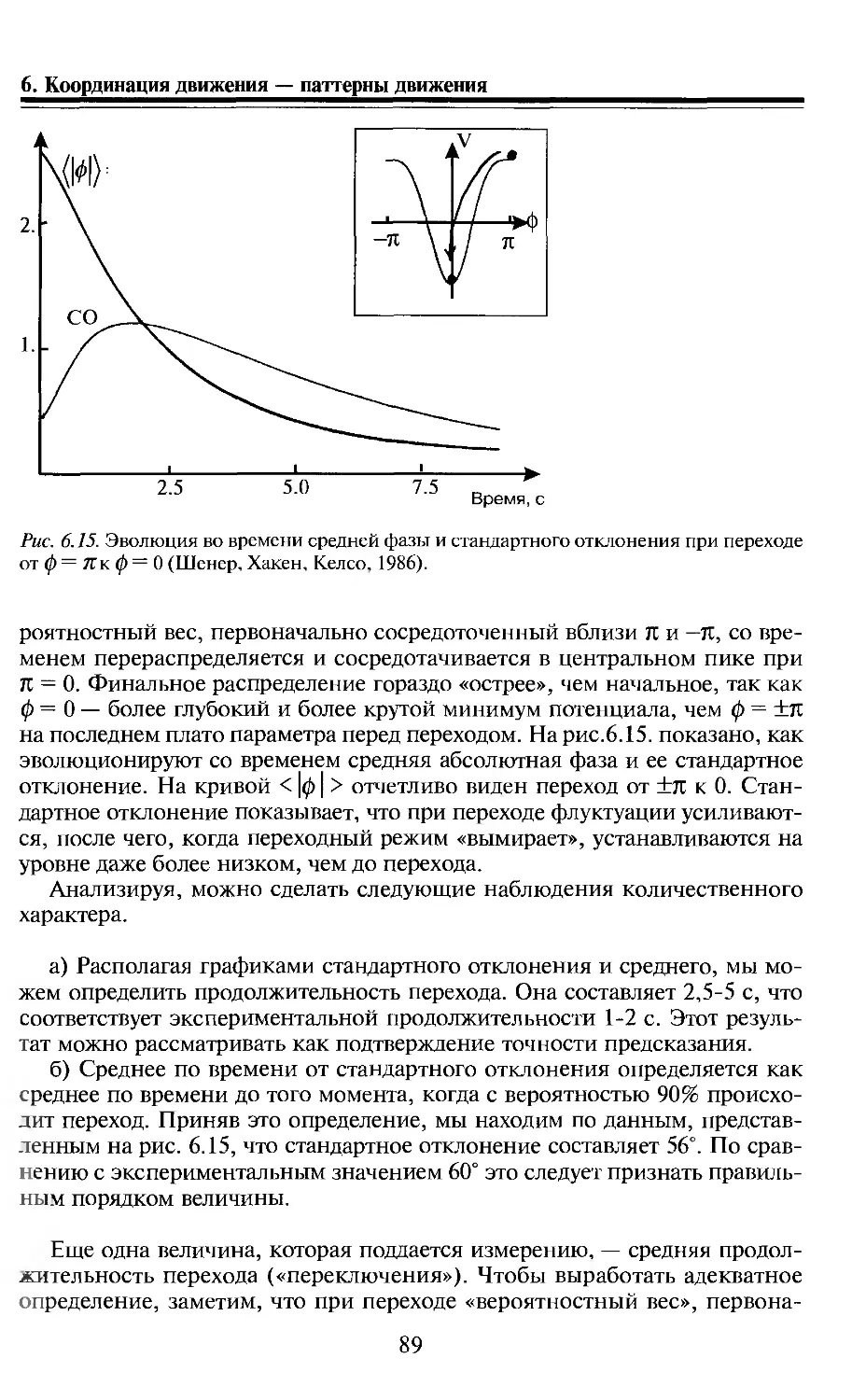
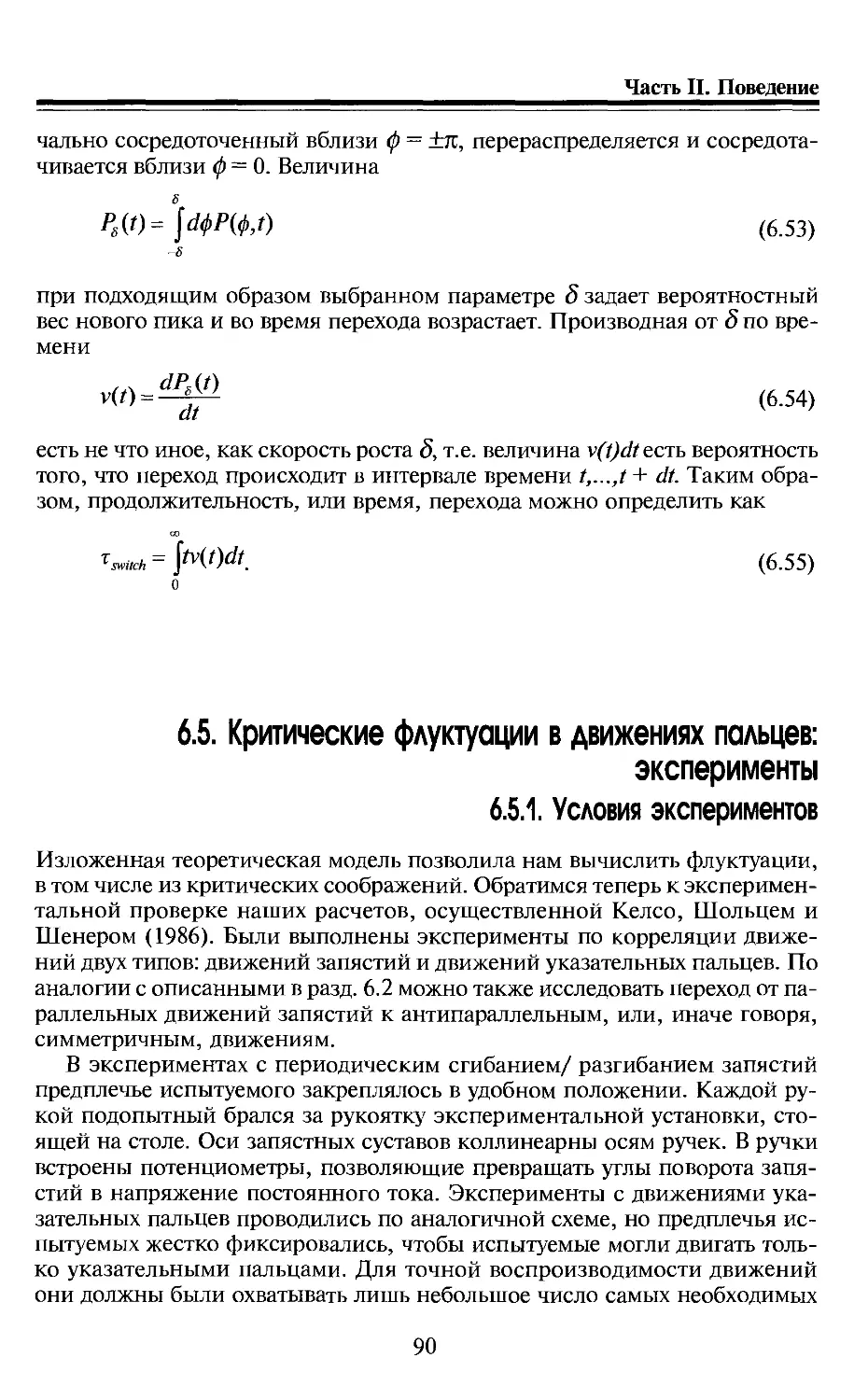
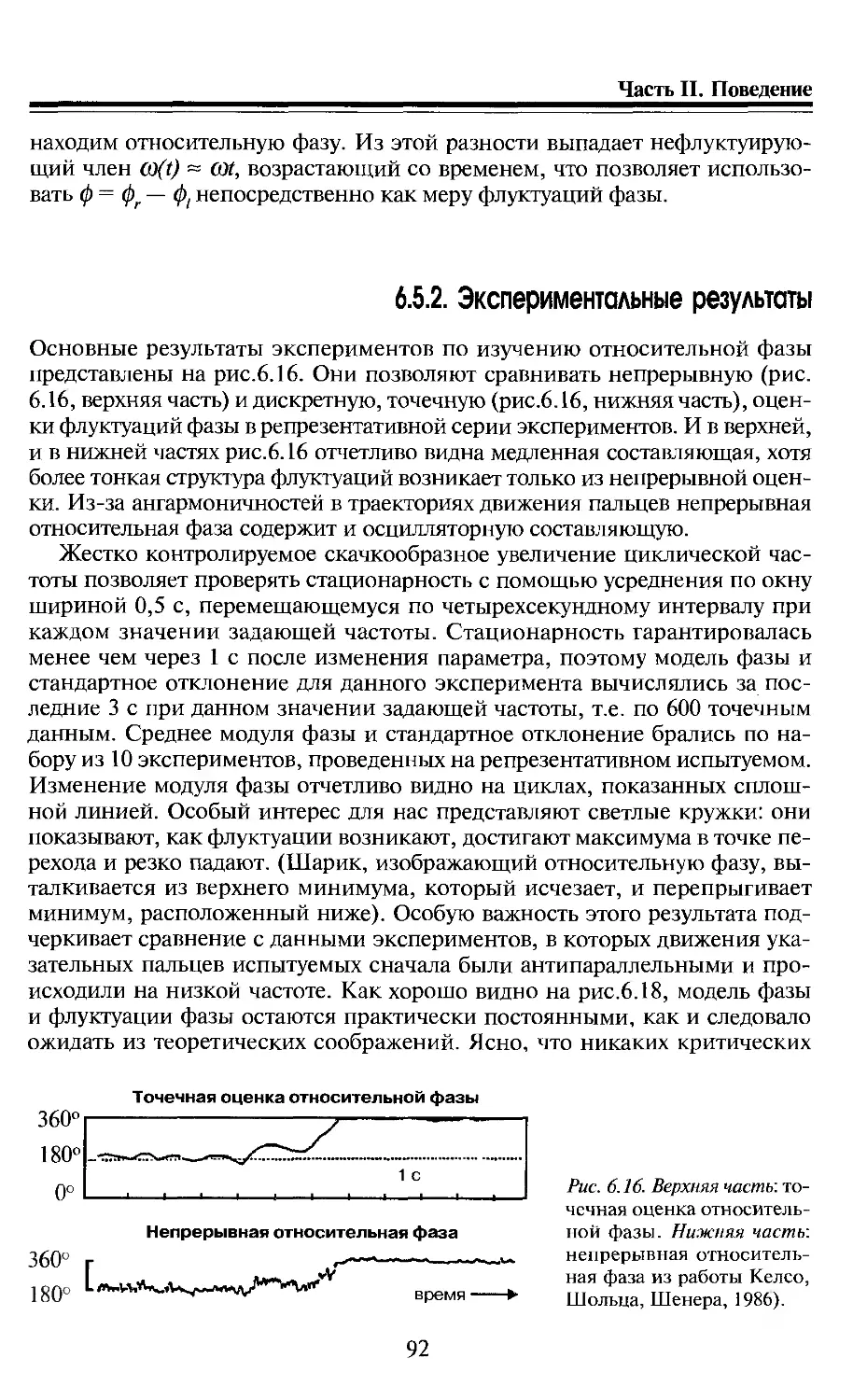
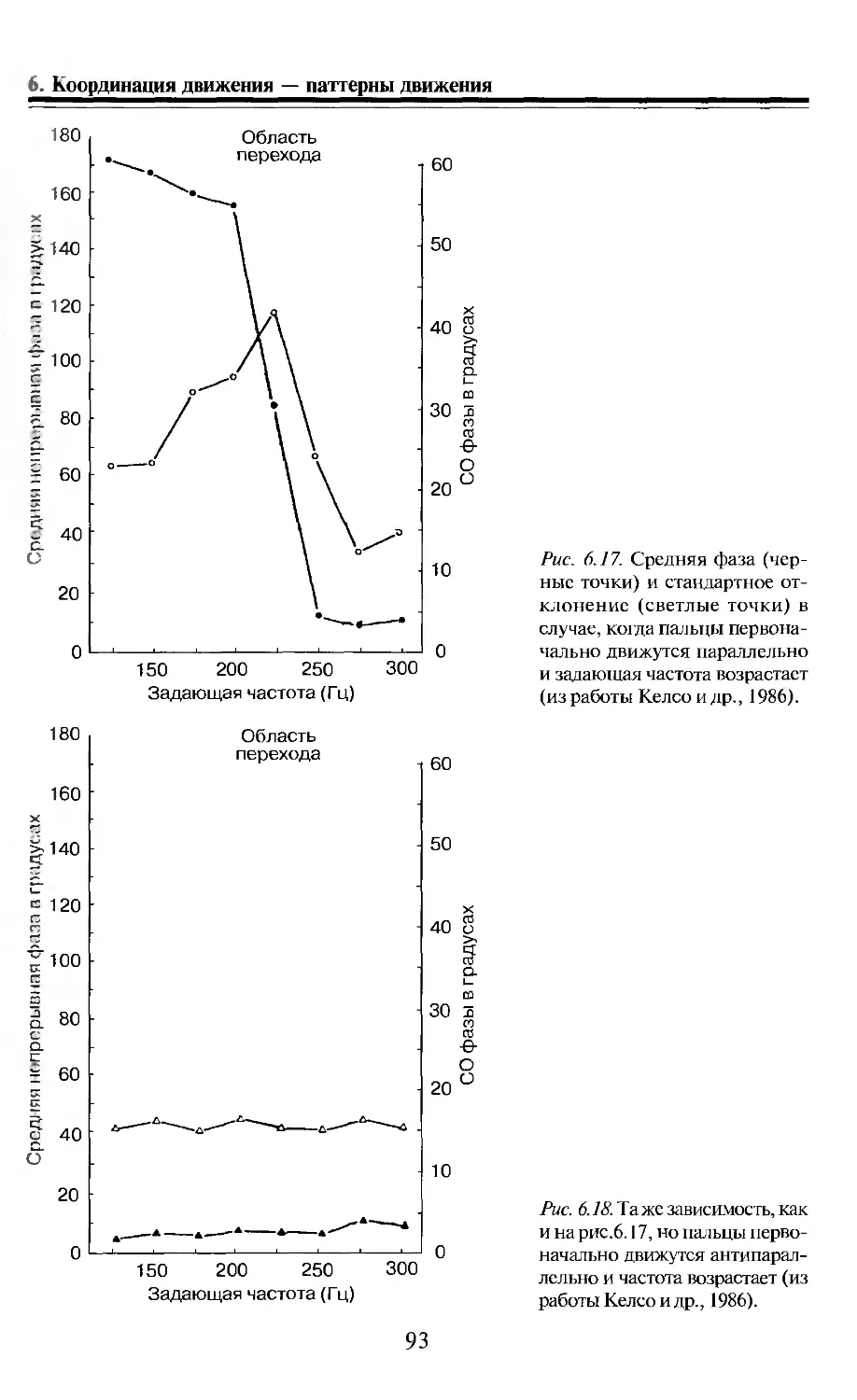
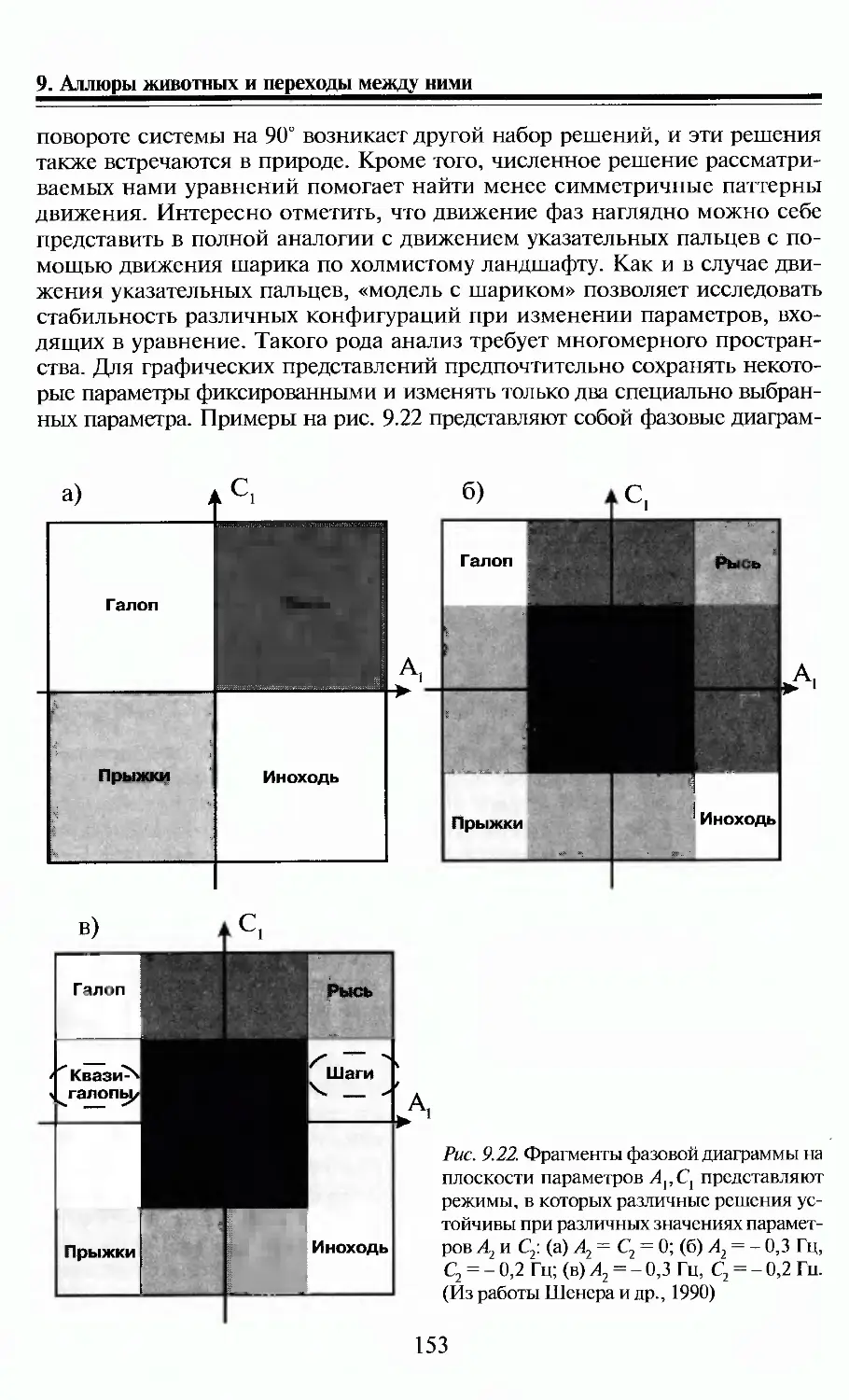
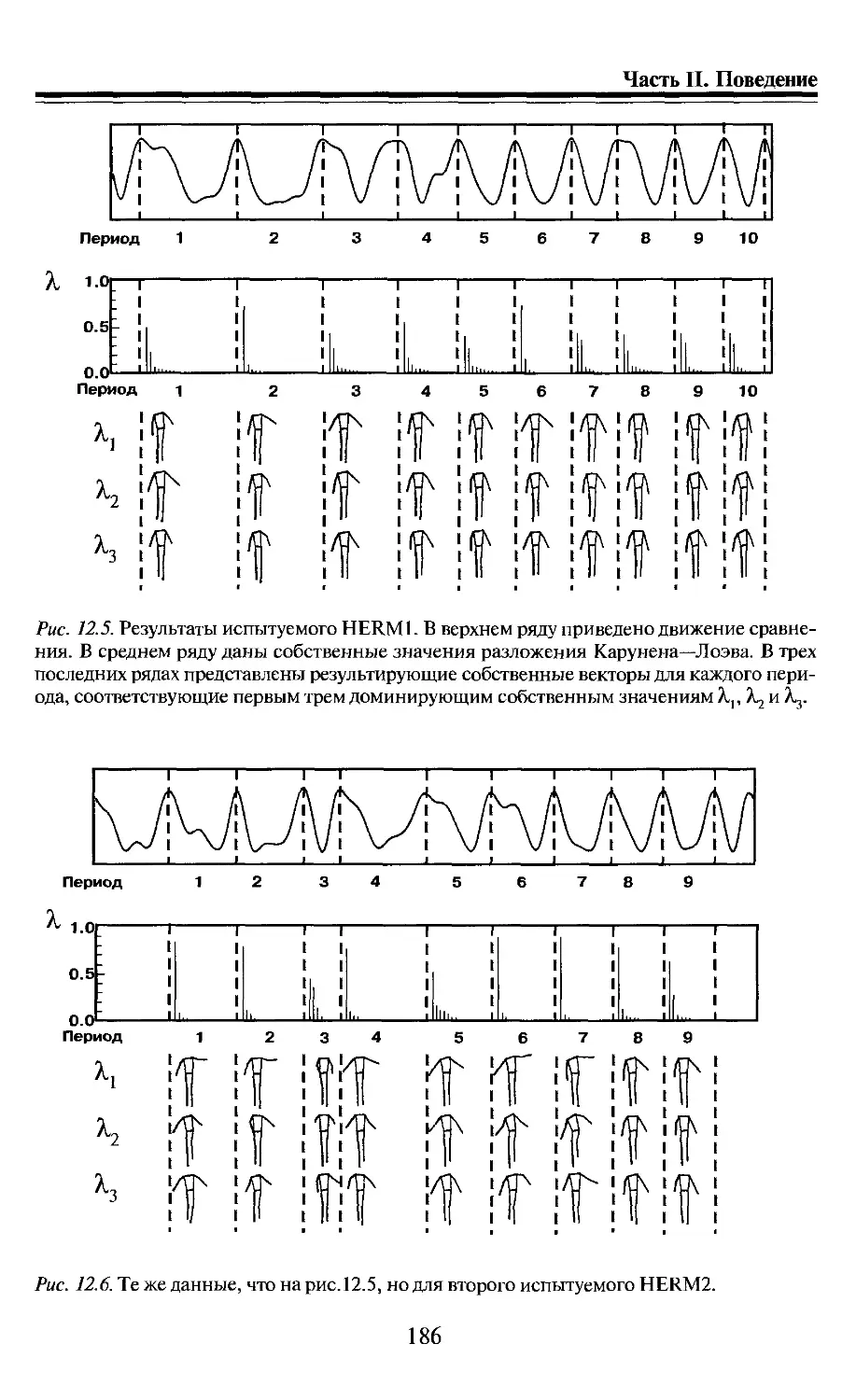
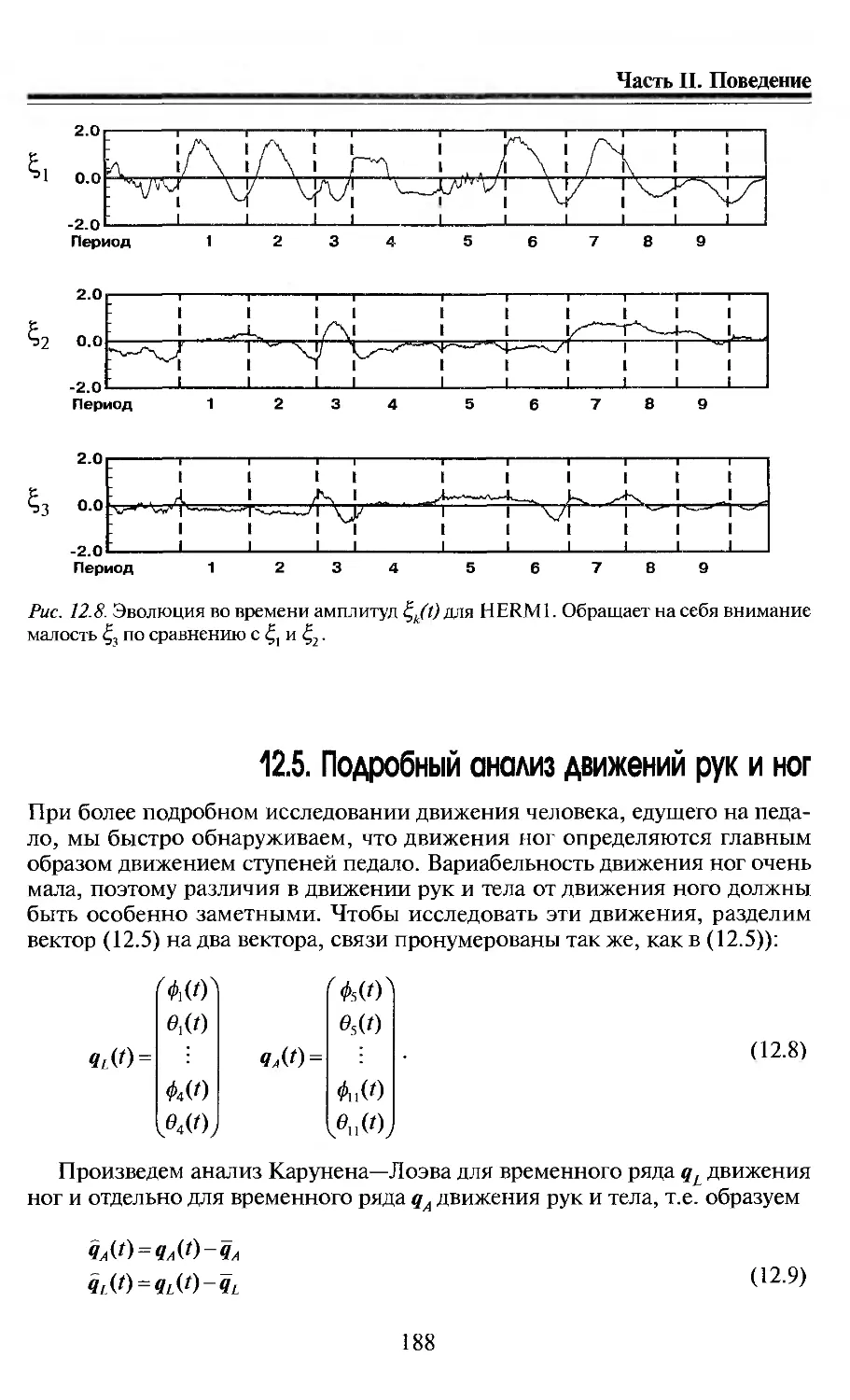
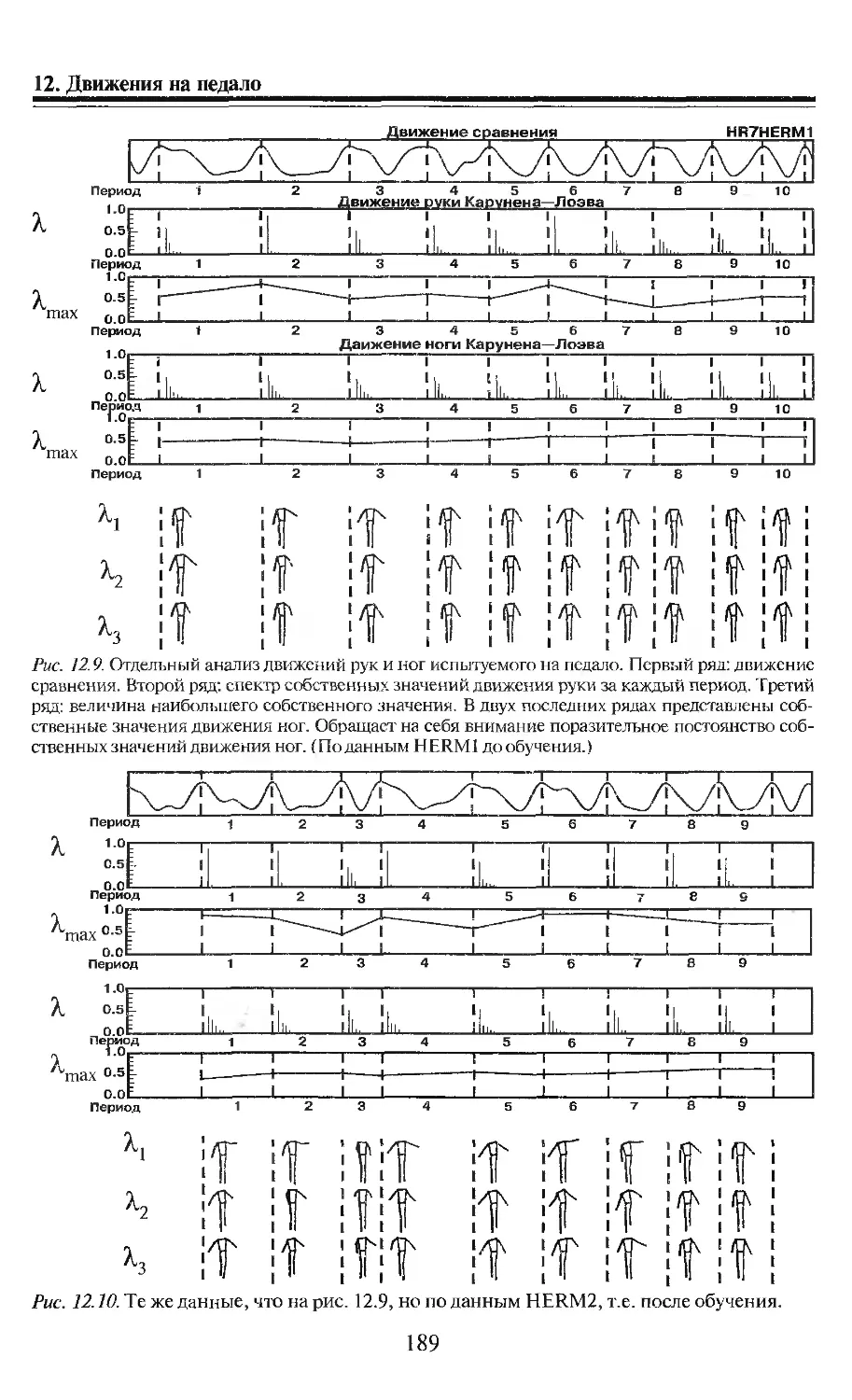
/























































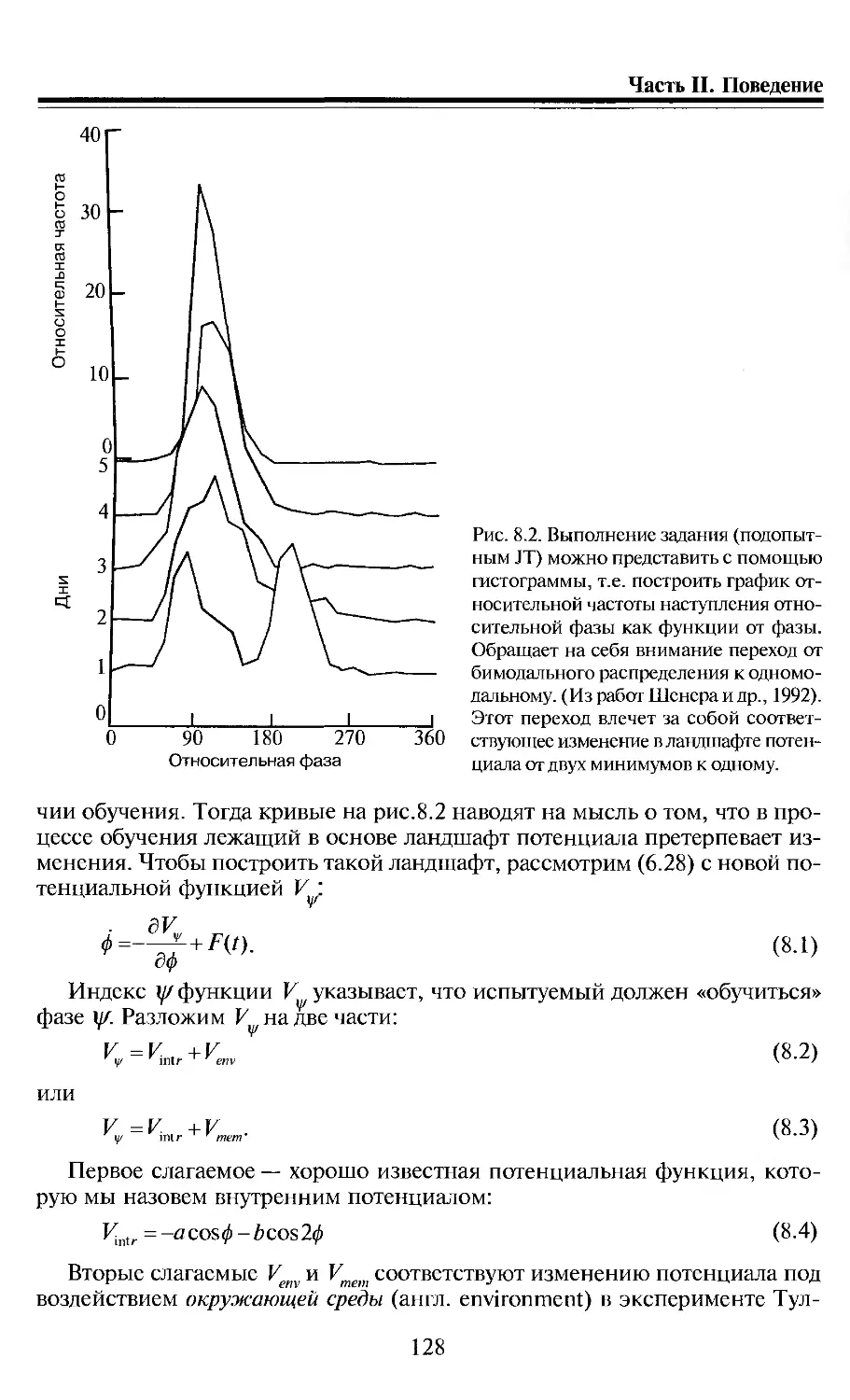















































































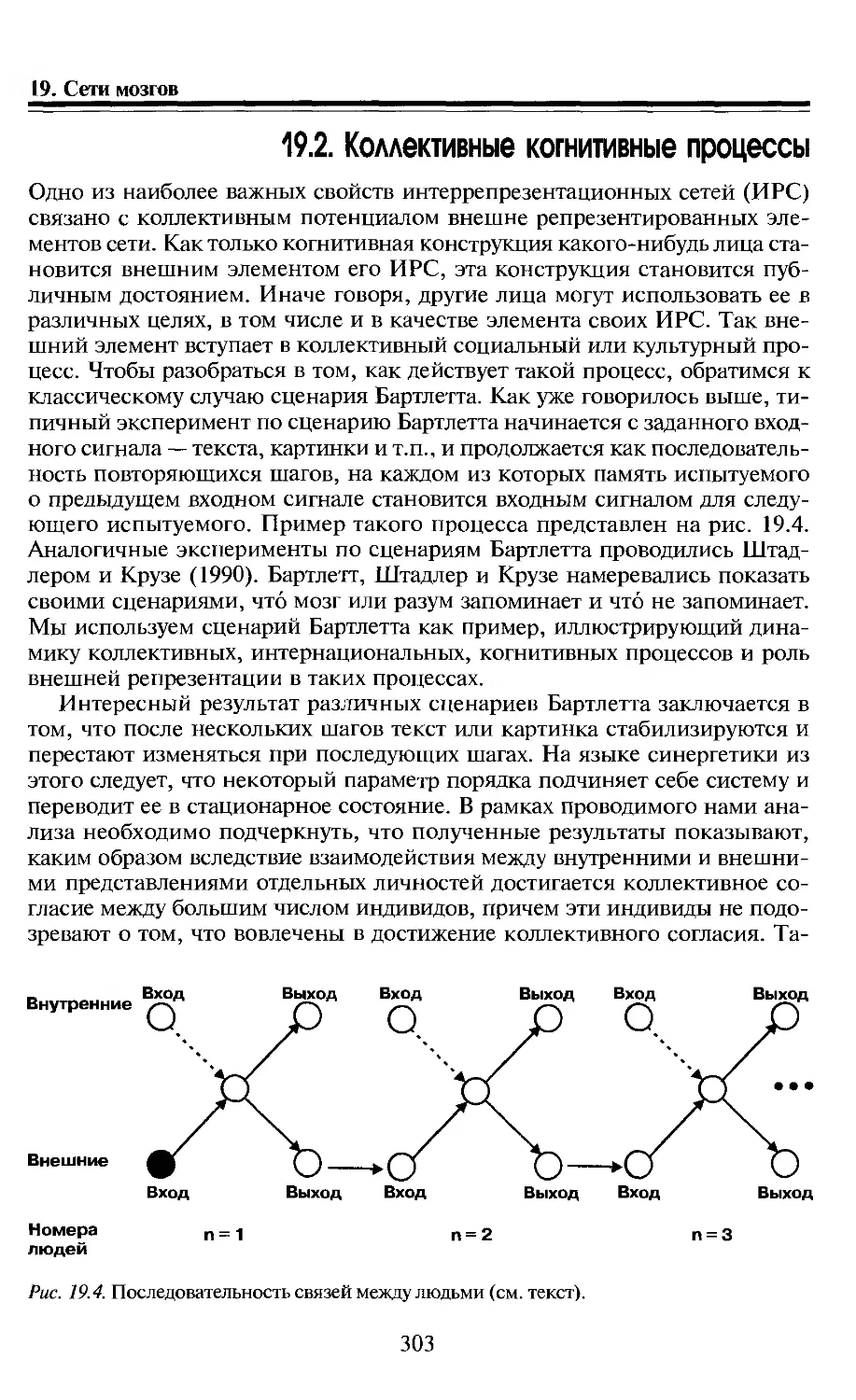
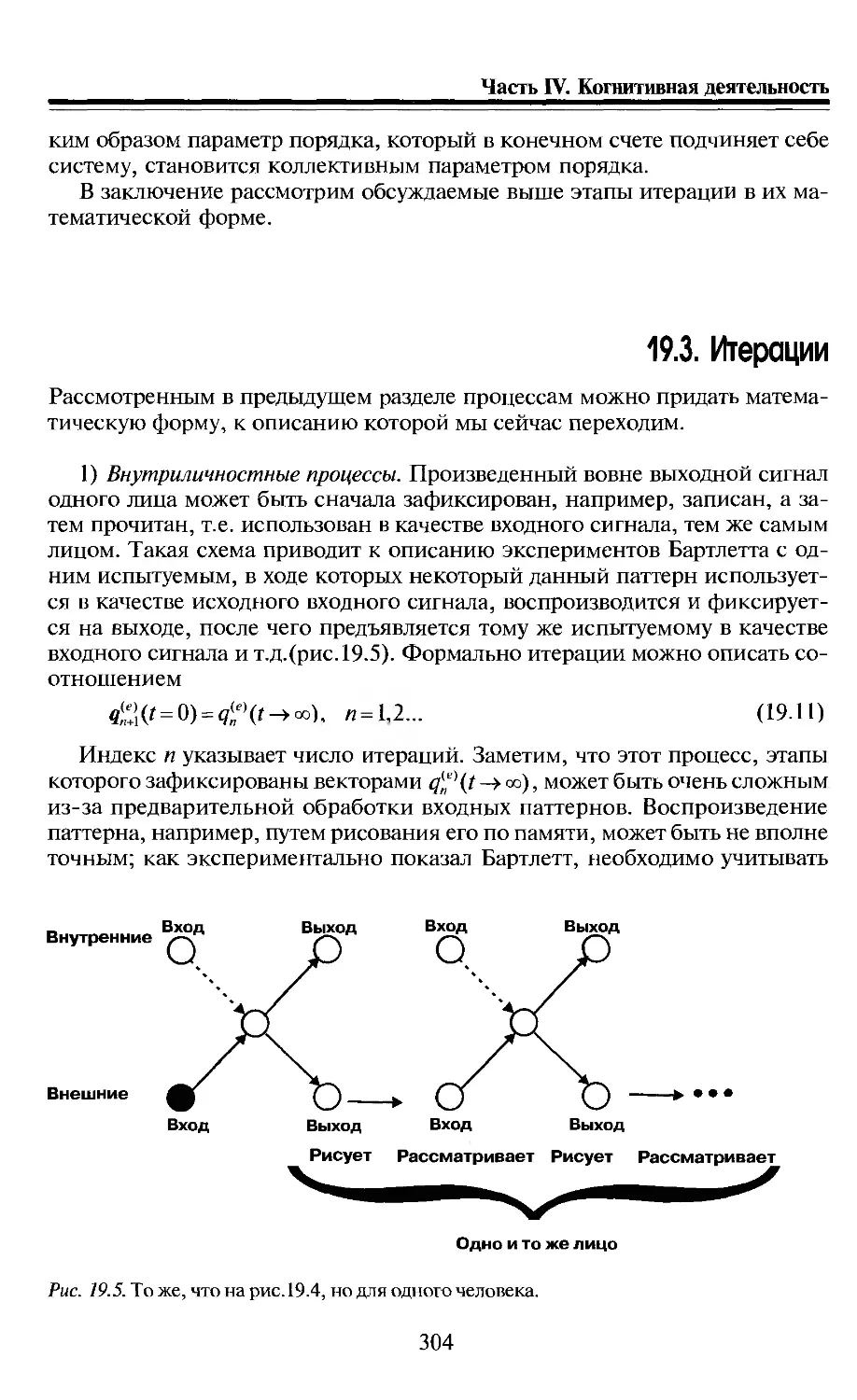
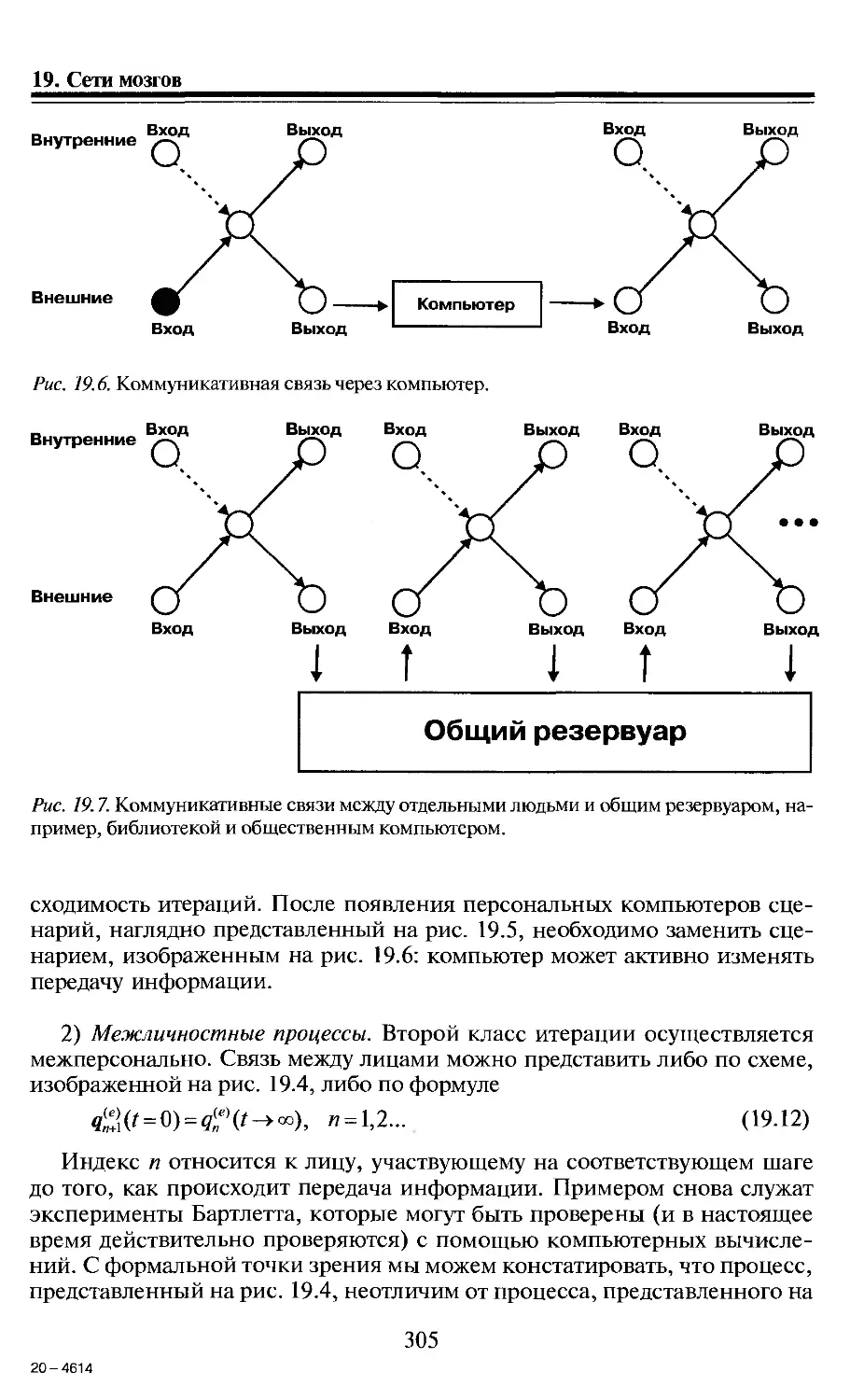




































Текст
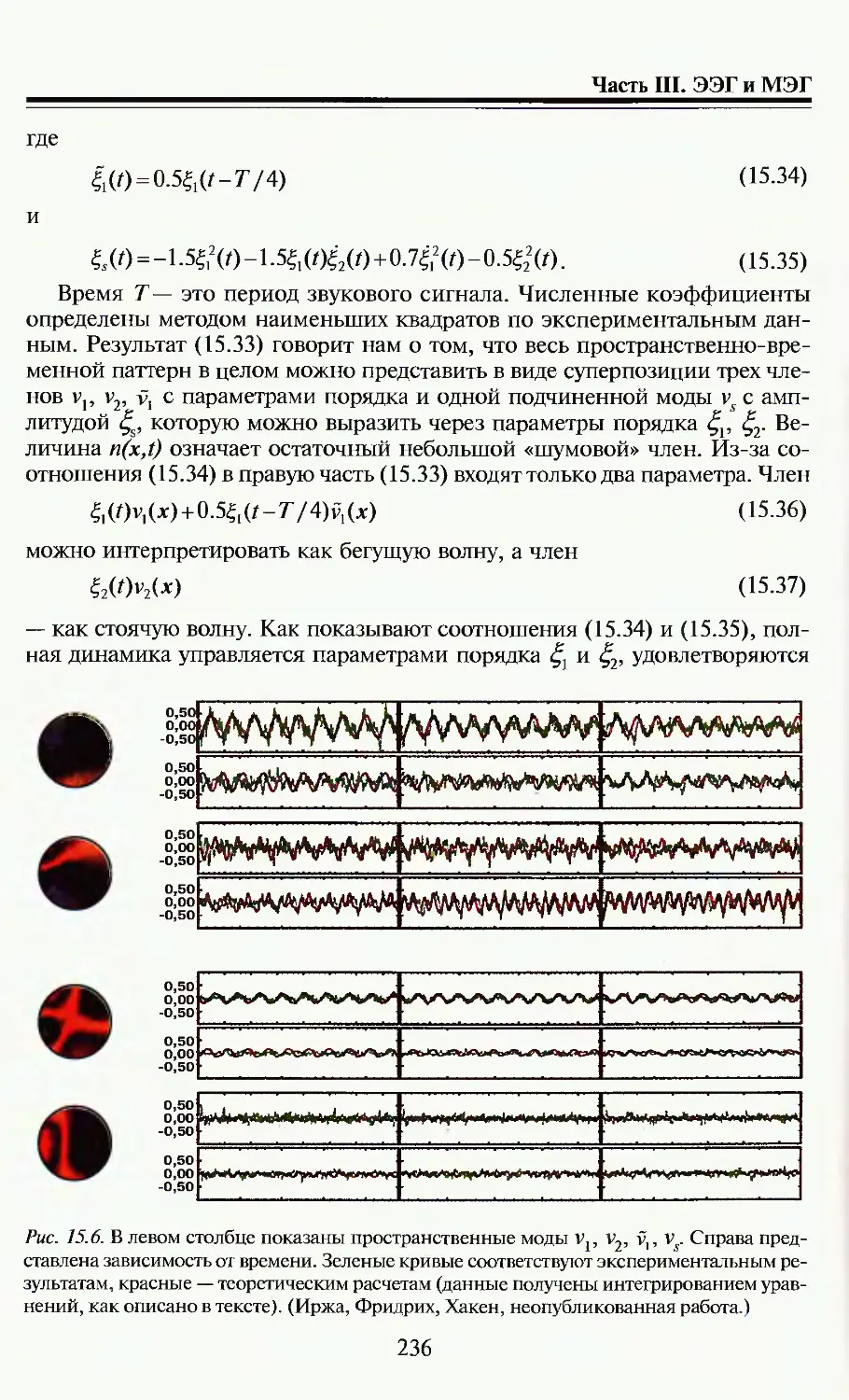
Герман
Хакен
иьципы работы
ГОЛОВНОГО
мозга
Hermann
Haken
Principles
of Brain
Functioning
A Synergetic Approach
to Brain Activity,
Behavior and Cognition
Springer
Герман
Хакен
Принципы работы
ГОЛОВНОГО
мозга
Синергетический подход
к активности мозга, поведению
и когнитивной деятельности
Москва
2001
УДК 159.9
ББК 88
X 16
л ЦЕЛЬНЫЙ
| ЭКЗЕМПЛЯР
Издание осуществлено при финансовой поддержке
Российского гуманитарного научного фонда (РГНФ)
Проект № 01-03-16121
Перевод: Ю.А. Данилов
Научное редактирование: В.И. Аршинов
Герман Хакен
X 16 Принципы работы головного мозга: Синергетический подход к
активности мозга, поведению и когнитивной деятельности. — М.:
ПЕР СЭ, 2001.-351 с.
ISBN 5-9292-0047-5
Герман Хакен — выдающийся немецкий ученый, хорошо известный в России как
один из родоначальников термина «синергетика» и синергетического подхода к науке
и междисциплинарным исследованиям. Его книги «Синергетика», «Иерархия форм
неустойчивости в неравновесных структурах», «Самоорганизация и информация» были
переведены на русский язык и были самым благожелательным образом встречены рос-
сийской научной общественностью.
Предлагаемая книга, изданная в Германии в 1996 г. и впервые переведенная на рус-
ский язык, представляет собой прекрасный пример реализации синергетического под-
хода в изучении естественнонаучных и философских проблем общества и человека на
примере такого сложного процесса, как функционирование головного мозга, поведе-
ния и познавательного процесса человека.
Книга снабжена обширным научным аппаратом, большим количеством цветных и
черно-белых иллюстраций и адресована в первую очередь специалистам, занимающим-
ся данной тематикой, но также может быть использована для обучения студентов со-
'давсч •»»•>< ,/еждеиае
Е С П У Б Л • •» л й С КАЯ
НАУЧНАЯ
МЕДИЦИНСКАЯ
БИБЛИО ГЕКА"
ответствующих специальностей в вузах
Translation from the English language edition:
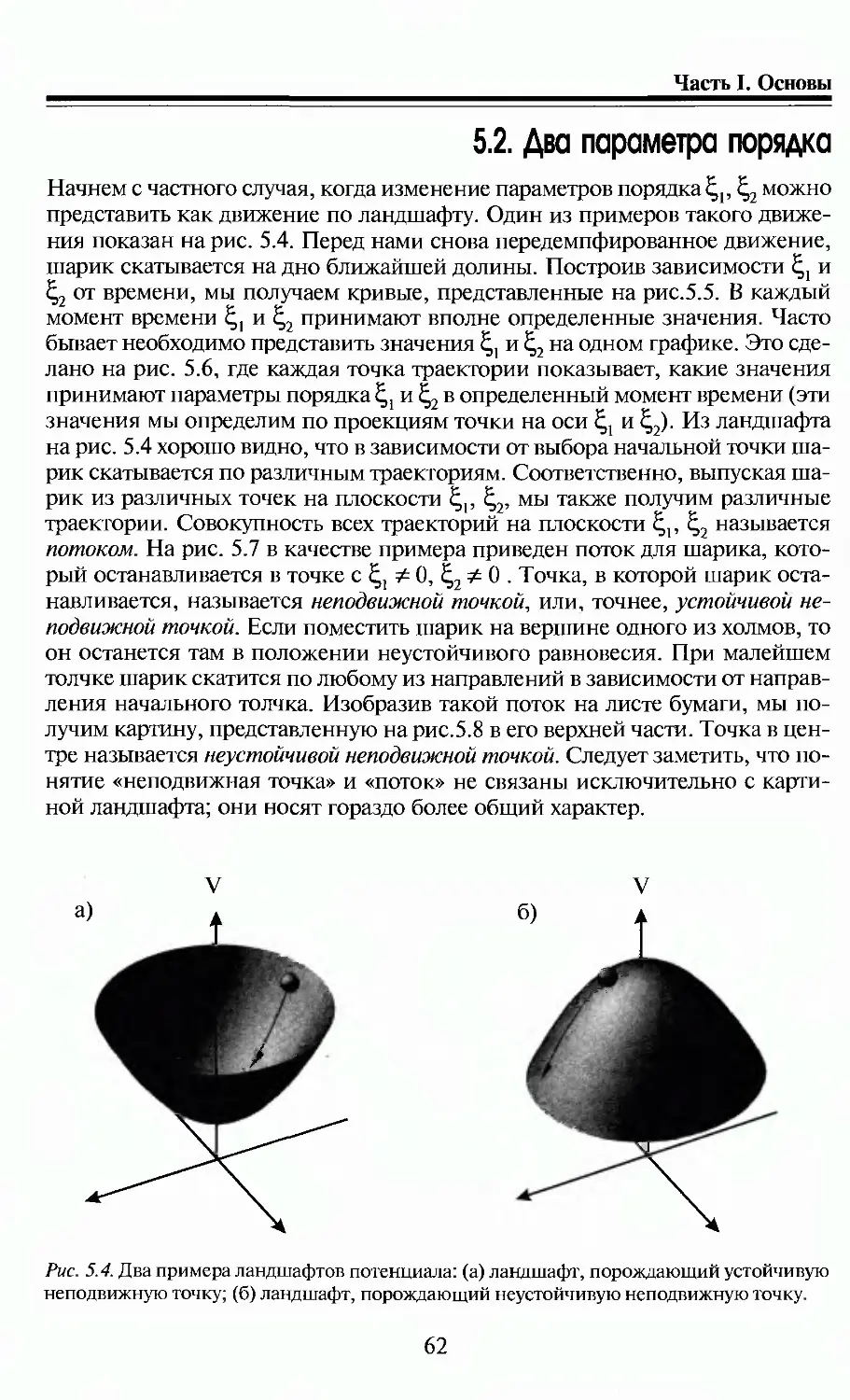
Principles of Brain Functioning^}/ Hermann Haken
Copyright © Springer-Verlag Berlin Heidelberg 1996
Springer-Verlag is a company in the BertelsmannSpringer publishing group
All Rights Reserved
ISBN 5-9292-0047-5
© Ю.А. Данилов, перевод, 2001
© ООО «ПЕР СЭ», оргинал-макет, оформление, 2001
Предисловие к русскому изданию
Головной мозг человека — орган в высшей степени загадочный и самая
сложная из известных нам систем в природе. Чтобы расшифровать, как он
«функционирует», ученые часто исследуют его элементы во все более мел-
ких масштабах, вплоть до отдельных элементов. Хотя изучение функциони-
рования элементов мозга, несомненно, является важной областью исследо-
вания, столь же очевидно, что для контроля за движением, для зрения, слу-
ха и т.д. решающее значение имеет согласованное взаимодействие «блоков»,
образующих мозг. Адекватный анализ этих кооперативных эффектов требует
холистических и динамических подходов, имеющих давнюю традицию, в
частности, в физике. В этой области исследований мы узнали, как важно
анализировать эмержентные микроскопические свойства, например, сверх-
проводимость, в терминах новых понятий, а также навести мост через про-
пасть между микроскопическими и макроскопическими явлениями.
В прошлом веке фундаментальный вклад в развитие таких подходов был сде-
лан в России. Из многих великих русских ученых упомянем лишь А.М. Ляпу-
нова и Л.Д. Ландау. Столь же богатую историю имеют бихевиористские и
нейрофизиологические исследования в России. Эти тесные взаимосвязи
позволяют понять, почему мне особенно приятно, что моя книга «Прин-
ципы функционирования головного мозга», основанная на идеях синер-
гетики, ныне переведена на русский язык.
Я глубоко признателен проф. Данилову, который перевел на русский
язык несколько моих предыдущих книг, за великолепный перевод этой
книги. Я надеюсь, что она окажется полезной читателям и стимулирует их
собственные исследования того все еще загадочного органа, который на-
зывается головным мозгом человека.
Герман Хакен
Предисловие
В последние годы все больше растет осознание того, что эксперименталь-
ное и теоретическое исследование сложной системы, которая именуется
мозгом, требует сотрудничества многих дисциплин, включая биологию, ме-
дицину, физику, химию, математику, компьютерные науки, лингвистику
и ряд других. Тем самым исследование мозга становится подлинным меж-
дисциплинарным мероприятием. Действительно, наиболее значительный
прогресс чаще всего имеет место, когда разные дисциплины коопериру-
ются друг с другом. Из этого следует, что ученым чаще необходимо смот-
реть за изгородь, окружающую их дисциплину. Именно в этом духе и на-
писана настоящая книга. Она адресована аспирантам, профессорам и уче-
ным, работающим в разных областях исследований, таких, как биология,
медицина и физика. Помимо математического представления в книге зна-
чительное место отводится вербальному и наглядному описанию основных
и, как я полагаю, фундаментально новых взглядов, так что она может быть
интересной также и для широкого круга читателей не-специалистов.
Пользуясь возможностью, хотел бы поблагодарить за многолетнее со-
трудничество моих бывших студентов, с некоторыми из которых я рабо-
таю и по сей день. Среди них я хотел бы в частности отметить М. Бесте-
хорна, Л. Борланда, Г. Банца, А. Дафертшофера, Т. Дитцингера, Е. Фище-
ра, А. Фуша, Р. Хааса, Р. Хенлигера, В. Джирса, М. Нейфельда, М. Осси-
га, Д. Риманна, М. Шанца, Ж. Шенера, П. Тасса, С. Уля. Особую благо-
дарность я хотел бы выразить Р. Фридриху и А. Вандерлин за их постоян-
ную и многостороннюю помощь. Хочу также отметить стимулирующие
дискуссии с рядом коллег из разных областей. Рискуя пропустить некото-
рые важные имена, я хочу упомянуть П. Крузе и М. Стадлера, указавших
на связь гештальт-теории и синергетики, Е. Базара, Т. Баллока, В. Фри-
мэна, Д. Лемана, Г. Петше и Ж. Фуртшеллера, обративших внимание на
различные аспекты EEG измерений и их интерпретацию, X. Керндтля и
К.Х. Лейста за их анализ движений, особенно движений на педало. Я так-
же благодарен П. Бек и В. Бек, О. Меджер и Л. Пепер за возможность об-
суждения с ними вопросов координации движений и роли параметров по-
рядка, П. Вангер за сотрудничество в исследовании вопросов распознава-
ния человеческой мимики, а также Дж. Португали за его концепцию ин-
6
терреляционных сетей. Я хотел бы специально поблагодарить моего друга
и коллегу Скотта Келсо, который внес решающий вклад в доказательство
того, что концепции синергетики играют фундаментальную роль в коор-
динации движений и смежных областях. Это было сделано им, в частно-
сти, благодаря искусно придуманным и точно выполненным эксперимен-
там. Я думаю, что будет правильно сказать, что как раз здесь и произошел
сдвиг парадигмы: именно, вместо изучения стабильных состояний мы те-
перь изучаем переходы вблизи точек нестабильности, переходы, которые
имеют место в нашем мозгу.
Эта книга никогда бы не была закончена без неутомимой помоши мо-
его секретаря госпожи И. Меллер, которая напечатала несколько версий
рукописи этой книги, включая все ее формулы. Причем, она сделала всю
эту работу, удивительным образом сочетая быстроту и высокую точность ис-
полнения. Кроме того, миссис Меллер вместе с моим сотрудником Р. Хаа-
сом подготовила окончательный вариант рукописи книги для печати. А.
Даффертшофер и другие сотрудники моего института внимательно про-
чли всю рукопись моей книги. Ими, а также Р. Хаасом, В. Бирса, Д. Рей-
маном и С. Улем были сделаны ценные замечания. Рисунки были подго-
товлены А. Даффертшофером и М. Нейфельдом. Я благодарен всем им
за оказанную мне большую помощь.
И, наконец, я хотел бы поблагодарить руководство издательства
Springer-Verlag за традиционно прекрасное сотрудничество и особенно
проф. В. Бейглбека, д-ра Лахи, а также мисс Петру Трайбер.
Герман Хакен
Штуттгарт, октябрь, 1995
Пролог
Головной мозг человека — самая сложная система и наиболее сложный из из-
вестных нам органов. Ввиду его чудовищной сложности фундаментальная
проблема заключается в следующем: какие важные вопросы мы можем задать
об активности мозга? Эти вопросы тесно связаны с имеющимися в нашем рас-
поряжении методами анализа. Наиболее известен метод разложения сложной
системы на более простые части. В случае головного мозга мы, пользуясь этим
методом, находим отдельные части мозга, такие, как нейроны и глиальные
клетки. Редуцируя эти клетки дальше, мы находим, например, мембраны, ре-
цепторы, органеллы, а на еще более фундаментальном уровне — биомолеку-
лы. Внутри клеток и между ними происходят многочисленные химические,
электрические и электрохимические процессы. Но здесь и начинается загад-
ка: чтобы управлять движениями, распознавать образы или принимать реше-
ния (мы ограничиваемся лишь несколькими примерами) мириады нейронов
должны действовать согласованно — в высшей степени регулируемым, упо-
рядоченным образом. Тот же вопрос можно сформулировать и в антропомор-
фных терминах: кто или что управляет поведением нейронов? Всякий, кто
размышлял над этой проблемой, признает, что здесь мы соприкасаемся с тай-
ной проблемы разум—тело (mind-body problem). Ответ, который я даю на этот
вопрос в предлагаемой вниманию читателя книге, основан на синергетике —
междисциплинарной области исследований, начало которой было положено
мной в 1969 г. Синергетика нашла применение в физике, химии, биологии,
компьютерных науках и в других областях. Чтобы подкрепить мой ответ фак-
тами, я придерживаюсь двух линий: с одной стороны, я излагаю общие прин-
ципы и концепции синергетики, а с другой (и это, возможно, еще более важ-
но), я привожу конкретные модели, позволяющие весьма подробно предста-
вить экспериментальные результаты. Но и эти модели сформулированы мной
с единой — синергетической — точки зрения.
Соответственно, основными результатами в этой книге следует считать
ориентированные на приложения подробные синергетические модели. Я
надеюсь, что эта книга поможет проложить путь к более глубокому пони-
манию механизмов активности головного мозга и тем самым будет иметь
практическое значение (как некоторые из изложенных в ней результатов —
в прошлом).
8
Еще на раннем этапе синергетики мне удалось «нащупать» возможные
связи между концепциями синергетики и человеческим восприятием. В
моей книге по синергетике (1974) я интерпретировал восприятие неодноз-
начных фигур как результат бистабильных состояний параметров порядка
в синергетических, т.е. самоорганизующихся, системах. Эта линия мыш-
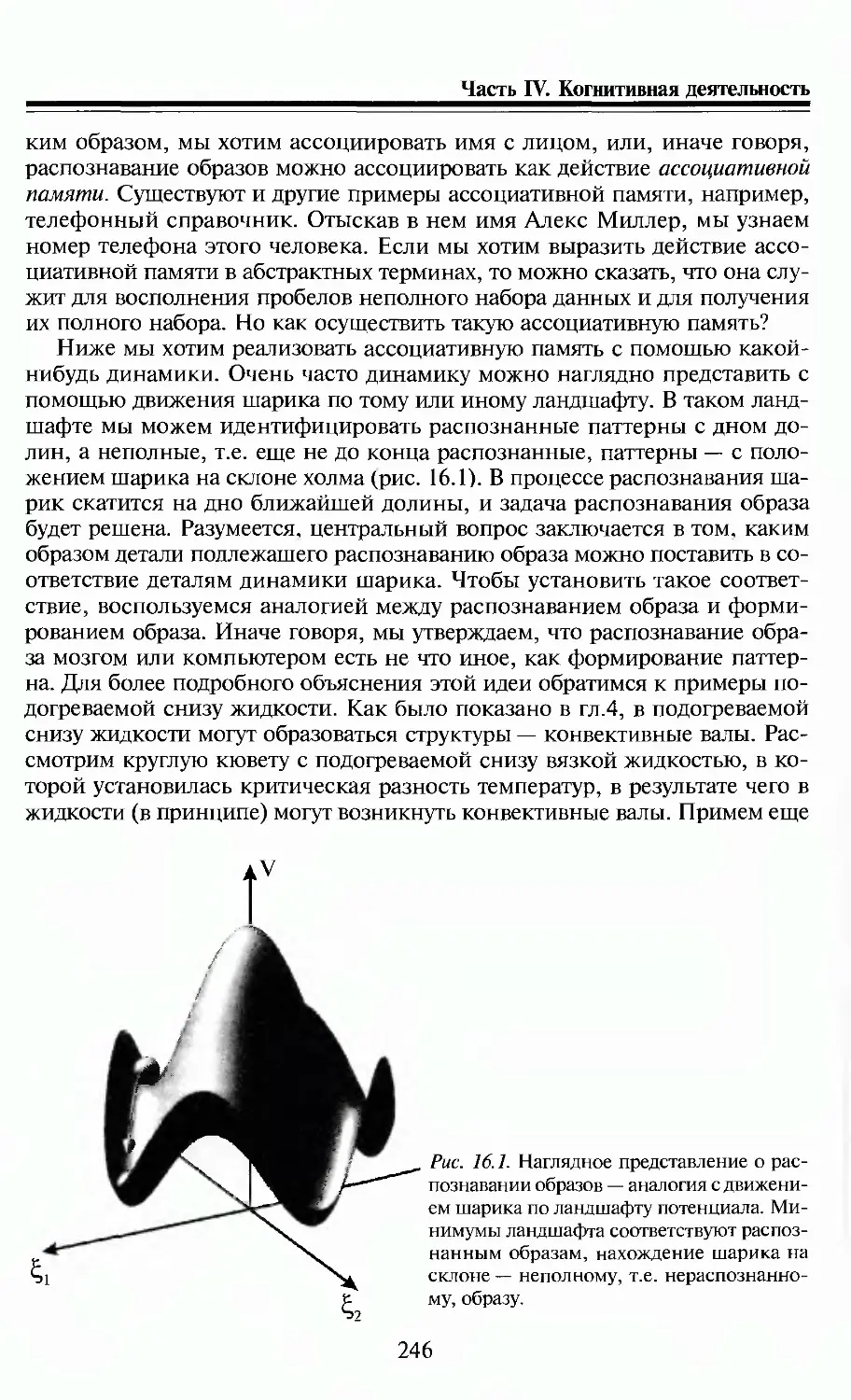
ления представлена в гл. 16 данной книги. Другая линия мышления (Ха-
кен, 1979), оказавшаяся весьма плодотворной, сводится к идее, что распоз-
навание образов человеком или машинами представляет собой специфи-
ческую разновидность формирования паттернов, так же, как и в самоор-
ганизующихся системах. Этой концепции я следую во все той же главе 16.
Такие и аналогичные идеи привели меня к мысли выступить с общим пред-
ложением рассматривать головной мозг человека как синергетическую си-
стему, производящую свои макроскопические характерные особенности с
помощью самоорганизации (Хакен, 1983). В качестве специфического
средства изучения самоорганизации я предложил рассматривать качествен-
ные изменения в макроскопических масштабах. В качестве явного приме-
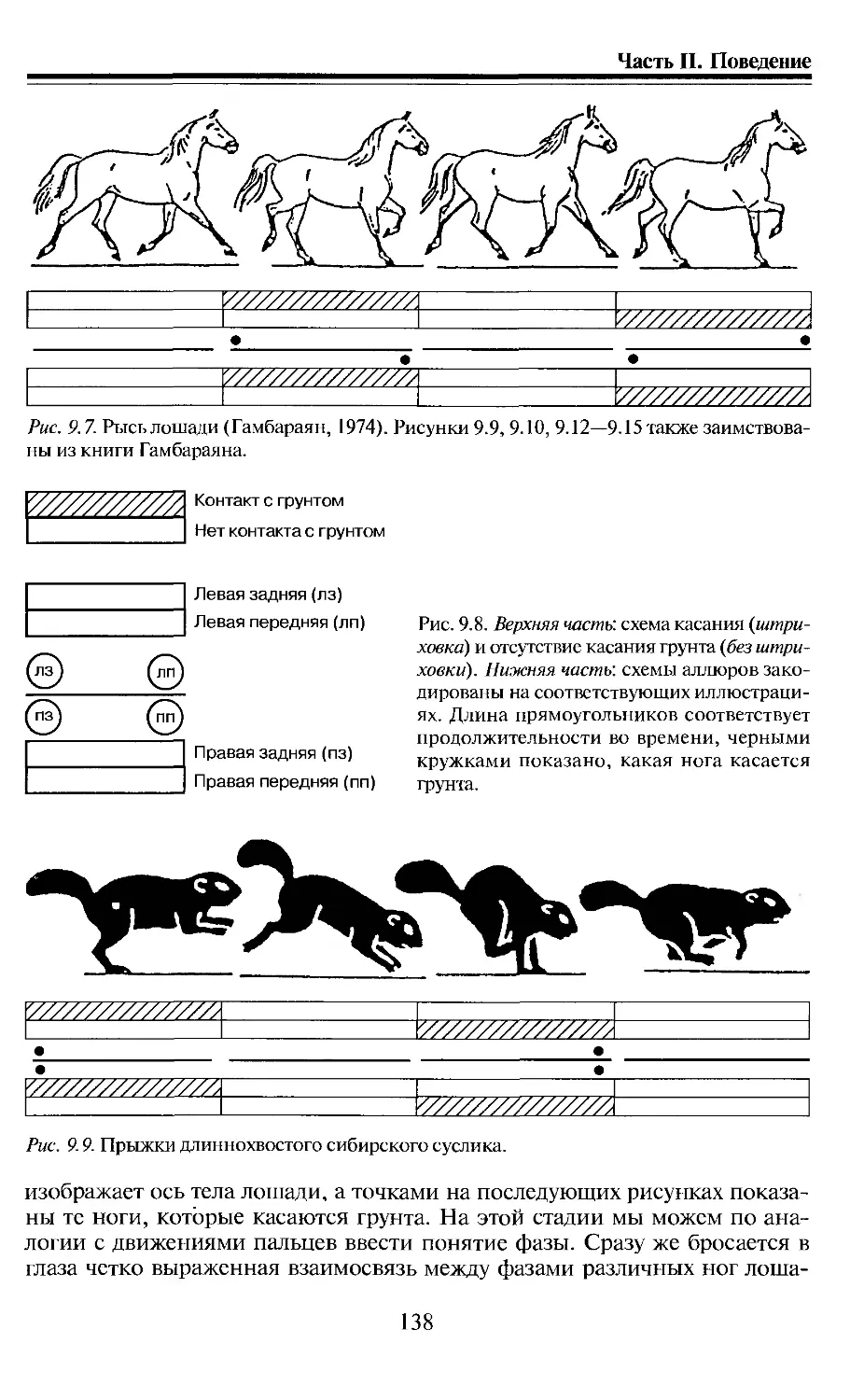
ра я привожу изменение аллюров у лошадей, на которых отчетливо вид-
ны, с одной стороны, четко выраженные поведенческие паттерны, а с дру-
гой стороны — не менее четкие переходы между этими паттернами.
Еще одна точка зрения, выдвинутая мной в упомянутой выше работе,
заключалась в том, что мозг действует вблизи неустойчивостей, где снова
и снова проявляются лишь немногие моды активности. Согласно концеп-
циям синергетики, эти моды управляются параметрами порядка, воздей-
ствующими на отдельные компоненты, например, на нейроны, в соответ-
ствии с принципом подчинения. (Все понятия синергетики будут подробно
объяснены в книге.) Я считаю своей большой удачей, что в конце 1983 г.
Скотт Келсо, нейрофизиолог, нанес мне визит и рассказал о своих экспе-
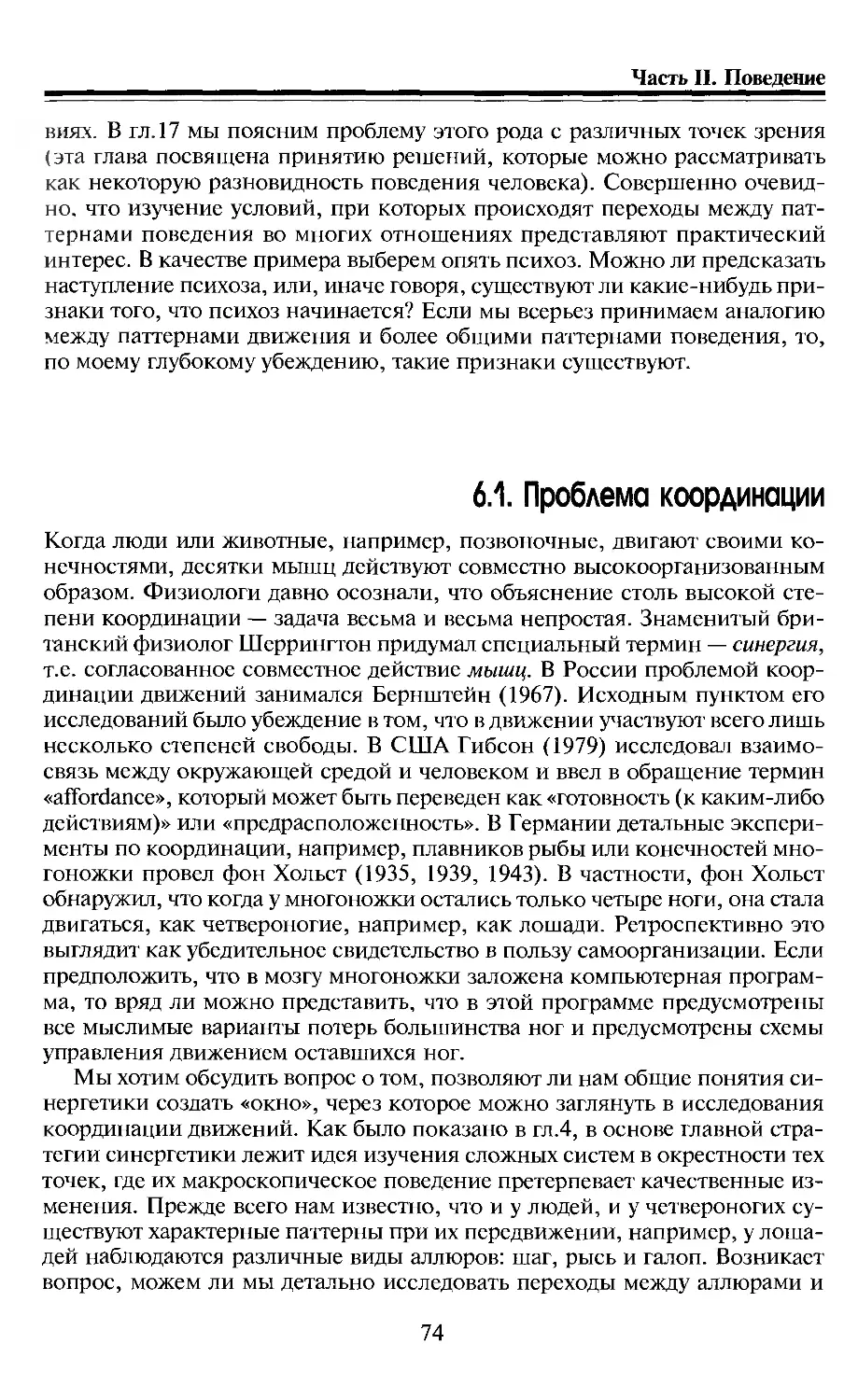
риментах с движениями пальцев (Келсо, 1983. 1984). Келсо показал, что
между двумя типами движений пальцев существуют специфические пере-
ходы, которые происходят вполне определенным, но совершенно непро-
извольным образом. Эксперимент Келсо стал для меня своего рода вызо-
вом: сумею ли я смоделировать его в синергетических терминах? Постро-
енная модель (Хакен, Келсо, Бунц, 1985) оказалась способной не только
успешно представить ряд экспериментально обнаруженных режимов, но
и совместно с общими результатами синергетики предсказывать некото-
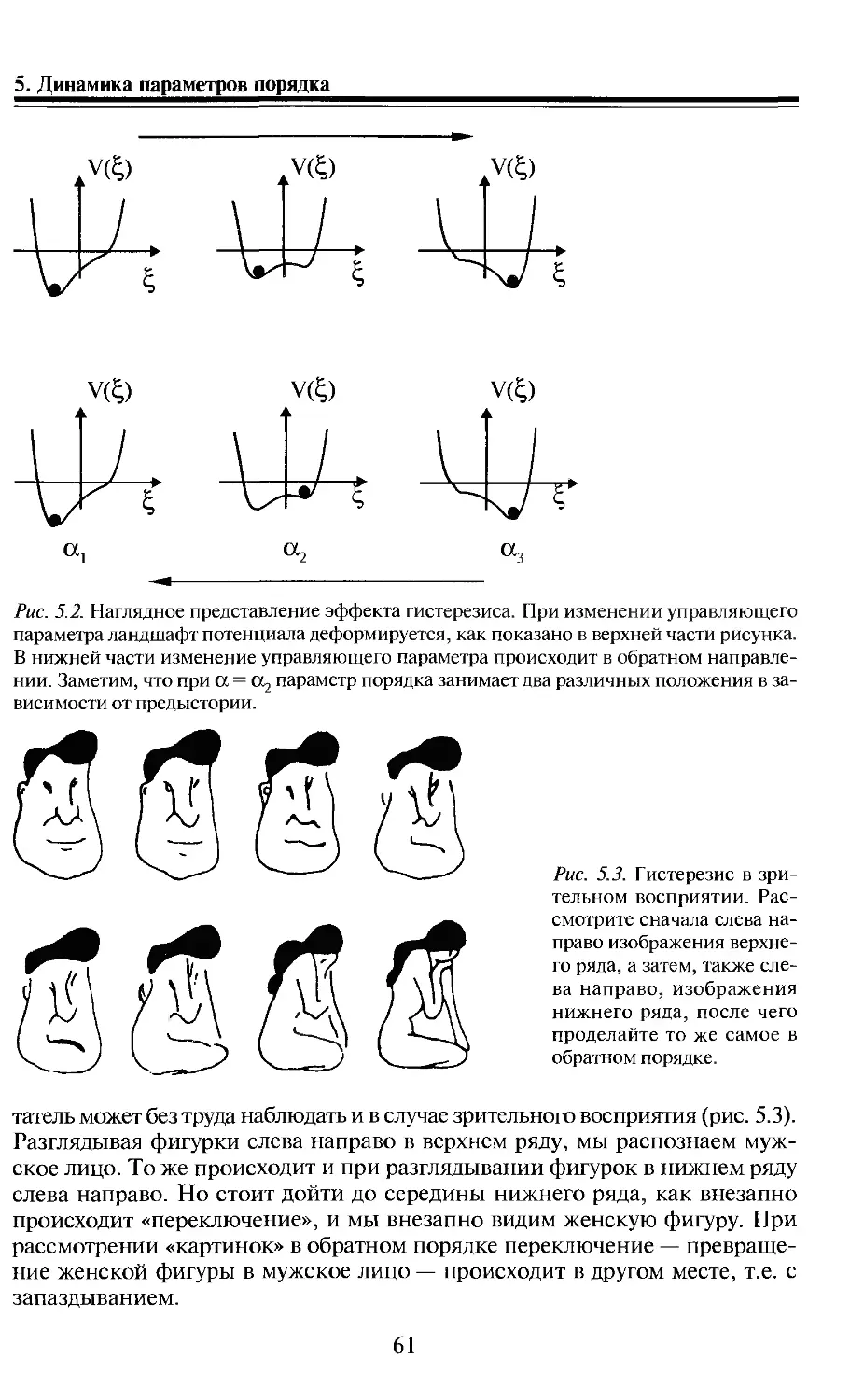
рые новые режимы, такие, как эффект гистерезиса, критические флукту-
ации и критическое замедление (Шёнер, Хакен, Келсо, 1986). Построен-
ная модель оказалась надежной основой для объяснения ряда дальнейших
экспериментов и послужила исходным пунктом для создания более слож-
ных моделей координации движений. В качестве важных примеров упо-
мяну эксперименты Шмидта, Карелло, Терви (1990) по координации дви-
жений различных людей, экперименты Келсо и сотрудников, а также экс-
перименты Бека, Пепера, ван Вирингена (1992) и других по отстукиванию
ритма пальцами. В тексте я еще вернусь к этим проблемам. Центральной
темой в синергетике следует считать координацию действий отдельных ча-
стей с помощью параметров порядка и принципа подчинения. Это приве-
9
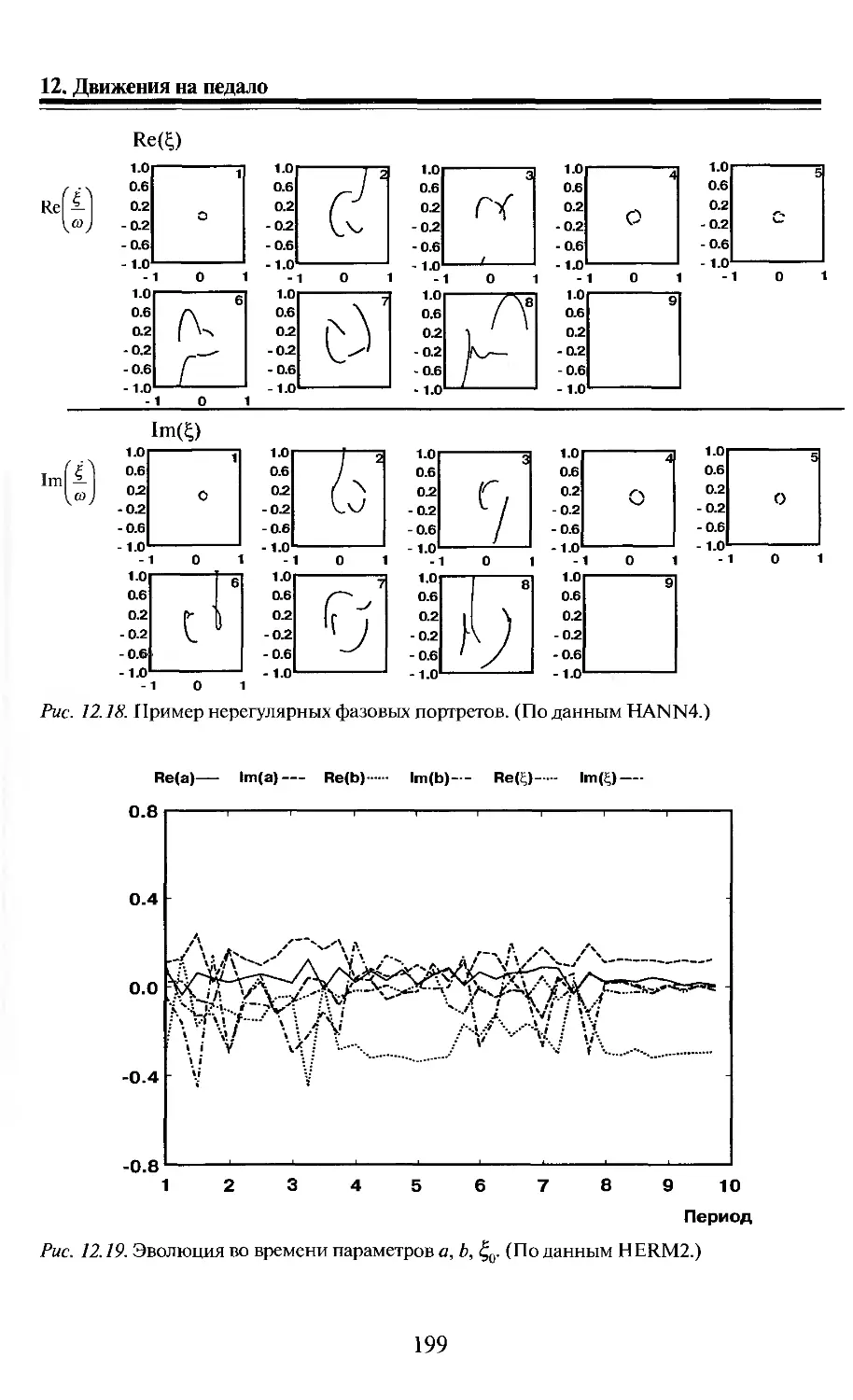
ло меня к анализу экспериментов, связанных с движением на педало, вы-
полненных Кёрндтлем (1992). Выяснилось, что в течение процесса обуче-
ния сложный паттерн движения на самом деле управляется единственным
параметром порядка, который подчиняется простому стандартному нели-
нейному уравнению.
Паттерны движения (или более общо паттерны поведения) — макроско-
пические косвенные проявления активности мозга. Более непосредствен-
ными также макроскопическими проявлениями следует считать создавае-
мые головным мозгом электрические и магнитные поля. В подтверждение
выдвинутого мной тезиса, что мозг функционирует вблизи точек потери
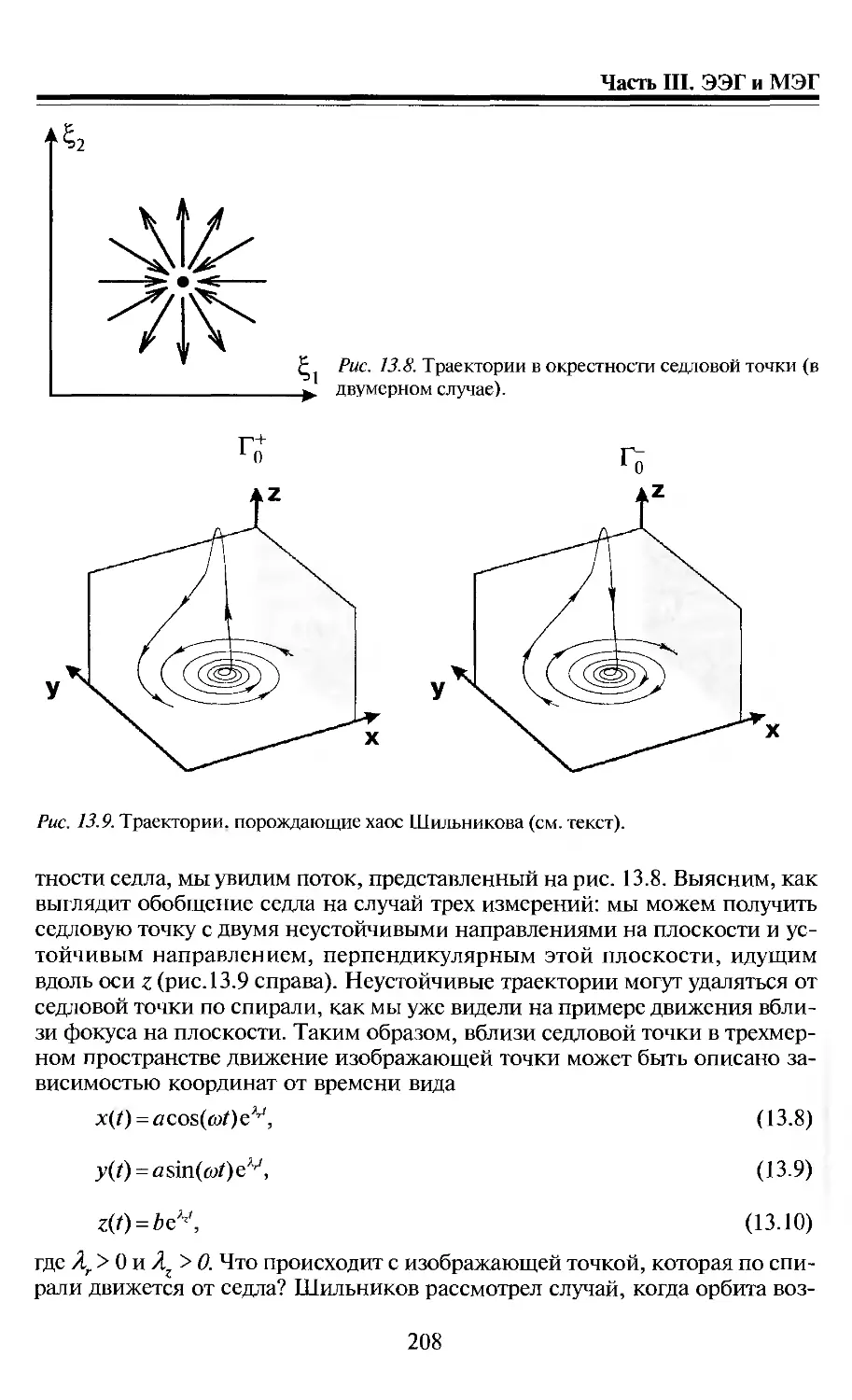
устойчивости, я изложу проведенный Фридрихом и Улем анализ ЭЭГ в слу-
чае petit mal epilepsy (1995) и анализ экспериментов с МЭГ, проведенный
Фуксом, Келсо, Хакеном (1992).
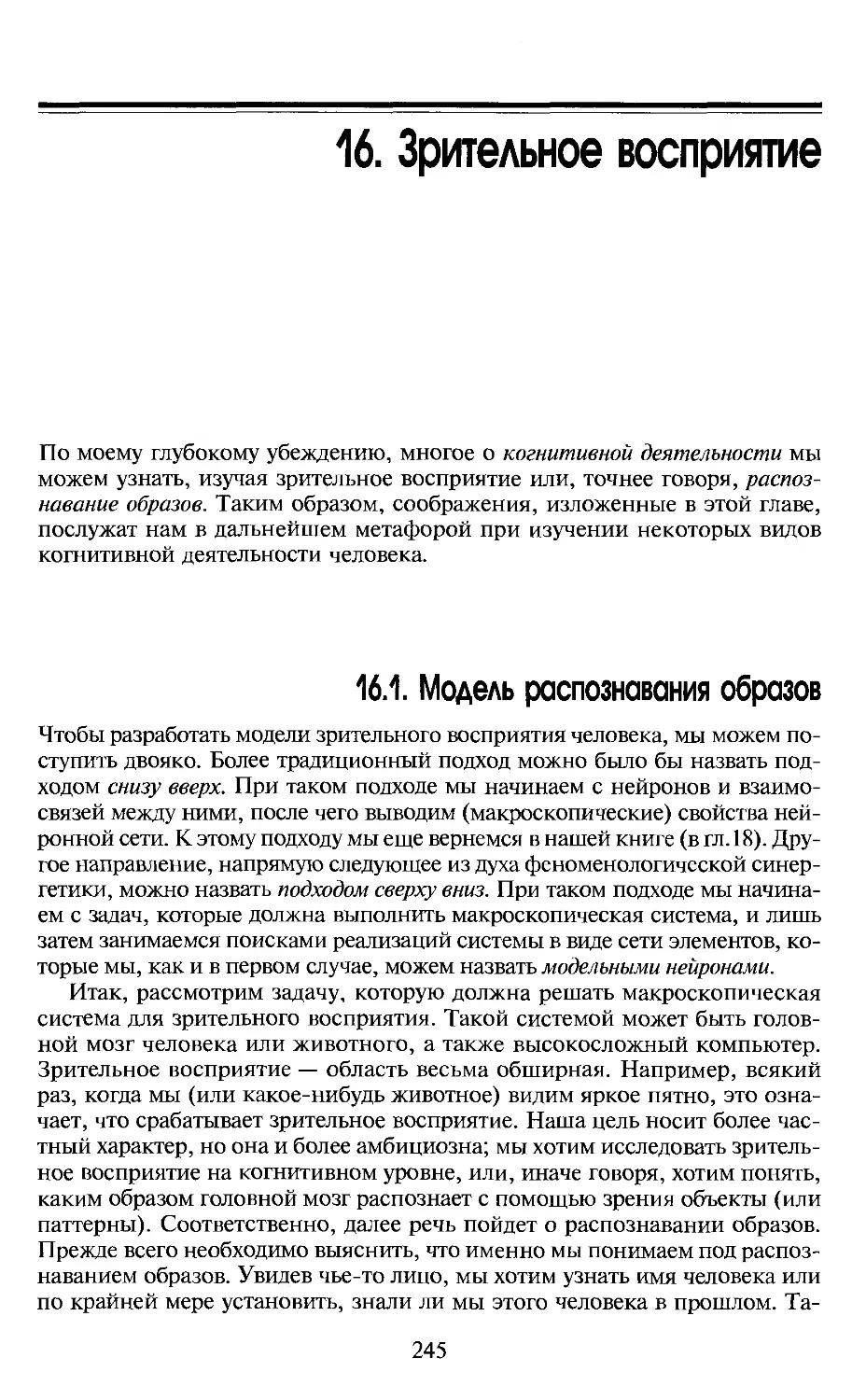
Затем я перейду к гораздо более сложному явлению, а именно, к зре-
нию. Излагаемая мной модель зрения (Хакен, 1987) может быть распрост-
ранена на зрительное восприятие неоднозначных фигур (Дитцингер, Ха-
кен, 1989, 1990). Расширенная модель позволяет войти в контакт с рядом
детальных экспериментов. Кроме того, она служит основой для описания
стереоскопического зрения. Моя модель зрения основана на идее о том,
что распознавание образов есть не что иное, как их формирование, и я по-
ясню эту аналогию более подробно.
Еще одна точка зрения заключается в том, что исследование зрения по-
зволяет нам многое понять в механизмах когнитивной деятельности. В под-
тверждение этого я привожу детальные аналогии между принятием реше-
ний, например, единственное, колебательное или случайное решения и
эффекты гистерезиса, могут быть поняты с помощью таких аналогий.
В заключении книги я привожу даю обзор исследований сетей мозга, а
также критические итоги и резюме.
В действительности эта книга затрагивает больше проблем, чем было
упомянуто выше. Чтобы облегчит ее чтение тем, кто лишь начинает зна-
комиться с синергетикой, или с исследованиями головного мозга, или с
обеими этими областями, я включил в книгу несколько глав, из которых
читатель может почерпнуть необходимые основы. Этот материал в основ-
ном сосредоточен в части 1, где излагаются основы синергетики. Следую-
щие три части — о поведении, об ЭЭГ и МЭГ и о когнитивной деятельно-
сти можно читать практически независимо одну от другой, например, чи-
татель, которого интересует главным образом когнитивная деятельность,
может ознакомиться с частью I и после этого приступать к части IV.
Значком * отмечены части или разделы, содержащие несколько более
сложную математику.
Часть I
Основы
1. Введение
1.1. Биологические системы — сложные системы
Все биологические системы отличаются необычайной сложностью. Боль-
шинство их состоит из гигантского числа клеток, каждая из которых так-
же представляет собой сложную систему. Кроме того, все эти системы об-
ладают весьма сложным поведением. Одна из наиболее поразительных осо-
бенностей живых организмов — кооперативная деятельность многочислен-
ных клеток, которая проявляется, например, в координации мышц при
передвижении или в других движениях. Именно эта слаженная работа раз-
личных мышц побудила на заре XX века знаменитого физиолога Шеррин-
тона ввести специальный термин — синергия мышц. Столь же высокая ко-
ординация наблюдается при дыхании, сердцебиении и кровообращении.
На еще более высоком уровне — в головном мозге человека — огромное ко-
личество клеток целенаправленно кооперируют свою деятельность, что де-
лает возможными чувственное восприятие, мышление, устную и письмен-
ную речь и другие явления, в том числе эмоции. Во всех этих случаях на
макроскопическом уровне возникают новые качества, которые отсутству-
ют на микроскопическом уровне отдельных клеток. Одной из величайших
загадок биологии, несомненно, следует считать ту высокую степень интер-
претации, которая присуща взаимосвязи между микроскопическим и мак-
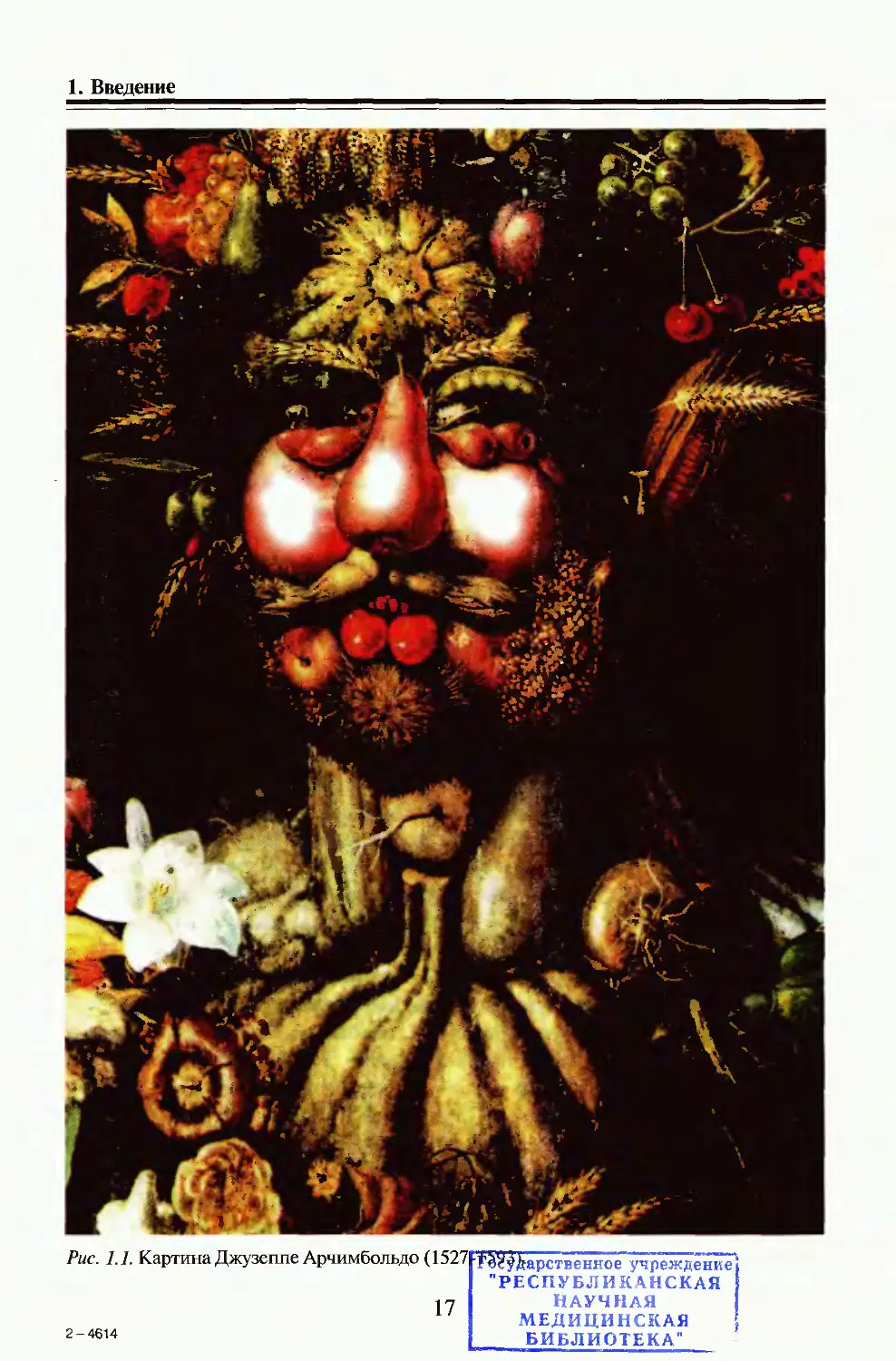
роскопическим уровнями. Насколько сильна интегративная способность
нашего мозга, можно судить по картине Джузеппе Арчимбольдо, которая
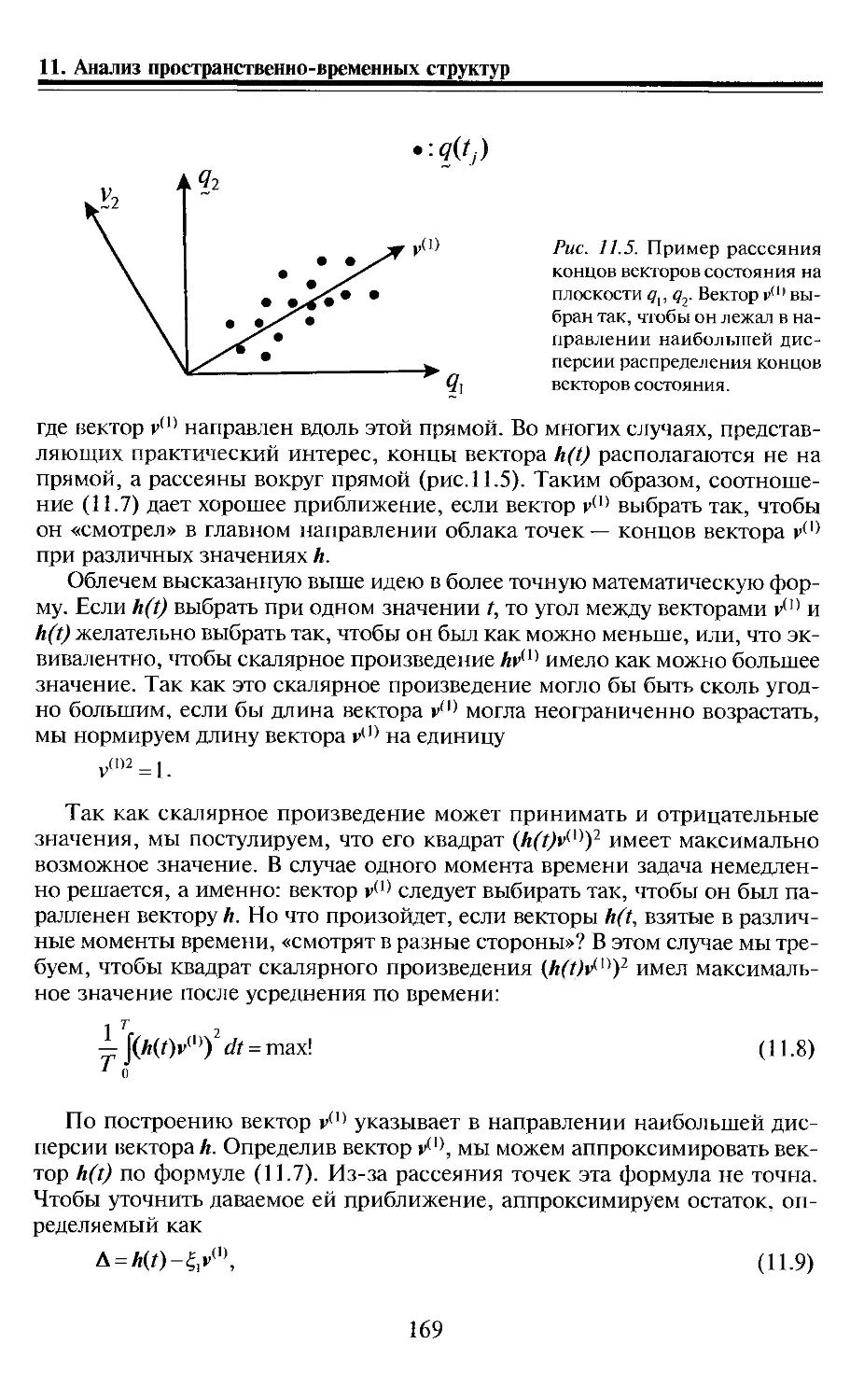
воспроизведена на рис. 1.1. На первый взгляд мы распознаем человечес-
кое лицо, но при более внимательном рассмотрении обнаруживается, что
перед нами композиция из овощей и фруктов. Мы распознаем человечес-
кое лицо не по отдельным деталям, а вопреки деталям! В дальнейшем этот
пример можно использовать метафорически, хотя отдельными деталями
будут не фрукты, а главным образом нервные клетки.
Каким образом возникает интерпретация? В старину можно было ви-
деть картинки, на которых изображалось, будто внутри человеческого мозга
сидит крохотный человечек, который управляет всеми эффектами и орга-
низует их. В XX веке знаменитый нейрофизиолог Экклс вместе с филосо-
фом Поппером написали книгу «Я и его Мозг» («Self and Its Brain)», в ко-
13
Часть I. Основы
торой в известной степени представили Я как программиста, а его Мозг
как компьютер. В предлагаемой читателю книге я исхожу из совершенно
иной точки зрения. Вместо допущения о том, что интеграция обусловлена
организующими центрами, программистами или компьютерными про-
граммами того или иного рода, я развиваю идею самоорганизации. Синер-
гетику можно рассматривать как наиболее разработанную теорию самоор-
ганизации, и я хочу рассмотреть, как эта теория может быть применена к
широкому кругу разнообразных явлений, обнаруженных в биологических
системах, в частности, явлений, связанных с различными видами актив-
ности мозга, поведением и когнитивной деятельностью. Биологическую
систему я рассматриваю как гигантскую системы, функционирующую по
законам физики. Однако, как мы убедимся, законы биологии не могут быть
однозначно выведены из законов физики. Существуют еще и другие, до-
полнительные законы, связанные с возникновением новых качеств. Имен-
но поэтому синергетика не впадает в конфликт с физикой — с одной сто-
роны, а с другой синергетику не следует отождествлять в какой бы то ни
было разновидностью физикализма. Синергетика — дисциплина, самоор-
ганизация — явление.
1.2. Цели синергетики
Сложные системы состоят из большого числа отдельных частей, элемен-
тов или подсистем, нередко сложным образом взаимодействующих между
собой. Один классический рецепт, позволяющий «справиться» с такими
системами, принадлежит Декарту. Он предложил разлагать сложную сис-
тему на все более мелкие детали до тех пор, пока не будет достигнут уро-
вень, на котором эти детали, или части, станут понятными. Нетрудно ви-
деть, что такого подхода придерживается молекулярная биология. С дру-
гой стороны, взаимодействие элементов системы приводит к возникнове-
нию на макроскопическом уровне качественно новых свойств и особен-
ностей. Не подлежит сомнению, что в нашем понимании взаимосвязей
между микроскопическим уровнями все еще остается огромный разрыв.
Цель синергетики состоит в том, чтобы преодолеть его. Вместе с тем, как
будет показано, в большинстве случаев структуры создаются не некоей
организующей рукой, а самими системами, действующими без всякого воз-
действия извне. Именно поэтому мы говорим о самоорганизации. В рам-
ках подхода, который можно было назвать декартовым, существует еще
одна трудность. Для описания отдельных частей необходимо огромное ко-
личество информации, обработать которое никто не в состоянии. Это вы-
нуждает нас создавать адекватные методы сжатия информации. Простым
примером того, как достигается такая цель, может служить наше ощуще-
ние температуры. Как известно, газ, например воздух, состоит из мириад
молекул, движения каждой из которых в отдельности мы не замечаем. Вме-
14
1. Введение
сто этого мы каким-то образом интегрируем по их движению и ощущаем
только некоторую температуру. Аналогично этому в большинстве случаев
отдельные слова означают целые классы, категории, объекты или сложные
действия.
Можно ли развить общую теорию, которая позволит адекватно сжимать
информацию совершенно автоматически? Как будет показано в дальней-
шем, такое сжатие информации происходит в тех случаях, когда система ка-
чественно изменяет свое макроскопическое состояние. В неорганическом
мире существует рад таких резких изменений, называемых фазовыми пере-
ходами. Примерами таких переходов могут служить замерзание, когда вода
(жидкость) переходит в твердое состояние (лед), возникновение намагни-
ченного состояния или наступление сверхпроводимости. Как мы увидим из
дальнейшего, аналогичные качественные изменения, хотя и на гораздо бо-
лее высоком уровне сложности, в изобилии встречаются в биологии.
1.3. Мозг как сложная система
Человеческий мозг состоит примерно из 100 миллиардов (1011) нейронов,
и на один нейрон может приходиться до 104связей. Кроме того, каждый
нейрон сам по себе представляет собой сложную систему. Нейроны соеди-
нены между собой чрезвычайно сложным образом. Число нейронов нево-
образимо велико: если нейроны раздуть до таких размеров, чтобы в напер-
сток объемом, скажем, в один кубический сантиметр помещалось сто ней-
ронов, то такие наперстки заполнили бы здание шириной 10 м, длиной 10
м и высотой 10 м.
Исследования мозга, поведения и когнитивной деятельности имеют
много граней, и если честно, то число этих граней неисчерпаемо велико.
Поэтому естественно спросить, какие вопросы ведут к цели. В свою оче-
редь вопросы «по существу» зависят от нашего уровня научных исследо-
ваний, который в свою очередь зависит от экспериментальной техники и
теоретических концепций, равно как и от используемых математических
процедур. Кроме того, уровень научных исследований определяется вку-
сами, модой, нашей подготовкой и т.д. Из-за чудовищной сложности мозга
мы вынуждены заниматься поиском моделей, парадигм или метафор. Но
на каком уровне и в каком точном смысле мы намереваемся использовать
метафоры? Все эти вопросы мы рассмотрим в дальнейшем.
15
Часть I. Основы
1.4. Традиционные или синергетические интерпретации
функции мозга
Чтобы читатель мог почувствовать, насколько развиваемые нами сообра-
жения на основе синергетики отличаются от традиционных подходов, мы
заранее сообщим читателю некоторые из основных результатов нашей кни-
ги. В левом столбце таблицы 1.1 мы перечислим традиционные понятия, а
соответствующие синергетические понятия приведем в правом столбце.
Таблица 1.1.
Сравнение традиционных и синергетических интерпретаций функций мозга
Традиционные понятия Синергетические понятия
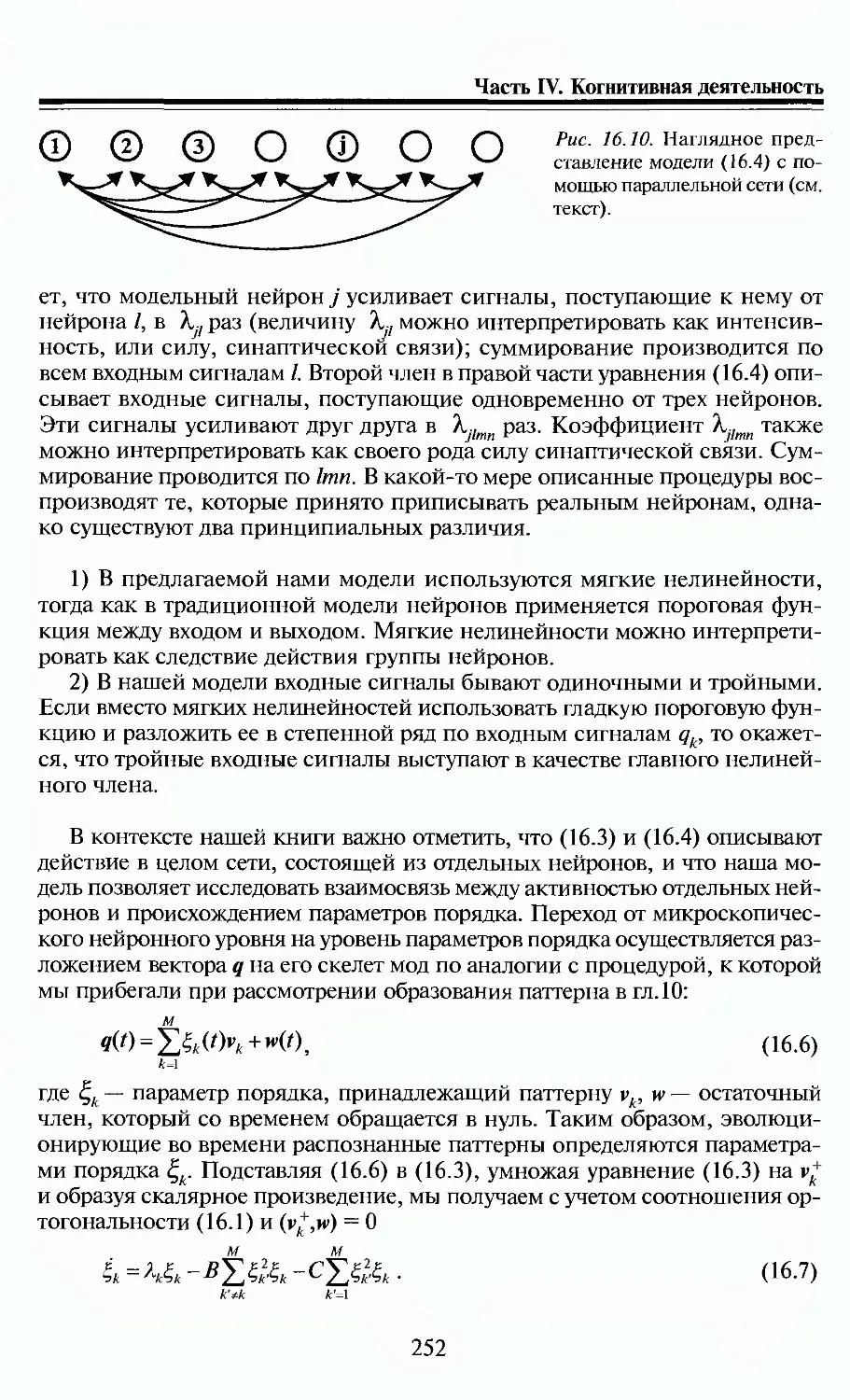
Одиночная клетка Отдельный элемент Клетка, индентифинирующая нашу бабушку Ведущая клетка Действия локализованы Энграмма Запрограммированный компьютер Алгоритм Последовательная обработка инфор- мации Действие определяется детерминис- тическими событиями Функционирование устойчиво Сеть клеток Ансамбль элементов Коллектив клеток, индентифипирую- щих нашу бабушку Коллектив ведущих клеток Действия делокализованы Распределенная информация Самоорганизация Самоорганизация Параллельная и последовательная обработка информации Действие определяется детермини- стическими и случайными событиями Функционирование вблизи потери устойчивости
Рассмотрим таблицу 1.1 более подробно, сравнивая левую и правую ча-
сти строка за строкой. Традиционные экспериментальные и теоретичес-
кие исследования мозга сосредоточены на отдельной клетке, в синергети-
ке мы концентрируем внимание на деятельности целой сети клеток. Та-
ким образом, вместо того чтобы исследовать отдельный элемент, мы изу-
чаем ансамбль. Различие в подходах становится отчетливо видно при об-
суждении проблемы клетки нашей бабушки в традиционных теориях. Со-
гласно этой идее мы узнаем свою бабушку с помощью особой клетки в на-
шем мозгу, которая идентифицирует нашу прарадительницу. При синер-
гетическом подходе распознавание образов достигается в результате дей-
ствия ансамбля клеток. Аналогичным образом при традиционном подхо-
де управление движением осуществляется одной ведущей клеткой, тогда
16
1. Введение
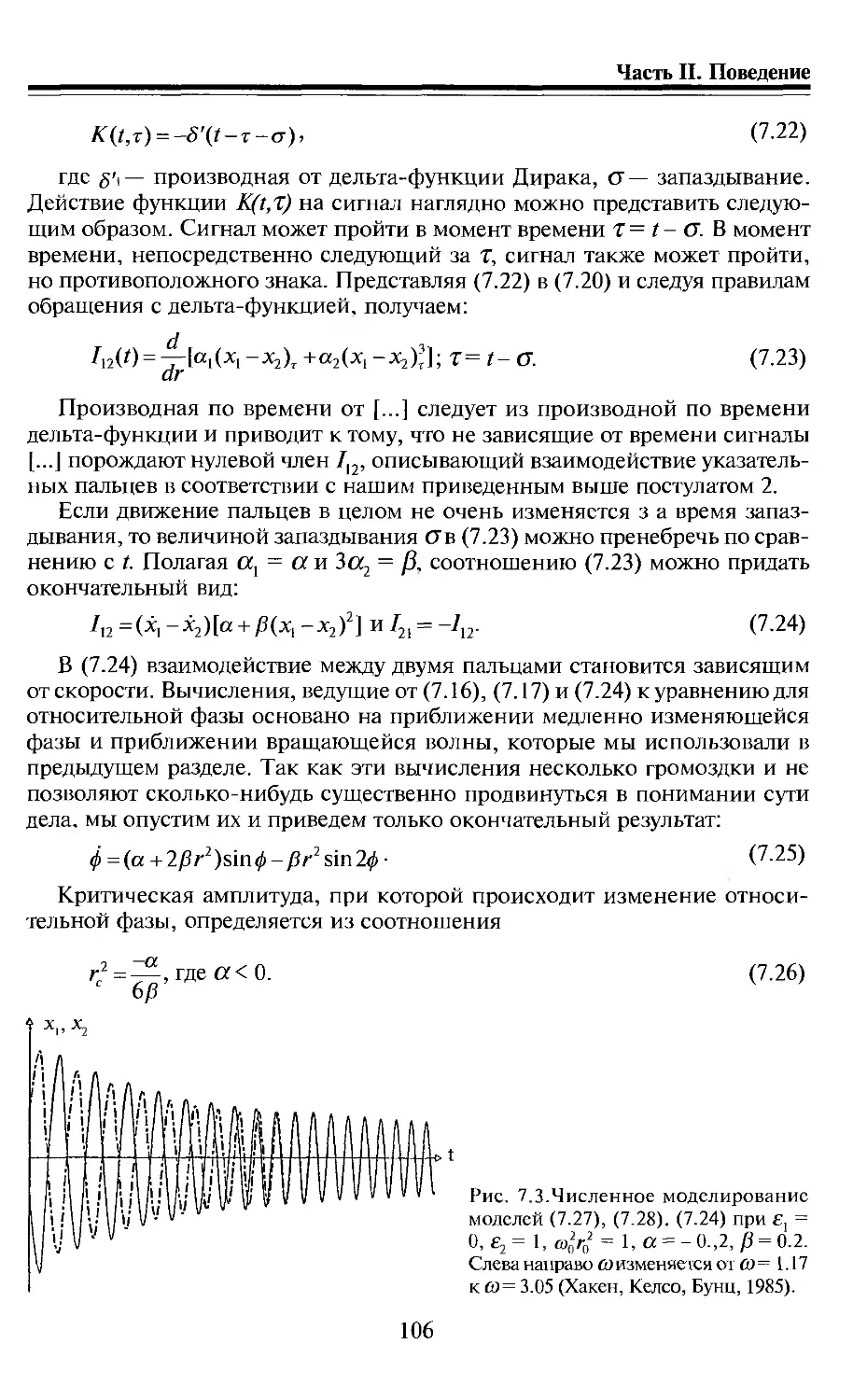
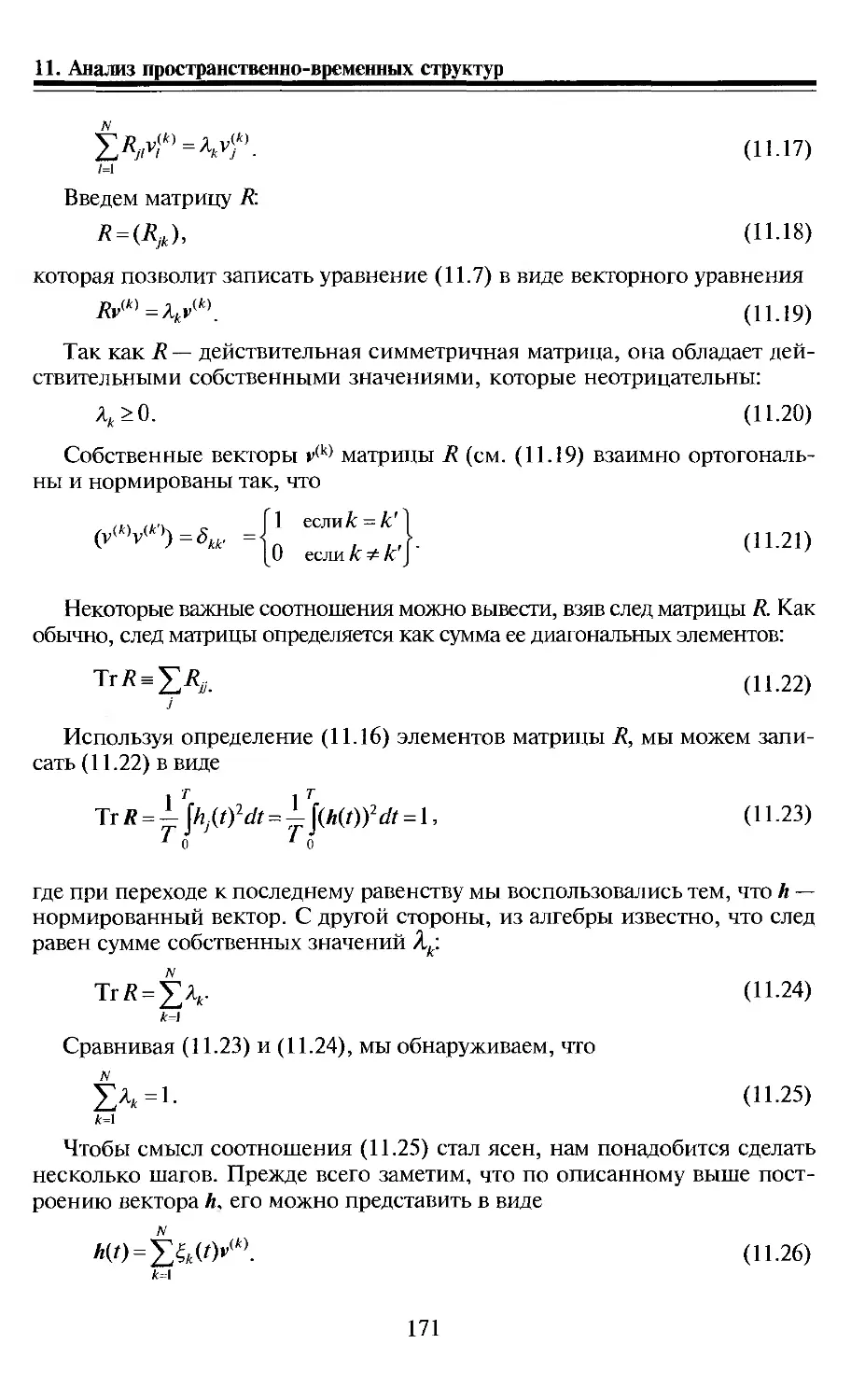
Рис. 1.1. Картина Джузеппе Арчимбольдо (15271
2-4614
(^Дарственное учреждение")
РЕСПУБЛИК\НСКАЯ
НАУЧНАЯ I
МЕДИЦИНСКАЯ j
БИБЛИОТЕКА"
17
Часть I. Основы
как при синергетическом подходе управление движением становится ре-
зультатом действия ансамбля клеток. Совершенно очевидно, что при тра-
диционном подходе действия строго локализованы, тогда как при синер-
гетическом подходе они становятся делокализованными и могут быть рас-
пределены по обширным участкам мозга. Следуя синергетическому под-
ходу мы должны заниматься поиском не энграмм, а распределенной ин-
формации. (Подобные взгляды разделяют, в частности, сторонники конек-
ционизма; см. разд. 18.4)
Основное различие между синергетической точкой зрения и взглядами
других школ проявляется и в том случае, когда мы анализируем широко
распространенное представление о том, что мозг действует на основе ал-
горитмов как запрограммированный компьютер. Мы считаем, что мозг
действует посредством самоорганизации, которая может использовать ал-
горитмы, а может их и не использовать. При традиционном подходе по-
ступающая информация обрабатывается последовательно. При новом, си-
нергетическом подходе поступающая информация обрабатывается в основ-
ном параллельно. Представление о мозге как запрограммированном ком-
пьютере означает, что вся система мозга работает детерминистически. Как
будет показано в нашей книге, действия биологических систем определя-
ются как детерминистическими, так и случайными событиями. Еще одно
фундаментальное различие проявляется в отношении устойчивости. Тра-
диционный подход исходит из предположения, что мозг находится в ус-
тойчивом состоянии. На этом допущении основаны многочисленные эк-
сперименты по изучению функций мозга. Мы приведем убедительные ар-
гументы, позволяющие считать, что мозг функционирует вблизи точек по-
тери устойчивости.
Надеюсь, что Таблица 1.1. убедит читателей в целесообразности следо-
вания новому, синергетическому подходу, а также покажет, какими экс-
периментальными данными мы располагаем, предлагая упомянутые выше
изменения в наших теоретических представлениях о функциях мозга.
2. Исследуем мозг
В этой главе я даю краткий обзор наиболее выдающихся эксперименталь-
ных методов изучения мозга. Особое внимание уделяется различным фи-
зическим методам.
2.1 Мозг как черный ящик
Черный ящик — подход, хорошо известный в электротехнике и радиофи-
зике. В ряде случаев, когда новое устройство конструируется из отдель-
ных частей, инженеру достаточно знать некоторые характерные особен-
ности компонент, а именно взаимосвязь между входом и выходом. При
таком подходе внутренняя структура отдельной части не имеет значения.
Аналогично, человека или животное можно рассматривать как черный
ящик, специфическим образом реагирующий на определенные сигналы
извне. Иначе говоря, при таком подходе предметом изучения становит-
ся поведение. Идея такой методологии, получившей название бихевио-
ризма, принадлежит главным образом Скиннеру, который, например,
строил специальные клетки для изучения реакции животных на такие раз-
дражители , как пища или наказание. Внутренние состояния мозга при
таком подходе полностью игнорируются. Более того, полагалось ненауч-
ным задавать вопросы о внутренних состояниях. Бихевиористский под-
ход можно еще было бы считать приемлемым по отношению к животным,
которые не могут говорить, но при изучении людей, наделенных способ-
ностью к общению, разумно воспользоваться столь важным инструмен-
том как интроспекция. В настоящее время ситуация изменяется, и даже
начали появляться исследования, позволяющие заглянуть в состояния
ума животных. Во всяком случае бихевиоризм как таковой (per se) не на-
ходится более в центре внимания современных исследований, хотя изу-
чение различных типов поведения по-прежнему остается важным инст-
рументом, в чем нам предстоит неоднократно убедиться в этой книге.
Приведем лишь несколько примеров исследований поведения. Изучени-
ем движения людей и животных занимается особая дисциплина — наука
о движении. Исследования движений представляют интерес и для науки
19
2"
Часть I. Основы
о спорте. Изучением поведения человека на уровне интеллекта занима-
ются психология и психиатрия. Можно сказать, что и лингвистика в оп-
ределенной мере изучает язык как черный ящик, поскольку не рассмат-
ривает, как мозг продуцирует язык, а исследует только абстрактную
структуру этого психического (mental) продукта. Проводимое психологи-
ей изучение зрительного и слухового восприятия можно рассматривать
как своего рода мост между внешними и внутренними мирами в зависи-
мости от того, как интерпретировать соответствующие эксперименты, т.е.
от степени участия интроспекции.
2.2. Открываем черный ящик
Вскрыв череп, мы увидим беловато-серую массу, по форме очень похожую
на ядро грецкого ореха (рис. 2.1. и 2.2). Даже под микроскопом удается раз-
личить лишь немногие детали. Но стоит подкрасить ткани мозга (впервые
это сделал Гольджи), как картина изменяется: в микроскоп становится ви-
димой сеть с узлами. Этими узлами служат нейроны, которые могут иметь
различную форму. Например, нейрон на рис. 2.3(a) имеет форму пирами-
ды и называется пирамидальной клеткой. Другие нейроны называются
клетками Пуркинье в честь их открывателя (рис. 2.3.6). Всего известно бо-
лее двадцати различных типов нейронов.
Двигательная доля
Передним раздел мозга
I Чувствительная доля
Височная доля
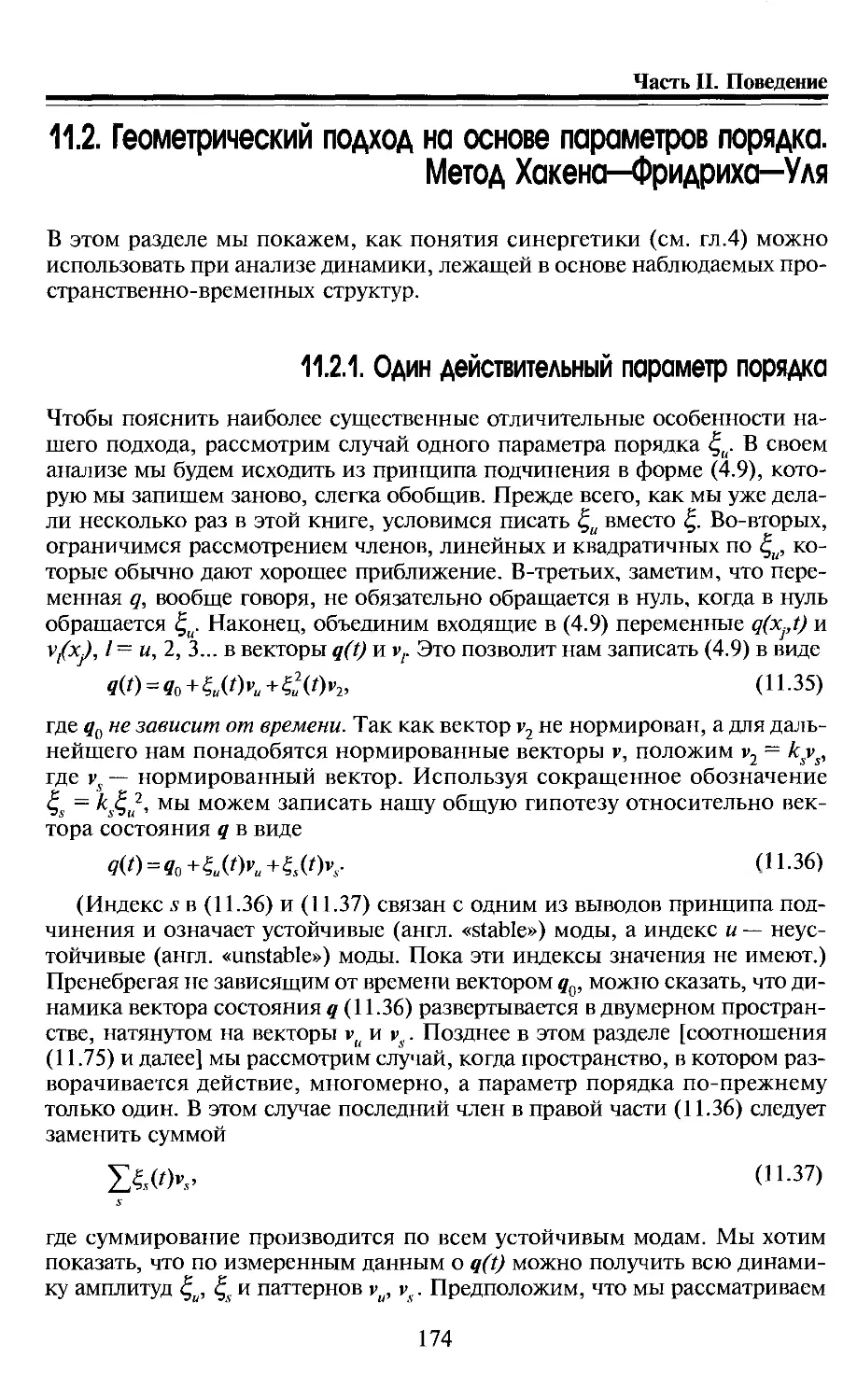
Рис. 2.1. Головной мозг человека. Вид слева.
20
2. Исследуем мозг
Левое
полушарие
Правое
полушарие
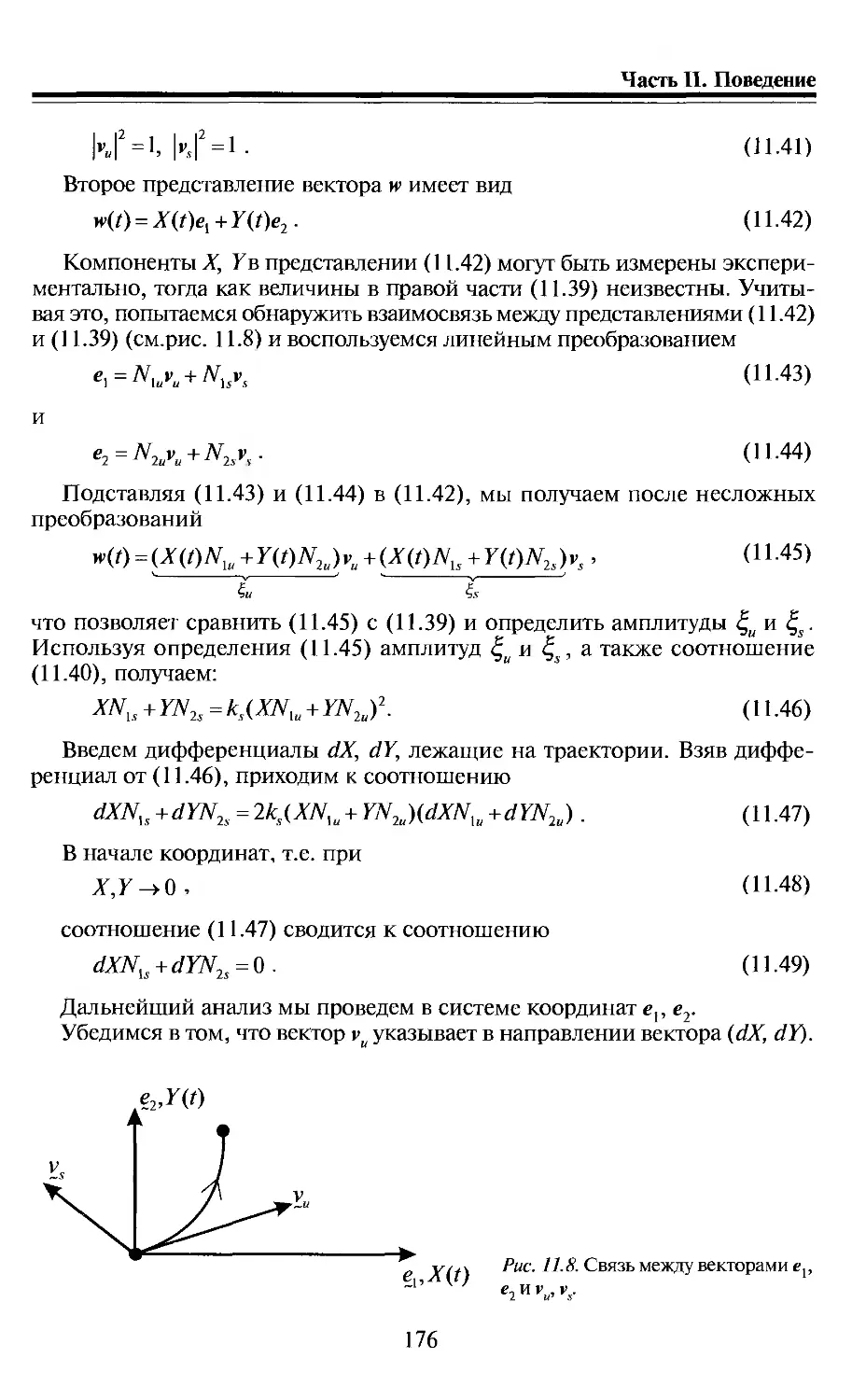
Рис.2.2. Головной мозг человека. Вид сверху.
Рис.2.3 (а) Пирамидальные клетки; (б) Клетка Пуркинье (Буллок и др., 1977).
21
Часть I. Основы
2.3. Структура и функция на макроскопическом уровне
При исследовании мозга выяснилось, что с определенными участками моз-
га могут быть сопоставлены различные специфические функции. (Вместе
с тем с самого начала необходимо заметить, что функции могут мигриро-
вать из одного участка мозга в другой, вследствие чего функциональная
карта мозга может трансформироваться, например, когда мозг получил по-
вреждение и происходит восстановление пострадавшего участка.) Впервые
установить расположение функциональных областей позволили травмы
мозга и инсульты. Например, при поражении левого полушария мозга при
инсульте мог развиться паралич правой половины тела, т.е. правой ноги,
правой руки и ее кисти, а поражение при инсульте правого полушария
приводило к параличу частей левой половины тела. В 1861 г. Брока об-
наружил, что поражение при ударе четко локализованной области мозга
приводит к нарушению речи. Позднее (в 1874 г.) Вернике открыл еще
один центр, расположенный рядом с центром Брока, который также уп-
равляет речью. В случае повреждения центра Брока человек еще может
говорить осмысленно, но утрачивается грамматическая правильность
речи. С другой стороны, при повреждении центра Вернике человек про-
износит предложения, которые кажутся грамматически правильными, но
бессмысленны. Еще одно важное открытие было сделано во время рус-
ско-японской войны 1904—1905 гг. японским врачом Иноуэ. На воору-
жение русской армии поступила новая винтовка, придававшая пуле боль-
ший импульс. При проникающих ранениях в голову японские солдаты в
некоторых случаях теряли зрение, хотя их глаза оставались неповрежден-
ными. Иноуэ пришел к выводу, что за зрительное восприятие отвечает
задний отдел мозга.
Упомянем теперь кратко о роли двух полушарий мозга (рис. 2.2). Эти
два полушария связаны между собой пучками нервных волокон. Соедини-
тельный мост между полушариями называется мозолистым телом (Corpus
calosum). Было обнаружено, что эпилептические припадки частично или
полностью прекращаются при частичном или полном иссечении мозоли-
стого тела. С другой стороны, такие операции обладают значительными
побочными эффектами. Изучая поведение пациентов с частично или пол-
ностью разделенными полушариями мозга, Сперри сделал удивительные
открытия. Чтобы объяснить их, напомним читателям, что правое поле зре-
ния проецируется на левое полушарие, а левое поле зрения — на правое
полушарие. Помещая в соответствующие поля те или иные предметы,
Сперри активизировал левое или правое полушарие мозга. Если объекты
располагались в левом зрительном поле, то пациент с иссеченным мозо-
листым телом не мог сознательно воспринимать и называть их. Вместе с
тем пациент мог свободно манипулировать объектами. Если же объекты
располагались в правом зрительном поле, то пациент мог правильно на-
зывать их. Не вдаваясь в детали, можно сказать, что левое полушарие от-
вечает за язык и последовательные процессы, тогда как правое полушарие
имеет дело со сложными сценами, музыкой, зрительным воображением и
22
2. Исследуем мозг
т.д. Но, как показали исследования, различия между сферами носят не
вполне четкий характер.
В следующих разделах мы рассмотрим неинвазивные методы изучения
мозга.
2.4. Неинвазивные методы
В этом разделе мы рассмотрим несколько физических методов, позволя-
ющих исследователям изучать различные свойства мозга. К числу таких
методов относятся рентгеновская томография, электроэнцефалограммы,
магнитоэнцефалограммы, магниторезонансные изображения и позитрон-
эмиссионная томография. Кратко поясним все эти методы.
2.4.1 Рентгеновская томография
С тех пор, как Рентген открыл, что излучение, носящее ныне его имя, спо-
собно проникать сквозь биологические ткани, рентгеновское излучение ста-
ло важным инструментом медицинской диагностики. Значительный про-
гресс был достигнут с изобретением компьютерной томографии. Ее прин-
ципы были независимо разработаны Кульмаком и Хоунсфилдом. Биологи-
ческий объект, например мозг, просвечивается рентгеновским излучением
под различными углами, после чего полученные рентгенограммы подверга-
ются компьютерной обработке, позволяющей построить трехмерное изоб-
ражение. Компьютерная томография позволяет локализовать опухоль в моз-
гу, причем можно видеть не только положение опухоли, но и ее форму.
2.4.2. Электроэнцефалограммы (ЭЭГ)
Экспериментальные исследования электрических полей в мозге имеют
долгую историю. Еще в 1875 г. Катон утверждал: «Если к двум точкам на
поверхности мозга подвести электроды, то через усилитель потекут слабые
токи переменной полярности». Но только в 1929 г. Бергер приступил к си-
стематическому исследованию электроэнцефалограмм человека.
При измерении ЭЭГ на череп помещают один или несколько электро-
дов, и производится измерение разности потенциалов между этими элек-
тродами и электродом сравнения. Вид снимаемых кривых сильно зависит
от интеллектуальной активности. Для дальнейшего анализа, по крайней
мере в общем случае, снятые кривые подвергаются частотной фильтрации,
вследствие чего исследованию подвергаются только некоторые полосы ча-
стот. Если подопытный находится в состоянии покоя с закрытыми глазами,
то на ЭЭГ наблюдаются так называемые ОС-волны с частотой около 10 Гц.
23
Часть I. Основы
Во сне можно выделить различные
фазы. Одна из них — фаза быстрого
сна — связана со сновидениями и бы-
стрыми движениями глаз. Если ЭЭГ
снимают несколькими электродами
(рис. 2.4), то можно обнаружить про-
странственно-временную структуру
сигналов. На рис. 2.5 представлены
временные ряды, соответствующие от-
дельным электродам (расположение
прямоугольников с сигналами отвеча-
ет расположению электродов на чере-
пе испытуемого). Снимая активность
во всех прямоугольниках синхронно, мы можем составить карту локаль-
ной активности в местах расположения отдельных электродов. Интерпре-
тируя между точками, где находятся электроды, получаем распределение
в одном из кружков на рис. 2.6. Повторяя эту процедуру для последователь-
ности моментов времени, получаем всю совокупность распределений,
представленных на рис. 2.6. Она показывает, как эволюционирует во вре-
мени пространственное распределение активности.
Ряд исследователей, например Леман из Цюриха и Петше из Вены, изу-
чали взаимосвязь между интеллектуальной активностью и топографией вы-
Рис. 2.5. Разность напряжений между отдельным электродом и электродом сравнения как
функция времени для каждого электрода. Расположение сигналов соответствует распо-
ложению электродов на черепе (Леман, частное сообщение).
24
2. Исследуем мозг
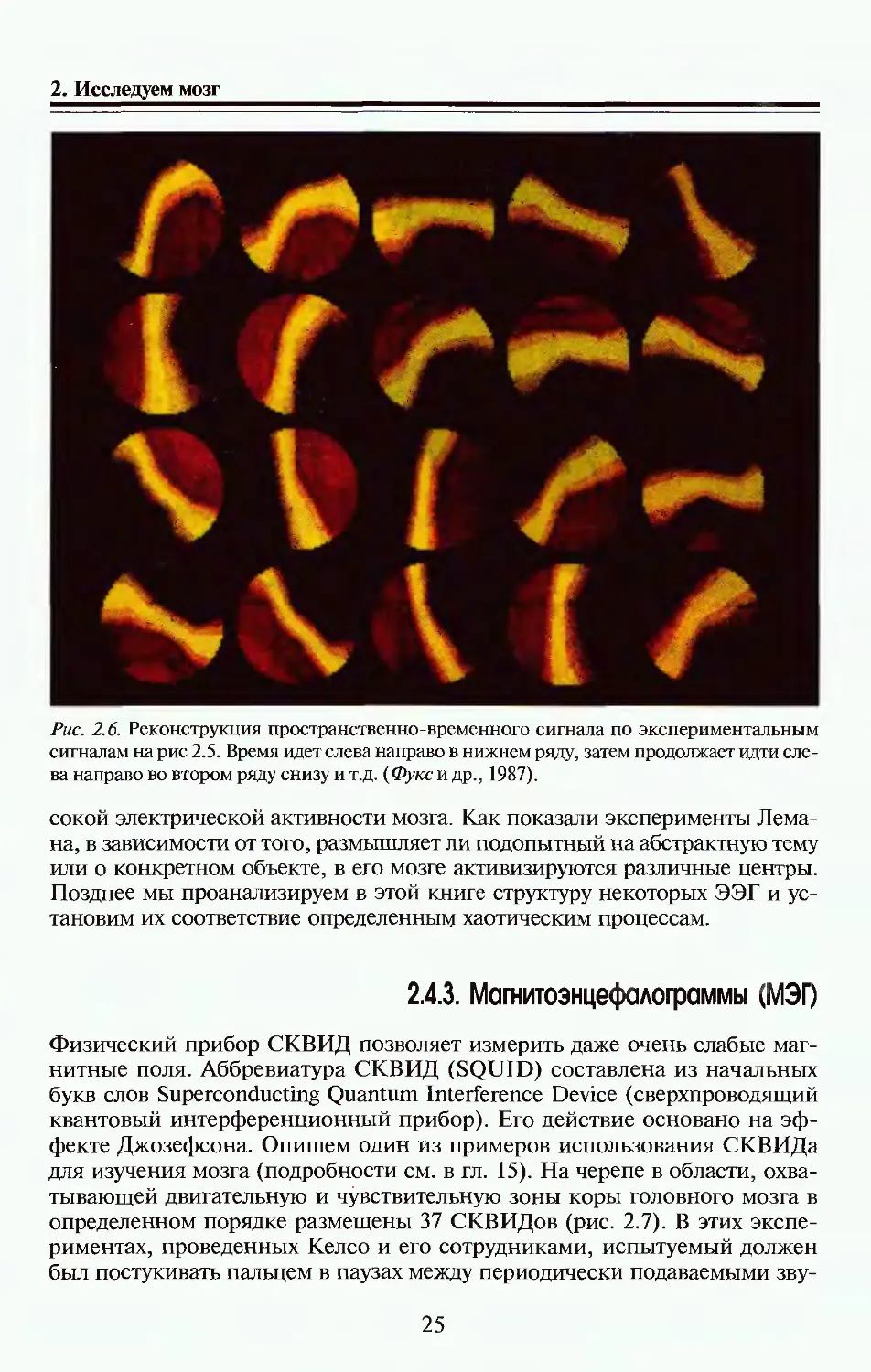
Рис. 2.6. Реконструкция пространственно-временного сигнала по экспериментальным
сигналам на рис 2.5. Время идет слева направо в нижнем ряду, затем продолжает идти сле-
ва направо во втором ряду снизу и т.д. (Фукс и др., 1987).
сокой электрической активности мозга. Как показали эксперименты Лема-
на, в зависимости от того, размышляет ли подопытный на абстрактную тему
или о конкретном объекте, в его мозге активизируются различные центры.
Позднее мы проанализируем в этой книге структуру некоторых ЭЭГ и ус-
тановим их соответствие определенным хаотическим процессам.
2.4.3. Магнитоэнцефалограммы (МЭГ)
Физический прибор СКВИД позволяет измерить даже очень слабые маг-
нитные поля. Аббревиатура СКВИД (SQUID) составлена из начальных
букв слов Superconducting Quantum Interference Device (сверхпроводящий
квантовый интерференционный прибор). Его действие основано на эф-
фекте Джозефсона. Опишем один из примеров использования СКВИДа
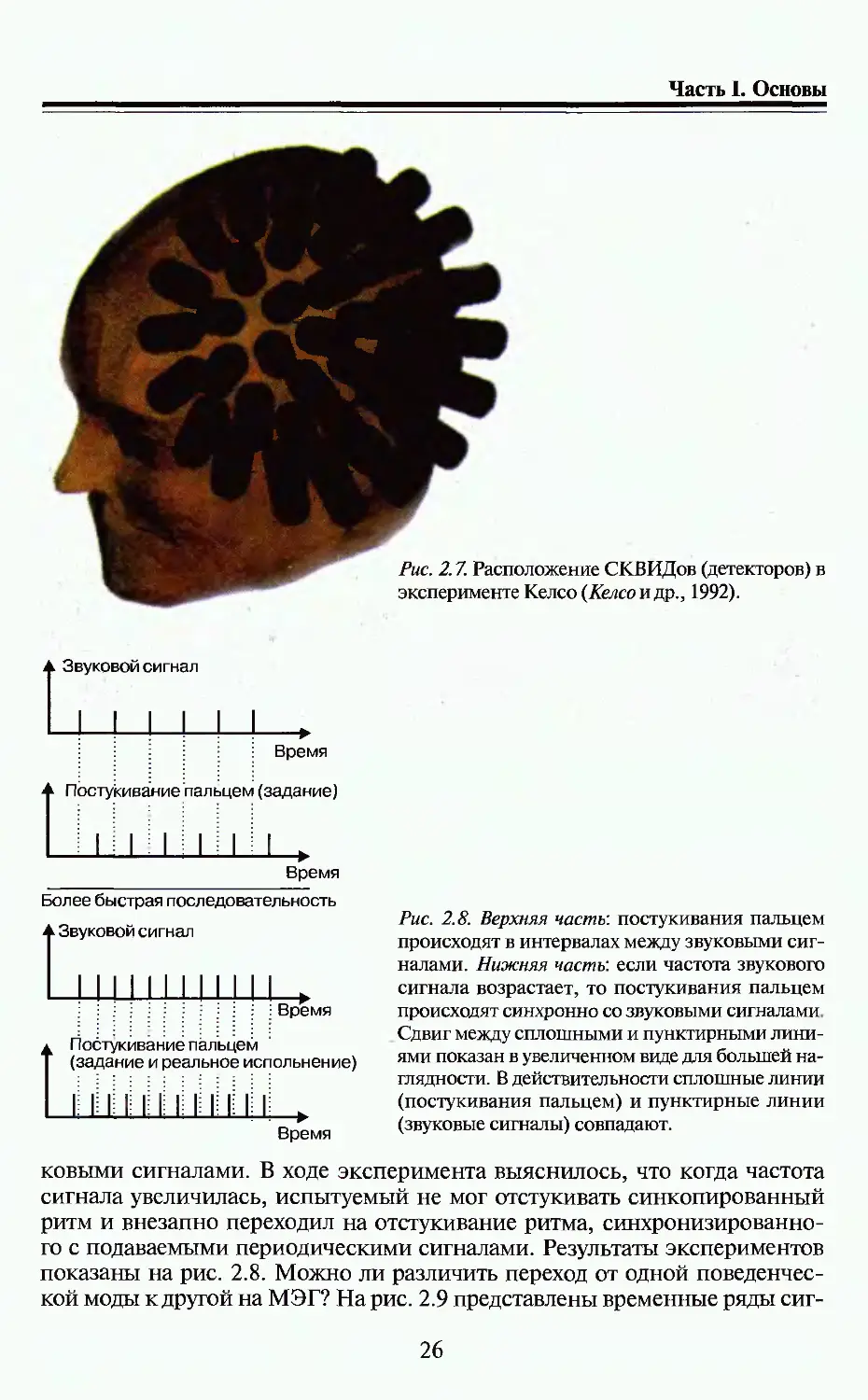
для изучения мозга (подробности см. в гл. 15). На черепе в области, охва-
тывающей двигательную и чувствительную зоны коры головного мозга в
определенном порядке размещены 37 СКВИДов (рис. 2.7). В этих экспе-
риментах, проведенных Келсо и его сотрудниками, испытуемый должен
был постукивать пальцем в паузах между периодически подаваемыми зву-
25
Часть 1. Основы
Л Звуковой сигнал
Время
Постукивание пальцем (задание)
I I । । । : ,
Время
Более быстрая последовательность
‘ < Звуковой сигнал
:Время
Постукивание пальцем
(задание и реальное испольнение)
Время
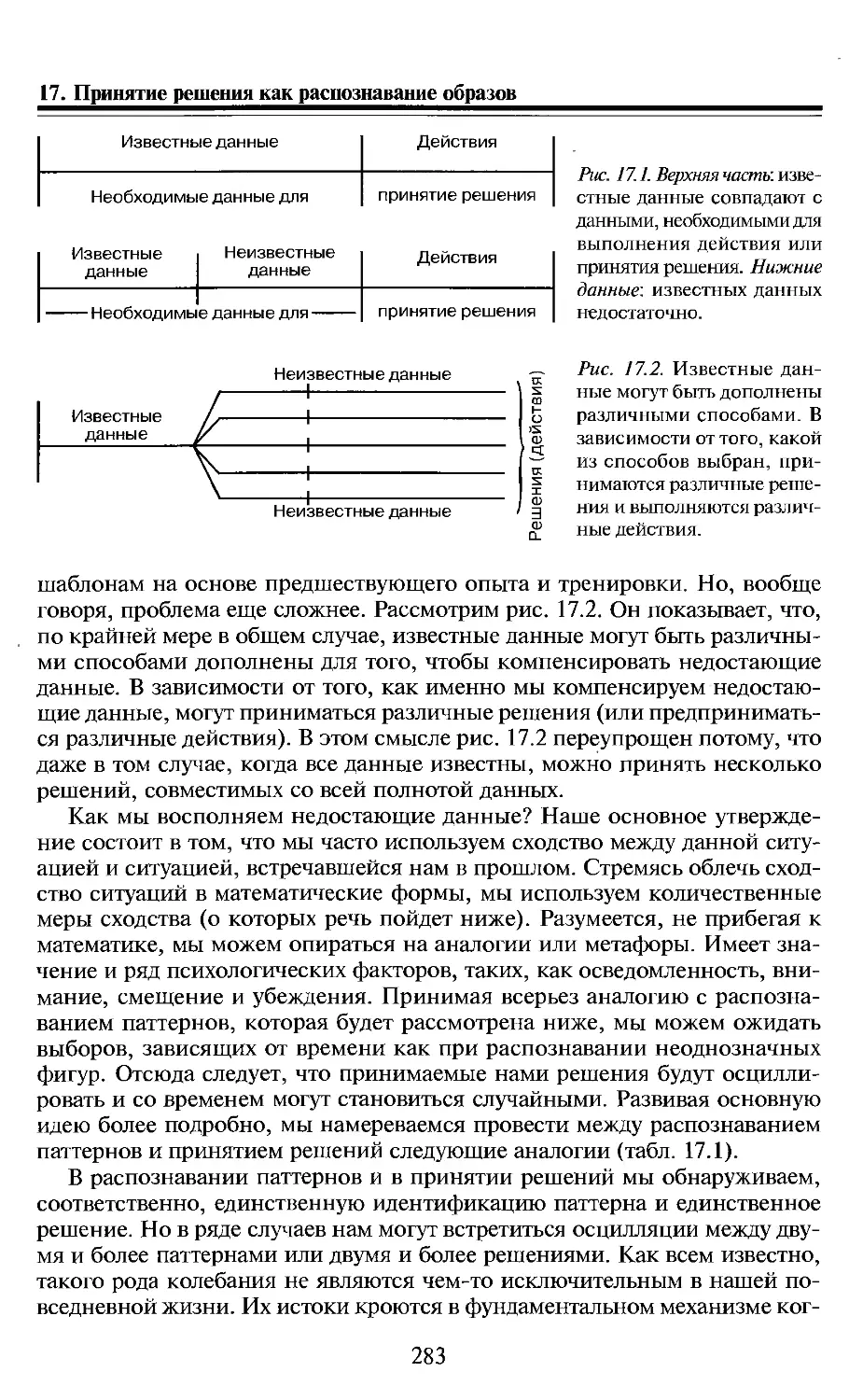
Рис. 2.8. Верхняя часть', постукивания пальцем
происходят в интервалах между звуковыми сиг-
налами. Нижняя часть', если частота звукового
сигнала возрастает, то постукивания пальцем
происходят синхронно со звуковыми сигналами
Сдвиг между сплошными и пунктирными лини-
ями показан в увеличенном виде для большей на-
глядности. В действительности сплошные линии
(постукивания пальцем) и пунктирные линии
(звуковые сигналы) совпадают.
ковыми сигналами. В ходе эксперимента выяснилось, что когда частота
сигнала увеличилась, испытуемый не мог отстукивать синкопированный
ритм и внезапно переходил на отстукивание ритма, синхронизированно-
го с подаваемыми периодическими сигналами. Результаты экспериментов
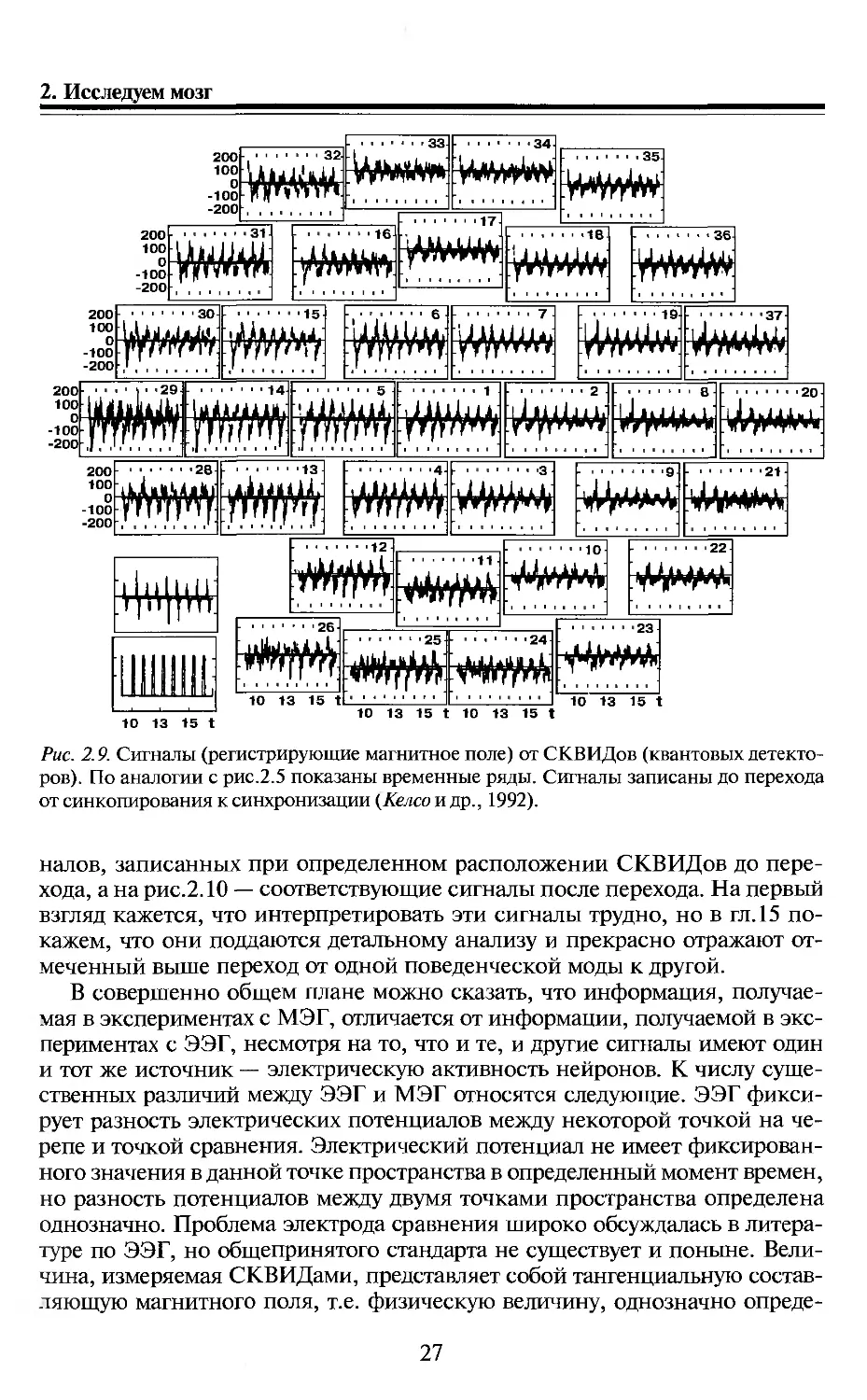
показаны на рис. 2.8. Можно ли различить переход от одной поведенчес-
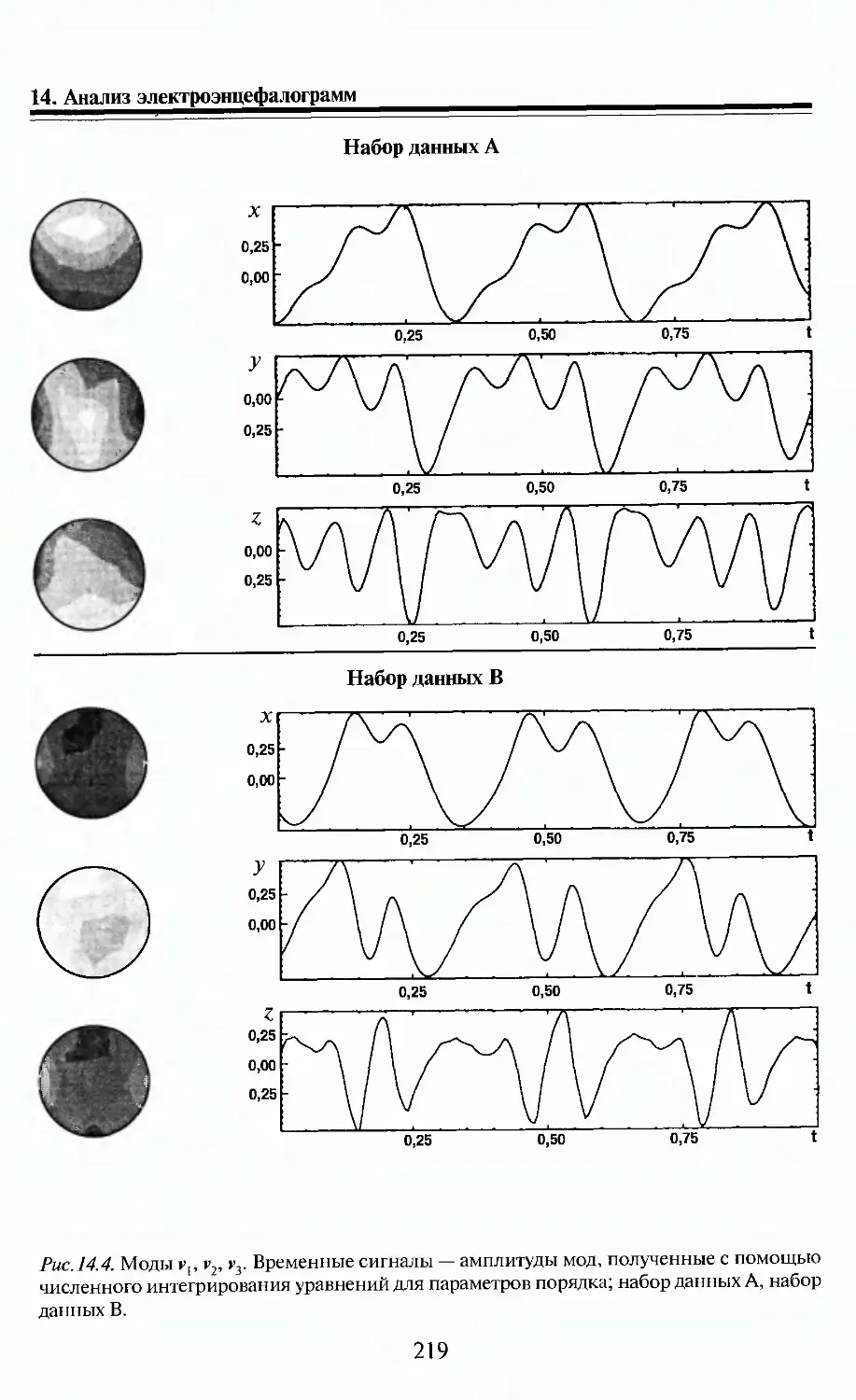
кой моды к другой на МЭГ? На рис. 2.9 представлены временные ряды сиг-
26
2. Исследуем мозг
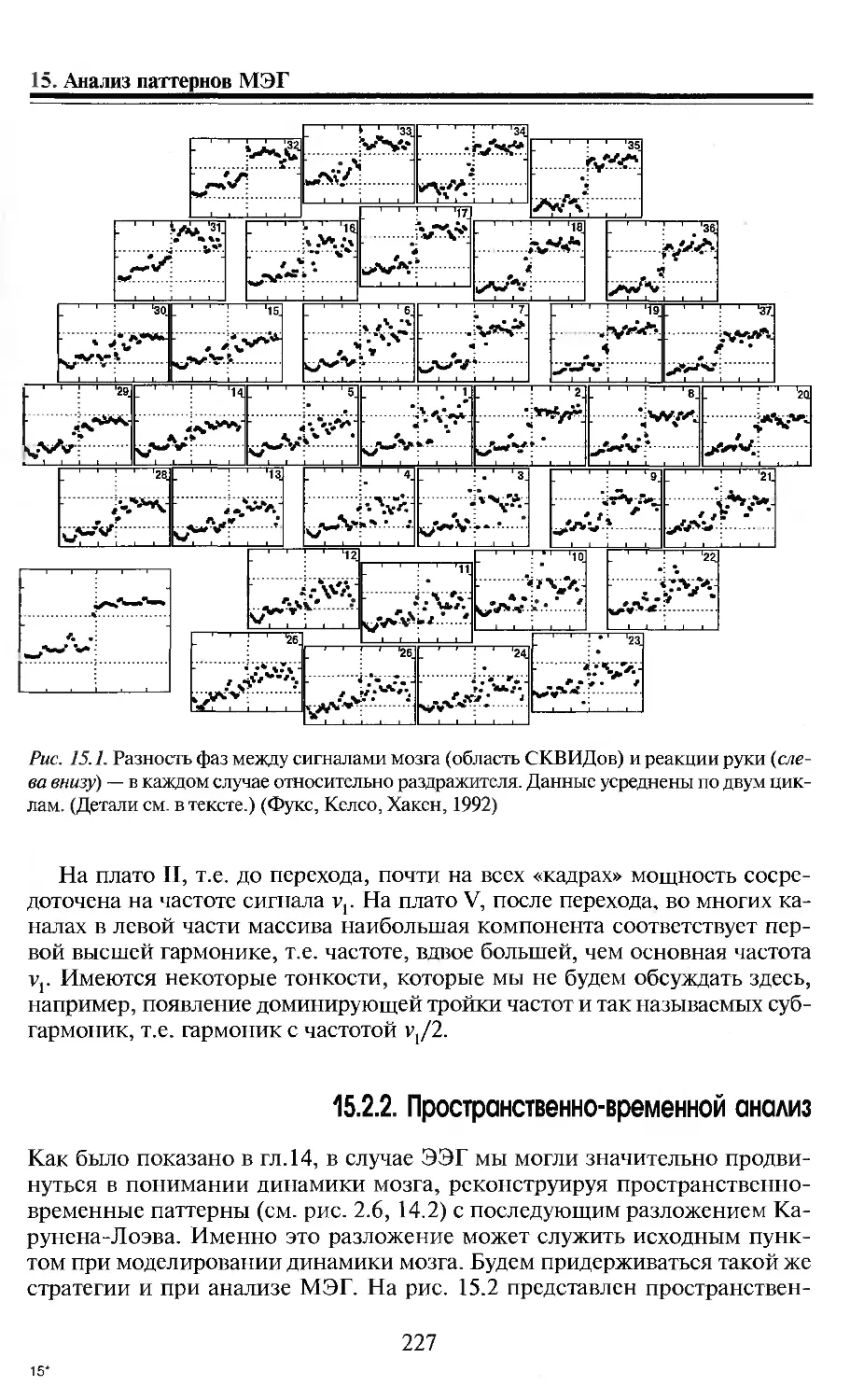
Рис. 2.9. Сигналы (регистрирующие магнитное поле) от СКВИДов (квантовых детекто-
ров). По аналогии с рис.2.5 показаны временные ряды. Сигналы записаны до перехода
от синкопирования к синхронизации (Келсо и др., 1992).
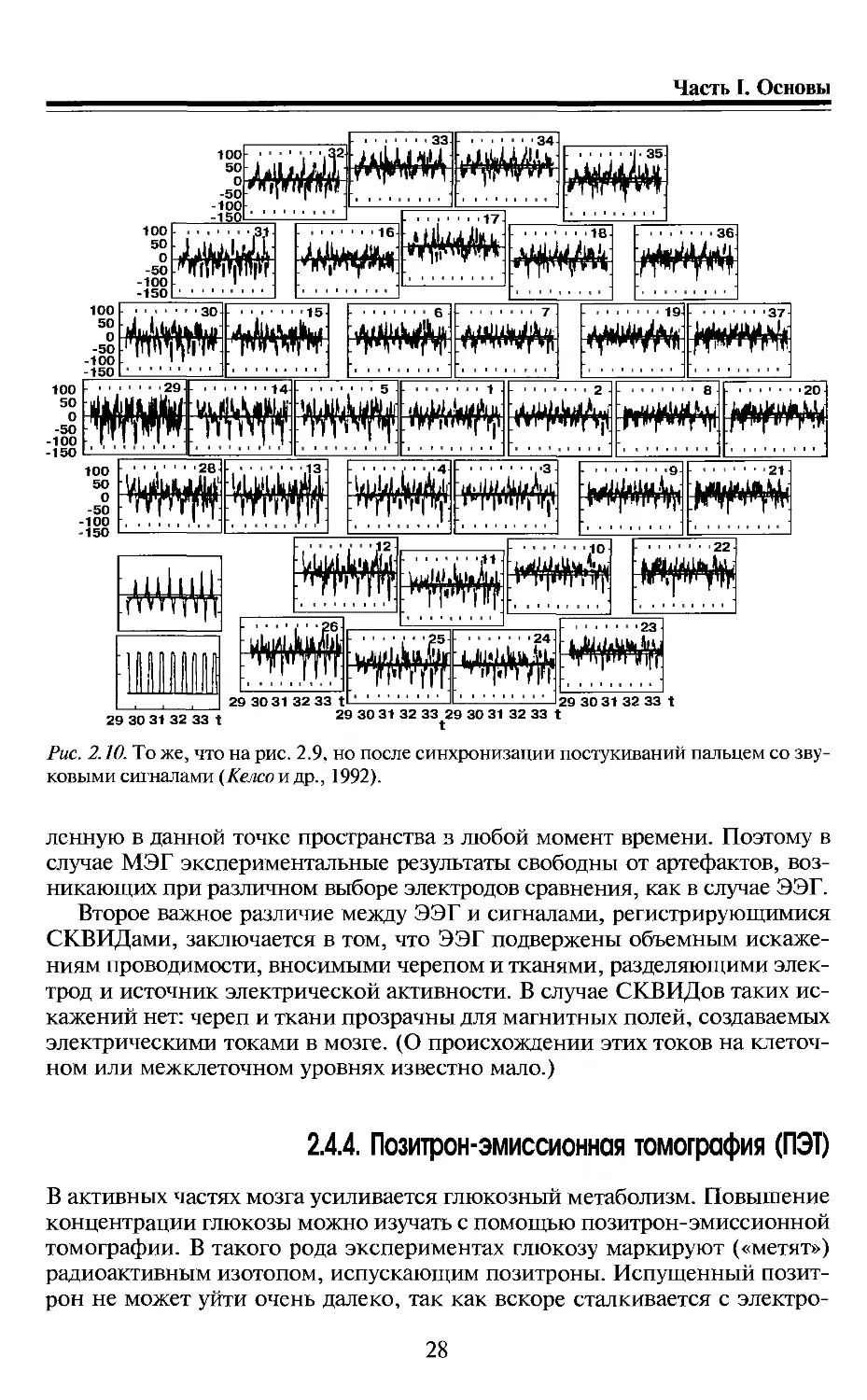
налов, записанных при определенном расположении СКВИДов до пере-
хода, а на рис.2.10 — соответствующие сигналы после перехода. На первый
взгляд кажется, что интерпретировать эти сигналы трудно, но в гл. 15 по-
кажем, что они поддаются детальному анализу и прекрасно отражают от-
меченный выше переход от одной поведенческой моды к другой.
В совершенно общем плане можно сказать, что информация, получае-
мая в экспериментах с МЭГ, отличается от информации, получаемой в экс-
периментах с ЭЭГ, несмотря на то, что и те, и другие сигналы имеют один
и тот же источник — электрическую активность нейронов. К числу суще-
ственных различий между ЭЭГ и МЭГ относятся следующие. ЭЭГ фикси-
рует разность электрических потенциалов между некоторой точкой на че-
репе и точкой сравнения. Электрический потенциал не имеет фиксирован-
ного значения в данной точке пространства в определенный момент времен,
но разность потенциалов между двумя точками пространства определена
однозначно. Проблема электрода сравнения широко обсуждалась в литера-
туре по ЭЭГ, но общепринятого стандарта не существует и поныне. Вели-
чина, измеряемая СКВИДами, представляет собой тангенциальную состав-
ляющую магнитного поля, т.е. физическую величину, однозначно опреде-
27
Часть [. Основы
Рис. 2.10. То же, что на рис. 2.9, но после синхронизации постукиваний пальцем со зву-
ковыми сигналами (Келсо и др., 1992).
ленную в данной точке пространства в любой момент времени. Поэтому в
случае МЭГ экспериментальные результаты свободны от артефактов, воз-
никающих при различном выборе электродов сравнения, как в случае ЭЭГ.
Второе важное различие между ЭЭГ и сигналами, регистрирующимися
СКВИДами, заключается в том, что ЭЭГ подвержены объемным искаже-
ниям проводимости, вносимыми черепом и тканями, разделяющими элек-
трод и источник электрической активности. В случае СКВИДов таких ис-
кажений нет: череп и ткани прозрачны для магнитных полей, создаваемых
электрическими токами в мозге. (О происхождении этих токов на клеточ-
ном или межклеточном уровнях известно мало.)
2.4.4. Позитрон-эмиссионная томография (ПЭТ)
В активных частях мозга усиливается глюкозный метаболизм. Повышение
концентрации глюкозы можно изучать с помощью позитрон-эмиссионной
томографии. В такого рода экспериментах глюкозу маркируют («метят»)
радиоактивным изотопом, испускающим позитроны. Испущенный позит-
рон не может уйти очень далеко, так как вскоре сталкивается с электро-
28
2. Исследуем мозг
ном, и обе частицы аннигилируют. В результате процесса аннигиляции в
противоположных направлениях испускаются два у-кванта. Если вокруг
черепа поместить детекторы у-излучения, то, подвергая их сигналы пос-
ледующей компьютерной обработке, можно определить положение цент-
ров излучения с точностью до нескольких миллиметров. До сих пор наи-
более надежным показателем локальной интеллектуальной активности был
кровоток. Такого рода взаимосвязь предвидели еще в 1890 г. Рой и Шер-
рингтон, которые утверждали, что «кровоснабжение мозга [автоматичес-
ки] связано с локальной активностью мозга». Активные участки мозга тре-
буют более интенсивного кровоснабжения. С другой стороны, нейроны,
по крайней мере в малых временных масштабах, действуют в отсутствие
кислорода, т.е. в анаэробных условиях, поэтому концентрация кислорода
в венозной крови оказывается выше обычной. На практике такого рода эк-
сперименты проводятся следующим образом. В вену руки делается инъек-
ция воды Н,О. В молекуле воды атом кислорода радиоактивен — это атом
изотопа О , излучающий позитроны. Примерно через минуту молекула
воды попадает в мозг. А само время жизни радиоактивного изотопа состав-
ляет около двух минут, т.е. радиоактивный изотоп кислорода распадается
очень быстро и в тканях мозга не остается радиоактивных материалов.
Сравнивая изображения мозга, не занятого или занятого решением какой-
то конкретной задачи, полученные с помощью позитрон-эмиссионной то-
мографии, трудно усмотреть между ними какие-нибудь существенные раз-
личия. Но если вычесть одно изображение из другого, то различия стано-
вятся заметными. Кроме того, позитрон-эмиссионное томографическое
обследование допускает многократное повторение. Измерения, произво-
димые у различных людей, усредняются, а измерения, производимые над
одних и тех же испытуемых, позволяют усилить эффект.
В 1988 г. Петерсен и др. (см. Райл, 1994) воспользовались методом ПЭТ
для изучения организации языка. Испытуемым предлагалось некоторое су-
ществительное, а они должны были подобрать соответствующее ему слово
и произнести его. Например, предлагалось слово «молот», а испытуемый
подбирал слово «ударяет». Реально эксперимент проводился следующим об-
разом. Испытуемый смотрел на экран телевизора, на котором появлялся
крестик, и существительное задавалось либо на экране, либо сообщалось
через наушники. Испытуемый должен был произнести существительное,
которое он услышал или увидел и сообщить, какое слово он подобрал. Как
и ожидалось, зрительное восприятие оказалось сосредоточенным в заднем
отделе мозга (главным образом, в зрительной зоне), а слуховое восприятие —
в височной доле. Произносимые подопытным слова порождались в двига-
тельной зоне, но не в зонах Брока или Вернике. Иначе говоря, мышление
не принимало участия в создании слов. С другой стороны, если перед ис-
пытуемым ставилась комбинированная задача, а именно: сознательное рас-
познавание заданного слова и выбор ответа, то включались левая лобная и
височная доли. После пятнадцатиминутного обучения наблюдалось интерес-
ное изменение картины: области, возбуждаемыые при распознавании задан-
ных слов, совпадали с областями, возбуждавшимися при выработке ответов.
29
Часть I. Основы
2.4.5. Магнитно-резонансное изображение (МРИ)
В основе этого метода лежит явление ядерного магнитного резонанса, изу-
чением которого в физике занимались Блох и Перселл. Как известно, атом
состоит из ядра, вокруг которого орбитируют электроны. Многие ядра об-
ладают магнитным моментом, который связан с из спином. В определен-
ном смысле ядра атомов можно наглядно представить в виде крохотных эле-
ментарных магнитов с северным и южным полюсами. Простейшее из ядер —
ядро атома водорода — называется протоном. Оно обладает спином 1/2, ко-
торый в постоянном магнитном поле может расположиться либо по на-
правлению поля, либо против него. При одном направлении спина энер-
гия ядра больше, при противоположном направлении — меньше (рис.2.11,
верхняя часть). Если приложить дополнительное магнитное поле, осцил-
лирующее во времени, то элементарный магнит может начать изменять
свою ориентацию (рис. 2.11, нижняя часть). Для того чтобы изменение ори-
ентации произошло, магнитное поле должно удовлетворять решающему
требованию: его частота V должна быть равна разности энергий Е2 — Ер
деленной на постоянную Планка h. Если это условие выполнено, то гово-
рят, что имеет место резонанс. Это объясняет, почему в название метода
включен магнитный резонанс. Угол, на который изменяется ориентация
элементарного магнита, пропорционален напряженности приложенного
поля и продолжительности его включения. Таким образом, выбирая под-
ходящую продолжительность включения внешнего поля, можно придать
элементарному магниту любую финальную ориентацию. Если спин «опро-
кидывается», изменяя свое направление с вертикального на горизонталь-
ное, т.е. на угол Л/2, то говорят об Л/2-импульсе приложенного извне ос-
циллирующего магнитного поля (рис. 2.12, верхняя часть). Если направ-
ление спина изменяется на угол 71, т.е. спин, первоначально направленный
вверх, переворачивается и «смотрит» вниз, то говорят о я-импульсе при-
ложенного извне осциллирующего магнитного поля (рис. 2.12, нижняя
часть). Особый интерес представляет Л/2-импульс. Из квантовой механи-
ки известно, что под действием постоянного магнитного поля спины вра-
щаются в плоскости, перпендикулярной направлению магнитного поля,
причем вращаются когерентно, а поскольку спины ведут себя как крохот-
ные магниты, они могут создавать переменное когерентное магнитное
поле, которое можно уловить и зафиксировать. Таким образом, протоны
(или другие ядра) реагируют на внешний импульс. Но окружающая среда
вносит возмущения в согласованное действие элементарных магнитов. В
результате со временем их когерентное движение нарушается и создавае-
мое их «совместными усилиями» магнитное поле падает до нуля за время,
которое называется временем поперечной релаксации Т2. Генерация магнит-
ного поля прекращается также, когда спины переходят от своего движе-
ния в горизонтальной плоскости к магнитно наиболее благоприятной вер-
тикальной ориентации. Такая переориентация спинов происходит за вре-
мя, которое называется временем продольной релаксации Тр В зависимости
от характера и последовательности импульсов, прилагаемых к спинам,
30
2. Исследуем мозг
Постоянное поле Энергия
До
Спин 1/2
О
Е
Энергия
‘А
Л Спин—1/2 £
V т°+
Рис. 2.11. Верхняя и средняя части-, в постоян-
ном магнитном поле Во спин - 1/2 может на-
ходиться в двух положениях: быть направлен-
ным вверх или вниз, соответственно, с пере-
ходом на более низкий или более высокий
энергетический уровень. Нижняя часть: пе-
ременное магнитное поле, приложенное до-
полнительно к постоянному магнитному
полю й(), при выполнении условия резонан-
Р са йсо = Е+ — Е может привести к опроки-
- дыванию спина. Величина перехода (раз-
ность энергий между уровнями) пропорцио-
нальна приложенному постоянному магнит-
ному полю Во.
1) Насыщение—восстановление
(последовательность тг/2-импульсов)
2) Последовательность спинового эха
(тг-л/2-последовател ьность)
Автоэлектронная
эмиссия
Время
поперечной
релаксации
Т2
3) Инверсия-восстановление
(n-jt/2-последовательность)
Время
продольной
релаксации
Г,
Рис. 2.12. Схематическое изображение раз-
личных типов процессов магнитного резо-
нанса.
можно измерять либо Г2, либо Т\. По величине испускаемого магнитного
сигнала можно судить о концентрации спинов, а измеряя времена релакса-
ции 7\ и Г2 этого поля — о химическом окружении спинов. На вдаваясь чрез-
мерно в детали, назовем лишь три самые главные процедуры (рис. 2.12).
1) Насыщение—восстановление: последовательность л/2-импульсов.
31
Часть I. Основы
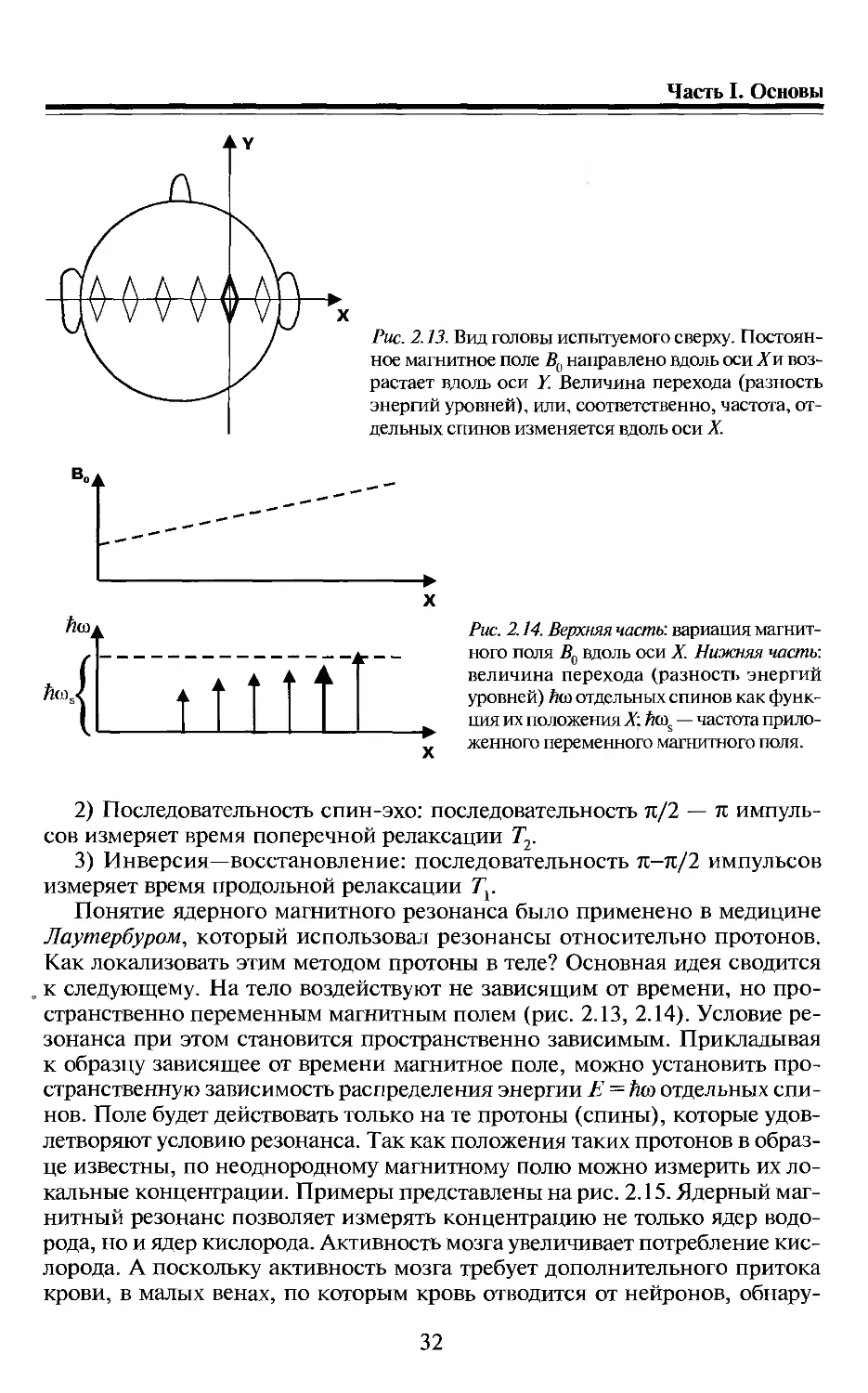
Рис. 2.13. Вид головы испытуемого сверху. Постоян-
ное магнитное поле й(| направлено вдоль оси X и воз-
растает вдоль оси Y. Величина перехода (разность
энергий уровней), или, соответственно, частота, от-
дельных спинов изменяется вдоль оси X.
Рис. 2.14. Верхняя часть: вариация магнит-
ного поля Во вдоль оси X. Нижняя часть:
величина перехода (разность энергий
уровней) Лео отдельных спинов как функ-
ция их положения X: Лсо& — частота прило-
женного переменного магнитного поля.
2) Последовательность спин-эхо: последовательность л/2 — л импуль-
сов измеряет время поперечной релаксации Т2.
3) Инверсия—восстановление: последовательность л-л/2 импульсов
измеряет время продольной релаксации Тг
Понятие ядерного магнитного резонанса было применено в медицине
Лаутпербуром, который использовал резонансы относительно протонов.
Как локализовать этим методом протоны в теле? Основная идея сводится
, к следующему. На тело воздействуют не зависящим от времени, но про-
странственно переменным магнитным полем (рис. 2.13, 2.14). Условие ре-
зонанса при этом становится пространственно зависимым. Прикладывая
к образцу зависящее от времени магнитное поле, можно установить про-
странственную зависимость распределения энергии E = hca отдельных спи-
нов. Поле будет действовать только на те протоны (спины), которые удов-
летворяют условию резонанса. Так как положения таких протонов в образ-
це известны, по неоднородному магнитному полю можно измерить их ло-
кальные концентрации. Примеры представлены на рис. 2.15. Ядерный маг-
нитный резонанс позволяет измерять концентрацию не только ядер водо-
рода, но и ядер кислорода. Активность мозга увеличивает потребление кис-
лорода. А поскольку активность мозга требует дополнительного притока
крови, в малых венах, по которым кровь отводится от нейронов, обнару-
32
2. Исследуем мозг
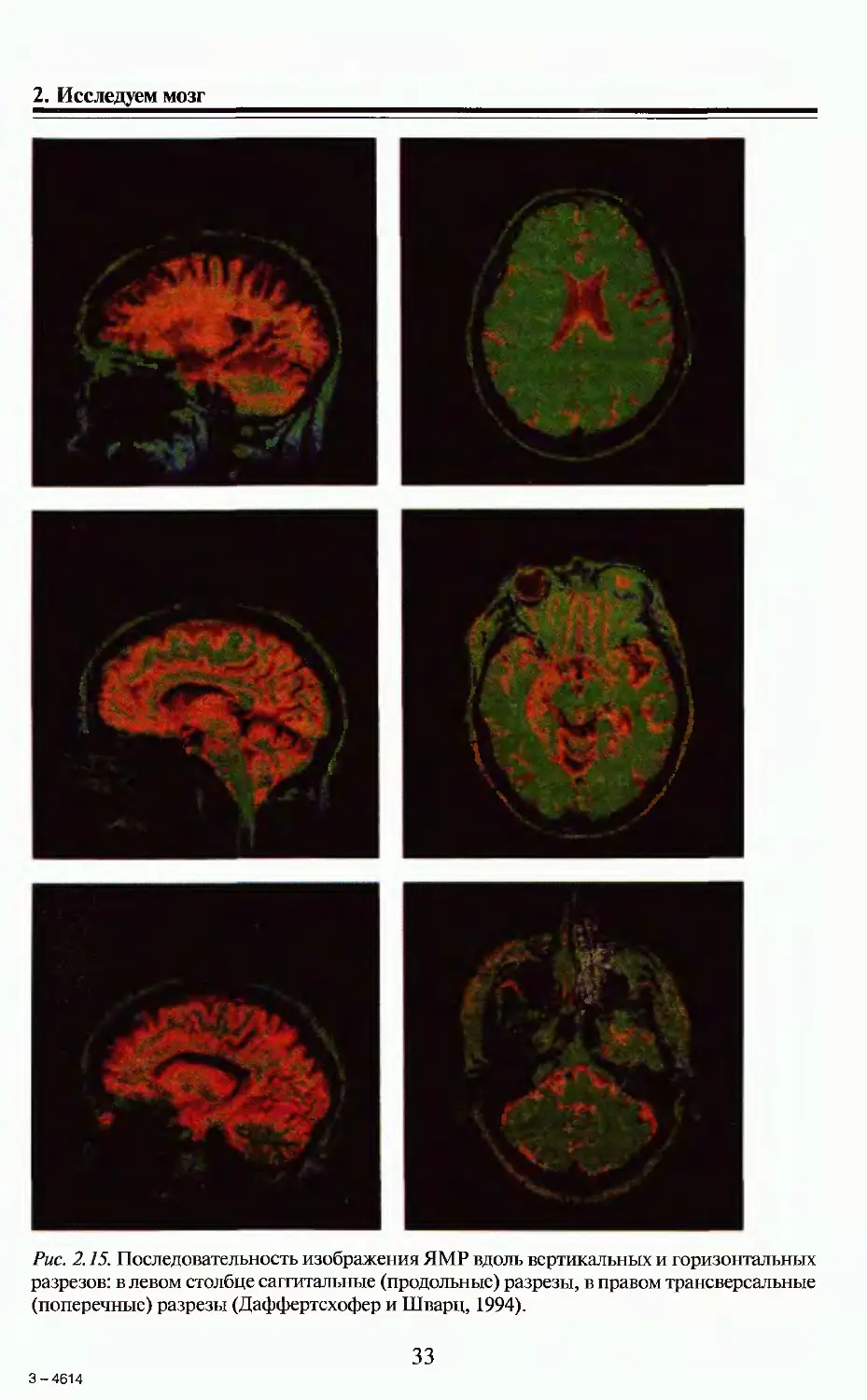
Рис. 2.15. Последовательность изображения ЯМР вдоль вертикальных и горизонтальных
разрезов: в левом столбце саггитальные (продольные) разрезы, в правом трансверсальные
(поперечные) разрезы (Даффертсхофер и Шварц, 1994).
3-4614
33
Часть I. Основы
живается повышенная концентрация кислорода. Кислород переносится ге-
моглобином. В 1935 г. Полинг показал, что магнитные свойства гемогло-
бина изменяются соответственно количеству переносимого кислорода. В
1990 г. Бугава и др. показали, что с помощью ядерного магнитного резо-
нанса (ЯМР), или по новой терминологии магнитно-ядерного изображе-
ния (МЯИ), можно обнаруживать даже слабые магнитные отклонения.
Пространственное разрешение составляет от 1 до 2 мм. Измерения могут
проводиться в реальном времени, но разрешение по времени составляет
от 100 миллисекунд до нескольких секунд. Такое разрешение может ока-
заться слишком грубым при исследовании некоторых важных видов интел-
лектуальной деятельности.
2.5. Структура и функция на микроскопическом уровне
Структуру и функцию нейронов мы изучаем на микроскопическом уровне.
Нейрон, если отвлечься от мелких деталей, состоит из тела клетки и аксона,
по которому генерируемые электрические сигналы передаются другим ней-
ронам. (В действительности нейрон представляет собой высокосложную си-
стему, в которой можно выделить ряд компонент. К числу последних принад-
лежат микрострубочки, могущие согласно гипотезе Хамероффа (1987) играть
фундаментальную роль в организации памяти и даже сознания. В конце книги
мы кратко вернемся к этой пока все еще умозрительной гипотезе, а в этой гла-
ве будем придерживаться только установленных фактов). Кроме тела клетки
у нейрона имеются несколько отростков, называемых дендритами, которые
принимают сигналы, поступающие от других нейронов. Иногда также гово-
рят о дендритном дереве. Сам аксон, разветвляясь, переходит в дендритное
дерево. Сигналы передаются от клетки к клетке в точках контакта между ден-
дритами. Эти точки контакта имеют особую структуру и называются синап-
сами (рис.2.16). Каждый синапс содержит несколько пузырьков, в которых
хранятся молекулы так называемых нейротрансмиттеров. Когда испущенный
аксоном электрический сигнал достигает синапса, пузырьки раскрываются и
выделяют нейротрансмиттеры, которые диффундируют по синаптической
щели и в конце концов вызывают новый сигнал по другую сторону контакта.
В настоящее время известен ряд различных нейротрансмиттеров: ацетилхо-
лин, серотонин, дофамин, ГАБА и др. Установлено, что серотонин «приглу-
шает» активность мозга, а если его уровень слишком низок, то это может при-
водить к депрессиям. С другой стороны, дофамин стимулирует активность
мозга, но при слишком больших или быстро флуктуирующих концентрациях
может вызывать шизофреническое поведение. В мембране у синаптической
щели имеются особые центры, так называемые рецепторы, ответственные за
поглощение нейротрансмиттеров. Например, существуют рецепторы серото-
нина. Прием лекарственных препаратов приводит к блокированию опреде-
ленных рецепторов. Например, кофеин блокирует рецепторы серотонина, а
34
2. Исследуем мозг
сеть
----Стенка клетки
-----Аксон
-елротрансмиттера
-. . 2.16. Типичная нервная клетка.
галоперидол, препарат, используе-
мый при лечении шизофрении,
блокирует рецепторы дофамина-2.
Именно в этой связи возникают
интересные связи с синергетикой,
поскольку необходимо понять, по-
чему простое изменение концент-
рации лекарственного препарата и
тем самым простое изменение в
блокировке специфических ре-
цепторов приводит к изменению
макроскопического поведения че-
ловека. Например, выпив кофе,
мы становимся бодрыми и актив-
ными, а прием галоперидола может
не только затормозить активность
мозга, но и вызвать качественное
изменение поведения.
В то время как одни нейроны
испускают сигналы, активирую-
щие другие нейроны, существуют
также нейроны, которые испуска-
ют сигналы, ингибирующие (тормо-
зящие) действие других нейронов.
Таким образом, необходимо раз-
личать активирующие нейроны от
ингибирующих. Получая сигналы
от других нейронов, активаторов
или ингибиторов, нейрон сумми-
рует их и формирует постсинапти-
ческий сигнал. Преобразования
входящих сигналов в исходящие
происходит таким образом, что
исходящий сигнал может быть ис-
пущен только в том случае, если
приходящие сигналы превосходят
некоторый специфический порог.
Какого рода сигналы может
испускать нейрон? Независимо от
того, к какому типу относится
нейрон, он может испускать толь-
ко одну разновидность сигнала, а
именно: короткий импульс про-
должительностью около 1 милли-
секунды. Этот электрический им-
пульс распространяется вдоль ак-
35
Часть I. Основы
сона. Степень возбуждения нейрона кодируется скоростью испускания
сигналов. Чем выше уровень активации или чем больше постсинаптичес-
кий потенциал, тем с большей скоростью испускаются импульсы. Если вос-
пользоваться радиотехнической терминологией, то можно сказать, что при
передаче нервных сигналов используется импульсно-кодовая модуляция.
Самое замечательное заключается в том, что клетки, принадлежащие раз-
личным областям мозга, например, зонам, ведающим обработкой слухо-
вых или зрительных сигналов, используют один и тот же код.
Важную взаимосвязь между сенсорными входами и скоростью возбужде-
ния нейрона обнаружили Хубель и Визель (1962), занимавшиеся изучением
скорости возбуждения специфических нейронов в зрительной зоне коры
больших полушарий анестезированных кошек. Глаза кошек были открыты и
могли воспринимать изображения. Типичным изображением была черта, про-
веденная в определенном направлении, которая перемещалась в том же на-
правлении. «Срабатывание» конкретного нейрона сильно зависело от ориен-
тации черты. Например, если черта была проведена в горизонтальном направ-
лении, то нейрон вообще не возбуждался. Если черта была проведена под уг-
лом, например, 45° к горизонтальной оси, то нейрон возбуждался с умерен-
ной скоростью. Наконец, если черта была проведена вертикально, то нейрон
возбуждался необычайно быстро. Фриман, изучавший обонятельную лукови-
цу крыс, обнаружил, что возбуждение различных нейронов может стать кор-
релированным. Такие эксперименты особенно убедительны, если они про-
делываются в зрительной области, как впервые показали Сингер, Грей и их
сотрудники, а также Экхорн и его сотрудники. Эти авторы обнаружили, что
две черты, движущиеся в одном и том же направлении и имеющие одинако-
вую ориентацию, воспринимались зрительными полями двух различных ней-
ронов, причем оба нейрона синхронно возбуждались на короткое время.
2.6. Обучение и память
Структуры и процессы, лежащие в основе обучения и памяти на нейронном
уровне, изучены еще недостаточно хорошо. Согласно общепринятым гипо-
тезам Хебба, обучение достигается путем усиления синапсов между нейро-
нами, которые синхронно активизируются снова и снова, и соответствую-
щего ослабления синапсов между нейронами, если один из них (или оба од-
новременно) находятся в неактивном состоянии. Взаимосвязь между воз-
никновением паттернов поведения и изменениями на нейронном уровне
изучались, например, Канделем, на таких низших животных, как голожа-
берные моллюски Aplysia и Hermissenda. Изменения поведенческих паттер-
нов, которые могут происходить, бывают двух типов: привыкание и сенси-
билизация. Установлены корреляции между этими изменениями макроско-
пических поведенческих паттернов и изменениями в формировании новых
рецепторных каналов, правда, на протяжении всего лишь нескольких часов.
36
2. Исследуем мозг
3. Моделируем мозг.
Первая попытка:
мозг как динамическая система
3.1 Что такое динамическая система?
Динамические системы были предметом изучения в математике и физике
на протяжении столетий. Примерами динамических систем могут служить
маятник и Солнечная система — Солнце и обращающиеся вокруг него пла-
неты. Жидкости также можно рассматривать как динамические системы.
Они состоят из мириад молекул, которые подчиняются законам классичес-
кой (или квантовой) механики. На еще более абстрактном уровне хими-
ческие реакции также допустимо трактовать как процессы, происходящие
в динамической системе взаимодействующих молекул.
Кратко обсудим теперь, что общего имеют все эти примеры. Для мате-
матического описания движения маятника нам нужны его амплитуда х и
скорость г. Так как и амплитуда, и скорость изменяются со временем, за-
пишем их в виде x(t) и v(t), чтобы явно указать зависимость от времени. В
случае солнечной системы введем положения, или координаты, хр...,хп, и
соответствующие скорости v],v2,...,vn, где индексы относятся к различным
планетам. В жидкости вместо того, чтобы рассматривать каждую молеку-
лу в отдельности, мы вводим плотности молекул и скорости малых объе-
мов, которые содержат достаточно много молекул. При рассмотрении хи-
мических реакций мы можем вводить число молекул или их плотности. Во
всех этих случаях различные величины, по крайней мере в общем случае,
зависят от времени. Чтобы рассматривать все перечисленные выше (и мно-
гие другие) проблемы с единой точки зрения, введем переменные q и ус-
ловимся отличать их по индексу. Например, в случае маятника можно по-
ложить х = qv г = qr В общем случае мы вводим набор таких координат и
определяем вектор состояния соотношением
q = {qvqv...,qt). <31)
Чтобы описать систему и, кроме того, предсказывать ее эволюцию во
времени, мы используем уравнения движения. Примером уравнений дви-
жения могут служить уравнения механики Ньютона.
Рассмотрим одну частицу с массой т. Ее импульс р связан с ее скорос-
тью г соотношением
37
Часть I. Основы
р = mv.
(3-2)
(3.3)
Под действием силы Г импульс изменятся в соответствии с уравнением
dp
dt
В явном виде сила F известна, например, в случае пружины, на кото-
рой подвешена материальная частица. Если положение частицы х отожде-
ствить с удлинением пружины, то сила F будет иметь вид
F = —кх,
где к — постоянная Гука. Таким образом, Г зависит от положения и (иног-
да) от импульса. Чтобы совместить такую запись с обозначениями (3.1),
положим х = qx и v = qr Напомнив, что v = dx/dt= dqx/dt, запишем (3.2) и
(3.3) в виде
dqx д2
dt т ’
^ = F{qx,q2),
at
(3.4)
(3.5)
где в явном виде указана зависимость Гот q} и qr
Приведенные выше соображения допускают существенное обобщение.
Если система может быть описана набором адекватно выбранных перемен-
ных qv...,qn, то уравнения движения можно представить в виде
-
(3.6)
Предоставляем читателям в качестве несложного упражнения убедить-
ся в том, что уравнения (3.4), (3.5) и (3.6) эквивалентны. Вводя вектор со-
стояния (3.1) и новый вектор N= (klv Nn), запишем систему уравнений
(3.6) как одно уравнение вида
at
(3-7)
Левая часть уравнения (3.7) описывает изменение вектора состояния во
времени, правая зависит от текущего состояния q системы и говорит нам
о том, как именно временное состояние определяется текущим состояни-
ем. Область применимости уравнений (3.6) и (3.7) не ограничивается ме-
ханикой. В действительности огромная область разнообразнейших процес-
38
Зк Моделируем мозг. Первая попытка: мозг как динамическая система
сов может быть описана на языке динамических систем, что и является ис-
тодны_ г пунктом теории динамических систем. Но существуют и два огра-
- ’ чения: уравнения (3.6) и (3.7) не охватывают квантовомеханические про-
_ессы. включение стохастических процессов в общую схему теории дина-
мических систем также требуют привлечения дополнительных соображе-
нии. Уравнения (3.6) и (3.7) распространяются на классические, детерми-
- стические процессы. Центральная проблема теории динамических сис-
тем — аналитическое, численное или качественное решение уравнений
«3.6) и (3.7). Имея в виду дальнейшие приложения, упомянем о том, что
динамические системы могут быть описаны и с помощью дискретных ото-
бражений. На языке последних мы отслеживаем траекторию, например,-
-детины, только через дискретные шаги по времени tn, п=1,2,..., и иссле-
дуем. как состояние системы в момент времени tn+] зависит от состояния
в предыдущий момент времени tn.
3.2 . Мозг как динамическая система
Как было показано в гл.1, в мозге происходят многочисленные химичес-
кие и электрические процессы. По крайней мере с формальной точки зре-
ния это позволяет нам рассматривать мозг как гигантскую динамическую
систему. Но при таком подходе мы сталкиваемся с принципиальными
трудностями. Во-первых, вопрос, каким образом точно определить пере-
менные qr Относятся ли эти переменные к составным частям отдельных
ейронов? Какие молекулы, участвующие в химических процессах, ко-
торые происходят в мозге, нам необходимо рассматривать? Так как в од-
ном кубическом сантиметре находится около Ю22 молекул, нам необхо-
димо сформулировать по крайней мере столько же уравнений для опи-
сания активности мозга. Но мы не знаем даже параметры, например, ки-
-етические постоянные! На этом уровне рассмотрения мы заведомо стал-
киваемся с неразрешимой задачей. Попытаемся перейти на нейронный
уровень. На нейронном уровне нам также необходимо сформулировать
уравнения движения. Предположим, что все связи между нейронами и
параметры нам известны. (В действительности мы еще очень далеки от
столь полного знания связей между нейронами и параметрами, так как
нейроны отличаются необычайной сложностью и отличаются друг от дру-
га.) Так как, исследуя мозг, мы имеем дело примерно со ста миллиарда-
ми нейронов, возникает необходимость решить 10" уравнений. Даже для
самых совершенных современных компьютеров это безнадежная задача.
Совершенно ясно, что подход, основанный на рассмотрении мозга как
динамической системы, неосуществим. Тем не менее в рамках указанного
подхода был предпринят ряд попыток, ставших возможными лишь бла-
годаря сильнейшим упрощениям. К числу таких упрощений принадлежит
нейрокомпьютер, в котором свойства нейронов и связей между ними
39
Часть I. Основы
сильно упрощены и используется только очень ограниченное число мо-
делей нейронов, например дюжина или сотня вместо ста миллиардов (см.
гл.18). Совершенно ясно, что активность мозга и поведенческие паттер-
ны необходимо рассматривать в терминах различных понятий. Именно
это и будет нашей главной заботой на страницах предлагаемой вниманию
читателей книги, в которой мы рассматриваем мозг как синергетическую
систему. В основе этой идеи лежит представление о том, что вследствие
кооперации отдельных частей новые качества возникают в результате са-
моорганизации. Чтобы объяснить новый, синергетический подход, нам
придется использовать основные принципы синергетики, к изложению
которых мы переходим в следующей главе.
4. Основные понятия синергетики I:
параметры порядка
и принцип подчинения
4.1 Факторы, определяющие эволюцию во времени
В этой главе мы исходим из весьма широкой точки зрения. Мы рассмот-
рим сложные системы, которые встречаются в ряде таких дисциплин, как
физика, химия, биология и медицина, а также экономика и экология. Во
всех рассматриваемых случаях системы состоят из многих компонент, под-
систем, элементов или частей. Некоторые из первых шагов нашего анализа
очень похожи на аналогичные операции теории динамических систем, но
позднее между двумя подходами появятся решающие различия. Компонен-
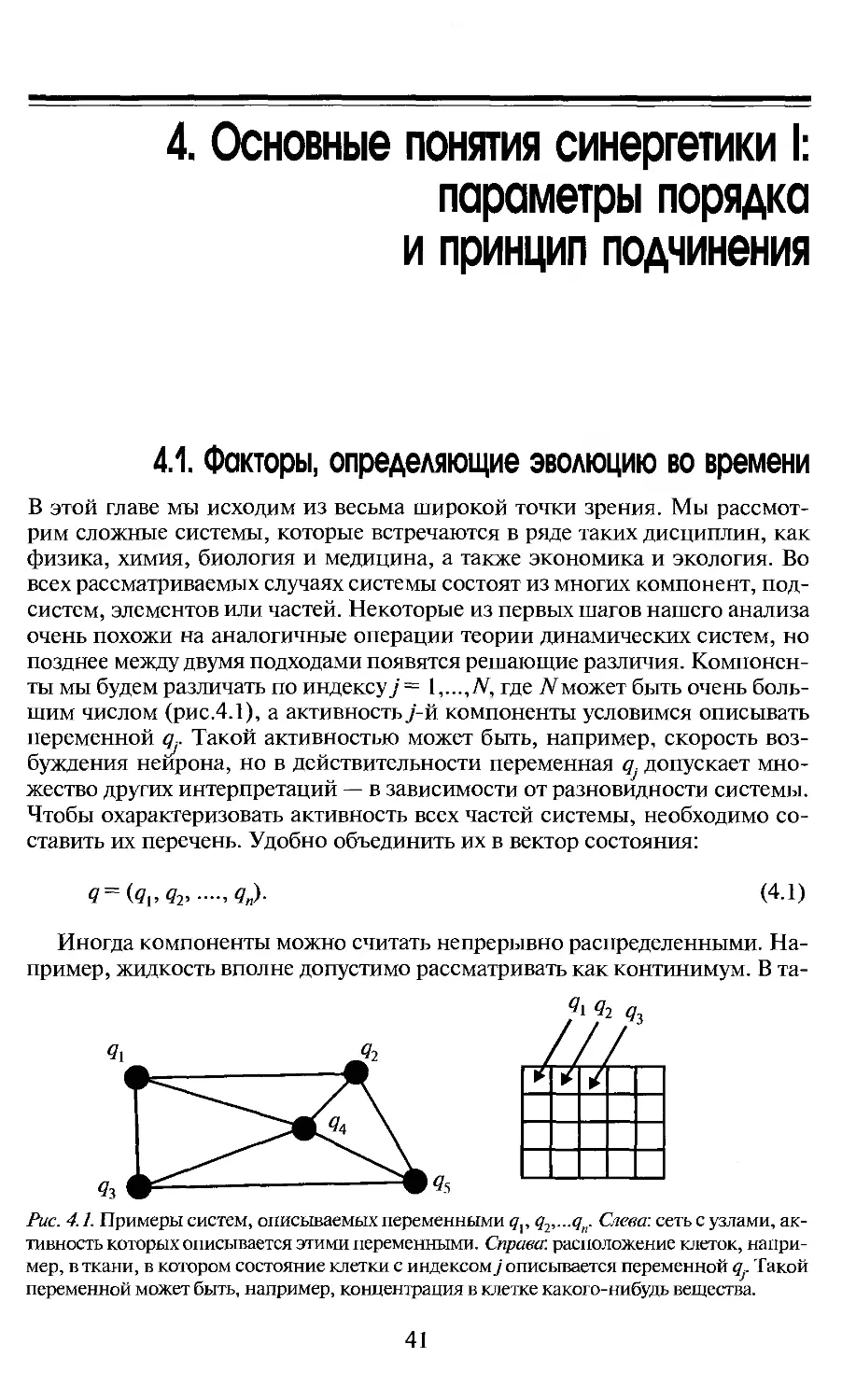
ты мы будем различать по индексу j = 1,...,N, где Nможет быть очень боль-
шим числом (рис.4.1), а активностьу-й компоненты условимся описывать
переменной Такой активностью может быть, например, скорость воз-
буждения нейрона, но в действительности переменная qj допускает мно-
жество других интерпретаций — в зависимости от разновидности системы.
Чтобы охарактеризовать активность всех частей системы, необходимо со-
ставить их перечень. Удобно объединить их в вектор состояния:
q={ql,qv ....,qn).
(4.1)
Иногда компоненты можно считать непрерывно распределенными. На-
пример, жидкость вполне допустимо рассматривать как континимум. В та-
Рис. 4.1. Примеры систем, описываемых переменными qv qv...qn. Слева: сеть с узлами, ак-
тивность которых описывается этими переменными. Справа-, расположение клеток, напри-
мер, в ткани, в котором состояние клетки с индексом j описывается переменной qf Такой
переменной может быть, например, концентрация в клетке какого-нибудь вещества.
41
Часть I. Основы
ких системах мы заменяем дискретный индекс j пространственной коор-
динатой х, у, z = х, a qj— функцией q(x). Примером q(x) может служить
плотность молекул жидкости, которая изменяется как функция простран-
ственных координат х. Во многих случаях состояние системы изменяется
со временем, т.е. вектор состояния системы q (4.1) становится функцией
времени Г.
Q = (4.2)
В синергетике, для того чтобы исследовать изменение вектора состоя-
ния во времени, мы предполагаем, что оно определяется несколькими фак-
торами:
1) текущим состоянием q системы;
2) связями между компонентами q.,
3) управляющими параметрами а и
4) случайными событиями.
Рассмотрим эти различные факторы более подробно.
1. Текущее состояние. Примером может служить передемпфированное
движение точечной массы, прикрепленной к пружине. Существует неко-
торое равновесное положение этой массы. Когда мы растягиваем пружи-
ну и, отпустив ее, приводим массу в движение, при обычных условиях она
начинает совершать колебания. Но если предположить, что эти колебания
происходят, например, в густой патоке, то трение может оказаться настоль-
ко сильным, что никаких колебаний не будет. В подобных случаях приня-
то говорить, что колебания передемпфированы. Обозначив отклонение от
положения равновесия через q, уравнение движения можно записать в виде
q = —kq, (4.3)
где к — постоянная. Ясно, что изменение отклонения q (левая часть уравне-
ния (4.3) — зависит от текущего отклонения q (правая часть уравнения (4.3.).
2. Связи между qf. Примером может служить пружина, соединяющая две
точечные массы (1) и (2), занимающие, соответственно, положения q} и q2
(рис. 4.2). Если а — равновесное расстояние между точечными массами, то
на точечную массу (1) действует сила
F= ~k(q2 — q{ — а), (4.4)
где к — коэффициент упругости пружины.
------------------->
Рис. 4.2. Две точечные массы в положениях qY
- ^w/vvvvvvvvw»— —> и <?2, соединенные пружиной, длина которой
Q в состоянии равновесия равна а.
42
I Основные понятия синергетики I: параметры порядка и принцип подчинения
Как показывает этот пример, в уравнение движения входят величины
двух совершенно различных типов, а именно: с одной стороны, перемен-
ные q,, а с другой стороны — характерные постоянные, такие, как к и а. С
Аналогичной ситуацией мы встречаемся и в гораздо более сложных случа-
жх. например, когда речь идет о синаптических связях между двумя ней-
ронами. В непрерывно распределенных средах, таких, как жидкости или
эеакпионные среды в химии, где мы оперируем зависящими от простран-
ственных координат концентрациями q(x) молекул, связи могут зависеть
о градиентов величин q(x) или от их производных более высокого поряд-
ка по пространственным координатам.
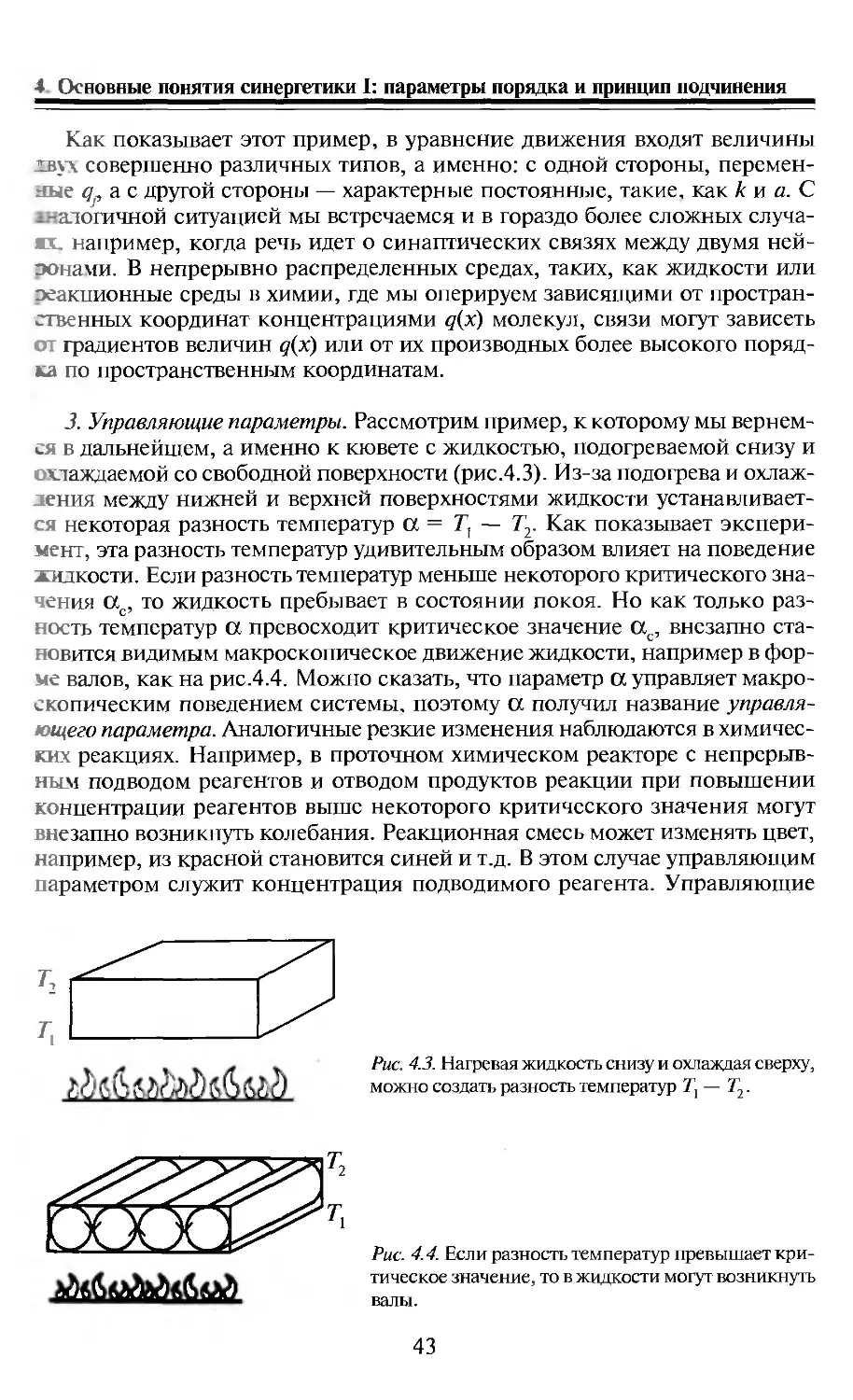
3. Управляющие параметры. Рассмотрим пример, к которому мы вернем-
ся в дальнейшем, а именно к кювете с жидкостью, подогреваемой снизу и
охлаждаемой со свободной поверхности (рис.4.3). Из-за подогрева и охлаж-
дения между нижней и верхней поверхностями жидкости устанавливает-
ся некоторая разность температур ос = Т\ — Т2. Как показывает экспери-
мент, эта разность температур удивительным образом влияет на поведение
жидкости. Если разность температур меньше некоторого критического зна-
чения 0Сс, то жидкость пребывает в состоянии покоя. Но как только раз-
ность температур а превосходит критическое значение 0Сс, внезапно ста-
новится видимым макроскопическое движение жидкости, например в фор-
ме валов, как на рис.4.4. Можно сказать, что параметр а управляет макро-
скопическим поведением системы, поэтому а получил название управля-
ющего параметра. Аналогичные резкие изменения наблюдаются в химичес-
ких реакциях. Например, в проточном химическом реакторе с непрерыв-
ным подводом реагентов и отводом продуктов реакции при повышении
концентрации реагентов выше некоторого критического значения могут
внезапно возникнуть колебания. Реакционная смесь может изменять цвет,
например, из красной становится синей и т.д. В этом случае управляющим
параметром служит концентрация подводимого реагента. Управляющие
Рис. 4.3. Нагревая жидкость снизу и охлаждая сверху,
можно создать разность температур Тх — Т2.
Рис. 4.4. Если разность температур превышает кри-
тическое значение, то в жидкости могут возникнуть
валы.
43
Часть I. Основы
параметры удается выделить даже в самых сложных системах, таких, как
мозг. Их роль могут играть концентрации нейротрансмиттеров, например,
серотонина или дофамина, или концентрации принимаемых лекарствен-
ных препаратов, например, галоперидола, кофеина и т.д. В ряде случаев
управляющими параметрами можно считать концентрации гормонов. По-
чему все эти химические вещества можно рассматривать как управляющие
параметры для мозга, мы обсудим в дальнейшем.
Применяя понятие управляющих параметров к биологическим сис-
темам, необходимо соблюдать известную осторожность. В физических
и химических системах мы фиксируем значения одного или нескольких
управляющих параметров извне, налагая соответствующие эксперимен-
тальные условия, например, регулируя интенсивность подогрева жид-
кости на рис. 4.3. В биологических системах управляющие параметры
весьма часто вырабатываются самой системой, и их в определенном
смысле можно рассматривать как переменные. Но по сравнению с теми
действиями, которые они вызывают, эти переменные изменяются мед-
ленно. В дальнейшем мы поясним взаимосвязь между управляющими
параметрами и другими переменными в биологических системах на ряде
конкретных примеров.
4. Случайные события. Наконец, нельзя не упомянуть о случайных собы-
тиях. Во многих областях науки господствует идея о том, что случайных
событий не существует и что все процессы полностью детерминистичес-
кие. Но в ряде важных процессов случайные события играют важную роль.
Случайные события во множестве встречаются в квантовой механике, где
с ними связано поведение атомов и молекул. Примером может служить ра-
диоактивный распад ядра атома. Если ядро обладает естественной радио-
активностью или становится радиоактивным в результате столкновений с
другими ядрами, то невозможно предсказать, когда именно произойдет
радиоактивный распад ядра с испусканием элементарной частицы, напри-
мер, электрона или у-кванта. То же самое справедливо и относительно
спонтанного испускания света атомами. Находясь в возбужденном состо-
янии, он может испускать световую волну, или, на языке квантовой тео-
рии, фотон, но предсказать, когда именно это произойдет, невозможно.
Строго говоря, все элементарные процессы в химических реакциях име-
ют квантовомеханическую и, следовательно, случайную природу. Соглас-
но современным физическим представлениям, случайные события носят
фундаментальный характер и не могут быть предсказаны будущей более
детальной теорией.
Существует, однако, случайность другого рода, а именно: случай-
ность тепловых флуктуаций, например, флуктуаций плотности в газах,
жидкостях или твердых телах или флуктуаций электрического тока в по-
лупроводниках и металлах. Такие флуктуации происходят, даже если
пренебречь квантовой природой молекул, т.е. если рассматривать их как
классические частицы. В случае тепловых флуктуаций мы имеем дело со
случайными событиями, обусловленными неполнотой нашего знания
44
4. Основные понятия синергетики I: параметры порядка и принцип подчинения
точных положений молекул. Таким образом, за исключением квантовой
теории ответ на вопрос о том, можно или нельзя говорить о случайных
событиях, зависит от выбранного нами уровня описания. Например,
движение атомов газа можно рассматривать в рамках классической ме-
ханики, т.е. полностью детерминистической теории. Тем не менее мы
можем учитывать флуктуации плотности так, как если бы они были слу-
чайными событиями, описываемыми статистическими теориями. Име-
ются веские основания полагать, что случайные события происходят и
в нашем мозге. Такими событиями могут быть спонтанное открывание
плзырьков в нейронах, случайное возбуждение нейронов или возникно-
вение тремола. Но при современном уровне знания важных микроско-
пических процессов в мозге остается неясным, имеют ли флуктуации в
мозге фундаментальную, квантовомеханическую природу или зависят
.тишь от нашего уровня описания.
4.2. Стратегия решения
4.2.1. Неустойчивость, параметры порядка, принцип подчинения
Совершенно ясно, что системы, которые были бегло охарактеризованы
в предыдущем разделе, широко распространены, и многие из систем, ко-
торые мы намереваемся рассмотреть далее, отличаются высокой сложно-
стью. Теоретически кажется, что найти общий рецепт для анализа таких
систем — задача безнадежная и что здесь мы сталкиваемся с теми же про-
блемами, о которых говорили в разд. 3.2. Чтобы найти выход из возник-
шего тупика, мы будем руководствоваться экспериментами и основны-
ми идеями синергетики: искать качественные изменения в макроскопи-
ческих масштабах! Действительно, существует обширный класс явлений,
в которых сложные системы претерпевают качественные изменения сво-
их макроскопических состояний. В разд.4.1 мы упоминали пример с жид-
костью. Когда управляющий параметр а (в том примере — разность тем-
ператур) превышал критическое значение, система внезапно переходила
в новое макроскопическое состояние, сильно отличающееся от прежне-
го однородного состояния, в котором жидкость покоилась. В физике и
химии имеются многочисленные другие примеры (рис.4.5 и 4.6), и совер-
шенно аналогичные явления наблюдаются при образовании структур в
биологии (рис.4.7). Рассмотрим более подробно пример с образованием
конвективных валов в жидкости. Начнем со значения (Хо управляющего
параметра, при котором состояние системы известно. Обозначим это со-
стояние через д(1. В нашем случае д0 — это состояние, в котором жидкость
покоится. Изменяя управляющий параметр, мы достигнем такого его зна-
чения, при котором жидкость внезапно переходит в новое состояние. При
45
Часть I. Основы
Зеркала
Световое поле
Световое поле
Лампа
Шум
Лазер
Когерентный свет
Рис. 4.5. Верхняя часть', типич-
ная схема газового лазера. Стек-
лянная трубка наполнена атома-
ми газа и ограничена на концах
двумя зеркалами. Атомы газа
возбуждаются электрическим
разрядом. Лазерное излучение
испускается через одно из полу-
отражающих зеркал. Нижняя
часть (слева)', в обычной лампе
световое поле, создаваемое ато-
мами газа, состоит из отдельных
цугов волн, образующих шум,
или хаос. Справа', в лазере обра-
зуется высоко упорядоченная,
т.е. когерентная, световая волна.
(Подробнее см. разд. 4.2.2.)
Рис. 4.6. В некоторых химических реакциях круговые вол-
ны возникают спонтанно, как схематически показано на
этом рисунке.
Рис. 4.7. Туловище этой тропи-
ческой рыбы украшено узором
из хорошо различимых полос.
Возникновение таких узоров
может быть объяснено меха-
низмом, впервые предложен-
ным Тьюрингом (1952). (Ана-
лиз узоров на шкурах рыб и
других животных в рамках си-
нергетики см.: Хакен, 1993.)
46
4. Основные понятия синергетики I: параметры порядка и принцип подчинения
Рис. 4.8. Слева', две различ-
ные конфигурации валов в
жидкости. Справа', поведе-
ние амплитуд этих конфи-
гураций со временем: в од-
ном случае амплитуды воз-
растают, в другом затухают.
(Определение амплитуд см.
рис.4.9.)
Скорость v
Рис. 4.9. Верхняя часть', конфигурация валов такая же,
как на рис.4.8. Средняя часть: проведя через жидкость
горизонтальную срединную плоскость, мы можем пост-
роить график зависимости локальной скорости от точ-
ки пространства х (величины локальной скорости на ри-
сунке показаны стрелками). Нижняя часть: при более
точном описании скорость v непрерывно изменяется
вдоль оси х по формуле v = ^sin(2nx/A.), где А. — длина
волны.
дальнейшем увеличении управляющего параметра движение жидкости
становится все интенсивнее, или, иначе говоря, скорость вращения ва-
лов со временем возрастает. Это свидетельствует о неустойчивости. Ста-
рое состояние, в котором жидкость покоится, становится неустойчивым.
Вновь развивающееся движение возникает из малых флуктуаций, таких,
как флуктуации плотности молекул жидкости или локальных флуктуаций
скоростей жидкости. Первый шаг анализа состоит в изучении поведения
жидкости при значении параметра, лишь слегка превышающем критичес-
кое (точку потери устойчивости). Оказывается, в системе могут возникать
47
Часть I. Основы
t = 1000.5
t = 1040.0
t = 1120.0
t = 1200.0
Рис. 4.10. Пример перехода
от шестиугольной структу-
ры в жидкости к спираль-
ной. Этот переход происхо-
дит, когда подогреваются не
только дно, но и стенки кю-
веты (Бестехорн и др., 1993).
t = 1280.0
t = 1360.0
совершенно различные коллективные движения. Некоторые из (рис. 4.9) кон-
фигураций нарастают, другие конфигурации затухают, даже если их выз-
вала к жизни какая-то флуктуация (рис. 4.8 справа). Особый интерес для
последующего анализа представляет амплитуда нарастающей конфигу-
рации, так как именно она определяет эволюционирующие со временем
макроскопические структуры, например, конфигурацию валов или дру-
гие паттерны (рис.4.10). Когда структуры только начинают формировать-
ся, амплитуды очень малы. Это позволяет нам исследовать рост и зату-
хание отдельных конфигураций независимо друг от друга. И только при
дальнейшем росте амплитуд конфигурации начинают влиять одна на дру-
гую. Например, в одних случаях конфигурации могут конкурировать друг
с другом, и та единственная конфигурация, которая одержит верх над ос-
тальными, подавит их всех. В других случаях конфигурации могут сосу-
ществовать и даже стабилизировать одна другую. Амплитуды нарастаю-
48
4. Основные понятия синергетики I: параметры порядка и принцип подчинения
4, 42 43 4П
Рис. 4.11. Наглядная схема, представляющая принцип под-
чинения. Один или несколько параметров порядка подчи-
няют себе поведение подсистем, описываемых переменны-
ми qvq2,....
Ж
4, 42 43 4П
Рис. 4.12. Подсистемы, описываемые переменными q}, qv...
воздействуют на параметр порядка и даже порождают его.
щих конфигураций называются параметрами порядка. Они описывают
макроскопический порядок, или, если говорить в более общем плане,
макроскопическую структуру системы. Состояние q системы может быть
описано как суперпозиция всех, т.е. нарастающих и затухающих конфи-
гураций.
Если число компонент системы велико,то, соответственно, велико и
множество отдельных конфигураций. Это означает, что информация, не-
обходимая для описания поведения системы, не сводится к разложению
на ее конфигурации: именно здесь и появляется на сцене центральная те-
орема синергетики. Она утверждает, что не только поведение нарастаю-
щих конфигураций, но и поведение затухающих конфигураций однознач-
но определяется параметрами порядка. Как следствие, общая простран-
ственно-временная эволюция состояния q удовлетворяет параметрам по-
рядка (или подчиняется параметрам порядка). В этом и состоит принцип
подчинения (рис.4.11). Так как в общем случае число параметров порядка
гораздо меньше числа компонент системы, принцип подчинения позво-
ляет достичь резкого сокращения числа степеней свободы, или, иначе го-
воря, происходит сильное сжатие информации. В определенном смысле
параметры порядка действуют, как кукловоды, заставляющие кукол пля-
сать. Но между тем, что происходит в действительности, и наивной ме-
тафорой с кукольным театром существует важное различие. Оказыва-
ется, что своим коллективным действием отдельные компоненты систе-
мы, или «куклы», сами влияют на параметры порядка, т.е. на «куклово-
дов». С одной стороны, «кукловоды» (параметры порядка) определяют
движение компонент системы, с другой стороны, компоненты в свою
очередь определяют действие параметров порядка (рис. 4.12). Это явле-
ние получило название круговой причинности. Принцип круговой причин-
ности позволяет предложить еще одну интерпретацию принципа подчи-
нения. Так как отдельные компоненты системы определяют или даже по-
рождают параметры порядка, которые в свою очередь подчиняют себе
компоненты, последние определяют эволюцию параметров порядка ко-
--4614
49
Часть I. Основы
оперативно. Трудно удержаться от искушения описать это явление в ан-
тропоморфных терминах как консенсус между отдельными компонента-
ми. Таким образом, принцип подчинения и консенсус между компонента-
ми — две стороны одной медали.
4.2.2. Лазерная парадигма, или лодки на озере
Проиллюстрируем эти зависимости на еще одном примере из области фи-
зики, а именно на примере лазерного источника света (рис.4.5). Лазер-
ный источник испускает уникальный в своем роде свет, а именно коге-
рентный свет. Рассмотрим в качестве примера газовый лазер. Он пред-
ставляет собой стеклянную трубку, в которой находятся лазер-активные
атомы. Под действием электрического разряда атомы газа переходят в
более высокое энергетическое — возбужденное состояние. Находясь в
возбужденном состоянии, атомы ведут себя, как миниатюрные радиоан-
тенны, но в отличие от обычных радиоантенн испускают не радиоволны,
а световые волны. При усилении возбуждения атом испускает все боль-
ше световых волн. Их отражают зеркала, которые предназначены для
того, чтобы на какое-то время задерживать световые волны в лазере. При
этом концентрация световых волн повышается. Когда плотность свето-
вых волн становится выше критической, начинается новый процесс, ко-
торый был впервые описан Эйнштейном, а именно: световая волна, стал-
киваясь с возбужденным атомом, заставляет его отдать ей энергию, от-
чего световая волна усиливается (рис. 4.13). Этот процесс называется ин-
дуцированным излучением. В свою очередь усиленная волна сталкивается
с каким-нибудь другим возбужденным атомом и т.д. Возникает лавино-
образный эффект: лазер достигает своего неустойчивого состояния. По-
добно тому, как в случае подогреваемой снизу вязкой жидкости могут воз-
никать различные конфигурации, лазер может испускать световые вол-
ны различных типов, обладающие тенденцией либо к усилению, либо к
затуханию. Между усиливающими световыми волнами может возникнуть
конкуренция, и в конце концов одна волна побеждает все остальные. Ам-
плитуда волны-«победительницы» и есть параметр порядка. Чтобы пред-
ставить принцип подчинения в менее абстрактном виде, напомним чи-
тателям, что в физике световые волны принято характеризовать напря-
женностью их электрического поля. Согласно принципу подчиненности,
параметр (или параметры) порядка управляют компонентами системы,
подчиняя их себе; в рассматриваемом случае компонентами служат ато-
мы газа. Каждый атом можно считать состоящим из ядра и обращающе-
Рис. 4.13. В процессе стиму-
лированного излучения све-
та возбужденными атомами
возникает лавинообразное
испускание света.
Атом
Атом
®ww
Атом
Лавина
50
4. Основные понятия синергетики I: параметры порядка и принцип подчинения
Рис.4.14а, б, в. Наглядное
представление принципа
подчинения: движение лод-
ки на озере, (а) Положение
лодки на волне, распростра-
няющейся по поверхности
озера, (б) Описание ампли-
туды волны как функции
пространственной коорди-
наты х и времени t. Движе-
ние волны вверх-вниз опи-
сывается функцией време-
ни ^(Г). (в) Волной, пред-
ставленной на графике (б),
высота лодки в точке хь оп-
ределяется однозначно.
гося вокруг него электрона. Хорошо известно, что электрические поля
действуют на такие заряженные частицы, как электроны. Световая вол-
на осциллирует и оказывает осциллирующее действие на электрон, зас-
тавляя его двигаться в фазе с волной. Наглядно этот процесс можно пред-
ставить себе следующим образом. Предположим, что перед нами озеро,
на котором плавают лодки (рис.4.14). Электрическое поле можно уподо-
бить волнам на воде, а электроны — лодкам. Распространяясь по повер-
хности озера, волна то поднимает, то опускает лодки. Аналогичным об-
разом электрон движется в такт с колебаниями напряженности электри-
ческого поля. Это и есть принцип подчинения в действии. Электрон на-
чинает двигаться под влиянием электрического поля. С другой стороны,
из электродинамики известно, что осциллирующие заряды, в данном слу-
чае осциллирующие электроны, создают электрическое поле. Так мы сно-
ва приходим к круговому принципу причинности.
51
4*
Часть I. Основы
4.2.3. Принцип подчинения
Картина лодок, плавающих по озеру, позволяет нам наглядно продемон-
стрировать математическое содержание принципа причинности несколь-
ко более подробно. Стоячую волну на озере можно представить в виде
w(x,f) = ^(Z)sin(2Ttx/X),
(4.5)
где X — длина волны (рис.4.14). Амплитуда £,(/) играет роль параметра по-
рядка. Так как волна колеблется то вверх, то вниз, зависимость sin(Kx/X)
от времени носит осциллирующий характер:
£,(/) = «sin(coz),
(4.6)
где а — постоянная амплитуда, СО — (циклическая) частота. Рассмотрим
лодку, находящуюся в точке с координатой Xj (рис.4.14). Обозначим сме-
щение лодки по вертикали в момент времени t через ^(х,С). Совершенно
ясно, что
q(x},t) = ^(Z)sin(27Tx|./X).
(4.7)
Переменная подчиненной подсистемы, а именно лодки с номером j, за-
висит от величины параметра порядка £,(/) в тот же момент времени. Кро-
ме того, в первую часть выражения (4.7) входит множитель sin(27rXj/ X), ко-
торый устанавливает связь между параметром порядка и переменной под-
системы Xj. Таким образом, (4.7) воплощает весьма важный ингредиент
принципа подчинения. Во многих практических приложениях неоценимую
роль играют обобщения соотношения (4.7).
1) Пространственная часть соотношения (4.7), представленная множи-
телем sinPnXj/ X), может быть более сложной функцией пространствен-
ной координаты — в зависимости от рассматриваемой проблемы. Обозна-
чая эту функцию через г„(ху), можно заменить (4.5) и (4.7) более общим со-
отношением
?(хр/) =
(4.8)
(Мы снабдим функцию г нижним индексом ц, чтобы отличать ее от дру-
гих функций, которые сейчас введем.)
2) В проблемах синергетики, которые всегда нелинейны, соотношения
(4.7) и (4.8.) представляют лишь первое приближение (хотя оно и дает глав-
ный член). Поэтому в необходимо учитывать старшие члены, в резуль-
тате чего соотношение (4.8) заменяется более общим соотношением
qtx^t) = ^(0v„(xy) + ^2(0v2(xy) + ^(t)v3(Xj) + ...
(4-9)
52
4. Основные понятия синергетики I: параметры порядка и принцип подчинения
Взаимосвязям между поведением отдельных компонент системы и пара-
метрами порядка, т.е. принципу подчинения, можно придать еще более об-
щую и абстрактную форму. Дискретны компоненты или непрерывно распре-
делены, не имеет значения. Обозначим по-прежнему через qj переменную
(или набор переменных) компоненты с номером j и рассмотрим некоторые
параметры порядка £,2, ..., ^м. Принцип подчинения утверждает, что
(4.10)
Словами соотношение (4.10) можно выразить так: состояние qj компо-
ненты j однозначно определяется параметрами порядка. В частности, это
утверждение выполняется и в том случае, если параметры порядка зави-
сят от времени. Назовем конфигурацию системы, описываемую вектором
состояния вида q = (q^.-.q^ с qf, определяемым соотношением (4.10), кол-
лективной модой, или для краткости просто модой. Так как число парамет-
ров М меньше числа компонент системы, (4.10) можно рассматривать как
математическое выражение упоминавшегося выше сжатия информации.
В завершение этого краткого экскурса в математическое описание
принципа подчинения рассмотрим не стоячую, а бегущую волну. Ампли-
туду такой волны в точке пространства с координатой х и момент време-
ни t можно представить в виде
w(x,t) = ^(0sin(27lx/A. — ф (0), (4.11)
где ф (f) — фаза. Совершенно ясно, что смещение лодки по вертикали оп-
ределяется не только амплитудой S,, но и фазой ф. Фазы могут быть пара-
метрами порядка'.
На первый взгляд может показаться, что примеры, иллюстрирующие
принцип подчинения в случае подогреваемой снизу жидкости и в случае
лазера, совершенно различны, поскольку в первом случае речь идет о кон-
фигурациях, или коллективных движениях жидкости, тогда как в случае
лазера мы рассматриваем движения отдельных электронов в атомах рабо-
чего тела лазера. Но, как показывает математический анализ, на котором
мы не будем сейчас останавливаться подробно, оба описания эквивалент-
ны, и выбор одного из них зависит от того, какую проблему мы решаем.
Оба случая обладают одной общей фундаментальной особенностью, а
именно: и в том, и в другом случае роль параметров порядка отчетливо от-
личима от роли подчиненных переменных или компонент. Если возмутить
параметры порядка, а затем «выключить» возмущение, то релаксация па-
раметров порядка происходит медленно. Если же возмутить компоненты
системы, то их релаксация наступает быстро, т.е. параметры порядка и
компоненты системы отличаются своими масштабами времени. Если мы
хотим применить принцип синергетики к мозгу, то необходимо прежде
всего проверить, существует ли такое разделение масштабов времени. Ус-
ловимся рассматривать нейроны как отдельные подчиненные компонен-
ты, а макроскопические действия, такие, как восприятие или управление
53
Часть I. Основы
движениями, как макроскопические величины, описываемые параметра-
ми порядка. Нейроны обладают постоянными времени порядка одной мил-
лисекунды, тогда как восприятие и т.д. происходит во временных масш-
табах порядка сотен миллисекунд. Таким образом, в головном мозге мас-
штабы времени разделены вполне четко.
4.2.4. Центральная роль параметров порядка
Подведем итоги сказанному в это разделе. Мы рассмотрели класс систем,
обладающих следующими свойствами: при изменении одного параметра
порядка или, может быть, нескольких параметров порядка система ста-
новится неустойчивой! Иначе говоря, система выходит из своего прежне-
го состояния и начинает формировать качественно новое макроскопичес-
кое состояние. В окрестности точки потери устойчивости возникают кол-
лективные конфигурации различного рода; одни из них растут, другие
после возникновения под воздействием флуктуаций затухают. Исследуя
растущие и затухающие состояния, мы можем провести различие между
неустойчивыми и устойчивыми конфигурациями и в результате придем
к конфигурациям, управляемым параметрами порядка. Как уже говори-
лось, параметры порядка определяют поведение компонент системы че-
рез принцип подчинения. Таким образом, поведение сложных систем
может быть описано и понято в терминах параметров порядка. В то же
время отпадает необходимость рассматривать действия или поведение
отдельных частей, поскольку открывается возможность описания всей
системы в целом с помощью параметров порядка. Мы видим, что прин-
цип подчинения, лежащий в основе описанной выше взаимосвязи, при-
водит к колоссальному сжатию информации, которым мы воспользуем-
ся как средством изучения мозга, поведения и когнитивной деятельнос-
ти. В огромном числе случаев число параметров порядка очень мало, и
мы можем рассматривать поведение системы в терминах именно этих не-
многих параметров порядка. Например, в лазере число атомов достигает
1018, в то время как имеется только один параметр порядка — напряжен-
ность электрического поля моды, победившей в конкурентной борьбе
другие моды. Кроме того, можно утверждать, что через этот единствен-
ный параметр порядка движение электронов становится сильно корре-
лированным. Аналогично при исследовании головного мозга мы имеем
дело с мириадами нейронов, но число паттернов в поведении (сколь они
ни многочисленны!) гораздо меньше. Как будет показано в гл.5, парамет-
ры порядка — величины абстрактные, но во многих случаях они обрета-
ют свое конкретное содержание.
В заключение этого раздела мне хотелось бы предостеречь читателей от
преждевременных выводов. Так как принципы синергетики были проил-
люстрированы на примерах из физики (а именно: физики жидкости и ла-
54
4. Основные понятия синергетики I: параметры порядка и принцип подчинения
зеров), кто-нибудь может безосновательно заключить, будто синергетика
представляет собой разновидность физикализма. Однако такой вывод со-
всем неверен, так как в синергетике мы исходим из абстрактных матема-
тических соотношений, которые затем применяем к множеству систем раз-
личной природы, в том числе и физическим. Но поскольку физические си-
стемы относительно просты по сравнению с биологическими системами,
они лучше всего подходят в качестве примера для иллюстрации смысла ма-
тематических принципов синергетики.
В этом разделе мы рассмотрели содержание принципа подчинения на
более или менее качественном уровне, но так, чтобы этого было достаточно
для понимания последующих частей книги. Читатели, которых интересу-
ет математическое доказательство принципа подчинения (который в дей-
ствительности представляет собой теорему), я рекомендую обратиться к
моей книге «Синергетика. Иерархия неустойчивостей в самоорганизую-
щихся системах и устройствах» (см. список рекомендуемой литературы в
конце книги). Доказательство требует, чтобы рассматриваемая система на-
ходилась вблизи точки потери устойчивости. Однако, как показали общие
соображения, а также многочисленные приложения принципа подчине-
ния, во многих случаях принцип подчинения выполняется и в системах,
далеких от своих точек потери устойчивости. Дальнейшую информацию по
этим вопросам см. в работах, указанных в «Использованных источниках и
литературе для дальнейшего чтения».
4.3. Самоорганизация и второе начало термодинамики
Из предыдущего рассмотрения ясно, что мы понимаем под самоорганиза-
цией системы, а именно: в совершенно общем случае при изменении не-
которых внешних или внутренних управляющих параметров существуют
определенные ситуации, когда система претерпевает не малые, а значи-
тельные изменения своего макроскопического состояния, примером ко-
торых может служить спонтанное образование структур в лазерах и жид-
костях. Излишне говорить, что в биологии и медицине существует множе-
ство такого рода качественных изменений от образования пространствен-
ных структур или морфогенеза до существенных изменений в поведении,
например, при психозе. Важно заметить, что управляющие параметры не
позволяют предвидеть возникновение макроскопических структур и пат-
тернов. Например, подогреваемая снизу жидкость совершенно однород-
на; тем не менее взаимодействие между молекулами жидкости порождает
различные структуры.
Спонтанное образование структур в результате самоорганизации кажет-
ся противоречащим второму началу термодинамики. Согласно второму
началу в так называемых замкнутых системах макроскопический порядок
должен исчезнуть, уступив место однородному состоянию, которое на мик-
роскопическом уровне обнаруживает структуру хаотического движения.
55
Часть I. Основы
Например, движения атомов газа совершенно хаотичны, но на макроско-
пическом уровне газ кажется практически однородным. Эта тенденция к
максимально хаотическому и бесструктурному состоянию на макроскопи-
ческом уровне сформулирована в утверждении о том, что энтропия систе-
мы возрастает до своего максимального значения. Однако это утвержде-
ние справедливо лишь для замкнутых систем, которые не обмениваются
энергией или веществом с окружающей средой. Знаменитый биолог Люд-
виг фон Берталанфи обратил внимание на то, что биологические системы
принадлежат к числу открытых систем, структуры и функции которых
поддерживаются притоком энергии и вещества либо в форме солнечного
света и веществ, извлекаемых из почвы, как это происходит у растений,
либо в форме питательных веществ и кислорода, как это происходит у жи-
вотных. Для обозначения этого состояния живой материи фон Берталан-
фи предложил термин Fliessgleichgewicht (текущее равновесие). Все систе-
мы, изучаемые в синергетике, можно рассматривать как открытые и тем
самым удовлетворяющие необходимому условию самоорганизации.
5. Динамика параметров порядка
5.1 Один параметр порядка
В предыдущей главе мы узнали, что вблизи точек потери устойчивости по-
ведение сложных систем управляется небольшим числом переменных, а
именно: параметрами порядка. В ряде случаев число параметров порядка
очень мало, и мы начнем с рассмотрения всего лишь одного параметра по-
рядка. Для описания поведения единственного параметра порядка выше
и ниже точки потери устойчивости системы очень полезной оказалась ме-
ханическая модель. Величину параметра порядка мы отождествим с ко-
ординатой шарика, скатывающегося по склону холма на дно долины. Го-
воря техническим языком, мы рассмотрим передемпфированное движение
частиц под действием силы тяжести с наложенной связью: частица движет-
ся по параболе (рис.5.1, верхняя часть). Так как движение передемпфиро-
вано, скорость, с которой скатывается частица, пропорциональна крутиз-
не склона. Чем круче склон, тем больше скорость. Ясно, что на дне доли-
ны наклон к горизонту становится равным нулю, и частица останавлива-
ется. Типичные параметры порядка подвержены действию флуктуаций.
Наглядно флуктуации можно представить себе, как удары футболистов,
бьющих по мячу. В реальном футбольном матче часто бывает так, что иг-
роки бьют по мячу совершенно случайно, — великолепная картина того,
как действуют флуктуации! Из-за наносимых по мячу ударов он не оста-
ется в состоянии покоя, а перемещается то влево, то вправо, то скатыва-
ется ниже, получает новые удары и т.д. Только что описанная ситуация
применима к области значений управляющего параметра ниже порога, или,
иначе говоря, ниже критического значения управляющего параметра.
Если управляющий параметр изменяется так, что достигает своего кри-
тического значения, при котором возникает неустойчивость, ландшафт
деформируется (рис. 5.1, средняя часть). Долина становится очень плос-
кой. Если шарик смещается из начала координат, то, поскольку вынужда-
ющая сила практически равна нулю, пройдет очень много времени, преж-
де чем он остановится в точке равновесия при = 0. Это явление называ-
ется критическим замедлением. Если вспомнить, что шарик по-прежнему
подвержен действию флуктуаций и возвращающая сила очень мала, то ста-
нет ясно, что шарик может далеко откатиться от точки равновесия, пока
57
Часть I. Основы
а = О
Рис. 5.7. Этот рисунок позволяет наглядно представить поведение параметра порядка при раз-
личных значениях управляющего порядка (X (критическое значение в данном случае а = 0).
Верхняя часть: ниже критического значения управляющего параметра параметр порядка
ведет себя, как шарик, скатывающийся по склону холма на дно долины. Такую картину мы
будем называть ландшафтом потенциала. Средняя часть: когда управляющий параметр при-
нимает критическое значение, дно долины становится очень плоским. Нижняя часть (сле-
ва): при значении управляющего параметра выше критического точка £, = 0, бывшая ранее
устойчивой, становится неустойчивой, а вблизи нее возникают два новых устойчивых по-
ложения. Нижняя часть (справа): приводим график положения равновесия £, как функции
от управляющего параметра а. При а < 0 существует только одно устойчивое положение
соответствующее дну долины на верхней части рисунка. Выше порога, т.е. при а > 0, су-
ществуют две устойчивые ветви, соответствующие двум устойчивым положениям на дне
долины в нижней части рисунка, и одна неустойчивая ветвь, соответствующая Е, = 0.
его не остановят круто поднимающийся склон. Таким образом, шарик со-
вершает случайное движение, или, иначе говоря, его поведение можно рас-
сматривать как проявление больших флуктуаций. На техническом языке
можно утверждать, что речь идет о критических флуктуациях.
Наконец, если управляющему параметру придать значение, превыша-
ющее критическую точку, то ландшафт качественно деформируется, и вме-
сто прежней одной долины появятся две долины (рис. 5.1, нижняя часть).
58
5. Динамика параметров порядка
Нижняя точка каждой долины представляет собой устойчивое положение.
Так как таких устойчивых положения два, то мы говорим о бистабильнос-
ти. В данном случае ландшафт симметричен относительно вертикальной
оси V, но шарик может находиться только в одной долине. Ему как бы при-
ходится делать выбор в пользу одной из двух возможностей, которые сим-
метричны, поэтому мы говорим о нарушении симметрии. Так как его пре-
жнее положение на рис.5.1 при 2, = 0 стало неустойчивым и уступило мес-
то новому устойчивому положению, мы также говорим, о неустойчивости,
нарушающей симметрию. Это явление называется критическим замедлени-
ем. Явления критического замедления, критических флуктуаций и наруше-
ния симметрии наблюдались ранее при так называемых фазовых перехо-
дах систем, находящихся в состоянии теплового равновесия. Такие фазо-
вые переходы происходят, например, при замерзании воды и превраще-
нии ее в лед, при намагничивании магнитного материала или при превра-
щении проводников в сверхпроводники. Было установлено, что все эти яв-
ления происходят и в системах, далеких от состояния теплового равнове-
сия, поддерживающих свое активное состояние за счет непрерывного при-
тока энергии в систему и диссипации энергии. Примером может служить
лазер, рассмотренный нами в разд.4.2.2. Так как нам приходится иметь дело
с системами,- находящимися в состоянии, далеком от равновесного, мы
можем говорить о неравновесных фазовых переходах. В области синергети-
ки критические флуктуации и критическое замедление можно рассматри-
вать как веские признаки процессов самоорганизации, так как источни-
ком флуктуаций, действующих на параметр порядка, является случайное,
т.е. некогерентное, движение компонент системы. Когда система теряет ус-
тойчивость в критической точке, флуктуации растут до тех пор, пока сис-
тема не достигает нового устойчивого состояния в одной из двух долин при
соответствующем значении параметра порядка. При дальнейшем увеличе-
нии управляющего параметра в том месте, где находились долины, окажут-
ся склоны, настолько крутые, что флуктуации становятся чрезвычайно ма-
лыми. Это явление было весьма подробно исследовано в случае лазера. Как
будет показано далее, то же самое явление обнаружено и в координации
биологических движений.
В заключение нашего анализа поведения единственного параметра по-
рядка продемонстрируем еще один вариант поведения параметра порядка
(рис. 5.1, нижняя часть, справа). Построим зависимость положения рав-
новесия 2, от управляющего параметра ос. При ос < 0Сс значение парамет-
ра порядка 2, = 0. При ос > осс мы получаем три ветви. Ветвь в £, = 0 соот-
ветствует положению, которое только что стало неустойчивым (на рис.5.1,
нижняя часть, слева), в то время как верхняя и нижняя ветви соответству-
ют положительной и отрицательной устойчивым точкам ( на рис.5.1, ниж-
няя часть, слева). Так как график зависимости от ос напоминает по фор-
ме вилку, это явление получило название бифуркации (от латинского
bifurcatus — двузубая вилка). Изучением бифуркаций занимается специаль-
ный раздел математики — теория бифуркаций. Между подходом к бифур-
кациям в синергетике и в теории бифуркаций существует четкое различие,
59
Часть I. Основы
которое необходимо иметь в виду. В теории бифуркаций полностью исклю-
чают из рассмотрения влияние флуктуаций, т.е. пренебрегают одним из
важных признаков самоорганизации. Кроме того, в синергетике мы изу-
чаем релаксационное поведение параметра порядка, например, его крити-
ческое замедление. Это еще одно явление, которое традиционная теория
бифуркаций оставляет без внимания. Для тех, кто интересуется математи-
ческой стороной дела, запишем уравнение для параметра порядка, соот-
ветствтующее рис. 5.1, в виде
^ = a^-p^+F(t), (5.1)
где относительно флуктуирующей силы F(t) обычно предполагается, что
она имеет гауссово распределение и содержит белый шум. В уравнении
(5.1) ос играет роль управляющего параметра с осс = 0. Потенциал И позво-
ляет записать уравнение (5.1) в виде
^-=-— + F(t), (5.2)
dt 8$
где
Потенциал V= И(£,) есть в точности та кривая, которая представлена
на рис.5.1, где значениям ос < 0 соответствует верхняя часть, ОС = 0 — сред-
няя часть, и ос > 0 — нижняя часть рисунка. Еще одна важная возможность
представлена последовательностью ландшафтов на рис.5.2, которая соот-
ветствует уравнению вида
= (5.4)
dt
с управляющими параметрами а и Д. Если начать с ситуации, изображен-
ной в верхнем ряду слева, и варьировать управляющий параметр, то шарик
сначала останется в своем положении равновесия 2, = 0. Только при ос = ос3
он может перепрыгнуть в новое положение равновесия. Но при измене-
нии управляющего параметра в обратном порядке шарик останется в по-
ложении равновесия при и только при значении управляющего па-
раметра ос = ОС] вернется в положение равновесия при £, = 0. В средней ча-
сти верхнего и нижнего рядов на рис. 5.2. шарик занимает различные по-
ложения при одном и том же значении управляющего параметра. Ясно, что
положение шарика зависит от предыстории. В подобном случае говорят о
гистерезисе. Когда дно долины становится очень пологим, снова возника-
ют критические флуктуации и критическое замедление.
Как будет показано в следующей главе, явление критических флуктуа-
ций, критического замедления и гистерезиса могут наблюдаться и в коор-
динации движений биологических объектов, что определенно свидетель-
ствует о происходящей в них самоорганизации. Явление гистерезиса чи-
60
5. Динамика параметров порядка
Рис. 5.2. Наглядное представление эффекта гистерезиса. При изменении управляющего
параметра ландшафт потенциала деформируется, как показано в верхней части рисунка.
В нижней части изменение управляющего параметра происходит в обратном направле-
нии. Заметим, что при а = а2 параметр порядка занимает два различных положения в за-
висимости от предыстории.
га
Рис. 5.3. Гистерезис в зри-
тельном восприятии. Рас-
смотрите сначала слева на-
право изображения верхне-
го ряда, а затем, также сле-
ва направо, изображения
нижнего ряда, после чего
проделайте то же самое в
обратном порядке.
татель может без труда наблюдать и в случае зрительного восприятия (рис. 5.3).
Разглядывая фигурки слева направо в верхнем ряду, мы распознаем муж-
ское лицо. То же происходит и при разглядывании фигурок в нижнем ряду
слева направо. Но стоит дойти до середины нижнего ряда, как внезапно
происходит «переключение», и мы внезапно видим женскую фигуру. При
рассмотрении «картинок» в обратном порядке переключение — превраще-
ние женской фигуры в мужское лицо — происходит в другом месте, т.е. с
запаздыванием.
61
Часть I. Основы
5.2. Два параметра порядка
Начнем с частного случая, когда изменение параметров порядка , Е,2 можно
представить как движение по ландшафту. Один из примеров такого движе-
ния показан на рис. 5.4. Перед нами снова передемпфированное движение,
шарик скатывается на дно ближайшей долины. Построив зависимости и
£,2 от времени, мы получаем кривые, представленные на рис.5.5. В каждый
момент времени и принимают вполне определенные значения. Часто
бывает необходимо представить значения и ^2 на одном графике. Это сде-
лано на рис. 5.6, где каждая точка траектории показывает, какие значения
принимают параметры порядка и ^2 в определенный момент времени (эти
значения мы определим по проекциям точки на оси и ^2). Из ландшафта
на рис. 5.4 хорошо видно, что в зависимости от выбора начальной точки ша-
рик скатывается по различным траекториям. Соответственно, выпуская ша-
рик из различных точек на плоскости ^2, мы также получим различные
траектории. Совокупность всех траекторий на плоскости , ^2 называется
потоком. На рис. 5.7 в качестве примера приведен поток для шарика, кото-
рый останавливается в точке с Ф 0, ^2 Ф 0 . Точка, в которой шарик оста-
навливается, называется неподвижной точкой, или, точнее, устойчивой не-
подвижной точкой. Если поместить шарик на вершине одного из холмов, то
он останется там в положении неустойчивого равновесия. При малейшем
толчке шарик скатится по любому из направлений в зависимости от направ-
ления начального толчка. Изобразив такой поток на листе бумаги, мы по-
лучим картину, представленную на рис.5.8 в его верхней части. Точка в цен-
тре называется неустойчивой неподвижной точкой. Следует заметить, что по-
нятие «неподвижная точка» и «поток» не связаны исключительно с карти-
ной ландшафта; они носят гораздо более общий характер.
Рис. 5.4. Два примера ландшафтов потенциала: (а) ландшафт, порождающий устойчивую
неподвижную точку; (б) ландшафт, порождающий неустойчивую неподвижную точку.
62
5. Динамика параметров порядка
Рис. 5.5. Релаксация параметров порядка^
и со временем к устойчивому состоянию.
Рис. 5.6. Два графика, представленных на
рис. 5.5, сведены в один: траектория пред-
ставлена в координатах ^2, изменяю-
щихся со временем.
Рассмотрим еще один типич-
ный случай — предельные циклы.
За примером мы снова обратимся
к механике и выберем в качестве
такового маятник (рис.5.9, верхняя
часть). В математике и теоретичес-
кой физике движение маятника
принято рассматривать в особом
пространстве, представленном в
нижней части рис.5.9. По горизон-
тальной оси (оси абсцисс) мы от-
кладываем положение маятника,
или его отклонение от положения
равновесия, х; по вертикальной
оси (оси ординат) — скорость ма-
ятника г. Ясно, что в правой точ-
ке возврата отклонение маятника
от положения равновесия макси-
мально, а скорость маятника рав-
на нулю. Достигнув правой точки
возврата, маятник начинает дви-
гаться влево, его скорость возрас-
тает, а поскольку она направлена
влево, мы считаем ее отрицатель-
ной. Маятник описывает нижнюю
часть эллипса, изображенного на
рис.5.9. В нижней точке при х = О
скорость маятника максимальна.
При дальнейшем движении влево
скорость убывает, пока, наконец,
маятник не достигает левой точки
возврата, в которой равновесие
максимально (и отрицательно), а
скорость равна нулю. Затем маят-
ник с возрастающей скоростью
движется вправо и «вычерчивает»
верхнюю часть эллипса. Таким об-
разом, описанием движения маят-
ника становится движение точки
по эллипсу на так называемой фа-
зовой плоскости. Придав маятнику
большее отклонение от положения
равновесия и отпустив с нулевой начальной скоростью, мы также по-
лучим эллипс, но больших размеров. Следует иметь в виду, однако, что
вся картина колебаний маятника упрощена, так как мы пренебрегли
трением. Из-за трения механическая энергия маятника переходит в теп-
63
Часть I. Основы
ловую и рассеивается, из-за чего
движение маятника замедляется.
Изобразив на фазовой плоскости
движение маятника с трением, мы
получим картину, представленную
на рис. 5.10. Маятник в конце кон-
цов останавливается в точке х =0,
г = 0. Такая точка называется ус-
тойчивым фокусом.
В старину маятник был непре-
менной деталью часов. Чтобы он
мог преодолевать трение и нахо-
диться в движении, его приходи-
лось регулярно подталкивать. Де-
лать это нужно было с таким расче-
том, чтобы возмущенное движение
маятника всякий раз возвращалось
к одной и той же замкнутой кри-
вой — так называемому устойчиво-
му предельному циклу. Предельный
цикл можно построить либо на фа-
зовой плоскости, либо в виде его
«разверток» отдельных зависимос-
тей от и от времени (рис.5.11).
Флуктуации (или толчки), действу-
ющие на движение по предельному
циклу, могут привести к двум эф-
фектам в зависимости от того, дей-
ствуют ли они поперек предельно-
го цикла или вдоль него. Так как
движение по предельному циклу
происходит во времени так же, как
бежит распространяющаяся волна
(5.10), имеет смысл говорить о фазе
движения. Иначе говоря, флуктуа-
ции в тангенциальном, или каса-
тельном, направлении вызывают
флуктуации фазы.
До сих пор мы говорили о дви-
жении параметров порядка при
фиксированном значении управля-
ющего параметра. При изменении
Рис. 5.7. Если начальные состояния пара-
метров порядка и каждый раз выбира-
ются другие, то возникает множество траек-
торий, которые все стремятся к неподвиж-
ной точке. Это множество траекторий на-
зывается потоком по аналогии с течением
жидкости.
Рис. 5.8. Траектории в окрестности неус-
тойчивой неподвижной точки.
управляющего порядка могут происходить процессы, аналогичные тем,
которые происходят в случае одного параметра порядка, а именно: одна
неподвижная точка может стать неустойчивой, а вместо нее могут возник-
нуть две новые устойчивые неподвижные точки. Мы снова встречаемся
64
5. Динамика параметров порядка
Рис. 5.9. Верхняя часть: маят-
ник. Нижняя часть: представ-
ление движения маятника без
трения на плоскости, на кото-
рой за оси координат приняты
положение х и скорость у (см.
текст).
Рис. 5.10. В случае маятника с затуханием
эллипс заменяется спиралью, закручиваю-
щейся вокруг начала координат.
с явлением бифуркации, или, если принять во внимание флуктуации, с
неравновесным фазовым переходом. В случае двух параметров порядка
помимо этого могут происходить переходы более общего типа, например,
устойчивая неподвижная точка может стать неподвижной, а вокруг нее
образоваться устойчивый предельный цикл. Например, так происходит,
если толкнуть покоившийся маятник часов с таким расчетом, чтобы часы
пошли, как обычно.
5-4614
65
Часть I. Основы
Время t
Рис. 5.11. Наглядное представление предельного цикла. Слева’, предельный цикл на плос-
кости ^2- Справа’, периодическое движение и ^2, связанное с предельным циклом.
Рис. 5.12. Осцилляции зрительного восприятия: куб Нек-
кера. Грань, параллельная плоскости страницы, может вос-
приниматься то как передняя, то как задняя грань куба.
Интерпретация грани как передней или задней осциллиру-
ет во времени.
Как известно, в физиологии встречается множество различных осцил-
ляторов. В активности мозга наблюдаются многочисленные колебатель-
ные процессы, которые в дальнейшем мы изучим более подробно. Напри-
мер, если говорить о зрении, то колебания наблюдаются, например, ког-
да мы разглядываем амбивалентные изображения вроде того, которое
представлено на рис. 5. 12. Наконец, для читателя, интересующегося ма-
тематической стороной дела, приведем несколько типичных уравнений
для параметра порядка. Примером динамики, разыгрывающейся в окре-
стности устойчивой неподвижной точки при =0, ^2 = 0, могут служить
уравнения
66
5. Динамика параметров порядка
и
di
-уА
(5.5)
^ = -/2^ (5-6)
Примером предельного цикла читатель обнаружит в уравнениях
^ = «5, +^2+МЧ2)К, (5.7)
и
= ®2-?, + ®2£ +у[а-(£ + ЙЖ2
(5-8)
Более тщательный анализ уравнений (5.7) и (5.8) показывает, что пер-
вые два члена в их правых частях порождают колебательное движение, тог-
да как третьи члены обеспечивают устойчивость предельного цикла ради-
уса £4 £= я.
5.3. Три и более параметра порядка
Самый удобный способ исследовать поведение трех параметров порядка
состоит в том, чтобы представить их в трехмерном фазовом пространстве,
т.е. в пространстве с тремя координатами , £,2 и ^3. И в этом случае мож-
но рассматривать поведение потока, только на этот раз — в трехмерном
пространстве, и изучить его специфические особенности. Поток может, во-
первых, стремиться к неподвижной точке или исходить из неподвижной
точки. Во-вторых, в пространстве могут возникнуть устойчивые или неус-
тойчивые предельные циклы.
Долгое время полагали, что помимо неподвижных точек и предельных
циклов существует еще только один интересный объект, связанный с ти-
пичным поведение потока, — так называемый тор. Представьте себе, что
вы находитесь на карусели и размахиваете флагом, описывая круги в
птоскости, перпендикулярной движению карусели. Когда карусель оста-
навливается, флаг движется, так сказать, по предельному циклу. Когда же
карусель и вы сами также движетесь по предельному циклу, флаг движет-
ся по спирали. После того, как карусель совершит один оборот, флаг мо-
жет оказаться в точности в том положении, в котором он находился в на-
чальный момент, и далее будет двигаться по предельному циклу. Но в об-
щем случае по завершении каруселью одного оборота его положение бу-
дет насколько отличаться от исходного и спираль не замкнется. В этом
67
Часть I. Основы
Рис. 5.13. Изображение тора.
случае спираль постепенно заполнит поверхность тора — геометрическо-
го тела, имеющего форму бублика (рис.5.13). Когда же выяснилось, что
существует еще один весьма необычный объект — хаотический аттрактор,
это стало большим сюрпризом для математиков и физиков (впрочем, не
только для них). К рассмотрению хаотического аттрактора мы еще вер-
немся в гл. 13.
5.4. Параметры порядка и нормальные формы*
Как было показано выше, в особенно малой окрестности точек потери ус-
тойчивости динамика системы, если не всегда, то по крайней мере во мно-
гих случаях, может быть описана одним или несколькими параметрами по-
рядка. Во многих важных случаях вблизи точки перехода системы из ус-
тойчивого состояния в неустойчивое параметры сохраняют малые значе-
ния. Это позволяет удерживать в их уравнениях движения только несколь-
ко главных членов, содержащих низшие степени параметров порядка. На-
пример, в случае одного параметра порядка типичным можно считать урав-
нение (5.4). Если системы обладают только одним параметром порядка, то
их уравнения одинаковы, несмотря на то, что микроскопические элемен-
ты могут быть совершенно различными. Например, динамика одномодо-
вого лазера и конвективных валов в жидкости подчиняется одним и тем же
уравнениям для параметра порядка. Можно даже пойти на один шаг даль-
ше и преобразовать параметры порядка так, чтобы их уравнения, различ-
ные на первый взгляд, описывали одну и ту же динамику. Важным сред-
ством достижения тождественности динамических режимов, кажущихся
различными, служит теория нормальных форм. В наши цели заведомо не
входит полное ознакомление читателя с основами теории нормальных
68
. Динамика параметров порядка
зорм. но нам все же хотелось бы, чтобы читатель получил хотя бы общее
представление о возможностях этого метода.
Рассмотрим простой случай, когда динамика параметра порядка, кото-
?ый мы обозначим через х, описывается потенциальной функцией
V(x) = ax2 + bx+c- (5-9)
Соответствующая динамика, т.е. передемпфированное движение части-
_.. в поле потенциала V, определяется уравнением
8V
х =----= -2ах-Ь. (5.10)
8х
Преобразуем координату х в новую координату х с помощью линейной
одстановки
х = ах + Р- (5.11)
Это преобразование означает, что мы сдвигаем начало системы коор-
динат вдоль оси абсцисс и подвергаем х преобразованию подобия (изме-
няем масштаб). Подставляя (5.11) в (5.9) получаем:
V=а(а2х2 + 2офх + 02)+Ь(ах+ fl) + c. (5.12)
Наша цель состоит в том, чтобы подходящим выбором коэффициентов
aw fl в преобразовании (5.11) придать правой части потенциала (5.12) про-
стую форму. Потребуем для этого, чтобы
аа2х2=х2, (5.13)
или. иначе говоря, коэффициент а должен быть выбран так, чтобы
floc2 = 1, или а = 1/д/й. (5.14)
Потребуем также, чтобы член, линейный по сс, обратился в нуль:
(2а/За + Ьа)х = 0- (5.15)
Это условие будет выполнено, если коэффициент fl выбрать так, чтобы
2fla + b = 0, или р=-Ь/(2d)- (5.16)
Наконец, введем для краткости величину Ко:
ap2 + bfl+c = V0. (5.17)
Проделав все это, мы можем ввести новую потенциальную функцию у\
V(x) = V(x)-V0=x2- (5.18)
Вряд ли нужно говорить о том, что потенциал (5.18) проще потенциала
5.9). так как все коэффициенты а, Ь, с обратились в нуль или единицу. По-
TI нциальная функция У(х) — нормальная форма потенциальной функции
17х). Уравнение движения также сильно упрощается и принимает вид
х = -2х- (5.19)
69
Часть I. Основы
Еше один пример: потенциальная функция вида
V(x)=ax4+bx3+cx2+dx+e (5.20)
линейным преобразованием приводится к виду
V(x) = x4+ Ьх3+сх2- (5.21)
Если из других соображений известно, что потенциал у симметричен, т.е.
У(-х) = У(х), (5.22)
то в (5.21) можно отбросить кубический член и получить в качестве нор-
мальной формы
У(х) = х4+сх2- (5.23)
Нормальные формы могут быть также получены для потенциалов, зави-
сящих от нескольких переменных, и теорию катастроф Рене Тома можно
рассматривать как теорию, позволяющую находить такие нормальные фор-
мы. Для уравнений, которые не выводятся из потенциала, также существу-
ют нормальные формы. Мы не будем останавливаться здесь на этой более
трудной проблеме, так как хотели бы, чтобы читатель просто составил об-
щее представление о том, что следует понимать под нормальными форма-
ми, и показать, что нормальные формы позволяют сводить различного рода
потенциалы к одному-единственному потенциалу. Если же ко всему прочему
исходный потенциал обладает той или иной симметрией, то это позволяет
еще больше уменьшить число коэффициентов в нормальной форме.
После этого краткого введения в основные понятия синергетики мы уже
в состоянии приступить к рассмотрению некоторых важных биологичес-
ких проблем с новой, синергетической, точки зрения.
Часть II
Поведение
6. Координация движения — паттерны
движения
Подзаголовок этой книги содержит слово поведение. Изучение поведения
человека — необъятная область для исследований. В понятие поведения мы
вкладываем самые разные явления — от простых движений до высоко-
сложного поведения, такого, как общение человека с другими людьми или
его действия в тех или иных ситуациях. Развивая свой подход, я буду стре-
миться к тому, чтобы он был как можно более операциональным, и поста-
раюсь рассматривать такие экспериментальные феномены, которые допус-
кают количественный анализ. Именно поэтому в этой и последующих гла-
вах я избрал своей темой координацию движений. В духе синергетики я
буду рассматривать качественные изменения (которые могут быть измере-
ны количественно!). Следует отметить, однако, что качественные измене-
ния наблюдаются в большинстве самых различных типов поведения чело-
века. Приведем самый поразительный пример — истории болезней, лече-
нием которых занимается психиатрия. Например, в случае шизофрении мы
обнаруживаем четкие переходы между нормальным поведением и психо-
тическими эпизодами. То же можно сказать и относительно переходов
между депрессиями и маниакальными эпизодами. Наиболее поразитель-
ная особенность этих явлений — существование вполне определенных пат-
тернов поведения; например, мы легко отличаем нормальное состояние че-
ловека от психотического, несмотря на то, что существует множество раз-
личных проявлений одной и той же болезни, например, шизофрении. Во
всяком случае мы можем констатировать, что паттерны поведения опре-
делены весьма четко и согласуются сами с собой. Выглядит это так, как
если бы поведение человека управлялось тем, что я назвал бы одним па-
раметром порядка. Возможно, такая картина излишне упрощена. Тем не
менее основная цель этой главы состоит в том, чтобы продемонстрировать
непреложную истину: в координации движений происходят четкие пере-
ходы, и я намереваюсь более или менее убедительно показать, что, отправ-
ляясь от этих фактов, мы можем экстраполировать наши наблюдения и
выводы на гораздо более сложные типы движений и переходы между ними.
В каком-то смысле проблема состоит не столько в том, чтобы построить
модели этих более сложных переходов, сколько в том, чтобы выработать
способы и средства квантификации поведения человека в сложных усло-
73
Часть II. Поведение
внях. В гл. 17 мы поясним проблему этого рода с различных точек зрения
(эта глава посвящена принятию решений, которые можно рассматривать
как некоторую разновидность поведения человека). Совершенно очевид-
но. что изучение условий, при которых происходят переходы между пат-
тернами поведения во многих отношениях представляют практический
интерес. В качестве примера выберем опять психоз. Можно ли предсказать
наступление психоза, или, иначе говоря, существуют ли какие-нибудь при-
знаки того, что психоз начинается? Если мы всерьез принимаем аналогию
между паттернами движения и более общими паттернами поведения, то,
по моему глубокому убеждению, такие признаки существуют.
6.1. Проблема координации
Когда люди или животные, например, позвоночные, двигают своими ко-
нечностями, десятки мышц действуют совместно высокоорганизованным
образом. Физиологи давно осознали, что объяснение столь высокой сте-
пени координации — задача весьма и весьма непростая. Знаменитый бри-
танский физиолог Шеррингтон придумал специальный термин — синергия,
т.е. согласованное совместное действие мышц. В России проблемой коор-
динации движений занимался Бернштейн (1967). Исходным пунктом его
исследований было убеждение в том, что в движении участвуют всего лишь
несколько степеней свободы. В США Гибсон (1979) исследовал взаимо-
связь между окружающей средой и человеком и ввел в обращение термин
«affordance», который может быть переведен как «готовность (к каким-либо
действиям)» или «предрасположенность». В Германии детальные экспери-
менты по координации, например, плавников рыбы или конечностей мно-
гоножки провел фон Хольст (1935, 1939, 1943). В частности, фон Хольст
обнаружил, что когда у многоножки остались только четыре ноги, она стала
двигаться, как четвероногие, например, как лошади. Ретроспективно это
выглядит как убедительное свидетельство в пользу самоорганизации. Если
предположить, что в мозгу многоножки заложена компьютерная програм-
ма, то вряд ли можно представить, что в этой программе предусмотрены
все мыслимые варианты потерь большинства ног и предусмотрены схемы
управления движением оставшихся ног.
Мы хотим обсудить вопрос о том, позволяют ли нам общие понятия си-
нергетики создать «окно», через которое можно заглянуть в исследования
координации движений. Как было показано в гл.4, в основе главной стра-
тегии синергетики лежит идея изучения сложных систем в окрестности тех
точек, где их макроскопическое поведение претерпевает качественные из-
менения. Прежде всего нам известно, что и у людей, и у четвероногих су-
ществуют характерные паттерны при их передвижении, например, у лоша-
дей наблюдаются различные виды аллюров: шаг, рысь и галоп. Возникает
вопрос, можем ли мы детально исследовать переходы между аллюрами и
74
6. Координация движения — паттерны движения
сделать соответствующие выводы в терминах синергетики. Действуя в рам-
ках синергетического подхода, мы должны идентифицировать один или
несколько параметров порядка, один или несколько управляющих пара-
метров и постараться обнаружить признаки самоорганизации, такие, как
критическое замедление и критические флуктуации.
6.2. Фазовые переходы в движениях пальцев:
эксперименты и простая модель
Развитию моих синергетических идей в немалой мере способствовали
детальные эксперименты по координации движений пальцев, которые
выполнил Келсо (1981, 1984). Испытуемые получали задание двигать па-
раллельно указательными пальцами обеих рук (рис.6.1, слева), а затем
по сигналу, либо в виде устной команды, отдаваемой экспериментато-
ром, либо в такт с метрономом, их просили ускорить движения. При оп-
ределенной критической частоте СОс внезапно и совершенно непроиз-
вольно происходило изменение паттерна движения пальцев — переход
от параллельного движения пальцев к антипараллельному, или, иначе
говоря, симметричному движению (рис. 6.1 справа). Так как изменение
движения пальцев происходило при вполне определенном значении ча-
стоты СО, напрашивается мысль о том, чтобы частоту СО считать управ-
ляющим параметром.
Рассмотрим результаты этого эксперимента Келсо более подробно. Для
этого введем смещения кончиков указательных пальцев, обозначив их че-
рез х, и х2 (рис.6.2). На рис. 6.3 схематически представлены результаты эк-
спериментов Келсо. Время возрастает слева направо. По оси ординат отло-
жены смещения и х2 (сплошная и пунктирная линии). По ходу экспери-
мента частота колебаний метронома медленно увеличивалась. На рис. 6.3
Параллельное движение
Антипараллельное движение
Рис. 6.1. Параллельное и антипараллельное движения указательных пальцев.
75
Часть II. Поведение
Рис. 6.3. Схематическое представление результатов экспериментов по смещению кончи-
ков пальцев х, (сплошная линия) и х2 (пунктирная линия) как функции времени при не-
прерывном увеличении частоты движения пальцев. В реальном эксперименте Келсо и др.
амплитуды х, и х2 убывали с увеличением частоты (D.
Acos(cot — Ф)
ф ,
Рис. 6.4. Наглядное представ-
ление сдвига по фазе ф. Ниж-
няя часть: косинусоида со
сдвигом по фазе. Косинусои-
да без сдвига по фазе изобра-
жена пунктирной кривой.
ясно видно, что между кривыми сначала наблюдалась разность фаз, затем
кривые постепенно слились, что указывает на переход к новому режиму,
изображенному на рис. 6.1 справа. Далее я намереваюсь изложить модель
Хакена—Келсо—Бунца (1985). Чтобы ввести адекватный параметр поряд-
ка, остановимся несколько более подробно на математическом описании
колебательного движения. Описанием гармонического движения служат
76
6. Координация движения — паттерны движения
функции косинус или синус (рис.6.4). Косинусоиду можно сдвигать вдоль
оси частот cot, вводя фазу ф:
ф = a>t0, (6.1)
где Го — сдвиг по времени, соответствующий сдвигу максимума косинусо-
иды на величину Ф, как показано на рис.6.4. Смещения кончиков указа-
тельных пальцев можно представить в виде
%, =г, со5(со(-ф1) (6.2)
и
х2=г2со$(а>1-ф2), (6.3)
где Г] и г2 — амплитуды колебаний, т.е. максимальные смещения кончиков
левого и правого пальцев, ф] и ф2-— соответствующие фазы. Ясно, что пе-
реход от рис.6.1 (слева) к рис.6.1 (справа) можно интерпретировать как из-
менение относительной фазы, определяемое соотношением
ф=фг-ф2, (6.4)
от ф = л до ф = 0. Заметим, что вследствие периодичности функции коси-
нуса относительная фаза ф — 71 эквивалентна ф = — 71. Ясно, что переход от
параллельного движения указательных пальцев к антипараллельному дви-
жению представляет собой качественное изменение в макроскопическом
масштабе. Кроме того, это изменение описывается относительной фазой
(6.4). Таким образом, ф становится нашим кандидатом на роль параметра по-
рядка. Прежде чем переходить дальше, упомянем о том, что для излагаемой
далее модели в правых частях соотношений (6.2) и (6.3) не обязательно дол-
жны стоять чистые косинусы. Вместо них могут быть любые периодические
функции, т.е. любые функции, обладающие тем свойством, что
f(at + 2л) = f(cot), (6-5)
которые качественно напоминают по форме косинусоиду. Таким образом,
вместо соотношений (6.2) и (6.3) мы можем также рассматривать более об-
щие соотношения
хх=г^(а7-ф^ (6.6)
и
Х2=г2/{сз1-ф2). (6.7)
Обсудим теперь вывод уравнения для параметра порядка ф. В общем
случае для одного параметра порядка можно ожидать уравнение вида
8V
(» = -—, (6.8)
дф
где V— потенциальная функция того типа, о котором говорилось в разд.5.1.
Нетрудно вывести две важные общие характерные особенности функции
V Прежде всего вследствие периодичности косинусоид вся система в це-
77
Часть II. Поведение
лом периодична, т.е. переходит в себя, когда ф изменяется на 2л или на ве-
личину, кратную 2л. Таким образом, мы требуем, чтобы потенциал И был
периодическим:
К(0 + 2л) = Г(0). (6.9)
Кроме того, левый и правый указательные пальцы играют симметрич-
ную роль, т.е. потенциал Vдолжен быть периодическим. Как показано в
математике, наиболее общая форма такого потенциала имеет вид
У(ф) = а1 cos0 + й2 cos(20) + ... + ап соъпф + ..., (6.10)
где п — целое число, которое в принципе может возрастать до бесконеч-
ности. Для дальнейшего нам достаточно рассмотреть лишь наиболее суще-
ственные особенности, которые могут быть подмечены на простейшей
форме потенциала V. Прежде всего сохраним в разложении(б.Ю) только
первый член
K(0) = -47COS0 (6.Н)
и предположим, что
д>0. (6.12)
В результате мы получим потенциал, изображенный на рис.6.5. Он име-
ет только один минимум при 0=0, т.е. при таком потенциале должно было
бы быть возможно только одно стабильное движение. Однако в действи-
тельности при малых частотах (О возможны не одно, а два стабильных дви-
жения, а именно: параллельное и антипараллельное (симметричное) дви-
жения указательных пальцев. Чтобы уловить эту бистабильность, мы до-
бавляем еще один параметр к (6.11) и получаем
K(0) = -<7COS0-/?COS20- (6.13)
Вставив (6.13) в (6.8), мы получим уравнение движения для параметра
порядка ф в виде
=-о cos0-/? cos 20 . (6.14)
Соответствующая форма потенциала представлена на рис.6.6, который
Рис. 6.5. Графическое представление потенциала (6.11).
78
6. Координация движения — паттерны движения
Рис. 6.6. Графическое представление потенциала (6.13) при убывающих значениях b/а (см.
текст).
нужно читать по горизонтали ряд за рядом, начиная каждый раз слева. На от-
дельных «кадрах» показано, как изменяется форма потенциала при убываю-
щих значениях параметра Ъ/а. Положение шарика при ф = Л (или ф = —Л) со-
ответствуют параллельному движению указательных пальцев испытуемого.
При убывании параметра b/а потенциал в окрестности минимума стано-
вится более плоским, и постепенно минимум полностью исчезает. Шарик
скатывается в положение при ф = 0, соответствующее симметричному дви-
жению указательных пальцев. Эта простая модель очень хорошо отражает
наблюдавшийся переход. Но кроме того она позволяет сделать одно важ-
ное предсказание, а именно: предсказать явление гистерезиса. Когда по-
допытный (или подопытная) двигает пальцами в симметричной моде на
частоте (О > (0с, это движение соответствует ф = 0. При убывании частоты
мы проходим последовательность отдельных «кадров» на рис.6.6 в обрат-
ном направлении (по сравнению с направлением предыдущего обхода) с
одним существенным различием, а именно: шарик не прыгает спонтанно
вверх, а будет покоиться в положении ф = 0. Это явление наблюдается в
действительности. Когда подопытных просят двигать указательными паль-
цами медленнее, их пальцы даже при низкой частоте продолжают совер-
шать исходное симметричное движение.
Но вернемся к исходной последовательности и выясним, где исчезает
верхний минимум. Для этого нам придется проделать некоторые выклад-
ки, которые могут показаться скучными, но занимают всего лишь несколь-
ко строк. Положение минимумов можно найти из условия, что угловой ко-
эффициент касательной к потенциалу Vв них обращается в нуль. Исполь-
зуя явный вид (6.13) потенциала V, находим:
79
Часть II. Поведение
csin0 + 26sin20 = O- (6.15)
Преобразуя второй член по формуле синус двойного угла, (6.15) можно
записать в виде
sin0(n + 46cos0) = 0- (6.16)
Левая часть тригонометрического уравнения (6.16) обращается в нуль,
если либо
sin 0=0, (6.17)
либо
tf + 4Z>cos0 = O- (6.18)
В первом случае мы получаем решения
0=0, 0=±7Г, (6-19)
которые просто соответствуют минимумам потенциала. Решение тригоно-
метрического уравнения (6.18) представимо в виде
cos 0 = -а /(4Ь) • (6- 20)
Значения 0, удовлетворяющее этому уравнению, говорят нам, где рас-
положены максимумы потенциала V. Переход происходит, когда максимум
потенциала Vисчезает, что означает, что уравнение (6.20) не имеет реше-
ния при любом действительном 0. Это случается, когда косинус должен
стать больше +1 или меньше -1, т.е., иначе говоря, когда
а
46
>1.
(6.21)
Разрешив неравенство (6.21) относительно Ь, мы получаем критическое
значение Ьс, если параметр Ьс рассматривать как переменную, значение ко-
торой может изменяться в зависимости от условий эксперимента, а зна-
чение параметра а сохранять фиксированным:
|6с|<|я|/4. (6.22)
Так как экспериментальные результаты показывают, что с увеличени-
ем частоты СО амплитуды движения пальцев гх и г2 убывают, потенциал V
разумно записать в виде
V = —а COS0+—^^-cos(20)
4 г.
(6.23)
где гс — критическая амплитуда в момент перехода. Следует подчеркнуть,
что потенциал (6.23) — не более чем временная гипотеза и нуждается в под-
креплении, а частности, с помощью соответствующих экспериментов.
Прежде чем включить в рассмотрение флуктуации, обсудим предложен-
ную в литературе альтернативу (см. литературу к следующему разделу).
80
6. Координация движения — паттерны движения
6.3. Альтернативная модель?
Экспериментально наблюдаемое «переключение» точек устойчивости с
ф = 71 на ф = 0 служит для нас исходным пунктом при формулировке мо-
дели, в общих чертах обрисованной выше. Впоследствии в литературе была
предложена другая модель, основанная на первом члене разложения (6.10),
а именно на потенциале V= асо$ф. При а > 0 потенциал имеет такой вид,
как показано на рис. 6.7 слева. Предположив, что а зависит от управляю-
щего параметра й), мы можем рассмотреть изменение параметра а от от-
рицательных значений к положительным в зависимости от управляющего
параметра. Так как изменение параметра а по предположению непрерыв-
но, параметр а должен пройти через нуль, что приводит к ситуации, пред-
ставленной на рис. 6.7 в середине. В конце концов при отрицательном а
мы получим потенциал, представленный на рис. 6.7 справа. Переход от по-
тенциалов, изображенных на рис. 6.7 слева, к потенциалам, изображенным
на рис. 6.7 справа, обнаруживает смену устойчивости. Таким образом, на
первый взгляд кажется, будто предложенная модель не только эквивален-
тна изложенной в предыдущем разделе, но и проще ее. Какая из моделей
нам подходит, должны решить эксперименты. Прежде всего заметим, что
альтернативная модель не обладает гистерезисом. Стоит преодолеть пере-
ходную область на рис. 6.7, как флуктуации тотчас же уведут систему из ее
старого состояния в новое состояние. Кроме того, флуктуации в альтер-
нативной модели необычайно велики (критические флуктуации). Взглянув
на плоскую «кривую» в средней части рис. 6.7, мы со всей наглядностью
видим, что флуктуации «укатят» шарик, представляющий значение пара-
метра порядка, из положения ф = —71 в положение ф= +71. Как будет пока-
зано ниже, столь большие флуктуации не наблюдаются. Все эти факторы
вынуждают нас отказаться от альтернативной модели.
Рис. 6.7. Графическое представление потенциала V= ocos0 при различных значениях уп-
равляющего параметра а.
81
Часть II. Поведение
6.4. Флуктуации в движениях пальцев: теория*
Как было показано в разд. 5.1, наличие критических флуктуаций — важ-
ный признак процесса самоорганизации. Естественно возникает вопрос:
могут ли флуктуации наблюдаться в движениях пальцев? Прежде чем
приступать к анализу, вдумаемся в проблему математического модели-
рования флуктуаций более подробно. Воспользуемся для этого проце-
дурой, которая хорошо известна в синергетике, а именно: начнем с вы-
вода уравнения для параметра порядка, которое учитывало бы влияние
флуктуаций. В данном случае мы в качестве параметра порядка исполь-
зуем относительную фазу ф. В уравнение движения (6.14) для параметра
порядка мы дополнительно вводим флуктуирующую силу F(t), поэтому
уравнение, которое нам предстоит исследовать, выглядит следующим
образом:
ф = -flsin$-26sin 2ф + F(fy (6.24)
Условимся предполагать, что F(t) описывает стохастические силы, вли-
яющие на движение пальцев и проистекающие на микроскопическом уров-
не, например, от спонтанного возбуждения нейронов. Все, что нам требу-
ется знать для анализа, — два простых свойства флуктуирующей силы F(t).
1) Ее среднее значение равно нулю:
(Г(0) = 0. (6.25)
Соотношение (6.25) означает, что значение функции F(t) обращается в
нуль при усреднении ее по длинной серии измерений. Применительно к
нашему случаю это означает, что один и тот же эксперимент с движения-
ми пальцев мы повторяем снова и снова.
2) Кроме того, мы условимся предполагать, что корреляционная функ-
ция для F(t) удовлетворяет соотношению
{F(t)F{t'} = Q8{t-t'}. (6.26)
В соотношении (6.26) мы образуем произведение двух значений функ-
ций Г, взятых в различные моменты времени, и усредняем по нескольким
(в идеале — очень многим) повторениям эксперимента: Q — амплитуда
флуктуирующей силы (так сказать, сила ударов, наносимых по мячу фут-
болистами, гоняющими его то в одну, то в другую сторону); 8 — дельта-
функция Дирака, график которой представлен на рис.6.8 (она равна нулю
практически всюду, где t—t' 0, и только при t—t' - 0 имеет очень острый
пик. Наличие дельта-функции Дирака в правой части соотношения (6.26)
сигнализирует о том, что время корреляции между флуктуирующими си-
лами очень мало, по крайней мере по сравнению со всеми постоянными
времени в процессе изменения относительной фазы ф.
Уравнение (6.24) вместе с условиями (6.25, 6.26) — исходный пункт
модели Шёнера-Хакена-Келсо (1986), результаты которой я изложу в
82
*. координация движения — паттерны движения
Рис. 6.9. Эволюция распреде-
ления вероятности Р со вре-
менем. Начальное распреде-
ление изображено справа.
дальнейшем. Уравнение (6.24) называется уравнением Ланжевена. Ис-
пользуя точную форму потенциала V, его можно записать в более точ-
ном виде: если
У = -tfcos$-6cos20 > (6.27)
то
0=-—+f(0. (6.28)
дф
В ряде случаев удобнее рассматривать вместо уравнения Ланжевена
(6.28) уравнение Фоккера-Планка. В это уравнение вероятности Р(ф,/), где
P(O,t)d(j) — вероятность найти в момент времени г относительную фазу в ин-
тервале от ф,...ф + <1ф. Пример распределения представлен на рис. 6.9. Урав-
нение Фоккера-Планка имеет вид:
Р(ф^) = —\—Р\ +
дф\дф )
Qd2P
2 Э02’
(6.29)
где в левой части стоит изменение распределения вероятности со време-
нем. Первое слагаемое в правой части называется дрейфом, а второе —
диффузионным членом. Если Р не изменяется более во времени, то оно
достигает своего стационарного значения, определяемого из условия
83
Часть II. Поведение
Лю,=0. (6.30)
В этом случае уравнение Фоккера-Планка (6.29) может быть решено в
явном виде. Решение имеет вид
PSM,W = 7Vexp[-2PW)/Q], (6.31)
где V— потенциальная функция, входящая в (6.29) и не имеющая специ-
ального вида (6.27), N— нормирующий множитель:
N~X = j ^ЛФ^Ф (6.32)
Чтобы мы могли делать предсказания относительно движения пальцев,
необходимо более подробно исследовать решения уравнений (6.24) или
(6.29). Для этого мы начнем с рассмотрения некоторых простых случаев.
а) Симметричное движение пальцев. Займемся изучением поведения двух
указательных пальцев с относительной фазой, близкой к ф = 0. Предполо-
жим, что флуктуации фазы не слишком велики. Это позволит нам заме-
нить синусы в правой части уравнения (6.24) их аргументами:
sin(x)® х, где х = ф или х = 2ф.
Уравнение (6.24) в результате такой замены переходит в уравнение
ф = -(а + 4Ь)ф + F(f)i (6.34)
где соответствующий потенциал V— простая квадратичная функция от ф,
а именно (см. рис.6.10, пунктирная кривая):
С = ^(а + 4Ь)ф\
В этом случае, согласно (6.31), стационарное решение уравнения Фок-
кера-Планка (6.29) имеет следующий вид:
N схр(-г/2</>2Д
где константа d определяется по формуле
(6.33)
(6.35)
(6.36)
d =
a+4b
(6.37)
(6.38)
а нормирующий множитель N— по формуле
7V =--------
тг erf(zri7) ’
Более подробный вид множителя N сейчас не представляет для нас осо-
бого интереса, и мы заметим, что erf — функция ошибок. Ясно, что Р име-
ет гауссово распределение, т.е. представляет собой колоколообразную фун-
84
i. Координация движения — паттерны движения
Рис.6.10. Вблизи 0 = 0 по-
тенциал И(6.13) (сплошная
линия) может быть аппрок-
симирован параболой (пун-
ктирная линия).
кпию. Важность формулы (6.36) обусловлена тем, что она позволяет вы-
числять в явном виде среднее значение величины | ф | и стандартное от-
клонение <5. Среднее значение определяется выражением
(|ф|)= р0|0|Дю,(0).
(6.39)
Формула (6.36) позволяет легко вычислить (6.39) и мы получаем:
Стандартное отклонение <5, как обычно, определяется по формуле
и может быть вычислено в явном виде:
2_ 1 л/тг ехр(-я2б/2)
2d1 б/егЦтп/)
(6.42)
График среднего значения и стандартного отклонения как функций па-
раметра d представлен на рис. 6.11. Две линии показывают эксперименталь-
ные значения среднего и стандартного отклонения, что позволяет «считы-
вать» с этих кривых экспериментально реалистические значения параметра
d Важной постоянной времени является время, которое требуется системе,
чтобы релаксировать после возмущения к предыдущему состоянию при ф =
0. Время релаксации можно «вычитать» из уравнения (6.34), смысл которо-
го наглядно можно представить следующим образом: последний член в пра-
вой части F(t) описывает отдельные толчки, воздействующие на относитель-
ную фазу ф. Релаксация фазы ф после каждого толчка описывается первым
членом в правой части, имеющим смысл времени релаксации. Совершен-
но очевидно, что это время определяется формулой
1
46 +о
(6.43)
85
Часть II. Поведение
Экспериментальный диапазон значений параметра d
Рис. 6.11. Зависимость средней фазы и стандартного отклонения как функции параметра
d (6.37). На врезке показана аппроксимация потенциала параболой (Шенер, Хакен, Кел-
со, 1986).
Позднее, в разд. 6.5, мы познакомимся с одним экспериментальным те-
стом, а пока продолжим теоретический анализ и для этого обратимся к рас-
смотрению антисимметричной моды, т.е. параллельному движению ука-
зательных пальцев.
б) Параллельное движение пальцев. В этом случае относительная фаза
близка к ф = ±л:
Фяа, = ±*г • (б-44)
Из разд.6.2 нам известно, что параллельное движение пальцев устойчиво
при | а| < |4b|. Если флуктуации не слишком велики, то мы можем посту-
пить, как прежде. Единственное отличие состоит в том, что уравнение
(6.24) необходимо линеаризовать в окрестностях точек ф — ±Д. Для этого
мы введем новую переменную (см.рис. 6.12):
86
» Координация движения — паттерны движения
8 = ф - 7Г при 0 < ф < п ,
8 =ф+л при -п <ф<0.
(6.45)
Следующие шаги полностью аналогичны тем, которые мы проделали в
д_а Запишем уравнение (6.34) для новой переменной:
<5 = -(46-й)0 + Г(ф (6-46)
Стационарное решение соответствующего уравнения Фоккера—План-
ид можно представить в виде
PsJ8) = Nexp(-f282), (6.47)
де параметр f определяется по формуле
146-а
\0~
а нормальный множитель N — по формуле
N =----------
TrerfOr/)
Среднее значение модуля величины 8 находим по формуле
1-ехр(-тг2/2)
х/тт/егЦтг/) ’
а стандартное отклонение — по формуле
1___л/л ехр(-я2/2)
2/2 /егЯя/)
(6.48)
(6.49)
(6.50)
(6.51)
-й!.
Несмотря на формальную аналогию между формулами (6.40, 6.42) и (6.50,
6.51) между ними существует глубокое различие, так как известно, что при
4Z> — а = 0 существует фазовый переход. Совершенно ясно, что в этой точ-
ке параметр f (6.48) обращается в нуль, среднее значение модуля величины
8 стремится к 71, а стандартное отклонение <7 расходится. Иначе говоря, мы
обнаруживаем критические флуктуации с <7 ос I//2 <=< Q/(4b — а). Эта расхо-
димость— артефакт линейной апроксимации (6.46) уравнения (6.24), но и
без перехода к приближению стандартное отклонение <7стало бы очень боль-
шим. Из уравнения (6.46) мы находим релаксационное время:
1
Эе/ д 1
4Ь-а
(6.52)
И снова мы обнаруживаем расходимость при 4Ь - а —> 0 в точке перехо-
да. что указывает на критическое замедление.
Средняя абсолютная фаза и ее стандартное отклонение для локальной
модели антисимметричной моды как функции от параметра/представле-
87
Часть II. Поведение
Рис. 6.13. Зависимость средней фазы и стандартного отклонения от параметра/(6.48) при
<р ~ ±л (Шенер, Хакен, Келсо, 1986).
Рис. 6.14. Эволюция во време-
ни распределения вероятности
от параллельного движения
пальцев до перехода в антипа-
раллельного движения пальцев
(Шенер, Хакен, Келсо, 1986).
ны на рис. 6.13. Приближение к точке перехода соответствует/—>0. Ось f
направлена влево. Кривые использовались для нахождения соответствую-
щих значений f по экспериментальным значениям среднего и стандартного
отклонения. Диапазон экспериментальных значений указан. Рассмотрим
переходную область более подробно, так как она требует более тщатель-
ного исследования.
В переходной области уравнение Фоккера—Планка приходится решать
численно. Эволюция во времени плотности вероятности при значениях
параметра осг = 2.0 Гц, Z>cr = 0.5 Гц, вычисленная при 0.0с, 1с, 10с, 2.19с,
3.29с и 4.39с, представлена на рис.6.14. Все распределения нормированы.
Начальное условие выбрано в качестве стационарного распределения в ло-
кальной модели антисимметричной моды. Из рис.6.14 ясно видно, что ве-
88
6. Координация движения — паттерны движения
Рис. 6.15. Эволюция во времени средней фазы и стандартного отклонения при переходе
от ф = 7Гк 0 = 0 (Шенер, Хакен, Келсо, 1986).
роятностный вес, первоначально сосредоточенный вблизи я и —Я, со вре-
менем перераспределяется и сосредотачивается в центральном пике при
71 = 0. Финальное распределение гораздо «острее», чем начальное, так как
0=0 — более глубокий и более крутой минимум потенциала, чем ф = ±71
на последнем плато параметра перед переходом. На рис.6.15, показано, как
эволюционируют со временем средняя абсолютная фаза и ее стандартное
отклонение. На кривой < |ф | > отчетливо виден переход от ±7Г к 0. Стан-
дартное отклонение показывает, что при переходе флуктуации усиливают-
ся, после чего, когда переходный режим «вымирает», устанавливаются на
уровне даже более низком, чем до перехода.
Анализируя, можно сделать следующие наблюдения количественного
характера.
а) Располагая графиками стандартного отклонения и среднего, мы мо-
жем определить продолжительность перехода. Она составляет 2,5-5 с, что
соответствует экспериментальной продолжительности 1-2 с. Этот резуль-
тат можно рассматривать как подтверждение точности предсказания.
б) Среднее по времени от стандартного отклонения определяется как
среднее по времени до того момента, когда с вероятностью 90% происхо-
дит переход. Приняв это определение, мы находим по данным, представ-
ленным на рис. 6.15, что стандартное отклонение составляет 56°. По срав-
нению с экспериментальным значением 60° это следует признать правиль-
ным порядком величины.
Еще одна величина, которая поддается измерению, — средняя продол-
жительность перехода («переключения»). Чтобы выработать адекватное
определение, заметим, что при переходе «вероятностный вес», первона-
89
Часть II. Поведение
чально сосредоточенный вблизи ф = ±Л, перераспределяется и сосредота-
чивается вблизи ф = 0. Величина
s
Ps(t)= \(1фР(ф,1) (6.53)
-8
при подходящим образом выбранном параметре 8 задает вероятностный
вес нового пика и во время перехода возрастает. Производная от 8 по вре-
мени
(654)
at
есть не что иное, как скорость роста 8, т.е. величина v(t)dt есть вероятность
того, что переход происходит в интервале времени t,...,t + dt. Таким обра-
зом, продолжительность, или время, перехода можно определить как
= (6.55)
о
6.5. Критические флуктуации в движениях пальцев:
эксперименты
6.5.1. Условия экспериментов
Изложенная теоретическая модель позволила нам вычислить флуктуации,
в том числе из критических соображений. Обратимся теперь к эксперимен-
тальной проверке наших расчетов, осуществленной Келсо, Шольцем и
Шенером (1986). Были выполнены эксперименты по корреляции движе-
ний двух типов: движений запястий и движений указательных пальцев. По
аналогии с описанными в разд. 6.2 можно также исследовать переход от па-
раллельных движений запястий к антипараллельным, или, иначе говоря,
симметричным, движениям.
В экспериментах с периодическим сгибанием/ разгибанием запястий
предплечье испытуемого закреплялось в удобном положении. Каждой ру-
кой подопытный брался за рукоятку экспериментальной установки, сто-
ящей на столе. Оси запястных суставов коллинеарны осям ручек. В ручки
встроены потенциометры, позволяющие превращать углы поворота запя-
стий в напряжение постоянного тока. Эксперименты с движениями ука-
зательных пальцев проводились по аналогичной схеме, но предплечья ис-
пытуемых жестко фиксировались, чтобы испытуемые могли двигать толь-
ко указательными пальцами. Для точной воспроизводимости движений
они должны были охватывать лишь небольшое число самых необходимых
90
6. Координация движения — паттерны движения
степеней свободы — тех, которые относятся к движениям, соответствен-
но, запястий и указательных пальцев. В экспериментах испытуемые дви-
гали указательными пальцами то в одну, то в другую сторону, выполняя
повторно циклы абдукция—аддукция, т.е. отведение — приведение. Непре-
рывные координаты х, у конца каждого указательного пальца измерялись
с помощью инфракрасного излучения, испускаемого прикрепленным к
концу пальца диодом. Все данные переводились в цифровую форму ана-
лого-цифровым преобразователем на 12 бит со скоростью 200 сигналов в
секунду и записывались на магнитную ленту для последующей обработки
на компьютере.
Изложим теперь кратко результаты экспериментов Келсо, Шольца,
Шенера по изучению движений указательных пальцев. В этих экспери-
ментах частота колебательных движений пальцев систематически повы-
шалась скачкообразно на 0,25 Гц через каждые 4 с. Темп колебаний за-
давался метрономом. Данные о движениях пальцев усреднялись двумя
способами:
1) с помощью точечной, т.е. по дискретным точкам, оценки (измеря-
лась фаза тика колебательного движения запястья, т.е. максимальное сме-
щение одного пика относительно другого);
2) с помощью практически непрерывного измерения (измерение отно-
сительной фазы производилось через каждые 5 мс).
Чтобы определить по экспериментальным данным зависящую от време-
ни фазу, воспользуемся тем, что движения конца каждого указательного
пальца можно описывать по аналогии с движением маятника — на фазовой
плоскости (рис.5.9), где по оси абсцисс отложено смещение х указательно-
го пальца, а по оси ординат — скорость смещения х„ Для конца указатель-
ного пальца правой руки с координатами на фазовой плоскости хг, хг мож-
но ввести из геометрических соображений фазовый угол фг, определив его
из соотношения
(6.56)
Введенный таким образом фазовый угол совпадает с введенным ранее
определением (6.2), если пренебречь зависимостью амплитуды гот време-
ни. Чтобы компенсировать зависимость от времени, заменим хт и хг нор-
мированными величинами хг и хг, где хг — положение конца указатель-
ного пальца правой руки, нормированное на экстремумы цикла, а хг —
нормированная мгновенная скорость. Подставив эти величины в (5.56) и
разрешив полученное соотношение относительно фг, находим:
фг = arctg(xr/хг) • (6.57)
Аналогичным образом определяется фазовый угол 0, для конца указа-
тельного пальца левой руки. Затем мы вычисляем разность ф = фг— ф^
91
Часть II. Поведение
находим относительную фазу. Из этой разности выпадает нефлуктуирую-
щий член (О(t) ~ (Ot, возрастающий со временем, что позволяет использо-
вать ф = фг — ф1 непосредственно как меру флуктуаций фазы.
6.5.2. Экспериментальные результаты
Основные результаты экспериментов по изучению относительной фазы
представлены на рис.6.16. Они позволяют сравнивать непрерывную (рис.
6.16, верхняя часть) и дискретную, точечную (рис.6.16, нижняя часть), оцен-
ки флуктуаций фазы в репрезентативной серии экспериментов. И в верхней,
и в нижней частях рис.6.16 отчетливо видна медленная составляющая, хотя
более тонкая структура флуктуаций возникает только из непрерывной оцен-
ки. Из-за ангармоничностей в траекториях движения пальцев непрерывная
относительная фаза содержит и осцилляторную составляющую.
Жестко контролируемое скачкообразное увеличение циклической час-
тоты позволяет проверять стационарность с помощью усреднения по окну
шириной 0,5 с, перемещающемуся по четырехсекундному интервалу при
каждом значении задающей частоты. Стационарность гарантировалась
менее чем через 1 с после изменения параметра, поэтому модель фазы и
стандартное отклонение для данного эксперимента вычислялись за пос-
ледние 3 с при данном значении задающей частоты, т.е. по 600 точечным
данным. Среднее модуля фазы и стандартное отклонение брались по на-
бору из 10 экспериментов, проведенных на репрезентативном испытуемом.
Изменение модуля фазы отчетливо видно на циклах, показанных сплош-
ной линией. Особый интерес для нас представляют светлые кружки: они
показывают, как флуктуации возникают, достигают максимума в точке пе-
рехода и резко падают. (Шарик, изображающий относительную фазу, вы-
талкивается из верхнего минимума, который исчезает, и перепрыгивает
минимум, расположенный ниже). Особую важность этого результата под-
черкивает сравнение с данными экспериментов, в которых движения ука-
зательных пальцев испытуемых сначала были антипараллельными и про-
исходили на низкой частоте. Как хорошо видно на рис.6.18, модель фазы
и флуктуации фазы остаются практически постоянными, как и следовало
ожидать из теоретических соображений. Ясно, что никаких критических
Точечная оценка относительной фазы
360°
Рис. 6.16. Верхняя часть', то-
чечная оценка относитель-
ной фазы. Нижняя часть'.
непрерывная относитель-
ная фаза из работы Келсо,
Шольца, Шенера, 1986).
180°
92
S. Координация движения — паттерны движения
Средняя непрерывная фаза п градусах Средняя поприрыппля фа in n i радугах
Рис. 6.17. Средняя фаза (чер-
ные точки) и стандартное от-
клонение (светлые точки) в
случае, когда пальцы первона-
чально движутся параллельно
и задающая частота возрастает
(из работы Келсо и др., 1986).
Рис. 6.18. Та же зависимость, как
и на рис.6.17, но пальцы перво-
начально движутся антипарал-
лельно и частота возрастает (из
работы Келсо и др., 1986).
93
Часть II. Поведение
флуктуаций при этом не наблюдается, т.е. не происходит неравновесного
фазового перехода.
Результаты Келсо, Шольца и Шенера (1986) по критическим флук-
туациям движений запястья качественно аналогичны данным по движе-
ниям указательных пальцев. Мы не приводим их здесь, так как они ос-
нованы только на точечных оценках и по этой причине, возможно, не
столь «выразительны». Впрочем, не подлежит сомнению, что и экспе-
рименты по движению указательных пальцев, и эксперименты по дви-
жению запястий полностью подтверждают предсказание критических
флуктуаций, подтверждающих существование неравновесного фазово-
го перехода.
Обратимся теперь ко второму признаку — критическому замедлению.
Как можно измерить критическое замедление? Напомним: критическое
замедление означает, что в области перехода отклик системы на возму-
щения становится медленным по сравнению с реакцией системы, нахо-
дящейся в стабильной области. Следовательно, если мы хотим выполнить
эксперимент с движениями пальцев, то необходимо взять устройство,
которое позволит внести возмущение в движение пальцев и проследить
за возмущенным движением. Такие эксперименты были проделаны
Шольцем, Келсо и Шенером (1987). В схему своих экспериментов они
внесли ряд существенных модификаций по сравнению с описанной выше
схемой проведения экспериментов по изучению критических флуктуа-
ций. Испытуемые должны были вставлять свои указательные пальцы в
металлические «наконечники», оси вращения которых совпадали с ося-
ми так называемых первых пястно-фаланговых суставов. Металлические
наконечники ограничивали движение указательных пальцев, позволяя им
только сгибаться и выпрямляться в пястно-фаланговом суставе в горизон-
тальной плоскости. Задача испытуемого заключалась в том, чтобы рит-
мически двигать указательными пальцами рук с одной и той же частотой
в одной из двух мод координации, т.е. либо параллельно, либо антипа-
раллельно. Темп движения задавался на слух — метрономом, на каждый
отсчет испытуемый должен был выполнить один полный цикл движений.
При проведении эксперимента задающая частота возрастала скачкообраз-
Рис. 6.19. Типичное поведение эксперименталь-
но обнаруженного критического времени релак-
сации. Светлые треугольники: испытуемый пер-
воначально совершает параллельные движения
пальцами; переход к антипараллельному движе-
нию происходит при увеличении частоты. Чер-
ные треугольники: испытуемый первоначально
совершает антипараллельные движения пальца-
ми; антипараллельность движений сохраняется
(из работы Шольца, Келсо, Шенера, 1987).
94
к Координация движения — паттерны движения
но через каждые 10 с на 0,2 Гц. В начале каждого эксперимента коорди-
нация движений двух рук выбиралась либо в синфазной, либо в проти-
вофазной моде. Для определения времени релаксации в движения паль-
ев вносилось возмущение: в тот момент, когда скорость сгибания пра-
вого указательного пальца достигала максимальной скорости, по пальцу
наносились легкие толчки, или, если говорить более специальным язы-
ком. к пальцу через металлический наконечник прикладывали в импуль-
сном режиме крутящий момент (продолжительность импульса — 50 мс).
В каждом эксперименте возмущение вносилось от 1 до 4 раз в не иду-
щие подряд интервалы продолжительностью по 10 с каждый, на протя-
жении которых частота остается постоянной. Возмущения были случай-
ным образом распределены по серии экспериментов. В каждый из девя-
ти 10-секундных интервалов возмущение вносилось всего 10 раз. Оцен-
ка времени релаксации была получена по продолжительности интервала
от приложения крутящего момента к металлическому наконечнику до
стабилизации временного ряда относительной фазы на среднем значении
до включения возмущения. Для измерения времени перехода на тех ин-
тервалах постоянства частоты, на которых включалось возмущение, ис-
пользовался компьютерный дисплей в интерактивном режиме. В этом
случае оценка определялась как время, отсчитываемое от начала интер-
вала постоянства частоты до того момента времени, когда временной ряд
относительной фазы стабилизируется на среднем значении, равном 0°,
что соответствует окончанию перехода. Измерения проводились на 5 ис-
пытуемых. Типичный результат представлен на рис.6.19. Светлые треу-
гольники соответствуют противофазному режиму, т.е. параллельному
движению указательных пальцев, черные треугольники соответствуют
движению пальцев в синфазном режиме, т.е. симметричному движению
пальцев. Критическое замедление, т.е. увеличение времени релаксации,
отчетливо наблюдается в противофазном режиме. Только у одного из пяти
испытуемых картина движения была не столь явной. В соответствии с те-
орией оказалось, что противофазный режим динамически менее стаби-
лен, чем синфазный, и что переход от противофазного режима к синфаз-
ному связан с потерей устойчивости.
Сравним полученные результаты с теоретическими предсказаниями мо-
дели, описанной в разд.6.4. Времена релаксации для движений в окрест-
ностях 0 = Ои0=7Гпо предсказаниям модели равны
1 = 1
4Ь+а 4Ь-а
(6.58)
где Ьъа- коэффициенты в уравнениях (6.14) и (6.24). Сравнение теоре-
тических и экспериментальных результатов позволяет предложить новый
подход к определению параметров а и Ь. Однако мы не будем сейчас оста-
навливаться на подробном обсуждении деталей, так как хотели лишь по-
яснить наиболее важные пункты исследований.
95
Часть II. Поведение
6.6. Некоторые важные заключения
Прежде всего обсудим, можно ли фазовый переход, наблюдаемый в дви-
жениях указательных пальцев, считать уникальным явлением или он на-
блюдается и в других движениях. Было выполнено несколько эксперимен-
тов по координации движений, например, по изучению относительной
фазы между верхней частью руки от туловища до локтя и кистью, а также
между нижней частью руки от локтя до запястья и верхней частью. Были
исследованы и другие примеры координации (см., например, Йека, Кел-
со, Кимель (1993)). К удивлению исследователей выяснилось, что явления
координации наблюдаются и между различными людьми. В эксперимен-
тах Шмидта, Карелло и Терви (1990) двух испытуемых попросили подви-
гать нижней частью ног в антипараллельном режиме; координация уста-
навливалась через глазной контакт. При увеличении частоты внезапно про-
исходил непроизвольный переход к синфазному движению (рис.6.20, 6.21).
Все эти экспериментально установленные факты согласуются с моделью
фазовых переходов Хакена—Келсо—Бунца. Таким образом, мы имеем дело
с весьма универсальным явлением в биологической координации.
Но почему результаты, изложенные в предыдущих разделах так важны
для нашего общего понимания головного мозга и поведения? Рассмотрим
полученные экспериментальные факты в свете идей, согласно которым
наш мозг — это компьютер или наш мозг — это динамическая система. Так
как движения могут, по крайней мере отчасти, порождаться или управлять-
ся спинным мозгом, можно считать, что спиной мозг составляет часть на-
шего головного мозга. Такой взгляд никак не скажется на наших общих вы-
водах. Что следовало бы ожидать от компьютера, выполняющего заложен-
ную в него программу, которую в нашем случае можно было бы назвать
моторной программой, если воспользоваться термином, весьма часто встре-
чающимся в нейрофизиологии? Можно представить себе, что существует
своего рода переключатель, действующий параметр — частота движений
указательных пальцев. Такое устройство позволяет переключать компью-
тер с одной моторной программы на другую, но две особенности компью-
тера остаются необъяснимыми.
Рис. 6.20. Схематическое изо-
бражение эксперимента Шмид-
та—Карелло—Терви (см. текст).
96
6. Координация движения — паттерны движения
О
360
180
Рис. 6.21. (а) Перемещение ноги как функция времени в синфазных экспериментах; (б)
относительная фаза; (в) перемещение ноги как функция времени; сначала реализуется
противофазное состояние; (г) переход относительной фазы. Во всех этих случаях частота
со временем возрастает. (Из работы Шмидта, Карелло, Терви, 1990.)
1) Компьютерные программы по своей природе детерминистичны, и
поэтому в них нет места флуктуациям, в частности, флуктуациям в пере-
ходном режиме.
2) Переключение с одной программы на другую в компьютере проис-
ходит мгновенно или по крайней мере за фиксированное время реакции,
тогда как эксперименты с движением указательных пальцев показывают,
что время релаксации — стохастическая, т.е. случайная переменная, кото-
рая не может входить в детерминистическую программу.
Явление критических флуктуаций и критического замедления могут
быть легко объяснены в терминах самоорганизации — одного из основных
понятий синергетики, о чем говорилось в гл.5.
Кроме того, мы можем сделать один важный вывод относительно био-
логических систем. Как было показано выше, если требуется переключить
поведение системы с одного режима на другой, то значение управляюще-
го параметра необходимо изменить, например, так, чтобы верхняя часть
рис. 5.1 поменялась местами с нижней частью рис. 5.1. Кроме того, чтобы
заставить систему перейти из старого состояния равновесия в новое, не-
обходим случайный начальный толчок. По-видимому, такие случайные
7-4614
97
Часть II. Поведение
толчки необходимы не только в физических, но и в биологических систе-
мах. Имеются веские основания полагать, биологическая система способ-
на создавать флуктуации, например, при треморе. В пользу этой идеи сви-
детельствуют первые оценки параметров в работе Шенера, Хакена и Кел-
со (1986). Полученные ими результаты позволяют по-новому взглянуть на
эксперименты фон Хольста с многоножками (1939), в ходе которых было
установлено, что после ампутации большинства конечностей многонож-
ки четко передвигались различными новыми аллюрами.
Возникает вопрос: как происходит самоорганизация, или, иначе гово-
ря, какую роль играет самоорганизация в биологических моторных дей-
ствиях? Тремор генерируется миндалевидным телом, но можно указать и
другие источники шумов. В некотором смысле головной мозг служит ге-
нератором случайных режимов. На феноменологическом уровне ландшаф-
тов потенциала (рис.6.6) становится понятной роль управляющего парамет-
ра. При изменении управляющего параметра ландшафт потенциала может
деформироваться даже качественно, а это ведет к появлению новых устой-
чивых точек равновесия и к исчезновению старых. Острую реакцию био-
логических систем на изменение управляющих параметров продемонстри-
ровали Шик, Северин и Орловский (1966). В их экспериментах децереб-
рированные кошки получали раздражитель — электрический разряд. Кош-
ки могли бежать по движущейся ленте либо рысью, либо галопом — в за-
висимости от силы разряда, служившей управляющим параметром. В кри-
тической области кошки случайным образом переходили с рыси на галоп
или с галопа на рысь. В связи с этими наблюдениями возникают по край-
ней мере два фундаментальных вопроса.
1) Можно ли на феноменологическом уровне потерю устойчивости все-
гда описывать с помощью ландшафтов потенциала?
2) Можно ли понять происходящее на нейронном уровне, т.е. разобрать-
ся в том, какие процессы, происходящие в нейронной сети, лежат в осно-
ве феноменологического уровня?
В дальнейшем, особенно в гл. 16 и 20, мы еще вернемся к этим вопросам.
7. Еще о движениях пальцев
7.1. Движение указательного пальца
В гл.6 мы рассматривали относительную фазу движения указательных паль-
цев. В этой главе мы хотим показать, как сформулировать модель, учиты-
вающую осцилляторное движение пальцев. Как было показано в разд. 5.2,
устойчивые колебания могут быть описаны с помощью предельных цик-
лов. В литературе было исследовано несколько уравнений, позволяющих
математически описывать такие предельные циклы. Очень поучителен
пример генератора Ван дер Поля, который первоначально, на заре радио-
техники, был предложен для описания функционирования электронных
ламп. Как мы уже знаем, в синергетике для формулировки уравнений ма-
териальный субстрат — носитель описываемых процессов — не имеет ни-
какого значения. Уравнение Ван дер Поля содержит одну переменную x(t),
которую в контексте интересующих нас проблем можно идентифицировать
со смещением одного из указательных пальцев (рис.6.2), и имеет следую-
щий вид:
х + е(х2 -Го2)х + <7Х = О. (7.1)
Все слагаемые в левой части уравнения (7.1) имеют простой смысл. Так
х — ускорение переменной х. Первый и последний член вместе, т.е.
х + ох = 0, (7.2)
описывают гармонические колебания с решениями вида x(t) = г sin 69/ и
х = г cosCDt (или их суперпозициями), где циклическая частота (О связа-
на с константой а соотношением
со2=а. (7.3)
Средний член в левой части уравнения (7.1) пропорционален скорости
х . Произведение ух хорошо известно в теории колебаний: это — завися-
щее от скорости затухание осциллятора с коэффициентом затухания у.
Сравнивая ух с средним членом в левой части уравнения (7.1), мы видим,
что е(х2-г02) можно интерпретировать как одну из версий коэффициента
затухания у, зависящего от переменной (или смещения) х. При х2 > г02 ко-
эффициент у положителен, и движение затухает. Но при х2 < г02 коэффи-
99
Часть II. Поведение
циент у становится отрицательным, и переменная х возрастает. Следова-
тельно, средний член стабилизирует движение вокруг х = г0, или, иначе го-
воря, удерживает движение на предельном цикле радиуса г().
Чтобы исследовать более подробно свойства решения уравнения (7.1),
предположим, что
х = Ае'‘“г+А*е~!ш'> (7-4)
где амплитуда А и комплексно-сопряженная амплитуда А * могут зависеть
от времени. Подставим (7.4) в (7.1) и воспользуемся двумя приближения-
ми, хорошо известными в теории колебаний. Предположим, что A(t) из-
меняется гораздо медленнее, чем экспонента е'®'. Это позволит нам вос-
пользоваться приближением медленно изменяющейся амплитуды, в кото-
ром А можно пренебречь по сравнению с (DA. Подставив (7.4) в (7.1), со-
берем члены вида
е±3"“' (7.5)
или
е±/ш'. (7.6)
Так как члены (7.5) осциллируют быстрее, чем (7.6), мы можем пренеб-
речь членами (7.5) по сравнению с членами (7.6). Полученное приближе-
ние называется приближением вращающейся волны. В рамках этих двух при-
ближений мы после несложных преобразований приходим от уравнения
(7.1) к уравнению
2A + e(\Af-ro2)A = O, (7.7)
где мы отбросили множитель i(0£ifO‘, общий для всех членов левой части. В
стационарном состоянии А — 0, и из (7.7) мы получаем соотношение
И|2 = гЛ (7.8)
Оно говорит нам о том, что г02 имеет смысл квадрата модуля, и из (7.8)
мы заключаем, что амплитуда не зависит от частоты О), которая входит в
(7.3). Такой вывод не вполне согласуется с экспериментальными данны-
ми, которые показывают, что с увеличением частоты амплитуда движений
пальцев уменьшается.
Чтобы устранить расхождение с экспериментом, рассмотрим новое мо-
дельное уравнение, которое как мы сейчас убедимся, приводит к ампли-
туде, убывающей с возрастанием частоты. Это уравнение Рэлея имеет вид
Х + £(х2-(ОоГ02)х + <7Х = 0 (7.9)
и отличается от (7.1) видом члена, описывающего затухание. На этот раз
коэффициент затухания у = е(х2 -соцГц)х положителен, если скорость х
больше некоторой постоянной величины со^, и отрицателен в противном
случае. Таким образом, уравнение (7.9) стабилизирует решения с данной
скоростью.
Принимая снова гипотезу (7.4), используя приближения медленно ме-
100
Еще о движениях пальцев
кяюшейся амплитуды и вращающейся волны и опуская общий множитель
СХ!(Л. приводим (7.9) к виду
2Л + еЛ(3|Л|2®2-®о2го2) = О- (7.Ю)
В стационарном случае, когда
Л = 0, (7-Н)
мы немедленно находим, что
И = ^, (7.12)
у13со
т.е. получаем требуемый результат — амплитуда А убывает с возрастанием
частоты О). Как показывают экспериментальные данные, амплитуда А ве-
дет себя промежуточным образом как некая комбинация случаев (7.8) и
< ”.12). Учитывая это, попытаемся вывести уравнение, сочетающее оба типа
поведения. Для этого введем суперпозицию членов, описывающих затуха-
ние в уравнениях (7.1) и (7.9) (Хакен, Келсо, Бунц (1985)), и получим урав-
нение
x+IeJx2-г02) + £2(х2-со(2г(2)]л' + ал'=:(). (7.13)
В том же приближении, которое в стационарном состоянии позволило
получить из уравнения (7.1) соотношение (7.8), находим
M = J у, (7.14)
у £| + 3^2^
где с = -(£, +£2со2)/;2.
Соответствующие эксперименты были выполнены Кеем, Келсо, Заль-
цманом и Шенером (1987), которые показали, как по экспериментальным
данным можно определить значения параметров, входящих в уравнение
(7.13). Кинематические данные, т.е. положение концов пальцев и их ско-
рость фиксировались со скоростью 200 точек (положение, скорость) в се-
кунду, после чего производился подробный анализ амплитуды движения,
частоты и пика скорости. Частота, входящая через величину а = СО2, изме-
нялась в диапазоне от 1 Гц до 6 Гц шагами в 1 Гц с помощью задающего
темп метронома. Заметим, что единственным управляющим параметром
была «жесткость», или коэффициент возвращающей силы, а при возрас-
тании частоты СО амплитуда убывает по закону (7.14). Траектория, постро-
енная на плоскости положение—скорость (на фазовой плоскости), пред-
ставляет типичный предельный цикл (рис.7.1). На рис.7.1 в левом столбце
представлены экспериментальные результаты при возрастающей частоте,
а в правом столбце — результаты, полученные с помощью нашей модели.
Отчетливо видно, что амплитуда убывает (по горизонтальной оси) и одно-
временно возрастает пик скорости (по вертикальной оси). В этих экспе-
риментах точность движения не фиксируется, и ею не манипулируют.
101
Часть II. Поведение
Скорость (градусы/с)
Положение (градусы)
Рис. 7.1. Траектории на фазовой плоскости при частотах от 1 Гц до 6 Гц. Левый столбец-.
репрезентативные примеры изданных, собранных об одном испытуемом. Правый стол-
бец: траектории модели (7.13). (Кей, Келсо, Зальцман, Шенер, 1987).
102
". Еше о движениях пальцев
Только частота монотонно увеличивается, а амплитуде предоставляют из-
меняться естественным образом, т.е. испытуемым разрешалось двигать
указательными пальцами с любой амплитудой без какого бы то ни было
вмешательства со стороны сознания.
Попутно заметим, что ранее в описанных выше экспериментальных ус-
ловиях проводилось удивительно мало исследований (Фрейнд (1983)).
Фельдман (1980) опубликовал данные об испытуемом, который пытался
сохранять максимальную амплитуду (углового смещения локтя) при посте-
пенном увеличении частоты до предельного значения. Наблюдаемое об-
ратное соотношение сопровождалось все возрастающей тонической коак-
тивацией мышц-антагонистов. Кроме того, угловой коэффициент так на-
зываемой инвариантной характеристикой (Асатрян и Фельдман) 1965); Дэ-
вис и Келсо (1982) — график зависимости крутящего момента, приложен-
ного к суставу, от угла поворота сустава возрастал с ритмически изменяв-
шейся частотой. Это наводит на мысль о том, что собственная частота (или
ее динамический эквивалент — жесткость «пружины», или коэффициент
возвращающей силы) — управляющий параметр. В других исследованиях
частота изменялась в определенных пределах, но амплитуда движения была
фиксирована. Выводы были аналогичны выводам Фельдмана: изменения
частоты в исследуемом диапазоне возвращающей силы (Вивиани, Зехтинг
и Терцуоло (1976)).
Убывание амплитуды с увеличением частоты хорошо описывала наша
модель гибридного осциллятора, в чем нетрудно убедиться, взглянув на
рис. 7.2, на котором для сравнения представлены экспериментальные дан-
ные и данные, полученные из расчетов на основе гибридного осциллято-
ра, генератора Ван дер Поля и осциллятора Рэлея. Модель предельного
Частота(Гц)
Рис. 7.2. Частота (в Гц) как
функция амплитуды (в гра-
дусах) для данных по одной
руке и кривые наилучшей
подгонки осцилляторов Ван
дер Поля, Рэлея и гибридно-
го осциллятора (7.13). (Кей
и др., 1987).
103
Часть II. Поведение
цикла также позволяет установить простое соотношение между пиком ско-
рости v и амплитудой vp = соЛ. Величину А следует выбрать того же масш-
таба, что и экспериментальные значения, измеренные в градусах. Чтобы
найти параметры модели, необходимо:
а) частоту, задающую темп, отождествить с СО;
б) выбрать с - -0.05®ргеу (=0,64 Гц) и найти £j и е2 из соотношения меж-
ду амплитудой и частотой, выбранного по методу наименьших квадратов:
с = -0.05ю;)ге/(= 0,641 Гц)
ех = 12,457 Гц
е2 = 0,007095 Гц3. (7.15)
Стандартные отклонения величин е2 и Ej составили, соответственно,
0,001025 Гц3 и 1,0129 Гц.
Результаты проведенного экспериментально! о и теоретического иссле-
дования оказались в известном смысле удивительными. Они показали, что
такая весьма сложная система с многими степенями свободы, как наше
тело, ведет себя так, будто подчиняется уравнению для простого осцилля-
тора с одной степенью свободы — смещение конца указательного пальца.
Объяснение этого результата кроется, с одной стороны, в синергетичес-
ком понятии параметра порядка, а с другой стороны, его надлежит искать
в исследованиях поведения спинного и головного мозга. К этой проблеме
мы еше вернемся в гл. 15.
7.2. Связанное движение указательных пальцев
После подробного изучения движения одного указательного пальца попы-
таемся теперь построить модель связанного движения указательных паль-
цев, явно учитывающую осцилляторное движение.
Напомним, что смещения концов указательных пальцев мы обозначим
через х, и х2. Запишем сначала уравнения, которые требуется найти, в об-
щем виде:
х1+/(х1,х|) = /12(х1,х2), (7.16)
Х2+/2(Х2,Х2) = /2|(Х1,Х2). <7-17)
Начнем с того, что рассмотрим левые части этих уравнений. Сравни-
вая их с левой частью уравнения (7.13), мы видим, каков явный вид/j wf2.
Подробная запись левых частей уравнений (7.16) и (7.17) требует некото-
рых познаний из теории колебаний. Что же касается понятий синергети-
ки. то они понадобятся нам при рассмотрении членов, стоящих в правых
частях уравнений (7.16) и (7.17). Они описывают связь между пальцами, и
104
7. Еще о движениях пальцев
выбирать их надо так, чтобы в конце концов получить уравнение для па-
раметра порядка — относительной фазы (6.14). Это очень мощный руко-
водящий принцип, которого мы будем придерживаться при выводе урав-
нения. Простейшая гипотеза имеет вид
1п = а(х, -х2). (7.18)
Ее подсказывает теория колебаний. Как показывает подробный анализ,
эта гипотеза не приводит к правильной форме правой части соотношения
(7.14). В частности, в ней бы отсутствовал второй член. Чтобы получить его,
необходимо дополнить правую часть соотношения (7.18) кубическим слага-
емым. Итак, попытаемся воспользоваться нелинейным приближением вида
Z12 =а(х1-x2) + j6(x,-х2)3. (7.19)
Но и эта гипотеза не приводит к правильному соотношению фаз. Конста-
тировав это, полезно обратиться к более подробному анализу рассматриваемой
физиологической системы. Как может возникнуть корреляция между конца-
ми указательных пальцев? Для возникновения корреляции между движения-
ми пальцев необходима передача сигнала от правого пальца к левому и наобо-
рот через нервную систему, причем пока мы не будем вдаваться в обсуждение
того, передаются ли сигналы только через спинной мозг или, например, отча-
сти и через мозжечок. В любом случае необходимо предположить, что суще-
ствует задержка во времени. Соответственно, мы принимаем гипотезу
/12(/)= |лГ(Г,г)[а1(х1-х2)+а2(х|-х2)31й?т) (7.20)
где
(х1-х2)т=(х1(т)-х2(т)). (7.21)
Из соотношения (7.20) видно, что член /12, описывающий влияние сме-
щений указательных пальцев Xj и х2 на движение пальца 1 в момент време-
ни t, зависит от значений переменных х, и х2 в предыдущие моменты вре-
мени т. Величина запаздывания зависит от функции задержки K(t,T). Опре-
делить функцию K(t,T) можно, если положить на нее следующие требования.
1) Функция К действует как фильтр, позволяющий осуществлять толь-
ко в интервале t - tx < Т < t - передачу информации, носителем которой
служит множитель в подинтегральном выражении в (7.2), заключенный в
квадратные скобки. Мы предполагаем, что этот интервал короткий.
2) Чтобы избегать насыщения нервных клеток, нервная система очень
часто реагирует только на изменения сигналов во времени. Следовательно,
K(t,T) должна в различные моменты времени преобразовывать сигнал [...]
в соответствующие различные разности сигналов [...].
В предельном случае коротких временных интервалов оба требования
1) и 2) можно выполнить, выбрав
105
Часть II. Поведение
K(t,T) = — 8\t — т-а), (7.22)
где 5'(— производная от дельта-функции Дирака, О’ запаздывание.
Действие функции K(t,T) на сигнал наглядно можно представить следую-
щим образом. Сигнал может пройти в момент времени т = t - (У. В момент
времени, непосредственно следующий за Т, сигнал также может пройти,
но противоположного знака. Представляя (7.22) в (7.20) и следуя правилам
обращения с дельта-функцией, получаем:
d ,
A2(O=^-[«iUi-^)r+«2(^-^);]; T=t-(y. (7.23)
dr
Производная по времени от [...] следует из производной по времени
дельта-функции и приводит к тому, что не зависящие от времени сигналы
[...J порождают нулевой член /12, описывающий взаимодействие указатель-
ных пальцев в соответствии с нашим приведенным выше постулатом 2.
Если движение пальцев в целом не очень изменяется з а время запаз-
дывания, то величиной запаздывания СУв (7.23) можно пренебречь по срав-
нению с t. Полагая а, = а и За2 = Д соотношению (7.23) можно придать
окончательный вид:
^^(xj-x^ta + ^x,-^)2] и/21 = -712. (7.24)
В (7.24) взаимодействие между двумя пальцами становится зависящим
от скорости. Вычисления, ведущие от (7.16), (7.17) и (7.24) к уравнению для
относительной фазы основано на приближении медленно изменяющейся
фазы и приближении вращающейся волны, которые мы использовали в
предыдущем разделе. Так как эти вычисления несколько громоздки и не
позволяют сколько-нибудь существенно продвинуться в понимании сути
дела, мы опустим их и приведем только окончательный результат:
ф =(а +2/?r2)sin0-/3r2sin20 • (7-25)
Критическая амплитуда, при которой происходит изменение относи-
тельной фазы, определяется из соотношения
t
(7.26)
Рис. 7.3.Численное моделирование
моделей (7.27), (7.28). (7.24) при Et =
0, £2= 1, ®2r02 = 1, а = -0.,2, /1 = 0.2.
Слева направо ft) изменяется от ft) = 1.17
к ft)= 3.05 (Хакен, Келсо, Бунц, 1985).
106
Еще о движениях пальцев
При переходах, обычно изучаемых в синергетике, важную роль игра-
ют флуктуирующие силы. Соответственно, переход, ведущий, например,
из ф = л к ф = 0, может быть инициирован только при наличии флуктуи-
рующих сил F. Учитывая это, мы включаем флуктуирующие силы в урав-
нения (7.16) и (7.17):
х,+У|(х1,х1) = /12(х1,х2) + Л(/), (7.27)
x2+f2(x2,x2) = Ili(xi,x2) + F2(t). (7.28)
В контексте данного раздела достаточно предположить, что Fp j = 1,2, —
малая случайная переменная, которую легко имитировать с помощью циф-
рового компьютера. На рис.7.3 приведены данные из работы Хакена, Келсо
и Бунца (1985), в которой был учтен только рэлеевский член. Тем не ме-
нее данные хорошо согласуются с экспериментальными данными.
Резюмируя, можно утверждать, что предложенная выше математичес-
кая модель хорошо передает основные особенности экспериментальных
данных.
7.3. Фазовые переходы в движениях рук человека
в заданиях на многочастотное постукивание
В гл.6, и предыдущей части гл.7 мы изложим простой на первый взгляд эк-
сперимент по изучению координации движений указательных пальцев с за-
данной частотой. Но тщательное экспериментальное и теоретическое ис-
следование, в особенности области фазового перехода, обнаруживает ряд
замечательных особенностей, лежащих в основе интерпретации наблюда-
емых явлений в терминах самоорганизации. В этом и следующих разделах
я хочу проанализировать более сложные задания на координацию движе-
ния. В этих экспериментах постукивание пальцами производится не с од-
ной и той же частотой (синфазно или в противофазе), а с различными ча-
стотами СО] и С02. Задание состоит в поддержании постоянного отношения
частот СО]/СО2 = т/п, где тип — целые числа, а частоты СО] и С02 пропорци-
ональны частоте СО, задаваемой (акустически или зрительно) метрономом.
В этих экспериментах наблюдаются интересные переходы в координации
движений: при возрастании задающей частоты СО отношение т/п претер-
певает непроизвольные изменения. Самое важное состоит в том, что чис-
ла т и п при таких переходах убывают. Было проведено много различных
экспериментов и испробован не один теоретический подход, в частности
с использованием так называемого отображения окружности на себя. В
разд.7.4.1 мы изложим в общих чертах эксперименты Бека и Пепера и те-
оретическую модель, которая может пролить некоторый свет на механиз-
мы связи между движениями указательных пальцев, не поддававшихся
описанию с помощью ранее существовавших методов, например, с помо-
щью отображения окружности на себя.
107
Часть II. Поведение
7.3.1. Эксперименты: переходы при многочастотном постукивании
Эксперимент проводился на трех испытуемых — мужчинах, высокопро-
фессиональных музыкантах-ударниках (все испытуемые были «правша-
ми»), Стереосигналы генерировались микрокомпьютерами и поступали к
испытуемым в наушники. Движения рук испытуемых фиксировались с по-
мощью экспериментальной установки, которая производила запись поло-
жения рук, для чего к концам средних пальцев было прикреплено по све-
тодиоду. Запись производилась с частотой 122 Гц. Микрокомпьютер гене-
рировал два цуга раздражителей — синусоидальных сигналов продолжи-
тельностью 50 мс с небольшой расстройкой между цугами по частоте (бы-
стрый цуг: 440 Гц (тон «ля»); медленный цуг: 554 Гц (тон «до диез»). Во всех
случаях начальная частота подачи раздражителей быстрого цуга составля-
ла 2 Гц. Частота подачи раздражителей медленного цуга выбиралась так,
чтобы отношение частот подачи сигналов двух цугов, быстрого и медлен-
ного, было равно либо 2:5, либо 3:5. Интервал времени, в котором укла-
дывалось 5 сигналов быстрого цуга и 2-3 сигнала медленного цуга, полу-
чил название (ритмического) цикла. В эксперименте использовались сиг-
налы трех типов.
Сигнал 1 -го типа состоял из 25 ритмических циклов, подаваемых с по-
стоянной скоростью. Продолжительность сигнала— 62,5 с.
Сигнал 2-го типа начинался с 10 циклов, подаваемых с постоянной ско-
ростью, после чего скорость подачи каждого последующего цикла увели-
чивалась на 4% по сравнению с предыдущим, т.е. продолжительность каж-
дого последующего цикла оказывалась на 4% меньше, чем продолжитель-
ность предыдущего цикла. Такая процедура продолжалась до тех пор, пока
частота подачи раздражителей быстрого цикла не достигала 10 Гц. Продол-
жительность сигнала — 75 с.
Сигнал 3-го типа имел такую же структуру, как сигнал 2-го типа. Един-
ственное различие состояло в том, что после 8 циклов (когда скорость по-
дачи раздражителей еще была постоянной) подавался только первый раз-
дражитель очередного цикла (если раздражители двух цугов совпадали).
Как и у сигнала 2-го типа, продолжительность каждого нового цикла, на-
чиная с одинакового была на 4% меньше, чем у предыдущего. Продолжи-
тельность сигнала — 75 с.
Испытуемый с наушниками на голове сидел прямо на стуле, положив
руку от локтя до кисти на крышку стола. Его задача состояла в том, чтобы
постукивать ладонями (сгибая и разгибая руки в запястьях) по столу и син-
хронизировать постукивание левой рукой с раздражителями правого кана-
ла (быстрого). Если передавался сигнал 3-го типа, испытуемый должен был
продолжать постукивать по столу в заданном ритме, даже когда в наушни-
ках звучали только совпадающие раздражители двух циклов. Первые по-
стукивания каждого цикла следовало синхронизировать с этими раздражи-
телями, отчего частота постукивания возрастала. По инструкции в том слу-
108
7. Еще о движениях пальцев
чае, если увеличение частоты постукивания входило в противоречие с со-
хранением заданного отношения частот, испытуемый должен был разре-
шать «конфликт» путем отказа от поддержания требуемого отношения ча-
стот в пользу увеличения частоты постукивания.
Блок тестов состоял из 7 сигналов, передаваемых испытуемому. Снача-
ла испытуемый должен был выполнить все действия, которые необходи-
мо произвести по получении сигнала 1 -го типа. Затем испытуемый посту-
кивал со все возрастающей частотой, как того требовал сигнал 2-го типа.
Следующие 5 сигналов были 3-го типа. Преимущество этих сигналов пе-
ред сигналами 2-го типа состояло в том, что заданные и выполненные от-
ношения частот не были связаны между собой. После каждого сигнала ис-
пытуемый отдыхал в течение 60 с. В течение одной сессии оба отношения
задавались попеременно сериями по 3 блока. Посреди каждой сессии уст-
раивался короткий перерыв. Сессия продолжалась около 2 часов. В каж-
дый из 5 дней подряд проводилось по 5 сессий. Таким образом, на долю
каждого испытуемого приходилось по 75 экспериментов с каждым из двух
отношений частот. Условия экспериментов были равномерно распределе-
ны по всем испытуемым.
По завершении последней сессии испытуемым предлагалось постучать по
столу с максимально возможной быстротой. Обе руки нагружались поровну:
каждой рукой испытуемый выполнял по 3 блока (каждый продолжительнос-
тью 20 с.) постукиваний с максимальной быстротой. Для каждого ритмичес-
кого блока среднее отношение частот определялось как fjf] (= ffast/fsi0J, что
приводило к значениям большим единицы. Захват частоты фиксировался в
том случае, если он длился по крайней мере два последовательных ритми-
ческих цикла, в течение которых отношение частот отличалось менее чем
на 0,1 от своего среднего значения по этим двум циклам. Вариации ±0,1 при
захвате частоты считались допустимыми. Кроме того, временной паттерн
постукиваний должен был совпадать с отношением fjfr
Суть полученных экспериментальных результатов сводится к следующему.
При увеличении частоты движений устойчивое поддержание требуемого
отношения частот становится невозможным. Важно отметить, что крити-
ческие частоты, при которых требуемое отношение частот теряет устойчи-
вость (если за единицу измерения принять среднюю частоту правой (быс-
трой) руки, то: при отношении частот 2:5 критическая частота составляет
5,95 Гц с среднеквадратичным отклонением 0,79; при отношении 3:5 кри-
тическая частота составляет 5,64 Гц с среднеквадратичным отклонением
0,73), примерно на 1-1,5 Гц меньше частот максимально быстрых посту-
киваний правой рукой в опытах с постукиванием одной рукой. Иными сло-
вами, временной паттерн нарушался в результате ограничений на коорди-
нацию, а не ограничений, связанных с модульными осцилляторами. Во
многих экспериментах вслед за потерей устойчивости наблюдался переход
к другому отношению частот (рис. 7.4). В таблице 7.1 представлены наблю-
давшиеся переходы для каждого испытуемого. Статистический анализ без
каких-либо предварительных гипотез относительно параметров распреде-
ления или зависимостей между ними показывает, что экспериментов, в
109
Часть II. Поведение
Ритмический цикл
Рис. 7.4. Два типичных сценария перехода, полученных для испытуемого А. По оси у от-
ложено наблюдаемое среднее отношение частот за один ритмический цикл. Ча-
стота постукиваний, отложенная по оси х, возрастает с увеличением числа ритмических
циклов. В верхней части требуемое отношение частот было равно 5:2 (т.е.2,5), но после
внезапного перехода понизилось до 2:1 (т.е. 2,0). В нижней части показан переход от 5:3
(т.е.1,67) до 3:2 (т.е. 1,5). Оба перехода согласуются с принципом унимодальности (Бек,
Пепер, 1995).
которых происходили переходы от одного поведенческого паттерна к дру-
гому, гораздо больше, чем экспериментов без переходов (переходы проис-
ходили в 283 экспериментах, в 177 экспериментах переходы не наблюда-
лись; %2 =7,05; df= 1, р < 0,01).
Прежде чем переходить к описанию нашей модели, обсудим на каче-
ственном уровне некоторые из основных аспектов экспериментально ус-
тановленных фактов.
ПО
7. Еще о движениях пальцев
Таблица 7.1 Маршруты переходов для различных испытуемых
2:5 3:5
Маршрут перехода Число перехо- дов Маршрут перехода Число перехо- дов
Испытуемый А
2:5 1:2 52 3:5 3:4 43
2:5 10 3:5 3:4 1:1 13
2:5 2:3 2 3:5 3:4 1:1 3:4 5
2:5 1:2 1:1 2 3:5 2:3 3
2:5 1:2 2:3 2 3:5 3:4 3:5 3:4 3
Другие (по 1 разу каждый) 5 Другие (по 1 разу каждый) 6
Испытуемый Б
2:5 1:2 50 3:5 38
2:5 15 3:5 2:3 13
2:5 1:3 1:2 4 1:2 7
1:3 1:2 4 3:5 1:2 4
1:3 2:5 1:2 2 1:2 3:5 1:2 2
Другие (по 1 разу каждый) 11
Испытуемый В
2:5 44 3:5 44
2:5 2:3 19 3:5 2:3 25
2:5 1:2 6 3:5 1:2 3:5 2
2:5 1:2 2:3 3 3:5 2:3 3:5 2
2:5 3:5 2:5 3:5 2 3:5 3:4 2:3 1
2:5 2:3 2:5 1 3:5 1:2 2:3 1
Как и в первых исследованиях ритмических движений конечностей, в
качестве контрольного параметра выступала частота движений. Увеличе-
ние частоты приводило к потере устойчивости заданного отношения час-
тот. В большинстве экспериментов наблюдались переходы к другим отно-
шениям частот. Это свидетельствует в пользу моделирования постукива-
ния двумя руками с помощью нелинейной системы связанных осциллято-
ров. Более внимательный анализ таблицы 7.1 обнаруживает четко выра-
женные индивидуальные различия: по-видимому, у каждого испытуемого
имеются свои предпочтительные переходы между различными отношени-
ями частот, не связанные между собой однозначно (у испытуемого А — пе-
реход от 3:5 к 3:4, у испытуемого С — переход от 2:5 к 2:3). Эти результаты
нелегко понять с точки зрения динамики отображения окружности на себя
или усовершенствованного отображения того же типа, учитывающего за-
111
Часть II. Поведение
висимость от соотношения фаз между осцилляторами — притягивающего
отображения фаз (де Гузман и Келсо (1991); Келсо, де Гузман, Холройд
(1990)). В этих моделях относительная стабильность грубо фиксирована
(отношения h/k и h '/к' низкого порядка создают более широкую область
устойчивости, чем промежуточное отношение \h"]k"\ более высокого по-
рядка). Изменение параметра связи оказывает аналогичный эффект на ста-
бильность захвата всех мод. Переходы к ближним более устойчивым атт-
ракторам влекут за собой переходы от одной моды к другой.
Наблюдаемые в экспериментах индивидуальные тенденции показыва-
ют, что дифференцированная стабильность захвата притягивающих мод
отчасти имеет дифференцированную организацию. Для понимания пред-
почтительности тех или иных маршрутов перехода требуется более усо-
вершенствованная модель. Если предположить, что модульные осцилля-
торы по-прежнему выполняют свою функцию как датчики частоты дви-
жений, то необходимо более точно промоделировать член, описывающий
связь между осцилляторами. Решению этой задачи и посвяшен следую-
щий раздел.
7.4. Модель многочастотного поведения*
Эта модель построена с учетом основных особенностей эксперимен-
тальных данных, а именно: (i) стабильного поддержания многочастотных
отношений; (ii) потери устойчивости при увеличении частоты; (iii) пере-
ходов к отношениям частот низшего порядка; (iv) индивидуальных тенден-
ций; (v) решений, свободных от ограничений и связей.
Так как математический аппарат этого и следующего разделов несколь-
ко более сложен и громоздок, читатели, которых интересуют только основ-
ные результаты, могут переходить прямо к разд.7.6.
По аналогии с нашей моделью из разд.7.2((7.16), (7.17)) начнем со сле-
дующих уравнений для смещений х,, х2 концов указательных пальцев
х1+/(х1,х1) = /12 (7.29)
и
х2 + = (7.30)
Функцию/мы ввели раньше. Она представляет собой подходящую ком-
бинацию осцилляторов Ван дер Поля и Рэлея. Заметим, что в отличие от
разд.7.2 постоянная возвращающей силы а имеет в функциях fx wf2 различ-
ные значения.
Так как постукивание периодично, мы представляем зависимость пере-
менных хр х2 от времени в виде разложения
ху =Л7(/)ехр(/ю7/) +Л*(/)ехр(-/ю7/), j = 1,2 (7.31)
112
7. Еще о движениях пальцев
где комплексные амплитуды в свою очередь представимы в виде произве-
дения модуля и фазового множителя:
A.{f) = . (7.32)
В дальнейшем мы будем предполагать, что и 0. — медленно изменяю-
щиеся функции по сравнению с cxp(ift)./), т.е. используем приближение
медленно изменяюшейся амплитуды. Кроме того, время от времени мы бу-
дем для краткости использовать обозначение
0,.+щ/ = ху(О. (7.33)
Подставляя (7.31) в левые части уравнений (7.29), (7.30), мы получаем
члены вида
ехр(/го7/),ехр(-/<и/) (7.34)
и
exp(3«oyZ), exp(-3zroyZ).
(7.35)
В приближении вращающейся волны вклад членов (7.35) меньше вкла-
да членов (7.34), и поэтому в дальнейшем членами (7.35) можно пренеб-
речь. Сосредоточим наше внимание на члене 712, описывающем взаимо-
действие осцилляторов. Обобщая рассмотренную в разд.7.2 модель Хаке-
на, Келсо, Бунца, будем предполагать, что 712 можно представить в виде
многочлена, содержащего члены вида т.е.
712 = / , Ск1Х\ Х2
к,Ы
(7.36)
с независящими от времени коэффициентами ск1. Суммирование по к и I
проводится до достаточно больших к и I, чтобы охватить все эксперимен-
тальные данные. В нашем случае к,1 =5. Следует иметь в виду, что соо=О.
В разд.7.2 член, описывающий связь между осцилляторами, содержал
производные по времени хь х2 для того, чтобы получились адекватные со-
отношения между фазами. Как показывает более тщательный анализ, обоб-
щение, соответствующее рассматриваемому случаю, может быть получе-
но, если член /12 в (7.36) заменить его производной по времени. Таким об-
разом, наш окончательный выбор члена 1п в (7.36) приводит к
12 ” dt
X<V^X2 .
А./=0 J
(7.37)
Аналогичный вид (с коэффициентами dk/) имеет член 721, также описы-
вающий взаимодействие между осцилляторами. До тех пор пока мы можем
считать правую и левую руки эквивалентными, допустимо принять равен-
ство коэффициентов: dkl = скГ Рассмотрим прежде всего, что означают от-
дельные члены xfy многочлена (7.36) после подстановки разложения (7.31),
т.е. что означают выражения
8-4614
113
Часть II. Поведение
xfx} = [Д ехрО’ю/) + Д* ехр(-/®/)]* х [Д схр(/Д/) + Д* ехр(-л»2Г)]'. (7.38)
После некоторых несложных преобразований первую скобку можно
представить в виде
4’^ ехр(-г(Л - 2к)а>1!) , (7.39)
где I I — биноминальные коэффициенты.
Если число к четное, то все числа (к-2К) четные, а если число к нечет-
ное, то все числа (к-2к) нечетные. Используя разложение (7.32), каждый
член, стоящий в (7.39) под знаком суммы, можно представить в виде
ДКД’*-К схр(-/(Л - 2к)() = rk схр(-1(к - 2к)Х1). (7.40)
Разумеется, те же соотношения остаются в силе и относительно второй
скобки в (7.38). В итоге мы приходим к заключению, что /|2 представляет
собой суперпозицию членов вида
ехр(-?(Л-2к)го1/‘)-ехр(-/(/-2Л)ю2/) ...
Заметим, что
-к<т<к (7.42)
и
-1<п<1- (7-43)
Разумеется, те же соображения остаются в силе и относительно 11у
Нашу основную идею можно пояснить с помощью уравнения (7.29). Мы
ищем условие резонанса, при котором колебания в левой части, описыва-
емые членами exp(±ico1t). находятся в резонансе с одним из колебательных
членов в правой части, имеющих общий вид
ехр(-//жо1/-/т)2/). (7.44)
Заметим, что производная по времени в правой части (7.37), не влияет
на наши соображения. Вид членов (7.44) приводит к условию резонанса
+(»! =-та>{ -пт2, (7.45)
или после несложных преобразований
(ш + Пю, + пс)2 = 0. (7.46)
Если включить фазовые множители, введенные в (7.32), и, кроме того,
воспользоваться соотношением (7.33), то мы придем к выражениям вида
114
7. Еще о движениях пальцев
cxpO'Kwll)/,+и/2|), (7.47)
которые возникают при умножении правой части уравнения (7.29) на
exp(+ix1).
Рассмотрим теперь в свете этих соображений экспериментальные ре-
зультаты — те отношения частот, которые были обнаружены в ходе наблю-
дений. В единицах основной частоты это означает, что со, = 2, со2 = 5. Из
условия (7.46) получаем уравнение в целых числах
Го| = 2,го2 =5:(д7±1)2 = -5л (7.48)
с решениями
(7-49)
и
л = —2. (7.50)
где два значения числа т в (7.49) получаются при выборе различных зна-
ков в уравнении (7.48). Этого примера достаточно, чтобы понять, как по-
лучены результаты, представленные в таблице 7.2, где пит принимают
только несколько малых значений. Совершенно аналогично соображения
применимы и к условиям резонанса, которые получаются для уравне-
ния^.30). Как показывают экспериментальные результаты, существует не-
сколько возможных маршрутов, например, маршрут п = +2, для которых
число п — +2 остается постоянным. Самая удивительная особенность экс-
периментальных результатов, приведенных выше, — существование пере-
ходов между наблюдавшимися отношениями частот. Такие переходы оз-
начают, что старые связи между частотами нарушаются, а вместо них воз-
никают новые. Заметим, что для этого отдельные экспоненциальные фун-
со.: со, 1 2 т - п
3:5 4 3
6 3
3:4 3 3
5 3
2:3 2 2
4 2
1:2 1 1
3 1
1:1 0 0
2 0
Таблица 7.2. Комбинации значений т и и, удовлетворяю-
щих условию резонанса (т ± 1 )CDj + псо2 = 0, полученному
для отношений частот, которые приведены в таблице 7.1.
Более быстрая частота обозначена через со2. Подробности
см. в тексте.
з-
115
Часть II. Поведение
кции вида (7.47) должны умножаться на амплитуды, как это сделано в пра-
вой части (7.40) для (и, аналогично, для г2). Следуя экспериментам, при-
веденным в разд.7.1, предположим, что с увеличением частоты амплиту-
ды убывают. Это означает, что с увеличением частоты те экспоненциаль-
ные функции вида (7.47), которые содержат меньшие тип, становятся все
более важными. Иначе говоря, с увеличением основных частот со члены
низших порядков становятся более «весомыми», чем члены старших по-
рядков. Кроме того, предположим, что ведущей является более быстрая
рука. Тогда число п можно считать постоянным и сохраняющим малое зна-
чение, а число т не возрастает, а, наоборот, убывает (см. таблицу 7.2). В при-
веденных выше соображениях мы исходим из предположения о том, что ко-
эффициенты многочлена, содержащие экспоненциальные функции (7.47),
не зависят от основной частоты СО. Это вполне разумное допущение.
7.5. Основные уравнения захвата частоты и их решения*
После приведенного выше общего обзора мы уже можем придать нашей
модели явную форму. Начнем с более подробного анализа левой части
уравнения (7.29), которая в случае смешанного осциллятора Ван дер
Поля— Рэлея имеет вид
х, +[£|(х|2-г|^) + £2(х1 )]х, +arf =1п. (7.51)
Положим
flj = ю2 +560,(2(0]), (7.52)
где Seo, обозначает некоторую расстройку. В дальнейшем мы будем рас-
сматривать С,, е2, г10 и СО, как константы, а значения параметров (и, со-
ответственно, а2) можно подобрать способом, о котором будет сказано
дальше. Примем гипотезу
X] = Д ехр(ко/) +компл. сопр. (7.53)
Используя приближение медленно изменяющейся амплитуды и враща-
ющейся волны, уравнение (7.51) можно преобразовать к виду
/Ю] ехр(йо/)[2Д -2/<5й)|Д +(е](|Д|2 -х^) (7.54)
+£2го2(3|Д|2-Хщ))Д]+копл. сопр. = /|2.
Тут в игру вступает наше фундаментальное условие резонанса (7.45): в
левой и правой частях уравнения (7.54) мы сравниваем коэффициенты при
ехр(1С01С) и cxp(-iG)]/). Кроме того, мы полагаем
Д(/) = Г](С)ехр(/Д(/)). (7.55)
Учитывая соотношение (7.55) и
/1=Ю]С+^|, (7.56)
116
7. Еще о движениях пальцев
мы получаем после деления коэффициента ехр^со^) в (7.54) на 2iC0j урав-
нение
exp(/Z1)(/i +1ф^ -йю/! +Лг1(г1)) = Д, (7.57)
где
^i('i) = |{£i(ki|2 -*ni)+E2®iWi|2 “4)}й (7.58)
Обозначенная через 7?, правая часть описывает связь с другой перемен-
ной х2. Умножив (7.57) на cxpl-i/^ и взяв действительную часть, получим:
6 +7Vl(r1) = Re{exp(-z/|)7?l}. (7.59)
Вид функции гарантирует устойчивое решение гр лишь слегка из-
меняющееся в зависимости от правой части уравнения (7.59) и убывающее
при увеличении частоты О),. Взяв мнимую часть, получим:
=^Im{exp(-/z1)jRl}+<5(»k (7.60)
Чтобы продемонстрировать нашу модель в действии, посмотрим, как
она описывает каскад переходов между отношениями частот 5:2, 3:2, 2:1.
Как видно из таблицы 7.1, этот каскад дважды наблюдался у испытуемого
А. Первый переход (от 2:5 к 2:3) оказался предпочтительным для испытуе-
мого С. Запишем теперь уравнение (7.60), указав в явном виде члены пра-
вой части, «ответственные» за переход от 2:5 к 2:3.
<h = -Sc»t + arl3r2sin(5/l -2/2) + Z?rlr22sin(3/l -2Z2) + cr2sin(2x1 -/2).(7.61)
Уравнение для фазы второй руки выводится полностью аналогично
тому, как было выведено уравнение для фазы руки. Оно имеет вид
Ф-, = -&э2 +a'rl5sin(5Z1 -2Z2)+i'63sin(3Z1 -2/2)+с'(^/г2)81п(2/| -/2) (7.62)
В уравнения (7.61) и (7.62) включены только низшие из возможных
степеней амплитуд гх и г2. Следует иметь в виду, что коэффициенты а, Ъ'
и с уравнения (7.62) могут отличаться от коэффициентов а, b и с уравне-
ния (7.61) и, в частности, могут иначе зависеть от амплитуд мод. В даль-
нейшем мы будем предполагать, что коэффициенты а, Ь, с, а, Ъ', с не за-
висят от основной частоты (О. [В этом можно убедиться непосредствен-
но. Исходные коэффициенты са, dkl по предположению не зависели от (О.
При переходе от (7.54) к (7.57) мы разделили член, описывающий взаи-
модействие между осцилляторами, на величину 2/(0,, пропорциональную
частоте (О. С другой стороны, производная по времени в (7.37) порожда-
ет множитель + п(02), также пропорциональный частоте (О. В окон-
чательном результате члены, зависящие от (О, взаимно уничтожаются.
Вместе с тем следует заметить, что и члены с z также взаимно уничтожа-
ются. Таким образом, коэффициенты при экспоненциальных функциях
действительные, и мнимую часть связи между осцилляторами можно за-
менить синусами.]
117
Часть II. Поведение
Уравнения (7.61) и (7.62) образуют систему связанных между собой урав-
нений для фаз ф, и ф2. Как будет показано выше, эти уравнения содержат
ключ к нашему пониманию наблюдаемых переходов в движениях челове-
ческих рук. При увеличении основной частоты со амплитуды гр г2 убыва-
ют. В результате коэффициенты с более высокими степенями амплитуд гр
г, убывают быстрее, чем коэффициенты с более низкими степенями. Из
этого следует, что коэффициент, например, при sin(5/, - 2/2) убывает бы-
стрее, чем коэффициент при sin(3/j - 2/2). Как будет показано, этим и
объясняется переход в поведении. Интересно отметить, что убывание ам-
плитуд гр г2 лежит и в основе фазовых переходов в движениях указатель-
ных пальцев, описываемых нашей моделью в гл.6.
Чтобы выявить наиболее существенные особенности предлагаемой моде-
ли, отбросим третьи члены в правых частях уравнений (7.61) и (7.62). Это по-
зволит нам в дальнейшем сосредоточить все внимание на переходе 2:5 —> 2:4.
Уравнения после отбрасывания третьих членов можно подвергнуть дальней-
шим преобразованиям. Введем переменные Др Д2, определяемые как
Д|=5/1-2/2 (7-63)
A2=3Z1-2Z2, (7.64)
где (см.(7.56))
=^.+ю/, j = 1,2. (7.65)
Наоборот, и %2 можно выразить через новые переменные следующим
образом:
и
Подставим (7.65), (7.63) и (7.64) в уравнения (7.61) и (7.62). Умножая
уравнения (7.61) на 5, а уравнение (7.62) — на 2 и вычитая одно уравнение
из другого, получаем уравнение вида
Aj =ai-Bt sin А, - С, sinAr (7.68)
Аналогичным образом можно вывести и уравнение для Д2:
Д2 =n2-S2sinA1 -C2sinA2- (7.69)
Для краткости мы воспользовались обозначениями а. = + Гф j =1,2, где
Q, = 5®, -2<о2, = -5<5(О| + 2<5со2 (7.70)
и
П2 =3<»| — 2<о2, Ц2 = -3<5cOj +25(о2. (7.71)
118
7. Еще о движениях пальцев
Заметим, что коэффициенты £?., Cjt j = 1,2, содержат степени амплитуд
г2, как это следует из уравнении (7.61) и (7.62). Рассмотрим сначала слу-
чай , когда достигается отношение частот 2:5, и поэтому предположим, что
Ц = 5(0] - 2со2 =0, ц, = 5<5tO] + 2<5со2 = 0 или малая величина. (7.72)
Уравнения (7.68) и (7.69) при этом вырождаются в уравнения
А] =??]-SjSinA]-C]SinA2, (7.73)
и
Д2 =Q2+7]2-S2sinA]-C2sinA2. (7.74)
Начнем с рассмотрения случая
|В,|>|С,|, (7.75)
N>N>|C!| (7.76)
и положим 7], = 0. Как мы увидим далее, условия (7.75) и (7.76) порожда-
ют совершенно различное поведение переменных Л, и Д2: в Д] практичес-
ки происходит захват частоты, т.е. A, =5/j -2/2 const, Д2 возрастает со
временем и по существу пропорционально Q2. Именно такого поведения
мы ожидали в случае захвата частоты при отношении частот 2:5. С другой сто-
роны, при нарушении условия (7.75), т.е. ]С’1| >|2?j|, возникает новое поведе-
ние: захват частоты нарушается, и частоты изменяются свободно. Однако и
при этих условиях может наступить захват частот при отношении частот 2:3.
Рассмотрим эти случаи более подробно. Мы утверждаем, что если ус-
ловия (7.75) и (7.76) выполнены, то решения уравнений (7.73), (7.74) обла-
дают следующими свойствами:
Д] = константа + малые колебания при Q2 и гармониках
более высокого порядка, (7.77)
Д2 = Г12/ + малые колебания при Q2 и гармониках
более высокого порядка. (7.78)
Чтобы доказать наше утверждение, положим снова = 0 и
А] =АП + <51(Г), (7.79)
где До — решение уравнения
-В} sin Ап - С] sin А2 = 0 (7.80)
(черта сверху означает усреднение по времени). В силу неравенства (7.75)
всегда можно найти вещественнозначную, не зависящую от времени по-
стоянную До, удовлетворяющую уравнению (7.80). Подставляя (7.79) в
(7.73) и используя (7.80) и соотношение
sinA] =sinAncos<5] +cosA(jsin<5l,
получаем при достаточно малом 6]
<5j =-Д cosAn<5] -C](sinA2 -sinA2)- (7.81)
119
Часть II. Поведение
Помимо затухающих переходных режимов решение уравнения (7.81)
представляет собой чисто осциллирующую функцию времени с такой же
зависимостью от частоты, как у члена в скобках. С учетом (7.79) и в пред-
вкушении (самосогласованным образом) (7.78) это доказывает утвержде-
ние (7.77). Для доказательства нашего утверждения (7.81) введем в (7.74)
гипотезу
Д2=О2/+<52(/), (7.82)
и, используя
sinA2 = sinO2/cos<52 + cos02/sin<52,
получим при малых 5,, 62 (пренебрегая членами более высокого порядка
по 6р 62 и С2 62)
<52 =?]2-l?2sinA0-7?2cosAn<5| -C2sinO2/. (7.83)
Если, по предположению |Q2| »|Б2|, то Z?2sinA0— величина, малая по
сравнению с Q2. Таким образом, испытуемый может слегка изменять ко-
эффициент возрастающей силы, входящий через д2 в (7.83), и тем самым
компенсировать 7?2sinA0. При этом условии решение S2(t) уравнения (7.83),
описывающее стационарное состояние, состоит из чистых колебаний,
обусловленных 5р и sinQ2t, причем и первые, и вторые осциллируют при
Q2 и более высоких гармониках.
В заключение мы можем констатировать, что при условиях (7.75) и (7.76)
система может поддерживать отношение частот 2:5. Этот результат полно-
стью поддерживается численным решением уравнений (7.68), (7.69), пред-
ставленным на рис.7.5.
Предположим теперь, что при увеличении частоты амплитуды гх, г2 убы-
вают и что в конечном счете
<|CjsinA2. (7.84)
Грубо говоря, в этом случае член, содержащий Вх, не может более ком-
пенсироватьдоследний член в (7.73), если параметр Г)х мал. Добавляя и вы-
читая C|Sin А2, запишем уравнение в виде
А, =т]х -CjSinA2 -Д sinAj -Cj(sin Д2 -sin Д2),
а его решение — в виде
д, = (qx -Сх sin Д2)/ + малые колебания. (7.85)
В том, что решение имеет именно такой вид, нетрудно убедиться, рас-
сматривая предельный случай при В, —> 0.
Общий результат (7.85) полностью подтверждается численным решени-
ем уравнений (7.71), (7.72) (как видно из рис.7.6). Если вспомнить, что по
определению
Aj =5<В| — 2ю2 + 50, — 202,
то из (7.85) следует, что захват частоты не происходит, так как при захвате
120
7. Еще о движениях пальцев
Рис. 7.5. Результат интегрирования уравнений (7.68), (7.69) с начальным условием Az(0) = 0.
Сплошная кривая соответствует Л, + £2,(1), штриховая — А2 + Q2(t). Заметим, что кри-
вая А, + Q,(t) устойчива. Параметры:
1 п. В. ci £1
1 0 1 0,75 0
2 0 1 0,9 1,1
и ф2 не зависят от времени или по крайней мере не возрастают линейно
со временем. Поскольку Qj = 0, для поддержания отношения частот 2:5 при
захвате частоты изменение величины 7], должно быть очень большим (по
сравнению с Qj). Если же Т]1 изменяется мало, то состояние с захватом ча-
стоты исчезает. Меняя Q, и Q2 ролями, мы приходим к аналогу рассмот-
ренного выше случая, но захват частоты при этом произойдет при соот-
ношении частот 2:3. Иначе говоря, испытуемый может реализовать новое
состояние с захватом частоты с помощью небольшой расстройки по час-
тоте между движениями рук.
Часть II. Поведение
Рис. 7.6. В общем случае условие захвата частоты, или устойчивости, можно выразить соот-
ношением Л, + Qjt = constant + малые колебания, или, аналогичным образом, (А,) + Q, —> 0.
Таким образом, диапазон изменения параметров стационарных состояний можно определить
«на глаз», вычисляя средние по времени от Л( при различных значениях параметров ср Вр
Ср или Ср или А;. Возникающие кривые устойчивости закодированы так, что большие зна-
чения (Д,) + Г2, соответствуют более темной окраске дисплея. Верхняя часть: на кривых ус-
тойчивости представлены абсолютные значения усредненных по времени производных от
А. + Q. t. Белая область на дисплее слева означает, что для Л, + Qjt существует диапазон, в
котором происходит захват частоты, тогда как поведение А2 + Q2t всегда остается неустой-
чивым (a t + малые колебания) Точное соответствие с серыми областями указано сверху. Сле-
ва: 1=1; справа i = 2. В нижней части показано, как эволюционируют со временем А, + Q, t
(i = 1 — сплошная линия; i = 2 — штриховая линия). Параметры В] и С, выбраны так, что
кривая А] + становится либо устойчивой (справа), либо неустойчивой (слева). В первом
случае захват частоты происходит, во втором — не происходит. Параметры:
i п, в, С, Qj
1 (слева) 0 0,15 1,5 0
1 (справа) 0 1 0,75 0
2 0 1 0,9 1,1
122
7. Еще о движениях пальцев
7.6. Сводка основных теоретических результатов
В разд. 7.4 и 7.5 мы построили теоретическую модель, позволяющую опи-
сывать основные особенности эмпирических данных: (i) захват частоты; (И)
потерю устойчивости при увеличении частоты движения; (iii) переходы к
одному или нескольким малым отношениям частот в большинстве экспе-
риментов; (iv) индивидуальные тенденции в маршрутах переходов и (v) сво-
бодные решения в ряде случаев. Как показано в гл.6 и нескольких разде-
лах гл.7, смещения хр х2 концов указательных пальцев моделировались с
помощью осцилляторов смешанного типа Ван дер Поля—Рэлея. Наиболее
существенным элементом в нашем подходе является вид связи между ос-
цилляторами, моделирующими движения пальцев. Разлагая ху (/ = 1 или 2)
на действительнозначную амплитуду г, частотный множитель i(0; t и фазо-
вый множитель i(J)-, мы получаем члены, описывающие связь между осцил-
ляторами, которые зависят от экспоненциальных функций, содержащих
различные комбинации частот вида ш(01 - и(02, где тип — целые числа.
Коэффициенты при экспонентах содержат константы а, Ь,... и степени ам-
плитуд г, и г2. Чем больше тип, тем выше степени амплитуд t\ и г2. Затем
мы исследовали случаи, когда комбинации частот ш®] - л(02 резонирова-
ли с частотами (О, и (02 отдельных колебаний концов указательных паль-
цев. Какие из этих условий резонанса выполняются, зависит от частот СО,,
(02 и особенно от амплитуд rt, г2. Так как увеличение частоты (0 движения
связано с уменьшением амплитуд г, и г2, относительные веса членов, опи-
сывающих связь между осцилляторами, зависят от управляющего парамет-
ра (0. Если частота движения увеличивается, то члены низшего порядков
становятся более важными, чем члены старших порядков. Если заданное
отношение частот (высокого порядка) теряет устойчивость, то, внося в си-
стему небольшую расстройку по частоте, систему можно ввести в режим с
захватом частоты при отношении частот низкого порядка.
Функционирование модели было продемонстрировано на примере мар-
шрута переходов 2:5 2:3 2:2. В рамках предлагаемого подхода появле-
ние именно этого каскада переходов может быть интерпретировано сле-
дующим образом: путем обучения или практики испытуемый может подо-
брать коэффициенты а, b и а', Ь' так, чтобы в нашей модели при основной
задающей частоте (0 стал возможен устойчивый захват частот при отноше-
нии частот 5:2.
Но при увеличении задающей частоты, амплитуды гр г2 убывают, как
было показано в начале этой главы. В результате в членах, описывающих
связь между осцилляторами, увеличивается, относительный вес тех ком-
бинаций частот mCOj - и(02, которые связаны со степенями амплитуд гр г2 с
.меньшими т и/или п. Это приводит к нарушению условия захвата частот с
отношением частот 5:2, и вместо захвата частот мы получаем свободное
решение, т.е. система (головной мозг испытуемого) вынуждена заняться
поиском нового совместимого с имеющимися условиями решения. Новый
захват частоты может произойти при небольшом изменении параметров.
Так возникает переход к отношению частот 3:2. Наш подход может быть
123
Часть II. Поведение
продолжен, если ввести еще один член связи. Так по аналогии с описан-
ным выше переходом мы получаем описание перехода 3:2 -^2:1.
Обобщая сказанное относительно того, как работает наша модель, мы
считаем необходимым подчеркнуть, что функция, описывающая связь меж-
ду осцилляторами, состоит из большого числа членов, задающих не только
экспериментально наблюдаемые захваты частоты. Относительные веса этих
членов зависят от внутренней динамики, обучения и намерений испытуе-
мого. Если представить себе возникающий в результате обобщенный ланд-
шафт потенциала как функции отношения частот между движениями рук,
то минимумы будут соответствовать тем отношениям частот, которые мо-
гут быть достигнуты. При изменении задающей частоты (0 некоторые ми-
нимумы могут исчезать, а между захватами частоты могут происходить пе-
реходы. Но при наличии нескольких минимумов переходы не определены
однозначно и отчасти зависят от происходящих в системе случайных собы-
тий. Если требуемое отношение частот теряет устойчивость, то систему мож-
но перевести в состояние с новым захватом частоты с помощью расстройки
коэффициента возвращающей силы. В общем случае эта расстройка мала.
Отсюда следует, что новое отношение частот будет либо близко к требуемому
отношению (в единичном интервале), либо отношением с большими веса-
ми (например, в результате практики). И в том, и в другом случае для пере-
хода к новому отношению требуется лишь небольшая расстройка парамет-
ра. Этим могут объясняться сильные индивидуальные тенденции в экспе-
риментально наблюдаемых маршрутах переходов. Асимметрии между быс-
трой и медленной руками (см. Саммерс, Форд, Торд (1993); Саммерс, Кен-
неди (1992); Пепер и др. — в печати) можно учесть, допуская для медлен-
ной руки большую расстройку, чем для быстрой.
В заключение полезно сравнить подход, излагаемый в разделе 7.5, с под-
ходом из разд. 7.1, моделирующим переход между синфазным и противо-
фазным движениями при выполнении задания на координацию движений
с отношением частот 1:1. В разд.7.5 в отличие от разд.7.1 мы рассматрива-
ли переходы между различными отношениями частот. В случае, рассмот-
ренном в разд. 7.1, переход был обусловлен потенциальной функцией для
относительных фаз (при увеличении частоты один минимум исчез). Слу-
чай, рассмотренный в разд.7.5, более сложен. По аналогии с моделью из
разд. 7.1 мы установили, что члены связи между двумя руками играют ре-
шающую роль и в установлении, и в исчезновении захвата частоты. Но в
отличие от первого случая на этот раз потребовались дополнительные ус-
ловия. Прежде всего со1 и (02 должны быть целыми кратными задающей ча-
стоты (0. Келсо и др. (1992) представили результаты, подтверждающие адек-
ватность модели реальному функционированию мозга в указанном выше
отношении (см. гл. 15). Магнитоэнцефалограммы испытуемых показали,
что при постукивании в ответ на звуковой сигнал генерировались не толь-
ко основная частота сигнала, но и высшие гармоники (см.гл.15). Эти выс-
шие гармоники можно использовать для фиксации собственных частот
движений конечностей с помощью коэффициентов и а2 возвращающей
силы. Такой механизм гарантировал бы определенный механизм перехо-
124
7. Еще о движениях пальцев
да от одного отношения частот к другому. Кроме того, испытуемые, на-
сколько можно судить, избегали свободных решений. Отсюда напрашива-
ется вывод о существовании дополнительного механизма, осуществляю-
щего контроль за тем, нарушается ли захват частоты, и занимающегося по-
иском новых возможностей для координированного поведения. Иначе го-
воря, механизм перехода между различными моделями координации дви-
жений не столь ограничен, как в случае экспериментов с движениями ука-
зательных пальцев, выполненных Келсо и его сотрудниками (см., напри-
мер, Келсо (1994). Келсо и др. (1986)). Этот вывод подтверждается резуль-
татами экспериментов, приведенными в разд.7.3. В них отчетливо просмат-
риваются свободные решения, а также вариации и индивидуальные тен-
денции маршрутов переходов.
7.7. Выводы и перспективы
Бросая ретроспективный взгляд на гл.7, мы можем констатировать, что
когерентная картина колебательных движений указательных пальцев воз-
никают и в отношении движения одного (указательного) пальца, и в от-
ношении связанных движений. В разд.7.3 мы построили модель, позволя-
ющую описывать весьма сложные явления, объяснение которых выходит
за рамки предыдущих подходов, в частности объяснения на основе отобра-
жения окружности на себя. Проведенные мной предварительные исследо-
вания показывают, что теоретический подход, развитый в разд.7.3, приме-
ним и для объяснения теоретических результатов, феноменологически
описываемых деревом Фарея. Таким образом, наша модель может стать
интересной альтернативой модели на основе отображения окружности на
себя. Продолжая аргументацию, изложенную в конце гл.6, мы можем ожи-
дать, что модель из разд.7.3 окажется применимой и к другим заданиям на
координацию движений.
125
Часть II. Поведение
8. Обучение
В этой главе мы рассмотрим различные типы обучения и установим их
связь с понятием параметра порядка.
8.1. Как обучение изменяет ландшафт параметра порядка
Парадигма движений указательных пальцев, рассмотрением которых мы
занимались в предыдущих разделах, позволяет пролить новый свет на ме-
ханизм обучения. Соответствующие эксперименты были выполнены
Яманиши, Кавамото, Сузуки (1980), Туллером и Келсо (1989), Цаноне и
Келсо (1992). Начнем с описания эксперимента Яманиши и др. Испыту-
емым предлагалось следовать двум визуально наблюдаемым метрономам
(по одному метроному на каждый палец), двигая в такт пальцами. Час-
тота движений была фиксированной, а относительная фаза между мет-
рономами варьировалась. Испытуемых просили воспроизвести несколь-
ко паттернов такой фазировки до тех пор, пока они не достигали опре-
деленного «уровня исполнения», после чего от них требовалось воспро-
извести ту относительную фазу, которую им удалось запомнить. В экс-
перименте Туллера/Келсо испытуемые должны были все время следить
за метрономами.
Опишем эксперимент Цаноне/Келсо более подробно. Процедура обу-
чения состояла из сессий, проводившихся 5 дней подряд, за которыми не-
делю спустя проводилась контрольная сессия. Визуальный метроном со-
стоял из двух светодиодов, расположенных на высоте взгляда на расстоя-
нии 8 см друг от друга. Указательные пальцы испытуемых были вставлены
в прибор, позволявший измерять их сгибание-разгибание. Задание состо-
яло в том, чтобы сгибать и разгибать каждый палец в такт с включением
«одноименного» диода — правого для правого пальца, левого — для лево-
го. Переменной, подлежащей измерению, была точечная оценка возникав-
шей в результате эксперимента относительной фазы. Исследовался пат-
терн, состоявший из движений пальцев с относительной фазой 90°. Мы не
будем останавливаться на деталях тщательных измерений, а ограничимся
изложением некоторых из наиболее характерных особенностей, которые
126
8. Обучение
Рис. 8.1. На каждом из трех
графиков, относящихся к
трем испытуемым BA, JT и
MS, построена зависимость
ошибки сканирования (ф —
Venv) ОТ Venv ДО Обучения
(сплошная кривая) и после
обучения (штриховая кри-
вая). (Шейер, Цаноне и Кел-
со, 1992).
приведут нас к фундаментальному заключению относительно обучения.
Для проверки эффекта движение пальца исследовалось по всем заранее за-
данным относительным фазам в диапазоне от 0° до 180°, причем фазы воз-
растали с шагом 15°. На рис.8.1 представлены получившиеся кривые для
трех испытуемых. Рассмотрим, например, самую верхнюю часть рис.8.1.
Чтобы разобраться в ней, определим ошибку ф — у/ет как разность между
реально достигнутой и заданной относительной фазой. Сплошная кривая
показывает зависимость ошибки от заданной относительной фазы в 1-й
день до обучения, штриховая кривая — ту же зависимость на 5-й день после
обучения. Совершенно ясно, что во всех трех случаях ошибка достигла ми-
нимума при 90°. Более глубокое понимание статистической природы по-
лученных результатов дает рис. 8.2. На нем представлена зависимость от-
носительной частоты достигнутой в эксперименте относительной фазы от
заданной относительной фазы. Каждая отдельная кривая соответствует
обучению в течение от 1 до 5 дней, как указано в нижней части оси орди-
нат. Обратите внимание на соответствующим образом сдвинутый нулевой
уровень функции распределения. После 1 дня обучения функция распре-
деления частоты имеет два пика, после дальнейшего обучения трансфор-
мируется в кривую с одним пиком.
Экспериментально измеренная относительная частота может быть не-
посредственно связана с распределением вероятности того типа, о кото-
ром мы говорили в разд.6.4. Было показано, что распределение вероятно-
сти возникает из двух источников: детерминистической вынуждающей
силы, связанной с ландшафтом потенциала, и флуктуирующей силы. Пред-
положим, что флуктуирующая сила остается постоянной даже при нали-
127
Часть II. Поведение
Рис. 8.2. Выполнение задания (подопыт-
ным JT) можно представить с помощью
гистограммы, т.е. построить график от-
носительной частоты наступления отно-
сительной фазы как функции от фазы.
Обращает на себя внимание переход от
бимодального распределения к одномо-
дальному. (ИзрабогШенераидр., 1992).
Этот переход влечет за собой соответ-
ствующее изменение в ландшафте потен-
циала от двух минимумов к одному.
чии обучения. Тогда кривые на рис.8.2 наводят на мысль о том, что в про-
цессе обучения лежащий в основе ландшафт потенциала претерпевает из-
менения. Чтобы построить такой ландшафт, рассмотрим (6.28) с новой по-
тенциальной функцией V^.
ЗГ
Ф=-—*-+Р(Г). (8.1)
оф
Индекс у/ функции V указывает, что испытуемый должен «обучиться»
фазе у/. Разложим V на две части:
Vv = Vmlr + VeJ (8.2)
или
Vv=Vmr + Vmm. (8.3)
Первое слагаемое — хорошо известная потенциальная функция, кото-
рую мы назовем внутренним потенциалом:
Ути.=-асо$ф-Ьсо$2ф (8.4)
Вторые слагаемые Vem и Vmem соответствуют изменению потенциала под
воздействием окружающей среды (англ, environment) в эксперименте Тул-
128
8. Обучение
Рис. 8.3. Стационарное распределе-
ние вероятности Pslal (в процентах)
относительной фазы ф как функция
времени обучения. Сначала распре-
деление бимодально, что отражает
бистабильность лежащей в основе
процесса динамики. В первой точке
потери устойчивости распределение
становится одномодальным. Вторая
точка потери устойчивости проявля-
ется как резкий сдвиг положения
пика, сопровождаемый уширением
распределения. (Шенеридр., 1992.)
лера—Келсо или под влиянием памяти (англ, memory) в эксперименте
Яманиши и др. Если учитывается намерение, или интенция, то в правую
часть (8.2) или (8.3) можно включить аналогичное третье слагаемое. Новое
слагаемое в потенциале должно учитывать, что после обучения (// должна
стать предпочтительной фазой, т.е. новое слагаемое должно иметь мини-
мум при ф =у/. Мы можем рассмотреть несколько форм на выбор, но, как
показали Шенер и Келсо (1988), простейший потенциал, совместимый с
требованиями минимума при ф — l/и периодичности, имеет вид
= -ccos((^-y/)/2). (8.5)
тет
Суперпозиция потенциалов (8.5) и (8.4) при возрастающем значении с > О
действительно задает потенциальную кривую, которая при подстановке в
правую часть уравнения (8.1) порождает в качестве стационарного реше-
ния распределение вероятности (рис.8.3), соответствующее распределению
относительной частоты на рис.8.3.
Существует еще более непосредственный способ, позволяющий полу-
чить потенциальную кривую по рис.8.2. Для этого мы исходим из явного
вида стационарного решения одномерного уравнения Фоккера—Планка
(6.31) из разд. 6.4. Разрешив его относительно ¥^ф), мы получаем потен-
циал, который требовалось найти:
9-4614
129
Часть П. Поведение
(8.6)
W=|(in7v-in/^)),
где Q — величина флуктуирующих сил, которую можно найти из других эк-
спериментов так, как было показано в разд.6.4. Первое слагаемое в скобках,
стоящих в правой части формулы (8.6), проистекает от нормировки и пред-
ставляет собой сдвиг потенциала на константу, который не существен. Вто-
рое слагаемое устанавливает важное соотношение между потенциалом У^ф)
и относительной частотой (или вероятностью), обозначенной здесь Р^ф)-
Фаза у в данном случае сохраняется постоянной и равной 90°. Совершен-
но ясно, что это — простой способ, позволяющий проверить точность раз-
ложения (8.2) с учетом (8.4) и (8.5) по экспериментальным данным.
Приведенные выше эксперименты и их теоретическая интерпретация
Шенера и Келсо позволяют по-новому взглянуть на обучение. Ясно, что
внутренняя динамика, присущая данному субъекту, может быть (генети-
чески) наследственной или возникнуть под более ранними влияниями обу-
чающей динамики. Точки, ранее бывшие аттракторами, оказывают свое
влияние на обучение новым состояниям-аттракторам. Такой вывод может
привести к важным следствиям, например, для методов тренировки в
спорте. Например, при обучении технике горнолыжного спорта начина-
ющим обычно сначала показывают спуск «плугом», и только потом они ос-
ваивают более сложную технику «качания». Но как показывает опыт мно-
гих спортсменов, при возникновении затруднительной ситуации горно-
лыжники прибегают не к более эффективному «качанию», а к более при-
митивному «плугу», технике которого их обучили раньше. Ясно, что в све-
те приведенной выше интерпретации можно сказать, что старые аттрак-
торы еще присутствуют и более стабильны, чем недавно освоенные новые.
8.2. Как обучение изменяет число параметров порядка
Существует несколько механизмов, позволяющих изменять паттерны дви-
жения, описываемые параметрами порядка. Выше мы рассмотрели случай,
когда изменение динамики параметров порядка приводило к тому, что лан-
дшафт потенциала претерпевал переход. Но могут существовать и другие
механизмы, которые, насколько нам известно, ранее не рассматривались,
а именно: возникновение новых параметров порядка в результате совмест-
ного действия старых параметров порядка. Приведем пример, взятый из
области физики динамики жидкости. При определенных условиях в подо-
греваемой снизу жидкости образуются конвективные валы, которые могут
быть ориентированы в трех различных направлениях. В зависимости от
конкретных условий нагревания и поверхностного натяжения эти три
моды поведения, действуя совместно, образуют шестиугольные ячейки,
управляемые одним новым параметром порядка.
130
8. Обучение
В гл. 12 мы проанализируем, как обучают людей ездить на педало. Мы
покажем, что по мере обучения в паттерне движения доминирует все мень-
ше степеней свободы, или, иначе говоря, паттерн определяется все мень-
шим числом параметров порядка. В конечном счете паттерн движения оп-
ределяется одним параметром порядка.
8.3. Как обучение может привести к возникновению новых
параметров порядка
Наконец, обучение можно рассматривать как процесс возникновения но-
вых параметров порядка из микроскопических частей. Примером может слу-
жить синергетический компьютер, о котором речь пойдет ниже (разд. 16.1).
Этот пример позволит нам рассмотреть процесс обучения на уровне ней-
ронов. Обучение в случае синергетического компьютера изменяет управ-
ляющие параметры на микроскопическом уровне. Управляющими пара-
метрами служат интенсивности синаптических связей, а правило обучения
идентично правилу Хебба или по крайней мере связано с ним. Возникаю-
щая новая динамика порождает совершенно новые параметры порядка,
задающие новые вполне различимые паттерны.
Часть II. Поведение
9. Аллюры животных
и переходы между ними
9.1. Вводные замечания
Прекрасным примером паттернов поведения и перехода между ними слу-
жат аллюры животных, например, лошадей. В этой главе мы сосредоточим
внимание на аллюрах передвижения четвероногих. Экспериментальное
изучение таких аллюров имеет долгую историю. В последнее время появи-
лись и теоретические исследования; в разд.9.4—9.7 мы будем по существу
следовать Шенеру, Йянгу и Келсо (1990), использовавших синергетичес-
кий подход. В контексте нашей книги представляется вполне естествен-
ным попытаться моделировать аллюры и переходы между ними по анало-
гии с тем, как в гл. 6 мы моделировали движения указательных пальцев.
Ясно, что новая проблема отличается большей сложностью, так как вмес-
то двух переменных (фаз двух указательных пальцев) или одного перемен-
ного (относительной фазы) при изучении аллюров приходится иметь дело
с четырьмя фазами конечностей животного. Следовательно, соответству-
ющие уравнения должны содержать больше членов и больше подгоночных
констант. Это означает, что нам необходима дополнительная «путеводная
нить» для вывода уравнений, определяющих фазы, и для классификации
эволюционирующих во времени паттернов движения. Изящный подход
основан на использовании теории групп — важного раздела математики.
Так как мы не предполагаем, что читатель сведущ в теории групп, вся не-
обходимая информация приводится ниже. Как читатель вскоре убедится,
изучать теорию групп — одно удовольствие, так как симметрии можно
представить наглядно с помощью «картинок».
План гл. 9 состоит в следующем. Сначала мы введем основные поня-
тия теории групп, которые понадобятся нам в дальнейшем, а затем убедим-
ся в том, что аллюры животных имеют самое непосредственное отноше-
ние к симметриям. Затем мы выведем уравнения для фаз и рассмотрим их
решения, а в заключение обсудим проблему переходов между аллюрами.
132
9. Аллюры животных и переходы между ними
9.2. Симметрии и группы
Рис. 9.1. Квадрат с пронуме-
рованными вершинами.
Рассмотрим квадрат на рис.9.1, вершины которо-
го пронумерованы числами 1, 2, 3, 4. Прежде все-
го введем понятие операций симметрии. Квадрат
можно отразить относительно вертикальной оси
так, как показано на рис.9.2 вверху слева. При
этом нумерация вершин изменится: новая нуме-
рация представлена на рис.9.2 вверху справа.
Обозначим отражение относительно вертикаль-
ной оси через 5,. Помимо 5, существуют еще три
отражения: относительно горизонтальной оси,
диагонали, идущей от вершины 1 к вершине 3, и диагонали, идущей от вер-
шины 4 к вершине 2 (рис.9.2). Кроме того, квадрат можно повернуть про-
тив часовой стрелки на угол 90° вокруг оси, проходящей через центр квад-
рата. Обозначим такой поворот через R (рис.9.3). Повернув квадрат по ча-
совой стрелке, мы компенсируем первоначальный поворот R. Такую опе-
Рис. 9.2. Левый столбец', пунк-
тиром показаны прямые, от-
носительно которых произво-
дится зеркальное отражение.
Правый столбец', действие опе-
раций симметрии S^j=1,2,3.4,
проявляется в изменении ну-
мерации вершин квадрата.
133
Часть II. Поведение
4ф------•<
R-
3*------>2
4ф-----В1
Зф----->2
Рис. 9.3. Левый верхний угол: как
действует поворот, или вращение,
на 90°. Правый верхний угол', дей-
ствие поворота на 90° (R) на нуме-
рацию вершин квадрата. Если по-
ворот на 90° повторить два или три
раза, то нумерация станет такой,
как показано в правом столбце
(соответственно, R2 и R3). Внизу'.
преобразование R1, обратное по-
вороту R.
рацию мы назовем обратной и обозначим через R~}. Ясно, что квадрат мож-
но повернуть не только один раз, но и два или три раза. Такие повороты
представлены на рис.9.3. Повторив первоначальный поворот А четыре раза,
мы получим вновь исходный квадрат, изображенный на рис. 9.3 вверху сле-
ва. Это означает, что операция R4 равна тождественной операции, остав-
ляющей ориентацию квадрата неизменной.
За исключением нумерации вершин любая операция симметрии ниче-
го не изменяет. Это замечание приводит нас к определению симметрии.
Мы называем конфигурацию (в нашем случае — квадрата) симметричной
относительно операции симметрии, если после выполнения этой опера-
ции финальное состояние неотличимо от исходного. Следует обратить вни-
мание на одну концептуальную трудность: с одной стороны, мы различа-
ем вершины квадрата по номерам, с другой стороны, мы в конечном сче-
те пренебрегаем нумерацией вершин. Таким образом, намереваясь выпол-
нить операции симметрии, мы сначала акцентируем внимание на харак-
терных особенностях конфигураций (в нашем случае — на пронумерован-
134
>. Аллюры животных и переходы между ними
ных вершинах квадрата), выполняем операцию и в окончательном резуль-
тате полностью отвлекаемся от характерных особенностей конфигурации.
Вместо того чтобы говорить, что конфигурация симметрична относитель-
но операции симметрии, можно сказать, что конфигурация инвариантна
относительно этой операции. Выполняя операции симметрии последова-
тельно, одну за другой, мы можем комбинировать их. Например, мы мо-
жем проделать над квадратом две операции симметрии. Так как квадрат
остается инвариантным относительно каждой из них, он остается инвари-
антным и относительно комбинации двух операций симметрии. Это при-
водит нас к определению группы. Операции, или элементы, образуют груп-
пу, если они удовлетворяют следующим условиям, обычно называемых ак-
сиомами.
1) Если А, В — элементы группы, то их комбинация, или произведение,
АВ — также элемент той же группы.
2) Выполняется так называемый ассоциативный закон: (АВ)С = А(ВС).
Правая часть означает, что сначала мы образуем комбинацию ВС и полу-
чаем новый элемент. После того, как этот элемент образован и применен
в качестве операции симметрии, мы действуем на результат операцией А.
Левая часть означает, что сначала мы применяем операцию С, а затем дей-
ствуем на результат операцией (АВ), рассматриваемой как один элемент.
Действуя двумя способами, описываемыми правой и левой частями, мы
получаем один и тот же результат. Рекомендуем читателям проверить это
утверждение на нескольких примерах, используя операции симметрии на
квадрате.
3) Существует единичный элемент Е, обладающий тем свойством, что
комбинация его с любым элементом группы дает этот элемент: АЕ = А.
4) Для каждого элемента А существует обратный элемент А'1 такой, что
А*А=Е.
Рассмотрим несколько примеров, которые позволят нам лучше понять
природу введенных выше правил умножения. Применим к квадрату снача-
ла поворот R, а затем отражение А,. Результат представлен на рис. 9.4. За-
метим, что в этих обозначениях последовательность выполнения операций
записывается справа налево, т.е. первой должна выполняться операция, сто-
ящая справа от остальных, которые должны быть выполнены после нее. Рас-
смотрим теперь обратную последовательность операций, а именно выпол-
ним сначала А,, а затем R. Сравнивая верхнюю и нижнюю части рис. 9.4, мы
видим, что нумерации, возникающие в результате выполнения комбинаций
5, R и АА,, различны. На языке формул мы можем утверждать, что .S’, R Ф RSr
Иначе говоря, правила группового умножения могут (но не обязательно!)
отличаться от правил умножения обычных чисел, для которого выполня-
ется коммутативный закон АВ = БА: группы могут быть некоммутативны-
ми. В теории групп важную роль играет понятие подгруппы. Примером мо-
гут служить два элемента Е и Ар Повторив дважды отражение мы, ра-
зумеется, вернемся в исходное состояние, или на языке формул S? = Е.
135
Часть II. Поведение
S{R:
Рис. 9.4. Верхняя часть: после поворота исходного квадрата на 90° на результат действует
отражение 5,. Нижняя часть: сначала на исходный квадрат действует отражение 5,, а за-
тем поворот на 90°. Обратите внимание, что результирующие нумерации в верхней и ниж-
ней частях различны.
RS\:
Рис. 9.5. Верхняя часть: если все вершины квадрата экви-
валентны, то применимы обе операции симметрии 5, и S2.
Нижняя часть: если две верхние вершины квадрата сделать
отличными от двух нижних вершин, то применима только
операция симметрии 5,.
!•------02
R:
4>------>3
Рис. 9.6. Поворот квадрата в
левой части равенства на 90°
против часовой стрелки ин-
дуцирует перестановку но-
меров вершин.
Иначе говоря, отражение 5, совпадает с обратной операцией: S,1 = 5,. Та-
ким образом, все элементы этой подгруппы исчерпываются элементами Е,
и, как нетрудно видеть, образуют группу. Другой пример: единичный
элемент Еи повороты R, А2 и R3. Так как Ri = Е, мы заключаем, что R~l = R3.
136
9. Аллюры животных и переходы между ними
С понятием подгруппы тесно связано понятие нарушенной симметрии.
Квадрат на рис. 9.5, разумеется, инвариантен относительно отображений
А, и 3’2. Изменим квадрат материально, например, сделав вершины 1 и 2
отличными от вершин 3 и 4 (для этого можно хотя бы поместить в верши-
нах 1 и 2 одинаковые шары одного размера, а в вершинах 3 и 4 одинако-
вые шары другого размера). Ясно, что квадрат с шарами в вершинах инва-
риантен относительно отражения но неинвариантен относительно от-
ражения Sr Такой квадрат, как нетрудно видеть, инвариантен только от-
носительно группы Е, Sx, т.е. подгруппы группы G, порожденной единичным
элементом Е и отражениями Ар 52. При переходе от верхней части рис. 9.5 к
его нижней части происходит нарушение симметрии.
Операции симметрии квадрата — отражения и повороты — можно опи-
сать, сосредоточив внимание на изменениях в расположении чисел 1,2,3,4
под действием этих операций. Например, при повороте R (рис. 9.6) нуме-
рация вершин квадрата изменяется по закону 1->2, 2->3, 3->4, 4->1.В
более кратких обозначениях это можно записать в виде 1->2->3—>4-> 1.Еще
короче запись (2,3,4,1), что означает замену единицы на стоящий на пер-
вом месте номер 2, двойки — на стоящий на втором месте номер 3, и т.д.
Иначе говоря, исходное расположение номеров 1,2,3,4 претерпевает пе-
рестановку и превращается в расположение 2,3,4,1. Ясно, что все опера-
ции симметрии можно представить в виде перестановок, как в нашем при-
мере с пронумерованными вершинами квадрата. Так как операции сим-
метрии образуют группу, их представления с помощью перестановок так-
же образуют группу, которая так и называется — группа перестановок.
9.3. Экспериментальное изучение аллюров животных
Чтобы построить модель аллюров, рассмотрим прежде всего, как выглядят
эти самые аллюры. Например, на рис. 9.7 показаны различные стадии пат-
терна движений лошади, бегущей рысью. Рассматривая «кадры» слева на-
право, мы видим, что сначала лошадь не имеет касания с грунтом, ее пе-
редняя правая и задняя правая ноги направлены наружу, а передняя левая
и задняя левая ноги направлены внутрь. Затем передняя правая и задняя
левая ноги касаются грунта и остаются на какое-то мгновенье в контакте
с грунтом, после чего лошадь снова «подвисает», ее передняя левая и зад-
няя правая направлены наружу, а передняя правая и задняя левая — внутрь,
после чего передняя левая и задняя правая касаются грунта и на какое-то
мгновенье остаются в контакте с грунтом. После этих четырех стадий весь
цикл повторяется сначала. Четыре стадии движения лошади рысью пред-
ставлены в нижней части рис. 9.7 в «кодированном виде». Поясним смысл
такой кодировки на рис. 9.8. Заштрихованные участки означают, что со-
ответствующая нога касается грунта, а незашрихованные — что соответ-
ствующая нога не касается грунта. Разделительная горизонтальная линия
137
Часть II. Поведение
////////////////7.
7///////////////7
'////////////////у
Рис. 9.7. Рысь лошади (Гамбараян, 1974). Рисунки 9.9, 9.10, 9.12—9.15 также заимствова-
ны из книги Гамбараяна.
Рис. 9.8. Верхняя часть', схема касания (штри-
ховка) и отсутствие касания грунта (без штри-
ховки). Нижняя часть', схемы аллюров зако-
дированы на соответствующих иллюстраци-
ях. Длина прямоугольников соответствует
продолжительности во времени, черными
кружками показано, какая нога касается
грунта.
////////////////у
'////////////////у
'////////////////
7//////////////Л
Рис. 9.9. Прыжки длиннохвостого сибирского суслика.
изображает ось тела лошади, а точками на последующих рисунках показа-
ны те ноги, которые касаются грунта. На этой стадии мы можем по ана-
логии с движениями пальцев ввести понятие фазы. Сразу же бросается в
глаза четко выраженная взаимосвязь между фазами различных ног лоша-
138
9. Аллюры животных и переходы между ними
Рис. 9.10. Походка верблюда.
ди, бегущей рысью: передняя правая и задняя левая ноги движутся всегда
параллельно, как и передняя левая и задняя правая. Ноги в каждой из этих
пар движутся в одной фазе. С другой стороны, если мы сравним две пере-
дние ноги, то увидим, что они движутся в противоположных направлени-
ях, т.е. антипараллельно, или что разность фаз между их движениями рав-
на . Этот пример наглядно показывает, что фаза и в данном случае выс-
тупает в роли подходящей макроскопической переменной и что в движе-
ниях лошади видна определенная симметрия.
В дальнейшем мы рассмотрим несколько более сложных аллюров и по-
строим зависимости их экспериментально наблюдаемых фазовых углов.
Фазовый угол можно определять по-разному. Мы рассмотрим два опреде-
139
Часть II. Поведение
Прыжок д'д • • • •
д°б° о • • о • •
Галоп д'д • о о • о о
• • о • • о
Рысь О 6° ▼ 0,5 •1* °W • о о
6° о ▼ 0,5 о о • • • о
Иноходь О 6° ▼ 0,5 О 6° ’0,5 о о • • о о • • о о • • Рис. 9.11. Наглядное изобра- жение отдельных фазовых углов (в единицах 2 л), со- ответствующих различным аллюрам. В правом столбце изображены касание грунта (черные кружки) и отсут- ствие касания (светлые круж- ки). Время идет снизу вверх.
ления фазового угла, имеющие особое значение для наших исследований.
Желая придать фазам численные значения, относительную фазу 0(. ноги i
можно определить как долю характерного для рассматриваемого аллюра
цикла между касанием грунта референтной ноги, например передней ле-
вой у четвероногих, и касанием грунта ноги /. Такая «квантификация» при-
водит кчислам, представленным на рис. 9.11 и9.16. Сдругой стороны, если
мы хотим описывать всю динамику движения конечностей,то 0;. необхо-
димо рассматривать как функцию времени. Для этого требуется другое оп-
ределение относительной фазы, к которому мы обратимся позднее.
А пока рассмотрим примеры, наиболее существенные для проводимого
нами анализа. Простейшим примером служит передвижение скачками: все
четыре ноги движутся вместе и синфазно. Таким аллюром иногда передви-
гаются газели и другие молодые четвероногие. Следующий простой паттерн
движения — идеальный галоп (рис. 9.9): передние ноги движутся вместе и
140
9. Аллюры животных и переходы между ними
Рис. 9.12. Походка быка.
«£?£££?£
7/////// 7/////// У///////, ////////,
7/////// 7//7Z7// '//////// ///////л
Рис. 9.13. Легкий галоп лошади.
141
Часть II. Поведение
7//////Л 7//////Л
7///////, '////////
7//////Л
7//////Л 7//////Л
Рис. 9.14. Поперечный галоп лошадей.
Рис. 9.15. Вращательный галоп гепарда.
синфазно, задние — также вместе со сдвигом по фазе относительно пере-
дней пары. Мы уже встречались с рысью (рис.9.7), при которой вместе и син-
фазно движутся ноги, расположенные по диагонали. Передняя правая и зад-
няя левая ноги движутся вместе со сдвигом по фазе на половину периода от-
носительно другой пары. При передвижении иноходью (рис.9.10) левые ноги
движутся вместе и синфазно, а правые — вместе и со сдвигом на половину пе-
риода относительно левых ног. Все четыре аллюра представлены на рис. 9.11.
Следует иметь в виду, что относительная фаза указана в единицах 2л, по-
этому 0,5 соответствует фазовому углу, равному л.
Рассмотрим теперь серию нескольких более сложных аллюров: шаг
(рис. 9.12), легкий галоп (рис. 9.13), поперечный галоп (рис. 9.14) и враща-
тельный галоп (рис. 9.15). Фазовые отношения конечностей представлены на
142
9. Аллюры животных и переходы между ними
0,8
Поперечный
галоп
Рис. 9.16. Фазовые углы в единицах 2л при
различных аллюрах.
Рис. 9.17. Схематическое изображение фа-
зовых углов при различных аллюрах. (Из
работы Шенера, Иянга, Келсо, 1990.)
143
Часть II. Поведение
Рис. 9.18. Упрощенное схематическое пред-
ставление фазовых углов различных аллю-
ров (из работы Шенера и др., 1990).
рис. 9.16. Заметим, что фазовые отношения выражены в этих аллюрах не столь
четко, как на рис. 9.11: в новой серии аллюров встречаются такие фазы, как
0,8; 0,1 или 0,6 (вместо 0 и 0,5). Чтобы выявить наиболее существенные для
последующего анализа моменты, рассмотрим идеальные случаи, изображен-
ные на рис. 9.17 и 9.18 (вместо прежних аллюров, изображенных на рис. 9.11
и 9.16). Ив экспериментально наблюдаемых аллюрах, и в теоретических схе-
мах мы имеем дело с ярко выраженной симметрией. Каким образом эта сим-
метрия могла возникнуть из динамики, лежащей в основе движений живот-
ных, или, на языке математики, из уравнений движения?
9.4. Динамика фаз и симметрии
Чтобы сформулировать определение фаз, учитывающее их зависимость от
времени, начнем с высоты поднятия концевых эффекторов, которые мы
будем отличать по индексу к. Обозначая поднятие к -го эффектора через
хк, а его скорость через vk, мы можем описать движение А-го концевого эф-
фектора, представив его на фазовой плоскости (см. разд.5.2 и рис.5.9-5.11):
xk(t) = rk(t)cos<l>k(f) (9.1)
и
4(O = ^(Osin0A.(O, к = 1, 2, 3, 4. (9.2)
В дальнейшем мы не будем рассматривать зависимость от времени ам-
плитуд гк, а сосредоточим внимание на зависимости от времени фаз фк. Ко-
нечности мы будем отличать по индексам:
г — правая, / — левая, /— передняя и h — задняя. (9.3)
144
9. Аллюры животных и переходы между ними
Соответственно, фазовые углы «передней правой» и т.д. конечности мы
будем отмечать индексами
Ф^Ф/рФ^Ф^ (9.4)
Удобно также ввести сокращенное обозначение
Фу,1 = г, (9.5)
где первый индекс i указывает правую или левую, а второй индекс j — пе-
реднюю или заднюю ногу. Так как косинус и синус — периодические фун-
кции, фазовые углы достаточно рассматривать только в области
-Л,... + Л (mod 2л) (9.6)
Иногда четыре фазы удобно записывать в виде одного фазового вектора
Ф=(Ф^Ф^Фгн>ФЛ)- (9-7)
Так как сдвиг всех фаз на одну и ту же константу означает просто сдвиг
по времени и не имеет никакого отношения к относительным фазам, мы
можем рассматривать фазовые векторы
ф, ф + cl как тождественно равные, (9.8)
где
1 = (1,1, 1,1). (9.9)
С более формальной точки зрения мы образуем из векторов (9.8) век-
торное пространство
Р4 = {ф = ф + cl при всех действительных с}. (9.10)
Где в игру вступает симметрия? При взгляде на рис. 9.17 и 9.18 стано-
вится ясно, что симметрия должна играть важную роль. В одном анекдоте
физика и химика попросили ответить на вопрос, что такое лошадь. Физик
ответил, что в первом приближении лошадь можно считать сферой, а хи-
мик определил лошадь как мешок с белками. В том же духе они могли бы
охарактеризовать лошадь и любое другое четвероногое как какой-нибудь
простой геометрический объект, в нашем случае — квадрат. Четыре вер-
шины квадрата соответствуют четырем конечностям. Одну симметрию мы
распознаем с первого взгляда: это симметрия относительно вертикальной
плоскости, проходящей через продольную ось животного. Некоторые дру-
гие симметрии имеют более искусственный характер, но, как мы увидим
далее, вполне разумны. К числу таких симметрий относится зеркальная
симметрия относительно плоскости, перпендикулярной продольной оси
животного, т.е. симметрии относительно замены переднего пояса на зад-
10 -4614
145
Часть II. Поведение
ний и наоборот. Передние ноги обычно анатомически отличаются от зад-
них, но это различие не обязательно затрагивает невральный субстракт,
служащий для запуска и коррекции движений ног. Следующий шаг состо-
ит в допущении операций симметрии, возникающих при всех возможных
перестановках вершин квадрата, т.е. теперь — всех четырех ног, или их со-
ответствующих фазовых переменных фу. Наконец, если мы ограничимся
рассмотрением кинематики, то можем представить себе, что время течет
еще и вспять, иначе говоря, что система инвариантна относительно заме-
ны всех фазовых углов с ф на - ф. Взятые вместе, перечисленные выше опе-
рации образуют наибольшую группу симметрии, которую мы обозначим А.
Она включает в себя все перестановки фазовых переменных фу и инвер-
сию — Е: ф - ф. Заметим, что группа А содержит и повороты.
Выясним, какие из паттернов движения, представленных на рис. 9.17 или
9.18, инвариантны относительно группы симметрии. Ясно, что эта группа
оставляет квадрат инвариантным, если вершины квадрата неотличимы друг
от друга. Единственный паттерн, который обладает таким свойством, — пе-
редвижение скачками (рис. 9.17). Чтобы уловить симметрии других конфи-
гураций, рассмотрим подгруппу группы А, которую обозначим В. Она опи-
сывает симметрии четвероногих более реалистично. В подгруппе В допус-
тимыми считаются следующие основные операции. Во-первых, подгруппа
В включает в себя отражение относительно продольной вертикальной плос-
кости, или, иначе говоря, замены правого на левое и наоборот. Обозначим
эту операцию через Ог1. Аналогичным образом будем считать допустимой
симметрию относительно вертикальной плоскости, перпендикулярной оси
тела, или, иначе говоря, замены передних ног на задние и наоборот. Обо-
значим эту операцию СЕ . Наконец, В включает в себя инверсию фазовых
углов, т.е. операцию — Е.
Итого группа симметрии В включает в себя следующие основные эле-
менты:
В={Е, Ог„ О#,-Е}. (9.11)
Можно показать, что все паттерны движения на рис. 9.17 инвариантны
относительно группы симметрии В. Для этого рассмотрим галоп. Ясно, что
паттерн движения на рис. 9.19 остается инвариантным при отражении от-
носительно продольной оси, т.е. относительно операции Ог1. Применив
операцию Ofh, т.е. замены задних ног передними и наоборот, мы прихо-
дим к паттерну на рис.9. 20. Но, повернув четыре указателя (или четыре
фазы) на 71, мы вернемся к исходной фигуре. Как известно, из свойства (9.8)
следует, что такой одновременный поворот возможен и соответствует сдвигу
во времени, но не изменению относительных фаз. Наконец, применяя ин-
версию — Е (рис. 9.21), мы обнаруживаем такую же ситуацию, как на рис.
9.20, которая, как было показано, эквивалентна исходной (рис. 9.19).
В качестве второго примера рассмотрим рысь. Билатеральная симмет-
рия (правого/левого) не просматривается, но стоит заметить, что после
замены правой стороны на левую и наоборот мы можем одновременно
146
9. Аллюры животных и переходы между ними
Рис. 9.19. Применение операции симметрии Ог/ к схеме
прыжков.
ф1 + Л ф2 + Л
Ф3 + Л ф4 + Л
Рис. 9.20. Применение опера-
ции симметрии к схеме,
представленной на рис.9.19, по-
рождает новую схему, которая
представлена на этом рисунке.
Каждый фазовый угол на новой
схеме повернут на л по сравне-
нию со схемой на рис.9.19.
ф = 0
Рис. 9.21. Применение опера-
ции - Ек схеме прыжков. Фазо-
вый угол в верхнем ряду сдви-
нут на ф = л, а в нижнем углу —
на ф = 0. Схему прыжков мож-
но восстановить одновремен-
ным сдвигом всех фу на Л.
сдвинуть все фазы на Л и вернуться к исходной конфигурации. Симмет-
рия относительно замены передних ног задними и наоборот приводит к
фигуре, у которой все фазы одновременно изменены на л и которая, та-
ким образом, снова эквивалентна исходной. Аналогичным образом мож-
но показать, что рысь инвариантна относительно операции — Е. При попыт-
ке применить операции из группы симметрии В к паттернам на рис. 9.18 мы
быстро устанавливаем, что эти паттерны неинвариантны. Для достижения
инвариантности необходимо рассмотреть еще меньшую группу симметрии,
а именно:
С={Е, 0,,-ЕО^}.
(9.12)
Группа С содержит в качестве элемента симметрии замену правой сто-
роны на левую и наоборот, а замена передних конечностей на задние и на-
оборот сопровождается обрашением времени. Доказательство инвариант-
ности паттернов на рис. 9.18 относительно группы С мы предоставляем чи-
тателю в качестве самостоятельного упражнения.
147
Часть II. Поведение
9.5. Уравнение динамики фаз
Будем руководствоваться той же гипотезой, что и в случае движений ука-
зательных пальцев, а именно, что фазы могут служить параметрами поряд-
ка. Иначе говоря, мы исходим из предположения, что фазы удовлетворя-
ют уравнениям, которые описывают изменения фаз во времени:
ф = К(ф)- (9-13)
Так как известно, что одновременный сдвиг на одну и ту же величину
всех фаз не изменяет динамику, необходимо потребовать, чтобы
К(ф) = K(f+ с!)- (9-14)
В полной аналогии с движением указательных пальцев мы можем зак-
лючить, что К зависит только от относительных фаз. Например, при рас-
смотрении отдельных компонентов (9.14), например, компоненты с индек-
сом if, правая часть уравнения (9.13) принимает особый вид, позволяющий
записать уравнение для этой компоненты следующим образом:
Ф^ -Фи,)’ <9’15)
где К^в правой части зависит только от относительных фаз, а ^выбрана
в качестве задающей фазы. Разумеется, соответствующие уравнения могут
быть выписаны для фг11, фл и ф^. Правая часть уравнения (9.15) все еше ос-
тается слишком общей и нуждается в дальнейшей специализации. И сно-
ва на помощь приходит аналогия с движениями указательных пальцев. Бу-
дем предполагать, что прямое взаимодействие попарно, т.е. движение пе-
редней правой ноги сопряжено либо с движением передней левой ноги,
либо — по диагонали — с движением левой задней ноги. Иначе говоря, мы
будем использовать следующее разложение Кг,:
Кг! = -Ф^ + К^-ф^ + К^-ф,,). (9.16)
Индексы Н, I, D означают: Н — гомологичные колатеральные, I — ко-
латеральные, D — диагональные контралатеральные конечности. Чтобы
сделать наш анализ как можно более простым и прозрачным, мы будем пре-
небрегать диагональной связью между конечностями. Чтобы записать в яв-
ном виде члены К в правой части (9.16), нужно удержаться от искушения
воспользоваться непосредственно соответствующими членами из парадиг-
мы движений указательных пальцев (разд. 6.2). Но при этом мы утратили бы
важные преимущества соображений симметрии. Чтобы обрисовать в общих
чертах основную идею, мы поступим следующим образом. Каждая из фун-
кций в правой части (9.16) периодична по своему аргументу. Обозначив этот
аргумент, т.е. относительную фазу, через ф, мы можем разложить
(9.17)
в суперпозицию косинусов и синусов
cos«0,sin«0, «=0,1,2,... (9.18)
148
9. Аллюры животных и переходы между ними
Требование инвариантности фазовых уравнений относительно группы
В позволяет их существенно упростить. Чтобы не перегружать изложение,
поясним процедуру на двух примерах, после чего, не вдаваясь в детали,
выпишем окончательный результат — полные уравнения. Сначала мы рас-
смотрим в качестве примера применение групповой операции - Е. В ка-
честве примера выберем простое уравнение
ф = Д, + Д sin0 + Вх cos0 • (9.19)
Применяя к нему операцию
-Е'.ф^-ф, (9.20)
преобразуем уравнение (9.19) к виду
-ф = Д + Д sin(-^) + 5,cos(-0). (9.21)
Используя симметрию тригонометрических функций
sin(-0) = -sin0)
/дч л Г (9-22)
COS(-0) = COS0 J
и суммируя уравнения (9.19) и (9.21), получаем
0 = Д, + В, cos0 . (9.23)
Это уравнение должно выполняться при всех значениях ф от — л до + ТС,
что возможно только при
Д)=0,В,=0. (9.24)
Этот пример показывает, что соображения симметрии позволяют суще-
ственно упростить уравнения для параметров порядка ф.
В качестве примера рассмотрим групповую операцию Ог1, т.е. замену
правой стороны на левую и наоборот. Как было показано, в этом случае
достаточно использовать только синусы. Запишем уравнения для ф^ и фу,
удерживая в их правых частях только синусы низших порядков:
ф^ =^sin(0^-0^), (9.25)
фу = Вьт(фу-фу)- (9.26)
Применение групповой операции Ог1 означает, что необходимо всюду
поменять местами индексы г и I. В результате (9.25) перейдет в
0r = ^sin(0r-0^), (9-27)
а (9.26) — в
ф^ =5sin(0^-0z/). (9.28)
Инвариантность означает, что уравнения остаются такими же, т.е. урав-
нение (9.27) для ф1Г должно совпадать с прежним уравнением (9.26) для фу,
а уравнение (9.28) для фу — с уравнением (9.25). Сравнивая уравнения
149
Часть II. Поведение
(9.27) и (9.26) и, аналогично, уравнения (9.28) и (9.25), мы приходим к ус-
ловию
А = В- (9.29)
Таким образом, требование инвариантности уравнений относительно
0и приводит к соотношению между коэффициентами соответствующих
уравнений. Считаем своим долгом предупредить читателя о возможной
«ловушке», которая возникает следующим образом. Коэффициенты А и В
можно было бы с тем же успехом обозначить по-другому, а именно:
А = А^ (9.30)
и
В = А1р (9.31)
чтобы подчеркнуть, что коэффициент А стоит в правой части уравнения
для ф^, а коэффициент В— в правой части уравнения для ф^. При таком
выборе обозначений отпадает необходимость в перестановке индексов г, I
коэффициента Л в уравнениях (9.30) и (.9.31): групповая операция действу-
ет только на переменные ф.
Воспользуемся этими идеями для упрощения уравнения (9.15) с правой
частью из (9.16) и соответствующими выражениями для фг11, ф1Н ,фу. Пред-
положим, что правые части (9.15) и (9.16) разложены в суперпозицию ко-
синусов и синусов (9.18) с пока неопределенными коэффициентами А},
Вр... Потребуем, чтобы уравнения оставались неизменными, т.е. инвари-
антными, относительно операций группы В. Тогда после несложного ана-
лиза выясняется поразительный факт. Чтобы выявить красоту уравнений,
возникающих после проделанных выше преобразований, введем обозна-
чения с «шляпками»:
- 17 = г
i :еслщ то
[/ = /
и
(9.32)
i =г
- I j = г
/:еслщ то
\j = h
j = f
Шляпка над i означает, что нужно от текущего значения i перейти к его
«дополнению», например, если / означало «правая», то f означает «левая».
Аналогичное соглашение действует и в отношении индекса j, принимаю-
щего значения «передняя» и «задняя». В итоге мы получаем уравнения вида
Фу = 4 sin ] + 4 sin [2(0у - ф. ]
+ С, sin[^ -ф.] + С2 sin[2(0y -0.,)] = Sff, (9.34)
150
9. Аллюры животных и переходы между ними
где Sy— сокращенное обозначение правой части (9.34) и понадобится нам
только в дальнейшем. В действительности соображения симметрии отнюдь
не исключают появления членов старшего порядка вида
sin[«(^-^],n=3,4,... (9.35)
Дойдя в своих рассуждениях до этого места, мы снова воспользуемся
аналогией с парадигмой движения указательных пальцев, при рассмотре-
нии которой выяснилось, что первого члена, пропорционального sin0, не
достаточно для описания бистабильности, или фазовых переходов, а не-
обходим второй член. Члены более высоких порядков существенно услож-
няют анализ, и для наших целей в них нет необходимости.
Убедимся в том, что уравнения (9.34) обладают требуемыми свойства-
ми инвариантности. Рассмотрим в качестве примера операцию 0г1, кото-
рая означает, что мы должны заменить i на i . Применяя эту операцию к
(9.34), получаем:
Фу = 4 sin[^. -0а] + 4 sin[2(^. -^]
+ С1 sin[^ij -Ф[ j] + с2 sin[2(^j-фл)]. (9.36)
Выписав систему уравнений (9.34) и (9.36) с индексами ij, замененны-
ми их значениями rh, lh, if. If, мы сразу же увидим, что система уравнений
(9.36) остается такой же, как система уравнений (9.34); изменится только
порядок следования уравнений.
9.6. Стационарные решения
Стационарность решений означает, что ф не изменяется со временем, т.е.
<j>v = Q. (9-37)
Кроме того, так как интересуют только относительные фазы, одну из
них мы можем выбрать произвольно и положить
фу=0. (9.38)
Рассмотрим одно из уравнений (9.34), а именно уравнение с индексом
if Это уравнение имеет вид
4 sin + 4 sin(2$r) + С, sin + С2 sin(20rA) = 0. (9.39)
Предполагая билатеральную (право/левую) симметрию переднего пояса,
мы можем положить либо
^=0, (9.40)
что совместно с (9.38) описывает симметричный паттерн, либо
151
Часть II. Поведение
<hf=+n, (9.41)
что совместно с (9.38) описывает антисимметричный паттерн. Учитывая
(9.40) и (9.41) в (9.39), мы видим, что члены, содержащие Av А2, обраща-
ются в нуль, и что остаются члены
Clsin0rt + C2sin(20rJ = O. (9.42)
Используя тригонометрическое соотношение
sin20 = 2sin0cos0 , (9-43)
мы можем преобразовать уравнение (9.42)к виду
(С,+2C2cos0r/!)sin0r/! = 0. (9.44)
Это уравнение допускает четыре различных решения. Если синус обра-
щается в нуль, то либо
^=0, (9.45)
либо
фл=+я', (9.46)
если же в нуль обращаются скобки, то мы обнаруживаем дополнительные
паттерны, описываемые решениями
=±arccos|-^-|, <=ф®А, 0°=О (9.47)
И
0®—таже фаза, но 0,®=^®-^, = (9.48)
Здесь мы дополнили результаты, проистекающие из уравнения (9.44),
решениями остальных уравнений (9.34).
Рассмотрим решения (9.47) и (9.48) более подробно. Соотношения (9.38)
и (9.47) означают, что обе фазы передних конечностей равны нулю, тогда
как фазы задних ног, правой и левой, имеют одну и ту же фазу, отличную
от 0 и, например, л. Такая конфигурация соответствует квазигалопу, пред-
ставленному на рис.9.18. С другой стороны, из соотношений (9.38) и (9.48)
следует, что фазы передних ног отличаются на фазовый угол л, как задние
ноги, но соотношение фаз между передними и задними ногами сложнее,
чем просто равенство 0 или л: оно задается арккосинусом. Соотношение
фаз (9.48) соответствует шагу. Заметим, что на рис.9.18 представлены два
типа решений: прямой и обратный шаг, а также прямой и обратный ква-
зигалоп. Когда аргумент арккосинуса приближается к +1 или -1, возника-
ют четкие соотношения, присущие рис. 9.18: при CJ2C2 -> 1 прямой и об-
ратный квазигалоп переходит в идеальный галоп, а прямой и обратный
шаг — в рысь. С другой стороны, при С(/2С2 -> -1 прямой и обратный ква-
зигалоп переходят в скачки, а обратный шаг — в иноходь. Заметим, что при
152
9. Аллюры животных и переходы между ними
повороте системы на 90° возникает другой набор решений, и эти решения
также встречаются в природе. Кроме того, численное решение рассматри-
ваемых нами уравнений помогает найти менее симметричные паттерны
движения. Интересно отметить, что движение фаз наглядно можно себе
представить в полной аналогии с движением указательных пальцев с по-
мощью движения шарика по холмистому ландшафту. Как и в случае дви-
жения указательных пальцев, «модель с шариком» позволяет исследовать
стабильность различных конфигураций при изменении параметров, вхо-
дящих в уравнение. Такого рода анализ требует многомерного простран-
ства. Для графических представлений предпочтительно сохранять некото-
рые параметры фиксированными и изменять только два специально выбран-
ных параметра. Примеры на рис. 9.22 представляют собой фазовые диаграм-
ме. 9.22. Фрагменты фазовой диаграммы на
плоскости параметров ЛрС, представляют
режимы, в которых различные решения ус-
тойчивы при различных значениях парамет-
ров А2 и С2: (а) Л2 = С2 = 0; (б) А2 = - 0,3 Гц,
С2 = - 0,2 Гц; (в) А2 = - 0,3 Гц, С2 = - 0,2 Гц.
(Из работы Шенера и др., 1990)
153
Часть II. Поведение
мы на плоскости (>4, С,). Простейший случай соответствует А2= С2 = 0. Как
показано на рис. 9.22 а, существует только четыре основных паттерна, и в
каждой точке пространства параметров (Л] С,) только один из четырех пат-
тернов устойчив. При А2 < 0, С2 < 0 области устойчивости основных пат-
тернов пересекаются (рис. 9.226). В двух прямых полосах шириной 4|С2| и
4|Л2|, параллельных осям А} и Ср области устойчивости пересекаются (рис.
9.22в). Как читатель, должно быть, заметил, существует множество разно-
образных вариантов существования и сосуществования паттернов движе-
ния, но мы воздержимся от их более подробного рассмотрения. После того,
как нарушается устойчивость, по аналогии с движением указательных
пальцев можно ожидать критических флуктуаций и критического замед-
ления. В примере с движениями указательных пальцев мы имели только
один управляющий параметр — частоты движений. Аналогичным образом,
в случае движений четвероногих мы имели либо только один управляющий
параметр, либо несколько (но немного!) существенных управляющих па-
раметров. Такой вывод подкрепляется экспериментами с различными ал-
люрами у лошадей или над децеребрированными кошками, которые опи-
саны в конце этого раздела.
9.7. Динамика аллюров с низкой симметрией
В разд. 9.5 мы вывели фазовые уравнения, инвариантные относительно
операций группы В. Мы нашли решения с нарушенной симметрией,
или, иначе говоря, с симметрией более низкой, чем группа В, например,
аллюр «шаг». Применяя некоторые операции из группы В к паттерну
«шаг», можно обнаружить другие решения, например, прямой и обрат-
ный шаг. Иначе говоря, такие решения вырождены. Чтобы снять вы-
рождение, необходимо понизить симметрию динамики, т.е. уравне-
ний. При этом мы обнаруживаем, что взаимодействие симметрии и вы-
рождения проливает свет на происхождение функций в биологических
системах. В качестве примера покажем, как происходит дифференциа-
ция прямого и обратного шага при устранении симметрии между пере-
дними и задними конечностями. У многих биологических видов прямой
шаг имеет функциональные отличия от обратного шага, и нередко
встречается только какая-то одна разновидность шага — либо прямой,
либо обратный. Чтобы снять вырождение — существование прямого и
обратного шага и вырождение квазигалопов, понизим группу симмет-
рии В до группы С, так как передвижение шагом и квазигалопы инва-
риантны относительно малой группы С. Начав, как и прежде, с общей
формулировки уравнений движения, мы можем применить условия сим-
метрии к этим уравнениям. Заметим, что симметрия правого/левого со-
храняется, но симметрия между передними и задними конечностями
нарушается. Мы можем воспользоваться операцией симметрии — ЕО^
154
9. Аллюры животных и переходы между ними
Так как симметрия между передней и задней частями животного отсут-
ствует, необходимо отличать уравнения для передних конечностей от
уравнений для задних конечностей. Напомнив, что такое Sy из (9.34), мы
можем записать новые уравнения в виде
Для передних конечностей, i = г,1,
4>if = sif + 4 + D\ cos[(0r-ф1Н)] + D2 cos[2(^ (9.49)
Для задних конечностей, i = г,I,
Фи, = sih + 4 + Д cos[(^-ф^)] + D, cos[2(^-ф1Л)] (9.50)
Ясно, что отсутствие симметрии между передними и задними конеч-
ностями допускает введение дополнительных членов по сравнению с
(9.34). Эти уравнения могут быть легко решены численными методами,
но мы не будем сейчас останавливаться на обсуждении подробных ре-
зультатов, а ограничимся лишь тем, что просто упомянем несколько осо-
бенностей, представляющих особый интерес. Например, при включении
члена низшей симметрии с Dt = 0,2 Гц > 0 четыре основных паттерна
всюду заменяются аллюрами «шаг» и квазигалопами и восстанавлива-
ются только в пределах Заметим, что существуют только пря-
мые паттерны. Член, понижающий симметрию, индуцирует отклонение
от основных паттернов в определенном направлении. Обращение зна-
ка коэффициента Dt произвело бы обратный эффект; при £>, = 0 рысь и ино-
ходь стали бы бистабильными. Мы имели бы два аллюра «шаг»: один — близ-
кий к рыси, другой — близкий к иноходи, и аналогичные утверждения
справедливы относительно галопа и передвижения скачками. И в этом
случае мы не будем останавливаться на деталях очень богатой структу-
ры фазовых диаграмм динамики, но нам хотелось бы особо подчеркнуть
новый аспект, который возникает при анализе простейшего члена, по-
нижающего симметрию, — константы Ао. Самое интересное заключается
в том, что в полосе, параллельной оси не существует более ни одно-
го стабильного стационарного паттерна. Константа Ао описывает раз-
ность собственных частот передних и задних конечностей. Если раз-
ность собственных частот, т.е. если Асо = со2 - СО], достаточно велика,
то захват частоты и захват фазы нарушаются, и передние и задние ко-
нечности могут принять слегка различные частоты движения. Возникает
ситуация, аналогичная той, которую мы обнаружили при рассмотрении
рис. 9.23. Кроме того, функции компонент наделяют относительные
фазы некоторой структурой. Переход фаз происходит медленнее в тех
паттернах, у которых наклон кривых на рис. 9.23 минимален. Такого
рода притяжение к выделенным значениям фазы наблюдалось экспери-
ментально фон Хольстом (1939) на нескольких видах, включая четверо-
ногих. Фон Хольст назвал это явление относительной координацией и ра-
зобрался в его механизмах достаточно подробно, что позволило ему по-
строить на основе гидромеханики модели, способные воспроизводить
относительную координацию. Время протекания этого явления и таб-
лицы скоростей можно интерпретировать как рекуррентные отображе-
155
Часть II. Поведение
Рис. 9.23. Наглядное представление захвата
частоты и нарушения захват частоты при
слишком большой расстройке. Для интер-
претации кривой рассмотрим шарик, кото-
рый скатывается по ней. Положение шари-
ка задается фазовым углом 0. Если общий
градиент мал, то шар застревает в локальном
минимуме при некотором ф = ф0 (захват
фазы). При достаточно большом градиенте
локальные минимумы исчезают, и шарик
беспрепятственно скатывается по кривой. В
случае сверхкритического затухания средняя
скорость шарика остается постоянной, хотя
и подвержена локальным вариациям.
ния дискретных выборок относительной фазы, обнаруживающие тен-
денцию притяжения относительной фазы к некоторым выделенным
значениям. Передние и задние конечности движутся не в режиме зах-
вата фазы, хотя передние конечности стабильно движутся в антифазе.
Задние конечности движутся медленнее передних, что приводит к мо-
нотонному убыванию фг(1 и ф1И . Дрейф модулирован. Существуют два
значения фазы, при которых переход замедляется, — выделенные отно-
шения фаз. Как можно заключить из рис. 9.23, если эти значения срав-
нительно малы или находятся на грани обращения в нуль, то шум игра-
ет важную роль в движении фаз. Из кривых на рис. 9.23 непосредствен-
но видно, что относительная координация возникает, когда нарушает-
ся стабильность состояния захвата фазы, т.е. исчезает одна из долин на
рис. 9.23.
9.8. Итоги и перспективы
В этой главе, исходя из синергетической теории Шенера и др., мы пока-
зали, что паттерны движения четвероногих могут быть рассмотрены на ос-
нове новых фундаментальных понятий.
Опираясь на синергетический подход, мы ввели в качестве параметров
порядка фазы отдельных конечностей и подчинили их обычной для пара-
метров порядка динамике. Для упрощения соответствующих уравнений мы
воспользовались соображениями симметрии. В то же время результирую-
щие паттерны можно классифицировать по их симметрии. Мы обнаружи-
ли, что паттерны можно подразделить на классы, каждый элемент кото-
156
). Аллюры животных и переходы между ними
Скорость, тс-1
Рис. 9.24. Потребление кислорода лошадьми при монотонной нагрузке на различных ал-
люрах. (Хойи Тейлор, 1981.)
рых может быть преобразован в любой другой операциями из группы. Что-
бы нарушить симметрию между передними и задними конечностями, мы
рассмотрели меньшую группу и обнаружили новые эффекты, например,
исчезновение сосуществования паттернов. Все эти соображения без труда
распространяются на все аллюры, представленные на рис. 9.16, а именно:
на шаг, вращательный и поперечный галопы. Для этого необходимо ввес-
ти прямую диагональную связь между конечностями. Можно показать, что
достаточно ввести связь правых и левых конечностей и диагональную
связь. Так как подобная процедура аналогична приведенной выше, ее под-
157
Часть II. Поведение
робное описание мы предоставляем читателю в качестве самостоятельно-
го упражнения довольно большого объема. Можно спросить, что же вы-
зывает переходы между различными аллюрами животных. Один из возмож-
ных ответов гласит: намерение животных двигаться быстрее. Интересный
эксперимент, выполненный Хойтом и Тейлором (1981), может пролить
свет на механизмы переходов. Когда лошадей вынуждали бежать на корде
с заданной скоростью, потребление ими кислорода достигало минимума,
если аллюр выбирался произвольно (рис. 9.24)
Какой шаг необходимо сделать дальше, нетрудно понять по аналогии с
парадигмой движения указательных пальцев: из уравнений, связанных ос-
цилляторов по аналогии с (7.16), (7.17) из разд. 7.2, следует вывести урав-
нения для фаз. Это было сделано Лоренцом (1987), который рассмотрел
переходы между аллюрами. Мы не будем заниматься выводом уравнений
для фаз, так как он сопряжен с довольно громоздкими вычислениями. Мы
убеждены, что дальнейшие экспериментальные исследования и сравнение
с теоретическими результатами представляют большой интерес и могут
пролить свет на самоорганизацию в биологических системах.
10. Основные понятия синергетики II:
образование пространственно-временных
структур
Одна из наиболее поразительных особенностей самоорганизующихся сис-
тем — их способность образовывать пространственно-временные структу-
ры. Так как мы рассматриваем мозг как самоорганизующуюся систему, вы-
рабатывающую пространственно-временные паттерны активности, жела-
тельно проанализировать механизмы образования этих паттернов с общей
точки зрения. Мы уже встречали некоторые простые примеры возникнове-
ния структур, например, знаменитую конвекционную неустойчивость в гид-
родинамике (рис.4.4). Еще один пример — шестиугольные ячейки или по-
лосы, обнаруженные в некоторых химических реакциях. Эти явления и те-
оретические понятия, лежащие в основе их объяснения, привели и к моде-
лям образования узоров на шкурах животных или на коже рыб (рис.4.7). В
этой главе мы хотим показать, как методы синергетики позволяют нам вы-
водить такие паттерны и в определенном смысле классифицировать их. Так
как цветные узоры могут быть описаны так же, как черные и белые узоры,
мы можем пояснить суть нашего фундаментального подхода на черных и
белых узорах или, точнее говоря, узоры в серых тонах, в которых тон может
изменяться от точки к точке и со временем. Заметим, что серый тон может
символизировать, например, некоторую локальную активность в электро-
энцефалограммах. Интенсивность серого тона условимся характеризовать
переменной q. Наше состояние сравнения q{> однородно, не зависит от вре-
мени и может означать определенную интенсивность серого тона. Затем мы
вводим q как отклонение реальной интенсивности серого тона от средней
интенсивности <у0. Переменная q, по крайней мере в общем случае, зависит
от пространства и времени, поэтому мы запишем q = q(x,t). Понятие пара-
метра порядка оказывается необычайно полезным для исследования отдель-
ных структур и их классификации.
Начнем с простейшего примера — одного параметра порядка. Как по-
казывает синергетика, главную часть q можно разложить на два множите-
ля: один — описывающий изменение структуры во времени, другой — опи-
сывающий изменение структуры в пространстве. В общем случае нашу ги-
потезу можно представить в виде
q(x,t) = ^u(t)vu(x) + более высокий порядок, (10.1)
где второе слагаемое, обозначенное как более высокий порядок, — малая ве-
159
Часть II. Поведение
I----- L-------1
Рис. 10.1. Слева', увеличение параметра порядка Е,и со временем до стационарного посто-
янного значения. Справа', пример пространственной зависимости v(x) как функции про-
странственной координаты х.
личина, по крайней мере вблизи точки потери устойчивости. Таким обра-
зом, чтобы разобраться в «устройстве» пространственно-временной струк-
туры, мы можем ограничиться анализом только первого слагаемого. Ока-
зывается, что играет роль параметра порядка. Когда система находится
выше своей критической точки, небольшая флуктуация может вызвать по-
явление ^и. Далее внутренняя динамика приводит к возрастанию до тех
пор, пока не достигает стационарного состояния. Множитель vu(x) мож-
но найти из анализа устойчивости по линейному приближению. Этот ана-
лиз дает нам все множество пространственных функций v(x), но мы выб-
рали только такую v(x) = vu(x), собственное значение X которой положи-
тельно. (Предположим на миг, что собственное значение — действитель-
ное число.) Типичное пространственное поведение множителя vu представ-
лено на рис. 10.1 справа; временное поведение множителя £и показано на
том же рисунке слева.
Рассмотрим в одномерном случае переменную
?(х,0 = £„(0к(х), (10.2)
которую мы назовем скелетом моды. Предположим, что система находи-
лась ниже своей критической точки до начального момента времени t — 0.
При t = 0 управляющему параметру придается значение несколько выше
критического, например, жидкость подогревается до соответствующей тем-
пературы или внезапно увеличивается концентрация некоторых химичес-
ких веществ. В этот момент в системе имеются только малые флуктуации.
Но из соотношения (19.1) следует, что £,u(t) возрастает. В результате через
какой-то промежуток времени мы наблюдаем картину, изображенную на
рис. 10.2. в средней части. Наконец, по прошествии достаточно большого
промежутка времени система достигает стационарного состояния, и пат-
терн принимает форму, представленную на рис. 10.2 в нижней части. При-
веденный пример обладает рядом интересных особенностей. Упорядочен-
ные состояния могут наблюдаться уже в переходном режиме и, разумеет-
ся, в устойчивом окончательном состоянии. Если ландшафт потенциала,
лежащий в основе эволюции системы, симметричен, то мы можем ветре-
160
10. Основные понятия синергетики II
а)
Q(x,t)
Г=0
Рис. 10.2а, б, в. Рост паттерна, описываемо-
го соотношением (10.2) со временем, (а)
При t = 0 существует только начальная
флуктуация, (б) В некоторый промежуточ-
ный момент времени t= tx формируется пе-
реходный паттерн, (в) При достаточно
больших временах достигается стационар-
ное состояние и возникает паттерн, не за-
висящий от времени.
титься с явлением нарушения симметрии. Существуют две разновиднос-
ти эволюции величины ^(t). В одном случае % остается положительной и
возрастает, в другом — всегда остается отрицательной и представляет со-
бой зеркальное отражение положительной ветви. Аналогичным образом
можно построить зеркальное отражение «картинок», представленных на
рис. 10.2: там, где в исходном режиме амплитуда возрастала, в зеркальном
отражении амплитуда будет убывать и наоборот.
Перейдем к рассмотрению двух параметров порядка. В этом случае пе-
ременная q достигает разложения вида
q(x,t) = ^X(t)vx(x)+^(t)v2(x) + члены старшего порядка. (10.3)
Главными являются два явно выписанных члена в правой части, которые
мы, как и прежде, назовем скелетом моды. Пространственные функции V],
v2 можно, как и в случае одного параметра порядка, определить из анализа
устойчивости в линейной приближении. Например, они могут быть произ-
ведениями синусоидальных волн sin(A:|x)sin(A'2y)- Наш пример наглядно по-
казывает, как взаимодействие временных функций £ и <^2 с одной стороны
и пространственных функций г1 и v2 — с другой стороны порождают разно-
образие пространственно-временных структур. Их можно анализировать,
рассматривая поведение параметров порядка во времени. Для большей кон-
кретности и простоты мы будем предполагать, что пространственные фун-
кции у, и v2 имеют очень простой вид — такой, как показано на рис. 10.3.
161
11 -4614
Часть II. Поведение
X х
Рис. 10.3. Примеры двух основных мод v, и v2. Серым тоном показана величина функций.
Рис. /0.4.(а) Неподвижная точка на плоскости £2 при Ф 0, £2 £ 0. (б) Неподвижная
точка на той же плоскости, лежащая на оси
Рис. 10.5. Две неподвижные точ-
ки, лежащие на осях и ^2.
162
10. Основные понятия синергетики II
Рис. 10.6. Паттерны, соответствующие разложению (10.3) и рис. 10.3. в случае динамики
неподвижной точки (см. текст).
Следует отличать известные типы поведения двух параметров порядка
(разд.5.2).
а) Устойчивая неподвижная точка (рис. 10.4.а,б). Рассмотрим сначала слу-
чай на оси (рис. 10.4в). В скелете моды можно положить Ф 0, £2 Ф 0.
Между модами происходит конкуренция. Мода 1 побеждает и определяет
возникающий паттерн, представленный на рис. 10.3 слева. Очень часто воз-
никает не одна, а несколько неподвижных точек, например, одна неподвиж-
ная точка на оси <^р другая — на оси <^2 (рис. 10.5). В зависимости от началь-
ного состояния система эволюционирует по соответствующей траектории
и заканчивается либо в одной, либо в другой неподвижной точке. Соответ-
ственно, реализуется либо паттерн 1, либо паттерн 2. Наконец, неподвиж-
ная точка может располагаться так, что Ф 0, £2 Ф 0 (рис. 10.4а). В этом слу-
чае в стационарном состоянии наблюдается суперпозиция паттернов 1 и 2,
даже если первоначально существовал только один паттерн (рис. 10.6).
В описанных выше случаях окончательные паттерны не зависели от вре-
мени. С другой ситуацией мы сталкиваемся при рассмотрении предельного
цикла.
б) Предельный цикл (рис. 10.7). Левый столбец на рис. 10.7 напомина-
ет читателю о предельном цикле на плоскости £р £2 — изображающая точка
движется по окружности (в общем случае — по замкнутой несамопересе-
кающейся кривой более сложной формы). Воспользуемся основными про-
странственными паттернами vp v2, представленными на рис. 10.3, и начнем
с момента времени , когда £2 = 0. Это соответствует левому паттерну на
рис. 10.3. В момент времени Z2 возникает суперпозиция двух паттернов. В
более поздний момент времени (3 функция обращается в нуль, и весь пат-
терн состоит из одного лишь паттерна 2. Продолжая самостоятельно, чи-
татель сможет легко разобраться в том, что изображено на рис. 10.7, и по-
строить паттерны, которые возникают в дальнейшем.
Наконец, рассмотрим случай более двух параметров порядка, когда пе-
ременную q можно представить в виде
q(x,t) = ^^„(Z)v„(x) + члены старшего порядка, (10.4)
и
163
11*
Часть II. Поведение
Рис. 10.7. Пространственно-временные паттерны в случае динамики предельного цикла
(две переменные).
т.е. как суперпозицию пространственных мод и зависящих от времени ам-
плитуд. И в этом случае паттерны могут быть проанализированы с помо-
щью параметров порядка. Неподвижные точки в случае существования
элементарных паттернов порождают статическую их суперпозицию. В ряде
случаев может также возникнуть конкуренция и один из паттернов — «по-
164
10. Основные понятия синергетики II
бедитель» — определяет весь окончательный паттерн. Прекрасным приме-
ром эффекта сосуществования может служить возникновение шестиуголь-
ных ячеек в гидродинамике. Шестиугольные структуры можно интерпре-
тировать как суперпозицию трех элементарных паттернов — полос, — рас-
положенных под углом 60° друг к другу. В данном случае в одной и той же
системе могут возникать и полосатый , и шестиугольный паттерны — в за-
висимости от значения управляющего параметра. Например, в подогрева-
емой снизу жидкости, если разность температур между придонным слоем
и свободной поверхностью немного выше критической, возникают шес-
тиугольные ячейки, а при дальнейшем увеличении разности температур
ячейки сменяются конвективными валами. Исследуя динамику парамет-
ров порядка, разобраться в смене паттернов совсем не трудно. В первом
случае динамика допускает сосуществование трех паттернов порядка, во
втором случае в конкурентной борьбе побеждает один параметр порядка.
Наконец, самое интересное заключается в том, что параметры порядка
могут претерпевать хаотические изменения. Этот случай мы рассмотрим
подробнее в гл. 13. Паттерны изменяются локально в пространстве и во вре-
мени как бы случайным образом. Однако следует иметь в виду, что окон-
чательный паттерн в этом случае все же можно представить в виде супер-
позиции (10.4) небольшого числа пространственных мод. Таким образом,
несмотря на сложные на первый взгляд изменения в пространстве и вре-
мени, сложность проистекает только из временной, но не из простран-
ственной зависимости.
Часть II. Поведение
11. Анализ пространственно-временных
структур
В предыдущем разделе мы показали, как пространственные структуры
можно построить из элементарных паттернов, т.е. из пространственных
функций в. При анализе пространственно-временных структур, встреча-
ющихся в природе, в том числе и паттернов активности головного мозга,
нам весьма часто приходится встречаться с обратной проблемой. Как было
показано в разд.2.5, из экспериментов мы можем получить какие-то про-
странственно-временные структуры, например, паттерны ЭЭГ или МЭГ.
Возникает вопрос: построены ли эти структуры из более простых структур,
анализируя которые мы могли бы понять динамику, лежащую в основе пре-
вращений одних пространственно-временных структур в другие. В этом
разделе мы изложим два метода, позволяющие осуществлять такое разло-
жение. Начнем с разложения, которое применялось при анализе ЭЭГ и
МЭЭГ и широко используется при распознавании образов’.
111 Разложение Карунена—Лоэва,
разложение по сингулярным значениям,
анализ главных компонент — три названия
одного и того же метода
Все три названия, как будет показано ниже, описывают один и тот же ме-
тод. Для практических целей удобно разложить пространственную струк-
туру на отдельные ячейки, или, как их иногда называют, пиксели. Одна
ячейка может иметь серый цвет различной интенсивности, которая мо-
жет оцениваться «значением серого», как показано на рис. 11.1. Каждому
значению серого мы можем приписать число q, которое будет варьиро-
ваться от 0 до, например, 1, причем 0 будет кодировать белый цвет, 1 —
черный, а все промежуточные значения от 0 до 1 будут соответствовать
* Эта глава носит чисто математический характер и по большей части может быть опущена теми
читателями, которые не интересуются математическими деталями.
166
11. Анализ пространственно-временных структур
q
Рис. 11.1. Кодирование серых значений
величиной переменной q.
Рис. 77.2. Примеры паттерна с
двумя пикселями 1,2 и неко-
торыми серыми значениями.
£
Рис. 11.3. Серые значения двумерного
паттерна, аналогичного изображенному
на рис. 11.2, можно представить точками
на плоскости q}, qr Если в двух пикселях
значения равны нулю, то точка, описы-
вающая такой паттерн, совпадает с нача-
^1 лом координат.
различным оттенкам серого цвета. Такая «шкала серости» позволяет ха-
рактеризовать паттерны на рис. 11.1 числами, заключенными между ну-
лем и единицей. Объяснить основные особенности излагаемого нами
подхода можно на примере паттерна, составленного из двух пикселей I
и 2 (рис. 11.2). Каждый пиксель может иметь любые значения серости от
О до I — в полной аналогии с рис. 11.1. Пусть qx — значение серости для
пикселя 1, q2 — для пикселя 2. Любая точка на рис. 11.3 соответствует
вполне определенному паттерну. На этом рисунке мы представили толь-
ко предельные случаи, когда либо оба пикселя черные, либо один из пик-
селей белый, а другой черный. Значения серости — переменных q} и q2 —
(за исключением чисто белого и чисто черного) расположены внутри еди-
ничного квадрата. Когда мы имеем дело с пространственно-временной
структурой, значения серости двух пикселей изменяются во времени ко-
герентным, случайным или смешанным образом. Записав значения серо-
сти qv q2B виде вектора
0 = (^2)> (ИЛ)
мы можем построить этот вектор для момента времени 7, как на рис. 11.4а. В
другой момент времени t2 мы будем иметь другой вектор. Со временем (напом-
ним, что мы рассматриваем только дискретные моменты времени) на нашем
единичном квадрате появится «облако» представляющих точек (рис. 11.4.6,в).
167
Часть II. Поведение
Рис. 11.4. (а) Вектор состояния в момент времени на плоскости qt, qY (б) Векторы со-
стояния в два различных момента времени, (в) Концы векторов состояния в различные
моменты времени.
Нам бы хотелось получить более простое описание распределения этих точек.
Прежде всего сдвинем начало системы координат в центр тяжести полученных
точек. Для этого вычислим положение центра тяжести по формуле
1 £
« = (11-2)
где — дискретные моменты времени. Для упрощения расчетов заменим
(11.2) усреднением по времени, производимым по формуле
(11.3)
j 1 о
где суммирование заменено интегрированием по времени. Пользуясь но-
вым определением усреднения по времени, заменим (11.2) соотношением
(11.4)
1 о
Чтобы произвести сдвиг начала системы координат в центр тяжести,
введем новую переменную й:
Л(0 = (9(0-9(0Ж (11.5)
где N — нормировочная постоянная, введенная для того, чтобы вектор h
имел единичную длину. Это достигается требованием
1{л(02л=1. (11.6)
* о
Наша цель состоит в том, чтобы построить по возможности наиболее
простое и эффективное приближение зависящего от времени вектора h.
Если все точки, до которых «дотягивается» вектор h(t) в различные момен-
ты времени, располагаются на прямой, то h(t) можно представить в виде
h(t)=£(t)vw, (11.7)
168
11. Анализ пространственно-временных структур
*:
Рис. 11.5. Пример рассеяния
концов векторов состояния на
плоскости qvq2. Вектор i’(" вы-
бран так, чтобы он лежал в на-
правлении наибольшей дис-
персии распределения концов
векторов состояния.
где вектор г(1> направлен вдоль этой прямой. Во многих случаях, представ-
ляющих практический интерес, концы вектора h(t) располагаются не на
прямой, а рассеяны вокруг прямой (рис. 11.5). Таким образом, соотноше-
ние (11.7) дает хорошее приближение, если вектор г(1) выбрать так, чтобы
он «смотрел» в главном направлении облака точек — концов вектора v(1)
при различных значениях h.
Облечем высказанную выше идею в более точную математическую фор-
му. Если h(t) выбрать при одном значении t, то угол между векторами г(1> и
h(t) желательно выбрать так, чтобы он был как можно меньше, или, что эк-
вивалентно, чтобы скалярное произведение йг(1) имело как можно большее
значение. Так как это скалярное произведение могло бы быть сколь угод-
но большим, если бы длина вектора могла неограниченно возрастать,
мы нормируем длину вектора г1 ° на единицу
v(1)2 = l.
Так как скалярное произведение может принимать и отрицательные
значения, мы постулируем, что его квадрат (h(t)vmY имеет максимально
возможное значение. В случае одного момента времени задача немедлен-
но решается, а именно: вектор г(1) следует выбирать так, чтобы он был па-
ралленен вектору h. Но что произойдет, если векторы h(t, взятые в различ-
ные моменты времени, «смотрят в разные стороны»? В этом случае мы тре-
буем, чтобы квадрат скалярного произведения (h(t)YuY имел максималь-
ное значение после усреднения по времени:
у J(A(Ov(l))2 J/ = max! (11.8)
* о
По построению вектор г(|) указывает в направлении наибольшей дис-
персии вектора h. Определив вектор уй), мы можем аппроксимировать век-
тор h(t) по формуле (11.7). Из-за рассеяния точек эта формула не точна.
Чтобы уточнить даваемое ей приближение, аппроксимируем остаток, оп-
ределяемый как
A = A(r)-^v(,), (11.9)
169
Часть II. Поведение
вторым вектором г(2), указывающим в направлении наибольшей дисперсии
вектора А, ортогонального вектору г(,) (вектор г(2) также нормирован). Та-
ким образом, мы требуем, чтобы
1 Т 2
- J((A(r)-£/1))»’(2)) J/ = max!. (11.10)
* о
Но из-за ортогональности вектора г(2) к вектору г(|) соотношение (11.10)
сводится к более простому выражению
1 т 2
— |(й(/) г( к 1 )dt = max!,
Т о
(11.11)
где теперь вместо k = 1 в (11.8) стоит к = 2. Ясно, что если вектор h при-
надлежит TV-мерному пространству с N > 2, то описанную выше процеду-
ру необходимо продолжить. Каждый раз мы требуем, чтобы выполнялось
условие (11.11), т.е. чтобы вектор у® указывал в направлении наибольшей
дисперсии, ортогональном предыдущим векторам. Кроме того, мы каждый
раз требуем, чтобы
у(*)2=1. (11.12)
Чтобы решить вариационную проблему (11.11) при условии (11.12), вос-
пользуемся множителями Лагранжа Ак и потребуем обращения вариации
в нуль:
1 ' 2 2
<5Mj(A(r)v®) J/-4(v®) [ = 0.
л
(11.13)
0
Взять вариации мы можем, варьируя фигурные скобки по отдельным
компонентам векторов у®, полагая их независимыми, как того требует при-
менение метода множителей Лагранжа
= (11.14)
Дифференцирование легко выполнимо и приводит к тому, что
1 т
= (11.15)
о
Разделив (11.15) на 2 и обозначив для краткости
(ц.16)
1 о
мы можем записать (11.15) в виде
170
11. Анализ пространственно-временных структур
(Ц-17)
/-1
Введем матрицу R:
R=(RJk), (11.18)
которая позволит записать уравнение (11.7) в виде векторного уравнения
Rvw=Akvw. (11.19)
Так как R — действительная симметричная матрица, она обладает дей-
ствительными собственными значениями, которые неотрицательны:
Л*>0. (11.20)
Собственные векторы v(k) матрицы R (см. (11.19) взаимно ортогональ-
ны и нормированы так, что
1 если к = к' 1
0 если к к' Г
(vwv(r))=5w =
(И-21)
Некоторые важные соотношения можно вывести, взяв след матрицы R. Как
обычно, след матрицы определяется как сумма ее диагональных элементов:
= (11.22)
j
Используя определение (11.16) элементов матрицы R, мы можем запи-
сать (11.22) в виде
Тг R = ^]hj(t)2dt = = 1, (11-23)
2 о 'о
где при переходе к последнему равенству мы воспользовались тем, что h —
нормированный вектор. С другой стороны, из алгебры известно, что след
равен сумме собственных значений ЛА:
ТгЯ = £Лг (11.24)
и
Сравнивая (11.23) и (11.24), мы обнаруживаем, что
f^=l. (11.25)
k=t
Чтобы смысл соотношения (11.25) стал ясен, нам понадобится сделать
несколько шагов. Прежде всего заметим, что по описанному выше пост-
роению вектора й, его можно представить в виде
h(t) = ^k(t)vik\ (11.26)
к=1
171
Часть II. Поведение
Амплитуды ^k(t) можно найти, зная векторы h и из соотношения
(0 = vwh(t) = £ . (11.27)
/=1
Мы ожидаем, что основной результат — формула корреляции между £,к-
и ^к — будет иметь вид
^k.(t)^(t)dt = kk3k,, (11.28)
7 о
где 8кк' — дельта-символ Кронекера, определенный соотношением (11.21).
При к' корреляция обращается в нуль. Это означает, что амплитуды
Е,к' и статистически независимы. При к= к' мы получаем, что срежнее
по времени от равно собственному значению Лк. Так как это среднее
говорит нам о том, сколь велика доля гА в h(t), величина собственного
значения указывает эту долю.
Следующие несколько шагов понадобятся нам для того, чтобы вывести
соотношение (11.28), но нетерпеливый читатель может переходить непос-
редственно к формуле (11.32). Чтобы доказать корреляционное соотноше-
ние (11.28), подставим (11.27) в левую часть соотношения (11.28):
(11.28) = 1 vf ^h]{t^h^dt. (11.29)
1 0 7=1 /=1
Переставив порядок суммирования и интегрирования, преобразуем
(11.29) к виду
(11.29)f кт(Г)Л (11.30)
/=i /=i / о ,
Используя сокращенное обозначение /?7 и уравнение (11.17) для соб-
ственных векторов и собственных значений, получаем:
(11.29) = fvfV/^ZA^ (11.31)
7-1
где при получении последнего равенства мы воспользовались соотноше-
нием ортогональности (11.21).
Проделав эти несложные вычисления, продолжим выяснение смысла
соотношения (11.28). Для этого выясним величину средней ошибки, кото-
рую мы совершаем, учитывая меньшее количество членов К при макси-
мальном числе членов N. Средняя ошибка определяется квадратом разно-
сти между вектором h и его приближенным разложением и вычисляется по
формуле
172
11. Анализ пространственно-временных структур
1 77 к у
Ек dt. (11.32)
1 О \ *=1 )
Из соображений, аналогичных тем, которые позволили нам перейти от
(11.28) к (11.31), получаем:
(11.33)
к=\
Упорядочив собственные значения по их величине
A,>A2>A3... , (11.34)
мы видим, что быстрее всего среднюю ошибку можно минимизировать,
если первым включить в (11.33) или, соответственно, в (11.32) наибольшие
собственные значения. Таким образом, определив собственные значения
мы получаем возможность оценить качество нашего приближения. Оказы-
вается, что во многих случаях, возникающих на практике, достаточно ог-
раничиться несколькими первыми собственными числами (11.34).
Разумеется, трудно устоять от искушения сравнить разложение (11.26)
с тем разложением, которое мы используем в синергетике (см. гл. 10), а
именно — с разложением на моды у® линеаризация с амплитудами со-
ответствующими параметрами порядка. У этой идеи есть хорошие и пло-
хие стороны. С одной стороны, в ряде случаев паттерны развиваются в гра-
ницах, обладающих симметрией, например, симметрией квадрата, окруж-
ности или сферической симметрией. Для определения свойств симметрии
линеаризованных уравнений, лежащих в основе паттернов основных мод
v(k), можно воспользоваться теорией групп. Те же принципы симметрии
применимы и к модам разложения Лоэва-Карунена, поэтому мы ожидаем
согласия между двумя наборами мод. В некоторых практических случаях
такое согласие действительно наблюдается. С другой стороны, мы не мо-
жем гарантировать, по крайней мере в общем случае, что амплитуды va> в
разложении Лоэва-Карунена тождественны параметрам порядка или ам-
плитудам подчиненных мод. Иначе говоря, разложение Лоэва-Карунена
характеризует частоту появления основных паттернов, но не лежащую в их
основе динамику. Было бы весьма желательно разработать метод, который
бы позволял непосредственно определять параметры порядка и амплиту-
ды подчиненных мод по измеренным пространственно-временным струк-
турам. Именно этим мы и займемся в следующем разделе.
Часть II. Поведение
11.2. Геометрический подход на основе параметров порядка.
Метод Хакена—Фридриха—Уля
В этом разделе мы покажем, как понятия синергетики (см. гл.4) можно
использовать при анализе динамики, лежащей в основе наблюдаемых про-
странственно-временных структур.
11.2.1. Один действительный параметр порядка
Чтобы пояснить наиболее существенные отличительные особенности на-
шего подхода, рассмотрим случай одного параметра порядка %и. В своем
анализе мы будем исходить из принципа подчинения в форме (4.9), кото-
рую мы запишем заново, слегка обобщив. Прежде всего, как мы уже дела-
ли несколько раз в этой книге, условимся писать вместо £. Во-вторых,
ограничимся рассмотрением членов, линейных и квадратичных по ^и, ко-
торые обычно дают хорошее приближение. В-третьих, заметим, что пере-
менная q, вообще говоря, не обязательно обращается в нуль, когда в нуль
обращается £и. Наконец, объединим входящие в (4.9) переменные q(xjtt) и
v/xp, I— и, 2, 3... в векторы q(t) и vr Это позволит нам записать (4.9) в виде
«(О=«о+£Ж+^(Оъ, (11-35)
где q0 не зависит от времени. Так как вектор г2 не нормирован, а для даль-
нейшего нам понадобятся нормированные векторы г, положим v2 — ksvs,
где — нормированный вектор. Используя сокращенное обозначение
мы можем записать нашу общую гипотезу относительно век-
тора состояния q в виде
?(O = ffo+^(O’'„+^(O”r (11.36)
(Индекс 5 в (11.36) и (11.37) связан с одним из выводов принципа под-
чинения и означает устойчивые (англ, «stable») моды, а индекс и — неус-
тойчивые (англ, «unstable») моды. Пока эти индексы значения не имеют.)
Пренебрегая не зависящим от времени вектором #0, можно сказать, что ди-
намика вектора состояния q (11.36) развертывается в двумерном простран-
стве, натянутом на векторы vu и vs. Позднее в этом разделе [соотношения
(11.75) и далее] мы рассмотрим случай, когда пространство, в котором раз-
ворачивается действие, многомерно, а параметр порядка по-прежнему
только один. В этом случае последний член в правой части (11.36) следует
заменить суммой
(Н.37)
£
где суммирование производится по всем устойчивым модам. Мы хотим
показать, что по измеренным данным о q(t) можно получить всю динами-
ку амплитуд £и, и паттернов vu, vs. Предположим, что мы рассматриваем
174
11. Анализ пространственно-временных структур
Рис. 11.6. Пример эволюции q(t) со време-
нем на плоскости q{, q2.
Рис. ПЛЛо же, что на рис. 11.6, но со сдви-
нутым началом отсчета.
неравновесный фазовый переход, в котором параметр порядка удовлетво-
ряет уравнению [см.разд.5.1, уравнение (5.1) или (5.2)]
£И=Ж). (11.38)
Помимо , ти и г, мы хотим также определить и другие неизвест-
ные величины — функцию f и константу ks. Если мы рассматриваем толь-
ко не зависящее от времени состояние (11.36), то в нашем распоряжении
имеется только один паттерн, и в решении интересующей нас проблемы
невозможно продвинуться сколько-нибудь далеко. Однако ситуация ко-
ренным образом изменяется при рассмотрении переходных режимов, в ко-
торых изменяется со временем от t = 0 до t ~ например, так, как по-
казано на рис.5.1. Сосредоточив внимание на двумерном примере, мы об-
наружим, что q претерпевает эволюцию во времени, которая представле-
на на рис. 11.6. Так как qG не зависит от времени, введем величину w(t), оп-
ределив ее следующим образом: w(t) = q - q0 (мы предполагаем, что q0 со-
впадает с начальным значением вектора это означает, что параметр по-
рядка £,и обращается в нуль при t = 0. Изменение w(t) во времени показано
на рис. 11.7. Система координат на рис. 11.7 отличается от системы коор-
динат на рис. 11.6 только сдвигом начала координат е, и е2- единичные
векторы, a X(t) и Y(t) — компоненты вектора ю. Воспользуемся двумя пред-
ставлениями вектора и». Первое имеет вид
w(t) = £u(t)vu+Zs(t)vs (11.39)
с соотношением
£=Ж2- (11-40)
Заметим, что векторы vu и , вообще говоря, не ортогональны друг дру-
гу, но мы будем предполагать, что они нормированы:
175
Часть II. Поведение
НГ=1, н2=1. (И.41)
Второе представление вектора w имеет вид
w(t) = X(t)ei+Y(t)e2. (11.42)
Компоненты X, У в представлении (11.42) могут быть измерены экспери-
ментально, тогда как величины в правой части (11.39) неизвестны. Учиты-
вая это, попытаемся обнаружить взаимосвязь между представлениями (11.42)
и (11.39) (см.рис. 11.8) и воспользуемся линейным преобразованием
(п-43)
и
+ (11.44)
Подставляя (11.43) и (11.44) в (11.42), мы получаем после несложных
преобразований
НО = (X(t)Nlu + Y(t)N2u)vu + (X(t)Nls + Y(t)N2s)vs, (И-45)
' Xu ' Xs '
что позволяет сравнить (11.45) с (11.39) и определить амплитуды и
Используя определения (11.45) амплитуд и а также соотношение
(11.40), получаем:
XNls + YN2s = ks( XNlu + YN2u)2. (11.46)
Введем дифференциалы dX, dY, лежащие на траектории. Взяв диффе-
ренциал от (11.46), приходим к соотношению
dXNis+dYN2s = 2ks(XNiu + YN2u)(dXN{u+dYN2u). (11.47)
В начале координат, т.е. при
X,Y->0, (Н-48)
соотношение (11.47) сводится к соотношению
dXNis+dYN2s = 0. (11.49)
Дальнейший анализ мы проведем в системе координат е,, е2.
Убедимся в том, что вектор vu указывает в направлении вектора (dX, dY).
Рис. 11.8. Связь между векторами е,,
176
11. Анализ пространственно-временных структур
Для этого умножим (11.43) на — N2s, (11.44) — на N{s и сложим получившие-
ся соотношения. У нас получится:
~N2A + Nlse2 = (-N2sNiu + NMvu. (11.50)
Вектор в (11.50) не входит. Вектор vu<x(-N2sNls) и, следовательно,
vu Y(Nls,N2s), который в свою очередь, как показывает соотношение
(11.49), ортогонален вектору dX, dY Следовательно, на плоскости
vu\\(dX,dY) . (11.51)
Таким образом, мы определили вектор vu и в дальнейшем будем пред-
полагать, что он нормирован. Чтобы определить вектор vs, примем за ис-
ходное разложение (11.39) и предположим, что выполняется соотношение
(11.40). Разложим следующим образом:
vs=avs+bvu’ (11.52)
где по предположению
(11.53)
Из разложения (11.39) с учетом (11.52) и (11.60), получаем:
w(t) = vu(£и + bk£) + ksa£vs. (11.54)
Используя условия ортогональности и нормировки, находим:
(*Л(0) = £и + ^и2 (11-55)
и
(vsw(t)) = ksa^. (11.56)
Введем также сокращенные обозначения
bks = c2,aks=cx. (11.57)
Из (11.55) и (11.56) мы можем исключить член, содержащий и вмес-
то (11.55) получить
£„ = (”„*’)-Ф’?’’) ’ (11.58)
где мы воспользовались определением
с = с2/сх. (11.59)
Наконец, подставляя (11.58) в (11.56), находим:
(^О = яМ0^)-Ф>)]2 (11.60)
— соотношение, которое выполняется при всех t. Используя очевидные
соотношения (11.60), можно записать в виде
177
12-4614
Часть II. Поведение
s(t) = aks [u(t) - c.s(/)]2. (11.61)
Это соотношение позволяет нам рассматривать ks и с. Для этого мы рас-
сматриваем (11.61) в два различные момента времени Ц, /2), т.е.
5, = aks(u,-ел’,)2 (11.62)
и
л’2 = aks(u2-csrf . (11.63)
Разделим (11.62) на (11.63):
Л1 = (ц, . (П.64)
S2
Извлекая квадратный корень из правой и левой частей соотношения
(11.64), получаем после очевидных преобразований
(«! -СЛ’,) = ±y[sjs^(u2 -cs2). (11.65)
Нетрудно видеть, что с можно легко найти из (11.65). Тем самым мы нахо-
дим или, что эквивалентно, Ъ/а. Так как вектор гд в (1.52) по предполо-
жению нормирован, выполняется соотношение с2 + & = 1, поэтому а и b так-
же определены. Соотношение (11.62) можно разрешить относительно ks'.
(11.66)
(Wj-Wj)
что позволяет считать величину ks известной. Заметим, что переменные ks
и с из (11.61) можно найти и методом наименьших квадратов, минимизи-
руя величину
W = |{5-ЛД(РиИ’)-С(Р5И’)]2}2£?/.
о
Такой способ определения ks и с разумно использовать, когда данные
«зашумлены».
Остановимся на миг и подведем итоги. Нам удалось уже найти vu, iy и
a, b, ks. Из соотношения (11.52), зная а и Ь, мы нашли vs. Тем самым мы
достигли поставленной цели: определить пространственные моды и соот-
ношение между и , следующее из (11.40). Наша последняя задача —
вывод уравнения движения для . Для этого введем сопряженный вектор
v„i, такой, что
(рЛ) = 1 (11.67)
и
(рЛ) = 1- (П-68)
Умножая (11.53) на jyi, получаем:
(w(t))=$u + bk£;, (11.69)
178
11. Анализ пространственно-временных структур
Рис. 11.9. Ландшафт потенциала.
Рис. 11.10. Движение величины <^и на фазовой плоскости.
Траектория порождена ландшафтом потенциала, изобра-
женным на рис. 11.9.
так как левая часть соотношения (11.69) известна, то известна и перемен-
ная . Чтобы вывести уравнения движения, продифференцируем обе ча-
сти соотношения (11.69) по времени и потребуем, чтобы
^(-Ж=Ж) (11.70)
Примером может служить f(E>u) = , где Л и /3 — все еще неизве-
стные коэффициенты. Чтобы найти их, заметим, что, как нетрудно видеть,
= Л при = 0. (11.71)
<%и
Имея в виду потенциальную функцию, представленную на рис. 11.9, по-
рождающую фазовый портрет, изображенный на рис. 11.10, получаем ус-
ловие при вида
^„-^„2=0, (11.72)
из которого находим:
Д=Ж2, (11.73)
где — стационарное решение уравнения (11.70). Таким образом, мы мо-
жем найти все неизвестные величины, и наша программа оказывается вы-
полненной. Заметим, что для уравнений движения существуют и другие
возможности. Например, в зависимости от типа бифуркаций уравнения
движения могут иметь вид
=a + b^u + Y^ (11.74)
179
12*
Часть II. Поведение
или соответствующих им нормальных форм. Коэффициенты находятся по
графику на плоскости (£„Х) .
В заключение рассмотрим общий случай многомерного пространства
векторов q, где по -прежнему имеется только один параметр порядка, но
много подчиненных мод г, (см.(11.37). Мы исходим из разложения векто-
ра и» в виде
(11.75)
и по-прежнему предполагаем, что выполняется соотношение
,5=1,2,.. (11.76)
между амплитудами подчиненных мод и параметры порядка Z;u. Подстав-
ляя (11.76) в (11.75), получаем:
(il-77)
Ясно, что пространство, в котором движется w(t), натянуто на векторы
и Vs, т.е. по- прежнему двумерно. Это позволяет нам воспользоваться ме-
тодом, который мы применили в предыдущем случае. Двумерное вектор-
ное пространство, о котором идет речь, может быть натянуто на вектор ю,
взятый в два различные момента времени г, и г2, выбранные из соображе-
ний удобства. Формально мы можем придать представлению векторного
пространства вид
(11.78)
w(t) = X(t)el +Y(t)e2
единичными векторами
е - К'(?|) (11.79)
' На)|
e2 = y2[wU2)-e1(e1w(/2))] (11.80)
и условием нормировки
jV2~2=|H’(/2)-e1(e1M»(Z,)) |. (11.81)
Таким образом, многомерная задача полностью сводится к рассмотрен-
ной ранее двумерной задаче. Следует заметить, что по экспериментальным
данным мы можем определить vu, но не отдельные векторы , а только
сумму всех векторов г — вектор Vs. Это не вызывает никаких осложнений,
так как при образовании структур нас интересует главным образом так на-
зываемый скелет моды, представленный первым членом в правой части
разложения (11.77).
Еще один метод, широко используемый на практике и позволяющий
найти двумерный базис для w. сводится к использованию на первом шаге
метода Карунена—Лоэва, после чего становится возможным рассматривать
180
11. Анализ пространственно-временных структур
w в двумерном пространстве, натянутом на векторы е, и е2, соответствую-
щие модам Карунена—Лоэва и} и и2.
11.2.2. Колебания, связанные с одним комплексным параметром
порядка
В этом разделе мы хотим проанализировать пространственно-временные
структуры, претерпевающие колебания и управляемые одним параметром
порядка. Для большей математической ясности мы будем использовать
комплексный параметр порядка, который запишем в виде
£и = aein' + члены старшего порядка, (11.82)
Q — основная частота. Комплексная амплитуда а может зависеть от вре-
мени, но изменяется мало по сравнению с ei£lt. В правую часть (11.82) мо-
гут входить высшие гармоники (мы назвали их членами старшего поряд-
ка). Вычтем из наблюдаемой пространственно-временной структуры q(t)
ее среднее по времени q, после чего нам останется проанализировать по-
ведение функции w(t) = q(t) - q. Используя принцип подчинения в его низ-
шем приближении, мы можем представить w в виде
+^Л+к^и vs . (11.83)
Прежде всего определим вектор неустойчивой моды vu. Эта задача ре-
шается без труда, если воспользоваться соотношением
Jein,w(t)dt = avu> (11.84)
так как члены, связанные с подчиненными модами, начинаются с высших
частот, как того требует форма
%2 = a2e2ini + члены старшего порядка. (11.85)
Если члены старшего порядка в (11.85) достаточно малы, то зависимость
вектора w(t) от e±21£lt в (11.85) может проистекать от третьего и четвертого
членов в правой части (11.83). Это позволяет нам определить, например,
с точностью до мультипликативной постоянной с:
crs=-^ р-2/п'и>(^/. (11.86)
Именно такая процедура составляет основу метода, которому мы будем
следовать в разд. 12.6 при выводе уравнения движения для параметра по-
рядка £и. Если членами старшего порядка в (12.10) нельзя пренебречь, то
необходимо прибегнуть к более сложной процедуре.
181
Часть II. Поведение
12. Движения на педало
12.1. Задача
В предыдущих главах, посвященных координации движений, мы рассмат-
ривали ситуации, в которых по условиям эксперимента в движениях участво-
вало лишь очень небольшое число степеней свободы. В этой главе мы хотим
подвергнуть анализу движения, в которых по крайней мере в принципе мо-
жет участвовать очень большое число степеней свободы. В частности, мы ис-
следуем, каким образом в процессе обучения возникает координация между
отдельными степенями свободы. В эксперименте, который мы имеем в виду,
используется устройство, известное под названием «педало» (рис. 12.1). Оно
состоит из двух ступеней, эксцентрически прикрепленных к четырем коле-
сам. Задача обучения заключается в приобретении навыков передвижения на
педало с помощью попеременного нажатия ногами на ступени. Задача эта от-
нюдь не тривиальна, но может быть достигнута за сравнительно короткий пе-
риод обучения, на протяжении которого мы можем следить за успехами обу-
чаемого, контролируя его движения. Задача, представляющая общий интерес,
заключается в оценке прогресса в обучении, т.е. в установлении критериев
выполнения требуемых движений. Для этого мы прежде всего введем подхо-
дящее описание паттернов движения, после чего будем придерживаться в на-
ших исследованиях двух линий. Первое направление будет опираться на ана-
лиз паттернов движения в терминах разложения Карунена—Лоэва, о котором
шла речь в разд. 11.1. Как будет показано, эволюционирующие во времени
Рис. 12.1. Педало. Схематическое изображение. Педало состоит из двух ступенек, эксцен-
трически прикрепленных к колесам. Результирующее движение левой и правой ног сме-
щены на 180°. Справа показан вид на педало сбоку.
182
12. Движения на педало
паттерны движения управляются всего лишь несколькими модами Каруне-
на—Лоэва. Это убедительно свидетельствует о том, что паттерны движения
управляются лишь небольшим числом параметров порядка.
Другое направление исследования связано с анализом паттернов дви-
жения в терминах параметров порядка. Мы придем к удивительному ре-
зультату, когда выясним, что весь паттерн движения в целом управляется
одним параметром порядка, по крайней мере после обучения. Это озна-
чает, что многочисленные степени свободы, в частности, при движении
руки, управляются, или, иначе говоря, подчиняются, одной переменной.
12.2.Описание паперна движения
В проводившемся эксперименте к суставам испытуемого прикреплялись
светодиоды так, как это показано на рис. 12.2. На рис. 12.3 показаны свя-
зи между суставами и их нумерация. «Ездок» приводит педало в движение
в направлении, перпендикулярном плоскости наблюдателя. В этой плос-
кости задана система координат X, Y. Движение светодиодов регистриру-
ется камерой. Последовательность изображений переводится в цифровую
форму, и возникает движение точек (x'(t),y'(t)) во времени. Так как ездок
на педало движется по направлению к камере, его изображение со време-
нем увеличивается в размерах. Для компенсации этого эффекта два свето-
диода прикреплены к педало. (Соответствующие точки 1 и 2 не показаны
на рис. 12.2) Расстояние между точками х'} и у\ позволяет внести поправку
в расстояния между другими точками, изменяющиеся при движении (х'~> х).
Так как пространство, в котором проводились эксперименты с педало,
было ограничено, за время проведения одного опыта удавалось регистри-
ровать только десять периодов. Эксперименты проводились Кернделем
(1992) в Регенсбургском университете.
Рис. 12.2. Расположение и нумерация свето-
диодов.
Рис. 12.3. Нумерация связующих звеньев
едущего на педало.
183
Часть II. Поведение
12.3. Квантификация движения на педало
Чтобы данные измерений можно было обработать, движение необходимо
«облечь» в соответствующую форму. Для этого мы вычислим угол 0(. меж-
ду каждой связью и плоскостью наблюдателя и угол 0. между и верти-
кальной осью в плоскости наблюдателя. Обозначим через Лх, Ду разности
координат между двумя «соседними» суставами (концами одной связи) с
координатами (х, уу) и (хк, ук)
&X = Xj—хк
Ду = У)~Ук
(12.1)
Из простых геометрических соображений находим ф1, 0,:
= arcsin
7(Ах,)2+(Лу,)2
(12.2)
. (7(ДХ;)2+(ДУ;)2>
= arcsin Д'
(12.3)
Индекс z нумерует все пары суставов, между которыми существует пря-
мая связь. Так как разность Дг не определена, угол 6 не определен одно-
значно, но неопределенность — только в знаке. Чтобы избавиться от нее,
условимся считать угол 0 положительным. Изменение некоторых углов со
временем представлено на рис. 12.4. На этом же рисунке показано также
сглаженное движение сравнение. Оно вычислено по движению двух сту-
пеней педало, т.е. по точкам 3 и 10 на рис. 12.2:
Уге/=Ую-Уз- (12.4)
Величина ^нормирована на интервале 0,1 и сглажена. С помощью дви-
жения сравнения мы разделяем движение ездока на периоды. Используя 22
введенные выше углы, мы можем образовать двадцатидвухмерный вектор q(t).
'ФМ'
ем
Q0) =
(12.5)
В дальнейшем мы будем анализировать движение в терминах этого век-
тора паттерна.
184
12. Движения на педало
100. 200. 300. 400. 500.
Рис. 12.4. Эволюция во времени первых пяти углов. Слева внизу показано сглаженное дви-
жение сравнения.
12.4. Анализ движения на основе
разложения Карунена—Лоэва
Полный эксперимент состоит из пяти тестов на движение, обозначен-
ных HERM1, HERM2, HANN4, RAIN3, MARK3. Данные по тестам
HERM1 и HERM2 представляют особый интерес, так как относятся к од-
ному и тому же испытуемому до и после обучения. Другие данные получе-
ны на испытуемых, достигших различного уровня владения педало. Изу-
чая движение в этом разделе, мы используем разложение Карунена—Лоэ-
ва. Типичные данные для теста HERM1 представлены на рис. 12.5.
В первом ряду показано движение сравнения по данным, снятым не-
посредственно с педало. Во втором ряду представлены собственные зна-
чения разложения Карунена—Лоэва. В последних трех рядах вы видите
моды Карунена-Лоэва для первых трех собственных значений. Углы уси-
лены, чтобы сделать более наглядными характерные особенности. Кривая
сравнения позволяет составить первое впечатление о плавности движения.
Максимальное собственное значение позволяет составить представле-
ние о том, насколько хорошо движение может быть представлено одной
модой. Интересно отметить, что после периода обучения это значение за-
185
Часть II. Поведение
Период 1 2 3 456789 10
Л 10—I 1- : I । о-5г ; ; 00UL L 1 1 1 1 1 1 1 Т 1 1 1 1 1 1 1 1 1 1 iii i ii i, in. ii it iii. i
Период 1 2 3 456789 10
Т Г IT ITIf ITITIT IT ITI
Чт i' r it iritiririt it iti
? г IF it itif ititit ifiti
Рис. 12.5. Результаты испытуемого HERM1. В верхнем ряду приведено движение сравне-
ния. В среднем ряду даны собственные значения разложения Карунена—Лоэва. В трех
последних рядах представлены результирующие собственные векторы для каждого пери-
ода, соответствующие первым трем доминирующим собственным значениям А.р и А3.
Период 12 34 5 6789
I I I I I I I I I q in c Q C Г" I I I I I h 1— I I II I <lh. I I I I , l<> 1 II 1 1 1 1 1 1.. 1 । । । । । । । । । । i. । i,... “1 1 1 1 1 1 1 1 !L 1
Период X, |/ k ;/ h r г r 2 3 [if r if Г if if 1! IT Ii IT 11 I 5 Г 6 7 8 Г If IT Г If If Г If IT 9 iti iti iti I I
Рис. 12.6. Те же данные, что на рис. 12.5, но для второго испытуемого HERM2.
186
12. Движения на педало
---- Собственный вектор
---- Среднее значение
Рис. 12.7. Увеличенное изображение трех собственных векторов из набора данных о
HERM1 за первый период.
метно возрастало, тогда как другие собственные значения либо малы, либо
даже ими можно полностью пренебречь (рис. 12.6). Результаты по осталь-
ным испытуемым по существу аналогичны данным по тесту HERM1, если
речь идет о числе доминирующих мод, хотя у двух испытуемых наблюда-
лись четко выраженные движения рук. Форма движения более точно пред-
ставлена на рис. 12.7.
Амплитуды ^k(t), входящие в разложение
q(t) = q(t)-q = Y£kvk' <12'6)
к
могут быть вычислены с помощью мод vk Карунена-Лоэва амплитуд для
каждого периода
<^(0 = м(0- (12-7)
На рис. 12.8 показана эволюция амплитуд ^k(t) во времени для первых
трех мод по данным, представленным на рис. 12.5. Рис. 12.8 (равно как не
приводимые нами аналогичные кривые, соответствующие другим испыту-
емым) подтверждают наше главное заключение относительно того, что
движение может быть достаточно хорошо представлено первой модой или
первой и второй модами.
187
Часть II. Поведение
Рис. 12.8. Эволюция во времени амплитуд ^к(t) для HERM1. Обращает на себя внимание
малость по сравнению с и <|2.
12.5. Подробный анализ движений рук и ног
При более подробном исследовании движения человека, едущего на педа-
ло, мы быстро обнаруживаем, что движения ног определяются главным
образом движением ступеней педало. Вариабельность движения ног очень
мала, поэтому различия в движении рук и тела от движения него должны
быть особенно заметными. Чтобы исследовать эти движения, разделим
вектор (12.5) на два вектора, связи пронумерованы так же, как в (12.5)):
Ч('Г ОМ 'ФМ' вМ
9т(0 = ФМ ОМ, Ф1М ^0} 1 (0 >
(12.8)
Произведем анализ Карунена—Лоэва для временного ряда qL движения
ног и отдельно для временного ряда qA движения рук и тела, т.е. образуем
qA(t)=qA(t)-qA
QL^} = qM~qL
(12.9)
188
12. Движения на педало
Рис. 12.9. Отдельный анализ движений рук и ног испытуемого на педало. Первый ряд: движение
сравнения. Второй ряд: спектр собственных значений движения руки за каждый период. Третий
ряд: величина наибольшего собственного значения. В двух последних рядах представлены соб-
ственные значения движения ног. Обращает на себя внимание поразительное постоянство соб-
ственных значений движения ног. (Поданным HERM1 дообучения.)
г "х А \—/ 1 . ... —. /|\ / l\ / 1 1 ' " ' 1 ГХ /> I 1 1 1 1 /*\ /*\ / —“I \ /l\ / О 1 V
Период 2 3 4 5 6 7 8 9
Л 0.5 Ё- 1 : 1 1 1 , I 1 LL 1 1 di u. 1 1 и Г 1 . L 1 i 1 1 1
Период 1 2 3 4 5 6 7 8 9
\пах °-5 п п f и 1 1
Н 1 = 1 i J_ 1 т L_ Illi I 1 1 1
Период 1 2 3 4 5 6 7 8 9
А 0.5 1 1 : ill,.. ||||. ill. L k ь. ki L_1 IL 1. 1
Период 1 2 3 4 5 6 7 8 9
'Чт.ах 0-5 п.п : 1 = III 1 1 1 J
—1— b + —I— 1 1 1 1 1 ! li ! 1 I 1 1
Период 1 х' if г if ’ К if ;1 Рис. 12.10. Те же данные, что 2 3 Г 1?И r irr на рис. 12.9, 4 5 6 7 8 9 Г if if if if iff i ff if if if it iff i Г if if if if iff i но по данным HERM2, т.е. после обучения.
189
Часть II. Поведение
Далее можно вычислить соответствующие собственные значения ХкА и
ХкЧ Результаты представлены на рис. 12.9 вместе с отдельными паттерна-
ми, соответствующими собственным значениям А,р Х2, Х3. В случае движе-
ний рук максимальное собственное значение обнаруживает значительные
вариации на протяжении отдельных периодов, максимальное собственное
значение движений ног остается почти постоянным. На рис. 12.10 пред-
ставлены те же данные после обучения. Мы видим, что и на этот раз мак-
симальное собственное значение движения ног остается практически по-
стоянным, тогда как собственное значение движения рук значительно воз-
растает.
12.6. Анализ параметра порядка Хакена—Фридриха—Уля
Результаты, приведенные в предыдущих разделах, подтверждают идею о
том, что движение может быть описано одним или немногими параметра-
ми порядка, по крайней мере после периода обучения. Чтобы убедиться в
этом, примем гипотезу, согласно которой движение управляется одним
комплексным параметром порядка, который мы запишем в виде
£и = Ае““'+ члены старшего порядка, (12.10)
где СО— основная частота = 1ЛЗ/Т, Т— продолжительность одного периода.
По предположению, коэффициент А может зависеть от времени, но изме-
няться медленно по сравнению с exp(iCOt). Высшие гармоники, обозначен-
ные как члены старшего порядка, мы считаем пренебрежимо малыми. Наши
дальнейшие действия строятся по образцу и подобию разд. 11.2. Прежде всего
образуем разность между вектором паттерна q и его средним по времени:
w(t) = q(t)-q. (12.11)
Записываем вектор паттерна w в виде
w(t) = %Л+ + k£1 2uvs + (12.12)
Заметим, что vu — (комплексная) мода, принадлежащая параметру по-
рядка ^к, a vu — суперпозиция подчиненных мод. Предположенная зави-
симость от времени (12.10) позволяет легко вычислить моды, входящие в
(12.12), по формулам
avu=^\e-ia,w(t)dt, (12.13)
Т <0
1
avu=^~ (12.14)
Т
190
12. Движения на педало
/Ч=| je-i2alw(t)dt, (12.15)
1 %
f}vs=^+\e^w(t)dt, (12.16)
2 'о
где а и Р — постоянные коэффициенты. Введем обозначения
< = К
v'2 = vu
, , (12.17)
и нормируем векторы
|p,f=l (12.18)
с помощью нормировочного множителя
г,. = А>;. (12.19)
Так как эти векторы, по крайней мере в общем случае, не ортогональ-
ны, нам понадобятся сопряженные векторы
«,г/) = ^, (12.20)
разложим их следующим образом:
^=XaiJvr (12-21)
j
Амплитуды отдельных мод определяются скалярными произведениями
£.(/) = (”>('))• (12.22)
На рис. 12.11 показаны амплитуды набора данных из теста HERM1. Так
как мы ожидаем, что параметры порядка удовлетворяют дифференциаль-
ному уравнению первого порядка, мы также приводим график первой про-
изводной от как функции времени (рис. 12.12). Последуем теперь нашей
гипотезе о том, что движение управляется одним параметром порядка. Для
того построим фазовый портрет на плоскости Так как — величи-
на комплексная, мы строим фазовый портрет для действительной и мни-
мой частей отдельно. Это можно рассматривать как обобщение фазовых
портретов (или фазовых плоскостей, о которых шла речь в гл.5. Так как рас-
сматриваемое движение (более или менее) периодично, мы ожидаем, что
фазовый портрет окажется замкнутым, и наши ожидания действительно
сбываются, как показывают фазовые портреты на рис. 12.13. Если фазо-
вые портреты на рис.12.13 соответствуют паттернам движения, представ-
ленным на рис. 12.15, фазовые портреты на рис. 12.14 соответствуют дан-
191
Часть II. Поведение
Re(d/dt^1) InUd/dt^)
0.15
0.10
0.05
d/dt^ o.oo
-0.05
- 0.10
- 0.15
О 100 200 300 400 500 600
Рис. 12.12. Временная зависимость производной первой моды по времени.
192
12. Движения на ведало
ным на рис. 12.16. Если движение управляется одним параметром поряд-
ка, то можно попытаться вывести уравнение для этого единственного па-
раметра порядка. В качестве первой попытки примем гипотезу о том, что
+c?+d£3, (12.23)
где комплексные параметры а, Ь, с и d неизвестны и подлежат определе-
нию. Мы найдем их, минимизируя среднеквадратичное отклонение
‘й+1 I 9 |2
V = \\^-a^-b^-c^-dC}\dt.
(12.24)
Минимум по параметру а определяется из условия
|Х=7 |(s - кГ -- ^‘3)fdi
го
= + + (12.25)
где мы воспользовались сокращенным обозначением
{(...))= (12.26)
'о
Остальные уравнения могут быть выведены по аналогии с (12.25), если
воспользоваться условиями
дУ ___дУ SV
db'~dc~dd*~ ’
Это приводит к системе линейных уравнений
Ах = у,
где мы ввели сокращенные обозначения
(12.27)
(12.28)
(12.29)
(12.30)
193
13-4614
Часть II. Поведение
Рис. 12.13. Фазовый портрет первой моды у,. Построен график зависимости ^/й) от В
двух верхних рядах показана действительная часть, в двух нижних — мнимая (По данным
HERM1).
' (и2) (Ю (н2«2) (О'
И (и6) Й«2) (и2«")
(|фг) (|4|4Г’) (Г)
ч Ю (i«i2«’4) Ю (и‘),
(12.31)
Эта система уравнений может быть легко решена для каждого периода.
Зная параметры а, Ь, ..., мы можем восстановить временной ряд, интегри-
руя (12.23) по времени t с начальными значениями, задаваемыми ^(7^) для
экспериментально измеренных данных. Результаты представлены на рис.
12.15 и 12.16. Их следует сравнить, соответственно, срис. 12.13 и 12.14. На
первый взгляд, согласие между теоретическими и экспериментальными
данными не очень плохое, но ряд особенностей все же нуждается в уточ-
нении. При более внимательном изучении экспериментальных данных на
рис. 12.13 и 12.14 выясняется, что особенно в фазе обучения мы имеем дело
не со сплошной окружностью или сплошной кривой, а с кривой, состоя-
щей из отдельных сегментов. Чтобы воспроизвести эту особенность, раз-
194
12. Движения на педало
Re(^)
1.0
0.6
0.2
-0.2
-0.6
- 1.0
1.0
0.6
0.2
-0.2
-0.6
- 1.0
1.0
0.6
0.2
•0.2
0.6
1.0
1.0
0.6
0.2
0.2
0.6
1.0
$ 2 1.0 0.6 0.2 -0.2 О 3 1.0 0.6 0.2 -0.2 $ 1.0 0.6 0.2 -0.2 5 4
-0.6 -0.6 - 1.0 - 1.0 0.6 -0.6
1 0 - 1.0 1.0 0.6 1 0 1 0 - 0
7 8 9
а 0.2 -0.2 0 0.2 -0.2 0
-0.6 -0.6 -1.0
1ml
1.0
0.6
0.2
-0.2
-0.6
- 1.0
0.6
0.2
-0.2
-0.6
- 1.0
1.0
0.6
0.2
-0.2
0.6
1.0
-1 О
1.0
0.6
0.2
-0.2
-0.6
- 1.0
0.6
0.2
-0.2
-0.6
- 1.0
0.6
0.2
-0.2
-0.6
- 1.0
Рис. 12.14. То же, что на рис. 12.13, но по данным HERM2, т.е. после обучения.
дожим каждый период на четыре равные части и попытаемся реконструи-
ровать временные ряды с помощью смещенных нелинейных осциллято-
ров. Уравнения для параметра порядка при этом принимает вид
+ (12.32)
где а, Ьи комплексные параметры, значения которых необходимо под-
бирать для каждой четверти периода. Для этого мы образуем потенциал
'о+Г/4
1
*0
(12.33)
и минимизируем его с помощью динамики градиента
“=“I?=W -°(1« -4»Г),
аналогично,
аи
а№
(12.34)
(12.35)
195
13*
Часть II. Поведение
Рис. 12.15. Фазовые портреты, вычисленные с помошью интегрирования уравнения
(12.23) для параметра порядка; значения параметров порядка получены из уравнения
(12.28) с учетом соотношений (12.29)-(12.31).
= (12.36)
где мы не стали раскрывать несколько громоздкие выражения для й Vfdb*
и Уточненный вариант фазовых портретов представлен на рис.
12.17, и его можно сравнить с экспериментальными данными (рис.1 2.13).
Что касается размеров и формы теоретических фазовых портретов, то со-
гласие с экспериментальными данными на этот раз превосходное, в осо-
бенности на последних фазах обучения. Расхождения принято связывать
с возможностью того, что движение управляется более чем одним парамет-
ром порядка. С другой стороны, хорошее согласие в ряде случаев убеди-
тельно свидетельствует о том, что движение действительно управляется
одним параметром порядка. Мы считаем этот результат поистине замеча-
тельным. Он показывает, что задача сложной координации движений ре-
шается человеком с помощью одного параметра порядка, управляющего
координацией, но для каждой четверти периода коэффициенты соответ-
ствующего уравнения для параметра порядка выбираются человеком зано-
во. Результаты на рис. 12.17 принадлежат испытуемому, который вполне
успешно освоил езду на педало, но еще более поучительны результаты,
принадлежащие испытуемому, который далек от овладения техникой езды
на педало, и в его «исполнении» лишь отдельные эпизоды отдаленно на-
196
12. Движения на педало
поминают то, что должно получиться. На рис.12.18 представлен фазовый
портрет первой моды. Ясно, что наряду с отдельными эпизодами правиль-
ной езды (эпизоды 4 и 5) наблюдались неправильные движения (эпизоды
3,7 и 8). Если хорошие эпизоды могли быть воспроизведены с высокой точ-
ностью, то эпизоды с неправильными движениями не укладывались в рам-
ки гипотезы об одном параметре порядка. Это подтверждает наше заклю-
чение о том, что при неправильных движениях в период обучения управ-
ление движениями происходит при участии нескольких параметров поряд-
ка. Как будет показано ниже, при общем обсуждении полученных резуль-
татов, такое обновление параметров порядка принадлежит к числу общих
особенностей самоорганизации координации движений. Ясно, что и схе-
ма эксперимента, и теоретический анализ могут быть уточнены, но я счи-
таю, что эти эксперименты и их теоретическое моделирование имеют пер-
востепенное значение для главной темы нашей книги.
Интересно отметить, что (12.23) и в особенности (12.33) тесно связаны с
уравнением осциллятора Ван дер Поля в приближении вращающейся фазы.
Это становится особенно заметно, если ввести в (12.32) новую переменную
Г) = £ + ^0. После такой замены переменной уравнение для Г) совпадает с
уравнением Ван дер Поля в приближении вращающейся волны. Это тем бо-
лее замечательно, что при исследовании движений указательных пальцев
выяснилось, что его также можно приближенно представить указанным вы-
197
Часть II. Поведение
Рис. 12.17. Фазовые портреты, вычисленные с помощью интегрирования уравнения
(12.32) для параметра порядка по периодам Т/4. (Поданным HERM1.)
ражением (хотя для этого понадобился дополнительный член в виде осцил-
лятора Рэлея). Постепенно мы со все большей ясностью сознаем, что урав-
нение Ван дер Поля (в соответствующих модификациях), по-видимому, иг-
рает фундаментальную роль не только в координации движений указатель-
ных пальцев, но и в гораздо более сложных задачах координации движений.
Результаты этой главы приводят нас к пониманию того, что даже очень
сложную задачу на координацию движений человек решает таким способом,
при котором все движение в целом подчиняется одному параметру порядка.
Коэффициенты соответствующих уравнений для параметра порядка «подби-
раются» каждым в индивидуальном порядке. Можно было бы подозревать, что
искусные ездоки на педало нашли единственный рецепт, позволяющий бе-
зошибочно подбирать параметры. Самое удивительное заключается в том, что
это не так. На рис. 12.19 показано, как изменяются во времени коэффициен-
ты в тесте HERM2, т.е. после обучения, а на рис. 12.20 приведены аналогич-
ные данные для испытуемого в совершенстве овладевшего техникой езды на
педало (MARK3). Если в тесте HERM 2 при фиксации параметров наблюда-
ются сильные флуктуации, то в тесте MARK 3 выбор коэффициентов урав-
нения для управляющего параметра не подвержен сколько-нибудь заметным
флуктуациям. Из сказанного мы можем (пока) сделать два различных выво-
да: либо хорошая техника езды на педало не требует единственного набора
коэффициента, либо в тесте MARK 3 испытуемый демонстрирует более вы-
198
12. Движения на педало
Re(^)
Рис. 12.18. Пример нерегулярных фазовых портретов. (По данным HANN4.)
Яе(а)— lm(a)— Re(b)... Im(b)— Не(,)- .... 1т(£.) —
Период
Рис. 12.19. Эволюция во времени параметров а, Ь, £0. (По данным HERM2.)
199
Часть!!. Поведение
Рис. 12.20. То же, что на рис. 12.19, но по данным MARK3.
сокую технику езды на педало, чем испытуемый в тесте HERM 2. В пользу вто-
рой интерпретации свидетельствуют (не приведенные здесь) фазовые порт-
реты для случая MARK 3: они имеют форму сплошных окружностей!
12.7. Заключительные замечания к части II
В гл. 12 мы проанализировали конкретную задачу на обучение и пришли
к заключению, что после обучения движение управляется одним комплек-
сным параметром порядка. Того же можно ожидать и в случае любого дру-
гого периодического движения, такого, как ходьба, бег, езда на велосипе-
де и т.д. Жесткая координация, или подчинение одному парметру поряд-
ка, может распространяться на дыхание, а иногда и на сердцебиение.
В начале части II мы особо подчеркивали парадигматическую природу
координации движений по отношению к общей проблеме поведения. И
хотя перед наукой о поведении в свете синергетики лежит непочатый край
работы, я считаю уместным начать (по крайней мере!) с изучения управ-
ления паттернами поведения и их параметров порядка. На мысль о суще-
ствовании, а возможно и природе, соответствующих параметров порядка
даже в случае сложных поведенческих паттернов наводит среди прочего
наш повседневный язык, например, такие слова, как «радость», «гнев» и
т.д. Эти слова указывают на особые состояния человека с высоко корре-
лированными симптомами, такими, как выражение лица, кровяное давле-
ние и т.д. Основная проблема состоит в том, чтобы облечь эти понятия в
научную форму, которая включает в себя процедуры их квантификации.
200
Часть III
ЭЭГ и МЭГ
13. Хаос, хаос, хаос
Троекратно повторенное в заголовке гл. 13 слово «хаос» указывает на то,
что оно используется в совершенно различных смыслах. У знаменитого
голландского художника Эшера есть рисунок «Порядок и хаос». В центре
его изображен прекрасный правильный кристалл, окруженный всевозмож-
ным мусором: осколками разбитой бутылки, жестяными банками и т.п.
Такая интерпретация слов «порядок» и «хаос» очевидна. В ее рамках мы
имеем дело с состояниями, не изменяющимися во времени. В науке, осо-
бенно в физике и математике, слово «хаос» имеет совершенно иное зна-
чение: оно связано с изменениями. Но и здесь мы встречаемся с необхо-
димостью проводить различие между двумя различными типами хаоса —
хаосом микроскопическим и хаосом макроскопическим или детерминис-
тическим. Примером микроскопического хаоса может служить испускание
света электрическими лампами. Световое поле состоит из многих фрагмен-
тов («цугов») волн, беспорядочно испускаемых атомами. Другим примером
микроскопического хаоса может служить движение молекул газа (рис. 13.1).
Двигаясь, молекулы то и дело сталкиваются, изменяя при каждом столк-
новении самым хаотическим образом величину и направление своей ско-
рости. Таким образом, микроскопический хаос возникает вследствие хао-
тического движения, или поведения, очень большого числа отдельных ча-
стей. В отличие от микроскопического хаоса макроскопический хаос воз-
никает вследствие хаотического поведения очень небольшого числа степе-
ней свободы, или переменных. Например, движение маятника можно опи-
Рис.13.1. Микроскопический хаос. Атомы
газа движутся в случайных направлениях со
случайными скоростями.
203
Часть III. ЭЭГ и МЭГ
сать двумя переменными — смещением из положения равновесия и ско-
ростью. Связав маятник пружиной с вращающимся мотором, мы как бы
добавляем маятнику третью переменную. Если на маятник воздействовать
достаточно сильно, то его движение может стать совершенно хаотическим,
и его нельзя будет описать как движение по предельному циклу или тору
(см. разд.5.3). Возникает совершенно новая разновидность движения, ко-
торая называется детерминистическим хаосом. Прилагательное «детерми-
нистический» добавлено потому, что движение маятника подчиняется за-
конам детерминистической ньютоновской механике.
Первым изучением детерминистического хаоса занялся на рубеже XX
века знаменитый французский математик Анри Пуанкаре. Но свойства де-
терминистического хаоса оказались настолько сложными, что ни один из
его преемников не решился продолжить работу над этой проблемой. И
только в 1963 г., решая на компьютере упрощенные гидродинамические
уравнения, метеоролог Эдвард Лоренц заново открыл детерминистический
хаос. Рассмотренные им уравнения были удивительно простыми
X = o(y-z), (13.1)
y = x(r-z)~y,
z = xy-bz,
(13.2)
(13.3)
где х, у, z — переменные, зависящие от времени, о, г и b — постоянные. По-
строив полученные решения в фазовом пространстве, Лоренц обнаружил
траектории такого вида, как на рис. 13.2. Точка (х, у, z), принадлежащая ре-
шению уравнений (13.1)— (13.3), какое-то время кружит в одной области
пространства, затем внезапно перепрыгивает в другую область, где также ка-
кое-то время описывает круги, пос-
ле чего перепрыгивает обратно и т.д.
Прыжки то в одну, то в другую об-
ласть происходят случайным обра-
зом и чувствительно зависят от поло-
жения изображающей точки. Приня-
то говорить о чувствительной зави-
симости системы (13.1)—(13.3) от на-
чальных условий. Такая чувствитель-
ность противоречит нашим интуи-
тивным представлениям о механи-
ческих движениях. Например, когда
мы бросаем камень на землю и по-
вторяем наш эксперимент, лишь
слегка сдвигая исходное положение
по горизонтали, место удара камня о
землю также немного смещается от-
носительно самой первоначальной
точки падения. Грубо говоря, не-
Рис. 13.2. Аттрактор Лоренца.
204
13. Хаос, хаос, хаос
большое изменение начальных условий в этом случае вызывает малое откло-
нение траектории. С другой стороны, существуют механические процессы,
в которых чувствительность к начальным условиям представляется весьма
естественной. Представим себе, что небольшой стальной шарик падает на
вертикально стоящее лезвие бритвы (рис. 13.3). Ясно, что стоит центру тя-
жести стального шарика хотя бы немного уклониться влево от острия лез-
вия, траектория шарика пойдет влево, а при уклонении вправо — траекто-
рия пойдет вправо. Подобного рода чувствительность к начальным услови-
ям почти два столетия используется в игральных машинах, например, в ус-
тройстве, известном под названием «доска Гальтона» (рис. 13.4).
Важной особенностью хаотического движения является наличие нели-
нейных членов в уравнениях движения. Действительно, в системе уравне-
ний (13.1)-(13.3) мы имеем две нелинейности: — хгв(13.2) илу в (13.3). Еще
более простую систему нашел Ресслер (1977). Она состоит из уравнений
x=-y-z, (13.4)
у = х + ау,
z = b+z(x-c)
(13.5)
(13.6)
и содержит только одну нелинейность: член xz в (13.6).
Существует несколько отличительных особенностей, которыми можно
воспользоваться, чтобы установить свойства странного аттрактора. Ког-
да система, описываемая уравнениями (13.1)—(13.3), стартует из какой-ни-
будь точки фазового пространства, она попадает в некоторую область фа-
зового пространства — область аттрактора, покинуть которую система уже
не может. Если мы рассмотрим движение двух первоначально близких
Рис. 13.3. Стальной шарик, падающий на
острие вертикального лезвия бритвы, может
служить примером чувствительной зависи-
мости траекторий от начальных условий.
Рис. 13.4. Схематическое изображение дос-
ки Гальтона. Стальной шарик, падая, на-
талкивается на гвозди, вбитые перпендику-
лярно плоскости страницы.
205
Часть [II. ЭЭГ и МЭГ
Рис. 13.5. Экспоненциальное разбегание
двух первоначально близких траекторий.
изображающих точек по траектории хаотического аттрактора, то обнару-
жим, что они быстро разбегаются: расстояние d между ними возрастает
экспоненциально со временем t (рис. 13.5):
Jocez'. (13.7)
Постоянная Л в аргументе экспоненциальной функции называется по-
казателем Ляпунова. Положительный показатель Ляпунова говорит о том.
что мы имеем дело с хаотическим аттрактором, так как отражает чувстви-
тельность к начальным условиям. Со временем траектории заполняют ат-
трактор, но не полностью, а лишь весьма ограниченную его часть, что уди-
вительно. Чтобы получить количественную меру степени заполнения тра-
екториями пространства аттрактора, мы вводим понятие фрактальной раз-
мерности. К этому понятию мы вернемся в приложении А.
Еще одно важное свойство хаотических траекторий — их самоподобие.
Для объяснения этого понятия воспользуемся знаменитым примером, по-
строенным Хельге фон Кохом в 1904 г. Рассмотрим равносторонний треу-
гольник на рис. 13.6. Разделим каждую сторону на три равные части, на
средней трети построим новый равносторонний треугольник во внешнюю
сторону относительно исходного треугольника, а основание нового треу-
гольника сотрем. Продолжим нашу процедуру неограниченное число раз.
Первые этапы построения показаны на рис. 13.6. Рассматривая предель-
ную, полученную после бесконечного повторения процедуры, кривую фон
Коха под микроскопом со все большим увеличением, мы всякий раз уви-
дим одну и ту же кривую. Форма этой кривой не зависит от увеличения,
или, иначе говоря, от масштаба. Такая инвариантность относительно мас-
штаба называется самоподобием. Пример самоподобия применительно к
хаотическим аттракторам вы видите на рис. 13.7. При увеличении квадрат-
ной рамки мы всякий раз получаем одну и ту же структуру.
Важный класс хаотического движения был открыт Л.П.Шильниковым
(1965, 1970). Для объяснения этой разновидности хаоса рассмотрим непод-
вижные точки на фазовой плоскости. Неподвижными называются такие
точки, в которых траектории начинаются или заканчиваются, как было по-
казано в гл.5. Но существует и другая разновидность неподвижных точек,
в которых одни траектории заканчиваются, а другие начинаются. Такая
неподвижная точка называется седловой, или седлом. Если представить себе
206
13. Хаос, хаос, хаос
Рис. 13.6. Последовательные этапы постро-
ения снежинки и ломаной фон Коха (сверху
вниз; см. текст).
Рис. 13.7. Явление самоподобия на примере так называемого аттрактора Хенона—Хейле-
са. Слева направо', в левом «кадре» показана исходная траектория; маленький квадрат в уве-
личенном виде представлен в кадре посредине; маленький квадрат в нем в увеличенном
виде приведен в кадре справа и т.д. Как нетрудно заметить, «содержимое» квадратов ста-
новится неотличимым, несмотря на различные увеличения.
шарик, катящийся по седлу, то для его движения существуют два выделен-
ных направления: двигаясь вдоль хребта лошади, шарик скатывается в ми-
нимум поверхности седла; двигаясь в направлении, перпендикулярном
хребту, шарик скатывается в одну из двух сторон — либо налево, либо на-
право от хребта. Рассматривая сверху все возможные траектории в окрес-
207
Часть III. ЭЭГ и МЭГ
Рис. 13.9. Траектории, порождающие хаос Шильникова (см. текст).
тности седла, мы увидим поток, представленный на рис. 13.8. Выясним, как
выглядит обобщение седла на случай трех измерений: мы можем получить
седловую точку с двумя неустойчивыми направлениями на плоскости и ус-
тойчивым направлением, перпендикулярным этой плоскости, идущим
вдоль оси z (рис. 13.9 справа). Неустойчивые траектории могут удаляться от
седловой точки по спирали, как мы уже видели на примере движения вбли-
зи фокуса на плоскости. Таким образом, вблизи седловой точки в трехмер-
ном пространстве движение изображающей точки может быть описано за-
висимостью координат от времени вида
x(/) = ccos(<»/)eJ’r', (13.8)
y(/) = csin(<»/)ev, (13.9)
Z(t) = be\ (13.10)
где Ar > 0 и Л, > 0. Что происходит с изображающей точкой, которая по спи-
рали движется от седла? Шильников рассмотрел случай, когда орбита воз-
208
13. Хаос, хаос, хаос
вращается в седловую точку (рис. 13.9). Орбита, которая уходит из седло-
вой точки и возвращается в нее же, называется гомоклинической орбитой.
Шильникову удалось доказать, что при условии
М>ы <13.П)
вокруг только что рассмотренной траектории существует бесконечное мно-
жество неустойчивых предельных циклов. Изображающая точка может слу-
чайным образом перепрыгивать с одного неустойчивого предельного цикла
на другой и тем самым порождать хаос. При обращении времени мы об-
наруживаем в точности такую же картину, но все стрелки (направление
движения) также необходимо повернуть в противоположную сторону. Та-
ким образом, вместо ухода из седловой точки по спирали мы обнаружим
приближение по спирали к плоскости ху, а вместо траектории, входящей
в седловую точку вдоль оси z, мы получим траекторию, выходящую из сед-
ловой точки вдоль оси z (рис. 13.9 слева). Таким образом, существуют два
типа хаоса Шильникова.
Но какое отношение имеют все эти результаты и понятия к синергети-
ке вообще и к функциям головного мозга в частности? В синергетике мы
занимаемся изучением систем, состоящих из очень большого числа отдель-
ных частей, что позволяет ожидать не детерминистический, а микроско-
пический хаос. Вот здесь и вступают в игру наиболее существенные отли-
чительные особенности синергетики. Как было показано, в результате со-
гласованного взаимодействия большого числа отдельных частей, могут воз-
никнуть макроскопические состояния, управляемые параметрами поряд-
ка. Число параметров порядка может быть очень мало, например, их мо-
жет быть три или чуть больше. Таким образом, сложная динамика всей си-
стемы в целом описывается всего лишь несколькими параметрами поряд-
ка, которые могут в точности удовлетворять уравнениям детерминистичес-
кого хаоса. Синергетика объясняет, почему сложные системы могут порож-
дать детерминистический хаос. Возникает ли детерминистический хаос в
головном мозге? На этот вопрос несомненно следует дать утвердительный
ответ, и в следующей главе мы еще вернемся ко всем перечисленным выше
захватывающим проблемам.
14-4614
Часть Ш. ЭЭГ и МЭГ
14. Анализ электроэнцефалограмм
14.1. Цели анализа
В этой главе мы хотим показать, что понятия и методы синергетики по-
зволяют развить новый подход к анализу электроэнцефалограмм (ЭЭГ). Об
ЭЭГ мы упоминали во вводной главе об исследовании головного мозга.
Микроскопическое происхождение электрических полей, измеряемых в
ЭЭГ, не вполне ясно. Действуя в духе синергетики, мы будем рассматри-
вать эти поля как макроскопические явления, которые требуется исследо-
вать на языке синергетических понятий.
Прежде всего необходимо подчеркнуть, что традиционно основным
стимулом исследования ЭЭГ было стремление найти участки той или иной
специфической активности мозга — зрения или определенных видов мыш-
ления. Такие исследования важны для нахождения центров эпилептичес-
кой активности, так как в ряде случаев их можно удалить хирургическим
путем и излечить эпилепсию. Следуя такому локальному описанию различ-
ных видов активности мозга, были разработаны представления, ставшее
основой методов локализации центров активности. Наглядно такой под-
ход можно представить следующим образом. Представим себе, что не-
сколько радиостанций ведут передачи, которые можно принимать на оп-
ределенной территории. Возникает вопрос: можно ли восстановить распо-
ложение радиодатчиков по пространственно-временному распределению
принимаемых радиоволн? Аналогичным образом мы можем попытаться
разработать методы локализации центров, создающих электрические поля,
по измеренным пространственно-временным распределениям полей по
скальпу. Мы не хотим преувеличивать недостатки такого подхода, но, по
крайней мере, две трудности нельзя не отметить. Очень часто центры не
удается локализовать однозначно, и , кроме того, может оказаться, что цен-
тры лежат вне мозга, т.е. результат локализации не имеет смысла. Это оз-
начает, что необходимы другие подходы, и настоятельно необходимо
выяснить, в каких случаях упомянутый выше традиционный метод приме-
ним, а в каких — неприменим.
Для большей конкретности рассмотрим эпилептические признаки, так
как их сигналы отличаются особой четкостью. В случае парциальных при-
ступов эпилептическая активность локализована в одном или нескольких
210
14. Анализ электроэнцефалограмм
эпилептогенных очагах. Это тот случай, когда описанный выше традици-
онный анализ применим или должен быть применим. С другой стороны,
большие эпилептические припадки характеризуются эпилептической ак-
тивностью, охватывающей оба полушария мозга. В частности, так называ-
емая petit-mal эпилепсия принадлежит к классу больших эпилептических
припадков. Обычно она связана с кратковременной потерей сознания (так
называемым абсансом), которая длится несколько секунд. На ЭЭГ при
этом появляются четко выраженные пики. В дальнейшем мы намереваемся
показать, каким образом понятия синергетики позволяют нам анализиро-
вать большие эпилептические припадки, которые очевидным образом не
локализованы. Наша основная идея заключается в следующем. Как изве-
стно из многочисленных примеров в синергетике, пространственно-вре-
менные структуры, которые возникают в системах вблизи точек потери ус-
тойчивости, можно рассматривать как суперпозицию небольшого числа
пространственных структур (или мод) с зависящими от времени амплиту-
дами. Несколько примеров, подтверждающих возможность такого пред-
ставления, были приведены в гл.4 и J0. Если серьезно относиться к идее о
том, что наш мозг функционирует вблизи точек потери устойчивости, то
можно ожидать, что ЭЭГ допустимо интерпретировать как суперпозиции
небольшого числа фундаментальных пространственных мод с зависящи-
ми от времени амплитудами.
14.2. Идентификация параметров порядка
и пространственные моды
В этом разделе мы покажем, что при анализе эпилептических припадков
или некоторых других энцефалограмм действительно можно выделить про-
странственные моды и определить динамику их зависящих от времени ам-
плитуд. Ясно, что такой подход по существу приводит к новому анализу
ЭЭГ и, как мы увидим в дальнейшем, к новому анализу МЭГ. Эксперимен-
тальные данные по petit-mal эпилептическим припадкам были получены
Леманом. Кривые были получены в точках на основе стандартной между-
народной системы 10-20. В анализе, произведенном Фридрихом и Улем
(1992, 1995) (в дальнейшем мы будем следовать именно их работам), были
получены два набора данных, относящихся к пациентам А и В. На рис. 14.1
показаны временные ряды, порожденные разностью потенциалов между
отдельными электродами на скальпе и электродом сравнения. Данные об-
наруживают заметные пики — известный в клинической практике симп-
том petit-mal эпилепсии. Обычно в течение одной секунды наблюдаются три
цикла пиков. На рис. 14.2 показано, как эволюционирует в течение цикла
пространственный паттерн. Эти изображения реконструированы по вре-
менным рядам, снятым с отдельных электродов так, как было сказано в
разд.2.4. Паттерны пространственно когерентны. В случае набора данных
211
14*
Часть III. ЭЭГ и МЭГ
Набор данных А
Рис. !4.1. Пикообразное поведение электрического потенциала во время эпилептического
приступа, записанное с различных электродов: набор данных А, набор данных В. Сплош-
ная линия: экспериментальный временной ряд, штриховая линия: реконструированный
временной ряд. [Рис.14.1-14.6 из работы Фридриха и Уля, 1995.]
212
Набор данных А
Набор данных В
оооооо
® ® о о
оооооо
Рис. 14.2. Эволюция во времени распределений электрического поля во время одного пи-
кообразного волнового цикла; набор данных А, набор данных В. Распределения получе-
ны интерпретацией многосеточного ЭЭГ-потенциала V(t).
213
Часть III. ЭЭГ и МЭГ
А паттерны состоят из двух областей противоположной полярности. На
фрагменте с пиком наблюдаются малые колебания паттернов вокруг сред-
ней ориентации. На фрагменте с волной релаксации паттерн претерпева-
ет обращение полярности. В дальнейшем второе обращение полярности
возвращает систему в состояние, близкое к исходному, после чего начи-
нается следующий цикл. В случае набора данных В эволюция паттернов
совершенно иная, хотя временной ряд на рис. 14.1 обнаруживает анало-
гичные пики и мелкие колебания паттернов.
Чтобы начать наш анализ, прежде всего необходимо определить подхо-
дящий вектор состояния q(t). Так как набор данных состоит из зависящих
от времени потенциалов Vj(t), измеренных отдельными электродами j, на-
прашивается мысль выбрать в качестве q вектор V(t) = (Г,,..., Кп). Далее не-
обходимо принять гипотезу о числе параметров порядка позволяющих
представить V(t) виде
Г(/) = ^2^у(Г)ту(т)+ члены старшего порядка, (14.1)
7=1
как было показано в гл. 10. Для этого мы можем действовать двумя спосо-
бами:
1) вычислить фрактальную размерность D (приложение А) с помощью ана-
лиза временного ряда, который дает значение D, заключенное между 2 и 3;
2) произвести анализ вектора V(t) методом Карунена—Лоэва.
Оказывается, что первые три моды разложения Карунена—Лоэва «по-
крывают» более 97% всего потенциала V(t).
Оба подхода показывают, что трех параметров порядка , f2, <^3 долж-
но быть достаточно, чтобы представить V(t), т.е.
^(0 = <i(0”i + О4-2)
Наша задача заключается в том, чтобы определить пространственные
моды г. и динамику параметров порядка. Для нашего анализа полезно вве-
сти сопряженные моды р.+, j = 1, 2, 3, удовлетворяющие условию ортого-
нальности
(14.3)
Умножая (14.2) слева на Vj+,j = 1, 2, 3, и используя (14.3), получаем:
^.(Г) = г;г(/), ./=1,2,3 (14.4)
Действуя в духе разд. 11.2, мы должны иметь какое-то представление о
том, как примерно выглядят динамические уравнения для параметров по-
рядка. Для этого в первом приближении мы отождествим р. в (14.2) с пер-
выми тремя главными модами Карунена—Лоэва и обозначим их гу(0). По по-
строению они ортогональны v.(0)pz(0)= 6/7;, и соотношение (14.4) в том же
приближении принимает вид
= (14.5)
Построив график зависимости от времени, мы увидим [это —
214
14. Анализ электроэнцефалограмм
единственное место, где в игру вступает интуиция!], что в хорошем при-
ближении амплитуды первой и третьей мод разложения Карунена—Лоэва
связаны между собой соотношением
^*0>(/)~ const. х^3(0). (14.6)
Это соотношение играет решающую роль в динамике паттернов, поэто-
му разумно использовать такое соотношение при выводе динамических
уравнений. Обобщая (14.6), предположим, что
= (14.7)
Ш = (14.8)
и потребуем кроме того, чтобы
Ш = (14.9)
где а — совокупность всех коэффициентов разложения функций f в ряд
Тейлора
, £2 ,£,«) = я, + + я4£3 + ... (14.10)
Воспользовавшись (14.7)—(14.9), мы можем представить динамику сле-
дующим образом
d%/dt = f{^Jdt,d^Jdt\d) (14.11)
Наша задача сводится к тому, чтобы определить коэффициенты а раз-
ложения Тейлора (14.10) одновременно с векторами т;+ непосредственно
по экспериментальному временному ряду. Воспользуемся для этого мето-
дом, предложенным Улем, Фридрихом и Хакеном (1993, 1995). [В
разд. 11.2.1 мы предположили схожий метод — среднеквадратичную под-
гонку экспериментальных данных по формуле (11.66).] Введем функции
W2, зависящие от сопряженных мод г(.+, а также от коэффициентов «:
dt
d2 "I \
(14 12)
я3 ( (] d2
dt I dt dt
(14.13)
Скобки <...> означают усреднение по времени. Потенциалы Wv W2 лег-
ко поддаются интерпретации, если воспользоваться соотношениями (14.4).
Нетрудно видеть, что (14.12) и (14.13) представляют собой не что иное, как
среднеквадратичные отклонения уравнений (14.7), (14.8) и (14.11). Абсо-
лютный минимум этих двух потенциалов относительно мод т;+ и коэффи-
циентов а служит приближением к пространственным модам и динамике
изменений по времени (14.7), (14.8) и (14.11).
Обсудим некоторые технические детали, полезные при нахождении аб-
215
Часть Ш. ЭЭГ и МЭГ
солютных минимумов потенциалов Wv W2. Варьируя потенциал по г2+,
р3+, получаем:
С|Т2 — Qv,
Q3 =Сз”Г
(14.14)
Здесь под матрицами Ср С2, С3 следует понимать следующие корреля-
ционные матрицы:
I d1 \
(14.15)
Если вектор г/ известен, то мы можем выразить т2+, г3+ через г/. Най-
ти минимум потенциала 1Е2 можно численными методами. Потенциал
зависит от вектора г/ очень высокой размерности. Заметим, что размер-
ность этого вектора может быть понижена, если выполнить разложение
Карунена—Лоэва и использовать в качестве V(t) первые несколько глав-
ных мод Карунена—Лоэва. В результате сопряженный вектор р/ будет за-
висеть от нескольких рассмотренных мод Карунена—Лоэва. В интересу-
ющем нас сейчас случае мод Карунена—Лоэва, дающих точное представ-
ление временного сигнала V(t). Нелинейная функция/была аппроксими-
рована многочленами по до четвертого порядка, квадратичными по
и линейными по <^3. Так как сопряженные моды vf+ определены, мы мо-
жем вычислить с помощью соотношений (14.4) и известной из экспери-
мента зависимости вектора V(t) от времени и зависимости от времени па-
раметров порядка .
После этого нам останется найти моды v., для чего мы воспользуемся
подгонкой к (14.2) методом наименьших квадратов. Проделав необходи-
мые вычисления, получим:
p2=^2m/))/^2(/)2) (1416)
Результаты изложены в следующем разделе.
216
14. Анализ электроэнцефалограмм
14.3. Результаты
Резюмируем полученные результаты. На рис. 14.3 представлены сопряжен-
ные моды Vj+ (в первом ряду — для j = 1, во втором ряду — для j = 3 и в тре-
тьем ряду — для j = 2) вместе с их амплитудами, вычисленными по фор-
муле (14.4) из экспериментального временного ряда. Как видно из рис. 14.3,
приближение к соотношениям (14.7) —(14.9) достаточно хорошее. На
рис. 14.4 показаны пространственные моды vr Соответствующие времен-
ные сигналы получаются численным интегрированием динамической си-
стемы (14.7)-(14.9) со значениями параметра а, определенными описанным
выше методом, с подходящими начальными условиями. Располагая таки-
ми решениями, мы можем вычислить полный временной сигнал V(t) по
формуле (14.2). Как показано на рис. 14.1, подобная реконструкция нахо-
дится в тесном согласии с экспериментальными данными.
Рассмотрим динамическое поведение, порожденное динамикой пара-
метров порядка. На рис. 14.5 показаны траектории в фазовом пространстве,
натянутом на амплитуды, полученные численным интегрированием. На
рис. 14.6 изображены траектории, но для амплитуд, восстановленных по
экспериментальным данным.
Взглянув более внимательно на теоретические и экспериментальные ре-
зультаты. представленные на рис. 14.5 и 14.6, мы обнаружим, что траектории
ведут себя следующим образом. В случае А они раскручиваются по спирали
из одной точки пространства, оставаясь более или менее в плоскости и воз-
вращаются в исходную точку из третьего измерения. В случае В траектории
качественно ведут себя так же, как в случае А, но имеют обратное направле-
ние. И в том, и в другом случае картина движения напоминает хаос Шиль-
никова, который мы рассматривали в гл.13. Уравнения (14.7)—(14.9) позво-
ляют исследовать эту проблему более подробно. В зависимости от значений
параметров мы обнаруживаем, что в случае А существует седловая точка, из
которой траектории раскручиваются по спиралям и в которую они возвраща-
ются по устойчивому направлению. Вычислив в линейном приближении (по-
ложительные или отрицательные) скорости роста Л (см.гл.13), мы обна-
ружим, что условие хаоса Шильникова выполняется. В случае В, хотя траек-
тории выглядят аналогично траекториям в случае А, условие Шильникова не
выполняется, и поэтому случай В требует дополнительного рассмотрения.
Проведенный в этой главе анализ обнаружил ряд замечательных особен-
ностей активности мозга. В ряде случаев активность мозга управляется все-
го лишь небольшим числом параметров порядка. Малая размерность про-
странства параметров порядка была ранее обнаружена Баблоянц (1985) в
ее основополагающих работах на основе анализа временных рядов. Как
будет показано в приложении (см. также библиографию к этой главе), та-
кой анализ наталкивается на трудность, связанную с тем, что эксперимен-
тальные временные ряды недостаточно стационарны на протяжении
сколько-нибудь продолжительных промежутков времени для того, чтобы
из них можно было извлечь надежные данные, в частности, точные зна-
чения фрактальных размерностей. Наш анализ, основанный на многоэлек-
217
Часть III. ЭЭГ и МЭГ
ctfx,f(x,d,x,d}x)
Набор данных А
0,25 0,50 0,75 *
d]x,f(x,d,x.d]x) Набор данных В
Рис. 14.3. Сопряженные моды vf, vj, v?. временные ряды показывают амплитуды tfx(t).
cPtx(t), dtx(t) (сплошная линия). Штрихованная линия показывает величины, вычисленные
из временных последовательностей, которые соотносятся с dJtx(t) через уравнение пара-
метра порядка.
218
14, Анализ электроэнцефалограмм
Набор данных А
0,25 0,50 0,75 t
Набор данных В
Рис.14.4. Моды г,, г2, г3. Временные сигналы — амплитуды мод, полученные с помощью
численного интегрирования уравнений для параметров порядка; набор данных А, набор
данных В.
219
Часть Ш. ЭЭГ и МЭГ
Набор данных А
Рис. 14.5. Реконструкция траекторий с помощью численного интегрирования уравнений
для параметров порядка на фазовой плоскости с координатами х, у = dtx(t), у = d'fx(t): на-
бор данных А, набор данных В (См. следующую страницу).
тродных экспериментах и новом методе вычислений, приводит непосред-
ственно к топологии траекторий и даже позволяет определить тип хаоса.
В случае petit-mal эпилепсии теоретически выделены два типа эпилепсии.
Остается выяснить, обладают ли они теми особенностями, которые отме-
чены в других клинически наблюдаемых явлениях.
Анализ многоэлектродных экспериментов с альфа-ритмом, проведен-
ный Фридрихом, Фуксом и Хакеном (1987, 1991, 1992), также обнаружил
маломерную динамику. Число параметров порядка оказалось равным пяти.
220
14. Анализ электроэнцефалограмм
Рис. 14.5. (продолжение)
Динамика, лежащая в основе альфа-ритма, оказалась хаотической, но тип
хаотического аттрактора не был установлен. Маломерная динамика озна-
чает, что огромное количество нейронов возбуждаются когерентно. Увле-
кательная задача будущего — выяснение того типа стимуляции мозга, при
которой может быть нарушена эта хаотическая динамика. В заключение
уместно замолвить слово о предлагаемом нами методе анализа. Хотя ана-
лиз Карунена—Лоэва может служить исходным пунктом при исследовании
той или иной активности головного мозга, он недостаточен для более глу-
бокого изучения динамики. Изложенный выше метод на основе синерге-
тики представляется более адекватным.
221
Часть III. ЭЭГ и МЭГ
Рис. 14.6. То же, что на рис. 14.5, но для амплитуды x(t), полученной из эксперименталь-
ных данных; набор данных А, набор данных В (см. следующую страницу).
222
14. Анализ электроэнцефалограмм
Рис. 14.6. (продолжение)
223
Часть III. ЭЭГ и МЭГ
15. Анализ паттернов МЭГ
15.1. Экспериментальные результаты
Экспериментальное и теоретическое изучение магнитных полей, создава-
емых головным мозгом, вызывает в настоящее время большой интерес. Ему
посвящены многочисленные исследования. Однако наша цель состоит не
в том, чтобы дать обзор всех этих разнообразных работ. Мы хотим выбрать
один эксперимент и сосредоточить внимание на его теоретическом ана-
лизе, тесно связанном с другими экспериментами, о которых сообщается
в нашей книге, и с понятиями синергетики. Наш выбор пал на экспери-
менты с МЭГ, выполненные Келсо и его сотрудниками (1991, 1992). В этих
экспериментах СКВИДы, т.е. сенсоры магнитных полей, размещенные на
левой затылочно-височной части коры головного мозга так, чтобы датчи-
ки покрывали моторную и слуховую зоны.
Прежде чем мы перейдем к изложению весьма интересных результатов
Келсо и его сотрудников, скажем несколько слов о технических деталях,
которые позволят пролить свет на пространственное и временное разре-
шение. Система СКВИДов, выпускаемая компанией Biomagnetic Techno-
logies Inc., состоит из 37 аксиально симметричных градиометров первого
порядка диаметром 20 мм, расположенных на расстоянии 22 мм друг от
друга. Весь массив СКВИДов имел в диаметре около 13 см, а его центр на-
ходился в 2 см сзади от точки СЗ (интернациональной системы 10-20). По-
казания каждого сенсора считывались с частотой выборки 862 Гц и отфиль-
тровывались в полосе пропускания от 0,1 до 100 Гц. Сырые данные от 29
серий измерений, которые учитывались, усреднялись, отфильтровывались
(0,3 Гц < f <50 Гц), после чего из них производилась выборка до 8192 то-
чек на канал, что приводило к эффективной частоте выборки 212 Гц. Весь
анализ, проведенный Фуксом, Келсо и Хакеном (1992), и все модели, ко-
торые мы приведем ниже, основаны на усредненных данных.
Обратимся теперь к эксперименту Келсо и др. (1991, 1992); см. также
Фукс, Келсо, Хакен (1992). Испытуемому предъявлялся акустический сиг-
нал, состоявший из подававшихся через равные промежутки с частотой
52 звуков («бип»). Задача испытуемого состояла в том, чтобы нажимать
пальцем на кнопку синкопически (термин предложен Келсо), т.е. в про-
межутках между акустическими раздражителями. Эксперимент начинался
224
15. Анализ паттернов МЭГ
с £2=1 Гц, а после 10 циклов раздражителей частота повышалась на 0,25
Гц, и выполнялись еще 10 циклов. Так повторялось до тех пор, пока час-
тота не доходила до £2 = 2,25 Гц. Периоды, на протяжении которых час-
тота раздражителей оставалась постоянной, назывались плато. Всего
было шесть плато I-IV. В ходе эксперимента обнаружилась любопытная
особенность: до частоты 1,75 Гц, т.е. на плато I-Ш, испытуемый мог ре-
агировать синкопически. При частоте 1,75 Гц и выше нажатия кнопки
синхронизировались с звуковыми раздражителями. В переходной облас-
ти в движениях пальца обнаруживались критические флуктуации и кри-
тическое замедление. Иначе говоря, происходил фазовый переход, ана-
логичный переходу в движениях указательных пальцев, о которых шла
речь в разд.6.2 и далее. Но что происходит в головном мозгу, судя по
МЭГ? Результаты представлены на рис.2.9 для плато II, т.е. до фазового
перехода, и на рис.2.10 для плато V, т.е. после фазового перехода. На каж-
дом «кадре» показаны измеренные и усредненные временные ряды, по-
лученные от отдельных секторов, соответствующим образом расположен-
ных на скальпе. В левом углу (в верхней части) представлен раздражитель
и (в нижней части) отклик. На первый взгляд кажется, что в неразберихе
полученных данных невозможно разобраться, но, как будет показано
дальше, в действительности полученные результаты содержат ценную ин-
формацию, которую можно извлечь. В следующем разделе мы проанали-
зируем экспериментальные данные, а в разделах 15.3 и 15.4 попытаемся
построить модель, позволяющую их воспроизвести. На плато I-Ш сигна-
лы головного мозга осциллируют с основной частотой £2, на плато IV-
VI — с частотой 2£2. При Фурье-анализе сигнала головного мозга выяс-
няется, что первая компонента осциллирует с частотой £2, но скачок фазы
происходит на 71. Разность фаз между первой компонентой сигнала моз-
га и звуковым сигналом остается постоянной до тех пор, пока не проис-
ходит переход — скачкообразное изменение фазы, после чего разность
снова становится постоянной. Кроме того, наблюдаются критические
флуктуации и критическое замедление МЭГ.
15.2. Временной и пространственный анализ
15 .2.1. Временной анализ
В этом разделе я буду в основном придерживаться схемы анализа, выпол-
ненного в работе Фукса, Келсо, Хакена (1992). Полезным методом иссле-
дования временных рядов выборки, разумеется, служит разложение в ряд
Фурье. Так как раздражитель периодичен по времени с характерным пе-
риодом Тс (с от слова «cycle» — цикл), то разложение Фурье сигнала g(t)
выглядит следующим образом:
#(0 = Z Л exp(i Innt/T^.
225
15-4614
Часть III. ЭЭГ и МЭГ
сп — коэффициент Фурье, связанный с частотой vn = п/Тс. Положим
cn = g(y„). Согласно теореме Фурье
т
g(v„) = ±- \g(t)^(-i2nvnt)dt. (15.1)
с О
Поскольку выбрка состоит из N дискретных моментов времени t = tt —
l/vs, l=Q,...,N-1, где — частота выборки, то интеграл необходимо заме-
нить суммой:
ЛГ-1
f(v„) = £<?(0exP(-i2?™,/(). (15.2)
1=0
Первый интересный вопрос, который хотелось бы задать: отражается ли
на МЭГ переход от синкопированного к синхронизованному движению
пальца (нажатию кнопки)? Чтобы ответить на него, сравним разность меж-
ду фазой, присущей сигналам МЭГ, и фазой, присущей звуковым сигна-
лам. Определим эти фазы ф с помощью коэффициентов Фурье при члене
с основной частотой Vp
^(^) = |^(^)|ехр(1^), (15.3)
^(ч) = |^г(т,)|ехр(1^), (15.4)
где индекс г относится к звуковому сигналу, a s — к отклику (магнитному
или моторному (движения пальца). Результирующие разности фаз фг — ф*
представлены на рис. 15.1. Чтобы их объяснить, начнем с левого нижнего
угла, где в «кадре» показана разность фаз между реакцией пальца и звуко-
вым сигналом (отложенным по ординате). Расстояние между пунктирны-
ми линиями равно 71. Вдоль оси абсцисс отложены временные интервалы,
каждый продолжительностью в два цикла (по которым для уменьшения за-
шумленности производился Фурье-анализ); плато отмечены небольшими
вертикальными черточками.
Обратимся теперь к другим «кадрам» на рис. 15.1. Каждый из них соот-
ветствует одному «кадру» на рис. 2.9. Соответствующие результаты имеют-
ся и для других плато — 1, III-VL В полной аналогии с левым нижним углом
на рис. 15.1 в каждом «кадре» показана разность фаз между магнитным от-
кликом и звуковым сигналом. По абсциссе отложена та же величина, что и в
«кадре», расположенном в левом нижнем углу. И в этом случае заметны скач-
ки фазы, но в зависимости от расположения сенсоров скачки выражены то
более, то менее четко. Такой тип поведения, отличающийся от описанного
выше, возможно, обусловлен тем, что сенсоры расположены частично на дви-
гательной зоне, частично — на чувствительной зоне коры мозга, но оконча-
тельное выяснение этого вопроса требует дальнейшего анализа.
Еще один важный тип информации — спектр мощности, задаваемый
коэффициентами Фурье g(yn), точнее квадратом их модуля |g(v„) |2. Не при-
водя соответствующих графиков, упомянем наиболее значительные осо-
бенности спектра мощности.
226
15. Анализ паттернов МЭГ
Рис. 15.1. Разность фаз между сигналами мозга (область СКВИДов) и реакции руки (сле-
ва внизу) — в каждом случае относительно раздражителя. Данные усреднены по двум цик-
лам. (Детали см. в тексте.) (Фукс, Келсо, Хакен, 1992)
На плато II, т.е. до перехода, почти на всех «кадрах» мощность сосре-
доточена на частоте сигнала v,. На плато V, после перехода, во многих ка-
налах в левой части массива наибольшая компонента соответствует пер-
вой высшей гармонике, т.е. частоте, вдвое большей, чем основная частота
у,. Имеются некоторые тонкости, которые мы не будем обсуждать здесь,
например, появление доминирующей тройки частот и так называемых суб-
гармоник, т.е. гармоник с частотой v,/2.
15 .2.2. Пространственно-временной анализ
Как было показано в гл. 14, в случае ЭЭГ мы могли значительно продви-
нуться в понимании динамики мозга, реконструируя пространственно-
временные паттерны (см. рис. 2.6, 14.2) с последующим разложением Ка-
рунена-Лоэва. Именно это разложение может служить исходным пунк-
том при моделировании динамики мозга. Будем придерживаться такой же
стратегии и при анализе МЭГ. На рис. 15.2 представлен пространствен-
227
15*
Часть III. ЭЭГ и МЭГ
Рис. 15.2. Пространственная и временная когерентность сигналов от сдвигов на плато II.
В каждом кружке показано, как распределено магнитное поле в определенный момент
времени. В каждом ряду показано, как изменяется распределение магнитного поля за 14
шагов по времени в пределах одного цикла (время возрастает слева направо). Сигнал по-
чти периодический с положительной амплитудой вскоре после воздействия раздражите-
ля и, как правило, отрицательной амплитудой после реакции. (Фрагмент иллюстрации из
работы Фукса, Келсо, Хакена, 1992)
X .5636 Х-1853 X - 0992 Х-0651 X .0325
X 0178 Х= 0067 Х-..0058 X- 0042 Х=.ОО34
ММ1
х- 0021 Х-,0018 X '.0013 X- 0011
Рис. 15.3. Пространственные моды Карунена—Лоэва всего временного ряда. Число X —
собственное значение уравнений Карунена—Лоэва и описывает вклад соответствующей
моды в весь сигнал. В правом нижнем углу показана зависимость log Xk от к. (Фукс, Кел-
со, Хакен, 1992).
228
15. Анализ паттернов МЭГ
Рис. 15.4. Классификация пространственных мод по сферической симметрии. В верхней
половине показаны действительные (от центрального столбца вправо) и мнимые (от цент-
рального столбца влево) части сферических гармоник на проекции верхней части сферы на
экваториальную плоскость. Ряды соответствуют (сверху вниз) /= 1, /= 2 и /= 3. Кроме того,
показана функция при /= 4, т = 4. Распределения, обведенные светлыми кружками, при-
ближенно совпадают с распределениями мод Карунена—Лоэва на рис. 15.3. Девятая мода
на рис. 15.4 представляет собой суперпозицию функций с 1=2, т= 1 и / = 3, m = 3. (Фукс,
Келсо, Хакен, 1992.)
но-временной паттерн на плато II. В каждом кружке вы видите распре-
деление магнитного поля в какой-то конкретный момент времени. В каж-
дом ряду представлены выборки из одного цикла, произведенные за 14
шагов по времени. (Красный цвет соответствует положительным, голу-
бой — отрицательным и желтый — нулевым значениям сигнала.) Броса-
ется в глаза сильная пространственная когерентность, указывающая на
то, что значительная часть двигательной и чувствительной зон действу-
ют согласованно.
Пространственные моды, полученные из разложения Карунена—Ло-
эва по всему временному ряду (по всем 6 плато) представлены на рис. 15.3.
Под каждой пространственной модой указано соответствующее собствен-
ное значение Лк. В правом нижнем углу показана зависимость log Лк, к =
1,2,..., от номера к. Одна из самых поразительных особенностей— сим-
метрия мод Карунена—Лоэва. Аналогичное поведение ранее было обна-
ружено при анализе паттернов ЭЭГ (Фридрих, Фукс, Хакен (1992)). Ре-
шения уравнения, описывающего стоячие волны в круговой (барабан)
или сферической геометрии (колебания поверхности Солнца), обнаружи-
вают одинаковые паттерны! Это хорошо видно на рис. 15.4. В чем при-
чина такого сходства? Проистекает ли она от симметрии мозга (мозг как
сфера?), кругового расположения СКВИДов или это свойство мозга?
Ответить на эти вопросы нелегко. Ключ к возможному ответу заключа-
ется в величине собственных значений Лк, служащей мерой «участия»
моды vk = vk(x) (см. (11.26)) во всем пространственно-временном паттер-
229
Часть III. ЭЭГ и МЭГ
не (усредненном по времени). Как известно, Лк убывает с возрастанием
числа узловых линий, на которых vk(x) обращается в нуль (числа желтых
линий на рис. 15.3, 15.4). Из теории решений волновых уравнений мы
знаем, что увеличение числа узловых линий указывает на уменьшение
длин волн. Таким образом, разложение Карунена—Лоэва показывает, что
чем короче длины волн активности мозга, тем менее значителен их вклад
в образование паттерна. Если бы нас попросили разложить простран-
ственную функцию в суперпозицию мод, содержащих все меньшие и
меньшие частоты, совместимых с круговой (или сферической) симмет-
рией и взаимно ортогональных, то мы автоматически пришли бы к мо-
дам, представленным на рис. 15.4. Как показывает более глубокий ана-
лиз, классификация в случае сферической геометрии предпочтительнее
классификации в случае круговой геометрии.
Таким образом, тому существуют три причины:
1) динамика мозга — превалируют более длинные волны;
2) круговая геометрия массива сенсоров;
3) сферическая геометрия мозга.
В случае анализа ЭЭГ (гл. 14) исследование временной динамики про-
странственных мод была важным отправным пунктом при построении мо-
делей. Это означает, что пространственно-временной сигнал q(x,t) пред-
ставим в виде
q(x,t} = ^k(t}vk(x}. (15.5)
к
Зная q и vk, мы можем определить зависящие от времени амплитуды
E>k(t). Учитывая сложность проблемы, разумно вести себя скромно и изу-
чить зависимость от времени только двух первых главных мод. Результа-
ты анализа представлены в верхней и нижней частях рис. 15.5. Рассмот-
рим рис. 15.5 более подробно. В правом верхнем углу показана простран-
ственная зависимость главной моды. В первом ряду слева вы видите, как
зависит от времени амплитуда ^(t). Вертикальные красные линии отме-
чают начало или конец соответствующих плато III, во втором ряду — то же
самое, но для плато IV-VI. В третьем ряду представлен спектр мощности,
соответствующий каждому из плато 1-VI. До перехода сигнал почти пери-
одичен с доминирующей частотой, равной основной частоте vr После пе-
рехода сигнал менее периодичен, а амплитуда становится существенно
меньше. В нижней части рис. 15.5 показано, как ведет себя вторая наиболь-
шая мода с соответствующими графиками, представленными в верхней ча-
сти того же рисунка. До перехода спектры мощности размыты и амплиту-
ды их малы, тогда как на плато V и VI сигнал становится периодическим,
а в спектрах мощности появляются отчетливые пики. Но в отличие от са-
мой главной доминирующей моды самый высокий пик приходится не на
частоту раздражителя, а на частоту его первой гармоники. Были вычисле-
ны также (см. Фукс, Келсо, Хакен (1992) временные ряды для других ве-
дущих мод до иг = 2 включительно, но мы не будем приводить здесь резуль-
таты этих расчетов.
230
15. Анализ паттернов МЭГ
Наша цель в дальнейшем будет состоять в том, чтобы изложить моде-
ли, позволяющие учесть пространственно-временное описание активно-
сти мозга, по крайней мере в том виде, в каком его передают две главные
моды. Для этого мы будем придерживаться двух совершенно различных
направлений. В первом приближении (разд. 15.3) мы будем исходить из из-
вестных основных пространственных мод г, и v2, как показано в верхней
и нижней частях правой половины рис. 15.5. Затем мы выведем уравнения
для амплитуд мод и £2, отражающих наблюдаемое поведение сигнала. В
том же разд. 15.3 мы предложим уточненную модель, учитывающую боль-
шее число мод Карунена—Лоэва. В разд. 15.4 мы изложим совершенно
иной подход, в котором головной мозг рассматривается как нелинейная
среда, в которой распространяются волны, после чего выведем нелиней-
ное волновое уравнение для q(x,t). В результате мы получим два совершен-
но различных метода и сравним их в конце главы.
15.3. Моделирование динамики
В этом разделе мы хотим промоделировать пространственно-временные
паттерны, экспериментально обнаруженные в МЭГ (см. предыдущий раз-
дел). Чтобы получить первое представление о динамике, учтем только пер-
вые две моды Карунена—Лоэва vt(x), v2(x), т.е. попытаемся описать про-
странственно-временной паттерн q(x,t) отрезком разложения
q(x, t) = ^(Оч (х)+£2(0v2(x). (15.6)
Наша цель состоит в том, чтобы вывести уравнения для амплитуд мод
и £2, которые охватывали бы наиболее существенные особенности вре-
менных рядов для первых двух мод, представленных на рис. 15.5.
Рассмотрим сначала амплитуду моды Так как в поведении времен-
ного ряда обнаруживается отчетливо выраженная периодичность, в каче-
стве исходного пункта естественно использовать уравнения гармоничес-
кого осциллятора с частотой (О01:
£+^=0. (15.7)
Как показывают эксперименты, амплитуда стабильна, и поэтому мы ожи-
даем какого-то баланса между вынуждающей силой и демпфирующей си-
лой. Как обычно, мы предполагаем, что затухание пропорционально скоро-
сти изменения амплитуды т.е. пропорционально Кроме того, мы нео-
днократно видели в различных случаях, например, в экспериментах с дви-
жением указательных пальцев, что динамика подчиняется уравнению Ван
дер Поля, в котором демпфирующая сила пропорциональна квадрату своей
амплитуды. Это наводит на мысль о введении демпфирующей силы вида
4^ <15-8)
231
Часть Ш. ЭЭГ и МЭГ
Рис. 15.5. Динамика пространственных мод. Верхний правый угол', пространственное рас-
пределение наибольшей моды Карунена—Лоэва, соответствующее рис. 15.3. Первый ряд'.
зависимость этой доминирующей моды на табло I—III (до перехода) от времени. Сигнал
почти периодический. Второй ряд: то же, но для табло IV-VI (после перехода). Сигнал ме-
нее периодичен, и амплитуда значительно меньше. Третий ряд' спектр мощности различ-
ных табло. До перехода существует сильная компонента на частоте раздражителя. Ниж-
няя часть справа, вторая по величине мода Карунена—Лоэва. Три нижних ряда соответ-
ствуют трем верхним рядам, но временные ряды и спектры обнаруживают почти проти-
воположное поведение. До перехода спектры расплываются и меньше по мощности, тогда
как на табло V и VI сигнал становится периодическим, и на спектрах видны отчетливые
пики. Наибольший пик приходится не на частоту пика, а на частоту его первой гармони-
ки. (Из работы Фукса, Келсо, Хакена, 1992).
Что же касается вынуждающей силы, то она в конечном счете обуслов-
лена звуковым сигналом, который в нашей модели представлен главным
членом разложения в ряд Фурье
F cos(Qt + ф). (15.9)
Выражая, как обычно, косинус через экспоненты, мы можем вместо
(15.9) записать
—(JFe'n,+i’i
+ комплексно сопряженная величина).
(15.10)
232
15. Анализ паттернов МЭГ
Подставляя (15.10) в левую часть уравнения (15.7), мы обнаруживаем,
что амплитуда осциллирует с фазой, которая совпадает с фазой вынуж-
дающей силы
^~еф. (15.11)
Это воспрепятствовало бы четкому переходу фазы примерно на 71, об-
наруженному экспериментально. Действительно, испытуемый (или испы-
туемая) может произвольно, по крайней мере при малых частотах, изме-
нять свой мануальный отклик синфазно с задающим сигналом или в про-
тивофазе с ним. Это наводит на мысль рассмотреть параметрическую вы-
нуждающую силу, или, иначе говоря, уравнения параметрического осцил-
лятора. Таким параметрическим осциллятором могут быть, например, че-
ловек, приседающий и выпрямляющийся на качелях. Хорошо известно,
что качели можно раскачать с частотой, удвоенной по сравнению с час-
тотой колебаний качелей. Таким образом, мы записываем вынуждающую
силу в виде
jEsin(2Q0£i> (15.12)
где £] — постоянная. Собирая члены (15.7), (15.8) и (15.12), получаем урав-
нение движения
+ Д sin(2Q% + <»oi£ =0- (15.13)
Это уравнение движения не учитывает связей между амплитудами и
<^2, неоценимых для объяснения экспериментальных результатов. Чтобы
получить представление о том, как могли бы выглядеть члены связи, мы
можем руководствоваться парадигмой движения указательных пальцев,
изложенной в гл.7. Мы видели, что перемещения указательных пальцев
были связаны членом
(x)-x2)[a + jB(x1-x2)2]. (15.14)
Произведем замену переменных
х2 —><^2, (15.15)
X] —х2 F cosQZ, Xj->/•’cosQ/ х2-><!;2. (15.16)
Далее мы поступим следующим образом. Раскроем в (15.14) скобки и
заметим некоторые из полученных членов по формулам (15.15) или (15.16).
В принципе мы могли бы заменить по формулам (15.15) и (15.16) все чле-
ны. Но при более внимательном рассмотрении выясняется, что для вос-
произведения экспериментальных результатов необходимы не все члены.
Поэтому в приводимом ниже перечне мы приводим только те члены, ко-
торые реально принимаются во внимание:
хР (15.17)
(15.18)
233
Часть III. ЭЭГ и МЭГ
XjXj -^^Fcos£lt(FcosQZ) = -Q.^FsinQr, (15.19)
xYx}xv (15.20)
x2-><^ (15.21)
x2x2, (15.22)
jqx2x2 -> ^177cosQZ(/’cosQ/)* = -y^17?2sin2Q/j (15.23)
x2x2. (15.24)
Рассмотрим эти члены подробно: (15.18) приводит к нелинейному за-
туханию , которое уже было учтено в (15.13); (15.19) вводит член связи с
£2, как и (15.21). Наконец, интересно отметить, что (15.23) снова приво-
дит нас к параметрическому вынуждающему члену (15.12), который мы вве-
ли в (15.13). Включая новые члены (15.19) и (15.21) в (15.13), получаем:
ё+Л=О- (15.25)
Аналогичным образом мы можем вывести уравнение для <^2:
£,+/2=0. (15.26)
В этих уравнениях / и /2 определяются выражениями
А = (4<л + В&)£, + ю(2! [1 +£,sin(2QZ)] §l+Cl^l2sinQZ+Z)4 (15.27)
и
f2 = (4§,2 + + +£2sin(2QZ)]§2 +C2^2sinQ/L + Z)2^1- (15.28)
Параметр Et мы вводим с помощью соотношения
Д=®о>г (15.29)
Уравнения (15.25), (15.26) с и /2 задаваемыми соотношениями (15.27),
(15.28), могут быть приближенно решены аналитически или проинтегриро-
ваны численными методами (Йиржа, Фридрих, Хакен (1992)). В произведен-
ных вычислениях были использованы следующие значения параметров:
4=2, 4=3, Д =1.3, Д = 1, Д =-0.05, С2 =1.5,
Д = 0.1, Д = 1, = 0.02, £2 = -0.6, ®01 = 0.32, ю02 = 1 (15.30)
Рассмотрим некоторые свойства этих уравнений. Параметрическое
возбуждение обладает характерным свойством — наличием устойчивых
или неустойчивых решений в зависимости от отношения СО0(. и Q при
i = 1,2. Неустойчивые решения получаются при CO0(./2Q = к, где к = 1/2,
1, Этим свойством параметрического возбуждения обусловлена ча-
стотная селекция в зависимости от выбранного пространства парамет-
234
15. Анализ паттернов МЭГ
ров. Динамика модели, описываемой уравнениями (15.25), (15.26) с fx и
f2, определяемой соотношениями (15.27), (15.28), сводится к следующе-
му. В области до перехода осциллятор находится в своей области не-
стабильности к = 1/2 и колеблется с частотой раздражителя Q. Осцил-
лятор <fj2 находится в своей области стабильности, и, следовательно, его
колебания затухают. С увеличением частоты раздражителя Q осцилля-
тор попадает в область нестабильности к = 1 при критической часто-
те и начинает возрастать. Из-за возрастания осциллятора <fj2 относитель-
ная фаза между первыми компонентами Фурье осцилляторов и <^2, с
одной стороны, и сигнала-раздражителя, с другой, внезапно претерпе-
вает переход на 71. Амплитуда осциллятора <fj2 совершает колебания с ча-
стотой, равной удвоенной частоте раздражителя, становится большой,
и осциллятор затухает под действием связи с <fj2. Мы не будем изла-
гать здесь в явном виде временные ряды, так как хотели бы их еще бо-
лее усовершенствовать. Прежде чем переходить к изложению соответ-
ствующих результатов Йржи, Фридриха и Хакена (1995), я хотел бы про-
цитировать знаменитого математика Гаусса. Рассказывают, что од-
нажды он обронил следующее замечание. Математическая теорема, по
утверждению Гаусса, подобна готическому собору: по завершении стро-
ительства, леса следует убрать, чтобы стала видна красота сооружения.
Я не вполне разделяю мнение Гаусса и полагаю, что строительные леса
несут важную информацию: всем, особенно тем, кто впервые изучает
предмет, важно знать, как первоначально была (часто неверно!) дока-
зана теорема. В нашем случае подробный рассказ о том, как был полу-
чен окончательный результат (который я приведу ниже) был бы слиш-
ком длинен. Я могу указать лишь несколько важных пунктов в ходе до-
казательства. Прежде всего необходимо отметить, что пространственные
моды V] и v2, входящие в (15.5), удалось усовершенствовать, используя
метод Уля—Фридриха—Хакена, который мы применяли в гл. 14. Распо-
лагая усовершенствованными пространственными функциями Vj и v2,
мы образуем разность между реально наблюдаемым пространственно-
временным паттерном и приближенным паттерном:
q(x, t) = q(x, t) - & (t)vt (x) -%2(t)v2(x). (15.31)
На следующем этапе анализа мы подвергаем этот остаточный паттерн
еще одному разложению Карунена—Лоэва по его модам Uj (х), взятым по
всем 6 плато:
4
4(х,0 = £д(0м/х), (15.32)
7=1
удерживая в разложении только 4 главные моды. Подробный анализ час-
тот до и после перехода прокладывает путь к окончательному результату,
который мы немедленно записываем:
?(x,0 = ^i(0vi(x)+^2(0v2(x) + §(0viW + ^(0vXx) = «(x,/), (15.33)
235
Часть III. ЭЭГ и МЭГ
где
Ш = 0.5^-Т/4)
и
(15.34)
^(/) = -1.5^(/)-1.5^(/)^(/) + 0.7^(O-0.5^(O. (15.35)
Время Т— это период звукового сигнала. Численные коэффициенты
определены методом наименьших квадратов по экспериментальным дан-
ным. Результат (15.33) говорит нам о том, что весь пространственно-вре-
менной паттерн в целом можно представить в виде суперпозиции трех чле-
нов гр v2, v, с параметрами порядка и одной подчиненной моды vs с амп-
литудой ^s, которую можно выразить через параметры порядка <^2. Ве-
личина n(x,t) означает остаточный небольшой «шумовой» член. Из-за со-
отношения (15.34) в правую часть (15.33) входят только два параметра. Член
§1(Ог1(х) + 0.5^1(/-Т/4)г1(х) (15.36)
можно интерпретировать как бегущую волну, а член
^(Оъ(х) (15.37)
— как стоячую волну. Как показывают соотношения (15.34) и (15.35), пол-
ная динамика управляется параметрами порядка и <^2, удовлетворяются
Рис. 15.6. В левом столбце показаны пространственные моды гр г2, , г Справа пред-
ставлена зависимость от времени. Зеленые кривые соответствуют экспериментальным ре-
зультатам, красные — теоретическим расчетам (данные получены интегрированием урав-
нений, как описано в тексте), (Иржа, Фридрих, Хакен, неопубликованная работа.)
236
15. Анализ паттернов МЭГ
ИНН linn null 1II III min Iiiiiii
Mll ll.LLl.J 1ШЛ ILULL 111Ш Ljluji
}• r . f 1 1 1 1 1 1 Г1Д, 1 i J 1 ШЩ Jimi ши
F LLHLLL. 11ШЛ Lllui Lum ШШ 11'111
Рис. 15.7. Спектры мощности, соответствующие временным рядам, представленным на
Рис. 15.6. (Иржа, Фридрих, Хакен, неопубликованная работа.)
исходными уравнениями (15.25)— (15.28). Что следовало бы определить из
экспериментальных данных, так это коэффициенты, входящие в уравне-
ния параметров порядка, а также пространственные моды. Пространствен-
ные моды vp v2, Г) и vs показаны в левой части рис. 15.5.В правой части по-
казана эволюция во времени соответствующих амплитуд £ для различных
плато. Зеленая кривая соответствуют экспериментальным результатам,
«спроектированным» на соответствующие пространственные моды. Крас-
ная кривая представляет результаты прямого интегрирования уравнений
(15.25)-(15.28) с учетом соотношений (15.34) и (15.35). На рис. 15.7 пока-
заны соответствующие графики спектров мощности. Мы считаем, что уда-
лось достичь замечательного согласия.
Несмотря на успех предложенной модели, все же необходимо сделать
одно предупреждение. Оказывается, в ряде случаев такого рода модели не
определены однозначно: варьироваться могут и численные значения ко-
эффициентов, и форма отдельных членов. В подобных случаях одни и те
же пространственно-временные паттерны могут порождать целые классы
систем. К этому вопросу мы вернемся в следующем разделе.
237
Часть III. ЭЭГ и МЭГ
15.4. Моделирование динамики:
к полевой теории активности мозга
В приводимом ниже анализе мы используем подход, заимствованный нами
из физики. Хотя с начала XX века физиками было установлено, что веще-
ство состоит из атомов, объяснение коллективных явлений, таких, как фер-
ромагнетизм или сверхпроводимость, впервые было дано появившимися
гораздо позднее так называемыми феноменологическими теориями. В этих
теориях практически не используются специфические свойства атомов.
Они имеют дело с макроскопическими явлениями, такими, как, например,
макроскопическое магнитное поле ферромагнетика. Их моделирование ос-
новано на нескольких общих допущениях, приведенных в соответствие с
экспериментальными фактами. Феноменологические теории были весьма
успешными и проложили дорогу созданным впоследствии микроскопичес-
ким теориям.
Ситуация в теории головного мозга, на мой взгляд, не слишком отли-
чается от описанной выше. Разумеется, мы знаем, что мозг состоит из мил-
лиардов нейронов, сложнейшим образом соединенных друг с другом, но
установить явную связь между детальными динамическими свойствами от-
дельных нейронов и макроскопически наблюдаемыми явлениями пред-
ставляется безнадежной задачей. Поэтому по аналогии с тем, что было сде-
лано в физике, мы хотим попытаться развить полевую теорию активности
мозга. Имея в виду необычайное разнообразие активности головного мозга,
конкретизируем стоящую перед нами задачу. Наша полевая теория долж-
на моделировать действие мозга в описанном выше эксперименте Келсо.
Однако мы надеемся, что наша теория послужит более широкой основой,
применимой и к другим процессам, происходящим в макроскопических
масштабах.
Прежде всего мы будем исходить из допущения о том, что в основе ак-
тивности головного мозга лежат процессы, происходящие в мозгу, без вне-
шних источников, например, звуковых или каких-либо других сигналов.
Иначе говоря, мы прежде всего рассматриваем внутреннюю динамику. Так
как данные, полученные при анализе ЭЭГ и МЭГ, свидетельствуют о рас-
пространении в мозге волн активности, основанных на электрохимичес-
ких и магнитных процессах, мы начнем с уравнения
q(x,f) + Lq(x,t) = 0, (15.38)
аналогичному волновому уравнению. В типичном волновом уравнении L —
линейный оператор, который может, например, иметь следующий вид:
Т = -с2Д + а2, (15.39)
где с и а0 — некоторые постоянные, А — оператор Лапласа. В более слож-
ных случаях под L можно понимать нелокальный оператор вида
L= |К(х,х')..А, (15.40)
где многоточия указывают на то, что функцию q, стоящую в уравнении
238
15. Анализ паттернов МЭГ
(15.38) под знаком оператора L, в подынтегральном выражении следует
взять с координатами х, после чего интегрирование по cf'x даст некото-
рую новую функцию от х.
В дальнейшем мы будем использовать простую форму (15.39) операто-
ра L. Условимся предполагать, что активность мозга затухает сама по себе,
без внешнего сигнала. Будем считать, что это затухание имеет вид
П?(х,/), (15.41)
как обычно в явлениях, связанных с распространением волн. Из ряда био-
логических явлений известно, что линейное затухание (15.41) недостаточ-
но и что наряду с ними встречается и нелинейное затухание. Например,
нелинейное затухание наблюдается в модели движения пальцев. Соответ-
ствующий член имеет вид
y2q2(x,t)q(x,t). (15.42)
Собирая все члены (15.39)—(15.42), получаем нашу модель внутренней
динамики
q(x,t) + (/[ + +7^(х,/) = 0- (15-43)
Наша главная задача состоит в том, чтобы ввести активность внешнего
сигнала. Поскольку проблема, интересующая нас сейчас, аналогична про-
блеме корреляции движений указательных пальцев, мы приходим к необ-
ходимости рассмотреть член, описывающий связь между активностью моз-
га и внешним сигналом, который аналогичен членам, рассмотренным нами
в случае движений пальцев. Это возвращает нас к перечню членов связи
(15.17)—(15.24) из разд. 15.3, но теперь мы отождествляем
X](/)->^(x,Z), х2->F(x)cosQZ. (15.44)
Повторяя ту часть перечня, которую затрагивает замена переменных
(15.44), получаем:
xvx2-+qq2, (15.45)
Х]Х,х2 -^>qqF(x)cosQt, (15.46)
Х]Х2х2^(х) Jsin2Qz. (15.47)
Наша главная цель теперь состоит в том, чтобы описать переход по ча-
стоте и фазе так, как это было сделано в разд. 15.2. Для этого помимо при-
веденного выше перечня членов (15.45)-(15.47), нам требуется еще один
член
<7 sin О/. (15.48)
Собрав все члены, приходим к уравнению
# + (У1+/2<72)<7 + g(x)sinQ&7 + /(x)cosQZ^ + £^+£l^sin(2QZ) = 0. (15.49)
239
Часть III. ЭЭГ и МЭГ
Пространственные функции F(x), g(x) и f(x) характеризуют простран-
ственное распределение звукового раздражителя. Почему мы выбрали чле-
ны (15.45)—(15.48)? В моделировании такого рода есть свой «секрет», ко-
торый необходимо пояснить. Чтобы исследовать свойства решения урав-
нения (15.49), мы принимаем гипотезу о том, что
= е|£!'+§2е2|£!'+ комплексно сопряженная величина (15.50)
— из-за параметрической вынуждающей силы. Амплитуды <^0, <^, <^2 могут,
как и прежде, зависеть от пространства и времени. Воспользуемся двумя
аппроксимациями, которые уже неоднократно встречались нам в этой кни-
ге, а именно: приближением вращающейся волны и приближением мед-
ленно изменяющейся амплитуды. Такой подход позволяет нам преобразо-
вывать (15.49) в систему связанных дифференциальных уравнений для ам-
плитуд в (15.50). Затем мы выбираем коэффициенты в уравнении (15.49)
так, чтобы получить наблюдаемое изменение спектра мощности и сдвиг
фаз при фазовом переходе. После того, как предполагаемая модель пост-
роена, мы можем забыть соображения, использованные при его выводе, и
решать уравнение (15.49) на компьютере. Чтобы получить численно устой-
чивое решение, необходимо ввести две модификации. Необходимо произ-
вести замену
на -Y^q
и постоянную L{ — на оператор
L,
Разложив численное решение q(x,t) по модам Карунена—Лоэва, мы об-
наружим хорошее согласие между зависящими от времени амплитудами
и экспериментальными данными (включая частоту перехода). С другой
стороны, уравнение (15.49) требует некоторых усовершенствований, если
мы хотим достичь той же точности, которая достижима при использова-
нии метода, изложенного в разд. 15.3. Важной задачей на будущее оста-
ется установление связи между этими результатами и результатами мик-
роскопических теорий, например, тех, которые сформулированы Нуне-
сом (1995).
15.5. Еще раз об анализе ЭЭГ и МЭГ
Рассмотрим результаты двух предыдущих глав об ЭЭГ и МЭГ с позиций
синергетики. Как можно понять из гл.2 об исследованиях головного моз-
га, значительная часть этих исследований сосредоточена на локализо-
ванных действиях мозга. Это верно не только относительно исследова-
ний функционирования отдельных нейронов, но и исследований с ис-
240
15. Анализ паттернов МЭГ
пользованием изображений на основе магнитного резонанса (ИМР) и
позитрон-эмиссионной спектроскопии (ПЭС-сканирование). Основной
акцент делается на детектировании локализованных центров, где, в ча-
стности, используется метод вычитания. Выводы, которые мы намере-
ваемся сделать по результатам анализа ЭЭГ и МЭГ, изложенного в пре-
дыдущих главах, весьма различны. Мы обнаружили в рассмотренных
нами случаях макроскопические когерентные паттерны электрической
и магнитной активности и показали, что эти паттерны управляются не-
многочисленными параметрами порядка. Такой вывод имеет решающее
значение, так как число параметров порядка оказалось гораздо меньше
числа каналов (электродов или СКВИДов). В случае ЭЭГ, снятых на
больных petit mal-эпилепсией, можно высказать уверенность в том, что
мы имеем дело с патологической ситуацией, в которой большое число
нейронов возбуждается когерентно вследствие некоторой гиперактив-
ности. У здоровых людей ЭЭГ также обнаруживают когерентную актив-
ность в О'.-вол нах, т.е. когда испытуемые отдыхали с закрытыми глаза-
ми. И в этом случае макроскопическая активность управляется всего
лишь несколькими параметрами порядка, число которых, как показы-
вает предыдущий анализ, о котором кратко упоминалось в гл. 14, не пре-
вышает пяти. Еще более поразительны результаты экспериментов Кел-
со, в которых испытуемые должны были решать более четко поставлен-
ные задачи. Можно было бы ожидать, что эти задачи выполнялись в
сильно локализованных зонах. Но в действительности все происходило
иначе: как показали эксперименты, в решении задачи приняли участие
обширные зоны головного мозга, в том числе слуховая и двигательная
зоны, действовавшие весьма согласованно. Эксперименты со всей яс-
ностью показали, что возникшие когерентные паттерны не обусловле-
ны какой-то неспецифической «фоновой» активностью мозга, а непос-
редственно связаны с решаемой задачей. Это видно по спектру мощно-
сти, имеющему пики на частоте звукового сигнала и его высших гармо-
ник или субгармоник. Динамика управляется весьма небольшим числом
параметров порядка, во много раз меньшим числа сигналов.
Наши замечания отнюдь не исключают возможности появления при
меньших временных и пространственных масштабах дополнительных про-
цессов, однако, по мнению автора, следует ожидать сильной корреляции
между макроскопическими и микроскопическими паттернами — корреля-
циями, выражаемыми принципом подчинения. Ясно, что для установле-
ния во всех деталях взаимосвязи между макроскопической и микроскопи-
ческой активностями многое еще предстоит сделать. Как было показано в
этой и предыдущих главах, динамика параметров порядка управляется
сравнительно простыми уравнениями связанных осцилляторов или хаоти-
ческие системы не локализованы и не реализуются отдельными клетками,
а являются свойством всей нейронной системы, подобно тому, как харак-
терные структуры в жидкости обусловлены коллективным поведением всех
молекул или когерентное поле лазера создается коллективными актами ис-
пускания излучения отдельными атомами. С другой стороны, необходимо
1G -4614
241
Часть Ш. ЭЭГ и МЭГ
сознавать, что активность головного мозга человека по сложности неиз-
меримо превосходит такие простые физические явления, как тепловая кон-
векция в жидкости или когерентное лазерное излучение. Тем не менее все
эти системы имеют одно общее свойство: они обладают способностью по-
рождать явления, отличающиеся высокой когерентностью в пространстве
и времени. Экспериментальные результаты изучения МЭГ отличаются осо-
бенной четкостью из-за периодической вынуждающей силы. В будущих
исследованиях особый интерес представляет анализ переходов, так как
именно он позволит составить более точное представление о различных
константах скоростей.
Часть IV
Когнитивная деятельность
16. Зрительное восприятие
По моему глубокому убеждению, многое о когнитивной деятельности мы
можем узнать, изучая зрительное восприятие или, точнее говоря, распоз-
навание образов. Таким образом, соображения, изложенные в этой главе,
послужат нам в дальнейшем метафорой при изучении некоторых видов
когнитивной деятельности человека.
16.1 Модель распознавания образов
Чтобы разработать модели зрительного восприятия человека, мы можем по-
ступить двояко. Более традиционный подход можно было бы назвать под-
ходом снизу вверх. При таком подходе мы начинаем с нейронов и взаимо-
связей между ними, после чего выводим (макроскопические) свойства ней-
ронной сети. К этому подходу мы еще вернемся в нашей книге (в гл. 18). Дру-
гое направление, напрямую следующее из духа феноменологической синер-
гетики, можно назвать подходом сверху вниз. При таком подходе мы начина-
ем с задач, которые должна выполнить макроскопическая система, и лишь
затем занимаемся поисками реализаций системы в виде сети элементов, ко-
торые мы, как и в первом случае, можем назвать модельными нейронами.
Итак, рассмотрим задачу, которую должна решать макроскопическая
система для зрительного восприятия. Такой системой может быть голов-
ной мозг человека или животного, а также высокосложный компьютер.
Зрительное восприятие — область весьма обширная. Например, всякий
раз, когда мы (или какое-нибудь животное) видим яркое пятно, это озна-
чает, что срабатывает зрительное восприятие. Наша цель носит более час-
тный характер, но она и более амбициозна; мы хотим исследовать зритель-
ное восприятие на когнитивном уровне, или, иначе говоря, хотим понять,
каким образом головной мозг распознает с помощью зрения объекты (или
паттерны). Соответственно, далее речь пойдет о распознавании образов.
Прежде всего необходимо выяснить, что именно мы понимаем под распоз-
наванием образов. Увидев чье-то лицо, мы хотим узнать имя человека или
по крайней мере установить, знали ли мы этого человека в прошлом. Та-
245
Часть IV. Когнитивная деятельность
ким образом, мы хотим ассоциировать имя с лицом, или, иначе говоря,
распознавание образов можно ассоциировать как действие ассоциативной
памяти. Существуют и другие примеры ассоциативной памяти, например,
телефонный справочник. Отыскав в нем имя Алекс Миллер, мы узнаем
номер телефона этого человека. Если мы хотим выразить действие ассо-
циативной памяти в абстрактных терминах, то можно сказать, что она слу-
жит для восполнения пробелов неполного набора данных и для получения
их полного набора. Но как осуществить такую ассоциативную память?
Ниже мы хотим реализовать ассоциативную память с помощью какой-
нибудь динамики. Очень часто динамику можно наглядно представить с
помощью движения шарика по тому или иному ландшафту. В таком ланд-
шафте мы можем идентифицировать распознанные паттерны с дном до-
лин, а неполные, т.е. еще не до конца распознанные, паттерны — с поло-
жением шарика на склоне холма (рис. 16.1). В процессе распознавания ша-
рик скатится на дно ближайшей долины, и задача распознавания образа
будет решена. Разумеется, центральный вопрос заключается в том, каким
образом детали подлежащего распознаванию образа можно поставить в со-
ответствие деталям динамики шарика. Чтобы установить такое соответ-
ствие, воспользуемся аналогией между распознаванием образа и форми-
рованием образа. Иначе говоря, мы утверждаем, что распознавание обра-
за мозгом или компьютером есть не что иное, как формирование паттер-
на. Для более подробного объяснения этой идеи обратимся к примеры по-
догреваемой снизу жидкости. Как было показано в гл.4, в подогреваемой
снизу жидкости могут образоваться структуры — конвективные валы. Рас-
смотрим круглую кювету с подогреваемой снизу вязкой жидкостью, в ко-
торой установилась критическая разность температур, в результате чего в
жидкости (в принципе) могут возникнуть конвективные валы. Примем еще
Рис. 16.1. Наглядное представление о рас-
познавании образов — аналогия с движени-
ем шарика по ландшафту потенциала. Ми-
нимумы ландшафта соответствуют распоз-
нанным образам, нахождение шарика на
склоне — неполному, т.е. нераспознанно-
му, образу.
246
16. Зрительное восприятие
а) б) в)
Т= 0.0
Т= 0.0
Т= 0.0
Т= 3.0
Т= 3.0
Т= 10.0
Т= 7.0
Т= 60.0
Т= 200.0 Т= 200.0 Т= 200.0
Рис. 16.2а, б, в. Компьютерное
моделирование образования
структуры в подогреваемой
снизу жидкости в круглой
кювете. Жидкость нагрета до
температуры выше критичес-
кой. Левый столбец: первона-
чально в жидкости создается
восходящее течение в виде
вала; со временем жидкость
«достраивает» одиночный вал
до целой системы валов, иду-
щих в том же направлении.
Средний столбец: то же, что в
левом столбце, но с другим на-
чальным состоянием. Правый
столбец: конфликтная ситуа-
ция создана с помощью зада-
ния в жидкости двух началь-
ных валов, один из которых
несколько «сильнее» друго-
го. Со временем в конкурен-
тной борьбе побеждает толь-
ко один (более сильный) вал
и порождаемая им структура
валов.
одно допущение: предположим, что первоначально возникший единствен-
ный конвективный вал имеет какое-то заданное нами направление
(рис. 16.2, левый столбец). Как показывает компьютерное моделирование,
жидкость может со временем достроить паттерн, заполнив параллельны-
ми конвективными валами всю жидкость. Придав начальному конвектив-
ному валу другое направление, мы получим паттерн, состоящий из конвек-
тивных валов, параллельных новому направлению (рис. 16.2, средний стол-
бец). Наконец, мы вынуждаем жидкость войти в конфликт с двумя изна-
чально заданными валами в разных направлениях, так что один вал ока-
зывается в чем-то более сильным, чем другой (рис. 16.2, правый столбец).
Попробуем найти интерпретацию этих результатов в терминах парамет-
ров порядка и принципа подчинения. Прежде всего приготовим началь-
ное состояние, которое можно представить в виде суперпозиции всевоз-
можных паттернов из конвективных валов, ориентированных по различ-
ным направлениям. Каждый из этих паттернов конвективных валов управ-
247
Часть IV. Когнитивная деятельность
Формирование Распознавание
образов образов
Параметры!---------------
_________________порядка __________________
//!\\\ //1\\\
Части
Черты
Рис. 16.3. Аналогия между
формированием и распозна-
ванием образов (см. текст).
ляется своим параметром порядка, но один параметр порядка оказывает-
ся сильнее всех других, а именно тот, который принадлежит первоначаль-
но заданному валу. После того как начальное состояние приготовлено,
между различными параметрами порядка возникает конкуренция, в кото-
рой выигрывает параметр порядка, принадлежащий первоначально наи-
более сильному конвективному валу. Это, помимо прочего, отчетливо вид-
но по правому столбцу на рис. 16.2. Победив в конкурентной борьбе ос-
тальные параметры порядка, этот параметр порядка подчиняет себе всю
систему, т.е. заставляет ее перейти в состояние с упорядоченными конвек-
тивными валами. Иначе говоря, частично упорядоченная система через
конкуренцию параметров порядка переходит в свое полностью упорядо-
ченное состояние.
А что происходит при распознавании образов? Мы утверждаем то же са-
мое, а именно: сначала человеческому мозгу или компьютеру могут быть
предъявлены какие-то черты лица, например, нос или глаза, чтобы опреде-
лить начальное состояние образа. Этим «вызывается» соответствующий па-
раметр порядка, который вступает в конкуренцию со всеми остальными па-
раметрами порядка; «победив» их, этот параметр порядка восполняет задан-
ные черты другими и восстанавливает целиком все изображение. Например,
может быть «дорисовано» лицо или, если это требуется, указано имя чело-
века (рис. 16.3). Чтобы понять, как работает предложенная процедура, рас-
смотрим конкретные примеры — распознавание человеческих лиц. Пор-
треты людей мы разложим на отдельные пиксели размером 0,01 на 0,01
(рис. 16.4). Условимся обозначать пиксель его номером j. Каждому пиксе-
лю припишем какое-то определенное значение серости у.. Совокупность
всех значений серости г. образует вектор v = (vp v2,...,vN). Если имеется не-
сколько лиц, то их векторы мы отличаем по индексу к и записываем vk. Рас-
смотрим теперь процесс распознавания, в котором в качестве исходного век-
тора паттерна задан вектор неполного изображения, например, от лица со-
хранились только глаза или нос. Обозначим исходный вектор паттерна че-
рез q. Мы хотим предложить такую динамику, в которой вектор q со време-
нем «проявляется» (как фотопленка), превращаясь в вектор где —
один из хранящихся в памяти прототипов векторов паттернов. Как показы-
вает анализ, который мы здесь не приводим, в интересующем нас случае
можно построить динамику, удивительно напоминающую динамику в при-
248
16. Зрительное восприятие
Рис. 16.4. Пример построения вектора-про-
тотипа. Его компоненты — серые значения
соответствующих пикселей j.
мере с подогреваемой снизу жидкостью. Для этого введем сопряженные век-
торы vk, определяемые соотношениями ортогональности
(16.1)
Сопряженные векторы можно построить из исходных векторов vk по
формуле
м
(16.2)
А=1
где — транспонированный вектор vk, а коэффициенты матрицы Акк мож-
но вычислить по формуле (16.1) (см. приложение В). Динамику распозна-
вания образов описывают уравнения
м м
0 = 2Л(Г*^ Z (г^)2(гл+9Х(16.3)
Л-1 Л,Г'=1
где члены в правой части имеют следующий смысл. Первый член содер-
жит параметры внимания Л*. Их роль и интерпретацию мы поясним в
разд. 16.2. Разлагая векторы vk,vk на их компоненты v* и vkj, мы можем
записать j-ю компоненту члена (ykq)vk в виде
J'
В этом выражении vkj vj — обучающая матрица паттерна к. Третий со-
множитель позволяет различать паттерны. Наконец, последнее слагаемое
в (16.3) ограничивает рост значений серости пикселей. Динамику вектора
q наглядно можно представить как движение шарика по ландшафту потен-
циала (такое представление мы уже неоднократно использовали в этой
книге). В общем случае динамика вектора q разыгрывается в многомерном
249
Часть IV. Когнитивная деятельность
пространстве, но когда мы рассматриваем двумерный пример всего лишь
с двумя пикселями и двумя паттернами-прототипами, форму потенциала
можно наглядно представить в виде двумерной поверхности (рис. 16.1).
Уяснить всю процедуру в целом помогут несколько явных примеров. На
рис. 16.5 Вы видите ряд лиц (вместо портретов можно взять какие-нибудь дру-
гие паттерны), хранящиеся в памяти вместе с их именами (закодированны-
ми буквами). На рис. 16.6 показан процесс распознавания, использующий все
хранимые в памяти паттерны одновременно. Динамика очень грубая: напри-
мер, легко могут быть распознаны зашумленные паттерны (рис. 16.7). Наш
подход был в дальнейшем усовершенствован настолько, что позволял распоз-
навать образы, даже если портреты были сдвинуты, повернуты, увеличены или
уменьшены. И даже деформированы (рис. 16.8). Синергетический компью-
тер можно также обучить распознаванию выражений лица (рис. 16.9). Для это-
го необходимо произвести соответствующее усреднение по лицам различных
людей (каждое лицо берется с одним и тем же выражением), после ассоции-
ровать выражение лица с определенной интерпретацией (например, с радос-
тью). В зависимости от выбора задачи и параметров внимания синергетичес-
кий компьютер научается распознавать лицо безотносительно к его выраже-
нию или выражение лица безотносительно к человеку. (В наших эксперимен-
тах доля успешных исходов составляла около 80%.)
Но не будем задерживаться на деталях, так как мы хотим подчеркнуть
другой аспект, а именно: взаимосвязь между сетью нейронов и парамет-
рами порядка. Уравнение (16.3) можно следующим образом интерпрети-
ровать как описывающее различные типы активности сети модельных ней-
ронов. Сопоставим каждому индексу j модельный нейрон с активностью
qj и перепишем уравнения (16.3) компонентно:
Qj ^jlmnQlQmQn (1 6.4)
I Imn
где коэффициенты К1тп могут быть найдены из уравнений (16.3) и со-
Рис. 16.5. Примеры хранящихся в памяти структур-прототипов (включая фамилии).
250
16. Зрительное восприятие
Рис. 16.6. Пример процесса распознавания, в котором часть лица задана как начальное
состояние.
Рис. 16.7. Распознавание зашумленных лиц.
Рис. 16.8. Распознавание деформированного лица.
Рис. 16.9. Примеры выражений лиц, распознанных синергетическим компьютером, обу-
ченным различать выражения липа.
стоят из компонент векторов прототипа vk и сопряженных с ними векто-
ров vk. Например, А?, определяется соотношением
^i=^kvkjv+ki, (16.5)
к
где vkj — компоненты вектора vk, a vkl — компоненты сопряженного век-
тора vk. Как видно из уравнения (16.4), модельный нейрон j изменяет свою
активность под действием входных сигналов, поступающих от других ней-
ронов (рис. 16.10). Первая сумма в правой части уравнения (16.4) означа-
251
Часть IV. Когнитивная деятельность
Рис. 16.10. Наглядное пред-
ставление модели (16.4) с по-
мощью параллельной сети (см.
текст).
ет, что модельный нейрон j усиливает сигналы, поступающие к нему от
нейрона I, в Х./7 раз (величину Х7 можно интерпретировать как интенсив-
ность, или силу, синаптической связи); суммирование производится по
всем входным сигналам /. Второй член в правой части уравнения (16.4) опи-
сывает входные сигналы, поступающие одновременно от трех нейронов.
Эти сигналы усиливают друг друга в к.1тп раз. Коэффициент Х7ти также
можно интерпретировать как своего рода силу синаптической связи. Сум-
мирование проводится по 1тп. В какой-то мере описанные процедуры вос-
производят те, которые принято приписывать реальным нейронам, одна-
ко существуют два принципиальных различия.
1) В предлагаемой нами модели используются мягкие нелинейности,
тогда как в традиционной модели нейронов применяется пороговая фун-
кция между входом и выходом. Мягкие нелинейности можно интерпрети-
ровать как следствие действия группы нейронов.
2) В нашей модели входные сигналы бывают одиночными и тройными.
Если вместо мягких нелинейностей использовать гладкую пороговую фун-
кцию и разложить ее в степенной ряд по входным сигналам дк, то окажет-
ся, что тройные входные сигналы выступают в качестве главного нелиней-
ного члена.
В контексте нашей книги важно отметить, что (16.3) и (16.4) описывают
действие в целом сети, состоящей из отдельных нейронов, и что наша мо-
дель позволяет исследовать взаимосвязь между активностью отдельных ней-
ронов и происхождением параметров порядка. Переход от микроскопичес-
кого нейронного уровня на уровень параметров порядка осуществляется раз-
ложением вектора q на его скелет мод по аналогии с процедурой, к которой
мы прибегали при рассмотрении образования паттерна в гл. 10:
м
9(f) = ^k(t)vk + w(f\ (16.6)
где — параметр порядка, принадлежащий паттерну vk, w — остаточный
член, который со временем обращается в нуль. Таким образом, эволюци-
онирующие во времени распознанные паттерны определяются параметра-
ми порядка %к. Подставляя (16.6) в (16.3), умножая уравнение (16.3) на vk
и образуя скалярное произведение, мы получаем с учетом соотношения ор-
тогональности (16.1) и (va+,m>) = 0
м м
‘к=^к-В^&к-CY& (16.7)
к'*к к'-\
252
16. Зрительное восприятие
Рис.16.11. Взаимосвязь между
активностью отдельных моде-
лей нейронов (верхний ряд) и
динамикой параметров поряд-
ка (среднийряд). Параметры
порядка определяют динамику
на выходе q^t) (нижний ряд).
(Подробности см. в тексте.)
Уравнение (16.7) дает нам ключ к определению начальных значений ам-
плитуд
&(0) = (<?(())). (16.8)
Уравнения (16.6)—(16.8) устанавливают взаимосвязь между микроско-
пическими паттернами активности модельных нейронов и уровнем пара-
метров порядка. Как мы видели, каждый паттерн к управляется своим па-
раметром порядка £к. В определенном смысле можно утверждать, что па-
раметр порядка выражает «идею паттерна к».
Взаимосвязь между активностью q. отдельных нейронов и параметрами
порядка наглядно можно представить по аналогии с рис. 16.11. В верхнем
слое представлены отдельные нейроны j с активностями . Их начальная
активность в момент времени t = 0 проецируется на средний слой пара-
метров порядка по правилу (16.8). Далее начинается динамика между па-
раметрами порядка. В конкурентной борьбе побеждает только один из них.
Именно он и определяет паттерн активности нейронов, представленный
нижним слоем на рис. 16.11. Разумеется в действительности нижний уро-
вень совпадает с самым верхним. В действительности такое наглядное
представление взаимосвязи между отдельными нейронами и параметрами
порядка содержится и в рис. 16.3, в котором мы использовали аналогию
между формированием паттерна и распознаванием паттерна. На рис. 16.3
мы изобразили только один параметр порядка. Заметив, что на рис. 16.11
верхний слой совпадает с нижним и отразив рис. 16.11 относительно го-
ризонтальной оси — уровня параметра порядка, мы обнаружим, что рис.
16.3 и 16.11 тождественны. Рис. 16.11 допускает и другую интерпретацию,
а именно: верхний слой можно отождествить, например, с сенсорными
нейронами, а нижний слой — с двигательными, или моторными, нейро-
нами. При такой интерпретации параметры порядка управляют двигатель-
ной активностью.
Часть IV. Когнитивная деятельность
16.2. Роль параметров внимания.
Неоднозначные фигуры
Попытаемся теперь выяснить роль параметров внимания Лк. Если предъя-
вить компьютеру такую сцену, которая изображена на рис. 16.12, то он
прежде всего распознает женщину на переднем плане. Если мы положим
параметр внимания, соответствующий женщине, равным нулю и предъя-
вим компьютеру ту же сцену, то он распознает фигуру мужчины на заднем
плане. В приведенных нами экспериментах компьютер смог распознать
сцены, состоящие из 5 частично скрытых лиц. По моему убеждению, этот
результат можно рассматривать как указание на то, каким образом голов-
ной мозг справляется с распознаванием сложных сцен: сначала он рассмат-
ривает часть сцены, затем внимание к ней исчезает и переключается на
другую часть сцены. В пользу такой интерпретации говорят и проводимые
ниже соображения.
В редких случаях компьютер не мог узнать лица на предъявленной ему
сцене, а вместо них узнавал какое-то другое лицо. Но оказывается, что кар-
тинки могут вводить в заблуждение не только компьютер, но и людей.
Взгляните на рис. 16.13. Большинство людей, взглянув на него, сначала
распознают лицо Эйнштейна и, лишь приглядевшись, начинают различать
фигуры трех купальщиц. Этот пример вводит нас в обширную область
неоднозначных паттернов. Еще несколько примеров неоднозначных изоб-
ражений приведены на рис. 16.14—16.16. Неоднозначность может иметь
различные источники, например, основываться на различных простран-
ственных интерпретациях, как в случае куба Неккера, или быть связанной
с семантическими неоднозначностями, как в случае дилемм «ваза или два
лица» или «юная красавица или дряхлая старуха». Наш мозг «обрабатыва-
ет такие неоднозначные изображения весьма специфическим образом.
Например, разглядывая картинку «ваза или два лица», мы какое-то время
Рис. 16.12. Пример сцены, распознанной
синергетическим компьютером.
254
16. Зрительное восприятие
Рис. 16.13. Портрет Эйнштейна или три ку-
пающиеся девы?
Рис. 16.14. Куб Неккера.
распознаем вазу, затем видим два лица, после чего снова видим вазу и т.д.
Иначе говоря, наше восприятие осциллирует между этими двумя интер-
претациями. В начале XX в. гештальт-психолог Келер предложил объяс-
нение этого явления. Идея Келера сводилась к следующему. Коль скоро
паттерн распознан, внимание к нему затухает и новое внимание обретает
возможность сосредоточиться на другой интерпретации. Келер предложил
и физическое объяснение таких процессов, которое теперь считается ус-
таревшим и не разделяется большинством нейрофизиологов или психофи-
зиков. С другой стороны, в рамках предлагаемого нами подхода на основе
параметров порядка моделировать такие процессы очень просто. В каче-
стве исходного пункта запишем уравнения двух параметров порядка и
255
Часть IV. Когнитивная деятельность
Рис. 16.15. Ваза или лица?
Рис. 16.16. Старуха или молодая женщина?
Рис. 16.17. Зависимость параметров порядка <|2, соответствующих двум интерпретаци-
ям, например, вазе и лицам, от времени.
£2, соответствующих двум зрительным образам, например, вазе и лицам.
Записывая уравнение (16.7) применительно к данному случаю, получаем:
^=^-C^2-(B + C)^22], (16.9)
(16.10)
Обратите внимание на полностью симметричную роль параметров по-
рядка и £2.
Кроме того, мы подчиняем параметры внимания динамике, учитываю-
щей насыщение, т.е. параметр внимания убывает, когда соответствующий
256
16. Зрительное восприятие
параметр порядка возрастает. Уравнения для насыщения параметров вни-
мания принимает следующий вид:
^=/(1-^-^), (16.11)
^ = /(1-2,-^)- (16.12)
Решение системы связанных уравнений (16.9)—(16.12) представлено на
рис. 16.17. Отчетливо видны наблюдаемые осцилляции зрительного восприятия.
16.3. Влияние смещения
Во многих случаях один паттерн распознается быстрее другого. Например,
в случае рис. 16.16, как показывают подробные психологические исследо-
вания, 80% мужчин сначала распознают изображение юной красавицы и
только 20% сначала видят старуху. Это свидетельствует о том, что в рас-
познавании неоднозначных фигур существует определенное смещение.
Рассмотрим нашу модель этого явления несколько подробнее, так как она
проливает свет на интересную взаимосвязь между величиной смещения и
продолжительностью периодов, в течение которых воспринимается пат-
терн. Обозначим вектор паттерна-прототипа старухи номером 1, а вектор
паттерна-прототипа юной красавицы — номером 2. Переформулируем
приведенное выше утверждение следующим образом: доля pt = 20% всех
мужчин идентифицируют вектор q паттерна-теста, который объективно со-
ответствует реально предъявленному паттерну, с , а доля р2 = 80% — с
т2.Такая формулировка наводит на мысль реконструировать вектор q пат-
терна-теста по имеющимся экспериментальным данным, полагая
« = дГ1+йг2. (16.13)
Чтобы промоделировать это присущее данному случаю смещение, вос-
пользуемся фундаментальным механизмом, введенным в оригинальном
подходе, который был изложен в предыдущем разделе (рис. 16.1). Приме-
нительно к двумерному случаю этот подход означает, что ландшафт потен-
циала V, построенный над плоскостью, натянутой на ^2, разделен хреб-
257
17-4614
Часть IV. Когнитивная деятельность
том, проходящим по диагонали (рис. 16.18). В этом случае внутренне при-
сущее смещение отсутствует, поэтому рх = р2 = 50% и вектор q совпадает с
хребтом, идущим вдоль диагонали. Но при наличии смещения хребет дол-
жен был бы сместиться так, чтобы линия нейтральной силы, т.е. вектор q,
определялась бы формулой (16.13). Как показывает простой математичес-
кий анализ, хребет смещается вследствие добавления к потенциалу потен-
циала Vb, имеющего следующий вид:
НА=-2^22[1-4а|^1
(16.14)
Этот дополнительный потенциал содержит только параметр а. Действи-
тельно, формула (16.14) устроена так, что «хребет» полного потенциала об-
разует с осью Vj такой же угол ОС, как вектор q (16.13) (рис. 16.18). Чтобы по-
лучить новые уравнения для параметров порядка, необходимо лишь доба-
вить к правым частям уравнений (16.9) и (16.10) отрицательные производ-
ные от Vb, соответственно, по и ^2. Таким образом, в своем окончатель-
ном виде уравнения для параметров порядка выглядят следующим обра-
зом:
(16.15)
^^-Cg-fB+C)#]-^
^52
(16.16)
Решив эти уравнения вместе с уравнениями для параметров внимания,
мы получим результаты, представленные на рис. 16.19. Соотношение между
временами Тх и Т2, в течение которых наблюдатель идентифицирует один
из двух паттернов (например, видит юную красавицу или дряхлую стару-
ху) и параметром смещения а0 имеет вид
т2-т;
(16.17)
где
1~В
(16.18)
Как показывает анализ уравнений (16.15), (16.16), (16.11) и (16.12), ос-
цилляции восприятия происходят только при условии, если
~acrit <& < Ucrjt-
(16.19)
В противном случае наблюдатель будет все время видеть тот из паттер-
нов, который соответствует большему смещению. Как видно из рис. 16.19,
время, в течение которого наблюдатель воспринимает паттерн с большим
смещением, увеличивается с увеличением параметра смещения ос0. Экспе-
риментально и теоретически установлен весьма замечательный факт: су-
258
16. Зрительное восприятие
.100 .200 .300 .400 Время
Рис. 16.19 а, б, в. Колеба-
ния с возрастающим сме-
щением.
шествование взаимосвязи между поведением группы наблюдателей и по-
ведением отдельного наблюдателя. Поведение группы наблюдателей про-
является в (выраженной в процентах) доле тех, кто видит первый распоз-
нанный паттерн, поведение индивидуального наблюдателя в продолжи-
тельности того отрезка времени, в течение которого он (или она) видит
преимущественно наблюдаемый паттерн.
Рассмотрим теперь две другие поразительные особенности, возникаю-
щие при распознавании неоднозначных паттернов, а именно: гистерезис
и флуктуации. С явлением гистерезиса мы встретились в разд.5.1, где это
явление человеческого восприятия было продемонстрировано на рис.5.3.
Из приведенных нами ранее соображений следовало, что состояние нашего
мозга зависит от предшествующего опыта. Таким образом, один и тот же
паттерн допускает различные интерпретации в зависимости от того, какие
паттерны нам доводилось видеть в прошлом. Чтобы объяснить этот эффект
в рамках излагаемого нами сейчас подхода, начнем с следующего сообра-
жения. Если мы не видели паттерн раньше вообще или по крайней мере
долгое время, то параметр смещения (угол а0) присваивается после при-
выкания к нему в течение некоторого времени. Если мы посмотрим на не-
сколько иную картину, то начальное смешение сходит на нет и устанав-
ливается новое смешение, соответствующее этой картине. Такая адапта-
ция занимает некоторое время, поэтому параметр смещения СХ = СХ0 в
(16.14)—(16.16) становится зависящей от времени функцией, удовлетворя-
ющей уравнению вида
259
17*
Часть IV. Когнитивная деятельность
а(О = -р[а(О-аоу], (16.20)
где Ц — параметр затухания, CXOj — «объективное» смещение паттерна с ин-
дексом j. («Объективное» смещение может быть измерено по временам об-
ращения, хотя обсуждение этого понятия сейчас лежит в стороне от обсуж-
даемой нами темы.) Решение уравнения (16.20) при t> t., где 6 — началь-
ный момент времени, имеет вид
а(О = аОу +[a(fz)-a0/]e''('-'y). (16.21)
Далее мы поступим следующим образом. Предположим, что в момент
времени t = наблюдатель начинает воспринимать паттерн 1 и видит его
в течение некоторого времени, например, т. В этом случае индекс j над-
лежит положить равным 1; следовательно, CXOj = а0Р Начальное значение
(ХЦ) субъективно, и при моделировании его можно выбирать произволь-
но. Спустя время т, т.е. в момент времени t = + т = t7, наблюдатель на-
чинает смотреть на вторую картину j = 2. Параметр CXOj следует положить
равным а02, а начальное значение параметра а — величине CX(Z2) — вы-
числяется по формуле (16.21) для заключительного момента времени, т.е.
при t2 = Zj + т.
Изложенную выше процедуру мы повторяем шаг за шагом. Финальное
значение параметра а на каждом интервале служит начальным значением
для следующего интервала. В результате такого построения мы получаем
кривую, изображенную в нижней части рис. 16.20. Одновременно мы ре-
шаем уравнения для ^к и кк, учитывающих зависимость CL(t) от времени. Эво-
люция во времени £р и Лр Л2 показана в верхних частях рис. 16.20. Вы-
полнив те же вычисления, но для обращенного, т.е. «повернутого вспять»,
времени (рис. 16.20), мы обнаружим пересечение двух параметров поряд-
ка и <fj2, происходящее при различных значениях смещения. Это и есть
эффект, называемый гистерезисом.
Рис. 16.20. Эффект гистере-
зиса в распознавании обра-
за «лицо или женщина».
260
16. Зрительное восприятие
16.4. Роль флуктуаций параметров внимания
В этом разделе мы хотим показать, каким образом можно уточнить при-
веденные выше результаты с учетом флуктуации параметров внимания.
При этом удается достичь хорошего качественного согласия с психофизи-
ческими данными Борселлино и др. (1972). При надлежащем выборе па-
раметров флуктуаций и других параметров модельной системы удается до-
стичь не только качественного, но и количественного согласия. Напомним
кратко основные эксперименты Борселлино и его соавторов. Эта группа
тщательно исследовала распределение периодов осцилляции, которые чет-
ко не зафиксированы и флуктуируют в определенных пределах (рис. 16.21).
Варьируя размеры объектов, например, кубов Неккера, предъявляемых
испытуемым, Борселлино и др. варьировали угол зрения (угол, под кото-
рым глаз видит предъявляемый паттерн) и изучали его влияние на флук-
туации времени распознавания паттерна. Построив график зависимости
частоты (доли благоприятных исходов) от продолжительности, исследова-
тели получили функцию распределения, форма и центр тяжести которой
зависят от угла зрения. При малых углах зрения эта функция распределе-
ния имеет небольшую ширину и сосредоточена на сравнительно малых
промежутках времени. При больших углах зрения ширина возрастает, а
положение максимума функции распределения сдвигается в сторону
больших промежутков времени. Тип поведения оказывается одним и тем
же для различных наблюдателей. Борселлино и др. удалось выделить быс-
трых, медленных и типичных наблюдателей. Максимумы распределения
частоты были сдвинуты в сторону более коротких промежутков времени
(у быстрых наблюдателей) или в сторону более продолжительных проме-
жутков времени (у медленных наблюдателей).
Чтобы описать эволюцию параметров порядка во времени, воспользу-
емся уравнениями (16.15), (16.16) или (в отсутствие смещения) уравнени-
ями (16.9), (16.10). Мы исходим из предположения, что зависящие от вре-
мени параметры внимания удовлетворяют уравнениям
Л, = /(1 - Л,+ ВД, (16.22)
A2=y(l-A2-^) + W (16.23)
Рис. 16.21. Относительная частота
различных периодов Т. (Экспери-
ментальные результаты Борселлино
и др., 1972.)
261
Часть IV. Когнитивная деятельность
Как видно из уравнений (16.22), (16.23), параметры внимания Л] и Л2
подвержены действию флуктуирующих сил F, и F2. Предполагается, что
среднее значение сил F. равно нулю:
(Fy.(/)) = 0, (16.24)
и что флуктуации имеют короткую память, или, точнее, что
(Fy(0A(O) = ^,e5(/-n, J,k= 1,2. (16.25)
В моделируемых нами процессах допускается варьирование величины
флуктуаций Q.
500
1000 1500 Время
Рис. 16.24. Относительные
частоты времен Т для мед-
ленного наблюдателя.
Рис. 16.22. То же, что на рис.
16.21. (Теоретические ре-
зультаты Дитцингера и Хаке-
на, 1990.)
Рис. 16.23. Относительные
частоты времен Тдля быст-
рого наблюдателя.
262
16. Зрительное восприятие
К
.050 .100 Время
.050 .100 Время
Рис. 16.25. В случае, когда
возможны три интерпрета-
ции и допускается воздей-
ствие шума на параметры
внимания, возникает слу-
чайная последовательность
интерпретаций.
Уравнения (16.9), (16.10), (16.22), (16.23) решались методом ломаных Эй-
лера с шагом вперед. Влияние флуктуирующих сил имитировалось датчиком
случайных чисел. Начальные значения параметров порядка и <fj2 выбира-
лись случайным образом из отрезка 0—1. Эксперимент повторялся достаточ-
но долго, чтобы набрать уверенную статистику частоты продолжительности,
т.е. определить распределение частот как функцию продолжительности.
В последующих сериях экспериментов величина флуктуирующих сил
варьировалась, и для каждой величины определялась функция распреде-
ления. Полученные кривые представлены на рис. 16.22. Качественно они
хорошо согласуются с данными Борселлино и др.
Чтобы сравнить наши результаты с данными Борселлино и др. по быс-
трым и медленным наблюдателям, мы варьировали постоянную релакса-
ции у параметров внимания (рис. 16.23 и 16.24). И в этом случае достигну-
то хорошее качественное согласие, которое при подходящем выборе па-
раметров может быть превращено (в определенных пределах) в количе-
ственное согласие.
Наконец, мы исследовали влияние флуктуаций на повторяемость ин-
терпретации паттернов для случая, когда возможны 3 интерпретации. Ре-
зультаты представлены на рис. 16.25. Нетрудно видеть, что паттерны рас-
познавались в случайной последовательности.
Можно было бы спросить, влияют ли флуктуации только на параметры
внимания или и на параметры порядка, управляющие распознаванием пат-
тернов. Как показывают полученные нами результаты численного моде-
лирования, учитывавшего оба типа флуктуаций, разумные результаты по-
лучались только в том случае, когда мы исходили из предположения о вли-
янии флуктуаций на параметры внимания, но не на параметры порядка.
Полученные результаты отнюдь не исключают того, что флуктуации, не-
посредственно действующие на параметры порядка, могут играть опреде-
ленную роль. Но в качестве общего заключения мы можем со всей опре-
деленностью утверждать, что влияние флуктуаций на параметры внимания
имеют гораздо большее значение.
Хорошее согласие между полученными нами результатами и экспери-
263
Часть IV. Когнитивная деятельность
ментальными данными Борселлино и др., несомненно, имеет первостепен-
ную важность. Оно подкрепляет идею о том, что обнаруженное в экспе-
риментах Борселлино и др. изменение формы и положения функции рас-
пределения, может быть объяснено изменением амплитуды флуктуаций.
Мы уже упоминали о том, что экспериментально построенная функция
распределения изменялась как функция угла зрения. При увеличении угла
зрения (увеличении объекта) функция распределения становилась шире.
В нашей интерпретации это означает, что параметры внимания должны
флуктуировать интенсивнее при большем угле зрения, что следует рассмат-
ривать как правдоподобное допущение.
16.5. Паттерны обучения
Человеческое зрение, несомненно, является наиболее изученной, теоре-
тически и экспериментально, областью когнитивной деятельности. В пре-
дыдущих разделах этой главы мы рассматривали распознавание паттер-
нов как возникновение новых паттернов, формирующихся в головном
мозгу человека или в некоторых типах параллельных компьютеров, на-
пример, в синергетическом компьютере. Мы считаем, что понятия синер-
гетики позволяют пролить свет на взаимосвязь процессов на микроско-
пическом уровне и эмержентных макроскопических свойств, описывае-
мых параметрами порядка, управляемой ранее известными паттернами,
параметрами внимания и смещением. Как и в случае движения пальцев,
понятия синергетики позволяют нам моделировать когнитивные процес-
сы так, что построенные модели допускают количественную проверку. Та-
ким образом, синергетика позволяет установить связь между микроскопи-
ческим и макроскопическим уровнями. В частности, выясняется, что для
многих процессов, происходящих на макроскопическом уровне, детальная
структура и природа подсистем, в нашем случае нейронов, не имеет осо-
бого значения, существенны лишь немногие общие свойства подсистем.
Возникает вопрос: почему реальные нейроны так сложны? Вероятнее все-
го, ответ на этот вопрос лежит в проблеме обучения и памяти, которые еще
не до конца понятны.
Рассмотрим в заключение модель обучения в терминах синергетичес-
кого компьютера. Как будет показано далее, предлагаемая новая процеду-
ра позволяет по-новому взглянуть на своего рода обучение на нейронном
уровне, а также на уровне параметров порядка и их динамики. Напомним
парадигму обучения, выведенную на основе движений пальцев в разд.8.1,
где утверждалось, что под влиянием обучения ландшафт потенциала па-
раметров порядка претерпевает деформацию. Но как именно связаны меж-
ду собой изменения нейронной сети и изменения ландшафта потенциала,
оставалось не совсем ясно. Рассмотрим этот фундаментальный вопрос бо-
лее подробно и начнем с динамики процесса распознавания, описываемой
уравнением (16.3). Существенными элементами здесь являются хранимые
264
16. Зрительное восприятие
в памяти паттерны-прототипы vk и их сопряженные векторы Записав
уравнения для отдельных компонент # вектора q и интерпретировав их как
активности нейронов, мы получим уравнение (16.4), где коэффициенты Лу/
и A,jlmn означают силы синапсов. Их можно выразить с помощью хранимых
в памяти паттернов-прототипов, например, с помощью соотношения
(16.5). Ясно, что предлагаемый нами подход обладает огромным преиму-
ществом перед всеми другими традиционными нейрокомпьютерами или
моделями нейронных цепей, поскольку позволяет установить прямую вза-
имосвязь между силами синапсов с одной стороны и хранящимися в па-
мяти паттернами-прототипами — с другой стороны. Пользуясь нашим под-
ходом, мы можем вместо того, чтобы изучать, как изменяются силы синап-
сов, исследовать обучение паттернам-прототипам. Это достигается следу-
ющим образом. Как мы уже упоминали выше, уравнения для динамики
процесса распознавания паттернов, т.е. (16.3), могут быть выведены из по-
тенциала V, который зависит, с одной стороны, от хранящихся в памяти
паттернов-прототипов vk (или сопряженных с ними векторов р^), а с дру-
гой стороны, от вектора тестового паттерна q, т.е. V= V(yk, q). В качестве
явного примера может служить потенциал
1 М 1 м
= +-^BM,q)\v+k.,qY (16.26)
£ к-\ кк'=\
где
f В + С если к* к'
Me если*=Г <16'27>
Воспользуемся следующей разновидностью принципа двойственнос-
ти: для того чтобы произошло распознавание паттерна, шарик, символи-
зирующий вектор паттерна q, должен скатиться по ландшафту потенци-
ала (рис. 16.1), или, если воспользоваться более абстрактными термина-
ми, потенциал V должен быть минимизирован динамикой градиента век-
тора q. Векторы-прототипы vk при этом считаются фиксированными. Об-
ратим теперь наши рассуждения и рассмотрим векторы тестовых паттер-
нов q как предъявленные, но фиксированные паттерны, а паттерны-про-
тотипы vk и сопряженные с ними векторы как те паттерны, распознаванию
которых нужно научиться, т.е. как те паттерны, которые необходимо «по-
догнать». И на этот раз для подгонки необходимо воспользоваться проце-
дурой минимизации. Для этого мы выписываем общий потенциал И( 16.26)
и производим суммирование по векторам q всех предъявленных тестовых
паттернов. Вектора vk необходимо определить так, чтобы среднее потен-
циала (К) = ^ V(vk,qj) имело минимальное значение, что в свою очередь
достигается с помощью динамики градиента по vk *. Таким образом, обу-
* Для практических приложений условия = 1 и (16.2) необходимо учитывать с помощью
дополнительных ограничений в виде потенциалов Г'2 и V3, добавляемых в (16.26). Подробно-
сти см. в приложении С.
265
Часть IV. Когнитивная деятельность
Рис. 16.26. Пример обучения распознаванию черт лица. Требовалось научить компьютер рас-
познавать три образа-прототипа (верхний ряд). Они вводились в компьютер в случайной пос-
ледовательности. В трех нижних рядах показано, как процедура обучения сказалась на век-
торах и совместных векторах (продолжительность обучения возрастает слева направо).
I
Г *
nHsnei
Рис. 16.27. Обучение распознаванию частично скрытых лиц. В компьютер вводилась слу-
чайная последовательность частично скрытых изображений (каждый раз квадрат, закры-
вающий часть лица, занимал другое положение). Процесс обучения приводил к форми-
рованию полного изображения-прототипа, совпадающего с незакрытыми портретами в
верхней части рис. 16.26.
266
16. Зрительное восприятие
чение обретает форму процесса оптимизации.- Несколько примеров тако-
го подхода представлены на рис. 16.26 и 16.27. Они убедительно показы-
вают, что предлагаемая процедура обеспечивает эффективное обучение
паттернам-прототипам. Коль скоро паттерны-прототипы «выучены», мы
можем тотчас же построить соответствующие силы синапсов kjP к1тп и тем
самым построить динамику распознавания в соответствии с (16.3). В ре-
зультате мы устанавливаем взаимосвязь между процедурой обучения с од-
ной стороны и изменением сил синапсов — с другой. Вместе с тем мы ви-
дим, что абстрактный ландшафт потенциала (а именно <У>) изменяется
под влиянием процедуры обучения. Интересно отметить, что на процеду-
ру обучения можно воздействовать подходящим выбором параметров вни-
мания. Такой выбор облегчает образование классов, или категорий.
Наконец, операция проектирования (16.8) позволяет нам перейти с мик-
роскопического уровня, описываемого вектором д, на уровень параметров
порядка, описываемый величинами %к. Совершая такой переход, необхо-
димо преобразовать потенциал V, зависящий от q и vk, в потенциал V, за-
висящий только от параметров порядка и параметров внимания. В случае
распознавания паттернов потенциал имеет универсальную природу. Он оп-
ределяется по формуле
1 М I
И = (16.28)
2 к=1 к,к'
где коэффициенты заданы соотношением (16.27). Нетрудно видеть, что
паттерны vk исчезли. Но эффект обучения кроется в правиле проектиро-
вания (16.8), которое содержит паттерны vk.
16.6. Модель стереоскопического зрения
Наш мир трехмерен. Каждому из нас это утверждение кажется очевидным,
но для зрительной системы нашего головного мозга трехмерность окружа-
ющего мира не очевидна. Чем это объясняется? Рассмотрим кратко, как
наши глаза обрабатывают визуальную информацию. Как всем известно,
наш глаз работает как миниатюрная фотокамера. Лучи света, идущие от
объекта, попадают на сетчатую оболочку, где создают изображение. Так как
сетчатая оболочка двумерна, создаваемое на ней изображение также дву-
мерно. Таким образом, окружающий мир должен был бы казаться нам дву-
мерным, но мы видим его трехмерным. Каким образом наш мозг рекон-
струирует трехмерный мир? Было предложено несколько механизмов, про-
веренных в психофизических экспериментах. Простая догадка заключается
в том, что о глубине сцены мы судим по размерам объектов. Например,
зная средний рост человека, мы можем судить об удаленности фигур по
кажущемуся уменьшению из размеров с расстоянием. Однако здесь воз-
267
Часть IV. Когнитивная деятельность
Рис. 16.29. Пример случайной точечной стереограммы Юлиша. Левая и правая случайные
точечные стереограммы различны, если их рассматривать, соответственно, левым и пра-
вым глазом. Если разделить стереограммы листом бумаги, перпендикулярным плоскости
страницы, то при рассмотрении стереопары двумя глазами возникает изображение квад-
рата, плавающего над фоном. Квадрат справа представляет собой карту несовпадения, ко-
ординирующую сдвиги а и б (см. текст). Эта карта наглядно показывает, что компьютер
распознал квадрат, плавающий над фоном.
Рис. 16.28. Оптическая ил-
люзия, связанная с оценкой
роста фигур. В действитель-
ности обе фигуры одинако-
вого роста.
можны оптические иллюзии (рис. 16.28). Еще один ключ к оценке глуби-
ны сцены: по тени предмета мы строим заключение о его форме: по теням,
отбрасываемым всеми предметами, мы угадываем о третьем измерении. Во
всех этих случаях для оценки третьего измерения нам необходим некото-
рый предварительный опыт. Юлеш обнаружил важный фундаментальный
механизм (1991), создав стереограммы из случайно расположенных точек
(рис. 16.29). Рассматривая стереограммы Юлеша так, чтобы левый глаз мог
видеть только левое изображение, а правый глаз — правое, мы увидим квад-
268
16. Зрительное восприятие
рат, плавающий над фоном. Распознавание глубины независимо от того,
знаем ли мы объекты или нет, называется ранним зрением.
Какого рода информация поступает а мозг, позволяя ему реконструи-
ровать третье измерение? Рассмотрим рис. 16.30 и 16.31. На рис. 16.30 два
точечных объекта удалены от наблюдателя на одно и то же расстояние. Из
геометрического построения мы легко устанавливаем, что на сетчатой обо-
лочке правого и левого глаза расстояния между точечным изображениями
объектов также одинаковы. Рассмотрим теперь рис. 16.31, где объекты на-
ходятся от наблюдателя на различных расстояниях. В этом случае, как вид-
но из чертежа, расстояния между изображениями объектов на сетчатых
оболочках правого и левого глаза различны. Сравнивая изображения на
сетчатке правого и левого глаз, мы обнаруживаем, что точки, соответству-
ющие одному и тому же объекту в пространстве, сдвинуты друг относитель-
но друга. Этот сдвиг зависит от положения изображений на сетчатой обо-
лочке глаз и от глубины и называется различием. Зная величину различия,
269
Часть IV. Когнитивная деятельность
Рис. 16.32. Иллюстрация неоднозначности
в определении расстояний до объектов.
мы можем с помощью геометрических построений вычислить расстояние
до объектов. (В действительности существуют еще два сигнала, позволяю-
щие судить о трехмерности сцены: схождение и адаптации.)
Мы не будем подробно анализировать здесь эти соображения, а хотим
изучить более фундаментальную проблему, а именно: каким образом наш
мозг знает, какие точки на сетчатой оболочке принадлежат одному и тому
же объекту? Как видно из рис. 16.32, это действительно нетривиальная за-
дача. Проследим за ходом световых лучей вспять — от конца к началу. Каж-
дая точка пересечения двух световых лучей может возникать от одного и
того же объекта, но, как видно из рис. 16.32, мы можем «распознавать» три
объекта перед плоскостью, в которой расположены два объекта. Пользу-
ясь принятой в математике терминологией, можно сказать, что задача рас-
познавания объекта некорректна. Поэтому наша первая задача состоит в
том, чтобы придумать механизм, при котором задача распознавания объек-
та станет корректной, т.е. будет допускать единственное решение. Но
прежде чем мы приступим к описанию такого механизма, необходимо не-
сколько глубже рассмотреть те трудности, которые встретятся нам на пути.
Из-за конечности разрешения на плоскости изображения, т.е. на сетчатой
поверхности, точка на плоскости соответствует не точке, а отрезку в про-
странстве. Точке в трехмерном пространстве, не находящейся в фокусе, со-
ответствует некоторая область, или площадка, на плоскости изображений.
Левый глаз (левая камера) может видеть точки объекта, невидимые правому
глазу (правой камере) и наоборот. У таких заслоненных точек нет паттер-
на. Многие пиксели изображения могут иметь одни и те же значения се-
рости; это означает, что наша задача часто не имеет единственного реше-
ния. Из-за различных точек зрения левая и правая плоскости изображений
могут иметь глобально различные уровни яркости. Поэтому даже если
структура изображений одинакова, на уровне яркости у изображений нет
соответственных точек.
Из наших замечаний следует, что конечность разрешения на плоскости
изображений приводит к конечности разрешения в трехмерном простран-
стве, в частности, к конечному разрешению по глубине, и мы не можем
270
16. Зрительное восприятие
использовать значения уровня серости как единственную характеристику:
необходимы характеристики, обладающие более тонкой структурой, что
позволяло бы ставить их в однозначное соответствие с объектом. Эти ха-
рактеристики не должны зависеть от абсолютных величин яркости и дол-
жны соответствовать вполне определенным положениям объекта в про-
странстве (Марр и Хилдрет (1980), Марр и Поджо (1976, 1979). Чтобы пре-
одолеть указанные трудности, мы, следуя этим авторам, введем несколь-
ко ограничений.
1) Ограничение области поиска. Мы исходим из предположения, что зри-
тельной системе человека присущ определенный диапазон значений раз-
личия. Слияние, т.е. отождествление различных изображений на сетчатой
оболочке, возможно только при условии, если значение различия d <18 ле-
жит в определенном диапазоне, который называется областью слияния Па-
нума. Грубо говоря, различие наблюдается в основном по горизонтали, точ-
нее, в так называемом эпиполярном направлении, но так как система линз
может быть несовершенной, необходимо также учитывать и небольшое
различие в перпендикулярном направлении.
2) Ограничение непрерывности. По крайней мере в общем случае мы все-
гда обнаруживаем вокруг себя протяженные поверхности одинаковой глу-
бины. Следовательно, значения различия вдоль протяженных областей в
плоскости изображений.
3) Ограничение единственности. Утверждается, что проблема соответ-
ствия должна иметь единственное решение.
Резюмируя сказанное, мы можем прийти к следующему заключению.
Стоящая перед нами проблема состоит в том, чтобы найти на сетчатой обо-
лочке два изображения, которые находятся в соответствии друг с другом.
Назовем ее проблемой соответствия. Решение проблемы соответствия
можно разделить на несколько этапов. Прежде всего требуется определить
те характеристики, между которыми желательно установить соответствие,
после чего ввести меру сходства между двумя характеристиками. Затем,
опираясь на экспериментальный факт существования так называемых на-
строенных на различие нейронов, мы выведем уравнения, описывающие
эволюцию их активности во времени. Так мы шаг за шагом приходим к ре-
шению проблемы соответствия. Рассмотрим этапы ее решения более под-
робно.
Чтобы определить те свойства, между которыми требуется установить
соответствие (такие свойства, или характеристики, мы будем называть со-
ответственными), сопоставим каждый точке изображения некоторую об-
ласть вокруг нее. В результате с каждой точкой изображения мы связыва-
ем некоторую область, обладающую каким-то свойством. Наша цель со-
стоит в том, чтобы по свойству левого изображения найти наиболее похо-
жее на него свойство правого изображения. Решение этой задачи позво-
ляет нам установить различие изображения. При решении проблемы раз-
личной яркости двух изображений мы берем не значения серости облас-
271
Часть ГУ. Когнитивная деятельность
Рис. 16.33. Зависимость се-
рых значений g(x) от х.
Рис. 16.34. Определение ок-
ружения точки и.
тей, а принимаем во внимание структурно значимые различия в локаль-
ной средней яркости областей, между которыми устанавливается соответ-
ствие. Эти так называемые локальные свойства содержат всю необходимую
нам информацию, а именно информацию о локальной структуре изобра-
жения. Чем больше область, тем более однозначно соответствие, но тем
хуже пространственное разрешение. Большая область изображения долж-
на соответствовать связной части трехмерного пространства; поэтому для
таких свойств существует взаимно однозначное соответствие между плос-
костью изображения и объектом.
Чтобы показать, каким образом мы вводим соответственные свой-
ства, рассмотрим одномерный пример, в котором точки изображения
лежат на оси х. Каждая точка изображения обладает значением серости
g(x) (рис. 16.33). Определим окрестность точки и, ширину которой мы вы-
берем равной 2с (рис. 16.34). Так как нас интересуют локальные вариации,
вычтем из g(x) среднее значение gi, которое, как нетрудно видеть, опреде-
ляется по формуле
| и+с
— § g(x)dx = g(u).
(16.29)
Чтобы вырезать интервал длиной 2с вокруг точки изображения и, вве-
дем функцию f («окно»):
[1/2с если |х-и|<с
Лх-И)= 0 если |х-«|>с (16-30)
272
16. Зрительное восприятие
(график такого «окна» представлен на рис. 16.35). Будем считать, что фун-
кция — «окно» нормирована:
J/(x-m)Jx = 1. (16.31)
Пользуясь функцией — «окно» f мы можем вырезать сегмент функции
g(x) вдоль оси х, как показано на рис. 16.36. Как уже было сказано выше,
мы вычитаем среднее значение gi(u) и, таким образом, определяем соот-
ветственное свойство для левого изображения с помощью соотношения
L(x;u) = f(x-u)[gL(x)-gL(u)] (16.32)
(рис. 16.37). Так как значение серости относится к левому изображению,
мы снабдили функцию g индексом L. Правый глаз получит соответствен-
ное изображение с более или менее теми же свойствами, но сдвинутыми в
пространстве. По аналогии с (16.32) вводим
R(x- и) = f(x - и) [gK(x) - gA(w)] (16.33)
На рис. 16.38 показана функция R с интервалом, выбранным вдоль оси
х, и свойствами, соответствующими свойствам функции L на рис. 16.37. За-
дача мозга состоит в том, чтобы определить сдвиг, т.е. различие а, сравни-
вая свойства, представленные на рис. 16.38, со свойствами, представлен-
ными на рис. 16.36. Чтобы произвести также сравнение, мы сдвигаем фун-
кцию R на рис. 16.38 так, чтобы ее график совпал с графиком функции f на
рис. 16.36. Это означает, что мы сдвигаем функцию R по оси х на величи-
ну а. Для этого мы вводим R(x + а,и + а) (рис. 16.39), что и означает: сдвиг
произведен. Проблема, стоящая перед головным мозгом или компьютером,
273
18-4614
Часть ГУ. Когнитивная деятельность
Рис. 16.38. Пример функ-
ции R(x;u + а). В этом слу-
чае R сдвинута относитель-
но L.
Рис. 16.37. Вид функции
L(x;u).
Рис. 16.39. Сдвиг функции
R вдоль оси х может приве-
сти к совпадению R и L (см.
рис. 16.37).
сводится к следующему: им необходимо определить величину а сдвига в
форме соответственных свойств так, чтобы соответственные свойства по
возможности максимально совпадали. Следует иметь в виду, что два свой-
ства не обязательно должны полностью совпадать, например, из-за обту-
рации и т.д. Прежде чем переходить дальше, обощим наши соображения
на случай двух измерений следующим образом:
х—>х,у
u-^u,v -
a-^a,b
(16.34)
Сходство между точкой левого изображения и, v и точкой правого изоб-
ражение и + a, v + b мы установим, рассматривая расстояние между свой-
ствами, определяемыми функциями L и R и интегрируя эти функции со-
ответственно по окружностям точек и, v и и + a, v + b. Различие становит-
ся минимальным, если совпадение достигается оптимальным образом пу-
тем подходяшего выбора anb.
В дальнейшем мы вводим положительную меру сходства, принимая сле-
дующее определение меры сходства-.
S(u,v;a,b) =Е - ^\L(x,y;u,v) - R(x + а,у + b‘,u+a,v + b)\dxdy. (16.35)
274
16. Зрительное восприятие
В (16.35) Е— положительная константа, значение которой выбрано до-
статочно большим для того, чтобы гарантировать положительность меры
S. Ясно, что когда сходство между свойствами окрестностей точек и, v и
и + a, v + b наибольшее, S достигает своего максимального значения.
Наша цель состоит в том, чтобы придумать такую динамику, которая (при
подходящем выборе а и Ь) гарантировала бы, что S со временем достига-
ет своего максимального значения. Для этого мы введем переменные
<^(t), а в качестве начальных значений для них воспользуемся соотно-
шением
S(u,v,a,b) = ^(t = 0). (16.36)
Переменные %™ будем считать активностями «нейронов различия», со-
ответствующими точке изображения и, v и различию а, Ь. Мы предполага-
ем, что активности %™ изменяется со временем из-за процесса, в ходе ко-
торого активности нейронов различия конкурируют между собой. В конеч-
ном счете побеждает только одна конфигурация, которая соответствует
правильным распределениям различий, отвечающих расположению объек-
тов в трехмерном пространстве.
Основную идею такого процесса мы заимствуем из модели синергети-
ческого компьютера, рассмотренной в разд. 16.1. Будем считать, что пере-
менные удовлетворяют системе дифференциальных уравнений, описы-
вающих конкуренцию различий, в которой выигрывает наибольшее сход-
ство. Обобщая нашу модель, мы вводим дополнительный член, содержа-
щий точки uv, соседние с мт и обладающие таким же различием ab, кото-
рый помогает переменной выиграть конкуренцию. Все эти соображе-
ния приводят нас к уравнениям
2 2
^-(д+с)£ет -с(С) +^(О > (16.37)
u'v'
где мы воспользовались следующими аналогиями с (16.7):
&->С(0> (16.38)
(16.39)
Штрихи у знаков сумм означают, что при первом суммировании
а',Ь'Фа Ь, а ПРИ втором суммировании Выясним, что означают в
уравнении (16.37) отдельные члены.
Мы выбираем Л"’ так, чтобы
A“vb=S(u,v;a,b), (16.40)
т.е. придаем первоначально наибольшей конфигурации а, b наибольшую
скорость роста. Существуют три причины, по которым мы не просто вы-
бираем это наибольшее значение, чтобы найти правильное различие а, b
данной точке изображения и, v.
275
18*
Часть IV. Когнитивная деятельность
1) У функции S(u,v;a,b) может не быть единственного или существенно
превосходящего остальные значения максимума.
2) Мы не реализовали ограничение непрерывности.
3) Выбор — процесс, осуществляемый последовательно и поэтому мед-
ленный. По аналогии с активностью головного мозга можно утверждать,
что при обработке большого объема данных достаточной быстротой отли-
чаются только алгоритмы, действующие параллельно. Члены, содержащие
Ви Св (16.37), служат для создания конкуренции между переменными
с различными индексами а, Ь. Член, содержащий D, поддерживает пере-
менные с одним и тем же индексом ab с помощью соседних точек изоб-
ражения u',v’ -
Как показано в разд.16.1, уравнения вида (16.37) могут быть легко ин-
терпретированы как действие параллельной сети. При существующем в
настоящее время уровне компьютерной психологии систему уравнений
(16.37) приходится решать на последовательном компьютере вместо того,
чтобы использовать параллельную сеть. Заметим, что число уравнений
(16.37) очень велико, так как мы использовали 100 х 100 пикселей (и,у) и
Левое изображение
Правое изображение
Карта несовпадения
Рис. 16.40. То же, что на рис. 16.39, но со случайными точечными стереограммами раз-
личной зернистости. Компьютер, как и человек, все еще распознает квадрат, плавающий
над фоном (из работы Реймана и Хакена, 1995, как и рис. 16.41,16.42,16.45— 15.48).
Левое изображение
Правое изображение
Карта несовпадения
Рис. 16.41. То же, что на рис. 16.40, со случайными распределениями редких точек.
276
16. Зрительное восприятие
Левое изображение
Правое изображение
Несовпадение по X
Несовпадение по Y
Рис. 16.42. То, же, что на
рис. 16.41, но со спиралью.
Обратите внимание на то,
что карта несовпадения об-
наруживает различную глу-
бину изображения.
Рис. 16.43. Схема того, как
можно распознать трехмер-
ные объекты, разглядывая
двумерную картину. Пиксели
(01ЛеВ-01прав)и™(02лев,02прав)
на плоскости двумерной кар-
тины можно идентифици-
ровать как возникающие от
одного и того же объекта 01
(или. соответственно, 02).
Эти объекты реконструиру-
ются как трехмерные.
смещения (а,Ь) порядка 10. Проделав необходимые вычисления, мы обна-
ружим, что одни равны нулю, а другие отличны от нуля. Из последних
мы можем определить положение объекта u,v и различие а,Ь. Например,
на рис. 16.29 (в его правой части) черным цветом показаны те участки, в
точках которого различие имеет некоторое постоянное значение, а бе-
лым — участки, в точках которых различие имеет другое постоянное зна-
чение (соответствующее «плаванию» квадрата над фоном). Заметим, что в
этом примере различие по направлению оси у (по вертикали) было выбра-
но равным нулю. Рис. 16.40—16.42 показывают, что описанный выше про-
цесс распознавания глубины приводит к довольно грубым результатам что,
277
Часть IV. Когнитивная деятельность
Рис. 16.44. Сечение коммер-
ческого трехмерного изоб-
ражения.
Плоскость Один Тройной
изображения единорог единорог
Смещение
Рис. 16.45. Зависимость потенциала (16.41) от смещения.
впрочем, известно и по наблюдениям за испытуемыми. Полученные дан-
ные были подкреплены дальнейшими компьютерными экспериментами
(Рейман и Хакен (1994).
В заключение этого раздела, посвященного стереоскопическому зре-
нию, следует сделать одно замечание по поводу распознавания трехмер-
ных объектов на двумерных изображениях. (Такие изображения пользуют-
ся большой популярностью и встречаются ныне в книгах, на обоях, исполь-
зуются в рекламах и т.д.) Принцип, положенный в основу таких изобра-
жений, показан на рис. 16.43. Он связан с неоднозначностью распознава-
ния глубины сцены (рис. 16.32). Но при построении протяженных объек-
тов, подходящим образом нагроможденных друг на друга (для чего суще-
ствуют специальные компьютерные программы), схема, представленная на
278
16. Зрительное восприятие
Рис. 16.46. Эволюция во вре-
мени карты несовпадения
картины, фрагмент которой
изображен на рис. 16.44.
Рис. 16.47. Карта несовпадения тройного
единорога, построенная на основе соответ-
ствующего минимума потенциала, пред-
ставленного на рис. 16.45.
279
Часть IV. Когнитивная деятельность
Время t
Время t + т
Рис. 16.48. Определение оп-
тического потока, связанно-
го с движением, два момен-
тальных снимка, которые
представлены слева. (Рей-
ман, 1995).
рис. 16.43, допускает обобщение, позволяющее распознавать в трехмерном
пространстве целые объекты. Человек, желающий распознать трехмерный
объект, должен определенным образом расположить свои глаза, т.е. конт-
ролировать схождение. Если распознаванием трехмерного объекта зани-
мается компьютер, то эта цель достигается путем минимизации потенци-
ала V по сдвигу схождения. Потенциал можно выбрать различными спо-
собами. Простая процедура состоит в том, чтобы положить
V^-S, (16.41)
где функция S определена соотношением (16.35), и а = s, b = 0, если мы
рассматриваем только горизонтальный сдвиг. Необходимо отметить два су-
щественных отличия использования функции S в данном случае от ее ис-
пользования в предыдущем случае.
1) В отличие от предыдущей процедуры мы выбираем теперь
R(u, v) = £(w, v).
2) R и L относятся к более крупным деталям или к объекту целиком, тог-
да как ранее мы были озабочены «тонкой настройкой».
На рис. 16.44 показан фрагмент трехмерной картины, в котором скрыт
280
16. Зрительное восприятие
единорог. Минимум потенциала V (рис. 16.45) определяют большие зна-
чения различия, после чего компьютер осуществляет тонкую настройку.
Рис. 16.46 и 16.47 показывают, как на картах различия обнаруживаются
одиночный единорог или утроенное изображение единорога.
Чтобы распознать глубину, человеку или компьютеру необходимо срав-
нить в пространстве (или на сетчатой оболочке) два изображения. Но мы
можем также сравнивать изменение изображений в пространстве и во вре-
мени. Как показал Рейман (1995), описанная выше процедура легко может
быть обобщена так, чтобы компьютер мог обнаружить оптический поток,
как показано на рис. 16.48.
Часть IV. Когнитивная деятельность
17. Принятие решения
как распознавание образов
В этой главе будем следовать нашей идее, согласно которой распознава-
ние зрительных образов может служить метафорой для понимания спо-
собностей человека к когнитивной деятельности. Одна из типичных про-
блем, с которыми сталкивается человек, — приходится принимать реше-
ния в обыденной жизни, решения принимаются в экономике и в компа-
ниях (особенно менеджерами, а также в политике) и т.д. Анализируя про-
блему принятия решений более тщательно, мы быстро обнаруживаем, что
существует ряд специфических трудностей, из которых мы упомянем
лишь о некоторых. В общем случае информация, которой мы располага-
ем, относительно которой требуется принять решение, неполна. Пользу-
ясь математической терминологией, можно было бы сказать, что пробле-
ма принятия решений некорректна аналогично тому, как некорректны
проблемы, с которыми нам пришлось столкнуться при рассмотрении сте-
реоскопического зрения. Очень часто решения приходится принимать в
конфликтных ситуациях. Каждое конкретное решение сопряжено со сво-
им собственным риском. Из проблемы принятия решений следует, что в
общем случае имеется широкий выбор и немалый репертуар действий.
При исследовании проблемы принятия решений использовались как ко-
личественные, так и качественные методы. Принятию решений посвяще-
на обширная литература.
В этой главе мы хотим по-новому взглянуть на эту проблему, исполь-
зуя аналогию между принятием решений и распознаванием паттернов. В
общем случае между тем, что известно, и тем, что необходимо знать для
принятия решения о конкретном действии, существует разрыв (рис. 17.1).
В идеальном случае известные данные совпадают с данными, необходимы-
ми для принятия решения. В общем случае известных данных недостаточ-
но, т.е. существует определенное число неизвестных данных. Как человек
восполняет разрыв между известными и необходимыми данными? Ответ
на этот вопрос мы намереваемся проанализировать в этой главе. Простым,
хотя и нетривиальным, примером может послужить поведение теннисис-
та на корте. Даже поверхностный анализ показывает, что время которым
располагает теннисист на корте для ответной реакции, слишком мало для
тщательного анализа сенсорных данных, прежде чем начать моторное дей-
ствие. Значит, теннисист должен действовать по каким-то специфическим
282
17. Принятие решения как распознавание образов
Известные данные
Действия
Необходимые данные для
принятие решения
Известные Неизвестные
данные данные
Действия
----Необходимые данные для---
принятие решения
Рис. 17.1. Верхняя часть', изве-
стные данные совпадают с
данными, необходимыми для
выполнения действия или
принятия решения. Нижние
данные', известных данных
недостаточно.
Неизвестные данные
Известные
данные
Неизвестные данные
Рис. 17.2. Известные дан-
ные могут быть дополнены
различными способами. В
зависимости от того, какой
из способов выбран, при-
нимаются различные реше-
ния и выполняются различ-
ные действия.
шаблонам на основе предшествующего опыта и тренировки. Но, вообще
говоря, проблема еще сложнее. Рассмотрим рис. 17.2. Он показывает, что,
по крайней мере в общем случае, известные данные могут быть различны-
ми способами дополнены для того, чтобы компенсировать недостающие
данные. В зависимости от того, как именно мы компенсируем недостаю-
щие данные, могут приниматься различные решения (или предпринимать-
ся различные действия). В этом смысле рис. 17.2 переупрощен потому, что
даже в том случае, когда все данные известны, можно принять несколько
решений, совместимых со всей полнотой данных.
Как мы восполняем недостающие данные? Наше основное утвержде-
ние состоит в том, что мы часто используем сходство между данной ситу-
ацией и ситуацией, встречавшейся нам в прошлом. Стремясь облечь сход-
ство ситуаций в математические формы, мы используем количественные
меры сходства (о которых речь пойдет ниже). Разумеется, не прибегая к
математике, мы можем опираться на аналогии или метафоры. Имеет зна-
чение и ряд психологических факторов, таких, как осведомленность, вни-
мание, смещение и убеждения. Принимая всерьез аналогию с распозна-
ванием паттернов, которая будет рассмотрена ниже, мы можем ожидать
выборов, зависящих от времени как при распознавании неоднозначных
фигур. Отсюда следует, что принимаемые нами решения будут осцилли-
ровать и со временем могут становиться случайными. Развивая основную
идею более подробно, мы намереваемся провести между распознаванием
паттернов и принятием решений следующие аналогии (табл. 17.1).
В распознавании паттернов и в принятии решений мы обнаруживаем,
соответственно, единственную идентификацию паттерна и единственное
решение. Но в ряде случаев нам могут встретиться осцилляции между дву-
мя и более паттернами или двумя и более решениями. Как всем известно,
такого рода колебания не являются чем-то исключительным в нашей по-
вседневной жизни. Их истоки кроются в фундаментальном механизме ког-
283
Часть IV. Когнитивная деятельность
Таблица 17.1. Соответствие между элементами и процессами распознавания пат-
тернов и принятия решений
Распознавание паттернов Принятие решений
Паттерны, изображения, расположе- ния объектов, визуальные и звуковые сигналы, паттерны движения, действия (часто кодируемые в виде векторов). Данные (количественные и качествен- ные, правила «да—нет», законы, инст- рукции, алгоритмы, программы, тех- нологические схемы, диаграммы, мно- гомерные команды, короче говоря, «данные». Наборы известных полных «данных», возникшие в результате обучения или полученные изначально.
Паттерны-прототипы, возникшие в результате обучения или полученные изначально
Паттерны-тесты Неполные данные, в частности отсут- ствует «действие» Мера сходства, динамика, смещение, динамика, осведомленность
Единственность идентификации или осцилляции между двумя или более паттернами, гистерезис, сложные сие- ны, насыщение внимания Единственность решения или осцил- ляции между двумя или более решени- ями, делать то же, что в прошлый раз даже при изменившихся обстоятель- ствах, множественный выбор, неудач- ная попытка, новая попытка на осно- ве нового решения, «эвристика».
нитивных способностей человека. Весьма важная аналогия возникает, если
вспомнить об эффекте гистерезиса, с которым мы встречались при распоз-
навании паттернов (см. рис. 16.20). Перевод этого эффекта на язык при-
нятия решений означает следующее: человек даже при изменившихся об-
стоятельствах делает то, что делал в последний раз. Аналогию между рас-
познаванием паттернов и принятием решений можно продолжить. При
распознавании паттернов мы имеем дело со сложными сценами и видим,
что компьютер, а возможно, и головной мозг человека анализирует такие
сцены с помощью насыщения внимания: распознав часть сцены, мы со-
средотачиваем внимание на других объектах. В нашем анализе принятия
решений множественный выбор соответствует сложным сценам, а насы-
щение внимания, распознавание паттернов может быть переведено следу-
ющим образом. Сосредотачивая внимание, мы производим первый выбор.
Потерпев неудачу, мы полагаем равным нулю параметр внимания, соответ-
ствовавший сорвавшейся попытке. Затем мы предпринимаем новую по-
пытку, сосредотачивая внимание на новом решении, и т.д. В зависимости
от нашего предшествующего опыта может выстроиться целая иерархия па-
раметров внимания, которые мы последовательно, один за другим, испы-
тываем, начиная с наибольшего. Такая интерпретация аналогии между рас-
познаванием паттернов и принятием решений связана с предложенным
Вагенааром (1993) понятием эвристики.
284
17. Принятие решения как распознавание образов
Резюмируя эти идеи, мы можем утверждать следующее. Механизмы,
рассматриваемые в случае распознавания паттернов, допускают перевод на
язык принятия решений. Этот перевод может быть произведен не только
на качественном, но и количественном — на уровне компьютерных алго-
ритмов по аналогии с синергетическим компьютером. Разумеемся, наш
анализ неполон, и другие стратегии могут оказаться столь же важными. В
этой связи следует упомянуть искусственный интеллект и особенно под-
ход на основе экспертных систем. Однако на его пути возникает пробле-
ма ветвления: число различных ветвей возрастает чрезвычайно быстро, и
принятие решений становится весьма затруднительным. Мы убеждены, что
подход, намеченный нами выше, позволяет обойти проблему ветвления,
поскольку, как в случае распознавания паттернов, различные возможнос-
ти могут быть учтены параллельно.
Часть IV. Когнитивная деятельность
18. Мозг как компьютер,
или Могут ли компьютеры мыслить?
18.1. Экскурс: что такое «мыслить»?
Разумеется, что такое «мыслить», знает каждый из нас. Но когда требует-
ся дать более строгое определение тому, что мы подразумеваем, когда го-
ворим о способности мыслить, то это оказывается трудной задачей. Прежде
всего совсем просто определить такие действия, которые по всеобщему
мнению не основаны на мышлении. К числу таких действий относятся
рефлексы. Например, мы закрываем глаза, если какой-нибудь объект бы-
стро приближается к нашему лицу, или наша нога дергается, если кто-ни-
будь стукнет нас молоточком по колену. Предполагается, что инстинкты
не связаны с мышлением, и даже очень сложное поведение насекомых ча-
сто объясняют инстинктами. (Однако может возникнуть и новое понима-
ние поведения насекомых.) Мышление не участвует в таких бессознатель-
ных действиях, как, например, ходьба или плавание, управляемых мозжеч-
ком и спинным мозгом.
О мышлении мы с полным основанием говорим, когда речь заходит о
высших формах активности головного мозга, в понимании и производстве
речи, анализе сцен, картин и т.п., т.е. во всех случаях, когда зрительным
или слуховым паттернам приписывается какой-то смысл. Мышление уча-
ствует в анализе ситуаций, будь то постановка врачом диагноза или изуче-
ние домашней хозяйкой ассортимента товаров в супермаркете. Значитель-
ная часть мышления основана на проведении аналогий, на ассоциациях и
на классификации. Планирование и принятие решений сопряжены с мыш-
лением. Модель принятия решений мы рассмотрели в предыдущей главе.
Мы все убеждены, что игра в шахматы или решение математических задач
в значительной мере связаны с мышлением. Мышление лежит в основе
создания теорий о физических, химических, социальных и многих других
процессах или решения технических задач. В самом общем плане можно
утверждать, что в процессе мышления мы создаем мысленные картины,
или представления, внешнего мира. Чтобы подкрепить эти представления,
было проведено несколько экспериментов. Например, когда людей про-
сили назвать цветок, большинство сразу же называли розу, если рабочий
инструмент — молоток, если дикого зверя — льва. При исследовании мыс-
ленных представлений ученые говорят о внутренних картах, аналогичных,
286
18. Мозг как компьютер, или Могут ли компьютеры мыслить?
например, картам городов или окрестностей. Мышление связано с созна-
нием и интроспекцией — двумя большими областями, остающимися во
многом неисследованными вопреки многочисленным попыткам. Вопрос
о том, могут ли животные мыслить (в другой редакции — обладают ли жи-
вотные сознанием), и многочисленные эксперименты, показавшие, что
совершенно различные виды действительно могут мыслить, стали резуль-
татом огромного интереса к этому кругу проблем.
В заключение этого раздела позвольте упомянуть о том, что существу-
ют целые книги, посвященные проблеме интеллекта и установлению ко-
личественных мер интеллекта. Широко известным примером может слу-
жить показатель развития интеллекта, или IQ, для определения которого
испытуемым предлагается ответить на несколько четко поставленных воп-
росов (IQ вычисляется по ответам на эти вопросы). В последнее время эти
процедуры подвергаются все большим сомнениям. По мнению некоторых
ученых, которое автор этой книги разделяет в настоящее время, вопрос об
интеллекте и о его измерении более тонок потому, что интеллект может
оказаться сильно связанным с решением задач. Одни люди обладают спо-
собностями к решению задач одного рода, другие — другого. Кроме того,
возможно, существует своего рода иерархия интеллектов, когда мы срав-
ниваем интеллект в мире животных с человеческим интеллектом. В кон-
тексте этой главы современные компьютеры все еще далеки от выполне-
ния задач, которые свидетельствовали бы об интеллекте, поэтому IQ для
компьютеров еще не установлен.
18.2. Компьютеры
Механизация процессов мышления имеет давнюю историю, которая вос-
ходит к Лейбницу и создателям механических калькуляторов, или механи-
ческих вычислительных машин. Эти машины были построены для выпол-
нения операций сложения, вычитания, умножения и деления. Большой
шаг вперед был сделан с появлением электронных компьютеров и изоб-
ретением эффективной архитектуры компьютеров главным образом Цузе
и фон Нейманом. В варианте архитектуры, предложенном фон Нейманом,
компьютер состоит из процессора, в котором выполняются все операции,
и памяти. По существу ту же самую архитектуру мы обнаруживаем и в аб-
страктной универсальной машине Тьюринга, о которой речь пойдет ниже.
Если первые электронные компьютеры были построены на электронных
лампах, то современные компьютеры построены на полупроводниковых
устройствах, а именно на кремниевых чипах, в которых интегрированы ми-
риады отдельных функциональных элементов. Безотносительно к матери-
альному субстрату отдельные элементы компьютера представляют собой
логические элементы, которые могут реализовать математические опера-
ции так называемой булевой алгебры. Интересно отметить, что речь идет
287
Часть IV. Когнитивнаядеятельность
не о арифметических операциях, например, операции умножения, а о ло-
гических операциях, таких, как «И» и «ИЛИ». Пример того, как такие опе-
рации могут быть реализованы простым механическим устройством на
трубках с водой, показан на рис. 18.1. Взаимосвязь между логическими опе-
рациями булевой алгебры и арифметическими операциями умножения,
сложения, вычитания и деления может быть легко установлена, если пе-
рейти к двоичной системе счисления. В двоичной системе любое число
представимо только нулями и единицами. Проиллюстрируем взаимосвязь
между логическими отношениями и умножением на следующем примере.
Как известно даже младшим школьникам, правила умножения в двоичной
системе сводятся к следующим: 0x0 = 0, 0x1=0, 1х0 = 0и 1x1 = 1. Эти
правила полностью воспроизводит водяной компьютер на рис. 18.1, если пу-
стой сосуд мы отождествим с нулем, а полный — с единицей. В то же вре-
мя водяной компьютер реализует логическую операцию «ИЛИ»: нижние
сосуды становятся полными, если полны левый или правый верхние сосу-
ды (или оба верхних сосуда). Аналогичным образом можно воспроизвести
и другие алгебраические и логические правила, например, задающие ариф-
метическую операцию сложения (логическую операцию «И»),
Важным понятием теории вычислений и, как теперь выясняется, неко-
торых теорий мозга служит понятие машины Тьюринга, или, точнее гово-
ря, универсальной машины Тьюринга. Такая абстрактная машина была впер-
вые предложена знаменитым английским математиком Тьюрингом (1936).
Она состоит из ленты, которая (по крайней мере теоретически) может быть
бесконечно длинной. Головка, перемещающаяся вдоль ленты, может пе-
чатать на ней или стирать цифры нуль или единица. Головка снабжена про-
граммой. Следуя этой программе и считываемой с ленты цифре, головка
может заменить одну цифру другой или оставить цифру неизменной и мо-
жет передвинуться вправо или влево. В новой позиции головка снова сти-
рает старую цифру и впечатывает новую или оставляет цифру на ленте не-
изменной и снова перемещается в новое положение. Программа также мо-
жет быть закодирована цифрами. Прежде чем машина Тьюринга начина-
ет действовать, на ленте уже напечатана последовательность цифр. Эти
числа служат и программой, считываемой головкой, и начальными значе-
ниями, над которыми программа производит предписанные команды.
Предполагается, что машина работает в течение какого-то времени, затем
останавливается и считывает окончательный результат с ленты. Матема-
тическая проблема называется вычислимой, если при решении ее маши-
на Тьюринга останавливается через конечное время. Так машина Тьюринга
играет важную роль при анализе и в доказательствах вычислимости.
Чтобы проиллюстрировать понятие вычислимости, представим себе не-
сколько символов, например, символы А, В и С. Предположим, что опе-
рации, связывающие эти символы, образуют группу (см. гл. 9). Рассмот-
рим всевозможные выражения, вроде АА, АВ, АС, ВСА, т.е. любые ком-
бинации из букв А, В и С. Каждая такая комбинация называется «словом».
Определим определяющие соотношения, такие, как АВ = 1, т.е. положим
некоторые комбинации букв равными единице. Ясно, что вследствие оп-
288
18. Мозг как компьютер, или Могут ли компьютеры мыслить?
Рис. 18.1. Простой пример
реализации логической фун-
кции «ИЛИ» с помощью со-
единяющихся сосудов, кото-
рые можно наполнять во-
дой. Справа перечислены
различные возможные вари-
анты наполнения.
ределяюшего соотношения АВ = 1 мы получаем некоторые другие соот-
ношения, например, АВС =С. Проблема тождества слов в теории групп со-
стоит в ответе на вопрос, тождественны ли два слова (например, АВС =
С) с учетом определяющих отношений (таких, как АВ =1). Рассмотрим те-
перь общий случай: произвольный набор букв (или алфавит) и некоторый
набор определяющих отношений. Можно ли указать общую процедуру
(или общий алгоритм), позволяющий решить, тождественны ли два дан-
ных слова или не тождественны. Проблема тождества слов в теории групп
может быть переведена в соответствующую проблему для машины Тьюрин-
га. Доказано, что для этой проблемы невозможно определить, остановится
ли машина Тьюринга или нет. Иначе говоря, не существует общего алгорит-
ма, который позволил бы решить проблему тождества слов в теории групп.
Проблема остановки машины Тьюринга тесно связана с теоремой Гёделя о
неполноте, но мы не будем останавливаться на этой взаимосвязи.
Так как в некоторых дискуссиях о природе активностей мозга машина
Тьюринга и теорема Гёделя играют важную роль, добавим несколько ком-
ментариев по поводу проблемы остановки машины Тьюринга. В пробле-
ме остановки существует немало тонкостей, о которых упоминал, хотя и в
другом контексте, еще Винер (1948) в своей знаменитой книге о киберне-
тике. В контексте нашей книги мы можем, например, предложить маши-
не Тьюринга решить проблему распознавания неоднозначных фигур. В
гл. 16 было показано, как можно получить соответствующие уравнения.
Мы можем спросить, может ли машина Тьюринга решить, «видит» ли она
вазу или два профиля. Ясно, что решение будет осциллирующим, т.е. ма-
шина Тьюринга никогда не остановится. Следовательно, на этом уровне
проблема «ваза или два лица» неразрешима. Но природа недвусмысленно
учит нас, как решать такую проблему — с помощью осцилляций. Поэтому
стоит лишь нам перевести исходную проблему в проблему на более высо-
ком уровне и спросить: «Существуют ли осцилляции?», как машина Тью-
ринга сразу же даст утвердительный ответ и остановится. Хотя этот при-
мер чрезвычайно прост, он позволяет нам прийти к некоторым интерес-
ным заключениям. Разрешима проблема или нет, зависит не только от про-
цесса решения, но и характера и/или, в частности, от нашего интуитив-
289
19 — 4614
Часть IV. Когнитивная деятельность
ного представления о том, что мы приемлем в качестве решения. Вспом-
ним хотя бы открытие мнимой единицы i = л/~Г. Мы признаем z в качестве
приемлемого решения уравнения z2 =-1, если расширим понятие числа.
Если принять всерьез эти комментарии, то можно со всей определен-
ностью утверждать, что наш мозг действует не так, как машина Тьюринга.
Иначе говоря, если машина Тьюринга производит в качестве решения ма-
тематической проблемы набор чисел, то человек придает этим числам
смыл, или если машина Тьюринга находит проблему неразрешимой, то че-
ловек может обнаружить, что именно происходит! К вопросу о смысле по-
лученного результата мы еще вернемся.
18.3. Искусственный интеллект
Вскоре после того как был изобретен электронный компьютер, стало ясно,
что эта машина может не только манипулировать числами, но и работать
с символами. Ныне это избитая истина: достаточно взглянуть на персо-
нальный компьютер (ПК) как на процессор, занимающийся обработкой
слов. С другой стороны, мы должны понимать, что производимые этим
процессором операции над словами все еще весьма примитивны и заве-
домо не связаны с проявлениями компьютером элементов мышления. Цель
создания искусственного интеллекта далека от простой обработки слов. В
основе проекта «искусственный интеллект» лежит идея о том, что объек-
ты и действия представлены в нашем мозгу символами. Создатели буду-
щего искусственного интеллекта полагают, что мышление представляет
собой обработку этих символов по определенным правилам. На основе
этой идеи были созданы компьютерные программы, которые должны были
показать, что рад проблем действительно может быть решен таким спосо-
бом. Примером таких проблем может служить возведение сооружений из
небольших разноцветных «строительных блоков», например, из кубиков,
цилиндров и пирамид, по определенным правилам. Пирамиду разрешает-
ся ставить на кубик, но кубик запрещается ставить на пирамиду. Виног-
рад (1972) разработал программы, позволяющие компьютерам выполнять
такие команды: «Поставить красную пирамиду на синий цилиндр, а все
сооружение поставить на зеленый кубик и т.д.». Другим примером приме-
нения искусственного интеллекта может служить создание шахматных
компьютеров, достигших ныне весьма высокого уровня игры и иногда вы-
игрывающих партии даже у гроссмейстеров. Секрет успеха шахматного
компьютера — в его быстродействии: за короткое время он успевает про-
анализировать огромное количество ходов. Способ действия шахматного
компьютера полностью отличается от того, как действует квалифицирован-
ный шахматист: компьютер действует не столько интеллектом, сколько
грубой силой.
Еще один пример — знаменитая компьютерная программа «Элиза», со-
290
18. Мозг как компьютер, или Могут ли компьютеры мыслить?
зданная Вайценбаумом (1966). «Элиза» могла в какой-то мере подражать
психоаналитику: она задавала вопросы и действовала в зависимости от ре-
акций пациентов. В действительности в основу программы были положе-
ны некоторые трюки, заимствованные из типичных вопросов, задаваемых
психоаналитиками. Например, если пациент упоминал о своей матери, со
стороны компьютерной программы следовала просьба: «Расскажите о ва-
шей матери подробнее». Сам Вейценбаум весьма скептически относился
к избранному им подходу и полностью сознавал ограниченные возможно-
сти компьютеров и присущего им типа «мышления».
В конкретных четко определенных областях компьютеры можно ис-
пользовать для выполнения человеком, например, регистрации клиентов
банка, постояльцев отелей или пассажиров на транспорте при условии, что
пользователи неукоснительно придерживаются установленных правил.
Еще одно применение компьютеров известно под названием экспертных
систем. Например, некоторые врачи заинтересованы в создании компью-
терных программ, которые смогут ставить диагноз пациентам вместо че-
ловека. Но практикующим врачам известно, что такой подход отягощен
чудовищными трудностями из-за сложности постановки диагноза. Одни
и те же симптомы могут быть вызваны совершенно различными болезня-
ми, и если желательно исследовать все возможности или исключить наи-
более невероятные случаи, то число вопросов и решений, которые необ-
ходимо принять, становится необычайно большим. Кроме того, следует
иметь в виду, что практически во всех случаях эффективность, или возмож-
ности, компьютера основана не на его способности мыслить, а на интел-
лекте программиста.
Опыт, накопленный на основе всех этих систем, позволяет прийти к
следующему общему заключению: предпосылкой для функционирования
любого современного компьютера служат конечное число вполне опреде-
ленных объектов и вполне определенные правила. Компьютеры не могут
(или, если могут, то с трудом) работать с объектами, нечетко определен-
ными, неоднозначными и т.п. (что, впрочем, не следует смешивать с рас-
плывчатыми множествами, в основе которых лежат вполне определенные
правила!) По-видимому, мозг использует совершенно другие стратегии.
Некоторые из них мы рассмотрели в гл. 17.
18.4. Нейрокомпьютеры и коннективизм
Сравнивая быстроту, с которой выполняют типичные задачи повседнев-
ной человеческой жизни компьютеры и человеческий мозг, мы быстро об-
наруживаем между ними большое различие. Например, когда мы рассмат-
риваем какую-нибудь сцену, нашему мозгу (а глаза — это часть мозга!) при-
ходится обрабатывать миллиарды битов. С другой стороны хорошо извес-
тно, что элементарные компоненты головного мозга, а именно нейроны,
291
19*
Часть IV. Когнитивная деятельность
работают медленно — в диапазоне миллисекунд. Несмотря на медленность
срабатывания элементов, наш мозг в ничтожно малую долю секунды ус-
певает обрабатывать огромное количество информации. В отличие от на-
шего мозга элементы компьютера обладают высоким быстродействием, но
обычно компьютер распознает сцены медленно (или даже бывает неспо-
собен их распознавать). По этим причинам головной мозг не может об-
рабатывать информацию последовательно, как стандартный компьютер,
а работает в параллельном режиме. Так как концепция параллельного
компьютера была сформулирована еще в эпохальной работе Мак-Каллоха
и Питтса (1943), мы лишь напомним читателю, в чем состоит предложен-
ная ими модель. Предполагается, что сеть состоит из индивидуальных мо-
делей нейронов, каждый из которых может находиться в одном из двух
состояний: состоянии покоя и состоянии возбуждения. Если нейрон, на-
ходящийся в состоянии покоя, получает сигналы от других нейронов, то
он остается в состоянии покоя, если сумма сигналов меньше некоторого
критического значения, называемого порогом (возбуждения). Если же
сумма полученных сигналов превышает пороговое значение, то нейрон
переходит в возбужденное состояние и в своею очередь испускает сигнал.
Мак-Калл ох и Питтс показали, что сеть, состоящая из связанных между
собой нейронов описанного выше типа, может выполнять все логичес-
кие операции булевой алгебры, если связи между нейронами выбраны
подходящим образом. Розенблатт (1962) стал первым, кому удалось реа-
лизовать нейронную сеть Мак-Каллоха—Питтса в своем персептроне.
Утверждают, будто в дальнейшем от усовершенствования персептрона
было решено отказаться из-за критики, которой подверг это направле-
ние Минский, показавший, что персептрон не может решить проблему
«исключающего ИЛИ». Однако специалисты рассказывали мне, что все,
кто работал над созданием искусственного интеллекта, также были осве-
домлены об этом и других недостатках персептрона. Во всяком случае в
течение какого-то времени исследования в этом направлении почти не
проводились. Интерес к теории персептрона с новой силой вспыхнул в
начале 1980-х.
Прогресс был достигнут с появлением трехуровневых адаптивных филь-
тров (рис. 18.2). Первый слой — входной. Информация от него передается
ко второму слою, содержащему так называемые скрытые переменные. (В
отличие от сети на рис. 16.1 скрытые переменные не связаны между собой.)
От среднего слоя сигналы поступают к третьему слою — выходу. Основная
проблема состоит в задании проекций одного слоя на следующий. Эти про-
екции зависят от входных сигналов, испускаемых каждым нейроном в от-
дельности, а также от веса, с которым передается сигнал. Основная проблема
состоит в определении весов сигналов, или синаптических сил. (Слово «си-
наптические» выбрано по аналогии с процессами, происходящими между
реальными нейронами; гл.2.) Чтобы задать синаптические сигналы, широ-
ко используется понятие обратного распространения сигналов.
Поясним это понятие более подробно. Согласно философии, широко
распространенной в рассматриваемой нами области, нейронная сеть обу-
292
18. Мозг как компьютер, или Могут ли компьютеры мыслить?
Вход
Выход
Рис. 18.2. Адаптивный фильтр. Стрелки указывают синаптические силы. Обратите вни-
мание на то, что указаны не все связи. В отличие от более привычных представлений вход-
ной слой изображен вверху, а выходной — внизу в соответствии с представлениями гл. 16.
Между синергетическим компьютером (рис. 16.11) и адаптивным фильтром имеется су-
щественное различие: в синергетическом компьютере узлы среднего слоя соединены меж-
ду собой, тогда как в адаптивном фильтре между ними нет связей.
Скрытые переменные
чается на примерах. Нейронной сети задают ряд задач, решения которых
известны. Синаптические силы в сети первоначально распределены более
или менее случайным образом. Решения, предложенные сетью, сравнива-
ются с известными правильными решениями. Цель сравнения состоит в
том, чтобы путем последовательного подбора синаптических сил миними-
зировать ошибку. Так как процедура проделывается в обратном порядке —
от выходного слоя к среднему и от среднего слоя к выходному, — она по-
лучила название обратного распределения.
Знаменитым примером обратного распределения может служить рабо-
та Сейновского и Розенберга (1987), которые научили сеть читать вслух
английские тексты. Как известно, в английском языке произношение глас-
ных и согласных зависит от того, в каком слове они встречаются. Напри-
мер, «а» в слове «Ьаг» звучит иначе, чем «а» в слове «bad», a «s» читается
по-разному в зависимости от того, встречается ли она в сочетании с «й» или
нет. Сейновскому и Розенбергу удалось обучить нейронную сеть чтению
английских текстов и достичь результатов, сравнимых с успехами школь-
ников первого и второго классов. Следует подчеркнуть, что при этом ком-
пьютер обучался не семантике, а только правилам— которых нужно было
придерживаться при произношении английских слов.
И поныне многие исследователи любят сравнивать функционирование
нейронной сети и головного мозга человека при решении задач обучения.
Но такого рода параллели наталкиваются по крайней мере на две трудно-
сти: до сих пор не существует общей теории обучения или теории созда-
ния нейронных сетей, которая давала бы рекомендации относительно чис-
ла компонент в различных слоях, равно как не существует общего пони-
мания того, как в действительности работает нейронная сеть. Мы можем
варьировать синаптические силы и даже визуализовать их, но это не по-
зволяет нам ни на шаг продвинуться в понимании обших принципов ус-
293
Часть IV. Когнитивная деятельность
тановления состояния всей сети в целом и того, как следует адекватно опи-
сывать нейронную сеть.
В заключение этого раздела заметим, что интерес физиков к этой обла-
сти исследований был в значительной мере стимулирован работой Хоп-
филда (1982), который показал формальную эквивалентность модели Мак-
Каллоха-Питтса и спиновых стекол в физике твердого тела. Спиновые
стекла наглядно можно представить состоящими из отдельных магнитов,
каждый из которых обладает северным и южным полюсами. Известно, что
энергия взаимодействия между такими магнитами больше, когда они рас-
положены параллельно, и меньше, когда они расположены антипараллель-
но. В предположении, что нам удалось зафиксировать интенсивность вза-
имодействий между магнитами в узлах некоторой решетки, мы можем при-
писать всей системе полную энергию в зависимости от ориентации отдель-
ных магнитов. Ориентации «вверх» и «вниз» соответствуют двум состоя-
ниям двухмерного нейрона в модели Мак-Каллоха—Питтса. Модель Хоп-
филда обладает тем преимуществом, что позволяет вычислить характерную
энергию системы, связанную с состояниями элементарных магнитов. С
другой стороны, система отягчена так называемыми призрачными состо-
яниями, т.е. состояниями, которые не соответствуют хранящимся в памя-
ти паттернам, и система может оказаться захваченной в такие состояния.
В заключение этого раздела позвольте сравнить нейрокомпьютеры с
синергетическим компьютером из разд. 16.1. Несмотря на некоторые фор-
мальные аналогии (параллельная обработка информации, трехуровневые
реализации), между нейрокомпьютерами (в том числе моделями спиновых
стекол и адаптивными фильтрами) имеется ряд фундаментальных разли-
чий. Основные различия помимо детальных свойств нейронов, рассмот-
ренных в разд. 16.1, сводятся к следующему.
1) В ряде случаев, например, в модели Хопфилда, существуют так на-
зываемые состояния-призраки, т.е. процесс распознавания попадает в ло-
вушки — в состояния, которые не соответствуют реально хранимым пат-
тернами или паттернам, которые становятся доступными системе в ре-
зультате обучения. Чтобы обойти трудности, связанные с попаданием в
ловушки, была разработана сложная и сопряженная с большими затра-
тами времени процедура, получившая название стимулированного отжи-
га. В ходе этого процесса шарик, скатывающийся по рельефу потенциа-
ла, подвергается случайным толчкам, и эти толчки не дают ему застрять
в ловушке-призраке, а вынуждают скатываться в лежащие ниже состоя-
ния, которые соответствуют паттернам, реально обретенным в результа-
те обучения. Синергетический компьютер полностью избегает этой труд-
ности, так как для него не существует ни состояний призраков, ни каких-
либо других нежелательных состояний. Мало вероятно, что головной мозг
человека использует стимулированный отжиг или какой-нибудь другой
процесс в том же роде.
2) В случае синергетического компьютера понятия параметра порядка
и принцип подчинения позволяют нам характеризовать состояния сети в
294
18. Мозг как компьютер, или Могут ли компьютеры мыслить?
целом и даже приписывать им определенный смысл. В случае нейроком-
пьютеров возможность интерпретации состояний отсутствует.
3) В реализациях нейрокомпьютеров до сих пор не удавалось использо-
вать более нескольких сотен нейронов.
4) В случае синергетического компьютера мы имеем теорию обучения,
позволяющую определить синаптические силы и устанавливать их связь с
паттернами прототипами. В случае нейрокомпьютеров такая теория обу-
чения отсутствует.
Хотя создание нейрокомпьютеров, несомненно, стало важным этапом
в моделировании активности нейронов, я глубоко убежден в том, что си-
нергетический компьютер, разработанный на основе понятий синергети-
ки, позволяет ближе подойти к достижению главной цели — пониманию
того, как работает головной мозг человека.
18.5. Могут ли компьютеры мыслить?
Как можно было бы проверить, может ли компьютер мыслить? Идея тес-
та, позволяющего ответить на этот вопрос, заимствована нами у Тьюрин-
га (1950). Представим себе следующий опыт. По одну сторону (по «эту» сто-
рону) стены находится некто. За стеной (или, если угодно, по «ту» сторо-
ну стены) находится человек или компьютер. Находящиеся по разные сто-
роны могут общаться между собой по телетайпу или факсу. Человек, на-
ходящийся по «эту» сторону стены может задавать находящемуся по «ту»
сторону вопросы и получать на них ответы. Можно ли по характеру отве-
тов установить, кто (или что) находится по «ту» сторону стены — человек
или компьютер? Во всех без исключения опытах такого рода, проведенных
к настоящему времени, тому, кто находился по «эту» сторону стены, уда-
валось безошибочно определить, ведет ли он переговоры через стенку с
компьютером или с человеком. Впрочем, способность компьютеров вести
себя наподобие человека зависит не столько от их собственного интеллек-
та, сколько от интеллекта их программистов. Забавно, что тот же тест мож-
но использовать и противоположным образом — как доказательство того,
что по другую сторону стены находится компьютер. Например, существу-
ют задачи, решить которые за короткий срок человеку не под силу, тако-
во, например, умножение больших чисел. Компьютер же справляется с ре-
шением таких задач очень быстро и тем самым «выдает», что за стеной на-
ходится компьютер, а не человек, разумеется, если он не запрограммиро-
ван так, чтобы отклонять подобные задачи или медлить с ответом. Однако
и в этом случае предвидение программиста играет большую роль, чем ин-
теллект компьютера.
Резюмируя накопленный нами опыт работы со всевозможными компь-
ютерами, можно утверждать следующее. То, что когда-то казалось очень
295
Часть IV. Когнитивная деятельность
трудным, например, игра в шахматы, стало простым, а то, что некогда ка-
залось простым, например, распознавание паттернов, лиц или выражений
лица, анализ сцен, восприятие устной речи, стало трудным. По мнению
некоторых исследователей, например, Дрейфуса (1972), существуют убе-
дительные свидетельства того, что имеется своего рода неформализуемый
опыт. В жизни наше поведение в некоторых ситуациях основано не столько
на алгоритмах, сколько на интуиции. Трудности возникают и в других, ка-
залось бы, простых задач, например, при переводе. Очень часто слова и
предложения имеют двоякий смысл. Может ли компьютер распознать
двойной смысл или иронию, заключенную в некоторых предложениях?
Я считаю, что давать определенные ответы на вопросы такого рода
преждевременно. Что же касается алгоритмов, то я смотрю на них с
большим оптимизмом. Например, в главах о неоднозначных фигурах и
принятии решений мы видим, как алгоритмы можно использовать при рас-
смотрении проблем, не имеющих однозначного решения. Точно так же мы
вряд ли видим (если видим вообще) одно и то же лицо дважды. Дело в том,
что человеческое лицо все время изменяется: из-за мимики, освещения, с
возрастом и т.д. Но, как упоминалось в гл. 16, мы располагаем алгоритма-
ми, позволяющими деформировать лица. Таким образом, эта неоднознач-
ность может быть устранена, хотя иногда и не единственным образом.
Иначе говоря, существует огромный потенциал трансформации неформа-
лизуемого опыта в опыт формализуемый. Последнее утверждение допус-
кает и то, что существуют колоссальные возможности усовершенствова-
ния компьютеров, в том числе и возможности сделать их менее чувстви-
тельными (более «терпимыми») к ошибкам, например, предусмотрев воз-
можность деформаций в абстрактном смысле.
С другой стороны, существующим ныне компьютерам предстоит про-
делать долгий путь, прежде чем они действительно смогут мыслить, и ис-
следования головного мозга могут открыть нам такие горизонты, о кото-
рых мы и не мечтаем. К этим проблемам мы еще вернемся в гл. 20.
19. Сети мозгов
Основная тема синергетики — согласованное действие, или кооперация час-
тей системы. До сих пор мы занимались (более или менее косвенно) изуче-
нием взаимодействия нейронов мозга. Наша книга была бы неполной, если
бы мы хотя бы кратко не упомянули о том, как осуществляется взаимодей-
ствие между мозгами различных людей. Именно согласованное действие боль-
шого числа людей позволило человеческой расе занять господствующее по-
ложение в мире животных. Новое качество — в первую очередь язык — стало
возможным только в результате согласованного действия большого числа моз-
гов. Происхождение языка и поныне окутано ореолом тайны, но некоторые
соображения на эту тему, по-видимому, все же не слишком далеки от исти-
ны. На ранних стадиях толчком к возникновению языка могли стать случай-
ные события, когда те или иные слова первоначально случайным образом свя-
зывались с какими-то объектами или явлениями. Когда же эти слова прини-
мались группой людей и закреплялись за одними и теми же объектами и со-
бытиями, мог возникнуть примитивный язык. Как ни странно, такая ситуа-
ция напоминает то, что происходит в лазере, где сначала случайным образом
испускается несколько фотонов, и это в конечном счете приводит к возник-
новению когерентной волны — лазерного параметра порядка. В то же время
не подлежит сомнению, что мозг мог хранить слова и ассоциации с объекта-
ми и событиями и вспоминать их в контексте с объектами и явлениями. При-
дание смысла словам могло происходить только через контекст. В этом не-
трудно убедиться, если понаблюдать за маленькими детьми, овладевающими
основными элементами языка. Сначала дети осваивают отдельные слова, обо-
значающие простые объекты, затем они начинают пользоваться комбинаци-
ями из двух слов, а потом внезапно появляются более сложные комбинации.
Язык сформировался на протяжении длительных периодов времени. В исто-
рии средних веков известны жестокие «эксперименты»: дети росли, не всту-
пая в словесный контакт с окружающими. Такие дети вырастают «немыми»:
у них полностью отсутствуют языковые навыки. Таким образом, не подлежит
сомнению, что владение языком передается от поколения к поколению.
В мире животных передача знаний весьма ограничена. Иное дело пе-
редача знаний между людьми, обладающих устой и письменной речью. Ог-
ромное преимущество людей перед животными обусловлено именно кол-
лективной традицией знания, накопленного предыдущими поколениями,
в частности, знания, хранящегося в библиотеках. В настоящее время мы
297
Часть IV. Когнитивная деятельность
переживаем новую революцию, обусловленную появлением компьютеров,
позволяющих не только хранить, но и обрабатывать информацию различ-
ными способами. Потенциальное влияние этой новой революции на даль-
нейшее развитие человечества вряд ли можно переоценить.
Помимо хранения и обработки информации внутри головного мозга
каждого человека теперь необходимо принимать во внимание внешнюю
память и внешнюю обработку информации. Анализ этого обстоятельства
привел Португали (1994) к необходимости введения понятия интеррепре-
зентационных сетей (ИРС). (О связи этого понятия с понятием когнитив-
ной карты см. литературу к гл. 19) В этой главе мы хотим пояснить неко-
торые из понятий, следуя в основном работе Хакена и Португали (1994).
Взаимодействие внутреннего и внешнего приводит к появлению новых па-
раметров порядка как в сфере индивидуального, так и в сфере коллектив-
ного. В данном случае когнитивную систему подлежит рассматривать не
как внутреннюю сеть, представляющую внешнюю окружающую среду, а
внутренне-внешнюю сеть, часть элементов которой представлена или хра-
нится внутренне в разуме, или мозге, а часть существует (хранится или
внешне представлена) во внешней среде. Португали в качестве наиболее
ярких экспериментальных примеров ИРС в действии привел так называе-
мые сценарии Бартлетта (1932), введенные этим исследователем в качестве
составной части его работ по изучению запоминания. Общая структура сце-
нариев Бартлетта достаточно полно передает суть понятия ИРС.
Типичный сценарий Бартлетта развивается следующим образом. Испы-
туемому предлагают текст или картинку, которые он должен запомнить, а
затем воспроизвести по памяти (внешняя репрезентация). Эту внешнюю
репрезентацию предлагают запомнить, а затем воспроизвести, и т.д. Обыч-
ный исход таких экспериментов состоит в том, что после сильных флук-
туаций в воспроизведении текст или картинка стабилизируются и переста-
ют изменяться от итерации к итерации. Предложенная интерпретация сво-
дится к тому, что мы имеем здесь
(i) когнитивную сеть, состоящую из внешних и внутренних элементов
и внутренних и внешних представлений, или репрезентации;
(ii) секвенциальное, или последовательное, взаимодействие между внут-
ренними и внешними элементами системы;
(iii) типичный синергетический процесс; секвенциальное взаимодействие
сначала обнаруживает сильные флуктуации между конкурирующими кон-
фигурациями текстов или картинок, приводящие спустя какое-то время к
возникновению параметра порядка, подчиняющего себе внешние и внут-
ренние элементы или представления (репрезентации) системы. Таким об-
разом вместо обычного процесса образования паттерна, в ходе которого
один или несколько параметров порядка подчиняют себе те или иные вне-
шние подсистемы, и обычного процесса распознавания паттернов, в кото-
ром один или несколько параметров порядка подчиняют себе те или иные
внешние свойства системы, мы имеем здесь интегрированный процесс: один
или несколько параметров порядка подчиняют себе и внешне репрезенти-
рованные подсистемы и внутренне репрезентированные свойства.
298
19. Сети мозгов
19.1. Общая модель ИРС в терминах синергетики
Чтобы придать изложенному выше графическую и, следовательно, мате-
матическую форму, напомним читателю модель распознавания паттернов
синергетической сетью, о которой шла речь в гл. 16. По синергетическим
понятиям синергетический компьютер может быть реализован в виде трех-
слойной сети (рис. 19.1). Эти три слоя выполняют следующие функции:
1) входной слой состоит из (моделей) нейронов с индексом к, где <7А(0) —
начально заданная входная активность нейрона к\
2) средний слой представляет параметры порядка ;
3) выходной слой состоит из нейронов с индексом /, где <7/°°) — конеч-
ная активность нейрона /.
В дальнейшем нам будет удобно рассматривать сеть на рис. 19.1 со сто-
роны, указанной стрелкой. Так мы приходим к сети, представленной на
рис. 19.2. Теперь мы уже в состоянии придать нашему интегративному под-
ходу графическую форму (рис. 19.3). Мы имеем входы двух типов: (/ —
внутренний, англ, internal) и </<е) (е — внешний, англ, external) и выходы двух
типов — внутренний и внешний. Входы берутся в момент времени t = 0, тог-
да как выходы берутся при t > 0, а в большинстве случаев при t —» <*> (см.
ниже). Средние узлы символизируют мозг, в котором устанавливаются один
или несколько параметров порядка . Индекс J позволяет отличать один
q(0) = q^
Параметры порядка
q(t^M) = q^-™»
Рис. 19.1. Трехуровневая сеть синергетического компьютера. Первый (верхний) слой со-
стоит из модельных нейронов, принимающих входной сигнал. Первый слой проециру-
ется на второй слой, представляющий параметры порядка. Третий слой служит выходом
из слоя параметров порядка. При всем формальном сходстве с устройством нейрокомпь-
ютера алгоритм синергетического компьютера совершенной иной, например, модельные
нейроны взаимодействуют между собой посредством мягких нелинейностей. Обратите
внимание на то, что паттерны, которым обучен синергетический компьютер, закодиро-
ваны в связях между первым и вторым, а также между вторым и третьим слоями. В слу-
чае статичных паттернов связи устанавливаются между параметрами порядка одной и той
же универсальной формы, тогда как в случае динамических паттернов связи между пара-
метрами порядка могут зависеть от того, какие схемы движения требуется генерировать.
Эти замечания остаются в силе и для остальных иллюстраций этой главы.
299
Часть IV. Когнитивная деятельность
Q Параметры порядка
Рис. 19.2. Сеть, представленная на рис. 19.1, видима со
стороны, указанной на рис. 19.1 стрелкой.
Рис. 19.3. Простейший случай модели ин-
террепрезентаиионной сети с внешними
входом и выходом и внутренними входом и
выходом. Средний ряд соответствует пара-
метрам порядка. Обращает на себя анало-
гия с рис. 19.2 — сетью, аналогичной пред-
ставленной на рис. 19.1 и рассматриваемой
со стороны, указанной стрелкой (каждый
кружок означает целый набор модельных
нейронов).
параметр порядка от другого. В контексте нашей книги важно отметить,
что одни и те же параметры порядка £. могут управлять совершенно раз-
личными внешними выходами. Например, параметр порядка может быть
с каким-нибудь конкретным выходным паттерном v^e\ Этим выходным
паттерном может быть текст или картинка, как в сценариях Бартлетта, или
какое-нибудь другое действие, например, движения или записи, что мо-
жет привести к возникновению внешней памяти в виде написанного от
руки текста или в компьютере. Все множество возможных выходных пат-
тернов можно представить выходным вектором:
q(e\t}^^. (19.1)
J
Со временем этот выходной вектор претерпевает изменение. В общем
случае мы прослеживаем за его эволюцией в течение столь продолжитель-
ного промежутка времени, что изменение параметров порядка во време-
ни успевает завершиться. Аналогичным образом параметры порядка £. мо-
гут управлять формированием внутренних паттернов, например, паттернов,
хранимых во внутренней памяти или возникших в результате обучения.
Внутренние паттерны мы обозначим v^. Все множество возможных внут-
ренних паттернов представимо вектором
«‘'’(О^Ж’- (19.2)
300
19. Сети мозгов
Читателя не должны были вводить в заблуждение и такие обозначения,
при которых все паттерны, и внешние, и внутренние, были бы скрыты за
одной и той же буквой г. Заметим, что верхний индекс может относиться
к совершенно различным по своей природе паттернам, например, г(е) мо-
жет обозначать слова в устной речи, а г(1) — соответствующие словам об-
разы, хранящиеся во внутренней памяти.
На следующем этапе анализа необходимо установить причины, порож-
дающие параметры порядка. Для этого мы, следуя рис. 19.3, рассматрива-
ем два различных входа на уровень параметров порядка, а именно внешний
и внутренний входы. Внешний вход обозначим ^(е)(0), внутренний — ^(i)(0).
Нуль в скобках указывает на то, что эти входные сигналы берутся в началь-
ный момент времени — при / = 0. И в этом случае входные сигналы могут
иметь совершенно различные модальности. Векторы q представляют мно-
жества данных в различных модальностях и могут иметь различную размер-
ность. Вектор ^(е) задается внешним образом сенсорной системой — зри-
тельной, слуховой или тактильной. Вектор задан внутренним образом,
например, смутными идеями, фантазиями, снами, размышлениями и т.д.
Важный шаг — переход с верхнего (входного) уровня на средний уровень
(параметров порядка) осуществляется с помощью предварительной обра-
ботки заданных паттернов. Например, заданные паттерны могут быть не-
полными, искаженными или смещенными в пространстве, повернутыми,
растянутыми или сжатыми, деформированными. Заданные паттерны под-
лежат внутренней проверке путем сравнения с хранящимися в памяти пат-
тернами-прототипами, которые мы обозначим через «. Условимся пред-
полагать, что такая предварительная обработка заданных паттернов осуще-
ствляется всякий раз, когда в этом возникает необходимость. Совершен-
но ясно, что именно на этом этапе возникает понятие гештальта. Предва-
рительной обработке могут подвергаться либо вектор q, либо векторы иу.,
либо те и другие векторы одновременно.
Пользуясь паттернами-прототипами и., мы можем разложить вектор
внутренне заданных данных ^(е), представив его в виде
q^=Y^uf+w{e\ (19.3)
J
где и’(е) — остаточный член, в рассмотрении которого нет необходимости
(см. гл. 16). Воспользуемся и на этот раз сопряженными векторами «у(е)+,
удовлетворяющими соотношению ортогональности
(19.4)
Умножая (19.3) на сопряженный вектор, мы немедленно получаем
§je)(0)= (и(еН«(е)(0)), (19.5)
где нулевой аргумент в обеих частях равенства означает, что мы берем зна-
чения величин при t = 0, т.е. в начальный момент времени. В полной ана-
логии с внешне заданным сигналом внутренне заданный сигнал можно так-
же обработать, воспользовавшись разложением
301
Часть IV. Когнитивная деятельность
= +w(i), (19.6)
j
где, вообще говоря, вполне допустимо считать, что при выборе паттернов-
прототипов мы используем различные критерии или что паттерны прото-
типы имеют различные модальности. По этой причине мы различаем пат-
терны-прототипы по верхнему индексу е или /. По аналогии с (19.5) мож-
но записать, что
^(Q)=(u^qw(Q)). (19.7)
Возникает вопрос: как определить новые параметры порядка для всей
системы, внешней и внутренней? Чтобы попытаться ответить на этот воп-
рос, введем взвешенные суперпозиции параметров порядка (19.5) и (19.7):
^.(О) = а7|^’(О)| + /Зу|^(О)|. (19.8)
Подвергнем параметры порядка Е,. процессу конкуренции, известному
из распознавания образов синергетическим компьютером (гд.16). Приме-
нительно к нашему подходу это означает, что мы имеем дело с распозна-
ванием внутренне или внешне заданного паттерна, в ходе которого кон-
курируют различные параметры порядка с индексами j и побеждает в
конкурентной борьбе один параметр порядка, а именно тот, который в на-
чальный момент времени получает наибольшее значение (19.8). Конкурен-
цию описывают уравнения
= [Л,. - (В + C)D + (19.9)
где
Я = В,С>0, (19.10)
г
а В и С— положительные константы уравнения (19.9) — обладают тем
свойством, что конкурентную борьбу выигрывает только один параметр по-
рядка, или, иначе говоря, используется стратегия «победитель получает
все». Можно также было бы указать механизмы, при которых параметры
порядка кооперируются, но мы не будем рассматривать здесь эту возмож-
ность.
Заметим, что все перечисленные выше этапы, включая предваритель-
ную обработку паттернов, могут быть выполнены (и действительно были
выполнены) компьютером, поэтому предлагаемый нами подход чисто опе-
рациональный. Это замечание остается в силе и применительно к после-
дующим разделам этой главы.
302
19. Сети мозгов
19.2. Коллективные когнитивные процессы
Одно из наиболее важных свойств интеррепрезентационных сетей (ИРС)
связано с коллективным потенциалом внешне репрезентированных эле-
ментов сети. Как только когнитивная конструкция какого-нибудь лица ста-
новится внешним элементом его ИРС, эта конструкция становится пуб-
личным достоянием. Иначе говоря, другие лица могут использовать ее в
различных целях, в том числе и в качестве элемента своих ИРС. Так вне-
шний элемент вступает в коллективный социальный или культурный про-
цесс. Чтобы разобраться в том, как действует такой процесс, обратимся к
классическому случаю сценария Бартлетта. Как уже говорилось выше, ти-
пичный эксперимент по сценарию Бартлетта начинается с заданного вход-
ного сигнала — текста, картинки и т.п., и продолжается как последователь-
ность повторяющихся шагов, на каждом из которых память испытуемого
о предыдущем входном сигнале становится входным сигналом для следу-
ющего испытуемого. Пример такого процесса представлен на рис. 19.4.
Аналогичные эксперименты по сценариям Бартлетта проводились Штад-
лером и Крузе (1990). Бартлетт, Штадлер и Крузе намеревались показать
своими сценариями, что мозг или разум запоминает и что не запоминает.
Мы используем сценарий Бартлетта как пример, иллюстрирующий дина-
мику коллективных, интернациональных, когнитивных процессов и роль
внешней репрезентации в таких процессах.
Интересный результат различных сценариев Бартлетта заключается в
том, что после нескольких шагов текст или картинка стабилизируются и
перестают изменяться при последующих шагах. На языке синергетики из
этого следует, что некоторый параметр порядка подчиняет себе систему и
переводит ее в стационарное состояние. В рамках проводимого нами ана-
лиза необходимо подчеркнуть, что полученные результаты показывают,
каким образом вследствие взаимодействия между внутренними и внешни-
ми представлениями отдельных личностей достигается коллективное со-
гласие между большим числом индивидов, причем эти индивиды не подо-
зревают о том, что вовлечены в достижение коллективного согласия. Та-
Внутренние
Внешние
Вход Выход Вход
Выход Вход
Выход
Рис. 19.4. Последовательность связей между людьми (см. текст).
Номера
людей
303
Часть IV. Когнитивная деятельность
ким образом параметр порядка, который в конечном счете подчиняет себе
систему, становится коллективным параметром порядка.
В заключение рассмотрим обсуждаемые выше этапы итерации в их ма-
тематической форме.
19.3. Итерации
Рассмотренным в предыдущем разделе процессам можно придать матема-
тическую форму, к описанию которой мы сейчас переходим.
1) Внутриличностные процессы. Произведенный вовне выходной сигнал
одного лица может быть сначала зафиксирован, например, записан, а за-
тем прочитан, т.е. использован в качестве входного сигнала, тем же самым
лицом. Такая схема приводит к описанию экспериментов Бартлетта с од-
ним испытуемым, в ходе которых некоторый данный паттерн использует-
ся в качестве исходного входного сигнала, воспроизводится и фиксирует-
ся на выходе, после чего предъявляется тому же испытуемому в качестве
входного сигнала и т.д.(рис.19.5). Формально итерации можно описать со-
отношением
= = я = 1,2... (19.11)
Индекс п указывает число итераций. Заметим, что этот процесс, этапы
которого зафиксированы векторами q^\t -> оо), может быть очень сложным
из-за предварительной обработки входных паттернов. Воспроизведение
паттерна, например, путем рисования его по памяти, может быть не вполне
точным; как экспериментально показал Бартлетт, необходимо учитывать
Одно и то же лицо
Рис. 19.5. Тоже, что на рис. 19.4, но для одного человека.
304
19. Сети мозгов
Рис. 19.6. Коммуникативная связь через компьютер.
Общий резервуар
Рис. 19.7. Коммуникативные связи между отдельными людьми и общим резервуаром, на-
пример, библиотекой и общественным компьютером.
сходимость итераций. После появления персональных компьютеров сце-
нарий, наглядно представленный на рис. 19.5, необходимо заменить сце-
нарием, изображенным на рис. 19.6: компьютер может активно изменять
передачу информации.
2) Межличностные процессы. Второй класс итерации осуществляется
межперсонально. Связь между лицами можно представить либо по схеме,
изображенной на рис. 19.4, либо по формуле
0^ = О) = О-><«), « = 1,2... (19.12)
Индекс п относится к лицу, участвующему на соответствующем шаге
до того, как происходит передача информации. Примером снова служат
эксперименты Бартлетта, которые могут быть проверены (и в настоящее
время действительно проверяются) с помощью компьютерных вычисле-
ний. С формальной точки зрения мы можем констатировать, что процесс,
представленный на рис. 19.4, неотличим от процесса, представленного на
305
20-4614
Часть IV. Когнитивная деятельность
рис. 19.5, если предварительная обработка входных сигналов для всех лиц
подчиняется одним и тем же простым законам.
3) Межличностная связь через общий резервуар. Еще один вид межпер-
сональной связи осуществляется, как показано на рис. 19.7, где выходной
сигнал от каждого индивида поступает в общий резервуар (библиотеку, ар-
хив данных или публичный компьютер), откуда каждый получает свой
входной сигнал. С формальной точки зрения мы имеем соотношения
^(0) = ^^, к =!,...«
(19.13)
(19.14)
Индекс к нумерует индивидов, Wk — оператор индивидуального окна,
выбирающий для индивида к его часть информации, хранящейся в дпбщее.
19.4. Заключительные замечания
В этой главе мы показали, как понятиям ИРС можно придать графичес-
кую форму. Графическое представление позволяет наглядно представить
эти понятия и подсказывает нам, как лучше всего действовать, чтобы по-
лучить их математическую форму. Согласно последней входные данные
кодируются в виде векторов q, подвергаются предварительной обработке
и трансформируются в параметры порядка и паттерны-прототипы. По-
лученные параметры порядка управляют новыми внешними и внутрен-
ними выходными паттернами, которые могут встречаться в различных
модальностях.
Недостаток места не позволяет мне входить в подробности, для изло-
жения которых потребовалась бы целая книга.
20. Синергетика головного мозга.
Где мы находимся?
К чему мы идем?
20.1. Оглядываясь назад
Нашу книгу можно рассматривать как попытку построить последователь-
ную теорию активности мозга на макроскопическом уровне. Мы рассмат-
риваем мозг как гигантскую сложную систему, которая подчиняется зако-
нам синергетики, т.е. функционирует вблизи точек потери устойчивости,
где макроскопические паттерны определяются параметрами порядка.
Принцип подчинения наводит мост между макроскопическим и мик-
роскопическим уровнями. В прошлом из-за сложности функционирования
мозга в области теории мозга доминировали его словесные описания. В
настоящее время ситуация быстро изменяется из-за двух основных направ-
лений исследований. Одно из них, которое можно было бы назвать кон-
некционизмом, восходит корнями к модели Мак-Каллоха—Питтса, о ко-
торой мы кратко упоминали в гл. 18. Другим направлением можно считать
последовательную реализацию математического моделирования головно-
го мозга на основе идей синергетики. Эта программа в общих чертах из-
ложена в нашей книге. Сказанное отнюдь не означает, будто не существу-
ет других подходов, но, насколько можно судить, другие подходы уступа-
ют по широте синергетическому. Очень часто словесные описания кажут-
ся более гибкими из-за неоднозначности, присущей самой природе язы-
ка. В отличие от вербальных математические подходы операциональны, т.е.
допускают строгую проверку сделанных утверждений. По-видимому, наи-
более адекватный подход должен был бы лежать где-то посредине, т.е. не
должен был бы быть столь жестким, как существующие ныне математичес-
кие подходы, и должен был бы носить более количественный характер, чем
обычные словесные описания.
Повторим еще раз то, что составляет ядро нашей книги. Особый акцент
мы делали на изложении конкретных моделей, по возможности точно пе-
редающих экспериментальные данные. Мы начали с экспериментов по ко-
ординации движений и моделей, позволяющих показать, насколько хоро-
шо основные понятия синергетики применимы к явлениям координации
движений. Центральной темой этой части книги было описание поведения
с помощью одного или нескольких паттернов порядка и демонстрации того,
что в результате обучения мозг уменьшает число параметров порядка.
307
20*
Часть IV. Когнитивная деятельность
Еще одним конкретным примером был анализ ЭЭГ, в частности, ЭЭГ,
снятых во время эпиллептических припадков, для которых была построе-
на конкретная модель. В случае сенсорной и моторной координации, как
показали эксперименты Келсо с МЭГ. трудности моделирования более
очевидны, а именно трудности построения единственных моделей.
Далее мы рассмотрели различные аспекты зрения, в том числе стерео-
скопическое зрение и интерпретацию неоднозначных фигур. Моделиро-
вание производилось на макроскопическом феноменологическом уровне,
хотя создалось впечатление, что феноменологический подход, который
позволяет навести контакт с понятиями из области нейрокомпьютеров,
может стать основой для вывода непосредственно микроскопических мо-
делей. И в этом случае стала очевидной доминирующая роль понятий па-
раметров порядка.
Сделав дерзкий шаг к построению теории когнитивных способностей
своим утверждением о том, что процессы зрения можно рассматривать как
метафоры других когнитивных способностей, мы разработали эту идею для
случая принятия решений, проведя тесную аналогию между принятием
решений и распознаванием паттернов. Наконец, мы показали, каким об-
разом можно построить сети, элементами которых являются головы (го-
ловной мозг) людей, — сети, в которых устанавливается иерархия парамет-
ров порядка. В ряде случаев модели активности головного мозга удалось
построить с помощью связанных нелинейных осцилляторов, как в неко-
торых экспериментах с движением пальцев.
Прежде чем приступать к обсуждению более фундаментальных вопро-
сов, необходимо сказать слово о том, какого рода модели были нами ис-
пользованы и об их наглядном смысле. Уже с первого взгляда видно, что
важную роль играет понятие ландшафта потенциала, будь то в теории дви-
жений или зрения. Это понятие обладает тем преимуществом, что дает ин-
туитивное представление о важных процессах, приводящих к качествен-
ным макроскопическим изменениям в поведении и когнитивной деятель-
ности. Я обнаружил, что описания на основе ландшафтных представлений
очень полезны, например, они позволили мне предсказать резкое измене-
ние свойств лазерного излучения (Хакен (1964). (Реплика в сторону для фи-
зика: разумеется, потенциалы хорошо известны в механике и для систем,
находящихся в тепловом равновесии, но существование потенциалов в не-
равновесных системах, например, в лазерах, отнюдь не очевидно.)
Несмотря на успехи, достигнутые с помощью моделей на основе по-
тенциального ландшафта, не следует закрывать глаза на их ограничения.
Даже в относительно простом случае лазера эта модель выполняется толь-
ко при весьма специфических условиях. Сказанное тем более верно, если
речь идет об активности мозга. Действительно, ландшафт модели Хаке-
на—Келсо—Бунца, рассмотренной в разд. 6.2, представляет собой лишь
аппроксимацию рельефа осцилляторной модели, также принадлежащей
Хакену—Келсо—Бунцу (1984), с которой мы познакомились в разд. 7.2.
При исследовании многочастотных задач, связанных с отстукиванием
ритмов или осцилляциями восприятия, нам приходилось выходить за
308
20. Синергетика головного мозга. Где мы находимся? К чему мы идем?
рамки модели, основанной на изучении ландшафта потенциала. Резюми-
руя все эти соображения, можно утверждать, что мозг, насколько можно
судить, функционирует вблизи точек потери устойчивости, причем изме-
няет свое состояние непрерывно. В каких-то конкретных задачах ланд-
шафт потенциала для параметров порядка может возникнуть и исчезнуть
с тем, чтобы затем исчезнуть, уступив место другому ландшафту; насту-
пает хаос того или иного рода, различные колебания и т.п. Например, ког-
да мы спокойно сидим с закрытыми глазами, в нашей ЭЭГ наблюдается
d-волны. Их анализ (Фридрих, Фукс, Хакен (1990)) обнаруживает хаос
малой размерности.
Бросая ретроспективный взгляд на нашу книгу, нам очень хотелось бы
сказать, что мозг ведет себя так, будто решает дифференциальные уравне-
ния, в особенности дифференциальные уравнения нелинейных колебаний.
Но это всего лишь наша интерпретация. При интерпретации нашего под-
хода следует избегать еще одной ловушки: наличие колебаний отнюдь не
означает, будто в мозге имеются осцилляторы, соединенные между собой
сетью «проволочек» раз и навсегда сложившейся конфигурации. Сеть «про-
волочек» (которая сводится к тому или иному распределению синаптичес-
ких сил) отличается исключительной (хотя и неполной) гибкостью. Сде-
ланные выше замечания приводят меня к обсуждению более фундамен-
тальных аспектов.
20.2. Дух и материя — вечный вопрос
Изложенные нами подходы наглядно демонстрирует всю важность одной
существенной идеи синергетики, а именно идеи самоорганизации систе-
мы, косвенно управляемой приданием подходящих значений управляю-
щим параметрам. Придание управляющим параметрам определенных зна-
чений — задача отнюдь не тривиальная. Всякий раз, когда возникает не-
обходимость в фиксации управляющих параметров в уравнениях модели,
будь то уравнения, описывающие постукивание пальцами, или анализа
МЭГ, решения чувствительно зависят от значений параметров. В этой свя-
зи возникает очень глубокая проблема, а именно вопрос: кто придает со-
ответствующие значения управляющим параметрам в мозгу? Верна ли идея
Экклса, согласно которой мозг представляет собой вычислительную маши-
ну, или компьютер, а его программа, или — в терминах самоорганизации —
значения его управляющих параметров, определяются разумом? Я глубо-
ко убежден, что управляющие параметры задаются мозгом через другие
процессы самоорганизации на ином уровне, нежели уровень уравнений,
определяющих, например, те или иные движения. Имеется ряд указаний
относительно того, каким образом может быть достигнуто придание пара-
метрам подходящих значений: один из возможных путей — обучение, т.е.
изменение синаптических сил. Косвенным указанием на придание соот-
309
Часть IV. Когнитивная деятельность
ветствующих значений управляющим параметрам служат так называемые
Bereitschaftspotentiale (потенциалы готовности), открытые Корнхубером и
Дикке (1965). В соответствующих экспериментах испытуемого просят, на-
пример, поднять указательный палец всякий раз, когда ему того захочет-
ся. В какой-то момент времени палец поднимается. Но (в этом и состоит
решающее открытие), как показывает ЭЭГ, примерно за 60 миллисекунд
в мозгу возникают специфические электрические потенциалы. Мозг как бы
заранее готовится к предстоящему действию. По моему мнению, возник-
новение Bereiftschatspotentiale является еще одним актом самоорганизации,
предшествующим другим актам самоорганизации, который приводит к ус-
тановлению соответствующих значений управляющих параметров. Воз-
никает очевидная трудность: что «запускает» самоорганизацию Bereift-
schaftspotentiale? Я полагаю, что происходит трансформация микроско-
пических явлений в макроскопические проявления в форме электричес-
ких потенциалов. По моему убеждению, все действия мозга, которые
ныне считаются нематериальными, в действительности связаны с мате-
риальными процессами. Например, команда (передаваемая по материаль-
ным путям) материально хранится в нейронах (или синапсах и т.п.), в за-
тем (может быть, спонтанно) активируется (возможно, флуктуацией). Эк-
спериментальное доказательство моей гипотезы затруднительно, по край-
ней мере в настоящее время, поскольку о материальной основе памяти из-
вестно слишком мало.
Я отнюдь не утверждаю, что все свойства разума являются всего лишь
результатом материальной активности мозга. Моя точка зрения основы-
вается на концепции параметров порядка и принципа подчинения, вклю-
чая принцип круговой причинности. Иначе говоря, моя интерпретация со-
стоит в том, что абстрактные процессы управляются параметрами поряд-
ка (и их изменениями) и что материальные процессы, описываемые от-
дельными переменными системы, обуславливают друг друга. Возможно, не
так уже плохо, что эти утверждения непроверяемы или носят «философ-
ский» характер. Причина заключается в том, что мозг необычайно сложен
и возникновение новых качеств может происходить на множестве различ-
ных уровней от микроскопического до макроскопического, и поэтому ус-
тановить все корреляции, необходимые для доказательства того, что но-
вое качество действительно возникло, может быть очень трудно.
В нашей книге мы не раз по различным поводам отмечали, что нали-
чие параметров порядка и действие принципа подчинения влекут за собой
колоссальное сжатие информации. Характерные сложные микроскопичес-
кие конфигурации управляются одним или несколькими параметрами по-
рядка. Ярким примером того, как действует сжатие информации, служит
сам язык. Какое-нибудь простое слово, например, «собака», включает в
себя неисчерпаемое разнообразие пород, окраса, форм, осанок и т.п. Ком-
муникация стала возможной лишь благодаря сжатию информации в ука-
занном выше и других смыслах. Вместе с тем сжатие информации порож-
дает неоднозначности, и эффективность языка заключается в балансе меж-
ду однозначностью и неоднозначностью.
310
20. Синергетика головного мозга. Где мы находимся? К чему мы идем?
Интересно отметить, что сжатие информации можно обнаружить и в
управлении двигательной активностью. Как было показано нами в экспе-
рименте с педало, это движение в конечном счете после обучения управ-
ляется одним комплексным параметром порядка, удовлетворяющим весь-
ма универсальному уравнению для параметра порядка, а именно осцилля-
торному уравнению Ван дер Поля. С другой стороны, отдельные парамет-
ры порядка необходимо сделать эффективными путем трансляции на мно-
гие степени свободы, например, на мышечные клетки. Этот процесс можно
рассматривать как инфляцию информации. Таким образом, принцип под-
чинения имеет в определенном смысле два аспекта: с одной стороны,
принцип подчинения служит сжатию информации, с другой — порождает
инфляцию информации.
Еще один аспект заслуживает обсуждения: природа параметров поряд-
ка. За редким исключением параметры порядка нематериальны, например,
параметром порядка может быть фазовый угол, как в примере с движени-
ем пальца. Это немедленно приводит нас к проблеме «дух—материя» или
«разум —тело»: как такая нематериальная величина как параметр порядка
может управлять поведением материальной системы, например, мышц? С
чисто математической точки зрения никакая проблема, разумеется, не су-
ществует: фазовый угол и сокращение мышечных клеток могут быть опи-
саны математическими переменными и их уравнениями движения. Как
показано в синергетике, отдельные части системы с их переменными q
приводят к возникновению параметров порядка которые в свою очередь
через принцип подчинения управляют поведением частей системы. Мате-
матически это выражается так:
q = № (20-1)
т.е. q становится функцией параметров порядка Но в физике и еще в
большей мере в философии мы хотим интерпретировать соотношения,
или, иначе говоря, придать им смысл. Например, закон Ньютона
ma = F, (20.2)
т.е. произведение массы частицы на ее ускорение а равно действующей на
частицу силе F, интерпретируют, утверждая: «сила F есть причина ускоре-
ния частицы». Что можно было бы считать интерпретацией соотношения
(20.1)? Утверждение о том, что q представляет переменные материальных
составляющих системы, например, мышечных клеток, тогда как параметр
порядка Е, представляет нематериальную величину (разум?). По аналогии
между (20.1) и (20.2) можно было бы сказать: «Дух определяет поведение
материи».
С другой стороны, как упоминалось выше, q порождает или, если
прибегнуть к интерпретации, «материя определяет дух». (Знаменитая книга
Дельбрюка так и называется: «Дух из материи».) Наконец, нельзя не упо-
мянуть о круговой причинности: дух и материя взаимно обуславливают
друг друга, или иначе говоря, дух и материя — две стороны одной и той же
медали. Такова моя точка зрения, но она не нова. Как я узнал от Атлана,
311
Часть ГУ. Когнитивная деятельность
этой точки зрения придерживался Спиноза. Боюсь, что по проблеме духа
и материи могут быть высказаны и дискутироваться совершенно различ-
ные точки зрения. По моему мнению, в данном случае трудность начина-
ется, когда мы переходим от математики к онтологии мозга и разума.
Каков бы ни был исход таких диспутов и обсуждений, я все же склоня-
юсь к понятию параметра порядка и принципу подчинения, по крайней
мере как метафора проблемы разум—тело, а может быть и более широкой
проблемы.
20.3. Некоторые открытые проблемы
В науке хорошо известно, что решение одной проблемы часто порождает
дюжину новых вопросов. Разумеется, это применимо и к подходу, изло-
женному в нашей книге. Мозг — необычайно сложная система, и, как я
упомянул в начале, эта система многогранна. Существуют многочислен-
ные вопросы, которые не получили ответов в нашей книге или ответы на
которые вообще не известны. Назову лишь некоторые из них. Один из та-
ких вопросов: где локализована память? Локализована ли память в синап-
сах или, более конкретно, в рецепторах? Может быть, как подозревают не-
которые ученые, например, Хамероф (1987).
Проблема, которую я совсем не обсуждаю, — рост и развитие мозга. Эта
проблема носит весьма фундаментальный характер, так как структура и
функция взаимно обуславливают друг друга. Затронутая нами тема столь
обширна, что заслуживает особой книги.
Еще одна проблема, которую я умышленно обошел молчанием, — со-
знание. Как заметил в своей последней книге Фриман (1995), эта пробле-
ма возникала снова и снова по крайней мере через каждые пятьдесят лет.
По своему собственному опыту я знаю, что чем ближе область собствен-
ных исследований ученого к исследованию мозга, тем реже этот ученый
говорит о проблеме сознания. Таково общее положение дел. Разумеется,
не обходится и без исключений. Тем не менее создается впечатление, что
все, кто так или иначе связан с исследованием активности мозга, весьма
неохотно обсуждают проблему сознания. В качестве выдающихся контр-
примеров можно назвать Крика и Коха (1990), а также Эдельмана (1992).
Все они предложили различные научные подходы к проблеме сознания, но
лично я предпочитаю оставить ее без обсуждения. То же относится и к та-
ким свойствам, как восприятие цвета или ощущение боли. По моему мне-
нию, эти свойства не поддаются (по крайней мере в настоящее время) ма-
тематическому моделированию в указанных выше направлениях.
Каково же будущее изложенного мной подхода? Ясно, что мы можем
предпринять попытки построить более сложные математические модели
в рамках синергетики и подвергнуть анализу более сложные движения или
типы поведения. Обширная область моделирования, которая еще только
312
20. Синергетика головного мозга. Где мы находимся? К чему мы идем?
начинает развиваться, — это создание теории связанных нелинейных ос-
цилляторов, которая позволила бы описать специфические эксперименты
по зрительному восприятию, о чем говорилось в гл. 2 (см., например, Тасс
и Хакен (1995).
В качестве заключения упомяну несколько обших проблем.
1) Наш мозг — вычислительная машина ? При обсуждении этой пробле-
мы необходимо иметь в виду, что за прошедшие века понятие машины пре-
терпело значительные изменения. Первоначально под машиной понима-
ли простое устройство, например, рычаг или молот, для выполнения ме-
ханической работы. В наши дни мы говорим о компьютере как о машине.
Кроме того, в настоящее время к машинам применяют ряд понятий, за-
имствованных из биологии. В контексте конструирования машин мы
встречаем такие понятия, как самоорганизация, самовосстановление, са-
мосборка, самоуправление и т.д. Обратите внимание, как широко «са-
мость» вторглась в мир машин! Поэтому когда речь заходит о сравнении
мозга с машиной, необходимо тшательно оговаривать, какого рода маши-
на имеется в виду. Мозг заведомо не является машиной в первоначальном
смысле слова, а именно — созданным человеком устройством для выпол-
нения определенных задач. Но по мере того как мы наделяем машину все
новыми и новыми биологическими аспектами, различие между мозгом и
машиной стирается все больше. Ситуация выглядит так, как если бы меж-
ду человеческим мозгом и человеческим мозгом (это не опечатка!) шла не-
кая престижная гонка. С одной стороны, человеческий мозг стремится по-
строить машину, возможности которой были бы равны возможностям моз-
га, а с другой стороны, человеческий мозг стремится доказать свое превос-
ходство перед машиной. (Нечто подобное мы обнаруживаем в сравнении
человеческого мозга с компьютером. Эту ситуацию мы обсудили в гл. 18,
и поэтому не будем повторяться.)
2) Мозг и чипы, или протезы мозга. Интересная задача — установление
физической связи между нейронами и чипами. Решением ее занимается,
например, Фромхерц (1994). Мы находимся здесь в самом начале пути, и
делать сколько-нибудь определенные прогнозы относительно будущего
развития, например, относительно чипов, имплантированных в повреж-
денный мозг или увеличения информационной емкости мозга (протезы
мозга). Только будущее покажет, имеем ли мы дело с научной фантасти-
кой или реальностью. Но с абстрактной точки зрения синергетики коопе-
ративные эффекты могут приводить к такому же макроскопическому по-
ведению систем с совершенно различными микроскопическими компо-
нентами. Существенны лишь параметры порядка.
3) Креативность. Наконец, было бы уместно сказать несколько слов о
креативности. До сих пор я полностью обходил молчанием эту проблему.
В действительности креативность представляется мне самой глубокой из
всех головоломок, связанных с мозгом. Под креативностью имеется в виду
313
Часть IV. Когнитивная деятельность
рождение идей, которые не рождались никогда прежде и более того — рож-
дение которых в высшей степени маловероятно. Рождение новой идеи
можно уподобить головоломке, при решении которой после многих безус-
пешных попыток из кусочков причудливой формы внезапно складывает-
ся картинка. Акт творения сравнительно легко охарактеризовать на сло-
весном уровне, например, как конкуренцию и кооперацию различных идей
в форме параметров порядка. По поводу такого рода определений трудно
удержаться от критических замечаний: высказывать подобные сентен-
ции — пустое дело, они не дают нам никакого операционального подхода
и не дают рецепта, который позволял бы решить головоломку или найти
новую фундаментальную идею. Может быть, хорошо, что природа гения
все еще окутана тайной.
Приложения
А. Анализ временных рядов
Как было показано в гл. 2, сложная структура временных рядов электро-
энцефалограмм становится явной, если построить зависимость электри-
ческого потенциала от времени (рис. 2.5). Возникает правдоподобное пред-
положение о том, что электрическая активность, или, точнее, электричес-
кая динамика мозга, обладает высокой сложностью и обусловлена большим
числом степеней свободы. Тем большей неожиданностью для многих уче-
ных стала работа Баблоянц (см. литературу к гл. 14), в которой было пока-
зано, что динамика, лежащая в основе активности мозга, развивается в
сравнительно малой размерности порядка 6 или 7 в зависимости от состо-
яния человека, который может, например, находиться в глубоком сне или
пребывать в каком-то другом состоянии сна. Аналогичные результаты были
получены и относительно эпилептических припадков. Оказывается, что
размерности во всех этих случаях — не обычные целочисленные размер-
ности, с которыми мы оперируем при рассмотрении гладкой линии или
квадрата, а так называемые фрактальные размерности. Далее мы покажем,
как определить, что такое фрактальные размерности, и каким образом их
можно вычислить по данным измерений или математическим моделям ди-
намических процессов. В заключение (в А.4) мы обсудим некоторые труд-
ности, с которыми встречается предлагаемый метод.
Начнем с проблемы анализа временного ряда, которую рассмотрим на
простом примере.
А.1. Анализ временного ряда
Рассмотрим маятник, с которым мы уже встречались в разд.5.2. Его дви-
жение наглядно можно представить на фазовой плоскости, на которой мы
построим траекторию как функцию координаты х и скорости у (рис. А.1).
Имея в виду последующие обобщения, обозначим координату х через qv а
координату у через qr Разумеется, скорость у связана с координатой по-
ложения х соотношением
v=x, (А.1)
317
Приложения
где точка, как обычно, означает производную по времени. В новых обо-
значениях (А.1) принимает вид
q2=qv (А.2)
Кроме того, заметим, что координата х, или, что эквивалентно, коор-
дината qv удовлетворяет уравнению гармонического осциллятора
qx=-kqx, (А.З)
где к — некоторая положительная постоянная.
Рассмотрим случай, когда мы измеряем только координату qx, для ко-
торой построим график ее зависимости от времени (рис. А.2). Эта зависи-
мость имеет вид
qx = Asin®/. (А. 4)
Спросим себя теперь: можно ли восстановить по этому временному ряду
траекторию или аттрактор на фазовой плоскости, представленной на рис.
А. 1 ? В данном случае сделать это очень просто, так как мы располагаем со-
отношением (А.2), т.е.
q2=qx- (А.5)
Из него мы сразу же заключаем, что
#2=®Acos®/. (А.6)
Рис. А. I. Траектория, описываемая коорди-
натами qx — Asin®/, q2 = aAcosCO/.
A q, = A, sin(cot)
->
X, Qi
t Рис. А.2. Пример временно-
го ряда: q} = Asin®/.
318
Приложения
Нанося координаты (А.4) и (А.6) на фазовую плоскость при все больших
значениях t, мы, разумеется, получаем эллипс, изображенный на рис. А.1.
Соотношения (А.4) и (А.6) можно представить в более общем и аб-
страктном виде. Предположим, что система, описываемая переменной qx,
удовлетворяет уравнению
(А-7)
где/— заданная функция переменных qx и qx. Мы можем ввести новую пе-
ременную q2, положив
<72=<71’ (А-8)
заменить систему уравнений (А.7) и (А.8) системой уравнений
(А-9)
?2=/(?1^2)- (А.10)
Это означает, что траекторию на фазовой плоскости можно задать эти-
ми двумя уравнениями. Ясно, что восстановление траектории на фазовой
плоскости по временному ряду — тривиальная задача.
Приведенные выше соображения без труда допускают обобщение на
случай п измерений. Однако основное допущение состоит в том, что мы
имеем дело с динамической системой и что размерность фазового про-
странства, т.е. число независимых переменных, нам известно. Обозначим
/-ю производную:
(А-11)
dtJ 1
Мы предполагаем, что динамика описывается уравнением вида
^)=/(^.91(,),...^1<и-,))- (А.12)
Можно ввести новые координаты
(А-13)
?у = ^-п- (А-14)
Уравнение (А. 12) при этом переходит в систему уравнений
<h=q2’ (А. 15)
(А-16)
qn=f(&,qv...,q„y (А.17)
Эти уравнения задают траектории в л-мерном фазовом пространстве.
Выбрав возрастающую последовательность моментов времени, мы немед-
ленно получаем траекторию, просто вычисляя производные все более вы-
319
Приложения
сокого порядка от qx по формуле (А. 14). Действуя таким образом, можно
легко построить аттрактор.
Но стоит нам захотеть воспользоваться описанной выше процедурой при-
менительно к реально измеренным временным рядам, как мы столкнемся с
принципиальной трудностью, поскольку такой ряд может состоять лишь из
дискретного набора точек и в действительности не быть ни дифференцируе-
мым, ни даже непрерывным, в связи с чем оценка производных сопряжена с
большими вычислительными трудностями. Учитывая это, Такенс (1980) и дру-
гие предложили иной метод построения аттрактора, который оказался весьма
полезным. Как и прежде, наша цель состоит в реконструкции траектории на
рис. А. 1 по временному ряду, представленному на рис. А.2. Основная идея зак-
лючается во введении сдвига по времени Т так, что координата qx
qx=Asma>t (А. 18)
преобразуется в
q2 (t) = Cqx (t+T) = СЛ sin [ю (t + 7)] (A. 19)
— временную последовательность переменной q2, если CO 7’= л/2. Величина
С в (А. 19) — масштабный множитель. Этот пример показывает, что мы мо-
жем реконструировать траекторию на рис. А. 1 с помощью подходящего
сдвига по времени Т. Но в практических приложениях возникает труд-
ность, так как априори нам не известно из экспериментальных данных,
какой сдвиг по времени Т следует использовать. Из второй строки в (А. 19)
получаем
q2 = СА (sin®Zcos®T + cos®Zsin®T)- (А.20)
Используя соотношение (А.20), можно показать, что qx и q2 теперь удов-
летворяют уравнению вида
(?2 - Щ )2 + f3qx = (СЛ)2, (А.21)
где
а = С coscoT
Р = Csine>7
Возникающая в результате новая траектория представлена на рис. А.З. Срав-
нивая рис. А.З и А. 1, мы можем заключить, что, используя произвольный сдвиг,
или запаздывание, по времени Т, мы в принципе получаем тот же аттрактор,
но только повернутый и деформированный в фазовом пространстве. Патоло-
гический случай возникает при /3 = 0, что соответствует Т = 2л/СО. В этом слу-
чае уравнение (А.21) заменяется линейным уравнением
q2-Cqt=±CA, (А.23)
и аттрактор состоит лишь из двух отдельных прямых, т.е. не может быть
«разрешен». Этот пример наглядно показывает, что реконструкция аттрак-
тора, по крайней мере в некоторых случаях, может чувствительно зависеть
от выбора сдвига по времен Т. Далее мы покажем, как реконструировать
320
Приложения
Рис. А.З. Реконструированная траектория
(см. текст).
аттракторы для более сложных систем. Но сначала мы обсудим, как опре-
делить размерности аттрактора, в частности хаотического аттрактора.
А.2. Определения размерностей
Рассмотрим сначала возможные определения размерностей и начнем с
вполне очевидных случаев прямой, квадрата и куба. Но наша цель состо-
ит во введении понятия фрактальной размерности, т.е. размерности, во-
обще говоря, не целочисленной.
Начнем с одного измерения и рассмотрим одну прямую с равноотстоя-
щими точками (рис. А.4). Общее число точек равно N. Nk(r) — число точек
в fc-ом интервале длины г. Для простоты условимся пока считать, что все
ячейки одинаковых размеров, и положим Nk(r) = N(r). Число ячеек, необ-
ходимых для того, чтобы покрыть все точки, обозначим М(г). Эта величи-
на удовлетворяет соотношению
М(г)хА(г) = TV-
Для дальнейших целей запишем (А. 24) в виде
N(r) _ 1
TV ” M(r)
Совершенно ясно, что в одноименном случае
TV(r) сс г.
(А.24)
(А.25)
(А.26)
21-4614
Рис .А. 4. Иллюстрация определений вели-
чин Nk, N и М, входящих в соотношение
(А.24).
321
Приложения
Аналогично, в двумерном случае
A(r)ccr2, (А.27)
а в D- мерном случае
A(r)ocrB, (А.28)
или, точнее,
A(r) = CrB, (А.29)
где С— постоянная, которая зависит от формы элементов, образующих
покрытие (такие элементы могут иметь, например, форму кубов, сфер и
т.п.)- Прологарифмировав соотношение (А.29), получим:
1пА(г) = 1пС+Р1пг, (А.30)
откуда
n In Mr)
D = ——(А.31)
In г
по крайней мере при г -> 0, когда
(А.32)
|1пг|
С учетом (А.25) формулу (А.31) можно представить в виде
Д = 11ш111 Л/(г>. (А.ЗЗ)
г-»0 1пг
Формула (А.31) — наш первый фундаментальный результат: она говорит
нам, как определить размерность D. Это определение остается в силе не толь-
ко для рассмотренных нами гладких объектов, но и, как будет показано ниже,
для фрактальных объектов. Для практических целей очень часто используются
другие определения величины D. Покажем, как возникают такие определе-
ния. Прежде всего заметим, что распределение точек не обязательно одно-
родно, поэтому разумно ввести локальную плотность точек в fc-ой ячейке
Р = (А.34)
к N
Это выражение можно интерпретировать и как вероятность найти точ-
ку в fc-ой ячейке.
Чтобы получить точное математическое определение величины Рк, не-
обходимо перейти к пределу.
Л = ИтМ. (А.35)
А —>оо
В практических приложениях это означает, что число N надлежит вы-
бирать достаточно большим.
Может показаться несколько странным, что вместо простых определе-
322
Приложения
ний (А.31) или (А.ЗЗ) используются более сложные определения размер-
ности. Одна из причин заключается в том, что плотность точек не обяза-
тельно равномерна и можно различными способами вводить весовые мно-
жители, или просто — веса. Начнем с общего определения размерности
Реньи Dc'.
(Л
Д=—Ит— q-1 г>!| Inr (А.36)
где параметр q> 0 не обязательно принимает целочисленные значения. Что-
бы пояснить взаимосвязь между (А.36) и элементарными определениями,
рассмотрим частный случай: однородное распределение и q Ф 1, когда
Р. = Р.*И. к N (А.37)
Сумма, стоящая в (А.36) под знаком логарифма, немедленно вычисля-
ется и дает
(А.38)
или, с учетом (А.25), у I A J (А.39)
Подставляя этот результат в (А.36), получим: 1 In —— п г 1 А ) D„ = lim —- -> In г (А.40)
величина q - 1 в числителе и знаменателе сократилась. Как мы уже знаем,
величина N(r), или N(r)/N, пропорциональна г°:
N (А.41)
откуда мы немедленно получаем 1ПгВ Inr D=^— = D— = D Inr Inr ’ (А.42)
т.е. определение обычной размерности. Рассмотрим теперь некоторые про-
стые частные случаи формулы (А.36). При q = 0 сумма под логарифмом вы-
рождается в
2Г
323
Приложения
M(r)
k=\
и вместо (A. 36) мы получаем
(A.43)
(A.44)
Dn =-lim
In M (r)
Inr
Это так называемая размерность Хаусдорфа—Безиковича. Случай
q = 1 D. = lim Z) (А.45)
несколько сложнее, так как числитель и знаменатель в (А.36) обращаются
в нуль. Но мы можем определить D} по формуле (А.45). Раскрывая неопре-
деленность по правилу Лопиталя, Dl можно представить в виде
( А
D, = lim ——--------------
г-»0 1ПГ
(А.46)
Это так называемая информационная размерность, так как информа-
цией распределения вероятностей Рк по определению называется величи-
на
/ = -^Л1пЛ (А.47)
при условии
^Pk=l. (А.48)
Наконец, самое важное в контексте нашей книги определение возни-
кает при q = 2, когда мы вводим так называемую корреляционную размер-
ность v, полагая
v = Z)2- (А. 49)
Численные значения различных размерностей при q = 0, 1, 2... не обя-
зательно совпадают, но можно показать, что в общем случае
Д<Д<Д. (А.50)
После этих предварительных замечаний мы можем приступить к рас-
смотрению размерности аттракторов.
А.З. Размерность апракторов
Прежде всего напомним, как мы получаем аттракторы. В настоящее вре-
мя аттракторы возникают при численном решении динамических уравне-
ний (А. 12) или (А. 15) — (А. 17) на цифровом компьютере. Важно знать, что
в любом случае мы получаем лишь дискретное множество точек, соответ-
324
Приложения
ствующее дискретному множеству используемых при решении шагов по
времени. С аналогичной ситуацией мы встречаемся и при обработке экс-
периментальных данных, так как из-за ограниченного разрешения по вре-
мени операций измерения мы получаем только дискретный временной
ряд, по которому требуется реконструировать аттрактор по правилам, из-
ложенных в А.1. Когда мы имеем дело с экспериментальными данными в
форме временного ряда одной переменной, размерность фазового про-
странства априори не известна. Поэтому нам приходится ее подбирать,
пробуя фазовые пространства различной размерности. Процедуру подбо-
ра размерности п фазового пространства называется вложением: мы вкла-
дываем траекторию в «-мерное фазовое пространство путем построения
адекватного числа п переменных по правилам, изложенным в разд. А1.
Итак, мы строим «-мерные векторы в дискретные моменты времени t..
(А.51)
где i = 1, ..., N. В результате мы получаем А точек в фазовом пространстве.
Этот ансамбль точек мы покрываем кубами с длиной ребра г. Напомним,
что М(г) мы определим как минимальное число кубов, необходимых для
покрытия всех точек. В практических приложениях наиболее подходящей
оказалась корреляционная размерность D2. Однако ее следует несколько
преобразовать. Напомним, что из (А. 34) мы немедленно получаем
р2 = ^(Н2 (А.52)
к N2
Величину (А. 52) можно интерпретировать как вероятность найти две
точки в к-м кубе, или, иначе говоря, вероятность того, что расстояние меж-
ду этими двумя точками меньше г. Составив величину
т.е. просуммировав Рк2 по всем кубам, мы получим вероятность того, что
расстояние между любыми парами точек меньше г. Но эту же величину
можно рассматривать и как число пар, для которых
\qi-qj\<r, (А.54)
деленное на А2, т.е. как величину
1 . .
um(число пар, для которых \qt -q}\< г, i * j).
Величину (А.53) можно представить еще одним способом, а именно в виде
так называемого корреляционного интеграла
= "«/!)• (А.55)
* ’ /=1 У=1
и
В этом интеграле двойная сумма «пересчитывает» все точки, для кото-
325
Приложения
рых выполняется неравенство (А.54). В (А.55) мы воспользовались так на-
зываемой функцией Хевисайда, определяемой соотношением
ад={‘
если х> О
если х<0
(А.56)
Грассбергер и Прокачча (1983) определили размерность г как
v = lim2aW. (А.57)
In г
С соотношением (А.57) надлежит обращаться с осторожностью. Во-пер-
вых, если убрать предел lim, то (А.57) становится эквивалентным утверж-
дению о том, что
С(г) ос r\ (А.58)
причем должно выполняться ограничение
v<n. (А.59)
V™ означает, что г следует выбирать малым по сравнению с протяжен-
ностью аттрактора: ясно, что при таком выборе г вероятность найти в рас-
сматриваемом аттракторе две точки на практически произвольном рассто-
янии одна от другой становится равной 1 :
C(r)->1. (А.60)
Во-вторых, при любом численном моделировании, если г слишком
мало, не найдется достаточного числа пар точек. Таким образом, успех все-
го подхода в целом в решающей мере зависит от искусства выбора подхо-
дящего диапазона значений г. На практике для этого строят «график Рап-
па» (Rapp, 1985): берут величину
ЛпС(г)
dlnr
и строят ее зависимость от
InC(r). (А.62)
Производную в (А.61) приходится находить численно. Смысл этого оп-
ределения отчетливо виден на примере С(г) ос rv Записав
С(г)^г1=с"п',
мы легко вычислим (А.61):
Jlnevlnr
-------= v-
dlnr
Кроме того,
lnC = vlnr-
(А.64)
(А.65)
326
Приложения
Таким образом, построив зависимость (А.61) от (А.62), мы получим го-
ризонтальную прямую на высоте, равной значению параметра v, который
есть просто размерность. Следовательно, в практических приложениях не-
обходимо искать такие участки «графика Раппа», на которых зависимость
In С от Inr представлена отрезком горизонтальной прямой.
А.4 Некоторые выводы
Установив фрактальные размерности, мы можем составить некоторое
представление о том, сколько параметров следует ожидать. Следует заме-
тить, что для точного определения фрактальных размерностей необходи-
мо располагать достаточно длинными временными рядами, снятыми в ста-
ционарных условиях. К сожалению, в физиологических измерениях (в том
числе в измерениях ЭЭГ и МЭГ) соблюсти это требование не представля-
ется возможным. Поэтому фрактальные размерности в подобных случаях
могут дать лишь кое-какие указания, и воспринимать их следует с извест-
ной осторожностью.
В. Определение сопряженных векторов
Умножая обе части (16.2) слева на vk., получаем с учетом (16.1)
k = Y,...,M. (B.l)
k=l
Используя сокращенные обозначения
1 = 8к,, Л = (4,.), Г = (ГЛ„), (В.2)
(В.1) можно представить в виде матричного уравнения
I = AK (В.З)
решение которого можно записать в виде
A = V\ (В.4)
327
Приложения
С. Потенциалы, упоминаемые в разд.16.5
Потенциалы V2 и V3, упоминаемые в сноске в разд. 16.5, имеют вид
1/2=г2|{|(1-р1)а|2+|(1-Д)а|2}, (С.1)
где Рр Р2 — проекционные операторы с компонентами
к=\
И
Гз=ГзЕ(1_(гЛ)Ь (С.2)
к=\
У2 и Уз ~ положительные константы. Минимум полного потенциала
ktot = И+ V2 + V3 может быть найден с помощью градиентной динамики
(С.З)
4i = -SVl0,/dvl. (С.4)
Литература и рекомендации для дальнейшего чтения
Литература о строении и функционировании головного мозга и когнитивной де-
ятельности огромна, и полный перечень публикаций занял бы не одну книгу. По-
этому я сошлюсь только на те источники, которые использовал при написании
этой книги. Кроме того, я стремился добавлять те ссылки, которые могли бы ока-
заться полезными и существенными. Я отчетливо сознаю, что в приведенном мной
списке нет ряда важных изданий. Назову лишь некоторые из недавно вышедших
книг по строению и функционированию головного мозга, разуму, поведению и
когнитивной деятельности.
Aferstin A. (ed.). Brain theory. — Amsterdam: Elsevier, 1993.
Arbib A. (ed.). The handbook of brain and neural networks. — Cambridge, MA: MIT
Press, 1995.
Bock P. The emergence of artificial cognition. — Singapore: World Scientific, 1993.
Calvin W.H. The cerebral symphony. — N.Y.: Bantam Doubleday Dell, 1990.
Carpenter G.A., Grossberg S. (eds.) Pattern recognition by self — organising neural
networks. — Cambridge, MA: MIT Press, 1991.
Crowley J.L., Christense H.I. Vision as process. — Berlin: Springier, 1995.
Donalds M. Origins of the modern mind. — Cambridge, MA: Harvard
Duke S.W., Pritchard W.S. (eds.). Measuring chaos in the human brain. — Singapore:
World Scientific, 1991.
Edelman G.M. Bright air, brilliant fire. — L.: Penguin Books, 1992.
Eggermont J.J. The correlative drain. Theory and experiment in neural interaction. —
Berlin: Springer, 1990.
Finke R.A., Ward T.B.,Smith M. Creative cognition. — Cambridge, MA: MIT Press,
1992.
Gardner H. The mind’s new science. A history of the cognitive revolution. — N.Y.: Basic
Books, 1985.
Gazzaniga M.S. The cognitive neuroscience. — Cambridge, MA: MIT Press, 1994.
Haken H., Hakeh-Krell M. Erfolgsgeheimnisse der Wahrnehmung. — Stuttgart: Deutsche
Verlag-Anstalt, 1992.
Hanson S.J., Olson C.R. (eds.) Connectionist modeling and brain function: The
Developing Interface. — Cambridge, MA: MIT Press, 1990.
Impedovo S. (ed.) Fundamental in handwriting recognition. — Berlin: Springer, 1994.
Kohonen T., Fogelmann-Soulie F. Cognitiva 90, At the crossroads of artificial
intelligence, Cognitive Science and Neuroscience. — Amsterdam: North-Holland,
1991.
Levy W.B., Anderson J.A., Lehmkuhl S. (eds.) Synaptic modification, neurou sectivity,
and nervous system organization. — L.: Laurence Erlbaum Associates, 1985.
Logie R.H., Denis M. Mental images in human cognition. — Amsterdam: North-Holland,
1991.
Moser U., von Zeppelin 1. (eds.) Cognitive-affective processes. — Berlin: Springer, 1991.
Omidvar O.M. (ed.) Progress in neural networks, Vol.3. — Norwood, NJ: Ablex
Publishing Corporation, 1995.
Petry S., Meyer G.E. (eds.) The perception of illusory contours. — Berlin: Springer, 1987.
Poppel E. (ed.) Gehirn und Bewusstsein. — Wienheim: VCH Verlaggesellschaft, 1989.
Purpura D.P. (ed.) Cognitive brain research. — Amsterdam: Elsevier Science Publishers, 1993.
Reichardt W.E., Poggio T. (eds.) Theoretical approaches in neurobiology. — Cambridge,
MA: MIT Press, 1981.
Rentschler L, Herzbacher B., Epstein D. (eds.) Beauty and the brain. — Basel: Birkhauser
Verlag, 1988.
329
Литература и рекомендации для дальнейшего чтения
Schmitt F.O., Worden F., Adelman G., Dennis S.G. (eds.) The organization of the
cerebral cortex. — Cambridge, MA: MIT Press, 1981.
Stillings N.A., Feinstein M.H., Garfield J.L., Rissland E.L., Rosenbaum D., Weisler S.E.,
Baker — Ward L. Cognitive science, An Introduction. — Cambridge, MA: MIT Press,
1987.
Trevarthen C. Brains, circuits, and functions of the mind. — Cambridge: Cambridge
University Press, 1990.
Пролог
Haken H. Pattern formation and pattern recognition — An attempt at a synthesis. — IN:
Haken H. (ed.) Pattern formation by dynamic systems and pattern recognition. —
Berlin: Springer, 1979.
Haken H. Synergetics, An introduction. — Berlin:Springer, 1977. (Русский перевод: Ха-
кен Г. Синергетика. — М.: Мир, 1980)
Haken Н. Synopsis and Introduction. — In: Basar E., Flohr H., Haken H., Mandell A.J.
(eds.) Synergetics of the brain. — Berlin: Springer, 1983, 3-25.
Kelso J.A.S. On the oscillatory basis of movements // Bulletin of Psychological Society.
- 1981. - V.18.— P.63.
Kelso J.A.S. Phase transitions and critical behavior in human bimanual coordination //
American Journal of Physiology: Regulatory, Integrative and Comparative Physiology.
-1984. - V. 15. - P.R1000 - R1004.
Haken H., Kelso J.A.S., Bunz H. A theoretical model of phase transitions in human hand
movements. — Biol. Cybern. — 1985. — V.51. — P.347-356.
Schoner G., Haken H., Kelso J.A.S. A stochastic theory of phase transitions in human
movement.-Biol. Cybern.,-1986.-V.53.-P.247-257.
Schmidt R.C., Carello C., Turvey M.T. Phase transitions and critical fluctuations in visual
coordination of rhythmic movements between people // Journal of Experimental
Psychology: Human Perception and Performance.-1990.-V.16.-P.227-247.
Beek P.I., Peper C.E., var Wieringen P.C.W. Frequency locking, frequency modulation,
and bifurcations in dynamic movement systems.-In: Stelmach G.E., Requin J. (eds.)
Tutorials in motor neuroscience.-Amsterdam: North-Holland, 1992, P.599-622.
Komdle H. (1992). Частное сообщение.
Friedrich R., Uni C. Spatio-temporal analysis of human electroencephalograms: Petit-
mal epilepsy (1995). (He опубликовано.)
Fuchs A., Kelso J.A.S.,Haken H. Phase transitions in the human brain: Spatial mode
dynamics // International Journal of Bifurcation and Chaos.-1992.-V.2.-P.917-939.
Kelso J.A.S., Bressler S.L., Buchanan S., de Guzman C.C., Ding M., Fuch A, Holroyd T.
A phase transition in human brain and behavior // Phys.Lett.-1992.-V.A169.-P.134-144.
Haken H. Synergetic computers for patter recognition and associative memory.-In: Haken
H. (ed.) Computational systems, natural and artificial.-Berlin: Springer, 1987, P.2-22.
Ditzinger T., Haken H. Oscillations in the perception of ambiguous patterns.// Biol.
Cybern.-1989.-V.61.-P.279-287.
Ditzinger T., Haken H. The impact of fluctuations on the recognition of ambiguous
patterns // Biol.Cybern.— 1990.-V.63.-P.453-456.
Роль синергетики убедительно изложена в двух превосходных публикациях:
Freeman W.J. Societies of brains.-Hilsday, N.J.: Lawrence Erlbaum Associates, 1995.
И особенно в книге
Kelso J.A.S. Dynamic patterns: The self-organization of brain and behavior.— Boston:
MIT Press, 1995.
В этих книгах приведены многочисленные ссылки на литературу.
330
Литература и рекомендации для дальнейшего чтения
1. Введение
1.1. Биологические системы — сложные системы
Sherrington C.S. The integrative action of the nervous system. — L.: Constable, 1906.
Popper K.R., Eccles J.C. The self and its brain. — Berlin: Springer, 1977.
Позднее Экклс ввел вместо программиста квантовомеханическое поле вероятно-
стей. См. Eccles J.C. New light on the mind-brain problem: How mental events could
influence neural events.-In: Haken H. (ed.) Complex systems — operational
approaches. — Berlin: Springer, 1985, p.81-106.
1.2. Цели синергетики
Популярное изложение см. в книге:
Haken Н. The science of structure. Synergetics.— N.Y.: Van Nostrand Reinhold, 1984.
2.Исследуем мозг
2.1. Мозг как черный ящик
Работу Скиннера см. в сб.: Catania С.А., Harvard S. (eds.) The selection of behavior.
— Cambridge: Cambridge University Press, 1988.
Расширенный вариант ранних исследований Скиннера см. в книге: Skinner B.F.
Verbal Behavior. — N.Y.: Appleton -Century -Crofts, 1957.
2.2. Открываем черный ящик
2.3. Структура и функция на макроскопическом уровне
Brocca Р. Remarques sur la siege de la faculte du language articule // Bulletin de la
sosiete d’anthropologic. -1861.— Paris 6.
Wernicke C. Der aphasische Symptomenkomplex.— Breslau, 1874.
Превосходное изложение работ Сперри и более поздних исследований см. в книге:
Springer S.P., Deutsch G. Left Braun, Right Brain, 4th ed. — N.Y.: W.H.Freeman and
Co., 1993.
2.4. Неинвазивные методы
Daffertshofer M., Schwatz A., 1994. Личное сообщение.
Компьютерная томография:
Dann R., Hofeord J., Kovacic S., Revich M., Bajcsy R. Evaluation of elastic matching
system for anatomic (CT, MR) and functional (PET) cerebral images // J.Comput.
Assist. Tomogr.— 1989. - V.13. - №4. -P.603-611.
Radii E.W., Kendall B.E., Moseley I.F. Computertomograhie des Kopfes. Technische
Grundlagen — Interpretation — Klinik. — Stuttgart, N.Y.: Thieme, 1987.
V5>/?
Berger H. Uber das Elektroenkephalogramm des Menschen // Arch.Phychiatr. Nervenkr.
- 1929. - V.87. - S.527-570.
Cooper R., Osselton J.W., Shaw J.C. Elektroenzephalograhie: Technik und Methoden,
3rd rev.ed.-Stuttgart: Gustav Fischer Verlag, 1984.
331
Литература и рекомендации для дальнейшего чтения
Freeman W.J. Mass action in the nervous system: Examination of the neurophysiological
basis of adaptive behavior through the EEG.-L.: Academic Press, 1975.
Lehmann D. Multichannel topography of human alpha EEG fields // Electroceph. Clin.
Neurophysiol. — 1971. — V.31. — P.439-449
Lehmann D. Human scalp EEG fields: Evoked, alpha, sleep, and spike-wave patterns. -
In: Petsche H., Brazier M.A.B.(eds.) Synchronization of EEG activity in epilepsies.
— Berlin: Springer, 1972.
Jansen B.H., Brandt M.E. Nonlinear dynamical analysis of the EEG. -Singapore: World
Scientific, 1993.
Nunez P.L. Electric fields of the brain: The neurophysics of EEG. — Oxford: Oxford
University Press, 1981.
Nunez P.L. Necortical dynamics and human EEG rhythms. — Oxford: Oxford University
Press,1995.
МЭГ:
Kelso J.A.S. и др. Ссылки см. в гл. 15.
Hamalainen М., Hari R., Ilmoniemi R.J., Knuutila J., Lounasmaa O.V. Magnetoence-
phalography — theory, instrumentation, and applications to noninvasive studies of the
working human brain // Rev.Mod.Phys. — April 1993. — V.65. -No.2 -P.413-497.
ПЭТ сканирование:
Raichle M.E. Visualizing the mind // Scientific American. — April 1994. — V.270. -No.4.
- P. 36-42.
Dann R., Hoford J., Kovacic S., Reivich M., Bajcsy R. Evaluation of elastic matching
system for anatomic (CT, MR) and functional (PET) cerebral images // J. Comput.
Assist.Tomography. — 1989. — V.13. — No.4. — P.603-611.
Martin W.R.W., Grochovsky E., Palmer M., Pate B.D. Correlation of structural and
functional image in the same patient // J.Nucl.Med. — 1987. — V.28. — P.634.
McIntosh A.R., Grady C.L., Ungerleider L.G., Haxby J.V., Rapoport S.L, Horwitz B.
Network analysis of cortical visual pathways mapped with PET 11 J. Neuroscience.
- 1994. - V.14. - No.2. -P.655-666.
МРИ:
Damandian R. Tumor defection by nuclear magnetic resonance // Science. — 1971.
V.171. - P.1151-1153.
Huk W.J., Gademann G., Friedmann G. MRI of central nervous system diseases. —
Berlin: Springer, 1990.
Morris P.G. Nuclear resonance imaging in medicine and biology. — Oxford: Clarendon
Press, 1986.
2.5. Структура и функция: микроскопический уровень
Обзоры:
Bullock Т.Н., Orkland R., Grinnel A. Introduction to nervous systems. — San Francisco:
W.H.Freetnan and C°., 1977.
Thompson R.F. The brain, A neuroscience primer, 2nd ed. — San Francisco: W.H.
Freeman and C°., 1993.
Shaw G.L., McGauch J.L., Rose S.P.R. (eds.) Neurobiology of learning and memory,
reprint volume. — Singapore: World Scientific, 1990.
Hameroff S.R. Ultimate computing. Biomolecular consciousness and nanotechnology.
— Amsterdam: North-Holland, 1987.
332
Литература и рекомендации для дальнейшего чтения
Hubei D.H., Wiesel T.N. Receptive fields, binocular interaction and functional
architecture in the cat’s visual cortex. // J.Physiol. -1962. — V.160. — P.106-154.
См. также:
Hubei D. Eye, brain and vision. — N.Y.: Scientific American Books, 1988.
Freeman W.J. The physiology of perception // Scientific American. — 1991. — V.264.
- P.78-85.
Gray C.M., Konig P., Engel A.K., Singer W. Synchronization of oscillatory responses in
visual cortex: A plausible mechanism for scene segmentation. — In: Haken H., Stadler
M. (eds.) Synergetics of Cognition. — Berlin: Springer, 1990.
Иллюстрации заимствованы из работы:
Fuchs A., Friedrich R., Haken H., Lehmann D. Spatio-temporal analysis of multichannel
CC-EEG map series. — In: Haken H. (ed.) Computational systems -natural and
artifical. — Berlin: Springer. 1987.
2.6. Обучение и память
Hebb D.O. The organization of behavior. — N.Y.: Wiley, 1949.
Kandel E.R., Schwartz J.H. Principles of neural science, 2nd ed. — N.Y.: Elsevier, North-
Holland, 1985.
Kandel E.R. Behavioral biology of Aplysia: A contribution to the comparative study of
opisthobranch molluscs. — San Francisco: W.H.Freeman and Co., 1979.
Kuffler S.W., Nichols J.G., Martin A.R. From neuron to brain. — Sunderland,
MA:Sinauer, 1984.
3. Моделирование мозга. Первая попытка:
мозг как динамическая система
3.1. Что такое динамические системы
Из сравнительно недавних книг по динамическим системам см.:
Arnold V.A. Geometrical methods in the theory ordinary differential equations. — Berlin:
Springer, 1983.
Anosov D.V., Arnold V.I. (eds.) Dynamical systems I. — In: Encyclopaedia of
Math.Sciences, V.I. — Berlin: Springer, 1988.
Arnold V.I. Dynamical systems V.— In: Encyclopaedia of Math.Sciences, V.5. — Berlin:
Springer, 1993.
Guckenheimer J., Holmes P.J. Nonlinear oscillations, dynamical systems, and
bifurcations of vector fields. — Berlin: Springer, 1983.
Wiggins J. Global bifurcations and chaos. — Berlin: Springer, 1991.
4. Основные понятия синергетики I:
Параметры порядка и принцип подчинения
Haken Н. Synergetics, An introduction, #rd ed. — Berlin: Springer, 1983. (Русский пе-
ревод с 1-го изд.: Хакен Г. Синергетика. — М.: Мир, 1980.)
Haken Н. Advanced Synergetics, 3rd ed. — Berlin: Springer, 1993. (Русский перевод 1-го
изд.: Хакен Г. Синергетика. Иерархии неустойчивостей в самоорганизующих-
ся системах и устройствах. — М.: Мир, 1985)
333
Литература и рекомендации для дальнейшего чтения
Важное обобщение принципа подчинения на дифференциальные уравнения с за-
паздывающим аргументом см. в работе:
Wischert W., Wunderlin A, Pelster A., Olivier М., Groslambert J. Delay-induced instabilities
in nonlinear feedback systems 11 Phys.Rev. — 1994. — V.E49. — P.203-219.
4.3. Самоорганизация и второе начало термодинамики
Von Bertalanffy L. General system theory, foundations, development, applications, rev.ed.
— N.Y.: George Brazilier, 1976.
Turing A.M. The chemical basis of morphogenesis // Phil. Trans. Roy. Soc. — 1952. —
V.B237. - P.37-52.
См. также:
Meinhardt H. Models of biological pattern formation. — L.: Academic Press, 1982.
Wolpert L. The triumph of the embryo. — Oxford: Oxford University Press, 1991.
Bestehorn M., Fantz (Neufeld) M., Friedrich R., Haken H. Hexagonal and spiral patterns
of thermal convection. // Phys. Lett. A. — 1993. — V.174, P.48-52.
5. Динамика параметров порядка
Haken H. Synergetics, An Introduction, 3rd ed. — Berlin: Springer, 1983. (Русский пе-
ревод с 1-го изд.: Хакен Г. Синергетика. — М.: Мир, 1980.)
Haken Н. Advanced synergetics, 3rd ed. — Berlin : 1993. (Русский перевод с 1-го изд.
Хакен Г. Синергетика. Иерархия неустойчивостей в самоорганизующихся си-
стемах и устройствах. — М.: Мир, 1985.)
Graham R., Haken Н. Quantum theory of light propagation in a fluctuating laser-active
medium // Zs.Physik. — 1968. — V.213. — S.420-450.
Graham R., Haken H. Laser light — first example of a second-order phase transition far
away from thermal equilibrium // Zs.Physik. — 1979. — V.237. — S.31-46.
5.4. Параметры порядка и нормальные формы
Теория катастроф:
Thom R. Structural stability and morphogenesis. — Reading, MA:W.A.Benjamin, 1975.
Arnold V.I. Catastrophe theory. — Berlin: Springer, 1986. (Русский оригинал: Арнольд В.И.
Теория катастроф, -изд. 2-е, доп. — М.: Изд-во Московского университета, 1983.)
Poston Т., Stewart LN. Catastrophe theory and its applications. — L.: Pitman, 1978.
Нормальные формы:
Arnold V.I. Geometrical methods in the theory of ordinary differential equations. —
Berlin: Springer 1983. (Русский оригинал :
Bruno A.D. Local methods in nonlinear differential equations. — Berlin: Springer, 1989.
6. Координация движений — паттерны движения
6.1. Проблема координации
Bernstein N. The coordination and regulation of movements. — L.: Pergamon Press, 1967.
Sherrington C.S. The integrative action of the nervous system. — L.: Constable, 1906.
334
Литература и рекомендации для дальнейшего чтения
Gibson J.J. The ecological approach to visual perception. — Boston: Houghton-Mifflin, 1906.
von Holst E. Die relative Koordination als Plmnomen und als Methode zentralnervnser
Funktionsanalysen // Erg.Physiol. — 1939. -Bd.42. — S.228-306.
von Holst E. bber den Prozess deer zentralnervnsen Koordination // Pflbgers Arch. —
1935. - Bd.236. - S.149-159.
von Holst E. bber relative Koordination bei Anthropoden // Pflbgers Arch. — 1943.
Bd.246. - S. 847-865.
Существует обширная литература по проблемам регуляции двигательной актив-
ности и генерации двигательных паттернов. Из последних работ отметим:
Kupfermann 1. The generation of motor patterns // Current Directions in Psychological
Science. - 1993. - V.2. - P.126.
Cohen A.H., Rossignol S., Grillner S. Neural control of rhythmic movements. — N.Y.:
Vertebrates, Wiley, 1988.
Turvey M.T. Coordination // American Physiologist. — 1990. — v.45. — P.938-953.
6.2. Фазовые переходы в движениях пальцев. Эксперименты и простая модель
Эксперименты:
Kelso J.A.S. On the oscillatory basis of movements // Bulletin of PsychOnomic Society.
- 1981.-V.18.-P.63.
Kelso J.A.S. Phase transitions and critical behavior in human bimanual coordination //
American Journal of Physiology: Regulatory, Integrative and Comparative Physiology.
- 1984. - V.15. - P.R1000-R1004.
Теория:
Haken H., Kelso J.AS., Bunz H. A theoretical model of phase transitions in human hand
movements // Biol. Cybernetics. — 1985. — V.S1. — P.347-356.
6.3. Альтернативная модель?
Эта модель была предложена в работе:
Schmidt R.C., Shaw В.К., Turvey M.T. Coupling dynamics in interlimb coordination //
Journal of Experimental Psychology: Human Perception and Performance. — 1993.
-V.19.-P.397-415.
Критические замечания, аналогичные нашим, см. в работе:
Fuchs A., Kelso J.A.S. A theoretical note on models of interlimb coordination // Journal
of Experimental Psychology: Human Perception and Performance. — 1994. — V.20.
-No.5.-P.1088-1097.
6.4. Флуктуации в движениях пальцев: теория
Schoner G., Haken H., Kelso J.A.S. A stochastic theory of phase transitions in human
hand movement // Biol. Cybernetics. — 1986. -V.53. — P.247 —257.
Haken H. Synergetics, An Introduction, 3rd ed. — Berlin: Springer, 1983 (Русский пе-
ревод 1-го изд.: Хакен Г. Синергетика. — М.: Мир, 1980.)
6.5. Критические флуктуации в движениях пальцев: эксперименты
Kelso J.A.S., Scholz J.P., Schoner G. Non-equilibrium phase transitions in coordinated
biological motion: Critical fluctuations // Phys.Lett. — 1986. — V.A118. — P.279-284.
Kelso J.A.S., Schoner G., Scholz J.P., Haken H. Phase-locked modes, phase transitions
335
Литература и рекомендации для дальнейшего чтения
and component oscillators in biological motion // Physica Scripta. — 1987. — V.35.
- P.79-87.
Scholz J.P., Kelso J.A.S., Schoner G. Non-equilibrium phase transitions in coordinated
biological motion: critical slowing down and switching time // Phys. Lett. — 1987. —
V.A123. - P.390-394.
6.6. Несколько важных выводов
Эксперименты:
Jeca J.J., Kelso J.A.S., Kiemel T. Pattern switching in human multilimb coordination
dynamics // Bulletin of Mathematical Biology. — 1993. — V.55. — P.829-845.
von Holst E. Zur Verhaltensphysiologie bei Tieren und Menschen. — In: von Holst E.
Gesammelte Abhandlungen, Bd. I, Teil I: Relative Koordination. — Miinchen, 1969.
Schmidt R.C., Carello C., Turvey M.T. Phase transitions and critical fluctuations in the
visual coordination of rhythmic movements between people 11 Journal of Experimental
Psychology: Human Perception and Performance. — 1990. V.I6. — P.227-247.
Shik M.L., Severin F.V., Orlovskii G.N. Control of walking and running by means of
electrical stimulation of the mid-brain I I Theor. Biol. — 1966. — V.142. — P.359-391.
7. Еще о движениях пальцев
7.1. Движение одного указательного пальца
Haken Н., Kelso J.A.S., Bunz Н. A theoretical model of phase transitions in human hand
movements 11 Biol. Cybernetics. — 1985. — V.51. — P.347-356.
Kay B.A., Kelso J.A.S., Saltzman E.L., Schoner G. The phase-time behavior of single
and bimanual Experimental Psychology: Human Perception and Performance. —
1987. -V.13. - P.178-192.
Freund H.I. Motor unit and muscle activity in voluntary motor control // Psychological
Reviews. - 1983. - V.63. - P.387-436.
Feldmann AG. Superposition of motor programs: I. Rhythmic forearm movements in
man// Neuroscience. — 1980. — V.5. — P.81-90.
Asatryan D.G., Feldmann A.G. Functional tunning of the nervous system with control of
movement or maintenance of a steady posture: 1. Mechanographic analysis on the work
of the joint on execution of a posturaltask // Biophysics. — 1965. — V. 10, P.925-935.
Davis W.E., Kelso J.A.S. Analysis of invariant characteristics in the motor control of
Down’s syndrome and normal subjects // Journal of Motor Behavior. — 1982. — V.14.
- P.194-212.
Vivian P., Soechting J.F., Terzuolo M. Influence of mechanical properties of the relation
between EEG activity and torque // Journal de physiologic (Paris). — 1976. — T.72.
- P.42-45.
7.2. Связанное движение указательных пальцев
Haken Н., Kelso J.A.S., Bunz H. A theoretical model of phase transitions in human hand
movements// Biol. Cybernetics. — 1985. — V.51. — P.347-356.
Kay B.A., Kelso J.A.S., Saltzman E.L., Schoner G. The space-time behavior of single
and bimanual movements: Data and model// Journal Experimental Psychology:
Human Perception and Performance. — 1987. — V.13. — P.178-192.
Freund H.I. Motor unit and muscle activity in voluntary motor regulation// Psychology
Review. - 1983. - V.63 - P.387-436.
336
Литература и рекомендации для дальнейшего чтения
Feldmann A.G. Superposition of motor programs: I.Rhythmic forearm movements in
man // Neurocience. — 1980. — V.5. — P.81-90.
Asatryan D.G., Feldmann AG. Functional tuning of the nervous system with control of
mvement or maintenance of a steady posture: 1. Mechanographic analysis on the work
of the joint on execution of a postural task//Biophysics. — 1965. — V.10. — P.925-935.
Davis W.E., Kelso J.A.S. Analysis of invariant characteristics in the motor control of
Down’s synchrome and normal subjects // Journal of motor Behavior. — 1982. —
V.14.-P.194-212.
Viviani P., Soechting J.F., Terzuolo M. Influence of mechanical properties on the relation
between EMG activity and torque / Journal de physiologic (Paris). — 1976. — V.72.
- P.45-62.
Hakeh H., Kelso J.A.S.,Bunz H. A theoretical model of phase transitions in human hand
movements // Biol.Cybernetics. — 1985. — V.51. — P.347-356.
7.3. Фазовые переходы в движениях человеческих рук при выполнении заданий,
связанных с многочастотным постукиванием
В этой главе я близко следую экспериментальной и теоретической работе:
Haken Н., Веек P.J., Peter С.Е., Dafertshofer A. A model for phase transitions in human
hand movements during multifrequency tapping (неопубл.)
7.3.1. Эксперимент: фазовые переходы при многочастотном постукивании
Мы описываем эксперименты П.Дж.Бека и К.Э.Пепера (частотное сообщение).
Относительно других или аналогичных экспериментов с постукиванием пальца-
ми см., например:
Deutsch D. The generation of two isochronous sequences in parallel // Percept.
Psychophys. - 1983. - V.34. - P.331-337.
Summers J.J., Rosenbaum D.A., Bums B.D., Ford S.K. Production of polyrhythms //
J.Exp. PhychoL Hum. Percept.Perf. — 1993. — V.19. P.416-428.
Kelso J.A.S., de Guzman C.G. Order in time: How cooperation between the hands
informs the design of the brain. — In: Haken H. (ed.) Neural and Synergetic
Computers. — Berlin: Springer, 1988. — P.180-196.
Treffner P.J., Turvey M.T. Resonance constraints on rhythmic movements //
J.Exp.Psychol. Hum. Percept. Perf. — 1993. — V.19. — P.1221-1237.
Beek P.J., Peper C.E., van Wieringen P.C.W. Frequency locking, frequency modulation,
and bifurcation in dynamic movement systems. — In: Stelmach G.E., Requin J. (eds.)
Tutorials in motor behavior. — Amsterdam: North-Holland, 1992. — P.599-622.
Фазопритягивающее отображение окружности в связи с постукиванием пальцами:
de Guzman C.G., Kelso J.A.S. Multifrequency behavioral patterns and the phase
attractive circle map 11 Biol.Cybern. — 1991. — V.64. — P.485-495.
См. также тематически связанные с этой работой публикации:
de Guzman G.C., Kelso J.A.S., Holroyd T. The self-organized phase attractive dynamics
of coordination. — In: Babloyantz A. (ed.) Self-organization, emerging properties and
learning. N.Y.: Plenum, 1931. — Series B. — V.260. — P.41-62.
de Guzman G.C., Kelso J.A.S., Holroyd T. Synergetic dynamics of biological
coordination with special reference to phase attraction and intermittency. — In: Haken
H., Koepchen H.P. (eds.) Rhythms in physiological systems. — Berlin: Springer, 1991.
-P.195-213.
337
22 - 4614
Литература и рекомендации для дальнейшего чтения
Kelso J.A.S. Phase transitions: Foundations of behavior. — In: Haken H., Stadler N. (eds.)
Synergetics of Cognition. — Berlin: Springer, 1990. — P. 249-295.
7.4. Модель многочастотного поведения
7.5. Основные уравнения захвата частот и их решения
В основе этой теории лежит неопубликованная работа:
Haken Н., Веек O.J., Peper С.Е., Daffertshofer A. A model for phase transitions in human
hand movements during multifrequency tapping.
7.6. Сводка основных теоретических результатов
Summers J.J., Ford S.K., Todd J.A. Practice effects on the bimanual tapping task //
Human Movement Science. — 1993. — V.12. — P.111-133.
Summers J .J., Kennedy T,M, Strategies in the production of a 5:3 polyrhythm // Human
Movement Science. — 1992. — V.ll. — P.101-112.
Kelso J.A.S., Bressler S.L., Buchanan S., de Guzman G.C., Ding M., Fuchs A., Holroyd
T. Cooperative and critical phenomena in the human brain revealed by multiple
SQUIDs. — In: Duke D., Pritchard W. (eds.) Measuring chaos in the human brain.
— Singapore: World Scientific, 1991.
8. Обучение
Savelsbergh G.J.P.(ed.) The development of coordination in infancy. — Amsterdam:
Elsevier, 1993.
8.1. Изменения в ландшафтах параметров порядка, вызванные обучением
Schoner G., Kelso J.A.S. A dynamical pattern theory of behavioral change // J.Theoretical
Biology. - 1988. - V.135. - P.501-524.
Аналогичный механизм ландшафта потенциала измененной интенциональности
для моделирования интенциональности навеян работами:
Kelso J.A.S., Scholz J.P., Schoner G. Dynamics governs switching among patterns of
coordination in biological movement 11 Phys.Lett. — 1988. — V.A134. — P.8-12.
Scholz J.P., Kelso J.A.S. Intentional switching between patterns of bimanual coordination
depends on the intrinsic dynamics of the patterns // J. Of Motor Behavior. — 1990.
-V.20.-P.98-124.
Zanone P.G., Kelso J.A.S. The evolution of behavioral attractors with learning:
Nonequilibrium phase transition // J. of Experimental Psychology: Human Perception
and Performance. — 1992. — V.18. — P.403-421.
Schoner G.S. Learning and recall in a dynamic theory of coordination patterns //
Biological Cybernetics. — 1989. — V.62. — P.39-54.
Schoner G.S., Zanome P.G., Kelso J.A.S. Learning as change in coordination dynamics:
Theory and experiment // J. Of Motor Behavior. — 1992. — V.24. — P.29-48.
Yamanischi J., Kawamoto M., Suzuki R. Two coupled oscillators as a model for the coordinated
finger tapping by both hands //Biol. Cybernetics. — 1980. — V.37. — P.210-225.
Yamanishi J., Kuramoto M., Suzuki R. Studies on human finger tapping, neural networks
by phase transition curves // Biol. Cybernetics. — 1979. — V.33. — P. 199-208.
Tuller B., Kelso J.A.S. Environmentally specified patterns of movement coordination in normal
and split-brain subjects // Experimental Brain Research. — 1989. — V.74. — P.306-316.
338
Литература и рекомендации для дальнейшего чтения
8.2. Обучение изменяет число параметров порядка
См. ссылки к гл. 12.
8.3. Обучение порождает новые параметры порядка
См. ссылки к гл. 12, а также книгу:
Hebb D.O. The organization of behavior. — N.Y.: Wiley, 1949.
9. Аллюры животных и переходы между ними
Schoner G., Yiang W.I., Kelso J.A.S. A synergetical theory of quadrupedal gaits and gait
transitions // J. Theor.Biol. — 1990. — V.142. — P.359-391.
Lorenz W. Nichtgleichgewichtsphaseniibergange bei Bewegungskoordinationen. —
Diplom Thesis. — Universitat von Stuttgart. — 1987.
Collins J.J., Stewart I.N. Coupled nonlinear oscillators and the symmetries of animal gains
//J. Nonlinear Sci, — 1993. — V.3. — P.349-392.
Hoyt D.F., Taylor C.R. Gait and the energetics of locomotion in horses 11 Nature. —
1974. - P.239-292.
Gambaryan P. How mammals run: Anatomical adaptations. — N.Y.: Distributed by John
Wiley and Sins, 1974.
von Holst E. Die relative Koordinationals Phanomen und als Methode zentralnervuser
Funktionsanalysen// Erg. Physiol. — 1993. — V.42. — P.228-306.
10. Основные понятия синергетики II:
образование пространственно-временных структур
Haken Н. Synergetics, An Introduction. — Berlin: Springer, 1983. (Русский перевод с
1-го изд.: Хакен Г. Синергетика. — М.: Мир, 1980.)
Haken Н. Advances Synergetics. 3rd ed. — Berlin: Springer, 1993. (Русский перевод с
1-ro изд.: Хакен Г. Синергетика. Иерархия неустойчивостей в самоорганизую-
щихся системах и устройствах. — М.: Мир, 1985.)
Mikhailov A .S. Foundations of Synergetics I. — Berlin: Springer, 1990.
Mikhailov A.S., Loskutov A.Yu. Foundations of Synergetics. IL— Berlin: Springer, 1991.
11. Анализ пространственно-временных структур
11.1. Разложение Карунена—Аоэва, разложение сингулярного значения, анализ
главной компоненты — три названия одного и того же метода
Watanabe S. Pattern recognition: Human and mechanical. — N.Y.: Wiley, 1985.
11.2. Геометрический подход на основе параметров порядка.
Метод Хакена—Фридмана—Уля
Мы следуем работе:
Haken Н., Friedrich R., Uhl С. (неопубл.)
Аналогичные исследования см. в работах:
339
22*
Литература и рекомендации для дальнейшего чтения
Fridrich R., Uhl С., Haken Н. Reconstruction of spatio-temporal signals of complex
systems // Zs.Physik. — 1993. -Bd.B92. — S.211-219.
Uhl C., Fridrich R., Haken H. Analysis of spatio-temporal signals of complex systems //
Phys.Rev. - 1995. - V.E51. - P.3890-3900.
Относительно соотношения (11.36) и обозначений устойчивых и неустойчивых
мод и т.п. см:
Haken Н. Advanced Synergetics, 3rd.ed. — Berlin: Springer, 1995. (Русский перевод с
1-го издания: Хакен Г. Синергетика. Иерархия неустойчивостей и устройствах.
- М.: Мир, 1985)
12. Движения на педало
Эксперименты были выполнены Х.Керндлем.
Korndle Н., 1992 (частное сообщение).
Метод Карунена—Лоэва, см.гл. 11.
Теоретический анализ был выполнен в работах:
Haas R.Ph.D. Thesis. — University of Stuttgart, 1995.
Haas R., Haken H., Kprndle H. Movements on a pedalo: An analysis based on synergetics
(неопубликованная рукопись).
13. Хаос, хаос, хаос
Poincare Н. Les methodes nouvelles de la mecanique celeste, T.l-3. — Paris: Gauthier-
Villars. Перепечатка: N.Y.: Dover, 1957.
Lorenz E.N. Deterministic nonperriodic flow // J. Atmos.Sci. — 1963. — V.20. — P. 130-141.
Rossler O.E. Continuous chaos. — In: Haken H (ed.) Synergetics, A Workshop. — Berlin:
Springer, 1977.
Некоторые книжные издания по хаосу:
Ott Е. Chaos in dynamical systems. — Cambridge: Cambridge University Press, 1993.
Davaney R.L. A first course in chaotic dynamical systems, 2nd print. — Reading, MA:
Addison-Wesley, 1993.
McCauley J.L. An introduction to nonlinear dynamics and chaos theory. — Stockholm:
Royal Swedish Academy of Sciences, 1988.
Tabor M. Chaos and integrability in nonlinear dynamics. — N.Y.: Wiley, 1989.
Ott E., Sauer T., Yorke J.A. Copying with chaos. — N.Y.: Wiley, 1994.
Hoppensteadt F.C. Analysis and simulation of chaotic systems. — Berlin: Springer, 1993.
Peitgen H.-О., Jurgens H., Saupe D. Chaos and fractals, corrected 2nd print. — Berlin:
Springer, 1993. (Русский перевод :
Lasota A., Mackey M.C. Chaos, fractals and noise, 2nd ed. — Berlin: Springer, 1994.
Klimantovich Yu. L. Turbulent motion and the structure of chaos. — Dordrecht: Kluwer, 1991.
Scott S.K. Chemical chaos. — Oxford: Clarendon Press, 1991.
Schuster H.G. Deterministic chaos: An introduction, 2nd revised ed. — Weinheim: VCH
Verlagsgesellschaft, 1988. (Русский перевод: Шустер Г. Детерминированный хаос.
Введение. М.: Мир, 1988).
von Koch Н. Sur une courbe continue sans tangente, obtenue par une construction geometric
elementaire // Arkiv for Mathematik, Astronomi och Fysik. — 1904. — Bd.l. — P.681-704.
Shilnikov L.P. A case of the existence of a countable number of periodic motions // Sov. Math.
Dokl. - 1965. - V.6. - P. 163-166; Math. USSR Sbomik. - 1970. - V.10. - Р.91.
Glendinning P., Sparrow C. Local and global behavior near homoclinic orbits // J. Stat.
Phys. - 1984. - V.35. - P.645-696.
340
Литература и рекомендации для дальнейшего чтения
May R.M. Simple mathematical models with very complicated dynamics // Nature. —
1976. — V.26L — P.459-467.
14. Анализ электроэнцефалограмм
Общие сведения относительно электрических полей в мозге см. в работе:
Nunez P.L/ Electric fields in the brain. — Oxford: N.Y.: Oxford University Press, 1981.
Основные результаты этой главы используют работу:
Friedrich R., Uhl С. Spatio-temporal analysis of human electroencephalograms: petit -
mal epilepsy (неопубл.)
Работы, близкие по содержанию:
Lehmann D. Multichannel topograhy of human alpha EEG fields // Electroenceph. Clin.
Neurophysiol. — 1971. — V. 31. — P.431-449; Human scalp EEG fields: evoked,
alpha, sleep and spike-wave patterns. — In: Petasche H., Brazier M.A.B. (eds.)
Synchronization of EEG activity in epilepsy. — Berlin: Springer, 1972.
Babloyantz A. Strange attractor in the dynamics of brain activity. — In: Haken H. (ed.)
Complex systems — operational approaches. — Berlin: Springer, 1985.
Babloyantz A., Nicolis C., Salazar M. Evidence of chaotic dynamics of brain activity
during the sleep cycle // Phys.Lett. — 1985. — V.A111. — P.152.
Babloyantz A., Destexhe A. Low dimensional chaos in an instant of epilepsy 11 Proc.
Nat.Acad. Sci. - 1986. - V.83. - P.3513-3517.
Layne S.P., Mayer-Kress G., Holzfuss J. Problems associated with dimensional analysis
of electroencephalogram data. — In: Mayer-Kress G. (ed.) Dimensions and entropies
in chaotic systems. — Berlin: Springer. 1086.
Fuchs A., Friedrich R., Haken H., Lehmann D. Spatio-temporal analysis of multichannel
a-EEG map series. — In: Haken H. (ed.) Computational systems — natural and
artificial. — Berlin: Springer, 1987.
Fridrich R., Fuchs A., Haken H. Synergetic analysis of spatio-temporal EEG-patterns.
— In: Holden A.V., Markus M., Othmer H.G. (eds.) Nonlinear processes in excitable
media. — N.Y.:Plenum, 1991.
Fridrich R., Fuchs A., Haken H. Spatiotemporal EEG-patterns. In: Haken H., Kopchen
H.P. (eds.) Rhythms in biological systems. — Berlin: Springer, 1992.
Fridrich R., Uhl C. Synergetic analysis of human electroencephalograms: Petit-mal
epilepsy. — In: Fridrich R., Wunderlin A. (eds.) Evolution of dynamical structures in
complex systems. — Berlin: Springer, 1992.
15. Анализ структур МЭГ
Эксперименты:
Kelso J.A.S., Bressler S.L., Buchanan S., de Guzman G.C., Ding M., Fuchs A., Holroyd
T. Cooperative and critical phenomena in the human brain revealed by mutiple
SQUIDs. In: Duke D., Pritchard W. (eds.) Measuring chaos in the human brain. —
Singapore: World Scientific, 1991.
Kelso J.A.S., Bressler S. L., Buchanen S., de Guzman G.C., Ding M., Fuchs A., Holroyd
T. A phase transition in human brain and behavior // Phys.Lett. — 1992. — V.A169.
P.134-144.
Теория:
Fuchs A., Kelso J.A.S., Haken H. Phase transitions in the human brain: Spatial mode
dynamics // Intern. J. Of Bifurcation and chaos. — f992. — V.2. — P.917-939.
341
Литература и рекомендации для дальнейшего чтения
Jirsa V.K., Friedrich R., Haken H., Kelso J.A.S. A theoretical model of phase transitions
in the human brain // Biol.Cybern. — 1994. — V.71. — P.27-35.
Jirsa V.K., Frirdrich R., Haken H. Reconstruction of the spatio-temporal dynamics of a
human magnetoencephalogram (неопубл.).
Bestehorn M., Haken H., 1995 (неопубл, результаты). (Раздел 15.4.)
Friedrich R., Fuchs A, Haken H., 1992: см. гл. 14.
16. Зрительное восприятие
16.1. Модель распознания образов
Обширный обзор:
Haken Н. Synergetic computers and cognition. — Berlin: Springer, 1991.
Классический труд по ассоциативной памяти:
Kohonen Т. Associative memory and self-organization, 2nd ed. — Berlin: Springer, 1987.
Аналогия между распознаванием образов и формированием образов:
Haken Н. Pattern formation and pattern recognition — an attempt at a synthesis. In:
Haken H. (ed.) Pattern formation by dynamic systems and pattern recognition. —
Berlin: Springer, 1979. — P.2-13.
Стандартная модель синергетического компьютера:
Haken Н. Synergetic computers for pattern recognition and associative memory. — In:
Haken H. (ed.) Computational systems — natural and artificial. — Berlin: Springer,
1987. — P.2-22-
Haken H. Synergetics in pattern recognition and associative action. — In: Haken H. (ed.)
Neural and synergetic computers. — Berlin: Springer. 1988. — P.2-15.
Распознавание лиц и карт городов:
Fuchs A., Haken Н. Pattern recognition and associative memory as dynamical processes
in a synergetic system I + II, Erratum // Biol.Cybern. — 1988. — V.60. — P. 17-22;
107-109: 476.
Bestehorn M., Haken H. Associative memory of a dynamical system: The example of the
convection instability//Zs. Physik. — 1991. — Bd.82. — S.305-308.
Инвариантность относительно параллельного переноса, вращения и преобразо-
вания подобия: см., например,
Fuchs A., Haken Н., 1988, loc.cit.
Обработка деформированных изображений:
Daffertshofer A, Haken Н. A new approach to recognition of deformed patterns // Pattern
Recognition. - 1994. - V.27. - Nj.12. - P. 1697-1705.
Выражение лица:
Vanger P., Honlinger R., Haken H. Automated coding of facial expressions of emotions
with the synergetic computer (готовится к печати).
Vanger P., Honlinger R., Haken H. Applications of the synergetic computer in decoding
complex facial patterns // Proceedings of the First International Conference on
Applied Synergetic and Synergetic Engineering, June 21-23, Erlangen. -1994. —
P.111-117.
16.2. Роль параметров внимания
Неоднозначные фигуры:
Haken Н. Synergetics, An Introduction. — Berlin: Springer, 1977. ( Русский перевод:
Хакен Г. Синергетика. — М.: Мир, 1980.)
342
Литература и рекомендации для дальнейшего чтения
В этом первом (и последующих) изданиях моей книги я установил связь между би-
стабильностью и гистерезисом человеческого восприятия и поведением пара-
метров порядка синергетических (самоорганизующихся) систем. Эта связь по-
ложена в основу раздела 16.2.
Гештальт-психология:
Kohler W. Die physischen Gestalten in Ruhe und im stationaren Zustand. —
Braunschweig: Vieweg, 1920.
Kohler W. The task of Gestalt psychology. — Princeton, 1969.
16.3. Влияние предвзятости
Существует обширная литература, посвященная неодназначным фигурам. Статьи
на эту тему и многочисленные ссылки см. в сборнике:
Kruse Р., Stadler М. (eds.) Ambiguity in mind and nature, multistable cognitive
phenomena. — Berlin: Springer, 1995.
Участие в этом издании приняли: G.Roth, М.Stadler, P.Kruse, G.Kanizsa, J.A.S.,
Kelso, R.Luccio, C.van Leeuwen, A.C.Zimmer, G.Caglioti и др.
Мы следуем в наиболее существенных пунктах работам:
Ditzinger Т., Haken Н. Oscillations in the perception of ambiguous patterns //
BioLCybern. - 1989. - V.61. - P.279-287.
Ditzinger T., Haken H. The impact of fluctuations on the recognition of ambiguous
patterns // BioLCybern. — 1990. — V.63. — P.453-456.
Более поздняя работа в том же направлении:
Ditzinger Т., Haken Н. A synergetic model of multistability in perception. — In: Kruse
P., Stadler M. (eds.) loc.cit., P.255-274.
16.4. Роль флуктуаций параметров внимания
Эксперименты:
Borsellino A., de Marso A., Allazeyya A.. Rinesi S., Bartollini B.Reversal time distribution
in the perception of visual ambiguous stimuli // Kybemetik. — 1972. — V. 10. — No.3.
-P. 139-144.
Borsellino A., Carlini R., Riani M., Tuccio M.T., de Marso A., Penengo P., Trabucco
A. Effects of visual angle on perspective reversal for ambiguous patterns // Perception.
- 1982. - V.12. - P.263-273.
Теория:
Ditzinger T., Haken H., 1990 (loc.cit.).
Относительно других экспериментов и альтернативных теорий см. статьи в сбор-
нике: Kruase Р., Stadler М. (eds.), 1990 (loc.cit.), в особенности статьи Kelso J.A.S.
и Schoner G. См. также: Riani М., Simonotto L. Stochatic resonance in the
perceptual interpretation of ambiguous figures: A neural network model // Phys.
Rev.Lett. - 1994. V.72. - P.3120-3123.
16.5. Стратегии обучения
При написании этого раздела я близко следовал работе:
Haken Н., Haas R., Banzhaf W. A new learning algorithm for synergetic computers //
BioLCybern. - 1989. - V.62. - P. 107-111.
См. также:
Haken H. Synergetic computers and cognition. — Berlin: Springer, 1991.
343
Литература и рекомендации для дальнейшего чтения
6.6. Модель стереоскопического зрения
Стереоскопическому зрению посвящена обширная литература. Мы упомянем поэтому
лишь несколько основных статей или обзоров. Dhond U.R., Aggarwal J.K. Structure
from stereo —a review//IEEE Trans. Systems Man Cybem. — 1989. V.19. — P. 1489-1510.
Обзор no вычислительным и биологическим моделям:
Barnarf S.T., Fischer M.A. Computational stereo // Comput.Surveys. — 1990. — V.14.
- P.553-572.
Сравнение кооперативных и некооперативных, иерархических и неиерархических моделей:
Hentschel Н.С.Е., Fine A. Statistical mechanics of stereoscopic vision // Phys.Rev. —
1989. - V.A40. - P.3983-3997.
Стохастические подходы:
Geman S., Geman D. Stochastic relaxation, Gibbs distribution and the Bayesian
restoration of images // IEEE Trans. Pattern Anal.Machine Intellect. — 1986. V.6.
- P.721-741.
Yeulle A, Geiger D., Bulthoff H. Stereo integration, mean field theory and psychophysics
I/ Network. — 1991. — V.2. — P.423-442.
Детерминистические подходы:
Terzoupulos D., Witkin A., Kass M. Stereomatching as constrained optimization using
scale continuation methods // Optical and Digital Pattern Recognition SPIE. — 1987.
V.754. - P.92-99.
Стереограммы из случайных точек были изобретены и исследованы Юлешом:
JuleszB. Foundations of cyclopean perception. — Chicago: University of Chicago Press, 1991.
Динамическая модель, сформированная в разделе 16.4, принадлежит Рейману и
Хакену:
Reimann D., Haken Н. Stereo vision by self-organization//Biol.Cybern. — 1994. — V.71.
-P.17-26.
Особенно важные работы:
Marr D., Hildreth H. Theory of edge detection // Proc. Roy. Soc. London {Biol.}. — V.207.
- P.187-217.
Marr D., Poggio T. Cooperative computation of stereo disparity // Science. — 1976. —
V. 194.-P.283-287.
Marr D., Poggio T. Cooperative computation of stereo disparity // Science. — 1976. —
V. 194.-P.283-287.
Marr D., Poggio T. A computational theory of human stereo vision // Proc.Roy.Soc.
London {Biol.}. - 1979. - V.204. - P,301-328.
Другие приложения см. в работе:
Reimann D., Ditzinger T., Haken H. Vergence eye movement control and multivalent
perception of autostereograms // Biol.Cybern.— 1995. V.7. — P. 123-128.
17. Принятие решений как распознавание образов
Как показывает знакомство с публикациями в Journal of Behavioral Decision
Making, Eds. Wright G., Chichester: Wiley, принятие решений стало бурно раз-
вивающейся областью деятельности.
344
Литература и рекомендации для дальнейшего чтения
Важной ранней работой по праву считается:
Lewin К. Principles of topological phychology. — N.Y.: MacGrow Hill, 1936. В этой
главе я придерживаюсь своей лекции, прочитанной в июле 1994 г. в универси-
тете Регенсбурга.
Относительно эвристики см.: Wagenaar W.A. Heuristics: Simple ways for dealing with
complex problems. Доклад, прочитанный на симпозиуме: Natural Sciences and
Human Thought, Villa Vigoni, Italy, 29.3-2.4 1993.
18. Мозг как компьютер, или могут ли компьютеры мыслить?
Zuse К. Der Computer, mein Lebenswerk, Nachdr der 2. Aufl. — Berlin: Springer, 1990.
von Neumann J. The computer and the brain. — New Heaven, Connecticut, 1958.
Turing A.M. On the computable numbers, with application to the Entscheidungs problem
// Proc. London Mathem. Soc. — 1936. — Series 2. — V.42. — P.230-265.
Turing A.M. Computing machinery and intelligence. — In: Mind. — V.59. Wiener N.
Cybernetics, or control and communication in the animal and the machine. —
Cambridge, MA, 1948.
Winograd T. Understanding natural language. — N.Y., 1972.
Weizenbaum J.Eliza — A computer program for the study of natural language
communication between man and machine // Communications of the Association for
Computing Machinery. — 1966. — V.(. — P.36-45.
Коннекционизм:
Rumelhart D.E., McClelland J.L., P.D.P.Research Group. Parallel distributed processing:
Explorations in the microstructure of cognitions, V.1,2. — Cambridge: Cambridge
University Press, 1986.
Нейрокомпьютеры:
Wassermann P.D. Neural computing, theory and practice. — N.Y.: Van Nostrand
Reinhold, 1989.
McCulloch W., Pitts W. A logical calculus of the ideas immanent in nervous activity 11
Bulletin of Math. Biophysics. — 1943. — V.5. — P.115-133. (Русский перевод:
Rosenblatt R. Principles of neurodynamics. — N.Y.: Spartan Books, 1962. Sejnowski
T.N., Rosenberg C.R. Parallel networks that learn to pronounce English text 11
Complex Systems. — 1987. V.I. — P.145-168.
Hopfield J.J. Neural networks and physical systems with emergent collective
computational abilities // Proc.Nat. Acad.Sci. — 1982. — V.79. — P.2554-2558.
19. Сети мозгов
Bartlett F. Remembering, A study in experimental and social psychology. — Cambridge:
Cambridge University Press, 1932.
Haken H., Portugali J. Synergetics, inter-representation networks and cognitive map. (Го-
товится публикация в Geoforum.)
Установлены связи с более ранними работами Л.С. Выготского, Гибсона, Румель-
харта, Лакоффа, Дональда, Эдельмана, Португали и Хакена.
Portugali J., 1994 (частное сообщение; см. также подготавливаемую публикацию в
Geoforum’e).
Stadler М., Kruse Р. The self-organization perspective in cognition research: mental
approaches. — In: Haken H., Stadler M. (eds.) Synergetics of cognition. — Berlin:
Springer, 1990. — P.32-52.
Было бы интересно установить взаимосвязи между нашим подходом и исследо-
ваниями кооперативных роботов. См.:
345
Литература и рекомендации для дальнейшего чтения
Steel L. (ed.) The biology and technology of intelligent autonomous agents. — Berlin:
Springer, 1994.
McFaraland D., Steels L. Cooperative robots. — Boston, MA: VIN Press, 1995.
20. Синергетика мозга: где мы находимся? Куда мы идем?
Crick F.H.C., Koch С. The problem of consciousness. — Scientific American. — 1990.
- V.267. - P. 152-159.
Edelman G.M. Bright air, brillant fire. — N.Y.: Basic Books, 1992.
Fromherz P., Offenhauser A., Vetter T, Weis J. A neuron-silicon junction: A retzius-cell of
the leech on an insulated-gate field-effect transistor // Science. — 1991. — P.252-253.
Kornhuber H., Deecke L. Himpotentialanderung bei Willkiirbewegungen und passiven
Bewegungen des Menschen: Bereitschaftspotential und reafferente Potentiale //
Pflugers Archiv. - 1965. - V.284. - P.1-17.
Обзоры см. в работах:
Deecke L. Electrophysiological correlates of movement initiation // Reviews of
Neurology (Paris). - 1990. - V.146. - P.612-619.
Delbriick M. Mind from matter? An essay on evolutionary epistemology. — Palo Alto,
CA: Blackwell, 1986.
Freeman W.J. Societies of brains. — Hillsdale, NJ: Lawrence Erlbaum Ass., 1995.
Tass P., Haken H. Synchronized oscillations in the visual cortex — a synergetic model
(готовится к печати).
Приложение А
Координаты с запаздыванием по времени:
Packard N.H., Crutchfield J.P., Farmer J.D., Shaw R.S. Geometry from a time series 11
Phys.Rev.Lett. - 1980. - V.45. - P.712-716.
Takens F. Detecting strange attractors in turbulence. — In: Dynamical Systems and
Turbulence, Warwick 1980, Lecture Notes in Mathematics. — Lecture Notes in
Mathematics. — Berlin: Springer, 1980. — V.898. — P.366-381.
Фракталы размерности
Eckmann J.P., Ruelle D. Ergodic theory of chaos and strange attractors 11 Rev.Mod.Phys.
- 1986. - V.53. - No3. - P.617-656.
Grassberger P., Proccacia I. Measuring the strangeness of strange attrators // Physica. —
V.D9.-P. 189-208.
Корреляционная размерность:
Grassberger P., Proccacia 1. Characterization of strange attractors // Phys.Rev.Lett. —
1983. -V.50. - P.346-349.
Grassberger P., Proccacia I. Estimation of the Kolmogorov entropy from a chaotic signal
I/ Phys.Rev. - 1983. - V.A28. - No4. - P.2591-2593.
Диаграмма Раппа:
Rapp P.E., Zimmermann I.D., Albano A.M., de Guzman G.C., Greenbaum N.N.
Dynamics of spontaneous neural activity in the simian motor cortex: The dimensions
of chaotic neurons // Phys.Lett. — 1985. — V.l 10A. -No6. — P.335-338.
346
Об авторе
Герман Хакен родился в 1927 г. Степень доктора философии (Ph.D.) по
математике защитил в Эрлангенском университете. В 1956 г. стал лекто-
ром по теоретической физике в том же университете. С 1960 г. Хакен —
профессор теоретической физики Штуттгартского университета. В каче-
стве приглашенного научного сотрудника, консультанта и приглашенно-
го профессора побывал в США, Великобритании, Франции, Японии и
СССР. Ему принадлежат многочисленные исследования в теории групп,
физике твердого тела, лазерной физике и нелинейной оптике, статисти-
ческой физике, физике плазмы, теории бифуркаций, моделях морфогене-
за. Перу Хакена принадлежат монография «Теория лазеров», учебники
«Синергетика» и «Квантово-полевая теория твердого тела», а также различ-
ные другие книги, в том числе написанная в соавторстве с Х.К.Вольфом
«Физика атомов и квантов», «Молекулярная физика» и «Элементы кван-
товой химии».
В 1976 г. за выдающийся вклад в теорию возбужденных состояний твер-
дых телах и квантовую оптику, в особенности в теорию лазеров, Хакен был
удостоен премии Макса Борна и медали Британского института физики и
немецкого физического общества. За работы по теории лазеров и создание
синергетики в 1981 он получил медаль Альберта Майкельсона Института
Франклина (США). В 1982 г. Хакен стал почетным доктором Эссенского
университета, в 1987 г. — Мадридского университета, в 1992 г. — Атланти-
ческого университета во Флориде, и в 1994 г. — Регенсбурского универси-
тета. Среди других наград Хакена — медаль Макса Планка Немецкого фи-
зического общества, премия Хонды (Токио) и медаль Лоренца—Окена Не-
мецкого общества естествоиспытателей и врачей.
Хакен состоит членом нескольких академий, в том числе Леопольдины,
Баварской академии наук, Academia Europaea (Лондон) и Academia
Scientiarum et Artium Eiropaea (Зальцбург).
Содержание
Предисловие к русскому изданию................................5
Предисловие...................................................6
Пролог........................................................8
Часть I. Основы............................................. 11
1. Введение................................................. 13
1.1. Биологические системы — сложные системы...............13
1.2. Цели синергетики......................................14
1.3. Мозг как сложная система............................. 15
1.4. Традиционные или синергетические интерпретации
функции мозга............................................. 16
2. Исследуем мозг............................................19
2.1. Мозг как черный яшик..................................19
2.2. Открываем черный ящик.................................20
2.3. Структура и функция на макроскопическом уровне........21
2.4. Неинвазивные методы...................................23
2.4.1. Рентгеновская томография.........................23
2.4.2. Электроэнфалограммы (ЭЭГ)........................23
2.4.3. Магнитоэнцефалограммы (МЭГ)......................25
2.4.4. Позитрон-эмиссионная томография (ПЭТ)............28
2.4.5. Магнитно-резонансное изображение (МРИ)...........30
2.5. Структура и функция на микроскопическом уровне........34
2.6. Обучение и память.....................................36
3. Моделируем мозг. Первая попытка:
мозг как динамическая систем.................................37
3.1. Что такое динамическая система?.......................37
3.2. Мозг как динамическая система.........................39
4. Основные понятия синергетики I: параметры порядка и принцип
подчинения...................................................41
4.1. Факторы, определяющие эволюцию во времени..........41
4.2. Стратегия решения.....................................45
4.2.1. Неустойчивость, параметры порядка,
принцип подчинения......................................45
4.2.2. Лазерная парадигма, или лодки на озере...........50
4.2.3. Принцип подчиненности............................52
4.2.4. Центральная роль параметров порядка..............54
4.3. Самоорганизация и второе начало термодинамики.........55
5. Динамика параметров порядка...............................57
5.1. Один параметр порядка.................................57
5.2. Два параметра порядка.................................62
5.3. Три и более параметра порядка.........................67
5.4. Параметрыпорядка и нормальные формы...................68
348
Часть II. Поведение..........................................71
6. Координация движения — паттерны движения..................73
6.1. Проблема координации..................................74
6.2. Фазовые переходы в движениях пальцев: эксперименты
и простая модель...........................................75
6.3. Альтернативная модель?................................81
6.4. Флуктуации в движениях пальцев: теория................82
6.5. Критические флуктуации в движениях пальцев: эксперименты ... 90
6.5.1. Условия экспериментов............................90
6.5.2. Экспериментальные результаты.....................92
6.6. Некоторые важные заключения...........................96
7. Еще о движениях пальцев...................................99
7.1. Движение указательного пальца.........................99
7.2. Связанное движение указательных пальцев............. 104
7.3. Фазовые переходы в движениях рук человека
в заданиях на многочастотное постукивание................ 107
7.3.1. Эксперименты: переходы при многочастотном
постукивании...........................................108
7.4. Модель многочастотного поведения.................... 112
7.5. Основные уравнения захвата частоты и их решения..... 116
7.6. Сводка основных теоретических результатов............123
7.7. Выводы и перспективы................................ 125
8. Обучение................................................ 126
8.1. Как обучение изменяет ландшафт параметра порядка.... 126
8.2. Как обучение изменяет число параметров порядка...... 130
8.3. Как обучение может привести к возникновению новых
параметров порядка....................................... 131
9. Аллюры животных и переходы между ними................... 132
9.1. Вводные замечания................................... 132
9.2. Симметрии и группы.................................. 133
9.3. Экспериментальное изучение аллюров животных......... 137
9.4. Динамика фаз и симметрии............................ 144
9.5. Уравнение динамики фаз.............................. 148
9.6. Стационарные решения................................ 151
9.7. Динамика аллюров с низкой симметрией................ 154
9.8. Итоги и перспективы................................. 156
10. Основные понятия синергетики II:
образование пространственно-временных структур............. 159
11. Анализ пространственно-временных структур.............. 166
11.1. Разложение Карунена—Лоэва, разложение по сингулярным
значениям, анализ главных компонент — три названия
одного и того же метода.................................. 166
349
11.2. Геометрический подход на основе параметров порядка. Метод
Хакена-Фридриха-Уля..................................... 174
11.2.1. Один действительный параметр порядка...........174
11.2.2. Колебания, связанные с одним комплексным
параметром порядка....................................181
12. Движения на педало.................................... 182
12.1. Задача............................................ 182
12.2. Описание паттерна движения........................ 183
12.3. Квантификация движения на педало.................. 184
12.4. Анализ движения на основе разложения Карунена—Лоэва. 185
12.5. Подробный анализ движений рук и ног............... 188
12.6. Анализ параметра порядка Хакена—Фридриха—Уля...... 190
12.7. Заключительные замечания к части II................200
Часть III. ЭЭГ и МЭГ.......................................201
13. Хаос, хаос, хаос.......................................203
14. Анализ электроэнцефалограмм............................210
14.1. Цели анализа.......................................210
14.2. Идентификация параметров порядка и пространственные
моды.....................................................211
14.3. Результаты.........................................217
15. Анализ паттернов МЭГ...................................224
15.1. Экспериментальные результаты.......................224
15.2. Временной и пространственный анализ................225
15.2.1. Временной анализ..............................225
15.2.2. Пространственно-временной анализ..............227
15.3. Моделирование динамики.............................231
15.4. Моделирование динамики: к полевой теории активности мозга 238
15.5. Еще раз об анализе ЭЭГ и МЭГ.......................240
Часть IV. Когнитивная деятельность.........................243
16. Зрительное восприятие..................................245
16.1. Модель распознавания образов.......................245
16.2. Роль параметров внимания. Неоднозначные фигуры.....254
16.3. Влияние смещения...................................257
16.4. Роль флуктуаций параметров внимания................261
16.5. Паттерны обучения..................................264
16.6. Модель стереоскопического зрения...................267
17. Принятие решения как распознавание образов.............282
18. Мозг как компьютер, или могут ли компьютеры мыслить?...286
18.1. Экскурс: что такое «мыслить»?......................286
18.2. Компьютеры.........................................287
350
18.3. Искусственный интеллект............................290
18.4. Нейрокомпьютеры и коннективизм.....................291
18.5. Мотугли компьютеры мыслить?........................295
19. Сети мозгов............................................297
19.1. Общая модель ИРС в терминах синергетики............299
19.2. Коллективные когнитивные процессы..................303
19.3. Итерации...........................................304
19.4. Заключительные замечания...........................306
20. Синергетика головного мозга. Где мы находимся?
К чему мы идем?.............................................307
20.1. Оглядываясь назад..................................307
20.2. Дух и материя — вечный вопрос......................309
20.3. Некоторые открытые проблемы........................312
Приложения..................................................315
А. Анализ временных рядов..................................317
А. 1. Анализ временного ряда,............................317
А.2. Определения размерностей............................321
А.З. Размерность аттракторов.............................324
А.4 Некоторые выводы.....................................327
В. Определение сопряженных векторов........................327
С. Потенциалы, упоминаемые в разд. 16.5....................328
Литература и рекомендации для дальнейшего чтения............329
Научное издание
Герман Хакен
Принципы работы головного мозга:
Синергетический подход к активности мозга, поведению и когнитивной
деятельности
Художник: П.П. Ефремов
Компьютерная верстка: Ю.В. Балабанов
Корректор: Л.Н. Гагулина
Лицензия ИД №01018 от 21 февраля 2000 г.
Санитарно-эпидемиологическое заключение
№ 77.99.02.953.Д.003868.07.01 от 11.07.2001
Издательство «ПЕР СЭ»
129366, Москва, ул.Ярославская, 13, к. 120
тел/факс: (095) 216-30-31
e-mail: perse@psychol.ras.ru
Налоговая льгота — общероссийский классификатор
продукции ОК-005-093, том 2; 953000 — книги, брошюры
Подписано в печать 02.10.2001. Формат 70 х 100 '/к,. Печать офсетная.
Бумага офсетная. Гарнитура Таймс.
Усл. печ. л. 22. Тираж 5000 экз. Первый завод 3000 экз.
Заказ № 4614.
Отпечатано в полном соответствии
с качеством предоставленных диапозитивов
в ОАО «Можайский полиграфический комбинат».
143200, г. Можайск, ул. Мира, 93.
SBN 5-9292-004
9'795929
200471