе.
В 1966—1968 гг. были осуществлены запуски семи аппара¬
тов «Сервейор»; аппараты были оборудованы системой мягкой
посадки, включающей автономную радиосистему для определе¬
ния координат и вектора скорости. На «Сервейорах» проводи¬
лось изучение локальных характеристик поверхности и грунта.
Для этого использовалась панорамная телевизионная система
высокого разрешения, грунтозаборное устройство и альфа-спек¬
трометр для определения химического состава, а также мини¬
ковш для изучения механических параметров грунта. За время
2*
19
работы аппаратами было передано на Землю около 85 000 изо¬
бражений.
Изучение и выбор возможных мест посадки пилотируемых
кораблей «Аполлон», картирование поверхности, определение
параметров гравитационного поля Луны, изучение радиацион¬
ной и метеорной обстановки в окололунном пространстве явля¬
лись основными научными задачами аппаратов «Лунар орби-
тер-1—5», запускавшихся в 1966—1967 гг. Перицентр селено¬
центрической орбиты на четырех из них располагался на высоте
50... 100 км, что обеспечивало получение снимков поверхности
с высоким разрешением.
Завершением Лунной программы 70-х гг. явились запуски
кораблей «Аполлон» 1966—1972 гг. Всего было проведено 17
запусков, из которых И —пилотируемых; 6 кораблей соверши¬
ли посадку на Луну. Астронавтами был выполнен большой
объем исследований Луны, собрано и доставлено на Землю
около 400 кг образцов лунного грунта.
1.2.2. ПРОГРАММА ИССЛЕДОВАНИЯ ПЛАНЕТ СОЛНЕЧНОЙ СИСТЕМЫ
Высокий уровень развития технологии в приборостроении
позволил США создать космические аппараты с большим сро¬
ком активного существования, спланировать и осуществить по¬
леты ко всем планетам Солнечной системы, кроме Плутона.
Исследования Венеры и Меркурия. В 1962 г. в сторону
Венеры был запущен аппарат «Маринер-2», оснащенный радио¬
метрами сантиметрового и ИК диапазонов. Полученные данные
подтвердили обнаруженный ранее наземными наблюдениями
факт излучения Венеры с высокой яркостной температурой
(около 600 К) в радиодиапазоне, хотя и не дали ему однознач¬
ного объяснения.
На аппарате «Маринер-5», пролетевшем мимо Венеры в
1967 г., методом радиопросвечивания на волне 13 см был опре¬
делен профиль плотности атмосферы от высоты 100 км пример¬
но до 35 км*.
Аппарат «Маринер-10», запущенный в 1973 г., был предназ¬
начен для фотографирования облачного слоя Венеры и поверх¬
ности Меркурия. «Маринер-10» пролетел мимо Венеры на рас¬
стоянии около 6000 км, совершил гравитационный маневр и
вышел на гелиоцентрическую орбиту с перицентром вблизи
орбиты Меркурия, По 3000 снимкам Меркурия, полученным
при трех пролетах, была составлена карта поверхности, прак¬
* По данным прямых измерений состава и параметров атмосферы на
станции «Венера-4» был построен вертикальный профиль температуры и дав¬
ления. Температура же поверхности была измерена станцией «Венера-7».
20
тически сплошь покрытой кратерами, напоминающими лунные.
С помощью телевизионных камер, работавших в ультрафио¬
летовом диапазоне, было получено около 3500 изображений
облачного слоя Венеры. Если в видимом диапазоне облачный
слой Венеры не имеет деталей, то снимки «Маринера-10» от¬
крыли множество особенностей в строении верхнего облачного
слоя и в его циркуляции (суперротации), обнаруженной по на¬
земным наблюдениям и измерениям на станциях «Венера».
Два аппарата «Пионер—Венера» были запущены в 1989 г.;
один из них был выведен на орбиту спутника Венеры, с дру¬
гого были сброшены четыре СА, которые совершили одновре¬
менное зондирование атмосферы в трех точках в экваториаль¬
ной области на дневной и ночной стороне и одно — на широте
около 65° с. ш. Методом радиоинтерферометрии со сверхдлин-
ной базой были измерены зональная и меридиональная компо¬
ненты скорости ветра от высоты 65 км вплоть до поверхности,
во многом подтвердившие данные, полученные с помощью
доплеровского метода на станциях «Венера». Близкими оказа¬
лись и результаты измерений химического состава, термодина¬
мических параметров, радиационного режима.
Данные многополосного ИК радиометра, установленного на
спутнике «Пионер—Венера», позволили воссоздать детальную
картину теплового излучения верхнего облачного слоя: относи¬
тельно однородное излучение экваториальной области, холод¬
ная область на широте около 70° и неожиданно сложная струк¬
тура излучения в полярной области с вращающимися «горячи¬
ми» пятнами. Методом радиопросвечивания в двух диапазонах
было получено несколько десятков профилей ионосферы и ней¬
тральной атмосферы Венеры.
Аппарат «Магеллан», запущенный в 1990 г. и оснащенный
радиолокатором бокового обзора, начал передачу изображе¬
ний поверхности Венеры с разрешением до 100 м (т. е. на по¬
рядок выше, чем на «Венере-15, 16»), что позволило обнару¬
жить массу новых деталей и процессов, ответственных за фор¬
мирование поверхности (см. гл. 10).
Программа исследований Марса. Эта планета занимала
важное место в американской космической программе; в период
1964—1975 гг. к Марсу было успешно запущено шесть КА:
«Маринер-4, 6,7,9» и «Викинг-1,2». Аппарат «Маринер-4» со¬
вершил пролет мимо Марса в 1965 г.; методом радиопросве¬
чивания впервые было надежно установлено давление у
поверхности (5—7 мбар) и построен вертикальный профиль
атмосферных параметров; тем же методом у Марса была обна¬
ружена ионосфера и определена электронная концентрация.
Переданные на Землю 22 телевизионных снимка впервые дали
представление о некоторых особенностях поверхности.
21
Четыре новых профиля параметров атмосферы и ионосферы
и 66 телевизионных снимков, полученные с пролетных траекто¬
рий на аппаратах «Маринер-6, 7», подтвердили и расширили
данные «Маринера-4».
Аппарат «Маринер-9», выведенный в 1969 г. на орбиту ис¬
кусственного спутника Марса, был оснащен несколькими при¬
борами для исследования поверхности и атмосферы Марса. На
Землю было передано более 7000 снимков поверхности с раз¬
решением до 100 м. В средних и низких широтах поверхность
сильно кратерирована, плотность кратеров сравнима с лунной.
В центральной части планеты находятся несколько гигантских
потухших вулканов; один из них — Олимпус — имеет перепад
высот от подошвы до вершины более 27 км. В экваториальной
области находится также огромная долина Маринера — обра¬
зование длиной около 4000 км, шириной до нескольких сотен
километров и глубиной несколько километров. Сенсационным
было обнаружение деталей, напоминающих русла высохших
рек, — свидетельство существования в далеком прошлом зна¬
чительных объемов воды на Марсе.
Впервые были получены крупномасштабные изображения
спутников Марса Фобоса и Деймоса. С помощью фурье-спект-
рометра были построены глобальные вертикальные распределе¬
ния атмосферных параметров, позволившие оценить тепловой и
ветровой режимы атмосферы. По данным ИК-радиометра
определены температуры поверхности. Множественные радио¬
просвечивания дали информацию о вертикальном строении
нейтральной атмосферы и ионосферы, а также абсолютную
высотную привязку в различных районах планеты.
В 1976 г. после предварительного выбора и обследования с
орбиты возможных районов посадки на поверхность Марса
совершили мягкую посадку два спускаемых аппарата КА «Ви¬
кинг» для проведения прямых экспериментов при спуске в
атмосфере и на поверхности Марса; одновременно ОА продол¬
жили дистанционные исследования планеты.
Данные со спускаемых аппаратов (СА) передавались не¬
посредственно на Землю и ретранслировались через ОА. Аппа¬
рат «Викинг-1» продолжал активно существовать около 4 лет,
а СА «Викинг-2» — около 6 лет.
Одной из главных задач «Викингов» являлось проведение
экспериментов по обнаружению жизни на Марсе. Эксперимен¬
ты с приборами, позволившими определить наличие обмена
веществ, газообмена или фотосинтеза, не дали положительных
результатов, однако оставили некоторую неоднозначность в
интерпретации.
Были получены цветные панорамы поверхности в двух рай¬
онах в различное время суток в разные сезоны. Панорамы по¬
22
казывают поверхность, покрытую большим количеством камней
и засыпанную мелкораздробленным материалом. Химический
анализ установил, что состав поверхности близок в обоих рай¬
онах и поверхностный слой обогащен железом. Близость хими¬
ческого состава указывает на перенос большого количества ве¬
щества в виде песка и пыли ветром, в результате чего поверх¬
ностный слой может быть достаточно однороден.
Масс-спектрометрический анализ однозначно установил га¬
зовый состав атмосферы, основными компонентами которой
являются углекислый газ, азот и аргон. Многолетними метео¬
рологическими измерениями были выявлены особенности тер¬
мического и ветрового режимов в приповерхностном слое атмос¬
феры в районах посадки. Сейсмометры «Викингов» не дали
значительных результатов из-за большого уровня ветрового
фона, маскировавшего собственно сейсмические события.
Телевизионные съемки с ОА позволили построить карту
практически всей поверхности планеты с разрешением около
300 м, а отдельных районов — с разрешением до 25 м. Анализ
изображений выбросов кратеров показал, что на глубине от
нескольких десятков до нескольких сотен метров под поверх¬
ностью располагается, по-видимому, слой вечной мерзлоты, в
котором могут быть сосредоточены большие запасы водяного
льда; установлено, что северная полярная шапка состоит в
основном также из водяного льда.
Следующий после «Викингов» аппарат для изучения Мар¬
са— «Марс-Обсервер» — запущен в сентябре 1992 г.
Программа изучения больших планет. Первый аппарат для
изучения больших планет (Юпитера, Сатурна, Урана и Непту¬
на)— «Пионер-10» — был запущен в марте 1972 г.; через пол¬
тора года он совершил пролет мимо Юпитера на расстоянии
около 130 тыс. км, передав около 80 фотографий. В декабре
1974 г. аппарат «Пионер-11» пролетел мимо Юпитера, совер¬
шил гравитационный маневр и через пять лет — в 1979 г.—•
пролетел мимо Сатурна. В 1993 г. он пересечет орбиту Плутона
и выйдет за пределы Солнечной системы. Связь с «Пионером-
11» поддерживается и сейчас — через двадцать лет после за¬
пуска.
Рекогносцировочные миссии «Пионеров» позволили обнару¬
жить сильные магнитные поля и радиационные пояса Юпитера
и Сатурна, произвести радиопросвечивание атмосфер и опре¬
делить характеристики теплового излучения планет. С помощью
сканирующего фотополяриметра получены изображения планет
и их 'спутников с разрешением, во много раз превышающим
полученное при земных съемках. Если в видимом облачном
слое Сатурна, имеющем полосатую структуру, обнаружено не¬
23
много характерных деталей, то облака Юпитера имеют слож¬
ную структуру, отражающую многочисленные динамические
процессы в атмосфере.
Следующие запуски к большим планетам состоялись в
1977 г.: были запущены два аппарата «Вояджер», которые
прошли мимо Юпитера в 1979 г., а мимо Сатурна — в 1980 и
1981 гг. С использованием гравитационных маневров аппарат
«Вояджер-2» затем был направлен для выполнения, пожалуй,
наиболее яркой планетной миссии — «большого тура» — поле¬
та к Урану и Нептуну. В 1986 г. «Вояджер-2» произвел успеш¬
ное зондирование Урана, а в агусте 1989 г. — Нептуна и его
спутника Тритона. Большая информативность радиолинии —
115 кбит/с от Юпитера и 30 кбит/с от Сатурна — позволила
получить от аппаратов огромный объем научной информации.
Результаты миссии «Вояджеров» открыли практически не¬
известный мир больших планет и их спутников. Изображения
Юпитера дали ценный материал о сложнейших динамических
процессах в его атмосфере. Видимые полосы, представляю¬
щие, очевидно, выход конвективных ячеек, вращаются с разной
скоростью и на их границах создаются сильно турбулизован-
ные слои, содержащие вихри разного масштаба и разной про¬
должительности — от единиц суток вплоть до сотен лет (как
известное Большое красное пятно). На снимках видно много
красных и белых вихревых пятен; за некоторыми из них распо¬
ложены «вихревые дорожки» — следствие обтекания и взаимо¬
действия пятен с основным потоком. Скорости ветра в атмос¬
фере Юпитера достигают сотен метров в секунду.
Атмосфера Юпитера, как и других больших планет, состоит
в основном из водорода и гелия, прозрачных для видимого
света. Широкая гамма цветов — от желтого до пурпурного и
синего — создается за счет конденсации небольших примесей
газов неустановленной пока природы, возможно, соединений
серы и фосфора.
Наиболее сенсационными результатами, пожалуй, явились
данные телевизионной съемки спутников. Были открыты три
новых спутника Юпитера в дополнение к тринадцати, извест¬
ным по земным наблюдениям; было обнаружено также сущест¬
вование у Юпитера кольца, аналогичного кольцам Сатурна, но
во много раз менее плотного. Изображения Амалтеи — наибо¬
лее близкого к Юпитеру спутника — и четырех самых боль¬
ших— Ио, Европы, Ганимеда и Каллисто — открыли практи¬
чески новый мир. Амалтея оказалась каменным объектом нере¬
гулярной формы (270X155 км). Поверхность Ио имеет
красно-оранжевый цвет; на ней было обнаружено около 100
вулканов, из которых семь постоянно действовали. Это единст¬
венное тело в Солнечной системе, помимо Земли, где найдены
24
действующие вулканы. Вулканы выбрасывают серу, нагретую
до сотен градусов, и камни; поверхность Ио покрыта серой.
Спутник Европа — желтоватый шар, покрытый льдом. По
сравнению с известными объектами он имеет самую ровную
поверхность, на которой видны многочисленные линии длиной
до нескольких тысяч километров, являющиеся, по-видимому,
следами сдвигов ледяной коры. Ганимед имеет кратерирован-
ную поверхность с темными и светлыми областями; он состоит
из смеси снега и камней. Поверхность Каллисто, возможно,
самая древняя. Она равномерно покрыта кратерами и сохра¬
нилась практически без изменений с периода древней бомбар¬
дировки.
Сатурн по своей природе и параметрам близок к Юпитеру,
однако их различия очень велики. Результаты измерений КА
«Пионер» и «Вояджер» показали, что магнитное поле Сатурна
значительно слабее. Динамика атмосферы обнаруживает те же
проявления, что и на Юпитере, однако облачные детали значи¬
тельно менее контрастны. Скорости ветра на Сатурне сущест¬
венно больше, чем на Юпитере, и достигают 1500 км/ч.
Наиболее замечательной особенностью Сатурна являются
его кольца; по наблюдениям с Земли их было известно три.
«Вояджеры» обнаружили, что большие кольца сами состоят из
тысяч тонких колец; даже в промежутке между большими
кольцами (промежутке Кассини) обнаружено несколько десят¬
ков колец. Кольца Сатурна состоят, видимо, из частиц льда и
замерзшего аммиака размером от единиц сантиметров до еди¬
ниц метров.
«Вояджер-1» получил изображения семи спутников планеты,
состоящих в основном из льда с примесью камней. Поверхности
их различны. Спутники Мимас, Дион, Тетис и Реа имеют силь¬
но кратерированные поверхности — по-видимому, результат
бомбардировки в период образования планет 4,5 млрд лет
назад. Поверхность Энцелада ровная, а поверхность Япета
имеет темную и светлую части с выраженной границей. Из из¬
вестных спутников Сатурна только Титан обладает атмосферой.
Обнаружено, что основной составляющей атмосферы является
азот; в атмосфере присутствует смог, состоящий из сложных
органических молекул, образованных за счет фотохимических
реакций. Давление у поверхности близко к земному — 2 ... 3 атм,
а температура —150...—200° С.
При пролете мимо Урана в январе 1986 г. приборами
«Вояджера» было обнаружено магнитное поле, сравнимое с
полем Сатурна. Анализ изображений, передававшихся на Зем¬
лю со скоростью около 20 кбит/с, показал, что облачный слой
практически не имеет деталей и его структура проступает толь¬
ко при сильном увеличении контраста. Слабые полосы ориен¬
25
тированы в направлении собственного вращения планеты (ось
вращения Урана близка к плоскости его орбиты); скорости
ветра, определяемые по движению облаков, составляют 40 ...
... 160 м/с.
«Вояджер» получил изображения пяти известных спутников
Урана и обнаружил еще десять. Для четырех из них (Ариэль,
Умбриэль, Титания, Оберон) характерны кратерированные по¬
верхности и разная степень геологической активности в прош¬
лом. Поверхность самого маленького из известных ранее спут¬
ников— Миранды — представляет два совершенно различных
типа: старые сильно кратерированные области и молодые со
сложной геологической историей, имеющие сильную складча¬
тую структуру. Существует гипотеза, что Миранда «замерзла»
в период формирования поверхности. Приборами «Вояджера»
была изучена также структура колец Урана.
В августе 1989 г. «Вояджер-2» в своем «большом туре»
достиг последней планеты — Нептуна. В атмосфере Нептуна,
состоящей из водорода, гелия и метана, обнаружен ряд вихре¬
вых структур (Большое темное пятно и другие), сходных с
аналогичными структурами на Юпитере. Зарегистрированные
скорости ветра в атмосфере составляют до 1000 км/ч.
«Вояджер» обнаружил шесть новых спутников и кольца
Нептуна. Изучение самого большого из спутников — Тритона —
показало наличие у него тонкой азотной атмосферы, в которой
присутствуют также органические молекулы. В отличие от всех
других известных спутников наклонение орбиты Тритона со¬
ставляет 157 град, т. е. он вращается по орбите в направлении,
противоположном движению планеты. Имеется гипотеза, что
Тритон является внешним телом,, захваченным гравитационным
полем Нептуна.
Телевизионные изображения Тритона выявили необычную
поверхность, покрытую льдом. Большая часть экваториальной
области покрыта кольцевыми депрессиями, природа которых не
вполне ясна. Видны следы «ледяного» вулканизма, возможно,
существующего и в настоящее время. Темные следы свидетель¬
ствуют о переносе материала ветром.
В 1990 г. был запущен космический аппарат «Галилей»,
предназначенный для дальнейшего изучения Юпитера, к кото¬
рому аппарат подлетит в 1995 г.; предусматривается сброс СА,
который совершит спуск в атмосфере планеты и проведет пря¬
мые измерения. Из-за ограничения разгонного импульса при
выводе на гелиоцентрическую орбиту, недостаточного для пря¬
мого полета к Юпитеру, траектория «Галилея» предусматрива¬
ет несколько гравитационных маневров с использованием Земли
и Венеры: аппарат уже по одному разу облетел Венеру и Зем¬
лю, а в 1992 г. совершил второй облет Земли и вышел на тра¬
26
екторию к Юпитеру. К сожалению, остронаправленная антенна
«Галилея» раскрылась неполностью, что может 'существенно
ограничить научную программу полета.
В заключение следует отметить, что усложнение и удорожа¬
ние программ космических исследований неизбежно потребует
для их реализации дальнейшего развития эффективного между¬
народного сотрудничества. Некоторые связанные с этим вопро¬
сы затронуты в гл. 12.
Глава 2
РЕЖИМЫ РАБОТЫ И ОСНОВНЫЕ
ХАРАКТЕРИСТИКИ
МНОГОФУНКЦИОНАЛЬНОГО
РАДИОКОМПЛЕКСА
ДАЛЬНЕЙ КОСМИЧЕСКОЙ СВЯЗИ
Полеты дальних КА всех отечественных программ обеспечивались много¬
функциональной радиосистемой дальней космической связи (ДКС), которая
осуществляла:
передачу командной и программной информации с Земли на КА;
передачу телеметрической информации о работе систем КА и информа¬
ции от научных приборов, в том числе видеоинформации с изображением
планет и их спутников с КА на Землю;
измерения радиальной дальности и скорости, необходимые для навига¬
ции КА и исследования характеристик космического и околопланетного про¬
странства.
Рассмотрим особенности режимов работы и энергетические характеристи¬
ки радиосистемы ДКС, а также эволюцию совершенствования основных па¬
раметров отечественной системы ДКС.
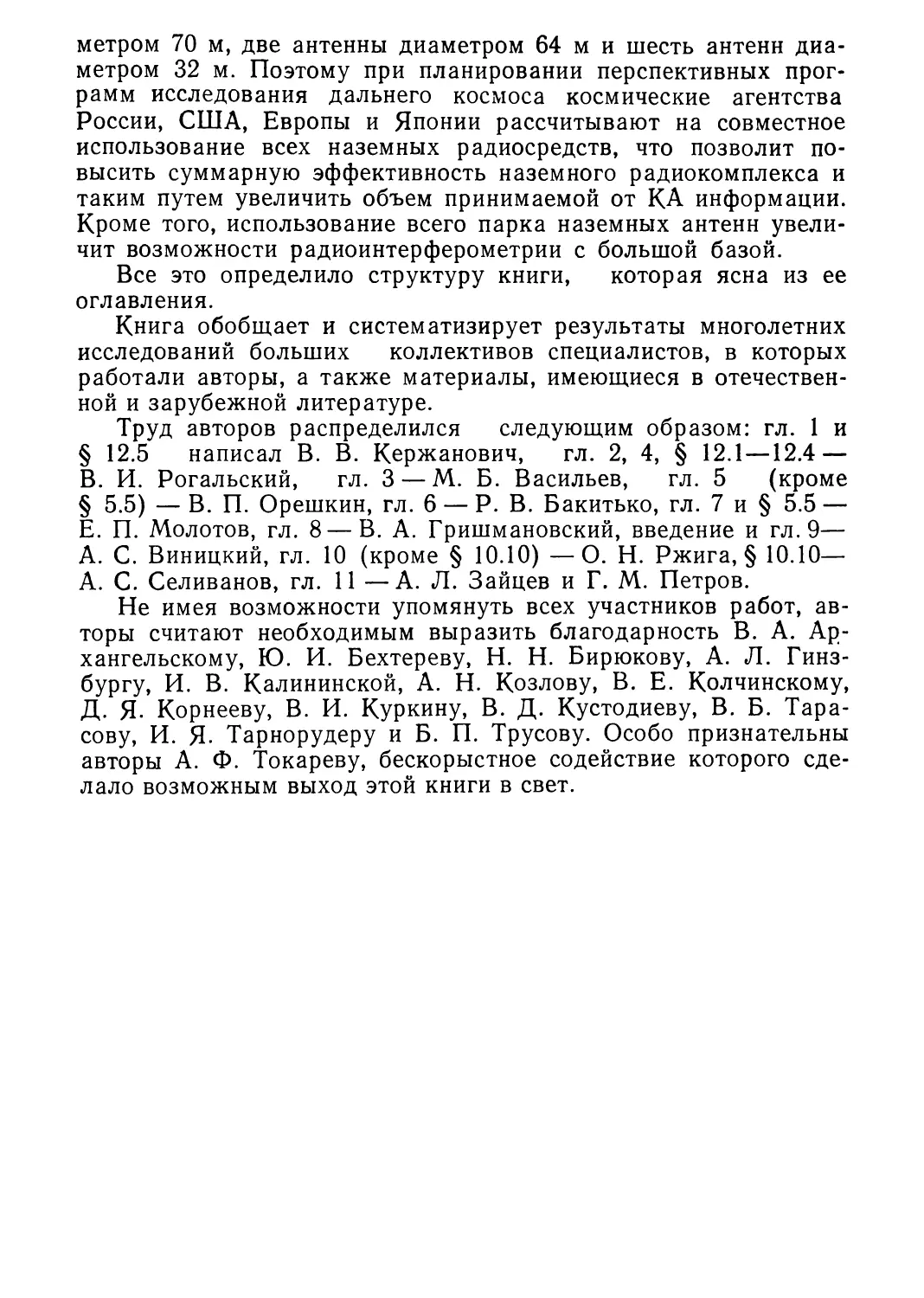
2.1. СОСТАВ И РЕЖИМЫ РАБОТЫ РАДИОСИСТЕМЫ ДКС
Функциональная схема радиосистемы ДКС приведена на
рис. 2.1. Основные задачи по радиообеспечению полета КА ре¬
шаются с помощью двух систем передачи информации: команд¬
но-программной и телеметрической, и одной системы извлече¬
ния информации о параметрах движения КА — системы траек-
торных измерений. В каждую из этих систем входят
специализированные бортовая (БРК) и наземная (НРК) инфор¬
мационные подсистемы и радиолиния, единая для всех трех
систем. Особенности построения каждой из них будут подробно
рассмотрены далее.
27
Бортодой радиокояллехс РА
Рис. 2,1. Функциональная схема радиосистемы ДКС
Для исследования планет в зависимости от фазы полета
дальнего космического аппарата используют несколько режи¬
мов работы системы ориентации:
постоянной солнечно-звездной ориентации (ПСЗО)—обе¬
спечивает трехсоосную стабилизацию положения КА с погреш¬
ностью не более 20 угл. мин;
постоянной солнечной ориентации (ПСО) — обеспечивает
одноосную ориентацию вокруг оси, направленной на Солнце.
При этом возникает случайное медленное (со скоростью не бо¬
лее 0,02 град/с) вращение КА;
погрешность (максимальная) ориентации оси КА на Солнце
40 мин;
одноосной ориентации вокруг оси, направленной на Солнце,
скорость вращения КА вокруг этой оси постоянная — 2 град/с,
погрешность ориентации не более 15°.
На этапе перелета КА находится в режиме одноосной ори¬
ентации, а в сеансах связи переходит в режимы ПСЗО и ПСО.
Наилучшие условия для связи создаются в режиме ПСЗО, так
как при этом можно использовать бортовую остронаправлен¬
ную антенну с высоким коэффициентом усиления. Диаметр
28
бортовых антенн на отечественных дальних КА в зависимости
от решаемой задачи 0,9 ... 2,8 м.
Основные характеристики радиолинии КА—Земля—КА рас¬
смотрим на примере программы «Фобос-88».
2.2. ЭНЕРГЕТИЧЕСКИЕ СООТНОШЕНИЯ В
РАДИОСИСТЕМЕ ДКС
Как следует из рис. 2.2, максимальная дальность до КА
380 млн км, максимальная скорость ее изменения 20 км/с, ми¬
нимальный угол ф=0,5°. Чтобы обосновать требования к радио¬
системе для обеспечения программы «Фобос-88», определим
мощность сигналов, принимаемых на КА и на Земле, и оценим
энергетические запасы в радиолинии по отношению к порого¬
вым значениям характеристик радиосистемы. Поток мощности
на расстоянии R от излучающего источника мощностью Рп, ко¬
торый имеет антенну с коэффициентом усиления GnPA [1],
Ф=РпОПрд/4я/?2. (2.1)
Мощность, принимаемая антенной, эффективная площадь кото-
О о прм
рОИ Бэф ,
PnpM = ®SnPM. (2.2)
Полагаем, что основной источник помех — тепловой «бе¬
лый» шум со спектральной плотностью N0=kT3KB (k — постоян¬
ная Больцмана; Тэкв — эквивалентная температура шума при¬
емной системы). При использовании в радиолиниях фазовой
модуляции (ФМ) система фазовой автоподстройки частоты
(ФАПЧ), имеющая двустороннюю шумовую полосу 2Рш, рабо¬
тает при отношении мощности немодулированной части приня¬
того сигнала к мощности шума [2]:
/pH \ пор
>10. (2.3
\ Р ш /
При выполнении (2.3) обеспечивается надежный захват и сле¬
жение системой ФАП за фазой входного сигнала. Согласно
(2.1) и (2.2) в общем случае мощность сигнала на приемном
конце
Pnpu = PnGnpAST/^R2- (2-4)
Мощность сигнала в радиолинии на несущей частоте в зависи¬
мости от индекса фазовой модуляции
Рн — КпР
прм — А ' прМ,
где Кн — коэффициент использования мощности сигнала по
несущей частоте.
29
f, (/гл. R, R,
град, км/с млн нм
Рис. 2.2. Зависимость на¬
клонной дальности R,
скорости ее изменения R
и угла Солнце—Земля—
КА г|> от времени пере¬
лета для программы
fQO 200 300 Ш Т,сут
«Фобос-88»
Энергетический запас системы по захвату и слежению си¬
стемой ФАП за фазой сигнала на несущей частоте
характеризует качество синхронизации по несущей частоте.
Это весьма важно для оценки потерь в когерентном детекторе
и случайных ошибок в канале измерения радиальной скорости.
При передаче телеметрической информации (представлен¬
ной в виде равномерного двоичного потока со скоростью пере¬
дачи ср) также можно рассчитать энергетический запас LH, если
определить часть мощности принятого сигнала, расходуемую
на передачу информации:
где Ки — коэффициент использования мощности сигнала при
передаче информации.
Энергетический потенциал является наиболее удобной ха¬
рактеристикой радиолинии: он не зависит от используемых ме¬
тодов модуляции и кодирования. Энергетический информа¬
ционный потенциал радиолинии на входе приемника можно
определить как
Коэффициенты Ки и Ки связаны с индексом фазовой мани¬
пуляции 0, например /Сн=0,25 и Ки=0,75 для 0=±6О°. Тогда
удельный расход энергетического потенциала в радиолинии на
передачу 1 бит/с
где Еб — энергия бита информации.
(2.5)
(2.6)
H* = PlPK/N0.
(2.7)
30
Пороговое значение Ec/N0 зависит от используемых сигна¬
лов и методов кодирования [3]. Для цифровой формы представ¬
ления сообщений наилучшим показателем качества является
вероятность ошибочного приема одного бита ptm. Для ис¬
пользуемых типов сигналов, методов кодирования и модели
помех существует строгая зависимость ptm = Ф(Еб/Ы0). Для
системы передачи телеметрической информации в радиосисте¬
ме ДКС приемлемым является рош <Ю-4. Для безызбыточ-
ного кода при фазовой модуляции ему соответствует
(Еб/М0)т? =4,8. Энергетический запас при передаче информа¬
ции определяется как
• (2-9)
Таким образом, при определении необходимого значения Ьл
учитывается отличие реальных методов обработки, используе¬
мых при приеме смеси сигнала с шумом, от идеальных, допус¬
ки на параметры отдельных элементов радиолинии, а также
условия распространения радиоволн.
В командно-программной системе запасы определяются так
же, как и в телеметрической системе, только допустимые зна¬
чения Рош —10~5 ... 10“6.
Параметры движения КА измеряются при использовании
двусторонней радиолинии Земля—КА и КА—Земля. Запросный
сигнал измерения дальности ретранслируется бортовым при-
емоответчиком в некоторой полосе частот AFRf зависящей от
ширины спектра модулирующих сигналов. Поэтому информа¬
ционная часть эквивалентного энергетического потенциала
где Н% =КИН3 — информационный энергетический потенциал
запросной радиолинии Земля—КА; Н0и=КнН0 — информацион¬
ный энергетический потенциал ответной радиолинии КА—Зем¬
ля, определяемый индексом фазовой модуляции.
Система траекторных измерений может обеспечить задан¬
ную точность, определяемую среднеквадратическим значением
ошибки, только при определенном отношении сигнал-шум
Рс/Рш в эффективной полосе измерителя Д^изм наземного ра-
диокомплекса. Тогда
(ЯэИкв)П°Р = А^изм(Рс/Рш).
Энергетический запас в системе траекторных измерений
можно определить как отношение эквивалентного информа¬
31
ционного энергетического потенциала в радиолинии к его по¬
роговому значению:
1ти = Яэикв/(//эикв)пор. (2.11)
Расчетные значения LH для радиосистемы «Фобос-88»
приведены в табл. 2.1 и 2.2 при максимальной дальности
Таблица 2.1
Параметр
Значение
Частота, МГц
5885
Мощность передатчика КА, Вт
50
Усиление бортовой антенны диаметром
0,9 м
600
Индекс фазовой модуляции, рад
±1,3
Кодирование
Сверточный код при скорости
R= 1/2 и длине К=6
Скорость передачи информации, бит/с
16 384
Достоверность приема одного бита
ю-4
Эффективность наземной приемной систе¬
мы с антенной диаметром 70 м для
7^30°, м2/К
Удельный расход энергетического потен¬
80
циала для рбош= Ю-4
3
Пороговое значение энергетического потен¬
циала по несущей (2/7ш= Ю Гц) для
ФАПЧ, Гц
100
Энергетический запас по информации LH
3
Таблица 2.2
Параметр
Значение
Частота, МГц
5008
Мощность, кВт
50
Усиление наземной антенны диаметром
70 м для т^30°, 5эфпрд = 2500 м2, дБ
69,4
Глубина амплитудной модуляции, %
100
Кодирование
Код Хемминга
Скорость передачи информации, бит/с
0,16
Достоверность приема одного бита
10-5
Усиление бортовой антенны
0,5
Чувствительность бортового приемника,
дБВт
—168
Энергетический запас по несущей L„
1,5
32
380 млн км, номинальных параметрах радиолинии КА—Земля
и Земля—КА и использовании наземной антенны с диаметром
зеркала 70 м.
2.3. ОБЗОР РАЗВИТИЯ ОТЕЧЕСТВЕННОЙ СИСТЕМЫ ДКС
Первый полет советского КА к планетам Солнечной систе¬
мы (проект «Венера-1») был совершен в 1961 г. Для этого
проекта была разработана радиосистема первого поколения
«Плутон», функционирующая в диапазоне 900/700 МГц. На¬
земная часть системы состояла из станции в Симферополе и
станции в Евпатории. На станции в Симферополе использова¬
лась антенна диаметром 25 м, а в Евпатории — антенная ре¬
шетка из восьми зеркал диаметром 8 м каждое. Радиосистема
обеспечивала передачу командной информации со скоростью
0,16 бит/с, прием телеметрической информации с максимальной
скоростью 64 бит/с и траекторные измерения скорости и даль¬
ности с точностью 100 мм/с и 400 м соответственно. По мере
усложнения задач исследования Марса и Венеры совершен¬
ствовались характеристики радиосистемы. С завершением пер¬
вого этапа исследования Венеры (1972 г.) с помощью спускае¬
мых в ее атмосферу аппаратов было закончено использование
радиосистемы первого поколения.
Для исследования Марса с помощью орбитальных и поса¬
дочных аппаратов в 1970 г. была создана радиосистема вто¬
рого поколения «Сатурн-МС», работавшая в диапазонах
900/700 МГц и 6 ГГц. Эта система использовалась также на
втором этапе исследований Венеры с помощью спускаемых и
орбитальных аппаратов и при встрече с кометой Галлея в
1986 г. Наземные приемопередающие радиосистемы разме¬
щались на двух центрах ДКС в Евпатории и Уссурийске. Для
связи с КА использовались антенны диаметром зеркала 32 и
70 м. Скорости передачи информации с КА были повышены до
100 кбит/с на дальности до 260 млн км, точности траекторных
измерений скорости и дальности до 10 мм/с и 200 м.
Радиосистема третьего поколения была разработана для
программы «Фобос». Радиолинии этой системы работали как
в диапазоне 900/700 МГц, так и в диапазоне 6/5 ГГц. Точность
траекторных измерений скорости и дальности была повышена
до 0,5 мм/с и 10 м. Для наземного обеспечения использовались
приемопередающие станции в Евпатории и Уссурийске с ан¬
теннами диаметром 32 и 70 м и одна станция приема с антен¬
ной диаметром 64 м в Москве. Кроме того, на долговременной
автоматической станции (ДАС), которая должна была осуще¬
ствить посадку на поверхность Фобоса, была установлена ра¬
диосистема ДАС—Земля—ДАС. Радиолония ДАС—Земля мог¬
3—4229
33
ла работать как с отечественной, так и с международной сетью
наземных станций в диапазоне 1,6 ГГц, обеспечивая передачу
телеметрической информации и траекторные измерения.
Для перспективных программ исследования планет и кос¬
мического пространства предполагается использовать радиоси¬
стему третьего поколения в составе бортового магистрального
радиокомплекса (МРК) и наземного «Квант-Д». Радиосистема
ДКС используется для связи не только с межпланетными КА,
но и с ИСЗ, предназначенными для исследования космического
пространства на высокоэллиптических орбитах. Более того, на
всех ИСЗ серий «Спектр», предназначенных для астрофизиче¬
ских исследований, также планируется использовать МРК и
«Квант-Д».
Особое положение занимает радиосистема для исследования
Луны. Для лунных программ в 60—70-х гг. в СССР использо¬
валась радиосистема с наземными антеннами диаметром 25 м;
радиолинии работали в диапазоне волн 900/700 МГц. Исследо¬
вания Луны с помощью КА завершились в СССР в 1976 г.
Реализация будущих лунных программ возможна с помощью
радиосистем дальней связи третьего, а может быть, и четвер¬
того поколения.
Помимо магистральной радиосистемы, обеспечивающей
двустороннюю связь между дальними КА и наземными стан¬
циями, на ряде дальних КА устанавливаются автономные ра-
ср, к Gum/с
100
10
0,00*
100 пли м/г
*00 млн мп
Г
10
260/1ЛНК/1
*00 млн мм
*00 млн мм
- КИП2-фи (моОобо-имлулзсная мобрляция-
фазобая мобуляцмя)
БО-Фи Сбиортогомалояые моО+/
фаз оба я /гобрляция)
ВИН (бремя- амлрлосмая
Пмобрляцая)
кин2-ек-Фп
цая- ебертоояо/е моды-
фа зоба я мобрляция) лри
К-1/2 и КяО
I960 О* 68 72 76 80 8* 88 92
Годы
Рис. 2.3. Скорость передачи информа¬
ции в радиолинии КА—Земля
1960 6* 68 72
J-
——i j~
76 80 8* 88 92
Го&ы
Рис. 2.4. Удельный расход энергети¬
ческого потенциала радиолинии
43
диосистемы для связи
СА с пролетным или ор¬
битальным КА. Автономные
системы использовались
в проектах Марс, Венера,
Венера—Галлей, где они
работали в диапазоне
140 МГц и обеспечивали
передачу научной информа¬
ции от СА на КА со ско¬
ростью 3078 бит/с. Для
программы «Марс-94» спро¬
ектирована АРС в диапазо¬
не 400 МГц.
Рассмотрим более под¬
робно изменение основных
характеристик бортовых и
наземных радиокомплексов
отечественной сети слеже¬
ния за КА дальнего космо¬
са, начиная с 1960 г.
(рис. 2.3—2.6).
Такие технические ха-
Р6,Вт Ръ, кВт
(*)
100
■ i
ДМ (0,9ГГц) /а
г-| -|
1 1
76
-160
1
И"
1
60
- 100
Д*
1 1
1 f
1—+-*
1
26
-60
I j
1 ! сп 5
СМ(6ГП,)\ Г~
1
- J
Г“ Р
11 . I 1 | 1
1960 6*
68
72 те 80 Л 88 и
Годы
Рис. 2.54 Мощность наземных (а) и
бортовых (б) передатчиков в ДМ и
СМ диапазонах
рактеристики, как ср, Э3у Р3у изменялись не плавно, а скачко¬
образно, поскольку они улучшаются по мере возникновения
новых научных задач. Так, скачок cv с 3000 до 100 000 бит/с
на дальности 260 млн км эъ,*г/к э6,х~'
(рис. 2.3) был связан с W (б)
требованиями передачи
большого объема радио¬
локационной информации
за сеанс связи при работе
КА «Венера-15, 16», глав¬
ным назначением которых
была радиолокационная
съемка северной полусфе¬
ры Венеры с разрешением
1 ... 2 км.
Рис. 2.6. Эффективность назем¬
ных (а) и бортовых (б) при¬
емных систем в ДМ (0,7 ГГц)
и СМ (5 ГГц) диапазонах:
— эффективная площадь на¬
земной антенны; Gg — коэффици¬
ент усиления бортовой антенны;
^экв —эквивалентная температу¬
ра антенно-приемного устройства
3*
100
80
60
А0
20
12
10
8
6
¥
-10
8
6
¥
-2
-О
-2
-¥
•SWup /тъжЬ
Эбж£б/ГпЪ
ДМ, Ф-70*
0s8/f
■о (8шт)
—10
-12
\--н
-16 ДМ,Ф-
ф-32»|
5JT"?
077 ) I
J
V
СМ.Ф*ОМ
I—
•32м
ДМ,Ф-2,8м_Г I
^
№11,
1950 6* 68 72 76 80 8¥ 88 62
Годы
35
Повышение эффективности наземного и бортового радио¬
комплексов дальних КА в первую очередь определяется пара¬
метрами СВЧ элементов (АФУ, приемных и передающих
устройств).
Данные о БРК различных поколений отечественных КА
приведены в табл. 2.3, а о наземном радиокомплексе, обеспечи¬
вающем связь с КА, — в табл. 2.4.
Структура КА оптимизируется для максимизации разме-
Таблица 2.3
Поколение КА (годы эксплуатации)
Параметр
1-е
(1960-1969)
2-е
(1969-1988)
3-е
(1988-1998)
4-е
(1998-2008)
Диапазон частот, ГГц:
Земля — КА
КА — Земля
0,7
0,9
0,7
0,9; 1,6;
6,0
0,7; 5,0
0,9; 8,4;
6,0
5,0; 7,2
6,0; 8,4
Мощность передатчика,
Вт, в диапазоне:
0,9 ГГц
6,0 ГГц
120
100
24
10
50
50
Метод модуляции пере¬
датчика
ФМ
ФМ, ВИМ
ФМ
ФМ
Диаметр антенны КА, м
1,6
2,8
0,9; 1,6
1,5; 2,8
Коэффициент усиления
антенны в диапазоне:
0,9 ГГц
6,0 ГГц
50
160
5000
600'Pl500
1500; 5000
Эффективность борто¬
вой антенно-приемной
системы, дБ/К, в диапа¬
зоне:
0,7 ГГц
5,0 ГГц
—18
—12
—2,0; 1,0
1,0; 5,0
Шумовая температура
приемника, К, в диапа¬
зоне:
0,7 ГГц
5,0 ГГц
3000
2000
1500
1000
500
36
Таблица 2.4
Поколение (годы эксплуатации)
Параметр
1-е
(1960-1988)
2-е
(1971-1988)
3-е (1988-1998)
4-е (1998-2008)
Диапазон частот,
ГГц:
Земля—КА
КА—Земля
0,7
0,9
0,7
0,9; 6,0
0,7; 5,0
0,9; 6,0; 8,4
О) СЛ
о о
ОО -vj
Мощность пере¬
датчика, кВт
(максимальная)
200
(0,7 ГГц)
200
(0,7 ГГц)
50
(5,0 ГГц)
200
(0,7 ГГц)
50 (5,0 ГГц)
Метод модуляции
Тип антенного
устройства
AM и ФМ
АДУ-1000
(08 м,
8 шт.)
ТНА-200
(025 м)
AM и ФМ
П400
(0 = 32 м)
AM и ФМ
П2500
(0 = 70 м)
ФМ
Л2500—П400
Эффективность
антенно-приемной
системы, м2/К
6
(АДУ-1000)
2
(ТНА-200)
8... 12
40 (0,9 ГГц)
80 (6,0 ГГц)
чистый прием
100 (6,0 ГГц)
чистый прием
щаемой на нем массы научной аппаратуры. При этом к борто¬
вому радиокомплексу в свою очередь предъявляются очень
жесткие требования в отношении его массы и потребляемой
энергии.
Радиосистема работает в основном в двух режимах: дежур¬
ном и сеансном. В дежурном режиме включены только задаю¬
щие генераторы передатчика, приемники командно-про¬
граммной подсистемы и программно-временная подсистема.
В сеансном режиме включаются все системы бортового радио¬
комплекса.
В дежурном режиме одноосной ориентации энергетический
потенциал радиолиний определяется характеристиками мало¬
направленных антенн КА. В сеансном режиме трехосной ори¬
ентации на борту КА используется остронаправленная антенна
с высоким коэффициентом усиления.
37
Глава 3
ОСОБЕННОСТИ РАСПРОСТРАНЕНИЯ
РАДИОВОЛН В ДАЛЬНЕМ КОСМОСЕ
При радиосвязи между КА, находящимися в дальнем космосе, и земны¬
ми станциями радиоволны проходят через различные области космического
пространства и атмосферы Земли, которые влияют на характеристики радио¬
сигналов. Поскольку под дальним космосом понимается космическое прост¬
ранство, удаленное от Земли не менее чем на 2-106 км [4], влияние атмосфе¬
ры Земли и межпланетной плазмы будет проявляться при любом положении
КА в дальнем космосе, а влияние атмосфер других планет, околосолнечной
плазмы, короны Солнца будет иметь место лишь при определенных положе¬
ниях КА, как это следует из рис. 3.1. Степень влияния указанных сред на
характеристики радиосигналов определяется параметрами среды вдоль пути
радиолуча, который можно полагать состоящим из отдельных участков, про¬
ходимых радиоволнами в каждом виде среды распространения. Поэтому
целесообразно рассмотреть влияние указанных сред на условия распростра¬
нения раздельно.
v \
\ Нежллане/лиая плазма \
\ —
—г "-^Атмосфера планет*
/Околшлнеоная аеяо-
X плазма \ Ф*рв)
/ \ \
' Земля
ч \
уАтмосфера\ —
Земли (тропол
сфера, ионосфера).
Околоземное лространсагоо
'Рис, 3.1. Геометрическое положение линии радиосвязи с дальними космиче¬
скими аппаратами относительно различных сред, влияющих на условия рас¬
пространения радиосигналов
38
3.1. ПАРАМЕТРЫ ТРОПОСФЕРЫ ЗЕМЛИ И ЕЕ
ВЛИЯНИЕ НА УСЛОВИЯ РАДИОСВЯЗИ
Влияние тропосферы Земли на характеристики распростра¬
няющихся в ней радиоволн связано с изменением коэффициен¬
та преломления п и его отличием от единицы. Это отличие
принято выражать индексом преломления
#= (п—1) 106. (3.1)
В диапазоне радиочастот индекс преломления зависит от
параметров тропосферы
А^=77,6Р/Т+3,73* 105е/Р, (3.2)
где Р — атмосферное давление в миллибарах; Т — температура
в кельвинах; е — давление водяного пара в миллибарах.
Это соотношение дает ошибку менее 0,5% для частот вплоть
до 100 ГГц. Поскольку параметры тропосферы (Р, Г, е) по¬
стоянно изменяются в зависимости от времени, географических
координат, высоты над уровнем моря, индекс преломления бу¬
дет также постоянно меняться.
Зависимость N от высот над поверхностью хорошо аппро¬
ксимируется экспонентой вида
N(h)=N0exp(—bh), (3.3)
где No — значение индекса премломления на уровне моря; Ь==
= 0,136 км-1.
Значение индекса преломления на уровне моря N0 зависит
от географических координат, сезона года, времени суток и из¬
меняется в пределах 300^V0^400. Среднее значение N0 на по¬
верхности Земли в средних широтах Л7ОСр = 315. В экваториаль¬
ных областях N0 увеличивается до Л70ср=350. На рис. 3.2 пока¬
заны зависимости N (h) для
усредненной среднеширотной
тропосферы (кривая В) и
для модели, описанной соот¬
ношением (3.3) (кривая А).
Важной характеристикой
тропосферы является высот¬
ный градиент индекса прелом¬
ления dN/dh, который в хоро¬
шо перемешанном воздухе при
адиабатическом изменении
температуры с высотой оста¬
ется постоянным. Для оценок
влияния тропосферы на рас¬
пространение радиоволн ис¬
Н,км
Рис. 3.2. Зависимости индекса пре¬
ломления тропосферы Земли от вы¬
соты над поверхностью
39
пользуют понятие международной стандартной атмосферы,
для которой приняты значения: N0=325, dN/dh= —4,ЗХ
•10“2м-1. Такую тропосферу еще называют нормальной.
Среднемесячные высотные градиенты индекса преломления
в приземном слое тропосферы в различные сезоны года могут
принимать значения от —30 до —100 км-1 [5]. Горизонтальные
переносы и сжатие воздушных масс, а также радиационное
охлаждение поверхности Земли способствуют образованию в
приземных слоях тропосферы областей с очень сильными гради¬
ентами индекса преломления dN/dh<L—157 км-1, получившими
название инверсий. Эти области могут достигать горизонталь¬
ных размеров от десяти до сотен километров, а по толщине не
превышать нескольких сотен метров. Они могут непосредствен¬
но примыкать к поверхности Земли (приземная инверсия) или
располагаться на небольшой высоте (приподнятая инверсия).
Наличие в атмосфере молекулярного кислорода и паров во¬
ды вызывает поглощение проходящих через нее радиоволн, ко¬
торое становится существенным на частотах /^10 ГГц и резко
возрастает вблизи линий молекулярного поглощения. Поэтому
концентрация этих газов в атмосфере — очень важный пара¬
метр: концентрация кислорода в атмосфере относительно посто¬
янна, тогда как концентрация водяных паров сильно изменяет¬
ся в зависимости от географических координат, времени года,
погодных условий. Среднемесячные значения концентрации па¬
ров воды р в атмосфере Земли изменяются от 0,5 до 2,5 г/м3
[5].
Поглощение и рассеяние радиоволн вызываются также гид¬
рометеорами (дождь, снег, туман, град) и зависят от интенсив¬
ности осадков, размера и формы капель. В зависимости от кли¬
матических условий любой район Земли может быть отнесен к
Таблица 3.1
Интенсивность осадков, мм/ч, для дождевых зон
данного
времени
худшего
месяца
года, %
А
в
с
D
Е
F
G
н
J
к
L
м
1,0
<0,5
1
2
3
1
2
3
2
8
2
2
4
0,3
1
2
3
5
3
4
7
4
13
6
7
11
0,1
2
3
5
8
6
8
12
10
20
12
15
22
0,03
5
6
9
13
12
15
20
18
2
23
33
40
0,01
8
12
15
19
22
28
30
32
35
42
60
63
0,03
14
21
26
28
41
54
45
55
45
70
105
95
0,001
22
32
42
42
70
78
65
83
55
100
150
120
40
30° 13° 0° 13° 309 *0° 60° 73° 90° /09° 120° /39° f30° /99° 180° /93° /<%?*
*9° 30° 19° 0° f3° 30° *3° 60° 79° 90° 109° 120° 139° 190° /33° 180° 163° 190°
Рис. 3.3. Распределение дождевых зон на Евроазиатском континенте
одной из двенадцати дождевых зон, параметры которых приве¬
дены в табл. 3.1. Каждая зона характеризуется интенсивностью
осадков, превышающей пороговое значение в течение заданных
отрезков времени худшего месяца года. Распределение дожде¬
вых зон на Евроазиатском континенте показано на рис. 3.3.
Наличие тропосферы на пути радиосигналов приводит к по¬
терям распространения, которые включают следующие эффек¬
ты:
затухание в атмосферных газах,
уменьшение усиления антенн из-за некогерентности волново¬
го фронта,
замирания и многолучевость.
Кроме того, отличие коэффициента преломления тропосферы
от единицы вызывает изменение скорости распространения и
связанные с этим задержки радиосигналов.
Влияние тропосферы проявляется на всех частотах, но осо-
41
Wf,rrq
Рис. 3.4. Зависимость суммарных потерь распространения в тропосфере Зем¬
ли от частоты при различных углах места $ в ясную погоду при плотности
водяных паров 7,5 г/м3 (—) и дождливую при интенсивности дождя
10 ,мм/ч ( )
бенно существенно на частотах выше 1 ГГц и при низких углах
места.
На рис. 3.4 показаны зависимости суммарных потерь в тро¬
посфере Земли от частоты в диапазоне 0 ... 40 ГГц при различ¬
ных углах места и погодных условиях. При ясной погоде зату¬
хание в тропосфере пренебрежимо мало для частот ниже
20 ГГц и имеется небольшой максимум вблизи линии поглоще¬
ния паров воды (на частоте 22,3 ГГц). В полосе частот
~27... 35 ГГц затухание в тропосфере минимально, а затем
опять начинает расти и резко увеличивается до 250 ... 300 дБ
вблизи линии поглощения атомарного кислорода (в полосе ча¬
стот 57 ... 63 ГГц). На более высоких частотах зависимость
имеет вид осциллирующей кривой с максимумами вблизи ли¬
ний поглощения и уменьшением между ними на несколько де¬
цибел. Однако абсолютные значения затухания при этом оста¬
ются значительно выше, чем в диапазоне частот до 40 ГГц.
При дожде (даже незначительной интенсивности) поглоще¬
ние в тропосфере резко увеличивается и начинает сказываться
на частотах выше 5 ... 10 ГГц, особенно при низких углах ме¬
ста. На частотах выше 20 ГГц поглощение превышает 10...
... 12 дБ при углах места (1^15 ... 20°.
Поглощению в тропосфере Земли подвержены радиосигналы
42
как на линии Земля—Космос, так и в обратном направлении.
Для качества приема радиосигналов из дальнего космоса важ¬
ной характеристикой является также шумовая температура не¬
ба, ограничивающая чувствительность приемника земной стан¬
ции, в которую наряду с шумами космоса входят также шумы,
связанные с поглощением в атмосфере. На рис. 3.5 показаны
зависимости шумовой температуры неба от частоты в диапазо¬
не 0 ... 40 ГГц [6]. Следует отметить, что шумы начинают уве¬
личиваться на частотах выше 10 ГГц даже при ясной погоде,
что связано с увеличением поглощения в атмосферных газах и
парах воды. Это приводит к снижению чувствительности прием¬
ника к сигналам, принимаемым из дальнего космоса.
Результаты, приведенные на рис. 3.4 и 3.5, рассчитаны по
методике, рекомендованной МККР [7]. При этом явления тро¬
посферной рефракции и замираний не учитывались, поскольку
их влияние на радиолинии дальнего космоса пренебрежимо
мало для частот ниже 10 ГГц и углов места выше 3 ... 5°.
Оценки, выполненные в [8], показывают, что при углах ме¬
ста более 10° средние значения углов тропосферной рефракции
не превышают 1 ... 6 угл. мин и резко возрастают при углах
места менее 5°. Тропосферная рефракция вызывает расхож¬
дение лучей и, как следствие, расфокусировку луча антенны,
что приводит к дополнительным потерям. Эти потери не ЗаВИ-
Яц, к
Рис. 3.5. Зависимость шумовой температуры тропосферы и космоса на входе
антенны от частоты при различных углах места р в ясную погоду при плот¬
ности водяных паров 7,5 г/м3 (—) и дождливую при интенсивности дождя
10 мм/ч ( )
43
сят от частоты и не превышают 0,4 дБ при угле места 3° даже
для очень высоких значений индекса рефракции у поверхности
Земли [9].
Мелкомасштабные неоднородности индекса преломления
тропосферы вызывают некогерентность волнового фронта на
входе приемной антенны, что приводит к дополнительным по¬
терям усиления. Этот эффект зависит от диаметра антенны и
увеличивается с частотой и при уменьшении угла места. Из¬
мерения показывают, что эти потери не превышают
0,2 ... 0,6 дБ при угле места 5° для антенн диаметром 22 и 7 м
на частотах 4/6, 15,5 и 31,6 ГГц [9].
Флуктуации индекса преломления тропосферы вызывают
быстрые изменения амплитуды распространяющихся сигналов—
замирания. Они возрастают при увеличении частоты сигналов
и уменьшении угла места. Для углов места более 10° в ясную
погоду стандартная девиация отклонений амплитуды на часто¬
те И ГГц не превышает 0,2 дБ в течение 1% летнего времени.
При углах места менее 5... 10° замирания могут превышать
3 ... 5 дБ [9].
Рефракция радиосигналов в тропосфере приводит к отли¬
чиям фазового и группового путей радиосигналов от прямоли¬
нейного, называемых фазовой и групповой поправками. Оценки
этих поправок для средних метеорологических условий [8] по¬
казывают, что они не превышают 10... 15 м при углах места
более 10° и увеличиваются при низких углах места (до 40 м
при угле места 3°). Наличие фазовой и групповой поправок в
тропосфере приводит к погрешностям измерений дальности и
радиальной скорости аппаратов.
3.2. ВЛИЯНИЕ ИОНОСФЕРЫ ЗЕМЛИ НА УСЛОВИЯ
РАДИОСВЯЗИ
Ионосфера Земли представляет собой смесь ионизованного
и нейтрального газов. Коэффициент преломления такой среды
является величиной комплексной. Это означает, что амплитуда
распространяющейся в среде плоской волны затухает, а фаза
претерпевает дополнительные изменения. При воздействии
магнитного поля такая среда становится анизотропной. Все
эти факторы приводят к достаточно сложной зависимости
комплексного коэффициента преломления ионосферы от пара¬
метров среды и напряженности внешнего магнитного поля. Од¬
нако на практике для учета влияния ионосферы на распростра¬
нение радиоволн при связи с дальними КА можно с достаточ¬
ной степенью точности пользоваться упрощенными соотноше¬
ниями для коэффициента поглощения [10]
о и=Яе -Ne-v/m (cd2+v2) (3.4)
44
и для коэффициента преломления
n=\-^^-Ne + ^^^-Ne—2-^-Ne2+..., (3.5)
mco2 е ты2 со е т2 со4 е 1 » v ;
где qe и m — заряд и масса электрона, со = 2л/ — частота ра¬
диоволны, v — частота столкновений частиц, Ne — число элект¬
ронов в единице объема, сон= (qe/mc0) | Н [ cos 0 — продольная
гирочастота электронов, Н — напряженность магнитного поля
Земли, 0 — угол между направлением радиолуча и вектором Н,
с0 — скорость света в вакууме.
В соотношении (3.5) зависимость п(со) при разложении в
ряд ограничена членами второго порядка малости. Такого
приближения на практике вполне достаточно для учета влия¬
ния ионосферы Земли на условия радиосвязи.
Из (3.5) видно, что коэффициент преломления ионосферы
всегда меньше единицы и зависит от концентрации электро¬
нов Nе. Последняя постоянно изменяется в зависимости от
времени (часа суток, сезона, фазы цикла солнечной активно¬
сти), географических координат, высоты над уровнем моря.
Усредненные зависимости Ne(h)—высотные профили рас¬
пределения электронной концентрации в ионосфере Земли для
различных часов суток показаны на рис. 3.6. Эти зависимости
обнаруживают в ионосфере Земли четыре устойчивые области
повышенной концентрации (Д Е, Ft и F2). Область D распо¬
ложена на высотах от 60 до 90 км; Е — от 100 до 140 км; F± —
от 180 до 240 км (существует только в летние месяцы, в часы
освещенности Солнцем); F2— от 230 до 400 км. Суточный ход
изменений электронной концентрации в областях Д Е и Fu а
также их расположение повторяются ото дня ко дню, в то
время как наиболее протяженная область F2y в которой Ne
максимальна, сильно неустойчива. При этом сильным измене¬
ниям подвержены электронная концентрация, высота, на ко¬
торой наблюдается ее максимум, толщина области. Для всех
профилей Ne(h) характерно общее возрастание Ne до высоты
максимума концентрации в области F2, а затем уменьшение ее
по экспоненте. При этом в области F2 профиль Ne(h) по фор¬
ме близок к параболе, а при Л^2000 км наблюдается слабая
зависимость Ne от времени суток и солнечной активности.
Верхняя граница ионосферы — область перехода в межпланет¬
ную плазму (плазмопауза)—характеризуется резким умень¬
шением Л/е, располагается на высотах (18... 23) -103 км и за¬
висит лишь от фазы цикла солнечной активности.
Такая сложная зависимость Ne(h) затрудняет точную
аппроксимацию профиля электронной концентрации. Исполь¬
зуемые в настоящее время аналитические зависимости Ne(h)
45
07.
.03 ч
103
10*
105
10е
ОЗ..
.05 ч
10*
703
10*
105
05..
.06ч
10
10г
105
10*
05.
.07ч
10
10г
103
07..
.09ч
10
10*
09..
.11ч
10
11... 13 ч
13... 15ч
106
10s
106
10*
ю5
106
103
10*
ю5
10*
103
10*
10
10*
103
10
10*
а)
106
10s
10*
103
10°
105
10*
Mt, эл/см3
106
105
h,Kti
900
700
500
300
100
23..
.01ч \ 1
7... 23ч \ 19...21ч
\ 17... 19
Л 15.17ч
-
\
\
-
\
-
4
\
\
1 1
1 I
I 1—
1 1
‘ ‘
■ «
—I I—
. I
23...01Ч
103
10*
ю5
106
21...23 ч
102
103
10*
ю5
106
19... 21ч
10
10*
103
10*
ю5
10е
17... 19 ч
10
102
103
10*
ю5
15... 17ч
10
10*
103
10*
f)
Ne, эл/см3
10s
109
Рис. 3.6. Усредненные зависимости концентрации электронов в ионосфере
Земли от высоты над поверхностью в различное время суток
базируются на результатах ионосферного зондирования с по¬
верхности Земли и со спутников, а также на данных, получен¬
ных при запусках геофизических ракет и зондировании ионо-
46
сферы методами некогерентного рассеяния радиоволн и т. д.
Для учета влияния ионосферы при связи с КА достаточную
точность (до 75... 90%) дает модель, аппроксимирующая за¬
висимость Ne{h) бипараболой в области Fz и экспонентой в
верхней части ионосферы [11]. При этом используются месяч¬
ные прогнозы распространения радиоволн и данные зондиро¬
вания ионосферы со спутников.
Для учета влияния ионосферы Земли на условия радиосвя¬
зи и радиоизмерений с КА необходимо знать интегральную
электронную концентрацию вдоль пути радиосигналов. К на¬
стоящему времени накоплены обширные экспериментальные
данные, позволяющие судить об этой величине в различное
время суток, сезона, цикла солнечной активности (рис. 3.7), ее
зависимости от географических параметров. Как видно из
рис. 3.7, Л/'по достигает наибольших значений в околополуден-
ные часы в годы максимальной солнечной активности
(Л/цо тах~ (4 ... 6) • 1013 см-2, в отдельных случаях до 1014 см-2),
а в период спада активности Солнца Nm max уменьшается в
5—6 раз. При этом характер суточной и сезонной зависимости
сохраняется. Значения Nuo минимальны в ночные и предрас¬
светные часы, причем в летние месяцы электронная концентра¬
ция в это время суток значительно ниже, чем в остальное вре¬
мя года. В зависимости от фазы цикла солнечной активности и
времени года она колеблется в пределах Л/ПОтах^
» (0,2 ... 1) • 1013 см"2. На средних широтах интегральная
электронная концентрация уменьшается по направлению к се¬
веру. На экваториальных широтах наблюдаются два максиму¬
ма Nm вблизи широт ~20° в северном и южном полушариях,
между которыми Nuo уменьшается, образуя «экваториальную
аномалию». Широтные градиенты интегральной электронной
концентрации на средних широтах днем составляют 1 .. .4% на
градус широты, а ночью увеличиваются до 7... 10%. Однако
из-за уменьшения Nno ночью вследствие суточного хода абсо¬
лютные значения широтного градиента в ночное время суток
меньше, чем днем.
Зависимости Nno от времени для отдельных дней часто силь¬
но отличаются от усредненных месячных кривых. Эти отличия
могут быть обусловлены следующими основными причинами:
1) ионосферными геомагнитными возмущениями и бурями,
которые вызывают сильные отклонения, продолжающиеся одни
или несколько суток. Через несколько часов после начала воз¬
мущения Nuo сильно увеличивается (на 100... 200%), а еще
через несколько часов сильно падает. Эти вариации Nm сильно
коррелируют с изменениями индекса геомагнитной активности.
Измерения показывают, что в спокойных геомагнитных усло¬
виях зависимости Nuo(t) для соседних дней отличаются в сред-
47
О 2 * 6 8 fO f2K fSf82022 2bt,4 0 2 b 6 8 10 12 ft f6 1820222bt,4
нем на ±20%, тогда как даже в слабо возмущенные периоды на¬
блюдаются существенные отличия (до 60% при значении индек¬
са геомагнитной активности Кр=4);
2) движущимися ионосферными возмущениями, которые
имеют размеры от сотен метров до нескольких сотен километ¬
ров. Их условно разделяют на две группы:
мелкомасштабные неоднородности с линейным размером
/<Л0 км, которые вызывают быстрые флуктуации амплитуд и
фаз принимаемых радиосигналов (мерцания),
крупномасштабные неоднородности с />10...100 км, вы¬
зывающие медленные изменения фазы радиосигналов.
О характерных относительных изменениях Л/по, вызываемых
неоднородностями различных размеров в средних широтах,
можно судить из рис. 3.8, построенного по результатам экспе¬
риментальных исследований различных авторов [12—14].
48
A Nno /
n О
Рис. 3.8. Относительные изменения
интегральной электронной кон¬
центрации в ионосфере Земли для
неоднородностей различных раз¬
меров
Рис. 3.9. Зависимости групповой
ионосферной задержки АтгР от ча¬
стоты при различных значениях инте¬
гральной электронной концентрации
Заштрихованная область на рис. 3.8 указывает возможный пре¬
дел изменения ANU0/Nm для данного размера / неоднородности,
а сплошная линия дает средние значения. Отношение ANU0/Nm
увеличивается с ростом размера неоднородности и может до¬
стигать 10 .. . 20% при 1&500 ... 1000 км. Наиболее часто
наблюдаются неоднородности с /^100 км, вызывающие ва¬
риации Nno с ANm/Nm&2 ... 4% [12].
Неоднородности наблюдаются в любое время суток, сезона,
года. С повышением геомагнитной активности степень неодно¬
родности ионосферы увеличивается и возможно появление об¬
разований очень большого размера.
Скорость изменения интегральной электронной . концентра¬
ции определяется суточным ходом Nm(t) и перемещениями
неоднородностей ионосферы. Средние скорости изменения Nno(t)
обычно не превышают ± (3 ... 5) • 109 см-2 с-1, однако в отдель¬
ные дни при геомагнитных бурях они могут возрастать до
dNno/dtж ±:l0i0 см-2 с-1.
Влияние ионосферы на распространяющиеся в ней радиовол¬
ны приводит к следующим эффектам:
поглощению,
вариации параметров сигналов,
рефракции радиоволн,
4—4229
49
дисперсии радиосигналов,
вращению плоскости поляризации.
Вариации амплитуды, фазы, поляризации и углов прихода
радиосигналов вызываются мелкомасштабными неоднородно¬
стями ионосферы. Вариации амплитуды радиосигналов харак¬
теризуются индексом замираний S4, который представляет от¬
ношение среднеквадратического отклонения принимаемой мощ¬
ности сигнала к ее среднему значению и уменьшается с уве¬
личением частоты радиосигналов. В большинстве наблюдений
установлена зависимость S4~/-1,5. Индекс замираний изме¬
няется в зависимости от геомагнитной широты, долготы, мест¬
ного времени, фазы цикла солнечной активности, индекса гео¬
магнитной активности [15]. Так, на частоте 137 МГц флуктуации
амплитуд сигнала, превышающие 6 дБ, отмечались около 20%
времени наблюдения вблизи геомагнитного экватора, реже чем
в 2% в полярных областях и реже чем в 0,1% на средних ши¬
ротах [16]. Многочисленные измерения замираний на разных
частотах показали, что флуктуации параметров радиосигналов
хорошо описываются теоретическим методом плавных возмуще¬
ний [17] в предположении степенного пространственного спек¬
тра флуктуаций плотности электронов с показателем р»4 (в
экспериментах получены значения 3,8^р^4,3).
Поглощение в ионосфере существенно лишь на частотах ни¬
же 70 МГц и поэтому не оказывает заметного влияния на
связь с дальними КА, для которой используется более высо¬
кочастотный диапазон.
Рефракция в ионосфере (как и в тропосфере) обусловлена
регулярным изменением коэффициента преломления с высотой
и его градиентами. При этом наблюдаются как регулярные из¬
менения траекторий радиолучей, так и нерегулярные, вызыва¬
емые ионосферными неоднородностями и приводящие к ва¬
риации углов прихода радиосигналов. Эти эффекты могут быть
очень существенны при низких углах места (примерно до 5°)
и резко уменьшаются при их увеличении. Так, на частоте
100 МГц при углах места 3 ... 5° вариации углов прихода мо¬
гут достигать нескольких миллирадиан. Они имеют суточный
ход и обратно пропорциональны квадрату частоты радиосигна¬
лов.
Фазовая и групповая задержки, вращение плоскости поля¬
ризации и дисперсия радиосигналов в ионосфере связаны с ин¬
тегральной электронной концентрацией. При этом фазовая и
групповая поправки, представляющие собой разность между
фазовым (или групповым) временем распространения радио¬
сигналов и временем распространения света в свободном про¬
странстве по тому же пути, в приближении первого порядка
(т. е. при учете только первого члена в разложении в ряд (3.5)
50
для коэффициента преломления) могут быть вычислены
уравнения
из
Лтгр= — Ат,
■Ф*
1,33-10-7
; р
as-
1,33-ю-7
р
Nn, (3.6)
где АтГр и Атф измерены в секундах, f — частота в герцах,
Nn = Sne(S)dS — интегральная электронная концентрация вдоль
пути радиосигналов в электронах на квадратный метр.
Рис. 3.9 иллюстрирует зависимости групповой ионосферной
задержки радиосигналов от частоты при различных значениях
Nn [15].
Если через ионосферу распространяются широкополосные
сигналы, то групповая задержка, зависящая от частоты, будет
различной для составляющих спектра широкополосного сигна¬
ла, что вызывает его искажения. Это явление, известное как
относительная дисперсия [15], характеризуется разностью задер¬
жек между нижней и верхней частотами спектров импульсов,
распространяющихся через ионосферу (рис. 3.10). Для фикси¬
рованной ширины спектра сигналов относительная дисперсия
обратно пропорциональна частоте в третьей степени.
При распространении линейно-поляризованных радиоволн в
ионосфере происходит их расщепление на две эллиптически по¬
ляризованные компоненты (обыкновенная и необыкновенная),
которые распространяются с разной скоростью из-за влияния
магнитного поля Земли. В результате сложения этих компонент
в точке приема плоскость поляризации результирующей волны
будет повернута на угол
<Р = 2$ н№)cos 0-». (S) dS> (3-7)
0 s
где H0(h)—напряженность магнитного поля земли на высоте ft-
над поверхностью.
Это явление получило название эффекта Фарадея. Как вид-
Рис. 3.10. Зависимости
разности задержек в
ионосфере крайних ча¬
стот спектров импульсов
различной длительности
Т от частоты при Nn=
= 5.1017 эл./м2
4*
51
но из (3.7), угол поворота плоскости поляризации ср зависит от
ЛГП и напряженности геомагнитного поля H0(h) вдоль пути ра¬
диоволн в ионосфере и поэтому будет иметь регулярную зави¬
симость от времени суток, сезона и фазы цикла солнечной ак¬
тивности и нерегулярные изменения, связанные с геомагнитными
бурями и распространяющимися ионосферными неоднородно¬
стями. В табл. 3.2 приведены значения ср, ожидаемые на частоте
1 ГГц на средних широтах для различных процентов времени
года максимума и минимума солнечной активности [15].
Таблица 3.2
Относительное время
существования, %
99
90
50
10
1
0,1
0,01
Угол поворота, град, при
активности Солнца:
максимальной
3
7
23
43
64
74
82
минимальной
1
2
7
14
30
41
47
Таблица 3.3
Ионосферный эффект
Значение
Зависимость
от частоты
Групповое запаздывание
0,25 мкс
i/p
Вращение плоскости поляризации
108°
I//2
Рефракция
<0,6 угл.мин
i/p
Вариации угла прихода
0,2 угл.мин
I//2
Поглощение (полярные широты)
0,05 дБ
~1/Р
Поглощение (средние широты)
<0,01 дБ
~1 /Г
Относительная дисперсия
0,4 не/МГц
1/г
Замирания
Wflfi
В табл. 3.3 даны оценки максимальных ионосферных эффек¬
тов и характер их зависимости от частоты радиосигналов для
интегральной электронной концентрации в вертикальном столбе
ионосферы Л/по=Ю18 эл/м2, частоты 1 ГГц и угла места 30°
[15].
3.3. ВЛИЯНИЕ АТМОСФЕР ДРУГИХ ПЛАНЕТ
НА РАСПРОСТРАНЕНИЕ РАДИОВОЛН
При полете КА вблизи другой планеты могут возникнуть
два принципиально различных по условиям радиосвязи случая:
аппарат находится в атмосфере или на поверхности планеты
52
и излучаемые радиосигналы распространяются в атмосфере под
некоторым углом места к горизонту;
аппарат находится за планетой и радиоволны проходят через
атмосферу, просвечивая ее.
Первый случай имеет место при связи со спускаемыми ап¬
паратами (зондами), второй — при связи с искусственными
спутниками планет или аппаратами, пролетающими вблизи пла¬
неты.
К настоящему времени накоплено достаточно данных о фи¬
зических характеристиках атмосфер планет. Наибольший ма¬
териал собран об атмосферах Венеры и Марса.
Атмосфера Венеры состоит в основном из углекислого газа
(~96%) и азота (~2%). Давление на поверхности около
92 атм., а температура Г0^750 К [18]. В столь плотной атмо¬
сфере сильно выражены явления рефракции и поглощения ра¬
диоволн. Выполненный в [19] анализ показал, что при угле
места р<ркр = 8,8° наступает критическая рефракция и радио¬
лучи возращаются на поверхность планеты. Зависимости угла
рефракции е от угла места луча в атмосфере Венеры, группо¬
вой поправки при вертикальном падении от высоты и ослабле¬
ния потока энергии от длины волны [19] показаны на рис.
3.11. Приведенные на рис. 3.11,6 зависимости учитывают погло¬
щение радиоволн в атмосфере и рефракционное ослабление,
обусловленное расхождением лучей.
При радиопросвечивании атмосферы Венеры по мере при¬
ближения радиолуча к поверхности планеты угол рефракции
быстро увеличивается (рис. 3.12), что вызывает сильное ослаб¬
ление потока энергии приходящих в точку приема радиосигна¬
лов и при /г=34 км происходит захватывание радиоволн атмо¬
сферой [19].
Рис. 3.11. Зависимости угла рефракции е в атмосфере Венеры от угла места
луча (} (а), групповой поправки при вертикальном падении ALrpo от высоты
над поверхностью Венеры (б) и ослабления потока энергии в атмосфере Ве¬
неры Р]Ро от длины волны X при Р = 90° (1), 30° (2), 12° (3) (в)
53
Рис. 3.12. Зависимости угла рефракции 8 и ре¬
фракционного ослабления потока энергии радио¬
волн % от высоты луча над поверхностью Венеры
h при радиопросвечивании атмосферы
Изменение частоты радиосигналов,
обусловленное атмосферой планеты,
связано с углом рефракции соотноше¬
нием
^fg=f/cov±e{h)t
(3.8)
где v±— составляющая скорости аппарата, перпендикулярная
направлению на Землю.
Ионосфера Венеры значительно менее плотная, чем у Зем¬
ли, с максимальной плотностью электронной концентрации
Nmах= (1 ... 5) • 105 эл/см3 на высотах около 140 ... 150 км
[20, 21]. При этом верхняя граница ионосферы сильно зависит
от зенитного угла Солнца и располагается на высотах 300 ...
... 600 км. Ночная ионосфера Венеры очень нестабильна, мак¬
симальная плотность электронов не превышает (0,5...4)Х
ХЮ4 эл/см3 на высотах п= 110 ... 160 км [22]. При этом часто
наблюдаются два максимума электронной концентрации. Су¬
щественных изменений частоты и угла рефракции ионосфера
Венеры не вызывает.
Атмосфера Марса, значительно менее плотная, чем у Вене¬
ры и Земли, состоит в основном из углекислого газа (~96%)
и азота (около 3%). Давление у поверхности планеты не более
4... 7 мБар, температура ~ 170... 210 К. Такая атмосфера
практически не влияет на распространение радиоволн при рас¬
положении источника на поверхности планеты или в ее атмо¬
сфере. При радиопросвечивании будут наблюдаться незначи¬
тельные изменения частоты и амплитуды радиоволн.
3.4. ВЛИЯНИЕ МЕЖПЛАНЕТНОЙ И
ОКОЛОСОЛНЕЧНОЙ ПЛАЗМЫ НА РАСПРОСТРАНЕНИЕ
РАДИОВОЛН
В настоящее время приняты следующие представления о
межпланетной и околосолнечной плазме, которые вытекают из
гидродинамической теории солнечного ветра, предложенной
Е. Н. Паркером [23] и подтвержденной результатами экспери¬
ментов:
1. Солнце является непрерывным источником плазмы, запол¬
няющей околосолнечное и межпланетное пространство (солнеч¬
54
ного ветра). В основном солнечный ветер истекает из «коронар¬
ных дыр» — областей в верхней атмосфере Солнца, в которых
силовые линии магнитного поля не замкнуты. Плазма в этих
областях не может быть удержана магнитным полем и ради¬
ально вытекает в околосолнечное пространство.
2. Истекающая из Солнца плазма несет с собой «вморожен¬
ное» магнитное поле, напряженность которого быстро умень¬
шается до Н~ 10~2 Гс при удалениях R = 5RQ (RQ— радиус
Солнца). В дальнейшем H~R~2 и у орбиты Земли составляет
в среднем около 10-5 Гс. Силовые линии межпланетного магнит¬
ного поля с учетом вращения Солнца и радиального истечения
плазмы имеют вид спиралей Архимеда, радиально исходящих
из Солнца. При этом из-за вращения Солнца межпланетное
магнитное поле периодически меняет свое направление. Эти
периоды определяются вращением Солнца (около 27 дней) и
зависят от его активности. Такое строение магнитного поля в
межпланетном пространстве получило название «секторной
структуры». Число секторов, их размеры, устойчивость сильно
зависят от фазы цикла солнечной активности.
3. Средняя электронная концентрация уменьшается с увели¬
чением радиального расстояния от Солнца в соответствии с мо¬
делью Аллена—Баумбаха [24].
В этой модели первый член описывает внутреннюю корону
Солнца при R/Rq<4, а второй — внешнюю при R/RQ^5 ... 10.
Соотношение (3.9) справедливо только для низких гелиогра-
фических широт (0~±15°). Поскольку обнаружено, что элек¬
тронная концентрация в направлении от экватора к полюсам
Солнца уменьшается в 4—5 раз, было предложено [25] учиты¬
вать это изменение путем введения в (3.9) множителя
4. Плотность потоков межпланетной плазмы постоянно ме¬
няется из-за вращения секторной структуры межпланетного
пространства, выбросов крупномасштабных потоков плазмы во
время солнечных вспышек, вариаций электронной концентрации,
связанных с распространением магнитогидродинамических и
ударных волн, неоднородностей различного масштаба. Средняя
скорость потока плазмы, истекающего из Солнца, составляет
10 ... 40 км/с и быстро возрастает - до 300 .. . 1000 км/с при
удалении на расстояние ~30 млн км и затем остается в ука¬
занных пределах. Различие в скоростях движения потоков
плазмы приводит к образованию областей разряженной и уп¬
лотненной плазмы в межпланетном пространстве. Так, на орби¬
(3.9)
N(Q) ~ [cos20 + O,O4sin20]I/2.
(3.10)
55
те Земли наблюдалась средняя плотность межпланетной плазмы
около 4 ... 9 эл/см-3, минимальная — 0,5 ... 1 эл/см~3 и макси¬
мальная— 50 ... 100 эл/см-3. Неоднородная структура солнеч¬
ного ветра характеризуется одноразмерным спектром флуктуа¬
ции [26]:
Gne= 1,7* 10-7(R/RQ)"3-45/s-1’e5, (эл/м3)2/Гц, (3.11)
где 20^/?//?о^215, fa — частота флуктуаций электронной кон¬
центрации в герцах, скорость потоков солнечного ветра принята
равной 300 км/с.
5. Солнечный ветер постепенно переходит в межзвездную
среду при удалениях от Солнца до 100 астрономических еди¬
ниц, где плотность спадает до значения iV^lO-4 см-3.
При радиосвязи с аппаратами дальнего космоса радиовол¬
ны проходят через протяженные области межпланетной и око¬
лосолнечной плазмы, которые вызывают фазовое и групповое
запаздывание радиосигналов. Обычно под околосолнечной плаз¬
мой понимается область пространства, непосредственно приле¬
гающая к Солнцу и ограниченная орбитой первой планеты —
Меркурия (R^83Rq), а под межпланетной — внешнее по отно¬
шению к этой сфере пространство между орбитами планет.
Таблица ЗА
Протяженность линии
радиосвязи Lo, млн км
100
150
170
200
250
300
350
Угол Солнце—Земля—ис¬
точник, град
130,3
99
90
79,7
64
47,7
24,7
Электронная концентрация
у орбиты Земли N0, эл/см3:
50
110
210
260
316
465
720
1750
8,9
19,3
36,6
45
55
81
125
305
1
2,2
4,2
5,2
6,3
9,3
14,5
35
В табл. 3.4 приведены расчетные значения групповой поправ¬
ки ALrp, м, в межпланетной плазме на частоте ~ 1 ГГц для трасс
разной протяженности при различных значениях электронной
концентрации межпланетной плазмы у орбиты Земли N0y соот¬
ветствующих минимальным, средним и максимальным измерен¬
ным ее значениям при движении источника по орбите Марса.
Неоднородности межпланетной и околосолнечной плазмы
вызывают флуктуации амплитуды и фазы распространяющихся
через нее радиосигналов (рис. 3.13). Выполненные исследова¬
ния показывают, что при приближении радиолуча к Солнцу на¬
блюдается насыщение флуктуаций амплитуды (индекс мерцания
56
8 tO 20 tfO SO tOO R/Re
г 8 6 8 10 20 R/R&
Рис. 3.13. Зависимость индек-
ca амплитудных мерцаний ра¬
диоволн в межланетной и око¬
лосолнечной плазме от мини¬
мального расстояния радиолуча
до Солнца при Я] = 13 см (1) и
>,2 = 32 см (2)
Рис. 3.14. Экспериментальные зависи¬
мости ширины спектральной линии
монохроматических сигналов В от
минимального расстояния радиолуча
до Солнца R/Rq при Я1 = 32 см (1),
>.2=13 см (2), = 8 см (3), ХА =
= 3,7 см (4)
стремится к единице), которое наступает при R/RQtt 12 (для
К\ = 13 см) я R/Rq—17 (для Я2 = 32 см) [19].
Флуктуации фазы и частоты радиосигналов обусловлены ва¬
риациями интегральной электронной концентрации. Эти вариа¬
ции могут достигать 100% со спектром в виде степенного ряда
с показателем степени —2,9. При приближении к Солнцу флук¬
туации сильно увеличиваются [19, 26]. В диапазоне минималь¬
ных расстояний радиолуча от Солнца R/RQ^8 ... 100 дисперсия
флуктуаций частоты изменяется как af~(R/R@)-l>3. Из сравне¬
ния данных о флуктуациях частоты радиосигналов КА «Пио¬
нер», «Гелиос» и «Викинг» (Я=13 см) с аналогичными резуль¬
татами, полученными при помощи аппаратов «Марс» и «Венера»
в диапазоне А,=32 см, следует, что 0/~А,-2 [19].
При приближении радиолуча к Солнцу наблюдается ушире-
ние спектральной линии монохроматического радиосигнала.
Исследования, выполненные при полетах КА, позволили уста¬
новить зависимости ширины спектральной линии от расстояния
радиолуча до Солнца для радиосигналов ^=32, 13, 8 и 3,7 см,
которые приведены на рис. 3.14. Уширение спектральной линии
в околосолнечной плазме достаточно сильное и при Х = 32 см и
R/Rq=2 достигает значений о^600 Гц [27].
3.5. КРИТЕРИИ ВЫБОРА И ОСОБЕННОСТИ
ИСПОЛЬЗОВАНИЯ ПОЛОС РАДИОЧАСТОТ ДЛЯ
ИССЛЕДОВАНИЯ ДАЛЬНЕГО КОСМОСА
Эффективность решения научных и прикладных задач при
исследованиях дальнего космоса с помощью КА во многом
определяется правильным выбором полос радиочастот для ра-
57
диолиний Земля—КА и КА—Земля. Для каждой конкретной
задачи критерии выбора оптимальных полос радиочастот могут
быть различными. Наряду с техническими характеристиками
эти критерии зависят и от условий распространения радиосиг¬
налов. Наиболее оптимальным параметром для характеристики
эффективности радиолиний является отношение принятой мощ¬
ности сигнала Рс к спектральной плотности мощности шума No.
Полоса радиочастот, обеспечивающая наивысшее значение
Pc/N0 для заданных характеристик системы и условий распро¬
странения, может считаться оптимальной.
В соответствии с методикой, принятой МККР [6], эффек¬
тивность (энергетический потенциал) радиолинии определяется
следующим образом:
Pc/N0 = Рпрд+ ^прд LcB Рвтм -^осЧ-,
+ (?прм— 101g(&rnpM), дБ, (3.12)
где Рцрд — мощность передатчика, дБВт; Gnpfl— коэффициент
усиления антенны передатчика, дБ; LCB —потери передачи в сво¬
бодном пространстве, дБ; LaTм — потери передачи, вызываемые
атмосферой с учетом затухания в парах воды, дБ; Ьос — допол¬
нительные потери передачи, вызываемые осадками (дождь, снег,
облака и т. д.), дБ; GnpM— коэффициент усиления приемной
антенны, дБ; k — постоянная Больцмана; ТПрМ=Татм+ос-\-Тк-{-
~\~ТпРмо — суммарная шумовая температура на входе приемника,
К; Т атм+ос шумовая температура, обусловленная атмосферой
с учетом осадков, К; Тк — шумовая температура, обусловлен¬
ная шумами космоса с учетом ослабления в атмосфере и осад¬
ках, К; Тпрмо — шумовая температура собственно приемника, К.
Для радиолинии Земля—космос вкладом атмосферы Земли и
осадков в суммарную шумовую температуру приемника косми¬
ческой станции дальнего космоса можно пренебречь и тогда
Тпрм== Тк-{-ТПрмО.
Оптимальные полосы частот для конкретной радиолинии
определяются из зависимостей Pc/N0 от частоты. Алгоритмы
расчета ослаблений в атмосфере и осадках, шумовой темпера¬
туры и эффективности радиолиний, базируемые на использова¬
нии материалов МККР, приведены в [7].
На рис. 3.15 построены зависимости эффективности радиоли¬
ний космос—Земля и Земля—космос от частоты при различных
углах места р. Для расчетов использовались следующие харак¬
теристики: протяженность радиолинии 8-108 км, диаметр антен¬
ны земной станции 70 м, мощность передатчика земной стан¬
ции 100 кВт, диаметр антенны космической станции 3,7 м,
мощность передатчика космической станции 25 Вт, коэффициент
использования поверхности антенны 0,6, шумовая температура
приемников принята равной 0 К (идеальный приемник).
58
Р'/Ь, л в
а)
Рс/Во, ДВ
ю
Рис. 3.15. Зависимости эффективности радиолиний дальний космос—Земля
(а) и Земля—дальний космос (б) от частоты при различных углах места
для ясной погоды (плотность водяных паров 7,5 г/м3 (—)) и дождливой при
интенсивности дождя 10 мм/ч ( ) и 32 мм/ч (• • •)
Важной особенностью зависимостей эффективности радиоли¬
ний от частоты является наличие максимума и зависимость его
от угла места и интенсивности осадков. Это свидетельствует о
наличии оптимальных полос частот для различных погодных
условий. В табл. 3.5 приведены оптимальные полосы частот
радиолиний дальнего космоса для угла места 30°, в которых
59
Таблица 3.5
Оптимальная полоса
частот, ГГц
Применение
~1 ...2
1 ...4
1 ...8
4... 10
7,5... 18
12 ... 35,5
26,5 ... 39,5
Радиолинии Земля — космос, использующие малона¬
правленные бортовые антенны с низким усилением
для подачи команд и траекторных измерений при
отсутствии точной ориентации КА на Землю в ясную
и дождливую погоду (всепогодные)
Радиолинии космос — Земля, использующие малонап¬
равленные бортовые антенны с низким усилением для
передачи низкоскоростной телеметрической информа¬
ции и траекторных измерений в дождливую погоду
Радиолинии космос — Земля, использующие малона¬
правленные бортовые антенны в ясную погоду
Радиолинии космос — Земля, использующие остронап¬
равленные бортовые антенны в режиме точной ориен¬
тации КА для передачи высокоскоростной телеметри¬
ческой информации и траекторных измерений в дож¬
дливую погоду
Радиолинии Земля — космос, использующие острона¬
правленные бортовые антенны в дождливую погоду
Радиолинии Земля — космос, использующие острона¬
правленные бортовые антенны только в ясную погоду
Радиолинии космос — Земля, использующие острона¬
правленные бортовые антенны для передачи сверхши-
рокополосной информации только в ясную погоду
эффективность уменьшается не более чем на 1 дБ относительно
максимального значения, и указаны условия их применения.
3.6. МЕЖДУНАРОДНО-ПРАВОВЫЕ ОСНОВЫ
ИСПОЛЬЗОВАНИЯ ПОЛОС РАДИОЧАСТОТ
ДЛЯ РАДИОЛИНИЙ ДАЛЬНЕГО КОСМОСА
Использование радиочастотного спектра регулируется администрациями
связи стран, участвующих в деятельности Международного Союза Электро¬
связи (МСЭ) — специально созданного для этих целей органа ООН. Админи¬
стративные конференции МСЭ (Всемирные или Региональные) рассматривают
вопросы Регламента радиосвязи (РР), который является основным право¬
вым документом при взаимоотношениях между странами по вопросам радио¬
связи и распределения полос радиочастот между радиослужбами, определяет
принципы, процедуры и технические нормы, принимаемые во взаимодействии
администраций связи при эксплуатации их радиослужб. Регламент радио¬
связи [28] представляет собой сборник основных международных постанов¬
лений в области использования радиоспектра. Им установлены следующие ка¬
тегории распределения полос радиочастот: первичная, разрешенная и вто¬
ричная.
60
Службы первичной и разрешенной категорий пользуются равными права¬
ми, однако при составлении частотных планов службе первичной категории
предоставляется приоритетное право выбора полос радиочастот.
Станции служб вторичной категории не должны создавать помех стан¬
циям первичной и разрешенных служб и не могут требовать защиты от по¬
мех со стороны этих служб.
Статья 8 РР «Таблица распределения частот» устанавливает границы
районов и зон, на территории которых действует то или иное распределение
РР, категории служб и распределений. Администрации — члены МСЭ не
должны присваивать станциям частоты в нарушение Таблицы распределе¬
ния частот иначе как при условии, что не должны создаваться помехи служ¬
бам, работающим в соответствии с PP.
Установленное в настоящее время РР распределение частот предусмат¬
ривает использование службой космических исследований (дальний космос)
следующих полос частот:
1. 2110... 2120 МГц (Земля—космос) и 2290 ... 2300 МГц (космос —
Земля) на первичной основе во всех районах Земли. Эти полосы используют¬
ся для всепогодных радиолиний с бортовыми антеннами низкой и высокой
направленности. Малая ширина этих полос частот ограничивает скорости
передачи телеметрической информации и точность измерений дальности, осо¬
бенно при связи с двумя или более космическими аппаратами в одном луче
антенны земной станции.
2. 7145... 7190 МГц (Земля — космос) и 8400 ... 8450 МГц (космос —
Земля). Эти полосы используются для всепогодных радиолиний с бортовыми
антеннами высокой направленности. В этих полосах частот возможна работа
одной антенной с несколькими космическими станциями одновременно при
достаточно высокой скорости передачи информации. Полоса 8,4... 8,45 ГГц
распределена службе космических исследований (дальний космос) на первич¬
ной основе во всех районах Земли, а использование полосы 7,145... 7,190 ГГц
требует дополнительного согласования по процедуре статьи 14 РР с фикси¬
рованной и подвижной наземными службами, которым эта полоса распреде¬
лена на первичной основе. Следует отметить, что распределение полосы ча¬
стот 7,145... 7,190 не оптимально для радиолиний Земля — космос с точки
зрения критериев, рассмотренных в § 3.5.
3. 12,75 ... 13,25 ГГц (космос — Земля) и 16,0... 17,1 ГГц (Земля — кос¬
мос). Эти полосы частот могут использоваться на вторичной основе во всех
районах Земли радиолиниями с высоконаправленными бортовыми антеннами
и при ясной погоде. Полоса 12,75... 13,25 ГГц не оптимальна.
4. 31,8... 32,3 ГГц (космос — Земля) и 34,2 ... 34,7 ГГц (Земля — кос¬
мос). Эти полосы частот могут использоваться на первичной основе во всех
районах Земли радиолиниями с высоконаправленными бортовыми антеннами
только при ясной погоде. В их пределах возможна сверхширокополосная
передача данных и высокая точность измерения дальности (до нескольких
сантиметров), а также радиосвязь при прохождении радиолучей вблизи Солн-
Па, не реализуемая на более низких частотах из-за сильных флуктуаций,
обусловленных околосолнечной плазмой.
61
AR, с ft
10б
to*
105
to2
10
1
0,1
0,01
13 V4
1 1—1—1—L-L1J-
1 L-I-LUI L
0,1
m
Рис. 3.16. Зависимости погреш¬
ности измерения дальности от
углового расстояния до Солнца
для различных частотных диа¬
пазонов, распределенных ра¬
диолиниям дальнего космоса
Ширина распределенной полосы частот в диапазонах 13... 17 и 32...
...34 ГГц составляет 500 МГц, что позволяет с высокой точностью измерять
дальность и использовать широко разнесенные сигналы для радиоинтерферо¬
метрии со сверхдлинными базами (РСДБ). В пределах этих полос частот бу¬
дут также малы погрешности траекторных измерений из-за распространения
в межпланетной и околосолнечной плазме (рис. 3.16), а также в ионосферах
планет.
Используя несколько частот в разных диапазонах, можно достаточно
точно измерять (или исключать) эффекты, связанные с влиянием плазмы на
пути радиосигналов. Для этого следует обеспечить когерентность радиосигна¬
лов в разных диапазонах. Кроме того, для точных измерений дальности не¬
обходима когерентность сигналов на линиях Земля — космос и космос —
Земля.
Группой координации космических частот, объединяющей ведущие кос¬
мические агентства многих стран,, рекомендованы отношения частот и частот¬
ный план для радиолиний дальнего космоса, использующие перечисленные
распределения частот [29].
Как уже говорилось, на КА в режиме одноосной ориентации или при ее
потере применяются малонаправленные антенны. Остронаправленная антенна
служит для передачи высокоскоростного потока научной информации в ре¬
жиме трехосной ориентации. В СССР радиосистемы дальнего космоса начали
развиваться в диапазоне 0,7/0,9 ГГц, который примыкает к оптимальной по¬
лосе частот для радиолиний с малонаправленными антеннами на КА.
С 1970 г. в радиолиниях КА — Земля используется диапазон 6 ГГц, что со¬
впадает с рекомендациями табл. 3.5 при работе через остронаправленную
антенну. В 1988 г. был введен диапазон 5 ГГц для радиолиний Земля — КА,
что обеспечивало двустороннюю когерентную радиосвязь на частотах 5/6 ГГц.
Со временем используемые в СССР для дальней космической радиосвязи
полосы частот пришли в противоречие с международным Регламентом радио¬
связи [28], согласно которому службам космической эксплуатации (передача
команд, служебной телеметрии, траекторные измерения) и космических иссле¬
дований (дальний космос) распределены следующие полосы частот:
62
2110... 2120 МГц для линии Земля — КА;
2290 .. .2300 МГц для линии КА — Земля;
7145... 7190 МГц для линии Земля— КА;
8400 ... 8450 МГц для линии КА — Земля.
Эти частоты, как и частоты, используемые в России, хорошо согласуются
с рекомендациями табл. 3.5.
Для эффективного международного сотрудничества при выполнении со¬
вместных программ космических исследований Россией, США, государствами
Европы, Японией необходимо обеспечить техническую совместимость космиче¬
ских и земных станций заинтересованных стран. С этой целью планируется
постепенный перевод российских радиосистем дальнего космоса в Междуна¬
родные полосы радиочастот. В первую очередь предполагается достигнуть
полной технической совместимости в радиолиниях КА — Земля для передачи
научных данных. Так, уже в проекте Марс-94 планируется использовать ра¬
диолинию КА — Земля, работающую на частоте 8,4 ГГц.
В РР также определены перспективные полосы частот для дальней кос¬
мической радиосвязи: 31,8... 32,3 ГГц на линии КА — Земля и 34,2...
...34,7 ГГц на линии Земля — КА. Предполагается, что их применение обес¬
печит повышение точности траекторных измерений и скорости передачи
информации. Эти полосы частот в настоящее время не используются из-за
повышенного их ослабления в атмосфере Земли. Реализация сверхширокопо-
лосных радиолиний пока затруднена из-за ограниченной мощности существую¬
щих бортовых энергоисточников и недостаточной точности наведения борто¬
вых антенн, которая при диаметре зеркала антенны около 3 м должна
составлять несколько угловых минут. Использование околоземных спутников-
ретрансляторов при высокой точности их ориентации наряду с самонаводя-
щимися антеннами на КА позволит в будущем реализовать энергетический
выигрыш от применения остронаправленных антенн на радиолинии КА —
ИСЗ-ретраслятор на частотах около 30 ГГц с тем, чтобы ретрансляция по ли¬
нии ИСЗ — Земля осуществлялась по радиолинии, работающей на частотах,
не испытывающих большого затухания в атмосфере Земли. Далее частоты,
используемые в России и на Украине сетью слежения за КА дальнего кос¬
моса, будут обозначены следующим образом: ДМ1—полоса частот около
926 МГц; ДМ2 — около 772 МГц; ДМЗ — около 1676 МГц; СМ1 — около
5884 МГц; СМ2 — около 5008 МГц; СМЗ — около 8427 МГц.
3.7. ПОЛОСЫ РАДИОЧАСТОТ ПЕРСПЕКТИВНЫХ
РАДИОЛИНИЙ ДАЛЬНЕГО КОСМОСА
Поглощение в атмосфере Земли и шумы не позволяют соз¬
дать оптимальные радиолинии дальнего космоса в полосах ча¬
стот выше 20 ГГц. Однако и в этом диапазоне имеются полосы
с минимальным ослаблением в атмосфере Земли, которые при
соответствующем развитии техники могут быть использованы в
63
радиолиниях дальнего космоса. Кроме того, в диапазоне
20... 120 ГГц можно создать высокоэффективные радиолинии
между спутником-ретранслятором на околоземной орбите и
станцией дальнего космоса.
В этом случае на эффективность радиолинии уже не влияют
шумы и поглощение в атмосфере Земли, и она будет опреде¬
ляться только поглощением и рассеянием на частицах межпла¬
нетной плазмы, а также шумами космоса. Анализ показывает,
что поглощение и рассеяние вне атмосферы планеты не превы¬
шает 0,1 дБ в диапазоне 10 ... 120 ГГц и поэтому ими на прак¬
тике можно пренебречь. Шумовая температура космоса скла¬
дывается из фонового излучения (около 3 К) и квантового
шума (см. зависимость 1 на рис. 3.17). Кроме того, если антен¬
на космической станции направлена на Землю, последняя мо¬
жет вносить дополнительный вклад в шумовую температуру
космоса. Однако, поскольку угловой размер Земли, видимый с
космической станции, много меньше ширины луча антенны, этот
7, К Рс/No, Д5
100
Z
Ю1
5
Z
10
5
3
-
/
^2
/
/
_
А2 /
-
-
1
-
j00^
-LL
1
1 L-
1 I 1-L
90
40
70
60
50
W
30
20
-
-
-
Z
Л
-
- /
-
-
1
1 И 1
1
1 L—L.
J-JU-L
5 10 20
50 100150
?,ГЫ
7 10
20
50
Л ГГц
Рис. 3.18. Зависимость эффективности ра¬
диолиний дальний космос—спутник Земли
(1) и дальний космос—земная станция (2)
от частоты
Рис. 3.17. Зависимости шумовой темпера¬
туры космоса (1) и атмосферы Земли при
ясной (2) и дождливой (3) погоде (ин¬
тенсивность дождя 55 мм/ч) от частоты в
диапазоне 10 ...120 ГГц
64
вклад будет незначительным и им можно пренебречь. Зависи¬
мости шумовой температуры атмосферы Земли от частоты при¬
ведены на рис. 3.17 для ясной (2) и дождливой погоды (3)
(интенсивность дождя 55 мм, что соответствует 0,001% време¬
ни в климатической зоне /, см. табл. 3.1).
На рис. 3.18 приведены зависимости эффективности радио¬
линий дальнего космоса от частоты [31], рассчитанные для тех
же технических характеристик, что и в § 3.5. Анализ рис. 3.18
показывает, что эффективность радиолиний, проходящих только
через космическое пространство, увеличивается с частотой и
всегда больше, чем у радиолиний, включающих атмосферу пла¬
неты. При этом радиолинии, пересекающие атмосферу, могут
быть достаточно эффективны в полосах частот 30 ... 40 и
80 ... 100 ГГц. В полосах частот около 60 и 120 ГГц могут быть
реализованы высокоэффективные радиолинии между спутником
Земли и космической станцией в дальнем космосе, защищенные
от помех со стороны наземных служб. Основываясь на анализе
данных расчета эффективности перспективных радиолиний
дальнего космоса, можно рекомендовать оптимальные полосы
частот для них, приведенные в табл. 3.6.
Таблица 3.6
Полоса частот, ГГц
Направление радиолинии
Примечание
56 ... 64
Спутник-ретранслятор —
дальний космос и обратно.
Линии, защищенные от по¬
мех со стороны наземных
служб
Необходимы две полосы
шириной по 500 МГц, раз¬
несенные на 7... 10%
80...100
Дальний космос — Земля и
обратно
Спутник-ретранслятор —
дальний космос
То же
Около 110
Необходима одна полоса
частот шириной 500 МГц,
разнесенная с полосой
117,7 ... 119,8 ГГц не ме¬
нее, чем на 7... 10%
117,7... 119,8
Дальний космос — спутник-
ретранслятор. Линии, за¬
щищенные от помех со сто¬
роны наземных служб
То же
5—4229
65
Глава 4
СИСТЕМЫ ПЕРЕДАЧИ
КОМАНДНО-ПРОГРАММНОЙ
И ТЕЛЕМЕТРИЧЕСКОЙ ИНФОРМАЦИИ
Радиолинии Земля — КА и КА — Земля являются неотъемлемой частью
систем передачи командно-программной и телеметрической информации. Ра¬
диосвязь с КА, удаленных от Земли на сотни миллионов километров, требует
использования высокоэффективных антенн, высокостабильных задающих гене¬
раторов, оптимальной структуры сигналов и эффективных методов кодирова¬
ния.
Рассмотрим принципы построения и основные технические характеристики
систем передачи командно-программной и телеметрической информации, ис¬
пользуемых для радиообеспечения полетов дальних КА в России.
4.1. ОБЩИЕ ОСОБЕННОСТИ СИСТЕМ ПЕРЕДАЧИ
ИНФОРМАЦИИ, ОБЕСПЕЧИВАЮЩИХ ПОЛЕТ
ДАЛЬНИХ КА
Управление полетом КА осуществляется автоматизирован¬
ной системой управления (АСУ) (рис. 4.1). Бортовой комплекс
управления КА состоит из двух главных систем: управления
движением и ориентации. Наземный автоматизированный комп¬
лекс управления объединяет наземные командно-измерительные
пункты, центры управления полетом КА и баллистические цент¬
ры (подробнее см. гл. 7).
Основной задачей АСУ является управление ориентацией
КА и движением его центра масс. Для этого необходимы си¬
стемы передачи командно-программной информации на КА и
телеметрической информации с КА.
Для определения местоположения КА в пространстве ис¬
пользуется система извлечения информации о параметрах дви¬
жения КА, которой посвящена гл. 5. Здесь же рассмотрим
принципы построения и основные технические характеристики
систем передачи командно-программной информации (КПИ) и
телеметрической информации (ТМИ). Обе системы используют
цифровую форму представления сообщений в виде равномерно¬
го двоичного кода. Известно [31], что в этом случае оптималь¬
ными являются противоположные сигналы, которые могут быть
получены при фазовой манипуляции гармонического колебания.
При воздействии аддитивного «белого» шума оптимальный
приемник сигналов представляет собой перемножитель образца
принимаемого сигнала и смеси сигнала с шумом. Результат
66
Рис. 4.1. Функциональная схема АСУ дальних КА
перемножения интегрируется на интервале длительности сим¬
вола и сравнивается с нулевым порогом.
При идеальном приеме все значащие моменты времени при¬
нимаемого сигнала должны быть известны. Для этого приемник
содержит устройства синхронизации, которые, как правило,
реализуются в виде замкнутых систем, следящих за фазами не¬
сущей, поднесущей и символьной частот. Замкнутые следящие
системы фазовой автоподстройки частоты требуют дополни¬
тельной аппаратуры и дополнительного времени на поиск и
захват сигнала по частоте и фазе. В то же время асинхронные
системы приема цифровых сигналов обладают худшими удель¬
ными расходами энергии и более широкой полосой частот, од¬
нако они аппаратно менее сложны и позволяют с меньшими
задержками обеспечить прием сигналов.
Для дальних КА энергетический потенциал сигнала на вхо¬
де бортового приемника при использовании малонаправленной
антенны не превышает тысячи герц. При таком энергетическом
потенциале при последовательных методах поиска несущей
частоты и фазы сигнала в пределах неопределенности знания
5*
67
радиальной скорости КА (±0,3 км/с) на вхождение в синхро¬
низм затрачивается до 300 с. Примерно столько же времени не¬
обходимо для поиска фазы модулирующей последовательности.
Итого для полного вхождения в синхронизм бортовому прием¬
нику требуется до 600 с. Такое время вхождения в синхронизм
не слишком велико в штатной ситуации, ибо сеанс связи с даль¬
ним КА может длиться до 160 минут. Однако в аварийной си¬
туации, например при потере ориентации и вращении КА, уро¬
вень сигнала на входе приемника сильно меняется в течение
1 ... 2 мин из-за неравномерности диаграммы направленности
бортовой антенны. В такой ситуации 600 с, требуемые для синх¬
ронизации, не позволят установить связь с КА.
Учитывая сказанное, можно обосновать структуру сигнала
в радиолиниях систем передачи командно-программной и теле¬
метрической информации. Расчеты показывают, что энергетиче¬
ский потенциал радиолинии КА — Земля всегда на порядок
выше, чем радиолинии Земля — КА, из-за возможности исполь¬
зования на Земле в 100... 1000 раз более мощного передат¬
чика, в то время как чувствительность наземного приемника
выше, чем у бортового приемника, всего в 10 раз. Это озна¬
чает, что при одинаковой скорости передачи информации по
этим радиолиниям для передачи командно-программной инфор¬
мации можно использовать неоптимальные (асинхронные) ме¬
тоды приема сигналов ради исключения системы синхронизации
и повышения тем самым надежности вхождения в связь, а
также ради уменьшения массы аппаратуры на КА.
При создании радиолинии систем передачи командно-прог¬
раммной и телеметрической информации дальних КА необходи¬
мо учитывать следующие особенности условий их работы:
большой диапазон изменения расстояния между КА и Зем¬
лей в процессе осуществления проекта (от миллиона до не¬
скольких миллиардов километров);
большое доплеровское смещение частоты принимаемого сиг¬
нала за счет взаимного движения КА и наземной станции
'(Ч=10-4 от номинального значения частоты радиолинии);
сильное влияние среды распространения (атмосфер Земли
и исследуемой планеты, межпланетного пространства и около¬
солнечной плазмы) на изменение амплитуды, фазы и частоты
сигнала;
ограничения массы, габаритов и энергопотребления борто¬
вой аппаратуры;
высокая надежность бортовой аппаратуры в течение 5—
10 лет, вытекающая из высокой стоимости проекта и жестких
астрономических сроков осуществления проекта.
68
4.2. ПРИНЦИПЫ ПОСТРОЕНИЯ СИСТЕМЫ ПЕРЕДАЧИ
КОМАНДНО-ПРОГРАММНОЙ ИНФОРМАЦИИ
Эта система обеспечивает передачу командно-программной
информации, предназначенной для управления системами КА
и научными приборами. Командная информация, немедленно
исполняемая, носит функциональный характер, поэтому для нее
используется термин «функциональная команда» (ФК). Прог¬
раммная информация, содержащая числовые значения каких-
либо параметров, которые надо изменить в заданное время,
обычно сначала запоминается в оперативной памяти систем КА.
В указанный момент времени на КА выполняется какая-либо
операция, содержание которой определяется запомненным чис¬
ловым значением. Для такой информации используется термин
«числовая команда» (ЧК).
К отличительным особенностям командно-программной си¬
стемы передачи информации следует отнести:
малую вероятность трансформации одной ФК (ЧК) в дру¬
гую;
высокую вероятность правильного приема каждой ФК и ЧК;
обязательный прием ФК и ЧК при любой ориентации КА,
в том числе и в нештатных ситуациях;
непрерывную работу бортовой части системы в течение всего
срока жизни КА (дежурный режим);
сравнительно невысокие скорости передачи информации (от
0,1 до 10 бит/с).
В основном ФК предназначены для систем управления,
ориентации, терморегулирования, электропитания, научных при¬
боров, а ЧК — для программно-временной системы и системы
управления.
Как следует из рис. 4.1, источником ФК является Центр
управления полетом КА (ЦУП), в котором размещается группа
управления. В то же время ЧК формируются как в ЦУП, так и
в баллистическом центре. Скомпонованный в ЦУП массив
КПП заранее по каналам связи поступает на наземную часть
системы, где запоминается и шифрируется. В сеансах связи за¬
помненный массив КПП передается на КА.
В бортовой части системы обеспечивается прием сигналов,
выделение символов цифрового кода и дешифрация ФК и ЧК.
В процессе излучения сигналов КПП контролируется правиль¬
ность этого процесса путем приема на наземной станции части
мощности излучаемого сигнала, его декодирования, дешифри¬
рования и сравнения принятых ЧК и ФК с переданными. Этот
процесс носит название «обратный контроль».
Контроль правильности принятых на КА ФК и ЧК выпол¬
няет система передачи телеметрической информации, по кото¬
69
рой с КА на Землю в режиме контроля КПИ передаются по¬
разрядно значения ФК и ЧК.
В дежурном режиме, когда сигналы на КА принимаются
через малонаправленные антенны и энергетический потенциал
радиолинии Земля — КА невысок, КПИ передается с малой
скоростью. В радиолинии Земля — КА применяется асинхрон¬
ный метод приема амплитудно-модулированных сигналов несу¬
щей частоты. Модуляция осуществляется двоичным цифровым
сигналом, который, в свою очередь, преобразует символы «1» и
«О» в меандровые колебания звукового диапазона с частотами
Fx и F2- Такой метод модуляции в общем виде можно записать
как КИМ2 — ЧМ — AM, т. е. кодово-импульсная модуляция
двоичным кодом — частотная модуляция — амплитудная моду¬
ляция. Спектр сигнала на входе бортового приемника показан
на рис. 4.2.
В сеансном режиме прием сигналов на КА осуществляется
через остронаправленную антенну и энергетический потенциал
радиолинии Земля — КА возрастает на два порядка. В этом
режиме скорость передачи КПИ возрастает в несколько раз, в
том числе и благодаря использованию оптимальных (фазовых)
методов модуляции. Структура сигнала в радиолинии Земля —
,КА изменяется на КИМ2 — ЧМ — ФМ, т. е. кодово-импульсная
модуляция двоичным кодом — частотная модуляция — фазовая
модуляция.
Для нормальной работы систем КА требуется не менее
256 различных ФК. Каждая ФК состоит из восьми значащих
разрядов.
Каждая ЧК содержит 36 значащих разрядов. Первые шесть
разрядов ЧК относятся к адресу получателя, а последующие 30
определяют изменяемый параметр.
Рассмотрим на конкретном примере программы «Фобос-88»
энергетические потенциалы радиолинии Земля—КА и оценим
возможные скорости передачи КПИ. При мощности наземного
передатчика 120 кВт, работающего через антенну с диаметром
зеркала 32 м на частоте 0,7 ГГц, уровень сигнала на входе при¬
емника КА, который использует малонаправленную антенну с
коэффициентом усиления 0,5, таков, что при шумовой темпера-
Рис. 4.2. Спектр сигнала на входе приемника системы передачи КПИ при
приеме символов «0» (а) и «1» (б)
&
9s
*)
О
70
туре приемника в 1500 К обеспечивает суммарный энергетиче¬
ский потенциал на входе Явх=300 Гц.
Определим минимально необходимую полосу частот фильтра
перед амплитудным детектором бортового приемника из соот¬
ношения
Д/прм = Д/с+2 Д/д+2 Д/гет, (4.1)
где Д/с — полоса частот, занимаемая сигналом; Д/д— непрогно¬
зируемая часть доплеровского сдвига несущей частоты; Д/Гет —
нестабильность частоты гетеродинов бортового приемника.
Если принять долговременную относительную нестабиль¬
ность частоты гетеродинов равной 10“6, непрогнозируемую часть
радиальной скорости движения КА относительно Земли
±0,3 км/с, а поднесущую частоту 1 кГц, то получим Д/прм—
=6 кГц.
При коэффициенте прямоугольности АЧХ преддетекторного
фильтра, равном 1,5, эффективная полоса этого фильтра будет
равна Д/прм ш=9 кГц.
Энергетические потенциалы на входе и выходе приемной си¬
стемы при амплитудном некогерентном детекторе связаны соот¬
ношением
#вх = 1/4,8Д /прмш-/-/вых. (4.2)
Для рассматриваемого примера при ЯВх=300 Гц и Д/Прмш=
=9 кГц получим ЯВых=2 Гц. При энергетическом потенциале
в 2 Гц возможна передача информации только со скоростью
0,16 бит/с при рбош=10_6. При приеме сигналов КПП через
остронаправленную антенну скорость передачи повышается до
2,5 бит/с.
К характерным особенностям системы передачи КПП сле¬
дует отнести большое время задержки между моментами пере¬
дачи команды на Земле и приема ее на КА. Это время дости¬
гает 20 мин для связи с КА, находящимся в районе Марса, ког¬
да Марс и Землю разделяет 380 млн км. Поэтому управление
системами КА на всех динамичных участках полета ведется от
программно-временной системы (ПВС), в память которой за¬
благовременно заложена необходимая КПП. Эта система пред¬
назначена для:
отработки «жестких» (хранящихся в ПЗУ) и «гибких» (хра¬
нящихся в ОЗУ) временных программ с выдачей управляющих
кодовых слов в системы КА;
обеспечения обмена управляющими кодовыми словами меж¬
ду системами КА;
формирования и выдачи синхрочастот в системы КА;
счета времени и выдачи в системы КА кода бортового вре¬
мени;
71
запоминания, хранения и выдачи в системы КА числовых
команд в виде управляющих кодовых слов.
Приведем основные выходные характеристики системы пере¬
дачи КПИ на примере программы «Фобос-88»:
число ФК 512;
число «жестких» временных программ 20;
число «гибких» программ 10;
число разрядов в ФК 10 (8 значащих);
число разрядов в ЧК 39 (36 значащих);
скорости передачи 0,16 и 2,5 бит/с;
вероятность неприема ФК, ЧК 10~4;
вероятность трансформации ФК, ЧК Ю~6;
максимальная длительность программы 5 сут.;
число временных меток в одной программе:
«жесткой» 170;
«гибкой» 100;
энергопотребление в дежурном режиме бортового комплек¬
са 4 Вт.
Для радиолинии Земля—КА, обеспечивающей передачу ЧК
и ФК в любых погодных условиях в неориентированном режиме
КА, был выбран близкий к оптимальному дециметровый диа¬
пазон волн 0,7 ГГц. Приемные устройства в этом диапазоне
имеют малое потребление электрической мощности, что важно
при работе в дежурном режиме. Для передачи СВЧ колебаний
этого диапазона от антенны к приемнику без существенных по¬
терь используются коаксиальные кабели, что легче и техноло¬
гичней, чем канализировать их с помощью волноводов в санти¬
метровом диапазоне.
Бортовой приемник (рис. 4.3) выполняет усиление, гетероди-
нирование и амплитудное детектирование сигнала с выделе¬
нием поднесущих частот. Каждой из поднесущих частот при¬
своен символ «0» или «1» для двух значений длительности сим¬
вола, соответствующих скоростям передачи 0,16 и 2,5 бит/с.
Так, поднесущие Л и F<i используются для представления сим¬
волов длительностью тс = 3 с; а поднесущие и Fa — для пред¬
ставления символов длительностью тс=0,2 с.
Дешифратор распознает структуру и значения ФК и ЧК.
В соответствии с адресом код ЧК поступает в оперативную
память либо программно-временной системы, либо в ЭВМ си¬
стемы управления.
На КА устанавливают две малонаправленные антенны с
эллиптической поляризацией для приема сигналов с Земли во
всей сфере. Диаграмма направленности каждой антенны закры¬
вает полусферу, обеспечивая коэффициент усиления не менее
0,5. Одна антенна устанавливается вдоль оси X КА, в полете
72
*пп2яРг
Рис. 4.3. Структурная схема приемника системы передачи КПИ
направленной на Солнце, вторая — вдоль противоположной
оси —X.
Устройство выделения двоичных символов представляет со¬
бой двухканальную схему обработки ортогональных сигналов.
Фильтр 2 предназначен для выделения сигнала с поднесущей,
соответствующей символу «О», а фильтр 3 — с поднесущей,
соответствующей символу «1». Для приема символов длитель¬
ностью 3 с устанавливаются камертонные фильтры с полосой
пропускания по уровню —3 дБ, равной 0,75 Гц, а для символов
с Тс=0,2 с — электромеханические фильтры с полосой пропуска¬
ния по уровню —3 дБ, равной 5 Гц.
Приведем основные радиотехнические характеристики си¬
стемы передачи КПИ для программы «Фобос-88»:
несущая частота 0,7 и 5,0 ГГц;
метод модуляции АМ/ФМ;
индекс модуляции:
для AM 100%;
для ФМ 0 .. . 120°;
диапазон поднесущих частот несколько килогерц;
длительность одной команды:
234 с при Тс=3 с для ЧК;
56 с при тс=3 с для ФК;
чувствительность приемника:
—168 дБВт при тс=3 с;
—162 дБВт при тс==0,2 с.
На станциях дальней космической связи для передачи КПИ
используются антенные системы с диаметром зеркала 32 и 70 м.
73
Рис. 4.4. Структурная схема наземного комплекса системы передачи КПИ
Командно-программная информация накапливается в опера¬
тивной памяти наземного радиокомплекса (рис. 4.4). Каждая
ФК привязана ко времени и выдается на передатчик с запасом
на время распространения до КА. Массивы ЧК передаются за¬
ранее в ближайшем сеансе связи, когда на КА используется
постоянная солнечно-звездная ориентация и прием ведется че¬
рез остронаправленную антенну.
Последовательность двоичных чисел, защищенных кодом
Хемминга, управляет генератором поднесущих частот. Генера¬
тор позволяет создавать 32 варианта поднесущих частот для
длительности символа тс = 3 с и 42 варианта частот для дли¬
тельности символа тс = 0,2 с. Возможность выбора разных пар
поднесущих частот обеспечивает работу наземного радиоком¬
плекса на одной несущей частоте одновременно с нескольки¬
ми КА.
Структура сигналов в радиолинии Земля—КА такова, что
на передачу одного бита затрачивается двойной временной ин¬
тервал, т. е. после каждого символа имеется пауза, равная дли¬
74
тельности символа. Это сделано для уменьшения переходных
искажений при асинхронном приеме. Поэтому при длительности
символа тс=3 с скорость передачи информации соответствует
0,16 бит/с, а при длительности символа тс=0,2 с скорость рав¬
на 2,5 бит/с. Наземный передатчик работает с амплитудной или
фазовой модуляцией. Амплитудная модуляция используется,
как правило, при передаче КПИ с длительностью символа 3 с,
а при длительности 0,2 с применяется фазовая модуляция.
Чтобы частота принятого сигнала всегда находилась в полосе
пропускания бортового приемника, наземный комплекс содер¬
жит цифровой синтезатор частоты, который компенсирует ос¬
новную составляющую доплеровского изменения частоты. Код
изменения частоты поступает с вычислительных средств назем¬
ного радиокомплекса.
Контроль за достоверностью принятого на КА массива ЧК
выполняет система передачи ТМИ, которая имеет возможность
поразрядно контролировать содержание оперативной памяти
программно-временной системы КА, где хранятся ЧК.
В настоящее время команды передаются в диапазонах 0,7 и
5 ГГц как через малонаправленную, так и через остронаправ¬
ленную антенны.
Рассматривается вопрос о введении с 1996 г. в систему пе¬
редачи более высокой скорости, при которой длительность сим¬
вола составляет 0,25 мс. Этот режим должен обеспечить быст¬
рое перепрограммирование бортовых процессоров, которые бу¬
дут входить в состав научных приборов.
4.3. ПРИНЦИПЫ ПОСТРОЕНИЯ СИСТЕМЫ ПЕРЕДАЧИ
ТЕЛЕМЕТРИЧЕСКОЙ ИНФОРМАЦИИ
Система передачи телеметрической информации объединяет
бортовую и наземную телеметрические системы, а также радио¬
линию КА—Земля.
Бортовая телеметрическая система обеспечивает сбор ин¬
формации от различных служебных и научных датчиков, пре¬
образует выходные сигналы этих датчиков в цифровую форму,
обеспечивает хранение информации в период между сеансами
связи и формирование единого цифрового потока двоичных дан¬
ных.
Можно выделить три основных вида источников данных
на КА:
системы КА (электропитания, ориентации, управления, дви¬
гательная установка и др.);
низкоинформативные научные приборы;
высокоинформативные научные приборы (ТВ камеры, опти¬
ко-механические сканеры и т. п.).
75
Эти источники информации, как правило, используют об¬
щую бортовую систему сбора, преобразования и хранения ин¬
формации и единую радиолинию КА—Земля.
На Земле с выхода телеметрической системы передачи ин¬
формации сообщения поступают к разным потребителям. Дан¬
ные о состоянии систем КА поступают в группу анализа ЦУП.
Научная информация используется различными институтами
под эгидой Академии Наук. Информация от датчиков изобра¬
жения используется как в интересах управления КА, так и в
интересах науки.
Характеристики телеметрической системы зависят от того,
какие датчики информации она обслуживает.
Задачи системы передачи служебной телеметрической ин¬
формации сводятся к передаче сообщений о состоянии систем
КА, температурах в отсеках КА, исполнении передаваемых
функциональных и числовых команд.
Запуск каждого нового дальнего КА является началом лет¬
но-конструкторских испытаний, так как практически все даль¬
ние КА отличаются друг от друга по решаемым задачам и, сле¬
довательно, имеют отличия в системах КА и укомплектованы
разными научными приборами.
Основными отличительными признаками системы передачи
служебной телеметрической информации являются:
большая избыточность передаваемых сообщений;
невысокая точность измерения параметров;
большое число измеряемых параметров;
необходимость передачи данных в аварийном состоянии КА
(потеря ориентации, снижение мощности передатчика и др.).
Требования минимизации массы и потребления бортовой
аппаратуры приводят к необходимости создания единой борто¬
вой телеметрической системы, которая передает сообщения как
от датчиков состояния систем КА (служебная телеметрия), так
и от научных датчиков (научная телеметрия).
Телеметрическая информация передается кадрами (рис. 4.5).
Каждый кадр состоит из 128 восьмиразрядных слов. В начале
каждого кадра передается синхропосылка (СП), состоящая из
четырех слов. Вид СП в двоичном коде: 0111110; 01101110;
10100001; 00101100. Первое слово после СП несет в себе зна¬
чение номера ТМ кадра, в которое входит номер цифрового
массива (ЦМ), передаваемого в структуре ТМ кадра.
Порядок следования информационных слов в ТМ кадре од¬
нозначно определяется номером кадра. При передаче ЦМ в
четырех старших разрядах 5-го слова записывается «0». 6-е и
7-е слова в ТМ кадре несут информацию о бортовом времени
(БВ) от 0 до 59 мин. Шесть старших разрядов 6-го слова мо¬
гут принимать значение от 0 до 59 мин с дискретом 1 мин. Два
76
Рис. 4.5. Состав телеметрического кадра
младших разряда 6-го слова и четыре старших разряда
7-го слова могут принимать значение от 0 до 59 с с дискре¬
том 1 с.
Четыре младших разряда 7-го слова могут принимать зна¬
чение от 0 до 15 (0 .. .937,5 мс) с дискретом 62,5 мс. С 8-го по
127-е слово передается телеметрическая информация.
Последнее слово в кадре —контрольная сумма. Она полу¬
чается суммированием двоичных слов всего кадра с учетом СП
без переноса бита переполнения восьмиразрядной сетки.
Телеметрическая информация передается как безызбыточ-
ным кодом при малых скоростях передачи, так и после кодиро¬
вания сверточным кодом (СК) с длиной кодового ограничения
7С=6 и кодовой скоростью R = 1/2. Впервые сверточный код
К=6 и ^=1/2 был применен в 1975 г. в проекте «Венера-9, 10»
для передачи научной информации с орбитального аппарата.
В проекте Марс-94 и последующих проектах предполагается ис¬
пользовать сверточный код К= 7; R = 1/2.
Приведем основные характеристики системы передачи теле¬
метрической информации для программы «Фобос-88»:
Число входов 1152
Число температурных датчиков 120
Объем ЗУ, бит 32x106
Длина кадра, бит 1024
Объем одного измерения, бит 8
Тип информационного обслуживания .... адресный
Вероятность ошибочного приема одного бита . 10_3...10~5
Скорость передачи в радиолинии, бит/с ... 1; 4; 16; 32; 64;
128; IK; 4К; 16К
Число программ опроса 32
Возможность передачи внешних цифровых мас¬
сивов есть
77
б
Рощ
-J
10
10*
-5
10
10п
S; R-1/2)
2,0
3,0 Et/N0
Рис. 4.6. Зависимость вероятности =1/3 [33].
Следует отметить, что скоро¬
сти 1, 4, 16, 32, 64 и 128 бит/с
передаются без кодирования на
поднесущей 1024 Гц, а более вы¬
сокие скорости передаются пу¬
тем взвешивания на собственную
тактовую частоту и сверточного
кодирования.
При выборе перспективных
методов кодирования ТМИ рас¬
сматриваются несколько воз¬
можных кодов:
каскадный код [32], состо¬
ящий из сверточного кода К=6,
R = 1/2 и расширенного кода
Боуза—Чоудхари — Хеквенгейма
(64; 51; t=2).
сверточный код с 9, R =
ошибочного приема бита от отно¬
шения энергии бита к спектраль¬
ной плотности шума
На рис. 4.6 приведены ха¬
рактеристики рассмотренных ме¬
тодов кодирования.
Требуемое отношение сигнал-шум на бит информации для
обеспечения вероятности ошибки 10-5 соответственно составляет
2,2 и 1,9. Для сравнения отношение Еб/No для сверточного кода
с К = 6 и ^=1/2 в этом случае равно 2,8.
Полагаем, что потери при демодуляции и синхронизации
кодовых символов реально не должны превышать 1 дБ. Для
рекомендации одного из рассматриваемых методов кодирования
учтем следующие соображения:
наиболее помехоустойчивый из этих кодов — сверточный с
К=9, R = 1/3 — пригоден в основном для программной реали¬
зации. Сложность аппаратурной реализации примерно в восемь
раз больше, чем для сверточного кода с К=6; R = 1/2;
каскадный код приводит к утроению — учетверению сложно¬
сти кодирующего устройства. Сложность декодирующего устрой-
сгва увеличится незначительно. Учитывая, что энергетический
выигрыш, на который разменивается сложность, составляет
1 дБ, следует иметь убедительные причины для его применения.
Бортовой комплекс телеметрической системы (рис. 4.7) обес¬
печивает следующие режимы работы:
передачу в реальном времени в сеансе связи;
запоминание информации между сеансами связи;
передачу одной части информации в реальном времени и
одновременное запоминание другой части информации.
78
0/77 ЛВС
Рис. 4.7. Структурная схема бортового комплекса системы передачи теле¬
метрической информации
Сигналы от датчиков поступают на входы коммутаторов.
Программа опроса датчиков находится в памяти устройства
хранения и формирования. Аналоговые сигналы проходят через
АЦП и в устройстве формирования кадра УФК объединяются в
единый цифровой поток, который в реальном времени пере¬
дается через радиолинию, а в режиме запоминания поступает
в стартстопное запоминающее устройство. Все необходимые
синхросигналы бортовой комплекс получает от программно-вре¬
менной системы ПВС. Обработку цифровых сообщений и управ¬
ление режимами работы системы выполняет микроЭВМ, входя¬
щая в состав телеметрической системы. Запоминающее устрой¬
ство представляет собой магнитофон, использующий в качестве
носителя магнитную проволоку. Устройство записи и воспроиз¬
ведения ТМИ состоит из восьми малогабаритных магнитофонов
емкостью 4Х106 бит каждый. Бортовой комплекс способен об¬
рабатывать не только данные отдельных датчиков, но и цифро¬
вые массивы, при этом поступающий на вход радиолинии циф¬
ровой массив разделяется на стандартные кадры по 1024 бита.
В каждом кадре имеется синхропосылка.
Телеметрический сигнал передается на наземные станции
через мало- либо остронаправленную антенну (рис. 4.8). Усили¬
тель мощности выполнен на амплитроне с твердотельным преду¬
силителем и имеет два режима работы. В основном режиме
используются оба усилителя, при этом выходная мощность до¬
стигает 50 Вт. Во втором, вспомогательном, режиме работает
79
*ь-6 ГГц
*п~е ггц
Рис. 4.8. Структурная схема бортового телеметрического передатчика
только предусилитель, и выходная мощность составляет 2,5 Вт.
Фазовый модулятор также имеет два режима работы: с индек¬
сом модуляции 0 ... 120° и 0...1500. Последний используется
при больших скоростях передачи информации, когда распреде¬
ление мощности между информацией и остатком на несущей
частоте должно быть в пользу информации. Высокоскоростная
информация (выше 128 бит/с) взвешивается на собственную
тактовую частоту и кодируется сверточным кодом с К=6, R =
= 1/2, а низкоскоростная информация переносится на поднесу-
щую 1024 Гц и без дополнительного кодирования поступает на
фазовый модулятор.
Источником стабильной частоты для передатчика является
кварцевый задающий генератор с выходной частотой около
14 МГц. Нестабильность частоты задающего генератора, полу¬
ченная как компромисс требований к массе, энергопотреблению
;И точности измерения радиальной скорости в беззапросном ре¬
жиме, характеризуется следующими цифрами:
Долговременная нестабильность за 1 год ±10-7
Нестабильность за 24 ч ±ЗХ10-9
Нестабильность за 15 мин ±Ю“10
Нестабильность кратковременная (вариация Аллана) при
т= 10 с 2ХЮ-11
В сеансе связи ТМИ сначала передается в режиме воспро¬
изведения с магнитофона, а затем в реальном времени. Типо¬
вой сеанс связи продолжается около 30 мин. При необходи¬
мости передачи большого объема данных сеанс может про¬
должаться до нескольких часов в зависимости от возможности
80
системы электропитания КА обеспечивать работу передатчика
в режиме 50 Вт.
Наземный комплекс предусматривает регистрацию прини¬
маемой информации на магнитных носителях, чтобы отказ в
сеансе связи наземных систем синхронизации и декодирова¬
ния, каналов связи с ЦУП и т. п. не приводил к потере инфор¬
мации. Поэтому наземный комплекс (рис. 4.9) имеет несколько
ступеней магнитной регистрации.
Для приема ТМИ используется одна из двух антенн комп¬
лекса дальней космической связи: с диаметром зеркала 32
либо 70 м.
Для сужения зоны поиска сигнала по частоте и снижения
тем самым порогового значения энергетического потенциала
используются программируемые синтезаторы частоты, позво¬
ляющие компенсировать известную часть доплеровского сдви¬
га частоты принимаемого сигнала. В системе используется мяг-
*
Остронаарад
ленная
антенна
X
Нжлошунящии
уснлотел*
i
Преодразода-
теле
частоты
«*■ Санлгезатор
Водородный
генератор
Фазодая ад-
mooodcmpeaxi
частоты
несущей
Фазодая ад-
толлдсшройлщ-*
на
поднесу щей
Фазедыа
детел тор на
несущей
Фазодый
детелтор на
ноднесущей
Bs/деленне
санЛелоЛ
т
Порог
Вадеонагна-
тофон
Менодер
ВатерЛа
Система
единого
Лрененн
t ♦
Выделен не сна-
нала чадроЛой
сннхреунзаана
i
ЦарроЛоИ
магнитофон
В ЦУП
Рис. 4.9. Структурная схема наземного телеметрического комплекса
6—4229 81
кое декодирование по алгоритму Витерби. При этом с учетом
потерь в реальном приемном устройстве при вероятности
ошибочного приема бита информации 10-4 требуется £6/Л^о=3
с учетом потерь на реализацию. Максимальная скорость пере¬
дачи, при которой происходит декодирование, составляет
100 кбит/с. После декодирования цифровые данные поступают
на схему выделения сигнала кадровой синхронизации и схему
выделения результатов измерения отдельных параметров.
Глава 5
СИСТЕМЫ ИЗМЕРЕНИЯ
ПАРАМЕТРОВ ДВИЖЕНИЯ
КОСМИЧЕСКИХ АППАРАТОВ
Для измерения параметров движения межпланетных КА используется
траекторный измерительный комплекс, представляющий собой совокупность
радиотехнических систем для измерения параметров движения КА, временной
привязки, первичной обработки и передачи измерительной информации в -бал¬
листический центр (БЦ), вычислительные средства которого рассчитывают
параметры траектории КА.
Число измерительных систем, привлекаемых для обеспечения полета меж¬
планетных КА, может быть различным на разных этапах этого полета. На¬
пример, на так называемом участке перелета при отсутствии неизвестных воз¬
мущающих сил и коррекций движения КА, т. е. когда траекторию полета
можно считать детерминированной, для сопровождения КА может оказаться
достаточно одной измерительной системы. В то же время на приземном уча¬
стке полета в условиях большой неопределенности параметров траектории
КА и для быстрой подготовки ранней коррекции траектории движения кроме
специализированных измерительных систем дальнего космоса применяются и
разнесенные в пространстве измерительные системы ближнего космоса (мало¬
го радиуса действия).
Разнообразие используемых измерительных средств, разработанных в
разное время и для других целей, приводит к вынужденному усложнению
аппаратуры приемоответчиков межпланетных КА. Например, в состав маги¬
стрального радиокомплекса (МРК) для межпланетных КА кроме основной
аппаратуры СМ диапазона включен приемоответчик ДМ диапазона для обес¬
печения работы на приземном участке измерительных средств ближнего кос¬
моса. В последние годы аппаратура Западного и Восточного центров ДКС
стала привлекаться для интерферометрических измерений углового положе¬
ния КА относительно сверхдлинной (более 1000 км) базы интерферометра.
Подробному рассмотрению всех этих методов и средств траекторных измере¬
ний посвящена данная глава.
82
5.1. ПРИНЦИПЫ ПОСТРОЕНИЯ И ЗАДАЧИ СИСТЕМ
ТРАЕКТОРНЫХ ИЗМЕРЕНИЙ
Специализированными системами измерения параметров
движения межпланетных КА оборудованы радиотехнические
комплексы Западного и Восточного центров дальней комичес¬
кой связи (ДКС). По составу измеряемых параметров (на¬
клонная дальность от антенны наземной станции до КА и ра¬
диальная составляющая скорости движения КА относительно
той же антенны) эти системы (как и привлекаемые системы
ближнего космоса) являются двупараметрическими.
Такой состав измеряемых параметров сложился в резуль¬
тате действия различных факторов в процессе эволюций изме¬
рительных систем дальнего космоса, которые на начальном
этапе своего развития были трехпараметрическими. Следует
отметить, что исключение измерителя угловых координат даль¬
них КА не бесспорно. Конечно, достигнутые точности этого
измерителя (при длине базы 0,5 км) недостаточны для эффек¬
тивного определения угломерного параметра на дальних участ¬
ках полета КА. Однако на приземном участке ценность угло¬
мерных измерений несомненна, и именно их отсутствие являет¬
ся одной из причин для использования дополнительных изме¬
рительных средств.
В радиолиниях дальних КА, работающих с непрерывными
сигналами, наклонная дальность измеряется обычно фазовым
методом. При этом в качестве дальномерных сигналов исполь¬
зуются либо многочастотные сигналы, либо псевдослучайные
коды, модулирующие сигналы несущей.
Выбор того или иного дальномерного сигнала обусловлены
целым рядом факторов, как объективных (ожидаемые энерге¬
тические потенциалы в радиолиниях Земля — КА и КА — Зем¬
ля, время, выделяемое для измерений, наличие готовой аппара¬
туры наземных измерительных пунктов и т. д.), так и субъек-
тиных, из которых не последнюю роль играют склонности и
«симпатии» конкретного разработчика, определяющего выбор.
Можно лишь констатировать, что использование для дальномер¬
ных измерений как многочастотных, так и псевдослучайных
сигналов в конечном итоге позволит получить одинаковые точ¬
ности при равенстве начальных условий.
Бортовой магистральный радиокомплекс (МРК), разрабо¬
танный по программе «Фобос» и являющийся основным при
реализации практически всех планируемых в настоящее вре¬
мя межпланетных программ, обеспечивает использование раз¬
личных видов дальномерных сигналов.
В СМ диапазоне несущих частот приемоответчик МРК вы¬
полняет прием, узкополосную регенерацию и ретрансляцию
6*
83
псевдослучайных даль-номерных кодов с тактовой частотой
«1,2 МГц, а также прием, широкополосную фильтрацию и
ретрансляцию многочастотных дальномерных сигналов в диа¬
пазоне частот 300 кГц. В ДМ диапазоне несущих частот прие-
моответчик МРК обеспечивает прием, широкополосную фильт¬
рацию и ретрансляцию многочастотных дальномерных сигналов
в диапазоне 300 или 30 кГц. Ретрансляция сигналов в диапа¬
зоне 30 кГц позволяет на начальном (приземном) участке
привлекать для выполнения программы измерений дальних КА
дальномеры ближнего космоса.
Дальномерная аппаратура, разработанная по программе
«Фобос» для оснащения наземных центров ДКС, учитывает
все указанные возможности бортового МРК и обеспечивает ра¬
боту с приемоответчиком МРК в диапазоне как СМ, так и ДМ.
При этом СМ диапазон является основным, а ДМ преимущест¬
венно используется на приземном участке полета.
В основе измерения радиальной составляющей скорости КА
лежит эффект Доплера, который проявляется в том, что час¬
тота сигнала, ретранслированного приемоответчиком движу¬
щегося КА и принятого наземной аппаратурой, отличается от
частоты сигнала, излучаемого наземной аппаратурой, на зна¬
чение доплеровского сдвига, пропорционального радиальной со¬
ставляющей скорости движения КА.
При постоянной радиальной скорости доплеровский сдвиг
также будет постоянным и определится из выражения
Д/д=2 Rfu/c,
где R— радиальная скорость КА, /н — частота излучаемой не¬
сущей. Таким образом, для определения R необходимо изме¬
рить доплеровский сдвиг принимаемой частоты А/д одним из
известных способов.
Необходимо отметить, что частотомер, непосредственно из¬
меряющий Д/д, не позволяет получать требуемые точности из¬
мерения из-за большой ошибки дискретности измерения часто¬
ты 6о)д=2я/7\ Эту ошибку можно уменьшить, либо увеличив
мерный интервал (что нежелательно из-за усложнения вре¬
менной привязки измерений при движении КА с ускорением),
либо умножив частоту А/д перед подачей сигнала на частото¬
мер (что при большом коэффициенте умножения приводит к
техническим трудностям). Если вместо частотомера (или в до¬
полнение к нему) использовать периодомер, то можно значи¬
тельно снизить ошибку дискретности. И хотя при этом появ¬
ляются зависимости цены отсчетной единицы и длины мерного
интервала от измеряемой частоты, именно этот метод, позво¬
ливший существенно повысить точность измерения радиальной
84
скорости, использовался в качестве основного вплоть до ввода
измерительной системы центра ДКС в 1988 г.
В измерительной системе центра ДКС оказалось проще и с
высокой точностью измерять не доплеровскую частоту непо¬
средственно, а полный набег фазы сигнала Дер(Т) на выходе
цифроаналоговой системы фазовой автоподстройки частоты
(ФАПЧ) на интервале Г, определяемый доплеровским сдвигом
частоты. При этом можно достаточно_точно оценить среднюю
частоту сигнала на мерном интервале: со = Дф (Т)/Т.
Так как измерительная система определяет Дф^) на срав¬
нительно небольших интервалах времени (Г=10 с), причем
так, что сохраняется возможность увеличения Т без дополни¬
тельных потерь, при дальнейшей обработке отсчетов в БЦ
можно применять квазиоптимальные методы, обеспечивающие
близкую к потенциальной точность измерения частоты, а следо¬
вательно, и радиальной скорости.
5.2. ИЗМЕРЕНИЕ ДАЛЬНОСТИ
Рассмотрим основные особенности и характеристики даль-
номерной аппаратуры центра ДКС, использующей многочастот¬
ные и псевдослучайные сигналы.
5.2.1. ФАЗОВЫЙ МНОГОЧАСТОТНЫЙ ДАЛЬНОМЕР
В центре ДКС применяется модифицированный метод фа¬
зовой многочастотной дальнометрии с одношкальным отсчетом
[95]. Этот метод, как и при использовании псевдослучайных
кодов, позволяет получать однозначную оценку дальности не¬
посредственно в самой аппаратуре дальномера. Однако при этом
в отличие от псевдошумового дальномера время вхождения в
связь невелико, так как дальномерный сигнал состоит из отно¬
сительно небольшого числа компонент (тонов). Точное измере¬
ние дальности производится на высшей (точной) дальномерной
частоте /т, а остальные частоты (/<) являются частотами разре¬
шения неоднозначности, причем /*+1=/*/г, где г — целое число.
При целочисленном кратном соотношении дальномерных час¬
тот частоты разрешения неоднозначности формируются после¬
довательно включенными цифровыми делителями частоты, на
вход которых подан сигнал точной дальномерной частоты /т.
Такой способ формирования частот обеспечивает их жесткую
фазовую синхронность (когерентность), что существенно упро¬
щает их последующую обработку при приеме и повышает на¬
дежность разрешения неоднозначности.
В дальномере центра ДКС кратность г дальномерных частот
выбрана равной 4, хотя оптимальная кратность с точки зрения
85
времени разрешения неоднозначности равна 3 [95]. Однако при
г=4 (как и при г=2) в отличие от г=3 простыми цифровыми
делителями частоты обеспечивается формирование меандровых
сигналов разрешения неоднозначности, а проигрыш по времени
разрешения неоднозначности не превышает 5%. При г=2 по
сравнению с г=4 повышается вероятность правильного обнару¬
жения сигналов разрешения неоднозначности при равных энер¬
гетических потенциалах и времени обнаружения. Однако окон¬
чательный выбор г=4 явился в основном следствием примене¬
ния в МРК для последеткторной фильтрации дальномерных
сигналов полосового фильтра с добротностью Q = 2, настроенно¬
го на точную дальномерную частоту /т. Эта же причина опре¬
делила и выбор способа параллельно-последовательной переда¬
чи дальномерных частот, при котором точная частота переда¬
ется постоянно, а частоты разрешения неоднозначности — по¬
очередно, модулируя по фазе сигнал точной частоты.
Точная дальномерная частота определяется выражением
/t=79V/480=79/h/480/2, где fB — частота несущей излучаемого
наземным передатчиком сигнала, п — целое число, определяю¬
щее соотношение между частотой /н и исходной частотой V.
Наличие такой жесткой связи (когерентности) между /т и fH
(при когерентной ретрансляции несущей в МРК) определяет
принципиальную возможность использования последователь¬
ного способа передачи всех дальномерных частот, включая /т,
так как частота /т при этом может быть восстановлена из
принимаемой частоты несущей. В дальномере центра ДКС реа¬
лизован циклический последовательный способ передачи даль¬
номерных частот. При длительности цикла 10 с передача одной
точной частоты производится в течение 5 с, а в остальное вре¬
мя последовательно передаются частоты разрешения неодно¬
значности методом фазовой манипуляции на 180° сигнала точ¬
ной частоты (при необходимости длительность цикла может
быть увеличена).
Число частот разрешения неоднозначности определяется
ошибкой априорной оценки дальности до КА. В дальномере
центра ДКС используются пять таких частот. Минимальная из
них /б=/т/45 и определяет зону однозначного измерения даль¬
ности аппаратурой дальномера.
При точной частоте fT~3-104 Гц (используется в ДМ диа¬
пазоне) зона однозначного измерения Яодн^с/2/5~5000 км;
при /т~3-105 Гц (диапазон СМ) /?ОДн^500 км.
Как видно из рис. 5.1, запросный дальномерный сигнал
формируется из сигнала высокостабильного задающего генера¬
тора частотой 5 МГц. Эта частота одновременно является ис¬
ходной для формирования несущей частоты /н излучаемого
передатчиком сигнала.
86
Рис. 5.1. Структурная схема радиокомплекса центра ДКС в режиме измерений
Дальномерный сигнал точной частоты /т с выхода синтеза¬
тора подается на формирователь частот разрешения неодно¬
значности, выполненный в виде цепочжи из пяти последова¬
тельно включенных делителей на 4. Выходные сигналы делите¬
лей частоты после мультиплексора, осуществляющего их времен¬
ную коммутацию, совместно с сигналом точной частоты посту¬
пают на формирователь запросного дальномерного сигнала,
который в соответствии с циклограммой передачи представляет
собой либо собственно сигнал точной частоты /т, либо сигнал
точной частоты, балансно модулированный одним из сигналов
разрешения неоднозначности с частотой
Излучаемый передатчиком сигнал модулируется по фазе с
индексом 60°. Для обеспечения когерентности дальномерного
сигнала и сигнала несущей код доплеровского смещения вво¬
дится при формировании как частоты несущей (в канально-
доплеровском синтезаторе КДС1), та(к и частоты /х (в синте¬
заторе тактовой частоты СТЧ1). Сформированный таким обра¬
зом дальномерный сигнал излучается передающей антенной в
направлении КА, где фильтруется и ретранслируется приемо-
ответчиком КА на частоте /отв в радиолинии КА — Земля. При
87
приеме ретранслированного сигнала в наземном комплексе ис¬
пользуется априорная информация о его доплеровском сдвиге
(в канально-доплеровском синтезаторе КДС2 и синтезаторе
тактовой частоты СТЧ2), а также о времени распространения
дальномерного сигнала (или о дальности до КА). Последняя
информация позволяет управлять коммутатором частот разре¬
шения неоднозначности в формирователе копии принимаемого
дальномерного сигнала.
Принятый дальномерный сигнал после усиления и преобра¬
зования в приемном устройстве и синхронного детектирования
поступает в аппаратуру обработки. В аппаратуре обработки с
помощью системы ФАПЧ на основе перестраиваемого синтеза¬
тора тактовой частоты СТЧ2 выполняются узкополосная фильт¬
рация сигнала точной частоты и синхронная демодуляция час¬
тот разрешения неоднозначности fu поступающих на корреля¬
торы устройства фазирования. В качестве опорных сигналов на
корреляторы с выхода мультиплексора поступают копии при¬
нимаемых сигналов fi on, полученные из точной частоты /т с
помощью цепочки делителей на 4. Фазовращатель по вход¬
ной частоте /т позволяет компенсировать разность задержек
дальномерных сигналов /т и /* в аппаратуре МРК и наземном
комплексе. В результате этого опорные колебания с частотой
/гоп с любого выхода цепочки делителей на 4 будут иметь либо
одинаковую фазу с принятым колебанием той же частоты, либо
смещенную относительно него на величину, кратную 360°/4.
При отличии фаз опорный сигнал фазируется с принятым
путем принудительной установки в нужное положение тригге¬
ров соответствующего делителя частоты.
Фазирование цепочки делителей производится последова¬
тельно, начиная с делителя, формирующего частоту /ion. После
фазирования всех опорных частот /г- оп измеряется временной
интервал между импульсами с выхода линеек делителей часто¬
ты запросного и приемного каналов. Этот временной интервал
позволяет однозначно и точно определять дальность R до
объекта, пользуясь известным соотношением AT=2R/c и ап¬
риорным знанием дальности R с точностью не хуже ±/?0Дн/2.
Таким образом, в многочастотной системе измерения даль¬
ности реализуются одношкальные отсчеты. Однако при прямом
методе измерения временного интервала для обеспечения малой
ошибки дискретности измерителя требуется очень высокая счет¬
ная частота и соответствующее быстродействие счетных схем.
Поэтому в рассматриваемом дальномере используется другой
принцип определения временного интервала, при котором фак¬
тически измеряется пропорциональная этому интервалу раз¬
ность фаз между низшими частотами разрешения неоднознач¬
ности fi mm запросного и приемного дальномерного каналов.
Для этого в заданные моменты времени Т0) синхронизированные
с нерабочим (непереключающим) фронтом точной запросной
частоты /т, в регистр памяти заносятся состояния триггеров де¬
лителей частоты на 4 формирователя запросных частот разреше¬
ния неоднозначности Д-. Одновременно в другой регистр памяти
переписываются состояния триггеров формирователей копии
принимаемых сигналов /т оп и оп, определяющих их фазу. Во
избежание возможных искажений фазы при переписи сигнал от¬
ключается (или блокируется) от входа синтезатора тактовой
частоты /т оп на время окончания переходных процессов в це¬
почке делителей частоты и последующей переписи их состояния
в регистр памяти. После этого в алгебраическом сумматоре
определяется разность фаз принятого и излученного дальномер-
ных сигналов как разность чисел, записанных в двух регистрах
памяти. Чтобы каждый раз после коммутации входной час¬
тоты не производить заново синхронизацию копии принимае¬
мого сигнала, целесообразно для отсчета фазы использовать
второй (дополнительный) формирователь копии, синхронизиро¬
ванный с основным формирователем, непрерывно отслеживаю¬
щим фазу принимаемого дальномерного сигнала.
Из других особенностей фазового многочастотного дально¬
мера следует отметить следующие.
1. При достаточно большом энергетическом потенциале
КА — Земля может быть реализована обработка дальномерно¬
го сигнала в режиме свертки спектра принимаемого сигнала
с помощью перемножения его с копией дальномерного сигна¬
ла в блоке ремодулятора (РМ) на входе дальномера. Такая
ремодуляция фазоманипулированного сигнала позволяет ис¬
пользовать после РМ не фазовую, а амплитудную обработку
узкополосного сигнала, что снимает требования к фазовой ста¬
бильности последующих трактов и снижает требования к их
быстродействию. Такая схема обработки принимаемого сигна¬
ла при работе с КА «Фобос» продемонстрировала ее высокие
точность и надежность при энергетическом потенциале выше
25 дБ.
При более низком потенциале целесообразно использовать
первую схему, обеспечивающую лучшую энергетику при обра¬
ботке многочастотного сигнала.
2. При формировании запросного многочастотного дально¬
мерного сигнала, чтобы исключить попадание низких дально-
мерных частот в полосу пропускания системы ФАПЧ для сиг-,
нала /т, обычно этими частотами вначале модулируют сигнал
частоты f 1 (или /2), а затем полученным колебанием — сигнал
точной частоты.
В дальномере центра ДКС благодаря принятой циклограм¬
ме излучения дальномерных сигналов можно использовать не-
89
посредственную модуляцию частоты /т всеми сигналами разре¬
шения неоднозначности, в том числе и самым низким по час¬
тоте (~30 Гц). При этом получается некоторое «размытие»
фазы сигнала точной частоты /т во время приема сигнала /»mm,
что практически не влияет на процесс фазирования сигнала
/тип (вследствие уменьшения этого «размытия» при делении
частоты /т). В то же время в соответствии с циклограммой при¬
ема и обработки дальномерного сигнала фазовая задержка
измеряется после окончания процесса фазирования всех час¬
тот разрешения неоднозначности в момент Т0у т. е. в конце
интервала приема точной частоты /т.
3. Задача фазирования любой из частот /*0п сводится к
задаче сравнения четырех полностью известных 'сигналов sh
равных
5/=t/1sign cos(cd^+/*36074), где /=0, 1, 2, 3.
При этом оптимальная схема сравнивающего устройства
выполнена в виде четырех каналов (корреляторов) и
устройства выбора канала по максимуму выходной величины.
На корреляторы подаются выделенный сигнал и его копии
(опорные колебания) с частотами /<оп и фазами, отличающи¬
мися друг от друга на 90° (рис. 5.2). Фактически в фазовом
дальномере реализованы не четыре, а два коррелятора, на ко¬
торые подаются копии сигналов /{ с фазами 0 и 90°, так как
результаты корреляции выделенного сигнала /г- и копий его
90
Рис. 5.2. Схема сравнивающего устройства
с фазами 180 и 270° отличаются только знаками от результа¬
тов корреляции сигнала и копий его с фазами 0 и 90° соответ¬
ственно.
4. Рассмотренная схема фазирования (или разрешения не¬
однозначности) всегда будет производить выбор по максимуму
одного из четырех каналов, даже если на самом деле сигнала
на входе устройства вообще нет. Поэтому, если нет уверен¬
ности в наличии сигнала, схему фазирования обычно дополня¬
ют схемой обнаружения, в которой сравниваются максималь¬
ный сигнал выбранного канала и его пороговое значение. При
этом вероятность ошибки обнаружения сигнала будет зависеть
от того, насколько правильно выбран порог, что является не¬
простой задачей, если уровень принимаемого сигнала либо
априори неизвестен, либо изменяется в больших пределах.
В дальномере центра ДКС используется другой (не прямой)
метод обнаружения, основанный на сравнении результатов
фазирования всех частот fi0n в данном цикле и предыдущем.
При этом предполагается, что при наличии сигнала и правиль¬
ном фазировании частот в предыдущем цикле в последующем
цикле при фазировании каждой из частот fi0n максимальная
выходная величина должна быть снята с коррелятора, на ко¬
торый подана копия сигнала с фазой 0°.
Известно [95], что при пороговом методе обнаружения меан-
дровых сигналов разрешения неоднозначности для обеспечения
равной вероятности ложной тревоги и пропуска сигнала при
г—4 необходимо обеспечить в два раза большую энергию сиг¬
нала, чем при определении фазы сигнала. Примененный метод
не требует дополнительных затрат энергии на обнаружение, а
вероятность правильного обнаружения при этом определяется
только вероятностью правильного определения фазы сигнала.
5.2.2. ФАЗОВЫЙ ДАЛЬНОМЕР С ИСПОЛЬЗОВАНИЕМ
ПСЕВДОСЛУЧАЙНЫХ КОДОВ
Как уже отмечалось, псевдослучайные коды для измерения
дальности используются при работе приемоответчика МРК в
СМ диапазоне.
Однокомпонентный псевдослучайный дальномерный сигнал
формируется генератором псевдослучайной М-последователь-
ности (ГПСП) из выходного сигнала синтезатора тактовой час¬
тоты /T=79V(/H3T+fAH)/480fH3T, где V — исходная эталонная час¬
тота, /нэт и /дн — эталонное значение частоты излучаемого на¬
земным комплексом сигнала и доплеровский сдвиг этой часто¬
ты соответственно.
Генератор псевдослучайной последовательности (ПСП) на
91
основе ll-разрядного регистра сдвига с обратными связями ре¬
ализует образующий полином вида хп+х9+1.
Длительность кода формируемой ПСП соответствует 2047
элементам кода (или 2047 периодам тактовой частоты Гт= 1//т)
и определяет зону однозначного измерения дальности, равную
#одн=2047с/2/т^250 км.
Для обеспечения когерентности /т и излучаемой наземным
комплексом несущей fн~~fнэт~/дн на синтезатор тактовой час¬
тоты СТЧ1 кроме эталонного сигнала f0 подается код доплеров-
ского сдвига излучаемой несущей частоты, пересчитанный для
частоты V—/нэт
/п, где п — целочисленный коэффициент.
Наличие остатка несущей в излучаемом наземным передат¬
чиком сигнале, когерентность частот /т и fH и высокий энергети¬
ческий потенциал радиолинии Земля—КА позволяют упростить
схемы вхождения в связь по несущей и тактовой частотам и
применить последовательный поиск при вхождении в связь по
задержке дальномерного сигнала в приемоответчике МРК.
Обработка ретранслированного и принятого антенной на¬
земного комплекса дальномерного сигнала при вхождении в
связь по несущей и тактовой частотам аналогична обработке
в фазовом многочастотном дальномере. Для ускорения пррцес-
са вхождения в связь по задержке кода ПСП применяется па¬
раллельно-последовательный метод поиска.
После окончания поиска по задержке кода дальномер пере¬
ходит в режим точного слежения за фазой и измерения даль¬
ности Яодн, пропорциональной разности фаз излучаемого и при¬
нимаемого кодов ПСП.
5.3. ИЗМЕРЕНИЕ РАДИАЛЬНОЙ СКОРОСТИ
Радиальную составляющую скорости можно измерять в
запросном (когерентном) или беззапросном режиме. Запрос¬
ный режим, обеспечивающий наиболее точные измерения, явля¬
ется основным. При работе в этом режиме антенна наземного
комплекса в направлении КА излучает сигнал частотой fH =
=п^к+/дНПР, где п — целочисленный коэффициент; vK — исход¬
ная канальная частота радиолинии; /дНПр — смещение частоты,
компенсирующее априори известный доплеровский сдвиг несу¬
щей в радиолинии Земля—КА. Значение /днпр рассчитывается
на начало сеанса измерения и в течение всего сеанса остается
неизменным. Формирование сигнала частотой /ДНпр производит¬
ся канально-доплеровским синтезатором КДС1.
Приемоответчик КА принимает сигнал частотой
/н7 =/н(1—R!C) —fn—/дн,
92
где R — радиальная составляющая скорости движения КА;
/дН — доплеровский свдиг принимаемой частоты.
После узкополосной фильтрации приемоответчик когерентно
переизлучает принятый сигнал с учетом коэффициента преобра¬
зования т/п на частоте f'oTB=fHrm/n=mfH(l—R/c)/rt.
Антенной наземного комплекса принимается сигнал часто¬
той
/отв = //отв/ (l-f-/?/c) == Hlf н (1—R/c)/n(l+R/c) = mf н/д, отв.
где /д отв = mfH(—2R/c-\-2R2/c2—2R'3/c6-\-.. .)/п — доплеровский
сдвиг принимаемого сигнала относительно излученного.
Принятый сигнал подается на преобразователь, на второй
вход которого с канально-доплеровского синтезатора КДС2
поступает сигнал гетеродина, смещенный по частоте относи¬
тельно эталонного сигнала на значение прогнозируемого допле-
ровского сдвига несущей принимаемого сигнала /д пр. Значение
/д Пр на любой момент времени приема T0-\-At определяется в
соответствии с выражением
/д up(T0+At) =А0(Т0) +Ai(T0)At+A2(T0)At2/2+A3 (Т0) At3/6,
где А0(Т0), Ai(T0), А2(Т0) и А3(Г0) —коэффициенты полинома,
аппроксимирующего закон изменения доплеровского сдвига
принимаемого сигнала в интервале от Т0 до Г0+ДЛ
Таким образом, после узкополосной фильтрации системой
ФАПЧ на измеритель радиальной скорости подается сигнал
промежуточной частоты, смещенный относительно своего эта¬
лонного значения на ошибку прогноза доплеровского сдвига
Д/д = /д отв /д пр.
Измерителем радиальной скорости на временном интервале
Д^=Ю с измеряется полный набег нециклической, т. е. не огра¬
ниченной значением 2я, фазы этого сигнала, обусловленный
ошибкой прогноза Д/д. Эти отсчеты фазы совместно с коэффи¬
циентами полинома, апроксимирующего прогнозируемый доп¬
леровский сдвиг, передаются в БЦ, где в результате совместной
их обработки определяется значение /д на любой момент вре¬
мени приема, а затем и соответствующее значение радиальной
скорости R.
5.4. ТОЧНОСТЬ ИЗМЕРЕНИЯ. СОСТАВЛЯЮЩИЕ
ПОГРЕШНОСТЕЙ ИЗМЕРЕНИЯ
5.4.1. ПОГРЕШНОСТИ ИЗМЕРИТЕЛЯ РАДИАЛЬНОЙ СКОРОСТИ
При измерении радиальной скорости движения дальних
КА в запросном режиме основными источниками аппаратурных
93
погрешностей являются фазовые нестабильности передающего
и приемного трактов назешой аппаратуры. При этом систе¬
матические (медленно меняющиеся) погрешности определяют¬
ся в основном фазовой нестабильностью формирователей несу¬
щей частоты в передающем тракте и гетеродинных сигналов
в приемном тракте, а также нестабильностью выходного сигна¬
ла опорного генератора или незнанием изменения его частоты
за время распространения сигнала в радиолинии Земля—КА—
Земля. При расчете этих погрешностей (табл. 5.1) использова-
Таблица 5.1
Погрешности и их причины
Значение,
мм/с
Примечание
Систематические
Неточность номинала частоты опор¬
ного генератора
Фазовая нестабильность приемопе¬
0,15
6f/f=10“12
редающего тракта
Влияние условий распространения:
0,15
в ионосфере
о
сл
о
Средняя концентрация
электронов и углы мес¬
та 10...90°
в тропосфере
Флуктуационные
Нестабильность частоты опорного
генератора на интервале:
0,1,7
Вызваны пространствен¬
но-временными флук¬
туациями коэффициента
преломления на интер¬
вале 7м= 10 с
7м=10 с
0,3
Тс = 300 с
Фазовая нестабильность аппаратуры
на интервале:
0,045
Гм = 10 с
0,125
Максимальная
Гс = 300 с
0,041
Шумовая
0,05
Рс/Рш = 30 в эквива¬
лентной полосе системы
ФАПЧ, Гм =10 с
лись экспериментальные оценки фазовой нестабильности назем¬
ной аппаратуры, полученные в процессе ее работы с объектами
«Фобос». Неточность номинала несущей частоты принималась
равной неточности номинала частоты опорного (водородного)
генератора 6//f=10-12.
Систематические погрешности измерения радиальной ско¬
рости из-за влияния условий распространения в ионосфере и
тропосфере могут быть уменьшены следующим образом:
94
измерением параметров тропосферы в точке приема и пос¬
ледующим расчетом поправки, учитывающей влияние тропо¬
сферы;
при использовании информации об интегральной концентра¬
ции электронов по трассе распространения, полученной в ре¬
зультате специальных дисперсионных измерений, совмещенных
с сеансами измерения радиальной скорости или проведенных
непосредственно перед или после этих сеансов.
5.4.2. ПОГРЕШНОСТИ ИЗМЕРИТЕЛЯ ДАЛЬНОСТИ
Результаты расчета погрешностей измерителя дальности
приведены в табл. 5.2. Основной вклад в результирующую
погрешность вносят систематические составляющие, обуслов¬
ленные фазовой нестабильностью наземной аппаратуры и аппа-
Таблица 5.2
Погрешности и их причины
Значение, м
Примечание
Систематические
Фазовая нестабильность приемоот¬
ветчика КА
Фазовая нестабильность наземной
1,05
/т= 1,2- 10е Гц
аппаратуры
Неточность временной привязки
Неточность знания номинала часто¬
ты
Влияние условий распространения:
в тропосфере
в ионосфере
1,05
0,6
0,4
2,6... 15,04
0,42... 1,25
Д£ = 30 мкс и R =
= 20 км/с
6///=10-12 И Яшах =
= 4 • НО8 км
Угол места 10 ... 90°
Средняя концентрация
электронов jV = 3*1013
эл/см3
Флуктуационные
Дискрет измерителя
Шумовая
0У26
1,4
Разовый отсчет
Рс/Рш=100 в эквива¬
лентной полосе системы
ФАПЧ по /т
ратуры приемоответчика. Для их уменьшения проводятся пред¬
полетные тарировки фазовых задержек дальномерного сигнала
в аппаратуре приемоответчика в зависимости от изменения
комплектации этой аппаратуры, а также температуры окружа¬
ющей среды и уровня входного сигнала. В процессе полета
результаты этих тарировок с учетом полученных от КА данных
о температуре и уровне входного сигнала используются для
уточнения фазовых задержек в приемоответчике КА.
95
Для уменьшения фазовой нестабильности наземной аппа¬
ратуры следует рационально строить тракты обработки даль-
номерного сигнала, использовать цифровую обработку и пред-
сеансные калибровки фазовых аппаратурных задержек.
Погрешности из-за влияния условий распространения в тро¬
посфере и ионосфере уменьшаются так же, как и соответствую¬
щие погрешности измерения скорости.
Флуктуационная погрешность измерения дальности опреде¬
ляется в основном шумовой составляющей, зависящей от отно¬
шения сигнал-шум в эквивалентной полосе следящего фильтра
по точной дальномерной частоте.
5.5. РАДИОИНТЕРФЕРОМЕТР СО СВЕРХБОЛЬШОЙ
БАЗОЙ В СОСТАВЕ СЕТИ СЛЕЖЕНИЯ
ЗА ДАЛЬНИМИ КА
В настоящее время основными видами навигационных шара-
метров при траекторных измерениях КА для исследования
дальнего космоса остаются традиционные измерения радиаль¬
ных дальности R и скорости R относительно наземных станций
слежения. Этот способ решения навигационной задачи при по¬
лете КА к планетам предусматривает использование большого
объема измерений, разнесенных во времени и охватывающих
достаточно протяженные участки траектории так, чтобы обес¬
печить необходимую для определения пространственного дви¬
жения КА динамику изменения R, R. Такой способ навигации,
хотя в принципе и позволяет решить поставленную задачу,
однако обладает рядом очевидных недостатков, особо проявля¬
ющихся при необходимости оперативно определять траекторию
полета КА.
В последние годы для навигации дальних КА наряду с тра¬
диционными измерениями R и R стали применять и «дифферен¬
циальные» интерферометрические измерения, при которых опре¬
деляется угловое положение КА относительно космических
источников (КИ) с известным с высокой точностью угловым
положением на небесной сфере. При традиционных методах
измерений R и R (при 8R = 20 м, 8R = l мм/с) точность опре¬
деления траектории КА не хуже 100 км на расстояниях сотен
миллионов километров может быть достигнута только через
4 месяца регулярных измерений. Если же к измерениям R, R
добавить высокоточные радиоинтерферометрические измерения,
то точность определения орбиты 50... 100 км может быть дос¬
тигнута через 5—10 дней измерений [35, 45—48].
96
5.5.1. ПРИНЦИПЫ РАБОТЫ И СТРУКТУРНАЯ СХЕМА
РАДИОИНТЕРФЕРОМЕТРА СО СВЕРХБОЛЬШОЙ БАЗОЙ (ИББ)
Сигналы от КА и космических источников радиоизлучения
(КИ) принимаются тремя приемными пунктами (рис. 5.3), раз¬
несенными на расстояния в несколько тысяч километров (в
г. Евпатории, Уссурийске и пос. Медвежьи Озера). Длина баз
Евпатория—Уссурийск — 6900 км, Евпатория—Медвежьи Озе¬
ра— 1200 км. При таких базах невозможно обеспечить коге¬
рентность сигналов гетеродинов приемных устройств путем
передачи опорного сигнала по кабелю, как в обычных интер¬
ферометрах с ограниченной базой (сотни—тысячи метров).
Поэтому принятые сигналы преобразуются в цифровую форму,
привязываются ко времени по меткам, полученным от высоко¬
стабильного стандарта частоты, и записываются на магнитную
ленту.
Магнитные ленты с записями отсылаются в центр первич¬
ной обработки данных, где в результате корреляционной обра¬
ботки зарегистрированных сигналов, принятых в разных пунк¬
тах, определяется взаимная (по каждой базе) временная за¬
держка т и частота интерференции F(t) =f0dr(t)/dt, соответст¬
вующая скорости изменения запаздывания (задержки) сигна¬
лов на данной базе.
Частота интерференции характеризует дифференциальный
доплеровский сдвиг частоты сигналов, принимаемых в разнесен¬
ных пунктах, вызванный вращением базы интерферометра от-
Рис. 5.3. Структурная схема радиоинтерферометра со сверхбольшой базой
(ИББ)
7—4229 97
носительно наблюдаемого источника. Полученные данные (т и
F) передаются в баллистический центр, где используются для
определения траектории полета КА.
Затем с помощью метода интерферометрических изме¬
рений определяют координаты КИ, расположенных близко к
проекции траектории КА на небе. Эти измерения проводятся в
двух частотных диапазонах (18 и 5 см либо 5 и 32 см), что
позволяет исключать погрешности, вносимые при распростране¬
нии сигнала в межпланетной среде и ионосфере Земли (зависи¬
мость этих погрешностей от длины волны квадратичная). Ре¬
зультаты этих измерений используются также для уточнения
координат приемных антенн и длин баз и привязки времени в
приемных пунктах.
Определив положение КИ, проводят интерферометрические
измерения положения КА на длине волны бортового передат¬
чика. Точность интерферометрических измерений тем выше,
чем шире полоса принимаемого сигнала. Основным ограниче¬
нием при этом являются возможности аппаратуры регистрации.
На рис. 5.4 представлена структурная схема приемного пунк¬
та ИББ. Принимаемый сигнал усиливается широкополосным
приемным устройством с многократным преобразованием час¬
тоты и подается на систему синтеза полосы пропускания интер¬
ферометра. Это устройство работает в двух режимах: с КИ и
с КА.
При работе с КИ из общей полосы частот сигналов f, при¬
нимаемых приемником, специальными фильтрами вырезаются
четыре полосы по 500 кГц или 2 МГц (в зависимости от вида
используемого регистратора). Сигналы с выхода этих фильтров
поступают на регистрацию. При их обработке после регистра¬
ции точность измерений близка к точности при обработке в поло¬
се /, а мощность соответствует мощности сигнала от КИ в полосе
Рис. 5.4. Структурная схема приемного пункта ИББ
98
500 кГц (2 МГц). Работа с КИ в каждом из двух диапазонов
производится последовательно.
При работе с КА в режиме интерферометрии несущая час¬
тота передатчика КА модулируется поднесущими частотами,
значения которых определяются следующими соображениями.
При увеличении частоты поднесущей увеличивается точность
интерферометрических измерений КА, но сужается диапазон
однозначного определения углового положения КА, что требует
повышения точности априорного знания положения КА. Так,
при разносе боковых частот на 27 МГц зона однозначного оп¬
ределения углового положения КА при базе 6900 км составит
0,4 угл. с, при разносе частот 7 МГц—1,5 угл. с и при
1,7 МГц — 6 угл. с. В рассматриваемом ИББ использовался
разнос частот 14 МГц (поднесущая — 7 МГц)'.
В режиме работы с КА в системе синтеза полосы пропуска¬
ния интерферометра используются три фильтра для несущей и
боковых частот принимаемого с КА сигнала. Полоса пропуска¬
ния этих фильтров сужена до 300 Гц. После фильтрации прини¬
маемые сигналы в режимах КИ и КА с помощью гетеродини-
рования переводятся в видеодиапазон и затем устройством,
называемым форматер, осуществляются следующие операции
над сигналом:
преобразование аналогового сигнала в цифровую форму
путем бинарного квантования по амплитуде и дискретизации
во времени;
привязка сигнала ко времени;
покадровая организация информации со структурой, позво¬
ляющей регистрировать ее на магнитофоне. Для полосы до
500 кГц используется цифровой магнитофон, а для полосы до
2 МГц — видеомагнитофон, на видеодорожку которого записы¬
вается сформированная информация.
Звуковая дорожка используется и для служебной информа¬
ции в цифровом виде, также организованной в кадры, что соот¬
ветствует международному формату МАРК-И. Точность интер¬
ферометрических измерений зависит от стабильности фазовых
характеристик приемных стройств. Важны также стабильность
частоты гетеродинов приемных устройств и когерентность их ра¬
боты. Оценка этих параметров приемного тракта осуществля¬
ется с помощью специально формируемого когерентного сигна¬
ла и устройства контроля фазовых характеристик.
Контрольный сигнал формируется из периодической после¬
довательности коротких импульсов (<0,1 не) с частотой повто¬
рения 4 МГц, синхронизируемых водородным генератором. При
подаче такого сигнала на вход приемного устройства получа¬
ется набор сфазированных когерентных гармонических сигна¬
лов, кратных 4 МГц.
7*
99
При работе с КА разнос частот гармонических сигналов
выбирается равным частоте модуляции передатчика КА в ре¬
жиме интерферометрии.
При работе интерферометра контрольный сигнал проходит
вместе с принимаемым сигналом через весь тракт приема и
вместе с ним регистрируется на магнитной ленте. При обработ¬
ке информации по зарегистрированному контрольному сигналу
определяются фазовые уходы приемных трактов и в результате
измерений вносятся соответствующие поправки. Это позволяет
при подготовке и проведении сеанса приема контролировать
фазовую стабильность приемного тракта.
5.5.2. ЦЕНТР ОБРАБОТКИ ИНТЕРФЕРОМЕТРИЧЕСКОЙ ИНФОРМАЦИИ
Интерферометрическая информация, зарегистрированная в пунктах при¬
ема на магнитных регистраторах, доставляется в центр обработки интерфе-
рометрической информации (рис. 5.5). Здесь определяются точные значения
разностей временных задержек между принятыми в приемных пунктах интер¬
ферометра сигналами от радиоисточников (КА или КИ) и частотного сдвига
между этими сигналами (частот интерференции).
Средства воспроизведения информации представляют собой три магни¬
тофона, аналогичных тем, которые используются в пунктах приема. Их ско¬
рость воспроизведения синхронизирована специальной аппаратурой. С выхо¬
дов всех магнитофонов сигналы одновременно поступают в систему подготов¬
ки данных, которая выравнивает скорость поступления информации от
каждого магнитофона и вводит информацию в систему обработки.
Система подготовки данных учитывает геометрические поправки на рас¬
положение баз и доплеровские приращения частот сигналов, вызванные пере¬
мещением баз за счет вращения Земли и движения КА, а также поправки
на условия распространения сигнала в тропосфере с учетом реальных метео¬
условий.
Система обработки информации выполняет достаточно сложную корреля¬
ционную и статистическую попарную обработку сигналов, принятых на каж¬
дой базе. При этом учитываются результаты обработки калибровочных сиг-
Нетки Дргмни
Рис. 5.5. Структурная схема центра обработки интерферометрической инфор¬
мации
100
Таблица 5.3
Параметр
Значение
Диаметр антенн, м:
в Евпатории
70
в Уссурийске
70
в Медвежьих Озерах
64
Длины баз, км
6900 и 1200
Рабочие диапазоны, см
32, 18, 5
Суммарная температура шума, К, в ди¬
апазонах:
32 и 18 см
50
5 см
30
Полоса пропускания, МГц, приемных
устройств в диапазонах:
32 см
5
18 см
30
5 см
20
Полоса регистрации и число каналов:
при работе с КИ
0,5 МГц, 4 канала (цифровой
магнитофон)
при работе с КА
2 МГц, 4 канала (видеомаг¬
нитофон) 300 Гц, 3 канала
Длительность записи на магнитную ленту:
цифрового магнитофона
200 с
видеомагнитофона
4 ч
Калибровочные сигналы
Гармонические с частотой 1;
Точность измерения длины баз, м
2; 4 МГц
1
Точность привязки времени в пунктах
1
приема, мс
Погрешность измерения взаимной задерж¬
3... 5
ки сигналов, не
Погрешность измерения частоты интер¬
ю-3
ференции, Гц
Точность угловых измерений, угл.с
о
о
СП
о
налов для коррекции фазовых сдвигов в приемных трактах интерферометра.
В результате обработки определяются временные задержки для всех базовых
линий интерферометра и соответствующие частоты интерференции.
Порядок обработки информации от КИ и КА в значительной степени
одинаков, хотя1 и имеются определенные особенности. При работе в диффе¬
ренциальном режиме дополнительно вычисляются разности задержек между
КИ и КА по каждой базе, которые передаются в баллистический центр для
определения орбиты КА.
Основные технические характеристики ИББ приведены в табл. 5.3.
101
Глава 6
БОРТОВЫЕ МАГИСТРАЛЬНЫЕ КОМПЛЕКСЫ
Структура бортового радиокомплекса в основных чертах сформировалась
в начале 60-х гг. и сравнительно медленно эволюционировала в связи с освое¬
нием новых диапазонов волн и развитием элементных средств и цифровых
методов обработки сигналов.
Можно выделить три самостоятельные, но аппаратурно связанные зада¬
чи, решаемые радиокомплексом: прием команд и программ управления, пере¬
дача научной и служебной информации и ретрансляция сигналов для изме¬
рения параметров движения.
В направлении Земли все эти задачи решаются полностью. В направлении
спускаемого на поверхность планеты аппарата может решаться только часть
задач в зависимости от типа аппарата.
Общие цели и принципы построения командно-программных и телеметри¬
ческих систем и методов измерения параметров движения изложены в гл. 2,
4 и 5. Здесь же обсудим структуры бортовых радиокомплексов, реализующие
эти идеи и принципы, и их основные характеристики.
Общая особенность всех рассматриваемых структур — тенденция к ин¬
теграции приборов, решающих различные функциональные задачи, в единый
приемопередатчик ввиду жестких энергомассовых ограничений. Возникающие
при этом потери для каждой из функций незначительны.
6.1. РАДИОСВЯЗЬ С ЗЕМЛЕЙ
В годы активных космических исследований Луны (1963—
1973) сменилось два поколения аппаратуры магистрального ра¬
диокомплекса.
Аппаратура первого поколения эксплуатировалась на авто¬
матических станциях Луна-1, Луна-3, Луна-5 в период 1963—
1968 гг. Ее основу составлял приемопередатчик в метровом диа¬
пазоне волн. В направлении Земля—КА излучался сигнал на
частоте 102 МГц с модуляцией вида КИМ—ЧМ—AM. Несущая
частота запросного сигнала после когерентного преобразования
с коэффициентом 9/5 ретранслировалась для обеспечения изме¬
рения радиальной скорости и дальности. Ответный сигнал на
частоте 183,6 МГц имел модуляцию вида КИМ—ФМ, с по¬
мощью которой передавалась телеметрическая и научная ин¬
формация со скоростями до 1,0 кбод.
Представляет интерес метод измерения дальности, принятый
в системах первого поколения. В основе его лежал «маневр
частоты» — однократное изменение несущей частоты запросно¬
го сигнала без разрыва фазы. Метод иллюстрирует рис. 6.1, где
f 1 — изменение частоты запросного сигнала; f2 — изменение
102
Рис. 6.1. Изменение частоты при измерении дальности методом «.мане-вра»
частоты
частоты ответного сигнала, приведенной к запросному с коэф¬
фициентом 5/9.
При линейном изменении доплеровского сдвига частоты /д
за время измерения задержка т (т. е. дальность R) может быть
выражена так:
Х=2-Т=тг;( 5 J Af(t)dt\
м \д*. д*! д/3 /
где Af(t)=fi(t)—f2(t)t Atl = At2=Ats.
Точность измерения этим методом определяется значением
«маневра» частоты FM и точностью независимого определения
доплеровского сдвига частоты. При FM—3 кГц была реализова¬
на точность измерения дальности 2 км. В аппаратуре первого
поколения (рис. 6.2) величина FM определялась полосой про¬
пускания бортового когерентного приемоответчика, ограничен¬
ной энергетическими характеристиками радиолинии Земля—КА.
Анализируя аппаратуру первого поколения с позиций сегод¬
няшнего дня, можно оценить ее характеристики и результаты
функционирования как уникальные.
В 1973 г. был создан первый бортовой радиокомплекс вто¬
рого поколения в ДМ диапазоне, который обеспечил полеты
аппаратов «Луна-10»—«Луна-16». Этот радиокомплекс сохра¬
нил в основном черты первого поколения — отсутствие фазовых
автоподстроек и когерентных демодуляторов (рис. 6.3).
В приемной части радиокомплекса обрабатывался сигнал
вида КИМ—ЧТ—AM, несущий командно-программную инфор¬
мацию. Команда передавалась четырехсимвольным кодом.
Каждому символу соответствовала своя поднесущая частота.
Значения поднесущих частот лежали в диапазоне 25 кГц. Поло-
103
Рис. 6.2. Структурная схема радиокомплекса первого поколения
770 МГц
13,6МГц
рплеяеер\*-\ ПФ1См
Г
АРУ
У/77
ПФ2
Af=fO МГц
АЛж20МГц
*60
±
зг
13,03 МГц
УМ
X3
922,8МГц
*2Ь
Линей¬
ный
ФМ
ПФЗ [■*■] АД
ПФЬ
Лилейный
сумматор
~Т“
ТВ
1
Фм
Т
МОарцеОые г r-J—i
фильтры ( I '0' |
ЕГД
АД
АД
'О'
АД
Г Т 1
Дешифратор
АЛ 20 гц
х
: I
§
Цифробои мотом
Рис. 6.3. Структурная схема радиокомплекса второго поколения
сы пропускания кварцевых фильтров поднесущих 20 . .. 30 Гц.
В дешифраторе значение текущего символа определялось срав¬
нением огибающих на выходах четырех фильтров. Код коман¬
ды формировался так, чтобы соседние символы надежно раз¬
личались. Поэтому в системе можно было обойтись без сим¬
вольной синхронизации.
Ретрансляция сигналов для измерения радиальной скорости
и дальности выполнялась некогерентно, путем модуляции по
фазе ответного сигнала сигналом промежуточной частоты.
104
Рис. 6.4. Спектр группового сигнала
В радиокомплексе был реализован совмещенный режим пе¬
редачи телевизионных сигналов, телеметрии и сигналов траек-
торных измерений. Полный спектр излучаемого сигнала приве¬
ден на рис. 6.4.
В радиокомплексах первого и второго поколений применя¬
лись задающие кварцевые генераторы без термостатов. Это
обеспечивало простоту и экономичность. Необходимая стабиль¬
ность достигалась благодаря применению прецизионных высо¬
кодобротных кварцев (добротность больше 3 -106), имеющих
высокую температурную и долговременную стабильности. Так,
полная относительная нестабильность частоты генератора в схе¬
ме на рис. 6.3 от температуры, времени и напряжения была
лучше 3-10“6.
Для исследования Венеры была разработана аппаратура
(рис. 6.5) в том же ДМ диапазоне, но с применением когерент-
Рис, 6.5. Структурная схема когерентного радиокомплекса ДМ диапазона
105-
ных методов обработки. В основе радиокомплекса — когерент¬
ный приемоответчик с ФАПЧ. Коэффициент преобразования
частоты входного сигнала 6/5. Система ФАПЧ с поиском обес¬
печивала узкополосную (~20 Гц) фильтрацию несущей и коге¬
рентную демодуляцию сигнала.
Командно-программная информация из сигнала вида КИМ—
ЧМ—ФМ выдавалась когерентным ФМ демодулятором и де¬
шифратором с двумя камертонными фильтрами с полосой про¬
пускания 1 Гц.
Приборы аппаратуры третьего поколения имели хорошие
энергетические характеристики: чувствительность приемника
около —166 дБ/Вт, мощность передатчика до 100 Вт.
В 1984 г. было спроектировано, а в 1988 г. реализовано но¬
вое поколение аппаратуры для КА дальнего космоса. Радио¬
комплекс этого типа является базовым на ближайшие годы.
Основной диапазон в радиокомплексе — СМ. Однако для
преемственности результатов траекторных измерений и дубли¬
рования аппаратура может работать и в ДМ диапазоне. В СМ
диапазоне обеспечиваются точные траекторные измерения и вы¬
сокие скорости передачи информации, а в ДМ диапазоне — на¬
дежный прием команд и дублирование траекторных измерений
с пониженной точностью.
Для реализации предельных характеристик по чувствитель¬
ности и точности траекторных измерений все частоты в системе
(несущие и поднесущие) когерентны. В связи с этим все часто¬
ты кратны V = 7,355 МГц и удобно представляются в относи¬
тельных единицах.
В радиолинии Земля—КА используются сигналы двух ви¬
дов: КИМ—ФТ—ФМ и ПШ—ФМ. В радиолинии КА—Земля
соответственно—КИМ (сверточный)—ФМ и ПШ—ФМ. В аппа¬
ратуре КА реализуется фазовая демодуляция, свертка псевдо-
шумовых сигналов и сверточное кодирование.
Для измерения дальности в системе используется когерент¬
ный псевдошумовой сигнал с параметрами FTaKT= (79/480) V,
Л/= 2047.
Бортовой радиокомплекс (рис. 6.6) можно условно разбить
на когерентную приемопередающую командно-траекторную си¬
стему и чисто командную. Последняя состоит из двух ДМ при¬
емников с AM детектором и автономными задающими генера¬
торами (ЗГ). Приемники связаны каждый со своей антенной и
работают в дежурном режиме. Диаграммы направленности ан¬
тенн обеспечивают прием при любой ориентации объекта.
Единый блок ФАПЧ и когерентного демодулятора командно-
траекторной системы работает либо от СМ, либо от ДМ прием¬
ника (рис. 6.6). Блок генерирует когерентный входному сигнал
на частоте 2V (14,71 МГц), используемый для формирования
106
285 7
7
ЗГ1
Выделитель
силдолод
ПФ
30,300кГц
Сигналы
дальяасти
ПОдлоддля
тор
//одрлирр/ощая
фрикция
1
пр/i дп
ЗГ2
Выделитель
27
силдолод
Рис. 6.6. Структурная схема радиокомплекса СМ диапазона
всех гетеродинных сигналов и для возбуждения передатчиков.
Схема частотных преобразований приведена на рис. 6.7.
В системе предусмотрен режим возбуждения передатчиков
от автономного ЗГ. Система ФАПЧ (рис. 6.8) работает в режи¬
мах поиска и слежения. В режиме поиска частота управляемо¬
го генератора (УГ) перестраивается цифровым генератором
пилообразного напряжения (ЦГП), представляющим собой счет-
Рис. 6.7. Схема частотных преобразований
107
Рис. 6.8. Эквивалентная схема ФАПЧ
чик частоты импульсов с ЦАП. После захвата частоты и появ¬
ления постоянного напряжения на выходе когерентного детек¬
тора, превышающего порог, в компараторе происходит пе¬
реход в режим слежения. В режиме слежения отключаются им¬
пульсы, подаваемые с тактового генератора (ТГ) на ЦГП, и
изменяются параметры пропорционально-интегрирующего филь¬
тра (ПИФ) для сужения полосы ФАПЧ. Предусмотрены два
режима поиска: в полосе ±150 кГц за 5 с и в полосе ±15 кГц
за 60 с. Соответственно в этих режимах полосы ФАПЧ равны
2 кГц и 200 Гц.
Принимаемая командно-программная информация выделяет¬
ся фазовым детектором ФД1, посимвольно обрабатывается и
поступает для словной обработки в бортовой вычислительный
комплекс, реализующий управление режимами работы и связь
с другими системами.
Для измерения дальности система ретранслирует два вида
сигналов: широкополосный псевдошумовой (ПШ) и узкополос¬
ные многочастотные F^ = 30±3 кГц или /7И=300±30 кГц. Экви¬
валентная схема приема и обработки псевдошумового сигнала
приведена на рис. 6.9.
Входной сигнал на частоте 681 V манипулирован по фазе
с индексом 60° псевдошумовой последовательностью длиной
2047 и тактовой частотой FTaKT= (79/480) V. В фазовом мани¬
пуляторе ФМ, имеющем индекс 60°, фаза входного сигнала из¬
меняется по закону местного псевдошумового сигнала (ПШ).
Частота местного ПШ когерентна частоте принимаемого сигна¬
ла, так как формируется в синтезаторе тактовой частоты (СТЧ)
из частоты управляемого генератора (УГ). Схема слежения за
фазой ПШ работает в режимах поиска и слежения. В режиме
поиска частота сдвигается относительно номинала на 18,7 Гц.
108
На модулятор
передатчика
Рис. 6.9. Эквивалентная схема обработки ПШ сигнала
Максимальное время поиска 120 с. Обнаружение сигнала про¬
исходит при превышении фиксированного порога на выходе
ФД2. Дискриминационная характеристика системы слежения
формируется путем коммутации фазы местного ПШ на ±45°
с частотой FK=FT/2047 и сравнения усредняемых значений на¬
пряжения на выходе ФД2, соответствующих разным фазам.
Очевидно, что в такой схеме точное слежение за фазой ПШ
обеспечивает система ФАПЧ по несущей частоте. Второе коль¬
цо слежения непосредственно по фазе ПШ необходимо только
для устранения начального рассогласования и компенсации
аномальных скачков фазы, например из-за сбоев в делителях
частоты.
Потенциальная погрешность регенерации ПШ сигнала в та¬
кой системе определяется фазированием на несущей частоте и
не превышает 0,5 не. Реальная мгновенная погрешность ограни¬
чена минимальным дискретом подстройки фазы ПШ сигнала
в синтезаторе тактовой частоты, который составляет 4 не, и при
усреднении может быть сделана существенно меньше.
Благодаря применению такой схемы на аппарате «Фобос»
была достигнута точность измерения дальности около 5 м.
6.2. РАДИОСВЯЗЬ СО СПУСКАЕМЫМ АППАРАТОМ
Информация со спускаемого на поверхность планеты аппа¬
рата (СА) может передаваться на Землю непосредственно или
через ретранслятор, пролетающий вблизи планеты. Ввиду зна-
109
Рис. 6.10. Структурная схема передатчиков спускаемого аппарата
чительных энергомассовых ограничений на СА излучаемая
мощность не превышает 10... 30 Вт. Поэтому скорость переда¬
чи информации радиолинии СА—Земля не превышает 4 ...
... 16 дв. ед./с на расстояниях 300 млн км. Радиолинии с ре¬
трансляцией значительно эффективнее. При той же мощности
СА скорость передачи информации может достигать 105дв.ед./с.
Первая радиолиния с ретрансляцией сигнала через спутник
планеты была создана в 1974 г. для спускаемых на поверхность
Венеры аппаратов. По радиолинии были переданы панорамы
Венеры и научная информация.
На СА были установлены два передатчика мощностью 30 Вт,
работающих на частотах 122,8 и 138,6 МГц одновременно че¬
рез диплексер (Д) на одну общую антенну (рис. 6.10). Через
оба передатчика передавалась одинаковая информация со ско¬
ростью 3072 бит/с на поднесущей частоте 30 720 кГц.
Поднесущая частота введена для «очистки» спектра сигнала
передатчика в районе несущей частоты, что необходимо для
обеспечения надежной работы системы ФАПЧ приемника. Ин¬
декс модуляции несущей 60°. Модуляция поднесущей — относи¬
тельно фазовая (ОФТ) с индексом 90°.
Сигналы, излучаемые СА, ретранслировались через пролет¬
ный аппарат одновременно в двух режимах: прямом (без демо¬
дуляции) и с посимвольной регенерацией. При прямой ретранс¬
ляции фаза сигнала ДМ передатчика магистральной радио¬
линии с индексом 60° манипулировалась выходным сигналом
второго усилителя промежуточной частоты приемника-ретранс¬
лятора (рис. 6.11). Полоса пропускания фильтра канала пря¬
мой ретрансляции 80 кГц. Ограничитель перед модулятором
необходим для нормировки индекса модуляции. Канал прямой
ретрансляции имеет низкую эффективность, ограниченную энер¬
гопотенциалом радиолинии ретранслятор—Земля в ДМ диапа¬
зоне. Поэтому через него возможно только выделение сигнала
несущей частоты передатчиков СА. Однако, так как в допле¬
ровский сдвиг несущей частоты заложена чрезвычайно важная
1 ю
122,0 МГц Ц1 МГц 0,21* МГц
028 МГц
Рис. 6.11. Структурная схема канала прямой ретрансляции
информация о динамике спуска аппарата, канал с научной точ¬
ки зрения оказался весьма эффективным.
В канале с посимвольной обработкой (рис. 6.12) опорный
сигнал для фазового демодулятора на несущей частоте (ФД1)
формируется аналоговой системой ФАПЧ1, работающей в ре¬
жиме поиска в полосе 10 кГц и после захвата в режиме сле¬
жения с полосой 100 Гц. Импульсные системы ФАПЧ2 и ФАПЧЗ
формируют опорные сигналы соответственно для демодулятора
поднесущей частоты (ФД2) и согласованного с длительностью
символов фильтра (интегратор со сбросом). Так как поднесу-
щая и символьная частоты когерентны, ФАПЧ1 и ФАПЧ2 име¬
ют когерентные сетки частот.
В силу исторических особенностей развития в радиолинии
СА—Земля в СМ диапазоне в 1971—1981 гг. применялась
время-импульсная модуляция (ВИМ). Поэтому сигналы КИМ
преобразовывались в сигналы ВИМ и со скоростью 512 восьме¬
ричных сигналов в секунду передавались на Землю. Для этого
использовался импульсный магнетронный передатчик мощ¬
ностью 25 кВт в импульсе.
Рис. 6.12. Структурная схема канала ретрансляции с посимвольной обработ¬
кой сигнала
111
6.3. РАДИОСВЯЗЬ С АЭРОСТАТНЫМ ЗОНДОМ
В июле 1986 г. проводился эксперимент по изучению цирку¬
ляции атмосферы Венеры с помощью аэростатных зондов (АЗ).
На зонде, дрейфовавшем на высоте 54 км над поверхностью,
были установлены передающий радиокомплекс и научная аппа¬
ратура.
Прием радиосигналов с борта АЗ, а также определение его
координат и скорости перемещения в атмосфере планеты вы¬
полняли советская и международная сети наземных радиотеле¬
скопов, работавших по согласованной программе и располо¬
женных на территории Европы, Азии, Австралии, Африки, Се¬
верной и Южной Америки.
В передающем радиокомплексе АЗ (рис. 6.13) программно¬
временное устройство (ПВУ) включалось по команде с АЗ и
далее работало автономно от собственного батарейного источ¬
ника питания. Радиопередающее устройство ПРД включалось
короткими сеансами по 320 с через каждые 30 мин и передава¬
ло в трех сеансах подряд ТМ информацию от научной аппара¬
туры с индексом модуляции 45°. В четвертом сеансе передат¬
чик модулировался частотой 3,25 МГц с индексом 0...1800,
при этом в эфир передавались две когерентные несущие часто¬
ты, разнесенные на 6,5 МГц. Эти несущие использовались для
точных координатных измерений. Далее циклы сеансов повто¬
рялись.
Для обеспечения точных измерений была достигнута весьма
высокая стабильность задающего кварцевого генератора (ЗХ
ХЮ-9 за 1 сутки и 10-1 за 1 с), при этом ослабление всех па¬
разитных составляющих спектра ЗГ в полосе ±300 кГц было
Стжр&е&2*/Ш! я
яадмой вллярсппдр?
Рис. 6.13. Структурная схема передающего (радиоко.мплекса аэростатного
зонда
112
более 60 дБ. Информация, поступающая от научной аппарату¬
ры, кодировалась сверточным кодером и передавалась со ско¬
ростью 4 бод/с на поднесущей 254 Гц.
6.4. ОСНОВНЫЕ ХАРАКТЕРИСТИКИ БОРТОВЫХ
РАДИОКОМПЛЕКСОВ
Чувствительность радиоприемных устройств. Реальная чув¬
ствительность радиоприемных устройств определяется коэффи¬
циентом шума входного усилителя и пороговыми характеристи¬
ками демодулятора и решающей схемы. Приемники магистраль¬
ных радиолиний выполняют две функции: прием команд и ре¬
трансляцию сигналов траекторных измерений, т. е. содержат
две решающие схемы с различными характеристиками. Поэто¬
му они имеют два значения чувствительности: по командам и
по «дальности» (сокращенное название режима ретрансляции).
В табл. 6.1 приведены значения чувствительности радио¬
комплексов четырех поколений.
Таблица 6.1
Диапазоны частот
гш. к
Команды
Дальность
скорость
передачи,
команда/с
чувствитель¬
ность, дБ/Вт
точность,
м
чувствитель¬
ность, дБ/Вт
М (1,960)
3000
0,5
— 152
2000
— 141
ДМ (1973)
1500
1
—153
150
— 133
ДМ (1974)
1500
0,16
—166
100
—160
СМ (1984)
500
2,5
—162
10
— 160
Относительное несоответствие чувствительности и темпера¬
туры шума аппаратуры разных поколений объясняется тем,
что при переходе к последующим поколениям снижалась тем¬
пература, но росли точности и скорости. Поэтому чувствитель¬
ность росла непропорционально снижению Тш и иногда даже
падала.
Мощности передатчиков и информативность радиолинии
КА—Земля. Как было показано, информативность радиолинии
определяется в первую очередь мощностью передатчика и уси¬
лением антенны (которая зависит от ее размеров и точности
ориентации), а также видом модуляции. В процессе перехода
к последующим поколениям росли мощности и рабочие частоты
передатчиков, а следовательно, и информативность.
В табл. 6.2 собраны основные показатели передатчиков ма¬
гистральных радиолиний.
8—4229
113
Таблица 6.2
Частота, МГц
Мощность, Вт
Вид модуляции
Масса, кг
Потребляемая
мощность, Вт
183,6
3
КИМ—ФМ
1,5
30
930
10
КИМ—ФМ
6
100
930
100
КИМ—ФМ
12
430
5844 (имп.)
25
вим
8
350
5850
50
КИМ ск—ФМ
10
250
Глава 7
НАЗЕМНАЯ СЕТЬ СЛЕЖЕНИЯ ЗА ДАЛЬНИМИ КА
Наземная сеть слежения за дальними КА представляет собой сложную
надсистему, в которую входят наземные средства систем, подробно освещен¬
ных в гл. 4 и 5. Поэтому здесь рассматриваются не схемотехнические реше¬
ния и принципы работы этих систем, а макроструктура и организационно¬
технические основы обеспечения работы наземного автоматизированного
комплекса управления дальними КА (НКУ ДКА), а также принципы по¬
строения, функционирования и контроля характеристик станций слежения
[35].
7.1. ЗАДАЧИ И ПРИНЦИПЫ ПОСТРОЕНИЯ НАЗЕМНОГО
АВТОМАТИЗИРОВАННОГО КОМПЛЕКСА УПРАВЛЕНИЯ
Средства наземной сети слежения за КА, как правило, вы¬
полняют следующие задачи:
угловое сопровождение КА, находящихся в полете;
формирование и передачу на КА командной информации
для управления бортовой аппаратурой;
проведение траекторных измерений и определение траекто¬
рии полета;
прием с борта КА, выделение, обработку и представление
телеметрической информации о работе бортовой аппаратуры;
получение научной информации с борта КА;
обмен всеми видами информации, необходимой для управ¬
ления КА, между станциями слежения, центром управления
полетом (ЦУП) и баллистическим центром (БЦ);
контроль работы технических средств сети слежения.
Состав основных средств НКУ ДКА, обеспечивающих реше¬
ние этих задач, приведен на рис. 7.1.
114
Рис. 7.1. Структура наземной сети слежения за КА дальнего космоса
Как уже указывалось, станции сети слежения расположены
в Крыму, вблизи г. Евпатории — Западный центр ДКС, и на
Дальнем Востоке, в г. Уссурийске — Восточный центр ДКС.
Расположение станций в сравнительно низких широтах и зна¬
чительное разнесение их по долготе обеспечивает максималь¬
ную зону видимости КА с территории страны и повышенную
точность определения траектории полета по результатам нави¬
гационных измерений.
Полетом КА поочередно управляют из двух дублирующих
друг друга центров управления полетом — основного, рас¬
положенного в подмосковном г. Калининграде, и региональ¬
ного, территориально совмещенного с Западным центром ДКС.
В состав НКУ входят также два баллистических центра:
один в составе подмосковного Центра управления полетом
(ЦУП) и второй — в Институте Прикладной Математики
АН РФ.
С помощью спутниковых и наземных каналов связи теле¬
метрическая информация, принятая станциями слежения с КА,
доставляется в ЦУП, а информация, необходимая для управ¬
ления КА, — из ЦУП на станции слежения, откуда она пере¬
дается на КА.
Центр управления полетом. Общее руководство из ЦУП по¬
летом КА выполняет Главная оперативная группа управления
(ГОГУ), формируемая из специалистов предприятий и органи¬
заций, участвующих в разработке КА и в управлении поле¬
том.
8*
115
Главная оперативная группа управления состоит из следую¬
щих основных подразделений:
группы управления, осуществляющей реализацию програм¬
мы непосредственно в процессе сеанса управления;
группы анализа работы бортовых систем, оперативно ана¬
лизирующей состояние систем КА в процессе сеанса;
группы планирования, выполняющей оперативное и долго¬
срочное планирование полета КА, формирование командно¬
программной информации управления;
группы планирования и анализа работы средств НКУ, при¬
влекаемых к управлению КА;
баллистической группы, координирующей работу средств
при выполнении траекторных измерений, доставке траекторной
информации в баллистические центры (БЦ) и определении
траектории движения КА;
группы связи, контролирующей работу средств связи НКУ.
Сбор, обработку и предоставление информации специали¬
стам ГОГУ в объеме и виде, необходимом для принятия ре¬
шения, выполняют средства и операторский состав ЦУП.
Центр управления полетами должен максимально облегчить
операторам ГОГУ процесс подготовки и проведения сеанса
управления. Поэтому очень важно, чтобы средства ЦУП да¬
вали возможность широкого моделирования поведения отдель¬
ных систем КА и позволяли оператору активно взаимодейство¬
вать в этих целях с аппаратно-программным вычислительным
комплексом в процессе подготовки и проведения сеанса управ¬
ления и при изучении возникших нештатных ситуаций.
Средства ЦУП обеспечивают решение следующих основных
задач в процессе сеанса управления:
оперативный анализ состояния систем КА, включающий в
себя обработку и предоставление полученной со станций сле¬
жения телеметрической информации (ТМИ), прогнозирование
ловедения систем КА и выявление отклонений технических па¬
раметров систем от нормы;
проверку подготовленных команд управления на соответ¬
ствие состоянию систем КА на время проведения сеанса;
автоматизированную выдачу командной информации на
станции слежения и контроль ее прохождения и исполнения
на борту КА;
отображение хода выполнения сеанса управления.
При подготовке сеанса управления ЦУП обеспечивает:
поиск, выбор и предоставление необходимой информации
по запросу операторов ГОГУ;
автоматизированное планирование работы КА и сеансов
управления;
подготовку и передачу по линиям связи на станции слеже¬
.116
ния информации, необходимой для организации и проведения
предстоящих сеансов связи;
прием из БЦ и предоставление информации о траектории
движения КА, необходимой для организации управления.
Кроме того, во всех режимах проводится документирование
всей получаемой и выдаваемой из ЦУП информации.
Важным условием успешного функционирования ЦУП,
удаленного от станций слежения, является наличие надежных
каналов связи между ними.
Информационно-вычислительный комплекс ЦУП (рис. 7.2)
построен применительно к решению указанных задач. Он со¬
стоит из трех основных аппаратно-программных комплексов:
автоматизированной обработки и анализа телеметрической
информации;
командно-программного обеспечения;
отображения информации.
Аппаратно-программные комплексы построены на принци¬
пах разделения решаемых вычислительных задач между боль¬
шими быстродействующими универсальными ЭВМ, работаю¬
щими в реальном времени, и ЭВМ среднего быстродействия
типа персональных систем и персональных ЭВМ. Их взаимо¬
действие обеспечивается специально разработанным общим ма¬
тематическим обеспечением, включающим операционные систе-
Лроералла сеанса
д/ur СС
У сходные дан¬
ные на сеанс
от ГУ
Лрогралла
УЛУ на СО
У датанщан
бы да на У Л У
от ОС
Лланироба-
нае
работы ЛУУ
Лланароба-
нае
работы У А
нае УЛУ
Уонтроле
прохожде¬
ния УЛУ
Уололене
оланаробанал
работе/ а
рорабленая
ЛУУ от ЛЦ
Уолллемс обработал ТМУ
Обработал
ТМУ
Ж
ТМУ от Сд
Анализ рабо¬
ты бортодза
систе/г
УоделароЛаяиз
5 работы беря
0ых сиетел
Средстба облена леждр нололеноала УЛУ
~3~
I Уололёле I
I средетб
отображения
Мядибидралз-
ные средстба
отображения
(терлинал а/)
Улрадля/отая
ЭВМ
Уоллентаб\
на/с средсг-
ба о/яобра- _
желая
I
Рис. 7.2. Структурная схема ИВК ЦУП
117
мы и системы программирования, функционирующие на ЭВМ.
Специальное математическое обеспечение комплекса обра¬
ботки телеметрической информации решает следующие задачи:
автоматизированный прием и обработку в реальном време¬
ни полных потоков телеметрической информации;
анализ работы бортовых систем;
математическое моделирование работы бортовых систем;
подготовку и выдачу всех видов информации на системы
регистрации и отображения.
Специальное математическое обеспечение командно-про¬
граммного комплекса осуществляет следующие основные функ¬
ции:
автоматизированное долгосрочное и оперативное планиро¬
вание работы КА (разработка программы сеанса управления);
автоматизированное формирование командно-программной
информации, проверку ее на модели и передачу на станции
слежения;
автоматический контроль по результатам оперативной об¬
работки телеметрической информации, прохождения и испол¬
нения командно-программной информации на борту КА с до¬
кументированием;
автоматизированное планирование и контроль работы
средств НКУ, привлекаемых к сеансу управления;
подготовку и выдачу всех видов информации на системы
регистрации и отображения.
Комплекс отображения информации состоит из управляю¬
щей ЭВМ с соответствующим программным обеспечением и
средств отображения коллективного и индивидуального пользо¬
вания. Коллективные средства отображения предназначены для
обеспечения персонала, осуществляющего управление КА, ру¬
ководства и привлекаемых специалистов обобщенной информа¬
цией о состоянии КА или отдельных его систем.
Информация, необходимая для контроля и управления, по
способам представления делится на алфавитно-цифровую, гра¬
фическую и фототелевизионную. Алфавитно-цифровая инфор¬
мация о состоянии систем КА представляется на табло тексто¬
вой информации. Схемы, графики, карты отображаются на
графических табло. Телевизионная информация, фотоизобра¬
жения воспроизводятся с помощью телевизионного проектора.
Средства индивидуального пользования представляют собой
цветные дисплеи, установленные на унифицированных рабочих
местах операторов, оснащенных также средствами индиви¬
дуальной связи. На дисплеи по запросам операторов выводит¬
ся телеметрическая, командно-программная, справочная и дру¬
гая информация.
Средства связи ЦУП обеспечивают надежный обмен инфор¬
11 8
мацией между ЦУП, станциями слежения и баллистическими
центрами (БЦ).
В зависимости от информативности телеметрическая инфор¬
мация со станций слежения передается в ЦУП по телефонным
(до 8 кбит/с) или широкополосным (до 100 кбит/с) каналам
связи с использованием средств повышения достоверности.
Одновременно передается информация и о работе станции сле¬
жения.
Из БЦ в ЦУП передается баллистическая информация, ха¬
рактеризующая движения КА, необходимая для формирования
программы работы КА и проведения маневров КА.
Из ЦУП на станции слежения поступает командно-про¬
граммная информация для передачи ее на КА в установленные
моменты времени, а также информация о порядке работы
средств станций слежения в сеансе управления (программа се¬
анса).
Баллистический центр. Основной задачей БЦ (рис. 7.3) яв¬
ляется определение по результатам траекторных измерений,
осуществляемых станциями слежения, траектории движения
КА и прогноз его движения за период между циклами траек¬
торных измерений.
При подготовке коррекций траектории БЦ рассчитывает
параметры маневра, совершаемого КА для перехода с одной
траектории на другую. Данные на маневр КА в цифровом ви¬
де (так называемые «уставки») передаются на станцию сле¬
жения, а оттуда по радиолинии закладываются в программно-
Телеграфныа
канал
лраела
Приел
траелторлоа
алрарлацаа
Ж
Apxaf |Q=
ЦУП
j Of лен
Ofpafa/лла
ПОП
ОУпел
ТУ
ПЦ
Г
Г
Pafovae пета
Р
_х Opefemfa лаллллл™
■V лого алгабражелал
Телефоллл/и
лалал еОяза
Рис. 7.3. Структурная схема баллистического центра
119
временное устройство системы управления КА для коррекции
движения КА в заданные моменты времени.
Траектория движения КА и параметры его маневра рас¬
считываются независимо на двух БЦ. Результаты расчетов
сравниваются и только после их совпадения используются в
дальнейшей работе.
Кроме того, БЦ решает следующие задачи:
расчет баллистико-навигационной информации (БНИ), не¬
обходимой ЦУП для планирования работы КА и разработки
сеансов управления;
расчет и передачу на станции слежения необходимых для
расчета целеуказаний начальных условий (НУ);
■ прием и предварительную обработку траекторной информа¬
ции, получаемой со станции слежения, оценку качества изме¬
рений и их регистрацию;
расчет данных для средств наглядного отображения бал¬
листических характеристик полета КА.
Информационно-вычислительный комплекс БЦ состоит из
следующих основных аппаратно-программных подкомплексов:
приема, предварительной обработки и регистрации траек¬
торной информации, получаемой от станций слежения;
обработки БНИ и проведения баллистических расчетов; •
обмена БНИ с дублирующим БЦ и ЦУП;
доставки НУ на станции слежения;
отображения БНИ.
Средства связи. Между элементами сети слежения за КА
циркулируют большие массивы разнообразной информации.
Большая географическая разнесенность элементов сети для
обмена информацией требует использования спутниковых си¬
стем связи.
Научная и телеметрическая информация с КА принимается
станциями слежения и передается потребителям и в ЦУП
(рис. 7.4).
В зависимости от информативности передаваемой информа¬
ции используются телефонные (скорость до 8 кбит/с) либо ши¬
рокополосные каналы связи (LLIKC) (скорость до 100 кбит/с).
Траекторная информация (50 бит/с) передается со станций
слежения в БЦ по телеграфным каналам связи.
Обмен БНИ между основным и дублирующим БЦ и ЦУП
происходит по телефонным каналам.
Начальные условия выдаются из БЦ на вычислительные
центры (ВЦ) станций слежения, где производится расчет целе¬
указаний для антенны, синтезаторов, осуществляющих прогно¬
зирование доплеровской частоты, зон видимости станций сле¬
жения и другой баллистической информации, необходимой для
функционирования станций слежения.
120
Рис. 7.4. Структурная схема каналов связи
Станции слежения и ЦУП обмениваются командно-про¬
граммной информацией, а также информацией, подтверждаю¬
щей прохождение командно-программной информации по те¬
лефонным каналам связи.
Данные о содержании сеансов управления (программа
сеанса) и ответные данные о ходе выполнения сеанса управле¬
ния передаются из ЦУП на станции слежения и обратно по
телеграфным каналам связи.
Надежность доставки информации потребителям по кана¬
лам связи обеспечивается аппаратурой повышения достоверно¬
сти (АПД), а также резервированием каналов связи.
Центры управления полетом, станции* слежения, БЦ имеют
в своем составе узлы связи (УС), оснащенные аппаратурой
согласования каналов связи с потребителями, аппаратурой
коммутации и контроля качества каналов связи.
Между операторами ГОГУ в ЦУП и операторами станций
слежения имеется циркулярная громкоговорящая связь (ГГС),
По которой оперативно координируется работа соответствую¬
щих служб (командный циркуляр, телеметрический циркуляр,
баллистический циркуляр и др.).
121
7.2. УПРАВЛЕНИЕ ДАЛЬНИМИ КА НА РАЗЛИЧНЫХ
ЭТАПАХ ПОЛЕТА
Вывод КА на траекторию полета к планете производится в
несколько этапов (рис. 7.5), которым соответствуют различные
режимы работы наземной сети. На первом этапе многоступен¬
чатая ракета-носитель выводит КА вместе с разгонным ракет¬
ным блоком на промежуточную низкую орбиту ИСЗ, по которой
КА совершает пассивный полет. При выходе в заданную точку
на орбите ИСЗ включается двигатель разгонного блока и КА
переводится на траекторию полета к планете.
На практике КА выводится на траекторию полета с погреш¬
ностями, что приводит к отличию реальной траектории полета
от номинальной. Поэтому в процессе полета необходимо произ¬
водить коррекции траектории, устраняющие ошибки выведения.
Обычно таких коррекций предусматривается две или три:
1-я — на 7—15-е сутки полета, 2-я — в середине и 3-я — в конце
полета, за 7—15 суток до подлета к планете.
Время перелета к Венере может составлять 120—180 суток,
к Марсу — 200—300 суток.
В зависимости от задачи исследований планеты КА может
осуществлять посадку на поверхность планеты, выводиться на
орбиту спутника планеты или проводить исследования с пролет¬
ной траектории. В первом случае последняя коррекция обеспе¬
чивает выведение КА на попадающую траекторию, а во втором
и третьем — пролетную с заданным размером «промаха», т. е.
расстоянием, на котором КА пройдет мимо планеты.
Посадка на поверхность планеты или вывод на необходимую
орбиту спутника планеты обеспечивается соответствующим тор¬
мозным импульсом при выполнении маневра торможения.
При выводе КА на орбиту спутника в процессе исследований
возможны несколько коррекций для формирования орбиты,
наиболее подходящей для решения соответствующих научных
задач.
С точки зрения особенностей управления траектория полета
КА к планете может быть условно разбита на несколько участ¬
ков: выведения; приземный; перелета; подлета; формирования
рабочей орбиты (рис. 7.5).
Участок выведения начинается с момента старта ракеты-но¬
сителя и заканчивается отделением КА от разгонного блока
после его вторичного включения. Управление полетом ракеты-
носителя на этом участке производится автономной системой
управления. Работа всех ступеней ракеты-носителя контроли¬
руется телеметрической системой с использованием приемных
телеметрических станций, расположенных на территории стра¬
ны вдоль трассы полета, и корабельных телеметрических комп¬
122
Подлетный роае/яо/^
\/ / Рпдота ддагателя разгонного длона
- АнтоРно/а руастон
Исследрелая
планета
Вкл/oveHae ддагателя
для форлародапая
раденер ореРате/
Выдеденае
Зепля
- /7а со о дно/а полет РА
по орРате PCS
Рис. 7.5. Этапы полета КА
лексов, располагаемых в точках мирового океана, над которы¬
ми происходит работа двигателя разгонного блока. Телеметри¬
ческая информация со всех наземных станций передается в
ЦУП.
Приземный участок траектории начинается с момента отде¬
ления КА от разгонного блока и заканчивается проведением
первой коррекции. На этом участке вступают в управление КА
станции слежения Западного и Восточного центров ДКС.
Сеть слежения на приземном участке обеспечивает телемет¬
рический контроль состояния бортовых систем КА после выво¬
да, уточнение ошибок выведения КА на траекторию полета по
результатам траекторных измерений, расчет уставок на про¬
ведение первой коррекции, «закладку» их на борт КА и прове¬
дение коррекции, обеспечивающей перевод КА на номинальную
траекторию полета.
Дальность до КА в конце приземного участка может состав¬
лять 1 ... 3 млн км.
Сенсы связи с КА на этом участке проводятся ежедневно,
причем для повышения точности определения траектории при
траекторных измерениях кроме Западного и Восточного центров
ДКС привлекаются дополнительно одна-две станции слежения,
разнесенные относительно них по широте.
На участке перелета сеансы связи с КА проводятся один
раз в 3—5 дней. Во время этих сеансов производятся контроль
работы бортовых систем, прием информации с научных прибо¬
ров, работающих на участке перелета, и траекторные измерения.
По результатам траекторных измерений оцениваются откло¬
123
нения реальной траектории полета КА от номинальной и при
необходимости проводится вторая коррекция. Участок перелета
заканчивается третьей коррекцией.
На участке подлета сеансы связи проводятся каждый день.
Основной задачей на этом участке является уточнение траекто¬
рии по результатам измерений, проведение баллистических рас¬
четов на проведение торможения и вывод КА на рабочую траек¬
торию—посадочную, пролетную или орбиту спутника планеты.
Рабочую орбиту можно формировать в несколько этапов пу¬
тем проведения дополнительных коррекций.
Стратегия работы с КА на рабочей орбите, при посадке КА
либо на пролетной траектории оптимизируется под выполнение
научных задач.
Станции слежения при необходимости работают в течение
всей зоны видимости КА, причем наиболее важные операции,
например посадка СА на поверхность планеты, планируются в
общей зоне видимости Западного и Восточного центров ДКС.
При этом станции слежения обеспечивают управление научной
аппаратурой КА путем выдачи соответствующих команд и
прием больших потоков научной информации, которая передает¬
ся потребителям и регистрируется на магнитных регистраторах.
Время проведения научных исследований может составлять
от нескольких часов при посадке СА на поверхность планеты
до нескольких лет при исследованиях с орбиты спутника пла¬
неты.
7.3. ОСОБЕННОСТИ И ОСНОВНЫЕ ПРИНЦИПЫ
ПОСТРОЕНИЯ СТАНЦИЙ СЛЕЖЕНИЯ
Станции слежения за дальними КА должны обеспечивать
решение тех же основных задач, что и станции других космиче¬
ских систем:
поиска и слежения за КА;
приема с него телеметрической информации;
проведения траекторных измерений;
выдачи команд управления.
Но специфические особенности радиолиний дальней космиче¬
ской связи предъявляют к станциям слежения такие дополни¬
тельные требования, которые делают их совершенно уникальны¬
ми по техническим характеристикам и мало похожими на стан¬
ции других космических систем.
Основной особенностью радиолиний дальней космической
связи является необходимость осуществлять радиосвязь на ги¬
гантских расстояниях — сотен миллионов километров. Время
распространения радиосигнала на эти расстояния может до¬
стигать нескольких десятков минут (а при полете к дальним
124
планетам — и несколь.ких часов). В связи с тем, что масса и
возможности энергопитания дальних КА весьма ограничены,
мощности бортовых передатчиков и размеры бортовых антенн
невелики. Поэтому для приема информации с этих КА на Зем¬
ле приходится строить гигантские антенны с диаметром пара¬
болического зеркала до 30 ... 70 м. Стоимость создания таких
антенн очень велика. Поэтому нет возможности иметь отдельно
приемные и передающие антенны, и приходится их делать со¬
вмещенными, работающими одновременно на прием и передачу.
При этом необычно высокие требования предъявляются к точ¬
ности наведения антенны при слежении за КА (доли угловых
минут).
Чувствительность приемных устройств должна быть пре¬
дельно достижимой для современного уровня техники.
Мощность передающих устройств также должна быть доста¬
точно большой (десятки и сотни киловатт мощности в непре¬
рывном режиме).
Для улучшения отношения сигнал-шум путем уменьшения
полосы пропускания в бортовых и наземных приемных устрой¬
ствах приходится принимать меры для исключения влияния
доплеровского смещения частоты принимаемого сигнала. Из-за
большого времени распространения радиосигнала для обеспече¬
ния необходимой точности траекторных измерений необходимо
в системе эталонных частот использовать задающие генераторы
с очень высокой стабильностью частоты (водородные стандар¬
ты частоты со стабильностью 1 • 10”13... 10-14).
В связи с уже упоминавшимися жесткими ограничениями
массы и энергопотребления при создании дальних КА отсутст¬
вует возможность иметь на борту КА раздельные радиосистемы
управления КА и целевую систему сбора и передачи на Землю
научной информации по специальной радиолинии, как это де¬
лается в других космических системах (связных, навигацион¬
ных, исследования Земли и др.)* Поэтому радиолинии дальних
КА выполняются совмещенными и по ним передается как ин¬
формация, необходимая для управления КА, так и целевая на¬
учная информация, ради которой осуществляется цолет КА.
Наземная аппаратура для приема телеметрической и науч¬
ной информации является объединенной, но при этом она долж¬
на обладать предельными пороговыми характеристиками и ра¬
ботать в расширенном диапазоне информативности принимае¬
мой информации: от единиц бит в секунду до сотен килобит в
секунду. Большое время распространения сигналов в дальних
радиолиниях не позволяет использовать принятый в других кос¬
мических системах способ повышения достоверности передачи
команд путем сравнения в наземной аппаратуре переданной на
борт команды с командой, ретранслированной с борта.
125
В дальних радиолиниях необходимая достоверность передачи
команд обеспечивается повышением потенциала в командной
радиолинии путем узкополосной фильтрации поднесущих ча¬
стот команд и использованием помехоустойчивого кодирования.
Число команд, выдаваемых на борт КА за время сеанса,
очень велико (может достичь нескольких сотен). Поэтому ко¬
мандно-программная система в процессе сеанса работает пол¬
ностью в автоматическом режиме без вмешательства человека.
В остальном к станциям слежения за дальними КА предъяв¬
ляются такие же требования, что и к станциям других типов:
надежность работы; минимизация обслуживающего персонала;
простота и удобство в обслуживании и др.
В состав станции слежения входят:
антенные устройства с программным наведением;
приемные устройства;
передающие устройства;
устройства формирования и выдачи командно-программной
информации;
аппаратура траекторных измерений;
аппаратура выделения, обработки и регистрации телеметри¬
ческой информации;
аппаратура точных частот и привязки времени;
аппаратура калибровки и проверки аппаратуры станции
слежения;
система централизованного управления аппаратурой стан¬
ции слежения.
7.4. ФУНКЦИОНАЛЬНАЯ СХЕМА И ОСНОВНЫЕ
ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ СТАНЦИИ
СЛЕЖЕНИЯ
Станция слежения (рис. 7.6) оснащена приемопередающей
антенной с диаметром зеркала 70 м (РТ-70) и передающей ан¬
тенной с диаметром зеркала 32 м (РТ-32). Аппаратура станции
размещается в кабинах и пилоне с кольцевой обстройкой ан¬
тенны РТ-70 и в основном здании.
Входные приемные устройства устанавливаются в непосред¬
ственной близости от облучателей в зеркальных кабинах ан¬
тенны. Так же предельно близко к облучателю размещены
оконечные каскады передатчика СМ диапазона.
Криогенное оборудование приемных устройств расположено
на вращающейся платформе антенны.
В кольцевой обстройке пилона антенны размещаются: систе¬
ма управления, дециметровый передатчик, аппаратура электро¬
силового привода антенны, приемные устройства, синтезаторы
частоты, а также система траекторных измерений.
126
127
Рис. 7.6. Структурная схема станции слежения Западного центра ДКС
Все гетеродинные сигналы приемников и сигналы возбуж¬
дения передатчиков формируются из эталонного высокоста¬
бильного сигнала с частотой f0 = 5 МГц, генерируемого водород¬
ным стандартом частоты. Долговременная относительная не¬
стабильность частоты водородного генератора составляет
5Х10-14. Кратковременная относительная нестабильность ча¬
стоты (за 1 с) составляет 3X10-12.
Пост управления комплексом, системы приема и обработки
сигнала и телеметрической информации, система формирова¬
ния и выдачи командно-программной информации, аппаратура
интерферометрических измерений, а также аппаратура эталон¬
ных частот и единого времени расположены в основном техни¬
ческом здании. Там же размещены аппаратура планетного ра¬
диолокатора, региональный пункт управления полетом КА, а
также аппаратура предварительной оперативной обработки на¬
учной информации. Антенна РТ-32 с передающими устройства¬
ми расположена на расстоянии 5 км от РТ-70.
Состав Восточного центра ДКС аналогичен составу Запад¬
ного, но имеет некоторые отличия (рис. 7.7):
отсутствует аппаратура планетного радиолокатора;
антенна РТ-32 работает только на прием;
в качестве резервной передающей антенны может использо¬
ваться антенна с диаметром зеркала 25 м.
Радиокомплекс, расположенный в пос. Медвежьи Озера с
антенной, имеющей диаметр зеркала 64 м, предназначен толь¬
ко для приема научной информации.
Станция слежения с антенной РТ-70 работает в следующих
диапазонах длин волн:
на прием — 5, 6 (в режиме радиолокации), 18 и 32 см;
на передачу — 6 и 39 см.
Поворотно-зеркальная система (ПЗС) антенны за счет пе¬
реключения облучателей позволяет реализовать следующие
режимы работы станции:
1) совмещенный режим приема сигналов в диапазоне 5 см
и излучения в диапазоне 6 см;
2) одновременный прием сигналов в диапазонах 5 и 32 см;
3) прием сигналов в диапазоне 6 см (режим радиолока¬
ции) ;
4) излучение сигнала в диапазоне 6 см;
5) одновременный прием сигналов в диапазонах 5 и 32 см,
совмещенный с излучением сигнала в диапазоне 39 см;
6) прием сигнала в диапазоне' 18 см. ;
Эффективность радиокомплекса, определяемая выражением
5Эф/Гщ, где S9c*) — эффективная площадь антенны в данном
диапазоне; Тш — суммарная шумовая температура системы
128
ч§ ^
111
м
"^1
111
|f\
§
11
■i i
Программируемые
синтезаторы
частоты
i
I
f
1*
n
l1
§
|
I
s *■
&
*•5 5
hi
ill
«ii-
.1
\
t t
f
t
t
i
1 *
11
IP
1*1
1st
m
1H
14
iii
hi
|4
11|
fti
f?i
N ^
1
II4
§ §
IP
IP
1^1
«1
IP
i >.
ill
!i!
9—4229
129
Рис. 7.7, Структурная схема станции слежения Восточного
антенна—приемник, для различных режимов ПЗС и для угла
места антенны 90° приведена в табл. 7.1.
Как видно из табл. 7.1, совмещение режимов приема и пе¬
редачи приводит к уменьшению эффективности радиоком¬
плекса.
Таблица 7.1
Эффективность, м*/К, в диапазоне, см
Режим ПЗС
5
6
18
32
1
78
2
80
—
—
44
3
—
107
—
—
5
60
—
—
39
6
~
"
45
,
Основные радиотехнические характеристики антенн РТ-70
и РТ-32 приведены в гл. 8, а характеристики радиопередающих
устройств — в табл. 7.2.
Таблица 7.2
Антенна
Рабочий диа¬
пазон, /СМ
Р
вых
кВт
Коэффии
пользоват
но<
AM
[иент ис-
тя мощ-
:ти
ФМ
Центр
РТ-70
39
200
0,5
0,65
Евпатория
100
0,5
0,65
Уссурийск
6
100
0,5
0,65
Евпатория
50
0,5
0,65
Уссурийск
РТ-32
39
80
0,5
0,65
Евпатория
6
8
0,5
0,65
Евпатория
РТ-25
39
120
0,5
Уссурийск
В радиолинии Земля—КА при передаче командно-программ¬
ной информации и запросного сигнала траекторных измерений
используется фазовая манипуляция с индексом модуляции ±60°
при отношении мощности информационного сигнала к полной
мощности сигнала КИнф=0,65 (—1,84 дБ). Для передачи команд
может использоваться также амплитудная модуляция с
Кинф==0,5.
В радиолинии КА—Земля при передаче телеметрической ин¬
формации и ответного сигнала траекторных измерений исполь¬
зуется фазовая манипуляция с возможностью работы с одним
из двух индексов модуляции: ±60° при /СИнф=0,65 и ±75° при
Кинф=0,85 (—0,69 дБ).
130
Система телеметрической информации. Телеметрический
сигнал кодируется сверточным кодом с относительной ско¬
ростью R = 1/2 и кодовым ограничением К=6.
Система обнаружения и демодуляции радиосигнала пред¬
ставляет собой программируемый цифровой приемник, управ¬
ляемый быстродействующей специализированной ЭВМ. В этой
системе аппаратно-программными методами решаются следу¬
ющие задачи:
поиск сигнала и его обнаружение в диапазоне ±60 кГц при
энергетическом потенциале радиолинии #=10 Гц;
слежение за несущей и измерение доплеровского сдвига ча¬
стоты (шумовая полоса системы ФАП регулируется автомати¬
чески в пределах 1 ... 100 Гц, уменьшаясь при понижении
уровня сигнала);
демодуляция фазомодулированого радиосигнала и выделе¬
ние информационных сигналов;
измерение энергетического потенциала радиолинии с точ¬
ностью ±0,5 дБ.
Далее выделенная информация обрабатывается в системе
обработки и регистрации телеметрической информации. Эта
система выполняет декодирование информации по алгоритму
Витерби при длине кодового ограничения сверточного кода
К=6 и относительной скорости R= 1/2. При этом достовер¬
ность передачи информации составляет 1ХЮ-4 на бит при
£/#0=4 дБ на бит.
Предусмотрены следующие скорости приема телеметриче¬
ской информации, передаваемой методом КИМ—СК (сверточ¬
ный код): 512, 1024, 2048, 4096, 8192, 16 384, 32 868, 65 536, а
также 3072 и 100 000 бит/с. Без кодирования может прини¬
маться информация со скоростями 1, 4, 16, 64, 128 бит/с.
Система в реальном времени выделяет из принятого пото¬
ка информации сигналы кадровой и словной синхронизации,
метки бортового времени, распределяет информацию по кана¬
лам, регистрирует ее на АЦПУ и цифровых магнитофонах, а
также передает потребителям и в каналы связи в последова¬
тельном или параллельном коде с привязкой ко времени с точ¬
ностью ±1 мс.
Система траекторных измерений. Радиальная скорость КА
измеряется доплеровским методом по несущей частоте в за¬
просном и беззапросном режимах.
Для повышения отношения сигнал-шум в бортовом и назем¬
ном приемниках (путем сужения полосы пропускания) при
формировании несущей частоты наземного передатчика и гете¬
родинного сигнала наземного приемника программируемым
синтезатором частоты производится сдвиг частот на прогнози¬
руемое значение доплеровской частоты.
7*
131
Для измерения дальности используется фазовый метод, ос¬
нованный на измерении времени распространения по прираще¬
нию фазы дальномерного сигнала, модулирующего несущую ча¬
стоту наземного передатчика и ретранслированного бортовым
приемоответчиком. При этом, поскольку положение КА
дальнего космоса априори достаточно хорошо известно, произ¬
водится только уточнение априорной оценки полной дальности.
Аппаратура станции слежения позволяет обрабатывать сиг¬
налы траекторных измерений как в СМ, так и в ДМ диапазо¬
нах волн, а также одновременно в обоих диапазонах. При
этом уточняются результаты измерений. При работе в ДМ
диапазоне в качестве многошкального дальномерного сигнала
(см. гл. 5) используется сигнал частоты 30 кГц, модулирован¬
ный по фазе поочередно пятью частотами разрешения неодно¬
значности, из которых каждая последующая в 4 раза меньше
предыдущей. В СМ диапазоне точная частота запроса равна
300 кГц, а в качестве дальномерного сигнала может исполь¬
зоваться также псевдослучайная последовательность с тактовой
частотой 1200 кГц и длиной кода 2047 элементов.
Таблица 7.3
Рабочая длина
волны, см
Частота за¬
проса дально¬
сти, кГц
Среднеквадратическое
отклонение
Пороговый потенциал, Гц
по дально¬
сти, м
по скорости,
мм/с
по дальности
по скорости
32
30
100
2
50
25
5
300
20
0,5
50
25
5
1200
5
0,5
500
25
В табл. 7.3 приведены точностные и пороговые характери¬
стики станций слежения в режиме траекторных измерений.
Система командно-программной информации. Система КПП
формирует и выдает на борт КА через наземные передающие
устройства командно-программную информацию в двух видах:
функциональных команд управления (ФК), поступающих непо¬
средственно на исполнительные органы КА, и числовых команд
(ЧК), несущих информацию о тех или иных операциях, зада¬
ваемых в систему управления КА. Функциональные команды
могут содержать 6 и 9 разрядов. Числовые команды — 36 раз¬
рядов, при этом длительность передачи одного символа может
составлять 0,02 с («быстрые команды») либо 3 с («медленные
команды»).
Программа сеанса связи с КА, разрабатываемая в ЦУП, в
виде последовательности ФК и ЧК с привязкой по времени
(точность 0,1 с) по каналам связи повышенной достоверности
автоматически закладывается в память системы КПП (объем
132
памяти на 6 тыс. девятиразрядных слов) и в процессе сеанса
автоматически подается на модулятор передатчика. При этом в
ЦУП выполняется автоматический контроль выданных команд.
7.5. КОНТРОЛЬ ТЕХНИЧЕСКИХ ХАРАКТЕРИСТИК
СТАНЦИИ СЛЕЖЕНИЯ
Как видно из сказанного ранее, станция слежения представ¬
ляет собой весьма сложную систему. Обеспечение ее надежной
работы требует принятия ряда специальных организационных и
технических мер, одна из которых — проведение контрольных
проверок аппаратуры станции.
Основной задачей этих проверок является контроль сохран¬
ности основных технических характеристик станции и правиль¬
ности функционирования ее аппаратуры.
Контрольные проверки можно разделить на периодические
и ежедневные. К периодическим относятся проверки основных
радиотехнических характеристик станции, таких как площадь
антенн, шумовые характеристики антенн и приемных устройств,
мощности передающих устройств, пороговые характеристики и
ряд других параметров. По периодичности проведения они мо¬
гут относиться к годовым, полугодовым, ежеквартальным или
ежемесячным проверкам.
При периодических проверках используются как стандарт¬
ные измерительные приборы, так и специально разработанные
(например, для снятия пороговых характеристик). При этом
выбор используемых приборов должен обеспечить высокую
точность измерений' (0,5 ... 1 дБ).
Ежедневные проверки позволяют контролировать правиль¬
ность функционирования аппаратуры в основных режимах с по¬
мощью контрольной аппаратуры, имитирующей сигналы КА
перед началом сеанса связи.
Принципы и порядок проведения контрольных проверок за¬
кладываются при разработке станции слежения.
Проверкам на правильность функционирования станции сле¬
жения подвергается в следующих режимах:
прием телеметрической информации;
прием траекторной информации;
выдача команд управления;
прием сигналов от радиоисточников с известной интенсив¬
ностью излучения.
В режиме приема телеметрической информации с выхода
контрольной аппаратуры на вход станции поступает сигнал на
одной из рабочих частот, по структуре идентичный телеметри¬
ческой информации с КА, при мощности сигнала, равной ожи¬
даемой в сеансе связи.
133
Правильность функционирования аппаратуры оценивается
по числу сбоев принимаемой информации. Норма определяется
требованиями к достоверности принимаемой информации и мо¬
жет составлять 10-4, 10-5 и др.
Проверка в режиме траекторных измерений производится с
помощью ретранслятора, на вход которого поступает запросный
сигнал с передатчика, а с выхода сигнал, частота которого пре¬
образована в частоту приема, подается на приемные устройства
и далее на аппаратуру траекторных измерений. Измеренная
при этом задержка сигнала дальности вычитается из результа¬
тов измерения дальности до КА.
Правильность -функционирования станции оценивается по
флуктуациям отсчетов в каналах скорости и дальности.
Для проверки станции в режиме выдачи команд сравни¬
ваются сигналы командной информации, поступающей на мо¬
дулятор, и полученный после демодуляции выходного сигнала
передатчика. Это сравнение выполняется в аппаратуре форми¬
рования и выдачи команд.
Проверки станции на правильность функционирования поз¬
воляют косвенно контролировать основные технические харак¬
теристики станции слежения. При этом результаты контроля
получаются оперативно, но погрешности оценок параметров
оказываются выше, чем при периодических проверках.
Прием сигналов от радиоисточников позволяет оперативно
оценивать с достаточной достоверностью эффективную площадь
антенны и ее шумовые характеристики, а также правильность
работы системы наведения антенны.
7.6. УПРАВЛЕНИЕ СТАНЦИЕЙ СЛЕЖЕНИЯ
В ТИПОВОМ СЕАНСЕ СВЯЗИ
Управление аппаратурой станции слежения при подготовке
и проведении сеанса связи производится с поста управления.
Пост управления (рис. 7.8) оборудован необходимой аппарату¬
рой наглядного отображения состояния аппаратуры станции
слежения, ее конфигурации, используемой в данном сеансе, ос¬
новных характеристик принимаемого и передаваемого сигналов
и хода проводимого сеанса связи.
Пост управления оборудован также средствами воздействия
на аппаратуру станции, позволяющими оператору осуществить
выбор конфигурации аппаратуры станции, необходимой для
проведения данного сеанса связи, и средствами связи операто¬
ра поста управления, ведущего сеанс, с операторами станции
слежения, контролирующими работу аппаратуры на других по¬
стах, и с операторами группы управления, находящимися в
ЦУП.
134
раСС
УС
Аппарату
раСС
IУС
расе
Ж
I УС
г
Шала о&лела
аярорлааиеи
зг~^
ЭВМ оСМеяа
иярор/r. яалгр.
а
УС
ЭВМ колллеяеа атаСражеяия
Сиеллей
Графический
Сисллей
РаВиилгехличеслие
среСе/лСа олгоСражелая
СС
Алларал7л-
расе
УС\
Алларатр
иг^раСС
г—— Лрльт
хяааиатрра рлраСлелия
рлраСлеяия 9
Рис. 7.8. Структурная схема поста управления станции слежения
Аппаратура станции слежения построена таким образом, что
основные операции выполняются в процессе сеанса связи в ав¬
томатическом режиме, без вмешательства человека.
В автоматическом режиме производятся: наведение антенны
на КА по заранее рассчитанным программам, работа синтеза¬
торов, выдающих прогнозируемые значения доплеровской ча¬
стоты в каналы передачи и приема сигналов, выдача команд
управления в заданные моменты времени, поиск принимаемого
сигнала по частоте, «захват» сигнала, демодуляция, выделение
и обработка телеметрической информации, а также траекторные
измерения.
Задачами оператора поста управления являются подготовка
аппаратуры станции слежения к сеансу связи, а также проведе¬
ние его. Во время сеанса связи оператор должен контролиро¬
вать работу аппаратуры и при возникновении нештатных ситуа¬
ций в наземной или бортовой аппаратуре принимать меры к
выходу из них путем замены неисправной аппаратуры либо
изменения режимов работы.
Для принятия ответственных решений о выходе из нештат¬
ных ситуаций оператор должен непрерывно получать от средств
отображения достоверную информацию о состоянии аппарату¬
ры в удобной для восприятия форме.
Средства отображения можно разделить на отображающие
радиотехнические параметры передаваемого и принимаемого
сигналов (анализаторы спектра сигналов, осциллографы, пред¬
ставляющие огибающие телеметрического и командного сигна¬
лов) и фиксирующие в графическом или цифровом виде на
135
дисплеях информацию о конфигурации комплекса аппаратуры,
участвующей в сеансе связи, ее работоспособности, основных
технических параметрах (уровень принимаемого сигнала, мощ¬
ность передатчика и др.)- Эта информация собирается, обраба¬
тывается и представляется на дисплеях с помощью автомати¬
зированной системы сбора информации, контроля и управления.
Встроенные в аппаратуру устройства связи (УС) выполняют
обмен информацией контроля и управления между аппаратурой
станции слежения и специализированной малой ЭВМ, которая
после обработки этой информации отображает ее на дисплеях.
Эта же ЭВМ преобразует команды с клавиатуры пульта поста
управления в управляющие сигналы, подаваемые на аппарату¬
ру станции.
Порядок проведения типового сеанса связи. Программа по¬
лета КА разрабатывается задолго до его пуска. При этом в ней
предусматриваются все операции с КА, обеспечивающие выпол¬
нение им целевой задачи: исследования поверхности планеты,
встреча с кометой и ее исследование и др.
Все определяемые программой полета сеансы связи делятся
на типовые, многократно повторяемые в процессе полета КА,
и специальные, во время которых решаются динамические за¬
дачи полета, такие как коррекции, выход на орбиту вокруг пла¬
неты, посадка на поверхность и др. При проведении типового
сеанса связи (рис. 7.9) решаются основные задачи управления
полетом КА: определение состояния бортовой аппаратуры; оп¬
ределение траектории движения КА и закладка на борт про¬
граммы работы бортовых систем и научной аппаратуры.
На основе программы полета разрабатываются месячные и
Часть сеанса, проводимая
Восточным центром ДНС
Часть сеанса, прододамая
Западным центром Дне
Команды на Внл/очение дортодои
аппаратуры а ВыВдр режима радеть/
Занладна программ на
автоматическую работу
дортоВых систем между
сеансами сВязи
Работа ее _
на aepeffavp \
„ _ _ Время распространения^'
гаоо та ее радиосигнала от ^ L
на ярче» Iтми | РКО\сс*0м * \Гпи\вт ни \ нм |г/гмIгко\
U-L
Зона Видимости Восточного центра Дне
Зона Видимости Западного центра Дне
-I 1 L_
-I I L_
10 11
12 13 К /3 fS
17 18 19 20 t
НосноВсное бремя
Рис. 7.9. Структура типового сеанса связи
136
суточные программы работы с КА. Суточная программа посту-
пает на станцию слежения не позже чем за сутки до начала
первого сеанса связи суточной программы.
Кроме того, на станцию слежения из баллистического цент¬
ра поступают так называемые «начальные условия» — данные,
характеризующие траекторию полета КА, на основании которых
на вычислительном центре рассчитываются целеуказания для
антенн и доплеровских синтезаторов частоты на предстоящие
сутки полета.
На основании суточной программы работы оператор поста
управления за 2 ч до начала сеанса связи проверяет работо¬
способность аппаратуры станции (предсеансные проверки), а
затем формирует конфигурацию комплекса, необходимую для
выполнения работ с КА, предусмотренных программной сеанса.
Команды управления, подлежащие выдаче на борт КА, с
данными о времени их выдачи заранее передаются из ЦУП и
записываются в память системы командно-программной ин¬
формации.
За 15 мин до начала сеанса антенны выводятся на програм¬
му слежения за КА. В это же время начинается отработка
программы доплеровских синтезаторов частоты.
За 1 мин до начала сеанса излучается запросный сигнал
передатчика станции слежения.
Сеанс связи начинается с выдачи команд управления на
включение бортового передатчика.
Через интервал времени, необходимый для прохождения ра¬
диосигналом расстояния от Земли до КА и обратно, на назем¬
ные антенны приходит ответный сигнал бортового передатчика
КА, производится поиск сигнала по частоте, «захват» его систе¬
мой слежения и выделение информации. При этом продолжает¬
ся опережающая выдача команд на борт КА в соответствии с
программой сеанса.
Как показано на рис. 7.9, сеанс начинается с приема теле¬
метрической информации, которая передается в ЦУП для ана¬
лиза специалистами Группы управления. Если анализ ТМИ
подтверждает правильность функционирования бортовой аппа¬
ратуры, то сеанс продолжается в соответствии с программой.
После окончания приема ТМИ станция слежения переходит в
режим траекторных измерений, результаты которых в реальном
времени передаются в баллистический центр. После траектор¬
ных измерений начинает осуществляться целевая задача сеанса
связи — прием научной информации, которая регистрируется на
Магнитных лентах, а также передается на терминалы оператив¬
ного контроля научной информации.
Научная информация передается с КА в двух режимах:
137
с приборов, работающих во время сеанса, — режим непо¬
средственной передачи (режим НП);
с бортового запоминающего устройства, записанная между
сеансами связи (режим ЗУ).
Одновременно с приемом научной информации на борт КА
передается программа работы научных приборов на время
между сеансами связи. После окончания приема научной ин¬
формации вновь передается телеметрическая информация, по
которой определяется правильность приема на борту програм¬
мы работы научных приборов. Затем выдачей команд на вы¬
ключение бортового передатчика сеанс связи заканчивается.
7.7. ДОПОЛНИТЕЛЬНЫЕ ЗАДАЧИ, РЕШАЕМЫЕ
СТАНЦИЯМИ СЛЕЖЕНИЯ
Появление в нашей стране таких уникальных инструментов,
как антенные системы с диаметром зеркала 70 м, позволило
кроме решения основной задачи — управления дальними КА
решить методами радиоастрономии большой объем научных за¬
дач. На базе Евпаторийского радиотелескопа РТ-70 с мощными
радиопередающими устройствами создан планетный радиолока¬
тор, с помощью которого регулярно осуществляется программа
радиолокации Марса, Венеры, Меркурия (см. гл. 11) [36—38].
В результате исследования распространения радиоволн от
искусственных (передатчик КА) и естественных (квазары и
др.) радиоисточников были получены новые данные о короне
Солнца, солнечном ветре и межпланетной плазме [39—41].
Методами радиопросвечивания исследовались атмосферы
Марса и Венеры, а также плазменная оболочка кометы Галлея
[42—44].
Совместное использование отечественного и международных
интерферометров для слежения за аэростатными зондами, дрей¬
фовавшими в атмосфере Венеры, позволило определить скоро¬
сти ветра в различных районах Венеры [47, 48].
По результатам ретрансляционных доплеровских измерений
были получены разрезы атмосферы Венеры и Марса в части
плотности, давления, температуры, скорости ветра и турбулент¬
ности [49—51].
С помощью планетного радиолокатора и способом бистати-
ческой радиолокации (сравнение прямого и отраженного от по¬
верхности радиолуча) изучались характеристики поверхности
планет [52—54].
В ближайшем будущем наиболее перспективным направле¬
нием научных исследований, проводимых средствами станций
слежения, использующих интерферометрические методы, явля¬
ется участие в Российских и международных программах коор-
138
динатно-временного обеспечения, контроля за движением мате¬
риков, полюсов Земли и других фундаментальных и приклад¬
ных задач геодезии, геодинамики и геофизики.
Глава 8
НАЗЕМНЫЕ АНТЕННЫЕ СИСТЕМЫ
Возникновение и развитие космических исследований способствовали ста¬
новлению особого вида антенной техники — наземных и бортовых антенн для
обеспечения радиосвязи при околоземных и дальних космических полетах.
Хотя общие принципы направленного излучения и приема радиоволн
подчиняются известным физическим законам, особенности работы антенн в
космических системах управления, связи и навигации наложили отпечаток на
их облик и конструкцию, что связано с условиями их работы, характером
решаемых ими задач. Соответственно сформировались семейства бортовых и
наземных антенн для космической связи.
В настоящей главе после краткого рассмотрения антенн предыдущих по¬
колений основное внимание уделено особенностям уникальной антенны
PT-70 и оценки возможности повышения точности ее программного наведе¬
ния без принципиальных изменений конструкции.
8.1. ЗАДАЧИ И ОСНОВНЫЕ ОСОБЕННОСТИ
АНТЕННОГО КОМПЛЕКСА
Главной задачей конструирования бортовых антенн является
уменьшение их габаритов и массы при сохранении стабильности
радиотехнических параметров в условиях воздействия космиче¬
ской среды, солнечной радиации, невесомости и динамических
нагрузок при маневрировании аппарата.
Для наземных антенн космической связи наряду с обычны¬
ми требованиями стабильности радиотехнических параметров в
условиях климатических и гравитационных нагрузок на поверх¬
ности Земли можно сформулировать несколько основных задач,
решение которых в одной антенне было и остается главным
стимулом развития этого вида техники:
необходимость обзора всей небесной полусферы с точно¬
стью наведения не хуже 20 % угловой ширины радиолуча;
предельная чувствительность при приеме и максимальная
Мощность при передаче с целью минимизации энергетических
характеристик бортовой радиоаппаратуры и ее массы;
многофункциональность, т. е. возможность работы в различ¬
ных радиолиниях командно-измерительных комплексов вплоть
До радиолокации планет Солнечной системы, приема телеметри¬
ческой информации с КА. Комплектование этих функций в
139
одной антенне связано с оптимизацией ее конструкции по кри¬
терию выполнения требований важнейшей из решаемых задач;
многочастотность, т. е. возможность одновременной или по¬
очередной работы в различных диапазонах волн, связанная с
обеспечением многофункциональности и использования антенны
для связи с различными КА.
Последнее обстоятельство принципиально изменяет эконо¬
мические критерии в оценке допустимой стоимости наземных
антенн как части центра управления ансамблем КА для различ¬
ных программ исследования космоса. В США, например, таким
критерием является равенство затрат на космический и назем¬
ный сегменты долгосрочных программ исследований. Таким
образом, чем больше КА способна обслуживать наземная ан¬
тенна, тем большая цена является экономически целесообразной
для придания ей свойств многофункциональности и многоча-
стотности. Естественно, что реализация этих свойств опреде¬
ляется уровнем технического прогресса, достигнутого в процессе
развития центров космической связи и последовательного совер¬
шенствования их антенных устройств.
История отечественных Центров дальней космической связи началась в
1960 г. с создания раздельных приемных и передающих антенн АДУ-1000 в
Крыму в г. Евпатории. Эти антенны представляют собой решетки из восьми
16-метровых параболоидов на общем поворотном устройстве со сложением
сигналов ДМ диапазона на волноводных тройниках. Построенные в рекорд¬
ный срок — за один год, эти антенны обеспечивали все программы исследо¬
вания дальнего космоса до конца 70-х гг. На базе этих антенн был создан
первый отечественный планетный локатор ДМ диапазона волн и проведены
радиолокационные исследования Марса и Венеры.
В 70-е гг. формируется второй центр космической связи на Дальнем Во¬
стоке в районе г. Уссурийска и оба центра — Западный и Восточный — осна¬
щаются 32-метровыми антеннами П-400, обеспечивающими совмещенную ра¬
боту в ДМ и СМ диапазонах волн и, наконец, в начале 80-х гг. оба центра
оснащаются многофункциональной и многочастотной антенной РТ-70 с диа¬
метром зеркала 70 м, планетным радиолокатором СМ диапазона волн и по¬
тенциальными возможностями работы во всем спектре ДМ и СМ волн вплоть
до 0,8 см.
8.2. АНТЕННЫ АДУ-1000
Антенна АДУ-1000 работает в ДМ диапазоне волн (А,=
= 30... 40 см) и представляет собой решетку из восьми пара¬
болических зеркал, расположенных в два ряда по четыре зер¬
кала (рис. 8.1).
Фидерный тракт выполнен на базе волноводов 292X146 мм.
Сигналы суммируются сначала от каждой вертикальной пары
зеркал, затем от двух соседних пар, объединенных в четверку,
и, наконец, от двух четверок, образующих восьмерку. Эффектив¬
но
Щй уы ж*?‘>т*'?‘ -:Ш * тъж
'./... л У. Уй; УУ УУ~ с-4 ' *//^ЖУ/%.///4Р# у
Рис. 8.1. Антенна АДУ-1000
ная площадь антенны 900 м2, шумовая температура при зенит¬
ном положении антенны 25 К. Ширина ДН антенны на прием¬
ной частоте в горизонтальной плоскости 16 угл. мин, в верти¬
кальной 36 угл. мин. На передающей частоте ширины ДН
соответственно равны 19 и 40 угл. мин. Поступающая от пере¬
датчика мощность 100 кВт в режиме непрерывного излучения.
Антенна имеет программное наведение с точностью 1 угл. мин.
В 1961 г. передающая антенна была модернизирована для
обеспечения работы планетного радиолокатора. В этом же году
осуществлена первая локация Марса. В 1962 г. были модерни¬
зированы и приемные антенны для обеспечения одновременного
приема в ДМ и СМ (к=8 см) диапазонах волн. Для этого зер¬
кальная система элемента решетки выполняется по двухзер¬
кальной схеме Кассегрена и устанавливается двухчастотный
облучатель (см. рис. 8.1). Фидерный тракт СМ диапазона вы¬
полнен на базе круглых волноводов 0 70 и 120 мм. После мо¬
дернизации эффективная площадь антенны в ДМ диапазоне
волн составила 650 м2, в СМ 450 м2. В этом состоянии антен¬
ны эксплуатируются и в настоящее время.
8.3. АНТЕННЫ ДАЛЬНЕЙ СВЯЗИ
С ДИАМЕТРОМ ЗЕРКАЛА 32 м
В конце 60-х и начале 70-х гг. благодаря развитию методов
формостабилизации конструкции зеркальных систем, разработке
специальных оптико-механических методов юстировки и контро-
141
Рис. 8.2. Антенна П-400
ля поверхности были созданы зеркальные системы диаметром
32 м (РТ-32, рис. 8.2).
На базе типовой конструкции зеркала РТ-32 созданы антен¬
ны дальней космической связи П-400 (приемная) и П-400П
(передающая), обеспечивающие одновременную работу в ДМ
и СМ диапазонах волн. Обе антенны выполнены по двухзер¬
кальной схеме с параболическим профилем рефлектора. В со¬
став каждой антенны входят: зеркало диаметром 32 м; контр¬
рефлектор; облучающая система; волноводные тракты; опорно¬
поворотное устройство; электросиловой привод; датчики углов;
аппаратура наведения; кабины для размещения приемопередаю¬
щей аппаратуры.
Конструкция зеркала состоит из опорного основания, карка¬
са и отражательных щитов, устанавливаемых на регулировоч-
142
НЫХ опорах. Каркас и основание выполнены из стали с точно¬
стью ±10 мм, а щиты из алюминиевых сплавов.
После регулировки положения щитов получена среднеквад¬
ратическая точность формирования отражающей поверхности
(СКО) 0,5 мм. От воздействия гравитационных и ветровых на¬
грузок СКО увеличивается до 1,3 мм, что позволяет использо¬
вать антенну на волнах до 2 см.
Облучающая система антенны П-400 содержит пирамидаль¬
ный рупор большой электрической длины и возбудители ДМ и
СМ диапазонов. В СМ диапазоне расфазировка поля в раскры-
ве превышает 2я, в результате чего ширина ДН постоянна в
широком диапазоне частот. Это позволяет обеспечить работу
от Я=30 см до Х = 2 см при смене возбудителя СМ диапазона.
В антенне П-400П применен коаксиально-волноводный облу¬
чатель, центральный волновод которого является излучателем
СМ диапазона, а наружняя труба — ДМ.
В антенне П-400 используется гиперболический контррефлек¬
тор диаметром 4,5 м (~15Х), а в антенне П-400П — плоский
контррефлектор малых электрических размеров (5... 6 Я), раз¬
мещенный в ближнем поле облучателя на расстоянии, соизмери¬
мом с длиной волны, что позволяет при сохранении эффектив¬
ного использования поверхности зеркала значительно умень¬
шить деформации зеркальной системы.
Канализация энергии от входа облучателя до приемных
устройств в обеих антеннах осуществляется коаксиальным трак¬
том в ДМ диапазоне и волноводным в СМ диапазоне. До пе¬
редающих устройств энергия канализируется волноводами в СМ
и ДМ диапазонах.
Вращение антенны обеспечивается опорно-поворотным уст¬
ройством (ОПУ) башенного типа с большой базой между под¬
шипниками вертикальной оси. Опорно-поворотное устройство
азимутально-угломестного типа с пересекающимися взаимно
перпендикулярными осями позволяет наводить антенну в верти¬
кальной (угломестной) плоскости в пределах — 2 ... +105° и в
горизонтальной (азимутальной) плоскости ±330°. Неподвиж¬
ным опорным основанием ОПУ является башня-фундамент —
железобетонное здание в виде полой усеченной двенадцати¬
гранной пирамиды, фундаментом которой служит монолитная
плита, обеспечивающая устойчивость всей антенной системы.
Внутри башни-фундамента располагаются механизмы и элект-
рорадиоборудование. Для размещения радиоаппаратуры допол¬
нительно предусмотрены кабины на вращающейся части ОПУ
в непосредственной близости от зеркала.
Зеркальная система вращается относительно исполнитель¬
ных осей с помощью азимутальных и угломестных электромеха¬
нических приводов с плавно изменяющимися угловыми скоро¬
143
стями. Приводы наведения рассчитаны на работу при скоро¬
стях ветра до 25 м/с. Управление электроприводами осущест¬
вляется по 2-канальной схеме; каждой кинематической цепи
привода соответствует свой канал управления.
Электрооборудование работает от сети трехфазного пере¬
менного тока напряжением 380 В и частотой 50 Гц.
Система наведения антенны может функционировать в ре¬
жимах:
полуавтоматического управления по углу;
полуавтоматического управления по скорости;
программного управления.
Включение соответствующего режима осуществляется с
пульта управления.
В процессе настройки и эксплуатации антенн П-400 и
П-400П проведено тщательное исследование всех параметров с
помощью оптических, радиотехнических и радиоастрономических
методов, которые подтвердили достаточно высокую эффектив¬
ность параметров и их стабильность во времени.
Основные характеристики антенны П-400 приведены в табл.
8.1, а антенные П-400П — в табл. 8.2.
При создании антенных систем П-400 и П-400П предусмат¬
ривались потенциальные возможности их дальнейшего совер¬
шенствования для обеспечения работы в коротковолновой части
СМ диапазона.
В настоящее время антенны П-400 и П-400П модернизируют¬
ся для расширения их функциональных возможностей. Разраба-
Таблица 8.1
Параметр
Значение в
i диапазоне
ДМ
СМ
Эффективная площадь на входе при¬
емника, м2
Шумовая температура, К
422
407
19,5
30
Поляризация
Круговая правая
Круговая левая
Ширина диаграммы направленности
на уровне половинной мощности,
угл. мин
38
5,8
Сектор вращения, град:
±330
±330
по азимуту
по углу места
—2... +105
—2 ... + 105
Наведение на КА
Программное
СКО наведения, угл. мин
1,5
1,5
Максимальная скорость слежения в
диапазоне скоростей «быстро», град/с
2
2
Допустимая рабочая скорость вет¬
25
25
ра, м/с
Допустимая температура, °С
±50
±50
144
Таблица 8.2
Параметр
Значение в
диапазоне
ДМ
СМ
Эффективная площадь на входе об¬
лучателя, м2:
раздельные ДМ и СМ диапазоны
560
415
совмещенные ДМ и СМ диапазоны
405
410
Поляризация
Круговая
правая
Ширина диаграммы направленности
на уровне половинной мощности,
мин
40
6,5
Допустимый уровень мощности, кВт
200
20
Ошибка наведения, мин
1,5
1,5
Наведение на КА
Программное
Сектор вращения, уел. град:
по азимуту
±330
±330
по углу места
—2... +105
—2... +105
Максимальная скорость слежения в
диапазоне скоростей «медленно»,
угл. мин/с
2
2
Допустимая рабочая скорость ветра,
м/с
25
25
Допустимая температура, °С
±50
±50
тываются многофункциональные облучающие системы и приво¬
ды управления на новой элементной базе. После модернизации
антенна П-400 будет обеспечивать одновременную работу на
прием и передачу в диапазонах К=2; 3,5; 4; 5; 6 см, а антен¬
на П-400П — в диапазонах Я=5; 6; 32; 39 см.
Проведенные эксперименты подтвердили возможность рабо¬
ты антенн на волнах до К=2 см при удовлетворительных зна¬
чениях эффективной площади и шумовой температуры.
8.4. ПРИЕМОПЕРЕДАЮЩАЯ АНТЕННА РТ-70
В 1965 г. в СССР было начато проектирование приемопере¬
дающей 70-метровой зеркальной антенны РТ-70 с модифициро¬
ванными профилями зеркал. Потребовалось еще 8 лет на экспе¬
риментальные исследования, разработку конструкторской доку¬
ментации, техническую и финансовую экспертизы для обосно¬
вания технического риска реализации идеи в таком крупном
проекте. В 1973 г. было открыто финансирование и усилия мно¬
гочисленной кооперации промышленных и строительно-монтаж¬
ных предприятий увенчались успешным вводом в действие ра¬
диотелескопа РТ-70 в г. Евпатория в 1978 г. (рис. 8.3).
Для обеспечения различных исследовательских и полетных
программ предусматривалась смена аппаратных кабин и облу¬
чателей. Однако трудности, выявленные при практическом осу-
10—4229
145
Рис. 8.3. Антенна РТ-70
ществлении этих операций, заставили отказаться от этой кон¬
цепции. В 1982 г. была проведена модернизация, после которой
оставлялась одна аппаратная кабина с шестью стационарно
установленными облучателями, а режимы работы коммутирова¬
лись специальной поворотной зеркальной системой (ПЗС),
представляющей собой лучеводный преобразователь сфериче¬
ских волн. В частности, это позволило разделить приемные и
передающие каналы планетного радиолокатора, повысив его
эффективность и надежность.
Проектирование РТ-70 поставило перед разработчиками ра¬
диотехнической части и конструкторами ряд задач, которые ра¬
нее в практике создания крупных антенных систем не решались:
обеспечение эффективной работы зеркальной системы с
модифицированными формами зеркал в СМ диапазоне волн в
условиях гравитационных деформаций;
146
работа в приемопередающем режиме на различных частотах
ДМ и СМ диапазонов волн с оперативной сменой режимов ра¬
боты для обеспечения различных полетных программ;
создание методов и аппаратуры для измерения в процессе
монтажа и ввода в эксплуатацию изменения формы зеркаль¬
ных поверхностей и их деформаций под воздействием перемен¬
ных гравитационных нагрузок и тепловых полей;
разработка электрических силовых приводов (ЭСП) основ¬
ного зеркала и контррефлектора и системы управления ими,
обеспечивающих заданные точность и скорость наведения ДН
антенны;
разработка цифровых датчиков углов наведения и аппара¬
туры для измерения деформаций ОПУ и зеркальной системы
антенны;
разработка методик, выбор и отработка аппаратурных
средств (радиометры, комплекты геодезических приборов и
т. д.) для обеспечения геодезических, астрономических и радио¬
астрономических юстировок положения ДН антенны, для изме¬
рения ее геометрических параметров в статике и динамике и
привязки цифровых датчиков углового положения осей к мест¬
ным геодезическим координатам;
разработка программно-математического обеспечения для
всех заданных режимов наведения антенны и для обработки
данных при котировочных работах различного назначения.
8.4.1. ЗЕРКАЛЬНАЯ СИСТЕМА И СВЧ ПАРАМЕТРЫ
Расчет геометрии зеркальной системы. Ход текущего луча в
двухзеркальной системе показан на рис. 8.4. Форма образующей
контррефлектора описывается уравнением
t
радиус-вектор точки на обра¬
зующей КР; т — длина опти¬
ческого пути от облучателя
До раскрыва основного зер-
грена; ?=tg0/2; r=r(0) — у
с начальным условием г0=
===/’(0), где знак минус соот¬
ветствует системам Грегори,
знак плюс — системам Кассе-
= [(т,—2г) д± х]/(т + хд) (8.1)
Рис. 8.4. Осесимметричная двухзер¬
кальная антенна
10*
147
т
PM
Рис. 8.5. Главный лепесток ДН об¬
лучателя
Рис. 8.6. Амплитудное распределе¬
ние в раскрыве антенны
кала; x—x(Q)—радиальная координата точки в его раскрыве.
Зависимость x=x(0) определялась из решения уравнения
0 X
энергетического баланса $ f(Q)sinQdQ~ I P(x)xdx, где /(0),
о о
Р(х) — соответственно ДН облучателя по мощности и распреде¬
ление энергии в раскрыве основного зеркала (рис. 8.5, 8.6).
Форма образующей основного зеркала описывается уравне¬
нием
dy
dx
■■ [{т — 2у) q± х]/(щ + xq)
(8.2)
с начальным условием уо=у(0), где у=у{х) —ордината ос¬
новного зеркала, q=q(х) определяется из уравнения энергети¬
ческого баланса.
Величины, характеризующие деформации зеркальной систе¬
мы, показаны на рис. 8.7, 8.8, где система координат х, z свя-
Рис. 8.7* Компоненты деформаций основного зеркала в точке с координата¬
ми р, у
148
зана с представлением деформации основного зеркала парамет¬
рами dXy dZy ф аппроксимирующего параболоида.
При проектировании зеркальной системы учитывалось, что
упругие деформации положения и формы отражающих поверх¬
ностей должны подчиняться условиям
w+ (1 +cos(3) +u+sin(3+(b —az) X
X(l+cos6)+Ml— cos p)=0, (8.3)
or-(l+cos f})+w_sin p—a*sin 0+
“I-bx(sin 0—sin [}) -{-cpj/’sin(0-j-[J) -f-
+rq(sin 0—sin [})]—0m*=O, (8.4)
где w+, w~, ц+, иг — симметричные и кососимметричные состав¬
ляющие деформации поверхности основного зеркала; azt ах, bZ9
Ьх — соответственно симметричные и кососимметричные дефор¬
мации положения облучателя и контррефлектора; <р — угол по¬
ворота контррефлектор^ вокруг его вершины; 0т — угловое сме¬
щение максимума ДН;; (} — угол между осью симметрии зер¬
кальной системы и отраженным от контррефлектора лучом.
Уравнения (8.3), (8.4)—условия согласованности деформа¬
ций положения и формы элементов зеркальной системы. Их;
можно рассматривать как требования, которым должны удов¬
летворять срдтавляющие деформации поверхности основного
зеркала при его проектировании.
149
Форма зеркал поворотной зеркальной системы (рис. 8.9)
рассчитывалась по уравнению
Щ- /r = (x„ s)/[l-(e,s)], (8.5)
где e^i sin cos % + j sin 0! sin + kcos 0! — единичный вектор
луча, выходящего из облучателя; s = e2 — wfi;
<*>==— h0 = + e2 (m — rj); e2 = i sin 02 cos ф2 + j sin 02 sin ф2+
+'k со s 02; В = to2/2 (we2) — вспомогательные величины, входя¬
щие в (8.5).
При решении (8.5) полагалось 02=О,5 0ь ф2=фь
Оптическая схема. Основные требования. Геометрические
размеры зеркальной системы показаны на рис. 8.10. Формы зер¬
кал модифицированы таким образом, что в раскрыве антенны
формируются однородное фазовое и близкое к равномерному
амплитудное распределения. В геометрооптическом приближе¬
нии одно и то же амплитудное распределение может быть реа¬
лизовано при построении антенны по схемам Грегори и Кассе-
грена. На выбор для антенны РТ-70 схемы Грегори повлияли
следующие обстоятельства. Экспериментально и теоретически
Рис. 8.9. Поворотная Рис. 8.10. Основные раз-
зеркальная система меры зеркальной системы
150
было показано, что ДН облучающей системы (контррефлек¬
тор +облучатель) для схемы Грегори имеет более высокий ра¬
диационный КПД и резкую отсечку поля за оптическим краем,
что снижает шумовую температуру антенны. Фазовые искаже-
* * * * д т
ния \та, mb9 тф, где антенны Грегори—монотонно воз¬
растающие функции текущего радиуса раскрыва, что позволяет
надеяться на более высокую компенсацию фазовых искажений
от гравитационных сил, чем в антенне Кассегрена. Сравнитель¬
ные характеристики форм фазовых искажений антенн Грегори
и Кассегрена приведены на рис. 8.11.
Соответственно требования, относящиеся к деформациям по¬
верхностей основного зеркала и положению контррефлектора
как целого, сводились к следующему:
четные составляющие деформаций поверхностей основного
зеркала должны соответствовать уравнению (8.3);
нечетные составляющие этих деформаций должны соответст¬
вовать уравнению (8.4);
для компенсации фазовых искажений зеркальной системы
следует использовать программное изменение положения контр¬
рефлектора. Соответствующий механизм должен обеспечивать
его продольное перемещение для компенсации четных фазовых
искажений, угловой разворот вокруг его вершины на угол ери
поперечное линейное смещение на расстояние b для компенса¬
ции нечетных фазовых искажений. Последние два перемещения
связаны соотношением Ь/ф = /?, где величина R может регули¬
роваться;
юстировка зеркальной системы должна проводиться в зенит¬
ном положении антенны. В зависимости от угла места h четные
составляющие деформаций должны меняться по закону sink—1,
нечетные — по закону cos/i. Таким образом, деформации поверх¬
ности основного зеркала должны описываться выражениями
w+(x, 7, h)=w+(x)(sinh—l); (8.6)
ц+(х, у, h)=u+(x) (sink—1);
w~(x, у, h) =w~ (x)cosycosh;
u~(xy y> h) =u~ (x)cosycosh,
где x, у — радиус и азимутальный угол, отсчитываемый в рас-
крыве зеркала от линии пересечения раскрыва с угломестной
плоскостью, w+(x)t и+(х) удовлетворяют условию (8.3),
a w~(x), и~(х) —условию (8.4);
деформации поверхности контррефлектора должны отсутст¬
вовать, т. е. он должен быть подобен твердому телу.
Отражающая поверхность основного зеркала образуется
151
/77*
0,2
О
-0,2
S
f.O
*)
Рис. 8.11. Фазовые искажения в раскрыве антенны для систем Грегори (а) и
Кассегрена (б)
дюралевыми фацетами, расположенными в виде 14 кольцевых
поясов, габаритные размеры фацеты 2,5X0 •••2) м. Фацеты
крепятся к подзеркальной конструкции шпилечными узлами со
специальным механизмом для их юстировки со стороны отра¬
жающей поверхности. Для исследования деформаций основного
зеркала и юстировки на каждой фацете имеются четыре репер¬
ных отверстия. Для юстировки зеркальной системы и исследо¬
вания ее деформаций предусматривались оптико-механические
152
системы с регистрацией и обработкой результатов измерений
на ЭВМ. Среднеквадратическая погрешность (СКО) измере¬
ний величин w, и равна 0,5 мм, СКО измерений линейных ве¬
личин, а, b — 0,11 мм, угловых — 5 угл. с.
Гравитационные деформации зеркальной системы. Ампли¬
тудные значения измеренных деформаций, характеризующих
смещение облучателя и контррефлектора, равны ах= —13,5 мм,
az = — 1 мм, Ь = —40,1 мм, bz = —7,2 мм, ср=17 угл. мин. В за¬
висимости от угла места h симметричные деформации изменя¬
ются по закону sink—1, кососимметричные — по закону cos/i.
Что касается деформации поверхности основного зеркала, то их
зависимость от угла места h в системе координат (х, у) его
раскрыва соответствуют (8.6) с точностью измерения самих де¬
формаций.
Приращения длины оптического пути (фазовые искажения),
обусловленные симметричными и кососимметричными деформа¬
циями формы основного зеркала, хорошо аппроксимируются
выражениями
Атд+=— 30,9аг2+20,7аг4; Дтд“= — 22х— 16,8л:3.
Фазовая компенсация гравитационных деформаций зеркаль¬
ной системы. Воздействие фазовых искажений на радиотехниче¬
ские характеристики антенны характеризуются снижением ко¬
эффициента использования поверхности (КИП) в максимуме
ДН Дх и ее угловым смещением 0т. Снижение КИП антенны
в зависимости от деформаций ри р,- определяется квадратичной
формой
&x±~'2lA£Jplpj, (8.7)
i.J
где A±iij — постоянные коэффициенты, обусловленные геомет¬
рией зеркальной системы и распределением амплитуд р(х) в
раскрыве.
Смещение максимума ДН определяется линейной формой:
0то~2с,р,. (8.8)
Поскольку контррефлектор имеет описанные программные
перемещения, то можно поставить задачу минимизации (8.7)
по этим перемещениям. Расчет показывает, что снижение КИП
пнтенны из-за симметричных деформаций зеркальной системы
пн длине волны Я=5 см составит 30 %, а от кососимметричных
Деформаций—12%. Эти значения соответствуют углу места
антенны 0°, где деформации максимальны. В общем случае эф¬
153
фективная площадь антенны в зависимости от угла места изме-
няется по закону
5Эф(h)= 5Эф (90°) (1— Acos2h). (8.9)
Значение коэффициента А характеризует работу системы
фазовой компенсации, которая у антенны РТ-70 является луч¬
шей среди существующих в мире антенн диаметром 64, 70 и
100 м. Экспериментально измеренные значения коэффициента
А приведены в табл. 8.3.
На волнах Х>6 см, как видно из табл. 8.3, включение систе¬
мы фазовой компенсации не требуется.
Таблица 8.3
X, см
6
5
3,55
1,35
0,8
А
0,015
0,03
0,035
0,07
0,2
На рис. 8.12 приведены ДН антенны на А,=3,25 см, снятые
по радиоисточнику DR-21 и характеризующие эффективность
системы фазовой компенсации гравитационных деформаций.
Высокочастотная система антенны. Для решения различных
полетных задач в аппаратной кабине стационарно может уста¬
навливаться шесть облучателей. Смена режимов работы осу-
ЯГ
30°
20°
j
\
h-70°
30°
30•
20°
V
V J
о
Рис. 8.12. Зависимости ДН антенны от ее угла места с отключенной (а) и
включенной (б) системой- фазовой компенсации гравитационных деформаций
154
ществляется поворотом вокруг оси специальной лучеводной по¬
воротной зеркальной системы, которая преобразует широко¬
угольную осесимметричную ДН облучателя в осесимметричную
диаграмму, необходимую для оптимального облучения контр¬
рефлектора.
Максимальное время смены облучателя не превышает 30 с.
Выходные ДН поворотной зеркальной системы на длине
волны Х=5 см в плоскости симметрии этой системы и в орто¬
гональной плоскости приведены на рис. 8.13.
Наличие поворотной зеркальной системы позволило опти¬
мально решить задачи разделения режимов приема и передачи
планетного радиолокатора СМ диапазона, что увеличило его
эффективность и надежность. Выходные характеристики антен¬
ны в этих режимах: прием S34>=2800 м2 при Га = 15 К, переда¬
ча 5эф=2760 м2.
Приемный облучатель рассчитан на одновременный прием
радиоволн с круговой поляризацией правого и левого враще¬
ния. К передатчику подключается также передающий канал
облучателя командно-измерительной радиолинии СМ диапазо¬
на. Этот же облучатель выполняет прием при ортогональной
поляризации. Выходные характеристики антенны в этом режи-
дБ
50 *0 30 го Ю о ГО 20 30 w so в
дБ
W 30 20 10 О 10 20 30 ЬО ООО
а)
*)
Рис. 8.13. Диаграммы направлен/ности поворотной зеркальной системы в пло¬
скости симметрии (а) и в ортогональной плоскости (б)
155
ме: прием S3I}>=2500 м2 при Га=23 К, передача 5Эф=2600 м2.
Командно-измерительную ДМ радиолинию обслуживает
совмещенный облучатель, обеспечивающий одновременно прием
и передачу в ДМ диапазоне волн, а также прием в СМ диапа¬
зоне волн. Эффективная площадь антенны в ДМ диапазоне
2000 м2, в СМ 2500 м2. Для радиоастрономических измерений
имеется облучатель на Я,= 18 см, обеспечивающий 5Эф=2430 м2
и Га= 14 К.
Таблица 8.4
Длина
волны,
см
Параметр
18
6
5
3,55
1,35
0,82
Эффективная площадь, м2
2450
2800
2750
2450
1700
850
Коэффициент усиления, дБ
60,0
69,9
71,4
73,9
80,7
83,7
Шумовая температура, К
16
15
14
12,4
—
—
Ширина ДН на уровне —3 дБ,
угл. мин
9
3
2,6
1,7
0,66
0,5
Таблица 8.5
к, см
Шумовая температура,
К, для
углов
места,
град
90
80
70
60
50
40
30
20
1 10
18
16,7
14,5
13,7
14,6
18,6
23
28,3
6
12,8
—
—
—
—
—
14,5
18
26,7
3,5
12,3
12,3
12,3
12,3
12,3
15,2
17,2
20,5
27
Радиотехнические характеристики антенны. В табл. 8.4 при¬
ведены экспериментальные характеристики антенны, начиная с
Л=18 см, поскольку в перспективе командно-измерительную
радиолинию ДМ диапазона предполагается демонтировать.
Приведенные результаты измерения эффективной площади
соответствуют СКО юстировки отражающей поверхностй основ¬
ного зеркала ~0,7 мм.
Экспериментальные данные о шумовой температуре антен¬
ны для разных углов места приведены в табл. 8.5.
8.4.2. СИСТЕМА НАВЕДЕНИЯ
Принципы построения системы наведения. По функцио¬
нальному назначению и взаимодействию отдельных структур¬
ных элементов система наведения построена по иерархической
схеме (рис. 8.14).
156
Рис. 8.14. Схема системы наведения РТ-70
Система наведения включает электросиловой привод (ЭСП)
и систему управления (СУ). Электросиловой привод объеди¬
няет приводы основного зеркала, контррефлектора и электро¬
оборудование и состоит из механизмов наведения, исполнитель¬
ных двигателей, комплектных тиристорных электроагрегатов
(усилителей мощности) и регуляторов положения, скорости и
тока. Управляющие сигналы для ЭСП вырабатываются в СУ.
В СУ входят: вычислительный управляющий комплекс
(ВУК), пульт оператора (ПО), аппаратура управления приво¬
дом поворотной зеркальной системы (ПЗС), измерительные си¬
стемы и программно-математическое обеспечение (ПМО).
В свою очередь, измерительные системы включают в себя
углоизмерительную систему (УИС) и систему измерения де¬
формаций (СИД).
Для системы управления характерны следующие особенно¬
сти:
автономность замкнутого контура ЭСП контррефлектора,
управляющим воздействием для которого является изменение
угла места основного зеркала;
использование системы измерения деформаций (СИД) как
измерительного инструмента, не влияющего на динамические
параметры работы системы наведения. Данные с СИД обра¬
батываются и учитываются путем коррекции программных це¬
леуказаний в вычислительном управляющем комплексе.
Программно-математическое обеспечение в вычислитель¬
ном управляющем комплексе выполняет:
вычисление с периодом в 1 с текущих (программных) коор¬
динат сопровождаемых объектов и интерполяцию получаемых
Координат внутри интервалов в 1 с;
157
вычисление разницы между программными координатами
и координатами, вырабатываемыми цифровыми датчиками по-
ложения антенны по азимуту (Л) и углу места (h) (ошибок
программного наведения), используемых в цифровом виде для
формирования управляющих сигналов в ЭСП-Л и ЭСП-ft;
ввод поправок к положению исполнительных осей, к систе¬
матическому отклонению радиолуча по углу места, связанному
с работой ЭСП контррефлектора и радиорефракцией, к поло¬
жению нулей цифровых датчиков углов;
ввод текущих поправок к времени и координатам с клавиа¬
туры дисплея или с пульта оператора;
ввод текущих поправок от системы измерения деформаций;
сканирование радиолучом антенны по азимуту и углу ме¬
ста в процессе программного наведения при юстировках поло¬
жения электрической оси антенны по радиоисточникам;
вывод и печать основных параметров наведения антенны
при сопровождении космических объектов;
визуальную индикацию основных параметров наведения и
текущего времени.
Углоизмерительная система состоит из цифровых датчиков
обратной связи азимута и угла места (ЦД-Л; ЦД-ft).
Кроме перечисленных систем, обеспечивающих наведение
антенны с необходимыми скоростями и точностью, имеется
автономная система управления поворотной зеркальной систе¬
мы, которая обеспечивает ее поворот и фиксацию в шести на¬
правлениях в соответствии с числом облучателей зеркальной
системы.
Функциональная схема системы наведения. На функцио¬
нальной схеме ныне действующей системы наведения РТ-70
(рис. 8.15) приведены отдельные системы и устройства в соот¬
ветствии с их размещением на опорно-поворотном устройстве
(ОПУ), на зеркальной системе и в аппаратных помещениях.
Резервируемые комплекты аппаратуры обозначены римскими
I и II.
Система наведения работает следующим образом. В вычис¬
лительный управляющий комплекс (ВУК) вводятся целеука¬
зания с перфоленты или с клавиатуры дисплея (Д). Целеука¬
зания между опорными точками интерполируются и сумми¬
руются со всеми видами поправок: постоянных и зависящих от
текущих координат по Л и ft. В результате вырабатываются
текущие программные координаты Aup{t) и ftnp(0> которые
сравниваются с текущими кодами цифровых датчиков ЦДОС-Л
и ЦДОС-ft. Полученные при этом значения ошибок отработки
ДЛПр(0 и Д/1ПР(0 преобразуются в напряжения и передаются
158
АУ РТ-70
159
Рис. 8.15. Функциональная схема системы наведения РТ-70
соответственно в ЭСП-Л и ЭСП-Л. Эта операция в ВУК описы¬
вается формулами
AAnp(ti-\-kAt) =Anv(ti-{-kAt)—А цдос (ti-\-kAt), (8.10)
АЛПр (ti-\~kAt)= hnp (ti-\-kAt) —Нцдос (ti-\-kkt),
где h — время начала очередного периода интерполяции; At
период, зависящий от частоты опроса ЦД (тактовая частота);
k — порядковый номер приращения внутри кадра.
В настоящее время тактовая частота равна 32 Гц и соот¬
ветственно й=1, 2,..., 32, а А^= 1 /32 с.
Аналоговые сигналы ДАпр(£) и ДЛпр(£) подаются на входы
регуляторов положения и скорости ЭСП, а сигналы с их выхо¬
дов используются, для управления комплектными тиристорны¬
ми электроприводами.
Автономная система управления движением контррефлек¬
тора (КР) работает следующим образом. При повороте антен¬
ны по углу места вращающийся трансформатор (ВТ), связан¬
ный с угломестной осью, через синусно-косинусный преобразо¬
ватель (СКП) выдает два управляющих сигнала. Один сигнал,
пропорциональный sin h(t)9 задает перемещение контррефлек¬
тора вдоль фокальной оси основного зеркала, а другой, про¬
порциональный cos Л (0, — перемещение контррефлектор.а в
угломестной плоскости по нормали к оси этого зеркала. С по¬
перечным перемещением кинематически * связан поворот контр¬
рефлектора в угломестной плоскости. Эти перемещения, выпол¬
няемые замкнутой системой регулирования, обеспечивают уста¬
новку контррефлектора в расчетные положения, определяемые
параметрами системы фазовой компенсации гравитационных
деформаций зеркальной системы. Точность отработки расчет¬
ных положений контррефлектора составляет 0,5... 0,7 мм для
каждого из перемещений.
Гравитационные деформации, воздействие ветрового потока
и неравномерный солнечный нагрев ОПУ и подзеркальных ме¬
таллоконструкций приводят к погрешностям измерения циф¬
ровыми датчиками истинных азимута и угла места антенны,
которые могут достигать нескольких десятков угловых секунд.
Существенная часть этих ошибок по углу места компенсирует¬
ся за счет коррекции положения нулей датчиков, выполняемой
автономно действующими каналами системы измерения дефор¬
маций (на схеме каналы К2, КЗ). В этих каналах используются
оптико-электронные приборы, работающие в режиме автокол¬
лиматоров (в параллельном пучке). Чувствительность их на¬
ходится на уровне 0,2 ... 0,3 угл. с, а стабильность положения
нулей не хуже 0,5... 0,7 угл. с. Излучатели этих приборов уста¬
новлены на платформе ОПУ под стойками подшипников угло¬
местной оси.
160
Угломестные каналы vK2 и КЗ удерживают нули датчика
цД-Zi в одном и том же положении относительно плоскости,
опирающейся на шаровой погон ОПУ.
Каналы системы измерения деформаций К4 и К5 предназна¬
чены для ввода текущих поправок к программным координа¬
там на деформацию ОПУ по азимуту. Оптико-электронные при¬
боры каналов К4 и К5 нечувствительны к взаимным угловым
разворотам передающих и принимающих приборов. В то же
время при линейном перемещении принимающих приборов в
направлении, нормальном к оптической оси канала, вырабаты¬
вается сигнал рассогласования, который используется в следя¬
щей системе для возвращения принимающих приборов к поло¬
жению оптической оси передающего прибора. Аналоговые сиг¬
налы, пропорциональные этому перемещению, преобразуются в
коды и суммируются с Anp*(t) в соответствии с формулой
АПр(0=Апр*(0+*[АА4(0-ДА5(0], (8.11)
где Anp(t)—программное значение координаты с учетом по¬
правок к смещению угломестных осей ОПУ по азимуту;
АПр*(0—программное значение координаты; ДА4(£) и
ДЛ5(^)—горизонтальные смещения торцов угломестных осей
из-за деформации стоек ОПУ в направлении, перпендикуляр¬
ном угломестной оси; k — масштабный коэффициент.
Если перемещения ДЛ4 и ДАъ имеют одинаковые направле¬
ние и значение, то скручивание ОПУ по азимуту равно нулю.
Во всех других случаях к значению Апр*(0 прибавится соот¬
ветствующая поправка.
Таким образом, в наведении луча антенны участвуют три
подсистемы: управления основного зеркала, управления контр¬
рефлектора и измерения деформаций, не связанные между со¬
бой прямыми информационными каналами обмена данных.
Интересно рассмотреть распределение ошибок отдельных
подсистем и определить СКО системы наведения.
Оценка погрешности программного наведения. При оценке
суммарной СКО наведения и отдельных ее составляющих сле¬
дует учитывать, что:
допустимая СКО наведения не должна превышать 1/60 дн;
азимут-угломестная подвеска осей ОПУ позволяет расши¬
рять допуск на ошибки по азимуту, обратно пропорциональный
cos А;
отдельные составляющие суммарной СКО могут рассмат¬
риваться как случайные, подчиняющиеся гауссовскому закону
Распределения.
11—4229
161
С учетом этих замечаний суммарную СК.0 наведения радио-
луча антенны можно рассчитать по формуле
A2cko=1^(^2Cko)2 4“ (A^cko) cosTh(t), (8.12)
где Ascko—суммарная CKO в картинной плоскости; Агско =
= 1/ A2cko=V суммарные СКО по азимуту
t i
и углу места; А (0 —текущее значение угла места; А 1ал~
отдельные составляющие ошибок.
Приведенные в табл. 8.6 расчетные значения СКО, под-
Таблица 8.6
Источник погрешности
СКО,
по азимуту А
угл. с
по углу места h
Дискретность цифрового датчика
2,5
2,5
Вычисление программных координат
2
2
Геодезические измерения неортого-
нальности осей ОПУ
2
2
Эталонирование цифровых датчиков
5
5
Учет рефракции
—
2
Ошибки системы измерения дефор¬
9
6
маций
Ошибки приводов контррефлектора
—
6
Ошибки приводов основного зеркала:
при безветрии
5
5
при ветре 10 м/с
15
15
Суммарная СКО при h — 0°:
при безветрии
12
12 (15 при h =
= 45°)
при ветре 10 м/с
18,5
18,5 (23 при Л =
= 45°)
твержденные экспериментально, взяты за основу при разработ¬
ке системы наведения, суммарная СКО получена по результа¬
там регулярных предсеансовых радиоюстировок системы наве¬
дения по внеземным источникам радиоизлучения.
Как следует из табл. 8.6, суммарная СКО, реализуемая су¬
ществующими аппаратными средствами системы наведения
РТ-70, удовлетворяет требованиям к точности наведения при
работе в штатных диапазонах волн см, так как ширина
ДН на волне К=5 см составляет 2,6 угл. мин и соответственно
допустимая ошибка наведения 26 угл. с. Однако зеркальная
система РТ-70 (см. табл. 8.4) способна эффективно работать
на более коротких волнах, вплоть до 0,8 см. С учетом совре-
162
денной тенденции освоения коротковолновых диапазонов инте¬
ресно оценить потенциальные возможности конструкции РТ-70
по реализации повышенных требований к точности системы на¬
ведения.
8.5. РЕЗЕРВЫ СНИЖЕНИЯ СУММАРНОЙ СКО
НАВЕДЕНИЯ РТ-70
Антенна РТ-70 и ее система наведения были рассчитаны на
достижение более высоких точностей, чем приведенные в
табл. 8.6, однако в связи с использованием на первом этапе
эксплуатации РТ-70 для дальней космической связи только
ДМ и длинноволновой части СМ диапазонов волн эти возмож¬
ности не были реализованы. Так, в процессе наведения почти
не использовались данные системы измерения деформаций, бы¬
ли установлены датчики углов пониженной разрядности и т. д.
При переходе в коротковолновую часть СМ диапазона и в ММ
диапазон волн заложенные возможности наведения радиолуча
с большими точностями должны быть реализованы. Рассмот¬
рим основные пути решения этой задачи.
8.5.1. УСОВЕРШЕНСТВОВАНИЕ ЭСП ОСНОВНОГО ЗЕРКАЛА
Для повышения точности ЭСП основного зеркала принци¬
пиальным является переход к полностью цифровому ЭСП с
индивидуальной ЭВМ в контуре управления, с устройством со¬
пряжения с объектом регулирования и контроллером, обеспе¬
чивающими практически полную автоматизацию процессов
управления и контроля работы аппаратуры ЭСП. В этом ЭСП
в качестве силовых агрегатов должны быть применены ком¬
плектные тиристорные электроагрегаты третьего поколения, в
составе которых имеются цифровые регуляторы положения,
скорости и тока, а также средства разветвленного контроля
работоспособности отдельных аппаратных средств, включая
электрооборудование комплектного тиристорного электропри¬
вода.
Введение в контур управления индивидуальной ЭВМ позво¬
ляет реализовать упомянутые регуляторы в цифровой струк¬
турной схеме ЭСП с наблюдающим устройством, которые пре¬
вращают ЭСП в замкнутую следящую систему, определяющую
Динамические параметры системы наведения антенны во всех
ее режимах. Поэтому описываемые далее математические и
структурные модели ЭСП рассматриваются в качестве основ¬
ных динамических моделей системы наведения в целом.
При этом входящая в нее система управления может рас-
11*
163
Му, яНн
Нг , яН'М
10000
8000
$000
mo
2000
0
-2000
-mo
-sooo
-8000
-10000
-12000
лЧ)
's.
v^k
/
/
/
Г
-/0л
fe
/
ю
ТО
50
¥0
W
90
ат
-°Ьт
я/
fi
\
1
п//Ц
V
\
СС"
но*
\
/Ом/к
'—
12000
8000
mo
0
-woo
-
18м/с
-
\
-
101
'/?
\
\
-
Л7
¥0\
/
1
60
Чч
80
100
120
N
V
1W?
\
>
ч .
А
ос
ос-1809
<0
f'Sn(n)'10~\f (кГс'н)* с-Гц
6)
Рис* 8.16. Моменты нагрузок относительно оси угла места (а) и оси азимута
(б), а также спектральная плотность аэродинамического момента (в)
164
сматриваться как задающее устройство независимо от харак¬
тера вырабатываемого ею управляющего сигнала.
Оценка динамической ошибки цифрового ЭСП. При разра¬
ботке аппаратурных и схемных решений электросилового при¬
вода учитывались исходные требования к динамическим харак¬
теристикам ЭСП (табл. 8.7), моменты сопротивлений при сред¬
ней скорости ветровых потоков и спектральной плотности аэро¬
динамического момента при скорости ветра 10 м/с (рис. 8.16).
Таблица 8.7
По азимуту А
По углу
места h
Параметр
медленно
быстро
медленно
быстро
Максимальная скорость, угл.мин/с
4
20
1
10
Максимальное ускорение, угл.с/с2
10
18
10
18
GKO наведения при vB, угл.с:
2 м/с
1,5
1,5
10 м/с
5
10
5
10
Амплитуды гармонического колеба¬
ния, угл.мин
Частота гармонического колебания,
Гц
96
1333
6
333
0,04
0,015
0,17
0,030
Рассмотрим особенности построения
ЭСП-А
ДЛЯ
режима
«медленно» как основного рабочего режима программного на¬
ведения. Одна из главных особенностей структурной схемы
ЭСП-Л (рис. 8.17)—использование электромеханической вы¬
борки мертвого хода — обеспечивает наведение АУ с повышен¬
ной точностью. Для выборки мертвого хода включают двух¬
двигательный привод, один двигатель которого работает в дви¬
гательном режиме, а второй в тормозном. За счет этого соз¬
дается момент распора между ними и осуществляется выборка
мертвого хода (рис. 8.18).
На рис. 8.18 1 соответствует суммарному моменту, разви¬
ваемому двумя двигателями, 2 и 3 — моментам двигателей
ИД1 и ИД2. Если номинальные моменты принять за 1, то до
уровня моментов ±0,25 поддерживается максимальный момент
распора, к значению ±0,5 момент распора исчезает и моменты
двигателей суммируются. Для защиты двигателей и механиз¬
мов наведения в ограничителях Ф1, Ф2 (см. рис. 8.17) форми¬
руется ограничение по напряжению, а в регуляторах РТ1 и
РТ2 — ограничение по току. Для подавления противофазных
колебаний ИД1 и ИД2 на входы Ф1 и Ф2 подаются напряже¬
ния с регулятора разности скоростей РРС, пропорциональные
разности сигналов ТГ1 и ТГ2.
165
Рис. 8.17. Структурная схема ЭСП-Л для режима с выборкой мертвого хода:
ЦДОС — цифровой датчик обратной связи; 30 — зубчатый обод; КШ1, КШ2 — корен¬
ные шестерни; PI, Р2 — редукторы; ТГ1 ТГ2 — тахогенераторы; ИД1 и ИД2 — испол¬
нительные двигатели; ШН1 и ШН2 — шунты; ТП1 и ТП2 — тиристорные приводы;
ДТ1, ДТ2 — датчики тока; РТ1, РТ2 — регуляторы тока; Ф1, Ф2 — формирователи-ограни¬
чители выходного напряжения; БВМ и БФС — формирователи сигнала; PC — регулятор
скорости; РРС — регулятор разности скоростей; РП — регулятор положения; ^ост1
иостг’ uocci’ ^осс2 — сигналы обратной связи по току и скорости двигателей;
цСигн —управляющий сигнал по положению
Для математического моделирования динамических харак¬
теристик ЭСП разработаны расчетные структурные схемы ка¬
налов наведения «быстро» и «медленно» по каждой из осей
антенны с реализацией цифровых регуляторов в управляющей
ЭВМ и цифровой моделью трехмассового наблюдающего
устройства (рис. 8.19). При расчетах не учитывалось сухое тре¬
ние в механизмах наведения. Однако, как было подтверждено
натурными испытаниями РТ-70, эта нелинейность не оказыва¬
ет заметного влияния на качество отработки управляющего
воздействия и проявляется только на скоростях, меньших
3 уел. с/с, которые кратковременно возникают при слежении
166
Рис. 8.18. Моменты наполнительных двигателей:
/ — суммарный момент двух двигателей; 2 — момент первого двигателя; 3 — момент
второго двигателя; 4 — начальный ток распора двигателей; 5 — ток распора первого
двигателя; 6 — ток распора второго двигателя; 7 — напряжение ограничения; « — на¬
пряжение начала уменьшения момента распора, I — ток якоря двигателя, и напря¬
жение, М — момент, -ирс — сигнал с регулятора скорости
за источником в элонгации по азимуту и кульминации по углу
места. ^
Расчетные динамические погрешности работы ЭСП при под¬
боре параметров структурной схемы путем настройки регуля¬
торов положения, скорости и тока, а также настройки наблю¬
дающего устройства приведены в табл. 8.8. Общая погрешность
Таблица 8.8
Погрешность ЭСП, угл. с
По азимуту А
По углу места h
По управляющему воздействию:
1.5
0.4
без производной
2
0,4
с производной
По возмущающему воздействию
2,7
3.3
Общая при ветре:
до 2 м/с:
1.5
0.4
без производной
2
0,4
с производной
До 10 м/с:
3,4
2,7
3,7
3.3
без производной
с производной
167
Я 1
Ls ь
еч П
х " 3
£*?
л a ■ *
a;
• * s °
R s о ,
я £ П |
Д 5 to
S 2 £ *
1 PU
! gi*..
5 Я tt 05 m
*3 а к ч £
a> о о <=г о
5 н Н <г
^ к ° 3 о
¥ ч О £ §.
« & Т “ &■
S £ I d *!
S3
-lifii!
^ 41
^ >1 nl
~ 35 а 2 :
3 я н ч:
■—■ я п и с i
U # я 2 1
m 8 § 5 i
2.8 I о 3«
5S с 2 ^
о> м
X
о
к
<я
s
Он
>»
* 5
<v *
С
е&:
си
Ь» X
2
о
о
ч
« к °
>> Я
a s х
О * £
S I &
Я о J
К С
н Si
О) CJ Л
D* й I
оря
«2II,
о> £ §j
1—1 О. 1
00 н 2
« V '
ago
к 3- 11
л Я 5*
Он Я s
*0< я
•& g
0 Й
«
2
я ЗЕ н
си о
«й ft S
Н с(
168
системы наведения определялась по формуле
02СКО = V(0у ско)2 + (0в ско)2 , (8.13)
где 0у ско—максимальная ошибка по управляющему воздей¬
ствию;
0в ско — СКО от возмущающего ветрового воздействия.
Расчетное значение погрешностей наведения удовлетворяет
требованиям к точности наведения антенны. В процессе экспе¬
риментальной отработки привода предполагается ввести алго¬
ритмы самонастройки системы управления по минимуму ошиб¬
ки наведения антенны. Новых аппаратурных решений при этом
не требуется.
8.5.2. УСОВЕРШЕНСТВОВАНИЕ ЭСП КОНТРРЕФЛЕКТОРА
Создание автономно работающей системы управления
контррефлектора на базе ЭСП с релейными элементами в це¬
пях управления позволило существенно упростить систему на¬
ведения РТ-70 и повысить ее надежность. Весь накопленный
опыт эксплуатации ЭСП контррефлектора подтверждает доста¬
точность принятых схемных и конструктивных решений для
обеспечения работы зеркальной системы в диапазонах волн
Я>5 см.
В связи с тенденцией освоения более коротковолновых диа¬
пазонов предполагается повысить точность наведения контр¬
рефлектора в три раза за счет перехода к цифровому ЭСП с
возможностью управления ЭСП контррефлектора как от авто¬
номного преобразователя, так и от вычислительного управляю¬
щего комплекса по программе. В электропривод будут введены
линейные цифровые датчики перемещений, а релейная часть
ЭСП заменена аналоговыми усилителями-преобразователями,
позволяющими уменьшить зону нечувствительности и соответ¬
ственно СКО наведения с 0,5 ... 0,7 до 0,15 ... 0,2 мм. С учетом
коэффициента редукции радиолуча от смещения контррефлек¬
тора, равного 10 угл. с на 1 мм смещения, вклад ошибки мо¬
дернизированного ЭСП контррефлектора в общую ошибку на¬
ведения не превысит 2 угл. с.
Модернизированный ЭСП контррефлектора предусматрива¬
ет два режима работы: автономное управление в диапазоне
Я^>3 см, программное при КЗ см.
8.6. УГЛОИЗМЕРИТЕЛЬНЫЕ СИСТЕМЫ И
УСТРОЙСТВА РТ-70
В суммарную ошибку наведения вносят вклад ошибки цифровых датчи¬
ков обратной связи, погрешности их эталонирования в рабочем диапазоне
углов наведения, ошибки системы измерения деформации опорно-поворотно-
169
го устройства и зеркальной системы антенны. Все эти составляющие соответ¬
ствуют техническим требованиям для обеспечения работы системы наведения
РТ-70 в штатных диапазонах волн см.
В зарубежных разработках больших радиотелескопов за счет выбора
конструкции зеркальной системы и опорно-поворотного устройства реализо¬
ваны некоторые принципы построения углоизмерительных систем, которые
оптимально решают задачу измерения текущих углов наведения антенны.
Приведем два примера.
На Боннском 100-м радиотелескопе для системы наведения по азимуту
используется кольцевой рельс диаметром 64 м, на который опираются тележ¬
ки поворотной части антенны по азимуту [57]. С помощью специального мер¬
ного катка и реперных точек, привязанных к геодедическим направлениям по
азимуту, в измерительной системе реализован цифровой датчик угла, с кото¬
рым не может конкурировать практически ни один цифровой датчик, установ¬
ленный на азимутальной оси. С начала эксплуатации этого радиотелескопа
прогнозировалась точность измерения азимута на уровне 1 ... 1,2 угл. с. Од¬
нако при прочих равных условиях в этом радиотелескопе, как и в РТ-70,
необходимо измерять деформации опорно-поворотного устройства и зеркаль¬
ной системы.
Более полным в техническом отношении является использование в 70-м
радиотелескопах (в Титбинбиле, Австралия, и в Голдстоуне, США) фотоги¬
да, работающего в автоматическом режиме. Фотогид установлен на поворот¬
ном устройстве с экваториальной подвеской осей (одна из осей ориентирова¬
на в направлении полюса мира). Точка пересечения осей этого фотогида
совпадает с точкой пересечения осей радиотелескопа по азимуту и углу места.
Фотогиду задается склонение и часовое ведение, как в обычных оптических
телескопах с тем же типом подвески осей. При этом основное зеркало авто-
коллимационным способом отслеживает положение оптической оси фотогида.
Опорная колонна под фотогидом развязана от опорного фундамента и
является стабильным сооружением (не наклоняется и не скручивается, по
крайней мере за относительно продолжительные промежутки времени). При
таком способе наведения зеркальной системы исключаются все погрешности,
связанные с деформациями металлоконструкций радиотелескопа, начиная от
горизонта и кончая базовой площадкой на основном зеркале, нормаль к ко¬
торой совпадает с направлением геометрической оси основного зеркала ра¬
диотелескопа. С другой стороны, в такой системе реализован принцип авто¬
сопровождения с задающим устройством, смонтированным на стабильном
основании.
Подобный способ управления в РТ-70 использовать невозможно, так как,
с одной стороны, азимутальная и угломестная оси не пересекаются, а с дру¬
гой — конструкция опорно-поворотного устройства не позволяет поднять до
уровня угломестной оси неподвижную колонну для установки фотогида или
другой измерительной аппаратуры.
Кажущийся конструктивный недостаток опорно-поворотного устройства
РТ-70, исключающий применение американской углоизмерительной системы и
являющийся платой за радиально-симметричную схему силового каркаса зер-
170
vvvw
кальной системы, на самом деле обеспечивает ее уникальные гомологические
свойства и работу системы фазовой компенсации гравитационных деформа¬
ций, определяющих в итоге возможность работы РТ-70 при Я=8 мм. Что
же касается точности фиксации положения антенны РТ-70 tno азимуту к
углу места, то система измерения деформаций, применяемая в системе наве¬
дения, и методы привязки угломестных датчиков способны обеспечить ту же
точность, что и система, расположенная на пересечении азимутальной и угло¬
местной осей антенны.
Поэтому при создании углоизмерительных систем и приборов для РТ-70
была разработана комбинированная система измерений угловых положений
осей ОПУ, использующая цифровые датчики угловых поворотов осей и систе¬
му измерения деформаций ОПУ. Недостатком комбинированной системы яв¬
ляется применение системы измерения деформаций только на одном из де¬
формируемых участков ОПУ — на стойках подшипников угломестной оси. При
этом стабилизацию статоров цифровых датчиков угла места по сигналам
оптико-электронных датчиков деформаций выполняет следящий электропри¬
вод, содержащий сложные электромеханические поворотно-корректирующие
устройства и блоки управления. Весьма сложным по конструкции оказалось
и устройство для установки цифрового датчика азимута.
Как видно из рис. 8.20, платформа ОПУ вращается на шаровом погоне
и удерживается от смещения в горизонтальной плоскости центральным шты¬
рем с роликовым подшипниковым узлом. Азимутальная ось платформы
физически занята вращающимися переходами дециметрового передающего
волновода сечением 150X300 мм. Чтобы вывести цифровой датчик на ось
вращения, используется кронштейн для передачи вращения на ротор цифро-
fjy ВЧТ ВЛ ЦШАУШЛ
Рис. 8.20. Конструкция устройства
Для установки действующего циф¬
рового датчика азимута:
ПУ — параллелограммное устройство;
«П — вращающийся переход; ЦШ —
Центральный штырь ОПУ; АУ — антен¬
ная установка; ШП — шаровой погон;
ОК—опорная колонна; ВЧТ — СВЧ
тракт; ЦД — цифровой датчик азиму¬
та; М — муфта
Рис. 8.21. Конструкция устройства
для установки кольцевого цифрового
датчика азимута:
ВЧТ — СВЧ тракт; ВП — вращающийся
переход; АУ — антенная установка; ШП
шаровой погон; Кр — кронштейн; ЦУД —
центрирующее устройство датчика; ОК—
опорная колонна; ЦД — цифровой кольце¬
вой датчик азимута; Сф —сильфонная
муфта
171
вого датчика и специальное параллелограммное устройство для фиксации его
статора относительно опорной колонны.
Из схемы видно, что помимо собственных ошибок цифрового датчика и
его эталонирования основными погрешностями измерений азимута будут
скручивание отдельных частей параллелограммного устройства и ошибки
передачи угла соединительной муфтой из-за остаточного эксцентриситета
между осями вращения платформы й датчика.
Многолетней практикой эталонирования подтверждено, что суммарная
СКО измерения азимута с использованием этой конструктивной схемы' колеб¬
лется в пределах 5... 8 угл. с.
Для снижения суммарной ошибки системы управления предусмотрен
кольцевой датчик типа 2ВТ-5, имеющий отверстие диаметром 405 мм, через
которое можно провести волновод с упомянутым сечением.
В конструкции углоизмерительной системы по азимуту, построенной на
базе кольцевого датчика (рис. 8.21), внутреннее кольцо цифрового датчика
закреплено неподвижно на опорной колонне. Внешнее кольцо этого датчика
через сильфонную муфту соединено с кронштейном, который своим верхним
концом прикреплен к дну платформы. Внешнее кольцо датчика центрируется
относительно внутреннего центрирующим устройством датчика. Для этой
цели предполагается использовать муфту МС 451 фирмы «Фотон». Абсолют¬
ная погрешность этой муфты не превышает ±0,5 угл. с, что заведомо меньше
дискретности датчика 2ВТ-5.
Дополнительные погрешности в варианте с использованием датчика
2ВТ-5 вносятся скручиванием кронштейна и опорной колонны, а также по¬
грешностями цифрового датчика.
Для 20-разрядного датчика типа 2ВТ-5 собственная погрешность вместе
с погрешностью работы преобразователя не превышает 1,5 угл. с. Скручива¬
ние колонны и кронштейна, как показали специальные исследования, остают¬
ся в пределах 1 ... 1,5 угл. с. При погрешности эталонирования 1,5 угл. с
суммарная СКО измерения азимута с таким датчиком не должна превышать
2,5 угл. с.
Система измерения деформаций стоек подшипников угломестной оси по
азимуту (К4 и К5 на рис. 8.15) содержит приводы, электромеханические
устройства и довольно сложные блоки управления, обеспечивающие сведение
к нулю сигналов рассогласования, вырабатываемых оптико-электронной аппа¬
ратурой.
Источниками погрешностей при определении деформаций являются:
порог чувствительности оптико-электронной аппаратуры (Ai^0,5 угл. с);
дрейф нуля оптико-электронной аппаратуры (А2^0,8 угл. с);
неточность привязки нулей отсчетов этой аппаратуры к координатам
опорно-поворотного устройства (А3^2 угл. с);
зона нечувствительности усилителей-преобразователей блока управления
и привода в целом (А4^0,8 угл. с);
неточность начальной привязки нулей отсчетов потенциометрических дат¬
чиков перемещений кареток оптико-электронной аппаратуры (Аб^2 угл. с);
172
неточность считывания аналогового сигнала и его преобразования в циф-
ровой КОД (Дб<2,5 угл. с);
неточность суммирования сигналов с «левого» и «правого» измеритель¬
ных каналов (А7^5 угл. с; определяется ценой младшего разряда после пре-
0бразования аналоговых сигналов в коды).
При этом суммарная СКО обоих наклонных каналов К4 и К5 опреде¬
ляется по формуле
Дсид=|/Г2 2v<9yrjl- с.
В новой системе наведения, в которой ожидается снижение погрешности
азимутального датчика до 2,5 угл. с, наклонные каналы могут существенно
првысить общую точность при условии, что будут уменьшены собственные
погрешности работы этих каналов.
Для реализации проектной точности этих каналов исключаются электро¬
механические следящие устройства, а сигналы рассогласования оптико-элект¬
ронных приборов используются в цифровом виде. В этом случае Ai, А2, Aj
останутся прежними, а А4 и А5 будут исключены. Погрешности преобразова¬
ния и операций сложения А6 и А7 будут снижены до 1 угл. с за счет увели¬
чения разрядности кодов вычислительного управляющего комплекса. Тогда
суммарная погрешность канала измерения деформаций по азимуту будет
равна 2,6 угл. с, а вместе с погрешностями азимутального датчика общая
СКО углоизмерительной системы по азимуту не превысит 3,7 угл. с.
Усовершенствование измерительной системы угла места. Автономная угло¬
измерительная система, не требующая использования системы измерения
деформаций, выполняется на базе лазерного гирометра и гравитационного
датчика вертикали, размещаемых в основании зеркальной системы на металло¬
конструкции, жестко связанной с осью основного зеркала антенны. Совмест¬
ное использование лазерного гирометра и гравитационного датчика вертика¬
ли связано с необходимостью привязки системы к местному горизонту, зада¬
ваемому оптическим зеркалом, установленным на стабилизированной
платформе с чувствительным элементом в контуре ее системы управления,
выполненным на базе гравитационного датчика вертикали.
Результаты измерения истинного угла места, полученные от углоизмери¬
тельной системы, используются для коррекции показаний существующих
Дифровых датчиков углов, установленных на угломестной оси.
Достижимая точность измерения угла с помощью лазерного гирометра
соответствует 0,2... 0,3 угл. с, а точность поддержания опорного направле¬
ния, задаваемого стабилизированной платформой, имитирующей местный го¬
ризонт, определяется чувствительностью датчика вертикали и ошибками
°тработки привода стабилизированной платформы.
Чувствительность датчика примененного типа составляет 0,3 угл. с, на¬
чальная привязка положения нуля может быть обеспечена с погрешностью в
пределах 1 угл. с, а достижимая точность отработки следящего привода
173
0,8... 1 угл. с. Таким образом, СКО автономной системы измерения угла
места
где A hi — названные составляющие суммарной СКО.
8.7. МЕТОД ПРЕДСЕАНСОВОЙ РАДИОЮСТИРОВКИ ДЛЯ
ПОВЫШЕНИЯ ТОЧНОСТИ НАВЕДЕНИЯ РТ-70
Наряду с другими режимами работы системы наведения
РТ-70 используется режим экстремального наведения. Однако
в большинстве сеансов связи малое отношение сигнал-шум либо
отсутствие немодулированного пилот-сигнала с борта сопро¬
вождаемого объекта не позволяет использовать этот режим не¬
прерывно. Практически легко определять поправки к про¬
граммному наведению в результате предсеансовых юстировок
положения электрической оси антенны по внеземным радио¬
источникам. Этот метод оказался весьма эффективным при вы¬
полнении программ «Фобос» и «Вега» и с тех пор рекомендует¬
ся инструкциями по проведению предсеансовых проверок систе¬
мы наведения РТ-70 как один из основных этапов подготовки
системы наведения к проведению сеансов слежения за дальни¬
ми КА.
Эффективность метода предопределяется тем, что действие
этих поправок распространяется на время одного сеанса, в те¬
чение которого климатические и метеорологические условия
эксплуатации, как правило, не меняются.
Предсеансовая проверка фиксирует стабильный на время
сеанса интегральный конгломерат всех составляющих ошибок и
заканчивается определением поправок к программе наведения
в виде ДА (Лю) и АА(ЛЮ), где Лю — угол места сопровождаемо¬
го радиоисточника при предсеансовой юстировке.
Найденные поправки в течение штатного сеанса непрерывно
учитываются в коррекции программных координат по форму¬
лам
Практический опыт эксплуатации существующей системы
наведения РТ-70 показывает, что при безветрии после вводя
ЛпР(/)=Л*пр(0+ЛЛ(Лю);
Апр (t) =А*Пр (0 +ДА (Лю) cos Лю/cos h (/).
174
Х,сн А, у гл. с
Vi, ф
Рис. 8.22. Зависимость СКО СН от скорости ветра
поправок по результатам предсеансовой юстировки обеспечи¬
вается сопровождение источников по программе с СКО, не
превышающей 6 угл. с.
Увеличение ошибки сопровождения из-за нарастания скоро¬
сти ветра можно оценить по формуле
Ascko = У А 2/ + Ав2 ,
где Д2,-= 6 угл. с — суммарная СКО в безветренную погоду
после предсеансовой юстировки; Дв — приращение СКО из-за
возмущений от ветра.
Нарастание СКО из-за ветровых нагрузок происходит по
квадратичному закону, а экспериментально установлено, что
при г>в=10 м/с Дв=21 угл. с. Тогда, принимая, что при ив=0
Ав=0, можно построить график изменения Ахско, рассчитывае¬
мой по приведенной выше формуле (рис. 8.22). На рис. 8.22 зна¬
чениям СКО сопоставлена шкала минимальных рабочих длин
волн, при которых погрешность сопровождения не превышает
1/6 ширины ДН.
Из графика видно, что с помощью предсеансовой радио-
юстировки действующая система наведения РТ-70 обеспечивает
работу на волнах см при скорости ветра до 7 м/с.
После модернизации системы наведения ожидается сущест¬
венное повышение точности программного наведения. Данные
о составляющих погрешностях и суммарной точности модерни¬
зированной системы наведения приведены в табл. 8.9.
175
Таблица 8.9
СКО, угл. с
Источник погрешности
по азимуту А
по углу места h
Дискретность цифрового датчика
0,6'
0,6
Вычисление программных координат
0,6
0,6
Радиорефракции
—
2
Ошибки углоизмерительной системы
3,7
1,5
Ошибки привода контррефлектора
—
2
Ошибки приводов основного зерка¬
ла:
при безветрии
2
1,5
при ветре 10 м/с
3,4
3,7
Суммарная СКО при h = 0°:
при безветрии
4,3
3,6 (4,7 при h =
= 45°)
при ветре 10 м/с
5
5,1 (6,2 при h =
= 45°)
Из табл. 8.9 следует, что новая система в режиме про¬
граммного наведения позволит реализовать заложенные в ан¬
тенне РТ-70 возможности работы в диапазонах волн ^8 мм.
Глава 9
БОРТОВЫЕ АВТОНОМНЫЕ РАДИОСИСТЕМЫ
ТРАЕКТОРНЫХ ИЗМЕРЕНИИ
При радиотехническом обеспечении полетов дальних КА сказываются
следующие характерные ограничения наземных радиокомплексов:
лимитированные сеансы видимости КА с наземного пункта как вследст¬
вие вращения Земли, так и вследствие «захода» КА за планету назначения;
невозможность оперативного управления КА с Земли (особенно в аварий¬
ных ситуациях) из-за большого времени распространения радиоволн (сигнал
от Марса или Венеры идет десятки минут);
невозможность контроля наземными средствами параметров движения
дальнего КА относительно реального рельефа поверхности планеты назначе¬
ния, особенно при спуске, посадке и движении КА по этой поверхности;
трудности детального исследования с Земли радиокарты, микрорельефа
и других локальных характеристик планет.
От этих ограничений свободны автономные бортовые радиосистемы, спо¬
собные решать многообразные задачи без помощи наземных радиосредств.
Это определило их все возрастающую роль в реализации космических прог¬
рамм. Различают три основных типа задач, решаемых автономными радио¬
системами:
176
взаимные траекторные измерения между двумя движущимися КА при их
сближении и стыковке или между КА и напланетным маяком-ответчиком;
траекторные измерения относительно подстилающей поверхности планеты;
радиокартографирование и определение локальных характеристик по¬
верхности планет.
Своеобразие этих задач определяет следующие общие особенности авто¬
номных радиосистем:
малая дальность действия по сравнению с магистральной радиолинией
КА — Земля;
расширенные состав и относительный диапазон измеряемых параметров
движения КА, особенно при взаимных измерениях;
необходимость обнаружения и прецизионной обработки сложных стоха¬
стических сигналов, отраженных или излученных протяженной поверхностью
планеты, либо их эффективного подавления при взаимных измерениях.
Рассмотрим автономные радиосистемы взаимных измерений и системы
траекторных измерений относительно поверхности планеты. Автономным ра¬
диосистемам картографирования планет посвящена отдельная глава.
9.1. СИСТЕМЫ СБЛИЖЕНИЯ И СТЫКОВКИ КА
9.1.1. ОБЩИЕ СВЕДЕНИЯ
Одной из наиболее сложных операций при управлении даль¬
ними КА является сборка входящих в их состав модулей на
окололунной или околопланетной орбите. Необходимость в та¬
кой операции возникает, в частности, при сборке командного
модуля, движущегося по околопланетной орбите, с посадочным
модулем, выполнившим программу работ на поверхности пла¬
неты. Решение этой задачи облегчается, если радиоизмеритель-
ными системами снабжены оба модуля, которые при этом на¬
зываются кооперируемыми, и существенно усложняется, когда
один из модулей не имеет радиосистемы (такие модули назы¬
ваются некооперируемыми).
Характерным примером сборки кооперируемых модулей яв¬
ляется выполнение этой операции в реализованной США про¬
грамме «Аполлон» [58]—программе высадки космонавтов на
Луну, и в разработанной, но по ряду причин не реализованной
аналогичной отечественной программе [60].
Процесс сборки КА включает этапы сближения, причалива¬
ния и стыковки. Этап сближения важно выполнять по наиболее
экономной, оптимальной траектории, полет по которой обеспе¬
чивает при достаточно малом времени сближения минимальный
Расход топлива. С этим условием связаны весьма жесткие тре¬
бования к числу, диапазону и точности измерения параметров
нэаимного движения модулей. При этом часто приходится идти
На увеличение числа параметров и точности их измерений с
12—4229
177
соответствующим увеличением сложности и массы радиосисте¬
мы ради экономии существенно большей массы расходуемого
горючего.
Начальная дальность автономного сближения определяется
точностью сведения модулей наземным магистральным ком¬
плексом и существенно зависит от особенностей конкретной
космической программы. Так, при стыковке модулей на около¬
лунной орбите автономное сближение может начинаться с даль¬
ностей 50... 100 км, а при решении той же задачи на около-
марсианской орбите может потребоваться автономное сближе¬
ние с дальностей, превышающих 500 ... 600 км.
При сближении пилотируемых модулей обычно посадочный
модуль является активным, осуществляющим маневры сближе¬
ния по данным размещенной на нем запросной радиосистемы
(запросчика), а орбитальный модуль — пассивным, движущим¬
ся по орбите ожидания и оснащенным ответной радиосистемой
(ответчиком). Для управления активным модулем на этапе
сближения необходимо измерять в связанной с ним системе от¬
счета угловые координаты и дальность до пассивного модуля
как точечной цели, а также первые производные этих коорди¬
нат (радиальную скорость и угловые скорости). При этом для
оптимизации траектории сближения особенно жесткие требо¬
вания предъявляются к точности измерения угловых скоростей.
На этапе сближения точная взаимная ориентация модулей не
требуется.
На этапе причаливания необходимо обеспечить соосность
стыковочных узлов активного и пассивного модулей, а также
сведение к нулю их взаимного разворота (крена) относительно
общей продольной оси. Поэтому на данном этапе необходимо
измерение на пассивном модуле в связанной с ним системе от¬
счета угловых координат активного модуля и их производных,
а также взаимного крена стыковочных узлов.
На этапе стыковки модулей особое значение приобретает
прецизионное измерение их весьма малой взаимной скорости,
что позволяет предохранять их от повреждения.
Учитывая все эти особенности, перечислим основные траек-
торные параметры, которые необходимо измерять при сборке
на активном модуле: дальность R, радиальная скорость R, воз¬
вышение ПМ 0Уп, угловая скорость возвышения ПМ 0уШ боко¬
вое уклонение ПМ 02П, угловая скорость бокового уклонения
ПМ 02П, а также взаимный крен т]ап. При сборке на пассивном
модуле следует измерять возвышение AM 0уа и его угловую
скорость 0уа, а также боковое уклонение AM 02а и его угловую
скорость 02а. Все обозначения пояснены на рис. 9.1, иллюстри-
178
Рис. 9.1. Геометрические соотношения при сборке активного и пассивного мо¬
дулей КА
рующем геометрические соотношения при сборке активного и
пассивного модулей.
Таким образом, радиосистема, обеспечивающая автоматиче¬
скую автономную сборку модулей КА на орбите, должна изме¬
рять до И геометрических параметров их взаимного движения.
На пилотируемых КА часть траекторных определений на этапах
причаливания и стыковки может взять на себя космонавт, ис¬
пользуя оптические и телевизионные средства наблюдения
кооперируемого модуля. Однако и при этом радиосистема сты¬
ковки КА на орбите остается самой многопараметрической из
известных измерительных радиосистем.
К особенностям, затрудняющим ее разработку, относится
также большой относительный диапазон изменения измеряемых
параметров: дальностей от сотен километров до долей метра,
скоростей от космических до миллиметров в секунду, угловых
координат и их скоростей в шаровом секторе, превышающем
в ряде задач 200°. Типовые требования к диапазонам и точно¬
стям взаимных измерений при сборке КА приведены в табл. 9.1.
Дополнительные трудности возникают при решении задачи
сближения с некооперируемым модулем (например, с аварий¬
ным модулем, ответчик которого вышел из строя), когда необ¬
ходимо извлекать траекторную информацию из отраженного его
поверхностью сигнала.
12*
Таблица 9j
Параметр
Диапазон измерений
Случайная ошибка
Дальность, м
105... 0,2
0,15 + 0,5 %
Радиальная скорость, м/с
103... 0,4
0,005+0,5 %
Угловые координаты, град
100X200
од
Угловые скорости, град/с.
±2
0,01
Взаимный крен, град
±180
1 ...2
Вначале рассмотрим основные особенности и типовые мето¬
ды измерения взаимных параметров кооперируемых КА, а так¬
же общие принципы построения радиосистемы взаимных изме¬
рений, обеспечивающей их сборку.
9.1.2. СБЛИЖЕНИЕ И СТЫКОВКА КООПЕРИРУЕМЫХ КА
Для бортовых радиосистем КА характерны весьма жесткие
ограничения габаритов антенн, массы и энергопотребления ап¬
паратуры. Поэтому при максимально возможных раскрыве
(усилении) антенны, чувствительности приемника и пиковой
мощности передатчика основным способом повышения энерго¬
потенциала взаимной радиолинии является увеличение длитель¬
ности излучения радиосигнала — в пределе переход к непрерыв¬
ному излучению сигнала.
Основная трудность реализации непрерывного излучения в
подобных радиолиниях связана с защитой приемника от посту¬
пающего на его вход сигнала «своего» передатчика. Однако в
радиосистемах взаимных измерений эта защита легко обеспе¬
чивается частотной селекцией благодаря разносу частот /зп за¬
просной и /от ответной радиолиний, как наглядно показано на
рис. 9.2. Эффективность защиты определяется селективностью
приемника на частоте «своего» передатчика.
Пространственный поиск и угловое сопровождение цели.
После того как наземный комплекс управления выведет КА в
исходную позицию для сближения, на запросчике и ответчике
включатся радиосистемы взаимных измерений.
Запросчик Отбетчик
Рис, 9.2. Структура запросно-ответной радиолинии взаимных измерений
180
Проще всего первоначальный радиоконтакт между ними
устанавливается при непрерывном излучении сигнала ответчика
малонаправленной антенной, диаграмма направленности (ДН)
которой перекрывает шаровой сектор, где может находиться
запросчик. При этом можно ограничиться пространственным
поиском этого сигнала запросчиком, который выполняется либо
коммутацией набора малонаправленных антенн, ДН которых
заполняют шаровой сектор обзора, либо механическим (или
электрическим) сканированием этого сектора узким лучом
остронаправленной антенны, как это было сделано в программе
«Аполлон» [58].
Первый из этих методов из-за низкого усиления малонаправ¬
ленной антенны характеризуется существенным снижением
энергопотенциала радиолинии и усложнением антенно-фидерной
сети на КА. Второй метод дает выигрыш в энергопотенциале,
но требует тем большего времени пространственного поиска,
чем уже сканирующий луч по сравнению с сектором поиска.
Дальнейший выигрыш в энергопотенциале может быть полу¬
чен при использовании остронаправленной антенны и на ответ¬
чике, как это было сделано в первой отечественной системе
«Игла». Однако при этом возникает весьма непростая задача
организации взаимного пространственного поиска запросчика и
ответчика.
По завершении поиска и захвата сигнала ответчика необхо¬
димы оценка и сведение к минимуму рассогласования между
осью антенны запросчика и линией визирования цели. Эта опе¬
рация может осуществляться разворотом как корпуса КА, так
и антенны относительно корпуса. Обычно первоначальное рас¬
согласование грубо уменьшается корпусом КА, а последующее
прецизионное угловое автосопровождение цели в процессе сбли¬
жения осуществляется антенной.
Для минимизации углового рассогласования при сближении
необходимо на запросчике непрерывно оценивать две ортого¬
нальные угловые координаты ответчика и их производные (уг¬
ловые скорости) с указанными в табл. 9.2 высокими точностя¬
ми. Для этого в последнее время широко используются моно-
импульсные методы пеленгации [61].
Один из наиболее простых — фазовый метод моноимпульсной
пеленгации — основан на измерении разности фаз сигналов,
приходящих от цели на две антенны, фазовые центры которых
разнесены на базу d (рис. 9.3, а). При некотором угле прихо¬
да радиоволны а эта разность фаз составляет такую же долю
от 2л, какую разность хода лучей d sin а составляет от длины
полны К:
От цели
Рис. 9.3. Фазовый метод моноимпульсной пеленгации
откуда зависимость а от Дф определяется соотношением
а=arc sin (ЯДг|э/2nd). (9.2)
При нормальном падении волны (а=0) Дг|э=0. При а^О Дг|э
отображает величину и знак углового отклонения направления
на цель от нормали к базе.
На рис. 9.3, а показана простейшая схема формирования сиг¬
нала ошибки, пропорционального Дф. После преобразования
сигналов обеих антенн на промежуточную частоту с помощью
смесителей СМ и общего гетеродина Г они усиливаются в раз¬
дельных УПЧ. Благодаря общему гетеродину фазовые соотно¬
шения между двумя сигналами сохраняются и на промежуточ¬
ной частоте. После сдвига фазы одного из них на я/2 оба сиг¬
нала подаются на фазовый детектор ФД. Как известно, при та¬
ком сдвиге фаз напряжение на выходе ФД равно нулю. Однако
здесь вследствие дополнительного фазового сдвига на я/2 одно¬
го из входных напряжений характеристика ФД смещена так, что
зависимость иот Дф на рис. 9,3, б имеет на рабочем участке
2 Дфраб необходимую форму пеленгационной характеристики.
Поэтому ид* играет роль сигнала ошибки и после усиления в
усилителе У может подаваться на систему отработки углового
рассогласования а.
Фазовый пеленгатор обладает общим для всех фазоизме¬
рительных устройств недостатком: при d sina>K/2 из (9.2)
Дф>я и однозначность отсчета угла а нарушается, что хоро¬
шо видно и на рис. 9.3, б. Типовой метод устранения неодно¬
значности отсчета при большом диапазоне изменения а — до-
182
бавление одной или нескольких «грубых» шкал, для каждой из
которых ДОЛЖНО ВЫПОЛНЯТЬСЯ соотношение drp sinamax гр<Х/2‘
Чем больше атахгр данной грубой шкалы, тем меньшей долж¬
ка быть соответствующая ей база drp. Типовое расположение
на опорной штанге антенн грубой (гр), средней (ср) и точ¬
ной (т) шкал трехшкального фазового пеленгатора показано
на рис. 9.3, в. При поиске цели обычно применяется последо¬
вательная во времени работа грубой, средней, затем точной
шкал с поочередным подключением соответствующих пар ан¬
тенн к одной и той же схеме обработки сигнала.
При необходимости пеленгации по двум ортогональным
угловым координатам число антенн удваивается, причем они
располагаются крестообразно на двух ортогональных опорных
штангах.
При фазовой пеленгации один из наиболее точных методов
измерения угловой скорости линии визирования а состоит в
измерении разности доплеровских приращений частоты AfR сиг¬
налов, пришедших от цели к двум разнесенным на базу d антен¬
нам. Действительно, из (9.1) следует
^04) = (^-)acosa. (9.3)
С другой стороны,
Si (ДЧ>)=^7* ~ЧГ = к + ®Д1) - К + ® д2) =
= 2л (/д1 — /д2) = 2 я А/д. (9.4)
Приравняв (9.3) и (9.4), получим
сс=-^—^— Д/д. (9.5)
d cos сс д v '
Таким образом, измерение а сводится к измерению часто¬
ты биений между двумя входными сигналами.
Как видно из табл. 9.1, требуемая точность измерения ос
существенно выше точности измерения самой угловой координа¬
ты а. Поэтому при фазовой пеленгации для измерения а необ¬
ходимо увеличение базы d. Например, при К=3 см, а=0 и точ¬
ности измерения частоты биений б/д = 0,1 Гц для обеспечения
погрешности измерения а не более 6а=0,01 град/с=1,5Х
ХЮ~4 рад/с потребуется база =37-0,1 /2• 10-4 = 2-103 см = 20м,
что весьма трудно реализуемо на борту КА.
Кроме того, при жестком закреплении фазового пеленгатора
на корпусе КА ДН составляющих его антенн должна превы¬
шать заданный диапазон изменения угла а, т. е. здесь необхо¬
димо использовать малонаправленные антенны с соответствен¬
183
но сниженным усилением и уменьшенной точностью измерения
сс у границ зоны обзора. С этим связаны два важных недостат¬
ка пеленгаторов этого типа: снижение энергопотенциала (даль¬
ности действия) радиолинии и практическое отсутствие про¬
странственной селекции, в частности, относительно паразитных
сигналов, переотраженных от корпуса кооперируемого КА.
Все это привело к тому, что в наземных радиокомплексах,
в том числе в большебазных интерферометрах, рассмотренных
в гл. 5, в основном используются фазовые пеленгаторы, а в бор¬
товых системах поиска и автосопровождения по направлению
одиночных целей — амплитудные пеленгаторы с механическим
приводом остронаправленной антенны, реже с ФАР.
Одним из наиболее перспективных является суммарно-раз¬
ностный амплитудный метод моноимпульсной пеленгации.
Основное его достоинство — формирование пеленгационной
характеристики непосредственно в антенно-фидерном тракте,
что исключает влияние на положение ее нулевой точки как не¬
стабильностей элементов приемного тракта, так и изменений
амплитуд входных сигналов. Такая характеристика формирует¬
ся гибридным четырехплечим кольцевым мостом в волноводном
или микрополосковом исполнении (рис. 9.4, а) или аналогичным
ему многоплечим устройством. Как видно из рис. 9.4, а, если
при указанных длинах плеч, выраженных через длину волны в
волноводе КВ9 подвести к отводам 1 и 2 два синфазных сигнала,
то до отвода 2 они пройдут одинаковые пути и сложатся в фа-
G(Y~7°)
БРК
№EFЧ yn4z\
-Го Л
*Г, Г ,
'Gs(r>e(r-ro)*G(rro)
\С?. W=G(rr<>)-G(r*ro)
ж
№)-(*+*)
А /раб
О
г)
Рис. 9.4. Суммарно-разностный амплитудный метод моноимпульсной пелен¬
гации
184
Зе, а до отвода Д — пути, различающиеся на Хв/2, и сложатся в.
^ротивофазе, т. е. вычтутся.
Типовая структура суммарно-разностного амплитудного пе¬
ленгатора, измеряющего одну угловую координату, приведена
на рис. 9.4, б. Два неподвижных облучателя, смещенных в раз¬
ные стороны от оси рефлектора антенны, формируют две разне¬
сенные на угол 2у0 диаграммы направленности G(y—у0) и
£?(у+уо) (в полярной системе координат — диаграммы на
рис. 9.4, б, а в декартовой системе — верхние кривые на
рис. 9.4, в). На выходах 2 и А гибридного моста образуются
суммы и разности напряжений двух облучателей, формируя сум¬
марную Gz(y) и разностную Ga(y) диаграммы направленности
(нижние кривые на рис. 9.4, в). Сигнал передатчика Прд через
блок разделения каналов БРК и суммарный отвод моста излу¬
чается в пределах раствора суммарной ДН Gs(y). Сигналы,
пришедшие к двум облучателям от дели под некоторым углом
уц относительно оси антенны, пройдя через гибридный мост,
образуют на его отводах 2 и А соответствующие суммарные
и разностные напряжения. Оба напряжения в раздельных ка¬
налах преобразуются с помощью смесителей СМ и общего ге¬
теродина Г на одинаковую промежуточную частоту и усили¬
ваются в УПЧг и УПЧд.
Разностная ДН GA(y) в пределах ее рабочего участка АурЭб
имеет форму пеленгационной характеристики, однозначно опре¬
деляющей сигнал ошибки, т. е. размер и знак уц. Однако на¬
пряжение иА разностного канала содержит информацию только
о значении уц, а для определения знака уц необходимо сравнить
фазу аА с фазой напряжения суммарного канала uz, которое для
положительных уц синфазно с иАу а для отрицательных уц про-
тивофазно иА (рис. 9.4, в). Это сравнение выполняет фазовый
детектор ФД: значение и знак его выходного напряжения одно¬
значно связаны со значением и знаком уц. Этот сигнал ошибки
после усиления в усилителе У воздействует на двигатель антен¬
ного привода, минимизирующего уц и совмещающего ось антен¬
ны с направлением на цель.
Из рис. 9.4, в видно, что в пределах рабочего участка Аураб
суммарный сигнал uz максимален и практически постоянен. Это
позволяет с его помощью надежно обнаруживать цель и изме¬
рять такие ее координаты, как дальность и радиальная ско¬
рость.
Как уже указывалось, примечательным свойством такого пе¬
ленгатора является то, что положение нуля его пеленгационной
Характеристики, сформированной в гибридном мосте, не зави¬
сит ни от амплитуды входного сигнала, ни от параметров прием¬
ника. Однако крутизна пеленгационной характеристики от них
зависит, а это может привести к неустойчивости контура управ¬
185
ления антенной. Чтобы исключить такую возможность, в схе¬
му введена цепь быстродействующей авторегулировки усиления
БАРУ, управляемая с выхода суммарного канала, а воздейст¬
вующая на усиление обоих каналов. При этом выходное на¬
пряжение Ц2ВЫХ стабилизируется, а цДвЫх нормируется к постоян¬
ному и*вых и становится функцией только ^ц-
Чтобы обеспечить автосопровождение цели по двум ортого¬
нальным угловым координатам ^ и р, необходимо сформировать
не менее трех лучей. Обычно проще сформировать четыре луча
с помощью четырех симметрично смещенных относительно оси
антенны облучателей, объединив их выходы четырьмя гибрид¬
ными мостами, как показано на рис. 9.4, г. На выходах мостов
III и IV формируются общее суммарное напряжение и,ъ и раз¬
дельные разностные напряжения пдт и пдр по каждой координа¬
те. При этом в схеме на рис. 9.4, б добавляется второй разност¬
ный канал и второй привод антенны для уменьшения ее рассо¬
гласования по оси р.
Благодаря тому, что механический привод обеспечивает
«прокачку» оси антенны в пределах всего шарового сектора, в
котором может находиться ответчик, пеленгатор при автосо¬
провождении цели все время работает вблизи нулевой точки
его пеленгационной характеристики и точность автосопровожде¬
ния цели у границ зоны обзора не снижается.
В пеленгаторах с механическим приводом прецизионное из¬
мерение угловых скоростей | и р может реализоваться индук¬
ционными датчиками угловой скорости (ДУС), устанавливаемы¬
ми на осях привода антенны, а при монтаже антенны на ги-
ростабилизированной платформе — датчиками моментов [59].
Измерение дальности до ответчика и ее производной. В за¬
просно-ответных радиолиниях широко применяется фазовый
метод дальнометрии ввиду его простоты и энергетической эф¬
фективности. Обычно в качестве информативного параметра ис¬
пользуется фаза модулирующих гармонических колебаний неко¬
торой масштабной частоты шт (см. гл. 5).
В фазовом дальномере (рис. 9.5) как на запросчике, так и
Го
ГМЧ
п I 7,
irdffi
ФМ
sna
Ус
дм
Прпг\
' 1 nPAtn
Запросчик ОтЗе/пчик
Рис. 9.5. Структура простейшего фазового радиодальномера
186
на ответчике передатчик и приемник подключены к общей ан¬
тенне через блок разделения каналов БРК- Генератор масштаб¬
ной частоты о)м ГМЧ модулирует сигнал передатчика Прдзп с
несущей частотой <оь излучаемый в направлении ответчика,
g ответчике сигнал с выхода приемника Прмох преобразуется
преобразователем частоты ПЧ в ответную несущую частоту
02=5^(01 и после усиления в передатчике Прдот излучается обрат¬
но к запросчику, где на выходе приемника Прмзп включен де¬
модулятор ДМ, восстанавливающий сигнал масштабной часто¬
ты сом. Фазометр ФМ измеряет фазовый сдвиг Дфн между сиг¬
налами на выходах ГМЧ (ф0) и ДМ (фс). Этот фазовый сдвиг
пропорционален задержке т ретранслированного ответчиком
сигнала:
Дфя=фс—Фо=о)мт, (9.6)
где
Т = Тя+Тап==2/?/с+Тап. (9.7)
Здесь тд — время распространения радиоволн от запросчика к
ответчику и обратно; тап — аппаратурная задержка сигнала в
запросчике и ответчике; R — расстояние между запросчиком и
ответчиком; с — скорость света.
Подставив (9.7) в (9.6), получим зависимость расстояния
от фазового сдвига
R= (с/2о)м) (Дфд—сомтап). (9.8)
Обычно Тап^Тд, причем тап может быть заранее оценена и вве¬
дена в (9.8). Ошибку вносит лишь нестабильность тап, которая
не превышает (0,05... 0,1) тап. При этом часто пользуются
упрощенной формулой
(с/2сом) Дфд. (9.9)
Погрешность дальнометрии бR при заданной погрешности из¬
мерения фазового сдвига бфд определяется из (9.9):
бR^ (с/2ом)бфд, (9.10)
т- е. для уменьшения бR необходимо увеличивать сом. С другой
стороны, однозначный отсчет фазы возможен лишь до Дфд=2я.
Отсюда диапазон однозначного отсчета дальности
Д/?тах= (с/2(0м)2л; — ЯС/Шм, (9.1 1)
Т- е. для увеличения Д7?тах необходимо уменьшать сом.
Таким образом, как и при фазовой пеленгации, здесь тре¬
бования повышения точности и увеличения диапазона одно¬
значного отсчета противоречат одно другому. Как в отечест-
зснных, так и в зарубежных системах сближения кооперируе¬
187
мых КА [59] это противоречие обычно разрешается много-
шкальным методом. При использовании этого метода точное из.
мерение дальности производится на высокой масштабной час-
тоте шмт, а устранение неоднозначности отсчета обеспечивает
грубое измерение на более низкой частоте сом гр (таких «гру,
бых» шкал может быть несколько).
Для сопряжения шкал необходимо, чтобы точность отсчета
на грубой шкале б/?гр была меньше диапазона однозначного
отсчета на точной шкале Д/?т:
Ш?гр^ДЯт> (9.12)
где k — коэффициент запаса.
С учетом (9.10) и (9.12) условие сопряжения шкал сводит¬
ся к соотношению
<9ЛЗ>
Кроме того, сомт должна удовлетворять формуле точности (9.10),
а Шмгр — формуле однозначности (9.11). Если эти три условия
несовместны, добавляют промежуточную масштабную часто¬
ту сом Пр, чтобы
0>МТ _ ^мпр 2л; (9 141
WM пр «М гр £бфГр
Если и при этом условия несовместны, добавляют еще одну
промежуточную частоту. При характерных для систем взаим¬
ных измерений высокой точности и широком диапазоне от¬
счета дальности приходится использовать до пяти-шести шкал.
Одновременная передача всех масштабных частот энергети¬
чески невыгодна, а последовательное их включение увеличи¬
вает время каждого цикла измерения дальности. Обычно ис¬
пользуется компромиссный режим, когда точная шкала вклю¬
чена непрерывно, а все грубые шкалы — поочередно.
Наряду с этим проводились поиски методов сокращения чис¬
ла шкал при сохранении заданных точности и диапазона одно¬
значного измерения дальности. Один из них — дополнительная
фазокодовая модуляция сигнала масштабной частоты в тракте
передатчика и введение соответствующего опорного фазокодо¬
вого сигнала в тракт приемника: после совмещения опорной
фазокодовой последовательности с принятой и «грубого» опре¬
деления времени распространения сигнала тд=2R/c по задерж¬
ке опоры дополнительно уточняются результаты его измерения
фазометром, определяющим остаточный фазовый сдвиг при¬
нятого и опорного масштабных сигналов частоты сом т- При
таком двушкальном измерении диапазон однозначного отсчета
188
дальности определяется только длиной фазокодовой последо¬
вательности.
Производную дальности (радиальную скорость) vr=R в
принципе можно было бы определять, дифференцируя показа-
нйЯ радиодальномера либо оценивая конечную разность даль¬
ностей на границах фиксированного интервала времени. Одна¬
ко повсеместно для измерения R используется эффект Доплера
на несущей частоте, так как при этом простыми средствами
обеспечивается несравненно большая точность измерений [59].
Разность несущих частот излученного и принятого колеба¬
ний — доплеровское приращение частоты /д — определяется
известным соотношением
/Д = ^СО5 0=-^, (9.15)*
где v — модуль вектора скорости излучателя относительно цели,
Я —длина радиоволны, 0 — угол между вектором скорости и
линией визирования цели, vr — радиальная проекция вектора
взаимной скорости на линию визирования цели.
Поскольку частоты /зп запроса и f0T ответа известны, в за¬
просно-ответных радиолиниях задача измерения радиальной
составляющей скорости сводится к измерению частоты биений
между несущими частотами /зп излученного запросного и
/от+/д принятого от кооперируемого КА ответного сигналов
после снятия с них модуляции.
Применительно к задаче взаимных измерений между коопе¬
рируемыми КА фазовые методы дальнометрии имеют два су¬
щественных ограничения:
■многошкальность измерений в характерном для этого клас¬
са задач широком диапазоне однозначной оценки дальности;
отсутствие защиты от сигналов, переотраженных от других
объектов или подстилающей поверхности.
Эти ограничения особенно существенны при взаимных из¬
мерениях под малыми углами к горизонту планеты и особенно
при измерениях между посадочным КА и напланетным мая-
ком-ответчиком. Их удается устранить при переходе от фазо¬
вой дальнометрии к частотной с использованием широкополос¬
ных ЧМ сигналов. С учетом этого особенности реализации та¬
кого метода дальнометрии рассмотрены в § 9.2.
Измерение взаимного крена стыковочных узлов КА. На эта¬
пах причаливания и стыковки после совмещения продольных
°сей активного и пассивного модулей важно Минимизировать
* Формула (9.15) приведена без релятивистской поправки, так как в
Данном классе задач излучатель и приемник находятся в одной и той же
системе отсчета.
1 89
Изображение
источника
а)
^ ли
обдод
1 | \^&пшоА
I | I уз/га
:Ч_
П п г
-■ Lfr" st
toг
дг.
J »
о
Рис. 9.6. Схема измерения крена оптическим координатором
взаимный крен их стыковочных узлов с точностью 1 ... 2° (см.
табл. 9.1). Эта задача может решаться различными средствами.
Когда на борту активного КА работает космонавт, он может ее
решить визуально с помощью простых визирных или телеви¬
зионных приборов.
Для уменьшения крена радиотехническими средствами
можно использовать совмещение линейной поляризации пере¬
дающей антенны на пассивном объекте с поляризацией прием¬
ной антенны на активном объекте, однако при этом точность
измерения крена недостаточна.
Одним из наиболее эффективных средств автоматического
решения этой задачи является простейший оптический коорди¬
натор, широко используемый в системах астронавигации [59].
Принцип работы одного из таких координаторов поясняет
рис. 9.6, а. На пассивном модуле (ПМ) в характерной точке
периметра стыковочного узла устанавливается точечный источ¬
ник света И (например, полупроводниковый лазер). На актив¬
ном модуле (AM) устанавливается телескоп Т, оптическая ось
которого совмещена с продольной осью стыковочного узла AM,
а радиус поля зрения превышает предельное угловое рассто¬
яние источника света И от оси стыковочного узла ПМ. В фо¬
кальной плоскости телескопа помещен полудисковый обтюра¬
тор О (рис. 9.6,6), вращаемый опорным генератором ОГ с уг¬
ловой скоростью Q и осуществляющий 100%-ную модуляцию
светового потока источника И, который преобразуется фото¬
приемником ФП в электрический сигнал ис. Этот сигнал посту-
190
дает на фазовый детектор ФД, на второй вход которого по¬
дается с опорного генератора ОГ меандровое опорное напряже¬
ние Иоп с начальной фазой, соответствующей нулевому взаим¬
ному крену стыковочных узлов. Как показано на рис. 9.6, в,
при этом измеряемый ФД сдвиг фаз между ис и иоп опреде¬
ляет знак и размер взаимного крена стыковочных узлов г\аи.
Для защиты от паразитной засветки фотоприемника други¬
ми источниками излучения источник И может быть промодули-
рован «окрашивающим» сигналом частоты со»£2, на которую
настроен включаемый на выходе ФП узкополосный фильтр.
Существует много таких оптических координаторов, в том
числе более сложных, которые могут наряду с взаимным кре¬
ном определять с высокой точностью взаимное расстояние и
другие координаты кооперируемых КА.
Структура типовой радиосистемы сближения и стыковки
кооперируемых КА. В качестве типового примера рассмотрим
структуру запросно-ответной системы взаимных измерений, ус¬
пешно использованной в дальнем космосе в программе высадки
космонавтов на Луну «Аполлон» [58]. В этой программе актив¬
ным модулем являлась спускаемая на поверхность Луны пило¬
тируемая лунная кабина, а пассивным — пилотируемая
командная кабина на окололунной круговой орбите ожидания.
Радиосистема состояла из твердотельного запросчика не¬
прерывного излучения с размещаемой на корпусе лунной каби¬
ны поворотной остронаправленной антенной, осуществляющей
захват и угловое автосопровождение сигнала ответчика, и твер¬
дотельного ответчика с малонаправленной антенной, жестко
закрепленной на корпусе командной кабины. Система работа¬
ла при частоте запроса /зп=9832,8 МГц и частоте ответа
/01=9792 МГц (разнос частот на /пPi=40,8 МГц).
Для получения максимальной угловой чувствительности и
точности автосопровождения цели по двум угловым координа¬
там использовался рассмотренный амплитудный суммарно-раз¬
ностный пеленгатор с четырьмя смещенными с осью антенны
рупорными облучателями и трехканальной схемой обработки.
Данные об угловых координатах линии визирования снимались
кодовыми датчиками с осей антенной гироплатформы, которая
обеспечивала стабилизацию линии визирования цели в инер-
Циальном пространстве при колебаниях корпуса лунной каби¬
ны, а также точные измерения угловых скоростей линии визи¬
рования по показаниям датчиков моментов следящей системы
гироплатформы.
Дальность измерялась трехшкальным фазовым методом с
Последовательной фазовой модуляцией запросного сигнала тре¬
мя масштабными частотами. Используя (9.10), (9.11) и (9.14),
нетрудно составить табл. 9.2, из которой видно, что при вы-
191
Таблица
5-2
Шкала
Грубая
Средняя
Точная
Диапазон однозначночПогрешность измепе
го отсчета /?, км ния, м
О... 750
0 ... 23,5
0 ... 0,730
4-103
130
.4
бранных значениях масштабных частот и точности фазометра
бф = 2° условия однозначности отсчета, точности и сопряжения
шкал выполняются.
Радиальная скорость измерялась путем оценки доплеров-
екого приращения несущей частоты сигнала, пришедшего от
ответчика.
Запросчик был смонтирован в двух блоках: антенном и
электроники (рис. 9.7). Синтезатор частот в блоке электроники
вырабатывал сигнал частоты возбуждения передатчика
(102,4 МГц), которая цепочкой варакторных умножителей ча¬
стоты умножалась на 96 до частоты запроса (/зп~
= 9832,8 МГц). В твердотельном усилителе мощности этот сиг¬
нал модулировался по фазе тремя масштабными частотами и
Антеннь/й Блок
Блок электроники
ФазоВош
200 Гц
ноВрля-
С,* кГц
тор
20*,8 кГц
Синтезатор частот
£ т-Om ЭВМ
~«\uL-
РонанОы от ЭВМ
Поборот от руки
Включение абто-
еонробомеВения
К инВикаторр
Рис. 9.7. Структурная схема запросчика системы взаимных измерений, ис¬
пользованной в лунной программе «Аполлон»
192
через блок разделения каналов поступал в антенну. Энергия
ответного сигнала ответчика принималась четырехрупорным об¬
лучателем антенны и через блок разделения каналов подава¬
лась на гибридный мост, формировавший суммарный (2) и
дВа разностных (Да, Др) сигнала, которые в смесителях гете-
родинировались сигналом передатчика на промежуточную ча¬
стоту 40,8 МГц. В трехканальном приемнике вырабатывались
сигналы ошибки Да и Др, воздействовавшие на следящие систе¬
мы гироплатформы, двигатели которых минимизировали эти
ошибки, обеспечивая автосопровождение цели по а и р. С осей
антенны информация об углах аир поступала в ЭВМ, к ин¬
дикаторам и на телеметрическую систему (ТМС), передавав¬
шую эти данные на Землю. Со следящей системы снимались
данные об а и р. Следящая система помимо режима автосо¬
провождения могла выставлять ось антенны по командам от
ЭВМ или ручного управления.
Фазоманипулированный сигнал второй промежуточной ча¬
стоты (6,8 МГц) в суммарном канале использовался для изме¬
рения R и R. В устройстве сопровождения по дальности по¬
следовательно сравнивались фазы сигналов трех масштабных
частот и опорных сигналов, и результаты вводились в устрой¬
ство обработки данных и логики, откуда значения R выдава¬
лись в ЭВМ и на индикатор пульта космонавта.
Выходной суммарный сигнал частоты 6,8 МГц+/д также
поступал на устройство сопровождения по частоте, где в ре¬
зультате сравнения его с опорным сигналом 6,8 МГц от син¬
тезатора частоты формировался сигнал доплеровских биений,
который передавался в устройство обработки данных и логи¬
ки, откуда значения радиальной скорости R вводились в ЭВМ
и на пульт космонавта. С устройства обработки данных и ло¬
гики в ЭВМ и на ТМС также поступали сигналы потери сопро¬
вождения по угловым координатам, дальности или радиальной
скорости и ряд других контрольных сигналов.
Ответчик обеспечивал фазокогерентную ретрансляцию за¬
просного сигнала со смещением его несущей частоты на
40,8 МГц при сохранении фазовых соотношений между
масштабными модулирующими сигналами. Структурная схема
ответчика, решавшего эту задачу, приведена на рис. 9.8. При¬
нятый антенной запросный сигнал частоты /Зп+/д был модули¬
рован по фазе масштабными частотами (на схеме обозначено
ФМ). Через блок разделения каналов этот сигнал поступал в
приемник с двойным преобразованием частоты, на который с
синтезатора опорных частот подавались «очищенные» от фазо-
вой модуляции сигналы гетеродинирующих частот /0т+/д и
34 МГц+/д. С выхода приемника ФМ сигнал частоты
13—4229
193
Нш
т
Лп+*А
(ФМ)
Блок
разБелекия
каналоБ
f%n*fя
Усилитель
мощности
т
>ог+/д (Щ _
Лт+/д
СН1
УПЧ1
Приепник
(ФМ)
ЩвМГц^
СМ2
\SotVa
*96
*3
УЛЧ2
*/j*w
1^/у;
ЗЬМГц+f\
*5
\6,8МЩ.
j Синтезатор опорных частот
ФазоБый поБуллтор
200 Гц
Б^кГц
6,8МГц+Рд(ФМ)
т,8кгц
Блок разоБого
БемоБуллтора мйаатаБных
частот
Блок поиска частоты запроса
а контур РАБ
БыБеления несущей
6,8 МГц
Рис. 9.8. Структурная схема ответчика системы взаимных измерений, исполь¬
зованной в лунной программе «Аполлон»
6,8 МГц+/д разветвлялся на блок поиска частоты запроса и
контур ФАП выделения несущей, а также на блок фазового
демодулятора масштабных частот. Первый из них непрерывно
(в том числе и в отсутствие сигнала запроса) осуществлял
поиск по частоте путем перестройки по пилообразному закону
кварцевого генератора. При обнаружении и захвате запросного
сигнала поиск прекращался и контур ФАП обеспечивал фазо¬
вую синхронизацию кварцевого генератора сигналом несущей
частоты 6,8 МГц+/д с подавлением его фазовой модуляции.
Гармонический сигнал кварцевого генератора являлся зада¬
ющим для синтезатора опорных частот и опорным для блока
фазового демодулятора масштабных частот, на второй вход
которого подавался выходной ФМ сигнал приемника той же
частоты 6,8 МГц+/д.
В блоке фазового демодулятора три масштабные частоты
выделялись полосовыми фильтрами, усиливались и подавались
на фазовый модулятор усилителя мощности ответного сигнала.
В этом усилителе, возбуждавшемся немодулированным сигна¬
лом синтезатора опорных частот /0т+/д, точно восстанавлива¬
лась фазовая модуляция его масштабными сигналами. Сфор¬
мированный таким образом ответный ФМ сигнал после блока
разделения каналов излучался антенной в направлении запрос¬
чика.
В данной системе обеспечивалось измерение только шести
из 11 указанных параметров. Кроме того, точность дальномер-
194
лого канала была недостаточна для последнего этапа стыков¬
ки. Это связано с тем, что здесь оба кооперируемых модуля
были пилотируемыми и взаимная ориентация стыковочных уз¬
лов и их стыковка на завершающем этапе были возложены на
космонавтов, которые имели для этого необходимые оптические
приборы. Подобный режим управления «вручную» особенно
эффективен при так называемой андрогинной стыковке, когда
каждый из двух модулей способен выполнять функции актив¬
ного.
9.1.3. ОСОБЕННОСТИ СИСТЕМ СБЛИЖЕНИЯ
С НЕКООПЕРИРУЕМЫМ КА
Прежде всего измерение траекторных параметров взаимного
движения в отсутствие ответчика на пассивном КА вынуждает
использовать сигнал, отраженный от его поверхности, т. е. роль
запросчика должен выполнять многопараметрический радиоло¬
катор. Для всякого радиолокатора характерно равенство несу¬
щих частот излученного и отраженного сигналов, и в связи с
этим частотные методы развязки каналов передачи и приема
невозможны. Это вынуждает использовать их временную раз¬
вязку, т. е. импульсный режим работы передатчика с внутриим-
пульсной модуляцией или без нее.
Из-за ограниченного энергопотенциала бортового радиоло¬
катора на больших дальностях необходимы длительные им¬
пульсы с малой скважностью. С другой стороны, на малых
дальностях R, которым соответствуют малые времена запазды¬
вания отраженных сигналов Тд=2^/с«Сти б, при больших тИб
невозможна временная развязка, но имеется большой запас по
энергетике и требуемое для развязки уменьшение длительности
импульсов тим и периода их повторения Гпм вполне допусти¬
мо. Все это приводит к необходимости непрерывной адаптации
ти и Гп К измеряемой дальности по мере ее уменьшения. По
существу при этом происходит размен энергетики радиолинии
на точность.
Следующая особенность такого радиолокатора связана с
необходимостью высокоточного углового автосопровождения
пассивного КА. Всякий пеленгатор строит нормаль к фазовому
фронту отраженной от цели сферической волны. Однако такая
сложная цель, как КА, имеет многолепестковую диаграмму об¬
ратного рассеяния (ДОР), благодаря которой при перемещении
Цели относительно радиолокатора кроме амплитудных флукту¬
аций на 10 ... 12 дБ отраженного от нее сигнала имеют место
флуктуации фазового фронта отраженной волны, т. е. перемен¬
ные во времени отклонения фронта волны от идеально сфери¬
ческого. Вследствие этого любой пеленгатор фактически опре¬
деляет направление на фиктивную «блуждающую блестящую
13*
195
точку» фазового центра отражающей цели, что дает особенно
большие погрешности на малых расстояниях от цели. Спектр
таких «угловых шумов» лежит в диапазоне 0 ... 5 Гц и потому
сгладить их нельзя. Точность пеленгации дополнительно сни¬
жается из-за потерь от глубоких амплитудных флуктуаций от¬
раженного сигнала.
К настоящему времени пожалуй единственным эффективным
методом уменьшения влияния таких флуктуаций на точность
пеленгации является многочастотная радиолокация [62]. Мно¬
гочастотными названы радиолокаторы, работающие на не¬
скольких несущих частотах в одном и том же угловом секторе
пространства. Физический смысл даваемого ими выигрыша оп¬
ределяется тем, что при должном разносе несущих частот ле¬
пестки ДОР цели, соответствующие различным частотам, как
бы «вплетаются» друг в друга из-за углового сдвига между
ними, благодаря чему изрезанность результирующей ДОР и
флуктуации отраженного сигнала уменьшаются. Сглаживание
максимально при статистической независимости отраженных от
цели сигналов разных частот, для чего достаточно, чтобы длина
волны сигнала биений между соседними несущими частотами
была мала по сравнению с радиальной протяженностью эффек¬
тивно отражающей части цели. Для объектов типа КА • это
соответствует разносу частот на 15... 20 МГц. Исследования
показали, что эффективная компенсация потерь из-за флукту¬
аций отраженного сигнала достигается уже при использова¬
нии трех—пяти несущих частот. Важно, что многочастотная
радиолокация дополнительно обеспечивает повышение частоты
флуктуаций фазового фронта отраженной волны, что позволяет
эффективно фильтровать их контуром углового автосопровож¬
дения пассивного КА. Обычно несущие частоты излучаются
последовательно во времени либо в пределах каждого излу¬
чаемого импульса, либо от импульса к импульсу.
Примером рациональной реализации радиосистемы сбли¬
жения с некооперируемым КА с учетом всех перечисленных
особенностей является многочастотный импульсно-доплеровский
радиолокатор орбитального самолета многоразового использо¬
вания, подробно описанный в [63]. Данных об аналогичных си¬
стемах для программ дальнего космоса не имеется.
9.2. РАДИОСИСТЕМЫ ПРИЦЕЛЬНОЙ ПОСАДКИ
НА ПОВЕРХНОСТЬ ПЛАНЕТЫ
9.2.1. ОБЩИЕ СВЕДЕНИЯ
В программе создания постоянных баз на Луне и в ряде
других комплексных космических программ возникает задача
кучной посадки группы КА в заданном районе Луны или пла-
196
jjgxbi назначения. При этом первый посадочный аппарат может
служить напланетным маяком-ответчиком для последующих ап¬
паратов, на которых наряду с другими радиосистемами разме¬
щается запросчик радиолинии взаимных измерений между са¬
дящимся КА и напланетным маяком.
Такие системы имеют следующие существенные особенности
по сравнению с рассмотренными системами стыковки КА:
1. При групповой посадке КА задача сводится не к непо¬
средственной стыковке с напланетным маяком, а к посадке на
заданном расстоянии от маяка, т. е. с заданным «промахом»,
который должен быть заложен в алгоритм обработки измери¬
тельной информации. При этом, естественно, отпадает необхо¬
димость в измерении взаимного крена КА. В остальном состав
и точность измерений взаимных траекторных параметров те
же, что и при сближении и стыковке КА (см. табл. 9.2).
2. В отличие от операции стыковки, когда на конечном эта¬
пе сближения линия визирования пассивного КА совмещена с
продольной осью активного КА, при посадке угол между про¬
дольной осью активного КА и линией визирования маяка не¬
прерывно изменяется, нарастая по мере сближения с маяком.
Это приводит к необходимости использовать поворотную ан¬
тенну запросчика с большими углами «прокачки» ее оси отно¬
сительно продольной оси КА-носителя.
3. Наиболее важен и требует особо точных измерений вза¬
имных параметров КА конечный этап спуска, на котором из¬
мерения выполняются под малыми углами к горизонту в непо¬
средственной близости от подстилающей поверхности. Как на¬
глядно показано на рис. 9.9, при этом резко возрастают поме¬
хи, создаваемые паразитными сигналами, переотраженными от
этой поверхности. Предварительные оценки и последовавшие
за ними эксперименты показали, что в реальных условиях, осо¬
бенно при йолете над сильнопересеченной местностью, вноси¬
мые переотраженными сигналами погрешности измерений мо-
Спуснаеный НА
Рис. 9.9. Переотражения от поверхности планеты при прицельной посадке КА
197
гут стать недопустимыми, достигая единиц—десятков процентов
от измеряемого значения параметра. Поэтому при посадке КА
на маяк на первый план выдвигается компенсация влияния па¬
разитных переотражений от подстилающей поверхности на точ¬
ность взаимных измерений траекторных параметров.
Из рис. 9.9 ясно, что основным признаком, по которому
можно различить полезный и переотраженный сигналы, яв¬
ляется разность проходимых ими расстояний, т. е. времен их
запаздывания: в запросно-ответных радиолиниях переотражен¬
ный сигнал всегда проходит больший путь и потому запазды¬
вает относительно полезного. Следовательно, для эффективной
защиты от переотраженных сигналов необходима острая селек¬
тивность запросчика по времени запаздывания сигнала (по
дальности).
Все эти обстоятельства определяют основные отличия типо¬
вой радиосистемы прицельной посадки от системы стыковки.
9.2.2. ОСНОВНЫЕ ОСОБЕННОСТИ РАДИОСИСТЕМЫ
ПРИЦЕЛЬНОЙ ПОСАДКИ
Вид модуляции. Импульсные радиодальномеры с большой
скважностью здесь невыгодны из энергетических соображений.
Из числа систем непрерывного излучения прецизионные фазо¬
вые дальномеры для решения данной задачи непригодны, так
как неспособны разрешить сдвинутые по фазе полезный и пе-
реотраженные сигналы одинаковой частоты.
Как уже отмечалось, для этого наиболее выгодна широко¬
полосная частотная модуляция запросного сигнала, для кото¬
рой характерна острая селктивность по времени запаздывания
сигнала [64].
Пространственный поиск и угловое автосопровождение
маяка. Ввиду больших и непрерывно нарастающих по мере
сближения с целью углов прокачки антенны относительно оси
садящегося КА здесь наиболее эффективен пеленгатор с ме¬
ханическим приводом остронаправленной антенны и суммарно¬
разностным методом моноимпульсной пеленгации, рассмотрен¬
ным в п. 9.1.2.
Прецизионные измерения угловых скоростей линии визиро¬
вания маяка могут выполнять индукционные датчики угловой
скорости (ДУС), устанавливаемые на осях привода антенны
запросчика.
Измерение дальности до маяка и ее производной. Для ча¬
стотной дальнометрии характерна трудность совместного изме¬
рения дальности и ее производной, так как для разделения
дальномерного и доплеровского приращений несущей частоты
сигнала необходимы специальные методы.
198
Наиболее просто эта трудность разрешается при симметрич¬
ной линейной частотной модуляции сигнала передатчика на за¬
просчике. Ввиду разноса несущих частот f3n0 запроса и f0Tо
ответа, необходимого для развязки каналов приема и передачи,
цМ сигнал запроса f3n(t) удобно использовать в качестве гете¬
родинного в приемном тракте запросчика, преобразуя принятый
сигнал частоты fOT(0 в сигнал промежуточной частоты fnчо—
==fo тО—f зпО-
Соответствующие частотно-временные соотношения поясняет
рис. 9.10,а. Если бы маяк-ответчик был на пренебрежимо малом
постоянном расстоянии от запросчика (/?-*-0, £ = 0), частота
ответного сигнала fOT(t) была бы модулирована синфазно с
/зп(0> но смещена по частоте на /пчо^/ото—/зпо (верхняя штрих-
пунктирная линия). Если при столь же малом расстоянии ра¬
диальная скорость сближения с маяком не равна нулю, частота
ответного сигнала /от(0 сместится вверх на доплеровское при¬
ращение частоты /д=2#ДСр, где Хср= (Хзп+^от)/2 — средняя
длина волны запросного и ответного сигналов (верхняя штрихо¬
вая линия). Наконец, если и расстояние до маяка конечно, ча¬
стота ответного сигнала fOT{t) сместится дополнительно по вре¬
менной шкале на время распространения сигнала до ответчика
и обратно tr=2R/c, где с — скорость света (верхняя сплошная
Переотраженные
у сигналы
Полезный
^ ct/гнал
^ЛЧ0+Л
fnO+trfRmin ЛчО+Ъ+Ът
О
рис. 9.10. Частотно-временные соотношения в запросчике системы прицель¬
ной посадки при ЧМ радиовысотометрии
199
линия). Это создает дополнительное дальномерное приращение
W 2 R
частоты, равное /и=^ти= 75— , где f— скорость изменения
* /72/ С
частоты при ЧМ, W — девиация частоты. При гетеро-
динировании принятого ответного сигнала частоты /от (О
сигналом передатчика частоты /Зп(0 частота преобразованного
сигнала на выходе смесителя приемника /пч(0 =/пчо+/д=Ь/я
будет изменяться, как показано на рис. 9.10,а. Важно, что на
восходящем и нисходящем участках периода частотной моду¬
ляции /д имеет одинаковый знак, a fR— разный, что создает
условия для их раздельного измерения.
На рис. 9.11 приведена одна из возможных структурных
схем запросчика, решающего эту задачу. Сигнал задающего ге¬
нератора ЗГ ЧМ передатчика используется для гетеродинирова-
ния ответного сигнала в смесителе СМ приемника. С выхода
смесителя преобразованный сигнал частоты /Пч(0 через УПЧ
и коммутатор К, синхронизованный от синхрогенератора СГ с
частотным модулятором передатчика ЧМ, поочередно подается
на два измерителя частоты того или иного типа: ИЧН и ИЧВ.
Первый включается на нисходящем участке изменения /зп(0>
второй — на восходящем. Как ясно из рис. 9.10,а, сумма их по¬
казаний даст значение /д, а разность — значение fR.
Влияние зон обращения /Пч(0 между восходящим и нисхо¬
дящим участками периода ЧМ, которые могут исказить показа¬
ния ИЧН и ИЧВ, обычно устраняется путем подключения изме¬
рителей частоты лишь в интервалах, условно показанных внизу
рис. 9.10,а. В результате при тд<Гт результирующий спектр
ответного сигнала на выходе коммутатора К имеет вид, пока¬
занный на рис. 9.10,6. Паразитные сигналы, переотраженные
Рис. 9.11. Структурная схема запросчика системы прицельной посадки при
ЧМ. радиодальнометрии
200
поверхностью планеты, запаздывают относительно полезного
ответного сигнала и соответственно имеют большие значения
fB. Вертолетный эксперимент над сильнопересеченной местно¬
стью показал, что спектр переотражений дискретный, как ус¬
ловно показано на нижней кривой рис. 9.10,а и в. Таким обра¬
зом, защита от сигналов, переотраженных поверхностью, сво¬
дится к выделению на входе ИЧВ максимальной частоты
fn4 щах=/пчо+/д—fmm, а на входе ИЧН — минимальной частоты
/пч гпт = /пч0+/д+/я-
Существуют различные способы решения этой задачи [59,
65]. Один из наиболее эффективных — динамическое выделение
крайней частоты спектра — поясняет рис. 9.12. На входе изме¬
рителя частоты включается узкополосный следящий фильтр
СФ, частота которого подстраивается управителем частоты УЧ.
Управляющее напряжение на входе УЧ формируется двумя
встречно подключенными к общей нагрузке R детекторами: Д1,
выпрямляющим входное напряжение СФ, и Д2, выпрямляю¬
щим предварительно усиленное усилителем У выходное напря¬
жение СФ.
При выделении /пч min начальная настройка фильтра /ф0 вы¬
бирается ниже минимально возможного значения нижней часто¬
ты входного спектра /пч min. Тогда при любом значении расстоя¬
ния до маяка дальномерный спектр G(fn4) вначале лежит вне
полосы пропускания СФ и напряжение на выходе СФ равно
нулю. Уровень входного сигнала СФ определяется энергией
всего спектра и после выпрямления в Д1 воздействует на УЧ
с такой полярностью, чтобы резонансная частота фильтра /<ф
смещалась вверх (рис. 9.12,6). Частота /ф будет увеличиваться
до тех пор, пока в полосу пропускания СФ не попадет нижний
край спектра G(fnч). В этот момент на выходе СФ появится
°0
СФ,
/ф о
f
О
Рис. 9.12. Структура (а) л спектрограммы (б, в) динамического выделителя
со следящим фильтром крайней частоты спектра
201
GVb-(fm*fK)l
'У
iiULJ
G^rO*(fm*W
Уро fro
0
К: '
if
Sqo
0)
Рис. 9.13. Структура (а) и спектрограммы (б, в) динамического выделителя
со следящим гетеродином крайней частоты спектра
напряжение, которое после усиления и детектирования в Д2
создаст в нагрузке R ток, обратный току от Д1, и при доста¬
точном уровне усиления остановит перестройку фильтра. В цепи
установится режим динамического равновесия (рис. 9.12,в) —
через СФ на измеритель частоты пройдет только нижний край
спектра вблизи частоты, характеризующей истинное значение
расстояния до маяка. При изменении расстояния СФ будет от¬
слеживать изменение частоты /пч mm-
Аналогично работает и динамический выделитель минималь¬
ной частоты со следящим гетеродином (рис. 9.13).
Для выделения /пч шах достаточно в схеме на рис. 9.12 уста¬
новить /фо>/пчтах и изменить полярность диодов Д1 и Д2 на
обратную. Аналогичны изменения в схеме со следящим гетеро¬
дином на рис. 9.13.
Широкополосность ретранслируемого маяком ЛЧМ сигнала
при необходимости сдвига ответной несущей частоты относи¬
тельно запросной определяет особенности структурной схемы
установленного на нем ответчика, один из вариантов которой
показан на рис. 9.14. Здесь применяется двукратное преобра¬
зование частоты, причем в качестве второго гетеродина исполь¬
зуется ЧМ генератор ЧМГ, закон модуляции которого с высо¬
кой точностью идентичен закону модуляции передатчика на за¬
просчике. Достижения последних лет в области прецизионного
формирования ЧМ сигналов [66] делают создание такого гете¬
родина вполне реальным.
Сигнал частоты f3u(t) запросного сигнала через блок разде¬
ления каналов БРК поступает на смеситель СМ1, где перемно¬
жается с сигналом высокостабильного кварцевого генератора
КГ, частота которого FQ умножена в П\ раз. Сигнал разностной
комбинационной частоты (О =/зп (0—n\F0 после усиления
в УПЧ1 подается на смеситель СМ2, где перемножается с сиг¬
налом ЧМГ частоты-/г(0 =/n4i(^—т0+/пч2о, где т — случайный
202
/ЭЛ (t)
*
CM1
УПЧ1
^пч1 (t)
СМ2
*n.
БРН
НГ
a
for(t)
*— Прд
Kni
\П2?0
СолроЗржЗенис
VP
sr(t)
ЧМГ
CMb
■Рпчз(^)
УЛЧЗ
fr(t)
CH3
УПЧ2
*^пч2 ft)
Рис, 9.14, Структурная схема ответчика со сдвигом несущей частоты запрос¬
ного широкополосного ЧМ сигнала
временной сдвиг модуляции частоты ЧМГ относительно идентич¬
ной модуляции частоты принятого запросного сигнала. Частота
преобразованного сигнала на выходе СМ2 /Пчг(0 =/пч2о+
+/зп (t—т) fan (t) .
Начало каждого периода частотной модуляции ЧМГ задает¬
ся тактовыми импульсами от генератора тактовых импульсов
ГТИ. В режиме поиска период их повторения Тп несколько от¬
личен от периода частотной модуляции запросного сигнала, бла¬
годаря чему модулирующая функция гетеродина непрерывно
смещается во времени относительно модулирующей функции
принятого сигнала, пока не совпадет с ней. К этому моменту
сигнал второй промежуточной частоты вырождается в гармони¬
ческий, так как при т=0 /пч2(0 =/пч2о- Это приводит к резкому
возрастанию уровня сигнала на выходе УПЧ2, узкополосный
фильтр которого настроен на /Пч2о, и реле Р переключает ЧМГ
в режим автосопровождения по частоте, при котором Ти перио¬
дически принимает значения Гт+Дт и Тт—Дт, где Дт<СГт, вы¬
рабатывая на выходе УПЧ2 сигнал ошибки, используемый для
временной коррекции тактовых импульсов и соответственно
начальной фазы частотной модуляции ЧМГ.
Таким образом, в тракте второй промежуточной частоты
производится сжатие по частоте принятого сигнала, что позво¬
ляет уменьшать шумовую полосу УПЧ2 до значений, близких
к информативной полосе: ограничения обусловлены лишь неточ¬
ностью воспроизведения закона f3n(t) в ЧМГ.
После узкополосной фильтрации сигнала в УПЧ2 необходи¬
мо вновь восстановить его частотную модуляцию. Это реали¬
зуется в смесителе СМЗ, на выходе которого УПЧЗ выделяет
сигнал нижней комбинационной частоты /пчз(0=М0—/пч2о=
Этот сигнал подается на смеситель СМ4, где пере¬
203
множается с опорным сигналом частоты n^F0. На выходе СЩ
выделяется сигнал верхней комбинационной частоты f от
=}зп(0 + (п2—ni)Fo, который усиливается в передатчике Прд
и через БРК излучается в направлении запросчика.
Таким образом в ответчике можно обеспечить узкополосную
фильтрацию широкополосного сигнала, а рациональным выбо¬
ром F0, П\ и п2 независимо оптимизировать значения разноса
запросной и ответной частот (/г2—n\)F0 и промежуточной часто¬
ты /пчЮ==/зпО niF0.
В заключение следует отметить, что при разработке систем
взаимных измерений для групповой высадки десанта КА на по¬
верхность Луны или планеты целесообразно объединить их
системы стыковки и прицельной посадки, применив и при сты¬
ковке частотную дальнометрию, характеризуемую острой селек¬
тивностью по дальности.
9.3. СИСТЕМЫ НАВИГАЦИОННЫХ ИЗМЕРЕНИЙ
ОТНОСИТЕЛЬНО ПОВЕРХНОСТИ ПЛАНЕТЫ
9.3.1. ОБЩИЕ СВЕДЕНИЯ
Для обеспечения оптимального режима снижения и после¬
дующей мягкой посадки спускаемого КА на поверхность .пла¬
неты необходимо непрерывно измерять параметры его движе¬
ния относительно реального рельефа подстилающей поверхно¬
сти, прежде всего вектора скорости и истинной высоты полета.
Решить эту задачу наземными радиосредствами невозмож¬
но. Для этого необходимы автономные бортовые радиоизмери-
тельные системы, для которых характерно извлечение траек¬
торией информации из радиоволн, отраженных от подстилаю¬
щей поверхности.
В отличие от радиосистем, рассматриваемых в гл. 10, зада¬
чей данного класса систем не является извлечение информа¬
ции о самой подстилающей поверхности и ее характеристиках.
Более того, для их эффективной работы идеальной является
абсолютно ровная шероховатая подстилающая поверхность
на всей трассе полета. Однако реальная поверхность планеты
далека от этого идеала. Поэтому одно из важнейших требо¬
ваний, предъявляемых к радиосистемам этого класса, — обе¬
спечение независимости их нормального функционирования от
различного рода неоднородностей подстилающей поверхности.
Рассмотрим некоторые общие особенности таких радиоси¬
стем.
Модель отражающей поверхности. Радиолокационные отра¬
жения от поверхности Луны или планеты — сложный процесс,
зависящий от большого числа случайных факторов, определяе¬
мых комплексными электродинамическими соотношениями.
204
Однако для рассматриваемых здесь навигационных радиоси-
стем, не связанных с исследованием характеристик самой по¬
верхности, вполне удовлетворительна достаточно простая мо¬
дель, представляющая облучаемую однородную шероховатую
поверхность в виде очень большого числа случайно располо¬
женных рассеивающих элементов — «фацетов». Взаимная не¬
зависимость отраженных от них сигналов определяется тем, что
разности расстояний от фазового центра бортовой антенны до
отдельных отражателей больше длины волны излучения радио¬
локатора, лежащей, как правило, в СМ диапазоне.
Ввиду того, что фазы элементарных отраженных сигналов
независимы, эти сигналы суммируются по мощности, образуя
результирующую среднюю мощность отраженной поверхностью
радиоволны, пропорциональную числу элементарных отражате¬
лей, т. е. площади поверхности Лпл, облучаемой радиолокато¬
ром. Однако эта мощность помимо размеров отражающей пло¬
щадки зависит от целого ряда параметров радиолокатора (дли¬
ны волны, раствора и направления луча антенны, поляризации
радиоволн и др.) и земной поверхности (проводимости, диэлек¬
трической проницаемости, шероховатости, макрорельефа, ра¬
стительного покрова и др.)* Поэтому для интегральной харак¬
теристики влияния основной части этих параметров введен
коэффициент рассеяния оо, который характеризует эффектив¬
ную площадь рассеяния (ЭПР) единицы отражающей поверх¬
ности [67].
Важно отметить, что использование коэффициента рассея¬
ния эффективно лишь при относительной однородности отра¬
жающих свойств поверхности в пределах облучаемой площад¬
ки и отсутствии на ней интенсивно отражающих одиночных
точечных объектов. Особенно удобен этот коэффициент при
узких ДН радиолокационной антенны, когда можно считать о0
для всей облучаемой площадки одинаковым. В этом случае
эффективная поверхность рассеяния отражающей площадки
равна
Спл = (То^пл. (9.16)
Энергетика радиолинии при локации протяженной поверх¬
ности. Рассмотрим радиолинию при произвольном угле облу¬
чения поверхности и непрерывном режиме излучения радио-
в°лн, характерном для припланетных бортовых радиолокато¬
ров.
Основные геометрические соотношения для этого режима
Работы представлены на рис. 9.15.
Мощность сигнала на входе радиолокационного приемника
°пределяется известной формулой радиолокации [67]:
Рпрм = РпрдСпрдОпрм^2Т|2(Тпл/ (4я)3/?4,
205
Рис. 9.15. Геометрические соотноше¬
ния при локации протяженной по¬
верхности планеты бортовым радио¬
локатором КА
Р р ^Г1Д р
ПрМ ^ П4 > ^ :
где Рцрд — мощность пере,
датчика, РПрм — мощность
на входе приемника, G-^
коэффициент усиления ра.
диолокационной антенны
X— длина волны, ц — ко¬
эффициент потерь в среде
распространения, апл — эф¬
фективная поверхность рас¬
сеяния цели, R— даль¬
ность до цели.
В отличие от точечной
цели здесь при заданной
ширине радиолуча эффек¬
тивная поверхность рассе¬
яния облучаемой площад¬
ки Опл зависит от рассто¬
яния до поверхности R.
Использовав (9.16), обо¬
значим единым коэффици¬
ентом С все независимые
от R параметры радиолока¬
тора и поверхности
^прд^прд^прм^1!2^
(9.17)
и определим зависимость ЛПл от R. При наклонном облучении
поверхности с расстояния R под углом Ро и ширине ДН антен¬
ны в плоскости полета Д{5, а в нормальной к ней плоскости Да
облучаемая площадь поверхности будет иметь форму эллипса
с большой осью а и малой осью Ь. Из рис. 9.15 ясно, что а=
=i?A^/sin р0; b=RAa. Площадь эллипса пропорциональна
квадрату расстояния:
л п nh л р2 — РП2 D я AftAft
Атл 4 CLO 4 sin р0 ^ ’ В — 4 sin ft/
Отсюда
Р =С В — =
1 npM w D4 П2
(9.18)
Следовательно, в отличие от точечной цели мощность отра¬
женного поверхностью непрерывного сигнала на входе радио¬
локационного приемника убывает со второй степенью расстоя¬
ния.
206
9.3.2. БОРТОВОЙ ПОСАДОЧНЫЙ РАДИОЛОКАТОР
Посадочный радиолокатор, устанавливаемый на межпланет¬
ном КА, предназначен для непрерывного измерения всех трех
ортогональных составляющих вектора скорости его полета от¬
носительно подстилающей поверхности планеты и истинной
высоты полета при снижении и посадке на поверхность плане¬
ты. Типовые требования, предъявляемые к такому радиолока¬
тору, сведены в табл. 9.3 [59].
Таблица 9.3
Скорость, см/с
Параметр
продольная
поперечная
вертикальная
Высота, км
Диапазон
измерения
—600. ..+ 150
±150
+ 900. ..— 150
0...12
Точность, %
1,5
1,5
1,5
1,4+0,5 м
Скорость измеряется до высоты 7,5 км.
Из табл. 9.3 видно, что требования к измерению скорости
близки к типовым данным доплеровских измерителей скорости
и угла сноса самолетов в приземном пространстве [68], а тре¬
бования к измерению высоты — типовым данным самолетных
ЧМ радиовысотомеров [69]. Однако здесь задача сводилась к
созданию многопараметрической системы, наилучшим образом
отвечающей весьма жестким габаритно-массовым и надежност¬
ным требованиям, характерным для дальних КА, как пилоти¬
руемых, так и автоматических.
Было разработано множество проектов, основанных на раз¬
личных методах решения данной задачи единой дальномерно-
скоростемерной радиосистемой. Однако в конечном счете была
выбрана система, в которой используются раздельные ЧМ ра¬
диовысотомер и доплеровский измеритель вектора скорости,
даже функционирующие на разных несущих частотах. Связано
это с тем, что в данной задаче условия оптимизации радиовы¬
сотомера и измерителя скорости противоречат друг другу. Что¬
бы убедиться в этом, рассмотрим особенности их реализации.
Основные особенности измерителя вектора скорости. Типо-
вые самолетные доплеровские измерители скорости (ДИС)
°бычно позволяют определять вектор путевой скорости в гори¬
зонтальной плоскости, для чего достаточно измерять горизон¬
тальную проекцию вектора скорости и угол сноса — угол меж-
207
ду этой проекцией и осью самолета. При этих условиях в прищ
ципе задачу можно решить с помощью однолучевой поворотной
антенны, ось которой направлена на земную поверхность под
острым углом к путевой скорости. И если в современных само¬
летных ДИС повсеместно применяются многолучевые антенные
системы, то это связано с необходимостью повышения точности
определения угла сноса и компенсации влияния кренов самоле¬
та на точность отсчета скорости [68].
Иная ситуация характерна для посадочного радиолокатора,
так как здесь необходимо определять все три ортогональные
составляющие вектора скорости. Так как по каждому лучу
доплеровского радиолокатора можно измерить лишь проекцию
вектора скорости на ось этого радиолуча, для полной оценки
вектора скорости в трехмерном пространстве принципиально
необходимы не менее трех некомпланарных лучей антенны, на¬
правленных на подстилающую поверхность планеты.
Рассмотрим структуру отраженного сигнала для какого-
либо одного из лучей. На рис. 9.16 представлены геометриче¬
ские соотношения в вертикальной (а) и горизонтальной (б)
плоскостях при некоторой ширине ДН антенны Д[5о,5 и откло¬
нении ее оси от вектора скорости на угол р0. Любому i-му эле¬
менту облучаемой площадки соответствует отраженный сигнал
с доплеровским приращением частоты
fAi= (2v/'k)cos рг-, (9.19)
где v — модуль вектора скорости, pt- — угол между линией ви¬
зирования i-ro элемента и вектором скорости, X— длина волны.
При направлении вектора скорости, близком к горизонталь¬
ному, линии равных /Д1* (т. е. равных f}t-) на поверхности пред¬
ставляют собой гиперболические полоски, показанные штрихо-
Рис. 9.16. Геометрические соотношения, характерные для бортового измерите¬
ля скорости КА относительно поверхности планеты
208
Бь1МИ линиями на рис. 9.16, б. Все сигналы, отраженные элемен¬
тными площадками в пределах некоторой i-и полоски (утол¬
щенная линия на рис. 9.16,6), будут иметь одинаковое значе¬
ние /д*- То же относится ко всем другим гиперболическим по¬
лоскам, которым соответствуют другие значения fAi. Поэтому
каждое фиксированное значение скорости характеризуется до¬
статочно широким спектром доплеровских частот отраженных
0т облучаемой площадки сигналов. Огибающая этого спектра
обусловлена формой ДН антенны, и, как нетрудно определить
из рис. 9.16, ширина этого спектра по уровню половинной мощ¬
ности
Д/д— (2v/K)sin р0Д(Jo,5. (9.20)
Если не учитывать малых разностей энергий элементарных
сигналов, связанных с различием коэффициента обратного рас*
сеяния гиперболических полосок и расстояний до них, симмет¬
ричной ДН соответствует симметричный спектр, а направлению
максимума ДН р0 — его центральная частота fA0= (2v/'k)cos (J0
(рис. 9.16, в). Так как доплеровский спектр формируется в ре¬
зультате суммирования сигналов от множества независимых
случайных отражателей, он является случайным с гауссовским
законом распределения.
Относительная ширина доплеровского спектра
А/д/Тдо^М^Ро. (9.21)
При типовых значениях р0—70°, Др0,5—4 ... 5° получим
Д/д//до—0,1 . .. 0,15, т. е. доплеровский спектр узкополосен.
Таким образом, измерение проекции вектора скорости на
каждый радиолуч антенной системы сводится к измерению
средней частоты узкополосного случайного доплеровского
спектра, сформированного на выходе соответствующего канала
бортового приемника.
Как во всяком радиолокаторе непрерывного излучения, в
Доплеровском измерителе скорости применяется пространствен¬
ная развязка каналов приема и передачи, т. е. раздельные пе¬
редающая и приемная антенны. Так как в ДИС измеряется
Доплеровское приращение несущей частоты сигналя, нет нуж-
Ды в его модуляции и передатчик ДИС излучает гармонический
сигнал несущей частоты.
Одна из типовых структур одноканального ДИС представ¬
лена на рис. 9.17. С помощью гетеродина Г, балансного смеси¬
теля БСМ и фильтра боковой частоты ФБЧ формируется гете¬
родинный сигнал частоты /0—/пч. В смесителе СМ1 спектр доп¬
етровских частот переносится с несущей частоты fo на проме¬
жуточную fu4. После усиления в УПЧ он поступает на смеси¬
тель СМ2, где перемножается с сигналом гетеродина Г. При
14—4229
209
^прд
Лпрм
Рис. 9.17. Типовая структура одноканального доплеровского измерителя
скорости
этом устраняется «подставка» /пч и доплеровский спектр по¬
ступает на измеритель его средней частоты ИСЧ, показания
которого выдаются в бортовую ЭВМ.
Специфическим элементом этой структурной схемы являет¬
ся только измеритель изменяющейся в процессе полета средней
частоты спектра ИСЧ.
Эргодический случайный узкополосный доплеровский спектр
G(fAi) можно представить как синусоиду с медленно изменяю¬
щейся по случайному закону частотой /д(0- Тогда среднее зна¬
чение его частоты /дб легко получить в результате усреднения
его мгновенной частоты на интервале Т:
т
/до = 7ЛО = т$Л(0^- (9-22)
О
Такую операцию проще всего реализовать с помощью типо¬
вого частотомера-счетчика, подсчитывающего число пересечений
нуля доплеровским напряжением на интервале усреднения [59].
Важно, что увеличение временного интервала усреднения
ограничено заданным темпом измерений. Поэтому для эффек¬
тивного усреднения желательно увеличить число периодов fA(t)
на 1 м/с. Так как при заданной скорости /д пропорциональна
несущей частоте /0, выгодно выбирать более высокую несущую
частоту ДИС.
Полоса пропускания счетчика очень широка: она охватывает
весь диапазон изменения доплеровских частот (0.../дтах), что
для посадочных радиолокаторов с напряженной энергетикой
радиолинии крайне нежелательно. Поэтому здесь, как правило,
210
fAi (t)
jql
CM
^AO ^a
f<po AM r
—I M(po 'm
!L-W—
Фо
ФД
сг
Ч\
^инт
гм
УЧ
Ik
Инт
Ч±>
U»-*AO
Рис. 9.18. Типовая структура следящего измерителя средней частоты Допле¬
ров ского спектра
применяются следящие измерители, полоса пропускания кото¬
рых равна или меньше ширины доплеровского спектра Д/д.
В следящем ИСЧ на рис. 9.18 значение /до оценивается в
частотной области с помощью контура автоподстройки следя¬
щего гетеродина СГ. На два входа смесителя СМ подаются
доплеровский спектр с выхода приемного тракта системы на
рис. 9.17 и сигнал СГ. На выходе СМ формируется разностный
сигнал со спектром, воспроизводящим спектр входного сигнала,
смещенный по частоте на /г. Этот сигнал проходит через фильтр
Фо и детектируется амплитудным детектором АД. На управи¬
тель частоты УЧ поступает сумма иИнт напряжения с выхода
интегратора Инт и ыт напряжения с генератора меандра ГМ
частоты Fm. При этом суммарное напряжение и2 и линейно за¬
висящая от него частота следящего гетеродина fr{t) будут из¬
меняться согласно кривой на рис. 9.18. На выходе АД включен,
фазовый детектор ФД, на который в качестве опорного подано
меандровое напряжение с ГМ. Выходное напряжение ФД
усредняется в интеграторе Инт, с которого напряжение иИНТ по¬
ступает на сумматор. Подключенный к следящему гетеродину
усредняющий счетчик частоты УСЧ измеряет текущее значение
средней частоты СГ /г0, однозначно связанное с текущим зна¬
чением /д0 соотношением /до^/го—/фо-
Процесс формирования выходного напряжения мИнт пояснен
на рис. 9.19. Преобразованный спектр fAi на выходе СМ скач¬
кообразно смещается с периодом Tm=i/Fm относительно резо¬
нансной частоты /ф0 фильтра Ф0. При совпадении средней час¬
тоты /до этого частотно-манипулированного сигнала с /фо ампли¬
туда напряжения Ыф0 на выходе фильтра в обоих полупериодах
Меандра одинакова и на ФД поступает постоянное напряжение.
При /до>/фо напряжение Що изменяется по закону меандра од¬
ной фазы, а при /до</фо — по тому же закону, но противопо-
14*
211
Рис. 9.19. Частотно-временные соотношения в следящем измерителе средней
частоты доплеровского спектра
ложной фазы, причем амплитуда цф0 тем больше, чем больше
расстройка |/до—/Фо|- При правильной полярности иинт на вхо¬
де УЧ эта расстройка будет уменьшаться до /до=/го—/до=/фо.
Так как частота настройки фильтра /ф0 заранее известна, часто¬
та /до=/го—/фо однозначно определяется /го. Но /го, в свою оче¬
редь, однозначно определяется напряжением иинт. При измене¬
нии скорости КА и соответственно частоты /до следящий гетеро¬
дин подстраивается так, чтобы новое значение средней частоты
fA0 совместилось с частотой /ф0 настройки фильтра. Это позво¬
ляет оценивать /д0 при полосе пропускания фильтра, равной или
даже меньшей ширины доплеровского спектра.
Расчеты и результаты экспериментов [68] показывают, что
если для надежной работы частотомера-счетчика необходимо
превышение сигнала над шумом на его входе не менее 20 дБ,
то следящий частотомер надежно работает при превышениях,
меньших 0 дБ, что для радиолиний с напряженной энергетикой
имеет решающее значение.
Известны различные модификации следящего частотомера:
со следящим фильтром и неперестраиваемым гетеродином, с
отдельными блоками, выполненными на элементах цифровой
техники, и т. д., однако исходный принцип работы у них общий.
212
Основные особенности радиовысотомера. Характерный для
посадочного радиолокатора широкий относительный диапазон
измеряемых высот (см. табл. 9.4) делает предпочтительной
одношкальную ЧМ радиовысотометрию, а необходимость высо¬
кой точности измерения высоты на конечном участке спуска
(доли метра) приводит к необходимости использовать на этом
участке широкополосную ЧМ.
Так как радиовысотомер должен непрерывно измерять ис¬
тинную высоту относительно конкретного участка поверхности,
над которым пролетает КА, для него характерно использование
однолучевой антенны, ДН которой направлена по нормали к
поверхности. Интересно отметить то редко встречающееся об¬
стоятельство, что такое направление ДН оптимально по не¬
скольким критериям качества, ни один из которых не противо¬
речит другим, и, в частности, обеспечивает минимальную шири¬
ну дальномерного спектра, минимум паразитного для радио¬
высотомера доплеровского приращения частоты, наилучшую
энергетику радиолинии.
Рассмотрим структуру дальномерного спектра отраженного
поверхностью сигнала ЧМ радиовысотомера при вертикальном
ее облучении, использовав геометрические соотношения и вре¬
менные зависимости на рис. 9.20, где /прд(0 —частота ЧМ сиг¬
нала передатчика, fc{t)—частота отраженного ЧМ сигнала.
При обычно используемом несимметричном линейном законе
частотной модуляции (ЛЧМ) связь дальномерных приращений
частоты с расстоянием до поверхности определяется ясными из
рис. 9.20, б соотношениями
/_ W 2Н # - 2tf sec(Ap0f5/2) w
/н ТТН f 7Г"» /я max — R max— “ jT~. (9.23)
л m с с J т
Отсюда относительная ширина спектра на урозне половинной
мощности
R fR шах fн ДРо,
/н _ /н
sec —^— 1 (9.24)
зависит только от ширины ДН антенны Д[5о,5-
Ввиду независимости и случайного расположения многочис¬
ленных элементарных отражателей облучаемой площадки даль-
номерный спектр, подобно доплеровскому, случаен с гауссов¬
ским распределением вероятностей. Распределение энергии в
спектре и здесь определяется двусторонней ДН антенны. Из
Рис. 9.20, а видно, что при вертикальном направлении оси ан¬
гины сигналы, отраженные от центра площадки Л, соответст-
вУющего fRmin==fny будут иметь максимальную интенсивность,
а сигналы, отраженные от крайней кольцевой площадки^ соот-
213
0)
Рис. 9.20. Геометрические и частотно-временные соотношения, характерные
для ЧМ радиовысотомера
ветствующей fR max, — минимальную. Поэтому огибающая даль¬
номерного спектра отраженного сигнала получается несиммет¬
ричной с резким срезом на частоте /н (рис. 9.20, в).
Теперь можно сформулировать основные требования к поса¬
дочному ЧМ радиовысотомеру:
для точного измерения истинной высоты Н необходимо не¬
прерывно отслеживать и измерять минимальную частоту даль¬
номерного спектра /н;
для измерения малых высот с точностью до долей метра не¬
обходима ширина спектра зондирующего ЧМ сигнала и соот¬
ветственно его девиация частоты W порядка сотен мегагерц;
так как /н зависит только от скорости изменения частоты 1
JI4M сигнала (см. (9.23)), для точного измерения /н первосте¬
пенное значение имеет обеспечение стабильности 'у;
в отличие от /д согласно (9.23) /н не зависит от несущей
частоты ЧМ сигнала /0. Поэтому погрешность в измерения мо¬
жет вносить лишь абсолютная нестабильность несущей б/о за
время измерения, так как вместо /н при этом будет отсчитана
/н±б/о- В этой связи при заданной относительной нестабильно¬
'214
сти несущей частоты передатчика б/o/fo желательно снижать не¬
сшую частоту /о, а с ней и б/0 до значений, при которых еще
легко обеспечить заданную девиацию частоты W и другие тре¬
бования к системе.
Типовая укрупненная структура ЧМ радиовысотомера, удов¬
летворяющего этим требованиям, приведена на рис. 9.21.
Передатчик, модулируемый частотным модулятором ЧМ, со¬
держит задающий генератор ЗГ с несущей частотой f3о порядка
сотен мегагерц и девиацией частоты W3 порядка десятков мега¬
герц, умножитель частоты УЧ, умножающий /з0 до fo=nf30 по¬
рядка десятка гигагерц и W3 до W=nW3 порядка сотен мега¬
герц, формируя зондирующий ЧМ сигнал частоты fn{t). Усили¬
тель мощности УМ усиливает его до уровня порядка сотен
милливатт, после чего сигнал излучается антенной АпРд.
Для формирования гетеродинного ЧМ сигнала, смещенного
относительно /„(/) на промежуточную частоту /пч, ЧМ сигнал
с выхода УЧ подается на балансный смеситель БСМ, на второй
вход которого подается сигнал гетеродина Г частоты /пч. На
выходе БСМ включен следящий ЧМ фильтр боковой полосы
СФБП, управляемый от частотного модулятора ЧМ синфазно
с ЗГ. Нетрудно видеть, что эта схема подобна схеме формиро¬
вания гетеродинного сигнала в ДИС (рис. 9.17), отличаясь от
нее наличием следящего ЧМ фильтра. Связано это с тем, что
^лрм
Уп (t)-fn4 ^ ^ ^ ft) +/пч
fo'fm fo f
О)
СФБП
Рис. 9.21* Структурная схема ЧМ радиовысотомера
215
/пч<Г и гармонические спектры несущего и боковых
(fn (t) zt/пч) колебаний в гетеродинном тракте перекрываются
(рис. 9.21, а) и не могут быть разделены фильтром боковой
частоты с постоянными параметрами. В системе отсчета следя,
щего ЧМ фильтра [64], резонансная частота которого модули¬
рована синфазно с /п(0, несущее и боковые колебания вырож¬
даются в гармонические (рис. 9.21,6) и СФБП легко выделяет
нижнюю боковую ЧМ составляющую частоты /п(0—!пч-
В приемнике принятый антенной Апрм спектр отраженного
облучаемой площадкой сигнала после малошумящего усилителя
МШУ поступает на смеситель СМ, на второй вход которого по¬
дается гетеродинный ЧМ сигнал частоты fn(t)—/пч. В резуль¬
тате дальномерный спектр переносится на промежуточную час¬
тоту и после усиления в УПЧ поступает на описанный ранее
динамический выделитель минимальной частоты спектра ВМЧ,
отслеживающий сигнал частоты /пч+/н и подающий его на из¬
меритель частоты ИЧ. Показания ИЧ выдаются в бортовую
ЭВМ.
Как уже отмечалось, для точного измерения высоты перво¬
степенное значение имеет стабильность "(-скорости линейного
изменения частоты зондирующего ЛЧМ сигнала. Для выполне¬
ния этого требования с заданной высокой точностью в совре¬
менных ЧМ системах наметились два основных пути: цифровой
синтез ЧМ сигнала задающего генератора и автоподстройка
крутизны изменения частоты ЧМ сигнала в аналоговом задаю¬
щем генераторе. Достаточно полный анализ обоих классов та¬
ких устройств дан в [66]. Поэтому ограничимся лишь некоторы¬
ми общими сведениями.
Работа цифрового синтезатора сводится к вычислению и
формированию в дискретные моменты времени мгновенных от¬
счетов ЧМ сигнала с последующим сглаживанием шума кван¬
тования в аналоговых фильтрах. Существует много цифровых
синтезаторов ЧМ сигналов, в которых используется либо деле¬
ние частоты с переменным коэффициентом деления (ДПКДЬ
либо суммирование импульсных последовательностей, либо
иные методы цифрового формирования заданных функций.
Важнейшими достоинствами цифровых ЧМ синтезаторов яв¬
ляются:
высокая точность и стабильность формирования ЧМ сиг¬
нала;
возможность гибкого управления параметрами цифрового
ЧМ сигнала;
идентичность закона частотной модуляции от периода к пе¬
риоду за 1000 с и более.
Основное ограничение цифровых синтезаторов ЧМ сигналов
216
сВязано с их сравнительно малым быстродействием, не позво¬
ляющим формировать короткие ЧМ импульсы и непрерывные
qM сигналы с девиациями частоты порядка сотен мегагерц.
Эффективным методом формирования столь широкополосного
qM сигнала является автоподстройка крутизны изменения его
частоты в аналоговом ЧМ генераторе. Существует много мето¬
дов решения этой задачи. Один из простейших основан на ис¬
пользовании эталонной линии задержки для оценки текущих
значений крутизны изменения частоты 4 (О и сравнения их
с эталоном 'jo- Для этого выходной сигнал ЛЧМ генератора
подается на линию задержки с малым временем задержки тэт.
Текущее значение ч(0 определяется как отношение разности
мгновенных частот ЛЧМ сигналов на входе (МО) и выходе
(fr(t—Тэт)) линии к их временному разносу тэт. Обычно в кон¬
туре стабилизации 7 частота биений /б(0=М0—fr(t—тэт)
сравнивается с частотой эталонного генератора /эт=Тотэт для
выработки сигнала ошибки ид=£[М0—/эт]. Этот сигнал воз¬
действует на управитель частоты ЛЧМ генератора, непрерывно
обеспечивая т(0—То=0-
В настоящее время с помощью таких аналоговых устройств
удается сформировать ЛЧМ сигналы с базой, превышающей
106, девиацией частоты, превышающей 1 ГГц при относительной
погрешности формирования ЛЧМ сигнала менее 10“6.
В заключение отметим еще одну особенность посадочного
ЧМ радиовысотомера: на больших высотах допустимы сравни¬
тельно большие абсолютные погрешности измерения высоты
(например, при Н—10 км 8#/#= 1,5% /соответствует бН =
= 150 м), но очень критична энергетика радиолинии, а на ма¬
лых высотах потребны точности порядка долей метра, но име¬
ются очень большие запасы по энергетике. Это создает условия
для адаптации параметров высотомера в процессе полета с
«разменом» энергетики на точность. В простейшем случае это
сводится к дискретному, ступенчатому одно- или двукратному
увеличению девиации частоты зондирующего сигнала (а с ним
и точности измерений) по мере сближения с поверхностью пла¬
неты.
Особенности комплексирования посадочного радиолокатора.
Из проведенного рассмотрения видно, что условия оптимизации
Доплеровского измерителя скорости (ДИС) и радиовысотомера
Действительно противоречат друг другу, что наглядно иллюст¬
рирует табл. 9.4. Поэтому типовой вариант посадочного радио¬
локатора основан на комплексировании полностью автономных
ДИС и радиовысотомера. Укрупненная структура такого поса¬
дочного радиолокатора приведена на рис. 9.22. Радиовысотомер
и ДИС выполнены с раздельными передатчиками, приемника¬
ми и блоками первичной обработки сигналов. На длине волны
217
Таблица 9.4
Характеристика
ДИС
Радиовысотомер
Оптимальное число лучей
Три-четыре
Один
Оптимальное направление
лучей
Наклонное
Вертикальное
Оптимальный вид сигнала
Гармонический
С широкополосной адапти¬
руемой ЧМ
Оптимальная несущая час¬
тота
Максимально
Минимально возможная
возможная
Xi = 2 см ДИС через свою антенную систему излучает и при¬
нимает немодулированные радиоволны по трем лучам 1, 2 и 3,
которым соответствуют доплеровские приращения частоты
/дь /д2 и /д3. На длине волны X2=3 см радиовысотомер излуча¬
ет и принимает широкополосный ЧМ сигнал по вертикальному
лучу 4, которому соответствует дальномерное приращение час¬
тоты /н и паразитное приращение доплеровской частоты /д4.
С выходов трехканального приемника ДИС и приемника радио¬
высотомера сигналы поступают на блоки поиска и автосопро¬
вождения частоты скоростемерных (БПСС) и высотомерного
(БПСВ) сигналов. Вычисляются три ортогональные составля¬
ющие скорости в антенной системе координат: vx=kl(fM-\-fA3),
vv=k2(fAX—/д2), vz = k3(fA3—/д2) (постоянные коэффициенты
k\, k2, k3 определяются постоянными значениями длины волны
Ki и углов между лучами) [68]. Значение vx с выхюда БПСС
вводится в БПСВ для компенсации /д4. С выходов обоих бло¬
ков значения Я, vxy vy и vz выдаются в аналоговом виде на ин¬
дикаторы пульта астронавта, а в двоичном коде — в бортовую
ЭВМ. Передающие и приемные щелевые антенны, выполненные
в виде единого конструктивного узла с необходимой развязкой
каналов приема и передачи, помещены на опорно-поворотное
Рис. 9.22. Типовая структура посадочного радиолокатора
218
Рис. 9.23. Доплеровский посадочный радиолокатор ДА-018, использованный в
советской лунной программе:
/ — передающая антенна; 2 — приемная антенна; 3 — передающее устройство; 4 — при¬
емное устройство; 5 — устройство следящей узкополосной фильтрации (УПФ); 6 —
высотомер; 7 — вычислитель скорости и расстояния; 8 — блок питания
устройство, которое может управляться как автоматически, так
и вручную.
В ЭВМ vx, vy, vz могут быть пересчитаны в планетоцентри¬
ческую систему координат по данным гиродатчиков системы уп¬
равления.
На рис. 9.23 показан посадочный радиолокатор ДА-018,
разработанный в Московском НИИ Приборостроения под ру¬
ководством В. Е. Колчинского и В. А. Грановского и использо¬
ванный в лунной программе.
9.3.3. РАДИОСИСТЕМА АВТОВЫБОРА МЕСТА ПОСАДКИ
Автовыбор посадочной площадки особенно важен при посад¬
ке автоматического КА в горном районе планеты, так как из¬
лишне крутой уклон поверхности или высокая неровность могут
привести к опрокидыванию КА при соприкосновении с поверх¬
ностью. Типовые критерии для выбора площадки: средний
уклон поверхности не выше 10°, неровности не более 1,5 м,
размер посадочной площадки 15... 30 м, зона поиска, ограни¬
ченная маневренностью КА и запасом топлива, не более 150Х
XI50 м [70].
219
Основной новой задачей здесь является определение сред,
него уклона поверхности относительно гравитационной гори,
зонтали. Решение этой задачи облегчается тем, что на борту
КА имеются независимые от радиосистемы построители грави¬
тационной вертикали (обычно гироскопические), контур управ¬
ления которых выполнен по схеме, имитирующей маятник дли¬
ной до центра масс планеты (маятник Шулера), не возмущае¬
мый ускорениями КА [59]. Следовательно, в задачи радиосисте¬
мы автовыбора площадки входит построение местной вертика¬
ли, т. е. нормали к подстилающей поверхности, и определение
ее углового отклонения от измеренной другим средствами гра¬
витационной вертикали.
Сравнение различных радиометодов построения местной вер¬
тикали показало, что наиболее точным и эффективным являет¬
ся разностно-дальномерный метод [59], суть которого примени¬
тельно к построению вертикали в одной плоскости поясняет
рис. 9.24, а. Два луча, отклоненные от вертикальной оси КА
00' вперед и назад на одинаковый угол ^о, облучают подстила¬
ющую поверхность. Принимая отраженные от нее сигналы,
измеряют дальности R\ и R2 любым из описанных методов. При
отклонении оси 00' от нормали к поверхности на угол 0 спра¬
ведливы следующие соотношения:
Rl==Hseс(^о+0); ^?2 = //sec('Yo—0). (9.25)
В этих выражениях два неизвестных: Я и 0. После измерения
Rti и R2 можно, решив в бортовой ЭВМ совместно два урав¬
нения (9.25), найти оба неизвестных.
Возможна и минимизация угла 0. Для этого, учитывая зна¬
чение и знак сигнала ошибки R{—R2=H[sec(^+Q)—sec(yo—9)L
необходимо разворачивать антенну до сведения его к нулю; при
Рис. 9.24. Принцип работы разностно-дальномерного радиопостроителя мест¬
ной вертикали
220
/?!— /?2 = 0 0 — 0 и ось 00' будет направлена по нормали к по¬
верхности.
Для построения местной вертикали в трехмерном простран¬
стве необходима такая же пара наклонных лучей, но в ортого¬
нальной плоскости, причем один из лучей может быть общим
для двух пар (рис. 9.24,6).
Оценим относительную точность 6(R\—R2)/Я измерения раз-
ности наклонных дальностей до поверхности, необходимую для
измерения уклонений от местной вертикали 0 с заданной точ¬
ностью 60. При разложении sec(^o=h60) вблизи 0 = 0 получим
б(Rr-Xt) =sec 60) — sec (ч0_60)—2чоб0. (9.26)
Приняв типовое значение у0= 10°^0,17 рад и задав с запа¬
сом для этой задачи 60=1°^О,О17 рад, найдем б (Ri—R2)/H=
=6 • 10-3. При поиске площадки с высоты порядка #=100 м
получим 8(Ri—R2) = 6• 10-3• 102=0,6 м, т. е. примерно ту же
точность, что и необходимая для измерения Н в посадочном
радиолокаторе (см. табл. 9.3).
С учетом этих особенностей для решения задачи автовыбора
посадочной площадки следует применить трехлучевой радио¬
локатор с линейной ЧМ зондирующего сигнала (рис. 9.25, а),
по каждому лучу которого измеряется наклонная дальность до
поверхности R и радиальная составляющая вектора скорости
R [70]. Возможная аппаратурная реализация совместного изме¬
рения R и R в единой ЛЧМ системе уже рассматривалась в
п. 9.3.1. В такой системе вектор скорости однозначно определя¬
ется по его трем радиальным составляющим
v=f(Ru *2, Яз), (9.27)
^ис. 9.25. Трехлучевой радиолокатор автовыбора посадочной площадки
221
а две ортогональные составляющие отклонений оси антенны от
местной вертикали 0ц и 0± — по трем измеренным дальностям
®н ==^1 1—^2)* 0±=^2(^?2—*з). (9.28)
Что касается средней высоты, то при известных и постоянных
угловых отклонениях трех лучей от оси антенны она однознач¬
но определяется по сумме наклонных дальностей
H=kz(Rl+R2+Rz). (9.29)
При этом усреднение в (9.29) результатов независимых изме¬
рений трех дальностей приведет к тому, что относительная
погрешность определения высоты Н будет в ]/ 3 раз меньше
погрешности измерения каждой из дальностей. В этих услови¬
ях необходимость в отдельном радиовысотомере и дополнитель¬
ном вертикальном радиолуче отпадает.
При использовании такого трехлучевого радиолокатора ал¬
горитм автовыбора посадочной площадки сводится к следую¬
щему. Космический аппарат обследует поверхность, перемеща¬
ясь в заданных пределах на постоянной высоте #=100 ... 200 м.
Если в исходный момент средний уклон превышает допустимый,
КА движется в направлении уклона, пока не найдет площадку
с допустимым уклоном. Однако даже при равенстве всех трех
R (нулевой средний уклон) неровности могут быть недопусти¬
мо большими (рис. 9.25,6). Поэтому необходимо дополнитель¬
ное сканирование лучей по радиусу для обнаружения больших
неровностей. При их обнаружении следует продолжать движе¬
ние до достижения пригодной посадочной площадки.
Глава 10
БОРТОВЫЕ СРЕДСТВА КАРТОГРАФИРОВАНИЯ
И ИЗМЕРЕНИЯ ЛОКАЛЬНЫХ ХАРАКТЕРИСТИК
ПОВЕРХНОСТИ ПЛАНЕТ
Для бортовых систем этого класса в отличие от систем, рассмотренных в
гл. 9, наличие неоднородностей и контрастов на подстилающей поверхности
и в среде распространения является полезным эффектом. Изменения уклона и
рельефа поверхности, неоднородности и контрасты ее отражательной способ¬
ности в различных диапазонах длин волн электромагнитного излучения, не¬
однородности характеристик среды распространения — все это объекты наблю¬
дения, измерения и регистрации в таких системах.
Опыт создания и эксплуатации этих систем показал высокую эффектив¬
ность сочетания локальных и глобальных, оптических и радиотехнических
222
средств исследования планет, устанавливаемых как на искусственных спутни¬
ках планет, так и на посадочных аппаратах. Поэтому здесь основное внимание
уделено обстоятельному рассмотрению радиотехнических бортовых локаторов
бокового обзора с синтезом апертуры и радиовысотомеров на примере радио¬
локационной системы, примененной для картографирования поверхности Вене¬
ры с КА «Венера-15» и. «Венера-16». В заключение дана весьма краткая
информация об оптических сканерах и бортовых телевизионных системах и
полученных с их помощью результатах, сыгравших большую роль в изучении
планет земной группы. По сравнению с другими научными приборами именно
средства планетографирования определили предельные характеристики радио¬
линии КА — Земля (скорость передачи информации, емкость бортовых ЗУ и
др)-
В 70-х гг. с помощью крупнейших радиолокационных установок в Голд*
стоуне и Аресибо (США) были получены изображения отдельных участков
поверхности Венеры с пространственным разрешением 10... 20 км [72, 73].
Впоследствии разрешение было несколько улучшено для некоторых снимков
горных районов. Однако окружающие пространства с более гладкой поверх¬
ностью неразличимы вследствие низкого уровня отраженного сигнала, а
полярные районы вообще недоступны для наблюдения с Земли.
В 1980 г. с помощью радиовысотомера, установленного на американском
орбитальном аппарате «Пионер — Венера», была построена карта высот,
охватывающая поверхность Венеры между 60° южной широты и 75° северной
[74]. На этой карте видны детали континентального масштаба. Высота изме¬
рялась через каждые 50... 150 км, и более мелкие детали оказались нераз¬
личимы.
В 1983—1984 гг. с помощью радиолокационных систем, установленных
на космических аппаратах «Венера-15» и «Венера-16», было впервые выполне¬
но детальное картографирование закрытой непрозрачной атмосферой поверх¬
ности планеты Венера, создан первый в истории астрономии «Атлас поверх¬
ности Венеры» [71].
Для картографирования Венеры была разработана радиолокационная
система, совмещающая РЛС бокового обзора с синтезом апертуры для полу¬
чения изображений поверхности планеты и радиовысотомер для измерения
высот рельефа и локальных характеристик отражения поверхности. Общие
принципы построения радиолокационной системы, как и сама идея экспери¬
мента, разработаны в Институте радиотехники и электроники АН СССР, соз¬
дана радиолокационная система в Особом конструкторском бюро Московско¬
го энергетического института. В научно-исследовательском институте космиче¬
ского приборостроения разработана радиолиния с повышенной скоростью
передачи данных радиолокационной съемки на Землю. Космические аппараты
«Венера-15» и «Венера-16» созданы в Научно-испытательном центре
им- Г. Н. Бабакина.
Установка радиолокатора на искусственном спутнике, движущемся около
поверхности планеты, позволила обеспечить по сравнению с радиолокацион¬
ными наблюдениями Венеры, выполненными с Земли, уровень отраженных
сигналов, необходимый для получения изображений высокого качества, и
223
создать одинаковые условия наблюдения разных районов независимо от их
расположения на планете.
В процессе подготовки эксперимента были разработаны принципы ра,
диолокационной съемки поверхности Венеры в условиях изменяющихся рас¬
стояния и скорости искусственного спутника, движущегося по эллиптической
орбите. Сформирована концепция радиолокационной системы как единого це¬
лого с КА и наземной системой цифровой обработки данных, что позволило
■выполнить эксперимент на основе существующих разработок аппаратуры.
Успешная реализация эксперимента «с первой попытки» и высокое каче¬
ство полученных изображений подтвердили правильность выбора параметров.
В частности, была подтверждена высокая контрастность радиолокационного
изображения при малых углах обзора (10° для РЛС с синтезом апертуры
КА «Венера-15» и «Венера-16»), что способствовало выявлению формы гео¬
логических структур.
В сентябре 1990 г. радиолокационное картографирование Венеры было
продолжено американским КА «Магеллан». Установленная на нем РЛС с
синтезом апертуры имеет разрешение поверхности 120... 300 м [75].
В 1990—1992 гг. снята почти вся поверхность Венеры (по сравнению с 25%
поверхности, снятой КА «Венера-15» и «Венера-16»).
Примечательно, что радиолокационные системы «Магеллан», «Венера-15»
и «Венера-16» имеют общие технические решения. Например, и для РЛС с
синтезом апертуры, и для радиовысотомера используются общие передатчик,
приемник, запоминающие устройства и разные антенны. Для согласования
скоростей поступления информации с приемника и записи ее накопителем на
магнитной ленте используется буферное оперативное запоминающее устрой¬
ство. По радиолинии передается радиоголограмма (отраженный сигнал), по
которой изображение синтезируется на Земле.
Чтобы обеспечить большую длительность приема отраженных сигналов
для получения более высокого пространственного разрешения при синтезе
апертуры, в радиолокационной системе «Магеллан» используется импульсный
зондирующий сигнал (в системе «Венера-15» и «Венера-16» непрерывный).
Однозначное разделение отраженных сигналов в большом диапазоне высот
КА (300... 2000 км) в системе «Магеллан» было обеспечено изменением
угла обзора с высотой. При этом усложнилась интерпретация изображений,
так как вид радиолокационного изображения в сильной степени зависит от
угла обзора.
10.1. МЕТОД СИНТЕЗА АПЕРТУРЫ ПРИ
ПОКАДРОВОЙ СЪЕМКЕ
10.1.1. РАЗДЕЛЕНИЕ СИГНАЛОВ ПО УДАЛЕННОСТИ
И РАДИАЛЬНОЙ СКОРОСТИ ОТРАЖАЮЩИХ
ЭЛЕМЕНТОВ ПОВЕРХНОСТИ
Получение изображений когерентной дальностно-доплеров-
ской РЛС, установленной на подвижном носителе, основано на
224
том, чт0 сигналы, отраженные точками поверхности, получают
разное запаздывание момента прихода и разное доплеровское
Смещение частоты в соответствии с удаленностью и радиальной
составляющей скорости этих точек относительно бортовой ан¬
тенны.
Сигналы, отраженные точками, находящимися на расстоя¬
нии т от антенны РЛС S (рис. 10.1), запаздывают по отноше¬
нию к моменту излучения на одно и тоже значение
т==т(/)=2г/с, (10.1)
где с — скорость распространения электромагнитных волн.
В свободном пространстве геометрическое место точек одина¬
кового запаздывания образует сферу 2 с центром в точке S на
трассе полета 1.
Доплеровское смещение частоты определяется проекцией
скорости v на направление радиуса-вектора г (рис. 10.1), про¬
веденного в данную точку:
yr = r0v = ycos ^ (Ю.2)
(г0 — единичный вектор, *у — угол, составляемый векторами
г и v). Скорость vr одинакова для всех направлений, состав¬
ляющих один и тот же угол *у с вектором скорости. Следова¬
тельно, при движении в свободном пространстве доплеровское
смещение
/д=—2vr/K=—2 (v До) COS4 (10.3)
(где X— длина волны) одинаково для точек, расположенных
на поверхности прямого кругового конуса 3 с вершиной в точ-
Рнс. 10.1. Поверхности одинакового Рис. 10.2. Линии одинакового за -
запаздывания (2) и доплеровского паздывания (2) и доплеровского сме-
смещения (5) в свободном простран- щения (5) на плоской поверхности
стве (1 — траектория движения но- (1 — трасса полета, 0—подспутнико-
сителя РЛС) вая точка)
15—4229
225
ке S, образующие которого составляют угол у с вектором ско¬
рости.
Поверхности одинакового запаздывания и одинакового
доплеровского смещения, пересекаясь с отражающей поверх¬
ностью, образуют линии, форма которых определяется формой
отражающей поверхности. Если отражающая поверхность плос¬
кая, то в пересечении с ней поверхности одинакового запазды¬
вания образуют концентрические окружности 2, а поверхности
одинакового доплеровского смещения — конические сечения
(гиперболы) 3 (рис. 10.2).
Разделив отраженные сигналы по времени запаздывания и
доплеровскому смещению частоты, можно выделить отражения,
соответствующие определенным элементам поверхности. Одна¬
ко точки, расположенные симметрично относительно проекции
вектора скорости 1 (трассы полета), например В и В' на рис.
10.2, находятся на одинаковом расстоянии от антенны РЛС и
имеют одинаковые составляющие скорости. Отраженные ими
сигналы можно принять раздельно, «освещая» только часть
поверхности, лежащую по одну сторону от трассы 1, с по¬
мощью антенны с узкой диаграммой направленности (4 — ее
след на поверхности). Для этого КА ориентируется так, чтобы
бортовая антенна была отклонена от местной вертикали на не¬
который угол (угол обзора).
10.1.2. ПРИНЦИПЫ КОГЕРЕНТНОЙ ОБРАБОТКИ
ОТРАЖЕННОГО СИГНАЛА
Устройство обработки, служащее для получения радиолока¬
ционного изображения, должно выделить отраженные сигналы,
соответствующие определенным элементам поверхности, и из¬
мерить их энергию.
Представим зондирующий сигнал у антенны РЛС в комп¬
лексной форме
Sl(t)=M(t)exp j(o0t, (10.4)
где M(t)—комплексная огибающая зондирующего сигнала,
определяемая видом и параметрами модуляции; ©о — среднее
значение частоты зондирующего сигнала. Обычно огибающая
медленно меняется по сравнению с комплексной экспонентой.
Отраженный сигнал запаздывает относительно момента
излучения на время т, определяемое расстоянием г до данного
элемента поверхности (10.1). Форма сигнала претерпевает из¬
менение, сжимаясь или растягиваясь в зависимости от того,
приближается или удаляется данный элемент по отношению к
антенне. Мощность отраженного сигнала у антенны пропорцио-
226
лальна эффективной площади обратного рассеяния элемента:
Лэ = о(ф)АЛ, (10.5)
где — геометрическая площадь элемента; о(ср)—удельная
эффективная площадь обратного рассеяния поверхности.
Если не принимать во внимание ослабление интенсивности
При распространении волн, то сигнал, отраженный'некоторым
достаточно малым элементом поверхности, будет иметь вид
5г(0= V АэМ(*—т)ехр j[co0(^—т)+ф0], (10.6)
где фо — неизвестное начальное значение фазы отраженного
сигнала.
На входе приемника оказывается сумма сигналов, отражен¬
ных всеми элементами, находящимися в данный момент в пре¬
делах диаграммы направленности антенны. Операция выделе¬
ния отраженного сигнала, соответствующего определенному
элементу поверхности, состоит в умножении принятого сигнала
на некоторое опорное колебание s0(t) и интегрировании про¬
изведения в интервале когерентного накопления ft:
0/2
2= J S2(t)s0(t)dt. (10.7)
-0/2
За начало отсчета времени принята середина интервала коге¬
рентного накопления.
Опорное колебание представляет собой комплексно-сопря¬
женную копию зондирующего сигнала (10.4), задержанную
относительно момента излучения на время т, определяемое рас¬
стоянием до данного участка поверхности (10.1):
s0(t)=M* (t—r) ехр[—/©о (t—x) ] (Ю.8)
(звездочкой обозначена комплексно-сопряженная величина).
С точностью до неизвестной начальной фазы ф0 аргумент опор¬
ного колебания совпадает по абсолютному значению с аргумен¬
том сигнала (10.6), отраженного выбранным элементом по¬
верхности.
В результате умножения на опорное колебание и интегриро¬
вания для соответствующего элемента поверхности имеем
0(2
z = YАъ ехр (]ф0) { M(t — x)M*(t — i)dt.
“0/2
Интеграл в этом выражении определяется только параметрами
Лидирующего сигнала. Это чисто действительная величина, так
15*
227
как подынтегральное выражение является произведением ком-
плексно-сопряженных величин. Введя нормировку
0/2
M{t-x)M*(t-T)dt=\,
получим
2 = VА3 ехр(]ф0) = ]/Лэ С05ф0 + ] УАЭ sif^0 = Rez +j 1ш г.
Отсюда находим эффективную площадь обратного рассея¬
ния:
Лэ= (Rez)2+(Im z)'2. (10.9)
Операции (10.7) и (10.9) выполняет устройство для выделе¬
ния и измерения сигнала, отраженного определенным элемен¬
том поверхности (рис. 10.3). Наиболее сложным является прог¬
нозирование запаздывания т (расстояния /*), представляемого
в общем случае особой функцией для каждого разрешаемого
элемента поверхности. Число опорных колебаний (10.8) долж¬
но быть таким же, как и число разрешаемых элементов.
При пространственном разрешении 1 ... 2 км, реализован¬
ном в РЛС с синтезом апертуры КА «Венера-15» и «Венера-16»,
устройство обработки можно упростить, если использовать ре¬
жим нефокусированного синтеза апертуры. Функцию, описыва¬
ющую изменение расстояния • между антенной радиолокатора
и данным элементом поверхности, представим в виде суммы
постоянной части гь соответствующей расстоянию в момент
/=0 (середина интервала когерентного накопления), и пере¬
менной части:
r=r{t)=rl + i\jvrdt,
0
где vT=r(t) —радиальная составляющая скорости.
Аэ
►о Рис. 10.3. Структурная схема
канала выделения отраженного
сигнала и измерения его энер¬
гии для одного элемента по¬
верхности
228
фаза опорного колебания
ф (t)= ©0(* т)= 0)ozf + 0)oV= —wo^“b0)o-71“b0)oV ^ ътсЧ,
частота с учетом постоянства гх
где
• 2 я)
(О (2")= _ф=Юо — ю0—^ = со0 + 2я/д,
Л=-2£®, X (Ю-10)
—доплеровское смещение частоты. Опорное колебание запи*
шем в виде
м
L о
Г _]0)0^ —]2n jj /д|
L о
= М* (t — т) ехр — ]«>(/ — ]2я \ /д (t) dt
(10.11)
При нефокусированном синтезе апертуры можно пренебречь
изменениями расстояния и радиальной скорости за время коге¬
рентного накопления -О и считать x = const и /A = const. В этом
случае в интервале когерентного накопления
t
М (t — х)^М (t — Ti), ^/д (t)dt^fht,
О
И
5о(0 = ехр(—/©0*)Л4* {t—тг)ехр (—j2nfkt) (10.12)
Tt и fh равны запаздыванию и доплеровскому смещению в сере¬
дине интервала когерентного накопления.
Соответствующее устройство обработки изображено на рис.
Ю.4. Сигналы, отраженные множеством элементов в пределах
Диаграммы направленности антенны (радиоголограмма), сна¬
чала гетеродинируются в область нулевых частот, умножаются
на комплексно-сопряженные огибающие, соответствующие всем
возможным значениям задержки т, и подвергаются гармони¬
ческому анализу в интервале Энергия отраженных сигналов
229
Рис. 10.4. Структурная схема устройства обработки отраженных сигналов
при нефокусированном синтезе апертуры
находится квадратичным суммированием коэффициентов раз¬
ложения Фурье.
10.1.3. РАЗРЕШАЮЩАЯ СПОСОБНОСТЬ
Детальность полученного изображения и, следовательно,
круг задач, которые могут быть решены по результатам радио¬
локационной съемки, определяется пространственной разреша¬
ющей способностью радиолокационной системы. Первые совет¬
230
ские КА серии «Зонд» фотографировали Луну с номинальным
разрешением 3 км. Телевизионная съемка всей поверхности
д!арса, которая расценивалась как основной результат полета
американского КА «Маринер-9», была выполнена широко¬
угольной камерой с разрешением 1 км. Фактическое разрешение
зависело от расстояния и угла наблюдения (зенитного рассто¬
яния космического аппарата) в момент фотографирования. По
этой причине разрешение поверхности Марса при съемке ме¬
нялось от 1 до 3 км. Для картографирования поверхности Ве¬
неры с КА «Венера-15» и «Венера-16» технически оказалось
возможным создать РЛС с синтезом апертуры с фактическим
разрешением 1 ... 2 км.
Рассмотрим для простоты выкладок случай, когда радиоло¬
кационная система движется равномерно и прямолинейно над
плоской поверхностью. Систему отсчета свяжем с антенной спут¬
ника S, совместив плоскость хОу с подстилающей поверхностью
и направив ось х против движения (рис. 10.5). Некоторая точ¬
ка В, дающая отражение, движется навстречу также равномер-
сгг, vb, h, км
иом движении антенны радиоло- горизонтальной (vr) и вертикаль-
катора ной (ав) составляющих его скоро¬
сти в зависимости от истинной
аномалии (t) и расстояния от пе¬
рицентра (iRу R — радиус плане¬
ты; период обращения 24 ч)
231
но и прямолинейно, причем расстояние между антенной и точ¬
кой В изменяется как
г — ]/ г 02 -f- х2 у
(10.13)
где г0 — минимальное расстояние (в момент прохождения через
плоскость zOy), a x=x(t). При этом доплеровское смещение
частоты у антенны, являющееся функцией х,
Чтобы найти разрешающую способность адоль трассы по¬
лета (вдоль оси х), продифференцируем доплеровское смеще¬
ние в выражении (10.14) по л: и перейдем к конечным прираще¬
ниям
если х2<Сг2. Частотное разрешение Af==l]$ непосредственно
связано с временем когерентного накопления отраженных сиг¬
налов Ф, оно и определяет в конечном счете разрешающую
способность вдоль трассы:
Здесь Дх—минимальное расстояние между двумя точками
поверхности, при котором отраженные ими колебания еще
могут быть разделены.
Расстояние г0 непосредственно выражается через высоту h и
угол обзора а, составляемый направлением на данную точку в
момент прохождения плоскости zOy и местной вертикалью SO:
Для РЛС с синтезом апертуры КА «Венера-15» и «Венера-
16» а=10°, К=8 см. Время когерентного накопления фиксиро¬
вано и равно 3,9 мс. За это время КА, двигаясь вблизи пери¬
центра со скоростью у = 9,16 км/с, перемещается на 36 м, что
и является длиной синтезированной апертуры. В перицентре
номинальная высота ft=1000 км и разрешение Дх=1,2 км. При
уходе из перицентра разрешающая способность Дх постепенно
ухудшается из-за увеличения высоты и уменьшения горизощ
тальной составляющей скорости vTy которая обеспечивает раз¬
решение. При истинной аномалии / = 45° высота увеличивается
2v х
17’
(Ю.14)
где x=v — скорость движения антенны.
(10.15)
Ах=А,г0/2у&.
(10.16)
r0=hlcos а.
Тогда
Ax==Xhf2udcos а.
(10.17)
232
до h = 2047 км, а скорость vr уменьшается до 8,30 км/с (рис.
Ю.6). При этом Дх=2,7 км.
В направлении, перпендикулярном трассе (вдоль оси у),
отраженные сигналы разделяются из-за различного времени
запаздывания их, которое является функцией расстояния у:
Т=т=r^h2+y2+x2’ (10л8>
где у — расстояние между подспутниковой точкой 0 и траекто¬
рией движения отражающей точки (см. рис. 10.5).
Дифференцируя (10.18) по у и переходя к конечным прира¬
щениям, находим связь между разрешающей способностью в
направлении, перпендикулярном трассе (Ду), и разрешающей
способностью по запаздыванию (Дт), которая обеспечивается
параметрами модуляции зондирующего сигнала:
сА г сА
если x2<^h2-{-y2.
Разрешающая способность по запаздыванию фиксирована —
1,54 мкс. Для элемента, находящегося в данный момент на пу¬
ти электрической оси антенны (точка А на рис. 10.2), для
которого а=10°, при Дт=1,54 мкс Ду=1,3 км.
Разрешение в этом направлении изменяется с углом а и,
следовательно, не остается постоянным в кадре. Для крайних
точек в кадре (точки Е и F на рис. 10.2) а= 10+2,75°. На
ближнем краю ДуЕ=1,8 км, на дальнем ДуР-=1,0 км.
В отличие от Дх величина Ду при полете над плоской по¬
верхностью от высоты не зависит.
10.2. ВЫБОР ХАРАКТЕРИСТИК
РАДИОЛОКАЦИОННОЙ СЪЕМКИ
10.2.1. ВЫБОР ДЛИНЫ ВОЛНЫ. ВЛИЯНИЕ АТМОСФЕРЫ ВЕНЕРЫ
При фиксированном времени когерентного накопления раз¬
решающая способность РЛС с синтезом апертуры в направле¬
нии движения оказывается тем выше, чем короче рабочая вол¬
на [см. (10.17)]. Предел укорочению волны ставит поглощение
электромагнитного излучения в атмосфере Венеры, которое
проявляется на волнах короче 10 см [76]. Причиной этого яв¬
ляется нерезонансное поглощение электромагнитного излучения
в газовых составляющих атмосферы Венеры, в первую очередь
в углекислом газе, из которого она почти целиком состоит.
Окончательный выбор длины волны определило наличие
233
проверенного в условиях космического полета передатчика не¬
прерывного излучения от спутника связи «Молния-1», на длину
волны 8 см. На волне 8 см поглощение при двукратном про¬
хождении атмосферы по вертикали 2,2 дБ (табл. 10.1), что
Таблица 10.\
Длина волны, см
5
6
8
10
12
15
20
Ослабление, дБ
5,6
3,9
2,2
1,4
1,0
0,6
0,4
было учтено при расчете энергетического потенциала системы.
Для сигналов РЛС с синтезом апертуры, которые излучаются
под углом 10° относительно вертикали, поглощение возрастает
на 1,5%.
Очень плотная атмосфера Венеры увеличивает время запаз¬
дывания отраженного сигнала, причем над средней поверхно¬
стью планеты это увеличение составляет 1,7 мкс или 260 м в
пересчете к высоте [76]. Дополнительное запаздывание изме¬
няется в соответствии с толщиной атмосферы над данной точкой
поверхности, что учитывалось при обработке по результатам
измерений радиовысотомера.
Вследствие рефракции траектория радиолуча РЛС с синте¬
зом апертуры в атмосфере несколько искривляется и прибли¬
жается к вертикали. Это вызывает смещение точки, в которой
происходит отражение, по поверхности планеты. Однако из-за
небольшого угла между радиолучом и вертикалью это смеще¬
ние не превышает 100 м.
Возникновение сильных флуктуаций фазы отраженных сиг¬
налов из-за пространственной неоднородности атмосферы могло
бы сделать невозможными когерентную обработку и синтез изо¬
бражения. Однако из всего пути, проходимого радиолучом,
только небольшая часть приходится на атмосферу Венеры. Дей¬
ствительно, при высоте ИСВ 1000 км путь 36 м, пролетаемый
за время когерентного накопления, виден с поверхности под
углом 3,5-10-5 рад. На высоте однородной атмосферы, которая
для Венеры равна 15 км, за время когерентного накопления
радиолуч переместится всего на 0,5 м. Маловероятно, чтобы
такое незначительное перемещение луча вызвало заметное из¬
менение набега фазы в атмосфере. Косвенно это подтверждает¬
ся анализом сигналов, передаваемых спускаемыми аппаратами
КА «Венера» с поверхности планеты. Например, фактическая
ширина спектральной линии сигналов КА «Венера-7» не превы¬
шала 1...2 Гц [77], что было вызвано манипуляцией сигнала
передаваемым сообщением.
234
Ввиду отсутствия у Венеры заметного магнитного поля мож¬
но было использовать при передаче и приеме линейную (гори¬
зонтальную) поляризацию антенн, не опасаясь возникновения
поляризационных помех при прохождении радиоволн через ее
ионосферу.
Контрастность радиолокационного изображения определяет-
ся тем, насколько сильно изменяется мощность отраженных
сигналов для отдельных участков поверхности, имеющих раз¬
ный наклон к падающему лучу. Мощность отраженных сигна¬
лов прямо пропорциональна удельной эффективной площади
обратного рассеяния о(ф). Она показывает, как изменяется
эффективная площадь обратного рассеяния участка поверхности
единичной площади в зависимости от угла падения ср. Эта зави¬
симость, полученная ранее на основе наземных радиолокацион¬
ных наблюдений Венеры и пересчитанная к волне 8 см, на ко¬
торой работала радиолокационная система КА «Венера-15» и
«Венера-16», приведена на рис. 10.7. Из нее следует, что при
приеме на антенну, поляризация которой согласована с поляри¬
зацией зеркально отраженных волн, вначале мощность отражен¬
ных сигналов зависит от угла ср очень резко и изменение его на
Г приводит к изменению мощности на 1 дБ.
У РЛС с синтезом апертуры КА «Венера-15» и «Венера-16»
угол обзора, составляемый электрической осью диаграммы на-
10.2.2. КОНТРАСТНОСТЬ ИЗОБРАЖЕНИЯ
в
10
ч
+ I
Рис. 10.7. Удельная эффектив¬
ная площадь обратного рассея¬
ния поверхности Венеры на
волне 8 см по измерениям, вы¬
полненным с Земли (поляриза¬
ция антенны согласована с по¬
ляризацией волн, отраженных
О
к
20° 30°
J 7
зеркально)
235
правленности антенны и местной вертикалью, выбран 10°. Если
не учитывать кривизну поверхности планеты, то угол падения
в центре диаграммы направленности будет иметь то же значе¬
ние. Как следует из рис. 10.7, при отклонении падающего луча
от вертикали на 10° мощность отраженных сигналов уменьшает¬
ся на 10 дБ. Это значение определяет среднюю яркость изобра¬
жения, относительно которой выделяются детали изображаемой
поверхности. При этом некоторые элементы поверхности, такие
как склоны горных хребтов, кратеров и долин, обращенные к
КА, могут занять более удачное положение по отношению к па¬
дающему лучу. Мощность отраженных сигналов для них будет
превышать среднее значение до 10 дБ. Другие элементы оказы¬
ваются ориентированными к падающему лучу менее удачно:
для них ф>10° и мощность отраженных сигналов ниже средне¬
го значения, достигая —8 дБ при ф = 20°. Следовательно, конт¬
расты между отдельными элементами поверхности могут дости¬
гать 18 дБ, подчеркивая форму геологических структур.
Максимальное отражение дают элементы с крутизной 10°,
ориентированные перпендикулярно падающему лучу. Если кру¬
тизна становится больше 10°, то, как следует из рис. 10.7, мощ¬
ность отраженных сигналов начинает уменьшаться, как и при
меньшей крутизне, что создает неоднозначность. Поэтому обыч¬
но при картографировании земных горных районов угол обзора
рекомендуется брать в пределах 35 ... 55° [78], чтобы сохранить
однозначность между мощностью отраженных сигналов и укло¬
ном элемента от средней поверхности планеты.
В данном случае однозначность должна нарушаться, если
крутизна склонов, обращенных к КА, превышает 10°. Однако
такие крутые склоны с достаточной протяженностью, чтобы
проявиться при пространственном разрешении 1 ... 2 км, встре¬
чаются редко.
10.2.3. ПОГРЕШНОСТЬ ИЗМЕРЕНИЯ МОЩНОСТИ
ОТРАЖЕННЫХ СИГНАЛОВ
Качество радиолокационного изображения помимо разреша¬
ющей способности и контрастности определяется также погреш¬
ностью измерения мощности отраженных сигналов. Эта погреш¬
ность зависит от отношения средних значений мощности отра¬
женных сигналов и шумов приемной аппаратуры s/ц, опреде¬
ляемого параметрами РЛС, а также от числа N некогерентно
усредняемых независимых результатов измерений мощности
отраженных сигналов. Некогерентное усреднение необходимо
для ослабления влияния интерференции сигналов, отраженных
отдельными точками в пределах разрешаемого элемента (в оп¬
тике это явление называется спекл-эффектом).
236
Среднеквадратическое значение а погрешности измерения
мощности отраженных сигналов, отнесенное к среднему значе¬
нию 5 этой мощности, на выходе устройства обработки имеет
вид
В РЛС с синтезом апертуры КА «Венера-15» и «Венера-16»
возможность усреднения независимо полученных результатов
измерений мощности отраженных сигналов обеспечивается тем,
что соседние кадры радиолокационного изображения перекры¬
ваются между собой. В зависимости от высоты КА число N
изменяется от 6 до 14. Для элементов поверхности, находящих¬
ся в центре диаграммы направленности антенны, отношение
сигнал-шум s/n равно 26 . . . 20 дБ в диапазоне высот 1000...
...2000 км, и относительное среднеквадратическое значение по¬
грешности измерения мощности отраженных сигналов a/s изме¬
няется от 0,41 до 0,27. Для элементов, находящихся на краю
диаграммы направленности, отношение сигнал-шум падает в
10 раз. Кроме того, для некоторых элементов поверхности мощ¬
ность отраженных сигналов может быть еще в 10 раз ниже
средней (в зависимости от ориентации к падающему лучу). Для
этих элементов o/s возрастает до 0,5.
Как видно из рис. 10.7, изменение мощности отраженных
сигналов в l+o/s=l,5 раза (на 1,8 дБ) в среднем соответст¬
вует изменению угла наклона элемента поверхности относитель¬
но падающего луча на 2°. Следовательно, возможное изменение
углов наклона от 0 до 20°, на что рассчитан эксперимент, дол¬
жно приводить к изменению мощности, превышающему средне¬
квадратическое значение погрешности ее измерения в 18 дБ:
1,8 дБ=10 раз. Это оказалось достаточным для получения изо¬
бражения хорошего качества.
Уменьшение угла обзора а, составляемого электриче¬
ской осью антенны и местной вертикалью (рис. 10.8), с одной
стороны, приводит к расширению полосы обзора поверхности
и увеличению мощности отраженного сигнала, а с другой — тре¬
бует увеличения полосы частот модуляции зондирующего сиг¬
нала для достижения той же разрешающей способности в на¬
правлении, перпендикулярном движению (10.19). К. тому же
снижается динамический диапазон яркостей изображения. Дей¬
(10.20)
10.2.4. УГОЛ ОБЗОРА И ВЫСОТА СЪЕМКИ
237
ствительно, если угол обзора вы¬
бран около 10°, то максимальная
яркость элемента поверхности не мо¬
жет превысить 10 дБ по отношению к
средней яркости (см. рис. 10.7). Яр¬
кость элемента, отклоняющегося в
плоскости визирования на угол боль¬
ше 10°, начинает падать после того,
как его нормаль совпала с падающим
лучом. Если задать динамический
диапазон яркостей в пределах
±10 дБ по отношению к средней, то
угол обзора не должен быть мень¬
ше 10°.
Разрешающая способность в на¬
правлении, перпендикулярном дви¬
жению, (Ду) меняется в пределах пят¬
на, освещаемого диаграммой направ¬
ленности бортовой антенны: на дальнем краю (а) диаграммы
направленности
сАх
*Уа~ 2 sin (а+ 0^/2) ’
на ближнем (&)
л сАх
аУь 2 sin (а — 0^/2)
(см. рис. 10.8).
Если максимальное изменение разрешения в кадре не более
двух раз, то должно выполняться неравенство
Ауа sin (а.— 0^/2) j
sin (а + 0у/2)
При малых углах sin х&х и поэтому
0„<се/1,5. (10.21)
Ширина диаграммы направленности бортовой антенны в
вертикальном сечении непосредственно связана с высотой h и
шириной полосы обзора Ly:
ву=* (Lylh)cos2a^Lylh.
Отсюда получаем
h>lt5Ly/a. (10.22)
При 7^=100 км и а=10° высота КА при съемке должна
быть не менее 860 км, чтобы изменение разрешения в кадре не
превышало двух раз.
Рис. 10.8. Раскрыв диаграм¬
мы направленности борто¬
вой антенны в вертикаль¬
ном сечении
238
10.3. ВЫБОР ПАРАМЕТРОВ АНТЕННЫ РЛС
10.3.1. ОПРЕДЕЛЕНИЕ ПОЛЕЗНОЙ ЧАСТИ КАДРА
На выходе устройства обработки радиолокационное изобра¬
жение получается в координатах время запаздывания — допле¬
ровское смещение частоты (рис. 10.9). Протяженность кадра
по запаздыванию равна периоду модуляции зондирующего сиг¬
нала Гм, а по доплеровскому смещению 1/Гм. Если размеры
радиолокационного изображения, определяемые шириной глав¬
ного лепестка диаграммы направленности бортовой антенны, в
этих координатах превышают Гм и 1/Гм, то происходит наложе¬
ние изображений, соответствующих разным участкам местно¬
сти (рис. 10.10).
Диаграмма направленности бортовой антенны задает осве¬
щенность в кадре радиолокационного изображения и обеспечи¬
вает подавление помех, создаваемых участками поверхности
вне кадра из-за периодичности зондирующего сигнала. Пра¬
вильный выбор формы диаграммы направленности антенны
определяет качество получаемого изображения.
На рис. 10.11 показано распределение мощности отражен¬
ного сигнала в центральном сечении кадра (см. рис. 10.9) по
оси времени (в вертикальном сечении диаграммы направлен¬
ности антенны). Если считать, что все элементы поверхности в
пределах кадра имеют одинаковую отражательную способность,
то распределение мощности отраженного сигнала определяется
квадратом (сигнал проходит через антенну дважды) коэффи¬
циента направленности антенны по мощности Г(0).
о
ш
А.
Пт,\
Рис. 10.9. Кадр радиолока¬
ционного изображения
Рис. 10.10. Радиолокационное изображение
при несогласованности ширины диаграммы на¬
правленности бортовой антенны и параметров
модуляции зондирующего сигнала без нало¬
жений (а) и при возникновении наложений
(б)
239
Яркость элементов поверхности однозначно воспроизводит¬
ся в области 0, соответствующей одному периоду зондирующ^
го сигнала Тм. Участки поверхности, находящиеся вне области
0, создают помеху на изображении. Из-за периодичности сиг¬
нала фрагмент изображения, расположенный правее точки 2,
смещается влево на значение 0, а фрагмент, расположенный
левее точки 1, — вправо на то же значение, накладываясь на
изображение в кадре. Вблизи границ кадра 1 и 2 мощность
помехи равна мощности самого сигнала. И только в области
01 (полезная часть кадра) ее мощность становится ниже за¬
данного уровня.
Допустим на границах полезной части кадра в центральном
сечении по оси времени ослабление отраженного сигнала диа¬
граммой направленности относительно максимума
Я(±01у/2)= —10 дБ. (10.23)
Опыт показывает, что для получения удовлетворительного
качества изображения уровень коррелированной помехи от
участков поверхности вне кадра (в том числе помехи от под¬
спутниковой точки) должен быть меньше —20 дБ по сравне¬
нию с полезным сигналом. Тогда при симметричной диаграмме
направленности для подавления помехи по отношению к полез¬
ному сигналу не менее чем на 20 дБ необходимо обеспечить
F2(±Q2y/2)>—30 дБ (10.24)
(см. рис. 10.11).
В центральном сечении кадра радиолокационного изобра¬
жения по оси частот (горизонтальное сечение диаграммы на¬
правленности антенны) распределение мощности сигнала и
помехи носит тот же характер, что и в сечении по оси времени.
Рис. 10.11. Распределение мощности отраженного сигнала (—) и помехи,
создаваемой участками (поверхности вне кадра, ( ) в центральном се¬
чении кадра радиолокационного изображения (1, 2 — границы кадра)
240
Щеточником помехи являются, максимумы: двумерной, корреля¬
ционной функции зондирующего сигнала на гармониках часто¬
ты повторения. Область однозначного воспроизведения яркости
9 в сечении по оси частот соответствует^ величине, обратной пе¬
риоду модуляции зондирующего сигнала (1/7"м). В этом сече¬
нии допустимо меньшее, чем в сечении по оси времени, ослаб¬
ление отраженного сигнала диаграммой направленности на
границах полезной части кадра*:
Я(±0и/2)=—6 дБ. (10.25)
Тогда для подавления помехи по отношению к полезному
сигналу не менее чем на 20 дБ необходимо обеспечить
F2(±62х/2)^—26 дБ. (10.26)
Форма диаграммы направленности антенны в сильной сте¬
пени зависит от формы зеркала и распределения токов в его
раскрыве [79]. Рассматривалось облучение параболоида эле¬
ментарным вибратором с рефлектором для ряда значений фо¬
кального расстояния f. В оценках принималось, что ось вибра¬
тора параллельна поперечной оси антенного зеркала и, следо¬
вательно, горизонтальное сечение диаграммы направленности
является плоскостью Я, а вертикальное сечение — пло¬
скостью Е. Отношение полуосей антенного зеркала к фокусно¬
му расстоянию было взято Ях/2/=1,6, Dv/2/=0,8.
Таблица 10.2
Р(0), ДБ
—3
—5
—10
—13
—15
Х>х
1,21
1,59
2,16
2,38
2,55
У/у
1,08
1,46
1,91
2,13
2,23
Чтобы отразить разницу размеров, в табл. 10.2 приведены
значения коэффициента х, связывающего ширину диаграммы
направленности в соответствующем сечении с длиной волны и
размером антенны:
0=хУЯ. (10.27)
Из этой таблицы следует, что при условиях (10.23) — (10.26)
* При большем ослаблении на границах увеличивается полезная пло¬
щадь кадра, но должен быть обеспечен более высокий энергетический по¬
тенциал. Большее ослабление выгоднее допустить в вертикальном сечении
диаграммы направленности антенны, увеличив ширину снимаемой полосы
п°верхности.
16— 4229
241
полезная часть кадра составляет в вертикальном сечении диа.
граммы направленности
У __ 2х,у __0?9
0J, Ъу + Ъу
в горизонтальном сечении
= —=0,68.
0JC >^1JC + X?JC
Полезная часть составляет 53% всей площади кадра.
10.3.2. ШИРИНА ДИАГРАММЫ НАПРАВЛЕННОСТИ
При А,=8 см и максимально допустимой для данного КА
длине антенны Dx=6 м из (10.27) с помощью данных табл. 10.2
получаем: в горизонтальном сечении (плоскость Н) ширина
диаграммы направленности бортовой антенны 0i*=O,93° по
уровню —3 дБ; 02*= 1,83° по уровню —13 дБ.
В вертикальном сечении ширину диаграммы направленно-
сти бортовой антенны найдем из условия однозначного разде¬
ления отраженных сигналов по доплеровскому смещению
HTH>F. (10.28)
Здесь F — разность доплеровских смещений сигналов, отражен¬
ных точками с и d на набегающем и сбегающем краях диаграм¬
мы направленности (рис. 10.12) [см. (10.14)]:
^ = /шах - /ш.п = X Sin "Г * X 0'°'29)
В горизонтальном сечении ширина диаграммы направленности
0*=(0и+02*)/2=1,38°.
Горизонтальная составляющая скорости медленно умень*
шается с ростом истинной аномалии i (см. рис. 10.6). При
=8 см в перицентре F=5,50 кГц и уменьшается до 5,35 и
4,98 кГц при i=22,5 и 45° соответственно.
По определению в области ду разность запаздываний сиг¬
налов, отраженных наиболее удаленной (а) и наименее удален¬
ной (Ъ) точками, равна периоду повторения зондирующего сиг¬
нала
Г = Tmax—Tmin = Т м,
242
d
Рис. 10.12. Раскрыв диа-
с граммы направленности
” бортовой антенны в го¬
ризонтальном сечении
Tmax.mln с C0S(a±Qy/2)
(см. рис. 10.8) и
4 h sinasin0y/2
гр пч У'
м с cos (a + 0^/2) cos (a — 0^/2)
2h sin a
с cos2 a
0y. (10.30)
При изменении истинной аномалии от 0 до 45° высота из¬
меняется в два раза (см. рис. 10.6). Возьмем за основу пара¬
метры, соответствующие 1 = 22,5°, поскольку до этого момента
высота меняется мало, при этом Л=1250 км, v = 8,93 км/с.
Из неравенства (10.28) определяем максимально допусти¬
мое значение периода Тм= 187 мкс, которому при а=10° соот¬
ветствует 0^=7,2°.
Используя соотношения
с помощью данных табл. 10.2 получаем, что в вертикальном
сечении (плоскость Е) ширина диаграммы направленности бор¬
товой антенны 0ir/=5,7° по уровню —5 дБ; 02t/=8,7° по уровню
15 дБ.
Учет диаграммы обратного рассеяния поверхности в первом
приближении не влияет на полученные оценки ширины главно¬
со лепестка диаграммы направленности бортовой антенны.
Диаграмма обратного рассеяния в среднем поднимает яркость
8 кадре со стороны подспутниковой точки и уменьшает ее с
противоположной стороны, что эквивалентно уменьшению угла
пизирования электрической оси антенны в среднем на 1°. Это
2
16*
243
явление в некоторой степени компенсируется фактическим
личением угла падения луча из-за неучтенной сферичности по.
верхности планеты.
10.3.3. УРОВЕНЬ БОКОВЫХ ЛЕПЕСТКОВ
Мощность отраженного сигнала пропорциональна произве¬
дению Лфа(ф)^2(0), где Av=AxAy — площадь* разрешаемого
элемента поверхности; а(ф) -—удельная эффективная площадь
обратного рассеяния; ^(б)—коэффициент направленности ан¬
тенны по мощности. '
При малых углах падения (см. рис. 10.7), когда возникает
зеркальный блик, а(ф) резко увеличивается. Размер разрешае¬
мого элемента в направлении движения почти не меняется
(см. (10.17) при а=0 и 10°), а в перпендикулярном направле¬
нии растет с уменьшением угла а (10.19) и при а=0 становит¬
ся равным
Ду0 = 21/ш; (10.31)
В один элемент разрешения по запаздыванию от подспутнико¬
вой точки попадают сигналы, отраженные пятном, радиус ко¬
торого
(л-Г^) —h?ttYhcbx при (сДх/2)2</гсДт
Поэтому существует большая опасность помехи со стороны зер¬
кального блика в подспутниковой точке (точке 0 на рис. 10.2),
если не обесценить достаточного подавления боковых лепестков
бортовой антенны. Периодичность модуляции не позволяет из¬
бавиться от этого явления за счет различного запаздывания от¬
раженных сигналов.
Ухудшение разрешения в подспутниковой точке
Дуо/Ду = 4 sin a Yh/cAx
[см. (10.31) и (10.19)]. При а=10°, Дт=1,54 мкс для h —
= 1250 км оно составляет 15,6 дБ. Среднее по поверхности Ве¬
неры значение а(ф) при нормальном падении луча возрастает
на 10,2 дБ по сравнению с ф= 10е. К этому значению надо
добавить ослабление диаграммой направленности сигналов на
границах полезной части кадра (10 дБ) и необходимое подав¬
ление помехи по сравнению с сигналом (20 дБ), что составляет
55,8 дБ.
Следовательно, уровень боковых лепестков, направленных в
подспутниковую точку, должен быть не выше —27,9 дБ по
сравнению с максимумом диаграммы направленности. Это
244
достаточно жесткое требование для реальной антенны удалось
выполнить, так как с направлением на подспутниковую точку
совпал второй нуль диаграммы направленности антенны в вер¬
тикальном сечении (см. рис. 10.11).
10.4. ОЦЕНКА ПОМЕХ ФАЗОМАНИПУЛИРОВАННОГО
СИГНАЛА
10.4.1. ДВУМЕРНАЯ ВЕСОВАЯ ФУНКЦИЯ
ФАЗОМАНИПУЛИРОВАННОГО СИГНАЛА
Разрешающая способность когерентного радиолокатора ха¬
рактеризуется двумерной корреляционной функцией зондиру¬
ющего сигнала, показывающей, с каким весом воспринимается
энергия отраженного сигнала вокруг заданных времени за¬
паздывания и доплеровского смещения частоты. Форма этой
функции определяется видом модуляции и процедурой обработ¬
ки отраженного сигнала.
При нефокусированном синтезе апертуры опорные колеба¬
ния имеют фиксированные значения задержки и частоты fk9
так как не учитывается изменение запаздывания (в аргументе
огибающей) и доплеровского смещения (в аргументе экспонен¬
ты) за время когерентной обработки [см. (10.12)]. С учетом
этого операция выделения сигнала (10.7) примет вид
0/2
2= J M(t-x0)M* (t-%t)exp[]2n(f0-fb)t]dt. (10.32
—0/2
Двумерная весовая функция, характеризующая разреша¬
ющую способность измерений по времени запаздывания и доп-
леровскому смещению частоты, вычисляется с помощью соотно¬
шений (10.32) и (10.9), если подставлять модулирующую функ¬
цию зондирующего сигнала и изменять т0 и /0 точечной цели от¬
носительно г* и fh.
Можно показать, что для периодического фазоманипулиро-
нанного (0, л) сигнала, выбранного для радиолокационной си¬
стемы КА «Венера-15» и «Венера-16», двумерная весовая функ¬
ция в точках, отстоящих по оси времени на значение, кратное
Длительности элементарного импульса, имеет вид
U4“ 2 cos 21И/4Г I +
+ (ж|1/"в~‘5|п2^ДГ) ]^ЙЙ7ТГ’ С0.33)
245
где т и f — отклонения запаздывания и доплеровского смеще.
ния отраженного сигнала от задержки и смещения частоты
опорного колебания: т=т0—т< (=kAT)t f=f0—/у, 0П — элемен¬
тарный импульс (±1) длительностью Д71; Тш — период моду,
ляции; М=$/Тм — число периодов модуляции в интервале ко¬
герентной обработки О. Предполагается, что смещение сигнала
относительно опорного колебания по оси времени происходит
циклически без потерь, т. е. k последних импульсов переходят
в начало с сохранением очередности.
Из выражения (10.33) следует, что двумерная весовая
функция сигнала, содержащего М периодов, представляет со¬
бой произведение двумерной весовой функции одного периода
сигнала W\(t, f) (выражение в квадратных скобках) и множи¬
теля периодичности, обращающегося в 1 при М= 1.
10.4.2. ВЫБОР МОДУЛИРУЮЩЕЙ ПОСЛЕДОВАТЕЛЬНОСТИ
Известно, что фазоманипулированные (0, я) сигналы, по¬
строенные на основе периодических кодовых Л4-последователь-
ностей (кодовых последовательностей максимальной длины),
имеют малый уровень боковых лепестков. Для таких сигналов
уровень боковых лепестков по мощности при нулевой расстрой¬
ке по частоте постоянный, равный 1 /N2 (N—число элементов
последовательности).
При разрешении фазоманипулированными сигналами про¬
странственно-протяженных целей, каковой является поверхность
планеты, важно знать уровень боковых лепестков на всей пло¬
скости время запаздывания — частота, поскольку при выделе¬
нии сигнала, отраженного данным элементом поверхности, все
остальные элементы, находящиеся в пределах диаграммы на¬
правленности бортовой антенны, создают помеху. Оценим уро¬
вень боковых лепестков при ненулевой расстройке по частоте
и среди ^-последовательностей одной длины N=127 (что
обеспечивает необходимую ширину полосы обзора при задан¬
ном разрешении) найдем такие, которые лучше удовлетворяют
задаче разрешения пространственно-протяженной цели. Крите¬
рием качества может служить минимум суммы боковых лепест¬
ков (по мощности), а при равенстве сумм — их равномерность
(серость).
Число различающихся ^-последовательностей опреде¬
ляется формулой (N—l)/log2(N+l) [80] и для N=127 рав¬
но 18.
Значения элементов последовательностей вычислялись по
рекуррентной формуле
qn=kiqn-i+k2qn-2+ • • • +£7^-7 (сложение по модулю 2)
(10.34)
246
7АТ
Рис. 10.13. Схема генерирования кодовых последовательностей
180], где перебирались коэффициенты. Схема генерирования
последовательностей приведена на рис. 10.13. Для каждой по¬
следовательности находился фазоманипулированный сигнал на
одном периоде, содержащем 127 элементарных импульсов
0п=(-1)^.
Затем при циклическом смещении последовательности отно¬
сительно самой себя определялась корреляционная функция
сигнала. Значение ее при произвольных смещениях на целое
число импульсов только для ^-последовательности не должно
превышать 1/127 от максимального, что и использовалось для
выявления ^-последовательностей из общего числа 127 воз¬
можных.
Двумерная нормированная корреляционная функция (по
мощности) одного периода фазоманипулированного сигнала
имеет вид
/ N \2
ИМ*, /гс) = Ж 2 еп9л+* cos 2л птп
71=1
N М
+
( 1 V*
+Ьг2 0*0«+*sin23t
п=1
NM
(10.35)
где n/N — расстройка по времени запаздывания в долях пе¬
риода; т/М — расстройка по частоте в долях величины, обрат¬
ной длительности периода. Суммирование п и k в индексах ве¬
дется по модулю 127 (если п-|-/г^127, то вычитается 127).
Разрезы по оси частот главного лепестка (& = 0) и двух бо¬
ковых лепестков (k = 7 и 126) функции W^k.m) для сигнала
одной из 18 ^-последовательностей приведены на рис. 10.14, а.
247
Рис. 10.14. Разрезы по оси частот главного лепестка (6=0) и боковых ле¬
пестков (k = 7 и 126) функции W\(k, т) для фазоманипулированного сигнала
^-последовательности 3 при N=127 (а, б, коэффициенты формулы (10.34):
0, 0, 0, 0о 0, 1, 1) и для М-(последовательности 8 (в, коэффициенты:
0, 1, 1, 1, 0, 0, 1)
В главном сечении функция имеет вид sin х2/х2, что и сле¬
довало ожидать, поскольку при k = 0 выражение (10.35) опи¬
сывает операцию дискретного гармонического анализа прямо¬
угольного импульса постоянного тока длительностью N эле¬
ментов. Первые нули сечения находятся в точках т = ±М (М—
число периодов модуляции — выбрано равным 20).
В боковых лепестках (масштаб изменен в 10 раз) функция
возрастает от 1/1272 (при т=0), достигая своего максимума
между значениями т=10 и 20, а далее колеблется около 1/127.
До т= 10 расчет велся с единичным шагом, а далее — с ша¬
гом 10 (масштаб после т= 10 изменен в 5 раз).
На рис. 10.14,6 приведены разрезы по оси частот функции
Wi(ktm) той же М-последовательности с шагом 1 для самых
больших боковых лепестков и еще нескольких, выбранных про¬
извольно. При т=20 все кривые сходятся к значению 1/127=
= 0,0078. Для сравнения та же последовательность снималась
с высшего разряда регистра сдвига (а не с низшего, как пока¬
зано на рис. 10.13). При этом номера лепестков изменились, а
соотношение между ними осталось тем же самым.
248
Монотонное возрастание кривых от пг=О до т= 10 нару¬
шается только для самых низких лепестков (см., например,'
#=5, 80 на рис. 10.14,6). Поэтому относительный размер ле¬
пестков можно характеризовать их значениями в одном сечении
по оси времени, например, при т=10. Оказалось, что для
всех 18 последовательностей суммы боковых лепестков в этом
сечении близки к 1. Следовательно, и суммы всех боковых ле¬
пестков для этих последовательностей должны быть одинаковы.
Критерием при выборе М-последовательности может быть
уровень максимального бокового лепестка (точнее, уровень
всех боковых лепестков в сечении по оси частот, поскольку он
изменяется монотонно).
Уровни в максимуме сечений наибольших боковых Лепест¬
ков для разных последовательностей отличаются примерно в
два раза по мощности (0,031 и 0,017). Из всех 18 М-последо-
вательностей наиболее серой (с точки зрения боковых лепест¬
ков) является последовательность 8 (рис. 10.14, в) и ее зер¬
кальное отображение — последовательность 15. Как видно из
рис. 10.14, в, некоторые лепестки повторяются многократно.
С точки зрения формирования кода наиболее просты после¬
довательности 3 (коэффициенты 0, 0, 0, 0, 0, 1, 1), 7 (коэффи¬
циенты 0, 0, 0, 1, 0, 0, 1) и их зеркальные 4, 11. Они требуют
лишь одного сложения по модулю 2. Но из них 3(4) имеют
больший уровень боковых лепестков (см. рис. 10.14,6). Для
последовательности 7, реализованной в модуляторе радиолока¬
ционной системы, он меньше в 1,42 раза. Переход к наилучшей
(с точки зрения наибольшего лепестка) последовательно¬
сти 8 (15) дает выигрыш в 1,26 раза, но при этом формирова¬
тель кода имеет три сложения по модулю 2.
10.4.3. ОЦЕНКА ПОМЕХ, СОЗДАВАЕМЫХ БОКОВЫМИ ЛЕПЕСТКАМИ
ДВУМЕРНОЙ ВЕСОВОЙ ФУНКЦИИ
Суммарная мощность сигналов, принимаемых боковыми ле¬
пестками двумерной весовой функции (10.33), создает помеху
на изображении. В сечении по оси времени уровень боковых
лепестков определяется корреляционными свойствами одного
периода сигнала Wi(xyf). В сечении по оси частот уровень бо¬
ковых лепестков снижается еще множителем периодичности
[см. (10.33)].
Мощность помехи, создаваемой площадкой протяжен¬
ностью At по запаздыванию, в интервале частот от f до
(f+6f) равна
249'
Переходя к интегралу, определяем мощность помехи о
одной элементарной площадки
Пределы интегрирования ограничены доплеровским смеще¬
нием на краях кадра радиолокационного изображения. Участ¬
ки поверхности, создающие большие по абсолютному значению
доплеровские смещения, не попадают в диаграмму направлен¬
ности бортовой антенны (см. рис. 10.10).
Для упрощения вычислений аппроксимируем функцию
НМт, /) прямой, проходящей через начало координат и точку
с координатами 1/2 7М, 1/N (рис. 10.15). Поскольку при т=
= 10 сумма всех остатков равна 1, боковой лепесток, проходя¬
щий через эту точку, является средним по мощности.
Множитель периодичности в области его лепестков аппро¬
ксимируем квадратичной гиперболой
Тогда, учитывая четность подынтегрального выражение
получаем
Поскольку лишь одна элементарная площадка согласована
5 ЯМт./)
sin2 Мх 1—cos 2Мх
М2 sin* х 2М2х2
1
Рис. 10.15. Аппроксимация функ¬
ции Wi(t, f) и множителя перио¬
дичности
250
По запаздыванию с опорным колебанием, остальные N—1
создают помеху, средняя мощность которой
2ДТ N—1 М 2ДГ М
Рш = (М—\)Рш= п2М2Тм п2М2Тм 1п!Г* О0*38)
Мощность сигнала, создаваемого элементом разрешения,
согласованным по запаздыванию и частоте, можно найти из
интеграла (10.36), положив №i(0,0) = l и уменьшив интервал
интегрирования:
\{МТ м
<10'39>
-l/AfTM
тогда получим
Р —Д 2 ^ sin2 MnfTм , (Ю 40)
(Мл/Гм)2 МТЫ'
о
Следовательно, суммарная мощность помехи, принимаемой
на боковые лепестки двумерной весовой функции, по отношению
к мощности сигнала, отраженного элементом разрешения, со¬
ставляет
Р ш 2 In M/2 Н041)
Рс~ л2 М •
При М = 20 получим Рш/Рс=0,023, что можно считать впол¬
не приемлемым.
10.5. ВЫБОР ПОРОГА ОГРАНИЧЕНИЯ
ПРИ КВАНТОВАНИИ СИГНАЛА В ПРИЕМНИКЕ
Преобразование сигнала на выходе приемника в дискретный
сопровождается дополнительными шумами, которые условно
можно разделить на шумы квантования и шумы ограничения.
Шумы квантования связаны с тем, что в рабочем диапазоне
входных напряжений дискретные отсчеты на выходе аналого-
цифрового преобразователя (АЦП) представляют мгновенное
напряжение на входе с некоторой ошибкой. Шумы ограничения
обусловлены выходом мгновенного напряжения на входе АЦП
за пределы рабочего диапазона преобразователя.
Если уровни квантования сигнала АЦП расставлены равно¬
мерно и переход на соседний уровень (м± 1) происходит при
|и—цп|>Дц/2, то ошибка квантования (и—ип)=ик в рабочем
диапазоне АЦП будет иметь пилообразную форму, ограничен¬
ную значениями ±Дц/2 (рис. 10.16). Мгновенное напряжение
ошибки квантования на одном ходе «пилы» в некотором при¬
ближении можно представить в виде ик= (&u/Q)t при |/|^0/2
251
9
Рис. 10.16. Ошибка квантования
и вычислить среднюю мощность шумов квантования через энер¬
гию
0/2
л,-4 5 f.
-0/2
Если число уровней квантования сигнала АЦП равно п0 и
его рабочий диапазон ±м0, то
п0 к 3/г0
(10.42)
Мощность шумов ограничения, возникающих в те моменты,
когда мгновенное напряжение на входе АЦП выходит за пре¬
делы ±и0> можно вычислить как
— и 0 СО
Р0= ^ и2/(и) + ^ &2/ (и)
(10.43)
«о
Отраженный сигнал, как и шумы приемной аппаратуры,
представляет случайный нормальный процесс. Плотность веро¬
ятности мгновенного напряжения на входе АЦП
(10.44)
где о2 — дисперсия мгновенного напряжения на входе АЦП
(мощность сигнала).
Подставив (10.44) в (10.43) и выполнив интегрирование по
частям, получим
^=?%ехр(_^)+1~ф(Ло)’ (10‘45)
Х° 2
где Ф (л:0)= -/?— ^ ехр (— у) ^ — интеграл вероятности, а
я о 4 '
г _ао
ло~ а*
В тех же обозначениях мощность шумов квантования
Рк __ *о2
а2 3 по'
(10.46)
252
■рис.' 10.17. Мощность шумов квантования
(Рк[а2) и суммарная мощность шумов
квантования и шумов ограничения (Рк/<*2+
4-Ро/а2) аналого-цифрового преобразовате¬
ля в зависимости от его рабочего диапазо¬
на при 15 уровнях квантования
Зависимость ее от х0 при
yiqа== 15, принятом для АЦП ра¬
диолокационной системы, пока¬
зана на рис. 10.17 штриховой ли¬
нией.
Сумма шумов квантования и
ограничения (сплошная линия на
рис. 10.17) имеет минимум, поло¬
жение которого задается уравне¬
нием
Р/ьг
*оехР -Т =
При п0=15 минимум шумов приходится на значение и0/а=
= 3.72.
10.6. ПРИНЦИПЫ РАБОТЫ РАДИОЛОКАЦИОННОЙ
СИСТЕМЫ КА «ВЕНЕРА-15» И «ВЕНЕРА-16»
Упрощенная структурная схема радиолокационной системы
КА «Венера-15» и «Венера-16» [81] представлена на рис. 10.18,
*777 • 7777
Рис. 10,18. Упрощенная структурная схема радиолокационной системы КА
«Венера-15» и «Венера-16» (РЛС СА — радиолокационная станция с синте¬
зом апертуры; РВ—радиовысотомер)
Таблица Ю.з
Параметр
PJIC с синтезом
апертуры
Радиовысотомер
Рабочая частота (длина волны 8 см),
1
МГц
3744
Размер антенны, м
6X1,4
1.0
Поляризация антенны
Линейная
Ширина диаграммы направленности
(по уровню —3 дБ)*, град
0,95X5,5
5,2
Угол обзора (к вертикали), град
10
0
Взаимная развязка трактов в ан¬
тенном переключателе, дБ, не менее
30
Режим работы передатчика на ин¬
тервале синтеза
Непрерывный
Мощность передатчика, Вт
80
Вид модуляции
Фазовая (0, я)
Вид кода
^-последовательность
Число элементов кода
127
31 или 127
Длительность элементарного импуль¬
1
са, МКС
1,54
Период модуляции, мкс
195,4
I 47,7 или 195,4
Длительность непрерывного включе¬
1
ния, мс
14,7
Период повторения импульсов, мс
300
Шумовая температура приемника, К
2000
Число разрядов АЦП
2X4
Период взятия отсчетов АЦП, мкс
1,54
Число отсчетов на когерентном
интервале
2540
1 434
Дискретность системы АРУ, дБ
1,1
Число разрядов АРУ
6
Емкость оперативного запоминающе¬
I
го устройства, бит
20320
3472
Емкость бортового накопителя на
К
магнитной ленте, Мбит
2X100
Длительность работы накопителя, с
1000
Диапазон рабочих высот, км
650.
..2200
* Для РЛС ширина диаграммы направленности 5,5° по уровню —5 дБ.
ее параметры — в табл. 10.3. Сигналы этой полностью когерен¬
тной системы формируются от общего задающего генератора.
На передатчик (длина волны 8 см) поступают высокочас¬
тотные импульсы длительностью около 15 мс (рис. 10.19). Во
время первого импульса и последующей паузы, используемой
для приема отраженных сигналов, передатчик и приемник под¬
ключены к антенне РЛС с синтезом апертуры, а во время
второго импульса и паузы — к антенне радиовысотомера.
Внутри импульсов фаза сигнала изменяется на 180° в мо¬
менты, определяемые кодом периодически повторяемой после-
254
15 нс 5нс
Антенна РЛС с синmeson Антенна
апертуры ра5ио5ысстонера
N эн
Рис. 10.19. Циклограмма переключения режимов работы радиолокационной
системы
довательности максимальной длины (^-последовательности).
Длительность элементарного импульса, определяющего разре¬
шающую способность радиолокационной системы по наклонной
дальности и высоте, 1,54 мкс. В режиме РЛС с синтезом апер¬
туры период кодовой последовательности содержит 127 элемен¬
тарных импульсов (195,4 мкс), в режиме радиовысотомера —
31* элементарный импульс (47,7 мкс). Циклы излучения им¬
пульсов через антенну РЛС с синтезом апертуры и антенну
радиовысотомера следуют через 0,3 с.
Прием и регистрация отраженных сигналов производятся в
паузе по окончании импульса передатчика. Для простоты дли¬
тельности излучения и приема фиксированы, а не изменяются
в зависимости от высоты КА, движущегося по эллиптической
орбите. При этом время регистрации меньше времени присут¬
ствия отраженных сигналов на входе приемника. В режиме
РЛС с синтезом апертуры отраженные сигналы регистрируются
3,9 мс, а в режиме радиовысотомера 0,67 мс (рис. 10.19), что и
определяет время когерентного накопления в дальнейшем при
обработке.
Мгновенное напряжение отраженных сигналов, преобразо¬
ванных к нулевой частоте в двух квадратурных каналах, усред¬
няется на интервале, равном длительности элементарного
импульса (1,54 мкс), и представляется 4-разрядным двоичным
кодом (рис. 10.18). Согласование уровня отраженных, сигналов
с динамическим диапазоном АЦП обеспечивается цифровой
системой автоматического регулирования усиления (АРУ), ме¬
няющей коэффициент усиления ступенями через 1,1 дБ. Через
каждые 0,3 с 2540 отсчетов отраженных сигналов в режиме
* В режиме радиовысотомера по команде с Земли период кодовой
последовательности может быть установлен равным также 127 элементам,
что облегчает раскрытие неоднозначности в измеренном расстоянии.
255
Рис. 10.20. Диаграмма, иллюстрирующая запаздывание отраженных сигналов
относительно момента излучения (а), для минимальной (б) и максимальной
(в) дальностей (заштрихован интервал регистрации)
РЛС с синтезом апертуры (20 периодов 127-элементной М-пос-
ледовательности длительностью 3,9 мс) и 434 отсчета отражен¬
ных сигналов в режиме радиовысотомера (14 периодов 31-эле-
ментной ^-последовательности длительность 0,67 мс, рис. 10.19)
поступают двумя 4-разрядными словами в оперативное запо¬
минающее устройство совместно с данными об усилении, уста¬
новленном системой АРУ, а затем в паузе переписываются в
бортовые накопители информации на магнитной ленте. За
16 мин, в течение которых проводится радиолокационная съем¬
ка, получается около 3200 таких массивов общим объемом
100-106 бит.
Отраженные сигналы с учетом запаздывания т при рас¬
пространении должны попасть в интервал, отведенный для их
регистрации (рис. 10.20, а). Длительность импульса передат¬
чика и интервал регистрации обеспечивают его заполнение
отраженными сигналами в диапазоне высот примерно от 650
до 2200 км (крайние случаи приведены на рис. 10.20, б, в).
Отсчеты мгновенного напряжения отраженных сигналов
вместе с данными об усилении приемного тракта, установлен¬
ном системой АРУ, и служебной информацией затем передают¬
ся по радиолинии на Землю для обработки и построения изо¬
бражений и профилей высот поверхности.
10.7. ПЕРЕДАЧА РАДИОЛОКАЦИОННОЙ ИНФОРМАЦИИ
НА ЗЕМЛЮ
Общий вид КА «Венера-15» и «Венера-16» с радиолокаци¬
онной аппаратурой представлен на рис. 10.21. В передней час¬
ти КА установлены две антенны радиолокационной системы.
Зеркало антенны РЛС с синтезом апертуры имеет форму пара-
256
V
' ,tow//r ■
тш>щ ммт
0Ш$№'
/--.
Атдрафрра
//лМя/Ш&шря
\ А шЛттт
Рис. 10.21. Общий вид КА «Венера-15» и «Венера-16» с аппаратурой радио¬
локационной системы
болического цилиндра размером 6X1,4 м. Зеркало антенны
радиовысотомера — параболическое диаметром 1 м. Электри¬
ческая ось антенны радиовысотомера совмещена с продольной
осью КА. Электрическая ось антенны РЛС с синтезом апертуры
отклонена от продольной оси КА на 10°.
Направление электрических осей антенн радиовысотомера
по местной вертикали, т. е. к центру планеты, а РЛС с синте¬
зом апертуры — в плоскости, перпендикулярной трассе, выпол¬
няет система астроориентации, непрерывно изменяющая поло¬
жение КА по заданной программе при облете планеты.
Для передачи данных радиолокационной съемки на Землю
разработана радиолиния, работающая в 5-см диапазоне волн
и обеспечивающая скорость передачи 100 кбит/с на всех воз¬
можных расстояниях между Венерой и Землей вплоть до
260 млн км. Ее антенна диаметром 2,6 м видна справа от кор¬
пуса КА (см. рис. 10.21).
На Земле прием информации обеспечивался двухзеркальной
антенной с диаметром главного зеркала 70 м в Центре дальней
космической связи под Евпаторией. Другая двухзеркальная
антенна с диаметром главного зеркала 64 м обеспечивала при¬
17—4229
257
ем информации в Медвежьих Озерах под Москвой. За восемь
месяцев ежедневной съемки на Землю было передано 50 Гбит
научной информации — больше, чем всеми другими отечествен¬
ными аппаратами из дальнего космоса.
Аппараты «Венера-15» и «Венера-16» стартовали с проме¬
жуточной орбиты спутника Земли 2 и 7 июня 1983 г. 10 и 14 ок¬
тября оба космических аппарата были выведены на орбиты
спутников Венеры со следующими параметрами:
Период обращения 24 ч
Большая полуось 39 460 км
Эксцентриситет 0,8213
Сдвиг плоскостей орбит друг относительно друга 4°
Наклонение 92,5°
Широта перицентра 62°
Высота в перицентре . . 1000± 100 км
Высота в апоцентре 66 000 км
Скорость в перицентре 9,16 км/с
10.8. КРАТКОЕ ОПИСАНИЕ ЭКСПЕРИМЕНТА
При прохождении КА вблизи планеты за 16 мин ежедневно
снималась полоса поверхности шириной около 100 км и длиной
7500 км, вытянутая вдоль трассы полета (рис. 10.22). Обычно
съемка начиналась на широте 80° за северным полюсом Вене^
ры. Аппарат проходил вблизи него и, двигаясь примерно вдоль
меридиана, заканчивал съем¬
ку на широте 30°. За 24 ч Ве¬
нера поворачивалась вокруг
своей оси на 1,5°, и при следу¬
ющем прохождении КА сни¬
малась новая полоса поверх¬
ности, частично перекрываю¬
щая предыдущую. Длина
полосы съемки определялась
рабочим диапазоном высот
радиолокационной системы
(от 1000 до 2000 км) и ем¬
костью бортовых накопителей
информации.
Аппараты «Венера-15» и
«Венера-16» функционирова¬
ли как единая космическая
система. Плоскости их орбит
были смещены примерно на
4Г, что обеспечивало при не¬
обходимости возможность пов-
180*
О9
Рис. 10.22. Последовательность ра¬
диолокационной съемки поверхности
Венеры:
1 — полоса, снимаемая при прохождении
КА вблизи Венеры; 2 — полоса, снимаемая
при следующем прохождении спустя сутки;
3 — путь КА; 4 — направление вращения
Венеры; 5 — граница области картографи¬
рования; 6 — область гор Максвелла
258
торной съемки одной и той же области, не прерывая регуляр¬
ности съемки.
В период съемки в бортовые накопители информации посту¬
пают массивы отсчетов сигналов, отраженных участками по¬
верхности в пределах диаграмм направленности антенны РЛС
с синтезом апертуры (1) и антенны радиовысотомера (2) (рис,
10.23). При наземной обработке сигналы разделяются по за¬
паздыванию и доплеровскому смещению, в результате форми¬
руется «кадр» радиолокационного изображения. В режиме РЛС
с синтезом апертуры отдельные кадры, получаемые по мере
движения КА, объединяются в сплошную полосу без потери в
разрешающей способности [82].
В режиме радиовысотомера измеренные значения мощности
в кадре суммируются по частоте. Полученное распределение
мощности отраженных сигналов по запаздыванию затем срав¬
нивается методом математической свертки с рядом моделей
этого распределения, отличающихся значениями коэффициента
шероховатости и дисперсии высот в участке поверхности 2,
оказавшемся в диаграмме направленности антенны (рис. 10.23).
При выборе моделей учитывается высота КА и возможное
отклонение электрической оси антенны от местной вертикали
(как правило, в пределах ±0,5°), которое измеряется по сме¬
щению средней частоты спектра отраженного сигнала. Поло-
/
/
/
/
Рис. 10.23. Следы диаграмм направленности антенн РЛС с
синтезом апертуры (1) и радиовысотомера (2) (элемент раз¬
решения заштрихован)
17*
259
щрррюмшрк
^ N ' N ^ % X iw^'l"
^^^ччЧч^чччч^ч^^^хчч^чч^^
ж®»#¥ ^ л 44С4 '^1 ¥■'' 'I
Р''|*н^5% ' |р11 ^'""""
s s - 4 ■'-' ■ *.
-44* --С'' »' 1 %:'Ч%:'V'H <4
8® чч^^чч%$^ ^ччх-х х^ччч^чч^чч ^5^>х^\х^\\чч\ч\^#5^х^8»> . Я
*£~К г^АИ
«.^4' "V 'I f-\; 1ч^Г"'' 'Ц" J:
чч^^>Ч'\\чН*'\ч'"4'4^444"^^4444'4*4^^^
Я^ккк л \ -<уЛ^ $ "-' -\4.4T-" $• ^ t
Й^чССуС&Учч^&уй^ч^^
*V| ^V|o‘ * !>o
V*
ЙЛЧ.Й +L^.:- ,
Рис. 10.24. Профили высот поверхности Венеры, полученные КА «Венера-16»
24 ноября 1983 г. (вверху) при 127-элементной модулирующей М-последова-
тельности сигнала и 25 ноября 1983 г. (внизу) при 31-элементной М-после-
довательности
жение наибольшего максимума сверток дает высоту спутника
над средней поверхностью в разрешаемом пятне, высота рель¬
ефа поверхности оценивается как разность расстояния спут¬
ника относительно центра масс планеты, определяемого по
260
результатам траекторных измерений, и измеренной высоты*
спутника над поверхностью.
Длительность модулирующей последовательности (31 или
127 элементов) устанавливается с Земли. Использование более
короткой последовательности позволяет разделять отраженные
сигналы и по доплеровскому смещению, что обеспечивает более
высокое разрешение вдоль трассы. Однако период однозначных
измерений для 31-элементной последовательности в четыре
раза меньше, чем для 127-элементной. Для раскрытия неодно¬
значности использовались данные о расстоянии КА относитель¬
но центра масс планеты.
В первые две недели съемки, когда еще была не ясна
ошибка определения планетоцентрического расстояния КА,
использовался зондирующий сигнал с 127-элементной последо¬
вательностью. Переход на сигнал с 31-элементной последова-
Таблица 10.4
Параметр
Значение
Разрешение поверхности в режиме РЛС с синте¬
зом апертуры, км:
вдоль трассы
1,2... 2,7
перпендикулярно трассе (на краях следа)
0,9... 1,5
Ширина полосы съемки, км
120... 70
Длина полосы съемки, км
7500
Угол падения волн, град:
на краях следа диаграммы направленности
8,5... 15
в его центре
11,7... 13,4
Число усреднений независимых измерений мощ¬
ности
6—14
Разрешение поверхности в режиме радиовысо¬
томера, км:
вдоль трассы при длительности модулирующей
последовательности 31 и 127 элементов
6... 14, 40... 50
перпендикулярно трассе
40... 50
Среднеквадратическая погрешность измерения вы¬
соты, м
30
Период однозначных измерений для длительнос¬
ти модулирующей последовательности 31 и
127 элементов, км
7,15, 29,3
Период повторения измерений, с (расстояние
по трассе 2,5 км)
0,3
Расстояние между трассами при ежесуточной
съемке на широте 60, 45, 30°, км
78, 110, 135
Примечание. Изменение разрешения вдоль трассы, ширины полосы съемки.
Угла падения волн в центре следа диаграммы направленности и числа усреднений
независимых измерений мощности РЛС с синтезом апертуры, а также изменение раз¬
решения радиовысотомера дано для диапазона высот 1000 . . . 2000 км.
261
тельностью для аппарата «Венера-16» был произведен 25 нояб¬
ря 1983 г. Как видно из рис. 10.24, на котором приведены цро-
фили высот 'поверхности Венеры для двух близких трасс 24 и
25 ноября 1983 г., смена сигнала прошла без какого-либо замет¬
ного систематического смещения.
В отличие от радиовысотомера орбитального аппарата
«Пионер—Венера» высота измерялась через 2,5 км, и профиль
высотного рельефа по трассам получался непрерывным.
Характеристики радиолокационной съемки (при учете сфе¬
ричности планеты) приведены в табл. 10.4.
10.9. НЕКОТОРЫЕ РЕЗУЛЬТАТЫ
РАДИОЛОКАЦИОННОГО КАРТОГРАФИРОВАНИЯ
ВЕНЕРЫ
Регулярное картографирование поверхности Венеры началось И ноября
1983 г. после коррекции орбит и проведения пробных сеансов съемки и про¬
должалось до 10 июля 1984 г. Радиолокационные изображения поверхности
Венеры, полученные КА «Венера-16» 20 октября 1983 г. и 3 июля 1984 г.
после того, как Венера совершила оборот вокруг своей оси и под орбитой
оказался тот же самый район*, приведены на рис. 10.25.
По горизонтальной и вертикальной осям отложены угловые расстояния
относительно перицентра и плоскости орбиты, измеренные в градусах из
центра планеты (один градус на поверхности Венеры занимает 105,6 км).
Положению трассы соответствует 0° по вертикальной шкале. Несовпадение
горизонтальных шкал связано с некоторым изменением широты перицентра
КА. Длина приведенных фрагментов 1100 км при полной ширине изобра¬
женной полосы 156 км (195 элементов по 0,8 км). Полезная часть изображе¬
ния зависит от высоты КА. Изображение построено в предположении,
что поверхность Венеры — сфера радиусом 6051 км. Отклонения местного
радиуса от этого размера проявляются в нерегулярном смещении границ
по вертикали, видимом на изображении. Плавное смещение границ вызвано
изменением высоты аппарата при его движении по эллиптической орбите.
Космический аппарат двигался слева направо, его трасса проходила выше
снятой полосы. Чем больше мощность отраженных сигналов, тем светлее де¬
тали на изображении. Склоны, обращенные к падающему лучу, выглядят
светлыми; склоны, отвернутые от него,—темными.
Расшифровать видимые на снимках образования помогают измерения
* В еередине июня 1984 г., когда Венера проходила за Солнцем, плос¬
кость орбиты КА «Венера-16» была повернута назад на угол около 20°.
Вследствие этого тот же самый район оказался под орбитой на две недели
позже, чем время полного оборота Венеры (243 сут.).
262
-
— H’i
&*■$. ‘
ipilit
263
Рис. 10.25. Радиолокационные изображения одного и того же района поверхности Венеры, полученные КА «Вене¬
ра-16» 20 октября 1983 г. (а) и 3 июля 1984 г., спустя 8 месяцев (б)
2С4
. 10.26. Радиолокационное изображение района гор Маскв елла с кратером Клеопатры, полученное КА «Венера-16»
января 1984 г., и профиль поверхности по трассе полета 17 января 1984 г. (белая линия на изображении)
радиовысотомером. На рис. 10.26 изображен район гор Максвелла с кратером
Клеопатры диаметром около 100 км. С радиолокационным изображением
совмещен профиль высот, измеренный тремя днями раньше, по трассе КА
«Венера-16», показанной белой линией. Максимальная высота горного мас¬
сива для данного профиля 11 км над уровнем. средней поверхности радиу¬
сом 6051 км. Кратер, который пересекла трасса измерений высоты, располо¬
жен на склоне горного массива и имеет сложную форму. Из сопоставления
изображения с профилем следует, что внутри большего кратера глубиной,
около 1,5 км находится второй меньшего диаметра, дно которого опущено
на 2,5 км.
Заметим, что значительное отклонение местного радиуса от 6051 км, что
принято за радиус сферы, на которую наносится изображение, привело к за-
Рис. 10.27. Фотокарта гор Максвелла и окружающей области Венеры (6 на
схеме рис. 10.22), построенная по результатам радиолокационной съемки с
КА «Венера-15» и «Венера-16» с 30 декабря 1983 г. по 1 февраля 1984 г.:
долгота 345... 25°, широта 55 ... 75°. Проекция нормальная, равноугольная,
коническая Ламберта—Гаусса
265
JSS°
0°
Рис. 10.28. Фрагмент топографической карты гор Максвелла и окружающей
области * Венеры (см. подпись к рис. 10.27): горизонтали следуют с шагом
500 м относительно уровня средней сферы радиуса 6051 км
266
четным перспективным искажениям формы кратера, которые были учтены при
нанесении трассы радиовысотомера на изображение.
При ежедневной работе КА «Венера-15» и «Венера-16» с октября 1983 г.
но июль 1984 г. снята территория, простирающаяся от северного полюса
Венеры до широты 30°. Площадь этой территории 115 млн км2, что состав¬
ляет 25% площади поверхности Венеры. Для всей снятой территории в ИРЭ
ДН СССР при участии ЦНИИГАиК ГУГК и ИПМ АН СССР цифровыми
методами построены фотокарты и топографические карты [71]. В виде при¬
мера на рис. 10.27 и 10.28 приведены карты области гор Максвелла — самой
высокой на Венере. При построении фотокарт из полос изображений по изме¬
рениям радиовысотомера вносилась топографическая коррекция (сравните
форму кратера Клеопатры на рис. 10.26 и 10.27).
На поверхности Венеры обнаружены интересные явления, связанные с
локальными аномалиями характеристик отражения радиоволн. На рис. 10.29
показан фрагмент с двумя кратерами ударного происхождения диаметром
15... 20 км. Дно кратера, представленного на рис. 10.29, а, выглядит не-
Рие. 10.29. Фрагменты с кратерами Аня (а) и Брук, (б) ударного происхож¬
дения на поверхности Венеры
267
обычно ярким по сравнению с кратером на рис. 10.29, б. Уровень сигналов,,
отраженных от дна этого кратера, возрастает на 7 дБ по сравнению с сиг¬
налами, отраженными от окружающей местности. Анализ показывает, что это
не может быть вызвано только большей шероховатостью дна кратера по
сравнению с окружающей местностью, что увеличивает интенсивность отра¬
жения сигналов к радиолокатору. Следовательно, дно кратера должно иметь
больший коэффициент отражения, чем окружающая местность. Если повы¬
шение отражательной способности обусловлено высокой электропроводи¬
мостью, то можно предположить, что это явление связано с химическим со¬
ставом метеорита, при ударе которого образовался кратер (например, с по¬
вышенным содержанием железа) [83]. Примерно 10% общего числа кратеров,
видимых на радиолокационных изображениях, полученных с помощью КА
«Венера-15» и «Венера-16», имеют яркое дно или окружены ярким выбросом.
Сравнение мощности отраженных сигналов, принятых РЛС с синтезом
апертуры и радиовысотомером, позволило построить карты отражательной
способности и шероховатости для северного полушария Венеры. Мощность
отраженных сигналов на входе приемника пропорциональна удельной
эффективной площади обратного рассеяния поверхности а(ф), зависящей от
угла падения волн ф. В свое время Т. Хэгфорсом было получено выражение
а(ф) =^(соб4ф + С sin2 ф)~3/2, (10.48)
где р—'Коэффициент отражения радиоволн при нормальном падении; С —
коэффициент, определяемый степенью неровности поверхности (С“1/2 — сред¬
неквадратическое значение углов наклона неровностей поверхности).
Для РЛС с синтезом апертуры с учетом кривизны поверхности планеты и
изменения высоты КА угол падения волн менялся от 11,7 до 13,4° (см. табл.
10.4). Для радиовысотомера ф = 0°. Решение уравнения (10.48) для дзу.х
значений угла падения, когда а(ф) определено в результате измерений мощ¬
ности отраженных сигналов РЛС с синтезом апертуры и радиовысотомера
для одного и того же участка поверхности планеты, позволило найти р и С.
Калибровка измерительных трактов осуществлялась при полете над од¬
нородной местностью. При этом КА был развернут так, что обе антенны
оказались по разные стороны плоскости орбиты под одним и тем же углом
(5°) к местной вертикали.
Полученная карта коэффициента отражения поверхности для северного
полушария Венеры приведена на рис. 10.30. За среднее значение коэффициен¬
та отражения поверхности было принято 0,15, что соответствует результатам
наземных радиолокационных наблюдений Венеры, для которых легче обес¬
печить необходимую точность абсолютной калибровки чувствительности ра¬
диолокационной аппаратуры, чем при съемке с КА. Обращает на себя вни¬
мание то, что в некоторых районах Венеры коэффициент отражения поверх¬
ности в несколько раз превышает среднее значение, достигая 0,6 в горах
Максвелла, что было замечено и ранее американскими исследователями [84]
при анализе данных радиовысотомера орбитального аппарата «Пионер —
Венера». Для объяснения этого явления надо допустить, что либо относи-
2 68
Рис. 10.30. Контурная карта коэффициента отражения поверхности Венеры
по данным измерений с КА «Венера-15» и «Венера-16»: М — горы Масквелла
тельная диэлектрическая проницаемость горных пород достигает 20... 30,
либо они обладают высокой электропроводимостью. Лучшее по сравнению с
радиовысотомером «Пионер — Венера» пространственное разрешение радио¬
локационной системы КА «Венера-15» и «Венера-16» позволило обнаружить
высокое значение коэффициента отражения и в менее крупных горных обра¬
зованиях, а также на равнине [85].
10.10. КОСМИЧЕСКИЕ ТЕЛЕВИЗИОННЫЕ СИСТЕМЫ
Космические телевизионные системы (КТС) занимают важное место в
Исследовании планет. В силу особенностей восприятия человеком окружаю¬
щей среды телевизионная информация представляет собой наиболее адекват¬
269
ную и легко воспринимаемую форму отображения. Эта форма имеет универ-
сальный характер и в значительной степени инвариантна по отношению к
решаемым задачам и пользователям. Поэтому КТС применяются как источ¬
ники научной информации, как средства технического наблюдения и управ¬
ления КА и, наконец, как системы общественной информации («космовиде¬
ние»)« Разделение КТС по указанным направлениям условно, так как они
одновременно могут выполнять несколько функций.
В дальнем космосе КТС используются прежде всего как источники
научной информации о поверхности планет, совершенно недоступной для
наземных средств наблюдения. Такая информация получается с пролетных,
орбитальных и посадочных КА. Телевизионные системы этих КА могут одно¬
временно выполнять и служебные функции как оптические датчики для авто¬
номной навигации.
Важная особенность КТС состоит в том, что они являются источниками
весьма больших потоков информации прежде всего потому, что видеоинфор¬
мация по своей природе как минимум трехмерна. Причем это относится
только к простейшему виду — черно-белому монохромному изображению.
Цветные, или спектрозональные, изображения требуют увеличения объема из¬
мерений пропорционально числу спектральных каналов. В силу этого ис¬
пользование КТС на КА диктует наиболее жесткие требования к радиоси¬
стеме по скорости передачи.
Имеют место существенные отличия КТС от систем вещательного теле¬
видения по таким основным параметрам, как четкость или число элементов
(пикселей), из которых строятся изображения (условный кадр), число кад¬
ров, передаваемых в единицу времени, спектральная чувствительность.
Во многих случаях использования КТС объект исследования (поверх¬
ность планеты, звездные образования и т. п.) не отличается заметной дина¬
микой, требующей многокадровой передачи за короткое время. Ландшафт по¬
верхности Луны, Марса, Венеры практически неподвижен. Некоторые весь¬
ма медленные изменения изображений вызываются суточным движением
Солнца и ветровым переносом вещества на поверхности, что наблюдалось на
Венере и Марсе. Таким образом, для изучения поверхности достаточно сде¬
лать однократный телевизионный обзор местности вокруг КА, если он не¬
подвижен. Наиболее экономичным в данном случае будет получение как
минимум одного панорамного (кругорамного) изображения, не расчлененно¬
го на более мелкие кадры.
По существу аналогичная, хотя геометрически обратная, ситуация возни¬
кает при пролете КА мимо изучаемого небесного тела или наблюдения с
орбиты его спутника. Динамика самого объекта наблюдения здесь не регист¬
рируется, а относительное движение КТС и объекта используется для пано¬
рамного обзора. Не исключается и покадровый (малокадровый) метод наблю¬
дения, когда сплошная съемка поверхности обеспечивается некоторым пере¬
крытием отдельных кадров.
Примерами наблюдения более динамичных объектов с помощью КТС
служит система телевизионного управления луноходами на поверхности Лу¬
270
ды и съемка кометы Галлея с пролетающего на встречном курсе КА. В обоих
случаях применялась покадровая съемка со скоростью один кадр за несколь¬
ко секунд.
Для научных исследований КТС должны обладать чувствительностью в
нескольких спектральных диапазонах, многие из которых не воспринимаются
глазом. Таким путем повышается точность идентификации изучаемого объек¬
та, например, по его минералогическому составу, структуре. Как правило, ряд
спектральных каналов располагается в инфракрасной области спектра вплоть
до тепловой, делающей КТС тепловизионной системой. Видимая область
также может разделяться на ряд узких спектральных каналов.
Съемка в различных спектральных каналах, не видимых глазом, назы¬
вается спектрозональной. Подобный метод, перенесенный в СВЧ-диапазон, в
настоящее время применяется и для радиолокации бокового обзора. В кос¬
мосе пока он использовался для дистанционного зондирования Земли, но
перспективен и для наблюдения планет в сочетании со спектральной съемкой
в оптическом диапазоне с помощью КТС.
Разнообразие задач и условий работы приводит к широкой гамме техни¬
ческих средств, на основе которых строятся различные типы КТС. В связи со
сравнительно низкими скоростями получения изображения, большим спект¬
ральным диапазоном чувствительности, а также рядом требований к каче¬
ству изображения, надежности КТС в них возродились оптико-механические
способы передачи изображения, близкие к методам фототелеграфии (факси¬
мильной связи). Наряду с ними применяются и классические телевизионные
методы с электронными передающими трубками различных типов, а в послед¬
ние годы на приборах с зарядовой связью. На начальном этапе космических
исследований использовались комбинированные фототелевизионные устройст¬
ва, с помощью которых исследуемый объект фотографировался, а затем
проявленное на борту изображение фототелеграфным способом передавалось
на Землю.
Космические телевизионные системы имеют наземную часть, которая по
своей сложности может превосходить бортовую. В наземной части кроме
регистрации получаемых изображений в доступной для анализа форме, как
правило, производится цифровая (ранее аналоговая) обработка изображения
по различным алгоритмам. Цель обработки состоит в повышенной геометри¬
ческой и фотометрической точности и достоверности видеоинформации, кар¬
тографической коррекции, выделении разнообразных элементов изображения
по запросам пользователей.
История космического телевидения тесно переплетена с историей миро¬
вой космонавтики, наибольший вклад в которую внесли отечественные и аме¬
риканские исследователи. На счету наших специалистов в области космиче¬
ского телевидения имеются пионерские достижения (табл. 10.5), включая са¬
мый первый в истории научный эксперимент с использованием КТС: съемку
обратной стороны Луны [86—88]. Американские работы, отличающиеся масш¬
табностью, имеют на своем счету такие достижения, как съемка планет КА
типа «Маринер», «Вайкинг», «Вояджер».
271
Таблица 10.5
Год
Событие
КА
Тип КТС
Четкость кад¬
ра или пано¬
рамы (тел.
элементов)
1959
Съемка обратной сторо¬
ны Луны
«Луна-3»
Фототелеви¬
зионный
1000X1000
1965
Завершение съемки об¬
ратной стороны Луны
«Зонд-З»
»
1100X1100
1966
Съемка лунной панора¬
мы
«Луна-9»
Оптико-меха¬
нический
500X600
1970
Телевизионное управле¬
ние луноходом
«Луно¬
ход-1»
Оптико-эле¬
ктронный
400X625
1974
Получение цветных
снимков поверхности
Марса
Съемка черно-белой па¬
норамы поверхности Be-
ПАП 1Л
«Марс-5»
Фототелеви¬
зионный
1975
«Венера-9»
Оптико-меха¬
нический
115X517
1982
пер Ы
Съемка цветной панора¬
мы поверхности Венеры
«Венера-13»
»
211X1000
1986
Съемка кометы Галлея
«Вега-1»
Оптико-элек¬
тронный
на ПЗС
512X576
1989
Съемка тепловой карты
Марса с высоким разре¬
шением
«Фобос-2»
Оптико-меха¬
нический
384X3500
Глава 11
НАЗЕМНАЯ РАДИОЛОКАЦИЯ ПЛАНЕТ
Основным назначением планетного радиолокатора являются регулярные
измерения расстояний и скоростей планет Венера, Марс, Меркурий, особенно
в периоды полетов к ним автоматических межпланетных станций (АМС).
Радиолокационные измерения расстояния и скорости планет направлены
на решение следующих фундаментальных и прикладных задач:
уточнение орбиты и местоположения планеты непосредственно в период
полета межпланетной станции для коррекции траектории АМС;
определение рельефа приэкваториальных областей поверхности планеты,
знание которого необходимо для точной привязки измеренных значений рас¬
стояния и скорости к центру планеты;
накопление экспериментальных данных с целью дальнейшего уточнения
теории движения планет и фундаментальных астрономических констант
(астрономической единицы, параметров орбит планет, их массы, радиуса и
др.), которые являются основой прогнозирования орбиты при подготовке
программы полета межпланетных станций.
Кроме решения чисто астрометрических задач, радиолокационные иссле¬
272
дования эффективно дополняют традиционные методы планетных исследова¬
ли более общего характера. К их числу относятся:
изучение физического строения поверхности планет, элементов их вра¬
щения, построение радиолокационных карт поверхностей различного функ¬
ционального назначения (яркостных, морфологических, гипсометрических
и др );
изучение эволюции планетных орбит и Солнечной системы в целом.
Возможность решения этой задачи будет повышаться по мере накопления
экспериментальных данных исследования орбит за длительный период;
исследование спутников Юпитера, колец Сатурна, ближних комет
и малых планет, астероидов главного пояса и астероидов, сближающихся
с Землей, таких как Икар, Эрос, Аполлон, Таутатис.
Основная часть данной главы посвящена описанию планетного радио¬
локатора, который входит в состав измерительного радиокомплекса на ба¬
зе антенны РТ-70 Центра ДКС и предназначен для решения прикладных
и научных задач, связанных с обеспечением полетов межпланетных стан¬
ций, а также с изучением физической природы планет и построением вы¬
сокоточных теорий их движения.
11.1. ОСОБЕННОСТИ РАДИОЛОКАЦИИ ПЛАНЕТ
К основным особенностям радиолокации Венеры, Меркурия
и Марса, рассматриваемых как радиолокационные цели, харак¬
теристики которых определяют структурную схему планетного
радиолокатора, требования к параметрам входящих в его со¬
став устройств и методику проведения радиолокационных на¬
блюдений, следует отнести, во-первых, большие расстояния до
них, исчисляемые десятками и сотнями миллионов километров,
и, во-вторых, весьма точное знание их движения по орбитам
вокруг Солнца. Это позволяет с высокой точностью прогнози¬
ровать (рассчитывать) их положение в космическом простран¬
стве в каждый момент времени. Далее вместо внесистемной
единицы (млн. км) используется более удобная — гигаметр
[Гм].
Расстояния до указанных планет по мере их движения по
орбитам изменяются в пределах 40 ... 260 Гм для Венеры,
80 ... 220 Гм для Меркурия, 56 ... 380 Гм для Марса. Мини¬
мальные расстояния в нижних соединениях составляют 39,5 ...
.. .41 Гм для Венеры и 80 ... 100 Гм для Меркурия. Для Мар¬
са в разных нижних противостояниях минимальное расстояние
может изменяться в очень широких пределах — от 56 до
100 Гм, причем на 56 Гм Марс приближается к Земле только
в периоды Великих противостояний, повторяющихся через
17 лет, в других же противостояниях он приближается к Земле
в основном на 80... 100 Гм. Нижние соединения (противостоя¬
ния) планет повторяются через синодические периоды их обра-
18—4229
273
щения, значения которых равны 583,92 суток для Венеры,
115,88 суток для Меркурия, 779,94 суток для Марса. Как сле-
дует из приведенных цифр, интервал расстояний, в котором
должна проводиться радиолокация указанных планет, состав¬
ляет от 40 до 380 Гм. Поскольку уровень отраженных от пла¬
нет сигналов, принимаемых приемником радиолокатора, ослабе¬
вает по сравнению с излученным сигналом пропорционально
четвертой степени расстояния (см. § 11.3), то общее ослабле¬
ние, обусловленное дальностью до радиолокационной цели, со¬
ставляет от 2,56-1042 до 2,19-1046.
При таких громадных ослаблениях сигналов радиолокация
планет стала возможной только после создания уникальных
высокочувствительных планетных радиолокаторов. Первые ус¬
пешные эксперименты были проведены в начале 60-х гг.: для
Венеры — в апреле 1961 г. одновременно в США, СССР и Анг¬
лии, для Меркурия — в июне 1962 г. в СССР, для Марса — в
1963 г. в СССР и США. В дальнейшем радиолокационные на¬
блюдения Венеры, Марса и Меркурия проводились регулярно и
охватывали большие участки их орбит. В результате этих
наблюдений в 60—70-х гг. была накоплена обширная радиоло¬
кационная информация об измерениях расстояния и скорости
этих планет за длительный интервал времени, составляющий
значительное число периодов их обращения вокруг Солнца.
Полученная измерительная информация позволила почти на
пять порядков уточнить размеры Солнечной системы в кило¬
метрах и создать высокоточную теорию движения планет, учи¬
тывающую релятивистские эффекты общей теории относитель¬
ности. По сравнению с классической теорией движения планет,
которая основана на законах Ньютона и угломерной астромет¬
рической информации, накопленной в течение почти трех веков
при наблюдениях за движением планет с помощью оптических
телескопов, ошибки расчета положения планет в космическом
пространстве на основе релятивистской теории были уменьше¬
ны на два-три порядка. В настоящее время положение центров
масс Венеры, Меркурия и Марса в космическом пространстве
относительно планетного радиолокатора для каждого заданного
момента Всемирного времени можно рассчитывать (прогнози¬
ровать) с беспрецедентно высокой точностью: угловые коорди¬
наты на небесной сфере — с точностью до долей угловой секун¬
ды, расстояния до планеты — с точностью 10 ... 15 км, скорость
его изменения (радиальную скорость планеты)—с точностью
1 ... 2 см/с.
Отмеченное обстоятельство, заключающееся в необходимости
лишь уточнения величин, известных с очень высокой точностью,
определяет основу методики радиолокационной астрометрий
планет и особенности построения радиолокационной системы.
274
Полные значения измеряемых величин — задержки эхосигнала
л его доплеровского смещения — определяются как суммы двух
величин: прогнозируемых, которые рассчитываются перед на¬
чалом измерений на основе теории движения, а затем вводятся
в аппаратуру локатора для резкого сокращения диапазона из¬
мерений, и поправок к прогнозу, оцениваемых по результатам
цифровой обработки эхосигналов.
11.2. ДИАГРАММА ОБРАТНОГО РАССЕЯНИЯ ПЛАНЕТЫ
И СПЕКТР ОТРАЖЕННОГО СИГНАЛА
Результаты обширных радиолокационных исследований Ве¬
неры, Марса и Меркурия на различных длинах волн в диапа¬
зоне 3,5 ... 70 см указывают на то, что наибольший вклад в
отражение вносят области в окрестности ближайшей к земному
наблюдателю точки. Иными словами, отражение радиоволн
является в основном зеркальным и вызвано элементами поверх¬
ности, ориентированными нормально к радиолучу и имеющими
размеры, много большие длины волны.
Угловую зависимость мощности, отражаемой в сторону ра¬
диолокатора, описывают с помощью диаграммы обратного рас¬
сеяния (ДОР), которая в общем случае может быть представ¬
лена в виде суммы двух слагаемых 5(0) = (1—(}')В3(0) +
+(}'ВД(0), одно из которых — В3(0)—описывает зеркальную
компоненту отражения, а другое — 5Д(0) —диффузную. Зер¬
кальная компонента связана с отражением от элементов поверх¬
ности, радиус кривизны которых много больше длины волны,
диффузная — с рассеянием на неровностях, соизмеримых с дли¬
ной волны. Параметр [J' характеризует соотношение между энер¬
гиями этих компонент. В радиодиапазоне для малых углов па¬
дения преобладает зеркальная компонента.
Из большого разнообразия предлагавшихся моделей зер¬
кальной компоненты наилучшим образом аппроксимирует экспе¬
риментальные данные модель, предложенная Хэгфорсом [90] и
основанная на предположении о гауссовском распределении вы¬
сот поверхности и об экспоненциальной корреляционной функ¬
ции неровностей. Аналитически закон Хэгфорса имеет вид
Дз(О) = (cos^+Csin2^)-1’5.
Здесь ft — угол, отсчитываемый из центра планеты, между под-
локаторной (ближайшей к земному наблюдателю) точкой и
точкой на поверхности, для которой ищется интенсивность от¬
ражения. Как уже отмечалось, вблизи подлокаторной точки пре¬
валирует зеркальная компонента и степень этого превалирова¬
18*
275
ния характеризуется параметром С, который в зависимости от
структуры поверхности меняется от 50 до 2000, причем для
Марса он в среднем наиболее высок, а для Меркурия минима¬
лен. Это указывает на то, что Марс — самая гладкая (в мас¬
штабах длины волны) планета земной группы, Венера занимает
промежуточное положение, а Меркурий — наиболее шерохова¬
тая из них.
Для аппроксимации диффузной компоненты чаще всего ис¬
пользуется косинусоидальная зависимость вида ВД(Ф) =0,5(м-f
+ l)cosnd, где п — параметр, характеризующий степень шерохо¬
ватости поверхности и распределение яркости отражения по
диску. Случай п— 1 соответствует закону Ломмеля—Зилигера
(равномерная яркость), п = 2— закону Ламберта. При п= 1
яркость поверхности не зависит от О, а определяется только
локальным коэффициентом отражения. Такая картина наблю¬
дается, например, при полной Луне.
Монохроматический зондирующий сигнал после отражения
от планеты размывается по спектру, поскольку разные точки
вращающейся планеты имеют разные лучевые скорости, что, в
свою очередь, приводит к различным доплеровским смещениям
частоты падающего излучения в диапазоне Д/д=2Дv/ct где
Av — разность скоростей приближающегося и удаляющегося
краев видимого диска. В общем виде выражение для спектра
при монохроматическом зондирующем сигнале находится путем
Рис. 11.1. Спектры зеркальной Р8 и диффузной Рд компонент эхосигнала в
случае зондирования планеты монохроматическим излучением
?76
интегрирования ДОР по всей видимой поверхности вращающей¬
ся сферы:
71/2
/»(/)« ) £[ф(0, f)]db,
О
где ф (О, /) = a rccos (|/1 — (//А/д)2 sin О).
Результат интегрирования для закона Хэгфорса выражается
в виде комбинации эллиптических интегралов. Диффузная ком¬
понента cosnd описывается более простым выражением для доп-
леровского спектра отраженного сигнала:
Рд(/)~[1-(//л/д)2:г.
Графики зависимостей P(f) приведены на рис. 11.1. Зер¬
кальный спектр Р3 — экспериментальный для С=130, спектр
Рд(/) соответствует п=2 (закон Ламберта).
11.3. РАСЧЕТ НЕОБХОДИМОГО ЭНЕРГЕТИЧЕСКОГО
ПОТЕНЦИАЛА
Для обеспечения полетов АМС к планетам требуется изме¬
рять расстояния на всех участках их орбит, вплоть до макси¬
мально удаленных от Земли, что для Марса составляет 380 Гм,
для Венеры 260 Гм и для Меркурия 210 Гм.
Ожидаемое отношение мощности эхосигнала Рс к мощности
шума Рш определяется из основного уравнения радиолокации
и применительно к сферической вращающейся цели, каковой
является планета, имеет вид
РС РИ^И^П^Э л[ Тн У1 1 1 ч
Рш— 4nkTmVr* У АД’ 'АЬА;
где Ри — излучаемая мощность; SH, Sn — эффективные площа¬
ди излучающей и приемной антенн; аэ — радиолокационное по¬
перечное сечение цели; k — постоянная Больцмана; Тш — шу¬
мовая температура приемной системы; К — длина волны; г —
расстояние от локатора до цели; Гн — время накопления; Д[э —
полоса частот, занимаемая отраженным сигналом.
Уширение спектра отраженного сигнала по сравнению со
спектром зондирующего связано с вращением планеты. Оно
пропорционально скорости вращения и размеру ближайшей к
наблюдателю области, ответственной за зеркальное отраже¬
ние обратно, в сторону локатора:
Д/э = 4о)/2А/?-А2 Д.
277
Здесь h — высота шарового сегмента, определяемая выбран¬
ной разрешающей способности по дальности, R — радиус, а
— угловая скорость вращения планеты. Например, для Мар.
са при h—5 км диаметр этого сегмента равен 368 км, а Д/э на
волне 6 см составляет 890 Гц.
Радиолокационное поперечное сечение шарового сегмента
планеты определяется выражением
Оэ — Sra(0), (11.2)
где ST=n(2hr—h2)—геометрическая площадь этого сегмента,
71/2
sin <ррг/<р
<т(0)= у
2 (1 + С sin2 ф)
1 ,5
•—эффективная поверхность обратного отражения планеты.
Для Марса при более вероятных значениях р=0,05 и С=400
Оэ = 5,8-10п м2.
В этом случае при заданных параметрах сантиметрового
планетного радиолокатора (Ри—200 кВт, SH=2500 м2, Sn =
= 2700 м2, Тш=20 К) на максимальной дальности гтах=380 Гм
при усреднении в течение сеанса Гн=2гтах/с=42 мин получаем
Рс/Ъ
Рс/Рш
J to /О 20 25Ах, МАГ
ю
2 * 6 в fO Дх,х/1 О 5 Ю /5 20Дх,м
О
б)
Рис. 11.2. Зависимость отношения сигнал-шум от разрешающей способности
по дальности при различных отражательных характеристиках Марса на
максимальной дальности 380 Гм (а), Венеры на максимальной дальности
260 Гм (б) и Меркурия на максимальной дальности 220 Гм (в)
278
Яс/Аи»4,0. Более надежные измерения при r=rmax возможны
при большем усреднении в течение нескольких сеансов.
На рис. 11.2 приведены зависимости Рс/Рш от разрешающей
способности по дальности A*=/i, рассчитанные для Евпато¬
рийского локатора (А,=6 см) при различных значениях пара¬
метра С для Марса (а), Венеры (б) и Меркурия (в). Как по¬
казывают наблюдения, значение С в зависимости от того, ка¬
кой областью к наблюдателю повернута планета, меняется в
очень широких пределах. Это особенно относится к Марсу, для
которого С может изменяться от сотен до нескольких тысяч.
Расстояние г до планет во всех трех случаях принималось рав¬
ным максимально возможному значению, принятые при расче¬
тах значения других параметров приведены в табл. 11.1.
Таблица 11.1
Планета
с
Р
Vе
г, Гм
^шах*
Марс
100
400
2000
4000
0,05
2530 -
380
8000
Венера
50
100
200
0,076
1866
260
.110
Меркурий
40
100
0,06
1466
220
80
Для надежного обнаружения эхосигналов и измерения их
параметров необходимо, чтобы Рс/Рш^Ъ. Как показывает ана¬
лиз рис. 11.2, а, Марс при максимальном относительно наблю¬
дателя расстоянии находится в зоне предельной дальности дей¬
ствия Евпаторийского радиолокатора. Поэтому разрешающую
способность Ах: необходимо выбирать такой, чтобы отношение
Рс/Рш было близко к своему максимальному значению: 3 км^
^Ax^lO км. При радиолокации Венеры и Меркурия для удов¬
летворения условию надежности необходимо, чтобы Ах:^200 м
и Дх;^500 м соответственно.
279
11.4. СОПОСТАВЛЕНИЕ РАЗЛИЧНЫХ СИСТЕМ
ПЛАНЕТНОЙ РАДИОЛОКАЦИИ
В выражении (11.1) можно выделить группу сомножителей,
характеризующих потенциальные возможности радиолокатора.
Для сопоставления радиолокационных систем, имеющих различ¬
ную рабочую длину волны, а также различные возможности
непрерывного наблюдения, т. е. систем с полноповоротными и
неподвижными антеннами, вводится нормировка по X и Тп.
В логарифмической форме выражение для энергетического по¬
тенциала имеет вид
//=PH+GH+Sn+0,5 (Х/Хо) +0,5(Гн/Гн0) —k—Тш.
Здесь GH = 4n;SH/A,2 — коэффициент усиления передающей
антенны, Хо и Тп0 — нормировочные значения, введенные для
того, чтобы иметь возможность сопоставлять системы, имеющие
различные длину волны и условия наблюдения. Нормировка по
Тш обусловлена двумя причинами. Во-первых, в обсерватории
Аресибо (Пуэрто-Рико, США) используется неподвижная прие¬
мопередающая антенна, которая может сопровождать цель
лишь в пределах ±20° .относительно зенита, поэтому время на¬
блюдения не превышает 2,5 ч в день. Во-вторых, для разнесен¬
ных систем продолжительность времени накопления равна
времени видимости объекта, поскольку нет необходимости вы¬
ключать передатчик во время приема.
Результаты сопоставления энергетических потенциалов раз¬
личных систем планетной радиолокации приведены в табл. 11.2.
За опорные значения приняты Гн0=5 ч, что соответствует ти¬
пичному значению времени накопления при 10-часовой зоне
видимости планеты, и Яо=0,3 м (fo=\ ГГц).
Система, расположенная в Голдстоуне (Калифорния, США),
имеет 70-метровую полноповоротную приемопередающую антен¬
ну, передатчик мощностью 1 МВт на волне 3,5 см (по состоя¬
нию на начало 1992 г.), приемную систему с Тш=20 К.
Обсерватория Аресибо имеет неподвижную параболическую
антенну диаметром 1000 футов (305 м). В 1992 г. проведена оче¬
редная модернизация планетного радиолокатора, в результате
чего мощность передатчика на волне 12,5 см доведена до
900 кВт, а усиление антенны за счет вторичного зеркала — до
1,2• 107 [91]. При сопоставлении времен накопления в табл. 11.2
фигурирует коэффициент 0,5, отражающий проигрыш в отно¬
шении сигнал-шум из-за ограниченного сектора обзора.
Расположенная под Евпаторией РЛС имеет, как уже упо¬
миналось, передатчик мощностью 200 кВт на волне 6 см и 70-
метровую полноповоротную антенну с усилением 70 дБ [35].
Она уступает в потенциале американским системам главным
280
Таблица 11.2
Система
Голдстоун
Аресибо
Евпатория
Евпатория —
Бонн
Евпатория —
Бонн
Я, СМ
3,5
12,5
6
6
3,5
Ри, кВт
1000
900
200
200
1000
60
59,5
53
53
60
Си, • 10“7
2,5
1,2
1
1
2,5
74
71
70
70
74
Sn, М2
2500
16000
2700
4300
4000
34
42
34,3
36,3
36
Тш, К
20
33
20
20
20
—13
— 15
— 13
—13
—13
УЯ/Я0
0,34
0,65
0,45
0,45
0,34
4,7
-1,9
—3,5
—3,5
—4,7
ут/т0
1
0,5
1
1,4
1,4
0
—3
0
1,5
1,5
Я, • 10“36
77,6
132
8,7
19,4
173
378,9
381,2
369,4
372,9
382,4
Я/Яевп
8,9
15,2
1
2,2
19,9
9,5
11,8
0
3,5
13,0
Цифры в знаменателе — значения параметров в децибелах.
Последний столбец относится к системе, которая не существует, но может быть-
создана на базе антенн, действующих в Евпатории и Бонне.
образом из-за меньшей мощности передатчика, большей, чем
в Голдостоуне, длины волны и меньшей, чем в Аресибо, пло¬
щади антенны. Увеличить потенциал этой системы можно за
счет перехода от обычной моностатической схемы, в которой
циклы излучения и приема чередуются между собой, к бистати-
ческой, где передатчик и приемник могут работать непрерывно,,
поскольку разнесены в пространстве и не мешают друг другу.
В этом случае обеспечивается двукратный выигрыш во време¬
ни накопления.
Дополнительное преимущество бистатической схемы — воз¬
можность использовать в качестве приемных антенн высоко¬
чувствительные радиотелескопы, в том числе наиболее круп¬
ный из них, расположенный в окрестностях Бонна и имеющий
полноповоторную антенну диаметром 100 м. Такая система Ев-
281
патория—Бонн на волне 6 см лишь в четыре раза будет усту¬
пать системе в Голдстоуне, зато сможет удачно дополнять по¬
следнюю, поскольку является практически ее антиподом*.
При оснащении Евпаторийской антенны передатчиком, ана¬
логичным установленному в Голдстоуне, система Евпатория—
Бонн на волне 3,5 см будет иметь рекордный энергетический
потенциал, превосходящий в 2,2 раза потенциал системы в
Голдстоуне и в 1,3 раза системы в Аресибо.
В качестве иллюстрации оценим возможности этой системы
по радиолокации Фобоса, который по некоторым представлени¬
ям является астероидом С-типа, захваченным Марсом. Резуль¬
таты расчетов отношения сигнал-шум для трех очередных про¬
тивостояний при накоплении в течение одного наблюдательного
дня приведены в табл. 11.3, где L — суммарные радиолока¬
ционные потери, связанные с отражающими свойствами Фобоса
и расстоянием до него.
Таблица 11.3
Дата
rmin’ Гм
L, дБ
рс<рш> ДБ
Январь 1993 г.
94,5
372,9
9,5
Февраль 1995 г.
102
374,2
8,2
Март 1997 г.
99
373,7
8,7
11.5. КРАТКОЕ ОПИСАНИЕ ПЛАНЕТНОГО
РАДИОЛОКАТОРА
11.5.1. ОБОБЩЕННАЯ ФУНКЦИОНАЛЬНАЯ СХЕМА
Структура и функционирование РЛС рассмотрены для
Евпаторийского радиолокатора, однако другие системы в
основном схожи с Евпаторийской, а поскольку схема, при¬
веденная на рис. 11.3, лишена конкретных черт и детальности,
то можно считать, что она представляет обобщенную струк¬
туру планетного радиолокатора.
Основу системы составляет антенна А, к которой через ан¬
тенный переключатель АП попеременно подключаются пере¬
датчик Прд и приемник. Разделение сеанса радиолокационных
наблюдений на два цикла — «Излучение» и «Прием» — вызва¬
но тем, что прием слабых отраженных сигналов невозможен
* В декабре 1992 г. система Евпатория—Бонн была впервые реализова¬
на для радиолокации астероида (4179) Таутатис, который приблизился к
Земле на расстояние 3,6 Гм.
282
р-
,Приеп"
ПД
\ок
НШУ
ПД
пч
АЦП
ЦР
ЦОС
~^о
Jrc
ОН
АП
з-
FJ
, Излучение
- ПРД —
Z3Z
5 сзс •*-
сч
эч
*и
(AfAl Ат)-уточнение НУ
ИЮ
ЦДС
дли
пн
т
НУ
Рис. 11.3. Функциональная схема планетного радиолокатора на основе одной
приемопередающей антенны («моностатический радиолокатор»)
при включенном мощном передатчике из-за сильных наводок от
него. Поэтому только половина времени, в течение которого
виден объект, уходит на его радиолокацию.
В цикле «Излучение» в направлении небесного тела излу¬
чается сигнал, несущая частота которого fo=c/X складывается
с частотной зависимостью Fa(t), изменяющейся во времени так,
чтобы отраженный от движущейся цели сигнал возвращался к
антенне, имея частоту, совпадающую (с точностью до ошибок
прогноза) с номинальной /о. Другими словами, тот частотный
сдвиг, который приобретает отраженный от движущейся це¬
ли сигнал за счет эффекта Доплера, должен быть предвари¬
тельно рассчитан, воспроизведен и скомпенсирован с тем, что¬
бы приемник был настроен на фиксированный, узкий диапазон
с центральной частотой /0.
Предварительный расчет «доплеровской программы на из¬
лучение» ДПИ (/) производится с помощью персонального
компьютера ПК, который, оперируя начальными условиями
(НУ) о выбранном объекте и пакетом специально разрабо¬
танных программ, в конечном итоге формирует для цифрово¬
го доплеровского синтезатора ЦДС коэффициенты полинома,
аппроксимирующего требуемый закон изменения частоты.
283
Кроме введения доплеровской поправки, излучаемое коле¬
бание модулируется по фазе или частоте сигналом, формируе¬
мым синтезатором зондирующего сигнала СЗС. Существенно,
что входным сигналом для СЗС служит колебание с частотой
fo+FK(t). Это позволяет ввести доплеровскую поправку и к
модулирующей функции. Таким образом происходит не только
компенсация доплеровского смещения спектральной линии, но
и учет изменения ее ширины. Введение модуляции необходимо
при измерениях задержки зхосигнала, поскольку немодулиро-
ванное монохроматическое колебание имеет неоднозначность,
равную Х/2, что много меньше неопределенности информации
о расстоянии до цели. Перед началом работы в СЗС заносят¬
ся параметры модулирующего колебания: его полоса F и пе¬
риод Т. Конкретные значения этих параметров зависят от
требуемого разрешения по дальности Д/=1/7\- и неопределен¬
ности сведений о расстоянии до объекта, которая не должна
выходить за пределы ±сТ{/2, где и 7\— выбранные значе¬
ния полосы и периода зондирующего сигнала.
Штриховой линией на схеме выделены устройства, общие
для трактов излучения и приема. В том случае, если передаю¬
щая и приемная части РЛС разнесены в пространстве, каждая
из них должна содержать свою подсистему, выделенную штри-.
ховой линией. Она объединяет высокостабильный (как пра¬
вило, водородный) эталон частоты ЭЧ и синтезатор частот
СЧ, формирующий из эталонного колебания /эт все остальные
сигналы для трактов излучения и приема. Из этого же колеба¬
ния /эт формируется атомная шкала времени, которая при¬
вязывается к всемирной шкале с помощью средств службы вре¬
мени СВ. Начало модуляции излучаемого сигнала в известный
момент времени и периодическая разметка цифровой регист¬
рации ЦР принимаемого сигнала в известные моменты време¬
ни tu обеспечивают временную привязку радиолокационных
измерений.
В цикле «Прием» эхосигналы, принятые антенной, через
АП поступают на поляризационный делитель ПД, где они рас¬
щепляются на две компоненты с разной поляризацией: проти¬
воположную излученной (ортогональная круговая — ОК),
соответствующей зеркальной и половине диффузной компонен¬
там, и согласованную с излученной, соответствующей другой
половине диффузной компоненты (согласованная круговая —
СК). В дальнейшем приемные каналы полностью идентичны
и объединяются мультиплексором ЦР.
Принятый сигнал после усиления в малошумящем усилите¬
ле МШУ и. многократного преобразования частоты ПЧ пере¬
носится в район нулевых частот и подвергается затем анало¬
го-цифровому преобразованию АЦП с периодом,- задаваемым
2 84
±
частотой дискретизации /дСК, которая согласуется с полосой
преобразуемого эхосигнала.
В реальном времени сеанса радиолокации производится
цифровая регистрация и оперативная цифровая обработка.
Основные операции цифровой обработки сигналов (ЦОС) вы¬
полняются по окончании их цифровой регистрации. В процессе
ЦОС определяются поправки к прогнозу доплеровского сме¬
щения Д/д и запаздывания Ат принятых эхосигналов. На их
основе возможно периодическое уточнение начальных условий
и их обновление в памяти ПК. Данная процедура способствует
повышению точности прогнозирования доплеровского смеще¬
ния FR(t) в последующих сеансах, что сужает диапазон поиска
отраженного сигнала и тем самым уменьшает объем и время
цифровой обработки.
В принципе компенсация доплеровского смещения возмож¬
на также и при приеме. В этом случае излучение осуществляет¬
ся все время на несущей частоте /0, а ЦДС формирует допле-
ровскую поправку на прием Fn(t)y которая вычитается из час¬
тоты эхосигнала. Однако с точки зрения максимального упро¬
щения приемной части, что наиболее важно при реализации
разнесенной схемы, такая методи¬
ка, по-видимому, менее предпочти¬
тельна. Тем не менее она может
быть целесообразной именно в раз¬
несенной схеме тогда, 'когда за¬
труднена взаимосвязь между пере¬
дающей и приемной частями систе¬
мы и операцию по занесению уточ¬
ненных начальных условий проще
выполнить на приемном пункте.
К вариантам построения при¬
емной части бистатического ра¬
диолокатора относятся и варианты
размещения аппаратуры ЦОС: ли¬
бо там же, где и вся остальная ап¬
паратура, либо на передающем
пункте, и тогда информация от ЦР
должна передаваться на ЦОС по
линии связи (рис. 11.4). В разне¬
сенной схеме перед началом рабо¬
ты или по ее окончании необходим
•сеанс привязки эталонов частоты и
временных шкал. В отличие от ра- Рис. 11.4. Функциональная схема
диоинтерферометра с независимым пРиемн°й части пространственно-
приемом, где процедура привязки
связана с транспортировкой атом- тор»)
АП
МШУ
сн
мд
он
МШУ
эг
пч
*
04
су
АЦП
_Удск
АЦП
СВ
ЦР Ь
---Н *** 1
285
РТ-70
<0
Рис. 11.5, Структурная схема Евпаторийского планетного
а) СВЧ часть, расположенная непосредственно в антенной башне. Значения всех частот
частот, кроме оговоренных, в килогерцах. Цифры над косыми
ных часов или магнитных лент с записями опорного радио¬
источника, здесь она выполняется гораздо проще путем радио¬
локации эталонного объекта, расстояние и скорость которого
хорошо известны. Таким объектом может быть Луна, синхрон¬
ный спутник или Венера.
СВЧ часть Евпаторийского локатора (рис. 11.5, а) распо¬
ложена непосредственно в башне антенны, низкочастотная
часть (рис. 11.5, б)—в лабораторном корпусе, удаленном от
антенны на 0,3 км. В процессе формирования несущей частоты
при втором преобразовании осуществляется ее модуляция и вве¬
дение доплеровской поправки. Для модуляции используется пе¬
риодический сигнал с пилообразным линейным изменением час¬
тоты (ЛЧМ сигнал). В синтезатор ЛЧМ сигнала предваритель¬
но заносится режим сеанса PC, определяющий вид зондирую¬
щего сигнала — немодулированная непрерывная синусоидальная
посылка (режим «несущая») либо периодический ЛЧМ сигнал
(режим «пила»), период Т и девиация F — в случае ЛЧМ сигна¬
ла, а также частота следования синхроимпульсов для аналого-
286
радиолокатора 6-см диапазона:
указаны в мегагерцах; б) низкочастотная часть, удаленная от антенны. Значения всех
штрихами указывают разрядность передаваемых кодов
цифрового преобразователя (СИ АЦП) и магнитного регистра¬
тора (СИ МАГ). Более подробно синтезатор ЛЧМ сигналов
рассмотрен в п. 11.5.2.
При формировании зондирующего и демодулирующего ЛЧМ
сигналов (рис. 11.6) в их мгновенную частоту вводится допле-
ровская поправка fA(t), пропорциональная ДПИ(^). Входной
сигнал с частотой 50ч=/д поступает от канального доплеровско-
го синтезатора КДС (см. гл. 5). После деления на 1000 и пре¬
образования с помощью кольца ФАП он переносится к частоте
1,0±/д/1000. Если /д рассчитана для 1000 /0, то сигнал на вы¬
ходе управляемого генератора (УГ) будет иметь частоту 1,0+
±/д (1), т. е. доплеровская поправка для него будет соответ¬
ствовать его среднему значению, причем это соответствие не
будет нарушено при любом рациональном преобразовании час¬
тоты. Поэтому, если сигнал с выхода УГ использовать в каче¬
стве входного для синтезатора ЛЧМ сигналов, они автомати¬
чески будут формироваться с доплеровской поправкой к своей
мгновенной частоте.
287
S¥*УД (1002)+ЛЧМ (Лд) 52^±/д (1002)+ЛЧМ (ft)
Рис. 11.6. Схема формирования доплеровской поправки к текущей частоте
зондирующего («И») и демодулирующего («П») ЛЧМ сигналов, Значения
частот указаны в долях /эт = 5 МГц
Дробное преобразование на коэффициент 512/625 приводит
центральную частоту УГ к значению 213-10""3 /0, что обеспечи¬
вает целочисленные (в долях f0) значения F и Т при синтези¬
ровании ЛЧМ сигнала устройством, имеющим двоичную струк¬
туру. С этого преобразователя сигнал поступает также на дели¬
тель с переменным коэффициентом деления (ДПКД). Частоты
2 88
синхронизации АЦП и МАГ устанавливаются независимо кодом
Геи. Последующие преобразования переносят центральную час¬
тоту к значению 54 f0 (в цикле «И» — излучение) и 52,4 fo
(в цикле «П» — прием). Суммарная доплеровская поправка
соответствует несущей 1002 /0.
Отраженный от планеты сигнал улавливается антенной и
поступает на поляризационный делитель ПД, где разделяется
на два канала, соответствующие зеркальному и диффузному от¬
ражению. Состав и конфигурация аппаратных средств для
обоих каналов идентичны, поэтому на рис. 11.5 показана схема
одного из них. После малошумящего квантового парамагнитно¬
го усилителя (см. гл. 6) сигнал подвергается четырехкратному
преобразованию частоты. Компенсация доплеровских искаже¬
ний принятого сигнала и его демодуляция реализуются во вто¬
ром преобразователе. Третий гетеродин (рис. 11.5,6), в качест¬
ве которого применен синтезатор частот 46-31, имеет два зна¬
чения частоты, соответствующие формированию сигнала на вы¬
ходе полосовых фильтров ПФ в диапазоне 48±16 кГц при ра¬
диолокации Марса или 3±1 кГц при радиолокации Венеры и
Меркурия. После фазовращателя на ±я/4 комплексный сигнал
поступает на двухканальный восьмиразрядный АЦП, с выхода
которого выборки принятого колебания подаются на спецпро¬
цессор Фурье БПФ [92]. Если доплеровское смещение компен¬
сируется в цикле приема, частота синхроимпульсов для АЦП
содержит изменяющуюся во времени доплеровскую поправку,
что позволяет учесть растяжение или сжатие модулирующей
функции. Алгоритм предварительной обработки — быстрое пре¬
образование Фурье по 2048 отсчетам с накоплением в течение
10 с и последующей записью результатов на магнитные диски
НМД. По окончании сеанса результаты переписываются на лен¬
ту НМЛ. Процессом предварительной обработки управляет
мини-ЭВМ.
Параллельно с предварительной обработкой производится
цифровая запись на цифровом магнитном регистраторе ЦМР,
подключенном к выходам фазовращателя через интерфейс маг¬
нитного регистратора ИМР. Записанная на ЦМР информация
воспроизводится и вводится в спецпроцессор БПФ при переводе
переключателей из положения «Л» (линия) в положение «М»
(магнитофон).
Все процессы во время сеанса происходят автоматически по
командам программно-временного устройства ПВУ. Перед на¬
чалом очередного сеанса в него заносится прогноз тп, соответ¬
ствующий назначенному времени начала измерений t*. За ми¬
нуту до t* в КДС поступает команда tH на запуск доплеровской
программы. В момент t* производится привязка начала моду¬
ляции зондирующего сигнала к сигналам единого времени.
19—4229
289
За 20 с до момента приема (/*+тп) выключается передатчик,
вход антенны с помощью АП отключается от передающего вол¬
новодного тракта и подключается к приемному, а на КДС по¬
дается команда tK на остановку доплеровской программы. Син¬
хроимпульсы включаются в ПВУ с началом приема и выключа¬
ются за 20 с до его окончания. В цикле «шум», когда производит¬
ся анализ собственных шумов приемника, ПВУ повторяет
команды, выдаваемые при приеме. Программно-временное уст¬
ройство выдает также сигнал «излучение—прием» на систему
наведения для ввода и снятия абберационных поправок.
11.5.2. СИНТЕЗАТОР ЗОНДИРУЮЩИХ ЛЧМ СИГНАЛОВ
Рассмотрим более подробно цифровой синтезатор, входящий в состав
системы, и приведем некоторые его параметры.
Структурная схема устройства показана на рис. 11.7. Входной сину¬
соидальный сигнал с частотой 213-10”3/о±/д(/вх) после умножения на 12
поступает на распределитель импульсных последовательностей РИП, фор¬
мирующий три потока, положительные импульсы в которых не перекры¬
ваются во времени [93]. В синтезаторе сигналов СС формируется непре¬
рывная по фазе импульсная последовательность с линейным изменением
частоты от нуля до своего максимального значения, равного частоте сиг¬
нала на входе СС. При этом на выходе устройства формируется ЛЧМ
сигнал с максимальной девиацией /7шах = 512 кГц. Сигналы с меньшими
значениями девиации получаются путем двоичного деления сигнала с мак¬
симальной девиацией. Всего можно получить 10 значений F от 1 до 512 кГц.
Синтезатор частотной подставки СП вырабатывает колебание, обеспечиваю¬
щее постоянство центральной частоты
при смене девиации, так как в результа¬
те деления эта частота смещается. Пе¬
риод Т синтезируемого сигнала может
принимать 14 различных, кратных степе¬
ни два, значений от 1 до 8192 мс. Воз¬
можен также выбор из десяти различ¬
ных режимов синтеза сигналов (табл.
11.4).
Режимам 1, 2, 3 соответствуют не¬
прерывные смодулированные сигналы с
частотой, равной нижней FH, средней F0
и верхней FB частотам ЛЧМ сигнала;
режимам 4, 5, 6 — периодические ЛЧМ
сигналы с линейно-возрастающим (4),
линейно-убывающим (5) и треуголь¬
ным (6) законами частотной модуляции.
Возможна также частотная манипуля¬
ция (Fн, FB) с выбранным периодом Т
290
PC
Рис. 11.7. Структурная схема
цифрового синтезатора сигна¬
лов с линейной частотной мо¬
дуляцией. Двойными линиями
показаны информационные свя¬
зи
Таблица 11.4
МЬ п/п
I
2
3
4
5
6
7
8
9
10
Режим
^0
ЛЧМ|
ЯЧЩ
лчмц
о
о
t. о
I, о
(режим 7) и три режима, когда в течение времени Т синтезируется либо
центральная частота F0, либо один из пилообразных J14M сигналов, а
затем в течение такого же отрезка времени выходной сигнал отсутствует
(режимы 8, 9, 10 соответственно). Тот или иной режим включается с по¬
мощью формирователя кодов ФК, преобразующего управляющую команду
«Режим сеанса» PC.
Сформированные в распределителе три неперекрывающиеся между собой
импульсные последовательности суммируются в сумматоре СИП и поступают
на управляемый делитель частоты ДЧ. Первая гармоника квазимеандрового
ЛЧМ колебания выделяется полосовым фильтром ПФ.
Цифровые методы формирования частотно-модулированных колебаний
обеспечивают высокую стабильность их параметров, соизмеримую со стабиль¬
ностью эталона, выполняя тем самым главное требование, предъявляемое к
зондирующим сигналам при прецизионных измерениях на межпланетных рас¬
стояниях, когда моменты излучения и приема разделены десятками минут.
Кроме того, даже при радиолокации близких, но быстродвижущихся объек¬
тов, таких как ИСЗ или околоземные астероиды, только синтезаторы сигна¬
лов позволяют учесть преобразование огибающей эхосигнала, вызываемое
эффектом Доплера. Эти изменения компенсируются введением доплеровской
поправки во входное опорное колебание, подаваемое на синтезатор зонди¬
рующих сигналов (см. рис. 11.3 и 11.5,6).
11.6. ПРОЦЕДУРА ИЗМЕРЕНИЙ
Процесс радиолокационных исследований планет состоит
из трех основных этапов: подготовки к наблюдениям, собствен¬
но радиолокационных наблюдений (сеансы радиолокации) и
обработки экспериментальных данных.
Первый этап включает автономные и комплексные проверки
систем планетного радиолокатора (ПРЛ), измерения чувстви¬
тельности и калибровку приемника по радиоисточникам, за¬
пись и обработку контрольных сигналов в режиме непосред¬
ственного приема излучаемого колебания (режим «замыкание
кольца»). В результате контрольных измерений оцениваются
ширина спектральной линии рис. 11.8), номинальное значение
частоты на входе АЦП, уровень паразитных спектральных
составляющих, «аппаратное запаздывание». Аппаратное запаз¬
дывание оценивается по соотношению мощностей двух сосед-
19*
291-
них гармоник, имеющих на¬
ибольшую мощность, и в дан¬
ном случае составляет
4,5 мкс, что в пересчете к
дальности соответствует си¬
стематической ошибке 680 м,
которая учитывается при циф¬
ровой обработке эхосигналов.
Перед началом сеансов ра¬
диолокации выбирают объект
наблюдений (имя планеты) и
рассчитывают на ЭВМ его
координаты для наведения
антенны. Для очередного сеан-
Рис. 11.8. Спектр демодулированного са также рассчитывают на
Л™ сигнала с девиацией частоты ЭВМ прогнозируемые значе-
128 кГц и периодом модуляции 1 с, „ чалепжки т и гтгтттрпгт
получаемый в режиме непосредствен- задержки тп и Доплеров-
ного приема собственного излучения СКОГО смещения /д п отражен¬
ного сигнала. Результат тако¬
го прогноза вручную или дистанционно вводится затем в аппа¬
ратуру локатора. Помимо тп и /дП предварительно рассчиты¬
вают и другие параметры. В табл. 11.5 приведен образец рас¬
печатки результатов расчета прогнозируемых данных на оче¬
редной сеанс.
Таблица 11.5
Венера
Дата-18.9.1991 *н»14,34
Начало излучения ** = 14.35
ВР:
373.1808937
ДПИ:
340450.298
ШН
6.41
КД:
28
ДН
354.62
АО:
205965104
шк
6.41
А1:
490171
ДК
354.62
А2:
—3674
УС
53.003
АЗ:
—284
АА
33.01
КЧ1:
250340430
АУ
—8.61
КЧ2:
250340594
В верхней строке выводится имя планеты, дата наблюде¬
ний, времена tH запуска доплеровской программы при излуче¬
нии и t* начала излучения, соответствующее моменту привязки
начала модуляции к единому времени. Здесь ВР — прогнози¬
руемое время распространения в секундах, соответствующее
моменту t*\ ШН, ДН, ШК, ДК — широта и долгота подлока-
торной точки соответственно на начало и конец отражения;
292
УС — полуширина доплеровского размытия спектра в герцах
за счет видимого вращения планеты; АА и АУ — абберацион-
ные поправки наведения антенны при излучении по азимуту
и углу места (в угловых секундах); ДПИ — доплеровская по¬
правка в герцах на время tK; КД, АО—АЗ — коэффициенты по¬
линома третьей степени, интерполирующего доплеровскую по¬
правку в цикле излучения; КЧ1 и КЧ2— контрольные числа
(показания частотомера), позволяющие судить о правильности
введения с помощью полиномиального синтезатора КДС доп-
леровекой поправки в начале и конце цикла излучения.
Предварительно назначается также режим сеанса (PC), под
которым понимаются вид зондирующего сигнала, его парамет¬
ры (при выборе сигнала ЛЧМ — девиация и период), частота
следования синхроимпульсов (СИ) для АЦП и магнитного
регистратора, частотное разрешение и объем накопления при
цифровом спектральном анализе отраженных сигналов.
Второй этап — сеансы радиолокационных наблюдений, ко¬
торые проводятся автоматически в режиме реального времени
и включают в себя циклы излучения («И») и приема («П»)
отраженного сигнала, а также приема только собственных шу¬
мов («Ш»). Последний цикл необходим для радиометрии. Во
время циклов П и Ш выполняются предварительная обработка
и магнитная регистрация принимаемых сигналов.
Третий этап представляет собой вторичную цифровую обра¬
ботку отраженных сигналов, в результате которой измеряются
запаздывание и доплеровское смещение, а также оцениваются
физические характеристики поверхности планеты: рельеф, коэф¬
фициент отражения, степень шероховатости.
11.7. СПЕКТРЫ ОТРАЖЕННЫХ СИГНАЛОВ
На рис. 11.9 в качестве иллюстрации приведены спектры,
полученные в процессе первого этапа цифровой обработки отра¬
женных сигналов в реальном времени сеанса. В цикле «Прием»
анализируется смесь сигнала и теплового шума (рис. 11.9, а),
при этом неравномерность амплитудно-частотной характерис¬
тики (АЧХ) приемного тракта искажает истинную . картину
спектра отраженного сигнала. В цикле «Шум» анализируется
лишь форма АЧХ, которая затем аппроксимируется гладкой
полиномиальной зависимостью (рис. 11.9,6). После вычитания
найденного полинома из исходного спектра смеси (сигнал-(-
+шум) указанные неравномерности устраняются (рис. 11.9, в).
На рис. 11.10 показаны спектры эхосигналов от астероида
(4179) Таутатис, полученные 9 декабря 1992 г. в период сбли¬
жения астероида с Землей. Астероид представляет собой тес¬
ную двойную систему, состоящую из двух примерно равных
293
Рс+Р*
Рис. 11.9. Спектры эхосигнала на фоне тепловых шумов приемного тракта в
цикле «Прием» (а), шума в цикле «Шум» (б), а также центральная часть их
разности (в): Рш— аппроксимация АЧХ приемного тракта полиномом
10 степени
.294
Р/Ртах
Рис. 11.10. Спектры зеркальной (1) и диффузной (2) компонент эхосигналов
от астероида (4179) Таутатис, Я=6 см, смодулированный зондирующий
сигнал
частей, о чем свидетельствует провал в центре спектров. Общие
размеры 6... 6,5 км. Период собственного вращения Таутати-
са, оцененный на основе измерений ширины спектра, оказался
аномально большим для семейства астероидов, сближающихся
с Землей, и равен 10—11,5 суток.
11.8. ВТОРИЧНАЯ ЦИФРОВАЯ ОБРАБОТКА
Оптимальный прием радиолокационных сигналов заключа¬
ется, как известно, в фильтрации принятого колебания филь¬
тром, характеристики которого согласованы с отраженным
сигналом. Для точечной цели отраженный сигнал — сдвинутая
по времени и частоте точная копия зондирующего, и задача
построения согласованного фильтра может быть решена от¬
носительно просто. Для протяженной вращающейся цели, ка¬
ковой является планета, отраженный сигнал существенно отли¬
чается от зондирующего, поэтому оптимальный прием, тем
более реализуемый в реальном времени, представляется труд¬
норазрешимой задачей, и более целесообразен поиск квазиоп-
тимальных алгоритмов.
Один из вариантов близкого к оптимальному алгоритма
оценки параметров отраженного сигнала представляет собой
двухэтапную процедуру, где на первом этапе принимаемое ко¬
лебание свертывается с задержанным на прогнозируемое время
запаздывания тп зондирующим сигналом, а на втором резуль¬
295
тат свертки сравнивается с ожидаемым распределением, полу¬
ченным аналитически, на основе модельных представлений о
форме планеты и характере отражения. Первый этап обработ¬
ки, как уже отмечалось, выполняется аппаратурно в реальном
времени радиолокационного сеанса, второй — с помощью ЭВМ
по окончании сеанса. В число уточняемых в процессе вторичной
обработки параметров входят поправки по запаздыванию Лт
и доплеровскому смещению Д/д к прогнозу тп и [дп, а также
параметр С. Оценивание выполняется методом наименьших
квадратов по измерениям энергетического спектра демодулиро-
ванного отраженного сигнала. Алгоритмически это сводится к
максимизации по параметрам Дт, Д/д и С функционала
q=2 p^uwk I (2- 2
и I \ k k /
Здесь Ph — измеренный энергетический епектр, Wk — весовые
коэффициенты, обратно пропорциональные погрешности изме¬
рения, Рк — величины, пропорциональные математическим ожи¬
даниям Рк и определяемые по формуле
Рк = ^ В (О) Ak (х, у) ds,
где ,& = arctg( YR/x—1) —Угол падения радиоволн на поверх¬
ность сферической планеты радиуса /?, В (О).— диаграмма об¬
ратного рассеяния, х, у — планетоцентрические координаты точ¬
ки поверхности, Ак(ху у) — аппаратная функция радиолокато¬
ра, которая при использовании в качестве зондирующего перио¬
дического ЛЧМ сигнала имеет вид [94]
Л(хУ)=(1-|2(;?-ус+Дт1)х
х 2 sin°2 [n N7 (2 № —■*)/£+Дт) + _L£Hh£^£±AeI j | х
X Sine»[л Y(/„+Д/+ f +
Здесь a — параметр ЛЧМ (a=l для положительной скорос¬
ти ЛЧМ, а——1 для отрицательной), f0 — номинальная часто¬
та, т — номер временного интервала (зоны) по запаздыванию,
296
Рис. 11.11. Модель энергетического спектра эхосигнала при зондировании
планеты периодическим JI4M сигналом: для С=800, dx=0,5 (а)у
dr.=0,75 (б)
ДФ— частотное разрешение при спектральном анализе,
sinc(p) =sinp/p, с — скорость света. Параметр /д max — ДО П Л е_
ровское уширение спектра отраженного сигнала, вызванное
вращением планеты; оно вычисляется в программе расчета
целеуказаний для каждого сеанса измерений наряду с прог¬
нозами расстояния до поверхности планеты и ее скорости. При
локации Марса, скорость вращения которого велика по сравне¬
нию с вариациями видимой скорости, вызванными «обеганиями»
планеты вокруг Солнца, этот параметр можно считать постоян¬
ным.
Прямое решение задачи минимизации функционала Q тре¬
бует большого объема вычислений. Для ускорения вычислений
можно разделить переменные и сократить число одновременно
Рис. 11.12. Совмещение теоретического и экспериментального спектров
297
варьируемых параметров. Так, если просуммировать энергии
гармоник в каждом подспектре, что эквивалентно мысленной
остановке вращения планеты, полученное распределение энер¬
гии сигнала по запаздыванию, вид которого и положение на
оси частот практически не зависят от значения Д/д (при Д/д<
<fа шах) j будет определяться только диаграммой обратного
рассеяния и отклонением от прогноза Дт.
На рис. 11.11 показаны теоретические спектры отраженного
сигнала, соответствующие реальному сигналу, изображенному
на рис. 11.9, в. Здесь dx — сдвиг от прогноза в долях разреше¬
ния по запаздыванию 1/F. В целом можно отметить довольно
хорошее согласование теоретических и экспериментальных ре¬
зультатов, что проиллюстрировано на рис. 11.12, где спектры
рис. 11.9, в и 11.11,6 совмещены.
Таким образом, привлекая дополнительные априорные све¬
дения об исследуемой планете, с помощью вторичной цифровой
обработки можно реализовать близкую к потенциальной точ¬
ность оценок доплеровского смещения и запаздывания эхосиг-
налов.
Глава 12
ЗАРУБЕЖНЫЕ КОМПЛЕКСЫ
ДАЛЬНЕЙ КОСМИЧЕСКОЙ СВЯЗИ
И МЕЖДУНАРОДНОЕ СОТРУДНИЧЕСТВО
В 1962 г. в США была утверждена национальная программа высадки в
течение десятилетия на Луну первого человека. В это время была создана
наземная сеть станций слежения за КА, участвующих в программах освоения
Луны и исследования планет Солнечной системы. В 1964 г. был запущен пер¬
вый КА для исследования Марса с пролетной траектории. В 1969 г. была
успешно выполнена национальная программа высадки первого человека на
Луну и после 1973 г. запуски КА в сторону Луны прекратились. В то же
время интенсивность исследования планет Солнечной системы возросла и на¬
земная сеть слежения за КА дальнего космоса DSN непрерывно развива¬
лась*.
В 1979 г. была утверждена японская программа исследования планет
Солнечной системы. Первый японский КА «Сакигаке» был запущен в 1985 г.
для исследования с пролетной траектории кометы Галлея. Управление поле¬
том японского КА осуществлялось с помощью японских станций слежения
и Центра управления с привлечением американской сети DSN.
* DSN работает под руководством Лаборатории реактивного движения
Калифорнийского технологического института, но принадлежит НАСА.
298
В 1985 г. был запущен первый европейский дальний КА «Джотто», ко¬
торый также предназначался для исследования кометы Галлея с пролетной
траектории. Для радиообеспечения полета этого КА использовалась в основ¬
ном американская сеть слежения. Центр управления КА «Джотто» находил¬
ся в г. Дармштадт (ФРГ). Таким образом, с 1985 г. в мире только четыре
космических агентства (РФ, США, Япония,, Европа) осуществляют исследо¬
вания дальнего космического пространства и три агентства (РФ, США, Япо¬
ния) имеют собственную наземную сеть слежения за КА дальнего космоса.
Далее рассмотрены основные технические характеристики американской и
японской наземной сети и их типовых бортовых радиокомплексов. После
этого дан обзор будущих программ РФ и США и перспектив международно¬
го сотрудничества при их реализации.
12.1. ХАРАКТЕРИСТИКИ АМЕРИКАНСКОЙ СЕТИ
СЛЕЖЕНИЯ ЗА ДАЛЬНИМИ КА
Радиосистема обеспечения полетов дальних КА в США
развивалась и совершенствовалась от программы к программе.
Наращивались мощность наземных передатчиков; повышались
эффективность наземных антенн и стабильность частоты бор¬
товых и наземных задающих генераторов; использовались бо¬
лее эффективные методы кодирования цифровых сигналов и
увеличивались скорости передачи информации с КА.
Рассмотрим структуру и основные характеристики DSN.
Наземная сеть слежения (рис. 12.1) состоит из трех Центров
обработки сигналов от приемопередающих станций слежения
Центр наземных станций
П1 (Голдстоун) США
Центр наземных станций Центр наземных станций
М2 (Мадрид) Меланин М3 (Иандерра) Ад страна я
Фх32м
/^Ф=70м рф=32п рф=70п рф=32н Дф=70п ^
Приемная
Передатчия
г. Посадила
США
Приемная
Переданная
J
Приемная
HepedamvuH
\
раллиетичесяиа
Центр, ЦУП
Иан ал еднзи (КПП, ш)
Приемная
Передатчия
1
Приемная
ПередатняА
Ианал еднза (КПП, ТМП)
Праемния
Переданная
Т
Научные
центры США
Рис. 12.1. Структурная схема сети DSN
299
Рис. 12.2. Структурная схема станции сети DSN
(рис. 12.2), расположенных в США (г. Голдстоун), Испании
(г. Мадрид) и Австралии (г. Канберра) и одного Центра управ¬
ления полетом в г. Пасадине (США). Центр управления поле-
Таблица 12.1
Параметр
Значение
Несущая частота*, ГГц:
Земля — КА
2,1 и 7,2
КА — Земля
2,3 и 8,4
Стабильность несущей частоты наземной
станции (водородный генератор):
ю-15
долговременная
кратковременная (за 100 с)
зхю-15
Модуляция несущей частоты
Земля — КА и КА — Земля
Фазовая
Кодирование телеметрической информации
Сверточное; код Рида—Соло¬
мона; каскадное
Скорости передачи служебной телеметри¬
ческой информации, бит/с
8,3
Максимальная скорость передачи научной
телеметрической информации, кбит/с
134,4
Измеряемые параметры движения КА
Дальность, радиальная ско¬
рость, угловое положение
относительно радиоисточников
Точность измерения дальности, м, при
максимальной частоте модуляции 500 МГц
на несущей частоте 8,4 ГГц
2 (на дальности 300 млн. км)
Точность измерения радиальной скорости,
мм/с
0,4
Число КА, одновременно обслуживаемое
наземным центром
3—6
* Планируется переход в диапазон 13/17, 32/34 ГГц.
300
том совмещен с баллистическим Центром. Каждый центр обра¬
ботки включает несколько наземных станций с антеннами, ко¬
торые имеют зеркала диаметром 70 и 34 м. Основные характе¬
ристики радиолиний, обеспечивающих работу систем передачи
командно-программной и телеметрической информации, а так¬
же характеристики системы траекторных измерений приведены
в табл. 12.1, а характеристики станции с антенной 70 м — в
табл. 12.2. Первоначально все три большие приемопередающие
Таблица 12.2
Несущая частота,
ГГц (радиолиния)
Усиление
антенны, дБ
Ширина луча,
град
Мощ¬
ность
передат-
чика, кВт
эиим,
дБ Вт
Шумовая тем¬
пература при¬
емной систе¬
мы, К
2,1
62
0,14
100
112
(Земля — КА)
400
118
2,3
63
0,13
—
—
26*
(КА — Земля)
21**
7,2
72
0,04
20
115
(Земля — КА)
8,4
74
0,04
—
—
37*
(КА — Земля)
27**
* Усиление антенны дано для угла места > 30° в режиме приемопередачи при
ясной погоде.
** Ясная погода, угол места > 30° в режиме приема.
антенны имели диаметр 64 м и только в 1988 г. их диаметр был
увеличен до 70 м. Мощность передатчика достигает 400 кВт
для работы только в аварийных ситуациях. Антенная система
наиболее эффективна при использовании облучателя только
для приема сигналов. Антенна диаметром 70 м может работать
с тремя различными видами поляризации: линейной, правой
круговой, левой круговой.
В табл. 12.3 приведены характеристики наземных станций с
антенной диаметром 34 м. Они используются при работе с КА,
когда не требуются предельные характеристики от радиоли¬
ний: на этапе перелета либо для проведения сеансов контроля
служебных систем КА и т. п.
Указанные в табл. 12.2 и 12.3 значения шумовой темпера¬
туры системы существенно зависят от угла места антенны, со¬
стояния атмосферы и режима работы станции. Наиболее часто
употребляемой характеристикой наземной станции в режиме
приема данных служит отношение усиления антенны к шумо¬
вой температуре системы. Для антенны диаметром 70 м это
отношение на частоте 8,4 ГГц составляет 59,5 дБ-К^1, а на час-
301
Таблица 12.3
Несущая частота,
ГГц (радиолиния)
Усиление
антенны, дБ
Ширина луча,
град
Мощность пе¬
редатчика,
кВт
эиим,
дБ Вт
Шумовая
температура
приемной
системы, К
2,1
55
0,30
20
98
(Земля — КА)
2 3
(КА — Земля)
56
0,27
)—
33*
27**
7,2
63
0,09
20
109
—
(Земля — КА)
30*
8,4
(КА — Земля)
67
0,07
* Усиление антенны дано для угла места > 30° в режиме приемопередачи при
ясной погоде.
** Ясная погода, угол места > 30° в режиме приема.
тоте 2,3 ГГц — примерно 50 дБ-К-1. Ширина полосы частот, за¬
нимаемая сигналом для работы с одним КА, не превышает
3 МГц. Наибольшую часть этой полосы занимает спектр сигна¬
ла при высоких скоростях передачи и проведении высокоточных-
измерений дальности. Если же КА работает в режиме интер¬
ферометрии с большой базой (ИББ), то ширина полосы частот
в радиолинии КА — Земля увеличивается до 25 МГц. Очевид¬
но, что расширение полосы частот радиолинии, занимаемой од¬
ним КА, и желание обеспечить работу наземной сети одновре¬
менно с несколькими КА приводят к необходимости в будущем
переходить из диапазона 7,2/8,4 ГГц, где разрешена полоса
только 50 МГц, в более высокочастотные диапазоны 13/17 и
32/34 ГГц. Для их использования необходимо обеспечить более
высокую чистоту поверхности наземной и бортовой остронаправ¬
ленных антенн, а также более высокие .точности наведения и
стабилизации КА.
Возможности дальнейшего улучшения энергетических харак¬
теристик систем передачи информации с дальних КА весьма
ограничены, так как в настоящее время реализуются практиче¬
ски все известные на сегодня способы, позволяющие повысить
скорость передачи информации. К этим способам следует от¬
нести:
повышение эффективности наземных антенн. Так как строи¬
тельство поворотных антенн с зеркалом диаметром более 70 м
неэффективно, то в DSN производится сложение принимаемых
сигналов от всех антенн сети с диаметрами 34 и 70 м, а также
от других 25 высокоэффективных антенн США. В результате
302
такого сложения отношение эффективной площади к шумовой
температуре приемной системы возросло на 7 дБ по сравнению
с отношением для одной станции с антенной диаметром 70 м;
использование более эффективных методов избыточного ко¬
дирования. При использовании сверточных кодов с парамет¬
рами /С= 15; R = 1/3 вероятность ошибочного приема бита,
равная 10_3, обеспечивается при E6/N0= 1, что близко к теоре¬
тическому пределу (0, 7).
В ближайшей перспективе предполагается освоить диапа¬
зон 32/34 ГГц; реализовать технологию сжатия данных на
КА в 8... 10 раз; снизить шумовую температуру приемной ан¬
тенны.
12.2. БОРТОВОЙ РАДИОКОМПЛЕКС КА «ГАЛИЛЕЙ»
Рассмотрим основные технические характеристики бортово¬
го радиокомплекса КА «Галилей», запущенного в 1989 г. и на¬
ходящегося сейчас в полете к Юпитеру. Бортовой радиоком¬
плекс для связи с DSN использует диапазоны частот 2,1/2,3 и
7,2/8,4 ГГц. В диапазоне 2,1 ГГц осуществляется передача на
КА функциональных и числовых команд, а в диапазоне
2,3 ГГц — передача с КА служебной телеметрической инфор¬
мации. Диапазон 8,4 ГГц используется для передачи высоко¬
скоростной научной телеметрии с КА, а частоты 7,2/8,4 ГГц
служат для высокоточных запросных измерений дальности и
радиальной скорости.
Основные технические характеристики бортового радио¬
комплекса КА «Галилей» приведены в табл. 12.4.
Частоты бортового комплекса формируются с учетом коге¬
рентного преобразования частот запроса и ответа с помощью
системы фазовой автоподстройки частоты. Полоса системы
ФАПЧ выбрана с учетом того, что основной (детерминирован¬
ный) сдвиг частоты, вызванный эффектом Доплера, будет ском¬
пенсирован в запросном сигнале наземной станции. Синхрони¬
зация по псевдослучайной последовательности при приеме ко¬
манд обеспечивается при Рвх=—166 дБВт и на нее затрачи¬
вается до 5 мин. Усилитель мощности в диапазоне 2,3 ГГц
выполнен на транзисторе, а в диапазоне 8,4 ГГц — на лампе
бегущей волны. Все узлы приемника и передатчика резервиро¬
ваны.
Функции программно-временной системы выполняются еди¬
ным бортовым процессором, который одновременно обслужива¬
ет и систему управления КА.
Кодирование информации осуществляется сверточным ко¬
дом с длиной кодового ограничения /(=15 и скоростью R = 1/4.
Этот код хотя и сложен для декодирования, однако дает вы-
303
Таблица 12.4
Параметр
Значение
Несущая частота, МГц:
КА — Земля
2295 и 8425
Земля — КА
2115 и 7150
Диаметр бортовой островаправленной антенны, м
3,7
Мощность передатчика, Вт, на частоте:
2,3 ГГц
20
8,4 ГГц
20
Шумовая температура приемника, К, на частоте:
2,1 ГГц
1200
7,2 ГГц
390
Модуляция передатчика КА
Фазовая
Максимальная скорость передачи, кбит/с
134,4
Кодирование
Сверточное
Скорость передачи команд, бит/с
Относительная стабильность частоты бортового
задающего генератора:
32
з-ю-11
за срок службы
за 100 с
ю-11
игрыш на 1,3 дБ по сравнению с каскадным, состоящим из вну¬
треннего сверточного кода с /С=7 и R= 1/2 и внешнего кода
Рида—Соломона (255, 223).
12.3. ЯПОНСКАЯ СЕТЬ СЛЕЖЕНИЯ ЗА ДАЛЬНИМ
КОСМОСОМ
Наземная сеть создавалась для работы с первыми дальни¬
ми КА Японии «Сусей» и «Сакигаке» в диапазоне частот
2,1/2,3 ГГц на 20 лет позже аналогичных сетей в СССР и
США. При этом японские специалисты использовали новейшие
достижения в технике и технологии радиоаппаратуры, в част¬
ности цифровую обработку сигналов и совершенные методы
функционального контроля.
Наземная сеть Японии (рис. 12.3) состоит из двух станций
слежения, одна из которых находится в г. Усуда и имеет антен¬
ну диаметром 64 м, а вторая — в г. Кацума и имеет антенну
диаметром 18 м. Главной станцией является станция в г. Усуда.
Аппаратура станции позволяет осуществлять связь с КА «Са¬
кигаке», удаленным на расстояние до 225 млн км.
К особенностям этой станции следует отнести следующее:
шумовая температура МШУ, созданного на базе охлаждае-
304
СЛязь с назен/tou сеш/о 27S/V (США)
Рис. 12.3. Структура наземной сети Японии
мого параметрического усилителя, составляет 8 К; полоса про-
пускания 20 МГц; коэффициент усиления 45 дБ;
мощность входного сигнала, при которой обеспечивается
захват и слежение системы ФАПЧ, не превышает — 204 дБВт.
Шумовая полоса ФАПЧ равна 3 Гц;
управление подсистемами станции, как местное, так и из
ЦУП, осуществляется с помощью микрокомпьютеров;
для связи антенны с аппаратурой обработки используется
волоконно-оптическая линия;
частота запросного и ответного сигналов изменяется с по¬
мощью цифрового синтезатора с шагом 1 МГц.
Основные технические характеристики радиосистемы для
станции в г. Усуда приведены в табл. 12.5.
Антенна построена по лучеводному принципу и имеет коэф¬
фициент использования поверхности 0,77 при шумовой темпера¬
туре 12 К.
Система передачи телеметрической информации обеспечи¬
вает решение перспективных задач, позволяет по программе
изменять поднесущие частоты и скорости передачи информации.
Возможна работа и без поднесущей частоты. Диапазон измене¬
ния поднесущих частот колеблется от 100 Гц до 999 кГц, а
скорость передачи информации — от 5 до 500 000 символов в
секунду. Применяется сверточное кодирование с декодирова¬
нием по алгоритму Витерби.
Система передачи командно-программной информации рабо¬
тает с поднесущими частотами в диапазоне 100... 16 384 Гц,
тактовая частота вырабатывается путем деления поднесущей,
т. е. когерентна с поднесущей.
Методы измерения дальности совместимы с методами изме¬
рения дальности в DSN. Наивысшая поднесущая в модулирую-
20—4229
305
Таблица 12.5
Параметр
Значение
Диапазон частот, МГц:
Земля — КА
2105... 2120
КА — Земля
2280 ... 2300
Передатчик:
мощность, кВт:
максимальная
20,0
минимальная
0,2
ширина полосы, МГц, по уровню
— 1 дБ
6,0
Синтезатор частоты Земля — КА:
диапазон изменения частоты, кГц
±300
скорость изменения, кГц/с
±2
Модуляция Земля — КА:
вид
Фазовая
индекс, град
0... 120
полоса частот, Гц
50... 1,5-106
Шумовая температура приемника, К
30
Уровень принимаемых сигналов, дБВт
— 110...—204
Диапазон изменения частоты синтезатора
КА — Земля, кГц
±150
Эквивалентная шумовая полоса системы
ФАПЧ, Гц
3; 10; 30; 100; 300; 1000
щем сигнале составляет 500 кГц. Минимальная поднесущая
равна 1 Гц.
Частоты поднесущих измерения дальности получаются пу¬
тем деления несущей частоты на 2П, где п— И ... 14.
Систематическая и случайная (среднеквадратическое значе¬
ние) погрешности измерения дальности составляют 2 м при
времени накопления 250 с и энергетическом потенциале 9 Гц.
Время одиночного измерения радиальной скорости от 60 до
1/60 с. Полная погрешность измерения радиальной скорости со¬
ставляет 0,3 мм/с при времени измерения 60 с.
12.4. БОРТОВОЙ РАДИОКОМПЛЕКС ЯПОНСКОГО КА
«САКИГАКЕ»
Бортовой радиокомплекс предназначен для передачи теле¬
метрических данных с КА, приема командно-программной ин¬
формации с Земли, когерентного преобразования запросной ча¬
стоты и демодуляции — модуляции сигналом дальности. Коэф¬
фициент когерентного преобразования частоты 221/240.
Приемопередатчик обеспечивает связь с Земли с помощью
трех бортовых антенн: с малым, средним и высоким усилением.
306
ОНА
И
[Г
Л ере ключа-
теле
Фильтр
Когерент¬
ный
нриелник
Сигнал
дальности
Лере ключа-
тель ^
Лередат-
чик
Декодер
коланд
Блок
одрадотка
данных
ФК
ТМЛ
Сигнал
скорости
Фильтр
Когерент¬
ный
нриелник |—
Рис. 12.4. Структурная схема бортового комплекса КА «Сакигаке»
Бортовой радиокомплекс (рис. 12.4) состоит из приемопере¬
датчика, антенн, декодера команд, блока обработки данных и
оперативного запоминающего устройства. Основные технические
характеристики приведены в табл. 12.6.
Таблица 12.6
Параметр
Значение
Несущие частоты, ГГц
Усиление антенны, дБ:
остронаправленной
направленной
малонаправленной
Мощность передатчика, Вт
Относительная стабильность частоты
задающего генератора:
долговременная за I год
кратковременная за 1 с
Индекс фазовой модуляции, рад
Кодирование ТМ информации
Скорость передачи ТМ, бит/с:
без кодирования
с кодированием
Объем ЗУ на ЦМД, бит
Максимальная скорость записи/воспро¬
изведения, бит/с
Шумовая температура приемника, дБ
Шумовая полоса ФАПЧ, Гц
Пороговый сигнал системы ФАПЧ,
дБВт
Вероятность ошибочного приема бита
Требуемое отношение Eq/No, дБ, без
кодирования
Скорость передачи команд с Земли,
бит/с
2,1
21,5
-1,5
—4,5
2,3
23,5
—0,5
—0,3
5,0
±10"6
ю-9
±0,6
Сверточным кодом
R= 1/2
2048
64
1 048 576
2048
3,0
40
—175
ю-5
9,6
16
К = 7>
20*
307
Окончание
Параметр
Значение
Число команд:
функциональных
224
числовых
15
Масса антенны, кг:
остронаправленной
3,7
направленной
1,35
малонаправленной
0,188
Масса приемопередатчика (два прием¬
ника и один передатчик), кг
3,99
Масса декодера, кг
1,58
Масса ЗУ, кг
2,1
Общая масса БРК, кг:
без АФУ
7,7
с АФУ
12,5
В 1986 г. КА «Сакигаке» прошел на расстоянии 8 млн км
от ядра кометы Галлея. Все системы бортового радиокомплек¬
са работали удовлетворительно. По массе и габаритным харак¬
теристикам бортовой радиокомплекс этого КА самый малень¬
кий из всех ранее разработанных для КА дальнего космоса.
12.5. БУДУЩИЕ ПРОГРАММЫ И ПЕРСПЕКТИВЫ
МЕЖДУНАРОДНОГО СОТРУДНИЧЕСТВА
12.5.1. РОССИЙСКАЯ ПРОГРАММА
ПОСЛЕДУЮЩЕГО ИЗУЧЕНИЯ МАРСА
Программа исследований Марса до 2005 г. разрабатывалась
в 1987—1989 гг. и была включена в число приоритетных госу¬
дарственных научно-технических программ. С учетом нынешней
обстановки в стране конкретные сроки ее реализации могут,
конечно, измениться, но основные этапы будут, видимо, со¬
хранены.
Программа предусматривала целенаправленное глобальное
изучение Марса, чтобы сделать возможным полет пилотируе¬
мого корабля с высадкой космонавтов в 10—20-х гг. следующе¬
го столетия. Кроме того, программа предполагает не конкурен¬
цию, как это было прежде, а координацию с американской кос¬
мической программой.
Первый этап (1994—1997 гг.) рассчитан на глобальное изу¬
чение атмосферы, поверхности и подповерхностных слоев ди¬
станционными экспериментами с орбиты спутника Марса и ши¬
рокий комплекс прямых исследований в атмосфере и на
308
поверхности десантными средствами. Его целью является пред¬
варительный выбор районов, наиболее интересных для после¬
дующего детального исследования. Одновременное изучение ат¬
мосферы и поверхности десантными средствами и дистанцион¬
ными методами, существенно дополняющими друг друга, по¬
зволит получить более достоверные данные о Марсе: локаль¬
ные и непосредственные измерения десантными средствами дают
хорошие точки для калибровки и привязки дистанционных дан¬
ных; глобальный охват дистанционных методов позволяет, в
свою очередь, более точно экстраполировать данные, получен¬
ные десантными средствами.
Со спутника Марса будут проведены: детальная многоспект¬
ральная съемка с разрешением до 10 м, исследования трехмер¬
ного поля температуры атмосферы и температуры поверхности
с высоким пространственным и спектральным разрешением, де¬
тальное изучение спектров видимого и ИК излучения, исследо¬
вание элементного состава поверхности по собственному гамма-
излучению, изучение подповерхностных слоев радиолокацион¬
ным методом, исследования вертикальной структуры и состава
атмосферы.
Разрабатываются четыре вида десантных средств для пря¬
мых экспериментов: аэростатная станция, марсоход, малые
станции и пенетраторы.
Аэростатная станция (АС) предназначена для съемки боль¬
ших районов поверхности со сверхвысоким разрешением (до
1 см), метеорологических исследований в пограничном слое и в
свободной атмосфере, изучения минералогического состава ме¬
тодом ИК спектрометрии и элементного состава поверхности
методами гамма-спектроскопии, структуры подповерхностных
слоев радиолокационным зондированием и магнитного поля.
Хотя сейчас мы и имеем представление о всей поверхности
Марса, более 90% ее снято с разрешением не лучше 300 м
и только несколько процентов — с разрешением до 25 м. Пред¬
ставление о локальном рельефе имеется только в двух точках
посадки аппаратов «Викинг». Знание же местного рельефа
особенно важно для проектирования посадочных средств и вы¬
бора районов посадки. Несколько сотен снимков в день с аэро¬
стата в течение до 10 дней его полета позволят существенно
расширить наши сведения об особенностях поверхности.
Аэростатная станция включает собственно аэростат, к ко¬
торому подвешены приборная гондола и гайдроп. Аэростат за¬
крытый, цилиндрической формы, высотой около 30 м и диамет¬
ром 15 м имеет объем около 5500 м3, сделан из пленки
толщиной 6 мкм и заполняется гелием. На расстоянии около
50 м под ним подвешена гондола массой 15 кг, в которой поми¬
мо научных приборов находятся радиосистема для передачи
309
информации, бортовой процессор с ЗУ емкостью 32 Мбит, бата¬
рея питания и радиоизотопные нагреватели.
На расстоянии 50—100 м от гондолы подвешен гайдроп —
распределительный груз длиной около 10 м и массой 13 кг, ко¬
торый состоит из 26 полых металлических секций; внутри сек¬
ций размещаются гамма-высотомер, радиолокатор, РТС для
передачи информации на гондолу и батареи питания.
Днем оболочка нагревается прямым солнечным и ИК излу¬
чением поверхности и нагревает газ внутри аэростата, который,
расширяясь, увеличивает подъемную силу аэростата, и аэростат
поднимается на высоту 2... 4 км и дрейфует под действием
ветра. Вечером происходит радиационное охлаждение оболоч¬
ки, а вместе с ней и гелия; гелий, сжимаясь, уже не заполняет
оболочку, подъемная сила уменьшается, и аэростат опускается
вниз.
Гайдроп предотвращает касание оболочки и гондолы поверх¬
ности Марса (это привело бы к гибели АС): часть гайдропа
оказывается на поверхности Марса и уменьшение массы АС
компенсирует недостаток подъемной силы аэростата. Под дей¬
ствием ветра аэростат дрейфует вдоль поверхности планеты;
гайдроп служит здесь и в качестве стабилизатора.
На АС устанавливаются две автономные радиосистемы
(АРС): одна для передачи информации с гайдропа на гондолу*
вторая — главная — для передачи информации с гондолы на
орбитальный аппарат. Скорость передачи информации на спут¬
ник до 32 кбит/с; объем передаваемой за один сеанс информа¬
ции до 100 Мбит; передача данных осуществляется по запросу
со спутника один-два раза в сутки во время взаимной видимо¬
сти с АС. На спутнике производится оценка уровня сигнала с
АС; запрос на передачу данных выдается после превышения
порога, обеспечивающего вероятность ошибки 1/100 000. По
доплеровским измерениям на спутнике также определяются
координаты АС.
Для АС, как и для всех десантных модулей, ограничения
массы особенно жестки; масса каждого научного прибора не
превышает 0,5 ... 1 кг, масса радиосистемы около 1 кг.
Совместимый с АРС аэростатной станции приемопередат¬
чик установлен и на американском КА «Марс-Обсервер», за¬
пуск которого осуществлен в 1992 г. Орбита КА «Марс-Обсер¬
вер»— полярная круговая высотой около 380 км; она обеспечи¬
вает взаимную видимость любой точки на поверхности Марса
по крайней мере два раза в сутки. Использование этого аппа¬
рата существенно расширяет возможности эксперимента. (В ав¬
густе 1993 г. связь с КА «Марс-Обсервер» была потеряна.)
На первом этапе разрабатывается небольшой, массой около
70 кг, самодвижущийся аппарат — марсоход, оснащенный при¬
310
борами, предназначенными главным образом для исследования
поверхности Марса; в их состав входят груптозаборное устрой¬
ство для взятия проб грунта с глубины до десятков сантимет¬
ров, хроматомасс-спектрометр, мессбауэровский спектрометр,
рентгеновский альфа-спектрометр, ИК спектрометр, телевизион¬
ный комплекс, прибор для электромагнитного зондирования
и др.
Из-за большого времени распространения сигнала марсоход
в отличие от лунохода практически не может двигаться по пря¬
мым радиокомандам с Земли — это было бы весьма неэффек¬
тивно. Другая крайность — полностью автономное движение с
поиском и прокладкой пути — пока мало реальна. Поэтому
для марсохода разрабатывается комплекс устройств, позво¬
ляющих ему автономно двигаться в пределах до десятков мет¬
ров, с учетом информации о непосредственно окружающей об¬
становке, получаемой от датчиков. Выбор цели и генеральная
прокладка курса осуществляются на Земле по всей совокупно¬
сти имеющихся данных и передаются на марсоход.
Автономный навигационный комплекс включает информа¬
ционные датчики — стереотелевизионные камеры, тактильные
.датчики препятствий и т. п., датчики, определяющие положение
самого марсохода и углы наклона различных его частей, и дат¬
чики, определяющие координаты марсохода: датчики Солнца,
местной вертикали, гироскопы. Информацию обрабатывает бор¬
товой процессор, который, кроме того, прокладывает реальный
курс и управляет двигателями для перемещения к намеченной
с Земли точке.
Простейший алгоритм может использовать информацию
только тактильных датчиков, более сложный позволяет по¬
строить локальную карту местности и выбрать траекторию
объезда препятствий. Выбор алгоритмов будет определяться с
учетом их совместимости с ресурсами процессора, надежностью
и др.
Функциями АРС марсохода являются передача научной ин¬
формации— ее объем может составлять до 100 Мбит в сутки,
прием программ работы и целевых точек, а также определение
координат марсохода.
Основной объем информации с марсохода предполагается
передавать посредством ретрансляции через спутники Марса:
автономная радиосистема марсохода совместима с АРС аэро¬
статной станции и обеспечит скорость передачи до 128 кбит/с;
недостатком такого метода является необходимость использо¬
вания спутника, что может привести к конфликтам с другими
экспериментами (по требованиям к орбите и ресурсам спутни¬
ка). Кроме того, время активного существования спутника из-за
наличия расходуемых компонентов (например, газ для системы
311
ориентации) может оказаться меньше времени жизни марсохо¬
да. Поэтому прорабатывается также радиолиния для прямой
передачи на Землю; при скорости передачи информации в этой
линии порядка нескольких сотен бит в секунду за продолжи¬
тельный сеанс связи (8—10 ч) может быть передано 10—
20 Мбит в день.
Малые автономные станции (MAC) будут отделены от орби¬
тального аппарата за 3—5 суток до подлета к Марсу и осущест¬
вят посадку з разных районах планеты. Их цель — проведение
длительных (до 2 лет) исследований атмосферы, сейсмической
активности и вариаций магнитного поля; на станциях будет
измеряться элементный состав. После входа в атмосферу и
торможения аэродинамическим экраном станции совершат па¬
рашютный спуск. При посадке скорость будет гаситься надув¬
ными пневматическими амортизаторами, аналогичными исполь¬
зовавшимся на станциях «Луна». Во время снижения на пара¬
шюте будут производиться измерения атмосферных параметров
и телевизионная съемка поверхности. Информация будет запи¬
сываться в запоминающее устройство для последующей переда¬
чи на Землю.
После успокоения станция будет приведена в рабочее поло¬
жение лепестковым устройством. Оно раскроется, выдвинет
вверх платформу с метеодатчиками и антеннами, а вбок на
штангах вынесет альфа-спектрометр и магнитометр.
Полная масса MAC менее 30 кг, масса полезной нагрузки
около 9 кг. Питание станции будет подаваться от двух малога¬
баритных радиоизотопных электрогенераторов общей электри¬
ческой мощностью около 200 мВт, подключаемых через буфер¬
ную аккумуляторную батарею. Работой станции будет управ¬
лять центральный процессор. Большую часть времени MAC бу¬
дут находиться в режиме «сна», включаясь на время измерений
или передачи данных.
Радиосистема MAC совместима с АРС аэростатной станции
по частотам, методике вхождения в связь и используемым
кодам, отличаясь в основном скоростью передачи информации.
Передача данных с каждой станции планируется короткими се¬
ансами через несколько суток. Малые автономные станции мо¬
гут передавать информацию и на американский КА «Марс-
Обсервер».
Пенетраторы являются также автономными станциями, но
предназначаются в основном для исследований под поверх¬
ностью Марса. Отделение пенетраторов от орбитального аппа¬
рата, как и малых станций, происходит за 3—5 суток до входа
в атмосферу. В отличие от других десантных аппаратов на
пенетраторах нет парашюта, а имеется только надувной стаби¬
лизатор. Пенетратор заглубляется в поверхность со скоростью
312
около 100 м/с. Специальный амортизатор внутри него позво¬
лит снизить перегрузки на приборы. Эксперименты на пенетра-
торе нацелены на более детальный анализ состава вещества, ме¬
ханических и электрических характеристик грунта.
Функции АРС пенетраторов и режим работы аналогичны
АРС MAC. Информация передается по запросу спутника.
На поверхности Марса одновременно могут находиться до
8—10 десантных аппаратов четырех различных типов, причем
сразу несколько — в зоне видимости спутника. Поэтому особое
внимание уделяется циклограммам работы аппаратов, осущест¬
влению их индивидуального вызова, чтобы избежать конфликт¬
ных ситуаций при передаче данных.
Последующие этапы программы изучения Марса предусмат¬
ривают высадку большого марсохода с дальностью перемеще¬
ния до нескольких сотен километров, который сможет детально
исследовать выбранные районы. Заключительным этапом подго¬
товительной программы предполагается взятие образцов грунта
и доставка их на Землю для детального химического, изотопного
и биологического анализа.
Значительно повысить эффективность марсианских исследо¬
ваний могло бы создание специализированного связного спутни¬
ка-ретранслятора или системы спутников на круговой орбите
Марса, которые позволят осуществить отбор данных с десант¬
ных средств и их передачу на Землю.
12.5.2. БУДУЩАЯ ПРОГРАММА США И МЕЖДУНАРОДНОЕ
СОТРУДНИЧЕСТВО
Единственными утвержденными сейчас проектами изучения
планет являются «Марс-Обсервер» и «Крафт-Кассини». «Марс-
Обсервер» в 1993 г. будет выведен на круговую орбиту вокруг
Марса с высотой 380 км. На аппарате установлены камера вы¬
сокого разрешения (до 3 м на поверхности), с помощью кото¬
рой предполагается снять отдельные районы Марса, и несколь¬
ко приборов для глобального дистанционного зондирования. На
нем также размещен ретранслятор для приема сигналов с де¬
сантных средств российских проектов «Марс-94» и «Марс-96».
Европейско-американский проект «Краф-Кассини» предпола¬
гает одновременный запуск двух аппаратов: для встречи с яд¬
ром кометы и для исследования Сатурна и посадки на его спут¬
ник Титан. Однако из-за прекращения финансирования в 1992 г.
дальнейшая судьба проекта «Краф-Кассини» не ясна.
Серьезно прорабатываются американский проект «Межур»
и европейский «Марснет», предусматривающие развертывание
на Марсе сети малых станций, развивающих принципы малых
станций проекта «Марс-94». В проекте «Межур» четырьмя за¬
21—4229
313
пусками в течение 1996—2003 гг. предполагается доставить на
поверхность Марса 16 станций и спутник-ретранслятор. При
каждом запуске будут выводиться четыре станции, которые
после выхода на траекторию полета к Марсу отделятся от по¬
следней ступени ракеты и будут далее двигаться независимо —
в этом основное отличие схемы полета от малых станций проек¬
та «Марс-94». Масса каждой из этих станций около 90 кг, со¬
став научной аппаратуры практически такой же, что и в проек¬
те «Марс-94». На нескольких станциях предполагается прямая
передача данных на Землю.
Получает развитие объявленная в 1989 г. президентом США
новая космическая инициатива, предполагающая полет в буду¬
щем столетии пилотируемой экспедиции к Марсу. Естественно,
что перед полетом человека потребуется более детальное изу¬
чение планеты автоматическими средствами.
Сближение нашей страны со странами Запада, уход от со¬
ревновательности в космических программах, общность науч¬
ных задач и ограничения в финансировании являются объек¬
тивной основой для сотрудничества в изучении дальнего
космоса.
До проекта «Вега» главной областью сотрудничества было
проведение совместных научных экспериментов на советских
аппаратах; нашими основными партнерами являлись страны
социалистического лагеря и Франция. В проекте «Вега» приня¬
ло участие уже более 10 стран. Из-за ограничений, наложенных
правительством США, до 1992 г. не допускалась установка
аппаратуры, разработанной в США, на советских КА. Поэтому
помимо обмена научными данными, практически никогда не
прекращавшегося, единственной реальной формой сотрудничест¬
ва оставалась кооперация в наземном обеспечении аппаратов:
американские станции использовались для приема телеметричес¬
кой информации и определения траектории аэростатных зондов
проекта «Вега», определения траекторий КА «Вега» при сбли¬
жении с кометой Галлея для навигации КА «Джотто».
Станции DSN были подготовлены к приему информации и
проведению небесно-механических экспериментов с долговре¬
менной автономной станцией (ДАС) программы «Фобос» и про¬
вели несколько интерферометрических наблюдений с КА
«Фобос».
Для приема информации с десантных средств проекта
«Марс-94» на американском аппарате «Марс-Обсервер» уста¬
новлен специальный ретранслятор, информация с которого бу¬
дет приниматься станциями DSN; эти же станции будут участ¬
вовать в навигационном обеспечении проекта «Марс-94». На
российской сети слежения за дальними КА проведены сеансы
приема сигналов с аппарата «Вояджер-1» в интересах НАСА.
314
В настоящее время между Российским космическим агенст-
вом (РКА) и НАСА ведутся переговоры об использовании рос¬
сийской наземной сети слежения за КА дальнего космоса для
приема телеметрической информации с КА США «Вояджер-1,2»
и «Галилей». Для выполнения соглашения большие наземные
антенны диаметром 70 м сначала в Уссурийске, а затем и в
Евпатории переоборудуются для приема сигналов в диапазонах
2,3 и 8,4 ГГц.
Аппаратура выделения сигналов наземных станций, рабо¬
тающих с большими антеннами, модернизируется так, чтобы
уметь дешифрировать структуру телеметрических кадров аме¬
риканских КА, отличную от структуры кадров российских КА,
а также декодировать ТМИ при использовании каскадных ко¬
дов, применяемых НАСА.
Если прием ТМИ российскими станциями от КА «Вояд¬
жер-1,2» позволит разгрузить американскую сеть DSN, то прием
ТМИ с КА «Галилей» позволит спасти ценную научную инфор¬
мацию, которая предположительно будет получена от научных
приборов этого КА после 1996 г., когда начнутся исследования
Юпитера и его основных спутников с орбиты искусственного
спутника. Дело в том, что на КА «Галилей» не полностью рас¬
крылась бортовая остронаправленная антенна диаметром 3,8 м
и возникла угроза существенного уменьшения энергетического
потенциала радиолинии КА — Земля. Это привело к снижению
скорости передачи ТМИ и, следовательно, к сокращению
объемов передаваемой научной информации. Подключение,
больших российских антенн к приему сигналов КА «Галилей»
позволяет частично скомпенсировать потерю энергетического
потенциала, так как включает в американскую наземную сеть
дополнительно две российские станции.
Основные космические агентства мира, которые заинтересо¬
ваны в исследовании дальнего космоса, пришли к необходимо¬
сти тесного сотрудничества для обеспечения технической совме¬
стимости наземных станций приема. Это касается диапазонов
частот, структуры телеметрической информации, методов ко¬
дирования и методов модуляции. В результате сотрудничества
России, США, стран Европы и Японии должна быть достигнута
полная техническая совместимость национальных средств и все
наземные станции слежения за КА дальнего космоса (три в
России, три в США, три в Европе и три в Японии) будут объ¬
единены в общую наземную сеть, что снизит расходы каждого
агентства и повысит эффективность и надежность реализации
каждого проекта.
Помимо сотрудничества в приеме телеметрической информа¬
ции развивается взаимная поддержка проектов и в части на¬
вигации дальних КА. Так, в обеспечении навигации КА проекта
21*
315
«Марс-94» будут участвовать американские наземные станции
DSN, позволяя измерять угловое положение КА на припланет-
ном участке с помощью большебазового интерферометра. Рос¬
сийские станции в Уссурийске и Евпатории будут проводить
измерения радиальной скорости американских КА «Вояд¬
жер- 1,2» и «Марс-Обсервер».
Российское космическое агентство и НАСА ведут совместные
проектные работы по созданию КА для исследования поверх¬
ности Венеры с помощью спускаемых аппаратов.
Предполагается, что орбитальный аппарат будет использо¬
вать опыт разработки КА «Марс-94», а спускаемый аппарат —
опыт разработки СА по программам «Венера» и «Вега». На
спускаемом аппарате будет установлена научная аппаратура,
созданная под руководством НАСА для исследования химиче¬
ских свойств венерианской поверхности в районах, обнаружен¬
ных по снимкам КА «Магеллан» в 1991—1992 гг.
Хотя радиосистемы дальних КА создавались в России и
США независимо, они имеют много общего. Современное со¬
стояние международных отношений, ограничения на природные
ресурсы и финансы приводят космические агентства России.
США и других стран к необходимости тесной кооперации в реа¬
лизации новых проектов и в первую очередь в использовании
наземных радиосистем для поддержки новых проектов. Этим
целям и служит данная монография, впервые детально описы¬
вающая принципы и аппаратурную реализацию радиосистемы
обеспечения полетов дальних КА, созданной в России к 1993 г.
СПИСОК ОСНОВНЫХ СОКРАЩЕНИИ
АРС — автономная радиосистема
АФС — антенно-фидерная система
БНИ — баллистико-навигационная информация
БРК — бортовой радиокомплекс
БЦ — баллистический центр
ГГС — громкоговорящая связь
ДКС — дальняя космическая связь
ДМ — дециметровый диапазон радиоволн
ЗУ — запоминающее устройство
КА — космический аппарат
КИП — коэффициент использования поверхности антенны
КПИ — командно-программная информация
КР — контррефлектор
МРК — магистральный бортовой радиокомплекс
НАКУ — наземный автоматизированный комплекс управления
НИ — научная информация
НУ — начальные условия
ОА — орбитальный аппарат
03 — основное зеркало антенны
ОПУ — опорно-поворотное устройство антенны
ПЗС — поворотная зеркальная система антенны
ПСЗО — постоянная солнечно-звездная ориентация
ПСО—постоянная солнечная ориентация
СА — спускаемый аппарат
СИД — система измерения деформаций антенны
СМ — сантиметровый диапазон радиоволн
ТИ — траекторная информация
ТМИ — телеметрическая информация
УС — узел связи
ЦУП — центр управления полетом
ЭСП—электрический силовой привод антенны
СПИСОК ЛИТЕРАТУРЫ
1. Энергетические характеристики космических радиолиний / Г. П. Вимберг,
Ю. В. Виноградов, А. Ф. Фомин и др.— М.: Сов. радио, 1972.— 435 с.
2. Витерби Э. Д. Принципы когерентной связи / Пер. с англ.: Под ред.
Б. Р. Левина.— М.: Сов. радио, 1970.— 391 с.
3. Мановцев А. П. Введение в цифровую радиотелеметрию,— М.: Энергия,
1967.— 343 с.
4. Заключительные акты Всемирной Административной Конференции Радио¬
связи по использованию геостационарной орбиты и планированию косми¬
ческих служб, ее использующих (ОРБ-88).— Женева: МККР, 1988.—
402 с.
5. Radiometeorological data / Report 563.— CCIR, 1990.— 36 p.
6. Frequency bands in the 1 to 40 GHz range that are preferred for deep
space research / Report 683.— CCIR, 1990.— 17 p.
7. Method of calculating attenuation, noise temperature and telecommunica¬
tion link performance for the selection of preferred frequency bands / Re¬
port A A/2.— CCIR, 1990.— 20 p.
8. Колосов М. А., Арманд H. А., Яковлев О. И. Распространение радиоволн
при космической связи.— М.: Связь, 1969.— 155 с.
9. Propagation data and prediction methods required for Earth-Space tele¬
communication systems / Report 564.— CCIR, 1990.— 40 p.
10. Долуханов М. П. Распространение электромагнитных волн.— М.: Связь,
1965.— 400 с.
11. Konhlein W. Electron density models of the ionosphere // Rev. Geoph.
Space Phys.— 1978.— Vol. 16, № 3.— P. 341.
12. Исследования электронной концентрации ионосферы при помощи назем¬
ного приема радиосигналов, излучаемых с космических аппаратов /
Г. Г. Гетманцев, К. И. Грингауз и др. // Изв. вузов СССР. Сер. Радио¬
физика.— 1968.— Т. 11, № 5.— С. 649.
13. Titheridge J. Е. The characteristics of large ionospheric irregularities // J.
Atm. Terr. Phys.— 1968.— Vol. 30, № 1.— P. 73.
14. Titheridge J. E. The spectrum of electron content fluctuations in the iono¬
sphere // Planet. Space Science.— 1971.— Vol. 19, № 12.— P.. 1593.
15. Ionospheric effects upon Earth-Space propagation // Report 263.— CCIR,
1990.— 28 c.
16. Crane R. K. Ionospheric scientillation // IEEE Trans.— 1977.— Vol. AP-65,
№ 2.- P. 180.
17. Татарский В. И. Распространение волн в турбулентной атмосфере.— М:.
Наука, 1967.— 548 с.
18. Мороз В. И. Атмосфера Венеры // Успехи физических наук.— 1971.—
Т. 104, № 2.— С. 256.
19. Яковлев О. И. Распространение радиоволн в космосе.— М.: Наука, 1985.
— 216 с.
20. Дневная ионосфера Венеры по данным двухчастотного радиопросвечива¬
ния при помощи спутников «Венера-9,, 10» / Ю. Н. Александров,
Н. А. Арманд, О. И. Яковлев и др. // Радиотехника и электроника —
1978.— Т. 23, № 5.— С. 1840.
318
21. Fjeldbo G.t Seidel B., Sweetnam D., Howard T. The Mariner-10 radio occul-
tation measurements of the ionosphere of Venus «// J. Atm. Science.—
1975.— Vol. 32, № 6.— P. 1232.
22. Ночная ионосфера Венеры по результатам двухчастотного радиопросве¬
чивания при помощи спутников «Венера-9» и «Венера-10» / Ю. Н. Алек¬
сандров, Н. А. Арманд, О. И. Яковлев и др. // Космические исследова¬
ния.— 1976.— Т. 1,4, № 5.— С. 824.
23. Паркер Н. Динамические процессы в межпланетной плазме: Пер. с англ.
— М.: Мир, 1968.— 362 с.
24. Models of extraterrestrial plasmas.— Report 887.— CCIR, 1990.— 5 c.
25. Tyler G. L., Brenkle J. P., Komarek T. A., Zygtelbaym A. I. The Viking
solar corona experiment // J. Geophys. Res.— 1977.— Vol. 82, № 28.— P.
4335.
26. Woo R., Armstrong J. W. Spacecraft radio scattering observations of the
power spectrum of electron density fluctuations in the solar wind // J.
Geophys. Res.— 1979.— Vol. 84, № A12.— P. 7288.
27. Измерения спектров двух когерентных радиосигналов станции «Вене¬
ра-10», проходивших вблизи Солнца в июне 1976 г. / Ю. Н. Александ¬
ров, Н. А. Арманд, О. И. Яковлев и др. // Радиотехника и электрони¬
ка.— 1979.— Т. 24, № 5.— С. 881.
28. Регламент радиосвязи.— М.: Радио- и связь, 1985.— Т. 1.— 509 с.
29. Transponder turnaround frequency rations and radio frequency channel
plans for space research, category В / Draff Recommendation 7-1R2 //
Handbook of the Space Frequency Coordination Group.— SFCG, 1991.—
P. 7-1R2.
30. Frequency bands in the 20 to 120 GHz range that are preferred for deep-
space research / Report 849.— CCIR, 1990.— 9 p.
31. Банкет В. JI., Дорофеев В. М. Цифровые методы спутниковой связи.—
М.: Радио и связь. 1988.— 240 с.
32. Хацкелевич Я. Д., Готлиб В. М. Эффективность каскадного кода при
декодировании с метками ненадежности // Тр. НИИР.— 1979.— № 1.—
С. 5.
33. Хацкелевич Я. Д. Расширение пределов сверточных кодов // Тр. НИИР.
— 1982.— Кя 1.— С. И.
34. Deep space telecommunications systems engineering / J. H. Yuen, Editor —
New York and London: Plenum Press, 1982.— 597 p.
35. Характеристики советской наземной сети слежения за космическими ап¬
паратами дальнего космоса.— М.: Центр научно-технической информации
«Поиск», 1990 г.— Сер. VI, вып. 6.— 44 с.
36. Результаты радиолокации Марса на волне 39 см в 1980 году /В. А. Ко¬
тельников, Ю. Н. Александров, Р. А. Андреев и др. // Астрономический
журнал.— 1983.— Т. 69, № 3.— С. ,422—429.
37. Особенности распространения радиоволн через солнечную плазму по дан¬
ным аппаратов «МАРС-2» и МАРС-7» / О. И. Яковлев, Е. П. Молотов,
А. И. Ефимов и др. II Радиотехника и электроника.— 1977.— Т. XXII,
№ 2.— С. 260—267.
38. Особенности распространения УКВ через околосолнечную плазму при ра¬
диосвязи с аппаратом «Венера-10» / О. И. Яковлев, Е. П. Молотов,
А. И. Ефимов и др. // Радиотехника.— 1978.— Т. 33, № 4.— С. 96—98.
39. Исследование распространения дециметровых радиоволн в околосолнечной
плазме при полете межпланетной станции «Венера-10» / М. А. Колосов,
О. И. Яковлев, А. И. Ефимов и др. // Радиотехника и электроника.—
1978.— Т. XXIII, Ко 9.— С. 1829—1839.
40. Временные спектры флуктуаций амплитуды сантиметровых и дециметро¬
вых радиоволн аппаратов «Венера-15» и «Венера-16» при просвечивании
околосолнечной плазмы / А. И. Ефимов, О. И. Яковлев, С. Н. Рубцов и
31£
др. // Радиотехника и электроника.— 1987.— Т. XXXII, № 10.— С.
2025—2032.
41. Флуктуации амплитуды дециметровых и сантиметровых радиоволн, излу¬
чаемых спутниками «Венера-15» и «Венера-16» при распространении че¬
рез околосолнечную плазму / О. И. Яковлев, А. И. Ефимов, Е. П. Моло¬
тов и др. // Радиофизика.— 1988.— Т. XXXI, № 1.— С. 3—9.
42. О радиопросвечивании атмосферы Венеры при помощи спутников «Вене¬
ра-9» и «Венера-10» / М. А. Колосов, О. И. Яковлев, Б. П. Трусов и др.
// Радиотехника и электроника.— 1976.— Т. XXI, № 8.— С. 1585—1594.
43. Двухчастотное радиозондирование кометы Галлея при пролете космиче¬
ских аппаратов «Вега-1» и «Вега-2» / Н. А. Савич, В. И. Алтунин,
Ю. Ф. Андреев и др. // Письма в Астрономический журнал.— 1986.—
Т. 12, № 9.— С. 675—682.
44. Измерения радиосигналов станций «Вега-1» и «Вега-2» при просвечивании
оболочки кометы Галлея / В. В. Селезнев, В. Е. Андреев, А. Л. Гаврик и
др. // Радиотехника.— 1988.— Т. 43, N° 5.— С. 56—59.
45. Трехэлементный радиоинтерферометр со сверхдлинными базами /
Л. И. Матвеенко, Р. 3. Сагдеев, В. И. Костенко и др. // Письма в
Астрономический журнал.— 1983.— Т. 9, № 7.— С. 415—420.
46. Сверхдальняя радиоинтерференционная сеть на волне 18 см / Л. И. Мат¬
веенко, Р. 3. Сагдеев, В. М. Балебанов и др. // Письма в Астрономиче¬
ский журнал.— 1986.— Т. 12. № 1.— С. 59—65.
47. Специализированная сеть приема информации и интерферометрических
измерений аэростатного эксперимента / Н. А. Арманд, А. Ф. Богомолов,
В. И. Шевченко и др. // Письма в Астрономический журнал.— 1986.—
Т. 12, N° 12.— С. 131—136.
48. Интерферометрия с большой базой с использованием аппаратов «Венера»
/ Н. А. Арманд, О. И. Яковлев, В. А. Филоненко и др. // Радиотехника и
электроника.— 1987.— Т. XXXII, N° 10.— С. 2017—2025.
49. Длиннобазовая узкополосная радиоинтерферометрия для космической
навигации. Ч. I. Межпланетные аппараты; измерения координат АМС
«Вега» / В. А. Алексеев, В. И. Алтунин, А. А. Антипенко и др. // Косми¬
ческие исследования.— 1989.— Т. XXVII, № 3.— С. 447—453.
50. Длиннобазовая узкополосная радиоинтерферометрия для космической на¬
вигации. Ч. II. Орбитальные аппараты; измерения координат ИСЗ
«Астрон» / В. А. Алексеев, В. И. Алтунин, А. А. Антипенко и др. // Кос¬
мические исследования.— Т. XXVII, N° 5.— С. 765—771.
51. Оценки скорости ветра и турбулентности по ретрансляционным доплеров-
ским измерениям скорости спускаемых аппаратов АМС «Венера-9» и «Ве¬
нера-10» / Н. М. Анцибор, Р. В. Бакитько, А. Л. Гинзбург и др. // Кос¬
мические исследования.— 1976.— Т. XIV, № 5.— С. 714—721.
52. Измерение параметров радиосигнала со спускаемого аппарата АМС
«Марс-6» методом ретрансляции / В. Н. Андреев, Н. М. Анцибор,
Р. В. Бакитько и др. // Космические исследования.— 1976.— Т. XIV,
N° 4.— С. 598—609.
53. Оценки скорости ветра и турбулентности в атмосфере Венеры на основе
взаимных доплеровских измерений на АМС «Венера-11» и «Венера-12» /
В. В. Кержанович, Ю. Ф. Макаров, М. Я. Маров и др. // Космические
исследования.— 1979.— Т. XVII, N° 5.— С. 690—696.
54. Оценки скорости ветра по доплеровским измерениям на АМС «Венера-13»
и «Венера-14». Первые результаты / В. В. Кержанович, Ю. Ф. Макаров,
Е. П. Молотов и др. // Письма в Астрономический журнал.— 1982.—
Т. 8, N° 7.— С. 414—418.
55. Аэростатный эксперимент «Вега»: средняя скорость ветра в атмосфере
Венеры по доплеровским измерениям аэростатных станций / Р. А. Анд¬
реев, В. И. Алтунин, Н. А. Арманд и др. // Письма в Астрономический
журнал.— 1986.— Т. 12, № 1.— С. 41—45.
320
56. Бистатическая радиолокация Венеры при помощи спутников «Венера-9»
и «Венера-10» / М. А. Колосов, О. И. Яковлев, А. Т. Павельев и др. //
Радиотехника и электроника.— 1976.— Т. XXI, № 9.— С. 1808—1815.
57. Белянский П. В., Сергеев Б. Г. Управление наземными антеннами и
радиотелескопами.— М.: Сов. радио, 1980.— 280 с.
58. Справочник по радиолокации. Т. 3 / Под ред. М. Сколника: Пер. с англ.
под ред. А. С. Виницкого.— М.: Сов. радио, 1979.— 528 с.
59. Виницкий А. С. Автономные радиосистемы.— М.: Радио и связь, 1986.—
336 с.
60. Федосьев В. И. Главный конструктор и его время // Наука и жизнь.—
1992.— № 4.— С. 48—57.
61. Леонов А. И., Фомичев К. И. Моноимпульсная радиолокация.— М.: Радио
и связь, 1984.— 312 с.
62. Вишин Г. М. Многочастотная радиолокация.— М.: Воениздат, 1973.—
92 с.
63. Alem U. Км Veber С. L. Performance analysis of pulse Doppler digital ra¬
dars with application to the Shuttle Ku-band system // IEEE Trans.— 1978.
— Vol. COM-26, № 11.— P. 1620—1635.
64. Виницкий А. С. Модулированные фильтры и следящий прием ЧМ сигна¬
лов.— М.: Сов. радио, 1969.— 548 с.
65. Шляхов Н. С. Исследование работы динамического выделителя крайней
частоты спектра сигнала при наличии флуктуационных шумов // Методы
помехоустойчивого приема ЧМ и ФМ / Под ред. А. С. Виницкого,
А. Г. Зюко.— М.: Сов. радио, 1976.— С. 120—130.
66. Кочемасов В. Н., Белов Л. Ам Оконечников В. С. Формирование сигналов
с линейной частотной модуляцией.— М.: Радио и связь, 1983.— 192 с.
67. Теоретические основы радиолокации / В. Е. Дулевич, А. А. Коростелев,
Ю. А. Мельник и др.; Под ред. В. Е. Дулевича.— М.: Сов. радио, 1978.—
608 с.
68. Доплеровские устройства и системы навигации / В. Е. Колчинский,
И. А. Мандуровский, М. И. Константиновский; Под ред. В. Е. Колчинско-
го.— М.: Сов. радио, 1975.— 430 с.
69. Теоретические основы радиовысотометрии / А. П. Жуковский,
Е. И. Оноприенко, В. И. Чижов и др.; Под ред. А. П. Жуковского.—
М.: Сов. радио, 1979.— 320 с.
70. Dauson J. С., Gamber W. N. A high resolution system for Lunar and pla¬
netary landing-site selection // New links to new worlds: Rec. 1963 / Na¬
tional Space Electronics Symposium.— Miami Beach, Florida.— Pap. 9.1.
71. Атлас поверхности Венеры.— М.: ГУГК СССР, 1989.— 328 с.
72. Rumsey Н. С., Morris G. A., Green R. RM Coldstein R. M. A radar bright¬
ness and altitude image of a portion of Venus // Icarus.— 1974.— Vol. 23,
№ 1.— P. 1.
73. Campbell D. B., Dyce R. B., Pettengill G. H. New radar image of Venus //
Science.— 17 September 1976.— Vol. 193, № 4258.— P. 1123.
74. Pioner-Venus radar results: altimetry and surface properties / G. H. Pet¬
tengill. E. Eliason, P. G. Ford et al. // J. Geophys. Res.— 1980.— Vol. 85,
N2 A13.— P. 8261.
75. Magellan: radar performance and data products / G. H. Pettengill,
P. G. Ford, W. Т. K. Johnson et al. // Science— 12 April 1991— Vol. 252,
No 5003.— P. 260.
76. Ржига О. H. Развитие методики и некоторые результаты исследования
физической природы планет при помощи радиолокации: Дис. докт.
физ.-мат. наук.— М., 1971.— 252 с.
77. Александров Ю. Н., Ржига О. Н., Шаховский А. М. Исследование радио¬
сигналов, переданных советской межпланетной станцией «Венера-7» при
посадке на поверхность Венеры, с применением ЦВМ // Космические ис¬
следования.— 1971.— Т. 9, № 6.— С. 904.
321
78. MacDonald H. С., Lewis A. J., Wing R. S. Mapping and Landform ana¬
lysis of coastal regions with radar // Bull. Am. Geol. Sci.— 1971.—
Vol. 82.— P. 345.
79. Айзенберг Г. 3. Антенны ультракоротких волн.— М.: Связьиздат, 1957.—
700 с.
80. Теоретические основы радиолокации / Я. Д. Ширман, В. Н. Голиков,
И. Н. Бусыгин и др.; Под ред. Я. Д. Ширмана.— М.: Сов. радио, 1970.
81. Богомолов А. Ф., Жерихин Н. В., Соколов Г. А. «Венера-15» и «Вене¬
ра- 16»: радиолокатор с синтезированной апертурой на орбите ИСВ //
Изв. вузов СССР. Сер. Радиофизика.— 1985.— Т. 28, № 3.— С. 259.
82. Вновь открытая планета. Радиолокационные исследования Венеры с
космических аппаратов «Венера-15» и «Венера-16» / Ю. Н. Александров,
А. Т. Базилевский, Г. М. Петров и др. // Итоги науки и техники. Сер.
Астрономия.— 1987.— Вып. 32.— С. 201.
83. Possible origin of radar bright craters on Venus / A. P. Krivtsov,
O. N. Rzhiga, A. I. Sidorenko et al. // Earth, Moon and Planets.— 1990.—
Vol. 50/51.— P. 533.
84. Pettengi!! G. H., Farb P. G., Nozette S. Venus: global surface radar reflec¬
tivity // Science.— 13 August 1982.— Vol. 217, Nb 4560.— P. 640.
85. Alexandrov Yu. N., Krivtsov A. P., Rzhiga O. N. Venera-15 and -16 spa¬
cecraft: some results of Venus surface reflection measurements // Abstracts
Lunar Planet. Sci. Conf.— 1990.— Vol. 21.— P. 13.
86. Брацлавец П. Ф., Росселевич И. А., Хромов JI. И. Космическое телевиде¬
ние.— М.: Связь, 1973.— 248 с.
87. Селиванов А. С. Космическое телевидение на службе науки и народного
хозяйства // Техника кино и телевидения.— 1977.— № 10.— С. 61—67.
88. Селиванов А. С. Космос — миру. Телевизионные исследования планет.—
М.: Знание, 1990.— 64 с.
89. Очерки истории радиоастрономии в СССР.— Киев: Наукова думка, 1985.
—280 с.
90. Radar Astronomy / Ed. by J. V. Evans and T. Hagfors.— New York:
McGraw-Hill, 1968.— 697 p.
91. Ostro S. J. Radar detectability of Phobos and Deimos // Bull. Amer. Astron.
Soc.— 1986.— Vol. 18.— P. 815.
92. Андреев P. А., Орлов Ю. H. Специализированный процессор для цифро¬
вой обработки сигналов.— Препринт.— Москва, 1985.— 47 с.— ИРЭ АН
СССР № 5 (423).
93. А. с. 1706004, МКИ Al, Н 03 С 3/08. Формирователь линейно-частотно-
модулированных сигналов / А. С. Зайцев, В. Е. Зимов, Г. М. Петров.—
Опубл. 15.01.92, Бюлл. № 2.
94. Хасянов А. Ф. Методика определения рельефа планет с помощью радио¬
локации // Тез. докл. 12 Всесоюз. науч-техн. конф. по распространению
радиоволн. Ч. 1.— Томск, 1978.— С. 147.
95. Выбор параметров при реализации фазового метода измерения дальности
с одношкальным отсчетом / Н. М. Анцибор. М. И. Жодзишский,
Ю. М. Круглов и др. // Радиотехника.— 1975.— Т. 30, № 8.— 19 с.
96. Космические траекторные измерения / П. А. Агаджанов, Н. М. Бараба¬
нов, Н. И. Буренин и др.; Под ред. П. А. Агаджанова, В. Е. Дулевича,
А. А. Коростелева.— М.: Сов. радио, 1969.— 498 с.
97. Анцибор Н. М., Жодзишский М. И. Измерение частоты сигнала на фоне
шума с помощью цифровых систем ФАПЧ // Радиотехника.— 1979.— Т.
30, № 5.— 35 с.
СОДЕРЖАНИЕ
Предисловие 3
Введение . 5
Глава 1. Обзор программ исследования дальнего космоса 8
1.1. Отечественные программы исследований 9
1.1.1. Программа исследования Луны 9
1.1.2. Программа исследования Венеры 10
1.1.3. Проект «Вега» 13
1.1.4. Первая программа исследования Марса .... 16
1.1.5. Проект «Фобос» 17
1.2. Американские программы исследований 19
1.2.1. Лунная программа 19
1.2.2. Программа исследования планет Солнечной системы 20
Глава 2. Режимы работы и основные характеристики многофунк¬
ционального радиокомплекса дальней космической связи ... 27
2.1. Состав и режимы работы радиосистемы ДКС . . 27
2.2. Энергетические соотношения в радиосистеме ДКС 29
2.3. Обзор развития отечественной системы ДКС . 33
Глава 3. Особенности распространения радиоволн в дальнем
космосе 38
3.1. Параметры тропосферы Земли и ее влияние на условия ра¬
диосвязи 39
3.2. Влияние ионосферы Земли на условия радиосвязи ... 44
3.3. Влияние атмосфер других планет на распространение радио¬
волн 52
3.4. Влияние межпланетной и околосолнечной плазмы на распро¬
странение радиоволн 54
3.5. Критерии выбора и особенности использования полос радио¬
частот для исследования дальнего космоса 57
3.6. Международно-правовые основы использования полос радио¬
частот для радиолиний дальнего космоса 60
3.7. Полосы радиочастот перспективных радиолиний дальнего кос¬
моса 63
Глава 4. Системы передачи командно-программной и телеметриче¬
ской информации 66
4.1. Общие особенности систем передачи информации, обеспечива¬
ющих полет дальних КА 66
4.2. Принципы построения системы передачи командно-программной
информации 69
323
4.3. Принципы построения системы передачи телеметрической ин¬
формации 75
Глава 5. Системы измерения параметров движения космических
аппаратов 82
5.1. Принципы построения и задачи систем траекторных измерений 83
5.2. Измерение дальности 85
5.2.1. Фазовый многочастотный дальномер 85
5.2.2. Фазовый дальномер с использованием псевдослучайных
кодов 91
5.3. Измерение радиальной скорости 92
5.4. Точность измерения. Составляющие погрешностей измерения 93
5.4.1. Погрешности измерителя радиальной скорости . 93
5.4.2. Погрешности измерителя дальности 95
5.5. Радиоинтерферометр со сверхбольшой базой в составе сети
слежения за дальними КА 96
5.5.1. Принципы работы и структурная схема радиоинтерферо¬
метра со сверхбольшой базой (ИББ) 97
5.5.2. Центр обработки интерферометрической информации . 100
Глава 6. Бортовые магистральные комплексы . - 102
6.1. Радиосвязь с Землей 102
6.2. Радиосвязь со спускаемым аппаратом 109
6.3. Радиосвязь с аэростатным зондом 112
6.4. Основные характеристики бортовых радиокомплексов 113
Глава 7. Наземная сеть слежения за дальними КА 114.
7.1. Задачи и принципы построения наземного автоматизирован¬
ного комплекса управления 114
7.2. Управление дальними КА на различных этапах полета7 . 122
7.3. Особенности и основные принципы построения станций сле¬
жения 124
7.4. Функциональная схема и основные технические характеристи¬
ки станции слежения 126
7.5. Контроль технических характеристик станции слежения . . 133
7.6. Управление станцией слежения в типовом сеансе связи . . 134
7.7. Дополнительные задачи, решаемые станциями слежения . . 138
Глава 8. Наземные антенные системы 139
8.1. Задачи и основные особенности антенного комплекса . . 139
8.2. Антенны АДУ-1000 . . 140
8.3. Антенны дальней связи с диаметром зеркала 32 м . . 141
8.4. Приемопередающая антенна РТ-70 145
8.4.1. Зеркальная система и СВЧ параметры . . 147
8.4.2. Система наведения . . 156
8.5. Резервы снижения суммарной СКО наведения РТ-70 . 163
8.5.1. Усовершенствование ЭСП основного зеркала . 163
8.5.2. Усовершенствование ЭСП контррефлектор а . . . 169
8.6. Углоизмерительные системы и устройства РТ-70 . . . 169
8.7. Метод предсеансовой радиоюстировки для повышения точ¬
ности наведения РТ-70 174
Глава 9. Бортовые автономные радиосистемы траекторных измерений 176
9.1. Системы сближения и стыковки КА . . . .177
9.1.1. Общие сведения . .177
324
9.1.2. Сближение и стыковка кооперируемых КА . . . . 180
9.1.3 Особенности систем сближения с некооперируемым КА 195
9.2. Радиосистемы прицельной посадки на поверхность планеты . 196
9.2.1. Общие сведения 196
9.2.2. Основные особенности радиосистемы прицельной посадки 198
9.3. Системы навигационных измерений относительно поверхности
планеты 204
9.3.1. Общие сведения 204
9.3.2. Бортовой посадочный радиолокатор 207
9.3.3. Радиосистема автозыбора места посадки . . . . 219
Глава 10. Бортовые средства картографирования и измерения ло¬
кальных характеристик поверхности планет 222
10.1. Метод синтеза апертуры при покадровой съемке . . . 224
10.1.1. Разделение сигналов по удаленности и радиальной
скорости отражающих элементов поверхности . . 224
10.1.2. Принципы когерентной обработки отраженного сигнала 226
10.1.3. Разрешающая способность 230
10.2. Выбор характеристик радиолокационной съемки .... 233
10.2.1. Выбор длины волны. Влияние атмосферы Венеры . 233
10.2.2. Контрастность изображения 235
10.2.3. Погрешность измерения мощности отраженных сигна¬
лов 236
10.2.4. Угол обзора и высота съемки 237
10.3. Выбор параметров антенны РЛС 239
10.3.1. Определение полезной части кадра 239
10.3.2. Ширина диаграммы направленности .... . . 242
10.3.3. Уровень боковых лепестков 244
10.4. Оценка помех фазоманипулированного сигнала .... 245
10.4.1. Двумерная весовая функция фазоманипулированного
сигнала 245
10.4.2. Выбор модулирующей последовательности . . 246
10.4.3. Оценка помех, создаваемых боковыми лепестками дву¬
мерной весовой функции 249
10.5. Выбор порога ограничения при квантовании сигнала в при¬
емнике 251
10.6. Принципы работы радиолокационной системы КА «Венера-15»
и «Венера-16» 253
10.7. Передача радиолокационной информации на Землю . . 256
10.8. Краткое описание эксперимента 258
10.9. Некоторые результаты радиолокационного картографирования
Венеры 262
10.10. Космические телевизионные системы 269
Глава 11. Наземная радиолокация планет 272
11.1. Особенности радиолокации планет 273
11.2. Диаграмма обратного рассеяния планеты и спектр отражен¬
ного сигнала 275
11.3. Расчет необходимого энергетического потенциала . . 277
11.4. Сопоставление различных систем планетной радиолокации . 280
11.5. Краткое описание планетного радиолокатора .... 282
11.5.1. Обобщенная функциональная схема 282
11.5.2. Синтезатор зондирующих ЛЧМ сигналов . . . 290
11.6. Процедура измерений 291
11.7. Спектры отраженных сигналов 293
11.8. Вторичная цифровая обработка 295
325
Глава 12. Зарубежные комплексы дальней космической связи и
международное сотрудничество 298
12.1. Характеристики американской сети слежения за дальними КА 299
12.2. Бортовой радиокомплекс КА «Галилей»
12.3. Японская сеть слежения за дальним космосом
12.4. Бортовой радиокомплекс японского КА «Сакигаке»
12.5. Будущие программы и перспективы международного сотруд
ничества
12.5.1. Российская программа последующего изучения Марса
12.5.2. Будущая программа США и международное сотрудни
чество
Список основных сокращений
Список литературы
303
304
306
308
308
313
317
318
Научное издание
Бакитько Рудольф Владимирович, Васильев Михаил Борисович,
Виницкий Аркадий Саввич, Гришмановский Виктор Александрович,
Зайцев Александр Леонидович, Кержанович Виктор Валентинович,
Молотов Евгений Павлович, Орешкин Владимир Павлович,
Петров Геннадий Михайлович, Ржига Олег Николаевич,
Рогальский Владислав Иванович, Селиванов Арнольд Сергеевич
РАДИОСИСТЕМЫ МЕЖПЛАНЕТНЫХ
КОСМИЧЕСКИХ АППАРАТОВ
Заведующий редакцией Ю. Н. Рысев
Редактор Э. М. Горелик
Переплет художника А. А. Данилина
Художественный и технический редактор Т. Н. Зыкина
Корректор Н. Л. Жукова
ИБ № 2511
ЛР No 010164 от 04.01.92
Сдано в набор 8.09.93 Подписано в печать 10.11.93 Формат 60x847i6
Бумага тип. № 2 Гарнитура литер. Печать высокая
Уел. печ. л. 19,06 Уел. кр-отт. 19,06 Уч.-изд. л. 20,97 Тираж 1000 экз.
Изд. № 23575 Зак. №> 4229 С-096
Издательство «Радио и связь». 101000 Москва, Почтамт, а/я 693
Производственно-издательский комбинат ВИНИТИ.
140010, Люберцы, 10, Московской обл., Октябрьский просп., 403
Фирма «Экзотерм»
Предлагает к продаже самые совершенные системы индиви¬
дуального радиопоиска [Pager] мирового лидера в производстве
и использовании системы связи фирмы «Motorola» (США).
Эти миниатюрные приемные устройства позволяют отыскать
Вас и сообщить необходимую Вам информацию в любой точке
города Москвы и ближнего Подмосковья. Они избавят вас от не¬
обходимости носить повсюду с собой дорогостоящие и громозд¬
кие радиотелефоны.
Pager — Ваш незаменимый маленький друг, поможет пол¬
учить, а также обработать речевую, цифровую, и цифро-тексто-
вую информацию в нужный момент, не доставляя Вам
беспокойства все остальное время.
Малые размеры и масса прибора, простота обращения, уни¬
версальность использования в совокупности с гарантией каче¬
ства и надежности, а также сравнительно низкой ценой
предоставят Вам неоспоримые преимущества.
Характеристики различных систем
индивидуального радиопоиска
Масса (включая
источник питания)
Размеры
Чувствительность
Избирательность
Способ вызова
Способ передачи
информации
Питание
80...90 г
8x5x2 см
5...10мкВ/м
60...70 дБ при ± 25 кГц
тоновый, вибрационный
речевой, визуальный
(цифровой, текстовый на
дисплей)
1,5 В постоянного тока
Фирма «Экзотерм» обеспечит Ваше подключение к сети
пользователей системой индивидуального радиопоиска.
Телефон (095) 925-26-01
Факс (095)231-64-19
Фирма «Экзотерм»
Продает оптом и в розницу автомобильные и носимые рз
диостанции гражданского диапазона 27 МГц.
Наши радиостанции производства Южной Кореи, импорт*
руемые из США, обойдуться Вам в полтора - два раза дешевле
рыночной цены на аналогичные устройства.
Портативная и надежная аппаратура двусторонней симплек
сной радиосвязи для автолюбителя, бизнесмена, фермера, прг
раба, администратора, охотника, коммерсанта, диспетчера.
Для всех, кто ценит время и деньги, безопасность и инфо*
мировакность!
Радиостанция обеспечит техническую и медицинскую по¬
мощь, консультацию специалиста, дорожную информацию, иск¬
лючит противоправные действия нежелательных лиц на Ваших
объектах, принесет радость общения.
Сорок каналов оперативной связи в масштабах районов и
округов столиц, областных центров, фермерских хозяйств, круп¬
ных строек. Свобода перемещений в лабиринтах улиц, на про¬
сторах тундры, в хаосе руин и дебрях «медвежьих углов».
Технические характеристики автомобильных станций.
«ROAD ALERT-400», «ROAD ALERT-100»
Диапазон частот 26,975...27,405 МГц
Число каналов 40
Выходная мощность 4 Вт
Вид модуляции амплитудная
Чувствительность 0,7 мкВ при отношении сигнал-шум 10 дБ
Избирательность
RA-400 не хуже 50 дБ при ± 10 кГц
RA-100 не хуже 40 дБ при ± 10 кГц
Питание 12 В постоянного тока
Дальность связи от 5 до 60 км в зависимости от
комплектации
Дополнительное оборудование
антенны автомобильные магнитные и стационарные
антенны базовые
согласующие устройства
блоки питания на 8 — 20 А
Фирма «Экзотерм» реализует полуфабрикаты печатных плат
40-канальных радиостанций по доступным ценам.
Предусмотрена любая форма оплаты, поставка со склада в
Москве и на заказ.
Телефон (095) 925-26-01
Факс (095> 231-64-19