/






































































































































































Автор: Белов Л.А. Кочемасов В.Н. Оконешников В.С.
Теги: электротехника радиолокация обработка сигналов
Год: 1983




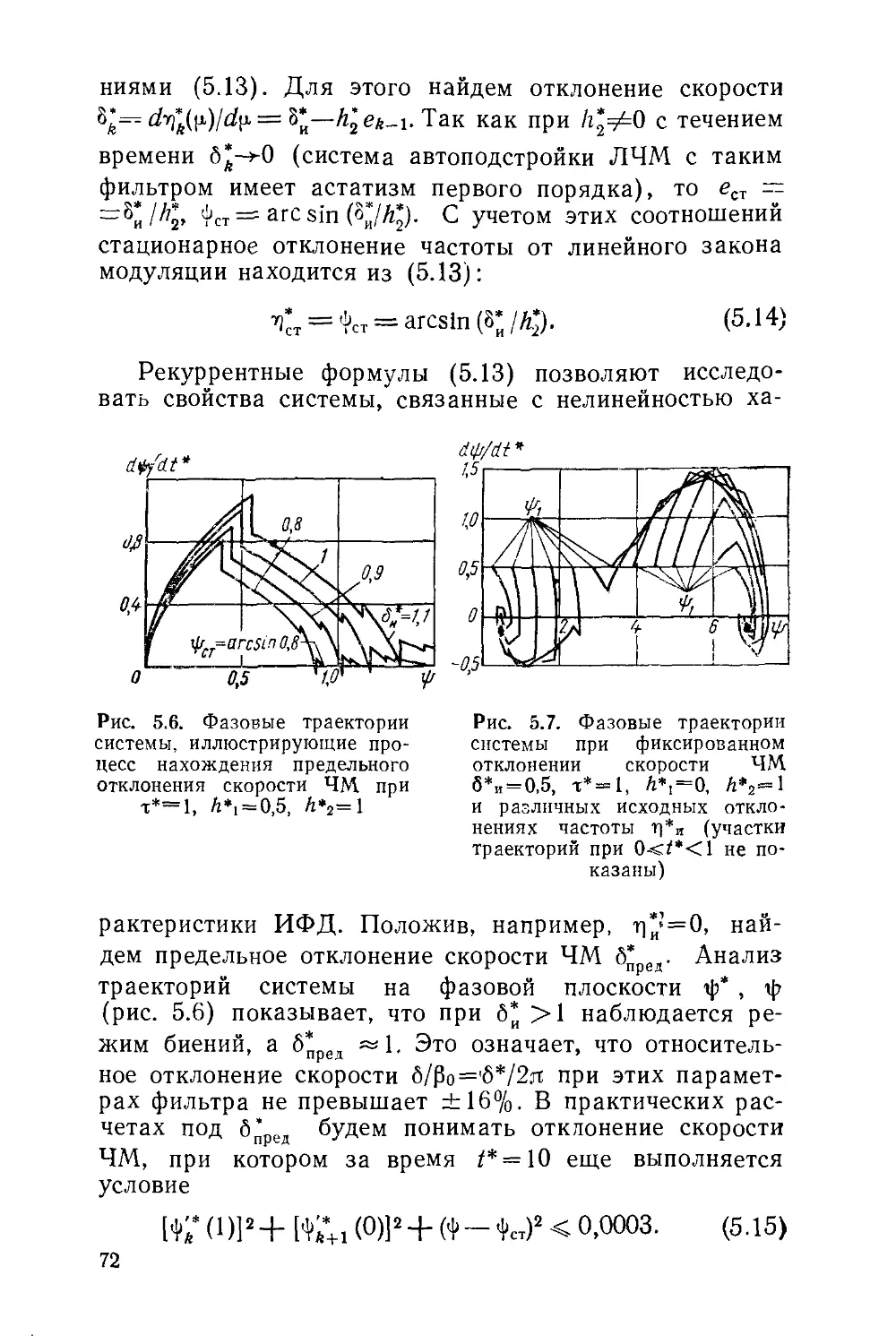
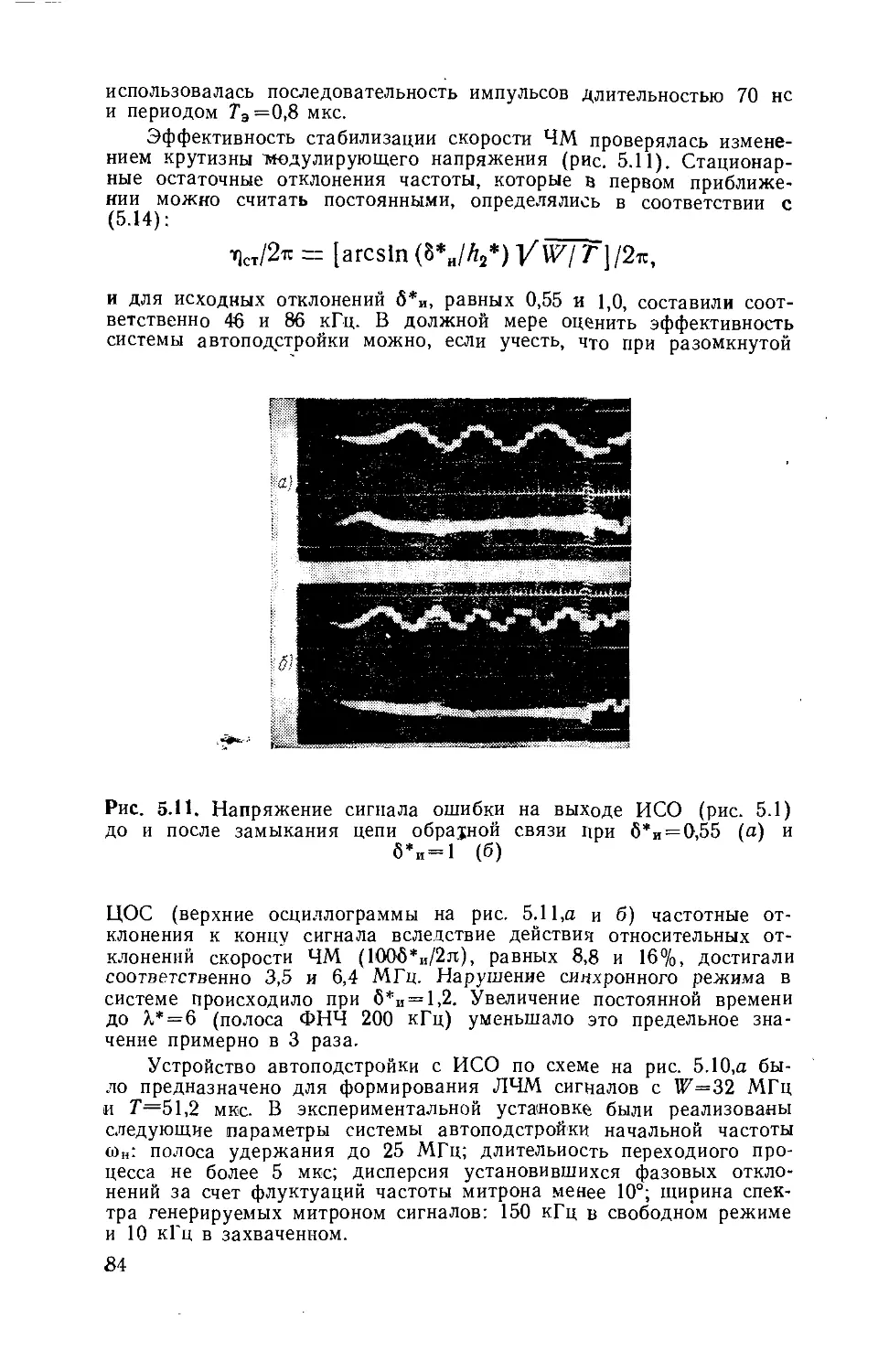
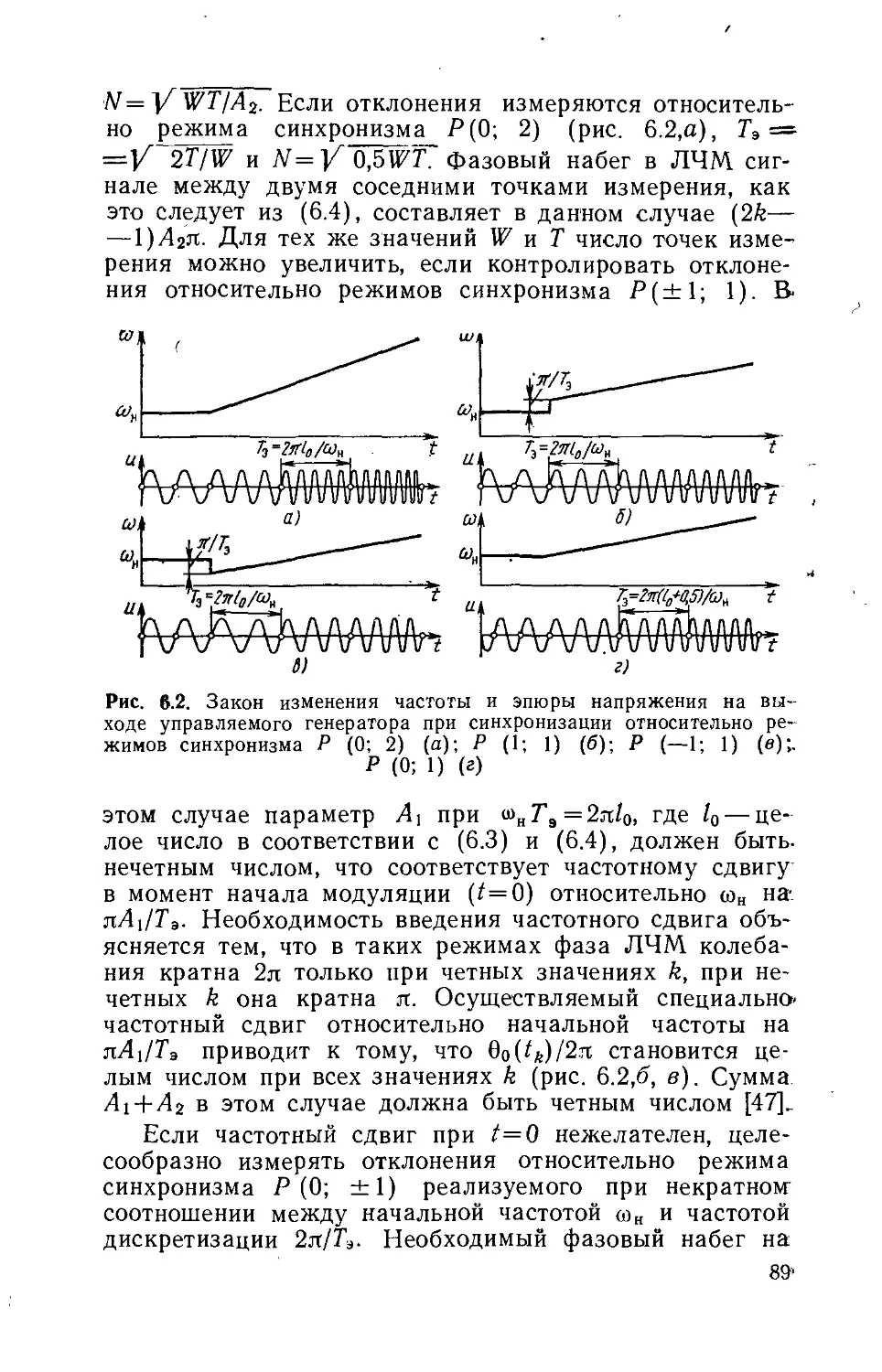
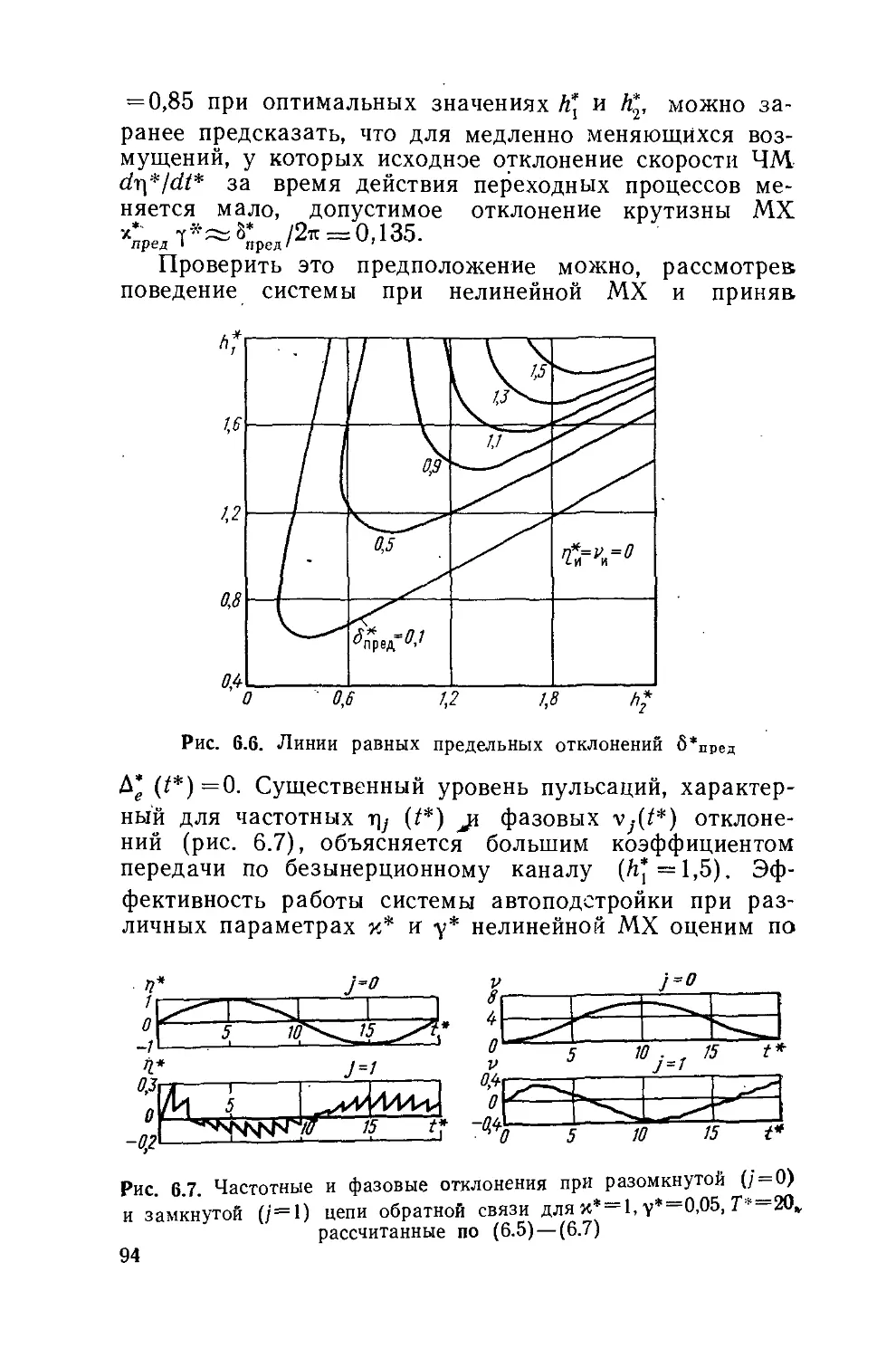
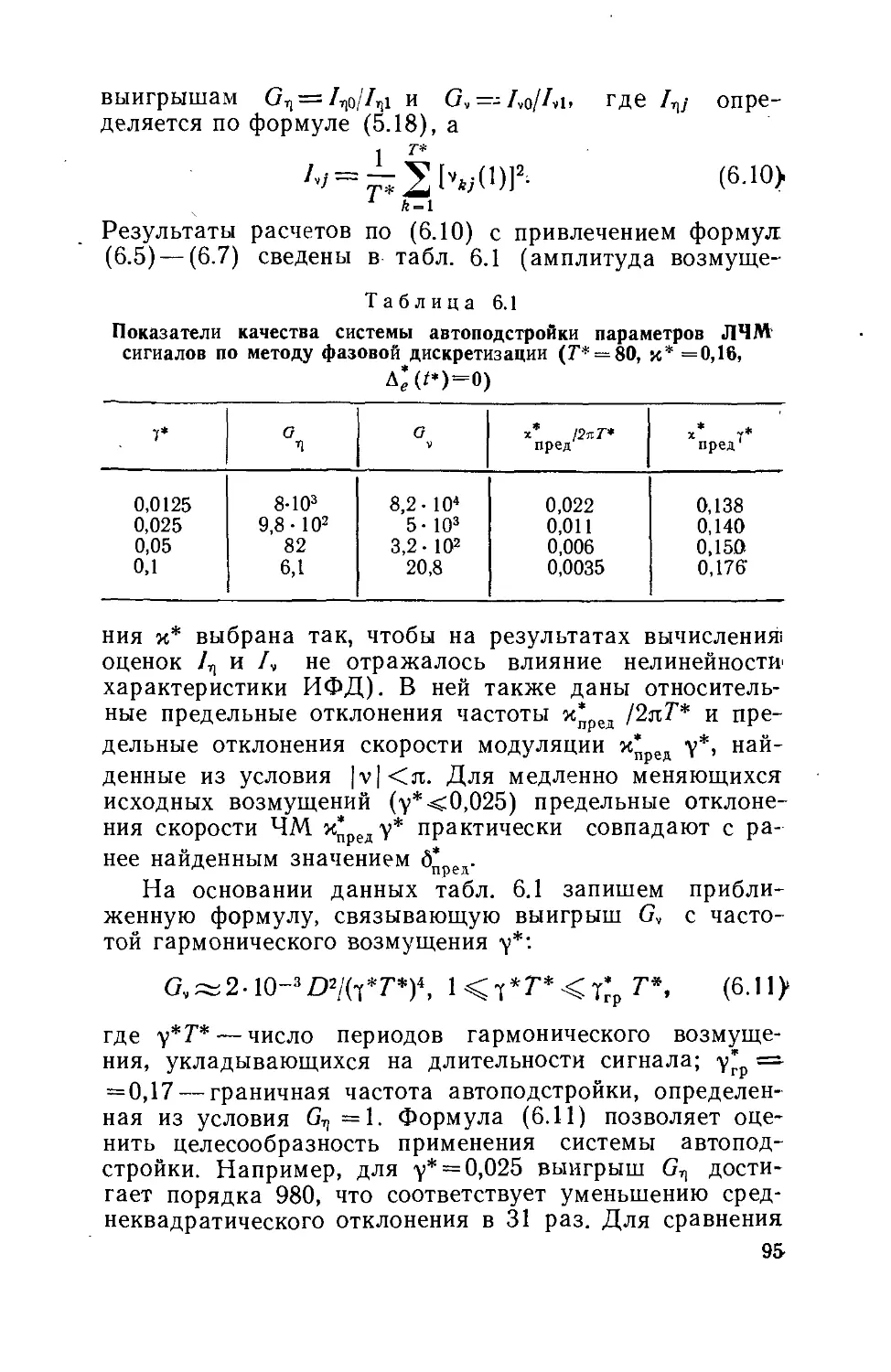
Текст
В.Н.НЛЧЕМАСОВ,Л.А.6ЕЛо'в.В.С.ОНОНЕШНИЛОВ
ФОРМИРОВАНИЕ
СИГНАЛОВ
С ЛИНЕЙНОЙ
ЧАСТОТНОЙ
МОДУЛЯЦИЕЙ
В.Н.КОЧЕМАСОВ.Л.А.БЕЛОВ.В.С.ОКОНЕШНИКОВ
ФОРМИРОВАНИЕ
СИГНАЛОВ
С ЛИНЕЙНОЙ
ЧАСТОТНОЙ
МОДУЛЯЦИЕЙ
Scanned & DJVUed
МОСКВА
„РАДИО И СВЯЗЬ”
1983
ББК 32.95
К75
УДК 621.376.32:621.396.962.25
Кочемасов В. Н., Белов Л. А., Оконешников В. С.
К75 Формирование сигналов с линейной частотной
модуляцией. — М.: Радио и связь, 1983. — 192 с., ил.
55 к.
Рассмотрены различные методы и устройства для формирования
как непрерывных, так н импульсных сигналов с линейной частотной
модуляцией (ЛЧМ)—от пассивных схем до систем автоподстройки
н сложных синтезаторов. Оценены их возможности по девиации ча-
стоты, скорости перестройки, частотным и фазовым ошибкам. Сфор-
мулированы требования, обеспечивающие заданные характеристики
сигнала на выходе приемника, и указаны возможные применения
таких сигналов. Уделено внимание методам предыскажения ЛЧМ
сигналов, обеспечивающим низкий уровень боковых лепестков на вы-
ходе схемы обработки.
Для инженеров, специализирующихся в области формирования
и обработки сигналов. Может быть полезна научным сотрудникам и
аспирантам.
2402020000-132 ББК 32.95
К 046(01 )-83 14’83 6Ф2
РЕЦЕНЗЕНТЫ: доктор техн, наук, проф. И. С. ГОНОРОВСКИИ;
доктор техн, наук, проф. Ю. И. ПАХОМОВ
Редакция литературы по радиотехнике
© Издательство «Радио и связь», 1983
Предисловие
В последние годы начали интенсивно развиваться
теория и техника формирования сложных сигналов, в
частности частотно-модулйрованных сигналов, которые
играют решающую роль в системах радиолокации и
гидролокации, радиосвязи, радионавигации и др. Исто-
рически первыми стали применяться занимающие сей-
час особое место радиосигналы с линейной частотной
модуляцией (ЛЧМ), позволяющие обеспечить большие
(до нескольких гигагерц) полосы частот и широкий ин-
тервал длительностей. Вопросам формирования и иссле-
дования ЛЧМ сигналов посвящены работы Кука, Кэпь-
юти, Кибблера, а также советских специалистов
Л. Е. Варакина, А. С. Виницкого, И. С. Гоноровского,
М. Е. Лейбмана, Я. Д. Ширмана и др. Однако в этих
работах не нашли отражения многие современные тех-
нические средства формирования ЧМ сигналов.
Для формирования ЛЧМ сигналов вследствие значи-
тельного разнообразия требований к параметрам и точ-
ности их реализации используются различные устрой-
ства— от пассивных с дисперсионными линиями за-
держки и управляемых автогенераторов до прецизион-
ных синтезаторов с несколькими системами автопод-
стройки. Поэтому необходимо обобщить опыт теорети-
ческого и экспериментального исследования таких
устройств и помочь разработчикам в выборе требова-
ний к сложным сигналам, понять особенности форми-
рования и обработки составных, ступенчатых и нели-
нейных ЧМ сигналов, правильно ориентироваться в ме-
тодах уменьшения искажений, возникающих при уси-
лении сигналов и излучении с помощью крупноапертур-
ных фазированных решеток.
Книга является первой попыткой систематического
изложения широкого круга вопросов генерирования и
синтеза сложных ЧМ сигналов на примере широко рас-
пространенного ЛЧМ сигнала. Основное внимание уде-
лено импульсным ЧМ сигналам, произведение полосы
частот на длительность импульса (база) которых ме-
3
няется от единиц до десятков тысяч. Излагаются общие
понятия, анализируются требования к устройствам фор-
мирования, вытекающие из различных применений. По-
казано, что относительное частотное отклонение обрат-
но пропорционально базе сигнала и для реализации
требуемой точности формирования ЛЧМ сигнала при
малых базах можно использовать несложные устройст-
ва, при больших базах — более сложные, включающие
системы автоматической подстройки или специальные
синтезаторы. Для улучшения качества выходных сиг-
налов необходимо учитывать влияние пульсаций спек-
тра на уровень и форму боковых лепестков функции
неопределенности при средних и малых базах сигнала
и особенности формирования сигналов с нелинейной
ЧМ, а также использовать методы предыскажений ЛЧМ
сигналов для улучшения качества сжатия.
В основу книги положены работы авторов, а также
материалы, опубликованные в советской и зарубежной
периодической печати, оригинальные технические ре-
шения.
Работа по написанию книги распределилась следую-
щим образом: гл. 2, 5—7, § 4.1, 4.7, 8.1—8.3, 11.2, 11.4
написаны В. Н. Кочемасовым; предисловие, гл. 3,
§ 4.2—4.5, 4.8, 8.4, 10.4, гл. 12 — Л. А. Беловым; гл. 1, 9,
§ 4.6, 10.1 —10.3, 11.1, 11.3 — В. С. Оконешниковым.
Авторы благодарят М. В. Капранова и С. С. Карин-
ского, содействовавших постановке ряда вопросов, раз-
витых в книге, А. Д. Ревуна, В. В. Лапшина, А. М. Том-
ского, В. П. Кряжева, М. Ю. Зацепина за помощь в
проведении расчетов и эксп<?риментов. Авторы выража-
ют искреннюю признательность докторам технических
наук, профессорам И. С. Гоноровскому и Ю. И. Пахо-
мову, чья доброжелательная критика способствовала
улучшению рукописи, а также Г, П. Беловой, Н. В. Гор-
деевой, помощь которых обеспечила подготовку рукопи-
си к печати.
Замечания и пожелания авторы просят направлять
в издательство «Радио и связь» (101000, Москва, Чисто-
прудный бульвар, 2).
Глава 1
ЧАСТОТНО-МОДУЛИРОВАННЫЕ СИГНАЛЫ
1.1. Виды частотно-модулированных сигналов
К сложным сигналам относят радиосигналы, пара-
метры которых изменяются в течение импульса или пе-
риода повторения по определенному, детерминирован-
ному закону, так что база сигнала — произведение
девиации частоты W на длительность Т — D = TW^1.
Выбор конкретного сигнала определяется его назначе-
нием. Частотно-модулированные (ЧМ) сигналы широко
применяются во многих областях техники: радиолока-
ции, радионавигации, системах связи (в том числе кос-
мических), радиоизмерениях и т. д. Использование
сложных сигналов в радиолокации обеспечивает высо-
кую разрешающую способность и по дальности, и по
скорости, позволяет существенно повысить информатив-
ность радиосистем.
Чаще всего используются ЛЧМ сигналы, которые
имеют определенные преимущества перед другими
сложными сигналами: возможность достижения боль-
ших девиаций частоты (1 ГГц и более) и значительной
скорости перестройки; сравнительная простота измене-
ния формы огибающей ЧМ сигнала и скорости частот-
ной модуляции для улучшения параметров сжатого
сигнала, простота оценки, измерения и коррекции иска-
жений. Они используются в качестве базовых при фор-
мировании непрерывных ЧМ сигналов треугольной,
пилообразной или зигзагообразной формы [115] либо
сигналов с V-, М-образной ЧМ, импульсных последова-
тельностей, а также сигналов, разнесенных по спектру
[66, 115]. Эти сигналы при надлежащем выборе их па-
раметров обеспечивают высокую разрешающую способ-
ность одновременно по дальности и скорости, сохраняя
при этом все достоинства ЛЧМ сигналов. Благодаря
отмеченным преимуществам, а также тому, что методы
и устройства обработки ЛЧМ сигналов и сигналов, по-
5
строенных на их основе, хорошо разработаны, эти сиг-
налы привлекают внимание специалистов многих отрас-
лей техники.
Кроме сигналов с линейным (или кусочно-линей-
ным) законом ЧМ используют сигналы с нелинейным
законом ЧМ. Это позволяет уменьшить отношение сиг-
нал-шум или повысить разрешающую способность и по
дальности, и по скорости. Сигналы с дискретной ЧМ
применяются в системах связи, радиолокации и часто
используются как сигналы, аппроксимирующие требуе-
мый (линейный или нелинейный) закон изменения ча-
стоты [22, 83].
Соответствие сигнала поставленным требованиям
оценивается по функции неопределенности, наиболее
полно отражающей его потенциальные возможности и
информативность. База сигнала выступает как ограни-
чительная характеристика практической реализации то-
го или иного сигнала с заданной точностью на основе
рассматриваемого принципа формирования и обработ-
ки ЧМ сигналов. Чем больше база сигнала, тем выше
потенциальные возможности, информативность сигнала,
но тем труднее реализовать его с необходимой точ-
ностью. В частности, в радиолокации увеличение девиа-
ции частоты сигнала приводит к повышению разрешаю-
щей способности по дальности, а использование сигнала
большей длительности»,— к повышению разрешающей
способности по скорости. К спектру сигнала чаще всего
обращаются при практической реализации конкретных
устройств.
1.2. Функции неопределенности и спектры ЧМ сигналов
Для определения требований к точности изменения
частоты в устройствах формирования ЧМ сигналов не-
обходимо оценить влияние отклонений от закона ЧМ на
основные характеристики ЧМ сигналов, такие как функ-
ции неопределенности сигнала и его спектр. Для при-
мера рассмотрим ЛЧМ сигнал с прямоугольной оги-
бающей [38]:
m ft/cos[<o0*4-0,5?0/2 + <Po] при р|<0,5Г
1 ’ |0 при р|>0,5Т,
где U, ыо. ₽о. <ро — амплитуда, центральная частота, ско
рость ЧМ и начальная фаза сигнала.
6
Иногда такой сигнал удобнее представить в ком-
плексной форме
U(0,oZ + 0’W2 + tP°)] при |£|<0,5Г,
U (о при |/|>0,57’.
Спектр ЛЧМ сигнала с прямоугольной огибающей
описывается выражением [51]
Sa (w) = U /7721Г exp [- J (® - <М2 Г/4« IT] X
X[Z(^) + Z(X2)], (1.2)
где AIj2 = /D/2 [1 ± (ш - ш0)/« U7];
X
Z (X) = J е^2 dt — интеграл Френеля,
о
Форма амплитудно-частотного спектра сигнала
близка к прямоугольной, но отличается от нее плав-
ными переходами и пульсациями, наиболее яркими на
граничных участках полосы (рис. 1.1). При больших
Рис. 1.1. Осциллограммы спектра ЛЧМ сигнала с прямоугольной
огибающей при значениях базы, равных 10(a); 15(6); 30(e); 62(e)
7
00
Таблица 1.1
Функции неопределенности и спектры ЛЧМ сигналов
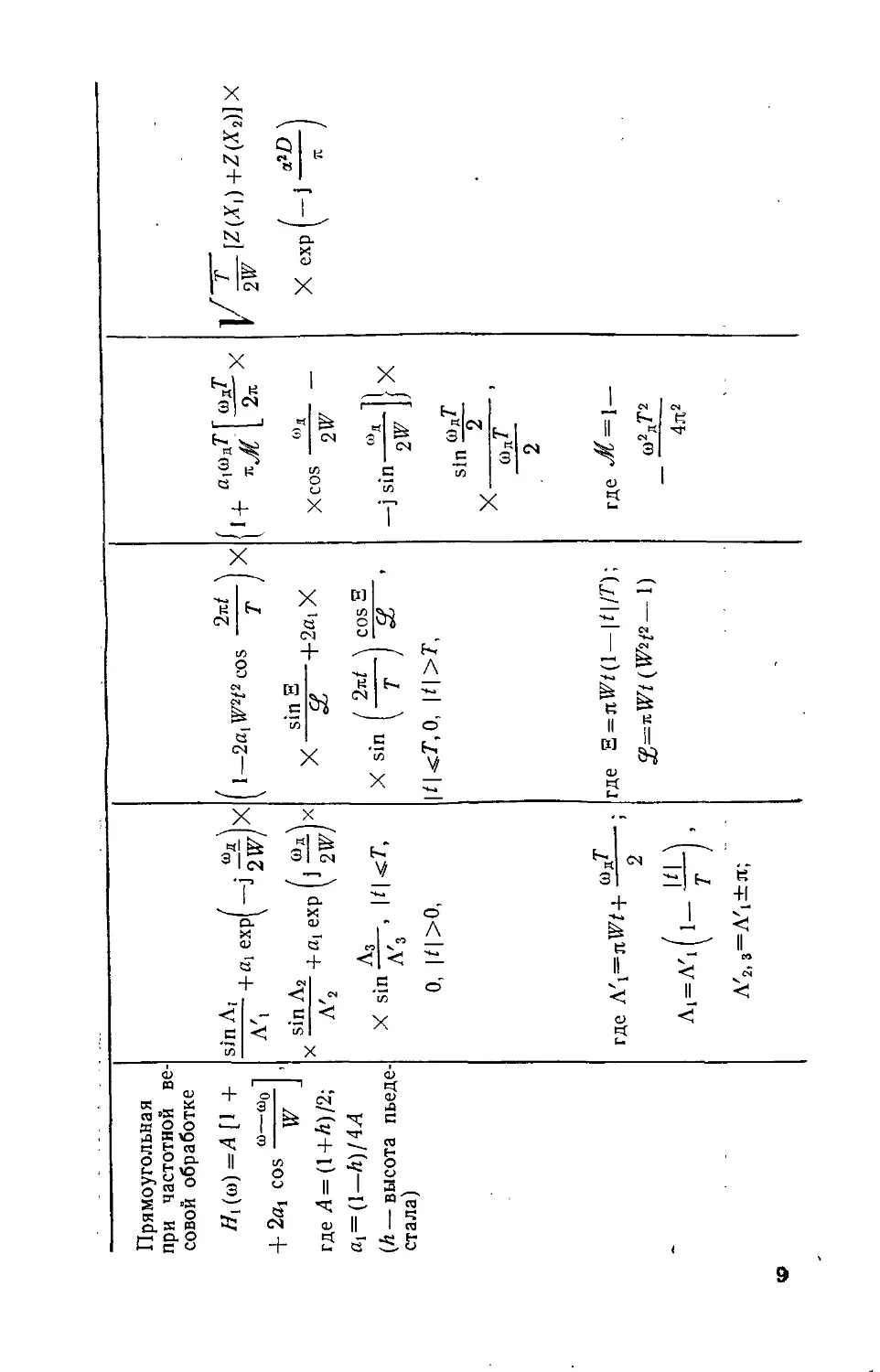
Форма огибающей Функция неопределенности |g(^, Шд)| Сечення функции неопределенности ч Спектр Su (ы)
|g(^, 0)1 1 g(0, <0д) I
Прямоугольная 1 Г . Г! (АцТ\ . МдТ sin 2 |/ -LlZ^O+Z^JX
~у? exp|j(uH + sin 1 л 1 X
, 71 w \i ЫдТ ** niw ылГ 2 / a^D \ Хехр — j
Т /J И <0,5 Т, о, |/|>о,5т ( 1Л м Х р- г 1 А 1—d, |/|<л о, hi > т . KI<T 0, |/|>т \ к / где Z(X)=|cxp j — df; б \ z /
*"«-1/4(1± v)’ (0 — <0q 2W
Прямоугольная
при частотной ве-
совой обработке
Hi (со) =А [1 +
+ 2аг cos
(О-(Oq
W
sin At / . <од\
А'! +а‘ехр( j2W7X
где А= (1+Л)/2;
Й1 = (1-Л)/4Л
(Л — высота пьеде-
стала)
Sin Л;
Л72
/ (Од \
+ И1 exp j — х
V 2WJ
X sin |/| <Т,
Л'з
О, |i|>0,
т
где Л'1=л1Г/+
2
А'2,3=Л'1±я;
<о
1—20,15/2/2 cos
о.ОдТ Г (ОдТ1
sin s
cp +2t?i X
/ 2г/ \ cos S
x sin
ИсГ.О, |/|>Т,
где Е=лШ(1|/|/7');
X=r.Wt(W^— 1)
°'д
Xc0S4F
. . ч
—J sin-------
21F
sin
2
ЫдГ
2
где M — 1—
_ m2«P
4л2
|/ _L.[Z(X,)+Z(X2)]X
X exp I — j----
\ ft /
Окончание табл. 1.1
Форма огибающей Функция неопределенности 1?(Л«д) 1 Сечения функций неопределенности Спектр .с S«(a)
|g(/, 0)1 lg(0, Шд) |
/ 1 z А-2» 3 2j 3 1 I ' 1 у, 1 \ ± D ) |± ¥ * !
Колоколообразяая 1 4k2 \i/i X \ 7U / X ехр (—&t2) X Хехр [j(«ot + nWt2 \1 + Т )] ехр | — — j\2t2 + (2лШ/7’+о>д)2 ' + 4й2 1 Г 1 / exp I — ~ ( fe2+ T2k2 / J ( 1 “% \ exp\-T7F; / 2ji№ V/4 \^Т2+п^2] X v If - XeXPll 4(^27'-jW) + 1 k2T 1] + J “X- arctg ? 2 nW JJ
Косинусоидальная
1 / т-t \ —— cos — X Ут \ tJ Л 1£Ш P'K 11— cos |— 1 ><
X sxp[j (<!)(/+ + T JJ, sin A, sin До X + 2A2 +
И <0,5 T, 0, |Z|>0,5T sin A31 + 2Д, ]’ |/|<Г
0, |^|>T
где Д,=
х(.-Иф
1 л - Л IN ^2» з — Л.(Н“Л 11—
/ ~-t \ sin В C0S ~ sm 2 ]/ IfiZ(X\)+Z(X'2)}K
/ rcZ \ cos В -sm % Л 2 Xexp(ja)+[Z(X3) + + Z(X4)]exp (—ja)}X
I aiD \ X exp I — j , \ TC /
/, 2a \ где Z,b2= 1+ — X \ K /
v l/'D' , 1 .
A Г 2 ± V2D ’ Xs, 4 = X'l, 2-t- -g-
базах (/>>100) пульсациями спектра пренебрегают и
амплитудно-частотный спектр считают прямоугольным,
а фазочастотаый — параболическим, что является удоб-
ным в устройствах обработки сигнала. Для средних
значений базы предположение о прямоугольности спек-
тра может оказаться недостаточно корректным. При
малых базах (О<10) форма спектра существенно от-
личается от прямоугольной.
Функция неопределенности ЛЧМ сигнала с прямо-
угольной огибающей имеет вид
•^sin 1(кГ< + шдТ/2)(1 - I <|/Т))
~Wt 4- <»дТ/2
X exp ]
(1.3)
где Ид — абсолютная доплеровская расстройка частоты.
Тело неопределенности ЛЧМ сигнала с прямоугольной
огибающей имеет форму основного гребня и ряда до-
полнительных боковых. Вертикальные сечения поверх-
ности тела неопределенности вдоль осей частот и вре-
мени имеют лепестковую структуру. Наибольший инте-
рес представляет сечение корреляционной функции сиг-
нала вдоль оси времени, т. е. сечение g(/, 0). Уровень
боковых лепестков корреляционной функции спадает
достаточно медленно по гиперболическому закону
[19, 51].
Кроме ЛЧМ сигнала с прямоугольной огибающей,
применяются ЛЧМ сигналы с колоколообразной и ко-
синусоидальной огибающей [66, 83] (табл. 1.1). Коло-
колообразный ЛЧМ сигнал удовлетворяет условию
минимизации боковых лепестков после сжатия [19, 20,
51, 83], но на практике реализовать его достаточно
трудно, особенно при использовании усилителей мощ-
ности, работающих в режиме насыщения [51]. В этом
случае можно сформировать сигнал с косинусоидаль-
ной огибающей [66], близкий по своим параметрам к
ЛЧМ сигналу с колоколообразной огибающей. Тело
неопределенности ЛЧМ сигнала с косинусоидальной
огибающей имеет форму скругленного главного гребня
с сопутствующими боковыми параллельно расположен-
ными гребнями, высота которых незначительна и убы-
вает достаточно быстро при удалении от главного
12
(рис. 1.2). Форма корреляционной функции косинусо-
идального ЛЧМ импульса, так же как п прямоугольно-
го, зависит от его базы, что проявляется в числе боко-
вых лепестков и их форме. Для прямоугольного ЛЧМ
импульса уровень первого бокового лепестка ниже на
13 дБ, а последующие убывают обратно_ пропорцио-
Рис. 1.2. Функция неопределенности ЛЧМ сигнала с косинусо-
идальной огибающей при Д=10
нально расстоянию до главного. Для косинусоидально-
го ЛЧМимпульса уровень первого бокового лепестка
не более —30 дБ, а последующие убывают обратно про-
порционально кубу расстояния до главного. С такой же
скоростью спадают'"'боковые лепестки* ~и‘ в сечении
g(0, (Од).
Спектр ЛЧМ импульса с косинусоидальной огибаю-
щей описывается выражением, содержащим вектор-
ную сумму интегралов Френеля. За счет компенсации
квазигармонических пульсаций обеспечивается гладкая,
форма амплитудного и фазового спектров, упрощается
синтез характеристик согласованного фильтра сжатия.
Сигналы с косинусоидальной огибающей могут най-
ти применение в тех случаях, когда ожидаются боль-
шие доплеровские расстройки частоты [51], например
в сигнале с V-образной ЧМ (|рис. 1.3,а). Амплитудный
13
спектр такого сигнала является действительной функ-
цией частоты и имеет осциллирующий характер
(рис. 1.3,6). Функция неопределенности этого сигнала,
состоящего из двух разнесенных во времени ЛЧМ со-
ставляющих (рис. 1.3,в), имеет высокий уровень боко-
Рис. 1.3. Характеристики ЛЧМ сигнала, составного во времени
вых лепестков, равный 0,5/ D, в виде пьедестала
(рис. 1-3,г), который определяется взаимной корреля-
ционной функцией двух составляющих сигнала.
Для уменьшения высоты пьедестала можно исполь-
зовать сигналы с зубчатой ЧМ, ЛЧМ составляющие ко-
Рис. 1.4. Характеристики ЛЧМ сигнала, составного по спектру.
14
a) \
.. |-----------------------------।_____________________1_
-W/2 0 W/2
Рис. 1.5. Изменение спектра ЛЧМ сигнала с Д=225 (а) при коди-
ровании фазы ^-последовательностями длиной 3 (б), 7 (в), 15 (г),.
31 (б)
15
торых разнесены по спектру. Подобные сигналы реали-
зуются в многоканальных устройствах формирования с
фазированной антенной решеткой (ФАР). В этих слу-
чаях ЛЧМсигналы, разнесенные по спектру (рис. 1.4,в),
могут быть совмещены во времени, как показано на
рис. 1.4,а. Такой сигнал представляет собой импульс с
постоянной несущей частотой «0 и осциллирующей оги-
бающей (рис. 1.4,6). При малых доплеровских рас-
стройках частоты пьедестал боковых лепестков в сжа-
том сигнале практически отсутствует (рис. 1.4,г).
В настоящее время значительный интерес прояв-
ляется к ЛЧМ сигналам с внутриимпульсной фазовой
манипуляцией (ЛЧМ ФМ). Использование таких сиг-
налов позволяет расширить возможности и увеличить
точность современных радиотехнических систем, обес-
печивает лучшее одновременное разрешение по даль-
,ности и скорости, чем обычный ЛЧМ сигнал, и в то же
время в отдельных случаях позволяет использовать
весовую обработку для снижения уровня боковых
лепестков отклика [48]. Спектр ЛЧМ ФМ сигнала
представляет собой смещенные по частоте спектры
ЛЧМ импульсов, суммирование которых определяется
соотношениями их фаз в зависимости от длины кодовой
последовательности (рис. 1.5). По мере увеличения дли-
ны последовательности амплитудный спектр все более
приобретает черты спектра шумоподобного сигнала, а
полоса частот, занимаемая ЛЧМ ФМ сигналом, рас-
ширяется.
1.3. Взаимные функции неопределенности
Основные положения теории сложных ЧМ сигналов,
и в частности теория согласованной фильтрации ЛЧМ
сигнала, широко освещены в литературе [19, 38, 51, 83,
115]. На практике для согласования параметров филь-
тра сжатия и сигнала формулируют требования к аппа-
ратурным искажениям устройств формирования или об-
работки сигнала. Решению этой задачи посвящено зна-
чительное число работ (например, [31, 51, 52]). Одни
из них затрагивают вопросы коррекции искажений ЧМ
сигнала в устройствах формирования [31], другие от-
ражают результаты исследований по снижению иска-
жений в устройствах обработки, и в частности в филь-
трах сжатия [51].
16
Для уменьшения уровня боковых лепестков сжатого
сигнала используют весовую обработку ЛЧМ сигнала.
Чтобы по уровню боковых лепестков определить требо-
вания к параметрам сигнала и фильтра сжатия, в част-
ности к точности формирования ЧМ сигналов (см.
гл. 3), необходимо исследовать свойства взаимной, функ-
ции неопределенности и ее структуру.
Взаимную функцию неопределенности можно опре-
делить в виде
gl(f,O = J- f + (1.4)
Zic J
где //i(w)—весовая функция, в качестве которой ис-
пользуют гауссовскую функцию, тейлоровские весовые
функции, и в частности косинус-квадратную функцию с
пьедесталом, которую можно привести к виду (см.
табл. 1.1).
(u>) = А [1 + 20] cos («> — о>о)/IF]. (1.5)
Если предположить, что при больших базах ЛЧМ
сигнал (1.1) имеет прямоугольную форму, то с учетом
(1-5)
gi (t, ®л) = ~т=- е^* 1
У 2те₽0
г» ь
§ е]ш*п?о) + а1е]ш"/'<7 J
- а а
ь
+ a1e~J’“,»/'F J с
Ь-<о0
выражения (1.6), получаем
(1-6)
где а = <о0 + — it IF;
= (<°о + шд/2) t +
Вычисляя интегралы
щд)
gi (0,0)
—м
2-IF J
1
sin Sin ^2
"T~ vtl “ ,u’ 1
+ a i е]'шд/ж
sin ЧД
nr
13
где ^ = («-<^/211^(1^+ шдВД; Т2.3=Ф1±
± (it — <Ba/2IF).
В форме тела взаимной неопределенности наблю-
дается лепестковая структура. Вдоль оси частот боко-
2—1022
17
вне лепестки убывают обратно пропорционально рас-
стройке частоты. Вдоль оси времени, как показывают
исследования [71], уровень боковых лепестков оказы-
вается наименьшим (—42,8 дБ), когда ai = 0,425 или
/i = 0,08. Исходя из этого предъявляют требования к точ-
ности параболического закона изменения фазы ЛЧМ
сигналов в 1 ... 3° [51].
При средних и малых базах сигнала становится за-
метным влияние пульсаций спектра на уровень и форму
боковых лепестков взаимной функции неопределенно-
сти. В этих случаях трудно достигнуть уровня боковых
лепестков ниже —(30 ... 35) дБ. Для оценки боковых
лепестков в этом случае необходимо учитывать отличие
амплитудного спектра от прямоугольного, фазового от
параболического, а кроме того, несогласованность
амплитудно- и фазочастотных характеристик сигнала и
устройства сжатия. Иногда несогласованность сигнала
с устройством сжатия проявляется в дополнительной
весовой обработке амплитудного спектра сигнала (см.
табл. 1.1). В большинстве случаев устройства сжатия
имеют ограниченные по полосе амплитудно-частотную
характеристику в виде весовой функции и фазочастот-
ную характеристику. Несогласованность этих характе-
ристик с реальным спектром приводит к более сложно-
му выражению для взаимной функции неопределенно-
сти.
Глава 2
Л
ПРИМЕНЕНИЯ ЛЧМ СИГНАЛОВ
2.1. Обнаружение целей и оценка их параметров
В современных РЛС для обнаружения целей и слежения за
ними часто применяются ЛЧМ сигналы, поскольку при их исполь-
зовании необходимо небольшое число доплеровских каналов. Свя-
зано это с гребенчатой формой функции неопределенности ЛЧМ
сигнала, при которой значительные доплеровские расстройки мало
сказываются иа амплитуде выходного сигнала приемника.
Совместное измерение дальности и скорости при наличии по-
мех можно осуществить, если в качестве зондирующего использо-
вать сигнал, состоящий из ряда ЛЧМ сигналов, начальные значения
фазы и частоты, скорость ЧМ и длительность которых в общем
случае неодинаковы [48, 115]. Простейшими частными случаями
составных сигналов являются сигналы с V-образиой ЧМ или несим-
метричной двуиаправлеииой ЧМ [51].
18
До недавнего времени применение когерентных последователь-
ностей широкополосных ЛЧМ импульсов в условиях неопределен-
ной частоты принятого сигнала было сложной задачей. Успехи,
достигнутые в построении приборов иа поверхностных акустиче-
ских волнах (ПАВ), открыли широкие возможности для обработки
таких сигналов [99].
Возможности импульсных последовательностей существенно
расширяются, если кодируется скорость ЧМ в отдельных импуль-.
сах [118] либо изменяется их начальная частота по линейному за-
кону [28]. Так, ..кодирование скорости позволяет снизить урореиь”)
боковых лепестков йа частотйбЩрем'ёнйои плоскости, а изменение '
начальной частоты позволяет радиолокационным станциям работать""
иа Малых дальностях. При этом в отличие от РЛС с непрерывными
ЛЧМ сигналами разрешение по дальности и относительный уровень
боковых лепестков остаются постоянными даже при значительном
перекрытии передаваемого и принятого сигналов [116].
Одновременное измерение дальности и скорости целей осущест-
вляется также РЛС с непрерывной ЧМ, например, по треугольному
закону [22]. Повышенный интерес к таким РЛС связан с достиже-
ниями в разработке твердотельных СВЧ приборов, позволяющих
получать в непрерывном режиме среднюю мощность по крайней
мере иа порядок больше, чем в импульсном. Трудности реализации
работающих в непрерывном режиме РЛС, связанные с необходи-
мостью устранения нелинейности ЧМ, в значительной степени оку-
паются простотой приемника. Помехоустойчивость таких РЛС при
работе в условиях сильных отражений можно повысить, усложнив
форму непрерывно излучаемых сигналов, например, псевдослучай-
ным изменением частоты в моменты смены знака скорости ЧМ при
модуляции по треугольному закону [125].
В некоторых случаях условия применения РЛС требуют адап-
тивного изменения параметров излучаемого сигнала. Например, в
РЛС поиска надводных целей [124] для устранения влияния отра-
жений от морской поверхности, маскирующих малоразмерные цели,
период пилообразных ЧМ сигналов меняется пропорционально
дальности до облучаемой цели, а девиация частоты поддерживается
равной 100 МГц. Этим обеспечивается высокое разрешение мало-
размерных целей иа небольших дальностях иа фойе отражений от
морской поверхности и эффективное обнаружение крупных целей
на больших расстояниях. На дальностях, меиьших 0,9 км, период
ЧМ сигналов фиксируется, а девиация частоты снижается до
37,5 МГц.
2.2. Распознавание космических объектов
Современные РЛС в состоянии ие только обнаруживать кос-
мические объекты и измерять параметры их движения, ио и опре-
делять их размер, конфигурацию, скорость вращения вокруг центра
тяжести и оси вращения. По изменению скорости вращения спу-
скаемого объекта при его вхождении в плотные слои атмосферы
можно определить его массу. Для решения этих задач необходимы
сигналы с полосой частот в несколько сотеи мегагерц. В литературе
встречаются упоминания об использовании для этого непрерывных
ЧМ сигналов и коротких иемодулироваииых радиоимпульсов с по-
лосой частот в несколько гигагерц [94], ио наибольшее применение
иашли все же ЛЧМ сигналы [46, 95, 101]. Поскольку дальность
2* 19
действия таких РЛС велика, для обеспечения заданного отношения
сигнал-шум увеличивают и длительность сигнала, например, до 1 мс
[101]. При этом база сигнала достигает порядка 106 и более. При
такой базе и тех скоростях, которые имеют космические объекты,
уже нельзя счйтать, что действие эффекта Доплера сводится толь-
ко к смещению центральной частоты. Кроме того, при полосах ча-
стот в несколько сотен мегагерц условия распространения радио-
волн для различных участков спектра сигнала оказываются неоди-
наковыми. В этих условиях применение для такого рода задач ФМ
сигналов практически невозможно. При использовании ЛЧМ сиг-
налов, для которых каждому моменту времени соответствует впол-
не определенная частота, эти эффекты могут быть скомпенсированы,
поскольку условия распространения радиоволн в различных участ-
ках спектра сигнала и параметры движения объектов контроли-
руются сигналами с относительно небольшой базой [101]. В таких
РЛС возможны три способа обработки принятого сигнала: корреля-
ционный, фильтровой и их комбинация—корреляционно-фильтро-
вой. Среди них первый и третий для РЛС с высокой разрешающей
способностью более предпочтительны, поскольку выходная инфор-
мация в иих легко преобразуется в цифровую и может быть исполь-
зована для анализа в ЭВМ.
Кратко охарактеризуем известные по литературе РЛС, предна-
значенные для распознавания космических объектов.
Станция AN/FPS-85 [46] является многофункциональной РЛС
дециметрового диапазона с ФАР и управляется с помощью двух
ЭВМ IBM-360. Дальность действия станции достигает нескольких
тысяч километров. Среди семи сигналов два ЛЧМ сигнала. Один
(длительностью 250 мкс) используется для поиска на больших даль-
ностях и идентификации объектов, другой — для сопровождения на
больших дальностях.
Флойдская РЛС и РЛС ALCOR [111] работают в режиме по-
очередного излучения узкополосных и широкополосных ЛЧМ сиг-
налов (табл. 2.1). В первоначальном варианте флойдская РЛС бы-
Таблица 2.1
Параметры широкополосных ЛЧМ сигналов, используемых
в РЛС для распознавания Целей
Параметры сигнала Флойдская ALCOR COBRA DANE LRIR
Начальная частота, МГц 3350 5665 1175 5500
Девиация частоты, МГц 500 500 200 1000
Длительность, мкс 40 10 1000 250
Импульсная мощность, МВт 10 4 15,4 0,5
Частота повторения, Гц 70 200 60 <1600
ла рассчитана иа ЛЧМ сигнал длительностью 20 мкс и девиацией
частоты 250 МГц. Для формирования этого сигнала (рис. 2.1) сме-
шивались сигналы генератора с девиацией частоты 247,5 МГц и
сигналы с девиацией частоты 2,5 МГц, полученные ударным воз-
буждением дисперсионной линии задержки (ЛЗ). Во флойдской
РЛС используется корреляционио-фильтровая обработка такого сиг-
20
Рис. 2.1. Схема приемно-передающей части флойдской РЛС:
ГИ — генератор коротких импульсов; Сум — сумматор; ДЛЗ — дисперсионная
линия задержки; Ком — коммутатор; См — смеситель; УПЧ — усилитель про-
межуточной частоты; ГЛЧМ — генератор ЛЧМ сигналов; У — усилитель
нала со 100-кратным измене-
нием временного масштаба.
Поскольку дисперсионная ЛЗ
имеет полосу 5 МГц и ее ха-
рактеристика линейна на ин-
тервале 40 мкс, одновременно
просматриваемый участок по
дальности составляет 30 м. В
РЛС ALCOR для обработки
широкополосного ЛЧМ сигна-
ла применяются сразу два
процессора. В одном спектр
входного сигнала разделяется
на 32 участка, сжатие во всех
участках производится парал-
лельно, после чего все отклики
объединяются. В другом про-
цессоре применяется корреля-
ционная обработка.
Радиолокационный ком-
плекс COBRA DANE [101]
предназначен для сбора ин-
формации о ракетах и спутни-
ках. В станции используется
11 ЛЧМ сигналов. Для распо-
знавания космических объек-
тов служит широкополосный
когерентный ЛЧМ сигнал с де-
виацией частоты 200 МГц и
длительностью 1 мс, средне-
квадратические фазовые откло-
нения в котором не превы-
шают 6°. Широкая полоса ча-
fi.
2
60МГц
От синхрони-
затора
S кГц
о
АЦП\
П
АЦП
Рис. 2.2. Схема приемника РЛС
COBRA DANE:
ПФ — полосовой фильтр; АЦП — анало-
го-цифровой преобразователь; П — пере-
множитель; ФВ — фазовращатель
60МГЦ
От синхро-
низатора
БПФ-про-
ДМ.
Дальность
21
стот н большая длительность сигнала приводят к необходимости
компенсировать изменение параметров отраженного от цели сигна-
ла нз-за разных условий распространения радиоволн в рабочем
диапазоне частот, протяженности цели н эффекта Доплера. Для
устранения влияния этих факторов, приводящих к изменению ско-
рости ЧМ принятого сигнала, осуществляется нх дискретная кор-
рекция. Для компенсации второго и третьего из названных факто-
ров используются данные о параметрах движения цели, поступаю-
щие нз канала слежения, а ионосферная коррекция проводится каж-
дые полчаса по результатам измерения разности времени распро-
странения до цели и обратно двух ЛЧМ сигналов с полосой 25МГц
И центральными, частотами 1187,5 и 1369,5 МГц, прилегающими к
краям рабочего диапазона. В РЛС применяется корреляционная
обработка принятого сигнала с последующим его анализом в циф-
ровом процессоре на основе быстрого преобразования Фурье
(БПФ) (рнс. 2.2), корректирующем также ошибки, вызванные
амплитудными н фазовыми искажениями в тракте. Реализация пе-
речисленных мер позволила получить разрешающую способность по
дальности 1 м н уровень боковых лепестков —30 дБ.
Еще одна РЛС с корреляционной обработкой (LRIR—Longa
Range Imaging Rador), предназначенная для определения харак-
теристик космических объектов,, создана в лаборатории нм. Лин-
кольна Массачусетского технологического института [95]. В этой
станции, так же как и в названных ранее, используется разнооб-
разный набор сигналов, включая последовательность когерентных
широкополосных ЛЧМ сигналов с девиацией частоты 1 ГГц и дли-
тельностью 250 мкс. Для увеличения отношения сигнал-шум, что
необходимо для эффективного разрешения отражающих центров
наблюдаемого объекта, здесь применяется когерентное накопление.
Это предъявляет жесткие требования к когерентности формируемых
ЛЧМ сигналов. Для коррекции амплитудных и фазовых искажений,
вносимых передатчиком н другими элементами СВЧ тракта, наряду
со схемами автоподстройкн применяют трансверсальные выравни-
вающие схемы. В зависимости от окружающей обстановки «окно»
по дальности в этой РЛС выбирается равным 30, 60 н 120 м.
2.3. Радиовысотомеры
В радиовысотомерах (РВ), устанавливаемых на самолетах, вер-
толетах, искусственных спутниках Земли н космических аппаратах,
часто применяют импульсные ЛЧМ сигналы [46, 112] н непрерыв-
ные сигналы с частотой, меняющейся по пилообразному и треуголь-
ному законам [66]. В первых нз ннх измерение высоты осущест-
вляется по каждому импульсу, а во вторых получают усредненный
результат измерения. Этим н определяется более высокая потен-
циальная точность РВ с импульсными ЛЧМ сигналами. В то же
время для РВ с непрерывными ЧМ сигналами требуется менее мощ-
ный передатчик, который можно выполнить на твердотельных при-
борах. Несколько вариантов РВ рассмотрено в [66].
Радиовысотомеры с ЧМ позволяют не только с высокой точ-
ностью измерять средние н малые расстояния между излучателем
и поверхностью, но и получать дополнительную информацию о ско-
рости снижения, характере подстилающей поверхности н т.'д.
Например, импульсный РВ [46] корабля «Аполлон-17», рабо-
тающий на частотах 5; 15 и 150 МГц, предназначался для опреде-
22
лення геологического характера верхнего слоя лунной поверхности
(до глубины 1300 м) и построения его профиля. Для этой цели в
РВ в качестве зондирующих использовались ЛЧМ сигналы с базой
128 и девиацией, равной 10% от несущей частоты. Спутниковые РВ
в настоящее время применяют при геодезических, геологических и
океанографических исследованиях, позволяя получать информацию
о геонде земной поверхности н ее подводной структуре, измерять
высоту волн и их распределение по водной поверхности для опре-
деления условий морской навигации, характера н направления мор-
ских течений, приливов, цунами и т. п. Например, РВ, установлен-
ный на ИСЗ SEASAT-A [112], работает на частоте 13,5 ГГц, при- .
чем девиация частоты н длительность ЛЧМ сигнала составляют /
соответственно 320 МГц и 3,2 мкс. Для формирования ЛЧМ снг-(
нала с такими параметрами в РВ используется дисперсионная Л3\
на полосу 80 МГц и умножитель частоты на 4. Среднеквадрати-
чёская~ошй5йа' измерения высоты волн в таком РВ составляет прн-,
мерно 10 см прн их перепаде от 1 до 20 м.
2.4. Физические измерения
Радиолокаторы с ЛЧМ применяют для различных физических
измерений, поскольку онн позволяют с высокой точностью опреде-
лить характеристики облучаемых объектов. Остановимся на неко-
торых нз таких применений. Одним нз ннх является радиолокаци-
онное наблюдение планет Венера н Марс [40] для прогнознровання
их положения в момент приближения к ннм межпланетных стан-
ций. Прн помощи этого же радиолокатора с ЧМ были определены
такие характеристики планеты Венера, как период н направление ее
вращения, получены сведения о свойствах ее поверхности и атмо-
сферы. Применение когерентной последовательности ЛЧМ сигналов
с девиацией частоты до 128 кГц обеспечило измерение с погреш-
ностью менее 1 км на дальностях до 100 млн. км.
С помощью РЛС, использующей непрерывный ЧМ сигнал с
девиацией 200 МГц, длительностью 50 мс и средней частотой
2,9 ГГц [59], исследовалось состояние атмосферы. Для формиро-
вания таких сигналов использовался транзисторный генератор, в
котором отклонения частоты от линейного закона не превышали
±17 кГц. Частота генератора модулировалась пилообразным на-
пряжением, полученным цифровым методом. Станции такого типа
могут использоваться для регистрации отражений от насекомых
[60], которые могут восприниматься как помехи радиолокаторами
с высокой разрешающей способностью, а также для наблюдения
за дождем и снегом, для определения скорости ветра, турбулентно-
сти атмосферы и других ее характеристик, причем вся эта инфор-
мация может быть получена за несколько секунд, а для решения
тех же задач с помощью воздушных зондов на это требуются мно-
гие минуты. Необходимость в такого рода нсследованнях связана
с решением как чисто научных, так н практических задач по обслу-
живанию аэропортов, исследованию и прогнозированию смога, вы-
явлению аномалий атмосферы, которые могут привести к ошибкам
в определении азимута целей н к регистрации ложных целей в РЛС.
Наличие н интенсивность атмосферных осадков для составления
метеорологических прогнозов могут быть также установлены со
спутникового РВ [ИЗ]. Использование в РЛС наклонного зонднро-
f 23
вания ионосферы ЛЧМ сигналов в комплексе со связной системой
[46] позволяет абонентам оперативно определять оптимальные для
связи частоты в коротковолновом диапазоне, необходимое превыше-
ние сигнала над шумом и скорость передачи информации.
Радиолокаторы с ЛЧМ (W=2 ГГц, 7'=10 мс, /н=2 ГГц) мо-
гут применяться и для обнаружения скрытых под землей неметал-
лических предметов [110]. Сильное затухание радиоволн в почве
ограничивает возможности обнаружения предметов подобными
РЛС глубиной в несколько десятков сантиметров.
Радиолокаторы с ЛЧМ используются для определения взаим-
ного положения и скорости сближения различных объектов в усло-
виях плохой видимости; служат для автоматизированной посадки
самолетов в густом тумане н для предотвращения столкновений
автомобилей. Ойн- могут оказаться полезными при измерении уров-
ня жидкостей нлн сыпучих материалов в резервуарах н бункерах,
а также толщины угольных пластов в шахтах.
2.5. Системы передачи информации
Интерес к системам передачи ннформацнн (СПИ) с расширен-
ным спектром, в которых информация передается сложными сиг-
налами, имеющими полосу, много большую, чем у передаваемого
сообщения, объясняется определенными их преимуществами в по-
мехоустойчивости, стойкости к селективным замираниям, а также
возможностями кодового разделения абонентов и работы ниже уров-
ня шумов [46]. Увеличение ширины спектра передаваемых сиг-
налов обеспечивает более эффективную работу таких СПИ в уело*
внях многолучевого распространения. Если первоначально эти СПИ
использовались преимущественно в военных целях, то сейчас наме-
тнлась тенденция нх применения и в гражданских комплексах. Это-t,
му способствовали два обстоятельства: резкое увеличение числа
радиостанций н появление больших интегральных микросхем, при-
боров на ПАВ, приборов с зарядовой связью, использование кото-
рых позволило уменьшить размеры и стоимость аппаратуры, а так-
же повысить ее надежность. л
Наибольшее распространение в настоящее время получили СПИ,
в которых используются сигналы с манипуляцией фазы и частоты.
Вместе с тем, как это следует нз многочисленных публикаций, боль-
шое внимание уделяется СПИ, в которых применяются ЛЧМ сиг-
налы.
Системы передачи ннформацнн, использующие ЛЧМ сигналы,
могут быть как аналоговыми, так н цифровыми. Из литературы
известны два вида аналоговых СПИ. Так, в [108] ЛЧМ сигнал
используется для передачи звуковых частот в полосе от 50 Гц до
7 кГц. Система связи реализована в диапазоне 4 ... 8 ГГц, девиация
в завнснмостн от частоты сообщения меняется от 50 до 60 МГц.
В приемнике принятый ЛЧМ сигнал смешивают с задержанной на
240 нс копией, а разностный сигнал после усиления н детектирова-
ния используют для выделения переданного сообщения. СПИ, в
которых ЛЧМ сигналы используются в качестве поднесущих, могут
обслуживать большее число одновременно работающих станций.
Подобная система для связи с подводными объектами прн наличии
сильных отражений от дна н поверхности воды [121] работала в
акустическом диапазоне 65 ... 95 кГц, причем частота свнпнрования
24
в экспериментальном макете менялась от 5 до 50 Гц, а полоса
частот передаваемого сообщения — от 300 до 1800 Гц. Прием Bi-
такой СПИ осуществлялся на синхронно перестраиваемый фильтр-
с полосой 4 кГц.
Большее разнообразие в использовании ЛЧМ сигналов возмож-
но в цифровых СПИ. Так, известны СПИ, в которых импульсы
кодовых групп передаются перекрывающимися во времени ЛЧМ
сигналами [68, 105], которые разделяются в приемнике на выходе
согласованного фильтра, реализованного на дисперсионной ЛЗ.
Для передачи двоичной информации используются также ЛЧМ
радиоимпульсы с положительной и отрицательной скоростью ЧМ
[46]. Дополнительный выигрыш в помехоустойчивости обеспечи-
вает СПИ [128], в которой начальная частота ЛЧМ сигналов к то-
му же меняется по заранее известному псевдослучайному закону.
Возможности таких СПИ в значительной степени зависят от
того, насколько велнк объем ансамбля ЛЧМ сигналов с заданными
взаимокорреляцноннымн свойствами.
Различные способы построения ансамблей ЛЧМ сигналов мож-
но найтн в работах [26, 48, 98]. Так, в [26, 98] обсуждаются во-
просы передачи данных с помощью ЛЧМ сигналов, различающихся
по скорости ЧМ, и ЛЧМ сигналов с различными начальными часто-
тами. Определенный интерес для СПИ представляют также ансам-
бли ЛЧМ сигналов, полученные модуляцией внутренней фазы ЛЧМ
сигналов по гармоническому [98] н псевдослучайному [48] за-
конам.
2.6. Другие применения ЛЧМ сигналов
Частотно-модулнрованные сигналы нашли применение в различ-
ных областях раднотехннкн, так как они обеспечивают высокую
помехоустойчивость, точность измерения параметров облучаемых
объектов, возможность работы ниже уровня шумов н др. Приве-
денный здесь обзор не охватывает всех возможных областей ис-
пользования этих сигналов. В качестве примера можно назвать гид-
ролокаторы, системы электрического сканирования диаграммы на-
правленности антенн в РЛС, ультразвуковые локаторы, применяе-
мые слепыми н при нсследованнн работы сердца, спиновые [35] и
днсперснонно-временные [70] анализаторы спектра, рефлектометры
[18] н т. п. Большое внимание уделяется устройствам, в которых,
с помощью ЛЧМ сигналов осуществляются различные частотно-
временные преобразования входного сигнала [29, 45]. Использова-
ние этих устройств, например, для растяжения временного масшта-
ба в ряде случаев позволяет снизить стоимость приемной аппара-
туры и применить менее быстродействующие аналого-цифровые
преобразователи (АЦП) [126].
Устройства формирования ЛЧМ сигналов существенно разли-
чаются диапазоном частот от звукового [56] до оптического [106],.
девиацией частоты от единиц герц до единиц гигагерц и скоростью-
изменения частоты, достигающей в отдельных случаях 1 ГГц/мкс
и более.
Кроме того, широко применяются не только ЛЧМ импульсы и-
непрерывные ЧМ сигналы с треугольным нлн пилообразным зако-
нами изменения частоты, но н более сложные сигналы, например:
ЛЧМ импульсы с дополнительной модуляцией амплитуды и
фазы;
25-
составные сигналы, состоящие нз ЛЧМ сигналов, у которых
начальные фаза н частота, а также скорость модуляции и длитель-
ность каждого участка в общем случае неодинаковы;
последовательности ЛЧМ импульсов с постоянными или меня-
ющимися во времени параметрами модуляции;
непрерывные ЧМ сигналы с дополнительной частотной нлн фа-
зовой манипуляцией.
В ряде случаев очень жесткими оказываются требования к точ-
ности поддержания заданного закона модуляции, причем они зави-
сят от большого числа факторов: технических требований, предъ-
являемых к устройству, использующему ЛЧМ сигналы; способа
обработки (фильтровая, корреляционная нлн корреляционно-филь-
тровая); характеристик ЛЧМ сигнала н т, д. Например, при кор-
реляционной обработке требования к допустимым отклонениям от
заданного закона ЧМ существенно зависят от того, как формиру-
ются смешиваемые ЛЧМ сигналы: одним генератором нлн разными.
В первом случае требования к точности поддержания заданного
закона модуляции могут быть ослаблены, если принятый н опор-
ный сигналы начинаются примерно в одни н тот же момент вре-
мени. Такой режим работы характерен для РЛС с высокой разре-
шающей способностью, облучающих объекты, дальность до которых
априори известна, н для систем, применяемых при локации объек-
тов на малых дальностях.
В некоторых применениях, характеризуемых большими полоса-
ми частот н базами сигналов, ЛЧМ сигналы имеют ряд преиму-
ществ перед ФМ снгналамн. Назовем три нз них: для ЛЧМ сигна-
лов относительно просто осуществляется коррекция искажений, вно-
симых элементами тракта н средой распространения радиоволн,
при корреляционной или корреляционно-фильтровой обработке ши-
рокополосные ЛЧМ сигналы трансформируются в узкополосные,
которые можно преобразовать в цифровую форму с помощью не
слишком быстродействующих АЦП н исследовать, например, в
БПФ процессоре, чтобы выделить интересующую нас информацию,
в лучшем состоянии на сегодняшний день находятся технические
средства формирования н обработки ЛЧМ сигналов на ПАВ (на-
пример, разработаны дисперсионные ЛЗ, у которых полоса н про-
изведение полосы на задержку на порядок больше, чем у фильтров
сжатия ФМ сигналов [29]), созданы генераторы СВЧ на транзи-
сторах, на ЛОВ, на мнтронах, на генераторах Ганна, позволяющие
перекрывать полосы в несколько гигагерц со скоростью перестрой-
ки 20—50 ГГц/мкс.
Из всего сказанного вытекает настоятельная необходимость
ознакомления разработчиков радиоэлектронной аппаратуры с су-
ществующими в настоящее время возможностями для формирова-
ния ЧМ сигналов н средствами, обеспечивающими поддержание за-
данного закона нзменення частоты.
26
Глава 3
ТРЕБОВАНИЯ К ТОЧНОСТИ ФОРМИРОВАНИЯ
ЛЧМ СИГНАЛОВ
3.1. Критерии оценки качества формирования
Для того чтобы обоснованно выбрать схему устрой-
ства формирования ЛЧМ сигналов, необходимо грамот-
но сформулировать требования к точности поддержа-
ния заданного закона ЧМ. Однако, прежде чем обсуж-
дать эти требования, рассмотрим возможные критерии
оценки точности формирования ЛЧМ сигнала.
Запишем общее выражение мгновенного значения
ЛЧМ сигнала на выходе устройства формирования:
и (t) = U cos [ш0£ + 0,5JV2 + v (0], М I 0,5 Г. (3.1)
Полную фазу сигнала Ф(/), частоту =dO)/dt и
скорость ЧМ fj(/)=d(o/d/ можно определить из (3.1):
Ф(/) = ш0! + O,5po/24-v(/); =z ш0 + м+ МО;
8(/)-80 + аД), (3.2)
где v(/), т)(/), 6(/)—текущие отклонения фазы, ча-
стоты и скорости ЧМ соответственно.
Точность формирования сигнала можно оценить по
любой из функций v(/), ц(0 или 6(/) в зависимости от-
того, какая из них важна в конкретном случае и какая
из них может быть измерена.
Конкретные виды функций v(i“), ц(^) или б(/) раз-
личны, поэтому часто используют [5, 21] оценки их
абсолютного (максимального) отклонения от заданного
закона за время модуляции:
= max | v (t) I, т]мн = max | t](0 |/2k1F,
8MH = max | 8(/)|/p0. (3.3)
Более полной характеристикой точности формирова-
ния сигнала могут служить [5, 79] интегральные квад-
ратичные оценки
0,5 Г
j ^dt, (3.4)
-0,5 Г
где под w понимается v(/), ц (/) или 6(/).
27
Когда погрешности формирования сигнала измеря-
ются в N точках за время модуляции, то вместо (3.4)
удобнее использовать суммарные квадратичные оценки
Jw= kDW-
Л—1
В некоторых случаях удобнее измерять не времен-
ные характеристики (3.3), (3.4), а их спектры Sw [51].
Отметим, что погрешности формирования приводят так-
же и к отличиям спектра Su(co) реального ЛЧМ. сигнала
(3.1) от идеального (1.2). Например, малое гармониче-
ское фазовое возмущение v(/)=vMsin Q/ с амплитудой
'<ч и частотой Q приводит к дополнительным пульса-
циям модуля спектра |Su(co) | с амплитудой примерно
0,5vM и периодом частоты 2лр0/П-
Основная задача выработки требований к тем или
иным характеристикам ЛЧМ сигнала сводится к вы-
явлению связи между способностью радиосистемы ре-
шать поставленные задачи и этими характеристиками.
Рассмотрим подробнее системы с различными спосо-
бами обработки широкополосного сигнала (фильтро-
вым, корреляционным или их комбинацией), предпола-
гая, что сигнал сформирован с погрешностями, а систе-
ма обработки идеальна.
3.2. Требования к точности формирования
при фильтровой обработке
Импульсная переходная характеристика согласован-
ного фильтра при обработке идеального ЛЧМ сигнала
(1.1) имеет вид
g« (t) - /230/т: cos [ш0/ — О,5ро/2]. (3.5)
При подаче на вход согласованного фильтра реаль-
ного сигнала (3.1) его выходной сигнал g(t) описы-
вается выражением
____0,5 т
g(t) = l/ J exp {j Ь' + О,53от24-Л')]} X
' /-0.5Г
X ехр {] [ш0 (t - т) - О,5ро (t - т)2]} dx. (3.6)
Рассмотрим влияние некоторых конкретных видов
фазового отклонения v(/) на вид g(t). Постоянное фа-
зовое отклонение v(/)=vo приводит к смещению лишь
28
фазы высокочастотного заполнения сжатого импульса.
Поэтому при обработке одиночных ЛЧМ. импульсов,
где важна лишь огибающая на выходе схемы сжатия,
такие отклонения несущественны. Если имеется посто-
янное отклонение частоты го согласно (3.6)
[31,38,83] (0,)
, _ . / W sin [0,5 (т10 + pof)] (Т - 111)
v « х
X cos(ш04-О,5т?о)/, . (3.7)
Главный лепесток отклика сдвигается по времени
на —г]о772л1Е', расширяется и уровень его уменьшается
до 1—т]М1|. Кроме того, уменьшается отношение сигнал-
шум из-за снижения уровня главного лепестка и воз-
растания уровня боковых лепестков. Чтобы смещение
главного лепестка не превышало его ширины, равной
Т/D, необходимо выполнение условия
t1mh = t|0/2kW7<1/D. (3.8)
Часто на практике можно учесть смещение сжатого им-
пульса и исключить погрешности радиолокационных
измерений. Уменьшение отношения сигнал-шум в неко-
торых случаях можно скомпенсировать увеличением по-
лосы пропускания фильтра сжатия и последетекторной
фильтрацией спектральных составляющих шума. В этих
условиях допуск на постоянное отклонение частоты мо-
жет быть увеличен.
Если имеется постоянное отклонение [51] скорости
ЧМ 6o=const, v(t) = 0,5<50/2, то при сохране-
нии положения максимума сжатого импульса во вре-
мени его форма меняется: уменьшается его уровень,
возрастает ширина главного лепестка, увеличивается
уровень боковых лепестков, исчезают нулевые зна-
чения, появляется своеобразный пьедестал. Если, на-
пример, допустимым является уменьшение уровня глав-
ного лепестка не более чем на 10%, т. е. уменьшение
отношения сигнал-шум на 1 дБ, то отклонение скорости
ЧМ не должно превышать
8МН = Ш<1,2/Г. (3.9)
Условие (3.9) соответствует отклонению фазы ЛЧМ
сигнала от заданного квадратического закона не более
чем на 0,5л за все время модуляции.
29
Для распознавания целей с различной отражающей
способностью важно иметь малый уровень боковых ле-
пестков сжатого сигнала [66, 83]. Для их уменьшения
за счет некоторого уменьшения отношения сигнал-шум
и небольшого расширения главного лепестка применяют
весовую обработку [51, 71]. При этом требования к
точности формирования ЛЧМ сигнала несколько меня-
главного лепестка В, определяющая разрешающую
способность, без весовой обработки увеличивается в
5 раз, а при ее использовании — лишь в 1,8 раза1
(рис. 3.1). Вместе с тем при весовой обработке более
резко увеличивается уровень боковых лепестков в за-
Рис. 3.2. Влияние отклонения частоты на уровень главного и боко-
вых лепестков тгри весовой обработке вида (1.5) (------экспери-
ментальные данные)
30
, при весовой обработке по Теи-
Рис. 3.3. Зависимость уровня бо-
ковых лепестков от абсолютного
фазового отклонения vM и глуби-
ны амплитудной модуляции р для
кубических (/) и гармонических
(2, 3) возмущений
висимости от отклонения частот (рис. 3.2). В целом, как
без весовой обработки, так и при ее использовании уро-
вень требований высок, особенно при большой базе.
Прохождение ЛЧМ сигнала через тракты с нелиней-
ными фазочастотными характеристиками зачастую при-
водит к непериодическим отклонениям фазы, которые-
описываются кубической параболой v(t)=a3t3. Как по-
казывают расчеты [65], такого рода изменения приво-
дят к смещению и несимметричному искажению формы
главного лепестка. Так
лору [51] (кривая 1 на
рис. 3.3) уровень боко-
вых лепестков сжато-
го сигнала оказывает-
ся ниже —40 дБ, если
максимальное фазовое
отклонение vM = a37’3
удовлетворяет условию
vh<k/16. (3.10)
Если на выходе
устройства формиро-
вания ЛЧМ сигнал
вместо прямоугольной
имеет огибающую с
линейным спадом на А,
то амплитуда сжатого
импульса уменьшается
на 0,5А, а его длитель-
ность увеличивается
примерно в 1+0,02А2
раз [5, 72]. Поэтому при
формировании ЛЧМ сигналов необходимо уменьшать
паразитную амплитудную модуляцию (см. § 4.2), а в
ряде случаев использовать системы автоматической ре-
гулировки мощности (см. § 12.4).
При гармоническом фазовом возмущении v(/) =
= vusinQ/ удобно находить отклик (3.6), представляя
тригонометрические функции в показательной фор-
ме и используя разложение по функциям Бесселя
ejvHsin2r_ 2 (vM) ei*8'.
о©
31
В результате отклик фильтра g(t) представляется
суперпозицией сдвинутых откликов:
g(^)=/0(vM)g0(/)+2 лс'мИорн-
*=i L \
kQ
/ Z>Q
+ (-l)Vft(vM)g0
(З.П)
где go(/)—отклик (3.6) фильтра на неискаженный
сигнал.
Из (3.11) следует, что вокруг главного лепестка по-
являются дополнительные боковые отклики меньшей
амплитуды типа парного эхо, разнесенные по времени
друг от друга на й/₽о. Интервал между этими импуль-
сами приблизительно равен ширине главного лепестка,
умноженной на число периодов модулирующей функ-
ции за время Т. Как показывают расчеты [51],
уровень дополнительных откликов остается (кривая 2
на рис. 3.3) ниже. — 40 дБ, _если амплитуда фазового
возмущения не превышает 1 ... 2°. Подобные результа-
ты получаются и при гармоническом возмущении
амплитуды U(t) = <70( 1 + ц sin Q7) (см. штриховую ли-
нию на рис. 3.3).
Рассмотрим, наконец, случай, когда фазовое откло-
нение является случайной функцией [72] с дис-
персией и интервалом корреляции р0. При этом це-
лесообразно определить границы спектра So. Низко-
частотные составляющие с р, >Т, период изменения
которых больше Т, в основном влияют на смещение и
изменение формы главного Лепестка. Высокочастотные
составляющие с pv<7’ приводят к возрастанию уровня
боковых лепестков до среднеквадратического значения
ovPv /Т. Если среднеквадратическое значение фазового
отклонения, выраженное в децибелах, не превышает
суммы допустимого уровня боковых лепестков £ и отно-
шения Т/рч в тех же единицах:
^СС+Г/р,, (3.12)
то фактический уровень боковых лепестков сжатого
сигнала ниже допустимого.
3.3. Требования к точности формирования
при корреляционной обработке
При корреляционной обработке происходит перемно-
жение ЛЧМ. сигнала местного гетеродина u(t) и задер-
32
жанного на время т отраженного ЛЧМ. сигнала u(t—т)
в смеси с шумом. Полученный сигнал разностной часто-
ты поступает затем в анализатор спектра [39]. Как
фильтровая обработка, так и корреляционная без до-
полнительного взвешивания являются разновидностями
оптимальной фильтрации [72]. Учитывая, что во мно-
гих случаях применяется взвешивание и что техниче-
ская реализация сжатия по времени или по частоте раз-
личная, целесообразно отдельно рассмотреть требова-
ния к точности формирования ЛЧМ сигнала при этом
виде обработки.
Предполагая, что сигнал имеет вид (3.1), а откло-
нения v(t) возникают лишь в устройстве формирова-
ния, запишем выражение для напряжения на выходе
перемножителя
еп (/) = С/п(Л*) cos[М + <Ро+ '?(/)], П I <0,5Г, (3.13)
где Un — kU (t) U (t — т) (k— коэффициент про-
порциональности); ср0 = шот—О,5р0т2; ф (/)= v(f) — v(f —х).
Спектр сигнала (3.13) представим в виде
0,5Г
S (ш) ——J— f С/п(С ^)еЯ^+?»++«)] e-Wt (3.14)
Т — х J
Т-0.5Г
Если ЛЧМ сигнал идеален (v(^)=0, Un (t, т) = 1), то
из (3.14) следует
sin 0,5 (шТ + ₽0)
(3.15)
Длительность главного лепестка спектра (3.15) рав-
на 1/Т, а его положение определяется временем задерж-
ки т. Уровень боковых лепестков в случае необходимо-
сти может быть снижен до заданного при дополнитель-
ной весовой обработке.
Фазу сигнала еп (t) вида (3.13), отбросив постоян-
ную начальную составляющую ф0, можно выразить че-
рез отклонение частоты в момент времени t' из интер-
вала (/—т, t):
ф (/) = у (t) — v (t — x) — x-ri(t'). (3.16)
Если функция v(0 гладкая, а х/Т мало, так что значе-
ния v(t) и —т) сильно коррелированы, можно счи-
3—1022 33
тать, что t'~t и ф(/) пропорционально отклонению ча-
стоты T] (/) .
Схема корреляционной обработки, как видно из
(3.13), нечувствительна к постоянному фазовому от-
клонению vo. Постоянное отклонение частоты т]0 приво-
дит к изменению лишь начальной фазы ф(/)=т|от. По-
стоянное отклонение скорости ЧМ. бо приводит к сме-
щению этого спектра по частоте ф(/)=тбоЛ Чтобы это
смещение, не было больше длительности главного ле-
пестка 1/Г, необходимо выполнить условие
^n<TjxD. (3.17)
Когда Т/х~^>1, условие (3.17) легче выполняется, чем
(3.9), соответствующее фильтровой обработке.
Гармоническое фазовое возмущение v(/) приводит к
появлению гармонической составляющей в фазе ф(/) с
частотой И и амплитудой a = v„]/ 2—2 cos Пт. В наибо-
лее частом случае П<с4л/т, когда за время и уклады-
вается малая доля периода возмущения, амплитуда
этой составляющей равна vmtH, что значительно мень-
ше исходной vM. Схема корреляционной обработки ком-
пенсирует возмущение, период которого в целое число
раз меньше т, а наибольшее влияние оказывает такое
возмущение, полупериод которого укладывается за вре-
мя т нечетное число раз. Подставив v(0=v„ sin Qt в
(3.16), а затем в (3.14) и используя разложение
ej a sin й / в ряд фурье, получаем, что искаженный
спектр состоит из набора смещенных по частоте на «И
неискаженных спектров ви/fa (3.15) с весовыми коэф-
фициентами, определяемыми функциями Бесселя Jл(а)
(где п — номер гармоники). Указанные спектры разде-
ляются по частоте, если П больше длительности глав-
ного лепестка ‘In 'iT. Чтобы наибольший уровень этих до-
полнительных откликов был ниже определенного поро-
гового необходимо выполнение соотношения
vM < С у/ 2/(1 — cos 2т).
(3.18)
Из (3.18) следует, что требования к фазовому откло-
нению формируемого ЛЧМ. сигнала зависят от относи-
тельной частоты возмущения Пт (рис. 3.4).
Если v(0—случайная функция со среднеквадрати-
ческим отклонением щ и интервалом корреляции pv, то
при pv >т справедливо <зп ~ где а,— среднеквад-
34
ратическое отклонение частоты. Тогда отношение сиг-
нал-шум Q= (I — т2<з2)/т2<з2 [5]. Отсюда получим огра-
ничение
(3.19)
Наконец, если интервал корреляции мал р, <Ст (т. е.
спектр возмущения широкий), то слагаемые в соотно-
Рис. 3.4. Зависимость
уровня боковых лепест-
ков от амплитуды гар-
монического фазового
возмущения при корре-
ляционной обработке
шении (3.16) можно рассматривать как некоррелиро-
ванные, что дает а2п — 2а2. При этом допустимое сред-
неквадратическое отклонение, выраженное в децибелах,
должно удовлетворять соотношению
о,<;-0,5+ Г/?,.
(3.20)
Сопоставляя (3.12) и (3.20), видим, что при широ-
кополосном возмущении требования к точности форми-
рования ЛЧМ сигнала при фильтровой и корреляцион-
ной обработке почти одинаковы. Некоторое снижение
требований имеет место в корреляционных системах при
большом по сравнению с задержкой т интервале кор-
реляции.
3.4. Требования к точности формирования
при других видах обработки
В радиолокационных применениях при большой ба-
зе сигнала используют также корреляционно-фильтро-
вую обработку, когда ЛЧМ сигнал частично сжимается
по спектру путем перемножения с гетеродинным ЛЧМ
сигналом, имеющим меньшую девиацию, а затем сжи-
мается по времени в дисперсионных фильтрах [83]. В
этом случае можно достигнуть высокой степени сжатия
ЛЧМ сигнала. Однако обычно требования к точности
формирования зондирующего и гетеродинного ЛЧМ
3* 35
сигналов такие же, как при фильтровой обработке в
расчете на полную девиацию. Определенное снижение
требований возможно, если при формировании зонди-
рующего и гетеродинного сигналов использован один и
тот же генератор ЛЧМ. сигнала с большим по сравне-
нию с задержкой интервалом корреляции.
Особенность радиовысотомеров [39] и радиорефлек-
тометров [17, 18] состоит в том, что обычно применяет-
ся непрерывный ЛЧМ сигнал с периодом повторения Тп
циклов модуляции по пилообразному или треугольному
закону. Поэтому спектр сигнала на выходе перемножи-
теля является линейчатым с интервалом 2л/Тп между
дискретными составляющими. Основная составляющая
спектра соответствует расчетной разностной частоте
§от. Уровень боковых составляющих спектра зависит от
погрешностей формирования ЛЧМ сигнала (см. § 3.3),
а также от отношения х/Тц, поскольку сигнал еп(0 име-
ет частоту, близкую к расчетной только в течение части
периода Тп-
При спектральном анализе требования к качеству
формирования гетеродинного ЛЧМ сигнала определя-
ются типом анализатора спектра, а также видом изме-
ряемого сигнала и возмущения. В анализаторах после-
довательного типа отклонение частоты при не-
периодической возмущении должно быть меньше поло-
сы пропускания фильтра П^>От;. В дисперсионных ана-
лизаторах спектра [35, 70] требования к точности под-
держания заданной скорости ЧМ значительно выше и
фактически совпадают с приведенными в § 3.2. Для до-
стижения точности анализа "Ь единицы процентов необ-
ходимо поддерживать заданную скорость ЧМ с точ-
ностью до долей процента. Гармонические возмущения
в анализаторах спектра приводят к появлению ложных
откликов типа «парного эхо» и интерпретируются как
нелинейные искажения или ложные сигналы.
Г л а в а 4
МЕТОДЫ И УСТРОЙСТВА ФОРМИРОВАНИЯ
ЛЧМ СИГНАЛОВ
4.1. Пассивный метод формирования
Основным узлом устройства формирования ЛЧМ
сигнала пассивным методом (рис. 4.1) является диспер-
36
сионная ЛЗ, обычно выполняемая на пластине из пьезо-
диэлектрика, в котором с помощью встречно-штыревых
преобразователей возбуждается ПАВ. При конструиро-
вании дисперсионных ЛЗ возникают трудности из-за
генерации объемных волн, отражений от краев пласти-
ны и концов штырей, из-за неточности изготовления пре-
Рис. 4.1. Структурная схема
устройства формирования ЛЧМ
сигналов пассивным методом
ЛЧМ
От синхро-
низатора.
образователей. В результате оказываются ограничен-
ными максимальная база, центральная частота и шири-
на полосы формируемого сигнала (табл. 4.1).
По ряду параметров лучшими являются дисперси-
онные ЛЗ на отражательных решетках, нанесенных в
виде рисок или канавок на поверхности пластины (ко-
торая может и не быть пьезоэлектрической). В таких
устройствах дефекты изготовления сказываются сла-
бее. Для компенсации фазовых отклонений в отражатель-
ных решетках на пути распространения ПАВ помещают
профилированную металлическую пленку, ширину ко-
Таблица 4.1
Характеристики дисперсионных линий задержки [29]
Параметр Дисперсионные ЛЗ
на встречно-штыревых преобразователях на отражательных решетках
современные перспективные современные перспективные
Центральная ча- стота, МГц Ширина полосы, МГц 10... 1 200 10... 1 500 60... 1 200 60... 1 200
1...500 1...750 1...500 1...1 000
Время задержки, мкс 0.5...50 0,1...80 1...100 0.5...120
База 4...800 4-2 000 40 ..16 000 10...50 000
Неравномерность амплитуды, дБ 0,2 0,1 0,5 0,5
Фазовое откло- нение, град 0,5 0,2 0,5 0,5
Уровень боко- вых лепестков, дБ —45 —50 —40 —45
37
торой подбирают опытным путем. В дисперсионных ЛЗ
часто применяют коррекцию огибающей, позволяющую
уменьшить уровень боковых лепестков сжатого сигнала
[77]. Для этого изменяют длину перекрытия штырей в
преобразователе [36], длину или глубину канавок в от-
ражательных решетках и др. [45].
Известны устройства пассивного формирования ЛЧМ
сигналов в СВЧ диапазоне с помощью дисперсионных
радиоволноводов [27] или антенных устройств [119].
Разработаны методы расчета профиля волновода или
расположения, элементов антенны, чтобы закон внутри-
импульсной ЧМ выходного сигнала был близок к за-
данному.
Существенным преимуществом устройств пассивного
формирования является возможность использования
одинакового, а иногда одного и того же фильтра как
для формирования, так и для сжатия. Этим обеспечи-
вается согласование сигнала и фильтра даже при не-
точном соблюдении линейного закона ЧМ. Таким
устройствам свойственны высокая частотно-временная
стабильность генерируемых ЛЧМ сигналов, надежность.
Вместе с тем им присущи и существенные недостатки:
большие потери на преобразование электрических коле-
баний в ПАВ и обратно (—35 ... —50 дБ), ограничение
амплитуды входного сигнала дисперсионных ЛЗ, недо-
статочно высокое отношение сигнал-шум на выходе,
трудность оперативной регулировки параметров форми-
руемых ЛЧМ сигналов и текущей коррекции фазовых
отклонений, возникающих в последующих усилительно-
преобразовательных каскадах тракта ЛЧМ передатчи-
ка, необходимость преобразования несущей частоты,
иногда узкополосность дисперсионных ЛЗ.
4.2. Формирование ЛЧМ сигналов в управляемых
по частоте автогенераторах
Автогенераторы электромагнитных колебаний, управ-
ляемые по частоте напряжением, находят широкое при-
менение в различных диапазонах от инфранизких до
сверхвысоких частот, а также в оптическом диапазоне;
они весьма разнообразны по используемым активным
элементам и по параметрам. Рассмотрим основные ха-
рактеристики и особенности выбора управляемых гене-
раторов (УГ), которые необходимо иметь в виду при
формировании ЛЧМ сигналов.
38
К основным характеристикам У Г относят модуляци-
онную характеристику (MX)—зависимость частоты ге-
нерации от управляющего напряжения <о(еу), которая
в общем случае является инерционной. Кроме того, УГ
характеризуется уровнем паразитной амплитудной мо-
дуляции f/(ey), допустимой скоростью модуляции, ко-
торая определяется нижней и верхней частотами моду-
лирующего сигнала 2Н и 2В, пределами перестройки
частоты генерации шн и шв, стабильностью частоты.
Если спектр модулирующих частот лежит внутри допу-
стимой полосы S2H<^2<SB, то УГ можно считать бе-
зынерционным и пользоваться его статической MX [25].
При формировании ЛЧМ сигналов желательно иметь
линейную MX. Используются различные методики оцен-
ки ее нелинейности, которые надо уметь сопоставлять.
Мерой нелинейности монотонной MX может служить
[21, 34] коэффициент нелинейности, равный перепаду
крутизны MX S(ey) =rfoj/rfey, отнесенному к максималь-
ной крутизне £нлх — (Хмакс — 5НИ„) / Хмакс. Оценка
по может быть не всегда достаточна, так как она
учитывает свойства не всей MX, а лишь ее экстремаль-
ных участков.
Другой метод [21, 34] основан на том, что наличие
нелинейности MX при гармоническом модулирующем
напряжении еу = /7ц sin Qt приводит к появлению в
спектре <о(/) кроме составляющих с частотой й высших
гармоник с кратными частотами. Используя разложе-
ние функции <о(еу) в степенной ряд ш = ш0Stey
+ еу + ..., можно найти коэффициенты гармоник в
вйде отношения амплитуд соответствующих гармоник к
амплитуде первой гармоники:
*“ = Т V- и‘- = V- (4J>
В качестве единой оценки по всем гармоникам в [21]
принимается ^нл - ]/‘^л2+^л3 + • • • =
Чтобы использовать оценки (4.1) при формировании
ЛЧМ сигналов, надо выбрать амплитуду Us равной по-
ловине размаха модулирующего напряжения генератора
пилообразного напряжения (ГПН). Если отличен от
39
нуля только один из коэффициентов kH]li (i=2, 3, ./.),
то нетрудно связать оценки &нлх и 1гНЛ1:
k _ (8^нл?/(1 + 8*нл2) при 5г = 0, / = 3,4, ....
НЛ5 I12W1 + 12*Нлз) при 5г = 0, / = 2,4,5,....
(4-2)
Применительно к формированию ЛЧМ. сигналов
иногда используют относительное отклонение частоты
от линейного по еу закона: &нл<» = max | ш — 5^1/2^11/.
При тех же предположениях, что и в (4.2),
— 4^НЛ2, — 2^нл3. (4.3)
Наконец, при фильтровой обработке ЛЧМ сигналов
целесообразно оценить максимальное отклонение фазы
vM во времени от квадратичного закона. Предполагая
модулирующее напряжение линейным при S3=S4 =
= ... =0, получаем
= 8/з*нл2^^- (4-4)
Иногда MX оказывается волнистой [21], т. е. может
быть аппроксимирована выражением <о = (о0+ 5ге„
+ х sin 7 еу, где х, у— параметры аппроксимации MX.
В этом случае различные оценки нелинейности MX свя-
заны следующими соотношениями:
6НЛШ = х/2к1Г; kHJlS = 4r.Wk„^/(Sr + хТ);
= 5г7^нЛа,/у; ^Hjit — 4^нлш^ (*[ ^я), (4'5)
где JiiyUsi) —функция Бесселя первого рода поряд-
ка i от аргумента yUs-
Таким образом, можно использовать любую оценку
нелинейности MX и устанавливать допуски, исходя из
способа обработки и вида возмущения с помощью соот-
ношений (4.1) — (4.5).
Суммарная оценка нелинейности MX и модулирую-
щего напряжения определяют уровень нелинейных фа-
зовых отклонений ЛЧМ сигнала. Допустим, что функ-
ция фазовых отклонений генерируемого ЛЧМ сигнала
т
имеет вид v(/) = У, cos«Q/. Тогда нелинейная со-
1
т
ставляющая ЧМ !](/) =— У ^мл sin n£lt, где T]Mn—
л—1
40
= nQvM/I—амплитуда n-й гармоники в разложении
функции нелинейной ЧМ.
Поскольку уровень нелинейных фазовых отклонений
ограничен допустимым значением vM, необходимо, чтобы
'Чип Например, для уровня боковых лепестков
—30 дБ и Z) = 25 нелинейность MX по третьей гармони-
ке #нлз <0,07. Это показывает, что использовать авто-
генераторы в качестве источников ЛЧМ сигналов целе-
сообразно при малых D, в частности при коротких им-
пульсах. Поскольку в этом случае уровень боковых ле-
пестков отклика зависит от D, то допуски на отклоне-
ния следует определять из уровня боковых лепестков.
Например, для Р = 25 при допустимом уровне боковых
лепестков —30 дБ коэффициент гармоник может со-
ставлять ^нл2 — 0,03 вместо 0,01 при уровне боковых ле-
пестков —40 дБ.
Инерционность зависимости <о(еу, р) обусловлена,
во-первых, ограничениями полосы пропускания цепи
управления. В первом приближении ее можно описать
оператором 1/(1 + рту), где p = dldt\ ту — постоянная
времени цепи управления. Во-вторых, процесс установ-'
ления частоты автоколебаний при идеальном скачке
управляющего напряжения занимает конечное время,
которое зависит от типа и режима автогенератора, а
также от характера нелинейности его активного эле-
мента. Инерционность установления частоты управляе-
мых генераторов СВЧ определяет условия [24], при ко-
торых нельзя тот или иной генератор СВЧ считать бе-
зынерционным по цепи управления частотой.
Уровень паразитной амплитудной модуляции также-
может ограничить девиацию частоты. При ограничении
изменения амплитуды приходится использовать малую
часть диапазона перестройки. Стабилизируя амплитуду
и используя управители частоты, слабо влияющие на
амплитуду, удается расширить диапазон перестройки
по частоте. Так, типичной является октавная перестрой-
ка транзисторных генераторов СВЧ с помощью варика-
пов [75], известны генераторы с диапазоном перестрой-
ки в 3—4 декады [6].
Пределы изменения скорости перестройки характе-
ризуются амплитудно-частотной характеристикой цепи
управления, которая представляет собой зависимость
управляющего напряжения <?у от частоты модуляции Si
при гармоническом модулирующем напряжении с по-
4В
стоянной амплитудой. Если формируется ЛЧМ сигнал
длительностью Т и периодом повторения 1а, то в пре-
делах от QH = 2ir7’n до £?в ~20.т/Г сосредоточено свы-
ше 99% мощности спектра модулирующего пилообраз-
ного сигнала. Поэтому амплитудно-частотная характе-
ристика цепи управления должна быть равномерной
в указанной полосе частот.
Рассмотрим некоторые типы генераторов, управляе-
мых по частоте напряжением, с точки зрения использо-
вания их для формирования ЛЧМ сигналов.
В диапазоне низких и сверхнизких частот исполь-
зуют управляемые PC-генераторы. В частности, приме-
няются функциональные [56] генераторы (рис. 4.2), в
Рис. 4.2. Структурная схема функцио-
нального генератора
Рис. 4.3. Схема ко-
лебательной системы
LC-автогенератора с
варикапом
которых соединенные в кольцо интегратор (Инт) и реле
(Р) обеспечивают режим непрерывной генерации тре-
угольного или пилообразного напряжения u(t) на вы-'
ходе интегратора, а реле подключает ко входу интегра-
тора попеременно управляющие напряжения +еу и
—абу, где а = 1 для симметричного треугольного сигна-
ла. Частота колебаний <о в таком генераторе линейно
связана с управляющим напряжением, т. е. <о =
= irey/ ЕпорRC (l-J-1/ct), где Епор—пороговое напря-
жение реле; 1/RC — скорость интегрирования.
Генераторы такого типа работают с частотами
10-6 ... 107 Гц, нелинейность MX не превышает 1%,
верхняя модулирующая частота й может достигать мак-
симальной выходной частоты (ов т. е. при скачке управ-
ляющего напряжения переход на другую частоту проис-
ходит за время, меньшее периода выходных сигналов.
Пределы электрической перестройки частоты ограниче-
ны наибольшим еу и нестабильностью напряжения на
входе интегратора. Серийные функциональные генера-
торы обеспечивают перекрытие по частоте km = 0)в/0)н
42
Рис. 4.4. Зависимость частоты
(-----) и резонансного со-
противления (---------) от
управляющего напряжения ва-
рикапа
до 100 на одном поддиапазоне. Основные недостатки
RC-генераторов — низкая (10-2 ... 10-3) относительная
стабильность частоты генерации и повышенное содер-
жание высших гармоник в выходном напряжении из-за
наличия нелинейного преобразователя треугольных сиг-
налов в гармонические.
Из других типов управляемых RC-генераторов ши-
рокую перестройку по
частоте имеют генерато-
ры с мостами Вина [6],
RC-генераторы гармони-
ческих сигналов, мульти-
вибраторы. Например, в
управляемом по частоте
транзисторном мультивиб-
раторе возможно форми-
рование ЛЧМ сигнала в
диапазоне 70 МГц с де-
виацией частоты 30 МГц
и коэффициентом нелиней-
ности в несколько деся-
тых долей процента [21].
При формировании
ЛЧМ сигналов широко применяются генераторы с уп-
равлением частотой с помощью варикапа [1, 2, 23, 75].
На примере схемы на рис. 4.3, рассмотрим особенно-
сти электронной перестройки частоты генерации вари-
капом, который представлен емкостью Св(еу) с доб-
ротностью QB —1/(оСвгв, где гв—сопротивление по-
терь варикапа. Вольт-фарадную характеристику можно
записать в виде Св(^у) = Cq/j/I 4~г?у/«0, где Со— на-
чальная емкость при еу=0; ио=О,3 ... 0,6 В — контакт-
ная разность потенциалов.
Для схемы на рис. 4.3 получим следующие выраже-
ния для частоты генерации со и резонансного сопротив-
ления контура RK (рис. 4.4):
= L QB/?K(1 Д-авх) I-1'2.
О>0 _ (1 + ^в-^)2 + (^B-^/Qs)2.
____Rk_______ । f 0) У___________PkQ.Ql ]-'
&/Ц/С, I + Q2bU+«b*)2/«b*2] J ’
(4.6)
43
где х = -j~ ey/zz0 ; ш0—\/УькСк — резонансная ча-
стота контура без варикапа; QL—добротность контура
без варикапа; aB=Ci/C0— коэффициент связи варика-
па; Pk = CqICk—коэффициент включения. Зависи-
мость RK (<?у) (рис. 4.4) позволяет, судить о глубине па-
разитной амплитудной модуляции, поскольку амплиту-
да колебаний U определяется запасом по самовозбуж-
дению, который пропорционален RK.
Таким образом, частотная модуляция с помощью
варикапа сопровождается значительной нелинейностью,
возрастающей - с увеличением девиации. Паразитную
амплитудную модуляцию и нелинейность частотной мо-
дуляции можно снизить, подобрав параметры ав и рк.
Для генерации ЛЧМ сигналов в диапазоне 1 ...
... 20 ГГц используют генераторы с магнитно-перестраи-
ваемыми резонаторами из железо-иттриевого граната
(ЖИГ-перестройка) (табл. 4.2). Такие ферритовые
СВЧ резонаторы обладают высокой (до нескольких ты-
сяч) добротностью и могут перестраиваться по частоте
в 2 ... 3 раза изменением тока в обмотке подмагничива-
ния. Существенным достоинством ЖИГ-перестройки
является линейная связь резонансной частоты с напря-
женностью магнитного поля. В таких автогенераторах
частота колебаний определяется ферритовым резонато-
ром и близка к его резонансной частоте [3, 33]. В ге-
нераторах ЛЧМ сигнала с ЖИГ-перестройкой достижи-
ма высокая линейность (#нлш =0,017%) MX [59]. Основ-
ными недостатками схем с ЖИГ-перестройкой является
большая мощность в цепи управления и инерционность
этой цепи, связанные с необходимостью создания высо-
кой напряженности магнитного поля, меняющейся во
времени. В связи с этим мощность в цепи управления
сравнима с потребляемой от источника питания генера-
тора, а длительность модуляции обычно не менее 1 ...
... 10 мс. Гистерезисные явления в феррите могут при-
вести к неоднозначности частоты порядка 10“4, если
меняется знак скорости модуляции (например, при мо-
дуляции по треугольному закону).
Генераторы на отражательных клистронах имеют
низкий уровень флуктуационных шумов и ничтожную
мощность в цепи управления, что позволяет получить
высокую скорость перестройки. Перестраиваемые на-
пряжением магнетроны—митроны — обладают высокой
линейностью модуляционной характеристики (MX), од-
44
Таблица 4.2
Характеристики управляемых по частоте генераторов
Активный элемент Способ управления частотой Максимальная выходная мощ- ность, мВт Диапазон частот, Гц Коэффициент перекрытия k О) Коэффициент нелинейности лу Нестабиль- ность частоты Источник
Операционный усилитель Генератор тока Управляемое со- противление 103 102 ю-6...ю7 10-‘...106 10... 100 10...103 1...2 2...5 Ю-2 IO"2 [56] [6]
Транзистор Генератортока Варикап жиг 103 103...10 100...10 102...108 106...1010 3- 1О9...1О19 1,5...3 1,5...2 2...3 1...2 5...20 1...5 ю-3 ю-4 ю-6 [21] [1, 75] [3]
Диод Ганна жиг Варикап 100...50 100...50 3- 1О9...1Оп 109...1010 1,5...2 1.2...2 1...5 5...20 ю-5 ю-5 [33] • [21]
ЛПД Варикап жиг 200... 100 200... 100 3- 1О9...1Ои 3- 1О9...1Оп 1.2...2 1,5...2 5...20 2...5 ю-5 ю-6 [21] [21]
Отражательный клистрон Напряжение от- ражателя 200...25 1О9...1О11 1,05...1,2 2...5 ю-6 [21]
лов Напряжение за- медляющей си- стемы 1О3...1ОО 5 • 109...5 • 1011 1,5...3 5...20 ю-4 [17, 18]
Митрон Анодное напря- жение 1О4...1О3 3- 108...5- 1019 1.5...3 1...20 ю-4 [21, 109]
Лазер Внешний ФМ Внутренний ФМ 1 5 1О14...1О15 5 • 1О13...1О15 1,05... 1,1 1,1...2 — ю-10 ю-6 [106] [46, 106]
нако требуют высоковольтных источников питания и
дают повышенную нестабильность частоты. Из пере-
страиваемых генераторов СВЧ наиболее высокочастот-
ными являются лампы обратной волны (ЛОВ), поэто-
му девиацию в несколько гигагерц в миллиметровом
диапазоне волн получают именно с помощью этих при-
боров. Так как модуляционная характеристика ЛОВ
нелинейна, при большой девиации частоты используют
схемы линеаризации. Разрабатываются методы частот-
ной модуляции лазеров [46, 106].
4.3. Формирование ЛЧМ сигналов с помощью
фазовых модуляторов
Сигналы с ЛЧМ можно формировать с помощью
управляемого фазового модулятора (УФМ), подавая в
качестве управляющего напряжение такой формы, что-
бы фаза выходного сигнала менялась во времени по
квадратичному закону. Допустим, что MX управляю-
щего фазового модулятора описывается полиномом
ф (еу) = -[- Х^уЦ-ОДХ^е2 ..., где <р0—фазовый сдвиг
при еу = 0; Xz (i=l, 2, 3, ...)—коэффициенты полино-
миальной аппроксимации. Если управляющее напряже-
ние ey = at2, т. е. имеет параболическую форму, то из-
менение фазы на выходе содержит кроме желаемой
квадратичной составляющей регулярное возмуще-
ние :
<Р [еу (/)] = <р0 < Stat2 + v (Z), (4.7)
где v(/) —
1-2
Для уменьшения v(£) необходимо использовать
управляемые фазовые модуляторы с линейной MX.
Предположим, что это условие выполнено, т. е. Х2 =
= Х3= ... =0 [21].
Максимальная девиация фазы (рис. 4.5,а) требуе-
мая от УФМ при t=T, составляет (рмакс =Х(йТ2. Для
неискаженного ЛЧМ сигнала й>=о)о + Ро/ фаза (3.2)
должна меняться по закону ф(£) = од/+ 0,5[М2. Первое
слагаемое в этой сумме определяется частотой входно-
го сигнала УФМ, второе — скоростью модуляции. Под-
ставив в это выражение t—Т, можно видеть, что (рМакс
46
ограничивает наибольшее значение базы сигнала, рав-
ное
£) = U7T<<pMaKC/*. (4-8)
Если требуемая девиация фазы nD больше макси-
мальной для данного модулятора фмакс, то ее можно
уменьшить вчетверо, сформировав модулирующее на-
Рис. 4.5. Характеристики
односторонней (а), симмет-
ричной (б) и симметричной
со сбросом (в) квадратич-
ной фазовой модуляции
пряжение в форме симметричной квадратичной пара-
болы с экстремумом при t — T/2 (рис. 4.5,6). При такой
симметричной модуляции опорная частота входного
сигнала равна центральной частоте выходного ЛЧМ
сигнала. Это особенно удобно, когда в радиосистеме
наряду с ЛЧМ сигналами используются когерентные
или немодулированные радиоимпульсы, которые полу-
чаются простым выключением управляющего напряже-
ния УФМ.
Наряду с этим для преодоления ограничения (4.8)
используют быстрый сброс фазы на целое число пе-
риодов [86], который можно производить многократно
за время модуляции (рис. 4.5,в). Чтобы искажения
ЛЧМ сигнала при этом были допустимыми, необходи-
мо, чтобы длительность сброса фазы была много мень-
ше интервала времени между соседними сбросами. Для
этого применяют дискретные УФМ с малым шагом,
управляемые от процессора [67].
Устройства фазовой модуляции выполняются дис-
кретными (например, в виде переключателя фазы со
сглаживающим фильтром) и непрерывными. В качестве
47
УФМ используют ЛБВ, усилительный клистрон, фазо-
вращательную ЛБВ и т. д. Удачным решением являет-,
ся применение управляемой линии задержки в виде:
индуктивности с отводами, к которым подключены ва-
рикапы [122], так что входное сопротивление УФМ
имеет емкостный характер. Эта цепь используется для
интегрирования линейно меняющегося входного сигна-
ла. Широко применяются УФМ, в которых управление
происходит за счет изменения емкости диода, включен-
ного в отрезок волновода, в резонансный контур про-
межуточной частоты или в отвод линии задержки.
Устройства фазовой модуляции отличаются малыми
массой и габаритами, высокой надежностью, тепловой
и радиационной стойкостью.
Для уменьшения требуемой девиации фазы можно
использовать также умножение частоты в последую-
щих каскадах [84]. Однако при фильтрации нужной
гармоники ЛЧМ сигнала в умножителе частоты предъ-
являются жесткие требования к линейности фазочастот-
ной характеристики фильтра в пределах занимаемой
полосы.
4.4. Коррекция модуляционных характеристик
При изменении управляющего напряжения еу в
управляемых генераторах и в фазовых модуляторах на-
блюдаются отклонения амплитуды и фазы выходного
сигнала от заданных. Для уменьшения этих отклонений
используют различные способы коррекции. Рассмотрим
вначале коррекцию характеристики <о(еу).
Программные устройства линеаризации MX разли-
чаются видом нелинейного преобразования напряже-
ния и схемой автоматической коррекции нелинейно-
сти. В этих схемах используют дополнительное нелиней-
ное звено в цепи управляющего напряжения, которое
обеспечивает минимальное отклонение характеристики
<п(еу (/)) от линейного во времени закона. Настраивая
звено нелинейности, интерполируют зависимость еу (ем),
заданную в выбранном числе точек. Чем больше число
точек настройки и выше степень аппроксимирующего
полинома между ними, тем меньше наибольшее откло-
нение характеристики в целом. Однако при этом зна-
чительно усложняется процесс настройки и уменьшает-
ся полоса модулирующих частот, в которой зависимость
еу (ем) можно считать безынерционной. В результате
48
устройства программной линеаризации обеспечивают
Лнл не лучше 1—2% при длительности сигнала более
1 ... 2 мс. Известны схемы с линейной интерполяцией
диодными ячейками в 10 ... 15 точках на операционном
усилителе [23], схемы с преобразованием управляюще-
го напряжения в цифровую форму и обратно [1] и дру-
гие [17]. Верхняя модулирующая частота в таких схе-
мах не превышает 10 ... 15 кГц, что соответствует дли-
тельности ЛЧМ сигнала не менее 1 мс, а линейность
перестройки повышается с 10 ... 15 до 1 ... 2%.
При формировании ЛЧМ сигнала не обязательно
добиваться линейной MX, можно производить коррек-
цию зависимости еу(/) модулятора. Например, если в .
LC-генераторе емкость варикапа с вольт-фарадной ха-
рактеристикой Св^С0//"еу составляет всю емкость
контура, то для получения ЛЧМ сигнала необходимо,
чтобы напряжение еу менялось пропорционально /4, а
для этого через емкость требуется пропустить линейно
растущий ток. Действительно, напряжение еу меняется
согласно уравнению de^dt — i(t)jCs, которое при
имеет решение еу(/)_&2Д/С2, а частота со(/)
меняется линейно. Включая корректирующие /?С-цепи
в генератор линейно растущего тока, удается снизить
коэффициент нелинейности ЧМ до 1 ... 2% [21]. Далее
(§ 4.6) рассмотрена схема генератора ЛЧМ сигналов с
коррекцией, позволяющей уменьшить коэффициент не-
линейности закона частотной модуляции за счет вари-
капа /гнл до 0,3%.
Для автоматической коррекции линейности MX мож-
но использовать отрицательную обратную связь по ча-
стоте или по крутизне s (еу) (рис. 4.6). Предположим
Рис. 4.6. Структурная схема
системы автоподстройки ли-
нейности модуляционной ха-
рактеристики управляемого ге-
нератора
для простоты, что управляемый генератор имеет линей-
но-ломаную MX вида
со = o>04-aSrey, (4,9)
где а=1 при еу<0 и а>1 при ev>0. Таким образом,
без обратной связи kHxs=a—1. Пусть частотный дис-
4—1022 49
криминатор (ЧД) имеет характеристику ечд = (со—
—©о) Зчд. усиление по цепи обратной связи ЦОС равно
hi, а еу = еи — Л^чд, где ем—внешнее модулирующее
напряжение...Нетрудно показать, что MX генератора с
системой линеаризации описывается соотношением
«)(ем) = «>о + ®5ген/(1 + аЛ*), (4.10)
где h* = hiS1S4ji —коэффициент регулирования. Со-
поставляя (4.9) и (4.10), можно видеть, что за счет си-
стемы линеаризации крутизна MX падает, но линей-
ность ее возрастает таким образом, что ккл$ =
= (а—1)/(1 +>ah*). При достаточно большом h* всегда
можно добиться 'a/i*^>l, т. е. в ah* раз повысить ли-
нейность MX. Аналогичные выводы можно сделать при
иной аппроксимации исходной MX.
Подобная автоматическая линеаризация MX фазо-
вого модулятора ср(еу) осуществляется в системе авто-
подстройки фазового сдвига [2] (см. § 12.3). Важно
отметить, что рассмотренные здесь системы автомати-
ческой линеаризации MX работают при модулирующем
сигнале произвольной формы и могут быть использова-
ны при формировании других ЧМ сигналов в отличие от
устройств автоподстройки параметров ЛЧМ, рассмот-
ренных в гл. 5—7.
4.5. Модуляторы
При использовании активного метода формирования
ЛЧМ сигналов нужны генераторы модулирующих сиг-
налов: линейно изменяющегося напряжения или тока,
напряжения параболической формы или более слож-
ных функций времени. Требования к точности заданной
функции времени определяются требованиями к пара-
метрам ЛЧМ сигнала. Обычно для изменения парамет-
ров ЛЧМ сигнала или для их автоматической коррек-
ции необходимо управление выходным сигналом моду-
лятора. Рассмотрим методы построения модуляторов
при формировании ЛЧМ сигналов.
Используют аналоговые и цифровые генераторы пи-
лообразного напряжения (ГПН). Основой аналогового
ГПН является конденсатор С, который заряжается по-
стоянным током /3, так что напряжение на нем ме-
няется по линейному закону Uc(t) = «с(0) + (Л/С)t.
50
Известно большое число аналоговых ГПН, отличающих-
ся схемами стабилизации тока заряда [55], переклю-
чения по окончании модуляции [1], коррекции нелиней-
ности выходного напряжения или стабилизации ампли-
туды выходного сигнала пилообразной или треугольной
формы [55].
Высокую линейность напряжения «с (0 и хорошую
нагрузочную способность обеспечивает схема с интегра- (
тором (рис. 4.2) на операционном усилителе с конден-
сатором в цепи обратной связи. Коэффициент нелиней-
ности сигнала такой схемы падает с ростом коэффици-
ента усиления операционного усилителя и может дости-
гать 1 ... 0,1%.
Цифровые ГПН позволяют формировать ступенча-
тое напряжение, близкое к линейно изменяющемуся.
Например, в схеме на рис. 4.7 эталонная последова-
Рис. 4.8. Структурная схема
аналого-цифрового генератора
пилообразного напряжения
Рис. 4.7. Структурная схема
цифрового генератора пило-
образного напряжения
тельность импульсов с ЭГ поступает на счетчик (Сч),
сигналы с разрядов которого поступают на преобразо-
ватель код — сопротивление (ИКС) на входе операци-
онного усилителя. В таких схемах стабильность высоты
ступеньки ступенчатого напряжения лучше 0,1% при
длительности одной ступеньки не менее 1 ... 2 мкс. Чис-
ло ступенек определяется точностью аппроксимации
линейного закона и обратно пропорционально допусти-
мой погрешности изменения выходного напряжения
ГПН. В связи с этим ограничена снизу длительность
модуляции Т.
Для преодоления этого противоречия и повышения
точности формирования пилообразного напряжения ис-
пользуют комбинированные аналого-цифровые ГПН
(рис. 4.8). Здесь, выходное напряжение является суммой
ступенчатого и пилообразного, причем продифференци-
рованные импульсы обратного хода аналогового ГПН
служат входными для счетчика.
4* 51
4.6. Генератор ЛЧМ сигналов, согласованный
с модулятором
Рассмотрим пример схемы генератора ЛЧМ сигна-
лов, где благодаря согласованию нелинейных характе-
ристик управляемого генератора (рис. 4.9) и генератора
модулирующего напряжения удается достигнуть высо-
Рис. 4.9. Схема колебательной си-
стемы генератора ЛЧМ сигналов,
согласованного с модулятором
кой точности формирования без применения систем
автоподстройки.
Для перестройки частоты от верхней сов до нижней
% по линейному закону надо подать на диод Д1 пряг
моугольный положительный импульс с амплитудой,
превышающей напряжение Еэ, определяющее порог
открывания диода Д2. Во время действия импульса
конденсатор С! заряжается, а после его окончания раз-
ряжается по экспоненциальному закону так, что управ-
ляющее напряжение варикапа ey(t) меняется согласно
еу (0 = (Дэ - Еси) е- + Еси, (4.11)
где Ti=7?iCi — постоянная времени модулятора; £см —
напряжение смещения.
Зависимость частоты настройки контура со от управ-
ляющего напряжения еу (см. § 4.2) можно привести к
виду
a)^[LK(CK + C0//^)]-V2. (4.12)
В данной схеме использован принцип согласования
[114] нелинейной MX со(еу) по (4.12) с нелинейным мо-
дулирующим напряжением еу (t) по (4.11), так что ре-
зультирующая зависимость со (t) линейна. Подставляя
(4.11) в (4.12), получаем следующую зависимость:
w(Z) = wB/^+“l{[(l—x)e-^4-x]-i.'2 + a}-i/2i (4.13)
где о)в = [£к Ск (1 + 1/га)]-1'2; х = £'сн/£,э;
я — Ск ~\Д E9/u0IC0.
52
Желаемую линейную зависимость частоты от вре-
мени в пределах сов>со>сон можно записать в виде
U)B-ШН t
шэ (0 — ШВ - >
1пЛ т,
л- +
1 — х[&!>(а-ф1) — а]2
(4-14)
(jfem = u>B/u)H — коэффициент перекрытия по частоте).
Вычитая (4.14) из (4.13), получаем отклонение частоты
т](0 (рис. 4.10,а) :
т](г?) _ (1 — х)е~^-}-х
шв V 1 4- а /~(Ь- х) е- 4-Т
k,,— 1 _ j
TjAm 1пД
(4-15)
Как видно из рис. 4.10, погрешность по частоте при
0<7<3ti не превышает нескольких десятых долей про-
цента.
Если требуется девиация частоты 2rtIF, меньшая
<вв — и)н, то на зависимости со(/) можно выбрать участок
с меньшей нелинейностью. Определим, например, ча-
стотное отклонение относительно касательной к (4.15)
в произвольной точке t = t0 при х = 0 (рис. 4.10,6)
Рис. 4.10. Зависимости отклонения частоты от линейного закона
в генераторе ЛЧМ сигналов, согласованном с модулятором при
£<> = 1,25 и различных значениях х и а
53
У (t) = U)B
5т, 1пД
2
1 4- e-^
—/0)
2т, /2(1 + e-^)3-2
(4-16)
- 1 +
Как видно из рис. 4.10,6, при t0= 1,5ti и а=1 в ограни-
ченном участке перестройки нелинейные искажения в
10 ... 30 раз меньше, чем во всем диапазоне.
Для радиолокационных ЛЧМ импульсов целесооб-
разно выбирать параметры схемы формирования, исхо-
дя из обеспечения минимальных отклонений во времени
фазы от квадратичного закона. Интегрируя (4.15), по-
лучаем
V (/) =2ко /5+^1-ГН _
L Т(/гт-1) У а + е- + уа
kmt f?
(km— 1)т, 2т, ПпД
(4-17)
Экспериментальные генераторы, разработанные по
данной методике, позволяли получать ЛЧМ сигналы с
девиаций 1 ... 15 МГц и длительностью 1000...3 мкс. В
таких генераторах достижимы относительное отклоне-
ние частоты от линейного закона ее изменения t]MH<
<0,3%, фазовое отклонение vM<l,5° при хорошем со-
впадении расчета с экспериментом (рис. 4.11).
Рис. 4.11. Теоретические (—----) и экспериментальные (—— —)
зависимости отклонений от заданного закона изменения частоты (а)
и фазы (б) генератора ЛЧМ сигналов (рис. 4.9)
54
Таким образом, рассмотренный генератор ЛЧМ сиг-
налов, согласованный с модулятором, отличается про-
стотой конструкции, надежностью, возможностью плав-
ной регулировки параметров и при средних значениях
базы (£)<200) обеспечивает высокую (доли процента)
линейность и малые (1—3°) отклонения изменения фа-
зы от квадратичного во времени закона.
4.7. Цифровые методы формирования ЛЧМ сигналов
Интенсивное развитие цифровых схем различной сте-
пени интеграции и появление процессоров для обработ-
ки сложных сигналов в значительной степени способст-
вовали созданию различного рода цифровых устройств
формирования ЛЧМ сигналов [46, 100]. Эти устройст-
ва позволяют не только изменять параметры формируе-
мых сигналов (девиацию частоты, длительность), но и
вводить в сигнал требуемые предыскажения, обеспечи-
вают стабильность и когерентность сигналов, а также
хорошую воспроизводимость характеристик при серий-
ном изготовлении.
Принцип работы большинства цифровых устройств
формирования ЛЧМ сигналов (рис. 4.12) основан на
Рис. 4.12. Структурная схема
цифрового синтезатора ЛЧМ
сигнала на основе накопителей
( 1 Я я.
-Went
I ™ г=1 . г=0
вычислении кода фазы сигнала в моменты времени
tr = rT3:
ЯГ R
^=2 ^н+2^
r=I L г=о
(4.18)
где Кши, К$—коды начальной частоты сон и скорости
модуляции Po=2nIF/7'; 7? — число точек отсчета; W—
емкость второго накопителя. Для выравнивания задер-
жек, вносимых регистрами сдвига, входящими в нако-
пители Н1 и Н2, второй из них, как следует из (4.18),
начинает работать спустя время 7\ (/э= 1/7\—эта-
лонная частота) после подачи тактовых импульсов на
Н1. Если код фиксирован, Н1, формирующий ли-
нейно меняющееся число, можно заменить счетчиком.
55
Цифровой синтезатор на рис. 4.12 позволяет форми-
ровать ЛЧМ сигналы двумя способами. По первому
каждый раз, когда код фазы К^г превышает
(рис. 4.13,а) емкость накопителя N, которая при этом
соответствует я, в нем формируются импульсы пере-
полнения (рис. 4.13,6), т. е. последовательно для I —
Рис. 4.13. Диаграмма формирования ЛЧМ сигнала в цифровом
синтезаторе (рис. 4.12) по* импульсам переполнения:
а —код фазы на выходе HI; б—импульсы переполнения; в —
ЛЧМ сигнал на выходе триггера
= 1, 2, 3, ... решается уравнение ®н -j- О,5ро & = wi,
чтобы определить моменты времени в которые фаза
ЛЧМ колебания кратна л. Поскольку код фазы К^г
вычисляется в дискретные моменты времени, значения
ft определяются с погрешностью, которая может до-
стигать 7'э=1//э. Полученная таким образом после-
довательность импульсов образует после деления в триг-
гере ЛЧМ сигнал прямоугольной формы (рис. 4.13,е)
с заданными значениями W и Т. Спектр этого сигнала
содержит лишь нечетные гармоники (рис. 4.14). Для
выделения первой гармоники начальную частоту необ-
ходимо выбирать больше половины девиации: fH>0,5IF.
56
Другой способ формирования ЛЧМ сигналов пред-
полагает использование кода фазы Кчг Для обращения
к запоминающему устройству ЗУ на рис. 4.15, в памяти
которого записаны значения выборок гармонического-
напряжения. Считанные из ЗУ выборки и s [г] —
= sin (ЗтсК^/АЛ) и [гj = cos поступают на
Рис. 4.14. Спектр ЛЧМ сигнала с прямоугольным заполнением при
Р=Ю0, /Н=2Г
цифроаналоговые преобразователи (ЦАП) и далее на
фильтры (Ф).
Квадратурные составляющие видеочастотного ЛЧМ
сигнала us (t) — Usin 90(i) и «с (/) = £/cos 6o(0> полу-
ченные с выхода фильтров, используются далее для
формирования в однополосном модуляторе радиочастот-
Рис. 4.15. Структурная схема цифрового синтезатора ЛЧМ сигнал»
на частоте <Оо
ПЧМ сигнал
ного сигнала на частоте соо- Из-за амплитудных и фа-
зовых погрешностей, возникающих в практических схе-
мах, и недостаточной фильтрации сигнала несущей ча-
стоты выходной радиосигнал наряду с полезной содер-
жит и паразитные составляющие, т. е.
и (f) — £7cos [u)0 t — 60(/)] + U' cos W + 'Jo W] +
-|- U” cos u)0 i,
57
которые обусловливают появление в сжатом сигнале
дополнительных боковых лепестков. Однако [ЮО] , тща;
тельно настраивая входящие в однополосный модуля-
тор перемноЖители и сумматор, можно снизить отно-
шение амплитуд паразитных составляющих U', V" к
амплитуде U полезного сигнала до —(50 ... 60) дБ.
Точность формирования ЛЧМ сигналов этим спосо-
бом зависит от числа адресов, по которым осущест-
вляется обращение к ЗУ (числа разрядов квантования
по фазе], и от разрядности чисел, хранимых в ЗУ. Так,
напримерХиз .25 разрядов накопителя [100] для адре-
сации к ЗУ используется лишь 11 старших разрядов.
Их число, а также необходимость хранения в ЗУ 10-раз-
рядных выборок, определяется допустимым уровнем бо-
ковых лепестков в сжатом сигнале. Проведенные испы-
тания экспериментальных образцов таких синтезаторов
показали (табл. 4.3), что принципиально можно полу-
чить уровень боковых лепестков А = — (30 ... 35) дБ.
Т а б Jrii ц а 4.3
Характеристики ЛЧМ сигналов, формируемых цифровым
синтезатором [100]
W, МГц Т, мкс D А, дБ
2 10 20 —36
2 150 300 —33
9,4 102 960 —33
10 2 20 —33
20 1 20 —35
35 2 70 —32
35 4 140 —31
35 25,6 896 —32
35 1 35 —31
Отметим, что число хранимых выборок, а следова-
тельно, и емкость ЗУ можно существенно уменьшить,
если требуется сформировать лишь один ЛЧМ сигнал
с определенным образом подобранной базой [46].
4.8. Устройства формирования широкополосных ЛЧМ
сигналов с высокой точностью
При формировании ЛЧМ сигналов с большими зна-
чениями девиации частоты и базы трудно реализовать
высокие требования к точности. Это противоречие мож-
58
но разрешить, используя более сложные устройства,
например, рециркуляционные схемы, системы автопод-
стройки параметров ЛЧМ сигнала, а также аналого-
цифровые синтезаторы (см. гл. 9).
Идея рециркуляционной схемы [4] состоит в том,
что необходимая длительность выходного ЛЧМ сигна-
ла Т делится на М участков длительностью ТХ = Т/М
каждый. На первом из них формируется исходный
ЛЧМ сигнал Ui = t7sin(coo^+0,5Po^2) (0<^<7’1), который
задерживается на время 7^1, преобразуется по частоте
на Aco=iPo7’i и вновь поступает на вход. Девиация ча-
стоты в нем равна сдвигу ее в преобразователе 2л!^1=
=iPo7'i, поэтому при совпадении начальной и конечной
фаз сигнала и стабилизации выходной амплитуды сум-
марные девиация частоты и длительность возрастают
в М раз, где М — число рециркуляций. При этом база
увеличивается в М2 раз.
Исходный ЛЧМ сигнал длительностью Тх поступает
на сумматор от генератора ЛЧМ сигнала (рис. 4.16).
Кольцо рециркуляции состоит из смесителя (См), уси-
От синхро-
низатора
Рис. 4.17. Структурная схема си-
стемы автоподстройки параметров
ЛЧМ сигнала
Рис. 4.16. Структурная схема
устройства формирования ЛЧМ
сигнала на базе рециркулятора
лителя с автоматической регулировкой усиления (АРУ)
и линии задержки (ЛЗ) на время Тх. Основная труд-
ность реализации такой схемы состоит в обеспечении
малых фазовых и амплитудных возмущений в моменты
времени, кратные периоду рециркуляции. Для их умень-
шения необходимо, чтобы фазовый набег ЛЧМ сигнала
Ро^?/2 за время единичного импульса был кратен цело-
му числу периодов сигнала опорного генератора. Для
этого внутри кольца рециркуляции, а также на выходе
устройства используют электронно-перестраиваемые
фильтры [4], например, управляемый по частоте в пре-
делах всей девиации автогенератор, следящий с по-
мощью системы фазовой автоподстройки частоты [82]
за частотой выходного ЛЧМ сигнала на рис. 4.16. Чис-
59
ло рециркуляций М в таких системах может достигать
200 ... 500, что обеспечивает базу сигнала до 105 при
малых фазовых отклонениях.
При воздействии на устройство формирования деста-
билизирующих факторов (климатические изменения,
вибрации, шумы), при нелинейной MX и одновременно
высоких требованиях к точности целесообразно исполь-
зовать систему автоматической подстройки параметров
ЛЧМ сигналов (рис. 4.17). Здесь в качестве генератора
ЛЧМ сигнала может быть использован управляемый
автогенератор - (§ 4.2) или комбинация эталонного ге-
нератора с УФМ (§ 4.3), причем в этих устройствах
должны быть приняты возможные меры для линеариза-
ции MX (§ 4.4) и управляющих напряжений (§ 4.5).
Система автоподстройки ЛЧМ сигнала предназначена
для автоматической коррекции отклонений фазы, часто-
ты или скорости ЧМ независимо от вызвавшей их при-
чины.
Измеритель сигнала ошибки (ИСО) вырабатывает
напряжение £о(О, пропорциональное отклонениям па-
раметров формируемого ЛЧМ сигнала от заданных зна-
чений. Высокие требования к точности работы ИСО за-
ставляют использовать в составе таких устройств эле-
менты, являющиеся эталонными с точки зрения изме-
нения температуры, а также и других внешних факто-
ров или старения. В настоящее время широко использу-
ются три типа ИСО. В первом из них ЛЧМ сигнал с
помощью эталонной ЛЗ и смесителя преобразуется в
сигнал разностной частоты. При этом отклонения от
линейного закона ЧМ т](/) приводят к вариациям фазы
сигнала разностной частоты, поступающего затем на
частотный или фазовый детектор (ФД). В дальнейшем,
поскольку ФД с точки зрения точности более пред-
почтителен, мы будем в основном рассматривать ИСО
с фазовым детектированием. Второй тип ИСО позво-
ляет измерять отклонения фазы от заданного квадра-
тичного закона непосредственно, не преобразуя ЧМ сиг-
нал на разностную частоту. Такое измерение осущест-
вляется в импульсно-фазовом детекторе (ИФД) при по-
мощи последовательности коротких видео- или радио-
импульсов [107, 117]. И, наконец, в третьем типе ИСО
применяется цифровой преобразователь ЛЧМ сигнала
в сигнал постоянной частоты [87].
60
От синхронизатора
Рис. 4.18. Структурная схема ана-
лого-цифрового ИСО
Точность измерения во всех этих схемах зависит не
только от стабильности характеристик входящих в них
элементов, но и от выбора их параметров. На характе-
ристики ИСО влияет тип ФД. Например, ИФД типа
«выборка-запоминание» имеют малую инерционность и
обеспечивают подавление входного сигнала на выходе
более чем на —80 дБ [53, 78]. В зависимости от формы
сигналов, поступающих на входы ФД, диапазона частот,
типа ИСО и конкретной схемы входящего в него дис-
криминатора его характеристика F(<p) может быть раз-
личной (синусоидальной, пилообразной, треугольной
и т. д.). Иногда ис-
пользуют варианты
упомянутых ИСО, от-
личающиеся дополни-
тельными преобразо-
ваниями частоты, ум-
ножением или деле-
нием частоты в целое
число раз.
При формировании
ЛЧМ сигналов с малой
девиацией и большой
базой успешно приме-
няются аналого-цифро-
вые схемы ИСО. В одной из них (рис. 4.18) [46]
на выходе смесителя образуется ЛЧМ сигнал есм (t) с
уменьшенной на юн начальной частотой и увеличенной
в п раз скоростью перестройки, где п — коэффициент
умножения частоты. В счетчике Сч1 фиксируется число
переходов через нуль напряжения есм (t), а на выходе
накопителя Н из импульсов синхронизатора, прошед-
ших через счетчик Сч2, образуется число, равное рас-
четному числу переходов через нуль при идеальной
модуляции. После вычитающего устройства (ВУ) сиг-
нал ошибки преобразуется в ЦАП в аналоговую форму
и корректирует частоту УГ. В этой схеме фазовая по-
грешность выходного ЛЧМ сигнала измеряется с дис-
кретностью квантования по фазе 360°/гг.
Цепь обратной связи преобразует напряжение eQ(t)
в сигнал коррекции с необходимым его сглаживанием.
Для компенсации изменения во времени коэффициента
передачи ИСО с преобразователем в ЦОС иногда ис-
пользуется блок с переменным усилением. Известны
схемы, где в ЦОС применяют цифровые и переключаю-
61
щие элементы, обеспечивающие оптимальную коррек-
цию фазовой погрешности формируемого ЛЧМ- сигнала.
Дальнейшее ^существенное повышение точности под-
стройки достигается при использовании в ЦОС автома-
тического компенсатора регулярных искажений.
Глава 5
УСТРОЙСТВА АВТОПОДСТРОЙКИ ПАРАМЕТРОВ
ЛЧМ СИГНАЛОВ С ИЗМЕРИТЕЛЯМИ НА ЛИНИИ
ЗАДЕРЖКИ
5.1. Измерение отклонений от линейного закона
частотной модуляции с помощью линии задержки
Рассмотрим принцип ..работы измерителя сигнала
ошибки (ИСО), построенного с применением ЛЗ, сме-
сителя и импульсно-фазового детектора (ИФД)
(рис. 5.1). Входной сигнал u(t) с частотой и(/)=©н4-
+!₽о/+,цЦ) (рис. 5.2,а), где тД г)—текущее отклонение
Рис. 5.1. Структурная схема
измерителя сигнала ошибки на
линии задержки
Рис. 5.2. Изменение частоты на
входах (а) и выходе (б) сме-
сителя при Т)(()=6/
частоты от линейного закона ее изменения, поступает
на смеситель как непосредственно, так и через эталон-
ную ЛЗ с запаздыванием т. Сигнал разностной частоты
“р (0 =ю(Ц—w(/—т) (рис. 5.2,б) подается на ИФД, в
котором вырабатывается сигнал ошибки. Из рис. 5.2,6
видно, что информация о сигнале ошибки начинает по-
ступать при
62
Найдем связь между напряжением сигнала ошибки
е0 (t) и отклонением фазы v(t) от требуемого квадра-
тичного закона во(О=ОД₽о^2 в ИСО по схеме на
рис. 5.1 [42, 50]. В общем виде ЛЧМ сигнал u(t) мож-
но записать следующим образом:
и (t) = t7cos[uin t + О,5ро t2 + v (0], (5.1)
Полагая, что смеситель, на входы которого поступает
этот сигнал, осуществляет операцию перемножения, а
составляющая сигнала суммарной частоты фильтрует-
ся, получаем
«cM(0 = ^cmCOs[<o„t:4-Po^— О,5₽от:2+ 4 (£)], t >т,
где UCM —амплитуда сигнала на выходе смесителя;
4>(0=v(0——т). Подавая этот сигнал на ИФД, к
которому в моменты времени tk = т k Тэ -|- Фэо 71э/2тс
поступают эталонные импульсы, получим напряжение
сигнала ошибки
<?0 [£] = Uo F[<он т: — О,5ро г2 — Фэо О (£)], t >
где Та =2n/^ot = T/Wx — период повторения эталонной
последовательности; Фэ0 —ее начальная фаза; k = 0,
1, 2, ... —номер выборки; UQ—максимальное значение
модуля напряжения на выходе ИФД; F(-) —его харак-
теристика. В отсутствие отклонений от заданного за-
кона модуляции, т. е. при v(t)=s 0, сигнал ошибки на
выходе ИФД должен быть нулевым. Это требование
можно выполнить, если обеспечить равенство
т — О,5ро "2 ~ Фэо = 2яЛ (5-2)
где I — целое число. С учетом (5.2) получаем формулу, .
связывающую отклонение фазы ф с напряжением сиг-
нала ошибки:
e0[k] =UqF{ф[Л]} при t > т. (5.3)
Имея далее в виду, что в соответствии с теоремой Лаг-
ранжа v(t) — v(t—т) =‘тт] (t— цт), 0<ц<1, формулу
(5.3) можно записать иначе:
^o[A]==(/0F{ttj[A— р]} при (5.4)
Из этой формулы следует, что с уменьшением т чув-
ствительность ИСО к отклонениям частоты т](^) от ли-
нейного закона модуляции падает, а ширина линейного
63
участка дискриминационной характеристики возрастает.
Для рассогласований, приходящихся на линейный уча-
сток характеристики ИФД, напряжение сигнала ошиб-
ки пропорционально отклонению частоты т](^) от за-
данного закона модуляции, т. е.
е0 [&] «s Uo F^o гц \k — р], > г,
(5.5)
где —крутизна характеристики ИФД при ф = 0. Со-
отношениями (5.4), (5.5) удобно пользоваться при экс-
периментальном определении частотных отклонений.
Инерционность ИСО зависит как от запаздывания в
ЛЗ, так и от вида фиксирующей цепи, восстанавливаю-
щей реальный закон изменения т](^) по выборкам
<,[6]. Операторное выражение для коэффициента пере-
дачи ИСО //и со (Р) = е0 (р)/ц(р) получим, предполо-
жив, что на выходе ИФД стоит фиксирующая цепь нуле-
вого порядка с коэффициентом передачи У/фЦ = (1—
—е~Ртэ)1р, равенство (5.2) выполнено, а |ф[&] |<С1-
Последнее позволяет считать характеристику ИФД ли-
нейной, т. е. £of£] = Fifl (70ф[£]. Разность фаз на вхо-
дах ИФД связана с т](^) соотношением ф(0 =
= Лп(0— *п(у—
о
Переходя к символической форме записи, учитывая
выражение для (р) и связь между е0[/г] и ф [&],
находим коэффициент передачи ИСО
Яисо (Р) = Uo [(1 - ^рТ^/р] [(1 - (5-6)
Заменив р на jo/, получим выражение для частотной
характеристики ИСО
и а г пт (si’n (°,5<о'т:)1
Ни со (jul) == Дро U0T9l —-- — } X
( и,оа) т J
[ sin(0,5a/7^) '
I 0,5о)'Гэ
—)0,5ш’(т + Г )
е я
из которого видно, что погрешность измерения склады-
вается из двух составляющих: первая определяется ча-
стотной зависимостью модуля коэффициента передачи
ИСО, а вторая — вносимым ИСО запаздыванием на
время 0,5(т+Тэ). В рамках схемы на рис. 5.1 мини-
64
тральное запаздывание с учетом Та = 2лрот определяет-
ся из уравнения
\ 2-п:/рр т)_0
d~
Решая это уравнение относительно т, находим, что ИСО
вносит минимальное запаздывание, когда т= 4F=
— У TfW- При таком выборе т максимальной оказы-
вается и полоса пропускания ИСО. В реальных схемах
ИСО равенство т = <5’ часто не соблюдается. Обычно
учитываются дополнительные соображения, например,
стремление расширить линейный участок характеристи-
ки ИСО, уменьшить размеры ЛЗ и снизить в ней зату-
хание приводят к выбору т< ST.
На выбор времени задержки т могут также сущест-
венно повлиять отклонения задержки Дт от номиналь-
ного значения т, связанные с неточностью установки,
дисперсионными свойствами ЛЗ, зависимостью времени
запаздывания от температуры, старения и других факто-
ров. Другими словами, значительную роль при выборе
параметров ИСО играют эталонные свойства ЛЗ. Пред-
положив, что запаздывание в ЛЗ равно т + Дх где Дт С
<Ст, получим
е0 [А] Uo F (т (шн 4- р0 kT3) + т) [(А - И) ГЭ]П.
J)
Первое слагаемое определяет нестабильность нуля дис-
криминационной характеристики ИСО. Вследствие это-
го точность измерения частотных отклонений ц (t) от
линейного закона модуляции в таком ИСО не может
быть лучше («>„ + Из сказанного следует, что
при выборе ЛЗ особое внимание необходимо обращать
на стабильность ее задержки и уровень дисперсии
[ЮЗ].
Оценивая в целом ИСО па рис. 5.1, можно отметить,
что несмотря на его инерционность и относительно не-
высокую точность он широко применяется благодаря
своей простоте, возможностям анализа широкополосных
сигналов и использования в различных диапазонах ча-
стот Г69, 1041-
65
5.2. Математическая модель системы автоподстройки
При активном методе формирования ЛЧМ сигналов
отклонения от заданного закона модуляции зависят в
основном от характеристик УГ и модулятора, а тип
фильтра и параметры цепи обратной связи (ЦОС) в
системе автоподстройки определяют качество под-
стройки.
Модуляционную характеристику УГ представим в
виде
. <о (<?у) = Sr еу + xsin 7 еу, (5.7)
где еу—управляющее напряжение, равное сумме на-
пряжений с выходов модулятора и фильтра; Sr, и и у —
параметры аппроксимации реальной MX. В частном
случае, при и —О, модель описывает УГ с линейной
связью между частотой и управляющим напряжением.
Под действием модулирующего напряжения ек (t) =
— at+Ae (t), включающего, действующее по входу УГ
возмущение &e(t), на выходе УГ формируется ЛЧМ
сигнал вида (5.1), причем уровень остаточных откло-
нений от заданного закона модуляции определяется
типом фильтра и параметрами ЦОС. В зависимости от
требуемого порядка астатизма этот фильтр может со-
держать различное число интеграторов, которое в си-
стемах автоподстройки ЛЧМ сигналов обычно не пре-
вышает двух. Тогда коэффициент передачи фильтра
можно представить в виде
Н(р) = (1 + Хр)-1 (h. h2p-' + h2p~\ (5.8)
где К—постоянная времени инерционного звена, учи-
тывающего конечную полосу пропускания ЦОС; h., h2,
Рис. 5.3. Модель системы автоподстройки параметров ЛЧМ сигна-
лов с измерителем на линии задержки
66
h3 — коэффициенты усиления по отдельным каналам.
Систему автоподстройки с таким фильтром будем ис-
следовать только в линейном случае, при оптимизации
параметров ЦОС. При решении более сложных задач
будем полагать к = /г3 = 0.
Составленная с учетом этих замечаний модель си-
стемы автоподстройки с ИСО на ЛЗ (рис. 5.1) пред-
ставлена на рис. 5.3, где
t*/= t/S'; = т/^; Т* = Гэ/^; к* = к/^; 7* = /<£Г;
/ <o* = <oj'; х*=х^Г; e*=SreyS';
<U*) = SrM0^ P* = PST-,
р; = р0 </-2 = 2к; а* = sr = 2^;
h\ = Sr F^ U0 h, S'; h* = Sr Гфо UQ h2 S'2;
a; = Sr F*o UQ h3 S'*; £ (f*) = Sr Де (0 S';
y* = d^/dF; S* = l; e = e0IE. (5.9)
Точность формирования сигналов в системе автопод-
стройки (рис. 5.3) во многом зависит от выбора време-
ни задержки. Особый интерес представляет случай
x = S~, т. е. т* = 1, при котором погрешности измерения
минимальны. Исследование системы при таком времени
задержки раскрывает основные особенности ее динами-
ки, позволяет сравнительно просто оценить влияние
нелинейности характеристик УГ и ИФД. По этой при-
чине исследованию системы при т* = Г*=1 уделим наи-
большее внимание. (Дополнительные сведения о пове-
дении линейной модели системы АП ЛЧМ при временах
запаздывания, отличных от рассматриваемых здесь,
можно найти в статье [81]. Общий подход к исследо-
ванию линейных систем с произвольным запаздыванием
изложен в [32].)
5.3. Оптимизация параметров фильтра в цепи обратной
связи
При исследовании устойчивости, переходных процес-
сов и оптимизации параметров фильтра будем полагать
характеристики УГ и ИФД в системе на рис. 5,3 ли-
нейными. Из этого следует, что х* = 0, £=ф.
5* 67
Эффективным средством анализа линейных импульс-
ных систем автоматического регулирования являются
методы z-преобразования и модифицированного z-npe-
образования [32, 79]. Ими мы и воспользуемся для
определения параметров фильтра, удовлетворяющих
условиям устойчивости. Запишем характеристическое
уравнение в виде
D(z) = A*P1(z)+A*P2(z) + P3(z), (5.10)
где Pi (z)—полиномы, коэффициенты которых опреде-
ляются через параметры X* и h*3 [41]. Подставляя в
(5.10) z=e',y и обозначая Pt (jy) = Re Р((у) +
-l-jlmP^y), получаем систему уравнений
Al Re Р, (у) + /г* Re Р2 (у) + Re Р3 (у) = 0,
(5.Н)
h\ Im Pi (у) h* Im P2 (у) + Im P3 (y) = 0,
относительно неизвестных hx и Задавая различные
значения у в пределах от 0 до л [79] и решая последо-
вательно систему уравнений (5.11) на ЭВМ, построим
Рис. 5.4. Границы устойчивости системы автоподстройки при раз-
личных сочетаниях параметров Л* и ft*sr
границы устойчивости системы в плоскости параметров
/г*, Л* (рис. 5.4).
Знание границ устойчивости позволяет судить толь-
ко о влиянии параметров фильтра на размеры области
устойчивости и ее положение. При выборе же парамет-
ров фильтра необходимо знать, как меняется характер
68
процессов в области устойчивости. Одним из критериев
оценки качества работы системы может служить пара-
метр £*, характеризующий степень устойчивости и свя-
занный с длительностью переходного процесса /*ер со-
отношением ^*ер~3/£* [79]. Каждому значению в
области параметров h*, h*2 соответствует некоторая ли-
ния, для любой точки которой степень устойчивости
одинакова. Нахождение линий равной степени устойчи-
вости сводится к определению границ устойчивости пре-
образованного характеристического уравнения Z)(z),
где z=zee*.
Границы устойчивости такого преобразованного
уравнения по-прежнему находят, решая систему урав-
нений (5.11), в которой коэффициенты полиномов за-
менены новыми [79]. Максимальная степень устойчи-
вости £*акс определяет оптимальные с точки зрения
быстродействия параметры фильтра h*w h^0 и мини-
мальную длительность переходных процессов f„epuHH
(табл. 5.1) при фиксированных X* и h*3.
Таблица 5.1
Оптимальные с точки зрения быстродействия параметры фильтра
к* ъ* *20 fa* Лю t* пер мин
0 . 0 1,0 0,5 2
0,25 0 0,67 0,4 ~3
2,5 0 0,37 1,4 ~3,7
1,0 1 1,5 1,67 ~8,5
1,0 1 4,0 10 ~12
Другим критерием качества, позволяющим судить
о характере переходных процессов, служит квадратич-
ная оценка, которую можно найти непосредственно по
z-изображению частотного или фазового отклонения
при условии, что последнее с течением времени стре-
мится к нулю. Вывод выражений для изображений про-
цесса с увеличением порядка характеристического урав-
нения D(z) существенно усложняется, поэтому ограни-
чимся рассмотрением квадратичных оценок для филь-
тра //(/?*)=( 1 -J-X*/?*)-1 /1^/р*) при отклонении ско-
рости ЧМ от заданной, т. е. Д*(/*)•= В* t*, где
69
8* = Sr8И <^2- Поскольку система с таким фильтром об-
ладает астатизмом первого порядка, к нулю с течением
времени стремится лишь отклонение скорости ЧМ
Поэтому будем рассматривать только критерий
/7s. Отклонение скорости ЧМ от заданной в z-изобра-
жении равно
т—1 / т \—1
= dpt {^CjzA , (5.12)
i-0 \/=0 /
где 0<ц<1; m — порядок характеристического уравне-
ния, а коэффициенты cJt dt определяются через пара-
метры фильтра. Интегральная квадратичная оценка .7s
находится по этим коэффициентам непосредственно из
формул, приведенных в [79]. Исходное отклонение ско(-
роста ЧМ полагается при этом равным единице (S* =
= 1). Линии равной степени устойчивости g* и квадра-
тичной оценки для построены на рис. 5.5.
При К*=0 бесконечная степень устойчивости, а следо-
вательно, и минимальная длительность переходных про-
цессов достигаются при /г* = 0,5 и /г*= 1.
5.4. Допустимые отклонения скорости частотной
. модуляции и начальной частоты
Линеаризация дискриминационной характеристики
ИСО и изучение свойств системы на упрощенной моде-
ли допустимы при малых исходных возмущениях. Что-
бы указать границы применимости линейной модели и
сформулировать требования к величине допустимых ис-
ходных возмущений, необходимо найти предельные от-
клонения частоты или скорости, при которых еще
|ф| <л. Решим эту задачу для возмущения Д* (t*) =
= + в предположении, что модуляционная ха-
рактеристика УГ линейна х* = 0, т* = 1, Г(ф) = sin-ф, а
коэффициент передачи фильтра Н(р*) = h*-\-h*/p*.
Воспользуемся методом «суммарных» уравнений
[80], являющихся аналогом интегральных уравнений.
Сигнал ошибки по этому методу в дискретные моменты
времени находится суммированием отклика фильтра с
нормированным модулирующим напряжением и после-
дующим преобразованием полученной суммы в соот-
ветствии с рис. 5.3. На первом шаге отклонение частоты
70
и фаза разностного сигнала имеют вид ?]* = tj* и
ф|(н)= <!^О,58*и!?, гДе 0сц<1. Измеренное к кон-
цу первого шага отклонение фазы ф(1) преобразуется
в ИФД в напряжение e^sintpjl), которое запоми-
нается до следующей выборки. Начиная со второго ша-
Рис. 5.5. Линии равных значений степени устойчивости В* (а) и
квадратичной оценки (<5) при Т1(0=6^ А*=0,25, А*з=0
га (/*>1), переменные состояния системы т,* и ф* опре-
деляются не только внешним возмущением Д*(/*), нои
сигналом коррекции, поступающим из ЦОС. На fe-м
шаге эти переменные имеют следующий вид:
Ъ М ~ 1) 8*„ ~ Ca-i - А; 2 et + (В*и - h'2ek_^,
i-i
А-3
Фа (Н) = < + 0,5 (‘2k - 3) 8* - AJ eft_2 - h\ et - (5.13)
z-i
- 0,5^ вА-2 + [В* 4- А* (вй-2 - 6A-!) - h* вА-2] Н +
+ 0,5A*(eft-2 —eA-i)|i2,
где ek = sin<|>A(l); [л = t* — k 4- 1.
Определим стационарные значения переменных со-
стояния в системе автоподстройки, описываемой уравне-
71
ниями (5.13). Для этого найдем отклонение скорости
8*= = 8*—А*щ_1.Так как при /г*^0 с течением
времени б^-»-0 (система автоподстройки ЛЧМ с таким
фильтром имеет астатизм первого порядка), то ест
=8*/А*, Фет = arc sin (8*//?*). С учетом этих соотношений
стационарное отклонение частоты от линейного закона
модуляции находится из (5.13):
71ст = Фст = агс81п(8*/^). (5.14)
Рекуррентные формулы (5.13) позволяют исследо-
вать свойства системы, связанные с нелинейностью ха-
d^dt*
Рис. 5.6. Фазовые траектории
системы, иллюстрирующие про-
цесс нахождения предельного
отклонения скорости ЧМ при
т*~1, Л»1=0,5, Л»2=1
Лф/dt*
tfi---
Рис. 5.7. Фазовые траектории
системы при фиксированном
отклонении скорости ЧМ
6*и = 0,5, т*=1, Л»1=0, 4*2=1
и различных исходных откло-
нениях частоты т]*я (участки
траекторий при 0с/*<1 не по-
казаны)
рактеристики ИФД. Положив, например, т)*’=0, на®‘
дем предельное отклонение скорости ЧМ б*ред. Анализ
траекторий системы на фазовой плоскости ф* , ф
(рис. 5.6) показывает, что при S* >1 наблюдается ре-
жим биений, а 6*ред «1. Это означает, что относитель-
ное отклонение скорости б/Ро='б*/2.тг при этих парамет-
рах фильтра не превышает ±16%. В практических рас-
четах под б‘ред будем понимать отклонение скорости
ЧМ, при котором за время /* = 10 еще выполняется
условие
(i)]2+ 1ф;+1 (0)р+(ф-фст)2 < о,оооз. <5 л5>
72
Проведенные на ЭВМ расчеты показали, что в области
параметров h*, /1*, определяемой неравенствами 1>
> h* > 0,5h* — 0,3; 2>/г*>0,6, отклонение скорости
8*ред практически совпадает с коэффициентом h*.
Выясним теперь, как влияет отклонение частоты от
ее начального значения шн на переходные процессы и
параметры ЛЧМ сигнала. Для этого обратимся к фа-
зовым траекториям рассматриваемой импульсной си-
стемы (рис. 5.7). Как и в обычной системе ФАПЧ, здесь
наблюдается чередование особых точек: устойчивой с
координатами ф'*=0, фуст== arcsin (8*//?*) +2ш и не-
устойчивой с координатами ф/#=0, фнуст = к—
— arcsin(о*/А*) ±2ш, где i = 0, 1, 2, ... Максимальные-
длительности переходных процессов соответствуют фа-
зовым траекториям, начинающимся из области седло-
вой точки. Стационарные же частотные отклонения в
зависимости от т,* принимают значения rfCT — Фуст =
= arcsin (8*/А*) ±2ш’. Эту особенность системы авто-
подстройки с ИСО на ЛЗ можно использовать для фор-
мирования ЛЧМ сигналов с различными начальными
частотами. Во всех остальных случаях приходится за-
ботиться о том, чтобы обеспечить стационарный режим
при i = 0.
5.5. Оценка влияния нелинейности модуляционной
характеристики
Нелинейность модуляционной характеристики УГ
двояко влияет на работу системы автоподстройки пара-
метров ЛЧМ сигналов. Во-первых, она приводит к по-
явлению отклонений частоты или фазы от заданного,
закона их изменения и, во-вторых, к изменению коэф-
фициента усиления ЦОС в процессе перестройки УГ ПО'
частоте. Последнее обстоятельство может существен-
ным образом изменить условия работы системы авто-
подстройки вплоть до того, что первоначально выбран-
ная рабочая точка (например, параметры h* и /г’) при
изменении частоты управляемого генератора может ока-
заться за границей устойчивости системы. В то же вре-
мя при исследованиях системы автоподстройки возму-
щение, связанное с нелинейностью MX, обычно перено-
сится на вход УГ, а сам он полагается линейным. Тем
самым один из негативных эффектов, связанных с не-
73
линейностью MX, полностью игнорируется. В связи с
этим представляется интересным количественно оценить
влияние нелинейности MX и обосновать возможность
применения линейной модели УГ. Здесь вопрос об уста-
новлении правомерности замены нелинейной MX линей-
ной решим в рамках модели на рис. 5.3, где УГ имеет
MX вида (5.7), ИФД обладает синусоидальной харак-
теристикой, время запаздывания в ЛЗ т*-=1, фильтр с
коэффициентом передачи (5.8) имеет параметры Х* =
=Аз = 0, А* = 0,5; //‘=1,0, а входное возмущение отсут-
ствует [41, 42].
Для определения процессов в системе воспользуемся
методом «суммарных» уравнений. Представим е*
(рис. 5.3) в виде — Mk-\-Nk р., где 0<ц<1. Тогда ко-
эффициенты Mk и на k-м шаге
А-2
Мк = 2к (k — 1) — ek_t - А* V = 2к —
/=1
1
С учетом этого /£(!), т)*+1(0) и фА = фА_1 Д- J[tq*
о
—в дискретные моменты времени t*k = k
^(b = Qft+**sirn*Qft-2rcA, 7j*+1 (0) = Mk+l +
4~ x*sin — 2лА; (5.16)
Ф* — фл-i + Мк — Mk-i 0,5 (Nk — +
+ x* (cos y*34A — cos7*Qft)/7*^ — x* (cos7*/Wft_i—
— cos7* Qa-i)/7*7Va-i — 2~,
где фо = Qk = Mk + Nk-
{При необходимости нетрудно вывести выражения для
переменных состояния и как функции времени.)
Подобным образом можно получить суммарные
уравнения и в том случае, когда нелинейная MX заме-
нена линейной <о*(^*) = е*, а связанное с ней возмуще-
ние отнесено ко входу УГ, т. е. A* (if*) =x*sin 2лу*^*-
В этом случае переменные состояния системы на А-м
шаге
А-1
(1) = X* Sin 2Л *А - а; е^, - а; 2 *1,
1=1
74
rik+l(O) = ^ sin 2^k-h*ek-h^ei; (5.17) '
<|»л (!)=**[ cos 2^*(k — 1) — cos2iq*£]/2itf* — h*ek-i —
\ fe-2
v -a; 2^-0(5A^*_,.
i=l I
При оценке качества процессов в обоих случаях при-
меним квадратичный критерий
(5.18)
где T* = Tj^T ^=yD —нормированная длительность
сигнала, численно равная нормированной девиации ча-
стоты, выражение в квадратных скобках определяет
среднее значение частотного отклонения в дискрет-
ные моменты времени /*=&; /=0 соответствует ра-
зомкнутой, а /=1—замкнутой ЦОС. Принятый крите-
рий качества учитывает в совокупности и быстроту за-
тухания процессов, и значение частотного отклонения.
Результаты расчета выигрыша Ог; = Л0/Л1, найден-
ного при Г* = 200 по квадратичному критерию (5.18),
показывают (рис. 5.8), что
по мере возрастания часто-
ты у* исходного возмуще-
ния (т. е. числа периодов
у*Т* возмущения на дли-
тельности сигнала Т*) вы-
игрыш G уменьшается. Для
приведенных кривых он
максимален, когда на дли-
тельности сигнала уклады-
вается один период возму-
щения (у*7’* = 1), и мини-
мален, когда на длитель-
ность сигнала приходится
16 периодов. Эти кривые
можно разбить на два уча-
стка. На первом из них вы-
игрыш Ог; от амплитуды х*
не зависит, поскольку в
Рис. 5.8. Зависимость выигры-
ша G-q от амплитуды гармо-
нического возмущения для ли-
нейной (------) и нелинейной
(------) модуляционной ха-
рактеристики
75
этом случае сигнал ошибки на выходе ИФД находится
в пределах линейного участка его характеристики. На
втором участке, когда начинает сказываться нелиней-
ность синусоидальной характеристики ИФД, наблю-
дается сначала медленное, а затем резкое уменьшение
выигрыша Grj с увеличением амплитуды возмущения х*.
Для нелинейной MX выход из режима слежения насту-
пает при меньших хпред. Поскольку различие в резуль-
татах для,двух исследуемых моделей сказывается толь-
ко в области значений х*ред, определяемых нелинейны-
ми свойствами ИФД, а исходные частотные отклонения
(0 = Хпред s'n 2лу*^* Для прецизионных систем явля-
ются недопустимо большими (при х = х*ред отклонения
скорости ЧМ от требуемого значения в зависимости от
частоты возмущения у* составляют от 14 до 36%), то
замену нелинейной MX линейной с переносом возму-
щения на вход УГ для систем автоподстройки ЛЧМ с
ИСО на рис. 5.1 можно считать оправданной. На осно-
вании проведенных расчетов для А* = 0,5, А* = 1 можно
записать приближенную формулу, связывающую вы-
игрыш Gy с частотой возмущения:
0,0250/(-[*Т*)2> 1 <7*T*<frpT* при т*=1,(5.19)
где -(гр =0,15 или (0.15/ i) )—граничная частота авто
подстройки, найденная из условия 6^ = 1.
Наглядное представление о работе системы автопод
стройки ЛЧМ дают переходные процессы (рис. 5.9)
Рис. 5.9. Переходные процессы в системе автоподстройки ЛЧМ при
нелинейной модуляционной характеристике _для х* — К0.5 (а);
т*=1 (б); т*=/2 (в); т*=/з (г)
76
построенные в предположении, что. ю*(е*) = е* 4~
+ sin0,05e*, д*(£*)=0, А*=0,5,/£=1, Т* = 20. И3У рис. 5.9
видно, что по мере увеличения т* выигрыш Gr растет
и колебательный _характер процессов проявляется силь-
нее. При т*= У 2 (рис. 5.9,в) прирост в выигрыше Gn
по сравнению со случаем т*=1 (рис. 5.9,6) достаточно
велик, а колебания процесса не слишком заметны. Для
этого случая выигрыш G^ связан с частотой возмуще-
ния у* следующим соотношением [42].’
« 0,05D/(7*T*)2, 1 < vPT* при х* = /2. (5.20)
Эти соотношения позволяют оценить выигрыш от
применения системы автоподстройки ЛЧМ для сигнала
с конкретным значением базы Z) = 1PT, а кроме того,
показывают, что систему автоподстройки с ИСО
на ЛЗ целесообразно применять при достаточно
больших значениях базы, например D> 103.
5.6. Система автоподстройки с измерителем
на промежуточной частоте
Система автоподстройки ИСО (рис. 5.1) отличается
простотой исполнения, но ей присущи два недостатка,
ограничивающие ее применение. Первый состоит в том,
что для получения достаточно большой разностной ча-
стоты, соответствующей т*~1, необходимо иметь эта-
лонную ЛЗ с большим временем запаздывания и с ма-
лыми потерями. Вторым недостатком является узкая
полоса пропускания, что отрицательно сказывается на
динамических свойствах системы автоподстройки. На-
пример, при оптимальных с точки зрения быстродейст-
вия параметрах системы h* = Q,5,h*—l и т*=1 вы-
игрыш 0^^0,025/у*2, а максимально допустимое откло-
нение скорости ЧМ не превышает 16%. В рамках схемы
на рис. 5.1 невозможно что-либо изменить, поскольку в
таком ИСО время задержки т* и период дискретизации
Т* жестко между собой связаны (т*7^=1). Разрешить
это противоречие можно, если перейти к ИСО на про-
межуточной частоте (рис. 5.10), в которых время за-
держки т* и период дискретизации 7* выбираются не-
зависимо друг от друга, что позволит обеспечить ши-
рокие полосы пропускания и звена на ЛЗ и ФД.
77
Общим для ИСО, показанных на рис. 5.10 [41, 95,
130], является генератор когерентных колебаний
(ГКК), вырабатывающий два сигнала с частотами,
различающимися на Wt/T. Полосовые фильтры (ПФ),
стоящие после смесителей (См), выделяют сигналы
суммарной частоты. Для достаточного подавления ос-
f(t)
ff - Wt/T
ftt)+fx-WT/T
f, + f(t)-f(t-T)-WT/T
Отсинхро^Л—Л
низатара.
а)
А-
\См
।—\ftt)+fr+f,-Wt/T
/7»| ।
f.-Wt/T
Вт синхро'
низатара
\fr*f,-Wr/r
J/г
6)
f г^т
———
От синхро- L—।
низатора
f(t)
Э См -^ПФ
f(t)+fx-Wr/T
, 'Vf.-wt/T
WT/T д
_ Jl/Лл I
От синхронигХ-Тл
затора f
— f(t-z) Ж —
' “ См —ПФ
ЛЗ
f(t-T) + fr
М-^1 У/7¥ |—1
f{t-T)+fT
f(t-T)
Рис. 5.10. Структурные схемы ИСО с преобразованием частоты
тальных спектральных составляющих смешиваемых
сигналов частота гетеродина [г должна с некоторым
запасом превышать девиацию частоты W генерируемо-
го ЛЧМ сигнала. Заметим также, что к стабильности
сигнала с частотой [г особые требования не предъяв-
ляются.
78
Выбирая в этих ИСО время запаздывания т доста-
точно малым (т<^Г), а частоту сравнения, на которой
работает ФД, большой (последнее относится только к
ИСО на рис. 5.10,6), можно обеспечить и малую инер-
ционность звена на ЛЗ, и широкую полосу пропуска-
ния ФД. При этом считаем, что сигнал ошибки на вы-
ходе ИСО измеряется непрерывно
е0 (0 = U0F [v (f) - v (t - т)], t > т. (5.21 >
Недостатком ИСО с преобразованием частоты
является их сложность, связанная с необходимостью по-
лучать два сигнала с близкими частотами, а также с
введением в схему дополнительных смесителей и поло-
совых фильтров, характеристики которых сказываются
на точности измерения частотных отклонений. Кроме-
того, необходимо иметь в виду, что с уменьшением вре-
мени запаздывания т из-за падения чувствительности
ИСО возрастает влияние шумов.
Рассмотрим теперь динамические свойства системы,
автоподстройки с преобразованием частоты. Чтобы вос-
пользоваться результатами, полученными при анализе-
системы автоподстройки с ИСО (рис. 5.1), целесообраз-
но ввести новые обозначения:
& = <°ГД; т=1; k = k*&; 7 = Т*&;
ш = «>*/&; = Гу = 4/&; ём (7) = е*м (£*)/&;
Де (F) = Д; (**)/»; % = Ро‘/&2 = 2к/&2; а = а*/&2 = 2к/&2;
Г=х*/&; А1 = АТ/&; А2 = ^/&2; А3 = Аз/&3; р = р*^,
(5.22>
которые позволяют использовать ранее полученные ре-
зультаты.
Например, выбрав в ИСО на промежуточной частоте-
т* = 7^ =0,5 и взяв оптимальные с точки зрения быстро-
действия параметры фильтра h* = 0,5,h^=\, на осно-
вании результатов, изложенных ранее для т* = Т* = 1,.
получим, что допустимые отклонения скорости ЧМ до-
стигают ±64% (^пред = 8Д*2 = 4), граничная частота
автоподстройки увеличивается в 2 раза (7гР = 7гр/т* ~
— 0,3), а выигрыш 6, в 4 раза (О^ = О^Д*2). Таким
79
же образом оцениваются характеристики системы авто-
подстройки ЛЧМ с ИСО на промежуточной частоте и
при т*<1. Уменьшение в каждом таком случае периода
дискретизации Т* по сравнению со временем запазды-
вания т* приводит к уменьшению инерционности ФД, а
следовательно, и всего ИСО. Это, в свою очередь, бла-
гоприятно сказывается на характере процессов в систе-
ме автоподстройки ЛЧМ. По сути дела, уже прит*/?^ >
>8 ... 10 импульсная система переходит в непрерывную
[41], которая описывается дифференциальным уравне-
яием с запаздывающим аргументом [12]:
/М — H(p)ty для t> 1,
|йи^ для 0< t <_ 1,
(5.23)
Ф= J bi(0 — ?(?—1)]^.
о
Записав в соответствии с (5.23) характеристическое
уравнение
(р) ==р* (1 + кд) + (1 - e-₽)/(^ + h2p + Л3) = 0. (5.24)
заменив в нем р на \у—£ и применив метод D-разбие-
ний, можно получить формулы для нахождения линий
равной степени устойчивости [41], а следовательно, и
удобный способ оптими-
зации параметров ЦОС.
Таблица 5.2 Оптимальные с точки зрения быстродействия параметры
•фильтра В непрерывной системе
к ^Я0 пер мин
0 0 1,02 0,18 1
0,25 0 1,1 0,35 2
2,5 0 2 3,0 3,5
1 1 2,5 2,0 4,6
10 1 6,5 12,0 5
ред импульсной (см. табл.
Для
нескольких сочета-
ний параметров К и й.з
оптимальные с точки
зрения быстродействия
параметры h\Q, /i2o и со-
ответствующие им зна-
чения Термин сведены в
табл. 5.2, которая не
только показывает опре-
деленные преимущества
непрерывной системы пе-
5.1), но и позволяет опре-
делить минимально возможную длительность переход-
ЦОС пРоцесса АЛЯ конкРетного сочетания параметров
50
Реальный ФД, в отличие от рассмотренного идеаль-
ного, обладает некоторой инерционностью, поэтому це-
лесообразно сопоставить импульсную систему с коэф-
фициентом передачи фильтра Н(р) = h\ + h2/p и непре-
рывную, у которой Н(р) = (/Ц-f-Zt2/p)/(l +Лр), при усло-
вии, что период дискретизации Т3 и постоянная времени
инерционного _звена X равны. Исследование показало,
что если при ТЭ=Х=1 значения оптимальных парамет-
ров и вид линий равной степени устойчивости в импульс-
ной и непрерывной системах существенно различаются,
то уже для Т3 =Л=0,25 наблюдается достаточно хоро-
шее их совпадение [41]. Это позволяет считать им-
пульсную систему с Н(р) =hl + h2/p и Т3 <0,25 эквива-
лентной непрерывной, у которой Н(р) = (А1 + А2/р)/(1 4-
4-Хр) и К=Т3. Установленная эквивалентность позволя-
ет при изучении непрерывной и импульсной систем
пользоваться методом исследования, адекватным поста-
вленной задаче. Так, определяя оптимальные с точки
зрения быстродействия параметры импульсной системы
высокого порядка т/Гэ >4, ее можно заменить непре-
рывной, а инерционность ИФД учесть, введя в ЦОС
звено с постоянной времени Х = 7'э. При исследовании
переходных процессов и вопросов, связанных с нели-
нейностями УГ и ФД, непрерывную систему с фильтром
Я(р) = (hi + hi/p)/(I +Лр) целесообразно представить ее
импульсным аналогом с фильтром //(р) —hv + h2(p) и
Т3 = к. В такой импульсной системе при действии исход-
ного отклонения скорости ЧМ переменные состояния т],
б и ф в дискретные моменты времени tk=k можно най-
ти для любых целых значений пй = х!Т3 [41]. В то же
время получение выражений для линий равной степени
устойчивости при п0>2 связано с усложнением матема-
тических выкладок, поскольку порядок характеристиче-
ского уравнения растет пропорционально п0.
Подводя итог теоретическому рассмотрению системы
автоподстройки с ИСО на промежуточной частоте, еще
раз отметим, что уменьшением времени запаздывания т
в линии можно существенно увеличить степень устойчи-
вости g* = g/-r*, уменьшить квадратичную оценку ,7г =
— Js/т*2 и расширить области допустимых исходных
отклонений, другими словами, улучшить все динамиче-
6—1022 81
ские характеристики по сравнению с системой АП па-
раметров ЛЧМ сигналов на разностной частоте. Все
сказанное, конечно, справедливо до тех пор, пока иска-
жения, вносимые элементами ИСО, не превзойдут от-
клонений, допустимых для формируемого ЛЧМ. сиг-
нала.
5.7. Практическая реализация систем автоподстройки
параметров ЛЧМ сигналов с линией задержки
Измерители на ЛЗ применяются как для стабилизации часто-
ты [34], так и для контроля линейности закона модуляции [54,
85, 120]. Очень часто их применяют в РВ, где они обеспечивают
калибровку и стабилизацию шкалы высоты, причем результат из-
мерения либо используется непосредственно для уменьшения откло-
нений от линейного закона ЧМ излучаемого сигнала [66, 127], либо
учитывается при обработке принятого сигнала [129]. Для пано-
рамного измерения крутизны MX и диапазона перестройки ЧМ ге-
нераторов схема ИСО на ЛЗ была предложена А. М. Чернушенко
в 1957 г. [85]. Позднее [54] появился усовершенствованный ва-
риант такого ИСО, в котором частотный детектор был заменен бы-
стродействующим преобразователем «частота — напряжение». Ме-
тодика измерения отклонений частоты от линейного закона в ИСО
на ЛЗ с фазовым детектированием содержится в [120].
К одним из первых работ по исследованию систем автопод-
стройки с ИСО на ЛЗ можно отнести статьи, опубликованные в
Японии в 1963—1966 гг. В них исследовались генераторы на ЛОВ
с ИСО как на разностной [103], так и на промежуточной частоте
по схеме на рис. 5.10,6 [102], но с той лишь разницей, что вместо
фазового дискриминатора использовался частотный. В обоих слу-
чаях формировались ЛЧМ сигналы в диапазоне 35 ГГц с девиа-
цией 500 МГц и длительностью 2 мс, а время запаздывания в ЛЗ
было взято равным 0,2 мкс.
Линия задержки вдвое меньшей длины требуется в том слу-
чае, когда она включена на отражение. При этом падающая и от-
раженная волны разделяются при помощи циркулятора. Такой же
принцип использован в системе автоподстройки [104], работающей
в диапазоне миллиметровых волн, где для реализации требуемого
запаздывания ЛЧМ сигнал излучается передающей антенной в сто-
рону уголкового отражателя. Отраженный ЛЧМ сигнал поступает
далее на приемную антенну и используется для создания разност-
ной частоты. При такой реализации ЛЗ ошибки измерения, связан-
ные с ее дисперсионностью, практически отсутствуют. Малое зату-
хание обеспечивается высокой направленностью антенны, которая
достаточно легко реализуется на частоте 94 ГГц.
Система автоподстройки с ИСО (рис. 5.1), предназначенная
для работы в РЛС с корреляционной обработкой, исследовалась
в диапазоне 10 ГГц [97]. Для обеспечения линейной связи между
выходным напряжением ИСО и частотными отклонениями были
приняты меры к выполнению равенства (5.2) и тщательным под-
бором формы модулирующего напряжения минимизированы исход-
ные отклонения от линейного закона ЧМ. Все это позволило кон-
тролировать работу системы автоподстройки по осциллограммам
82
на выходе ИСО, откалиброванного в единицах отклонения частоты
т|(/)/2л от линейного закона. Для случая генератора ЛЧМ сигна-
лов с №=240 МГц, Т~ 120 мкс и т=0,5 мкс измеренные таким об-
разом отклонения не превышали ±5 кГц. Достаточно низкий уро-
вень высокочастотных составляющих частотного и фазового откло-
нений позволяет обеспечить низкий уровень боковых лепестков в
РЛС с корреляционной обработкой, предназначенных для работы
в небольших по дальности «окнах». При такой корреляционной об-
работке низкочастотные отклонения в значительной степени компен-
сируются [97].
Отличительная особенность генератора ЛЧМ сигналов с де-
виацией частоты №=1 ГГц и длительностью 7=250 мкс, предна-
значенного для формирования когерентных последовательностей
импульсов [95], состоит в том, что в нем первоначально стабили-
зируется не начальная, а центральная частота 6 ГГц, выходная же
частота в процессе модуляции меняется от 5,5 до 6,5 ГГц. В этой
системе ИСО выполнен по схеме на рис. 5.10,6, в результате чего
ИФД работает не на разностной частоте №-/?=! МГц, а на про-
межуточной /э=И МГц, лежащей вне полосы, образованной сме-
шением гетеродинного сигнала и сигнала, отраженного от цели, и
равной 3,2 МГц при максимальном «окне» по дальности 120 м.
Модулирующее напряжение, подаваемое на один из управля-
ющих входов У Г с полосой пропускания 500 кГц и крутизной MX
порядка 100 МГц/B, получается двойным интегрированием прямо-
угольного импульса. Необходимость в формировании такого мо-
дулирующего напряжения вызвана тем, что крутизна MX падает
примерно на 8 дБ прн изменении частоты от 5,5 до 6,5 ГГц. Из-за
непостоянства крутизны управления, а также из-за неравномерно-
сти затухания, вносимого элементами СВЧ тракта, общая нерав-
номерность усиления ЦОС в диапазоне частот составляет примерно
12 дБ. Этот вредный эффект, не позволяющий оптимальным обра-
зом выбрать параметры ЦОС, устраняется специальным компенси-
рующим фильтром, у которого разница в затухании на краях диа-
пазона также равна 12 дБ, что позволяет поддерживать коэффи-
циент усиления ЦОС во всем диапазоне генерируемых частот по-
стоянным с точностью до 2 дБ. Хорошее качество сформированного
ЛЧМ сигнала было подтверждено натурными испытаниями, при ко-
торых работа РЛС проверялась по сигналу, отраженному от точеч-
ной цели (сферы), удаленной на 1000 км. Минимальное влияние
отклонений от заданного закона модуляции наблюдалось в том слу-
чае, когда отраженный эхо-сигнал находился в центре окна по
дальности или, другими словами, когда отраженный и гетеродин-
ный сигналы точно совпадали по времени. Уровень боковых лепест-
ков в сжатом сигнале, полученном в результате обработки данных,
образованных смешением отраженного и гетеродинного сигналов,
составлял —32 дБ от главного лепестка.
В экспериментальных исследованиях двух вариантов системы
автоподстройки с ИСО на разностной (рис. 5.1) и на промежуточ-
ной (рис. 5.10,а) частотах использовались митрон дециметрового
диапазона и ЛЗ с т=0,8 мкс и затуханием 15 дБ, выполненная на
коаксиальном кабеле длиной ПО м [11, 12, 41]. Характеристика
ИСО в обоих случаях была синусоидальной, а фильтр имел двух-
канальную структуру.
В первом из этих устройств, предназначенном для формирова-
ния сигналов с №=40 МГц и 7’с=25,6 мкс, в качестве эталонной
6* 83
использовалась последовательность импульсов длительностью 70 нс
и периодом Тэ=0,8 мкс.
Эффективность стабилизации скорости ЧМ проверялась измене-
нием крутизны "модулирующего напряжения (рис. 5.11). Стационар-
ные остаточные отклонения частоты, которые в первом приближе-
нии можно считать постоянными, определялись в соответствии с
(5.14): _____
г]ст/2л = [arcsin (8*и/Л2*) ]/ W/ Т ]/2л,
и для исходных отклонений б*и, равных 0,55 и 1,0, составили соот-
ветственно 46 и 86 кГц. В должной мере оценить эффективность
системы автоподстройки можно, если учесть, что при разомкнутой
Рис. 5.11. Напряжение сигнала ошибки на выходе ИСО (рис. 5.1)
до и после замыкания цепи o6pajHoft связи при б*и = 0,55 (а) и
б*и=1 (б)
ЦОС (верхние осциллограммы на рис. 5.11,а и б) частотные от-
клонения к концу сигнала вследствие действия относительных от-
клонений скорости ЧМ (100б*и/2л), равных 8,8 и 16%, достигали
соответственно 3,5 и 6,4 МГц. Нарушение синхронного режима в
системе происходило при б*и = 1,2. Увеличение постоянной времени
до Х*=6 (полоса ФНЧ 200 кГц) уменьшало это предельное зна-
чение примерно в 3 раза.
Устройство автоподстройки с ИСО по схеме на рис. 5.10,а бы-
ло предназначено для формирования ЛЧМ сигналов с W=32 МГц
и 7=51,2 мкс. В экспериментальной установке были реализованы
следующие параметры системы автоподстройки начальной частоты
сон: полоса удержания до 25 МГц; длительность переходного про-
цесса не более 5 мкс; дисперсия установившихся фазовых откло-
нений за счет флуктуаций частоты митрона менее 10°; ширина спек-
тра генерируемых митроном сигналов: 150 кГц в свободном режиме
и 10 кГц в захваченном.
84
Характер переходных процессов в системе зависит от началь-
ных условий (рис. 5.12). Если Гирот/2л— число дробно-рациональ-
ное, то фаза Фэ0 в уравнении (5.2) принимает несколько значений.
Например, на рис. 5.12 эти значения отличаются между собой на
72°, Различной для этих случаев, как это следует из уравнения
(5.2), оказывается и настройка ИСО. Это приводит к сдвигу ча-
стоты относительно требуе-
мого значения сон. При разо-
мкнутой цепи обратной свя-
зи (рис. 5.12,а) относитель-
ное отклонение скорости ЧМ
составляет примерно 1%.
Замыкание цепи обратной
связи по безынерционному
каналу (Zs*i=2,5) уменьшает
это значение до 0,3% (рис.
5.12,6). При включении инте-
гратора в ЦОС с /г*2=0,6
максимальное отклонение
скорости ЧМ падает до 0,1 %,
а среднеквадратическое по
окончании переходного
процесса для любой на-
чальной фазы составляет
примерно 0,05% (рис.
5.12,в). Увеличение при-
мерно в 2 раза для одной
из пяти траекторий дли-
тельности переходного про-
цесса объясняется тем, что
она выходит из области
седловой точки.
Система автоподстрой-
ки с ФД на разностной ча-
стоте [17, 18] применя-
Рис. 5.12. Напряжение сигнала ошиб-
ки на выходе ИСО (рис. 5.10.а) при
разомкнутой цепи обратной связи
h*t=h*2=0 (а); при подключенном
безынерционном канале h*i=2,5;
/г*2=0 (б); при двухканальной кор-
рекции /г*| = 2,5; Л*2=0,6 (в)
лась также для улучшения
характеристик свип-гене-
ратора на ЛОВ сантимет-
рового диапазона. В пер-
вом из разработанных
свип-генераторов [18] де-
виация частоты и дли-
тельность сигнала были
соответственно равны 2 ГГц
и 6,67 мс. Коэффициент не-
линейности йНлу не превышал 1%, т. е. в 30... 35 раз меньше, чем
в случае разомкнутой ЦОС. Эффективность работы системы авто-
подстройки оценивалась также по ширине спектра частоты биений
сигнала, отраженного от неоднородности типа короткозамкнутого на
конце кабеля длиной 10 м. При включенной ЦОС ширина спектра
биений составляла 0,75 ... 0,9 кГц на уровне — 20 дБ от макси-
мального значения, а при отключенной 12 ... 15 кГц. В другом
свип-генераторе [17] с девиацией 1Г=5 ... 6 ГГц исходный коэф-
фициент нелинейности достигал значения £Нл£=0,71, что не позво-
ляло непосредственно использовать систему автоподстройки. По-
85
этому здесь применялась комбинйрованная схема с пассивным кор-
ректором на основе диодного преобразователя, аппроксимирующего
MX генератора на ЛОВ-О тремя линейными отрезками. В этом
случае коэффициент нелинейности при включенной системе авто-
подстройки не превышал йнл5=0,014. Ширина же спектра частоты
биений на уровне —20 дБ от максимального значения составила
1 ... 1,2 кГц. При отключенной системе автоподстронки, но с пас-
сивным корректором ширина спектра этого сигнала достигала
25 ... 30 кГц.
В заключение следует отметить, что наиболее целесообразной
областью применения рассмотренных здесь устройств является ста-
билизация параметров ЛЧМ сигналов с большими базами
(табл. 5.3) при корреляционной обработке (РЛС с высокой разре-
Таблица 5.3
Параметры ЛЧМ сигналов, полученных в системах автоподстройки
с ИСО на линии задержки
D-105 W, ГГц Т, мс /н, ГГцр, град т}/2л, кГц &нл S Источник
10 0,50 2 35 [102, 103]
10 1,00 1 94 — 18,4** — 104]
0,288 0,24 0,12 10 30* 5* — 97
32 4,00 0,8 10 60* — — 97
— 5,00 — — — — «0,014 17
2.5 1,00 0,25 5,5 — — — 95
2 в 0,20 1 1,175 — — — 101]
* Максимальное отклонение.
** Среднеквадратическое отклонение.
шающей способностью, рефлектометры, радиовысотомеры и т. д.).
Основным недостатком подобных устройств следует считать труд-
ность обеспечения эталонных свойств ЛЗ и нечувствительность вы-
полненных на ее основе измерителей к начальным фазовым откло-
нениям. Это затрудняет их использование в когерентных системах.
Глава 6
УСТРОЙСТВА АВТОПОДСТРОЙКИ ПАРАМЕТРОВ
ЛЧМ СИГНАЛОВ С ИЗМЕРЕНИЕМ ОШИБОК
ПО МЕТОДУ ФАЗОВОЙ ДИСКРЕТИЗАЦИИ
6.1. Метод фазовой дискретизации
Измерение сигнала ошибки в ИСО по методу фазо-
вой дискретизации (рис. 6.1,а) осуществляется при
стробировании ЧМ сигнала u(t) = U sin[coH/ + 0o(O +
86
+v(/)] короткими видеоимпульсами «стр (tk) в момен-
ты времени tb = kl\ (рис. 6.1,6) и последующем запо-
минании в фиксирующей цепи (ФЦ) выборок u(tk) на
время Та. При измерении фазовых отклонений ЛЧМ
(рис. 6.1,6), выборки сигнала u(fft), для которого ын =0
и во(^Ф=О>5ро4> пропорциональны v(7ft), если, на-
пример, 0,5ft)71 = и sin v (tk) « м (tk).
В качестве опорного сигнала нстр(7) перемножителя
(77 на рис. 6.1,а) можно использовать как видео-, так и
Г (f )
ИСО
a)
Рис. 6.1. Структурная
схема ИСО по методу
фазовой дискретизации
(а) и графики, поясняю-
щие его работу (б)
радиоимпульсы [49, 117]. Если спектр опорного сигна-
ла равномерен в пределах полосы формируемого сиг-
нала, погрешность измерения фазовых отклонений ока-
зывается малой.
Чтобы полнее выявить свойства такого ИСО, рас-
смотрим входной сигнал вида
U(O = ufM4-9o(O+W (6-1)
Желаемый закон фазовой модуляции (ФМ) имеет вид
степенного полинома
m
ео(О=2«А *>0- (6.2)
i-1
Полагая [47] длительность стробирующих импульсов
7стр много меньшей минимального периода ЧМ сигнала
и (7), подставив в (6.1) tk = kT3. Тогда на выходе ИСО
е0 (7ft) = UF [ш^Т9 90 (k Та) + v (k Та)].
При строгом соблюдении заданного закона модуляции,
т. е. когда 4(ift)=;0, сигнал ошибки на выходе ИСО
87
должен отсутствовать, тогда фазовый набег в циклах
[“н^э + ®о(^Л)]',2л будет равен целому числу. Допу-
стим, что ш„7’э/2'г равно целому числу. Тогда для пра-
вильной работы ИСО необходимо выполнить условие
j?V'=±2Z, (6.3)
i=l f
где At = a.TF~, 1 = 0, 1, 2, ... Для определения значе-
ний Ait удовлетворяющих условию (6.3), удобно поль-
зоваться вытекающим из него соотношением
т
2Л[(*4-1)г--И = ±2/д, (6.4)
i=l
где целое число /д=±[М^+1) — 0o(Zft)]/2it опре- ч
деляет фазовый набег в циклах между соседними точка-
ми измерения (на рис. 6.1,6).
Соотношения (6.3) и (6.4) при фиксированном пе-
риоде дискретизации Тэ могут удовлетворяться для це-
лого набора значений параметров модуляции А/. Ре-
жимы, при которых выполняются соотношения (6.3) и
(6.4), будем называть режимами синхронизма и обо-
значать Р(Лг, А2; ... ;Ат). Относительно этих режимов
синхронизма в таких ИСО можно контролировать фа-
зовые отклонения, т. е. е0 (tk) = Uo F (Zft)]. Вид дис-
криминационной характеристики ИСО F[v] определяет-
ся формой входного сигнала п(/), которая может быть
синусоидальной, треугольной, прямоугольной и др. Да-
лее будем полагать, что она синусоидальная F (v) =
= sinvfc.
Таким образом, при |v(/ft) |<С1 в моменты времени
tk измеряется фазовое отклонение относительно вы-
бранного режима синхронизма.
Среди множества режимов синхронизма практиче-
скую ценность представляют те, которые при заданных
значениях коэффициентов а, позволяют обеспечить ми-
нимально возможный фазовый набег между выборками,
а следовательно, и наибольшее число точек измерения
N=T/T3. Поскольку этот фазовый набег в основном
определяется коэффициентом ат, то минимальный пе-
риод дискретизации Тэ обеспечивается, если абсолют-
ное значение параметра модуляции Ат наименьшее.
При измерении отклонений от квадратичного закона
изменения фазы 0О(/) период дискретизации и число
точек измерения соответственно равны Тэ = У A2T/W и
88
N= V WT/A2. Если отклонения измеряются относитель-
но режима синхронизма Р(0; 2) (рис. 6.2,а), Тэ ==
=)/ 2T/W и N=y~ 0,5И^7\ фазовый набег в ЛЧМ сиг-
нале между двумя соседними точками измерения, как
это следует из (6.4), составляет в данном случае (2k—
— 1)Д2Л. Для тех же значений W и Т число точек изме-
рения можно увеличить, если контролировать отклоне-
ния относительно режимов синхронизма Р(±1; 1). В
Рис. 6.2. Закон изменения частоты и эпюры напряжения на вы-
ходе управляемого генератора при синхронизации относительно ре-
жимов синхронизма Р (0; 2) (а); Р (1; 1) (б); Р (—1; 1) (в);.
Р (0; 1) (г)
этом случае параметр Л] при <»нТа = 2л/0> где 10 — це-
лое число в соответствии с (6.3) и (6.4), должен быть-
нечетным числом, что соответствует частотному сдвигу
в момент начала модуляции (t=0) относительно сон
пА\/Тэ. Необходимость введения частотного сдвига объ-
ясняется тем, что в таких режимах фаза ЛЧМ колеба-
ния кратна 2л только при четных значениях k, при не-
четных k она кратна л. Осуществляемый специально,
частотный сдвиг относительно начальной частоты на
лЛ^Тэ приводит к тому, что 0о(/*)/2л становится це-
лым числом при всех значениях k (рис. 6.2,6, в). Сумма
Л1 + Л2 в этом случае должна быть четным числом [47].
Если частотный сдвиг при /=0 нежелателен, целе-
сообразно измерять отклонения относительно режима
синхронизма Р (0; ±1) реализуемого при некратном
соотношении между начальной частотой «>н и частотой
дискретизации 2л/7э- Необходимый фазовый набег на
89'
2л между выборками (рис. 6.2,г) достигается в данном
случае тем, что на периоде дискретизации Тэ уклады-
вается Zo+0,5 циклов начальной частоты сон-
Точность измерения отклонений по методу фазовой
дискретизации зависит от длительности стробирующих
импульсов, которую обычно выбирают в 3 ... 10 раз
меньшей минимального периода ЛЧМ сигналов 1/([н +
+ II?) при использовании в качестве стробирующих ви-
деоимпульсов и 1/И? при использовании радиоимпуль-
сов [49]. В обоих случаях предпочтительной является
форма импульсов, обеспечивающая более равномерный
спектр «стр(/) в полосе частот W формируемого сигнала.
Поскольку современные устройства могут генерировать
импульсы длительностью 10~10 ... 10-11 с [62], то можно
достичь необходимой точности измерения фазовых от-
клонений в ЧМ сигналах в полосе до нескольких гига-
герц.
6.2. Оптимизация параметров фильтра в цепи
обратной связи
В модели системы автоподстройки параметров ЛЧМ
сигналов по методу фазовой дискретизации (рис. 6.3)
использованы те же обозначения, что и в (5.9), но с тем
Рис. 6.3. Модель системы автоподстройки параметров ЛЧМ сигна-
лов по методу фазовой дискретизации для режимов синхронизации
Р (Л,; ±1)
•отличием, что под здесь понимается период дискре-
тизации, соответствующий режимам синхронизма Р(Л];
±1), т. е. 3~—VTIW. Найдем границы устойчивости
системы автоподстройки и оптимальные с точки зрения
быстродействия параметры k*, h* при использовании
фильтра с коэффициентом передачи Н(р) (5.8). Для
“90
этого воспользуемся методом D-разбиений. Границы
устойчивости рассматриваемой системы для трех режи-
мов синхронизма (рис. 6.4,а), обеспечивающих мини-
мальный период дискретизации, получены по формулам
(5.11), в которых коэффициенты полиномов RePt (у),
Im Р{ !у и определяются через параметры фильтра X* и
Рис. 6.4. Границы устойчивости системы автоподстройки парамет-
ров ЛЧМ сигналов по методу фазовой дискретизации для разных
режимов синхронизма (а) и для режимов P(/4i; ±1) (б)
Л* [41]. Наибольшие значения коэффициентов ft* и h2,
а следовательно, и наименьшие отклонения обеспечива-
ются при синхронизации относительно режимов Р (Лг,
±1). Поэтому далее будем считать, что отклонения из-
меряются именно применительно к этим режимам.
Инерционность ЦОС может существенно ограничивать
область устойчивости (рис. 6.4,6).
Линии равной степени устойчивости g и равных
квадратичных оценок при отклонении скорости ЧМ
от заданной для системы автоматического сопровожде-
ния по дальности с X* = /ig =0 были получены Я. 3. Цып-
киным [79]. Максимальная степень устойчивости, а
следовательно, и минимальная длительность переход-
ного процесса обеспечиваются в такой системе при h* =
= 1,5 и h* = l. Эти же параметры оказываются опти-
мальными и с точки зрения квадратичной оценки
Введение инерционного звена или третьего канала при-
водит к увеличению длительности переходных процес-
сов и уменьшению h*Q. Так, при Х* = 0,25 и h*3 =0,5 мак-
симальная степень устойчивости лишь незначительно
91
превышает 0,25, что соответствует /*ер ~12. Из сказан-
ного следует, что для повышения быстродействия систе-
мы и уменьшения стационарных отклонений постоян-
ную времени X* следует брать как можно меньше.
6.3. Оценка качества работы системы автоподстройки
параметров ЛЧМ сигналов при различных возмущениях
Для того чтобы оценить влияние нелинейности ха-
рактеристик УГ и ИФД на поведение системы автопод-
стройки, воспользуемся, как и прежде, методом «сум-
марных» уравнений [80]. Положим, что входное воз-
мущение Д*(/*) содержит только постоянную q* и ли-
нейную d* t* составляющие, начальное фазовое откло-
нение равно v„, а коэффициент передачи фильтра
+ й*/р. Тогда, представив, как и раньше, еу к
в виде суммы|i, запишем согласно модели на
рис. 6.3 суммарные уравнения для коэффициентов Afk,
TVj, а также для частотного и фазового отклонений
А—2
Mk = + (2к 4- 8; )(й - 1) - h\ - й‘2 2 ес,
Nk = 2^ + V-Klelt^ (6.5)
К (Ю = eyk + у* sin т* еуА — 2к (/г — 1 4- р.); (6.6)
VA (Iх) = (1) + Мц Iх + [I2 4~ X* [ cos 7* Mk —
- cos (Г e^irK,, (k - 1) и - к|Л (6.7)
Чтобы сформулировать требования к точности обес-
печения начальных значений скорости ЧМ, частоты и
фазы, необходимо найти такие их граничные значения,
при которых синхронный режим еще не нарушается,
т. е. фазовые отклонения удовлетворяют условию |v| <
<л. Рассмотрим сначала эту задачу при линейной MX,
Полагая в уравнении (6.6) z* = 0 и подставляя в него
(6.5), получаем
А-2
К (Iх) = + 8и (А — 0 ~ К — Л2*2 +
i=i
+ (8*-л;ей_])р.. (6.8)
Рассматриваемая система автоподстройки обладает
астатизмом второго порядка [44, 49] и частотное от-
92
клонение в ней при Д*(/) = "*]* + по окончании
переходных процессов равно нулю. Тогда из (6.8) сле-
дует, что ест — 8* /ft*, »ст = arcsin (8‘ /Лр. Воспользовав-
шись формулами (6.5) — (6.7), построим для нескольких
исходных значений отклонений скорости ЧМ б* фазо-
вые траектории системы на плоскости ц*—v (рис. 6.5)
в предположении, чтот]*=уи = 0, а параметры фильтра
выбраны из условия получения максимального быстро-
действия в линейной системе (А* = 1,5; А* = 1). При
Рис. 6.5. Фазовые траектории системы при различных отклонениях
скорости ЧМ (п*и=->., = 0)
8* =1 наблюдаются биения; при 6* =0,9; 0,8 и 0,7 — ста-
ционарный режим, причем время отработки исходного
возмущения с уменьшением б* стремится к 2 (как и
должно быть в линейной системе при оптимальных с
точки зрения быстродействия параметрах фильтра [49,
79]). Линии равных предельных отклонений скорости
ЧМ б*ред (рис. 6.6) вычислены на 10 шагах при усло-
вии
и; (I)]2 + К+1 (О)]2 + (vft - vCT)2 < 0,0003, (6.9)
аналогичном (5.15). Их значения оказываются несколь-
ко ниже, чем в системе автоподстройки с ИСО на ЛЗ
(рис. 5.1).
Знание предельных отклонений скорости ЧМ б*ред
позволяет сформулировать требования к допустимой
нелинейности MX и модулятору. Так, зная, что д* =
93
= 0,85 при оптимальных значениях h\ и Л*, можно за-
ранее предсказать, что для медленно меняющихся воз-
мущений, у которых исходное отклонение скорости ЧМ
dv^/dt* за время действия переходных процессов ме-
няется мало, допустимое отклонение крутизны MX
/2л = 0,135.
Проверить это предположение можно, рассмотрев
поведение системы при нелинейной MX и приняв.
Рис. 6.6. Линии равных предельных отклонений 6*Пред
Д* (/*)=0. Существенный уровень пульсаций, характер-
ный для частотных т]7- (/*) ji фазовых vy(/*) отклоне-
ний (рис. 6.7), объясняется большим коэффициентом
передачи по безынерционному каналу (Л* =1,5). Эф-
фективность работы системы автоподстройки при раз-
личных параметрах х* и у* нелинейной MX оценим по
Рис. 6.7. Частотные и фазовые отклонения при разомкнутой (7 — 0)
и замкнутой (/=1) цепи обратной связи для х* = 1, у*=0,05, Г—20;
рассчитанные по (6.5) — (6.7)
94
выигрышам Gn = /n0//ni и Gv=- Ло/Ль где Inj опре-
деляется по формуле (5.18), а
1 У*
= - 2Ы’)]2- (6-10>
1 k-l
Результаты расчетов по (6.10) с привлечением формул;
(6.5) — (6.7) сведены в табл. 6.1 (амплитуда возмуще-
Таблица 6.1
Показатели качества системы автоподстройки параметров ЛЧМ'
сигналов по методу фазовой дискретизации (Г* = 80, и* =0,16,
д;(/*)=о)
7* G П G V х* пред х* 7* пред'
0,0125 8-Ю3 8,2- 104 0,022 0,138
0,025 9,8- 102 5- 103 0,011 0,140
0,05 82 3,2- 10? 0,006 0,150
0,1 6,1 20,8 0,0035 0,176
ния и* выбрана так, чтобы на результатах вычисления!
оценок Д и /, не отражалось влияние нелинейности
характеристики ИФД). В ней также даны относитель-
ные предельные отклонения частоты и*ред /2лТ* и пре-
дельные отклонения скорости модуляции х*ред у*, най-
денные из условия |v|<jt. Для медленно меняющихся
исходных возмущений (у*<0,025) предельные отклоне-
ния скорости ЧМ х*реду* практически совпадают с ра-
нее найденным значением д*ред.
На основании данных табл. 6.1 запишем прибли-
женную формулу, связывающую выигрыш Gv с часто-
той гармонического возмущения у*:
G, 2 • Ю-3 Z)2/(y*7'*)4, 1 < у * Г* < уг*р Т*, (6.11 >
где у*Г* — число периодов гармонического возмуще-
ния, укладывающихся на длительности сигнала; у* =
= 0,17 — граничная частота автоподстройки, определен-
ная из условия G,] =1. Формула (6.11) позволяет оце-
нить целесообразность применения системы автопод-
стройки. Например, для у* = 0,025 выигрыш Gr, дости-
гает порядка 980, что соответствует уменьшению сред-
неквадратического отклонения в 31 раз. Для сравнения
95
укажем, что в системе автоподстройки с ИСО на ЛЗ,
как это следует из (5.19), G, и соответственно
равны 40 и 6,3,
Недостатком системы автоподстройки по методу фа-
зовой дискретизации является то, что для ввода ее в
синхронизм необходимо принимать мецы для уменьше-
ния начальных отклонений относительно требуемого
закона ЧМ.
6.4. Модифицированный метод фазовой дискретизации
В системах автоподстройки по методу фазовой дис-
кретизации частота выборок 1/Т3 не может превышать
!/</= j/lT/r , поскольку фаза ЛЧМ сигнала ц>н^+0о(^)
в дискретные моменты времени tk — kTa должна быть
кратна целому числу 2л. При модифицированном мето-
де фазовой дискретизации [131] достаточно, чтобы зна-
чения фазы
Ф* = <“н 4- 60 (* Та) — ent'{[wH k Га 90 (k Гэ)]/2-ге}
были кратны некоторому значению Фь меньшему 2л.
Из практических соображений удобно брать Ф1 = 2л/22
(/=1, 2, 3, ...). Полагая, что 0о(/) = n,Wt2/T, а фаза
<»HkT3 кратна 2л, определяем значения Фй =
= n,W(kTa)2/T — 2лent[0,51F(ife7’3)2/Г] в дискретные мо-
менты времени th = kTa для нескольких значений Тэ
(табл. 6.2). В табл. 6.2 значения Фй представляют со-
Таблица 6.2
Значения фазы Ф/; при различных нормированных периодах
дискретизации Т*9 = Г9/WjT
т* э *3 *3 ф< *5 *6 *? *8 *, фм *.. *13 *К *15 *15
1 к 0 п 0 ТС 0 К 0 к 0 К 0 к 0 ТС 0
1 к к К к к к к
— 0 ~ — 0 ——— 0 .. 0 — 0 0 0 • 0
J/2 2 2 2 2 2 2 2 2
1 К ТС ТС ТС К ТС К ТС
1 - к 0 К I - 0 ТЕ • 0 а>*~ к ——~ 0
2 4 4 4 4 4 4 4 4
1 К к 9т. 9тс к К К К 9тс 9л к ТС
2/2 8 т 8 и 8 2 8 0 8 8 и 8 2 8 и
1 К к 9т 25л К 17л 17л к 25л 9тс К ТС
— о о
4 16 4 16 16 4 16 16 4 16 16 4 16
96
бой систематическую погрешность измерения фазовых
отклонений ЛЧМ сигнала (6.2) при стробировании его
импульсами, следующими с частотой повторения
]/гл1^'/Ф17’. Выявленную систематическую погрешность
можно скомпенсировать [131], введя в устройство фа-
зовращатель (ФВ) с кодовым управлением от синхро-
низатора С (рис. 6.8). Поскольку значения системати-
ческой погрешности Фй периодически повторяются,
формирование кода управления оказывается неслож-
ным. Особые требования не предъявляются и к быстро-
действию фазовращателя, поскольку от момента смены
кода до момента стробирования проходит время, прак-
тически равное периоду дискретизации Д,—1/Ф17'/'л: U7.
Для модифицированного метода фазовой дискрети-
зации, как и ранее, удобно пользоваться обозначениями
для режимов синхрониз-
ма, которые для приве-
денных в табл. 6.2 при-
меров записываются сле-
дующим образом: Р(0;
1), Р(0; 1/2), Р(0; 1/4),
Р(0; 1/8) и Р(0; 1/16).
Повышение частоты
дискретизации, достигае-
мое в системе автопод-
Рис. 6.8. Структурная схема си-
стемы автоподстройки параметров
ЛЧМ сигналов по модифициро-
ванному методу фазовой дискре-
тизации
стройки на рис. 6.8 вве-
дением фазовращателя,
приводит к существен-
ному улучшению всех
характеристик системы.
Численно улучшение ха-
рактеристик
системы автоподстройки по модифицирован-
ному методу фазовой дискретизации можно оценить, вос-
пользовавшись результатами исследования системы при
Т9 = 1 (см. § 6.3). Для этого целесообразно ввести обо-
значения (5.22), но 9=^/Г, и Гэ=1. Тогда, напри-
мер, при синхронизации относительно режимов Р(А{;
1/16), что соответствует 7’э = 1/4, и оптимальных с точки
зрения быстродействия параметрах ht = l,5, h2—l филь-
тра Н(р) =hl + h2/p находим, что допустимые отклоне-
ния скорости ЧМ 8пред/2тс= ± 216% (§пред= 8пред^2 =
= 0,85-16=13,6), граничная частота автоподстройки
увеличивается в 4 раза (у*Р = 7 гр& = 0,17-4 = 0,68), а
7—1022 97
выигрыш G, в 16 раз (G, = G,&2). Также определя-
ются и предельная амплитуда гармонического возму-
щения. Например, для этого возмущения допустимое
относительное отклонение частоты и*12лТ* =‘
= (ипРед/2л:7’)'О' возрастает в 4 раза.
Говоря о достоинствах системы автоподстройки с из-
мерением сигналов ошибок по модифицированному ме-
тоду фазовой дискретизации, необходимо отметить сле-
дующее. Если нестабильность частоты управляемого
генератора меньше частоты выборок 1/Гэ и требования
к быстродействию системы АПЧ не очень жесткие, то
можно использовать стробирующие импульсы с одина-
ковой частотой повторения как в режиме автоподстрой-
ки начальной частоты, так и в режиме автоподстройки
параметров ЛЧМ сигнала. Это позволяет обойтись в
ЦОС одним фильтром с постоянными параметрами
(рис. 6.8), а следовательно, устранить ошибки, связан-
ные с коммутацией фильтров либо их параметров. В
схеме без ФВ такой режим реализуется при более же-
стких требованиях к УГ. Следует, однако, отметить, что
минимально возможный период дискретизации Тэ, а
следовательно, и эффективность применения такой си-
стемы автоподстройки зависят от точности и быстродей-
ствия используемого фазовращателя, а также от поло-
сы пропускания ЦОС (параметра А,).
6.5. Устройства автоподстройки параметров ЛЧМ
сигналов, работающие по методу фазовой
дискретизации
Точность поддержания заданного закона модуляции в сигна-
лах, формируемых устройствами автоподстройки по методу фазо-
вой дискретизации, в значительной степени зависит от выбора ре-
жима синхронизма. Так, в [117] фазовые отклонения измерялись
относительно режима синхронизма Р (—1; 1), что обеспечивало
изменение частоты по линейному закону от 2,095 до 2,320 МГц за
1,709 с при отклонении частоты менее ±75 Гц. Измерение фазо-
вых отклонений осуществлялось короткими видеоимпульсами, ча-
стота которых в режиме автоподстройки начальной частоты fa —
=2,095 МГц, т. е. в 5788 раз больше, чем в режиме автоподстрой-
ки ЛЧМ сигнала (1/7'э=362 Гц). Поэтому время, отведенное на
стабилизацию начальной частоты, составляло незначительную часть
длительности ЛЧМ сигнала. Меры, принятые в этой системе авто-
подстройки, по уменьшению исходных отклонений от линейного
закона модуляции позволили сузить полосу пропускания ЦОС, что
обеспечило лучшее подавление шумов квантования в режиме ЛЧМ.
Так, измерение шумов квантования, проведенное при отключенном
98
ГПН, показало, что уровни спектральных составляющих с часто-
тами, отличающимися от начальной иа ±362, ±724, ±1086 Гц,
были ниже уровня спектральной составляющей начальной частоты
соответственно на 41, 53 и 59 дБ.
В устройстве автоподстройки, выполненном по схеме на рис. 6.9,
была осуществлена проверка эффективности синхронизации сиг-
нала с различными скоростями
ЧМ при фиксированном перио-
де дискретизации ГЭ.В качестве
УГ использовался транзистор-
ный автогенератор с пере-
стройкой частоты варикапом.
Параметры ЛЧМ сигналов в
исследуемых режимах даны в
табл. 6.3. До начала модуля-
ции в системе осуществляется
автоподстройка начальных зна-
чений частоты и фазы. Входя-
щий в состав системы АПЧ
интегратор Инт1 обеспечивает
запоминание отслеженных от-
клонений на время формиро-
вания ЛЧМ сигнала. Опорный
сигнал на выходе перемножи-
теля П в режиме АПЧ непре-
рывный (рис. 6.10), а частота
его совпадает с начальной.
Рис. 6.9. Структурная схема си-
стемы автоподстройки параметров
ЛЧМ сигналов со стробированием
радиоимпульсами
Во время модуляции в пере-
множителе формируется после-
довательность радиоимпульсов
(рис. 6.10), частота заполне-
ния /ри которых совпадает с на-
чальной частотой fu, а дли-
тельность /Стр=1,52 мкс. В режиме АПЧ выход ФД2 подклю-
чен к сумматору через усилитель У1 и интегратор Инт1 с большой
постоянной времени. При переходе к режиму АП ЛЧМ на выходе
ФД2 присутствуют такие короткие импульсы, амплитуда которых
Таблица 6.3
Параметры ЛЧМ сигналов при синхронизации относительно
различных режимов синхронизма при )п = 10,5 МГц и Т=1,56 мс
Р(Ай Л2) W, МГц vM, град о , град Гц ’ 2к ’ а V г , Гц 2тс а % 6* пред
Р (Г, 1) 0,164 7 5 200 90 0,06 ±1,15
Р (0; 2) 0,328 26 16 400 250 0,08 ±0,44
р (—1; з) 0,492 70 40 1700 670 0,14 ±0,19
пропорциональна фазовому отклонению. После расширителя (Р)
эти импульсы подаются на сумматор через усилитель У2 и интегра-
тор Инт2. Поскольку Инт1 с постоянной времени, примерно равной
10 мс, практически не реагирует на короткие импульсы с /стр =
= 1,52 мкс, сигнал коррекции в режиме АП ЛЧМ поступает на сум-
7* 99
матор по трем каналам через У1, У2 и Инт2. Коэффициенты пере-
дачи этих звеньев соответственно равны h0, /ij и h2. Импульсная
система с таким коэффициентом передачи будет устойчивой [49],
если 2 > (Ло + Л*) > 0,5Л2‘, где h*0 = SrUohoF^.
Zn_________
г
Рис. 6.10. Эпюры эталонного сигнала на входе перемножителя
Режим синхронизма можно определить по числу циклов ЛЧМ
сигнала между яркостными метками (рис. 6.11 слева), которыми
отмечены моменты стробирования напряжения на выходе контроль-
ного ФД1. О фазовых и частотных отклонениях можно судить по
Рис. 6.11. Осциллограммы напряжения на выходе контрольного
ФД1 (слева) и на выходе расширителя (справа) при синхрониза-
ции относительно режима Р (1; 1) (а), Р (0; 2) (б), Р (—1; 3) (в)
осциллограммам напряжений на выходе расширителя импульсов
(рис. 6.11 справа). Максимальные значения отклонений ^макс>
^макс/Зя и их среднеквадратические отклонения ат]/2л сведены
в табл. 6 3. Там же приведены относительные отклонения по часто-
те о^/2л1Г. Увеличение отклонений в режимах Р (0; 2) и особенно
Р (—1; 3) по сравнению с Р (1; 1) связано с увеличением фазового
набега ЛЧМ сигнала между соседними точками измерения и ро-
стом нелинейности MX, поскольку используется больший ее уча-
А00
сток. Осциллограммы, приведенные на рис. 6.11, соответствуют
минимально возможным для каждого режима исходным отклоне-
ниям, предельные значения которых бпред, определенные экспери-
ментально, указаны в табл. 6.3.
Повышение требований к уровню фазовых отклонений в режи-
ме формирования ЛЧМ сигналов, стабильности начальной частоты
и постоянству мощности приводит [96] к усложнению схемы
устройства формирования (рис. 6.12). Для обеспечения когерент-
Рис. 6.12. Структурная схема системы автоподстройки параметров
ЛЧМ сигналов по методу фазовой дискретизации в диапазоне СВЧ
(ДЧ — делитель частоты)
ности от импульса к импульсу сигнал УГ на ЛОВ до начала ЛЧМ
стабилизируется по одной из гармоник эталонного сигнала системой
АПЧ. С началом каждого импульса эта цепь фазовой синхрониза-
ции размыкается и формируется модулирующее напряжение, фор-
ма которого рассчитывается индивидуально для каждой лампы так,
101
чтобы отклонения от квадратичного закона изменения фазы были
минимальны. Кроме того, на катод ЛОВ подается специальным
образом подобранное кусочно-линейное напряжение, состоящее из
20 отрезков, дополнительно уменьшающее фазовые отклонения и
вырабатываемое в корректоре Kopl. Формирование стробирующих
радиоимпульсов в данном устройстве осуществляется полосовым
фильтром (ПФ), полоса пропускания которого превышает девиацию
частоты W= 1008 МГц формируемого ЛЧМ сигнала. По сути дела,
здесь используется тот же способ получения стробирующих радио-
импульсов, что и в [107]. Компенсация изменения усиления в си-
стеме автоподстройки ЛЧМ сигнала из-за того, что чувствитель-
ность ЛОВ (крутизна MX) и амплитуды гармоник эталонного спек-
тра последовательности радиоимпульсов (период повторения кото-
рых Та) по диапазону меняются, осуществляется напряжением с
выхода корректора Кор2, подаваемым на усилитель с автоматиче-
ской регулировкой усиления (АРУ). Принятые меры позволили
получить в ЛЧМ сигнале длительностью 14 мкс и девиацией ча-
стоты 1008 МГц среднеквадратические фазовые отклонения ме-
нее 7°.
Заметим, что эти отклонения могли бы быть еще меньше, если
бы синхронизация осуществлялась относительно режимов Р (Af,
1), а не режима Р (0; 2). Действительно, синхронизация относи-
тельно режимов Р (Af, 1) позволила бы при требуемых параметрах
сигнала (В7 =1008 МГц, Т= 14 мкс) увеличить число выборок с
N= ]/rWT/2=84 до N= yrWT= 119. Принимая меры к снижению
фазовых отклонений, конечно, необходимо иметь в виду, что в ко-
нечном счете их достижимый уровень определяется характеристи-
ками элементов тракта (смесителей, мостов, направленных ответви-
телей, циркуляторов и т. д.), входящих в систему автоподстройки.
Например, в системе автоподстройки [96] среднеквадратические
отклонения для отдельных элементов тракта достигали 1,7° в диа-
пазоне частот от 2,73 до 3,73 ГГц.
Высокие требования в этой системе предъявляются и к посто-
янству мощности выходного сигнала. Эта задача решается с по-
мощью системы автоматической регулировки мощности (АРМ),
состоящей из амплитудного детектора (АД), усилителя (У) и
амплитудного модулятора (AM) и обеспечивающей изменение
амплитуды ЛЧМ импульса не более 0,3 дБ.
Оценивая в целом системы автоподстройки по методу фазовой
дискретизации, отметим, что они позволяют получать когерентные
ЛЧМ сигналы с низким уровнем фазовых отклонений прежде всего
за счет использования прецизионного ИСО. В сравнении с система-
ми автоподстройки ЛЧМ сигналов с ИСО на ЛЗ эти системы чув-
Таблица 6.4
Параметры ЛЧМ сигналов, полученные в системах автоподстройки
ИСО по методу фазовой дискретизации
D U7, МГц Г, мкс /н. МГц VM3KC' град а V 71макс'2’'> кГц Источник
3,85-105 103 1,4- 10" 0,225 1 1008 1,7 • 103 1 0,014 2,095 10 3,7- 103 12 17 5 7 0,075 [117] [107] [96]
102
ствительны к исходным отклонениям не только скорости ЧМ и на-
чальной частоты, но и фазы. Это обстоятельство предопределяет
необходимость принятия более тщательных мер для обеспечения
в них синхронного режима.
Возможности таких систем расширяются при измерении от-
клонений по модифицированному методу фазовой дискретизации.
Некоторое их усложнение за счет введения дискретного фазовра-
щателя окупается существенным улучшением динамических харак-
теристик.
Особых ограничений на максимальную длительность сигналов,
формируемых такими устройствами, не накладывается (см.
табл. 6.4). Предельная полоса находится в прямой зависимости от
достижений в области наносекундной техники и на сегодняшний
день может составлять несколько гигагерц [62].
Глава 7
УСТРОЙСТВА АВТОПОДСТРОЙКИ
С ЦИФРОВЫМ ПРЕОБРАЗОВАНИЕМ ЛЧМ
СИГНАЛОВ
7.1. Измерение ошибок в схеме с цифровым
преобразованием ЛЧМ сигналов
Устройства автоподстройки с цифровым преобразо-
ванием ЛЧМ сигналов [87], а также ряд их более позд-
них модификаций [88, 90]
в настоящее время получи-
ли широкое распростране-
ние. Особенностью этих
устройств (рис. 7.1) яв-
ляется наличие в них циф-
рового преобразователя
(ЦП), выполненного, на-
пример, на базе делителя
частоты, коэффициент де- ₽ис. 7.1. Структурная схема
Ленин которого в режиме системы автоподстройки па-
тт., , 1 1 раметров ЛЧМ сигналов с
ЧМ функционально связан цифровым преобразователем
с числом импульсов, по-
явившихся на его выходе с начала модуляции. Харак-
тер этой связи задается таким образом, чтобы при от-
сутствии отклонений от линейного закона ЧМ последо-
вательность импульсов на выходе цифрового преобра-
зователя была строго равномерной.
103
В режиме АПЧ устройство работает, как обычная
система ФАП с делителем частоты, коэффициент деле-
ния 10 которого задается от синхронизатора (С). При
этом частота f УГ связана с опорной частотой 1/Тэ сиг-
нала, подаваемого на ИФД, и частотой /» ЭГ /=/э 4-
-hz0/r8.
Рассмотрим работу устройства в режиме формиро-
вания ЛЧМ сигналов. Напряжение на выходе смеси-
теля
«см(0 = ^см sin[2irZ0 ^/7’9 + a1^4-a2i!2 + v(0], £>0. (7.1)
Здесь al = nAi/T3—дополнительный частотный сдвиг,
вводимый в начале модуляции для повышения опорной
частоты \)ТЭ ИФД (см. § 6.1); П2=лА2/7^ = О,5ро опре-
деляет скорость ЧМ, а целые числа Ау, А2 удовлетворя-
ют вытекающему из (6.3), (6.4) условию jAi+A2j=2j,
где j = 0, 1, 2, ...
В отсутствие отклонений от заданного закона ЧМ
фаза сигнала (7.1) в дискретные моменты времени tk —
— kT э кратна 2л, а число циклов lk сигнала (7.1) меж-
ду моментами времени tk—x и tk равно
h = И1 — А2) A2k.
(7-2)
Выражение (7.2) определяет алгоритм работы цифро-
вого преобразователя или, другими словами, указыва-
ет связь между его коэффициентом деления и числом
импульсов, появившихся на его выходе с начала моду-
ляции. Иллюстрацией работы цифрового преобразова-
теля при /0=2, А!=—1, А2=1 служит рис. 7.2. Выде-
Я 1 I I I I I I I I I I I I I 1 I I -
Ццп
0 Т3 ?7Э Л, 4Т3 5Т3 t
Рис. 7.2. Эпюры напряжений на выходе смесителя (а), схемы фор-
мирования импульсов, входящей в цифровой преобразователь (б),
и цифрового преобразователя (в)
104
ленные цифровым преобразователем импульсы с номе-
рами
OTft=Z0^+0,5(Д1А +Л2Лг) (7.3)
сравниваются в ИФД по фазе с сигналом опорной ча-
стоты 1/7э. За нулевой здесь принимается импульс,
сформированный из сигнала (7.1) в момент времени
Z —0. При отклонениях от заданного закона модуляции
выделяемый ИФД сигнал ошибки отличен от нуля.
Найдем связь между фазовыми отклонениями ЛЧМ
сигнала v* и преобразованной последовательности им-
пульсов ф*. По аналогии с (6.3) запишем следующее
соотношение:
24 (к/Тэ + ^AttkITa + тгА2 t* / Т'2 + = 2™ft. (7.4)
Подставляя в (7.4) tk = kTa + Т3!2к if учитывая
(7.3), получаем уравнение, связывающее отклонение
фазы vA до преобразователя с фазой после преобра-
зователя:
Л2 /4тс-|- (Zo + 0,5Aj 4- A2k) ф* 4- — 0.
Решив это уравнение относительно фА, находим
~ (^o + O.SAi-l- Д2 &) {[1 ~ -A2va/tc (Zo-|-O,5A1 +
+ А2£)2р2-1}А2-’. (7.5)
Поскольку при небольших исходных отклонениях
|A2vft /л(/о+О,5А1 + А2А)2|<С1, то для определения фА
можно пользоваться соотношением
— v*/(^o4“O>5Ai + A2k). (7.6)
Тогда сигнал ошибки
+ +А2л)]. (7.7)
Из (7.6) и (7.7) следует, что в системе автоподстройки
с цифровым преобразователем чувствительность к фа-
зовому отклонению vk с увеличением номера выборки k
не остается постоянной. Это приводит к изменению ко-
эффициента усиления ЦОС во время формирования
ЛЧМ сигнала. Для устранения этого после ИФД целе-
сообразно поставить программный регулятор усиления'
с коэффициентом передачи Apft = /о+ОД/^ + А^ [41, 90].
105-
Напряжение на выходе такого регулятора при работе
на линейном участке характеристики ИФД будет про-
порционально фазовому отклонению
7.2. Переходные процессы
Под воздействием модулирующего напряжения
^„(/) и напряжения еф(/), поступающего с фильтра,
частота <осм=<о—<°э на входе цифрового преобразовате-
ля (рис. 7.3) меняется следующим образом:
^см (0 = 2тс^0/Тв -j- 2g2Z + Д- Де (t) шф (О-
Здесь 5rAe(Z) —исходное отклонение частоты от тре-
буемого закона ЧМ, вызванное неточным формирова-
нием модулирующего напряжения; шф(0—частотная
поправка, вносимая при включенной ЦОС.
Фис. 7.3. Модель системы автоподстройки параметров ЛЧМ сигна-
лов с цифровым преобразователем при линейной модуляционной
характеристике управляемого генератора (Н (v, k) — коэффициент
^передачи цифрового преобразователя фазового отклонения в из-
меряемую рабность фаз Ф*)
Используя обозначения (5.9) и учитывая, что —
— 7\, получаем
<м(н=«’;(н+д;(^)+«’,ф(н.
где <oo(^*)=2irZ0-}-TtA]/]/A2 4-2тс^*.
Рассмотрим сначала работу системы при наличии
•отклонения скорости ЧМ d*(Z*)=6‘Z*. При этом нор-
мированная частота (/*) на входе цифрового пре-
образователя на k-м временном интервале при Н(р*) =
—А*-|- h*2lp* может быть представлена следующим об-
разом:
(7.8)
“см k (и) = Mk + Nk И»
106
где
Mk = 2к/0 т.А^У A2 + (2к -j- Зи) tk-\ 4" Gk—i + Л2 X
fe-2
xj^+i; 4=2«+s:+a;^-i, (7.9)
i=l
Й-1
Z*_I = 2t\.— момент появления (k—1)-го импулйЬа на
/ — 1
выходе цифрового преобразователя; 0 ц < р*, и *—дли-
тельность Д-го временного интервала; ek = hpkF[^k\—
нормированное напряжение на входе фильтра.
При синхронизации относительно режима Р(А^ Аг)
фаза 0О(/*) ЛЧМ сигнала в момент времени t* прини-
мает значения 2nmk (7.3). Тогда временной интервал
Р*, на котором фаза ЛЧМ сигнала изменилась на 2л/*
(7.2), можно найти из уравнения
0,5ад + Млр*-2^ = 0. (7.10)
По уравнению (7.10) с учетом (7.9) можно рассчитать
= 2izmk - 2к (l0 4- 0,5А, fk /у^ + 0,5 )2) (7.11)
и нормированный сигнал ошибки ek. Знание р*, t*k и ek
позволяет определить текущие отклонения скорости ЧМ,
частоты и фазы:
8; = ^-21С = 8*и + й2*^_1;
1£(н) = й’сИА(н) — «да;
v* (р) = 2тсот*_1 + М*р-]-0,5М*р2 — 2к [(/0 +
+ O^AjV^tk-r + р) + 0,5 (ZL, + р)2]. (7.12)
Точность формирования сигналов в системе АП
ЛЧМ с цифровым преобразователем в значительной
степени зависит от того, имеется или отсутствует в ней
регулятор усиления. Положим сначала hpk =/о+О,5А! +
+А2А. В этом случае при выполнении условия vk)(lo+
+ 0,5А1 + А2А)С1 на вход фильтра поступает напряже-
ние, пропорциональное фазовому отклонению vk. Это
означает, что реакция системы на исходные возмуще-
ния, а также стационарные отклонения в ней будут та-
кими же, как в системе автоподстройки по методу фа-
зовой дискретизации (см. § 6.3).
107
Когда регулировка усиления ЦОС во время модуля-
ции не осуществляется и hpk равен, например, Лр1, в
стационарном режиме наблюдается линейный рост фа-
зовых отклонений и установление частотных на посто-
янном уровне (рис. 7.4).
Рис. 7.5. Частотные и фазовые
отклонения при действии гар-
монического возмущения (х* =
=1, у*=0,05, 4*1=1,5, А*2=1
и 10~8) при отключенном ре-
гуляторе усиления
Рис. 7.4. Частотные и фа-
зовые отклонения в систе-
ме автоподстройки с циф-
ровым преобразователем
при отключенном регулято-
ре усиления (6*и = 1; 4*1 =
= 1,5; Л*2=1; /о=4)
Стационарные значения фазовых ф и v, а также ча-
стотного ц* отклонений определим, исходя из того, что
отклонение скорости ЧМ в стационарном режиме равно
нулю. При этом напряжение на входе фильтра и период
следования импульсов на выходе цифрового преобра-
зователя соответственно равны ест == Ар1 ek е= 8Н [h^
р.ст = Т*э = Учитывая, что при синусоидальной ха-
рактеристике ИФД ek = sirup* и принимая во внимание
соотношение (7.6), получаем
фст == arcsin (8* /гр1); vCT * = (10 + ОДД, -J- А2 k) <рст,
т[ст = d^dt*(vCT * vCT *_1)Д1СТ = фст^Аз-
Непостоянство коэффициента усиления ЦОС, обуслов-
ленное изменением чувствительности ИФД к фазовому
отклонению v* сказывается как на длительности пере-
ходных процессов (рис. 7.4), так и на эффективности
108
коррекции гармонических возмущений (рис. 7.5). Из
рис. 7.4 и 7.5, а также из формул (7.13) следует целесо-
образность увеличения начального коэффициента деле-
ния /о- Эффективность коррекции возмущений за время
модуляции будет примерно одинаковой, если для лю-
бых значений k отношение /^//о не буцет очень сильно
отличаться от единицы.
Полученные здесь суммарные уравнения позволяют
аналитически определить стационарные значения пере-
менных состояний в системе автоподстройки на рис. 7.3,
но не характер переходных процессов. Приближенно
это можно сделать, если в схеме на рис. 7.3 заменить
цифровой преобразователь на непрерывный, для кото-
рого справедливо соотношение ф (/*)==—v(/*)/(/q+^*)-
Тогда, считая, что б*(/*)=б*/* и рабочая точка не вы-
ходит за пределы линейного участка характеристики
ИФД, запишем дифференциальное уравнение
Рис. 7.6. Переходные процессы в системе на рис. 7.3 при замене
дискретного преобразователя на непрерывный
109
которое можно решить, используя функции Бесселя
(рис. 7.6): Эти графики дают достаточно полное пред-
ставление о характере процессов в исследуемом устрой-
стве в зависимости от исходного отклонения скорости
8Н, параметров ЦОС h*, А* и начального коэффициента
деления 10.
7.3. Работа системы при сложных возмущениях
Эффективность работы системы автоподстройки с
цифровым преобразователем при отличающихся по ча-
стоте у* и амплитуде и* гармонических возмущениях
Л* (/*) =z*sin 2лу*7* оценивалась по выигрышам Gq и
Gv, характеризующем отношения квадратичных оце-
нок, вычисленных соответственно по формулам (5.18) и
(6.10), при разомкнутой и замкнутой ЦОС. Вычисление
выигрышей Oq и G, велось при следующих значениях
параметров системы и фильтра: At = — 1, Л2=1. Л*=1,5
и = Длительность сигнала Т* в этих расчетах по-
лагалась равной 80, т. е. А=1, 2,..., 80. Как и при ис-
следовании переходных процессов, рассматривались два
случая: hpk —10 + ®,5А}-\-A2k м hpk —hpt. В первом
значения G», вычисленные при небольших амплитудах
гармонических возмущений, отличающихся частотой
(то же верно и в отношении Gq), не зависит от началь-
ного коэффициента деления /0 (непрерывная линия на
рис. 7.7) и в точности совпадают со значениями этого
критерия, найденными для системы автоподстройки по
методу фазовой дискретизации [44]. Иначе обстоит
дело, когда изменение чувствительности к фазовому от-
клонению vk от одной выборки к другой не компенси-
руется. В этом случае качество подстройки снижается
и характеристики формируемого сигнала зависят уже
не только от начального коэффициента деления /о, но и
от того, насколько сильно отношение lk/lo отличается от
единицы (штриховые линии на рис. 7.7). Из приведен-
ных на рис. 7.7 зависимостей следует, что с уменьше-
нием /о наряду со снижением эффективности подстрой-
ки уменьшается и полоса частот, в которой система
обеспечивает выигрыш G».
Существенным для систем автоподстройки с цифро-
вым преобразователем является то, что они могут рабо-
тать при очень больших исходных отклонениях от за-
110
данного закона ЧМ (рис. 7.8). За предельно допусти-
мое отклонение частоты в этих расчетах прини-
малась такая амплитуда гармонического возмущения
z*sin 2лу*/*, при которой в системе еще не нарушался
Рис. 7.8. Зависимости относи-
тельного предельного отклоне-
ния от частоты гармоническо-
го возмущения для системы
автоподстройки по методу фа-
зовой дискретизации и с циф-
ровым преобразователем при
включенном регуляторе усиле-
ния (------), а также для си-
стемы автоподстройки с циф-
ровым преобразователем без
регулятора усиления (-------)
Рис. 7.7. Зависимость вы-
игрыша от частоты гармо-
нического возмущения
синхронный режим.
Сравнение зависимо-
стей на рис. 7.8 пока-
зывает, что в системе
по методу фазовой дис-
кретизации и в системе
с цифровым преоб-
разователем разница
предельных отклонений частоты составляет для
исследованных значений /о один-два порядка и стано-
вится еще больше при увеличении /0- Объясняется это
тем, что система автоподстройки с цифровым преобра-
зователем и регулятором усиления, обладая одинако-
вым с системой автоподстройки по методу фазовой дис-
кретизации операторным коэффициентом передачи для
возмущения Д*(/*), имеет по отношению к фазовым
отклонениям v существенно больший линейный участок
дискриминационной характеристики. Так, если в систе-
ме с преобразователем допустимы, например, отклоне-
111
ния |фА|<л, что согласно (7.6) соответствует | vk | <
<л(/о+О,5Л1+Л2^), то в системе автоподстройки по
методу фазовой дискретизации |vft | <л для всех значе-
ний k.
Предельно допустимые отклонения оказываются не-
сколько меньшими, если изменение коэффициента уси-
ления ЦОС не компенсируется, т. е. при ЛрА=/гр) (штри-
ховые кривые на рис. 7.8). е
Приведенные результаты показывают, что система
автоподстройки с цифровым преобразователем по срав-
нению с системой по методу фазовой дискретизации
может работать при существенно больших исходных от-
клонениях от заданного закона ЧМ. Этот вывод был
подтвержден и экспериментально. В дециметровом диа-
пазоне волн была осуществлена подстройка генерируе-
мого митроном сигнала с №=4,25 МГц и Т = 50 мкс
[9], а на низких частотах (0,1 ... 1 МГц)—сигнала,
формируемого функциональным генератором. Точность
поддержания требуемой скорости ЧМ при синхрониза-
ции относительно режима Р(0; 2) в обоих случаях бы-
ла лучше 0,1 %.
На длительность формируемого сигнала в таких
устройствах особых ограничений не накладывается, по-
лоса частот определяется достижимым быстродействи-
ем цифрового преобразователя.
Из-за меньшей чувствительности к фазовым откло-
нениям, определяемой текущим коэффициентом деления
цифрового преобразователя, эти устройства имеют не-
сколько худшую точность, чем устройства по методу
фазовой дискретизации.
Глава 8
АВТОМАТИЧЕСКИЕ КОМПЕНСАТОРЫ
РЕГУЛЯРНЫХ ИСКАЖЕНИИ
8.1. Область применения автоматических
компенсаторов регулярных искажений
Рассмотренные в предыдущих главах системы авто-
подстройки ЛЧМ сигналов в ряде случаев из-за ограни-
чений на коэффициенты усиления ЦОС, связанных с
нарушением условий устойчивости, не в состоянии обес-
112
печить требуемую точность формируемых сигналов.
Точность формирования сигналов можно повысить,
только уменьшив исходные отклонения от требуемого
закона ЧМ. Известно несколько способов решения этой
задачи: линеаризация их [17] (см. также § 4.4), под-
ключение ко входу УГ заранее подобранного компен-
сирующего напряжения [96], автоматическое формиро-
Рис. 8.1. Структурная
схема системы авто-
подстройки парамет-
ров ЛЧМ сигналов
С автоматическим
^компенсатором регу-
лярных искажений
Рис. 8-2. Структурная схема аналогового
автоматического компенсатора регулярных
искажений
вание компенсирующего напряже-
ния [43, 123] на основе информации
об ошибках, измеренных в предыду-
щих периодах модуляции (рис. 8.1).
Применение этих способов возможно, если регуляр-
ные отклонения, определяемые нелинейностью характе-
ристик УГ и модулятора, значительно превышают слу-
чайные.
Экспериментальная оценка вклада случайных от-
клонений в генераторе на ЛОВ показывает, что [97]
максимальное значение случайного отклонения частоты
спустя 1 мс после отключения системы АПЧ не превы-
шает 25 Гц. В том же генераторе при девиации частоты
117=240 МГц регулярные частотные отклонения состав-
ляли 240 и 5 кГц пргЭ отключенной и включенной систе-
мах автоподстройки. Малый вклад случайных отклоне-
ний подтверждается также результатами эксперимен-
тального исследования и других типов ЛЧМ генерато-
ров [17, 49, 95, 96, 107, 117].
8—1022 113
Точность компенсации отклонений при первых двух
способах ограничивается долговременной и температур-
ной нестабильностями характеристик используемых в
системе автоподстройки элементов, в основном УГ и
модуляторов. При особо жестких требованиях к допу-
стимым отклонениям от заданного закона модуляции
более перспективным следует считать использование
автоматического компенсатора регулярных искажений
(АКРИ), не требующего дополнительной настройки да-
же тогда, когда отклонения с течением времени мед-
ленно меняются, например, при изменении напряжений
питания температуры или старении входящих в систе-
му АП ЛЧМ элементов.
8.2. Практическая реализация
Автоматические компенсаторы регулярных искаже-
ний могут быть выполнены как аналоговыми, так и
цифровыми. В первом случае запоминание сигнала
ошибки может быть, например, реализовано [123] на
интеграторах (рис. 8.2). Запись сигнала ошибки в па-
мять такого АКРИ осуществляется попеременным под-
соединением интеграторов при помощи переключателей
Кл1 к выходу ИСО. Считывание компенсирующего на-
пряжения из АКРИ осуществляется попеременным за-
мыканием переключателей Кл2 по команде синхрони-
затора. Характерной особенностью системы [123]
является то, что в ней отсутствует непосредственная
связь между выходом ИСО и входом УГ. Это приводит
к тому, что даже при небольших исходных отклонениях
от требуемого закона ЧМ напряжение на выходе ИСО,
имеющего периодическую характеристику, в первом пос-
ле замыкания цепи ОС ЛЧМ сигнале не отражает дей-
ствительного вида сигнала ошибки. Поэтому при опи-
санном выше порядке записи информации о сигнале
ошибки в первом ЛЧМ сигнале отклонение от задан-
ного закона модуляции в последующих ЛЧМ сигналах
может даже увеличиться. Чтобы избежать этого, в [123]
предлагается каждый последующий интегратор вклю-
чать лишь после того, как на входе предыдущего уста-
новится нулевое напряжение. Поскольку на это затра-
чивается по крайней мере один ЛЧМ сигнал, общее вре-
мя вхождения в нормальный режим функционирования
может быть существенным, особенно при большом чис-
ле интеграторов.
114
Этот недостаток можно устранить, если сигнал кор-
рекции подавать на вход УГ как через АКРИ и фильтр
Ф2, так и непосредственно через фильтр Ф1 (рис. 8.1).
Сказанное, конечно, справедливо лишь в том случае,
когда уже в первом после включения ЛЧМ сигнале не
наблюдается срыва слежения. Рассмотрим работу та-
кой комбинированной схемы (рис. 8.1) с цифровым
АКРИ (рис. 8.3) [92]. Попутно отметим, что цифровые
Рис. 8.3. Структурная схема цифрового автоматического компенса-
тора регулярных искажений
АКРИ эффективны с точки зрения точного воспроизве-
дения сигнал?, ошибки через значительные промежутки
времени, что выгодно отличает их от аналоговых.
В промежутках между формированием ЛЧМ сигна-
лов система АПЧ (на рис. 8.1 она не показана) сводит
к нулю напряжение на выходе ИСО. В моменты време-
ни tj=stQ+(j—i)T„ система АПЧ отключается и моду-
лятор начинает перестраивать частоту УГ. Здесь Т„ —
период модуляции; / — его номер, отсчитываемый с мо-
мента включения АКРИ. Во время генерации ЛЧМ
сигнала отклонение закона изменения частоты <о(/) от
заданного [W (рис. 8.4,а) приводит к появлению на
выходе ИСО сигнала ошибки e0(t) (рис. 8.4,6), кото-
рый после преобразования в цифровой код Кеа исполь-
зуется для формирования компенсирующего напряже-
ния, подводимого ко входу УГ при генерации последу-
ющих ЛЧМ сигналов.
Основным блоком АКРИ является блок памяти
(БП), каждая ячейка которого заменяет один интегра-
тор в схеме на рис. 8.2. Ячейки памяти в момент вклю-
чения АКРИ могут быть либо обнулены, либо содер-
жать информацию о форме компенсирующего напряже-
ния, полученную по результатам измерения исходных
отклонений от линейного закона ЧМ или на основании
предыдущих включений АКРИ. Запись и считывание
цифровой информации в блоке памяти осуществляются
по командам блока адресации (БА).
8* 115
Рассмотрим процесс формирования компенсирующе-
го напряжения в /-м ЛЧМ сигнале. Во временных ин-
тервалах ^у + С/—1) Т'п»’ ^о + ^^'э4'(/ —
— 1) Тп}, Ту < Та, отмеченных на рис. 8.4,5—ж гори-
зонтальной штриховкой, код Кбпь из £-й ячейки памяти
Рис. 8.4. Диаграммы работы системы автоподстройки параметров
‘ЛЧМ сигналов с цифровым автоматическим компенсатором регу-
лярных искажений
(рис. 8.45—ж) переписывается в буферный регистр
(БР), где он хранится в течение времени Тэ. Запись
новых кодов /Сбп*> представляющих собой сумму Къ
(рис. 8.4,г) кодов Ке и K6f с выходов АЦП
(рис. 8.4,6) и буферного регистра (рис. 8.4,в), в k-ю
ячейку памяти осуществляется во временных интерва-
лах {/0+ Л7\ + (/-1) 7'п; /0+(А-{-1) T9-Ty+(J-
116
— 1)ГП}, отмеченных на рис. 8.45—ж косой штрихов-
кой. Сформированный на основании измерений сигнала
ошибки в предыдущих ЛЧМ сигналах и содержащийся
в буферном регистре цифровой код
А-6₽ k = 2 ^0 № ~ W
1=1
после преобразования к аналоговому виду и сглажива-
ния в фильтре Ф2 компенсирует присущие УГ и моду-
лятору отклонения, повторяющиеся от одного ЛЧМ сиг-
нала к другому.
Наличие в настоящее время блоков памяти на де-
сятки килобит позволяет создавать АКРИ с числом то-
чек коррекции в несколько сотен, что обеспечивает за-
данный уровень отклонений от требуемого закона моду-
ляции при весьма больших базах формируемых сигна-
лов. Существенным является также и то, что цифровой
АКРИ проще в настройке.
8.3. Оптимизация параметров цепи обратной связи
Автоматические компенсаторы регулярных искаже-
ний могут применяться в системах автоподстройки с
любым из рассмотренных ранее измерителей, но целе-
сообразнее всего их использовать в сочетании с ИСО по
методу фазовой дискретизации, который обеспечивает
лучшую точность измерения отклонений. Для исследо-
вания такой системы автоподстройки (рис. 8.5) вос-
пользуемся методом суммарных уравнений [80]. При
Рис. 8.5. Модель системы автоподстройки по методу фазовой дис-
кретизации с автоматическим компенсатором регулярных искажений
117
условии одинаковой структуры фильтров Ф1 и Ф2, т. е.
Щр*) — A* + hyp* и //к(Р*) = А^1 + Ь"кУр*, переменную
состояния е*у при Д*(£*) = 8*£* на временных интерва-
лах А—1 < t* < k — Т* и k — Г* < £* < А можно пред-
ставить в виде
е‘ =[Л,;/ + ЛГ«'*' °<»‘<1-77>
+ 0<|><г;.
Здесь k — номер периода дискретизации (шага); / —
номер периода ЛЧМ импульса (строки) с момента
включения; Т* =Ту^Г. На А-м шаге /-й строки с учетом
/-1
того, что e'kj = ем [43] >
Mk. = (k- 1) (2к + 8;) - А^_,. / - (Л‘К1 + Гу )<_lt/ -
M"kl= (k - ту (2к + 8’) - [Л; + й2‘(1 _ гу)] / -
А—2
^К1 enl ek-l,j 2 еЧ + ^К2 е'1^'
Nki — 2~ + 8и Л2 еь-i, i hK2 ek_^ jt
= 2к + s: - Л2* ek-lt, - л*2 eki. (8.1)
С учетом (8.1) суммарные уравнения для частотного
*1а/ (Ю и фазового vkj (ц) отклонений при о>* (е’)=
=e*+«* sin у*е* на рассматриваемых временных интер-
валах в соответствии со схемой на рис. 8.5 записыва-
ются следующим образом:
'*&>) = М’к1+ N'ki? + х* sin [y*(Ai;. + N'kjp.)]— 2к(А-1 + и),
’iZ/ fa) = M'ki + Nki^ + x*sinh* (M'k/ 4- N‘kl p) ] —
-2k (A - ry* + [x);
\ (H) = / (Ty~) + f W dz, 0 < p < 1 - T*y ,
0
+ (8.2)
0
118
Суммарные уравнения (8.1) — (8.2) позволяют иссле-
довать влияние на характеристики системы автопод-
стройки отклонений по скорости ЧМ, возмущений, свя-
занных с нелинейностью модуляционной характеристи-
ки УГ, а также явления, вызванные нелинейностью дис-
криминационной характеристики ИСО. При необходи-
мости в этих уравнениях можно учесть и другие деста-
билизирующие воздействия, влияющие на качество фор-
мируемого сигнала, например конечное число разрядов
квантования сигнала ошибки при цифровом АКРИ. По-
добные суммарные уравнения можно записать также
для более сложных фильтров в ЦОС или для возмуще-
ний, присущих конкретным модуляторам и управляе-
мым генераторам. Имея в своем распоряжении такие
уравнения, можно далее выбрать параметры системы
таким образом, чтобы обеспечить минимум какого-либо
критерия (квадратичные оценки отклонений скорости
ЧМ, частоты или фазы, уровень боковых лепестков в
сжатом сигнале, уровень гармоник в сигнале ошибки
и др.), не нарушая синхронизма.
Здесь мы ограничимся рассмотренчем относительно
простого примера — минимизации параметров Т* и а
в предположении, что на входе системы А* (/*) = §*/*,
модуляционная характеристика УГ и дискриминацион-
ная характеристика ИСО линейны и в системе имеется
лишь один фильтр с параметрами А* =1,5 и h\~\(оп-
тимальные с точки зрения быстродействия параметры
фильтра в системе автоподстройки без АКРИ), на ко-
торый через усилитель с коэффициентом усиления а
поступает напряжение e'kj. Оптимизацию параметров
Т* и а проведем, минимизируя интегральный критерий
*
1—т
7'* у*
О Л=1
«
Т \
+ jK/WNp , (8.3)
о )
учитывающий возможные
нала длительностью Т* в
кретных точках измерения
межутках между ними.
отклонения фазы ЛЧМ сиг-
/-й строке не только в дис-
сигнала ошибки, но и в про-
119
По формуле (8.3) с учетом (8.1), (8.2) были найде-
ны значения критерия для сигнала длительностью
Г* = 10 при различных сочетаниях параметров Г* и а.
Минимальное значение этого критерия обеспечивается
при Ту ='а = 0,75.
Для оценки качества работы системы в условиях,
приближенных к реальным, было проведено ее исследо-
вание непосредственно по схеме на рис. 8.5 в предполо-
жении, что длительность ЛЧМ сигнала Г* =20, модуля-
ционная характеристика УГ нелинейна “*(е*) = е* +
+ sin0,05e*, возмущение А* (£*) со стороны модулятора
отсутствует, a л* = 0, А* =1,5, А£=1,0, Т* = а =0,75.
Выполненные по формулам (8.1), (8.2) для различных
сочетаний параметров и* и у* MX расчеты показали,
что применение АКРИ в системе АП ЛЧМ обеспечивает
существенное улучшение качества подстройки (рнс. 8.6).
7* V
г
Рис. 8.6. Частотные и фазовые отклонения в системе автоподстрой-
ки параметров ЛЧМ сигналов по методу фазовой дискретизации
с автоматическим компенсатором регулярных искажений (/>5)
8.4. Синтез фильтра в системе автоподстройки
с АКРИ
Оптимизация параметров системы автоподстройки с
АКРИ позволила дать ответ об оптимальных по крите-
рию (8.3) параметрах системы и фильтра с фиксирован-
ной структурой. Такая оптимизация, в принципе, может
проводиться и по любому другому критерию с учетом
реальных характеристик, входящих в систему элементов
(например, нелинейности УГ и ИСО), но не гарантиру-
ет реализации потенциальных возможностей системы,
например, с точки зрения быстродействия. Ответ на этот
вопрос можно получить, лишь решив задачу синтеза
фильтра в ЦОС [8].
При решении этой задачи будем полагать характе-
ристики УГ и ИСО в системе автоподстройки по методу
фазовой дискретизации линейными, параметры фильтра
Ф1 примем оптимальными с точки зрения быстродейст-
120
вия (A* = 1,5, А*=1), а возмущение Л*(^*) отнесем на
вход системы.
Воспользовавшись далее аппаратом z-преобразова-
ния [32], запишем изображение для отклонения фазы
от квадратичного закона
v (г) =______5_______^1Р*}г{Я__________________.
(1 - z~r-) [ 1 + ztf/p* + liifp*} + г{Як(р*)/р*}]
(8.4)
Здесь символом z[-] обозначен переход к z-преобразо-
*
ванию; член 1—z~Tn отражает периодичность измене-
ния возмущения а А^(р*)—искомый коэффи-
циент передачи по каналу АКРИ. Потребуем, чтобы
—т*
множитель 1—z п в знаменателе (8.4) отсутствовал,
т. е. положим знаменатель равным 1 -|- z{h*lp*+^lp^
Отсюда
Ч(/>*)
Р*
[А!
а;
(р*)2
(8.5)
1— Z т"
Коэффициент передачи по каналу АКРИ Н'к (р*)
можно представить в виде Н'к(р*) = Нр(р*) Нк(р*)г
где Нр(р*)—коэффициент передачи самого АКРИ, а
Нк (Р*) — коэффициент передачи последовательно
включенного фильтра. Предполагая, что //(р*) =
♦ ♦
= е-₽’п/(1 — е-₽*Гп), из (8.5) найдем, что последова-
тельно с ним надо включить фильтр с
(р*) = А*оА*, + А*2/р*. (8.6)
Фильтр вида (8.6) обеспечит равенство нулю сигнала
ошибки в точках измерения всех циклов модуляции, на-
чиная со второго. Однако физически реализовать иде-
альный дифференциатор, требуемый по (8.6), невоз-
можно. При замене его звеном с реализуемой характе-
ристикой р*/(р* +V), где невозможно полностью
компенсировать ошибки, поэтому в рециркуляторе сле-
дует предусмотреть отвод на реальное дифференцирую-
щее звено с опережением на время Т*.
121
Расчеты, аналогичные проведенным, показывают,
что синтезированная передаточная функция фильтрра в
цепи АКРИ должна иметь вид
Нк(р*) = Акор* ер'Ту 1(р* + X*) + Лю + Акг/р*. (8.7)
Рассчитывая условия устойчивости для фильтра с ко-
зффиниенгом передачи (8.7), можно нантн систему не-
равенств, которым должны удовлетворять коэффициен-
ты усиления /г*ко, Потребовав минимально-
го времени переходного процесса, получим для 7* =Т*:
Ако = х7(1-е-Аг ^ = 4 м
где АО1, а А* и h*2 —оптимальные с точки зрения бы-
стродействия значения параметров фильтра Ф1 в систе-
ме автоподстройки без АКРИ. Если предусмотреть опе-
режение на время 7* Для всего сигнала ошибки
(рис. 8.7), то вместо (8.8) оптимальные значения
Лко = к*(О,5А2‘+ l-A^l-e^*); А*К1 = h\ - h*v
А’кг = А*. (8.9)
Если к тому же параметры фильтра Ф1 выбраны опти-
мальными с точки зрения быстродействия, т. е. А* =1,5,
Л2 =1, то, как следует из (8.9), необходимость в диф-
ференцирующем звене отпадает А*о = 0,• A^j=0,5; Ак2=1-
Рис. 8.7. Модель цепи обратной
связи системы автоподстройки
параметров ЛЧМ. сигналов с ав-
томатическим компенсатором ре-
гулярных искажений
Синтезированные здесь
структуры фильтра Ф2
обеспечивают нулевое фа-
зовое отклонение в точ-
ках съема информации,
начиная со второго ЛЧМ
сигнала (рис. 8.8). На-
личие пульсаций связано
с тем, что при двухка-
нальной структуре филь-
тров Ф1 и Ф2 напряже-
ние на их выходе содер-
жит только постоянную и
линейную составляющие, вследствие чего сложное по сво-
ему характеру исходное возмущение аппроксимируется
линейно-ломаной кривой. Амплитуда пульсаций частотно-
122
го и фазового отклонений примерно пропорциональна
d2t\*/dt2* — второй производной исходного возмущения.
Если необходимо иметь точное представление о спек-
тре частотных S, и фазовых S, отклонений, для их вы-
числения целесообразно воспользоваться алгоритмом
Z/- 0,00406
0J15
-0,05
1'^0,008.581
Рис. 8.8. Частотные и фазовые отклонения в системе автопод-
стройки параметров ЛЧМ сигналов по методу фазовой дискретиза-
ции с автоматическим компенсатором регулярных искажений (/>2)
при действии входного возмущения Де (<*) =sin 0,1 nt* и синтези-
рованной по быстродействию цепью обратной связи (Л*! = 1,5,
Л*2=1, Л*К1=0,5, Л*к2=1, V = 0)
БПФ [58]. При вычислении спектров считалось, что и
частотные и фазовые отклонения периодически повто-
ряются, причем таким образом, что Т*п = Т*. Поэтому
Рис. _8.9. Огибающие спектра частотных Stj и фазовых 5» откло-
нений в первом (а, /=1) и последующих (Ь, />2) периодах моду-
ляции, ^нормированные к амплитуде гармоники исходного возмуще-
ния Де (i*)=sin ni*/16, вычисленные по алгоритму БПФ в пред-
положении, что Т*П=Т*=32, Л*1=1,5, Л*2=1, Л.* к! =0,5, Л*К2 = 1,
Х* = 0, Т*т= 1
123
спектр частотных и фазовых отклонений имеет линей-
чатый характер (для наглядности на рис. 8.9 показаны
огибающие этих спектров).
Рассмотренные автоматические компенсаторы регу-
лярных искажений целесообразно применять в тех слу-;
чаях, когда устройства автоподстройки ЛЧМ сигналов
не обеспечивают требуемой точности формирования сиг-
нала. Относительная сложность автоматических ком-
пенсаторов окупается достигаемыми при их введении
результатами.
Глава 9
СИНТЕЗАТОРЫ ЛЧМ СИГНАЛОВ
9.1. Синтезаторы "Сигналов с линейным
или ступенчатым изменением частоты
При больших значениях базы иногда используют
формирование ЛЧМ сигналов из отдельных подымпуль-
сов, как когерентных, так и некогерентных. Широкое
применение находят методы формирования ЛЧМ сигна-
ла из сигналов с линейно-ступенчатой и пилообразной
ЧМ. В этом случае полный ЛЧМ импульс разделяется
на М подымпульсов, в каждом из которых использует-
ся в М раз меньшая девиация частоты [57].
Рис. 9.1. Изменение частоты составных сигналов при формировании
сигналов с пилообразной ЧМ с помощью униполярной (а) и бипо-
лярной (б) фазовой модуляции
124
Из условия непрерывности изменения фазы синтези-
руемого ЛЧМ радиоимпульса следует, что в сигналах
как со ступенчатой, так и с пилообразной ЧМ скачки
фазы должны отсутствовать или быть кратными 2л. Для
этого в сигнале со ступенчатой ЧМ частота переключе-
ния и шаг дискретного изменения частоты должны быть
кратными и формироваться одним высокостабильным
(например, кварцевым) генератором. Определим зави-
симость числа подымпульсов от параметров ЧМ и ис-
следуем условия непрерывности изменения фазы для
двух вариантов формирования сигнала с пилообразной
ЧМ. В первом из них используется несимметричное из-
менение частоты относительно начальной (рис. 9.1,а).
П$и этом фаза сигнала внутри подымпульса изменяется
по закону параболы (нижняя парабола на рис. 9.2) и
Рис. 9.2. Диаграммы изменения фазы сигнала с пилообразной ЧМ
МА)
на стыке подымпульсов используется (см. § 4.3) быст-
рый сброс фазы (униполярная ФМ). Во втором вариан-
те (рис. 9.1,6) частота изменяется симметрично отно-
сительно центральной, при этом фаза сигнала внутри
подымпульса меняется по квадратичному закону (бипо-
лярная ФМ), так что ее значения на стыках подым-
пульсов совпадают с линейным законом изменения фа-
зы опорного сигнала (непрерывная линия на рис. 9.2).
Учитывая, что ступенчатое изменение частоты дости-
гается последовательным переключением когерентных
составляющих сетки частот, отличающихся на за-
пишем выражение для фазы к концу z-го подымпульса
?z = [“о1 +W - 1ЖШэ +*Л)> (9.1)
где ©о1—частота 1-го подымпульса; /3 —задержка
ЛЧМ радиоимпульса относительно начального момента,
125
при котором составляющие сетки частот имеют одина-
ковую начальную фазу. Фаза в начале (i+l)-ro по-
дымпульса равна
Tf+i = [o>oi + 2iu UZj] (/3-(- ITi).
Разность фаз на стыке i-ro и (i+l)-ro подымпульсов
при ступенчатой ЧМ
Acpi = <р/+1 — ^.=.2tzW1 (t3 i 7\).
Разность фаз при униполярной ФМ Д<р2 = —nWiTi и при
биполярной ФМ Дф2 = 0.
Суммарный фазовый набег Д<р=Д<рi -f-А<р2 в синтези-
руемом ЛЧМ подымпульсе
( 2n£>i(i—0,5)+2nVTi^3 при униполярной ФМ,
I 2nj£)I-|-2nIV7i/3 при биполярной ФМ,
(9.2)
где D\ = TiWi — произведение девиации частоты на дли-
тельность подымпульса, т: е. база подымпульса.
Соответствующей регулировкой фазы второе слагае-
мое 2л1^^3 можно сделать кратным 2л и не учитывать.
Первое слагаемое также должно быть кратным 2л. Обо-
значив коэффициент кратности через ткр, из (9.2) при
i = l найдем
& ___(2/ziKP при униполярной ФМ,
(щкр при биполярной ФМ.
Соотношение (9.3) означает, что база подымпульса
должна быть целым числом, т. е. девиация частоты ITi
кратна частоте повторения подымпульсов. Число по-
дымпульсов при этом определяется выражением М2 =
= / D/Di. Учитывая (9.3), запишем
VDI2mxp при униполярной ФМ,
У D/mKp при биполярной ФМ,
где ткр =1, 2, 3, ...
Таким образом, число подымпульсов не может быть
произвольным, а зависит от параметров импульса и от
вида ФМ. Допустимое число подымпульсов Ммакс бу-
дет максимальным при биполярной ФМ. Можно увели-
чить Мнакс, приняв ткр =0,5. При этом необходимо
ввести дополнительные компенсирующие фазовые сдви-
ги на л на стыке подымпульсов.
126
9.2. Формирование сигнала с пилообразной частотной
модуляцией
Последовательность когерентных ЛЧМ подымпуль-
сов описывается выражением
И(О =
м
при
1=1
(9.4)
О при других t,
где Ф (t) = (o>0i — V/J / + О,5ро t2 — текущая фаза;
= ПРИ (г—
(О при других t.
Спектр последовательности ЛЧМ подымпульсов, огра-
ниченной во времени, представляется в виде периодиче-
ских пиков, расположенных в полосе спектра одиноч-
ного подымпульса на частотах, кратных частоте повто-
рения подымпульсов. Для непрерывной последователь-
ности ЛЧМ подымпульсов спектр имеет линейчатую
форму.
Необходимым требованием при формировании сиг-
нала пилообразной ЧМ является когерентность сосед-
них ЛЧМ подымпульсов. Для ее обеспечения при малой
базе £>i можно применить, например, фазовую модуля-
цию напряжения опорной частоты. В этом случае про-
ще выполнить условия непрерывности фазы на стыке
подымпульсов. Опорная частота при ФМ может соот-
ветствовать начальной или центральной частоте по-
дымпульса. Диапазон изменения фазы составляет n£>i
для униполярной ФМ и л£>1/4 для биполярной. Точность
параболического закона ФМ зависит от точности фор-
мы управляющего напряжения модулятора, линейности
модуляционной характеристики (MX) и быстродействия
управляемого фазового модулятора. Обычно точность
ФМ 2 ... 5%. На практике параболу удобно аппрокси-
мировать отрезком косинусоиды и получать управляю-
щее напряжение из опорного гармонического колеба-
ния. В этом случае фазовые ошибки аппроксимации па-
раболы отрезком в четверть периода не превышают 1 %,
а отрезком в половину периода — 5%. При этом спектр
одиночного подымпульса
127
0,5 Г,
St(a>)= С exp {j [(o>0i — o>H + #(l — cos2//m)]} dt,
-0,51,
(9.5)
где В = Д<р (1 — cos к[т)-л = [4(1 — cosit/m)] -1, m ^>2.
ИСпользуя разложение
gjzcosS __
(9-6)
получаем
DO
s„(«>) = 2]A (-1**
— u*
Отсюда
sin[(o> — a>01 — k&lm) 7i]
(a> — a>0L-— Л2//П) Л
ISJoOI^
sin 04 ~
jo(B)-----+y]ft(_i)ftjft(B)x
“1 A=1
где 04 = it (/ — /01) ; a2 = ai + k^/rn', a3 == 04 — k-Klm.
Таким образом, при малой базе Dy спектр ЛЧМ им-
пульса можно представить конечным рядом смещен-
ных по частоте членов sinx/x, амплитуды которых
Рис. 9.3. Изменение формы спектра ЛЧМ сигнала с прямоугольной
огибающей при последовательном увеличении базы Dx (------------
спектр немодулированного радиоимпульса)
128
определяются функциями Бесселя. Подобное представ-
ление позволяет проследить предельный переход спек-
тра вида sinx/x «смодулированного радиоимпульса к
почти прямоугольному спектру ЛЧМ импульса и пояс-
нить природу френелевских пульсаций этого спектра.
Расчетные (рис. 9.3) и экспериментальные (рис. 9.4)
Рис. 9.4. Спектры ЛЧМ сигнала с прямоугольной огибающей при
£>!=! (а), £>! = 2 (б), А=4 (в), Р1 = 8 (г)
спектры дают наглядное представление об изменении
спектра сигнала при возрастании базы подымпульса. В
синтезаторах ЛЧМ сигналов для обеспечения точности
закона изменения частоты выбирают максимально до-
пустимое число подымпульсов, что соответствует мало-
му индексу ФМ. Огибающая спектра пилообразного ЧМ
сигнала в этом случае незначительно отличается от
функции вида sinx/x и может быть вычислена по (9.7).
9.3. Формирование сигналов со ступенчатой частотной
модуляцией
В рассматриваемом методе синтеза ЛЧМ сигнала из
подымпульсов ступенчатой и пилообразной ЧМ первая
9—1022 129
составляющая обеспечивает основную часть квадратич-
ного фазового набега, а вторая корректирует неболь-
шие отклонения фазы в пределах подымпульса. Тем
самым девиация частоты в генераторе пилообразного
ЛЧМ сигнала снижается в М раз, что облегчает выпол-
нение требований к линейности ЧМ. При этом точность
сигнала со ступенчатой ЧМ должна быть достаточно
высокой, чтобы обеспечить среднюю крутизну результи-
рующего изменения частоты.
Представим спектр сигнала со ступенчатой ЧМ в
виде последовательности подымпульсов без проме-
жутков.
м
S. («) = 2 Т. 2 sin 0 5 («.-.о,-»,) 7, х
/=1 0,5 (а> — а>01 — а>г)
X ехр {] [(<•> — а>г — a>Oi)(Z — 0,5) 7\]}.
Тогда модуль спектра сигнала
I s (/) । = 2 л У •sin М
Хехр[-№(7-А!„)(2п-1)]|, (9.8)
где ?=(/-/01)Ж; kn = n-0,5(M+ 1).
Спектр последовательности подымпульсов, разнесен-
ных по частоте и времени, описывается векторной сум-
мой функций вида sinx/x, смещенных по частоте и раз-
личающихся наклоном фазовой характеристики. Про-
цесс образования спектра сигнала ступенчатой ЧМ из
функций вида sinx/x можно проследить на примере
последовательного удвоения числа подымпульсов
(рис. 9.5). При малых значениях Di форма амплитуд-
ного спектра сигнала ступенчатой ЧМ очень напоминает
форму спектра ЛЧМ сигнала. Анализ формы спектров
показывает, что уровень боковых лепестков в централь-
ной области частот возрастает и по мере увеличения
числа подымпульсов (рис. 9.5,в), а за пределами этой
области резко уменьшается.
При больших М (что характерно для сигналов с
большими базами) амплитудный спектр последователь-
ности подымпульсов все более приближается к прямо-
угольному. При этом пульсации спектра приобретают
форму, характерную для спектра ЛЧМ импульса. При
увеличении ITi (т. е. при больших £>i) снижается вза-
130
имное влияние парциальных спектров подымпульсов и
результирующий спектр имеет гребенчатую форму.
Известно достаточно много устройств формирова-
ния радиоимпульсов, несущая частота которых изме-
няется дискретно. Более высокую точность ступенчатой
ЧМ и стабильность фазы можно обеспечить переклю-
чением когерентных составляющих сетки частот [57], для
чего чаще всего используются быстродействующие син-
тезаторы частоты (рис. 9.6). Такие синтезаторы позво-
Рис. 9.5. Расчетные и экспериментально снятые спектры сигнала
со ступенчатой ЧМ для £>i = l при удвоении числа подымпульсов
М==2 (а), М=4 (б), М=8 (в)
ляют оперативно менять знак скорости ЧМ в 2* точках,
разнесенных по частоте на Wi. Число k нахо-
дится из соотношения 2*>М. Когерентные составляю-
щие удобно получать делением, а не умножением часто-
ты опорного кварцевого генератора. В этом случае но-
9* 131
минал частоты генератора выбирают равным 2*-1 VFi и
применяют k—1 двоичных делителей частоты (ДЧ).
Синтезатор ступенчатой ЧМ состоит из k каналов,
каждый из которых содержит смеситель, фильтр и ком-
мутатор. Каждая составляющая сетки частот поступает
на свой смеситель. На выходе фильтра выделяется одна
из боковых частот, сме-
От синхро-
низатора.
Рис. 9.6. Структурная схема дво-
ичного синтезатора ступенчатой
ЧМ
но из дискретных значений
щепная относительно
опорной частоты на 2г Wj
(1—номер канала). Ком-
мутатор осуществляет
выборку сигнала опорной
или смещенной частоты.
Выходы коммутаторов
подключены к цепи из
k—1 последовательно со-
единенных преобразова-
телей частоты. Частота
сигнала на выходе послед-
него преобразователя
равна сумме частот всех
каналов и в зависимости
от кода управления ком-
мутаторов принимает од-
ступенчатой ЧМ. При ли-
нейно-ступенчатой ЧМ коммутаторы переключаются по-
переменно. Частоту переключения получают делением
частоты с выхода ДЧ*_1 цепочкой двоичных делителей
частоты. ,
В устройстве используются две опорные частоты,
значения которых выбираются достаточно высокими по
сравнению с девиацией частоты W. Это упрощает филь-
трацию при образовании результирующей частоты сум-
мированием частот каналов. Поскольку в описываемом
синтезаторе точность и стабильность дискретного изме-
нения частоты, а также длительность подымпульсов
определяются точностью и стабильностью частоты квар-
цевого генератора, то для обеспечения монотонного из-
менения фазы необходимо выполнить фазирование ка-
налов.
Установление требуемых значений фазы осущест-
вляется на основе анализа формы спектра последова-
тельно удваиваемого числа подымпульсов. Вначале
устанавливается соотношение фаз первого и второго
132
подымпульсов, затем первой и второй пары подымпуль-
сов, далее между первой и второй четверкой подымпуль-
сов и т. д. Каждый раз устанавливается такая фаза,
чтобы форма спектра была симметричной, что соответ-
ствует только двум значениям фазы (0 или л). В пер-
вом случае на центральной частоте происходит сумми-
рование амплитуд, во втором — вычитание. Указанные
две формы спектра легко различаются, поэтому нетруд-
но выбрать нулевое значение фазы и добиться соответ-
ствия спектра расчетному (рис. 9.5).
Для установления фазы после переключения (в на-
чале каждого подымпульса) необходимо иметь широ-
кую полосу пропускания во всех коммутаторах и сум-
мирующих преобразователях частоты, что не всегда
выполнимо. При недостаточном быстродействии имеют
место продолжительные переходные процессы. Для их
сокращения применяется схема, содержащая два син-
тезатора частоты, каждый из которых аналогичен опи-
санному, но состоит из k—1 канала, причем частота
младшего разряда равна 21Fj. Синтезаторы, частоты ко-
торых смещены одна относительно другой на Wi, под-
ключаются на выход попеременно через шйрокополос-
ный коммутатор (рис. 9.7). При этом высоких требова-
Рис. 9.7. Структурная схема синтезатора ЛЧМ сигналов
ний по быстродействию к коммутаторам, входящим в
синтезаторы ступенчатой ЧМ, не предъявляется. Следу-
ет отметить, что при формировании сигнала с пилооб-
разной ЧМ для исключения переходных процессов на
стыке подымпульсов целесообразно использовать два
УФМ, которые рассчитаны ча девиацию частоты 2Wt и
работают попеременно. Суммирование сигналов пило-
образной и ступенчатой ЧМ желательно производить до
широкополосного коммутатора. Переходные процессы в
133
обоих синтезаторах разнесены во времени (рис. 9.8).
С помощью широкополосного коммутатора производит-
ся попеременное подключение участков ЛЧМ коле-
баний.
Рис. 9.8. Ступенчатая (а), пилообразная (б) и линейная (в) ЧМ
в синтезатору на рис. 9,7
Отметим, что в синтезаторах ЛЧМ сигналов, выпол-
ненных по рассмотренному методу, имеется возмож-
ность программного управления законом ЧМ: исключая
ФМ, можно получить ступенчатую ЧМ, изменяя код
переключения ступенек, — псевдослучайную ЧМ.
9.4, Фазовые отклонения в синтезаторах ЛЧМ сигналов
Оценим точность параболического закона изменения
фазы, которая может быть достигнута в синтезаторе
ЛЧМ сигнала на рис. 9.7. Фазовые отклонения в синте-
зируемом ЛЧМ сигнале обусловливаются отклонениями
пилообразной и ступенчатой ЧМ. Учтем их влияние на
параметры сжатого сигнала по известной методике
определения уровня боковых лепестков [38].
134
Фазовое отклонение в пилообразной ЧМ чаще всего
выражается как ошибка в установке индекса ФМ, т. е.
как отклонение скорости ЧМ б при неизменной дли-
тельности подымпульса 1\. Учитывая, что фазовое от-
клонение периодически повторяется, выразим парабо-
лическую функцию фазовых отклонений в виде ряда
Фурье. Для униполярной ФМ (рис. 9.2) найдем [25]:
среднее значение фазовых отклонений
1 Г / 3/2 \
Л .) \~)dt=
1 о 4 '
8Т2
"6“
амплитуды косинусоидальной и синусоидальной со-
ставляющих и-й гармоники
2 р 8/2 /2nzt\ ST] srf
п~ Л .1 ~2~ C0S / М= 2nW ’ а,1~~~2п^'
В результате
ч (0 = + Z ~~ Н 1 + П~ cos ’
о п=] \ / \ 11 /
где ф„ = arctg (ая/ся).
Для биполярной ФМ > л
2nitt
~тГ
Учитывая разложение (9.6) и пользуясь методом
«парного эхо» [38], найдем выражение для сжатого
сигнала
ч Г т
g(O = t/ П Jo (А„)| -^- +
[«=] 1
. у Ji (^я) s?n тс (t — nN)
„41 JoMn) ^(i~nN)
, sin тс (Z 4-nV) eJ.^
тс (t nN)
где Bn = nN^tjD + Ф„, t = tW\
(9.9)
8/Д У1 4-«2тс2/п2тс при униполярной ФМ,
^Di/n2^ при биполярной ФМ.
135
Выражение (9.9) учитывает влияние фазовых откло-
нений пилообразной ЧМ на параметры сжатого сигнала
и позволяет определить допуски. Так, для уровня бо-
ковых лепестков —40 дБ и £>i=l ошибка по индексу
ФМ не должна превышать 6,3% для биполярной ФМ и
1,9% для униполярной. Если ФМ не производить, то
выходной закон ЧМ оказывается ступенчатым. При
этом боковые лепестки, вызванные ошибками аппрокси-
мации лилейного закона ЧМ ступенчатым, будут на
уровне —6,6 дБ для несимметричного изменения часто-
ты (рис. 9Д, а) и —17 дБ для симметричного
(рис. 9.1,6).
Фазовое отклонение ступенчатой ЧМ определяется
отклонениями фазирования каналов всех разрядов дво-
ичного синтезатора частоты. Каждый канал имеет слу-
чайное и независимое фазовое отклонение, которое при-
водит к результирующему фазовому отклонению ступен-
чатого изменения частоты. Фазовое отклонение двоич-
ного синтезатора частоты Ч’2г- имеет форму меандра, ча-
стота которого определяется номером канала:
мо= -£-+21 —15sin
I 2 \ it / m=i
2‘-i
(2m— I)-1.
Результирующее фазовое отклонение двоичного син-
тезатора частоты является суммой отклонений во всех
каналах:
X 2 sin Г(2т-1)-^-1)(2т-1)-‘. (9.10)
/п —I J
Анализ фазовых отклонений сигнала, а также опыт
работы с такими синтезаторами показал, что при дан-
ном формировании ЛЧМ сигнала может быть достигну-
та точность квадратичного закона изменения фазы
1 ... 3°. Синтезаторы, выполненные по схеме на рис. 9.7,
целесообразно использовать для формирования сигна-
лов со ступенчатой или линейной ЧМ при базах
« 102 ... 105.
136
Глава 10
ПРИМЕНЕНИЕ ПРЕДЫСКАЖЕНИЙ В ЛЧМ
ИМПУЛЬСЕ ДЛЯ УЛУЧШЕНИЯ СТРУКТУРЫ
ОБРАБОТАННОГО СИГНАЛА
10.1. Влияние френелевских пульсаций спектра ЛЧМ
импульса на параметры сжатого сигнала
Ограничения, которые возникают при снижении
уровня боковых лепестков сжатого ЛЧМ сигнала, при-
влекают внимание разработчиков современных радио-
устройств. При сжатии ЛЧМ импульса с прямоугольной
огибающей используют устройства с параболической
ФЧХ и АЧХ в виде (1.5). При этом обычно полагают
амплитудный спектр входного сигнала прямоугольным,,
фазовый — параболическим и получают сигнал вида
sinx/x. При весовой обработке расширяется главный
лепесток и снижается уровень боковых лепестков
[52, 71].
В действительности спектр ЛЧМ сигнала тем силь-
нее отличается от прямоугольного, чем меньше база
сигнала. Это отличие приводит к повышению уровня
боковых лепестков. Рекомендации по их снижению с
помощью весовой обработки, выработанные в предпо-
ложении о прямоугольности спектра, оказываются в-
этих условиях недостаточными.
Чтобы выявить возможности снижения уровня боко-
вых лепестков сжатого сигнала, рассмотрим его форму.
Спектр ЛЧМ сигнала с прямоугольной огибающей
описывается варажением (1.2). Передаточную функцию'
квазиоптимального согласованного фильтра представим
в виде
н , х , (°>0 ~ w)2 Т
HjHexpj --------------
Н(«) =
4тгГ
при
.0 при | ш — о>о I >
где НДсо)—весовая функция;
<о0/0 t/u>
J (10.1>
со — о>о | 'С
i0 — начальная за-
держка.
Сигнал на выходе фильтра с учетом (1.2)
g (О - —У==- С (Ш) [Z (Xt)+Z(A2)] du>. (10.2>
4 VMo w
u>o —7tU/
137
Аналитическое решение интеграла (10.2) в литера-
туре не представлено. Частные, приближенные решения
[51, 63] не приводят к однозначной зависимости уров-
ня боковых лепестков от коэффициента сжатия и при
-средней и малой базе D не отражают реальной формы
сжатого сигнала. Найдем сигнал g(/) (10.2).
Вначале рассмотрим случай, когда весовая обработ-
ка не используется. Полагая Н1(<о) = 1 и /'о=0, запишем
a>0+nUZ
ei“/Z(Ar1)dw4-
+ J ejWZ (X2) d<o
wo— T.W
(10.3)
Произведем замену переменной <o на Xi в соответствии
с (1.2) для первого интеграла в (10.3):
V
!( (/) = be^-^ j eift«-Z (Л\) dXt,
О
где b ~ 2тгЦ7/]/ 2D; v = V2D. Интегрирование ![(/)
по частям дает
Z(^)
Р Jo
_ f .dZVV.l dx] . (10.4)
J dXx \t J
0 l J 4
Учитывая, что t/Z(Xi)/t/Xi = e_;’’'-xi/2, дополним выражение
в показателе подынтегральной функции (10.4) до полно-
го квадрата. В результате получим
It (f) = Z{v) [(ei(“»/+’tW'« — еЯ“»<-^«1+</7')1)/] X
v+w
x J c>-X2'2dX,
w
где X = Xt + tV2D/T; w-=tV2D/T.
Используя выражения для интегральных функций Фре-
неля, будем иметь
1( (/) = {Z (v) е^‘ — [Z(v + w) — Z (®)J X
X e~i(,tW'/+wg/2’} eJa,o*/j t. (Ю.5)
138
Произведем замену переменной <о на Х2 во втором
интеграле (10.3):
12(0 = {—Z(T/)e-i^+[Z(T/ —w) —Z(w)] X
X IW)} ej“7J t. (10.6)
Подставив (10.5), (10.6) в (10.3), получим точное вы-
ражение для сигнала на выходе фильтра
g(7) = czj/-Я
— jZ(w)e-i^D +
тс/
+ [Z(t/ — да) eJ7tr — Z (z/ 4- да) e_J7tZ] X
X------UeW* (10.7)
J2tc/ J ' '
где l=Wt.
Для пояснения формы сжатого сигнала воспользуемся
асимптотическим разложением интеграла Френеля й,
Рис. 10.1. Нормированные огибающие выходного сигнала, вычис-
ленные в соответствии с (10.7)
139
пренебрегая составляющими второго порядка малости,
получаем
(1 + -
nt
- j V'2 Z ( \f ~ . (10.8)
\ r L) 1 -^t
Для больших значений базы ?/£)<^1, при этом со-
множитель 1 + е(10.8) стремится к 2, а послед-
нее слагаемое к нулю. Тогда форма сжатого сигнала
имеет хорошо известный вид sin nt/nt. В общем случае
Рис. Ю.2, Форма сжатого сигнала для малых баз при весовой
обработке
Рис. 10.3. Форма сжатого сигнала для средних баз при весовой
обработке
140
сжатый сигнал определяется суммой двух ортогональ-
ных векторов. При целочисленных значениях t, когда
длина первого вектора нулевая, длина второго вектора
максимальная. Из этого следует, что сжатый сигнал в
принципе не имеет нулевых значений, и амплитуды боль-
шинства боковых лепестков меньше, чем у функции
sin ait nt (рис. 10.1).
Можно показать, что при весовой функции вида
(1.5) сжатый сигнал на выходе фильтра имеет вид
I g(O I = {AUVD I Gj (?) sin
•ф-ОИ?)е-^° sin-ГНУТОЙ?) e~iK^Dcosir?|}(2it)-1, (10.9)
где 01(?)=4_jaL:
' t V — 1
G2(?) = -7- - ? cos -£- + j sin ;
t \ u u / t* — 1
0, (t) = . - a,
t L t— 1
. Z (t>i + ®,) ei2K‘fD
H ГП J’
Wi =?]/ 2/D;
v1 = /2/71
Выражение (10.9),
полученное при стро-
гом решении интегра-
ла (10.2), позволяет
точнее представить
форму сжатого сигна-
ла и оценить влияние
пульсаций спектра на
параметры этого сиг-
нала. Результаты рас-
чета огибающей сигна-
ла для двух видов ве-
совой фуНКЦИИ (П1 =
= 0,425, ai = 0,5), при-
веденные на рис. 10.2,
10.3, достаточно точно
который имеет место на практике.
Рис. 10.4. Зависимость уровня бо-
ковых лепестков сжатого ЛЧМ
сигнала от его базы:
•----уровень блнжннх боковых лепест
ков;-------уровень пьедестала
отражают вид сжатого сигнала,
141
Исследования показали, что с уменьшением базы
ЛЧМ импульса нарушается лепестковая структура сжа-
того сигнала^ сглаживаются выбросы, образуется пьеде-
стал, При этом возрастает уровень дальних боковых
лепестков, а при £><100 он может превышать уровень
ближних. Изменение параметра весовой функции ау
(1,5) в основном сказывается на местоположении мак-
симума дальних боковых лепестков, а не на их уровне,
который определяется базой сигналов (рис. 10,4).
10.2. Уровень боковых лепестков сжатого сигнала
при расстройке частоты
Пульсации спектра ЛЧМ сигнала с прямоугольной
огибающей приводят не только к изменению лепестко-
вой структуры и возрастанию уровня боковых лепест-
ков, но и к асимметричной форме сжатого сигнала при
расстройке частоты. Покажем это на примере доплеров-
ской расстройки частоты. Представим спектр ЛЧМ сиг-
нала, смещенного на <од, в виде
Su (ш) = U VTi^ exp [- j (ш0 4- шд- ш)2 Т/4« W] X
X[Z(^) + Z№)], ~ (10.10)
где Xt = ]/£>/2[1 + (ш0 + <%- <»)МИ, г =1,2.
Минус соответствует i= 1, плюс i = 2.
Используя (10,1), запишем для сигнала на выходе
фильтра
g(^)=(^/WiF) J HiWfZpQ + Z^JX
а>0 —rcUZ
X exp [j <0 (f — ta 4-ед7) — j сро (ед)] d<0, (10.11)
где <p0 (ед) = (<o0 еди1Г) едГ; ед _- <од/2л1Г — относитель-
ная доплеровская расстройка частоты.
Полагая в (10.1) H1(w)=l, 4 = ?+едТ, t0=0, произве-
дем замену переменной со на Х[ для первого интеграла
Френеля и на Х2 для второго. Тогда вместо (10.11) по-
лучим
g
(iit ед) = T/W W (еЧт.(«д)
J Z (XJ e>2‘<x‘> dXt —
vt
142
- J Z (Л2) dX2
v3
(10.12>
где Qi,2(A'i,2) — [<°o + + (A'ii2 1^'2/D—IJitU^]^; ^2,3 =
=(1 + ед) /2D; ^ = ea/2R
Интегрируя выражение (10.12) и используя при этом
дифференцирование интеграла Френеля, как это сдела-
но в § 10.1, получаем
g (Л, ед) - U VD/2 {Z (-п2) - Z (w2) е-jW.-p.('.i) +
+ 2 [Z (vj e-i^^+ Z (w4) emW] cos (*ГЛ)+
-|- Z (®з) eiI’tW^‘+'f’‘Wl —
— Z(t>3) e-j’tW“/-}en<“>o+vw')/‘-'P“<91/j27tWZZ1, (10.13)
где w2,3 = (1 + ед) V^D ± Wt, V2/D; =Wt, V^D—
~^2D\ ?1 (^) = - %d/2r + Wti, = W (1 +ед).
Можно показать, что максимум амплитуды сигнала
имеет место при t = —елТ, т. е. при /1 = 0.
Для выяснения формы сжатого сигнала преобразуем:
выражение (10.13) и перейдем к безразмерному време-
ни t=Wti. Заменив интегралы Френеля по асимптоти-
ческим формулам, что допустимо для небольших значе-
ний ед <0,5, получим
U VD Г sin “i г— г7=— cos«i
g(^ea)l=-^< -j/2Z(e,/2D)—~ 4-
Xr 1*1 Caj
' sin aj r- ( / 2 -\cosai] . ~
+ [—-J/2 z|y j—Jjem(0 , (1O.14>
где «4 = it (t + Ед£>); <p2 (t) = ^t2/D — e^D.
При вд—>0 величина Z(ea У2D)-^-0 и выражение (10.14)
совпадает с (10.8).
Квазиоптимально сжатый сигнал при расстройке ча-
стоты определяется векторной суммой четырех слагаемых,
два из которых вида sinx/x, а два других—вида cosx/x.
Разность фаз между однородными функциями зависит
от расположения этих функций по оси t и от расстройки
частоты. При этом фазовые набеги суммируются при
/>0 и вычитаются при /<0, что приводит к асимметрии
143
формы сжатого сигнала, в том числе и главного лепест-
ка. Разрушение лепестковой структуры проявляется не
только при малой базе сигнала Ь, но и при большой.
Указанные особенности приводят к изменению формы
сжатого сигнала на выходе фильтра. Оценим эти изме-
нения для весовой функции (1.5). Подставляя (1.5) в
(10.11), после преобразований получаем
g (Г? ед) = AU /D/2 {0,5jG1 (7) ] Z (v3) е~Н _
— Z (v2) — 2Z +4) cos ~t] — ]G2 (7) cos it?e^U) +
+0,5 j [ G3 (?) eW — G4 eWfy (Ю. 15)
где <p3 (0 = —
GjW^-L — ;
1 t - 1
Z (w3 + t>,)
e-iKD;
G4 (?) = -
Z (w2 - p,) ci2gPn
t— 1
Выражение (10.15) представляет собой строгое ре-
шение для взаимной корреляционной функции при ква-
зиоптимальной обработке ЛЧМ сигнала. Функции
Ga(0 и G3(Z), определяющие уровень дальних боковых
лепестков, зависят в данном случае как от базы сигна-
ла D, так и от относительной расстройки частоты ед-
При этом они меняются во времени несимметрично от-
носительно t = Q, что приводит к асимметрии сжатого
144
сигнала (рис. 10.5). Это подтверждается результатами
эксперимента (рис. 10.6,а б).
Рис. 10.5. Форма сжатого сигнала, рассчитанная по формуле (10.15)
(в| = 0,425; ед=0,2)
Рис. 10.6. Осциллограммы сжатых ЛЧМ сигналов с прямоугольной
(в, б) и косинусоидальной (в, г) огибающей без расстройки ча-
стоты (а, в) и при ед=0,25 (б, г)
При упрощенном анализе, когда спектр сигнала при-
нимается прямоугольным, сжатый сигнал при расстрой-
ке частоты, рассчитанный по (17), имеет симметричную
форму (рис. 10.7).
Зависимость максимальной амплитуды сигнала от
расстройки частоты при весовой обработке существенно
10—1022 145
Рис. 10.7. Форма сжатого сигнала, рассчитанная по формуле (1.7)
при Я]=0,5 на выходе линейного (в) и логарифмического (б) уси-
лителей
Рис. 10.8. Влияние допле-
ровской расстройки часто-
ты на максимальную ам-
плитуду сжатого сигнала:
------ прн весовой обработке;
------прн согласованной филь-
трации
отличается от зависимости при согласованной фильтра-
ции (рис. 10.8). Она имеет округленную форму с при-
тупленной вершиной и резким спадом при ед =0,25 ...
... 0,75. Небольшие расстройки частоты (10%) приводят
к увеличению уровня боковых лепестков на 5 ... 10 дБ,
а уровень главного снижается всего на 0,1 ... 0,2 дБ.
-146
10.3. Амплитудно-частотная и амплитудно-временная
обработка ЛЧМ сигнала в устройстве формирования
. Результаты исследований ЛЧМ сигнала, представ-
ленные в § 10.1 и 10.2, показывают, что при малых ко-
эффициентах сжатия или при больших расстройках ча-
стоты весовая обработка ЛЧМ сигнала с прямоугольной
огибающей в приемнике не обеспечивает достаточного
снижения уровня боковых лепестков сжатого сигнала.
Рассмотрим возможность выполнения весовой обработ-
ки на передающей стороне радиолинии с целью умень-
шения уровня боковых лепестков и получения малой
чувствительности сжатого сигнала к расстройкам ча-
стоты.
Для получения гладкой формы огибающей и спектра
ЛЧМ сигнала иа выходе усилителя мощности могут
быть использованы два варианта весовой обработки. В
многоканальной системе, смещая составляющие сигна-
ла относительно друг друга, можно реализовать частот-
ную или временную весовую обработку. Особенно удоб-
но реализовать такую обработку в устройстве форми-
рования сигналов для ФАР, когда суммирование состав-
ляющих происходит в пространстве.
В устройстве на рис. 10.9,а входной ЛЧМ сигнал в
одном канале задерживается на т и фаза несущего сиг-
нала смещается на —tpi, в другом канале предусмотрен
фазовый сдвиг на +<pi. Суммарный сигнал можно за-
писать в виде
us(0 = 0,5t7{exp [j(%^ + ?o^/2 + ?i)] +
+ exp {j [<oo (f — т) + p0 (t — t)2/2 — cpj])}.
Полученное выражение можно преобразовать к виду
11 Т '. т
eW-Ч», ,-----,
2 2
^exp|j Ф(*)-Ь-у-
u;(n=
,, Г
U cos
, t—
Т I 2
11 Т Т
-ехр {][Ф(^ —+ —- ,
£ £ £
(10-16)
где Ф (t) = wot + nWt2/T; <pa =
Из (10.16) следует, что в пределах —Т/2+x<t<T/2
суммарный сигнал на выходе устройства на рис. 10.9,а
10*
147
имеет косинусоидальную огибающую. Можно показать,
что при т== 1/W спектр сигнала и\ (/) имеет вид
Ss (<«) = S„ (<в) cos |(ш — <о0) /2 W] e-K®-®o)/2iF t
где SB (<о) —спектр входного ЛЧМ сигнала. Таким об-
разом, амплитудная частотная весовая обработка вы-
полняется по косинусоидальному закону.
Рис. 10.9. Устройства формирования ЛЧМ сигнала с косинусо-
идальной огибающей
В устройстве на рис. 10.9,6 входной ЧМ сигнал сдви-
гается по частоте управляемыми фазовыми модулято-
рами (УФМ) в одном канале на Q/2, в другом на
—Q/2. Для этого в каждом из УФМ фазовый сдвиг
меняется по линейному закону <р(-= ±Q//2(i= 1,2).
Выравнивание амплитуд составляющих сигнала щ и и2
и установка начальных фаз з одном канале может осу-
ществляться аттенюатором, в другом — фазовращателем
[66]. Суммарный выходной сигнал в этом устройстве
имеет вид
u; (^=0,5 Z7{exp [j (Ф W + W)] + exp[j (Ф (t) - Qt/2)]},
где Ф(/)—фаза входного ЧМ сигнала. При £1 = 2л/Т
полученное выражение приводится к виду
2 [0, I t I > Т/2.
Таким образом, устройство на рис. 10.9,6 обеспечи-
вает амплитудно-временную весовую обработку сигна-
ла при произвольном законе частотной модуляции вход-
ного сигнала, в том числе для сигналов без внутриим-
148
пульсной модуляции. В частности, для ЛЧМ сигнала
запишем
и- / л=\и cos (ш/2) ejW+^/2+^ । *\ < m по 18v
’ io, \t | > 7/2. ' ’ ’
Найдем спектр ЛЧМ сигнала (10.18)
{7/2
у еЛ(“о-<“К+^/2^ +
-7/2
7/2
-7/2
где <Oq= <о0 — 2/2; % = <о0 + й/2.
Используя (1.2) и полагая <p0=Q27’/16jtTi^, получаем
s; (Ш) = 0,5 /772T{[Z (Х\) 4- Z (АУ] е* +
+ [Z (Af,) + Z (AQ] e-i“} e-i“’D/", (10.19)
где а = (ш — <o0)/2V7; Х},2 = [1 — (<о — <о0)М’7] -/£>/2 +
+ QГ/2к/2Г>; Хзл = Xi,2 ± (2Т/2^) ^2[D.
Амплитудный спектр ЛЧМ сигнала с косинусоидаль-
ной огибающей имеет гладкую форму (рис. 10.10,а).
Рис. 10.10. Амплитудный (а) и фазовый (б) спектры ЛЧМ сиг-
нала с косинусоидальной огибающей (£2=2л/Т)
149
При больших базах сигнала (D>100) спектр сосредо-
точен в полосе 2л№ и не отличается по форме от коси-
нусоиды. По мере уменьшения D увеличивается полоса
занимаемых ~ частот, происходит перераспределение
спектральной плотности, но гладкая форма спектра со-
храняется, и пульсации отсутствуют. Остаточный фазо-
вый член спектра косинусоидального ЛЧМ сигнала
практически не имеет пульсаций в полосе частот, огра-
ниченной девиацией частоты (рис. 10.10,6).
Найдем корреляционную функцию ЛЧМ сигнала с
косинусоидальной огибающей. Для этого, используя
выражение (10.18), запишем
g’(4 шд)=^/2В0/т: jcos f(Q/2) s]cos[(2/2) (t-
a
— s)] exp [j (<P (s) - <p (t — s) ь шд$)] ds.
Преобразуя произведение косинусов в сумму, получаем^
Ш с Г s
g"(4«4) = Ul/ ^-°J cosT/ +
' a
+ cos -y(f —2s)
exp [j + was -j- 0,5^2 — !Vs)] ds,
где
ft - Г/2-,
a = '
I- Tj2,
t>0',
Z<0.
b \T^
U+ T/2,
Представив полученное выражение в виде суммы трех
интегралов, будем иметь после интегрирования
<4
UVD ( I И \ ( sin а
--уДДсоз -2-
. sin а, . sin а3 \ Г. / .
+ -V-1 ех₽ IJ S + v
2ос2 ZCC3 • I \ **
t , (10,20)
L
где at = (тг117^-|-<Вд7’/2) (1 — | t |/Г); <*2,3 = а1 ± (2 T’/S) X
x(i-i^F)-
Можно показать, что при амплитудно-частотной ве-
совой обработке комплексная корреляционная функция
150
UVD Г “д' sin^2(Z) ,
g (/,”.)=—2—[ cos-2--------+ 2Ъ(П +
sjn fetm < r/ t v_i) 0
2$x(t) J ( |Д 2 / 2 J/
где <h (0 = (2*Wt + ®д0/2, ф2 (t) = <|>, {t) (1 - | t \IT)-
t' = t — v, t" = t-\-T.
Анализ выражений (10.20), (10.21) показывает, что
весовая обработка ЛЧМ сигнала в устройстве форми-
рования по сравнению с весовой обработкой в прием-
ном устройстве позволяет в основном сохранить форму
сжатого сигнала при доплеровских расстройках часто-
ты. При этом происходит лишь его расширение и незна-
чительно возрастают боковые лепестки (рис. 10.11).
Характерной особенностью корреляционной функции
вида (10.20) является то, что при (од=0 с уменьшением
Рис. 10.11. Сигналы на выходе согласованного фильтра при рас-
стройке частоты на выходе линейного (я) и логарифмического (б)
усилителей
151
базы максимальные уровни боковых лепестков почти не
возрастают, оставаясь на уровне —30 дБ, сохраняется
и скорость затухания боковых лепестков, в то время
как у корреляционной функции вида (10.21) уровни
боковых лепестков с уменьшением D резко возрастают,
Рис, 10.12, Корреляционные функции ЛЧМ сигналов при ампли-
тудно-временной (------) и амплитудно-частотной (--------) весо-
вой обработке
особенно дальние. При Z)<50 амплитуда и ширина
дальних боковых лепестков (/>Z)/4) больше, чем
ближних (рис, 10.12),
Рассмотрим зависимость параметров сжатого сигна-
ла от степени скругления огибающей или спектра излу-
чаемого ЛЧМ импульса. Уровень боковых лепестков
сжатого сигнала оценим в ближней зоне при t<^D и в
отсутствие доплеровских расстроек частоты (ед=0).
Выражения (10,20) и (10,21) в этом случае приводятся
к зависимости вида
152
g(/,0) ~ sin тс/ sin (тс/ — Ttt) . sin (тс/ тс?) }Q
g (0, 0) Tt7 2 (тс/ — tct) 2 (тс/ 4" ят)
где
~ (Wr для устройства на рис. 10.9, а,
Т 2= /
(2Г/2тс для устройства на рис. 10.9, б.
Из (10.22) следует, что при больших базах оба ва-
рианта весовой обработки излучаемого импульса рав-
нозначны по влиянию на форму сжатого сигнала в-
ближней зоне (табл. 10.1). Искажения сжатого сигна-
Таблица 10.1
। Значения параметров сжатого сигнала для различных т
Параметры Относительная задержка иди частота т
0,6 0,8 0.9 1.0 1.1 1,2
Ширина спектра по уров- ню —3 дБ 0,78 0,62 0,55 0,50 0,45 0,42
Коэффициент расширения основного лепестка 1,14 1,38 1,43 1,62 1,77 1,9Б
Уровень боковых лепест- ков, дБ Отношение сигнал-шум, 21,40 28,50 32,00 32,20 32,00 29,50Г
1,09 2,09 2,62 3,00 3,42 3,74
дБ
ла, имеющие место при прямоугольной огибающей и
малой базе, такие как увеличение уровня боковых ле-
пестков, образование пьедестала, появление асиммет-
рии, могут быть устранены амплитудно-временной весо-
вой обработкой излучаемого ЛЧМ сигнала.
Результаты экспериментов (рис. 10.6) показывают,,
что при прямоугольной огибающей входного ЛЧМ сиг-
нала уровень боковых лепестков сжатого сигнала.
—32 дБ без расстройки частоты и —26 дБ при ед=0,25..
При косинусоидальной огибающей наблюдается боль-
шая скорость затухания боковых лепестков, дальние ле-
пестки снижаются до —40 дБ. Низкий уровень боковых
лепестков и симметричная форма сжатого сигнала со-
храняется в этом случае и при расстройке частотьс
(рис. 10.6,г).
10.4. Применение амплитудных и фазовых
предыскажений ЛЧМ импульса для уменьшения
уровня боковых лепестков сжатого сигнала
При согласованной фильтрации ЛЧМ сигнала с пря-
моугольной огибающей сжатый сигнал отличается от
153:
функции sin х/х наличием остаточного фазового члена
в аргументе функции sinx
sin(iW \t | — p0/2/2) cos
* <*’ =---------------агй--------------------
11 К T. (10.23)
После весовой обработки сжатый сигнал можно
представить суперпозицией трех разнесенных во време-
ни откликов
g2it) = axg(t-\)W) + g (t) + axg (t +1[W).
Используя (10.23), можно преобразовать gz(t) к виду
£2 (0 ~ ( 1 — 2й1 cos
2^
Т )
sin[^r | t | 4-p0/2/2]coso>fl/
(10.24)
Первый сомножитель в (10.24) показывает, что уровень
боковых лепестков на удалении 772 от главного возра-
стает в 1 +2ai раз, например, для ах = 0,425 на 5,4 дБ
(кривые 1 и 2 на рис. 10.13).
При больших базах (7)>120), когда влияние пуль-
саций спектра становится незначительным, относитель-
ный уровень боковых лепестков 2 (1 + 2ах) /n,D падает
ниже —40 дБ. При средних значениях базы (Д<100)
для уменьшения уровня боковых лепестков в окрестно-
сти ±Т/2. можно использовать предыскажения огибаю-
щей или закона модуляции в передатчике. Если пара-
метры предыскажения выбраны так, что пульса-
ции спектра уменьшаются, то уровень указанных лепе-
стков снижается. Например, при трапецеидальной оги-
154
бающей с длительностью фронта и среза Т/2 боковые
лепестки возрастают лишь на 2,8 дБ. Однако при фор-
мировании трапецеидальной огибающей в радиопере-
дающем устройстве могут появиться фазовые искаже-
ния, что приводит к росту уровня ближних боковых ле-
пестков.
Лучшие результаты может дать применение преды-
скажения закона частотной модуляции. В [15] исполь-
зуется простой вариант предыскажения, когда на краях
ЛЧМ радиоимпульса выделяются участки длитель-
ностью упТ с увеличенной в а2 раз скоростью пере-
стройки. Для выявления связи между параметрами
предыскажения уп и а2, с одной стороны, и уровнем
боковых лепестков — с другой рассчитаем огибающую
сигнала на выходе фильтра, согласованного с неиска-
женным сигналом. Расчет сводится к вычислению вза-
имной корреляционной функции предыскаженного сиг-
нала и фильтра с последующей весовой обработкой.
Результаты вычислений для базы Д = 20 показыва-
ют, что изменением уп и а2 можно уменьшить уровень
на 2 ... 4,5 дБ в окрестности ±Т!2. Зависимости сни-
жения уровня боковых лепестков А от длительности
Рис. 10.14. Зависимость
максимального уровня
боковых лепестков от
параметров предыска-
жений
участка предыскажений (рис. 10.14,а) и от увеличения
скорости ЧМ (рис. 10.14,6) имеют экстремальные точ-
ки. Наибольшее снижение уровня боковых лепестков
имеет место при уп=0,75 и <22=18. При этом уровень
главного лепестка уменьшается на 1,5 ... 2 дБ, его ши-
рина возрастает на 10 ... 20%, а уровни ближних боко-
вых увеличиваются на 0,3 ... 0,6 дБ. По эксперимен-
тальным данным [51], за счет предыскажения закона
частотной модуляции в передатчике удается снизить
уровень лепестков в окрестности ±7/2 с —35 до
—40 дБ.
155
Глава 11
ФОРМИРОВАНИЕ
ЧАСТОТНО-МОДУЛИРОВАННЫХ СИГНАЛОВ
НА ОСНОВЕ ГЕНЕРАЦИИ ЛЧМ СИГНАЛОВ
11.1. Сигналы с зигзагообразной и нелинейной ЧМ
Методы и устройства генерации ЛЧМ сигналов, рас-
смотренные выше, могут быть использованы для фор-
мирования сигналов с другими законами частотной мо-
дуляции. Среди всего разнообразия таких сигналов вы-
делим две группы, которые находят широкое приме-
нение.
К первой группе отнесем составные ЛЧМ сигналы
(рис. 11.1,а), представляющие собой последователь-
Рис. 11.1. Составные ЛЧМ сигналы (а) и сигналы с нелинейной
симметричной частотной модуляцией (б)
ность ЛЧМ подымпульсов с манипуляцией начальной
фазы, частоты или скорости. Такие сигналы называют
также зигзагообразными [115], М и V-образными [51].
К этой же группе относятся ЛЧМ-ФМ сигналы (см.
§ 1.2) [48]. При определенном выборе параметров ЧМ
сигналы этой группы могут иметь форму тела неопре-
деленности, близкую к кнопочной, сохраняя все досто-
инства ЛЧМ сигналов, обеспечивая высокую разреша-
ющую способность по дальности и по скорости.
Ко второй группе (рис. 11.1,6) относятся сигналы,
частота в которых меняется по нелинейному закону
симметрично относительно центральной частоты:
“’(/) = ®«+M + “’W, С11-1)
156
где Ро — скорость изменения частоты опорного ЛЧМ
сигнала; со(/)—нелинейная симметричная корректи-
рующая составляющая ЧМ, в качестве которой исполь-
зуют функции тригонометрического или гиперболиче-
ского синуса, арктангенса, интеграла вероятности, пара-
болу с нечетными степенями и др. [19, 51, 74]. Указан-
ные функции нелинейной ЧМ импульсного сигнала с
прямоугольной огибающей приводят к гладкой, моно-
тонной или скругленной лепестковой форме спектра и
малому уровню боковых лепестков корреляционной
функции. Это позволяет отказаться от весовой обработ-
ки сигнала и исключить, таким образом, потери в отно-
шении сигнал-шум.
Уровень боковых лепестков корреляционной функ-
ции таких сигналов существенно зависит от вида ©(f).
Для больших баз Z)>100 использование функций три-
гонометрического синуса снижает уровень боковых ле-
пестков с —13 до —(21 ... 47) дБ, а гиперболического
синуса до —(50 ... 60) дБ [19]. При средних значениях/)
обычно используемый для нахождения функции ©(/)
метод стационарной фазы [19] не обеспечивает доста-
точной точности получения результатов в связи с ро-
стом пульсаций спектра, что не позволяет снизить уро-
вень боковых лепестков корреляционной функции [64].
Так, например, при D = 8 вместо —32 дБ имеем уровень
—20 дБ (непрерывная кривая на рис. 11.2). При этих
условиях используется степенная функция
т
7(/) = 2яА (И-2)
1-Х
где t — нечетное число.
Таблица 11.1
Коэффициенты а; полинома
степени т нелинейной ЧМ (Д=8)
0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1,0 t/T
Рис. 11.2. Корреляционная функ-
ция сигнала с нелинейной ЧМ
Методом численного интегрирования по известной
формуле интегральной свертки двух функций были най-
дены значения коэффициентов at (см. табл. 11.1), по-
157
ними законами ЧМ. Сигнал с
зволяющие получить корреляционную функцию с мини-
мальным уровнем боковых лепестков (штриховая линия
на рис. 11.2). При полиноме седьмой степени амплитуд-
но-частотный- спектр имеет гладкую скругленную форму
с незначительными пульсациями и четко выраженной
лепестковой структурой в корреляционной функции
(рис. 11.3).
Кроме выделенных двух групп используются сигна-
лы с квадратичной, кубической, гиперболической и дру-
гиперболической ЧМ [37,
38] (линейная модуля-
ция периода или лога-
рифмическая ФМ) отли-
чается тем, что форма
сжатого сигнала слабо
зависит от доплеровской
расстройки частоты. В
связи с этим такой сиг-
нал находит применение,
когда ширина спектра
сравнима с несущей ча-
стотой, а также при
больших значениях ба-
зы. Сигналы с полино-
миальной (в частности, с квадратичной) ЧМ [20] в
различных радиолокационных приложениях позволяют
определить направление движения цели или получить
более точные оценки измерения скорости.
Su
О 02 Ofi 06 0,8 1,0 1,2 1,4
ЛЯ
Рис. 11.3. Спектры сигналов с ли-
нейной (-------) и нелинейной
ЧМ (--------) при D=8
11.2. Формирование составных ЛЧМ сигналов
Рассмотренные в книге устройства формирования
ЛЧМ сигналов могут быть использованы и для форми-
рования составных ЛЧМ сигналов. В цифровых устрой-
ствах переход к составным ЛЧМ сигналам достигается
соответствующим изменением во времени кодов скоро-
сти ЧМ, начальной частоты или фазы.
Для формирования составного сигнала при широких
полосах частот и больших базах подымпульсов приме-
няют автогенераторы, управление частотой которых
осуществляется модулирующим напряжением. Когда к
точности составных ЛЧМ сигналов предъявляются вы-
сокие требования, необходимо применять устройства
автоподстройки параметров ЛЧМ сигналов. Рассмотрим
основные особенности их использования. В устройстве
158
автоподстройки с линией задержки ГПН заменяется
модулятором, обеспечивающим возможно более точное
соблюдение закона изменения частоты УГ, а частота
эталонного сигнала соэ переключается в соответствии со
скоростью ЧМ в каждом подымпульсе.
Если модуль скорости ЧМ в соседних элементах
одинаков, то при использовании ИСО, схема которого
приведена на рис. 5.1, переключения частоты иэ не тре-
буется (рис. 11.4).
’'Рис. пл. Закон изменения частоты (а, б) и эпюры напряжения
в ИСО (в, г) при V-образной ЧМ
Для формирования составных ЛЧМ сигналов удоб-
но использовать устройства автоподстройки по методу
фазовой дискретизации (гл. 6). Переход от одного по-
дымпульса к другому целесообразно осуществлять в
узловых точках (рис. 11.5). Для устойчивой работы си-
стемы автоподстройки при переходе от одного подым-
159
пульса к другому предъявляются высокие требования к
исходным отклонениям формируемого сигнала. Эти тре-
бования существенно снижаются при использовании
устройств автоподстройки по модифицированному мето-
ду фазовой дискретизации (см. § 6.4) или с цифровым
преобразователем (см. гл. 7). Особенность использо-
вания устройств автоподстройки с цифровым преобра-
зователем заключается в том, что при переходе от одно-
Рис. 11.5. Режимы синхронизма
го элемента к другому необходимо менять алгоритм
работы преобразователя. Как показывает опыт, иногда
система автоподстройки может работать без модулято-
ра, а управляющее напряжение автоматически форми-
руется в ЦОС по сигналу ошибки Однако при этом
точность формирования сигнала оказывается несколько
хуже, чем при модулирующем напряжении.
160
11.3. Формирование сигналов с нелинейной
симметричной частотной модуляцией
Методы формирования ЛЧМ сигнала могут быть ис-
пользованы и при формировании сигналов второй груп-
пы. Автогенераторы без систем автоподстройки (§ 4.2)
легко можно приспособить для генерирования сигналов
с нелинейной симметричной ЧМ, необходимо только из-
менить вид модулирующего напряжения. Без сущест-
венных усложнений могут быть применены автогенера-
торы с программной коррекцией MX (§ 4.4). Пассивный
метод формирования можно с успехом применить при
нелинейном монотонном законе ЧМ, рассчитывая соот-
ветствующим образом параметры дисперсионной ЛЗ.
Устройства формирования ЧМ и ЛЧМ сигналов с
помощью фазовой модуляции (§ 4.3) отличаются спо-
собом создания управляющего напряжения еу
(рис. 11.6). Здесь генера-
Рис. 11.6. Структурные схемы
устройства формирования сигна-
лов с нелинейной ЧМ (а) и мо-
дуляторов при униполярной (б) и
биполярной (в) ФМ.
Рис. 11.7. Структурные схемы
устройств формирования сиг-
налов с нелинейной ЧМ
161
ляющего напряжения. Для повышения девиации фазы
используется умножитель частоты (УЧ). Фазовая моду-
ляция в этом устройстве может быть как униполярной
[122], так и'биполярной [93].
Биполярная ФМ является более эффективным вари-
антом формирования нелинейной ЧМ. Если при линей-
ной ЧМ биполярная ФМ позволяет в 4 раза увеличить
произведение TW по сравнению с униполярной (при
одних и тех же пределах изменения фазы в приборе),
то при нелинейной, симметричной ЧМ это произведение
увеличивается, в 8 ... 12 раз в зависимости от вида нели-
нейной функции [91, 93]. Точность выполнения ФМ со]
ставляет единицы процентов от общего фазового набегг
за длительность импульса. Поэтому устройства с фазо
вым модулятором могут быть использованы для получе
ния нелинейной ЧМ непосредственно из опорного гар]
ионического сигнала при сравнительно небольших ба<
зах. Если база велика, то для выполнения требований
к точности поддержания закона ЧМ и уровня фазовых
отклонений целесообразно использовать фазовую моду-
ляцию ЛЧМ сигнала.
Можно применить два типа устройств формирова-
ния сигналов с нелинейной ЧМ (рис. 11.7). В первом
(рис. 11.7,а) сигнал с нелинейной ЧМ со(/) получается
смешением ЛЧМ сигнала от синтезатора и нелинейного
ЧМ сигнала со(/) в соответствии с (11.1). В схеме
рис. 11.7,6 сигнал с нелинейной ЧМ w(Z) вводится в
кольцо любой системы автоподстройки ЛЧМ сигнала.
При этом система работает jaK, что на выходе смесите-
ля имеется ЛЧМ сигнал, а сигнал с требуемой нели-
нейной ЧМ вида (11.1) формируется непосредственно
УГ с высоким уровнем мощности.
Так как методы и техника формирования ЛЧМ сиг£.
налов к настоящему времени разработаны, то таком*
подход к формированию сигналов с нелинейной ЧАт,]
является оправданным. Сигнал с нелинейной ЧМ со(/)'
может быть получен модуляцией частоты автогенерато*
ра цифровыми методами, а также с помощью фазовой
модуляции эталонного сигнала. Поскольку преобразова-
ние ЛЧМ в нелинейную ЧМ осуществляется на значи-
тельно меньшем фазовом набеге, чем полный параболи-
ческий фазовый набег ЛЧМ сигнала, то при одних и тем
же относительных фазовых отклонениях можно полу-
чить более высокую абсолютную точность изменений
162
фазы нелинейной ЧМ. Наиболее эффективным этот спо-
соб оказывается при формировании симметричной ЧМ,
где дополнительное отклонение фазы от параболическо-
го закона можно сделать незначительным.
Рассмотрим основные особенности данного способа.
Сигналы с нелинейной ЧМ можно представить как ЛЧМ
импульсы с дополнительной нелинейной ЧМ. Крутизну
ЛЧМ сигнала удобно принять такой, чтобы отклонение
закона ЧМ от линейного было наименьшим. Диапазон
изменения фазы зависит от вида функций нелинейной
ЧМ и способа ее аппроксимации. На примере функции,
обеспечивающей косинусоидальную огибающую спектра
(уровень лепестков —32 дБ), оценим необходимый диа-
пазон изменения фазы. Зависимость групповой задерж-
ки от частоты [51] имеет вид
т (<о) = Т [(<« — <1>о)/2гси7 + sin (<о — <o0)/2kU7],
| <о — <о0 | к Ж (Н.З)
Предположим, что применяется биполярная ФМ. Тогда,
интегрируя (11.3), имеем
Ф (<о) — J = kD/4 + D/к. (11.4)
“о
Если в качестве опорного ЛЧМ сигнала принять ко-
лебание с девиацией ча-
стоты W и длительностью
Т (штриховая линия на
рис. 11.8), то первое сла-
гаемое в (11.4) определяет
фазовый набег опорного
сигнала, а второе—необ-
ходимый диапазон измене-
ния фазы сигнала с нели-
нейной ЧМ со(/). Индекс
ФМ можно существенно
уменьшить, если принять в
качестве опорного ЛЧМ
сигнал с групповой задерж-
кой (непрерывная линия
на рис. 11.8)
Рис. 11.8. Функции групповой
задержки для сигнала с коси-
нусоидальным спектром
I <1>0— (!) I > кЦТр
_ (Т(® — ^/2^
\Т/2
при
при
где IT] определяется из условия
11*
163
' cu0-{-izW\ ' <o04-rcU7,
J т (o>) dw = J Tj (co) d<0.
<°o <°o
Решая полученное соотношение, получаем
^ = 117(1-4/712). (П.6)
Требуемый диапазон изменения фазы ;
“х о>х I
д<р = J т (<о) df» — J tj(w) d&, (11.7)
<°о too J
где х — абсцисса точки пересечения функций т(<в) И’
Ti (со). Из условия т («1^)= (шЛ) находим
4<оЛ./к = <о0 -j- «IF (1 — 4/к2) sin шх/2п№.
Графическое решение полученного трансцендентного
уравнения дает шх ~со0 + n,W/2. Подставляя значение
<ож в (11.7) t имеем
Д<р = кО («2 _ 8)/4к2 тс£)/200.
Таким образом, если используется опорный ЛЧМ
сигнал с девиацией Wh то диапазон изменения фазы
уменьшается в 20 раз по сравнению с (П.4). Это позво-
Рис. 11.9. Формирование сигнала с нелинейной ЧМ из сигнала со
ступенчатой (а) и нелинейной пилообразной (б) ЧМ
164
ляет для сигналов с ZX200 иметь диапазон изменения
фазы УФМ менее л.
Небольшой диапазон изменения фазы обычно тре-
буется для формирования сигналов с другими закона-
ми со (Z).
На базе синтезатора ЛЧМ сигнала (рис. 9.7) можно
создать устройство формирования когерентных радио-
импульсов с нелинейной ЧМ. Частоту сигнала со^ (О
дополнительно изменяют по нелинейному закону
(рис. 11.9) и далее на выходе устройства выделяют сиг-
нал с нелинейной ЧМ вида (11.1).
11.4. Формирование сигналов с гиперболической
и полиномиальной частотной модуляцией
Для формирования сигналов с гиперболической или
полиномиальной ЧМ удобно использовать цифровые
устройства. Особенно просто в этом случае формиру-
ются сигналы с гиперболической ЧМ. Для этого исполь-
зуется цифровой преобразователь [37], коэффициент
деления которого линейно зависит от числа импульсов,
появившихся на его выходе. При поступлении на вход
цифрового преобразователя сигнала постоянной часто-
ты на его выходе формируется дискретный прямоуголь-
ный сигнал, у которого длительность каждого следую-
щего полупериода изменяется на фиксированную вели-
чину. Заметим, что точно такой же цифровой преобра-
зователь с обратной связью используется и в системе
автоподстройки параметров сигналов, рассмотренной в
гл. 7. Отличие заключается в том, что в системе авто-
подстройки на вход цифрового преобразователя посту-
пает ЛЧМ сигнал, а при формировании сигналов с ги-
перболической ЧМ — эталонный сигнал постоянной ча-
стоты.
Полагая, что на вход цифрового преобразователя
поступает сигнал с эталонной частотой /э, а коэффи-
циент деления меняется, начиная с /о. линейно, получа-
ем формулу для k-ro полупериода Tk = [Zo
в которой й=1, 2, 3, ..., Д. Началу и концу этого ЧМ
колебания соответствуют граничные частоты спектра
сигнала
Л = —1; /2 =---------------------- =
Т,+Тг 2Z0 ± 1 7>-1+7\
165
2/0 ± 2 (/С — 2) + 1
Общая длительность сигнала Т определяется как
сумма всех полупериодов
т =. 2 Tk = KZ° + ^(^-0 = ^[Zo ±0,5^-1)1
Л=1 Уэ 2/э Уэ
Формируемые таким образом сигналы из-за ограничен-
ного быстродействия преобразователя имеют относи-
тельно неширокую полосу и низкую центральную часто-
ту. Тем не менее эти сигналы сравнительно просто мо-
гут быть перенесены в ВЧ диапазон, причем, поскольку
ошибки формирования малы, коэффициент умножения
в умножителе частоты может быть очень большим.
Начальный /0 и конечный 10± (К—1) коэффициенты
деления выбираются достаточно произвольно, если по
условиям задачи необходимо иметь прямоугольный сиг-
нал с гиперболической ЧМ. Однако, если сигналы долж-
ны быть гармоническими, 10 и 10± (К— 1), выбираются
такие, чтобы можно было надежно подавить высшие
гармоники спектра.
Относительно просто формируются и сигналы с по-
линомиальной ЧМ вида (11.2) при произвольных зна-
чениях т. Код фазы, соответствующий (11.2), вычис-
ляется с помощью т последовательно соединенных
накопителей, кодовый выход последнего используется
для обращения к ЗУ с целью получения синусоидаль-
ных выборок или для управления фазовращателем.
Можно также формировать такой сигнал и по импуль-
сам переполнения.
Вопрос о выборе емкости накопителей решается ис-
ходя из требуемых значений коэффициентов aL. Для
адресации к ЗУ или для управления дискретным фазо-
вращателем обычно используются лишь старшие разря-
ды кода на выходе последнего накопителя, число кото-
рых определяется соответственно числом адресов в ЗУ
и числом разрядов фазовращателя.
При широких полосах и больших базах применяют
перестраиваемые по частоте автогенераторы. При срав-
нительно простых законах ЧМ (например, квадратич-
ном) необходимое для управления частотой модулиру-
ющее напряжение получают обычно с помощью анало-
166
говых устройств. Если вид модуляции достаточно сло-
жен, то для получения модулирующего напряжения
целесообразно применять цифровые устройства. Напри-
мер, для формирования управляющего напряжения, ме-
няющегося по полиномиальному закону, можно исполь-
зовать цепочку из т—1 последовательно соединенных
накопителей, в последнем из которых формируется код
частоты Кт- Этот код после преобразования к аналого-
вому виду может использоваться для управления ча-
стотой генератора.
Если к точности формирования ЧМ сигналов предъ-
являются высокие требования, необходимо применять
системы автоподстройки. Возможность использования
для этой цели системы автоподстройки с измерителем
на ЛЗ в значительной степени определяется успехами,
достигнутыми в области цифрового синтеза сигналов.
Рассмотрим сначала систему автоподстройки с измери-
телем на разностной частоте (рис. 5.1), На выходе
управляемого генератора имеем сигнал вида
u(t) = U cos [«>/ + 60W4-v W1» ^>0.
После смешения этого сигнала со своей задержан-
ной копией и фильтрации ВЧ составляющих на выходе
смесителя получаем
"си (0 — Е cos [u>HT + 60 (t)—60 (t—x) Д- V (f)—v(t—т)], t > x.
Воспользовавшись выражением для требуемого за-
кона ФМ 0о (/), получим
п Г 1
% (*) - 0О (^ - Д =2 “t tl - 2 17-' , ’
~ L /S /!(*-./)!
t>x. (11.8)
Из (11.8) видно, что при степень полинома
6о(0—0о(t—т) на единицу меньше, чем у исходного
закона ФМ 0о(О-
Для правильной настройки измерителя необходимо
обеспечить выполнение условия cos[coH т + 0о(т)] =0 и в
качестве эталонной использовать последовательность,
частота которой меняется по полиномиальному закону,
порядок которого на единицу меньше, чем у стабилизи-
руемого ЧМ сигнала. Такую последовательность можно
получить с помощью ряда последовательно соединен-
167
ных накопителей. Выбирая время задержки т достаточ-
но малым, а тактовую частоту накопителей высокой,
можно обеспечить формирование последовательности
эталонных импульсов с заданным фазовым отклонени-
ем. При этом, конечно, необходимо обращать внимание
на то, что с уменьшением времени задержки т снижает-
ся быстродействие системы автоподстройки параметров
ЛЧМ сигналов, а спектр сигнала ошибки смещается в
область низких частот. Если используется система АП
ЛЧМ с измерителем на промежуточной частоте, то один
из ВЧ когерентных сигналов (рис. 5.10) имеет постоян-
ную частоту,' а частота другого отличается на
-^-[0о(О — М - ^)]-
dt
Устройства, использующие стробирование ЧМ сиг-
налов видео- или радиоимпульсами, целесообразнее
строить на основе модифицированного метода фазовой
дискретизации (§ 6.4). При выборе режима синхрониз-
ма здесь, как и в случае линейной ЧМ, нормированный
параметр А т следует выбирать минимально возможным.
В системах автоподстройки с цифровым преобразо-
ванием ЧМ сигнала (гл. 7) необходимо изменить алго-
ритм работы преобразователя. Считая, что до начала
модуляции коэффициент деления цифрового преобразо-
вателя был равен /0, на основании (6.4) запишем фор-
мулу для его определения в динамическом режиме
। т Г < .
2 i=i L/=o J' Ч — У)!
(11.9)
Выражение (11.9) представляет собой полином от k
степени т—1. Это обстоятельство дает основание ис-
пользовать для определения коэффициента 1к схему из
ряда последовательно соединенных накопителей. Такти-
рование регистров, входящих в накопители, осущест-
вляется импульсами с выхода цифрового преобразова-
теля.
Глава 12
ТРАКТЫ УСИЛЕНИЯ
И ПРЕОБРАЗОВАНИЯ ЛЧМ СИГНАЛОВ
12.1. Требования к характеристикам трактов
преобразования ЛЧМ сигналов
Усиление мощности, преобразование частоты, умножение, деле-
ние частоты и другие операции над ЛЧМ сигналами в трактах со-
провождаются фазовыми или амплитудными искажениями сигнала,
появлением дополнительных случайных составляющих. Влияние-
искажений сигнала на качество работы радиосистемы обсужда-
лось в гл. 3. Здесь рассмотрим требования к трактам преобразо-
вания нрименительно к ЛЧМ сигналу.
Идеальный неискажающий тракт [34] имеет в полосе частот
ЛЧМ сигнала линейную фазочастотную характеристику (ФЧХ)
ф((Т>) =arctg Нтр((о) и равномерную амплитудно-частотную характе-
ристику (АЧХ) //1р (<») = | Нтр(о>) |, где Нгр(о>) — коэффициент пе-
редачи тракта. Допуски на нелинейность ф(ц>) и неравномерность.
//тр (<о) определяются соображениями, изложенными в гл. 3. Так,,
если отклонение ФЧХ от линейной имеет вид кубической параболы,
то искажения сжатого сигнала считаются [65] допустимыми при
vMcn/16.
Предположим, что ФЧХ тракта описывается выражением-
<р((о) = arctg(<o—(Оо) тк, гдетк=2<2/<Оо — постоянная времени оди-
ночного контура с добротностью Q и резонансной частотой о>о, со-
впадающей со средней частотой ЛЧМ сигнала. Учитывая, что при
небольших обобщенных расстройках контура ~ (<л— <о0)тк, ФЧХ
можно аппроксимировать кубической параболой <? (5К) ~—5к+5к^»-
для оценки допустимых искажений можно воспользоваться резуль-
татами § 3.2. Отклонение ФЧХ от линейной не превышает л/16,
если г
I <0 — <001 < хк/0.963. (12.1)
Оценим параметры ЛЧМ
сигнала, при которых основ-
ная часть спектральной плот-
ности мощности приходится
на указанную полосу. Полоса
частот П3, занимаемая спек-
тром ЛЧМ сигнала, зависит
от его базы В и доли спек-
тральной плотности мощно-
сти, лежащей за пределами
Рис. 12.1. Зависимость полосы
полосы П3. Оценивая эту до-
лю по относительному уровню частот, занимаемой спектром,
модуля спектральной плот- ЛЧМ сигнала, от его базы
пости мощности (рис. 12.1),
можно считать, что для £>>100 при Ь{ — 0,1 (—40 дБ) П3 не пре-
вышает ЗлИ7. Подставляя половину этой полосы в выражение-
169»
•(12.1), находим, что если полоса пропускания тракта По,5=2/тк
«больше П05гр =3,12л1У, то фазовые искажения типа кубической
лараболы будут малы.
Преобразование широкополосного ЛЧМ сигнала на другую не-
сущую частоту, умножение и деление его частоты требуют полосо-
вой фильтрации. Использование многозвенных или многоконтурных
полосовых фильтров сопровождается появлением гармонических ис-
кажений ФЧХ ф(ю) в пределах полосы пропускания фильтра. Ана-
логичные периодические отклонения ФЧХ <р(<о) от линейной на-
блюдаются в широкополосных усилителях СВЧ на ЛБВ, амплитро-
нах и других генераторных приборах СВЧ при недостаточном со-
гласовании [65] на входе и выходе.
Рассмотрим, .например, усилитель СВЧ, связанный с нагрузкой
линией передачи длиной I и волновым сопротивлением шл. Прово-
димость активной нагрузки Ra пересчитывается ко входу линии
Yh = (1 — Г)/дал (1 + Г), где Г =рк е л—коэффициент отраже-
ния; фаза коэффициента отражения <рл зависит от длины линии I
и фазовой скорости &ф волны в ней: <рл=2и>//«ф 4-<рн (<рн— фаза от-
ражения от нагрузки). Проводимость собственно контура усилителя
YK = 1//?к + 1 (“ — “о)/Рк> где Рк —характеристическое сопротивле-
ние. Коэффициент передачи усилителя Ну = UH/UBX можно запи-
сать в виде
Ну = F, ej?JI (YK+ Y')/(l + Г), (12.2)
-где Fi — коэффициент, характеризующий усилительный элемент.
Подставляя выражения для <?л, YK, YH и Г в (12.2) считая для
простоты фл =0, получаем
7 , J . ..-,
2 (ш — ШО) /?к/шорк + RKB'H (ш)
И») = - arctg----------ГТЖЙ----------------т
+ arctg' (12.3)
1 + рк COS <РЛ
тде
О' / \ _ _______^Рк в
^л(1 +/^+2/?Kcos ул) ’
— w,(l + р2^2рк cos ?л)
•— реактивная и активная составляющие проводимости нагрузки со-
ответственно.
Учет влияния несогласованной нагрузки привел к появлению
гармонических искажений с периодом по частоте 2л&ф/2/ (рис. 12.2),
.амплитуду которых vM можно оценить, считая <рл «л/2:
/ Wji 1 — Р2 \ Т-1
^ = 2Л (1+Х) —- + -птЗ- -РК- (12.4)
\ Ак I г7к / _
]70
Из (12.4) можно найти требования к модулю коэффициента отра-
жения тракта рк- Например, для того чтобы уровень дополнитель-
ных боковых лепестков сжатого ЛЧМ сигнала был менее —40 дБ,
согласно рис. 3.3 надо иметь vM <0,035 рад. Отсюда следует, что
коэффициент стоячей волны в тракте А\.аи=(1 + />к)/(1—Рк) дол-
жен быть при дал//?к = 1 не более 1,07. Электрическая длина тракта
<в0//Цф определяет расположение дополнительных боковых лепестков
в сжатом ЛЧМ сигнале. При //гЗф~1/2Ц7 дополнительные боковые
лепестки располагаются в окрестности первого минимума сжатого
сигнала.
12.2. Компенсация фазовых и амплитудных искажений
Поскольку отклонения закона изменения фазы и амплитуды
ЧМ сигнала от заданных могут появляться в различных узлах
устройства формирования, имеется возможность компенсации иска-
жений, если невозможно устранить’ ’вызвавшую их причину. При-
меняются’ пассивные и активные методы коррекций или'компенса-
ции искажений сигнала в тракте. Пассивный метод состоит в ис-
пользовании в тракте линейной корректирующей цепи с такими
АЧХ и ФЧХ, чтобы ЧМ сигнал на ее выходе имел заданные харак-
теристики при искажениях на входе. При активном методе коррек-
ции используется управляемый фазовый модулятор (УФМ), а также
при необходимости амплитудный модулятор, причем коррекция про-
исходит за счет формирования корректирующего напряжения
йкор (0 нужной формы.
Допустим, что на выходе генератооа имеется искаженный ЛЧМ
сигнал
и (t) = Uo [1 + [X (01 cos [<М + ^2/2 + V (0]. (12.5)
Представим функцию v(t) на интервале времени 0</<Г в виде
ряда Тейлора v(t) =v0+vI/-t-V2^2/2 + ... Постоянное фазовое возму-
щение Vo при необходимости в тракте можно компенсировать, из-
171
меняя рабочую точку УФМ. Линейная компонента соответствую-
щая сдвигу начальной частоты ц>о, компенсируется подачей моду-
лирующего пилообразного сигнала на управляющий вход УФМ или
включением в тракт линии задержки на время т=\’]/р0 и постоян-
ным фазовым'сдвигом на Vo+^i/2^. Квадратичную компоненту
0,5v2Z2 в тракте можно компенсировать, формируя управляющее
напряжение еу (/) параболической формы.
Второй путь состоит в использовании тракта с ФЧХ ф(ц>),
имеющей в частотном интервале wo<w<(®o+2nll7) квадратичный
участок ф(<о) =ao-f-ai(0+0,5a2<o2, причем а2 надо выбрать в соот-
ветствии с условием
“2=-Wo + ^.). (12.6)
Необходимо отметить, что при использовании для коррекции це-
пей с нелинейной ФЧХ компенсация искажений одного вида (напри-
мер, кубических), как правило, должна сопровождаться дополни-
тельной коррекцией компонент с меньшим показателем степени, т. е.
квадратичных и линейных. Кроме того, следует считаться с возмож-
ностью появления недопустимых искажений амплитуды.
12.3. Автоподстройка фазового набега в трактах
усиления ЛЧМ сигнала
Для улучшения качества формирования выходного ЛЧМ сиг-
нала при воздействии на усилитель дестабилизирующих факторов
(вибрации, климатические изменения, нестабильности питающих на-
пряжений и др.) целесообразно использовать [2] систему автома-
Рис. 12.3. Структурная схе-
тической подстройки фазового набе-
га (АПФ). Помимо автоматической
компенсации возникающих в тракте
фазовых отклонений, применение, на-
пример, резонансного усилителя с
АПФ в качестве следящего фильтра
увеличивает отношение сигнал-шум
при усилении ЛЧМ сигнала в смеси
с йумом [22].
Рассмотрим одноконтурный ре-
зонансный усилитель [2] с АПФ
ма резонансного усилителя
ЛЧМ сигнала с системой
АПФ
(рис. 12.3). Считая, что форма вход-
близка к
2л№7(о0< 1.
дифферен-
циальное уравнение такой системы. Запишем коэффициент переда-
ного ЛЧМ сигнала
синусоидальной, т. е.
составим укороченное
чи управляемого одноконтурного усилителя для медленно меняю-
щихся амплитуды (Дых и фазового набега <р=!Рвых— ?вх в виде
ну (р)=ад 1 + л+ж +«мь (12-7)
где Дрез — усиление на резонансной частоте; тк =2Q/w0 — постоян-
ная времени контура; $к = (<он — <о0)тк—начальная расстройка;
а (еу)—корректирующая расстройка; еу— управляющее напряже-
ние. Предположим для простоты, что модуляционная характеристи-
ка линейна: а = 5yrK6V) где 5у—крутизна .MX контура. Управ-
172
ляющее напряжение можно выразить через параметры входного и
выходного сигналов
^y = ^(p)FMaKCF(T), (12.8)
где £макс,^(ф)—наибольшее напряжение и форма характеристики
ФД; Нф(р)—коэффициент передачи ФНЧ. Используя (12.7) и
(12.8) для £Макс = kUBx 1^аых> уравнение усилителя с АПФ при
входном ЛЧМ сигнале записывается в виде
Д1 ехр [] (ф + O,5₽0Z2 — itlF)] =
_ _________exp [J (O,5^0Z2 — uU7)] | / | < 772 М2 9)
l+№ + + K ’
где Ai = Uвых1Нрезиax — обобщенная амплитуда выходного сиг-
нала; Ь — S
Если в ФНЧ использован двухканальный фильтр с Hil(p') =
=hi + h2/p в предположении, что r(<p)=sin<p, из (12.9) получим
dA-JcUi = — Ау + cos <р,
dy/dit — — ~ sin ф/Ai — /цAj sin <p — ?K — zt
dzjdtx — h2Ax sin<p,
(12.10)
где tv — tltK\ — 30t2; ;к =лЛУ; hi^h^b и h2=h2brK —коэффици-
енты регулирования. Решения системы нелинейных дифференциаль-
ных уравнений (12.10) зависят от начальных условий АДО), <р(0),
5к, скорости модуляции Pi и коэффициентов регулирования hi и h2.
Допустим, что происходит усиление симметричного относитель-
но <о0 ЛЧМ радиоимпульса. Тогда, как следует [2] из (12.10) без
АПФ (при /11=/г2=0), увеличение Pi=PoT^ сопровождается по-
явлением амплитудных и фазовых искажений, имеющих колеба-
тельный характер. Напряжение на выходе фазового детектора про-
порционально амплитуде выходного сигнала, поэтому на участке
роста выходной амплитуды после прихода радиоимпульса действие
АПФ проявляется слабо и надо выбирать такие параметры конту-
ра, чтобы выполнялось условие Т/тк^>1. Обобщенная расстройка
контура, когда а>о соответствует середине полосы ЛЧМ сигнала,
меняется в пределах | ;к I < О,5ро7тк.
Если считать допустимым отклонение <р(/) от линейной функ-
ции на интервале —Т/4 не более л/16, то скорость модуля-
ции не должна быть больше ₽макс “ 1/27тк, а, соответственно, де-
виация частоты — меньше полосы контура.
Увеличение коэффициентов регулирования h\ и h2 приводит к
тому, что ФЧХ усилителя становится более пологой и линейной, а
диапазон изменения амплитуды уменьшается (рис. 12.4). Исполь-
зование интегрирующего канала й2=Н=0 придает системе АПФ аста-
тические свойства, когда усиление ЛЧМ сигнала сопровождается
небольшим и постоянным фазовым сдвигом — $ilh2. Важно под-
173
Рис. 12.4. Изменение амплитуды (а) и фазового сдвига (б) резо-
нансного усилителя при радиоимпульсе с ЛЧМ на входе (Pi = l>
1к=-3)
Рис. 12.5. Фазовые портреты резонансного усилителя при £к=—3:
а) ₽ 1=0,25, ?1=7|2-О; б) ₽, = !. й1-'й2-0; в) Р>=0,25, /1~ = 10;
г) 31=1, ^-10, h2=0
174
черкнуть, что при использовании АПФ можно сузить полосу усили-
теля и увеличить за счет этого максимальное усиление без появле-
ния недопустимых искажений. Можно увеличить допустимую де-
виацию частоты 117 при тех же Т и тк или уменьшить Т при тех же-
W и тк. Экспериментальное исследование модели усилителя с АПФ
показало возможность увеличения скорости ЛЧМ в 10 ...20 раз.
Анализируя фазовые портреты усилителя с АПФ, связываю-
щие в полярных координатах значения At и <р во время прохож-
дения ЛЧМ радиоимпульса, можно сделать вывод, что без АПФ
(рис. 12.5,а, б) происходит падение усиления и возрастание фазо-
вого сдвига с ростом скорости модуляции. При дальнейшем ее уве-
личении фазовый сдвиг превышает 2л. Система АПФ устраняет
отмеченные недостатки (рис. 12.5,в, г). По яркостным меткам, сле-
дующим через Г/тк=0,1, можно судить о сокращении длительности-
процесса установления амплитуды и фазового сдвига.
Таким образом, использование системы АПФ при усилении
ЛЧМ сигнала позволяет значительно уменьшить искажения и за
счет этого увеличить скорость или максимальное усиление.
12.4. Автоматическая регулировка мощности
выходного ЛЧМ сигнала
Обычно при формировании ЛЧМ сигнала надо обеспечить пря-
моугольную огибающую на выходе передатчика. Причины, приво-
дящие к изменению амплитуды колебаний, могут быть различными:
паразитная амплитудная модуляция при использовании управляе-
мого автогенератора или фазового модулятора, неравномерность
АЧХ выходного усилителя, нестабильность питающих напряжений,
вибрации, климатические изменения и др. Применение ограничите-
лей амплитуды не всегда возможно ввиду присущих им искажений
или при повышенных требованиях к КПД. Более эффективным
является использование системы автоматической регулировки мощ-
ности (АРМ).
Можно использовать различные способы управления мощ-
ностью выходного ЧМ сигнала: с помощью быстродействующего
аттенюатора на р—i—«-диодах [34], в усилителе на ЛБВ, управ-
лением выходной мощностью ЧМ автогенератора и др. При любом
способе необходимо учитывать влияние напряжения еа, кроме
амплитуды на фазу выходного сигнала. В прецизионном устройстве
формирования ЛЧМ сигнала действуют одновременно две систе-
мы авторегулирования: автоподстройки параметров ЛЧМ сигналов
и АРМ. Они оказываются связанными, так как напряжение еуг
управляющее частотой, влияет на амплитуду, а напряжение еа —
на частоту.
Примем простейшую модель такого взаимодействия — в форме
линейной комбинации напряжений ел и еу:
® = SX4-S"^y + «)0; U = C'ea-]-C"eyt (12.11)
где S' и S" — крутизны MX <о(еа, еу)\ С' и С" — крутизны MX
U (еа, <?у).
В соответствии с (12.11) в модели на рис. 12.6 обозначим Нии
и Ди» — коэффициенты передачи ИСО по амплитуде и по ЛЧМ;
175
/7фм О’) и (р) — коэффициенты передачи фильтров в ЦОС си-
стем автоподстройки ЛЧМ и АРМ; £а и Еу— постоянные напря-
жения источников питания; a(t)—напряжение, модулирующее ча-
стоту (в простейшем случае a(t)=alt). Примем в системе АРМ
7/им = ЛАРМ’ ^фм(р) = 5д/(1 +ртф), где I/Тф —граничная частота
полосы пропускания системы АРМ. Предположим также, что в си-
стёме автоподстройки ЛЧМ используется схема с ЛЗ, так что
„ 1 — е-^
пт =----------- и
Р
е 1 — е~Р"'
1 +Р'л L Р
u>t — F3t
где 1/тл — граничная частота полосы пропускания ЦОС системы
автоподстройки ЛЧМ. Процессы в схеме на рис. 12.6 тогда описЫ'
ваются системой уравнений
р _р , n , ^1 + а2/р 1
Ч — £а “Г “Ц------------------ ------------ (о eN -f-
1 + РЧ р
+ S"et) — F3t , (12.12)
еу — — ^арм5д (С'е3 + С'^у)/(14-ртф) + Йарм^о.
где <7о — подлежащее стабилизации напряжение; 5Д—крутизна
амплитудного детектора. Устойчивость системы (12.12) обеспечи-
вается при отсутствии в левой полуплоскости корней характери-
стического уравнения
1 Н (Р) ЯР^АРМ X
х------—=0,
1 +/^ф + ЛАРМ
(12.131
где ^Арм = /гАРМ5дС ,
ap — C'S'/C"S"; =
Hl(p)=fh±M.l±^
1+/кл р
й, = тЛ15/, й2 = t2Zi25z.
Когда ар=0, взаимодейст-
вия систем автоподстройкп
ЛЧМ и АРМ нет. Если фильтр
в ЦОС системы АРМ широко-
ствующих систем автоподстройки
ЛЧМ и АРМ
полосен тф —>0, то измене-
ния амплитуды за счет АРМ уменьшаются в 1+йАРм раз.
Чтобы стабилизирующее действие сохранялось при инерционной
ЦОС системы АРМ, надо, чтобы граничная частота 1/тф превышала
наибольшую частоту возмущения амплитуды, или, если длитель-
176
ность сигнала меньше, чем период помехи, должно выполняться
условие Тф^>Г.
Из анализа областей устойчивости (рис. 12.7), построенных по
(12.13), следует, что взаимодействие систем автоподстройки ЛЧМ
и АРМ, имеющее место при ар=Н=0, приводит к расширению для
ар>0 области устойчивости значений h\, h2. При сильной связи, ког-
да = (1 + ^арм)/^арМ’ теряется устойчивость из-за резонанса в
системе.
Практическое применение системы АРМ особенно часто оказы-
вается необходимым при формировании ЛЧМ сигнала с большой
девиацией частоты ввиду возрастания глубины сопутствующей
амплитудной модуляции. Экспериментальное исследование показы-
Рис. 12.7. Области устойчивости взаимодействующих систем авто-
подстройки ЛЧМ и АРМ
вает, что введение системы АРМ приводит к уменьшению в 10 ...
... 15 раз сопутствующей амплитудной модуляции и улучшению
качества формирования ЛЧМ сигнала даже при значительных (до
ар=0,1) значениях коэффициента связи систем АРМ и автопод-
стройки ЛЧМ.
Таким образом, для стабилизации амплитуды формируемого
ЛЧМ сигнала целесообразно использовать систему АРМ. При раз-
работке прецизионных устройств формирования с особо высокими
требованиями к постоянству амплитуды при незначительном услож-
нении ЦОС системы АРМ можно использовать автоматическую
Компенсацию регулярных искажений амплитуды, подобную системе
АКРИ по скорости модуляции (гл- 8).
12.5. Многоканальные устройства формирования
ЛЧМ сигналов
В ряде применений возникает задача формирования ЛЧМ сиг-
нала с высокой точностью поддержания закона модуляции фазы и
формы огибающей в заданном направлении пространства [11, 13, 16,
12-1022 177
67}. Эта задача решается при помощи излучения ЛЧМ сигнала
ФАР. Высокие требования к разрешающей способности по угловым
координатам приводят к увеличению апертуры ФАР, для повы-
шения разрешающей способности по дальности увеличивают девиа-
цию частоты W. В результате при установке заданного направле-
ния ФАР на средней частоте спектра ЛЧМ сигнал в пространстве
оказывается искаженным, а диаграмма направленности ФАР пере-
мещается во времени. Избежать этого можно при многоканальном
формировании ансамбля ЛЧМ сигналов для ФАР. Рассмотрим
подробнее методы построения таких устройств.
Пусть линейная ФАР содержит n=^AP(Zj+l излучающих эле-
ментов (где /-фДр — апертура, Ц— расстояние между излучателя-
ми). Фазовый сдвиг в канальных фазовращателях фг (1 = 1, 2, ...
.... п — номер канала) не зависит от частоты, поэтому направление
максимума диаграммы направленности, характеризуемое углом 0,
меняется во время излучения ЛЧМ сигнала: sin 0=фг7((Оо+РоО^ь
Компенсация пространственного запаздывания ЛЧМ сигнала на
время = (il sin 0)/с (где с=3-108 м/с — скорость света) фазовым
сдвигом ф;=сопз1 приводит к амплитудным и фазовым искаже-
ниям ЛЧМ сигнала в пространстве. Действительно, при установке
диаграммы направленности ФАР на частоте соо суммарный сигнал
в направлении 0 равен
п
(z)=2^°cos +м* +д^)2''2+<12-14)
/=1
где ф/=—(iw0G sin 0)/с—фазовый сдвиг в канальных фазовра-
щателях. При условии р0А^2(/2<С 1 сумма (12.14) равна
.. sin[2п/гГфАрt!T(n— 1)1
Ме(/) и0------11cos
sin [2кгфар tjT (п — 1)]
4- + 2k/~*ap.^ , (12.15)
где ГфАр= U/Тфдр |sin 0]/с — параметр широкополосности ФАР.
Из анализа графиков на рис. 12.8, построенных по (12.15), сле-
дует, например, что если неравномерность амплитуды не должна
превышать 0,5 дБ, то при гФАр >0,1 установка диаграммы на-
правленности ФАР на частоте <о0 приводит к недопустимым иска-
жениям.
Наряду с рассмотренным здесь эффектом (называемым апер-
турным) в схеме формирования сигнала с ФАР искажения широ-
кополосного ЛЧМ сигнала появляются из-за неравной длины линий
питания канальных фазовращателей (эффект системы питания
[16]). В результате происходит также перемещение диаграммы на-
правленности с изменением частоты. Эффект системы питания мож-
но уменьшить, используя питание в центре апертуры, или даже
свести к нулю, используя параллельное питание. Однако последний
вариант конструктивно и технологически сложно реализовать при
большом числе излучателей.
Для широкополосного ЛЧМ сигнала ФАР представляет собой
фильтр, коэффициент передачи которого 7/ФАр (ш) зависит от де-
178
виации частоты сигнала Wt числа излучателей п и направления 0 =
=0(<о) [16]:
sin ^nlrW sin 6/с)
sin (kZj W sin 6/c)
^ФАР —
Ширина главного лепестка амплитудно-частотной характеристики
ФАР (12.16) уменьшается с ростом числа излучателей п. В резуль-
тате ЛЧМ сигнал, прошед-
ший через ФАР, искажает-
ся, а на выходе приемно-
го устройства уменьшает-
ся отношение сигнал-шум,
расширяется главный ле-
песток сжатого сигнала. В
радиолокационных приме-
нениях, сигнал, проходя-
щий через ФАР, претерпе-
вает эти искажения дваж-
ды — при излучении и при
приеме. Величина искаже-
ний определяется парамет-
ром широкополосности
ФАР /'фдр. При ^фар>
(12.16)
Рис. 12.8. Искажения огибающей
и фазы ЛЧМ сигнала в ФАР при
фазировании на одной частоте
>0,5 необходимо исполь-
зовать многоканальные
устройства формирования
ЛЧМ сигналов.
Для компенсации перемещения диаграммы направленности ФАР
во время излучения ЛЧМ сигнала надо кроме установки диаграммы
направленности на частоте <о0 менять [13] фазовый сдвиг в каждом
канале во время модуляции по линейному закону
Дф; = — (PoZ/t sin 9)/с — sin 62)/2с2. (12.17)
Дополнительное изменение фазового сдвига по (12.17) неве-
лико и для наиболее удаленного из излучателей составляет
Д?макс = 2лгФАр. Точно так же, как и при формировании ЛЧМ
сигнала с помощью фазовых модуляторов (§ 4.3), для уменьшения
требуемого диапазона изменения фазы можно применить кратко-
временный сброс фазы на целое число периодов.
Таким образом, при формировании широкополосного ЛЧМ сиг-
нала в пространстве с помощью ФАР при ГфАр >0,5 надо приме-
нять многоканальные устройства формирования, предусматривая
дополнительный линейно меняющийся во времени фазовый сдвиг
каждого из излучаемых сигналов. Это позволяет исключить иска-
жения, связанные со смещением диаграммы направленности ФАР,
и полностью реализовать потенциальные возможности ЛЧМ сиг-
нала.
179
Список литературы
1. Авербух О. Н., Курбатов Н. Н., Степановский Д. И. и др. Об
одном способе линейного управления частотой генератора с
варикапом. — Вопросы радиоэлектроники. Сер. ОТ, 1975, вып. 7,
с, 119 122.
е2 . Автоматическая подстройка фазового набега в усилителях /
Г. М. Уткин, М. В. Капранов, Л. А. Белов и др.; Под ред.
М. В. Капранова.—М.: Сов. радио, 1972,— 176 с.
3. Агаев А. Н., Вязьминова М. Д., Лучинина Э. Р. Широкодиа-
пазоннйй транзисторный генератор с ферритовой перестрой-
кой.— Вопросы радиоэлектроники. Сер. РИТ, 1974, вып. 3.,
с. 85—87. - .
4. Александров С. Н., Перетягин И. В. Генератор линейно-частот-
но-модулированных (ЛЧМ) сигналов на базе рециркулятора.—
Изв. вузов СССР. Приборостроение, 1976, т. 19, № 12,
с. 77—82.
5. Амиантов И. Н. Избранные вопросы статистической теории
связи. — М.: Сов. радио, 1971. — 416 с.
6. Батяев И. М. Генератор с широкодиапазонной электронной
перестройкой частоты,—ПТЭ, 1976, № 5, с. 122—123.
7. Белов Л. А. Моделирование системы автоподстройки скорости
ЛЧМ с линией задержки. — Труды МЭИ, 1975, вып. 265,
с. 101—104.
8. Белов Л. А. Синтез фильтра в системе автоматической кор-
рекции регулярных искажений ЛЧМ сигнала. — Труды МЭИ,
1980, вып. 463, с. 90—93.
9. Белов Л. А., Барабанов В. Б., Кочемасов В. Н. Система авто-
подстройки линейного во времени закона частотной модуля-
ции.— Электросвязь, 1973, № 5, с. 54—59.
10. Белов Л. А., Капранов М. В. Система автоподстройки линей-
ного закона изменения частоты автогенератора. — Докл. науч.-
техн. конф, по итогам науч.-иссл. работ за 1968—1969 гг. Сек-
ция радиоте.хн., подсекция теории колебаний/МЭИ — М., 1969,
с. 3—9.
11. Белов Л. А., Каринский С. С., Комаров В. Г. Формирование
ЛЧМ сигналов и их обработка в фильтре на акустических по-
верхностных волнах. — Изв. вузов СССР. Радиоэлектроника,
19'79, т. 22, № 9, с. 73—75.
12. Белов Л. А., Кочемасов В. Н. Автоподстройка скорости линей-
ной частотной модуляции. — Радиотехника, 1977, т. 32, № 8,
с. 30—34.
13. Белов Л. А., Кочемасов В. Н. О формировании широкополос-
ного сигнала при помощи ФАР. — Изв. вузов СССР. Радио-
электроника, 1976, № 7, с. 107—109.
14. Белов Л. А., Кочемасов В. Н., Ревун А. Д. Качество регулиро-
вания в дискретной системе автоподстройки скорости частот-
ной модуляции. — Труды МЭИ, 1974, вып. 193, с. 13—17.
15. Белов Л. А., Томский А. М. Предыскажение линейной ЧМ для
улучшения качества сжатия СВЧ сигналов. — Труды МЭИ,
1979, вып. 397, с. 15—18.
16. Белов Л. А., Томский А. М. Искажения широкополосных сиг-
налов в ФАР. — Зарубежная радиоэлектроника, 1979, № 10,
с. 42—59.
180
17. Будник В. В. Схема линеаризации характеристик перестройки
частоты ЛОВО. — Электронная техника. Сер. Электроника
СВЧ, 1978, вып. 10, с. 72—77.
18. Будник В. В., Зайцева Т. Г., Хахилева Г. А. Исследование рас-
пределения неоднородностей в ЭВП с протяженным взаимо-
действием методом частотно-модулированной рефлектомет-
рии. — Электронная техника. Сер. Электроника СВЧ, 1975,
вып. 1, с. 82—90.
19. Вакман Д. Е. Сложные сигналы и принцип неопределенности в
радиолокации.— М.: Сов. радио, 1965. — 304 с.
20. Варакин Л. Е. Теория сложных сигналов. — М.: Сов. радио»
1970. —376 с.
21. Верещагин Е. М., Никитенко Ю. Г. Частотная и фазовая мо-
дуляция в технике связи. — М.: Связь, 1974. — 224 с.
22. Виницкий А. С. Модулированные фильтры и следящий прием
ЧМ сигналов.— М.: Сов. радио, 1969.— 548 с.
23. Голованов Ю. С. Линеаризация функции настройки гетероди-
на с варикапом при управлении кусочно-линейным напряже-
нием.— Вопросы радиоэлектроники. Сер. ОТ, 1973, вып. 11,
с. 93—98.
24. Гомозов В. И. Анализ устройств частотной модуляции и авто-
подстройки с учетом нестационарности процессов в генерато-
рах. — Радиотехника и электроника, 1978, т. 23, К» 4, с. 759—
770.
25. Гоноровский И. С. Радиотехнические цепи и сигналы. — М.:
Сов. радио, 1977. — 608 с.
26. Дейтон. Использование широкополосных сигналов в многолу-
чевых каналах. — Электроника, 1967, т. 40, № 24, с. 33—38.
27. Деньгин Г. Д. Способ формирования и обработки ЧМ сиг-
нала, согласованного с волноводом. — Труды Горьк. политехи,
ин-та, 1972, т. 28, № 7, с. 9—И.
28. Деньгин Г. Д., Лёзин Ю. С., Лещинский М. М. Свойства и
обработка последовательностей радиоимпульсов с линейной
перестройкой несущей частоты. — Изв. вузов СССР. Радио-
электроника, 1976, т. 19, № 1, с. 18—23.
29. Джек А. А., Грант П. М., Коллинз Дж. X. Теория, проектиро-
вание и применение фурье-процессоров на поверхностных аку-
стических волнах. — ТИИЭР, 1980, т. 68, № 4, с. 22—43.
30. Дзехцер Г. Б., Зарубин А. С., Темин В. С. Некоторые экспе-
риментальные результаты проектирования широкодиапазонных
электрически управляемых аттенюаторов на PIN-диодах.—
Вопросы радиоэлектроники. Сер. РИТ, 1974, вып. 1, с. 89—95.
31. Дифранко, Рубин. Анализ искажений при обработке радиоло-
кационного сигнала. — Зарубежная радиоэлектроника, 1963,
№ 9, с. 35—44.
32. Джури Э. Импульсные системы автоматического регулирова-
ния: Пер. с англ./Под ред. Я. 3. Цыпкина. — М.: Гостехиздат,
1963, —456 с.
33. Зайончковский А. Я. Микрополосковый генератор Ганна, пе-
рестраиваемый с помощью сферы ЖИГ. — Изв. вузов СССР.
Радиоэлектроника, 1974, т. 17, № 8, с. 91—92.
34. Зенькович А. В. Искажения частотно-модулировэнных колеба-
ний.— М.: Сов. радио, 1974. — 296 с.
35. Иванов Ю. П. Влияние фазовых искажений ЛЧМ сигналов на
точность анализа спектров в спиновых анализаторах. — Радио-
техника, 1979, т. 34, № 9, с. 83—84.
181
36. Каринский С. С. Устройства обработки сигналов на ультра-
звуковых поверхностных волнах. — М.: Сов. радио, 1975.—
176 с.
37. Квашнин Е. Ф., Зарецкий К. А., Зуев В. Н. и др. Дискретный
сигнал с линейным изменением периода.— Радиотехника,
1975, т. 30, № 2, с. 18—23.
38. Клаудер, Прайс, Дарлингтон и др. Теория и расчет импульс-
•' ных радиолокационных станций с частотной модуляцией.—
Зарубежная радиоэлектроника, 1961, № 1, с. 15—49.
39. Коган И. М. Ближняя радиолокация. — М.: Сов. радио, 1973.—
272 с.
40. Котельников В. А., Ржига О. Н., Александров Ю. Н. и др.
Развитие радиолокационных исследований планет в Советском
Союзе. — В. кн.: Проблемы современной радиотехники и элек-
троники/Под ред. В. А. Котельникова. — М.: Наука, 1980,
с. 32—57.
41. Кочемасов В. Н. Исследование прецизионных систем формиро-
вания ЛЧМ колебаний: Канд. дис./МЭИ — М., 1976.
42. Кочемасов В. Н. Исследование системы автоподстройки ЛЧМ
колебаний с измерителем на линии задержки. — Изв. вузов
СССР. Радиоэлектроника, 1977, т. 20, № 11, с. 46—;55.
43. Кочемасов В. Н. Система формирования ЛЧМ сигналов с авто-
матической компенсацией регулярных ошибок — Изв. вузов
СССР. Радиоэлектроника, 1978, т. 21, Ns 7, с. 29—35.
44. Кочемасов В. Н. О системе автоподстройки ЛЧМ колебаний
с измерителем ошибок по методу фазовой дискретизации. —
Радиотехника, 1978, т. 33, Ns 10, с. 25—30.
45. Кочемасов В. Н. Генерация и синтез частот с применением
приборов на поверхностных акустических волнах. — Зарубеж-
ная радиоэлектроника, 1979, Ns 1, с. 96—132.
• 46. Кочемасов В. Н., Белов Л. А. Применения ЛЧМ сигналов и
методы их формирования. — Зарубежная радиоэлектроника,
1975, Ns 8, с. 32—63.
47. Кочемасов В. Н., Белов Л. А. Измерение фазовых ошибок при
формировании сложных ЧМ сигналов. — Изв. вузов СССР.
Радиоэлектроника, 1976, т. 19, Ns 8, с. 124—127.
48. Кочемасов В. Н., Кряжев В. П., Оконешников В. С. ЛЧМ сиг-
налы с внутриимпульсной фазовой манипуляцией. — Радиотех-
ника, 1980, т. 35, № 2, с. 57—60.
49. Кочемасов В. Н., Лапшин В. В. Использование метода фазо-
вой дискретизации для коррекции закона изменения частоты.—
В кн.: Фазовая синхронизация / Под ред. В. В. Шахгильдяна,
Л. Н. Белюстиной. — М.: Связь, 1975, с. 228—238.
50. Кочемасов В. Н, Озеров Е. В. Измерение и коррекция оши-
бок в системе автоподстройки ЛЧМ колебаний с линией за-
держки.— Труды МЭИ, 1975, вып. 265, с. 105—108.
51. Кук Ч., Бернфельд М. Радиолокационные сигналы: Пер. с англ./
Под ред. В. С. Кельзона. — М.: Сов. радио, 1971. — 568 с.
52. Лёзии Ю. С. Оптимальные фильтры и накопители импульсных
сигналов. — М.: Сов. радио, 1963. — 320 с.
53. Манассевич В. Синтезаторы частот (Теория и проектирова-
ние): Пер. с англ. / Под ред. А. С. Галина.—М.: Связь, 1979.
54. Могучее В. И. Автокорреляционный метод панорамных изме-
рений параметров ЛЧМ сигнала и дисперсионных цепей.—
Вопросы радиоэлектроники. Сер. ТРС, 1972, вып. 1, с. 3—8.
182
55. Модель А. 3., Быльев С. Ю. О коррекции нелинейности пи-
лообразного напряжения.—Вопросы радиоэлектроники. Сер. ТТ,
1973, вып. 4, с. 91—99.
56. Ноткин Л. Р. К построению функционального генератора с ав-
томатическим и дистанционным управлением частотой.— Ра-
диотехника, 1975, т. 30, № 5, с. 49—52.
57. Пиблс, Стивенс. Метод генерирования радиолокационных им-
пульсных сигналов, частота которых модулирована по точно,
линейному закону. — Зарубежная радиоэлектроника, 1965,
№ 10, с. 23—36.
58. Рабииер Л., Гоулд Б. Теория и применение цифровой обра-
ботки сигналов; Пер. с англ. / Под ред. Ю. Н. Александрова. —
М.: Мир, 1978, —848 с.
59. Рихтер, Йенсен. Сканирующий радиолокационный зонд на не-
затухающих колебаниях с частотной модуляцией. — Приборы
для научных исследований, 1972, т. 43, № 11, с. 70—72.
60. Рихтер, Йенсен. Измерения радиолокационного поперечного се-
чения насекомых. — ТИИЭР, 1973, т. 61, № 1, с. 167—168.
61. Рубчинский С. М., Васильев А. А., Кузьмин В. Ф. и др. Об
измерении мгновенной частоты ЧМ колебаний. — Радиотехни-
ка и электроника, 1956, т. 1, № 7, с. 986—1000.
62. Рябинин Ю. А. Стробоскопическое осцИллографирование.—
М.: Сов. радио, 1972. — 272 с.
63. Свврчевсхая Г. В. О влиянии .остэтот.тогс, фЗЭового члена спех-
тральной характеристики сигнала с ЛЧМ на форму сжатого
сигнала. — Изв. вузов СССР. Радиоэлектроника, 1969, т. 12,
№ 2,. с. 187—193.
64. Седлецкий Р. М. О синтезе малобазовых сигналов с фазовой
модуляцией. — В кн.: Обработка информации в некоторых ра-
диотехнических устройствах / Под ред. И. С. Гоноровского. —
М.; МАИ, 1980, с. 6—9.
65. Сигалаев В. Н. Непериодические искажения фазовых характе-
ристик СВЧ усилителя и сжатие импульсов с ЛЧМ. — Элек-
тронная техника. Сер. Электроника, СВЧ, 1975, вып. 7,
с. 112—117.
66. Сколиик М. Справочник по радиолокации, Т. 3. Радиолока-
ционные устройства и системы / Под ред. А. С. Виницкого.—
М.: Сов. радио, 1979. — 528 с.
67. Старк. Теория фазированных антенных решеток СВЧ диапа-
зона.— ТИИЭР, 1974, т. 62, № 12, с. 55—104.
68. Стащук Л. Д. Использование широкополосных ЛЧМ сигналов
в цифровых кодах. — Изв. вузов СССР. Радиоэлектроника,
1973, т. 16, № 2, с. 122—126.
69. Танака, Браун. Использование аналоговой линии задержки в
низкочастотном дискриминаторе. — Электроника, 1974, т. 47;
№ 23, с. 84—86.
70. Тверской В. И. Дисперсионно-временные методы измерений
спектров радиосигналов. — М.: Сов. радио, 1974. — 240 с.
71. Тимс. Коррекция боковых лепестков в канале дальности ра-
диолокационной станции со сжатием импульсов. — Зарубежная
радиоэлектроника, 1963, № 5, с. 23—34.
72. Тихонов В. И. Статистическая радиотехника. — М.: Сов. ра-
дио, 1966. — 680 с.
73. Тузов Г. И. Статистическая теория приема сложных сигна-
лов.— М.: Сов. радио, 1977. — 400 с.
183
74. Фалькович С. Е. Корреляционные функции и спектры ЧМ ра-
диолокационных сигналов. — Радиотехника, 1960, т. 15, № 12,
с. 13—20.
75. Филатов К- В. Коррекция нелинейности частотной модуляции
в схеме с варикапами. — Вопросы радиоэлектроники. Сер. ОТ,
1973, вып. 1, с. 53—56.
76. Фогельсон Б. А. Оценка смещения автокорреляционной функ-
ции сложного сигнала при фазовых искажениях. — Вопросы
радиоэлектроники. Сер. ОТ, 1973, вып. 3, с. 34—42.
77. Холланд, Клейборн. Устройства на поверхностных акустиче-
ских волнах. — ТИИЭР, 1974, т. 62, № 5, с. 45—83.
78. Цифровые системы фазовой синхронизации / М. И. Жодзиш-
ский, С. Ю. Сила-Новицкий, В. А. Прасолов и др.; Под ред.
М. И. Жодзишского.— М.; Сов. радио, 1980.'—208 с.
79. Цыпкин Я- 3. Теория линейных импульсных систем. — М.: Гос-
техиздат, 1963. — 968 с.
80. Цыпкин Я. 3., Попков Ю. С. Теория нелинейных импульсных
систем. — М.; Наука, 1973. — 416 с.
81. Чирков Г. В., Елфимов В. И. Подстраивающие действия схем
фазовой автоподстройки крутизны и определение оптимального
значения времени задержки ЭЛЗ. — Изв. вузов СССР. Радио-
электроника, 1978, т. 21, № 5, с. 83—88.
82. Шахгильдян В. В., Ляховкин А. А. Системы фазовой авто-
подстройки частоты. — М.ССвязь, 1972.— 448 с.
83. Ширман Я. Д. Разрешение и сжатие сигналов. — М.: Сов. ра-
дио, 1974. — 360 с.
84. Шитов А. М., Киреев В. С. Умножитель для широкодиапазон-
ного СВЧ генератора с электронной перестройкой частоты.—
Вопросы радиоэлектроники. Сер. РИТ, 1974, вып. 2, с. 53—58.
85. А. с. 113346 (СССР). Устройство для снятия характеристик
электронной настройки широкополосных генераторов/ А. М. Чер-
нушенко. — Опубл, в Б. И., 1958, № 6.
86. А. с. 374694 (СССР). Устройство формирования радиосигналов
с заданным законом изменения частоты/Ю. И. Вайсман,
В. Н. Карнаушевский, Г. Г. Солодарь. — Опубл, в Б. И., 1973,
№ 15.
87. А. с. 526997 (СССР). Устройство для автоподстройки частоты,
изменяющейся по заданному закону/В. Н. Кочемасов.—
Опубл, в Б. И., 1976, № 32.
88. А. с. 587596 (СССР). Генератор с линейной частотной моду-
ляцией/В. И. Елфимов, Г. В. Чирков, Б. В. Черкашин.—
Опубл, в Б. И., 1978, № 1.
89. А. с. 596954 (СССР). Устройство для формирования сигналов
с изменением частоты по закону полинома п-й степени /
Г. М. Петров, С. М. Барабошкин, А. Л. Зайцев. — Опубл, в
Б. И„ 1978, № 9.
90. А. с. 640418 (СССР). Устройство для автоподстройки частоты,
изменяющейся по заданному закону/В. Н. Кочемасов.—
Опубл, в Б. И., 1978, № 48.
91. А. с. 642853 (СССР). Генератор радиоимпульсов с частотно-
модулированной несущей частотой / В. С. Оконешников. —
Опубл, в Б. И., 1979, № 2.
92. А. с. 790102 (СССР). Устройство прецизионного формирования
повторяющихся частотно-модулированных сигналов / В. Н. Ко-
чемасов, А. Н. Фадеев. — Опубл, в Б. И., 1980, № 47.
184
93. А. с. 794708 (СССР). Генератор радиоимпульсов с частотно-
модулированной несущей/В. С. Оконешников. — Опубл, в
Б. И., 1981, № 1.
94. Alongi А. V. Short-pulse and wide-bandwidth high-resolution
radars.—In: Atmospheric effects on radar target identification
and imaging. — Dordrecht—Boston, 1976, p. 83—456.
95. Bromaghim D. R., Perry J. B. A wideband linear FM ramp
generator for long-range imaging radar. — IEEE Trans., 1978,
v. MTT-26, N5, p. 322—325.
96. Campbell B. D. High-resolution, radar coherent linear FM
microwave source. — IEEE Trans., 1970, v. AES-6, Nl, p. 62—72.
97. Caputi W. J. Stabilized linear FM generator. — IEEE Trans.,.
1973, v. AES-9, N5, p. 670—678.
98. Cook С. E. Linear FM signal format for beacon and communi-
cation systems. — IEEE Trans., 1974, v. AES-10, N4, p. 471—478.
99. Degan L. J., Stitts J. R. Burst waveform processor using surface
wave devices. —In: EASCON‘74, IEEE Cat. N74 CHO 881-3
AES. — Washington, 1974, p. 214—220.
100. Eber L. O., Soule H. H. Digital generation of wideband LFM
waveforms. — In: Int. Radar Conf., IEEE Cat. N75 CHO 938-1
AES. —Arlington, 1975, p. 170—175.
101. Filer E., Hartt J. COBRA DANE wideband pulse compression
system. — In: EASCON‘76, IEEE Cat. N76 CH 1154-4. — Wa-
shington, 1976, p. 61-A — 61-M.
102. Hata M. High accuracy control of linearity for MM wave BWO.—
In: Int. Conf. Microwaves, Circuit Theory and Information
Theory. Pt. 1. — Tokyo, 1964, p. 231—232,
103. Hata M. Experiments with wideband frequency-sweep control for
mm-wave BWO.—J. Inst. Electrical Communication Engineers
Jap., 1966, v, 49, N5, p. 899—905.
104. Hoffman L., Hurlburt K., Kind D. e. a. A 94-GHz radar for space
object identification. — IEEE Trans., 1969, v. MTT-17, N12,
p. 1145—1149.
105. Holland-Morritz E. K., Dute J. C., Brundage D. R. Swept frequ-
ency modulation.— In: Nat. Electr. Conf. Proc., 1966, v. 22,
p. 469—474.
106. Hudghes A. J., O'Shaughnessy J., Pike E. R. FM-CW radar range
measurement at 10-jim wavelength.— IEEE J., 1972, v. QE-8,
N12, p. 909—910.
107. Kibbler G. О. T. H. The CLFM: A method of generating linear
frequencv-coded radar pulses. — IEEE Trans., 1968, v. AES-4, N3,
p. 385—391.
108. Lafuse H. G. A wideband communication system using frequency
slope modulation. — In: Nat. Electr. Conf. Proc., 1963, v. 19,
p. 343—357.
109. Lechuda G. Les magnetrons moderns й agilite de frequences.—
Toute 1‘Electronique, 1974, N384, p. 35—38.
110. Lentz R. R. Detection of shallowly buried objects. — Electronics
Letts, 1976, v. 12, N22, p. 594—595.
111. Maggio T., Christensen J. L. Alignment and testing of wideband
radars.— In: EASCON‘71, IEEE Cat. N71 C 34-AES. — Washing-
ton, 1971, p. 183—189.
112. McArthur J. L. Design of the SEASAT-A radar altimeter. — In:
Ocean‘76, IEEE Cat. N76 CH 1118-9 OEC. —Washington, 1976,
p. 10B/1— 10B/8.
185
113. McGoogan J. T. Satellite altimetry applications. — IEEE Trans.,
1975, v. MTT-23, N12, p. 970—978.
114. Mortley W. S. Active devices replace delay line for pulse-
compression.— Electronic Des., 1965, v. 13, N17, p. 134—137.
115. Rihaczek A. W. Principles of high resolution radar. — New York:
McGraw-Hill, 1969.—498 p.
116. Ringel M. B. A high duty factor chirp radar. — In: NAECON‘78
IEEE Cat. N78 CH 1336-7. — Dayton, 1978, p. 1114—1119.
117. Shirley F. R. A synchronous sweep frequency oscillator. — IEEE
Trans., 1968, v. IM-17, p. 80—88.
118. Temes C. L., Thompson W. E. Slope coding of coherent pulse-
burst waveforms. — IEEE Trans., 1975, v. AES-11, N2, p. 183—
189.
119. Van Etten P. The present technology of impulse radars. — In:
RADAR‘77, IEEE Cat., N77 CH 1271-6 AES. —London, 1977,
p. 535—539.
120. Withers W. J. Method of measuring the phase errors in linear
frequency-modulated and pulse-compression radar systems. —
Electronics Letts, 1966, v. 2, N2, p. 50—51.
121. Zielinski A.,Barbour L. Swept carrier acoustic underwater com-
munications.— In: Ocean‘78, IEEE Cat. N78 CH 1351-6 OEC.—
Washington, 1978, p. 60—65.
122. Пат. 3382497 (США), Littear frequency modulation radar/
P. Cooly. — Опубл. 7,05.68.
123. Пат. 3699448 (США). Precision generation of linear FM sig-
nal/ G, L, Martin, L. R. Blair, — Опубл. 17.10.72.
124. Пат. 3728724 (США). Adaptive swept-frequency active radar
seeker / F. C. Alpers. — Опубл. 17.04.73.
125. Пат. 3878525 (США). Frequency jumping CW radar/F. G. Al-
pers.— Опубл. 15.04.75.
J 26. Пат. 3898660 (США). Time / bandwidth interchange system/
A. S. Munster. — Опубл. 5.08.75.
127. Пат. 4008475 (США). Stabilizing and calibration circuit for
FM-CW radar ranging systems/Н. C. Johnson.—Опубл.
15.02.77.
128. Пат. 4037159 (США). Chirp communication system/А. R. Mar-
tin. — Опубл. 9.07.77.
129, Пат. 4106020 (США). FM—CW radar ranging system/
H. C, Johnson — Опубл. 8.08.78,
130. Пат. 4123719. (США). Chirp phase distortion detection in
a wideband linearization feedback control loop / F. W. Hopwood,
L. K. Staley. — Опубл. 31.10.78.
131. Пат. 4160958 (США), Sampling linearizer utilizing a phase
shifter/J. H. Mims, F. W. Hopwood. — Опубл. 10.07.79.
Предметный указатель
Автогенератор ЧМ 38, 43, 52
Автоматический компенсатор
регулярных искажений
(АКРИ) 62, 112
аналоговый 114
цифровой 115
Автоподстронка:
мощности 175
скорости ЧМ 60, 62, 8&, 103,
112
фазового набега 172
частоты 98
Ассиметрня сжатого сигнала
144
База сигнала 5, 18
Время переключения частоты
132
Границы устойчивости 68, 91,
100
Делитель с переменным коэф-
фициентом деления 103
Детектор фазовый 60
Диапазон изменения фазы 46,
164
Измеритель сигнала ошибки
60
по методу фазовой дискре-
тизации 87
с линией задержки 63
с цифровым преобразовате-
лем 105
Интервал корреляции 32, 34
Коэффициент нелинейности 39
— перекрытия по частоте 42
Лепестки боковые 29, 137
Линеаризация характеристики
48
Линия задержки управляемая
48
----- эталонная 62
— передачи 170
Метод формирования пассив-
ный 36
Модель автоподстройки ЛЧМ
математическая:
по методу фазовой дискре-
тизации 90
с АКРИ 117
с измерителем на линии за-
держки 66
с цифровым преобразовате-
лем 106
Модуляция:
паразитная амплитудная 41
фазовая биполярная 125, 162
— униполярная 125, 162
Накопитель 55, 166
Обработка сигналов:
весовая 30, 137, 147
дисперсионно-временная 137
корреляционная 32
фильтровая 28
Огибающая сигнала:
колоколообразная 12
косинусоидальная 13, 149
прямоугольная 6
Отклонения;
по скорости ЧМ 27
по фазе 87, 105
по частоте 92
Оценки квадратичные:
интегральные 27
суммарные 28, 75
Подымпульсы:
число 126
скачки фазы 59, 132
спектры 130
Предыскажения:
амплитудно-временные 150
амплитудно-частотные 153
фазовые 154
Преобразование ЛЧМ 25
— Фурье быстрое 26, 123
Преобразователь:
встречно-штыревой 37
цифровой 103
Приемники панорамные 25
Пульсации спектра 137
187
Пьедестал остатков 142
Радиовысотомеры:
импульсные 2_2
с непрерывным излучением
23, 82
спутниковые 23
Радиолокаторы:
для обнаружения 18
для исследований 23
метеорологические 23
с высоким разрешением 19,
20
Расстройка частоты 12, 142
Режимы синхронизации 88,
160
Рефлектометрия 22
Рециркулятор 59
Сигнал:
ЛЧМ ФМ 16, 26
сжатый 13
составной 16, 25, 158
с ЧМ гиперболической 158,*
165
— кососимметричной 161
— линейной 3
— пилообразной 127, 164
— полиномиальной 158
— ступенчатой 129, 165
— V-образной 14, 159
Синтезаторы ЛЧМ сигналов:
аналоговые 124, 132
цифровые 55
частот 61
Синхронизатор 85, 101
Системы передачи информа-
ции:
аналоговые 24
цифровые 25
Спектр;
ЛЧМ сигнала 7, 137
-----с огибающей колоко-
лообразной 10
--------косинусоидальной 11
—--------- прямоугольной 8, 9
пачки ЛЧМ импульсов 16
прямоугольного импульса с
ЛЧМ ФМ 16
— —< с ЧМ кососимметрич-
ной 157
— ------ пилообразной 127,
,158
--------- ступенчатой 130
--------- V-образной 14
отклонений фазовых 123
— частотных 85
Спектроанализаторы 25, 36
Степень устойчивости 71, 91
Усилитель резонансный 170,
172
Фазированная антенная решет-
ка 177
Фазовращатель управляемый
46, 148
Функция неопределенности 6,
12
Характеристика модуляцион-
ная 39
— фазочастотная 171
Эхо парное 32
Оглавление
Предисловие.............................................. 3
ГЛАВА 1. ЧАСТОТНО-МОДУЛИРОВАННЫЕ СИГНАЛЫ Q
1.1. Виды частотно-моду лированных сигналов .... 5
1.2. Функции неопределенности и спектры ЧМ сигналов . 6
1.3. Взаимные функции неопределенности...................16
ГЛАВА 2. ПРИМЕНЕНИЯ ЛЧМ СИГНАЛОВ
2.1. Обнаружение целей и оценка их параметров ... 18
2.2. Распознавание космических объектов..................19
2.3. Радиовысотомеры.....................................22
2.4. Физические измерения................................23
2.5. Системы передачи информации.........................24
2.6. Другие применения ЛЧМ сигналов......................25
ГЛАВА 3. ТРЕБОВАНИЯ К ТОЧНОСТИ ФОРМИРОВАНИЯ ЛЧМ
СИГНАЛОВ
3.1. Критерии оценки качества формирования .... 27
3.2. Требования к точности формирования при фильтровой
обработке...............................................28
3.3. Требования к точности формирования при корреляцион-
ной обработке...........................................32
3.4. Требования к точности формирования при других видах
обработки...............................................35
ГЛАВА 4. МЕТОДЫ И УСТРОЙСТВА ФОРМИРОВАНИЯ ЛЧМ
СИГНАЛОВ
4.1. Пассивный метод формирования........................36
4.2. Формирование ЛЧМ сигналов в управляемых по частоте
автогенераторах ........................................38
4.3. Формирование ЛЧМ сигналов с помощью фазовых мо-
дуляторов ..............................................46
4.4. Коррекция модуляционных характеристик . ... 48
4.5. Модуляторы ......................................50
4.6. Генератор ЛЧМ сигналов, согласованный с модулятором 52
4.7. Цифровые методы формирования ЛЧМ сигналов . . 55
4.8. Устройства формирования широкополосных ЛЧМ сигна-
лов с высокой точностью.................................58
ГЛАВА 5. УСТРОЙСТВА АВТОПОДСТРОЙКИ ПАРАМЕТРОВ ЛЧМ
СИГНАЛОВ С ИЗМЕРИТЕЛЯМИ НА ЛИНИИ ЗАДЕРЖКИ
5.1. Измерение отклонений от линейного закона частотной
модуляции с помощью линии задержки....................62
5.2. Математическая модель системы автоподстройки ... 66
5.3. Оптимизация параметров фильтра в цепи обратной связи 67
5.4. Допустимые отклонения скорости частотной модуляции
и начальной частоты ................................... 70
5.5. Оценка влияния нелинейности модуляционной характе-
ристики ................................................73
189
5.6. Система автоподстройки с измерителем на промежуточ-
ной частоте . . . . .. ....................77
5.7. Практическая реализация систем автоподстройки пара-
метров ЛЧМ сигналов с линией задержки .... 82
ГЛАВА 6. УСТРОЙСТВА АВТОПОДСТРОЙКИ ПАРАМЕТРОВ
ЛЧМ СИГНАЛОВ С ИЗМЕРЕНИЕМ ОШИБОК ПО МЕТОДУ
ФАЗОВОЙ ДИСКРЕТИЗАЦИИ
6.1. Метод фазовой дискретизации.........................86
6.2. Оптимизация параметров фильтра в цепи обратной связи 96
6.3. Оценка качества работы системы автоподстройки пара-
метров ЛЧМ сигналов при различных возмущениях . 92
6.4. Модифицированный метод фазовой дискретизации . 96
6.5. Устройства 'автоподстройки параметров ЛЧМ сигналов,
работающие по методу фазовой дискретизации . . 9&
ГЛАВА 7. УСТРОЙСТВА АВТОПОДСТРОЙКИ С ЦИФРОВЫМ
ПРЕОБРАЗОВАНИЕМ ЛЧМ СИГНАЛОВ
7.1. Измерение ошибок в схеме с цифровым преобразовани-
ем ЛЧМ сигналов.........................................103
7.2. Переходные процессы ...............................106
7.3. Работа системы при сложных возмущениях ... 110
ГЛАВА 8. АВТОМАТИЧЕСКИЕ КОМПЕНСАТОРЫ
РЕГУЛЯРНЫХ ИСКАЖЕНИЙ
8.1. Область применения автоматических компенсаторов регу-
лярных искажений......................................112
8.2. Практическая реализация..........................114
8.3. Оптимизация параметров цепи обратной связи . . 117
8.4. Синтез фильтра в системе автоподстройки с АКРИ . 120
ГЛАВА 9. СИНТЕЗАТОРЫ ЛЧМ СИГНАЛОВ
9.1. Синтезаторы сигналов с линейным или ступенчатым из-
менением частоты . . .........................124
9.2. Формирование сигнала с пилообразной частотной мо-
дуляцией ...............................................127
9.3 Формирование сигналов со ступенчатой частотной мо-
дуляцией ............................................129
9.4. Фазовые отклонения в синтезаторах ЛЧМ сигналов . . 134
ГЛАВА 10. ПРИМЕНЕНИЕ ПРЕДЫСКАЖЕНИЙ В ЛЧМ
ИМПУЛЬСЕ ДЛЯ УЛУЧШЕНИЯ СТРУКТУРЫ ОБРАБОТАННОГО
СИГНАЛА
10.1 Влияние френелевских пульсаций спектра ЛЧМ импуль-
са на параметры сжатого сигнала.........................137
10.2 Уровень боковых лепестков сжатого сигнала при рас-
стройке частоты.........................................142
10.3 . Амплитудно-частотная и амплитудно-временная обра-
ботка ЛЧМ сигнала в устройстве формирования . . 147
10.4 . Применение амплитудных и фазовых предыскажений
ЛЧМ импульса для уменьшения уровня боковых ле-
пестков сжатого сигнала ................................153
190
ГЛАВА 11. ФОРМИРОВАНИЕ ЧАСТОТНО-МОДУЛИРОВАННЫХ
СИГНАЛОВ НА ОСНОВЕ ГЕНЕРАЦИИ ЛЧМ СИГНАЛОВ
11.1. Сигналы с зигзагообразной и нелинейной ЧМ . . . 156-
11.2. Формирование составных ЛЧМ сигналов...............158
11.3. Формирование сигналов с нелинейной симметричной ча-
стотной модуляцией ...................................161
11.4. Формирование сигналов с гиперболической и полиноми-
альной частотной модуляцией.............................165*
ГЛАВА 12. ТРАКТЫ УСИЛЕНИЯ И ПРЕОБРАЗОВАНИЯ ЛЧМ
СИГНАЛОВ
12.1. Требования к характеристикам трактов преобразования
ЛЧМ сигналов ............................................169
12.2. Компенсация фазовых и амплитудных искажений . . 171
12.3. Автоподстройка фазового набега в трактах усиления
ЛЧМ сигнала..............................................172
12.4. Автоматическая регулировка мощности выходного ЛЧМ
сигнала ................................................175'
12.5. Многоканальные устройства формирования ЛЧМ сиг-
налов ...................................................177
Список литературы.......................................180
Предметный указатель.................................. 187
ВИКТОР НЕОФИДОВИЧ КОЧЕМАСОВ
ЛЕОНИД АЛЕКСЕЕВИЧ БЕЛОВ
ВИКТОР СТЕПАНОВИЧ ОКОНЕШНИКОВ
Формирование сигналов с линейной частотной модуляцией
Редакторы Э. М. ГОРЕЛИК, Т. М. ТОЛМАЧЕВА
Обложка художника Д. Ю. ПАНЧЕНКО
Художественный редактор Н. С. ШЕИН
Технический редактор 3. Н. РАТНИКОВА
Корректор И. В. КОЗЛОВА
МБ № 561
Сдано в набор 27.01.83. Подписано в печать 23.05.83. Т-09675
Формат 84Х1081/з^ Бумага писчая № 1 Гарнитура литературная
Печать высокая Усл. печ. л. 10,08 Усл. кр.-отт. 10,395 Уч.-изд. л. 10.46
Тираж 5700 экз. Изд. № 19710 Зак. № 1022 Цена 55 к.
Издательство «Радио и связь». 101000 Москва, Почтамт, а/я 693
Набрано и отпечатано в типографии изд-ва «Радио и связь».
101000 Москва, Почтамт, а/я 693
Тираж изготовлен в типографии издательства «Радио и связь»
Госкомиздата СССР 101000, Москва, ул. Кирова, д. 40