/







































































































































































































































Автор: Дмитриев А.С. Панас А.И.
Теги: вычислительная математика численный анализ математика информатика динамические системы системы связи
ISBN: 5-94052-066-9
Год: 2002
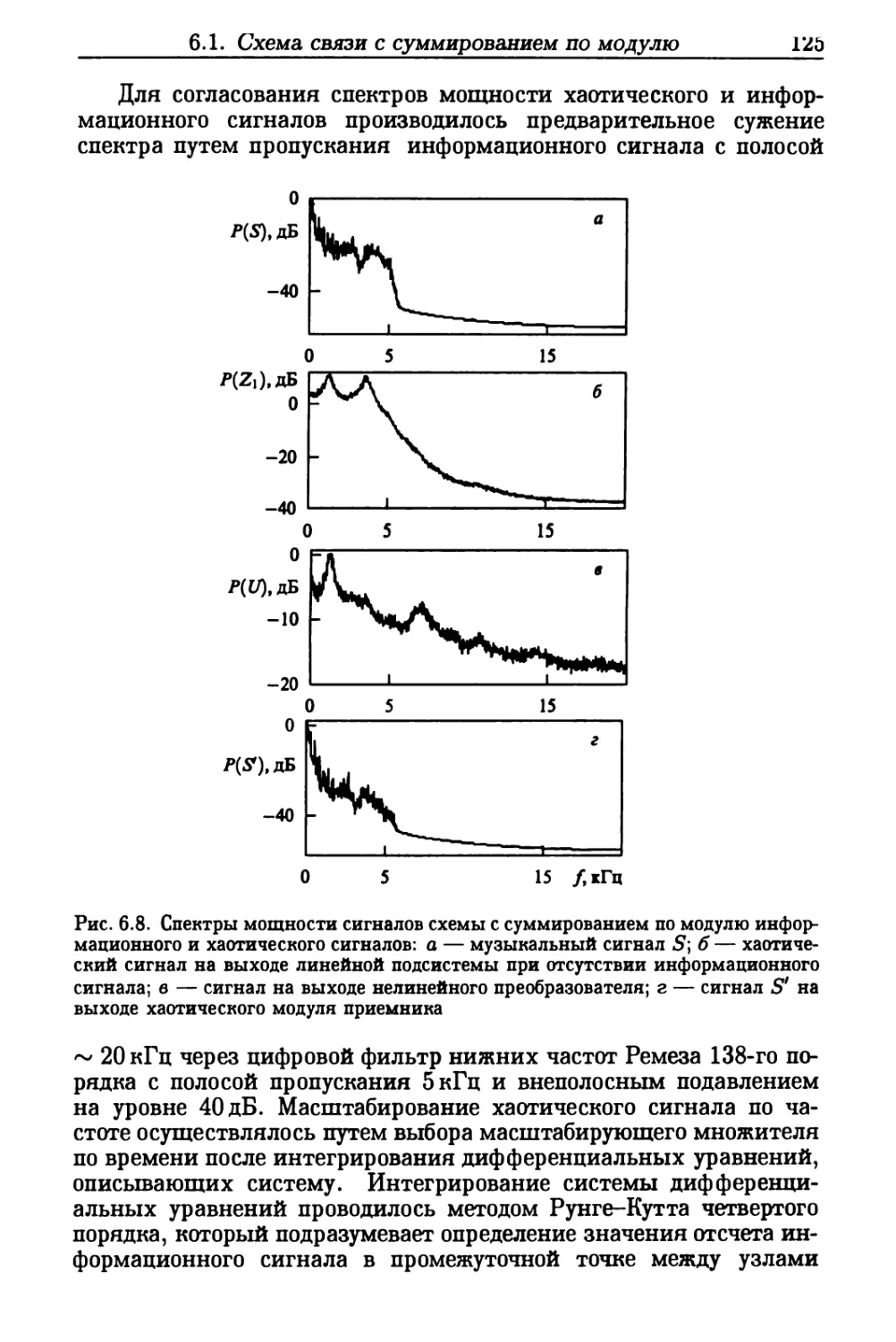
Текст
А. С. Дмитриев
А. И. Панас
ДИНАМИЧЕСКИЙ ХАОС
НОВЫЕ НОСИТЕЛИ
ИНФОРМАЦИИ
ДЛЯ СИСТЕМ СВЯЗИ
А. С. Дмитриев
А. И. Панас
ДИНАМИЧЕСКИЙ ХАОС
НОВЫЕ НОСИТЕЛИ ИНФОРМАЦИИ
ДЛЯ СИСТЕМ СВЯЗИ
Москва
Физматлит
2002
ББК 22.193
Д 53
УДК 519.6
ДМИТРИЕВ А. С., ПАН АС А.И. Динамический хаос: новые носители информа-
ции для систем связи.—М.: Издательство Физико-математической литературы,
2002.—252 с.—ISBN 5-94052-066-9.
Динамический хаос (хаотические колебания) представляет собой нерегуляр-
ное и непредсказуемое на большие времена движение в детерминированных не-
линейных динамических системах. Причинами нерегулярности и непредсказуе-
мости является собственная динамика системы, а не влияние шумов и внешних
возмущающих факторов. Последнее десятилетие характеризовалось большим
интересом к применению хаоса для передачи информации в качестве несущих
или модулируемых полезными сигналами колебаний. Это связано как со свой-
ствами динамического хаоса, привлекательными для связных приложений, так
и тенденциями развития самих коммуникационных технологий и систем, ис-
пытывающих потребность в новых идеях для решения грандиозных задач типа
задачи создания «информационного общества». Отечественные и зарубежные ис-
следования показали, что динамический хаос может быть использован в комму-
никационных системах в качестве несущих информацию колебаний. При этом
оказалось, что динамический хаос по своим свойствам во многом отличается от
такого традиционного носителя информации, как гармонические колебания, и его
с полным основанием можно называть новым типом носителя информации для
систем связи.
Для научных работников, а также аспирантов и студентов старших курсов
соответствующих специальностей.
DMITRIEV A.S., PANAS A.I. Dynamic chaos: novel type of information carrier
for communication systems.
Dynamic chaos (chaotic oscillations) is irregular and unpredictable (over large
time intervals) motion of deterministic nonlinear dynamic systems. The reason for
the irregularity and unpredictability is the inherent dynamics of the system rather
than effect of noise or external perturbing factors. The last decade is characteris-
tic of great interest to applications of chaos in communications as a carrier or as
oscillations modulated by useful signals. This is associated both with features of
dynamic chaos attractive to communication applications, and with development
tendencies of communication technologies and systems, requiring new ideas for
achieving such immense goals as building the «information society». As a result
of intense studies of Russian and foreign researchers the question of a principle
use of dynamic chaos in communications as information-carrying oscillations was
answered affirmatively. As was found, in many respects the dynamic chaos is dif-
ferent from such a conventional information carrier as harmonic oscillations, and
with good reason it can be called a novel type of information carrier for commu-
nication systems. The present book is devoted to investigation of the principles of
information transmission with this novel carrier.
I.IIIINII
9l785940h20665ll
ISBN 5-94052-052-9
© А. С. Дмитриев, А. И.Панас, 2002
ОГЛАВЛЕНИЕ
Введение .................................................... 9
Глава 1. Синхронный хаотический отклик ..................... 19
1.1. Понятие хаотического синхронного отклика............ 20
1.2. Примеры декомпозиции автоколебательных систем .... 21
1.3. Оценка качества хаотического синхронного отклика ... 26
1.4. Устойчивость отклика. Явление «on-off» перемежаемости 27
1.5. Отклик в условиях большой расстройки параметров ве-
дущей и ведомой систем............................. 33
1.6. Импульсная синхронизация хаотических генераторов . . 36
1.7. Выводы......................................... 40
Глава 2. Методы передачи информации с использованием син-
хронного хаотического отклика ............................ 42
2.1. Хаотическая маскировка......................... 42
2.2. Переключение хаотических режимов............... 44
2.3. Нелинейное подмешивание информационного сигнала к
хаотическому........................................ 46
2.4. Использование структуры ФАП......................... 49
2.5. Использование адаптивных методов приема............. 51
2.6. Сравнительный анализ схем передачи информации, ис-
пользующих хаотический синхронный отклик............... 52
2.7. Выводы.............................................. 56
Глава 3. Передача информации с нелинейным подмешива-
нием информационного сигнала к хаотическому ... 57
3.1. Структура системы. Выбор генератора хаоса........... 57
3.2. Математическая модель системы....................... 60
3.3. Передача аналоговой информации. Численный экспери-
мент .................................................. 61
3.4. Оценка качества передачи информации................. 64
3.5. Эксперименты по передаче речевых и музыкальных сиг-
налов ................................................. 64
3.6. Выводы.............................................. 69
Глава 4. Эксперименты по передаче информации с использова-
нием хаоса в радиодиапазоне............................... 71
4.1. Структура коммуникационной системы.................. 71
4.2. Математическая модель системы....................... 73
4.3. Анализ влияния возмущающих факторов................. 73
4
Оглавление
4.4. Экспериментальный мг(кет и его характеристики... 77
4.5. Передача речевой информации в радиодиапазоне по ка-
белю ................................................. 82
4.6. Передача речевой информации в радиодиапазоне по
эфиру................................................. 83
4.7. Выводы.............................................. 84
Глава 5. Прецизионные генераторы хаоса.................... 87
5.1. Критерий прецизионности генераторов................. 88
5.2. Структура прецизионных генераторов хаоса............ 90
5.3. Генератор хаоса с 1,5 степенями свободы............. 91
5.4. Генератор хаоса с 2,5 степенями свободы............ 105
5.5. Выводы............................................. 114
Глава 6. Повышение эффективности схемы с нелинейным под-
мешиванием информации ................................... 116
6.1. Схема связи с суммированием по модулю хаотического и
информационного сигналов ............................ 117
6.2. Схема с частотной модуляцией информационного сигнала 128
6.3. Выводы............................................. 134
Глава 7. Применение цифровых сигнальных процессоров для
реализации схемы с нелинейным подмешиванием
информации............................................... 136
7.1. Цифровой сигнальный процессор ADSP-21061 и его ос-
новные характеристики................................ 137
7.2. Эксперименты со схемой на одном сигнальном процес-
соре ................................................ 138
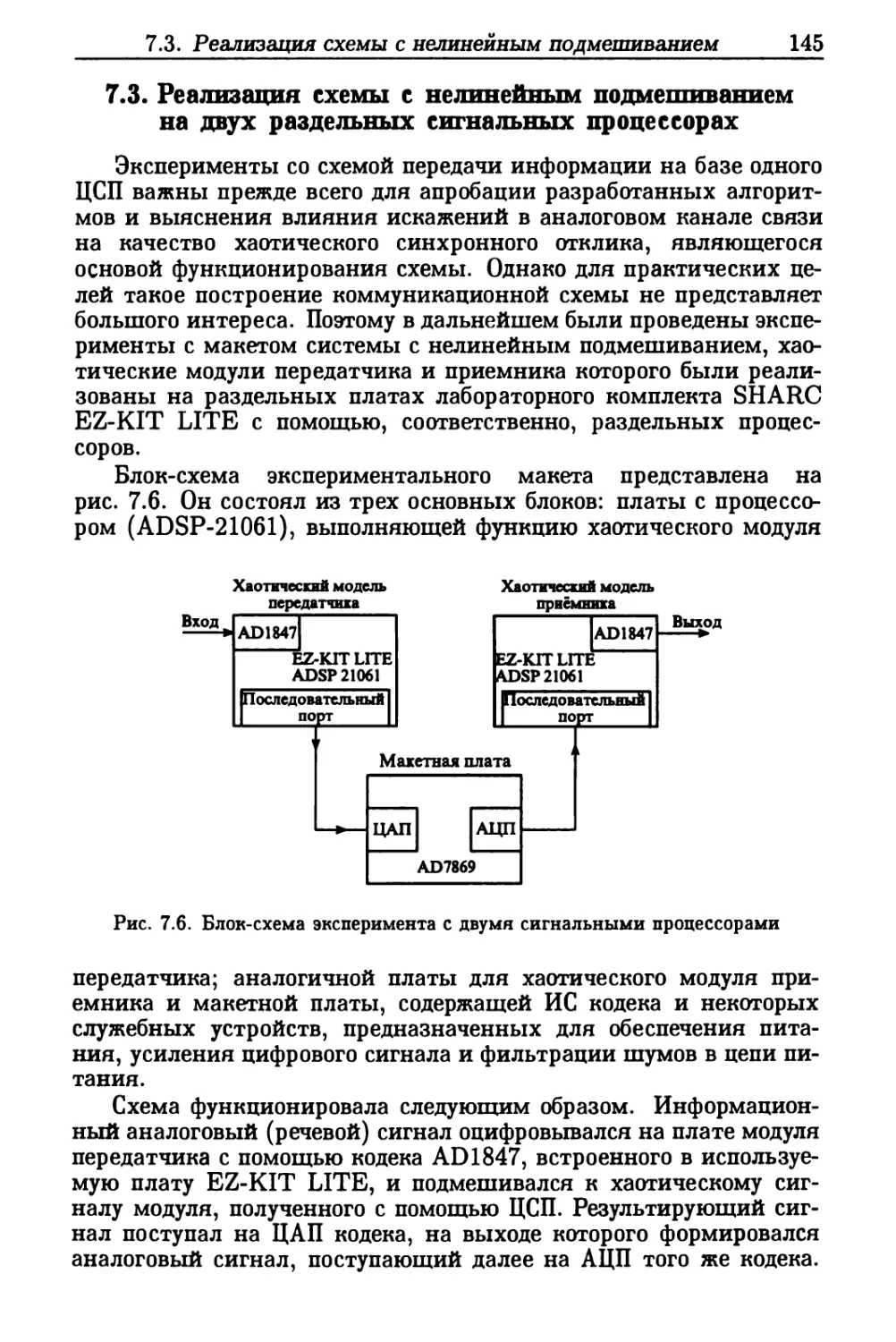
7.3. Реализация схемы с нелинейным подмешиванием на
двух раздельных сигнальных процессорах............... 145
7.4. Выводы............................................. 148
Глава 8. Система передачи информации для работы в усло-
виях фильтрации сигналов в канале связи ................. 149
8.1. Борьба с фильтрацией сигналов в канале связи.... 149
8.2. Структура системы ................................. 150
8.3. Математическое моделирование....................... 152
8.4. Макетирование хаотических модулей передатчика и при-
емника .............................................. 154
8.5. Синхронный хаотический отклик...................... 159
8.6. Передача тестовых информационных сигналов ......... 161
8.7. Выводы............................................. 162
Глава 9. Прямохаотические системы передачи информации . . 164
9.1. Понятие прямохаотической системы................... 164
9.2. Некоторые возможные схемы для организации прямохао-
тической системы..................................... 165
Оглавление
5
9.3. Генераторы хаоса ВЧ- и СВЧ- диапазонов.............. 169
9.4. Хаотическая синхронизация на высоких частотах .... 185
9.5. Ввод и извлечение информации........................ 186
9.6. Прямохаотическая система с некогерентным приемом . . 189
9.7. Выводы.............................................. 200
Глава 10. Сверхширокополосные прямохаотические системы
связи ............................................. 201
10.1. Структура.......................................... 202
10.2. Компьютерное моделирование......................... 204
10.3. Эксперименты....................................... 211
10.4. Выводы............................................. 215
Заключение.................................................. 216
Приложение. Моделирующий комплекс .......................... 218
П.1. Структура комплекса................................. 218
П.2. Методика проведения численного моделирования.... 223
П.З. Пакет программ для анализа схемы с нелинейным под-
мешиванием ....................................... 231
Список литературы .......................................... 240
CONTENTS
Introduction
Chapter 1. Synchronous chaotic response
1.1. Concept of synchronous chaotic response
1.2. Decomposition of oscillator systems. Examples
1.3. Quality estimate of synchronous chaotic response
1.4. Response stability. «On-off» intermittency
1.5. Synchronization of drive-response systems on condition of
a large mismatch of parameters
1.6. Impulse synchronization of chaotic oscillators
1.7. Conclusions
Chapter 2. Approaches to information transmission with the
use of synchronous chaotic response
2.1. Chaotic masking
2.2. Chaos shift keying
2.3. Nonlinear mixing information and chaotic signals
2.4. Using PLL structure
2.5. Using adaptive methods
2.6. Comparative analysis of communication systems using the
synchronous chaotic response
2.7. Conclusions
Chapter 3. Information transmission by means of nonlinear
mixing information and chaotic signals
3.1. The system structure. Choice of chaotic oscillator
3.2. Mathematical model of the system
3.3. Analog information transmission. Simulation
3.4. Quality estimate of the information transmission
3.5. Experiments on speech and music signal transmission
3.6. Conclusions
Chapter 4. Experiments on RF information transmission
using chaos
4.1. Structure of the communication system
4.2. Mathematical model of the system
4.3. Effect of disturbing factors
4.4. Experimental model and its characteristics
4.5. RF wire information transmission
Contents
7
4.6. RF wireless information transmission
4.7. Conclusions
Chapter 5. Precision chaotic oscillators
5.1. Precision test of oscillators
5.2. Singularities of the oscillator structure
5.3. Chaotic oscillator with 1,5 degrees of freedom
5.4. Chaotic oscillator with 2,5 degrees of freedom
5.5. Conclusions
Chapter 6. Raising efficiency of the communication system
with nonlinear information mixing
6.1. Communication system with modulo summation of chaotic
and information signals
6.2. Communication system with frequency modulation of in-
formation signal
6.3. Conclusions
Chapter 7. Application of digital signal processors for an
implementation of the communication system
with nonlinear information mixing
7.1. Digital signal processor ADSP-21061 and its basic charac-
teristics
7.2. Experiments with communication system based on one
signal processor
7.3. Implementation of the communication system with non-
linear information mixing based on two signal processors
7.4. Conclusions
Chapter 8. Communication system, operating under filtering
signals in communication channel
8.1. Combating with filtering the signals in communication
channel
8.2. System structure
8.3. Simulation
8.4. Implementation of the transmitter and receiver chaotic
modules
8.5. Synchronous chaotic response
8.6. Transmission of test information signals
8.7. Conclusions
Chapter 9. Direct chaotic communications
9.1. Concept of direct chaotic communication system
9.2. Some possible schemes for direct chaotic communication
design
9.3. High-frequency and microwave chaotic oscillators
9.4. High-frequency chaotic synchronization
8 Contents
9.5. Information input and extraction
9.6. Noncoherent direct chaotic communication system
9.7. Conclusions
Chapter 10. Ultra wideband direct chaotic communications
10.1. Structure
10.2. Simulation
10.3. Experiments
10.4. Conclusions
Conclusion
Appendix
Bibliography
ВВЕДЕНИЕ
Динамический (детерминированный) хаос — явление, вошед-
шее в научную картину мира сравнительно недавно, лишь в по-
следней четверти XX в. С тех пор интерес к нему не угасает не
только в кругу специалистов — физиков, математиков, биологов
и т. д., но и среди людей далеких от науки.
Оно представляет собой сложные непериодические колеба-
ния, порождаемые нелинейными динамическими системами. Эти
колебания могут возникать при отсутствии внешних шумов и
полностью определяются свойствами самой детерминированной
динамической системы. Динамический хаос обладает многими
свойствами случайных процессов: сплошным спектром мощно-
сти, экспоненциально спадающей корреляционной функцией, не-
предсказуемостью на большие интервалы времени. Вместе с тем
ему свойственны такие чисто динамические свойства, как чрезвы-
чайно высокая чувствительность к начальным условиям, связан-
ное с ней экспоненциальное в среднем разбегание близких траек-
торий и др.
Исследования, проведенные к началу восьмидесятых годов, по-
зволили, в основном, сформировать понимание причин возникно-
вения, свойств и закономерностей динамического хаоса [6, 7, 9-11,
17, 23, 32, 69, 74, 77, 82, 83, 85, 97, 138, 163, 178] и заставили пе-
ресмотреть многие привычные представления об окружающем нас
мире, внеся радикальные изменения в картину того, как могут
вести себя различные объекты и процессы.
Стало ясно, что разрабатываемые на основе этого явления тео-
рии и подходы могут привести к появлению новых возможностей
в различных областях знаний и к созданию новых технологий.
Таким образом, встал вопрос о практическом использовании ди-
намического хаоса, в первую очередь в информационных техноло-
гиях, электронике и технике связи.
Этому способствовало несколько важных обстоятельств.
Во-первых, электроника и радиотехника были одним из самых
важных теоретических и экспериментальных полигонов на всем
протяжении интенсивных исследований свойств хаоса [4, 5, 12, 13,
1 Зак. 18
10
Введение
22, 25, 28-30, 48, 50, 55, 57, 58, 60, 63, 64, 67, 71, 75, 76, 79, 104,
111, 117, 139, 151, 162, 164, 166, 174, 190, 202, 203, 205, 214].
Во-вторых, здесь был накоплен богатый опыт разработки уст-
ройств — генераторов хаоса в различных участках частотного диа-
пазона.
В-третьих, со времен появления работ Шеннона [93], Котель-
никова [62] и Харкевича [88] было известно, что широкополосные
сигналы, к которым относятся хаотические колебания, потенци-
ально очень эффективны для передачи информации.
Наконец, в-четвертых, растущие требования к коммуникаци-
онным системам требуют новых идей и подходов для своего реше-
ния.
Чем же определяется привлекательность динамического хаоса
для современных систем связи? Она связана со следующими его
свойствами:
1) возможностью получения сложных колебаний с помощью
простых по структуре устройств;
2) способностью в одном устройстве реализовать большое ко-
личество различных хаотических мод;
3) возможностью управления хаотическими режимами путем
малых изменений параметров системы;
4) большой информационной емкостью;
5) разнообразием методов ввода информационного сигнала в
хаотический;
6) увеличением скорости модуляции по отношению к модуля-
ции регулярных сигналов;
7) возможностью самосинхронизации передатчика и прием-
ника;
8) нетрадиционными методами мультиплексирования;
9) конфиденциальностью при передаче сообщений.
Рассмотрим эти свойства более подробно.
Возможность получения сложных колебаний с помощью про-
стых по структуре электронных устройств. К настоящему времени
предложено и исследовано значительное количество динамичес-
ких систем, генерирующих хаотические сигналы. «Минимальные»
хаотические генераторы описываются всего тремя обыкновенными
дифференциальными уравнениями и, по меньшей мере, часть из
них представляет собой генераторы, построенные путем добавле-
ния одного или нескольких элементов в стандартные генераторы
регулярных колебаний. Другие источники хаоса не так просто
связать с традиционными электронными генераторами, однако
они также могут быть реализованы с помощью современной эле-
ментной базы либо схемотехнически, либо в виде аналоговой
интегральной микросхемы, либо на основе цифровых сигналь-
ных процессоров. Типичными примерами источников хаоса с
полутора степенями свободы являются системы Лоренца [163] и
Введение
И
Ресслера [85], генератор с туннельным диодом [60], генератор с
инерционной нелинейностью [5], кольцевой автогенератор [25,
28-30, 32], цепь Чуа [117, 151, 164, 166, 214].
В этот список «генераторов» хаоса намеренно введены такие
системы, как системы Лоренца и Ресслера, которые первоначально
были предложены в областях далеких от электроники, с тем чтобы
еще раз подчеркнуть, что возможности современной микроэлек-
троники позволяют реализовать на базе этих моделей генераторы
хаоса, точно так же, как это делается с генераторами, более близ-
кими по своему виду к традиционным. Выбор модели и ее реа-
лизации определяется конкретной задачей, которая предъявляет
(или может предъявлять) к источнику хаоса специфические тре-
бования. Удовлетворение этих требований и происходит за счет
выбора конкретной модели источника хаоса.
Способность реализовать большое количество различных хао-
тических мод в одном устройстве. Траектории хаотических си-
стем чрезвычайно чувствительны к начальным условиям. В то же
время сами колебательные режимы источников хаоса демонстри-
руют богатство разнообразия при изменении параметров системы.
Большое количество различных мод представляет интерес для
коммуникационных систем, использующих хаос, поскольку потен-
циально позволяет организовать большое число отдельных кана-
лов связи, определяемых совокупностью значений параметров и
тем самым определенной долей приватности. Грубо говоря, для
того чтобы пара «посылающий сообщение-принимающий сообще-
ние» могла нормально работать, как посылающий абонент, так
и принимающий абонент должны знать этот набор параметров.
Другим потенциальным абонентам, не знающим конкретную со-
вокупность параметров (даже если они обладают приемником на
основе той же самой по структуре динамической системы), ин-
формация, пересылаемая упомянутой парой абонентов, будет не-
доступна.
Управление хаотическими режимами путем малых изменений
параметров системы. Большое количество различных колебатель-
ных мод в одной и той же системе означает, что изменение режима
происходит при малом изменении параметров системы. Этот факт
в зависимости от конкретной ситуации может иметь как отрица-
тельное, так и положительное влияние для систем передачи ин-
формации, использующих хаос. Отрицательное влияние: слиш-
ком высокая чувствительность к значениям параметров приводит
к жестким требованиям по идентичности параметров, требова-
ниям высокой температурной стабильности и т.д. С другой сто-
роны, эти же свойства позволяют управлять хаотическими систе-
мами на уровне мощностей, намного более низких, чем мощность
самого хаотического сигнала, что, несомненно, полезно для доста-
точно мощных источников хаоса. Это же свойство при прочих
12
Введение
равных условиях позволяет обеспечивать более высокую скорость
модуляции хаотических колебаний по сравнению со скоростью мо-
дуляции в классических системах. В целом, за счет возможности
управления хаотическими режимами путем малых изменений
параметров системы можно ожидать улучшения энергетической
эффективности коммуникационных систем с хаосом по сравнению
с традиционными системами.
Большая информационная емкость. Максимальное информа-
ционное содержание сигналов-сообщений прямо пропорционально
занимаемой ими полосе частот. Хаотические сигналы являются
широкополосными по своей природе. Они могут в принципе даже
не иметь выделенных в спектре частот. Это позволяет вводить
в них информационные сигналы-сообщения, с полосой вплоть до
полосы самих хаотических сигналов, практически без изменения
их полосы и формы спектра. Тем самым появляется возможность
достаточно простой реализации не только широкополосных, но и
сверхширокополосных систем связи.
Разнообразие методов ввода информационного сигнала в хао-
тический. Введение информации в несущий сигнал осуществля-
ется в классических системах связи путем модуляции амплитуды,
фазы или частоты несущих колебаний. Это — те три параметра
несущих колебаний, которые являются «свободными» для ввода
информации.
Ситуация с хаотическими колебаниями сложнее. Они разно-
образны по форме и их параметризация не может быть сведена к
таким внешним признакам, как амплитуда, фаза и частота. Из-
менение одного или нескольких параметров приводит к измене-
нию структуры колебаний, причем эти изменения, как правило,
не сводятся к таким изменениям внешнего вида колебаний, ко-
торые могут быть легко зафиксированы «невооруженным глазом».
Структура вида колебаний при небольшом изменении параметра
может измениться незначительно, но это будет уже другая хаоти-
ческая мода и факт ее смены может быть надежно зафиксирован
специально разработанными методами. Если в системе имеется
несколько изменяемых параметров, то варьирование каждым из
них в отдельности или одновременно будет приводить к измене-
нию типа хаотической моды. Поэтому ввод информации может
осуществляться с помощью изменения параметра (параметров).
Извлечение же информации в приемнике осуществляется за счет
выбора параметров приемника, синхронизующих работу прием-
ника с работой передатчика. Оценки значений этих параметров и
будут определять информационный сигнал, модулирующий хаоти-
ческую систему.
Таким образом, уже только модуляция параметров хаоти-
ческой системы дает большое разнообразие возможностей для
ввода информации в хаотический сигнал. Однако она далеко не
Введение
13
исчерпывает эти возможности. Предложен целый ряд методов
ввода информационного сигнала в хаотический, которые не сво-
дятся к модуляции параметров; среди них: нелинейное подме-
шивание информационного сигнала к хаотическому, коррекция
траекторий хаотической системы малыми возмущениями, исполь-
зование тонкой структуры аттрактора и др.
Увеличение скорости модуляции по отношению к модуляции
регулярных сигналов. Неустойчивость траекторий хаотических
систем делает их чрезвычайно чувствительными к управлению.
Например, при необходимости перевести фазовую траекторию из
одной точки аттрактора в другую требуемый результат может быть
получен за счет одного или серии малых возмущений траекто-
рии. Каждое из этих возмущений лишь слегка меняет траек-
торию системы, но через некоторое время накопление и экспо-
ненциальное усиление малых возмущений приводит к достаточно
сильной коррекции траектории и при соответствующем выборе
уровня и направления возмущений позволяет решить поставлен-
ную задачу. При этом траектория системы остается на хаотиче-
ском аттракторе. Таким образом, системы с хаосом демонстри-
руют одновременно и хорошую управляемость и удивительную
пластичность: система чутко реагирует на внешние воздействия,
при этом сохраняя тип движения.
Подобные же свойства проявляет хаотическая система при воз-
мущении ее параметров.
Поскольку величина и скорость реакции хаотической системы
на малые изменения параметра выше, чем при изменении пара-
метров системы с регулярной динамикой, выше будет и предельно
достижимая скорость модуляции. При этом в силу отмеченной
пластичности будет сохраняться структурная устойчивость дина-
мических режимов.
Самосинхронизация передатчика и приемника. Явления хао-
тической синхронизации [8, 141, 185] и хаотического синхрон-
ного отклика [183] представляют большой интерес для передачи
информации. Так, например, устройство, реализующее хаотиче-
ский синхронный отклик, обладает свойством нелинейного филь-
тра, позволяющего распознавать сигналы данного источника хаоса
среди сигналов, порождаемых другими источниками. По этой при-
чине явление хаотического синхронного отклика используется в
значительной части схем связи с хаотическими носителями.
Нетрадиционные методы мультиплексирования. Вопрос о том,
как обеспечить одновременное использование каналов связи не-
сколькими потребителями, является чрезвычайно важным в со-
временных системах связи. Только при его решении возможно
построение многопользовательских систем, примерами которых
являются: магистральные системы связи (в том числе информа-
14
Введение
ционные «highways»), спутниковые системы связи, системы обыч-
ной и сотовой телефонии, интернет и др. Совместное использо-
вание «пространства-времени» в них обеспечивается различными
способами, среди которых наиболее широко распространенными
являются: пространственное разделение сигналов (например, об-
служивание спутником одновременно нескольких территорий за
счет применения многолучевых направленных антенн), частот-
ное разделение каналов (frequency division), разделение каналов
по времени (time division), кодовое разделение каналов (code divi-
sion).
Хаотические сигналы обладают рядом свойств, которые позво-
ляют создать схемы разделения (мультиплексирования) сигналов,
принципиально отличающиеся от перечисленных, например, на
основе хаотической синхронизации и хаотического синхронного
отклика. Важно отметить, что подобные схемы разделения невоз-
можно реализовать для других типов сигналов.
Конфиденциальность при передаче сообщений. Интерес к хао-
тическим схемам связи в значительной степени определяется тем,
что даже простейшие из них обладают определенной степенью кон-
фиденциальности. Речь идет о том, что посторонний наблюдатель
должен обладать достаточно подробной информацией об используе-
мой в передатчике хаотической системе, чтобы иметь потенциаль-
ную возможность для организации перехвата этой информации.
Начиная с 1992 г., был предложен ряд способов передачи ин-
формации, использующих хаотическую динамику: хаотическая
маскировка (chaotic masking) [123, 137, 154], переключение хао-
тических режимов (chaos shift keying) [15, 33, 54, 125, 170, 176,
181], нелинейное подмешивание (nonlinear mixing) [21, 34, 38-41,
43, 129, 130, 132, 134, 179], схемы, на основе систем фазовой ав-
топодстройки частоты (ФАП) [90, 91, 193, 199], инверсные схемы
[107, 142, 143, 146] и другие [1, 2, 44-46, 81, 95, 98, 167, 209-212].
С их помощью была продемонстрирована возможность примене-
ния хаоса для передачи информации и тем самым созданы пред-
посылки для появления нового направления в системах связи.
Разработка этого направления должна прежде всего дать от-
вет на вопрос о реальных возможностях хаоса с точки зрения пе-
редачи информации. Действительно, первая волна исследований
принесла с собой кроме больших ожиданий и определенную долю
скепсиса. Оказалось, например, что схемам связи с использова-
нием хаоса свойственна высокая чувствительность к искажениям
в канале, шумам и неполной идентичности параметров передат-
чика и приемника. Только немногие из предложенных схем про-
шли хотя бы ограниченную экспериментальную верификацию, и
то лишь в низкочастотном диапазоне, где функцию канала связи
выполняла проводная линия.
Введение
15
Кроме того, для перевода вопросов передачи информации с
использованием динамического хаоса в практическую плоскость
необходимо решить ряд проблем, среди которых: эксперименталь-
ное подтверждение возможности высококачественной хаотической
синхронизации (самосинхронизации) и определение ее устойчи-
вости к возмущающим факторам, разработка генераторов хаоса в
различных частотных диапазонах, анализ спектральной и энерге-
тической эффективности разрабатываемых методов передачи ин-
формации, создание схем для организации конфиденциальной
передачи информации, развитие методик численного и экспери-
ментального исследования схем передачи и др.
Совокупность перечисленных проблем составляет предмет ком-
плексных исследований, результаты которых представлены в
книге.
Как уже отмечалось, имеется значительное количество различ-
ных схем передачи информации на основе динамического хаоса.
Поэтому возникает вопрос: какую из них (или какие из них) ис-
пользовать в качестве базовой схемы при исследованиях? При
постановке исследований мы исходили из того, что, несмотря на
разнообразие предлагаемых решений, их объединяет общность
проблем, требующих решения. Совокупность этих проблем можно
исследовать на примере одной-двух систем, полагая, что получен-
ные результаты, по меньшей мере, на качественном уровне будут
применимы и к другим системам. Именно такой подход и ис-
пользуется в данной работе. В качестве «базовой системы» для
исследования была выбрана схема с нелинейным подмешиванием
информационного сигнала к хаотическому сигналу.
Книга имеет следующую структуру.
Глава 1 посвящена хаотическому синхронному отклику. Рас-
сматривается вопрос о декомпозиции автоколебательных систем
для получения хаотического синхронного отклика. Вводятся кри-
терии качества отклика и производятся оценки его качества. Об-
суждается явление «On-Off» перемежаемости, отклик в условиях
большой расстройки параметров ведущей и ведомой систем. Опи-
сываются эксперименты по импульсной синхронизации хаотиче-
ских генераторов.
В гл. 2 рассматриваются основные методы передачи информа-
ции с использованием хаотического синхронного отклика. Среди
них: хаотическая маскировка, переключение хаотических режи-
мов, нелинейное подмешивание информационного сигнала к
хаотическому, использование структуры ФАП, использование ада-
птивных методов приема. После этого производится сравнитель-
ный анализ рассмотренных схем передачи информации.
Глава 3 посвящена системе передачи информации с нелиней-
ным подмешиванием информационного сигнала к хаотическому
сигналу. Описывается структура системы, выбор генератора хаоса,
16
Введение
математическая модель. Далее рассматриваются эксперименты по
передаче речевых и музыкальных сигналов. На основании полу-
ченных результатов оценивается качество передачи.
В гл. 4 представлены эксперименты по передаче информации с
использованием хаоса в радиодиапазоне. Описываются структура
коммуникационной системы и математическая модель, изучается
влияние возмущающих факторов. Рассматривается эксперимен-
тальный макет системы передачи информации и его характери-
стики, хаотические модули передатчика и приемника. Исследу-
ются вопросы передачи речевой и музыкальной информации в
радиодиапазоне по кабелю и по эфиру.
В гл. 5 вводится понятие прецизионного генератора хаоса, рас-
сматривается совокупность вопросов, связанных с реализацией та-
ких генераторов. Приводятся конкретные примеры построения
прецизионных генераторов хаоса с 1,5 и 2,5 степенями свободы,
результаты математического моделирования и экспериментов с
ними.
В гл. 6 анализируются пути повышения эффективности схемы
с нелинейным подмешиванием информации. Предлагаются и ис-
следуются два варианта исходной схемы связи: 1) схема с сумми-
рованием по модулю хаотического и информационного сигналов;
2) схема с предварительной частотной модуляцией хаотического
сигнала.
Глава 7 посвящена применению сигнальных цифровых про-
цессоров для реализации схемы с нелинейным подмешиванием
информации. Здесь описываются: реализация хаотических моду-
лей передатчика и приемника, синхронный хаотический отклик и
его качество, частотная модуляция информационного сигнала, рас-
сматривается реализация схемы с нелинейным подмешиванием на
одном сигнальном процессоре и двух раздельных сигнальных про-
цессорах, обсуждаются эксперименты и их результаты.
В гл. 8 вводится и изучается схема передачи информации, пред-
назначенная для работы в условиях фильтрации сигналов в ка-
налах связи. Описывается структура схемы, ее математическая
модель лабораторные макеты передатчика и приемника. Экспе-
риментально исследуется качество синхронного хаотического от-
клика и передача тестовых сигналов.
Глава 9 посвящена прямохаотическим системам передачи ин-
формации и перспективам их создания в радио- и СВЧ-диапазонах.
Здесь речь идет о схеме передачи радикально отличающейся от
различных вариантов схем, изучавшихся в предыдущих главах,
поскольку генерация хаотического сигнала и ввод информации в
него производится непосредственно в диапазоне сверхвысоких ча-
стот (СВЧ).
В гл. 9 рассматриваются основные проблемы, приводящие к
идее использования прямохаотических схем, вопросы генерации
Введение
17
хаотических колебаний в радио- и СВЧ-диапазонах, принципы
ввода и извлечения информации. Приводится пример прямохао-
тической схемы связи. Описывается ее лабораторный макет и ре-
зультаты экспериментов.
Наконец, в гл. 10 рассмотрены сверхширокополосные прямо-
хаотические системы связи (СП! ПХСС). В их основе также лежит
идея построения прямохаотических систем, но в отличие от схем,
рассмотренных в предыдущей главе, они используют существенно
более широкие полосы несущего хаотического колебания. Это по-
зволяет реализовать такие качества, как высокая скорость пере-
дачи данных, электромагнитная совместимость с другими связ-
ными системами, устойчивость работы в условиях многолучевого
распространения, экологическая безопасность и ряд других ка-
честв. Приводится пример экспериментальной реализации СШ
ПХСС. Описываются и анализируются результаты компьютерного
и физического экспериментов.
Последние две главы подготовлены авторами совместно с
Л.В. Кузьминым, Б.Е. Кяргинским, Н.А. Максимовым, Д.Ю. Пузи-
ковым и С.О. Старковым.
В Приложении описывается моделирующий комплекс и мето-
дика компьютерного моделирования различных схем передачи ин-
формации с использованием динамического хаоса и ее компонен-
тов. Сам пакет моделирующих программ, реализованный в среде
MatLab, размещен на сайте Института радиотехники и электро-
ники РАН http://www.cplire.ru.
Авторы высоко ценят поддержку исследований в области ди-
намического хаоса и его приложений в информационных и ком-
муникационных технологиях Н.А. Армандом, Ю.В. Гуляевым,
Н.Д. Девятковым, Ю.И. Журавлевым, С.Н. Ивановым, В.А. Котель-
никовым, С.П. Курдюмовым, В.Е. Любченко, В.И. Пустовойтом,
И.И. Чусовым.
Многие представления, нашедшие отражение в книге, сло-
жились у нас под влиянием и при взаимодействии с исследо-
вательскими группами: Института прикладной физики РАН,
Научно-исследовательского института прикладной математики и
кибернетики, Института прикладной математики РАН, Института
математики Украины, Саратовского отделения ИРЭ РАН, Москов-
ского физико-технического института, Московского государствен-
ного университета, Московского энергетического института, Мо-
сковского университета связи и информатики, Нижегородского
университета, Саратовского университета, Ярославского универ-
ситета, Калифорнийского университета (Беркли), Швейцарского
технического университета (Лозанна), Технического университета
(Дрезден).
Особенно хотелось бы выделить плодотворные дискуссии и об-
суждения с В.С. Анищенко, Б.П. Безручко, В.Н. Белых, Ю.А. Брю-
18
Введение
хановым, А. Волковским, Е.В. Григорьевой, Ю.Д. Калафати,
М.В. Капрановым, С. А. Кащенко, П. Кеннеди, Г. Колумбаном,
Л. Кочеревым, М.В. Краюшкиным, А.П. Кузнецовым, С.П. Куз-
нецовым, Д.С. Лукиным, Ю.Л. Майстренко, Г.Г. Малинецким,
В.И. Некоркиным, Л. Пекорой, М.И. Рабиновичем, Н. Рульковым,
Ю.Г. Тратасом, Д.И. Трубецковым, В.И. Федоренко, М.Хаслером,
Л. Чуа, Н.П. Чубинским, Д.В. Шалфеевым, А.Н. Шарковским,
В. Шварцем, Л.П. Шильниковым.
Авторы считают своим приятным долгом выразить глубокую
благодарность за сотрудничество Ю.А. Андрееву, Ю.Л. Бельскому,
С.А. Емецу, Л.В. Кузьмину, Б.Е. Кяргинскому, Н.А. Максимову,
Д.Ю. Пузикову и С.О. Старкову, с которыми совместно был полу-
чен ряд результатов, представленных в книге.
Наконец, мы искренне признательны основателям хаотической
динамики в ИРЭ АН СССР В.Я. Кислову, Н.Н. Залогину, Е.А. Мя-
сину, Ю.В. Анисимовой, Р.В. Беляеву, Г.М. Воронцову и членам
«хаотической команды» В.А. Бурыкину, Э.В. Кальянову, В.И. Ка-
линину, Г.Ф. Кулакову, В.П. Иванову, Ю.В. Ильину, М.Н. Лебедеву,
А.А. Лящуку, А.С. Максимову, С.В. Савельеву, А. Соколову за счаст-
ливые годы совместной работы.
Глава 1
СИНХРОННЫЙ ХАОТИЧЕСКИЙ отклик
Одной из основных проблем, которые приходится решать
при построении любой коммуникационной системы, является
проблема синхронизации. Если для систем, базирующихся на
регулярных сигналах, теория синхронизации хорошо развита и
характеризуется такими явлениями и терминами, как захват, за-
тягивание частот и др., то в отношении хаотических систем она
находится в процессе становления. Как следствие, термин «хао-
тическая синхронизация» в различных публикациях трактуется
по-разному и, как правило, требует дополнительных пояснений в
каждом конкретном случае.
Так, взаимная хаотическая синхронизация колебаний была
рассмотрена в работах [8, 141, 185], где с помощью моделирования
продемонстрирован эффект взаимной синхронизации двух дисси-
пативно связанных одинаковых генераторов динамического хаоса.
В [8] под синхронизацией генераторов, понимается идентичное
во времени изменение переменных X(t) и X'(t), описывающих
соответственно первую и вторую автоколебательную систему, т. е.
|X(t) — X'(£)| -> 0 при t —> оо, и это условие устойчиво по отноше-
нию к возмущениям. Для случая двух нетождественных генерато-
ров предложено рассматривать хаотическую синхронизацию в бо-
лее широком смысле: движение в обоих парциальных генераторах
одинаково в топологическом смысле, т. е. траектории X(t) и Xf(t)
повторяют друг друга, но не изохронны и функция (X(t) — X'(t))
есть случайная функция с нулевым средним. Важным представля-
ется замечание, высказанное относительно физической природы
явления хаотической синхронизации о том, что именно «...дис-
сипативный фактор “убивает” рассогласование в поведении инди-
видуальных хаотических генераторов». Таким образом, две тен-
денции определяют явление хаотической синхронизации: первая
порождается неустойчивостью системы и ответственна за хаотич-
ность процессов в связанных системах; вторая тенденция, обу-
словленная диссипативным характером движения, заставляет си-
стемы сжиматься и приближаться друг к другу вдоль устойчивых
направлений.
Впоследствии рассмотренные подходы к синхронизации хао-
тических систем были развиты и обобщены другими авторами.
20
Гл. 1. Синхронный хаотический отклик
Детальное обсуждение явления хаотической синхронизации выхо-
дит за рамки основной темы книги. Эта проблема достойна от-
дельного рассмотрения. Вместе с тем, разработка коммуникаци-
онных систем с хаосом невозможна без конкретизации как самого
термина «хаотическая синхронизация», так и присущих ей специ-
фических свойств. Именно этим вопросам и посвящена данная
глава.
1.1. Понятие хаотического синхронного отклика
В 1990 г. был предложен метод синхронизации хаотических
систем, полученных в результате декомпозиции [183]. Суть мето-
да в следующем. Пусть существует исходная автоколебательная
система, которая описывается уравнением
^=/(и), (1-
где U — в общем случае вектор, принадлежащий п-мерному
пространству (U G Rn). Если структура системы такова, что
она может быть представлена в виде двух подсистем V и W
(U (V, W)), то (1.1) можно переписать в виде
dV dW
= S(V, W), — = h(V, W), (1.2)
at at
где V = U2, W = (Um+l, Un), a g =
= h=(fm+1(U),..., /n(L7)).
Графически декомпозицию (разделение) исходной системы
можно отразить схемой, изображенной на рис. 1.1а. Как видно
из рисунка, в результате декомпозиции автоколебательная система
(АКС) обретает вид кольцевой структуры, в которой подсистемы
образуют единое кольцо обратной связи.
На следующем шаге берут две идентичные системы, получен-
ные в результате одинаковой декомпозиции. Одну из систем оста-
вляют в виде, представленном на рис. 1.1а. Таким образом, эта
система является активной (автоколебательной) и в дальнейшем
будет называться «ведущей» системой. В другой системе кольцо
обратной связи разрывают, в результате чего она становится пас-
сивной (не автоколебательной) системой. Такую систему назы-
вают «ведомой».
Если теперь сигнал с выхода одной из подсистем (например,
подсистемы 1) Vi(£) ведущей системы подать на вход другой под-
системы (подсистемы 2) ведомой системы, как это показано на
рис. l.ld, то при определенных условиях разность между вход-
ным Vi(t) и выходным V^t) сигналами в ведомой (разомкнутой)
1.2. Примеры декомпозиции автоколебательных систем 21
системе будет стремиться к нулю |Vi(t) — V2WI “> 0 при t -> 00.
Таким образом, с помощью декомпозиции возможно формиро-
вание пары систем («ведущая-ведомая»), в которой при однона-
правленном воздействии со стороны ведущей системы ведомая
асимптотически повторяет поведение ведущей системы.
б
Рис. 1.1. Декомпозиция автоколебательной системы и формирование на ее основе
«ведущей-ведомой» системы: a — декомпозиция исходной автоколебательной
системы; б — формирование пары систем «ведущая-ведомая»
Авторы называют этот эффект «хаотической синхронизацией».
Однако ведомая система не является автоколебательной и в отсут-
ствие внешнего сигнала имеет своим решением положение ус-
тойчивого равновесия. Поэтому более удачным следует считать
термин «хаотический синхронный отклик» [21], который в даль-
нейшем и будет использоваться в работе.
1.2. Примеры декомпозиции автоколебательных систем
В предыдущем параграфе был рассмотрен случай деления ав-
токолебательной системы на две подсистемы. Однако число под-
систем может не ограничиваться двумя и в зависимости от струк-
туры исходной системы или от целей декомпозиции приобретать
другие значения. Следует также отметить, что автоколебатель-
ные системы условно можно разделить на две группы. К первой
принадлежат системы, для которых декомпозиция физически не
реализуема (например, трехточечные генераторные схемы). Вто-
рую группу составляют системы, допускающие их представление
22
Гл. 1. Синхронный хаотический отклик
в виде двух или более подсистем. В данном параграфе речь
пойдет о последней группе и, в первую очередь, о тех ее пред-
ставителях, которые будут в центре внимания в последующих
главах работы.
Цепь Чуа (Chua’s circuit) [117, 151, 164, 166, 214].
Цепь Чуа является одной из простейших автоколебательных
систем с хаотическим поведением. Она состоит из четырех ли-
нейных элементов (индуктивности L, двух емкостей Ci, С2 и
Рис. 1.2. Цепь Чуа: a — схема цепи; б— вольт-амперная характеристика нели-
нейного элемента NR
резистора R) и одного нелинейного элемента NR (рис. 1.2а). Функ-
цию последнего элемента выполняет сопротивление с кусочно-
линейной вольт-амперной характеристикой, представленной на
рис. 1.26.
Динамические режимы генератора описываются следующими
дифференциальными уравнениями:
C1VC1=G(Vc2-VC1)-g(VCi),
C2Vc2=G(yCi-Vc2)-IL, (1-3)
Lh = ~Vc2,
1.2. Примеры декомпозиции автоколебательных систем
23
где G — 1/R, а g{Vci) — характеристика нелинейного элемента
(рис. 1.26):
g(VCl) = m0VC1 + |(ПЦ - mo) [|VC1 + Вр\ + |VCl - Вр|]. (1.4)
£
В качестве параметра управления колебательными режимами
генератора обычно используется величина сопротивления R. Ди-
намика цепи Чуа детально изучена и достаточно полно описана в
Обозначение элемента на рис. 1.3а Наименование элемента Номинал
Операционный усилитель 1/4 КР1401УД2А
Ri Резистор 22 кОм
R2 Резистор 22 кОм
Лз Резистор 3,3 кОм
Аг Операционный усилитель 1/4 КР1401УД2А
Ra Резистор 220 Ом
Rs Резистор 2200м
Re Резистор 2,2 кОм
Ci Конденсатор 5100 пФ
R Потенциометр 3,3 кОм
c2 Конденсатор 47 нФ
L Дроссель 18 мГн
v+, v~ Напряжение питания ±5 В
б
Рис. 1.3. Цепь Чуа. Экспериментальная реализация: a — принципиальная схема;
б — спецификация элементов
24
Гл. 1. Синхронный хаотический отклик
литературе [164]. Для практического использования генерато-
ра необходимо решить вопрос о реализации нелинейного эле-
мента Nr. В работе эта проблема решена за счет применения
электронной сборки КР1401УД2А, представляющей собой разме-
щенные в одном корпусе 4 идентичных операционных усилителя.
На рис. 1.3 представлена принципиальная схема генератора и одна
из спецификаций, отражающая номиналы используемых в нем
элементов.
Для декомпозиции цепи Чуа разделим ее на две подсистемы,
как это показано на рис. 1.4. Присутствующие на рисунке буфер-
ные каскады на операционных усилителях выполняют функции
элементов развязки между подсистемами и одновременно органи-
зуют обратную связь в автоколебательной системе в соответствие
с рис. 1.1а. Из сопоставления схем на рис. 1.4 и 1.2 следует,
Рис. 1.4. Декомпозиция цепи Чуа
что помимо буферных каскадов в модифицированной (в резуль-
тате декомпозиции) цепи Чуа появляется дополнительное сопро-
тивление /?2- Нетрудно показать, что в случае равенства сопроти-
влений, т. е. jRi = Z?2 = R, и идентичности остальных элементов
модифицированный генератор будет описываться системой диффе-
ренциальных уравнений (1.3), что свидетельствует о корректности
проведенной декомпозиции.
Кольцевые автоколебательные системы (АКС).
Еще одним типом автоколебательных систем с хаосом, исполь-
зуемых в работе для передачи информации, являются кольцевые
системы [25, 28-30, 32]. Они представляют собой совокупность
элементов, последовательно соединенных между собой с помощью
элементов развязки в единое кольцо обратной связи. В общем слу-
чае элементами системы являются нелинейный усилитель (НУ),
1.2. Примеры декомпозиции автоколебательных систем
25
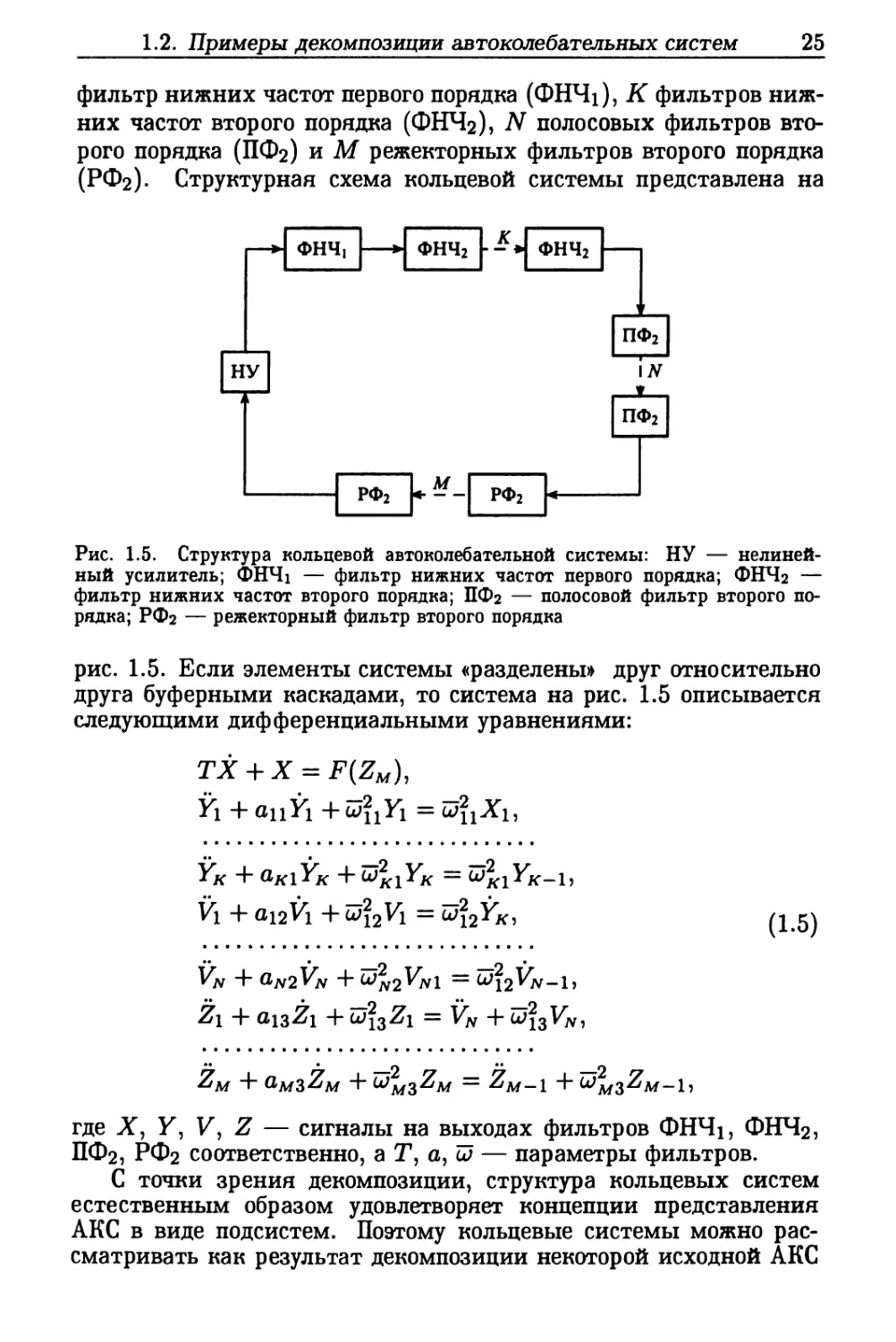
фильтр нижних частот первого порядка (ФНЧ1), К фильтров ниж-
них частот второго порядка (ФНЧ2), N полосовых фильтров вто-
рого порядка (ПФ2) и М режекторных фильтров второго порядка
Рис. 1.5. Структура кольцевой автоколебательной системы: НУ — нелиней-
ный усилитель; ФНЧ1 — фильтр нижних частот первого порядка; ФНЧг —
фильтр нижних частот второго порядка; ПФг — полосовой фильтр второго по-
рядка; РФг — режекторный фильтр второго порядка
рис. 1.5. Если элементы системы «разделены» друг относительно
друга буферными каскадами, то система на рис. 1.5 описывается
следующими дифференциальными уравнениями:
TX + X = F(ZM),
¥1+а11¥1+ш2п¥1=ш211Х1,
¥к + а>к\¥к + =
Vi + ai2Vi 4- = ^12^*> (1.5)
V/v + Gjv2Vjv + CV^2Vjvi = ^12^-1»
4- ai3Zi + Z\ = VN + VN,
%m + ^msZm + = ZM_\ +
где X, У, V, Z — сигналы на выходах фильтров ФНЧ1, ФНЧ2,
ПФ2, РФ2 соответственно, а Г, а, о7 — параметры фильтров.
С точки зрения декомпозиции, структура кольцевых систем
естественным образом удовлетворяет концепции представления
АКС в виде подсистем. Поэтому кольцевые системы можно рас-
сматривать как результат декомпозиции некоторой исходной АКС
26 Гл. 1. Синхронный хаотический отклик
на несколько подсистем, функции которых выполняют элементы
(НУ, фильтры) системы.
Кроме рассмотренных автоколебательных систем, декомпози-
ции можно подвергать и другие хаотические системы (см., напри-
мер, [122, 172]).
1.3. Оценка качества хаотического синхронного отклика
Существует два типа оценок качества хаотического синхрон-
ного отклика. Одна из них базируется на количественных по-
казателях. Пусть имеется ведущая и ведомая системы, каждая
из которых получена в результате декомпозиции одной и той же
автоколебательной системы. Если параметры систем идентичны
или близки друг к другу, то, соединяя их по схеме на рис. 1.16,
получим сигнал на выходе ведомой системы V2, который будет до-
статочно точно повторять сигнал на ее входе V\. Степень близости
(совпадения) сигналов можно оценить следующим отношением:
(ДУ2) РДу
у да pvi ’
где ДУ = V2 — Vi; () — среднее значение; Рду — мощность
шума рассинхронизации; PV1 — мощность хаотического сигнала
на входе ведомой системы.
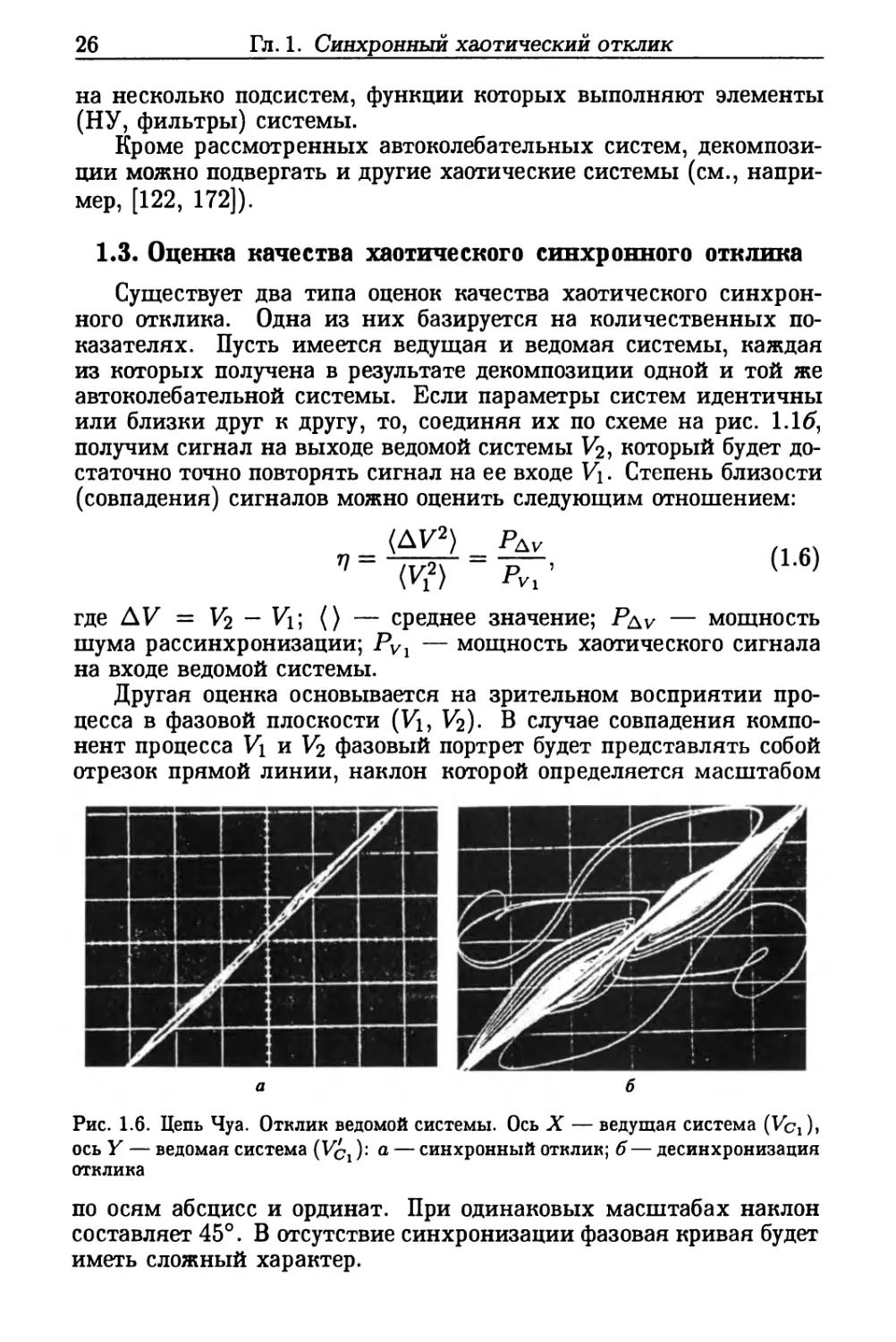
Другая оценка основывается на зрительном восприятии про-
цесса в фазовой плоскости (Vi, V2). В случае совпадения компо-
нент процесса Vi и V2 фазовый портрет будет представлять собой
отрезок прямой линии, наклон которой определяется масштабом
Рис. 1.6. Цепь Чуа. Отклик ведомой системы. Ось X — ведущая система (Vci),
ось Y — ведомая система (Усг): a — синхронный отклик; б— десинхронизация
отклика
по осям абсцисс и ординат. При одинаковых масштабах наклон
составляет 45°. В отсутствие синхронизации фазовая кривая будет
иметь сложный характер.
1.4. Устойчивость отклика. Явление ton-off* перемежаемости 27
В физическом эксперименте анализ качества отклика осуще-
ствляется с помощью осциллографов, имеющих входы по «ж» и «у»
(горизонтальное и вертикальное отклонение лучей). В качестве
примера на рис. 1.6 приведены фазовые портреты сигналов Vcx и
для ведущей-ведомой системы на базе цепи Чуа (см. рис. 1.4).
Рисунок 1.6а соответствует случаю подбора параметров ведущей
и ведомой систем с точностью в пределах 0,5%. Наблюдаемое
утолщение линии является результатом указанной небольшой
расстройки параметров. Увеличение расстройки даже одного из
элементов систем до 3-4% приводит к де синхронизации отклика
(рис. 1.66). В данном случае на 3% было изменено значение R\ в
ведущей системе по отношению к аналогичному параметру в ведо-
мой системе.
1.4. Устойчивость отклика.
Явление «on-off» перемежаемости
Рассмотрим пару «ведущая-ведомая» системы в соответствии
с рис. 1.16. Эта система описывается системой обычных диффе-
ренциальных уравнений вида
V1=J(V1,W1), Wi =/i(Vb WJ,
V2 = (ДУь W2), W2 = ft(V2, W2).
(1-7)
Здесь (Vi, Wi), (V2, W2) — n-мерные векторы состояния веду-
щей и ведомой систем. Воздействие ведущей системы на ведомую
осуществляется через векторную переменную Vi.
Для того чтобы в рассматриваемой паре систем наблюдался
синхронный хаотический отклик, необходимо и достаточно вы-
полнение двух требований:
1) в ведущей и ведомой системах должна существовать траек-
тория (Vi, Wi) = (V2, W2);
2) движение системы (1.7) вдоль этой траектории должно быть
устойчивым по отношению к любым малым, трансверсальным к
хаотическому аттрактору синхронизации возмущениям.
Первое требование определяет условие существования множе-
ства синхронизации. Траектории, удовлетворяющие этому требо-
ванию, существуют в силу уравнений (1.7).
Второе требование определяет устойчивость множества син-
хронизации. Необходимым условием устойчивости аттрактора
синхронизации является отрицательность первого ляпуновского
показателя ведомой системы Ai < 0 при воздействии на нее веду-
щей системы. Это условие необходимо для того, чтобы траекто-
рии системы притягивались к множеству синхронизации. Однако
отрицательность первого ляпуновского показателя представляет
28
Гл. 1. Синхронный хаотический отклик
собой усредненную характеристику и не гарантирует отсутствие
специальных траекторий, принадлежащих множеству синхрони-
зации и неустойчивых к трансверсальным, по отношению к этому
множеству, возмущениям. Поэтому Ai < 0 не является достаточ-
ным условием устойчивости множества синхронизации. В случае
наличия в этом множестве траекторий неустойчивых к трансвер-
сальным возмущениям при попытке синхронизации наблюдается
явление «on-off» перемежаемости [115, 116, 148, 186]. Указанное
явление проявляется в нерегулярном, кратковременном «срыве»
синхронизации, после которого на выходе ведомой системы в тече-
ние некоторого интервала времени реализуется хаотический син-
хронный отклик. Интервал синхронизации прерывается новым
«срывом» и т. д.
Для того чтобы проанализировать устойчивость ведомой
системы на множестве синхронизации (близость траекторий
(Vi, WJ и (V2, W2)), введем новые переменные
(<5V, <5W) = (Vb WO - (V2, W2), (1.8)
где* (<SV, 5W) — малые отклонения, и подставим их в систе-
му (1.7) вместо переменных (V2, W2). В новых переменных
(Vi, WJ, (5V, 5W) режиму синхронизации будут соответство-
вать решения с (5V, 5W) = 0. Анализ линейной устойчиво-
сти таких решений сводится к анализу устойчивости решения
(5V, 5W) = 0 для линеаризованного в окрестности (5V, 5W) = 0
дифференциального уравнения
(JV, <5W) = ,l(g’w 5W) = M ’ ^V’ (L9)
u(V 1, 1V1)
где M — матрица коэффициентов, зависящих от (Vi, WJ. Та-
ким образом, устойчивость аттрактора синхронизации определя-
ется собственными значениями матрицы М. Если действитель-
ные части всех собственных значений матрицы М во всех точках
аттрактора являются отрицательными, то решение системы (1.7)
абсолютно устойчиво.
Рассмотрим устойчивость ведущих-ведомых систем, реализо-
ванных на основе цепи Чуа и одной из кольцевых автоколебатель-
ных систем.
Цепь Чуа. Используя декомпозицию цепи Чуа (рис. 1.4), а
также принимая во внимание схему на рис. 1.16 и систему (1.3),
представим ведущую-ведомую систему в виде блок-схемы, изобра-
женной на рис. 1.7а.
Функционирование системы при идентичности основных эле-
ментов в ведущей и ведомой частях описывается следующей
1.4. Устойчивость отклика. Явление к on-off» перемежаемости 29
системой дифференциальных уравнений:
C1VC1 = Gl(VC2-VC1)-g(VCl),
C2Vc2=G2(VC1-Vc2) + Il,
LiL = -Vc2,
CiV^GdVc.-V^-gMJ, 1 >
C2V^=G2(V^-V^) + IL,
Li'L = -v^2,
где (Vc1? Vc2, II) и (V^, V^2, I'l) — напряжения на емкостях Ci,
C2 и ток через индуктивность L, соответственно, в ведущей и
ведомой системах, giVc^) — кусочно-линейная вольт-амперная
характеристика (1.4) нелинейного элемента NR.
Рис. 1.7. Синхронный хаотический отклик в ведущей-ведомой системе на основе
цепи Чуа: a — блок-схема ведущей-ведомой системы; б — осциллограммы сиг-
нала на входе (верхняя) и разностного сигнала на выходе (нижняя) ведомой
системы («on-off» перемежаемость)
Первые три уравнения относятся к ведущей системе, осталь-
ные три — к ведомой системе. Если в паре ведущая-ведомая си-
стема реализуется хаотический синхронный отклик, то Vc2 =
и S' = Vc2 — Vc2 = 0. При десинхронизации отклика на вы-
ходе ведомой системы в рассматриваемом примере наблюдается
«on-off» перемежаемость. Указанное явление проявляется в не-
регулярных, кратковременных «срывах» синхронизации в паре
ведущая-ведомая система. Типичная осциллограмма сигнала S'
для этого случая представлена на рис. 1.76. Для численных рас-
четов будем полагать, что L = 40 мГн, С\ = 15 нФ, С2 = 100 нФ,
Ri = R2 = R = 1,9 кОм, mo = -0,459 мСм, mi = -0,757мСм,
Вр = 1,56 В. При указанных параметрах в ведущей системе реа-
лизуется хаотический режим «двойная спираль» («double scroll»)
[117, 164]. Для системы (1.10) Ai = —0,498, т. е. необходимое
условие устойчивости аттрактора выполнено. Чтобы определить,
30
Гл. 1. Синхронный хаотический отклик
является ли оно достаточным, введем новые переменные:
svC1=v^-vC1,
SVc2=V^2-Vc2, (1.11)
6Il = I'l-Il
и преобразуем систему (1.10) к виду:
C^c^G^Vc.-Vc^-giVc.),
C2Vc2=G2(VC1-Vc2) + Il,
LIl = -Vc2,
C25Vc2 = G2(5VC1 - SVC2) + 6IL,
L5Il = -6VC2.
Первые три уравнения (1.12) совпадают с первыми тремя урав-
нениями (1.10). Остальные уравнения являются линейными с пе-
ременными коэффициентами и описывают малые отклонения тра-
екторий ведущей-ведомой системы от аттрактора синхронизации.
Если траектория принадлежит аттрактору, то решением послед-
них трех уравнений системы (1.12) будет 6Усг = 6Vc2 = 61L = 0.
Как отмечалось, анализ устойчивости этого решения сводится
к исследованию собственных значений матрицы коэффициентов
для трех последних уравнений системы (1.12). Формально
0 0\
dV^ )
1 1 1
r2c2 r2c2 с2
п 1 1
\ L L/
(113)
является матрицей с переменными коэффициентами. Однако вхо-
дящие в нее переменные коэффициенты определяются через вид
характеристики нелинейного элемента. Поскольку эта характери-
стика кусочно-линейная, то коэффициенты могут принимать лишь
два набора фиксированных значений:
Mi =
1 / 1 \
1
r2c2
1 1
r2c2 с2
1 1
L L/
(1-14)
о
1.4. Устойчивость отклика. Явление «on-off» перемежаемости 31
и
Мо =
1 ( 1
1
R2C2
1 1
R2C2 С2
~ L ~LJ
(1-15)
о
Для первого из них (относящегося к части фазового простран-
ства, содержащей начало координат) собственные значения ма-
трицы равны = 1,4014, //2,з = —0,5000 + 3,9686г, т. е. имеют
как положительные, так и отрицательные действительные части.
В случае второго набора коэффициентов (часть фазового простран-
ства, относящаяся к боковым ветвям нелинейности) /ii = —2,8028,
//2,3 = —0,5000 4- 3,9686г. Таким образом, траектория системы
является устойчивой по отношению к малым трансверсальным
возмущениям, когда проходит через область фазового простран-
ства, соответствующего матрице Mq и не является устойчивой
при нахождении в области фазового пространства, соответствую-
щей матрице Мр Поэтому аттрактор синхронизации не является
абсолютно устойчивым к трансверсальным возмущениям, что и
обусловливает возникновение «on-off» перемежаемости при откло-
нении значений параметров ведущей системы от параметров ве-
домой системы.
Кольцевая система. В качестве примера рассмотрим
кольцевую систему, которая состоит из последовательно соединен-
ных и замкнутых в кольцо обратной связи нелинейного усили-
теля, фильтра нижних частот первого порядка и фильтра нижних
частот второго порядка. В безразмерных переменных она описы-
вается следующей системой дифференциальных уравнений:
0х = mf(z) - х, 1б)
у = х — z, z = у — az, ' ’ '
где f(z) выберем кусочно-линейной функцией вида
1
Z 2
/(*) =
+ U-ii-b+u
На базе рассмотренной AKC сформируем ведущую-ведомую
пару, ведомая система в которой имеет переменные (u, v, w), а
связь между системами осуществляется с помощью компоненты z:
0х = mf(z) -х, y = x-z, z = y-az,
(3u = mf(z) — щ v = u — w, w = v — aw.
32
Гл. 1. Синхронный хаотический отклик
Конкретизируем параметры системы (1.17): пусть коэффици-
ент усиления тп = 4,8, а параметры фильтров первого и второго
порядка равны соответственно (3 = 2,0 и a = 0,1. При указанных
параметрах в ведущей системе реализуется хаотический режим.
Для системы уравнений (1.17) матрица коэффициентов М из (1.9)
определяется как
М =
(118)
и постоянна для всего фазового пространства.
Собственными значениями матрицы М являются pi = —0,5,
//2,з = —0,05 ± 0,9987г. Поскольку действительные части соб-
ственных значений отрицательны, то аттрактор синхронизации
является абсолютно устойчивым и явление «on-off» перемежаемо-
сти должно отсутствовать. Действительно, численные и физиче-
ские эксперименты с рассматриваемой парой «ведущая-ведомая»
системы подтверждают это.
Подобным образом можно показать, что и для ряда других
структур кольцевых АКС с различными наборами входящих в их
состав элементов (фильтров) хаотический синхронный отклик, в
случае его возникновения, является абсолютно устойчивым. Это
свойство отличает кольцевые системы от цепи Чуа. На рис. 1.8
приведены осциллограммы сигналов для практической реализа-
ции пары «ведущая-ведомая» системы на основе кольцевой АКС
Рис. 1.8. Синхронный хаотический отклик в ведущей-ведомой системе на основе
кольцевой АКС с 1,5 степенями свободы. Осциллограммы сигнала на входе (верх-
няя) и разностного сигнала на выходе (нижняя) ведомой системы
с 1,5 степенями свободы. Верхняя осциллограмма иллюстрирует
сигнал на входе ведомой системы, а нижняя — разностный сигнал
между сигналами на ее входе и выходе. Из сопоставления рис. 1.76
1.5. Отклик в условиях большой расстройки параметров 33
и 1.8 видно, что в последнем случае не происходит «срывов» син-
хронизации, типичных для «on-off» перемежаемости (рис. 1.76).
При этом качество отклика находится на уровне т] = 3 • 10“3
(-25 дБ).
1.5. Отклик в условиях большой расстройки параметров
ведущей и ведомой систем
Как было показано выше, аттрактор синхронизации ведущей-
ведомой системы на основе цепи Чуа не является абсолютно устой-
чивым к возмущениям, что обусловливает его чувствительность,
например, к расстройке (неидентичности) параметров подобных
элементов в ведущей и ведомой системах. Появление даже не-
большой расстройки приводит к ухудшению качества хаотиче-
ского синхронного отклика, выражающегося в нерегулярных сры-
вах синхронизации («on-off» перемежаемость). Какие существуют
способы борьбы с этим явлением?
Один из способов заключается в возможно более точном под-
боре параметров элементов. Однако на практике часто бывает
затруднительно обеспечить полную идентичность всех элементов,
входящих в состав ведущей и ведомой систем. В этом случае по-
лезным может оказаться введение обратной связи [16]. На рис. 1.9
Рис. 1.9. Модифицированная структура ведущей-ведрмой системы
представлена поясняющая его структурная схема ведущей-ведо-
мой системы. При сравнении этой схемы со схемой на рис. 1.16
можно выделить следующие отличия:
1. В ведомой системе появляется петля обратной связи, вклю-
чающая инвертирующий усилитель (а < 0), сумматор и подси-
стемы 1 и 2.
2. Сигнал, приходящий с выхода ведущей системы, подается
на вход сумматора ведомой системы с коэффициентом 1 — а.
3. Сигнал на входе второй подсистемы ведомой системы явля-
ется суммой сигнала, приходящего из петли обратной связи (п. 1),
и сигнала по п. 2.
4 Зак. 18
34
Гл. 1. Синхронный хаотический отклик
Если принять во внимание (1.10), то рассматриваемая ве-
дущая-ведомая система на базе цепи Чуа будет описываться
следующими дифференциальными уравнениями:
CiVC1 =G1(VC2-Vc1)-g(VC1),
C2Vc2= G2(VC1-Vc2) + Il,
= (119)
C2V^=G2(V^-V^+rL,
Li[ = -v^2.
При a = 0 (обратная связь в ведомой системе отсутствует)
система (1.19) полностью совпадает с (1.10) и для нее справед-
ливы матрицы коэффициентов (1.13)—(1.15). Собственные зна-
чения последних для указанных выше параметрах базовой цепи
Рис. 1.10. Сигналы на входе и выходе ведомой системы. Расстройка параметра
Gi в ведущей и ведомой системах 6%. Коэффициент усиления а = 0 (обратная
связь в ведомой системе отсутствует): a — сигналы на входе (Vc2, верхняя
осциллограмма) и выходе (Ус2, нижняя осциллограмма) ведомой системы; б —
фазовый портрет сигналов (а), прямая линия соответствует случаю, когда один
и тот же сигнал одновременно поступает на входы X и Y осциллографа; в —
сигнал на входе ведомой системы (верхняя осциллограмма) и разностный сигнал
(нижняя осциллограмма) на ее выходе
1.5. Отклик в условиях большой расстройки параметров 35
Чуа имели величины р\ = 1,4014, М2, з = —0,500 ± 3,9686г для
внутреннего сегмента mi вольт-амперной характеристики нели-
нейного элемента (рис. 1.26). Ограничимся далее именно этими
значениями, так как положительность действительной части pi
свидетельствует о неустойчивости множества синхронизации, а
ее абсолютная величина является индикатором интенсивности
«on-off» пер емежаемо сти.
Появление обратной связи в ведомой системе (а < 0) сни-
жает степень неустойчивости множества синхронизации. Так, при
a = — 2 собственные значения матрицы коэффициентов для си-
стемы (1.19) равны: pi = 0,1631, р>2,з = —0,816 ± 1,44г. Система
(1.19) по-прежнему остается неустойчивой. Однако величина Д1,
оставаясь положительной, заметно уменьшается по абсолютной ве-
личине. Этот факт отражает снижение степени неустойчивости
системы и, как следствие, ослабление эффекта «on-off» перемежае-
мости. В терминах синхронного отклика указанное понижение pi
эквивалентно уменьшению степени десинхронизации отклика и,
тем самым, улучшению его качества (уменьшение ту). Зависи-
мость первого собственного значения от коэффициента а является
нелинейной, и дальнейшее увеличение а (|а| > 2) существенно
не изменяет
a б
Рис. 1.11. Сигналы на входе и выходе ведомой системы. Расстройка параметра
Gi в ведущей и ведомой системах 6%. Коэффициент усиления а = —2: а —
сигналы на входе (Vc2, верхняя осциллограмма) и выходе (Vc2, нижняя осцил-
лограмма) ведомой системы; б— фазовый портрет сигналов (а), прямая линия
соответствует случаю, когда один и тот же сигнал одновременно поступает на
входы X и Y осциллографа; в — сигнал на входе ведомой системы (верхняя
осциллограмма) и разностный сигнал на ее выходе (нижняя осциллограмма)
36
Гл. 1. Синхронный хаотический отклик
Таким образом, введение обратной связи способно уменьшить
степень неустойчивости ведущей-ведомой системы и, как след-
ствие, ослабить ее чувствительность к возмущающим факторам.
Рисунки 1.10 и 1.11 иллюстрируют данное свойство. На фотогра-
фиях представлены осциллограммы сигналов на входе и выходе
ведомой системы при построении ведущей-ведомой пары на базе
цепи Чуа. Все параметры подобных элементов ведущей и ведо-
мой систем были подобраны с точностью 0,5%, кроме одного (Gi),
который отличался в системах на 6%.
В случае рис. 1.10 обратная связь в ведомой системе отсутство-
вала (а = 0). Указанная расстройка параметра приводила к де-
синхронизации отклика (рис. 1.106,в). Рисунок 1.11 демонстри-
рует эффект от введения дополнительного блока в той же самой
ведущей-ведомой системе. При a = — 2 в ней практически реа-
лизуется хаотический синхронный отклик, несмотря на большую
расстройку параметра. При этом в сигнале на выходе ведомой си-
стемы (рис. l.lle) еще наблюдаются «срывы» синхронизации, но
их интенсивность и амплитуда заметно уменьшаются по отноше-
нию к рис. 1.10в, как и было предсказано выше.
1.6. Импульсная синхронизация хаотических генераторов
До сих пор рассматривалась концепция хаотической синхро-
низации, в основе которой лежит представление двух взаимодей-
ствующих систем в виде пары «ведущая-ведомая». При этом одна
из систем (ведущая) является автоколебательной и генерирует хао-
тические колебания, которые воздействуют на другую (ведомую)
систему, представляющую собой нелинейный фильтр.
Вместе с тем, с точки зрения построения коммуникационных
систем с хаосом интерес представляет также случай синхрониза-
ции двух автоколебательных хаотических систем (генераторов),
одна из которых находится на передающей стороне, а другая —
на приемной. Взаимодействие систем — однонаправленное по ана-
логии с синхронным хаотическим откликом в паре «ведущая-
ведомая».
Вопросы синхронизации двух автоколебательных хаотических
систем при непрерывном воздействии одной из них на другую
были предметом исследования довольно большого числа работ и
к настоящему времени хорошо изучены [36, 49, 101, 103, 108,
118, 144, 153, 160, 191, 207]. Однако использование такого вида
синхронизации в системах передачи информации может столк-
нуться с рядом проблем, связанных с необходимостью организа-
ции специального, дополнительного канала связи между передат-
чиком и приемником. Поэтому представляет также интерес случай
прерывистой или импульсной синхронизации, при которой одна
система воздействует на другую в течение коротких интервалов
1.6. Импульсная синхронизация хаотических генераторов 37
времени. Причем указанные интервалы чередуются более длин-
ными паузами, во время которых взаимодействия нет, и следуют
друг за другом с некоторым периодом Г. При импульсной синхро-
низации можно использовать структуру коммуникационных си-
стем, в которых проблема синхронизации решается с помощью
пилот-сигналов. В этом случае хаотические сигналы во время ин-
тервалов взаимодействия будут выполнять ту же функцию, что и
пилот-сигналы.
Концепция импульсной синхронизации хаотических автоколе-
бательных систем была предложена и рассмотрена в [102, 201].
Спустя некоторое время была разработана теория ее устойчивости
[210, 211], а вслед за ней появились работы по возможному при-
менению импульсной синхронизации в системах скрытой (кон-
фиденциальной) связи и многопользовательских системах [209].
В указанных работах были представлены теоретические результа-
ты и данные компьютерного моделирования. Ниже представлены
результаты, демонстрирующие возможность реализации импульс-
ной синхронизации хаотических генераторов в физическом экспе-
рименте.
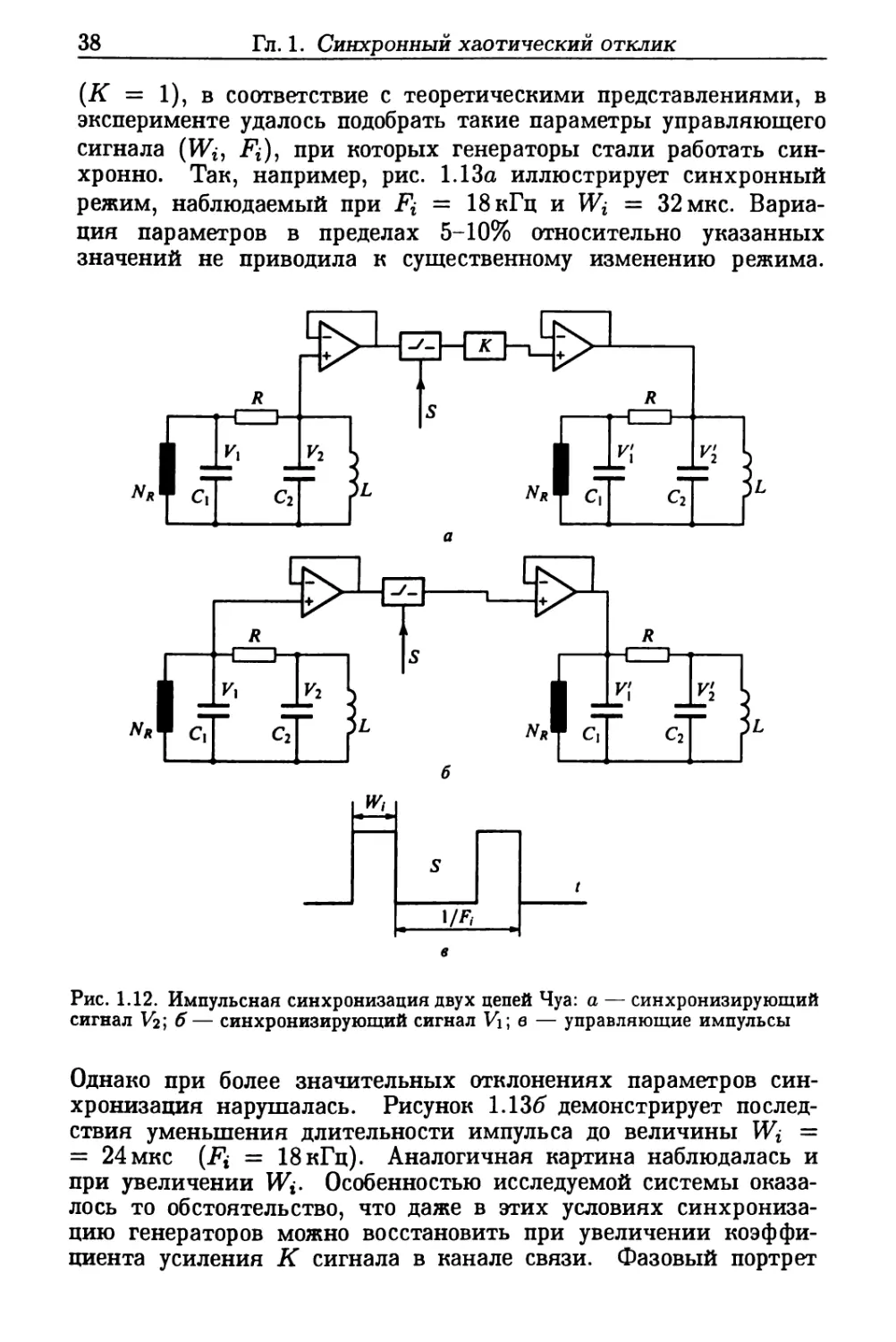
Блок-диаграмма экспериментов представлена на рис. 1.12.
Хаотический сигнал (либо V2 (рис. 1.12а), либо Vi (рис. 1.126))
с выхода ведущей цепи Чуа через буферный каскад поступал на
электронный ключ (микросхема AD6 212KN), управляемый двух-
уровневым (импульсным) сигналом S (рис. 1.12в). В моменты
времени, соответствующие верхнему уровню S', ключ открывался
и пропускал через себя синхронизирующий сигнал, который далее
через буферный каскад, а также усилитель К в случае рис. 1.12а
поступал на другую цепь Чуа, выполняющей функцию ведомой ак-
тивной системы. Наоборот, при паузах (нижний уровень S') ключ
был закрыт для хаотического сигнала. Длительность управляю-
щих импульсов Wi и частота их следования F} могли в экспери-
менте изменяться в широких пределах.
Параметры элементов цепей, принимавших участие в экспе-
риментах, подбирались с точностью 1% и имели следующие зна-
чения: Ci = 5,1 нФ, С2 = 47нФ, L = 18 мГн, R = 1,65 кОм,
Вр = 1,56 В, то = —0,459 мСм, mi = —0,757мСм. При ука-
занных параметрах в генераторах реализовывался хаотический
режим «двойная спираль». Спектр мощности хаотических колеба-
ний находился в пределах от 0-3 кГц. Были проведены две серии
экспериментов по импульсной синхронизации.
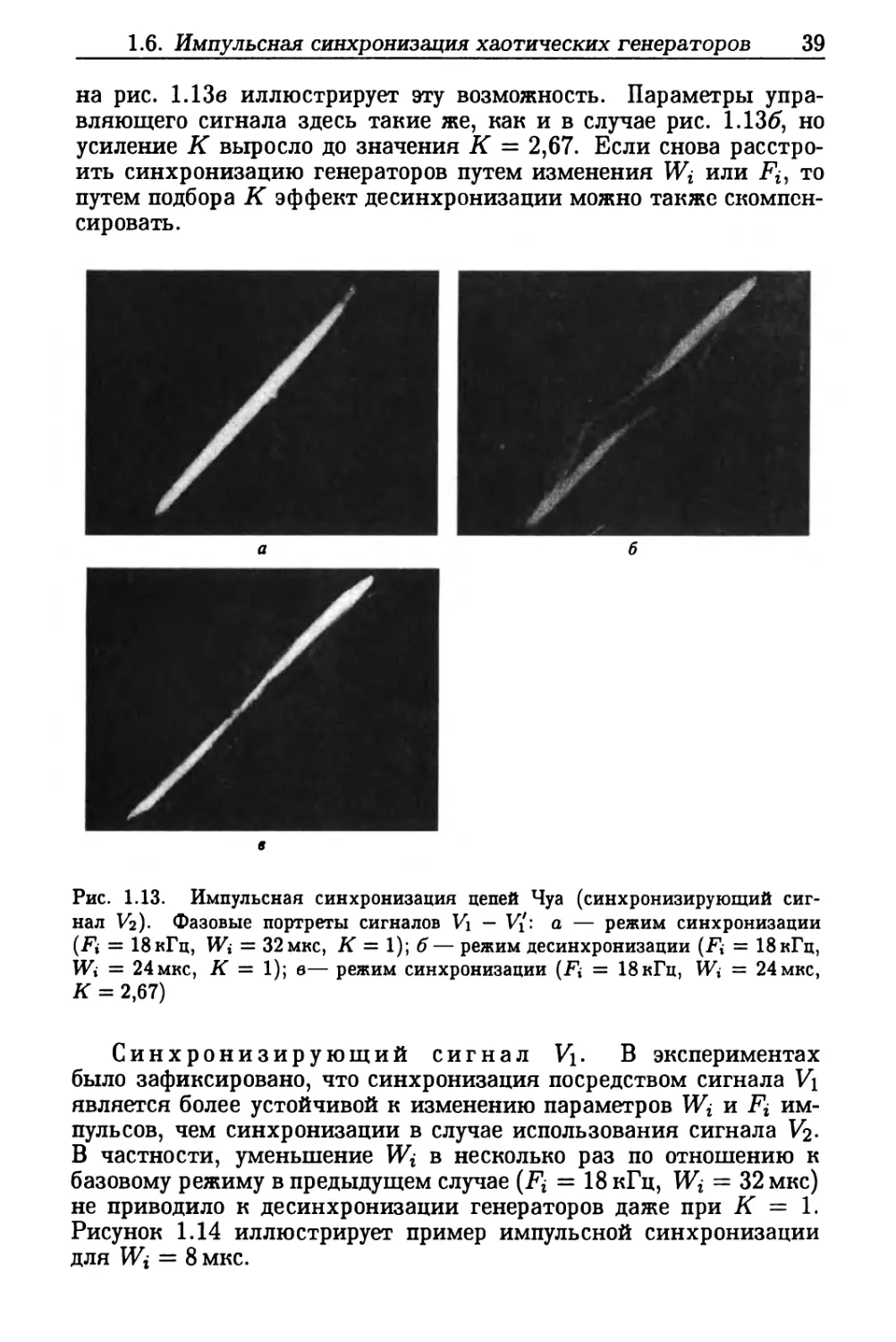
Синхронизирующий сигнал V2 (рис. 1.12а). Резуль-
таты экспериментов для этого случая представлены на рис. 1.13,
на котором демонстрируются фазовые портреты сигналов (на-
пряжений) Vi и V/. В отсутствие связи генераторы были де-
синхронизованы друг относительно друга. При наличии связи
38 Гл. 1. Синхронный хаотический отклик
(К = 1), в соответствие с теоретическими представлениями, в
эксперименте удалось подобрать такие параметры управляющего
сигнала (Wi, Ft), при которых генераторы стали работать син-
хронно. Так, например, рис. 1.13а иллюстрирует синхронный
режим, наблюдаемый при Fi = 18 кГц и Wi = 32 мкс. Вариа-
ция параметров в пределах 5-10% относительно указанных
значений не приводила к существенному изменению режима.
Рис. 1.12. Импульсная синхронизация двух цепей Чуа: a — синхронизирующий
сигнал Vi; б— синхронизирующий сигнал Vi; в — управляющие импульсы
Однако при более значительных отклонениях параметров син-
хронизация нарушалась. Рисунок 1.13d демонстрирует послед-
ствия уменьшения длительности импульса до величины Wi =
= 24мкс (Fi = 18кГц). Аналогичная картина наблюдалась и
при увеличении Wi. Особенностью исследуемой системы оказа-
лось то обстоятельство, что даже в этих условиях синхрониза-
цию генераторов можно восстановить при увеличении коэффи-
циента усиления К сигнала в канале связи. Фазовый портрет
1.6. Импульсная синхронизация хаотических генераторов 39
на рис. 1.13в иллюстрирует эту возможность. Параметры упра-
вляющего сигнала здесь такие же, как и в случае рис. 1.13d, но
усиление К выросло до значения К = 2,67. Если снова расстро-
ить синхронизацию генераторов путем изменения Wi или Fz, то
путем подбора К эффект десинхронизации можно также скомпен-
сировать.
a б
в
Рис. 1.13. Импульсная синхронизация цепей Чуа (синхронизирующий сиг-
нал V2). Фазовые портреты сигналов Vi — V{: a — режим синхронизации
(Fi = 18 кГц, Wi = 32 мкс, К = 1); б— режим десинхронизации (F = 18 кГц,
Wi = 24 мкс, К = 1); в— режим синхронизации (F = 18 кГц, Wi = 24 мкс,
К = 2,67)
Синхронизирующий сигнал Vp В экспериментах
было зафиксировано, что синхронизация посредством сигнала Vi
является более устойчивой к изменению параметров Wi и Fi им-
пульсов, чем синхронизации в случае использования сигнала р2-
В частности, уменьшение Wi в несколько раз по отношению к
базовому режиму в предыдущем случае (Fi = 18 кГц, Wi = 32 мкс)
не приводило к десинхронизации генераторов даже при К = 1.
Рисунок 1.14 иллюстрирует пример импульсной синхронизации
для Wi = 8 мкс.
40
Гл. 1. Синхронный хаотический отклик
Рис. 1.14. Импульсная синхронизация цепей Чуа (синхронизирующий сиг-
нал Vi). Фазовые портреты сигналов V2 — V?. Режим синхронизации (F* =
= 20 кГц, Wi =32 мкс)
1.7. Выводы
В основе традиционного построения коммуникационных си-
стем с когерентным приемом лежит получение в приемнике тем
или иным образом опорного сигнала и синхронизация его с подоб-
ным сигналом, используемым в передатчике для формирования
результирующего (с информацией) сигнала. Существует два под-
хода к решению данной проблемы. Согласно первому из них, на
приемной стороне располагают точно такой же генератор опорных
сигналов, что и в передатчике, а синхронизацию вырабатываемых
ими колебаний осуществляют с помощью, например, систем ФАПЧ
или специальных пилот-сигналов. Второй подход связан с переда-
чей опорного сигнала в приемник либо по дополнительному каналу
связи, либо в самом излучаемом сигнале в предусмотренные для
этой цели временные интервалы.
По сути дела, синхронный хаотический отклик выполняет ту
же самую функцию: получение опорного сигнала в приемнике.
Способ его получения отличается от рассмотренных выше. Можно
сказать, что опорный сигнал выделяется из результирующего сиг-
нала, приходящего из канала связи, с помощью согласованного
нелинейного фильтра, функцию которого выполняет генератор
хаотических колебаний с разорванной обратной связью. Особенно-
стью способа является то, что в нем не требуется никакой внешней
синхронизации. Если параметры принимающей сигнал системы
1.7. Выводы
41
удовлетворяют условиям получения отклика, то на выходе филь-
тра формируется реплика хаотического опорного сигнала, которая
синхронна по отношению к аналогичному сигналу в передатчике
в силу рассмотренной в разделе специфики построения ведущей-
ведомой (передатчик-приемник) системы. Этот факт находит свое
отражение в названии отклика.
После решения за счет явления хаотического синхронного от-
клика проблемы синхранизации передатчика и приемника на
передний план выходит задача получения в приемнике реплики
опорного хаотического сигнала, максимально совпадающей с ори-
гиналом. Именно от ее решения будет зависеть качество передачи,
что и определяет актуальность исследований по влиянию различ-
ных возмущающих факторов на точность восстановления опор-
ного сигнала и методов компенсации указанного влияния. Один
из факторов — неидентичность параметров подобных элементов в
ведущей и ведомой системах — был рассмотрен в данной главе.
Анализу воздействия других факторов будут посвящены последую-
щие главы.
3 Зак. 18
Глава 2
МЕТОДЫ ПЕРЕДАЧИ ИНФОРМАЦИИ
С ИСПОЛЬЗОВАНИЕМ СИНХРОННОГО
ХАОТИЧЕСКОГО ОТКЛИКА
Возможность получения синхронного отклика для хаотических
систем послужила толчком для интенсивных поисков способов
применения этого явления в целях передачи информации. Как
отмечалось во Введении, за последние годы в научно-технической
литературе появилось довольно большое число работ, авторами ко-
торых были предложены различные схемы передачи информации
на основе синхронного хаотического отклика. Эти схемы можно
условно объединить в несколько групп, среди которых: хаоти-
ческая маскировка (chaotic masking), переключение хаотических
режимов (chaos shift keying), нелинейное подмешивание инфор-
мационного сигнала к хаотическому (nonlinear signal mixing), ис-
пользование структуры ФАП (PLL), модуляция параметров пере-
датчика в сочетании с адаптивными методами приема (adaptive
methods). Данная глава посвящена рассмотрению специфики под-
ходов и их сравнительному анализу.
2.1. Хаотическая маскировка
При хаотической маскировке [123, 137, 154] информационный
сигнал S аддитивно подмешивается к хаотическому сигналу х на
выходе ведущей системы, после чего результирующий сигнал
х + S передается в канал связи (рис. 2.1) и далее на вход ведо-
мой системы.
В общем случае в канале связи к результирующему сигналу мо-
жет аддитивно добавляться шум канала w. Тогда на вход ведомой
системы поступает сигнал х + S + w.
По существу, рис. 2.1 представляет собой схему синхрони-
зации ведущей-ведомой хаотической системы под воздействием
возмущающего фактора, функцию которого выполняет инфор-
мационный сигнал S. Поэтому, как следует из гл. 1, если S
(а также w) достаточно мал по отношению к ж, то на выходе
ведомой системы формируется синхронный хаотический отклик.
В этом случае информационный сигнал S может быть извлечен
2.1. Хаотическая маскировка
43
путем вычитания выходного сигнала ведомой системы х из сиг-
нала на ее входе при условии |w| |S|.
Рис. 2.1. Хаотическая маскировка. Блок-схема: х — хаотический сигнал; S —
информационный сигнал; S' — оценка информационного сигнала на выходе ве-
домой системы; w — шум в канале связи
Рис. 2.2. Хаотическая маскировка. Передача речевого сигнала: a — исходный
речевой сигнал; б — сигнал на выходе ведомой системы; в — спектры мощности
речевого и маскирующего хаотического сигнала
44 Гл. 2. Методы передачи информации с использованием хаоса
Точность оценки извлеченной информации S' по отношению к
передаваемому исходному сообщению S зависит от многих факто-
ров. К ним относится степень идентичности ведущей и ведомой
систем, а также уровень внешнего шума w в канале. Анализ, про-
веденный в работе [137] для разных типов информационных сиг-
налов, свидетельствует о том, что в случае идентичности систем
и отсутствия шума в канале для качественной передачи необхо-
димо превышение мощности маскирующего хаотического сигнала
над информационным на величины от 35 до 65 дБ. Причина столь
жестких требований на отношение сигнал/хаос заключается в
нарушении условий синхронизации ведущей и ведомой систем в
результате возмущений опорного хаотического сигнала информа-
ционной компонентой и, как следствие, появлении шумов десин-
хронизации на выходе ведомой системы.
В качестве примера, рис. 2.2 демонстрирует передачу речевой
информации при использовании хаотической маскировки в веду-
щей-ведомой системе на основе системы Лоренца [123].
2.2. Переключение хаотических режимов
Еще один подход к передаче информации с использованием
хаоса получил название «переключение хаотических режимов»
[15, 125, 181]. На рис. 2.3 приведена блок-схема одного из воз-
можных вариантов подхода. Здесь передатчик представлен двумя
Рис. 2.3. Переключение хаотических режимов. Блок-схема подхода: S, S' —
исходный информационный сигнал в бинарной форме и его оценка на выходе
приемника
ведущими системами, в основе которых, в свою очередь, могут
лежать генераторы хаоса различной или одинаковой структуры.
В последнем случае они отличаются параметрами, но в интересах
конфиденциальности передачи возникающие в них хаотические
сигналы выбираются таким образом, чтобы они имели сходные
спектральные и статистические свойства. Приемник состоит из
двух ведомых систем, каждая из которых образует с соответствую-
щей ведущей системой пару «ведущая-ведомая». Другими словами,
2.2. Переключение хаотических режимов
45
в основе рассматриваемого подхода лежит взаимодействие двух пар
«ведущая-ведомая» систем. Взаимодействие происходит следую-
щим образом.
В каждый момент времени в канал связи передается хаотиче-
ский сигнал х только от одной из ведущих систем. С этой целью
на их выходах расположены коммутирующие устройства, управ-
ляемые информационным сообщением в форме бинарного сигнала.
По приходу бинарной «1» один из коммутаторов открывается и
пропускает сигнал xi, а другой (на выходе ведущей системы 2)
закрывается. При появлении «О» ситуация прямо противополож-
ная, в результате чего в канал проходит сигнал Х2- Хаотические
6
-4,5 -------------1----------1-----------1------------
О 75 150 225 t
ЬХ
о,1
-0,1
niHiHrt w
-0,3 L
0
75
150
225
Рис. 2.4. Переключение хаотических режимов. Передача бинарной информации:
a — изменение во времени параметра ведомой системы; б — сигнал на выходе
ведущей системы; в — сигнал на выходе ведомой системы
режимы в ведущих системах должны быть выбраны так, чтобы
соответствующие им сигналы приводили к появлению синхрон-
ного отклика на выходе только своей ведомой системы. Таким
46 Гл. 2. Методы передачи информации с использованием хаоса
образом, в зависимости от того, «О» или «1» приходят на управляю-
щие входы коммутаторов, будет синхронизована либо одна, либо
другая ведомая система. Путем выявления факта синхронизации
конкретной ведомой системы можно определить, какой из двух би-
тов был передан в каждый момент времени.
Существуют также другие разновидности рассматриваемого
подхода [15, 33, 54, 170, 176, 181]. Они отличаются различным
числом ведущих и ведомых систем, а также способом коммутации
режимов. В одной из них [15] применяется только одна ведущая-
ведомая система, для формирования которой использован генера-
тор хаоса с 1,5 степенями свободы [32], представляющий собой
последовательно замкнутые в кольцо нелинейный элемент и два
фильтра нижних частот первого и второго порядка. Ввод бинар-
ной информации производится путем чередования двух значений
постоянной времени фильтра первого порядка Т\ (рис. 2.4а) в ве-
дущей системе. Аналогичный фильтр в ведомой системе настроен
только на одно из указанных значений. Поэтому в те моменты,
когда постоянные времени фильтров Т\ в ведущей и ведомой си-
стемах совпадают, на выходе последней наблюдается синхронный
хаотический отклик. В противном случае синхронный отклик
отсутствует. На рис. 2.4 представлены характерные временные
реализации. Переключаемые значения постоянной времени филь-
тра Т\ выбирают таким образом, чтобы соответствующие им хао-
тические сигналы, с одной стороны, были близки по форме
(рис. 2.46), а с другой стороны, давали различающиеся отклики в
ведомой системе (рис. 2.4в). На рис. 2.4в нулевому отклику соот-
ветствует «0», а шумоподобному — «1» передаваемого сообщения.
2.3. Нелинейное подмешивание информационного сигнала
к хаотическому
Особенностью третьего подхода является то, что информаци-
онный сигнал непосредственно вводится в ведущую систему и,
таким образом, участвует в формировании ее выходного сигнала
(рис. 2.5а). Являясь нелинейной системой, она «перемалывает»
информационный сигнал наряду со своим собственным хаотиче-
ским сигналом, поэтому данный способ введения информации не-
льзя назвать ни аддитивным наложением, ни стандартной модуля-
цией. Извлечение полезного сигнала на приемном конце связано
с использованием в ведомой системе обратного по отношению к
ведущей системе преобразования.
На сегодняшний день среди возможных взаимообратных пре-
образований предложено использовать лишь несколько пар опера-
ций: сложение-вычитание, деление-умножение, сложение по мо-
дулю с основанием 2, а также преобразование напряжение-ток.
Однако наиболее широкое распространение получили системы,
2.3. Подмешивание инф-го сигнала к хаотическому 47
использующие операции сложение-вычитание [21, 34, 38-41, 43,
129, 130, 132, 134, 179]. В них информационный сигнал S до-
бавляется (подмешивается) к хаотическому сигналу х (рис. 2.56)
и, таким образом, участвует в формировании сложного поведения
б
Рис. 2.5. Нелинейное подмешивание информационного сигнала к хаотическому:
a — общая блок-схема; б— схема, использующая операции сложение-вычитание
системы. Такой ввод информации получил название «нелинейное
подмешивание информационного сигнала к хаотическому». По-
явление в названии слова «нелинейное» связано с тем, что ре-
зультирующий сигнал циркулирует по кольцу обратной связи веду-
щей системы, претерпевая при этом нелинейные преобразования в
одной из ее подсистем. В канал связи и, соответственно, на вход
ведомой системы поступает сигнал х + S (в случае отсутствия
возмущающих факторов в канале). Для выделения информации
в приемной части в точку разрыва обратной связи ведомой си-
стемы вводится вычитатель, который производит обратную опера-
цию вычитания сигнала, прошедшего по разомкнутой петле обрат-
ной связи, из сигнала на входе ведомой системы. Если ведущая
и ведомая системы синхронизированы, то на выходе вычитателя
выделяется информационный сигнал S'.
Пример использования другой пары преобразования (деление-
умножение) [142] представлен на рис. 2.6а. Здесь информацион-
ный сигнал вводится в ведущую систему на базе цепи Чуа по-
средством операции деления его с хаотическим сигналом, после
чего результирующий сигнал (напряжение S/Uc) управляет ис-
точником Z, инжектирующим ток в цепь обратной связи ведущей
48 Гл. 2. Методы передачи информации с использованием хаоса
системы. Для извлечения информации в ведомой системе приме-
няется обратная операция — умножение. Согласно рис. 2.6а, эту
операцию выполняет аналоговый перемножитель, на входы кото-
рого поступают сигналы непосредственно из канала связи и то-
кового детектора, а выходной сигнал представляет собой оценку
Рис. 2.6. Схемы передачи информации с использованием взаимообратных
преобразований: a — деление-умножение; б — преобразование напряжение-ток
передаваемой информации, если пара ведущая-ведомая система
изначально (в отсутствие информации) была синхронизирована.
Еще одной разновидностью схем с нелинейным преобразова-
нием информационного и хаотического сигналов являются систе-
мы, в которых непосредственно ввод информации приводит к по-
явлению хаотического сигнала на выходе ведущей системы [107].
Примером устройства, реализующего рассматриваемый принцип,
является схема на рис. 2.65. Здесь ведущая система представлена
нелинейным ЛЫ)-контуром, в цепь которого включен преобразо-
ватель напряжение-ток на основе операционного усилителя. При
воздействии внешнего информационного сигнала S в системе
возбуждаются хаотические колебания. Если в ведомой системе
помимо аналогичного ЛЫ)-контура использовать устройство, осу-
ществляющее обратное преобразование ток-напряжение, то на
выходе системы можно получить сигнал, синхронный входному.
То есть в данном случае синхронным откликом S' является сам
информационный сигнал.
Пример системы со сложением информационного и хаотиче-
ского сигналов по модулю рассмотрен в § 2.6.
2.4. Использование структуры ФАП
49
2.4. Использование структуры ФАП
Системы фазовой автоподстройки (ФАП) являются хорошо
известными радиотехническими устройствами, широко используе-
мыми в коммуникационных системах для синхронизации сигна-
лов [52, 68, 92]. Это обстоятельство, наряду с возможностью по-
лучения в системах ФАП хаотических колебаний [53, 61, 72, 84,
140, 157-159, 165], послужило причиной пристального внимания к
ним с точки зрения применения в системах передачи информации,
использующих динамический хаос.
На рис. 2.7а представлена блок-схема системы ФАП, включаю-
щая в себя фазовый детектор (ФД), фильтр (Ф) и управляемый
генератор (ГУН), замкнутые в петлю обратной связи. Детектор
имеет два входа, на один из которых поступает сигнал с выхода
Рис. 2.7. Использование ФАП для передачи информации с использованием хаоса:
а — блок-схема ФАП; б — схема передачи аналоговой информации (хаотическая
маскировка); в — схема передачи двоичной информации (взаимообратное пре-
образование); г — взаимообратное преобразование двоичных сигналов с исполь-
зованием логического элемента «исключающее ИЛИ» (=1)
ГУН, а на другой — сигнал опорного генератора (Г). В традицион-
ных применениях системы работают с регулярными сигналами,
а их назначением* является синхронизация колебаний опорного и
управляемого генераторов. В этом случае в качестве фильтров Ф ис-
пользуются фильтры первого порядка. Однако переход к фильтрам
50 Гл. 2. Методы передачи информации с использованием хаоса
более высокого порядка ведет к усложнению динамики ФАП. На-
ряду с синхронными режимами в системе становятся возможными
и хаотические режимы. В соответствии с рис. 2.7а ФАП в таком
режиме можно определить как неавтономную хаотическую систему
кольцевой структуры. Специфика конструкции системы наклады-
вает свой отпечаток на схемы передачи информации на ее основе,
хотя последние и используют при этом элементы уже рассмотрен-
ных методов [90, 91, 193, 199].
Рассмотрим несколько примеров.
Схема передачи информации, представленная на рис. 2.76, ис-
пользует элементы хаотической маскировки. Здесь две идентич-
ные петли ФАП (ФАП1 и ФАПг) играют роль ведущей и ведомой
систем. Режимами систем управляет хаотический сигнал с выхода
генератора хаоса на базе еще одной ФАПд. В случае идентичности
параметров ФАЩ и ФАП2 на выходах фильтров Ф наблюдаются
одинаковые хаотические сигналы xi и^- Поэтому если к одному
из них (#1) в соответствии с рис. 2.76 добавить информационный
сигнал S, а суммарный сигнал x^ + S направить через канал связи
к ведомой системе и вычесть затем из него 2:2, то в результате
можно очистить смесь хаотического и информационного сигналов
от хаотической компоненты и выделить таким образом передава-
емое сообщение S1. Под синхронным откликом в данном случае
следует подразумевать адекватную (синхронную) реакцию ведо-
мой системы (ФАП2) на управляющее воздействие опорной ФАПд
по отношению к ведущей системе (ФАП1). Отличительной чертой
схемы является необходимость использования двух каналов связи.
Один из них предназначен для передачи управляющего хаотиче-
ского сигнала опорной ФАПо к ведомой системе. Функция второго
канала — передать к ней суммарный сигнал х\ -h S.
Организация двух каналов связи на практике может ограни-
чить применение рассмотренной схемы. Поэтому на рис. 2.7в
показан вариант построения одноканальной схемы. В основе
применяемых в ней ведущей и ведомой систем лежит гибридная
ФАП [94]. Гибридная в том смысле, что внутри петли ФАП реа-
лизуются как аналоговые (на выходе фильтра Ф), так и цифровые
(на выходе ГУН и детектора) хаотические сигналы. В последнем
случае сигнал представляет собой последовательность импульсов
с нерегулярно изменяемыми длительностями импульсов и интер-
валами между ними. Источник информации преобразует переда-
ваемое сообщение S в двоичный сигнал, который выступает по
отношению к петле ФАП в роли опорного нерегулярного сигнала,
стимулируя появление в ней хаотических колебаний. Функцию
детектора гибридной ФАП выполняет логический элемент «исклю-
чающее ИЛИ». Известно, что пара таких элементов обеспечивает
взаимообратное преобразование бинарных сигналов при условии
синхронизации управляющих сигналов в соответствии с рис. 2.7г.
2.5. Использование адаптивных методов приема
51
Поэтому если в ведомой системе реализуется синхронный отклик
(идентичность двоичных сигналов xi и Т2), то на выходе «ис-
ключающего ИЛИ» в ней выделяется информационный сигнал S'
в двоичной форме. В данном случае для передачи информации до-
статочно одного канала связи, через который передается двоичный
сигнал, полученный в результате операции логического перемно-
жения двоичных сигналов S’ и х\.
2.5. Использование адаптивных методов приема
Использование адаптивных методов (адаптивных контролле-
ров) [87, 105, 106, 119, 150, 171, 194, 198, 208] является естествен-
ным шагом при переходе от дискретной модуляции управляющего
параметра ведущей системы в схеме с переключением хаотиче-
ских режимов на рис. 2.4в к модуляции непрерывным сигналом.
В этом случае функцию модулирующего сигнала выполняет анало-
говый информационный сигнал. Структура ведущей системы при
этом не претерпевает изменений, а основным условием модуляции
становится устойчивость хаотической генерации системы. Дру-
гими словами, непрерывное изменение управляющего параметра
не должно приводить к нарушению условий генерации хаотиче-
ских колебаний. Поэтому для выполнения условия необходимо
Рис. 2.8. Использование адаптивных методов приема
предварительно определить допустимый диапазон изменения па-
раметра и в соответствии с ним провести нормировку модулирую-
щего информационного сигнала.
В отличие от ведущей системы, в структуре ведомой системы
появляется новый элемент — цепь управления (рис. 2.8), назна-
чение которого осуществлять такое изменение аналогичного упра-
вляющего параметра в ведомой системе, чтобы она находилась в
52 Гл. 2. Методы передачи информации с использованием хаоса
режиме синхронного хаотического отклика. Иначе говоря, с помо-
щью нового элемента в ведомой системе образуется петля обрат-
ной связи, которая способна адаптировать ее к возможным изме-
нениям режимов в ведущей системе. В случае появления сигнала
рассогласования на выходе вычитателя (рис. 2.8) цепь управле-
ния вырабатывает сигнал ошибки S", изменяющий параметр до
тех пор, пока рассогласование систем не будет минимизировано.
Последнее возможно, если сигнал ошибки S' будет максимально
близок к модулирующему сигналу S. Таким образом, в рассматри-
ваемой схеме сигнал с выхода цепи управления ведомой системы
является оценкой передаваемой информации.
2.6. Сравнительный анализ схем передачи информации,
использующих хаотический синхронный отклик
Цель данного параграфа — проанализировать сильные и сла-
бые стороны рассмотренных схем передачи информации, а также
ответить на следующий вопрос: с какими проблемами может
столкнуться потенциальный потребитель при попытке использо-
вать эти схемы на практике?
Хаотическая маскировка. Как отмечалось, при хао-
тической маскировке уровень информационного сигнала должен
быть ниже на 35-65 дБ уровня хаотического (маскирующего) сиг-
нала. Сигнал такого низкого уровня становится соизмеримым с
уровнем шумов канала связи. Это может привести к небольшим
отношениям сигнал/шум на выходе ведомой системы и, соответ-
ственно, к невысокому качеству передачи. Потенциальная возмож-
ность появления каких-либо возмущающих факторов резко услож-
няет ситуацию. Так, расстройка параметров ведущей и ведомой
систем может привести к появлению на выходе последней допол-
нительных шумов синхронизации и сделать передачу труднореа-
лизуемой.
Возникают проблемы и с конфиденциальностью передачи, яв-
ляющейся одним из отличительных свойств хаотических комму-
никационных систем. На первый взгляд, низкий уровень инфор-
мационного сигнала более чем достаточен для его эффективной
маскировки хаотическим сигналом (-20-25дБ) при совпадении
полосы частот этих сигналов. Однако известны подходы [184,
195-197], которые позволяют воспроизвести на приемной стороне
исходный хаотический сигнал при таком уровне подмешиваемого
(добавляемого) сигнала, а значит, и выделить информацию. Вы-
ходом здесь является увеличение отношения сигнал/хаос в канале,
но это неизбежно приведет к ухудшению качества передачи, так
как при хаотической маскировке информационный сигнал высту-
пает в качестве внешнего возмущающего фактора по отношению к
хаотическому сигналу.
2.6. Сравнительный анализ схем передачи информации 53
К отмеченным факторам следует добавить низкую энергетиче-
скую эффективность схемы, передающей по каналу связи в основ-
ном сигнал, не содержащий информацию.
Таким образом, для использования на практике хаотической
маскировки необходимо обеспечить высокую степень идентично-
сти ведущей и ведомой систем, а также каналы связи с низким
уровнем шумов. Совокупность этих требований ограничивает воз-
можную область применения рассматриваемой схемы лишь спе-
циальными случаями и делает ее малоперспективной на практике.
Переключение хаотических режимов. Схемы, реа-
лизующие этот подход, не накладывает жестких ограничений
на степень идентичности используемых пар ведущая-ведомая
система и уровень шумов в канале связи. Происходит это по той
причине, что для выделения информации приемнику (ведомая си-
стема) достаточно определить «свой» или «чужой» сигнал посту-
пил на его вход. А такая задача может быть решена даже при
наличии возмущающих факторов.
Конфиденциальность передачи схемы связана прежде всего с
выбором переключаемых хаотических режимов, которые должны
быть близки по характеристикам друг к другу. С другой стороны,
указанная выше возможность воспроизведения в приемнике ис-
ходных хаотических сигналов напрямую относится и к рассма-
триваемой схеме и ограничивает ее приватность.
Энергетическая эффективность подхода достаточно высока, так
как весь передаваемый по каналу связи хаотический сигнал явля-
ется носителем информации.
Однако применяемый в схеме принцип ввода и извлечения ин-
формации несет в себе и проблемные моменты. Дело в том, что
при переключении режимов в ведущей системе возникают пере-
ходные процессы, которые находят свое отражение во временной
задержке входа в синхронизм ведомой системы. При относительно
медленном переключении по отношению к средней частоте хаоти-
ческого сигнала эта задержка не оказывает существенного вли-
яния на функционирование схемы. Но с ростом частоты пере-
ключения задержка может стать соизмеримой с длительностью
передаваемого информационного бита и вызывать ложные сраба-
тывания при определении «своего-чужого» сигнала. Другими сло-
вами, схема имеет ограничения по скорости передачи двоичной
информации.
Нелинейное подмешивание информационного
сигнала к хаотическому. Отличительной особенностью
подхода, основанного на взаимообратном преобразовании сигна-
лов, является возможность варьирования в широких пределах
уровня вводимого в передатчик информационного сообщения
по отношению к хаотическому сигналу. При этом амплитуда
54 Гл. 2. Методы передачи информации с использованием хаоса
(мощность) сообщения может быть как меньше соответствующих
характеристик хаотического сигнала, так и соизмеримой с ним и
даже превышать их. Указанное свойство важно не только с точки
зрения энергетической эффективности подхода, но также и для
качества передачи. Последнее определяется отношением мощно-
сти выделенного в приемнике информационного сигнала к оста-
точной мощности шумов приемника, одной из компонент которой
являются шумы десинхронизации ведомой системы, вызванные
влиянием дестабилизирующих факторов. Поэтому возможность
варьирования уровнем сообщения позволяет управлять качеством
передачи.
Другая особенность подхода связана с тем, что хаотический
сигнал, вырабатываемый ведущей системой, появляется либо в
результате непосредственного воздействия информационного сиг-
нала на систему, либо определяется им в значительной степени
(является функцией информационного сигнала). В обоих случаях
ведомую систему можно рассматривать как неавтономную систему.
Хаотический сигнал на выходе систем первого типа не наблюда-
ется при отсутствии информационного сигнала. С другой стороны,
и появление сообщения не всегда гарантирует реализацию хаоти-
ческого сигнала. В зависимости от уровня сообщения, в разные
моменты времени кроме хаотических могут наблюдаться и квази-
периодические сигналы.
Указанный эффект устраняется в системах второго типа. При
правильном выборе параметров ведущих систем они постоянно ге-
нерируют хаотический сигнал вне зависимости от наличия или от-
сутствия информации на их входах. Как отмечалось выше, такие
системы могут применять различные пары взаимообратных пре-
образований. Однако с точки зрения практической реализации
более предпочтительными оказываются системы, использующие
пару «сложение-вычитание».
Конфиденциальность передачи в рассматриваемых системах,
так же как и качество, определяется уровнем информационного
сигнала, но в отличие от качества передачи конфиденциальность
уменьшается с ростом уровня сигнала. С другой стороны, увели-
чение сигнала, вводимого в ведущую систему, затрудняет построе-
ние синхронизаторов и уменьшает, таким образом, возможность
перехвата информации в канале связи. Для потенциального поль-
зователя необходимо учитывать все отмеченные факторы, с тем
чтобы выбрать оптимальный для него уровень передаваемого со-
общения.
Что касается соотношения частот информационного и хаоти-
ческого сигналов, то в системах с нелинейным подмешиванием
не существует принципиального ограничения на него в отличие от
систем с переключением хаотических режимов. Однако с точки
зрения конфиденциальности передачи полоса частот информаци-
2.6. Сравнительный анализ схем передачи информации
55
онного сигнала не должна превышать полосу хаотического сигнала
и полностью «покрываться» последней, как и в случае хаотической
маскировки.
Использование структуры ФАП. Как отмечалось в
§2.4, представляется весьма заманчивым использование суще-
ствующих систем с ФАП в качестве базовой структуры при по-
строении хаотических систем передачи информации. Но на этом
пути есть ряд проблем, требующих своего решения. Одной их них
является довольно узкие зоны хаотического поведения в простран-
стве параметров систем ФАП. Другая проблема связана с низкой
стабильностью характеристик используемых в них управляемых
генераторов (ГУН), не влияющая на работу традиционных систем
связи с ФАП, но затрудняющая получение синхронизации (син-
хронного отклика) в их разновидностях, применяющих хаос.
В настоящее время идет поиск технических решений для пре-
одоления указанных проблем. Одним из предлагаемых вариан-
тов является использование каскадного соединения нескольких пе-
тель ФАП [91]. Применение такой структуры в коммуникационных
системах с хаосом делает их более робастными, однако передача
информации связана с необходимостью обеспечения у них нес-
кольких каналов связи.
Использование методов адаптивного приема. По
своей сути системы с адаптивными методами приема можно
рассматривать как модификацию систем с переключением хаоти-
ческих режимов при переходе от бинарных к аналоговым (непре-
рывным) сигналам. Поэтому к ним в полной мере относятся свой-
ства, отмеченные при анализе переключаемых схем. Главной из
них является то, что характерные частоты информационного сиг-
нала должны быть существенно ниже основной частоты хаотиче-
ских колебаний ведущей системы вне зависимости от конкретных
адаптивных методов, используемых в ведомой системе. Причина
этого в том, что для получения синхронного хаотического отклика
ведомая система должна успевать отслеживать «непрерывное пе-
реключение режимов» в ведущей системе. Другими словами, для
адаптации ведомой системы к меняющимся условиям генерации
в ведущей системе необходимо время. Чем ниже «скорость пере-
ключения» (частоты информационного сигнала) режимов по отно-
шению к скорости характерных изменений хаотического сигнала,
тем выше качество передачи. В реальных условиях это означает,
что для передачи, например, речевого сигнала ведущая система
должна генерировать хаотический сигнал в существенно более
высокочастотном диапазоне. Возможность же получения синхрон-
ного хаотического отклика в паре ведущая-ведомая система в
высокочастотном диапазоне представляет собой самостоятельную
проблему, требующую решения.
56 Гл. 2. Методы передачи информации с использованием хаоса
2.7. Выводы
Основное достоинство рассмотренных в этой главе методов в
том, что они позволили продемонстрировать принципиальную воз-
можность организации передачи информации с использованием
хаотических сигналов. По сути дела эти методы заложили фунда-
мент в построении хаотических коммуникационных систем. При
этом каждый из них не лишен недостатков, но вместе с тем обла-
дает и рядом привлекательных свойств, настраивающих исследо-
вателей на поиск эффективных решений возникающих проблем.
Все рассмотренные методы имеют одну принципиальную осо-
бенность — в их основе лежит синхронный хаотический отклик.
Из этого факта вытекает важное следствие: несмотря на специ-
фику подходов (методов), разработчикам систем связи на их основе
предстоит решать одинаковые проблемы, связанные с получением
качественного синхронного отклика, устранением влияния на него
и, соответственно, на качество передачи различных возмущаю-
щих факторов, с обеспечением конфиденциальности передачи
и т.п. Осознание этого обстоятельства приводит к заключению,
что для решения указанных проблем не обязательно рассматри-
вать каждый метод в отдельности, а, возможно, сконцентрировать
внимание на одном из них (базовом) и использовать далее полу-
ченные результаты для реализации на практике других методов.
В этой ситуации возникает вопрос: какой из методов выбрать
в качестве базового? Сравнительный анализ различных схем пе-
редачи информации, проведенный в этой главе показал, что по
соотношению достоинств и недостатков, наличию общих черт и
свойств на эту роль претендует схема с нелинейным подмеши-
ванием информационного сигнала к хаотическому. Она и была
выбрана в качестве базовой для исследований, представленных в
последующих главах.
Глава 3
ПЕРЕДАЧА ИНФОРМАЦИИ С НЕЛИНЕЙНЫМ
ПОДМЕШИВАНИЕМ ИНФОРМАЦИОННОГО СИГНАЛА
К ХАОТИЧЕСКОМУ
3.1. Структура системы. Выбор генератора хаоса
Базовая структура коммуникационной системы с нелинейным
подмешиванием информационного сигнала к хаотическому была
рассмотрена в гл. 2. Как следует из рис. 2.5, специфика конструк-
ции системы заключается в том, что используемые в ней генера-
торы хаоса имеют кольцевую структуру. Другими словами, для
применения в системе генераторы должны либо изначально иметь
кольцевую конфигурацию в явной форме (как например, генера-
торы на основе кольцевых автоколебательных систем), либо иметь
возможность быть представленными к кольцевой структуре в ре-
зультате декомпозиции. Примером последней является цепь Чуа,
в первоначальном виде не являющаяся кольцевой, но представля-
емая к ней при декомпозиции на две подсистемы с последующим
соединением их в кольцевую схему (см. рис. 1.4). Какими еще
свойствами должен обладать генератор хаоса для использования
в системе передачи информации с нелинейным подмешиванием?
С учетом влияния расстройки элементов генератора на качество
синхронного хаотического отклика, лежащего в основе функцио-
нирования рассматриваемой системы, таким свойством является
простота конструкции генератора. Под термином «простота» здесь
подразумевается минимально возможное число элементов, входя-
щих в состав генератора, для получения хаотических колебаний с
требуемыми характеристиками.
Среди генераторов, рассмотренных в § 1.3, совокупностью ука-
занных свойств в первую очередь обладает модифицированная схе-
ма Чуа (рис. 3.1а), полученная в результате декомпозиции кано-
нической цепи Чуа (см. рис. 1.4). Она состоит из двух подсистем,
RLC и RCNr (рис. 3.15,в), которые, в свою очередь, последо-
вательно соединены и замкнуты в кольцевую схему (рис. 3.1а).
Подсистема RLC представляет собой полосовой фильтр, а под-
система RCNr — низкочастотный фильтр первого порядка, на-
груженный на нелинейное сопротивление NR с трехсегментной,
кусочно-линейной зависимостью проходящего через него тока IN
58 Гл. 3. Передача информации с нелинейным подмешиванием
от прикладываемого напряжения Усг:
IN(VC1) = GbVC1 + ^Ga- Gb) [|VCl + £| - |VC1 - E|], (3.1)
Li
где GajGbnE — константы. Расположенные между подсистемами
буферные усилители играют роль элементов развязки (единичное
усиление, большое входное и малое выходное сопротивления) и
обеспечивают однонаправленность обратной связи генератора.
Рис. 3.1. Модифицированная в результате декомпозиции цепь Чуа: a —
блок-схема генератора; б — HLC-подсистема; в — RCNr-подсистема (NR —
нелинейный элемент с трехсегментной кусочно-линейной вольт-амперной харак-
теристикой (3.1))
Динамические режимы генератора описываются следующей
системой дифференциальных уравнений:
dVci _V&i Vci т /хг \
с dVa _ Vc, -Vc,.r
C2~dT - д2 +
dIL
L-± = -Vc2.
at
(3-2)
3.1. Структура системы. Выбор генератора хаоса
59
Сопротивления R2 являются параметрами управления
колебательными режимами генератора. При Ri = R2 = R
уравнения (3.2) совпадает с уравнениями канонической цепи
Чуа [164].
Рис. 3.2. Характеристики хаотических колебаний модифицированной цепи Чуа:
a — форма напряжения Vc2\ б — фазовый портрет колебаний в Vcx-Vc2-Il
плоскости; в — спектр мощности сигнала Vc2
В качестве базового режима для дальнейших исследований был
выбран режим с аттрактором «Double Scroll» (рис. 3.2), реализуе-
мый при следующих значениях параметров: Gb = —0,714 мСм,
Ga = -1,143 мСм, Е = 1 В, L = 0,0625 Гн, С2 = 1Ф, Ci =
= 0,10204 Ф, 1/Я1 = 1/Я2 = 1 См.
60 Гл. 3. Передача информации с нелинейным подмешиванием
3.2. Математическая модель системы
Архитектура коммуникационной системы представлена на
рис. 3.3. Она включает передатчик (передающий хаотический
модуль) I, приемник (приемный хаотический модуль) 2 и канал
связи 3 между ними. Передающий хаотический модуль конструи-
руется из исходного генератора хаоса (рис. 3.1а) путем добавления
з
Рис. 3.3. Структура коммуникационной системы с нелинейным подмешиванием
информации на основе модифицированной цепи Чуа: 1 — передатчик, 2 — при-
емник, 3 — канал связи, (+) — сумматор, (—) — вычитатель, S — исходный
информационный сигнал, S' — выделяемый в приемнике информационный сиг-
нал, N — сигнал в канале связи
в цепь обратной связи сумматора (+). Хаотический модуль прием-
ника реализуется на базе копии того же генератора путем размы-
кания петли обратной связи и добавления в цепь вычитателя (—).
Функционирование системы при идентичности основных элемен-
тов цепей передатчика и приемника описывается уравнениями
_ VCi + S - Vc! T (v .
— д — In\VCi)
УС1-Ус2 , T
rdVC1
C1~dF
rdVC2
C2~dT
Tdh- V
L~dT ~ ~Vc'‘
cdV^
C1~dT
dV^
C2—^
2 dt
rdI'L _
R2
2>
-W
Kl
. J,
r2 l’
(3.3)
3.3. Передача аналоговой информации. Численный эксперимент 61
где S — информационный сигнал, вводимый в передатчик, a S' =
= Vc2+S—Vq2 — сигнал, выделяемый в приемнике, (Vex > II}
и (, ^2,I'L) — напряжения на емкостях Ci, С2 и ток через
индуктивность L соответственно в передатчике и приемнике, а
In(Vci) — кусочно-линейная вольт-амперная характеристика (3.1)
нелинейного элемента NR.
Первые три уравнения относятся к передатчику, остальные
три — к приемнику.
Если в системе выполнены условия для получения синхрон-
ного хаотического отклика, то Vc2 = Vq (рис. 3.46) и S' = Vc2 +
-I- S — V'C2 = S. В случае десинхронизации отклика (рис. 3.4а),
Рис. 3.4. Синхронный хаотический отклик в фазовой плоскости Vc2 — Vc2: a —
десинхронизация отклика; б — синхронный отклик
вызванной «on-off» перемежаемостью, выходной сигнал Sf пред-
ставляет собой сложную смесь информационного и хаотического
сигналов.
3.3. Передача аналоговой информации.
Численный эксперимент
Численные расчеты с (3.3) при совпадении параметров пере-
датчика и приемника (параметры указаны в §3.1) проводились на
одночастотных (тоновых) сигналах
S{t) = A cos (2л ft) (3.4)
и многочастотных (частотно-модулированных) сигналах
5(f) = A sin (2лfat — фт cos (2тгР7)), (3.5)
где /о — средняя частота спектра сигнала, фт — индекс частотной
модуляции, F = О,1/о-
62 Гл. 3. Передача информации с нелинейным подмешиванием
Тоновый информационный сигнал. Моделирование
с использованием в качестве информационных сигналов синусо-
идальных колебаний осуществлялось при изменении отношения
мощности информационного сигнала Ps к мощности хаотического
сигнала PN
? = £ (3.6)
в пределах 10”6-10“2 и в диапазоне изменения частоты f от 0,1
до 0,6. Частота f = 0,6 соответствовала нормированной верхней
границе частот хаотического сигнала (рис. 3.2в).
При подмешивании синусоидального сигнала с р > 10”2 тра-
ектория системы, как правило, быстро уходила на бесконечность.
Поэтому р « 10"2 определяла максимально допустимую мощность
вводимого синусоидального информационного сигнала.
Проведенные расчеты показали, что во всей области изменения
параметров информационного сигнала его выделение в приемнике
происходит без искажений.
На рис. 3.5а-в представлены спектры мощности смеси хаоти-
ческого и информационного синусоидального сигналов, поступаю-
щих на вход приемника. Из рисунков следует, что вид спектров
S(rQ+S) S(Fc,+ S)
0 0,2 0,4 0,6 0,8 1,0 1,2 / 0 0,2 0,4 0,6 0,8 1,0 1,2 f
S(Vc,+ S) a S(Hc,+S) 6
0 0,2 0,4 0,6 0,8 1,0 1,2 f 0 0,2 0,4 0,6 0,8 1,0 1,2 /о
в г
Рис. 3.5. Спектры мощности сигнала в канале связи при передаче тестовых
информационных сигналов: а-в — синусоидальный сигнал S(t) = Acos(2tt/£):
a — А = 210"2, f = 0,4; б— А = 2,510"2, f = 0,4; в —А = 210-2, f = 0,5;
г — частотно-модулированный сигнал S(t) = Asin (2тг/о£ — cos (2ttF£)),
A = 2,5 • IO-2, f0 = 0,4, = 0,3, F = 0,2/o
весьма чувствителен к вводимому сигналу. Так, если частота вво-
димого сигнала находится вдали от характерных спектральных
3.3. Передача аналоговой информации. Численный эксперимент 63
пиков хаотических колебаний генератора, то присутствие синусо-
идального сигнала становится заметным при р « 10“4 (рис. 3.56).
Если же частота вводимого сигнала лежит вблизи характерного
спектрального пика хаотических колебаний, то его присутствие за-
метно уже при р « 10“5 (рис. 3.5в).
Частотно-модулированный сигнал. Частотно-моду-
лированный сигнал имеет линейчатый спектр мощности, тем са-
мым имитируя структуру более сложного (по отношению к тоно-
вому) информационного сигнала.
a
0 0,2 0,4 0,6 0,8 1,0 1,2 /
$(Ис2 + $) 6
О 10 20
д
30 t
Рис. 3.6. Передача тестового частотно-модулированного сигнала: a — сигнал на
входе передатчика (А = 2 • 10“ 2, /о = 0,4, = 0,3); б — спектр мощности
сигнала на входе передатчика; в, г — сигнал в канале связи (Vc2 + S) и его
спектр; д, е — сигнал на выходе приемника и его спектр
Проведенные расчеты показали, что максимальная мощность
данного типа информационного сигнала, при введении которого
траектория системы остается в ограниченной области фазового
64 Гл. 3. Передача информации с нелинейным подмешиванием
пространства, примерно в четыре раза выше, чем в случае исполь-
зования синусоидального сигнала, и составляет р « 4 • 10”2.
Как и в предыдущем случае, выделение информационного сиг-
нала в приемнике происходит без искажений (рис. 3.6).
Спектры мощности смеси хаотического и информационного
сигнала, поступающей на вход приемника, менее чувствительны к
вводимому сигналу, чем в случае тонового информационного сиг-
нала: компоненты спектра информационного сигнала становятся
заметными только при р 2 • 10“2 (рис. 3.5г).
3.4. Оценка качества передачи информации
Неидеальность (десинхронизация) хаотического отклика ведет
к появлению на выходе приемника шума рассинхронизации. Этот
шум является основной причиной ухудшения качества принимае-
мого сигнала. Поэтому для оценки качества передачи мы исполь-
зуем величину отношения мощности информационного сигнала на
выходе приемника Ps к мощности шума рассинхронизации
определяемого по формуле
С Ps
Ш Рд/
Как указывалось в гл. 1, вместо абсолютной мощности шума
рассинхронизации удобно рассматривать ее относительную мощ-
ность
Тогда отношение С/Ш может быть выражено через риг/
С - Ps _PSPN = М /ОПА
ш P±N PNP±N < k
В идеальном случае полного совпадения параметров передат-
чика и приемника и отсутствия искажений в канале связи т) = О
и С/Ш = оо. В реальной ситуации ту всегда отлична от нуля
и характеризует степень искажений передаваемого сигнала. На-
пример, если относительная мощность информационного сигнала
р = 10"2, а относительная мощность шума рассинхронизации
т) = 10“4, то С/Ш = 102.
3.5. Эксперименты по передаче
речевых и музыкальных сигналов
Экспериментальные исследования по передаче речевых и музы-
кальных сигналов проводились на макете системы, состоящем из
передатчика, приемника и канала связи в виде проводной линии.
3.5. Эксперименты по передаче речевых и музыкальных сигналов 65
На рис. 3.7 представлена принципиальная схема передатчика.
Функции всех использованных в ней операционных усилителей
(DI, D2) выполняли две микросхемы К1401УД2Б. В принятых
на рисунке обозначениях L1-C1-C2 соответствуют контуру L-C2,
Рис. 3.7. Принципиальная схема передатчика
a R1-R2 — сопротивлению R2 на рис. 3.15, в то время как
R6-R8-C3-C4 соответствуют цепочке R1-C1 на рис. 3.1в. Нели-
нейный элемент NR был реализован на двух усилителях в
сочетании с сопротивлениями R10-R11-R12-R14-R15-R16 по
схеме [151]. Такая конструкция обеспечивала трехсегментную ха-
рактеристику элемента (3.1) со следующими параметрами: Ga =
= — 0,757 мСм, Gb = —0,459 мСм, Е = 1,56 В. Информационный
сигнал поступал на вход 4, а смесь хаотического сигнала с инфор-
мационным подавалась в канал связи с выхода 5.
Модификация генератора в приемник осуществлялась путем
ввода в кольцо обратной связи между нелинейным элементом и
фильтром нижних частот вычитающего устройства. Сигнал из
канала связи поступал на один из входов вычитателя и одновре-
менно на вход нелинейного элемента, пройдя через который, а
также через полосовой фильтр и фильтр нижних частот, поступал
6 Зак. 18
66 Гл. 3. Передача информации с нелинейным подмешиванием
на второй вход вычитателя. В отличие от сумматора вычитающее
устройство разрывает цепь обратной связи, поэтому в автономном
режиме приемник является пассивной системой.
На рис. 3.8 представлена принципиальная схема приемника.
Использованные в ней микросхемы, а также обозначения элемен-
тов аналогичны рассмотренному выше случаю рис. 3.7. Хаотиче-
ский сигнал из канала связи поступал на вход 4, а выделенный
информационный сигнал снимался с выхода 5.
Информационный сигнал в виде музыкального или речевого
фрагмента, предварительно записанный на аудиокассете, воспро-
изводился на магнитофоне и с его линейного выхода подавался на
Рис. 3.8. Принципиальная схема приемника
один из входов сумматора в передатчике. Соответственно сигнал
с выхода вычитателя в приемнике поступал на акустическую си-
стему и прослушивался в реальном времени. Экспериментальная
установка позволяла снимать осциллограммы и спектры мощно-
сти в любых точках макета системы, а при необходимости прослу-
шивать сигналы, проходящие через них. Передатчик системы в
автономном режиме обеспечивал генерацию хаотических колеба-
ний в диапазоне частот 0-5 кГц. Среднее отношение амплитуд ин-
формационного сигнала и сигнала на выходе полосового фильтра
3.5. Эксперименты по передаче речевых и музыкальных сигналов 67
составляло ~ 1/8 (^ = 2 • 10“2). Разброс параметров передатчика
и приемника не выходил за пределы 0,5%, что позволяло получить
качество хаотического синхронного отклика на уровне т] « 9 • 10“4
(рис. 3.9а).
Рассмотрим основные результаты экспериментов. Первые экс-
перименты проводились с тоновыми сигналами (/ = 1кГц). Как
и в численных расчетах, синусоидальная компонента начинала
Рис. 3.9. Эксперименты по передаче тонового сигнала: a — синхронный хао-
тический отклик в фазовой плоскости (Vc2, Vc2) (верхняя линия соответствует
синхронизации тестового сигнала, когда два идентичных сигнала одновременно
поступают на входы х и у ослиллографа, нижняя линия соответствует экспери-
ментальным данным); б — временные реализации тонового сигнала (верхняя
реализация — на входе передатчика, нижняя — на выходе приемника)
проявляться в спектре мощности сигнала, передаваемого в канале
связи, со значений р > 10”4. О качестве сигнала, воспроизводи-
мого в приемнике, можно судить по рис. 3.95.
Рис. 3.10. Фазовые портреты: a — в отсутствие информационного сигнала; б —
при появлении информационного сигнала
Другая группа рисунков (рис. 3.10-3.12) иллюстрирует пере-
дачу речевых и музыкальных сигналов. Из анализа представлен-
ных на них характеристик сигналов в различных узлах схемы на
рис. 3.3 видно, что:
6*
68 Гл. 3. Передача информации с нелинейным подвешиванием
1. При введении в передатчик информации сигнал на его вы-
ходе остается сложным, шумоподобным, со сплошным спектром
мощности (рис. 3.10, 3.11). Изрезанность спектра мощности при
a б
в
Рис. 3.11. Спектры мощности: a — сигнал в канале связи в отсутствие инфор-
мационного сигнала; б — передаваемый информационный сигнал; в — сигнал в
канале связи при наличии информационного сигнала. Масштаб по оси ординат
логарифмический, по оси абсцисс развернуто 5 кГц (0-5 кГц)
этом уменьшается, свидетельствуя об увеличении степени нере-
гулярности выходного сигнала (рис. 3.11в). Срыва генерации при
варьировании параметров вводимого информационного сигнала не
наблюдалось вплоть до величин р ~ 7 • 10”2.
2. Сигнал на выходе приемника (рис. 3.12, нижння реализация)
достаточно точно воспроизводит передаваемый информационный
Рис. 3.12. Временные реализации: верхняя реализация — информационный
сигнал на входе передатчика; нижняя реализация — сигнал, выделяемый на
выходе приемника (инвертированный по отношению к исходному сигналу)
сигнал (рис. 3.12, верхняя реализация), что подтверждалось не-
посредственным прослушиванием сигнала с помохцью внешних
3.6. Выводы
69
акустических систем. Небольшие отклонения воспроизводимого
сигнала от исходного проявлялись в появлении дополнительного
шума на выходе приемника.
3. При /х < 4-10”2 информационный сигнал маскируется хаоти-
ческой несущей (рис. 3.11в) и не прослушивается в канале связи.
Достигаемые при этом отношения сигнал/шум на выходе прием-
ника составляли 17 дБ.
Качество выделяемого в приемнике информационного сигнала
определяется тем, насколько точно в эксперименте удается обес-
печить идентичность параметров передатчика и приемника. Если
в численном эксперименте проблем в этом плане не возникает,
то на практике получение полностью синхронного отклика, как
правило, не реализуемо. Решение возникающих при этом проблем
лежит не столько в технической области (введение различных
подстроечных элементов), сколько в правильном выборе схемы
построения и реализации генератора хаотических колебаний, яв-
ляющегося базовым элементом передатчика и приемника. Оп-
тимальный подбор содержащихся в генераторе пассивных и
активных элементов, а также связей между ними становится
решающим фактором качественной передачи информации с ис-
пользованием хаоса.
За пределами приведенных в главе результатов остались также
вопросы влияния помех и ослабления сигнала в канале связи на
воспроизведение информации. Они также могут существенно вли-
ять на качество передачи и будут рассмотрены в последующих
главах.
Кольцевая структура передатчика позволяет при необходимо-
сти менять характеристики передаваемого в канал хаотического
сигнала. В рассмотренных экспериментах в канал связи посту-
пала смесь информационного сигнала S и сигнала с выхода поло-
сового фильтра. Меняя полосу фильтра, можно управлять полосой
передаваемого в канал сигнала. С другой стороны, используемый
передатчик допускает использование хаотического сигнала с вы-
хода другой подсистемы (RCNr). Для этого достаточно поменять
подсистемы местами.
3.6. Выводы
Результаты моделирования и экспериментов подтверждают
работоспособность схемы с нелинейным подмешиванием для пере-
дачи как простых (тоновые), так и сложных (речь, музыка) анало-
говых сигналов. Продемонстрированная в экспериментах возмож-
ность конфиденциальной передачи информации свидетельствует о
потенциальной применимости схемы, например, для разработки и
построения скремблеров (по крайней мере в проводных системах).
Показано, что при использовании в схеме модифицированной цепи
70 Гл. 3. Передача информации с нелинейным подмешиванием
Чуа конфиденциальность передачи обеспечивается при отношении
сигнал/шум на выходе приемной части ~ 17 дБ. Такое качество пе-
редачи достигается при точности подбора элементов в передающем
и принимающем хаотических модулях на уровне 0,5%. Улучше-
ние качества возможно, но для этого необходимо решать проблему
повышения точности подбора элементов, либо изменения (моди-
фикации) схемы ввода информации.
До сих пор расстройка элементов являлась единственным воз-
мущающим фактором в экспериментах. Поэтому остается откры-
тым вопрос о возможности использования рассматриваемой схемы
для передачи информации в радиодиапазоне, где к указанному
фактору добавляются другие, не менее значимые факторы. Ана-
лизу возникающих при этом проблем посвящена следующая глава.
Глава 4
ЭКСПЕРИМЕНТЫ ПО ПЕРЕДАЧЕ ИНФОРМАЦИИ
С ИСПОЛЬЗОВАНИЕМ ХАОСА В РАДИОДИАПАЗОНЕ
В предыдущей главе рассмотрена коммуникационная система
с нелинейным подмешиванием информационного сигнала к хао-
тическому, а также описаны низкочастотные физические экспери-
менты, демонстрирующие принципиальную возможность практи-
ческой реализации такой системы.
Необходимым условием функционирования системы является
получение в приемнике синхронного хаотического отклика, от ка-
чества которого зависит точность извлечения передаваемого ин-
формационного сигнала. Качество отклика определяется наличием
и степенью влияния возмущающих факторов. В экспериментах
единственным возмущающим фактором была неидентичность па-
раметров элементов хаотических модулей передатчика и прием-
ника. Его влияние на качество передачи может быть уменьшено
путем тщательного подбора элементов, что и продемонстрировано
в экспериментах.
Возникает вопрос: а возможна ли реализация синхронного от-
клика, а следовательно, и извлечение информации в реальных
условиях, например при использовании хаотических модулей в
коммуникационных системах радиодиапазона? Проблема состоит
в том, что в таких системах с сигналом происходит ряд дополни-
тельных манипуляций (модуляция, гетеродинирование, усиление,
фильтрация и т. д.), которые с учетом сложной структуры сигнала
и нелинейных характеристик отдельных функциональных элемен-
тов систем могут приводить к искажениям сигнала и десинхрони-
зации отклика. Кроме того, к перечисленным возмущающим фак-
торам следует отнести и шумы в канале связи, также способные
ухудшить качество передачи.
В этой главе описываются эксперименты по передаче речевых
сигналов в радиодиапазоне на примере использования хаотиче-
ских модулей с нелинейным подмешиванием информации в стан-
дартных системах связи с амплитудной модуляцией.
4.1. Структура коммуникационной системы
Структура экспериментальной системы связи (рис. 4.1) была
выбрана близкой к классической.
72
Гл. 4. Эксперименты по передаче информации
В передатчике низкочастотный информационный сигнал с
микрофона поступает на вход хаотического модуля. В хаотиче-
ском модуле передатчика производится нелинейное подмешивание
Рис. 4.1. Структура коммуникационной системы: 1 — передатчик, 2 — прием-
ник, 3 — микрофон, 4 — низкочастотный усилитель, 5 — хаотический модуль,
6 — генератор несущих радиоколебаний, 7 — модулятор, 8 — усилитель мощ-
ности, 9 — антенна, 10 — селективный усилитель, 11 — демодулятор, 12 —
низкочастотный фильтр, 13 — акустическая система, S — информационный
сигнал
информационного сигнала к хаотическому. Выходной сигнал мо-
дуля, представляющий собой смесь хаотического и информацион-
ного сигналов, осуществляет амплитудную модуляцию высокоча-
стотных колебаний радиодиапазона. Этот сигнал усиливается и
излучается.
В приемнике радиосигнал, принятый антенной, избирательно
усиливается в полосе частот излучаемого передатчиком сигнала,
демодулируется и проходит через низкочастотный фильтр. При
фильтрации сигнал освобождается от составляющих, лежащих вне
полосы частот хаотического модуля. Хаотический модуль прием-
ника осуществляет выделение информационного сигнала из его
смеси с хаотическим сигналом.
Таким образом, структура исследуемой коммуникационной си-
стемы отличается от классической только наличием в передатчике
и приемнике дополнительных элементов — хаотических модулей.
Это обстоятельство позволяло в значительной степени использо-
вать стандартную технику радиосвязи для проведения экспери-
ментов.
Формально, если в классической системе связи с амплитуд-
ной модуляцией вместо информационного сигнала передавать его
смесь с низкочастотным хаотическим сигналом, используя, напри-
4.2. Математическая модель системы
73
мер, хаотический передающий модуль, то в приемнике можно вы-
делить информационную компоненту с помощью синхронного от-
клика хаотического принимающего модуля. На практике, однако,
возникают осложнения, которые связаны с тем, что при переносе
сигналов в радиодиапазон и обратно над ними осуществляется
ряд дополнительных манипуляций (усиление, модуляция, филь-
трация, демодуляция и др.). Каждая из этих манипуляций при-
водит к дополнительным искажениям и тем самым затрудняет
получение в приемнике точной копии хаотического сигнала (син-
хронный отклик), формируемого передатчиком. Поэтому для ка-
чественной передачи информации точность прямых и обратных
манипуляций с сигналом выходит на передний план. Практически
суммарные искажения сигнала вдоль всей цепочки манипуляций с
ним не должны превышать 1-2%.
4.2. Математическая модель системы
В исследуемой системе передачи фигурируют два масштаба ча-
стот: низкие частоты (до нескольких килогерц), характерные для
информационных сигналов и колебаний хаотического модуля, а
также высокие частоты (десятки мегагерц) колебаний радиодиа-
пазона. Сигналы на низких частотах модулируют высокочастот-
ные колебания. При анализе динамических свойств стандартных
радиотехнических систем в таких случаях выделяют «медленные
переменные», описывающие огибающую высокочастотного сиг-
нала, и изучают соответствующие дифференциальные уравнения
для этих медленных переменных.
В предыдущей главе была введена математическая модель си-
стемы с нелинейным подмешиванием информации. Она дала воз-
можность проанализировать основные динамические характери-
стики системы на примере передачи тестовых информационных
сигналов в условиях отсутствия возмущающих факторов. Чтобы
оценить потенциальные результаты влияния последних, в настоя-
щей главе эта модель используется для моделирования несовер-
шенства манипуляций и неидеальности коммуникационного кана-
ла путем параметрического введения специальных возмущающих
факторов.
4.3. Анализ влияния возмущающих факторов
Типичными возмущающими факторами, ухудшающими каче-
ство передачи информации, являются: неидентичность элемен-
тов приемника и передатчика, нелинейные искажения, неравно-
мерность амплитудно-частотных характеристик функциональных
элементов системы и внешние шумы в канале связи. Рассмотрим
влияние этих факторов с точки зрения качества получаемого на
выходе приемника синхронного хаотического отклика.
5 Зак. 18
74 Гл. 4. Эксперименты по передаче информации
Неидентичность элементов. В реальных условиях рас-
стройка параметров элементов хаотических модулей передатчика
и приемника всегда имеет место и влияет на качество передачи
информации.
Расстройка номинального значения хотя бы одного элемента
модуля передатчика по отношению к соответствующему элементу
модуля приемника приводит к появлению на выходе приемника
сигнала рассинхронизации. В качестве примера на рис. 4.2 при-
ведены характерные фрагменты сигнала рассинхронизации и их
О 50 t о 0,2 0,4 0,6 0,8 1,0 1,2 f
a б
в
Рис. 4.2. Влияние возмущающих факторов. Неидентичность элементов: a —
фрагмент сигнала рассинхронизации (Vc2 — Vc2)'> б— спектр мощности сиг-
нала рассинхронизации (на обоих рисунках кривые 1 соответствуют 0,1% рас-
стройке параметров R в передатчике и приемнике, в то время как кривые 2 —
1% расстройке Л); в — сигнал на входе (верхняя реализация) и выходе (нижняя
реализация) приемника
спектры мощности при расстройке номинального значения сопро-
тивления R (7?1, /?2 на рис. 3.1d,e) в передатчике и приемнике на
0,1% (зависимость 1) и 1% (зависимость 2).
Как было отмечено в § 1.4, неидентичность параметров элемен-
тов хаотических модулей передатчика и приемника на основе цепи
Чуа приводит к возникновению «on-off» перемежаемости. Поэтому
в реализациях на рис. 4.2 кроме сигнала рассогласования неболь-
шой амплитуды, пропорциональной величине расстройки пара-
метра, наблюдаются нерегулярные всплески большой амплитуды,
соизмеримые с амплитудой хаотических колебаний на входе при-
емника. Средняя частота этих нерегулярных всплесков растет с
4.3. Анализ влияния возмущающих факторов 75
увеличением расстройки параметра и ведет к резкому увеличению
относительной средней мощности сигнала рассинхронизации т) на
выходе приемника. На рис. 4.2в представлена типичная осцил-
лограмма сигнала на выходе приемника (нижняя реализация) по
сравнению с сигналом на его входе (верхняя реализация) в си-
туации, когда отсутствует информационный сигнал, а номиналы
элементов модулей подобраны с точностью 1%.
Неравномерность амплитудно-частотной харак-
теристики. Неравномерность амплитудно-частотных харак-
теристик функциональных элементов передатчика и приемника
приводит к фильтрации сигнала и изменению его спектральных
свойств. Как правило, такой эффект вызывают ЛС-цепи, выпол-
няющие функции фильтров нижних частот. Поэтому вопрос о
влиянии неравномерности амплитудно-частотных характеристик
на качество синхронного отклика рассматривается ниже на при-
мере характеристики фильтра нижних частот.
Будем полагать, что параметры передатчика и приемника иден-
тичны, выходной сигнал передатчика пропускается через фильтр
нижних частот первого порядка, а причиной де синхронизации от-
клика является лишь искажение сигнала на выходе фильтра по
отношению к сигналу на его входе. Преобразование сигнала филь-
тром описывается уравнением
Тх + х = у, (4.1)
где у — сигнал на выходе передатчика, х — сигнал на входе прием-
ника. Постоянная времени Т определяет частоту среза f фильтра
нижних частот (/ = 1/Т).
a б
Рис. 4.3. Влияние возмущающих факторов. Неравномерность амплитудно-час-
тотной характеристики канала связи: a — зависимость относительной мощности
шума рассинхронизации г) от частоты отсечки f фильтра нижних частот; б —
зависимость отношения сигнал/шум (С/Ш, при р = 1) от частоты отсечки f
фильтра нижних частот
5*
76 Гл. 4. Эксперименты по передаче информации
Как показывает анализ, качество синхронного отклика в рас-
сматриваемом случае определяется соотношением частоты среза f
фильтра и верхней граничной частоты F спектра мощности сиг-
нала на выходе передатчика. При f F наличие фильтра не
нарушает функционирование системы. С другой стороны, сораз-
мерность величин F и f приводит к ухудшению качества син-
хронного отклика и сохраняет эту тенденцию при уменьшении /.
На рис. 4.3 представлены зависимости относительной мощ-
ности шума рассинхронизации т] и отношение сигнал/шум (при
р = 1) от частоты среза f. Как следует из рисунка, т] резко
уменьшается, а отношение сигнал/шум быстро растет при уве-
личении /.
Нелинейные искажения в канале связи. Влия-
ние нелинейных искажений исследовалось на примере кубической
нелинейности
x = y(l- ay2), (4.2)
где у — сигнал на выходе передатчика, ах — сигнал на входе
приемника. Параметр а варьировался в пределах от 0,001, что
соответствует уровню нелинейных искажений 1% от амплитуды
сигнала на выходе передатчика системы, до 0,03 (30%). Зависи-
мость отношения сигнал/шум (при у = 1) на выходе приемника
от степени нелинейного искажения приведена на рис. 4.4а. Она
Рис. 4.4. Влияние возмущающих факторов. Нелинейные искажения и шумы
канала связи. Отношение сигнал/шум на выходе приемника: а — нелинейные
искажения в канале связи (а — параметр нелинейных искажений); б — адди-
тивный шум в канале связи (/ — граничная частота шума): 1 — уровень шума
-60 дБ; 2 50 дБ; 3 40 дБ
имеет ту же тенденцию, что и в случае амплитудно-частотных ис-
кажений. В частности, в обоих случаях максимально достижимое
отношение сигнал/шум равно 35-40 дБ.
4.4. Экспериментальный макет и его характеристики 77
Влияние аддитивного, нормально распределен-
ного шума. Влияние внешних шумов сказывается на функцио-
нирование системы при беспроводной передаче информации.
В численных экспериментах было рассмотрено влияние адди-
тивного, нормально распределенного шума в канале на качество
синхронного хаотического отклика и информационного сигнала на
выходе приемника. Полоса частот шума ограничивалась путем
пропускания его через фильтр нижних частот первого порядка, а
мощность шума фиксировалась на выходе фильтра.
На рис. 4.46 представлены зависимости отношения сигнал/шум
(р = 1) от частоты среза f для уровней шума —40 дБ, —50дБ,
—60 дБ. Анализ зависимостей свидетельствует о том, что нали-
чие внешнего шума в полосе частот несущего сигнала ухудшает
отношение сигнал/шум на выходе приемника (в данном случае
на 13-15 дБ) по сравнению с ситуацией в канале (вход прием-
ника). Такая тенденция наблюдается при различных уровнях
мощности шума и объясняется потерями в качестве при выделе-
нии информационного сигнала из смеси с хаотическим сигналом.
На рис. 4.45 зона неопределенности 2 связана с конечной дли-
ной временных выборок и нерегулярным появлением всплесков
рассинхронизации.
4.4. Экспериментальный макет и его характеристики
Основная цель экспериментов заключалась в реализации усло-
вий для передачи в радиодиапазоне аналоговой информации (на-
пример, речевой) с использованием динамического хаоса.
Идея экспериментов состояла в совместном использовании
низкочастотных хаотических модулей, рассмотренных в гл. 3 и
функциональных элементов одной из стандартных коммуникаци-
онных систем радиодиапазона.
Базовая коммуникационная система. В качестве
базовой системы использованы переносные малогабаритные прие-
мо-передающие станции с амплитудной модуляцией несущей
(27МГц), позволяющие передавать речевые сигналы с частотой до
2кГц (рис. 4.5). При работе станций осуществляются следующие
манипуляции с информационным сигналом.
В режиме «передача» речевой сигнал с выхода встроенного в
станцию микрофона усиливается и поступает на модулятор. Моду-
лятор выполнен в виде транзисторного усилительного каскада, на
вход которого подается сигнал кварцевого генератора (27МГц), а
низкочастотный речевой (модулирующий) сигнал аддитивно скла-
дывается с напряжением питания каскада, модулируя тем самым
его коэффициент усиления. Затем радиосигнал усиливается по
мощности и поступает на вход антенной системы станции.
78 Гл. 4. Эксперименты по передаче информации
В режиме «прием» радиосигнал с выхода антенной системы
усиливается и подается на демодулятор. Демодулятор предста-
вляет собой смеситель, на один вход которого поступает сигнал
кварцевого генератора, а на другой — указанный радиосигнал.
б
Рис. 4.5. Базовая коммуникационная система: a — внешний вид приемо-пере-
дающей станции и хаотического модуля; б— хаотический модуль, встроенный
в станцию; 1 — приемо-передающая станция, 2 — хаотический модуль
Выходной сигнал демодулятора фильтруется, оставляя в себе толь-
ко низкочастотную компоненту. Следующий функциональный
элемент — усилитель с автоматической регулировкой усиления
(АРУ), пройдя через который низкочастотный сигнал усиливается
и поступает в акустическую систему станции.
Хаотический модуль передатчика (рис. 4.6). Мо-
дуль имеет ту же конструкцию, которая использовалась в экспери-
ментах по передаче речевых и музыкальных сигналов в диапазоне
частот от 0 до 5 кГц (см. гл. 3). Однако поскольку применяе-
мые приемо-передающие станции способны передавать сигнал с
полосой частот только до 2 кГц, соответственно была уменьшена и
полоса частот хаотического модуля. С этой целью увеличены номи-
налы основных схемообразующих элементов модуля (Li = 40 мГн,
С\ = 0,1 мкФ, С2 = 0,015мкФ). Таким образом, хаотический мо-
дуль передатчика представляет собой устройство, в автономном
режиме генерирующее хаотические колебания в диапазоне частот
0-2 кГц (рис. 4.7а).
Элементы, представленные на принципиальной схеме (рис. 4.6),
выполняют следующие функции:
Fl, F2 — буферные усилители,
F3, F5 — сумматор,
4.4. Экспериментальный макет и его характеристики
79
F7, F8 — нелинейный элемент (диод Чуа),
Rl, R2, LI, Cl, С2 — ЯЯС-фильтр,
R8, R10, СЗ, С4 — ЯС-фильтр.
Настройка модуля осуществляется с помощью переменных со-
противлений R1 и R8.
Рис. 4.6. Хаотический модуль передатчика
Ввод информационного (речевого) сигнала в модуль осущест-
вляется через буферный усилитель F6 с регулировкой усиления
Рис. 4.7. Характеристики сигналов: a — спектры мощности выходного сигнала
хаотического модуля (/) и передаваемого речевого сигнала (2)\ б — осцилло-
грамма выходного сигнала передатчика при наличии речевого сигнала
(R5), что позволяет варьировать уровень информационного сиг-
нала по отношению к уровню хаотического сигнала. Регулировка
80 Гл. 4. Эксперименты по передаче информации
усиления предусмотрена и для выходного сигнала модуля (R20-F4)
с тем, чтобы обеспечить необходимую глубину модуляции и по-
следующее эффективное усиление радиосигнала. Операционные
усилители F реализованы на микросхеме КР1401УД26.
Хаотический модуль приемника (рис. 4.8). Функция
модуля — выделить речевой сигнал из его смеси с низкочастотным
хаотическим сигналом. Модуль является пассивным устройством
и состоит из тех же основных элементов (с теми же номиналами),
Рис. 4.8. Хаотический модуль приемника
что и модуль передатчика. Смесь хаотического и информацион-
ного сигналов поступает на вход Ц) и через буферный усилитель
F6 попадает в хаотический модуль. Усилитель F6 несет на себе
очень важную функцию. Его назначение — восстановить уровень
входного сигнала (посредством регулировки усиления R5) до ве-
личины, равной уровню выходного сигнала хаотического модуля
передатчика, что является необходимым условием восстановления
речевой информации на выходе модуля приемника.
Усилитель F5 (R18) также выполняет функцию буфера и при
необходимости позволяет усиливать выходной сигнал для даль-
нейшей обработки или озвучивания в акустической системе.
С помощью элементов С7, R23 и R13, С5 сформированы, соот-
ветственно, фильтры высоких и нижних частот, предназначенные
для устранения помеховых сигналов, находящихся вне полосы ча-
стот выделяемого речевого сигнала.
4.4. Экспериментальный макет и его характеристики
81
Остальные элементы модуля выполняют следующие функции:
Fl, F2, F4 — буферные усилители,
F3 — вычитатель,
F7, F8 — нелинейный элемент,
Rl, R2, LI, Cl, С2 — jRLC-фильтр,
R8, R10, СЗ, С4 — /?С-фильтр.
По аналогии с хаотическим модулем передатчика, сопротивле-
ния R1 и R8 являются элементами настройки, а операционные
усилители F реализованы на микросхеме КР1401УД26.
Макет экспериментальной коммуникационной
системы. Для проведения экспериментов использованы три
станции (рис. 4.9). Первая из них со встроенным хаотическим мо-
дулем выполняет роль передатчика коммуникационной системы.
Рис. 4.9. Блок-схема коммуникационной системы: 1 — передатчик, 2 — прием-
ник, 3 — аттенюатор, — контрольный приемник, 5 — встроенный микрофон,
6 — низкочастотный усилитель, 7— хаотический модуль передатчика, 8— хао-
тический модуль приемника, 9 — модулятор, 10 — усилитель радиодиапазона,
11 — антенна, 12 — демодулятор, 13 — фильтр, Ц — усилитель с автома-
тической регулировкой усиления, 15 — акустическая система, S — исходный
информационный чигнал, S' — сигнал, выделяемый приемником
В ней речевой сигнал с выхода микрофона выступает по отноше-
нию к хаотическому модулю в качестве информационного сигнала
и подается на его вход. Напротив, выходной сигнал модуля, пред-
ставляющий собой смесь речевого и хаотического сигналов, высту-
пает в роли информационного сигнала по отношению к станции.
82
Гл. 4. Эксперименты по передаче информации
После усиления он модулирует амплитуду несущей (27 МГц) и да-
лее, через антенную систему, поступает в канал связи (рис. 4.76).
Функция второй станции заключается в усилении принятого
из канала связи радиосигнала, его демодуляции, фильтрации и
усилении низкочастотной смеси речевого и хаотического сигналов,
а также в выделении информационной компоненты из смеси. По-
следняя манипуляция осуществляется с помощью хаотического
модуля, встроенного во вторую станцию. На вход модуля поступает
сигнал после усилителя с автоматической регулировкой усиления,
а выходной сигнал модуля подается на акустическую систему. Эта
станция выполняет функцию приемника системы.
Наконец, третья станция не содержит хаотических модулей и
выполняет функцию контрольного приемника.
4.5. Передача речевой информации
в радиодиапазоне по кабелю
Первая группа экспериментов посвящена передаче речевой ин-
формации в радиодиапазоне по проводным линиям. Канал связи
представлен в виде отрезка длинного радиокабеля с аттенюатором,
суммарное ослабление которых составляет 70дБ. Эксперименты
преследуют следующие цели:
— исследование эффектов, связанных с переносом низкоча-
стотных сигналов в радиодиапазон и обратно, на получение син-
хронного хаотического отклика и передачу речевой информации,
— настройка хаотических модулей и минимизация искажений
передаваемого сигнала в тракте радиоканала для подготовки бес-
проводных экспериментов.
Перед введением хаотических модулей в станции осуществлена
их тщательная настройка (точность соответствия параметров в
пределах 0,5-0,8%). Это необходимо для того, чтобы облегчить
ситуацию с прохождением сигнала в тракте радиоканала, но еще
не достаточно для получения синхронного отклика в приемнике.
В результате настройки хаотических модулей и проведении
вспомогательных низкочастотных экспериментов получен син-
хронный отклик, характеризуемый величиной т] ~ 9-10“4. Однако
при введении модулей в станции и проведении экспериментов в
радиодиапазоне т] увеличилось до значения 10“2. Увеличение т)
объясняется появлением искажений сигнала в радиоканале. Для
их минимизации проведена коррекция амплитудно-частотных ха-
рактеристик функциональных элементов базовой коммуникацион-
ной системы. Процедура коррекции заключалась в анализе вход-
ного и выходного сигналов каждого функционального элемента
и, при выявлении искажений в структуре низкочастотной ком-
поненты сигнала, в дополнительной его подстройке. В резуль-
тате проведения этой процедуры элемент за элементом получена
4.6. Передача речевой информации в радиодиалазоне по эфиру 83
суммарная амплитудно-частотную характеристика тракта радио-
канала, практически не зависящая от частоты в диапазоне распо-
ложения спектра мощности несущего хаотического сигнала. Это,
в свою очередь, привело к снижению т/ до значения 1,6 • 10“3.
На следующем этапе проведены эксперименты по передаче ре-
чевых сигналов. Варьируемой величиной в экспериментах явля-
ется уровень (мощность) речевого сигнала по отношению к хаоти-
ческому сигналу модуля передатчика д. При д < 2,5-10“3 речевой
сигнал в приемнике трудно различим и абсолютно не прослушива-
ется в контрольной станции. Увеличение д приводит к улучшению
качества воспроизводимого речевого сигнала в приемнике. Рису-
нок 4.10 демонстрирует осциллограммы фрагментов исходного ре-
чевого сигнала и сигналов на выходе приемника и контрольной
Рис. 4.10. Выходные сигналы. Верхние осциллограммы на фотографиях пред-
ставляют фрагменты речевого сигнала S, в то время как нижние осцилло-
граммы — сигналы на выходах приемника (а) и контрольной станции (б)
станции при д = 2,25 • 10“2 (С/Ш~ 11,5 дБ в приемнике). Нако-
нец, при д > 4-10“2 сигнал начинает прослушиваться в контроль-
ной станции, хотя и еще трудно различим. Хаотический модуль
передатчика позволяет увеличивать д до 1,6 • Ю-1 без изменения
хаотического режима модуля. При этом отношение сигнал/шум на
выходе модуля приемника достигает значения 20 дБ.
4.6. Передача речевой информации
в радиодиапазоне по эфиру
Для проведения экспериментов по беспроводной передаче рече-
вой информации в радиодиапазоне кабель, соединяющий передаю-
щую и приемную станцию, был удален, а радиосигнал излучался
и принимался антеннами, соответственно, передатчика и прием-
ника. Расстояние между станциями варьировалось в пределах ла-
бораторного помещения (10-15 м). В отсутствие информационного
84
Гл. 4. Эксперименты по передаче информации
сигнала было зафиксировано увеличение сигнала рассогласования
на выходе вычитателя приемника до величины т/ = 1,2 • 10”2.
Подстройкой модулей и ограничением полосы частот информа-
ционного канала в приемнике получить более качественный
синхронный отклик не удалось. Главными причинами повыше-
ния уровней шумов являются сильные внешние помехи в диа-
пазоне частот используемых приемо-передатчиков (27 МГц) и
переотражения излучаемого сигнала внутри лабораторного поме-
щения, являющиеся следствием работы в ближней зоне исполь-
зуемых приемо-передатчиков.
Для изучения влияния внешних возмущающих факторов на
качество передачи первоначально эксперименты проводились с си-
нусоидальным сигналом. На рис. 4.11а приведены осциллограммы
Рис. 4.11. Сигналы на выходе приемника: a — тестовый сигнал; б — рече-
вой сигнал. Верхние осциллограммы на фотографиях представляют исходные
сигналы 5, нижние осциллограммы — сигналы на выходе приемника S'
исходного и выделяемого тонового сигналов с частотой 600 Гц и
р = 4 • 10“2. Как видно из рисунка, тестовый сигнал различим,
но его отдельные фрагменты заметно искажены. Поэтому с уче-
том возросшего т] для разборчивого выделения в приемнике по-
требовалось увеличить уровень речевого сигнала на входе хаоти-
ческого модуля передатчика до величины р = 1,2 • 10-1-1,6 • 10"1
(рис. 4.116). Такой уровень информационного сигнала позволял
получить С/Ш« 11 дБ, но приводил к частичной прослушиваемо-
сти речи в контрольной станции, где С/Ш= 10 дБ.
4.7. Выводы
Представленные в этой главе результаты экспериментов свиде-
тельствуют о принципиальной возможности проводной и беспро-
водной передачи информации в радиодиапазоне с использованием
хаотических сигналов. Вместе с тем эксперименты выявили и про-
блемы, которые необходимо решить для того, чтобы осуществлять
4.7. Выводы
85
передачу информации с качеством, сопоставимым с уровнем суще-
ствующих коммуникационных систем. Проанализируем эти про-
блемы более подробно.
Как было обнаружено, в условиях действия возмущающих фак-
торов для качественной передачи информации необходимо увели-
чивать уровень вводимого в передатчик информационного сигнала.
С другой стороны, при необходимости обеспечения конфиденци-
альности передачи следует понижать уровень информационного
сигнала. Компромиссным решением этих противоречащих друг
другу требований выступает улучшение качества синхронного
хаотического отклика в приемнике (уменьшение т/). Другим воз-
можным решением является изменение способа ввода информации
в передающий хаотический модуль.
Из факторов, влияющих на качество отклика, выделим те,
которые существенны в описанных экспериментах.
Соответствие параметров одинаковых по функ-
циональному назначению элементов в передаю-
щем и принимающем хаотических модулях.
Точность соответствия параметров модулей в экспериментах до-
стигала 0,5%. Такая высокая точность достигалась путем тща-
тельного индивидуального подбора элементов. Однако даже она
не обеспечивала качества синхронного отклика выше т? ~ 10“3.
Причиной является специфика используемых в основе модулей
генераторов на базе цепи Чуа. Отсутствие абсолютной устойчи-
вости отклика в них приводит, как отмечалось, к появлению
«on-off» перемежаемости и, как следствие, к ухудшению качества
отклика при любых, даже самых малых расстройках параметров.
Поэтому одним из резервов повышения т/ следует признать разра-
ботку специальных «прецизионных» генераторов хаоса, которые
обладают простой структурой, обеспечивают абсолютную устойчи-
вость отклика в паре «ведущая-ведомая» система и позволяют по-
лучать хорошее качество синхронизации при менее жестких тре-
бованиях на точность соответствия параметров элементов. Другим
возможным направлением решения проблемы «соответствия пара-
метров» является привлечение цифровых сигнальных процессоров
для создания генераторов хаоса и, соответственно, принимающих
и передающих модулей на их основе.
Искажения сигнала в канале связи. Здесь речь
идет о суммарных амплитудных и фазовых искажениях сигнала,
выходящего из передающего хаотического модуля, на пути его про-
хождения к принимающему модулю. Для получения качествен-
ного отклика искажения должны либо отсутствовать, либо быть
минимальными. Если первое является труднореализуемым, то
второе в принципе возможно. Однако, как следует из эксперимен-
тов, даже в этом случае минимизация искажений не гарантирует
86
Гл. 4. Эксперименты по передаче информации
удовлетворительного результата. Дело в том, что на пути следова-
ния от передающего к принимающему модулю хаотический сиг-
нал претерпевает ряд преобразований, даже небольшие искажения
в процессе которых интегрально могут приводить к значитель-
ным изменениям характеристик передаваемого сигнала. Функцио-
нальные элементы, осуществляющие указанные преобразования,
можно объединить и представить в виде эквивалентного фильтра
канала связи. Тогда проблема заключается в том, чтобы на входе
принимающего модуля компенсировать искажения хаотического
сигнала, полученные им в результате прохождения эквивалентного
фильтра. Как минимизация искажений, так и их компенсация
являются трудоемкими процессами. Поэтому актуальной является
разработка методов передачи, учитывающих фильтрацию в канале
связи (особенно для радио- и более высокочастотных диапазонов).
В случае решения проблемы с соответствием параметров хаоти-
ческих модулей искажения передаваемого сигнала в канале связи
могут являться одной из основных причин десинхронизации
отклика. Поэтому представляется целесообразным рассмотреть
также варианты с уменьшением числа необходимых преобразова-
ний над сигналом в канале связи. В предельном случае указан-
ный подход означает формирование хаотического сигнала непо-
средственно в радиодиапазоне и передачу его к приемнику без
использования целого ряда устройств (а значит, и преобразований
над сигналом), ответственных за перенос низкочастотных сигна-
лов в радиодиапазон и обратно. Такие «прямохаотические» си-
стемы связи могут решить или, по крайней мере, ослабить про-
блему канала.
Влияние шумов в канале связи. Если формировать
хаотический сигнал в низкочастотной области, там же вводить
в него информацию, после чего результирующий сигнал перено-
сить в радиодиапазон, используя стандартные методы модуляции,
то последние и будут определять помехозащищенность передачи.
В этом смысле применение в экспериментах приемо-передающих
станций с амплитудной модуляцией несущей, возможно, не явля-
ется оптимальным решением. Известно, например, что с точки
зрения влияния шумов системы с частотной (фазовой) модуляцией
более помехоустойчивы. Поэтому не лишено оснований предполо-
жение о том, что использование частотной модуляции для фор-
мирования радиосигнала может облегчить ситуацию с шумами в
канале связи для исследуемой системы.
Глава 5
ПРЕЦИЗИОННЫЕ ГЕНЕРАТОРЫ ХАОСА
Качество передачи информации в системах связи с синхрон-
ным хаотическим откликом напрямую зависит от качества послед-
него. Как отмечалось в гл. 1, идеальный отклик может быть получен
только в случае отсутствия возмущающих факторов. В реальных
условиях получение синхронного хаотического отклика высокого
качества затруднено, что приводит к появлению на выходе хаоти-
ческого модуля приемника дополнительных шумов десинхрониза-
ции и, тем самым, ухудшает качество передачи. Одной из при-
чин является неидентичность параметров одинаковых элементов
в хаотических модулях передатчика и приемника. Если для бес-
проводных систем эта причина оказывает свое негативное влияние
на качество передачи наряду с возмущающими факторами канала
связи, то в проводных системах она является основной.
При проведении численных экспериментов точность задания
параметров элементов может быть настолько высока, насколько ее
обеспечивает используемый в процессе моделирования персональ-
ный компьютер. При реализации хаотических модулей, например,
на сигнальных процессорах влияние неидентичности элементов
также может быть сведено к минимуму [37, 135]. С другой сто-
роны, в аналоговых конструкциях модулей полностью избежать
неидентичности элементов не удается. Поэтому в этом случае це-
лесообразно говорить об уменьшении влияния рассматриваемого
возмущающего фактора.
Как в реальных условиях бороться с этим фактором? Так как
каждый элемент, входящий в состав модуля передатчика, потен-
циально может быть неидентичен по отношению к своему аналогу
в модуле приемника, то общий подход к решению проблемы связан
с построением (разработкой) модулей простой конфигурации с ми-
нимально возможным числом элементов. Кроме того, в различных
модулях с приблизительно одинаковым числом элементов важное
значение играет конкретная структура модулей. Так, рис. 5.1 ил-
люстрирует влияние расстройки параметров элементов модулей
на качество синхронного хаотического отклика для случаев, когда
основу конструкции модулей составляет кольцевой генератор с 1,5
степенями свободы (кривая 1) и модифицированная цепь Чуа
(кривая 2). Как видно из рисунка, первый генератор при прочих
88
Гл. 5. Прецизионные генераторы хаоса
равных условиях позволяет получать более качественный синхрон-
ный отклик по сравнению с цепью Чуа. Причина этого явления
обсуждалась в гл. 1 и связана с абсолютной устойчивостью отклика
Рис. 5.1. Влияние расстройки параметров элементов (С) хаотических модулей
передатчика и приемника на качество синхронного отклика т]. 1 — хаотические
модули на основе кольцевого генератора с 1,5 степенями свободы; 2 — хаотиче-
ские модули на основе цепи Чуа
(отсутствие «on-off» перемежаемости) в паре ведущая-ведомая си-
стема на базе кольцевого генератора.
Как один из способов борьбы с неидентичностью параметров
может рассматриваться индивидуальный подбор одинаковых эле-
ментов с целью обеспечения высокой степени соответствия их па-
раметров. Однако такой подход реализуем, в основном, на этапе
макетирования при проведении физических экспериментов и бес-
перспективен в случае перехода на массовое производство модулей.
Вопрос о применении интегральной технологии при производ-
стве хаотических модулей с точки зрения ее возможностей по вос-
произведению параметров модулей до сих пор остается открытым,
так как существующий опыт в этой области невелик [24, 120, 121,
126-128, 149].
Одним из выходов в сложившейся ситуации является разра-
ботка генераторов хаоса, обладающих прецизионными свойствами
и составляющих основу конструкции хаотических модулей пере-
датчика и приемника. Этой проблеме посвящена данная глава.
5.1. Критерий прецизионности генераторов
Сочетание слов «прецизионность» и «хаос» в формулировке про-
блемы, на первый взгляд, может показаться противоречивым.
Действительно, характерное для динамического хаоса экспоненци-
5.1. Критерий прецизионности генераторов
89
альное разбегание близлежащих траекторий в фазовом простран-
стве динамической системы делает ее чувствительной по отноше-
нию к параметрам и начальным (стартовым) условиям и приводит
к случайно-подобному поведению системы. Но другое свойство ди-
намического хаоса — его детерминированность — позволяет реа-
лизовывать воспроизводимые (в смысле близости или совпадения
основных характеристик) хаотические режимы в динамических
системах с одинаковой структурой. Для этого необходимо обеспе-
чить как можно более точное соответствие основных параметров
и начальных условий систем. Принимая во внимание указанные
свойства, необходимо пояснить, какое содержание вкладывается в
термин «прецизионный генератор хаоса» и что является крите-
рием прецизионности в данной работе.
В дальнейшем будем называть генератор хаотических сигналов
прецизионным, если он обладает следующими свойствами:
— сохраняет совокупность хаотических мод и переходов между
ними от образца к образцу;
— воспроизводит хаотические режимы при замене любого эле-
мента на аналогичный;
— имеет низкую чувствительность к изменениям внешних
условий (например, температуры);
— в реализованной на его основе паре ведущая-ведомая си-
стема наблюдается синхронный хаотический отклик, причем ве-
домая система демонстрирует абсолютную устойчивость отклика;
— имеет соответствие между результатами моделирования (ма-
тематическая модель, схемотехническое моделирование) и физи-
ческим экспериментом.
В контексте рассматриваемой в работе проблемы, в качестве
критерия прецизионности генератора будем рассматривать далее
возможность получения высококачественного синхронного хаоти-
ческого отклика в паре ведущая-ведомая система, основу которой
составляет указанный генератор.
Выступая в качестве критерия прецизионности, хаотический
синхронный отклик может быть положен в основу методики срав-
нения различных образцов генераторов хаоса одинаковой струк-
туры на предмет соответствия их параметров. Действительно, как
сравнить, например, два генератора хаоса одинаковой структуры,
но с возможно различающимися параметрами? Стартуя с разных
начальных условий или в разные моменты времени, реализации
сигналов с выходов генераторов, в силу специфики хаотической
динамики, могут значительно отличаться друг от друга даже в
случае идентичности параметров. Поэтому прямое сопоставление
реализаций может не дать оснований для заключения о результате
сравнения. С помощью существующей измерительной аппаратуры
можно оценить и сопоставить статистические характеристики ге-
нераторов (спектры мощности, функции распределения и т.д.).
90
Гл. 5. Прецизионные генераторы хаоса
Однако являясь усредненными по времени характеристиками, они
также не гарантируют соответствия параметров генераторов.
С другой стороны, если возможна декомпозиция генераторов
и образование на их основе пары ведущая-ведомая система, то
можно осуществить проверку степени идентичности параметров
генераторов, причем критерием идентичности будет являться на-
личие на выходе ведомой системы синхронного хаотического
отклика. В этом случае ведомая система является нелинейным со-
гласованным фильтром и играет роль определителя «свой-чужой».
«Свой» сигнал, поступая на вход ведомой системы, приводит к по-
явлению на ее выходе своей копии, в то время как «чужой» сигнал
проходит через систему со значительными искажениями. Если
параметры ведущей и ведомой систем идентичны, то сигнал с вы-
хода ведущей системы является «своим» по отношению к ведомой
системе и наоборот. Степень соответствия параметров систем при
этом оценивается по качеству синхронного отклика. Отсутствие
синхронного отклика свидетельствует о приходе на ведомую си-
стему «чужого» сигнала, т. е. действительно постороннего сигнала
или сигнала, соответствующего случаю разбаланса параметров ве-
дущей и ведомой систем.
5.2. Структура прецизионных генераторов хаоса
Рассмотрим структуру прецизионных генераторов хаотических
сигналов и требования, предъявляемые к их конструкциям.
К настоящему моменту известно большое число генераторов
хаоса, отличающихся как по структуре, так и по типовым хаоти-
ческим режимам. Однако их общим свойством является то, что
они представляют собой совокупность линейных и одного или не-
скольких нелинейных элементов. Линейные элементы могут быть
пассивными (сопротивления, конденсаторы, катушки индуктивно-
сти) и активными (усилители и т.п.). Функцию нелинейных эле-
ментов могут выполнять как стандартные элементы (диоды, тран-
зисторы и т.п.), так и специально разработанные приборы или
схемы, обладающие нелинейной сигнальной характеристикой.
Одним из сформулированных выше требований к прецизион-
ным генераторам является воспроизводимость хаотических режи-
мов в различных образцах. С другой стороны, для того чтобы два
или более генератора одной и той же структуры демонстрировали
режимы с высокой степенью соответствия, необходимо попарно
обеспечить идентичность всех составляющих его одинаковых эле-
ментов. Что касается линейных элементов, то их можно подобрать
с довольно высокой точностью. Идентичность же нелинейных
элементов подразумевает совпадение их функций преобразования
сигнала (сигнальных характеристик). В случае использования
стандартных нелинейных элементов, обладающих гладкими функ-
циями преобразования, подбор двух одинаковых элементов, как
5.3. Генератор хаоса с 1,5 степенями свободы
91
правило, представляет собой довольно сложную проблему, а для
специальных схем с такого вида функциями и совсем труднораз-
решимую.
Решить эту проблему можно путем применения нелинейных
элементов с воспроизводимыми функциями преобразования. При-
мерами указанных функций являются кусочно-линейные функ-
ции, состоящие из нескольких линейных сегментов. Основная
идея при этом базируется на возможности воспроизведения харак-
теристики нелинейного элемента на каждом из сегментов вслед-
ствие его линейности.
Однако применение элементов с кусочно-линейными характе-
ристиками еще не является достаточным условием прецизионно-
сти генераторов. Конструкция нелинейного элемента должна обес-
печивать не только кусочно-линейную сигнальную характеристику,
но и точное ее воспроизведение в различных образцах. Генера-
торы с нелинейными элементами, не удовлетворяющие этому тре-
бованию, не могут считаться прецизионными. Так, генераторы
[175, 192] имеют кусочно-линейные сигнальные характеристики
нелинейных элементов и позволяют получать разнообразные хао-
тические сигналы. Но в качестве нелинейных элементов в них ис-
пользуются диоды, которые имеют значительный разброс формы
характеристик. Другими словами, необходима разработка нели-
нейных элементов, конструкции которых содержат только линей-
ные компоненты.
Не менее важным фактором является и конкретная форма
кусочно-линейной характеристики, которая, с одной стороны,
должна обеспечивать генерацию хаотических сигналов, а с другой
стороны, создавать условия для получения синхронного хаотиче-
ского отклика, устойчивого по отношению к небольшому откло-
нению параметров генераторов или другим возмущающим факто-
рам, всегда существующим на практике. Проиллюстрируем это
на примере цепи Чуа, являющейся источником хаоса с кусочно-
линейной сигнальной характеристикой нелинейного элемента,
схемотехническая реализация которого допускает использование
только линейных элементов. Но ведущая-ведомая система на ее
основе оказывается очень чувствительной к возмущающим факто-
рам и, в частности, к разбросу параметров цепи в передатчике и
приемнике (рис. 5.1). Эта чувствительность приводит к появле-
нию «on-off» перемежаемости, проявляющейся в непериодически
возникающих нарушениях синхронности хаотического отклика, и
препятствует отнесению генератора к числу прецизионных.
5.3. Генератор хаоса с 1,5 степенями свободы
Структура генератора. Генератор, рассматриваемый ниже, при-
надлежит к классу хаотических кольцевых автоколебательных си-
стем [32], в которых составляющие генератор элементы последо-
92 Гл. 5. Прецизионные генераторы хаоса
вательно соединяют в схему, образующую единое кольцо обратной
связи. Соединение элементов генератора осуществляется через
буферные устройства, которые обеспечивают однонаправленность
обратной связи генератора и развязку между элементами. Чтобы
реализовать указанные свойства, буферные устройства должны
иметь большое входное и малое выходное сопротивления, обла-
дать единичным коэффициентом передачи в прямом направлении
и нулевым в обратном.
Блок-схема простейшего генератора этого класса изображена
на рис. 5.2а. Генератор состоит из нелинейного элемента F(z)
(подсистема 1) с амплитудным преобразованием входного сиг-
нала г, /?1 Ci-фильтра нижних частот (подсистема 2 (рис. 5.26)),
Рис. 5.2. Кольцевой генератор хаоса с 1,5 степенями свободы: a — блок-схема
генератора; б — структура подсистем генератора
/?2^2С2-фильтра нижних частот (подсистема 3 (рис. 5.26)) и явля-
ется автоколебательной системой с 1,5 степенями свободы. Буфер-
ные каскады реализованы на операционных усилителях.
Динамика такого генератора с характеристикой нелинейного
элемента
F(z) = Mzexp (-z2), (5.1)
где М — коэффициент усиления, хорошо изучена (см., например,
[32]) и включает в себя разнообразные хаотические режимы с ши-
рокими зонами устойчивости режимов в пространстве управляю-
щих параметров генератора. Форма характеристики (5.1) предста-
влена на рис. 5.3а. Как видно из рисунка, она является гладкой
функцией, что в силу указанных выше причин делает пробле-
5.3. Генератор хаоса с 1,5 степенями свободы
93
матичным воспроизводимость генератора, а следовательно, и его
пр ецизионно сть.
Чтобы сделать генератор воспроизводимым, сохранив при
этом разнообразие хаотических режимов, используем нелинейный
Рис. 5.3. Сигнальная характеристика нелинейного элемента: a — гладкая ха-
рактеристика; б — кусочно-линейная характеристика
элемент с кусочно-линейной пятисегментной характеристикой
(рис. 5.36), сохраняющей подобие с характеристикой (5.1) и пред-
ставляемой в виде
F(z) = М
k + ^il— к — ^il + (к — -®2| — к + ^|)х
(5-2)
где Ei, Е2 — константы, М — коэффициент усиления. Конкрет-
ный выбор £?i, Е2 и М однозначно определяет характеристику
(5.2). Наличие внешних ограничивающих сегментов связано с ре-
ально существующим ограничением уровня амплитуд выходных
сигналов в различных устройствах, применяемых в электронике.
Математическая модель. Динамические режимы генератора
описываются с помощью дифференциальных уравнений, полу-
чаемых из законов Кирхгофа для подсистем-четырехполюсников
(рис. 5.26).
Обозначая напряжения на конденсаторах С\ и С2 через Ucx и
Uc2 соответственно, рассмотрим каждую из трех подсистем.
Подсистема 1 представляет собой четырехполюсник с не-
линейной функцией преобразования амплитуды входного сигнала
F(z) (5.2). Входным сигналом для нее является выходной сигнал
подсистемы 3, т.е. напряжение Uc2- Таким образом, выходным
сигналом подсистемы 1 является напряжение F(t7c2).
Подсистема 2 представляет собой фильтр нижних частот
первого порядка, на вход которого подается напряжение F(J7c2),
а выходным сигналом является Uc^ В соответствие со вторым
законом Кирхгофа, и с учетом большого входного сопротивления
буферного каскада, подсоединенного к выходу подсистемы, зави-
94 Гл. 5. Прецизионные генераторы хаоса
симость между напряжениями описывается уравнением
C^Uc^FtUcJ-U^. (5.3)
Подсистема 3 является фильтром нижних частот второго
порядка с входным напряжением Ucx и выходным Uc2 • По анало-
гии с подсистемой 2, применение закона Кирхгофа дает следующее
уравнение:
L2C2Uc2 + C2R2Uc2 = UC1 - UC2. (5.4)
Объединение (5.3) и (5.4) приводит к системе дифференциаль-
ных уравнений, описывающих динамические режимы генератора:
CrRyUc, =F(Uc2)-UC1, ,rea
L2C2Uc2 + C2R2Uc2 = UC1 -Uc2.
Если обозначить Ucx = я, Uc2 = z, CiRi = Т, R2/L2 =
= a, 1/(L2C2) = cj2 и ввести новую переменную у = (dUc2/di) —
— R2Uc2/L2, то систему (5.5) можно представить в виде
F(z) — х . о, ч
т =--------, y = w(x-z), z = y-az. (5.6)
Система (5.6) позволяет использовать стандартные численные
методы решения дифференциальных уравнений (например, ме-
тод Рунге-Кутта) для анализа динамических режимов генератора.
Результатом решения системы являются зависимости x(t) и z(t).
Изменяя параметры системы (М, Т, о;, a, Ei, Е2) и анализируя
получаемые реализации т(/), z(£), можно исследовать режимы ге-
нератора.
Рассмотрим особенности возникновения различных колеба-
тельных режимов в модели генератора, описываемого системой
(5.6). Система уравнений имеет три положения равновесия
(ж, у, z)i = (0, 0, 0), (5.7)
О Д /Г Z?
(х,у,г)2,з = ±^(1,а,1). (5.8)
Первое из них существует при всех значениях М. Второе и
третье положения равновесия возникают при М > 1. При прохо-
ждении параметра М через бифуркационное значение М = 1 нуле-
вое положение теряет устойчивость (рис. 5.4а на цветной вклейке).
Рождающиеся при этом два ненулевых положения равновесия на-
ходятся на значительном расстоянии от начала координат и изна-
чально являются неустойчивыми. Одновременно с их появлением
5.3. Генератор хаоса с 1,5 степенями свободы
95
вокруг положений равновесия возникают устойчивые предельные
циклы конечных размеров. Автоколебания, соответствующие этим
предельным циклам, имеют частоту, близкую к резонансной ча-
стоте фильтра второго порядка.
дБ
20
0
-20
-40
-60
-80
-100
200 300 400 500 t
bJ
0 I f
Рис. 5.5. Форма сигнала на выходе подсистемы 2 (17С1 = z), его спектр мощности
и фазовый портрет в плоскости х, z (z = Uc2), а также форма характеристики
нелинейного элемента для представленного хаотического режима: a — М = 2,8,
а = 0,22, Т = 3, ы = 1, Ei = 0,5, Е2 = 2; б — М = 5, а = 0,22, Т = 3,
= 1, Ei = 0,5, Е2 = 2
При увеличении М регулярные колебания теряют устойчи-
вость и после ряда бифуркаций удвоения становятся хаотическими
(рис. 5.45, 5.5а). На следующем этапе колебания охватывают все
три положения равновесия. Хаотический аттрактор становится
похожим на «двойную спираль» (рис. 5.45, 5.56).
96
Гл. 5. Прецизионные генераторы хаоса
Реализация нелинейного элемента. Практическая значимость
рассматриваемого генератора определяется тем, насколько физи-
чески реализуем нелинейный элемент с характеристикой (5.2).
Аналоговая схема. Ниже предлагается конструкция
нелинейного элемента, содержащая операционные усилители и
Рис. 5.6. Аналоговая реализация нелинейного элемента: a — принципиальная
схема; б — эпюры напряжений в узлах схемы
линейные пассивные компоненты. На рис. 5.6а представлена
его принципиальная схема, а на рис. 5.6d приведены эпюры
a
б
г
д
2 2.5 3 3.5 4 4.5 5 5.5 6
М
е
Рис. 5.4. Генератор хаоса с 1,5 степенями свободы. Численный эксперимент: Т= 3,
а = 0,22, а)=1, Е\ = 0,5, Е2 = 2; а— бифуркационная диаграмма: зависи-
мость максимальных значений реализации сигнала UCi с выхода фильтра
нижних частот второго порядка от коэффициента усиления М; б, в, г, д —
фазовые портреты колебаний в пространстве x(UC\), у, 7\Uci) соответствен-
но при М= 2,855; 3,225; 3,4; 5; е — карта первого ляпуновского показателя
в плоскости параметров о), М
a
1.5 2 2.5 3 3.5 4
М
е
Рис. 5.14. Генератор хаоса с 2,5 степенями свободы. Численный эксперимент: Т = 0,8,
а! = 0,06, а2 = 0,28, О) = 0,39, EJE2 = 3; а — бифуркационная диаграмма: за-
висимость максимальных значений реализации сигнала Uc2 с выхода фильт-
ра нижних частот второго порядка от коэффициента усиления Л/; б, в, г, д —
фазовые портреты колебаний в пространстве C/CI, Uc2> U& соответственно
при М - 1,78; 1,7; 2; 3,3; е — карта первого ляпуновского показателя в плос-
кости параметров О), М
5.3. Генератор хаоса с 1,5 степенями свободы
97
напряжений в различных узлах схемы, иллюстрирующие форми-
рование характеристики (5.2). Переменная V2 представляет на-
пряжение на выходе амплитудного ограничителя, на вход кото-
рого подается напряжение Vi. Переменная V3 является разностью
напряжений Vi и Ц, a V4 — разностью напряжений V3 и V4. Край-
ний справа операционный усилитель осуществляет усиление и
инвертирование напряжения V4.
Сопротивления Ri и Т?2 являются элементами, управляющими
параметрами М и Ei характеристики (5.2). С помощью R2 (в даль-
нейшем при рассмотрении спектральных характеристик генера-
тора будем обозначать это сопротивление 7?ус, чтобы не путать его
с Яг в Л-Е/С-фильтре нижних частот) осуществляется изменение
крутизны сегмента CD (M), (в дальнейшем при рассмотрении
спектральных характеристик генератора будем обозначать это со-
противление 7?д, чтобы не путать его с Ri в 7?С-фильтре ниж-
них частот) регулирует ширину сегмента CD по оси абсцисс (Ei).
Внешние сегменты (АВ и EF) определяются напряжениями пита-
ния используемых в схеме операционных усилителей. На рис. 5.65
они изображены штрихом, так как реально (в типовых режимах,
рассматриваемых в работе) не принимают участия в формирова-
нии хаотических колебаний.
Комбинированная аналого-цифровая схема. Не-
линейный элемент является ключевым элементом генератора хао-
са, поэтому от того, насколько стабильна и устойчива его сиг-
нальная характеристика, зависит и устойчивость хаотических
режимов генератора. Рассмотренная выше реализация нелиней-
ного элемента содержит только аналоговые компоненты. С целью
повышения устойчивости режимов генератора предлагается ком-
бинированная, аналого-цифровая схема нелинейного элемента.
Нелинейный элемент реализован на 8-битном микроконтрол-
лере семейства AVR (производство фирмы ATMEL) и микросхеме
аналогового ввода/вывода фирмы Analog Devices.
Процесс преобразования входного сигнала (напряжения) нели-
нейного элемента в соответствии с требуемой сигнальной характе-
ристикой (5.2) осуществляется по следующей схеме:
1) на первом этапе сигнал поступает на аналоговый вход 8-бит-
ного АЦП указанной микросхемы аналогового ввода/вывода, при
этом с выхода контроллера поступает сигнал на управление схемой
выборки-хранения и запуск преобразования;
2) по завершению аналого-цифрового преобразования АЦП вы-,
рабатывает сигнал готовности, указывающий на то, что микрокон-
троллер может считать данные из АЦП (256-уровневое значение);
3) на следующем этапе микроконтроллер считывает байт и ис-
пользует его как индекс в таблице, расположенной в его энергоне-
зависимой памяти (так как формируемая сигнальная характери-
8 Зак. 18
98 Гл. 5. Прецизионные генераторы хаоса
стика является нечетной функцией, то достаточно хранить только
половину таблицы — 128 байт);
4) считанное из таблицы значение (байт) передается в ЦАП ми-
кросхемы ввода/вывода, на выходе которой вырабатывается ана-
логовый сигнал в соответствии с этим значением.
В этом процессе существенна задержка аналого-цифрового и
обратного преобразования — она составляет 6 мкс. Таким обра-
зом, аналого-цифровой нелинейный элемент может быть предста-
влен как мгновенный преобразователь с линией задержки. На-
личие аналоговых низкочастотных фильтров в схеме генератора
хаоса позволяет фильтровать импульсные всплески на выходе ЦАП
во время переключения.
Использование 8-битного ЦАП/АЦП обусловлено простотой
конструкции и доступностью таких микросхем. Это позволяет за-
трачивать минимум операций на преобразование (при использова-
нии 8-битного контроллера) и является оптимальным по шумовым
характеристикам (—45 дБ).
Для построения таблицы необходимо задать конкретную сиг-
нальную характеристику, соответствующую моделируемому хаоти-
ческому режиму. После этого входная область значений сигналов
разбивается на 256 частей симметрично относительно нуля и ка-
ждой из них ставится в соответствие выходной уровень сигнала
характеристики. Вопрос эффективного использования динамиче-
ского диапазона сводится к правильной нормировке. Так, млад-
ший разряд соответствует напряжению 0,04 В, а 0 соответствует
Рис. 5.7. Генератор хаоса с 1,5 степенями свободы с аналого-цифровым нелиней-
ным элементом: a — сигнальная характеристика нелинейного элемента; б —
фазовый портрет одного из типовых режимов
напряжение 0В относительно общего провода (земли). Для за-
грузки программы управления ЦАП/АЦП и таблицы преобразова-
ния в AVR в микроконтроллере используется последовательный
5.3. Генератор хаоса с 1,5 степенями свободы 99
алгоритм программирования. Программа написана на AVR ассем-
блере и отлажена с помощью свободно распространяемого ATMEL
средства AVRSTUDIO.
На рис. 5.7а приведена сигнальная характеристика описанного
аналого-цифрового нелинейного элемента и фазовый портрет од-
ного из типовых режимов генератора на его основе (рис. 5.76).
Схемотехническое моделирование. Эффективным средством
схемотехнического моделирования генератора является пакет при-
кладных программ Electronics Workbench («The electronic lab
in a computer»). Пакет разработан фирмой Interactive Image
Рис. 5.8. Моделирование с помощью пакета прикладных программ Electronics
Workbench. Принципиальная схема генератора и пример реализации хаотиче-
ских сигналов и фазового портрета на виртуальном осциллографе
8*
100 Гл. 5. Прецизионные генераторы хаоса
Technologies Ltd., является развитием пакета SPICE и удобен тем,
что получаемые с его помощью результаты позволяют значительно
сократить объем физических экспериментов. Electronics Work-
bench снабжен графическим редактором принципиальных схем и
набором виртуальных приборов (осциллограф, измеритель АЧХ,
генератор сигналов различной формы и др.), которые можно под-
ключать к любому узлу моделируемой схемы. С его помощью в
интерактивном режиме можно конструировать и анализировать
как аналоговые, так и цифровые схемы. Он работает под упра-
влением нескольких версий операционной системы Windows —
Windows 95, Windows 98, Windows 2000, Windows NT, — что по-
зволяет одновременно отражать на мониторе компьютера схему и
результаты ее моделирования на экранах виртуальных приборов.
На рис. 5.8 приведена принципиальная схема генератора с
кусочно-линейной характеристикой нелинейного элемента, собран-
ная с помощью графического редактора Electronics Workbench.
В качестве операционных усилителей в ней используются микро-
схемы LM324A с напряжением питания ±12 В. Структура не-
линейного элемента полностью совпадает со схемой на рис. 5.6.
К нелинейному элементу через буферные усилители подключены
фильтры нижних частот (подсистемы 2, 3), образуя кольцевой ге-
нератор в соответствии с рис. 5.2. На рис. 5.8 показаны виртуаль-
ные осциллографы, два входа которых подсоединены к выходам
фильтров нижних частот. Первый осциллограф работает в режиме
показа временных реализаций (я(£), >?(£)), второй — фазового пор-
трета. Для примера на рисунке демонстрируется режим хаотиче-
ских колебаний вокруг двух неустойчивых положений равновесия
и соответствующие этому режиму номиналы элементов принципи-
альной схемы.
Физический эксперимент. Основной задачей экспериментов
являлась практическая апробация генератора, а также исследова-
ние его характерных хаотических режимов и сопоставление их с
результатами моделирования.
Эксперименты проводились с макетами генераторов, полно-
стью соответствующим принципиальной схеме на рис. 5.8. Нели-
нейный элемент и буферные каскады были реализованы на базе
операционных усилителей КР1401УД2Б (аналоги используемых в
схеме на рис. 5.8 усилителей LM324A). Такой выбор усилителей
позволял варьировать напряжение питания в пределах ±5-15 В.
На рис. 5.9а, б представлены экспериментальные характери-
стики хаотических режимов, качественно подобные режимам, при-
веденным на рис. 5.5 и 5.8. Они получены при значениях пара-
метров = 800 0м, (71 = 33 нФ, 1/2 = 20 мГн, С2 = 68 нФ,
/?2 = 40 0м и различных коэффициентах усиления М. Рису-
нок 5.9в демонстрирует еще один типовой режим генератора.
5.3. Генератор хаоса с 1,5 степенями свободы
101
в
Рис. 5.9. Осциллограмма сигналов на выходах подсистем 2(х) и 3(z), фазовый
портрет в плоскости х, z, спектр мощности сигнала x^Uc^) и форма характе-
ристики нелинейного элемента для представленного хаотического режима при
Ri = 8000м, Ci = 33 нФ, Li = 20 мГн, Сг = 68 нФ, R2 = 400м. а — Мг,
б — Л/2; о — Л/з (ЛЛ> < Mi < Мз)
102
Гл. 5. Прецизионные генераторы хаоса
То обстоятельство, что используемые в схеме операционные
усилители работали в линейном режиме, позволяли применять
и другие серии усилителей, например КР544УД1Б, сохраняя при
этом совокупность типовых хаотических режимов.
Спектральные характеристики генератора. Зафиксируем ряд
параметров генератора (Lq = 18мГн, Ci = <72 = 0,15мкФ), а
остальные (J?i, Н2, Лус, Вд) будем изменять в процессе его на-
стройки на хаотический режим.
Если обратиться к структуре генератора (см. рис. 5.2), то
можно заметить, что его кольцевая схема позволяет «снимать»
сигналы в трех различных точках (узлах): на выходе нелиней-
ного элемента, а также на выходах ПС- и HLC-фильтров нижних
частот. Естественно ожидать, что максимально широкий спектр
будет наблюдаться на выходе нелинейного элемента. Так как хао-
тический сигнал затем последовательно проходит через два филь-
тра нижних частот, то и спектры сигналов на их выходах будут
«обуживаться» в соответствии с амплитудно-частотными характе-
ристиками фильтров. На рис. 5.10 показаны характерные спектры
Рис. 5.10. Спектры мощности хаотических сигналов Ri = 0,4 кОм, Нг = 880м,
Rye = 17,5 кОм, Ra = 8,4 кОм. a — сигнал на выходе нелинейного элемента;
б — сигнал на выходе ВС-фильтра; в — сигнал на выходе KLC-фильтра
для одного из хаотических режимов генератора в указанных точ-
ках. Действительно, самый широкий спектр наблюдался на вы-
ходе нелинейного элемента (рис. 5.10а), а наиболее узкий — на
выходе jRLC-фильтра. Таким образом, при необходимости можно
использовать тот из трех хаотических сигналов, спектр которого в
наибольшей степени удовлетворяет требованиям решаемой задачи.
5.3. Генератор хаоса с 1,5 степенями свободы
103
Проверка прецизионных свойств генераторов. Проверка преци-
зионных свойств генератора осуществлялась на 3 макетах в соот-
ветствии с рассмотренным выше критерием, основанным на полу-
чении синхронного хаотического отклика в паре ведущая-ведомая
система. При этом указанные макеты попарно выполняли функ-
ции ведущей и ведомой систем. Пассивные элементы, входящие в
состав генераторов, подбирались с точностью 1%. Эксперименты
показали, что при условии выбора одинаковых параметров (Г, ai,
«2» ^2/Е\) все генераторы демонстрируют идентичные по
структуре и основным характеристикам хаотические колебания.
Замена операционных усилителей или пассивных элементов
(в пределах указанной точности) не приводит к нарушению вос-
производимости режимов. Более того, усилители КР1401УД2Б
являются полностью взаимозаменяемыми с усилителями серии
LM324A.
С другой стороны, в схеме генератора возможно применение и
других серий усилителей, например КР544УД1Б, при сохранении
совокупности типовых хаотических режимов.
Методика экспериментов по проверке прецизионных свойств
была основана на том, что для идентификации в физическом экс-
перименте двух прецизионных хаотических сигналов достаточно
подать их на два входа осциллографа (вход X и вход У). При
этом, если сигналы совпадают или близки по форме и не имеют
фазового сдвига один относительно другого, то на экране осцилло-
графа наблюдается их фазовый портрет в виде отрезка прямой или
очень близкой к ней линии. В случае несовпадающих сигналов,
фазовый портрет имеет существенно более сложную форму.
В качестве примера на рис. 5.11а показан синхронный хаоти-
ческий отклик (нижняя линия) двух произвольно выбранных из
тестируемых генераторов, один из которых играл роль ведущей
системы, а другой — ведомой системы. Верхняя линия соответ-
ствует случаю, когда один и тот же хаотический сигнал подавался
одновременно на оба входа осциллографа. Таким образом, она от-
ражает ситуацию с идеальным синхронным откликом и высту-
пает в качестве тестовой (калибровочной) линии. Для сравнения
рис. 5.115 иллюстрирует десинхронизацию или отсутствие син-
хронного отклика, наблюдаемое при проведении экспериментов с
генераторами не обладающими прецизионными свойствами.
Для оценки устойчивости синхронного хаотического отклика
применим методику, описанную в гл. 1. В рассматриваемом слу-
чае анализ собственных значений матрицы коэффициентов для
дифференциальных уравнений, описывающих ведомую систему
на основе кольцевого генератора при а = 0,1, Т = 2, М = 4,8,
со = 1, приводит к значениям
/11 = —0,5, /12,з — -0,05 ± 0,9987г.
104
Гл. 5. Прецизионные генераторы хаоса
Так как действительные части собственных значений отри-
цательны для всего фазового пространства, то ведущая-ведомая
система с кольцевым генератором хаоса является абсолютно устой-
чивой и «on-off» перемежаемость должна отсутствовать. Этот вы-
вод подтверждался в физическом эксперименте (рис. 5.5), где
Рис. 5.11. Хаотический отклик: a — синхронный хаотический отклик (нижняя
линия); б— десинхронизация отклика
реальные параметры ведущей и ведомой систем всегда имеют рас-
стройку друг относительно друга, что должно было бы спровоци-
ровать появление «on-off» перемежаемости при ее наличии. На
рис. 5.12а представлен хаотический отклик ведомой системы, а
также разностный сигнал между входным сигналом ведомой си-
стемы и откликом на него. Отсутствие резких «всплесков» в
отклике, характерных для «on-off» перемежаемости, позволяет на-
деяться на улучшение качества передачи информации в случае
применения в схеме с нелинейным подмешиванием кольцевого
генератора хаоса вместо модифицированной цепи Чуа. Действи-
тельно, проведенные низкочастотные эксперименты по передаче
речевой информации с использованием рассматриваемого пре-
цизионного генератора зафиксировали следующие результаты
(рис. 5.126):
1. Отсутствие «on-off» перемежаемости позволяет увеличить
отношение сигнал/шум на выходе приемника (по сравнению с
использованием цепи Чуа) и достичь значений 20-25 дБ.
2. Система остается работоспособной при 3-5%-ной расстройке
параметров элементов ведущей (передатчик) и ведомой (прием-
ник) систем (рис. 5.1, кривая 2). Увеличение расстройки приво-
дит к пропорциональному уменьшению отношения сигнал/шум в
приемнике.
5.4. Генератор хаоса с 2,5 степенями свободы 105
3. Введение в передатчик информационного сигнала с ампли-
тудой до 60% по отношению к амплитуде хаотического сигнала
a
б
Рис. 5.12. Низкочастотные эксперименты с ведущей-ведомой системой на основе
кольцевого прецизионного генератора с 1,5 степенями свободы: a — сигнал на
входе (верхний луч) и разностный сигнал между входным и выходным сигна-
лом (нижний луч) ведомой системы при отсутствии информационного сигнала;
б — передача речевого сигнала: верхний луч — информационный сигнал на
входе ведущей системы, нижний луч — информационный сигнал, выделенный
в ведомой системе
не приводит к резким изменениям исходного режима генератора.
Это свойство позволяет расширить динамический диапазон пере-
даваемых сообщений.
5.4. Генератор хаоса с 2,5 степенями свободы
Рассматривавшийся до сих пор прецизионный генератор хао-
са с 1,5 степенями свободы имеет простую структуру. Динамика
генератора включает в себя разнообразные хаотические режимы
с широкими зонами устойчивости в пространстве управляющих
7 Зак. 18
106
Гл. 5. Прецизионные генераторы хаоса
параметров генератора. Однако генерируемые им сигналы всегда
имеют очень низкочастотные спектральные составляющие вплоть
до нулевых по частоте компонент, что может ограничивать исполь-
зование генератора в некоторых практических задачах. Поэтому
рассмотрим прецизионный генератор хаоса, позволяющий реали-
зовывать хаотические колебания, ограниченные по спектру мощ-
ности как со стороны низких, так и со стороны высоких частот.
Структура генератора. В качестве базовой используем струк-
туру кольцевого генератора хаоса с 1,5 степенями свободы. Для
получения полосовых сигналов воспользуемся методикой синтеза
хаотических сигналов с заданными спектральными характери-
стиками [14, 131, 133]. С этой целью дополнительно введем в
Подсистема 1 Подсистема 2
_ _Подсистема^З____
Г R1 U
1 о
[ с2== иС1
1 о о
Подсистема 4
Г Лз'
Рис. 5.13. Прецизионный генератор хаоса с 2,5 степенями свободы: a —
блок-схема генератора; б — структура подсистем, входящих в состав генератора:
подсистема 1 — нелинейный элемент с кусочно-линейной характеристикой, под-
система 2 — фильтр нижних частот первого порядка, подсистема 3 — фильтр
нижних частот второго порядка, подсистема 4 — полосовой фильтр
кольцо обратной связи генератора с 1,5 степенями свободы четвер-
тую подсистему (рис. 5.13а), представляющую собой полосовой
Лз^зСз-фильтр (рис. 5.136). В результате генератор трансфор-
мируется в автоколебательную систему с 2,5 степенями свободы.
5.4. Генератор хаоса с 2,5 степенями свободы 107
Математическая модель. Для того чтобы получить математи-
ческую модель системы, обозначим напряжения на конденсаторах
(71, Сг и (7з через Uc^ Uc2 и Uc3 соответственно и рассмотрим
подсистему 4, представляющую собой фильтр с входным напряже-
нием Uc2 и выходным Uc3, связь между которыми определяется
уравнением
Дп . .
СзЯз^Сз + ~rUc3 = UC2 - Uc3- (5.9)
Объединение (5.3), (5.4) и (5.9) приводит к системе дифферен-
циальных уравнений, описывающих динамические режимы гене-
ратора
CiR\Uci =F(Uc3)-UC1,
L2C2UC2 + C2R2UC2 = “ Uc2, (5.10)
..До .
C3R3Uc3 + ~rUC3 = UC2 - t/c3.
Ьз
Систему (5.10) можно представить в безразмерном виде
Тх + х = F(z),
У + &1У + у = X, (5.11)
Z + &2Z + V2Z = О12У)
где tf = t/\/L2C2^ Т = C]R\/\/L2C2) =
= У^/№С3), ш2 = Ь2С2/(Ь3С3), х = UCx, у = Uc2, z =
= Uc3, а частота среза 7?2^2<72"ФильтРа нижних частот равна
единице.
Рассмотрим условия возникновения различных колебатель-
ных режимов в модели генератора, описываемого системой (5.11).
С этой целью проанализируем области изменения параметров
системы, представляющие интерес с точки зрения генерации по-
лосовых хаотических сигналов.
Величина параметра Т существенно влияет на условия прохо-
ждения сигнала по кольцу обратной связи генератора и опреде-
ляет его общую полосу пропускания. При Т 1 частота среза
R1 (71-фильтра нижних частот становится высокой (cjcp = 1/Т),
а частота среза и резонансная частота, соответственно R2L2C2- и
ЛзЬзСз-фильтров, попадают в полосу прозрачности Ri (71-фильтра
и пропускаются им с практически одинаковым коэффициентом пе-
редачи. С другой стороны, в области больших значений Т они
практически не попадают в полосу прозрачности Ri (71-фильтра.
С точки зрения получения хаотических полосовых колебаний эти
области изменения Т не представляют интереса.
7*
108 Гл. 5. Прецизионные генераторы хаоса
В области средних Т полосы частот пропускания обоих
7?1/(7-фильтров попадают на срез амплитудно-частотной характе-
ристики 7?1С1-фильтра, но пропускаются им с различными ко-
эффициентами передачи. В этой области значений Т динамика
системы в значительной степени определяется двухчастотными
колебаниями. Из анализа соотношения частот среза (cuCp = 1)
резонансной частоты и следует, что для реализации хаотических
полосовых сигналов интерес представляет случай ш < 1, так как
при этом происходит сильное перекрытие амплитудно-частотных
характеристик фильтров, причем резонансная частота полосового
7?з£зСз-фильтра попадает в полосу прозрачности 7?21/2(72-фильтра
нижних частот. И наоборот, при w > 1 перекрытие характеристик
более слабое, что требует существенно более высоких, по сравне-
нию с первым случаем, коэффициентов усиления М для возбужде-
ния двухчастотных колебаний.
Параметры ai, а2 определяют потери в JlLC-фильтрах, а от
параметров Е\у Ё2 в характеристике нелинейного элемента (5.2)
зависит динамический диапазон возникающих в системе колеба-
ний. При проведении численных экспериментов будем полагать
далее Т = 0,8, «1 = 0,06, а2 = 0,28, си = 0,43, Е2/Е\ = 3.
Развитие динамических режимов рассматриваемого генератора
отражено на бифуркационной диаграмме (рис. 5.14а; см. цвет-
ную вклейку) и состоит в том, что при фиксированных параме-
трах (Т, ах, а2, tu, Е2/Е{) увеличение коэффициента усиления
М приводит к жесткому возбуждению двухчастотных колебаний
с образованием в фазовом пространстве системы инвариантного
тора (рис. 5.146). При отсутствии сильных резонансов в окрестно-
сти возникновения двухчастотного режима колебания с ростом М
мало отличаются от квазипериодических вплоть до стохастизации
колебаний. Если же си выражается рациональным числом, как в
случае рис. 5.14а, то в фазовом пространстве образуется резонанс-
ный тор (рис. 5.14в), который при увеличении М претерпевает
структурные перестройки с последующим разрушением и перехо-
дом к хаотическому аттрактору (рис. 5.14г). С дальнейшим ростом
М аттрактор начинает «разбухать», поглощая все большую часть
фазового пространства. Фазовый портрет одного из таких режимов
представлен на рис. 5.146. При этом возможно появление интер-
валов изменения М, в пределах которых система демонстрирует
регулярное движение (рис. 5.14а).
Схемотехническое моделирование. Рассмотрим результаты
схемотехнического моделирования генератора с помощью пакета
прикладных программ Electronics Workbench.
На рис. 5.15а представлена принципиальная схема генератора.
Структура генератора полностью соответствует рис. 5.13а, б, а но-
миналы отдельных его элементов подобраны таким образом, чтобы
5.4. Генератор хаоса с 2,5 степенями свободы
109
обеспечить генератору совокупность параметров, соответствующих
хаотическому режиму на рис. 5.145. Входящие в состав генератора
фильтры представляют собой стандартные электронные устрой-
ства. Функцию элементов развязки выполняют операционные
усилители (буферные каскады). Нелинейный элемент, располо-
женный между фильтром нижних частот первого порядка и полосо-
вым фильтром, реализован по схеме, представленной на рис. 5.6а.
Рис. 5.15. Схемотехническое моделирование генератора с 2,5 степенями свободы:
a — принципиальная схема генератора; б — экран виртуального осциллографа с
примером осциллограмм хаотических сигналов Ucx и Uc2 на выходах фильтров
нижних частот первого и второго порядков; в — экран виртуального осцилло-
графа с проекцией фазового портрета на плоскость сигналов Uci и. Uc3\ г —
сигнальная характеристика нелинейного элемента
На рис. 5.155,6 приведены экраны виртуальных осциллогра-
фов. Первый из них (рис. 5.155) работает в режиме отражения
временных реализаций Ucx, Uc2> второй (рис. 5.15в) — проекции
фазового портрета в плоскости напряжений Uc3-
no
Гл. 5. Прецизионные генераторы хаоса
Если осциллограф подключить одновременно к входу и выходу
нелинейного элемента, то можно наблюдать его сигнальную харак-
теристику. Эта возможность отражена рис. 5.15г, характеристика
на котором соответствует хаотическому режиму, представленному
на рис. 5.156, в.
Физический эксперимент. Эксперименты проводились с маке-
тами генераторов, схемотехническая реализация которых полно-
стью соответствовала принципиальной схеме на рис. 5.15а. Нели-
нейный элемент и буферные каскады были реализованы на базе
операционных усилителей LM324A. Номиналы пассивных элемен-
тов в макетах также находились в соответствии с принципиальной
схемой, за исключением сопротивлений Ri (НЧ-фильтр первого
порядка) и /?4, Т?5 (входной и выходной каскады нелинейного эле-
мента), при изменении которых осуществлялась настройка дина-
мических режимов генераторов. С помощью Ri можно изменять
параметр Т и тем самым управлять полосой пропускания цепи
обратной связи генератора, в то время как вариация номинала
сопротивления R$ приводит к изменению коэффициента усиле-
ния М (М ~ kR$, где к — константа, равная в эксперименте
0,15 • 10"3 Ом-1) нелинейного элемента, а сопротивление R4 отве-
чает за динамический диапазон (амплитуду) колебаний генерато-
ра. При проведении экспериментов, связанных с необходимостью
Рис. 5.16. Характеристики хаотического режима генератора с 2,5 степенями
свободы: Ri — 2800м, Ra = 13,5кОм, Rs = 15,1 кОм (Mi ~ 2,3), ш = 2,43.
a — спектр мощности сигнала Uc3; б— проекция фазового портрета в плоскости
Uc3, Uci; в — осциллограмма сигнала Uc3; г — сигнальная характеристика
нелинейного элемента для представленного режима
5.4. Генератор хаоса с 2,5 степенями свободы 111
получения различных си, дополнительно изменялись номиналы Сз
и/или (?2 в полосовом фильтре и 7?£(7-фильтре второго порядка
соответственно. Анализ хаотических режимов генератора прово-
дился по временным реализациям напряжения Uc3 на выходе по-
лосового фильтра и его спектрам мощности, а также проекциям
фазовых портретов хаотических сигналов на плоскости напряже-
ний Uc3 и L7C1.
На рис. 5.16 представлены экспериментальные характеристики
хаотического режима генератора, номиналы элементов которого с
точностью в пределах 1% соответствовали номиналам схемы на
рис. 5.15а. Так, например, Ri = 2800м, = 13,5 кОм, R$ =
= 15,1 кОм (Mi ~ 2,3, ш = 0,43).
Рассмотрим возможность получения в генераторе различных
по структуре хаотических сигналов в пределах фиксированной
полосы частот. На рис. 5.17 представлены хаотические режимы,
Рис. 5.17. Характеристики хаотических режимов генератора с 2,5 степенями сво-
боды (спектр мощности сигнала Uc3, проекция фазового портрета в плоскости
[/с3, Гец осциллограмма сигнала Uc3) для различных коэффициентов усиле-
ния: а — М < Mi \ б — М > Mi
демонстрирующие эту возможность. Они реализованы при тех же
значениях параметров, что и в предыдущем случае (рис. 5.16),
но с различными коэффициентами усиления М. При уменьше-
нии М (М < Mi) начинают отчетливо проявляться собственные
частоты фильтров второго порядка. Спектр становится более изре-
занным, а реализация напоминает гармонический сигнал с более
высокочастотной хаотической модуляцией огибающей (рис. 5.17а).
Наоборот, с увеличением М (М > MJ спектр мощности сигнала
(рис. 5.176) становится менее изрезанным, оставаясь при этом в
пределах полосы, определяемой соотношением резонансных ча-
стот фильтров второго порядка си. Спектру с такой характеристи-
112
Гл. 5. Прецизионные генераторы хаоса
кой соответствуют более сложный вид проекции фазового портрета
и реализация сигнала.
Рисунок 5.18 иллюстрирует возможность управления шириной
спектра генерируемого хаотического сигнала за счет вариации
При lu ~ 0,65 (рис. 5.18а) в генераторе реализуется хаотический
Рис. 5.18. Характеристики хаотических режимов генератора с 2,5 степенями
свободы (спектр мощности сигнала Uc3, осциллограмма сигнала Uc3) для раз-
личных и: a — ш = 0,65; б — w = 0,36; в — w = 0,3
сигнал, близкий по своим характеристикам к одночастотным
колебаниям. Разнесение собственных частот (уменьшение cj) по-
зволяет получать полосовые хаотические сигналы (рис. 5.186) с
равномерно распределенной в полосе частот спектральной плотно-
стью. Как следует из численного моделирования и эксперимен-
тов, указанные режимы наблюдаются в диапазоне изменения ш =
= 0,3—0,6. При и < 0,3 хаотические сигналы становятся более ши-
рокополосными (рис. 5.18в), но вместе с тем и более изрезанными
5.4. Генератор хаоса с 2,5 степенями свободы
113
по спектру, который с уменьшением си приобретает характерный
«двугорбый» вид. Спектральная плотность между собственными
частотами уменьшается по мере снижения си. Отметим также,
что с уменьшением си для возникновения хаотических режимов
необходимо обеспечивать все более высокие коэффициенты усиле-
ния М.
Спектральные характеристики. Добавление в конструкцию ге-
нератора полосового фильтра, по отношению к генератору с 1,5
степенями свободы, позволяет не только получать ограниченные по
спектру мощности хаотические колебания (на выходе полосового
Лз^зСз-фильтра), но и реализовывать на выходах нелинейного
Рис. 5.19. Спектры мощности хаотических сигналов генератора хаоса с 2,5 сте-
пенями свободы: Ri = 280 0м, Rz = 880м, Яз = 220 0м, Ra = 13,5 кОм,
Rs — 17,3 кОм, Lz = Ьз = 18 мГн, Ci = Cz = 0,15 мкФ, Сз — 0,824 мкФ. a —
на выходе нелинейного элемента; б — на выходе ЯС-фильтра нижних частот
элемента и RiCi-фильтра нижних частот сигналы с распределе-
нием спектральных плотностей близких к равномерным. В ка-
честве примера на рис. 5.19 представлены спектры хаотических
сигналов одного из режимов. Как видно из рис. 5.19а, спектр
114
Гл. 5. Прецизионные генераторы хаоса
колебаний на выходе нелинейного элемента имеет почти посто-
янную спектральную плотность в полосе частот 0-6 кГц (нерав-
номерность спектральной плотности не превышает 8 дБ). С другой
стороны, тот же сигнал, пропущенный через Ci-фильтр нижних
частот, приобретает спектр, плавно спадающий в сторону высоких
частот, в соответствии с амплитудно-частотной характеристикой
используемого в схеме генератора фильтра.
Здесь необходимо также отметить, что конструкция генератора
не значительно усложняется за счет введения дополнительного по-
лосового фильтра. С другой стороны, рассматриваемый генератор
приобретает ряд новых свойств по отношению к генератору с 1,5
степенями свободы. Прежде всего это относится к существенно
более богатому выбору хаотических режимов и возможности, тем
самым, получать колебания с различными спектральными харак-
теристиками.
Проверка прецизионных свойств. Методика проверки была
аналогичной той, которая использовалась в случае генератора с
1,5 степенями свободы. Из четырех образцов генераторов попарно
составлялись ведущие-ведомые системы и анализировалось ка-
чество синхронного хаотического отклика на выходе ведомой
системы. Как показали эксперименты, для двух произвольно вы-
бранных образцов генераторов с точностью подбора параметров
элементов в каждом из них в диапазоне 1-2% качество синхрон-
ного отклика (отношение мощностей сигналов на входе и выходе
ведомой системы) было в пределах 20-25 дБ.
Анализ собственных значений матрицы коэффициентов диф-
ференциальных уравнений для ведомой системы во всех облас-
тях фазового пространства показал, что введение в генератор
хаоса с 1,5 степенями свободы полосового фильтра не нарушает
абсолютной устойчивости множества синхронизации для ведущей-
ведомой системы. Тем самым, обеспечивается отсутствие явления
«on-off» перемежаемости в синхронном отклике.
5.5. Выводы
Разработка прецизионных генераторов хаоса и использование
их в системах связи помогает облегчить проблему передачи ин-
формации при несоответствии параметров одинаковых элементов
в хаотических модулях передатчика и приемника и, тем самым,
повысить качество передачи. Так, например, переход от модифи-
цированной цепи Чуа к прецизионному кольцевому генератору с
1,5 степенями свободы в коммуникационной системе с нелиней-
ным подмешиванием информации позволил увеличить отношение
сигнал/шум на выходе приемника на 5-8 дБ при одинаковой точ-
ности подбора элементов в обоих случаях и получить величину
отношения 20-25 дБ.
5.5. Выводы
115
С другой стороны, рассмотренный в этой главе генератор с 2,5
степенями свободы при сохранении прецизионных свойств обла-
дает еще одним важным качеством: генерируемые им хаотиче-
ские сигналы имеют полосовой спектр мощности, причем полоса
и диапазон частот являются управляемыми параметрами. Указан-
ное свойство может оказаться чрезвычайно полезным в борьбе с
искажениями сигнала в канале связи. Действительно, при извест-
ных характеристиках канала пользователю, имея в распоряжении
такой генератор, предоставляется возможность выбрать полосу и
диапазон частот хаотических колебаний, в пределах которых иска-
жения сигнала в канале связи будут минимальными. Аналогичная
ситуация наблюдалась, например, при беспроводной передаче ин-
формации, описанной в п. 5.4. Попытка использования стандарт-
ной аппаратуры для передачи по эфиру приводит к необходимости
формирования хаотических сигналов со спектром мощности, спа-
дающим как в области очень низких, так и высоких частот. Такие
сигналы как раз и могут быть получены в генераторе хаоса с 2,5
степенями свободы.
Глава 6
ПОВЫШЕНИЕ ЭФФЕКТИВНОСТИ СХЕМЫ
С НЕЛИНЕЙНЫМ ПОДМЕШИВАНИЕМ ИНФОРМАЦИИ
Система с нелинейным подмешиванием была детально рас-
смотрена в гл. 3, 4, где она исследовалась численно и экспери-
ментально на низких частотах и в радиодиапазоне. При этом
продемонстрирована ее пригодность для передачи как простых
(тоновых), так и сложных (речь, музыка) информационных сиг-
налов. В то же время эксперименты и численное моделирование
выявили ряд ограничений этой схемы:
• при относительно высоком уровне информационного сигнала
(/а > 0,1) хаотические модули передатчика на базе модифициро-
ванной цепи Чуа становятся неустойчивыми, что приводит к сры-
вам хаотической генерации; для генераторов на основе кольцевых
автоколебательных систем устойчивость хаотического режима со-
храняется, однако при увеличении уровня информационного сиг-
нала, вводимого в систему, его присутствие становится заметным
в канале;
• в эксперименте не удается получить качество синхронного
хаотического отклика выше значений т] » 10“3;
• низкая энергетическая эффективность.
С другой стороны, отношение сигнал/шум на выходе прием-
ника определяется как /2/77. Таким образом, при фиксирован-
ном т] резерв повышения качества передачи заложен в увеличе-
нии уровня информационного сигнала, вводимого в хаотический
модуль передатчика. С повышением нормированной на мощность
хаоса мощности информационного сигнала /2 связано также тре-
бование увеличения энергетической эффективности схемы с нели-
нейным подмешиванием. Но возможность увеличения /2 ограни-
чена указанными выше причинами. Возникает вопрос: а нельзя
ли поднять уровень вводимого информационного сигнала, а вместе
с ним качество и энергоэффективность передачи без ущерба кон-
фиденциальности и устойчивости функционирования системы?
Ниже анализируются два подхода к решению указанной проблемы.
6.1. Схема связи с суммированием по модулю 117
6.1. Схема связи с суммированием по модулю
хаотического и информационного сигналов
Идея одного из подходов заключается в дополнительном прео-
бразовании суммы информационного и хаотического сигналов пе-
ред посылкой результирующего сигнала в канал связи. Если в
обычной конфигурации схемы с нелинейным подмешиванием в ка-
нал передается простая сумма указанных сигналов, что приводит
к прослушиваемости сообщения уже при относительно небольших
уровнях информационного сигнала, то в рассматриваемом случае
вместо операции суммирования используется операция суммиро-
вания по модулю, применение которой направлено на исключение
возможности прослушивания сообщения даже при относительно
больших его уровнях. Кроме того, применение операции сумми-
рования по модулю призвано повысить устойчивость передатчика
к большим уровням вводимого в него информационного сигнала и
улучшить качество передачи.
Модель схемы. Структура коммуникационной схемы показана
на рис. 6.1а. Передатчик состоит из двух подсистем, одна из
Рис. 6.1. Структура коммуникационной системы с суммированием по модулю
информационного и хаотического сигналов: a — структурная схема, на которой
ЛП — линейная подсистема, НП — нелинейная подсистема, НПр — нелиней-
ный преобразователь, (+) — сумматор, (—) — вычитатель, S — передаваемый
информационный сигнал, S' — выделяемый информационный сигнал; б — ам-
плитудная характеристика нелинейного преобразователя НПр
118
Гл. 6. Повышение эффективности схемы
которых линейная (ЛП), а другая — нелинейная (НП), сумма-
тора (+) и дополнительного нелинейного преобразователя (НПр)
с характеристикой, представленной на рис. 6.Id и описываемой
следующей зависимостью:
Y = Xmod А = <
О,
Х + 2А,
X,
Х-2А,
О,
X < -2А,
-2А X < -А,
- А X < А,
А X < 2А,
Х>2А,
(6.1)
где А — константа. Сумматор совместно с нелинейным преобра-
зователем составляет сумматор по модулю А.
Информационный сигнал S(t) суммируется с выходным сиг-
налом линейной подсистемы и после нелинейного преобразования
поступает в канал связи и затем в приемник. Приемник состоит из
подсистем, идентичных подсистемам передатчика, вычитающего
устройства (—) и нелинейного преобразователя с характеристикой
(6.1). Таким образом, предлагаемая схема отличается от исходной
схемы с нелинейным подмешиванием наличием в передатчике и
приемнике дополнительного нелинейного преобразователя с харак-
теристикой (6.1).
Прежде чем перейти к анализу процессов в схеме передачи в
целом, посмотрим, как действует преобразователь с характеристи-
кой (6.1) на входной сигнал. При этом следует различать три слу-
чая: 1) амплитуда В входного сигнала X(t) меньше А (В < А);
2) А < В < 2А; 3) В > 2А. В первом случае сигнал на входе
преобразователя совпадает с сигналом на его выходе, во втором —
в выходном сигнале появляются разрывы, а в третьем — кроме
того, и фрагменты с нулевым значением сигнала (рис. 6.2). При-
менение преобразования (6.1) к сигналу с В > А, как видно из
рис. 6.2, приводит к расширению спектра последнего.
Нелинейная характеристика (6.1) преобразователя необратима.
На первый взгляд кажется, что это свойство делает невозмож-
ным извлечение информационного сигнала в приемнике. Однако
вследствие хаотической синхронизации передатчика и приемника
сигналы на выходах их линейных подсистем являются идентич-
ными, что и позволяет однозначно восстанавливать сигнал S(t).
Рассмотрим подробнее операции суммирования сигналов по мо-
дулю и извлечения одного из слагаемых при наличии суммы и
другого слагаемого.
Последовательное применение операции обычного суммирова-
ния и преобразования (6.1) эквивалентно суммированию по мо-
дулю А, а последовательное применение операции обычного вычи-
тания и (6.1) в свою очередь эквивалентно обратной операции —
6.1. Схема связи с суммированием по модулю
119
вычитанию по модулю. Пусть X(t) — складываемые сиг-
налы, a Z(t) = (X(t) +y(t))modA. Если X(t) и Y(t) лежат
в диапазоне (—А, Л), последовательность операций вычитания и
д е
Рис. 6.2. Реализации и спектры мощности сигналов на выходе нелиней-
ного преобразователя при прохождении через него гармонического сигнала
X = В sin (wt): a, б — В < А; в, г — А < В < 2А; д, е — В > 2А
преобразования (6.1) однозначно восстанавливает один из сигна-
лов при известном втором и их известной сумме по модулю, т. е.
X(t) = (Z(t) — Y(t))modA. Если же хотя бы один из сигналов
выходит из диапазона (—А, А), то однозначное восстановление
второго сигнала становится невозможным.
Схема передачи моделировалась для двух типов генераторов
хаоса: кольцевого генератора с 1,5 степенями свободы и модифи-
120
Гл. 6. Повышение эффективности схемы
цированной цепи Чуа. В случае кольцевого генератора (рис. 6.3),
модель схемы связи с суммированием информационного и хаоти-
ческого сигнала по модулю описывается системой уравнений
Т^- + Х1 = Шт),
at
d I n dZ i _ _ __
= (-X1 _ Zi)w2, —- = Yi~aZi,
at at
T^-+ X2 = F(U, m),
at
= № - Z2)w2, = Y2 - aZ2.
at at
(6-2)
В системе (6.2) T = R\C\ — постоянная фильтра нижних частот
первого порядка; а = (Т^С^)-1 и си2 = (Сг-Е/)”1 — коэффициент
диссипации и частота среза фильтра нижних частот второго по-
рядка; X, Z — напряжения на выходе нелинейной и линейной
Рис. 6.3. Структура подсистем модулей на основе кольцевого генератора: а —
нелинейная подсистема (НУ — нелинейный усилитель); б— линейная подси-
стема
подсистем соответственно. Первые три уравнения в (6.2) описы-
вают передатчик, три следующих — приемник. Первое уравнение
описывает нелинейную подсистему (рис. 6.3а), представляющую
собой последовательно соединенные фильтр нижних частот пер-
вого порядка и безынерционный нелинейный усилитель с кусочно-
линейной сигнальной характеристикой:
F(U, тп) = тп [|[/+ || - \U- || + М J^11] , (6-3)
где m — параметр; U = (Zi + 5)шос1Л — сигнал, поступающий
на вход безынерционных нелинейных усилителей передатчика и
приемника. Следующие два уравнения соответствуют линейной
подсистеме 2 (рис. 6.36).
121
6.1. Схема связи с суммированием по модулю
В случае схемы Чуа (рис. 6.4) модель схемы связи с суммиро-
ванием по модулю описывается системой уравнений
at гС\
=-----Е----+ 7ь, L— = -Vc2,
dt R2
rdV^ и-У'г
C1 dt
с<Щ2_у^-Ч Ldi'L_ v,
C2~dT - —rT~ + 4’ L~tt-~Vc>
(6-4)
Первые три уравнения в (6.4) описывают передатчик, три следую-
щих — приемник. Первое уравнение описывает нелинейную под-
систему передатчика (рис. 6.4а), а следующие два уравнения —
Рис. 6.4. Структура подсистем модулей на основе модифицированной цепи Чуа:
a — нелинейная подсистема (№ — нелинейный элемент); б— линейная под-
система
линейную подсистему (рис. 6.46). Здесь /N(Vci) — вольт-ампер-
ная характеристика нелинейного сопротивления NR:
IN(VCl) = GbVC1 + |(G6 - Ga) [|VC. + £| - |VC1 - E|], (6.5)
где IN — ток, протекающий через сопротивление NR, a Vci — на-
пряжение на нем, Ga, Gb^ E — константы, U = (Vc2 + S^mod A.
Резисторы Ri и R2 являются параметрами, определяющими ре-
жим колебаний в цепи. При Ri=R2 = RhS = 0 уравнения (6.4)
совпадают с канонической системой уравнений цепи Чуа [164].
Схема с кольцевым генератором. Моделирование проводилось
в интегрированной среде MatLab. При компьютерном модели-
ровании процесса передачи информации в качестве базового ре-
жима выбран режим, фазовый портрет которого представлен на
рис. 6.5а. Этот режим реализуется при следующем выборе пара-
метров: m = 4,9. Т = 2. a = 0.1. a>2 = 1.
122
Гл. 6. Повышение эффективности схемы
Численное моделирование схемы передачи с идентичными
значениями параметров передатчика и приемника проводилось с
частотно-модулированным гармоническим и реальным звуковым
(музыка, речь) сигналами.
а
Рис. 6.5. Фазовые портреты сигналов хаотического передающего модуля на
основе кольцевого генератора с 1,5 степенями свободы: а — в отсутствие инфор-
мационного сигнала; б — с информационным (частотно-модулированным гармо-
ническим) сигналом на входе модуля. Параметры генератора: тп = 4,9, Т = 2,
а = 0,1, си2 = 1
Частотно-модулированный гармонический сигнал
S(t) = A sin (2тг/о^ — Фтп cos (2ttF£)) (6.6)
имеет линейчатый спектр мощности с центральной частотой /о?
полоса которого определяется индексом модуляции фт и часто-
той модуляции F. Как полосовой сигнал он лучше имитирует
структуру речевого и музыкального сигналов, чем простейший
гармонический сигнал. Цель численного моделирования при
6.1. Схема связи с суммированием по модулю
123
использовании в качестве информационного сигнала частотно-
модулированного сигнала (6.6) заключалась в выяснении основ-
ных свойств динамики схемы и ее спектральных характеристик.
На рис. 6.5d представлен фазовый портрет аттрактора передаю-
щего хаотического модуля при входном частотно-модулированном
гармоническом сигнале. Как отмечено выше, динамика автоном-
ного генератора передатчика при наличии нелинейного преобра-
зователя или при его отсутствии совпадают, если Z\(t) лежит в
диапазоне (—А, А). Именно этот диапазон и был выбран в каче-
стве рабочего, т. е. значение константы А подбиралось так, чтобы
Рис. 6.6. Реализации и спектры мощности сигналов в схеме с суммированием
по модулю хаотического и информационного сигналов: а. б — информационный
сигнал S; в, г — сигнал (Z\ + S) на выходе сумматора (+); д, е — сигнал U на
выходе сумматора по модулю (НПр)
124 Гл. 6. Повышение эффективности схемы
максимальная амплитуда сигнала генератора перед нелинейным
преобразованием (6.1) была слегка меньше, чем А. Таким же обра-
зом нормировалась и амплитуда входного информационного сиг-
нала S. При этом отношение максимальных амплитуд информа-
ционного сигнала и сигнала, прошедшего через цепочку элементов
генератора, было равно единице. В принципе возможен выбор и
других соотношений между амплитудами информационного и хао-
тического сигналов. Однако ограничимся только соотношением
S/Zx = 1.
В отличие от автономного случая, режимы передатчика с вход-
ным информационным сигналом резко отличаются в случаях,
когда нелинейный дополнительный преобразователь есть и когда
его нет.
Рассмотрим более подробно свойства выходного сигнала пере-
датчика (рис. 6.6).
Во-первых, выходной сигнал ограничен амплитудой А
(рис. 6.6д). Во-вторых, его спектр мощности (рис. 6.бе) в 8-10 раз
шире спектра выходного сигнала перед нелинейным преобразова-
нием (на входе сумматора по модулю (рис. 6.6г)). Если после сум-
мирования хаотического и информационного сигналов в спектре
мощности отчетливо наблюдаются частотные компоненты инфор-
мационного сигнала (рис. 6.6г), то в спектре суммарного сигнала,
пропущенного через нелинейный преобразователь (рис. 6.бе), они
проявляются значительно слабее.
При моделировании процесса передачи с реальными звуковы-
ми сигналами использовались фрагменты музыкально-речевых
записей с компакт-дисков, для которых частота дискретизации
звукового сигнала составляла 44100 Гц, амплитуда каждого отсчета
о 1 2 з г, с
Рис. 6.7. Сигналы на входе (а) и выходе (б) хаотического модуля передатчика:
а — фрагмент музыкального сигнала на входе модуля; б — сигнал U на выходе
нелинейного преобразователя (НПр)
кодировалась 16 битами, а сам информационный сигнал лежал в
полосе 0-22 050 Гц. Характерный вид сигналов и их спектры по-
казаны соответственно на пис. 6.7 и 6.8
6.1. Схема связи с суммированием по модулю
Г2Ь
Для согласования спектров мощности хаотического и инфор-
мационного сигналов производилось предварительное сужение
спектра путем пропускания информационного сигнала с полосой
Рис. 6.8. Спектры мощности сигналов схемы с суммированием по модулю инфор-
мационного и хаотического сигналов: a — музыкальный сигнал S\ б— хаотиче-
ский сигнал на выходе линейной подсистемы при отсутствии информационного
сигнала; в — сигнал на выходе нелинейного преобразователя; г — сигнал S' на
выходе хаотического модуля приемника
~ 20 кГц через цифровой фильтр нижних частот Ремеза 138-го по-
рядка с полосой пропускания 5 кГц и внеполосным подавлением
на уровне 40 дБ. Масштабирование хаотического сигнала по ча-
стоте осуществлялось путем выбора масштабирующего множителя
по времени после интегрирования дифференциальных уравнений,
описывающих систему. Интегрирование системы дифференци-
альных уравнений проводилось методом Рунге-Кутта четвертого
порядка, который подразумевает определение значения отсчета ин-
формационного сигнала в промежуточной точке между узлами
126
Гл. 6. Повышение эффективности схемы
сетки. Эти значения вычислялись как среднее арифметическое
значение в соседних узлах сетки.
На слух профильтрованный звуковой сигнал был приглушен
вследствие удаления высокочастотной части спектра. Характерной
особенностью реальных звуковых сигналов является большой ди-
намический диапазон. В реализации сигнала наблюдались фраг-
менты, многократно различающиеся по амплитуде (рис. 6.7а). Ти-
пичная плотность распределения р мгновенных значений сигнала
S показана на рис. 6.9, из которого видно, что основная мощность
Рис. 6.9. Плотность распределения мгновенных значений музыкального сиг-
нала S
сигнала сосредоточена в его фрагментах, значения которых не пре-
вышают 0,2-0,25 от максимальных значений. Это означает, что
фрагменты с большими амплитудами сигнала встречаются доста-
точно редко. Таким образом, если нормировать уровень входного
информационного сигнала, исходя из его максимальной ампли-
туды, то после суммирования информационного и хаотического
сигналов значение их суммы будет редко выходить из диапазона
(—А, А) и пропускание через нелинейный преобразователь изме-
нит суммарный сигнал лишь на отдельных достаточно редких
участках. Спектр мощности и степень прослушиваемости сигнала
в канале в этом случае мало отличаются от аналогичных характе-
ристик схемы с нелинейным подмешиванием без использования
дополнительного нелинейного преобразователя.
Повысить влияние нелинейного преобразователя можно, если
несколько ухудшить качество извлекаемого в приемнике сигнала.
Тогда входной информационный сигнал нормируется не на макси-
мальную амплитуду, а на уровень, когда максимальная амплитуда
A(S) = 3-5 А. При этом большинство фрагментов информацион-
ного сигнала будет иметь амплитуду, сравнимую с А, и только
6.1. Схема связи с суммированием по модулю 127
изредка будут встречаться фрагменты значительно превышающие
по амплитуде это значение. Естественно, что декодирование ин-
формационного сигнала на этих участках происходит с ошибками.
Однако на остальных участках декодирование осуществляется
правильно. Ухудшение качества воспроизведения сигнала в при-
емнике происходило именно за счет фрагментов сигнала, декоди-
руемых с ошибками, и выражалось в появлении щелчков на
выходе акустической системы.
Проведенное моделирование показало, что при A(S) = 3-5 А
характерная ширина спектра мощности сигнала в канале увели-
чивалась в 8-10 раз. При этом, в спектре сигнала на выходе хаоти-
ческого модуля передатчика практически не наблюдалось призна-
ков, характерных для информационного сигнала (рис. 6.8в). При
аудио контроле в нем не прослушивался речевой сигнал, а в случае
передачи музыкальных фрагментов, последние проявлялись лишь
в виде некоторой ритмичности.
Схема при использовании цепи Чуа. Обсудим теперь резуль-
таты моделирования анализируемой схемы при использовании
цепи Чуа как источника хаоса. В качестве базового режима ко-
лебаний был выбран режим «двойная спираль». Данный режим
имеет место при следующем наборе параметров: Gb = —0,714 мСм,
о 0,4 0,8 1,2 /
a
0 0,4 0,8 1,2 / 0 2 4 /
в г
Рис. 6.10. Спектры мощности сигналов хаотического модуля на основе цепи
Чуа: a — частотно-модулированный гармонический (информационный) сигнал;
б — хаотический сигнал Uc2 на выходе линейной подсистемы при отсутствии
информационного сигнала S; в — сигнал на выходе сумматора (+); г — сигнал
на выходе нелинейного преобразователя
128
Гл. 6. Повышение эффективности схемы
Ga = -1,143мСм, Е = 1 В, L = 0,0625Гн, С2 = 1Ф, Сх =
= 0,10204 Ф и 1/Я1 = 1/Я2 = 1 См.
Численное моделирование системы (6.4) с идентичными пара-
метрами передатчика и приемника проводилось с частотно-модули-
рованным сигналом (6.6). На рис. 6.10 представлены спектры мощ-
ности в различных точках передатчика для случая |S'|/|t/c2l = 1-
Анализ спектров мощности позволяет сделать следующие вы-
воды. При отсутствии информационного сигнала S(t) на входе
передатчика динамика системы и спектры мощности полностью
соответствует динамике канонической цепи Чуа. Введение S(t)
существенно изменяет характер колебаний в передатчике, в част-
ности: спектр расширяется и становится дискретным (рис. 6.10е).
Более сильное расширение спектра наблюдалось у сигнала, посту-
пающего в канал связи (спектр мощности расширяется в 5-6 раз
(рис. 6.10г)), что является следствием применения нелинейного
преобразования (6.1). Однако если соответствующие параметры
передатчика и приемника совпадают, то возможно идеальное вос-
становление информации в приемнике.
6.2. Схема с частотной модуляцией
информационного сигнала
Идея второго подхода вытекает из следующих рассуждений.
Если непосредственное повышение уровня информационного сиг-
нала перед суммированием его с хаотическим сигналом в модуле
передатчика может привести к нежелательным эффектам из-за
сильной вариабельности амплитуды информационного сигнала, то
нельзя ли использовать какую-либо предварительную манипуля-
цию с информационным сигналом, позволяющую нивелировать
большие вариации его амплитуды. Если применить, например,
частотную модуляцию периодического сигнала информационным
сигналом, то амплитуда результирующего сигнала будет постоян-
ной величиной.
Частотно-модулированный (ЧМ) сигнал s(t) описывается вы-
ражением
t
s(f) = Accos ^2тг/с£ 4- 2nkf f m(r) dr'j, (6.7)
о
где Ac — амплитуда модулируемого колебания, fc — несущая
частота, m(t) — информационный сигнал, kf — коэффициент
частотной чувствительности. Максимальная девиация Д/ частоты
составляет Д/ = kf max |m(t)|.
Если в качестве модулирующего выступает гармонический сиг-
нал, то выражение (6.7) преобразуется к виду, частным случаем
которого является (6.6).
6.2. Схема с частотной модуляцией информационного сигнала 129
Спецификой ЧМ сигнала является широкий спектр мощности,
распространяемый по обе стороны от частоты несущего колеба-
ния. Рассмотрим такой сигнал, модулируемый синусоидальным
сигналом с частотой /ш. В этом случае спектр мощности фор-
мально содержит бесконечное число гармоник. Однако боковые
частоты, отстоящие от центральной (несущей) частоты на интер-
вал больший Д/, быстро стремятся к нулю, поэтому, хотя полоса
ЧМ сигнала шире, чем 2Д/, она ограничена. Эмпирическое пра-
вило (правило Карсона), по которому определяется эффективная
ширина полосы Вт, определяет ее как
Вг»2Д/ + 2/т = 2Д/(1 + 1) = 2(1+/3)/т, (6.8)
где (3 = Af /fm является индексом модуляции.
В более общем случае, для произвольного модулирующего сиг-
нала m(f), лежащего в полосе W, полоса ЧМ сигнала может также
идентифицироваться правилом Карсона со следующей поправкой:
индекс модуляции /3 для полосового сигнала определяется как от-
ношение максимальной девиации частоты, которой соответствует
максимальная амплитуда сигнала 771(f), к полосе W.
Применение частотной модуляции в коммуникационных систе-
мах позволяет получить выигрыш N в отношении сигнал/шум (по
мощности), теоретическая оценка которого определяется соотно-
шением
Н
~02,
(6-9)
где Д/ — максимальная девиация частоты, W — полоса инфор-
мационного (модулирующего) сигнала m(t).
Модель схемы. За основу модели взята схема с нелинейным
подмешиванием информации, хаотические модули в которой реа-
лизованы на базе прецизионного кольцевого генератора с 2,5 степе-
нями свободы (см. гл. 5). Отличием ее от стандартной конфигура-
ции являлось наличие дополнительных элементов в цепи подвода
информационного сигнала к сумматору хаотического модуля пере-
датчика. Информационный сигнал S сначала пропускался через
фильтр нижних частот с полосой пропускания затем отфиль-
трованный сигнал подавался на вход частотного модулятора, где
модулировал несущую частоту /с и после этого результирующий
сигнал поступал на вход сумматора.
В структуре приемника тоже появились дополнительные эле-
менты. Модуль приемника выделял ЧМ сигнал из смеси его с
хаотическим сигналом, поступающей из канала связи, и подавал
извлеченный сигнал на вход частотного демодулятора, на выходе
которого находился фильтр нижних частот.
10 Зак. 18
130
Гл. 6. Повышение эффективности схемы
Влияние возмущающих факторов моделировалось расстройкой
одного из параметров исследуемой схемы — коэффициента усиле-
ния m (6.3) нелинейного элемента в хаотическом модуле прием-
ника. Выбор расстройки коэффициента усиления как источника
шума не носит принципиального характера и был обусловлен удоб-
ством проведения расчетов.
В ходе моделирования оценивались отношения сигнал/шум
для передаваемого информационного сигнала и ЧМ сигнала, вы-
деляемого хаотическим модулем приемника, а также определялось
качество синхронного отклика.
При проведении численных экспериментов была использована
пара модулятор-демодулятор с частотой несущей /с = 10 кГц. Для
того чтобы ЧМ сигнал не был демаскирован в канале связи,
о
£
аГ -40
-60
0 20000 40000 60000 /, Гц
Рис. 6.11. Спектры мощности сигналов: а — в хаотическом модуле передатчика
на входе сумматора; б — в канале связи
хаотический модуль передатчика был настроен на генерацию
хаотического сигнала в диапазоне 0-20 кГц. Спектр мощности сиг-
нала хаотического модуля представлен на рис. 6.11а.
6.2. Схема с частотной модуляцией информационного сигнала 131
Эксперименты с гармоническим сигналом. В качестве пер-
вого тестового сигнала выступал гармонический сигнал с частотой
fm = 3,4 кГц. При девиации частоты Д/ = 104 Гц такой сигнал
обеспечивал максимально возможный индекс частотной модуля-
ции /3 = 2,94. На рис. 6.12 приведены спектры мощности ЧМ сиг-
нала, вводимого в хаотический модуль передатчика (рис. 6.12а) и
о - j.....i...г
О 10000 30000 - 50000
Л Гц
б
Рис. 6.12. Спектры мощности частотно-модулированного тестового сигнала (ин-
декс модуляции (3 = 2,94): a — на входе хаотического модуля передатчика; б —
на выходе хаотического модуля приемника при 10% расстройке параметра m
выделяемого в модуле приемника (рис. 6.126) при 10% расстройке
коэффициентов усиления тп нелинейных элементов модулей. Как
следует из рисунков, даже при указанной относительно большой
расстройке сигнал на выходе модуля приемника извлекается до-
статочно точно и не вызывает затруднений при демодуляции ин-
формационного сигнала. Анализ отношения сигнал/шум показал,
что выигрыш от применения частотной модуляции-демодуляции
10*
132
Гл. 6. Повышение эффективности схемы
составляет в данном случае ~ 15,5 дБ по отношению к качеству пе-
редачи аналогичного сигнала с указанной расстройкой параметров
при использовании стандартной схемы с нелинейным подмеши-
ванием.
Эксперименты с музыкальным сигналом. Для проведения экс-
периментов с музыкальным сигналом был использован его фраг-
мент, оцифрованный с частотой дискретизации 200 кГц. Спектр
0 -.....i.....?....!..-..t.....
0 5000 15000 25000
а /.ГД
0
0 5000 15000 25000
б /г*
0 5000 15000 25000
< /.Гц
Рис. 6.13. Спектры мощности: а — музыкальный сигнал; б — музыкальный
сигнал на выходе фильтра нижних частот; в — частотно-модулированный му-
зыкальный сигнал
мощности исходного сигнала представлен на рис. 6.13а. Согласно
(6.9) имеет смысл увеличивать индекс частотной модуляции для
получения максимального выигрыша в отношении сигнал/шум.
6.2. Схема с частотной модуляцией информационного сигнала 133
Чтобы обеспечить указанный индекс модуляции, фрагмент сиг-
нала пропускался через фильтр нижних частот с полосой пропуска-
ния 3,4кГц и внеполосным подавлением —20 дБ (рис. 6.136), после
чего подавался на вход частотного модулятора. Спектр мощности
модулированного сигнала представлен на рис. 6.13е. Как видно
из рисунка, фильтрация сигнала и выбор его мощности на уровне
мощности хаотического сигнала привели к максимально возмож-
ной для используемой в эксперименте несущей девиации частоты
(~ 10кГц). ЧМ музыкальный сигнал далее поступал на сумматор
модуля передатчика и после суммирования с хаотическим сигна-
лом передавался в канал связи (рис. 6.116). Хаотический модуль
приемника выделял ЧМ сигнал из его смеси с хаотическим сиг-
налом и направлял этот сигнал на вход частотного демодулятора.
Сигнал на выходе демодулятора фильтровался по низкой частоте
и поступал на акустические системы, с помощью которых прослу-
шивался.
Выбор характеристик музыкального сигнала, обеспечивающий
примерно одинаковый индекс модуляции, как и в случае гармо-
нического информационного сигнала, позволял надеяться на по-
добный результат в отношении выигрыша от применения частот-
ной модуляции. Однако в данном случае ЧМ дает улучшение в
отношении сигнал/шум приблизительно на 9-10 дБ, что объясня-
ется, по всей видимости, спецификой структуры (сильная нере-
гулярность) модулирующего музыкального сигнала. В качестве
Рис. 6.14. Зависимость отношения сигнал/шум от расстройки хаотических мо-
дулей передатчика и приемника: / — хаотический синхронный отклик; 2 —
частотно-модулированный информационный сигнал на выходе хаотического мо-
дуля приемника; 3 — информационный (музыкальный) сигнал на выходе ча-
стотного демодулятора приемника
иллюстрации на рис. 6.14 приведены отношения сигнал/шум для
частотно-модулированного сигнала на выходе хаотического модуля
приемника (кривая 2) и восстановленного музыкального сигнала
134
Гл. 6. Повышение эффективности схемы
(кривая 5) в зависимости от расстройки параметра тп в модулях.
Кривая 1 на рис. 6.14 характеризует качество синхронного хаоти-
ческого отклика. Практическое совпадение кривых 1 и 2 отражает
тот факт, что уровни мощностей музыкального и хаотического сиг-
налов близки друг к другу (/z ~ 1).
С целью проверки конфиденциальных свойств исследуемой
схемы сигнал прослушивался в канале связи. Было установлено,
что при непосредственном прослушивании без применения каких-
либо дополнительных устройств обработки информация в переда-
ваемом в канал результирующем сигнале не определялась не при
каких д. С другой стороны, использование в канале частотного
демодулятора, аналогичного применяемому в приемнике, позво-
ляло на слух воспроизвести передаваемый информационный сиг-
нал при уровнях соответствующих р ~ 1. Однако такая возмож-
ность исчезала уже при р 0,25 (—6 дБ).
6.3. Выводы
В главе обсуждались проблемы конфиденциальности и качества
передачи. Рассмотренные схемы передачи информации позволяют
частично решить эти противоречивые проблемы. Суммируем преи-
мущества и недостатки этих схем.
В базовой схеме с нелинейным подмешиванием уровень мощ-
ности вводимого в модуль передатчика информационного сигнала
в —12 дБ по отношению к хаотическому сигналу (р ~ 0,06) явля-
ется пороговым с точки зрения маскировки информации в канале
связи и, тем самым, определяет максимально возможное отноше-
ние сигнал/шум на выходе приемника (С/Ш ~ 15 дБ) с учетом
реально достижимого на практике качества синхронного хаотиче-
ского отклика (т] « 27дБ).
В схеме с суммированием по модулю хаотического и информа-
ционного сигналов амплитуда (мощность) информационного сиг-
нала может быть близка к амплитуде (мощности) хаотического
сигнала (р « 1), что повышает энергетическую эффективность
передачи и приводит к более качественному восстановлению ин-
формационного сигнала в приемнике. При этом выигрыш в отно-
шении сигнал/шум на выходе приемника может достигать 12 дБ.
С другой стороны, повышение качества передачи не приводит к
ухудшению конфиденциальности связи (как в базовом варианте),
так как информационное сообщение недоступно нежелательному
слушателю даже в случаях, когда его уровень превышает уровень
хаотического сигнала.
Еще одно положительное свойство схемы с суммированием по
модулю заключается в том, что она более устойчива по отношению
к уровню входного информационного сигнала. Если в базовой си-
стеме его увеличение приводит к росту уровня результирующего
6.3. Выводы
135
сигнала, поступающего в канал связи и в кольцо обратной связи
генератора, что может вызывать нестабильность хаотической гене-
рации, то в предложенной схеме он не может превышать некоторой
фиксированной величины, определяемой (6.1).
К недостаткам схемы следует отнести высокие требования к
идентичности характеристик сумматоров по модулю в хаотических
модулях передатчика и приемника и существенное расширение
спектра мощности сигнала, передаваемого в канал связи. Если
первая проблема может быть решена, например, с помощью при-
менения цифровых сигнальных процессоров для построения сум-
маторов и формирования их характеристик, то второй недостаток
является неустранимым. Расширение спектра в несколько раз по
отношению к базовому варианту носит принципиальный харак-
тер и ужесточает требования к каналу связи. Последний должен
теперь обеспечивать прохождение сигнала без искажений в более
широкой полосе частот.
Применение частотной модуляции-демодуляции информацион-
ного сигнала также позволяет повысить качество передачи при со-
хранении ее конфиденциальности. Модуляция делает невозмож-
ным прослушивание информационного сигнала в канале, если
мощность вводимого в модуль передатчика сигнала не превышает
—6 дБ (/z 0,25) по отношению к уровню хаотического сигнала.
Помимо этого, за счет применения частотной модуляции удается
улучшить отношение сигнал/шум на выходе приемника на ~ 9 дБ.
Таким образом, общий выигрыш схемы с частотной модуляцией
информационного сигнала перед системой с нелинейным подме-
шиванием может достигать ~ 15 дБ.
Как и в схеме с суммированием по модулю, недостатком второй
схемы является расширение полосы частот, необходимой для пере-
дачи информации. Указанные оценки были получены при макси-
мально возможном индексе модуляции с частотой несущей 10 кГц.
Даже в этом случае полоса частот результирующего сигнала в ка-
нале связи в 6-7 раз превышает полосу информационного сигнала
(3,4 кГц).
Общий вывод: в тех случаях, когда возможно обеспечить ка-
налы связи с необходимыми частотными характеристиками (на-
пример, в проводных системах), с помощью предложенных в
этой главе схем можно на 10-15 дБ повысить качество конфиден-
циальной передачи информации по сравнению с базовой системой
с нелинейным подмешиванием.
Г лава 7
ПРИМЕНЕНИЕ ЦИФРОВЫХ СИГНАЛЬНЫХ
ПРОЦЕССОРОВ ДЛЯ РЕАЛИЗАЦИИ СХЕМЫ
С НЕЛИНЕЙНЫМ ПОДМЕШИВАНИЕМ ИНФОРМАЦИИ
Пути повышения качества передачи, рассмотренные в преды-
дущей главе, базировались на том положении, что мы имеем дело с
фиксированной величиной ошибки синхронизации ту, предельная
оценка которой для аналоговых схем находится на уровне 10“3.
Вместе с тем, безусловно, заслуживают внимания решения, кото-
рые направлены на получение синхронного хаотического отклика
с более высоким качеством (уменьшение ту). Как отмечалось, од-
ной из ключевых проблем здесь является разработка воспроизво-
димых (от образца к образцу) генераторов хаоса с высокой точно-
стью параметров. Для ее решения в настоящее время известно
три подхода.
Один из них связан с разработкой специальных прецизионных
генераторов хаоса и обсуждался в гл. 5.
Второй подход к решению проблемы воспроизводимости харак-
теристик генераторов хаоса ориентирован на использование совре-
менных КМОП технологий. В этом случае разрабатываются специ-
альные интегральные микросхемы (ИС), заменяющие источники
хаоса в схемах передачи информации. Так, например, на сего-
дняшний день существуют две микросхемы для цепи Чуа, которые
конструктивно отличаются друг от друга. Блок-схема, конструк-
ция и внешний вид одной из них [120, 121] приведены на рис. 7.1.
Для подключения ИС необходимы источник питания 9 В и один
внешний резистор /?, назначение которого — выбор и управле-
ние конкретным хаотическим режимом. ИС выполнена по 2-мкм
КМОП технологии (размер кремниевой пластины 2,5х2,8 мм). Та-
ким образом, точность всех параметров цепи (за исключением R)
обеспечивается и определяется применяемой технологией. К сожа-
лению, авторы не указывают конкретного значения реализуемой
точности воспроизведения параметров.
Разработчики другой ИС [128] пошли дальше и отказались от
всех внешних элементов. При этом управление хаотическими
режимами осуществляется путем изменения тока на управляю-
щем входе. ИС выполнена по 2,4-мкм КМОП технологии (размер
кремниевой пластины 1,9x2,6мм). Другие характеристики ИС:
7.1. Цифровой сигнальный процессор ADSP-21061
137
напряжение питания — 5 В, потребляемая мощность — 1,8 мВт,
Юк управления — 1-2 мкА. Сведения о точности воспроизведения
характеристик ИС от образца к образцу также отсутствуют.
Рис. 7.1. Интегральная микросхема цепи Чуа: a — структура; б— блок-схема;
в — внешний вид
В основе третьего подхода лежит использование цифровых сиг-
нальных процессоров (ЦСП). В этом случае возможно обеспечить
практически любую идентичность параметров хаотических моду-
лей передатчика и приемника (с точностью до единицы младшего
разряда).
Данная глава посвящена именно третьему подходу. Основное
внимание в ней уделяется практическим аспектам использования
ЦСП в схеме с нелинейным подмешиванием информации, анализу
возникающих при этом проблем и путей их решения с точки зре-
ния обеспечения качественной передачи информации.
7.1. Цифровой сигнальный процессор ADSP-21061
и его основные характеристики
Для реализации хаотических модулей передатчика и приемни-
ка были использованы стандартные платы лабораторного комплек-
та SHARC EZ-KIT LITE фирмы Analog Devices, предназначенные
9 Зак. 18
138
Гл. 7. Применение цифровых сигнальных процессоров
для обработки аналоговых сигналов звукового диапазона. Они
включают в себя цифровой сигнальный процессор ADSP-21061,
ИС кодека AD1847, а также некоторые служебные периферийные
устройства предназначенные для стабилизации питания, осуще-
ствления интерфейса процессора с компьютером, хранения на-
чального загрузочного кода и т.д. Процессор ADSP-21061 обла-
дает следующими параметрами:
1) время выполнения одной инструкции — 25 нс;
2) внутренняя память — 1 Мбит;
3) разрядность — 32 разряда с возможностью выполнения про-
межуточных вычислений с 40-разрядными переменными.
Процессор может выполнять вычисления как с целой, так и с
плавающей точкой и допускает выполнение двух арифметических
операций в рамках одной инструкции.
ИС кодека AD1847, входящая в состав комплекта, предназна-
чена для оцифровки аналогового сигнала звукового диапазона и
обратного преобразования цифрового сигнала в аналоговый с мак-
симальной частотой дискретизации 48 кГц и точностью 16 бит.
Дополнительно кодек снабжен устройством S/Д интерполяции,
позволяющим внутри ИС поднимать тактовую частоту дискретиза-
ции и, таким образом, делающим возможным более качественную
оцифровку сигнала.
7.2. Эксперименты со схемой
на одном сигнальной процессоре
На первом этапе схема с нелинейным подмешиванием инфор-
мации была реализована на одном сигнальном процессоре, т.е.
для построения хаотических модулей как передатчика, так и при-
емника использовалась одна плата EZ-KIT LITE, а входящий в
ее состав ДСП «обслуживал» оба модуля одновременно (процессор
успевал просчитывать за 1/48000 секунды отсчеты обоих модулей).
Функцию канала связи выполняла ИС кодека AD1847, на цифро-
аналоговый преобразователь (ЦАП) которого поступал сигнал хао-
тического модуля передатчика, сформированный с помощью ДСП.
Пройдя ЦАП, сигнал по проводной линии передавался на аналого-
цифровой преобразователь (АЦП) кодека, с выхода которого по-
лучаемый цифровой сигнал далее использовался для обработки в
приемной части схемы по алгоритмам, задаваемым тем же са-
мым процессором. Таким образом, отличие описываемых ниже
экспериментов от численного моделирования схемы на персональ-
ном компьютере заключалось в наличии аналогового канала связи
между хаотическими модулями передатчика и приемника, харак-
теризуемого двумя дополнительными преобразованиями (с помо-
щью ЦАП и АЦП) над передаваемым в канал сигналом.
7.2. Эксперименты со схемой на одном сигнальной процессоре 139
Хаотические модули передатчика и приемника. Основу хаоти-
ческих модулей составляли кольцевые генераторы, рассмотренные
в гл. 5.
Для реализации модулей цифровым методом использовалось
два метода. Так как генераторы описываются системой диффе-
ренциальных уравнений, то одним из методов являлось числен-
ное интегрирование этой системы. В качестве метода интегриро-
вания был выбран метод Рунге-Кутты четвертого порядка. На его
реализацию процессор затрачивает примерно 200-300 тактов. По-
этому в тех случаях, когда необходимо было сэкономить ресурсы
процессора применялся другой метод, основанный на применении
рекурсивных фильтров. Так как структура кольцевых генераторов
представляет собой замкнутое в кольцо последовательное соедине-
ние нелинейного элемента и различных аналоговых фильтров, то
последним могут быть поставлены в соответствие цифровые БИХ
фильтры по методу билинейного преобразования [51].
Анализ характеристик генераторов, полученных двумя мето-
дами, показал, что они с высокой точностью соответствуют исход-
ной математической модели. При этом БИХ фильтрация сводится
к обычной свертке сигнала с коэффициентами (15-20 тактов) и
время, затрачиваемое на вычисление одного отсчета при ее при-
менении, на порядок меньше, чем в случае использования метода
Рунге-Кутта. С другой стороны, существует ряд недостатков ме-
тода БИХ фильтрации по сравнению с численным интегрирова-
нием. Одним из них является необходимость обеспечения боль-
шого количества отсчетов на квазипериод процесса, связанная со
спецификой билинейного преобразования. Речь идет о примерно
100-200 отсчетов вместо 5-15, требуемых для метода Рунге-Кутты.
По этой причине методу численного интегрирования в эксперимен-
тах отдавалось предпочтение.
Так как частота дискретизации кодека не превышала 48 кГц,
то с учетом сказанного максимальное значение частоты спектра
хаотических колебаний, реализуемых с помощью лабораторного
комплекта, составляла ~ 10 кГц.
Реализацию хаотического модуля приемника отличает появле-
ние в системе дифференциальных уравнений внешнего сигнала.
Поэтому для применения метода Рунге-Кутты необходимо было
иметь промежуточные отсчеты входного сигнала для обеспечения
соответствующей точности метода. Другими словами, частота дис-
кретизации входного сигнала должна в два раза превышать основ-
ную тактовую частоту. Так как кодек имеет ограничения по так-
товой частоте, то каждый второй отсчет необходимо извлекать
интерполяционными методами. Анализ синхронного хаотического
отклика на выходе модуля приемника показал, что для удовлетво-
рительного качества синхронизации достаточно проводить интер-
поляцию промежуточного отсчета по четырем известным (по два с
каждой стороны) отсчетам.
9*
140 Гл. 7. Применение цифровых сигнальных процессоров
Синхронный хаотический отклик. Для экспериментов по син-
хронизации и передачи информации шаг системы уравнений вы-
бран таким, чтобы частота среза хаотического сигнала находилась
на уровне 4 кГц.
Для того чтобы проверить правильность функционирования
исследуемой схемы отсчеты модуля передатчика в цифровом виде
(в формате с плавающей точкой) передавались на вход модуля при-
емника, т. е. аналоговый канал отсутствовал и эксперимент был
подобен компьютерному моделированию. Качество синхронного
отклика оценивалось по отношению мощностей сигналов на входе
и выходе хаотического модуля приемника (т?) в отсутствие переда-
ваемой информации.
В результате экспериментов было зафиксировано качество син-
хронизации на уровне —60дБ (т? = 10“6), что соответствует чи-
сленному моделированию в среде MatLab и, таким образом,
подтверждает корректность кодировки ДСП.
Как показано в гл. 4, при использовании реальных каналов
связи большое значение, с точки зрения получения качественного
синхронного отклика, приобретают суммарные искажения пере-
даваемых по ним сигналов. В связи с этим необходимо выяс-
нить характер и уровень искажений в аналоговом канале (цепочка
ЦАП-проводная линия-АЦП) и степень чувствительности к ним
Рис. 7.2. Частотные характеристики ИС кодека AD1847: a — амплитудная ха-
рактеристика; б — фазовая характеристика
модуля приемника. Для получения указанной информации из-
мерены амплитудно- (АЧХ) и фазо-частотная (ФЧХ) характери-
стики канала. Результаты проведенных измерений представлены
на рис. 7.2.
Первый вывод, который следует из анализа АЧХ (рис. 7.2а) —
для минимизации амплитудных искажений в сигнале, передава-
емом через канал, не должно быть постоянной составляющей и
7.2. Эксперименты со схемой на одном сигнальной процессоре 141
очень низких частот (единицы и десятки Гц). Кольцевой генератор
хаоса с 1,5 степенями свободы указанным свойством не обладает,
поэтому последующие эксперименты проводились с модулями на
основе генератора с 2,5 степенями свободы, в состав которого
включен полосовой фильтр. В сигнале на его выходе отсутство-
вали низкие частоты и постоянная составляющая, вследствие чего
именно он использовался для аддитивного суммирования с инфор-
мационным сообщением.
Второй вывод связан с неравномерностью амплитудной харак-
теристики в диапазоне частот генерации хаотических колебаний.
Как следует из АЧХ, в интервале частот от 1кГц до 4 кГц ампли-
туда отклика изменяется на 1-2%. Моделирование аналогичной
ситуации на компьютере показало, что отмеченный уровень иска-
жений сигнала приводит к ухудшению качества синхронизации с
—60 дБ до —31 дБ. Другими словами, если не принимать специаль-
ных мер по компенсации амплитудных искажений канала связи,
то трудно надеяться на получение хорошего качества синхрониза-
ции и, соответственно, передачи информации.
Для компенсации изменений коэффициента передачи канала в
пределах частотного диапазона хаотической генерации на входе
модуля приемника необходимо предусмотреть компенсационный
усилитель и во время информационных пауз (отсутствие сооб-
щения) производить подстройку его коэффициента усиления Ку.
Критерием настройки является обеспечение минимума шумов де-
синхронизации на выходе модуля приемника (минимальное if).
Принимая во внимание, что зависимость т) от коэффициента
передачи канала Кк имеет выраженный экстремум (рис. 7.3),
Рис. 7.3. Зависимость rj от коэффициента пропускания Кк канала связи
рассматриваемая оптимизационная задача корректна и решаема.
Поэтому если условия распространения сигнала в канале таковы,
что коэффициент передачи канала Кк постоянен от паузы к пау-
зе или меняется достаточно медленно, то такой метод способен
обеспечить удовлетворительное качество передачи.
142 Гл. 7. Применение цифровых сигнальных процессоров
Наконец третий вывод вытекает из анализа рис. 7.26. Наличие
фазового сдвига и его прямая пропорциональность частоте свиде-
тельствует о существовании в канале связи задержки сигнала. Ее
влияние на качество синхронного отклика становится понятным
из результатов экспериментов^ приведенных ниже.
Качество синхронизации в экспериментах зафиксировано на
уровне —20 дБ (рис. 7.4) и это несмотря на компенсацию ампли-
тудного ослабления сигнала в канале связи и переход на другую
Рис. 7.4. Характеристики хаотических сигналов: a — временная реализация
сигналов на входе (большая амплитуда) и выходе хаотического модуля прием-
ника (малая амплитуда) (горизонтальная развертка 0,5 мс/дел; вертикальная —
0,2В/дел); б— спектр мощности сигнала на входе модуля приемника (горизон-
тальная развертка 1,6кГц/дел; вертикальная — ЮдБ/дел)
базовую хаотическую систему с 2,5 степенями свободы. Как от-
мечалось, моделирование на компьютере при аналогичных усло-
виях (но без аналогового канала) с применением вычислений с
плавающей точкой обеспечивало качество —60 дБ. Тот же самый
результат получен при переходе от вычислений с плавающей точ-
кой к 16-разрядным вычислениям с фиксированной точкой. Так
как в эксперименте использовался 16-битный кодек, то ограниче-
ния по количеству разрядов не могло привести к такому резкому
ухудшению качества синхронизации по сравнению с численными
экспериментами. Кроме того, нестабильность кварца, задающего
тактовую частоту, порядка 10“14 также не должна приводить к
существенным искажениям. Таким образом, сопоставление ре-
зультатов численного моделирования и экспериментальных дан-
ных приводит к выводу о том, что ухудшение качества синхро-
низации возникает из-за неконтролируемых искажений сигнала в
канале связи.
Невысокое качество синхронного хаотического отклика не по-
зволяет организовать конфиденциальную передачу, например,
7.2. Эксперименты со схемой на одном сигнальной процессоре 143
речевого сигнала с удовлетворительным качеством. Так как ин-
формационный сигнал маскируется хаотическим сигналом в ка-
нале при соотношении сигнал/шум -12 дБ (р а; 0,063), то на
выходе модуля приемника максимальное отношение сигнал/шум
(С/Ш), которое удалось получить в данном эксперименте, не пре-
вышало 8 дБ.
Частотная модуляция информационного сигнала. В соответ-
ствии с результатами, описанными в гл. 6, качество передачи
можно улучшить при использовании предварительной частотной
модуляции информационного сигнала перед введением его в хао-
тический модуль передатчика.
Для того чтобы апробировать данный подход в исследуемом
макете, передаваемый речевой сигнал с полосой 1кГц частотно
модулировал гармонический сигнал fc = 3 кГц. Полученный ЧМ
сигнал нелинейно подмешивался к хаотическому сигналу и через
аналоговый канал связи и хаотический модуль приемника посту-
пал далее на частотный демодулятор. Указанные величины ча-
стоты несущего колебания fc и полосы речевого сигнала обеспечи-
вали индекс модуляции /3 а 3 и были выбраны исходя из ресурсов
и характеристик используемого в макете ДСП и ИС кодека.
Эксперименты подтвердили, что применение частотной моду-
ляции действительно дает дополнительный выигрыш в отношении
сигнал/шум на выходе хаотического модуля приемника. Примени-
тельно к указанным параметрам выигрыш оказался яа 16 дБ. Он
складывается из двух частей: 10 дБ обеспечивает используемая мо-
дуляция непосредственно и 6 дБ — она же опосредованно за счет
изменения порога прослушиваемости (декодирования) передавае-
мого сигнала в канале связи, который для частотной модуляции
составляет —6 дБ вместо —12 дБ (см. § 6.2). Поэтому в целом от-
ношение сигнал/шум на выходе модуля приемника оказалось на
уровне 24 дБ.
Эксперименты с кодеком AD7569. Анализ результатов экспе-
риментов, описанных выше, показал, что одними из вероятных
причин невысокого качества хаотического синхронного отклика
по сравнению с компьютерным моделированием являются про-
цессы в ИС кодека AD1847 используемой платы SHARC EZ-KIT
LITE, происходящие при цифро-аналоговом и аналого-цифровом
преобразованиях сигналов. В частности, было установлено, что
при указанных манипуляциях происходят фазовые искажения
сигнала. В случае преобразования речевых сигналов эти искаже-
ния незаметны и не сказываются на качестве воспроизводимого в
приемнике сигнала. Однако при передаче через канал хаотических
сигналов фазовые искажения способны привести к десинхрониза-
ции отклика и существенно ухудшить качество передачи. Поэтому
144
Гл. 7. Применение цифровых сигнальных процессоров
предстояло выяснить обстоятельства, к которым может привести
замена этой ИС на кодек другого типа.
С этой целью к плате EZ-KIT LITE была подключена ИС
кодека AD7569, использующая в своей работе принцип «выборка-
хранение». Она позволяет проЬводить цифро-аналоговые и ана-
лого-цифровые преобразования сигналов с 8-битной точностью и
предельной частотой дискретизации 300 кГц, но главным ее от-
личием от AD1847 является отсутствие цифровой интерполяции
и фильтрации при указанных манипуляциях. Специфика цифро-
аналогового преобразования AD1847 в том, что последователь-
ность цифровых отсчетов результирующего сигнала, поступающая
Рис. 7.5. Эксперименты с кодеком AD7569: a — сигнал с выхода ЦАП кодека
(горизонтальная развертка 2мс/дел, вертикальная развертка 0,5В/дел); б— ха-
отический сигнал на входе модуля приемника в отсутствие информации (гори-
зонтальная развертка 20мс/дел; вертикальная — 0,5В/дел)
пример которого приведен на осциллограмме рис. 7.5а. Это, в свою
очередь, предоставляет возможность передачи сигнала отсчет в
отсчет с минимальными потерями в канале связи.
Эксперименты показали, что только заменой кодека на другую
модель (с другим принципом функционирования) удается повы-
сить качество хаотической синхронизации до —28 дБ по сравнению
с —20 дБ при использовании AD1847. И это несмотря на уменьше-
ние точности преобразований нового кодека (8 бит вместо 16 бит у
AD1847).
Таким образом, при реализации схемы с нелинейным подме-
шиванием на базе одного сигнального процессора (ADSP-21061) с
каналом связи, функции которого выполняла ИС кодека AD7569,
и непосредственном подмешивании исходного информационного
сигнала (без модуляции) к хаосу отношение сигнал/шум на выходе
хаотического модуля приемника (С/Ш) достигало 16 дБ. В то же
время применение предварительной частотной модуляции инфор-
мационного сигнала позволяло увеличить С/Ш до 32 дБ.
7.3. Реализация схемы с нелинейным подмешиванием
145
7.3. Реализация схемы с нелинейным подмешиванием
на двух раздельных сигнальных процессорах
Эксперименты со схемой передачи информации на базе одного
ЦСП важны прежде всего для апробации разработанных алгорит-
мов и выяснения влияния искажений в аналоговом канале связи
на качество хаотического синхронного отклика, являющегося
основой функционирования схемы. Однако для практических це-
лей такое построение коммуникационной схемы не представляет
большого интереса. Поэтому в дальнейшем были проведены экспе-
рименты с макетом системы с нелинейным подмешиванием, хао-
тические модули передатчика и приемника которого были реали-
зованы на раздельных платах лабораторного комплекта SHARC
EZ-KIT LITE с помощью, соответственно, раздельных процес-
соров.
Блок-схема экспериментального макета представлена на
рис. 7.6. Он состоял из трех основных блоков: платы с процессо-
ром (ADSP-21061), выполняющей функцию хаотического модуля
Хаотический модель Хаотический модель
передатчика приёмника
Рис. 7.6. Блок-схема эксперимента с двумя сигнальными процессорами
передатчика; аналогичной платы для хаотического модуля при-
емника и макетной платы, содержащей ИС кодека и некоторых
служебных устройств, предназначенных для обеспечения пита-
ния, усиления цифрового сигнала и фильтрации шумов в цепи пи-
тания.
Схема функционировала следующим образом. Информацион-
ный аналоговый (речевой) сигнал оцифровывался на плате модуля
передатчика с помощью кодека AD1847, встроенного в используе-
мую плату EZ-KIT LITE, и подмешивался к хаотическому сиг-
налу модуля, полученного с помощью ЦСП. Результирующий сиг-
нал поступал на ЦАП кодека, на выходе которого формировался
аналоговый сигнал, поступающий далее на АЦП того же кодека.
146
Гл. 7. Применение цифровых сигнальных процессоров
С выхода АЦП оцифрованный сигнал поступал на плату хаотиче-
ского модуля приемника, где происходило декодирование речевого
сигнала и последующее преобразование его к аналоговому виду.
На входе модуля передатчика и выходе модуля приемника разме-
щались акустические системы для определения на слух качества
передачи (субъективный контроль), а также измерительные при-
боры (осциллограф, анализатор спектра) для объективной реги-
страции характеристик сигналов.
В соответствии с выводами предыдущего пункта, в качестве ко-
дека канала использовалась ИС AD7869. Она предназначена для
работы с аналоговыми сигналами звукового диапазона и постро-
ена по принципу «выборка-хранение». В корпусе кодека располо-
жены 14-битные ЦАП и АЦП, которые функционально полностью
независимы. Как для ЦАП, так и для АЦП максимальная тактовая
частота достигает 80 кГц, а рабочий диапазон напряжений сигнала
находится в пределах от —ЗВ до ЗВ. Связь кодека с внешними ци-
фровыми устройствами осуществлялась через последовательный
порт.
Специфика макета заключалась в том, что тактовые частоты
ЦАП и АЦП кодека обеспечивались раздельными источниками, на-
ходящимися на платах хаотических модулей передатчика и при-
емника соответственно. Таким образом имитировалась наиболее
типичная для практики ситуация с независимыми друг от друга
передатчиком и приемником. Функцию канала связи выполняла
проводная линия.
Результаты экспериментов. С учетом максимальной частоты
дискретизации (80 кГц) применяемых ЦАП и АЦП полоса маски-
рующего хаотического сигнала была выбрана равной 6 кГц. Пер-
вые же эксперименты по синхронизации дали обнадеживающий
результат. Используемая в макете элементная база при выбран-
ных параметрах хаотического сигнала обеспечила качество син-
хронизации на уровне -54 дБ, причем без применения каких-либо
специальных мер. Такое качество вполне сопоставимо с резуль-
татами компьютерного моделирования. Однако приблизительно
раз в секунду фиксировался кратковременный (« 0,1с) срыв син-
хронизации, приводящий к появлению на выходе акустической
системы коротких щелчков. После срыва синхронизация восста-
навливалась до следующего момента сбоя, после которого снова
восстанавливалась и т.д. Ситуация напоминает «оп-off» переме-
жаемость в экспериментах по синхронизации ведущей-ведомой
системы на основе цепи Чуа. Но в отличие от перемежаемости
наблюдаемые срывы синхронизации происходили периодически.
Анализ причин данного явления привел к следующим выводам.
Типичное расхождение между тактовыми частотами /о различ-
ных образцов лабораторных плат составляет Д/ ~ 1О“4/о- Это
7.3. Реализация схемы с нелинейным подмешиванием 147
приводит к тому, что отсчеты ЦАП и АЦП постоянно сдвигаются
друг относительно друга во времени и, как следствие, отсчеты АЦП
периодически оказываются на границе между отсчетами ЦАП —
область при переходе от одного значения напряжения на выходе
ЦАП к другому. Протяженность области составляет до 10% от
интервала между тактами и попадание в нее отсчета АЦП может
привести к срыву синхронизации.
Для устранения возможных последствий соотношение такто-
вых частот АЦП и ЦАП выбирается как три к одному (3/1). Так
как предельная частота АЦП не превышает 80 кГц, то единствен-
ным выходом в такой ситуации является уменьшение частоты
ЦАП (а следовательно, и частоты следования отсчетов хаотиче-
ского сигнала) до величины примерно 26,5 кГц. При этом на «сту-
пеньку» выходного напряжения ЦАП приходится в среднем три
отсчета АЦП (рис. 7.7). Указанное соотношение тактовых частот
Рис. 7.7. Иллюстрация ситуации с кратными тактовыми частотами ЦАП и АЦП
позволяет продетектировать границы «ступенек», а соответственно,
и сами «ступеньки» по перепадам между двумя соседними отсче-
тами АЦП. В результате исходная последовательность цифровых
отсчетов на входе ЦАП восстанавливается на выходе АЦП, срывы
синхронизации отсутствуют, а точность восстановления отсчетов
определяется только шумами в канале связи.
Следствием понижения тактовой частоты ЦАП является умень-
шение полосы передаваемого хаотического и, соответственно, ин-
формационного сигналов, так как для качественной передачи не-
обходимо обеспечить определенное число отсчетов на квазипериод.
Поэтому пропорционально (в 3 раза) уменьшается полоса передачи.
В результате экспериментов качество синхронизации было
зафиксировано на уровне —52 дБ, что обеспечило конфиденциаль-
ную передачу речевого сигнала с полосой 2 кГц и отношением
сигнал/шум на выходе приемника 40 дБ.
148
Гл. 7. Применение цифровых сигнальных процессоров
7.4. Выводы
Приведенные результаты свидетельствуют о перспективности
применения сигнальных процессоров для практической реализа-
ции конфиденциальных систем передачи, использующих хаотиче-
ские сигналы. На примере схемы с нелинейным подмешиванием
показано, что ЦСП позволяют решить задачу построения комму-
никационных систем с хаосом, обеспечивающих высококачествен-
ную конфиденциальную передачу информации.
Хаотические модули на базе ЦСП имеют масса-габаритные и
энергетические характеристики, сопоставимые с модулями, реали-
зованными на аналоговых компонентах, но по качеству передачи
превосходят их. Однако указанное преимущество не достигается
автоматически. Первые эксперименты показали, что произволь-
ный выбор необходимых компонентов, в частности кодеков, для
передачи информации с использованием процессоров может не
только не привести к успеху, но и дать результаты, уступающие
по основным характеристикам аналоговым моделям. Только пе-
реход к использованию 14-битных кодеков, работающих по прин-
ципу «выборка-хранение», обеспечил качественную передачу рече-
вой информации в полосе до 2 кГц.
Другими важными характеристиками являются вычислитель-
ные ресурсы используемых процессоров и максимальные такто-
вые частоты ЦАП и АЦП кодеков. И та и другая характеристики
обеспечивают большее число отсчетов на квазипериод колебаний и
тем самым позволяют более точно восстанавливать передаваемое
информационное сообщение. С другой стороны, увеличение числа
отсчетов, при заданной полосе информационного и хаотического
сигналов, повышает устойчивость системы к возмущающим фак-
торам или, при заданном качестве передачи, позволяет расширить
полосу сигналов.
Из анализа результатов следует, что применение 16-битных ко-
деков («выборка-хранение») с тактовыми частотами 300-400 кГц
и ЦСП, обеспечивающих обработку сигналов с частотами дискре-
тизации до 1 МГц, позволит организовать передачу сообщений в
полосе 10 кГц с качеством, превышающим 40 дБ даже без при-
менения предварительной частотной модуляции информационного
сигнала.
Глава 8
СИСТЕМА ПЕРЕДАЧИ ИНФОРМАЦИИ
ДЛЯ РАБОТЫ В УСЛОВИЯХ ФИЛЬТРАЦИИ
СИГНАЛОВ В КАНАЛЕ СВЯЗИ
8.1. Борьба е фильтрацией сигналов в канале связи
Фильтрация сигнала, передаваемого по каналу связи1), явля-
ется одним из возмущающих факторов, оказывающих влияние на
качество передачи информации с использованием динамического
хаоса. Причем по степени влияния ее следует отнести к наиболее
существенным факторам. Как правило, она всегда присутствует
в реальных каналах связи и поэтому требует адекватных мер по
устранению или, по крайней мере, уменьшению ее влияния. Под-
тверждением актуальности данной проблемы служат результаты
экспериментального исследования передачи речевых сигналов по
беспроводным и проводным каналам связи в радиодиапазоне, опи-
санные в гл. 4. Если с неидентичностью параметров хаотических
модулей в передатчике и приемнике можно бороться путем тща-
тельного подбора соответствующих элементов, разработкой преци-
зионных генераторов или применением сигнальных процессоров,
то борьба с канальными искажениями требует специальных под-
ходов.
Чтобы перейти к рассмотрению подходов, необходимо пояс-
нить, какие принципы лежат в их основе. С одной стороны, для
качественной передачи информации в коммуникационных систе-
мах с синхронным хаотическим откликом сигнал с выхода пере-
датчика должен передаваться на вход приемника с минимально
возможными искажениями. С другой стороны, сигнал в канале
может быть подвержен амплитудным и/или фазовым преобразо-
ваниям, приводящих в итоге к значительному искажению сигнала
на входе приемника. Таким образом, задача сводится к компен-
сации или уменьшению возможных искажений сигнала в канале
связи.
В общем случае, преобразования сигнала в канале предста-
вляют собой совокупность амплитудно- и фазочастотных прео-
т) Канал связи включает в себя выходные каскады передатчика (например,
модулятор, усилитель, антенна), входные цепи приемника (антенна, усилитель,
демодулятор) и беспроводную (или проводную) линию связи между ними.
150 Гл. 8. Система передачи информации
бразований. Поэтому для дальнейшего рассмотрения их удобно
поставить в соответствие некоторому эквивалентному фильтру
канала. По результатам наблюдений реальных каналов такой
фильтр обладает полосно-пропускающими свойствами и значи-
тельно искажает проходящие через него сигналы в области как
низких, так и высоких частот, лежащих вне полосы пропуска-
ния фильтра. В этой ситуации минимизировать общие искажения
можно с помощью нескольких подходов.
Один из них связан с использованием узкополосных хаоти-
ческих сигналов. При этом полоса частот сигналов должна ле-
жать в полосе пропускания фильтра канала и находиться в том ее
месте, где неравномерности амплитудно- и фазочастотных харак-
теристик фильтра отсутствуют либо минимальны. Такой подход
является вполне реализуемым, однако он может быть сопряжен
с ухудшением конфиденциальных свойств передачи вследствие
узкополосности маскирующего хаотического сигнала.
Другой подход ориентируется на построении корректирующих
элементов в виде фильтров, обратных по отношению к фильтру
канала и расположении их на входе приемника. Однако иссле-
дования, проведенные в [112-114, 168], показали, что такой под-
ход малоэффективен, поскольку для ряда наиболее интересных
случаев точное решение задачи коррекции либо отсутствует, либо
трудно достижимо, а приближенное не дает желаемого улучшения
качества хаотического синхронного отклика.
Рассмотренные подходы относятся к числу пассивных методов
борьбы с искажениями сигнала в канале связи. В данной главе
предлагается другой — активный подход к извлечению инфор-
мации при наличии фильтрующих свойств канала и приводятся
результаты численного и экспериментального его исследования.
Идея подхода заключается в том, чтобы включить в передатчик
и приемник элементы с фильтрующими свойствами, эквивалент-
ными фильтрующим свойствам канала.
8.2. Структура системы
Структура системы приведена на рис. 8.1. По сравнению со схе-
мой, рассмотренной в гл. 3, 4, в хаотический модуль передатчика
вводится фильтр 3, который является эквивалентным по своим
характеристикам фильтру канала III, а сумматор располагается
между линейной подсистемой 2 и фильтром 3. Таким образом,
в канал связи (и одновременно на вход фильтра 3) передается
сумма информационного (речевого) и хаотического сигнала с вы-
хода Яг^Сг-фильтра нижних частот второго порядка. Основная
идея предлагаемого подхода заключается в том, чтобы данный сум-
марный сигнал претерпевал одни и те же амплитудно-частотные
преобразования как в канале связи, так и в передатчике.
8.2. Структура, системы
151
Хаотический модуль приемника состоит из тех же элементов с
заменой сумматора на вычитатель. Если из модулей передатчика
и приемника исключить фильтр 3, а канал связи считать идеаль-
ным, то схема сведется к обычной схеме с нелинейным подме-
шиванием речевого и хаотического сигналов на основе кольцевого
генератора с 1,5 степенями свободы.
При наличии хаотического синхронного отклика и отсутствии
входного информационного сигнала, т.е. при S = 0, сигнал на
выходе вычитателя в приемнике Sf = U — Z2 = 0. Если фик-
сировать прохождение информационного сигнала (5 0 0) через
Рис. 8.1. Блок-схема системы передачи информации с нелинейным сумми-
рованием речевого и хаотического сигналов при наличии фильтрации в канале
связи: I — хаотический модуль передатчика, II — хаотический модуль прием-
ника, III — канал связи; 5, Sf — исходный и выделяемый в хаотическом модуле
приемника речевой сигнал; a — структура коммуникационной системы; б — не-
линейная подсистема 1 (нелинейный элемент 4- фильтр первого порядка); в —
линейная подсистема 2 (фильтр нижних частот второго порядка); г — полосовой
фильтр
элементы схемы, то можно убедится в том, что информационный
сигнал на выходе приемника Sf представляет собой копию сиг-
нала S', прошедшего через фильтр 3. Таким образом, остается вы-
яснить: (а) останется ли кольцевой генератор источником хаоса
при введении дополнительного фильтра 3; (б) будет ли возмож-
ным получение хаотического синхронного отклика в приемнике и
если да, то будет ли отклик устойчив.
152
Гл. 8. Система передачи информации
8.3. Математическое моделирование
Пусть для определенности III, а следовательно и 3, — полосо-
вые фильтры второго порядна. Тогда нормированные уравнения
системы передачи информации имеют вид
TXi + Х\ = F(Z\),
Yi+axYi+У^Хь
= и>2(У1 + S),
• их + а2Щ + = ц?(У1 + S'), (8.1)
TX2 + X2 = F(U),
Y2 + a1Y2 + Y2 = X2,
Z2 + a2Z2 + w2Z2 = cj2Y2.
Первое уравнение в (8.1) описывает нелинейную подсистему 1,
представляющую собой последовательно соединенные безынерци-
онный нелинейный преобразователь с характеристикой (5.2) и
фильтр нижних частот первого порядка; следующее уравнение со-
ответствует линейной подсистеме, представляющей собой фильтр
нижних частот второго порядка; третье уравнение описывает поло-
совой фильтр второго порядка модуля; такой же фильтр описывает
четвертое уравнение, но уже для процесса прохождения сигнала
через канал связи; три последних уравнения описывают хаотиче-
ский модуль приемника; S — информационный сигнал; (¥i +S) —
сигнал, поступающий в канал и на вход полосового фильтра хао-
тического модуля передатчика.
Таким образом, хаотический модуль передатчика на рис. 8.1
представляет собой генератор с фильтром нижних частот первого
порядка, фильтром нижних частот второго порядка и полосовым
фильтром. Известно [32], что в таких генераторах существует как
область хаотических колебаний, так и область гиперхаоса. Дру-
гими словами, условие (а) оказывается выполненным.
Система уравнений (8.1) имеет решение, траектории которого
в 12-мерном фазовом пространстве целиком лежат в 7-мерной ги-
перплоскости, определяемой условиями
Х1=Х2, У1=У2, У1 = У2, Zi = U, Z\ = U. (8.2)
Если такие решения являются устойчивыми под действием ма-
лых возмущений, то установившиеся колебания ведомой системы,
вызванные хаотическим воздействием ведущей системы и явля-
ются хаотическим синхронным откликом. Для дальнейших иссле-
дований использовался гиперхаотический режим передатчика при
следующих значениях параметров: m = 35, Т = 0,2, ai = 0,3,
ot2 = 0,2, cj = 2,5.
8.3. Математическое моделирование
153
Необходимым условием существования хаотического синхрон-
ного отклика является отрицательность первого показателя Ляпу-
нова А1 хаотического модуля приемника. Прямые расчеты по-
казывают, что условие устойчивости синхронизации выполнено.
Однако этого недостаточно, для того чтобы обеспечить устойчи-
вость хаотического синхронного отклика. На аттракторе системы
могут существовать участки траектории, неустойчивые в трансвер-
сальном направлении к гиперплоскости аттрактора синхрониза-
ции, что неизбежно приведет к «on-off» перемежаемости — случай-
ным непериодическим срывам режима синхронизации (см. гл. 1).
Расчеты, проведенные по методике, использованной в гл. 1, по-
казывают, что в рассматриваемом случае на аттракторе синхрони-
зации нет участков с локальной неустойчивостью в направлении
о 10 z 20
/, кГц
10 « _ 20
/,кГц
-40
0
Ю г 20
/, кГц
Рис. 8.2. Спектры мощности и временные реализации сигналов: a — исходный
информационный (музыкальный) сигнал на входе хаотического модуля передат-
чика; б — сигнал на входе хаотического модуля приемника; в — информацион-
ный сигнал на выходе хаотического модуля приемника
154
Гл. 8. Система передачи янформяггчи
трансверсальном гиперплоскости, синхронный отклик устойчив в
сильном смысле и «оп-off» перемежаемость отсутствует Та
образом, условие (б) также выполнено. аким
Компьютерные эксперименты по передаче музыкально-вечевых
сигналов продемонстрировали хорошую точность восстановления
информационного сообщения. На рис. 8.2 показаны ления
щие спектры мощности и фрагменты сигналов
(мощность сигнала)/(мощность хаоса) = —6 дБ.
при
со ответствую-
отношении
Рис. 8.3. Фазовые портреты сигналов хаотического мопи™
информационный сигнал отсутствует; б — в присутствии МиТ«ТЧИКа; “ ~
сигнала S гисутствии информационного
На рис. 8.3 изображены фазовые портреты модуля передатчика
в пространстве (%ь Гь ZJ для системы без информационного
сигнала (рис. 8.3а) и с сигналом S (рис. 8.36).
8.4. Макетирование хаотических модулей
передатчика и приемника
Для экспериментальной апробации предложенного подхода пе-
редачи информации при наличии фильтрации в канале связи ваГ
работаны макеты хаотических модулей передатчика и поиемникя
структура которых соответствовала рис. 8.1. ’
Хаотический модуль передатчика. Этот модуль по
существу представлял собой кольцевой генератор хаоса с 2 S
степенями свободы (см. гл. 5) На рис. 8.4 демонстрируется
внешний вид модуля, а на рис. 8.5 приведена его принципиальная
схема. В цепь обратной связи генератора, между Д2£9С9-Лил?
тром нижних частот (на принципиальной схеме рис 8 5 этот
фильтр реализован элементами L1-C10 и выходным сопротивле-
нием буферного каскада D4) и полосовым фильтром (R12-L3-C14-
С16), введен сумматор (реализованный на операционном усили
теле D5) для нелинейного подмешивания информационного сиг
нала к хаотическому. Для построения фильтров, входящих в
8.4. Макетирование хаотич. модулей передатчика и приемника 155
состав модуля, использованы пассивные Я, L, С элементы сле-
дующих номиналов:
— С\ = 150 нФ, R\ —> var (фильтр НЧ первого порядка, на
схеме R27-C23),
— (?2 = 150 нФ, Й2 = Ю Ом, 1^2 = 18 мГн (фильтр НЧ второго
порядка),
— Сз = 824нФ, L$ = 18мГн, Лз -> var (полосовой фильтр).
Сопротивления Ri (R27) и R$ (R12) играли роль управляю-
щих параметров генератора, с помощью которых осуществлялась
настройка его хаотических режимов, поэтому функцию Ri и R2
Рис. 8.4. Внешний вид хаотического модуля передатчика
выполняли переменные сопротивления. Отношение резонансных
частот фильтра НЧ второго порядка и полосового фильтра соста-
вляло ~ 2,3.
Нелинейный элемент реализован на базе операционных усили-
телей LM258N. Конструкция элемента (операционные усилители
D6-D7-D8) позволяла изменять коэффициент усиления m (путем
изменения переменного сопротивления R26), который также, как
и Я1, 7?з, выступал в качестве управляющего параметра генера-
тора. Усилители LM258N, кроме того, применялись в схемах сум-
матора (D5), буферных каскадов и в схеме ввода информационного
сигнала (D3).
При вариации параметров 7?i, 7?з, m генератор демонстриро-
вал различные хаотические режимы. Однако в качестве базового
среди них был выбран режим с полосой частот, лежащей в обла-
сти частот речевого сигнала (300 Гц-3,5 кГц). На рис. 8.6 предста-
влены спектр мощности сигнала Uc3 на выходе полосового филь-
тра (рис. 8.6а), фазовый портрет сигналов Uc2 на выходах
Рис. 8.5. Принципиальная схема хаотического модуля передатчика
СЛ
о
Гл. 8. Система передачи информации
8.4. Макетирование хаотич. модулей передатчика и приемника 157
фильтров нижних частот (рис. 8.66) и осциллограмма сигнала
Uc2 на выходе Яг^С-г-фильтра нижних частот (рис. 8.бе) для
базового режима модуля в отсутствие информационного сигнала.
в
Рис. 8.6. Базовый хаотический режим хаотического модуля передатчика в от-
сутствие информационного сигнала: а — спектр мощности сигнала на выходе
полосового фильтра; б — фазовый портрет сигналов на выходах фильтров ниж-
них частот; в — временная реализация сигнала на выходе фильтра нижних
частот второго порядка
Хаотический модуль приемника. Функция модуля —
выделить информационный сигнал из его смеси с низкочастотным
хаотическим сигналом. Он имеет точно такую же основную струк-
туру, как и модуль передатчика, но в отличие от него не содержит
сумматора и является пассивной (неавтоколебательной) системой.
Для этого разрывается кольцо обратной связи генератора и в точку
разрыва вводится вычитатель согласно схеме на рис. 8.1.
Точность соответствия номиналов пассивных элементов, вхо-
дящих в состав фильтров и нелинейного элемента, по отношению
к их аналогам в модуле передатчика составляла 1-3%.
Принципиальная схема модуля приведена на рис. 8.7. Здесь
на D3 реализован входной усилитель, назначение которого ком-
пенсация потерь сигнала в канале связи. К выходу вычитателя
Рис. 8.7. Принципиальная схема хаотического модуля приемника
Гл. 8. Система передачи информации
8.5. Синхронный хаотический отклик
159
(D7) подключены фильтры нижних и верхних частот (D9) для
обеспечения возможности коррекции сигнала на выходе модуля.
Коммуникационный канал. Эксперименты проводи-
лись в низкочастотном диапазоне, поэтому функцию канала
выполняла проводная линия (без потерь). Моделирование по-
лосно-пропускающих свойств канала осуществлялось с помощью
полосового фильтра (на схеме рис. 8.5 он реализован на элемен-
тах R11-L2-C13), вводимого в канал. Его параметры полностью
соответствовали параметрам полосовых фильтров хаотических мо-
дулей передатчика и приемника.
8.5. Синхронный хаотический отклик
Проследим синхронизацию хаотических сигналов в одинако-
вых узлах модулей передатчика и приемника в отсутствие пере-
даваемого информационного сигнала. На рис. 8.8 представлены
фотографии, на которых нижние лучи представляют фазовые пор-
треты наблюдаемых хаотических сигналов, подаваемых на входы
X и Y осциллографа. Верхний луч соответствует синхронизации
тестового сигнала, когда один и тот же сигнал одновременно по-
ступает на оба входа осциллографа.
Рисунок 8.8а свидетельствует о том, что при указанной точ-
ности подбора параметров пассивных элементов хаотические сиг-
налы на входе хаотического модуля приемника (выход фильтра III)
и на выходе полосового фильтра 3 передатчика практически иден-
тичны. Рассмотрим теперь. прохождение этих сигналов через
одинаковые элементы в модулях передатчика и приемника. Как
следует из рис. 8.8d, прохождение сигналами нелинейных преобра-
зователей и фильтров нижних частот не нарушает синхронности
сигналов или, другими словами, не вносит каких-либо значитель-
ных искажений в один сигнал по отношению к другому. Зато
сигналы на выходах фильтров нижних частот второго порядка
(рис. 8.8е) уже заметно различаются. Это находит свое отражение
в утолщении и искажении нижней линии на рис. 8.8е. Экспе-
рименты свидетельствуют, что именно фильтры нижних частот
второго порядка вносят основной вклад в десинхронизацию хао-
тических сигналов при расстройке параметров хаотических моду-
лей в пределах 1-3%. Наконец, рис. 8.8г демонстрирует степень
идентичности сигналов, поступающих в модуле приемника на оба
входа вычитателя. По сути этот рисунок и иллюстрирует наличие
в системе синхронного хаотического отклика. По форме рис. 8.8г
является подобным рис. 8.8е, что не удивительно, так как сиг-
налы после фильтров нижних частот второго порядка проходят
через полосовые фильтры, которые, как следует из рис. 8.8а, не
вносят существенных искажений.
160
Гл. 8. Система передачи информации
Таким образом, наличие синхронного отклика соответствует
случаю, когда на оба входа вычитателя поступают близкие по
форме сигналы. Степень их идентичности можно оценить по от-
ношению мощности разностного сигнала на выходе вычитателя к
Рис. 8.8. Синхронизация хаотических сигналов в хаотических модулях пере-
датчика и приемника. Верхние линии на всех фотографиях соответствуют
тестовым сигналам, когда один и тот же сигнал одновременно подается на
входы х и у осциллографа; а — синхронизация сигналов на выходах полосо-
вых фильтров в хаотическом модуле передатчика (фильтр 3) и канале связи
(фильтр III); б — синхронизация сигналов на выходах фильтров нижних ча-
стот первого порядка (фильтр 1) в хаотических модулях передатчика и прием-
ника; в — синхронизация сигналов на выходах фильров нижних частот вто-
рого порядка (фильтр 2) в хаотических модулях передатчика и приемника; г —
синхронный хаотический отклик на выходе модуля приемника (синхронизация
сигналов на выходах полосовых фильтров 3 в хаотическом модуле приемника и
III в канале связи)
мощности любого из входных хаотических сигналов. В экспери-
ментах эта величина достигала —25 дБ. Наличие ненулевого раз-
ностного сигнала объясняется расстройкой (в пределах указанной
8.6. Передача тестовых информационных сигналов
161
точности) параметров одинаковых элементов в модулях передат-
чика и приемника и приводит к появлению на выходе последнего
шума десинхронизации.
Как оценить величину шума десинхронизации в —25 дБ? При
нелинейном сложении хаотического и информационного сигналов
с одинаковыми амплитудами (мощностями) в хаотическом модуле
передатчика, такой уровень остаточного шума в лучшем случае по-
зволит обеспечить отношение сигнал/шум на выходе модуля 25 дБ.
Соответственно, уменьшении мощности информационного сигна-
ла по отношению к хаотическому сигналу приведет к снижению
отношения сигнал/шум и, тем самым, к ухудшению качества пе-
редачи.
8.6. Передача тестовых информационных сигналов
Эксперименты по передаче информации проводились с двумя
типами аналоговых сигналов. Первый из них представлял сину-
соидальный сигнал с частотой 1,6 кГц, который подмешивался к
выходному сигналу Яг^С^-фильтра нижних частот и имел мощ-
ность по отношению к нему —12 дБ. На рис. 8.9 представлены
спектр мощности сигнала в канале связи (рис. 8.9а) и осцилло-
граммы сигналов на входе (рис. 8.96) и выходе (рис. 8.9в) хао-
тического модуля приемника. Как видно из рис. 8.9а, введение
синусоидального сигнала в хаотический модуль передатчика ме-
няет характер его колебаний. По сравнению с рис. 8.6а в спектре
более отчетливо начинают проявляться частотные компоненты в
окрестности второй собственной частоты генератора, связанной с
Яг^С^-фильтром. С другой стороны, гармонический информа-
ционный сигнал указанной мощности и частоты демаскирован в
канале, на что указывает хорошо просматриваемая в спектре со-
ответствующая сигналу компонента. Качество выделяемого на
выходе модуля приемника информационного сигнала оценивалось
отношением сигнал/шум, которое с учетом шума десинхрониза-
ции составляло 13 дБ (рис. 8.9в).
В качестве второго информационного сигнала выступал рече-
вой сигнал. В этом случае на выходе модуля приемника устанавли-
валась акустическая система, которая позволяла непосредственно
прослушивать выделяемый модулем сигнал. Мощность речевого
сигнала, вводимого в модуль передатчика, была управляемой ве-
личиной, что позволяло оценивать качество передачи информации
в различных условиях.
В результате экспериментов было установлено, что речевой сиг-
нал с уровнем —10 дБ также, как и в предыдущем случае, при-
водил к подвозбуждению второй собственной частоты генератора.
Однако при этом в спектре сигнала на входе модуля приемника
информационный сигнал не был различим и, как следствие, не
12 Зак. 18
162
Гл. 8. Система передачи информации
прослушивался в канале. Такой уровень подмешиваемого рече-
вого сигнала обеспечивал на выходе модуля приемника отноше-
ние сигнал/шум 15 дБ. Качество выделяемого модулем сообщения
повышалось при увеличении мощности речевого сигнала, но он
начинал прослушиваться в канале.
в
Рис. 8.9. Характеристики сигналов на входе и выходе хаотического модуля
приемника: a — спектр мощности сигнала на входе модуля; б — временная
реализация сигнала на входе модуля; в — информационный сигнал на выходе
модуля
Увеличение расстройки параметров одинаковых элементов в
хаотических модулях передатчика и приемника приводил к возра-
станию шумов десинхронизации на выходе последнего и ухудше-
нию качества передачи. Это относится и к полосовому фильтру в
канале связи, степень идентичности параметров которого параме-
трам аналогичных фильтров в модулях должна быть достаточно
высокой.
8.7. Выводы
Рассмотренный метод активной борьбы с фильтрацией сиг-
нала в канале связи может оказаться эффективным в тех случаях,
когда свойства канала можно аппроксимировать эквивалентным
8.7. Выводы
163
фильтром и определить его параметры. Приведенные резуль-
таты компьютерного моделирования и физических эксперимен-
тов показали работоспособность и практическую реализуемость
метода. Он отнесен к числу активных по той причине, что
формирование хаотического сигнала в модуле передатчика осу-
ществляется с учетом преобразований сигнала в канале связи.
Принцип получения синхронного хаотического отклика при
наличии фильтрующих свойств канала рассмотрен в этой главе на
примере схемы передачи с нелинейным сложением хаотического и
информационного сигналов. Однако он может быть также приме-
нен и в других схемах передачи информации с использованием
хаоса, например в схемах передачи с переключением хаотических
режимов.
12*
Глава 9
ПРЯМОХАОТИЧЕСКИЕ СИСТЕМЫ
ПЕРЕДАЧИ ИНФОРМАЦИИ
До сих пор в качестве базовой схемы передачи информации
рассматривалась система с нелинейным подмешиванием. Как от-
мечалось, она обладает совокупностью свойств, типичных для ком-
муникационных систем с синхронным хаотическим откликом
(когерентный прием). По этой причине она является удобным объ-
ектом для исследования. В этой главе будет введен и исследован
другой класс систем передачи информации с использованием хао-
са — прямохаотические системы связи. В этих системах могут
использоваться не только когерентные, но и некогерентные при-
емники. Однако главным свойством этого класса систем является
их способность к передаче данных с высокими скоростями.
9.1. Понятие прямохаотической системы
Как отмечалось, в случае если в аналоговой системе хаотиче-
ские модули выполнены с требуемой степенью точности и вос-
производимости, то ключевую роль в передаче начинают играть
искажения сигнала в выходных цепях передатчиков и входных
цепях приемников, а также в канале связи. Если преобразования
сигнала в них представить в виде последовательности операций и
зафиксировать допустимые искажения в целом, то требования на
уровень искажений на отдельных операциях будет ужесточаться с
ростом числа операций.
Отсюда следует вывод: для повышения устойчивости схем пе-
редачи нужно попытаться уменьшить число преобразований над
хаотическим сигналом и максимально упростить структуру пере-
датчика. Предельным случаем такого упрощения структуры явля-
ются «прямохаотические передатчики». В них хаотический сигнал
формируется непосредственно в том диапазоне частот, где произ-
водится его излучение, а ввод информационного сигнала в хаоти-
ческий происходит либо в результате воздействия на формирова-
тель хаотического сигнала, либо уже на выходе из него. Таким
образом, единственным дополнительным элементом, через кото-
рый должен пройти хаотический сигнал, содержащий полезную
информацию, является выходной усилитель. Он же служит согла-
сующим устройством между источником хаоса и каналом.
9.2. Схемы для организации прямохаотической системы 165
Подобные проблемы возникают и в приемниках. Из концепции
прямохаотической передачи следует, что из структуры приемника
в этом случае выводится цепочка узлов, которая ответственна за
перенос несущей частоты сверху вниз, т. е. демодуляцию высоко-
частотного гармонического сигнала.
Таким образом, под «прямохаотическими» ниже понимаются
схемы передачи, в которых ввод информации осуществляется в
хаотический сигнал, генерируемый непосредственно в радио или
СВЧ диапазоне. Ввод сигнала производится, например, либо с по-
мощью модуляции параметров передатчика, либо путем модуляции
хаотического сигнала информационным уже после его генерации в
источнике. Соответственно, извлечение информационного сигнала
также производится в области высоких или сверхвысоких частот.
9.2. Некоторые возможные схемы
для организации прямохаотической системы
Проанализируем схемы передачи информации, рассмотренные
в гл. 2, с точки зрения потенциального использования их для реа-
лизации прямохаотических систем.
В основе принципа хаотической маскировки лежит аддитивное
подмешивание информационного сигнала к хаотическому на вы-
ходе модуля передатчика. По определению, в прямохаотической
системе генерируемый модулем хаотический сигнал должен при-
надлежать радио- или СВЧ-диапазонам. Поэтому если речь идет
о низкочастотном информационном сигнале, то его подмешивание
к гораздо более высокочастотному сигналу с точки зрения маски-
ровки не имеет смысла. Аналогичная ситуация и с нелинейным
подмешиванием информационного сигнала к хаотическому. Од-
нако обе схемы могут рассматриваться как потенциальные кан-
дидаты для построения прямохаотических систем в тех случаях,
когда информационный сигнал находится (или специально пере-
несен из низкочастотной области) в диапазон частот хаотического
сигнала.
Использование структуры ФАП также предполагает наличие
высокочастотной информационной компоненты, но это относится
только к аналоговой реализации. Специфика применения цифро-
вых ФАП подразумевает обязательное использование дополнитель-
ного несущего сигнала и по этой причине не вписывается в кон-
цепцию прямохаотических систем.
С другой стороны, принцип построения схемы с адаптивными
методами приема полностью удовлетворяет требованиям прямо-
хаотических систем и может быть использован для их реализации.
Все перечисленные схемы базируются на применении син-
хронного хаотического отклика, получение которого в радио- или
СВЧ-диапазонах может оказаться основной проблемой. Поэтому
166 Гл. 9. Прямохаотические системы передачи информации
более привлекательным кандидатом в прямохаотические системы
является схема с переключением хаотических режимов. Она от-
личается относительной простотой и принципиальной возможно-
стью построения в различных частотных диапазонах. В основе
ее функционирования также лежит хаотический синхронный от-
клик, но в отличие от схемы хаотической маскировки и схемы с
нелинейным подмешиванием она может оставаться работоспособ-
ной даже в случаях частичной десинхронизации отклика. Кроме
того, в этой схеме возможно применение корреляционных мето-
дов приема, способных повысить помехоустойчивость передачи и
решить проблему отклика в высокочастотных диапазонах.
Наряду с обсужденными существуют и другие схемы передачи
информации, которые также могут выступать в качестве потенци-
альных кандидатов для применения в прямохаотических систе-
мах. Рассмотрим их более подробно.
Схема с использованием специальных траекто-
рий [136]. Хаотическое движение динамических систем может
быть представлено как движение по неустойчивым периодическим
орбитам, образующим «скелет» странного аттрактора, и блужда-
ния между этими орбитами [124]. Структура этих орбит, их распо-
ложение в фазовом пространстве, степень неустойчивости опреде-
ляются конкретным видом динамической системы и, тем самым,
являются уникальным представлением данного хаотического дви-
жения. Имеется возможность предварительной классификации
скелетных периодических орбит, определения их количественных
и пространственных характеристик [35], а также разработаны ме-
тоды стабилизации неустойчивых периодических орбит с помо-
щью малых возмущений динамической системы. Совокупность
неустойчивых периодических орбит хаотического аттрактора мо-
жет быть использована в качестве кодирующего множества при
передаче информационных сообщений, причем основание кода
может быть выбрано достаточно большим. Для ввода информаци-
онного сообщения в передатчике необходимо организовать кратко-
временную стабилизацию орбит, выбранных в качестве кодирую-
щих элементов. Являясь фрагментами хаотической траектории
общего вида, неустойчивые орбиты обладают спектральными ха-
рактеристиками, близкими к характеристикам хаотических тра-
екторий общего вида. Это значит, что если в качестве источника
хаотических сигналов выбрать генератор, формирующий колеба-
ния в заданной полосе частот, то и спектр скелетных неустойчи-
вых периодических орбит этого генератора будет располагаться в
той же полосе частот.
Возможная схема передачи информации с использованием не-
устойчивых периодических орбит представлена на рис. 9.1. Ввод
информации в передатчике осуществляется за счет управления
хаотической траекторией. Малыми изменениями параметра хао-
9.2. Схемы для организации прямохаотической системы 167
тической динамической системы производится кратковременная
стабилизация неустойчивых периодических орбит (циклов-кодов)
«А» или «В». После прекращения процедуры стабилизации система
Рис. 9.1. Схема передачи информации с использованием неустойчивых периоди-
ческих орбит. «А», «В» — неустойчивые периодические орбиты (циклы-коды)
возвращается на хаотическую траекторию общего вида. В канал
связи, таким образом, поступает сигнал, состоящий из циклов-
кодов и фрагментов хаотической траектории общего вида. Задача
приемника заключается в селекции «своих» специальных фрагмен-
тов — циклов-кодов из хаотического сигнала. Селекция может про-
изводиться за счет использования в приемной части идентичных
хаотических систем, настроенных на воспроизведение нужных пе-
риодических орбит. Некоторые возможные варианты построения
приемников рассмотрены в [136]. Следует отметить, что описы-
ваемая схема легко обобщается на случай с числом кодирующих
неустойчивых периодических орбит больше двух.
Схема с управлением символической динамикой
[147]. Еще одна разновидность подхода к созданию систем пе-
редачи, использующих траектории специального вида, основана
на применении символической динамики, порождаемой хаотиче-
скими системами.
Детерминированность хаотических сигналов в ряде случаев по-
зволяет строить последовательности символов, взаимно однознач-
но связанные с поведением фазовой траектории системы. Например
такой последовательностью является последовательность положи-
тельных и отрицательных пиков хаотических колебаний, превы-
шающих по амплитуде некоторую пороговую величину (рис. 9.2).
Ставя в соответствие положительным пикам, превышающим по-
рог, символ «1», а отрицательным — символ «О», приведенный на
168
Гл. 9. Прямохаотические системы передачи информации
рисунке фрагмент хаотического сигнала длительности то можно
закодировать последовательностью из десяти символов г(1, 0) —
*0101001010». Эта последовательность символов однозначно по-
рождается начальными условиями (а также в силу непрерывно-
сти их небольшой окрестностью [Xq — Xq + б]). Если в какой-
то момент времени траектория попадает в окрестность точки Xq,
то в течение следующего интервала времени длительности то ди-
намическая система воспроизведет указанную последовательность
Рис. 9.2. Схема передачи информации с управлением символической динами-
кой. Пример кодирования фрагмента хаотического сигнала длительностью то
последовательностью из десяти символов — 0101001010
символов. Старт с других начальных условий порождает другую
последовательность. Производя запуск траектории с различных
начальных точек, можно построить функцию кодирования s(r) в
зависимости от начального значения Xq. Имея эту функцию, мы
можем задавать необходимое начальное условие и, соответственно,
воспроизводить требуемую последовательность из символов 0 и 1.
Необходимо подчеркнуть, что не все возможные комбинации ну-
лей и единиц могут порождаться конкретной динамической си-
стемой. Могут существовать и запрещенные последовательности,
нереализуемые ни при каких начальных условиях. Совокупность
разрешенных комбинаций образует «грамматику» символического
представления. Первый шаг к построению системы передачи за-
ключается в изучении этой «грамматики» и построении соответ-
ствующей функции кодирования.
9.3. Генераторы хаоса ВЧ- и СВЧ-диапазонов
169
Схема передачи, основанная на использовании управления
символической динамикой сходна по своей структуре со схемой,
использующей неустойчивые периодические орбиты. И в том, и в
другом случае основная задача приемника заключается в селекции
и идентификации специальных фрагментов хаотических траекто-
рий. И в том, и в другом случае, по аналогии со схемой с пере-
ключением хаотических режимов, возможно применение в прием-
никах элементов корреляционной обработки сигналов.
9.3. Генераторы хаоса ВЧ- и СВЧ-диапазонов
Рассмотренные схемы передачи информации, потенциально
пригодные для построения прямохаотических систем связи, не-
смотря на различные подходы в способах ввода и извлечения ин-
формации, содержат один общий элемент — источник полосового
ВЧ или СВЧ хаотического сигнала. Как известно, генераторы
хаотических колебаний выполняют функции таких источников.
Ниже рассматривается состояние проблемы построения хаотиче-
ских генераторов полосовых сигналов.
Под полосовым здесь и далее подразумевается сигнал с ограни-
ченным со стороны как нижних, так и верхних частот спектром
мощности. Требование ограниченности спектра вытекает из не-
обходимости работать в строго определенных диапазонах частот,
выделенных для коммуникационных систем.
Чтобы получить полосовые хаотические сигналы, можно ис-
пользовать какие-либо широкополосные источники хаоса, а затем
ограничить их полосу путем фильтрации выходного сигнала в
требуемом диапазоне [56]. Однако существует другой (активный)
подход для решения проблемы, согласно которому необходимый
сигнал формируется непосредственно в хаотическом генераторе.
В тех случаях, когда требуется обеспечить энергоэффективное ре-
шение активный подход оказывается более предпочтительным.
Так, в [14, 131, 133] рассматривается подход к созданию генера-
торов хаотических колебаний с заданной полосой и формой спек-
тральной характеристики выходного сигнала на основе кольцевых
автоколебательных систем (АКС) [32]. Основная идея подхода свя-
зана с введением в кольцо обратной связи АКС элементов, обес-
печивающих, с одной стороны, условия для генерации хаотиче-
ских колебаний, а с другой, — формирующих у них требуемые
характеристики. Специфика конструкции кольцевых АКС такова,
что в низкочастотном диапазоне практическая реализация подхода
не вызывает затруднений. Однако при переходе к более высоким
частотам появляются проблемы, которые становятся трудноразре-
шимыми в СВЧ-диапазоне, поэтому актуальным является поиск
решений, позволяющих реализовать указанный подход в высоко-
частотном диапазоне. С точки зрения возможных приложений,
такими решениями являются генераторы хаоса, технологичные в
11 Зак. 18
170
Гл. 9. Прямохаотические системы передачи информации
изготовлении и имеющие простую структуру. К последним отно-
сятся генераторы, которые содержат только один активный эле-
мент (например, транзистор) и несколько пассивных элементов.
Емкостная трехточка как базовый элемент генераторов. К на-
стоящему времени известно достаточно большое количество ге-
нераторов хаоса, которые отличаются структурой и характеристи-
ками колебаний, имеют как вакуумную, так и твердотельную
реализации и способны генерировать хаотические сигналы от са-
мых низких частот до оптического диапазона [3-5, 12, 13, 22, 25,
28-31, 48, 50, 55, 57, 58, 60, 63-65, 67, 70, 71, 75, 76, 79, 100,
104, 111. 117, 139, 151, 162, 164, 166, 173, 174, 190, 202, 203, 205,
213, 214].
Так как сама по себе генерация хаотических сигналов в радио-
и СВЧ-диапазонах не является новой задачей, то здесь речь пойдет
не просто о генерации хаоса в нужном диапазоне частот и с требу-
емой полосой, а о генераторах, которые могли бы быть выполнены
в виде интегральных схем. Это означает, что: 1) все элементы ге-
нератора должны быть технологически реализуемы как элементы
интегральной схемы; 2) должна быть разработана достаточно аде-
кватная математическая модель генератора и его электрическая
схема. При выполнении этих двух условий современные техноло-
гии позволяют создавать интегральные схемы в частотном диапа-
зоне до нескольких ГГц.
Среди известных в настоящее время генераторов хаоса радио-
и СВЧ-диапазона относительно простую структуру имеют твердо-
тельные генераторы, использующие в качестве активных элемен-
тов диоды и транзисторы [3, 31, 48, 65, 70, 71, 151, 164, 173, 174,
213]. Однако применение в конструкциях генераторов распреде-
ленных элементов, отсутствие достаточно точных эквивалентных
схем и, как следствие, отсутствие адекватных математических мо-
делей затрудняет непосредственное использование этих генерато-
ров как основы для разработки источников хаоса в интегральном
исполнении. С другой стороны, существуют генераторы перио-
дических колебаний, которые состоят только из сосредоточенных
элементов, имеют модели, адекватно описывающие протекающие в
генераторах процессы, и способны генерировать колебания вплоть
до нескольких гигагерц. Это трехточечные схемы на биполярных
транзисторах [86, 89]. Такие генераторы при условии наличия у
них хаотических режимов могут рассматриваться в качестве базо-
вого генераторного элемента для прямохаотических систем связи.
Причем более предпочтительными являются емкостные трехточки
[66], так как используемые в них внешние (сосредоточенные) кон-
денсаторы позволяют снизить влияние собственных емкостей
транзистора на характеристики колебательных режимов и тем
самым облегчить задачу воспроизведения режимов в различных
образцах генераторов.
9.3. Генераторы хаоса ВЧ- и СВЧ-диапазонов 171
Примером трехточечной схемы является генератор Колпитца
[152], принципиальная схема которого изображена на рис. 9.3а.
Генератор содержит один нелинейный активный элемент — би-
полярный транзистор Q. Обратная связь генератора образована
О 50 100 Г, МГц
в
Рис. 9.3. Генератор Колпитца: a — принципиальная схема; б — фазовый портрет
в плоскости (Усе и Уве)] g — спектр мощности сигнала Усе
индуктивностью L с сопротивлением RL и делителем напряжения
из емкостей С\ и С2, а рабочая точка транзистора устанавлива-
ется с помощью напряжений Vc, VE и сопротивления RE. Иногда
между коллектором (С) и базой (В) транзистора устанавливают
дополнительную емкость для расширения возможности управле-
ния колебательными режимами генератора.
Реактивные элементы, входящие в состав генератора, опреде-
ляют основную частоту генерируемого сигнала
1
Сг + С2
(9-1)
Приведенное выражение определяет частоту генерации в диа-
пазоне до 1 МГц и является достаточно точной ее оценкой в радио-
и СВЧ-диапазонах.
11*
172
Гл. 9. Прямохаотические системы передачи информации
Рассматриваемый генератор можно описать системой из трех
дифференциальных уравнений первого порядка
dVcE__г г
dVBE (Уе + Уве . т .
С2~дГ = ~ I —Б-----+ 4 +
dt у 1л, Е
~ VCE + Уве ~ ЬЛ
dt
(9-2)
в
где Vce nVBE — напряжения коллектор-эмиттер и база-эмиттер,
II, Ic, Iв — токи индуктивности, коллектора и базы соответ-
ственно, причем
1в — 0, если Vbe Кор,
1в = &(Уве ~~ ^пор), если Vbe > ^nopi (9*3)
1с=Р1в-
В (9.3) Кор является пороговым напряжением р-п-перехода
0,75 В), а представляет собой коэффициент, связанный с обрат-
ной величиной сопротивления эмиттерного р-п-перехода по ма-
лому сигналу, а /3 по существу является коэффициентом усиления
транзистора по току.
Классические однотранзисторные колебательные системы, к
которым относятся и трехточечные схемы, обычно генерируют
периодические сигналы. Не является исключением и рассматри-
ваемый генератор. Однако в [152, 161] было показано, что при
определенном выборе параметров генератор может демонстриро-
вать хаотическое поведение в низкочастотном диапазоне. Впослед-
ствии [110, 206] с помощью моделирования в PSpice была уста-
новлена возможность получения хаотических колебаний в этом
генераторе и в радиодиапазоне. На рис. 9.3d, в представлены фа-
зовый портрет колебаний (б) и спектр сигнала VCE (в) для ти-
пичного хаотического режима генератора. Приведенные харак-
теристики получены при использовании транзистора 2N2222A в
качестве активного элемента при следующих параметрах: Vc =
= 20 В, VE = —20 В, Rl = 950м, RE = 2,4 кОм, L = 1мкГн,
Ci = С2 = 70 пФ.
Как видно из рис. 9.Зе, особенностью хаотического режима ге-
нератора является широкополосность возбуждаемых в нем колеба-
ний. В приведенном примере при cjq = 26 МГц спектр мощности
сигнала простирается как в область очень низких частот, так и в
область высоких частот, в несколько раз превышающих cjq-
Структура и низкочастотная математическая модель. Возни-
кает вопрос: как нужно видоизменить трехточечную схему, чтобы
обеспечить в ней генерацию полосовых хаотических сигналов?
9.3. Генераторы хаоса ВЧ- и СВЧ-диапазонов 173
Рассмотрим сначала задачу для области низких частот. Введем в
цепь обратной связи генератора частотно-избирательный элемент
(система), полоса пропускания которого «охватывает» частоту а>о
и удовлетворяет заданным требованиям. Аналогичный подход
используется также при разработке генераторов синусоидальных
колебаний СВЧ-диапазона [89] и имеет своей целью обеспечить не-
обходимые частотно-избирательные свойства цепи обратной связи
генератора. В рассматриваемом случае функция частотно-избира-
тельной системы (ЧИС) заключается также в обеспечении усло-
вий для генерации полосовых хаотических сигналов в пределах
полосы ее пропускания. Причем здесь речь идет не о фильтра-
ции широкополосных колебаний резонансным элементом (РЭ), а о
формировании полосовых хаотических сигналов непосредственно
генератором, в состав которого входит указанная ЧИС. Поэтому
можно ожидать, что ширина и неравномерность спектра мощно-
сти хаотических колебаний будут определяться соответствующими
характеристиками частотно-избирательной системы.
Конкретизируем структуру генератора. Пусть генератор, изо-
браженный на рис. 9.3а, выступает в роли базовой трехточечной
схемы, в обратную связь которой (между коллектором С и эмит-
тером Е транзистора Q) введена ЧИС, состоящая из цепочки N
Рис. 9.4. Принципиальные схемы однотранзисторных генераторов полосовых
хаотических сигналов
параллельно-последовательных RLC-Cq звеньев (рис. 9.4а). В та-
кой конфигурации ЧИС представляет собой полосно-пропускаю-
щий фильтр (ППФ), на выходе TV-го звена которого формируется
амплитудно-частотная характеристика (АЧХ), определяемая кон-
кретными параметрами звеньев. Необходимо отметить, что воз-
174 Гл. 9. Прямохаотические системы передачи информации
можность представления совокупности звеньев в виде ППФ связана
с тем фактом, что база транзистора В заземлена и при прямом
смещении, превышающем 0,75 В, сопротивление перехода база-
эмиттер мало. В общем случае параметры отдельных звеньев мо-
гут отличаться друг от друга. Для простоты примем их одина-
ковыми, а число звеньев ограничим до четырех (N = 4). Тогда
колебательные процессы генератора с учетом (9.2) можно описать
следующей системой уравнений:
C\Vce = Ic “ Л,
у/ ___ Ve VbE j t
^2 VBE — 5 h — *B)
LIl = Vc “ Vce “ RlIl 4" Vbe>
ЬоЛ +Roii + (p + 77- + -y) Ii = L _ + 77-,
\G Go Gi/ ^1 Go
Loh + R0I2 + (77 + 7г) -^2 =
\ G C/0 / C/0
r T n T ( 2 \ Z2 + A
Z>o-^3 + Roh + I 77 + 77" ) h — 77 >
\ G Go / Go
T T nr ( 1 2 \ _ 1$
Roh + Roh + I 77 + 7г I h = 7Г-
\ G Go / Go
Первые три уравнения первого порядка описывают динамику
собственно генератора, в состав которого входят биполярный тран-
зистор Q и элементы RL, RB, L, Ci и Сг, причем Vce и Vbb
являются напряжениями коллектор-эмиттер и база-эмиттер, a IL,
Ic, 1в представляют токи через индуктивность L, коллектор С
и базу В соответственно. Остальные четыре уравнения второго по-
рядка описывают четырехконтурный ППФ, где I\, 1%, I3, h
являются токами, протекающими в последовательных элементах
(RoLqCo) каждого из звеньев.
В этих уравнениях (1/С + 2/Cq)/L = и2 — квадрат парци-
альной частоты контура фильтра, l/(LCo) = a — коэффициент
связи между контурами. Квадрат частоты собственных колебаний
генератора определяется в соответствии с (9.1).
Для проведения численных экспериментов использовалась ку-
сочно-линейная аппроксимация статических характеристик тран-
зистора. Нелинейность, связанная с режимом большого сигнала,
не учитывалась. В этом случае ВАХ транзистора можно предста-
вить в виде двухсегментной кусочно-линейной функции (9.3).
Полагаем, что Ci = С2 = Cq = пС, где п может прини-
мать значения как больше, так и меньше единицы, тогда и2 =
= (п + 2)/(пС£), = 2/(nLC), a = l/(nLC).
9.3. Генераторы хаоса ВЧ- и СВЧ-диапазонов
175
Известно [73, 109], что полоса прозрачности фильтра, пред-
ставленного в виде рассматриваемой цепочки звеньев, выражается
следующей формулой: (р2 — 2а) и2 (iz2 + 2а). Подставляя
значения для и а, получаем
1 / 2^!+4/п
LC Ш LC
(9-5)
Частота собственных колебаний cjq базовой трехточечной схе-
мы попадает в полосу при п 2, поэтому это значение является
пороговым для области изменения п. Из (9.5) следует, что нижняя
граница полосы прозрачности фильтра остается постоянной, в то
время как верхняя граница зависит от соотношения Cq = пС. При
п < 1 полоса пропускания фильтра расширяется в сторону более
высоких частот, при п > 1 сжимается в область более низких
частот. Аналогичные преобразования происходят и со спектром
мощности генерируемого системой сигнала.
На рис. 9.5 приведены спектры мощности, временные реали-
0 0,5 1,0 1,5 2,0 2,5 3,0 10 20 30 40 50 ОД 0,4 0,6 0,8 1,0 1,2
0 0,5 1,0 1,5 2,0 2,5 3,0 10 20 30 40 50 о,2 0,4 0,6 0,8 1,0 1,2
/, МГц /,мжс VBEfVT
Рис. 9.5. Характеристики хаотических колебаний генератора в зависимости от
соотношения Со = пС: а — п = 0,5; б — n = 1; в — п = 2
в системе при различных значениях п. В качестве переменной
рассматривалось безразмерное значение тока в последнем звене
фильтра тдр Iq = Vt/Ron, а для построения фазовых
176
Гл. 9. Прямохаотические системы передачи информации
портретов дополнительно использовалось безразмерное напряже-
ние база-эмиттер — VBE/VT.
При численном моделировании параметры генератора были
следующими: L = ЗОмкГн, С — 1нФ, R = 100м, RL = 400м,
Re = 4000м. В этом случае нижняя граница полосы прозрач-
ности фильтра /н = 0,9 МГц. При п = 0,5 (рис. 9.5а) в системе
возникают хаотические колебания, имеющие достаточно широкий
полосовой спектр мощности со значительной неравномерностью
по диапазону частот. Верхняя граница спектра согласно (9.5)
/в = 2,8 МГц. Большая неравномерность спектральной характе-
ристики объясняется значительным коэффициентом связи между
контурами фильтра и, следовательно, их большой расстройкой
один относительно другого. Дальнейшее увеличение коэффици-
ента связи, т. е. уменьшение п (например, п = 1/3), приводит к
срыву хаотических колебаний и установлению в системе детерми-
нированных колебаний.
При n = 1 (рис. 9.56) происходит сужение спектра мощности
(/н = 0,9 МГц, /в = 2,0МГц). Неравномерность спектральной ха-
рактеристики уменьшается, что отражается на фазовом портрете
и временной реализации, отражающих увеличение хаотизации ко-
лебаний в генераторе.
Следующий рассмотренный случай соответствует п = 2
(рис. 9.5е). При этом верхняя граница спектра /в = 1,6МГц.
Происходит дальнейшее сужение спектральной характеристики со
стороны верхних частот и уменьшение ее неравномерности. Как
отмечалось, при п = 2 частота собственных колебаний трехточеч-
ной схемы <jo совпадает с нижней границей полосы прозрачности
фильтра, поэтому это значение п фактически является предель-
ным значением, при котором в генераторе возникают хаотические
колебания. При п > 2 полоса фильтра перестает «охватывать» cjq,
что нарушает исходное положение используемого в работе подхода.
Поэтому при дальнейшем увеличении п коэффициент связи стано-
вится незначительным, частотные характеристики контуров сбли-
жаются, происходит срыв хаотических колебаний и установление
регулярных колебаний.
Таким образом, из результатов численных экспериментов мож-
но сделать следующие два вывода:
1) генератор, образованный трехточечной схемой с дополнитель-
но введенной в нее ЧИС, демонстрирует хаотическое поведение;
2) исходная схема (без частотно-избирательной системы) при
указанных выше параметрах генерирует только регулярные ко-
лебания, т.е. именно введение резонансного элемента создает в
генераторе условия для возникновения хаотических колебаний.
Частотный диапазон спектральной характеристики возникаю-
щих хаотических колебаний определяется полосой прозрачности
ЧИС и зависит от соотношения Со = пС, варьируя которым можно
9.3. Генераторы хаоса ВЧ- и СВЧ-диапазонов 177
управлять полосой генерации. Крутизна спада и неравномерность
спектра мощности колебаний при фиксированном коэффициенте
связи между отдельными звеньями резонансного элемента зави-
сит от N. Чем больше 7V, тем более четко выражены границы
частотного диапазона спектральной характеристики и меньше ее
неравномерность. С другой стороны, уменьшение N (N < 3) при-
водит не только к увеличению изрезанности спектра мощности,
но и к исчезновению хаотических колебаний при определенных
условиях.
Схемотехническое моделирование с помощью пакета программ
«Electronics Workbench». Схема генератора соответствовала
a
б
Рис. 9.6. Схемотехническое моделирование генератора. Характеристики хаоти-
ческих колебаний на экранах виртуальных осциллографов программного пакета
Electronics Workbench', a — временные реализации в узлах 1 (верхняя реализа-
ция) и 2 принципиальной схемы на рис. 9.4а; б — проекция фазового портрета
на плоскость напряжений в узлах 1 и 2
178 Гл. 9. Прямохаотические системы передачи информации
рис. 9.4а, а параметры элементов генератора — значениям, при-
веденным в предыдущем пункте. Функцию анализирующего при-
бора выполнял виртуальный двухканальный осциллограф, один из
входов которого подключался к узлу 1, а второй к узлу 2 схемы на
рис. 9.4а.
На рис. 9.6 представлены временные реализации и фазовый
портрет хаотических колебаний для Ci = С2 = Со = С = 1 нФ,
т. е. n = 1. Верхняя реализация на экране осциллографа соответ-
ствует колебаниям в последнем звене фильтра (узел 1).
Сопоставление результатов численного анализа математичес-
кой модели генератора и его схемотехнического аналога показы-
вает хорошее качественное совпадение, что говорит об адекватно-
сти моделей.
С помощью программного пакета был проведен анализ ампли-
тудно-частотных характеристик ЧИС генератора. Для этого к
узлу 3 подключался виртуальный генератор гармонических коле-
баний, а в узле 1 сигнал анализировался с помощью виртуального
измерителя амплитудно-частотных характеристик. На рис. 9.7
Рис. 9.7. Амплитудно-частотные характеристики резонансного элемента (С =
= 1 нФ): a — п = 0,5; б — n = 1; в — п = 2
представлены АЧХ используемого в генераторе ЧИС при различ-
ных соотношениях Со = пС, где С = 1 нФ. При п = 0,5 нижняя
граница полосы прозрачности фильтра /н = 0,93 МГц, а верхняя
/в = 2,6 МГц (рис. 9.7а). Для n = 1, /н = 0,93 МГц, /в = 2,05 МГц
(рис. 9.76). Заменяя в схеме Со на 2С (п = 2), получаем АЧХ с
границами /н = 0,93 МГц, /в = 1,6 МГц (рис. 9.7е). Верхняя гра-
ница АЧХ имеет более крутой спад, чем нижняя.
Сопоставление АЧХ на рис. 9.7 и спектров мощности на рис. 9.5
подтверждает вывод, сделанный в предыдущем пункте о том, что
9.3. Генераторы хаоса ВЧ- и СВЧ-диапазонов
179
спектральная характеристика хаотических колебаний определяет-
ся частотно-избирательной системой генератора. Следовательно,
меняя параметры ЧИС, можно формировать полосовые хаотиче-
ские сигналы с наперед заданными свойствами.
Физический эксперимент. Экспериментальный макет генера-
тора был собран в соответствии со схемой рис. 9.4а. В качестве ак-
тивного элемента использовался транзистор п-р-п типа (КТ3102).
Управление режимами генератора осуществлялось изменением
напряжения Vc на коллекторе и VE на эмиттере транзистора.
Режимы экспериментального макета исследовались в зависи-
мости от п, как это было сделано при анализе математической
модели и с помощью программного пакета Electronics Workbench.
Во всех случаях (п = 0,5; 1; 2) динамика перехода к хаосу в ге-
нераторе была одинакова и значение п влияло только на ширину
полосы спектральной характеристики. Так, при фиксированном
напряжении на коллекторе (Vc = 6 В) и при увеличении напря-
жения на эмиттере до VE > VT = 0,75 В в системе возникали
детерминированные колебания на частоте f » 1,4 МГц. Дальней-
шее изменение VE приводило к появлению в спектре колебаний не-
скольких составляющих, лежащих в полосе прозрачности фильтра
и после одной или двух бифуркаций удвоения периода в системе
скачкообразно возникали хаотические колебания.
1 мкс
Рис. 9.8. Физический эксперимент. Экспериментальные характеристики хаоти-
ческих колебаний макета генератора: a — спектр мощности колебаний в узле 1
принципиальной схемы на рис. 9.4а; б — временная реализация колебаний в
узле 1; в — фазовый портрет в плоскости напряжений в узлах 2 и 1
WWW
б
180 Гл. 9. Прямохаотические системы передачи информации
На рис. 9.8 приведены спектральная характеристика, времен-
ная реализация и фазовый портрет колебаний в генераторе при
n = 1, т. е. при Со = С = 1нФ. Частотный диапазон, занимае-
мый спектром мощности, практически совпадает с шириной по-
лосы прозрачности фильтра, вычисленного по (9.5) и составляет
~ 0,8 МГц. Фазовый портрет и временная реализация хаотиче-
ских колебаний, полученные в физическом эксперименте, подобны
характеристикам, рассмотренным выше.
Моделирование и реализация генераторов в СВЧ-диапазоне.
С помощью современных гибридно-интегральных технологий ге-
нератор с принципиальной схемой на рис. 9.4а можно реализо-
вать в частотном диапазоне до нескольких ГГц. Однако в случае
продвижения в более высокочастотные области необходимо пере-
ходить на микрополосковую технику. Как известно, микропо-
лосковые линии являются основными элементами устройств в
СВЧ-диапазоне. С их помощью согласовывают активные элементы
и изготавливают разнообразные пассивные компоненты.
Специфика микрополосков в том, что они — элементы с рас-
пределенными параметрами. Их эквивалентная схема может быть
представлена в виде бесконечной цепочки параллельно-последова-
тельных ЯЬС-звеньев, в каждом из которых как параллельное,
так и последовательное плечо является колебательным контуром.
Геометрические размеры полосковых линий, а также толщина и
диэлектрическая проницаемость материала подложки определяют
параметры контуров эквивалентной схемы.
С учетом указанной схемы замещения микрополосков рассма-
триваемый генератор целесообразно представить в виде принци-
пиальной схемы, изображенной на рис. 9.46 Здесь функцию ЧИС
выполняет цепочка из N RLC-RqLqCq резонансных звеньев.
Каждое из звеньев цепочки по существу представляет собой поло-
совой фильтр, обладающий четко выраженной полосой пропуска-
ния, граничные частоты которой определяются как
р 1 \/5±1 1
Л’2 “ 2я 2 y/Ltffr ( ’ )
Если обозначить элементы последовательного плеча каждого
из звеньев Л, L, С, а соответствующие элементы в параллельном
плече — До, Ьо, Со, то процессы в n-м звене (кроме первого и
последнего звена) можно описать с помощью следующих диффе-
ренциальных уравнений:
LIn + RIn +
С + Со)
^O^Lon “Ь “Ь q Ilqti
(9.7)
9.3. Генераторы хаоса ВЧ- и СВЧ-диапазонов
181
Принимая во внимание, что увеличение числа звеньев N при-
водит к уменьшению неравномерности АЧХ суммарного фильтра,
примем N = 3. Тогда, при условии однородности звеньев система
дифференциальных уравнений, описывающая динамику генера-
тора, примет следующий вид:
CiVce = Il~ Ic ~ 11>
c2vbe = ^-(ve-vbe)-il-ib,
гСе
LqIl = Ус — Усе + Уве — IlRl,
LI\ + Rh + f 77 + 7Г + 77" А = 77п(Л “ /с) + 77“ (^2 + Ло1),
\О Оо / О1 Оо
ЬоЛ01 + RoIlqI + — 77“(^1 “ ^2))
Со со
. /1 2 \ 1
LI2 + RI2 + ( 77 + 7Г ) ^2 = тг(^2 + I3 + Ilq2 — Ло1),
\С Со/ Со
ЬоЛо2 + RqIl02 + 7гЛ02 = тг(^2 - /з),
Со Со
(1 2 \ 1
77 + 7Г Из = тг(^2 + Ilq3 — Л,о2))
С Со / Со
LqIl03 + Я0Л0З + ТГ^оЗ = ТГ^З-
Со Со
(9.8)
В системе (9.8), по аналогии с (9.4), первые три уравнения от-
носятся к трехточечному генератору, а остальные шесть уравне-
ний второго порядка попарно описывают трехзвенный полосовой
?шльтр, в котором Zi, Z2, Z3 — токи в последовательных контурах
плечах), a ZLoi, ZLo2, ZLo3 — токи в индуктивных ветвях парал-
лельных контуров звеньев.
Однако в отличие от (9.4) в рассматриваемом случае использо-
валась другая модель транзистора: модель Эберса-Молла [109], со-
гласно которой коллекторный ток определяется через напряжение
между базой и эмиттером транзистора следующей зависимостью:
Ic = Zo exp
(9-9)
где VT = kT/q ~ 26 мВ, Iq — ток насыщения транзистора, обу-
словленный тепловой генерацией неосновных носителей заряда в
р и п областях. В активном режиме Ic 1о и членом (—1) можно
пренебречь.
182 Гл. 9. Прямохаотические системы передачи информации
С другой стороны, ток базы транзистора в соответствии с ис-
пользуемой моделью определяется как
1в = (9.Ю)
где /3 также, как и в системе (9.4), является коэффициентом уси-
ления по току и может принимать значения от 20 до 1000 в зави-
симости от типа транзистора.
На рис. 9.9а приведена бифуркационная диаграмма максималь-
ных значений напряжения VcQn в параллельном плече последнего
Рис. 9.9. Численный эксперимент. Бифуркационная диаграмма колебательных
режимов и характеристики хаотических сигналов: a — бифуркационная диа-
грамма; б— временная реализация напряжения на параллельном плече послед-
него (третьего) звена; в — фазовый портрет токов в последовательном и парал-
лельном плечах последнего звена; г — спектр мощности сигнала (б)
(третьего) звена в зависимости от напряжения питания транзи-
стора в эмиттерной цепи VE в численном эксперименте с (9.8) при
следующих параметрах системы: Lg = L = Lq = 0,5 мкГн, Ci =
= (?2 = С = Со = 1пФ, Re = 4000м, Rl = 400м, R = Rq =
= 50м, Vc = 7 В. Как видно из диаграммы, при VE > 1,4 В в
системе реализуются хаотические колебания, типичные характе-
ристики которых для сечения VE = 1,6 В приведены на рис. 9.9б-г.
Частотный диапазон, занимаемый спектром мощности
(рис. 9.9г), определяется амплитудно-частотной характеристикой
суммарного полосового фильтра. Частота собственно генератора
9.3. Генераторы хаоса ВЧ- и СВЧ-диапазонов 183
трехточки, определяемая с помощью (9.1), в данном случае fg ~
~ 320 МГц и близка к центральной частоте спектральной харак-
теристики. Следует отметить, что близость частоты собственно
генератора трехточки к центральной частоте АЧХ фильтра явля-
ется одним из условий формирования четко выраженной полосы
частот спектральной характеристики с резкой крутизной спада в
области граничных частот.
Проиллюстрируем работоспособность предлагаемого подхода на
примере генератора хаоса дециметрового диапазона. На рис. 9.10а
приведена фотография экспериментального макета генератора, а
Рис. 9.10. Экспериментальный макет генератора полосовых хаотических сиг-
налов дециметрового диапазона: a — фотография внешнего вида; б — эскиз
топологии
на рис. 9.106 — эскиз его топологии, выполненной на материа-
ле ФЛАН-10 толщиной 1мм с диэлектрической проницаемостью
е = 10. В качестве активного элемента (Q) в генераторе использу-
ется транзистор 2Т938А-2. Основу конструкции составляет трех-
точечная схема, поэтому сосредоточенные элементы Ci, СЪ, Сз,
L играют в ней такую же роль, что и элементы на рис. 9.3, 9.4.
Функцию ЧИС выполнял резонатор на связанных полосковых ли-
ниях. Изменение характеристик резонатора осуществлялось пу-
тем вариации емкости С$. Сигнал с выхода резонатора поступает
184 Гл. 9. Прямохаотические системы передачи информации
во внешнюю цепь. Настройка режимов генератора осуществлялась
с помощью переменных емкостей Ci, С2, С3 (4/30пФ) и вариации,
напряжений VE, Vc-
С макетом генератора были проведены эксперименты, которые
показали существование областей значений параметров (Ci, С2,
С3, VE. Vc), обеспечивающих генератору режим генерации хао-
тических колебаний. Причем, действительно, полоса и неравно-
мерность спектра мощности хаотического сигнала на выходе ге-
нератора определялась полосой пропускания и неравномерностью
АЧХ резонатора соответственно. В качестве иллюстрации на
рис. 9.11а, б представлены спектры мощности одного и того же вы-
ходного сигнала генератора в разных частотных масштабах для
хаотического режима, реализуемого в генераторе при VE = —0,85 В
и Vc = 5,3 В. Спектр, приведенный на рис. 9.11а, измерен в полосе
500 1000 МГц
a
800 900 1000 1100
900 950 1000 МГц
б
-------1-------1------1
10 дБ мг«
Рис. 9.11. Спектры мощности хаотических колебаний генератора дециметрового
диапазона
частот 0-1500 МГц и демонстрирует отсутствие колебаний где-либо
в диапазоне обзора измерительного прибора вне полосы генера-
ции. С другой стороны, спектр на рис. 9.116 позволяет более точно
оценить полосу генерации хаотического сигнала (950-990 МГц) и
неравномерность спектральной характеристики (в полосе), не пре-
вышающую в данном случае 8 дБ. Мощность выходного сигнала в
макете составляла 5 мВт.
9.4. Хаотическая синхронизация на высоких частотах 185
Представленный хаотический режим не исчерпывает возмож-
ностей генератора. При изменении одного или нескольких па-
раметров, соответствующих режиму на рис. 9.11а, 5, возможно
получение хаотических колебаний с другими спектральными ха-
рактеристиками. Так, например, путем вариации емкостей С\ и
Сз можно изменять полосу и неравномерность спектра мощности
колебаний (рис. 9.11е).
Управление генератором с целью ввода информации может осу-
ществляться либо добавлением параллельно одной из емкостей
(например, СЪ) варикапа и параметрического воздействия на него
информационным сигналом, либо путем введения дополнитель-
ного управляемого источника напряжения в цепь базы.
9.4. Хаотическая синхронизация на высоких частотах
Как отмечалось выше, один из подходов к построению прямо-
хаотических систем связи базируется на обеспечении режима хао-
тической синхронизации между передатчиком (ведущая система)
и приемником (ведомая система). Возможность ее осуществления
в радиодиапазоне рассматривалась на примере синхронизации
двух генераторов Колпитца при однонаправленной связи между
ними. Исследования проводились путем компьютерного модели-
рования в среде PSpice, адекватно описывающей реальные физи-
ческие процессы в радиотехнических схемах.
Сигнал Vce с выхода ведущей системы по каналу связи через
буферный элемент передавался на ведомую систему. Буферный
элемент обеспечивал передачу сигнала только в одном направле-
нии: от одного генератора к другому. Функцию канала связи вы-
полняла проводная линия (отсутствие потерь и искажений). В ка-
честве базового хаотического режима ведущего генератора был
выбран режим, соответствующий рис. 9.35, в. Анализ колебаний
осуществлялся путем сопоставления реализаций, фазовых портре-
тов и спектров мощности сигналов в идентичных узлах ведущего
и ведомого генераторов.
При идентичности параметров ведущей и ведомой систем на-
блюдалась идеальная синхронизация их хаотических сигналов.
Однако с точки зрения применения генераторов в коммуникаци-
онных системах, более интересен случай расстроенных друг от-
носительно друга параметров, так как эта разновидность дестаби-
лизирующих факторов наиболее часто встречается на практике.
Функцию такого дестабилизирующего фактора в экспериментах
выполняла емкость С2, определяющая согласно (9.1) основную
частоту генератора. Как показали эксперименты, изменение С2
в ведомом генераторе на 15-20% по отношению к номиналу С2
в ведущем генераторе при идентичности остальных параметров
не нарушает хаотическую синхронизацию (рис. 9.12а). С другой
186 Гл. 9. Прямохаотические системы передачи информации
стороны, дальнейшее увеличение расстройки указанных емкостей
приводит к постепенной десинхронизации сигналов (рис. 9.126),
Рис. 9.12. Хаотическая синхронизация трехточечных генераторов радиодиапа-
зона: a — синхронный режим генераторов; б — дисинхронизация генераторов
которая сопровождается плавным (без резких всплесков) измене-
нием структуры сигнала ведомого генератора.
9.5. Ввод и извлечение информации
При всей важности источников хаоса передача полезной ин-
формации будет возможна только тогда, когда в передатчике ин-
формационные сигналы будут введены в хаотический сигнал, а в
приемнике адекватным образом выделены.
Выше обсуждался ряд схем модуляции и демодуляции хаотиче-
ского носителя информационным сигналом, которые потенциально
могут применяться в прямохаотических системах связи. Рассмо-
трим эти схемы более подробно.
Начнем со схемы с переключением хаотических режимов. В ее
варианте, приведенном в гл. 2, процесс обработки сигнала закан-
чивается сравнением поступающего на вход приемника сигнала
с сигналами на выходах двух согласованных нелинейных филь-
тров. Фильтр, сигнал на выходе которого в наибольшей степени
совпадает с входным сигналом, т. е. на выходе которого наблюда-
ется хаотический синхронный отклик, полагается принимающим
в данный момент времени символ «1» или «О».
Однако схема передачи информации с хаотическим переключе-
нием режимов по существу является схемой с расширением спек-
тра. Действительно, характерная частота информационных им-
пульсов значительно ниже частоты хаотического сигнала. После
же ввода информация присутствует во всех спектральных ком-
понентах несущей. В связи с этим можно ожидать улучшения
характеристик системы, если обеспечить на ее выходе накопле-
ние сигнала. Возможная схема накопления для одного из каналов
9.5. Ввод и извлечение информации
187
приведена на рис. 9.13а. Согласно схеме, разностные сигналы по-
ступают на детектор (модуль Д), например квадратичный, затем
интегрируются в течение времени Г, характерного для данного
информационного импульса (модуль fT). Проинтегрированные
сигналы подаются на пороговое устройство, которое и фиксирует
наличие хаотического синхронного отклика: если сигнал ниже по-
рогового уровня, то хаотический синхронный отклик имеет ме-
сто и на выходе появляется символ, отвечающий данному каналу.
Если же интегральный уровень сигнала превышает порог, то хао-
тический синхронный отклик отсутствует, и на выходе появляется
символ, отвечающий второму каналу. Обобщение этой схемы на
случай двух каналов обеспечивает принятие решения по информа-
ции, поступающей из двух каналов одновременно. Еще один ва-
риант использования накопления показан на рис. 9.13d. Отличие
Рис. 9.13. Схемы извлечения информации, испольующие накопление сигнала
этой схемы от предыдущей в том, что здесь используется опера-
ция умножения (®) входного сигнала на опорный сигнал на вы-
ходе нелинейного согласованного фильтра (НСФ) вместо операции
вычитания этих сигналов друг из друга. Поэтому отпадает не-
обходимость в детектировании разностного сигнала. Применение
накопления позволяет существенно повысить помехоустойчивость
систем передачи, хотя возможность повышения помехоустойчи-
вости и ограничена фундаментальными информационными свой-
ствами хаотических сигналов [42].
Схема с нелинейным подмешиванием информации была под-
вергнута критике, с точки зрения ее использования в прямоха-
отических системах. Действительно, для того чтобы применить
эту схему в том виде, который рассматривался в гл. 2-8, необхо-
димо информационный сигнал перенести в один и тот же высо-
кочастотный (или сверхвысокочастотный) диапазон с хаотической
несущей. Однако возможна модификация схемы, при которой в
188 Гл. 9. Прямохаотические системы передачи информации
ней исчезнет необходимость указанного переноса информацион-
ного сигнала, а также будут доступны элементы накопления
сигнала.
По принципу действия нелинейное подмешивание информаци-
онного сигнала в хаотический сигнал может осуществляться с по-
мощью любых операций, допускающих в рассматриваемом классе
информационных сигналов обратную операцию — выделение ин-
формационного сигнала при наличии опорного сигнала. Далеко
не каждая операция над двумя входными сигналами удовлет-
воряет этому требованию. Однако такие операции существуют.
Во-первых, это уже рассматривавшаяся операция сложения. Об-
ратная ей операция — вычитание — существует для любых видов
информационного и хаотического сигналов. Во-вторых, — опе-
рация сложения по модулю (также рассматривавшаяся в работе).
Хотя она не является обратимой для сигналов произвольной ам-
плитуды, она обратима при ограничениях на амплитуду хаотиче-
ского и информационного сигналов.
Сложнее обстоит дело с операцией умножения. Обратная ей
операция — деление — недопустима для сигналов произвольного
вида вследствие возникающей некорректности при делении на
нуль. Однако имеются классы информационных сигналов, извле-
чение которых в приемнике все-таки возможно. Такими сигна-
лами являются, например, биполярные импульсы. Передаваемая
информация в этом случае кодируется последовательностью им-
пульсов с амплитудой ±1 и длиной намного превышающей время
между отсчетами для систем с дискретным временем или время
квазипериода хаотических колебаний для систем с непрерывным
временем.
Следует отметить, что изменение типа преобразования, с по-
мощью которого информация вводится в хаотический сигнал,
может радикально влиять на тип получаемой системы передачи
и ее основные параметры. Так, в случае сложения получаемая
система выполняет роль скремблера. Расширение спектра инфор-
мационного сигнала при этом может практически отсутствовать.
В случае же использования операции умножения — это типичная
система с расширением спектра.
На рис. 9.14 приведена структура схемы передачи с перемно-
жением информационного S(t) и хаотического сигналов для ис-
точников хаоса с непрерывным временем. Цифрами обозначены:
1 — нелинейная подсистема, 2 — первая линейная подсистема,
3 — вторая линейная подсистема. Элементами линейных подси-
стем могут быть, в частности, фильтры и задержки. Схема пе-
редачи функционирует следующим образом. Ввод информации в
хаотический сигнал передатчика осуществляется путем перемно-
жения (®) импульсов длины Т с амплитудой ±1 с хаотическим
9.6. Прямохаотическая система с некогерентным приемом 189
сигналом. При этом параметры генератора хаоса в передатчике
выбираются так, чтобы генерация хаоса имела место как при ин-
вертировании знака сигнала между подсистемами 2 и 3, так и без
нее. Извлечение информации в приемнике производится путем
Рис. 9.14. Модификация схемы с нелинейным подмешиванием. Структура схемы
передачи с перемножением информационного и хаотического сигналов: S(t) —
биполярные информационные импульсы; 1 — нелинейная подсистема; 2,3 —
линейные подсистемы; fT — интегратор; ® — перемножитель
перемножения (®) входного сигнала и сигнала с выхода подси-
стемы 3, накопления его в течение характерного времени Т (мо-
дуль fT) и принятия решения при превышении положительного и
отрицательного порогов — соответственно «1» или «О».
9.6. Прямохаотическая система с некогерентным приемом
Анализ потенциально возможных прямохаотических схем свя-
зи заставляет обратить внимание на схемы с сигналами в виде
хаотических радиоимпульсов. Передаваемая последовательностя-
ми таких импульсов информация может кодироваться местополо-
жением импульсов вдоль временной оси, длительностью импуль-
сов, расстояниями между импульсами и т. д.
Прием последовательности хаотических радиоимпульсов может
осуществляться как когерентно, например, с использованием явле-
ния хаотической самосинхронизации, так и, что крайне важно,
некогерентно. Когерентный прием на 3-5 дБ более эффективен,
190 Гл. 9. Прямохаотические системы передачи информации
с точки зрения отношения сигнал/шум. Однако как будет по-
казано ниже, практическая реализация некогерентного приема в
прямохаотических схемах радио- и СВЧ-диапазонов может быть
обеспечена уже сейчас, в то время как когерентный прием можно
рассматривать на перспективу.
В основу простейшей схемы прямохаотической связи можно за-
ложить три основные идеи, которые сделают ее практически реа-
лизуемой: 1) источник хаоса генерирует хаотические колебания
непосредственно в заданной полосе СВЧ-диапазона; 2) ввод ин-
формационного сигнала в хаотический осуществляется путем фор-
мирования соответствующего потока хаотических радиоимпуль-
сов; 3) для извлечения информации используется некогерентный
прием.
Структура схемы связи показана на рис. 9.15.
Передатчик системы состоит из устройства управления гене-
ратором 1, источника хаоса 2, генерирующего сигнал непосред-
ственно в частотном диапазоне передачи информации, т.е. в
Рис. 9.15. Структура прямохаотической коммуникационной системы с некоге-
рентным приемом. Передатчик: 1 — устройство управления генератором, 2 —
источник хаоса (генератор), 3 — модулятор, 4 — усилитель, 5 — антенна, 6 —
источник информации, 7 — кодер источника, 8 — кодер канала. Приемник: 9 —
антенна, 10 — фильтр, 11 — усилитель, 12 — система обработки сигнала
области сверхвысоких частот, модулятора ключевого типа 3, уси-
лителя 4, антенны 5, источника информации 6, кодера источника 7
и кодера канала 8.
Источник хаоса 2 обеспечивает генерацию сигнала с централь-
ной частотой /о и полосой частот Д/. Центральная частота и по-
лоса генерируемого сигнала могут регулироваться управляющим
устройством 1. Модулятор 3 осуществляет формирование хаотиче-
ских радиоимпульсов и интервалов между импульсами.
Информация, поступающая от источника информации 6, пре-
образуется кодером источника 7 в сигнал, подаваемый на вход
кодера канала 8, который, в свою очередь, преобразует его в мо-
дулирующий сигнал, обеспечивающий управление модулятором 3.
Длина формируемых хаотических импульсов может меняться от
значения Т ~ 1/Д/ до Т —> оо.
9.6. Прямохаотическая система с некогерентным приемом 191
Сформированный сигнал пропускается через усилитель 4 и из*
лучается в пространство с помощью широкополосной антенны 5.
Формирование информационного потока может осуществляться за
счет изменения расстояния между импульсами, изменения длины
импульсов, изменения среднеквадратичной амплитуды импульсов
или комбинации этих параметров.
Например, формирование потока может осуществляться при
фиксированной частоте следования импульсов и при фиксирован*
ной длительности импульсов. При этом наличию импульса на за-
данной позиции в потоке соответствует передаваемый символ «1»,
а отсутствию импульса — символ «О».
Приемник состоит из широкополосной антенны 9, фильтра 10,
пропускающего сигнал в полосе частот передатчика, малошумя-
щего усилителя 11 и системы обработки сигнала 12. Поток хао-
тических радиоимпульсов поступает в антенну 9, пропускается
через фильтр 10 и усилитель 11. После этого система обработки
осуществляет фиксацию импульсов, определение их параметров
и местоположения в потоке, выделение полезной информации из
сигнала.
Система обработки осуществляет выделение полезной инфор-
мации из сигнала путем интегрирования мощности импульсов в
пределах их длительности. Таким образом, в системе осуществля-
ется некогерентный прием последовательности импульсов.
Хаотические радиоимпульсы. Хаотический радиоимпульс
представляет собой фрагмент прямо-хаотического сигнала с дли-
ной, превышающей длину «квазипериода» хаотических колебаний
(рис. 9.16).
Полоса частот хаотического радиоимпульса определяется поло-
сой частот исходного хаотического сигнала, генерируемого источ-
ником хаоса, и в широких пределах изменения длины импульса
Рис. 9.16. Хаотические радиоимпульсы (слева) и занимаемая ими полоса частот
(справа)
не зависит от длительности импульса. Это существенно отли-
чает хаотический радиоимпульс от классического радиоимпульса,
192
Гл. 9. Прямохаотические системы передачи информации
заполненного фрагментом периодической несущей, полоса частот
которого f определяется его длиной Т:
f = f- (9.11)
Свойство сохранения полосы импульса при изменении его
длины позволяет реализовывать гибкие схемы модуляции потока
импульсов при фиксированных частотных параметрах выходных
цепей передатчика и входных цепей приемника. Например, при
изменении длин импульсов не нужно менять полосу входного
фильтра и малошумящего усилителя. В случае же классического
радиоимпульса, изменение длины импульса приводит к необходи-
мости изменения частотных параметров входных и выходных це-
пей, соответственно, передатчика и приемника. Это обстоятельст-
во практически исключает возможность использования импульсов
различной длины в одной и той же системе связи и существенно
ограничивает возможные типы модуляции сигнала, изменение
темпа передачи информации в зависимости от состояния окружаю-
щей среды и т. д.
Увеличение длины хаотического радиоимпульса повышает по-
мехоустойчивость схемы передачи. При этом энергия импульса
возрастает, и этот фактор может быть использован для регулиро-
вания дальности работы аппаратуры без изменения пиковой мощ-
ности передатчика.
Прямохаотическая схема связи может использовать для пере-
дачи информационного бита как одиночные импульсы, так и по-
следовательности импульсов. В любом из этих двух случаев во
временной области формируется последовательность хаотических
радиоимпульсов.
Длина хаотического радиоимпульса и средняя скважность
между импульсами являются варьируемыми параметрами. Это
позволяет гибко управлять скоростью передачи данных путем
изменения частоты следования импульсов и средней мощности
передаваемого сигнала.
В силу отмеченных выше свойств хаотического радиоимпульса,
эти манипуляции не приводят к существенному изменению спек-
тральных характеристик передаваемого сигнала по отношению к
сигналу источника хаоса. Никаких дополнительных спектраль-
ных компонент в излучаемом сигнале не возникает.
Модуляция и демодуляция. При большой скважности последо-
вательность хаотических радиоимпульсов интерферирует с сигна-
лами традиционных радиосхем только на очень коротких интер-
валах времени. Так, при частоте следования импульсов 105 имп/с
и длине каждого импульса 10-7 с скважность равна S = 100, т. е.
время интерференции составляет 1% от времени работы системы.
9.6. Прямохаотическая система с некогерентным приемом 193
При этом средняя излучаемая мощность в 100 раз ниже, чем сред-
няя мощность в интервалах времени излучения хаотических ра-
диоимпульсов. Если, например, мощность передатчика во время
излучения хаотического радиоимпульса равна 200 мВт, то средняя
излучаемая мощность составляет всего 2 мВт.
Периодическая последовательность хаотических радиоимпуль-
сов не несет информации из-за регулярности следования хаотиче-
ских радиоимпульсов.
Для того чтобы система могла передавать информацию, необ-
ходимы дополнительные манипуляции с сигналом, приводящие к
модуляции последовательности импульсов.
В прямохаотических системах связи может использоваться ряд
различных видов модуляции. Опишем в качестве примеров два
из них.
Простейшая система. В этом случае модуляция пос-
ледовательности импульсов осуществляется следующим образом
(рис. 9.17). Из исходного хаотического сигнала формируется
Рис. 9.17. Простейшая схема модуляции: a — 1 — исходная бинарная инфор-
мация, 2 — источник хаотических сигналов, 3 — модулятор; б — временные
диаграммы сигналов в различных точках схемы
последовательность хаотических радиоимпульсов с постоянной
частотой следования и с постоянными длинами импульсов. На
выходе формирователя каждый импульс умножается на +1,
если нужно передать символ «1», и на 0, если нужно передать сим-
вол «0».
Модуляция позиций импульсов. В этом случае ме-
няется только момент времени излучения хаотического радиоим-
пульса относительно его номинальной позиции. Например, в
системе с частотой формирования 107имп/с импульсы должны
формироваться в среднем через каждые 100 нс. В системе с
модуляцией позиции импульса, импульс, соответствующий сим-
волу «0», должен формироваться несколько раньше фиксированной
14 Зак. 18
194 Гл. 9. Прямохаотические системы передачи информации
лт । । «1»
t
Рис. 9.18. Модуляция позиций хаотических радиоимпульсов
позиции через 100нс, а импульс, соответствующий символу «1»,
несколько позже этой позиции. Процесс сдвижки импульса во
времени показан на рис. 9.18.
Экспериментальный макет. Для исследования принципов
функционирования прямохаотической схемы, представленной на
рис. 9.15, был создан экспериментальный макет, реализующий ее
основные функции.
Блок-схема макета приведена на рис. 9.19.
В передатчике макета генератор хаоса 1 вырабатывает непре-
рывные хаотические колебания дециметрового диапазона, которые
проходят через модулятор 2, управляемый импульсным сигналом
из источника импульсов 3, объединяющего в себе функции источ-
ника информации, кодера источника и кодера канала. В модуля-
торе из хаотического сигнала формируется поток радиоимпульсов,
огибающая которых соответствует потоку импульсов управления.
Далее хаотические радиоимпульсы усиливаются (усилитель 4) и
через антенну 5 излучаются в пространство (канал связи 6). Из
канала связи сигнал поступает на антенну приемника 7, пропуска-
ется через усилитель 8 и поступает на вход детектора 9, который
детектиоует поиходяший сигнал и отфильтровывает высокочастот-
9.6. Прямохаотическая система с некогерентным приемом 195
ную составляющую. Таким образом, детектором формируется оги-
бающая радиоимпульсов — импульсный сигнал, соответствующий
Рис. 9.19. Блок-схема экспериментального макета. Передатчик: 1 — генератор
хаоса, 2 — модулятор, 3 — источник импульсов, 4 — усилитель, 5 — антенна,
6 — канал связи. Приемник: 7 — антенна, 8 — усилитель, 9 — детектор, 10 —
осциллограф
импульсам управления источника 3. Этот импульсный сигнал ото-
бражался на осциллографе 10.
Рассмотрим элементы схемы на рис. 9.19 более подробно.
Генератор хаоса. В качестве генератора используется ге-
нератор, описанный в §9.3 и изображенный на рис. 9.10. Спектр
мощности хаотического сигнала на выходе генератора соответство-
вал спектру на рис. 9.Ив.
Модулятор. Функция модулятора — пропускать или не про-
пускать через себя хаотический сигнал от генератора хаоса в за-
висимости от уровня напряжения на его управляющем входе. При
подаче на управляющий вход импульсного (т. е. двухуровнего)
сигнала напряжение уровней подбирается таким образом, чтобы
одному из них соответствовал режим пропускания модулятора, а
другому — режим непропускания. Модулятор, используемый в
макете, выполнен в микрополосковом варианте с использованием
p-i-n диодов.
Источник импул.ьсов. В качестве источника импульсов в
экспериментах использовался генератор импульсов, позволявший
регулировать длительность и частоту следования (скважность)
импульсов. С помощью генератора формировались два тестовых
режима потока управляющих импульсов. Первый режим — с дли-
тельностью импульсов 150 нс и скважностью 4 (рис. 9.20а) — обес-
печивал скорость потока импульсов 1,67 миллиона импульсов в
секунду (Мимп/с). Второй режим — с длительностью импульсов
50 нс и скважностью 4 (рис. 9.206) — обеспечивал скорость по-
тока импульсов 5 Мимп/с. Из-за упомянутых выше особенностей
модулятора в качестве импульсов, обеспечивающих пропускание
хаотических колебаний через модулятор, выступали сигналы с
(>ол(*(‘ низким уровнем напряжения.
196 Гл. 9. Прямохаотические системы передачи информации
Поскольку применявшийся генератор импульсов не мог обес-
печить формирование импульсов с длительностью менее 50 нс,
в дальнейшем для повышения темпа передачи импульсов в ка-
честве источника импульсов был использован генератор синусои-
дальных колебаний с частотой 70 МГц. При подаче сигнала этого
Рис. 9.20. Тестовые управляющие импульсы: a — первый тестовый режим; б —
второй тестовый режим
источника на модулятор формировались хаотические радиоим-
пульсы с длительностью 7 нс и скважностью 2. Таким образом,
в третьем тестовом режиме темп следования хаотических радио-
импульсов составлял 70Мимп/с.
Канал связи. Эксперименты проводились в лабораторном
помещении (280 м3) с большим количеством металлических кон-
струкций в виде лабораторных стоек. В экспериментах расстояние
между передающей и приемной антеннами составляло ~ 10 м.
Детектор. Назначение детектора — демодуляция СВЧ сиг-
нала, фильтрация несущих хаотических колебаний и выделение
их огибающей. Конструктивно детектор был выполнен в одном
корпусе с усилителем приемника и позволял выделять огибаю-
щую с частотой следования импульсов вплоть до нескольких де-
сятков МГц.
Результаты экспериментов. Эксперименты включали в себя
передачу и прием по эфиру хаотического сигнала с разными ре-
жимами модуляции, а также изучение устойчивости передачи по
отношению к многолучевому распространению.
Исходная серия экспериментов была проведена с использова-
нием первого тестового режима потока управляющих импульсов
(длина импульсов 150 нс, скважность 4). Целями экспериментов
являлись испытание элементов макета и макета в целом на работо-
способность, а также проверка идей, заложенных при его создании.
Эксперименты проводились при типичном режиме работы ге-
нератора хаоса, спектр мощности которого приведен на рис. 9.Ив.
Поток управляющих импульсов (рис. 9.20а) подавался на модуля-
тор и формировал сигнал на выходе усилителя, представляющий
собой последовательность хаотических радиоимпульсов (рис. 9.21).
9.6. Прямохаотическая система, с некогерентным приемом 197
Рис. 9.21. Хаотические радиоимпульсы
800 900 1000 1100
a
в
Рис. 9.22. Спектры мощности сигналов на входе приемника экспериментального
макета: a — первый тестовый режим управляющих импульсов и хаотическая
несущая; б — второй тестовый режим и гармоническая несущая; в — третий
тестовый режим и хаотическая несущая
198 Гл. 9. Прямохаотические системы передачи информации
На рис. 9.22а приведен спектр мощности сигнала на входе при-
емника для первого тестового сигнала. Из сопоставления этого
спектра со спектром на рис. 9. Не следует, что при выбранных
в экспериментах параметрах хаотического и модулирующего сиг-
налов, информационная компонента не проявляет себя в спектре
мощности сигнала на входе приемника. При этом спектр мощ-
ности сигнала на входе приемника близок к спектру мощности
сигнала, генерируемого источником хаоса.
Отсутствие признаков модуляции в спектре мощности прини-
маемого из канала сигнала объясняется тем, что полоса несущего
хаотического колебания (100 МГц) значительно шире, чем полоса
частот, определяемая длительностью хаотических радиоимпульсов
(Д/ » 2/Т, где Т — длительность радиоимпульса).
На рис. 9.23а приведена осциллограмма огибающей СВЧ сиг-
нала, выделенной в приемнике. Сравнение формы осциллограмм
на рис. 9.20а и 9.23а свидетельствует об уверенном приеме пря-
мохаотического СВЧ сигнала приемником и высоком качестве из-
влечения формы модулирующего сигнала. Следует отметить, что
в
Рис. 9.23. Осциллограммы огибающих СВЧ сигналов в приемнике макета: a —
первый тестовый режим и хаотическая несущая; б — второй тестовый режим и
хаотическая несущая; в — третий тестовый режим и гармоническая несущая
последнее обстоятельство, вообще говоря, не является обязатель-
ным для надежной передачи цифрового потока данных. Для этого
достаточно надежно фиксировать лишь сам факт прихода импуль-
сов. Таким образом, в первой серии экспериментов была проде-
монстрирована принципиальная работоспособность предложенной
9.6. Прямохаотическая система с некогерентным приемом 199
прямохаотической схемы передачи информации в СВЧ-диапазоне
и обеспечена скорость потока 1,67 Мимп/с со скважностью 4, что
соответствует скорости передачи последовательности нулей и еди-
ниц 3,34Мбит/с со скважностью 2.
Во второй серии экспериментов использовался тестовый режим
потока управляющих импульсов с длительностью 50 нс и скваж-
ностью 4. Целями экспериментов являлись повышение скорости
передачи информации по сравнению с первой серией эксперимен-
тов и экспериментальное подтверждение независимости спектра
мощности формируемого сигнала от наличия или отсутствия мо-
дуляции. Как и в первой серии, эксперименты проводились при
типичном режиме работы генератора хаоса (рис. 9.lie). Поток
управляющих импульсов (рис. 9.206) подавался на модулятор и
формировал сигнал на выходе усилителя, представляющий собой
последовательность хаотических радиоимпульсов. Эксперименты
продемонстрировали, что, как и в случае предыдущей серии, ин-
формационная компонента не проявляет себя в спектре мощности
сигнала на входе приемника. На рис. 9.235 приведена осцилло-
грамма огибающей СВЧ сигнала, выделенной в приемнике. На
осциллограмме наблюдается остаточное заполнение импульсов и
промежутков между импульсами высокочастотной хаотической со-
ставляющей. Несмотря на это, сравнение формы осциллограмм
на рис. 9.205 и 9.236 свидетельствует об уверенном приеме пря-
мохаотического СВЧ сигнала приемником и достаточно высоком
качестве извлечения формы модулирующего сигнала.
Для сравнения свойств передачи информации с использовани-
ем хаотических радиоимпульсов и передачи, использующей радио-
импульсы с гармонической несущей, были проведены дополни-
тельные эксперименты. В них при формировании потока радиоим-
пульсов использовался гармонический режим функционирования
генератора. Частота колебаний была выбрана равной 950 МГц. На
рис. 9.225 представлен спектр мощности потока радиоимпульсов с
гармонической несущей. Для модуляции использовался второй те-
стовый режим потока управляющих импульсов. Спектр мощности
сигнала на выходе модулятора в этом случае линейчатый, его эф-
фективная ширина определяется длительностью импульсов и для
рассматриваемых длительностей составляет ~ 10 МГц, что значи-
тельно меньше, чем в случае хаотической несущей. Форма выде-
ленной в приемнике огибающей СВЧ сигнала (рис. 9.23в) нахо-
дится в хорошем соответствии с формой модулирующего сигнала.
Таким образом, во второй серии экспериментов была продемон-
стрирована прямохаотическая передача информации в СВЧ-диа-
пазоне со скоростью передачи данных до 10Мбит/с при неизмен-
ном спектре мощности хаотического сигнала.
В третьей серии экспериментов использовался тестовый режим
потока управляющих импульсов с длительностью импульсов 7 нс и
скважностью 2. Целями экспериментов являлись выяснение пре-
200 Гл. 9. Прямохаотические системы передачи информации
дела увеличения скорости передачи информации при сохранении
независимости спектра мощности формируемого сигнала.
Как и в предшествующих сериях, поступающий из канала сиг-
нал уверенно фиксировался приемником. Форма огибающей имела
достаточно интенсивную хаотическую составляющую, однако при
соответствующем интегрировании сигнала с постоянной времени,
характерной для длительности импульса, выделение полезного
цифрового сигнала не является проблемой. Спектр мощности по-
тока хаотических радиоимпульсов (рис. 9.22в) не изменялся по
отношению к спектру мощности хаотического сигнала генератора
(рис. 9.22а). Поэтому скорость потока 70Мимп/с для данного ма-
кета достигается без дополнительного расширения спектра.
Описанные выше эксперименты проводились с тестовыми
управляющими сигналами, выполняющими функцию информа-
ционных последовательностей. Для проверки функционирования
системы с реальными информационными сигналами были прове-
дены эксперименты по передаче данных с выхода Ethernet-карты
персонального компьютера (скорость передачи — 10Мбит/с). Ре-
зультаты экспериментов представлены на рис. 9.24 (см. цветную
вклейку). Как следует из рис. 9.245, сигнал на выходе демоду-
лятора приемника воспроизводит исходный сигнал с точностью,
достаточной для последующей однозначной обработки сигнала.
9.7. Выводы
Подход, рассмотренный в данной главе, основывается на ис-
пользовании хаотических сигналов непосредственно в качестве
несущих колебаний в отличие от подхода, примененного в гл. 4,
где сигналы выполняли функцию поднесущих колебаний. Для
схем передачи информации с синхронным хаотическим откликом
этот подход может облегчить решение проблемы фильтрации сиг-
налов в канале связи, но для этого необходимо обеспечить полу-
чение отклика в излучаемом диапазоне частот, т. е. в радио- или
СВЧ-диапазоне. Эта задача еще ждет своего решения.
С другой стороны, при использовании некогерентных методов
приема значительно упрощается реализация прямохаотических
систем, что и продемонстрировано выше. Применение некоге-
рентного приема накладывает свой отпечаток на методы модуля-
ции-демодуляции хаотического сигнала. Одним из простейших
вариантов является формирование в передатчике хаотических ра-
диоимпульсов, длительность или местоположение которых на
временной оси может выступать в роли модулируемой величины.
Установлено, что такое построение системы позволяет организо-
вать высокоскоростную передачу данных. При этом системе свой-
ственны слабая чувствительность к многолучевому распростране-
нию и возможность гибкого управления скоростью передачи, что
наряду с простой структурой делает ее весьма привлекательной.
a
б
Рис. 9.24. Эксперименты по прямохаотической передаче цифровой информации со ско-
ростью ~ 10 Мбит/с: а— последовательность хаотических радиоимпульсов в
различных временных масштабах; б— структура информационного сигнала
на входе модулятора (верхняя осциллограмма) передатчика и выходе демоду-
лятора (нижняя осциллограмма) приемника
a
б
Рис. 10.12 Эксперименты по сверхширокополосной прямохаотической передаче циф-
ровой информации со скоростью ~ 100 Мбит/с: а— последовательность
управляющих импульсов (нижняя осциллограмма) и соответствующий ей
поток хаотических радиоимпульсов (верхняя осциллограмма); б — струк-
тура информационного сигнала на входе модулятора (нижняя осцилло-
грамма) передатчика и выходе демодулятора (верхняя осциллограмма)
приемника
Глава 10
СВЕРХШИРОКОПОЛОСНЫЕ
ПРЯМОХАОТИЧБСКИЕ СИСТЕМЫ СВЯЗИ
В предыдущей главе рассматривались прямохаотические схе-
мы связи (ПХСС) и были приведены результаты экспериментов с
широкополосным макетом, работающим в относительной полосе
частот
к = 2(лг/н) ~ 10%’
JВ + /н
где /н и /в — нижняя и верхняя границы полосы частот хаотиче-
ского сигнала, определяемые по уровню —20 дБ от максимальной
спектральной плотности сигнала внутри полосы.
Однако прямохаотические системы могут быть не только широ-
кополосными, но и сверхширокополосными (СШ ПХСС) при усло-
вии создания соответствующих источников хаоса.
В данной главе этот вопрос обсуждается как с теоретической,
так и экспериментальной точки зрения.
Прежде всего поясним, какие возможности дает применение
сверхширокой полосы в прямохаотических системах.
Ясно, что те положительные качества, которые свойственны
широкополосным прямохаотическим системам (высокая скорость
передачи данных; электромагнитная совместимость с другими
связными системами; устойчивость работы в условиях многолу-
чевого распространения; экологическая безопасность), в сверхши-
рокополосных системах будут выражены в большей степени. Так,
ожидаемая максимальная скорость передачи информации при по-
лосе Д/ = /в - /н составляет R = (0,3-0,7)Д/. То есть если, на-
пример, спектр мощности сверхширокополосного источника хаоса
простирается от 500 до 2500 МГц, то предельная скорость переда-
чи, которая может быть реализована, составляет 0,6 до 1,4Гбит/с.
Конечно, при использовании сверхширокополосных хаотиче-
ских носителей возникает вопрос о том, что полоса частот, в кото-
рой они функционируют, давно поделена между разными связны-
ми службами. Однако, по меньшей мере, для части применений
спектральная плотность мощности для прямохаотических систем
может быть меньше, чем допустимый уровень промышленных
13 Зак. 18
202 Гл. 10. Сверхширокополосные прямохаотические системы связи
помех. Работа таких систем никак не будет сказываться на работе
других радиоэлектронных средств и, по существу, речь идет о
повторном использовании электромагнитного спектра. Ситуация
здесь аналогична ситуации со сверхширокополосными короткоим-
пульсными системами (Ultra-wide Band Pulse Radio — UWB PR),
нормативная база для которых сейчас создается в США и дру-
гих странах. Ситуация со сверхширокополосными прямохаотиче-
скими системами в каком-то смысле даже проще. В отличие от ко-
роткоимпульсных систем, принципы формирования хаотических
колебаний позволяют формировать сигналы со спектром мощно-
сти в заданной полосе частот.
10.1. Структура
Формально, структура сверхширокополосной ПХСС совпадает
со структурой широкополосной прямохаотической системы связи
(рис. 9.15). Разница, прежде всего, заключается в характеристи-
ках входящих в них элементов.
Передатчик системы состоит из источника хаоса, генерирую-
щего сигнал непосредственно в частотном диапазоне передачи
информации, т. е. в области от нескольких сотен мегагерц до
нескольких гигагерц, устройства управления режимами работы
хаотического генератора, источника информации, кодера источ-
ника, кодера канала, модулятора, усилителя и передающей ан-
тенны.
Источник (генератор) обеспечивает генерацию сверхширокопо-
лосного хаотического сигнала в полосе частот Д/ = /в—/н. Полоса
генерации и распределение спектральной плотности сигнала вну-
три полосы, вообще говоря, регулируются управляющим устрой-
ством (регулятором).
Исходная цифровая информация, поступающая от источника
информации, преобразуется кодером источника в сигнал, подавае-
мый на вход кодера канала, который, в свою очередь, преобразует
его к виду, обеспечивающему управление модулятором. Модуля-
тор осуществляет формирование импульсов хаотического сигнала
и интервалов между импульсами. Формирование импульсов может
осуществляться либо внешним образом, либо за счет изменения
внутренней динамики генератора хаоса.
Длина формируемых хаотических импульсов может меняться
от значений (2 4- 5)/(/в - /н) до оо.
Сформированный сигнал излучается в пространство с помо-
щью сверхширокополосной антенны. Формирование информаци-
онного потока может осуществляться за счет изменения расстоя-
ния между импульсами, изменения длины импульсов, изменения
среднеквадратичной амплитуды импульсов или комбинации этих
параметров.
10.1. Структура
203
Приемная часть системы состоит из антенны, полосового филь
тра, усилителя, демодулятора и устройства обработки сигнала.
В принципе, могут использоваться как некогерентныс, так и кого
рентные демодуляторы. Ниже все расчеты и эксперименты проно
дятся только для случая некогерентного демодулятора типа деток
тора огибающей.
Модуляция. В сверхширокополосных ПХСС могут быть исполь
зованы различные виды модуляции. Рассмотрим некоторые из
них (рис. 10.1).
1. Нули и единицы кодируются последовательно расположен-
ными фрагментами двух сигналов. Один из них, кодирующий
нули, — нулевой сигнал, а второй, кодирующий единицы,
хаотический. Этот метод модуляции в случае нехаотических сиг-
налов носит название «метод без возвращения к нулю» (NRZ
Not Return to Zero). В случае хаотического сигнала его логично
Основной
код
10 | 1 | 0 | 0 | 1 | 0 | 11 1 | I |
Модулированный
хаотический сигнал
CNRZ
(COOK)
crz _п___п_плп_
CCMI
cdmi 1ППЛ_ПЛ_Л
Рис. 10.1. Методы модуляции хаотического сигнала для передачи цифровой ин-
формации
назвать «методом без возвращения к нулю для хаотических сиг-
налов» (CNRZ). В англоязычной литературе используется также
термин ООК (On-Off Keying) для нехаотических сигналов и со-
ответственно COOK (Chaotic On-Off Keying) для хаотических.
2. В методе с возвращением к нулю (RZ — Return to Zero),
через время, соответствующее периоду после прохождения сиг-
нала «1», производится возврат к нулевому состоянию. Нули коди-
руются отсутствием на соответствующих позициях сигнала. В слу-
чае хаотического сигнала это — «метод с возращением к нулю для
хаотических сигналов» (CRZ — Chaotic Return to Zero).
3. Для модуляции «хаотических сигналов можно также исполь-
зовать метод кодирования, в котором период делится на две части
13*
204 Гл. 10. Сверхширокополосные прямохаотические системы связи
и производится попеременное инверсное преобразование «0» в «10»,
а «1» в «11» или в «00». В случае регулярных сигналов этот метод
называется CMI. В случае хаотического сигнала — CCMI.
4. Может быть также использован метод модуляции, называе-
мый в случае нехаотических сигналов DMI, в котором при инвер-
тировании нулей и единиц период изменяется в два раза. В случае
хаотического сигнала его логично называть CDML
5. Еще одной возможностью является случайное или хаотиче-
ское размещение позиций, на которых располагаются приходящие
сигналы, причем закон расположения позиций известен как отпра-
вителю, так и получателю.
Многопользовательский доступ. Перечисленные типы модуля-
ции (кодирования) предназначены для канала с одним пользова-
телем. Однако часть из них может быть обобщена на многополь-
зовательские системы. Например, если в методе CRZ увеличить
интервалы времени, на которые производится возврат к нулю (т. е.
интервалы времени, в которые сигнал не передается), то в них
можно разместить сигналы от других пользователей, обеспечивая
тем самым временное разделение сигналов для многопользова-
тельского доступа. Таким образом, многопользовательский доступ
может быть реализован с помощью временного разделения сигна-
лов пользователей.
Два других возможных способа обеспечения многопользова-
тельского режима в системе: асинхронная передача данных раз-
личных пользователей и кодовое разделение сигналов различных
пользователей.
Рассмотрим более детально принципы функционирования, ха-
рактеристики и технические решения для сверхширокополосных
прямохаотических систем на примере экспериментальной схемы,
работающей в диапазоне 0,7-3,5 ГГц.
Начнем с компьютерного моделирования системы.
10.2. Компьютерное моделирование
Компьютерное моделирование СШ ПХСС позволяет провести
предварительный анализ эффектов, имеющих место в СШ ПХСС,
на этапе разработки макета и подготовки экспериментов и затем
сопоставить полученные результаты с данными физических экс-
периментов.
Математическая модель СШ ПХСС эквивалентна эксперимен-
тальному макету на рис. 9.15. Структура математической модели
представлена на рис. 10.2. В модель входит модулятор, однополу-
периодный детектор и интегрирующее устройство, роль которого
играет фильтр нижних частот. Модель модулятора производит
умножение бинарного сигнала на хаотический. Однополупериод-
ный детектор пропускает положительную составляющую сигнала,
10.2. Компьютерное моделирование 205
поступающего на его вход. Интегрирующее устройство эквива-
лентно фильтру нижних частот, выделяющему низкочастотную
Модулятор Детектор Фильтр
Информационный
ДВОИЧНЫЙ сигнал
Принимаемый
сигнал
сигнал
Рис. 10.2. Структура математической модели сверхширокополосной прямохаоти-
ческой системы связи
составляющую из демодулированного сигнала. На выходе инте-
гратора формируется сигнал-оценка исходного информационного
бинарного сигнала, поступающего на вход модулятора.
В качестве модели источника сверхширокополосных хаотиче-
ских колебаний использовалась модель кольцевого автогенератора
с 4,5 степенями свободы. Генератор состоит из (рис. 10.3а)
Рис. 10.3. Модель генератора сверхширокополосных хаотических колебаний:
a — структура модели генератора; б — вид нелинейного преобразования
нелинейного элемента F (рис. 10.36), инерционного звена — филь-
тра нижних частот (LPF 1), фильтра нижних частот второго
порядка (LPF 2) и трех полосовых фильтров второго порядка
(HPF 3-5), замкнутых в кольцо.
206 Гл. 10. Сверхширокополосные прямохаотические системы связи
*RBM 1 NHz *VBH 10 kHz *SWP 50 м
a
S, дБ
20
10
0
-10
-20
-30
-40
0 0,3 0,6 0,9 1,2 1,5 1,8 2,1 2,4 2,7/, ГГц
б
Рис. 10.4. Спектры мощности сверхширокополосных хаотических колебаний:
a — экспериментальный макет; б — компьютерное моделирование
Автогенератор описывается следующей системой дифференци-
альных уравнений:
ТХх + Xi = mF(X5),
Х2 + OI2X2 + ^2^2 = tU^Xj,
Х3 + СИ^Хъ + CU3X3 = 0*3X2, (10.1)
Х4 + Q4X4 + CU4X4 = Q4X3,
Х5 + 0*5X5 + ^5X5 = 0*5X4,
где ш — коэффициент усиления, a F(-) — нелинейное преобразо-
вание (рис. 10.36), описываемое соотношением
F(x) = |х + EJ - |х - Fi| + |(|x - E2I - I® + Яг|). (Ю.2)
A
10.2. Компьютерное моделирование
207
На рис. 10.45 изображен спектр хаотических колебаний, основ-
ная мощность которых сосредоточена в диапазоне 0,7-3,5 ГГц.
Выбор модели генератора определялся необходимостью получения
в модели спектра мощности, по форме и диапазону сходного со
спектром мощности генератора хаоса, реализованного на микропо-
лосках и биполярных транзисторах (см. ниже § 10.3). Для сравне-
ния на рис. 10.4а приведен экспериментально наблюдаемый спектр
мощности сверхширокополосных хаотических сигналов. Фраг-
менты временных реализаций сигналов в эксперименте и модели
приведены на рис. 10.5а, б.
I SO.OmV М4.00га A Chi / O.OOmV
a
Время, нс
б
Рис. 10.5. Фрагменты временных реализаций хаотического сигнала: a — экспе-
риментальный макет; о — модель
Результаты моделирования СШ ПХСС для скорости передачи
информации ~ ЗОМбит/с представлены на рис. 10.6-10.8.
Фрагмент реализации сигнала на выходе модулятора —
последовательность хаотических радиоимпульсов, которой соот-
208 Гл. 10. Сверхширокополосные прямохаотические системы связи
ветствует 100 бит передаваемой информации, — изображен на
рис. 10.6. Длина радиоимпульса составляет около ~ 33 нс, что
1,5
-о,5----------i--------i--------i--------i--------i--------
0,5 1,0 1,5 2,0 2,5 3,0
Время, мкс
0,5 1,0 1,5 2,0 2,5 3,0
Время, мкс
Рис. 10.6. Моделирование сверхширокополосной прямохаотической передачи ин-
формации со скоростью ЗОМбит/с. Фрагмент последовательности управляющих
импульсов (верхний график) и соответствующего ей потока хаотических радио-
импульсов на выходе модулятора (нижний график)
соответствует скорости передачи приблизительно ЗОМбит/с. При
такой длительности импульса на длину импульса укладывается
200 независимых отсчетов колебаний.
Рисунок 10.7 иллюстрирует результат прохождения принятого
радиосигнала в приемнике, состоящем из однополупериодного
Время, мкс
Рис. 10.7. Моделирование сверхширокополосной прямохаотической передачи
информации со скоростью ЗОМбит/с. Сигнал на выходе однополупериодного
детектора
детектора и фильтра нижних частот, сквозь однополупериодный
детектор. Детектор пропускает положительную полуволну приня-
того радиосигнала, который далее поступает на вход фильтра
10.2. Компьютерное моделирование
209
нижних частот, выделяющего из потока радиоимпульсов низко-
частотную составляющую.
Рисунки 10.8а, б иллюстрируют работу фильтра нижних ча-
стот, на вход которого поступает продетектированный сигнал.
Фильтр имеет следующие параметры: полосу пропускания 300 МГц,
внеполосное подавление —30 дБ.
—0,5 ---------1--------i-------1--------1--------
2,25 2,30 2,35 2,40 2,45 Время, мкс
б
Рис. 10.8. Моделирование сверхширокополосной прямохаотической передачи ин*
формации со скоростью ЗОМбит/с. Фильтрация продетектированного сигнала:
исходная последовательность импульсов (верхние графики) и соответствующие
ей сигналы на выходе фильтра (нижние графики): a — для Змкс и б — для
250 нс фрагментов последовательности
На рис. 10.8а изображен полный фрагмент временной реали-
зации сигнала на выходе фильтра низких частот длительностью
Змкс. В верхней части рисунка показана исходная последова-
тельность прямоугольных импульсов, а в нижней фрагмент реа-
210 Гл. 10. Сверхширокополосные прямохаотические системы связи
лизании сигнала прошедшего через низкочастотный фильтр. На
рис. 10.86 изображен фрагмент сигнала длительностью 250 нс.
Результаты моделирования СШ ПХСС для скоростей передачи
информации ~ 200Мбит/с представлены на рис. 10.9.
Фрагмент реализации сигнала на выходе модулятора — по-
следовательность хаотических радиоимпульсов, которой соответ-
ствует 100 бит, — изображен на рис. 10.9а. Длина радиоимпульса
50 100 150 200 250 300 350 400 450 Время, нс
б
50 100 150 200 250 300 350 400 450 Время, нс
50 100 150 200 250 300 350 400 450 Время, нс
д
Рис. 10.9. Моделирование сверхширокополосной прямохаотической передачи ин-
формации со скоростью 200Мбит/с: a — исходная информация; б— последова-
тельность хаотических радиоимпульсез; в — сигнал на выходе детектора; д —
сигнал на выходе фильтра
составляет около ~ 5 нс, что соответствует скорости передачи при-
близительно 200Мбит/с. При таком соотношении длительности
импульса и полосы частот несущих колебаний на длину импуль-
са укладывается около 30 независимых отсчетов хаотических ко-
лебаний (рис. 10.96).
10.3. Эксперименты
211
Рисунки 10.9в, д соответственно иллюстрируют результат про-
хождения принятого радиосигнала в приемнике сквозь однополу-
периодный детектор и фильтр нижних частот (300МГц).
10.3. Эксперименты
Экспериментальный макет. Макет, осуществляющий сверх-
широкополосную однонаправленную прямохаотическую передачу
цифровой информации в дециметровом диапазоне длин волн, был
разработан и реализован в соответствии со схемой на рис. 9.15. Он
включает в себя передатчик, приемник и канал связи между ними.
Контроль, наблюдение и фиксация результатов осуществлялись с
помощью измерительного стенда, состоящего из анализатора спек-
тра, осциллографа, генератора импульсов и источников питания.
В состав передатчика входят сверхширокополосный генератор
хаотических колебаний, модулятор, СВЧ усилители и передающая
антенна.
Для получения сверхширокополосных колебаний используется
генератор хаоса, внешний вид которого представлен на рис. 10.10.
Частотно-избирательные цепи генератора представляют собой со-
вокупность связанных микрополосковых резонаторов различной
Рис. 10.10. Внешний вид сверхширокополосного генератора хаотических сиг-
налов
длины, к концам которых подсоединены транзисторы. Различные
длины резонаторов обеспечивают смещенные друг относительно
друга центральные частоты колебаний генераторов.
В качестве активных элементов используются биполярные
транзисторы 2Т938А. На рис. 10.4а показан спектр мощности од-
ного из типовых хаотических режимов генератора. Полоса частот
по уровню —20дБ составляет 2,8ГГц (0,7-3,5ГГц). Средняя вы-
ходная мощность генератора равна 10 мВт.
212 Гл. 10. Сверхширокополосные прямохаотические системы связи
Существенным элементом схемы передачи является модуля-
тор, назначение которого — сформировать последовательность
сверхширокополосных хаотических радиоимпульсов в соответ-
ствии с передаваемым информационным бинарным сигналом.
Если напряжение на управляющем входе модулятора соответствует
более высокому уровню (~ 5 В, логическая единица) информаци-
онного сигнала, то модулятор пропускает через себя хаотический
сигнал. Наоборот, низкий уровень (~ 0 В, логический ноль) при-
водит к закрытию модулятора. В эти моменты времени он не
пропускает хаотический сигнал. Таким образом, при появлении
на управляющем входе модулятора бинарного сигнала с амплиту-
дой ~ 5 В на его выходе формируется хаотические радиоимпульсы
в соответствии с указанным сигналом.
В экспериментах также использовались два широкополосных
усилителя, которые располагались на выходах генератора хаоса
и модулятора в передатчике. Первый из них помимо собственно
функции усилителя играет роль буферного устройства между ге-
нератором хаоса и модулятором. В каждом из усилителей исполь-
зуется микросборка MGA-81563, обеспечивающая усиление сигна-
лов с коэффициентом 10-15 дБ.
Функция демодулятора в приемной части заключается в извле-
чении полезного информационного (модулирующего) сигнала из
последовательности принимаемых хаотических радиоимпульсов.
Для проведения экспериментов использовался демодулятор, со-
стоящий из высокочастотного усилителя, детектора и усилителя
постоянного тока. СВЧ усилитель (G = 10 дБ) предназначен для
усиления хаотических радиоимпульсов, поступающих с выхода
приемной антенны, и передачи их на вход детектора. Детектор
выполнен на основе балансного дифференциального усилителя на
биполярных транзисторах 2Т3132А с использованием одного их
них в детекторном режиме. Сигнал с выхода детектора поступает
в усилитель постоянного тока (G = 20 дБ) и далее на вход реги-
стрирующего осциллографа.
Результаты экспериментов. Цель экспериментов заключалась
в демонстрации возможности передачи цифровой информации с
использованием сверхширокополосной хаотической несущей. Экс-
перименты проводились в широком диапазоне длительностей уп-
равляющих импульсов, имитирующих различные скорости пере-
дачи информации. Используемый источник импульсных сигналов
позволяет варьировать длительности управляющих импульсов
вплоть до 3-5 нс, а также формировать импульсные посылки раз-
личного содержания: одиночные, групповые с разным числом им-
пульсов и изменяемой скважностью.
Первые серии экспериментов проводились с относительно длин-
ными импульсами в несколько десятков наносекунд. При моду-
ляции несущего хаотического сигнала последовательностью им-
10.3. Эксперименты
213
пульсов на выходе демодулятора фиксировалась огибающая потока
хаотических радиоимпульсов.
На рис. 10.11а изображен фрагмент посылки из трех упра-
вляющих импульсов длительностью 35 нс каждый. Верхняя реали-
зация соответствует более длительному наблюдаемому временному
интервалу. Нижняя представляет собой увеличенный фрагмент,
1.00 в п
М 40.0 нс
б
Рис. 10.11. Эксперименты по сверхширокополосной прямохаотической передаче
цифровой информации со скоростью ~ ЗОМбит/с: а — исходная битовая по-
сылка; б — сигнал, извлекаемый на выходе приемника
отмеченный на верхней реализации. Наличие импульса в потоке
соответствует передаче 1, в то время как межимпульсное расстоя-
ние соответствует передаче двух нулей. Таким образом, каждому
передаваемому биту соответствует временной интервал ~ 35 нс,
а скорость передачи информации для такого потока составляет
~ ЗОМбит/с.
214 Гл. 10. Сверхширокополосные прямохаотические системы связи
Выделение информационного сигнала в приемнике в этом
случае происходит с относительно малым искажением формы
исходных импульсов. Это иллюстрирует рис. 10.lid, где изобра-
жена группа из трех импульсов, фиксируемых на выходе прием-
ника.
Увеличение скорости передачи осуществлялось за счет умень-
шения длительностей управляющих импульсов.
Вид модулирующего сигнала, соответствующего скоростям
100Мбит/с, а также формируемый при этом поток хаотических
радиоимпульсов приведен на рис. 10.12а (см. цветную вклейку).
Спектральные характеристики исходного и принимаемого несу-
щего сверхширокополосного сигнала оставались практически без
изменения и соответствовали рис. 10.4а.
Принимаемый приемником сигнал в виде огибающей сверхвы-
сокочастотного сигнала на выходе демодулятора повторяет форму
и структуру исходного передаваемого полезного потока данных,
что видно из сопоставления верхней и нижней осциллограмм
на рис. 10.126' (см. цветную вклейку). Нижние фрагменты ос-
циллограмм соответствуют форме исходной огибающей информа-
ционного потока, а верхние — форме сигнала на выходе демоду-
лятора. В ходе дальнейших экспериментов была осуществлена
передача потока импульсов, соответствующих скоростям вплоть до
200 Мбит/с.
10.4. Выводы
Результаты исследований позволяют сделать следующие вы-
воды:
• Сверхширокополосные прямохаотические схемы передачи
информации могут быть реализованы в виде простых, техноло-
гичных с точки зрения производства, устройств.
• СШ ПХСС обеспечивают высокие скорости передачи данных
при сложных (многолучевых) условиях распространения.
• СШ ПХСС могут быть реализованы в многопользовательском
варианте.
Интересно сравнить характеристики СШ ПХСС с характеристи-
ками UWB Radio Pulse схемой. В обеих системах используются
сигналы со сверхширокой полосой спектра мощности. При скоро-
сти передачи ~ 20Кбит/с и полосе 2 ГГц в идеальных условиях
UWB Radio Pulse схема теоретически может обеспечить 104-2-104
пользователей. СШ ПХСС при такой же и в зависимости от усло-
вий скорости передачи может обеспечить одновременную работу от
2,5 • 103 до 2,5 • 104 пользователей. Таким образом, по этому кри-
терию системы сопоставимы. UWB Radio Pulse имеет несколько
лучшие шумовые характеристики (при некогерентном приеме для
СШ ПХСС), но это преимущество не превышает 2-3 дБ. Вместе с
10.4. Выводы
215
тем у СШ ПХСС отсутствует ряд черт, которые имеются у UWB
Radio Pulse технологии и затрудняют ее по крайней мере в бли-
жайшей перспективе. Во-первых, ПХСС не требует такой точной
синхронизации, как UWB Radio Pulse; во-вторых, она требует
значительно меньше вычислительных ресурсов при обработке
сигналов; в-третьих, в ее рамках возможно управление спектром
сигнала и, в-четвертых, достаточно просто решаются вопросы
управления энергией сигнала, приходящейся на бит передаваемой
информации.
Таким образом, совокупность характеристик СШ ПХСС позво-
ляет рассматривать ее как перспективную технологию для высо-
коскоростной передачи информации: в частности, для локальных
беспроводных систем связи, связи внутри помещений и мобильной
локальной связи.
ЗАКЛЮЧЕНИЕ
Традиционно в системах связи используется в качестве носи-
теля информации гармонические колебания или близкие к ним.
В последние годы возник также интерес к сверхширокополосным
носителям, представляющим собой ультракороткие импульсы.
Эти два типа носителей информации занимают две крайние пози-
ции среди типов сигналов, которые можно использовать для пере-
дачи информации. Гармонические сигналы имеют узкий спектр
мощности и относительно большую протяженность во времени,
ультракороткие импульсы, наоборот, имеют очень широкую по-
лосу частот и короткую длительность. Оба типа сигналов без
принятия специальных мер являются сигналами с малой базой
В = AF • ДТ ~ 1. Такие сигналы в канале связи практически
не мешают друг другу. Что позволяет даже говорить о повтор-
ном использовании спектра в случае применения сверхшироко-
полосных систем в том же частотном диапазоне, что и обычных
систем.
Хаотические сигналы, в зависимости от структуры источника,
могут быть узкополосными, широкополосными или сверхширо-
кополосными. При этом легко регулируется и длительность по-
сылки, отводимая на передачу единицы информации. В отличие
от гармонических колебаний и ультракоротких импульсов, для
хаотических колебаний в широких пределах изменения длитель-
ности информационной посылки отсутствует связь между длиной
посылки и шириной спектра. Полоса частот модулированного ин-
формацией хаотического сигнала совпадает при этом с полосой
частот исходного хаотического сигнала. Отсюда следует, что база
хаотических носителей информации может простираться от еди-
ницы до 100 и более. Структура устройств, реализующих хаоти-
ческие сигналы и обеспечивающих ввод в них информации, чрез-
вычайно проста.
Использование динамического хаоса в системах передачи ин-
формации еще несколько лет назад представлялось интересной,
но экзотикой. Хотя потенциальные достоинства широкополосных,
случайно (шумо-) подобных сигналов известны еще со времен ра-
бот Шеннона, практическое использование хаотических сигналов
Заключение
217
сталкивалось (и еще продолжает сталкиваться) с целым рядом
проблем. И это несмотря на такое замечательное их свойство, как
возможность построения приемников, самосинхронизующихся с
передатчиками.
Вместе с тем проведенные исследования уже дали ответы на
многие важные вопросы, а именно:
— Можно ли передавать информацию с использованием хаоса?
— Какими потенциальными достоинствами обладает такая пе-
редача?
— Каковы перспективы практической реализации?
— Каковы наиболее привлекательные области приложений, и
каковы преимущества по сравнению с традиционными носите-
лями?
Совокупность ответов на эти вопросы позволяет утверждать,
что эпоха широкого применения динамического хаоса уже на
старте.
Приложение
МОДЕЛИРУЮЩИЙ КОМПЛЕКС
Моделирующий комплекс служит инструментом численного
анализа хаотических приемо-передающих систем и представляет
собой совокупность моделирующих программ, объединенных в
единую систему общим пользовательским интерфейсом. Помимо
своего прямого назначения, моделирующий комплекс предоста-
вляет исследователю некоторые сервисные функции, до некоторой
степени гарантирующие отсутствие ошибок.
П.1. Структура комплекса
В состав моделирующего комплекса входят процедуры числен-
ного анализа хаотических систем: вычисление показателей Ля-
пунова, построение бифуркационных диаграмм, построение их
фазовых портретов, построение амплитудно-частотных характери-
стик элементов, входящих в состав хаотических генераторов.
Поскольку в процессе моделирования необходимо осуществлять
над сигналами ряд преобразований, типичных для коммуника-
ционной системы, то в программный комплекс включены опера-
ции по обработке сигналов, такие как фильтрация, интерполяция,
вычисление спектра мощности, нелинейные преобразования сиг-
налов.
Совокупность сигналов в рабочей среде
моделирующего комплекса
5*1,52, —,Sm
Пользовательский
интерфейс
Ф1
Ф3
Ф/у
Ф1
Совокупность процедур и функций,
исползуемых для моделирования
хаотической приемо-передающей системы
Рис. П1
Структура комплекса схематично изображена на рис. П1. В его
состав входят следующие функции обработки сигналов:
• расчет коэффициентов фильтров нижних и высоких частот,
полосовых фильтров;
П.1. Структура комплекса
219
• фильтрация сигналов;
• генерирование информационного сигнала: имеется возмож-
ность загрузить информационный сигнал из аудиофайла или сфор-
мировать информационный сигнал простейшей формы;
• изменение частоты дискретизации сигналов: интерполяция
и децимация;
• нормирование сигналов на заданный уровень мощности;
• нелинейные преобразования: модуляция, демодуляция, сум-
мирование по модулю, логарифмирование;
• расчет спектров мощности сигналов;
• звуковое воспроизведение сигналов;
и процедуры численного анализа хаотических генераторов:
• генерация хаотических колебаний: цепь Чуа, кольцевые ав-
токолебательные системы с 1,5 и с 2,5 степенями свободы;
• расчет старшего показателя Ляпунова для парциальной си-
стемы и старшего показателя Ляпунова ведомой системы в паре
синхронизируемых генераторов;
• построение бифуркационной диаграммы;
• построение фазовых портретов динамических систем;
• моделирование хаотической приемо-передающей системы в
присутствии возмущений.
Перечисленные процедуры и функции можно условно разде-
лить на две группы: стандартные операции, используемые при
обработке сигналов, которые входят в состав ряда математических
пакетов высокого уровня (MatLab, MathCad, Mathematica), и вы-
числительные процедуры, специфика которых связана с хаотиче-
скими системами.
В качестве вычислительного пакета, реализующего стандарт-
ный набор операций по обработке сигналов, используется система
MatLab, включающая в себя разнообразные библиотеки процедур
и функций по обработке сигналов. Система MatLab является свое-
образным стандартом де-факто по численному моделированию и
проведению научных и инженерных расчетов в мире. MatLab
обладает развитым внутренним языком, позволяющим сосредото-
чить процесс программирования на решаемой задаче и не обра-
щать внимания на технические детали компьютерной реализации
той или иной процедуры.
Ввиду того, что компьютерное симулирование хаотических
коммуникационных систем связано с обработкой сигналов, полу-
ченных путем оцифровки звука из различных источников (аудио-
диски, мультимедийные файлы и т. д.), приходится иметь дело с
большими объемами информации. В этом случае использование
функций, написанных на языке MatLab, не всегда оправданно.
Более целесообразным становится использование программных
модулей написанных на языке С. Это не вносит неудобств,
связанных с межпрограммным интерфейсом, поскольку пользе-
220
Приложение. Моделирующий комплекс
Рис. П2
П.1. Структура комплекса
221
вательский и программный интерфейс среды MatLab позволяет
интегрировать в единое целое гетерогенные программы, совме-
щая производительность программ, написанных на языке С, с
гибкостью пользовательского интерфейса MatLab. Поэтому пакет
программ частично реализован в среде MatLab и частично на-
писан на языке С. Межпрограммный интерфейс осуществляется
средствами, предоставляемыми средой MatLab.
Модель коммуникационной системы включает в себя несколько
однотипных элементов, что приводит к повторяемости в исполь-
зовании алгоритмов, реализующих структурные элементы в про-
граммном коде. Поэтому представляется целесообразным создание
программных модулей в виде отлаженных и готовых к работе про-
цедур, моделирующих те или иные структурные элементы приемо-
передающей системы. Вызов программных модулей осуществля-
ется нажатием соответствующей программной кнопки на панели
пользовательского интерфейса, который является программной
оболочкой, предназначенной для обмена данными между моду-
лями.
Таким образом, вся совокупность программ объединена в еди-
ное целое общим интерфейсом (рис. П2), нажатие на программные
кнопки которого вызывает выполнение той или иной процедуры.
Кнопки сгруппированы по функциональному признаку. Интер-
фейс условно разделен на несколько зон, в каждой из которых на-
ходятся кнопки, отвечающие за вызов процедур симулирования
приемо-передающей системы, построенной на основе цепи Чуа,
кольцевых генераторов с 1,5 и 2,5 степенями свободы, а также
за вызов процедур обработки сигналов.
Программный комплекс обеспечивает возможность доступа к
данным и измерения параметров модели в любой точке схемы бла-
годаря тому, что в рабочем пространстве среды MatLab постоянно
сохраняются результаты работы программного пакета. Доступ к
результатам моделирования происходит автоматически после вы-
зова соответствующей процедуры: система предлагает выбрать сиг-
нал или параметр, предназначенный для обработки или измерения
(рис. ПЗ). Предлагаемый выбор ограничен множеством сигналов,
пригодных для данной процедуры, что дает некоторую гарантию
от ошибок.
Таким образом, имеется возможность постоянно контролиро-
вать все параметры системы, множество сигналов и их характе-
ристики. Блочное построение программного комплекса позволяет
независимо пополнять программный комплекс новыми модулями,
не затрагивая уже сформированные и отработанные процедуры и
функции.
Помимо процедур и функций, предназначенных непосредствен-
но для моделирования, в программной оболочке имеется ряд сер-
висных функций.
222
Приложение. Моделирующий комплекс
Программная оболочка обеспечивает возможность сохранения
результатов моделирования в виде изображений или в виде зву-
ковых файлов, в которые могут быть конвертированы соответ-
ствующие массивы данных. Также имеется возможность сохране-
ния результатов расчетов в виде программного файла, в котором
а
Рис. ПЗ
последовательно фиксируются операции, использованные разра-
ботчиком при моделировании конкретной системы. Данная воз-
можность хороша тем, что при необходимости получения стати-
стических характеристик моделирование в интерактивном режиме
не очень удобно. Приходится многократно повторять однотипные
П.2. Методика проведения численного моделирования 223
операции, которые удобней и быстрей осуществлять программным
образом. В этом случае с помощью программной оболочки форми-
руется единая программа, решающая ту или иную задачу, кото-
рая с незначительными изменениями может быть использована в
дальнейшем, например для определения статистических характе-
ристик приемо-передающей системы.
П.2. Методика проведения численного моделирования
Логика проведения моделирования хаотической приемо-пере-
дающей системы определяется поставленными выше задачами и
подходом к построению модели хаотической системы связи.
В процессе компьютерного симулирования определяются пре-
дельные характеристики цифровых и аналоговых хаотических си-
стем связи: характеристики, при которых достигается заданная
точность извлечения информационного сигнала на приемном кон-
це, или решается обратная задача: при заданной точности элемен-
тов фиксируется уровень шумов десинхронизации.
С помощью компьютерного симулирования также получают
предельные характеристики вычислительных алгоритмов в ана-
логово-цифровых системах, реализованных на базе цифровых
сигнальных процессоров, гарантирующих либо получение пре-
дельно достижимого качества хаотической синхронизации, либо
определение уровеня шума десинхронизации.
Получение предельных характеристик позволяет изучить влия-
ние искажений, которые не могут быть исследованы эксперимен-
тально: шум, нелинейные искажения, фильтрация, несовпадение
(рассогласование) параметров.
Каковы бы ни были цели и задачи компьютерного моделирова-
ния необходимо иметь в виду, что хаотическое движение по своей
природе крайне чувствительно к возмущениям, поэтому одно из
требований состоит в том, чтобы численные алгоритмы правильно
воспроизводили динамику хаотических систем в большом диапа-
зоне изменения их переменных. Численные модели позволяют
моделировать с высокой степенью точности широкий класс систем,
однако, в силу специфики решаемой задачи, первоначально необхо-
димо зафиксировать пределы точности вычислительных алгорит-
мов, что и будет служить опорной точкой в определении предель-
ных характеристик. В связи с этим целесообразно рассмотреть
два важных вопроса. Первый связан с точностью представления
хаотических сигналов при компьютерном симулировании. Второй
вопрос касается точности интегрирования хаотической системы.
При компьютерном моделировании аналоговые сигналы пред-
ставляются массивом дискретных отсчетов, частота выборки кото-
рых в соответствии с теоремой Котельникова равна, как минимум,
удвоенной максимальной частоте гармоник в спектре мощности
224
Приложение. Моделирующий комплекс
сигнала. Каждый отсчет представляется вещественным числом,
и точность этого представления крайне важна, так как она опре-
деляет уровень шума десинхронизации в процессе компьютерного
моделирования и накладывает фундаментальные ограничения на
определение предельных характеристик. То есть влияние любых
других возмущающих факторов на процесс синхронизации может
быть учтено лишь в случае, если десинхронизация, обусловленная
машинным представлением чисел, меньше, чем десинхронизация,
вызываемая возмущениями другого рода. Мантисса чисел в ма-
шинном формате double (на платформе PC Intel данному формату
соответствует восемь байт) имеет разрядность 52 бита, что соот-
ветствует относительной точности ~ 0,2 • 10”15 и диапазону пред-
ставления чисел от ±1,7 • 1О”308 до ±1,7 • 1О4"308. Этого достаточно
для моделирования хаотических систем, так как данный формат,
во-первых, покрывает точность представления чисел в сигнальных
процессорах, составляющих четыре байта, а во-вторых, шум де-
синхронизации в численной модели при идеальном совпадении па-
раметров и отсутствии возмущений находится на уровне —150 дБ.
Такой уровень синхронизации не достижим ни в одной аналоговой
схеме, поэтому компьютерное моделирование может быть исполь-
зовано для определения предельных характеристик хаотической
системы связи.
Помимо точности представления сигналов имеется ограниче-
ние на выбор шага интегрирования хаотической динамической
системы. В процессе интегрирования возможна ситуация, когда
при неправильном выборе шага траектория системы хаотична, од-
нако при уменьшении шага хаос исчезает и движение становится
регулярным. Критерием правильности интегрирования служит то,
что при уменьшении шага интегрирования ниже некоторого зна-
чения, характер движения не изменяется, например, регулярное
движение остается регулярным, а в случае хаотического режима
его характеристики (показатель Ляпунова, спектр мощности хао-
тического сигнала) остаются прежними.
Таким образом, в рамках точности представления отсчетов
хаотических сигналов и ограничений, накладываемых на шаг ин-
тегрирования, можно считать, что хаотическая динамика воспро-
изводится корректно.
Следующим важным вопросом является соразмерность спек-
тральных характеристик информационного и хаотического сиг-
налов.
В схеме с нелинейным подмешиванием характерная полоса
частот информационного сигнала должна быть соразмерна с ча-
стотной полосой хаотического сигнала. Имеются две возможно-
сти для совмещения полосы частот информационного и хаотиче-
ского сигналов. Первая из них связана с изменением масштаба по
времени одного (информационного или хаотического) или обоих
П.2. Методика проведения численного моделирования 225
(информационного и хаотического) сигналов. Вторая подразу-
мевает коррекцию спектра мощности информационного сигнала
фильтром с амплитудно-частотной характеристикой, близкой к
спектральной характеристике хаотического сигнала.
Рассмотрим первую возможность. Изменение масштаба по вре-
мени можно получить за счет децимации (удалении промежуточ-
ных отсчетов (рис. П46)) или интерполяции сигнала (увеличении
числа отсчетов, приходящихся на характерный период колебаний
сигнала (рис. П4в)).
Рис. П4
В случае децимации и сохранения неизменной частоты дискре-
тизации сигнала происходит пропорциональное расширение его
спектра мощности по отношению к исходному (без децимации)
сигналу. Форма спектра при этом не изменяется.
16 Зак. 18
226 Приложение. Моделирующий комплекс
В случае интерполяции имеет место обратный эффект: спектр
мощности интерполируемого сигнала пропорционально сужается
по отношению к исходному сигналу, не изменяя своей формы.
Ограничение сверху на шаг интегрирования приводит к тому,
что децимация, как правило, производится с хаотическим сигна-
лом, в то время как интерполируется информационный сигнал.
Объясняется это следующим образом. Шаг интегрирования хаоти-
ческой системы не может превышать определенного предела в силу
указанных выше причин. В свою очередь типичной является си-
туация, когда информационный сигнал занимает достаточно ши-
рокую полосу частот (например, музыкальный сигнал). При этом
шаг дискретизации информационного сигнала может быть значи-
тельно больше шага дискретизации хаотического сигнала. Если
введение информационного сигнала в хаотическую приемо-пере-
дающую систему производится путем суммирования, то каждый
хаотический отсчет суммируется с отсчетом информационного сиг-
нала. В этом случае совпадение частотных полос информационного
и хаотического сигналов имеет место только тогда, когда харак-
терные периоды обоих сигналов сопоставимы и на них приходится
одинаковое количество отсчетов. Если на характерный период ин-
формационного сигнала приходится мало отсчетов, то возникает
необходимость в увеличении числа отсчетов, т. е. информацион-
ный сигнал необходимо интерполировать и/или хаотический под-
вергнуть децимации.
При децимации возникает проблема представления (аппрокси-
мации) информационно-хаотического сигнала в приемнике. Шаг
интегрирования системы дифференциальных уравнений в при-
емнике ограничен сверху (на характерный период хаотического
сигнала должно приходиться не меньше Р шагов). На вход при-
емника поступает информационно-хаотический сигнал, на харак-
терный период которого приходится К < Р шагов. Поэтому в
приемной системе необходимо обеспечить операцию интерполяции
дискретных отсчетов входного сигнала. Процедуры интерполяции
также не избежать, если хаотические модули приемника и пере-
датчика интегрируются раздельно и интегрирование уравнений,
описывающих хаотический модуль приемника, осуществляется
методом Рунге-Кутта. В этом случае процедура интегрирования
требует восстановления значения отсчета на промежуточном шаге
интегрирования по методу Рунге-Кутта. Операция интерполяции
имеет фиксированную точность, поэтому с увеличением шага ин-
тегрирования растут ошибки аппроксимации, приводящие, в свою
очередь, к увеличению мощности шума десинхронизации.
Если при совместном интегрировании применение операции
интерполяции позволяет получить хаотический синхронный от-
клик с отношением сигнал/шум не хуже 150 дБ, то в случае раз-
дельного интегрирования потеря информации о промежуточном
П.2. Методика проведения численного моделирования
227
отсчете приводит к резкому ухудшению качества синхронизации.
При этом уровень шумов десинхронизации зависит от шага ин-
тегрирования и порядка аппроксимации отсчета в промежуточном
узле интегрирования. Частично исправить ситуацию возможно
за счет использования процедуры интерполяции хаотического сиг-
нала передатчика в приемнике. Например, при интерполяции по
четырем узлам уровень хаотического синхронного отклика дости-
гает значения ~ 60 дБ. Уменьшение шага интегрирования позво-
ляет поднять эту величину до ~ 100 дБ.
Причина отмеченных эффектов при хаотической синхрониза-
ции имеет гораздо более глубокие корни, чем может показаться на
первый взгляд, и связана с информационными аспектами процесса
синхронизации.
Как отмечалось выше, помимо ограничения, накладываемого
теоремой Котельникова на минимально возможную частоту дис-
кретизации хаотического сигнала, имеется ограничение на макси-
мально-возможный шаг интегрирования в процессе моделирова-
ния режима синхронизации. Дело в том, что теорема Котель-
никова касается точности воспроизведения аналоговых сигналов,
представленных в дискретной форме. С точки зрения простого
воспроизведения с наперед заданной точностью, определяемой
теоремой Котельникова, хаотические сигналы ничем не выделя-
ются среди множества регулярных сигналов. Новое качество по-
является, если хаотические сигналы рассматривать как ин-
формационный носитель в процессе синхронизации. Данный
вопрос является нетривиальным и имеет далеко идущие послед-
ствия.
В [42] показано, что для достижения режима синхронизации
необходимо, чтобы от ведомой системе к ведущей поступало ко-
личество информации не меньше некоторого предела, который
определяется энтропией синхронизируемых источников хаоса.
В указаненой работе информационный аспект хаотической синхро-
низации рассматривается с точки зрения точности представления
хаотических сигналов по своим дискретным отсчетам. Децима-
ция хаотического сигнала может приводить к потере информации,
что отрицательно влияет на качество синхронизации. В связи с
этим, частота дискретизации хаотического сигнала должна огра-
ничиваться снизу не только из соображений, которые следуют из
теоремы Котельникова, но также из соображений качества синхро-
низации. Другими словами, увеличение частоты дискретизации
позволяет передавать большее количество информации от системы
к системе, добиваясь лучшего качества синхронизации. Таким
образом, существует предельное fc такое, что частота дискретиза-
ции f должна быть больше или равна /с: f fc.
Рекомендацией, направленной на улучшение синхронизации,
может служить отказ от децимации хаотического сигнала, интер-
15 Зак. 18
228
Приложение. Моделирующий комплекс
полиция информационного сигнала, уменьшение шага интегри-
рования хаотической системы. Однако здесь возникает другая
трудность.
Увеличение частоты дискретизации не имеет большого зна-
чения при проведении численных экспериментов, направленных
на определение предельных характеристик хаотических приемо-
передающих систем. Время расчетов, как правило, жестко не
ограничено и в распоряжении исследователя имеется достаточный
запас вычислительных ресурсов для проведения численного экс-
перимента.
Совершенно другая ситуация складывается, когда хаотическая
приемо-передающая система реализуется, например, на базе ци-
фровых сигнальных процессоров. В этом случае вычислитель-
ные мощности ограничены как по времени, так и по точности
представления сигналов. Соответственно, появляются ограниче-
ния на ширину спектра обрабатываемых сигналов и на скорости
передаваемой информации. Поэтому неограниченное увеличение
частоты дискретизации, например, для достижения хаотической
синхронизации на уровне ~ 100 дБ возможно далеко не всегда
и определяется характеристиками соответствующих сигнальных
процессоров и параметрами цифро-аналоговых и аналого-цифро-
вых преобразователей.
Вернемся к сопоставлению спектральных характеристик хао-
тического и информационного сигналов. Рассмотрим вторую воз-
можность связанную с использованием фильтров.
Формирование спектральной характеристики информацион-
ного сигнала можно осуществлять с помощью фильтров. Данная
возможность реализуется при соразмерных спектральных харак-
теристиках информационного и хаотического сигналов. В этом
случае применение фильтров позволяет точно совместить спектры
информационного и хаотического сигналов. Если же соразмерно-
сти нет, то применение фильтров малоэффективно.
Последовательность проведения численного эксперимента
включает в себя несколько этапов.
Прежде всего процесс моделирования начинается с подбора
динамических режимов работы источников хаоса и определения
их характеристик. Выбор хаотического режима генерации осуще-
ствляется на основе расчета старшего показателя Ляпунова и спек-
тра мощности хаотического сигнала. Знак и абсолютная величина
ляпуновского показателя несут информацию о степени хаотично-
сти колебаний, а форма спектра мощности важна с точки зрения
совмещения спектров мощности информационного и хаотического
сигналов.
Следующим шагом является моделирование процесса синхро-
низации источников хаоса. При этом определяется максимально
возможный уровень хаотического синхронного отклика, свойст-
П.2. Методика проведения численного моделирования 229
венный исследуемой модели. Также исследуется зависимость хао-
тического синхронного отклика от различного рода возмущений:
шумов, нелинейных искажений, фильтрации и т. д.
Тестирование системы на примере передачи простых (гар-
монических и частотно-модулированных) информационных сиг-
налов проводится на следующем этапе. В этом случае имеется
возможность определить предельные характеристики системы.
Гармонический сигнал дает возможность определить отношение
сигнал/шум на выходе системы для различных участков спектра.
Данная характеристика может быть полезна для проверки АЧХ
канала между приемной и передающей системой.
На основе данных о поведении хаотической приемо-передаю-
щей системы в относительно простых ситуациях можно перехо-
дить к моделированию передачи речевых или музыкальных сиг-
налов.
Для речевых или музыкальных сигналов проводится тот же
цикл симуляций, что и для простых сигналов. Помимо отноше-
ния сигнал/шум, определяется также прослушиваемость сигнала
в канале и его оценка на слух в приемнике.
Схема численного эксперимента представлена на рис. П5.
Рис. П5
Данная схема является функциональной моделью хаотической
системы связи. На вход модели приемо-передающей системы
15*
230 Приложение. Моделирующий комплекс
поступает информационный сигнал s(t), который претерпевает по-
следовательность преобразований и затем вводится в хаотическую
систему передатчика. Результирующий информационно-хаотичес-
кий сигнал поступает на вход хаотического модуля приемника,
после чего над ним осуществляется последовательность операций
обратных или аналогичных соответствующим операциям пере-
датчика. На выходе приемной системы формируется сигнал-
оценка
Контроль функционирования модели и оценка ее характери-
стик производится на основе сравнения соответствующих сигна-
лов 51„.м друг с другом.
Для оценки эффектов, обусловленных неидеальностью режима
синхронизации, применяется следующий прием. Допустим, необ-
ходимо сравнить сигнал s(t) на входе коммуникационной системы
с сигналом-оценкой sf(t) на ее выходе. С этой целью формируется
опорный сигнал sR(t) из сигнала, поступающего в хаотический
модуль передатчика (в данном случае сигнала ). Формирование
Рис. Пб
опорного сигнала осуществляется путем пропускания его через всю
цепочку операций, которые претерпевает сигнал в хаотическом мо-
дуле приемника (в данном случае как показано на рис. П6.
П.З. Пакет программ для анализа схемы 231
Опорный сигнал позволяет автоматически учесть изменения, вно-
симые приемником. Таким образом, из процедуры сравнения сиг-
налов s'(t) и s(t) исключается влияние промежуточных операций
и производится оценка влияния на сигнал преобразований в хао-
тических модулях передатчика и приемника.
Аналогичным образом производится оценка сигналов, прошед-
ших через более длинную цепочку преобразований. Например, в
процедуру оценки могут быть включены операции, предшествую-
щие преобразованиям в хаотическом модуле передатчика. В этом
случае из процесса формировании опорного сигнала исключается
часть соответствующих операций.
П.З. Пакет программ для анализа схемы
с нелинейным подмешиванием
Пакет программ частично написан на языке MatLab, частично
на языке С.
Описываемый набор процедур и функций объединен в единое
целое общим пользовательским интерфейсом, реализованным
средствами пакета MatLab. Вид пользовательского интерфейса
представлен на рис. П2. Вызов процедур производится нажатием
на программные кнопки, что приводит к появлению диалоговых
окон (рис. ПЗ), предназначенных для задания тех или иных па-
раметров.
Процедуры обработки сигналов реализованы на основе соответ-
ствующих функций среды MatLab.
Функция фильтрации filtfilt. Формат вызова:
у = filtfilt (Ь, а, х),
где х — фильтруемый сигнал; а и b — коэффициенты передаточ-
ный функции фильтра [51, 180]:
У(р) = jl+t2P+ - +^4-1p"‘ (п D
О1 + О,2Р + . . . + ЬПа4-1рПа
Выбор фильтра того или иного типа определяется выбором весо-
вых коэффициентов. Расчет коэффициентов b и а осуществля-
ется с помощью ряда процедур, входящих в пакет MatLab: remez
рассчитывает коэффициенты фильтра Ремеза; butter — фильтра
Батерворта; chebyl и cheby2 — фильтров Чебышева; еШр — эл-
липтического фильтра. Вычислительные алгоритмы, положенные
в основу названных процедур, описаны в [177, 180, 187], а специ-
фику их использования в среде MatLab можно найти в руководстве
пользователя, прилагаемого к пакету.
Процедура filtfilt имеет два положительных свойства: во-пер-
вых, она сводит к минимуму влияние концевых эффектов путем
232
Приложение. Моделирующий комплекс
выбора соответствующих начальных условий; во-вторых, за счет
того, что процесс фильтрации повторяется дважды — сначала в
прямом направлении, затем в обратном — она позволяет исклю-
чить набег фазы, вносимый фильтром. Кроме того, поскольку
фильтрация проводится дважды, эффективный порядок фильтра
удваивается.
Функция изменения частот Ы дискретизации
сигнала resample. Формат вызова:
у = resample(x, р, q).
Данная функция изменяет частоту дискретизации сигнала х в
p/q раз по отношению к первоначальной частоте. Схема работы
процедуры resample изображена на рис. П4. На рис. П4а изо-
бражен дискретизированный сигнал х в первоначальном виде, на
рис. П5# изображен сигнал с уменьшенной частотой дискретиза-
ции, а на рис. П5в — с увеличенной. В процессе обработки сигнала
используется низкочастотный фильтр, сглаживающий биения.
Функция расчета спектра мощности сигнала.
Функция psdl предназначена для расчета спектра мощности сиг-
нала х. Формат вызова:
[fr, sp] = psdl(x,nfft,fSam).
Здесь nfft — шаг фурье-преобразования; fSam — частота дискре-
тизации аналогового сигнала. Функция определяет зависимость
спектральной плотности sp (измеряемой в децибелах) от частоты
fr, измеряемой в тех же единицах, что и величина fSam. Длина
линейных массивов fr и sp составляет nfft/2.
Расчет спектра мощности производится следующим образом.
Анализируемый сигнал х, имеющий длину L, разбивается на
фрагменты длиной nfft каждый. Каждый фрагмент подвергается
быстрому преобразованию Фурье, осуществляемого функцией fft,
входящей в пакет MatLab. Массивы коэффициентов полученных
спектрограмм содержат действительную и мнимую часть. Да-
лее вычисляются модули этих коэффициентов и производится их
усреднение по числу фрагментов.
Совокупность программ, предназначенных для моделирования
хаотических приемо-передающих систем, реализована на языке С
и включает в себя программы расчета траекторий динамической
системы, вычисления старшего показателя Ляпунова, построения
бифуркационных диаграмм, программы, моделирующие хаотиче-
скую синхронизацию и процесс передачи информации.
Ядром программ является процедура интегрирования системы
дифференциальных уравнений, описывающей хаотическую си-
стему. Предварительно система дифференциальных уравнений
П.З. Пакет программ для анализа схемы 233
приводится к виду
2*1 /1(271, 272, • • •» 27jv),
2*2 /2(2*1» • • •» 27jy), (д 2)
/n^I^ 272, • • • , 27 jy).
Интегрирование производится методом Рунге-Кутта четвертого
порядка точности с фиксированным шагом [47]. Конкретный вид
уравнений (П.2) описывается функцией fprach(.), входящей в со-
ответствующие программы.
Структура нелинейной системы дифференциальных уравнений
(П.2) такова, что допускает запись нелинейного преобразования в
виде отдельного выражения. Нелинейное преобразование описы-
вается функцией nonlinearity(.), обращение к которой происходит
из функции fprach(.).
В симулирующий программный комплекс входят следующие
процедуры и функции.
Процедура расчета траектории кольцевой сис-
темы с 1,5 степенями свободы. Вызов осуществляется из
среды MatLab в следующей форме:
[х, у, z] = ringl5(tlni, ylni, num, signal, P),
где tlni и ylni — начальные условия: tlni — время, ylni — трех-
мерный вектор начальных координат. Оба параметра имеют ве-
щественный тип. Параметр целого типа num задает количество
шагов интегрирования; signal — вектор отсчетов сигнала s(t), вво-
димого в систему (П.2). Длина вектора signal должна быть равна
произведению numfStep, где {Step — шаг децимации. Вектор Р
определяет коэффициенты, входящие в систему дифференциаль-
ных уравнений:
Р = [m alpha beta от iStep {Step el е2].
Здесь т, alpha, beta, от — коэффициенты системы (П.2);
iStep — шаг интегрирования, fStep — шаг децимации: данный
параметр позволяет рассчитывать траекторию системы (П.2) с про-
извольным шагом. Шаг интегрирования может изменяться лишь
в определенных, ограниченных пределах, но иногда возникает
необходимость делать выборку с большим шагом, поэтому расчет
системы производится с шагом iStep, а процедура ringl5 вычи-
сляет траекторию [x,y,z], шаг дискретизации которой составляет
iStep-fStep; el, е2 — параметры нелинейного преобразования.
Процедура расчета бифуркационной диаграм-
мы кольцевой системы с 1,5 степенями свободы.
Бифуркационная диаграмма рассчитывается согласно следующему
234
Приложение. Моделирующий комплекс
алгоритму. В процессе интегрирования системы (П.2), бифуркаци-
онный параметр медленно изменяется: каждому шагу интегриро-
вания последовательно сопоставляется значение бифуркационного
параметра из интервала его изменения, разбиваемого на num зна-
чений (num — количество шагов интегрирования). Одновременно
по заданной фазовой компоненте системы (П.2) отслеживаются ло-
кальные максимумы, несущие информацию о характере движения
системы (П.2).
Процедура ringl5biff вычисляет два вектора: тих. Вектор
m содержит значения бифуркационного параметра, соответствую-
щие локальным максимумам, в то время как вектор х соответ-
ствуют локальным максимумам выбранной фазовой переменной
системы (П.2).
Вызов осуществляется из среды MatLab в следующей форме:
[m,x] = ringl5biff(blni,bFin,ylni,num,P,'Biff. Parameter').
Здесь ylni — вектор начальных условий размерности три. Пере-
менные blni и bFin задают диапазон изменений бифуркационного
параметра zBiff. Parameter7. В кавычках указывается заглавная
буква названия параметра бифуркации, в данном случае: G, А, В
или О. Массив Р содержит коэффициенты, входящие в систему
дифференциальных уравнений:
Р = [m alpha beta от iStep el е2].
Процедура расчета старшего показателя Ляпу-
нова кольцевой системы с 1,5 степенями свободы.
Показатели Ляпунова количественно определяют устойчивость
движения на аттракторе. При расчете старшего показателя Ля-
пунова используется следующая методика. Совместно интегриру-
ются две системы дифференциальных уравнений (П.2), стартую-
щие с начальных условий xi(0) = и тг(О) = 4- <SL(O) и
отличающиеся в начальной момент времени t = 0 на малую ве-
личину 6L(0). Интегрирование проводится на отрезке времени
At —> О (шаг интегрирования стремится к нулю). В этом случае,
локально, эволюция компонент вектора возмущений 6L(t) описы-
вается соотношением
<SLi(t) =<Щ0) -еА<
(П.3)
Локальный показатель Ляпунова Xi на отрезке i определяет-
ся как
X 1i,i- SL^
А‘ Йо 5Ц0)
(П.4)
П.З. Пакет программ для анализа схемы 235
Усреднение по аттрактору приводит к виду
Л= lim lim In ~ (П.5)
n->oo N At—>о 6L(0) v 7
В процессе эволюции динамической системы первоначально близ-
лежащие траектории либо разбегаются, либо нет, соответственно
величина (П.5) в среднем либо положительна, либо отрицательна.
Расчет показателя Ляпунова для системы с 1,5 степенями
свободы производится по описанному алгоритму функцией
ringl51yap. Формат вызова:
[lyp, ylni] = ringl51yap(tlni, ylni, ITranProc, nlnterv, llnterv, P).
Здесь tlni и ylni — начальные условия: tlni — время, ylni — век-
тор начальных координат размерности три. Оба параметра имеют
вещественный тип. Параметр целого типа ITranProc задает длину
переходного процесса, параметр nlnterv определяет количество N
интервалов длительности At (шаг интегрирования), llnterv — це-
лое число, определяющее длину интервала At в шагах интегри-
рования. Вектор Р содержит коэффициенты, входящие в систему
дифференциальных уравнений:
Р = [ш alpha beta от iStep el е2].
Процедура для моделирования процесса синхро-
низации и передачи аналогового информацион-
ного сигнала методом нелинейного подмешивания
в кольцевых системах с 1,5 степенями свободы.
Данная процедура моделирует процесс синхронизации в системе
^1=7(®1), ^2 =7(^2, Z1), (П.6)
где — одна из компонент вектора состояний первой системы х\.
Формат вызова процедуры:
[х, у] = ringl5transceiver (tlni, ylni, signal, num, P).
Здесь tlni и ylni — начальные условия: tlni — время, ylni —
вектор начальных координат размерности три. Оба параметра
имеют вещественный тип. Параметр целого типа num определяет
количество шагов интегрирования. Поскольку данная процедура
предназначена как для моделирования синхронизации, так и для
моделирования процесса передачи аналогового информационно-
го сигнала методом нелинейного подмешивания, то переменная
signal — вектор отсчетов сигнала s(t), вводимого в систему (П.6),
в случае моделирования синхронизации представляет собой мас-
сив отсчетов сигнала s(t), равных нулю. И в том и в другом случае
236 Приложение. Моделирующий комплекс
длина вектора signal должна быть равна произведению num*fStep,
где fStep — шаг децимации. Вектор Р содержит коэффициенты,
входящие в систему дифференциальных уравнений:
Р = [m alpha beta от iStep fStep Ck el e2],
где m, alpha, beta, от — коэффициенты системы (П.2), iStep —
шаг интегрирования, fStep — шаг децимации, Ck — коэффициент
усиления или ослабления сигнала a?i, передаваемого от ведущей
системы к ведомой, el, е2 — параметры нелинейного преобразо-
вания.
Процедура ringl5transceiver вычисляет две компоненты си-
стемы (П.6): компоненту xi(t) (переменная х) первой половины
системы (П.6), к которой впоследствии добавляется информацион-
ный сигнал s(t) и переменную векторного типа у (П.6), по которой
наблюдается хаотический синхронный отклик второй половины
(П.6) на сигнал навязываемый первой системой.
Функция ringl5transceiver осуществляет совместное интегри-
рование системы (П.6), т.е. в функции fprach(.) записывается
правая часть системы (П.6). Однако в процессе моделирования
возникает необходимость в преобразовании информационно-хао-
тического сигнала передатчика (например, фильтрация) с по-
следующим вводом сигнала в приемник. Для этого требуется
информационно-хаотический сигнал подвергнуть некоторым прео-
бразованиям до момента его введения в приемную систему. Встраи-
вать подобные процедуры преобразования, написанные на языках
высокого уровня, в программные модули неэффективно с точки
зрения трудозатрат. Гораздо удобнее использовать готовые про-
цедуры и функции, имеющиеся в среде MatLab. В связи с этим
возникает необходимость иметь модули раздельного интегрирова-
ния системы (П.6).
Так как в процессе интегрирования (П.6) с использованием ал-
горитма Рунге-Кутта на промежуточном этапе вычисляется значе-
ние отсчета в средней точке между двумя соседними узлами [47],
которые являются текущим и последующим значением отсчета
траектории (П.6), то необходимо иметь в виду, что процесс со-
вместного интегрирования отличается от процесса, когда системы
(П.6) интегрируются раздельно. В последнем случае необходимо
знать значение отсчетов сигналов, вводимых в хаотическую си-
стему (это могут быть сигналы s(t) или x(t)) в промежуточных
точках, а эту информацию можно получить только за счет интер-
поляции. Процедура интерполяции имеет конечный порядок точ-
ности, следовательно процедура совместного интегрирования не
идентична раздельному интегрированию.
Процедура ringl5 позволяет воспроизводить траекторию коль-
цевой системы с 1,5 степенями свободы как без информацион-
ного сигнала s(t), так и в его присутствии, поэтому данная про-
П.З. Пакет программ для анализа схемы
237
цедура годится для моделирования передающей хаотической си-
стемы. В процедуре ring!5 промежуточный отсчет информацион-
ного сигнала s(t) интерполируется по четырем соседним узлам,
что обеспечивает относительную точность порядка Л2, где h — шаг
сетки.
Процедура, моделирующая приемную хаотичес-
кую систему. Программа ringl5receiver включает в себя ин-
терполяцию хаотического сигнала xi(t) + s(t), передаваемого к ве-
домой системе, в промежуточной точке. Формат вызова:
[х, у, z] = ringl5receiver(tlni, ylni, num, signal, P).
Здесь tlni и ylni — начальные условия: tlni — время, ylni —
трехмерный вектор начальных координат. Оба параметра имеют
вещественный тип. Параметр целого типа num задает количест-
во шагов интегрирования; signal — вектор отсчетов сигнала
^i(t) + s(t). Длина вектора signal должна быть равна произве-
дению num*fStep, где fStep — шаг децимации. Вектор Р опре-
деляет коэффициенты, входящие в систему дифференциальных
уравнений:
Р = [m alpha beta от iStep fStep el е2].
Процедура расчета траектории кольцевой сис-
темы с 2,5 степенями свободы. Вызов осуществляется из
среды MatLab в следующей форме:
[х, у, z] = ring25(tlni, ylni, signal, num, P).
Здесь tlni и ylni — начальные условия: tlni — время, ylni —
пятимерный вектор начальных координат. Оба параметра имеют
вещественный тип. signal — вектор отсчетов сигнала s(t), вводи-
мого в систему (П.2). Введение сигнала в (П.2) позволяет оценить
его влияние на динамику парциальной системы. Длина вектора
signal должна составлять num*fStep, где fStep — шаг децимации.
Парамигр целого типа num задает количество шагов интегриро-
вания. Вектор Р содержит коэффициенты входящие в систему
дифференциальных уравнений:
Р = [m alphal betal oml alpha2 beta2 om2 iStep fStep el e2],
где m, alphal, betal, oml, alpha2, beta2, om2 — коэффициенты
системы (11.2); iStep шаг интегрирования, fStep — шаг деци-
мации. Процедура ring25 вычисляет три компоненты [х,у, z] тра-
ектории пятимерной динамической системы, шаг дискретизации
которых составляет iStepfStep; el, е2 — параметры нелинейного
преобразования.
17 Зак. 18
238
Приложение. Моделирующий комплекс
Процедура расчета бифуркационной диаграммы
кольцевой системы с 2,5 степенями свободы.
Формат процедуры:
[m,x] = ring25biff(blni,bFin,ylni,num,P,'Biff. Parameter').
Здесь ylni — вектор начальных условий размерности пять. Пере-
менные blni и bFin задают диапазон изменений бифуркационного
параметра 'Biff. Parameter'. В кавычках указывается заглавная
буква названия параметра бифуркации, в данном случае: G, А, В
или О. Параметр целого типа num задает количество шагов инте-
грирования. Вектор Р содержит коэффициенты, входящие в си-
стему дифференциальных уравнений:
Р = [m alphal betal oml alpha2 beta2 om2 iStep el e2].
Процедура расчета старшего показателя Ляпу-
нова кольцевой системы с 2,5 степенями свободы.
Формат вызова:
[lyp, ylni] = ring251yp(tlni, ylni, ITYanProc, nlnterv, llnterv, P).
Здесь tlni и ylni — начальные условия: tlni — время, ylni —
вектор начальных координат размерности пять. Оба параметра
имеют вещественный тип. Параметр целого типа ПУапРгос задает
длину переходного процесса, параметр nlnterv определяет количе-
ство N интервалов длительности At, llnterv определяет длину At
интервала г. Вектор Р содержит коэффициенты, входящие в си-
стему дифференциальных уравнений:
Р = [m alphal betal oml alpha2 beta2 om2 iStep el e2].
Процедура для моделирования процесса синхро-
низации и передачи аналогового информационно-
го сигнала методом нелинейного подмешивания в
кольцевых системах с 2,5 степенями свободы.
Формат вызова процедуры:
[х, у] = ring25transceiver(tlni, ylni, signal, num, P).
Здесь tlni и ylni — начальные условия: tlni — время, ylni —
вектор начальных координат размерности пять. Оба параметра
имеют вещественный тип. Параметр целого типа num определяет
количество шагов интегрирования; signal — вектор отсчетов сиг-
нала s(t), вводимого в систему (П.6). Длина вектора signal должна
составлять num fStep отсчетов, где fStep — шаг децимации. Век-
тор Р содержит коэффициенты, входящие в систему дифференци-
альных уравнений:
Р = [m alphal betal oml alpha2 beta2 om2 iStep fStep Ck el e2],
П.З. Пакет программ для анализа схемы 239
где m, alphal, betal, oml, alpha2, beta2, om2 — коэффициенты
системы (П.1); iStep — шаг интегрирования, fStep — шаг де-
цимации, Ck — коэффициент усиления или ослабления сигнала
я?1(£) + s(t), передаваемого к ведомой системе, el, е2 — параметры
нелинейного преобразования.
Процедура ring25transceiver вычисляет две компоненты систе-
мы (П.6): компоненту (t) (переменная векторного типа х) первой
половины системы (П.6), к которой добавляется информационный
сигнал s(t), и компоненту второй половины (П.6) (переменная век-
торного типа у), по которой наблюдается хаотический синхронный
отклик второй половины (П.6) на сигнал xi(t) -I- s(t). Функция
ring25transceiver, аналогично функции ringl5transceiver, осуще-
ствляет совместное интегрирование системы (П.6). Имитирова-
ние приемной хаотической системы осуществляется процедурой
ring25receiver.
Процедура, моделирующая приемную хаотичес-
кую систему. В программу ring25receiver встроена интерпо-
ляция второго порядка хаотического сигнала xi(t) + s(t), переда-
ваемого от ведущей системы к ведомой системе, в промежуточной
точке.
Формат вызова:
[х, у, z] = ring 15receiver( tlni, ylni, num, signal, P).
Здесь tlni и ylni — начальные условия: tlni — время, ylni —
трехмерный вектор начальных координат. Оба параметра имеют
вещественный тип. Параметр целого типа num задает количество*
шагов интегрирования; signal — вектор отсчетов сигнала x(t) вво-
димого в систему (П.6). Длина вектора signal должна быть равна
произведению numfStep, где fStep — шаг децимации. Вектор Р
определяет коэффициенты, входящие в систему дифференциаль-
ных уравнений:
Р = [m alpha beta от iStep fStep el е2].
17*
СПИСОК ЛИТЕРАТУРЫ
1. Андреев Ю.В., Дмитриев А.С., Емец С.В., Кузьмин Л.В.,
Панас А.И., Пузиков Д.Ю., Старков С.О. Хаотические маркеры
и асинхронная передача данных /Письма в ЖТФ. 2000. Т. 26, вып. 14.
С. 53-59.
2. Андреев Ю.В., Дмитриев А.С., Емец С.В., Панас А.И., Стар-
ков С.О., Балабин А.М., Дмитриев А.А., Кишик В.В., Кузь-
мин Л.В., Борисенко А.Г. Стратегии использования динамического
хаоса в коммуникационных системах и компьютерных сетях. Разделение
хаотического кодера и кодера канала /Препринт ИРЭ РАН.—М., 2000.
№ 2(626). 76с.
3. Андрушкевич А.В., Кипчатов А.А., Красичков Л.В., Коро-
новский А.А. Путь к хаосу в кусочно-линейной модели генератора на
туннельном диоде /Изв. вузов. Сер. ПНД. 1993. Т. 1, К® 1. С. 93-103.
4. Анисимова Ю.В., Дмитриев А.С., Залогин Н.Н., Кали-
нин В.И., Кислов В.Я., Панас А.И. Об одном механизме перехода
к хаосу в системе «электронный пучок-электромагнитная волна» / Письма
в ЖЭТФ. 1983. Т. 37, № 8. С. 387-390.
5. Анищенко В.С., Астахов В.В., Летчфорд Т.Е. Многочастотные и
стохастические автоколебания в автогенераторе с инерционной нелинейно-
стью / Радиотехника и электроника. 1980. Т. 27, К® 10. С. 1972.
6. Анищенко В.С. Стохастические колебания в радиофизических систе-
мах.—Саратов: Изд-во Сарат. ун-та, 1985.
7. Анищенко В.С. Сложные колебания в простых системах.—М.: Наука,
1990. 311с.
8. Афраймович В.С., Веричев Н.И., Рабинович М.И. Стохастиче-
ская синхронизация колебаний в диссипативных системах / Изв. вузов. Сер.
Радиофизика. 1986. Т. 29, № 9. С. 1050-1062.
9. Афраймович В.С., Некоркин В.И., Осипов Г.В., Шалфеев В.Д.
Устойчивость, структуры и хаос в нелинейных сетях синхронизации.—
Горький: ИПФ РАН СССР, 1989.
10. Ахромеева Т.С., Малинецкий Г.Г., Самарский А. А. О классифи-
кации двухкомпонентных систем в окрестности точки бифуркации / ДАН
СССР. 1984. Т. 279, № 3. С. 591-595.
И. Ахромеева Т.С., Курдюмов С.П., Малинецкий Г.Г., Самар-
ский А. А. Нестационарные структуры и диффузионный хаос.—М.: Наука,
1992. 541с.
12. Безручко Б.П., Кузнецов С.П., Трубецков Д.И. Эксперименталь-
ное наблюдение стохастических автоколебаний в динамической системе
«электронный пучок-обратная электромагнитная волна» / Письма в ЖЭТФ.
1979. Т. 29. № 3. С. 180-184.
Список литературы
241
13. Безручко Б.П., Булгакова Л.В., Кузнецов С.П., Трубец-
ков ДИ. Стохастические колебания и неустойчивость в лампе обратной
волны / Радиотехника и электроника. 1983. Т. 28, К* б. С. 1136-1139.
14. Бельский Ю.Л., Дмитриев А.С., Панас А.И., Старков С.0.
Синтез полосовых хаотических сигналов в автоколебательных системах
/Радиотехника и электроника. 1992. Т. 37. № 4. С. 660-670.
15. Бельский Ю.Л., Дмитриев А.С. Передача информации с помощью
детерминированного хаоса / Радиотехника и электроника. 1993. Т. 38, К1 7.
С. 1310-1315.
16. Бельский Ю.Л., Дмитриев А.С. Влияние возмущающих факторов
на работоспособность системы передачи информации с хаотической несу-
щей /Радиотехника и электроника. 1995. Т. 40, К* 2. С. 265-281.
17. Берже П., Помо М., Видаль К. Порядок в хаосе.—М.: Мир, 1991. 387с.
18. Брюханов Ю.А. Свободные колебания в линейном цифровом осцилля-
торе /Радиотехника. 1996. К1 5. С. 46-50.
19. Варакин Л.Е. Теория сложных сигналов.—М.: Сов. радио, 1970.
20. В а р а к и н Л. Е. Системы связи с шумоподобными сигналами.—М.: Радио
и связь, 1985.
21. Волковский А.Р., Рульков Н. В. Синхронный хаотический отклик не-
линейной системы передачи информации с хаотической несущей / Письма
в ЖТФ. 1993. Т. 19, вып. 3. С. 71-75.
22. Гапонов-Грехов А.В., Рабинович М.И., Старобинец И.М. Ро-
ждение многомерного хаоса в активных решетках / ДАН СССР. 1984. Т. 279,
К» 3. С. 596-601.
23. Гидродинамические неустойчивости и переход к турбулентности. Сб. статей
под ред. X. Суинни и Дж.Голлаба.—М.: Мир, 1984. 344с.
24. Губанов Д., Дмитриев А., Панас А., Старков С., Стешенко В.
Генераторы хаоса в интегральном исполнении / Chip news. Новости о ми-
кросхемах. 1999. К* 8. С. 9-14.
25. Гуляев Ю.В., Дмитриев А.С., Кислов В.Я. Странные аттракторы
в кольцевых автоколебательных системах / ДАН СССР. 1985. Т. 25, К* 10.
С. 53.
26. Диксон Р.К. Широкополосные системы.—М.: Радио и связь, 1979.
27. Дмитриев А.С., Кислов В.Я., Панас А.И., Старков С.О.,
Иванов В.П. Система связи с шумовой несущей. А.с. № 279024. СССР.
1985.
28. Дмитриев А.С. Динамический хаос в кольцевых автоколебательных си-
стемах с нелинейным фильтром /И.зв. вузов. Радиофизика. 1985. Т. 28,
К* 4. С. 429-439.
29. Дмитриев А.С., Кислов В.Я., Старков С.О. Экспериментальное ис-
следование образования и взаимодействия странных аттракторов в кольце-
вом автогенераторе / ЖТФ. 1985. Т. 55, К1 12. С. 2417-2419.
30. Дмитриев А.С., Панас А.И. Странные аттракторы в кольцевых авто-
колебательных системах с инерционными звеньями /ЖТФ. 1986. Т. 56,
№ 4. С. 759-762.
31. Дмитриев А.С., Иванов В.П., Лебедев М.Н. Модель транзисторного
генератора с хаотической динамикой / Радиотехника и электроника. 1988.
Т. 33, № 5. С. 1085-1088.
242
Список литературы
32. Дмитриев А. С., Кислов В. Я. Стохастические колебания в радиофизике
и электронике.—М.: Наука, 1989. 278с.
33. Дмитриев А.С. Когда заговорит компьютер? / Радио. 1993. К® 1. С. 3.
34. Дмитриев А.С., Панас А.И., Старков С.О. Эксперименты по пере-
даче музыкальных и речевых сигналов с использованием динамического
хаоса / Препринт ИРЭ РАН.—М., 1994. К® 12. 42с.
35. Дмитриев А.С., Старков С.О., Широков М.Е. Структура периоди-
ческих орбит хаотической автоколебательной системы, описываемой раз-
ностными уравнениями 2-го порядка / Радиотехника и электроника. 1994.
Т. 39, К® 9. С. 1392-1401.
36. Дмитриев А.С., Старков С.0., Широков М.Е. Синхронизация ан-
самблей диссипативно связанных отображений / Препринт ИРЭ РАН.—М.,
1995. № 9(609).
37. Дмитриев А.С., Емец С.В., Панас А.И., Старков С.О. Экспери-
менты по применению сигнальных процессоров для передачи информации
с использованием хаотических колебаний / Препринт ИРЭ РАН.—М., 1997.
№ 4(618). 49с.
38. Дмитриев А.С., Кузьмин Л.В., Панас А.И., Старков С.0. Радио-
связь с использованием хаотических сигналов / Препринт ИРЭ РАН.—М.,
1997. № 1(615).
39. Дмитриев А.С., Панас А.И., Старков С.0. Динамический хаос
как парадигма современных систем связи / Зарубежная радиоэлектроника.
Успехи современной радиоэлектроники. 1997. К® 10. С. 4-26.
40. Дмитриев А. С. Детерминированный хаос и информационные техноло-
гии /Компьютерра. 1998. №» 47(275). С. 27-30.
41. Дмитриев А.С., Кузьмин Л.В., Панас А.И., Старков С.О. Экс-
перименты по передаче информации с использованием хаоса через радиока-
нал /Радиотехника и электроника. 1998. Т. 43, № 9. С. 1115-1128.
42. Дмитриев А.С., Старков С.0. Передача сообщений с использованием
хаоса и классическая теория информации / Зарубежная радиоэлектроника.
Успехи современной радиоэлектроники. 1998. К® 11. С. 4-32.
43. Дмитриев А.С., Кузьмин Л.В., Панас А.И. Схема передачи инфор-
мации на основе синхронного хаотического отклика при наличии фильтра-
ции в канале связи / Радиотехника. 1999. К® 4. С. 75-80.
44. Дмитриев А.С., Кяргинский Б.Е., Максимов Н.А., Панас А.И.,
Старков С.0. Перспективы создания прямо хаотических систем связи в
радио- и СВЧ-диапазонах / Радиотехника. 2000. К® 3. С. 9-20.
45. Дмитриев А.С., Кяргинский Б.Е., Максимов Н.А., Панас А.И.,
Старков С.О. Прямо хаотическая передача информации в СВЧ-диапа-
зоне /Препринт ИРЭ РАН.—М., 2000. № 1(625). 27с.
46. Дмитриев А.С., Кяргинский Б.Е., Панас А.И., Старков С.О.
Прямохаотические схемы передачи информации в сверхвысокочастотном
диапазоне / Радиотехника и электроника. 2001. Т. 46, N® 2. С. 224-233.
47. Калиткин Н.Н. Численные методы.—М.: Наука, 1978.
48. Кальянов Э.В., Иванов В.П., Лебедев М.Н. Экспериментальное ис-
следование транзисторного автогенератора с запаздывающей обратной свя-
зью /Радиотехника и электроника. 1982. Т. 27, К* 5. С. 982-986.
Список литературы
243
49. К а л ь я н о в Э. В. Синхронные и стохастические колебания в неавтономном
транзисторном генераторе с запаздывающей обратной связью Ц ЖТФ. 1986.
Т. 56, К* И. С. 2284-2287.
50. Кальянов Э.В. Синхронные и стохастические автоколебания в транзи-
сторном генераторе СВЧ с запаздывающей обратной связью при параме-
трическом воздействии внешней силы / Радиотехника и электроника. 1987.
Т. 32, № 4. С. 784-791.
51. Каппелини В., Константинидис А. Дж., Эмилиани П. Цифровые
фильтры и их применение.—М.: Энергоиздат, 1983.
52. Капранов М.В., Кулешов В.Н., Уткин Г.М. Теория колебаний в
радиотехнике.—М.: Наука, 1984.
53. Капранов М.В., Чернобаев В.Г. Управляемые генераторы хаотиче-
ских колебаний на базе систем фазовой синхронизации Ц Радиотехнические
тетради. 1998. К* 15. С. 86-90.
54. Капранов М.В., Кулешов В.Н., Ларионова М.В., Морозов А.Г.
Удалов Н.Н. Свойства систем передачи информации с манипуляцией
параметрами и начальными условиями генераторов хаотических колеба-
ний /Зарубежная радиоэлектроника. Успехи современной радиоэлектро-
ники. 2000. № 11. С. 48-60.
55. Кац В. А., Т р у б е ц к о в Д. И. Возникновение хаоса при разрушении квази-
периодических режимов и переходе через перемежаемость в распределенном
генераторе с запаздыванием / Письма в ЖЭТФ. 1984. Т. 39, К® 3. С. 116-119.
56. Кипчатов А. А., Красичков Л.В. Изменение структуры странного ат-
трактора при полосовой фильтрации хаотических колебаний /Письма в
ЖТФ. 1993. Т. 19, № 17. С. 68-71.
57. Кислов В. Я., За лог ин Н. Н., Мясин Е. А. Исследование стоха-
стических автоколебательных процессов в автогенераторах с запаздыва-
нием /Радиотехника и электроника. 1979. Т. 24, К® 6. С. 118.
58. Кислов В.Я. Теоретический анализ шумовых колебаний в электронно-
волновых системах / Радиотехника и электроника. 1980. Т. 25, К® 8. С. 1683.
59. Кислов В.Я., Кислов В.В. /Радиотехника и электроника. 1997. Т. 38,
№ 10. С. 1783.
60. Кияшко С.В., Пиковский А. С., Рабинович М. И. Автогенератор ра-
диодиапазона со стохастическим поведением / Радиотехника и электроника.
1980. Т. 25, № 2. С. 336.
61. Козлов А.К., Шалфеев В.Д. Избирательное подавление детермини-
рованных хаотических сигналов /Письма в ЖТФ. 1993. Т. 19, вып. 23.
С. 83-87.
62. Котельников В.А. Теория потенциальной помехоустойчивости.—М.:
Госэнергоиздат, 1956.
63. Кузнецов С.П., Перельман А.Н., Трубецков Д.И. Автомодуляци-
онные стохастические режимы в клистроне бегущей волны с внешней обрат-
ной связью / ЖТФ. 1983. Т. 53, № 1. С. 163-166.
64. Кузнецов Ю.И., Мигулин В.В., Минакова И.И., Сильнов Б.А.
Синхронизация хаотических колебаний / ДАН СССР. 1984. Т. 275, К® 6.
С. 1388-1391.
65. Кузьмин Л.В., Максимов Н.А., Панас А.И. Прецизионный генера-
тор хаотических колебаний с кусочно-линейной характеристикой нелиней-
ного элемента / Известия вузов. Прикладная нелинейная динамика. 1999.
№ 2, 3. С. 81-94.
244
Список литературы
66. Кяргинский Б.Е. Генераторы на биполярных транзисторах различной
мощности /Электронная техника. Сер. СВЧ-техника. 1993. Вып. 3(457).
С. 3-7.
67. Ланда П.С., Ольховой А.Ф., Перминов С.М. Исследование стоха-
стических автоколебаний в физических системах с инерционным самовоз-
буждением // Изв. вузов. Радиофизика. 1983. Т. 26, К* 5. С. 566-572.
68. Линдсей В. Системы синхронизации в связи и управлении.—М. : Сов.
радио, 1978.
69. Лихтенберг А., Либерман М. Регулярная и стохастическая дина-
мика.—М.: Мир, 1984. 528 с.
70. Максимов Н.А., Кислов В.Я. Об одной закономерности перехода от
детерминированной динамики к стохастической в автоколебательной си-
стеме /Письма в ЖТФ. 1983. Т. 9, К* 16. С. 979-982.
71. Максимов Н. А. Внутренняя структура перехода к странному аттрактору
в одной автоколебательной системе / Письма в ЖТФ. 1984. Т. 10, К* 10.
С. 624-628.
72. Матросов В.В. Регулярные и хаотические автоколебания фазовой си-
стемы /Письма в ЖТФ. 1996. Т. 22, вып. 23. С. 4-8.
73. Мигулин В.В. и др. Теория колебаний.—М.: Наука, 1978.
74. Мун Ф. Хаотические колебания.—М.: Мир, 1990. 311с.
75. Мясин Б.А., Кислов В.Я., Богданов Б.В. Способ генерирования
электромагнитных шумовых колебаний. А. с. К* 1125735 СССР (приоритет
от 31.07.67).
76. М я с и н Е. А., П а н а с А. И. К вопросу о стационарном состоянии СВЧ-авто-
генератора широкополосных стохастических колебаний /Радиотехника и
электроника. 1983. Т. 28, К* 12. С. 2423-2429.
77. Неймарк Ю.Н., Ланда П.С. Стохастические и хаотические колеба-
ния.—М.: Наука, 1987. 423с.
78. Петрович Н.Т., Размахнин М.К. Системы связи с шумоподобными
сигналами.—М.: Сов. Радио, 1969.
79. Пиковский А.С., Рабинович М.И. Простой автогенератор со стоха-
стическим поведением / ДАН СССР. 1978. Т. 239, К* 2. С. 301-304.
80. Поляков Л.Е. Широкополосные аналоговые системы связи с шумоподоб-
ными сигналами.—М.: Радио и связь, 1981.
81. Пустовойт В.И. Хаос в некоторых задачах информатики / Зарубежная
радиоэлектроника. Успехи современной радиоэлектроники. 1997. К1 10. С. 3.
82. Рабинович М.И. Стохастические автоколебания и турбулентность
/УФН. 1978. Т. 125. С. 123.
83. Рабинович М. И., Трубецков Д.И. Введение в теорию колебаний и
волн.—М.: Наука, 1984. 432 с.
84. Системы фазовой синхронизации / Под ред. В.В. Шахгильдяна, Л.Н. Белю-
стиной.—М.: Радио и связь, 1982.
85. Странные аттракторы. Сб. статей под ред. Я.Г. Синая и Л. П. Шильникова.—
М.: Мир, 1981.
86. У ткин Г.М. Проектирование радиопередающих устройств СВЧ.—М.: Сов.
радио, 1979.
87. Фрадков А.Л. Адаптивное управление в сложных системах.—М.: Наука,
1990.
Список литературы
245
88. Харкевич А. А. Передача сигналов модулированным шумом / Электро-
связь. 1957. № 11. С. 42-49.
89. Челноков О.А. Транзисторные генераторы синусоидальных колеба-
ний.—М.: Сов. радио, 1975.
90. Шалфеев В.Д., Осипов Г.В., Козлов А.К., Волковский А.В.
Хаотические колебания — генерация, синхронизация, управление /Зару-
бежная радиоэлектроника. Успехи современной радиоэлектроники. 1997.
№ 10. С. 27-49.
91. Шалфеев В.Д., Матросов В.В., Корзинова М.В. Динамический
хаос в ансамблях, связанных фазовых систем / Зарубежная радиоэлектро-
ника. Успехи современной радиоэлектроники. 1998. К1 11. С. 44-56.
92. Шахгильдян В.В., Ляховкин А. А. Системы фазовой автоподстройки
частоты.—М.: Связь, 1972.
93. Шеннон К. Работы по теории информации и кибернетике.—М.: ИЛ, 1963.
С. 243-332.
94. Шило В.Л. Популярные цифровые микросхемы.—Челябинск: Металлур-
гия, 1988.
95. Широков М.Е. Многопользовательская схема связи на хаотических несу-
щих / Радиотехника и Электроника. 1999. Т. 44, К® 5. С. 583-590.
96. Шустер Г. Детерминированный хаос. Введение.—М.: Мир, 1988. 240с.
97. A bar ban el Н. Analysis of Observed Chaotic Data.—Springer, 1995. 272 p.
98. Abarbanel H., Rulkov N., Tshimring L., Rabinovich M. Chaotic
communication apparatus and metod for use with a wired or wireless trans-
mission link. Patent № 5,923,760 USA.
99. Abel A., Bauer A., Keiber K., Schwarz W. Chaotic codes for
CDMA application /Proceedinds of ECCTD’97.—Budapest, Hungary. 1997.
P. 306-311.
100. Abraham N., Lugiato L., Mandel P., Narducci L., Baandy D.
Steady-state and unstable behavior of a single-mode inhomogeneously broad-
ened laser / J. Opt. Soc. Amer. B. 1985. V. 2, № 1. P. 35-46.
101. Alexeyev A.A., Shalfeev V.D. Chaotic synchronization of mutually
coupled generators with frequency-controlled feedback loop /Int. J. Bifurca-
tion and Chaos. 1995. V. 5. P. 551-557.
102. Amritkar R.E., Gupte N. Synchronization of chaotic orbits: The effect
of a finite time step / Phys. Rev. E. 1993. V. 47(6). P. 3889-3895.
103. Anishchenko V.S., Vadivasova T.E., Safonova M.A. Synchro-
nization and chaos / Int. J. Bifurcation and Chaos. 1992. V. 2. P. 633-644.
104. Azzouz A., Duhr R., Hasler M. Transsition to chaos in a simple non-
linear circuits driven by sinusoidal voltage source / IEEE Trans. Circuits and
Syst. 1983. V. 30, №12. P. 913, 914.
105. Boccaletti S., Arecchi F.T. Adaptive control of chaotic and hyper-
chaotic dynamics / Journal of Technical Physics. 1996. V. 37. P. 3, 4.
106. Boccaletti S., Farini A., Arecchi F.T. Adaptive synchronization of
chaos for secure communication /Phys. Rev. E. 1997. V. 55, № 5. P. 4979-
4981.
107. Bohme F., Feldman U., Schwarz W., Bauer A. Information trans-
mission by chaotizing /Proceedings of NDES’94.—Krakov, Poland. 1994.
P. 163-168.
246
Список литературы
108. Brown R., Rulkov N. Synchronization of chaotic systems: The effects of
additive noise and drift in the dynamics of the driving / Phys. Rev. E. 1994.
V. 50. P. 4488-4507.
109. Burns S.G., Bond P.R. Principles of electronics circuits..—Boston: PWS
Publishing Company, 1997.
110. Burykin V. A., Panas A.I. Chaotic synchronization of RF genera-
tors / Proceedings of NDES’97.—Moscow, Russia. 1997. P. 548-553.
111. Carcais P., Dilao R., Noronka da Costa A. Chaos and reverse
bifurcations in RLC Circuits / Phys. Lett. A. 1983. V. 93, K® 5. P. 213-216.
112. Car roll T.L. Communicating with use of filtered, synchronized, chaotic
signals / IEEE lYans. Circiuts and Systems. Fundamental theory and appli-
cation. 1995. V. 45, № 3. P. 105-110.
113. Car roll T. L., Pecora L. M. The effect of filtering on communication
using synchronized chaotic circuits /Proceedings of ISCAS’96.—Atlanta,
USA. 1996. P. 174-177.
114. Carroll T.L., Johnson G.A. Synchronizing broadband chaotic systems
to narrow-band signals / Phys. Rev. E. 1998. V. 57, K® 2. P. 1555-1558.
115. Chenys A. et al. On-off intermittency in chaotic synchronization experi-
ment /Phys. Lett. A. 1996. V. 213. P. 259-264.
116. Chenys A., Lustfeld H. Statistical Properties of the Noisy on-off Inter-
mittency /J. Phys. A. 1996. V. 29. P. 11-20.
117. Chua L.O., Komura M., Mayzumoto T. The double scroll family
/IEEE TYans Circuits and Syst. 1986. V. CAS-33, № 1. P. 1073-1118.
118. Chua L.O., Kocarev L., Eckert K., Itoh M. Experimental chaos
syncronization in Chua’s circuits /Int. J. Bifurcation and Chaos. 1992. V. 2.
P. 705-708.
119. Chua L.O., Yang T., Zhong G., Wu C. W. Adaptive synchronization of
Chua’s oscillators / Int. J. Bifurcation and Chaos. 1996. V. 6, К® 3. P. 189-201.
120. Cruz J.M., Chua L.O. A CMOS IC nonlinear resistor for Chua’s cir-
cuit /IEEE Trans. Circuits and Systems. Fundamental theory and applica-
tions. 1992. V. 39, № 12. P. 985.
121. С r u z J. M., C h u a L. O. An IC chip of Chua’s circuit / IEEE Trans. Circuits
and Systems. 1993. V. 40, № 10. P. 985-995.
122. Cuomo K., Oppenheim A. Circuit implementation of synchronization
chaos with applications to communications /Phys. Rev. Lett. 1993. V. 71,
№ 1. P. 65-68.
123. Cuomo M.K., Oppenheim A.V., Strogatz S.H. Synchronization of
Lorenz-Based Chaotic Circuits with Applications to Communications / IEEE
Trans. Circuits and Systems. 1993. V. 40, K® 10. P. 626.
124. Cvitanovic P. Invariant measurements of strange sets in terms of
cycles / Phys. Rev. Lett. 1988. V. 61, № 24. P. 2729-2732.
125. Dedieu H., Kennedy M., Hasler M. Chaos shift keying: Modulation
and demodulation of a chaotic carrier using self-synchronizing Chua’s cir-
cuits /IEEE TYans. Circuits and Systems. 1993. V. CAS-40, K® 10. P. 634-
642.
126. Delgado-Restituto M., Rodriguez-Vazquez A., Ahumada R.,
Li nan M. Experimental verification of secure communication using mono-
lithic chaotic circuits /Proceedings of ECCTD’95.—Istanbul, Turkey. 1995.
P. 471-474.
Список литературы
127. Delgado-Restitute V., Ahumada R., Rodriguez-Vazquez A.R.
Secure communication using CMOS current-mode samlped-data circuits
/Proceedings of NDES’95.—Dublin, Ireland. 1995.
128. Delgado-Restituto M., Linan M., Rodriguez-Vazguez A.
CMOS 2,4дтп chaotic oscillator: experimental verification of chaotic encryp-
tion of audio / Electronics letters. 1996. V. 32, K1 9. P. 795, 796.
129. Dmitriev A.S., Panas A.I., Starkov S.O. Experiments on music and
speech transition in system with nonlinear mixing of chaotic and informa-
tion oscillations / Proceedings of ECCTD’95.—Istanbul, Turkey. 1995. V. 1.
P. 475-478.
130. Dmitriev A.S., Panas A.I., Starkov S.O. Experiments on speech and
music signals transmission using chaos / Int. J. of Bifurcation and chaos. 1995.
V. 5. № 4. P. 1249-1254.
131. Dmitriev A.S., Panas A.I., Starkov S.O. Ring oscillating systems
and their application to the synthesis of chaos generators /Preprint IRE
RAN.—M., 1995. 35 p.
132. Dmitriev A., Panas A., Starkov S. Transmission of complex analog
signals by means of dynamical chaos /Proceedings of NDES’95.—Dublin,
Ireland. 1995. P. 241-244.
133. Dmitriev A.S., Panas A. I., Starkov S.O. Ring oscillating systems and
their application to the synthesis of chaos generators / Int. J. of Bifurcation
and Chaos. 1996. V. 6. № 5. P. 851-865.
134. Dmitriev A., Panas A., Starkov S., Kuzmin L. Experiments on
RF-band communications using chaos / Int. J. of Bifurcation and Chaos. 1997.
V. 7, K* 11. P. 2511-2527.
135. Dmitriev A., Panas A., Starkov S., Yemetz S. Digital processing for
chaos generation and information transmission / Proceedings of NDES’97.—
Moscow, Russia. 1997. P. 370-375.
136. Dmitriev A.S., Starkov S.O. Fine structure of chaotic attractor for
multiple-access communication /Proceedings of NDES’99.—Ronne, Den-
mark. 1999. P. 161-164.
137. Downes Ph. Secure communication using chaotic synchronization /SPIE.
1993. V. 2038. P. 227.
138. Eckman J-P., Ruelle D. Ergodic Theory of Chaos and Strange Attrac-
tors /Rev. of Modem Physics. 1985. V. 57, № 3, Part 1. P. 617-656.
139. Endo T., Chua L.O. Chaos from phase-locked loops /IEEE Trans. Cir-
cuits and Syst. 1988. V. 35, № 8. P. 987-1003.
140. Endo T. A review of chaos and nonlinear dynamics in phase-locked loops / J.
of the Franclin Institute. 1994. V. 331В, К® 6. P. 859-902.
141. Fujisaka H., Yamada T. Stability theory of synchronized motions in
coupled systems / Prog. Theor. Phys. 1983. V. 69. P. 32-46.
142. Halle K.S., Chai Wah Wu, Itoh M., Chua L.O. Spread Spectrum
Communication through Modulation of Chaos / Int. J. Bifurcation and Chaos.
1993. V. 3, № 2. P. 469-477.
143. Hasler M., Dedieu H., Kennedy M., Schweizer J. Secure com-
munication via Chua’s circuit / Proceedings of Int Symposium on Nonlinear
Theory and Application.—Hawaii, USA. 1993. P. 87-92.
144. Hasler M. Synchronization principles and applications /Proceedings of
ISCAS’94.—London, UK. P. 314-317.
248
Список литературы
145. Hasler М. Engineering chaos for encryption and broadband communica-
tion /Phil. Trans. Royal Soc. London A. 1995. V. 353. P. 115-126.
146. Hayes S., Grebogi C., Ott E. Communication with chaos /Phys. Rev.
Lett. 1993. V. 70(20). P. 3031-3034.
147. Hayes S., G rebogy C., Ott E., Mark A. Experimental control of chaos
for communication / Phys. Rev. Lett. 1994. V. 73, № 13. P. 1781-1784.
148. Heagy J.F., Platt N., Hammel S.M. Characterization of on-off inter-
mittency /Phys. Rev. 1994. V. E49(2). P. 1140-1150.
149. Itoh M., Murakami H., Chua L.O. Performance of Yamakawa’s
chaotic chips and Chua’s circuits for secure communications /Proceedings
of ISCAS’94.—London, UK. 1994. P. 105-108.
150. John J.K., Amritkar R.E. Synchronization by feedback and adaptive
control / Int. J. Bifurcation and Chaos. 1994. V. 4, № 6. P. 1687-1695.
151. Kennedy M.P. Robust op amp realization of Chua’s circuit /Frequenz.
1992. V. 46, № 3/4. P. 66-80.
152. Kennedy M. Chaos in Colpitts oscillator /IEEE Trans. Circuit and
Systems. 1994. V. 41, № 11. P. 771-774.
153. Kennedy M., Dedieu H. Synchronization of dynamical systems. Recent
progress, potential application and limitations / Proceedings of IEEE Work-
shop on Nonlinear Signal and Image Processing.—Greede. 1995. P. 121-124.
154. Kocarev L., Halle K.S., Eckert K., Chua L., Parlitz U. Exper-
imental demonstration of secure communications via chaotic synchroniza-
tion /Int. J. Bifurcation and Chaos. 1992. V. 2, № 3. P. 709-713.
155. Kohda T., Tsuneda A. Pseudonoise sequences by chaotic nonlinear maps
and their correlation properties /1Е1СЕ Trans. Commun. 1993. V. E76-B,
№ 8. P. 855-862.
156. Kohda T., Oschiumi A., Tsuneda A., Ishii K. A study of
pseudonoise-coded image communications / SPIE. 1994. V. 2308. P. 874-884.
157. Kolumban G., Vizvari R. Nonlinear dynamics and chaotic behavior of
sampling phase-locked loop / IEEE Trans. Circuits and Systems. 1994. V. 41.
P. 333-337.
158. Kolumban G., Vizvary R. Nonlinear and chaotic behavior of the analog
phase locked loop / Proceedings of NDES’95.—Dublin, Ireland. 1995. P. 99-
102.
159. Kozlov A.K., Shalfeev V.D. Chaos in controlled generators /Pro-
ceedings of NDES’95.—Dublin, Ireland. 1995. P. 233-236.
160. Kozlov A.K., Shalfeev V.D., Chua L.O. Exact synchronization of
mismatched chaotic systems / Int. J. Bifurcation and Chaos. 1996. V. 6, № 3.
P. 569-580.
161. Lindberg E. Colpitts, eigenvalues and chaos / Proceedings of NDES’97.—
Moscow, Russia. 1997. P. 262-267.
162. Linsey P. S. Period doubling and chaotic behaviour in a driven anharmonic
oscillator / Phys. Rev. Lett. 1981. V. 47, № 19. P. 1349.
163. Lorenz E. N. Deterministic nonperiodic flow / J. Atm. Sci. 1963. V. 20, К® 1.
P. 130-141.
164. Mad an R. Chua’s Circuits: A Paradigm for Chaos.—Singapore: World Sci-
entific, 1993.
Список литературы
249
165. Matrosov V. V. Regular and chaotic oscillations of phase-locked loop with
the second-order filter /Proceedings of NDES’97. —Moscow, Russia. 1997.
P. 554-558.
166. Matsumoto T. A. Chaotic Attractor from Chua’s Circuits / IEEE Trans.
Circuit and Systems. 1984. V. 31. P. 1055.
167. Mil ano vic V., Syed K.M., Zaghloul M. E. Chaotic communica-
tions by CDMA technigues / Proceedings of NDES’96.—Seville, Spain. 1996.
P. 155-160.
168. Mil ano vic V., Syed K., Zaghloul M.E. Combating noise and other
channel distortion in chaotic communication / Int. J. Bifurcation and chaos.
1997. V. 7, K® 1. P. 215-225.
169. Milanovich V., Zaghloul M. E. Chaotic signals and spreading sequences
for communications / Proceedings of ECCTD’97.—Budapest, Hungary. 1997.
P. 318-323.
170. Morozov A.G., Kapranov M.V., Butkovsky O.Ya., Krav-
tsov Yu. A. Modified CSK-system with discriminant procedure for signal
processing / Proceedings of COC’2000.—St.-Petersburg, Russia. 2000. P. 536-
539.
171. Mossayebi F., Qammar H.K., Hartley T. T. Adaptive estimation and
synchronization of chaotic systems / Phys. Lett. A. 1991. V. 161. P. 255-262.
172. Murali K., Lakshmanan M. Transmission of signals by synchronization
in a chaotic Van der Pol-Dufimg oscillator / Phys. Rev. E. 1993. V. 48, №» 3.
P. 1624.
173. Namajunas A., Tamasevicius A. Modified Wien-bridge oscillator for
chaos / Electronics Letters. 1995. V. 31. P. 335, 336.
174. Newcomb R.W., Sakham S. An RC-operational amplifier chaos genera-
tor /IEEE Trans. Circuits and Syst. 1983. V. 30, К® 1.
175. Nishio Y., Mori S., Saito T. An approach toward higher dimensional
autonomous chaotic circuits /Proceedings of NDES’92.—Moscow, Russia.
1992. V. 2. P. 60.
176. Ogorzalek M.J. Timing chaos. Part 1 — Synchronization / IEEE Trans.
Circuits and Systems. 1993. V. 40, № 10. P. 693.
177. Oppenheim A.V., Schafer R.W. Discrete-Time Signal Processing.—
Englewood Cliffs, NJ: Prentice Hall, 1989.
178. 011 E. Strange attractors and chaotic motions of dynamical systems / Rev.
Mod. Phys. 1981. V. 83. P. 655-671.
179. Panas A.I., Dmitriev A.S., Kuzmin L.V., Starkov S.O. RF-band
communications using chaos / Proceedings of NDES’96.—Seville, Spain. 1996.
P. 167-171.
180. Parks T.W., Burrus C.S. Digital Filter Design.—New York: John Wiley
& Sons, 1987.
181. Parlitz U., Chua L., Kocarev L., Halle K., Shang A. Transmission
of digital signals by chaotic synchronization / Int. J. Bifurcation and Chaos.
1992. V. 2, № 4. P. 973-977.
182. Parlitz U., Ergezinger S. Robust communications based on chaotic
spreading sequences / Phys. Lett. A. 1994. V. 188. P. 146-150.
183. Pecora L.M., Carroll T.L. Synchronization in chaotic systems /Phys.
Rev. Lett. 1990. V. 64, № 8. P. 821-824.
250
Список литературы
184. Perez G., Cerdeira H.A. Extracting messages masked by chaos / Phys.
Rev. Lett. 1995. V. 74, № 11. P. 1970-1973.
185. Pikovsky A. On the interaction of strange attractors /Z. Physik B. 1984.
V. 55. P. 149-154.
186. Platt N., Spiegel E.A., Tresser C. On-off intermittency a mechanism
for bursting / Phys. Rev. Lett. 1993. V. 70(3). P. 279-282.
187. Programs for Digital Signal Processing. IEEE Press.—New York: John Wiley
& Sons, 1979.
188. Ramsay W.R., Spilker J.J. Random energy communication system.
Patent № 4,363,130 USA.
189. Ramsay W.R., Spilker J.J. Binary digital communication system.
Patent № 4,326,292 USA.
190. Rodriguez-Verguez A.B., Huertas J.L., Chua L. Chaos in a
switched-capacitor circuit / IEEE Trans. Circuits and Syst. 1985. V. CAS-32,
№ 10. P. 1083-1085.
191. Rulkov N.F., Sushchik M.M., Tsimring L.S., Abarbanel H.D.
Generalized synchronization of chaos in directionally coupled chaotic sys-
tems /Phys. Rev. E. 1995. V. 51. P. 980-995.
192. Rulkov N.F. Images of synchronized chaos: Experiments with circuits
/Chaos. 1996. V. 6, № 3. P. 2629.
193. Sato A., Endo T. Experiments of secure communications of phase-locked
loops / Proceedings of NDES’94.—Krakov, Poland. 1994. P. 117-122.
194. Schweizer J., Setli G. Adaptive channel compensation for synchroniza-
tion of chaotic Lure systems /Proceedings of NDES’95.—Dublin, Ireland.
1995. P. 245-248.
195. Short K.M. Steps towards unmasking secure communications /Int. J.
Bifurcation and Chaos. 1994. V. 4, K® 4. P. 957-977.
196. Short K.M. Computational issues in unmasking chaotic communica-
tions /In Physics Computing’95. 1995.
197. Short K.M. Unmasking a modulated chaotic communications scheme / Int.
J. Bifurcation and Chaos. 1996. V. 6, № 2. P. 367-375.
198. Sinha S., Ramaswamy R., Rao J.S. Adaptive control in nonlinear dy-
namics /Physica D. 1990. V. 43. P. 118-128.
199. Smyth N., Crowley C., Kennedy M.P. Improved receiver for
CSK spread spectrum communications using analog phase locked loop
chaos / Proceedings of NDES’96.—Seville, Spain. 1996. P. 27-32.
200. Spilker J. J. Delay-modulated random energy intelligence communication
system. Patent № 4,324,002 USA.
201. Stojanovski T., Kocarev L., Parlitz U. Driving and synchronizing
by chaotic impulses / Phys. Rev. E. 1996. V. 54(2). P. 2128-2131.
202. Testa J., Perez J., Jeffries C. Evidence for universal chaotic behaviour
of a driven nonlinear oscillator / Phys. Rev. Lett. 1982. V. 48, K® 11.
203. Van Buskirk R., Jeffries C. Observation of chaotic dynamics of coupled
nonlinear oscillators / Phys. Rev. A. 1985. V. 31, K® 5. P. 3332-3357.
204. VanWiggeren G.D., Roy R. Optical communication with chaotic wave-
forms /Phys. Rev. Lett. 1998. V. 81, № 16. P. 3547-3550.
205. Waller I., Kapral R. Synchronization and chaos in coupled nonlinear
oscillators / Phys. Lett. A. 1984. V. 105, № 4/5. P. 163-168.
Список литературы
251
206. Wegen С., Kennedy М.Р. RF chaotic Colpitts oscillator /Proceedings
of NDES’95.—Dublin, Ireland. 1995. P. 255-258.
207. Wu C. W., Chua L.O. A simple way to synchronize chaotic systems with
application to secure communication systems / Int. J. Bifurcation and Chaos.
1993. V. 3, № 4. P. 1619-1627.
208. Wu C. W., Yang T., Chua L. O. On adaptive synchronization and control
of nonUnear dynamical systems / Int. J. Bifurcation and Chaos. 1996. V. 6,
№ 3. P. 455-471.
209. Yang T., Chua L. O. Chaotic digital code-division multiple access (CDMA)
systems / Int. J. Bifurcation and Chaos. 1997. V. 7(12). P. 2789-2805.
210. Yang T., Chua L.O. Impulsive control and synchronization of nonUnear
dynamical systems and application to secure communication / Int. J. Bifur-
cation and Chaos. 1997. V. 7(3). P. 645-664.
211. Yang T., Chua L.O. Impulsive stabiUzation for control and synchro-
nization of chaotic systems: Theory and appUcation to secure communi-
cation /IEEE Trans. Circuits Syst. 1: Fundamental Theor. Appl. 1997.
V. 44(10). P. 976-988.
212. Yoshimura K. Secure multichannel digital communications by the synchro-
nization of coupled chaotic systems /Proceedings of NOLTA’99.—Hawaii,
USA. 1999. P. 227-230.
213. Zhang J., Chen X., Davis A. High frequency chaotic osciUations in a
transformer-coupled osciUator / Proceedings of NDES’99.—Ronne, Denmark.
1999. P. 213-216.
214. Zhong G.O., Agrom F. Periodicity and chaos in Chua’s circuit /IEEE
Trans. Circuits and Syst. 1985. V. CAS-32, № 5. P. 501-503.
Научное издание
ДМИТРИЕВ Александр Сергеевич
ПАНАС Андрей Иванович
ДИНАМИЧЕСКИЙ ХАОС:
НОВЫЕ НОСИТЕЛИ ИНФОРМАЦИИ
ДЛЯ СИСТЕМ СВЯЗИ
Редактор Л.А. Панюшкина
Компьютерная графика А.В. Бобков
Компьютерная верстка Г.М. Красникова
ИД №01389 от 30.03.2000
Подписано в печать 02.09.2002. Формат 60x90/16.
Печать офсетная. Бумага офсетная №1.
Усл. печ. л. 15,75 + 3 вклейки. Уч.-изд. л. 17,33.
Тираж 1000 экз. Зак. 18
Издательство Физико-математической литературы
117071 Москва В-71, Ленинский проспект, 15
Отпечатано с готовых диапозитивов
ГУП «Облиздат»
248640 Калуга, пл. Старый торг, 5