






Автор: Полищук Г.М. Пичхадзе К.М.
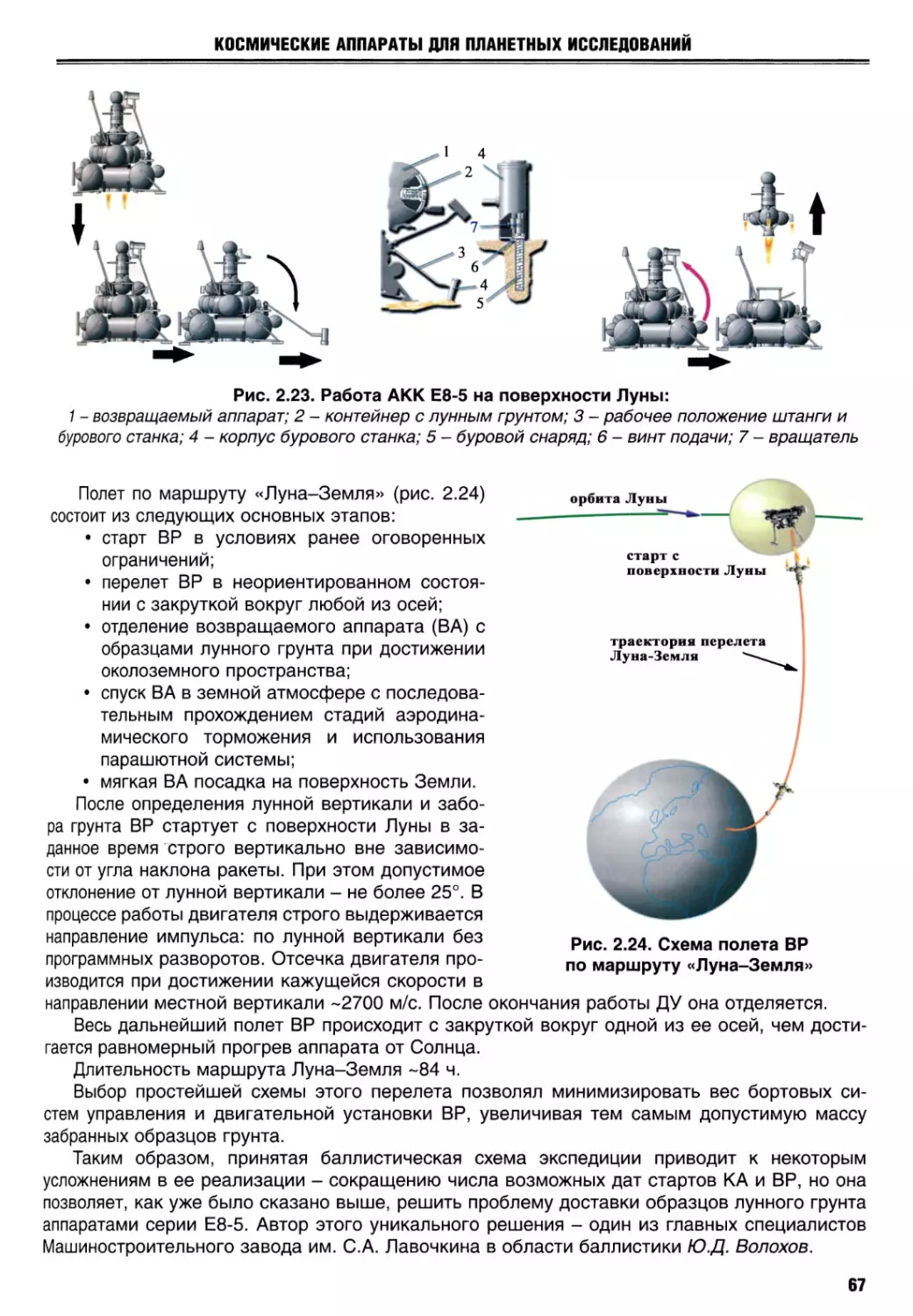
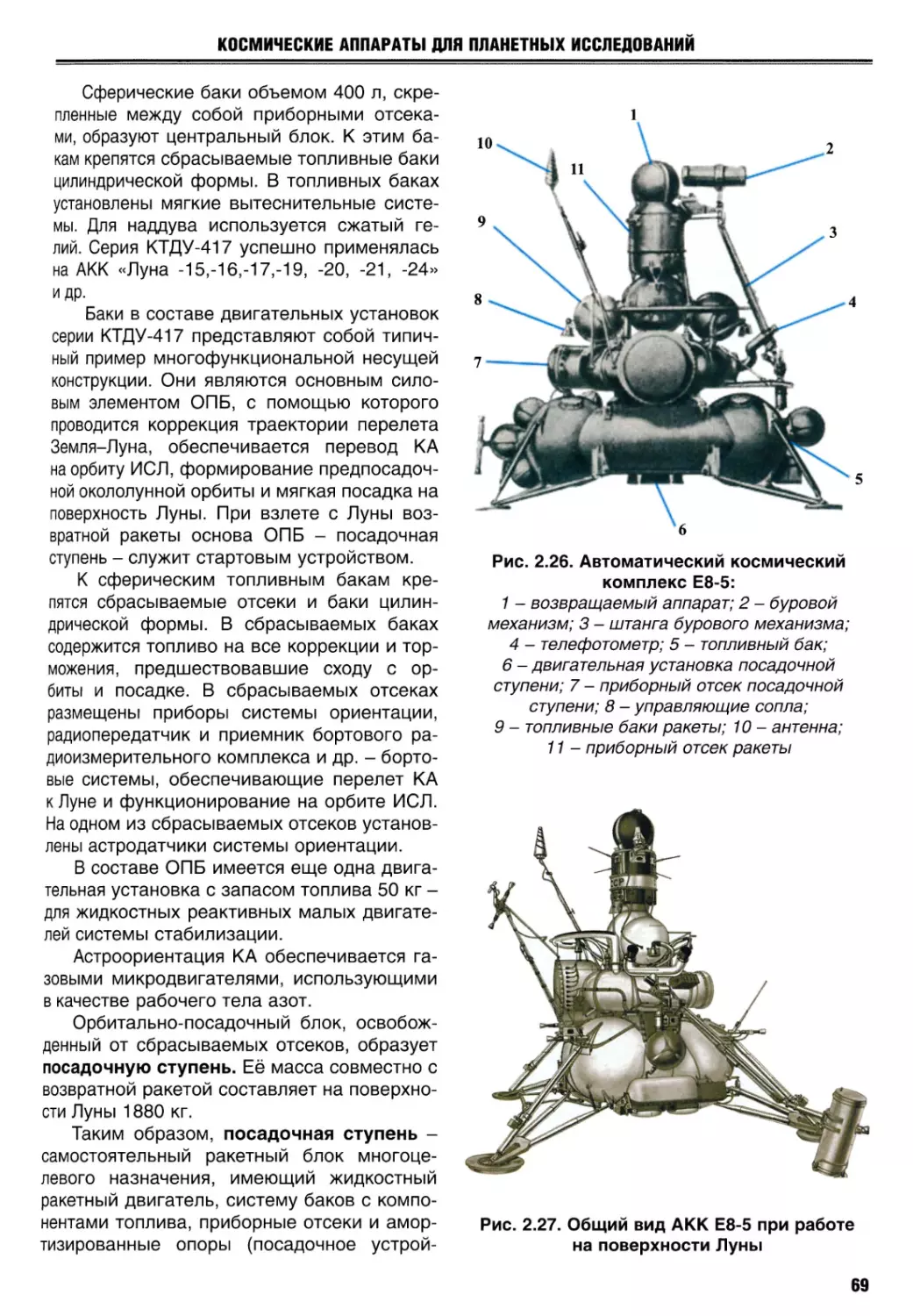
Теги: междупланетные соединения (междупланетные полеты) космонавтика (аэронавтика) космос космическая техника полет в космос издательство маи принт
ISBN: 978-5-7035-2176-2
Год: 2010



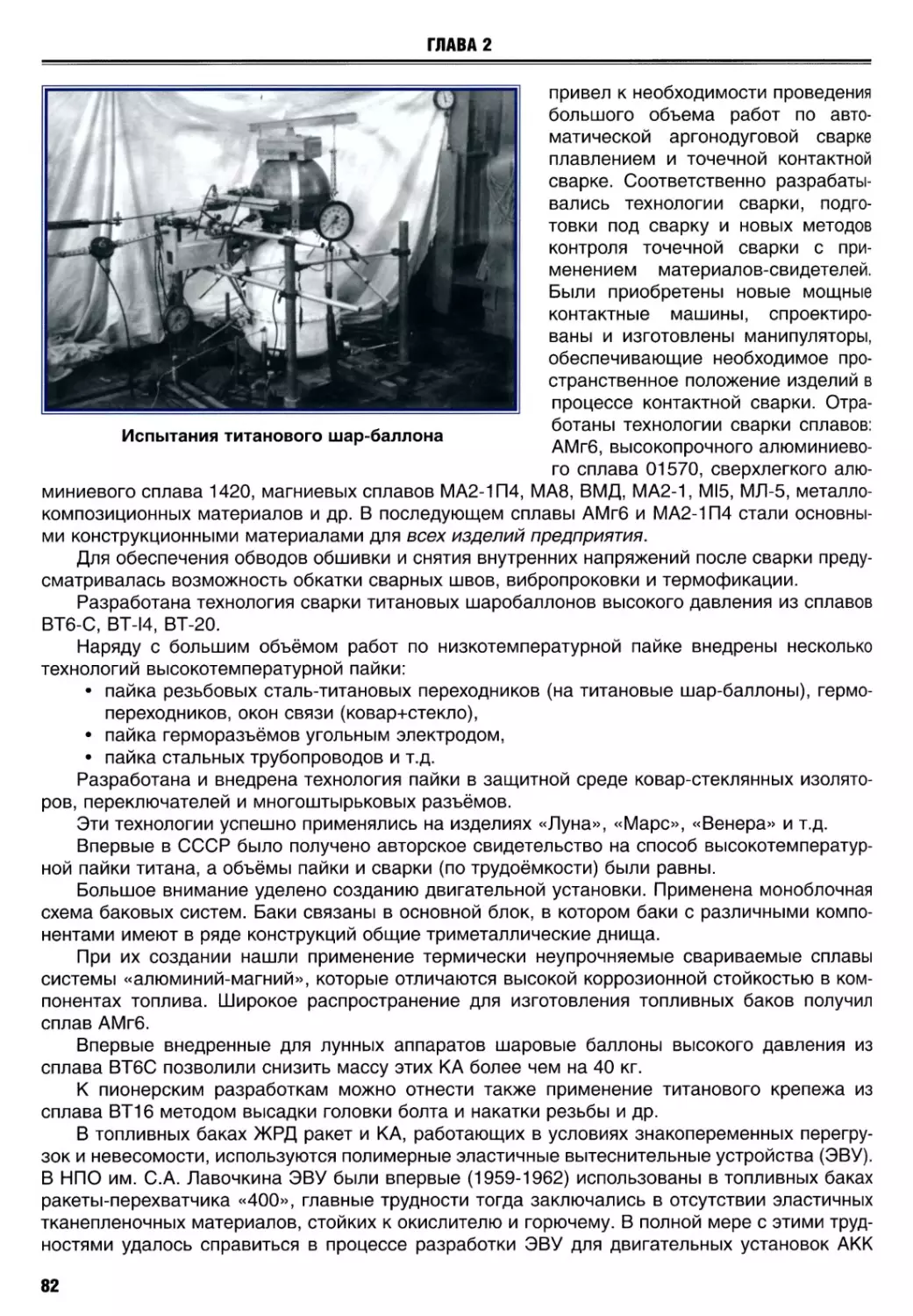
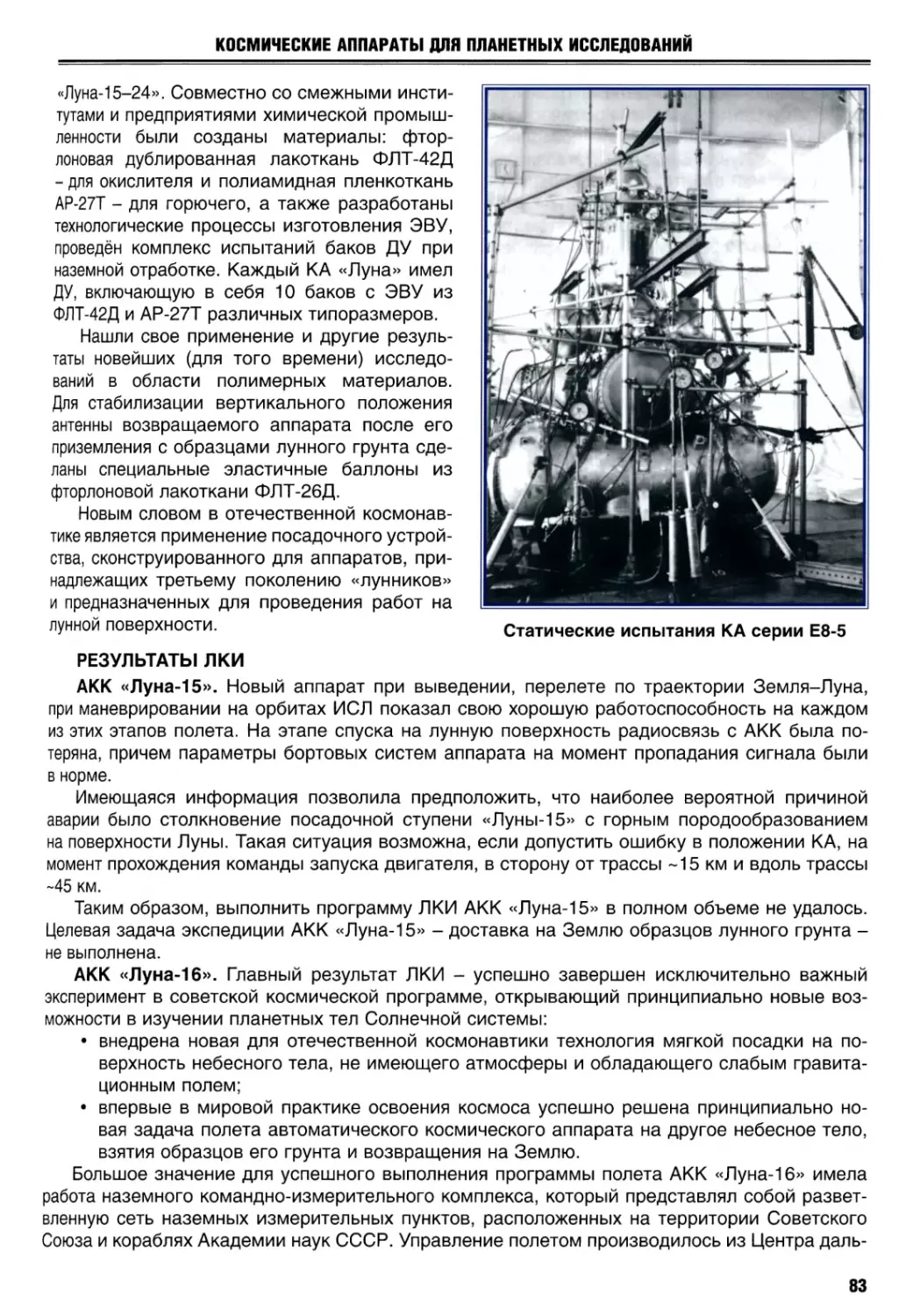
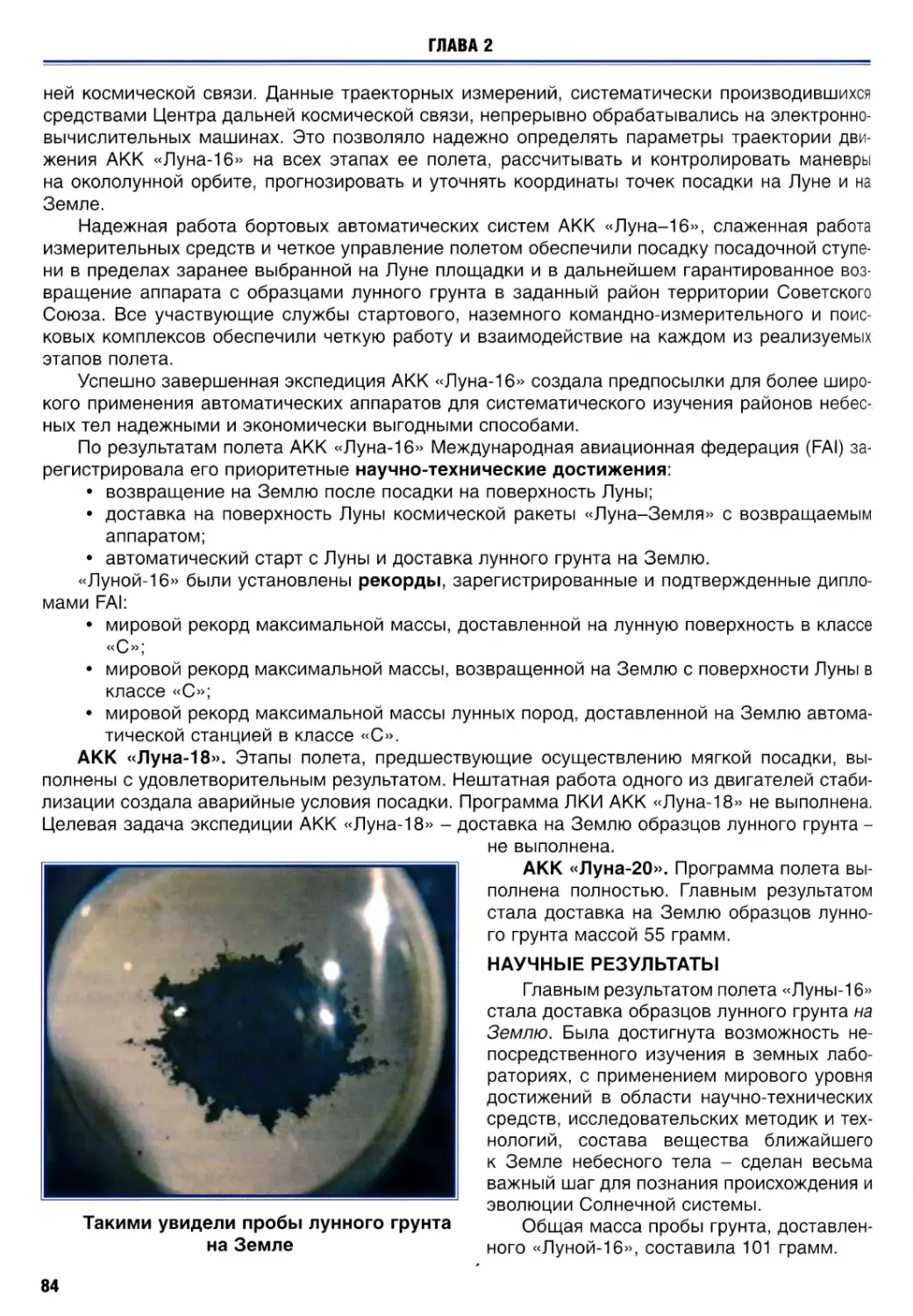
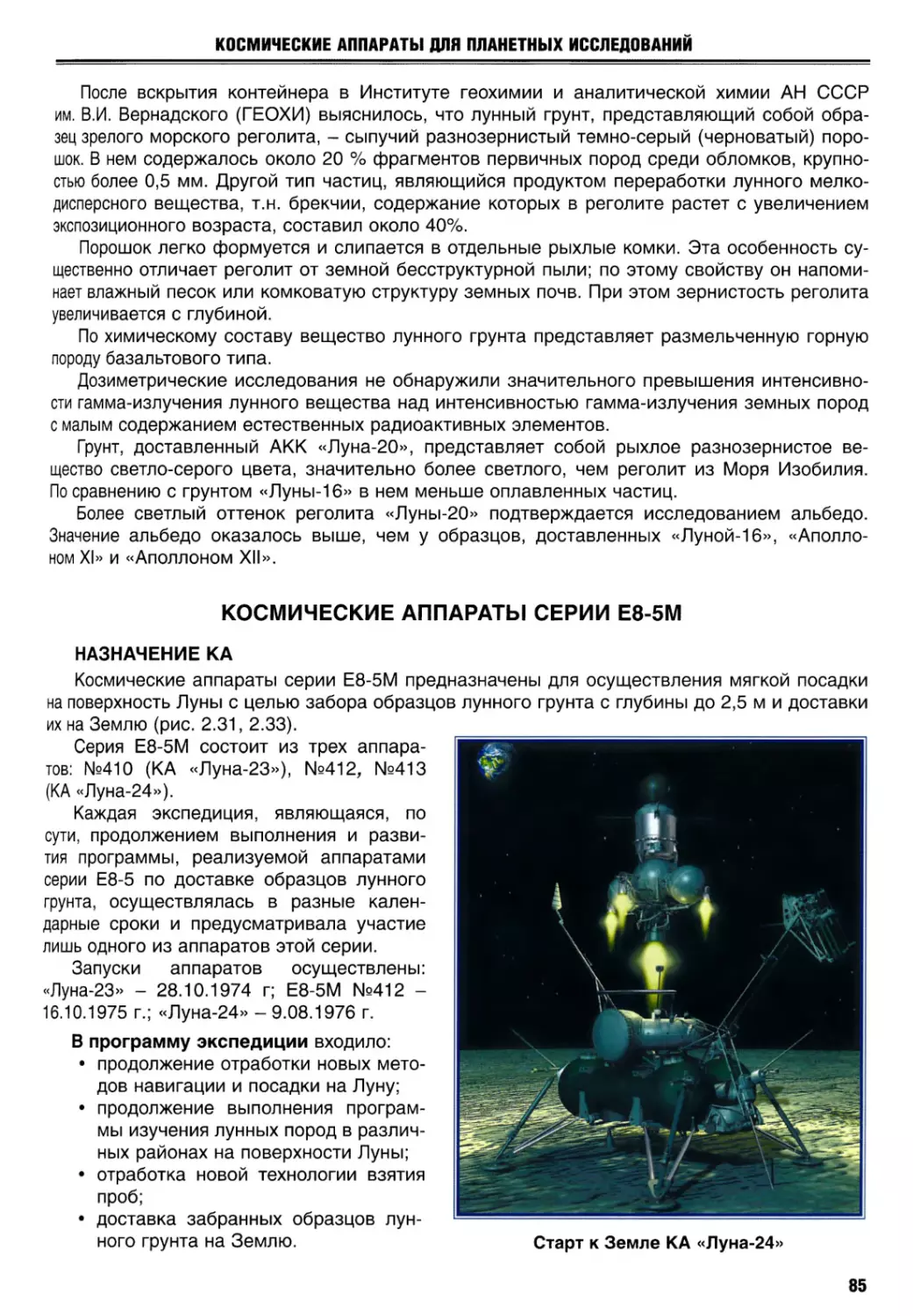
АВТОМАТИЧЕСКИЕ КОСМИЧЕСКИЕ АППАРАТЫ
ДЛЯ ФУНДАМЕНТАЛЬНЫХ И ПРИКЛАДНЫХ
НАУЧНЫХ ИССЛЕДОВАНИЙ
Под общей редакцией
доктора технических наук, профессора Г.М. Полищука
и доктора технических наук, профессора К.М. Пичхадзе
Москва
Издательство МАИ-ПРИНТ
2010
ББК 39.62
А 18
Авторы-составители: В.А. Асюшкин, П.А. Грешилов, В.В. Ефанов,
М.Б. Мартынов, А.А. Моишеев, С.А. Немыкин, В.М. Романов, И.Л. Шевалев
А 18 Автоматические космические аппараты для фундаментальных и приклад-
ных научных исследований / Под общ. ред. д-ра техн, наук, проф. Г.М. Полищука
и д-ра техн, наук, проф. К.М. Пичхадзе. - М.: Изд-во МАИ-ПРИНТ, 2010. - 660 с.: ил
ISBN 978-5-7035-2176-2
В книге обобщен почти полувековой опыт работы отечественных специали-
стов по созданию и использованию автоматических космических аппаратов для
фундаментальных и прикладных научных исследований.
Впервые в монографии достаточно подробно рассмотрен весь спектр косми-
ческих аппаратов, ведущая роль в создании которых и последующем выполнении
ими космических миссий принадлежит НПО им. С.А. Лавочкина.
Для специалистов в области РКТ, научных работников, студентов и препода-
вателей, а также для широкого круга читателей.
Рецензенты: директор ИКИ РАН, академик РАН Л.М. Зеленый;
чл.-корр. РАН, заместитель директора ИПМ им. М.В. Келдыша ЭЛ. Аким
В подготовке материалов книги участвовали непосредственные создатели ав-
томатических космических аппаратов НПО им. С.А. Лавочкина:
В.А. Асюшкин, О.А. Алымов, В.Е. Бабышкин, В.В. Балаков, В.А.Воронцов,
Н.В. Галич, А.В. Германов, К.А. Гончаров, П.А. Грешилов, И.П. Губанов, В.П. Дол-
гополов, В.Н. Ерошкин, В.В. Ефанов, О.Н. Зайцева, Ю.К. Зайко, А.С. Золотов,
С.В. Ишин, А.В. Кондратюк, В.Н. Карачевский, Г.Я. Коляскин, В.А. Кудряшов, В.И. Ло-
щенков, А.В. Лукьянчиков, В.П. Макаров, Н.А. Маркачев, А.И. Марков, М.Б. Марты-
нов, В.И. Машков, А.А. Моишеев, В.А. Молодцов, И.В. Москатиньев, С.А. Немыкин,
В.С. Огнев, К.М. Пичхадзе, Я.Г. Подобедов, Г.М. Полищук, И.И. Раб, А.Л. Родин,
В.И. Семункина, А.Е. Симаков, Е.В. Скрипунов, Ю.Г. Стекольщиков, И.Ю. Скоро-
глядов, А.И. Смирнов, В.Н. Тимофеев, Ю.Н. Устинов, В.М. Цвелев, А.Г. Чесноков,
Э.Г. Чистов, М.Н. Хайлов, А.И. Шейхет, И.Л. Шевалев, С.В. Шостак, Б.Д. Яковлев.
Работа с архивами - В.А. Молодцов, В.Н. Ерошкин.
В книге использованы фотоматериалы из архивов подразделений и служб
НПО им. С.А. Лавочкина и личных архивов сотрудников предприятия.
Все авторские права защищены. Перепечатка, размножение материалов книги
без разрешения владельца авторского права запрещены.
ISBN 978-5-7035-2176-2
©ФГУП «НПО им. С.А. Лавочкина», 2010
Per aspera ad astra
Посвящается Главным и Генеральным конструкто-
рам аэрокосмического предприятия, известного ныне
в мире как Научно-производственное объединение
им. С.А. Лавочкина, а также высококлассным специ-
алистам в области Науки, Инженерии, Технологии и
Рабочего ремесла предшествующих поколений и со-
временникам - создателям автоматических космиче-
ских аппаратов для фундаментальных и прикладных
научных исследований
ПРЕДИСЛОВИЕ
Монография «Автоматические космические аппараты для фундаментальных и приклад-
ных научных исследований» является обобщением опыта работы коллектива НПО им. С.А. Ла-
вочкина - головной фирмы отечественной космической отрасли, более 40 лет успешно спе-
циализирующейся в области создания ракетно-космических средств непилотируемой космо-
навтики, назначение которых отражено в названии этой книги.
Автоматические космические аппараты НПО им. С.А. Лавочкина с высокой результатив-
ностью обеспечили выполнение отечественных и международных научных программ в об-
ласти фундаментальных исследований космического пространства и объектов ближнего и
дальнего космоса, а также программ прикладных научных исследований, в том числе по при-
менению космических комплексов дистанционного зондирования Земли.
Вниманию читателя в достаточно доступном изложении предлагается описание целей и
задач совершенных космических экспедиций, будь то межпланетные полеты или работа на
околоземных орбитах; средств и способов воплощения в жизнь разработанных космических
проектов; хронология событий при их реализации. Уделено место анализу достигнутых при
этом научных и технических результатов, а также практического вклада, сделанного НПО
им. С.А. Лавочкина в развитие ракетно-космической техники и, посредством созданных им
«исследовательских инструментов», фундаментальных отраслей науки. Проводится также
сравнение состояния дел по аналогичным направлениям космонавтики за рубежом.
В разделах книги, каждый из которых посвящен одной из проблем, решаемых НПО
им. С.А. Лавочкина в своей многопрофильной деятельности, излагается современная кон-
цепция дальнейшего развития предприятием соответствующего направления отечественной
космонавтики.
Авторы книги надеются, что для современной России, взявшей курс на продолжение
полноценной космической деятельности для решения важнейших социально-экономических,
научных и других задач в интересах всестороннего развития страны и ее граждан, про-
деланный ими труд, популяризирующий и раскрывающий неисчерпанные потенциальные
возможности отечественной беспилотной космонавтики, способен принести существенную
пользу.
3
Глава 1.
ОТ ВИНТОМОТОРНОГО САМОЛЕТА
К «КОСМИЧЕСКОМУ РОБОТУ»
Глава 1. ОТ ВИНТОМОТОРНОГО САМОЛЕТА
К «КОСМИЧЕСКОМУ РОБОТУ»
ЛАВОЧКИН Семен Алексеевич
дважды Герой Социалистического Труда,
четырежды лауреат Государственной
премии СССР. Член-корр. Академии
наук СССР, доктор технических наук.
С 1939 по 1960 г. Главный, затем Гене-
ральный конструктор - ответственный
руководитель предприятия
Семидесятилетняя история НПО им. С.А. Ла-
вочкина представляет собой сложный путь жиз-
ненного становления ныне всемирно известной
космической фирмы, одного из промышленных
лидеров отечественной космонавтики. Это инте-
реснейшая летопись превращения небольшого,
изначально малозначимого авиационного завода,
в головную космическую фирму мирового уровня
с уникальной специализацией по созданию авто-
матических космических аппаратов для комплекс-
ных исследований планет и малых тел Солнечной
системы, для астрофизических исследований
Солнца и объектов дальнего космоса.
Импульсом к процессу преобразований по-
служило подключение предприятия к решению
задач общегосударственной важности. Наиболее
яркие и успешные его этапы связаны с имена-
ми таких выдающихся деятелей в области нау-
ки и техники, как С.А. Лавочкин, Н.С. Черняков,
Г.Н. Бабакин, А.П. Милованов, С.С. Крюков,
В.М. Ковтуненко, С.Д. Куликов. С тех пор и на
протяжении всех оставшихся в прошлом лет
планка этой значимости работ НПО им. С.А. Ла-
вочкина для нашей страны не снижается.
Под руководством Семена Алексеевича
Лавочкина - основателя самобытного конструк-
торского коллектива, благодаря которому и стали
возможны будущие преобразования - достигну-
ты впечатляющие результаты в области создания
авиационной и ракетной техники.
Винтомоторные самолеты-истребители Лавочкина в предвоенные годы и в годы Вели-
кой Отечественной войны по своим основным летно-техническим характеристикам достойно
конкурировали не только с отечественными самолетами аналогичного назначения, но и с ис-
требителями стран антигитлеровской коалиции, а в боевых единоборствах к концу войны уже
по многим параметрам превосходили противника. Вклад предприятия в дело защиты Отече-
ства получил достойную государственную оценку: высшей наградой того времени - орденом
В.И. Ленина - отмечен коллектив, звание Героя Социалистического Труда присвоено его ру-
ководителю - генерал-майору авиационно-технической службы С.А. Лавочкину.
При создании реактивных истребителей лавочкинцы впервые, наряду со своими кол-
легами из других авиационных конструкторских бюро и при плодотворном взаимодействии
с научно-исследовательскими институтами страны, ступили на путь первопроходцев и, как
покажет дальнейшее, уже не сворачивали с этого пути. Результаты на этом поприще также
весьма неплохи: вхождение в «первую тройку» авторов реактивных самолетов, выпущенных
серийно и принятых на вооружение; найденный оптимум аэродинамической формы конструк-
ции, ставшей на долгие годы основополагающей при разработках «стрелокрылой истреби-
тельной авиации»; преодоление - первыми - «звукового барьера» в полете со снижени-
ем; инициация и материализованное доказательство возможности создания сверхзвуковой
автоматизированной системы перехвата (базирующейся на сверхзвуковом истребителе-
ракетоносце, оснащенном радиоуправляемыми ракетами класса «воздух-воздух»), воспри-
7
ГЛАВА 1
Георгий Николаевич Бабакин
Главный конструктор(1965-1971),
Герой Социалистического Труда,
член-корр. Академии наук СССР,
доктор технических наук
наукоемкость результативной разработки
нятое и успешно развитое затем другими кон-
структорскими бюро, и многое, многое другое.
Последняя из вышеупомянутых работ и, тем
более, последующие за ней имели чрезвычайно
важное значение для укрепления обороны нашей
страны в условиях резкого ухудшения междуна-
родной обстановки, появления в арсеналах глав-
ного потенциального противника - США - ядер-
ного оружия и возникновения в связи с этим ре-
альной угрозы ядерной агрессии.
Предприятие становится одной из основных
фирм военно-промышленного комплекса СССР,
на которую возложено решение задач одновре-
менно по созданию новых видов средств защиты
от воздушного нападения и новых видов страте-
гических средств сдерживания, основывающих-
ся на разработке новейшего для того времени
оружия - ракет различного класса и назначения.
Первые отечественные ЗУРы для системы ПВО
С-25 - результат труда коллектива, руководимо-
го С.А. Лавочкиным. Коллектив удостоен ордена
Красного Знамени, С.А. Лавочкин (вторично) -
звания Героя Социалистического Труда. Лишь
лавочкинцам первыми (и на многие годы - един-
ственными в мировой практике) удалось вопло-
тить в жизнь идею создания сверхзвуковой меж-
континентальной крылатой ракеты. Чрезвычайная
отражена в присвоении ведущим специалистам
предприятия соответствующих ученых званий и степеней, в избрании С.А.Лавочкина членом-
корреспондентом Академии наук СССР, а технические отрасли науки обогатилась новыми
экспериментальными и испытательными данными в области ракетостроения и управляемых
полетов непилотируемых летательных аппаратов в условиях земной атмосферы со сверх-
звуковыми скоростями.
Один из важнейших итогов этого периода в жизни предприятия - сформирована активно
функционирующая структура, сочетающая проектные, конструкторские, экспериментальные,
испытательные и производственные подразделения, достаточно свободно адаптируемая к
возлагаемым на нее задачам по созданию летательных аппаратов военного назначения. Ха-
рактерный стиль организации и выполнения работ, качество и уровень разработок, с отра-
женной в них способностью не только прекрасно ориентироваться в преимущественных ми-
ровых тенденциях при создании аналогичной продукции, но и во многом предвосхищать их,
позволяют говорить о появлении «конструкторской школы Лавочкина», традиции и высокая
марка которой поддерживались и развивались все последующие годы.
Следующий шаг в «преодолении земного притяжения», шаг уже непосредственно в Космос
с помощью автоматических космических аппаратов сделан под руководством Георгия Нико-
лаевича Бабакина. К тому времени существенно изменился характер государственных зада-
ний, получаемых предприятием: участие в противоборстве с напавшим на страну реальным
противником и в формировании системы сдерживания в период холодной войны сменилось
«мирным противоборством» - необходимостью доказать преимущества отечественной науки
и техники в деле «выхода человечества за пределы земной колыбели», в изучении и освоении
Космоса. В решении этой проблемы предприятию отводится существенная роль. Получив из
рук основоположника отечественной практической космонавтики С.П. Королева эстафету по
созданию автоматических космических аппаратов для полетов к Луне и планетам Солнечной
системы, коллектив, возглавляемый Г.Н. Бабакиным, не только успешно продолжил начатое
8
ОТ ВИНТОМОТОРНОГО САМОЛЕТА К «КОСМИЧЕСКОМУ РОБОТУ»
дело, но и плодотворно развил его, обеспечив само-
стоятельность и самодостаточность этого направле-
ния. Более того, стал основным «поставщиком» ис-
следовательской информации, значительно обога-
тившей фундаментальную науку новыми данными о
Луне, Венере, Марсе и межпланетном пространстве.
На долю коллектива, с момента подключения
его к решению задач по космической тематике, вы-
пала честь стать главным соперником американских
исследователей космоса в пресловутой «лунной
гонке», когда практически параллельно развора-
чивались события, связанные с работой на лунной
поверхности астронавтов США и «космических ро-
ботов» СССР. Со значительно меньшими финан-
совыми затратами и при полном отсутствии риска,
связанного с непосредственным «внедрением» лю-
дей в сверхэкстремальные условия, получены ве-
ликолепные результаты по опережающей «мягкой»
посадке на лунную поверхность, доставке на Землю
образцов лунного грунта, длительному контактному
изучению физико-химических свойств лунных по-
род при движении управляемого с Земли самодви-
жущегося исследовательского зонда - лунохода.
Итогом деятельности Г.Н. Бабакина, удостоен-
ного по ее результатам звания Героя Социалистиче-
ского Труда и избранного членом-корреспондентом
Академии наук СССР, стала умело осуществленная
конверсия военно-промышленного предприятия в
научно-производствен- ный центр, создающий абсо-
лютно новый вид «исследовательских инструментов»
Вячеслав Михайлович Ковтуненко
Главный конструктор, затем - Гене-
ральный конструктор и генеральный
директор, Генеральный конструктор
(1977-1995), Герой Социалистичес-
кого Труда, член-корр. Академий наук
СССР, России и Украины, доктор тех-
нических наук, профессор
для проведения уникальных экспериментов в интересах фундаментальной науки - автоматиче-
ские космические аппараты и осуществляющий управление ими при выполнении научных про-
грамм в межпланетных исследовательских экспедициях. Под его руководством обрели жизнь
и были эффективно использованы три поколения аппаратов серии «Луна» и базовый аппарат для
планетных исследований, ставший основой межпланетных станций серий «Марс» и «Венера».
С именем Героя Социалистического Труда Вячеслава Михайловича Ковтуненко связа-
ны неоспоримые успехи отечественной беспилотной космонавтики по проведению разнопла-
новых и многопрофильных исследований Венеры, включающих дистанционное и контактное
ее зондирование с использованием широкого спектра исследовательских средств - десанти-
руемых спускаемых аппаратов, плавающих аэростатных зондов, бортовых радиолокаторов
и т.д. Заслуги В.М. Ковтуненко в области осуществления исследований Венеры, благодаря
чему в мировом научном сообществе она получила негласный статус «советской планеты»,
отмечены избранием его членом-корреспондентом Академии наук СССР.
Под руководством В.М. Ковтуненко осуществлены первые поисковые сближения КА с ма-
лыми телами Солнечной системы - кометой Галлея и Фобосом, совершающими движение
по трудноотслеживаемым с Земли небесным траекториям.
В этот период началось бурное внедрение новейших компьютерных технологий, причем
не только с точки зрения оснащения и организации работы «борта», но и буквально по всей
технологической цепочке созидательного процесса - от проектных и конструкторских прора-
боток до наземных автономных и комплексных испытаний, управления полетом и обработки
получаемой с КА научной и служебной информации.
Во многом благодаря этому был создан новый базовый аппарат, предназначенный для
полетов к планетам и малым телам Солнечной системы - «Фобос».
9
ГЛАВА 1
Станислав Данилович Куликов
Генеральный конструктор, затем
Генеральный конструктор
и генеральный директор (1996 - 2003),
доктор технических наук, профессор
В.М. Ковтуненко стал одним из основоположни-
ков нового направления в отечественной бес-
пилотной космонавтике - создания специализи-
рованных автоматических космических аппара-
тов для астрофизических исследований. Именно
эти аппараты стали первыми внеатмосферными
астрофизическими обсерваториями, причем ИСЗ-
«долгожителями», позволяющими проводить мно-
голетнее слежение за объектами дальнего Космо-
са в сочетании непрерывных наблюдений с мони-
торингом значительных областей небесной сферы.
При нем же стали регулярными патрульные
полеты КА серии «Прогноз». Это не только сде-
лало более доступным для ученых изучение при-
родных процессов, происходящих на Солнце, и
действия механизма солнечно-земных связей, но
и еще более приблизило фундаментальную науку
к решению проблематики повседневной жизни
людей - появилась возможность сопоставлять и
достоверно прогнозировать изменения биологиче-
ских и техногенных процессов на Земле под влия-
нием циклов солнечной активности.
Наступал период все большего «потепления»
в отношениях стран, причастных к решению кос-
мической проблематики, и НПО им. С.А. Лавочки-
на уже в силу своей специфики, в силу достаточ-
ной популярности В.М. Ковтуненко среди зарубежных коллег не могло оставаться вне этого
процесса. Отношения стали лавинообразно приобретать характер сотрудничества (при ор-
ганизации межпланетных экспедиций) или коммерческого партнерства (при оказании услуг
по запуску зарубежных ИСЗ), но все еще серьезнейшим образом сказывались пробелы в
«правовом поле» при установлении и реализации этих отношений.
В то же самое время значительно возросло участие предприятия в решении задач при-
кладного направления: была сформирована, успешно восполнялась и модернизировалась
орбитальная группировка СПРН, началась реализация выпестованной под руководством
В.М. Ковтуненко идеи о создании оптико-электронной космической системы ДЗЗ.
По целевой направленности и потенциальной востребованности имеющихся к середине
90-х годов прошлого века собственных разработок НПО им. С.А. Лавочкина готово было успеш-
но вступить в мир устанавливаемых в стране новых хозяйственных отношений. «Портфель
предложений» содержал и несколько вариантов систем спутниковой связи (ССС) и различные
варианты систем дистанционного зондирования Земли (СДЗЗ), в том числе, для раннего об-
наружения лесных пожаров, выявления аварийных участков на газопроводах, предупреждения
о глобальных катастрофах и т.д. Подразумевалось, прежде всего, применение, в качестве базо-
вых платформ, служебных модулей КА, прекрасно зарекомендовавших себя при выполнении
основных научных и прикладных программ, по которым работало в то время предприятие. Сво-
евременно повысив значимость в своей программе роли разгонных блоков НПО им. С.А. Лавоч-
кина оказалось готовым еще более укрепиться в своей «нише» на «рынке космических услуг» -
по обеспечению запусков на требуемые орбиты спутников зарубежного производства.
Но... Наступил и не самые лучшие для отечественной космонавтики времена: спад инте-
реса со стороны государства, временные и объемные провалы с финансированием государ-
ственных программ и,, в результате, вымывание высокопрофессиональных специалистов из
промышленных в коммерческие структуры, сбой производственных циклов и т.д.
Тем не менее, в условиях нарастающего экономического хаоса НПО им. С.А. Лавочкина под
руководством доктора технических наук, профессора Станислава Даниловича Куликова уда-
10
ОТ ВИНТОМОТОРНОГО САМОЛЕТА К «КОСМИЧЕСКОМУ РОБОТУ»
Константин Михайлович Пичхадзе
Генеральный конструктор
и генеральный директор (2003 - 2005),
доктор технических наук, профессор
лось не только довести до летных испытаний соз-
даваемые на предприятии космические аппараты
нового поколения, по сути целые космические
комплексы, по научной («Марс-96») и прикладной
(«Аркон-1») тематикам, продолжить производство
и запуски серийных машин («Прогноз», «Око-1»,
«Око-2»), но и на практике доказать свою готов-
ность к реализации нескольких проектов из вы-
шеназванного портфеля предложений - провести
ЛКИ КА «Купон» для первой отечественной систе-
мы банковской связи «Банкир», осуществить ряд
запусков ИСЗ зарубежного производства («Мю-
сат», «UNAMSAT-В») на коммерческой основе,
начать эксплуатацию универсального разгонного
блока «Фрегат».
Несомненной заслугой С.Д. Куликова явля-
ется сохранение продуктивного ядра коллектива
НПО им. С.А. Лавочкина. Сохранение, несмотря
на сложнейшую финансовую ситуацию.
При сменившем его в 2003 году на посту Гене-
рального конструктора и генерального директора
докторе технических наук, профессоре Констан-
тине Михайловиче Пичхадзе проявляются стиму-
лы значительного развития интеллектуального по-
тенциала этого ядра, опирающегося на освоение
и внедрение высоких и наукоемких технологий, на активное вовлечение в работу молодого
пополнения специалистов, молодых творческих сил.
Несмотря на столь сложный период жизни фирмы, пережитый ею в конце прошлого -
начале нынешнего веков, в проектных разработках НПО им. С.А. Лавочкина остались все
основные направления работ, присущие основной специализации фирмы и сохраняющие ее
мировую уникальность - программы исследования планет и малых тел Солнечной системы,
программы создания непилотируемых космических обсерваторий для проведения астрофи-
зических исследований в широком диапазоне спектров излучения и т.д.
Это тем более ценно, что начало нового столетия характеризуется существенными подвиж-
ками в осознании российской общественностью и, что более важно, власть имущими лицами
России истинной роли отечественной космонавтики в формировании современной судьбы на-
шей страны, в огромном влиянии на ее будущее. В оценке этой роли, данной В.В. Путиным в пе-
риод его президентства, прямо говорится о том, что: «...Космическая деятельность - это один
из ключевых факторов нашего развития. Она обеспечивает высокий статус России как страны
передовых научных технологий. И, безусловно, играет важнейшую роль в деле национальной
безопасности, подъеме экономики, повышении конкурентоспособности нашей страны.
Очевидно, что наша космическая отрасль может и должна развиваться опережающими
темпами. Более того, она способна тянуть за собой другие сектора экономики, стать инстру-
ментом по решению многих насущных задач».
И в оценках современных военных стратегов безусловно признается факт, «что прио-
ритетное развитие космических систем является жизненно важным фактором реализации
основополагающих принципов новой Военной доктрины России».
Провозглашенная и реализуемая политика Президента РФ Д.А.Медведева в отношении
ракетно-космической отрасли ныне на практике подтверждает и развивает эти мысли.
В соответствии с положительными изменениями ситуации в отношении к отечественной
космонавтике, на основе анализа общей тенденции развития мирового сообщества по инте-
ресующей нас проблематике и в рамках действующей «Космической политики России» за-
кладывается фундамент формирования «новой главы» в судьбе НПО им. С.А. Лавочкина.
11
ГЛАВА 1
Георгий Максимович Полищук
Генеральный конструктор
и генеральный директор (2005-2010),
доктор технических наук, профессор
Предложенные коллективом проработки по сна-
ряжению экспедиций к Луне, Марсу, созданию со-
временного поколения астрофизических обсерва-
торий, систем ДЗЗ на базе полноразмерных и ма-
логабаритных спутников легли в основу заказов,
получаемых предприятием на государственной
и коммерческой основе.
Начиная с 2005 года руководителем НПО
им. С.А. Лавочкина стал доктор технических
наук, профессор Георгий Максимович Поли-
щук. Главное, за что, как и прежде, в Россий-
ской Федерации отвечало предприятие - обе-
спечение научных исследований планет и малых
тел Солнечной системы. Весьма существенно,
что после длительного (почти двадцатилетнего)
перерыва в Федеральную космическую програм-
му включены и обеспечены средствами програм-
мы по освоению и исследованию Луны и Марса.
Это - отражение мировой тенденции в иссле-
довательской экспансии в отношении Космоса.
Для «клуба космических держав», таких как
Россия, США, Франция, и др., а также для Ев-
ропейского космического агентства проведение
фундаментальных научных космических иссле-
дований изначально было, остается и поныне,
одним из важнейших приоритетов космической деятельности.
Комплексная программа США, разработанная вплоть до 2020 - 2025 гг., предусматрива-
ет осуществление миссий на Луну и на Марс. Созвучные программы имеют Китай и Европей-
ское космическое агентство, запуски к Луне запланировала Индия.
В отечественной лунной программе существенная роль возложена на экспедиции «кос-
мических роботов» НПО им. С.А. Лавочкина.
Нынешний этап освоения Луны принципиально отличается от упомянутого ранее «баба-
кинского» периода: основное внимание уделяется решению задач прикладного характера.
Это связано, в частности, с поиском полезных ископаемых и новых видов энергоносителей.
В перспективе намечается создание на поверхности Луны научно-исследовательского по-
лигона для отработки принципиальных методик переработки лунного грунта, доставки по-
лученных образцов и материалов на Землю, а также проведения широкого спектра научных
исследований.
Не менее важным является решение проблемы использования Луны как промежуточной
базы при осуществлении межпланетных перелетов.
Одна из актуальнейших задач планетологии - исследование Марса и его природного
спутника Фобоса, отнесенного учеными в разряд так называемых малых тел - потенциаль-
ных носителей первородного вещества.
Проект НПО им. С.А. Лавочкина предусматривает решение этой задачи поэтапно - мис-
сиями «Фобос-грунт» и «Марс-Грунт».
Для реализации «лунной» и «марсианской» программ на предприятии создаются унифи-
цированные как перелетные, так и посадочные модули.
Федеральная космическая программа предусматривает также возобновление исследова-
тельских полетов к Венере, в осуществлении орбитально-десантных экспедиций к которой,
как ранее было сказано, НПО им. С.А. Лавочкина уже добивалось весомых успехов. Совре-
менная постановка задачи состоит в создании космического комплекса, способного в тече-
ние длительного срока проводить качественно новое детальное изучение планеты и окру-
жающей ее атмосферы с орбиты ИСВ и при посадке на её поверхность.
12
ОТ ВИНТОМОТОРНОГО САМОЛЕТА К «КОСМИЧЕСКОМУ РОБОТУ»
В последние годы, благодаря достижениям мировой космической техники и техноло-
гии, стали возможны полеты автоматических КА на периферию Солнечной системы, к пла-
нетам гигантам и к их естественным спутникам, имеющим собственную атмосферу. Реше-
ние этих задач, а также полеты к объектам пояса Койпера, доставка на Землю образцов
вещества астероида (проект «Астероид-грунт») или ядра кометы (проект «Комета-грунт»)
НПО им. С.А. Лавочкина связывает с более отдаленной перспективой. При этом уже сегодня
сделан хороший задел в виде проработки компоновок космических комплексов и проведен-
ного системного анализа предлагаемых экспедиций, проектируемых на базе перспективного
космического комплекса, использующего конструктивный задел перелётного модуля проекта
«Фобос-Грунт».
Характерная особенность современного этапа намечаемой учеными «планетной экспан-
сии» заключается в том, что освоение Марса или других планет, развертывание лунной базы
или полигона, многоплановость предполагаемых исследований и их стоимость - все это мо-
жет быть существенно оптимизировано за счет координации усилий многих стран, взаимной
увязки национальных миссий. Для России важнейшим при этом становится определение сво-
его четкого места в развивающемся процессе. Предлагаемая НПО им. С.А. Лавочкина про-
грамма работ по фундаментальным космическим исследованиям соответствует перспективе
дальнейшего освоения космического пространства, выбрана с учетом интересов и задач на-
циональных, международных программ и имеет особо важное значение для фундаменталь-
ных научных исследований Солнечной системы. Реализация любой из предлагаемых миссий,
и в особенности миссий к Марсу и планетам-гигантам позволит России занять лидирующее
положение в ряду ведущих космических держав.
В качестве основных направлений деятельности НПО им. С.А. Лавочкина остается также
астрофизическая тематика. На базе разработанной вновь универсальной платформы «На-
вигатор» создаются космические астрофизические обсерватории серии «Спектр» для ис-
следовательской работы в различных частотных диапазонах электромагнитного излучения.
Активную позицию занимает предприятие в разработке проектов, играющих существенную
роль в фундаментальных космических исследованиях, касающихся изучения Солнца, физики
космической плазмы и солнечно - земных связей.
Весьма перспективным научным направлением является проведение фундаментальных
исследований с помощью малых автоматических космических аппаратов, так называемых
микроспутников. В НПО им. С.А. Лавочкина разработана унифицированная космическая плат-
форма «Карат», а также технические предложения на серию микроспутников на ее базе.
В основных направлениях деятельности НПО им. С.А. Лавочкина не оставлено без вни-
мания создание космических аппаратов, космических комплексов и систем прикладного на-
значения, осуществляющих с той или иной целью мониторинг земной поверхности и рассчи-
танных на многолетнюю и непрерывную их эксплуатацию.
Российский космический комплекс «Электро» должен стать составной частью междуна-
родной системы геостационарных метеоспутников, действующей под эгидой Всемирной ме-
теорологической организации (WMO).
Стабильно востребован на рынке космических услуг универсальный разгонный блок
«Фрегат», ставший настоящим «космическим буксиром» для выведений в одном пуске одно-
временно нескольких спутников, предназначенных для работы на различных высокоэнерге-
тических орбитах ИСЗ, или КА, отправляемых в полет за пределы околоземного простран-
ства. Адаптируемость «Фрегата» с основными отечественными и рядом зарубежных ракет-
носителей различного класса, как существующих, так и разрабатываемых, таких как «Союз»,
«Союз-2» (этапы 1а, 16)», «Зенит-28Б», «Протон-М», «Ангара-АЗ», «Союз 2-3», «Ариан-5»,
делает его производство и эксплуатацию весьма перспективным направлением работы
НПО им. С.А. Лавочкина. .
Прогрессивно развивающееся направление, от которого уже в ближайшее время можно
ждать серьезной практической отдачи - это использование наших «ноу-хау» в области кос-
мических технологий в военных и гражданских целях. Сюда относится, например, примене-
ние тормозных надувных устройств.
13
ГЛАВА 1
Виктор Владимирович Хартов
Генеральный конструктор и генеральный
директор (с февраля 2010 г.),
доктор технических наук
При определении основных направлений дея-
тельности НПО им. С.А. Лавочкина учтены все не-
обходимые критерии оптимизации выбора - науч-
ные, технические и технологические, финансовые,
экономические и конъюнктурные и пр., и правиль-
ность сделанных выводов подтверждается ныне
активным спросом на многие из вышеперечислен-
ных работ со стороны потенциальных заказчиков,
отечественных и зарубежных.
В Федеральной космической программе пред-
приятие задействовано достаточно основательно,
что является, наряду с заказами от Министерства
обороны РФ, твердой гарантией нашей полномер-
ной загрузки, нашего финансового благополучия.
НПО им. С.А. Лавочкина сегодня - это дина-
мично развивающаяся структура со стабильным,
высокопрофессиональным коллективом, попол-
няемым за счет большого притока молодежи, спо-
собная сочетать достаточно оперативное реаги-
рование на изменения современных реалий с вы-
сокоэффективным выполнением стратегических
задач, обеспечивающих решение проблем госу-
дарственной важности.
Фундамент для успешного продолжения исто-
рической летописи НПО им. С.А. Лавочкина, воз-
главляемого ныне Генеральным конструктором и генеральным директором, доктором тех-
нических наук Виктором Владимировичем Хартовым - в оптимальном сочетании даль-
нейшего развития и планомерной, систематической реализации тематических программ по
определенным ныне основным направлениям практической деятельности предприятия в со-
ответствии с Федеральной космической программой России.
Надеемся, что страницы этого продолжения будут наполнены не менее интересным и зна-
чимым для нашего Отечества содержанием, нежели предыдущие.
14
Глава 2
КОСМИЧЕСКИЕ АППАРАТЫ
ДЛЯ ПЛАНЕТНЫХ ИССЛЕДОВАНИЙ
Глава 2. КОСМИЧЕСКИЕ АППАРАТЫ
ДЛЯ ПЛАНЕТНЫХ ИССЛЕДОВАНИЙ
Цели и задачи планетных исследований.
Стратегия планетных исследований
Развертывание исследований тел Солнечной системы при помощи космических аппара-
тов относится к числу самых впечатляющих итогов прошедшего столетия.
На первых этапах исследования подобного типа касались в первую очередь чисто миро-
воззренческой стороны наших представлений о мире, в котором мы живем. Суть некоторых
основополагающих постулатов, сформулированных современной наукой по этой проблеме
и отражающих превалирующую точку зрения отечественных и зарубежных ученых по сово-
купности относящихся к ней вопросов, такова:
Солнечная система представляет собой развивающуюся космическую структуру, в кото-
рой каждое из планетных тел последовательно в том или ином виде проходит определенную
стадию развития, присущую всей системе. Таким образом, нынешнее состояние каждой из
планет характеризует соответствующую стадию этого общего развития.
В меньшей степени процессу преобразований подвержены малые тела - астероиды, ко-
меты, планетные спутники, сохранившиеся в своей основе как различные формообразова-
ния «первородного вещества», так называемого реликта.
Земля - открытая система, и все живое на Земле есть космическое явление.
Последний постулат является в известной мере ключевым, стимулирующим поиск
ответов на вопросы: «Что же представляет собой глобальная система, частицей которой
является наша Земля? Как обеспечивается развитие этой системы?» Физика и астрофи-
зика установили факт тождественности физических законов во всей видимой части Все-
ленной. Астрономия показала, что Солнце и наша Галактика по различным параметрам
являются рядовыми «средними» объектами Вселенной среди множества им подобных. В на-
стоящее время вся совокупность наук человеческой цивилизации позволяет сделать нео-
провержимый вывод о возможности и большой вероятности существования жизни, в том
числе разумной, в подходящих для этого местах Вселенной, в частности в нашей Галактике.
Появившаяся возможность совершения межпланетных полетов существенно повысила эм-
пирический уровень исследования и организации научного знания в этой области, позво-
лила сделать решающие шаги на пути выявления законов природы, подтверждающих или
опровергающих эти знания.
Таким образом, главными научными целями планетных исследований являются:
• происхождение и эволюция Солнечной системы в целом;
• происхождение и эволюция Земли - с использованием подхода, который называется
сравнительной планетологией;
• эволюция климата и атмосфер планет земной группы;
• поиск жизни на других телах Солнечной системы.
Полеты космических аппаратов позволили значительно продвинуться к достижению этих
целей. Их научное значение огромно, однако само по себе оно было бы недостаточно для
тех вложений, которые были сделаны. Помогли иные факторы - военно-технические и по-
литические.
В последние годы возникла еще одна, пока далекая, но уже реальная цель - изучение
внеземных природных ресурсов. Естественная убыль и нерациональное использование ис-
тощают природные богатства Земли. Наши потомки неизбежно столкнутся с проблемой
полного исчезновения жизненно необходимых источников энергии, отдельных природных
материалов, запасов чистой воды и т.д. Существующие уже сейчас экологические пробле-
мы заставляют человечество не только менять свое потребительское отношение к природе,
сохраняя и более бережно расходуя существующие ресурсы, но и активизировать поиск
альтернативных источников сырья и энергии - естественную замену тому, что постепенно
исчезает на нашей планете.
17
ГЛАВА 2
Гпавной долговременной целью изучения с помощью космических средств планет и ма-
лых тел Солнечной системы является определение их морфологии, состава и внутреннего
строения для выявления общности и различий в условиях формирования и последующей
эволюции. Эти исследования направлены на решение двух сопряженных фундаментальных
научных проблем.
Во-первых, это выявление закономерностей допланетных этапов эволюции Солнеч-
ной системы, определяющих различие состава и строения планет земной группы и дальних
планет-гигантов, включая и их спутники. Теперь совершенно ясно, что наиболее важные осо-
бенности строения и состава оболочек планет были заложены в догеологический период их
развития во времена аккреции, которые и предопределили характер их дальнейшей эволю-
ции, энергетику и активность геологических процессов. Есть разные подходы к изучению
этой сложнейшей проблемы, и здесь необходимо использовать все пути и способы познания,
но наиболее информативным и действенным является прямой путь непосредственного изу-
чения вещества планет и их внутреннего строения с одновременным исследованием комет,
астероидов, метеоритов и космической пыли.
Во-вторых, это сравнительно-планетологический анализ геологического развития планет
земной группы. Земля, как и другие планеты Солнечной системы, образовалась 4,6 млрд лет
назад. Однако относительно изученный интервал геологической истории Земли (Фанерозой)
охватывает лишь последние 0,6 млрд лет, и чем дальше мы уходим вглубь истории Земли,
тем наши знания становятся все отрывочнее и фрагментарнее, а ведь именно с ранним пе-
риодом жизни Земли связано образование более 80% всех полезных ископаемых. На Земле
не известны породы древнее 3,8 млрд лет, и поэтому о первом миллиарде лет развития Зем-
ли мы практически ничего не знаем.
В то же время на Луне эндогенная жизнь завершилась около 3 млрд лет назад, на ней
мы можем изучать продукты геологической деятельности в интервале от 4,5 до 2,8 млрд лет,
т.е. там мы имеем дело как бы с «законсервированной» двухмиллиардной ранней историей
планетного тела земного типа, не затушеванной, как на Земле, наложением последующих
эндогенных и экзогенных процессов. Луна может рассматриваться как наиболее близкий
к Земле прототип самой ранней истории Земли, на стыке процессов аккреции и геологиче-
ских процессов, знание которой нам так необходимо.
Марс занимает промежуточное положение между Луной и Венерой и является важней-
шим репером в увязке догеологических и геологических этапов развития планет земной
группы. Среди планет Солнечной системы он представляет, вероятно, наибольший интерес
с точки зрения сравнительной планетологии. По характеристикам поверхности, атмосферы
и климата он ближе к Земле, чем все остальные планеты, включая Венеру. Возможно, что
в далеком прошлом на Марсе были более плотная атмосфера, более теплый климат, чем
сейчас, и открытые водоемы. Там могла зародиться жизнь. Не исключено, хотя и маловеро-
ятно, что жизнь есть и на современном Марсе.
Гипотеза о жизни на Марсе впервые была высказана еще в XIX столетии для объяснения
сезонных изменений темных областей на его поверхности. Позднее была предложена иная
интерпретация. Однако мечта найти следы биосферы на этой планете остается одной из ру-
ководящих идей при разработке долговременных программ исследований Марса. Все пони-
мают при этом, что начинать надо с другого - побольше узнать о самой планете.
Венера - «сестра» Земли. Они близки по размерам, массе, количеству тепла, получае-
мому от Солнца. Еще в середине 50-х годов прошлого века считалось, что поверхность Вене-
ры, скрытая непроницаемым облачным слоем, должна быть похожа на земную, и, возможно,
полностью или частично покрыта океаном.
Малые тела - астероиды, кометы, спутники планет - представляют максимальный инте-
рес с точки зрения проблемы происхождения и ранней эволюции Солнечной системы. Имен-
но их вещество имело шанс сохраниться в первозданном виде, не подвергаясь действию бо-
лее поздних процессов.
18
КОСМИЧЕСКИЕ АППАРАТЫ ДЛЯ ПЛАНЕТНЫХ ИССЛЕДОВАНИЙ
Из астероидов особый интерес представляют т.н. околоземные. Среди них есть такие,
орбиты которых близко подходят к Земле. Столкновение с астероидом, если оно произой-
дет, может смести с нее все живое. Поэтому тщательные наблюдения за околоземными
астероидами, измерения их орбит и физических характеристик являются одной из важней-
ших задач будущих исследований. Уже начинается использование для этой цели космиче-
ских аппаратов.
Накопленные сейчас материалы сравнительно-планетологического характера говорят о
том, что ранние стадии развития всех планетных тел земного типа были принципиально
близки. А это значит, что геологическая история Луны, Марса и особенно Венеры может и
должна использоваться для построения моделей геологической истории Земли. Только на
этом пути возможно объективное решение таких острейших фундаментальных проблем гео-
логической истории Земли, как ее развитие от 4,6 до 3,8 млрд лет, наличие или отсутствие
двух типов земной коры, гетерогенность мантии и ее причины, различие в строении мантии
под континентами и океаном, возможность горизонтальной миграции континентальных плит
и другие вопросы плитной тектоники, причины появления 2,6 млрд лет назад гранитных по-
род, образование и эволюция атмосферы и гидросферы и т.д.
Поэтому изучение планет и малых тел Солнечной системы имеет не только важнейшее
общенаучное значение, но и является действенным средством расшифровки тех страниц
истории Земли, которые мы по тем или другим причинам не можем прочесть, пользуясь толь-
ко земным материалом. А знание истории - это и предвидение будущего.
Уровень лунно-планетных исследований и научная значимость решаемых задач зависят
от ряда факторов. Это, прежде всего, определяется объемом наших знаний о той или другой
планете или планетном теле, а также реальными возможностями используемых приборов и
техники.
Характер исследований планет и малых тел Солнечной системы можно условно разде-
лить на три категории:
1. Рекогносцировка - получение возможных минимальных, разрозненных данных о ха-
рактере и составе поверхности и атмосферы, которые в научном плане могут в значительной
мере иметь случайный характер, определяемый техническими и баллистическими возмож-
ностями, а также отсутствием достаточных данных для постановки конкретных целевых на-
учных задач.
2. Планомерное изучение - получение основных глобальных данных о составе поверх-
ностных пород, содержании основных и малых компонентов в атмосфере, составе и распро-
страненности криосферы (Марс и спутники планет-гигантов), определение состава пород,
слагающих основные морфологические и структурно-тектонические типы поверхности, изу-
чение глубинного строения.
3. Детальные исследования - предусматривают доставку вещества из выбранных
участков поверхности планет и малых тел Солнечной системы, для их детального, тонкого
и всестороннего изучения на Земле, включая получение наиболее информативных для по-
нимания геологической истории данных по минералогическому составу пород; распреде-
лению в породах и минералах примесных химических элементов; летучих; органического
вещества; стабильных, радиогенных и космогенных изотопов абсолютного и космического
возраста и т.д.
Указанные три категории задач в исследовании планет и малых тел Солнечной системы
обычно отвечают последовательности в их изучении. Но в отдельных случаях (Луна) иногда
удается совмещать во времени исследования второго и третьего этапов.
В настоящее время первый этап исследований закончен в отношении Луны, Венеры
и Марса, еще не закончен в отношении Меркурия, только начался для Юпитера, Сатурна и их
спутников, для всех же остальных тел Солнечной системы - он еще впереди.
Изучение Венеры и Марса находится на втором этапе, а в отношении Луны, как уже упо-
миналось, осуществлен второй этап с элементами третьего.
19
ГЛАВА 2
Признанное ныне учеными всего мира перспективное стратегическое направление пла-
нетных исследований рассматривает широкую программу проведения во внутренней части
Солнечной системы научных и технологических исследований, поиска и освоения природных
ресурсов, а также работ, имеющих конечной целью организацию постоянного присутствия
человека на различных планетных телах. Внутри этого направления планируется развитие
проекта обитаемой базы на Луне и проектирование аналогичных баз на поверхности Марса,
а также разработка инфраструктур, необходимых для осуществления дальнейшей экспансии
внутри Солнечной системы.
20
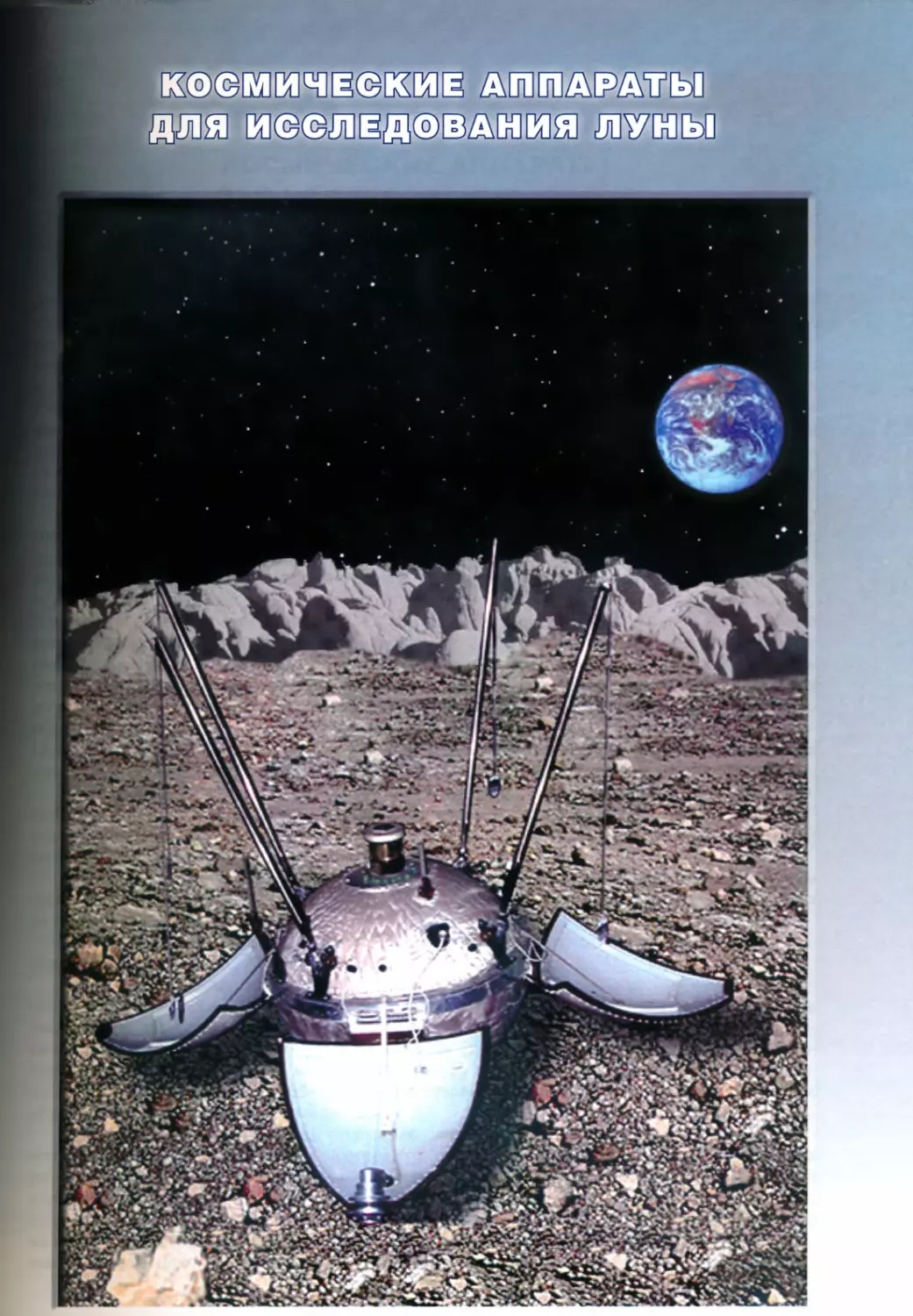
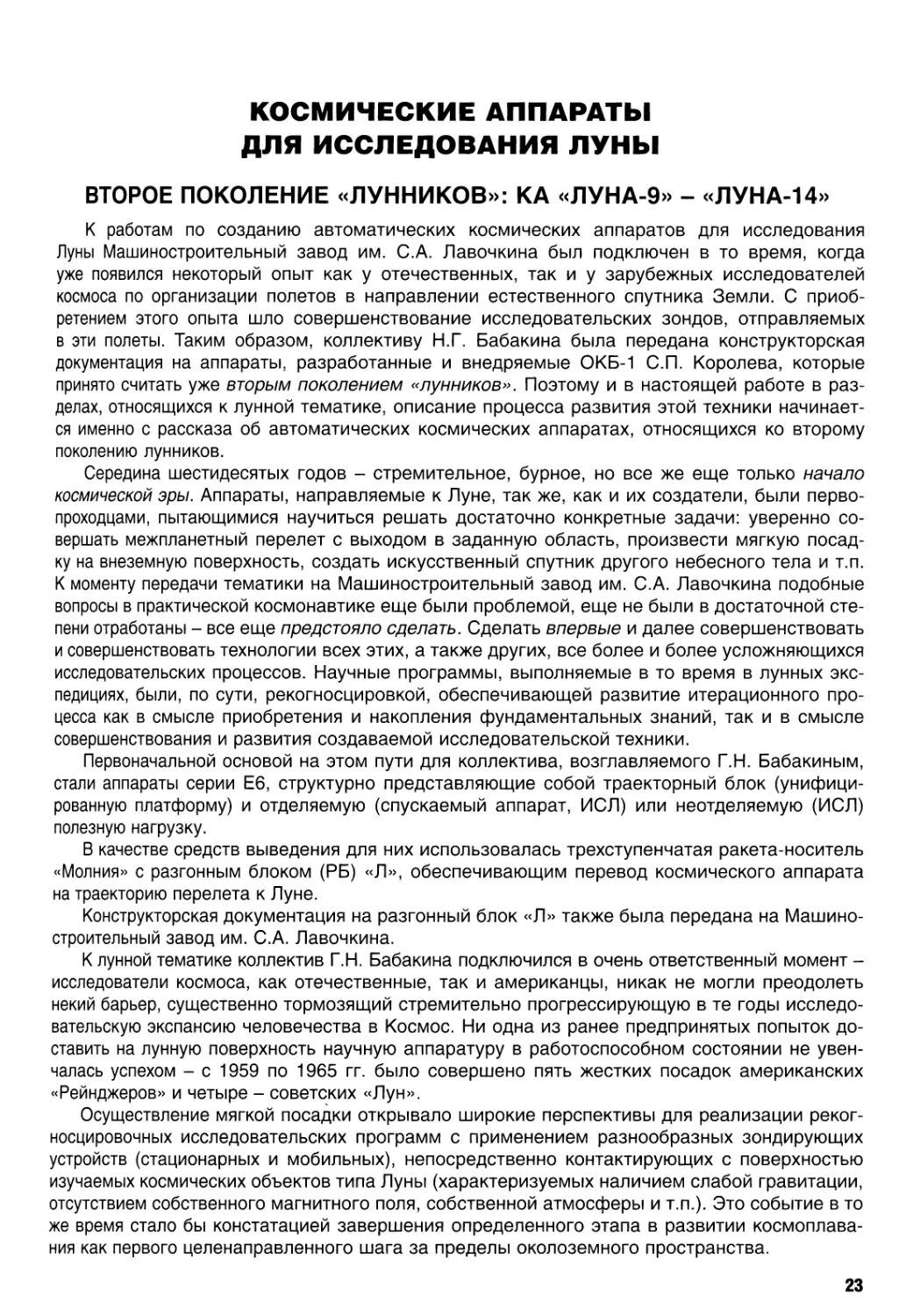
КОСМИЧЕСКИЕ АППАРАТЫ
ДЛЯ ИССЛЕДОВАНИЯ ЛУНЫ
ВТОРОЕ ПОКОЛЕНИЕ «ЛУННИКОВ»: КА «ЛУНА-9» - «ЛУНА-14»
К работам по созданию автоматических космических аппаратов для исследования
Луны Машиностроительный завод им. С.А. Лавочкина был подключен в то время, когда
уже появился некоторый опыт как у отечественных, так и у зарубежных исследователей
космоса по организации полетов в направлении естественного спутника Земли. С приоб-
ретением этого опыта шло совершенствование исследовательских зондов, отправляемых
в эти полеты. Таким образом, коллективу Н.Г. Бабакина была передана конструкторская
документация на аппараты, разработанные и внедряемые ОКБ-1 С.П. Королева, которые
принято считать уже вторым поколением «лунников». Поэтому и в настоящей работе в раз-
делах, относящихся к лунной тематике, описание процесса развития этой техники начинает-
ся именно с рассказа об автоматических космических аппаратах, относящихся ко второму
поколению лунников.
Середина шестидесятых годов - стремительное, бурное, но все же еще только начало
космической эры. Аппараты, направляемые к Луне, так же, как и их создатели, были перво-
проходцами, пытающимися научиться решать достаточно конкретные задачи: уверенно со-
вершать межпланетный перелет с выходом в заданную область, произвести мягкую посад-
ку на внеземную поверхность, создать искусственный спутник другого небесного тела и т.п.
К моменту передачи тематики на Машиностроительный завод им. С.А. Лавочкина подобные
вопросы в практической космонавтике еще были проблемой, еще не были в достаточной сте-
пени отработаны - все еще предстояло сделать. Сделать впервые и далее совершенствовать
и совершенствовать технологии всех этих, а также других, все более и более усложняющихся
исследовательских процессов. Научные программы, выполняемые в то время в лунных экс-
педициях, были, по сути, рекогносцировкой, обеспечивающей развитие итерационного про-
цесса как в смысле приобретения и накопления фундаментальных знаний, так и в смысле
совершенствования и развития создаваемой исследовательской техники.
Первоначальной основой на этом пути для коллектива, возглавляемого Г.Н. Бабакиным,
стали аппараты серии Е6, структурно представляющие собой траекторный блок (унифици-
рованную платформу) и отделяемую (спускаемый аппарат, ИСЛ) или неотделяемую (ИСЛ)
полезную нагрузку.
В качестве средств выведения для них использовалась трехступенчатая ракета-носитель
«Молния» с разгонным блоком (РБ) «Л», обеспечивающим перевод космического аппарата
на траекторию перелета к Луне.
Конструкторская документация на разгонный блок «Л» также была передана на Машино-
строительный завод им. С.А. Лавочкина.
К лунной тематике коллектив Г.Н. Бабакина подключился в очень ответственный момент -
исследователи космоса, как отечественные, так и американцы, никак не могли преодолеть
некий барьер, существенно тормозящий стремительно прогрессирующую в те годы исследо-
вательскую экспансию человечества в Космос. Ни одна из ранее предпринятых попыток до-
ставить на лунную поверхность научную аппаратуру в работоспособном состоянии не увен-
чалась успехом - с 1959 по 1965 гг. было совершено пять жестких посадок американских
«Рейнджеров» и четыре - советских «Лун».
Осуществление мягкой посадки открывало широкие перспективы для реализации реког-
носцировочных исследовательских программ с применением разнообразных зондирующих
устройств (стационарных и мобильных), непосредственно контактирующих с поверхностью
изучаемых космических объектов типа Луны (характеризуемых наличием слабой гравитации,
отсутствием собственного магнитного поля, собственной атмосферы и т.п.). Это событие в то
же время стало бы констатацией завершения определенного этапа в развитии космоплава-
ния как первого целенаправленного шага за пределы околоземного пространства.
23
ГЛАВА 2
Этот этап включал в себя первичную адаптацию космических аппаратов, создаваемых
по представлениям землян, не имевших ранее подобной практики, к реальным условиям ра-
боты в Космосе. В какой-то части это касалось и служебных агрегатов и систем, и научных
приборов, а также конструкции аппарата в целом. Особенно проблематичен был выбор кон-
струкции самого зонда - по отечественной терминологии спускаемого аппарата (СА). Ему
предстояло войти в непосредственное соприкосновение с изучаемой поверхностью, о струк-
туре которой на момент подготовки экспедиции имелись весьма и весьма скудные сведения,
основанные лишь на наблюдениях с Земли и попытках объяснить наблюдаемое, опираясь
на практику земного бытия. Для пополнения этих сведений зонд, по сути, и снаряжался в
эту экспедицию с учетом того, что земных аналогов вновь обнаруженному могло просто не
быть.
Например, физической модели Луны ни у отечественных, ни у американских ученых в то
время фактически не было, и первые полеты космических аппаратов к ней происходили, в этом
Лунные посадочные аппараты
“Луна-4 ””Луна-9”, “Луна-13”
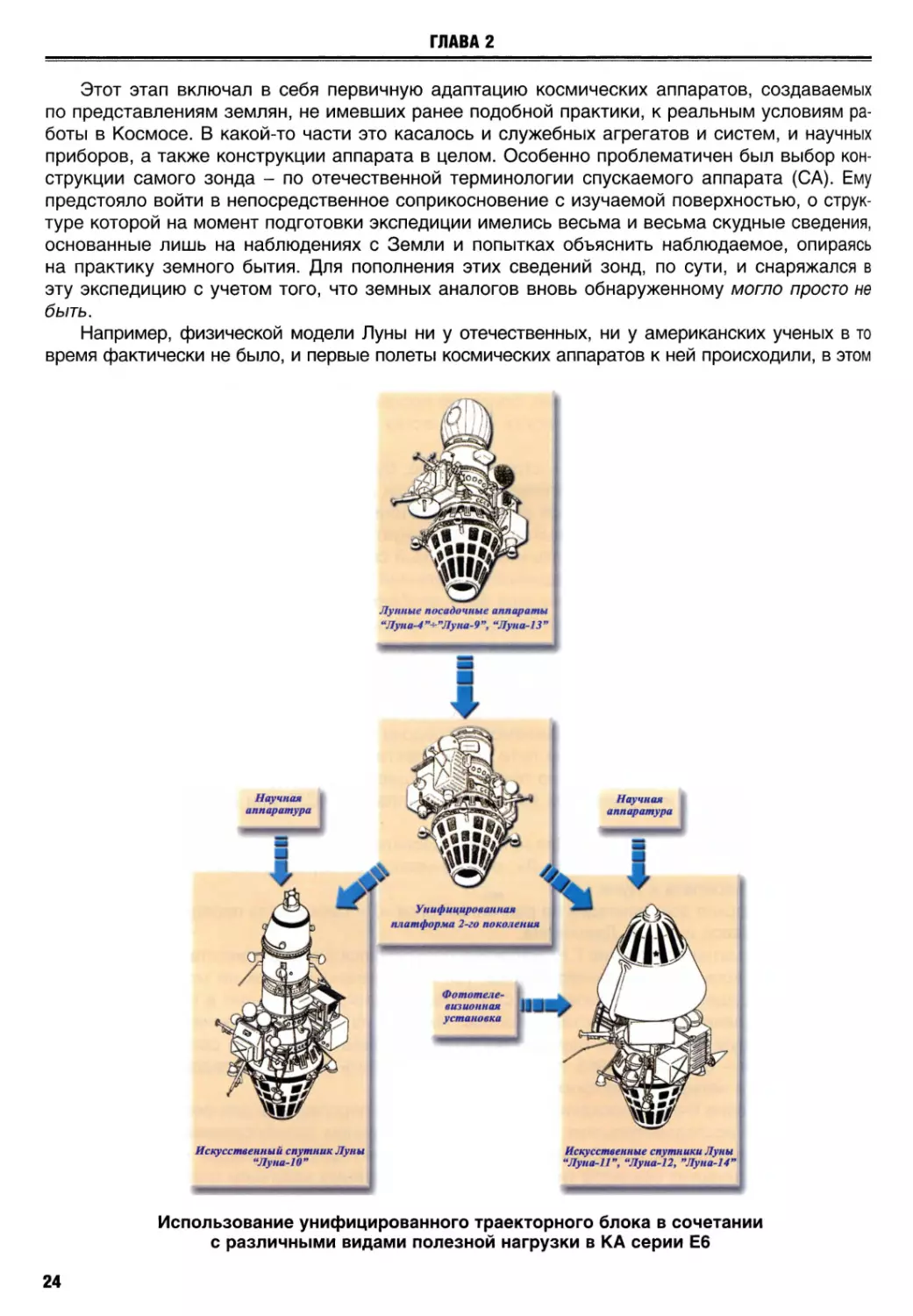
Использование унифицированного траекторного блока в сочетании
с различными видами полезной нагрузки в КА серии Е6
24
КОСМИЧЕСКИЕ АППАРАТЫ ДЛЯ ПЛАНЕТНЫХ ИССЛЕДОВАНИЙ
смысле, вслепую. Полученные с их помощью фотоизображения с достаточно близких расстоя-
ний и достаточно высокого качества, тем не менее, не давали возможности ученым однозначно
трактовать увиденное. Так, равноправно существовали мнения: что поверхность Луны - твер-
дая, представляющая собой скалистые горные пустыни; что вся она - т.н. «моря» и «материки»
- покрыта толстеннейшим слоем пыли, способным полностью поглотить попавшее в нее любое
инородное тело; что плотность ее верхнего слоя всего 0,5 г/см3, а, по мнению других ученых,
втрое выше -1,59 г/см3.
На этом этапе оптимизировалась баллистика космических полетов к Луне - сценарий по-
падания на нее «из пушки» с соответствующими промахами мимо цели или жесткими посад-
ками сменился управляемым, корректируемым полетом с достаточно точным для последую-
щих манипуляций (облет, посадка и т.п.) выведением космического летательного аппарата
(КЛА) к объекту изучения.
В достаточной степени была отработана схема так называемого сеансного диалога «Зем-
ля-КЛА», позволяющего осуществлять обмен служебными радиосигналами и воспринимать
добываемую зондом целевую информацию для последующей ее обработки и анализа в зем-
ных лабораториях.
При выполнении работ по управлению полетом «Луны-8», делающей очередную безу-
спешную попытку совершить мягкую посадку на лунную поверхность, и произошла передача
тематики «Исследование Луны и планет Солнечной системы автоматическими космически-
ми аппаратами» от С.П.Королева в ОКБ Машиностроительного завода им. С.А. Лавочкина
(ныне - ФГУП НПО им.С.А.Лавочкина). Лавочкинцы в тот момент выступали в роли стаже-
ров. Ответственность за следующий полет «лунника» уже целиком и полностью ложилась на
их плечи.
Уже в следующей экспедиции КА «Луна-9» положительный результат был достигнут. Этот
успех не следует рассматривать изолированно, но как искомую и профессионально подго-
товленную итерацию в общей последовательности решения задачи осуществления «мягкой
посадки» предшествующими ей «лунниками» С.П.Королева.
Разработанные для осуществления мягкой посадки и апробированные на «Луне-9» тех-
нологии, методики и технические решения нашли в том или ином виде свое применение при
реализации уже более сложных этапов программы исследования Луны. Многие из них полу-
чили свое развитие, иногда в то время непредсказуемое, при подготовке современных кос-
мических экспедиций.
25
ГЛАВА 2
КОСМИЧЕСКИЕ АППАРАТЫ СЕРИИ Е6М
НАЗНАЧЕНИЕ КА
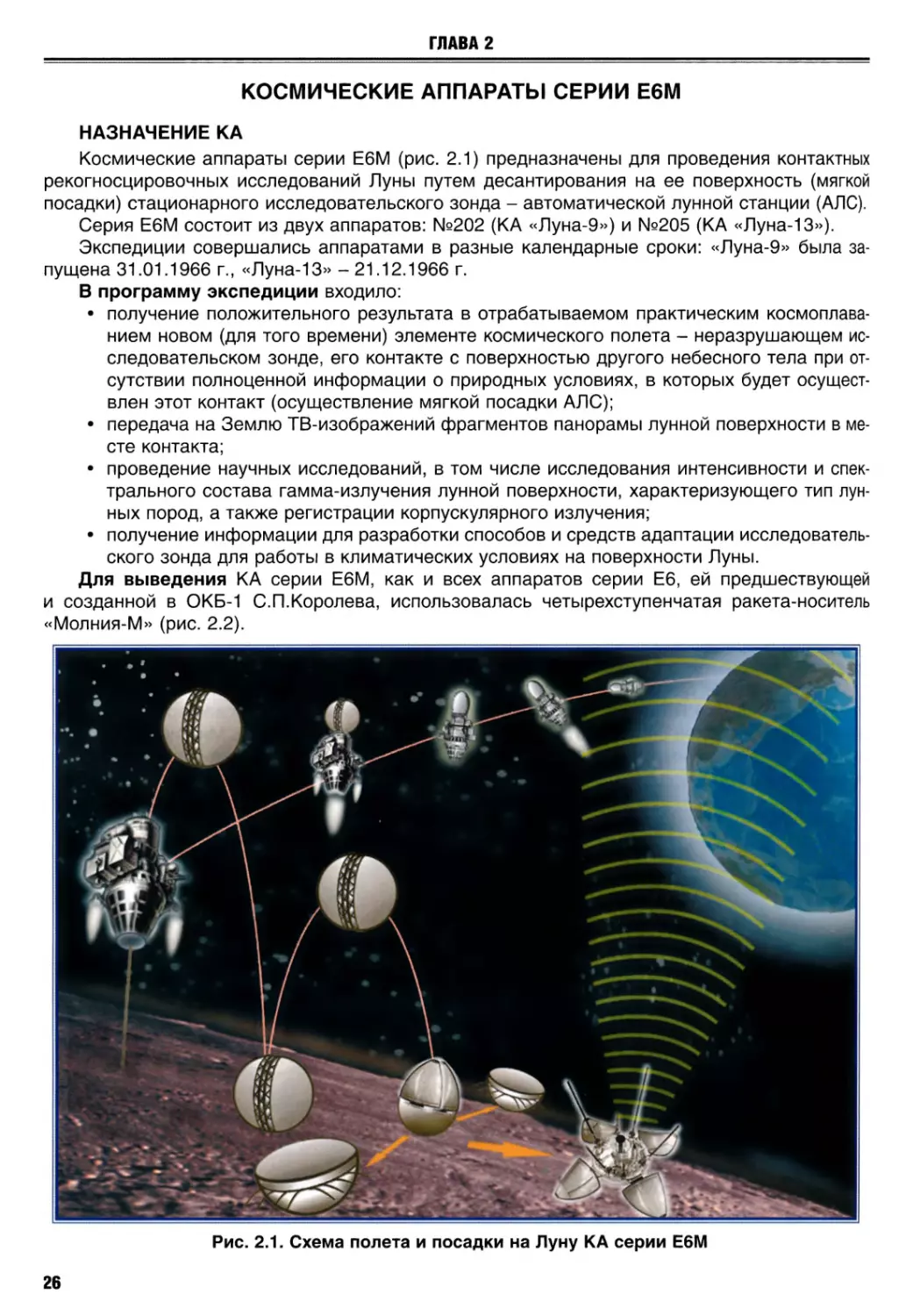
Космические аппараты серии Е6М (рис. 2.1) предназначены для проведения контактных
рекогносцировочных исследований Луны путем десантирования на ее поверхность (мягкой
посадки) стационарного исследовательского зонда - автоматической лунной станции (АЛС).
Серия Е6М состоит из двух аппаратов: №202 (КА «Луна-9») и №205 (КА «Луна-13»).
Экспедиции совершались аппаратами в разные календарные сроки: «Луна-9» была за-
пущена 31.01.1966 г., «Луна-13» - 21.12.1966 г.
В программу экспедиции входило:
• получение положительного результата в отрабатываемом практическим космоплава-
нием новом (для того времени) элементе космического полета - неразрушающем ис-
следовательском зонде, его контакте с поверхностью другого небесного тела при от-
сутствии полноценной информации о природных условиях, в которых будет осущест-
влен этот контакт (осуществление мягкой посадки АЛС);
• передача на Землю ТВ-изображений фрагментов панорамы лунной поверхности в ме-
сте контакта;
• проведение научных исследований, в том числе исследования интенсивности и спек-
трального состава гамма-излучения лунной поверхности, характеризующего тип лун-
ных пород, а также регистрации корпускулярного излучения;
• получение информации для разработки способов и средств адаптации исследователь-
ского зонда для работы в климатических условиях на поверхности Луны.
Для выведения КА серии Е6М, как и всех аппаратов серии Е6, ей предшествующей
и созданной в ОКБ-1 С.П.Королева, использовалась четырехступенчатая ракета-носитель
«Молния-М» (рис. 2.2).
Рис. 2.1. Схема полета и посадки на Луну КА серии Е6М
26
КОСМИЧЕСКИЕ АППАРАТЫ ДЛЯ ПЛАНЕТНЫХ ИССЛЕДОВАНИЙ
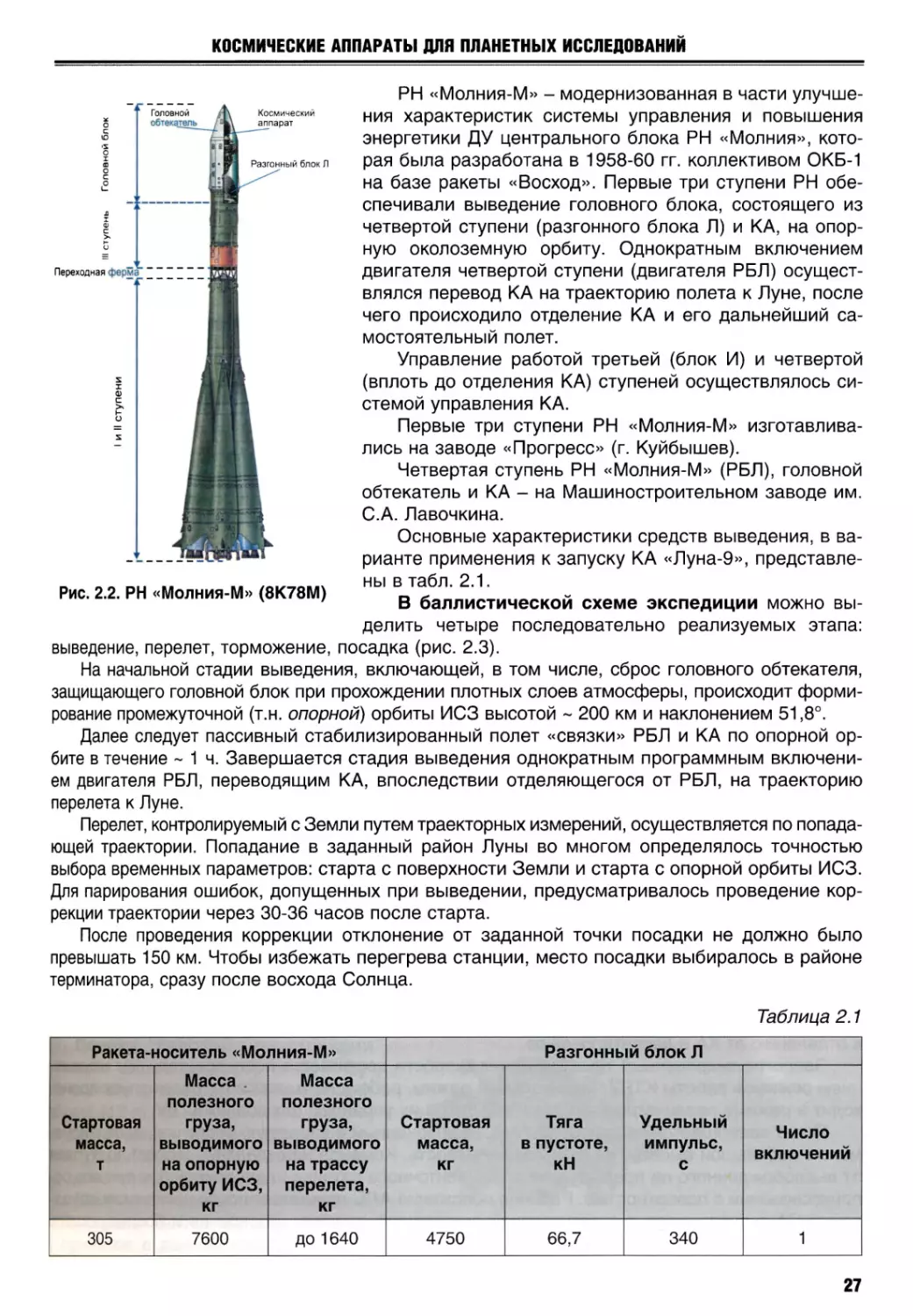
Рис. 2.2. PH «Молния-М» (8К78М)
PH «Молния-М» - модернизованная в части улучше-
ния характеристик системы управления и повышения
энергетики ДУ центрального блока PH «Молния», кото-
рая была разработана в 1958-60 гг. коллективом ОКБ-1
на базе ракеты «Восход». Первые три ступени PH обе-
спечивали выведение головного блока, состоящего из
четвертой ступени (разгонного блока Л) и КА, на опор-
ную околоземную орбиту. Однократным включением
двигателя четвертой ступени (двигателя РБЛ) осущест-
влялся перевод КА на траекторию полета к Луне, после
чего происходило отделение КА и его дальнейший са-
мостоятельный полет.
Управление работой третьей (блок И) и четвертой
(вплоть до отделения КА) ступеней осуществлялось си-
стемой управления КА.
Первые три ступени PH «Молния-М» изготавлива-
лись на заводе «Прогресс» (г. Куйбышев).
Четвертая ступень PH «Молния-М» (РБЛ), головной
обтекатель и КА - на Машиностроительном заводе им.
С.А. Лавочкина.
Основные характеристики средств выведения, в ва-
рианте применения к запуску КА «Луна-9», представле-
ны в табл. 2.1.
В баллистической схеме экспедиции можно вы-
делить четыре последовательно реализуемых этапа:
выведение, перелет, торможение, посадка (рис. 2.3).
На начальной стадии выведения, включающей, в том числе, сброс головного обтекателя,
защищающего головной блок при прохождении плотных слоев атмосферы, происходит форми-
рование промежуточной (т.н. опорной) орбиты ИСЗ высотой ~ 200 км и наклонением 51,8°.
Далее следует пассивный стабилизированный полет «связки» РБЛ и КА по опорной ор-
бите в течение ~ 1 ч. Завершается стадия выведения однократным программным включени-
ем двигателя РБЛ, переводящим КА, впоследствии отделяющегося от РБЛ, на траекторию
перелета к Луне.
Перелет, контролируемый с Земли путем траекторных измерений, осуществляется по попада-
ющей траектории. Попадание в заданный район Луны во многом определялось точностью
выбора временных параметров: старта с поверхности Земли и старта с опорной орбиты ИСЗ.
Для парирования ошибок, допущенных при выведении, предусматривалось проведение кор-
рекции траектории через 30-36 часов после старта.
После проведения коррекции отклонение от заданной точки посадки не должно было
превышать 150 км. Чтобы избежать перегрева станции, место посадки выбиралось в районе
терминатора, сразу после восхода Солнца.
Таблица 2.1
Ракета-носитель «Молния-М» Разгонный блок Л
Стартовая масса, т Масса полезного груза, выводимого на опорную орбиту ИСЗ, кг Масса полезного груза, выводимого на трассу перелета, кг Стартовая масса, кг Тяга в пустоте, кН Удельный импульс, с Число включений
305 7600 до 1640 4750 66,7 340 1
27
ГЛАВА 2
УЧАСТОК ТОРМОЖЕНИЯ
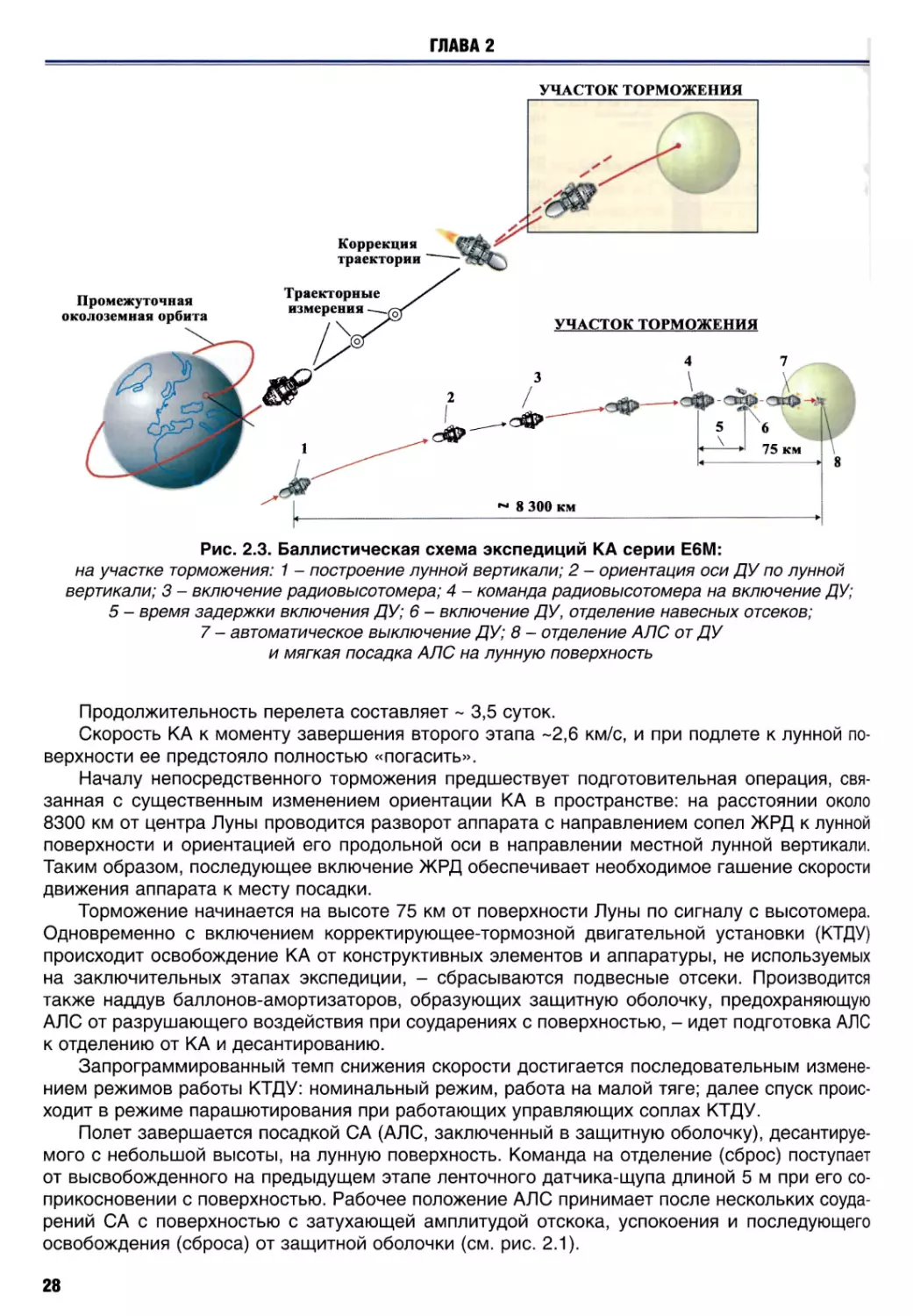
Рис. 2.3. Баллистическая схема экспедиций КА серии Е6М:
на участке торможения: 1 - построение лунной вертикали; 2 - ориентация оси ДУ по лунной
вертикали; 3 - включение радиовысотомера; 4 - команда радиовысотомера на включение ДУ;
5 - время задержки включения ДУ; 6 - включение ДУ, отделение навесных отсеков;
7 - автоматическое выключение ДУ; 8 - отделение АЛС от ДУ
и мягкая посадка АЛС на лунную поверхность
Продолжительность перелета составляет ~ 3,5 суток.
Скорость КА к моменту завершения второго этапа ~2,6 км/с, и при подлете к лунной по-
верхности ее предстояло полностью «погасить».
Началу непосредственного торможения предшествует подготовительная операция, свя-
занная с существенным изменением ориентации КА в пространстве: на расстоянии около
8300 км от центра Луны проводится разворот аппарата с направлением сопел ЖРД к лунной
поверхности и ориентацией его продольной оси в направлении местной лунной вертикали.
Таким образом, последующее включение ЖРД обеспечивает необходимое гашение скорости
движения аппарата к месту посадки.
Торможение начинается на высоте 75 км от поверхности Луны по сигналу с высотомера.
Одновременно с включением корректирующее-тормозной двигательной установки (КТДУ)
происходит освобождение КА от конструктивных элементов и аппаратуры, не используемых
на заключительных этапах экспедиции, - сбрасываются подвесные отсеки. Производится
также наддув баллонов-амортизаторов, образующих защитную оболочку, предохраняющую
АЛС от разрушающего воздействия при соударениях с поверхностью, - идет подготовка АЛС
к отделению от КА и десантированию.
Запрограммированный темп снижения скорости достигается последовательным измене-
нием режимов работы КТДУ: номинальный режим, работа на малой тяге; далее спуск проис-
ходит в режиме парашютирования при работающих управляющих соплах КТДУ.
Полет завершается посадкой СА (АЛС, заключенный в защитную оболочку), десантируе-
мого с небольшой высоты, на лунную поверхность. Команда на отделение (сброс) поступает
от высвобожденного на предыдущем этапе ленточного датчика-щупа длиной 5 м при его со-
прикосновении с поверхностью. Рабочее положение АЛС принимает после нескольких соуда-
рений СА с поверхностью с затухающей амплитудой отскока, успокоения и последующего
освобождения (сброса) от защитной оболочки (см. рис. 2.1).
28
КОСМИЧЕСКИЕ АППАРАТЫ ДЛЯ ПЛАНЕТНЫХ ИССЛЕДОВАНИЙ
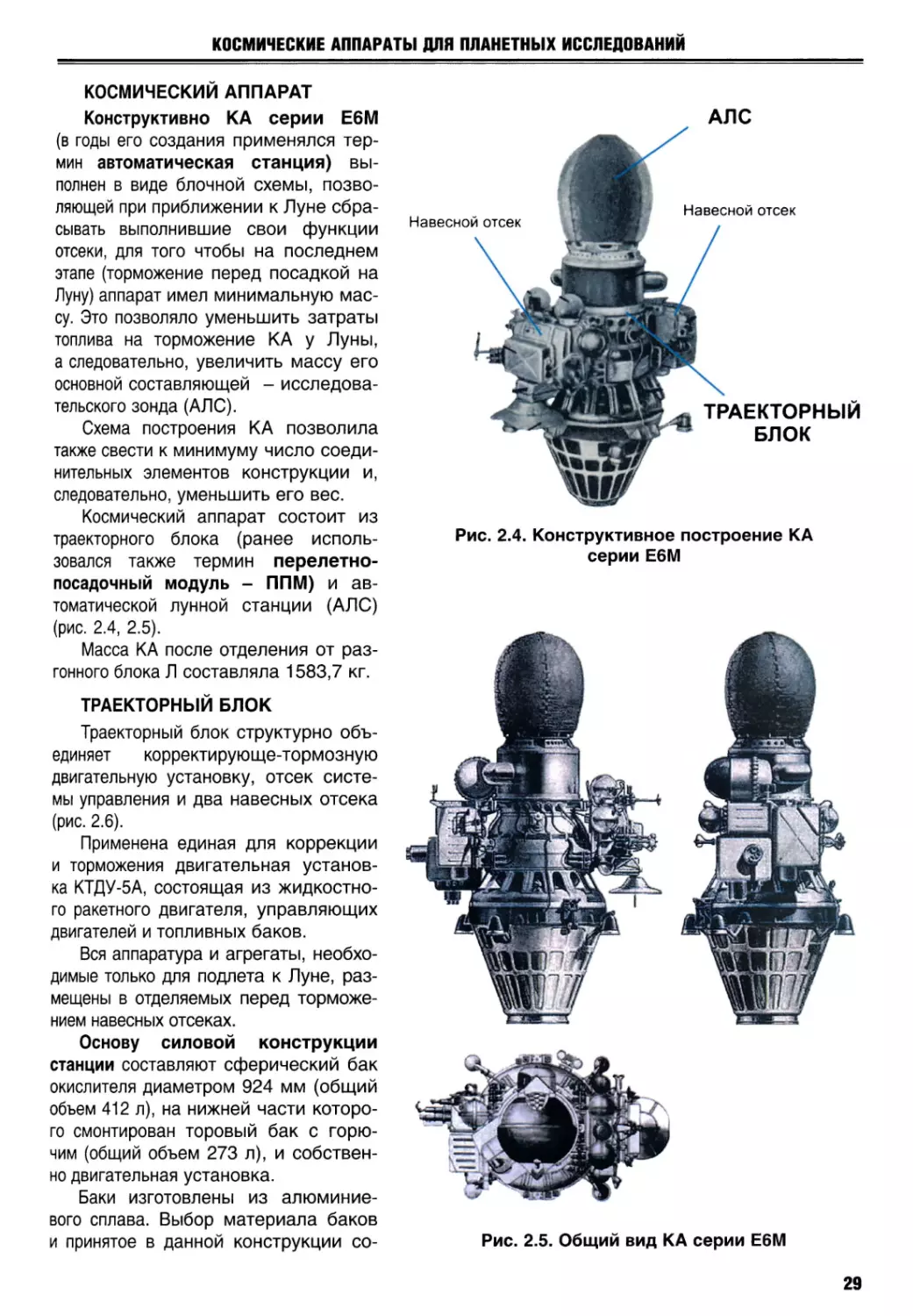
КОСМИЧЕСКИЙ АППАРАТ
Конструктивно КА серии Е6М
(в годы его создания применялся тер-
мин автоматическая станция) вы-
полнен в виде блочной схемы, позво-
ляющей при приближении к Луне сбра-
сывать выполнившие свои функции
отсеки, для того чтобы на последнем
этапе (торможение перед посадкой на
Луну) аппарат имел минимальную мас-
су. Это позволяло уменьшить затраты
топлива на торможение КА у Луны,
а следовательно, увеличить массу его
основной составляющей - исследова-
тельского зонда (АЛС).
Схема построения КА позволила
также свести к минимуму число соеди-
нительных элементов конструкции и,
следовательно, уменьшить его вес.
Космический аппарат состоит из
траекторного блока (ранее исполь-
зовался также термин перелетно-
посадочный модуль - ППМ) и ав-
томатической лунной станции (АЛС)
(рис. 2.4, 2.5).
Масса КА после отделения от раз-
гонного блока Л составляла 1583,7 кг.
ТРАЕКТОРНЫЙ БЛОК
Траекторный блок структурно объ-
единяет корректирующе-тормозную
двигательную установку, отсек систе-
мы управления и два навесных отсека
(рис. 2.6).
Применена единая для коррекции
и торможения двигательная установ-
ка КТДУ-5А, состоящая из жидкостно-
го ракетного двигателя, управляющих
двигателей и топливных баков.
Вся аппаратура и агрегаты, необхо-
димые только для подлета к Луне, раз-
мещены в отделяемых перед торможе-
нием навесных отсеках.
Основу силовой конструкции
станции составляют сферический бак
окислителя диаметром 924 мм (общий
объем 412 л), на нижней части которо-
го смонтирован торовый бак с горю-
чим (общий объем 273 л), и собствен-
но двигательная установка.
Баки изготовлены из алюминие-
вого сплава. Выбор материала баков
и принятое в данной конструкции со-
АЛС
Рис. 2.4. Конструктивное построение КА
серии Е6М
Рис. 2.5. Общий вид КА серии Е6М
29
ГЛАВА 2
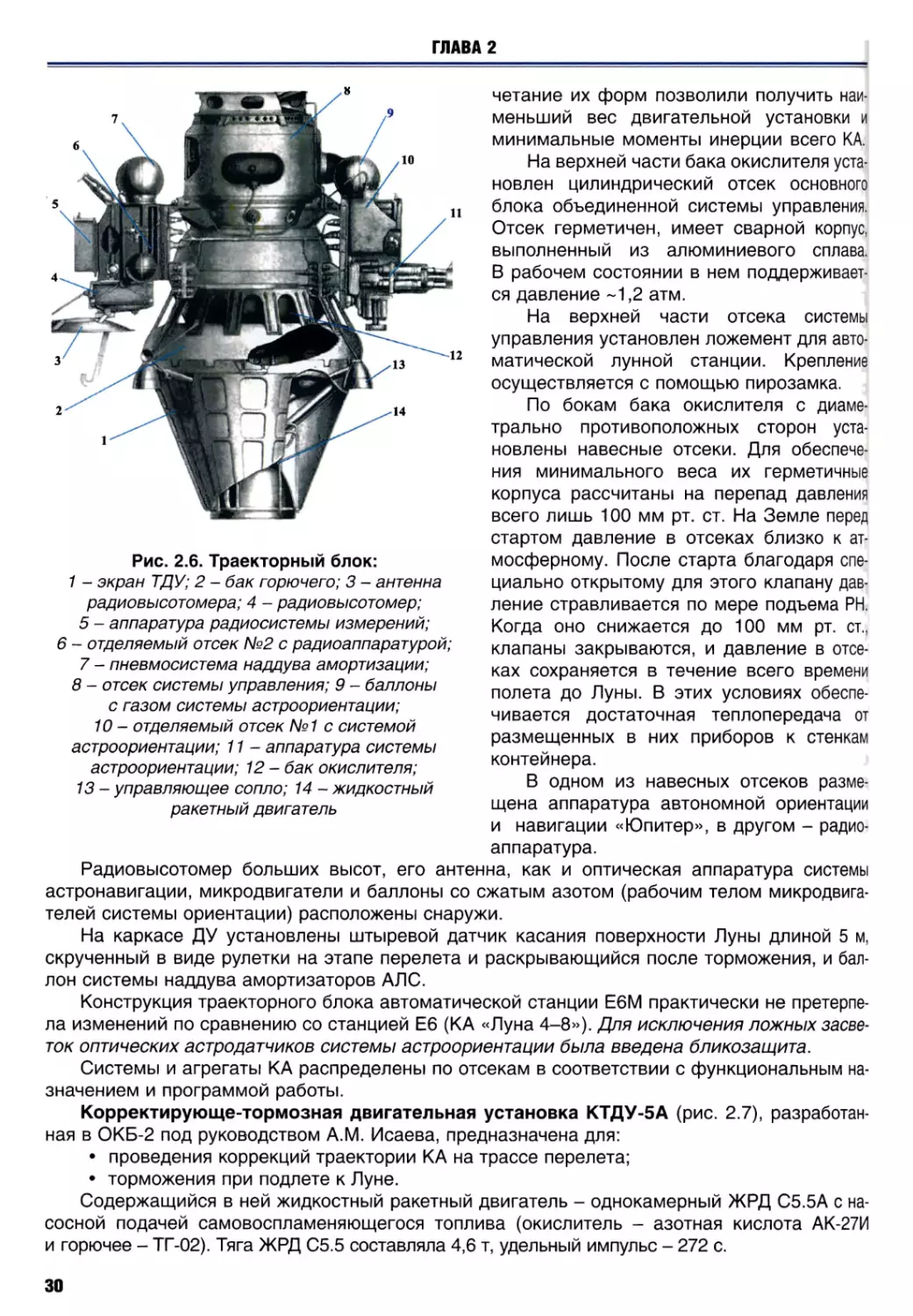
Рис. 2.6. Траекторный блок:
1 - экран ТДУ; 2 - бак горючего; 3 - антенна
радиовысотомера; 4 - радиовысотомер;
5 - аппаратура радиосистемы измерений;
6 - отделяемый отсек №2 с радиоаппаратурой;
7 - пневмосистема наддува амортизации;
8 - отсек системы управления; 9 - баллоны
с газом системы астроориентации;
10 - отделяемый отсек № 1 с системой
астроориентации; 11 - аппаратура системы
астроориентации; 12 - бак окислителя;
13- управляющее сопло; 14 - жидкостный
ракетный двигатель
метание их форм позволили получить наи-
меньший вес двигательной установки и
минимальные моменты инерции всего КА.
На верхней части бака окислителя уста-
новлен цилиндрический отсек основного
блока объединенной системы управления.
Отсек герметичен, имеет сварной корпус,
выполненный из алюминиевого сплава.
В рабочем состоянии в нем поддерживает-
ся давление -1,2 атм.
На верхней части отсека системы
управления установлен ложемент для авто-
матической лунной станции. Крепление
осуществляется с помощью пирозамка.
По бокам бака окислителя с диаме-
трально противоположных сторон уста-
новлены навесные отсеки. Для обеспече-
ния минимального веса их герметичные
корпуса рассчитаны на перепад давления
всего лишь 100 мм рт. ст. На Земле перед
стартом давление в отсеках близко к ат-
мосферному. После старта благодаря спе-
циально открытому для этого клапану дав-
ление стравливается по мере подъема PH.
Когда оно снижается до 100 мм рт. ст.,
клапаны закрываются, и давление в отсе-
ках сохраняется в течение всего времени
полета до Луны. В этих условиях обеспе-
чивается достаточная теплопередача от
размещенных в них приборов к стенкам
контейнера.
В одном из навесных отсеков разме-
щена аппаратура автономной ориентации
и навигации «Юпитер», в другом - радио-
аппаратура.
Радиовысотомер больших высот, его антенна, как и оптическая аппаратура системы
астронавигации, микродвигатели и баллоны со сжатым азотом (рабочим телом микродвига-
телей системы ориентации) расположены снаружи.
На каркасе ДУ установлены штыревой датчик касания поверхности Луны длиной 5 м,
скрученный в виде рулетки на этапе перелета и раскрывающийся после торможения, и бал-
лон системы наддува амортизаторов АЛС.
Конструкция траекторного блока автоматической станции Е6М практически не претерпе-
ла изменений по сравнению со станцией Е6 (КА «Луна 4-8»). Для исключения ложных засве-
ток оптических астродатчиков системы астроориентации была введена бликозащита.
Системы и агрегаты КА распределены по отсекам в соответствии с функциональным на-
значением и программой работы.
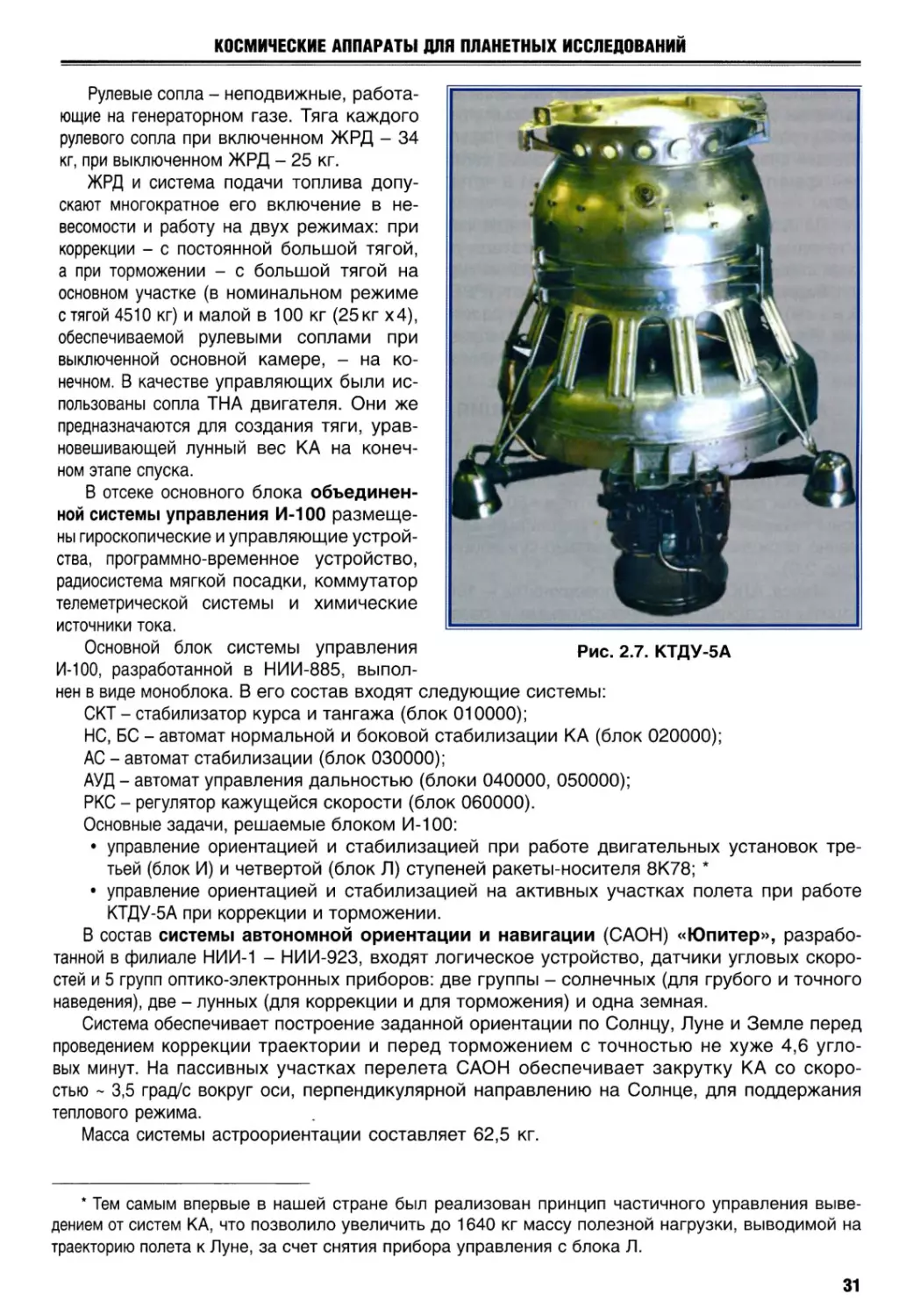
Корректирующе-тормозная двигательная установка КТДУ-5А (рис. 2.7), разработан-
ная в ОКБ-2 под руководством А.М. Исаева, предназначена для:
• проведения коррекций траектории КА на трассе перелета;
• торможения при подлете к Луне.
Содержащийся в ней жидкостный ракетный двигатель - однокамерный ЖРД С5.5А с на-
сосной подачей самовоспламеняющегося топлива (окислитель - азотная кислота АК-27И
и горючее - ТГ-02). Тяга ЖРД С5.5 составляла 4,6 т, удельный импульс - 272 с.
30
КОСМИЧЕСКИЕ АППАРАТЫ ДЛЯ ПЛАНЕТНЫХ ИССЛЕДОВАНИЙ
Рулевые сопла - неподвижные, работа-
ющие на генераторном газе. Тяга каждого
рулевого сопла при включенном ЖРД - 34
кг, при выключенном ЖРД - 25 кг.
ЖРД и система подачи топлива допу-
скают многократное его включение в не-
весомости и работу на двух режимах: при
коррекции - с постоянной большой тягой,
а при торможении - с большой тягой на
основном участке (в номинальном режиме
с тягой 4510 кг) и малой в 100 кг (25 кг х4),
обеспечиваемой рулевыми соплами при
выключенной основной камере, - на ко-
нечном. В качестве управляющих были ис-
пользованы сопла ТНА двигателя. Они же
предназначаются для создания тяги, урав-
новешивающей лунный вес КА на конеч-
ном этапе спуска.
В отсеке основного блока объединен-
ной системы управления И-100 размеще-
ны гироскопические и управляющие устрой-
ства, программно-временное устройство,
радиосистема мягкой посадки, коммутатор
телеметрической системы и химические
источники тока.
Основной блок системы управления рис. 2.7. КТДУ-5А
И-100, разработанной в НИИ-885, выпол-
нен в виде моноблока. В его состав входят следующие системы:
СКТ - стабилизатор курса и тангажа (блок 010000);
НС, БС - автомат нормальной и боковой стабилизации КА (блок 020000);
АС - автомат стабилизации (блок 030000);
АУД - автомат управления дальностью (блоки 040000, 050000);
РКС - регулятор кажущейся скорости (блок 060000).
Основные задачи, решаемые блоком И-100:
• управление ориентацией и стабилизацией при работе двигательных установок тре-
тьей (блок И) и четвертой (блок Л) ступеней ракеты-носителя 8К78; *
• управление ориентацией и стабилизацией на активных участках полета при работе
КТДУ-5А при коррекции и торможении.
В состав системы автономной ориентации и навигации (САОН) «Юпитер», разрабо-
танной в филиале НИИ-1 - НИИ-923, входят логическое устройство, датчики угловых скоро-
стей и 5 групп оптико-электронных приборов: две группы - солнечных (для грубого и точного
наведения), две - лунных (для коррекции и для торможения) и одна земная.
Система обеспечивает построение заданной ориентации по Солнцу, Луне и Земле перед
проведением коррекции траектории и перед торможением с точностью не хуже 4,6 угло-
вых минут. На пассивных участках перелета САОН обеспечивает закрутку КА со скоро-
стью - 3,5 град/с вокруг оси, перпендикулярной направлению на Солнце, для поддержания
теплового режима.
Масса системы астроориентации составляет 62,5 кг.
* Тем самым впервые в нашей стране был реализован принцип частичного управления выве-
дением от систем КА, что позволило увеличить до 1640 кг массу полезной нагрузки, выводимой на
траекторию полета к Луне, за счет снятия прибора управления с блока Л.
31
ГЛАВА 2
Исполнительными органами системы ориентации являются микродвигатели, работа-
ющие на сжатом азоте. Для стабилизации относительно оси X используются два сопла тягой
по 30 грамм, относительно оси Y - две пары сопел с тягой одного сопла 36 г, а вокруг оси
Z - два спаренных сопла с тягой одного сопла 30 г. Рабочее тело (азот) для микродвигате-
лей хранится под давлением 350 атм в четырех баллонах по 8 литров и трех баллонах по
2,6 л.
По команде на включение двигателя система астроориентации отключается. Дальше
в течение всего времени работы двигателя управление КА и его стабилизация обеспечива-
ются специальной системой, состоящей из гироскопических устройств.
Радиовысотомер больших высот (РВБВ), работающий в сантиметровом диапазоне
(Х=3 см), предназначен для измерения расстояния до поверхности Луны на этапе торможе-
ния. Радиовысотомер имеет свою узконаправленную параболическую антенну.
При достижении высоты 75 км РВБВ формирует метку для включения КТДУ на торможе-
ние. Точность определения высоты ±70 м.
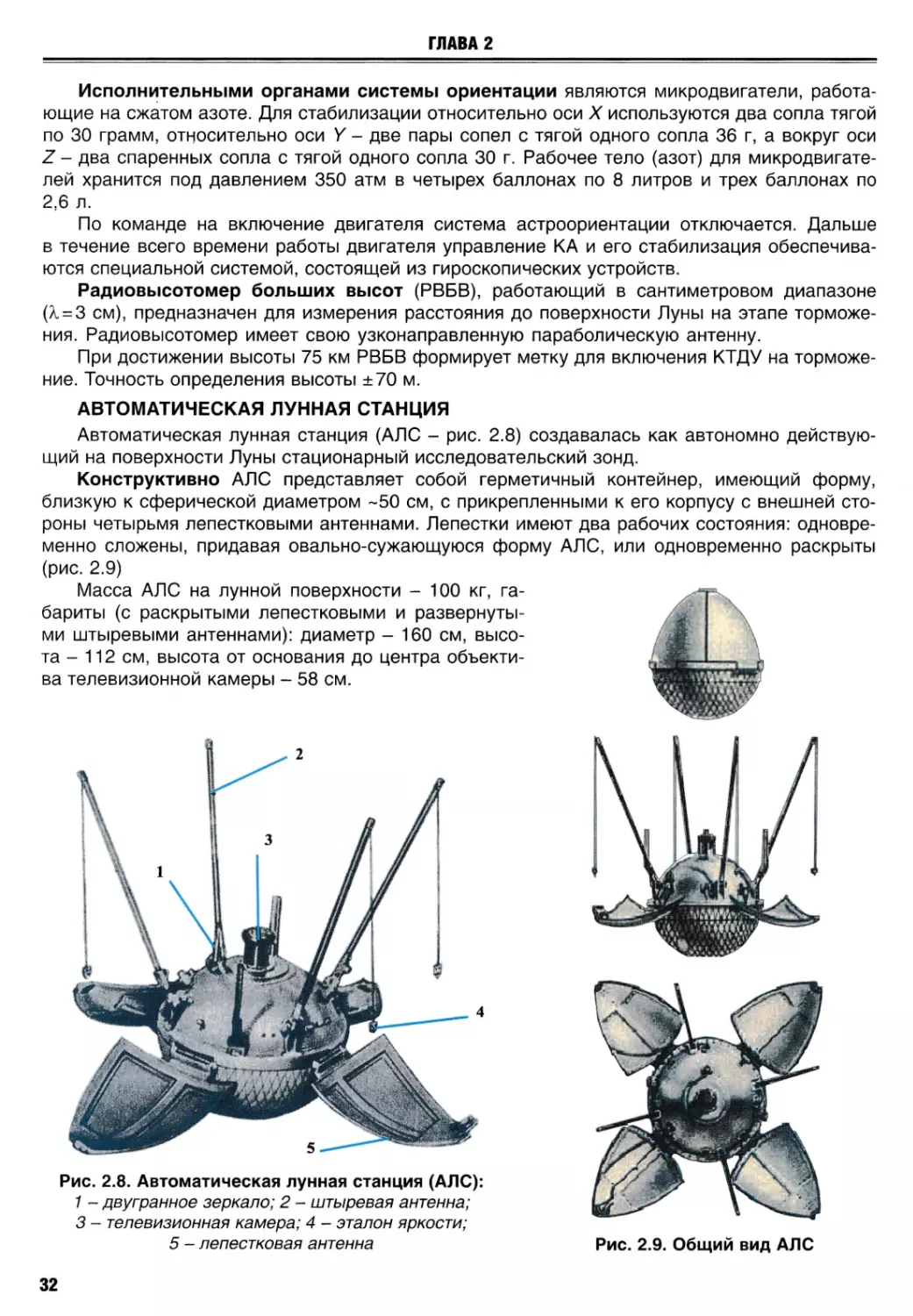
АВТОМАТИЧЕСКАЯ ЛУННАЯ СТАНЦИЯ
Автоматическая лунная станция (АЛС - рис. 2.8) создавалась как автономно действую-
щий на поверхности Луны стационарный исследовательский зонд.
Конструктивно АЛС представляет собой герметичный контейнер, имеющий форму,
близкую к сферической диаметром ~50 см, с прикрепленными к его корпусу с внешней сто-
роны четырьмя лепестковыми антеннами. Лепестки имеют два рабочих состояния: одновре-
менно сложены, придавая овально-сужающуюся форму АЛС, или одновременно раскрыты
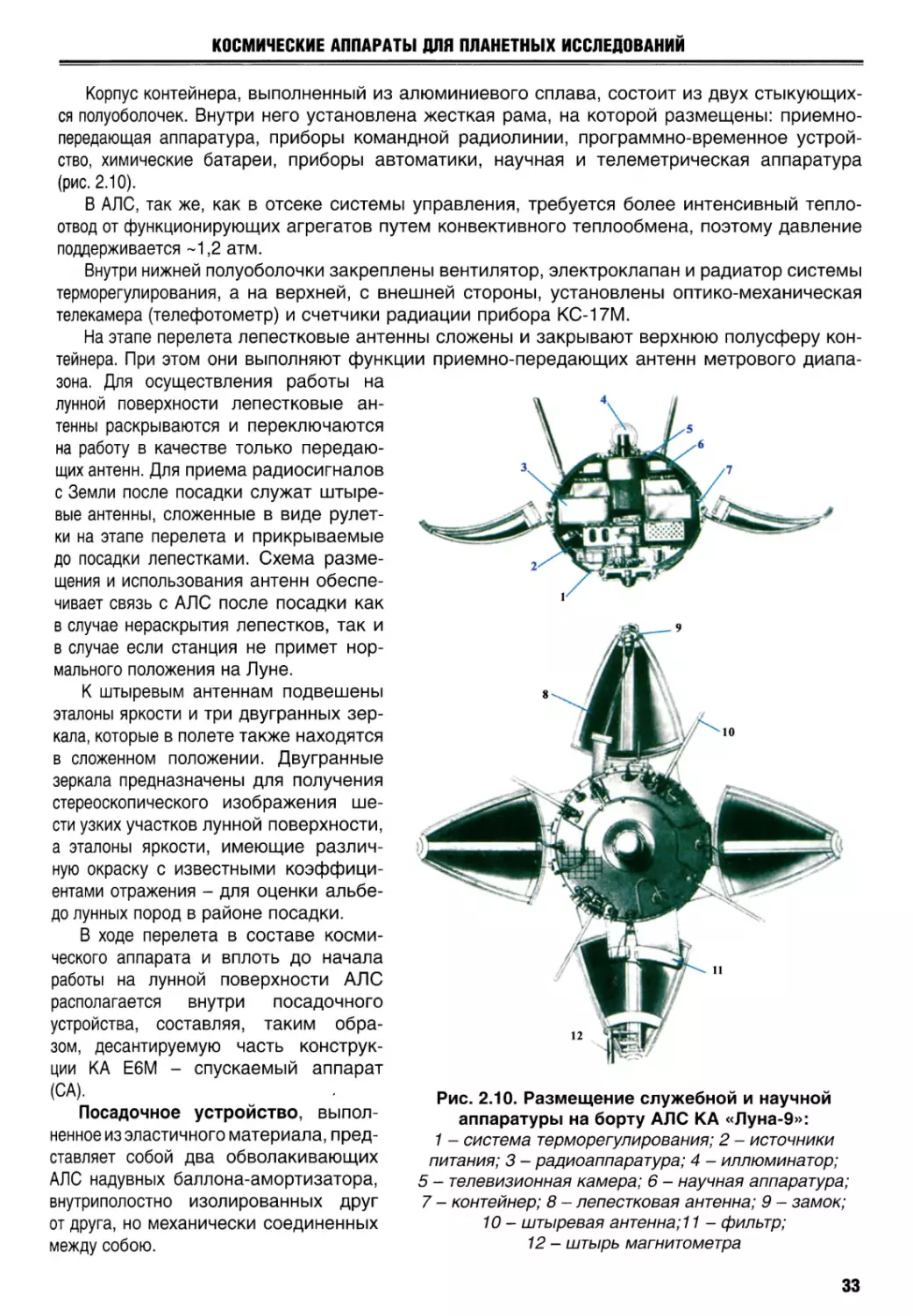
(рис. 2.9)
Масса АЛС на лунной поверхности - 100 кг, га-
бариты (с раскрытыми лепестковыми и развернуты- /а
ми штыревыми антеннами): диаметр - 160 см, высо- Л
та - 112 см, высота от основания до центра объекти- _ L
ва телевизионной камеры - 58 см.
Рис. 2.8. Автоматическая лунная станция (АЛС)
1 - двугранное зеркало; 2 - штыревая антенна;
3 - телевизионная камера; 4 - эталон яркости;
5 - лепестковая антенна
Рис. 2.9. Общий вид АЛС
32
КОСМИЧЕСКИЕ АППАРАТЫ ДЛЯ ПЛАНЕТНЫХ ИССЛЕДОВАНИЙ
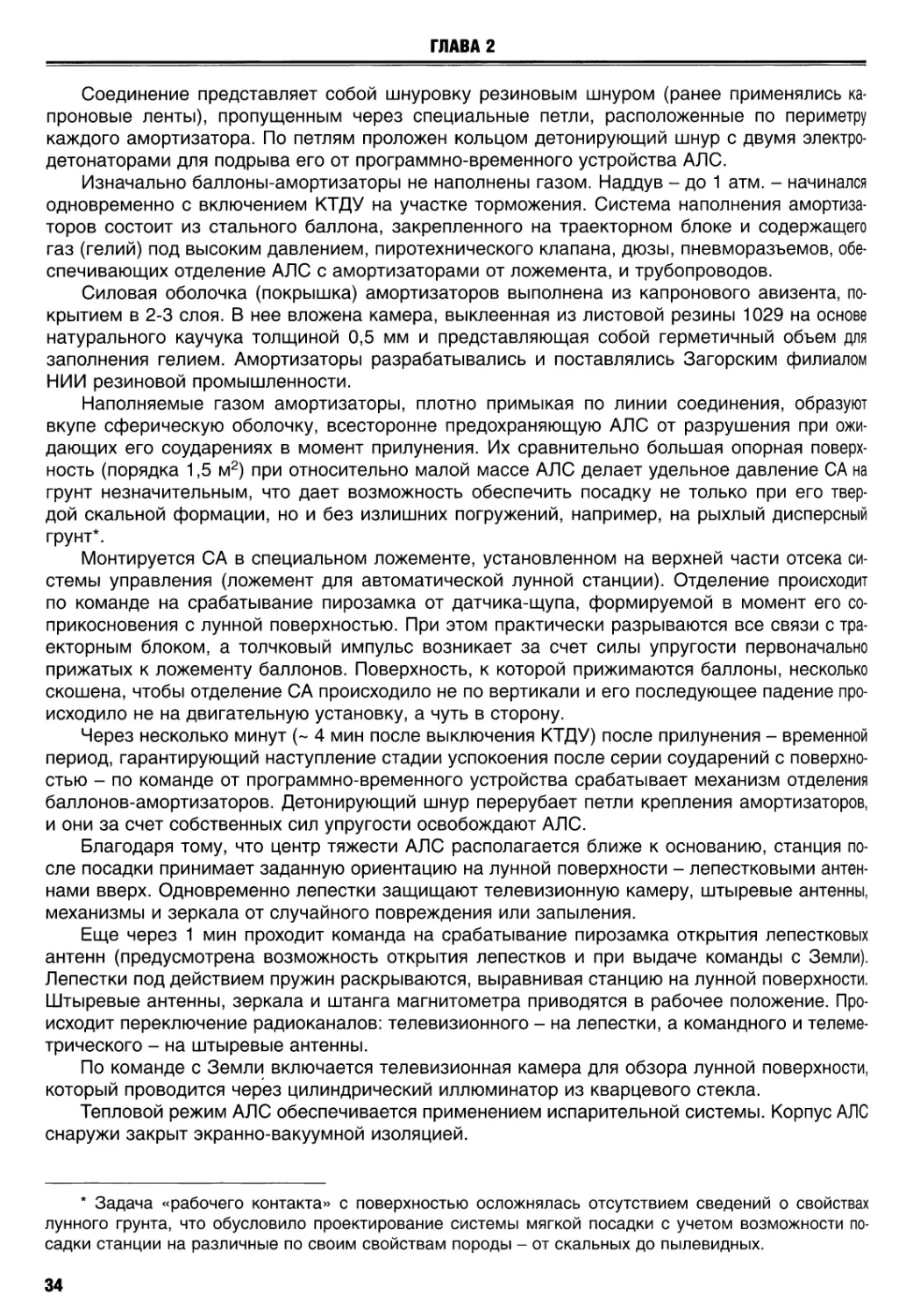
Корпус контейнера, выполненный из алюминиевого сплава, состоит из двух стыкующих-
ся полуоболочек. Внутри него установлена жесткая рама, на которой размещены: приемно-
передающая аппаратура, приборы командной радиолинии, программно-временное устрой-
ство, химические батареи, приборы автоматики, научная и телеметрическая аппаратура
(рис. 2.10).
В АЛС, так же, как в отсеке системы управления, требуется более интенсивный тепло-
отвод от функционирующих агрегатов путем конвективного теплообмена, поэтому давление
поддерживается —1,2 атм.
Внутри нижней полуоболочки закреплены вентилятор, электроклапан и радиатор системы
терморегулирования, а на верхней, с внешней стороны, установлены оптико-механическая
телекамера (телефотометр) и счетчики радиации прибора КС-17М.
На этапе перелета лепестковые антенны сложены и закрывают верхнюю полусферу кон-
тейнера. При этом они выполняют функции приемно-передающих антенн метрового диапа-
зона. Для осуществления работы на
лунной поверхности лепестковые ан-
тенны раскрываются и переключаются
на работу в качестве только передаю-
щих антенн. Для приема радиосигналов
с Земли после посадки служат штыре-
вые антенны, сложенные в виде рулет-
ки на этапе перелета и прикрываемые
до посадки лепестками. Схема разме-
щения и использования антенн обеспе-
чивает связь с АЛС после посадки как
в случае нераскрытая лепестков, так и
в случае если станция не примет нор-
мального положения на Луне.
К штыревым антеннам подвешены
эталоны яркости и три двугранных зер-
кала, которые в полете также находятся
в сложенном положении. Двугранные
зеркала предназначены для получения
стереоскопического изображения ше-
сти узких участков лунной поверхности,
а эталоны яркости, имеющие различ-
ную окраску с известными коэффици-
ентами отражения - для оценки альбе-
до лунных пород в районе посадки.
В ходе перелета в составе косми-
ческого аппарата и вплоть до начала
работы на лунной поверхности АЛС
располагается внутри посадочного
устройства, составляя, таким обра-
зом, десантируемую часть конструк-
ции КА Е6М - спускаемый аппарат
(СА).
Посадочное устройство, выпол-
ненное из эластичного материала, пред-
ставляет собой два обволакивающих
АЛС надувных баллона-амортизатора,
внутриполостно изолированных друг
от друга, но механически соединенных
между собою.
Рис. 2.10. Размещение служебной и научной
аппаратуры на борту АЛС КА «Луна-9»:
1 - система терморегулирования; 2 - источники
питания; 3 - радиоаппаратура; 4 - иллюминатор;
5 - телевизионная камера; 6 - научная аппаратура;
7 - контейнер; 8 - лепестковая антенна; 9 - замок;
10 - штыревая антенна;11 - фильтр;
12 - штырь магнитометра
33
ГЛАВА 2
Соединение представляет собой шнуровку резиновым шнуром (ранее применялись ка-
проновые ленты), пропущенным через специальные петли, расположенные по периметру
каждого амортизатора. По петлям проложен кольцом детонирующий шнур с двумя электро-
детонаторами для подрыва его от программно-временного устройства АЛС.
Изначально баллоны-амортизаторы не наполнены газом. Наддув - до 1 атм. - начинался
одновременно с включением КТДУ на участке торможения. Система наполнения амортиза-
торов состоит из стального баллона, закрепленного на траекторном блоке и содержащего
газ (гелий) под высоким давлением, пиротехнического клапана, дюзы, пневморазъемов, обе-
спечивающих отделение АЛС с амортизаторами от ложемента, и трубопроводов.
Силовая оболочка (покрышка) амортизаторов выполнена из капронового авизента, по-
крытием в 2-3 слоя. В нее вложена камера, выклеенная из листовой резины 1029 на основе
натурального каучука толщиной 0,5 мм и представляющая собой герметичный объем для
заполнения гелием. Амортизаторы разрабатывались и поставлялись Загорским филиалом
НИИ резиновой промышленности.
Наполняемые газом амортизаторы, плотно примыкая по линии соединения, образуют
вкупе сферическую оболочку, всесторонне предохраняющую АЛС от разрушения при ожи-
дающих его соударениях в момент прилунения. Их сравнительно большая опорная поверх-
ность (порядка 1,5 м2) при относительно малой массе АЛС делает удельное давление СА на
грунт незначительным, что дает возможность обеспечить посадку не только при его твер-
дой скальной формации, но и без излишних погружений, например, на рыхлый дисперсный
грунт*.
Монтируется СА в специальном ложементе, установленном на верхней части отсека си-
стемы управления (ложемент для автоматической лунной станции). Отделение происходит
по команде на срабатывание пирозамка от датчика-щупа, формируемой в момент его со-
прикосновения с лунной поверхностью. При этом практически разрываются все связи с тра-
екторным блоком, а толчковый импульс возникает за счет силы упругости первоначально
прижатых к ложементу баллонов. Поверхность, к которой прижимаются баллоны, несколько
скошена, чтобы отделение СА происходило не по вертикали и его последующее падение про-
исходило не на двигательную установку, а чуть в сторону.
Через несколько минут (~ 4 мин после выключения КТДУ) после прилунения - временной
период, гарантирующий наступление стадии успокоения после серии соударений с поверхно-
стью - по команде от программно-временного устройства срабатывает механизм отделения
баллонов-амортизаторов. Детонирующий шнур перерубает петли крепления амортизаторов,
и они за счет собственных сил упругости освобождают АЛС.
Благодаря тому, что центр тяжести АЛС располагается ближе к основанию, станция по-
сле посадки принимает заданную ориентацию на лунной поверхности - лепестковыми антен-
нами вверх. Одновременно лепестки защищают телевизионную камеру, штыревые антенны,
механизмы и зеркала от случайного повреждения или запыления.
Еще через 1 мин проходит команда на срабатывание пирозамка открытия лепестковых
антенн (предусмотрена возможность открытия лепестков и при выдаче команды с Земли).
Лепестки под действием пружин раскрываются, выравнивая станцию на лунной поверхности.
Штыревые антенны, зеркала и штанга магнитометра приводятся в рабочее положение. Про-
исходит переключение радиоканалов: телевизионного - на лепестки, а командного и телеме-
трического - на штыревые антенны.
По команде с Земли включается телевизионная камера для обзора лунной поверхности,
который проводится через цилиндрический иллюминатор из кварцевого стекла.
Тепловой режим АЛС обеспечивается применением испарительной системы. Корпус АЛС
снаружи закрыт экранно-вакуумной изоляцией.
* Задача «рабочего контакта» с поверхностью осложнялась отсутствием сведений о свойствах
лунного грунта, что обусловило проектирование системы мягкой посадки с учетом возможности по-
садки станции на различные по своим свойствам породы - от скальных до пылевидных.
34
КОСМИЧЕСКИЕ АППАРАТЫ ДЛЯ ПЛАНЕТНЫХ ИССЛЕДОВАНИЙ
По результатам предшествующих полетов КА «Луна- 4-8» специалистами КБ Машино-
строительного завода им. С.А. Лавочкина были внесены улучшения в конструкцию стан-
ции и, в первую очередь, существенно доработана система мягкой посадки. В частности:
• была проведена доработка амортизаторов, заключавшаяся в усилении прочности обо-
лочки в местах складок и вызванная случаями разрушения ее в момент отделения СА
от ложемента («Луна-8» - разрыв одного из амортизаторов сломавшимся стеклопла-
стиковым кронштейном крепления лепестковых антенн: газ начал выходить в космос,
создавая значительный вращающий момент, аппарат на скорости врезался в Луну);
• была улучшена конструкция обвязки амортизаторов в сложенном виде. Капроновый
шнур, используемый для обвязки, был заменен резиновым, что обеспечило более
плотную укладку амортизаторов и повысило надежность обвязки;
• была разработана новая конструкция теплоизоляции. Изготовленная в виде четырех
лепестков, выклеенных из стеклоткани и покрытых снаружи ЭВТИ, новая конструкция
теплоизоляции исключила случаи «заедания», имевшие место при экспериментах со
старой конструкцией;
• была существенно откорректирована инструкция по укладке амортизаторов. Инструк-
ция разработчика содержала самые общие указания по укладке. Заново были разра-
ботаны методика удаления воздуха из внутренних полостей амортизаторов и методи-
ка контроля.
Однако основная причина «жесткой» посадки предшественников КА «Луна-9» заключа-
лась в том, что в циклограмме их полета не было предусмотрено проведение целенаправ-
ленного парирования возмущающих моментов, возникающих при наполнении амортизато-
ров гелием. Проведенный анализ аварийных ситуаций показал, что расчет в этом смыс-
ле на возможности системы астроориентации и стабилизации, работающей одновременно
с наддувом баллонов-амортизаторов, был неоправданным - сопла этой системы давали
максимальную тягу, равную всего 33 г. Величина же возмущающих моментов такова, что
их парирование достижимо лишь при работе КТДУ, когда тяга каждого рулевого сопла при
включенном ЖРД составляла 34 кг. Поэтому в циклограмме полета КА «Луна-9» процессы
наполнения амортизаторов и сброса теплоизоляции запланированы уже после включения
КТДУ на торможение.
Это, в свою очередь, привело к изменению настроек в системе автоматического управ-
ления станции (блок И-100), а также была изменена последовательность выхода меток ПВУ.
СЛУЖЕБНАЯ И НАУЧНАЯ АППАРАТУРА АПС
Бортовая аппаратура АЛС для КА «Луна-9» и «Луна-13» несколько различается, что объ-
ясняется как постепенно приобретаемым опытом в создании подобных зондов, так и суще-
ствующими отличиями научных программ, для выполнения которых они были предназна-
чены - см. раздел «Реализация проекта. Космический аппарат «Луна-13» (Е6М №205)».
Радиокомплекс лунной станции КРС обеспечивает радиосвязь как на трассе перелета,
так и на поверхности Луны. Команды по линии Земля - борт (общее количество команд - 28)
передаются в метровом диапазоне с Х=3 м, а телевизионная и телеметрическая информация
по линии борт — Земля также в метровом диапазоне с Х=1,6 м. Мощность бортового передатчи-
ка - 3 Вт. Поскольку точность траекторных измерений в метровом диапазоне была недостаточ-
на, на борту установлена угломерная система дециметрового диапазона (Х=32 см) «Маяк-6».
Для сбора телеметрической информации на борту КА установлены два коммутатора.
Один из них обеспечивает подключение 110 аналоговых датчиков с преобразованием полу-
чаемой информации в 4-разрядный код и 6 групп контактных датчиков (по 3 в каждой груп-
пе). Каждый канал ТМ подключается для вывода информации 1 раз в 12,8 секунды. Второй
коммутатор работает только на участке работы двигательной установки и обеспечивает под-
ключение 114 аналоговых датчиков и 4 групп контактных датчиков (по 3 в каждой группе).
Каждый канал ТМ подключается для вывода информации 1 раз в 6,4 секунды. Сбор и пере-
дача на Землю телеметрической служебной, научной и телевизионной информации осущест-
вляется только в сеансах связи в режиме непосредственной передачи.
35
ГЛАВА 2
Телеметрическая служебная информация обеспечивает возможность контроля как рабо-
ты бортовой аппаратуры, так и состояния различных элементов конструкции. Предусмотрено
измерение температуры и давления во всех герметических отсеках, а также температуры в
различных местах оболочек и внутри многих приборов. Контролю подвергаются величины
электрического напряжения как непосредственно у источников электропитания, так и после
трансформации различными преобразователями. По сигналам телеметрии контролируется
осуществление различных операций, например раскрытие антенн, отделение тех или других
частей, срабатывание механизмов.
Столь тщательное исследование состояния всего комплекса аппаратуры и в особенно-
сти самой станции «Луна-9», было одной из важнейших составляющих научной программы
космического эксперимента - его результаты позволяли судить о возможностях и путях соз-
дания исследовательских зондов, адаптируемых для работы в климатических условиях на
поверхности Луны.
Температурный режим АЛС после посадки обеспечивается теплоизоляцией и активной
системой терморегулирования: первая максимально изолирует станцию от внешних тепло-
вых потоков, а вторая обеспечивает отвод выделяемого приборами тепла. Весь корпус АЛС
снаружи закрыт экранно-вакуумной теплоизоляцией. Внутри контейнера выравнивание тем-
пературы обеспечивается работой вентилятора, а регулирование температуры - работой ис-
парительного блока, поплавковый клапан которого открывается при превышении значения
температуры 30°С. Запас воды в испарительном блоке СТР составляет 3 литра.
Система терморегулирования может нормально функционировать при любом положении
станции относительно Луны. Для обеспечения теплового режима телевизионной камеры, вы-
ступающей за обводы герметического корпуса станции, наружная поверхность камеры по-
золочена. Это исключает нагрев камеры за счет тепла, излучаемого лунной поверхностью и
Солнцем. Кроме того, для защиты от прямого попадания солнечных лучей на верхней части
телевизионной камеры установлен теплоизолирующий экран.
Для энергопитания бортовой аппаратуры использованы химические батареи. При рас-
четном времени работы 3-5 суток в весовом отношении это более выгодно, чем применение
системы энергопитания с солнечными батареями. Кроме того, решающее значение имели
их простота и надежность, что было особенно важно при осуществлении первых попыток
посадки на Луну. Емкость установленной химической батареи обеспечивает работу АЛС на
поверхности Луны в течение 5 суток. На этот же период рассчитаны запасы воды в испари-
тельном блоке системы терморегулирования АЛС.
Большая часть источников электропитания находится в сбрасываемых навесных отсеках,
и только те из них, что обеспечивают работу аппаратуры на участке торможения и работу
АЛС после посадки, установлены соответственно в отсеке системы управления и внутри кон-
тейнера АЛС.
В качестве основной полезной нагрузки на борту АЛС установлены:
• телефотометр Я-198, функционально входящий в состав радиосистемы КРС;
• гамма-спектрометр для исследования интенсивности и спектрального состава гамма-
излучения лунной поверхности, характеризующего тип лунных пород (ГЕОХИ);
• КС-17М - прибор для регистрации корпускулярного излучения как на трассе перелета,
так и после посадки на лунную поверхность (НИИЯФ МГУ).
Основным научным прибором автоматической лунной станции является оптико-
механическая телевизионная камера (телефотометр) Я-198 с цилиндрическим иллюми-
натором, предназначенная для получения панорамы лунной поверхности. Угол зрения теле-
камеры составляет 360° по горизонтали (круговой обзор видимого пространства) и 36° по
вертикали, число строк по кадру - 6000, число элементов в строке - 500. Скорость передачи
изображения - 1 строка в секунду. Время передачи одной панорамы - 100 мин. Масса теле-
фотометра составляет 1,4 кг.
На КА Е6М установлена иная, нежели чем на ее предшественниках, телевизионная каме-
ра, разработанная в НИИ-885. Она на 1,5 кг легче, но при этом позволяет производить более
качественную съемку.
36
КОСМИЧЕСКИЕ АППАРАТЫ ДЛЯ ПЛАНЕТНЫХ ИССЛЕДОВАНИЙ
Аппаратура телефотометра расположена внутри контейнера, а иллюминатор - на его
верхней поверхности, что позволяет увидеть и передать на Землю панораму окружающей
местности.
ОРГАНИЗАЦИЯ УПРАВЛЕНИЯ ПОЛЕТОМ
Для связи со всеми «лунниками», начиная с Е6, привлечены средства НИП-10, располо-
женного недалеко от Симферополя. Для приема информации с лунных станций используется
антенна ТНА-400 с диаметром зеркала 32 метра, разработанная в ОКБ МЭИ. Выдача команд
на борт лунников осуществляется с помощью антенны П-200Б с диаметром зеркала 25 ме-
тров.
На НИП-10 располагается и Центр управления полетом (ЦУП).
Для проведения траекторных измерений в дециметровом диапазоне с помощью угломер-
ной системы «Маяк-6» привлечены антенны АДУ-1000 комплекса «Плутон», расположенного
на НИП-16 в Евпатории.
В середине 60-х годов на многих измерительных пунктах СССР были введены в эксплуа-
тацию средства наземного радиотехнического комплекса «Сатурн-МС», предназначенного
для работы с лунными станциями, пилотируемыми и беспилотными. Однако технический уро-
вень средств обработки и передачи информации не позволяли оперативно передавать теле-
метрическую информацию с удалённых НИПов в ЦУП, и, соответственно, команды управле-
ния - из ЦУПа на НИП.
Вследствие этого главная оперативная группа управления (ГОГУ) размещалась на НИП-10.
В состав ГОГУ входили представители Министерства обороны, специалисты ОКБ Машино-
строительного завода имени С.А. Лавочкина и смежных организаций.
На специалистов Машиностроительного завода им. С.А. Лавочкина (головная организа-
ция) и его смежников возлагалась вся техническая работа по управлению лунными станция-
ми. В их обязанности входило:
• формирование программ сеансов связи -
разработка циклограмм сеансов, содержащих
выдаваемые радиокоманды и метки ПВУ;
• проведение сеансов связи в соответствии с
утвержденными циклограммами;
• обработка и анализ получаемой телеметри-
ческой информации.
В состав группы анализа, которая тогда называ-
лась репортажной группой, входили специалисты по
основным системам КА. Единственными на то вре-
мя средствами отображения ТМ-информации были
самописцы и планшетные регистраторы.
Группа анализа совместно с телеметристами,
используя трафаретки и масштабные линейки, от-
слеживала изменение контролируемых параме-
тров - каждый по своей системе - и докладыва-
ли их руководителю репортажной группы. Тот, в
свою очередь, по громкой связи сообщал в груп-
пу управления о прохождении команд, меток ПВУ,
об изменении основных параметров. Сообщения
ретранслировались также на другие НИПы, задей-
ствованные в работе.
Наряду со специалистами завода им. С.А. Лавоч-
кина в управлении КА «Луна-9» участвовали пред-
ставители смежных организаций-разработчиков
бортовых систем: по радиокомплексу - НИИП (гл.
конструктор М.С. Рязанский), по системе управле-
Антенна ТНА-400, используемая для
дальней космической связи НИП-10
(Симферополь)
37
ГЛАВА 2
Испытания посадочного устройства
ния Е6 - НИИ АП (гл. конструктор Н.А. Пилюгин),
по системе управления Е8 - ОКБ «Салют», впо-
следствии филиал НИИ АП (гл. конструктор Н.П.
Никитин), по системе астроориентации - фили-
ал МИЭиА (гл. конструктор В.Л. Морачевский).
Баллистическое обеспечение управления по-
лётом лунных станций находилось в ведении бал-
листических центров (БЦ) НИИ-4 МО, ЦНИИМаш
и ИПМ АН СССР. Их представители, так же,
как баллистики Машиностроительного завода
им. С.А. Лавочкина, входили в состав ГОГУ.
Для реализации программы полета КА Е6М
было предусмотрено проведение типовых сеан-
сов в заданной последовательности:
• приземный сеанс предназначен для первого
вхождения в связь с Землей, построения сол-
нечной ориентации с последующей закруткой;
Отработка системы мягкой посадки
и проверка работы АЛС после
прилунения
• сеансы радиосвязи предназначены для контро-
ля состояния бортовых систем по телеметрии,
проведения траекторных измерений и выдачи
разовых управляющих команд;
• сеанс коррекции предназначен для коррекции
траектории КА на трассе перелета;
• сеанс торможения предназначен для построе-
ния лунной вертикали, снижения вертикальной
скорости и отделения АЛС.
Приземный сеанс включался по контактам
отделения от блока Л, сеансы радиосвязи -
по командам с Земли, сеансы коррекции и тор-
можения - по отработке временных уставок, за-
ложенных по командам с Земли.
Управление бортовыми системами КА по ко-
мандам с Земли осуществлялось в сеансах
радиосвязи. Их длительность не должна была
превышать 1 ч, поскольку этот интервал време-
ни был задан для принудительного выключения,
с целью экономии энергетики, бортового передатчика по метке ПВУ. Однако, как правило,
продолжительность сеанса радиосвязи составляла 10-20 мин. Бортовой приемник обеспечи-
вал постоянную возможность восприятия радиосигнала с Земли.
В остальных сеансах управление бортовыми системами осуществлялось по меткам ПВУ,
функциональным сигналам системы астроориентации и системы управления. По меткам ПВУ
каждые 25 минут происходила смена комплектов приемников и каждые 50 минут - смена
комплектов передатчиков.
Всего для управления бортовыми системами КА Е6М предусмотрено 28 радиокоманд,
в ом числе 20 функциональных команд, 5 адресных и 3 цифровых 17-разрядных команды.
РЕАЛИЗАЦИЯ ПРОЕКТА
КОСМИЧЕСКИЙ АППАРАТ «ЛУНА-9» (Е6М №202)
Успешность подготавливаемого космического эксперимента во многом определялась ин-
женерной интуицией, продуманностью и качеством выполнения работ при наземных испыта-
ниях снаряжаемого в полет аппарата и его составных частей.
Из всего комплекса испытаний при наземной отработке, проведенного как при подго-
товке предыдущих запусков, осуществляемых под руководством С.П. Королёва, так и для
38
КОСМИЧЕСКИЕ АППАРАТЫ ДЛЯ ПЛАНЕТНЫХ ИССЛЕДОВАНИЙ
«Луны-9», следует выделить, прежде всего, ряд основных для достижения положительного
результата в эксперименте мягкая посадка. Среди них:
• Отработка конструкции штыря с контактным датчиком, с помощью которого выраба-
тывался сигнал на отделение АЛС. Проводилась на специальной установке.
• Отработка конструкции амортизационных баллонов, обеспечивающих мягкую посадку
АЛС на поверхность Луны. Проводилась в барокамере. Полностью собранная станция
устанавливалась в барокамеру, амортизационные баллоны после откачки барокаме-
ры надувались, сбрасывая при этом термоукупорку.
• Отработка отделения боковых отсеков КА при температуре минус 50°С. Проводилась
на технологическом макете КА. Пирозамки замораживались жидким азотом, а затем
подрывались.
• Отработка отделения амортизационных баллонов при помощи пирошнура, продетого
в петли этих баллонов. АЛС с надутыми баллонами сбрасывалась со строительного
крана. После сброса и успокоения АЛС с пульта производился подрыв пирошнура.
• Отработка системы мягкой посадки и проверка работы АЛС после прилунения: сброс
АЛС с высоты 20 м, ее приземление, отделение амортизационных баллонов, раскры-
тие лепестковых и штыревых антенн. Испытания теле- и радиоаппаратуры осущест-
влялись на территории НИИ-229. Проверка на так называемое «бликование», т.е. про-
верка на отсутствие воздействия бликов Солнца на чувствительные системы, прово-
дилась в Крыму с зеркальным подсветом объекта Солнцем.
• Отработка испарительной системы терморегулирования АЛС.
• Отработка режима поиска реперных светил системой астронавигации. Проводилась
на специальном стенде, имевшем три степени свободы перемещения.
• Отработка микродвигателей системы ориентации.
• Отработка КТДУ при имитации подлета к лунной поверхности.
• Сбросовые испытания объекта с остатками топлива в баках с целью проверки воз-
можности возникновения взрыва или воспламенения этих остатков при разрушении
каркаса АС при падении на поверхность Луны.
• Тепловые испытания в барокамере.
Несмотря на жесткие сроки, отведенные на изготовление и подготовку станции «Луна-9»
к запуску, ее системы и агрегаты прошли всестороннюю проверку. Особенное внимание
было уделено отработке заново разработанных амортизаторов, включая их наполнение гели-
ем, отделение от траекторного блока перед посадкой и разделение половинок после посадки
и успокоения. При этом испытания проводились на территории Машиностроительного завода
им. С.А. Лавочкина.
Работы в сборочном цехе по подготовке АЛС «Луна-9» к полету
39
ГЛАВА 2
События по ходу экспедиции (в процессе реализации космического эксперимента) раз-
вивались следующим образом.
Автоматическая станция «Луна-9» (Е6М №202) была запущена с космодрома Байконур
31.01.1966 года в 14 часов 41 минуту 37 секунд.
Через 2 часа после отделения блока Л по метке ПВУ была включена система астроори-
ентации и навигации, и построена ориентация на Солнце с последующей закруткой вокруг
оси X, перпендикулярной направлению на Солнце, для обеспечения теплового режима.
В четвертом сеансе связи была построена ориентация КА и проведено измерение углов
направления на Солнце и Луну системой астронавигации. По результатам первых четырех
сеансов траекторных измерений на Земле были рассчитаны уставки (3 уставки), определяю-
щие величину корректирующего импульса и его направление в пространстве.
На трассе перелета к Луне 1 февраля, спустя 32 часа после старта, была проведена кор-
рекция траектории. Импульс коррекции составил 71,2 м/с.
В ходе перелета проводились траекторные измерения с помощью угломерной системы
«Маяк-6».
По результатам траекторных измерений, аналогично подготовке к коррекции, были рас-
считаны уставки (5 уставок) на торможение, которые были заложены на борт в сеансе связи.
Всего до подготовки АЛС к посадке было проведено 16 сеансов связи.
За 9 часов до сеанса торможения произошла разгерметизация приборного отсека систе-
мы управления, однако сама система управления не потеряла работоспособности и полно-
стью выполнила все задачи.
3 февраля 1966 года в 19 часов 28 минут на расстоянии 8300 км от Луны была включена
система астроориентации и навигации, которая обеспечила построение трехосной ориентации
по Солнцу, Луне и Земле с выставкой сопла двигательной установки в направлении Луны. За-
тем было произведено включение блока управления И-100. После прогрева осуществлялось
приведение рамок гироскопов СКТ по тангажу и рысканию. По сигналу формирования лунной
вертикали (СЛВ) было произведено «запоминание» лунной вертикали с помощью СКТ системы
управления. Эта ориентация поддерживалась до момента включения двигателя. Одновременно
был включен радиовысотомер для измерения расстояния до лунной поверхности.
За ~ 5 минут до расчетного времени включения двигателя САОН была переведена в пре-
цизионный режим, при котором газовые микродвигатели работали не в импульсном, а в не-
прерывном режиме.
За 48 секунд до посадки на высоте ~ 75 км по сигналу с радиовысотомера была включе-
на двигательная установка, выключена САОН, сброшены два навесных отсека и произведен
наддув баллонов-амортизаторов (время наполнения баллонов ~ 30 секунд). Одновременно с
включением двигателя было произведено разарретирование гироскопов и автомата управле-
ния дальностью, а стабилизация была переключена на СКТ, который стал обеспечивать угло-
вую стабилизацию КА относительно запомненного положения с помощью рулевых сопел.
На расстоянии 260-265 метров от поверхности при достижении заданного значения ка-
жущейся скорости по команде от прибора управления выключился основной двигатель, кото-
рый обеспечил гашение скорости с 2600 м/с до нескольких м/с на малой высоте, и спуск про-
должился в режиме парашютирования при работающих управляющих соплах КТДУ. На этом
участке был высвобожден ленточный датчик-щуп длиной 5 м, который при соприкосновении
с лунной поверхностью выдал команду на отстрел АЛС. Лунная станция, заключенная в обо-
лочку из наполненных газом баллонов-амортизаторов, отделилась от ложемента.
3 февраля 1966 года в 21 час 45 минут 30 секунд автоматическая лунная станция впер-
вые в мире совершила мягкую посадку на поверхности Луны на западном крае Океана Бурь,
западнее кратеров Рейнер и Марий, в точке с координатами 7° 8’ с.ш. и 64° 32’ з.д.
Через 4 минуты 10 секунд после посадки по команде ПВУ произошел сброс амортизаци-
онных баллонов, раскрылись лепестковые антенны, и начался первый в мире сеанс радио-
связи с аппаратом, находящемся на поверхности другого небесного тела.
По команде с Земли была включена телевизионная камера. При первой съемке не
удалось получить качественных снимков из-за низкой высоты Солнца над горизонтом
40
КОСМИЧЕСКИЕ АППАРАТЫ ДЛЯ ПЛАНЕТНЫХ ИССЛЕДОВАНИЙ
(~3 градуса). Лишь 4 и 5 февраля, когда
Солнце поднялось над лунным горизонтом
выше 7 градусов, были получены высоко-
качественные снимки лунного рельефа
(три телевизионные панорамы). Несколь-
ко фрагментов лунной поверхности было
передано на Землю 6 февраля при высоте
Солнца 41°. В период до 6 февраля было
проведено 7 сеансов связи со спускаемым
аппаратом общей продолжительностью
более 8 часов. На Землю были переданы
первые в мире панорамы лунной поверх-
ности, полученные при различных высотах
Солнца над горизонтом (7, 14, 27 и 41 гра-
дус)-
Из двух научных приборов один -
гамма-спектрометр - в результате поломки
был отключен еще до старта.
В результате образования льда на вы-
ходном клапане испарительного блока
системы терморегулирования АЛС стала
расти температура внутри приборного кон-
тейнера, что сократило срок жизни АЛС с 5
до 2,5 суток.
В целом программа полета автомати-
ческой станции «Луна-9» была выполнена.
Фрагмент карты Луны в районе посадки АЛС
«Луна-9». Место прилунения аппарата позднее
получило официальное название Равнина По-
садки (Planitia Descensus)
КОСМИЧЕСКИЙ АППАРАТ «ЛУНА-13» (Е6М №205)
В программу экспедиции входило:
• передача на Землю ТВ-изображений фрагментов панорамы лунной поверхности,
в том числе стереоизображений отдельных участков*, в месте контакта;
• проведение научных исследований, в том числе исследования интенсивности и спек-
трального состава гамма-излучения лунной поверхности, характеризующего тип лун-
ных пород, а также регистрации корпускулярного излучения;
• проведение экспериментов по определению механических свойств и плотности
наружного слоя лунного грунта;
• измерения теплового потока от лунной поверхности;
• получение информации для разработки способов и средств адаптации исследователь-
ского зонда для работы в климатических условиях на поверхности Луны.
Состав бортовой аппаратуры траекторного блока изменился лишь в части установки
усовершенствованных радиовысотомера больших высот (РВБВ-М вместо РВБВ-А) и прибора
управления (И-100М вместо И-100). Усовершенствования были сделаны по результатам по-
лета КА «Луна-9» и относились к повышению надежности работы этой аппаратуры.
Конструкция АЛС «Луны-13» в основном (конфигурация, размеры, исполнение) сохранена
такой же, как АЛС «Луны-9». Посадочное устройство так же сохранено в неизменном виде.
Значительные изменения претерпела бортовая аппаратура (рис. 2.11).
После успешного применения ранее на «Луне-10» на станции «Луна-13» для повышения
точности траекторных измерений вместо передатчика угломерной системы «Маяк-6» уста-
новлено два комплекта приемоответчика дециметрового диапазона РКТ-1, работающего на
длине волны Х=32 см по линии борт - Земля и Х=39 см по линии Земля - борт.
* жирным шрифтом выделены отличия (дополнения) научной программы экспедиции КА «Луна-13» от
программы КА «Луна-9».
41
ГЛАВА 2
Рис. 2.11. Автоматическая лунная станция «Луна-13»:
1 - штыревая антенна; 2 - телевизионная камера; 3 - лепестковая антенна; 4 - радиационный
плотномер; 5 - механизм выноса прибора; 6 - механический грунтомер
Состав и функции метрового радиокомплекса КРС остались неизменными, но, в отличие
от «Луны-9», после посадки и раскрытия лепестков они стали исполнять роль приемных ан-
тенн, а штыревые антенны - передающих, став при этом короче и толще.
С целью исключения замерзания воды в испарительной системе терморегулирования
АЛС поплавковый регулятор был заменен системой с биметаллическим регулятором воды,
при этом запас воды был увеличен до 3,7 литра.
Остальные служебные системы сохранены прежними.
В связи с появлением новых научных задач в программе полета на борту АЛС дополни-
тельно размещена новая исследовательская аппаратура.
В целом состав научной аппаратуры АЛС «Луна-13» выглядел так:
• две оптико-механические телевизионные камеры Я-198 с цилиндрическим иллюмина-
тором (НИИП);
• ВГ-1 - механический грунтомер-пенетрометр на выносной штанге для определения меха-
нической прочности наружного слоя лунного грунта (ОКБ завода им. С.А. Лавочкина);
• РП - радиационный плотномер на выносной штанге для определения плотности на-
ружного слоя лунного грунта (НИИ оснований и подземных сооружений совместно
с ОКБ завода им. С.А. Лавочкина);
• ДС-1 «Ястреб» - динамограф для регистрации перегрузки, которая возникала при
контакте АЛС с поверхностью Луны, а также для измерения времени от отстрела до
удара (СНИИП МОМ);
• КС-17МА - прибор для регистрации корпускулярного излучения как на трассе пере-
лета, так и после посадки на лунную поверхность (НИИЯФ МГУ);
• ИД-3 - прибор для измерения интегрального теплового потока радиации от поверх-
ности Луны (НИИЯФ МГУ).
На внешней стороне корпуса контейнера закреплены: две выносные штанги, позволяю-
щие проводить научные эксперименты по определению механических свойств и плотности
наружного слоя лунного грунта на удалении 1,5 метров от АЛС, датчики научных приборов
для измерения теплового потока от лунной поверхности, иллюминатор (дополнительно к су-
ществовавшему на АЛС «Луны-9») второй оптико-механической телекамеры Я-198.
Проведенные доработки привели к увеличению массы АЛС на лунной поверхности со
100 кг до 112 кг.
Автоматическая станция «Луна-13» (Е6М №205) была запущена с 31-й площадки кос-
модрома Байконур 21 декабря 1966 года в 13 ч 17 мин 8 сек с помощью ракеты-носителя
42
КОСМИЧЕСКИЕ АППАРАТЫ ДЛЯ ПЛАНЕТНЫХ ИССЛЕДОВАНИЙ
«Молния-М». Выведение на траекторию перелета осуществлено одноразовым импульсом
РБЛ, после чего КА отделился от РБЛ.
Масса КА «Луна-13» после отделения от РБЛ составила 1602 кг.
Первые включения бортовых систем подтвердили их штатную работу, в том числе при
поиске Солнца и закрутке. Однако анализ траекторных измерений показал, что выведение
КА на траекторию полета к Луне прошло с ошибкой, превышающей расчетные значения.
По расчетам возможное отклонение от прицельной точки максимально достигало 9900 км,
а актически - 15500 км.
Это привело к увеличению импульса коррекции траектории до значения 81,15 м/с, что,
тем не менее, обеспечивалось запасами топлива на борту КА - на «Луне-13» по сравнению
с «Луной-9» было увеличено значение возможного импульса коррекции со 100 до 130 м/с.
Сама коррекция была проведена 22 декабря 1966 года, при этом время работы двигателя
составило 3,25 сек. Однако из-за ошибки автомата управления дальности импульс коррекции
был отработан с недобором в 1,5 м/с. Такой недобор ухудшал условия вертикализации при
подлете к поверхности Луны за счет появления боковых скоростей ~ 5-6 м/с, что, впрочем,
находилось в допуске.
Траекторные измерения проводились в метровом (НИП-10) и дециметровом (НИП-16, 14 и 15)
диапазонах. Из-за слабого сигнала с РКТ-1 траекторные измерения в дециметровом диапа-
зоне проходили со сбоями. После коррекции не включился передатчик РКТ-1, что усложнило
прогнозирование траектории полета перед торможением. После отказа РКТ-1 траекторные
измерения проводились только с помощью радиокомплекса КРС в метровом диапазоне.
Также при проверках на перелете был обнаружен отказ одной телевизионной камеры.
Ошибки выведения и исполнения коррекции привели к более раннему (на 2 ч 13 мин)
прилету КА к Луне.
Подлет к Луне и торможение станции «Луна-13» проходили по схеме, отработанной при
посадке станции «Луна-9», при этом импульс торможения составил 2638,25 м/с, а время ра-
боты двигателя составило 45,4 сек. Выключение двигателя произошло почти одновременно
с касанием щупом поверхности Луны.
Станция «Луна-13» совершила мягкую посадку 24 декабря 1966 года в 21 ч 01 мин вбли-
зи западной окраины Океана Бурь в точке с координатами 18° 52’ с.ш. и 62° 04’ з.д. (в 400 км
от места прилунения станции «Луна-9»),
После прилунения, раскрытия лепестковых антенн и механизма выноса научных прибо-
ров был начат фототелевизионный сеанс связи. Всего за 3 суток было проведено 8 таких
сеансов. Панорамы лунной поверхности, переданные на Землю с единственной работоспо-
собной телекамеры, были сняты при высоте Солнца 6, 19 и 32 град.
С помощью установленных на станции выносных приборов механического грунтомера
и радиационного плотномера было проведено исследование механических свойств и плот-
ности поверхностного слоя лунного вещества.
После посадки АЛС на Луну, в первом сеансе связи, продолжавшемся около 10 мин,
была замерена интенсивность излучения заряженных частиц на ее поверхности.
В течение полета и активного времени существования станции на поверхности Луны при-
бор КС-17МА функционировал нормально, однако объем полученной информации был зна-
чительно снижен из-за кратковременности включения прибора во время сеанса связи.
Телескоп заряженных частиц прибора КС-17МА на участке полета от Земли к Луне из-за
малого времени работы не произвел замера интенсивности частиц космического излучения.
С помощью четырех датчиков ИД-3 была измерена эффективная температура лунного грунта.
ТЕХНИЧЕСКАЯ И ТЕХНОЛОГИЧЕСКАЯ НОВИЗНА.
РЕЗУЛЬТАТЫ ЛКИ
Главный результат полета «Луны-9» - внедрение в мировую практику космоплавания
технологии мягкой посадки исследовательского зонда на небесное тело твердой формации,
не имеющего собственной атмосферы и обладающего слабым гравитационным полем, с ис-
пользованием амортизационных надувных устройств.
43
ГЛАВА 2
Компьютерная репродукция функционирова-
ния АЛС «Луны-13» на лунной поверхности
Технология нашла дальнейшее приме-
нение:
• полностью - в экспедиции автоматиче-
ского космического аппарата «Луна-13»
(СССР, 1966);
• частично - в экспедициях к Марсу для
защиты десантируемых на поверхность
Марса исследовательских зондов
МАС - проект «Марс-96» (СССР) и ПА
«Пасфайндер» - экспедиция «Марс-
Пасфайндер» (США, 1996).
Опыт создания и применения баллонов-
амортизаторов был востребован, с учетом
достигнутого ныне уровня развития нау-
ки и производства, в современных раз-
работках НПО им. С.А. Лавочкина - так
называемых надувных тормозных устрой-
ствах (НТУ), предназначенных для спуска
с околоземных орбит спасаемого ценного
груза без задействования дорогостоящих
инженерно-технических средств и специального оборудования.
В экспедиции «Луны-9» впервые в мировой практике был осуществлен прямой телере-
портаж с поверхности другого небесного тела. Качество полученных телеизображений позво-
лило с достаточной степенью достоверности (подтвержденной в последующих экспедициях)
изучить микрорельеф лунного грунта, определить размеры и форму впадин и камней.
Получена телеметрическая информация в объеме, достаточном для осознания климати-
ческих условий и других специфических особенностей работы станции на поверхности Луны
и оценки поведенческого характера элементов конструкции и конструкционных материалов,
бортовых приборов, агрегатов и систем в этих условиях. Это позволило произвести необхо-
димую корректировку при создании последующих автоматических космических аппаратов,
предназначенных для исследования Луны.
По результатам полета «Луны-9» Международная авиационная федерация (FAI) зареги-
стрировала приоритетные научно-технические достижения станции:
• мягкая посадка автоматической станции на поверхность Луны;
• передача первой в мире круговой фотопанорамы лунной поверхности в районе по-
садки станции;
• проведение научных исследований и измерений с помощью автоматического косми-
ческого аппарата непосредственно на поверхности Луны.
• Станцией «Луна-9» были установлены рекорды, зарегистрированные и подтвержден-
ные дипломами FAI:
• мировой рекорд наибольшей массы, доставленной на поверхность Луны автоматиче-
ской станцией, в классе «С»;
• мировой рекорд продолжительности активного существования на лунной поверхно-
сти в классе «С».
РЕЗУЛЬТАТЫ ЛКИ
Программа полета каждым из аппаратов серии Е6М выполнена в полном объеме.
НАУЧНЫЕ РЕЗУЛЬТАТЫ
Программа научных наблюдений и измерений станцией «Луна-9» была выполнена, за ис-
ключением исследований с помощью гамма-спектрометра вследствие его неисправности,
обнаруженной на стартовой позиции перед пуском.
Сканирующая ТВ-камера, установленная на борту АЛС, за период лунного дня пере-
дала несколько круговых панорам, позволивших реконструировать рельеф окружающей
44
КОСМИЧЕСКИЕ АППАРАТЫ ДЛЯ ПЛАНЕТНЫХ ИССЛЕДОВАНИЙ
местности. Панорамы окружающего ландшафта
с разрешением отдельных деталей сантиметрово-
го размера, полученные при различных высотах
Солнца над горизонтом (7°, 14°, 27° и 41° градус),
позволили уже на первых этапах анализа изобра-
жений составить довольно полное представление
о структуре покровного слоя Луны (рис. 2.12).
По форме воронок мелких кратеров удалось
определить толщину наружного слоя - около 5 см.
На рис. 2.13 представлена схема первой съемки
на поверхности Луны, составленная П. Стуком
(P.J. Stooke, International Atlas of Lunar Exploration.
Cambridge Univ. Press., 2007).
С помощью прибора KC-17M была измерена
интенсивность жесткой радиации, обусловленной
космическими и солнечными лучами и радио-
активным излучением лунного грунта. Прибор
КС-17М регистрировал поток космических лучей
как по пути от Земли до Луны, так и на поверх-
ности последней. На пути Земля-Луна поток со-
ставлял 5,4 см-2 с-1 при средней скорости счета
3,3±0,01 имп/с.
После посадки на поверхности Луны из-
мерялась скорость счета в течение трех суток.
Средняя скорость счета при этом составляла
2,1 ±0,01 имп/с.
Таким образом, было установлено отсутствие
заметного магнитного поля Луны и лунных радиа-
ционных поясов и уточнено расположение внеш-
него радиационного пояса вокруг Земли.
Значительная часть знаний о природе Луны,
которыми ныне располагает наука, была получена
через исследование поверхностного слоя лунного
шара - реголита, и возможность прямых исследо-
ваний лунного реголита в естественных условиях
открылась исторически первой мягкой посадкой
на Луну автоматической станции «Луна-9».
Кроме варианта проведения ТВ-съемки с двух
телекамер, научная программа экспедиции автоматической станцией «Луна-13» выполнена
полностью.
Панорамы, переданные «Луной-13», по условиям освещенности отличались от панорам,
переданных «Луной-9». На панорамах со станции «Луна-13» хорошо просматривалось боль-
шое количество деталей.
В результате непосредственных измерений были определены некоторые физико-
механические характеристики лунного грунта. Плотность его в месте посадки оказалась рав-
ной 0,8 г/см3, что значительно меньше плотности земных пород и средней плотности Луны,
но близка к плотности пористых или зернистых слабосвязанных материалов.
Газоразрядные счетчики, регистрирующие космическое корпускулярное излучение,
позволили определить отражательную способность лунной поверхности для космических
лучей.
Расшифровка информации, полученной с датчиков ИД-3, показала, что эффективная
температура лунного грунта постепенно возрастает по мере увеличения высоты Солнца над
лунным горизонтом.
Рис. 2.12. Фрагмент панорамы лунного
ландшафта
Рис. 2.13. Схема первой съемки
на поверхности Луны
45
ГЛАВА 2
Программа исследований с помощью станции «Луна-13» была успешно завершена.
Обобщённые научные результаты экспедиций КА «Луна-9» и «Луна-13», обеспечивших
рекогносцировочные контактные исследования на поверхности Луны при использовании тех-
нологии «мягкой» посадки с применением надувных амортизационных средств защиты де-
сантируемого исследовательского зонда:
• получены первые телевизионные панорамы лунной поверхности;
• по полученным снимкам определены особенности микрорельефа поверхности;
• установлено отсутствие заметного магнитного поля Луны и лунных радиационных по-
ясов;
• уточнено расположение внешнего радиационного пояса вокруг Земли.
Кроме того, информация о характеристиках лунного грунта, полученная в экспедициях
КА серии Е6М, внесла существенные коррективы в подготовку новых технических средств
для следующего этапа изучения Луны: в разработку самоходного исследовательского зон-
да - лунохода. Грунт оказался достаточно твердым, слой пыли - небольшим. Поэтому кон-
структоры пересмотрели проект шасси лунохода, отказавшись от гусениц в пользу восьми
ведущих колес. Осенью 1966 года переработанный эскизный проект лунохода был утверж-
ден Георгием Николаевичем Бабакиным. Началась конструкторская проработка аппарата.
КОСМИЧЕСКИЕ АППАРАТЫ СЕРИИ Е6С
НАЗНАЧЕНИЕ КА
Космические аппараты серии Е6С предназначены для отработки технологии выведения
непилотируемого зонда на орбиту искусственного спутника Луны и проведения комплекса
научных исследований Луны и окололунного пространства.
Серия Е6С состоит из двух аппаратов: №204 («Космос-111») и №206 (КА «Луна-10»).
Оба аппарата полностью идентичны.
«Космос-111» запущен 1.03.1966 г., «Луна-10» -31.03.1966 г.
В программу экспедиции входило:
• получение положительного результата в отрабатываемом практическим космопла-
ванием новом (для того времени) элементе космического полета - создании искус-
ственного спутника другого небесного тела при отсутствии полноценной информации
о специфике условий работы исследовательского зонда на орбите ИСЛ;
• выявление наличия и уточнение нижнего предела возможного магнитного поля Луны;
• получение информации, способствующей предварительному определению параме-
тров гравитационного поля Луны;
• изучение собственного излучения Луны:
• исследование интенсивности и спектрального состава гамма-излучения поверхности;
• определение теплового излучения;
• измерение рентгеновского излучения пород лунной поверхности;
• выявление наличия ионосферы Луны и уточнение ее параметров;
• регистрация полного потока ионов и электронов солнечного ветра;
• регистрация солнечного корпускулярного и космического излучения;
• регистрация в межпланетном и окололунном пространстве метеорных частиц;
• получение информации для разработки способов и средств адаптации исследователь-
ских зондов, специализированных для работы на орбите ИСЛ.
Для выведения КА «Луна-10» использовалась четырехступенчатая ракета-носитель
«Молния-М». Доработок головного блока (ГБ), состоящего из КА и РБЛ, по сравнению с
ракетно-космическим комплексом «Луны-9» не проводилось.
В баллистической схеме экспедиции можно выделить четыре последовательно реали-
зуемых этапа: выведение, перелет, торможение, орбитальный полет ИСЛ (рис. 2.14).
Первые два этапа по характеру выполняемых операций аналогичны соответствующим
этапам полета «Луны-9». Основное отличие - в выборе направления траектории перелета.
Движение происходит не по попадающей, как в экспедиции «Луны-9», траектории, а по при-
46
КОСМИЧЕСКИЕ АППАРАТЫ ДЛЯ ПЛАНЕТНЫХ ИССЛЕДОВАНИЙ
Периселений
орбиты Автономное
Рис. 2.14. Схема полета автоматического космического аппарата «Луна-10»:
/ - промежуточная околоземная орбита; II - коррекция траектории полета к Луне;
III - ориентация КА перед торможением; IV - торможение и выход на орбиту ИСЛ
водящей КА в определенную область окололун-
ного пространства («прицельную точку»), уда-
ленную от поверхности Луны приблизительно на
1000 км. Началу непосредственного торможения
предшествует подготовительная операция, свя-
занная с заданным изменением ориентации КА в
пространстве, - на расстоянии около 8000 км от
Луны проводится разворот аппарата с выстав-
кой сопла двигательной установки в заданном
направлении и переход на управление стабили-
зацией от гироскопических приборов.
Участок торможения начинается при до-
стижении КА «прицельной точки». Включением
КТДУ производится торможение с уменьшением
скорости КА с 2,5 до 1,76 км/с, что обеспечивает
его выход на орбиту ИСЛ. Через 20 секунд после
выключения двигателя производится отделение
спутника от траекторного блока. Далее следует
автономный неориентируемый орбитальный по-
лет ИСЛ.
КОСМИЧЕСКИЙ АППАРАТ
Автоматическая станция Е6С была создана
на базе автоматической станции «Луна-9» (Е6М)
и состояла из траекторного блока и отделяемого
искусственного спутника Луны (ИСЛ) (рис. 2.15).
Масса КА после отделения от разгонного бло-
ка Л составляла 1583,7 кг, из которых 746,4 кг -
масса топлива (181,6 кг горючего и 564,8 кг окис-
лителя).
Рис. 2.15. КА «Луна-10»:
1 - искусственный спутник Луны;
2 - система отделения спутника;
3 - баллоны с газом; 4 - аппаратура
радиосистемы измерений; 5 - жидкостный
ракетный двигатель; 6 - управляющий
двигатель; 7 - аппаратура системы
астроориентации
47
ГЛАВА 2
ТРАЕКТОРНЫЙ БЛОК
Траекторный блок в целом сохранил структуру базового аппарата, представляющую со-
бой конструктивное объединение корректирующе-тормозной двигательной установки, отсека
системы управления и двух навесных отсеков.
Однако с учетом специфики экспедиции были внесены некоторые изменения. В связи с
тем, что отпала необходимость выстраивать ориентацию КА при торможении по лунной вер-
тикали и производить замеры расстояния до лунной поверхности для определения момента
включения двигателя (в данном случае КТДУ включается в расчетное время), из состава бор-
товой аппаратуры был исключен радиовысотомер. Поскольку весь траекторный блок после
отделения ИС в дальнейшей работе не участвовал, отказались от сброса навесных отсеков.
С аппарата также была снята система наддува амортизаторов.
На верхней части отсека системы управления установлен ложемент для размещения
ИСЛ и система отделения спутника.
Состав остальной бортовой аппаратуры, обеспечивающей проведение всех необходимых
операций в процессе полета вплоть до отделения ИЛС от траекторного блока, сохранен та-
ким же, как на базовом аппарате.
ИСКУССТВЕННЫЙ СПУТНИК ЛУНЫ
Для сокращения сроков подготовки к запуску и в соответствии с возложенными на него
задачами ИСЛ был сделан простым по конструкции и по составу оборудования.
Конструктивно ИСЛ (рис. 2.16) представляет собой единый герметичный контейнер,
предназначенный для размещения служебной аппаратуры и блоков научной аппаратуры, не-
приспособленных для работы в открытом космосе.
На внешней стороне контейнера размещены антенны радиокомплексов (4 штыревых ан-
тенны метрового диапазона и 4 спиральных антенны дециметрового диапазона), штанга маг-
нитометра СГ-59М длиной 1,5 метра, а также датчики научных приборов.
СЛУЖЕБНАЯ И НАУЧНАЯ АППАРАТУРА ИСЛ
Внутри герметичного контейнера установлены: телеметрическая аппаратура для сбора
служебной и научной информации (64 канала при скорости опроса 1 изм/с), программно-
временное устройство, радиосистема КРС
метрового диапазона и электронные блоки
научных приборов. Для повышения точности
траекторных измерений вместо передатчи-
ка угломерной системы «Маяк-6» («Луна-9»)
установлены два комплекта приемоответ-
чика дециметрового диапазона РКТ-1, рабо-
тающего на длине волны Х=32 см по линии
Борт-Земля и Х=39 см по линии Земля-Борт.
Мощность передатчика - 7 Ватт.
Химические источники тока располо-
жены в нижней полуоболочке ИСЛ. Там же
размещены предохранительные клапаны для
стравливания в открытый космос водорода,
выделяемого при разряде батареи.
В составе бортовой аппаратуры ИСЛ от-
сутствует система ориентации.
В составе системы терморегулиро-
вания - вентилятор, заимствованный с КА
«Луна-9»; сброс тепла осуществляется непо-
средственно через стенки контейнера. В се-
ансах связи вентилятор работал непрерывно,
а между сеансами - со скважностью 1:4.
Рис. 2.16. Искусственный спутник Луны:
1 - протонная ловушка; 2 - антенны;
3 - датчик магнитометра
48
КОСМИЧЕСКИЕ АППАРАТЫ ДЛЯ ПЛАНЕТНЫХ ИССЛЕДОВАНИЙ
В составе научной аппаратуры:
• гамма-спектрометр 3134-03 для исследования интенсивности и спектрального состава
гамма-излучения лунной поверхности, характеризующего тип лунных пород (ГЕОХИ);
• радиометр СЛ-1 для изучения радиационной обстановки вблизи Луны (НИИЯФ МГУ);
• Д-153 - прибор для изучения солнечной плазмы (РАИ);
• СГ-59М - трехкомпонентный магнитометр на штанге длиной 1,5 метра для исследова-
ния межпланетного магнитного поля и уточнения нижнего предела возможного маг-
нитного поля Луны (ИЗМИРАН);
• ИД-1 - прибор для регистрации инфракрасного излучения поверхности Луны и для
уточнения данных о тепловом режиме лунной поверхности (НИИЯФ МГУ);
• РМЧ-1 - регистратор метеоритных частиц в окололунном пространстве с массой
не менее 10‘8 грамм (ГЕОХИ);
• РФЛ-1 - прибор для обнаружения рентгеновского флуоресцентного излучения Луны
(линии кремния, алюминия, магния) - ФИАН.
Масса ИСЛ - 248,5 кг.
ОРГАНИЗАЦИЯ УПРАВЛЕНИЯ ПОЛЕТОМ
Для управления полетом КА серии Е6С задействованы те же наземные средства, что и
для КА «Луна-9», с тем же распределением обязанностей. Кроме того, в связи с установкой
на борт РКТ-1 для проведения траекторных измерений в дециметровом диапазоне, помимо
НРТК «Плутон» на НИП-16, привлекались передающие антенны РС-10 и приемные антенны
РС-10-2М, расположенные на НИП-14 (Щелково) и НИП-15 (Уссурийск).
РЕАЛИЗАЦИЯ ПРОЕКТА
КОСМИЧЕСКИЙ АППАРАТ Е6С №204
Фактически первый лунный спутник Е6С был разработан и изготовлен в рекордно корот-
кие сроки - всего лишь за 25 суток. Первая станция Е6С №204 запущена с космодрома Бай-
конур 1 марта 1966 года с помощью PH «Молния». Но на трассу Земля-Луна этот аппарат
не вышел. Произошла потеря стабилизации на участке работы двигателя блока Л, и станция
осталась на околоземной орбите под наименованием «Космос-111».
КОСМИЧЕСКИЙ АППАРАТ «ЛУНА-10»
Следующая станция Е6С №206 запущена 31 марта 1966 года в 13 часов 46 минут 59 се-
кунд. Все участки выведения прошли штатно, и уже после этого названная «Луной-10» стан-
ция была выведена на траекторию полета к Луне. КА отделился от РБЛ в 15 часов 4 минуты
57 секунд.
В ходе перелета каждые сутки проводилось по четыре сеанса траекторных измерений.
В метровом диапазоне траекторные измерения проводились только с НИП-10. В дециметро-
вом диапазоне НИП-14 и НИП-15 не смогли войти в связь с КА, поэтому измерения прово-
дились только с НИП-16.
1 апреля была проведена коррекция траектории, при этом ЖРД С5.5А, отработав всего
лишь 2,8 секунды, обеспечил импульс 68,68 м/с. С помощью этого маневра траектория была
скорректирована так, чтобы промах попадания в «прицельную точку» картинной плоскости
не превысил заданных пределов. Однако ошибки на этапе выведения с помощью PH при-
вели к тому, что КА подлетел к Луне на 3 часа раньше расчетного времени. С учетом этого
были рассчитаны уставки на торможение и скорректирована программа проведения сеан-
сов.
3 апреля 1966 года на расстоянии 8000 км от Луны была включена система астроориен-
тации и навигации, которая обеспечила построение трехосной ориентации по Солнцу, Луне
и Земле с выставкой сопла двигательной установки в заданном направлении. При этом до
формирования сигнала лунной вертикали (СЛВ) ориентация осуществлялась по Солнцу и
Луне, а после СЛВ - по Солнцу и Земле. Затем было произведено включение блока управ-
ления И-100 и приведение рамок стабилизатора курса и тангажа (СКТ) к осям КА. Разарре-
тирование СКТ и автомата управления дальностью (АУД), выключение системы автономной
49
ГЛАВА 2
ориентации и навигации (САОН) и переход на стабилизацию по сигналам с СКТ было произ-
ведено одновременно с включением двигателя.
КТДУ была включена в расчетное время и, проработав 26 секунд, обеспечила уменьше-
ние скорости с 2,5 до 1,76 км/с (импульс торможения 890,24 м/с). В результате маневра стан-
ция «Луна-10» была выведена на окололунную орбиту и стала первым в мире искусственным
спутником Луны. Через 20 секунд после окончания торможения от траекторного блока был
отделен собственно спутник - ИСЛ. Параметры его орбиты составили:
Высота Период обращения Наклонение орбиты
в апоселении 1027 км в периселении 350 км 2 ч 58 мин 11с 67° 9'
что оказалось близко к расчетным значениям.
Стоит отметить, что траекторные измерения проводились в основном метровым радио-
комплексом КРС, поскольку при измерениях дальности до КА с помощью системы РКТ-1
наблюдалась систематическая погрешность, а фактическая чувствительность приемного
устройства РКТ-1 и малая мощность наземных передатчиков не позволяли осуществить в
штатном режиме траекторные измерения.
Срок активного существования ИСЛ составил 56 суток, что определялось ресурсом бор-
товых химических источников тока. За это время со спутником было проведено 219 сеансов
связи, получена ценная научная информация.
Научная информация передавалась как в процессе перелета к Луне, так и при движении
ИСЛ по орбите вокруг Луны.
Программа полета станции «Луна-10» выполнена полностью.
Во время проведения XXIII съезда КПСС с борта спутника «Луна-10» прозвучала мело-
дия «Интернационала», которую стоя слушали делегаты партсъезда.
ТЕХНИЧЕСКАЯ И ТЕХНОЛОГИЧЕСКАЯ НОВИЗНА. РЕЗУЛЬТАТЫ ЛКИ
Главный результат полета «Луны-10» - создание впервые в мировой практике космопла-
вания искусственного спутника другого небесного тела при отсутствии исходной полноцен-
ной информации о специфике условий работы иссле-
довательского зонда на орбите ИСЛ.
Получена телеметрическая информация в объе-
ме, достаточном, для того чтобы стать основой при
разработке последующих автоматических космиче-
ских аппаратов, предназначенных для проведения
дистанционных исследований Луны.
По результатам полета «Луны-10» Международ-
ная авиационная федерация (FAI) зарегистрировала
приоритетные научно-технические достижения стан-
ции:
• выведение искусственного спутника Луны;
• проведение впервые в мире научно-технических
исследований и измерений с помощью автома-
тической станции, выведенной на орбиту искус-
ственного спутника Луны.
Станцией «Луна-10» были установлены рекорды,
зарегистрированные и подтвержденные дипло-
мами FAI:
• мировой рекорд максимальной массы, доставлен-
ной на лунную орбиту, в классе «С»;
• абсолютный мировой рекорд продолжительности
активного существования автоматической стан-
«Луна-10» (выставочный макет) ции На лунной орбите;
50
КОСМИЧЕСКИЕ АППАРАТЫ ДЛЯ ПЛАНЕТНЫХ ИССЛЕДОВАНИЙ
• мировой рекорд продолжительности активного существования на лунной орбите в
классе «С».
FAI также наградила Машиностроительный завод имени С.А. Лавочкина в числе других пред-
приятий за разработку автоматических станций «Луна-9» и «Луна-10» почетными дипломами.
НАУЧНЫЕ РЕЗУЛЬТАТЫ
На участке траектории между Землей и Луной была измерена интенсивность первичного
космического излучения.
При полете спутника по окололунной орбите удалось провести целый комплекс научных ис-
следований. Впервые были получены данные об общем химическом составе Луны по характе-
ру гамма-излучения ее поверхности. В результате обработки полученных гамма-спектров был
сделан вывод: лунные породы принадлежат к типу базальтовых пород Земли, а их радиоактив-
ность намного меньше, чем у гранитов, и не превышает радиоактивность земных базальтов.
На орбите ИСЛ было измерено альбедо проникающего корпускулярного излучения от
первичного космического излучения. Измеренная интенсивность корпускулярного излучения
подтвердила факт отсутствия в окололунном пространстве каких-либо аномалий, сходных
с радиационными поясами Земли. Были обнаружены квазистационарные потоки мягкой кор-
пускулярной радиации в области «хвоста» магнитосферы Земли на расстоянии, равном - 60
радиусам Земли.
За время активного существования станция дважды пересекала «хвост» магнитосферы
Земли, что было зафиксировано научными приборами.
Прибором РФЛ-1 были зарегистрированы электроны, входящие в состав продолжения
«хвоста» магнитосферы Земли. При нахождении спутника Луны в зоне радиации, связанной
с «хвостом» магнитосферы, скорость счета электронов составляла 50 имп-см-2 с1ср'1. Та-
кой поток электронов дал поток тормозного рентгеновского излучения -0,1, т.е. значительно
меньше ожидаемого потока рентгеновской флюоресценции.
На высотах 350 км и выше подробно исследовались эффекты возмущений и особенно-
сти распределения магнитного поля и межпланетной плазмы в окрестностях Луны. Исходя
из наблюдаемой топологии поля, был сделан вывод о его межпланетном характере с учетом
деформирования Луной.
Проведенные исследования магнетизма Луны подтвердили предположения о том, что
Луна не обладает дипольным магнитным моментом, не превышающим, по крайней мере,
Ю-4 магнитного момента Земли (Долгинов, 1982). Измеренная напряженность магнитного
поля и проведенные магнитографические разрезы окололунного пространства показали, что
магнитное поле Луны - весьма слабое (17-35 гамм).
Величины потоков ионов солнечной плазмы вблизи Луны были близки к типичным для
невозмущенного «солнечного ветра». Область «солнечного ветра», близкая к Луне, по-
видимому, возмущена - в ней наблюдались значительные потоки ионов, направление движе-
ния которых не совпадало с направлением от Солнца.
Измерения показали, что на орбите станции плотность микрометеоритов была, в среднем
за два месяца наблюдений, выше обычно наблюдаемой в межпланетном пространстве.
В настоящее время основным методом изучения гравитационного поля Луны остается
исследование гравитационных возмущений орбит ее искусственных спутников. Первым опы-
том таких измерений стали результаты анализа траекторных данных движения первого ИСЛ
«Луна-10». Эти пионерские исследования позволили определить значения 11 коэффициен-
тов в разложении гравитационного поля Луны (Аким, 1966). На рис. 2.17 представлена трех-
мерная схема плоских сечений во взаимно перпендикулярных плоскостях гравитационного
поля, построенная по данным ИСЛ «Луна-10». Следует обратить внимание, что общий харак-
тер распределения значений напряженности гравитационного поля предвосхищает откры-
тия последующих лет. Аномалия в северном полушарии видимой стороны Луны в точности
соответствует масконам, детально описанным позже по измерениям, проведенным на ИСЛ
серии «Лунар орбитер» (1967). Мюллер и Сьерген (1968), анализируя доплеровское измере-
ние частоты радиосигналов ИСЛ, определили компоненты скорости и ускорения спутников
51
ГЛАВА 2
Рис. 2.17. Трехмерная схема
плоских сечений гравитационного
поля Луны
по направлению к Земле. На основании этих данных
была построена первая детальная гравиметрическая
карта видимого полушария Луны в центральной об-
ласти. Аномальное усиление гравитационного поля в
экваториальной области обратной стороны Луны, об-
наруженное по данным ИСЛ «Луна-10», объяснилось
гораздо позже, когда были проведены исследования
с помощью ИСЛ нового поколения «Лунар проспек-
тор» (В.В. Шевченко, 1968).
Проведенные с помощью «Луны-10» исследова-
ния показали также, что возмущение движения Луны
за счет нецентральности поля тяготения в 5-6 раз
больше, чем возмущения, вызванные гравитацион-
ными влияниями Земли и Солнца.
Таким образом, за месячный срок аппарат полностью выполнил возложенную на него на-
учную программу, совершив к концу своего активного существования 450 витков.
КОСМИЧЕСКИЕ АППАРАТЫ СЕРИИ Е6-ЛФ
НАЗНАЧЕНИЕ КА
Космические аппараты серии Е6-ЛФ («лунный фотограф») предназначены для отработ-
ки методики вывода ИСЛ на экваториальную орбиту и проведения комплекса исследований
Луны и окололунного пространства, включая проведение фотосъемки приэкваториальных
областей лунной поверхности.
Серия Е6-ЛФ состоит из двух аппаратов: №101 (КА «Луна-11») и №102 (КА «Луна-12»).
Второй аппарат является дублером первого, призванным, с учетом опыта своего пред-
шественника и проведением на основе этого опыта соответствующих доработок, добиться
положительного результата в выполнении целевой задачи.
КА «Луна-11» запущен 24.08.1966 г., КА «Луна-12» -22.10.1966 г.
В программу экспедиции входило:
• фотосъемка поверхности Луны в районе экватора и последующая передача на Землю
фотоизображений;
• определение характеристик гравитационного поля по данным измерений эволюции
экваториальной орбиты;
• исследования интенсивности и спектрального состава гамма-излучения лунной по-
верхности;
• регистрация метеоритных частиц;
• изучение радиационной обстановки вблизи Луны;
• обнаружение рентгеновского флуоресцентного излучения Луны;
• измерение интенсивности радиоизлучения в длинноволновом диапазоне;
• измерение коэффициента отражения лунной поверхностью ультрафиолетовой части
спектра для определения ее структуры;
• проверка работоспособности зубчатых пар и подшипников качения в космических
условиях с целью изучения возможности их применения при создании самодвижущих-
ся зондов, предназначенных для контактного исследования лунной поверхности.
Для выведения КА серии Е6-ЛФ использован ракетно-космический комплекс в том же
составе, что и для предшествующих «лунных» аппаратов - трехступенчатая PH «Молния-М»
с разгонным блоком Л (РБЛ).
Баллистическая схема экспедиции выбрана во многом сходной со схемой полета КА
«Луна-10»: выведение на опорную орбиту, полет по пролетной траектории с прицельной точ-
кой, выбранной так, чтобы обеспечить выведение на ОИСЛ с перицентром - 100 км*, в райо-
* В выборе прицельной точки основное отличие от баллистики «Луны-10».
52
КОСМИЧЕСКИЕ АППАРАТЫ ДЛЯ ПЛАНЕТНЫХ ИССЛЕДОВАНИЙ
не которого проводится фотографирование лунной поверхности, коррекция, полет с закрут-
кой на пассивных участках, построение ориентации КА по лунной вертикали перед торможе-
нием.
Решение этой баллистической задачи для КА «Луна-11» реализуется следующим обра-
зом. При подлете к Луне система астроориентации и навигации (САОН), используя приборы
индикации (оптические приборы) Солнца и Луны, обеспечивает построение лунной верти-
кали, по завершении которого происходят изменения в работе САОН: оптические прибо-
ры отключаются, а вся система остается включенной до перехода в режим закрутки после
фотографирования. Стабилизация КА осуществляется работой блока электроники и газовых
микродвигателей САОН по сигналам системы управления (блок И-100Ф).
При формировании заданной орбиты ИСЛ с определенным положением перицентра си-
стема управления обеспечивает разворот аппарата на ~ 8° для выставки сопла двигателя
ЖРД в заданном направлении. Затем включается КТДУ, и после торможения аппарат выхо-
дит на спутниковую орбиту. В отличие от «Луны-10» весь КА в качестве спутника работает
как единое целое, а система управления продолжает его стабилизировать с целью создания
условий для фотографирования поверхности
рата рулевыми соплами КТДУ на активном
участке к стабилизации только с помощью
исполнительных органов САОН произво-
дится поэтапно. После выключения ЖРД
стабилизация осуществляется с помощью
рулевых сопел КТДУ еще в течение 20 с,
затем рулевые сопла отсекаются, и далее
аппарат стабилизируется уже только га-
зовыми соплами САОН до момента окон-
чания фотографирования (в течение еще
-2 ч). Для фотографирования предусмо-
трен участок орбиты в районе периселения
при дальности до поверхности Луны от 100
до 200 км.
КОСМИЧЕСКИЙ АППАРАТ
Автоматическая станция Е6-ЛФ соз-
дана на базе автоматической станции
«Луна-9» (Е6М) и состоит из объединенных
в единую конструкцию модернизированно-
го траекторного блока базового аппарата
и дополнительного отсека для служебных
и научных приборов, предназначенных
для работы на перелете и на орбите ИСЛ
(рис. 2.18). В связи с этим ранее применен-
ные в структурном делении КА серий Е6М
и Е6С наименования траекторный блок и
полезная нагрузка (АЛС - «Луна-9» или
ИСЛ - «Луна-10») теряют смысл, но для
удобства описания всего этого поколения
лунных аппаратов вышеназванная терми-
нология сохраняется и в дальнейшем.
Проектные результаты расчета балли-
стической схемы показали потребную ве-
личину импульса торможения меньше, чем
в экспедициях «Луны-9» и «Луны-10», что
привело к изменению объема топливных
Луны. При этом возврат от стабилизации аппа-
Рис. 2.18. Космический аппарат серии Е6-ЛФ
(«лунный фотограф»):
1 - баллоны с газом для исполнительных
органов системы астроориентации;
2 - фототелевизионное устройство;
3 - радиатор системы терморегулирования;
4 - радиометр; 5 - приборный отсек;
6 - химическая батарея; 7 - оптико-механический
блок системы астроориентации; 8 - антенна;
9 - электронный блок системы астроориента-
ции;'! О - управляющие двигатели;
11 - корректирующе-тормозная двигательная
установка^2 - баллоны с газом
53
ГЛАВА 2
баков КТДУ: бака окислителя - с 412 до 342,5 л (диаметр с 924 до 868 мм), бака горючего -
с 273 до 215 л. После доработки КТДУ получила индекс С5.5Ф.
Полностью сохранен (по конфигурации, исполнению и в большой степени по содержимо-
му) цилиндрический отсек основного блока объединенной системы управления.
Дополнительный приборный отсек - герметичный контейнер - монтируется на месте
АЛС («Луна-9») или ИСЛ («Луна-10»).
Вместо одного из навесных отсеков траекторного блока и радиовысотомера размеще-
ны фототелевизионные установки (ФТУ), оптические оси объективов которых изначально
параллельны продольной оси аппарата (оси X) и направлены в сторону КТДУ. При этом в
зависимости от даты пуска объективы ФТУ перед стартом могут быть отвернуты от этого по-
ложения на угол от 3 до 14 градусов.
Для проведения съемки лунной поверхности доработан прибор управления (И-100Ф),
обеспечивающий разворот КА на заданный угол 8° вокруг оси Z перед торможением и ста-
билизацию аппарата в течение 2 ч после окончания торможения и выхода на орбиту вокруг
Луны. Для связи системы управления и системы астроориентации установлен промежуточ-
ный блок ПБ-ЛФ. По окончании съемки аппарат переводится в режим «закрутки» вокруг оси
Z, что обеспечивает максимальную скорость передачи изображений с ФТУ при более узкой
(±30°) диаграмме направленности антенны.
В связи с увеличением времени работы прибора управления для «сброса» тепла разра-
ботан радиатор-охладитель в виде усеченного конуса, расположенного вокруг приборного
отсека.
Наличие радиатора не позволило установить штыревые антенны метрового диапазона
на самом приборном контейнере, как у «Луны-10». Поэтому они установлены на стыке при-
борного отсека с КТДУ, при этом количество передающих антенн уменьшено с четырех до
трех, и передача информации идет через все три антенны одновременно.
На базе приемоответчика дециметрового диапазона РКТ-1 путем ввода дополнитель-
ных блоков (дешифратора, модуляторов, ЗУ, хронизатора и ТМ-коммутатора) создан радио-
комплекс дециметрового диапазона РК-Д, обеспечивающий: прием 64 функциональных
команд для управления ФТУ и другими приборами; передачу телеметрической информации
в режиме непосредственной передачи со скоростями 4 и 64 дв.ед/с и в записи на магнито-
фон объемом 150 кбит со скоростью 64 дв.ед/с с последующим воспроизведением; внеш-
нетраекторные измерения; съемку лунной поверхности и передачу изображений на Землю.
ТМ-информация через РК-Д передается 6-разрядными словами: пять разрядов значащих и
шестой - дополнение до четности. Мощность передатчика РК-Д - 20 Вт. Все приборы радио-
комплекса РК-Д, кроме ФТУ, а также аппаратура КРС размещены в приборном отсеке. При-
боры радиокомплекса почти все задублированы.
В состав радиокомплекса РК-Д входят две фототелевизионные установки типа 15П52,
разработанные в НИИ приборостроения: ФТУ-Б с высоким разрешением (фокусное расстоя-
ние объектива «МТО-500 СА» 514,3 мм) и ФТУ-М с низким разрешением (фокусное расстоя-
ние объектива «Индустар-24СА» 106,9 мм) для «привязки» к местности детальных изобра-
жений участков лунной поверхности. Размер снимаемого участка на лунной поверхности для
ФТУ-Б составлял 24-24 км, а для ФТУ-М - 5x5 км. Разрешение на поверхности Луны при
съемке составляло 6 метров и 24 метра соответственно. Съемка производилась каждые 67
сек. Расстояние на Луне, соответствующее расстоянию между центрами снимков, - 120 км.
Запас пленки (42 кадра) на каждом ФТУ рассчитан на один сеанс съемки (64 мин) сразу
после торможения. Экспонирование пленки проводится с постоянно чередующимися выдерж-
ками 1/100 и 1/300 сек. Размер кадра 24 на 24 мм. Размер изображения 1100 на 1100 элемен-
тов. Время передачи на Землю одного кадра в штатном режиме составляет 17 мин по дециме-
тровой радиолинии (РК-Д) и в аварийном режиме - 68 мин по метровой радиолинии (КРС).
Включение РК-Д производится выдачей команды через радиосистему метрового диапа-
зона КРС. Команды в дециметровом диапазоне выдаются с НИП-16.
Система астроориентации и навигации также модернизирована и получила индекс
«Юпитер-М». Модернизация заключалась в продлении ее рабочего ресурса. Это было связа-
54
КОСМИЧЕСКИЕ АППАРАТЫ ДЛЯ ПЛАНЕТНЫХ ИССЛЕДОВАНИЙ
но с тем, что если на станциях «Луна-9, -10 и -13» она полностью выключалась после пере-
хвата стабилизации системой управления, а на «Луна-9, -13» и вовсе сбрасывалась, то на
«Луне-11, -12» в момент перехвата стабилизации системой управления (по сигналу СЛВ) вы-
ключались только оптические блоки, а вся система, включая блок ДУСов, оставалась вклю-
ченной и обеспечивала закрутку КА после окончания фотографирования. И только после
этого окончательно выключалась. Кроме того, система управления (блок СКТ) осуществляла
стабилизацию не только рулевыми соплами на активном участке, но и газовыми соплами си-
стемы астроориентации через блок ПБ.
При полете станций Е6-ЛФ использование земного датчика не планировалось, но для со-
хранения светотехнических характеристик КА он был оставлен в составе САОН.
Для проведения исследований Луны и межпланетного пространства на борту станции
«Луна-11» установлены следующие научные приборы:
• гамма-спектрометр 3134-03 для исследования интенсивности и спектрального состава
гамма-излучения лунной поверхности, характеризующего тип лунных пород (ГЕОХИ);
• РМЧ-1 - регистратор метеоритных частиц (ГЕОХИ);
• радиометр СЛ-1 для изучения радиационной обстановки вблизи Луны (НИИЯФ МГУ);
• РФЛ-Ф - прибор для обнаружения рентгеновского флуоресцентного излучения Луны
(ФИАН);
• «Кассиопея КЯ-4» - прибор для измерения интенсивности радиоизлучения в длинно-
волновом диапазоне (ГАИШ);
• спектрофотометр УС-3 - для определения структуры лунной поверхности путем изме-
рения коэффициента отражения ультрафиолетовой части спектра (НИИЯФ МГУ).
На борту «Луны-11» был также установлен экспериментальный редуктор Р-1, разра-
ботанный во ВНИИТрасмаше и предназначенный для проверки работоспособности зубчатых
пар и подшипников качения в космических условиях с целью последующего использования
результатов при создании луноходов.
Возможности использованных средств выведения позволяли увеличить массу станции до
1640 кг. Реально масса станции на трассе Земля - Луна составила 1621 кг (после отделения
от РБЛ), а на селеноцентрической орбите - 1148 кг.
ОРГАНИЗАЦИЯ УПРАВЛЕНИЯ ПОЛЕТОМ
Для управления полетом КА серии Е6-ЛФ задействованы все те же наземные средства,
что и для КА Е6С. Команды в дециметровом диапазоне выдавались с НИП-16.
Сохранен ранее примененный порядок проведения траекторных измерений и сеансный прин-
цип поддержания управляющей радиосвязи и получения телеметрической информации с КА.
Центр управления полетом располагался так же на НИП-10, вблизи г. Симферополь.
РЕАЛИЗАЦИЯ ПРОЕКТА
КОСМИЧЕСКИЙ АППАРАТ «ЛУНА-11» (Е6-ЛФ №101)
Старт ракеты-носителя «Молния-М» с автоматической станцией «Луна-11» (Е6-ЛФ №101)
произведен с космодрома Байконур 24 августа 1966 года в 11 ч 3 мин 21 сек. Старт с опор-
ной орбиты и отделение от РБЛ прошли в штатном режиме.
Первоначально коррекция траектории намечалась на 25 августа, однако во время пла-
нового сеанса связи произошел сбой - при отработке уставки астроприборами САОН была
преждевременно выдана команда с Земли на прекращение отработки. Перенесенная на 26
августа коррекция прошла штатно, а импульс коррекции составил 20,3 м/с (время работы
двигателя ~ 1 сек).
В предшествующих траекторных измерениях определялось отклонение траектории КА
от прицельной точки в картинной плоскости, которое было парировано коррекцией, и момент
включения КТДУ для выхода КА на селеноцентрическую орбиту.
28 августа, при подлете к Луне, была построена лунная вертикаль с использованием
индикаторов Солнца и Луны, при этом сигнал лунной вертикали (СЛВ) был сформирован на
5 мин раньше расчетного времени, что привело к аналогичному смещению момента вклю-
чения КТДУ. Причиной столь раннего формирования сигнала СЛВ явилось непредвиденное
55
ГЛАВА 2
увеличение освещенности поверхности Луны по сравнению с фиксируемой в экспедициях
«Луны-9» и «Луны-10».
Взаимодействие бортовых приборов и агрегатов по обеспечению стабилизации КА про-
шло по предусмотренной программе.
Несмотря на то, что двигательная установка отработала штатно - импульс торможения
составил 913,4 м/с и станция «Луна-11» вышла на орбиту ИСЛ, - смещение времени включе-
ния КТДУ привело к формированию орбиты с нерасчетным параметрами:
Фактические параметры Расчетные параметры
апоселений, км 1193,6 1512
периселений, км 163,5 100
наклонение, ° 10,7° 10,7°
период, мин 177,66 191,88
Как уже было сказано, переход на стабилизацию КА микродвигателями САОН прошел
штатно, однако из-за больших возмущений, связанных с несимметричным истечением газов
из дренажных сопел КТДУ, возникли большие отклонения по тангажу и рысканию. Механи-
ческие упоры гироскопической системы изменили положение рамок, в результате чего сфор-
мировалась нерасчетная ориентация КА.
Согласно циклограмме, через ~2 ч* после торможения были включены фототелевизион-
ные установки, которые проработали 64 мин. Было отснято по 40 кадров каждой ФТУ. Из-за
того, что пространственное положение КА оказалось отличным от расчетного, объективы фо-
токамер оказались направленными не на поверхность Луны, а вне ее, что и зафиксировали
полученные фотоснимки.
По этой же причине не получена ожидаемая информация со спектрофотометра УС-3.
По окончании съемки была выключена система управления, а еще через 16 мин прове-
дена закрутка КА вокруг оси Z.
На следующие сутки после выхода «Луны-11» на орбиту, после окончания сеанса свя-
зи в дециметровом диапазоне, на борту не была воспринята посланная с Земли команда
на выключение передатчика РК-Д. Результатом стал его отказ вследствие двукратного пре-
вышения допустимого для него времени непрерывной работы. После переключения на вто-
рой комплект передатчика работа в дециметровом диапазоне продолжалась до 14 сентября
1966 года, когда отказал и он.
Аппарат совершил 277 витков вокруг Луны.
Космический аппарат «Луна-12»
Конструкция «Луны-12» в целом сохранена такой же, что и у «Луны-11», однако невы-
полнение предшественницей основной задачи полета - фотографирования лунной поверхно-
сти - потребовало доработок отдельных систем космического аппарата.
Во-первых, сделаны дополнительные доработки для увеличения помехозащищенности
канала индикации Луны в САОН.
Во-вторых, так как основной причиной возникновения на «Луне-11» возмущающих мо-
ментов было воздействие на сопло камеры продуктов истечения из дренажных насадков
(Т-образных дренажных сопел) двигателя КТДУ, то для ликвидации указанных возмущаю-
щих моментов дренажи каждого из трактов двигателя объединены в отдельный коллектор.
Дренирование из коллектора производится через диаметрально расположенные сопла, дре-
нажные магистрали закольцованы.
* Включение прогрева ФТУ производилось по временной уставке (40-11 мин от включения двигателя),
а еще ровно через 1 час включались сами ФТУ. Длительность съемки - 64 мин, а еще через 16 мин
после окончания съемки КА переводился в режим закрутки.
Для «Луны-11» время запуска двигателя на торможение (реальное, на 5 мин раньше расчетного) - О
часов 49 мин 19,6 сек, время выхода метки Т12 на прогрев ФТУ - 1 час 47 мин 21,6 сек, включение
ФТУ - 2 часа 51 мин 24,6 сек, т.е. примерно через 2 часа после включения двигателя.
56
КОСМИЧЕСКИЕ АППАРАТЫ ДЛЯ ПЛАНЕТНЫХ ИССЛЕДОВАНИЙ
В-третьих, на «Луне-12» установлена дополнительная система стабилизации с повы-
шенной тягой сопел (два сопла тягой по 250 г по оси X, два сопла по 10ОО г по У и два сопла
по 500 г по Z), работающих на азоте. Вместе с основной системой микродвигателей САОН
она обеспечивала парирование нерасчетных возмущающих моментов и стабилизацию КА
после выключения маршевого двигателя. Для управления ими в блоке И-100Ф был установ-
лен дополнительный прибор РКБ. Для исполнительных органов дополнительной системы
был выделен один 8-литровый баллон с азотом.
Кроме того, около объективов ФТУ был установлен бликозащитный экран, а улучше-
ние теплоотвода от передатчиков системы РК-Д в приборном контейнере обеспечил допол-
нительный вентилятор для локального обдува передатчиков.
В остальном состав бортовых систем и научной аппаратуры станции «Луна-12» полно-
стью повторял «Луну-11».
Стартовая масса аппарата составляет 1640 кг вместе с опорной системой, которая слу-
жит для установки КА на блок Л. При отделении КА опорная система остается на блоке Л,
поэтому масса КА на перелете - 1621 кг, а на селеноцентрической орбите - 1136 кг.
Старт ракеты-носителя «Молния-М» с автоматической станцией «Луна-12» (Е6-ЛФ №102)
произведен с 31-й площадки космодрома Байконур 22 октября 1966 года в 11 ч 42 мин 26 сек.
Старт к Луне с промежуточной околоземной орбиты прошел штатно. КА отделился от РБЛ в
13 ч 4 мин 42 сек.
23 октября 1966 года проведена коррекция траектории. Время работы двигателя соста-
вило 2,5 сек.
При подлете к Луне 25 октября была штатно построена лунная вертикаль, произведен
доворот КА на 8 градусов с помощью системы управления, и включена КТДУ на торможение.
По окончании торможения, импульс которого составил 931,4 м/с, станция «Луна-12» вышла
на орбиту ИСЛ с параметрами, близкими к расчетным:
Фактические параметры Расчетные параметры
апоселений, км 1742 1720
периселений, км 103 100
наклонение, 0 36,6° 36,6°
период, мин 205,3 203,78
После торможения и выхода на орбиту ИСЛ система управления продолжала стабилизи-
ровать аппарат с помощью микродвигателей САОН «Юпитер-М» и дополнительной системы
стабилизации с целью создания условий, необходимых для запланированного фотографирова-
ния поверхности Луны. При этом переход от стабилизации рулевыми соплами КТДУ на актив-
ном участке к стабилизации с помощью исполнительных органов САОН проводился поэтапно.
В течение следующих за выключением ЖРД 20 секунд стабилизация осуществлялась с по-
мощью рулевых сопел КТДУ, которые затем отсекались. Одновременно с этим в параллель
к родолжающим работать микродвигателям САОН подключились исполнительные органы до-
полнительной системы стабилизации, которая, подключившись, работала до полного израсхо-
дования рабочего тела. Таким образом, параметры стабилизации поддерживались в пределах
заданной нормы. Микродвигатели САОН работали до момента окончания фотографирования.
Информации со спектрофотометра УС-3 получено не было по причине неисправности
прибора.
Автоматическая станция «Луна-12» проработала на окололунной орбите 86 суток, при
этом программа полета станции была выполнена полностью.
ТЕХНИЧЕСКАЯ И ТЕХНОЛОГИЧЕСКАЯ НОВИЗНА. РЕЗУЛЬТАТЫ ЛКИ
В экспедиции «Луны-11» сделаны первые шаги по отработке неапробированной ранее
схемы выведения КА на орбиту ИСЛ для проведения дистанционных исследовательских ра-
бот при заданной его ориентации в окололунном пространстве.
Результатом ЛКИ стало выявление непредвиденных факторов, оказывающих существен-
ное влияние на реализуемость предлагаемой схемы выведения, получение телеметрической
57
ГЛАВА 2
информации в объеме, достаточном для учета и устранения негативного влияния этих фак-
торов в последующих экспедициях.
Проверка экспериментального редуктора Р-1, проработавшего 5 часов (вместо 20 запла-
нированных) в условиях космического вакуума, показала его высокую работоспособность.
Итогом экспедиции КА «Луна-12» стало:
получение положительного результата в отрабатываемом варианте технологии выведе-
ния непилотируемого зонда на орбиту искусственного спутника Луны с заданной его ориен-
тацией в окололунном пространстве;
результативное проведение фотосъемки намеченных районов лунной поверхности - на
Земле получено 28 снимков с ФТУ-Б и 14 снимков с ФТУ-М нормального качества;
проверка экспериментального редуктора Р-1, проработавшего около 20 часов в условиях
космического вакуума, показала его высокую работоспособность;
сформированная комплектность бортовых служебных агрегатов, приборов и систем, ло-
гика их взаимодействия и качество их работы обеспечили выполнение полетного задания в
полном объеме.
НАУЧНЫЕ РЕЗУЛЬТАТЫ
Научная программа полета станции «Луна-11» была выполнена не в полном объеме:
• не получены фотоснимки лунной поверхности;
• недостаток траекторной информации с орбиты Луны не позволил уточнить параметры
ее гравитационного поля;
• отсутствие возможности нормальной работы прибора УС-3, а также отказ (в полете)
приборов РФЛ-Ф и 3134-03 не позволили провести, соответственно:
- измерения коэффициента отражения ультрафиолетовой части спектра лунной по-
верхностью для определения ее структуры;
- исследования по обнаружению рентгеновского флуоресцентного излучения Луны;
- исследования интенсивности и спектрального состава гамма-излучения лунной по-
верхности, характеризующего тип лунных пород.
В то же время в течение 34 суток* активного существования спутника на орбите ИСЛ
с НИП-10 было проведено 139 сеансов* радиосвязи с аппаратом в метровом диапазоне.
Научная аппаратура, сохранившая свою работоспособность, позволила продолжить исследо-
вания Луны и окололунного пространства, начатые в экспедиции «Луны-10».
Кроме этого, прибором КЯ-4 были обнаружены изменения интенсивности радиоизлуче-
ния в зависимости от ориентации аппарата и положения на орбите. С помощью радиометра
СЛ-1 было зарегистрировано необычайно сильное временное повышение уровня радиации,
связанное с происходившими солнечными хромосферными вспышками.
С борта «Луны-12» по характеру гамма-излучения поверхности Луны получены уточнен-
ные данные об ее общем химическом составе.
Методом гамма-спектрометрии измерено содержание естественных радиоактивных эле-
ментов (К, U, Th) и определен тип пород, залегающих на поверхности Луны. Эти данные под-
твердили информацию, полученную при полете станции «Луна-10».
Проведены исследования радиационных условий и распределения микрометеоритов
в окололунном пространстве, а также радиоастрономические наблюдения в диапазонах
длинных и средних волн.
Дополнительно с помощью траекторных измерений было проведено изучение характери-
стик гравитационного поля Луны по эволюции орбиты КА.
* Разногласие с ранее опубликованным. Уточненные данные взяты из отчета по летным испытани-
ям «Луны-11». Там же в таблице выполнения программы полета записано:
27 августа - сеанс 23 - торможение с выходом на ОИСЛ.
1 октября - в сеансах 160 и 161 сигнал принимался, но очень слабый.
1 октября - в сеансе 162 сигнал получен не был.
58
КОСМИЧЕСКИЕ АППАРАТЫ ДЛЯ ПЛАНЕТНЫХ ИССЛЕДОВАНИЙ
КОСМИЧЕСКИЕ АППАРАТЫ СЕРИИ Е6-ЛС
НАЗНАЧЕНИЕ КА
Космические аппараты серии Е6-ЛС предназначены для проведения испытаний нового
бортового радиокомплекса ДРК в условиях реального космического полета и для отработки
на его базе линий радиосвязи «Земля-Борт» и «Борт-Земля» с околоземной и окололунной
орбит, а также для проведения ряда научных исследований в окололунном пространстве.
Серия Е6-ЛС состоит из трех аппаратов: №111 (КА «Космос-159»), №112, №113
(КА Луна-14»),
Старты КА серии Е6-ЛС состоялись: «Космос-159» -17.05.1967 г., Е6-ЛС №112 -
7.02.1968 г., «Луна-14» - 7.04.1968 г.
В программу экспедиции входило:
• проведение испытаний в условиях реального космического полета нового бортового
радиокомплекса ДРК, предназначенного для последующего применения в составе
автоматических лунных станций нового поколения (серии Е8), а также на лунных пи-
лотируемых космических кораблях Л1 и ЛЗ;
• отработка на базе ДРК линий радиосвязи «Земля-Борт» и «Борт-Земля» с околозем-
ной и окололунной орбит;
• отработка нового наземного радиотехнического комплекса «Сатурн-МС», установ-
ленного на НИП-14 (Щёлково), НИП-15 (Уссурийск), НИП-10 (Симферополь) и НИП-16
(Евпатория);
• отработка методики выведения искусственного спутника Луны на селеноцентриче-
скую орбиту с наклонениями ~45 градусов и ~0° (близкую к экваториальной);
• изучение радиационной обстановки вблизи Луны и регистрация космического и сол-
нечного корпускулярного излучения;
• определение характеристик гравитационного поля Луны по эволюциям орбиты КА;
• исследования дифференциальных и интегральных тканевых доз;
• проверка работоспособности зубчатых пар (стальных и стеклокерамических) и раз-
личных типов подшипников качения с консистентной смазкой и без неё в космических
условиях с целью изучения возможности их применения при создании самодвижущих-
ся зондов, предназначенных для контактного исследования лунной поверхности;
• оценки эффективности уплотнения и работоспособности привода колеса проектируе-
мого самодвижущегося исследовательского зонда.
Для выведения КА серии Е6-ЛС использована четырехступенчатая ракета-носитель
«Молния-М». Доработок головного блока (ГБ), состоящего из КА и РБЛ, по сравнению с
ракетно-космическим комплексом «Луны-12» не проводилось.
Баллистическая схема экспедиции практически полностью повторяет схему полета КА «Луна-
11» и «Луна-12». С учетом того, что на КА серии Е6-ЛС отсутствует фототелевизионная установ-
ка, режим стабилизации в течение 2 час после торможения исключен. Выключение блока управ-
ления И-100 производится через 2 мин после включения двигателя на торможение.
КОСМИЧЕСКИЙ АППАРАТ
Конструкция КА Е6-ЛС (КТДУ С5.5Ф, цилиндрический отсек блока объединенной систе-
мы управления, дополнительный приборный отсек) и состав ее служебных бортовых систем
в целом сохранены такими же, что и у «Луны-12». Дополнительно установлен солнечный
датчик для определения пространственного положения КА при выключенной системе астроо-
риентации.
Основные отличия относятся к радиосистеме и вновь установленной телеметрической
аппаратуре.
В связи с изменением целевой задачи (по сравнению с «Луной-12») из состава бортовой
аппаратуры исключены все приборы и системы, обеспечивавшие проведение фотосъемки.
Отсутствуют также специальные элементы конструкции КА, способствующие её выполнению
(в т.ч. бликозащитный экран).
59
ГЛАВА 2
Помимо штатного радиокомплекса метрового диапазона КРС и приемоответчика деци-
метрового диапазона РКТ-1, на борту КА Е6-ЛС установлены: приемно-передающее устрой-
ство ДРК и телеметрическая аппаратура БР-9-7.
Приемно-передающее устройство ДРК обеспечивает прием с Земли до 113 функцио-
нальных команд для управления приборами ДРК, телеметрической аппаратурой БР-9-7 и на-
учными приборами.
Телеметрическая аппаратура БР-9-7 предназначена для сбора информации с приборов
ДРК и научной аппаратуры. Передача информации с БР-9-7 осуществляется только в режи-
ме непосредственной передачи через ДРК со скоростью 125 изм/с.
Для размещения аппаратуры ДРК и БР-9-7 использован также приборный контейнер ап-
паратов серии Е6-ЛФ, но удлиненный на 15 см за счет цилиндрической вставки.
Изменен состав научной аппаратуры. В него вошли:
• радиометр СЛ-2 для изучения радиационной обстановки вблизи Луны и регистрации
космического и солнечного корпускулярного излучения (НИИЯФ МГУ);
• тканевый дозиметр ИК-2 для исследования дифференциальных и интегральных тка-
невых доз.
• Кроме того, на борту КА Е6-ЛС установлены:
• приборы Р-1-1, Р-1-11 и Р-1-111, представляющие собой экспериментальные редукторы
для проверки работоспособности различных вариантов зубчатых пар и различных ти-
пов подшипников качения с различными вариантами смазки в условиях космоса;
• прибор М-1, предназначенный для оценки эффективности уплотнения и работоспособ-
ности привода колеса проектируемого самодвижущегося исследовательского зонда.
ОРГАНИЗАЦИЯ УПРАВЛЕНИЯ ПОЛЕТОМ
Для управления полетом КА Е6-ЛС задействованы все те же наземные средства, что и
для КА Е6-ЛФ. Команды в дециметровом диапазоне выдаются с НИП-16.
Сохранен ранее примененный порядок проведения траекторных измерений и сеансный
принцип поддержания управляющей радиосвязи и получения телеметрической информации
с КА.
Центр управления полетом располагается также на НИП-10, вблизи Симферополя.
РЕАЛИЗАЦИЯ ПРОЕКТА
Испытания нового бортового радиокомплекса ДРК в условиях реального космического
полета и отработку на его базе линий радиосвязи «Земля-Борт» и «Борт-Земля» с околозем-
ной и окололунной орбит намечалось проводить в два этапа.
На первом этапе КА выводится на околоземную эллиптическую орбиту, и вся программа
полета посвящена изучению работы радиокомплекса ДРК. Научная аппаратура, предназна-
ченная для проведения исследований в области фундаментальных отраслей науки, на борту
КА не устанавливается.
КОСМИЧЕСКИЙ АППАРАТ СЕРИИ Е6-ЛС ПОД №111, предназначенный для реализа-
ции первого этапа испытаний радиокомплекса ДРК, запущен 17 мая 1967 года в 0 час 44 мин
55 сек с помощью PH «Молния-М» с космодрома Байконур. Из-за нештатной работы РБЛ КА,
получивший обозначение «Космос-159», был выведен на вытянутую эллиптическую орбиту
ИСЗ ниже расчетной. Параметры орбиты составили: высота в апогее 60600 км, в перигее -
380 км, наклонение 51,5 град и период 19 час 33 мин.
Летные испытания новых бортовых систем проводились в течение 9 суток.
На втором этапе испытания проводятся с КА, выведенным на селеноцентрическую орби-
ту. В этом случае, кроме работ с радиокомплексом ДРК, выполняется научная программа по
исследованию окололунного и космического пространства, а также осуществляется контроль
работы экспериментальных установок (приборы Р-1-1, Р-1-11 и Р-1-111, М-1) для последующего
выбора оптимальных вариантов механизма шасси создаваемых самодвижущихся исследо-
вательских зондов.
Второй этап испытаний начался с неудачи.
60
КОСМИЧЕСКИЕ АППАРАТЫ ДЛЯ ПЛАНЕТНЫХ ИССЛЕДОВАНИЙ
КА СЕРИИ Е6-ЛС ПОД №112 запущен 7 февраля 1968 года в 13 час 44 мин 53 сек с
помощью PH «Молния-М». Выведение на околоземную орбиту закончилось аварией ракеты-
носителя. На участке работы третьей ступени произошел отказ стабилизатора, что явилось
причиной повышенного более чем в два раза расхода горючего.
Следующий запуск КА СЕРИИ Е6-ЛС №113 состоялся 7 апреля 1968 года в 13 час 09
мин 32 сек и прошел успешно: КА, получивший наименование «Луна-14», был выведен на
траекторию полета к Луне. Масса КА «Луна-14» после отделения от РБЛ составила 1621 кг.
Перелет проходил в штатном режиме: 8 апреля была проведена коррекция траектории,
а 10 апреля 1968 года в результате торможения при подлете к Луне скорость станции была
снижена с 2190 м/с до 1279 м/с.
«Луна-14» вышла на орбиту ИСЛ со следующими параметрами: высота в апоселении 870
км, в периселении -160 км, наклонение 42° и период орбиты 2 час 40 мин.
В течение 75 суток работы «Луны-14» на орбите ИСЛ (до выработки емкости химической
батареи) с КА был проведен 271 сеанс связи, в которых проводились проверки функциони-
рования в различных режимах нового радиокомплекса ДРК, в том числе при различных по-
ложениях станции относительно лунной поверхности, а также при заходах за Луну.
В интересах будущих пилотируемых экспедиций на Луну были проведены измерения по-
токов заряженных частиц, идущих от Солнца, и в структуре космических лучей.
ТЕХНИЧЕСКАЯ И ТЕХНОЛОГИЧЕСКАЯ НОВИЗНА. РЕЗУЛЬТАТЫ ЛКИ
На первом этапе испытаний (при работе КА «Космос-159» на орбите ИСЗ) установлено,
что энергетический потенциал дециметровой радиолинии Борт-Земля на 1-2 порядка ниже
расчетного значения.
Программа экспедиции КА «Луна-14» выполнена в полном объеме. Срок активного суще-
ствования на орбите ИСЛ превысил запланированный: 75 суток вместо 30, предусмотрен-
ных программой. Проведена отработка новой для отечественной космонавтики того времени
системы дальней космической связи, использующей более совершенную элементную базу,
обладающей большими функциональными возможностями. Получены результаты изучения
условий прохождения и стабильности радиосигналов, передаваемых с Земли на борт «Луны-
14» и обратно при нахождении КА в разных точках орбиты и при заходах за лунный диск;
проведена юстировка наземных средств радиосвязи.
В ходе испытаний ДРК были выявлены следующие недостатки:
низкий уровень энергетического потенциала радиолинии Борт-Земля в ряде сеансов
связи по системам ДРК и РКТ-1;
отсутствие когерентного ответа в большинстве сеансов связи по линии РКТ-1.
Отмечены также сложности в поддержании температурного режима - система термо-
регулирования работала на верхнем пределе, и в некоторых случаях значения температур
превышали допустимые.
Проверка приборов экспериментального редуктора Р-1 и прибора М-1 показала их вы-
сокую работоспособность в условиях космического вакуума. Эти эксперименты позволили
сделать окончательный выбор материалов для зубчатых пар редукторов и для уплотнений
приводов колес, а также подшипников для шасси лунохода.
НАУЧНЫЕ РЕЗУЛЬТАТЫ
Систематические длительные наблюдения за изменением параметров орбиты КА в ре-
зультате траекторных измерений, проводимых с помощью радиосистем КРС, РКТ-1 и ДРК,
позволили уточнить соотношение масс Земли и Луны, параметры либрационных движений
Луны, данные о гравитационном поле Луны и о её форме. В преддверие пилотируемых экс-
педиций изучались космические лучи и потоки заряженных частиц, идущих от Солнца.
Научная программа полета КА «Луна-14» была выполнена полностью.
61
ГЛАВА 2
ТРЕТЬЕ ПОКОЛЕНИЕ «ЛУННИКОВ»: КА «ЛУНА-15» - «ЛУНА-24»
Полеты к Луне автоматических космических аппаратов семейства Е6 позволили решить
многие приоритетные задачи, о которых было рассказано в предыдущих разделах. Однакс
для следующего шага в реализации намеченной стратегии изучения Луны - именно деталь-
ного её исследования - потребовалось значительно расширить функциональные возможно-
сти как самих космических аппаратов и их бортовых систем, так и используемых в лунны>
миссиях зондирующих средств.
В отношении зондирующих средств, работающих в контакте с поверхностью, ставилась
задача сделать их подвижными, многофункциональными в части проведения научных экспе
риментов, с большим ресурсом работоспособности в климатических условиях Луны.
Одна из важнейших задач планетологии - всестороннее изучение природных вещесть
исследуемого объекта, и в арсенале ученых должны были появиться принципиально новые
беспилотные зондирующие средства челночного типа, позволяющие использовать с этой це
лью богатейшие возможности земных лабораторий.
Разработка обоих видов зондирующих средств весьма перспективна, ведь только дле
Луны пока возможны альтернативные варианты.
Наступила пора применять и зондирующие средства дистанционного действия со значи
тельно большими исследовательскими возможностями, нежели ранее.
Решение всех этих задач предполагало и появление на космическом аппарате дополни
тельных устройств, агрегатов и бортовой аппаратуры, обеспечивающих работу новых зон
дов, и сами зонды становились более сложными и массивными аппаратами, чем те, которые
применялись в экспедициях КА серии Е6.
Одновременно с этим решалась и основная конструкторская задача - создавался уни
версальный служебный модуль, на котором, путем незначительной его модификации, могль
устанавливаться зондирующие средства любого из вышеназванных видов.
Все это было создано и активно использовалось в период с 1969 по 1976 гг.
Анализ различных проектно-конструкторских схем привел к выбору варианта автономно
го долгоживущего самоходного дистанционно-управляемого аппарата, получившего наимено
вание луноход. На стадии замысла (С.П.Королев, А.Л.Кемурджиан) луноход рассматривало
как вспомогательное средство - транспорт или радиомаяк - для пилотируемых экспедиций
в разработке Машиностроительного завода им. С.А. Лавочкина (Н.Г.Бабакин) он приобре!
вполне самостоятельное назначение и стал настоящей внеземной исследовательской лабо
раторией.
Для доставки на Землю образцов лунного грунта были созданы уникальные грунтозабор
ные устройства двух типов и возвратная ракета, использующая в качестве пусковой установ
ки служебный модуль космического аппарата для возвратного взлета с поверхности Луны.
Созданные комплексы бортовой научной аппаратуры дистанционного действия обеспе
чили выполнение задач картографирования и топографической съемки лунной поверхности
проведение исследований гравитационного и магнитного полей, определение химическое
состава при помощи гамма-спектрометра и др.
На базе нового универсального служебного модуля, получившего наименование
орбитально-посадочный блок (в ранних разработках - КТ), на Машиностроительном заводе
им. С.А. Лавочкина создано третье поколение автоматических космических аппаратов дл;
исследования Луны.
Эти аппараты совершали перелет к Луне по схеме, используемой КА второго поколения
но при этом стало возможным увеличить его результирующую точность за счет проведени!
нескольких коррекций на траектории полета от Земли к Луне и на орбите ИСЛ.
Использование минимально возможного количества астроориентиров - Солнце и Зем
ля - дало экономию по массе служебных систем, но при этом возник ряд дополнительны;
требований по баллистике: использование Земли накладывало ограничение на даты старта
ориентация не могла обеспечиваться, когда КА, Солнце и Земля находились на одной линии
или угол Солнце-КА-Земля был мал.
62
КОСМИЧЕСКИЕ АППАРАТЫ ДЛЯ ПЛАНЕТНЫХ ИССЛЕДОВАНИЙ
Для «лунников» третьего поколения, предназначенных для выполнения существенно бо-
лее сложных исследовательских работ на лунной поверхности, нежели те, что совершили
их предшественники, разработана принципиально иная схема посадки -полностью исключен
этап неуправляемого сближения с поверхностью.
Более совершенные, с точки зрения своего конструктивного построения, насыщенности
научной и служебной аппаратурой и их функциональных возможностей, более маневренные,
эти аппараты, представлявшие таким образом полезную нагрузку существенно большей мас-
сы, чем их предшественники, нашли свое применение благодаря введению в эксплуатацию PH
«Протон». Поэтому результативность совершаемых ими лунных экспедиций в начале этого при-
менения во многом определялась успешностью начала эксплуатации новой ракеты-носителя.
Третье поколение объединяет четыре серии космических аппаратов Е-8, Е8-5, Е8-5М,
Е8-ЛС, о каждой из которых рассказывается в следующих разделах (рис. 2.19).
КА для доставки лунного грунта
“Луна-15”, “Луна-16”, “Луна-18”
“Луна-20”, “Луна-23”, “Луна-24”
КА для доставки лунохода
“Луна-17”, “Луна-21”
Рис. 2.19. Использование универсального служебного модуля в сочетании
с различными видами полезной нагрузки в КА серий Е-8, Е8-5, Е8-5М, Е8-ЛС
63
ГЛАВА 2
КОСМИЧЕСКИЕ АППАРАТЫ СЕРИИ Е8-5
НАЗНАЧЕНИЕ КА
Космические аппараты серии Е8-5 предназначены для осуществления мягкой посадки
на поверхность Луны с целью забора образцов лунного грунта с глубины до 35 см и до-
ставки их на Землю.
Старт КА «Луна-16» (Е8-5) с Луны
Рис. 2.20. Ракета-носитель «Протон-К»
с размещенным в головной части КА
Серия Е8-5 состоит из восьми аппаратов: №401
(КА «Луна-15»), №402, №403 («Космос-300»), №404
(«Космос-305»), №405, №406 (КА «Луна-16»), №407
(«Луна-18»), №408 («Луна-20»).
Каждая экспедиция по доставке образцов лун-
ного грунта осуществлялась в разные календарные
сроки и предусматривала участие лишь одного из
аппаратов этой серии.
Запуски аппаратов осуществлены: Е8-5 №402 -
14.06.1969 г., «Луна-15» - 13.07.1969 г., «Космос-
300» - 23.09.1969 г., «Космос-305» - 22 .10.1969 г.,
Е8-5 №405 - 6.02.1970 г., «Луна-16» - 12.09.1970 г.,
«Луна-18» - 2.09. 1971 г., «Луна-20» - 14.02.1972 г.
В программу экспедиции входило:
• проведение летных испытаний КА из вводимого
в эксплуатацию третьего поколения автоматиче-
ских зондов для исследования Луны;
• отработка новых в отечественной космонавтике
методов навигации и технологии осуществления
мягкой посадки исследовательского зонда на
лунную поверхность;
• отработка технологии взятия проб образцов
из подповерхностного слоя лунного грунта;
• доставка забранных образцов лунного грунта
на Землю.
СРЕДСТВА ВЫВЕДЕНИЯ
Для выведения КА серии Е8-5 использована
четырехступенчатая ракета-носитель «Протон-К»
стартовой массой 690 тонн (рис. 2.20). На первых
трех ступенях ракеты применяется самовоспламе-
няющееся топливо: четырехокись азота (АТ) и не-
симметричный диметилгидразин (НДМГ). Четвертой
ступенью служит разгонный блок Д, работающий
на керосине и жидком кислороде. На блоке Д уста-
новлен двигатель 11Д58 тягой 8550 кг (в пустоте) с
удельным импульсом 345 секунд. Стартовая масса
блока Д - 17300 кг.
Первые три ступени обеспечивают выведение
головного блока, состоящего из четвертой ступени
(блока Д) и космического аппарата, на незамкнутую
околоземную орбиту.
Первым включением двигателя блока Д форми-
руется опорная орбита ИСЗ, вторым - КА выводится
на траекторию полета к Луне. Управление работой
блока Д происходит от системы управления косми-
ческого аппарата.
64
КОСМИЧЕСКИЕ АППАРАТЫ ДЛЯ ПЛАНЕТНЫХ ИССЛЕДОВАНИЙ
Рис. 2.21. Баллистическая схема экспедиции
Масса головного блока на опорной орбите составляет ~ 19,2 т, на перелетную траекто-
рию выводится полезный груз массой до 5800 кг.
Первые три ступени PH «Протон-К» изготовлены на Заводе им. М.В. Хруничева (г. Мо-
сква), четвертая ступень (блок Д) - на Заводе экспериментального машиностроения (г. Ка-
лининград Московской области), головной обтекатель и космический аппарат - на Машино-
строительном заводе им. С.А. Лавочкина.
Баллистическая схема экспедиции (рис. 2.21).
При описании баллистической схемы экспедиции целесообразно выделить две её составля-
ющие: полёт с поверхности Земли на Луну и обратный полёт - с поверхности Луны на Землю.
• Полет по маршруту Земля - Луна состоит из следующих основных этапов:
• старт и последующее выведение ГБ на незамкнутую околоземную орбиту;
• формирование опорной орбиты с параметрами: высота ~ 200 км, наклонение 51,6°;
• пассивный стабилизированный полет по опорной орбите в течение ~ 1 ч;
• перевод ГБ на траекторию перелета к Луне и последующее отделение КА от РБД;
• перелет с проведением коррекции траектории (на трассе перелета к Луне возможно
• проведение двух коррекций траектории: через 31-36 ч и через 80-84 ч после старта);
• торможение КА и выход на селеноцентрическую орбиту, близкую к круговой;
• полет и маневрирование на орбите ИСЛ с целью выбора момента посадки;
• торможение и посадка КА на лунную поверхность;
• определение лунной вертикали и забор грунта.
Поскольку одна из основных задач экспедиции КА серии Е8-5 - отработка новой для
отечественной космонавтики технологии посадки исследовательского зонда на лунную по-
верхность, имеет смысл более подробно описать заключительные этапы полета по маршруту
«Земля-Луна» (рис. 2.21, 2.22).
Торможение КА и выход на селеноцентрическую орбиту, близкую к круговой, обеспечи-
вается включением корректирующе-тормозной двигательной установки (КТДУ) спустя 4,5 су-
ток после старта.
С целью формирования условий для схода с орбиты в течение двух суток проводятся её
коррекции, в результате чего достигается прохождение аппарата над выбранным районом
посадки, а перицентр орбиты понижается до высоты 16-20 км.
65
ГЛАВА 2
выключение
двигательной
установки
включение
основного
двигателя
выключение
двигателей
малой тяги
УЧАСТОК
СНИЖЕНИЯ
С МАЛОЙ
СКОРОСТЬЮ
окончание
разворота КА;
включение
радиовысотомера и
измерителя скорости
УЧАСТОК
УПРАВЛЯЕМОГО
ТОРМОЖЕНИЯ
выключение
основного
двигателя;
включение
двигателей
малой тяги
Рис. 2.22. Схема посадки КА
на поверхность Луны
Через трое суток после выхода на око-
лолунную орбиту в её перицентре КТДУ
включается на торможение и одновременно
сбрасываются навесные отсеки. В ходе тор-
можения производится выдерживание мо-
дуля продольной составляющей кажущейся
скорости по заданному закону, а также скло-
нение по тангажу с отслеживанием опор-
ной траектории по сигналу рассогласования
между программной и измеренной с помо-
щью радиовысотомера «Вега» высотами.
Первый этап торможения заканчивается
выходом на высоту 1800±500 м над лунной
поверхностью, при достижении которой про-
исходит отсечка двигателя.
Далее аппарат совершает свободное па-
дение с доворотом продольной оси до мест-
ной вертикали, измеряющейся с помощью
доплеровского измерителя скорости.
На высоте 550±200 м начинается участок
прецизионного торможения, которое обеспе-
чивается основным двигателем КТДУ, рабо-
тающим в режиме с регулируемой тягой.
На высоте 10-30 м происходит переклю-
чение с основного двигателя КТДУ на блок
двигателей малой тяги, обеспечивающий
снижение КА с постоянной скоростью.
На высоте 1,8-3 м по сигналу с гамма-
высотомера «Квант-2» производится выклю-
чение двигателей, и аппарат опускается на
поверхность Луны.
В результате всех этих действий верти-
кальная скорость аппарата в момент касания
не должна превышать 5 м/с, точность посад-
ки в заданный район Луны - не хуже ±5 км.
Представляет определённую сложность
выбор места посадки - она допустима лишь
в ограниченном районе восточной части эк-
ваториальной зоны Луны.
Все эти ограничения диктовались тем,
что решение основной целевой задачи - до-
ставка на Землю образцов лунного грунта -
в экспедициях аппаратов серии Е8-5 воз-
можно лишь в случае прямого возвратного старта, т.е. возвратного полета по достаточно
строго заданной попадающей траектории, без осуществления разворотов и коррекций в его
процессе.
При этом выбор момента возвратного старта также имеет жесткие временные рамки.
Начиная с момента отделения от разгонного блока Д, аппарат совершает полет к Луне
как единое целое, в обратный путь отправляется лишь его составная часть - так называемая
возвратная (взлетная) ракета (ВР). При этом в качестве стартовой площадки используется
остающаяся на лунной поверхности посадочная платформа (орбитально-посадочный блок
без навесных отсеков, сброшенных перед посадкой). Последовательность выполнения опе-
раций, связанных с забором пробы лунного грунта, проиллюстрирована рис. 2.23.
66
КОСМИЧЕСКИЕ АППАРАТЫ ДЛЯ ПЛАНЕТНЫХ ИССЛЕДОВАНИЙ
Рис. 2.23. Работа АКК Е8-5 на поверхности Луны:
1 - возвращаемый аппарат; 2 - контейнер с лунным грунтом; 3 - рабочее положение штанги и
бурового станка; 4 - корпус бурового станка; 5 - буровой снаряд; 6 - винт подачи; 7 - вращатель
Полет по маршруту «Луна-Земля» (рис. 2.24)
состоит из следующих основных этапов:
• старт ВР в условиях ранее оговоренных
ограничений;
• перелет ВР в неориентированном состоя-
нии с закруткой вокруг любой из осей;
• отделение возвращаемого аппарата (ВА) с
образцами лунного грунта при достижении
околоземного пространства;
• спуск ВА в земной атмосфере с последова-
тельным прохождением стадий аэродина-
мического торможения и использования
парашютной системы;
• мягкая ВА посадка на поверхность Земли.
После определения лунной вертикали и забо-
ра грунта ВР стартует с поверхности Луны в за-
данное время строго вертикально вне зависимо-
сти от угла наклона ракеты. При этом допустимое
отклонение от лунной вертикали - не более 25°. В
процессе работы двигателя строго выдерживается
направление импульса: по лунной вертикали без
программных разворотов. Отсечка двигателя про-
изводится при достижении кажущейся скорости в
направлении местной вертикали -2700 м/с. После окончания работы ДУ она отделяется.
Весь дальнейший полет ВР происходит с закруткой вокруг одной из ее осей, чем дости-
гается равномерный прогрев аппарата от Солнца.
Длительность маршрута Луна-Земля -84 ч.
Выбор простейшей схемы этого перелета позволял минимизировать вес бортовых си-
стем управления и двигательной установки ВР, увеличивая тем самым допустимую массу
забранных образцов грунта.
Таким образом, принятая баллистическая схема экспедиции приводит к некоторым
усложнениям в ее реализации - сокращению числа возможных дат стартов КА и ВР, но она
позволяет, как уже было сказано выше, решить проблему доставки образцов лунного грунта
аппаратами серии Е8-5. Автор этого уникального решения - один из главных специалистов
Машиностроительного завода им. С.А. Лавочкина в области баллистики Ю.Д. Волохов.
старт с
поверхности Луны
Рис. 2.24. Схема полета ВР
по маршруту «Луна-Земля»
67
ГЛАВА 2
Рис. 2.25. Заключительный этап
доставки на Землю образцов
лунного грунта
За ~ 3 ч до входа в атмосферу по команде
с Земли производится отделение возвращае-
мого аппарата, содержащего капсулу с образ-
цами грунта, от возвратной ракеты.
Возвращаемый аппарат входит в атмос-
феру со скоростью -11 км/с и совершает
баллистический спуск. Величина перегрузки
в процессе аэродинамического торможения
достигает 315 единиц. При уменьшении верти-
кальной скорости до -300 м/с на высоте 15 км
вводится в действие парашютная система,
и возвращаемый аппарат совершает мягкое
приземление. Его месторасположение опре-
деляется по сигналу с радиопеленгационных
передатчиков (рис. 2.25).
Последовательность выполняемых опе-
раций по ходу экспедиции выглядела следую-
щим образом.
Через 588 сек после старта отключается
двигатель третьей ступени и запускается раз-
гонный блок 11С824 (блок «Д» от ракетного
комплекса «Н1-ЛЗ»). На 958-й секунде АКК
«Луна-16» с блоком «Д» выходит на околозем-
ную орбиту. Через 35 мин после запуска рас-
крываются элементы посадочного устройства
ОПБ, через 66 мин - проводится ориентация
комплекса, через 70 мин - двигатель блока
«Д» запускается повторно и переводит АКК
на траекторию полета к Луне. В ходе перелета предусматривалась возможность проведения
двух коррекций. Через 4 сут 7 час после старта «Луна-16» выходит на окололунную орбиту с
высотой 120 км и периодом обращения 2 час. Через сутки проводится первая коррекция для
снижения над выбранной точкой посадки до высоты 20 км, а еще сутки спустя — вторая с
целью подправить плоскость подхода аппарата к точке посадки. Наконец через 7 сут 16 час
запускается тормозная двигательная установка, и 6 мин спустя АКК совершает посадку на
поверхность Луны.
После забора образца лунного грунта и через 8 сут 18 час после взлета с Земли с ОПБ
как со стартовой площадки к Земле стартует возвратная ракета, а через 11 сут 16 час ее
возвратный аппарат совершает посадку на территории Советского Союза.
КОСМИЧЕСКИЙ АППАРАТ
Космические аппараты серии Е8-5 можно классифицировать как автоматические косми-
ческие комплексы (АКК).
Конструктивно АКК Е8-5 выполнен в виде блочной схемы, позволяющей в процессе
экспедиции освобождаться от выполнивших свои функции элементов конструкции и борто-
вой аппаратуры.
Космический аппарат состоит из орбитально-посадочного блока (унифицированный
блок, базовый для всех лунных непилотируемых аппаратов третьего поколения) и взлетной
ракеты (рис. 2.26, 2.27).
Основу орбитально-посадочного блока (ОПБ) составляет связка корректирующе-
тормозной двигательной установки (КТДУ-417) и четырех ее топливных баков сферической
формы. Геометрически эта конструкция выглядит следующим образом: в центре - КТДУ, к
корпусу которой, окружая ее, крепятся топливные баки - центры их сфер образуют вершины
квадрата. В верхней части связки устанавливается приборный торовый отсек.
68
КОСМИЧЕСКИЕ АППАРАТЫ ДЛЯ ПЛАНЕТНЫХ ИССЛЕДОВАНИЙ
Сферические баки объемом 400 л, скре-
пленные между собой приборными отсека-
ми, образуют центральный блок. К этим ба-
кам крепятся сбрасываемые топливные баки
цилиндрической формы. В топливных баках
установлены мягкие вытеснительные систе-
мы. Для наддува используется сжатый ге-
лий. Серия КТДУ-417 успешно применялась
на АКК «Луна -15,-16,-17,-19, -20, -21, -24»
и ДР-
Баки в составе двигательных установок
серии КТДУ-417 представляют собой типич-
ный пример многофункциональной несущей
конструкции. Они являются основным сило-
вым элементом ОПБ, с помощью которого
проводится коррекция траектории перелета
Земля-Луна, обеспечивается перевод КА
на орбиту ИСЛ, формирование предпосадоч-
ной окололунной орбиты и мягкая посадка на
поверхность Луны. При взлете с Луны воз-
вратной ракеты основа ОПБ - посадочная
ступень - служит стартовым устройством.
К сферическим топливным бакам кре-
пятся сбрасываемые отсеки и баки цилин-
дрической формы. В сбрасываемых баках
содержится топливо на все коррекции и тор-
можения, предшествовавшие сходу с ор-
биты и посадке. В сбрасываемых отсеках
размещены приборы системы ориентации,
радиопередатчик и приемник бортового ра-
диоизмерительного комплекса и др. - борто-
вые системы, обеспечивающие перелет КА
к Луне и функционирование на орбите ИСЛ.
На одном из сбрасываемых отсеков установ-
лены астродатчики системы ориентации.
В составе ОПБ имеется еще одна двига-
тельная установка с запасом топлива 50 кг -
для жидкостных реактивных малых двигате-
лей системы стабилизации.
Астроориентация КА обеспечивается га-
зовыми микродвигателями, использующими
в качестве рабочего тела азот.
Орбитально-посадочный блок, освобож-
денный от сбрасываемых отсеков, образует
посадочную ступень. Её масса совместно с
возвратной ракетой составляет на поверхно-
сти Луны 1880 кг.
Таким образом, посадочная ступень -
самостоятельный ракетный блок многоце-
левого назначения, имеющий жидкостный
ракетный двигатель, систему баков с компо-
нентами топлива, приборные отсеки и амор-
тизированные опоры (посадочное устрой-
Рис. 2.26. Автоматический космический
комплекс Е8-5:
1 - возвращаемый аппарат; 2 - буровой
механизм; 3 - штанга бурового механизма;
4 - телефотометр; 5 - топливный бак;
6 - двигательная установка посадочной
ступени; 7 - приборный отсек посадочной
ступени; 8 - управляющие сопла;
9 - топливные баки ракеты; 10 - антенна;
11 - приборный отсек ракеты
Рис. 2.27. Общий вид АКК Е8-5 при работе
на поверхности Луны
69
ГЛАВА 2
ство) для посадки на поверхность Луны. На посадочной ступени установлены также антенны
бортового радиокомплекса и грунтозаборное устройство (ГЗУ).
Двигательная установка посадочной ступени имеет основной двигатель с регулируемой
тягой для осуществления торможения, а также два самостоятельных одноразовых двигателя
малой тяги (350-210 кг), работающих на завершающем участке посадки, начиная с высоты
20 м, и расходующих ~ 22 кг топлива. Основной двигатель посадочной ступени имеет воз-
можность многократного запуска.
В приборных отсеках посадочной ступени расположена основная часть комплекса слу-
жебной аппаратуры ОПБ:
• счетно-решающие и гироскопические приборы систем управления и стабилизации;
• электронные приборы системы ориентации;
• радиопередатчики и приемники бортового радиоизмерительного комплекса (БРК),
работающие в нескольких диапазонах радиоволн;
• программно-временное устройство (ПВУ), автоматически управляющее работой
всех систем и агрегатов;
• источники питания - химические аккумуляторные батареи и преобразователи тока;
• элементы системы терморегулирования;
• автономные радиосредства измерения высоты, горизонтальной и вертикальной со-
ставляющих скорости при посадке на поверхность Луны (доплеровский измеритель
скорости ДА-018, радиовысотомер «Вега», гамма-высотомер «Квант»;
• телефотометры для передачи служебной информации о районе бурения,
а также научные приборы, определяющие температурные и радиационные условия как на
участке перелета, так и на поверхности Луны.
На посадочной ступени располагается также часть аппаратуры СУ, обеспечивающая
подготовку к старту возвратной ракеты. Это сделано с целью уменьшения веса возвратной
ракеты.
Вне приборных отсеков на внешних поверхностях посадочной ступени установлены ре-
активные микродвигатели систем ориентации и стабилизации, баллоны с запасом рабочего
тела для них.
Для решения одного из основных слагаемых целевой задачи - забора проб лунного грун-
та - на посадочной ступени установлено грунтозаборное устройство.
Грунтозаборное устройство (ГЗУ) состо-
ит из трех основных частей:
- бурового станка с системой электрических
приводов и бурового снаряда;
- штанги, на которой укреплен буровой ста-
нок (механизм выноса ГЗУ);
- приводов, перемещающих штангу в верти-
кальной и горизонтальной плоскостях (по
азимуту и углу места).
Главный элемент ГЗУ - буровой станок
С25 - разработан в СКБ Министерства геоло-
гии СССР и изготовлен на Омском электроме-
ханическом заводе. Буровой станок осущест-
вляет бурение и забор пробы лунного грунта
различной плотности — от самого рыхлого
(пылевидного) до самого твердого, подобного
земным базальтам и гранитам. При разработ-
ке учитывалась необходимость минимизации
веса грунтозаборного устройства. ГЗУ, уста-
новленное на КА серии Е8-5, обеспечивает
бурение как твердых, так и слабосвязанных
грунтов на глубину до 35 см, транспортировку
Испытания бурового снаряда ГЗУ,
устанавливаемых на КА серии Е8-5
70
КОСМИЧЕСКИЕ АППАРАТЫ ДЛЯ ПЛАНЕТНЫХ ИССЛЕДОВАНИЙ
взятого образца грунта с поверхности Луны к кон-
тейнеру возвращаемого аппарата и помещение его
внутрь контейнера.
Для выбора места бурения (азимута разворота
ГЗУ) на посадочной платформе установлена фото-
телевизионная система ФТ-5, в составе которой
два телефотометра Я-198. Соответствующей уста-
новкой светильников предусмотрена возможность
освещения зоны работы.
Посадочное устройство предназначено для
поглощения кинетической энергии аппарата в мо-
мент касания лунной поверхности и состоит из че-
тырех опор (рис. 2.28).
На посадочной ступени вмонтирован Государ-
ственный вымпел, выполненный в виде тонкой пря-
моугольной металлической пластины. На лицевой
стороне пластины имеется надпись: «Союз Совет-
ских Социалистических Республик», а также Герб
Советского Союза; на оборотной стороне — по
правому полю надпись: «Луна-16» сентябрь 1970»,
а на основном поле изображены старт ракеты с по-
верхности Луны, трасса Луна — Земля, земной
шар с очертаниями территории Советского Союза
и обозначением места посадки возвращаемого ап-
парата.
Приборный торовый отсек, расположенный, как
уже ранее было сказано, в верхней части посадоч-
ной ступени, служит местом экспедиционного раз-
мещения и стартовой площадкой для возвратной
ракеты.
Возвратная ракета (ВР) представляет собой са-
мостоятельный ракетный блок (рис. 2.29).
Двигатель ВР - однокамерный жидкостной ре-
активный двигатель КРД-61 (С5.61) тягой 1850 кг.
Компоненты топлива: горючее - несимметричный
диметилгидразин (НДМГ), окислитель - тетроксид
азота (АТ). Три сферических бака образуют систе-
му для размещения компонентов топлива. Цен-
тральный бак, диаметром 67 см, предназначен для
заправки горючим массой 112 кг; каждый из двух
периферийных баков, диаметром 53 см, - окисли-
телем массой 103 кг. Система подачи топлива на-
сосная.
КРД-61 снабжен также неподвижными рулевы-
ми соплами общей тягой 70 кг, служащими для ста-
билизации ракеты на активном участке и работаю-
щими на генераторном газе.
Для наддува топливных баков и управления
агрегатами автоматики двигательной установки
в ней используется гелий, хранящийся в сфериче-
ских баллонах.
На центральном баке укреплен цилиндрический
приборный отсек (ПО) диаметром 56 см, внутри ко-
Рис. 2.28. Амортизированная опора
посадочного устройства АКК Е8-5:
1 - опорный диск; 2 - V-образный
подкос; 3 - амортизатор
Рис. 2.29. Возвратная ракета АКК Е8-5:
1 - возвращаемый аппарат;
2 - ленточное крепление возвраща-
емого аппарата; 3 - антенны
радиокомплекса ВР; 4 - приборный
отсек ВР; 5 - топливные баки ВР
71
ГЛАВА 2
Возвратная ракета на испытаниях в КИС
торого установлен комплекс служебной ап
паратуры ВР: электронные счетно-решающие
и гироскопические приборы системы управ,
ления ракетой, приборы бортового радиоком
плекса метрового диапазона с телеметриче
ской системой, аккумуляторные батареи i
приборы бортовой автоматики.
Радиокомплекс метрового диапазоне
(101,965 МГц по линии Земля-борт и 183,53;
МГц по линии борт-Земля) предназначен дл!
измерения радиальной скорости и наклонной
дальности, прием шести функциональных ко
манд и передачу на Землю ТМ-информации.
В состав системы управления ВР, обеспе
чивающей построение и запоминание систе
мы координат в момент старта, стабилизации
аппарата при работе двигательной установки
входят:
• курсовой гироприбор, состоящий из дву)
свободных гироскопов КИ55-25,
• гироскопический интегратор продольны)
ускорений КИ22-41Л,
• автомат стабилизации,
• автомат отключения двигателя.
Исполнительными органами системы ста
билизации на активном участке служат руле
вые сопла двигательной установки.
Учитывая малое время полета ВР, в систе
ме энергопитания использованы одноразовы)
серебряно-цинковые батареи емкостью 14 А ч.
На внешней поверхности ПО ракеты установлены четыре штыревые приемно-передающие
антенны метрового диапазона.
В верхней части приборного отсека с помощью металлических стяжных лент прикрепле)
возвращаемый аппарат массой 36 кг, сферической формы. Ленты, закрепляющие возвра
щаемый аппарат, соединены специальным пиротехническим замком, который при подлете
ВР к Земле по радиокоманде открывается, и происходит отделение ВА.
Масса ВР на поверхности Луны - 512 кг.
Возвращаемый аппарат (в некоторых публикациях используется термин спасаемый ап
парат) представляет собой металлический шар диаметром 50 см, на внешнюю поверхносл
которого нанесено теплозащитное покрытие, состоящее из асботекстолитового наружноге
слоя и наполнителя из стеклотекстолитовых сот, предохраняющее аппарат с установленньи\
внутри него оборудованием от воздействия высоких температур при входе в атмосферу Зем
ли (рис. 2.30).
Внутренний объем возвращаемого аппарата разделен на три изолированных отсека.
В один из них, наибольший по объему, помещены радиопеленгационные передатчик)
УКВ-диапазона (121,5 и 114,167 МГц), обеспечивающие возможность обнаружения возвра
щаемого аппарата при спуске на парашюте на Землю; серебряно-цинковая аккумуляторна;
батарея емкостью 4,8 А-ч; элементы автоматики и программно-временное устройство, управ
ляющее вводом в действие парашютной системы.
Во втором отсеке расположены в сложенном виде парашют, четыре упругие антенны пе
ленгационных передатчиков и два наполняемых газом эластичных баллона, обеспечиваю
щие необходимое положение возвращаемого аппарата на поверхности Земли после посад
ки. Площадь купола тормозного парашюта - 1,5 м2, основного парашюта -10 м2.
72
КОСМИЧЕСКИЕ АППАРАТЫ ДЛЯ ПЛАНЕТНЫХ ИССЛЕДОВАНИЙ
Третий отсек - цилиндрический контей-
нер для грунта, взятого с поверхности Луны.
С одной стороны контейнера имеется прием-
ное отверстие, герметично закрываемое спе-
циальной крышкой после помещения в него
образцов лунной породы.
На возвращаемом аппарате установлен
Государственный знак СССР, имеющий форму
пятиугольника. На его лицевой стороне - над-
пись «СССР» и Герб Советского Союза; на обо-
ротной стороне - в центре пятиугольника - изо-
бражение станции «Луна-16», выполняющей по
программе забор лунного грунта. На этой же
стороне — обрамляющая надпись: «Луна-16»
сентябрь 1970 Земля — Луна — Земля».
Стартовая масса возвращаемого аппара-
та составляет 34 кг, а при входе в атмосферу
Земли вместе с помещенными в него образ-
цами грунта - 37,2 кг.
СОСТАВ НАУЧНОЙ АППАРАТУРЫ
В экспедициях аппаратов серии Е8-5 авто-
матический космический комплекс исполнял
роль сложного роботизированного инструмен-
та, добывающего и доставляющего интересу-
ющие ученых образцы лунных пород для про-
ведения их всесторонних исследований уже
в земных лабораториях. Поэтому из научной
аппаратуры на борту находились лишь прибо-
Испытания КА серии Е8-5 в КИС
Рис. 2.30. Возвращаемый аппарат АКК Е8-5
73
ГЛАВА 2
ры, определяющие температурные и радиационные условия как на участке перелета, так
и на поверхности Луны.
ОРГАНИЗАЦИЯ УПРАВЛЕНИЯ ПОЛЕТОМ
Как уже ранее было сказано, для связи со всеми «лунниками», начиная с экспедиций
КА серии Е6, привлекались средства НИП-10, расположенного недалеко от Симферополя.
На НИП-10 располагался и Центр управления полетом (ЦУП).
Сохранен ранее примененный порядок проведения траекторных измерений и сеанс-
ный принцип поддержания управляющей радиосвязи и получения телеметрической ин-
формации с АКК. По результатам обработки траекторных измерений в координационно-
вычислительном центре проводятся расчеты исходных данных для проведения коррекции
траектории (как на перелете, так и при маневрировании в окололунном пространстве):
величина и направление корректирующего импульса, а также время включения двига-
теля. Эти данные в виде специальных кодограмм - уставок - передаются в очередном
сеансе связи по радиолинии на борт АКК и закладываются в блок памяти программно-
временного устройства.
Для приема информации с лунных зондов используется антенна ТНА-400 (НИП-10, г.
Симферополь) с диаметром зеркала 32 метра, разработанная в ОКБ МЭИ. Выдача команд
на борт АКК осуществляется с помощью антенны П-200Б (НИП-10, г. Симферополь) с диа-
метром зеркала 25 метров.
Для проведения траекторных измерений в дециметровом диапазоне с помощью угломер-
ной системы «Маяк-6» задействованы антенны АДУ-1000 комплекса «Плутон», расположен-
ного на НИП-16 в Евпатории, передающие антенны РС-10 и приемные антенны РС-10-2М,
расположенные на НИП-14 (Щелково) и НИП-15 (Уссурийск).
Работу с ВР обеспечивает наземный радиотехнический комплекс «Сатурн-МС» на НИП-10
(г. Симферополь), доработанный для приема сигналов
К участию в работе привлекались также НИПы на кораблях Академии наук СССР.
В ходе реализации программы запусков КА серии Е8-5, по итогам полета АКК «Луна-
15» пересмотрена технология расчета уставок для второго торможения. Если при полете
«Луны-15» время от получения последних траекторных измерений до схода АКК с орбиты
составляло 1 сутки, то уже для «Луны-16» этот интервал сократился до 6 часов. Такое
сокращение времени для расчета уставок на торможение и закладку их на борт делало
очень напряженной работу ГОГУ в преддверии торможения, однако это позволяло учесть
эволюцию орбиты и обеспечить посадку в выбранном районе поверхности Луны с заданной
точностью (±5 км).
РЕАЛИЗАЦИЯ ПРОЕКТА
Попытка запуска первого АКК серии Е8-5 №402 состоялась 14 июня 1969 года в 7 часов
0 минут 48 секунд с космодрома Байконур. Первые три ступени ракеты-носителя «Протон-К»
отработали штатно. Однако на опорную геоцентрическую орбиту аппарат не вышел: из-за
схемной ошибки не прошли команды системы управления на подготовку и запуск двига-
тельной установки разгонного блока Д, которая должна была обеспечить довыведение го-
ловного блока.
КОСМИЧЕСКИЙ АППАРАТ «ЛУНА-15»
Старт PH «Протон-К» с АКК «Луна-15» (Е8-5 №401) произведен с космодрома Байконур
13 июля 1969 года в 5 час 54 мин 41 сек.
Последовательным включением двигателя РБД успешно пройдены этапы выведения ГБ
на опорную орбиту и затем, после пассивного полета - на траекторию перелета ОПБ к Луне.
Общая масса комплекса после его отделения от РБД - 5667 кг.
14 июля проведена коррекция траектории.
17 июля включением КТДУ над обратной стороной Луны проведено торможение, вслед-
ствие чего ОПБ «Луна-15» переведен на орбиту ИСЛ.
74
КОСМИЧЕСКИЕ АППАРАТЫ ДЛЯ ПЛАНЕТНЫХ ИССЛЕДОВАНИЙ
Подготовка возвратной ракеты к полету
(установка пассивных средств
теплозащиты - ЭВТИ) в цехе
После двух коррекций (19 и 20 июля) сфор-
мирована орбита посадки: высота в апоселе-
нии-110 км, высота в периселении - 16 км, на-
клонение 127°, период орбиты - 1 ч 54 мин.
21 июля 1969 года в 18 ч 46 мин 43 сек
включена КТДУ для схода с орбиты. Одновре-
менно произошел сброс навесных отсеков.
Первый этап снижения с помощью двигате-
ля большой тяги должен был завершиться
через 267,3 сек после включения, на высоте
-2,5 км. Однако сигнал с ОПБ на 237-й секун-
де снижения (в 18 ч 50 мин 40 сек) внезапно
пропал, причем параметры бортовых систем
аппарата на момент пропадания сигнала были
в норме.
Все работы, обеспечивающие выполнение
дальнейших этапов экспедиции АКК «Луна-15»,
были прекращены.
После полета «Луны-15», завершившего-
ся аварийной посадкой на поверхность Луны,
было предпринято еще три попытки запустить
аппараты типа Е8-5 для доставки на Землю
образцов лунного грунта.
КОСМИЧЕСКИЙ АППАРАТ Е8-5 №403 («КОСМОС-ЗОО»)
Запущен 23 сентября 1969 года в 17 часов 7 минут 37 секунд с помощью ракеты-носителя
«Протон-К». Первые три ступени ракеты-носителя отработали штатно. С помощью первого
включения двигательной установки разгонного блока Д головной блок был выведен на опор-
ную геоцентрическую орбиту. Однако на пассивном участке полета произошло истекание
окислителя из топливного бака блока Д. Причина - незакрытие разделительного клапана в
магистрали. Возникший нерасчетный возмущающий момент парировался исполнительными
органами системы обеспечения запуска, что привело к израсходованию рабочего тела СОЗ.
В результате не прошло второе включение двигательной установки разгонного блока Д, обе-
спечивающее переход КА на траекторию полета к Луне. По сигналу «Аварийное выключение
двигателя» произошло отделение космического аппарата Е8-5 №403, который получил наи-
менование «Космос-300», от разгонного блока. На 67-м витке орбитального полета включе-
нием по командам с Земли двигательной установки было проведено торможение космиче-
ского аппарата и последующее его затопление в акватории Тихого океана.
КОСМИЧЕСКИЙ АППАРАТ Е8-5 №404
Запущен 22 октября 1969 года в 17 часов 09 минут 51 секунду с помощью ракеты-
носителя «Протон-К». В результате работы трех ступеней ракеты-носителя и первого вклю-
чения двигательной установки блока Д аппарат, получивший название «Космос-305», был
выведен на опорную геоцентрическую орбиту. Однако из-за отказа одного из блоков радио-
комплекса обратные развороты головного блока были проведены со значительной ошибкой.
В результате этого к моменту второго включения ДУ головной блок был неправильно сориен-
тирован в пространстве. После отработки разгонного импульса КА и разгонный блок вместо
удаления от Земли вошли в плотные слои атмосферы над акваторией Тихого океана.
КОСМИЧЕСКИЙ АППАРАТ Е8-5 №405
Запущен 6 февраля 1970 года в 7 часов 16 минут 5 секунд с помощью ракеты-носителя
«Протон-К». Выведение закончилось аварией ракеты-носителя: при запуске двигательной
установки второй ступени из-за отказа сигнализатора давления в камере сгорания одного из
двигателей прошла команда на их отключение.
75
ГЛАВА 2
КОСМИЧЕСКИЙ АППАРАТ «ЛУНА-16»
По своей конструкции, решаемым задачам и составу бортовой аппаратуры АКК
«Луна-16» - полный аналог АКК «Луна-15».
Старт четырехступенчатой ракеты-носителя «Протон-К» с АКК «Луна-16» (Е8-5 №406)
произведен с космодрома Байконур 12 сентября 1970 года в 16 часов 25 минут 52 секунды.
С помощью первых трех ступеней PH «Протон-К» и первого включения двигателя РБД голов-
ной блок выведен на опорную орбиту ИСЗ. По данным обработки траекторных измерений, ее
параметры составили: высота - 188,7x204,1 км; наклонение к плоскости экватора — 51 гра-
дус 36 минут.
По сигналу бортового программно-временного устройства через 70 минут после старта
вторично включен двигатель РБД, который сообщил АКК дополнительную скорость, в ре-
зультате чего «Луна-16» вышла на траекторию перелета к Луне. Общая масса комплекса по-
сле его отделения от РБД - 5720 кг.
На пути к Луне 14 сентября проведена коррекция траектории. В ее преддверие АКК с
помощью системы управления и оптических датчиков системы ориентации был точно сори-
ентирован в пространстве относительно Солнца и Земли таким образом, чтобы двигатель
КТДУ принял заданное для коррекции направление.
Импульс коррекции составил 15,57 м/с. Проведенные в последующем траекторные из-
мерения показали, что параметры траектории близки к расчетным, в результате чего отпала
необходимость во второй ее коррекции.
При достижении АКК заданного района окололунного пространства произведена подго-
товка и осуществлено второе включение КТДУ с целью уменьшения скорости подлета к Луне
и перевода АКК на орбиту ИСЛ. При этом требовалась высокая точность ориентации аппара-
та и величины тормозного импульса.
17 сентября в 2 часа 38 минут 14 секунд произведено включение двигателя, который,
отработав 236 секунд, обеспечил торможение и выход АКК «Луна-16» на селеноцентри-
ческую орбиту. Ее параметры составили: высота в апоселении 118,6 км, в периселении
102,6 км, наклонение относительно плоскости лунного экватора 70° и период обращения
1 час 58 минут 53 секунды.
Следующим этапом стало формиро-
вание предпосадочной орбиты с низким
периселением. Такая орбита была необ-
ходима для создания оптимальных усло-
вий работы автономных систем управле-
ния на участках спуска и посадки АКК на
поверхность Луны.
Поскольку параметры орбиты, по-
лучившейся после торможения, оказа-
лись близки к расчетным, было приня-
то решение совместить в одном сеансе
коррекции выполнение задач, имеющих
рабочее обозначение АК-Ill и AK-IV,
а именно понизить высоту перицентра,
скорректировать аргумент широты пе-
рицентра и селенографическую долго-
ту КА на широте посадки для витка
второго торможения. AK-III - коррекция
орбиты, проведенная 18 сентября, обе-
спечила прохождение аппарата над вы-
бранным районом посадки с одновре-
менным понижением высоты перисе-
Космический аппарат «Луна-16»
в сборочном цехе
ления до 20,8 км. При этом величина
импульса составила 35,12 м/с.
76
КОСМИЧЕСКИЕ АППАРАТЫ ДЛЯ ПЛАНЕТНЫХ ИССЛЕДОВАНИЙ
Основные параметры орбиты после AK-III были близки к расчетным, однако для ликви-
дации отклонения трассы от центра посадочной площадки на витке спуска необходима была
еще одна коррекция. Она была проведена 19 сентября (Ухар = 12,75 м/с), в результате чего
высота перицентра была понижена до 11,86 км на посадочном витке.
20 сентября в 6 часов 06 минут был начат один из наиболее ответственных этапов полета
- подготовка к осуществлению мягкой посадки посадочной ступени на лунную поверхность.
В течение подготовительных операций с 6 часов 41 минуты до 7 часов 31 минуты АКК нахо-
дился за лунным диском, и радиосвязь с ним не поддерживалась.
После ряда операций по ориентации АКК и программных разворотов в 8 часов 12 ми-
нут был включен двигатель посадочной ступени, в результате чего скорость АКК «Луна-16»
уменьшилась до значения, обеспечивающего переход в режим снижения.
Сразу после включения двигателя были сброшены два навесных отсека.
В процессе спуска аппарат удерживался в строго определенном положении стабилизи-
рующими органами системы управления. Высота над поверхностью Луны на начало тормо-
жения составляла 13,28 км, а на момент выключения двигателя - 2,45 км.
После выключения двигателя аппарат в течение 43 секунд совершал свободное падение.
На высоте 600 метров от поверхности вновь начал работать основной двигатель КТДУ в ре-
жиме регулируемой тяги в соответствии с выбранной программой управления и поступающей
информацией от доплеровского измерителя скорости ДА-018 и радиовысотомера «Вега».
На высоте 20 метров скорость аппарата снизилась примерно до 2 м/с. Основной ЖРД
был выключен, и дальнейшее торможение происходило с помощью двигателей малой тяги
(ДМТ).
На высоте около 2 метров по команде от гамма-высотомера «Квант» ДМТ были вы-
ключены, и 20 сентября в 8 часов 18 минут АКК «Луна-16» совершил мягкую посадку
на поверхность Луны в районе Моря Изобилия. При этом вертикальная скорость ап-
парата в момент касания поверхности составила 4,8 м/с. Селенографические координаты
места прилунения: 0°41'04" ю.ш. и 56°18'03" в.д. Отклонение от расчетной точки посадки
составило 1,5 км. Протяженность трассы полета от точки схода с орбиты до точки посадки
составила 250 км.
После посадки на поверхность Луны по команде с Земли был включен бортовой радио-
комплекс. Анализ полученной информации показал нормальное состояние как аппарата
в целом, так и отдельных его систем. Определено было также и положение посадочной сту-
пени на лунной поверхности.
С помощью телефотометров предпринимались попытки получить ТВ-изображения места
бурения. Телефотометры включались трижды, но из-за недостаточной освещенности ожида-
емый результат не достигнут. На двух изображениях видна Земля - в виде светлого пятна.
Затем на борт посадочной ступени была передана команда на ввод в действие грунто-
заборного устройства. Открылся замок, удерживающий грунтозаборное устройство во время
полета, и штанга с буровым станком под воздействием одного из приводов заняла верти-
кальное положение. Далее штанга под воздействием второго привода повернулась вокруг
вертикальной оси на 180 градусов, с тем чтобы при последующем отводе штанги в горизон-
тальное положение корпус бурового станка оказался обращенным рабочей частью к лунной
поверхности. В это же время, также по команде с Земли, сработало устройство, открывшее
крышку бурового станка. Штанга была опущена до соприкосновения бурового станка с по-
верхностью Луны, причем без разворота ГЗУ по азимуту. По сигналу оператора были вклю-
чены приводы бурового механизма.
Бурение поверхностного слоя до глубины 35 см и извлечение грунта производилось спе-
циальным буром, представляющим собой пустотелую трубу с резцами на торце. Одновре-
менно с бурением измерялись плотности исследуемой породы. Скорость углубления бура
в лунную породу контролировалась с Земли. После окончания бурения бур с лунной породой
был введен в корпус бурового станка. Включением привода штанги грунтозаборного устрой-
ства она была поднята в вертикальное положение и повернута на 180 градусов вокруг своей
оси. Бур был подведен к приемному отверстию герметичного контейнера возвращаемого ап-
77
ГЛАВА 2
Селенографическая карта района посадки «Луны-16»
с автографами участников проведения этапов посадки и забора образцов грунта
парата. Очередная команда с Земли переместила бур с лунной породой внутрь контейнера.
Затем произошло отделение бура от буровой установки. После этого приемное отверстие в
контейнере возвращаемого аппарата автоматически герметично закрылось. Штанга с буро-
вым станком была отведена от возвратной ракеты.
Кроме решения основной задачи — взятия проб лунного грунта, производились также
измерения температуры элементов конструкции посадочной ступени и уровня радиации на
Возвратный аппарат АКК «Луна-16»,
побывавший на поверхности Луны
лунной поверхности, результаты которых пере-
давались на Землю.
Далее прошли подготовка к старту и старт
возвратной ракеты. Старту возвратной раке-
ты предшествовала закладка в ЗУ ее системы
управления величины скорости, необходимой
для взлетного разгона. Запуск ВР с поверх-
ности Луны состоялся по команде с Земли 21
сентября в 10 часов 43 минуты 21 секунду.
По достижении необходимой скорости, рав-
ной 2708 м/с, был выключен двигатель, и ракета
с возвращаемым аппаратом по баллистической
траектории устремилась к Земле. Завершаю-
щий этап экспедиции длился 84 часа.
В течение этого времени Центр управле-
ния полетом регулярно проводил траекторные
измерения, по результатам которых уточнялся
район приземления возвращаемого аппарата.
При подлете возвратной ракеты к Зем-
ле по радиокоманде, выданной 24 сентября в
4 часа 50 минут, произошло отделение от нее
возвращаемого аппарата. В 8 часов 10 минут
78
КОСМИЧЕСКИЕ АППАРАТЫ ДЛЯ ПЛАНЕТНЫХ ИССЛЕДОВАНИЙ
он вошел в плотные слои атмосферы Земли
со скоростью 10950 м/с. Максимальные пере-
грузки, действующие на аппарат в процессе
аэродинамического торможения, достигали
315 единиц. Температура пограничного слоя
при этом превышала 10000 градусов Цельсия.
В процессе нарастания перегрузок произо-
шло включение программно-временного ме-
ханизма и командных датчиков перегрузок и
давления. Датчик перегрузок выдал сигнал на
отстрел крышки парашютного отсека после про-
хождения максимальных температур и перегру-
зок. Тормозной парашют раскрылся при скоро-
сти снижения 250 м/с на высоте 14,5 километра.
Далее по сигналу барометрического датчика на
высоте около 11 километров произошло отделе-
ние тормозного парашюта, и открылся основной
парашют. Одновременно с этим включились пе-
Главный конструктор Машиностроительно-
го завода им. С.А.Лавочкина Г.Н. Бабакин
с извлеченным из возвращаемого аппарата
контейнером с образцами лунного грунта
ленгационные радиопередатчики.
В 8 часов 14 минут самолетами и вертолетами поискового комплекса, которые сосре-
доточились в ожидаемом районе приземления возвращаемого аппарата, были приняты его
радиосигналы, а затем спуск на парашюте уже визуально наблюдался с вертолета, который
сопровождал его до поверхности Земли. В 8 часов 26 минут возвращаемый аппарат совер-
шил посадку на Землю в восьмидесяти километрах юго-восточнее города Джезказган. Пред-
варительный осмотр показал, что аппарат успешно выдержал условия полета.
Возвращаемый аппарат с образцами лунной породы доставили на Машиностроительный
завод им. С.А. Лавочкина, здесь из него был извлечен контейнер с грунтом. Контейнер пере-
дали затем в ГЕОХИ им. В.И. Вернадского Академии наук СССР, в специальную лабораторию,
где его поместили в приемную камеру. Перед помещением в камеру были произведены дози-
метрические измерения, и вслед за этим весь контейнер тщательно стерилизован. Приемная
камера была оборудована устройством для вскрытия контейнера с веществом, для предвари-
тельного изучения содержимого и дальнейшей его расфасовки. Все эти операции производи-
лись в контролируемой газовой среде с соблюдением условий необходимой стерильности.
После закрепления контейнера в камере с помощью безмасляных средств откачки был
создан высокий вакуум. Затем камера была наполнена инертным газом (гелием) высокой
чистоты до атмосферного давления. Это исключало взаимодействие лунного вещества с ак-
тивными компонентами земной атмосферы - кислородом, водой и продуктами стерилиза-
ции, предварительно удаленными при вакуумировании, которые могли необратимо изменить
свойства лунного вещества. Вскрытие контейнера и извлечение из него бура проводились
оператором, находящимся с внешней стороны приемной камеры. Оператор при этом поль-
зовался стерильным инструментом, заранее помещенным в камеру. Изъятый из контейнера
бур оказался покрытым тонким слоем лунной пыли. Извлеченное из него вещество было по-
мещено на просмотровый лоток с сохранением распределения лунного вещества во взятой
пробе по глубине. Вслед за этим лунное вещество было осмотрено и сфотографировано че-
рез иллюминаторы камеры, изготовленные из оптического стекла.
Фотографирование производилось многократно, под различными углами, при разной
освещенности и увеличении.
До получения результатов токсикологического и биологического анализов лунное веще-
ство было подвергнуто карантину в приемной камере. В дальнейшем проводилось изучение
его радиационных, химических, физико-механических, теплофизических и других свойств.
Для детального изучения лунное вещество, расфасованное в специальные контейнеры, пе-
редавалось также и в другие, в том числе зарубежные, специализированные институты и ла-
боратории.
79
ГЛАВА 2
КОСМИЧЕСКИЙ АППАРАТ «ЛУНА-18»
По своей конструкции, решаемым задачам и составу бортовой аппаратуры АКК
«Луна-18» - полный аналог АКК «Луна-15», «Луна-16».
Старт четырехступенчатой ракеты-носителя «Протон-К» с АКК «Луна-18» (Е8-5 №407)
произведен с космодрома Байконур 2 сентября 1971 года в 16 часов 40 минут 40 секунд. Для
выхода на траекторию полета к Луне использована принятая для аппаратов этой серии про-
межуточная околоземная орбита - опорная орбита ИСЗ. Общая масса комплекса после его
отделения от РБД - 5778 кг.
На трассе перелета 4 и 6 сентября выполнены коррекции траектории.
При подлете к Луне в результате торможения с помощью КТДУ 7 сентября 1971 года АКК
«Луна-18» выведен на орбиту искусственного спутника Луны. Однако из-за методической
ошибки при подстройке хронизатора ПВУ включение КТДУ прошло на 15 секунд раньше рас-
четного времени, в результате чего параметры селеноцентрической орбиты после первого
торможения существенно отличались от расчетных.
Вместо установленной для аппаратов серии Е8-5 схемы маневрирования перед посадкой
в заданном районе (две коррекции, причем после второй коррекции высота орбиты в пери-
селении должна составлять 16-17 км) принято решение с целью экономии топлива ограни-
читься одной коррекцией орбиты. Она была проведена вне зоны радиовидимости. Однако
параметры полученной орбиты существенно отличались от расчетных:
Нтг = 93,4 км вместо 16,9 км ; На = 180,3 км вместо 123,9 км.
В результате анализа телеметрической информации было установлено, что программный
угол тангажа был отработан в два раза меньшим, чем его расчетное значение. Причина - за-
ниженная в ~ 40 раз эффективность одного из двигателей стабилизации (ЖРС), в который
не поступал окислитель, а тяга образовалась лишь за счет истечения горючего.
С целью исправления траектории в зоне радиовидимости была проведена дополнитель-
ная коррекция, при этом программный угол тангажа отрабатывался порциями, не превышаю-
щими 25°, для того чтобы не «встала на упор» (+30°) гиростабилизированная платформа.
11 сентября 1971 года была включена КТДУ для схода с орбиты. Однако в результа-
те ненормальной работы того же двигателя стабилизации получился перерасход горюче-
го, и при проведении второго торможения упала эффективность двигателей стабилизации
по всем трем каналам. В результате уставка по углу крена была отработана на 10° меньше
расчетной величины, что повлекло за собой нерасчетные аварийные условия спуска на по-
верхность Луны.
Связь с АКК прекратилась 11 сентября 1971 года в 10 часов 47 минут 16,5 секунд. По рас-
четам, «Луна-18» достигла поверхности Луны в горном районе у Моря Изобилия, в точке
с координатами 3° 34' с. ш. и 56° 30' в. д.
КОСМИЧЕСКИЙ АППАРАТ «ЛУНА-20»
АКК «Луна-20» является полным аналогом своих предшественников.
Общая масса АКК «Луна-20» после отделения от разгонного блока составляла 5789 кг.
Масса всего аппарата на поверхности Луны - 1907 кг, масса возвратной ракеты на поверхно-
сти Луны - 513,565 кг. Стартовая масса спасаемого аппарата составляла 35,4 кг, а при входе
в атмосферу Земли вместе с возвращаемым грунтом - 36,9 кг.
АКК «Луна-20» (Е8-5 №408) запущен с космодрома Байконур 14 февраля 1972 года
в 6 часов 27 минут 58,5 секунд с помощью четырехступенчатой ракеты-носителя «Протон-К».
Выход на траекторию полета к Луне осуществлен с использованием промежуточной около-
земной орбиты.
На трассе перелета к Луне 15 февраля проведена коррекция траектории, по результатам
которой от проведения второй коррекции, предусмотренной программой полёта, отказались.
При подлете к Луне 18 февраля проведено торможение АКК, в результате чего «Луна-20»
перешла на круговую селеноцентрическую орбиту с параметрами: высота над поверхностью
Луны 100 км, наклонение к плоскости лунного экватора 65°, период обращения вокруг Луны
1 час 58 минут. Масса КА после выхода на орбиту составила 4299,6 кг.
80
КОСМИЧЕСКИЕ АППАРАТЫ ДЛЯ ПЛАНЕТНЫХ ИССЛЕДОВАНИЙ
Возвратный аппарат «Луны-20»
после приземления
С целью формирования условий для схо-
да с орбиты 19 августа проведена только одна
коррекция орбиты вместо двух, предусмотрен-
ных программой, в результате чего АКК стал
совершать полет по эллиптической орбите
с максимальной высотой над поверхностью
Луны 100 км и минимальной высотой 21 км.
21 февраля в 22 часа 13 минут был вклю-
чен двигатель посадочной платформы, кото-
рый проработал 267 секунд и обеспечил сход с
орбиты. После выключения двигателя и до вы-
соты 760 метров аппарат совершал свободное
падение. В дальнейшем снижение проходило
в режиме управляемого спуска, в процессе
которого с помощью автоматической системы
управления изменялась тяга основного двига-
теля. Начиная с высоты 20 метров от поверх-
ности Луны, торможение осуществлялось с по-
мощью двигателей малой тяги.
21 февраля в 22 часа 19 минут 09 секунд
АКК «Луна-20» совершил мягкую посадку на
поверхность Луны в точке с координатами 3°
32' с.ш. и 56° 33' в.д., на участке лунного мате-
рика, примыкающего к северо-восточной око-
нечности Моря Изобилия, в 130 км к северу от точки посадки «Луны-16».
После посадки было определено положение посадочной ступени на лунной поверхности,
а с помощью телефотометров получены изображения лунной поверхности, по которым вы-
брали место взятия образцов лунной породы.
По команде с Земли было включено грунтозаборное устройство, и начались операции
по забору грунта. В процессе забора грунта дважды срабатывал автомат защиты по току,
бурение приостанавливалось, и его снова возобновляли по командам с Земли. Тем не менее,
общая глубина бурения составила 30 см, а масса образцов лунного грунта - 55 граммов.
Взятые образцы были помещены в контейнер возвратной ракеты и загерметизированы.
После окончания перегрузки грунта в спасаемый аппарат с помощью телефотометра повтор-
но получено изображение места взятия проб грунта.
Старт возвратной ракеты с поверхности Луны с образцами лунного грунта состоялся 23
февраля в 1 час 58 минут.
25 февраля за 8 часов до входа в атмосферу Земли от возвратной ракеты был отделён
спасаемый аппарат с образцами лунного грунта.
На высоте 15 км программно приведена в действие парашютная система, и спускаемый
аппарат совершил мягкую посадку в 40 км северо-западнее Джезказгана.
ТЕХНИЧЕСКАЯ И ТЕХНОЛОГИЧЕСКАЯ НОВИЗНА
АКК серии Е8-5, как уже ранее было сказано, принадлежат к новому поколению непи-
лотируемых космических аппаратов, предназначенных для проведения разноплановых ис-
следовательских задач в отношении Луны. При создании этих аппаратов реализованы нова-
торские проектные и конструкторские решения; внедрены ранее не применяемые в космо-
навтике конструкционные материалы; разработаны и отлажены технологии их механической
обработки, сварки, пайки и т.п. Развивалась наземная испытательная база, под новые техно-
логии перестраивалось производство.
Существенное для предприятия изменение в перечне применяемых материалов в связи с
его переориентацией на космическую тематику вызвало соответствующие изменения в раз-
работке новых способов сварки и контроля результатов этого процесса. Выбор алюминиево-
го сплава АМг-6 и магниевого сплава МА2 в качестве основных конструкционных материалов
81
ГЛАВА 2
Испытания титанового шар-баллона
привел к необходимости проведения
большого объема работ по авто-
матической аргонодуговой сварке
плавлением и точечной контактной
сварке. Соответственно разрабаты-
вались технологии сварки, подго-
товки под сварку и новых методов
контроля точечной сварки с при-
менением материалов-свидетелей.
Были приобретены новые мощные
контактные машины, спроектиро-
ваны и изготовлены манипуляторы,
обеспечивающие необходимое про-
странственное положение изделий в
процессе контактной сварки. Отра-
ботаны технологии сварки сплавов:
АМгб, высокопрочного алюминиево-
го сплава 01570, сверхлегкого алю-
миниевого сплава 1420, магниевых сплавов МА2-1П4, МА8, ВМД, МА2-1, MI5, МЛ-5, металло-
композиционных материалов и др. В последующем сплавы АМгб и МА2-1П4 стали основны-
ми конструкционными материалами для всех изделий предприятия.
Для обеспечения обводов обшивки и снятия внутренних напряжений после сварки преду-
сматривалась возможность обкатки сварных швов, вибропроковки и термофикации.
Разработана технология сварки титановых шаробаллонов высокого давления из сплавов
ВТ6-С, BT-I4, ВТ-20.
Наряду с большим объёмом работ по низкотемпературной пайке внедрены несколько
технологий высокотемпературной пайки:
• пайка резьбовых сталь-титановых переходников (на титановые шар-баллоны), гермо-
переходников, окон связи (ковар+стекло),
• пайка герморазъёмов угольным электродом,
• пайка стальных трубопроводов и т.д.
Разработана и внедрена технология пайки в защитной среде ковар-стеклянных изолято-
ров, переключателей и многоштырьковых разъёмов.
Эти технологии успешно применялись на изделиях «Луна», «Марс», «Венера» и т.д.
Впервые в СССР было получено авторское свидетельство на способ высокотемператур-
ной пайки титана, а объёмы пайки и сварки (по трудоёмкости) были равны.
Большое внимание уделено созданию двигательной установки. Применена моноблочная
схема баковых систем. Баки связаны в основной блок, в котором баки с различными компо-
нентами имеют в ряде конструкций общие триметаллические днища.
При их создании нашли применение термически неупрочняемые свариваемые сплавы
системы «алюминий-магний», которые отличаются высокой коррозионной стойкостью в ком-
понентах топлива. Широкое распространение для изготовления топливных баков получил
сплав АМгб.
Впервые внедренные для лунных аппаратов шаровые баллоны высокого давления из
сплава ВТ6С позволили снизить массу этих КА более чем на 40 кг.
К пионерским разработкам можно отнести также применение титанового крепежа из
сплава ВТ 16 методом высадки головки болта и накатки резьбы и др.
В топливных баках ЖРД ракет и КА, работающих в условиях знакопеременных перегру-
зок и невесомости, используются полимерные эластичные вытеснительные устройства (ЭВУ).
В НПО им. С.А. Лавочкина ЭВУ были впервые (1959-1962) использованы в топливных баках
ракеты-перехватчика «400», главные трудности тогда заключались в отсутствии эластичных
тканепленочных материалов, стойких к окислителю и горючему. В полной мере с этими труд-
ностями удалось справиться в процессе разработки ЭВУ для двигательных установок АКК
82
КОСМИЧЕСКИЕ АППАРАТЫ ДЛЯ ПЛАНЕТНЫХ ИССЛЕДОВАНИЙ
«Луна-15-24». Совместно со смежными инсти-
тутами и предприятиями химической промыш-
ленности были созданы материалы: фтор-
лоновая дублированная лакоткань ФЛТ-42Д
- для окислителя и полиамидная пленкоткань
АР-27Т - для горючего, а также разработаны
технологические процессы изготовления ЭВУ,
проведён комплекс испытаний баков ДУ при
наземной отработке. Каждый КА «Луна» имел
ДУ, включающую в себя 10 баков с ЭВУ из
ФЛТ-42Д и АР-27Т различных типоразмеров.
Нашли свое применение и другие резуль-
таты новейших (для того времени) исследо-
ваний в области полимерных материалов.
Для стабилизации вертикального положения
антенны возвращаемого аппарата после его
приземления с образцами лунного грунта сде-
ланы специальные эластичные баллоны из
фторлоновой лакоткани ФЛТ-26Д.
Новым словом в отечественной космонав-
тике является применение посадочного устрой-
ства, сконструированного для аппаратов, при-
надлежащих третьему поколению «лунников»
и предназначенных для проведения работ на
лунной поверхности.
Статические испытания КА серии Е8-5
РЕЗУЛЬТАТЫ ЛКИ
АКК «Луна-15». Новый аппарат при выведении, перелете по траектории Земля-Луна,
при маневрировании на орбитах ИСЛ показал свою хорошую работоспособность на каждом
из этих этапов полета. На этапе спуска на лунную поверхность радиосвязь с АКК была по-
теряна, причем параметры бортовых систем аппарата на момент пропадания сигнала были
в норме.
Имеющаяся информация позволила предположить, что наиболее вероятной причиной
аварии было столкновение посадочной ступени «Луны-15» с горным породообразованием
на поверхности Луны. Такая ситуация возможна, если допустить ошибку в положении КА, на
момент прохождения команды запуска двигателя, в сторону от трассы ~15 км и вдоль трассы
~45 км.
Таким образом, выполнить программу ЛКИ АКК «Луна-15» в полном объеме не удалось.
Целевая задача экспедиции АКК «Луна-15» - доставка на Землю образцов лунного грунта -
не выполнена.
АКК «Луна-16». Главный результат ЛКИ - успешно завершен исключительно важный
эксперимент в советской космической программе, открывающий принципиально новые воз-
можности в изучении планетных тел Солнечной системы:
• внедрена новая для отечественной космонавтики технология мягкой посадки на по-
верхность небесного тела, не имеющего атмосферы и обладающего слабым гравита-
ционным полем;
• впервые в мировой практике освоения космоса успешно решена принципиально но-
вая задача полета автоматического космического аппарата на другое небесное тело,
взятия образцов его грунта и возвращения на Землю.
Большое значение для успешного выполнения программы полета АКК «Луна-16» имела
работа наземного командно-измерительного комплекса, который представлял собой развет-
вленную сеть наземных измерительных пунктов, расположенных на территории Советского
Союза и кораблях Академии наук СССР. Управление полетом производилось из Центра даль-
83
ГЛАВА 2
ней космической связи. Данные траекторных измерений, систематически производившихся
средствами Центра дальней космической связи, непрерывно обрабатывались на электронно-
вычислительных машинах. Это позволяло надежно определять параметры траектории дви-
жения АКК «Луна-16» на всех этапах ее полета, рассчитывать и контролировать маневры
на окололунной орбите, прогнозировать и уточнять координаты точек посадки на Луне и на
Земле.
Надежная работа бортовых автоматических систем АКК «Луна-16», слаженная работа
измерительных средств и четкое управление полетом обеспечили посадку посадочной ступе-
ни в пределах заранее выбранной на Луне площадки и в дальнейшем гарантированное воз-
вращение аппарата с образцами лунного грунта в заданный район территории Советского
Союза. Все участвующие службы стартового, наземного командно-измерительного и поис-
ковых комплексов обеспечили четкую работу и взаимодействие на каждом из реализуемых
этапов полета.
Успешно завершенная экспедиция АКК «Луна-16» создала предпосылки для более широ-
кого применения автоматических аппаратов для систематического изучения районов небес-
ных тел надежными и экономически выгодными способами.
По результатам полета АКК «Луна-16» Международная авиационная федерация (FAI) за-
регистрировала его приоритетные научно-технические достижения:
• возвращение на Землю после посадки на поверхность Луны;
• доставка на поверхность Луны космической ракеты «Луна-Земля» с возвращаемым
аппаратом;
• автоматический старт с Луны и доставка лунного грунта на Землю.
«Луной-16» были установлены рекорды, зарегистрированные и подтвержденные дипло-
мами FAI:
• мировой рекорд максимальной массы, доставленной на лунную поверхность в классе
« С »;
• мировой рекорд максимальной массы, возвращенной на Землю с поверхности Луны в
классе «С»;
• мировой рекорд максимальной массы лунных пород, доставленной на Землю автома-
тической станцией в классе «С».
АКК «Луна-18». Этапы полета, предшествующие осуществлению мягкой посадки, вы-
полнены с удовлетворительным результатом. Нештатная работа одного из двигателей стаби-
лизации создала аварийные условия посадки. Программа ЛКИ АКК «Луна-18» не выполнена.
Целевая задача экспедиции АКК «Луна-18» - доставка на Землю образцов лунного грунта -
Такими увидели пробы лунного грунта
на Земле
не выполнена.
АКК «Луна-20». Программа полета вы-
полнена полностью. Главным результатом
стала доставка на Землю образцов лунно-
го грунта массой 55 грамм.
НАУЧНЫЕ РЕЗУЛЬТАТЫ
Главным результатом полета «Луны-16»
стала доставка образцов лунного грунта на
Землю. Была достигнута возможность не-
посредственного изучения в земных лабо-
раториях, с применением мирового уровня
достижений в области научно-технических
средств, исследовательских методик и тех-
нологий, состава вещества ближайшего
к Земле небесного тела - сделан весьма
важный шаг для познания происхождения и
эволюции Солнечной системы.
Общая масса пробы грунта, доставлен-
ного «Луной-16», составила 101 грамм.
84
КОСМИЧЕСКИЕ АППАРАТЫ ДЛЯ ПЛАНЕТНЫХ ИССЛЕДОВАНИЙ
После вскрытия контейнера в Институте геохимии и аналитической химии АН СССР
им. В.И. Вернадского (ГЕОХИ) выяснилось, что лунный грунт, представляющий собой обра-
зец зрелого морского реголита, - сыпучий разнозернистый темно-серый (черноватый) поро-
шок. В нем содержалось около 20 % фрагментов первичных пород среди обломков, крупно-
стью более 0,5 мм. Другой тип частиц, являющийся продуктом переработки лунного мелко-
дисперсного вещества, т.н. брекчии, содержание которых в реголите растет с увеличением
экспозиционного возраста, составил около 40%.
Порошок легко формуется и слипается в отдельные рыхлые комки. Эта особенность су-
щественно отличает реголит от земной бесструктурной пыли; по этому свойству он напоми-
нает влажный песок или комковатую структуру земных почв. При этом зернистость реголита
увеличивается с глубиной.
По химическому составу вещество лунного грунта представляет размельченную горную
породу базальтового типа.
Дозиметрические исследования не обнаружили значительного превышения интенсивно-
сти гамма-излучения лунного вещества над интенсивностью гамма-излучения земных пород
с малым содержанием естественных радиоактивных элементов.
Грунт, доставленный АКК «Луна-20», представляет собой рыхлое разнозернистое ве-
щество светло-серого цвета, значительно более светлого, чем реголит из Моря Изобилия.
По сравнению с грунтом «Луны-16» в нем меньше оплавленных частиц.
Более светлый оттенок реголита «Луны-20» подтверждается исследованием альбедо.
Значение альбедо оказалось выше, чем у образцов, доставленных «Луной-16», «Аполло-
ном XI» и «Аполлоном XII».
КОСМИЧЕСКИЕ АППАРАТЫ СЕРИИ Е8-5М
НАЗНАЧЕНИЕ КА
Космические аппараты серии Е8-5М предназначены для осуществления мягкой посадки
на поверхность Луны с целью забора образцов лунного грунта с глубины до 2,5 м и доставки
их на Землю (рис. 2.31, 2.33).
Серия Е8-5М состоит из трех аппара-
тов: №410 (КА «Луна-23»), №412, №413
(КА «Луна-24»),
Каждая экспедиция, являющаяся, по
сути, продолжением выполнения и разви-
тия программы, реализуемой аппаратами
серии Е8-5 по доставке образцов лунного
грунта, осуществлялась в разные кален-
дарные сроки и предусматривала участие
лишь одного из аппаратов этой серии.
Запуски аппаратов осуществлены:
«Луна-23» - 28.10.1974 г; Е8-5М №412 -
16.10.1975 г.; «Луна-24» - 9.08.1976 г.
В программу экспедиции входило:
• продолжение отработки новых мето-
дов навигации и посадки на Луну;
• продолжение выполнения програм-
мы изучения лунных пород в различ-
ных районах на поверхности Луны;
• отработка новой технологии взятия
проб;
• доставка забранных образцов лун-
Старт к Земле КА «Луна-24»
ного грунта на Землю.
85
ГЛАВА 2
Средства выведения, баллистическая схема экспедиции, последовательность вы-
полняемых операций полностью совпадают с примененными в экспедициях АКК серии Е8-5.
(см. раздел «Космические аппараты серии Е8-5»).
Масса головного блока на опорной орбите составляет - 19,2 т, на перелетную траекторию
выводится полезный груз массой до 5800 кг.
Рис. 2.31. Структурное построение АКК Е8-5М
КОСМИЧЕСКИЙ АППАРАТ
Серия Е8-5М базируется на модифи-
цированном автоматическом космическом
комплексе Е8-5.Усовершенствования кос-
нулись, в основном, служебных систем
орбитально-посадочного блока и воз-
вращаемого аппарата, а также применено
грунтозаборное устройство (ГЗУ) нового
типа (рис. 2.31).
Среди прочих доработок - в три раза
уменьшена заправка водой системы обе-
спечения теплового режима (СОТР) в то-
ровом приборном отсеке и снят высотомер
малых высот «Квант».
Основные же отличия связаны с за-
меной грунтозаборного устройства (ГЗУ).
Новое буровое ЛБ09, разработанное в
Ташкентском филиале КБ общего маши-
ностроения, состоит из буровой головки,
буровой штанги с колонкой и механизмом
забора грунта, механизма подачи буровой
головки, механизма перегрузки керна и
контейнера для укладки керна. Уникальная
Рис. 2.32. ГЗУ ЛБ09:
а) 1 - механизм перегрузки; 2 - буровая головка; 3 - грунтозаборный инструмент; 4 - механизм
подачи; 5 - кабельная сеть и концевые выключатели; 6 - ферма; 7 - тепловая изоляция; 8 - блок
управления; б) гибкий грунтонос в транспортировочном положении
86
КОСМИЧЕСКИЕ АППАРАТЫ ДЛЯ ПЛАНЕТНЫХ ИССЛЕДОВАНИЙ
буровая машина ЛБ-09 достаточно миниатюрна - весом всего 27 кг и высотой около 3 м
(рис. 2.32)
По сравнению с предыдущими экспедициями изменен принцип забора проб грунта.
В процессе бурения грунт поступает во внутреннюю полость штанги, где расположена гибкая
трубка-грунтонос и механизм, который подхватывает грунт и удерживает его в виде столбика
на протяжении всего процесса бурения. По окончании бурения грунтонос с грунтом извлека-
ется из внутренней полости штанги и наматывается на барабан, размещенный в специаль-
ном контейнере. Этот контейнер затем устанавливается в герметизируемую капсулу возвра-
щаемого аппарата возвратной ракеты.
Максимальная глубина бурения составляла 2,3 м.
После завершения перегрузки ГЗУ «переламывается» посередине, и верхняя часть от-
кидывается, чтобы не мешать старту ВР.
В связи с жесткой установкой ГЗУ на корпусе посадочной ступени из состава аппарату-
ры были исключены телефотометры и светильники.
Орбитально-посадочный блок, освобожденный от сбрасываемых отсеков, образует (как
уже ранее было сказано) посадочную ступень. Её масса совместно с возвратной ракетой
до операции забора грунта составляет на поверхности Луны 1880 кг.
Свое второе назначение сохранил также приборный торовый отсек, размещенный в верх-
ней части посадочной ступени - он служит стартовой площадкой для возвратной ракеты.
В верхней части посадочной ступени установлена возвратная ракета (РЕ8-5). Ее кон-
струкция, состав и назначение бортовой аппаратуры остались без изменения.
У возвращаемого аппарата изменения внесены лишь в конструкцию его внутренней
части - диаметр герметизируемой капсулы для размещения грунта увеличен с 68 до 100 мм.
Масса возвратной ракеты на поверхности Луны - 516,5 кг .
Стартовая масса возвращаемого аппарата составляет 35,4 кг, а при входе в атмосферу
Земли вместе с помещенными в него образцами грунта - 36,9 кг.
ОРГАНИЗАЦИЯ УПРАВЛЕНИЯ ПОЛЕТОМ
Организация управления полетом полностью сохранена такой же, какой была при управ-
лении АКК серии Е8-5.
В работе задействованы антенны:
• ТНА-400 (прием) и П-200Б (передача) - метровый диапазон (НИП-10, Симферополь);
Рис. 2.33. Расположение элементов конструкции АКК серии Е8-5М:
а - в полете; б - при посадке
87
ГЛАВА 2
• АДУ-1000 комплекса «Плутон» - дециметровые измерения (НИП-16, Евпатория);
• РС-10-2М (прием) и РС-10 (передача) - дециметровый диапазон (НИП-14, Щелково
и НИП-15, Уссурийск);
• НИПы на кораблях Академии наук СССР.
РЕАЛИЗАЦИЯ ПРОЕКТА
КОСМИЧЕСКИЙ АППАРАТ «ЛУНА-23»
Старт четырехступенчатой ракеты-носителя «Протон-К» с АКК «Луна-23» (Е8-5М №410)
произведен с космодрома Байконур 28 октября 1974 года в 17 часов 30 минут 32 секунды.
Выведение АКК на траекторию полета к Луне с промежуточной околоземной орбиты про-
шло без существенных замечаний. Общая масса комплекса после его отделения от РБД со-
ставила 5797,6 кг.
После проведения 31 октября первой коррекции (8,21 м/с) вторая не понадобилась.
При подлете к Луне включением двигателя КТДУ выполнено торможение, и 2 ноября
1974 года АКК «Луна-23» вышел на орбиту ИСЛ, близкую расчетной.
Для обеспечения посадки аппарата в намечаемом районе Луны проведены две кор-
рекции орбиты - 4 и 5 ноября. В результате «Луна-23» перешла на эллиптическую ор-
биту с максимальной высотой над лунной поверхностью 105 км и минимальной высотой
16,290 км.
6 ноября 1974 года в заданное время включена двигательная установка для схода косми-
ческого аппарата с орбиты. Первый этап торможения прошел штатно и закончился на высоте
2280 метров.
После выключения двигателя включился доплеровский измеритель скорости ДА-018, ко-
торый обеспечивал измерение скорости и дальности на этапе прецизионного торможения.
Однако, когда на высоте 400-600 м должно было произойти переключение на второй диа-
пазон измерений, по каналу дальности этого не произошло. В результате, начиная с высоты
130 м, прекратилось измерение высоты полета.
«Луна-23» совершила посадку на поверхности Луны в южной части Моря Кризисов в точ-
ке с координатами 12° 41' с.ш. и 62° 17' в.д.
Вертикальная скорость в момент посадки более чем вдвое превысила допустимую: 11 м/с
вместо 5 м/с, а сама посадка была произведена на площадку с углом наклона 10-15°. В со-
вокупности это стало причиной опрокидывания аппарата при его контакте с поверхностью.
Опрокидывание произошло в сторону грунтозаборного устройства, что привело к его ме-
ханическому повреждению, а также к разгерметизации приборного отсека посадочной ступе-
ни и отказу дециметрового передатчика.
Была все же предпринята попытка по командам включить ГЗУ и подготовить возвратную
ракету к старту с поверхности Луны, но безрезультатно, что подтвердила информация, полу-
чаемая через радиокомплекс возвратной ракеты.
КОСМИЧЕСКИЙ АППАРАТ Е8-5М №412
Запущен 16 октября 1975 года в 17 часов 04 минуты 56 секунд с помощью ракеты-
носителя «Протон-К». Однако выведение космического аппарата на опорную орбиту закон-
чилось аварией на участке первого включения двигательной установки разгонного блока.
КОСМИЧЕСКИЙ АППАРАТ «ЛУНА-24».
Старт четырехступенчатой ракеты-носителя «Протон-К» с АКК «Луна-24» (Е8-5М №413)
произведен с космодрома Байконур 9 августа 1976 года в 18 часов 4 минуты 12 секунд.
Выведение АКК на траекторию полета к Луне с промежуточной околоземной орбиты про-
шло без существенных замечаний. Общая масса комплекса после его отделения от РБД -
5797 кг.
В процессе перелета выполнена одна коррекция траектории, проведенная 11 августа.
Время работы двигателя КТДУ составило 8,73 сек. Таким образом было обеспечено попада-
ние аппарата в заданную точку окололунного пространства.
88
КОСМИЧЕСКИЕ АППАРАТЫ ДЛЯ ПЛАНЕТНЫХ ИССЛЕДОВАНИЙ
При подлете к Луне включением дви-
гателя КТДУ проведено торможение, и 14
августа АКК «Луна-24>> вышел на круговую
селеноцентрическую орбиту с параметра-
ми: высота над поверхностью Луны 115 км,
наклонение к плоскости лунного экватора
120°, период обращения вокруг Луны 1 час
59 минут.
Масса АКК после выхода на орбиту со-
ставила 4379,6 кг.
С целью формирования условий для
схода с орбиты 16 и 17 августа прово-
дились коррекции траектории движения,
в результате чего «Луна-24» стала со-
вершать полет по эллиптической орбите
с максимальной высотой над поверхно-
стью Луны 120 км и минимальной высо-
той 12 км.
18 августа в заданное время был вклю-
чен двигатель посадочной ступени, и спустя
6 минут в 9 часов 36 минут АКК «Луна-24»
совершил мягкую посадку в юго-восточном
районе Моря Кризисов, в точке с координа-
тами 12° 45' с. ш. и 62° 12' в. д.
Масса посадочной ступени совместно
с возвратной ракетой до операции забора
грунта составляет на поверхности Луны
1880 кг.
Через 15 минут после проверки состоя-
ния бортовых систем посадочной ступени
и определения ее положения на лунной по-
верхности по команде с Земли было вклю-
чено грунтозаборное устройство.
В процессе забора грунта до глубины
120 см использовался режим вращатель-
ного бурения, а далее происходила смена
способов бурения - с вращательного на
ударно-вращательный. Общая глубина бу-
рения составила 225 см, а в связи с тем,
что оно производилось с наклоном, общее
заглубление составило около 2 м. Фактиче-
ская длина колонки, образованной лунным
веществом, - около 160 см. Масса забран-
ных образцов - 170 грамм.
После выполнения операций перегруз-
ки, герметизации контейнера, отвода штан-
ги ГЗУ 19 августа в 8 часов 25 минут ВР
стартовала к Земле.
Масса возвратной ракеты (РЕ8-5) на
Снаряжение возвратного аппарата в цехе
Космический аппарат «Луна-24» в цехе
поверхности Луны - 514,8 кг.
Продолжительность обратного перелёта составила 84 часа. 22 августа ВР приблизилась
к Земле со второй космической скоростью. В расчетное время за 8 часов до входа возвра-
щаемого аппарата в атмосферу Земли произошло его отделение от ВР.
89
ГЛАВА 2
Возвращаемый аппарат АКК серии Е8-5М после приземления
Стартовая масса возвращаемого аппарата составляет 35,4 кг, а при входе в атмосферу
Земли вместе с помещенными в него образцами грунта - 36,9 кг.
На высоте 15 км была введена в действие парашютная система, и возвращаемый аппа-
рат совершил посадку в 200 км юго-восточнее Сургута.
Распределение вещества лунного грунта
сохранено по глубине его залегания
ТЕХНИЧЕСКАЯ И ТЕХНОЛОГИЧЕСКАЯ
НОВИЗНА
В экспедициях АКК серии Е8-5М отра-
батывалась новая технологии взятия проб
лунного вещества: с большим проникнове-
нием в подповерхностные слои грунта и с
сохранением во взятой пробе порядка рас-
пределения природного вещества по глуби-
не залегания. Успех достигнут при посадке
на Луну АКК «Луна-24» - пробы взяты с глу-
бины ~ 2 м, в большем объеме, чем в пред-
ыдущих полетах, и в полной сохранности, в
том числе по распределению, доставлены
на Землю.
РЕЗУЛЬТАТЫ ЛКИ
АКК «Луна-23». Программа полёта не
выполнена. Потеря контроля высоты и ско-
рости на заключительном этапе спуска, а
также сложный рельеф посадочной площад-
ки привели к аварийному результату ЛКИ.
АКК «ЛУНА-24». Программа полёта
АКК «Луна-24» выполнена полностью.
НАУЧНЫЕ РЕЗУЛЬТАТЫ
Целевая задача экспедиции АКК «Луна-
23» - доставка на Землю образцов лунного
грунта - не выполнена.
Главным результатом полета «Луны-
24» стала доставка на Землю образцов
лунного грунта массой 170 грамм. Грунт
90
КОСМИЧЕСКИЕ АППАРАТЫ ДЛЯ ПЛАНЕТНЫХ ИССЛЕДОВАНИЙ
с сохранением распределения по глубине был извлечен, специальным образом упакован
и доставлен на Землю возвращаемым модулем и передан десяткам исследовательских
центров для дальнейшего анализа.
Эта экспедиция стала последней в отечественной программе исследования Луны непи-
лотируемыми зондирующими средствами.
СВОДНАЯ ТАБЛИЦА ЭКСПЕДИЦИЙ АКК СЕРИЙ Е8-5 И Е8-5М
с целью доставки на Землю образцов лунного грунта
№ КА Дата и вре- мя старта Дата выхода на орбиту Луны Дата посадки на Луну Координаты точки посадки Дата взлёта с Луны Дата посадки на Землю
1 Е-8-5 №402 1969.06.14 04:00:47 Не вышла на орбиту Земли из-за отказа СУ блока «Д»
2 Е-8-5 №401 Луна-15 1969.07.13 02:54:42 1969.07.17 10:00 1969.07.21 15:52 ~17°с.ш„ ~60°в.д. Море Кризисов — —
3 Е-8-5 №403 Космос-300 1969.09.23 14:07:37 Осталась на орбите Земли из-за отказа СУ блока Д
4 Е-8-5 №404 Космос-305 1969.10.22 14:09:59 Не перешла на траекторию полёта к Луне из-за неправильной ориентации головного блока
5 Е-8-5 №405 1970.02.06 04:16:06 Не вышла на орбиту Земли из-за отказа СУ блока Д
6 Е-8-5 №406 Луна-16 1970.09.12 13:25:53 1970.09.16 23:42:10 1970.09.20 05:18:00 0°41'ю.ш., 56°18'в.д. Море Изобилия 1970.09.21 07:43:21 1970.09.24
7 Е-8-5 №407 Луна-18 1971.09.02 13:40:40 1971.09.07 1971.09.11 07:47:17 3°34'с.ш., 56°30'в.д. Море Изобилия — —
8 Е-8-5 №408 Луна-20 1972.02.14 03:27:58 1972.02.18 1972.02.21 19:19:09 3°32'с.ш., 56°33'в.д. Море Изобилия 1972.02.22 22:58:00 1972.02.25
9 Е-8-5М №410 Луна-23 1974.10.28 14:30:33 1974.11.02 1974.11.06 12°41'с.ш., 62°17'в.д. Море Кризисов — —
10 Е-8-5М №412 1975.10.16 14:04:56 Не вышла на орбиту Земли из-за отказа СУ блока Д
11 Е-8-5М №413 Луна-24 1976.08.09 15:04:12 1976.08.14 1976.08.18 06:36:00 12°45'С.Ш., 62°12в.д. Море Кризисов 1976.08.19 05:25:00 1976.08.22
91
ГЛАВА 2
КОСМИЧЕСКИЕ АППАРАТЫ СЕРИИ Е8
НАЗНАЧЕНИЕ КА
Космические аппараты серии Е8 пред-
назначены для доставки на поверхность
Луны самоходного аппарата «луноход»
(Е8Л) и проведения научных исследований
на лунной поверхности.
Серия Е8 состоит из трех аппара-
тов Е8 №201, Е8 №203 (КА «Луна-17»
с «Луноходом-1») и Е8 №204 (КА «Луна-21»
с «Луноходом-2»).
Работы по созданию четвертого ап-
парата этой серии прекращены в связи
с закрытием отечественной программы
исследования Луны космическими сред-
ствами. «Луноход-3», полностью подготов-
ленный для работы в составе очередной
лунной экспедиции, помещен в музей НПО
им. С.А. Лавочкина.
Посадка лунохода Каждая экспедиция осуществлялась в
разные календарные сроки и предусматри-
вала участие лишь одного из аппаратов этой серии.
Запуски аппаратов осуществлены: Е8 №201 - 19.02.1969 г., «Луна-17» - 10.11.1970 г.,
«Луна-21» -8.01.1973 г.
В программу экспедиции входило:
• исследование радиационной обстановки на трассе перелета к Луне, в окололунном
пространстве и на поверхности Луны;
• изучение рентгеновского космического излучения;
• движение по Луне с передачей на Землю телевизионного изображения лунной по-
верхности;
• изучение топографических и селено-морфологических особенностей местности;
• определение химического состава и физико-механических свойств грунта;
• эксперименты по лазерной локации Луны;
• проведение инженерно-технических исследований.
Средства выведения
Так же, как и остальные космические аппараты, предназначенные для исследования Луны
и относящиеся к их третьему поколению, запуск «лунников» серии Е8 предусмотрен с космо-
дрома Байконур с помощью ракеты носителя «Протон-К», выведение на опорную орбиту
и последующий перевод на траекторию перелета к Луне - двухимпульсной работой разгон-
ного блока Д.
Баллистическая схема экспедиции (рис. 2.34).
Старт с Земли, движение по траектории, коррекции, переход на орбиту спутника Луны,
маневрирование на орбите и посадка на поверхность Луны проводятся по тому же сценарию,
что и в экспедиции КА «Луна-16». После посадки и проведения соответствующей подготовки
осуществляется сход «Лунохода-1» на лунную поверхность и последующее выполнение им
научной программы по управляющим командам экипажа с Земли.
Последовательность выполняемых операций выглядит следующим образом.
Через 9,8 мин (588 с) после старта отключается двигатель третьей ступени PH и запуска-
ется РБ Д (блок11Д58, первое включение). На 35-й минуте раскрывается посадочное устрой-
ство на ОПБ (ступени КТ), и запускаются восемь ЖРД малой тяги системы стабилизации для
создания условий для повторного запуска двигателя РБД.
92
КОСМИЧЕСКИЕ АППАРАТЫ ДЛЯ ПЛАНЕТНЫХ ИССЛЕДОВАНИЙ
Рис. 2.34. Баллистическая схема экспедиции АКК серии Е8:
1 - участок выведения на орбиту ИСЗ; 2 - пассивный участок на орбите ИСЗ; 3 - разгон;
4 - первая коррекция; 5 - вторая коррекция; 6 - первое торможение;
7 - третья коррекция; 8 - второе торможение; 9 - точка посадки
Вторым включением двигательной установки РБ Д космический аппарат переводится на
траекторию полета к Луне, после чего происходит их разделение. Время работы двигателя
при первом включении составляет 370 секунд, а при втором - 400 секунд, при этом обеспе-
чивается дополнительное приращение скорости 3170 м/с.
На трассе перелета предусмотрено проведение двух коррекций траектории движения ап-
парата. Первая коррекция - через 32-36 часов после старта, она предназначена для устране-
ния ошибок выведения КА. Вторая коррекция возможна через 80-84 часа после старта, с её
помощью уточняются параметры траектории подлета к Луне.
Спустя 4,5 суток после старта включением КТДУ обеспечивается торможение КА и вы-
ход на селеноцентрическую орбиту, близкую к круговой.
С целью формирования условий для схода с орбиты в течение двух суток проводятся
коррекции окололунной орбиты, в результате чего обеспечивается прохождение аппара-
та над выбранным районом посадки. Перицентр орбиты при этом понижается до высоты
16-20 км.
Через трое суток после выхода на окололунную орбиту, в её перицентре, КТДУ включа-
ется на торможение с одновременным сбросом навесных отсеков. В ходе торможения произ-
водится:
- выдерживание модуля продольной составляющей кажущейся скорости по заданному
закону,
- склонение по тангажу с отслеживанием опорной траектории по сигналу рассогласова-
ния между программной и измеренной с помощью радиовысотомера «Вега» высотами.
Схема посадки представлена на рис. 2.35. Первый этап торможения заканчивается вы-
ходом на высоту 1800±500 метров, где происходит отсечка двигателя.
Далее аппарат совершает свободное падение с доворотом продольной оси до местной
вертикали, измеряющейся с помощью доплеровского измерителя скорости.
На высоте 550±200 метров начинается участок прецизионного торможения, которое обе-
спечивается основным двигателем КТДУ с регулированием тяги.
93
ГЛАВА 2
СХОД С ОРБИТЫ ИСЛ
Рис. 2.35. Схема посадки АКК Е8 на лунную
поверхность
На высоте 10-30 метров выклю-
чается основной двигатель КТДУ и
включается блок двигателей малой
тяги, обеспечивая снижение аппарата
с постоянной скоростью.
На высоте 1,8-3 метра по сигналу
с гамма-высотомера «Квант-2» про-
изводится выключение двигателей, и
аппарат опускается на поверхность
Луны. При этом вертикальная скорость
в момент касания не должна превы-
шать 5 м/с.
Точность посадки в заданный рай-
он Луны должна быть не хуже ±5 км.
Сразу после прилунения прово-
дится первый послепосадочный се-
анс, в котором включается гировер-
тикаль, и передаются на Землю те-
леметрические данные о положении
посадочного устройства, раскрытии
трапов, отстреле креплений лунохо-
да к посадочной ступени, раскрытии
солнечной батареи. Остронаправлен-
ная антенна наводится на Землю,
включаются телефотометры, теле-
визионные камеры и производится
осмотр места посадки. Управление
всеми системами лунохода осущест-
вляется по командам с Земли по ко-
мандной радиолинии (КРЛ). Луноход
остается на посадочной ступени до
следующего интервала видимости. За этот период от солнечных батарей подзаряжаются
буферные батареи.
В следующем интервале видимости проводится второй сеанс связи - сход лунохода
и осмотр посадочной ступени. Осмотр, с использованием телекамер и телефотометров, осу-
ществляется с трех сторон. Далее, в каждом интервале видимости проводится по одному
сеансу связи.
Управление движением осуществляется с Земли по командам с пульта управления луно-
ходом (ПУЛ), в состав которого входят рабочие места командира, водителя, штурмана и опе-
ратора остронаправленной антенны.
Обзор местности перед луноходом во время движения производится телевизионными
камерами, изображение с которых передается на Землю и воспроизводится на экранах
телевизоров, имеющихся перед командиром и водителем. Направление движения опреде-
ляется системой курсоуказания лунохода, которое уточняется по показаниям астроком-
плекса. По окончании движения производится определение координат лунохода на по-
верхности Луны.
Сеанс научных измерений может проводиться одновременно с сеансом движения и астро-
определения.
За трое - четверо суток до наступления «лунной ночи» производится зарядка аккуму-
ляторных батарей. Для этого луноход разворачивается к Солнцу зеркалом солнечной бата-
реи. Между сеансами связи и во время зарядки все системы лунохода переключаются на
дежурный режим. За сутки до наступления «лунной ночи» луноход разворачивается на угол
180 градусов (для обеспечения зарядки следующим «утром»), все системы лунохода, кроме
94
КОСМИЧЕСКИЕ АППАРАТЫ ДЛЯ ПЛАНЕТНЫХ ИССЛЕДОВАНИЙ
системы терморегулирования, выключаются, солнечная батарея закрывается. В таком состо-
янии луноход находится в течение всей «лунной ночи».
С наступлением «лунного дня», при достижении определенной температуры, термодат-
чики, установленные на луноходе, включают приемники КРЛ, и связь с луноходом возобнов-
ляется. Включение приемников дублируется датчиком СДК-6, реагирующим на появление
Солнце над горизонтом. Через сутки раскрывается солнечная батарея, и производится за-
рядка аккумуляторов.
В следующих интервалах видимости производится работа лунохода по расписанию сеан-
сов второго лунного дня. Сеансы связи аналогичны сеансам первого лунного дня.
Подготовке ко второй лунной ночи и работа лунохода в третий лунный день аналогичны
второму лунному дню.
КОСМИЧЕСКИЙ АППАРАТ
Космические аппараты серии Е8, как и аппараты серии Е8-5, можно классифицировать
как автоматические космические комплексы (АКК).
Автоматический космический аппарат Е8 состоит из орбитально-посадочного блока
(ОПБ, употребляется также первоначальное наименование - корректирующе-тормозной мо-
дуль, КТ), самоходного аппарата 8ЕЛ (лунохода) и трапов для схода лунохода на поверхность
Луны (рис. 2.36). Орбитально-посадочные
блоки по конструкции, назначению и со-
ставу служебной и научной аппаратуры
идентичны для всех КА серии Е8. Лу-
ноходы, установленные на борту КА Е8
№201 и Е8 №203(«Луноход-1») - иден-
тичны, «Луноход-2» (на борту КА Е8
№204) имеет с ними различия.
На посадочной ступени КА и луно-
ходе установлены флаги и вымпелы с
изображением Государственного герба
СССР и барельефом В.И. Ленина.
Орбитально-посадочный блок
предназначен для обеспечения пере-
лета по трассе Земля-Луна, включая
коррекции траектории, выход на орбиту
искусственного спутника Луны, форми-
рование предпосадочной окололунной
орбиты, сход с орбиты и посадку на лун-
ную поверхность.
Основу силовой конструкции ОПБ со-
ставляют четыре сферических топливных
бака, соединенных между собой цилин-
дрическими проставками, две из которых
исполняют роль приборных отсеков для
размещения аппаратуры системы управ-
ления перелетом и посадкой.
В первом приборном отсеке разме-
щаются: трехстепенная гиростабилизи-
рованная платформа, вычислительное
устройство автомата отсечки двигателя,
вычислительное устройство регулято-
ра кажущейся скорости и гироскопиче-
ский интегратор продольных ускорений.
Во втором - автомат стабилизации на
активных и пассивных участках; блок
Рис. 2.36. Общий вид АКК серии Е8:
1 - блок баков; 2 - радиовысотомер; 3 - жидкостный
реактивный микродвигатель системы стабилизации;
4 - топливный бак системы стабилизации; 5 - трап;
6 - баллон с азотом для системы астроориентации;
7 - телекамера; 8 - остронаправленная антенна;
9 - коническая спиральная антенна; 10- солнечная
батарея (в закрытом положении); 11 - «Луноход-1»;
12 - телефотокамера; 13 - штыревая антенна;
14 - изотопный источник тепла; 15- микродвигатель
системы ориентации; 16- доплеровская аппаратура;
17 - сбрасываемый отсек; 18- сопло основного
двигателя; 19- посадочное устройство
95
ГЛАВА 2
дальности, принимающий и обрабатывающий информацию с доплеровского радиолокатора;
блок программированных высот, принимающий и обрабатывающий информацию с радиовы-
сотомера. Для управления работой блока Д часть аппаратуры системы управления размеще-
на на переходной ферме.
На диагональной крестовине, соединяющей топливные баки ОПБ, закреплен двигатель.
К топливным бакам, в свою очередь, крепятся амортизирующие посадочные устройства,
радиовысотомер больших высот «Вега», доплеровская аппаратура для измерения скорости
и высоты снижения (ДА-018), малонаправленные антенны.
Помимо основных баков топливо размещается также в баках сбрасываемых отсеков.
Каждый их двух сбрасываемых отсеков представляет собой два цилиндрических топлив-
ных бака со сферическими днищами, соединенных между собой проставками, на которых
крепятся герметичные приборные контейнеры с аккумуляторными батареями, используе-
мыми для питания бортовой аппаратуры до момента схода с окололунной орбиты, основное
программно-временное устройство и аппаратура системы астроориентации. Сброс отсеков
производится перед включением двигателя для схода с орбиты.
Двигательная установка ОПБ состоит из основного двигателя 11Д417 с регулируемой тягой
и блока двигателей малой тяги с номинальной тягой 280 кг. Суммарная тяга основного двигателя
может изменяться в пределах от 1929 до 750 кгс, а удельный импульс - от 291 до 311 секунд. Для
стабилизации аппарата на участке работы двигателей используются рулевые сопла.
Конструкция ОПБ, лишенная сбрасываемых отсеков, образует посадочную ступень.
Верхняя часть посадочной ступени предусматривает возможность установки и крепления на
ней лунохода. Луноход крепится на крестовине с помощью пироболтов, которые после по-
садки на поверхность Луны разрываются по радиокоманде с Земли и освобождают луно-
ход. Съезд лунохода на поверхность Луны («вперед» - «назад», в зависимости от рельефа
в месте посадки) осуществляется по специальным откидным трапам, укрепленным на блоке
баков посадочной ступени.
СЛУЖЕБНАЯ АППАРАТУРА ОПБ
Система управления (СУ), разработанная в КБ «Салют» под руководством Н.П. Никити-
на, предназначена для управления ориентацией и стабилизацией КА и функционированием
КТДУ на всех активных участках полета, включая участок работы блока Д (11С824), коррек-
ции и торможения, а также на всем участке снижения и посадки вплоть до контакта с лун-
ной поверхностью. С целью максимального увеличения массы выводимого полезного груза
управление работой разгонного блока осуществляется СУ КА, для чего её включение проис-
ходит перед стартом.
На участках второго торможения, снижения и посадки в качестве измерительных
средств система управления использует радиовысотомер больших высот (РВ-В) «Вега» и до-
плеровский измеритель скорости ДА-018, в состав которого входит и измеритель дальности.
В качестве исполнительных органов системы управления на активных участках исполь-
зуются жидкостно-реактивные сопла, а на пассивных участках - ЖРС и воздушно-реактивные
двигатели.
Для отсечки блока двигателей малой тяги при достижении заданной высоты над Луной
предназначен высотомер малых высот «Квант-2», разработанный КБ технической киберне-
тики Ленинградского политехнического института имени М.И. Калинина.
Система астроориентации (САО), разработанная в НИИ-923 под руководством В.П. Мо-
рачевского (с 1970 года - отделение №1 Московского института электромеханики и автома-
тики), предназначена для построения трехосной ориентации по Солнцу и Земле перед прове-
дением активных маневров. В остальное время аппарат закручивается вокруг направления
на Солнце со скоростью 3 град/с для поддержания стабильного теплового режима и устой-
чивой связи с Землей. Измерительными средствами в САО являются оптико-электронные
приборы - датчики Солнца и Земли, образующие астроблок, а также блок датчиков угловых
скоростей (БДУС). При построении трехосной ориентации на орбите ИСЛ для исключения
ложного захвата Луны земным прибором применяется радиопеленг специального сигнала,
излучаемого наземной станцией. С этой целью на борту КА установлена антенна САО.
96
КОСМИЧЕСКИЕ АППАРАТЫ ДЛЯ ПЛАНЕТНЫХ ИССЛЕДОВАНИЙ
Исполнительными органами САО служат газовые микродвигатели, работающие на сжа-
том азоте.
АВТОМАТИЧЕСКИЙ САМОХОДНЫЙ АППАРАТ «ЛУНОХОД-1» (рис. 2.37) состоит из
двух основных частей: герметичного приборного отсека (возможен термин контейнер) и са-
моходного шасси.
Приборный отсек имеет корпус в форме усеченного конуса, замкнутого верхним и ниж-
ним днищами, изготовлен из магниевых сплавов. Отсек служит для размещения аппаратуры
бортовых систем лунохода и защиты ее от воздействия внешней среды в условиях космоса.
Верхнее днище, имеющее больший диаметр, чем нижнее, используется как радиатор-
охладитель в системе терморегулирования и закрывается откидной крышкой. В сборе флан-
цы верхнего днища и корпуса стыкуются при помощи болтов. Герметизация стыка обеспечи-
вается прокладкой кольцевого жгута из вакуумной резины. Стык нижнего днища - основания
приборного отсека - с корпусом герметизирован таким же образом. Внутренняя полость от-
сека заполняется газовой смесью: заправка производится через заправочные клапаны, уста-
новленные на корпусе и в основании.
Верхнее днище состоит из обшивки в форме усеченного конуса, собственно днища, име-
ющего сферическую поверхность, на наружной поверхности которого нанесено специальное
термооптическое покрытие из зеркальных (кварцевое стекло) элементов, и силового обода.
С внутренней стороны к обшивке и днищу с помощью точечной электросварки приварены
желоба - воздуховоды системы терморегулирования. В центре днища воздуховоды сходятся
в общий коллектор, соединенный с каналом вентилятора СТР. К силовому ободу приварено
кольцо радиатора-охладителя и кронштейны крепления механизма открытия и стопорения
солнечной батареи (откидной крышки), установлен фланец крепления астрокомплекса. Коль-
цо радиатора поддерживают диафрагмы. К кольцу радиатора-охладителя крепится крон-
штейн установки оптиче-
ского углового отражателя.
Снаружи размещены также
датчики аппаратуры РВ-2Н,
РТ-1, выносной блок (ВБ),
две панели источника и зер-
кало аппаратуры «Рифма».
С внутренней стороны
сферического днища к си-
ловому ободу приварены
узлы крепления оборудова-
ния СТР.
Снаружи коническо-
го корпуса, в передней его
части, расположены: иллю-
минаторы ТВ камер; под-
вижная остронаправленная
антенна, служащая для пе-
редачи на Землю ТВ изо-
бражений, с электрическим
приводом; малонаправлен-
ная антенна для приема
команд и передачи телеме-
трии; научные приборы.
По левому и правому
бортам установлены по две
панорамных телефотокаме-
ры, причем в каждой паре
одна из камер конструктив-
Рис. 2.37. «Луноход-1». Конструктивно-компоновочная схема:
1 - корпус лунохода (герметичный приборный отсек); 2 - выносной
блок аппаратуры «Рифма»; 3 - телекамеры; 4 - уголковый
лазерный отражатель; 5 - привод остронаправленной антенны;
6 - остронаправленная антенна; 7 - коническая спиральная
малонаправленная антенна;8 - верхнее днище приборного отсека
(радиатор-охладитель);9 - крышка (панель солнечной батареи);
10 - телефотометры;11 - изотопный источник тепловой энергии;
12 - девятое колесо (измеритель пройденного пути);13 - прибор
оценки проходимости для определения физико-механических
свойств грунта; 14 - штыревая антенна; 15 - мотор-колесо;
16 - блок колес шасси на торсионной подвеске
97
ГЛАВА 2
но объединена с определителем местной вертикали, и четыре штыревые антенны для прие-
ма радиокоманд с Земли в метровом диапазоне частот.
В задней части приборного отсека расположен радиоизотопный источник тепловой энер-
гии. Рядом с ним - прибор для определения физико-механических свойств лунного грунта
(прибор оценки проходимости - ПРОП) и механизм подъёма и опускания девятого колеса.
В корпус вмонтированы герметичные разъемы, штуцера заправки системы СТР, клапаны
заправки отсека газовой смесью.
Основание приборного отсека состоит из фрезерованного шпангоута и днища. В цилин-
дрической стенке шпангоута имеются гнезда для крепления герметичных разъемов; с на-
ружной стороны к шпангоуту приварены четыре кронштейна крепления шасси; с внутренней
стороны шпангоута крепится приборная рама.
К днищу основания приварены две балки, поддерживаемые полубалками, между которыми
вварены две панели с гнездами для крепления отрывных разъемов. К балкам с одной стороны кре-
пится приборная рама, с другой - узлы стыковки лунохода с крестовиной посадочной ступени.
В приборном отсеке размещены приборы телевизионного и радиокомплекса ДРК, теле-
метрической системы, системы дистанционного управления луноходом, блоки автоматики,
приборы системы терморегулирования, а также блоки системы электропитания и электрон-
ные блоки научной аппаратуры.
Значительная часть вышеперечисленной аппаратуры размещается на приборной раме.
Приборная рама своими вертикальными стенками и днищем образует семь полостей,
в которых установлены:
• моноблок радиокомплекса, датчик давления;
• две аккумуляторные батареи (блоки «810»), полупроводниковый аккумулятор, осуши-
тель;
• осушитель, блок коммутации и автоматики, преобразователь напряжения и блок авто-
матики шасси, счетчик ампер-часов;
• распределительно-коммутационный блок, блок указателя курса, датчик времени и
стабилизатор напряжения, курсоуказатель (на трех регулируемых опорах);
• телеметрический блок коммутации (БК), телеметрический блок системы измерения
температур (СИТ), осушитель и два телеметрических локальных коммутатора (ЛК);
• телеметрический моноблок (БР), телеметрический блок СИТ, два полупроводниковых
коммутатора (ППК), два телеметрических БК;
• телеметрический блок ЛК, осушитель и блок ЛФУ.
«Луноход-1» на испытаниях
98
КОСМИЧЕСКИЕ АППАРАТЫ ДЛЯ ПЛАНЕТНЫХ ИССЛЕДОВАНИЙ
К днищу приборной рамы снизу с помощью переходного профиля закреплен блок сол-
нечного датчика.
Откидная теплоизолированная крышка, внутренняя часть которой служит для размеще-
ния фотоэлементов и представляющая собой, таким образом, панель солнечной батареи, в
течение лунного дня открыта и фотоэлементы (на основе кремния) обеспечивают подзарядку
аккумуляторов. В период лунной ночи крышка закрывает радиатор и препятствует отводу
тепла из отсека.
В состав самоходного шасси входят ходовая часть с колесными движителями на
упругой подвеске (или применяется термин блок колес шасси на торсионной подвеске),
блок автоматики шасси и система безопасности движения (прибор оценки проходимо-
сти - ПРОП).
Ходовую часть образуют восемь колес с индивидуальными электромеханическими при-
водами, объединенные попарно в четыре блока - два блока колес левого борта и два блока
колес правого борта. Каждый блок колес с помощью кронштейна крепится к основанию при-
борного отсека лунохода. На рис. 2.38 показан передний блок колес правого борта.
Каждое колесо имеет три титановых обода, покрытых сеткой из нержавеющей стали и
соединенных грунтозацепами. Ступица колеса соединена с ободом спицами. Колеса, транс-
миссии и двигатели объединены в единые узлы - мотор-колеса. Самоходное шасси имеет
восемь мотор-колес, каждое из которых является ведущим. Диаметр каждого из колес по
грунтозацепам составляет 510 мм, ширина - 200 мм. Колесная база шасси - 170 мм, а шири-
на колеи 1600 мм.
Геометрия ходовой части, удельное давление на грунт, тяговые характеристики шасси,
параметры упругой подвески и конструкция опорной поверхности колес позволяют луноходу
уверенно передвигаться по поверхности с рыхлым, сыпучим слоем грунта, преодолевать кру-
тые подъемы, переезжать через кратеры и препятствия в виде отдельных камней или гряды
камней, соизмеримых с размерами ходовой части.
Шасси обеспечивает передвижение лунохода вперед (с двумя скоростями) и назад, по-
вороты на месте и в движении. Поворот может осуществляться только за счет различной
скорости вращения колес правого и левого бортов или за счет разнонаправленности их вра-
щения.
Торможение осуществляется переключением тяговых электродвигателей шасси в ре-
жим электродинамического торможения. Для удержания лунохода на уклонах и его полной
остановки включаются дисковые тормоза с электромагнитным управлением. Блок автома-
тики управляет движением лунохода
по радиокомандам с Земли, измеряет
и контролирует основные параметры
самоходного шасси и автоматическую
работу приборов для исследования
механических свойств грунта. Система
безопасности движения обеспечивает
автоматическую остановку лунохода
при предельных углах крена и диффе-
рента и перегрузках электродвигате-
лей колес.
Технические характеристики само-
ходного шасси представлены в табл.
2.2.
Управление движением шасси осу-
ществляется через систему дистанци-
онного управления луноходом как по
командам, поступающим по команд-
ной радиолинии (КРЛ) с Земли, так и
по сигналам бортовой автоматики.
Рис. 2.38. Блок колес самоходного шасси
99
ГЛАВА 2
Таблица 2.2
№ Наименование характеристики Технические данные № Наименование характеристики Технические данные
1 База 1700 мм 11 Фиксированные скорости дви- жения (I и II): - скорость движения I - скорость, движения II 1,0 км/ч 2,0 км/ч
2 Колея 1600 мм 12 Номинальный момент на валу электродвигателя: - на I скорости - на II скорости 2 кг-см 1 кг-см
3 Клиренс 300 мм 13 Мощность, потребная для пре- одоления луноходом подъема 17 град (грунт f= 0,2) 350 Вт
4 Диаметр колеса по грунто- зацепам 500 мм 14 Мощность, потребляемая контрольно-измерительной аппаратурой и тормозами: - в движении не более - на стоянке 80 Вт 20 Вт
5 Ширина колеса 200 мм 15 Способ поворота бортовой
6 Колесная формула 8x8 16 Поворот: - постоянный - дозированный - дозированный 5 град 20 град
7 Среднее удельное давле- ние на глубине колеи 30 мм 0,043 кг/см3 17 Радиус поворота по забегаю- щему борту: - в движении - на месте 5-6 м 0,8 м
8 Размеры преодолеваемых препятствий: - кратер с диаметром по гребню и глубинной впа- дине - ширина рва - одиночные камни с мак- симальным размером в поперечнике не более - эскарп - контрэскарп D - 1-3 м (0,25-1/6)4? 600 мм 300 мм до 250 мм 300 мм 18 Статический угол устойчиво- сти: - продольный - поперечный 41 град 45 град
9 Запас хода 40 км 19 Продольный динамический угол устойчивости при движе- нии: - на I скорости - на II скорости 20 град 17 град
10 Режимы движения: постоянное движение старт-стопный старт-стопный старт-стопный 15 с 10 с 5,5 с 12 Напряжение источника пита- ния 27 (+5...-3,5) В
100